



























































































































































































































































































































































































































































































Автор: Препарата Ф. Шеймос М.
Теги: компьютерные технологии математика геометрия
ISBN: 5-03-001041-6
Год: 1989



Текст
COMPUTATIONAL
GEOMETRY
An introduction
Franco P. Preparafa
Michael Ian Shamos
Springer-Verlag
New York Berlin Heidelberg Tokyo
Ф. Препарата, М. Шеймос
ВЫЧИСЛИТЕЛЬНАЯ
ГЕОМЕТРИЯ ••
Введение
Перевод с английского
С. А. Вичеса, М. М. Комарова
под редакцией
Ю. М. Банковского
Москва «Мир» 1989
ББК 22.19
П72
УДК 681.3 513
Препарата Ф., Шеймос М.
П72 Вычислительная геометрия: Введение: Пер. с англ. —
М.: Мир, 1989. —478 с.
ISBN 5-03-001041-6
Монография известных американских специалистов, содержащая
основы разработки и анализа алгоритмов вычислительной геометрии.
Изложение основано на детальном рассмотрении конкретных задач и
алгоритмов их решения. Особое внимание уделено способам описания
алгоритмов на упрощенном Алголе.
Для математиков-прикладников, аспирантов и студентов вузов
как учебное пособие по машинному проектированию, машинной гра-
графике, распознаванию образов.
1702070000-127
П 041@1)—89 28~89 ББК 22Л9
Редакция литературы по математическим наукам
ISBN 5-03-001041-6 (русск.) © 1985 by Springer-Verlag New York Inc.
ISBN 0-387-96131-3 (англ.) All Rights Reserved. Authorized transla-
translation from English language edition pub-
published by Springer-Verlag Berlin Heidel-
Heidelberg New York Tokyo
© перевод на русский язык, с авторскими
изменениями, «Мир», 1989
Предисловие
редактора перевода
В 1982 г. в издательстве «Мир» вышла книга
А. Фокса и М. Пратта «Вычислительная геометрия. Примене-
Применение в проектировании и прозводстве», в которой рассматри-
рассматриваются проблемы геометрического моделирования. И вот спустя
6 лет в книге по существу с таким же названием речь идет
совсем о другом, а именно об оценке сложности геометри-
геометрических вычислений, об анализе и построении эффективных ком-
комбинаторных алгоритмов для решения геометрических задач.
Парадокс объясняется просто: как одно, так и другое научное
направление родилось совсем недавно, около 15 лет назад, их
становление и интенсивное развитие протекали одновременно,
оба направления имеют глубокие геометрические корни и са-
самым непосредственным образом связаны с применением ЭВМ.
К настоящему моменту предмет исследований в каждом из
направлений обрел четкие очертания и в специальной литера-
литературе за одним из них утвердилось название — «Геометрическое
моделирование», а за другим, которому и посвящена данная
книга, — «Вычислительная геометрия».
Книга Ф. Препараты и М. Шеймоса — первая в мировой ли-
литературе монография, в которой систематизированы резуль-
результаты, рассеянные по многочисленным журнальным статьям и
отчетам. Эту книгу долго ждали, ссылки на нее появились
значительно раньше, чем она вышла в свет.
Вычислительная геометрия имеет широкий круг применений.
Это робототехника, распознавание образов, проектирование
СБИС, базы данных, машинная графика, раскрой материалов
и т. д. Популярность вычислительной геометрии непосред-
непосредственно связана с визуализацией вычислений и, как следствие,
с удобством геометрической интерпретации необязательно гео-
геометрических объектов.
Читатель увидит, что вычислительная геометрия опирается
на многие разделы как классической, так и современной мате-
Предисловие редактора перевода
матики. Богатство математического аппарата и широта приме-
применения вычислительной геометрии серьезно осложнили работу
над переводом. Определенные трудности создавала также при-
принятая в американской литературе образность терминов, проти-
противоречащая сложившейся традиции в русской научно-техничес-
научно-технической литературе.
При переводе были исправлены мелкие ошибки (но нет
гарантии, что не допущены другие). Часть таких ошибок лю-
любезно указал Ф. Препарата. Он же внес отдельные изменения
в текст книги, сделав ее более современной. Мы благодарны
проф. Ф. Препарате за внимание, с которым он отнесся к рус-
русскому изданию.
Большую помощь при переводе и редактировании кни-
книги оказали большие энтузиасты вычислительной геометрии
Н. М. Корнеенко и Б. М. Чудинович. Их советы и замечания
безусловно содействовали улучшению качества книги. К сожа-
сожалению, в нашей стране людей, активно работающих в новой,
актуальной области весьма и весьма мало. Поэтому можно
присоединиться к Ф. Препарате, выразившему надежду, что
появление книги на русском языке привлечет внимание моло-
молодых математиков и информатиков к новой и быстро развиваю-
развивающейся области научного поиска и соревнования.
Перевод книги выполнен С. А. Вичесом (гл. 1, 2, 7, 8) и
М. М. Комаровым (гл. 3, 4, 5, 6).
Апрель 1988 г. ю. Банковский
Предисловие автора
к русскому изданию
Прошло 3 года с момента выхода книги на англий-
английском языке, и теперь я с удовольствием приветствую ее пере-
перевод на русский язык. В течение этого короткого периода вре-
времени стремительные темпы развития вычислительной геометрии
возросли еще больше. Ряд задач, которые оставались нере-
нерешенными почти десятилетие, были либо полностью решены,
либо на пути к их решению были получены блестящие резуль-
результаты. Поэтому я с радостью воспользовался предоставленной
мне возможностью внести изменения в те предложения и аб-
абзацы книги, которые в связи с самыми последними достиже-
достижениями несколько устарели. Сегодня исследования в вычисли-
вычислительной геометрии продолжаются так же энергично, как и
прежде. Я надеюсь, что эта книга сможет способствовать уве-
увеличению числа наших коллег в Советском Союзе, присоединив-
присоединившихся к этому благородному и увлекательному состязанию.
Февраль 1988 г. Ф. Препарата
Паоле и Клаудии,
а также Юлии
Предисловие
Цель этой книги — единообразное изложение богатых
результатов, появившихся в основном за последнее десятилетие
в области вычислительной геометрии. Эта молодая дисциплина,
названная своим именем в его современном значении одним
из нас — М. Шеймосом, привлекла к себе огромный интерес и
выросла из набора разрозненных результатов в зрелую область
знаний. Достигнутая зрелость, однако, не помешала вычисли-
вычислительной геометрии оставаться постоянным источником научных
и прикладных задач.
По мере того, как исследования достигали действительно
высокого уровня, с появлением мощных методов и развитием
плодотворного взаимодействия с комбинаторной и алгебра-
алгебраической геометрией, возрастала потребность в методически ор-
организованном изложении накопленных результатов. Эта потреб-
потребность ощущалась как в учебной аудитории, где эксперимен-
экспериментальные спецкурсы велись на материале журнальных статей
и заметок, так и в профессиональной среде, где некоторые при-
прикладные области, такие как автоматизация проектирования,
машинная графика, робототехника и т. д., были готовы для
восприятия этих результатов.
Данная книга — попытка удовлетворить эту потребность.
Задуманная, в основном, как учебное пособие для студентов
младших курсов, она ориентирована также на специалистов
в вышеупомянутых прикладных областях. Однако необходимо
отметить, что эта книга не просто каталог готовых к употребле-
употреблению методов, хотя некоторые алгоритмы весьма практичны. Наша
точка зрения скорее восходит к дисциплине, известной как по-
построение и анализ алгоритмов (или «алгоритмика»), нацеленной
на определение трудоемкости решения отдельных задач. Наши
исследования в основном направлены на изучение поведения
алгоритмов в худшем случае; кроме того, результаты анализа
Предисловие
полностью проявляются лишь для достаточно больших задач
(асимптотический анализ). Оба эти момента нельзя упускать из
виду при выборе алгоритма, ибо метод, наиболее пригодный для
задач малой размерности, не обязательно будет асимптотически
оптимальным, а алгоритм не оптимальный в худшем случае, мо-
может превзойти другие при оценке его среднего поведения.
Мы попытались дать достаточно детальную панораму непре-
непрерывной ветви вычислительной геометрии, а не ее «дискретизи-
рованного» варианта. Однако главной целью было системати-
систематическое изложение предмета, а не педантичный обзор. Мы пы-
пытались частично восполнить этот недостаток в разделах
«Замечания и комментарии» в конце каждой главы. Приносим
свои извенения многим авторам, чьи работы не были описаны
или хотя бы упомянуты.
Начальным ядром книги была докторская диссертация
М. Шеймоса. Когда в 1981 г. Р. Грэхем предложил одному из
нас (Ф. Препарате) превратить эту исходную рукопись в учеб-
учебник, никто из нас не представлял себе реальных усилий, кото-
которые пришлось затратить впоследствии. К счастью, многие наши
коллеги и друзья щедро помогли выполнению этой задачи, тер-
терпеливо читая поступающие варианты, предлагая улучшения и
вылавливая ошибки. Мы весьма признательны им; и мы рады
искренне поблагодарить (в алфавитном порядке): Бентли Дж.,
Бхаттачарья Б., Ван-Леювена Дж., Вуда Д., Дайера М., Доб-
кина Д., Зайделя Р., Каллаи М., Ли Д. Т., Липски-мл. У.,
О'Рурка Дж., Перлиса А., Рафски Л., Туссена Г., Хоуи Дэна,
Чазелле Б., Шульца М., Эйвиса Д., Эйзенстата С. Мы также
благодарны за частичную поддержку Национальному научному
фонду (субсидия MCS 81-05552 для работы Ф. Препараты),
управлению военно-морских исследований, корпорации ИБМ,
Университету Карнеги — Меллона и Лабораториям Белла (за
работу М. Шеймоса) и руководству издательства «Шпрингер»
за энтузиазм, проявленный при сотрудничестве.
Наконец, мы благодарим наших жен, соответственно Розу-
Марию и Юлию, за их терпение и поддержку во время тех дол-
долгих часов, которые привели к окончательному варианту книги.
Май 1985 г. ф. Препарата
М. Щейцос
1
ГЛАВА
Введение
1.1. Исторический обзор
Египетская и греческая геометрия были шедевром
прикладной математики. Исходным импульсом для геометри-
геометрических задач была нужда в точном и справедливом земельном
налогообложении, а также в возведении зданий. Как это часто
бывает, созданная математика обладала общностью и значе-
значением, которые далеко превосходили породившие ее проблемы
фараонова департамента налогов, ибо геометрия — это сердце-
сердцевина математического мышления. Это область, дающая простор
интуиции, а новые открытия в ней вполне доступны для неспе-
неспециалистов.
Принято считать, что главным вкладом Евклида в геомет-
геометрию является его изложение аксиоматического метода доказа-
доказательства — утверждение, которое мы не станем оспаривать.
Однако для нашего обсуждения важнее изобретение евклидова
построения — схемы, состоящей из алгоритма и его доказа-
доказательства, сплетенных в весьма стилизованном формате. Это
евклидово построение удовлетворяет всем требованиям, предъяв-
предъявляемым к алгоритму: оно компактно, корректно и действенно.
После Евклида геометрия продолжала процветать, в то время
как анализ алгоритмов, к сожалению, попал в 2000-летнюю по-
полосу застоя. Это обстоятельство частично может быть объяснено
успехом метода приведения к абсурду, который упрощает ма-
математикам доказательство существования некоего объекта путем
построения этого доказательства от противного вместо того,
чтобы дать точную конструкцию для его получения (алгоритм).
Евклидово построение замечательно по разным причинам;
например, оно определяет набор допустимых инструментов
(линейка и циркуль) и множество допустимых операций (при-
(примитивов), которые можно выполнить с их помощью. Древних
чрезвычайно интересовала полнота системы евклидовых при-
примитивов при условии конечности числа операций. В частности,
1.1. Исторический обзор 11
их интересовало, допускает ли такая система все мыслимые
геометрические построения (например, трисекцию угла). В совре-
современной формулировке тот же вопрос ставит информатика: доста-
достаточно ли евклидовых примитивов для реализации всех геометри-
геометрических «вычислений»? При попытке ответить на этот вопрос
рассматривались многие альтернативные модели вычислений,
получаемые путем изменения как набора примитивов, так и
самих инструментов. Архимед предложил (корректную) кон-
конструкцию для трисекции угла в 60 градусов со следующим до-
добавлением к множеству примитивов: даны два круга А и В
и точка Р; мы можем выбрать отрезок MN прямой и разместить
его так, чтобы прямая прошла через Р, причем точка М ока-
оказалась бы на границе А, а N — на границе В. В ряде случаев
изучался ограниченный набор инструментов, например только
циркуль. Такие идеи выглядят почти предвосхищением методов
теории автоматов, которая проверяет мощность вычислительных
моделей при разных ограничениях. Увы, доказательство непол-
неполноты евклидовых средств должно было дожидаться развития
алгебры.
Влияние «Начал» Евклида было столь фундаментальным,
что никаких других формулировок геометрии не было предло-
предложено вплоть до Декарта. Введение последним координат позво-
позволило выразить геометрические задачи алгебраически, вымостив
путь к изучению высших плоских кривых и ньютоновскому ана-
анализу. Координаты позволили резко повысить вычислительные
возможности, соединив две великие области математики и дав
начало возрождению конструктивистского мышления. Теперь
появилась возможность получать новые геометрические объекты,
решая связанные с ними алгебраические уравнения. И вскоре
снова возникли вопросы вычислимости. Так, Гаусс, уже воору-
вооруженный алгебраическими средствами, вновь вернулся к задаче
о том, какие из правильных многоугольников с простым числом
сторон можно построить, используя евклидовы инструменты, и
полностью решил ее. При этом стала ясной близкая связь между
построениями с помощью циркуля и линейки, расширениями
поля1) и алгебраическими уравнениями. В своей докторской дис-
диссертации Гаусс показал, что у любого алгебраического уравне-
уравнения существует по крайней мере один корень (основная теорема
алгебры). Абель в 1828 г. занялся решением той же задачи на
ограниченной модели вычислений. Он задался вопросом, можно
ли найти корень любого алгебраического уравнения, воспользо-
воспользовавшись только арифметическими операциями и извлечением
корней п-я степени, и доказал, что этого сделать нельзя. Хотя
было известно, что все рациональные числа действительны, по-
') Имеется в виду поле действительных чисел. — Прим. перев.
\i Тл. I Введение
следний ответ показал, что не все действительные числа ра-
рациональны. Вскоре после этого Абель описал те алгебраические
уравнения, которые могут быть решены в радикалах, и это
дало ему возможность обсуждать осуществимость специфически
геометрических задач, таких как трисекция угла.
1.1.1. Представление о сложности
в классической геометрии
Евклидовы построения для любых задач, кроме самых
тривиальных, весьма сложны, ибо в них допустимы только ру-
рудиментарные примитивы. Весьма частым развлечением геометров
после Евклида было улучшение его построений так, чтобы они
могли выполняться за меньшее число «операций». Однако задача
определения количественной меры сложности построения не была
сформулирована вплоть до двадцатого столетия. В 1902 г.
Эмиль Лемуан ввел науку геометрографию, систематизировав
евклидовы примитивы следующим образом [Lemoin A902)]:
1. Поставить одну ножку циркуля в данную точку.
2. Поставить одну ножку циркуля на данную прямую.
3. Провести окружность.
4. Совместить ребро линейки с данной точкой.
5. Провести линию.
Общее число таких операций, выполняемых в процессе по-
построения, называется его простотой, хотя Лемуан полагал, что,
возможно, более уместен термин «мера сложности». Это опре-
определение близко связано с нашей современной идеей временной
сложности алгоритма, хотя в работе Лемуана нет функциональ-
функциональной связи между размером исходной информации (числом за-
заданных точек и линий) для геометрического построения и его
простотой. Безусловно, интерес Лемуана был направлен на улуч-
улучшение исходных евклидовых построений, а не на развитие те-
теории сложности вычислений. И в первом он добился замеча-
замечательного успеха — евклидово решение задачи о кругах Аполло-
Аполлония требовало 508 шагов, в то время как Лемуан сократил его
менее чем до двухсот [Coolidge A916)]. К сожалению, Лемуан
не почувствовал важности доказательства, а возможно, просто
не смог доказать, что определенное число операций было
необходимо для данного построения, и, таким образом, идея
о нижней оценке алгоритма ускользнула от него.
Однако Гильберт оценил важность нижних оценок. Работая
с ограниченной моделью, он рассматривал только такие постро-
построения, которые можно выполнить с помощью односторонней ли-
линейки и шкалы — инструмента, используемого только для по-
пометки отрезка фиксированной длины вдоль некоей линии. Не
1.1, Исторический обзор 13
все евклидовы построения выполнимы с помощью этого набора
инструментов. Но для тех, что выполнимы, мы можем рассмат-
рассматривать координаты построенных точек как функцию F от за-
заданных точек. Гильберт дал необходимое и достаточное условие
вычислимости F с использованием ровно п операций извлечения
квадратного корня — это одна из наиболее ранних теорем в ал-
алгебраической теории вычислительной сложности [Hilbert A899)].
Есть основания думать, что многие из наших современных
методов анализа алгоритмов были предвосхищены геометрами
минувших столетий. В 1672 г. Джордж Мор показал, что любое
построение, осуществимое с помощью линейки и циркуля, можно
выполнить только циркулем в том случае, когда исходные и
искомые объекты определяются точками. (Так, хотя прямую
линию нельзя нарисовать одним циркулем, две точки на этой
линии можно определить с помощью пересечения двух окруж-
окружностей.) В доказательстве Мора примечательно моделирование,
с помощью которого он показывает, что любую операцию, в ко-
которой участвует линейка, можно заменить конечным числом
операций циркуля. Можно ли тут поставить вопрос о близкой
связи с теорией автоматов? В этом же русле лежит и результат
о том, что линейка, используемая в любом построении, может
иметь произвольную положительную длину, и, даже будучи ма-
маленькой, все же способна моделировать линейку какой угодно
длины.
Лемуан и другие занимались временной сложностью евкли-
евклидовых построений, и тем не менее также поднимался вопрос об
объеме пространства, необходимого для этих построений. Хотя
использовавшаяся мера пространства (а именно площадь на
плоскости, необходимая для реализации построения) не совпа-
совпадает с нашим современным определением в смысле количества
памяти, занимаемой алгоритмом, она была замечательно близка
к нему и весьма естественна. Использованная площадь зависит,
вообще говоря, от площади выпуклой оболочки заданных геомет-
геометрических мест точек и от размера искомого результата, а также
от размера любых промежуточных геометрических мест, кото-
которые необходимо сформировать при построении [Eves A972)].
Мы подчеркиваем здесь, что геометрии не чужды представления
о времени и памяти.
Когда Галуа продемонстрировал невозможность реализации
некоторых евклидовых построений, то стало ясно, что точная
трисекция любого угла неосуществима, но нет запрета на выпол-
выполнимость какого-нибудь приближенного построения. Фактически
асимптотически сходящиеся процедуры для квадратуры круга
и удвоения куба были известны еще древним грекам [Heath
A921)]. История приближенных алгоритмов, безусловно, яв-
является долгой.
14 Гл. 1. Введение
1.1.2. Теория выпуклых множеств, метрическая
и комбинаторная геометрии
Геометрия XIX века развивалась по многим направ-
направлениям. Одно из них, провозглашенное Клейном, включало в
себя всестороннее изучение поведения геометрических объектов
при различных преобразованиях, а проективная геометрия была
его важным ответвлением (см. разд. 1.3.2). Хотя исследование
конечных проективных плоскостей приводит к чарующим вопро-
вопросам и в комбинаторике, и в теории дискретных алгоритмов, этот
аспект геометрии не будет предметом данной книги.
Развитие вещественного анализа возымело решающее вли-
влияние на геометрию, приведя к формальным абстракциям кон-
концепций, которые ранее были лишь интуитивными. Две такие
разработки — метрическая геометрия и теория выпуклости —
дали главные математические инструменты, которые помогают
при построении быстрых алгоритмов.
Расстояние — важное понятие в геометрии. Метрика — его
обобщение — дала возможность распространить геометрические
концепции и интуицию на анализ, где идея «расстояния» между
функциями привела к появлению функциональных пространств
и других мощных конструкций. К сожалению, многое из создан-
созданного уводило в неконструктивизм. Функциональные пространства
по своей природе не вычислимые объекты.
Важность теории выпуклости заключается в том, что она
аналитически работает с глобальными свойствами объектов и
позволяет нам решать экстремальные задачи. К сожалению,
многие вопросы выпуклости имеют громоздкие алгебраические
формулировки и субъективно подталкивают к неконструктив-
неконструктивным методам.
Комбинаторная геометрия гораздо ближе по духу к нашей
цели — алгоритмической геометрии. Она основана на описании
геометрических объектов в терминах свойств конечных подмно-
подмножеств. Например, некоторое множество выпукло тогда и только
тогда, когда отрезок, определяемый любой парой его точек,
лежит полностью в этом множестве. Неадекватность комбина-
комбинаторной геометрии для нас заключается в том, что для боль-
большинства интересующих нас множеств число их конечных под-
подмножеств бесконечно, а это препятствует их алгоритмической
обработке. Работа последних лет в области геометрических ал-
алгоритмов направлена на избавление от этих недостатков и
развитие математики, ведущей к созданию хороших алго-
алгоритмов.
1.1.3. Смежные направления
Геометрические по своему характеру алгоритмы раз-
разрабатывались в нескольких разных контекстах, и термин «вы-
1.1. Исторический обзор 15
числительная геометрия» уже употреблялся по крайней мере в
двух других значениях. Здесь мы попытаемся рассмотреть эти
смежные направления в соответствующей перспективе и со-
сопоставить их с современной трактовкой:
1. Геометрическое моделирование средствами сплайновых
кривых и поверхностей ¦— предмет, который по духу ближе к
численному анализу, чем к геометрии ¦— подробно разрабатыва-
разрабатывалось Безье, Форрестом и Ризенфельдом. Надо отметить, что
Форрест называл свою дисциплину «Вычислительной геомет-
геометрией» [Bezier A972), Forrest A971), Riesenfeld A973)]1).
2. В элегантной и захватывающей книге, названной «Пер-
септроны» (подзаголовком которой является также «Вычисли-
«Вычислительная геометрия»), Минский и Пейперт [Minsky, Papert
A969)] изучают сложность предикатов, которые распознают оп-
определенные геометрические свойства, такие как выпуклость.
Цель их работы заключалась в получении вывода о возможности
использования больших сетчаток, состоящих из простых схем,
для задач распознавания образов. Их теория полностью само-
самостоятельна и не укладывается в алгоритмические рамки нашей
книги.
3. В графическом программном обеспечении и геометричес-
геометрических редакторах широко используются многие алгоритмы, пред-
представленные в данной книге. Однако в даннном случае в фокусе
оказываются детали реализации и интерфейс с пользователем,
а отнюдь не анализ алгоритмов. К этому же классу относятся:
программное обеспечение станков с ЧПУ, программы для гра-
графопостроителей, картографические системы и программное
обеспечение для архитектурного дизайна и строительства.
4. Наконец, словосочетание «вычислительная геометрия» для
некоторых может означать деятельность в области доказатель-
доказательства геометрических теорем с помощью ЭВМ. Хотя это и увлека-
увлекательное исследование, но оно дает намного больше информации
о наших эвристиках, служащих для доказательства теорем и по-
понимания процедур доказательства, чем данных о геометрии
как таковой, и поэтому мы здесь этим заниматься не будем.
1.1.4. Предыстория вычислительной геометрии
У колыбели дисциплины, известной ныне как вычис-
вычислительная геометрия, стояло большое число приложений, ибо
они порождают свойственные им геометрические задачи, для
которых должны создаваться эффективные алгоритмы. К числу
таких задач относятся: задача коммивояжера на евклидовой
метрике, построение минимального остовного дерева, удаление
') См. также [Фокс, Пратт A982)]. — Прим. перев.
Гл. 1. Введение
невидимых линий, линейное программирование и многие другие.
Чтобы убедительно продемонстрировать широту приложений вы-
вычислительной геометрии, мы отложим представление основного
материала по этим задачам до той поры, пока они не встре-
встретятся в тексте.
Алгоритмические исследования этих и других задач появи-
появились в научной литературе в текущем столетии, причем их ин-
интенсивность увеличилась в последние два десятилетия. Однако
систематическое изучение геометрических алгоритмов было пред-
предпринято только совсем недавно и эта дисциплина, окрещенная
«вычислительной геометрией» в статье М. Шеймоса [Shamos
A975а)], привлекает к себе все большее число исследователей.
Перспективы и методология вычислительной геометрии про-
проясняется, как мы надеемся, при детальном изучении конкретных
задач, представленных в данной книге. Одно из основных свойств
этой дисциплины заключается в осознании того, что классичес-
классические характеристики геометрических объектов часто не влияют
на проектирование эффективных алгоритмов. Чтобы преодолеть
этот недостаток, необходимо найти полезные понятия и устано-
установить их свойства, способствующие эффективности вычислений.
Короче говоря, вычислительная геометрия должна преобразо-
преобразовать — там, где это необходимо, — классическую дисциплину в
ее вычислительную форму.
1.2. Алгоритмические основы
В течение последних пятнадцати лет анализ и постро-
построение вычислительных алгоритмов остаются одной из самых про-
продуктивных областей информатики. Фундаментальные труды
Кнута [Knuth A968; 1973)] и Ахо, Хопкрофта, Ульмана
[Aho, Hopcroft, Ullman A974)] позволили упорядочить и систе-
систематизировать богатую коллекцию отдельных результатов; в них
сформулированы основные концептуальные модели и установ-
установлена методология, ставшая стандартом в этой области. После-
Последующие работы [Reingold, Nievergelt, Deo A977), Wirth A976)]
укрепили фундамент этой теории.
Поэтому детальный обзор материала этих превосходных
книг, с которыми читатель, наверное, основательно знаком, оста-
останется за рамками нашей работы. Однако целесообразно — по
крайней мере с точки зрения терминологии — привести краткий
обзор основных компонент языка, который будет применяться
для описания вычислительной геометрии. Эти компоненты суть
алгоритмы н структуры данных. Алгоритмы — это программы,
исполнимые на удобной абстракции реальных «фон-нейманов-
«фон-неймановских» ЭВМ; структуры данных — это способы организации ин-
1.2. Алгоритмические основы 17
формации, которые в совокупности с алгоритмами приводят к
эффективному и элегантному решению вычислительных задач.
1.2.1. Алгоритмы: их запись и оценка эффективности
Алгоритмы формулируют по отношению к конкретной
модели вычислений; как мы увидим в разд. 1.4, эта модель
представляет собой удобную абстракцию реальной машины,
используемой для исполнения программ. Однако, как было под-
подчеркнуто в работе [Aho, Hopcroft, Ullman A974)], нет ни нужды,
ни желания записывать алгоритмы машинным кодом. Напротив,
в интересах ясности, изобразительной эффективности и крат-
краткости мы будем, как правило1), использовать язык высокого
уровня, ставший стандартным в литературе на данную тему —
псевдоалгол. Псевдоалгол — это неформализованная и гибкая
версия языка Алгол; он достаточно строг в своих управляющих
структурах, но весьма волен в формате других своих операто-
операторов, где употребление общепринятых математических обозначе-
обозначений свободно чередуется с использованием выражений естест-
естественного языка. Разумеется, программа на псевдоалголе может
быть рутинно превращена в строгую программу на языке
уровня.
Следуя за работой Ахо, Хопкрофта, Ульмана, мы кратко
проиллюстрируем конструкции псевдоалгола. Формальные опре-
определения типов данных опущены, а тип любой переменной обычно
становится ясным из контекста. Кроме того, не выбирается спе-
специальный формат для выражений и условий.
Любая программа, обычно называемая процедурой, имеет
следующий формат:
procedure имя (параметры) оператор.
Оператор можно заменить (согласно терминологии порож-
порождающих грамматик) цепочкой из двух или более операторов,
заключая ее в этом случае в «операторные скобки» «begin ... end»:
begin оператор;
оператор
end.
В свою очередь смысл любого оператора можно раскрыть или
предложением на естественном языке, или одним из нижесле-
нижеследующих особых более формальных способов.
') Иногда алгоритмы могут быть представлены в сугубо описательной
рме.
18 Гл. 1. Введение
1. Присваивание:
переменная := источник
Термин «источник» определяет вычисление, порождающее зна-
значение заданной переменной; вычисление это, вообще говоря,
некоторое выражение над множеством переменных. (Некоторые
из этих переменных могут в свою очередь выражаться через
«функции»; функция — это особая форма программы, как пока-
показано ниже.)
2. Условие:
if условие then оператор (else оператор)
где составляющая else необязательна.
3. Цикл. Он представим в одном из трех форматов:
за. for переменная := значение until значение do оператор
зб. while условие do оператор
3n rpfipat ппрпятпп until чс лпчнр
60. wiine условие ао оператор
Зв. repeat оператор until условие
Конструкции while и repeat различаются, поскольку в цикле
типа «while» условие проверяется перед выполнением опера-
оператора, в то время как в цикле типа «repeat» имеет место обратное.
4. Возврат:
return выражение
Оператор этого вида должен появиться в программе функцио-
функционального типа, которая имеет формат
function имя (параметры) оператор.
Выражение, стоящее аргументом в операторе return, становится
источником в операторе присваивания, как указано в п. 1.
Часто алгоритмы на псевдоалголе содержат комментарии,
предназначенные для пояснения происходящего. В данной книге
типовой формат комментария будет следующим: («предложение
на естественном языке*).
Время, затраченное на вычисление при выполнении алго-
алгоритма, представляет собой сумму времен отдельных исполнен-
исполненных операторов (см. также разд. 1.4). Как упоминалось выше,
программу, написанную на псевдоалголе, можно превратить
прямым (хотя и утомительным) путем в программу на машин-
1.2. Алгоритмические основы 19
ном коде заданной ЭВМ. Это в принципе дает метод оценки
времени выполнения указанной программы. Однако такой под-
подход не только скучен, но также и мало вразумителен, ибо он
ориентирован на конкретную ЭВМ, тогда как нас, по сути, инте-
интересует более общая функциональная зависимость времени счета
от размеров задачи (т. е. то, как быстро время счета растет
с ростом размеров задачи). В области анализа и построения ал-
алгоритмов принято выражать время выполнения, так же как и
любую другую меру эффективности, с точностью до мультипли-
мультипликативной константы. Это обычно делается путем подсчета лишь
определенных «ключевых операций», выполняемых алгоритмом
(что легко осуществить, анализируя версию этого алгоритма,
записанную на языке высокого уровня). Такой подход абсолютно
правомерен при определении нижних оценок времени выполне-
выполнения, поскольку любые неучтенные операции могут лишь увели-
увеличить их; однако при работе с верхними оценками мы обязаны
убедиться в том, что вклад выбранных ключевых операций в
сумме отличается не более чем в константу раз от вклада всех
операций, выполненных алгоритмом. Кнут популяризовал аппа-
аппарат обозначений, прекрасно отличающих верхние оценки от ниж-
нижних, который мы и заимствуем [Knuth A976)]:
O(f(N)) служит для обозначения множества всех функций
g(N) таких, что существуют положительные константы С и No,
для которых |g(Af)| s^ Cf(N) при всех N ^ No.
Щ/(^0) служит для обозначения множества всех функций
g(N) таких, что существуют положительные константы С и А^о,
для которых g(N)^ Cf(N) при всех N ^ No.
Q(f(N)) служит для обозначения множества всех функций
g(N) таких, что существуют положительные константы Сь С2
и No, для которых Cif(N)^g(N)^C2f(N) при всех N ^ No-
°(f(N)) служит для обозначения множества всех функций
g(N) таких, что для всех положительных констант С сущест-
существует некое No, при котором g(N)^ Cf(N) для всех N ^ No
(или, что то же самое, lim g{N)/f (N) = 0).
ЛГ->°о
Итак, O(f(N)) используется для указания функций, которые
не более чем в постоянное число раз превосходят f(N), этот
способ нужен для описания верхних оценок; напротив, Q(f(N))
используется для указания функций, которые не менее чем в
постоянное число раз превосходят f(N) —аналогичный способ,
но для нижних оценок. Наконец, Q(f(N)) используется для ука-
указания функций того же порядка, что и f(N); этот способ нужен
для «оптимальных» алгоритмов.
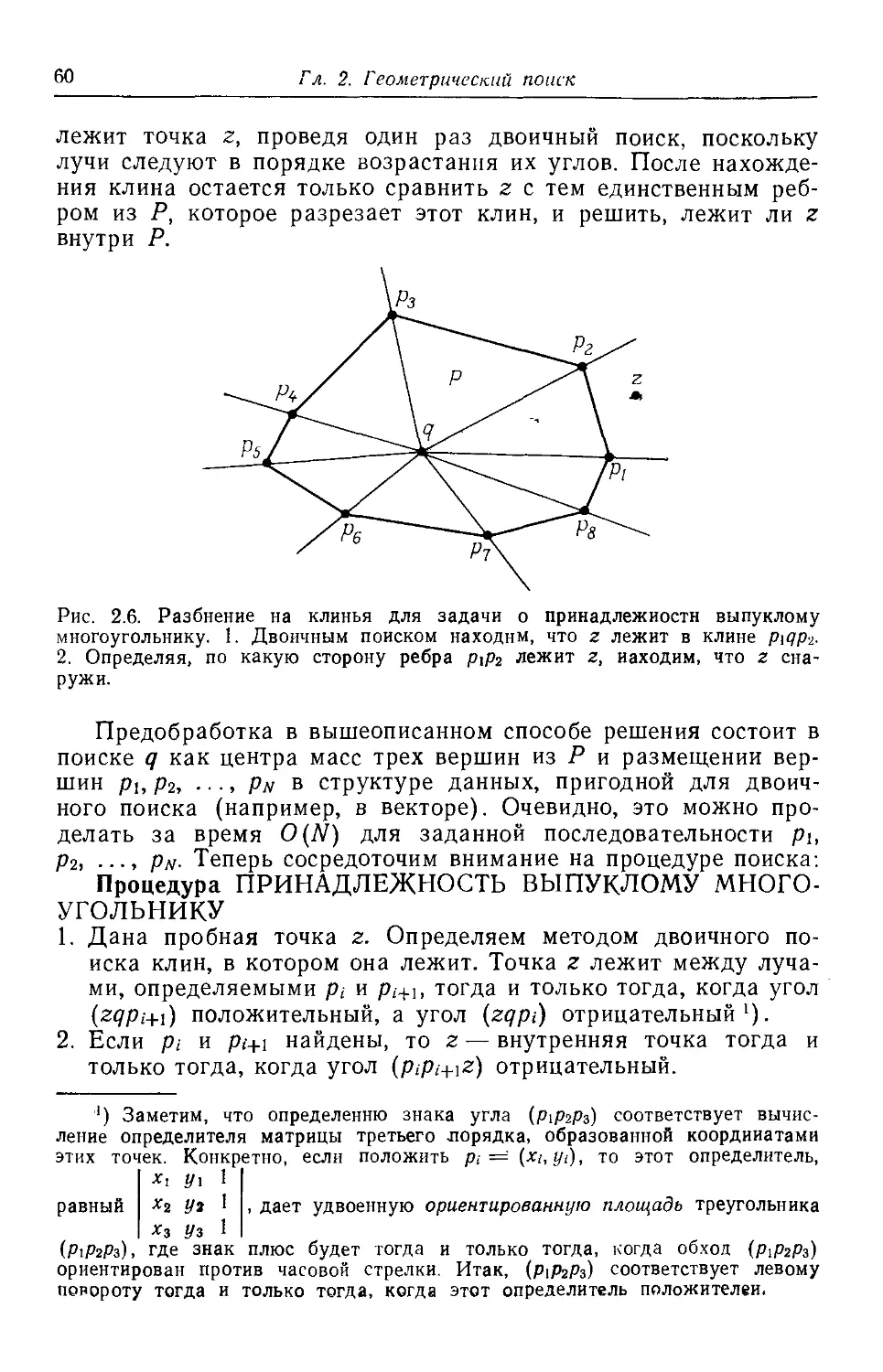
Предыдущее обсуждение было сосредоточено на времени
счета алгоритма. Другая важная мера его эффективности — это
20 Гл. 1. Введение
пространство, обычно совпадающее с объемом памяти, исполь-
использованной алгоритмом. Несомненно, пространственная и времен-
временная сложности как функции от размеров задачи являются дву-
двумя фундаментальными оценками эффективности при анализе
алгоритмов.
Главная цель данной книги, по сути, заключается в пред-
представлении алгоритмов для геометрических задач и оценке их
сложности для худшего случая. Сложность для худшего слу-
случая — это максимальная мера эффективности данного алгоритма
для всех задач данного размера, и ее нельзя путать со слож-
сложностью в среднем (или ожидаемой), которая отличается тем, что
дает оценку наблюдаемого поведения этого алгоритма. К сожа-
сожалению, анализ поведения в среднем значительно более сложная
вещь, чем анализ худшего случая, по двум причинам: во-первых,
существенные математические трудности возникают, даже если
удачно выбрано исходное распределение; во-вторых, часто с тру-
трудом достигается согласие в том, что именно выбранное распре-
распределение является реальной моделью изучаемой ситуации. Вот
почему преобладающее большинство результатов связано с ана-
анализом худших случаев; соответственно и в данной книге будут
лишь изредка обсуждаться результаты поведения в среднем.
Еще один важный момент, который следует отметить, связан
с тем, что обозначения «порядка» скрывают мультипликативные
константы. Следовательно, оценка сложности достигает своей
законной силы только при весьма больших размерах задачи;
именно поэтому такой подход называется асимптотическим ана-
анализом. Следовательно, вполне вероятно,— и действительно
часто бывает так, — что при малых размерах задачи наиболее
пригоден алгоритм, который асимптотически не оптимален. Это
предостережение никак нельзя игнорировать при выборе алго-
алгоритма для конкретного приложения.
1.2.2. Несколько замечаний об общих
алгоритмических методах
Эффективные алгоритмы для геометрических задач
часто конструируются при помощи общих методов теории алго-
алгоритмов, таких как «разделяй и властвуй», балансировка, рекур-
рекурсия и динамическое программирование. Превосходное обсужде-
обсуждение этих методов содержится в ставших теперь классическими
книгах по анализу и проектированию алгоритмов (см., например,
[Aho, Hopcroft, Ullman A974)]), и было бы излишеством повто-
повторять его здесь.
Однако существует метод, который подсказан — исключи-
исключительно и естественно — природой некоторых геометрических за-
задач. Этот метод называется заметанием, и наиболее часто ветре-
1.2. Алгоритмические основы 21
чаются примеры плоского заметания (в двух измерениях) и
пространственного заметания (в трех измерениях). Сейчас опи-
опишем главные черты плоского заметания; его можно весьма
просто обобщить на случай трех измерений.
Для определенности иллюстрируем этот метод на примере
конкретной задачи (обсуждаемой во всех подробностях
в разд. 7.2.3): дано множество отрезков на плоскости, надо
найти все их пересечения. Возьмем прямую / (предположим без
ограничения общности, что она вертикальная), которая разби-
разбивает данную плоскость на левую и правую полуплоскости. До-
Допустим, что каждая из этих полуплоскостей содержит концы
заданных отрезков. Очевидно, что решение нашей задачи есть
объединение решений для каждой из двух полуплоскостей; по-
поэтому, если предположить, что у нас уже есть множество точек
пересечения слева от /, то на это множество не будут влиять
отрезки, расположенные справа от /. Теперь заметим, что пере-
пересечение (искомое) может произойти только между такими двумя
отрезками, чьи пересечения с некоторой вертикалью смежны;
итак, если построить все вертикальные сечения отрезков задан-
заданного множества, то наверняка будут обнаружены и все искомые
пересечения. Однако этой (неразрешимой) задачи построения
(континуально) бесконечного множества всех секущих верти-
вертикалей можно избежать, если заметить, что плоскость разбивается
на вертикальные полосы, ограниченные или концами отрезков,
или точками их пересечения, и такие, что вертикальный порядок
точек пересечения вдоль любой вертикальной секущей в такой
полосе постоянен. Таким образом, все, что надо сделать, состоит
в скачке с левого края такой полосы на ее правый край с об-
обновлением порядка точек пересечения вертикали и поиском но-
новых пересечений среди «соседних» в этом порядке отрезков.
Предыдущее обсуждение намечает все существенные черты
метода плоского заметания. Есть вертикаль, которая заметает
плоскость слева направо, останавливаясь в особых точках, име-
именуемых «точками событий». Пересечение заметающей прямой
с входными данными задачи содержит всю полезную для про-
продолжения поиска информацию. Итак, мы имеем две основные
структуры:
1. Список точек событий — последовательность абсцисс,
упорядоченных слева направо и определяемых позициями оста-
остановок заметающей прямой. Отметим, что список точек событий
не требуется обязательно извлекать полностью из исходных дан-
данных, вместо этого его можно динамически обновлять при работе
алгоритма плоского заметания. В разных приложениях для этого
могут понадобиться различные структуры данных.
2. Статус заметающей прямой — адекватное описание пере-
пересечения этой заметающей прямой с заметаемой геометрической
22 Гл. 1. Введение
структурой. «Адекватное» означает, что это пересечение содер-
содержит информацию, полезную для данного приложения. Статус
заметающей прямой обновляется в каждой точке событий, а под-
подходящая для него структура данных должна выбираться приме-
применительно к каждому случаю.
Примеры алгоритмов плоского заметания можно найти
в разд. 2.2.2.
1.2.3. Структуры данных
Геометрические алгоритмы включают в себя манипу-
манипулирование с объектами, которые не обрабатываются на уровне
машинного языка. Поэтому пользователь должен описать эти
сложные объекты посредством более простых типов данных,
непосредственно представимых в машине. Такие описания при-
принято называть структурами данных.
Самые распространенные сложные объекты, встречающиеся
при построении геометрических алгоритмов, — это множества и
последовательности (упорядоченные множества). Структуры
данных, особенно удобные для этих сложных комбинаторных
объектов, хорошо описаны в стандартной литературе по алго-
алгоритмам, к которой и отсылается читатель [Aho, Hopcroft, Ullman
A974); Reingold, Nievergelt, Deo A977)]. Приведем их здесь
только затем, чтобы бегло очертить классификацию этих струк-
структур данных наряду с функциональными возможностями и вычис-
вычислительной эффективностью.
Пусть S — некоторое множество, представленное структурой
данных, и пусть и — произвольный элемент некоторого универ-
универсального множества, подмножеством которого является S. При-
Приведем основные операции, встречающиеся при работе со мно-
множествами:
1. ПРИНАДЛЕЖНОСТЬ (и, S).Верно, что «gS? (Ответ типа
ДА/НЕТ.)
2. ВСТАВИТЬ (и, S). Включить и в S.
3. УДАЛИТЬ (и, S). Исключить и из S.
Предположим теперь, что {Si, S2 Sk}— набор множеств
(попарно непересекающихся). На этом наборе полезны сле-
следующие операции:
4. НАЙТИ (и). Найти такое /, что и ge S,-.
5. ОБЪЕДИНИТЬ (Si, S,-; Sk). Сформировать объединение S,-
и Si и назвать его Sk.
1.2. Алгоритмические основы 23
Если универсальное множество полностью упорядочено, то
очень важны следующие операции:
6. MIN (S). Найти наименьший элемент S.
7. РАСЦЕПИТЬ (и, S). Разделить S на {Su S2) такие, что
Si = {o:oeSHt)<«},aS2 = S-Si.
8. СЦЕПИТЬ (Si, S2). Предположим, что для любых u'gS| и
и" G Sj имеем и'^и"; следует сформировать множество
s = s, и s2.
Структуры данных можно классифицировать на базе опера-
операций, которые на них допустимы (без учета их эффективности).
Так, для упорядоченных множеств имеется следующая таб-
таблица:
Таблица I
Структура данных
Словарь
Приоритетная очередь
Сцепляемая очередь
Допустимые операции
ПРИНАДЛЕЖНОСТЬ, ВСТАВИТЬ, УДАЛИТЬ
MIN, ВСТАВИТЬ, УДАЛИТЬ
ВСТАВИТЬ, УДАЛИТЬ, РАСЦЕПИТЬ, СЦЕ-
СЦЕПИТЬ
Для лучшей эффективности каждая из этих структур данных
обычно реализуется как дерево двоичного поиска, сбалансиро-
сбалансированное по высоте (часто как АВЛ- или 2-3-дерево) [Aho, Ho-
pcroft, Ullman A974)]. При такой реализации каждая из вы-
вышеописанных операций осуществляется за время, пропорциональ-
пропорциональное логарифму числа элементов, хранимых в структуре данных;
требуемая память пропорциональна мощности исходного мно-
множества.
Описанные выше структуры данных можно мысленно пред-
представить себе в виде линейного массива из элементов (списка)
так, что вставки и удаления можно осуществить в любой пози-
позиции этого массива. Иногда для каких-то приложений вполне
приемлемы некоторые более ограниченные режимы доступа, до-
допускающие упрощение. Приведем эти структуры: очереди —
вставки происходят с одного конца, а удаления — с другого;
стеки — и вставки, и удаления происходят с одного конца (вер-
(вершины стека). Очевидно, что все, что необходимо для управления
соответственно стеком или очередью, — это один или два указа-
указателя. Для краткости мы будем пользоваться обозначениями
«=>U» и «U=>» для указания соответственно добавления или
удаления из U, где U — это очередь или стек.
24 Гл. 1. Введение
Неупорядоченные множества всегда могут обрабатываться,
как упорядоченные: путем искусственного введения порядка над
их элементами (например, присвоением «имен» элементам и
использованием алфавитного порядка). Типовая структура дан-
данных в этой ситуации такова:
Таблица II
Структура данных
Сливаемая пирамида
Допустимые операции
ВСТАВИТЬ, УДАЛИТЬ, НАЙТИ, ОБЪЕДИ-
ОБЪЕДИНИТЬ, (MIN)
Каждую из вышеуказанных операций можно выполнить за вре-
время O(\ogN), где N — размер множества, запасенного в этой
структуре данных путем использования, как обычно, дерева,
сбалансированного по высоте. Если элементы рассматриваемого
множества представлены целыми числами от 1 до N, то более
сложная реализация этой структуры данных позволяет выпол-
выполнить N операций над множеством размером N за время
O(N-A(N)), где A(N)—чрезвычайно медленно растущая
функция, связанная с обратной функцией Аккермана (например,
для JV<22'6, или ~ Ю20000, Л(Л0<5).
Стандартные структуры данных, рассмотренные выше, ши-
широко используются в алгоритмах вычислительной геометрии.
Однако природа геометрических задач привела к созданию спе-
специальных, необычных структур данных, две из которых оказа-
оказались настолько общезначимыми, что целесообразно представить
их в данной вводной главе. Эти структуры — дерево отрезков и
реберный список с двойными связями.
1.2.3.1. Дерево отрезков
Дерево отрезков, впервые введенное Дж. Бентли
[Bentley A977)], это структура данных, созданная для работы
с такими интервалами на числовой оси, концы которых принад-
принадлежат фиксированному множеству из N абсцисс. Поскольку
множество абсцисс фиксировано, то дерево отрезков пред-
представляет собой статическую структуру по отношению к этим
абсциссам, т. е. структуру, на которой не разрешены вставки и
удаления абсцисс; кроме того, эти абсциссы можно нормализо-
нормализовать, заменяя каждую из них ее порядковым номером при об-
обходе их слева направо. Не теряя общности, можно считать эти
абсциссы целыми числами в интервале [ 1, ЛЛ].
1.2. Алгоритмические основы
25
Дерево отрезков — это двоичное дерево с корнем. Для за-
заданных целых чисел / и г таких, что Кг, дерево отрезков
ТA, г) строится рекурсивно следующим образом: оно состоит из
корня v с параметрами В[и] =/ и ?[t)] =r (В и Е мнемони-
мнемонически соответствуют словам «beginning» (начало) и «end» (ко-
(конец)), а если г—/>1, то оно состоит из левого поддерева
T(l, l(B[v] + ?[y])/2J) и правого поддерева T(l(B[v] +
+ ?[o])/2J, r). (Корни этих поддеревьев естественно обозначить
через ЛСЫН[о] и ПСЫН[и] соответственно.) Параметры В [v]
Рис. 1.1. Дерево отрезков ГD, 15).
и E[v] обозначают интервал [B[v], E[v]] s [I, r], связанный
с узлом v. Пример дерева отрезков приведен на рис. 1.1. Ин-
Интервалы, принадлежащие множеству {[В [и], ?[w]]: v — узел
T(l,r)}, называются стандартными интервалами дерева ТA,г).
Стандартные интервалы, принадлежащие листьям ТA, г), на-
называются элементарными интервалами1). Можно непосред-
непосредственно убедиться, что ТA,г) сбалансировано (все его листья
принадлежат двум смежным уровням) и имеет глубину
Г loga (г — 0 1.
Дерево отрезков ТA, г) предназначено для динамического
запоминания тех интервалов, чьи концы принадлежат множеству
{/, /+ 1 г} (т. е. допустимы операции вставки и удаления).
В частности, при г — / > 3 произвольный интервал [Ь, е] с це-
целыми b < е будет разбит в набор из не более чем \\ogz(r —
— 01+Llog2(r—/) J —2 стандартных интервалов дерева
ТA, г). Фрагментация интервала [Ь, е\полностью определяется
операцией, которая заносит (вставляет) [Ь, е] в дерево отрез-
отрезков Т, и, значит, обращением ВСТАВИТЬ (Ь, е; корень G))
к следующей процедуре:
'') Строго говоря, интервал, связанный с v, это полуоткрытый интервал
[B[v], E[v]), за исключением узлов самого правого пути в ТA,г), чьи ин-
интервалы замкнуты.
t~A. 1. Ёведениё
procedure ВСТАВИТЬ(b, e; v)
begin if F<B[y]) and (?[y]<e) then назначить [b, e] узлу v
else begin if (b < l(B[v] + E[v])/2]) then
ВСТАВИТЬ (b ,е;ЛСЫН[а]);
If (l(B[v) + E[v])/2\<e) then
ВСТАВИТЬF ,е;ПСЫН[а])
end
end.
Действие ВСТАВИТЬ(b, e; корень (Г)) соответствует «мар-
«маршруту» в Т, имеющему следующую общую структуру (рис. 1.2):
(возможно, пустой) начальный путь, именуемый Рнач, от корня
до узла v*, называемого развилкой, из которого выходят два
Рис. 1.2. Вставка интервала [74, 107] в ГA,257). Узлы отнесения окружены
дважды.
(возможно, пустых) пути—Рл и Рп- Вставляемый интервал от-
относится или полностью к развилке (в этом случае Рд и Рп оба
пусты), или ко всем правым сыновьям пути Рл, которые сами
не на Рл, наряду со всеми левыми сыновьями пути Рп, которые
сами не на Рп: при этом определяется фрагментация [Ь, е]
(узлы отнесения).
1.2. Алгоритмические основы 27
Отнесение интервала к узлу v из Т может принимать разные
формы в зависимости от потребностей конкретного приложения.
Часто все, что надо знать, — это мощность множества интерва-
интервалов, отнесенных к любому заданному узлу v; ее можно запом-
запомнить в единственном неотрицательном целом параметре C[v],
обозначающем эту мощность. Тогда отнесение [Ь, е] к узлу v —
это всего лишь
C[v]:=C[v] + l.
В других приложениях надо сохранить сведения об интервалах,
отнесенных к узлу v. Тогда к каждому узлу дерева Т добавляется
вторичная структура — связный список 3?\v\, чьи записи явля-
являются идентификаторами этих интервалов.
Совершенно симметрична операции ВСТАВИТЬ операция
УДАЛИТЬ, выражаемая следующей процедурой (здесь предпо-
предполагается, что нас интересует только состояние параметра С [и]):
procedure УДАЛИТЬF,е;и)
begin if (ft<S[y]) and (?[уГ<е) then C[v]:=C[v] — 1
else begin if (b < l(B[v] + E[v])/2]) then
УДАЛИТЬF,е;ЛСЫН[о]);
if (l(B[v] + E[v])/2]<e) then
УДАЛИТЬF,е;ПСЫН[о])
end
end.
(Заметим, что удаление только ранее вставленных интервалов
гарантирует корректность.)
Дерево отрезков — чрезвычайно гибкая структура данных,
в чем мы еще сможем убедиться в связи с многочисленными при-
приложениями (гл. 2 и 8). Отметим только, что если надо знать
число интервалов, содержащих данную точку х, то простой дво-
двоичный поиск в Т (т. е. прохождение пути от корня к листу) пол-
полностью решает эту задачу.
1.2.3.2. Реберный список с двойными связями
Реберный список с двойными связями (РСДС) осо-
особенно удобен для представления планарного графа, уложенного
на плоскости1) [Muller, Preparata A978)]. Плоская укладка
планарного графа G=(V, Е)— это отображение каждой вер-
вершины из V в точку на плоскости, а каждого ребра из Е
') Пленарный граф, уложенный на плоскости, принято называть пло-
плоским. — Прим. перев.
28
Гл. I. Введение
в простую линию, соединяющую пару образов концевых вер-
вершин этого ребра так, чтобы образы ребер пересекались только
в своих концевых точках. Хорошо известно, что любой планар-
ный граф можно уложить на плоскости так, чтобы все ребра
отобразились в прямолинейные отрезки [Fary A948)].
Пусть V = {v\, ..., vN}, a E={eu ..., ем}- Главная компо-
компонента РСДС для планарного графа (V, Е) это реберный узел.
Между ребрами и реберными узлами существует взаимно одно-
однозначное соответствие, т. е. каждое ребро представлено ровно один
раз. Реберный узел содержит четыре информационных поля (VI,
VI VZ F1 FZ Pi P2
аг
!
4
г
г
1
3
1
1
г
2
аг
Рис. 1.3. Пример РСДС.
V2, F\, F2) и два поля указателей (Р1 и Р2); следовательно,
соответствующую структуру данных легко реализовать как
шесть массивов с теми же именами, каждый из которых состоит
из М ячеек. Значения этих полей таковы. Поле VI содержит
начало ребра, а поле V2 содержит его конец; так ребро получает
условленную ориентацию. Поля ^1 и F2 содержат имена^ граней,
которые лежат соответственно слева и справа от ребра, ориен-
ориентированного от VI к V2. Указатель Р\ (соответственно Р2) за-
задает реберный узел, содержащий первое ребро, встречаемое
вслед за ребром (VI, V2), при повороте от него против часовой
стрелки вокруг VI (соответственно V2). Имена граней и вершин
могут быть заданы целыми числами. В качестве иллюстрации
фрагмент графа и соответствующий ему фрагмент РСДС пока-
показаны на рис. 1.3.
Теперь легко видеть, как с помощью РСДС можно вычислить
ребра, инцидентные заданной вершине, или ребра, ограничи-
ограничивающие заданную грань. Если в графе N вершин и F граней, то
мы можем ввести два массива (HV[l:N] и HF[l:F]) для за-
заголовков списков этих вершин и граней. Эти массивы можно
заполнить при просмотре массивов VI и F\ за время O(N).
1.3. Геометрические предпосылки 29
С помощью приведенной ниже процедуры ВЕРШИНА(/) можно
построить последовательность ребер, инцидентных vf, как после-
последовательность адресов, занесенных в массив А:
procedure ВЕРШИНА(/)
begin a := HV[]];
аа:=а; Л[1]:=а;
/ := 2;
if (Vl[a] = j) then а:=Р1[а] else а:=Р2[а];
while (а ф а0) do
begin A[i] := а;
if (Vl[a] = j) then o:=Pl[o] else a:=P2[a];
i:=i+ 1
end
end.
Ясно, что время работы процедуры ВЕРШИНА(/) пропор-
пропорционально числу ребер, инцидентных vj. Аналогично мы можем
создать процедуру ГРАНЬ (/), с помощью которой можно по-
получить последовательность ребер, ограничивающих fj, заменив
соответственно HV и VI на HF иЛ в процедуре ВЕРШИНА(/).
Отметим, что процедура ВЕРШИНА перечисляет ребра в по-
порядке обхода вокруг вершины против часовой стрелки, в то
время как ГРАНЬ перечисляет их в порядке обхода по часовой
стрелке вокруг грани.
Часто плоский граф G = (V, Е) представляется в форме
реберного списка, где каждой вершине v/ e V сопоставлен спи-
список инцидентных ей ребер, перечисленных в том порядке, в ко-
котором они следуют при обходе против часовой стрелки вокруг
Vj. Легко показать, что представление G в виде реберного списка
можно преобразовать в представление в форме РСДС за время
O(\V\).
1.3. Геометрические предпосылки
1.3.1. Общие определения и обозначения
Объекты, рассматриваемые в вычислительной гео-
геометрии, обычно задаются множествами точек в евклидовом
пространстве1). Предполагается, что задана система координат,
в которой каждая точка представима набором (вектором)
') Ограничение рамками евклидовой геометрии (частного, но весьма важ-
важного случая метрической геометрии) позволяет нам прибегнуть к своему не-
непосредственному опыту, но оно обосновано еще и тем, что подавляющее
большинство приложений формулируется в терминах евклидова простран-
пространства. Однако такое ограничение несущественно для множества тех приложе-
приложений, которые будут рассмотрены в следующих главах. Позднее мы еще раз
вернемся к этой важной теме (разд. 1.3.2).
30 Гл. 1, Введение
декартовых координат. Геометрические объекты не обязаны со-
состоять из конечных множеств точек, но должны удовлетворять
условию: быть описанными конечным образом (обычно конеч-
конечными цепочками параметров). Следовательно, помимо изоли-
изолированных точек будут рассматриваться также: прямая линия,
содержащая две заданные точки; отрезок прямой линии, опре-
определенный парой своих концевых точек; плоскость, содержащая
три заданные точки; многоугольник, определенный (упорядо-
(упорядоченной) последовательностью точек, и т. п.
Этот раздел не претендует на введение формальных опреде-
определений геометрических понятий, используемых в данной книге;
мы хотим только напомнить о понятиях, хорошо известных чи-
читателю, и ввести удобные обозначения.
Обозначим через Ей d-мерное евклидово пространство, т. е.
пространство d-плексов (Х\, . . ., Xd), состоящих из действитель-
(? Y/2
ных чисел Xi, i = 1, . . ., d, с расстоянием I ? х\ I . Определим
теперь важнейшие объекты, рассматриваемые вычислительной
геометрией.
Точка. Точкой р в пространстве Ей называется d-плекс
(х\, . . ., Ха) ¦ Эту точку можно интерпретировать также и как
d-компонентный вектор, исходящий из начала координат в Ей,
свободным концом которого является точка р.
Прямая, плоскость, линейное многообразие. Пусть даны две
разные точки q\ и q2, принадлежащие Ей; тогда линейная
комбинация
щх + A — a) q2 (а е= R)
называется прямой в Ed. В общем случае для заданных k
линейно независимых точек Ц\, . . ., qk, принадлежащих
Ed (k ^ d), линейная комбинация
«i^i + «ОДг + • • • + afe_i^ft-i + О — Щ — ¦ • ¦ — Oft-i) Як
(a,sR, /=1, ..., k-\)
называется линейным многообразием размерности (k— 1) в Ed.
Отрезок. Пусть даны две разные точки qx и q2, принадле-
принадлежащие Ей, тогда линейная комбинация aq\-\-(\ — a)q2 при
условии 0 ^ a ^ 1 определит выпуклую комбинацию для q\
и q2, т. е.
a<7i + (l— a)q2 (oeR, 0<a<l).
Эта выпуклая комбинация описывает прямолинейный отре-
отрезок, соединяющей две точки: q{ и q2. Обычно этот отрезок обо-
обозначают как qiq2 (неупорядоченная пара).
1.3. Геометрические предпосылки 31
Выпуклое многообразие. Область D, принадлежащая про-
пространству Ed, называется выпуклой, если для любой пары
точек q\ и q2 из D отрезок qiq2 целиком принадлежит D.
Можно доказать, что пересечением выпуклых областей яв-
является выпуклая область.
Выпуклая оболочка. Выпуклой оболочкой множества точек
S, принадлежащих пространству Ed, называется граница
наименьшей выпуклой области в Ed, которая охватывает S.
Многоугольник. Многоугольником в пространстве Е2 назы-
называется конечное множество отрезков, в котором каждый конец
отрезка принадлежит ровно двум отрезкам и никакое подмно-
подмножество этих отрезков не обладает указанным свойством. Эти
отрезки называются сторонами (иногда ребрами), а их концы —
вершинами многоугольника. (Заметим, что число сторон и число
вершин совпадают.) Многоугольник с N вершинами назы-
называется iV-угольником.
Многоугольник называется простым, если никакая пара не-
непоследовательных его ребер не имеет общих точек. Простой
многоугольник разбивает плоскость на две непересекающиеся
области — внутреннюю (конечную) и внешнюю (бесконечную),
разделенные этим многоугольником (теорема Жордана). (За-
(Замечание: в обиходе термин «многоугольник» часто употреб-
употребляется для обозначения объединения границы и внутренней
области.)
Простой многоугольник Р называется выпуклым, если его
внутренняя область является выпуклым множеством.
Простой многоугольник Р называется звездным1), если
существует точка г, не внешняя для Р, такая, что для всех
точек р, принадлежащих Р, отрезок zp полностью лежит внутри
Р. (Итак, любой выпуклый многоугольник звездный.) Мно-
Множество точек z, обладающих указанным выше свойством, на-
называется ядром Р. (Очевидно, выпуклый многоугольник совпа-
совпадает со своим ядром.)
Планарный граф. Граф G = (V, Е) (где V—множество
вершин, Е—множество ребер) называется планарным, если
его можно уложить на плоскости без самопересечений
(см. разд. 1.2.3.2). Прямолинейная укладка ребер планарного
графа определяет разбиение плоскости, называемое планарным
подразбиением или картой. Пусть v — число вершин, е — число
ребер и / — число граней (включая единственную бесконечную
') Следует отличать его от звездчатого многоугольника, т. е. от само-
самопересекающегося многоугольника, все стороны которого чкоигруэнтны и все
углы конгруэнтны. — Прим. ред.
&2 Гл. 1. Введение
грань) такого подразбиения. Эти три параметра связаны клас-
классической формулой Эйлера [Bollobas A979)]
v-e + f = 2. A.1)
Если мы, кроме того, знаем, что степень каждой вершины 5=3,
то в качестве простого упражнения можно доказать следующие
неравенства:
( 2
| »< е<36
которые показывают, что v, е и f попарно пропорциональны.
(Заметим, что три правых неравенства верны при всех ус-
условиях.)
Триангуляция. Планарное подразбиение называется триан-
триангуляцией, если все его конечные грани являются треугольни-
треугольниками. Триангуляцией конечного множества точек S называется
плоский граф S, имеющий наибольшее возможное число ребер
(другими словами, триангуляция S получена путем соединения
точек из S непересекающимися прямолинейными отрезками так,
что любая грань, лежащая внутри выпуклой оболочки S, яв-
является треугольником).
Полиэдр. Полиэдром в пространстве Е3 называется такое
конечное множество плоских многоугольников, когда каждая
сторона любого многоугольника принадлежит еще ровно одному
из остальных многоугольников (смежным многоугольникам) и
никакое из подмножеств этого множества многоугольников не
обладает указанным свойством. Вершины и стороны этих много-
многоугольников являются вершинами и ребрами данного полиэдра;
сами многоугольники называются гранями полиэдра.
Полиэдр называется простым, если никакая пара несмеж-
несмежных его граней не имеет общих точек. Простой полиэдр разби-
разбивает пространство на две непересекающиеся области — внут-
внутреннюю (конечную) и внешнюю (бесконечную). (И опять, в
обиходе термин «полиэдр» часто используется для обозначения
объединения границы и внутренней области.)
Поверхность любого полиэдра (рода нуль) изоморфна пла-
нарному подразбиению. Поэтому числа v, e и / соответственно
для его вершин, ребер и граней удовлетворяют формуле
Эйлера A.1).
Простой полиэдр называется выпуклым, если его внутрен-
внутренняя область является выпуклым множеством.
i.li. Геометрические предпосылки 33
1.3.2. Инварианты групп линейных преобразований
К геометрии можно подходить чисто аксиоматически
как к системе, состоящей из множеств объектов — таких, как
точки, прямые, плоскости и т. п. — и набора отношений между
ними. Такие объекты не обязаны обладать интуитивной связью
с нашим опытом, напротив, точное следование аксиомам должно
вести к раскрытию свойств этой системы. Такой подход, впервые
предложенный Гильбертом в конце девятнадцатого века [Hilbert
A899)], оказал исключительное влияние на развитие этой дис-
дисциплины. Чтобы резче подчеркнуть разницу между аксиомати-
аксиоматическим подходом и более традиционным — интуитивным, нужно
просто напомнить, что указанные множества точек и прямых
могут даже предполагаться конечными.
С более утилитарной точки зрения мы хотим сгладить это
расхождение, рассматривая геометрию как некую строгую аб-
абстракцию, основанную на обычном опыте. При таком подходе
ее главные составляющие — это модели реальных объектов, ос-
основанные на интуиции, например прямая линия это абстракция
пути светого луча, а ее результаты (теоремы) непосредственно
интерпретируются в терминах реальности. Второй подход не
противоречит первому: он просто проясняет природу аксиом,
связывая их с геометрической интуицией. Однако необходимо
отметить, что такое ограничение оставляет широкий простор:
несомненно, что использование неевклидовой геометрии в тео-
теории относительности было в известном смысле продиктовано
соображениями геометрической интуиции.
При изучении геометрических алгоритмов естественно пред-
предположить, что мы работаем в евклидовом пространстве. Помимо
всего прочего евклидово пространство — еще весьма удобная и
адекватная модель для многих областей знания, в которых воз-
возникают геометрические приложения. В частности, неслучайно,
что (евклидовы) плоскость и пространство являются областями
для ряда наиболее важных приложений геометрических методов
(машинная графика, автоматизированное проектирование
и т. д.). Будем также считать, что в евклидовом пространстве
имеется ортонормированная1) декартова система координат.
Интересно было бы расширить область применения отдель-
отдельных алгоритмических результатов за рамки евклидова простран-
пространства. В частности, нас интересует описание классов преобразо-
преобразований этого пространства (и данной индивидуальной2) задачи
¦') То есть координатные оси взаимно ортогональны, а соответствующие
им единичные отрезки имеют одинаковую длину. -\
2) Индивидуальной задачей называется задача вместе с конкретными зна-
значениями входных параметров (см. [Гэри, Джонсон A982), с. Щ. — Прим.
перев.
2 Зак. 1075
Гл. 1. Введение
в этом пространстве), сохраняющих коррективность выбранного
алгоритма.
Более формально, точку, принадлежащую пространству Ed,
можно интерпретировать как rf-компонентный вектор (хих2, ...
..., Xd), состоящий из ее координат (для краткости обозначим
его через х). Теперь рассмотрим отображения Т: Ed^-Ed, т. е.
которые переводят Еа в самоё себя. Такие отображения мы
всегда будем интерпретировать как движения точек по отно-
отношению к фиксированному базису (активная интерпретация), а
не как изменение базиса, оставляющее точки неподвижными
(пассивная интерпретация). (См., например, [Birkhoff, MacLane
A965)].) В частности, нас особенно интересуют линейные
преобразования, т. е. преобразования, при которых новые коор-
координаты точки линейно зависят от старых координат этой точки.
Итак, если (хих2, ..., ха) — координаты точки р, то образ р'
точки р при преобразовании Т имеет координаты
x't=I.ajtxl + cl {1=1, 2, ..., d), A.3)
/-1
или, более компактно,
х' = хЛ + с, A.4)
где Л=||а,7|| — матрица размером dy^d, с представляет со-
собой rf-компонентный вектор, а все векторы являются векторами-
строками.
Уравнение A.4) —это общая форма записи аффинного пре-
преобразования. Можно составить себе предварительное интуитив-
интуитивное представление об аффинном преобразовании, рассмотрев два
особых случая, когда А = 1 (единичная матрица), с = 0. При
А = 1 уравнение A.4) принимает вид
х' = х + с A.5)
и описывает преобразование, при котором каждая точка сме-
смещается на фиксированную величину с; такие преобразования
естественно называются переносами. С другой стороны, при
с = 0 мы имеем
т. е. линейное преобразование пространства, которое отображает
начало координат в себя (т. е. начало координат является
неподвижной точкой). Заметим, что, вообще говоря, rf-мерное
аффинное преобразование можно рассматривать как (d+1)-
мерное линейное преобразование однородных координат путем
простого увеличения числа компонент вектора точки (*i, . .., x<t)
1.3. Геометрические предпосылки 35
введением дополнительной компоненты xa+i = 1, т. е. уравне-
уравнение A.4) можно переписать следующим образом:
A-6)
Содержательная классификация аффинных преобразований
основана на свойствах матрицы А. В частности, различные об-
области геометрии можно рассматривать как изучение тех свойств,
которые инвариантны относительно некоторого множества пре-
преобразований. Этот весьма важный подход был предложен Клей-
Клейном около века назад [Klein A872)], и в настоящее время он
стал основным направлением геометрических исследований.
Начнем со случая, когда А — произвольная невырожденная
матрица. Очевидно, что множество всех таких преобразований
образует группу (с операцией композиции), в чем можно легко
убедиться1). Эта группа называется аффинной группой, а аф-
аффинная геометрия занимается теми ее свойствами, которые не
изменяются (инвариантны) при преобразованиях элементов
этой группы. Главный инвариант аффинной геометрии — это
инцидентность, т. е. принадлежность некой точки р к некоторой
прямой /.
Теперь рассмотрим особый случай, получаемый при выполне-
выполнении требования
ААТ = Х21, A.7)
где Я — действительное число (верхний индекс Т обозначает
«транспонирование»). Это условие характеризует важную под-
подгруппу аффинной группы, известную как группа подобия. При
выполнении A.7) легко проверить, что отношение расстояний
между точками сохраняется (равно как и углы, и перпендику-
перпендикулярность прямых). Без потери общности рассмотрим частный
случай е = 0 в равенстве A.4). Норма (корень квадратный из
длины) вектора х (отрезка между точкой и началом координат)
задается скалярным произведением ххг; значит, норма х' об-
образа х при преобразовании подобия равна
х'х'г = х Л (х А)т = xAAV = хХЧхт = А2ххт.
Отсюда видно, что вектор х был растянут в ± X раз. Далее,
если даны два вектора х и у, то для скалярного произведения
их образов х' и у' верно
') Замкнутость, ассоциативность, существование единицы и обратного
Элемента — все это непосредственно следует из аналогичных свойств группы
Невырожденных (d X d) -матриц.
36 Гл. 1. Введение
Поскольку х'у'т = | х' | • | у' | cos (х', у'), а хуг=| х | • | у | cos (x, у), то
cos(x', y') = cos(x, у),
что доказывает ранее сделанное утверждение.
Дальнейшее сужение (группы подобия) получается при вы-
выполнении дополнительного требования
где \А\ обозначает детерминант А. Подгруппа преобразований,
описываемая данным свойством, называется унимодулярной.
Ее инвариантом является объем. Действительно, рассмотрим
множество, состоящее из d векторов х1(Х2, ..., х^, в этом случае
модуль детерминанта матрицы [х[ ... х?] равен объему гипер-
гиперпараллелепипеда, определяемого этими векторами. Переходя к
образам этих векторов: х'{ = xtA, i=l, ¦.., d, получаем | [х,7 ...
... xj] | = | А 11 [xf ... \Td] | = ± | [х[ ... \Td] |, что и доказывает
инвариантность объема.
Если мы теперь рассмотрим пересечение группы подобия с
унимодулярной группой, то получим новую подгруппу преобра-
преобразований, называемую ортогональной. Инвариантом этой группы
является расстояние. Действительно, определитель матрицы
А-Ат равен
но, согласно A.7), \ААТ\ =К2, причем Я = ±1. Расстояние
d(x, у) между двумя точками х и у задается абсолютной вели-
величиной квадратного корня из нормы их разности, т. е.
d(x, у) = У(х-У)-(х-у)г-
Следовательно, мы имеем
d (х', у') = У(х^-
= V(x-y)-(x-y)r = d (х, у).
Аффинные преобразования, сохраняющие расстояние (и, следо-
следовательно, сохраняющие площадь, углы и перпендикулярность),
называются движениями; они и формируют основы евклидовой
геометрии.
Теперь вернемся к уравнению A.6), описывающему особое
преобразование (<i+ 1)-мерного векторного пространства, и сни-
снимем ограничение на вид последнего столбца матрицы преобра^-
зований. Получаем соотношение
r-ifi, A.8)
1.3. Геометрические предпосылки
37
где |' и |— векторы (d-\- 1)-мерного евклидова пространства
Vd+i, а В — невырожденная матрица размером (rf+ 1) X
X (d+1).
Сосредоточим свое внимание на направлении вектора, игно-
игнорируя его длину: это означает, что два коллинеарных вектора |
и с% (сФ 0) считаются эквивалентными. Представителем этого
класса эквивалентности мы можем выбрать точку, где прямая
1 = {с%: с^Щ протыкает единичную сферу Sd+l, принадлежа-
принадлежащую Ed+l (заметим, что Sd+l — это rf-мерное многообразие, так
Соответствунщав
точки
Рис. 1.4. Иллюстрация соответствия между однородными и неоднородными
(обычными) координатами.
как его точки определяются d параметрами). Если теперь
выбрать величину с так, чтобы последняя компонента вектора с%
была равна 1, то мы получим точку, в которой прямая I про-
протыкает гиперплоскость ха+\ = \ (рис. 1.4, для d = 2). Итак,
имеется взаимно однозначное соответствие между точками
плоскости xd+i = 1 и точками полусферы Sd+1, для которой спра-
справедливо условие Xd+i > 0; это соответствие называется цент-
центральным проецированием (из начала координат Ed+X). Заме-
Заметим, что гиперплоскость xd+\ = 1 сама является пространством
Ed с координатами х\, ..., ха-
Мы интерпретировали вектор (Ii, ..., Id, Id+i) (la+i^Q),
исходящий из начала координат пространства Ed+l, как точку
(х\, ..., ха), принадлежащую Ed, такую что */ = !//!d+i. Если
представить эту точку посредством (d-\- 1)-компонентного век-
вектора, то мы получим классическое представление точек в одно-
однородных координатах, которые позволяют выразить точки на
бесконечности, полагая 5d+i = 0.
38
Гл. 1. Введение
Возвращаясь к группе преобразований, заметим, что если
\А 01
в соотношении A.8) выбрать В = I,
то мы получим новую
интерпретацию аффинной группы в Ed. Для простоты рассмот-
рассмотрим случай d = 2. Заметим, что центральное проецирование
сферы S3 на плоскость Хз = 1 задает обратимое преобразование
больших окружностей сферы S3 в прямые линии в Е2, за исклю-
исключением «экваториальной» окружности (лежащей в плоскости
\В\ФО
Проективная группа
о (полная линейная группа
на d+1 однородной
координате)
Аффинная группа
(на d координатах)
Унимодулярная
группа
Гриппа
подобия
Евклидова группа^
(группа движений)
Рис. 1.5. Иллюстрация отношения включения на группах линейных преоб-
преобразований (диаграмма Хассе).
Хз = 0), которая отображается в бесконечно удаленную прямую
в Е2. Однако любое преобразование A.8) отображает плоскость,
проходящую через начало координат, в другую плоскость, тоже
проходящую через начало координат; в частности, экваториаль-
экваториальная плоскость может при этом перейти в некую другую плос-
плоскость, проходящую через начало координат. Если интерпретиро-
интерпретировать это в терминах центрального проецирования на плоскость
#з=1, то бесконечно удаленная прямая может перейти в лю-
любую прямую, но бесконечно удаленную. Эта свобода позволяет
отобразить любое коническое сечение (эллипс, параболу, гипер-
гиперболу) в окружность, поэтому все конические сечения эквива-
эквивалентны при преобразовании A.8). Эту группу преобразований
называют проективной.
Вышеизложенное удобно проиллюстрировать на диграмме
Хассе [Birkhoff, MacLane A965)], выражающей отношение
«быть подгруппой», которая приведена на рис. 1.5.
/.3. Геометрические предпосылки 39
1.3.3. Геометрическая двойственность. Поляритет
Теперь рассмотрим другую интерпретацию преобразо-
преобразования A.8), вновь для простоты на примере d = 2. Итак, мы
видели, что A.8) отображает точки в точки, а прямые в пря-
прямые Е2, т. е. это преобразование сохраняет размерность отобра-
отображаемых объектов. Предполагая, что |?|=^0, перепишем A.8)
в виде
Ц = 1В A.9)
и далее будем считать, что векторы, обозначенные через %,
представляют направление (т. е. прямую, проходящую через
начало координат), а векторы, обозначенные через ц, представ-
представляют нормаль к плоскости, проходящую через начало координат.
Поэтому соотношение A.9) интерпретируется как преобразова-
преобразование в ?3, переводящее прямую (представленную %) в плоскость
(представленную ц) и называемое корреляцией. Это частный
случай (при d = 2) общего свойства: в пространстве Ed+l, по
которому соотношение A.9) отображает линейное многообразие
размерности s ^ d -+- 1 в двойственное ему многообразие раз-
размерности d -\- 1 — s; в такой интерпретации A.9) называется
преобразованием двойственности и, действительно, та же самая
матрица В может использоваться для описания корреляции, ко-
которая переводит плоскости в прямые линии. Для заданной кор-
корреляции, описываемой матрицей В и переводящей прямую в
плоскость, мы хотим найти корреляцию, описываемую матрицей
D и переводящую плоскость в прямую, так чтобы пара (В, D)
сохраняла инцидентность, т. е. если прямая \ принадлежит
плоскости ц, то прямая r\D принадлежит плоскости %В. Оче-
Очевидно, что прямая % принадлежит плоскости ц тогда и только
тогда, когда
Поэтому потребуем, чтобы
Поскольку последнее уравнение должно выполняться для
любых | и ц, мы получаем BDT = kl, или
где k — некоторая константа.
Заметим, что произведение BD переводит прямые в прямые,
а плоскости в плоскости. Теперь для заданной пары (В, (В~1)т),
сохраняющей инцидентность, потребуем, чтобы произведение
В • (В~1)т переводило каждую прямую и каждую плоскость
в самих себя, т. е. потребуем, чтобы В- (В~1)т = Ы, или, что
40
Гл. 1. Введение
то же самое, В = kBT. В последнем равенстве нужно, чтобы
k = ±\; особенно интересен случай, когда
Б = БГ, A.10)
т. е. В — невырожденная, симметричная матрица третьего по-
порядка.
Теперь рассмотрим результат действия корреляции аналогич-
аналогичной A.9) при центральном проецировании на плоскость лг3 = 1.
Видно, что точки переходят в прямые, а прямые — в точки.
ГЛГ^ п SI i?
VVX 11 л УУ
Рис. 1.6. Иллюстрация соответствия между полюсом и полярой при полярном
преобразовании по отношению к единичной окружности.
Остаток этого раздела будет посвящен анализу этого отображе-
отображения в Е2; через % будем обозначать точки, а через ц — прямые.
Если матрица В третьего порядка удовлетворяет условию
В = ВТ, то, полагая х = {%\,х?.,xz), получаем хорошо известное
соотношение [Birkhoff, MacLane A965)]
это соотношение в однородных координатах задает коническое
сечение на плоскости (известное как коника, заданная В).
Возьмем фиксированный вектор % (представляющий точку на
плоскости в однородных координатах) такой, что %В%Т = 0. По
определению точка % лежит на конике, заданной В; если
назвать точку % полюсом, а прямую %Вхт полярой для |, то
увидим, что полюс на конике инцидентен своей собственной
поляре. Такое преобразование точек в прямые и наоборот, на-
называемое поляритетом, полезно при создании геометрических
алгоритмов. Это связано с тем, что интуитивно нам удобнее ра-
1.4. Модели вычислений 41
ботать с точками, чем с прямыми (в Е2) или плоскостями (в ?3),
и мы используем эту возможность в следующих главах.
В частности, пусть В — матрица, определяющая единичную
окружность на плоскости Е2 (рис. 1.6). В этом случае
В =
гю o-i
0 1 0 .
Loo —I J
поэтому точка р = {р\, pi, 1) отображается в прямую /, уравне-
уравнение которой имеет вид р\Х\ + /?2*2 — #з = 0 (в однородных ко-
координатах). Расстояние от р до начала координат этой плос-
плоскости равно /у/р2 + р2,, а расстояние от / до этого начала коорди-
координат равно 1/д//?2 + /?2- Значит, в этом частном случае поляритета:
расстояние(р, 0) X расстояние (поляра (р),0)= 1.
Отметим также, что при этом поляритете преобразование не
связано ни с какими вычислениями, просто по-разному интер-
интерпретируется тройка (ри р2, рз)'- в одном случае — как коорди-
координаты (pi/рз, ря/рз) точки, а в другом — как коэффициенты урав-
уравнения прямой р\Х\-\-р2Х2—рзхз — 0 в однородных координатах.
В следующих главах исследуются интересные приложения
этой геометрической двойственности.
1.4. Модели вычислений
Главный методологический вопрос, с которым неиз-
неизбежно сталкиваешься прежде всего при любом исследовании
алгоритмов, заключается в тщательном описании принятой мо-
модели вычислений. Действительно, алгоритм, предложенный для
решения определенной задачи, должен быть оценен в терминах
его стоимости как некой функции от размера индивидуального
экземпляра этой задачи. Принципиальная важность модели вы-
вычислений определяется следующим образом:
Модель вычислений определяет набор допустимых элемен-
элементарных операций и стоимости этих операций.
Элементарные операции — это такие операции, для каждой из
которых мы назначаем фиксированную стоимость, хотя эта стои-
стоимость неодинакова для разных элементарных операций. Напри-
Например, если элементарные операции обрабатывают отдельные
цифры в числах (как в булевских функциях с двумя двоичными
переменными, вычисляемыми на модели машины Тьюринга), то
стоимость операции сложения двух целых чисел возрастает с
ростом длины операндов, в то время как стоимость этой опера-
операции постоянна для модели, в которой операнды имеют фиксиро-
42 Гл. !. Введение
ванную длину (как в любой модели, ориентированной на пред-
представление реальных цифровых компьютеров). При выборе мо-
модели приходится идти на компромиссы между реальностью и
математической строгостью, выбирая схему, которая отражает
основные черты используемых математических методов и вместе
с тем достаточно проста, чтобы провести тщательный анализ.
Какой же тип модели подходит для геометрических прило-
приложений? Чтобы ответить на этот центральный вопрос, нужно тща-
тщательно рассмотреть природу решаемых задач.
Как указано в разд. 1.3, главными объектами, которые рас-
рассматриваются в вычислительной геометрии, являются точки, при-
принадлежащие пространству Ed. Хотя точка считается вектором
в декартовых координатах, желательно, чтобы выбор системы
координат не слишком влиял на время работы геометрического
алгоритма. Это приводит к тому, что модель вычислений должна
допускать необходимое преобразование (декартова базиса),
причем его стоимость в расчете на одну точку может зависеть
от числа измерений, но не от числа обрабатываемых точек.
С другой стороны, известно, что множество из N точек в
пространстве размерности d может быть выражено по отноше-
отношению к заданному декартову базису за время, пропорциональное
N (напомним, что столько же времени по порядку нужно для
«считывания» этих точек как исходных данных), поэтому мы
можем с самого начала считать, что эти точки уже заданы в из-
избранном декартовом базисе.
Задачи, возникающие в вычислительной геометрии, отно-
относятся к нескольким типам, которые мы для удобства сгруппи-
сгруппируем в три следующих класса:
1. Поиск подмножества. В задачах этого рода задан набор
объектов и требуется найти некое подмножество, которое удов-
удовлетворяет определенному условию. Например, поиск ближайшей
пары на множестве из N точек или поиск вершин выпуклой
оболочки множества. Важная черта задач о выборе подмно-
подмножества заключается в том, что не нужно создавать никаких
новых объектов; решение полностью состоит из элементов, кото-
которые заданы на входе.
2. Вычисление. Дано множество объектов, нужно вычислить
величину некоего геометрического параметра на этом множест-
множестве. Допустимые элементарные операции в модели должны быть
достаточно мощными, чтобы реализовать это вычисление. Пред-
Предположим, например, что точки имеют целочисленные коорди-
координаты. Чтобы найти расстояние между парой точек, надо уметь не
только представлять иррациональные числа, но также извлекать
квадратные корни. А в ряде задач нам могут понадобиться даж.е
тригонометрические функции,
1.4. Модели вычислений 43
3. Распознавание1). Задача распознавания естественным
образом связана с задачами «Поиск подмножества» и «Вычис-
«Вычисление». В частности,
A) Если в задаче s4- о вычислении требуется найти величину
параметра А, то в связанной с ней задаче распознавания D(s&)
требуется дать ответ ДА/НЕТ на вопрос типа: «Верно ли, что
А ^3= Ло?», где Ао — константа.
B) Если в задаче s4- о поиске подмножества требуется найти
подмножество заданного множества S, удовлетворяющее опре-
определенному свойству Р, то в задаче D(s4-) требуется ответ
ДА/НЕТ на вопрос типа: «Верно ли, что S' удовлетворяет Р?»,
где S' — подмножество 5-
Легко заметить, что есть необходимость работать с действи-
действительными числами (а не только с целыми) и (на реальном ком-
компьютере) с соответствующими им приближениями. Однако при
создании модели вычислений можно воспользоваться абстракт-
абстрактным понятием, чтобы избежать проблемы, связанной с округле-
округлением для приближенного представления действительного числа.
Конкретно, возмем машину с произвольным доступом к памяти
(РАМ), похожую на ту, что описана в [Aho, Hopcroft, Ullman
A974)] 2), но у которой каждая ячейка памяти способна хра-
хранить единственное действительное число. Следующие операции
считаются элементарными и обладают единичной стоимостью
(единичным временем выполнения):
1. Арифметические операции (+, —, X, /)¦
2. Сравнения двух действительных чисел (<, ^, =, ф,
3. Косвенная адресация памяти (допустимы только целочис-
целочисленные адреса).
Дополнительные операции (только для тех приложений, где
это необходимо):
4. Корни &-й степени, тригонометрические функции, ЕХР,
LOG (вообще аналитические выражения).
Эту модель будем называть вещественнозначной РАМ. Она хо-
хорошо отражает тот тип программ, которые обычно пишутся на
алгоритмических языках высокого уровня, таких как Фортран и
Алгол, в которых принято считать, что переменные типа REAL
имеют неограниченную точность. На этом уровне абстракции
можно игнорировать вопросы типа: «Как ввести или вывести
действительное число за конечное время?»
'•) См. [Гэри, Джоисон A982), с. 27]. — Прим. перев.
2) В русском переводе этой книги аббревиатура РАМ расшифровывается
как «равнодоступная адресная машина». — Прим. ред.
44 Гл. 1. Введение
Установление нижних оценок для характеристик работы ал-
алгоритмов решения определенной задачи — одна из главных це-
целей анализа алгоритмов, поскольку они дают меру для оценки
эффективности конкретных алгоритмов. Но это, вообще говоря,
очень трудная проблема. Иногда удается установить трудоем-
трудоемкость одной задачи по известной трудоемкости другой задачи,
используя метод преобразования задач1). В частности, предпо-
предположим, что у нас есть две задачи, s4- и <М, которые связаны так,
что задачу М- можно решить следующим образом:
1. Исходные данные к задаче s4- преобразуются в соответ-
соответствующие исходные данные для задачи &.
2. Решается задача &.
3. Результат решения задачи $ преобразуется в правильное
решение задачи s4-.
В этом случае мы говорим, что задача зФ преобразуема в
задачу 3§2). Если шаги 1 и 3 вышеприведенного преобразования
можно выполнить за время O(r(N)), где, как обычно, N — «раз-
«размер» задачи зФ, то скажем, что зФ r(N) -преобразуема в <%, и за-
запишем это кратко так: ^Фост{Ы)^. Вообще говоря, преобразуе-
мость не симметричное отношение; в частном случае, когда
?ф и & взаимно преобразуемы, мы назовем их эквивалентными.
Следующие два самоочевидных утверждения характеризуют
мощь метода преобразования в предположении, что это преоб-
преобразование сохраняет порядок размера задачи.
Предложение 1 (Нижние оценки методом преобразования).
Если известно, что задача зФ требует Т (N) времени и зФ r(N)-
преобразуема в & (т. е. s&ocx{N)&), то задача <% требует не
менее T(N) — O(r(N)) времени.
Предложение 2 (Верхние оценки методом преобразования).
Если задачу ?@ моокно решить за время T(N) и задача s4- т(Л^)-
преобразуема в & (т. е. s4-cc^ ,NKS), то зФ можно решить за
время, не превышающее T(N) + O(x(N)).
Эту ситуацию графически иллюстрирует рис. 1.7, на кото-
котором показано, как нижняя и верхняя оценки переносятся от
одной задачи к другой. Этот перенос справедлив, когда т(Л^) =
= O(T(N)), т. е. когда время преобразования не превосходит
времени вычисления.
') Этот метод очень часто именуют сведением. Поскольку «сведение»
предполагает преобразование к более простой задаче (а в данном случае
это не так), то мы постараемся обойтись без этого понятия.
2) Преобразуемость (или сводимость) обычно определяется по отноше-
отношению к языкам. В этом случае преобразование результатов не требуется,
поскольку в качестве результата распознаватель цепочки выдает нуль илн
единицу. Для геометрических задач необходима большая гибкость, под-
подкрепленная более общим определением.
1.4. Модели вычислений
45
Возвращаясь к нашей прежней классификации задач, возь-
возьмем некую задачу s4- (задачу вычисления или поиска подмно-
подмножества) и связанную с ней задачу распознавания D{s&). Легко
видеть, что D(s?) oc0.N.s&, поскольку:
1. Если ^ — задача вычисления, то никакого преобразова-
преобразования исходных данных не требуется (т. е. шаг 1 процедуры пре-
Иижняч оценка
Задачи А Х_(Ы)-преобразуемость Задача,
Верхняя оценка
Рис. 1.7. Перенос верхней и нижней оценок между преобразуемыми задачами.
образования не нужен), а решение s4> надо просто сравнить за
постоянное время 0A) с фиксированной величиной, даваемой
D(
2. Если же s& — задача поис-
поиска подмножества, то опять вход-
входная информация 5' для D{s4-)
подается на вход М- (т. е. шаг 1
не нужен), а решение s4- прове-
проверяется за время 0(N), чтобы
убедиться в том, что его мощ-
мощность совпадает с мощностью 5'.
Это очень важное рассуждение,
поскольку оно показывает, что,
когда мы ищем нижние оценки,
можно сосредоточить свое вни-
внимание на задачах распознавания.
Когда вещественнозначная
РАМ исполняет алгоритм для за-
задачи распознавания, ее поведе-
поведение описывается последователь-
последовательностью операций двух типов: арифметических и сравнения.
В этой последовательности главную роль играют сравнения, по-
поскольку в зависимости от результата каждого сравнения алго-
алгоритм выбирает ту или иную ветвь выполнения. Эта ситуация
графически показана на рис. 1.8; там каждый кружок представ-
представляет собой арифметическую операцию, а каждый треугольник —
сравнение. Другими словами, процесс вычислений, исполняемый
на РАМ, можно рассматривать как путь на дереве с корнем.
^е%
Рис. 1.8. Вычисление как
в дереве решений.
путь
46 Гл. 1. Введение
Это корневое дерево заключает в себе описание чрезвычайно
важной вычислительной модели, называемой «алгебраическим
деревом решений», которую мы сейчас формализуем.
Алгебраическим деревом решений {Reingold A972); Rabin
A972); Dobkin, Lipton A979)] на множестве переменных
{х\ хп} называется программа, записанная операторами
LUL2 Lf, следующего типа:
1. L,: Вычислить \{х\ х„). Если /: 0, то перейти к L,-,
в противном случае к L,- (двоеточие обозначает любую из опе-
операций сравнения).
2. Ls\ Останов и выдача ДА (в задаче распознавания вход
принят).
3. Lt: Останов и выдача НЕТ (в задаче распознавания вход
отвергнут).
В случае 1 f — это алгебраическая функция (полином степени
равной порядку (/)). Далее предполагается, что программа не
имеет возвратов, т. е. имеет структуру дерева Т, при которой
каждый нелистовой узел v описывается выражением
/„(*! хп): О,
где /о — полином от Х\ хп, а двоеточие обозначает отноше-
отношение сравнения. (Заметим, что в этом определении каждый
«арифметический отрезок пути» на рис. 1.8 свернут в следую-
следующий за ним узел сравнения.) Корень Т представляет начальный
шаг вычислений, а его листья представляют возможные окон-
окончания и содержат все возможные ответы. Без потери общности
допустим, что дерево Т двоичное ').
Хотя программа на алгебраическом дереве решений может
оказаться намного более громоздкой, чем соответствующая
РАМ-программа, однако для изучаемых нами классов задач обе
программы ведут себя идентично. В частности, время работы
РАМ-программы для худшего случая по меньшей мере пропор-
пропорционально длине максимального пути от корня в дереве реше-
решений. Это подтверждает важность модели дерева решений, по-
поскольку структура дерева достаточно удобна для получения
оценок его высоты.
Говорят, что алгебраическое дерево решений имеет порядок
d, если d ¦—это наибольшая из степеней полиномов /»(*i, ...
.. ., хп) среди всех узлов v из Т. Модель дерева решений 1-го
порядка, или линейная модель, является мощным средством
') Заметим, что степень узла Т равна числу различных исходов опера-
операции сравнения. Допущение о двоичности дерева основано на том факте, что
6-кратное разветвление может быть заменено на k — 1 экземпляров 2-крат-
2-кратных разветвлений.
1.4. Модели вычислений 47
установления нижних оценок для многих задач; мы еще обсу-
обсудим те весьма тонкие рассуждения, которые будут развиты в по-
последующих главах, в сответствующем контексте (см. разд. 2.2,
4.1.3, 5.2, 8.4). Однако ограничиться рассмотрением только ли-
линейных деревьев решений нельзя по двум причинам. Первая и
более важная состоит в том, что может случиться, когда любой
из известных алгоритмов для данной задачи использует функ-
функции со степенью ^2, поэтому нижняя оценка, основанная на
модели линейного дерева решений, окажется бесполезной; если
же исключить из рассмотрения подобную ситуацию, то возник-
возникнет вторая причина —• оценка, основанная на модели линейного
дерева решений, не применима к пока неизвестным алгоритмам,
использующим функции более высоких степеней.
Весьма важные вклады в решение этих вопросов для d ^ 2
были недавно внесены работами Стили, Яо [Steele, Jao A982)]
и Бен-Ора [Веп-Ог A983)], использующими классические поня-
понятия действительной алгебраической геометрии. Их подход осно-
основан на следующей очень простой идее: пусть Х\,Хъ, ..., хп — па-
параметры задачи распознавания, каждый индивидуальный экзем-
экземпляр которой может считаться точкой в я-мерном евклидовом
пространстве Еп. Задача распознавания определяет множество
точек W ? Еп, т. е. она дает ответ ДА тогда и только тогда,
когда (хи ..., xn)^W (можно сказать, что дерево решений Т
решает задачу о принадлежности точки множеству W). Пред-
Предположим, что нам заранее известно, исходя из природы этой
задачи, число #(№) разделимых связных компонент W. Каж-
Каждое вычисление соответствует какому-то однозначному пути vu
»2, ..., Vt-i, Vi в Т, где V\—корень, а У/ — лист; с каждым уз-
узлом V, на этом пути (/=1, ..., /—• 1) связана функция
/»у(*ь ••¦, хп), так что (хи ..., хп) удовлетворяет ограниче-
ограничению типа
fe/ = 0, или fv/>0, или fvf>0. A.11)
Для приобретения некоторой интуиции рассмотрим вначале
частный случай d = 1 (линейная модель дерева решений или
вычислений), следуя за Добкином и Липтоном [Dobkin, Lipton
A979)]. Доказательство их теоремы следует ниже.
Пусть W ? Еп — множество истинности ') для данной задачи
распознавания, и пусть #№ обозначает число разделимых связ-
связных компонент W. Пусть Т— (двоичное) линейное дерево реше-
решений, реализующее алгоритм s&, который проверяет принадлеж-
принадлежность W. С каждым листом Т связана область в Еп, и каждый
лист является принимающим или отвергающим. А именно пусть
') То есть на выходах из № задача имеет ответ «ДА». — Прим. персе.
48
Гл. 1. Введение
{Wu . . . , Wp) — компоненты W, {l\, . . ., lr) — множество
листьев, a D, — область, связанная с // '). Лист // является:
( принимающим, если D,- s W;
\ отвергающим в противном случае.
Нижняя оценка для числа листьев г получается путем доказа-
доказательства того, что г ^ #(tt7). Действительно, возьмем функцию
У- {Wu W2, ..., Wp}-+{1, 2, ..., г) такую, что Y(Wi) =
= min{/: / e {1, 2, . . . , г} и D/ П Wt Ф 0). Чтобы получить про-
противоречие, предположим, что существуют два различных под-
подмножества Wi и Wj таких, что Y(Wi)= Y(Wj)= h. Поскольку
Рис. 1.9. Иллюстрация к доказательству того, что Wt = Wj.
алгоритм зФ решает вопрос о принадлежности точки q множе-
множеству Wi, то лист 1н является принимающим. С другой стороны,
по определению У из равенства Y(Wi) = h следует, что Wi{\Dh
непусто. Пусть q' — точка из Wi П Dh, аналогично q" — точка из
Wj(]Dhi Поскольку Т-—линейное дерево решений, то область в
Еп, соответствующая Dh, образована пересечением полупро-
полупространств, т. е. это выпуклая область. Значит, любая выпуклая
комбинация точек из Dh принадлежит Dh (разд. 1.3.1). Рассмо-
Рассмотрим теперь отрезок q'q" (рис. 1.9). Этот отрезок пересекает по
крайней мере две компоненты W (он, безусловно, пересекает Wi
и W/), и, поскольку эти компоненты разделены, он содержит но
крайней мере одну точку q'" ф. W. Но так как область Dh вы-
выпукла, то весь отрезок q'q" принадлежит Dh, а, значит, и точка
q'" принадлежит внутренности W. Получаем противоречие.
В итоге Т должно иметь не менее р листов. Поскольку двоичное
дерево наименьшей высоты с заданным числом листов сбалан-
') Область входных данных, переводящих алгоритм в лист /,. — Прим.
перев.
1.4. Модели вычислений 49
сировано, то высота Т равна не менее чем Iog2 p = log2#(W).
Эти рассуждения приводят к следующей теореме.
Теорема 1.1 (Добкин — Липтон). Любое линейное дерево ре-
решений, алгоритм которого решает задачу о принадлежности
W Е Еп, должно иметь высоту не меньше, чем log2#(W), где
#(№)— число разделимых связных компонент W.
К сожалению, вышеизложенный метод ограничен алгоритма-
алгоритмами линейного дерева вычислений, поскольку он опирается на
свойство выпуклости области в Еп, связанной с листом этого
дерева. Если же максимальная степень полиномов fv ^ 2, то
это полезное свойство исчезает. Значит, нужны более глубокие
представления.
Интуитивно ясно, что, когда используются полиномы более
высоких степеней, тогда область, связанная с конкретным ли-
листом дерева решений, может состоять из нескольких разделимых
компонент в W. Если удастся оценить число компонент, связан-
связанных с неким листом в терминах высоты этого листа в дереве,
то, как мы вскоре увидим, нам удастся оценить высоту Т.
К счастью, ключ к решению этой трудной проблемы дала
утонченная адаптация [Steele, Yao A982); Ben-Or A983)] одного
классического результата из алгебраической геометрии, незави-
независимо полученного Милнором [Milnor A964)] и Томом [Thorn
A965)]. Ниже излагается результат Милнора и Тома.
Пусть V— множество точек (так называемое алгебраическое
многообразие) в m-мерном декартовом пространстве Ет, опреде-
определенное полиномиальными уравнениями
gl(xu...,xn) = 0;...;gp(xl,...,xm) = 0. A.12)
Тогда, если степень каждого полинома gt (t= I, . .., р) не пре-
превышает d, то число #(V) разделимых связных компонент1) V
оценивается как:
К сожалению, множество V определено лишь посредством ра-
равенств A.12), в то время как ограничения, связанные с путем
в Т, состоят как из равенств, так и из неравенств. Эта трудность
была блестяще преодолена Бен-Ором, который преобразовал си-
ситуацию с деревом Т так, что она стала удовлетворять условию
теоремы Милнора — Тома, как это будет сейчас показано.
') В действительности Милиор и Том доказали более сильный резуль-
результат, что dBd—\)m~1—это верхняя оценка суммы чисел Бетти для множе-
множества V, в то время как число =^(V) связных компонент V — это только
одно из таких чисел (число Бетти 0-го порядка1).
so
Гл. 1, Введение
Пусть U s Еп — множество точек, удовлетворяющих следую-
следующим ограничениям (здесь х = (хь ..., хп)):
р,(х)>0, ....
A.13)
где q и р— полиномы, d = max{2, степень (<7,), степень (р;)}-
Заметим, что имеется три типа ограничений: равенства, строгие
неравенства и нестрогие неравенства. Пусть #(?/) обозначает
число связных компонент множества U.
Рис. 1.10. Построение Ue по U; U ограничено сплошными линиями,
иг — штриховыми.
Первый шаг преобразования состоит в замене строгих нера-
неравенств нестрогими. Поскольку #(?/) конечно (см. [Milnor
A968)]), положим # (?/) Д/и поместим в каждую компоненту U
по точке. Обозначив эти точки Vi, ..., Vt, положим
s; /=
t}.
e = min{pi(v/): i=\, .
Поскольку каждая точка V/ e U, то pt(v/) > 0 (для i = 1, ...
..., s) и e > 0. Очевидно, что замкнутое множество точек С/е,
определяемое системой
A.14)
содержится в С/, #(f/e) ^ #(^), так как все V/ лежат в разных
связных компонентах С/е (см. в качестве интуитивного примера
рис. 1.10).
Второй шаг преобразования состоит во введении искусствен-
искусственных переменных г// для всех / = 1, ..., h (т.е. по одной для
каждого из нестрогих неравенств), чтобы Еп рассматривалось
как такое подпространство в En+h, где
Pi(x)-e — y\ = 0, ..., ps(x)-e-y2s =
Рщ+1 (х) - у\+х = 0 рн (х) - у\ = 0.
A.15)
1.4. Модели вычислений SI
Очевидно, что множество U* всех решений A.15) представляет
собой алгебраическое многообразие в En+h, определенное поли-
полиномами степени, не превышающей d и удовлетворяющее усло-
условиям теоремы Милнора — Тома; следовательно, число #(?/*)
связных компонент U* оценивается следующим образом:
#(?/')< dBd— I)"*".
Заметим, что Ue — это проекция U* на Еп; поскольку проециро-
проецирование является непрерывной функцией, то #(С/е) ^ #(?/*).
Вспоминая, что #(f/) ^ #(f/e), мы заключаем:
# (?/)< # (?/,) < # (?/*) < d • Bd - I)"-*-1,
что и является искомым результатом. В самом деле, если A.13)
есть множество ограничений, полученных при прохождении пути
в Т от корня к листу, то число неравенств h по величине не
превосходит длины этого пути. Отсюда следует, что лист на
этом пути связан не более чем с dBd— \)n+h-\ связными ком-
компонентами из множества W истинности для данной задачи. Если
п*— высота Т (длина наибольшего пути от корня до листа), то
Т имеет не более 2h" листов; поскольку каждый лист связан не
более чем с d Bd—1)"+ ~' связными компонентами из W, то
# (IF) < 2h* ¦ d ¦ Bd — l)n+h*~\
или, что то же самое,
.. -^ log»> ПП n\og»Bd-\) _ log2rf-log2Brf-l)
" ^ l + log8Bd-l) l+log8Bd-l) l + log8Bd-l) •
A.16)
Сформулируем этот важный результат в виде теоремы.
Теорема 1.2 '). Пусть W—множество в декартовом простран-
пространстве Еп, а Т — алгебраическое дерево решений фиксированного
порядка d (d ^ 2), которое решает задачу о принадлежности W.
Если h* — высота Т, а #(№)—число разделимых связных ком-
компонент W, то h* = Q(log#(№) —n).
Теорема 1.2 включает и случай d = 1, поскольку при любом
фиксированном d ^ 2 допустимы и полиномы меньших степеней
(простым обнулением коэффициентов при высших степенях). По
существу, использование нелинейных полиномов в качестве
функций принятия решений не изменяет природу этой задачи
радикально; просто наибольшая высота деревьев вычислений
уменьшается на мультипликативную константу, зависящую от
максимального порядка d. Последняя теорема — краеугольный
камень в построениях нижних оценок, которые будут представ-
представлены в следующих главах.
') В действительности Бен-Op доказал несколько более сильный резуль-
результат, независимый от d.
ГЛАВА
2
Геометрический поиск
Чтобы описать поиск в простейшей абстрактной фор-
форме, представим себе, что у нас есть некий набор данных (име-
(именуемый файлом) и некоторый новый элемент данных (именуе-
(именуемый образцом). Поиск — это установление связи между образцом
и файлом. К вспомогательным, но в принципе не чисто поисковым
операциям можно отнести: включение образца в файл, удаление
образца из файла, если он был там, и т. п. Как указал Кнут
[Knuth A973)], поиск сводится к определению позиции соответ-
соответствующей записи (или записей) в данном наборе записей.
Хотя все виды поиска обладают рядом общих базисных черт,
его особая геометрическая форма позволяет ставить вопросы со
своими неповторимыми нюансами. Во-первых, потому что в гео-
геометрических приложениях файлы это не просто «коллекции»,
как в ряде других областей информатики. Чаще они отображают
более сложные структуры, такие как многоугольники, полиэдры
и т. п. Хотя случай, скажем, набора отрезков на плоскости вы-
выглядит обманчиво бесструктурным, на самом деле каждому от-
отрезку сопоставлены его концы, координаты которых косвенно
связаны между собой метрической структурой этой плоскости.
Тот факт, что координаты точек представимы действитель-
действительными числами, часто ведет к тому, что результатом поиска мо-
может оказаться не элемент файла, соответствующий образцу, а
скорее положение последнего относительно файла. Это и состав-
составляет второе отличие геометрического поиска от обычного.
2.1. Введение в геометрический поиск
В данной главе описываются основные методы гео-
геометрического поиска, которые будут использованы в последую-
последующих главах для решения более трудных задач. Поисковое сооб-
сообщение, в соответствии с которым ведется просмотр файла, обыч-
2.1. Введение е геометрический поиск 53
но именуется запросом. От типа файла и от набора допустимых
запросов будут сильно зависеть организация первого и алго-
алгоритмы обработки последних. Один конкретный пример позволит
убедиться, насколько важен этот аспект задачи.
Пусть имеется набор геометрических данных и нужно узнать,
обладают ли они определенным свойством (скажем, выпук-
выпуклостью). В простейшем случае, когда этот вопрос возникает еди-
единожды, было расточительством проводить предобработку в
надежде ускорить прохождение последующих запросов. Назо-
Назовем разовый запрос такого типа уникальным. Однако будут и
запросы, обработка которых повторяется многократно на том
же самом файле. Такие запросы назовем массовыми.
В последнем случае, возможно, стоит расположить информа-
информацию в соответствии с некоторой структурой, облегчающей поиск.
Однако это можно проделать, только затратив некоторый ре-
ресурс, и анализ надо сосредоточить на четырех различных мерах
его оценки:
1. Время запроса. Сколько времени необходимо как в сред-
среднем, так и в худшем случае для ответа на один запрос?
2. Память. Сколько памяти необходимо для структуры дан-
данных?
3. Время предобработки. Сколько времени необходимо для
организации данных перед поиском?
4. Время корректировки. Указан элемент данных. Сколько
времени потребуется на его включение в структуру данных или
удаление из нее?
Различные варианты затрат времени запроса, времени пред-
предобработки и памяти хорошо продемонстрированы на следующем
примере решения задачи регионального поиска [Knuth A978),
т. З]1), которая часто возникает в географических приложениях
и при управлении базами данных:
Задача П.1 (РЕГИОНАЛЬНЫЙ ПОИСК —ПОДСЧЕТ).
Даны N точек на плоскости. Сколько из них лежит внутри за-
заданного прямоугольника, стороны которого параллельны коор-
координатным осям? То есть сколько точек (х, у) удовлетворяют не-
неравенствам a sg: л: s=: ?, с s=: у sg: d для заданных а, Ь, с и d
(рис. 2.1)?
Очевидно, что уникальный региональный запрос может быть
обработан (оптимально) за линейное время, так как надо толь-
только проверить каждую из N точек, чтобы увидеть, удовлетворяет
ли она неравенствам, задающим прямоугольник. Аналогично не-
необходима линейная затрата памяти, так как следует запомнить
только 2N координат. Нет никаких затрат на предобработку, а
') Эта задача будет рассмотрена в полном объеме в разд. 2.3.
2. Геометрический поиск
время корректировки для новой точки равно константе. Какую
структуру данных можно использовать для ускорения обработ-
обработки массовых запросов? Кажется, что слишком трудно найти та-
такое упорядочение точек, чтобы любой новый прямоугольник
мог быть легко с ним согласован. Мы не можем также решить
эту задачу наперед для всех возможных прямоугольников, так
как их число бесконечно. Следующее решение является приме-
примером использования метода локусов в геометрических задачах:
запросу ставится в соответствие точка в удобном для поиска
•
• •
•
•
•
•
•
•
•
•
•
•
•
а Ь
Рис. 2.1. Региональный запрос. Сколько точек внутри прямоугольника?.
пространстве, а это пространство разбивается на области (локу-
сы) '), в пределах которых ответ не изменяется. Другими сло-
словами, если считать эквивалентными два запроса, на которые
поступают одинаковые ответы, то каждая область разбиения
пространства поиска соответствует одному классу эквивалент-
эквивалентности запросов.
Прямоугольник сам по себе — неудобный объект; мы пред-
предпочитаем работать с точками. Это означает, например, что мож-
можно заменить запрос с прямоугольником четырьмя подзадачами,
по одной на каждую из его вершин, и совместить их решения
для получения окончательного ответа. В этом случае подзадача,
связанная с вершиной р, состоит в определении числа точек
Q(p) исходного множества, которые удовлетворяют неравен-
неравенствам xs^x(p) и у^у(р), т.е. числа точек в левом нижнем
квадранте, определяемом вершиной р (рис. 2.2).
Понятие, с которым мы встретились здесь, — это векторное
доминирование (см. также разд. 4.1.3). Говорят, что точка (век-
(вектор) v доминирует над w, тогда и только тогда, когда для всех
индексов i верно условие а,- ^ wt. На плоскости точка v доми-
доминирует над w тогда и только тогда, когда w лежит в левом
') Понятию «локус» соответствует устаревший термин «геометрическое
место точек», употребляющийся сейчас лишь в учебной литературе. — Прим.
перев.
2.1. Введение в геометрический поиск
55
нижнем квадранте, определяемом v. Итак, Q(p)—число
точек, над которыми доминирует р. Связь между доминиро-
доминированием и региональным поиском видна на рис. 2.3. Число точек
Рнс. 2.2. Сколько точек «юго-западнее» р?
N(plp2p3Pi) в прямоугольнике р\Р2РгРь определяется следующим
образом: ,
1N (р^РзРд = Q (Pi) -Я (ft) ~ Q (ft) + Q (Pa)-, I . B-1)
Это следует из комбинаторного правила включения — исключе-
исключения [Liu A968)]: над всеми точками прямоугольника, несомнен-
несомненно, доминирует вершина р\. Нужно исключить такие точки, над
которыми доминируют р2 и р
точек будет исключена два-
дважды, а именно те, над кото-
которыми доминируют и р2, и
Pi, но как раз эти точки ле-
лежат в левом нижнем квад-
квадранте вершины р3-
Итак, задача региональ-
регионального поиска сведена к зада-
задаче обработки запросов о до-
доминировании для четырех
точек. Свойство, облегчаю-
облегчающее эти запросы, заклю-
заключается в том, что на пло-
но это приведет к тому, что часть
У 1
•
•
Рг_ *
•
•
•
Pi
•
Рнс. 2.3. Региональный поиск в форме
четырех запросов о доминировании.
скости существуют области удобной формы, внутри которых
число доминирования Q является константой.
Предположим, что из наших точек на оси х и у опущены
перпендикуляры, а полученные линии продолжены в бесконеч-
бесконечность. Они создают решетку из (W+ IJ прямоугольников, как
показано на рис.2.4.
Для всех точек р в любом из таких прямоугольников (ячеек)
Q(p)—константа. Это означает, что доминантный поиск есть
56
Гл. 2. Геометрический поиск
просто ответ на вопрос: в какой ячейке прямоугольной решетки
лежит заданная точка? На этот вопрос особенно легко ответить.
После упорядочения исходных точек по обеим координатам
останется только выполнить два двоичных поиска (по одному
для каждой оси), чтобы найти ячейку, содержащую нашу точку.
Значит, время запроса будет равным только O(\ogN). К. сожа-
сожалению, имеется O(N2) ячеек, поэтому будет нужна квадратич-
квадратичная память. Нужно, конечно, вычислить число доминирования
з ; 4
+~~-f~--i—4—+--ч -i
О
о
11_1 +_
о ; о
о I о
. 5 j 6
¦—i н
3 J 4 ! 5
2 1 3 | 4
f--H -I -j -I -Ф 1-
о о
11 1
о ! о
2
0
Рис. 2.4. Прямоугольная решетка для доминантного поиска.
для каждой ячейки. Это можно легко проделать для любой из
ячеек за время O(N), что приводит к общей затрате времени
O(N3) на предобработку; однако для менее наивного подхода ')
время предобработки можно снизить до O(N2).
Если кто-то сочтет затраты памяти и времени на" предобра-
предобработку для вышеизложенного метода чрезмерными, то он может
Таблица I
Запрос
О (log ЛО
О (log2 Л')
O(N)
Память
О (N2)
О {N log -V)
O(N)
Предобработка
О (Л'2)
О (Л/ log Л/)
O(N)
Примечание
Изложенный ме-
метод
2)
Без предобра-
предобработки
') См. работу по региональному поиску [Bentley, Shamos A977)].
2) Этот результат, полученный также в [Bentley, Shamos A977)], будет
показан в разд 2.3.4.
2.2. Задачи локализации точки 57
исследовать другие подходы. Обычно эти исследования демон-
демонстрируют общее правило, известное из практики построения
алгоритмов, а именно взаимозависимость между различными
мерами эффективности. Задача регионального поиска не со-
составляет исключения; в таблице I показаны затраты при ком-
комбинировании ресурсов.
Из предыдущих рассуждений вытекают две главные модели
для задач геометрического поиска:
1. Задачи локализации, когда файл представляет собой раз-
разбиение геометрического пространства на области, а запрос явля-
является точкой. Локализация состоит в определении области, содер-
содержащей запрошенную точку.
2. Задачи регионального поиска, когда файл содержит на-
набор точек пространства, а запрос есть некая стандартная гео-
геометрическая фигура, произвольно перемещаемая в этом про-
пространстве (типичный запрос в 3-мерном пространстве это шар
или брус). Региональный поиск состоит в извлечении (задачи
отчета) или в подсчете числа (задачи подсчета) всех точек вну-
внутри запросного региона (области).
Хотя методы, используемые для решения этих двух типов
задач, близки — мы только что видели, как региональный поиск
может быть сведен к задаче о локализации точки, — удобно де-
демонстрировать их отдельно. Остаток этой главы посвящен дан-
данному вопросу.
2.2. Задачи локализации точки
2.2.1. Общие соображения. Простые случаи
Задачи локализации точки можно также с полным
основанием назвать задачами о принадлежности точки. В самом
деле, утверждение «точка р лежит в области R» синонимично
утверждению «точка р принадлежит области R». Трудоемкость
решения этой задачи, безусловно, будет существенно зависеть
от природы пространства и от способа его разбиения.
Для современного состояния вычислительной геометрии ти-
типично то, что плоская задача хорошо изучена, но весьма мало
известно про случай Е3 и даже еще менее — про случаи боль-
большего числа измерений.
Даже в самом простом случае плоскости тип разбиения, на
котором ведется поиск, определяет для этой задачи сложность,
оцениваемую тремя основными мерами, указанными в предыду-
предыдущем разделе. Рассмотрим сначала разбиения плоскости — или
планарные подразбиения, как их обычно называют, — образо-
образованные прямолинейными отрезками; затем мы откажемся от
этого допущения, которое выглядит ограничивающим. Однако
58 Гл. 2. Геометрический поиск
. j~*
прежде, чем изложение будет продолжено, необходимо упомя-
упомянуть об одной технической детали: рассматриваемые нами пла-
нарные подразбиения таковы, что после удаления из плоскости
границ областей остающиеся открытые множества связны. Это
нужно для того, чтобы пару точек, принадлежащих одной обла-
области, можно было соединить кривой, не содержащей граничных
точек области.
Первой приходит в голову задача, в которой плоскость раз-
разбита на две области, одна из которых бесконечна, а другая яв-
является многоугольником Р. Очевидно, что Р — простой много-
многоугольник; это следует из условия разбиения плоскости на две
области и из теоремы Жордана для многоугольников (см.
разд. 1.3.1). Итак, можно сформулировать:
Задачу П.2 (ПРИНАДЛЕЖНОСТЬ МНОГОУГОЛЬНИКУ).
Даны простой многоугольник Р и точка z; определить, находит-
находится ли z внутри Р.
Повторим еще раз, что трудоемкость этой задачи зависит от
того, обладает ли Р помимо простоты еще какими-нибудь полез-
полезными свойствами. Интуитивно выпуклый многоугольник выгля-
выглядит более простым объектом. Поэтому рассмотрим:
Задачу П.З (ПРИНАДЛЕЖНОСТЬ ВЫПУКЛОМУ МНО-
МНОГОУГОЛЬНИКУ). Даны выпуклый многоугольник Р и точка z.
Находится ли z внутри Р?
Можно сразу же продемонстрировать ее решение для случая
уникального запроса, причем этот результат будет справедлив и
для невыпуклых многоугольников.
Теорема 2.1. Принадлежность точки z внутренней области
простого N-угольника Р можно установить за время O(N) без
предобработки.
Доказательство. Проведем через точку z горизонталь I
(рис. 2.5). По теореме Жордана внешняя и внутренняя области
Р хорошо определены. Если I не пересекает Р, то z — внешняя
точка. Поэтому пусть I пересекает Р, и рассмотрим вначале слу-
случай, когда / не проходит ни через одну из вершин Р. Пусть L —
число точек пересечения / с границей Р слева от z. Поскольку Р
ограничен, левый конец / лежит вне Р. Будем двигаться вдоль /
от —оо направо вплоть до z. На самом левом пересечении / с
границей Р мы попадем внутрь Р, на следующем пересечении
выйдем наружу и т. д. Поэтому z лежит внутри тогда и только
тогда, когда L нечетно. Теперь рассмотрим вырожденный слу-
случай, когда / проходит через вершины Р. Бесконечно малый по-
поворот I вокруг z против часовой стрелки це изменит классифи-
классификации (внутри/вне) точки г, но устранит вырожденность. Итак,
2.2. Задачи локализации точки 59
вообразив реализацию этого бесконечно малого поворота, мы
увидим: если обе вершины ребра принадлежат /, то это ребро
следует отбросить; если же ровно одна вершина ребра лежит
на /, то пересечение будет учтено, когда эта вершина с большой
Рнс. 2.5. Решение задачи о принадлежности точки простому многоугольнику
при уникальном запросе. Есть только одно пересечение Р линией / слева
от 2, поэтому 2 внутри многоугольника.
ординатой, и игнорируется в противном случае. Резюмируя, по-
поручаем следующий алгоритм:
begin L:=0;
for i := 1 until N do if ребро (i) не горизонтально
then if (ребро (i) пересекает / нижним концом
слева от z)
then L:=L+ 1;
if (L нечетно) then z внутри else z снаружи
end.
Очевидно, что этот простой алгоритм выполняется за время
O(N).
Для массовых запросов сначала рассмотрим случай, когда
Р — выпуклый многоугольник. Предлагаемый метод использует
выпуклость Р, а именно свойство, что вершины выпуклого мно-
многоугольника упорядочены по полярным углам относительно лю-
любой внутренней точки. Такую точку q можно легко найти; на-
например, можно взять центр масс (центроид) треугольника, об-
образованного любой тройкой вершин Р. Теперь рассмотрим N лу-
лучей, исходящих из точки q и проходящих через вершины мно-
многоугольника Р (рис. 2.6).
Эти лучи разбивают плоскость на N клиньев. Каждый клин
разбит на две части одним из ребер Р. Одна из этих частей ле-
лежит целиком внутри Р, другая — целиком снаружи. Считая q
началом полярных координат, мы можем отыскать тот клин, где
60
Гл. 2. Геометрический поиск
лежит точка z, проведя один раз двоичный поиск, поскольку
лучи следуют в порядке возрастания их углов. После нахожде-
нахождения клина остается только сравнить z с тем единственным реб-
ребром из Р, которое разрезает этот клин, и решить, лежит ли z
внутри Р.
Рис. 2.6. Разбиение на клинья для задачи о принадлежности выпуклому
многоугольнику. 1. Двоичным поиском находим, что г лежит в клине Р\цръ
2. Определяя, по какую сторону ребра р\р2 лежит г, находим, что z сна-
снаружи.
Предобработка в вышеописанном способе решения состоит в
поиске q как центра масс трех вершин из Р и размещении вер-
вершин ри р2, ¦ ¦ ¦, Pn в структуре данных, пригодной для двоич-
двоичного поиска (например, в векторе). Очевидно, это можно про-
проделать за время O(N) для заданной последовательности pi,
р2, ••¦, Pn- Теперь сосредоточим внимание на процедуре поиска:
Процедура ПРИНАДЛЕЖНОСТЬ ВЫПУКЛОМУ МНОГО-
МНОГОУГОЛЬНИКУ
1. Дана пробная точка z. Определяем методом двоичного по-
поиска клин, в котором она лежит. Точка z лежит между луча-
лучами, определяемыми р, и р,+ь тогда и только тогда, когда угол
(zqpi+i) положительный, а угол {zqpi) отрицательный1).
2. Если pi и p,+i найдены, то z — внутренняя точка тогда и
только тогда, когда угол (pipi+]z) отрицательный.
') Заметим, что определению знака угла (Р[Р2Рз) соответствует вычис-
вычисление определителя матрицы третьего лорядка, образованной координатами
этих точек. Конкретно, если положить pi=?(xt,yi), то этот определитель,
i У\
равный
У2
, дает удвоенную ориентированную площадь треугольника
х3 Уз 1
(Р1Р2Р3), где знак плюс будет тогда и только тогда, когда обход (Р1Р2Р3)
ориентирован против часовой стрелки. Итак, (Р1Р2Р3) соответствует левому
пояороту тогда и только тогда, когда этот определитель положителен.
2.2. Задачи локализации точки 61
Теорема 2.2. Время ответа на запрос о принадлежности точ-
точки выпуклому N-угольнику равно O(\ogN) при затрате O(N)
памяти и O(N) времени на предварительную обработку.
Какое же свойство выпуклого многоугольника позволяет про-
провести быстрый поиск? Чтобы можно было применить двоичный
поиск, вершины должны быть упорядочены по углу относитель-
относительно некоторой точки. Очевидно, что выпуклость является только
достаточным условием обладания этим свойством. На самом же
деле существует более обширный класс простых, многоугольни-
многоугольников, включающий в себя и
выпуклые многоугольники,
который обладает этим
свойством: это класс звезд-
звездных многоугольников (см.
разд. 1.3.1). Действительно,
звездный многоугольник Р
(рис. 2.7) содержит по мень-
меньшей мере одну точку q та-
такую, что отрезок qpi лежит
целиком внутри многоуголь-
многоугольника Р для любой вершины
Pi из Р, i = 1, ..., N.
Для определения принад- Рис- 2-7- Звездный многоугольник.
лежности точки звездному
многоугольнику можно непосредственно использовать предыду-
предыдущий алгоритм, если найден соответствующий центр q, служа-
служащий основой поиска. Множество подходящих центров внутри Р
было определено в разд. 1.3.1 как ядро Р. Построение ядра
простого Af-угольника лежит за рамками этой главы; мы вер-
вернемся к этой задаче в разд. 7.2.6, где доказан неожиданный
результат, что ядро может быть найдено за время 0{N).
А сейчас предположим, что ядро Р HdneciHu—(и непусто^; по-
этому можно выбрать центр, относительно которого строятся
клинья, необходимые для поиска. Получаем следующую теорему:
Теорема 2.3. Время ответа на запрос о принадлежности точ-
точки звездному N-угольнику равно O(\ogN) при затрате O(N) па-
памяти и O(N) времени на предварительную обработку.
Теперь можно обратить внимание на простые многоугольни-
многоугольники общего вида, которые будем называть обыкновенными. Су-
Существует иерархия свойств, строго упорядоченная отношением
«быть подмножеством»:
ВЫПУКЛОСТЬ <= ЗВЕЗДНОСТЬ с ОБЫКНОВЕННОСТЬ.
B.2)
62 Гл. 2. Геометрический поиск
Мы только что видели, что задача о принадлежности звездному
многоугольнику асимптотически ничуть не сложнее задачи
о принадлежности выпуклому многоугольнику. Но что можно
сказать об обыкновенном случае? Один из подходов к этой за-
задаче подсказан тем, что каждый простой многоугольник есть
объединение некоторого числа многоугольников специального
вида — таких, как звездные или выпуклые, или в конечном итоге
треугольников. К сожалению, минимальная мощность Атакой де-
декомпозиции может сама оказаться равной О (N) >). Поэтому дан-
данный подход сводится к преобразованию простого Л/-угольника в
УУ-вершинный плоский граф. В связи с этим кажется, что задача
принадлежности обыкновенному простому многоугольнику не
легче, чем, по-видимому, более общая задача о локализации
точки в планарном подразбиении, хотя и неизвестно доказатель-
доказательство их эквивалентности. Поэтому мы сосредоточимся на по-
последней из этих задач.
2.2.2. Локализация точки на планарном подразбиении
В главе 1 упоминалось, что пленарный граф всегда
может быть уложен на плоскости так, что его ребра перейдут в
прямолинейные отрезки. Графы, уложенные подобным образом,
будут называться плоскими прямолинейными графами (ППЛГ).
Любой ППЛГ определяет, вообще говоря, подразбиение плоско-
плоскости; если в ППЛГ нет вершин со степенью <2, то можно непо-
непосредственно убедиться в том, что все ограниченные области
этого подразбиения — простые многоугольники. Без потери общ-
общности здесь и далее граф предполагается связным.
Чтобы вести поиск в подобной структуре, можно попытаться
разбить каждую область на такие многоугольники, для которых
поисковая операция относительно проста. Не принимая во вни-
внимание на некоторое время сложности получения желаемой де-
декомпозиции — это, безусловно, может оказаться не простым де-
делом, — заметим, что успех в локализации точки зависит от воз-
возможности быстро сузить множество компонент декомпозиции,
которые следует просмотреть. С другой стороны, скорейшие из
известных методов поиска основаны на дихотомии, иначе го-
говоря, на двоичном поиске. Легко убедиться после небольшого
размышления, что с точки зрения затрат времени на запрос воз-
возможность использовать двоичный поиск важнее, чем минимиза-
минимизация размера исследуемого множества, в связи с логарифмиче-
логарифмической зависимостью времени запроса от этого размера. Отсюда
') Это очевидно, если компонентами разбиения являются треугольники,
поскольку k = N — 3. Но даже для звездных компонент k может достигать
величины \NI$\ [Chvatal A975)].
'2.2. Задачи локализации точки
видно, что потенциально успешный метод локализации точки
должен обладать следующими чертами: исходное пленарное
подразбиение должно преобразовываться в новое, такое, что
каждый из составляющих его многоугольников пересекает не-
небольшое и ограниченное число (возможно, ровно одну) исход-
исходных областей, и, кроме того, такое, что к нему применим двоич-
двоичный поиск. Другими словами, главная идея состоит в том, чтобы
создать новые геометрические объекты, допускающие двоичный
поиск, и в таком виде она была сформулирована Добкином
и Липтоном [Dobkin, Lipton A976)]. Все известные методы,
описываемые ниже, по существу, пронизаны этой идеей.
2.2.2.1. Метод полос
Пусть задан ППЛГ G. Проведем горизонтальные пря-
прямые через каждую его вершину, как показано на рис. 2.8. Они
разделяют плоскость на N + 1 горизонтальных полос. Если про-
провести сортировку этих полос по координате у как часть предоб-
предобработки, то появится возможность найти ту полосу, в которой
лежит проЕшая^очка z. за время О (log N).
Рнс. 2.8. Вершины ППЛГ определяют горизонтальные полосы.
Теперь рассмотрим пересечение одной из полос с графом G.
Оно состоит из отрезков ребер графа G. Эти отрезки опреде-
определяют трапеции1). Поскольку G есть плоская укладка пленар-
пленарного графа, то его ребра пересекаются между собой только в
вершинах, а так как каждая вершина лежит на границе полосы,
то отрезки ребер внутри полос не пересекаются (рис. 2.9).
Поэтому данные отрезки можно полностью_у_по?ядочить..сле^
в^_нащ2лво-и_использовать двоичный" поиск для определения той
трапеции, в которую попала точка z, потратив на это O{\ogN)
времени. Отсюда получаем оценку времени запроса для худ-
худшего случая, равную O(\ogN).
') Такие трапецнн, очевидно, могут вырождаться в треугольники, как
показано на рнс. 2.9.
64
Гл. 2. Геометрический поиск
Осталось только узнать, сколько ресурсов ушло на предва-
предварительную подготовку и запоминание ППЛГ. При наивном под-
подходе кажется, что нужно сортировать все отрезки внутри каж-
каждой полосы. Кроме того, поскольку каждая полоса может содер-
Рис. 2.9. Отрезки ребер графа внутри полосы не пересекаются.
жать О (N) таких отрезков, то кажется, что должны потребо-
потребоваться затраты: O{N2\ogN) —для времени и O(N2) —для па-
памяти. Теперь покажем, как сократить время предобработки до
О (Л/2). Однако (в данном алгоритме) ничего нельзя сделать для
сокращения памяти, поскольку существуют такие ППЛГ, кото-
которые требуют квадратичной памяти (рис. 2.10).
— отрезков
? в полосе
Рис. 2.10. Суммарное число отрезков в полосах может достигать
Заметим, что если ребро ППЛГ проходит через несколько
полос, то эти полосы следуют одна за другой. Это наблюдение
и является тем ключом, позволяющим сократить время пред-
предобработки, поскольку можно воспользоваться методом замета-
заметания плоскости (см. разд. 1.2.2). Напомним, что алгоритм пло-
плоского заметания характеризуется двумя основными структурами
данных: A) списком точек событий, т.е. последовательностью
2.2. Задачи локализации точки
позиций, назначаемых для заметающей прямой; B) статусом
заметающей прямой, т. е. описанием пересечения заметающей
прямой с заметаемым геометрическим объектом. В нашем слу-
случае, если плоское заметание проводить, скажем, снизу вверх, то
моментальным статусом заметающей прямой будет упорядочен-
упорядоченная слева направо последовательность реоер графа, пересекаю-
пересекающих ту полосу, где находится заметающая прямая. Эта последо-
последовательность, т. е. порядок ребер слева направо, не изменяется
внутри данной полосы, но изменяется на границе со следующей
полосой, когда достигается v — новая вершина ППЛГ. Ясно,
что в этой ё
^_р2; L?J![Mi
няются теми, к№0^ыёТГач1шаются_в уГСтатус заметающей пря-
йоТГтожЖ "хранить"!» форме дёрё1а7~сбалансированного по вы-
высоте (т. е. 2-3 дерева), которое, как хорошо известно, допускает
реализацию операций ВСТАВИТЬ и УДАЛИТЬ за время, про-
пропорциональное логарифму его размера. Добавим, что заметаю-
заметающая прямая сканирует полосы в восходящем порядке, т. е. спи_-_
сок точек событий — это просто перечисленные снизу вверх вер-
вершины ППЛГ. В каждой точке события статус заметающей пря-
прямой корректируется и запоминается; ясно, что этот статус есть
просто последовательность отрезков внутри вышележащей поло-
полосы. С точки зрения затраты ресурсов работа состоит во вставле-
вставлении и удалении каждого из ребер графа — со стоимостью
O(logiV) на одну операцию — и в запоминании статуса; на пер-
первое уйдет O(iVlogiV) времени, поскольку по теореме Эйлера в
iV-вершинном планарном графе O(N) ребер, а последнее потре-
потребует O(N2) памяти, как указано выше. Алгоритм предобработ-
предобработки будет интуитивно понятнее, если считать ребра ориентиро-
ориентированными снизу вверх. Вершины, упорядоченные по возраста-
возрастанию у, запоминаются в массиве ВЕРШИНА; B[i] — множество
ребер, инцидентных ВЕРШИНЕИ снизу (входящие ребра) и
упорядоченных по углу против часовой стрелки; A[i] — множе-
множество ребер, исходящих из ВЕРШИНЫ (t)_Jn упорядоченных по
чагоипй стрелке Ррбря дяппинняютря r с'бялянгировяннгш по
высоте дереве /^.'Предлагается следующий алгоритм:
procedure ПРЕДОБРАБОТКА-ДЛЯ-ЛОКАЛИЗАЦИИ-
ТОЧКИ-НА-ПЛОСКОСТИ
begin ВЕРШИНА[1 : 2N] := вершины G, упорядоченные по
возрастанию у;
L:=0;
for i:=2 until N do
begin УДАЛИТЬ(В[/]) из L;
ВСТАВИТЬ(Л[/]) в L;
Запомнить L
end
end.
3 Зак. 1075
66 Гл. 2. Геометрический поиск
Итак, сформулируем теорему:
Теорема 2.4. Локализацию точки в N-вершинном планарном
подразбиении можно реализовать за время O(logiV) с исполь-
использованием О (N2) памяти, если О (N2) времени ушло на предобра-
предобработку.
Хотя данный метод обладает оптимальной оценкой времени
запроса, однако его время предобработки и — в еще большей
степени — его затраты памяти чрезмерны и для многих прило-
приложений недопустимы. Было высказано предположение [Shamos
A975а)], что затраты памяти можно сократить до O(N), хотя
это может потребовать увеличения времени запроса до O(log2 N).
Вскоре эта гипотеза подтвердилась, что и будет показано ниже.
Этот почти оптимальный метод стал основой для дальнейших
существенных продвижений [Edelsbrunner, Guibas, Stolfi A985)].
2.2.2.2. Метод цепей
В то время как в ^етоде полос эффективность лоиска
достигается благод^рл, декомпозиции исходного подразбиения
на трЗггещш~в методе цепей, предложенном Ли и Препаратой
[Lee, Preparata A978)], эта же цель достигается благодаря ис-
использованию в качестве базовой компоненты нового типа много-
многоугольников, называемых монотонными и определяемых ниже.
Ключевым в этом методе является определяемое здесь поня-
понятие «цепи».
Определение 2.1. Цепью С = (ии ..., ир) называется ППЛГ
с вершинами {ии ..., ир) и ребрами {(«,-, «,-+i): i = 1, ...
..., р— 1}.
Другими словами, цепью в силу данного определения явля-
является плоская укладка теоретико-графовой цепи, которую иногда
называют также ломаной линией (рис. 2.11 (а)).
Рассмотрим планарное подразбиение, определяемое ППЛГ G.
Предположим, что в G найдена цепь С (подграф G) одного из
следующих типов: A) С является циклом или B) оба конца и\
и ир из С лежат на границе бесконечной области. В последнем
случае дополним С с обоих концов полубесконечными парал-
параллельными ребрами. Теперь цепь каждого типа делит исходное
подразбиение на две части. Более того, мы скоро увидим, что
процедура определения того, по какую сторону от С лежит
пробная точка z, именуемая процедурой дискриминации z отно-
относительно С, довольно проста. Далее, если удастся выбрать С
так, чтобы указанные части были сравнимы по сложности, то,
рекурсивно повторяя деления, мы получим метод локализации
точки, который требует логарифмического числа дискримина-
2.2. Задачи локализации точки
67
ций. Поэтому сразу же возникают два вопроса: A) Какова стои-
стоимость процедуры дискриминации точки относительно произволь-
произвольной цепи и существуют ли такие цепи, дискриминация относи-
относительно которых проста? B) Какова трудоемкость поиска под-
подходящей разделяющей цепи?
Рассматривая первый вопрос, легко убедиться, что дискрими-
дискриминация относительно произвольной цепи есть, по существу, та же
U-Uj
Рис. 2.11. Примеры цепей: (а) — общего вида; (Ь) — монотонная по отно-
отношению к прямой /.
самая задача, что и проверка принадлежности обыкновенному
многоугольнику. Поэтому необходимо поискать более ограни-
ограниченный класс цепей. Один из таких классов задается следую-
следующим определением.
Определение 2.2. Цепь С = («ь ..., ир) называется монотон-
монотонной по отношению к прямой /, если любая прямая, ортогональ-
ортогональная к /, пересекает С ровно в одной точке.
Другими словами, любая монотонная цепь С принадлежит к
определенному выше типу B), а ортогональные проекции
{/(Mi), ..., 1(ир)} вершин С на I упорядочены вдоль / следую-
следующим образом: /(«i), ..., 1(ир).
Одна из подобных цепей показана на рис. 2.11 (Ь). Очевидно,
что проекцию t(z) заданной пробной точки г на / можно лока-
локализовать методом двоичного поиска в единственном из интерва-
интервалов (t(ui), l(ui+i)). Затем единственная линейная проверка по-
покажет, по какую сторону от прямой, несущей ребро и,и,+ь лежит
пробная точка z. Поэтому дискриминация произвольной точки
относительно р-вершинной цепи реализуется за время O(logp)').
') Заметим, что монотонную цепь можно считать предельным случаем
звездного многоугольника.
Гл. 2. Геометрический поиск
Такая эффективность побуждает использовать монотонные
цепи при локализации точек. Предположим, что существует не-
некое множество "g7 = {Си ..., Сг) цепей, монотонных относи-
относительно одной и той же прямой / и обладающих следующими до-
дополнительными свойствами:
Свойство 1. Объединение всех элементов W содержит задан-
заданный ППЛГ G1).
Свойство 2. Для любой пары цепей d и С; из Ч? те узлы С/,
которые не являются узлами Ch лежат по одну сторону от С,-.
Такое множество W называется полным множеством моно-
монотонных цепей графа G. Заметим, что, согласно свойству 2,"цепи
из полного множества упорядочены. Следовательно, можно при-
применить к W метод дихотомии (т.е. двоичный поиск), в котором
элементарной операцией вместо простого сравнения чисел те-
теперь будет дискриминация точки относительно цепи. Итак, если
у нас г цепей в W и в самой длинной цепи р вершин, то поиск
займет в наихудшем случае О (log r- log p) времени.
Но остается самый важный вопрос: можно ли построить
полное множество монотонных цепей для произвольного ППЛГ
G? Ответ на этот вопрос отрицательный. Однако мы покажем,
что ППЛГ допускает построение полного множества монотон-
монотонных цепей, если удовлетворяет довольно слабому ограничению.
Кроме того, мы покажем, что произвольный ППЛГ можно легко
преобразовать в такой граф, к которому применима процедура
построения цепей. Эта процедура создает несколько новых «ис-
«искусственных» областей, которые не мешают, однако, эффектив-
эффективному решению задачи локализации точки.
Следующее определение выражает упомянутое выше слабое
ограничение:
Определение 2.3. Пусть G— ППЛГ с множеством вершин
{v\, ..., vN}, где вершины индексированы так, что i <Z j тогда
и только тогда, когда y{vi)< y{Vj), или y(vt) = y(v{) и x(vt)>
>x(vj). Вершина V/ называется регулярной, если существуют
такие целые i < / < k, что (vt, V;) и (v/, Vk) — ребра G. Гово-
Говорят, что ППЛГ G регулярен, если каждая его вершина v,- регу-
регулярна при 1 < / < N (т. е. за исключением двух крайних вер-
вершин V\ И VN).
На рис. 2.12 приведен пример регулярного графа. Сейчас мы
покажем, что регулярный граф распадается на полное множе-
множество цепей, монотонных относительно оси у. (Далее прямая /
будет считаться осью у на плоскости.)
') Заметим, что конкретное ребро G может принадлежать более чем
одной цепи из W.
2.2. Задачи локализации точки
и7
Чтобы подтолкнуть интуицию, представим, что ребро (у,-, v,-)
ориентировано от у, к vf, если I < /. Поэтому можно говорить
о множествах IN(f/) и OUT(t»/) соответственно входящих и ис-
исходящих ребер для вершины Vj. Предположим, что ребра в
IN(ty) упорядочены по углу против часовой стрелки, а ребра в
OUT (о/) упорядочены по часовой стрелке. По предположению
о регулярности оба эти множе- ~
ства не пусты для каждой из не-
некрайних вершин. Отсюда видно,
что для любой v,- (/ ф 1) мож-
можно построить «/-монотонную цепь
от V\ до У/. Это тривиально для
/ = 2. Допустим, что данное ут-
утверждение верно для всех k < /.
Поскольку Vj регулярна, то по
определению 2.3 существует та-
такое К.], что (vt,Vj) — ребро G.
Но по предположению индук-
индукции существует цепь С от V\ до
Vi, монотонная относительно оси
у; ясно, что сцепление С с
(vt, Vj) — тоже монотонная цепь.
Для завершения доказательства
необходимо показать, что вы-
полнены свойства 1 и 2, упомяну-
тые выше. Пусть вес W(e) реб-
ребра е — это число цепей, которым принадлежит е. Кроме того,
введем следующие обозначения:
{e)\ Wout (v) = ? W (e).
e<=OUT(t>)
Ъ
^ 2-12- Пример регулярного
ППЛГ.
Win(v)=
Тогда надо только показать, что веса ребер можно выбрать та-
такими, что:
A) каждое ребро обладает положительным весом;
B) для любого Vj (j ф 1, N), WiN(Vj)= Wout(v,).
Условие A) устанавливает, что каждое ребро принадлежит по
крайней мере одной цепи (т.е. свойство 1), а условие B) гаран-
гарантирует, что Win(Vj) цепей проходят через Vj и их можно выбрать
так, чтобы они не пересекались (свойство 2). Реализация усло-
условия Win = Worn является решением достаточно известной клас-
классической потоковой задачи [Even A979)] и может быть достиг-
достигнуто за два прохода по графу G. Полагая W(e) = 1 для каж-
каждого ребра е, в первом проходе — от V\ до vN — мы получим
Win (w,-) ^ №оит(о,-) для всех некрайних vt. При втором прохо-
проходе— от vN до V\ — мы получим Win(Vi) ^ Wout(Ci), т.е. иско-
70 Гл. 2. Геометрический поиск
мое выражение. Обозначая viN(f)= I IN(f) | и vOuT(f) =
= |OUT(w)|, имеем алгоритм
procedure БАЛАНСИРОВКА-ПО-ВЕСУ-В-
РЕГУЛЯРНОМ-ППЛГ
begin for каждого ребра е do W(e) := 1 (* инициализация *)
for i := 2 until N — 1 do
begin fiN(t),) := сумма весов ребер, входящих в v-t;
d1 := крайнее слева ребро, исходящее из vt;
iWm(»i) > v0UT M) then №№):=№ш(сг)-
vout(w,-) + 1
end (* первый проход *);
for i := N — 1 until 2 do
begin Wour(f «¦) := сумма весов ребер, исходящих
из vt\
d2 := крайнее слева ребро, входящее в vt;
ii(WouT(Vi) > Win{vi)) then W (d2) :=
Wour(vt) - Wltl(vt) + W(d2)
end (* второй проход*)
end.
Очевидно, что этот алгоритм требует времени, линейно зави-
зависящего от числа ребер и вершин графа G. Данную процедуру
можно изменить так, чтобы построение %?, т. е. назначение ребер
цепям, проводилось при реализации второго прохода. Для крат-
краткости опустим эти детали и покажем на рис. 2.13(а)— (d) кон-
конфигурацию веса ребер после инициализации, первого и второго
проходов соответственно и чертеж цепей Ф для ППЛГ G с
рис. 2.12. Этим заканчивается доказательство того, что регуляр-
регулярный ППЛГ покрывается полным множеством монотонных цепей.
Перед проведением анализа работы этого алгоритма важно
показать, как произвольный ППЛГ преобразуется в регулярный.
Рассмотрим такую нерегулярную вершину v графа U, которая
не имеет, скажем, исходящих ребер (рис. 2.14). Горизонтальная
прямая, проходящая через v, протыкает в общем случае пару
ребер е\ и е2 графа G, ближайших к v слева и справа. (Заметим,
что, поскольку v — некрайняя вершина, по меньшей мере один
из этих проколов должен существовать.) Пусть о,- — верхняя
вершина ребер е, (j = l,2), и пусть v* — та из вершин {vi,v2},
которая имеет меньшую ординату Снапример. v2). Тогда отрезок
vv* не пересекает ребер G ') и, следовательно, может быть до-
') Это утверждение, вообще говоря, неверно. Контрпример получается,
если другая нерегулярная вершина t»3, не имеющая входящих ребер, нахо-
находится внутри треугольника (v, vt, vt). Здесь vt — точка пересечения ребра ег
с горизонтальной прямой, проходящей через точку v (см. рис. 2.14). Однако
это наблюдение не опровергает теорему 2.5, изложенную ниже. Алгоритм
регуляризации нуждается при этом в небольшом изменении. — Прим. перев.
2.2. Задачи локализации точки
71
бавлен к ППЛГ, тем самым «регуляризуя» вершину и. Данное
наблюдение позволяет использовать метод, именуемый верти-
вертикальным плоским заметанием (см. разд. 1.2.2). А именно заме-
заметаем граф сверху вниз, чтобы регуляризовать вершины, не
имеющие исходящих ребер, а затем снизу вверх, чтобы регуля-
регуляризовать вершины другого типа. В первом случае списком точек
событий является последова-
последовательность вершин vn, vn-u ¦ ¦ ¦
..., v\. Структура статуса
заметающей прямой (кото-
(которая будет реализована дере-
деревом, сбалансированным по
высоте) задается упорядо
ченным слева направо спис-
списком номеров ребер ППЛГ,
vz=v
Рис. 2.13. Построение множества 'S для
ППЛГ с рис. 2.12. Метки ребер являются
их весами после: (а) инициализации; (Ь)
первого прохода; (с) второго прохода. По-
Полученное множество цепей изображено на
(d).
Рис. 2.14. Пример типично;!
нерегулярной вершины v.
пересекающихся с этой заметающей прямой, и, кроме того, с каж-
каждым интервалом между этими ребрами связана одна вершина
(с минимальной ординатой в этом интервале). В процессе заме-
заметания для каждой встреченной вершины v реализуем следую-
следующие операции: A) локализуем v (по абсциссе) в одном из ин-
интервалов в структуре данных статуса; B) корректируем эту
структуру статуса; C) если v нерегулярна, добавляем ребро
от v до той вершины, которая связана с интервалом, определен-
определенным в операции A). Построение более формального алгоритма
мы оставляем для самостоятельного упражнения. Заметим, что
регуляризация iV-вершинного ППЛГ осуществима за время
O(JVlogiV) благодаря возможности начальной сортировки орди-
ординат его вершин и локализации N вершин в структуре данных
72
Гл. 2. Геометрический поиск
статуса за время O(logiV) для каждой вершины. Сформули-
Сформулируем этот факт как теорему для будущих ссылок.
Теорема 2.5. N-вершинный ППЛГ можно регуляризовать за
время O(N\ogN) с затратой O(N) памяти.
На рис. 2.15 показан результат регуляризации ППЛГ из
рис. 2.8.
Теперь, после того как мы определили, что метод цепей при-
применим к любому ППЛГ, — возможно, после его регуляриза-
регуляризации — проанализируем его эффективность. Верхняя оценка време-
времени поиска для наихудшего слу-
случая О (log p- log г) = О (log2 N)
уже была установлена. При-
Причем эта оценка достижима, по-
поскольку существует iV-вершин-
ный ППЛГ с О (л/N) цепями,
каждая с О (л/N) ребрами
(рис. 2.16(а) для N= 16).
Рассмотрим ППЛГ, изо-
изображенный на рис. 2.16(Ь).
Этот граф содержит в своем
полном множестве N/2 цепей,
Рис. 2.15. Регуляризованный ППЛГ. в каждой из которых N/2 ре-
Штриховыми линиями изображены
ребра, добавленные при заметании
сверху вниз, а пунктирными — при
заметании снизу вверх.
бер. На первый взгляд этот
пример внушает беспокойство,
так как в отношении затрат
памяти данный метод, каза-
казалось бы, демонстрирует обескураживающую зависимость O(iV2)!
Однако дела совсем не так плохи, если обратить внимание
на то, как в алгоритме используются цепи. Безусловно, цепи
используются в схеме двоичного поиска. Алгоритм двоичного
поиска на полностью упорядоченном множестве 5 индуцирует
естественную иерархию на 5, представленую двоичным деревом
с корнем; процесс поиска соответствует проходу в этом дереве
от корня к листу. Если естественным образом пронумеровать
цепи, скажем, слева направо, то ребро е, принадлежащее более
чем одной цепи, будет принадлежать всем элементам множества
(интервалу) последовательных цепей. Теперь предположим, что
цепи сопоставлены узлам дерева двоичного поиска. Если ребро е
принадлежит нескольким цепям какого-то интервала, то суще-
существует единственный элемент С* в этом интервале, который яв-
является общим предком ') для всех остальных элементов из этого
') Согласно стандартной терминологии, вершина Vi в корневом дереве Т
является предком или предшественником вершины v,-, если существует путь
от корня Т, содержащий и Vt, и V/, причем Vi ближе к корню.
2.2. Задачи локализации точки
73
интервала в дереве поиска. Пусть С — любой из этих остальных
элементов; тогда дискриминации точки z относительно С пред-
N/2 вершин
(a) (b)
Рис. 2.16. Примеры худших случаев ППЛГ.
Рис. 2.17. Полное множество монотонных цепей (а), на котором ведется
поиск в соответствии с иерархией, выраженной двоичным деревом (Ь). Об-
Обходные указатели показаны штриховыми линиями (с).
шествует — в схеме двоичного поиска — дискриминация z отно-
относительно С*. Следовательно, ребро е можно отнести только к
цепи С*, и на самом деле оно будет отнесено к самой верхней
В иерархии цепи из числа тех, которым оно принадлежит. При-
74 Гл. 2. Геометрический поиск
мер такого отнесения иллюстрирует рис. 2.17. Отметим наличие
обходных указателей на рис. 2.17(с); однако их число не пре-
превосходит числа ребер, отсюда следует, что полную структуру
данных для поиска можно разместить в O(N) ячейках памяти.
Что же касается предобработки, то по-прежнему предполо-
предположим, что ППЛГ задан в виде структуры данных РСДС, описан-
описанной в разд. 1.2.3.2. Поскольку кольцо ребер, инцидентных любой
вершине v графа G, можно получить за время, линейно связан-
связанное с ее степенью, то построение множеств IN(v) и OUT(v)
для всех v осуществимо за время O(N).
Процедура балансирования по весу, как мы видели, также
проходит за время O(N). Отмечая, что возможный предвари-
предварительный регуляризующий проход потребует еще O(N\ogN)
времени, заключаем, что задача предобработки займет
O(N\ogN) времени. Резюмируем:
Теорема 2.6. Локализацию точки в N-вершинном планарном
подразбиении можно реализовать за время O(\og2N) с исполь-
использованием O(N) памяти при затратах O(N\ogN) времени на
предобработку.
В начале разд. 2.2.2.2 было отмечено, что в методе цепей
используется новый тип простого многоугольника. Определим
эти многоугольники:
Определение 2.4. Простой многоугольник называется моно-
монотонным, если его границу можно разбить на две цепи, монотон-
монотонные относительно одной и той же прямой линии.
Монотонные многоугольники являются весьма интересными
геометрическими объектами. Из результатов данного раздела
непосредственно следует, что задачу о принадлежности точки
монотонному многоугольнику с N вершинами можно решить
за время О (log iV); позднее мы увидим, что и триангуляцию мо-
монотонного многоугольника, и определение факта монотонности
простого многоугольника можно осуществить за оптимальное
время O(N).
2.2.2.3. Оптимальные методы: метод планарного
сепаратора и метод детализации триангуляции
Существует ли метод со временем поиска O(logiV),
использующий менее чем квадратичную память? Эта знамени-
знаменитая задача довольно долго не была решена. Она получила поло-
положительное решение благодаря замечательной конструкции, при-
принадлежащей Липтону и Тарьяну [Lipton, Tarjan A977a, 1977b,
1980)]. Следует обратить внимание на слова «существует ли
метод». В действительности этот метод столь громоздок, а оценки
2.2. Задачи локализации точки 75
его эффективности столь откровенно и щедро опираются на
«большое О», что Липтон и Тарьян сами высказали следующее
предостережение [Lipton, Tarjan A977b)]: «Мы не считаем этот
алгоритм практичным, но его существование заставляет думать,
что может найтись практичный алгоритм с временной оценкой
O(logyV) и с оценкой памяти О (Л/)». Описание их удивительно
искусного метода выходит за рамки данной книги. Вместо этого
рассмотрим два недавно предложенных оптимальных метода,
дающих ответы на ожидания Липтона и Тарьяна. Первый ме-
метод— детализация триангуляции Киркпатрика [Kirkpatrick
(а)
Рис. 2.18. Заданная триангуляция (а) и та же триангуляция внутри охва-
охватывающего ее треугольника (Ь).
A983)] —может стать практичным алгоритмом; он описан в
данном разделе. Второй метод [Edelsbrunner, Guibas, Stolfi
A985)] является дальнейшим улучшением метода цепей и будет
кратко описан в разд. 2.4.
Метод «детализации триангуляции» принадлежит Киркпат-
рику. Предполагается, что А/-вершинный ППЛГ является триан-
триангуляцией (см разд. 1.3.1); в том случае, если он не триангуля-
триангуляция, его можно преобразовать в нее за время O((yVlogyV) с по-
помощью простого алгоритма, который будет описан в разд. 6.2.2.
Напомним, что триангуляция на множестве вершин V на плос-
плоскости есть ППЛГ с максимальным числом ребер, не превы-
превышающим 3|1/| — 6 (по формуле Эйлера) Кроме того, по причи-
причинам, которые скоро станут ясными, триангуляцию удобно окру-
окружить треугольной границей путем построения охватывающего ее
треугольника и триангулирования области между этими двумя
объектами (рис. 2.18). С учетом этого замечания все триангу-
триангуляции будут считаться обладающими границей с тремя верши-
вершинами и ровно с 3| V\—6 ребрами.
Пусть задана УУ-вершинная триангуляция G, и предположим,
что строится последовательность триангуляции Si, S2, .. ., Sh(,N),
Si = G, a St получается из Si~\ по следующим правилам:
76 Гл. 2. Геометрический поиск
Шаг A). Удалим некоторое множество независимых (т. е.
несмежных) неграничных вершин S»-i и инцидентные им ребра.
(От выбора этого множества, который будет описан ниже, са-
самым непосредственным образом зависит эффективность алго-
алгоритма.)
Шаг B). Вновь триангулируем многоугольники, образовав-
образовавшиеся в результате удаления вершин и ребер.
Таким образом, S^n) не имеет внутренних вершин (т. е. со-
состоит из одного треугольника).
Заметим, что все триангуляции 5Ь 5г, . . ., S^n) имеют одну
общую границу, поскольку на шаге A) мы удаляем только
внутренние вершины. Треугольники, главные объекты этого ме-
метода, будем обозначать буквой R, снабжая ее индексами.
Треугольник Rj может появляться во многих триангуляциях,
однако условимся, что Rj принадлежит триангуляции 5,-
(обозначая Rj^*Si), если R,- создан на шаге B) при постро-
построении St.
Теперь построим структуру данных Т для поиска; узлам этой
структуры соответствуют треугольники. (Для краткости узел
часто будет называться «треугольник Rj» вместо «узел, пред-
представляющий треугольник Rj».) Структура Т, топологию которой
представляет направленный ациклический граф, определяется
следующим образом: от треугольника Rk к треугольнику R,-
проводится дуга, если при построении S» после S»-i мы имеем:
1) Rj удаляется из 5,_i на шаге A);
2) Rk создается в S, на шаге B);
3) Rj[\R^0.
Очевидно, что треугольники из S\ не имеют исходящих дуг
в Г, и только они обладают этим свойством.
Для ясности удобно изобразить Т в рассмотренном виде, т. е.
помещая его узлы в горизонтальные строки, каждая из которых
соответствует какой-нибудь триангуляции. Последовательность
триангуляции показана на рис. 2.19(а); кружком обведены вер-
вершины, которые удалены на данном шаге. Соответствующая
структура Т показана на рис. 2.19(Ь).
После построения Т легко понять, как происходит локализа-
локализация точки. Элементарной операцией является «принадлежность
треугольнику», которая, очевидно, выполняется за время 0A).
Начальный шаг состоит в локализации пробной точки z относи-
относительно Sft(jv). Затем идем вниз по пути в Г и неизбежно остано-
остановимся в одном из треугольников, принадлежащих S\. Постро-
Построение данного пути происходит следующим образом: если достиг-
достигнут какой-то узел на этом пути (т. е. г локализована в соот-
2.2. Задачи локализации точки
77
ветствующем ему треугольнике), то проверяется принадлежность
точки z всем потомкам этого узла; поскольку z принадлежит
ровно одному из потомков, то в путь добавляется еще одна
дуга. Этот поиск можно также рассматривать как последова-
последовательную локализацию z в триангуляциях Shw, Sft(W)-i, ¦ ¦ ¦, S\.
То, что Si-i является результатом детализации St, объясняет
наименование самого метода.
-Si
Рис. 2.19. Последовательность триангуляции (а) и соответствующий ей на-
направленный ациклический граф поиска (Ь).
Более строго, предположим, что все потомки узла v из Т
собраны в список Г (и), и пусть ТРЕУГОЛЬНИК (v) обозначает
треугольник, отнесенный к узлу v. Теперь мы получили сле-
следующий поисковый алгоритм:
procedure ЛОКАЛИЗАЦИЯ-ТОЧКИ
begin if(z<? ТРЕУГОЛЬНИК (корень)) then печать
"г лежит в бесконечной области"
else begin о := корень;
while (T(v) ф 0) do
for каждый и е Г (и) do if
(ze= ТРЕУГОЛЬНИК^)) then v:=u;
печать v
end
end.
Как упоминалось ранее, от выбора множества вершин три-
триангуляции, которые будут удалены при построении S,- по 5,_ь
78 Гл. 2. Геометрический поиск
существенно зависит эффективность метода. Предположим, что
можно выбрать это множество так, чтобы выполнялись сле-
следующие свойства (здесь через Ni обозначено число вершин в Si):
Свойство 1. Ni = aiNi-i, где а< ^ а < 1 для i = 2, . . ., h(N).
Свойство 2. Каждый треугольник R,- e Si пересекается не
более чем с Н треугольниками из St-i, и наоборот.
Свойство 1 немедленно влечет за собой следствие, что
h(N) ^ Г log l/a^l = O(logN), поскольку дри переходе от 5,-_i
к Si удаляется по менмирй мр.ре фиксиро*ванная доля вершИНТ
Из свойств 1 и 2, вместе взятых, следует, что память для Г
равна O(N). Действительно, заметим, что эта память исполь-
используется для хранения узлов и указателей на их потомков. Из
теоремы Эйлера о плоских графах следует, что S,- содержит
Fi ¦< 2Ni треугольников. Число узлов Т, представляющих тре-
треугольники из Si, не превосходит Fi (только те треугольники, ко-
которые действительно «принадлежат» Si, появляются на соответ-
соответствующем ярусе Т). Отсюда следует, что общее число узлов
в Т меньше, чем
(заметим, что Ni = N по определению). Что касается памяти,
используемой под указатели, то по свойству 2 каждый узел
имеет не более Н указателей; поэтому не более 2NH/(\ — а)
указателей появится в Т. Это доказывает последнее утвер-
утверждение.
Теперь надо показать, что существует такой критерий вы-
выбора множества удаляемых вершин, при котором выполняются
свойства 1 и 2. Вот этот критерий: «Удалить несмежные вер-
вершины со степенью меньше К» (здесь К —^целое_числр, которое
будет тщательно подобрано). Порядок просмотра и, если необ-
необходимо, удаления этих__вершин~п"роизволен: нач!шаем с любой
"из" них, помечаем ее соседей (они не "могут" удаляться) и про-
продолжаем, пока еще остаются непомеченные вершины.
Введение данного критерия — это удачный прием. Выпол-
Выполнение свойства 2 обеспечивается тривиально. Поскольку удале-
удаление вершины со степенью меньше К приводит к образованию
многоугольника с числом ребер менее К, то каждый из уда-
удаленных тругольников пересекает не более К, — 2 А, Н новых тре-
треугольников. Для проверки выполнения свойства 1 необходимо
воспользоваться некоторыми особенностями плоских графов.
Хотя есть возможность провести более детальный анализ, при-
приводящий к лучшим результатам, но следующие соображения
достаточны для доказательства необходимого нам утверждения.
2.2. Задачи локализации точки 79
A) Из формулы Эйлера для плоских графов, в частном
случае триангуляции, ограниченной тремя ребрами, следует, что
число вершин N и число ребер е связаны соотношением
e = 3N- 6.
B) Пока в триангуляции есть внутренние вершины (в про-
противном случае задача тривиальна), степень каждой из трех гра-
граничных вершин не меньше трех. Поскольку существует 3N— б
ребер, а каждое ребро инцидентно двум вершинам, то сумма
степеней всех вершин меньше 6N. Отсюда сразу следует, что
не менее N/2 вершин имеет степень меньше 12. Следовательно,
пусть К = 12. Пусть v — это число выбранных вершин: поскольку
каждой из них инцидентно не более /С— 1 = 11 ребер, а три
граничные вершины не выбираются, то мы имеем
Следовательно, а^? 1 — 1/24 < 0,959 < 1, что доказывает спра-
справедливость свойства 1. Безусловно, наш грубый анализ дает
оценку ос, непрактично близкую к 1, и оценка данного метода,
полученная в результате этого анализа, вероятно, хуже, чем
оценка, которую покажут численные эксперименты.
Теорема 2.7. Локализацию точки в N-вершинном планар-
ном подразбиении можно осуществить за время O(\ogN) с ис-
использованием O(N) памяти, если O(N\ogN) времени ушло на
предобработку.
Другое доказательство этой теоремы, основанное на уточ-
уточнении метода цепей, кратко описано в разд. 2.4.
2.2.2.4. Метод трапеций
Хотя вопрос о существовании оптимального метода
локализации точки теоретически уже решен, а в литературе уже
представлены и практически оптимальные алгоритмы, описан-
описанные в предыдущем разделе, но более привлекательным методом
может оказаться такой, асимптотическое поведение которого
в худшем случае, возможно, и неоптимально, о чем говорилось
в разд. 1.2.1. Другими словами, желаемой целью может ока-
оказаться компромиссный подход, основанный на прямой процедуре
поиска при, возможно, немного неоптимальной затрате памяти.
Сейчас будет описан метод трапеций, который, по-видимому,
удовлетворяет этим требованиям [Preparata A981); Bilardi,
Preparata A981)] :).
Существуют несколько путей неформального изложения идеи
') Экспериментальные наблюдения, опубликованные в [Edahiro et al.
A983)], подтвердили эти ожидания.
80 Гл. 2. Геометрический поиск
этого метода. Возможно, наиболее естественный путь — считать
его развитием метода полос, принадлежащего Добкину и Лип-
тону и описанного в разд. 2.2.2.1. Как указано ранее, этот ме-
метод имеет чрезвычайно простую процедуру поиска — O(logiV),
но использует досадно много памяти—O(N2) в худшем случае.
Последнее обстоятельство имеет место благодаря возможному
наличию «длинных» ребер в ППЛГ; длинным считается ребро,
пересекающее несколько полос и, следовательно, разбиваемое
на такое же число фрагментов. Интересно, что длинные ребра —
проклятие метода полос — могут стать преимуществом в методе
трапеций. В самом деле, длинное ребро е так удобно разрезает
ППЛГ, что горизонтальные полосы по каждую сторону от е
образуют полностью независимые структуры (в то время как
в методе Добкина — Липтона е находится внутри полосы).
В результате плоскость будет разбита на трапеции, как опре-
определено ниже.
Определение 2.5. Трапеция имеет две горизонтальные сто-
стороны и может иметь две, одну или нуль боковых сторон, при-
причем боковые стороны, если они есть, являются ребрами ППЛГ
(или их частями) и никакое другое ребро ППЛГ не пересекает
обе ее горизонтальные стороны.
Поиск осуществляется путем локализации пробной точки
в последовательности вложенных трапеций, до тех пор пока
эта последовательность не закончится такой трапецией, внутри
которой нет ребер ППЛГ или их фрагментов. Будет показано,
что в этом методе ребро разбивается не более чем на 2Iog2 N
фрагментов в худшем случае, что существенно улучшает оценку
памяти, сохраняя О (log N) — оценку времени поиска метода Доб-
Добкина — Липтона (с незначительным ухудшением константы).
В методе трапеций не требуется, чтобы граф был триангу-
триангулирован; на самом деле позднее мы увидим, что не требуется
даже прямолинейности его ребер. Однако на некоторое время
допустим, что имеется ППЛГ G. Множество вершин V графа
G упорядочено по возрастанию их ординат, а множество его
ребер Е упорядочено в соответствии со следующим отношением
(частичного порядка) «<^»:
Определение 2.6. Даны два ребра в\ и е2 из Е\ запись ех^е2
(читается «е\ левее е2») обозначает, что существует горизон-
горизонталь, пересекающая оба ребра, и точка ее пересечения с ех бу-
будет левее соответствующей точки на е2. (Позднее (в примеча-
примечании 1, с. 87) мы обсудим, как алгоритмически получить это
упорядочение.)
Основной механизм, строящий структуру данных поиска, об-
обрабатывает по одной трапеции и стремится разбить ее на мак-
2.2. Задачи локализации точки
81
симально возможное число более мелких трапеций Это делается
путем разрезания трапеции R на «нижний» и «верхний» слои
Ri и R2 горизонталью, проходящей через ту вершину ППЛГ,
чья ордината является медианой множества ординат вершин
внутри R. Каждый из этих слоев Ri и R2, хотя и является гео-
(а)
Верхний слои
Кг
Медиана_
У=Уп,Ы
Нижний слой
Рис. 2.20. Трапеция R (а), разбитая на трапеции R3,
показано на (b).
i, Rs, Re и Rr, как
метрической трапецией, удовлетворяет не всем условиям опре-
определения 2.5, поскольку некоторые ребра ППЛГ могут пересе-
пересекать одновременно обе его горизонтальные стороны; такие ребра
назовем накрывающими. Теперь каждое ребро, накрывающее
один из слоев1), определяет его последующий разрез.
Проделываются следующие операции. После определения ме-
медианы у = г/med трапеции R (рис. 2.20) цепочка ребер ППЛГ,
пересекающих R, просматривается слева направо и разделяется
на две цепочки, относящиеся к слоям Rx и R2 соответственно.
') Никакое ребро не может накрывать и Ru и R?, иначе оно накрывало
бы трапецию R, что противоречит определению.
82 Гл. 2. Геометрический поиск
Всякий раз, когда встречается накрывающее ребро, оно стано-
становится правой боковой границей новой трапеции, которая может
обрабатываться независимо. Если внутренность трапеции пуста
(ребра ППЛГ не пересекают ее), то ее обработка тривиальна.
Структура данных поиска, соответствующая трапеции
с рис. 2.20, изображена на рис. 2.21. Каждой трапеции R соот-
соответствует дерево двоичного поиска T(R), каждый узел которого
слева
T(R6) T(R7) TUlj)
слева / \ справа
T(R4) T(R5)
Рис. 2.21. Структура данных поиска, соответствующая трапеции с рис. 2.20.
связан с линейной проверкой. Удобно различать узлы двух ти-
типов: V-узлы, если соответствующая проверка проводится отно-
относительно горизонтали, и О-узлы, если эта проверка ведется от-
относительно прямой, несущей ребро ППЛГ. Очевидно, что корень
T(R) всегда будет V-узлом. Заметим, что любому V-узлу соот-
соответствует единственная вершина ППЛГ, а именно такая вер-
вершина, ордината которой является медианой множества ординат
вершин ППЛГ в данной трапеции. Поскольку две крайние вер-
вершины ППЛГ не участвуют в разбиении трапеции, то число V-уз-
лов в дереве поиска будет равно N— 2.
Более формально, процедура-функция ТРАПЕЦИЯ, строящая
дерево поиска, получает на входе: Е — цепочку ребер ППЛГ,
V—последовательность вершин внутри R, упорядоченную по
возрастанию их ординат, и у—интервал / трапеции R. В про-
процедуре используются вспомогательные операции, такие как
«поиск медианы» и «балансировка», которые будут описаны
позже; Е\, Е2, U\ и U2— рабочие списки этого алгоритма.
1 function ТРАПЕЦИЯМ,V,1)
2 begin if(V = 0) then return Л (* лист дерева поиска *)
3 else begin El:=E2:=Vl:=V2:=U := 0;
4 t/med:= медиана множества ординат V;
5 /i:=[min(/),ymed]; 12:=\утЫ, max(/)];
6 repeat e<=E;
7 for i = 1,2 do
1.1. Задачи локализации точки 83
8 begin if(e имеет конец р
внутри Ri)
then
9 begin Ei<=e;
Ю Vt:=Vi[i{p)
end;
11 \i(e накрывает Rt)
или (е = Л) then
12 begin Ui<=TPAUE-
(,)
13 if(e =И= Л)
then Ui<=e\
H ?, := Vi := 0
end
end
15 until е = Л;
16 новый(до); (* создание нового V-узла до,
корня T(R)*)
17 У[до] :=ymed; (* дискриминация узла w*)
18 ЛДЕРЕВО[ш] := БАЛАНС^);
19 ПДЕРЕВО[ш] := БАЛАНС(?/2);
(* функция БАЛАНС принимает на входе
чередующуюся последовательность
из деревьев и ребер и организует их
в сбалансированное дерево *)
20 return ДЕРЕВО[ш]
end
end.
В этом алгоритме выделяются три основных действия:
1) определение медианы множества ординат вершин в R;
2) разбиение нижнего и верхнего слоев на трапеции и полу-
получение для каждого слоя Ri (i — 1, 2) цепочки Ui, состоящей из
ребер и деревьев (в нашем примере U2 = T(R3)eiT(Ri)e3T(R5),
a U\ = T(R6)e2T(R7)). На это уходит большая часть всей ра-
работы, и делается она в цикле repeat в строках 6—15;
3) балансировка двух цепочек U\ и U2 (строки 18 и 19).
Первое действие можно выполнить в принципе за время
О(| 1/|) с помощью классического алгоритма поиска медианы.
Однако существует более простой и прямой путь. Вершины тра-
трапеции располагаются в массиве по возрастанию ординат. (Ме-
(Медиану этого массива можно найти за одно обращение.) Моди-
Модификация процедуры ТРАПЕЦИЯ происходит следующим обра-
образом. Последовательность ребер просматривается дважды. При
первом проходе каждая вершина просто помечается именем той
трапеции, к которой она отнесена, непосредственно используя
эти пометки, строится массив вершин для каждой порождаемой
84 Гл. 2. Геометрический поиск
трапеции. При втором проходе выполняется цикл repeat (за ис-
исключением строки 10).
Вспомогательная функция БАЛАНС организует из чередую-
чередующейся цепочки, состоящей из деревьев и ребер, U = Тхв^Т^вг ¦ ¦ ¦
. . . eh-\Th — сбалансированное дерево. Каждое дерево Т,- имеет
вес W(Tf) ^ 0, равный числу вершин ППЛГ, содержащихся в
соответствующей трапеции. Вес U равен W (?/) = ^j=lW (Г,).
Функция БАЛАНС работает следующим образом:
1. Если W (U) =0 (т. е. U = ехв2 ¦ ¦ ¦ eh-X), то сделать из этих
ребер сбалансированное дерево. Иначе:
2.1. Найти такое целое г, чтобы ?^J W {T,)< W (f/)/2,
j
2.2. Построить дерево, подобное изображенному на
рис. 2.22 (а), где?/' = 7у, ... Tr_u U" = Tr+ler+l . .. Th,
а т'= БАЛАНС ((/'). ^" = БАЛАНС (?/")• (Заметим, что
W ((/') < W (U)/2 и W {U") < W (t/)/2.)
Очевидно, что процедура БАЛАНС требует О (h log h) времени.
Действительно, разделение U на (?/', Tr, U") потребует О {К)
времени, а затем последуют два рекурсивных вызова этой же
процедуры, применяемых к половинам исходной цепочки.
X
(a) (b)
Рис. 2.22. Пример операции балансирования.
Но еще интереснее анализ высоты сбалансированных деревь-
деревьев. Заметим для начала, что h — число деревьев в цепочке U,
меньшее N, где N, как и ранее, равно числу вершин в ППЛГ.
В самом деле, из рис. 2.23 видно, что h — число новых трапеций,
на единицу большее числа ребер, накрывающих исходную тра-
трапецию. Последнее число ограничено сверху числом ребер, кото-
которые можно пересечь одной прямой линией. Теперь заметим, что
эти ребра можно считать «диагоналями» простого многоуголь-
многоугольника (ограниченного на рис. 2.23 штриховой линией). Если
у этого многоугольника s вершин, то в нем не более s — 3 диа-
2.2. Задачи локализации точки 85
гоналей (потому что эти диагонали определяют триангуляцию
данного многоугольника). Поскольку s ^ N (числа вершин
ППЛГ), то получаем /i^s — 2 ^ N — 2. Теперь можно дока-
доказать следующую теорему.
Теорема. Для заданной цепочки U = Т\вх . .. ен-\Тн высота
б([/) дерева, построенного с помощью процедуры БАЛАНС, не
превосходит 3 log2 W(U) + Г Iog2 A^l +3.
Доказательство. Доказательство проведем индукцией по
W(U). Начнем с №(?/)=!. В этом случае, процедура БАЛАНС
1
Накрывающие ребра
J
Рис. 2.23. Иллюстрация к доказательству того, что h < N (h — число новых
трапеций).
дает такое дерево, как на рис. 2.22(а), у которого %' и т", воз-
возможно, пусты, а Тг — дерево, приведенное на рис. 2.22 (Ь). Здесь
Т'г и Т" содержат не более чем по N штук О-узлов. Поэтому
высота этого дерева не превосходит Flog2 Л^1 + 3, и теорема
верна. Полагая W(U) = K (целому положительному числу),до-
числу),допустим, что теорема справедлива для всех весов, меньших К-
Будем различать два случая:
Случай 1. №GV)<Д"/2. Поскольку верно также, что W(U'),
W (?/")< К/2, то по предположению индукции 6 (?/'), 6 (?/"),
б (Тг) < 3 log2 К/2 + riog2 К\ + 3 < 3 log2 К - 3 + [logo Щ +3; так
что конфигурация на рис. 2.22(а) обеспечивает индуктивный
переход.
Случай 2. W(Tr) Ж/2. Поскольку W(U'), W(U") ^ K/2,
то доводы для т' и т" будут теми же, что и в случае 1. Относи-
Относительно Тг заметим, что оно соответствует трапеции. Поэтому под
действием процедуры ТРАПЕЦИЯ Тг получает структуру, по-
показанную на рис. 2.22(Ь), где Т'г и Т" сами являются сбаланси-
сбалансированными деревьями, и в силу медианного разбиения W (T'r)t
86
Гл. 2. Геометрический поиск
W (Т") < W (Tr)j2 < /С/2. Следовательно, для некоторого h" < N
имеем 6G;), б (Т") < 3 log W (Гг)/2 + |"log2 Л + 3 < 3 log К —
— 3 + riog2A^l+3, что и завершает доказательство.
Поскольку для ППЛГ верно, что W(U) ^ N, то высота де-
дерева поиска для ППЛГ не превосходит 4flog2iVl4-3.
Наконец, рассмотрим цикл repeat в процедуре ТРАПЕЦИЯ.
Для каждого просматриваемого ребра (т. е. взятого из списка Е)*
эта процедура осуществляет константный объем вычислений в
строке бив строках либо 8—10, либо 12—14. Следовательно,
Медиана в /?' Трапеция R"
Первое
деление
Рис. 2.24. Иллюстрация механизма деления ребра.
общая работа, проделанная в этом цикле, пропорциональна сум-
суммарному числу фрагментов ребер, порождаемых данным алго-
алгоритмом. Теперь оценим это число сверху. Обращаясь к рис. 2.24,
видим, что ребро делится впервые тогда, когда его концы лежат
в разных слоях, определяемых медианой трапеции R. После это-
этого деления верхний фрагмент ребра попадает в трапецию R'.
Если медиана R' делит е (худший случай), то е накрывает ниж-
нижний слой в R', а следующее его деление может произойти только
в верхнем слое R'. Аналогичные соображения применимы к
фрагменту е, попавшему в нижний слой R. Поэтому, выражая
число делений верхнего фрагмента ребра е как функцию c(s')
от числа s' вершин в R', мы получаем грубую оценку: c(s')^.
^ 1 + c(s"), где s" — число вершин в трапеции R", как пока-
показано на рис. 2.24. Поскольку s" < s'/2, мы получаем c(s') ^
^ Iog2 s', а поскольку s' < N/2, то общее число делений е не
превосходит 2 Iog2 iV — 2. Эта оценка доказывает два утвержде-
утверждения. Первое: общая работа, производимая в цикле repeat, про-
пропорциональна O(iVlogiV), поскольку имеется O(N) ребер, а
каждое ребро разделено на не более чем O(logiV) фраг-
2.2. Задачи локализации точки 87
ментов. Поскольку обе задачи (поиска медиан и балансировки)
требуют в сумме O(iVlogiV) времени, то все построение струк-
структуры данных поиска завершается за время O(iVlogiV). Второе
утверждение таково: поскольку структура данных поиска имеет
О-узел для каждого фрагмента ребра и V-узел для каждой вер-
вершины, то используемая память также оценивается через
O(N\ogN) !). Подводя итог, имеем:
Теорема 2.8. Точку можно локализовать в N-вершинном пла-
нарном подразбиении менее чем за 4 Iog2 N проверок, с исполь-
использованием O(MlogN) памяти и такого же времени предобра-
предобработки.
Примечание 1. Ранее мы отложили обсуждение вопроса о по-
построении упорядочения множества ребер Е, согласованного с от-
отношением частичного порядка «<С», задаваемого определе-
определением 2.6. Для достижения этой цели можно употребить метод,
Рис. 2.25. Пример вычисления отношения «¦«» как результата обработки вер-
вершины а В случае (а) порождается пара (е\, е2); в случае (Ь) порож-
порождаются пары (еьег), (е2, ез) и (ез, е4).
являющийся простой модификацией плокого заметания, описан-
описанного в разд. 2.2.2.2 для «регуляризации» плоского графа.
В процессе заметания сверху вниз вершины графа G про-
просматриваются, а статус заметающей прямой корректируется так,
как описано выше. Побочным результатом этого заметания яв-
является регистрация смежности всех ребер, получаемая при их
вставлении или удалении. Отношение смежности, выражаемое
в виде упорядоченной пары ребер (левое, правое) (рис. 2.25),
является транзитивным сведением «¦¦«» искомого частичного
упорядочения. Очевидно, что если граф G имеет N вершин, то
отношение «¦«» можно вычислить за время O(N\ogN). Если
известно отношение ««», то искомое упорядочение можно
') В худшем случае затраты памяти действительно составляют
O(N log N). Однако для ППЛГ специального вида [Bilardi, Preparata A981)]
требуется памяти в среднем O(N), что заставляет предполагать аналогичное
поведение в среднем и для ППЛГ общего вида.
88 Гл. 2. Геометрический поиск
получить за время O(N) стандартным методом топологической
сортировки [Knuth A973) >)]•
Примечание 2. Описанный метод не ограничивается лишь
ППЛГ. В самом деле, прямолинейные отрезки можно заменить
другими кривыми, если будут выполнены следующие два усло-
условия: A) эти кривые — однозначные функции от одной избран-
избранной координаты (скажем, от у); B) дискриминацию точки отно-
относительно любой из таких кривых можно проделать за констант-
константное время. Например, эти условия, очевидно, выполняются для
дуг окружностей и других коник, которые не имеют горизон-
горизонтальных касательных к неконцевым точкам. Применение метода
Киркпатрика (разд. 2.2.2.3) в подобной ситуации представляет
очевидные трудности, поскольку требуется перетриангулировать
многоугольник с криволинейными ребрами.
2.3. Задачи регионального поиска
2.3.1. Общие замечания
Как было показано в разд. 2.1, задачи регионального
поиска можно рассматривать как двойственные, в определенном
смысле, к задачам локализации точки, которые уже были рас-
рассмотрены.
Здесь файлом будет считаться набор записей, каждая из ко-
которых идентифицирована упорядоченным d-плексом «ключей»
(х\, Х2, ..., Ха). Естественно считать d-плекс ключей точкой в
d-мерном декартовом пространстве. На таком файле можно до-
допустить некоторые действия пользователя, или запросы. Одна-
Однако в данном контексте мы будем иметь дело исключительно с
региональными запросами. Запрос определяет область (регион)
в d-мерном пространстве, а результатом поиска является отчет
о подмножестве точек файла, содержащихся в этой запрашивае-
запрашиваемой области. Другой, более ограниченной целью поиска явля-
является простой подсчет числа точек в запрашиваемой области.
(Единый подход к этим двум типам задач получится, если каж-
каждую запись сопоставить с одним из элементов коммутативной
полугруппы с операцией «*» и считать, что запрос реализует
операцию «*» над всеми записями в своем интервале. Тогда в
режиме отчета каждой записи сопоставлено ее имя, а «*» есть
операция объединения подмножеств; в режиме подсчета каждой
записи сопоставлено целое число 1, а «*» есть обычное сложе-
сложение [Fredman A981)].)
Представление в декартовом пространстве является абстрак-
абстракцией для множества очень важных приложений, часто именуе*
•) См. русское издание: Кнут, т. 1, с. 323. — Прим. перев.
2.3. Задачи регионального поиска 89
мых «поиском по многим ключам» (Knuth A973), v. 3J. Напри-
Например, отдел кадров компании может пожелать узнать число ра-
работников в возрасте от 30 до 40 лет, зарабатывающих от 27 000
до 34 500 долларов в год. Помимо данного выдуманного примера
приложения подобного рода возникают в географии, статистике
[Loftsgaarden, Queensberry A965)] и автоматизации проектиро-
проектирования [Lauther A978)].
Возвращаясь к нашей абстрактной задаче, заметим, что за-
запросы уникального типа не представляют интереса, ибо их обра-
обработка непременно сведется к какому-нибудь виду исчерпываю-
исчерпывающего перебора в пространстве. Поэтому сосредоточимся на мас-
массовых запросах, и тогда потребуются изначальные затраты на
предобработку и запоминание, чтобы в долгосрочном плане по-
получать выигрыш во времени поиска. В этом смысле нашей ко-
конечной целью является решение данной задачи в ее самом ши-
широком обобщении, т. е. умение работать в пространстве произ-
произвольной размерности и на множестве произвольных областей
запроса как по форме, так и по размеру. В то время как вопрос
о размерности пространства можно адекватно разрешить (за
определенную вычислительную плату, разумеется), к сожале-
сожалению, большая часть того, что известно сегодня относительно
природы запроса, связано с гиперпрямоугольными областями.
(Гиперпрямоугольная область — это декартово произведение ин-
интервалов на различных координатных осях1). Хотя случай ги-
гиперпрямоугольной области и очень важен, он, несомненно, не
охватывает всех желамых форм. Например, поиск всех точек на
ограниченном расстоянии d от пробной точки z, называемый
поиском на ограниченном расстоянии, порождает сферическую
область поиска (т.е. гиперсферу радиусом d с центром в z).
Как будет показано ниже, методы, успешно применяемые в ги-
гиперпрямоугольном случае, неприменимы в случае сферы. Если
для сферы когда-нибудь и удастся достичь сравнимой эффектив-
эффективности, то получена она будет, вероятно, на основе совершенно
иных принципов. На самом деле, имеются кое-какие недавние
продвижения [Chazelle, Cole, Preparata, Yap A984)] в задаче
поиска на ограниченном расстоянии при d = 2 (задача круго-
кругового регионального поиска), основанные на понятии «близости»;
') Выбранная так область поиска часто называется ортогональным за-
запросом, возможно, потому, что гиперплоскости, ограничивающие гиперпрямо-
гиперпрямоугольник, ортогональны координатным осям. Иногда гиперпрямоугольиик на-
называют прямоугольным (rectilinear); употребляя слово, вероятно, подска-
подсказанное формой путей в плоской Li-метрике (см. гл. 8). Однако нам кажется
неудачным такое использование термина «прямоугольный» (дискуссия иа
эту тему будет продолжена в разд. 8.2). (Терминологические вопросы, ко-
которые здесь возникли, специфичны для английского языка и ие имеют
прямых аналогий в русском. — Ред.).
90 Гл. 2. Геометрический поиск
они будут представлены в гл. 5 и 6. Эти рассуждения, строго го-
говоря, приложимы только к такому режиму работы, когда поис-
поисковые операции не получают доступа ни к каким другим эле-
элементам файла, кроме содержащихся внутри области запроса.
Если такое ограничение снять, то сферическую область можно
адекватно аппроксимировать семейством гиперпрямоугольных
областей; хотя подобный подход может оказаться неудачным
при оценке поведения в худшем случае, однако в «реальных»,
практических ситуациях он может работать весьма хорошо (на-
(например, метод й-О-дерева из разд. 2.3.2).
Общая черта всех методов, которые будут рассмотрены в на-
настоящей главе, состоит в том, что используемые структуры дан-
данных будут статическими, т. е. они не будут модифицироваться
после их построения. Очевидно, отсюда следует, что все состав-
составляющие их элементы — в нашем случае это множество точек в
d-мерном пространстве — должны быть заданы заранее. Соот-
Соответствующие динамические структуры данных, т. е. такие струк-
структуры, которые допускают вставку и удаление своих элементов,
по-видимому, будут значительно более сложными; их изучение
находится до сих пор в весьма активной стадии и не будет де-
детально обсуждаться в данной книге, за исключением нескольких
коротких замечаний и библиографических ссылок в разд. 2.4.
Теперь стоит поискать критерий для сравнения разных мето-
методов. Естественно в качестве критерия выбрать нижнюю оценку
для некоторых мер эффективности этих методов. Однако, перед
тем как двинуться дальше, стоит неформально проанализиро-
проанализировать взаимосвязь разных способов оценки.
Как обычно, предположим, что файл является фиксирован-
фиксированным набором S из N записей. Ответом на запрос будет S'-под-
множество S. Один из возможных подходов состоит в предвари-
предварительном вычислении ответов на все допустимые запросы. По-
Поскольку допустимые ответы составляют конечное множество
(как множество всех подмножеств конечного множества S), то
бесконечное множество запросов разбивается на конечное число
классов эквивалентности (два запроса эквивалентны, если на
них поступает одинаковый ответ). Тогда обработка запроса све-
свелась бы к его сравнению со стандартным представителем соот-
соответствующего класса эквивалентности, что в свою очередь не-
немедленно дало бы ответ. Этот метод прямого доступа (он будет
обсуждаться в разд. 2.3.3) продемонстрировал бы весьма про-
простую обработку запроса, достигнутую за счет огромных затрат
памяти и времени предобработки. Однако из двух последних
ресурсов память важнее времени предобработки; в самом деле,
время предобработки это вполне допустимая однократная за-
затрата, но память является долгосрочной затратой, поскольку не-
непригодна для других целей на протяжении всей жизни запросно-
2.3. Задачи регионального поиска 91
ответной системы. Поэтому стало традицией, если и не прене-
пренебрегать вовсе, то по крайней мере не переоценивать затраты на
предобработку, а вместо этого концентрировать внимание на
времени обработки запроса и объеме памяти для файла. (Впро-
(Впрочем, во многих приложениях время предобработки и память
оцениваются функциями одного порядка, поэтому бывает доста-
достаточно оценить лишь последнюю.) Вышеописанный метод харак-
характеризуется малым временем запроса и большой памятью; по-
понятно, что уменьшение требований к памяти достигается ценой
увеличения времени запроса; итак, мы столкнулись с взаимоза-
взаимозависимостью между двумя мерами эффективности. В соответ-
соответствии с современной практикой будем характеризовать метод
регионального поиска парой: (память файла, время запроса).
Понятие «время запроса», в свою очередь, заслуживает не-
некоторого обсуждения. Работа, затрачиваемая на обработку за-
запроса, естественно, зависит не только от размера файла N и от
подмножества S't^S, содержащегося внутри запрашиваемого
региона, но и от типа запроса (т. е. от природы ранее упомяну-
упомянутой операции «*» на полугруппе). В самом деле, ответом на за-
запрос в режиме подсчета всегда будет единственное целое число
(k — мощность S'), в то время как ответом на запрос в режиме
отчета будут имена всех k элементов S'. В принципе можно раз-
различать два вида действий при обработке запроса:
1. Поиск, т.е. действия, приводящие к элементам искомого
подмножества (обычно последовательность сравнений).
2. Выборка, т. е. действия по составлению ответа на запрос
(для запросов в режиме отчета — это фактическое извлечение
искомого подмножества).
Анализ запросов в режиме подсчета удобен тем, что всю вычис-
вычислительную работу вбирает в себя «поиск»; при этом следует
ожидать, что время запроса для худшего случая будет функцией
f(N, d), зависящей от размера файла и числа измерений. На-
Намного сложнее случай запросов в режиме отчета, поскольку вы-
вычислительная работа теперь является комбинацией поиска и вы-
выборки, и та ее часть, которая связана с выборкой, ограничена
снизу числом k — мощностью S'. Если потребовать, чтобы при
обработке запроса обеспечивался доступ только к элементам S',
то ясно, что время на поиск этих элементов будет одинаковым
для запросов обоих типов. Если же разрешить доступ к супер-
супермножеству, немного превосходящему искомое множество 5', то
появится возможность сократить затраты памяти, а часть стои-
стоимости поисковой работы «отнести на счет» задачи выборки;
в этом и состоит основная суть метода фильтрующего поиска
[Chazelle A983c)], который будет обсуждаться в конце данной
92
Гл. 2. Геометрический поиск
-а
I _
!__., i
-а
регион
запроса
1 I
главы '). Итак, в общем случае верхняя оценка времени запроса
в режиме отчета будет выражена в форме O(f(N,d) + k-g(N,d));
эти два слагаемых следует понимать как соответственно «время
поиска» и «время выборки», если допустимо в точности выби-
выбираемое множество, или как времена запроса для «малого» (й=
= O(f(N,d))) и «большого» (f(N, d) = o{k)) выбираемых мно-
множеств в более общем случае.
Относительно нижних оценок сразу же заметим, что Q(k) —
это тривиальная нижняя оценка времени выборки, поскольку
длина результата пропорциональна k. Что же касается времени
поиска, то обратимся к модели дво-
Типичный ичного дерева решений, которая,
как хорошо известно, подсчиты-
подсчитывает число сравнений, необходи-
необходимых для доступа к элементам мно-
множества S' cz S внутри запросного
региона (заметим, что здесь мы
считаем доступными только те эле-
элементы, которые необходимо вы-
выбрать). Это число сравнений огра-
ограничено снизу величиной log2Q(S),
где Q(S) — число различных подмно-
подмножеств S, получаемых как ответы на
запросы. Обращаясь к рис. 2.26, рассмотрим следующее множе-
множество [Bentley, Maurer A980)]: S — множество всех точек,
имеющих одну и только одну ненулевую целочисленную коорди-
координату в интервале [—а, а]; ясно, что N = lad. Затем выберем
независимо по каждой оси координат два любых целых числа
в интервалах соответственно [—а, —1] и [1, а]; они и определят
регион запроса, для которого подмножество связанных с ним
точек непусто и отлично от всех других подмножеств. Поскольку
вышеупомянутый выбор можно осуществить a2d = (N/Bd) Jd
способами, то нижняя оценка числа двоичных решений равна
Q(\og(N/Bd)Jd) = u(d\ogN). Хотя более тонкий комбинатор-
комбинаторный анализ [Saxe A979)] может дать более точную оценку чис-
числа ортогональных регионов, обладающих различными выбирае-
выбираемыми множествами точек, однако и простые доводы, приведен-
приведенные выше, дали нам нижнюю оценку времени поиска Q(d log N).
К сожалению, как отметил Люкер [Lueker A978)], модель де-
Рис. 2.26. Пример множества
S при d = 2.
') Существует принципиальное отличие фильтрующего поиска от того
метода поиска, в котором заданный регион аппроксимируется регионами дру-
других типов (например, сферический регион — гиперпрямоугольными). Хотя оба
эти метода не относятся к типу «точного доступа», при фильтрующем по-
поиске размер доступного множества не более чем на мультипликативную кон-
константу отличается от размера выбираемого множества.
2.3. Задачи регионального поиска 93
рева решений, по-видимому, не адекватна для данной задачи,
поскольку для больших d все известные методы показывают
экспоненциальную, а не линейную зависимость времени поиска
от d (т. е. верхняя граница имеет вид О ((log N)d)). Этот вопрос
был поставлен Фредменом [Fredman A981)], который доказал
нижнюю оценку времени поиска Q((logiV)d) для динамических
запросных систем (оценивая сложность операции «*» на полу-
полугруппе, которая была введена ранее в настоящем разделе); од-
однако не совсем ясно, как результат Фредмена можно приложить
к рассматриваемой здесь ситуации. Наконец, заметим, что
Q(Nd)—тривиальная нижняя оценка памяти, занятой под
структуру данных поиска.
Остаток этой главы будет посвящен в основном алгоритмам
для задачи типа «отчета», а не типа «подсчета» (за иключением
упражнения 4). Заметим, что алгоритм первого типа можно
тривиально использовать для решения задачи второго типа; од-
однако обратное преобразование в общем случае невозможно, т. е.
могут быть развиты специфические эффективные методы для
решения задачи типа «подсчета». Для всех описываемых алго-
алгоритмов время поиска выражается в форме O(f(N,d) + k).
В следующих разделах показано несколько достаточно инте-
интересных и тонких методов, предложенных для задачи региональ-
регионального поиска. Будет пролит свет на те трудности, которые до сих
пор не позволяют построить оптимальные алгоритмы и которые
непосредственно определяют соотношение между двумя важны-
важными ресурсами — временем запроса и объемом памяти.
Чтобы соответствующим образом подготовиться к изложению
существующих методов, нам придется начать с простейшего
примера регионального поиска, который при совершенной своей
тривиальности содержит существенные черты данной задачи:
речь пойдет об одномерном региональном поиске.
Множество из N точек на оси х представляет файл, а запрос-
запросным регионом является отрезок [х',х"] (называемый х-регио-
ном). Методом, дающим эффективный (оптимальный) регио-
региональный поиск, является двоичный поиск, т. е. дихотомия иско-
искомого упорядоченного множества. В самом деле, ясно, что х' —
левый конец лг-региона — локализуется на оси х дихотомией; на
этом завершается поиск, а для осуществления выборки надо
пройти ось х в направлении вырастания х вплоть до достижения
правого конца х". Структурой данных, обеспечивающей указан-
указанное действие, является прошитое двоичное дерево, т. е. такое
сбалансированное двоичное дерево, листья которого дополни-
дополнительно связаны в списке, отражающем порядок абсцисс; дерево
и список обрабатываются на фазах соответственно поиска и вы-
выборки. Заметим, что описанный метод оптимален как по време-
времени запроса 0(logiV + k), так и по памяти 8(iV).
94 Гл. 2. Геометрический поиск
В последующем обсуждении различных подходов к d-мерно-
му региональному поиску прежде всего будем рассматривать
простейший случай (т. е. d — 2) для выявления таких существен-
существенных черт каждого метода, которые свободны от бремени раз-
размерности. После достижения указанной цели мы будем стре-
стремиться там, где это уместно, к обобщению на произвольное
число измерений.
2.3.2. Метод многомерного двоичного дерева
(fe-D-дерева)
Мы только что видели чрезвычайную важность дихото-
дихотомии при разработке оптимального метода для одномерного ре-
регионального поиска. Поэтому естественно попытаться обобщить
дихотомию на двумерный случай, где файл является набором из
N точек, лежащих на плоскости (х, у). То, что делается при
дихотомии, есть не что иное, как последовательное разрезание
региона (неважно, конечного или бесконечного) на две части.
В случае двух измерений всю плоскость можно считать бесконеч-
бесконечным прямоугольником, который будет разрезан сначала на две
полуплоскости прямой, параллельной одной из осей, скажем
оси у. Затем каждая из этих полуплоскостей может разрезаться
еще раз прямой, параллельной оси х, и т. д., меняя на каждом
шаге направление разрезающей линии, например от х к у. Как
выбирать разрезающие линии? В точном соответствии с тем же
принципом, который используется при обычной дихотомии, т. е.
руководствуясь принципом получения приблизительно равного
числа элементов (точек) по каждую сторону от разреза. Таким
образом мы пришли к правомерному обобщению дихотомии и,
более того, к основной идее метода многомерного двоичного де-
дерева [Bentley A975)].
Более строго, назовем (обобщенным) прямоугольником такую
область на плоскости, которая определена декартовым произве-
произведением [Хи х2] X [У\, УН ^-интервала $хи х2] и «/-интервала [г/1,1/2],
включая предельные случаи, когда, в любой комбинации допу-
допускается: х\ = —оо, дг2 = оо, ух = —оо, г/2 = °°. Поэтому мы бу-
будем считать прямоугольниками также неограниченные (с одной
или двух сторон) полосы, любой квадрант, или даже всю пло-
плоскость. ..-¦'¦'rr^S
Процесс разбиения S путем разрезания плоскости лучше
всего иллюстрировать в сочетании с построением двумерного
двоичного дерева Т. С каждым v узлом Т мы неявно связываем
прямоугольник 5?(и) (он определен выше) и подмножество
S(v) sS точек, лежащих внутри 5?(и); явно же, т.е. как фак-
фактические параметры этой структуры данных, свяжем с v одну из-
избранную точку P(v) из S(v) и «секущую прямую» l(v), проходя-
проходящую через P(v) и параллельную одной из координатных осей.
2.3. Задачи региональной поиска
95
Этот процесс начинается с определения корня Т. С 52{корень)
соотносится вся плоскость, и полагается, что 5 (корень) = S; за-
затем определяется точка p^S, такая что х(р) —медиана мно-
множества абсцисс точек из 5 (корень), и полагается, что Р(ко-
Р(корень) =р, а с /(корень) соотносится прямая с уравнением
х = х(р). Точка р разбивает S на два множества приблизи-
приблизительно равной мощности, назначенных потомкам корня. Процесс
"pi
Рис. 2.27. Иллюстрация метода поиска с помощью двумерного двоичного
дерева. Разбиение плоскости (а) моделируется деревом (Ь). Поиск начи-
начинается с проведения вертикали через Р$. На рис. (Ь) приняты следующие
графические обозначения: круглые узлы соответствуют
резам, квадратные — горизонтальным, точки — листьям дерева.
дробления прекращается, когда обнаружен прямоуольник, не
содержащий внутри точек; соответствующий ему узел является
листом дерева Т.
Данный метод проиллюстрирован на примере с рис. 2.27 для
множества из N = 11 точек. Узлы трех разных типов обозначе-
обозначены различными графическими символами: кружками — нелисто-
нелистовые узлы с вертикальной линией разреза, квадратами — нели-
нелистовые узлы с горизонтальной линией разреза, точками — ли-
листья. Такая структура данных часто называется 2-D-depeeoM
(аббревиатура выражения «двумерное двоичное дерево поиска»).
Изучим теперь использование структуры данных типа
2-?)-дерева для регионального поиска. Алгоритмической схемой
будет метод «разделяй и властвуй» в чистом виде. Действитель-
Действительно, рассмотрим взаимное расположение прямоугольной области
&(v), связанной с v узлом Т, и некоего прямоугольного регио-
региона D такого, что 31 (v) и D имеют непустое пересечение. Область
32(v) разрезана на два прямоугольника Ri и R.2 прямой l(v),
проходящей через P(v). Если D П 3l(v) полностью содержится
96 Гл. 2. Геометрический поиск
в Ri (/ = 1, 2), то поиск продолжается с единственной парой
типа (область, регион), а именно с (Ri, D). Если же область
D Г) 91 (v) разрезана прямой 1(v),to l(v) имеет непустое пересе-
пересечение с D, а значит, D может содёржатВ~-р(т7)~. Поэтому сначала
проверим, находится ли P(v) внутри D, и если да, то поместим
эту точку в выбираемое множество; затем продолжим поиск с
двумя парами типа (область, регион), а именно с (Ru D) и
(R2, D). Этот процесс поиска прекращается при достижении лю-
любого листа.
Более строго любой узел v дерева Т характеризуется трой-
тройкой параметров (P(v), t(v), M(v)). Точка P(v) уже была опре-
определена. Два других параметра вместе определяют прямую l(v),
а именно t(v) определяет горизонтальность или вертикальность
l(v); в первом случае l(v) — это прямая у = М(v) !), во втором
случае — это прямая x = M(vJ). Данный алгоритм накапли-
накапливает выбираемые точки в списке U — внешнем по отношению
к процедуре и первоначально пустом. Обозначая через D =
— 1*и х2]\[У\, У?\ запросный регион, получаем, что поиск на
дереве Т осуществляется вызовом процедуры ПОИСК (ко-
рень(Т),?)), имеющей следующее описание:
procedure ПОИСКА ,Z));
begin 1Щу)=вертикаль) then [I,r] := [.q,^] else
[l,r]:=[ylty2];
if(/<M(u)<r) then 4f(P(i/) e= D) then U<= P(v);
\i(v ф- лист) then
begin \i(l<M(v)) then ПОИСК(ЛСЫН[г;],?>);
U{M(v) < r) then ПОИСК(ПСЫН[у], D)
end
end.
На рис. 2.28(а) показан пример регионального поиска для
файла, приведенного на рис. 2.27(а). В частности, на рис. 2.28(Ь)
показан обход узлов Т, осуществленный описанной выше проце-
процедурой поиска. Заметим, что только в тех узлах, где поисковый
обход раздваивается (таких, как рв, Ръ, р% Pi, Pio, Pi, Рь), произ-
производится проверка принадлежности точки региону. Звездочкой
(*) помечены те узлы, в которых такая проверка успешна, и
соответствующая точка выбрана. Фактически выбранное множе-
множество—это {рз, Pa, Ps}.
С точки зрения оценки сложности 2-?>-дерево использует оп-
оптимальную память 6(jV) (по узлу на точку из S). Кроме того, его
можно построить за оптимальное время 6(jVlogjV) следующим
образом. Вертикальный разрез множества S производится в ре-
') Здесь M(v) = y(P(v)). — Прим. перев.
2) Здесь M(v) = x{P(v)). — Прим. перев.
2.3. Задачи регионального поиска
97
зультате вычисления медианы множества лг-координат точек из
S за время O(|S|) (с использованием алгоритма из работы
[Blum et al. A973)]) и путем формирования разбиения S с та-
такой же оценкой времени; аналогично и для горизонтального
разреза. Итак, за время O(N) исходное множество разбивается,
в результате чего получаются полуплоскости, в каждой из кото-
которых по jV/2 точек; тривиально получаем рекуррентное соотноше-
соотношение для времени T(N) работы алгоритма построения дерева:
что и дает обещанную оценку этого времени. В более прямой
реализации этого построения обходятся без сложного алгоритма
(а)
(Ь)
Рис. 2.28. Пример регионального поиска иа ранее заданном файле. Часть
(Ь) показывает узлы, фактически пройденные при поиске.
поиска медианы. Поскольку в только что описанном методе
фактически производится сортировка множеств х- и (/-координат
путем рекурсивного поиска медианы, то мы можем прибегнуть
к предварительной сортировке для формирования упорядочен-
упорядоченных массивов абсцисс и ординат точек из S, именуемых соот-
соответственно х- и «/-массивами. Это займет O(N\ogN) времени.
Первый разрез производится выборкой (за константное время)
медианы х-массива путем маркировки тех точек, чьи абсциссы,
скажем, меньше этой медианы (за время 0{N)). Маркировка
позволяет быстро сформировать два отсортированных подмас-
сива, и процесс для них рекуррентно повторяется.
Анализ времени запроса для худшего случая намного более
сложен. И не удивительно, что этот анализ был разработан Ли
и Вонгом (Lee, Wong A977)] значительно позже того, как были
впервые предложены многомерные двоичные деревья. Очевидно,
что время запроса пропорционально общему числу узлов в Т,
4 Зак. 1075
Гл. 2. Геометрический поиск
посещаемых поисковым алгоритмом, поскольку в каждом узле
этот алгоритм затрачивает константное время. Очевидно, что
это время потрачено в узле v не зря, если точка P(v) выбирает-
Тип О
ям
о
D
*М
Тип 1
тип г
D
Тип 3
Тип 4
Рис. 2.29. Примеры различных типов пересечений D с X(v), когда
Ф0.
ся (продуктивный узел); иначе, этот узел считается непродук-
непродуктивным. Анализ, проделанный Ли и Вонгом, направлен на по-
построение ситуации худшего случая, т. е. он соответствует макси-
максимальному поддереву посещенных узлов, из которых все непро-
непродуктивны. Как указано ранее, каждый узел у из Г соответствует
Тип 3
на высоте
т-1
\
Тип 2
на высоте т
1
|| Тип г
на высоте
г
ТипЗ
на высоте т
Тип 3
^ нос высоте
/ т-2
@0
(Ь)
Рис. 2.30. Самовоспроизводящиеся ситуации, соответствующие непродуктивным
узлам в Т.
некоему обобщенному прямоугольнику 9t(v). Пересечения за-
запросного региона D и подобного обобщенного прямоугольника
91 (v) могут быть отнесены к разным «типам» в зависимости от
числа сторон 9t(v), имеющих непустые пересечения с D. В част-
частности, если обозначить это число через i, то говорят, что Пересе-
2.3. Задачи регионального поиска 99
чение имеет тип i для i = О, 1, 2, 3, 4 (рис. 2.29). Единственный
тип пересечений, который всегда продуктивен — это тип 4; все
остальные могут оказаться непродуктивными. Ограничимся част-
частными случаями пересечений типа 2 и 3. (Заметим, что пересече-
пересечения типов 2 и 3 могут начать появляться только на узлах, уда-
удаленных от корня на два и три уровня соответственно.) Рассма-
Рассматривая рис. 2.30(а), можно легко построить ситуацию, когда
пересечение типа 2 на высоте т непродуктивно и порождает
одно пересечение типа 2 и одно пересечение типа 3 на высоте
(т— 1) (оба они могут быть сделаны непродуктивными). Ана-
Аналогично, как показано на рис. 2.30 (Ь), при том же самом огра-
ограничении на типы непродуктивных узлов можно построить ситуа-
ситуацию, когда одно пересечение типа 3 на высоте т в Т порождает
пару пересечений типа 3 на высоте (т — 2). Итак, обозначая
через Ui(m) число пройденных непродуктивных узлов в подде-
поддереве высотой т, чей корень имеет тип i (i = 2, 3), получаем
рекуррентные соотношения:
/з И = "u^-lt+b ~l)+h B-3)
Результат же таков: для t/2('") и 11з(т) оценка одинакова —
О WN).
Заключаем, что для файла мощности N в худшем случае
время запроса составит O(-\/N), даже если выбранное множе-
множество окажется пустым. Этот негативный результат для худшего
случая противоречит хорошей оценке, полученной методом ими-
имитационного моделирования [Bentley A975)] и подтвержденной
эвристическим рассуждением [Bentley, Stanat A975)].
Обобщение вышеописанного метода на случай d измерений
получается непсредственно. Здесь мы будем работать с секущи-
секущими гиперплоскостями, ортогональными координатным осям, а
все, что необходимо определить, — это критерий, по которому
следует выбирать ориентации этих секущих гиперплоскостей.
Если координаты обозначены через хи х2, . . ., xd, то одним из
возможных критериев будет циклический сдвиг на последова-
последовательности A, 2, . . . , d) индексов координат. Результирующее
разбиение rf-мерного пространства моделируется двоичным де-
деревом с N узлами, которое называется многомерным двоичным
деревом или k-D-деревом1)- Анализ эффективности также
можно обобщить на случай d измерений, однако этого здесь мы
делать не будем. Подведем итоги в следующей теореме:
') Выражение «й-Д-дерево» — это принадлежащая Д. Кнуту аббревиатура
для «^-мерного дерева двоичного поиска». Оно ие слишком выразительно,
ио уже вошло в современный профессиональный жаргон.
100 Гл. 2. Геометрический поиск
Теорема 2.9. С помощью метода k-D-дерева региональный
поиск на й-мерном множестве (при d^- 2) из N точек можно
провести за время O(dN1~1/d + k) с использованием Q(dN) па-
памяти, если затратить в (dN log N) времени на предобработку.
Поэтому метод k-D-дерева дает (dN, dN1-1^)-алгоритм.
Оптимальные оценки по памяти и времени предобработки,
к сожалению, не компенсируют обескураживающую оценку вре-
времени поиска для худшего случая. Поэтому неудивительно, что
в качестве альтернатив были предложены другие методы. Эти
методы будут описаны ниже.
2.3.3. Метод прямого доступа и его варианты
Неэффективность метода й-?>-дерева для худшего слу-
случая является важным мотивом для исследования методов, обла-
обладающих удовлетворительными оценками времени поиска, воз-
возможно, за счет ухудшения двух других обсуждавшихся оценок
эффективности. Мы начнем с самого простого метода, а затем
последовательно будем его улучшать.
Как упоминалось в разд. 2.3.1, самый грубый способ мини-
минимизации времени поиска состоит в предварительном вычислении
ответов на все возможные при региональном поиске запросы.
Поэтому возникает искушение заявить, что время поиска можно
сократить до 0A), поскольку единственное обращение к памяти
завершило бы поиск. Это, конечно, приводит к постановке голо-
головоломного вопроса о кажущемся противоречии с нижней оцен-
оценкой, полученной в разд. 2.3.1. Скоро мы поймем, что есть одна
загвоздка, и все встанет на свои места.
Следуя подходу, введенному в разд. 2.1, предположим, что
дано множество S из N точек на плоскости, и проведем гори-
горизонтальную и вертикальную прямые через каждую из этих то-
точек. Разумеется, эти прямые разобьют плоскость на (N + IJ
прямоугольных ячеек. Положим, что в регионе Z) = [хь х2]Х
Xfj/ь У2] точка (хи у\) принадлежит ячейке Си а точка
(х2, г/г) — ячейке С2. Если теперь переместить как угодно лю-
любую из этих точек, оставляя ее, однако, внутри соответствующей
ячейки, то очевидно, что искомое множество (т. е. подмноже-
подмножество S, содержащееся внутри D) не изменится. Другими слова-
словами, пары ячеек формируют классы эквивалентности относитель-
относительно результатов регионального поиска. Следовательно, число
различных регионов, которые нам следовало бы рассмотреть,
ограничено сверху числом
2.3. Задачи регионального поиска 101
Если предварительно вычислить выбираемое множество для
каждой из этих пар ячеек (затратив при этом O(N5) памяти),
то мы получили бы схему, в которой поиск заканчивается после
единственного обращения к файлу. Однако для достижения этой
цели произвольный регион D нужно сопоставить паре ячеек,
или, что то же самое, произвольная точка должна быть сопо-
сопоставлена одной из ячеек. Очевидно, что это можно проделать
двумя двоичными поисками на множествах абсцисс и ординат
точек из S. На эту «нормализацию», однако, уйдет O(logjV)
времени, которое, будучи добавленным к 0A) времени на един-
единственное обращение к файлу, разрешает кажущееся противоре-
противоречие, встреченное нами ранее. Заметим в заключение, что дан-
данный метод дает на плоскости (N5, log jV)-алгоритм, слишком
обременительный для практического использования из-за затрат
памяти.
Чтобы найти пути сокращения памяти, заметим, что одно-
одномерный поиск, несмотря на наши безуспешные усилия обобщить
его, является оптимальным по обеим мерам (времени поиска и
памяти). Это замечание заставляет предположить возможность
улучшения вышеописанного «метода ячеек». В самом деле, мож-
можно объединить одномерный региональный поиск с локализа-
локализацией региона методом прямого доступа [Bentley, Maurer A980)].
Конкретно, для заданного региона D = [х\, лг2]Х[*/ь #г] можно
реализовать прямой доступ по координате х с последующим од-
одномерным поиском по координате у. Для этого требуется, чтобы
ко всем различимым упорядоченным парам абсцисс точек из 5
(х-регионы) был обеспечен прямой доступ; каждая такая пара
(х\ х") в свою очередь связана с двоичным деревом поиска на
ординатах точек, содержащихся в полосе х' ^ х ^ х". Теперь
удобно преобразовать исходную задачу, заменяя каждое дей-
действительное значение координаты на ее порядковый номер во
множестве координат. Такое преобразование, именуемое норма-
нормализацией, осуществляется путем операции сортировки на каж-
каждом из множеств координат. После нормализации этих данных
любой х-регион преобразуется за время O(N\ogN) в пару це-
целых чисел (i, /) из отрезка [1, N + \] (i < /). Такая пара соот-
соответствует адресу в массиве указателей прямого доступа1), ко-
который отсылает к двоичному дереву с (/ — ?) листьями. По-
Поэтому общий объем памяти пропорционален
') Например,, если этот массив начинается с адреса Л, то по паре (»',/)
можно однозначно вычислить адрес: А — 2 +BM(i — 1) + i — i2)/2 + /.
102
Гл. 2. Геометрический поиск
у-регион
•Рю
(а)
^-.Произвольный доступ
\ \
Рис. 2.31. Региональный поиск прямым доступом. Адрес х-интервала лока-
локализуется методом произвольного доступа после нормализации. По этому
адресу находится указатель к двоичному дереву поиска.
Заметим, что, хотя память удалось сократить с O(N5) до O(N3),
время поиска осталось равным O(logiV), поскольку и нормали-
нормализация регионов, и одномерный региональный поиск используют
O(\ogN) времени. Ситуация, характерная для последнего при-
примера, проиллюстрирована на рис. 2.31 (заметим, что точки ин-
индексированы в порядке возрастания абсцисс). В массиве х име-
имеется доступ к региону [2, 8], заданному нормализованными абс-
абсциссами (рис. 2.31 (Ь)); отсюда указатель направляет поиск к
двоичному дереву. Там поиск, как таковой, заканчивается лока-
2.3. Задачи регионального поиска 103
лизацией точки Pa, после чего производится выборка последова-
последовательности (Pa, Рз, Р*)-
У нас все еще мало оснований, чтобы быть довольными вы-
вышеописанным методом, и не только потому, что затрата O(N3)
памяти остается весьма дорогой платой, но также потому, что
в многомерном случае трюк с использованием одномерного по-
поиска можно проделать лишь однажды, тем самым снижая ис-
используемую память только в N2 раз. И на самом деле непо-
I I I У//////////&//////////Л I Первый этап
1 I I [11 I (грубый)
I У/ЛуЛуЛ \/*/л I I Второй этап
Г П11 Г И I I (точный)
II II Регион, который
I ' ' I яаоЬ локализовать
Рис. 2.32. Пример двухэтапиой схемы метода прямого доступа.
средственный анализ показывает, что если этот подход обоб-
обобщить на случай d измерений, то будет использовано O(N2d~x)
памяти.
Очевидно, что именно фаза прямого доступа в этой двухфаз-
двухфазной схеме виновна в большой затрате памяти. Поэтому улучше-
улучшения нужно искать именно в этой фазе. Бентли и Маурер пред-
предложили многоэтапный подход [Bentley, Maurer A980)] '), кото-
который будет продемонстрирован здесь для случая двух этапов.
Идея состоит в том, чтобы последовательно использовать гру-
грубую сетку и мелкую сетку (рис. 2.32). Все координаты норма-
нормализуются, и грубая сетка состоит из отрезков длиной k, при
этом на каждом таком отрезке существует мелкая сетка, состоя-
состоящая из отрезков единичной длины. Отсюда видно, что произ-
произвольный регион разбивается не более чем на три части, одна
из которых целиком принадлежит грубой сетке, а две других —
мелкой сетке (рис.2.32). Каждой сетке соответствует описанный
выше массив указателей прямого доступа. В частности, если
грубая сетка состоит из Na шагов @ < а ^ 1), то на грубой
сетке всего будет O(N2a) отрезков, а для соответствующей
структуры данных потребуется O(N2a)XN = O(Nx+2a) памяти.
Аналогично каждая мелкая сетка состоит из iV'~a шагов и всего
будет Na таких сеток, поэтому общая память для них составит
величину порядка Na X ЛД'-а>2 X ^'~а = N3~2a. Минимального
значения, равного O(N2), память достигает при а = 1/2 без
') Структуры данных, которые будут введены, первоначально назывались
многоуровневыми fe-региоиами.
104 Гл. 2. Геометрический поиск
потери логарифмической оценки для времени регионального по-
поиска. Фактически время поиска возрастает примерно в 3 раза,
и мы получаем О (N2, log N) -алгоритм.
Теперь можно обобщить этот подход, используя последова-
последовательность из / сеток возрастающей мелкости, для дальнейшего
сокращения памяти при сохранении, однако, оценки времени по-
поиска в пределах O(llogN). Этот относительно простой анализ
приводит к следующей теореме:
Теорема 2.10. Для любого е такого, что 0 < е < 1, регио-
региональный поиск на двумерном N -точечном файле можно прове-
провести с помощью (iV'+E, log N) -алгоритма, основанного на много-
многоэтапном методе прямого доступа.
Самый интересный вывод, который можно извлечь из пред-
предшествовавшего обсуждения методов прямого доступа, состоит в
следующем. Одномерный региональный поиск можно сделать
оптимальным. Поэтому следует добиваться преобразования мно-
многомерной задачи в серию одномерных задач. Схема прямого до-
доступа — это один из путей реализации такого преобразования.
В принципе в двумерном случае произвольный отрезок разби-
разбивается на не более чем три стандартных отрезка (и в d-мерном
случае точно так же в конечном итоге получается некое фикси-
фиксированное число стандартных отрезков). Данный подход содер-
содержит в себе некоторые идеи метода дерева регионов, который бу-
будет описан ниже ').
2.3.4. Метод дерева регионов и его варианты
Эффективность по времени поиска в методе прямого
доступа получена благодаря построению набора «стандартных»
отрезков. Выигрыш в памяти при переходе от одноэтапной схе-
схемы к двухэтапной получен благодаря сильному сокращению
числа таких стандартных отрезков. Возникает стремление к
дальнейшему следованию этой линии, т. е. к созданию схемы,
минимизирующей число стандартных отрезков. В этом и состоит
главная идея метода регионального дерева.
Рассмотрим множество на оси х, состоящее из N абсцисс,
нормализованных до целых чисел из интервала [1, N] по их ве-
величине. Эти N абсцисс определяют N—1 элементарных отрез-
отрезков [/, i -f 1] для i = 1, 2, ..., N— 1. Средством, которое будет
') Однако хронологически метод дерева регионов был создан немного
ранее методов прямого доступа [Bentley A979)]. Тем не менее с чисто идей-
идейной стороны его можно считать развитием последних методов. Первые идеи,
связанные с понятием дерева регионов, можно найти в работе [Bentley,
Shamos A977)].
2.3. Задачи регионального поиска 105
использовано для реализации разбиения произвольного отрезка
[i, /], является дерево отрезков, введенное в разд. 1.2.3.1. Повто-
Повторим просто для удобства читателя, что произвольный отрезок,
концы которого принадлежат множеству из N заданных абсцисс,
может быть разбит деревом отрезков 7A, N) на не более
2flog2 ЛП — 2 стандартных отрезков. Каждый стандартный от-
отрезок отнесен к одному из узлов 7A, N), а те узлы, которые
определяют разбиение отрезка [i, /], называются узлами отнесе-
отнесения для [i, /].
После такого напоминания не составит труда воспользовать-
воспользоваться деревом отрезков при региональном поиске. Начнем, как
обычно, с двумерного случая. Дерево отрезков 7A, N) исполь-
используется при поиске по х-координате. Этот поиск определяет уни-
уникальное множество узлов (узлов отнесения). Каждый такой
узел v соответствует множеству из (E[v] — B[v]) абсцисс (опре-
(определения даны в разд. 1.3.2.1), т.е. множеству из (E[v\ — B[v])
точек на плоскости. Ординаты этих точек образуют обычное
прошитое двоичное дерево для регионального поиска в (/-на-
(/-направлении. В результате построена новая структура данных,
именуемая деревом регионов; его первичной структурой явля-
является дерево отрезков, заданных на абсциссах точек исходного
множества 5. В каждом узле этого дерева имеется указатель
на прошитое двоичное дерево поиска (вторичные структуры).
Для нашего постоянного примера эта структура проиллюстриро-
проиллюстрирована на рис. 2.33.
Обобщение на d измерений можно провести весьма есте-
естественно. Пусть в d-мерном пространстве с координатными осями
Х\, Ха, . . ., Ха задано множество S из iV точек. Эти координаты
будут обрабатываться в следующем порядке: сначала хи затем
х2 и т. д. Предположим также, что все значения координат нор-
нормализованы. Дерево регионов строится рекурсивно следующим
образом:
A) Первичное дерево отрезков 7* соответствует множеству
{xi(p): peS). Для каждого узла v из 7* обозначим через
Sd(v)—множество точек из 5, проецирующихся на отрезок
[B[v], E[v]) по координате Х\. Определим (d—1)-мерное множе-
множество:
Sa-i'(v)& ((*2(Р), •.., xd(p)): pf=Sd(v)}.
B) Узел v из 7* имеет указатель на дерево регионов для
Sa-X(v).
Перед тем как приступить к анализу эффективности данного
метода, заметим, что дерево отрезков можно считать не только
инструментом для разбиения любого отрезка на логарифмиче-
логарифмическое число кусков, но также и способом применения метода
«разделяй и властвуй» к региональному поиску.
106
Гл. 2. Геометрический поиск
1
¦1
--
„рг
\
\
\
\
\
5
Л
\
^
\
\
\
\
\
\
\
\
D
5
)
8
<
.Р
.Р.,
(а)
Рис. 2.33. Иллюстрация применения метода дерева регионов к нашему по-
постоянному примеру. Исходный регион разбит тремя стандартными отрез-
отрезками (а). Поисковые действия показаны на рис. (Ь).
Переходя теперь к анализу сложности метода, заметим, во-
первых, что при d ^ 2 каждый узел отнесения из проекции за-
запросного региона на ось х\ (их всего О (log N)) порождает от-
отдельную (d—1)-мерную задачу регионального поиска. В част-
2.3. Задачи регионального поиска 107
ности, узел v порождает поиск на n(v) A.E [v] — В [v] точках.
Обозначая через Q(N, d) время поиска для файла из N штук
d-мерных точек, получаем простое рекуррентное соотношение:
Q{N,d) = О (log N) + S Q(n(v),d-l). B.4)
us множеству узлов
отнесения из проекции
запросного региона
на ось xi
Первый член в правой части этого уравнения появился из-за по-
поиска на первичном дереве отрезков, а второй член объясняется
наличием (d—1)-мерных подзадач. Поскольку существует не
более 2flog2^Vl — 2 узлов отнесения и n(v)^N (очевидно), то
получаем
Q(N, d) = О (logN)Q(N, d-\).
Поскольку Q (N, 1) = О (log N) для двоичного поиска, то полу-
получаем оценку времени поиска:
Q(N, d) = О ((log N)d). B.5)
Обозначая через S(N, d) память, занятую деревом регионов,
получаем рекуррентное соотношение
S(N,d) = O(N)+ S S(n(v),d-l), B.6)
по всем узлам и
первичного дерева
где первый член в правой части соответствует памяти, занятой
первичным деревом, а второй член соответствует всем (d— 1)-
мерным деревьям. Оценка второго члена очень проста, если N
есть степень 2; в противном случае будет использована столь же
эффективная простая аппроксимация. Существует не более двух
уз лов v с п (v) = 2г1огг Nl ~', не более четырех - с п (v) = 2rlogl JVi ~2
и т. д. Поэтому эту сумму можно оценить сверху следующим
образом:
Z S(n(v), rf-l)< ? 2n°^i-<-SB', d— 1).
по всем узлам v i<=0
первичного дерева
Учитывая эту аппроксимацию и замечая, что S(N, 1)= O(N) —
память под прошитое двоичное дерево, получаем решение
S(N, d) = O(Nlogd-1 N). B.7)
Для оценки времени предварительной обработки можно сле-
следовать той же самой схеме рассуждений; оставим это в каче-
качестве весьма простого упражнения. В самом деле, в этом случае
для оценки эффективности применимо рекуррентное соотноше-
соотношение, идентичное B.6), со всеми его следствиями. Теперь можно
подвести итог предшествовавшему обсуждению в следующей
теореме:
108 Гл. 2. Геометрический поиск
Теорема 2.11. Региональный поиск на d-мерном файле из N
точек можно провести (N log6*-1 N, logd N)-алгоритмом, если
затратить O(N log6^1 N) времени на предварительную обработ-
обработку. Этот алгоритм основан на методе дерева регионов.
В частности, при d = 2 эти меры — время запроса, память и
время предварительной обработки — выглядят так: O(log2 N + k),
O(N\ogN) и O{N\ogN)[) соответственно. Достигнута весьма
привлекательная оценка памяти, хотя и при некотором увеличе-
увеличении времени поиска.
Прежде чем согласиться с таким соотношением оценок, ко-
которое, вероятно, внутренне присуще этой задаче, стоит еще раз
осмыслить вопрос о возможной потере эффективности процесса
поиска. Уиллард [Willard A978)] и Люкер [Lueker A978)],
именно так и поступив, независимо друг от друга предложили
вариант схемы, в которой достигается оптимальное время по-
поиска для двух измерений. Теперь обсудим эту идею.
Каждый узел v в первичном дереве отрезков связан со спи-
списком Y(v) (а не с двоичным деревом!) тех точек, которые про-
проецируются на отрезок этого узла. Этот список упорядочен так,
чтобы ординаты указанных точек не убывали. Чтобы осуще-
осуществить выборку, необходимо найти первый элемент подсписка,
который надлежит выбрать. В схеме метода дерева регионов с
этой целью делается двоичный поиск для каждого узла v из
первичного дерева. Если рассмотреть два потомка узла v, мы
увидим, что У(ЛСЫЩи]) и У(ПСЫН[и]) образуют разбиение
Y(v). Предположим, теперь, что р — начальный (крайний сле-
слева) элемент Y(v), подлежащий выборке, — известен. Без потери
общности положим, что если ре У(ЛСЫН[и]), то существует
единственный элемент р' в У(ПСЫН[и]) такой, что у{р') — наи-
наименьшее число, для которого у(р) ^ У(р'>)- Следовательно, пара
указателей от р к Y(v) однозначно определяет соответствую-
соответствующую пару начальных элементов в У-списках для потомков и.
Теперь относительно просто можно сделать выводы. В де-
дереве регионов можно заменить каждое прошитое двоичное де-
дерево его листовым списком для всех узлов, кроме корня. В ка-
качестве же корневой структуры сохранится прошитое двоичное
дерево, поскольку оно необходимо для реализации поиска за
логарифмическое время. Для каждого нелистового узла в де-
дереве отрезков хранится пара указателей от каждого из элемен-
элементов его У-списка к паре У-списков его потомков. Этот метод
иногда называют расслоением, а модифицированное дерево ре-
') Заметим, что метод дерева регионов можно очевидным образом
адаптировать для режима подсчета точек и получить следующие оценки для
трех мер сложности: O(\og2N), O(N\ogN) и O(N logN). Это подтверждает
один из результатов, приведенных в разд. 2.1 (табл. I).
2.3. Задачи регионального поиска 109
гионов можно называть расслоенным деревом регионов. Исполь-
Использование модифицированного дерева регионов для случая нашего
постоянного примера показано на рис. 2.34.
Затраты памяти не изменились, поскольку и прошитое дво-
двоичное дерево с s листьями, и список с s записями и парой внеш-
внешних указателей на каждую запись требуют по O(s) памяти.
Однако время поиска сократилось до O(\ogN), поскольку дво-
Рис. 2.34. Иллюстрация обхода модифицированного дерева регионов для на-
нашего постоянного примера. Показана только часть указателей в У-списках.
ичный поиск в корне осуществляет начальную локализацию ле-
левого конца у-региона. Эта структура указателей реализует за
константное время вычисление левого конца для каждого узла,
встреченного при «проходе» дерева отрезков. При обобщении
этой схемы на случай большего числа измерений сохраняется
эффект уменьшения оценки времени поиска в log N раз. Итак,
получаем:
Теорема 2.12. Региональный поиск в d-мерном файле (при
d ^ 2) из N точек можно реализовать (N logd~' N, logd-' N) -ал-
-алгоритмом, если затратить (N logd-' N) времени на предвари-
предварительную обработку. Этот алгоритм основан на модификации
алгоритма Уилларда— Люкера для дерева регионов, известной
также как расслоенное дерево регионов.
110 Гл. 2. Геометрический поиск
2.4. Замечания и комментарии
Со времени появления статьи Добкина и Липтона
был достигнут заметный прогресс в решении задачи о локали-
локализации точки. Как указывалось в разд. 2.2, все представленные
методы формируют новые геометрические объекты, помогающие
при поиске. Например, в методе полос плоскость разбивается
на элементарные пустые трапеции, обладающие парой горизон-
горизонтальных сторон; два этапа двоичного поиска определяют одну-
единственную трапецию. В методе детализации триангуляции
путем перетриангуляции частей ППЛГ создается удобное малое
множество новых треугольников, на котором легко проводить
поиск. В методе трапеций ведется эффективное обследование
исходного графа путем создания трапеций, обладающих парой
горизонтальных сторон, которые быстро сужают область поиска.
Наконец, в методе цепей из плоского прямолинейного графа вы-
выделяется множество цепей ломаных линий, разбивающих пло-
плоскость на монотонные многоугольники, на которых легко вести
поиск. Хотя этот метод почти оптимален, его можно улучшить
и получить оптимальный и при том весьма простой алгоритм:
это улучшение основано на удачном сочетании метода цепей,
структуры указателей Уилларда — Люкера и «фильтрующего
поиска». Ниже будет кратко описан фильтрующий поиск.
Фильтрующий поиск [Chazelle A983c)]1) это один из общих
методов решения задач поиска в режиме отчета, основанный на
вычислительно разумной идее о том, что можно позволить до-
доступ к супермножеству искомого множества, если при этом по-
получается выигрыш вычислительных ресурсов (таких как память
или время поиска), при условии что мощность супермножества
превосходит не более чем заданную (малую) мультипликатив-
мультипликативную константу — мощность искомого множества. Другими сло-
словами, это супермножество является «черпаком», который выби-
выбирают, а затем «фильтруют», чтобы выделить искомое множе-
множество; поэтому «фильтрующий поиск» можно не без оснований
называть поиском типа «черпай и фильтруй». Этот подход был
успешно применен к различным задачам, таким как запросы
с ортогональным регионом, поиск близости (см. гл. 6), к зада-
задачам пересечения и т. д.
Возвращаясь к локализации точки, покажем теперь, как ме-
методология фильтрующего поиска и структура указателей Уил-
Уилларда — Люкера могут быть объединены с методом цепей
[Edelsbrunner, Guibas, Stolfi A985)]. В структуре первичного
дерева (где каждый узел v связан с одной из монотонных це-
') Исходные предварительные идеи этого подхода можно проследить
в работе [Bentley, Maurer A979)].
2.4. Замечания и комментарии 111
пей С) есть указатель от и к вторичной структуре, главной
компонентой которой является последовательность T(v), содер-
содержащая не только ординаты ребер, отнесенных к цепи С (как в
версии Ли — Препараты), но и дополненная, кроме того, каж-
каждым вторым членом последовательности, полученной слиянием
(дополненных) последовательностей для двух потомков v. Как
и в схеме Уилларда — Люкера для дерева регионов, в этой по-
последовательности T(v) поиск выполняется с помощью двоичного
дерева только в корне первичной структуры. Для всех осталь-
остальных узлов доступ к T(v) осуществляется через структуру ука-
указателей, что позволяет получить оценку для времени поиска
O(logiV). За счет распространения «каждого второго члена»
с одного уровня на следующий обеспечивается линейных расход
памяти, однако при этом, возможно, будет просмотрено вдвое
больше областей, чем это необходимо, и их следует профиль-
профильтровать в духе метода фильтрующего поиска.
Все методы, представленные в этой главе для локализации
точки на плоскости, настроены на работу для худшего случая.
В классе методов с хорошими оценками в среднем недавно опуб-
опубликованный метод «черпаков» [Edahiro, Kpkubo, Asano A983)]
экспериментально превосходит все ранее изложенные методы,
а среди последних лучшую экспериментальную оценку показал
метод трапеций.
Что касается регионального поиска, то в разд. 2.3 было по-
показано, что единственный метод, использующий линейную па-
память (метод &-/)-дерева), обладает большим временем поиска.
Поэтому кажется, что избыток памяти является ключевым усло-
условием быстрого поиска. Как метод прямого доступа, так и метод
дерева регионов служат примерами этой идеи. В действитель-
действительности это примеры приложений, названных Бентли и Сэйксом
«задачами поиска, допускающими декомпозицию» [Saxe, Bentley
A979)], в которых ответ на запрос относительно всего простран-
пространства получается как комбинация (в данном случае как сумма)
ответов на запросы относительно подходящего набора частей
этого пространства. Остается открытым важный вопрос о суще-
существовании (N, log N) -алгоритма для 2-мерного регионального
поиска. Недавно Чазелле [Chazelle A983c)], используя метод
фильтрующего поиска, смог понизить потребность в памяти с
N log N до N log iV/log log N, показав тем самым, что N log N
не является нижней оценкой.
Другие варианты задачи регионального поиска можно клас-
классифицировать по типу области поиска. В одном из таких классов
в качестве области поиска выбирают ^-угольник (поиск в много-
многоугольном регионе); предполагая, как обычно, что в файле N
точек, Уиллард создал (N, k№-77)-алгоритм (Wizard A982)],
который был позже улучшен до (N, k№-695) -алгоритма [Edels-
112 Гл. 2. Геометрический поиск
brunner, Welzl A983)]. Известен интересный частный случай
этой задачи, когда в качестве многоугольного региона берется
полуплоскость; для поиска в полуплоскости недавно был пред-
предложен оптимальный результат [Chazelle, Guibas, Lee A983)]
(этот метод неприменим, однако, к соответствующей задаче по-
поиска типа подсчета). Очень интересен также случай, когда по-
поисковая область имеет форму круга (круговой региональный
поиск, или поиск в диске). Если радиус такого диска фиксиро-
фиксирован, то задачу можно решить методом локализации, где пло-
плоскость разбита на области так, что все точки в заданной обла-
области порождают идентичные ответы. Этот подход можно реали-
реализовать, прибегнув, например, к методу трапеций и получив тем
самым (Nz\ogN, log N) -алгоритм. Однако этот алгоритм на-
намного превзойден (N, log N) -методом, предложенным недавно
[Chazelle, Edelsbrunner A984)]. Еще более интересен поиск в
переменном диске, где круговая область может обладать про-
произвольным радиусом и центром; лучший из известных методов
решения этой задачи имеет сложность (N(\ogN log log NJ log N)
и будет описан в гл. 6 [Chazelle, Cole, Preparata, Yap A984)].
Другие задачи поиска работают с различными геометриче-
геометрическими объектами, где пара (запрос, элемент файла) более не
соответствует типам: (точка, область) — как при локализации
точки или (область, точка) — как при региональном поиске. На-
Например, могут встретиться такие пары, как (многоугольник,
многоугольник), (отрезок, отрезок) и т. д.; в подобных случаях
искомое отношение скорее является «пересечением», вот почему
эти задачи лучше изучить в общем контексте задач о пересече-
пересечениях (гл. 7). В частности, когда пара (запрос, элемент файла)
имеет вид (прямоугольный регион, прямоугольный регион), то
получается семейство интересных задач типа пересечения или
принадлежности, которые уместнее обсудить в гл. 8.
И наконец, значительный прогресс достигнут при изучении
динамических поисковых структур, т. е. таких структур, которые
в дополнение к запросам поддерживают операции вставки и
удаления. В то время как одномерные динамические структуры
(АВЛ-деревья и т. п.) были известны уже более двадцати лет,
подступы к решению многомерной задачи начали искать отно-
относительно недавно. Следом за пионерской работой Беитли [Bent-
ley A979)] были разработаны общие методы преобразования
статических структур, удовлетворяющих некоторым слабым
ограничениям, в динамические.
Необходимо упомянуть о методе Ван Леювена и Вуда [van
Leeuwen, Wood A980)], общей идеей которого является органи-
организация файла как набора отдельных структур данных, для того
чтобы любая корректировка строго ограничивалась одной (или,
возможно, небольшим фиксированным числом) из них; однако.
2.5. Упражнения 113
чтобы избежать переноса центра тяжести с корректировок на
поисковую работу, необходимо не допускать чрезмерной фраг-
фрагментации, поскольку запросы обычно относятся ко всей сово-
совокупности данных. Самое современное и всестороннее исследова-
исследование состояния дел в области «динамизации» — это диссертация
Овермарса [Overmars A983)], и мы настоятельно рекомендуем
обратиться к ней.
2.5. Упражнения
1. Провести более глубокий анализ метода детализации триангуляции
Киркпатрика и выбрать К таким, чтобы достигнуть значения а а; 59/63.
(Указание: оценить отдельно узлы со степенью больше К и узлы со сте-
степенью не больше К.)
2. Зейдель. Пусть S — множество из N точек на плоскости и Л — пла-
нарное подразбиение с Q(N) областями.
(а) Показать, что необходимо Q(yVIogiV) времени для локализации всех
точек из S в А.
(б) Предположим теперь, что известна триангуляция S. Триангуляция
содержит информацию о том, как точки из S расположены относительно друг
друга. Эта информация могла бы помочь при локализации всех точек из S
в А. Показать, что, несмотря на знание триангуляции S, все же понадобится
Q (N log N) времени для локализации всех точек из S в А.
3. Доказать теорему 2.10. Предположить, что поиск состоит из / этапов
с возрастанием мелкости сеток, и получить (Nc\ C\ log ЛГ)-алгоритм с мини-
минимальным значением с2. Выразить с, и с2 как функции от /.
4. Можно ли модифицировать дерево регионов в варианте Уилларда —
Люкера так, чтобы получить (N log''-1 N, logd-' N) -алгоритм для задачи ре-
регионального поиска типа подсчета при d ^ 2? Строго обосновать свой ответ.
5. Эдельсбруннер — Гибас — Столфи. Рассмотреть метод цепей для за-
задачи плоской локализации точки на Л?-вершинной карте и модифицировать
его следующим образом. Начать с назначения этих цепей узлам дерева Т
первичной структуры, как это показано в работе [Lee, Preparata A978)] (см.
разд. 2.2.2.2), так что каждому узлу v из Т назначена последовательность
У(у), состоящая из концов ребер его цепи; затем для каждого нелистового
узла v сформировать Y*(v), дополняя У (у) всеми членами последовательно-
последовательности ОБЪЕДИНЕНИЕ (У* (ЛСЫЩу]),У* (ПСЫЩу])). Каждый список У* (у)
представляет разбиение вертикальной прямой: создать указатель от каждого
отрезка из У*(у) к каждому из отрезков в У*(ЛСЫН[у]) или в У*(ПСЫН[у]),
с которым он пересекается. Это определяет структуру данных для поиска Т*.
(а) Показать, что для запоминания Т* можно затратить O(N) памяти.
(б) Показать, что локализация точки на плоскости требует О (log Л?)
времени.
6. Применить метод локализации при решении следующей задачи (кру-
(круговой региональный поиск с фиксированным радиусом): даны N точек на
плоскости и число d > 0, требуется перечислить точки, находящиеся на рас-
расстоянии, не превышающем d от заданной пробной точки q (возможно, за-
затратив при этом дополнительно логарифмическое время).
ГЛАВА
3
Выпуклые оболочки:
основные алгоритмы
Задача вычисления (построения) выпуклой оболочки
не только является центральной в целом ряде приложений, но
и позволяет разрешить ряд вопросов вычислительной геометрии,
на первый взгляд не связанных с ней. Построение выпуклой
оболочки конечного множества точек, и особенно в случае точек
на плоскости, уже довольно широко и глубоко исследовано и
имеет приложения, например, в распознавании образов [Akl,
Toussaint A978); Duda, Hart A973)], обработке изображений
[Rosenfeld A969)], а также в задаче раскроя и компоновки ма-
материала {Freeman A974); Sklansky A972); Freeman-Shapira
A975)].
Понятие выпуклой оболочки множества точек S является
естественным и простым. В соответствии с определением — это
наименьшее выпуклое множество, содержащее S. Чтобы на-
наглядно представить это понятие в случае, когда S — конечное
множество точек на плоскости, предположим, что это множество
охвачено большой растянутой резиновой лентой. Когда лента
освобождается, то она принимает форму выпуклой оболочки.
Несмотря на интуитивную ясность понятия выпуклой обо-
оболочки, история создания алгоритмов вычисления выпуклых обо-
оболочек наглядно показывает общую картину в области разработ-
разработки и исследования алгоритмов. К. сожалению, приведенное выше
простое определение выпуклой оболочки неконструктивно. По-
Поэтому необходимо определить некоторые понятия, способствую-
способствующие разработке алгоритмов.
Предметом этой главы является построение выпуклой обо-
оболочки на плоскости и в пространствах более высокой размерно-
размерности. В следующей главе будут рассмотрены приложения, раз-
различные варианты задачи о выпуклой оболочке и некоторые свя-
связанные с ней, но отличные по существу задачи. Чтобы избежать
повторений, удобно ввести подходящую совокупность понятий,
3.1. Предварительные сведения 115
относящихся к выпуклой оболочке в пространстве произвольной
размерности (Griinbaum A967); Rockafellar A970); McMullen,
Shephard A971); Klee A966)]. В случае плоскости и трехмер-
трехмерного пространства эти понятия приобретают очень простой
смысл. Этому посвящен следующий раздел. В дальнейшем мы
часто будем ссылаться на понятия, введенные в разд. 1.3.1.
3.1. Предварительные сведения
Считая, что точки располагаются в d-мерном про-
пространстве, будем использовать общепринятые обозначения для
точек и d-мерных векторов, выходящих из начала системы ко-
координат в Ed.
Начнем с рассмотрения понятия аффинного множества.
Определение 3.1. Пусть в Ed заданы k различных точек р\,
Р2, ¦ ¦ ¦ , Pk- Множество точек р таких, что
p = aipl + a2p2+ ... +akpk
(a,eR, a, + a24- ... + aA=l), ( ' '
называются аффинным множеством, порожденным точками ри
Р2, ••., Pk, а р является аффинной комбинацией точек р\,Р2, ¦¦¦
.... Pk.
Заметим, что аффинная комбинация представляет частный
случай понятия линейной комбинации, возникающий при введе-
введении дополнительного условия ai + ... -\-ak= 1. В случае k=2
аффинное множество — это прямая, проходящая через две за-
заданные точки. Очевидно, что аффинными множествами являют-
являются точки, прямые линии, плоскости, гиперплоскости и т. п., т. е.
все объекты, с которыми связано интуитивное представление
о «прямолинейности». В действительности термин прямолиней-
прямолинейный объект является синонимом аффинного множества (наряду
с термином «аффинное многообразие»). Между векторными под-
подпространствами и аффинными множествами имеется взаимо-
взаимосвязь, состоящая в том, что каждое аффинное множество полу-
получается из некоторого векторного подпространства (линейного
множества) в результате преобразования переноса (на некото-
некоторый фиксированный вектор). Например, в пространстве Е3 ли-
линейными множествами являются прямые линии и плоскости,
проходящие через начало координат, и сама точка начала ко-
координат, в то время как аффинными множествами являются
произвольные точки, прямые линии и плоскости.
Пусть в Ed заданы k точек ри Рг, • • • . Pk. Если (k — 1) век-
векторов рг — pi, . . . , рь — Р\ являются линейно независимыми, то
эти точки называются аффинно независимыми. Интуитивно по-
116 Гл. 3. Выпуклые оболочки: основные алгоритмы
нятный смысл этого определения состоит в том, что мы выпол-
выполняем параллельный перенос множества точек так, что одна из
точек (в нашем случае pi) перемещается в начало координат,
и проверяем линейную независимость получившегося множества
векторов. Очевидно, что выбор точки, перемещаемой в начало
координат, является несущественным. Если заданы k аффинно
независимых точек рьРг, ••., Pk, то они образуют аффинный
базис (k—1)-мерного аффинного множества (т. е. размерность
аффинного множества равна размерности линейного множества,
из которого оно получается в результате переноса).
Определение 3.2. Пусть в пространстве Еа задано подмноже-
подмножество L. Аффинной оболочкой aff(L) множества L называется
наименьшее аффинное множество, содержащее L.
Другими словами, для любой пары точек из L прямая,
определяемая этими точками, целиком принадлежит aff(L). Так,
например, аффинной оболочкой отрезка является прямая, аф-
аффинной оболочкой плоского многоугольника — плоскость и т. д.
Теперь перейдем к рассмотрению понятия выпуклого множе-
множества, порожденного конечным числом точек.
Определение 3.3. Пусть в пространстве Ed заданы k различ-
различных точек р\, р2, ..., pk. Множество точек
(a/6=R, а,>0, a,+a2+ ... +aft=l) ( '2)
называется выпуклым множеством, порожденным точками ри
р2, • .., Pk, а р называется выпуклой комбинацией р\, рг, ¦ ¦ ¦
,. ¦ , Pk.
Вновь заметим, что понятие выпуклой комбинации является
сужением понятия аффинной комбинации, получающимся в ре-
результате введения дополнительного условия а/ ^ 0, / = 1, 2, . . .
. . ., k. В случае k = 2 результирующим выпуклым множеством
является отрезок, соединяющий заданные точки. Размерность
выпуклого множества равна размерности его аффинной оболоч-
оболочки. Например, размерность плоского выпуклого многоугольника
равна двум, так как его аффинной оболочкой является пло-
плоскость. Теперь можно ввести следующее важное понятие.
Определение 3.4. Пусть в пространстве Ed задано произволь-
произвольное подмножество L точек этого пространства. Выпуклой обо-
оболочкой conv(L) подмножества L называется наименьшее вы-
выпуклое множество, содержащее L.
Далее мы будем иметь дело лишь со случаем, когда L содер-
содержит конечное число точек (что соответствует выпуклому множе-
3.1. Предварительные сведения 117
ству, порожденному конечным числом точек). Чтобы охаракте-
охарактеризовать структуру conv(L) конечного множества точек L, не-
необходимо обобщить понятия выпуклого многоугольника и вы-
выпуклого многогранника.
Определение 3.5. Полиэдральным множеством в Ed назы-
называется пересечение конечного множества замкнутых полупро-
полупространств (полупространство — это часть Ел, расположенная по
одну сторону некоторой гиперплоскости).
Заметим, что полиэдральное множество является выпуклым,
так как полупространство является выпуклым и пересечение
выпуклых множеств также является выпуклым множеством.
В частности, выпуклые плоские многоугольники и трехмерные
многогранники — как они определены в разд. 1.3.1—являются
примерами (конечных) полиэдральных множеств. В общем слу-
случае мы будем называть конечное d-мерное полиэдральное мно-
множество выпуклым d-политопом (или, коротко, d-политопом, или
просто политопом).
Следующая теорема характеризует выпуклые оболочки в
нужном нам плане.
Теорема 3.1 {McMullen, Shephard A971)]. Выпуклая оболоч-
оболочка конечного множества точек в Ed является выпуклым полито-
политопом. Наоборот, каждый выпуклый политоп является выпуклой
оболочкой некоторого конечного множества точек.
Выпуклый политоп задается описанием его границы, состоя-
состоящей из граней. Каждая грань выпуклого политопа является вы-
выпуклым множеством (т. е. выпуклым политопом более низкой
размерности); k-грань обозначает ^-мерную грань (т. е. грань,
аффинная оболочка которой имеет размерность k). Если поли-
политоп Р имеет размерность d, то его (d— 1)-грани называются
гипергранями, (d — 2)-грани — подгранями, 1-грани — ребрами,
а 0-грани — вершинами. Ясно, что ребра и вершины сохраняют
свое привычное значение в пространствах любой размерности.
Для 3-политопа гиперграни являются плоскими многоугольни-
многоугольниками, а подграни и ребра совпадают. Как мы уже видели ранее,
эти четыре класса граней играют важную роль в алгоритмах
построения выпуклой оболочки. Для единообразия может ока-
оказаться полезным называть d-политоп d-гранью, а пустое множе-
множество в такой терминологии превращается в (— 1)-грань. Если Р
является выпуклой оболочкой конечного множества точек S в
Ed, то грань политопа Р является выпуклой оболочкой подмно-
подмножества Т множества S (т. е. она определяется подмножеством
множества S). Однако не все подмножества S определяют
грани.
118 Гл. 3. Выпуклые оболочки: основные алгоритмы
Политопы некоторых типов заслуживают особого внимания.
d-политоп Р называется d-симплексом (или кратко симплексом),
если он является выпуклой оболочкой (d-\- 1) аффинно незави-
независимых точек. В этом случае каждое подмножество из этих d
вершин само является симплексом и является гранью Р. Таким
образом, каждая й-грань содержит 2k+l граней ') (размерностей
k, k— 1, .. ., 0, —1). Например, для d = 0, 1, 2 и 3 соответ-
соответствующий симплекс является точкой, ребром, треугольником и
треугольной пирамидой. Заметим, что треугольная пирамида
C-грань в соответствии с принятым соглашением) содержит
одну 3-грань (сама пирамида), четыре 2-грани (треугольники),
шесть 1-граней (ребра), четыре 0-граней (вершины) и одну
(—1)-грань (пустое множество), что вместе составляет 16 =
= 24 граней.
Симплициальным называется d-политоп, каждая гипергрань
которого является симплексом. Это эквивалентно тому, что каж-
каждая грань симплициального d-политопа содержит в точности d
подграней. С другой стороны (можно было бы сказать «двой-
«двойственной»), d-политоп называется простым, если каждая из его
вершин инцидентна в точности d ребрам. В самом деле, легко
понять, что симплициальный политоп является двойственным по
отношению к простому политопу при понимании двойственности,
как это принято в общей топологии, как отображения, отобра-
отображающего множество размерности s ^ d в множество размер-
размерности d — s (обратите также внимание на более специальное от-
отношение двойственности, воплощаемое полярными преобразова-
преобразованиями, рассмотренными в разд. 1.3.3). Симплициальные и про-
простые политопы являются чрезвычайно важными не только из-за
их структурной привлекательности и — простите за игру слов —•
простоты, но также ввиду того, что они естественным образом
возникают в двух типичных (и двойственных!) ситуациях. В са-
самом деле, обратимся для конкретности к хорошо знакомому
трехмерному пространству. Выпуклая оболочка конечного мно-
множества точек, находящихся в общем положении, является сим-
симплициальным 3-политопом (вероятность того, что более трех
точек лежат в одной плоскости, равна нулю), вместе с тем пере-
пересечение конечного множества полупространств, находящихся в
общем положении, является простым 3-политопом.
Комбинаторной природе политопов, и в частности взаимо-
взаимосвязи между числом граней и размерностью, было уделено зна-
значительное внимание. Достаточно напомнить здесь, что число
') Действительно, в этом случае множество всех подмножеств множества
вершин является множеством граней. Как хорошо известно, диаграмма Хас-
се для этого множества представляет (й+1)-мерный Куб. Такая диаграмма
обычно называется графом граней политона.
3.1. Предварительные сведения 119
F(d, N) гиперграней d-политопа с N вершинами может дохо-
доходить до (см. [Klee A966)])
F(d, N) =
Для четных а,
для нечетных а.
C.3)
Короче можно сказать, что F (d, N) = O (A^Ld/2j). To, что число
гиперграней в худшем случае растет экспоненциально в зависи-
зависимости от числа вершин и наоборот (в соответствии с принципом
двойственности), приводит к серьезным затруднениям при пред-
представлении d-политопов для больших значений d. К. счастью, си-
ситуация оказывается значительно более простой для таких важ-
важных случаев, как d = 2, 3. В частности, для d = 2 политоп яв-
является выпуклым многоугольником. Важно понимать, что мно-
многоугольник— независимо от того, является ли он выпуклым
или нет, — представляет упорядоченную последовательность
вершин. Такую последовательность можно адекватно предста-
представить как массивом, так и двусвязным списком.
В трехмерном случае проблемы, связанные с представлением,
также не очень серьезные. Многогранник может быть полностью
определен перечислением его вершин, ребер и граней. В соот-
соответствии с формулой Эйлера (разд. 1.3.1) число вершин ребер
и граней трехмерного многогранника связано линейным соотно-
соотношением, откуда следует, что для полного описания (представле-
(представления) многогранника с N вершинами достаточно объема памяти
O(N). Более того, скелет такого многогранника (множество его
ребер) является планарным графом •), так что мы можем пред-
представить многогранник, используя любую структуру данных, под-
подходящую для представления планарного графа (такие как спи-
список смежности или реберный список с двойными связями, опи-
описанные в разд. 1.2.3.2).
Прежде чем переходить к описанию алгоритмов, уместно
дать формальную постановку задачи и указать на важный во-
вопрос относительно нижних оценок сложности этой задачи. Так
как алгоритмы построения выпуклой оболочки имеют дело с
границей этой выпуклой оболочки, то мы будем обозначать сим-
символом CH(L) границу выпуклой оболочки conv(L). Заметим,
однако, что в соответствии с общепринятой практикой как
conv(L), так и CH(L) будут называться «выпуклой оболочкой».
') Это следует из теоремы Штейница. См. [GrOnbaum, A967), р. 235].
120 Гл. 3. Выпуклые оболочки: основные алгоритмы
3.2. Постановка задачи и нижние оценки
сложности
Начнем с формулировки двух основных вариантов за-
задачи построения выпуклой оболочки.
Задача ВО1 (ВЫПУКЛАЯ ОБОЛОЧКА). В Ей задано мно-
множество S, содержащее N точек. Требуется построить их выпук-
выпуклую оболочку (т. е. полное описание границы CH(S)).
Задача ВО2 (КРАЙНИЕ ТОЧКИ). В Ed задано множество
S, содержащее N точек. Требуется определить те из них, кото-
которые являются вершинами выпуклой оболочки conv(S).
Должно быть понятно, что задача ВО1 асимптотически яв-
является по крайней мере такой же сложной, как и задача ВО2,
так как решение задачи ВО1 превращается в решение задачи
ВО2, если мы просто скопируем множество вершин, порождае-
порождаемое в результате решения первой задачи, представив его в виде
неупорядоченного списка точек. То есть одна задача преобра-
преобразуется в другую, или
КРАЙНИЕ ТОЧКИ ocN ВЫПУКЛАЯ ОБОЛОЧКА.
Естественно задать вопрос, является ли первая задача асим-
асимптотически более простой, чем вторая, или они имеют в действи-
действительности одинаковую сложность. Так как любая совокупность
точек в двумерном пространстве тривиальным образом вклады-
вкладывается в пространство Ed для d > 2, то любой результат для
нижней оценки, полученный для d = 2, заведомо остается спра-
справедливым для d > 2. Поэтому в дальнейшем обсуждении мы
будем рассматривать двумерные варианты задач ВО1 и ВО2.
Начнем с рассмотрения задачи ВО1 о выпуклой оболочке на
плоскости. То, что вершины многоугольника, являющегося вы-
выпуклой оболочкой, следуют в определенном порядке (в действи-
действительности мы можем говорить об упорядоченной выпуклой обо-
оболочке), указывает на естественную связь с задачей сортировки.
В самом деле, следующая теорема устанавливает тот факт, что
любой алгоритм решения задачи ВО1 должен быть способен
выполнять сортировку.
Теорема 3.2. Задача сортировки сводима за линейное время
к задаче построения выпуклой оболочки, и, следовательно, для
нахождения упорядоченной выпуклой оболочки N точек на плос-
плоскости требуется время Q (N log N).
Доказательство. Мы продемонстрируем процедуру сведения,
а сформулированное в теореме заключение является следствием
утверждения 1 из разд. 1.4. Пусть заданы N положительных
действительных чисел Х\, . . ., xN. Необходимо показать, как
3.2. Постановка задачи и нижние оценки сложности
121
У
Парабола у= x
можно использовать алгоритм построения выпуклой оболочки
для сортировки этих чисел, чтобы при этом дополнительные
затраты линейно зависели от количества чисел. Поставим в со-
соответствие числу х{ точку (х., х?) и присвоим ей номер I
(рис. 3.1). Все эти точки лежат на параболе у = х2. Выпуклая
оболочка этого множества точек, представленная в стандартном
виде, будет состоять из списка точек множества, упорядочен-
упорядоченного по значению абсциссы. Один просмотр этого списка позво-
позволяет прочитать в нужном по-
порядке значения х,1).
Так как для процедуры
сведения используются только
арифметические операции, то
теорема 3.2 остается справед-
справедливой во многих вычислитель-
вычислительных моделях. А именно в мо-
моделях, допускающих умноже-
умножение, и в которых время, необ-
необходимое для сортировки, равно
Q(NlogN). Как указывалось
ранее, теорема 3.2 применима
в пространствах любой раз-
размерности, большей I2).
Если взглянуть на задачу
Рис. 3.1. Иллюстрация к доказатель-
СТВУ теоРемы 3.2.
ВО2 о крайних точках, то сра-
сразу же становится ясно, что здесь не возникает никаких элементар-
элементарных соображений, подобных приведенным выше. В действитель-
действительности эта задача на протяжении некоторого времени оставалась
нерешенной. Первым прорывом явилась работа А. Яо [Yao
A981)], а окончательный ответ был получен в результате соеди-
соединения мощного метода алгебраических деревьев решений Бен-
Ора (см. разд. 1.4) с недавним результатом Стили и Яо [Steele,
Yao A982)].
Следуя привычному ходу мысли, рассмотрим задачу распо-
распознавания, связанную с ВО2, которая формулируется следующим
образом.
Задача ВОЗ (ПРОВЕРКА КРАЙНОСТИ ТОЧЕК ПЛОСКО-
ПЛОСКОСТИ). На плоскости заданы N точек. Определить, являются ли
они вершинами своей собственной выпуклой оболочки?
') Шеймос первоначально доказал эту теорему, отображая числа Xi на
единичную окружность. Отображение на параболу, предложенное С. Эйзенста-
том, является более предпочтительным, так как оно требует лишь опера-
операций рациональной арифметики.
2) Выпуклой оболочкой множества точек в пространстве размерности 1
является наименьший содержащий их интервал. Этот интервал может быть
найден за линейное время.
122 Гл. 3. Выпуклые оболочки: основные алгоритмы
Прежде чем обсуждать чрезвычайно важный результат Сти-
Стили — Яо и Бен-Ора, давайте посмотрим, почему модель линей-
линейного дерева решений не подходит для нашей задачи. Коротко
можно сказать, что не существует алгоритма построения вы-
выпуклой оболочки, использующего исключительно линейные про-
проверки, поэтому модель линейного дерева решений не применима.
Типичная элементарная операция имеет вид: даны три точки р,
р' и р" и требуется определить, находится ли точка р слева или
справа или на ориентированном отрезке р'р"? Полином, реали-
реализующий соответствующую проверку, задается определителем
х у 1
C.4)
А =
х' у' 1
х" у" 1
где р = {х, у), р' = (*', у') и р" = (х", у"). Этот определитель,
как отмечалось в разд. 2.2.1, дает удвоенную площадь треуголь-
треугольника {рр'р") со знаком. Очевидно, что полином C.4) является
квадратным.
Это — огорчающее обстоятельство, так как ранее Эйвис [Avis
A979)] предложил простое и изящное доказательство, основан-
основанное на модели линейного дерева решений. В этом доказатель-
доказательстве ключевым образом использовался тот факт, что линейная
проверка f(xi, ..., xm): 0 определяет гиперплоскость в т-мер-
ном евклидовом пространстве Ет и каждый путь от корня к
листу дерева определяет пересечение выпуклых множеств (по-
(полупространства соответствуют случаям «>» или «О, гипер-
гиперплоскости соответствуют случаю (« = »), которое само являет-
является выпуклым множеством в Ет (область решений, связанная с
этим листом). Однако это свойство не сохраняется, когда про-
проверочный полином имеет более высокую степень.
Искусное, но чрезвычайно сложное доказательство, пред-
представленное Яо, ограничивалось моделью квадратичных деревьев
решений. Хотя существующие алгоритмы можно охватить, огра-
ограничиваясь квадратичными деревьями вычислений, непроизволь-
непроизвольно возникает следующий вопрос: если допускаются полиномы
степени выше второй, то можно ли по-прежнему доказывать ана-
аналогичные результаты? Или, если этого нельзя сделать, можно
ли, используя такие, возможно, более мощные проверки, разра-
разработать более быстрые алгоритмы? Яо высказался против поло-
положительного ответа. Однако совсем недавно этот вопрос был
окончательно решен с помощью следующего доказательства.
Предположим, дан алгоритм, представленный алгебраиче-
алгебраическим деревом решений фиксированного порядка d ^ 2, претен-
претендующий на решение задачи ВОЗ для множества из 2N точек на
плоскости, т. е. он воспринимает на входе вектор из 4N компо-
3.2. Постановка задачи и нижние оценки сложности 123
нент (по две координаты для каждой точки) и определяет, содер-
содержит ли их выпуклая оболочка 2N крайних точек. Отметим, что
входной вектор, имеющий 4N компонент, можно вполне коррект-
корректно представлять как точку в пространстве EiN. Рассматривае-
Рассматриваемая нами задача на распознавание характеризуется «множе-
«множеством истинности» W a EiN (см. разд. 1.4). Для удобства мы
повторяем здесь результат, полученный Бен-Ором.
Теорема 1.2. Пусть W — множество в Em, a T — алгебраиче-
алгебраическое дерево решений фиксированного порядка d, решающее за-
задачу о принадлежности W. Если h* — глубина дерева Т, а
#(№) — число разделимых связных компонент W, то
ft' = Q(log#0F)-m).
Для того чтобы воспользоваться этим результатом, необхо-
необходимо получить нижнюю оценку для #(№). Это может быть
сделано следующим образом.
Пусть (ро, Рь • • •, P2N-1) — последовательность вершин вы-
выпуклого многоугольника, перечисленных в порядке обхода по ча-
часовой стрелке (рис. 3.2). Исходные данные для алгоритма пред-
представлены в виде цепочки z = (z0, Z\, ..., z,jv-i) действительных
Рг-Яг
Pzn-z -Qzn-2
Рис. 3.2. Иллюстрация к доказательству теоремы 3.3.
чисел, получаемой следующим образом: на плоскости заданы
2N точек <7о, Qi Q2N-1 с координатами qi = (xt, yi), пола-
полагаем z2i = Xi и ^H-i = yi для i = 0, 1 2N — 1. Для фиксиро-
фиксированной последовательности (ро, р\, . . . , р2ы-\) можно построить
ЛП различных экземпляров входных цепочек для данного вари-
варианта задачи, выбирая произвольную перестановку я целых чи-
чисел {0, 1, ..., W — 1} и полагая
(S = 0, ..., N —I). C.5)
Отметим, что все возможные для данной задачи входные после-
последовательности имеют одинаковые подпоследовательности точек
124 Гл. 3. Выпуклые оболочки: основные алгоритмы
с четными индексами (показанные на рис. 3.2 черными кружка-
кружками). Для заданной перестановки я обозначим через z (я) (после-
(последовательность координат точек (q0, ¦ ¦ ¦ , <72jv-i))-
Теперь для каждой перестановки я построим массив Л (я) с
N2 элементами. Сделаем это следующим образом. Обозначив че-
через А(и, v, w) площадь треугольника (и, v, w) со знаком и
через Л(я)[/] /-й элемент Л (я), имеем
Л (п) [Ns + Г] = A {q2s, <7Bsf2)mod2AT, <72r + l).
W. C.6)
Из C.5) и C.6) и рис. 3.2 легко понять, что для данного s
имеется всего одно значение г, для которого A(n)[Ns + г] < О
(это имеет место при 2s + 1 = п~1Bг +1)). Предположим те-
теперь, что Я[ и Я2—-две различные перестановки чисел {0, 1, ...
..., N—1}, и рассмотрим массивы Л(я^ и Л(я2). Мы утвер-
утверждаем, что существует по крайней мере одно целое число / та-
такое, что Л(я1)[/] и Л(я2)[/] имеют противоположные знаки. Дей-
Действительно, рассмотрим N элементов массива Л(я1), являющих-
являющихся отрицательными, т. е. элементы Л(я^ [Ni + '*<]> 0^i<CN.
Если Л (Я[) [Ni + п] -А (я2) [Ni + п] > 0, то обе точки qn^ ,Nl+r\
и Ч„-1 /Ni+r \ лежат слева от направленного отрезка рири+г, но
мы знаем, что имеется только одна точка в множестве {р0, ¦ ¦ •
..., p>2N-i}, обладающая этим свойством, и этой точкой является
p2i+\. Таким образом, q { r =qx_{ r =р2. + ]. Если это
имеет место для всех значений /, то эти две перестановки совпа-
совпадают, что противоречит предположению.
Поэтому существует такое /, что Л(я1)[/] и Л(яг)[/] имеют
противоположные знаки. Заметим теперь, что г(я1) и г(яг) яв-
являются различными точками в EiN, и рассмотрим кривую р в
EiN, соединяющую эти точки. Точка г, двигающаяся по р из
г{л\) в г(яг), описывает непрерывную деформацию на плоско-
плоскости конфигурации, соответствующей яь в конфигурацию, соот-
соответствующую я2, при этом Л(яО преобразуется в Л(я2). Так
как Л(я1) [/) -Л (я2) [/¦] <0, то, согласно теореме о промежуточном
значении, на кривой р существует точка г* такая, что в соответ-
соответствующей конфигурации три точки становятся коллинеарными
(т. е. треугольник с вершинами в этих точках имеет нулевую
площадь), и поэтому не более чем BN—1) точек являются
крайними. Это доказывает, что при перемещении из г(п\) в
г(я2) мы должны выходить из W, так что г(щ) и г(я2) принад-
принадлежат различным компонентам W. Так как это справедливо при
произвольном выборе Я] и я2, то отсюда следует, что #(№):=гЛП.
С учетом теоремы Бен-Ора имеем:
3.3. Алгоритм построения выпуклой оболочки 125
Теорема 3.3. В рамках модели алгебраических деревьев вы-
вычислений фиксированного порядка для определения крайних то-
точек множества из N точек на плоскости требуется Q(N\ogN)
операций.
Доказательство. В нашем случае m = 4N и #(№) ^ N\. Со-
Согласно теореме Бен-Ора, необходимо (log #(№)—т) :=г
;s=(log jV! — 4yV) = Q(N\ogN) операций.
На этом заканчивается наше обсуждение сложности задачи.
Прежде чем закончить эту тему, заметим, что двумерные ва-
варианты как задачи об упорядоченной выпуклой оболочке ВО1,
так и задачи о крайних точках ВО2 имеют тесную связь с зада-
задачей сортировки. Действительно, задача ВО1 явным образом
связана с ней посредством прямого сведения, в то время как
связь ВО2 осуществляется через мощность симметрической
группы. Эта связь является довольно глубокой, и в дальнейшем
в этой главе мы будем часто обращаться к ней.
Теперь мы переходим к описанию алгоритмов построения
выпуклой оболочки.
3.3. Алгоритм построения выпуклой
оболочки на плоскости
3.3.1. Предварительная разработка алгоритма
построения выпуклой оболочки
Теперь мы должны, опираясь на неконструктивное по
своей сути определение 3.4, получить математические результа-
результаты, ведущие к эффективным алгоритмам. В работах такого рода
принято представлять последовательность хорошо обоснован-
обоснованных и «отполированных» результатов, но сделать так здесь
означало бы лишь совсем немного раскрыть процесс разработ-
разработки алгоритмов, являющийся стержнем вычислительной геомет-
геометрии. Поэтому мы начинаем с обсуждения некоторых малопро-
малопродуктивных подходов.
Определение 3.6. Точка р выпуклого множества 5 называется
крайней, если не существует пары точек a,b^S таких, что р
лежит на открытом отрезке аЬ.
Множество Е крайних точек S представляет собой наименьшее
подмножество S, обладающее тем свойством, что conv(?) =
= conv(S), и ? в точности совпадает с множеством вершин
conv(S).
Отсюда следует, что для того, чтобы найти выпуклую обо-
оболочку конечного множества точек, требуется выполнить следую-
следующие два шага:
126 Гл. 3. Выпуклые оболочки: основные алгоритмы
1. Определить крайние точки. (Это задача ВО2 в двумерном
случае.)
2. Упорядочить эти точки так, чтобы они образовывали вы-
выпуклый многоугольник.
Необходима теорема, которая позволит нам проверять, является
ли некоторая точка крайней.
Теорема 3.4. Точка р не является крайней плоского выпук-
выпуклого множества S только тогда, когда она лежит в некотором
треугольнике, вершинами которого являются точки из S, но
сама она не является вершиной этого треугольника1) (рис. 3.3).
Рис. 3.3. Точка р не является крайней, так как она находится внутри тре-
треугольника (р\Р2Рз)-
Эта теорема дает идею для алгоритма удаления точек, не
являющихся крайними. Имеется O(N3) треугольников, опреде-
определяемых N точками множества S. Проверка принадлежности
точки заданному треугольнику может быть выполнена за неко-
некоторое постоянное число операций, так что за время O(N3)
можно определить, является ли конкретная точка крайней. По-
Повторение этой процедуры для всех N точек множества 5 потре-
потребует времени O(NA). Хотя наш алгоритм является чрезвычайно
неэффективным, он очень прост в идейном плане и показывает,
что крайние точки могут быть определены за конечное число
шагов.
Мы затратили время О(ЫЛ) только на определение крайних
точек, которые должны быть как-то упорядочены, чтобы образо-
образовать выпуклую оболочку. Смысл этого порядка раскрывается
следующими теоремами.
') Это непосредственно следует из доказательств теорем 10 и 11 в
книге [Hadwiger, Debrunner A964)]. Теорему 3.4 можно обобщить на слу-
случай rf-мерного пространства, заменив «треугольник» на «симплекс с d + 1
вершинами». Заметим, что треугольник может вырождаться в отрезок, когда
его вершины становятся коллинеарными.
3.3. Алгоритм построения выпуклой оболочки
127
Теорема 3.5. Луч, выходящий из внутренней точки ограничен-
ограниченной выпуклой фигуры F, пересекает границу F в точности в од-
одной точке ').
Теорема 3.6. Последовательные вершины выпуклого много-
многоугольника располагаются в порядке, соответствующем измене-
изменению угла относительно любой внутренней точки.
Представьте луч, выходящий из некоторой внутренней точ-
точки q многоугольника Р и заметающий вершины многоугольника
Р в порядке движения против часовой стрелки, начиная из по-
положения, совпадающего по направлению с положительным на-
Рг
Рз
Порядок обхода
npomize часовой-
стрелки
Р5
Рис. 3.4. Вершины многоугольника Р упорядочены относительно точки q.
правлением оси х системы координат. По мере движения от вер-
вершины к вершине полярный угол2) луча монотонно увеличивает-
увеличивается. Именно это имелось в виду, когда говорилось о том, что
вершины многоугольника Р «упорядочены» («располагаются в
порядке») (рис. 3.4).
Если даны крайние точки некоторого множества, то его вы-
выпуклую оболочку можно найти, выбрав точку q, про которую
известно, что она является внутренней точкой оболочки, и упо-
упорядочив затем крайние точки в соответствии с полярным углом
относительно q. В качестве точки q можно взять центроид мно-
множества крайних точек: хорошо известно, что центроид множе-
множества точек является внутренней точкой выпуклой оболочки3).
') Эта теорема является следствием теоремы 1.10 из [Valentine A964)]
и теоремы Жор дана.
2) Полярный угол измеряется обычным способом в направлении про-
против часовой стрелки от положительного направления оси х.
3) При условии что внутренность не пуста. В книге [Benson A966),
упр. 25.15] «внутренность» понимается в смысле относительной (индуциро-
(индуцированной) топологии. В ?3 выпуклая оболочка двух различных точек пред-
представляет отрезок, внутренность которого является пустой в метрической то-
топологии Е3, но не пустой в относительной топологии.
128 Гл. 3. Выпуклые оболочки: основные алгоритмы
Центроид множества из N точек в /г-мерном пространстве мо-
может быть тривиально вычислен за O(Nk) арифметических опе-
операций.
Грэхем предложил иной метод нахождения внутренней точ-
точки, заметив, что вполне достаточно взять центроид любых трех
неколлинеарных точек [Graham A972)]. Он начинает с двух
произвольных точек и по очереди исследует оставшиеся N — 2
точек, ища среди них одну, которая не лежит на прямой, опреде-
определяемой первыми двумя точками. В худшем случае для этого
требуется время O(N), но почти всегда процесс заканчивается
через некоторое фиксированное вре-
время: если точки выбираются из абсо-
абсолютно непрерывного распределения,
то с вероятностью единица первые
три точки являются неколлинеарными
[Efron A965)].
Найдя крайние точки множества S,
можно за время O(N) найти некото-
некоторую точку q, являющуюся внутренней
5 точкой оболочки. Остается только от-
отсортировать (упорядочить) крайние
Рис. 3.5. Сравнение поляр- точки в соответствии со значением по-
ных углов путем вычисле- лярного угла, используя точку q в ка-
ния ориентированной площа- честве начала системы координат. Это
ди треугольника @,p2,Pi)- можно сделать, преобразуя точки в
полярную систему координат за время
O(N), а затем отсортировав их за время O(N\ogN), но на са-
самом деле не требуется явного вычисления полярных координат.
Так как сортировка может быть выполнена путем попарных
сравнений, то необходимо лишь определять, какой из двух за-
заданных углов больше; нам не требуются их численные значения.
Давайте рассмотрим этот вопрос более подробно, так как он ил-
иллюстрирует простой, но важный геометрический «трюк», оказы-
оказывающийся полезным во многих приложениях. Пусть на плоско-
плоскости заданы две точки р\ и р2. Какая из них имеет больший по-
полярный угол? На этот вопрос можно без труда ответить, если
рассмотреть ориентированную (с учетом знака) площадь неко-
некоторого треугольника. Действительно, если даны две точки р\ и
Рг, то р2 образует с осью х строго меньший полярный угол, чем
Рь тогда и только тогда, когда треугольник (О, р2, pi) имеет
строго положительную площадь (рис. 3.5).
На этом заканчивается подробное обсуждение нашего пер-
первого алгоритма построения выпуклой оболочки. Было показано,
что эта задача может быть решена за время O(Af4) с использо-
использованием только арифметических операций и сравнений.
3.3. Алгоритм построения выпуклой оболочки 129
3.3.2. Метод обхода Грэхема
Алгоритм со временем выполнения О (Л74) не позволит
обрабатывать очень большие наборы данных. Если временные
характеристики должны быть улучшены, то это можно сделать,
либо устранив избыточные вычисления в имеющемся алгоритме,
либо выбрав иной теоретический подход. В этом разделе мы
исследуем наш алгоритм с точки зрения наличия в нем ненуж-
ненужных вычислений.
Так ли необходимо проверять все треугольники, определяе-
определяемые множеством из N точек, чтобы узнать, лежит ли некоторая
точка в каком-либо из них? Если нет, то имеется некоторая на-
надежда, что крайние точки можно найти за время, меньшее чем
O(N*). Грэхем в одной из первых работ, специально посвящен-
посвященных вопросу разработки эффективных геометрических алгорит-
алгоритмов [Graham A972)], показал, что, выполнив предварительно
сортировку точек, крайние точки можно найти за линейное вре-
время. Использованный им метод стал очень мощным средством
в области вычислительной геометрии.
Предположим, что внутренняя точка уже найдена, а коорди-
координаты других точек тривиальным образом преобразованы так,
что найденная внутренняя точка оказалась в начале координат.
Упорядочим лексикографически N точек в соответствии со зна-
значениями полярного угла и расстояния от начала координат. При
выполнении сортировки, естественно, не нужно вычислять дей-
действительное расстояние между двумя точками, так как требует-
требуется лишь сравнить две величины. Можно работать с квадратом
расстояния, избегая тем самым операции извлечения квадратно-
квадратного корня, но рассматриваемый случай еще проще. Сравнение
расстояний необходимо выполнять лишь в случае, если две точ-
точки имеют один и тот же полярный угол. Но тогда они лежат
на одной прямой с началом координат, и сравнение в этом слу-
случае тривиально.
Представив упорядоченные точки в виде лвяжлы
нТй
р^ получаем ситуацию, представленную на
рис. З.о. Обратите внимание: если точка не является вершиной
выпуклой оболочки, то она является внутренней точкой для не-
некоторого треугольника (Opq), где р и q — последовательные
вершины выпуклой оболочки. Суть алгоритма Грэхема состоит
в однократном просмотре упорядоченной последовательности
точек, в процессе которого удаляются внутренние точки. Остав-
Оставшиеся точки являются вершинами выпуклой оболочки, пред-
представленными в требуемом порядке.
Просмотр начинается с точки, помеченной как НАЧАЛО, в
качестве которой можно взять самую правую с наименьшей ор-
ординатой точку из данного множества, заведомо являющуюся
130 Гл. 3. Выпуклые оболочки: основные алгоритмы
вершиной выпуклой оболочки. Тройки последовательных точек
многократно проверяются в порядке обхода против часовой
стрелки с целью определить, образуют или нет они угол, боль-
больший или равный я. Если внутренний угол pip,2p3 больше или
равен я, то говорят, что рфгрз образуют «правый поворот»,
иначе они образуют «левый поворот». Это можно легко опреде-
определить, воспользовавшись формулой C.4). Из выпуклости много-
многоугольника непосредственно следует, что при его обходе будут
делаться только левые повороты. Если р\р2рз образуют правый
Порядок
обхода
точек
Рис. 3.6. Начало обхода точек в методе Грэхема. Вершина рг удаляется,
если угол Р\Рзрз оказывается вогнутым.
поворот, то р2 не может быть крайней точкой, так как она яв-
является внутренней для треугольника (Opip3). В зависимости от
результата проверки угла, образуемого текущей тройкой точек,
возможны два варианта продолжения просмотра:
1. р1р2рз образуют правый поворот. Удалить вершину р2 и
проверить тройку рорфз-
2. р1р2рз образуют левый поворот. Продолжить просмотр,
перейдя к проверке тройки ргрзр4-
Просмотр завершается, когда, обойдя все вершины, вновь при-
приходим в вершину НАЧАЛО. Заметим, что вершина НАЧАЛО
никогда не удаляется, так как она является крайней точкой и
поэтому при отходе назад после удаления точек, мы не сможем
уйти дальше точки, предшествующей точке НАЧАЛО. Простой
анализ показывает, что такой просмотр выполняется лишь за
линейное время. Проверка угла может быть выполнена за фик-
фиксированное (постоянное) число операций. После каждой про-
проверки происходит либо продвижение на одну точку (случай 2),
либо удаляется точка (случай 1). Так как множество содержит
лишь N точек, то продвижение вперед не может происходить
более N раз, как не может быть удалено и более N точек. Рас-
Рассмотренный метод обхода границы многоугольника является на-
настолько полезным, что в дальнейшем мы будем называть его
3.3. Алгоритм построения выпуклой оболочки 131
методом обхода Грэхема. Ниже дано более точное описание
этого алгоритма. В алгоритме 5 — это исходное множество из N
точек на плоскости.
procedure ОБОЛОЧКА-ГРЭХЕМА (S)
1. Найти внутреннюю точку q.
2. Используя q как начало координат, упорядочить точки мно-
множества S лексикографически в соответствии с полярным уг-
углом и расстоянием от q. Организовать точки множества в виде
кольцевого дважды связанного списка со ссылками СЛЕД и
ПРЕД и указателем НАЧАЛО на первую вершину. Значение
true логической переменной f указывает на то, что вершина
НАЧАЛО оказалась достигнутой при прямом продвижении по
оболочке, а не в результате возврата.
3. (Обход)
begin v:= НАЧАЛО; w:=TlPER[v]; f:= false;
\упПе(СЛЕДМ Ф НАЧАЛО or f = false) do
begin if CJ\ER[v] = w then f:=true;
if (три точки v, СЛЕДМ СЛЕД[СЛЕД[а]]
образуют левый поворот) then v := СЛЕД[а]
else begin УДАЛИТЬ СЛЕДИ;
v:=TlPER[v]
end
end
end.
По окончании выполнения алгоритма список содержит упо-
упорядоченные нужным образом вершины оболочки.
Теорема 3.7. Выпуклая оболочка N точек на плоскости мо-
может быть найдена за время O(N\ogN) при памяти O(N) с ис-
использованием только арифметических операций и сравнений.
Доказательство. Из предыдущего обсуждения алгоритма
Грэхема видно, что в нем используются лишь арифметические
операции и сравнения. Шаги 1 и 3 требуют линейного времени,
тогда как шаг 2, являющийся определяющим по времени ра-
работы, выполняется за время O(N\ogN). Для представления
связного списка точек достаточно O(N) памяти.
Если вспомнить нижнюю оценку, обсуждавшуюся в разд. 3.2,
то видно, что этот простой и изящный алгоритм имеет оптималь-
оптимальное время выполнения. Однако имеется одно обстоятельство,
которое может вызвать некоторое беспокойство у читателя, —
это использование полярных координат. В самом деле, это пред-
предполагает выполнение преобразования координат, что может быть
затруднительным в системах с ограниченным набором прими-
5*
132 Гл. 3. Выпуклые оболочки: основные алгоритмы
тивных операций. Как это обычно случается, ряд исследовате-
исследователей обратили внимание на это обстоятельство и предложили
решения, позволяющие избежать его. Мы коротко опишем ме-
метод, предложенный Эндрью (Andrew A979)]. Другой подход,
также заслуживающий внимания, был предложен Эклом и Тус-
сэном (Akl, Toussaint A978)].
Пусть на плоскости задано множество из JV точек. Опреде-
Определим сначала его левую и правую крайние точки /иг (рис. 3.7)
и построим прямую, проходящую через эти точки. Оставшиеся
точки разбиваются на два подмножества (нижнее и верхнее)
Верхнее
^ _ _ l подмножество
Обход
Мижнее
подмножество
Рис. 3.7. Левая и правая крайние точки определяют разбиение множества
на два подмножества.
в зависимости от того, по какую сторону от прямой они распола-
располагаются — ниже или выше прямой. Нижнее подмножество поро-
порождает ломаную {нижнюю оболочку, или Н-оболочку), монотон-
монотонную относительно оси х. Точно так же верхнее подмножество
порождает аналогичную ломаную (верхнюю оболочку, или
В-оболочку), а соединение этих двух ломаных дает выпуклую
оболочку исходного множества.
Рассмотрим построение верхней оболочки. Точки упорядочи-
упорядочиваются в соответствии с возрастанием абсциссы, и к полученной
последовательности применяется метод обхода Грэхема. При
таком подходе отпадает необходимость в тригонометрических
операциях. Заметим, однако, что предлагаемый подход есть не
что иное, как частный случай применения исходного метода
Грэхема, когда точка q, совпадающая с началом координат,
выбирается бесконечно удаленной в отрицательном направле-
направлении (--оо) по оси у, так что в этом случае упорядоченность по
абсциссе совпадает с упорядоченностью по полярному углу.
Несмотря на то что, как было показано, алгоритм Грэхема
является оптимальным, по-прежнему имеется много причин для
продолжения исследования задачи о выпуклой оболочке.
1. Рассмотренный алгоритм является оптимальным в худ-
худшем случае, но мы, однако, не изучили его поведение в среднем.
2. Так как алгоритм основывается на теореме 3.6, примени-
применимой только в случае плоскости, алгоритм не имеет обобщения
на случай пространств более высокой размерности.
3.3. Алгоритм построения выпуклой оболочки 133
3. Алгоритм не является открытым алгоритмом1), так как
все точки множества должны быть известны до начала работы
алгоритма.
4. При возможности параллельной обработки более предпо-
предпочтительным является рекурсивный алгоритм, допускающий раз-
разбиение исходной задачи и данных на меньшие подзадачи.
Прежде чем закончить этот раздел, отметим, что метод Грэ-
Грэхема явным образом использует сортировку. Вряд ли можно
найти более прямую связь этой задачи с задачей сортировки.
Аналогично тому, как исследование сортировки показало, что
не существует одного алгоритма, лучшего во всех случаях, мы
увидим, что то же самое справедливо и для задачи построения
выпуклой оболочки. Давайте продолжим исследование комбина-
комбинаторной геометрии в поисках идей, способных привести к иным
алгоритмам построения выпуклой оболочки.
3.3.3. Обход методом Джарвиса
Многоугольник с одинаковым успехом можно задать
упорядоченным множеством как его ребер, так и его вершин.
В задаче о выпуклой оболочке мы до сих пор обращали внима-
внимание главным образом на изолированные крайние точки. А что
если вместо этого попытаться определить ребра выпуклой обо-
оболочки, приведет ли такой подход к созданию практически при-
пригодного алгоритма? Если задано множество точек, то довольно
трудно быстро определить, является или нет некоторая точка
крайней. Однако если даны две точки, то непосредственно мож-
можно проверить, является или нет соединяющий их отрезок ребром
выпуклой оболочки.
Теорема 3.8. Отрезок I, определяемый двумя точками, явля-
является ребром выпуклой оболочки тогда и только тогда, когда все
другие точки заданного множества лежат на I или с одной сто-
стороны от него [Stoer, Witzgall A970), теорема 2.4.7]. (См. рис. 3.8.)
N точек определяют (о) = O(N2) прямых. Для каждой из
этих прямых можно, используя формулу C.4), определить за
линейное время положение остальных N — 2 точек относительно
этой прямой и тем самым проверить, удовлетворяет или нет пря-
прямая условиям теоремы 3.8. Таким образом, за время O(N3)
можно найти все пары точек, определяющих ребра выпуклой
оболочки. Не надо затем большого труда, чтобы расположить
эти точки в впде списка последовательных вершин оболочки.
') См. определение открытого алгоритма в разд. 3.3.6. В оригинале
«on-line». — Прим. перев.
134 Гл. 3. Выпуклые оболочки: основные алгоритмы
Джарвис заметил, что этот алгоритм можно улучшить, если
учесть следующий факт. Если установлено, что отрезок pq яв-
является ребром оболочки, то должно существовать другое ребро
с концом в точке q (Jarvis A973)]. В его работе показано, как
использовать этот факт, чтобы уменьшить требуемое время до
O(N2). Кроме того, в ней содержится ряд других идей, заслужи-
заслуживающих подробного обсуждения. Здесь будет рассмотрен ва-
вариант, включающий изменения, предложенные Эклом [Akl
A979)] и устраняющие небольшие неточности.
Выпуклая
оболочка
Рис. 3.8. Ребро выпуклой оболочки не может разделять множество точек
на части, pq является ребром выпуклой оболочки, так как все точки мно-
множества располагаются по одну сторону от него; p'q' не является ребром
выпуклой оболочки, так как по обе стороны от него имеются точки.
Предположим, что, как и в разд. 3.3.2, найдена наименьшая
в лексикографическом порядке точка р\ заданного множества
точек. Эта точка заведомо является вершиной оболочки, и те-
теперь хотелось бы найти следующую за ней вершину р2 выпук-
выпуклой оболочкицДочка р% — это точка, имеющая наименьший по-
положительный полярный угол относительно точки р\ как начала
координат. Диалогично следующая точка рг имеет наименьший
полярный угол относительно точки р% как начала--координат, и
каждая последующая точка выпуклой оболочки может быть
найдена за линейное время. Алгоритм Джарвиса обходит кру-
кругом выпуклую оболочку (отсюда и соответствующее название —
обход Джарвиса), порождая в нужном цорядке последователь-
последовательность крайних точек, по одной точке на каждом шаге (рис. 3.9).
Таким образом строится часть выпуклой оболочки (ломаная ли-
линия) от наименьшей в лексикографическом порядке точки (pi
на рис. 3.9) до наибольшей в лексикЬграфическом порядке точ-
точки (р4 на том же рисунке). Построений выпуклой оболочки за-
завершается нахождением другой ломаной, идущей из наиболь-
наибольшей в лексикографическом порядке точки в наименьшую в лек-
лексикографическом порядке точку. Ввиду симметричности этих
3.3. Алгоритм построения выпуклой оболочки 135
двух этапов необходимо изменить на противоположные направ-
направления осей' координат и иметь дело теперь с полярными углами,
наименьшими относительно отрицательного направления оси х.
Как уже было показано в разд. 3.3.1, наименьший угол мо-
может быть найден с использованием лишь арифметических опе-
операций и сравнений, не прибегая к явному вычислению значений
полярных углов.
Так как все N точек множества могут лежать на его выпук-
выпуклой оболочке (быть ее вершинами), а алгоритм Джарвиса за-
затрачивает на нахождение каждой точки оболочки линейное
Рис. 3.9. Построение выпуклой оболочки методом Джарвиса. Алгоритм
Джарвиса находит последовательные вершины оболочки путем многократ-
многократного вычисления угла поворота. Каждая новая вершина определяется за
время O(N).
время, то время выполнения алгоритма в худшем случае равно
O(N2), что хуже, чем у алгоритма Грэхема. Если в действитель-
действительности число вершин выпуклой оболочки равно h, то время вы-
выполнения алгоритма Джарвиса будет O(hN), и он очень эффек-
эффективен, когда заранее известно, что значение h мало. Например,
если оболочка заданного множества является многоугольником
с произвольным постоянным числом сторон, то ее можно найти
за линейное относительно числа точек время. Этот факт чрез-
чрезвычайно важен в свете анализа сложности алгоритмов построе-
построения выпуклой оболочки в среднем, который будет представлен
в следующей главе.
Другое уместное здесь замечание состоит в том, что идея по-
поиска последовательных вершин оболочки с помощью многократ-
многократного применения процедуры определения минимального угла ин-
интуитивно ассоциируется с завертыванием двумерного предмета.
В действительности метод Джарвиса можно рассматривать как
136 Гл. 3. Выпуклые оболочки: основные алгоритмы
двумерный вариант подхода, основанного на идее «заворачива-
«заворачивания подарка» и предложенного Чандом и Капуром [Chand, Ка-
pur A970)] еще до появления работы Джарвиса. Метод «заво-
«заворачивания подарка» применим также в случае пространств раз-
размерности большей двух, и в общих чертах он будет рассмотрен
в разд, 3.4.1.
3.3.4. Быстрые методы построения выпуклой оболочки
Задача сортировки является источником вдохновения
при выработке идей решения задачи построения выпуклой обо-
оболочки. Так, например, в ряде методов, независимо предложен-
предложенных почти в одно и то же время [Eddy A977); Bykat A978);
Green, Silverman A979); Floyd (частное сообщение, A976)],
легко угадывается основная идея (с небольшими вариациями)
алгоритма быстрой сортировки БЫСТРСОРТ1). Ввиду их близ-
близкого сходства с алгоритмом БЫСТРСОРТ мы выбрали для них
общее название — быстрые методы построения выпуклой обо-
оболочки, или БЫСТРОБОЛ-методы.
Чтобы лучше понять эту аналогию, коротко напомним меха-
механизм алгоритма БЫСТРСОРТ [Ноаге A962)]. Имеется массив
из N чисел, и необходимо разбить его на левый и правый под-
массивы так, чтобы каждый элемент первого подмассива не пре-
превосходил каждый из элементов второго подмассива. Это делается
с помощью двух указателей на элементы массива, установлен-
установленных в начале соответственно на два крайних элемента и пере-
перемещаемых навстречу друг другу на один элемент за один шаг
обработки. Каждый раз, когда элементы, на которые указывают
указатели, не удовлетворяют требуемому порядку, производится
перестановка этих элементов. Указатели двигаются поперемен-
попеременно — один двигается, а другой остается на месте. После каждой
выполненной перестановки указатели меняются ролями. При до-
достижении указателями одного и того же элемента массив ока-
оказывается разбитым на два подмассива, и затем к каждому из
них по отдельности применяется та же самая процедура. Как
хорошо известно, такой подход является очень эффективным
(обработка завершается за время О (Л^ log Л^)), если каждый
массив разбивается на приблизительно равные части.
Соответствующий БЫСТРОБОЛ-метод разбивает множество
S из N точек на два подмножества, каждое из которых будет
содержать одну из двух ломаных, соединение которых дает мно-
многоугольник выпуклой оболочки. Начальное разбиение множества
определяется прямой, проходящей через две точки / и г, имею-
•) [Aho, Hopcrott, Ullman A974)]-с. Ill русск. изд. и [Knuth A973)] ¦
с. 140 русск. изд. — Прим. перев.
3.3. Алгоритм построения выпуклой оболочки 137
щие соответственно наименьшую и наибольшую абсциссы
(рис. ЗЛО), точно так же, как в варианте алгоритма Грэхема,
предложенном Эндрью (см. разд. 3.3.2). Обозначим через SA)
подмножество точек, расположенных выше или на прямой, про-
проходящей через /и г, а через S<2> симметричным образом опреде-
определяемое подмножество точек, расположенных ниже или на той
же самой прямой. (Более точно, {SO, S<2>} не является разбие-
разбиением множества S, так как SO f) S<2> э {/, г}; эта несуществен-
несущественная деталь, обеспечивающая удобную симметрию, никоим обра-
образом не должна вводить в заблуждение читателя.)
Рис. 3.10. Точки I, r и h определяют разбиение множества SA>. Вес точки,
попавшие в заштрихованный треугольник, не рассматриваются.
На каждом последующем шаге обработка множеств, подоб-
подобных SO и SB), выполняется следующим образом (для конкрет-
конкретности мы рассмотрим множество SO на рис. 3.10). Определим
точку h, для которой треугольник (Mr) имеет максимальную
площадь среди всех треугольников {(plr): /jeSO}, а если таких
точек имеется более одной, то выбираем ту из них, у которой
угол Z (Mr) больше. Заметим, что точка h гарантированно при-
принадлежит выпуклой оболочке. Действительно, если провести че-
через точку h прямую, параллельную отрезку /г, то выше этой пря-
прямой не окажется ни одной точки множества S. Возможно, кроме
точки h на этой прямой окажутся другие точки из множества S,
но, согласно сделанному нами выбору, h является самой левой
из них. Так что точка h не может быть представлена в виде вы-
выпуклой комбинации двух других точек множества S.
Затем строятся две прямые: одна L\, направленная из / в h,
другая L2 — из h в г. Для каждой точки множества SO опреде-
определяется ее положение относительно этих прямых. Ясно, что ни
одна из точек не находится одновременно слева как от L\, так
и от L2, кроме того, все точки, расположенные справа от обеих
138 Гл. 3. Выпуклые оболочки: основные алгоритмы
прямых, являются внутренними точками треугольника (Irh)
и поэтому могут быть удалены из дальнейшей обработки. Точки,
расположенные слева от Lx или на ней (и расположенные спра-
справа от L2), образуют множество SA-Х); аналогично образуется
множество 5(|-2). Вновь образованные множества 5(|-'> и S(I-2)
передаются на следующий уровень рекурсивной обработки.
Данный метод использует в качестве примитивных процеду-
процедуры вычисления площади треугольника и определения положения
точки относительно прямой. Каждая из этих процедур требует
нескольких операций сложения и умножения.
Объяснив в общих чертах предлагаемый подход, укажем спо-
способ, позволяющий подогнать под общую схему обработки яв-
явную аномалию, связанную с первоначальным разбиением множе-
множества точек. Соответствующий выбор начальных значений {/0, г0}
точек /иг может быть выполнен следующим образом. Выберем
в качестве / точку (хо, уо), имеющую наименьшую абсциссу, а в
качестве г0 возьмем точку {х0, уо—е), где е — произвольное
малое положительное число. Это приводит к тому, что в каче-
качестве исходной прямой, разбивающей множество на части, выби-
выбирается вертикальная прямая, проходящая через /о- После завер-
завершения алгоритма точка го удаляется (положив е = 0, делаем
точки /о и Го совпадающими).
Теперь можно привести более формальное описание предла-
предлагаемого метода. Предполагается, что множество 5 содержит по
крайней мере две точки, а функция САМАЯДАЛЬНЯЯТОЧ-
КАE;/, г) вычисляет точку AeS описаным выше способом;
кроме того, БЫСТРОБОЛ возвращает в качестве результата
упорядоченный список точек, а «*» обозначает операцию сцеп-
сцепления (конкатенации) списков.
function БЫСТРОБОЛE; I, г)
1. begin ifE = {/,/•}) then return(/, r) (* выпуклая оболочка
состоит из единственного ориентированного ребра *)
2. else begin h := САМАЯДАЛЬНЯЯТОЧКАE; I,r);
SA):= точки множеств S, расположенные
слева от lh или на ней;
4. 5B) := точки множества S, расположенные сле-
слева от hr или на ней;
5. return БЫСТРОБОЛE"); /,/•)*
(БЫСТРОБОЛE<2); h,r) - h)
end
end
Таким образом, если уже имеется функция БЫСТРОБОЛ,
то поставленную задачу можно решить с помощью следующей
простой программы:
3.3. Алгоритм построения выпуклой оболочки 139
begin /0 = (х0, Уо):= точка множества S с наименьшей
абсциссой;
г0 := (х0, Уо — е);
БЫСТРОБОЛE;/0,г0);
удалить точку г0 (* это эквивалентно тому, чтобы
положить е = 0 *)
end.
Для того чтобы выделить из множества S подмножества SA)
и SB) (с неявным удалением точек, попадающих внутрь тре-
треугольника {Irh)), как это делается в строках 2, 3 и 4 приведен-
приведенной выше программы, требуется О (N) операций. Затем следует
рекурсивное обращение к функции для обработки SW и $B).
Теперь, если мощность каждого из этих множеств не превосхо-
превосходит мощности множества S, умноженной на некоторую констан-
константу, меньшую 1, и это условие имеет место на каждом уровне
рекурсии, то время выполнения алгоритма равно O(N log N).
Однако в худшем случае БЫСТРОБОЛ, несмотря на его про-
простоту, имеет тот же недостаток, что и БЫСТРСОРТ, дающий
время выполнения O(N2).
3.3.5. Алгоритмы типа «разделяй и властвуй»
Описанный в предыдущем разделе метод БЫСТРО-
БЫСТРОБОЛ не только прост в реализации, но и является попыткой
достигнуть одну из целей, сформулированных в конце разд. 3.3.2
(цель 4— возможность распараллеливания алгоритма). Дей-
Действительно, алгоритм разбивает исходную задачу на две под-
подзадачи, каждая из которых может решаться независимо от дру-
другой, и, следовательно, они могут решаться одновременно при
возможности параллельной обработки. Кроме того, объединение
результатов решения двух подзадач — так называемый шаг
«слияния» — представляет очень простую конкатенацию двух
результатов. К сожалению, эта простота является платой за
невозможность правильно управлять размерами двух подзадач,
на которые разбивается исходная задача, и тем самым гаранти-
гарантировать приемлемое поведение алгоритма в худшем случае.
Следовательно, несмотря на то что он представляет метод
«разделяй и властвуй», являющийся фундаментальным в обла-
области разработки алгоритмов, БЫСТРОБОЛ имеет очевидные не-
недостатки. В самом деле, подход «разделяй и властвуй» основан
на принципе сбалансированности {Aho, Hopcraft, Ullman A974),
с. 751)], предполагающем, что вычислительная задача должна
разбиваться на подзадачи примерно одинакового размера.
') Ссылка дается на русское издание. — Прим. перев.
140 Гл. 3. Выпуклые оболочки: основные алгоритмы
Предположим, при решении задачи построения выпуклой обо-
оболочки, исходное множество точек было разбито на две части Si
и S2, каждая из которых содержит половину точек исходного
множества. Если теперь рекурсивным образом найдены отдель-
отдельно CH(Si) и CH(S2), то каковы дополнительные затраты, необ-
необходимые для построения CH(Si U S2), т.е. выпуклой оболочки
исходного множества? Для ответа на этот вопрос можно вос-
воспользоваться следующим соотношением:
CH(Si U S2) = CH(CH(S,) U CH(S2)). C.7)
Хотя при первом взгляде на соотношение C.7) кажется, что та-
такой способ требует больших затрат, чем прямой способ построе-
построения выпуклой оболочки, решающее соображение состоит в том,
//CH(S2)
СНEЛ|
Рис. 3.11. Построение выпуклой оболочки методом «разделяй и властвуй».
Разбив множество S на два подмножества и построив рекурсивно выпуклые
оболочки этих подмножеств, можно свести исходную задачу к построению
выпуклой оболочки объединения двух выпуклых многоугольников.
что CH(Si) и CH(S2) —это не просто неупорядоченные множе-
множества точек, а выпуклые многоугольники (рис. 3.11).
Задача ВО4 (ВЫПУКЛАЯ ОБОЛОЧКА ОБЪЕДИНЕНИЯ
ВЫПУКЛЫХ МНОГОУГОЛЬНИКОВ). Заданы два выпуклых
многоугольника Pi и Р2. Найти выпуклую оболочку их объеди-
объединения.
Помимо того что эта задача интересна сама по себе, она
важна и в силу того, что представляет собой шаг слияния про-
процедуры «разделяй и властвуй» и, таким образом, дает фунда-
фундаментальное средство для решения геометрических задач. Нельзя
надеяться, что окончательный алгоритм будет эффективным, до
тех пор, пока решения подзадач не могут быть быстро объеди-
объединены.
procedure СЛИОБОЛ (S)
1. Если \S\ ^ k0 (k0 — некоторое небольшое целое число), то
построить выпуклую оболочку одним из прямых методов и
остановиться; иначе перейти к шагу 2.
3.3. Алгоритм построения выпуклой оболочки 141
2. Разбить исходное множество S произвольным образом на
два примерно равных по мощности подмножества Si и S2.
3. Рекурсивно найти выпуклые оболочки Si и S2.
4. Слить (соединить) две получившиеся оболочки вместе, об-
образуя CH(S).
Обозначим символом U (N) время, необходимое для нахо-
нахождения выпуклой оболочки объединения двух выпуклых много-
многоугольников, каждый из которых имеет N/2 вершин. Если T(N) —
время, необходимое для нахождения выпуклой оболочки множе-
множества из N точек, то, применяя соотношение C.7), получаем
U(N). C.8)
Следующий алгоритм «слияния» предложен М. Шеймосом
[Shamos A978)]:
procedure ОБОЛОЧКА-ОБЪЕДИНЕНИЯ-ВЫПУКЛЫХ-
МНОГОУГОЛЬНИКОВ(РЬ Р2)
1. Найти некоторую внутреннюю точку р многоугольника Р\.
(Например, центроид трех любых вершин Рь Такая точка р
будет внутренней точкой CH(P^))
Р;
Рис. 3.12. Точка р находится внутри многоугольника Р2. Так как точка р
одновременно находится внутри обоих многоугольников Р, и Рг, то их вер-
вершины упорядочены по значению полярного угла точки р. Слияние двух упо-
упорядоченных множеств вершин можно выполнить за линейное время.
2. Определить, является ли р внутренней точкой Р2. Это может
быть сделано за время O(N) методом, описанным в разд. 2.2.1.
Если р не является внутренней точкой Р2, перейти к шагу 4.
3. р является внутренней точкой Р2 (рис. 3.12). По теореме 3.6
вершины как Рь так и Р2 оказываются упорядоченными в со-
соответствии со значением полярного угла относительно точки р.
За время O(N) можно получить упорядоченный список вер-
вершин как Р\, так и Р2 путем слияния списков вершин этих
многоугольников. Перейти к шагу 5.
142
Гл. 3. Выпуклые оболочки: основные алгоритмы
4. р не является внутренней точкой Р2 (рис 3.13). Если смотреть
из точки р, то многоугольник Р2 лежит в клине с уголом раз-
разворота меньшим или равным я. Этот клин определяется
двумя вершинами и и v многоугольника Р2, которые могут
быть найдены за линейное время за один обход вершин
многоугольника Р2. / Эти вершины разбивают границу Р2
на две цепи вершин/ являющиеся монотонными относительно
изменения полярного уг-
угла с началом в р. При
движении по одной цепи
угол увеличивается, при
движении по другой —
уменьшается. Одна из
этих двух цепей, являю-
являющаяся выпуклой по на-
направлению к точке р,
может быть немедленно
удалена, так как ее вер-
вершины будут внутренними
точками CH(SiUS2).Дру-
CH(SiUS2).Другая цепь Р2 и граница Pi
представляют два упоря-
упорядоченных списка, содер-
содержащих в сумме не более
N вершин. За время О (N)
их можно слить в один
список вершин Pi U Р2,
упорядоченных по углу
относительно точки р.
5. Теперь к полученному
Рис. 3.13. Точка р находится вне много-
многоугольника Р3. Многоугольник Р2 нахо-
находится внутри угла, определяемого точ-
точками v, р, и. Точки v и и разбивают
последовательность вершин многоуголь-
многоугольника Р2 на две цепи. Одну из них мож-
можно удалить, а слияние вершин второй
цепн с упорядоченным множеством вер-
вершин многоугольника Pt можно выпол-
выполнить за линейное время.
списку можно применить
метод обхода Грэхема (шаг 3 алгоритма ОБОЛОЧКА-ГРЭ-
ХЕМА), требующий лишь линейное время. Теперь получена
выпуклая оболочка Pi U Р2.
Если многоугольник Pi имеет m вершин, а Р2 имеет п вер-
вершин, то время выполнения этого алгоритма равно О(ш-\-п),
что со всей очевидностью является оптимальным. Так что теперь
известно, что U(N) = O(N), и решением рекуррентного соотно-
соотношения C.8) в этом случае является T(N)= O(N\ogN). Таким
образом, имеет место
Теорема 3.9. Выпуклая оболочка объединения двух выпук-
выпуклых многоугольников может быть найдена за время, пропорцио-
пропорциональное суммарному числу их вершин.
Побочным результатом описанного метода слияния является
вычисление (нахождение) «опорных прямых», если они имеют-
3.3. Алгоритм построения выпуклой оболочки 143
ся, для двух выпуклых многоугольников. Опорной прямой к вы-
выпуклому многоугольнику Р называется прямая /, проходящая
через некоторую вершину многоугольника Р таким образом, что
внутренность Р целиком находится по одну сторону от / (в не-
некотором смысле понятие опорной прямой аналогично понятию
касательной). Очевидно, что два выпуклых многоугольника Pi
и Р2 с п и m вершинами соответственно, таких, что один не ле-
лежит целиком внутри другого, имеют общие опорные прямые (по
крайней мере не более 2min(n, m)). Если уже получена выпук-
выпуклая оболочка объединения Pi и Рг, то опорные прямые вычис-
вычисляются в результате просмотра списка вершин CH(PiUP2)-
Каждая пара последовательных вершин CH(Pi U Рг), одна из
которых принадлежит Р\, а другая Рг, определяет опорную
прямую.
Препарата и Хонг (Preparata, Hong A977)) предложили
иной метод нахождения выпуклой оболочки объединения двух
непересекающихся выпуклых многоугольников, основанный на
нахождении за линейное время двух опорных прямых к этим
многоугольникам. Однако этот метод здесь демонстрироваться
не будет.
3.3.6. Динамические алгоритмы построения
выпуклой оболочки
В каждом из рассматривавшихся ранее алгоритмов
требовалось, чтобы все обрабатываемые данные (а именно точ-
точки) были целиком представлены до начала работы алгоритма.
Во многих прикладных областях, где возникают геометрические
задачи, в частности связанные с обработкой данных в реальном
времени, такое ограничение отсутствует, а ряд вычислений дол-
должен выполняться по мере поступления точек (данных). В об-
общем случае алгоритм, обрабатывающий данные по мере поступ-
поступления, называется открытым, а алгоритм, обрабатывающий всю
совокупность целиком, называется закрытым.
Основной чертой открытых алгоритмов является отсутствие
ограничений на время коррекции, что равносильно тому, что но-
новый элемент данных (точка) вводится по запросу сразу же по-
после того, как завершается коррекция, связанная с предыдущим
элементом данных. Будем называть временной интервал между
вводом двух последовательных элементов данных задержкой
поступления данных. Более сложный в смысле предъявляемых
требований случай применения открытых алгоритмов возни-
возникает, когда задержка поступления данных находится вне кон-
контроля алгоритма. Иначе говоря, данные поступают не по за-
запросу алгоритма, а подаются на вход алгоритма в некоторые
моменты времени, никак не связанные с работой алгоритма.
144 Гл. 3. Выпуклые оболочки: основные алгоритмы
Однако мы будем считать, что поступление данных происходит
(распределено) равномерно по времени. В такой ситуации кор-
коррекция должна выполняться за время, не превышающее посто-
постоянную задержку поступления данных. Алгоритмы, работающие
в таком режиме, и называются соответственно алгоритмами ре-
реального времени. Следует отметить, что обычно открытые алго-
алгоритмы глобально являются менее эффективными по сравнению
с соответствующими закрытыми алгоритмами (какая-то плата
должна быть внесена за открытость алгоритма).
Целью этого раздела является разработка открытых алго-
алгоритмов построения выпуклой оболочки, в полной мере удовле-
удовлетворяющих конкретным требованиям.
Задача ВО5 (ОТКРЫТЫЙ АЛГОРИТМ ДЛЯ ВЫПУКЛОЙ
ОБОЛОЧКИ). На плоскости задана последовательность из N
точек ри . . . , pN. Требуется найти их выпуклую оболочку, орга-
организовав обработку таким образом, чтобы после обработки точ-
точки pi имелась СН({рь . .., р)).
Задача ВО6 (ВЫПУКЛАЯ ОБОЛОЧКА В РЕАЛЬНОМ
ВРЕМЕНИ). На плоскости задана последовательность из N то-
точек ри .. ., pN. Требуется найти их выпуклую оболочку при
условии, что время задержки поступления точек постоянно.
Соответствующий алгоритм должен поддерживать некоторое
представление текущей выпуклой оболочки и корректировать
его по мере поступления точек. Вопрос состоит в том, можно ли
сделать это, не принося в жертву оценку O(N\ogN) времени
выполнения алгоритма, необходимого на обработку всего мно-
множества точек.
Нет проблемы разработать открытый алгоритм построения
выпуклой оболочки, если время обработки не принимается во
внимание. Например, после получения каждой точки можно
было бы выполнять алгоритм Грэхема, получив при этом оценку
сложности O(.W2logN). Можно проявить большую сообрази-
сообразительность, вспомнив, что алгоритм Грэхема состоит из двух от-
отдельных шагов — сортировки и обхода.
1. Вводить точки до тех пор, пока не будут обнаружены
три неколлннеарные точки. Их центроид будет внутренней точ-
точкой окончательной выпуклой оболочки и, таким образом, под-
подходит для начала координат, относительно которого определя-
определяются полярные углы точек при сортировке в алгоритме ОБО-
ЛОЧКАГРЭХЕМА.
2. Поддерживать связанный список упорядоченных крайних
точек. При поступлении точки р,- временно вставить ее в этот
список в соответствии с ее полярным углом, затратив на это
время O(i).
3.3. Алгоритм построения выпуклой оболочки 145
3. Выполнить просмотр связанного списка крайних точек ме-
методом Грэхема. Так как просмотр методом Грэхема является
линейным, то на это потребуется лишь O(i) времени. Возможны
три варианта завершения этого шага:
a) точка pi является крайней обработанного на текущий мо-
момент множества, и ее включение в число крайних точек вызы-
вызывает удаление нескольких других точек;
b) точка pi является крайней, но никакие другие точки не
удаляются; *SlUni0^
c) точка pi является внутренней для создаваемой в!рзшлой
оболочки, и поэтому она удаляется.
В каждом случае размер списка увеличивается не более чем
на единицу. Полное время, затрачиваемое этим алгоритмом, в
худшем случае равно O(N2), что имеет место, если каждая но-
новая точка оказывается крайней точкой.
Может показаться, что предыдущая процедура могла бы
быть улучшена, если на шаге 2 можно было бы вместо линей-
линейной вставки делать бинарную вставку и в соответствии с этим
на шаге 3 более эффективно (т. е. логарифмически) выполнять
поиск вместо использования линейного просмотра методом
Грэхема.
Следуя по этому пути, Шеймос [Shamos A978)] разработал
алгоритм, который для множества из N точек выполняется гло-
глобально за время O(NlogN) и, следовательно, оптимален. Но
при этом на корректировку тратится время O(\og2N). Чтобы
определить, насколько этот алгоритм соответствует требованиям,
предъявляемым к алгоритмам для обработки в реальном вре-
времени, заметим, что нижние оценки, полученные для закрытых
алгоритмов, в равной мере применимы и к открытым алгорит-
алгоритмам. Этот факт можно использовать для получения нижних оце-
оценок времени, которое открытый алгоритм должен тратить на об-
обработку очередной порции данных. Пусть T[N) — время, ис-
используемое открытым алгоритмом в' худшем случае, при реше-
решении задачи с N элементами вводимых данных; U(i)—время,
используемое на обработку между поступлением t-ro и (i -(- 1)-го
элементов данных. Если L(N) —нижняя оценка времени, доста-
достаточного для решения задачи, то из соотношения
Г(Л0= ? U(i)>L(N) C.9)
(=i
находим нижнюю оценку для U(i).
В нашем случае совместное использование теоремы 3.2 и
соотношения C.9) приводит к следующей теореме, устанавли-
устанавливающей для заданного N нижнюю оценку для константы за-
задержки поступления данных, упомянутой в формулировке за-
задачи ВО6.
146 Гл. 3. Выпуклые оболочки: основные алгоритмы
Теорема 3.10. Любой открытый алгоритм построения выпук-
выпуклой оболочки в худшем случае должен затрачивать на обработ-
обработку между поступлением последовательных элементов данных
время Q.(\ogN).
Таким образом, можно заключить, что упомянутый выше ал-
алгоритм не удовлетворяет требованию, предъявляемому к алго-
алгоритмам реального времени. Однако впоследствии Препарата
[Preparata A979)] разработал открытый алгоритм с той же са-
самой глобальной оценкой временной сложности, но со временем
коррекции O(\ogN), что сопоставимо с оценкой времени за-
задержки поступления, установленной в теореме 3.10. Оба этих
Удаляется
Pi
\
Правая опорная
прямая
Левая опорная
прямая
Опорные точки
Рис. 3.14. Опорные прямые из точки pi к выпуклому многоугольнику Ci-\.
алгоритма тесно связаны друг с другом, и мы ограничимся
лишь обсуждением последнего из них.
Ключ к созданию эффективного открытого алгоритма дает
следующее соображение: единственное, что необходимо, — это
уметь быстро строить две опорные прямые к выпуклому много-
многоугольнику, проходящие через некоторую точку (см. разд. 3.3.5).
В частности, если точки обрабатываются в порядке ри р2, ¦.. и
pi — текущая точка, то обозначим через C,_i выпуклую оболоч-
оболочку множества {pi, р2, ¦ ¦ •, p«-i}- Необходимо построить из точки
pi опорные прямые к С-ь если они существуют (т. е. если точ-
точка pi является внешней для d-x). Таких прямых не существует
тогда и только тогда, когда точка pi является внутренней для
С;_ь В последнем случае точка pi просто удаляется. В первом
случае должна быть удалена соответствующая цепочка вершин,
заключенная между двумя опорными точками, и вместо них
должна быть вставлена точка pi. Эта ситуация показана на
рис. 3.14. Для удобства мы будем называть опорную прямую
левой или правой в соответствии с тем, по какую сторону она
находится, если смотреть из точки pi на С,-_ь
Рассмотрим построение опорных прямых из некоторой точ-
точки р к выпуклому многоугольнику С. (Структура данных для
¦3.3. Алгоритм построения выпуклой оболочки 147
представления вершин С пока не определена. Мы выберем ее
после того, как определим, какие операции с ней будут прово-
проводиться.) В последующем обсуждении важную роль будет играть
классификация вершин многоугольника С по отношению к от-
отрезку pv, соединяющему вершину v с точкой р. Вершина v на-
называете^ вогнутой (следовало бы добавить «по отношению к от-
отрезку pv», но обычно это уточнение будет опускаться), если
(а) Вогнутая (Ь) Опорная
(с) Выпуклая
Рис. 3.15. Классификация вершины v многоугольника С относительно от-
отрезка pv. (Стрелки указывают направление обхода при поиске левой опорной
прямой.)
отрезок pv пересекает внутренность многоугольника С. Иначе,
если две смежные с v вершины лежат по одну сторону от пря-
прямой, проходящей через точки р и v, вершина v называется
опорной. В оставшемся случае v называется выпуклой верши-
вершиной. Мы оставляем читателю в качестве упражнения показать,
что вершина v может быть классифицирована за постоянное
время.
Если v — опорная вершина, то на этом решение задачи за-
завершается. Предположим, что ищется левая опорная прямая.
Если точка v не является опорной, то необходимо шагать (или
еще лучше прыгать!) по вершинам многоугольника С против
или по часовой стрелке в зависимости от того, является ли v
вогнутой или выпуклой вершиной (рис. 3.15). Таким способом
148
Гл. 3. Выпуклые оболочки: основные алгоритмы
T-R(M) „_-.
R(M)
MM)
можно определить две опорные точки (если они существуют).
Если это сделано, необходимо иметь возможность удалить из
циклической последовательности вершин многоугольника С це-
цепочку вершин (возможно,
пустую) и вставить в об-
образовавшийся разрыв
точку р.
Теперь стало ясно, ка-
какой должна быть струк-
структура данных для откры-
открытого алгоритма. Необхо-
Необходимо иметь возможность
эффективно выполнять
следующие операции:
I. ПОИСК в упоря-
упорядоченной последователь-
последовательности элементов (кольце-
(кольцевого списка вершин обо-
оболочки) для определения
опорных прямых из точ-
точки ре,
П. РАСЦЕПЛЕНИЕ
последовательности на
две последовательности и
СЦЕПЛЕНИЕ двух по-
последовательностей;
III. ВСТАВКА одного
элемента (текущей точ-
точки pt).
Структура данных, в
полной мере удовлетворя-
удовлетворяющая перечисленным тре-
требованиям, хорошо изве-
известна и называется сцеп-
сцепляемой очередью1). Она
реализуется с помощью
сбалансированного по высоте дерева поиска, и при этом каждая
из указанных выше операций может быть выполнена за время
О (log г) в худшем случае, где i — число узлов дерева. Естествен-
Естественно, кольцевая последовательность вершин представляется в этой
древовидной структуре данных (называемой далее Г) цепочкой,
и при этом первый и последний элементы считаются смежными.
T-R(M)
Т-ЦМ)
Рнс. 3.16. Восемь возможных случаев в за-
зависимости от классификации вершин m, M
и угла а.
') См. разд. 1.2.3, а также [Aho, Hopcroft, UHman A974)] и [Reingold,
Nievergelt, Deo A977)], где этот вопрос рассмотрен более подробно.
3.3. Алгоритм построения выпуклой оболочки 149
В структуре Т будут выделены две вершины: m — самый левый
член цепочки и М — корневой член цепочки. Кроме того, мы
будем использовать угол Z(mpiM), который обозначим а. Этот
угол называется выпуклым, если он меньше или равен л, и во-
вогнутым в противном случае.
В зависимости от классификации вершин m и М (вогнутая,
опорная или выпуклая) и угла а возможны всего восемнадцать
случаев. Однако все эти случаи можно свести к восьми (покры-
(покрывающим вес возможности), сведенным в табл. I и показанным
Таблица I
Случай
1
2
3
4
5
6
7
8
а
выпуклый
выпуклый
выпуклый
выпуклый
вогнутый
вогнутый
вогнутый
вогнутый
m
вогнутая
вогнутая
невогнутая
невогнутая
выпуклая
выпуклая
невыпуклая
невыпуклая
М
вогнутая
невогнутая
выпуклая
невыпуклая
выпуклая
невыпуклая
вогнутая
невогнутая
на рис. 3.16. Диаграммы на рис. 3.16 расшифровываются сле-
следующим образом: окружность, на которой лежат точки Mum,
обозначает многоугольник Р; упорядоченная последовательность
вершин начинается в точке m и располагается по окружности
в порядке против часовой стрелки; L(M) и R(M)—это после-
последовательности вершин, хранимые в левом и правом поддеревьях
корня дерева Т.
Каждый из представленных на рис. 3.16 случаев требует раз-
различной обработки для определения левой и правой опорных
точек, обозначаемых соответственно / и г.
Рассмотрим сначала случаи 2, 4, 6 и 8. Для этих случаев
известно, что ! и г существуют (так как р не может быть вну-
внутренней точкой многоугольника) и их следует искать в различ-
различных поддеревьях корня дерева Т (одно из этих поддеревьев
расширяется, чтобы включить сам корень). Таким образом, по-
поиск /ил должен проходить одинаково. Например, следующая
процедура осуществляет поиск вершины /:
function ЛЕВЫЙ-ПОИСК(Г)
Input: дерево Т, описывающее последовательность вершин
Output: вершина /
1. begin с :=КОРЕНЬ(Г);
2. if (рс — опорная прямая) then / := с
150
Гл. 3. Выпуклые оболочки: основные алгоритмы
3. else begin if (с — выпуклая вершина) then
Г:=ЛДЕРЕВО(с) else T:= ПДЕРЕВО(с)
4. /:= ЛЕВЫЙ-ПОИСКА)
end;
5. return /
end.
Очевидно, что функция ЛЕВЫЙ-ПОИСК проходит по дере-
дереву Г некоторый путь, затрачивая в каждом узле ограниченное
время на классификацию соответствующей узлу вершины. То
же самое имеет место и для
функции ПРАВЫЙ-ПОИСК-
Теперь рассмотрим случаи
1, 3, 5 и 7. В каждом из этих
случаев обе вершины /ил сле-
следует искать в одном и том
же поддереве корня, если они
только существуют (следует
отметить, что в случаях 1 и 7
точка р может быть внутрен-
внутренней точкой Р). Таким обра-
образом, в каждом случае процеду-
процедура поиска рекурсивно вызы-
Расцепитль Расцепить
Сцепить
Удалить
Расцепить Расцепить
к\\\\\\\
Удалить
вает себя для поиска в подде-
, реве текущего дерева1) (выби-
удалить рается поддерево, соответству-
соответствующее последовательности, об-
Рис. 3.17. Для удаления точек, ока- веденной на рис. 3.16 штрихо-
завшихся внутри выпуклой оболоч- вой линией) до тех пор, пока
ки,ц требуется выполнить различные Не встретится один из случаев
действия в зависимости от относи- о л с о о
тельного положения вершин I и г 2' 4' 6 ИЛИ 8' В ЭТОМ месте ини-
инициируется раздельный поиск
„лг с помощью функций ЛЕВЫЙ-
ПОИСК и ПРАВЫЙ-ПОИСК. Если в процессе поиска будет
достигнут лист дерева Т и при этом не имел место ни один из
случаев 2, 4, 6 или 8, то точка р является внутренней для мно-
многоугольника. В заключение отметим, что в самом общем случае
можно наглядно представить процесс поиска опорных прямых,
прослеживая начальный участок пути из корня Т до узла с, в
котором происходит разветвление пути на два. Учитывая, что
') Для того чтобы каждое рекурсивное обращение выполнялось за
время ОA), необходимо, чтобы элементы пг и М поддерева были легко
доступны. Для М, являющегося корнем дерева, это не составляет проблемы.
Однако элемент m в правом поддереве будет достижим из текущего корня,
если «прошить» дерево, т. е. ввести указатель СЛЕДУЮЩИЙ, связываю-
связывающий вершину v со следующей за ней вершиной vt+l на границе много-
многоугольника.
3.3. Алгоритм построения выпуклой оболочки 151
дерево Т сбалансировано и содержит не более i < N вершин, а
на обработку в каждом узле требуется ограниченное время, по-
получаем для времени поиска оценку O(logt).
Чтобы завершить описание, рассмотрим процедуру перестрой-
перестройки многоугольника d-i, выполняемую, если точка pi является
внешней для него. Вершины между / и г должны быть удалены,
a pi должна быть вставлена на их место. В зависимости от того,
предшествует вершина / вершине г в дереве Т или нет, требует-
требуется выполнить немного различные действия (рис. 3.17). В первом
случае необходимо дважды выполнить операцию расцепления и
один раз сцепления; во втором случае только дважды выпол-
выполняется операция расцепления.
Как уже упоминалось ранее, обе операции РАСЦЕПИТЬ и
СЦЕПИТЬ выполняются за время O(logt)- В результате, учи-
учитывая, что коррекция выпуклой оболочки может быть выполне-
выполнена за время O(logt). имеем следующую теорему:
Теорема 3.11. Выпуклая оболочка множества из N точек на
плоскости может быть найдена с помощью открытого алгорит-
алгоритма за время Q(N\ogN) со временем коррекции 9(logN), т.е.
может быть построена в реальном времени.
3.3.7- Обобщение: поддержка динамической
выпуклой оболочки
Описанный в предыдущем разделе метод можно рас-
рассматривать как метод поддержки структуры данных, описываю-
описывающей выпуклую оболочку множества точек в случае, когда допу-
допускается лишь операция добавления (вставки) точек. При этом
вполне естественно возникает вопрос: можно ли разработать
структуру данных, организующую множество точек на плоскости
и описывающую их текущую выпуклую оболочку, в предполо-
предположении, что допускаются не только добавление (вставка), но и
удаление точек?
Как можно было ожидать, на этот вопрос нет простого от-
ответа. В самом деле, в то время как в открытом алгоритме по-
построения выпуклой оболочки из разд. 3.3.6 точки, про которые
становится известно, что они являются внутренними точками
текущей выпуклой оболочки, навсегда исключаются из рассмо-
рассмотрения, в этой новой ситуации необходимо с одинаковой тща-
тщательностью организовывать все точки, содержащиеся на теку-
текущий момент в множестве, так как удаление некоторой точки
текущей выпуклой оболочки может привести к тому, что не-
несколько внутренних точек станут граничными точками новой
выпуклой оболочки (рис. 3.18). Эта задача рассматривалась
Овермарсом и Ван Леювеном. Приведем формальную постанов-
постановку этой задачи:
152
Гл. 3. Выпуклые оболочки: основные алгоритмы
Задача В07 (ПОДДЕРЖКА ОБОЛОЧКИ). Заданы изна-
изначально пустое множество 5 и последовательность из N точек
Текущая
оболочка
Удаляемая точна
Точки, становящиеся
граничными.
Рнс. 3.18. Прн удалении точки р3 точки
ками выпуклой оболочки.
и р2 становятся граничными точ-
точ(Рь Р,2, ..., Pn), каждая из которых либо добавляется к мно-
множеству 5, либо удаляется из него (разумеется, точка может
быть удалена лишь при условии, что она содержится в 5). Тре-
Требуется поддерживать выпук-
выпуклую оболочку множества 5.
Теперь мы проиллюстрируем
очень интересное решение этой
задачи, предложенное Овер-
марсом и Ван Леювеном [Over-
mars, van Leeuwen A981)].
Прежде всего мы использу-
используем тот факт, что граница вы-
выпуклой оболочки представляет
объединение двух (выпуклых)
монотонных ломаных линий
(цепей). Эти ломаные огра-
ограничивают оболочку сверху и
снизу и в соответствии с этим
называются В-оболочкой и Н-оболочкой множества точек («В»
обозначает верхнюю, а «Н» — нижнюю оболочку). Например,
В-оболочка множества точек 5 получается как обычная выпук-
выпуклая оболочка множества SU{°°H} (рис. 3.19), где ооя точка
плоскости с координатами @,—ооI). Поняв, что выпуклая обо-
оболочка множества S тривиально получается в результате пере-
Рнс. 3.19.
точек.
В-оболочка множества
') Это понятие уже использовалось при обсуждении предложенного
Эндрью варианта алгоритма построения оболочки методом Грэхема (см.
разд. 3.3.2).
3.3. Алгоритм построения выпуклой оболочки 153
сечения (сцепления) его В-оболочки и Н-оболочкн, можно огра-
ограничить обсуждение вопросом построения одной из них, скажем
В-оболочки.
Нет ничего удивительного в том, что как открытый алгоритм
построения выпуклой оболочки, рассмотренной в разд. 3.3.6, так
и настоящий полностью динамический метод используют в ка-
качестве структур данных деревья. Однако в представлениях обо-
оболочки в этих двух подходах имеется существенное различие.
При первом подходе каждый узел дерева представляет некото-
некоторую точку множества. При втором подходе только листья дерева
используются для представления точек, а каждый внутренний
узел представляет В-оболочку точек, соответствующих его ли-
листьям.
Соответствующая структура данных Т организована следую-
следующим образом. Ее основой является сбалансированное по высоте
двоичное дерево поиска Т (с некоторой предосторожностью
вместо него можно было бы использовать 2-3-дерево (Aho, Hop-
croft, Ulman A974), (с. 169 русского издания)]), листья кото-
которого используются для хранения точек текущего множества. Про-
Процедура поиска будет производиться в соответствии со значением
абсциссы (х-координаты) точек, так что прохождение листьев
дерева слева направо дает множество точек, упорядоченное по
х-координате. Заметим, что последовательность точек В-оболоч-
В-оболочки (ее вершин) также упорядочена по возрастанию абсциссы, и,
следовательно, она является подпоследовательностью глобаль-
глобальной последовательности точек, хранящейся в листьях дерева.
Пусть v — узел дерева Т. Обозначим через ЛСЫН[у] и
ПСЫН[и] его левого >и правого потомков соответственно. Мы
хотим научиться строить В-оболочку точек, хранящихся в ли-
листьях поддерева с корнем в узле v. Так как для этого надо бу-
будет выполнять сцепление и расцепление цепей вершин, то мы
предполагаем, что каждая такая цепь представлена в виде
сцепляемой очереди (см. разд. 3.3.6). Обозначим через U(v)
В-оболочку множества точек, хранящихся в листьях поддерева
с корнем в v. Следуя принципу индукции, предположим теперь,
что уже имеются ?/(ЛСЫН[и]) и ?/(ПСЫН [v]), т. е. В-оболочки,
связанные с потомками узла v. Каким образом можно построить
U(vO Взгляните на рис. 3.20. Все, что необходимо сделать,—
это определить две опорные точки р\ и р2 единственного общего
опорного отрезка для двух оболочек. Здесь нам необходима
функция СОЕДИНИТЬ (?/ь U2), позволяющая найти опорный
отрезок для двух В-оболочек U{ и Ц2. Функция СОЕДИНИТЬ
позволяет эффективно расцеплять U\ на две цепи, составляю-
составляющие упорядоченную пару (Un, Ui2) (рис. 3.20), и аналогичным
образом U2— на пару цепей (U2U U22). При этом выполняется
следующее условие: опорная точка р\ е U\ входит в состав Un,
154 Гл. 3. Выпуклые оболочки: основные алгоритмы
а точка рг ^ U% входит в состав U22 (т. е. в обоих случаях опор-
опорная точка принадлежит «внешней» подцепи). На этом этапе,
сцепив Un и U22, получаем искомую В-оболочку U\ U U2. Есте-
Естественно, чтобы каждый узел v дерева Т указывал на сцепляе-
сцепляемую очередь, представляющую ту часть 0(v), которая не при-
принадлежит ?/(ОТЕЦ[у]).
Предположим, что мы хотим выполнить обратную операцию,
т.е., имея U(v), получить ?/(ЛСЫН{у]) и U(UCUH{v]). Все, что
требуется в этом случае, так это знать ребро р\Р%, соединяющее
опорные точки, т. е. одно целое число J[v], указывающее поло-
положение точки р\ в цепи вершин U(v). Имея эту информацию,
* и, = и(лсын[и])ч* иг = и(псын[и])\* >
Рис. 3.20. Для построения В-оболочкн объединения оболочек ?/, и L/2 необ-
необходимо построить общий опорный отрезок (мост) р\рг-
можно расцепить U(v) на цепи f/ц и ?/22, которые в свою оче-
очередь могут быть сцеплены с цепями, хранящимися в ЛСЫН[у]
и ПСЫН[у] соответственно. В заключение структура данных Т
дополняется следующими атрибутами, связываемыми с каждым
узлом v дерева Т:
1. указатель на сцепляемую очередь Q[v], содержащую часть
U{о), не входящую в t/(OTEUJ[w]) (если v является корнем, то
Q[v]= U(v));
2. целым числом J[v], указывающим положение (индекс) ле-
левой опорной точки в U(v).
Эта интересная структура данных использует память объ-
объемом лишь O(N), где N — размер текущего множества точек.
В самом деле, дерево Г, являющееся основой структуры данных,
имеет N листьев я N — 1 узлов на более высоких уровнях, в то
время как множества точек, хранимые в сцепляемых очередях,
представляют разбиение множества всех точек.
Учитывая, что операции расцепления и сцепления сцепляе-
сцепляемых очередей являются стандартными, наше внимание будет со-
сосредоточено на операции, выполняемой функцией СОЕДИНИТЬ,
для которой Овермарс и Ван Леювен [Overmars, van Leeuwen
A981)] предложили следующее решение:
3.3. Алгоритм построения выпуклой оболочки
155
Лемма 3.1. Соединение двух разделимых выпуклых цепей,
содержащих в сумме N точек, может быть выполнено за
O(\ogN) шагов.
Доказательство. Пусть даны две В-оболочки f/, и (/2 и две
вершины ^ е (/i и <?2 е U2. Каждая из этих двух вершин может
быть легко классифицирована по отношению к отрезку qxq2 как
выпуклая, опорная или вогнутая (см. разд. 3.3.6, где дано объ-
объяснение этих терминов). В зависимости от этой классификации
Вогнутая
Опорная
Выпуклая
Вогнутая
ftfl
(см. [Ь))
m
Опорная
ГГТП
Выпуклая
f 11
ПО
1 * ¦* 1 11 1 1 -f -f I
решение найдено
п
1
ч
гпй
(a)
Рис. 3.21. (а) Все возможные случаи, возникающие при выборе некоторой
вершины в Ui и некоторой вершины в U2; (b) иллюстрация случая (вогну-
(вогнутая, вогнутая).
возможны девять случаев, схематически показанных на
рис. 3.21 (а). Пилообразной линией на рисунке обозначены под-
подцепи, которые можно не рассматривать в дальнейшем, так как
они не содержат опорных точек. Все представленные случаи по-
понятны без дополнительных объяснений, за исключением случая
(qu Яг) = (вогнутая, вогнутая), который более детально пред-
представлен на рис. 3.21 (Ь). Пусть прямая U проходит через q\ и
ее правого соседа на 0\. Аналогично прямая h проходит через
q2 и ее левого соседа на \J% Обозначим через р точку пересече-
пересечения прямых /j и U. Напомним, что по предположению U\ и U2
разделимы вертикальной прямой /. Предположим для начала,
что точка р находится справа от прямой /. Легко видеть, что
опорная точка р\ может принадлежать лишь заштрихованной на
156
Гл. 3. Выпуклые оболочки: основные алгоритмы
рис. 3.21 (b) области и что точка и имеет меньшую ординату,
чем точка v. Отсюда следует, что любая вершина q'\ принадле-
принадлежащая правой относительно q% подцепи, является вогнутой от-
относительно отрезка q'q", где q' — произвольная вершина Vv
Поэтому очевидно, что цепь справа от вершины q2 можно не
рассматривать, но что касается цепи слева от вершины q\, то
Структура данных Т _/\(И, 4, h 5,12),3
Рис. 3.22. Множество точек на плоскости и соответствующая ему структура
данных Т.
для нее нельзя сделать подобное утверждение. Если точка пере-
пересечения р находится слева от разделяющей прямой /, то можно
показать, что цепь слева от вершины q\ можно не рассматривать.
Во всех случаях удаляется некоторая часть одной пли двух
оболочек. Если этот процесс начинается с корневых вершин
обоих деревьев, представляющих U\ и U2 соответственно, то,
так как эти деревья являются сбалансированными, время вы-
выполнения функции СОЕДИНИТЬ(U\, U2) составит O(logiV),
где N — это, как обычно, суммарное число вершин в двух обо-
оболочках.
Имея функцию СОЕДИНИТЬ, можно анализировать процесс
динамической поддержки выпуклой оболочки на плоскости. Ти-
Типичная ситуация показана на рис. 3.22. Номера точек соответ-
соответствуют порядку, в котором они добавлялись к множеству.
3.3. Алгоритм построения выпуклой оболочки
157
В структуре данных Т каждый лист соответствует точке, а каж-
каждый узел, не являющийся листом, соответствует мосту (т. е.
опорному отрезку, соединяющему две оболочки). Для каждого
такого узла указана пара Q[v], J[v]. Легко понять, что структура
данных описывает некоторое свободное дерево на текущем мно-
множестве точек, которое называется деревом оболочки. Читателю
Вставить р13
, 4,1,13,12), 3
Рис. 3.23. Вставка точки pi3. При вставке затронуты узлы: {A1, 4, 1, 13,
12), 3}, {B), 2}, {@), 1}, {E), 1}, {A0), 1}, {13}.
следует затратить немного времени, чтобы полностью разобрать-
разобраться во всех деталях рис. 3.22.
Предположим теперь, что ми хотим вставить новую точку р.
Процедура вставки должна не только давать сбалансированное
по высоте дерево Т, используя для этого обычный метод балан-
балансировки [Reingold, Nievergelt, Deo A977)], но и делать все не-
необходимое для того, чтобы была полная уверенность в том, что
сцепляемая очередь, связанная с каждой вершиной, по-прежне-
по-прежнему удовлетворяет требованиям, указанным в определении
структуры данных Т. Предположим для простоты, что баланси-
балансировка не требуется (все действия по балансировке просто уве-
увеличивают не имеющим значения способом число узлов, подле-
158 Гл. 3, Выпуклые оболочки: основные алгоритмы
жащих обработке, не приводя к каким-либо принципиальным
отличиям). Поэтому будем считать, что точка р\Ъ добавляется
к множеству точек, представленному на рис. 3.22, как это пока-
показано на рис. 3.23. На этом рисунке показано также состояние
структуры данных Т после вставки точки р13. Заметим, что рп
однозначно определяет путь из корня дерева Т к листу, в кото-
который должна быть вставлена ри- Двигаясь по этому пути из
корня, в каждом узле, находящемся на этом пути, мы собираем
В-оболочку, относящуюся к этому узлу, и затем, используя па-
параметр J[v], разбиваем ее на части, чтобы передать двум потом-
потомкам этого узла соответствующие им части. Действуя таким спо-
способом, будем иметь в каждом узле и, являющемся братом од-
одного из узлов на этом пути, полное представление U(u) в виде
сцепляемой очереди Щи]. Более формально такой спуск по де-
дереву с целью вставки точки р осуществляется путем вызова
процедуды СПУСК (корень (Т), р). СПУСК (v, p) —это рекур-
рекурсивная процедура, использующая функции РАСЦЕПИТЬ и
СЦЕПИТЬ, обсуждавшиеся ранее. Приведем описание этой про-
процедуры:
procedure СПУСК(и.р)
begin if (и ф лист) then
begin(QL, <гя):=РАСЦЕПИТЬ(?/[р]; J[v])
и[ЛСЫЩи}] := СЦЕПИТЬ^,С?[ЛСЫНМ]);
?/[ПСЫН[о]] := СЦЕПИТЬ(<Э[ПСЫНМ],<Эя);
if (*[p]<*[w]) then у:=ЛСЫН[у] else v:=
ПСЫВД;
СПУСК(о.р)
end
end.
Здесь мы вставляем новый лист и начинаем двигаться по
тому же самому пути в Г к корню дерева. При достижении каж-
каждого узла v, лежащего на этом пути, у нас имеется полная
В-оболочка, относящаяся к этому узлу. Как уже было показано,
в узле v доступна также В-оболочка брата узла v. Так что те-
теперь мы соединяем эти две оболочки, используя эффективное
расцепление В-оболочки U[v] на две части Qt и Q2 и соответ-
соответственно ?/[БРАТ[и]] на Q3 и Q4. Части Q2 и Q3 должны сохра-
сохраняться в узлах v и БРАТ{и] соответственно, в то время как часть
Q\ должна быть передана в узел, являющийся отцом узла v, где
она будет сцеплена с аналогичной частью Q*, полученной от
брата узла v. Таким образом мы получили В-оболочку узла,
являющегося отцом узла v, и подъем к корню дерева может
быть продолжен. И вновь, если говорить более формально, мы
используем следующую процедуру:
ЗА. Выпуклые оболочки размерности большей двух 159
procedure ПОДЪЕМ(у)
begin \\(v ф корень) then
begin(Q,,Q2,Q3,Q4, /):=СОЕДИНИТЬ(?/[о],
U[EPAT[v}});
<2[ЛСЫН[ОТЕЦ[у]]]:=<22;
Q[nCbIH[OTEU[o]]]:=Q,;
U[OTEl\[v\] := СЦЕПИТЬ^ ,Q4);
/[ОТЕЦ[оЦ:=/;
ПОДЪЕМ(ОТЕЦ[у])
end;
else Q[v]:=U[v]
end.
Рассматривая эти процедуры с точки зрения времени их вы-
выполнения, напомним, что каждая из процедур РАСЦЕПИТЬ и
СЦЕПИТЬ выполняется за время O(\ogk), где k — размер оче-
очереди до расцепления или после сцепления. Так как k ^ N, то
видно, что время обработки одного узла в процедуре СПУСК
составляет O(\ogN). А так как глубина дерева Т также равна
O(logiV), то время выполнения процедуры СПУСК равно
O(\og2N) в худшем случае. Что касается процедуры ПОДЪЕМ,
то, как мы видели ранее, время выполнения процедуры СОЕДИ-
СОЕДИНИТЬ также равно O(logjV), и поэтому та же оценка приме-
применима и в этом случае. Аналогичный анализ времени выполнения
можно использовать и в случае удаления точки из текущего
множества, и мы оставляем его в качестве упражнения для чи-
читателя. Таким образом, можно подвести итоги этого раздела,
сформулировав следующую теорему:
Теорема 3.12. Динамическая поддержка В-оболочки и Н-обо-
лочки множества из N точек на плоскости может быть выпол-
выполнена с временными затратами на операции вставки и удаления,
равными О (log2 N) в худшем случае.
Заметим, что если пользоваться этим методом для построе-
построения выпуклой оболочки множества из N точек в случае, когда
допускается только добавление точек, то получим оценку для
времени выполнения O(N\og2N), более высокую по сравнению
с O(N\ogN) для менее «мощного» метода. Ясно, что это яв-
является платой за использование метода, более мощного, чем
требуется в конкретной задаче.
3.4. Выпуклые оболочки в пространствах
размерности большей двух
Теперь мы готовы к тому, чтобы рассмотреть задачу
построения выпуклой оболочки конечного множества точек в
пространствах размерности большей двух. Мы уже видели, что
160 Гл. 3. Выпуклые оболочки: основные алгоритмы
такая оболочка является выпуклым политопом. Мы также ви-
видели, что политопы в случае большого числа измерений уже не
являются такими простыми геометрическими объектами, как их
двумерные аналоги — выпуклые многоугольники. Однако напо-
напомним, что в трехмерном пространстве число вершин v, число
ребер е и число граней / границы оболочки (многогранной по-
поверхности) связаны формулой Эйлера v — е + / = 2.
В случае пространств высокой размерности удобно исполь-
использовать следующие понятия. Будем говорить, что точка р нахо-
находится под гипергранью F политопа Р, если р лежит в открытом
• р, находите?
выше F
aff(F)
• рг находится ниже F
Рнс. 3.24. Иллюстрация понятий «под» и «над» в двумерном случае.
полупространстве, определяемом гиперплоскостью aff(i7) и со-
содержащем Р. (Другими словами, aff (Р) является опорной гипер-
гиперплоскостью к Р, а р и Р принадлежат одному и тому же полу-
полупространству, ограничиваемому этой гиперплоскостью.) Точка р
находится над F, если р лежит в открытом полупространстве,
определяемом aff(f) и не содержащем Р. Рис. 3.24 иллюстри-
иллюстрирует эти понятия в двумерном случае.
3.4.1. Метод «заворачивания подарка»
Как упоминалось ранее (разд. 3.1.2), неизвестны ра-
разумно эффективные алгоритмы построения выпуклой оболочки
конечного множества точек, которые не порождали бы полного
описания границы (граф граней) выпуклой оболочки политопа.
Поэтому в случае uf-мерного пространства необходимо тщатель-
тщательно организовывать процедуру вычисления гиперграней выпуклой
оболочки, чтобы ограничить возможные дополнительные затра-
затраты. Важным шагом в этом направлении является метод «заво-
«заворачивания подарка», предложенный Чандом и Капуром [Chand,
Kapur A970)]. Этот метод был проанализирован более чем де-
десятилетие спустя Бхаттачарья [Bhattacharya A982)].
3.4. Выпуклые оболочки размерности большей двух 161
Основная идея метода заключается в последовательном пе-
переходе от одной гиперграни к смежной с ней гиперграни при-
примерно так, как это происходит при заворачивании в лист бу-
бумаги объекта, ограниченного плоскими гранями. Простейшим
примером этого подхода является метод обхода Джарвиса, об-
обсуждавшийся ранее (разд. 3.3.3): в этом случае материал, ис-
используемый для заворачивания, больше похож на тесемку, чем
на лист бумаги. Идея метода более естественно воспринимается
в трехмерном пространстве, и мы часто будем обращаться имен-
именно к этому случаю, чтобы привлечь интуицию читателя. Однако
необходимо подчеркнуть, что обсуждение на примере трехмер-
трехмерного пространства обусловлено причинами, связанными чисто
с представлением материала, и при этом нисколько не ограни-
ограничивается общность рассматриваемого подхода. Последующее об-
обсуждение основано на предположении о том, что результирую-
результирующий политоп является симплициальным (см. разд. 3.1). Позже
мы прокомментируем ситуацию в общем случае.
Напомним, что для симплициального fif-политопа каждая его
гипергрань, являющаяся (d—1)-симплексом, определяется в
точности d вершинами. Кроме того, справедлива теорема, непо-
непосредственно следующая из сказанного.
Теорема 3.13. В симплициальном политопе некоторая под-
грань является общей в точности для двух гиперграней и две
гиперграни F\ и F2 имеют общую подгрань е тогда и только
тогда, когда е определяется общим подмножеством из (d—1)
вершины для множеств вершин, определяемых Ft и F2 (в этом
случае F\ и F2 называются смежными по е).
Эта теорема служит основой для рассматриваемого метода,
который использует некоторую подгрань е уже построенной ги-
гиперграни Fi для построения смежной с ней гиперграни F2, имею-
имеющей с F\ общую подгрань е. В этом смысле подграни являются
основными геометрическими объектами рассматриваемого ме-
метода ').
Пусть 5 = {р\, р2, . . . , pN} — конечное множество точек в Ed
и предположим, что известна некоторая гипергрань F выпуклой
оболочки СНE) вместе со всеми своими подгранями. Механизм
перехода от гиперграни F к смежной с ней гиперграни F', имею-
имеющей с F общую подгрань е, заключается в определении среди
всех точек множества 5, не являющихся вершинами F, такой
точки р', что все другие точки находятся под гиперплоскостью
aff(e U р'). Другими словами, среди всех гиперплоскостей, опре-
г) В самом деле, характеристика метода «заворачивания подарка» как
«ориентированного на ребре» означает в нашей терминологии «ориентиро-
«ориентированный на подграни».
162
Гл. 3. Выпуклые оболочки: основные алгоритмы
деляемых е и некоторой точкой из S, не принадлежащей F,
ищется гиперплоскость, образующая «наибольший угол» (в не-
некотором смысле) с aff(F). Для случая d = 3 эта ситуация пока-
показана на рис. 3.25(а). Здесь просматривается совокупность полу-
полуплоскостей, имеющих общую прямую, проходящую по ребру е,
и среди них ищется полуплоскость, образующая наибольший
угол <я (выпуклый угол) с полуплоскостью, содержащей F.
На рис. 3.25(а) искомая полуплоскость содержит точку р6.
aff(F)
(a) (b)
Рис. 3.25. (а) —Иллюстрация выбора полуплоскости, определяемой ребром е
н точкой р6 и образующей наибольший выпуклый угол с полуплоскостью,
содержащей F; (Ь) — иллюстрация вычисления котангенса угла.
Сравнение углов производится через сравнение котангенсов
этих углов. Пусть п — единичная нормаль к F (в полупростран-
полупространстве под aff(F)), a a — единичный вектор, ортогональный как
ребру е, так и вектору п (таким образом, ориентация вектора а
аналогична ориентации вектора nXWi)- Обозначим через v*
вектор p2pk. Котангенс угла, образованного гиперплоскостью,
содержащей F, с гиперплоскостью, содержащей е и pk, задается
отношением | Up2\/\UV\, где \Up2\ = у*-аг и \UV\ = Vk-nT.
Таким образом, для каждой точки pk, не принадлежащей F,
вычисляется значение
P*4-vft-ar/vft-nr C.10)
и выбирается такое р/, что
pf = maxpft. C.11)
k
В случае, когда результирующий политоп является симплици-
альным, последнее уравнение имеет единственное решение.
ЗА. Выпуклые оболочки размерности большей двух 163
Представив наглядным образом ситуацию в привычном для
нас трехмерном пространстве, легко показать, что в простран-
пространстве произвольной размерности d соотношения C.10) и C.11)
дают решение нашей задачи. Вычислительную сложность этой
примитивной операции можно легко оценить. Предположим, что
вектор п известен (это единичная нормаль к aff(F)), и будем
считать, что подгрань е определяется вершинами lp'v р'2, ...
..., ра_Л. Следовательно, вектор а ортогонален вектору п и
каждому из (d — 2) векторов p[p'd_x и может быть определен в
результате решения системы из (d — 2) уравнений с (d—1)
неизвестными с последующим нормированием результата, чтобы
получить вектор единичной длины. Эта процедура включает
O(d3) арифметических операций. Для вычисления каждого р*
требуется O(d) арифметических операций, а выбор р,- осуще-
осуществляется за O(Nd) операций. Теперь можно построить единич-
единичную нормаль к новой гиперграни F'. Эта нормаль пропорцио-
пропорциональна вектору —р*а + п. Таким образом, полная сложность
процедуры перехода от гиперграни F к смежной с ней гипергра-
гиперграни F' (шаг «заворачивания подарка») равна O(d3) -{-O(Nd).
Поняв механизм основной операции «заворачивания подар-
подарка», можно описать организацию всего алгоритма в целом. Ал-
Алгоритм начинает свою работу с некоторой исходной гиперграни
(далее мы увидим, как найти ее) и для каждой ее подграни
строит смежную гипергрань. Затем он переходит к новой гипер-
гиперграни и продолжает подобную обработку до тех пор, пока не
будут построены все гиперграни. Для каждой вновь полученной
гиперграни строятся все ее подграни и при этом поддерживает-
поддерживается список всех подграней, являющихся кандидатами на исполь-
использование на шаге «заворачивания подарка». (Отметим, что не-
некоторая подгрань е, общая для гиперграней F и F', может рас-
рассматриваться в качестве такого кандидата лишь в случае, когда
либо F, либо F', но не обе одновременно была построена в про-
процессе «заворачивания подарка».) Упорядоченный обход всех
гиперграней лучше всего организовать, использовав обычную
очередь гиперграней Q и файл 0~, содержащий подграни.
procedure ЗАВОРАЧИВАНИЕ-ПОДАРКА^, .... ры)
1. begin Q:=0; 9~' := 0;
2. F := найти некоторую исходную гипергрань
выпуклой оболочки;
3. 0~ <= подграни гиперграни F;
4. Q<=F;
5. while(Q=? 0) do
6. begin F<=Q(* выбрать первый элемент
из очереди *)
7. Т := подграни гиперграни F;
б*
164 Гл. 3. Выпуклые оболочки: основные алгоритмы
8. for each e^T [\T do (* е является
кандидатом для шага "заворачивания
подарка"*)
9. begin F' := гипергрань, смежная с F по
е (*"заворачивание подарка"*)
10. вставить в 3~ все подграни F',
которых еше нет в файле, и
удалить те из них, которые там
уже имеются;
11. Q<=F'
end;
12. выдать F
end
end.
Этот алгоритм содержит несколько основных этапов, реали-
реализацию которых необходимо теперь проанализировать более
подробно:
Шаг 2: Найти некоторую исходную гипергрань выпуклой обо-
оболочки.
Шаг 7: Построить подграни гиперграни F.
Шаг 8: Проверить, является ли подгрань е кандидатом на ис-
использование в последующей обработке.
Шаг 9 представляет собой шаг «заворачивания подарка», об-
обсуждавшийся ранее.
Рассмотрим теперь каждую из указанных операций и оце-
оценим их сложность.
Шаг 2. «Найти некоторую исходную гипергрань выпуклой
оболочки». Идея состоит в том, чтобы путем последовательной
аппроксимации получить гиперплоскость, содержащую гипер-
гипергрань выпуклой оболочки. То есть путем построения последова-
последовательности из d опорных гиперплоскостей jxi, л2, ..., nd, каждая
из которых имеет с выпуклой оболочкой на одну общую верши-
вершину больше, чем предыдущая гиперплоскость. ПЪ сути, этот ме-
метод является видоизменением механизма «заворачивания подар-
подарка», когда на /-й из d итераций гиперплоскость п/ содержит
(/—1) -грань выпуклой оболочки. Таким образом, процедура
начинается с определения точки с наименьшей первой коорди-
координатой (х\). Назовем эту точку р\. Эта точка со всей очевид-
очевидностью является вершиной @-гранью) выпуклой оболочки. По-
Поэтому, гипергрань щ выбирается ортогональной вектору A,
0, .... 0) и при этом должна проходить через точку р\. Сделав
таким образом начальную итерацию, на /-й итерации (/ = 2, ...
. . . , d) получим гиперплоскость n/_i с нормалью п^, содержа-
содержащую вершины р[, р'2, ..., р',у Вектор а,- выбирается ортогональ-
3.4. Выпуклые оболочки размерности большей двух
165
ным к нормали п/_ь каждому из (/ — 2) векторов р[р'2, р[р'3, ¦ . .
•••yp'ip'i-i и каждой из координатных осей х/+ь х,-+2, ¦¦¦, xd.
Эти (d—1) условий определяют вектор а,-, и, следовательно,
теперь можно выполнить основную операцию по «заворачива-
«заворачиванию», использовав для этого векторы а/ и п/_ь На рис. 3.26
показана последовательность гиперплоскостей для случая d = 3.
Вычислительные затраты на каждой итерации связаны главным
Рис. 3.26. Последовательность гиперплоскостей (яь Яг, Яз) такова, что я3
содержит гипергрань, которая берется в качестве исходной для процедуры
построения выпуклой оболочки.
образом с построением вектора а;- и выбором очередной точки
p'h Последняя операция имеет сложность O(Nd), в то время
как для определения вектора а,- требуется лишь время O(d2),
так как а; получается в результате добавления в точности одно-
одного линейного ограничения к ограничениям, определяющим век-
вектор a/_i. Таким образом, поскольку выполняется d итераций,
построение исходной грани завершается за время O(Nd2) +
+ O(d3) = O(Nd2), учитывая при этом, что N ^г d.
Шаг 7. «Построить подграни гиперграни F». В силу сделан-
сделанного предположения о симплициональности политопа каждая
гипергрань определяется в точности d вершинами, а каждое
подмножество, содержащее (d— 1) вершин гиперграни F, опре-
определяет подгрань. Таким образом, можно за время O(d2) оче-
очевидным способом построить подграни гиперграни F. Каждая ги-
гипергрань будет описываться (i-компонентным вектором индексов
ее вершин, а подгрань — аналогичным (d—1)-компонентным
вектором.
Шаг 8. «Проверить, является ли подгрань е кандидатом на
использование в последующей обработке». Подгрань является
166 Гл. 3. Выпуклые оболочки: основные алгоритмы
кандидатом, если она содержится лишь в одной грани, поро-
порождаемой алгоритмом, и, следовательно, если поддерживается
файл 2Г таких подграней, то требуемым тестом является про-
просмотр этого файла. Как отмечалось выше, подгрань описывается
(d— 1)-компонентным вектором из целых чисел (индексов опре-
определяющих ее вершин). Можно упорядочить файл 0" в соответ-
соответствии с лексикографическим порядком и хранить его в виде сба-
сбалансированного по высоте бинарного дерева поиска. Если име-
имеется некоторая подгрань е, то потребность в доступе к 0~ может
возникнуть в двух случаях: либо для проверки принадлежности
е к числу кандидатов (шаг 8 алгоритма), либо для изменения
файла (шаг 10 алгоритма). В первом случае просматривается
файл 0~ и определяется, содержит ли он е. Во втором случае
также происходит просмотр файла 0~ с целью определения
принадлежности е файлу, но, кроме того, если е уже содержится
в файле, то она удаляется, в противном случае она добавляется
в файл. В обоих случаях просмотр файла осуществляется за
время O(dlogM), где М — размер файла, ограниченный сверху
величиной SF(d, N), равной максимальному числу подграней ').
Теперь можно оценить полную сложность алгоритма. Слож-
Сложность начального этапа работы алгоритма (шаги 1—4) состав-
составляет O(Nd2). Шаги 6, 11 и 12 (добавление в очередь и удаление
из очереди или вывод гиперграни) можно рассматривать сов-
совместно. Если обозначить через <pd-i и <р<*_2 действительные числа
соответственно гиперграней и подграней политопа, то их пол-
полная сложность равна О(с?)Хф<2-ь Полная сложность шага 7 —
порождение всех подграней — равна 0(сОХф<*-2, так как каж-
каждая подгрань строится за время O(d) и порождается дважды.
Проверка, выполняемая на шаге 8, так же как и изменение
файла на шаге 10, выполняется за время O(cMog ф<*_2) на каж-
каждую подгрань, так что полная сложность составляет
О (d log ф<*-2) X ф<*-2- Наконец, полная сложность шага 9 — шаг
заворачивания — равна ф^-iX(О(d3) + O(Nd)). Если вспомнить,
что максимальное значение как для ф<г-1, так и для ф<*_2 равно
О (Af /2 ), то получим следующий результат:
Теорема 3.14. Выпуклая оболочка множества из N точек в
d-мерном пространстве может быть построена методом «завора-
«заворачивания подарка» за время T(d, N)= O(N-q>d-i) + О(ф<*-гХ
X log ф<*_2). Таким образом, в худшем случае имеем T(d, N) =
(u'2J+1) (^Ld'2J)
В заключение отметим, что нельзя игнорировать тот факт,
что рассмотренный выше метод применим в предположении
SF (d, N) = О1) (Nl d/2J) [Grunbaum A967), 9.6.1].
3.4. Выпуклые оболочки размерности большей двух 167
симплициальности результирующего политопа. Что происходит
в общем, хотя практически невероятном случае, когда гипергра-
гиперграни содержат более d вершин? Если гипергрань F не является
симплексом, то уравнение C.10) имеет более одного решения,
т. е. в множестве 5 имеются несколько точек, реализующих это
условие. Все эти точки принадлежат гиперплоскости aff(F).
Однако для того, чтобы определить состав граней, входящих в F
(т.е. (d— 2)-грани, ..., 0-грани), необходимо в свою очередь
(рекурсивно) решать (d— 1)-мерную задачу построения выпук-
выпуклой оболочки в aff(F). Таким образом, процедура порождения
подграней, не вызывавшая затруднений в случае симплициаль-
ного политопа, становится значительно более сложной. А рекур-
рекурсивное определение алгоритма для общего случая, естественно,
существенно затрудняет его анализ.
3.4.2. Метод «под-над»
В течение длительного времени метод «заворачивания
подарка» оставался единственным из известных общих методов
построения выпуклой оболочки конечного множества точек в
(i-мерном пространстве. Новый метод, названный «под-над», был
предложен Кейли [Kallay A981)]. Этот алгоритм обладает так-
также свойством открытости.
Основная идея метода существенно отличается от используе-
используемой в методе «заворачивания подарка» и довольно близка идее,
используемой в алгоритме для динамической двумерной выпук-
выпуклой оболочки, описанном в разд. 3.3.6. На содержательном уров-
уровне этот метод последовательно обрабатывает по одной точке,
назовем ее р, и если р — внешняя точка по отношению к теку-
текущей оболочке Р, то из точки р строится опорный «конус» к Р
и удаляется часть оболочки Р, затеняемая этим конусом. (Ис-
(Использование терминов «конус» и «затенение» происходит по ана-
аналогии с трехмерным случаем.) Рассматриваемый метод основан
на следующей теореме [McMullen, Shephard A971), p. 113]:
Теорема 3.15. Пусть Р — политоп, а р — точка в простран-
пространстве Ed. Введем обозначение Р' = СН(Р U р). Тогда для каж-
каждой грани Р' справедливо одно из двух утверждений:
A) грань f политопа Р является также гранью Р' тогда и
только тогда, когда существует гипергрань F политопа Р такая,
что f cz F и р находится под F;
B) если f — грань политопа Р, то f = CH(fUp) является
гранью Р' тогда и только тогда, когда либо
(а) среди гиперграней политопа Р, содержащих f, имеется
по крайней мере одна такая, что р находится под ней, и по
крайней мере одна такая, что р находится над ней, либо
bff(f
168 Гл. 3. Выпуклые оболочки: основные алгоритмы
Интуитивно понятно, что случай A) относится к гипергра-
гиперграням политопа Р, незатеняемым конусом и которые становятся
гипергранями Р', представляющего измененную выпуклую обо-
оболочку. (См. рис. 3.27, на котором показаны все случаи на при-
примере простого, но вместе с тем не теряющего общности двумер-
двумерного пространства.) Случай B) относится к гиперграням ко-
конуса. В частности, пункт (а) случая B) определяет грани, на
которые опирается конус, а пункт (Ь) определяет вырожденный
случай (Z)( a)
/ CU(fg\Jp)
/ случай (Z){b)
Рис. 3.27. Иллюстрация случаев, рассматриваемых в теореме 3.15.
вариант ситуации, определяемой в пункте (а). Заметим, что в
п. (а) случая B), размерность грани f = CH(f U р) оболочки Р'
на единицу больше размерности грани f политопа Р. И хотя в
общем случае целью является построение лишь гиперграней вы-
выпуклой оболочки, эффект увеличения размерности, имеющий
место в п. (а) случая B), вынуждает иметь необходимое описа-
описание всех граней текущего политопа.
Так как алгоритм является открытым, т. е. выпуклая оболоч-
оболочка строится путем последовательного добавления по одной точ-
точке, то потребуется по крайней мере (d-{-I) итераций, прежде
чем текущий политоп будет иметь размерность d. Это значит,
что сначала получается 0-грань, затем 1-грань и т. д. Однако
механизм перестройки выпуклой оболочки остается тем же са-
самым, и далее он будет описан в общем случае. Для простоты
предполагается, что точки находятся в общем положении, так
что вырождение не имеет места.
Адекватное описание текущего политопа Р дает его граф
граней Н{Р) (т.е. диаграмма Хассе для множества граней по-
политопа Р, основанная на отношении включения; см. разд. 3.1),
из которого удален узел, соответствующий политопу Р в целом,
так как он является избыточным при размерности Р, равной d.
В качестве структуры данных можно было бы использовать
3.4. Выпуклые оболочки размерности большей двух 169
(d + 1) списков L_i, Lo, Lb . . . , Ld-i, где L/ — список /-граней.
Каждая запись в L/ относится к некоторой /-грани / и содер-
содержит:
A) аффинный базис БАЗИС (/) грани /;
B) указатели СУПЕРГРАНЬ(/) на каждую (/+1)~гРань.
содержащую /, и указатели ПОДГРАНЬ(/) на каждую (/—1)-
грань, содержащуюся в /;
C) указатели ГИПЕРГРАНЬ (/) на каждую гипергрань, со-
содержащую f.
Указатели C) играют основную роль при определении отно-
относительного положения точки (п. (а) случая B) теоремы 3.15).
Остальные данные нужны для получения необходимой информа-
информации о том, следует ли повышать размерность грани, чтобы в ко-
конечном итоге превратить ее в гипергрань.
Изменение политопа Р, вызванное добавлением новой точки,
можно осуществить не единственным способом. Хотя предлагае-
предлагаемый ниже подход допускает некоторые улучшения на уровне
алгоритма, зато он довольно прост для описания.
Пусть политоп Р представлен своим графом граней Н(Р).
Создадим другой граф НР(Р), изоморфный Н(Р), узлы кото-
которого определяются следующим образом:
{/':/' = СН(/ U р) для каждой грани / политопа Р),
и, кроме того, для каждой грани / политопа Р создадим ребро,
отображающее включение f cz f' (рис. 3.28(b)). Все, что тре-
требуется сделать при создании /', это добавить к БАЗИС (/) точ-
точку р так как по предположению точки находятся в общем поло-
положении (что гарантирует выполнение условия p^aii(f)). Обозна-
Обозначим полученный таким образом граф Н(Р, р).
Очевидно, что НР(Р) содержит опорный «конус» к Р из точ-
точки р. Действительно, когда размерность политопа Р меньше d,
то НР(Р) представляет в точности опорный конус, и изменение
текущего политопа на этом заканчивается с Н(Р, р) =
= Я(СН(Ри р)).
Рассмотрим механизм корректировки в случае, когда размер-
размерность политопа Р равна d. В предположении, что точка р лежит
вне Р, требуемый граф Н(СИ(Р[] р)) получается из Н(Р,р)
в результате удаления некоторых узлов графа. А именно имеет
место следующее:
A) Н (Р) строго содержит часть, затеняемую конусом. В са-
самом деле, каждая грань / политопа Р такая, что для каждой
гиперграни F, содержащей f, точка р находится над F, принад-
принадлежит тени и поэтому должна быть удалена (в примере на
рис. 3.28 это имеет место для р3, е34 и е2з). Воспользуемся сле-
следующим очевидным свойством:
170
Гл. 3. Выпуклые оболочки: основные алгоритмы
Рис. 3.28. Иллюстрация перестройки политона Р; (а)—геометрия ситуации,
возникающей при перестройке; (Ь)—создание НР(Р) путем «переноса» гра-
графа Н(Р)\ (с)—H(CW(P[]p)) получается в результате удаления из графа
ряда узлов.
Свойство 1. Если f ф СН (R U p) ufczf, то f ф СН (Р U р).
Использование свойства 1 позволяет удалить в графе
Н(Р, р) все узлы, доминирующие над f. (Грани, удаляемые по
этой причине, показаны на рис. 3.28(с) черными кружками.)
Для каждой удаляемой грани f удаляются также инцидентные
ей ребра (т. е. как СУПЕРГРАНЬ (/), так и ПОДГРАНЬ(/)).
B) Нр(Р) содержит опорный конус. В самом деле, каждая
грань f политопа Р такая, что для каждой гиперграни F, содер-
3.4. Выпуклые оболочки размерности большей двух 171
жащей f, точка р находится под F, также является гранью
CH(PUp) (случай A) теоремы 3.15), так что CH(fl)p)e=
е НР(Р) должна быть удалена (в нашем примере это верно
для f = р\, е14, е12). Воспользуемся следующим очевидным свой-
свойством:
Свойство 2. Если CH(f U p)t? CU{P U p) и fczf, то
CH(f'Vp)<?CH(P[)p).
Использование свойства 2 позволяет удалять в графе НР(Р)
все узлы, доминирующие над CH(f U р). (Грани, удаляемые по
этой причине, показаны на рис. 3.28 (с) заштрихованными круж-
кружками.) Затем для каждого узла графа НР(Р), удаленного таким
образом, удаляются инцидентные ему ребра. Этот результирую-
результирующий граф, полученный путем удаления из Н(Р, р) некоторых
узлов, является графом граней политопа СН(Р[)р). Заметим
также, что, когда точка р не является внешней по отношению
к Р, свойство 2 остается справедливым для каждой грани f по-
политопа Р. Так что в этом случае удаляется целиком подграф
НР(Р) и при этом получается правильный результат
СН(Р{] р) = СЩР).
С точки зрения реализации основной частью этого метода
является процедура классификации каждой из N вершин поли-
политопа Р относительно точки р. При этом вершина может быть
классифицирована как вогнутая, выпуклая или опорная (в соот-
соответствии с обобщением терминологии из разд. 3.3.6). В част-
частности,
вогнутой, если для каждой гиперграни
F, содержащей v, точка р находится
вершина v отно-
относительно точки р
является
под F;
выпуклой, если для каждой гиперграни
F, содержащей v, точка р находится над F;
опорной во всех других случаях.
В качестве интересного упражнения читателю предлагается са-
самому придумать метод, выполняющий указанную выше класси-
классификацию вершин за время O((pd-i)+ O(Nd), где, как обычно,
qpd-i — число гиперграней политопа Р (упражнение 3.9 в конце
главы). Если такая классификация сделана, то свойство 1 при-
применимо ко всем граням, доминирующим над любой из выпуклых
вершин, а свойство 2 — ко всем граням, доминирующим над
вогнутыми вершинами в НР(Р), и эта операция может быть вы-
выполнена за время, пропорциональное полному числу вершин и
ребер Н(Р). Нетрудно показать, что последняя величина равна
O(cpd-i). Таким образом, полное время одной операции коррек-
корректировки выпуклой оболочки равно О(ц>а-\), а так как выпол-
выполняется Af таких операций, то получаем следующую теорему:
172 Гл. 3. Выпуклые оболочки: основные алгоритмы
Теорема 3.16. Выпуклая оболочка множества из N точек в
d-мерном пространстве может быть построена методом «под-
над», являющимся открытым, за время T(d, N) = O (N d/2J+1).
Сделаем два замечания. Первое, в рассмотренном методе не-
необходимо предусмотреть специальную обработку вырожденных
случаев, когда точка р принадлежит аффинной оболочке неко-
некоторой грани политопа Р. Второе, можно показать, что в случае,
когда политоп Р не является симплициальным, можно слегка
изменить Р, не увеличив существенным образом сложность
структуры его граней или сложность отношения включения.
И как следствие, временная оценка, полученная для симплици-
ального случая, остается применимой и в общем случае.
В заключение отметим, что метод «под-над» весьма привле-
привлекателен, так как его сложность сравнима со сложностью метода
«заворачивания подарка» и, кроме того, он является открытым,
что тоже очень важно.
3.4.3. Выпуклые оболочки в трехмерном пространстве
Для задачи построения выпуклой оболочки в много-
многомерных пространствах случай трехмерного пространства имеет
огромную важность, так как он естественным образом возни-
возникает во множестве прикладных областей, включающих машин-
машинную графику, автоматизацию проектирования, распознавание
образов, исследование операций. К счастью, этот важный для
приложений случай одновременно является «изюминкой» с точ-
точки зрения сложности вычислений. Далее мы попытаемся пояс-
пояснить эту несколько туманную мысль.
Как уже отмечалось ранее, результатом работы алгоритмов
построения выпуклой оболочки должно быть описание политопа,
представляющего выпуклую оболочку. Из разд. 3.1 известно,
что тривиальная нижняя оценка сложности в худшем случае
для любого алгоритма построения выпуклой оболочки N точек
в пространстве Ed, основанная на размере результирующего
описания, равна Q (N d/2J). В предыдущем разделе было показа-
показано также, что оценка для метода «под-над» превышает эту
нижнюю оценку на множитель O(N), и для d = 3 (d в этом
случае нечетное число) это лучшее, что можно ожидать для
открытого метода. Если отказаться от свойства открытости, то
можно рассчитывать, что удастся уменьшить этот множитель,
получив вместо O(N) что-нибудь, подобное О (log N). В трех-
трехмерном случае это дало бы оценку О (N 3/2J log N) —- О (N log N)
С другой стороны, нижняя оценка в общем случае в точности
равна Q (N log N) (см. разд. 3.2), поэтому лучшее, на что можно
3.4. Выпуклые оболочки размерности большей двух 173
надеяться, это получить алгоритм со сложностью Q(NlogN).
И эта цель достижима (Preparata, Hong A977)].
Как обычно, пусть имеется множество S = {pi, р2, . . ., ры)
из N точек в пространстве Ez. Для простоты предположим, что
для любой пары точек pt и /?,¦ из S имеет место Xk{pi)?= xk(pj),
k = 1, 2, 3. Это упрощение поможет яснее показать основные
идеи алгоритма, а изменения, которые необходимо сделать в ал-
алгоритме для общего случая, очевидны. Здесь мы попытаемся
разработать алгоритм типа «разделяй и властвуй» со слож-
сложностью O(NlogN).
Для начала упорядочим множество S по координате Х\ и,
если это необходимо, перенумеруем точки так, чтобы *i (/?,)<
< Х\ (Pj) <=>¦ i < /. Существует следующий простой рекурсивный
алгоритм построения выпуклой оболочки (представленный в
виде функции):
function CH(S)
1. begin if (|S|<A-o) then
begin построить CH(S) методом "грубой силы";
return CH(S)
end
2. else begin S,:={p1, ...,
{
i \
3. PX:=CH(S{); P2 := CH(S2);
4. Р:=СЛИТЬ(Р,,Р2);
5. return P
end
end.
Предварительная сортировка элементов множества S по ко-
координате х\ требует O(N\ogN) операций. Отметим, что благо-
благодаря такой сортировке и тому, как выполняется шаг 2 алгорит-
алгоритма, множества CH(Si) и CH(S2) представляют два непересе-
непересекающихся трехмерных политопа. Если «слияние», т. е. построе-
построение выпуклой оболочки объединения двух выпуклых оболочек
с суммарным числом вершин, равным N, может быть выполнено
не более чем за M(N) операций, то верхняя оценка для T(N) —
числа операций, выполняемых алгоритмом СН, определяется
уравнением T(N) = 2T(N/2)-\- M(N). (Отметим, что для про-
простоты мы считаем N четным, но это не влияет на общность ре-
результата.) Таким образом, если мы сумеем показать, что M(N)
равно O(N), то получим для Т (N) оценку O(NlogN) и, учиты-
учитывая затраты на предварительную сортировку, получим оценку
О (N log N) для сложности всего алгоритма построения выпук-
выпуклой оболочки.
Ясно, что функция СЛИТЬ является критическим местом
рассматриваемого метода. Начнем с обсуждения структуры дан-
174
Гл. 3. Выпуклые оболочки: основные алгоритмы
ных, подходящей для представления выпуклого трехмерного по-
политопа Р. Необходимо описать лишь границу политопа Р, кото-
которая в трехмерном случае топологически эквивалентна плоскому
графу. Как отмечалось в разд. 1.2.3.2, естественной структурой
для представления плоского графа является рёберный список с
двойными связями (РСДС). РСДС обладает интересным свой-
свойством — явным образом он содержит только ребра графа, но
эта структура позволяет за оптималь-
оптимальное время выделять вершины и мно-
множества вершин граней ').
Предположим теперь, что рекур-
рекурсивным образом получены политопы
Pi = CH(Si) и P2 = CH(S2). Важно
подчеркнуть, что вследствие предвари-
предварительной сортировки и выбранного спо-
способа разбиения результирующего мно-
множества (строка 2 в алгоритме СНE))
политопы Pi и Р2 не пересекаются.
Слияние Pi и Р2 можно выполнить
с помощью следующих операций
(рис. 3.29 иллюстрирует идею этих
операций):
1. Построить «цилиндрическую»
триангуляцию ST, опирающуюся на Pi
Рис. 3.29. Иллюстрация ос- и р2 по некоторым контурам ?, и Е2
соответственно2).
2. Удалить из Pi и Р2 части, ока-
оказавшиеся «скрытыми» в результате
построения триангуляции W~'.
Здесь использованы не определенные формально термины
«цилиндрическая» и «скрытые» в расчете на их интуитивное по-
понимание в соответствии с рис. 3.29. Оставаясь на интуитивном
уровне, построение триангуляции можно рассматривать как опе-
операцию «заворачивания подарка»: с помощью ST мы как бы за-
заворачиваем в один «сверток» одновременно и Pi, и Р2. Хотя ST
может иметь O(N) гиперграней, а каждый шаг заворачивания
в общем случае требует O(N) операций, использование особен-
особенностей трехмерных политопов позволяет, как будет показано
далее, сделать существенное упрощение.
новной идеи метода. Триан-
Триангуляция 9~ образуется в ре-
результате «заворачивания»
выпуклых оболочек Р\ и Рг.
') Здесь термин «грань» используется в общепринятом для плоских
графов смысле. Однако в оставшейся части этого раздела будет использо-
использоваться термин «гипергрань», чтобы подчеркнуть, что они являются (d—1)-
мерными множествами.
2) Мы неявно предполагаем, что на каждом этапе обработки мы имеем
симплициальные (триангулированные) политопы. Как будет видно из даль-
дальнейшего, это несущественно влияет на общность результата.
3.4. Выпуклые оболочки размерности большей двух
175
Построение триангуляции 3~ начинается с определения неко-
некоторой ее гиперграни или ее ребра. Хотя имеются несколько
способов решения этой задачи, довольно удобный способ осно-
основывается на построении проекций (например, на плоскость
(xi, х2)), являющихся многоугольниками, каждого из политопов
(рис. 3.30). Обозначим через Р\ проекцию Pt на плоскость
(Хи х2) (i = 1, 2). Теперь можно воспользоваться нашим люби-
Рис. 3.30. Начальный и последующие шаги процедуры построения
мым алгоритмом (см. разд. 3.3.5), чтобы построить общую опор-
опорную прямую к Р[ и Р'2 и получить тем самым на плоскости
(х\, х2) ребро е', являющееся проекцией ребра е триангуля-
триангуляции 3~. Имея ребро е, можно начать построение 3", выбрав в
качестве опорной плоскость, проходящую через ребро е парал-
параллельно оси Хз.
На очередном шаге построения 3~ в качестве базы исполь-
используется последняя построенная гипергрань триангуляции 3". Бу-
Будем исцользовать при обозначении вершин политопа Pi букву а,
а для Р2— букву Ь. Пусть гипергрань (а2, Ь2, й\) является базо-
базовой на текущем шаге (на рис. 3.30 она заштрихована). Теперь
среди вершин, смежных с а2, необходимо выбрать вершину а,
так чтобы гипергрань (а2, Ь2, й) образовала наибольший выпук-
выпуклый угол с (о,2, b2, at) среди всех гиперграней (а2, b2, v), где
v — вершина, смежная с а2, и v ф п\. Аналогичным образом
среди вершин, смежных с Ь2, выберем вершину б. По причинам,
176
Гл. 3. Выпуклые оболочки: основные алгоритмы
которые станут понятными в дальнейшем, эти сравнения назы-
называются сравнениями типа 1.
Теперь, когда выявлены два «претендента» — (а2, Ь2, а) и
(а2, Ь2, 6), делается заключительное сравнение, называемое
сравнением типа 2. Если (а2, Ь2, а) образует с (а2, b2, ai) боль-
больший выпуклый угол, чем (а2, h2, 6), то а добавляется к ST
(в противном случае добавляется #), и на этом очередной шаг
заканчивается. Описанный порядок выполнения сравнений яв-
является, как будет видно далее, эффективным способом реали-
реализации шага «заворачивания по-
г. дарка» вокруг ребра (а2,Ь2).
jZ Эффективная реализация опи-
описанного только что механизма
последовательного построения
граней триангуляции основывает-
основывается на следующих соображениях.
В РСДС можно эффективно
проходить ребра, инцидентные
некоторой вершине, в порядке
обхода по часовой стрелке или
против нее. Для большей кон-
конкретности обратимся к рис. 3.31.
Предположим, что вершина b
и ребро (Ь, а) триангуляции 3~
_„„,,„, „ были добавлены последними.
Рис. 3.31. Шаг, обеспечивающий *-, ,. ,> ,
продвижение при построении Т. ПУСТЬ @1, &)—ребро контура
Е2, входящее в вершину о. Не
теряя общности, можно предположить, что нумерация ребер,
инцидентных вершине Ь, и их конечных вершин Ь\, Ь2, . . . , b\
аналогична показанной на рис. 3.31 (где k = 7). Подобное же
предположение имеет место и относительно вершины а. Пусть
(bs, b, a) — гипергрань, образующая наибольший выпуклый угол
с (b\x b, а) из всех F,-, Ь, а) с i = 2, ..., k (в нашем примере
s = 4). Первое важное соображение состоит в том, что любое
ребро (b, bt) при 1 <С i <C s оказывается внутри выпуклой обо-
оболочки CH(Pi \}Pi), и поэтому его можно исключить из дальней-
дальнейшего рассмотрения. Что касается вершины а, то заметим, что
множество инцидентных ей ребер было частично просмотрено
на более раннем этапе работы алгоритма, так как вершина а
была получена прежде, чем вершина Ь. И как следствие сказан-
сказанного выше просмотр ребер, инцидентных вершине а, следует на-
начинать с последнего из просмотренных ребер, так как все другие
были удалены (на рис. 3.31 это ребро {а,а^)).
Следующее соображение связано с большим количеством
сравнений углов, каждое из которых должно выполняться за
постоянное время путем адаптации общего метода, описанного
3.4. Выпуклые оболочки размерности большей двух 177
в разд. 3.4.1 для случая d-мерного пространства. В результате
сравнения типа 1 из дальнейшего рассмотрения обязательно ис-
исключается одно ребро, принадлежащее либо Pi, либо Р2. Пусть
Vi и т, обозначают соответственно число вершин и число ребер
Pi (i = 1, 2). Таким образом, число сравнений типа 1 ограни-
ограничено сверху величиной (mi + m2). Далее каждое сравнение ти-
типа 2 добавляет новую вершину либо к Е\, либо к Е2. Так как
число вершин в контурах Е\ и Е2 не может превышать соответ-
соответственно V\ и v2, то число сравнений типа 2 ограничено величи-
величиной [v\ -\-v2— 1). Поскольку граф, представляющий структуру
поверхности политопа, является планарным, пц ^ 3t>; — 6, и,
следовательно, число сравнений углов растет не быстрее линей-
линейной функции от суммарного числа вершин политопов Pi и Р2.
Корректировку РСДС можно производить динамически в
процессе построения ST. Воспользуемся иллюстрацией на
рис. 3.31. Предположим, мы продвинулись от ребра (а, Ь\) к
ребру (а, Ь), «поворачиваясь» вокруг вершины а. Произойдет
просмотр ребер, инцидентных как вершине Ь, так и вершине а,
хотя ребра, инцидентные а, уже были частично просмотрены ра-
ранее. Сначала в РСДС создается новый узел для ребра (а, Ь)
и ребро (а, Ь) становится следующим за (а, Ь\) вокруг a, a
(bu b) становится следующим за ним вокруг Ъ\. Теперь начи-
начинается просмотр ребер, инцидентных Ь, в порядке движения по
часовой стрелке вокруг Ь, начиная с ребра в\ и кончая ее узлы,
соответствующие ребрам е2 и е3, были удалены ') (так как е2
и е3 оказались внутри оболочки), а ребро (а, Ь) становится
следующим за ребром в\. Аналогичный просмотр осуществляет-
осуществляется вокруг вершины а, начиная с некоторого ребра е'( до некото-
некоторого другого ребра е' = (a, as). Затем, если в результате срав-
сравнения углов выбирается гипергрань (a, b, 64), то ребра (а, 64)
и (Ь, 64) становятся следующими за ребром (a, Ь) вокруг вер-
вершин а и b соответственно. В противном случае вместо них бе-
берутся (а, а5) и (Ь, а5). Это приводит к корректировке РСДС
как связанной структуры данных. Отсюда следует, что полное
время, требуемое алгоритму СЛИТЬ, равно O(N), и поэтому
имеет место следующая теорема.
Теорема 3.17. Выпуклая оболочка множества из N точек в
трехмерном пространстве может быть построена за оптимальное
время О (N log N).
') Заметим, что при такой процедуре удаления ребер из РСДС не все
ребра, попавшие внутрь выпуклой оболочки, могут быть удалены. Однако
неудаленные (таким образом) ребра образуют пленарный граф с множе-
множеством вершин V, которые сами являются внутренними точками выпуклой
оболочки. Поэтому, число неудаленных ребер пропорционально \V'\, и полный
объем памяти, занимаемой РСДС, остается пропорциональным \S\. Отметим,
что граф с множеством вершин V не связан с графом выпуклой оболочки.
178
Гл. 3. Выпуклые оболочки: основные алгоритмы
В заключение необходимо обсудить, как быть с вырожден-
вырожденными ситуациями, когда политопы не является симплициальны-
ми. Самое разумное решение основывается на введении «искус-
«искусственной» триангуляции гиперграней, не являющихся треугольни-
треугольниками, и тогда политоп все время остается симплициальным.
Рассмотрим, в частности, процедуру просмотра множества ре-
ребер, инцидентных вершине b (рис. 3.32). В предположении сим-
симплициальности политопа просмотр завершается на ребре е, при-
принадлежащем двум гипергра-
гиперграням F и F', так что при этом
вершина а находится над F и
под F' (относительно смысла
терминов «над» и «под» см.на-
см.начало разд. 3.4). Это единствен-
единственно возможная ситуация, так
как в соответствии с предполо-
предположением никакие четыре точки
не могут лежать в одной пло-
плоскости. При отказе от этого
предположения критерий за-
завершения просмотра ребер ста-
становится следующим: просмотр
Рис. 3.32. Пример триангуляции ги- заканчивается на ребре е, при-
перграни, не являющейся треуголь- надлежащем гиперграням F и
ником- F' таким, что вершина а нахо-
находится не под F и над F'. В та-
таком случае, если вершина а и гипергрань F принадлежат одной
гиперплоскости, то результирующая гипергрань C\i(F\]a) ока-
оказывается разбитой на треугольники пучком ребер, выходящих
из вершины а (рис. 3.32). Таким образом, грани ST будут тре-
треугольниками, хотя смежные гиперграни могут лежать в одной
гиперплоскости. Лишние ребра легко могут быть удалены за
один проход по РСДС по окончании построения выпуклой обо-
оболочки. При прохождении РСДС отмечается каждое ребро, ком-
компланарное с двумя своими соседями, инцидентными одной и той
же вершине, а затем все отмеченные ребра удаляются.
3 5, Замечания и комментарии
В этой главе мы неоднократно указывали на тесную
связь задач сортировки и построения выпуклой оболочки на
плоскости. В частности, любой алгоритм, строящий упорядочен-
упорядоченную последовательность вершин выпуклой оболочки, т. е. ре-
решающий задачу ВО1 в случае плоскости независимо от реали-
реализуемого им метода, является замаскированным алгоритмом
3.5. Замечания и комментарии 179
сортировки. При каждом подходящем случае мы иллюстриро-
иллюстрировали эту аналогию, делая соответствующие примечания. В этом
разделе мы воспользуемся удобным случаем, чтобы дать более
систематический обзор алгоритмов, представленных в этой гла-
главе, раскрывая соответствующие им методы сортировки.
Уместно сделать следующее замечание. Если смотреть более
строго, то аналогия будет довольно полной, когда все заданные
точки являются вершинами выпуклой оболочки. Это вполне по-
понятно, так как в задаче сортировки нет аналога для внутренних
точек выпуклой оболочки.
В алгоритме Грэхема сортировка используется явным обра-
образом в самом начале работы. Первый алгоритм из разд. 3.3.1,
проверяющий каждую пару точек для определения, образуют
они или нет ребро выпуклой оболочки (и настолько не эффек-
эффективный, что мы даже не удостоили его собственного имени),
аналогичен следующему необычному алгоритму сортировки:
1. Для того чтобы отсортировать числа х\, ..., xN, нужно
сначала найти наименьшее по величине хт и поменять местами
Х\ и хт- (Требуемое время — O(N).)
2. Теперь нужно найти число, которое в окончательно отсор-
отсортированном списке будет следовать за Х\, просматривая возмож-
возможных кандидатов х2, ..., xN. Число х, следует за х\ тогда и
только тогда, когда между ними нет других элементов списка.
(Требуемое время — O(N2).)
3. Аналогичным образом найти элементы, следующие за
х2, . . . , xN_x. (Время, требуемое для нахождения каждого по-
последующего элемента, — O(N2). Полное время — O(N3).)
Эта процедура может быть очевидым образом улучшена за
счет ускорения процесса поиска последующего элемента. Для
того чтобы определить элемент, следующий за xi, необходимо
лишь найти наименьший элемент среди Xi+\, . . ., xN. После та-
такого изменения приведенный выше алгоритм превращается в
СОРТИРОВКУ ПОСРЕДСТВОМ ВЫБОРА [Knuth A973)] и
соответствует алгоритму Джарвиса (разд. 3.3.3).
Алгоритмы построения выпуклой оболочки, основанные на
методе «разделяй и властвуй», разбивающие исходное множе-
множество точек на две части, строящие выпуклую оболочку для
каждой из этих частей и затем объединяющие их за линейное
время, являются геометрическими аналогами алгоритма сорти-
сортировки слиянием. Алгоритм, строящий выпуклую оболочку в ре-
реальном времени, является аналогом алгоритма сортировки
вставками. Аналоги алгоритма быстрой сортировки обсужда-
обсуждались в разд. 3.3.4.
Хотя Q(N log N) является нижней оценкой сложности в худ-
худшем случае для любого алгоритма построения выпуклой обо-
180
Гл. 3. Выпуклые оболочки: основные алгоритмы
лочки множества S, содержащего N точек, тем не менее в слу-
случае, когда число крайних точек h существенно меньше N, по-
видимому, можно достигнуть меньшей сложности. Это сообра-
соображение с большим успехом использовали Киркпатрик и Зейдель,
разработавшие алгоритм со сложностью O(N log h) и предло-
предложившие его в качестве «предельного». Они также доказали,
что этот алгоритм является асимптотически оптимальным [Kirk-
patrick, Seidel A983)]. Их алгоритм отдельно строит верхнюю
и нижнюю оболочки. Рас-
Рассмотрим построение верхней
оболочки. Исходное множе-
множество разбивается на две рав-
равные части, отделимые друг
от друга вертикальной пря-
прямой. Затем вместо рекур-
рекурсивного построения верхней
оболочки для каждой из
двух частей и последующе-
последующего вычисления общей опор-
опорной прямой (называемой
верхним соединением) алго-
алгоритм сначала строит это
соединение, а затем раздель-
раздельб
Единичная
окружность
Рис. 3.33. Построение опорных прямых
эквивалентно поиску пересечения в двой-
двойственном пространстве.
но строит верхние оболоч-
оболочки для подмножеств то-
точек, расположенных соот-
соответственно слева и справа
от левого и правого концов соединения. Ключевым моментом
этого метода является эффективный способ построения соедине-
соединения. Опираясь на то, что соединение можно определить в ре-
результате решения задачи линейного программирования, авторы
алгоритма воспользовались методом решения задач линейного
программирования за линейное время, который был недавно
предложен Меджиддо и Дайером и подробно будет рассмотрен
в разд. 7.2.5. Обозначим через hi и h2 (hi -f- h2 = h) число вер-
вершин оболочки соответственно слева и справа от соединения, а
через T(N, h) время выполнения алгоритма. Легко проверить,
что следующее рекуррентное соотношение:
T(N, h) =
max (T(N/2),
, ho)),
где с — константа, имеет решение T(N, h)= O(\ogh).
Лишь совсем недавно задаче построения выпуклой оболочки
в Ed было уделено значительное внимание. Анализ алгоритма
Чанда — Капура, выполненный Бхаттачарья, и метод «под-над»,
предложенный Кейли, представляют два примера возрождения
3.6. Упражнения 181
интереса к этой проблеме. Зейдель [Seidel A981)] независимо
и почти одновременно разработал алгоритм, аналогичный алго-
алгоритму Кейли. Зейдель применил аналогичный подход, но только
в двойственном пространстве (см. разд. 1.3.3). Основную идею
алгоритма для случая d = 2 иллюстрирует рис. 3.33, где пока-
показано, что построение опорных прямых из точки р к многоуголь-
многоугольнику Р эквивалентно в двойственном пространстве определению
пересечения dual(P) с dual(p). Сложность эффективного алго-
алгоритма вычисления указанного пересечения в Ed равна
О (N d+l)l2 у Эта оценка была улучшена Кейли до О (N ),
которая в действительности является оптимальной для четных
d (О (N d/2 ) — размер получаемого результата).
3.6, Упражнения
1. Простая замкнутая ломаная. На плоскости заданы JV точек. Построить
простой многоугольник, вершинами которого являются данные точки.
(a) Показать, что нижняя оценка сложности алгоритма, решающего эту
задачу, равна Q(N log N).
(b) Разработать алгоритм решения этой задачи. (Указание: модифици-
модифицировать метод обхода Грэхема.)
2. На плоскости заданы два непересекающихся выпуклых многоуголь-
многоугольника Р, и Р2.
(a) Сколько общих опорных прямых могут иметь Рх и Р2?
(b) Построить общие опорные прямые с помощью алгоритма, основан-
основанного исключительно на использовании углов между ребрами многоугольников
и прямыми, проходящими через вершины многоугольников.
3. Разработать алгоритм, выполняющий за постоянное время классифи-
классификацию вершины v (как вогнутой,_огторной или выпуклой) выпуклого много-
многоугольника относительно отрезка pv, где р— заданная точка на плоскости.
4. Для алгоритма реального времени построения выпуклой оболочки на
плоскости из разд. 3.3.6:
(a) доказать, что в случаях 2, 4, 6 и 8, показанных на рис. 3.16, точка р
с необходимостью является внешней для многоугольника Р;
(b) предположив, что р является внутренней точкой многоугольника F,
подумать, как процедура поиска обнаружит эту ситуацию.
5. Для метода поддержки динамической выпуклой оболочки из разд. 3.3.7:
(a) написать программу на псевдоалголе, реализующую функцию
СОЕДИНИТЬ(Ui, U2), вычисляющую опорный отрезок для В-оболочек
U\ и U2;
(b) разработать спаренные процедуры ПОДЪЕМ-СПУСК для выполне-
выполнения операции удаления точки из множества на плоскости.
6. Кейл — Киркпатрик. П>сть .S — множество из jV точек на плоскости
с целочисленными координатами в интервале от 1 до Nd, где d — константа.
Показать, что выпуклую оболочку множества S можно найти за линейное
время.
7. Зейдель. Пусть S = {ру pv} с: ?J и x(pi) < х(р2) < ... < х(рм).
Показать, что, несмотря на априорное знание порядка следования точек
множества S на осп х, нижняя оценка сложности построения выпуклой обо-
оболочки множества S по-прежнему остается равной Q(N\ogN). (Указание:
182 Гл. 3. Выпуклые оболочки, основные алгоритмы
использовать преобразование, переводящее задачу о выпуклой оболочке на
плоскости в данную.)
8. Зейдель. В алгоритме «заворачивания подарка» Чанда — Капура не-
необходимо поддерживать структуру данных для множества Q из (d — 2) ги-
гиперграней, которые могут быть «завернуты» на последующих шагах обра-
обработки. В этом алгоритме можно печатать гиперграни сразу же после того,
как они найдены и нет необходимости запоминать их. Таким образом, раз-
размер структуры данных для Q определяет емкостную сложность алгоритма
«заворачивания подарка». Пусть 5 — множество из п точек в простран-
пространстве Ed, находящихся в общем положении.
(a) Показать, что если для построения выпуклой оболочки множества 5
используется алгоритм «заворачивания подарка», то существует некоторая
последовательность шагов «заворачивания подарка», такая, что размер Q
никогда не превышает максимального числа гиперграней политопа с N вер-
вершинами в Ed.
(b) Разработать вариант алгоритма «заворачивания подарка» с емкост-
емкостной сложностью
где <p<j_i — число гиперграней политопа.
9. Показать, что в алгоритме построения d-мерной выпуклой оболочки
методом «под-над» (разд. 3.4.2) классификация каждой из N вершин поли-
политопа Р как вогнутой, выпуклой или опорной может быть выполнена за время
0(<Pd-i) + O(Nd), где <fd-i — число гиперграней политопа Р.
ГЛАВА
4
Выпуклые оболочки:
расширения и приложения
В этой главе преследуются две цели. Первая — об-
обсуждение вариантов и частных случаев задачи построения вы-
выпуклой оболочки, а также анализ поведения алгоритмов по-
построения выпуклой оболочки в среднем. Вторая цель состоит в
обсуждении приложений, в которых используется выпуклая обо-
оболочка. Новые задачи будут сформулированы и обсуждены в том
виде, в каком они возникают в этих приложениях. Многообра-
Многообразие этих задач должно убедить читателя в важности задачи по-
построения выпуклой оболочки как для практики, так и в качестве
фундаментального средства для решения задач вычислительной
геометрии.
4.1. Расширения и варианты
4.1.1. Анализ среднего случая
Возвращаясь к обсуждавшимся в разд. 3.3 алгорит-
алгоритмам построения выпуклой оболочки на плоскости, следует отме-
отметить, что независимо от исходных данных алгоритм Грэхема
всегда требует О (N log N) времени, так как в начале он выпол-
выполняет сортировку данных. Напротив, время работы алгоритма
Джарвиса колеблется от линейного до квадратичного, и в свя-
связи с этим уместно поставить вопрос: каково среднее время ра-
работы алгоритма? Поиск ответа на этот вопрос приведет в слож-
сложную и вместе с тем «захватывающую» область стохастической
геометриии, где мы познакомимся с некоторыми трудностями,
касающимися анализа поведения геометрических алгоритмов в
среднем случае.
Так как алгоритм Джарвиса имеет сложность O(hN), где
h — число вершин выпуклой оболочки, то для оценки сложно-
сложности этого алгоритма в среднем необходимо лишь вычислить
E(h) —математическое ожидание величины h. Для этого надо
184 Гл. 4. Выпуклые оболочки: расширения и приложения
сделать ряд предположений о законе распределения исходных
точек. Ответ на этот вопрос лежит в области стохастической
геометрии, изучающей свойства случайных геометрических объ-
объектов и являющейся основой для анализа работы алгоритмов
в среднем'). Нам, конечно, хотелось бы сказать: «Даны N то-
точек, равномерно распределенные на плоскости...», — но техни-
технические проблемы делают это невозможным, так как точки мо-
могут быть равномерно распределены лишь в множестве с конеч-
конечной мерой Лебега [Kendall, Могап A963) ]2), так что мы вы-
вынуждены определить конкретную область, из которой выбира-
выбираются точки. К счастью, задаче вычисления E(h) было уделено
значительное внимание в литературе по статистике, и ниже при-
приведен ряд теорем, которые имеют прямое отношение к анализу
некоторых геометрических алгоритмов.
Теорема 4.1 [Renyi, Sulanke A963)]. Если N точек выбира-
выбираются равномерно и независимо из выпуклого r-угольника на
плоскости, то при N —у оо
+ logeN) + O(l), D.1)
где у — константа Эйлера.
Теорема 4.2 [Raynaud A970)]. Если N точек выбираются
равномерно и независимо из внутренности k-мерной гиперсфе-
гиперсферы, то при N —>- оо математическое ожидание Е (f) гиперграней
выпуклой оболочки этих точек асимптотически стремится к
D.2)
Отсюда следует, что
Е(Н) = О (iV1/3) для N точек, равномерно выбранных
из круга, и
Е (h) = О (Nl>2) для N точек, равномерно выбранных
из сферы.
Теорема 4.3 [Raynaud A970)]. Если N точек выбраны неза-
независимо в соответствии с k-мерным нормальным распределением,
то при yV-> оо E(h) асимптотически стремится к
E(h) = O((logNYk-^2). D.3)
Теорема 4.4 [Bentley, Kung, Schkolnick, Thompson A978)].
Если координаты N точек в k-мерном пространстве выбраны не-
') Довольно исчерпывающую информацию о результатах в этой области
можно найти в книге [Santalo A976)].
2) Речь идет об ограниченных множествах точек. — Прим. перев.
4.1. Расширения и варианты 185
зависимо в соответствии с произвольным непрерывным распре-
распределением (возможно, для каждой координаты используется
свое распределение), то
E(h) = O({logN)k~l). D.4)
Условиям этой теоремы удовлетворяют многие распределения,
включая равномерное распределение в гиперкубе.
Такое качественно неожиданное поведение выпуклых оболо-
оболочек случайных множеств точек можно интуитивно объяснить
следующим образом: при равномерной выборке из произвольной
ограниченной области F оболочка случайного множества точек
стремится принять форму границы F. В случае многоугольника
накопление точек в «углах» приводит к тому, что результирую-
результирующая выпуклая оболочка имеет очень мало вершин. Так как
у круга нет углов, то ожидаемое число вершин выпуклой обо-
оболочки сравнительно велико, хотя, как нам известно, нет элемен-
элементарного объяснения зависимости jVi/3 для плоского случая1).
Из приведенных результатов непосредственно следует, что
сложность в среднем алгоритма Джарвиса имеет значения,
представленные в табл. I.
Таблица I. Сложность в среднем алгоритма Джарвиса
Распределение Сложность в среднем
Равномерное в выпуклом много-
многоугольнике О (N log TV)
Равномерное в круге О (tV4'3)
Нормальное на плоскости О Qv (log JVI'")
Заметим: можно ожидать, что при нормальном распределе-
распределении точек алгоритм Джарвиса потребует несколько меньше вре-
времени, чем алгоритм Грэхема2).
Все распределения, рассмотренные в этом разделе, обладают
следующим свойством: математическое ожидание числа крайних
точек выборки объемом N равно O(Np), где р <С 1 — некоторая
константа. Такие распределения называются N^-распределениями.
Обратимся вновь к описанному в разд. 3.3.5 алгоритму «раз-
«разделяй и властвуй» для плоского случая. Как уже было пока-
') Математическое ожидание числа вершин выпуклой оболочки мно-
множества из N точек можно записать как интеграл от N-к степени интеграла
плотности вероятности [Efron A965)]. Но интерес представляет не значе-
значение этой величины, а ее асимптотическое поведение в зависимости от N.
2) Двумерное нормальное распределение часто используется в качестве
модели распределения попаданий пуль в цель.
186 Гл. 4. Выпуклые оболочки: расширения и приложения
зано, этот алгоритм имеет оптимальную сложность в худшем
случае. Бентли и Шеймос [Bentley, Shamos A978)] показали,
что с небольшими изменениями в реализации этот алгоритм до-
достигает линейной оценки сложности в среднем, и, по-видимому,
имеется возможность его обобщения на случай пространств бо-
более высокой размерности. Для пользы дела коротко напомним
идею алгоритма. Если число заданных точек N меньше некото-
некоторой константы jVo, то оболочка вычисляется некоторым прямым
методом. Если же N больше No, то процедура сначала произ-
произвольным образом разбивает множество из N точек на два под
множества, содержащие примерно по N/2 точек каждое. Затем
рекурсивно ищутся выпуклые оболочки для этих двух подмно-
подмножеств, т. е. решаются две подзадачи, аналогичные исходной.
Результатом каждого из этих рекурсивных обращений к про-
процедуре является выпуклый многоугольник. Оболочка исходного
множества есть не что иное, как оболочка объединения оболо-
оболочек подмножеств. Последняя может быть найдена за время,
пропорциональное полному числу вершин обеих подоболочек.
При разработке на основе этого метода алгоритма с линей-
линейной сложностью в среднем возникает проблема, связанная с ша-
шагом разбиения множества на части. Действительно, в том виде,
как это сделано в разд. 3.3.5, это разбиение могло бы потребо-
потребовать линейного времени, как того требует простое копирование
подзадач. Такой подход, однако, приводил бы к оценке
O(N log N) для полного времени выполнения алгоритма. Таким
образом, следует использовать иной подход, чтобы одновремен-
одновременно достичь двух следующих целей:
A) шаг разбиения должен выполняться за время O(Np),
где р < 1;
B) точки в каждом из двух подмножеств должны подчи-
подчиняться тому же закону распределения, что и исходное множе-
множество точек.
Вторая цель может быть довольно легко достигнута, если
вначале выполнить произвольную перестановку исходных точек
и расположить их в массиве (это делается путем записи точек
в этот массив в порядке их поступления). Тем самым гаранти-
гарантируется, что любая подпоследовательность полученной последо-
последовательности является случайной, т. е. она подчиняется закону
исходного распределения. Каждая подзадача касается множе-
множества точек, представленных некоторой последовательностью
элементов массива (подмассивом), и это множество полностью
определяется двумя указателями на граничные элементы соот-
соответствующего подмассива. Так что разбиение осуществляется
путем расщепления подмассива в средней его части (эта опера-
операция выполняется за постоянное время) с последующей переда-
передачей в каждом из рекурсивных обращений к процедуре лишь
4.1. Расширения и варианты 187
двух указателей. Использование такого приема позволяет до-
достичь первой цели. Эта цель неявно достигается, если воспользо-
воспользоваться итерационной (а не рекурсивной) схемой реализации ал-
алгоритма. При такой реализации последовательно обрабатыва-
обрабатывались бы снизу вверх сначала множества из четырех точек, затем
из восьми и т. д.
Таким образом, время выполнения шага слияния пропорцио-
пропорционально сумме размеров выпуклых оболочек каждого из двух
подмножеств. Обозначим последнюю величину C(N) и, как
обычно, Т (N) —время работы алгоритма на множестве разме-
размера N. Без труда получаем следующее рекуррентное соотноше-
соотношение:
Если теперь положить Гср (N) A E [Т (N)] (оператор Е[ ] обозна-
обозначает математическое ожидание), то, учитывая линейность опе-
оператора Е, получаем новое рекуррентное соотношение:
D.5)
Решение этого соотношения зависит от вида E[C(N)]. В част-
частности, если
rO(N), то Tcp(N) = O(N log N),
E[C(N)] = }o(N/logN), то TCV(N) = O(N log log N), D.6)
[O(NP), P<\, то TCV{N) = O(N).
Благодаря линейности оператора Е[ ] значение E[C(N)] не пре-
превосходит удвоенного значения математического ожидания раз-
размером h(N/2) выпуклой оболочки множества из N/2 точек. Учи-
Учитывая, что для всех упоминавшихся выше распределений имеет
место свойство E[h(N/2)] = O((N/2)p) для некоторого р < 1,
то E[C(N)] = O(NP). Полученный результат можно сформули-
сформулировать в следующей теореме:
Теорема 4.5. Для Nf'-распределения выпуклая оболочка вы-
выборки из N точек на плоскости может быть найдена в среднем
за время O(N).
Довольно соблазнительно сказать, что проведенный анализ
применим и к описанному в разд. 3.4.3 алгоритму Препараты и
Хонга построения выпуклой оболочки в трехмерном простран-
пространстве, который также основывается на методе «разделяй и вла-
властвуй». Однако (по крайней мере в приведенном изложении)
этот алгоритм существенным образом использует факт раздели-
разделимости двух выпуклых оболочек при их слиянии. К сожалению,
это предположение нарушает условие, согласно которому в
ходе обработки каждое подмножество должно быть случайным
и подчиняться одному и тому же распределению.
188
Гл. 4. Выпуклые оболочки: расширения и приложения
4.1.2. Алгоритмы аппроксимации выпуклой оболочки
Вместо выбора алгоритма построения выпуклой обо-
оболочки на основании его сложности в среднем (о чем говорилось
в предыдущем разделе) можно пойти по альтернативному пути,
разрабатывая алгоритмы, строящие аппроксимации для реаль-
реальной выпуклой оболочки, разменивая тем самым точность на
?
г
&
(Ь)
Рис. 4.1. Иллюстрация алгоритма аппроксимации выпуклой оболочки: (а) —
задано множество точек на плоскости, в котором выделяются самые левые
и самые правые точки; (Ь)—разбиение множества точек на части в зави-
зависимости от принадлежности их одной из k полос и определение в каждой
полосе точек с экстремальной ординатой; (с) — приближенная выпуклая
оболочка.
простоту и эффективность алгоритма. Такой алгоритм мог бы,
в частности, быть очень полезным для приложений, когда необ-
необходимо быстро получить решение, жертвуя ради этого даже точ-
точностью. Так, например, это вполне приемлемо в прикладной
статистике, где результаты наблюдений не являются точными,
а известны с некоторой вполне определенной точностью.
Здесь будет рассмотрен один из таких алгоритмов для пло-
плоского случая [Bentley, Faust, Preparata A982)]. Основная идея
этого алгоритма проста и состоит в том, чтобы выделить из
множества точек некоторое подмножество, выпуклая оболочка
которого и будет служить аппроксимацией выпуклой оболочки
исходного множества точек. Однако конкретная схема выделе-
выделения аппроксимирующего подмножества точек, которая будет
выбрана далее, основывается на модели вычислений, отличной
4.1. Расширения и варианты 189
от рассматривавшихся до сих пор. А именно в этом разделе бу-
будет предполагаться, что функция взятия целой части «|_ J»
входит в состав множества примитивных операций 1). Обратим-
Обратимся к рис. 4.1 (а).)На первом шаге алгоритма ищутся минималь-
минимальное и максимальное значения х-координаты точек множества, а
затем вертикальная полоса между ними разбивается на k полос
равной ширины. Эти k полос образуют последовательность
«ящиков», по которым будут распределены N точек исходного
множества 5 (для этого как раз и понадобится функция взятия
целой части). После этого в каждой из полос ищутся две точки,
имеющие минимальное и максимальное значения (/-координаты
(рис. 4.1 (Ь)). Кроме того, выбираются точки с экстремальными
значениями х-координаты. Если при этом одно и то же экстре-
экстремальное значение по х-координате имеют сразу несколько точек,
то из них выбираются только точки с минимальной и макси-
максимальной (/-координатами. Таким образом, результирующее мно-
множество, обозначаемое S*, содержит самое большее 2& + 4 точек.
Наконец, строится выпуклая оболочка множества 5*, которая
служит аппроксимацией оболочки исходного множества
(рис. 4.1 (с)). Отметим, что получившаяся оболочка в самом
деле является лишь аппроксимацией: в примере на рис. 4.1 (с)
одна из точек исходного множества лежит вне построенной обо-
оболочки.
Описанный здесь коротко метод чрезвычайно прост в реали-
реализации. Указанные k полос отображаются на массиве из (k + 2)
элементов (нулевой и (k-\- 1)-й элементы содержат две точки
с экстремальными значениями х-координаты: соответственно
Xmin и Хтах). Чтобы определить полосу, в которую попадает не-
некоторая точка р, необходимо вычесть из х(р) минимальное зна-
значение х-координаты (jcmm) и разделить получившуюся разность
на A/&)-ю часть разности значений х-координат экстремальных
точек. Взяв целую часть от получившегося результата, получим
номер полосы, содержащей точку. Можно параллельно искать
минимум и максимум в каждой полосе, так как для каждой
точки проверяется, выходит ли она за пределы текущих значе-
значений максимума и минимума, и, если это имеет место, произво-
производится необходимое изменение в массиве. И наконец, можно вы-
выбрать удобный в данном случае алгоритм построения выпуклой
оболочки: очевидно, что наиболее подходящим является вариант
алгоритма Грэхема, предложенный Эндрью (см. разд. 3.3.2).
Заметим, что точки множества S* почти упорядочены по значе-
значению х-координаты. Чтобы получить полностью упорядоченное
') Заметим, что модель вычислений, основанная на деревьях решений,
использовавшаяся во всех рассмотренных до сих пор алгоритмах построения
выпуклой оболочки, исключает использование функции взятия целой части.
190 Гл. 4. Выпуклые оболочки: расширения и приложения
множество, необходимо лишь сравнить в каждой полосе значе-
значения х-координаты двух точек множества S*, принадлежащих
этой полосе.
Работа этого метода также легко поддается анализу. Объем
необходимой памяти пропорционален k (в предположении, что
исходные точки уже представлены в памяти). Для нахождения
минимального и максимального значений х-координаты требует-
требуется время Q(N). Поиск экстремумов во всех полосах требует вре-
времени Q(N), а выпуклая оболочка множества S* может быть по-
построена за время O(k) (так как множество S* содержит не
более 2/С + 4 точек, причем эти точки уже упорядочены по зна-
значению х-координаты). Следовательно, полное время работы ал-
алгоритма равно Q(N + /г).
Простота и эффективность описанного алгоритма имели бы
небольшую ценность, если бы получаемый результат был слиш-
слишком неточным. Попробуем оценить точность такого подхода.
Прежде всего, так как для построения выпуклой оболочки ал-
алгоритм использует лишь точки исходного множества, то полу-
получающаяся аппроксимация является внутренней в том смысле,
что любая точка, попавшая внутрь приближенной оболочки,
будет также и внутренней точкой действительной выпуклой
оболочки. Возникает вопрос: насколько далеко от приближен-
приближенной выпуклой оболочки может оказаться точка из S, находя-
находящаяся вне её? Ответ на это вопрос дает следующая довольно
очевидная теорема:
Теорема 4.6. Любая точка р е S, не попавшая внутрь при-
приближенной выпуклой оболочки, находится на расстоянии, не
превышающем (xmax — xmin) /k от этой оболочки.
Доказательство. Рассмотрим полосу, содержащую точку р
(рис. 4.2). Так как точка р находится вне приближенной обо-
оболочки, то она не может иметь ни наибольшую, ни наименьшую
(/-координату среди точек, попавших в ту же полосу. Поэтому
Утт^у(р) ^ г/max. Если и-—это точка пересечения горизон-
горизонтальной прямой, проходящей через точку р, с ребром прибли-
приближенной оболочки, то длина отрезка ри ограничивает сверху рас-
расстояние от точки р до оболочки. Длина отрезка ри сама огра-
ограничена сверху шириной полосы (xmax — xmin)/&.
Рассмотренный метод аппроксимации дает приближенную
оболочку, являющуюся подмножеством истинной выпуклой обо-
оболочки, но нетрудно изменить метод, чтобы получать «супермно-
«супермножество» истинной оболочки. Достаточно лишь заменить каждую
экстремальную точку р парой точек на границах полосы, но с
той же ординатой, что и у точки р. Очевидно, что получающаяся
в результате оболочка охватывает истинную выпуклую оболоч-
4.1. Расширения и варианты
191
ку. Анализ точности аппроксимации, аналогичный проведенному
выше, показывает, что любая точка приближенной оболочки
(а не истинной оболочки) находится на расстоянии, не превы-
превышающем (Хщах — Xm\n)/k ОТ ИСТИННОЙ обоЛОЧКИ.
Можно ли применить этот подход в случае пространств бо-
более высокой размерности? Ограничимся обсуждением алгорит-
алгоритма, представляющего обобщение на трехмерный случай только
что рассмотренного алгоритма для плоскости. Сначала выпол-
выполняется просмотр множества и определяются точки с минималь-
минимальным и максимальным значениями координат по осям х и у. По-
Получившийся ПРЯМОУГОЛЬНИК .[Xmin, Xmax] X Ц/mln, «/max] разбивается
на (не более чем) (& + 2)Х(& + 2)
клеток прямыми, параллельными осям
х и у (k клеток в каждом измерении
вводятся для «действительных» точек
в клетках и две клетки по краям вво-
вводятся для экстремальных значений ко-
координат). Отметим, что по одному из
измерений может оказаться менее
(k-\-2) интервалов, в случае если об-
область, «заполняемая» проекциями то-
точек множества, не является квадра-
квадратом. Для каждой клетки разбиения
определяются точки с минимальным
И МаКСИМаЛЬНЫМ ЗНачеНИЯМИ Z-КООрДИ-
НЭТЫ. Эти ТОЧКИ образуют множество рис 4.2. Анализ алгоритма
S*, содержащее не более 2(k-\- аппроксимации.
+ 2J точек. В заключение строится
выпуклая оболочка множества S*, которая и служит прибли-
приближенной оболочкой исходного множества. Эта оболочка может
быть построена с помощью общего алгоритма Препараты —
Хонга для множеств точек в трехмерном пространстве
(разд. 3.4.3). Обратите внимание на бросающееся в глаза от-
отличие от метода, использованного в двумерном случае, когда
можно было воспользоваться знанием порядка точек на оси х:
в данном случае структурная организация точек, определяемая
решеткой, не используется для получения более быстрого алго-
алгоритма, а используется общий алгоритм. Любопытный вопрос со-
состоит в том, можно ли использовать регулярное расположение
точек множества S* в двумерной решетке для построения более
эффективного по сравнению с общим алгоритма.
Анализ алгоритма для трехмерного случая несколько отли-
отличается от того, как это делалось в двумерном случае. Множе-
Множество S* может быть найдено за время Q(N + k2), но построение
выпуклой оболочки множества S* при использовании общего
алгоритма требует времени O(k2logk), а не O(k2), так как нет
192 Гл. 4. Выпуклые оболочки: расширения и приложения
возможности использовать какой-либо естественный порядок
точек решетки, как это имело место в двумерном случае. Таким
образом, полное время работы алгоритма равно O(N + k2 log&).
Для оценки точности метода заметим, что длина диагонали
горизонтального сечения трехмерной ячейки является верхней
границей для расстояния от приближенной оболочки до любой
точки множества S, лежащей вне этой оболочки. Как нетрудно
найти, длина этой диагонали равна
V(*max — *minJ + («/max — «/minf /k.
Интересная особенность этого подхода состоит в том, что
точность результата можно быстро повышать, выполняя больший
объем вычислений (увеличивая k). В частности, число точек,
выбранных для аппроксимации, определяет ее точность, а спо-
способ выбора этих точек определяет тип аппроксимации (охваты-
(охватывающая или внутренняя).
4.1.3. Задача о максимумах множества точек
В этом разделе обсуждается задача, на первый взгляд
имеющая интригующее сходство с задачей построения выпуклой
оболочки, однако при более глубоком рассмотрении, что будет
сделано несколько позже, обнаруживается ее принципиальное
отличие от последней. Эта задача возникает в целом ряде при-
приложений — в статистике, экономике, исследовании операций
и т. п. В действительности первоначально эта задача была опи-
описана как «задача о плавающих курсах валют»1): каждый гра-
гражданин Эревона имеет некоторое количество («пакет») денег
в иностранной валюте; курсы иностранных валют плавают в до-
довольно широком диапазоне, поэтому каждый вечер человек, па-
пакет валюты которого имеет наибольшую общую стоимость, про-
провозглашается Королем Эревона. Каково наименьшее подмноже-
подмножество населения Эревона, с определенностью содержащее всех
потенциальных королей?
Теперь можно точно сформулировать эту задачу. Как обыч-
обычно, все точки принадлежат d-мерному пространству Ed с осями
координат хи х2, . . . , xd2).
Определение 4.1. Точка р\ доминирует над точкой рг (запи-
(записывается так: р2 ^ Р\), если х,(рг) =?^ xi(Pi) Для i = 1, 2, . . ., d.
(Отношение «<(» естественно называть отношением доминиро-
доминирования.)
') Эта забавная формулировка задачи принадлежит Фримену A973, не
опубликовано).
2) В несколько более общей формулировке можно считать, что заданы
d упорядоченных множеств U\, ..., Ud и каждый элемент является векто-
вектором teV, где V — декартово произведение U\ X • • • X Ud.
4.1. Расширения и варианты
193
Если задано множество S из N точек в Ed, то очевидно, что
отношение доминирования определяет на S частичный порядок
(при of> 1). Точка ре 5 является максимальным элементом
(или коротко просто максимумом) множества 5, если не суще-
существует ?eS такого, что р ф q и q )> р. «Задача о максимумах»
заключается в определении всех максимумов множества 5 для
данного отношения доминирования.
Проиллюстрируем теперь взаимосвязь между задачей о ма-
максимумах и задачей о построении выпуклой оболочки (см. так-
N
/
/
\
\
\
\
\
>
\
\
\
\
\
\
\
ч
ч
• \
/*-
У
/
/
У
У
Рис. 4.3. Максимумы в квадрантах, определяемых четырьмя крайними точ-
точками N, S, Е и W, дают грубое представление границы множества точек.
же [Bentley, Kung, Schkolnick, Thompson A978)]). Суть имею-
имеющегося сходства заключается в том, что как максимумы, так и
выпуклая оболочка являются представлениями «границы» мно-
множества 5, хотя первые дают неполное представление этой гра-
границы. В частности, если задано некоторое множество точек 5,
то можно поставить столько задач о максимумах, сколько име-
имеется ортантов в пространстве Ed (т. е. 2d задач; см. рис. 4.3, где
для случая d = 2 имеются четыре ортанта, называемых квад-
квадрантами). Каждая из этих задач может быть получена путем
приписывания одного из знаков « + » или «—» каждой из коор-
координат точек множества 5 (исходной формулировке задачи соот-
соответствует комбинация знаков (++ ••• +))¦ Нужную нам вза-
взаимосвязь между задачами выражает следующая теорема:
Теорема 4.7. Вершина р выпуклой оболочки множества S яв-
является максимумом по крайней мере при одном присваивании
знаков координатам точек множества S.
7 Зак. 1075
194 Гл. 4. Выпуклые оболочки: расширения и приложения
Доказательство. Предположим противное, а именно что име-
имеется вершина выпуклой оболочки р, не являющаяся максиму-
максимумом ни при каком присваивании знаков координатам точек.
Поместим начало системы координат в точку р и рассмотрим
все 2d ортантов пространства Ed. Так как точка не является
максимумом ни при одном присваивании знаков координатам
точек множества S, то в каждом ортанте имеется по крайней
мере одна точка множества S, отличная от р. Обозначим мно-
множество этих точек через S*. Очевидно, что conv(S*) содержит
внутри точку р и, следовательно, conv(S*) ^conv(S), что про-
противоречит предположению о принадлежности точки р границе
выпуклой оболочки.
Далее в этом разделе мы еще вернемся к этой интересной
взаимосвязи. Прежде чем переходить к описанию алгоритма
решения задачи о максимумах, уместно оценить ее сложность,
получив нижнюю оценку для времени работы любого алгоритма
отыскания максимумов в рамках модели деревьев вычислений.
В частности, приводимое ниже рассуждение относится к не-
несколько более слабому случаю модели линейных деревьев реше-
решений, известному как модель деревьев сравнений, хотя область
применения полученных результатов можно расширить и на
более сильный случай. (В модели деревьев сравнений число
аргументов линейной функции ограничено двумя переменными.)
Как это уже было в случае задачи построения выпуклой обо-
оболочки (разд. 3.1), будем искать нижнюю оценку для случая
двумерного пространства. Очевидно, что поскольку любую за-
задачу о максимумах в Еа~1 можно рассматривать как задачу в Ed,
то такая нижняя оценка будет справедлива для пространств
любой размерности (к сожалению, неизвестно, насколько эта
оценка точна для d > 3). Нет ничего удивительного в том, что
для того, чтобы получить нетривиальную нижнюю оценку слож-
сложности, мы прибегнем, как это часто делается для нижних оце-
оценок небольшой сложности, к уже знакомому сведению задач:
СОРТИРОВКА осд, МАКСИМУМЫ.
Пусть бФ — алгоритм, описанный с помощью дерева сравнений Г
(см. разд. 1.4), о котором утверждается, что он решает любую
задачу о максимумах для множества из /V точек, заданных на
плоскости. Выполнение алгоритма si- при решении любой кон-
конкретной индивидуальной задачи соответствует прохождению в
дереве Т пути из его корня до некоторого листа. Сведение от
задачи сортировки выполняется следующим образом. Пусть за-
заданы N действительных чисел .vb x2, ¦ ¦ ¦, Ум. Образуем множе-
множество точек на плоскости, положив S = {р,: i = 1, . .. , N; р,- =
= (х<> У')> xi + Hi — const}. Это можно сделать за линейное
4.1. Расширения и варианты 195
время. Условие х,- + yt = const для i = 1, ..., N эквивалентно
следующему:
i>yl. D.7)
Заметим, что при таком способе построения множества S каж-
каждый элемент (х,-, г/,) является максимальным. Для того чтобы
определить, что (х(, г/,) — максимум, алгоритм s& должен уметь
устанавливать тот факт, что «не существует такого j ф i, что
Xi < Xj и yi < г//». Но это эквивалентно следующему утвержде-
утверждению: «для всех / Ф i либо x-t > х/, либо yi > у,, т. е. либо
Xi > х/, либо х,-< X,-» (в соответствии с D.7)). Другими сло-
словами, для каждой пары {х(, х;} известен относительный порядок
её элементов, т. е. каждому листу дерева Т соответствует един-
единственное упорядоченное множество {хь х2, . . . , xN}, что дает ре-
решение задачи сортировки. Таким образом, имеет место следую-
следующая теорема:
Теорема 4.8 [Kung, Luccio, Preparata A975)]. В рамках мо-
модели деревьев сравнений любой алгоритм, решающий задачу
о максимумах для двумерного случая, имеет сложность
Q(N\ogN).
Теперь, имея для сложности алгоритма оценку снизу, рас-
рассмотрим вопрос разработки алгоритмов решения задачи о ма-
максимумах. Эта задача предоставляет нам великолепную воз-
возможность сравнить относительные достоинства и эффективность
двух основных парадигм вычислительной геометрии: «разделяй
и властвуй» и заметания по одному из измерений (см.
разд. 1.2.2).
Начнем с последней. Первым шагом в методе заметания яв-
является сортировка всех точек множества S в соответствии со
значением выбранной координаты, например ха. Эта координата
становится измерением, по которому производится заметание.
В соответствии с терминологией, введенной в разд. 1.2.2, «спи-
«список точек событий» — это очередь Q, содержащая точки мно-
множества в порядке уменьшения координаты xd. Организация
структуры, представляющей «статус заметающего сечения», бу-
будет рассмотрена позже. Запись р < U обозначает, что суще-
существует точка q e U такая, что р < д\ Теперь можно дать набро-
набросок следующего общего алгоритма:
function МАКСИМУ МЫ l(S,d)
1. begin M:= 0;
2. М* := 0; (* М и М* — это множества максимумов
соответственно по d и d — 1 измерениям *)
3. whi1e(Q Ф 0) do
4. begin p<=Q (*выбрать элемент из очереди*)
196 Гл. 4. Выпуклые оболочки: расширения и приложения
5. р* := проекция р на (хь ..., xd_l);
6. if(p*<M*) then
7. begin Af:= МАКСИМУМЫ l(Af U {/»*},
d-l);
8. M:=M[i {p}
end;
end;
9. return M
end.
Говоря на описательном уровне, функция МАКСИМУМЫ 1 вы-
выполняет заметание точек множества S в порядке убывания коор-
координаты ха и для каждой точки р определяет (пункты 5, 6),
доминирует над ней или нет по координатам хь х2, . . . , xd-\
какая-либо из уже просмотренных точек (эти точки уже доми-
доминируют над р по координате ха в соответствии с организацией
процедуры заметания). Тем самым обеспечивается корректность
этого подхода, критическим местом которого являются, как это
очевидно, пункты 6 и 7: «если р*<?М*, то М* : = МАКСИМУ-
МАКСИМУМЫ 1 (M*\j {p*}, d—1)». По существу, это не что иное, как
последовательное (т. е. по одной точке за один раз) построение
максимумов (d—1)-мерного множества. Это совсем не триви-
тривиальная задача. Эффективный способ ее решения известен лишь
для d = 2, 3.
В самом деле, для d = 2 множество М* является одномер-
одномерным (а значит, оно содержит лишь один элемент) и проверка
условия «р*<(Л1*?» сводится к проверке «х1 (р)^Х] = max Xj (</)?».
q e M
При этом операция по изменению множества М*
М* := МАКСИМУМЫ 1 (М* U {p*}, d—\)
превращается в следующее присваивание jci := *i(p). Как опе-
операция проверки, так и операция присваивания могут быть вы-
выполнены за постоянное время. Для d = 3 ситуация естественно
является более сложной, но по-прежнему остается управляемой.
В этом случае М* — двумерное множество максимумов
(рис. 4.4) — является линейно упорядоченным и может быть
организовано в виде сбалансированного по высоте дерева по-
поиска по координате х2. Проверка условия «р* <С ЛГ?» превра-
превращается в поиск Хг(р*) в этом дереве: если Хг(</) следует непо-
непосредственно за х2(р*), то имеет место эквивалентность
Корректировка множества М* в случае р* *? М* производится в
результате прохождения дерева, начиная с х2(р*), в «направле-
«направлении» уменьшения координаты х2. При этом удаляются все эле-
элементы множества до тех пор, пока не будет найдена первая
4.1. Расширения и варианты
197
точка q', для которой X\(q') > X\(p*). Легко найти, что время,
затрачиваемое на решение этой задачи в целом, составляет
O(N logiV), так как на каждую проверку «р* -< ЛГ?» (с возмож-
возможной вставкой элемента в дерево) требуется время O(logiV), в
то время как каждая операция удаления элемента при прохо-
прохождении дерева в процессе его изменения может быть выполнена
за постоянное время путем тривиального изменения дерева по-
поиска (прошиванием). Учитывая, что производятся jV операций
Рис. 4.4. Множество максимумов М* можно линейно упорядочить. При этом
проверка условия «р* <( М*?» заключается в сравнении Xi-координаты точки
р* с .^-координатой ближайшей к р* точки множества М*, расположенной
справа от нее.
«проверить — вставить» и не более iV операций «удалить», по-
получаем указанную оценку. Если вспомнить, что метод заметания
требует предварительной сортировки, приходим к выводу, что
в случае d = 2, 3 время работы алгоритма МАКСИМУМЫ 1 яв-
является оптимальным и составляет 0(iV logiV).
К сожалению, насколько нам известно, уже для d = 4 этот
метод имеет оценку O(N2). Так что необходимо искать иной
подход к решению этой задачи. Один из возможных подходов
основывается на методе «разделяй и властвуй». Как будет вид-
видно из дальнейшего, соответствующий алгоритм предполагает,
что множества точек по очереди разбиваются на части в соот-
соответствии со значениями координат ха, ха-\ х2. Поэтому,
чтобы облегчить выполнение этих часто используемых в алго-
алгоритме операций, удобно ввести некоторый шаг предварительной
обработки. Этот шаг заключается в сортировке элементов мно-
множества S по каждой из координат. Результирующая структура
данных представляет многосвязный список ((d—1)-кратно
прошитый список), каждый узел которого прошит каждым из
198
Гл. 4. Выпуклые оболочки: расширения и приложения
односвязных списков, соответствующих выбранным координа-
координатам. Для создания такой структуры данных требуется время
О (dN log N). Эта структура позволяет легко и эффективно раз-
разбивать множество на части. Избегая тяжеловесных оборотов,
будем говорить, что х/ разбивает S на (Si, S2), если для каж-
каждой peSi имеем х,(р) ^ х,-, а для каждой q^S2 имеем
xi{Q) > xi- Будем также говорить, что S разбито пополам по х,-
на (Si, S2), если X/ разбивает S на (Si, S2) и х/ является ме-
медианой множества точек S по координате X/ (так что ISJ ~
~|S2|).
Первым шагом алгоритма поиска всех максимумов МАКСИ-
МУМЫ2 является разбиение пополам заданного множества S
по координате ха на (Sb S2). Затем алгоритм рекурсивно при-
применяется к множествам Si и S2. В результате получаются два
(Si)
max (б'г")
Рис. 4.5. Шаг «слияния» в методе «разделяй и властвуй» для случая d = 3.
множества соответствующих им максимумов max (Si) и
max(S2). При объединении результатов двух рекурсивных об-
обращений к процедуре следует учитывать, что все элементы мно-
множества max(S2) являются также максимумами S, в то время
как для элементов max (Si) это может не иметь места. Дей-
Действительно, элемент множества max (Si) является максималь-
максимальным элементом S тогда и только тогда, когда над ним не доми-
доминирует ни один из элементов множества max(S2). Соответствую-
Соответствующая ситуация показана на рис. 4.5 для случая d = 3. Таким
образом, если U и V — два множества точек таких, что для
всех ре[/и?еУ имеет место xd(p) ^ xd(q), то удобно опре-
определить новое множество фильтр (U \ V)cz U:
фильтр (U\V)Ai{p: p<=U и р<У}.
Ясно, что шаг «слияния» в методе «разделяй и властвуй» сво-
сводится к вычислению множества фильтр(max(Sj) |max(S2)). Та-
Таким образом, получаем следующий простой алгоритм:
4.1. Расширения и варианты 199
function МАКСИМУ MbI2(S,rf)
begin if (|S|=1) then return S
else begin(SbS2) := разбиение S пополам по xd;
M, := МАКСИМУMbI2(S,,d);
M2 := МАКСИМУMbI2(S2, d);
return M2 U фильтр (М, j M2)
end
end.
Если обозначить через 7\<(|S|) время обработки процедуры
МАКСИМУМЫ2E), а через /\*_i(|Si|, \S2\) время, необходи-
необходимое для вычисления множества фильтрE] |S2) '), то сразу по-
получаем следующее рекуррентное соотношение (здесь предпола-
предполагается, что N — четное число):
Td (N) < 2Td {N12) + Fd_x (N12, N/2) + O(N), D.8)
где O(N) —время, используемое на разбиение множества S на
равные части Si и S2.
Очевидно, что основные затруднения в рассматриваемом ме-
методе связаны с вычислением множества, названного нами филь-
фильтром. Предположим снова, что U и V — два множества точек
в Ed, определенные как это сделано выше, и \U\ = и, а | V\ =
= v. Воспользуемся еще раз методом «разделяй и властвуй».
Разделим V пополам по ха-\ на (V\, V2) и обозначим через ха~\
наибольшее значение координаты xa-i точек из V\. Величина
x.d-\ разбивает U на (U\, U2). Рис. 4.6 иллюстрирует эту ситуа-
ситуацию. На этом рисунке показаны проекции множеств U и V на
плоскость (ха, ха-\). Заметим, что | V\ | а: у/2 и |У2|^и/2,
в то время как | U\ \ = m и \U2\ = и — пг, где пг — некоторое
целое число. При таком разбиении множеств исходная задача
вычисления множества фильтр(?/|У) заменяется четырьмя под-
подзадачами вычисления множеств фильтр(U\ \ V\), фильтр(U\ \ V2),
фильтр(U2\ V\) и фильтр(U21 V2). Отметим, однако, что множе-
множество фильтр(U2\ V\) вычисляется тривиально, так как для каж-
каждой р е U2 и q e V\ имеем ха(р) ^.xa(q) и ха-\ (р) > xd-\{q).
Кроме того, каждый элемент из V2 доминирует над каждым эле-
элементом из U\ по координатам ха и ха-\, так что подзадача вы-
вычисления множества фильтр (U\ | V2) имеет в действительности
размерность d — 2. Две оставшиеся подзадачи по-прежнему
имеют размерность d— 1, но относятся к множествам с мень-
меньшим числом элементов. Наглядно процесс вычисления можно
') Следует объяснить индексы, использованные в записи: Т( ) и F(,).
Множество S — это множество точек в Ed. Однако, так как каждая точка
множества S2 доминирует над каждой точкой множества Si по координате
Ха, то вычисление множества фильтр (S||S2) является фактически (d—1)-
мерной задачей.
200
Гл. 4. Выпуклые оболочки: расширения и приложения
представить как прохождение путей, порождаемых двойной ре-
рекурсией: по размерам обрабатываемых множеств и по размер-
размерности. Первая заканчивается, когда мощность одного из двух
множеств пары становится маленькой (равной единице), вторая
завершается, когда размерность становится настолько малень-
маленькой, что применим прямой эффективный метод (это имеет место
U V
Рис. 4.6. Вычисление множества фильтр(С/|У) методом «разделяй и вла-
властвуй» (путем сведения к трем более простым подзадачам).
при размерности, равной 3, когда можно воспользоваться моди-
модификацией метода заметания по измерению, описанного ранее).
Более формально алгоритм описывает следующая функция (за-
(заметим, что в алгоритме МАКСИМУМЫ2 множество
фильтр (Mi \M2) вычисляется в результате обращения к
ФИЛЬТР(MUM2; d—l)):
function ФИЛЬТР^,V; d)
begin if (d = 3) then A : = ФИЛЬТР2(?/,У);
if (V = {q)) then A: = {p: p^U и p < q}\
if (U = {p}) then
begin if for each i/eF: p < q then A:={p)
else A := 0
end
else begin {Vi,V2) •= разбиение V пополам по xd;
xd = max{xd{p): реУ]};
[U\, U2) := части, на которые xd разбивает U;
Л:=ФИЛЬТР(?/2,У2; d) U(ФИЛЬТР^,,
u d) П ФИЛЬТР^, ,V2;d-\))
end;
return A
end.
4.1. Расширения и варианты 201
Осталось описать процедуру ФИЛЫР2. Эта процедура ис-
использует метод заметания и аналогична процедуре МАКСИМУ-
МАКСИМУМЫ 1 для d = 2. Точки множества U U V просматриваются в
порядке уменьшения координаты х2 и помещаются в очередь Q.
Если текущая точка р принадлежит V, то М изменяется, в про-
противном случае р либо добавляется к М (как максимальный эле-
элемент), либо исключается из рассмотрения. Таким образом, имеем
function ФИЛЬТР2A/,У)
begin Q:= упорядочить U\jV в порядке убывания
координаты xd\
М:=0;
х\:=0;
while (Q ф 0) do
begin p<=Q;
if (jci (p) > x\) then
begin if (pe=I/) then M :=M(j{p}
(* является максимальным элементом *)
else x* := X\ (p)
end
end;
return M
end.
Для анализа работы алгоритма обозначим через Fd(u, v)
время обработки процедуры ФИЛЬТР(U, V; d). Анализ про-
процедуры ФИЛБТР2 непосредственно дает F2(u, v) = О (и -f- v)
(при условии что U и V предварительно упорядочены по значе-
значению координаты х2). В общем случае, анализируя процедуру
ФИЛЬТР, получаем следующее рекуррентное соотношение:
Fd(и, v) <Fd(m, v/2) + Fd(u - tn, v/2) + Fd^ (m, v/2), D.9)
где m — некоторое целое число 0 ^ m ^ и. Довольно утоми-
утомительные вычисления1) с учетом оценки для F2 показывают, что
максимальное значение правой части соотношения есть
О ((и -\- и) log u (log v)d~3). С учетом этого неравенство D.8) при-
принимает вид
Td (N) < 2Td (N/2) + O(N (log АО*) + О (N),
и, следовательно,
Td(N) = O{N (logN)"-2), d>2. D.10)
С учетом времени, затрачиваемого на предварительную сорти-
сортировку, получаем следующую теорему:
') Соответствующее доказательство приведено в работе [Kung, Luccio,
Preparata U975)].
202 Гл. 4. Выпуклые оболочки: расширения и приложения
Теорема 4.9. Максимумы множеств из N точек в Ed (d ^ 2)
могут быть найдены за время O(N(\og N)d~2)-\- O(N logiV).
Этот замечательный успех метода «разделяй и властвуй»,
потерпевшего неудачу в решении задачи о выпуклой оболочке
для d > 3 (см. разд. 3.4), является ключом к объяснению глубо-
глубоких различий между двумя задачами. Ключевое в этом вопросе
понятие тесно связано, но не в полной мере совпадает с поня-
понятием «декомпозируемое™», введенным Бентли [Bentley A979)].
Более конкретно, давайте рассмотрим задачи поиска (см. гл. 2),
связанные с задачами о максимумах и выпуклой оболочке, т. е.
задачи «проверка на максимум» и «принадлежность выпуклой
оболочке» соответственно. Предположим, множество точек 5
Сопи E,) ^^ Сопи 6%)
Рис. 4.7. Точка р находится вне conv(Si) и conv(S2), но внутри выпуклой
оболочки их объединения.
произвольным образом разбито на части {Si, 52}. Вопрос «Яв-
«Является ли р максимумом множества SU{p}?» имеет положи-
положительный ответ тогда и только тогда, когда получены положитель-
положительные ответы на вопросы «Является ли р максимумом множества
Si U {р}?» и «Является ли р максимумом множества S2 U {р}?»-
Однако нетрудно разбить 5 на части таким образом, что ответ
на вопрос «Находится ли р вне выпуклой оболочки множества
5?» является отрицательным, в то время как оба вопроса «На-
«Находится ли р вне выпуклой оболочки множества Si?» и «Нахо-
«Находится ли р вне выпуклой оболочки 52?» имеют положительные
ответы (рис. 4.7).
Прежде чем завершить этот раздел, рассмотрим работу об-
обсуждавшегося алгоритма в среднем случае при довольно общем
предположении о распределении вероятностей. Необходимый
нам для этого результат дает следующая
Теорема 4.10 [Bentley, Kung, Schkolnick, Thompson A978)].
Среднее число максимумов [i(N, d) множества S из N точек
в Ей равно
li (N, d) = O((logN)d-1) D.11)
при условии, что координаты каждой точки независимы и выби-
выбираются из одного и того же непрерывного распределения.
4.1. Расширения и даршнты 203
Заметим, что при используемом в алгоритме МАКСИМУ-
МЫ2 способе разбиения множества на части сохраняется слу-
случайность распределения точек в каждой из частей, так как точ-
точки в обеих частях подчинены тому же самому закону распреде-
распределения. Кроме того, разбиение множества можно выполнить за
постоянное время, используя для этого стратегию «передачи
указателя», рассмотренную в общих чертах в разд. 4.1.1. С уче-
учетом сказанного при анализе среднего случая соотношение D.8)
заменяется следующим соотношением:
E[Td(N)]^2E[Td(N/2)] + E[Fd_l(mu m2)] + O(l), D.12)
где ni\ и m2 — мощности множеств максимумов множеств S! и
S2, являющихся теперь случайными величинами со средним
значением \i{N/2, d). Из предыдущего обсуждения имеем
Fd_i {nil, "h) < К\ {nil + m2) log nil (log ni2)d~\
где /Ci — некоторая константа.
Так как nil и пг2 ограничены сверху значением N/2, то
Fd-\ (mu m2) < Ki (m, + m2) (log N)d~\
и, следовательно,
E [Fd_i {nil, m2)] < Kx (log N)d-3 {E [m,] + E [m2]) =
= О ((log N)d~3 log {N)d~l) = О ((log NJd-*).
Подставляя это значение в D.12), получаем следующий резуль-
результат:
Теорема 4.11. В предположении, что координаты каждой-
точки независимы и подчинены одному и тому же непрерывному
закону распределения, максимумы множества из N точек в Ed
могут быть найдены за время, равное в среднем
E[Td{N)] = O{N). D.13)
4.1.4. Выпуклая оболочка простого многоугольника
Всякий раз, когда на исследуемую задачу наклады-
накладывается некоторое ограничение, множество рассматриваемых ее
индивидуальных экземпляров, как правило, сокращается. В та-
таких случаях наибольший интерес вызывает вопрос, позволит ли
это ограничение разработать специально для этого случая су-
существенно более простой метод по сравнению с общим. Конеч-
Конечно, не всегда удается дать убедительный ответ на этот вопрос,
разработав более простой алгоритм или установив нижнюю
204 Гл. 4. Выпуклые оболочки: расширения и приложения
оценку сложности решения задачи, аналогичную нижней оценке
для общего случая. Но во всех случаях исследование этого во-
вопроса заслуживает внимания.
Примером такой «ситуации с ограничением» является за-
задача о выпуклой оболочке простого многоугольника. Заметим,
что если имеется множество S яз N точек, то его всегда можно
рассматривать как многоугольник, упорядочив произвольным
образом точки множества и предположив, что между соседними
(с учетом цикличности) точками получившейся последователь-
последовательности имеется ребро. Однако в общем случае получившийся
многоугольник не будет простым, т. е. некоторые его ребра мо-
могут пересекаться. Но что произойдет, если нам известно, что
этот многоугольник простой? (Определение простого много-
многоугольника см. в разд. 1.3.)
Подход, основанный на поиске нижних оценок, в данной си-
ситуации неприменим даже для случая упорядоченной оболочки,
так что следует довольствоваться тривиальной нижней оценкой
Q(N). Поэтому вполне естественно искать алгоритмы, имеющие
в худшем случае сложность, меньшую O(NlogN). И ряд таких
алгоритмов, каждый со сложностью O(N), был предложен.
К сожалению, некоторые из них оказываются неработоспособ-
неработоспособными в некоторых очень частных случаях i[Sklansky A972);
Shamos A975a)], но другие алгоритмы правильно решают дан-
данную задачу. Среди последних следует упомянуть довольно слож-
сложный алгоритм Маккаллума — Эйвиса [McCallum, Avis A979)],
использующий два стека. Впоследствии были предложены два
новых алгоритма, использующих один стек, — первый Ли [Lee
A983а)], а второй Грэхемом и Яо [Graham, Yao 1983)]. Ниже
описывается авторский вариант алгоритма Ли.
Пусть р\ — самая левая вершина заданного простого много-
многоугольника, a (pi, р2, • • •, Рм) — упорядоченная циклическая по-
последовательность его вершин (за вершиной ры следует pi).
Предполагается, что внутренность Р находится по правую сто-
сторону при обходе его границы в указанном порядке, т. е. цикли-
циклическая последовательность вершин многоугольника ориентиро-
ориентирована по часовой стрелке (рис. 4.8). Пусть рм — самая правая
вершина. Ясно, что р\ и рм являются граничными точками вы-
выпуклой оболочки многоугольника Р. Кроме того, они разбивают
последовательность вершин многоугольника на две цепи: одна
от р\ до Рм, другая от рм до р\. Достаточно рассмотреть по-
построение выпуклой оболочки лишь для цепи (р\, рг, ¦••, Рм),
которую, согласно использовавшейся ранее терминологии
(разд. 3.3.2), будем называть верхней оболочкой. Пусть подпо-
подпоследовательность (q\, q2, ¦ ¦ . , Яя) последовательности (pi, рг, • • •
..., рм), у которой q\ = p\ и qR = pM, — искомая выпуклая
оболочка многоугольника. Каждое из ребер <7<<7<+i (f=l, •••
4.1. Расширения и варианты
205
..., г—1) можно рассматривать как «крышку» «кармана» /(,,
где карман /G — это подцепочка последовательности (рь р2, ...
..., рм), первой и последней вершинами которой являются qt и
qi+х соответственно.
Рис. 4.8. Верхняя оболочка простого многоугольника.
Алгоритм проходит цепь (р\, . . . , рм) и последовательно
строит крышки всех карманов. Особым событием в ходе работы
алгоритма является обнаружение вершины типа q, образующей
карман вместе с последней найденной вершиной типа q. Такие
вершины q будем называть критическими вершинами. Заметим,
однако, что не каждая критиче-
критическая вершина является вершиной
окончательной выпуклой оболоч-
оболочки. Они являются лишь канди-
кандидатами в число таковых. По сути
дела, единственное, что утверж-
утверждается перед__завегш1ендем ра-
работы алгоритма, это то, что по-
построенная к этому моменту по-
последовательность критических
вершин (<7ь qi, • • ¦) согласуется
с предположением о простоте
многоугольника Р (более деталь-
i = Ps
Нарман K(-j
Рис. 4.9. Карман и его крышка.
пая характеристика будет дана далее). Так что теперь внима-
внимание будет сконцентрировано на процедуре перехода от одной
критической точки к другой. Эта процедура называется шагом
продвижения.
Предположим, что граница многоугольника просмотрена от
вершины р\ до ps (s ^ M) и вершина ps = qt является критиче-
критической. Соответствующая ситуация показана на рис. 4.9, где кар-
карман Ki-\ закрыт крышкой qi-iqu Обозначим через и вершину
206
Гл. 4. Выпуклые оболочки: расширения и приложения
границы Р, предшествующую qi. В зависимости от положения и
относительно ориентированного отрезка qMQt имеют место два
случая.
1. Вершина и находится справа от q^qi или на нем. В этом
случае в вертикальной полосе, задаваемой вершинами Ц\ и Цм,
можно рассмотреть и три области, обозначенные на рис. 4.10(а)
Чс-
Рис. 4.10. Области, в которых может находиться вершина v, следующая за
qi (показаны два случая — в зависимости от относительною положения и
и qMqi).
©, © и ®. Эти области определяются: прямой, проходящей че-
через вершины ^,_1 и qr, лучом, являющимся продолжением от-
отрезка qiu, и частью границы многоугольника Р, соответствую-
соответствующей карману Ki-\.
2. Вершина и находится слева от qMqi- В этом случае в до-
дополнение к предыдущим определим еще одну область D), пока-
показанную на рис. 4.10 (Ь).
Обозначим через v вершину, следующую за qi на границе
многоугольника Р. Вершина v находится в одной из областей,
определенных выше. Если v находится в областях© или ®, то
она является критической вершиной, а если она находится в об-
областях ф или ф, то она не является критической. Рассмотрим
четыре указанных случая более подробно.
1. Вершина v принадлежит области ф. В этом случае гра-
граница многоугольника заходит в карман. Будем продвигаться по
границе до тех пор, пока не достигнем первого ребра границы,
одна из вершин которого w находится вне кармана, т. е. в обла-
области © (рис. 4.11 (а)). Так как многоугольник Р простой, а кар-
карман и его крышка также образуют простой многоугольник, то,
согласно теореме о жордановой кривой, граница многоугольни-
4.1. Расширения и варианты
207
ка Р обязательно пересекает крышку кармана. Далее обрабаты-
обрабатываем w, как вершину v в случае, когда v принадлежит области
@, рассматриваемом ниже.
2. Вершина v принадлежит области ©. Вершина v является
критической. Ищется опорная прямая из вершины v к цепи
(<7ь •••, qi-\). Если эта прямая содержит qr (г < г), то вер-
вершины qr+\, . . . , qi удаляются, a v берется в качестве новой qr+\
4i-t
Рис. 4.11. При обходе границы многоугольника Р, следующей за выделенной
вершиной qi, возможны четыре случая.
(рис. 4.11 (Ь)). Ясно, что v является вершиной выпуклой обо-
оболочки (критической точкой), так как она является внешней по
отношению к текущей оболочке (q\, q2, -.., q/л). Проведение
опорной прямой эквивалентно построению conv(^i, . . . , qr,
Яг+и Ям)-
3. Вершина v принадлежит области ®. Вершина v является
критической, и она берется в качестве <7<+ь Действительно
(рис. 4.11 (с)), v является внешней по отношению к текущей
оболочке (яи Я2, - - -, Яи Ям), и так как она находится справа от
прямой, проходящей через <7<-i и Я' (и ориентированной в на-
направлении от Я'-\ к Яд, то угол (<7г-1<7*у) является выпуклым.
(Заметим, что рис. 44.11 (с) иллюстрирует случай, соответствую-
соответствующий рис. 4.10(Ь).)
208 Гл. 4. Выпуклые оболочки: расширения и приложения
4. Вершина v принадлежит области ф. В этом случае гра-
граница многоугольника заходит внутрь выпуклой оболочки. Как и
в случае 1, рассмотренном выше, будем продвигаться по гра-
границе многоугольника до тех пор, пока не достигнем первого
ребра, обладающего следующим свойством: одна из его вершин
является внешней по отношению к области ф или совпадает
с qM- В последнем случае процедура завершается. В первом же
случае вершина, являющаяся внешней по отношению к области
ф, находится либо в области ® (такая ситуация обрабаты-
обрабатывается способом, указанным в пункте 3 выше), либо в области
B) (такая ситуация обрабатывается способом, указанным в
пункте 2 выше) (рис. 4.11 (d)). Действительно, обозначим че-
через С часть границы многоугольника от qt до qM- С является
простой кривой. Кроме того, прежде чем она пересечет ЦгЦьл,
она не может выйти ни в область, находящуюся справа от вер-
вертикальной прямой, проходящей через qM, ни в область, находя-
находящуюся слева от вертикальной прямой, проходящей через q\. Так
как многоугольник Р простой, то С не может пересечь ни одну
из границ карманов К\, ¦ ¦ ¦ , Ki-i, и, следовательно, она не мо-
может пересечь ни одну из крышек этих карманов. Отсюда сле-
следует, что С может пересечь только q-flM- Если она не пересе-
пересекает указанный отрезок, то она заканчивается в точке qM-
Предыдущее обсуждение включает доказательство коррект-
корректности любой реализации, в которой обработка случаев 1—4 про-
производится указанным выше способом. Дадим формальное опи-
описание одного из таких алгоритмов. Наиболее подходящими
структурами данных являются: A) очередь Р, содержащая по-
последовательность (р2, Ръ, ¦¦¦, Рм); B) стек Q для хранения
последовательности (qo, q\, fe • • •) — ввиду того, что для встав-
вставки и удаления точек выпуклой оболочки используется механизм
«последний вошел — первый вышел», где qo — фиктивная вер-
вершина, имеющая ту же абсциссу, что и р\ = qu но меньшую
ординату и обеспечивающая единообразие обработки. Как было
сказано выше, и — это вершина на границе многоугольника Р,
непосредственно предшествующая вершине q,-, аи — текущая
вершина. Упорядоченная тройка вершин (siw) называется пра-
правым, поворотом, если w находится справа от прямой, проходя-
проходящей через s и t с учетом направления от s к t; в противном
случае она называется левым поворотом. Кроме того, наряду с
обычным использованием операции Us=v, означающей: «ЗА-
«ЗАТОЛКНУТЬ v В ?/», операция ВЫТОЛКНУТЬ U означает:
«v-$=U; игнорировать и»; qt обозначает вершину, находящуюся
на вершине стека, а ПЕРЕДНИЙ (Р) обозначает первый эле-
элемент очереди Р.
4.1. Расширения и варианты 209
procedure ОБОЛОЧКА-МНОГОУГОЛЬНИКА
(Рь ¦ • -. Рм)
1. begin P<=(p2, .... рм);
2. Q<=q0;
3. Q<=Pi;
4. while(P =^= 0) do
5. begin v<=P;
6. 'f((<7i-i<7^)— правый поворот)
(¦области ф,©,®*) then
7. if((«^jy) — правый поворот (* области
©,®*) then
8. Щ(ЧмЧ№) — правый поворот
(¦область ©*) then Q<=v
9. else (* область ф*)
10. 1уЫ1е(ПЕРЁДНИЙ(Р) находится
слева от qMqi или на нем) do
ВЫТОЛКНУТЬ Р
И. else (* область © *)
12. луЫИПЕРЕДНИЩР) находится слева
от qfli-\ или на нем) do
ВЫТОЛКНУТЬ Р
13. else (* область ф*)
14. begin while ((qi-iqiv) — левый поворот)
do ВЫТОЛКНУТЬ Q;
15. Q^=u
end
end
end.
Анализ сложности алгоритма ОБОЛОЧКА-МНОГОУГОЛЬ-
ОБОЛОЧКА-МНОГОУГОЛЬНИКА не вызывает затруднений. После инциализации (строки
1—3) каждая вершина границы посещается в точности один
раз, прежде чем она будет либо принята (строки 8, 15), либо
отвергнута (строки 10, 12). Обработка каждой вершины много-
многоугольника осуществляется за постоянное время. При построении
опорной прямой в цикле while (строка 14) на каждую операцию
удаления затрачивается постоянное время. Учитывая, что после-
последовательности (pi, . . ., рм) н (<7i, . . ., qR) содержат О(М) эле-
элементов, а рассуждения, аналогичные приведенным, можно при-
применить и для построения нижней оболочки прямоугольника Р,
то в завершение имеем следующую теорему:
Теорема 4.12. Выпуклая оболочка простого многоугольника
с N вершинами может быть построена за оптимальное время
6(jV) при использовании памяти объемом Q(N).
210 Гл. 4. Выпуклые оболочки: расширения и приложения
4.2. Приложения в статистике
Между геометрией и статистикой имеется тесная
связь, обусловленная тем, что многомерные статистические дан-
данные можно рассматривать как точки в евклидовом простран-
пространстве. В такой постановке задачи статистики превращаются в
чисто геометрические задачи. Например, в задаче о линейной
регрессии требуется найти наиболее подходящую в смысле за-
заданной нормы гиперплоскость. Некоторые задачи в теории голо-
голосования можно интерпретировать как задачи поиска ^-мерного
полушария, содержащего наибольшее число точек множества.
В работе [Shamos A976)] дан обзор геометрических методов,
применяемых в статистике. В некоторых задачах статистики по-
построение выпуклой оболочки является основным моментом, и
в нескольких последующих разделах мы рассмотрим некоторые
из них.
4.2.1. Робастное оценивание
Основной задачей в статистике является оценивание
параметров некоторой популяции, таких как среднее значение, на
основе лишь небольшой случайной выборки. Будем говорить,
что функция t является несмещенной оценкой для параметра р,
если E[t] =р, т. е. математическое ожидание / в точности равнор
oc = 0,Z [Удаляются 20 % пак верхних, так и нижних точек)
• • • j—О •-•-¦-• • •-• > I 9 • •
I I
I— Оста "чпсл г польки эти—|
точки
Рис. 4.12. а-урезанное среднее.
[Hoel A971)]. Так как среднее значение выборки является не-
несмещенной оценкой для среднего значения популяции, то оно
очень чувствительно к выбросам. — наблюдениям, существенно
выпадающим из основной массы. Желательно уменьшить влия-
влияние, оказываемое такими выбросами, так как они часто пред-
представляют неверные данные, которые иначе могли бы внести
ошибки в анализ данных. Соответствующее свойство, которым
должна обладать хорошая оценка, называется робастностью
(устойчивостью), что означает нечувствительность к отклоне-
отклонениям от предполагаемого распределения популяции. Было пред-
предложено много методов, дающих такие оценки [Andrews A972)].
Важный класс составляют методы оценивания, известные как
методы Гэствирта [Gastwirth A966)]. Эти методы основываются
на идее, согласно которой наибольшее доверие оказывается дан-
данным, более близким к «центру» выборки.
4.2. Приложения в статистике 211
Рассмотрим jV точек на прямой (рис. 4.12). Простой метод
устранения предполагаемых выбросов заключается в удалении
части точек с левого и правого краев — по ocN точек с каждой
стороны. Среднее значение вычисляется по оставшимся точкам.
Это значение известно как а-урезанное среднее и является част-
частным случаем оценки по методу Гэствирта:
N N
где X(i) обозначает г-й наименьший из х,-. Для а-урезанного
среднего имеем
Wi =l/[(l—2a) N], аЛ/</<A — а) Л/.
Любое урезанное среднее можно вычислить за время O(N) (ис-
(используя алгоритм выборки линейной сложности), а любую оцен-
оценку по методу Гэствирта можно вычислить за время O(yVlogyV)
(используя сортировку). Теперь возникает вопрос: что представ-
представляет собой аналогичная процедура в случае более высокой раз-
размерности? Тьюки предложил процедуру, известную под назва-
названием «лущение» или «шелушение», состоящую в удалении вы-
выпуклой оболочки множества с последующим удалением выпук-
выпуклой оболочки оставшегося множества, и так до тех пор, пока
не останется лишь A—2a)N точек [Huber A972)]. Эта про-
процедура приводит нас к следующим определению и задаче.
Определение 4.2. Глубиной точки р в множестве S называет-
называется число выпуклых оболочек (выпуклых слоев), которые долж-
должны быть удалены из S прежде, чем будет удалена точка р.
Глубина. 1
Глубина 2. —
Глубина 4 - i \ ^"^-_1 >* / ^ Глубина 3
Рис. 4.13. Глубина точки в множестве.
Глубина множества S — это глубина его самой глубокой точки
(рис. 4.13).
В связи со сказанным возникает следующая геометрическая
задача, представляющая и самостоятельный интерес-
Задача ВО8 (ГЛУБИНА МНОЖЕСТВА). На плоскости за-
задано множество из N точек. Требуется найти глубину каждой
точки.
212 Гл. 4. Выпуклые оболочки: расширения и приложения
Теорема 4.13. Любой алгоритм, определяющий глубину каж-
каждой точки в множестве, в худшем случае должен выполнить
Q(AMogiV) сравнений.
Доказательство. Воспользуемся методом сведения задачи
СОРТИРОВКА. Рассмотрим одномерное множество. Зная глу-
глубину каждой точки, можно упорядочить множество, выполнив
дополнительно лишь O(N) сравнений.
Лишь совсем недавно был разработан алгоритм, достигаю-
достигающий этой нижней оценки. Однако, прежде чем переходить к его
описанию, интересно вкратце рассмотреть историю этой задачи.
Начать просмотр
на глубине fy
Начать просмотр
на глубине 3
Начать просмотр ¦^^^~~~~-^^ ^^^L НАЧАЛИ
па глубине Z \ ч ~~^а*л^^ ^2л- HA4AJIU
Начать просмотр '< у-> —*с
на глубине 1 —*? <9>^щЛ0 НАЧАЛО
Рис. 4.14. Определение глубины точек множества путем многократного об- '
хода по методу Джарвиса. Вершины, помечаемые последовательно меткой
НАЧАЛО, обведены кружком.
Решение задачи методом «грубой силы» сводится к последо-
последовательному построению выпуклой оболочки данного множе-
множества S, затем выпуклой оболочки точек, не вошедших в первую
выпуклую оболочку, и т. д., на что потребуется в худшем случае
O(N2\og N) операций. (Эта оценка достигается в случае, когда
множество получаемых выпуклых оболочек представляет
[_iV/3J вложенных треугольников.) В несколько более искус-
искусном подходе [Shamos A978)] многократно используется метод
обхода Джарвиса (см. разд. 3.3.3), а достигаемое при этом
время работы алгоритма равно O(N2). Рис. 4.14 иллюстрирует
работу этого алгоритма. Для единообразия обработки вводится
дополнительная фиктивная точка ро — (х0, у0), координаты ко-
которой равны минимальным значениям абсциссы и ординаты то-
точек множества S. Просмотр точек множества начинается с точ-
точки ро, и первая достигнутая точка маркируется меткой НАЧА-
НАЧАЛО. Последующий обход точек выполняется в направлении
против часовой стрелки. Каждая пройденная точка (за исклю-
исключением НАЧАЛО) удаляется из S. Когда вновь достигается
точка НАЧАЛО, завершается построение выпуклой оболочки
глубины 1. Точка НАЧАЛО удаляется из множества S, а роль
точки ро принимает на себя точка, предшествующая точке НА-
4.2. Приложения в статистике 213
ЧАЛО; этот процесс продолжается до тех пор, пока из S не
будут удалены все точки.
Более сложный и вместе с тем более эффективный алгоритм
дает использование метода Овермарса — Ван Леювена поддерж-
поддержки выпуклой оболочки на плоскости (см. разд. 3.3.7). Напомним
лишь, что первичной структурой данных, используемой в этом
методе, является двоичное дерево поиска, узлы которого указы-
указывают на вторичные структуры данных, представляющие сцеп-
сцепляемые очереди. Кроме того, очередь, на которую указывает
корень дерева, дает верхнюю оболочку исходного множества
точек, а удаление каждой точки выполняется за время
O((logiVJ). Таким образом, используя одновременно структуры,
соответствующие верхней и нижней оболочкам, получаем вы-
выпуклую оболочку глубины 1. Затем каждая точка построенной
оболочки удаляется из обеих структур, из которых теперь мож-
можно получить оболочку глубины 2, и т. д. Оболочки получаются
тривиальным образом за линейное время в результате прохо-
прохождения сцепляемой очереди, а полное время, затрачиваемое на
удаление всех вершин, равно O(N\og2N).
Впоследствии эта идея была доведена до большого совер-
совершенства Чазелле (Chazelle A983b)]. А именно общий метод
Овермарса — Ван Леювена поддержки выпуклой оболочки рас-
рассчитан на произвольную последовательность операций вставки
и удаления точек. Однако при построении выпуклых слоев по-
последовательность операций удаления полностью управляется раз-
разработчиком алгоритма. Чазелле показал, как можно надлежа-
надлежащим образом сгруппировать операции по удалению точек, чтобы
порождать слои более эффективно. Отсылаем читателя к перво-
первоисточнику, содержащему доказательство следующей интересной
теоремы:
Теорема 4.14. Выпуклые слои, а следовательно, и глубина
множества из N точек на плоскости могут быть найдены за оп-
оптимальное время 8 (N log N).
4.2.2. Монотонная регрессия
Задачу о регрессии можно рассматривать как задачу
поиска наилучшей аппроксимации данных в некотором подпро-
подпространстве. Предположим, задано конечное множество точек в Ed,
рассматриваемых как значения некоторой функции /от (d— 1)
переменных, и необходимо определить допустимый класс аппро-
аппроксимирующих функций и норму для измерения ошибки1).
') В двумерном случае точки (xi,yi) представляют функцию Ui = f(xi),
и Xi называется независимой переменной. В 6-мерном случае имеем Xk =
214
Гл. 4. Выпуклые оболочки' расширения и приложения
Функция регрессии — это некоторая функция /* от (d— 1) пере-
переменных, минимизирующая норму || / — /* ||.
Задача о монотонной регрессии заключается в поиске наи-
наилучшей монотонной (т.е. невозрастающей или неубывающей)
Рис. 4.15. Монотонная функция, аппроксимирующая (не лучшим образом)
конечное множество точек.
аппроксимирующей функции для конечного множества точек.
Обычно в качестве нормы берется норма пространства L2 или
минимум суммы квадратов ввиду связи последней с методом
максимального правдоподобия1). Другими словами, задано
Рис. 4.16. Наилучшее соответствие обеспечивает ступенчатая функция. Для
ее задания необходимо определить как число ступенек, так и точки разрыва
при переходе с одной ступеньки на другую.
множество точек {(х/,у,): t=l, ..., JV} и необходимо найти
монотонную функцию /, минимизирующую
На рис. 4.15 приведен пример монотонной аппроксимирующей
функции.
') Более подробно монотонная регрессия рассматривается в книге
[Barlow, Bartholomew, Bremner, Brunk A972)].
4.2. Приложения в статистике
215
Приведенный выше рисунок вводит в некоторое заблужде-
заблуждение, так как он только усиливает интуитивное представление
о том, что функция f должна быть непрерывной. В рамках ме-
метода наименьших квадратов, когда минимизируется сумма квад-
квадратов отклонений, наилучшее соответствие дает ступенчатая
функция, пример которой показан на рис. 4.16. Остается «толь-
«только» определить точки перехода со ступеньки на ступеньку и
высоту каждой ступеньки.
9VS
Рз
Pi
ЯР5
Рис. 4.17. Нижняя выпуклая оболочка ДЧС определяет монотонную аппрок-
аппроксимирующую функцию.
Предположим, что данные упорядочены по значению лг-ко-
ординаты. (Обычно на практике нет необходимости производить
сортировку данных, так как независимой переменной является
время либо точки выбираются в порядке возрастания х.) Опре-
Определим диаграмму частичных сумм (ДЧС) как множество точек
Pi = (/. Sj), po = @, 0), где sy — это частичная сумма ординат
точек:
Наклон отрезка прямой, соединяющего точки p;-_i на pj, как раз
равен yj. Предположим теперь, что построена нижняя оболочка
Я множества точек {po.Pi. .... Pn} (cm. разд. 3.3.2). Между
нижней оболочкой Я и монотонной функцией регрессии суще-
существует замечательная связь: монотонная функция регрессии для
216 Гл. 4. Выпуклые оболочки: расширения и приложения
множества точек определяется наклоном отрезков нижней обо-
оболочки его диаграммы частичных сумм [Barlow A972)] {рис. 4.17).
Таким образом, имеет место следующий результат.
Теорема 4.15. Монотонная функция регрессии, определяемая
методом наименьших квадратов, для множества из N точек на
плоскости может быть найдена за время О (N log N). Если точки
множества уже упорядочены по значению абсциссы, то доста-
достаточным оказывается время O(N).
Если исходные данные уже упорядочены, то, используя метод
Грэхема, можно найти нижнюю оболочку за линейное время.
Если же точки не упорядочены, то в худшем случае потребуется
время O(N logN).
4.2.3. Выделение кластеров (диаметр
множества точек)
Следуя работе Хартигана [Hartigan A975)], класте-
кластеризация— это выделение групп схожих объектов (кластеров).
Кластеризация множества заключается в разбиении его на ча-
части таким образом, чтобы минимизировать некоторую меру раз-
различия. В книге Хартигана приведен целый ряд таких мер и
процедур кластеризации с их использованием. Мы рассмотрим
двумерный случай, предполагая, что координаты х и у выбраны
таким образом, что мерой различия является обычная метрика
евклидова пространства. Мерой «разброса» в кластере является
максимальное расстояние между двумя его произвольными точ-
точками, называемое диаметром кластера. Интуитивно понятно, что
кластер с небольшим диаметром содержит элементы, довольно
тесно связанные друг с другом, чего нельзя сказать о кластерах
с большим диаметром. Приведем формулировку одной из задач
кластеризации.
Задача ВО9 (/С-КЛАСТЕРИЗАЦИЯ С МИНИМАЛЬНЫМ
ДИАМЕТРОМ). На плоскости заданы N точек. Требуется раз-
разбить их на К кластеров С\, ..., Ск таким образом, чтобы ма-
максимальный из диаметров кластеров был минимальным.
Трудно представить, как можно решить эту задачу, не имея
по крайней мере алгоритма определения диаметра кластера.
Это приводит к следующей задаче:
Задача ВОЮ (ДИАМЕТР МНОЖЕСТВА). На плоскости
заданы N точек. Найти две наиболее удаленные друг от друга
точки.
Эта задача кажется настолько элементарной, что даже труд-
трудно представить, что с ней связаны какие-то проблемы. В конце
4.2. Приложения в статистике
217
Образ А
концов, можно непосредственно вычислить расстояние между
каждой из JV(JV—1)/2 пар точек и выбрать максимальное из
них, определяющее диаметр множества. Что же здесь еще изу-
изучать? Несомненно, следует задать вопрос, является ли эта про-
процедура, имеющая сложность O(N2), наилучшим из возможных
алгоритмов. Вопрос о вычислительной сложности задач такого
сорта является основным в вычислительной геометрии, который
мы обязаны ставить даже в слу-
случае отсутствия в нем практиче-
практической надобности.
Метод получения нетривиаль-
нетривиальной нижней оценки для задачи
ДИАМЕТР МНОЖЕСТВА был
разработан совсем недавно1).
Он основан на сведении задачи
РАЗДЕЛИМОСТЬ МНОЖЕСТВ,
для которой известна нетриви-
нетривиальная нижняя оценка, к задаче
ДИАМЕТР МНОЖЕСТВА.
Пусть А={аи ..., aN) и В =
= {&ь ..., 6N}—два множества
действительных неотрицатель-
неотрицательных чисел. Для проверки того,
что множества А и В не содер-
содержат одинаковых элементов (т. е. разделимость множеств А
и В), требуется выполнить Q,(N\ogN) сравнений [Reingold
A972)]. Сведем задачу РАЗДЕЛИМОСТЬ МНОЖЕСТВ к ДИА-
ДИАМЕТР МНОЖЕСТВА, отобразив множества Л и Б на единич-
единичную окружность С, при этом элементы множества А отобража-
отображаются в первый квадрант, а элементы множества В — в третий.
Отображение устроено следующим образом: а; отображается в
точку пересечения окружности С с прямой у = atx, находящую-
находящуюся в первом квадранте, а Ь; отображается аналогичным обра-
образом, но только в точку, находящуюся в третьем квадранте
(рис. 4.18). Обозначим через S множество, содержащее 2N по-
построенных таким образом точек пересечения. Нетрудно понять,
что множество S имеет диаметр, равный 2, тогда и только тогда,
когда оно содержит две диаметрально противоположные точки
окружности С, т. е. когда А (] В Ф 0. Таким образом, имеет ме-
место следующая теорема, справедливость которой для про-
пространств более высокой размерности очевидна:
Образ В
Рис. 4.18. Отображение множеств
Л и В на единичную окруж-
окружность С.
') Исходную идею преобразования можно найти в [Brown A979a)].
Очевидно, Добкин н Манро независимо придумали одно и то же отобра-
отображение.
218 Гл. 4. Выпуклые оболочки: расширения и приложения
Теорема 4.16. В рамках модели алгебраических деревьев вы-
вычислений для вычисления диаметра конечного множества из N
точек в Ed (d~^z2) требуется Q(N\ogN) операций.
Вернемся к разработке алгоритма решения задачи ДИА-
ДИАМЕТР МНОЖЕСТВА. Теорема 4.17 дает ключевую идею, по-
позволяющую избежать вычисления расстояния для каждой пары
точек:
Теорема 4.17 [Hocking, Young A961)]. Диаметр множества
равен диаметру его выпуклой оболочки. (См. рис. 4.19.)
Конечно, в худшем случае может получиться так, что все ис-
исходные точки множества окажутся вершинами выпуклой обо-
оболочки, так что, затратив
O(N\ogN) времени, не удаст-
удастся удалить ни одной точки.
Далее, если не оговорено
иное, будем рассматривать
двумерный случай задачи.
В этом случае выпуклая обо-
оболочка множества точек явля-
является выпуклым многоугольни-
многоугольником, а вовсе не конечным мно-
множеством точек. Так что имеет
Рис. 4.19. Diam(S)= Diam(CH(S)). место несколько иная задача.
Задача ВОН (ДИАМЕТР ВЫПУКЛОГО МНОГОУГОЛЬ-
МНОГОУГОЛЬНИКА). Дан выпуклый многоугольник. Найти его диаметр.
Сразу же получаем
ДИАМЕТР МНОЖЕСТВА ozN}ogN ДИАМЕТР ВЫПУК-
ВЫПУКЛОГО МНОГОУГОЛЬНИКА
Если диаметр выпуклого многоугольника можно найти за
время, меньшее чем O(N2), то и диаметр множества можно бу-
будет найти быстрее, чем за O(N2) операций.
Пока у нас нет причин заранее сомневаться в том, что свой-
свойство выпуклости поможет нам в решении задачи. Стоит продол-
продолжить исследование в этом направлении, прежде чем отказывать-
отказываться от этой идеи. По крайней мере следует рассмотреть несколь-
несколько иные подходы к определению диаметра. Один из них дает
следующая теорема.
Теорема 4.18. Диаметр выпуклой фигуры равен наибольшему
из расстояний между двумя параллельными опорными прямыми
к этой фигуре [Yaglom, Boltyanski A961)].
На примере рис. 4.20 видно, что параллельные прямые мож-
можно провести не через каждую пару точек. Например, никакие
4.2. Приложения в статистике 219
две опорные прямые, проходящие соответственно через вершины
Ра и р6, не являются параллельными. Это значит, что отрезок
Р4Рб не является диаметром. Ддра-точек, через которые можно
провести параллельные опорные прямые, называется противо-
противолежащей парой. В силу теоремы 4.18 необходимо рассматривать
лишь противолежащие пары точек. Задача заключается в том,
чтобы определить противолежащие пары, не перебирая все воз-
возможные пары точек.
Рассмотрим вершину р,- выпуклого многоугольника Р, вер-
вершины которого занумерованы в порядке обхода против часовой
Pi
Рис. 4.20. Не все пары вершин являются противолежащими. Через вершины
Pi и р6 нельзя провести параллельные опорные прямые. Таким образом, рцр6
не может быть диаметром.
стрелки (рис. 4.21 (а)). Предположим, что мы двигаемся по гра-
грани цеиполоутдлъшка Р против часовой стрелки. Начав движе-
ниеТГвершине pt, будем двигаться до тех пор, пока не достигнем
вершины q<?\ максимально удаленной от pi-ipi1). В случае не-
неоднозначности выбора, т. е. когда Р содержит параллельные
ребра, q$ — это первая вершина с заданным свойством, встре-
встретившаяся при обходе. Аналогичным образом определяется вер-
вершина q^\ максимально удаленная от pipi+i, которая выявляет-
выявляется при обходе границы многоугольника Р по часовой стрелке,
начиная с вершины pi. Утверждается, что цепь вершин между
q^ и q^ (включая эти вершины) дает множество С(р,), каж-
каждая вершина которого образует с pi противолежащую пару2).
Действительно, пусть 'сц -:=Тшешний угол, образуемый pi-\pi и
PiPi+i (а;>я). Ясно, что (pi, ps) является противолежащей
') Точнее сказать, ищется вершина, максимально удаленная от прямой,
содержащей отрезок pi-ip;. — Прим. перев.
2) Вершины q$ и q^ разбивают границу Р на две цепи. К С(р{) отно-
относятся вершины той из них, которая не содержит вершину pi. — Прим. перев.
220
Гл. 4. Выпуклые оболочки: расширения и приложения
парой тогда и только тогда, когда существует прямая, попадаю-
попадающая в пересечение углов as и а; (рис. 4.21 (Ь)). Так как C(pi)—
это выпуклая цепь, то каждая вершина pseC(p,) обладает
этим свойством. Более того, для каждой вершины Р, не принад-
принадлежащей С (pi), справедливо противоположное высказывание.
<п
Рис. 4.21. Характеризация противолежащих пар. Пересечение углов а,- и as
представляет собой два клина с совпадающими вершинами.
Это свойство немедленно подсказывает алгоритм порожде-
порождения всех противолежащих пар. Основная операция, необходи-
необходимая для этого, заключается в проверке условия максимальной
удаленности точки от прямой, определяемой отрезком p,-p,-+i.
Это легко сделать, вычислив площадь (с учетом знака) тре-
треугольника (pi, Pi+\, p) (см. разд. 2.2.1). Теперь можно описать
простой алгоритм. В этом алгоритме предполагается, что вер-
вершины многоугольника Р, составляющие при обходе против ча-
часовой стрелки последовательность (ри р2, ¦¦¦, Ры) (в которой
за pN следует р\), представлена списком с указателем СЛЕ-
ДУЮЩИЙ[ ], дающим следующий элемент списка.
4.2. Приложения в статистике 221
procedure ПРОТИВОЛЕЖАЩИЕ-ПАРЫ
1. begin p:=pN;
2. <7:=СЛЕДУЮЩИЙ[р];
3. while (Площадь(р, СЛЕДУЮЩИЙ^],
СЛЕДУЮЩИЙ^]) > Площадь
(р,СЛЕДУЮЩИЙ[р],<7)) do
q := СЛЕДУЮЩИЙ^];
(* продвигаться по границе Р до тех пор, пока
не будет достигнута вершина, максимально
удаленная от р СЛЕДУЮЩИЙ[р] *)
4. qo-=q;
5. while (q ^= p0) do
6. begin p:= СЛЕДУЮЩИЙ[р];
7. печать (p,q);
8. while(miou^b(p, СЛЕДУЮЩИЙ^],
СЛЕДУЮЩИЙМ)) >
Площадь(р,СЛЕДУЮЩИЙ^],?)) do
9. begin q := СЛЕДУЮЩИЙ^];
10. tf((P,q)?=(qQ,PQ)) then печать(р,^)
end;
11. if (Площадь(р,СЛЕДУЮЩИЙ^],
СЛЕДУЮЩИЙ^])) =
ПЛОЩАДЬ(р, СЛЕДУ ЮЩИЙ[р],^))
then
12. lf(p,q)=t(qQ,pN))thtn
печать(р, СЛЕДУ ЮЩИЙ[<7])
(* обработка параллельных ребер *)
end
end.
Рис. 4.22 иллюстрирует работу приведенного выше алгоритма.
Строки 1—3 алгоритма описывают поиск вершины q^, если
использовать обозначения, введенные ранее (в алгоритме эта
вершина обозначена q0). Последующий цикл while, в котором
формируется множество C(pi), использует два указателя р и q.
Эти два указателя двигаются по границе многоугольника Р в
направлении против часовой стрелки, при этом р продвигается
от pN до <7^>, a q — от q(^ до pN. Противолежащая пара по-
порождается каждый раз, когда либо происходит продвижение лю-
любого из двух упомянутых указателей (строки 5—7 и 9—10),либо
встречается пара параллельных ребер многоугольника Р (стро-
(строки 11 —12). Очевидно, что первой порожденной парой будет
(P,q)= (Pa, qo) (при первом выполнении строки 7). Утвер-
Утверждается, что последней парой будет (р, q) = (qQ, Pn), так как
Pn — это последнее значение, принимаемое q (иначе основной
цикл while в строке 5 завершается). Таким образом, каждая про-
222
Гл. 4. Выпуклые оболочки: расширения и приложения
тиволежащая пара порождается лишь один раз. И так как при
выполнении цикла while указатель р продвигается от ра до qo,
а указатель q — от q0 до pN, то произойдет всего Л' продвижений,
р q Печать Шаг
Рэ
ро
Р;
р
р
р
р?
Ро
Pi
Рг
Рз
р
р5
Р6
р
Р8
Рэ
'Ро Pb'
•
^Р: Ръ^
(Pi P6'
(Р; Р7)
!РгР6'
'Рг Р7)
(Рг Ре'
(рг р9)
(Рз Рэ'
(Р4 Рэ'
(Ps Рэ'
1
2
3
3
3
3
3
6
7
6
7
9
10
12
6
7
9
10
9
10
9
10
6
7
6
7
е
7
Ро 9
Рис. 4.22. Иллюстрация работы процедуры ПРОТИВОЛЕЖАЩИЕ-ПАРЫ.
Обратите внимание на то, что ребра ргр2 и р6р7 параллельны.
и, следовательно, при отсутствии параллельных ребер будет по-
порождено Л' противолежащих пар. Если имеются пары парал-
параллельных ребер, то их число не может превышать [N/2J, и,
следовательно, полное число противолежащих пар, порождае-
порождаемых алгоритмом, не превосходит 3N/2.
Алгоритм можно изменить таким образом, что он будет вы-
выдавать лишь такие противолежащие пары (их в точности N),
которые являются кандидатами на место диаметра. Действи-
Действительно, каждый раз, когда два ребра многоугольника парал-
4.3. Замечания и комментарии 223
лельны, необходимо рассматривать лишь диагонали определяе-
определяемой ими трапеции.
Так как для определения диаметра многоугольника вполне
достаточно знать все его противолежащие пары (согласно тео-
теореме 4.18), то имеет место следующий результат.
Теорема 4.19. Диаметр выпуклого многоугольника может
быть найден за линейное по числу его вершин время.
Следствие 4.1. Диаметр множества из N точек на плоскости
может быть найден за оптимальное время Q(N \ogN).
Теорема 4.20. Диаметр множества из N точек, выбранных из
^-распределения на плоскости (см. разд. 4.1.1), может быть
найден в среднем за время О (N).
Доказательство. Согласно теореме 4.5, выпуклую оболочку
можно найти в среднем за линейное время. Применяя теоре-
теорему 4.12, получаем необходимый результат.
Теорема 4.19 в сочетании с теоремой 4.12 (см. разд. 4.1.4)
позволяют получить следующий интересный результат.
Следствие 4.2. Диаметр простого многоугольника может быть
найден за линейное время.
На первый взгляд может показаться, что при прохождении
всех противолежащих пар для определения диаметра выпол-
выполняется лишняя работа. Легко убедиться, что при отсутствии па-
параллельных ребер этого не происходит. Ключевым в этом во-
вопросе является понятие диаметральной пары вершин в много-
многоугольнике Р, т. е. такой пары вершин в многоугольнике Р, рас-
расстояние между которыми в точности равно диаметру множе-
множества вершин. Так как диаметральная пара является также про-
противолежащей парой, то в множестве вершин имеется не более
N диаметральных пар. Классический результат, полученный Эр-
дёшем [Erdos A964)], состоит в следующем:
Теорема 4.21. В множестве из N точек на плоскости может
быть не более N пар точек, на которых достигается максималь-
максимальное расстояние между точками множества.
Очевидно, что данная оценка достигается на правильных
/V-угольниках (N^3, нечетное).
4.3. Замечания и комментарии
Оптимальное решение задачи вычисления диаметра
множества точек на плоскости было получено методом, обсу-
обсуждавшимся в разд. 4.2.3. Довольно соблазнительно расширить
этот подход на пространства более высокой размерности. В слу-
224 Гл. 4. Выпуклые оболочки: расширения и приложения
чае пространства Еъ еще одним фактором, стимулирующим инте-
интерес к этому вопросу, является следующий результат {Grunbaum
A956)] (известный как гипотеза Васони):
Теорема 4.22. В множестве из N точек в трехмерном про-
пространстве число пар точек, на которых достигается максималь-
максимальное расстояние, не превышает 2N — 2.
К сожалению, большое сходство теорем 4.21 и 4.22 скрывает
тот факт, что, в то время как в случае плоскости число диамет-
диаметральных пар и число противолежащих пар растут как O(N),
в трехмерном пространстве для них имеют место оценки О (N)
и O(N2) соответственно. В самом
деле, не составляет труда кон-
конструктивно продемонстрировать
тот факт, что число противоле-
противолежащих пар в трехмерном про-
пространстве может расти как
O(N2). Соответствующий пример
приведен на рис. 4.23, где нуж-
нужная конфигурация получается в
результате замены двух несмеж-
несмежных ребер тетраэдра двумя «це-
«цепями» по N/2 вершин в каждой.
Рис. 4.23. Конструкция множества Любая пара вершИн — ПО ОДНОЙ
из N точек в трехмерном про- r r „ ,
странстве с числом противолежа- вершине из каждой цепи —обра-
щих пар, равным 0{Ф). зует противолежащую пару. Та-
Таким образом, процедура поро-
порождения всех противолежащих пар требует времени O(N2) и,
возможно, является более трудоемкой по сравнению с методом
«грубой силы», основанным на вычислении расстояния между
каждой парой точек. Хотя диаметральные пары составляют под-
подмножество противолежащих пар, до сих пор не найден эффек-
эффективный способ выделения таких пар. Несмотря на ее внешнюю
простоту, задача вычисления диаметра множества точек в трех-
трехмерном пространстве явилась для многих исследователей пре-
преградой, о которую разбивались все их усилия.
В d-мерном пространстве диаметр множества из N точек
всегда можно определить за время O(dN2), вычисляя расстоя-
расстояние между каждой парой точек.
Следующая теорема сужает круг возможностей сделать это
более эффективно:
Теорема 4.23 [Erdos (I960)]. В множестве из N точек в
d-мерном (d > 3) пространстве число пар точек, на которых до-
достигается максимальное расстояние, может достигать
N2/{2 — \_d/2\)+O{N2~E), где е > 0 — некоторое число.
4.4. Упражнения 225
Яо [Yao A982)] предложил несколько иной подход к задаче
вычисления диаметра множества. Этот подход позволил полу-
получить алгоритм со сложностью o(N2). А именно оценка времени
работы алгоритма равна
T(N, d) = О {N2-a{d)(logN)l-a{d)),
где a(d) = 2-(d+I>. Для d = 3 эту оценку можно улучшить до
O((N log Л/I-8). Вопрос о том, можно ли уменьшить различие
между T(N, d) и Q(N\ogN), остается открытым.
4.4. Упражнения
1. Пусть S — множество из N точек на плоскости. Обе координаты каж-
каждой точки являются целыми числами, не превосходящими т {точки, задан-
заданные на решетке). Разработать алгоритм построения выпуклой оболочки
CH(S) со временем обработки O(N + m).
2. Пусть S — множество из N — т2 точек в Е3, определенное следующим
образом:
S - {Pif. х (рИ) - /, у (Р|/) _ /, г (рИ) > О, 0 < /, / < т).
Разработать специальный алгоритм построения верхней оболочки множе-
множества S.
3. Проверка на максимум в Е2. На плоскости задано множество S из
Af точек. Разработать метод, проверяющий за время O(logAf), является ли
некоторая точка q максимумом множества SU{?}- (Предполагается режим
многократных запросов — см. разд. 2.1.) Время, затрачиваемое на создание
структуры данных, используемой для поиска, не должно превышать
O{N\ogN), а занимаемый ею объем памяти — O(N).
4. Проверка на максимум в Е3. В пространстве Е3 задано множество S
из ЛГ точек. Разработать метод, проверяющий за время O(logAf), является ли
некоторая точка q максимумом множества SU {<?¦}• (Предполагается режим
многократных запросов.) Время, затрачиваемое на создание структуры дан-
данных, используемой для поиска, не должно превышать O(N\ogN), а зани-
занимаемый ею объем памяти — O(N). (Указание: использовать метод локализа-
локализации точки в некотором подходящем разбиении плоскости.)
5. Степень доминирования. На плоскости задано множество S нз N то-
точек. Доминирующим подмножеством множества S называется множество
max(S) максимумов множества S. Степенью доминирования точки р в мно-
множестве S называется число доминирующих подмножеств, которые необхо-
необходимо удалить для удаления точки р. Степень доминирования множества S
равна максимальной степени доминирования его точек.
(a) Разработать алгоритм со сложностью O(N\ogN) для вычисления
степени доминирования каждой точки множества S.
(b) Оптимален ли этот алгоритм?
5
ГЛАВА
Близость: основные алгоритмы
В главе 4 был приведен алгоритм двух наиболее уда-
удаленных друг от друга точек множества на плоскости, имеющей
сложность O(N-logN). Можно было бы предположить, что ал-
алгоритм поиска двух ближайших друг к другу точек множества
можно получить простым обобщением указанного алгоритма, но
это не так. Две наиболее удаленные точки множества с необхо-
необходимостью являются вершинами выпуклой оболочки этого мно-
множества, и для разработки быстрого алгоритма можно использо-
использовать свойство выпуклости. Две ближайшие точки совсем не обя-
обязательно имеют какое-либо отношение к выпуклой оболочке,
так что для решения этой задачи должен быть разработан но-
новый метод. Этому и будет посвящена данная глава. Мы рассмо-
рассмотрим большой класс задач, связанных с определением близости
точек на плоскости. Наша цель будет состоять в том, чтобы
решать все эти не связанные на первый взгляд между собой за-
задачи, используя единый алгоритм, который выявляет, обраба-
обрабатывает и запоминает компактным образом всю информацию от-
относительно близости точек. Чтобы добиться этого, мы возродим
классический математический объект, называемый диаграммой
Вороного, представив ее в виде эффективной вычислительной
структуры, позволяющей добиться огромного преимущества по
сравнению с лучшими из ранее известных алгоритмов. В этой
главе для штурма этого большого и трудного класса задач —
задач нахождения ближайших точек или, иначе говоря, задач
определения близости — будут использованы некоторые обсу-
обсуждавшиеся ранее методы решения геометрических задач, такие
как построение выпуклой оболочки и геометрический поиск.
Как уже говорилось выше, состояние дел в этой области вы-
вычислительной геометрии не является исключением по отношению
к сложившейся в настоящее время практике: в случае плоскости
имеются мощные и элегантные методы, в то время как для трех-
5.1. Набор задач 227
мерного пространства — и тем более для пространств более вы-
высокой размерности — известно очень мало и на каждом шагу
исследователя подстерегают труднопреодолимые препятствия, не
сулящие ничего хорошего.
Большинство задач, изученных в предыдущих главах (за ис-
исключением задачи о наиболее удаленной паре точек), основы-
основываются исключительно на свойствах инцидентности рассматри-
рассматриваемых геометрических объектов. Так что соответствующие ре-
результаты остаются справедливыми при применении к объектам
полной группы линейных преобразований (разд. 1.3.2). Задачи,
рассматриваемые в двух последующих главах, основываются на
метрических свойствах, и, таким образом, справедливость ре-
результата ограничивается группой евклидовых преобразований
(группой движений твердого тела).
5.1. Набор задач
Мы начнем с перечисления различных на первый
взгляд задач, относящихся к определению близости, но кото-
которые, как мы увидим далее, близки с точки зрения процедуры
их решения.
Задача Б.1 (БЛИЖАЙШАЯ ПАРА). На плоскости заданы
N точек. Найти две из них, расстояние между которыми наи-
наименьшее1).
Эта задача настолько просто формулируется и настолько
важна, что ее можно рассматривать как один из основных во-
вопросов вычислительной геометрии как с точки зрения ее прило-
приложений, так и с чисто теоретической точки зрения. Например,
одно из приложений этой задачи относится к системе реального
времени, управляющей движением самолетов: с некоторыми
упрощениями можно считать, что наибольшей опасности столк-
столкнуться подвергаются два самолета, находящиеся на наименьшем
расстоянии друг от друга.
Центральный вопрос разработки алгоритма решения этой
задачи состоит в том, нужно ли перебирать каждую пару точек,
чтобы найти определенное таким образом минимальное расстоя-
расстояние. Это может быть сделано за время O(dN2) в случае d-мер-
ного пространства (d — произвольное целое число). В одномер-
одномерном случае существует более быстрый алгоритм, использующий
тот факт, что каждая пара ближайших точек должна состоять
из последовательных точек множества при упорядочении его по
значению координаты. Таким образом, можно упорядочить N
заданных действительных чисел за O(N\ogN) шагов, а затем
') Может оказаться, что таких пар несколько. Будем считать, что для
решения задачи достаточно найти одну такую пару точек.
228 Гл. 5. Близость: основные алгоритмы
осуществить линейный просмотр упорядоченной последователь-
последовательности (хь х2, ..., Xn) за время O(N), вычисляя при этом
xi+i — Xi, i = 1, ..., N — 1. Как будет показано далее, этот оче-
очевидный алгоритм является оптимальным.
Задача Б.2 (ВСЕ БЛИЖАЙШИЕ СОСЕДИ). На плоскости
заданы N точек. Найти ближайшего соседа для каждой точки
множества.
«Ближайший сосед» — это отношение на множестве точек 5,
определяемое следующим образом: точка Ь является ближай-
ближайшим соседом точки а (обозначается а-^-Ъ), если
dist (a, 6) = min dist (а, с).
с s=S-a
Пример графа этого отношения изображен на рис. 5.1. Заметим,
что отношение «->-» не обязательно является симметричным, т. е.
из а-^-b вовсе не обяза-
обязательно следует, что Ь -*-
-*¦ а. Отметим также, что
точка может быть бли-
ближайшим соседом несколь-
нескольких точек1) (к тому же
отношение «—*¦» не обя-
обязательно является функ-
функцией) . Решением задачи
Б.2 является совокуп-
совокупность упорядоченных пар
(а, Ь), где а->-6.
Рис. 5.1. Отношение «ближайший сосед» ПаРа тОчек- УД°ВЛет-
(«->») на множестве точек. воряющая условию сим-
симметричности отношения
(имеют место а-*-Ь и Ь-+а), называется взаимной парой. Если
процедура выбора точек на плоскости является пуассоновским
процессом, то математическое ожидание доли взаимных пар то-
точек, согласно Пиелоу [Pielou A977)], равно
0.6215.
В математической экологии эта величина используется для
выявления тенденции особей некоторого биологического вида к
') Хотя точка может иметь в качестве ближайшего соседа каждую из
других точек множества, она может быть ближайшим соседом самое боль-
большее шести точек в двумерном пространстве и не более двенадцати точек
в трехмерном пространстве. Это максимальное число точек, для которых
некоторая точка является ближайшим соседом в пространстве размерности d,
совпадает с максимальным числом единичных сфер, которые могут быть
расположены таким образом, чтобы все они касались заданной единичной
сферы. (Саати [Saaty A970)] указывает, что это число ие известно для d,
больших 12.)
5.1. Набор задач 229
образованию изолированных пар. Для этого вычисляется фак-
фактическое число взаимных пар и получившееся потом отношение
сравнивается с указанной величиной. Другие задачи, включаю-
включающие вычисление ближайших соседей, возникают при исследова-
исследовании расселения видов. В этих задачах, так же как в географии
(см. [Kolars, Nystuen A974)]) и в физике твердого тела, пред-
представляет интерес распределение величин расстояний между бли-
ближайшими соседями. Очевидно, что в одномерном случае тот же
самый алгоритм, основанный на сортировке и решающий задачу
БЛИЖАЙШАЯ ПАРА, позволяет найти все пары ближайших
соседей. В дальнейшем мы рассмотрим трудности, присущие
этим двум задачам в пространствах большей размерности.
Задача Б.З (ЕВКЛИДОВО МИНИМАЛЬНОЕ ОСТОВНОЕ
ДЕРЕВО). На плоскости заданы N точек. Построить дерево,
вершинами которого являются все заданные точки и суммарная
длина всех ребер которого минимальна.
Решением задачи является список, содержащий N — 1 пару
точек. Каждая пара представляет ребро дерева. На рис. 5.2
показан пример такого дерева.
Задача построения евклидова
минимального остовного дерева
(ЕМОД) возникает в приложе-
приложениях, касающихся различного
рода сетей. Если необходимо ор-
организовать систему связи между
N пунктами, соединив их кабе-
кабелем, то использование ЕМОД
даст сеть минимальной стоимо- рис. 5.2. Минимальное остовное
сти. Любопытно, что федераль- дерево множества точек на пло-
ный закон придает данной про- скости.
блеме дополнительную значи-
значимость: федеральные тарифы требуют, чтобы тариф за пользова-
пользование междугородной линией связи был пропорционален длине
минимального остовного дерева, соединяющего конечные пункты
абонентов. Это расстояние должно измеряться на стандартной
плоской проекции поверхности Земли1). Это имеет место не-
несмотря на то, что Земля не является плоской и что телефонная
компания может организовать реальную сеть не обязательно
в виде МОД. Тем не менее расчет за услуги основывается на
решении реальной задачи построения евклидова остовного де-
дерева, которую приходится решать сотни раз в течение дня, по-
поскольку конфигурации телефонной сети постоянно изменяются.
') Авторы благодарны Стефану Барру, сообщившему эту информацию.
230 Гл. 5. Близость: основные алгоритмы
Этот закон представляет «Соломонов компромисс» между
тем, что требуется вычислять, и тем, что вычисляется на прак-
практике, так как минимальное остовное дерево не соответствует
наикратчайшей из возможных сетей, соединяющих заданные
точки, при условии, что к исходному множеству не запрещено
добавлять новые точки. Если такое ограничение действительно
отсутствует, то дерево, имеющее наикратчайшую длину, назы-
называется деревом Штейнера (рис. 5.3) ').
Как было показано Гэри, Грэхемом и Джонсоном [Garey,
Graham, Johnson A976)], задача построения дерева Штейнера
является Л/Р-трудной, и, используя современные средства, мы
(а) (Ь)
Рис. 5.3. Суммарная длина ребер дерева Штейнера (Ь) может быть меньше,
чем у МОД (а).
не в состоянии решать задачи более чем для 20—25 точек. По-
Поэтому неразумно требовать, чтобы тариф за использование ли-
линий связи вычислялся в соответствии с деревом Штейнера.
Минимальное остовное дерево используется при кластериза-
кластеризации [Cower, Ross A969), Johnson A967), Zahn A971)], при вы-
вычислении характерной размерности множеств точек [Schwartz-
mann, Vidal A975)] и при распознавании образов [Osteen, Lin
A974)]. Оно также использовалось для минимизации длины
проводников при компоновке электрической схемы ЭВМ [Lober-
mann, Weinberger A957)]. Минимальное остовное дерево дает
начальное приближение для многих алгоритмов решения задачи
о коммивояжере, которая обсуждается в разд. 6.1.
Задача о минимальном остовном дереве обычно формули-
формулируется как задача теории графов: задан взвешенный граф с N
вершинами и Е ребрами, требуется найти кратчайшее поддере-
поддерево графа G, включающее все его вершины. Эта задача незави-
независимо была решена Дейкстрой [Dijkstra A959)], Краскалом
[Kruskal A956)] и Примом [Prim A957)], а существование поли-
полиномиального алгоритма (который был представлен каждым из
них) является в значительной степени неожиданным, так как
граф с N вершинами может иметь NN~2 остовных деревьев
[Moon A967)] 2). В попытке найти быстрый алгоритм для этой
') Дерево Штейиера на рис. 5.3 взято из работы [Melzak A973)].
2) Впервые это было доказано Кэли в 1889 г.
S.I. Набор задач 23l
общей задачи было затрачено много усилий [Nijenhuis, Wilf
A975), Yao A975)] и лучший на сегодняшний день результат
состоит в том, что задача может быть решена за время О(Е),
если Е ;> N1+E [Cheriton, Tarjan A976)]. (См. также разд. 6.1.)
В случае евклидовой задачи о минимальном остовном дере-
дереве N вершин определяются 2N координатами точек на плоско-
плоскости, а соответствующий граф содержит ребра, соединяющие
каждую пару вершин. Вес ребра равен расстоянию между точ-
точками, соединяемыми ребром. В этом случае использование луч-
лучшего из известных алгоритмов решения задачи о МОД потре-
потребует времени 6(?)= 6 (N2). И так как МОД всегда содержит
самое короткое ребро графа G1), то легко доказать, что приве-
приведенное значение является нижней оценкой для произвольного
графа. Действительно, так как в произвольном графе значения
весов ребер ничем не ограничены, то алгоритм решения задачи
о МОД, требующий времени меньше O(N2), мог бы быть ис-
использован для поиска минимума среди N2 значений за время
O(N2), что невозможно. Из этого следует, что любой алгоритм,
рассматривающий решение задачи о евклидовом минимальном
остовном дереве как выделение минимального остовного дере-
дерева в полном графе с N вершинами, с необходимостью имеет
квадратичную сложность по времени. Какие же соображения за-
заставляют нас предполагать, что для решения задачи достаточно
меньшего времени? Прежде всего, евклидов вариант задачи
о МОД имеет лишь 2N входных величин (координат точек), в
то время как в случае произвольного графа имеется N(N— 1)/2
входных величин (длин ребер). Таким образом, евклидов ва-
вариант задачи содержит сильные ограничения по сравнению с
общим случаем, и при разработке быстрого алгоритма можно
было бы использовать метрические свойства.
Задача Б.4 (ТРИАНГУЛЯЦИЯ). На плоскости заданы Сто-
Сточек. Соединить их непересекающимися отрезками таким обра-
образом, чтобы каждая область внутри выпуклой оболочки этого
множества точек являлась треугольником. (См. разд. 1.3.1.)
Граф триангуляции множества из N точек, являясь планар-
ным, имеет не более 3N — 6 ребер. Результатом решения сфор-
сформулированной выше задачи должен быть по крайней мере спи-
список этих ребер. На рис. 5.4 приведен пример триангуляции.
Задача триангуляции возникает в методе конечных элемен-
элементов {Strang, Fix A973); Cavendish A974)] и при интерполяции
функции от двух переменных, когда заданы значения функции
в N произвольным образом расположенных точках (х/, г/,) и
требуется аппроксимировать ее в некоторой новой точке (х, у).
¦') Это показали Краскал и Прим.
232
Гл. 5. Близость: основные алгоритмы
Рис. 5.4. Триангуляция множества
точек.
Один из возможных подходов основывается на кусочно-линей-
кусочно-линейной интерполяции, при которой поверхность, определяемая функ-
функцией, аппроксимируется «сетью», состоящей из плоских тре-
треугольных граней. Проекция каждой точки (х, у) принадлежит
лишь одной из треугольных граней, и соответствующее значение
функции f(x, у) вычисляется в результате определения интер-
интерполирующей плоскости, проходящей через три вершины грани.
Процесс триангуляции заключается в выборе троек точек, ко-
которые и будут образовывать грани. Для определения «качества»
получаемой триангуляции было предложено немало критериев
[George A971)], включающих, в
частности, максимизацию наи-
наименьшего угла или минимизацию
полной длины ребер. Выбор ука-
указанных условий объясняется их
удобством для получения оценки
ошибки интерполяции, а не тем,
что они позволяют получить наи-
наилучшую триангуляцию.
Все четыре предшествующие
задачи (Б.1—Б.4) относятся к
числу задач, решение которых
ищется лишь один раз и состоит в построении некоторого гео-
геометрического объекта (ближайшей пары точек, всех ближай-
ближайших соседей, евклидова минимального остовного дерева и три-
триангуляции). Далее рассматриваются две задачи поиска (см.
гл. 2), которые приходится решать многократно и которые
вследствие этого допускают предварительную доработку исход-
исходных данных.
Задача Б.5 (ПОИСК БЛИЖАЙШЕГО СОСЕДА). На пло-
плоскости заданы N точек. Как быстро можно найти ближайшего
соседа для некоторой новой точки q, при условии что допускает-
допускается предварительная обработка [Knuth A973)]?
В пространстве размерности d эту задачу можно решить за
время O(dN). Но нас интересует, как, используя предваритель-
предварительную обработку, сделать процедуру поиска более быстрой. Суще-
Существует множество прикладных задач, в которых может быть
использован такой быстрый поиск. Наиболее важной из них,
по-видимому, является задача классификации. Один из методов
классификации основывается на правиле ближайшего соседа
[Duda, Hart A973)]. В соответствии с этим правилом, если не-
необходимо классифицировать объект на принадлежность к одно-
одному из заданных классов, то его следует отнести к классу, соот-
соответствующему его ближайшему соседу. Например, неизвестная
5.2. Задача о единственности элементов 233
точка U на рис. 5.5 была бы классифицирована как принадле-
принадлежащая классу В.
Похожая ситуация имеет место в информационных системах
при выборке информации, когда выбирается запись, наилучшим
образом соответствующая записи-запросу [Burkhard, Keller
A973), Friedman, Bentley, Finkel A977)]. В случае, когда тре-
требуется обрабатывать большое количество объектов, решая либо
задачи классификации [Duda, Hart A973)] (при распознавании
речи, идентификации элементарных частиц и т. п.), либо задачи
А* В*
А А
в'
Рис. 5.5. Правило ближайшего соседа.
выборки данных (выборка наиболее подходящего элемента),
необходимо достаточно быстро выполнять поиск ближайшего
соседа.
Задача Б.6 F-БЛИЖАИШИХ СОСЕДЕЙ). На плоскости
заданы N точек. Как быстро можно найти k точек, ближайших
к некоторой новой точке q, при условии что допускается пред-
предварительная обработка?
Процедура поиска k ближайших соседей использовалась при
интерполяции и выделении контуров [Davis A975)] и при клас-
классификации (правило, использующее k ближайших соседей, яв-
является более устойчивым ко всякого рода случайностям по
сравнению с тем, когда решение принимается с учетом лишь
единственного соседа). Хотя последняя задача представляется
более сложной, чем задача Б.5, далее будет показано, что обе
они могут быть решены с использованием аналогичных геомет-
геометрических структур (разд. 6.3.1).
5.2. Задача о единственности элементов
Изучая вычислительную сложность некоторой задачи,
т. е. получая нижние оценки для некоторых важных параметров,
таких как время, необходимое для решения задачи, и используе-
используемый объем памяти, мы часто пытаемся преобразовать (или.
234 Гл. 5. Близость: основные алгоритмы
иначе говоря, свести) некоторую хорошо изученную задачу, для
которой известны нетривиальные нижние оценки, к рассматри-
рассматриваемой (разд. 1.4).
Примеры такого подхода стали теперь классическими, и мы
уже сталкивались с ними при изучении вычислительной геомет-
геометрии. Напомним хотя бы о сведении задачи сортировки (в рам-
рамках модели деревьев вычислений) к задаче построения упорядо-
упорядоченной выпуклой оболочки множества точек. Другим известным
примером является задача ВЫПОЛНИМОСТЬ, часто исполь-
используемая при доказательстве /VP-полноты задач [Garey, Johnson
A982)]. Вполне естественно называть такие фундаментальные
задачи, играющие роль базовых для классов задач, задачами-
прототипами или вычислительными прототипами.
Для первых четырех задач, представленных в предыдущем
разделе, довольно легко разработать прямые алгоритмы с поли-
полиномиальной оценкой для времени. И поэтому вполне естественно
попробовать в качестве возможного прототипа задачу сортиров-
сортировки. Хотя мы не можем исключить возможность того, что сорти-
сортировка может оказаться подходящим прототипом, но до сих пор
для всех четырех задач Б.1—Б.4 соответствующее преобразова-
преобразование не найдено. Однако, к счастью, можно использовать другой
прототип —ЕДИНСТВЕННОСТЬ ЭЛЕМЕНТОВ [Dobkin, Lipton
A979)]. Эта задача формулируется следующим образом.
Задача (ЕДИНСТВЕННОСТЬ ЭЛЕМЕНТОВ). Даны N дей-
действительных чисел. Определить, имеются ли среди них хотя бы
два равных.
Получим для задачи ЕДИНСТВЕННОСТЬ ЭЛЕМЕНТОВ
нижнюю оценку временной сложности в рамках модели алге-
алгебраических деревьев решений.
Множество {х\, ..., xN} из N действительных чисел можно
рассматривать как точку {х\, ..., xN) в EN. Используя терми-
терминологию, введенную в разд. 1.4. обозначим через W <= EN мно-
множество истинности для задачи ЕДИНСТВЕННОСТЬ ЭЛЕМЕН-
ЭЛЕМЕНТОВ на множестве {хи .. .., xN} (т. е. W содержит все точки,
любая пара координат которых различна). Утверждается, что
W имеет N\ компонент связности. Действительно, любой пере-
перестановке л множества {1, 2, . . . , М^} соответствует множество
точек в Ек
<ХПB)< ...
Ясно, что
по всем я
и при этом W4 являются компонентами связности, a ifz{W) =
Отсюда как следствие теоремы 1.2 получаем
5.3. Нижние оценки 235
Следствие 5.1. В рамках модели алгебраических деревьев
вычислений любой алгоритм, определяющий, являются ли эле-
элементы множества из N действительных чисел различными, тре-
требует Q (N log N) проверок.
Этот важный результат будет использован в следующем
разделе.
Замечание. В вычислительной геометрии используются три
важные задачи-прототипа, имеющие небольшую сложность
Q (N log N). Это — сортировка, определение крайних точек и
проверка единственности элементов множества. Сведение этих
задач друг к другу — дело, далеко не простое. Но все они обла-
обладают одной общей и важной чертой: нижняя оценка сложности
этих задач получена в результате анализа мощности множества
перестановок из N элементов (симметрической группы SN).
И хотя довольно соблазнительно найти общего «предка» этих
задач-прототипов —нечто вроде ИДЕНТИФИКАЦИЯ ПЕРЕ-
ПЕРЕСТАНОВКИ, — но мы не видим пути, ведущего к естественной
формулировке подобной задачи.
5.3. Нижние оценки
Как обычно, прежде чем приступить к изучению алго-
алгоритмов решения задач, перечисленных в разд. 5.1, обсудим их
сложность. Начнем с задач поиска ПОИСК БЛИЖАЙШЕГО
СОСЕДА и &-БЛИЖАИШИХ СОСЕДЕЙ.
В качестве вычислительного прототипа возьмем задачу
ДВОИЧНЫЙ ПОИСК- Легко можно показать, что
ДВОИЧНЫЙ ПОИСК ос0A) БЛИЖАЙШИЙ СОСЕД.
Пусть заданы N действительных чисел Х\, х2, .... Хы. В ре-
результате двоичного поиска определяется число xt, ближайшее к
числу q, задаваемому в запросе на поиск. (При этом допускает-
допускается предварительная обработка!) Но эту же самую задачу мож-
можно представить и в геометрической формулировке, сопоставив
каждому числу xi точку на плоскости с координатами (*,-, 0).
И таким образом, поиск ближайшего соседа приведет к тому же
ответу, что и двоичный поиск. Используя один из основных фак-
фактов теории информации, получаем следующую теорему:
Теорема 5.1. Для поиска ближайшего соседа точки в про-
пространстве произвольной размерности необходимо выполнить
Q,(\ogN) сравнений (в худшем случае).
Если, оставаясь в рамках модели деревьев решений, пред-
предположить, что число q с равной вероятностью может принадле-
принадлежать любому из N + 1 интервалов, определяемых числами xi, то
236 Гл. 5. Близость: основные алгоритмы
теорема 5.1 дает оценку поведения в среднем для любого алго-
алгоритма поиска ближайшего соседа.
Что касается задачи 6-БЛИЖАИШИХ СОСЕДЕЙ, то, поло-
положив k=\, немедленно получаем сведение ПОИСК БЛИЖАЙ-
БЛИЖАЙШЕГО СОСЕДА ос 6-БЛИЖАИШИХ СОСЕДЕЙ. Таким об-
образом, теорема 5.1 применима и к задаче fe-БЛИЖАИШИХ СО-
СОСЕДЕЙ.
Разобравшись с задачами поиска, обратимся теперь к зада-
задачам Б.1—Б.4. На рис. 5.6 показана диаграмма сводимости задач
(на диаграмме символ ос заменен стрелкой).
ЕДИНСТВЕННОСТЬ ЭЛЕМЕНТОВ *- БЛИЖАЙШАЯ ПАРА C.1)
N
N
ВСЕ БЛНЖАИШИЕ
СОСЕДИ C.2)
СОРТИРОВКА *~ ЕМОД C.3)
N
ТРИАНГУЛЯЦИЯ C.4)
Рис. 5.6. Связь задач о близости с основными задачами, используемыми
в качестве вычислительных прототипов.
Начнем с рассмотрения сводимости ЕДИНСТВЕННОСТЬ
ЭЛЕМЕНТОВ ос„ БЛИЖАЙШАЯ ПАРА. Пусть задано множе-
множество действительных чисел {х\, х2, . . . , xN). Будем рассматривать
их как точки на прямой у = 0, пытаясь найти ближайшую пару
точек. Если расстояние между точками, образующими ближай-
ближайшую пару, не равно нулю, то все точки множества различны.
Так как множество точек, заданное в одномерном пространстве,
всегда можно вложить в пространство размерности k, то есте-
естественным образом получаем обобщение этого сведения.
Сведение БЛИЖАЙШАЯ ПАРА ос„ ВСЕ БЛИЖАЙШИЕ
СОСЕДИ очевидно, так как одна из пар, полученных в резуль-
результате решения последней задачи, будет ближайшей и она может
быть определена с помощью O(N) сравнений.
Рассмотрим теперь задачу ЕМОД (Б.З). В предыдущем раз-
разделе уже говорилось о том, что ЕМОД содержит кратчайшее
ребро евклидова графа на множестве из N точек, и, следова-
следовательно, задача БЛИЖАЙШАЯ ПАРА тривиальным образом
сводится к ЕМОД за линейное время. Однако можно также
показать, что
СОРТИРОВКА ocw ЕМОД.
5.3. Нижние оценки
237
Действительно, рассмотрим множество из N действительных чи-
чисел {xi xN). Рассматривая каждое число xi как точку (xi, 0)
на плоскости, построим соответствующее множество ЕМОД.
В получившемся ЕМОД вершины, соответствующие числам Xi и
Xj, соединены ребром тогда и только тогда, когда xi и х,- обра-
образуют пару последовательных чисел в упорядоченном множестве.
Решением задачи ЕМОД является список, содержащий N — 1
пар (i, /), каждая из которых определяет ребро дерева. Не со-
составляет труда преобразовать этот список в упорядоченный спи-
список чисел Xi, затратив на это время O(N). (Читателю предостав-
предоставляется сделать это в качестве простого упражнения.)
Рис. 5.7. Иллюстрация к получению нижней оценки сложности решения за-
задачи ТРИАНГУЛЯЦИЯ-
И наконец, рассмотрим задачу ТРИАНГУЛЯЦИЯ (Б.4) и
покажем, что
СОРТИРОВКА ocjy ТРИАНГУЛЯЦИЯ.
Рассмотрим множество из N точек {хи х2) ..., xN}, показан-
показанное на рис. 5.7. N — 1 точек множества лежат на одной прямой,
а одна точка находится вне этой прямой. Триангуляция этого
множества может быть выполнена единственным способом, как
это показано на рисунке. Список ребер, порождаемый алгорит-
алгоритмом триангуляции, можно использовать для получения упоря-
упорядоченного списка чисел Xi, затратив на это дополнительно О (N)
операций. Таким образом, необходимо сделать Q (N log N) срав-
сравнений ').
Проведенный анализ позволил установить сводимость задач,
представленную на рис. 5.6. Учитывая, что в рамках модели де-
деревьев вычислений обе задачи ЕДИНСТВЕННОСТЬ ЭЛЕМЕН-
ЭЛЕМЕНТОВ и СОРТИРОВКА — на множестве из N элементов имеют
нижнюю оценку сложности Q(NlogN), имеет место следующая
теорема.
Теорема 5.2. В рамках модели деревьев вычислений любой
алгоритм, решающий одну из задач — БЛИЖАЙШАЯ ПАРА,
') Эквивалентное сведение — УПОРЯДОЧЕННАЯ ОБОЛОЧКА <xN
ТРИАНГУЛЯЦИЯ — основывается на том, что триангуляция множества S
является планарным графом (уложенным на плоскости), внешняя граница
которого является выпуклой оболочкой множества S.
238 Гл. 5. Близость: основные алгоритмы
ВСЕ БЛИЖАЙШИЕ СОСЕДИ, ЕМОД, ТРИАНГУЛЯЦИЯ,—
требует Q(N log N) операций.
В последующих разделах мы займемся исследованием алго-
алгоритмов решения этих задач, стараясь найти оптимальные алго-
алгоритмы.
5.4. Решение задачи о ближайшей паре
методом «разделяй и властвуй»
Нижняя оценка, даваемая теоремой 5.2, стимулирует
нас на поиск алгоритма, решающего задачу БЛИЖАЙШАЯ
ПАРА и имеющего сложность Q (N log N). Для достижения
этой цели представляются разумными два пути, которые и
стоит попробовать: непосредственное использование сортиров-
сортировки и применение метода «разделяй и властвуй». Можно сразу
*Рг
Рис. 5.8. Пример, показывающий неприменимость метода, основанного на
проецировании. Точки pt и р2, образующие ближайшую пару, имеют наи-
наибольшее расстояние по (/-координате.
же отвергнуть первый поход, так как сортировка оказывается
полезной лишь в условиях наличия полной упорядоченности.
Единственный разумный способ получить полное упорядочение
заключается, по-видимому, в проецировании всех точек на не-
некоторую прямую. Но, к сожалению, при проецировании теряется
существенная в данном случае информация. Это демонстрирует
рис. 5.8, на котором точки р\ и рг образуют ближайшую пару,
но при этом дают максимальное расстояние при проецировании
на ось у.
Второй путь к достижению сложности 0 (N log N) заключает-
заключается в разбиении задачи на две подзадачи, решения которых мож-
можно объединить за линейное время, получая решение исходной
задачи [Bentley, Shamos A976); Shamos A980)]. Непосредствен-
Непосредственное применение метода «разделяй и властвуй» в данном случае
не принесет успеха, и довольно поучительно разобраться в при-
причинах неудачи. Хорошо было бы разбить множество на два под-
подмножества Si и S2 по N/2 точек в каждом и рекурсивно найти
в каждом из них ближайшую пару точек. Но возникает вопрос:
5.4. Решение задачи о ближайшей паре 239
как использовать полученную информацию? Не исключена воз-
возможность, что одна из точек, образующих ближайшую пару,
принадлежит подмножеству Si, а вторая — 52. При этом не вид-
видно способа, позволяющего избежать N2/4 дополнительных срав-
сравнений. Обозначим через P(N, 2) время работы алгоритма, ищу-
ищущего ближайшую пару точек на плоскости. Предыдущие рассу-
рассуждения дают следующее рекуррентное соотношение:
Р (N, 2) = 2Р {N12, 2) + О (N2).
Решением этого соотношения является P(N, 2)= O(N2). Попы-
Попытаемся внести некоторые изменения, чтобы преодолеть возник-
возникшее затруднение. Для этого рассмотрим одномерный случай.
В одномерном случае известен лишь единственный алгоритм,
решающий эту задачу и имеющий сложность 0 (N log N). Этот
Pi Рг Рз | Ъ Ъ Чь
—•—> »—• » ! * " *"' *'"' * * •—
т
Рис. 5.9. Метод «разделяй и властвуй» в одномерном случае.
алгоритм упорядочивает точки множества, а затем просматри-
просматривает его за линейное время. Поскольку, как уже отмечалось
выше, сортировка не допускает обобщения на двумерный слу-
случай, попытаемся разработать для одномерного случая метод
типа «разделяй и властвуй», допускающий обобщение на дву-
двумерный случай. Предположим, что точка т разбивает множе-
множество на два подмножества 5i и S2 и при этом р < q для всех
р е 5] и ? е S2. Решив раздельно рекурсивным образом задачу
о ближайшей паре для множеств 5, и 52, получим две пары
точек {рь р2} и {<7ь<72}, представляющие ближайшие пары для
5i и S2 соответственно. Обозначим б наименьшее расстояние,
найденное на текущий момент (рис. 5.9):
e = min(|p2 —p,|, \q2 — <7, |).
Ближайшей парой во всем множестве является либо {р\, р2},
либо {q\,q2}, либо {р3, <7з}. где р3 е Sb q3^S2. Обратим вни-
внимание на следующий ключевой момент: для того чтобы расстоя-
расстояние, даваемое парой {р3, ^з}, было меньше б, ръ и ^з должны
находиться на расстоянии, не превышающем б от точки т.
(Ясно, что рз должна быть самой правой точкой множества S{,
a q3 — самой левой точкой множества 52, но такая характери-
характеристика точек не имеет особого смысла в пространствах более вы-
высокой размерности, и поэтому мы предпочли нечто более об-
240 Гл. 5. Близость: основные алгоритмы
щее.) Сколько точек множества Si могут находиться в интерва-
интервале (пг — б, пг]? Так как каждый полуоткрытый интервал дли-
длиной б содержит не более одной точки множества 5Ь то интервал
(пг — б, пг] содержит не более одной точки. Аналогично интер-
интервал [пг, пг -\- б) содержит самое большее одну точку. Таким об-
образом, число сравнений, которые необходимо сделать для точек,
выбираемых из различных подмножеств, не превышает одного.
Очевидно, что все точки, попадающие в интервалы (пг — б, пг]
и [пг, пг + 6), можно определить, просмотрев множество за ли-
линейное время. Таким образом, получаем следующий алгоритм,
имеющий сложность O(N\ogN):
function БПАРАЦ5)
Входные данные: X[l: N], N точек множества 5 в одномер-
одномерном пространстве.
Выходные данные: б — расстояние между ближайшей парой
точек.
begin if (|S| = 2)then б :=|*[2] - *[1] |
else if(|5|=l) then б := оо
else begin пг := МедианаE);
Построить^, S2) (* Si = {p '¦ p^.m},
S2 = {p- p>m}*)\
б,:=БПАРА1E,);
62:=БПАРА1E2);
p:=max(Si);
q := min(S2);
б := гшпСб^бг.д — р)
end;
return б
end.
Хотя этот алгоритм, очевидно, сложнее алгоритма, исполь-
использующего сортировку с последующим просмотром, но он обеспе-
обеспечивает искомый переход к двумерному случаю.
Обобщение на двумерный случай можно выполнить самым
непосредственным способом. Разобьем множество точек на пло-
плоскости 5 на два подмножества S\ и S2 так, чтобы каждая точка
5] лежала левее любой точки S2. To есть множество разбивает-
разбивается на части вертикальной прямой /, определяемой медианой
множества 5 по л;-координате. Решив рекурсивно задачу для Si
и 52, получим числа Si и б2 — минимальные расстояния для мно-
множеств Si и S2 соответственно. Положим б = minFi, б2). (См.
рис. 5.10.)
Если ближайшую пару образуют точки peSi и q s 52, то,
очевидно, расстояния от р и q до / не превышают б. Таким об-
образом, если обозначить через Pi и Р2 две вертикальные полосы
5.4. Решение задачи о ближайшей паре
241
шириной б, расположенные соответственно слева и справа от /,
то р е Pi и q e Р2. Здесь возникает затруднение, которого не
было в одномерном случае. На прямой было не более одного
S,
I
l-jL
,6
Рис. 5.10. Метод «разделяй и властвуй» в случае плоскости.
кандидата ') для р и q. На плоскости таким кандидатом может
быть любая точка, если она находится на расстоянии, не превы-
превышающем б, от прямой /. На рис. 5.11 приведен пример такого
S,
/б,
p2
R
t
5
6
1
Рис. 5.11. Все точки мо- Рис. 5.12. Для каждой точки, лежащей в Ph
гут находиться на рас- необходимо проверить не более шести точек
стоянии, не превышаю- из Р2.
щем б от прямой /.
множества. Может показаться, что для определения ближайшей
пары вновь потребуется выполнить N2/4 сравнений расстояний
между точками. Но мы сейчас покажем, что в действительности
') В процедуре БПАРА1 имеется в точности один кандидат для р: р =
= max(S|).
242 Гл. 5. Близость: основные алгоритмы
точки, попадающие в полосы шириной б, расположенные по обе
стороны от прямой /, обладают особой структурой.
Обращаясь к рис. 5.12, рассмотрим в полосе Pi произволь-
произвольную точку р. Мы должны найти все точки q в Р2, удаленные от р
не более чем на б. Но сколько может быть таких точек? Все
они должны находиться в прямоугольнике R размером б X 26.
Кроме того, известно, что никакая пара точек в Р2 не может
находиться на расстоянии, меньшем б друг от друга1). Как
показано на рисунке, максимальное число точек, которые можно .
поместить в такой прямоугольник так, чтобы расстояние между
ними было не меньше б, равно шести. Это значит, что для каж-
каждой точки из Р\ необходимо исследовать лишь не более шести
точек из Р2, а вовсе не N/2 точек. Следовательно, на шаге слия-
слияния решений подзадач нужно выполнить не более 6 X N/2 = 3N
сравнений расстояний вместо N2/4.
Но пока мы еще не получили алгоритм со сложностью
O(N log N), так как хотя и известно, что для каждой точки из Pi
необходимо исследовать лишь шесть точек из Р2, но не извест-
известно, какие именно точки нужно исследовать! Чтобы ответить на
этот вопрос, предположим, что точка р и все точки из Р2 спрое-
спроецированы на прямую /. Для определения точек из Р2, попадаю-
попадающих в R, можно рассмотреть лишь проекции точек, находящихся
на расстоянии не более б от проекции точки р (их не более ше-
шести). Если точки упорядочены по у-координате, то для всех то-
точек из Pi «кандидаты» на место их ближайшего соседа из Р2
могут быть найдены за один проход этого упорядоченного спи-
списка. Ниже дан набросок алгоритма в том виде, как он разрабо-
разработан на данный момент.
procedure БПАРА2E)
1. Разбить 5 на два подмножества Si и 52 вертикальной пря-
прямой /, делящей множество пополам.
2. Рекурсивно найти расстояния для ближайших пар б| и 62-
3. 6:=minFi,62).
4. Пусть Pi — множество точек из 5Ь лежащих в полосе на
удалении б от разделяющей прямой /, а Р2 — аналогичное
подмножество в 52. Спроецировать Р| и Р2 на / и упорядочить
проекции по «/-координате. Пусть Р* и Р* — соответствующие
упорядоченные последовательности.
5. «Слияние» можно выполнить, просматривая Р* и для
каждой точки из Р*, изучая точки из Р*2, находящиеся на рас-
расстоянии, не превышающем б. Пока указатель продвигается по
последовательности Р*, указатель на Р\ может перемещаться
') Это принципиальное соображение принадлежит Стронгу (частное со-
сообщение, 1974).
5.4. Решение задачи о ближайшей паре 243
вперед-назад, оставаясь в интервале шириной 26. Пусть б/ —
минимальное расстояние между парой точек, найденное в ходе
этой процедуры.
6. 6s:=minF, б/).
Если обозначить через T(N) время обработки алгоритмом
множества из N точек, то время, затрачиваемое на обработку
на шагах 1 и 5, равно O(N), на шагах 3 и 6 затрачивается по-
постоянное время, а шаг 2 требует времени 2T(N/2). Если бы
сортировку нужно было производить при каждом выполнении
шага 4, то на это требовалось бы время О(Л^ log TV). Однако
можно прибегнуть к стандартному приему, называемому пред-
предварительной сортировкой, когда один раз создается упорядочен-
упорядоченный по «/-координате список всех точек, а затем при выполнении
шага 4 из этого списка за время O(N) выделяются в упорядо-
упорядоченном виде необходимые точки1). Эта небольшая хитрость
позволяет записать для времени обработки P{N, 2) алгоритма
поиска ближайшей пары в двумерном случае следующее рекур-
рекуррентное соотношение:
P(N, 2) = 2P(N/2, 2) + O(N)^O(N\ogN). E.1)
На основании этого соотношения получаем теорему 5.3:
Теорема 5.3. Кратчайшее расстояние, определяемое N точка-
точками на плоскости, может быть найдено за время d(N log N) и яв-
является оптимальным.
Главные особенности описанного подхода на основе метода
«разделяй и властвуй», обеспечивающие возможность его обоб-
обобщения на случай более высокой размерности, приведены ниже:
1. Шаг, на котором происходит объединение решений подза-
подзадач, производится в пространстве на единицу меньшей размер-
размерности (от плоскости переходим к прямой).
2. Два множества точек, объединяемые после решения под-
подзадач, обладают свойством разреженности, т. е. для каждого из
множеств справедливо условие: расстояние между любыми дву-
двумя точками не может быть меньше некоторой заданной кон-
константы. Свойство разреженности имеет ключевое значение для
шага объединения решений. Введем формальное определение.
Определение 5.1. Пусть заданы действительное число б > 0 и
целое число с ^ 1. Для заданного б множество точек 5 в rf-мер-
') При анализе нерекурсивной реализации этого алгоритма, разрабо-
разработанной Хоуи и Шеймосом, была обнаружена любопытная ситуация: число
выполняемых вычислений расстояния всегда было строго меньше N. Далее
в этом разделе будет показано, что это имеет место всегда. Конечно, время
работы алгоритма по-прежнему определяется шагом сортировки.
244
Гл. 5. Близость: основные алгоритмы
28
ном пространстве имеет разреженность с, если любой гиперкуб
со стороной 26 содержит не более с точек множества 5.
Здесь разреженность определяется как (монотонная неубы-
неубывающая) функция от б. Как будет показано, разреженность
можно ввести, взяв в качестве 6 минимальное расстояние между
парами точек. Как видно из рис. 5.12, в рассматриваемом слу-
случае множество точек, находящихся на расстоянии не более 6 от
разделяющей прямой /, является разреженным п при этом
с = 12. (Заметим, что с = 12 = 4 X 3 для d = 2.)
В случае d ^ 2 часть пространства Ей, заключенная между
двумя гиперплоскостями, ортогональными одной из координат-
координатных осей и удаленных друг от
друга на расстояние 26, называ-
называется 8-слоем. Заметим, что, если
разреженность б-слоя при задан-
заданном 6 равна с, эта разрежен-
разреженность сохраняется при проециро-
проецировании 6-слоя на гиперплоскость,
делящую б-слой пополам ((d —
— 1)-мерное многообразие). Дей-
Действительно d-мерный куб со сто-
стороной 26 проецируется в {d— 1)-
мерный куб также со стороной
26, содержащий ровно столько
же точек, сколько и исходный
куб (рис. 5.13).
Предположим теперь, что в Ed задано множество 5, содер-
содержащее N точек. По рассмотренной схеме, приведем следующий
алгоритм:
procedure BUAPAd(S)
1. Выбрав подходящим образом гиперплоскость / (называе-
(называемую разделяющей гиперплоскостью), ортогональную одной из
координатных осей, разбить множество 5 на два подмножества
Si и S2 (затратив на это время O(N)), содержащих соответ-
соответственно aN и A — a)N точек (где 0 < ао =?[ а =?[ 1 — а0 будет
определено далее).
2. Рекурсивно применить алгоритм к множествам 5] и S2,
получив минимальные расстояния 6i и 62 между точками в мно-
множествах Si и S2 соответственно. Положить б = minFi, 62).
3. Объединить полученные результаты, выполнив обработку
точек, попавших в б-слой пространства Ed, имеющий ширину 26
и разделяемый гиперплоскостью / пополам.
Рассмотрим более подробно шаг 3 алгоритма. В качестве ра-
рабочей гипотезы предположим, что множество точек в б-слое, обо-
Рис. 5.13. Свойство разреженно-
разреженности множества точек сохраняется
при ортогональном проецировании
(при d > 2).
5.4. Решение задачи о ближайшей паре 245
значаемое Sl2, имеет разреженность с при заданном 6 (позднее
мы убедимся, что такое с существует). Обозначим через 5*2
проекцию множества Sl2 на гиперплоскость / ((d—1)-мерное
пространство). Очевидно, что необходимым условием для того,
чтобы пара точек из 5i2 была ближайшей парой в множестве 5,
является следующее: расстояние между проекциями этих точек
на гиперплоскость / не должно превышать б. Таким образом,
имеется разреженное множество S*j2, в котором необходимо
найти все пары точек, удаленных друг от друга на расстояние,
не превышающее некоторую величину (<б). Это составляет
предмет следующей задачи, представляющей самостоятельный
интерес.
Задача Б.7 (ПОИСК БЛИЖАЙШИХ СОСЕДЕЙ В ОК-
ОКРЕСТНОСТИ ФИКСИРОВАННОГО РАДИУСА В РАЗРЕ-
РАЗРЕЖЕННОМ МНОЖЕСТВЕ). Пусть заданы действительное чис-
число б и множество из М точек в Еа, имеющее разреженность с
для заданного б. Требуется перечислить все пары точек, рас-
расстояние между которыми меньше б.
Полагая S\2 —M и обозначив через F6jC{M, d) время ре-
решения задачи Б.7, на основании проведенного анализа получаем
следующее рекуррентное соотношение:
P(N, d) = P(aN, d) + P((l -a)N,d)+ O(N) + FOtC(M, d-l).
E.2)
Наша цель заключается в минимизации F&jC(M, d— 1). Это до-
достигается как за счет выбора разделяющей гиперплоскости, ми-
минимизирующей М, так и за счет разработки эффективного алго-
алгоритма решения задачи Б.7. Обе эти подцели достижимы благо-
благодаря следующей интересной теореме:
Теорема 5.4 [Bentley, Shamos A976)]. Пусть в Ed задано мно-
множество S, содержащее N точек. Существует гиперплоскость I,
перпендикулярная одной из координатных осей и обладающая
следующими свойствами:
A) каждое из подмножеств Si и S2 множества S, располо-
расположенных по обе стороны от I, содержит не менее N/Dd) точек;
B) 8-слой пространства Ed, расположенный около гиперпло-
гиперплоскости I, содержит не более dbNl~l/d точек, где б = minF|,62),
б, — минимальное расстояние между точками множества Si
(t = 1, 2), a b — верхняя граница числа точек, содержащихся
в гиперкубе со стороной 26 и удаленных друг от друга на рас-
расстояние не менее б.
Доказательство. Проведем доказательство для d = 2, так
как в этом случае можно непосредственно опереться на интуи-
246
Гл. 5. Близость: основные алгоритмы
цию. Доказательство для rf-мерного случая проводится анало-
аналогичным образом. С несущественной потерей общности можно
считать, что N кратно 8. Определим по оси х интервал [х\, х2]
таким образом, чтобы слева от
X] и справа от х2 находилось по
N/8 точек множества 5. Обозна-
Обозначим через CX^S множество то-
точек с абсциссами между х\ и х2.
Заметим, что \Cx\ = 3N/4. Ана-
Аналогичным образом определим ин-
интервал \у\, у2] по оси у. Обо-
Обозначим через R декартово про-
произведение [х\, лгг]Х[1/ь У%]
(рис. 5.14).
Определим на оси х наиболь-
наибольший интервал, целиком попа-
попадающий в [х\, х2] и содержащий
проекции 2bN112 точек. Анало-
Аналогичный интервал определим на оси у. Обозначим через у
длину наибольшего из этих двух интервалов. Не теряя общно-
общности, будем считать, что таким интервалом является \х\, х'Л X
Х( [х[, х2~] а [хг *2]). Утверждается, что прямая /, задаваемая
Рис. 5.14. Определение прямо-
прямоугольника R =[хих2]Х[УьУ2\-
с
м
У/-'
1
А/ УУ)
~k точек Уу
° У/У
V'
Ж
Фу
Wy
гы
то'
г.
г, ^
v'/z
wk
Разделяюшдя
прямая 1
I
1
I
- точек
Рис. 5.15. Взаимосвязь между [xv x2] и [x1; xQ
уравнением х = (х\ + х'2)/2 (прямая, перпендикулярная оси х
и делящая отрезок х[х'2 пополам), удовлетворяет условиям A)
и B) теоремы (рис. 5.15).
Для доказательства этого утверждения покажем сначала,
что неравенство у <. 26 не может иметь места. А затем пока-
5.4. Решение задачи о ближайшей паре 247
жем, что условие у ^ 26 обеспечивает необходимый ре-
результат.
Условие у < 26 означает, что любая горизонтальная или
вертикальная полоса шириной 26, проекция которой попадает
внутрь [у\,у2] или [лг^лгг] соответственно, содержит больше
чем 2bN1/2 точек.
Разделим интервал [х\, х2] на подынтервалы длиной 26.
Каждая вертикальная полоса, проецируемая на такой подын-
подынтервал, содержит более 2bNl/2 точек. Так как имеется \,(х2—
— *i)/26J таких интервалов, то получаем
L(х2 - *,)/26J • 2bN <\СХ\ = ЗЛГ/4,
или
L (х2 - *i)/26J < WWfib.
Аналогичные рассуждения для интервала [у\,уг] приводят к
неравенству
Рассмотрим теперь прямоугольник R = [х\, х2] X [у и У2] ¦
Этот прямоугольник содержит не более \ (х2 — xi)/2,h~\-\ (у2 —
— У\)/2ЬЛ квадратов со стороной 26. Так как сторона каждого
такого квадрата равна 26, то по условию теоремы каждый
квадрат содержит не более Ъ точек. Отсюда следует, что число
точек множества 5, содержащихся в R, не превосходит
Так как Ъ — это небольшая по величине константа, большая
или равная 1, то правая часть этого неравенства принимает
максимальное значение при 6 = 1. Таким образом, R содержит
не более 2C/8JМ~0,28А/ точек при условии, что N ^ 8.
С другой стороны, вертикальные полосы, находящиеся вне
интервала [*i, Яг], содержат 2-N/8 точек, и то же самое спра-
справедливо для горизонтальных полос, находящихся вне интер-
интервала [у\,у2] (см. рис. 5.15). В соответствии с принципом вклю-
включения-исключения, число точек вне R не превышает 4/V/8 =
= N/2, и, следовательно, R содержит не менее N/2 точек. По-
Полученное противоречие указывает на то, что неравенство у <
< 26 не выполняется.
Так как у ^ 26, то сразу же получаем требуемый резуль-
результат: выполнение свойства A) обеспечивается способом по-
построения интервала [xi,x2], а свойство B) выполняется в силу
248 Гл. 5. Близость: основные алгоритмы
того, что б-слой около прямой / содержит не более 2bNl/2 точек.
Таким образом, прямая / удовлетворяет условиям теоремы.
Мы используем эту теорему для того, чтобы показать прежде
всего, что на шаге 1 алгоритма BnAPA<iE) можно так вы-
выбрать разделяющую гиперплоскость /, что будет иметь место
неравенство l/4d^a^.l—l/4cf, a 5|2 — множество точек в
б-слое около /—будет иметь мощность не более cdNl-l/d, где
c = 4-3rf-'. Действительно, если б = minFi, б2), то гиперкуб со
стороной 26, находящийся в б-слое, содержит не более с =
= 4-3rf-' точек, в чем можно легко, убедиться с помощью ин-
индукции по d. Индукция начинается со значения d = 2, для ко-
которого, как уже было показано, гиперкуб со стороной 26 содер-
содержит не более 12 точек. Тем самым доказывается, что разде-
разделяющая гиперплоскость / существует. Для ее определения вы-
выполним предварительно сортировку множества 5 по всем коор-
координатам, затратив на это время О (dN logN). Путем простого
просмотра за время O(dN) получившихся в результате сорти-
сортировки упорядоченных последовательностей определяем интер-
интервалы такие, что по обе стороны от них содержится по N /Ad то-
точек. В каждом из этих интервалов, опять-таки используя
простой просмотр, можно за время O(N) определить макси-
максимальные длины окон (подынтервалов), содержащих в точности
|_cdN[~[/d\ точек. Наибольший из этих подынтервалов опреде-
определяет единственную координатную ось и разделяющую гипер-
гиперплоскость, которая делит его пополам. Заметим, что исключи-
исключительно благодаря предварительной сортировке разделяющую
гиперплоскость можно найти за линейное по размеру множе-
множества 5 время.
Таким образом, мы получили разреженное множество 5|2,
мощность которого не превосходит cdNl-l/d (с разреженностью
c = 4-3rf~' для вычисленного б). Затем решаем задачу Б.7 для
множества 5*2, являющегося проекцией множества S|2 на полу-
полученную ранее разделяющую гиперплоскость /. Для этой задачи,
имеющей размерность d—1, вновь применяется метод «разде-
«разделяй и властвуй». В частности, ищется разделяющая гиперпло-
гиперплоскость /', существование которой гарантируется теоремой 5.4,
при этом б считается заданным (каким оно получено на шаге 2
процедуры BYlAPAd), а с равна разреженности множества S*2,
только что полученной нами. Отсюда следует, что мощность
множества точек в б-слое около разделяющей гиперплоскости /'
ограничена величиной (d—\) •cMl-l'<d-l\ т. е. о(М). В заклю-
заключение решается задача Б.7, имеющая размерность d— 1, для
чего приходится определять разделяющую гиперплоскость, за-
затратив на это время О(М), после чего рекурсивно решать две
аналогичные задачи на множествах с мощностью аМ и A —
S.5. Решение задач о близости методом локусов 249
— а)М, и наконец решается задача, имеющая размерность
d — 2 на множестве мощностью о(М). Это дает следующее ре-
рекуррентное соотношение:
+ О (М) + F6> с (о (М), d - 2). E.3)
Легко убедиться, что это соотношение имеет решение
F6tC(M,d—1) = О(МlogAf). Этот факт интересен сам по себе,
чтобы представить его в виде следующей теоремы:
Теорема 5.5. В разреженном множестве из М точек в Ed
(с разреженностью с для заданного б) все пары точек, расстоя-
расстояния между которыми меньше б, можно найти за время
O(M\ogM).
Возвращаясь к исходной задаче о ближайшей паре, напом-
напомним, что М — это мощность множества 5i2, равная в силу спо-
способа построения O(Nl-l/d), т. е. o(N\\ogN). Отсюда следует,
что F6<c{M,d—1)= О(М log Л1) = O(N). И как следствие, ре-
рекуррентное соотношение E.2) имеет решение P(N,d) =
= O(N\ogN). Таким образом, время выполнения основных
вычислений совпадает по порядку с временем, затрачиваемым
на предварительную сортировку. В результате получаем сле-
следующую теорему:
Теорема 5.6. Ближайшая пара множеств из N точек в Ed
может быть определена за время Q(N \ogN), что является оп-
оптимальным.
5.5. Решение задач о близости
методом локусов; диаграмма Вороного
Хотя использование метода «разделяй и властвуй»
при решении задачи о ближайшей паре выглядит довольно об-
обнадеживающе, но уже при решении задачи ВСЕ БЛИЖАЙ-
БЛИЖАЙШИЕ СОСЕДИ, являющейся на первый взгляд лишь простым
обобщением задачи о ближайшей паре, это метод оказывается
неприемлемым. Действительно, если попытаться аналогичным
образом использовать для решения задачи ВСЕ БЛИЖАЙШИЕ
СОСЕДИ рекурсию, то обнаружится, что при естественном
способе разбиения на подзадачи свойство разреженности уже
не имеет места и при этом не видно способа выполнить шаг
слияния быстрее, чем за квадратичное время. С другой сто-
стороны, довольно ценный эвристический прием, используемый
при разработке геометрических алгоритмов, состоит в том, что-
чтобы выделить области точек, обладающие требуемым свойством
250
Гл. 5. Близость: основные алгоритмы
(локусы), и попытаться организовать их в виде некоторой
структуры данных. Так, в случае плоскости мы хотим решить
следующую задачу.
Задача Б.8 (ОБЛАСТИ БЛИЗОСТИ). На плоскости задано
множество 5, содержащее N точек. Требуется для каждой
точки pi множества 5 определить локус точек (х, у) на пло-
t скости, для которых рас-
# стояние до р; меньше,
" . чем до любой другой точ-
точки множества 5.
J
Отметим, что интуи-
интуитивно решение этой за-
задачи представляется как
построение разбиения
плоскости на области,
каждая из которых яв-
является локусом точек
(х, у), более близких к
некоторой точке множе-
множества S, чем к любой дру-
другой точке 5. Заметим так-
также, что если так6е~тгаз--
биение плоскости изве-
известно, то, применив про-
процедуру поиска, опреде-
определяющую какой из обла-
областей разбиения принадле-
принадлежит некоторая точка q,
можно непосредственно
получить решение задачи
ПОИСК БЛИЖАЙШЕ-
БЛИЖАЙШЕГО СОСЕДА (задачи
Б.5). Исследуем теперь
структуру этого разбиения плоскости. Если имеются две точки
Pi и р,, то множество точек, более близких к ph чем к р,-, есть
не что иное, как полуплоскость, определяемая прямой, перпен-
перпендикулярной отрезку pipf и делящей его пополам, и содержащая
точку pi,. Обозначим эту полуплоскость H(pi,pj). Множество
точек, более близких к pit чем к любой другой точке, которое
будем обозначать V(i), получается в результате пересечения
N—1 полуплоскостей. Это множество является выпуклой мно-
многоугольной областью (см. разд. 1.3.1), имеющей не более ./V—1
сторон. Таким образом,
Рис. 5.16. (а)—многоугольник (ячейка)
Вороного; (Ь)—диаграмма Вороного.
5.5. Решение задач о близости методом локусов 251
Область V(i) называется многоугольником Вороного, соот-
соответствующим точке pi. На рис. 5.16(а) приведен пример мно-
многоугольника Вороного [Rogers A964)]').
Получаемые таким образом N областей образуют разбие-
разбиение плоскости, представляющее некоторую сеть, называемую
диаграммой Вороного. Диаграмму Вороного множества точек 5
будем обозначать Vor(S). На рис. 5.16(Ь) приведен пример диа-
диаграммы Вороного. Вершины многоугольников определяют вер-
вершины диаграммы Вороного, а соединяющие их отрезки — ребра
диаграммы Вороного.
Каждая из N исходных точек множества принадлежит в
точности одному многоугольнику Вороного. Поэтому, если
(x,y)^V(i), то pi является ближайшим соседом точки (х,у).
Диаграмма Вороного содержит всю информацию о близости
точек соответствующего множества.
5.5.1. Свойства диаграммы Вороного
Здесь будет приведен ряд важных свойств диаграм-
диаграммы Вороного. Хотя диаграмму Вороного можно определить для
пространства любой размерности, последующее обсуждение
будет вестись для двумерного случая. На то имеются две при-
причины: во-первых, стремление обеспечить связь проводимых
рассуждений с интуицией; во-вторых, желание сосредоточить об-
обсуждение лишь на изученных ситуациях, для которых разрабо-
разработаны эффективные алгоритмы решения возникающих задач.
В этом разделе мы будем считать справедливым следующее
предположение:
Предположение А. Никакие четыре точки исходного множе-
множества S не лежат на одной окружности.
Если отказаться от этого предположения, то в формули-
формулировки теорем и их доказательства потребуется внести несуще-
несущественные, но довольно длинные уточнения.
Для начала заметим, что каждое ребро диаграммы Воро-
Вороного является отрезком прямой, перпендикулярной отрезку,
соединяющему некоторую пару точек множества 5, и делящей
этот отрезок пополам. Таким образом, ребро принадлежит в
точности двум многоугольникам. Имеет место следующая тео-
теорема:
') Такие многоугольники впервые были глубоко изучены русским ма-
математиком Г. Вороным A868—1908), использовавшим их в работе по квад-
квадратичным формам [Voronoi A908)]. Иногда их также называют многоуголь-
многоугольниками (ячейками) Дирихле, многоугольниками Тиссеиа, ячейками Вигиера —
Зейтца. Хоуи предложил более образный (и более подходящий) термин «мно-
«многоугольники близости:».
252
Гл. 5. Близость: основные алгоритмы
Теорема 5.7. Каждая вершина диаграммы Вороного являет-
является точкой пересечения в точности трех ребер диаграммы.
Доказательство. Предположим, что вершина v является точ-
точкой пересечения некоторого множества ребер еи е2, ¦ ¦ ¦, ей
(k^2), перечисленных в порядке обхода вокруг вершины по
часовой стрелке (рис. 5.17). Ребро е,- является общим для мно-
многоугольников V(i—1) и V(i), где / = 2, ..., k, а ребро е\
является общим для V{k) и V{\). Заметим, что так как v при-
принадлежит ребру а, то она одинаково удалена от точек p,-_i
и pi. С другой стороны, аналогичным образом получаем, что
V0)
VB)
Рг
Рис. 5.17. Вершина диаграммы Во- Рис. 5.18. Окружность C(v) не со-
роного с инцидентными ей ребрами. держит ни одной точки множества S.
она равноудалена от точек р,- и р,-+1 и т. д. Таким образом,
вершина v равноудалена от точек рь р2, ..., рь Но это значит,
что точки р\, р2, ..., pk лежат на одной окружности, и тем са-
самым в случае k ^ 4 нарушается принятое предположение А.
Следовательно, k ^ 3. Предположим теперь, что k = 2. В этом
случае оба ребра в\ и е2 принадлежат многоугольникам VB)
и УA), поскольку оба они принадлежат перпендикуляру, деля-
делящему пополам отрезок pip2. А так как они не пересекаются
в v, то вновь получаем противоречие.
Теорема 5.7 эквивалентна следующему утверждению: вер-
вершины диаграммы Вороного являются центрами окружностей,
каждая из которых определяется тремя точками исходного мно-
множества, а сама диаграмма Вороного является регулярной1) со
степенью вершин, равной трем. Обозначим через C(v) упомя-
упомянутую выше окружность, соответствующую вершине v. Эти
окружности обладают следующим интересным свойством:
') В том смысле, как это обычно понимается в теории графов; граф
является регулярным, если все вершины имеют одну и ту же степень.
5.5. Решение задач о близости методом локусов
253
Теорема 5.8. Для каждой вершины v диаграммы Вороного
множества S окружность C(v) не содержит никаких других то-
точек множества S.
Доказательство. Докажем теорему методом «от противного».
Пусть р\, Р2 и р3 — три точки множества S, определяющие
окружность C(v) (рис. 5.18). Если окружность C(v) содержит
еще некоторую точку множества S, например р4, то вершина v
находится ближе к р4, чем к любой из точек pi, p2 или р3, и
в этом случае в соответствии с определением диаграммы Воро-
Вороного вершина v должна находиться в УD), а не в каком-либо
из многоугольников V(l), VB) или VC). Но это противоречит
тому, что вершина v принадлежит одновременно V(\), VB)
и VC).
Теорема 5.9. Каждый ближайший сосед точки р,- в S опре-
определяет ребро в многоугольнике Вороного V{i).
Доказательство. Пусть ру- является ближайшим соседом р,,
a v — середина соединяющего их отрезка. Предположим, что v
не лежит на границе V(i). Тогда отрезок р,у пересекает неко-
некоторое ребро многоугольника V(i), например равноудаленное от
Прямая, равноудаленная
от точек р(- и pj
Рис. 5.19. Каждый ближайший сосед точки р,- определяет ребро многоуголь-
многоугольника V(i).
р, и pk, в некоторой точке и (рис. 5.19). Тогда длина (p,w)<
< длина(piv) и поэтому длина (piPk)^ 2 длина (рм) < 2 дли-
длина (piv) = длина (Pip/), откуда следует, что pk ближе к р,-, чем
Pi, что противоречит условию теоремы.
Теорема 5.10. Многоугольник V(i) является неограниченным
тогда и только тогда, когда точка Pi лежит на границе выпук-
выпуклой оболочки множества S.
Доказательство. Если точка р,- не лежит на границе выпук-
выпуклой оболочки множества S, то, согласно теореме 3.4, она яв-
является внутренней точкой некоторого треугольника Рф^Рз- Рас-
254
Гл. 5. Близость: основные алгоритмы
смотрим окружности С\2, С\Ъ и С23, определяемые точкой pi
и тремя парами точек {р\,р2}, {р\, рз} и {р2, рз} соответственно
(рис. 5.20). Каждая из этих окружностей имеет конечный ра-
радиус. Обозначим через Ai2 внешнюю дугу окружности Ci2, т. е.
дугу окружности между точками р, и р2, не содержащую точку
pi. Можно непосредственно показать, что любая точка Ai2 бли-
ближе к р\ или к р2, чем к pi (аналогичное утверждение имеет
место и для С13 и С23). Пусть
С — окружность, охватываю-
охватывающая ОКруЖНОСТИ Ci2, С13 И С2з.
Утверждается, что любая точ-
точка х, лежащая вне С, ближе
к одной из точек ри р2 или рз,
чем к pi. Действительно, рас-
рассмотрим отрезок xpi. По тео-
теореме о жордановой кривой от-
отрезок xpi пересекает одну из
сторон треугольника р\р2рз,
например Р\р2. Значит, он так-
также пересекает и /5i2 в некото-
некоторой точке \и. Но и ближе к од-
одной из точек pi или р2, чем к
Pi, что и подтверждает сде-
сделанное утверждение. Так как
точка х ближе к ри р2 или р3,
чем к pi, то V(i) целиком содержится внутри С и, следова-
следовательно, является ограниченным.
Обратно, предположим, что многоугольник V(i) ограничен,
и пусть в\, е2, ..., ей {k Г3= 3) — последовательность ребер, об-
образующих его границу. Каждое ребро вн (А = 1, ..., k) при-
принадлежит прямой, перпендикулярной отрезку р{р'к, p'h^S и
делящей его пополам. Отсюда сразу следует, что pi является
внутренней точкой многоугольника р'хр'2 ... p'k, т. е. pi не лежит
на границе выпуклой оболочки множества 5.
Так как лишь неограниченные многоугольники могут иметь
в качестве ребер лучи, то лучи диаграммы Вороного соответ-
соответствуют парам смежных точек множества S, лежащих на гра-
границе выпуклой оболочки.
Рассмотрим теперь граф, двойственный диаграмме Воро-
Вороного, т. е. граф, уложенный на плоскости и получаемый в ре-
результате соединения отрезками каждой пары точек множе-
множества S, многоугольники Вороного которых имеют общее ребро.
В результате получается граф с вершинами в исходных iV точ-
точках (рис. 5.21).
Рис. 5.20. К доказательству теоре
мы 5.10.
S.5. Решение задач о близости методом локусов
255
На первый взгляд граф, двойственный диаграмме Вороного,
может показаться довольно необычным, так как ребро диа-
диаграммы может даже не пересекаться с двойственным ему реб-
ребром (рассмотрите, например, ребра, соединяющие последова-
последовательные вершины выпуклой оболочки). Важность двойствен-
двойственного графа во многом обусловлена следующей теоремой Де-
Делоне [Delaunay A934)]:
Рис. 5.21. Прямолинейный граф, двойственный диаграмме Вороного.
Теорема 5.11. Граф, двойственный диаграмме Вороного, яв-
является триангуляцией множества S '). ^x>sjM?xf-
(Отсюда следует, что диаграмма Вороного может быть ис-
использована для решения задачи триангуляции Б.4, но эта тео-
теорема имеет значительно более важные следствия.)
Доказательство. Чтобы доказать, что граф, двойственный
диаграмме Вороного, является триангуляцией, необходимо по-
показать, что выпуклая оболочка множества S разбивается на
треугольники, определяемые точками множества 5. Для этого
будет показано, что можно выделить множество треугольников
9~ — {T(v): v — вершина диаграммы Вороного} так, что ника-
никакие два из них не пересекаются и каждая точка внутри
conv(S) принадлежит одному из этих треугольников (и, следо-
следовательно, в точности одному такому треугольнику).
Соответствующие треугольники строятся следующим обра-
образом. Пусть v — вершина диаграммы Вороного, принадлежащая
одновременно многоугольникам V{1), V{2) и 1/C) (см. тео-
теорему 5.7). T(v) — это треугольник с вершинами в точках р\, р2
') В такой простой формулировке эта теорема оказывается неверной,
если имеется подмножество, содержащее четыре или более точек, лежащих
на одной окружности. Однако в этом случае возникающие изменения в три-
триангуляции очевидны.
256
Гл. 5. Близость: основные алгоритмы
Ф,)
и рз- Утверждается, что если T(v) имеет непустое пересечение
с внутренностью conv(S), то треугольник 7 (v) невырожденный
(т. е. точки pi, р2 и р3 не лежат на одной прямой). Действи-
Действительно, предположим обратное, т. е. что точки ри р2 и ръ лежат
на одной прямой. Тогда все три отрезка р\р2, Р\Ръ и р2р3 при-
принадлежат одной и той же прямой /, а перпендикулярные этим
отрезкам прямые, делящие их пополам, являются параллель-
параллельными. Так как вершина v является точкой пересечения этих
прямых, то и — бесконечно удаленная точка. Отсюда следует,
что многоугольники V{\), VB) и УC) являются неограничен-
неограниченными. Согласно теореме
5.10, это значит, что точ-
точки ри р2 и р3 принадле-
принадлежат границе выпуклой
оболочки. Это противоре-
противоречит предположению, что
Т (v) имеет непустое пере-
пересечение с внутренностью
conv(S). Тем самым ут-
утверждение доказано.
Рассмотрим два тре-
треугольника T(v\) и T(v2)
(vi Ф^ v2) и соответствую-
соответствующие им окружности С (v 1)
и C(v2) (заметим, что
окружность C(vi) является описанной вокруг треугольника
T(Vi)). Если окружности C(v{) и C(v2) не пересекаются, то
не пересекаются и треугольники T(v\) и T(v2). Поэтому пред-
предположим, что C(vi) и C(v2) имеют общие внутренние точки.
Отметим, что в силу теоремы 5.8 ни одна из окружностей не
может целиком содержать другую, поэтому окружности C(v\)
и C(v2) пересекаются в двух точках q\ и q2, которые опреде-
определяют прямую / (рис. 5.22), отделяющую точки V\ и v2 друг от
друга. Покажем, что / также отделяет треугольник T(vi) от
треугольника T(v2). Предположим обратное: в полуплоскости,
определяемой / и содержащей вершину v2, имеются точки тре-
треугольника T(v\) (т. е. в области, заштрихованной на рис. 5.22,
так как Т (v\)cz С (vi)). Отсюда следует, что в заштрихованную
область, а следовательно, и в C(v2) попадает вершина тре-
треугольника T(v\), что противоречит теореме 5.8. Таким образом,
T(v\) и T(v2) не имеют общих внутренних точек.
Наконец, рассмотрим произвольную точку х в conv(S) и
предположим, что она не принадлежит ни одному из треуголь-
треугольников T(v), где v — вершина диаграммы Вороного. Отсюда сле-
следует, что существует достаточно маленький круг у с центром в
х, все точки которого обладают тем же свойством, что и точка х
Рис. 5.22. Ни одна точка треугольника ()
не попадает внутрь заштрихованной об-
области.
5.5. Решение задач о близости методом локусов 257
(рис. 5.23). Пусть q— некоторая точка в Т(у), где v — произ-
произвольная вершина диаграммы. В круге у можно выбрать точку
у е у, такую, что прямая /, проходящая через q и г/, не прохо-
проходит ни через одну из точек множества 5. Прямая / пересекает
треугольники семейства Э~ по некоторому множеству замкнутых
интервалов. Обозначим через / конечную точку ближайшего к х
интервала и будем считать, что / принадлежит ребру р\р2 тре-
треугольника T(vi), где V\—некоторая вершина диаграммы Воро-
Рг
Рис. 5.23. Каждая точка внутри выпуклой оболочки множества принадлежит
некоторому треугольнику.
ного. Пусть р3 — третья вершина треугольника T(v\). Рассмот-
Рассмотрим перпендикуляр /, из v\ к рхр2. Начальная часть U совпадает
с ребром, ограничивающим V(l) и VB). Так как по предполо-
предположению точка х находится в conv(S), a x и р3 находятся по раз-
разные стороны отрезка pip2, то отрезок р{р2 не принадлежит гра-
границе выпуклой оболочки множества 5. Отсюда следует, что ребро,
"лежащее на 1Х, не является лучом (по теореме 5.10), а пред-
представляет отрезок, заканчивающийся в некоторой вершине v2.
Следовательно, р\ и р2 являются вершинами треугольника
T(v2), и так как T(vi)f\ T(v2) = 0 (как было показано выше),
то V\ и v2 лежат по разные стороны от отрезка р\р2. Значит,
/ является внутренней точкой Т(v\)[)T(v2), и это противоречит
(необоснованному) предположению, что точки отрезка ty не
принадлежат ни одному треугольнику из 0~.
Предыдущая теорема имеет непосредственное следствие:
Следствие 5.2. Диаграмма Вороного множества из N точек
имеет не более 2N — 5 вершин и 3N — 6 ребер.
Доказательство. Каждому ребру графа, двойственного диа-
диаграмме Вороного, соответствует единственное ребро диаграммы.
Двойственный граф является триангуляцией, а значит, планар-
9 Зак. 1075
258 Гл. 5. Близость: основные алгоритмы
ным графом с N вершинами. В соответствии с формулой Эй-
Эйлера он имеет не более ЗЛ^— 6 ребер и 2N— 4 граней. Следо-
Следовательно, диаграмма Вороного имеет не более 3N — 6 ребер.
Однако лишь ограниченные грани (их не более 2N — 5) соот-
соответствуют вершинам диаграммы Вороного при отображении
двойственности.
Используя введенное понятие двойственности, диаграмму
Вороного можно также применить для решения задачи ТРИАН-
ТРИАНГУЛЯЦИЯ (задача Б.4).
Так как диаграмма Вороного является планарным графом,
то для ее представления достаточно линейного по числу точек
объема памяти. Это позволяет представить информацию о бли-
близости в чрезвычайно компактной форме. Любой конкретный
многоугольник Вороного может иметь до N — 1 ребер, но пол-
полное число ребер не превосходит ЗЛ^— 6, при этом каждое ребро
принадлежит в точности двум многоугольникам. Это значит,
что среднее число ребер многоугольника Вороного не превос-
превосходит шести.
В двух последующих разделах рассмотренные свойства бу-
будут использованы для быстрого построения диаграммы Воро-
Вороного и рассмотрено ее применение для решения задач о бли-
близости точек.
5.5.2. Построение диаграммы Вороного
Хотя мы будем использовать диаграммы Вороного
для решения других задач, следует отметить, что в целом ряде
приложений конечной целью является именно построение диа-
диаграммы Вороного. В археологии многоугольники Вороного ис-
используются для нанесения на карту ареала применения орудий
труда в древних культурах и для изучения влияния соперни-
соперничающих центров торговли [Hodder, Orton A976)]. В экологии
возможности организма на выживание зависят от числа сосе-
соседей, с которыми он должен бороться за пищу и свет. Исполь-
Использование диаграммы Вороного, отражающей картину расселе-
расселения животных и распределения жизненно важных ресурсов, по-
помогает исследовать эффект перенаселенности [Pielou A977)].
Совместное влияние электрических и близкодействующих сил,
для изучения которых строятся сложные диаграммы Вороного,
помогает определять структуру молекул.
Под задачей построения диаграммы Вороного Vor(S) на
множестве точек S, для ссылки на которую мы будем исполь-
использовать название ДИАГРАММА ВОРОНОГО, будем понимать
порождение описания диаграммы как планарного графа, уло-
уложенного на плоскости. Это описание должно включать следую-
следующие элементы (см. разд. 1.2.3.2):
5.5. Решение задач о близости методом локусов 259
1. Координаты вершин диаграммы Вороного.
2. Множество ребер диаграммы, каждое из которых пред-
представляется парой вершин диаграммы. Для каждого ребра ука-
указываются два других ребра, следующих за ним при обходе
против часовой стрелки в каждой его концевой точке (реберный
список с двойными связями, см. разд. 1.2.3.2).
Такая организация неявным образом дает циклическую
упорядоченность против часовой стрелки ребер, инцидентных
любой вершине диаграммы, а также циклическую упорядочен-
упорядоченность по часовой стрелке ребер любой грани.
Теперь, как обычно, рассмотрим сначала вопрос о нижних
оценках для времени, необходимого для построения диаграммы
Вороного. Ответ на этот вопрос дает следующая простая тео-
теорема:
Теорема 5.12. В рамках модели алгебраических деревьев
вычислений для построения диаграммы Вороного множества из
N точек требуется Q(N\ogN) операций в худшем случае.
Доказательство. Далее мы увидим, что все задачи о близо-
близости точек можно свести за линейное время к задаче ДИА-
ДИАГРАММА ВОРОНОГО, и, следовательно, существует много
различных способов доказательства этой теоремы. Но здесь мы
ограничимся очень простым доказательством. В одномерном
случае диаграмму Вороного множества, состоящего из N точек,
представляет последовательность из Af—1 точек, отделяющих
друг от друга последовательные точки исходного множества и:
расположенных посередине между ними. Имея эту последова-
последовательность, можно за линейное время получить упорядоченный
список точек исходного множества. Таким образом, задача
СОРТИРОВКА может быть сведена за линейное время к за-
задаче ДИАГРАММА ВОРОНОГО.
Простой (и достаточно грубый) подход к построению диа-
диаграммы Вороного заключается в поочередном построении мно-
многоугольников, входящих в диаграмму. Так как каждый много-
многоугольник Вороного получается в результате пересечения N—1
полуплоскостей, то, используя метод, который будет рассмотрен
в тд^Лг- можно построить этот многоугольник за время
O(N \ogN), что дает для полного времени построения всех мно-
многоугольников оценку O(N2\ogN). Далее будет показано, что
вся диаграмма целиком может быть построена за оптимальное
время Q(N \ogN), а это значит, что асимптотически задача по-
построения всей диаграммы является не более сложной, чем за-
задача построения лишь одного из многоугольников этой диа-
диаграммы!
9*
260 Гл. 5. Близость: основные алгоритмы
В действительности, несмотря на кажущуюся сложность,
задача ДИАГРАММА ВОРОНОГО прекрасно подходит для
применения метода «разделяй и властвуй». Успех применяемого
нами метода зависит от различных структурных свойств диа-
диаграммы, использование которых позволяет произвести объеди-
объединение решений подзадач за линейное время.
Попытаемся в общих чертах описать алгоритм.
procedure ДИАГРАММА-ВОРОНОГО (предварительный ва-
вариант)
Шаг 1. Разделить множество 5 на два приблизительно равных
подмножества Si и S2.
Шаг 2. Рекурсивно построить VorEj) nVor(S2).
Шаг 3. Объединить Vor(Si) и Vor(S2) и таким образом полу-
получить Vor(S).
Предположим, что шаг 1 алгоритма можно выполнить за
время O(N) (позже мы докажем это). Если обозначить через
Т (N) полное время работы алгоритма, то на выполнение
шага 2 потребуется время, равное примерно 2T(N/2). Таким
образом, если удастся объединить Vor(S,) и Vor(S2) за линей-
линейное время, получив в результате диаграмму Вороного Vor(S)
всего исходного множества, то мы получим оптимальный ал-
алгоритм с временем работы Q(N\ogN). Но прежде чем браться
за более детальную разработку алгоритма, попытаемся отве-
ответить на следующий вопрос: на каком основании можно считать,
что Vor(Si) и VorE2) как-то связаны с Vor(S)?
Чтобы ответить на этот вопрос, определим геометрическую
конструкцию, играющую ключевую роль в рассматриваемом
подходе.
Определение 5.2. Пусть для заданного разбиения {5i,52}
множества 5 c(Si,S2) обозначает множество ребер диаграммы
Вороного, общих для пар многоугольников V(i) и V(j) диа-
диаграммы Vor E), где р, eSi и р,- е 52.
Совокупность ребер оEь 52) обладает следующими свой-
свойствами.
Теорема 5.13. Совокупность a(SitS2) является множеством
ребер некоторого подграфа диаграммы Vor E) и обладает сле-
следующими свойствами:
A) oEi,52) состоит из циклов и цепей, не имеющих общих
ребер. Если некоторая цепь содержит лишь одно ребро, то это
ребро является прямой линией; иначе два крайних ребра цепи
являются лучами.
B) Если множества Si и 5^ линейно разделимы1), то
') Если разделяющей прямой принадлежат более одной точки, то всех
их следует отнести к одному и тому же множеству разбиения.
5.5. Решение задач о близости методом локусов 26Г
g(S\,S2) состоит из единственной монотонной цепи (см.
разд. 2.2.2.2).
Доказательство. A) Если представить, что каждый из мно-
многоугольников {V(i): p,- e 5i} покрашен в красный цвет, а каж-
каждый из многоугольников {V(j): ft e S2}—в зеленый цвет, то
Vor(S) превратится в двухцветную карту. Хорошо известно,
что границы между многоугольниками различных цветов пред-
представляют циклы и цепи, не имеющие общих ребер [Bollobas
A979)]. (Заметим, что две компоненты множества a(Si,S2)
могут иметь общую вершину лишь в случае, когда степень этой
Рис. 5.24. Множества Si и S2 разделимы вертикальной прямой; (а)—каж-
(а)—каждая компонента a(Su S2) является монотонной по вертикали цепью; (Ь) —
a(Si,S2) состоит из единственной цепн.
вершины не меньше четырех. Поэтому, если все вершины диа-
диаграммы Вороного имеют степень три, то компоненты множества
oEi,52) не пересекаются также и по вершинам.) Каждая ком-
компонента множества a(Si,S2) разбивает плоскость на две части.
Таким образом, цепь либо содержит единственное ребро, пред-
представляющее прямую линию, либо ее первое и последнее ребра
являются лучами. Что доказывает свойство A).
B) Не теряя общности, предположим, что множества Si и
S2 разделены вертикальной прямой пг, и пусть С—-компонента
множества a(Si,S2). Будем двигаться по С, начав движение из
некоторой точки q ребра компоненты С в направлении умень-
уменьшения г/-координаты до тех пор, пока не достигнем вершины
диаграммы v\, в которой С поворачивает вверх (рис. 5.24(а)).
Ребро V\V2 перпендикулярно отрезку р\р2 и делит его пополам,
а ребро ViV3 перпендикулярно отрезку р{р3 и также делит его
пополам. Так как y(v3) > y(v\) и y(v2) > y(v\), то х(р3)^
^ х(р\) ^ х(р2). Однако, учитывая форму С, точки р2 и р3
принадлежат одному и тому же множеству (либо Si, либо S2).
262 Гл. 5. Близость: основные алгоритмы
Возникающая ситуация противоречит предположению о разде-
разделимости S\ и 52 вертикальной прямой. Значит, вершина, по-
подобная V\, не может существовать, а С является монотонной
относительно вертикальной прямой. Отсюда следует, что ком-
компонента С является цепью.
Предположим теперь, что оE1,5г) содержит по крайней
мере две монотонные относительно вертикальной прямой цепи
С{ и С2. Произвольная горизонтальная прямая / пересекает
каждую из цепей Сх и С2 в единственной точке (в силу моно-
монотонности С) и С2). Предположим, что точка пересечения пря-
прямой I с С\ находится левее точки пересечения / с С2
(рис. 5.24(Ь)). Тогда в 5 существуют три точки ри р2 и ръ
такие, что х(рх)<. х(р2)<. х{рг). При этом рх и ръ принадле-
принадлежат одному и тому же множеству разбиения {Si,S2}, что про-
противоречит предположению о разделимости этих двух множеств
вертикальной прямой. Поэтому a(SitS2) содержит лишь одну
компоненту, являющуюся монотонной цепью.
В том случае, когда множества Si и S2 являются линейно
разделимыми, единственную цепь, содержащуюся в a(Si,S2),
будем обозначать о. Если отделяющая прямая m является вер-
вертикальной, то можно недвусмысленно говорить о том, что о
разбивает плоскость на левую яь и правую Яц части. Имеет
место следующее важное свойство.
Теорема 5.14. Если множества S, и S2 линейно разделимы,
вертикальной прямой и при этом S\ находится слева от S2,
то диаграмма Вороного Vor E) представляет собой объедине-
объединение Vor E,) Л яь и Vor (S2) Л nR ').
Доказательство. Все точки множества S, расположенные
справа от о, принадлежат S2. Кроме того, все ребра диаграм-
диаграммы Vor E), расположенные справа от о, разделяют многоуголь-
многоугольники V(i) и V(j), где обе точки /?; и р, принадлежат S2. От-
Отсюда следует, что каждое ребро диаграммы Vor E), попадаю-
попадающее в Як, либо совпадает с некоторым ребром Vor(S2), либо
является его частью. Аналогичные утверждения справедливы
и для яь.
Предыдущая теорема дает ответ на вопрос о том, какая
связь имеется между Vor (Si), Vor(S2) и Vor(S). А именно
если множества Si и S2 линейно разделимы (а это полностью
в нашей власти и может быть реализовано на шаге 1 алго-
алгоритма), то теорема дает метод, позволяющий выполнить объ-
объединение Vor (Si) и Vor(S2). Пересмотренный вариант алго-
алгоритма приведен ниже.
>) Диаграмма Вороного Vor(S) представляет собой объединение
Vor(S,) П JU, Vor(S2) П ял и ст. — Прим. перев.
5.5. Решение задач о близости методом локусов 263
procedure ДИАГРАММА-ВОРОНОГО
Шаг 1. Разделить множество 5 на два приблизительно равных
подмножества S{ и S2, использовав для этого медиану по ^-ко-
^-координате.
Шаг 2. Рекурсивно построить Vor(Si) и VorE2).
Шаг 3'. Построить ломаную о, разделяющую Si и 52.
Шаг 3". Удалить все ребра диаграммы VorE2), расположен-
расположенные слева от о, и все ребра Vor(Si), расположенные справа
от о. В результате получаем Vor(S) — диаграмму Вороного для
множества в целом.
о 1
--. ° . \ • --
\
\
(а)
Хч~-х '' ~~-т'"о о
1
/
/ °
\
\ , о
\
\
(Ь)
Рис. 5.25. Диаграмма Вороного левого (а) и правого (Ь) множеств.
Очевидно, что успешное выполнение этой процедуры зави-
зависит от того, насколько быстро мы сможем построить а, так как
шаг 3" не вызывает затруднений. Для наглядности на
рис. 5.25 (а) и 5.25 (Ь) отдельно показаны Vor(Si) и VorE2)
соответственно, а на рис. 5.26 они представлены вместе с о.
Если говорить о времени обработки, то начальное разбие-
разбиение множества 5 с использованием медианы по х-координате
264 Гл. 5. Близость: основные алгоритмы
может быть выполнено за время O(N) с помощью стандартного
алгоритма поиска медианы. Кроме того, шаг 3" может быть
выполнен за время O(|5i| + |52| )= O(N). Остается лишь най-
найти эффективный способ построения разделяющей цепи о.
Рис. 5.26. Наложение Vor(Si), Vor(S2) и ст.
Рассмотрим теперь решение этой задачи [Shamos, Hoey
A975), Lee A978), A980а)].
5.5.2.1. Построение разделяющей цепи
Первый шаг в построении разделяющей цепи о за-
заключается в определении двух ее лучей. Заметим, что каждый
луч цепи о перпендикулярен опорному отрезку (каждый сво-
своему) к CH(Si) и СНEг) и делит его пополам. Отметим также,
что так как по предположению Si и S2 линейно разделимы, то
имеются в точности два опорных отрезка к CH(Si) и СНEг)
(тем самым подтверждается, что a(S\,S2) состоит лишь из од-
одной цепи о). Если теперь (по индукции) предположить, что
уже построены эти две выпуклые оболочки, то два опорных
отрезка, которые мы обозначим t\ и U, строятся (самое боль-
большее) за линейное время (см. разд. 3.3.5) после чего легко
определяются лучи цепи о (рис. 5.27). Заметим, что в качестве
побочного результата мы получаем также СНE), обеспечивая
тем самым наличие выпуклых оболочек, необходимых для
шага индукции.
5.5. Решение задач о близости методом локусов
265
CH(Sz")
L2 I
I
f
Найдя луч цепи а, мы последовательно строим ребра цепи
до тех пор, пока не достигнем второго луча. Для лучшего по-
понимания полезно обратиться к примеру на рис. 5.28, на кото-
котором для простоты каждая точка р,- представлена своим номе-
номером /. В приведенном примере верхний луч цепи о перпендику-
перпендикулярен отрезку, соединяющему точки 7 и 14, и делит его попо-
пополам. Представим точку z, двигающуюся по верхнему лучу из
бесконечности сверху вниз.
Первоначально точка z на-
находится в некоторых много-
многоугольниках диаграмм
Vor(Si) и VorE2). Точка г
будет двигаться по лучу до
тех пор, пока не пересечет
ребро одного из этих много-
угольников. С этого момен-
момента точка начнет двигаться
в другом направлении.В на-
нашем примере точка г пер-
первой пересечет ребро диа-
диаграммы VorE2). Это зна-
значит, что теперь z стала бли-
ближе к точке 11, чем к точке \
14, И поэтому она должна Рис. 5.27. Определение лучей цепи а.
двигаться вдоль прямой, Лучи цепи а перпендикулярны опорным
перпендикулярной отрезку, отрезкам к CH(Si) и CH(S2) и делят
соединяющему точки 7 и 11, их пополам-
и делящей его пополам.
Это продолжается до тех пор, пока не будет достигнута пря-
прямая, перпендикулярная отрезку, соединяющему точки 6 и 7,
делящая его пополам. Теперь точка г двигается по прямой,
перпендикулярной отрезку, соединяющему точки 6 и 11, и де-
делящей его пополам. В конце концов она пересечет прямую, пер-
перпендикулярную отрезку 10—11, делящую его пополам, и дви-
движение продолжится по прямой, перпендикулярной отрезку
6—10 и делящей его пополам. Такое зигзагообразное движение
по ломаной будет продолжаться до тех пор, пока не будет
достигнут нижний луч цепи а.
Предположим, что продвижение по о осуществляется в на-
направлении уменьшения у-координаты. Механизм продвижения
по а обеспечивает переход от текущего ребра е и текущей
вершины v (являющейся верхним концом ребра е) к следую-
следующим ребру е' и вершине v'. Если ребро е разделяет много-
многоугольники V(i) и V(j), где pi^Si и р\ е 5г, то вершина v'
является либо точкой пересечения е с границей V(i) в Vor(Si),
либо точкой пересечения е с границей V{j) в VorE2) в зави-
266 Гл. 5. Близость: основные алгоритмы
симости от того, какая из них ближе к v. Таким образом, про-
просмотрев границы многоугольников V(i) в Vor(Si) и V(j) в
Vor(S2)> можно легко определить вершину v'. К. сожалению,
цепь о может, оставаясь внутри некоторого многоугольника
V(i), многократно менять свое направление, прежде чем она
пересечет какое-либо ребро многоугольника V(i). И если каж-
каждый раз приходится просматривать все многоугольники V(i),
Рис. 5.28. Зигзагообразный путь, проходимый при построении а.
то может потребоваться проверить слишком много ребер, и в
общем случае необходимое для этого время может оказаться
квадратичным. Однако использование особенностей структуры
диаграммы Вороного позволяет разработать более эффектив-
эффективную стратегию просмотра.
Действительно, предположим, что последовательность ре-
ребер е\, е2, .... ek цепи о содержится в V{i), где для конкрет-
конкретности pi^Si (см. пример на рис. 5.29, где k = 3). Продолжим
каждое ребро eh за его конечную точку vh, получая луч rh, и
рассмотрим точку пересечения q^ луча гн с границей много-
многоугольника V(i) в Vor(Si). Рассмотрим подцепь Сх = ех, ...
..., ек цепи о и часть границы многоугольника V(i) в Vor(Si),
расположенную справа от о, которую обозначим С2. Подцепь
С2 — это часть границы (возможно, неограниченного) выпук-
выпуклого многоугольника V(i) в Vor(Si); C{ также является вы-
выпуклой и целиком содержится в V(i). Так как все углы между
отрезками vhqh и vhqh+\, где h = 1, 2, ..., k— 1 (с учетом на-
5.5. Решение задач о близости методом локусов
267
правления от Vhqti к Vhqh+i), имеют один и тот же знак, то
точки пересечения qu qi, ..., q*. оказываются упорядоченными
на С2. Отсюда следует, что при определении точек пересечения
<7i, qi, ¦¦• цепь Сг, т. е. границу многоугольника V(i) в VorEi),
необходимо просматривать без возвратов в порядке обхода по
часовой стрелке. Аналогичные рассуждения показывают, что
границу любого многоугольника V{j) в VorE2) следует про-
просматривать без возвратов в порядке обхода против часовой
стрелки.
Граница V(i) ,
a Vor(S,) |
Рис. 5.29. Точки пересечения qu q2, q3 упорядочены на С2.
В частности, будем считать, что как Vor(Si), так и VorE2)
представлены в виде РСДС (см. разд. 1.2.3.2), при этом циклы
граней ориентированы по часовой стрелке в Vor(Si) и против
часовой стрелки в УогEг). Для представления РСДС диа-
диаграммы Vor(Si) используется массив указателей СЛЕДУЮ-
СЛЕДУЮЩИЙ^ ], используемый для обхода границы грани по часовой
стрелке. Аналогичный массив СЛЕДУЮЩИИ2[ ] используется
для представления УогEг). В работе алгоритма используются
три ребра: два ребра ей и eR, принадлежащие соответственно
Vor(Si) и VorE2), и «текущее ребро» е цепи о (в действитель-
действительности не само ребро, а прямая, содержащая это ребро). Кроме
ребра е используется также его начальная точка v (для пер-
первого ребра е* цепи о, являющегося лучом, в качестве v* бе-
берется точка, лежащая на е* и имеющая достаточно большую
ординату). И наконец, используются две точки множества S,
Pl?=S1 и pR^S2, образующие отрезок PlPr, перпендикуляр-
перпендикулярный текущему ребру е, которое делит его пополам. Пусть
1{е,е') обозначает пересечение отрезков е и е', а запись
268 Гл. 5. Близость: основные алгоритмы
1(е,е') = А означает, что отрезки е и е' не пересекаются. Как
и ранее, t\ и U — это два опорных отрезка и при этом t\ = pq.
Ниже представлена реализация шага 3'.
1. begin pL:=p;
2. pR--=q;
3. е := е-,
4. v := v*;
5. eL := первое ребро (открытой) границы V (pL)\
6. eR := первое ребро (открытой) границы V (pR);
7. repeat
8. while(/(e,eL) = A) do eL ~ СЛЕДУЮЩИЙ,^]
(* посмотреть границу V(pL) *);
9. while(/(e,e*) = A) do eR :=СЛЕДУЮЩИЙ2[ед]
(* посмотреть границу V(pR) *);
10. if (и ближе к I(e,eL), чем к I(e,eR)) then
11. begin v := I(e,eL);
12. Pl:= точка множества S, находящаяся
по другую сторону от eL;
13. е:= прямая, перпендикулярная PlPr и
делящая его пополам;
14. eL := обратное к eL (* новое eL является
ребром V{pL) *)
end
15. else begin u:=/(e,e#);
16. Pr'-= точка множества 5, находящаяся
по другую сторону от eR;
17. е := прямая, перпендикулярная pLpR и
делящая его пополам;
18. eR:= обратное к eR
end
19. until(pLp* = t2)
end.
После инициализации (строки 1—6) начинается продвиже-
продвижение по цепи а (строки 7—19). Фактический механизм подвиже-
ния по цепи описывают строки 8—18, при этом строки 8 и 9
описывают просмотр без возврата границ многоугольников
V(pl) и V{pR) соответственно. Строки 11—14 и 15—18 отра-
отражают два взаимоисключающих случая изменения текущих зна-
значений параметров {и, pL, Pr, eL, eR}, на выполнение каждого из
которых требуется постоянное время. Так как диаграммы
Vor(Si) и УогEг) вместе содержат не более 3N — 6 ребер,
а цепь а содержит O(N) вершин, то полное время, необходи-
необходимое для построения цепи а, является линейным. Подробное
описание этой процедуры приведено в работе Ли [Lee A978)].
5.6. Решение задач о близости с помощью диаграммы Вороного 269
Напомним, что для получения диаграммы Вороного необхо-
необходимо удалить все ребра диаграммы Vor(Si), расположенные
справа от а, и все ребра VorE2), лежащие слева от а. Опе-
Операции по удалению ребер выполняются при обходе границ
многоугольников по часовой стрелке и против часовой стрелки
в процессе построения цепи а. Из всего сказанного следует, что
для объединения Vor(Si) и VorE2) требуется линейное время.
Завершим этот раздел следующей теоремой:
Теорема 5.15. Диаграмму Вороного для множества из N то-
точек на плоскости можно построить за время O(N\ogN), что
является оптимальным.
Доказательство. Время, необходимое для выполнения рекур-
рекурсивной процедуры объединения диаграмм, определяется рекур-
рекуррентным соотношением T(N) = 2T(N/2)+ O(N) = O(NlogN).
Оптимальность этой процедуры следует из теоремы 5.12.
5.6. Решение задач о близости
с помощью диаграммы Вороного
В разделе 5.1 уже говорилось, что все представлен-
представленные там задачи о близости можно эффективно решить с по-
помощью диаграммы Вороного. В этом разделе мы более по-
подробно обсудим это утверждение на примере задач Б.1, Б.2,
Б.4 и Б.5.
Начнем с задачи ВСЕ БЛИЖАЙШИЕ СОСЕДИ (Б.2), для
которой справедлива следующая теорема:
Теорема 5.16. Задача ВСЕ БЛИЖАЙШИЕ СОСЕДИ сво-
сводима за линейное время к задаче ДИАГРАММА ВОРОНОГО
и, следовательно, может быть решена за время O(AMogN), что
является оптимальным.
Доказательство. Согласно теореме 5.9, каждый ближайший
сосед точки р,- определяет ребро многоугольника V(i). Чтобы
найти ближайшего соседа точки pi, достаточно лишь просмот-
просмотреть каждое из ребер многоугольника V(i). Так как каждое
ребро принадлежит двум многоугольникам Вороного, то ни
одно из ребер не будет просматриваться более двух раз. Та-
Таким образом, имея диаграмму Вороного, можно найти всех
ближайших соседей за линейное время.
Учитывая, что задача БЛИЖАЙШАЯ ПАРА (Б.1) сводима
за линейное время к задаче ВСЕ БЛИЖАЙШИЕ СОСЕДИ, то
очевидно, что диаграмма Вороного может быть также исполь-
использована для оптимального решения задачи Б.1.
270 Гл. 5. Близость: основные алгоритмы
Решая задачу поиска ближайшего соседа (задачу Б.5), мы
стремимся выполнить предварительную обработку исходного
множества точек, с тем чтобы по возможности быстро осуще-
осуществлять поиск ближайшего соседа точки q, задаваемой в за-
запросе на поиск. Но поиск ближайшего соседа точки q эквива-
эквивалентен поиску многоугольника Вороного, содержащего эту точ-
точку. Значит, предварительная обработка должна заключаться
в построении диаграммы Вороного! Так как диаграмма Воро-
Вороного является планарным прямолинейным графом, то для по-
поиска на ней можно использовать любой из методов, представ-
представленных в разд. 2.2.2.
ЕДИНСТВЕННОСТЬ ЭЛЕМЕНТОВ —тг^ БЛИЖАЙШАЯ ПАРА C.1)
ВСЕ БЛИЖАЙШИЕ
СОСЕДИ C.2)
'N
сортировка —~^~^ триангуляция (за-)
УПОРЯДОЧЕННАЯ
ВЫПУКЛАЯ ОБОЛОЧКА
Рис. 5.30. Связь задач о близости с основными задачами-прототипами (до-
(дополненный рис. 5.6).
Теорема 5.17. Поиск ближайшего соседа можно выполнить
за оптимальное время O(logN), использовав для этого память
объемом O(N) и затратив на предварительную обработку вре-
время O(N log N).
Доказательство. На построение диаграммы Вороного затра-
затрачивается время O(N\ogN), затем применяется теорема 2.7.
Ранее уже говорилось о том, что граф, двойственный диа-
диаграмме Вороного, является триангуляцией (триангуляция Де-
Делоне, см. теорему 5.11). Справедлива следующая теорема:
Теорема 5.18. Триангуляция, в которой окружность, описан-
описанная вокруг любого треугольника, не содержит других точек,
может быть найдена за время Q(N\ogN), что является опти-
оптимальным для любой триангуляции.
Хотя диаграмма Вороного может быть использована для
получения в оптимальное время триангуляции множества то-
точек и, следовательно, для решения задачи Б.4, задача о пла-
нарной триангуляции в своей общей формулировке является
5.6. Решение задач о близости с помощью диаграммы Вороного 271
значительно более широкой, и мы еще вернемся к ней в
разд. 6.2. Кроме того, в одном из следующих разделов будет
рассмотрена интересная взаимосвязь задач ЕВКЛИДОВО МИ-
МИНИМАЛЬНОЕ ОСТОВНОЕ ДЕРЕВО и ДИАГРАММА ВО-
ВОРОНОГО.
Здесь уместно вновь вернуться к диаграмме, представленной
на рис. 5.6 и отражающей взаимосвязи между задачами о бли-
близости точек. На рис. 5.30 эта диаграмма показана с учетом ре-
результатов, приведенных в данном разделе. На этой диаграмме
также отражен известный факт о том, что задача СОРТИ-
СОРТИРОВКА сводима за линейное время к задаче ДИАГРАММА
Рис. 5.31. Построение выпуклой оболочки по диаграмме Вороного.
ВОРОНОГО (теорема 5.12), и показано новое сведение задачи
ВЫПУКЛАЯ ОБОЛОЧКА к задаче ДИАГРАММА ВОРО-
ВОРОНОГО, устанавливаемое следующей теоремой:
Теорема 5.19. Если имеется диаграмма Вороного множества
из N точек на плоскости, то выпуклая оболочка этого множе-
множества может быть найдена за линейное время.
Доказательство. Пусть диаграмма Вороного представлена
РСДС с ориентацией обхода циклов, составляющих грани, на-
например, против часовой стрелки. Будем перебирать ребра диа-
диаграммы до тех пор, пока не найдется луч (рис. 5.31). Если счи-
считать г ориентированным в направлении от бесконечности к его
началу и при этом многоугольник V(i) расположен справа от
луча г, то точка р,- является вершиной выпуклой оболочки (тео-
(теорема 5.10). Будем просматривать ребра многоугольника V(i)
до тех пор, пока не встретится другой луч г'. Изменив на об-
обратную ориентацию луча г, определим следующую вершину
выпуклой оболочки pj и теперь будем просматривать ребра
272 Гл. 5. Близость: основные алгоритмы
многоугольника V(j) и т. д., пока вновь не вернемся к много-
многоугольнику V(i). Ребро диаграммы просматривается лишь в том
случае, если выполняется обход ребер одного из многоугольни-
многоугольников, содержащих это ребро. Так как каждое ребро принадле-
принадлежит в точности двум многоугольникам, то ни одно ребро не бу-
будет просмотрено более двух раз и время обработки является
линейным.
Действительно, замечательно, что такая разнородная сово-
совокупность задач может быть решена с использованием единствен-
единственной структуры. Однако возможности применения диаграммы
Вороного не ограничиваются рассмотренными. При обсужде-
обсуждении в последующих разделах других приложений мы не пере-
перестанем удивляться многообразию использования диаграммы
Вороного.
5.7. Замечания и комментарии
Результаты, обсуждавшиеся в предыдущих разделах
этой главы, относились к задачам о близости точек в простран-
пространствах с евклидовой метрикой. Евклидова метрика может быть
легко обобщена до понятия Lp-метрики (метрики Минковского),
определяемой следующим образом:
Определение 5.3. /-„-расстояние между двумя точками q\ и
^2 в евклидовом пространстве Ей с координатами х\, х2, ¦ ¦ ¦, ха
для произвольного действительного числа 1 ^ р ^ оо опреде-
определяется следующей формулой:
/ d \i/p
dp (ди <?2) = I ? I х, (<?,) - х, Ы |р . E.4)
Таким образом, традиционная евклидова метрика совпадает
с /,2-метрикой. Все задачи, обсуждавшиеся ранее, можно рас-
рассматривать и в случае Lp-метрики для произвольного р, и та-
такое исследование было проведено в числе прочих Ли и Вонгом
[Lee, Wong A980)] и Хвангом [Hwang A979)]. Помимо
Z-2-расстояния особый интерес представляют Li-расстояние (из-
(известное также под названием манхеттенское расстояние) — дли-
длина кратчайшего пути, каждый участок которого является отрез-
отрезком, параллельным одной из осей координат, и Leo-расстояние,
определяемое максимальной разностью координат. Эти метрики
являются естественными для целого ряда приложений, таких
как моделирование движений руки и проектирование тополо-
топологии интегральных схем.
Естественно ожидать, что сужение некоторой задачи на
ограниченный класс данных позволит получить более эффек-
5.7. Замечания и комментарии 273
тивный алгоритм ее решения. Примером такого ограничения
служит ситуация, когда все N точек множества 5 являются вер-
вершинами выпуклой оболочки. В этом случае использование свой-
свойства выпуклости позволяет решить задачу ВСЕ БЛИЖАЙШИЕ
СОСЕДИ в оптимальное время Q(N) [Lee, Preparata A978)].
Около десяти лет вопрос о существовании алгоритма по-
построения диаграммы Вороного выпуклого многоугольника с
временем обработки Q(N) оставался одним из животрепещу-
животрепещущих вопросов вычислительной геометрии. Лишь недавно был
получен положительный ответ на этот вопрос [Aggarwal,
Guibas, Saxe, Shor A987)]. Предложенный ими метод основы-
основывается на рассмотренном в разд. 6.3.1.2 соответствии между
диаграммами Вороного множества 5 из N точек, лежащих в
плоскости 2=1, и разбиением пространства, определяемого
плоскостями, касательными к параболоиду z = х2 + у2 + 1 в
точках {(л:г, у., х^ + у2 + 1): (xt, j,)eS}. В частности, проекция
на плоскость z = 1 пересечения соответствующих полупро-
полупространств, определяемых этими плоскостями, дает диаграмму
Вороного ближней точки множества 5. Если 5 — это множество
вершин выпуклого многоугольника Р, лежащего в плоскости
2=1, то этот метод дает диаграмму Вороного многоуголь-
многоугольника Р. Ключевым моментом является тот факт, что знание
порядка следования вершин при обходе границы многоуголь-
многоугольника Р позволяет разработать хитроумный алгоритм вычисле-
вычисления требуемого пересечения полупространств за линейное
время.
В этой главе триангуляция Делоне была введена как неко-
некоторый попутный результат, получаемый при построении диа-
диаграммы Вороного. Однако можно определить триангуляцию
Делоне как единственную триангуляцию, обладающую тем
свойством, что окружность, описанная вокруг любого треуголь-
треугольника, не содержит внутри ни одной другой точки. Исходя из
такого определения, можно непосредственно построить триан-
триангуляцию Делоне, использовав для этого рекурсивную про-
процедуру, аналогичную приведенной процедуре построения диа-
диаграммы Вороного. Как показали Ли и Шехтер [Lee, Schachter,
A980)], время работы такой процедуры соответствует опти-
оптимальной оценке. В действительности этот подход был предло-
предложен для случая Li-метрики, так как для этой метрики диа-
диаграмма Вороного уже не является единственной и вследствие
этого нарушается связь между диаграммами Вороного и три-
триангуляцией Делоне.
Другой интересный класс задач касается расстояния между
множествами точек. Обычно расстояние между двумя множе-
множествами точек А и В определяется как минимальное расстояние
между точкой множества А и точкой множества В, а именно
274 Гл. 5. Близость: основные алгоритмы
d(A, B) = mmmind(a, b), где а<=А, b <= В и rf—евклидово
а Ь
расстояние. При таком определении d(A, B) = d{B, А). Другая
мера, представляющая интерес и не являющаяся симметричной,
это хаусдорфово расстояние [Griinbaum A967)]. Хаусдорфово
расстояние от А до В равно max mind (a, b), а хаусдорфово
а Ъ
расстояние между двумя множествами А и В равно
max{d(A, В), d{B, А)}. В случае конечных множеств А и В за-
задача БЛИЖАЙШАЯ ПАРА МЕЖДУ МНОЖЕСТВАМИ мо-
может быть решена с использованием диаграммы Вороного в
оптимальное время Q(N logN). Можно ожидать, что в случае,
когда точки множества являются вершинами выпуклого или
простого многоугольника, существует более быстрый алгоритм
решения. Аталла [Atallah A983)] рассматривает хаусдорфово
расстояние между двумя выпуклыми многоугольниками и дает
алгоритм его вычисления, имеющий сложность O(N). Шварц
[Shwartz A981)] рассмотрел задачу поиска ближайшей пары
точек двух выпуклых многоугольников (двух множеств, не яв-
являющихся конечными) и предложил алгоритм со сложностью
О (log2 Л7). Впоследствие этот результат был улучшен до
О (log W) [Edelsbrunner A982); Chin, Wang A983)]. Для по-
поиска ближайшей пары вершин двух выпуклых многоугольников
необходимо и достаточно времени O(N) [Chin, Wang A984);
Toussaint A983a)].
5.8. Упражнения
1. Ли. На плоскости заданы два множества А и В, содержащие по
N точек каждое. Найти две ближайшие точки, одна из которых принадле-
принадлежит А, а другая В. Показать, что для этого требуется Q(NlogN) опера-
операций. Что изменится, если множества А и В линейно разделимы?
2. Ли. На плоскости заданы два множества точек А а В, каждое из
которых образует «лестницу» (т. е. каждое множество совпадает с множе-
множеством своих максимумов в отношении доминирования; см. разд. 4.1.3).
(a) Найти пару точек (pi.pj), где р,- е А и р,- е В, ближайшую по
Li-метрике.
(b) Можно ли это сделать за линейное время?
3. Обращение диаграммы Вороного. Задана планарная карта валентно-
валентности 3 с N вершинами (каждая вершина имеет степень 3). Разработать эф-
5.8. Упражнения 275
фективный алгоритм, проверяющий, является ли эта карта диаграммой Во-
Вороного некоторого конечного множества точек S. В случае положительного
ответа алгоритм должен в явном виде построить множество S.
4. Диаграмма Вороного на сфере. На трехмерной сфере S3 задано мно-
множество S чз N точек. Рассмотреть диаграмму Вороного S3-Vor(S) мно-
множества S, построенную на сфере S3 с использованием евклидовой метрики.
(a) Показать, что каждое ребро диаграммы S3-Vor(S) является дугой
большой окружности сферы S3.
(b) Предположим, что все точки множества S находятся на полусфере
сферы S3 (все точки находятся по одну сторону от некоторой плоскости, про-
проходящей через центр сферы S3).
Показать, как можно использовать алгоритм построения диаграммы Во-
Вороного на плоскости (см. разд. 5.5) для построения S3-Vor(S).
5. (а) Охарактеризовать диаграмму Вороного множества из N точек
на плоскости в случае использования Li-метрики.
(b) Тот же самый вопрос для Loo-метрики.
(c) Какова взаимосвязь диаграмм Вороного, построенных для метрик L\
и ?„?
6. В случае Ьг-метрики точки множества S, многоугольники Вороного
которых не ограничены, образуют выпуклую оболочку множества S (тео-
(теорема 5.10). Имеет ли место то же самое для Lj-метрики?
7. Сформулировать и доказать теорему, аналогичную теореме 5.8, для
?гметрики.
8. Ли. Рассмотреть следующее определение триангуляции Делоне мно-
множества из N точек, никакие четыре из которых не лежат на одной окруж-
окружности. Две точки pi и р,- определяют ребро триангуляции Делоне тогда и
только тогда, когда существует окружность, проходящая через эти две точки
и не содержащая внутри никаких других точек множества. Показать, что
это определение дает триангуляцию, удовлетворяющую условию: окружность,
описанная вокруг любого треугольника, не содержит внутри никаких других
точек множества. Следовательно, это то же самое, что и граф двойственный
диаграмме Вороного этого множества точек.
9. Ли. Показать, что приведенному выше определению триангуляции Де-
Делоне соответствует единственная триангуляция (в предположении, что ника-
никакие четыре точки этого множества не лежат на одной окружности).
10. На плоскости заданы два множества точек А и В. Использовать
диаграмму Вороного для вычисления
min min dist (a, b)
аевА ЬеВ
за время O(N\og N), где N= |Л| + |В| (используется евклидова метрика).
6
ГЛАВА
Близость: варианты и обобщения
Основной вывод предыдущей главы, состоит в том,
что диаграмма Вороного, с одной стороны, является чрезвы-
чрезвычайно универсальным средством для решения ряда фундамен-
фундаментальных задач о близости точек, с другой стороны, она сама
представляет необычайно привлекательный математический
объект. И именно эти две стороны — инструментальная и эсте-
эстетическая— явились источником вдохновения для многочислен-
многочисленных исследований в этой области. В этой главе мы продемон-
продемонстрируем результаты таких исследований. Начнем с обсуж-
обсуждения двух очень важных приложений: с упоминавшейся уже
задачи о евклидовом минимальном остовном дереве (и неко-
некоторых ее вариантах) и задачи о триангуляции плоскости в об-
общей постановке. Затем будут показаны различные обобщения
понятия локуса. Завершается глава анализом класса задач,
касающихся покрытий множеств, что позволит оценить воз-
возможности различных моделей вычислений.
6.1. Евклидовы минимальные остовные
деревья
В предыдущей главе была рассмотрена задача о ев-
евклидовом минимальном остовном дереве (ЕМОД, задача Б.5,
разд. 5.1) и было показано, что задача СОРТИРОВКА сво-
сводима к ней за линейное время. Это дает нижнюю оценку
Q(N\ogN) для времени построения ЕМОД множества из N то-
точек. В этом разделе будет показано, что эта оценка алгорит-
алгоритмически достижима.
Алгоритм, который будет описан, как и любой известный
алгоритм поиска минимального остовного дерева в произволь-
произвольном графе, основывается на следующей довольно очевидной
лемме:
6.1. Евклидовы минимильные остовные деревья 277
Лемма 6.1 [Prim A957)] Пусть G = {У,Е)—граф со взве-
взвешенными ребрами, a {V\, V2}—разбиение множества V. В G
имеется минимальное остовное дерево, содержащее кратчайшее
из ребер, одна вершина которого принадлежит Vi, а другая V2-
В нашем случае множество вершин У — это множество то-
точек 5, а длина ребра равна евклидову расстоянию между его
конечными точками. На каждом шаге построения ЕМОД алго-
алгоритм будет обрабатывать лес, содержащий несколько деревьев
(которые впоследствии станут поддеревьями получающегося в
результате ЕМОД). Первоначально лес представляет совокуп-
совокупность вершин (т. е. каждая точка представляет отдельное де-
дерево без ребер). Основной шаг алгоритма выполняется следую-
следующим образом (здесь d(u,v) обозначает длину отрезка uv):
A) Выбрать из леса некоторое дерево Т.
B) Найти ребро (u',vf) такое, что d(u', v')= min{d(u, v):
u^T,v^S — T}.
C) Если Т — дерево, содержащее v', то объединить Т и Т',
соединив их ребром (u',v'). Выполнение алгоритма завершает-
завершается, когда лес содержит единственное дерево, являющееся
ЕМОД исходного множества точек.
Хотя реализация операций A) и C) требует большой тща-
тщательности, основные трудности рассматриваемого метода свя-
связаны с выполнением операции B).
Действительно, возникает интуитивное опасение, что объем
работы, необходимой для ее выполнения, пропорционален
| Т11X (Л^_ | Т\), что соответствует перебору всех пар вершин,
одна из которых принадлежит Т, а вторая берется из остав-
оставшейся части. К счастью, благодаря следующей лемме, здесь
нам на помощь приходит диаграмма Вороного.
Лемма 6.2. Пусть S — множество точек на плоскости, а А(р)
обозначает множество точек, смежных с р е5 в триангуляции
Делоне множества S. При любом разбиении {Si, 5г} множе-
множества S, если qp—кратчайший отрезок, соединяющий точки из
S\ и Sz, то q принадлежит А(р).
Доказательство. Пусть на отрезке pq достигается минималь-
минимальное расстояние между точками S\ и 52 и при этом S
4?S2 (рис. 6.1). Утверждается, что ^еА(р). Если
то перпендикуляр к отрезку pq, делящий его пополам, не со-
содержит отрезка границы V(p)—многоугольника Вороного точ-
точки р (теорема 5.9). Отсюда следует, что V(p) пересекает pq
в некоторой точке и^ расположенной между р и точкой М —
серединой отрезка pq. Ребро / диаграммы Вороного, содержа-
содержащее точку и, перпендикулярно отрезку р~р', p'eS и делит его
278
Гл. 6. Близость: варианты и обобщения
I {ребро диаграммы
Вороного)
пополам. При любом возможном выборе ни/ положение
точки р' ограничивается внутренностью круга С с центром в
точке М и диаметром qp. Возможны два случая: A) р' е Si,
в этом случае d(q, p')< d(q, p), так как ближе к q находится
р', а не р (противоречие); B) p'^S2, в этом случае d(p,p')<
<.d(q,p), так как р' ближе к р, чем q (снова противоречие).
Другими словами, согласно этой лемме, необходимо про-
просматривать лишь ребра триангуляции Делоне, т. е. необходимо
искать минимальное остовное дерево планарного графа
[Shamos A978)].
Вернемся вновь к реализации основного шага алгоритма по-
построения ЕМОД. Черитон и Тарьян [Cheriton, Tarjan A976)]
предложили в числе других методов следующую простую стра-
стратегию. Для выбора дерева Т (которое будет объединено с дру-
другим деревом леса) они
указали однородное пра-
правило выбора, перед ис-
использованием которого в
очередь помещаются все
деревья, содержащие по
одной вершине.
1. Выбрать дерево из
начала очереди.
2. Если дерево Т" по-
получено в результате объ-
объединения дерева Т с не-
некоторым другим деревом
Рис. 6.1. Иллюстрация к доказательству т/ ТГ1 .,„;,,„., т ,. т' mq
условия esa л . * tv/
K ' очереди и добавить Т в
конец очереди.
Так как каждый раз производится объединение двух де-
деревьев и исходно в очереди имеются N деревьев, то основной
шаг алгоритма выполняется в точности (N— 1) раз.
Определим для каждого дерева Т, находящегося в очереди,
целое число, называемое этапом и вычисляемое следующим
образом: этап(Т)=0, если |Г|=1, и этап(Т) = min(этап(Т'),
этап(Т"))-\- 1, если Т является результатом объединения де-
деревьев Т' и Т". Очередь деревьев обладает интересным свой-
свойством: в любой момент работы алгоритма совокупность чисел
этап(Т) в порядке от начала к концу очереди образует неубы-
неубывающую последовательность. Будем говорить, что этап j завер-
завершен, если из очереди удалено дерево Г, для которого
этап(Т) = /, и ни для одного другого дерева Т' в очереди зна-
значение этап(Т') не равно /. Заметим, что после завершения
этапа j очередь содержит не более N/2>+х элементов, а всего
6.1. Евклидовы минимальные остовные деревья 279
имеется не более ["log2An этапов1). Последующая обработка
происходит следующим образом. Выбрав из очереди первый
элемент Т (при этом этап(Т)= /), среди ребер, соединяющих
вершины дерева Т с вершинами вне его, ищем ребро наимень-
наименьшей длины. При такой организации обработки на каждом этапе
каждое ребро просматривается не более двух раз (за исключе-
исключением ребер, уже вошедших в некоторое дерево Т). Таким об-
образом, каждый этап обработки может быть выполнен за время,
пропорциональное числу ребер, которое в силу планарности
графа равно O(N). А так как число этапов не превосходит
["logaAH, то для времени работы алгоритма получаем оценку
О (NlogN). В этом месте читатель может заметить, что мы
могли бы удовлетвориться полученным результатом, так как
время, затрачиваемое на построение триангуляции Делоне, рав-
равно O(N\ogN), и во всяком случае мы имеем оптимальный
алгоритм. Однако интересно найти метод, позволяющий полу-
получить ЕМОД из диаграммы Вороного за линейное время. Этого
можно достичь с помощью операции «очистки», предложенной
Черитоном и Тарьяном.
Применение операции очистки имеет целью сжать исходный
граф G (в нашем случае это граф триангуляции Делоне), пре-
преобразовав его в некоторый граф G*, который в любой момент
работы алгоритма содержит лишь необходимую информацию.
Это значит, что каждое дерево Т, входящее в лес F, сжимается
в единственную вершину графа G (т. е. удаляются все неото-
неотобранные ребра, соединяющие вершины дерева Т (хорды)) и,
кроме того, удаляются все ребра, за исключением самого корот-
короткого из неотобранных, соединяющие деревья Т и Т". Важно
отметить, что если G— планарный граф, то G* тоже будет
пленарным.
Очистка графа производится сразу же после завершения
этапа (см. выше). Не составляет труда предложить такую реа-
реализацию, при которой время обработки пропорционально числу
ребер графа, удаляемых при очистке.
В заключение приведем формальное описание процедуры по-
построения ЕМОД. Предполагается, что с каждым деревом Т
связан список неотобранных ребер, инцидентных вершинам
дерева Т.
procedure ЕМОД
1. begin F:=.0;
2. for i := 1 to N do
3. begin этап(р,) := 0;
F
') To есть зтап(Т) может принимать не более n°g2 ЛП различных
значений. — Прим. перев.
280 Гл. 6. Близость: варианты и обобщения
end; (* очередь инициализирована*)
4. /:=1; (* номеру этапа присваивается следующее
значение *)
5. while (F содержит более одного элемента) do
6. begin T<=F\
7. if (этапG') = 7) then begin очистить граф;
8. /:=/ +1
end;
9. (и,v) := кратчайшее из неотобранных ребер,
инцидентных Т (и принадлежит Т);
10. Т':= дерево в F, содержащее v;
11. Г':= объединить(Г ,7");
12. удалить 7" из F;
13. этап(Г') := minCTanG'), этапG")) + 1;
14. F<=T"[*T" добавляется в конец очереди*)
end
end.
Теперь у нас есть все необходимое для анализа алгоритма.
По завершении этапа (/—1) в очереди имеется не более N/2'
деревьев, и, следовательно, соответствующий граф G* имеет не
более N/21' вершин и менее 3N/2/-1 ребер, так как он является
планарным. Этап / завершается за время, пропорциональное
числу ребер (каждое ребро просматривается на этапе не более
двух раз (строка 9)), и то же самое справедливо для времени,
затрачиваемого на очистку графа, которая производится по
завершении этапа / (строки 7, 8 выполняются непосредственно
перед переходом к этапу (/ + 1)). Таким образом, однократное
выполнение тела цикла (строки 6—14) происходит за время
O(N/2i). И если вспомнить, что число этапов не превосходит
riog2An, получаем следующую верхнюю оценку для полного
времени выполнения цикла 6—14:
где Ki — некоторая константа. Тем самым доказана следую-
следующая теорема.
Теорема 6.1. ЕМОД множества S из N точек на плоскости
может быть построено, исходя из триангуляции Делоне мно-
множества S, за оптимальное время Q(N).
Объединяя этот результат с уже известным нам фактом
о том, что триангуляция Делоне может быть построена за вре-
время Q(N\ogN), получаем
Следствие 6.1. ЕМОД множества S из N точек на плоскости
может быть построено за оптимальное время Q(N\og N).
6.1. Евклидовы минимальные остовные деревья
281
На рис. 6.2 показаны множество точек, его диаграмма Во-
Вороного и ЕМОД этого множества.
Рис. 6.2. Множество точек и соответствующие ему диаграмма Вороного
и ЕМОД.
Далее будет рассмотрено одно интересное приложение
ЕМОД конечного множества точек.
6.1.1. Евклидова задача о коммивояжере
Задача Б.9 (ЕВКЛИДОВА ЗАДАЧА О КОММИ-
КОММИВОЯЖЕРЕ). Найти кратчайший замкнутый путь, проходя-
проходящий через N заданных точек на
плоскости.
Пример такого кратчайше-
кратчайшего маршрута показан на рис.
6.3. (Читатель, представляющий
сложность этой задачи, может
удивиться тому, как удалось по-
получить решение для приведен-
приведенного примера, содержащего 16 то-
точек. Это было сделано с помощью
эвристического приема, предло-
предложенного Кристофидесом, кото-
который будет описан далее.)
Отличие этой задачи от задачи о коммивояжере в общей
постановке имеет ту же природу, что и отличие задачи о ев-
евклидовом остовном дереве от задачи о минимальном остовном
дереве в произвольном графе. А именно расстояния между точ-
точками не являются произвольными, а определяются евклидовой
Рис. 6.3. Маршрут коммивояжера.
282 Гл. 6. Близость: варианты и обобщения
метрикой. Как известно, задача о коммивояжере в общей поста-
постановке (ЗК) является ЛФ-трудной').
Можно было бы предположить, что свойства евклидовой
метрики могут быть использованы для разработки полиноми-
полиномиального алгоритма решения этой задачи в случае множества
точек, заданного на плоскости. Однако Гэри, Грэхем и Джон-
Джонсон [Garey, Graham, Johnson A976)], Пападимитриу и Стайг-
лиц [Papadimitriou, Steiglitz A976)] и Пападимитриу [Рара-
dimitriou A976)] наряду с другими результатами о ЛФ-полноте
некоторых геометрических задач доказали, что евклидова за-
задача о коммивояжере (ЕЗК) является ЛФ-трудной. Учитывая
это, мы не будем обсуждать вопрос разработки эффективного
Рис. 6.4. Продублировав все ребра ЕМ.ОД, получаем граф с эйлеровым
циклом.
в худшем случае алгоритма для ЕЗК, а рассмотрим взаимо-
взаимосвязь ЕЗК с другими задачами о близости точек с точки зрения
разработки хороших приближенных методов.
Начнем с рассмотрения более простого (и менее эффектив-
эффективного) из двух известных методов, основанного на следующей
теореме:
Теорема 6.2 [Rosenkrantz, Stearns, Lewis A974)]. Исполь-
Используя минимальное остовное дерево, можно получить прибли-
приближенное решение ЗК, дающее путь, длина которого меньше
удвоенной длины кратчайшего пути.
Доказательство. Пусть Т* обозначает евклидово минималь-
минимальное остовное дерево заданного множества точек S, а Ф —
оптимальный маршрут коммивояжера. Начнем с того, что за-
заменим каждое ребро дерева Т* парой ребер. В результате по-
получим граф W, каждая вершина которого имеет четную сте-
степень (рис. 6.4). Граф W является связным эйлеровым графом.
Это значит, что его ребра можно занумеровать таким образом,
что получившаяся последовательность образует эйлеров цикл,
') Сведения, касающиеся AfP-полных задач, а также доказательство
того, что ЗК является AfP-трудной, можно найти в [Кагр A972), Garey,
Johnson A979)].
6.1. Евклидовы минимальные остовные деревья
283
или, иначе говоря, маршрут, проходящий через все вершины
(при этом через некоторые вершины он проходит не один раз).
Следовательно, длина(№)=2 длина(Г*). Заметим, что если
удалить из Ф некоторое ребро е, то получим путь Фпуть, кото-
который также является остовным деревом множества S. Очевидно,
что длина (Г*) ^ длина (Фпуть) (по определению Т*) и дли-
длина (Фпуть) < длина (Ф). Отсюда получаем длина (W)< 2 дли-
на(Ф).
Заметим, что приближенный маршрут, показанный на
рис. 6.4, можно улучшить, сделав его более коротким, удалив
все ненужные остановки, т. е. при обходе точек ни одна из уже
пройденных точек не проходится вновь. Более конкретно это
Начальная вершина
Выбранное
направление
Рис. 6.5. Введение «хорд» в эйлеровом цикле обеспечивает однократное по-
посещение каждой вершины.
делается так. На эйлеровом цикле W выбираются произволь-
произвольным образом направление его обхода и начальная вершина
(которую мы оставим непомеченной). Каждая пройденная вер-
вершина помечается, а следующей вершиной окончательного мар-
маршрута является первая после нее непомеченная вершина, встре-
встретившаяся при обходе W в установленном направлении. Приме-
Применение такой процедуры удаления повторений вершин к при-
примеру на рис. 6.4 дает маршрут, показанный на рис. 6.5. (Заме-
(Заметим, что эта процедура удаления не может увеличить длину по-
получаемого маршрута, так как расстояния между точками удов-
удовлетворяют неравенству треугольника.)
Следующий результат, касающийся приближенных методов,
использует понятие минимального взвешенного паросочетания.
Задача Б.10 (МИНИМАЛЬНОЕ ЕВКЛИДОВО ПАРОСО-
ЧЕТАНИЕ). На плоскости заданы 2N точек. Объединить их
в пары, соединив отрезками так, чтобы сумма длин отрезков
была минимальной.
Пример такого паросочетания показан на рис. 6.6.
Едмондс [Edmonds A965)] показал, что минимальное взве-
взвешенное паросочетание в произвольном графе может быть най-
284 Гл. 6. Близость: варианты и обобщения
дено за полиномиальное время, а Габоу [Gabow A972)] раз-
разработал алгоритм со сложностью O(N3). Следующий результат,
полученный Кристофидесом [Christofides A976)], связывает
минимальные остовные деревья, паросочетания и задачу о ком-
коммивояжере.
Теорема 6.3. Если расстояния между точками удовлетворяют
неравенству треугольника, то за время O(N3) можно найти при-
приближенное решение задачи о коммивояжере, представляющее
Рис. 6.6. Минимальное евклидово паросочетание.
маршрут, длина которого не превосходит 3/2 длины минималь-
минимального маршрута.
Доказательство. Пусть задано множество точек S. Следую-
ший алгоритм соответствует условиям теоремы и дает необхо-
необходимый результат.
1. Найти минимальное остовное дерево Т* множества S.
2. Найти минимальное евклидово паросочетание М* для
множества IeS вершин, имеющих нечетную степень в Т*.
(Множество X всегда содержит четное число элементов для лю-
любого графа.)
3. Граф Т* U М* является эйлеровым, так как все его вер-
вершины имеют четную степень. Обозначим через Фе эйлеров
цикл этого графа.
4. Продвигаясь по Фе от ребра к ребру таким образом,
чтобы не проходить вновь уже пройденные вершины, построить
приближенный маршрут Ф„рибл.
Пусть, как обычно, Ф — минимальный маршрут. Заметим,
что: A) длина(Т*)< длина(Ф); B) длина(Л1*)< -^ длина(Ф).
Действительно, выбрав из Ф каждое второе ребро, получаем
два паросочетания на множестве S (к первому относятся ото-
отобранные ребра, а ко второму оставшиеся). Длина кратчайшего
из двух паросочетаний не превосходит 1/2 длина(Ф) и со всей
очевидностью не меньше длина (М*), так как М* — минималь-
минимальное паросочетание. Ранее было показано, что длина (Т*) <
< длина (Ф). И так как расстояния между точками удовлетво-
удовлетворяют неравенству треугольника, длина (Ф„рибл)^ длина (Фе).
6.2. Планарные триангуляции 285
Объединяя эти результаты, получаем
длина (Фприбл.Х длина (Фе)
= длина {Т*) + длина (ЛГ)
< длина (Ф) + y длина (Ф)
= Y длина (Ф).
Справедливость временной оценки следует из результата, по-
полученного Габоу.
Замечание. Воспользовавшись минимальным евклидовым
паросочетанием, можно получить лучшее приближенное реше-
решение, отличающееся от минимального не в 2, а в 3/2 раза. При
этом сложность вычислений возрастает с O(NlogN) до 0{N3).
За несколько лет, прошедших с момента, когда Кристофидес
получил свой результат, никому не удалось ни найти способ
поиска приближенного решения, отличающегося от минималь-
минимального менее чем в 3/2 раза, ни уменьшить время поиска прибли-
приближенного решения. Само по себе примечательно, что метод,
используемый для получения минимального евклидова паросо-
четания, не использует геометрические свойства. Действитель-
Действительно, единственный известный метод заключается в сведении
(преобразовании) данной задачи к задаче поиска максималь-
максимального взвешенного паросочетания (сведение осуществляется пу-
путем замены длины / каждого ребра величиной М — /, где М =
= max /) и применении к полученной в результате сведе-
по всем ребрам
ния задаче метода, разработанного для произвольных графов.
6.2. Планарные триангуляции
В разд. 5.1 уже отмечалась важность триангуляции
для многочисленных приложений, связанных с интерполяцией
поверхностей, как в задачах графического отображения дан-
данных, так и в задачах численного анализа. В дополнение к этим
очень важным приложениям возможность выполнять планар-
планарные триангуляции сама по себе является полезным средством,
используемым для решения других задач вычислительной гео-
геометрии. Достаточно упомянуть два примера: A) в методе гео-
геометрического поиска Киркпатрика (см. разд. 2.2.2.3) предпо-
предполагается, что планарное разбиение является триангуляцией;
B) алгоритм построения пересечения многогранников (см.
разд. 7.3.1) требует выполнить предварительную триангуля-
триангуляцию поверхности многогранников.
В предыдущей главе уже было показано, что триангуля-
триангуляция— а именно триангуляция Делоне — множества точек мо-
286 Гл. 6. Близость: варианты и обобщения
жет быть найдена за оптимальное время. Однако это не решает
проблемы, так как, хотя триангуляция Делоне является заме-
замечательным объектом, обладающим очень привлекательными
свойствами, могут встретиться приложения, для которых триан-
триангуляция Делоне не подходит. Например, может потребоваться
минимизировать суммарную длину ребер триангуляции (мини-
(минимальная взвешенная триангуляция). Было сделано предполо-
предположение, что триангуляция Делоне также является минимальной
взвешенной триангуляцией. Еще в одном предположении
утверждалось, что метод триангуляции, который будет описан
в разд. 6.2.1 (метод «жадной триангуляции»), также дает ми-
минимальную взвешенную триангуляцию. Оба этих утверждения
были опровергнуты Ллойдом [Lloyd A977)], и на сегодня во-
вопрос о сложности задачи построения минимальной взвешенной
триангуляции (т. е. является ли она JVP-трудной или суще-
существует полиномиальный алгоритм для ее решения) остается
открытым ').
Другие критерии не связаны с длиной ребер, а касаются ве-
величины внутренних углов треугольников. Во многих приложе-
приложениях требуется, чтобы треугольники были по возможности
«однородными», т. е. были «более или менее равносторонними».
С этой точки зрения триангуляция Делоне является очень
привлекательной, так как для нее минимальное значение угла
по всем треугольникам является максимальным среди всех три-
триангуляции. (Действительно, это эквивалентно тому, что окруж-
окружность, описанная вокруг треугольника в триангуляции Делоне,
не содержит внутри других точек заданного множества
[Lawson A977); Lee A978)].)
Отсылаем читателя к разд. 5.6, где подробно рассмотрены
свойства триангуляции Делоне. Далее будут рассмотрены не-
некоторые другие методы триангуляции применительно либо
к множествам точек, либо к смешанным множествам, содержа-
содержащим точки и отрезки. Здесь стоит напомнить, что для построе-
построения триангуляции множества из N точек на плоскости любым
из алгоритмов требуется Q(JVlogJV) операций (см. разд. 5.3).
6.2.1. Жадная триангуляция
Как хорошо известно, «жадный» метод — это такой
метод, при котором никогда не отменяется то, что уже было
сделано ранее. Таким образом, жадный метод триангуляции
последовательно порождает ребра триангуляции (по одному за
раз) и завершает этот процесс после того, как порождено не-
') Однако известно, что минимальная взвешенная триангуляция инди-
индивидуального iV-угольника может быть вычислена за время O(N3) [Gilbert
A979)]. \ > i
6.2. Планарные триангуляции 287
обходимое число ребер, которое полностью определяется раз-
размером множества точек и его выпуклой оболочкой. Если цель
состоит в минимизации суммарной длины ребер, то все, что
можно сделать, используя жадный метод, это применить ло-
локальный критерий, добавляя на каждом этапе кратчайшее из
возможных ребер, совместимое с ранее порожденными ребрами,
т. е. не пересекающее ни одно из них.
В этом суть метода. Непосредственная реализация этой идеи
сводится к следующей последовательности действий (как обыч-
обычно, S обозначает множество точек, а N — его размер). Сначала
порождается множество, содержащее все I J ребер, соеди-
соединяющих точки множества S, которые затем упорядочиваются
по возрастанию длин, образуя пул ребер. Вначале множество
ребер триангуляции является пустым. Основной шаг процеду-
процедуры триангуляции включает следующие действия. В пуле выби-
выбирается и исключается из него ребро наименьшей длины. Если
это ребро не пересекает ни одно из ребер, уже вошедших в
триангуляцию, то оно также включается в число ребер триан-
триангуляции. Иначе ребро просто исключается из дальнейшего
рассмотрения. Процесс завершится, либо когда будет построе-
построена триангуляция (что можно определить, подсчитывая число
добавляемых ребер), либо когда пул ребер станет пустым
[Duppe, Gottschalk A970)].
Этот метод, рассмотренный здесь лишь в общих чертах,
прост не только для реализации, но и для анализа. Для сор-
сортировки ребер по длине требуется O(N2logN) операций. За-
тем I „ 1 раз призводится выборка ребра из пула и каждое
выбранное ребро проходит проверку на пересечение с ребрами,
уже вошедшими в триангуляцию, на что требуется некоторое
время <p(iV). Вид ф зависит от метода, реализующего эту про-
проверку. В результате получаем для времени, необходимого для
этого метода, следующую оценку: О (N2 log ./V + №ф (N)).
Простейший способ выполнить упомянутую проверку — это
проверить, пересекает ли выбранное ребро каждое из k ребер,
уже вошедших в триангуляцию. Так как каждая из этих эле-
элементарных проверок выполняется за постоянное время, то для
Ф имеем q>(k)=C\k (где С\ — некоторая константа). Следова-
Следовательно, полное время обработки равно O(N3).
- Более эффективный подход был предложен Джильбертом
[Gilbert A979)]. Цель, ставившаяся при разработке этого под-
подхода, заключалась в том, чтобы сбалансировать работу по
принятию решений (принадлежит ли выбранное ребро триан-
триангуляции) и работу по выбору ребер (просмотр ребер в порядке
288
Гл. 6. Близость: варианты и обобщения
увеличения длин). Ясно, что затраты на последнюю из работ
составляют O(N2log N) независимо от того, используется пред-
предварительная сортировка или подход на основе пирамиды (пи-
(пирамидальная сортировка) [Aho, Hopcroft, Ullman A974)]. По-
Поэтому нужно добиться, чтобы на обработку ребра требовалось
не более O(logN) операций. А это можно сделать следующим
образом. Предположим, что выбрано ребро pip(- (рис. 6.7(а)).
(а)
Рис. 6.7. «Звезда из спиц» в точке ри Ребра триангуляции показаны жир-
жирными отрезками.
Рассмотрим множество ребер, соединяющих р\ со всеми дру-
другими точками множества S, и обозначим его ЗВЕЗДА (pi). Это
множество образует «звезду из спиц» в точке рь Эти спицы
упорядочены в порядке обхода вокруг точки р\, например про-
против часовой стрелки, и делят полный угол в 2л радиан на
(N—1) секторов, или угловых интервалов. Если некоторое
ребро
рр pPj уже включено в триангуляцию, то оно проходит че-
через несколько последовательных секторов звезды в р\, и то же
самое имеет место для любой точки pi Aфк,1). Заметим так-
также, что никакие два ребра, уже включенные в триангуляцию,
не пересекаются (по определению), так что ребра, попадаю-
попадающие в каждый угловой интервал, определяемый ЗВЕЗДА(р(),
где 1=1, ..., N, упорядочены1). Предположим, точка р* по-
попала в сектор PiPxPk, определяемый ЗВЕЗДА^). Чтобы ре-
решить, следует ли включать ребро pip,- в триангуляцию, необхо-
необходимо проверить, пересекает ли оно ребра триангуляции, прохо-
') Имеется в виду упорядоченность ребер внутри сектора по их рас-
расстоянию от точки ре. — Прим. перев.
6.2. Планарные триангуляции
дящие через этот сектор, и, в частности, ближайшее из них
к р\ ребро. Таким образом, проверка пересечения сводится
к частному случаю задачи определения положения точки на
плоскости, когда в каждом секторе, определяемом ЗВЕЗДА (рг)
(для всех /), необходимо хранить одно ребро триангуляции
(называемое опорным ребром). Типичная ситуация показана
на рис. 6.7(Ь), где затемнена область, допустимая для ребер
триангуляции.
Структура данных, используемая при проверке приемлемо-
приемлемости ребер, является динамической, так как она должна изме-
изменяться (перестраиваться) каждый раз, как некоторое ребро
включается в триангуляцию. Учитывая, однако, что в каждой
звезде изменения затрагивают множество последовательных
секторов, вполне естественно использовать деревья отрезков
(см. разд. 1.2.3.1). В частности, секторы, порождаемые
ЗВЕЗДА (pi), представлены (N— 1) листьями дерева отрезков
7У С каждым узлом v дерева Ti связано ребро e(v), являю-
являющееся ближайшим ребром к pt среди всех ребер, которые свя-
связывались с узлом v в результате вставки в дерево отрезков.
(Очевидно, что e(v) может быть пустым ребром.) При проверке
ребра pip/ выполняется поиск в дереве Г,-, осуществляемый с
помощью прохождения пути, определяемого Pj. В каждом узле
v, лежащем на этом пути, производится проверка взаимного по-
положения точки pj и ребра e(v). Ребро считается допустимым
тогда и только тогда, когда оно не пересекает ни одно из ре-
ребер, встретившихся при прохождении пути. Если выбранное
ребро оказывается непригодным, то поиск прекращается. Ина-
Иначе, когда ребро р,р/ является допустимым, необходимо произ-
произвести изменения: перестроить деревья, соответствующие каж-
каждому из множеств ЗВЕЗДА(р;), где 1ф1, }. Это реализуется
просто путем вставки ребра р,р/ в дерево для ЗВЕЗДА (pi) и
надлежащего изменения каждого узла v, лежащего на путях,
проходимых при вставке. (Отсылаем читателя к разд. 1.2.3,
где подробно рассмотрена работа с деревьями отрезков.) Оче-
Очевидно, что изменения в каждом из деревьев, соответствующих
ЗВЕЗДА(р;), /= 1, ..., N, можно сделать за время O(\ogN).
Так как, если некоторое ребро оказывается допустимым, необ-
необходимо произвести изменения в (N — 2) деревьях и эта опера-
операция выполняется O(N) раз, то полное время, необходимое на
выполнение изменений в деревьях при триангуляции, состав-
составляет O(N2\ogN).
Учитывая, что на управление выбором ребер, проверку до-
допустимости ребер и внесение изменений в структуры данных
требуется время O(N2\ogN) (на каждую в отдельности), по-
получаем следующий результат:
290 Гл. 6. Близость: варианты и обобщении
Теорема 6.4. Триангуляция множества из N точек жадным
методом может быть выполнена за время O(N2\ogN) с исполь-
использованием памяти объемом О (N2).
6.2.2. Триангуляция с ограничениями
Во многих случаях природа решаемой задачи такова,
что при триангуляции необходимо учитывать разного рода
ограничения, т. е. в исходной постановке задачи на множество
ребер триангуляции накладываются некоторые ограничения. Ти-
Типичный пример такой ситуации дает задача триангуляции внут-
внутренности простого многоугольника.
Из всех описанных ранее методов для решения таких задач
с ограничениями можно было бы использовать жадный метод,
но он имеет один недостаток: 'эффективность получения реше-
решения далека от оптимальной. С другой стороны, не видно спо-
способа приспособить для решения таких задач метод триангуля-
триангуляции Делоне. (См. разд. 5.6 и 6.5.) Следовательно, необходимо
искать новый метод.
Как обычно, на плоскости задано множество 5 из N точек.
Кроме того, на 5 задано множество Е из М непересекающихся
ребер (ограничения), которые должны войти в число ребер
триангуляции. Мы немного и несущественно изменим предыду-
предыдущее соглашение, условившись, что область, подвергаемая три-
триангуляции, представляет наименьший прямоугольник rect(S),
стороны которого параллельны координатным осям, охваты-
охватывающий все точки множества 5. (Заметим, что в rect(S) су-
существуют по крайней мере две вершины, имеющие наибольшее
значение «/-координаты, и по крайней мере две вершины с наи-
наименьшей «/-координатой.)
Цель состоит в том, чтобы эффективно выполнить разбиение
rect(S) на многоугольники меньшего размера, триангуляция
которых не вызывает затруднений. Следующее определение
описывает класс таких многоугольников [Garey, Johnson, Pre-
parata, Tarjan A978)].
Определение 6.1. Многоугольник Р называется монотонным
относительно прямой /, если он простой и его граница является
объединением двух цепей, монотонных относительно / (см.
разд. 2.2.2.2.) •).
Будем предполагать далее, что прямая / — это у = 0 си-
системы координат и что никакие две точки множества 5 не
имеют одинаковую ординату (как обычно, это предположение
') Было показано, что проверка монотонности простого многоугольника
может быть выполнена за линейное время [Preparata, Supowit A981)].
6.2. Планарныв триангуляции 291
не принципиально, но упрощает рассмотрение). Далее будет
представлен простой алгоритм триангуляции монотонного мно-
многоугольника, а сейчас покажем, как можно выполнить разбие-
разбиение прямоугольника rect(S).
Предлагаемый метод принадлежит классу методов, осно-
основанных на заметании плоскости, и, по существу, совпадает
с процедурой «регуляризации» пленарного графа, описанной в
разд. 2.2.2.2. Действительно, множества S н Е определяют пла-
нарный граф, уложенный на плоскости. Процедура регуляри-
регуляризации (описание которой здесь не приводится, чтобы не делать
ненужных повторений) за время O(N logN) добавляет ребра
так, что выполняются следующие условия:
A) никакие два ребра не пересекаются (за исключением,
возможно, в вершинах);
B) каждая вершина (за исключением вершин с наиболь-
наибольшей «/-координатой) непосредственно соединена по крайней
мере с одной вершиной, имеющей большую «/-координату;
C) каждая вершина (за исключением вершин с наимень-
наименьшей «/-координатой) непосредственно соединена по крайней
мере с одной вершиной, имеющей меньшую «/-координату.
Утверждается, что каждая область планарного графа, полу-
полученная в результате применения процедуры регуляризации, яв-
является монотонным многоугольником. Доказательство этого
утверждения основывается на понятии внутреннего пика. Вер-
Вершина v простого многоугольника называется внутренним пиком,
если внутренний угол в вершине v превышает я и обе смежные
с ней вершины имеют «/-координату, не превосходящую «/-коор-
«/-координату вершины v. Из условий B) и C) следует, что ни одна
вершина регуляризованного графа не может быть внутренним
пиком. Ключ к доказательству сделанного утверждения дает
следующая лемма:
Лемма 6.3. Если Р — простой многоугольник без внутренних
пиков, то Р — монотонный относительно у-оси многоугольник.
Доказательство. Пусть v\, v2, ..., vm~последовательность
вершин многоугольника Р в порядке обхода по часовой стрел-
стрелке, а о, и us —вершины с наибольшей и наименьшей «/-коор-
«/-координатами соответственно (рис. 6.8). Если многоугольник Р не
монотонный, то по крайней мере одна из двух цепей из vx в vs,
образованных ребрами многоугольника Р, не является строго
убывающей по «/-координате. Рассмотрим случай, когда это —
цепь, проходящая через вершину и2 (другой случай полностью
симметричен данному). Выберем в качестве первой вершины
на этом пути vit 1 < / < s, такую, что «/-координата вершины
vi+1 превосходит у-координату вершины vi.
292
Гл. 6. Близость: варианты и обобщения
Для начала заметим, что последовательность из трех вер-
вершин (vi-\ViVi+\) должна образовывать правый поворот, так
как иначе vt была бы внутренним пиком многоугольника Р
(рис. 6.8(а)). Рассмотрим теперь прямую, проходящую через
вершины v\ и vs (рис. 6.8(Ь)). Пусть г Ф ы — первая точка на
границе многоугольника Р, встретившаяся при движении из ш
в vs по прямой, проходящей через и,- и vs (r может совпадать
(с)
Рис. 6.8. (а)-—vr—первая вершина в последовательности v\, и2, ..., для
которой y(vi+i)> y(v;); (b)—г — первая точка пересечения прямой, идущей
из Vi в vs, с границей многоугольника Р; (с) — вершина и, имеющая в мно-
многоугольнике Р наибольшую (/-координату, является внутренним пиком мно-
многоугольника Р.
с vs). Отрезок, соединяющий Vi и г, делит область вне много-
многоугольника Р на две части, одна из которых представляет огра-
ограниченный многоугольник Р' (рис. 6.8(с)). Все вершины много-
многоугольника Р', за исключением г, являются вершинами много-
многоугольника Р. Пусть и — вершина многоугольника Р', имеющая
наибольшую у-координату. Тогда и является также и вершиной
многоугольника Р, и, кроме того, является внутренним пиком Р
(противоречие).
Лемма 6.3 и тот факт, что ни один из многоугольников, по-
полученных в результате регуляризации, не имеет внутренних пи-
пиков, доказывают утверждение о монотонности каждого из мно-
многоугольников. Теперь можно обратиться к вопросу триангуляции
монотонного многоугольника [Garey, Johnson, Preparata, Ta-
rjan A978)].
6.2.2.1. Триангуляция монотонного многоугольника
Так как многоугольник Р монотонный относительно
у-оси, то путем слияния двух монотонных цепей, образующих
границу Р, можно за время O(N) упорядочить вершины Р в
порядке уменьшения у-координаты. Пусть ии и2, ..., uN — по-
последовательность вершин, полученная в результате упорядоче-
6.2. Планарные триангуляции
293
ния. Из монотонности следует, что для каждой вершины ut
(l^Ci^CiV—1) имеется вершина щ, где с <. j, такая, что тщ
является ребром многоугольника Р.
Алгоритм триангуляции обрабатывает по одной вершине за
раз в порядке уменьшения у-координаты. В ходе этой обработ-
обработки порождаются диагонали многоугольника Р. Каждая диаго-
Вершина (СТЕН)
Рис. 6.9. Три случая, возникающие на основном шаге. Штриховыми линиями
обозначены добавленные диагонали.
наль ограничивает треугольник, оставляя для последующей три-
триангуляции многоугольник, имеющий на одну сторону меньше.
Алгоритм использует стек, содержащий пройденные вершины,
но которые еще не отсечены диагоналями. Алгоритму доступны
как самый верхний (верх), так и самый нижний (низ) эле-
элементы стека (нижний только для контроля).
Вершины v\ (нижний элемент стека), и2. •••, Vi, находя-
находящиеся в стеке СТЕК, образует цепь, являющуюся границей
многоугольника Р, и при этом y{v{) ~> у (иг) > ••• ~>y(vi).
Если { ^ 3, то угол (vjVj+iVj+2)^ 180° для / = 1, ..., i — 2
(рис. 6.9).
Алгоритм работает следующим образом:
Начальный шаг. В стек помещаются вершины щ и иг.
Основной шаг. Пусть и — текущая вершина.
294 Гл. 6. Близость: варианты и обобщения
A) Если и смежна с vu но не смежна с vi (верх(СТЕК)),
то добавить диагонали uv2, uvs, •.., uvi. Заменить содержимое
стека на ыи (рис. 6.9(а)).
B) Если и смежна с vt, но не смежна с v\, то, пока i > 1
и угол (uviVi-i)<Z 180°, добавлять диагональ uvi-\ и выталки-
выталкивать vi из стека. Если это условие, состоящее из двух частей,
больше не выполняется (или если оно не выполнялось с самого
начала), то добавить и в стек (рис. 6.9(Ь)).
C) Иначе, когда и смежна как с vu так и с vt, добавить
диагонали ии2, ииз, ..., uvt-i. (В этом случае обработка закан-
заканчивается (рис. 6.9(с)).)
Корректность алгоритма зависит от того, лежат ли добав-
добавляемые диагонали целиком внутри многоугольника. Рассмот-
Рассмотрим, например, диагональ (uv2), добавляемую в случае A).
Ни одна из вершин vz, ..., vi не может находиться внутри или
на границе треугольника (и, vi,v2), так как внутренние углы
в вершинах v2, v3, ..., Vi-\ равны не менее чем 180° и это при-
приводит к тому, что и ъ vz, Vi, ..., Vi находятся по разные сто-
стороны от прямой, содержащей отрезок v\v2. Никакая другая вер-
вершина многоугольника не может находиться внутри или на гра-
границе этого треугольника, так как все такие вершины имеют
у-координату, меньшую чем вершина и. Ни одна точка внут-
внутри треугольника не может быть внешней для многоугольника,
так как в этом случае ломаная прошла бы через внутренность
треугольника и по крайней мере одна из его вершин оказалась
внутри треугольника. Таким образом, диагональ uv2 целиком
лежит внутри многоугольника. Доказательства для случаев B)
и C) проводятся аналогично, и, кроме того, довольно просто
можно проверить, что свойства стека являются инвариантом
алгоритма.
Проанализируем работу алгоритма. Слияние цепей, произ-
производимое вначале, может быть выполнено за время O(N).
В процессе триангуляции каждая вершина заносится в стек и
просматривается в точности один раз, за исключением, когда в
случае B) не выполняется условие «пока i > 1 и угол
(uviVi-i) < 180°». Если отнести соответствующую работу, так же
как и затраты, связанные с доступом к верхнему и нижнему
элементам стека, на счет обработки текущей вершины и,
то очевидно, что эта процедура может быть выполнена также
за время O(N). В результате получаем следующую тео-
теорему:
Теорема 6.5. Триангуляция монотонного многоугольника с
N сторонами может быть выполнена за время O(N), что яв-
является оптимальным.
6.S. Обобщения диаграммы 29!j
Объединяя этот результат с полученным ранее, согласно ко-
которому прямоугольник rect(S) можно разбить на монотонные
многоугольники за время O(N \ogN), и припомнив нижнюю
оценку для задачи триангуляции, получаем следующую тео-
теорему:
Теорема 6.6. Триангуляцию с ограничением на множестве из
N точек можно выполнить за время d(N\ogN), что является
оптимальным.
Отметим, однако, что теорема 6.6 не применима в случае
триангуляции простого многоугольника, так как в этом случае
исходно заданные ребра триангуляции уже не являются произ-
произвольными. Мы еще вернемся к этому вопросу в разд. 6.5.
6.3. Обобщения диаграммы Вороного
Напомним определение диаграммы Вороного, данное
в предыдущей главе: Диаграмма Вороного конечного множе-
множества S точек на плоскости представляет такое разбиение пло-
плоскости, при котором каждая область этого разбиения образует
множество точек, более близких к одному из элементов множе-
множества S, чем к любому другому элементу этого множества.
В этом определении курсивом выделены три элемента (множе-
(множество точек, плоскость, один элемент), которые могут служить
основой для обобщения. И такие обобщения были сделаны,
правда, с различным успехом в каждом из этих трех направ-
направлений.
Прежде всего, оставаясь, как и прежде, в плоскости ^т. е.
в двумерном пространстве), можно расширить заданное множе-
множество, добавив помимо точек другие геометрические объекты,
такие как отрезки, окружности и т. п. Однако в этой книге это
направление подробно рассматриваться не будет (см. разд. 6.5).
Далее в поисках структуры данных, обеспечивающей эффек-
эффективное решение задачи поиска ^-ближайших соседей (см. за-
задачу Б.6 в разд. 5.1), может возникнуть желание определить
области, содержащие точки, более близкие к некоторому за-
заданному подмножеству из k элементов множества 5, чем к лю-
любому другому подмножеству с таким же числом элементов. Лю-
Любопытно, что если положить k равным /V— 1, то получится диа-
диаграмма Вороного дальней точки.
И наконец, хотя определение обычной диаграммы Вороного
на случай пространства произвольной размерности очевидно, ее
построение связано со значительными алгоритмическими проб-
проблемами. Действительно, можно легко показать, что при задан-
заданном числе точек N количество элементов, необходимых для
описания диаграммы Вороного, растет экспоненциально в за-
296
Гл. 6. Близость: варианты и обобщения
висимости от размерности пространства. Это — явление, с ко-
которым мы уже сталкивались, решая задачу о выпуклой обо-
оболочке. Впрочем, связь между диаграммами Вороного и выпук-
выпуклыми оболочками далеко не исчерпывается фактом экспонен-
экспоненциального роста соответствующих им описаний.
6.3.1. Диаграмма Вороного высших порядков
на плоскости
Диаграмма Вороного, являясь очень мощным сред-
средством, не дает ничего, когда речь идет о наиболее удаленных
точках, k ближайших точках и других метрических отношениях.
Рис. 6.10. Диаграмма Вороного второго порядка. Точки помечены своими
номерами. Некоторые многоугольники Вороного в диаграмме второго по-
порядка могут быть пустыми. Например, отсутствует многоугольник E,7).
Как таковая, диаграмма Вороного не может быть применена
для решения поставленных задач. Затруднение вызвано тем,
что мы рассматривали многоугольник Вороного, связанный
с одной точкой. Но такое ограничение вовсе не является необ-
необходимым, и будет полезно поговорить об обобщенном много-
многоугольнике Вороного V(Т) подмножества точек Т [Shamos,
Ноеу A975)], определяемом так:
V (Т) = {р:
TVw <=S-T, d(p, v)<d (p, w)}.
To есть V(T) — это множество точек на плоскости, таких что
каждая точка из Т ближе к некоторой точке реУ(Г), чем
6.3. Обобщения диаграммы 297
любая точка, не принадлежащая Т. Дадим эквивалентное оп-
определение:
V (Т) = Л Н (ph pt), Pl^T, Pjz=S-T,
где H(pi,pj), как обычно, представляет полуплоскость, содер-
содержащую pi и определяемую прямой, перпендикулярной отрезку
pip; и делящей его пополам. Это определение показывает, что
обобщенный многоугольник Вороного по-прежнему является
выпуклым. Конечно, может оказаться, что V(T) пусто. В при-
примере на рис. 6.10 отсутствуют точки, для которых их двумя бли-
ближайшими соседями являются точки р$ и рт. Множество S, со-
содержащее N точек, имеет 2N подмножеств. Для скольких из них
многоугольники Вороного непустые? Если соответствующее
число невелико, то есть надежда организовать поиск k ближай-
ближайших соседей, не используя для этого чрезмерный объем
памяти.
Определим диаграмму Вороного порядка k, обозначив ее
VoTk(S) — как совокупность всех обобщенных многоугольников
Вороного ^-элементных подмножеств множества 5. Таким об-
образом '),
При такой записи обычная диаграмма Вороного это просто
Vori(S). Название «диаграмма» для Vor*E) вполне уместно,
так как ее многоугольники разбивают плоскость на части. Если
задана диаграмма VorftE), то k ближайших соседей некоторой
новой точки q можно найти, определив многоугольник, в кото-
котором находится q. На рис. 6.10 показана диаграмма Вороного
второго порядка, содержащая области, определяющие пары
ближайших точек.
Прежде чем приступать к обсуждению вычислительных за-
задач, связанных с построением обобщенных диаграмм Воро-
Вороного, необходимо изучить их структуру. Этому вопросу посвя-
посвящен следующий раздел.
6.3.1.1. Элементы инверсной геометрии
Начнем с небольшого отступления в область инверс-
инверсной геометрии — средства, которое особенно подходит для на-
наших целей.
') Правильнее записать так:
Vorft (S) = [){V (T)}, T<=S. | Т | = k.
— Прим., перев.
298 Гл. 6. Близость: варианты и обобщения
Определение 6.2. Инверсия в пространстве Ed — это преоб-
преобразование, переводящее точку, определяемую вектором v, в
точку, определяемую вектором v' = v 1/| v|2').
Заметим, что инверсия является инволюцией, так как ска-
скалярное произведение v и ее образа v' равно единице:
v-Vr=vvr j^p-=l,
и, значит, v и v' являются образами друг друга при преобразо-
преобразовании инверсии. Рассмотрим одно характерное свойство инвер-
инверсии, выражаемое следующей теоремой:
Теорема 6.7. Инверсия в пространстве Ed отображает ги-
гиперсферы в гиперсферы.
Доказательство. Гиперсфера ст с центром в с и радиусом
г — это множество точек v, удовлетворяющих уравнению
|v — с|2 = г2. Отсюда сразу получаем 2v-cr = |v|2 -Ь|С12— г2.
Теперь рассмотрим величину |v' — с/(|с|2 — г2)\2, где v — об-
образ точки v при инверсии, т. е. v' = l/|v|2-v. Получаем
(|c
с
л2
с
1 9
1
+
2
1
V
I2
1
с |s
Iv
-|v|2
2-(U i2
|c
(|c
— т
2
|2
-r2)-
(
С
2v
',.
• cr
-r2J
Так как эта величина является константой (она зависит от
констант |с|2 и г), то отсюда следует, что образом гиперсферы
ст при преобразовании инверсии является гиперсфера с цент-
центром в с/(|с|2 — г2) и радиусом г/(|с|2 — г2).
Преобразование инверсии имеет особенность в начале коор-
координат пространства Ed. Образом начала координат является
бесконечно удаленная гиперплоскость. Следствием этого яв-
является тот факт, что при преобразовании инверсии внутренность
гиперсферы ст отображается на внутренность ее образа ст' тогда
и только тогда, когда ст (а значит, и ст') не содержит внутри
себя начало координат. В противном случае внутренность ст
отображается на внешнюю область ст'.
Для нас, в частности, представляет интерес случай, когда
гиперсферы проходят через начало координат, являющийся
промежуточным между двумя случаями, упомянутыми выше.
Гиперсфера, проходящая через начало координат, отображает-
') Между точками и векторами в Ed имеется взаимно однозначное со-
соответствие. Поэтому далее вместо «точка, определяемая вектором V» будем
использовать краткую форму «точка V». — Прим. перев.
6.3. Обобщения диаграммы 299
ся в гиперплоскость, а внутренность гиперсферы отображается
на полупространство (определяемое гиперплоскостью-образом),
не содержащее начало координат. Иначе говоря, семейство ги-
гиперплоскостей в Ed отображается в семейство гиперсфер, про-
проходящих через начало координат.
Для большей наглядности последующее изложение осно-
основывается на рассмотрении двумерного и трехмерного случаев.
Кроме того, при обсуждении диаграмм Вороного высших по-
порядков на плоскости мы также воспользуемся трехмерным про-
пространством; однако для простоты на рисунках будет изобра-
изображаться двумерная ситуация. Таким образом, из предыдущего
Единичная
окружность
Рис. 6.11. Пример преобразования инверсии на плоскости для случая прямых
и окружностей, проходящих через начало координат.
обсуждения следует, что при инверсии в случае плоскости
окружности переходят в окружности, а в трехмерном простран-
пространстве сферы отображаются в сферы.
В пространстве Еъ особую роль играет единичная сфера
(сфера единичного радиуса с центром в начале координат),
так как точки этой сферы остаются неподвижными при инвер-
инверсии. На рис. 6.11 показан пример преобразования инверсии на
плоскости. На этом рисунке прямая /, (/ = 1, 2, 3) и окруж-
окружность С,- при инверсии преобразуются друг в друга.
6.3.1.2. Структура диаграмм Вороного высших
порядков
Теперь мы готовы к обсуждению основного вопроса.
Пусть 5 — множество из N точек на плоскости. Поместим эту
плоскость в пространство Ег с координатами х, у и г, совместив
ее с плоскостью z = 1 (заметим, однако, что можно было вы-
выбрать любую другую плоскость). Построим образ этой плоско-
зоо
Гл. 6. Близость: варианты и обобщения,
сти при инверсии, т. е. сферу С радиусом 1/2 с центром в точке
@,0,1/2). (См. рис. 6.12, отражающий аналогичную ситуацию
в пространстве меньшей размерности.) Отобразим каждую точ-
точку множества S в точку на С путем проектирования вдоль
прямой, проходящей через начало координат в Е31). В резуль-
результате этого на сфере С получим множество S' из N точек.
Рассмотрим теперь плоскость я, определяемую тремя точ-
точками р\, р'{ и р\ множества S' (эти точки являются образами
точек pi, pj и pi множества S при преобразовании инверсии).
7
Полупространство H(jz)
I
l Единичная
ссрера
Рис. 6.12. Преобразование инверсии отображает множество точек, лежащих '
в плоскости z = 1, на сферу С.
(См. рис. 6.12.) Эта плоскость определяет на сфере С сегмент,
не содержащий начало координат. Обозначим через S'(n)^S'
подмножество точек множества S', попавших внутрь этого сег-
сегмента сферы. Заметим, что S'(n) содержит точки, лежащие
внутри полупространства Я(я), определяемого плоскостью л
и не содержащего начала координат. Рассмотрим образ пло-
плоскости я при инверсии, обозначив его С (я). Как мы уже знаем,
С (я) — это сфера, проходящая через начало координат и точки
pi, pj и pi (сфера однозначно определяется этими четырьмя
точками). Так как внутренние точки полупространства Я(л)
отображаются внутрь сферы С (л), то образы точек множества
S'(n) при инверсии попадают внутрь С (я). В частности, они
попадают внутрь окружности C(pit pj, pi), проходящей через
точки pi, pj и pi, так как эта окружность является пересече-
пересечением сферы С(я) с плоскостью z= 1. Обозначим буквой v центр
окружности C(pi,pj, pi), a RczS — подмножество точек мно-
') Такая проекция называется стереографической.
ё.З. Обобщения диаграммы 301
жества S, лежащих внутри C(pl,pj,pi) (очевидно, что R яв-
является образом S'(л)). Утверждается, что v является верши-
вершиной в некоторой диаграмме Вороного высшего порядка. Дей-
Действительно, положим |#| = & и предположим на время, что
0 < k < N — 3. Очевидно, что R содержит точки, находящиеся
от v на меньшем расстоянии, чем любая из точек {pi, pi, pi)-
Точка v будет вершиной диаграммы Вороного порядка (&+ 1),
являясь общей точкой многоугольников V{R\j{pi}), V(R[j
U{p/}) и V(R\j{pi}), и вершиной диаграммы порядка (k-\-2),
являясь обшей точкой многоугольников V(R\J {pi, pj}), V(R\J
[j {ph Pt}) и V(R\j {pi,pi})- Если R = 0 и, значит, k = 0, то v
являйся воршиной лишь Vor^S), а если |#| = JV — 3, то v яв-
является вершиной лишь Vonv_i(.S). Теперь обратим внимание на
то, что плоскость я может быть выбрана I о ) способами и
каждая такая плоскость определяет вершину диаграммы Воро-
Вороного (большинство из них являются вершинами двух диаграмм
Вороного высших порядков). Так как каждая диаграмма Во-
Вороного является планарным графом и каждая вершина диа-
диаграммы имеет степень не менее трех (на самом деле в точно-
точности три, за исключением вырожденных вершин), то в каждой
диаграмме Vork(S), k=l, ..., iV—1, число многоугольников
пропорционально числу вершин. Объединяя эти факты, полу-
получаем следующий интересный результат [Brown A979a),
A979b)].
Теорема 6.8. Число многоугольников Вороного в диаграм-
диаграммах всех порядков равно O(N3).
Чтобы добиться более глубокого понимания структуры диа-
диаграмм Вороного, воспользуемся подходом, аналогичным под-
подходу, недавно предложенному Эдельсбруннером и Зейделем
[Edelsbrunner, Seidel A986)]. Рассмотрим стереографическую
проекцию, представляющую сужение инверсии в пространстве
?3 на плоскость г = 1 (или, что эквивалентно, на сферу С,
являющуюся образом этой плоскости). Выпишем явно уравне-
уравнение сферы С:
= l. F.1)
Предположим теперь, что мы применяем к Е3 некоторое под-
подходящее проективное преобразование ф. Обозначим через g, r\
и ? координаты в преобразованном пространстве. В частности,
нас интересует преобразование, отображающее плоскость z = 0
в бесконечно удаленную плоскость. Мы осуществим это преоб-
преобразование следующим образом: сначала введем в Е3 однород-
однородные координаты х\, х2, хз и л;4 (см. разд. 1.3.2, где обсуждается
связь между однородными и неоднородными координатами), за-
302
Гл. 6. Близость: варианты и обобщения
тем рассмотрим их как координаты в Е* и, наконец, применим
к ЕА преобразование поворота, выражаемое следующим соот-
соотношением (здесь |i, |2, |з и |4 однородные координаты в пре-
преобразованном пространстве):
10 0 0
0 10 0
0 0 0 1
.0 0 1 0
Переписав уравнение F.1) в однородных координатах и при-
применив преобразование F.2), получим уравнение для ф(С) в
однородных координатах:
1. %2.
(хи х2,
F.2)
Переходя вновь к неоднородным координатам | = |i/|,4, tj =
= h/U и g = Ъз/Ъь получаем уравнение для Ф(С) в неодно-
неоднородных координатах:
? = 12 + т12+1, F.4)
которое описывает параболоид вращения 0*.
В дополнение к тому, что нам требовалось, преобразование
Ф отображает плоскость z = 1 в плоскость ? = 1, единичную
Рис. 6.13. Преобразование ф отображает диаграмму (а) в диаграмму (Ь).
сферу в гиперболоид с уравнением !2-|-ii2 — ?2+ 1 = 0 и точку
начала координат в бесконечно удаленную точку по ?-оси.
В итоге диаграмма, приведенная на рис. 6.12 и повторенная на
рис. 6.13(а), отображается при применении преобразования ф
в диаграмму, представленную на рис. 6.13(Ь). Рассмотрим те-
6.3. Обобщения диаграммы 303
перь образы при преобразовании <р пар точек, лежащих соот-
соответственно на С и на плоскости 2=1, являющихся образами
друг друга при преобразовании инверсии. Эти новые точки, ле-
лежащие соответственно на & и на плоскости ? = 1, теперь по-
получаются простым проецированием параллельно ?-оси (по вер-
вертикали). Обозначим эту вертикальную проекцию у: (Е; =
Пусть снова S — это конечное множество точек, лежащих в
плоскости ?=1, a S'={v(p): реS]. Пусть рх и р2 — Две
произвольные точки из множества S. Рассмотрим плоскости
n(pi) и я(рг), касательные к & в точках y(pi) и у(р2) соответ-
соответственно. Следующая лемма указывает на одно очень важное
свойство этих двух плоскостей. Доказательство леммы остав-
оставляем в качестве упражнения читателю.
Лемма 6.4. Проекция линии пересечения плоскостей п{р{) и
я(р2) на плоскость %= 1 перпендикулярна отрезку р\р2 и де-
делит его пополам.
Предположим теперь, что уже построено множество пло-
плоскостей (я(р): peS}. Эти плоскости разбивают пространство
на ячейки {Du D2, ..., DM}. Установим, какая связь имеется
между этими ячейками и многоугольниками Вороного (некото-
(некоторой диаграммы Vork(S)) на плоскости ?= 1. Для каждой точ-
точки peS определим полупространство HS(p), задаваемое пло-
плоскостью я(р) и лежащее вне параболоида & (здесь снова
я(р)— это плоскость, касательная к & в точке у(р)). Рассмот-
Рассмотрим некоторую ячейку D разбиения пространства, задаваемого
множеством плоскостей (я(р): peS}. С ячейкой D связано
(единственное) множество T(D)^S, определяемое как един-
единственное подмножество множества S такое, что
D = HS(р) для каждой точки p^T(D).
(См. рис. 6.14, где приведен двумерный аналог.) Пусть q' —
некоторая типичная точка в D, a q — ее вертикальная проекция
на плоскость ?=1. Кроме того, пусть p;^T(D) и p,-^S —
— T(D) (рис. 6.14(b)). По определению множества T(D), q'^
^HS(pi) и q' ф HS(pj). Вертикальная плоскость т, проходя-
проходящая по линии пересечения плоскостей я(р() и я(р;), опреде-
определяет два полупространства. Из условия q' eHS(p,) и q'ф.
ф HS (р;) следует, что q' лежит в полупространстве, содержа-
содержащем точку pi. С учетом леммы 6.4 получаем, что q принадле-
принадлежит полуплоскости H(pi,pi), и, так как точки pi^T(D) и
Pi^S — T(D) выбирались произвольно, приходим к следую-
следующему результату:
Теорема 6.9. Проекция на плоскость Z = 1 ячейки D раз-
разбиения пространства, определяемого множеством плоскостей
304
Гл. 6. Близость: варианты и обобщения
{я(р): ре5}, является многоугольником Вороного V(T), где
Т — наибольшее подмножество такое, что Z)sHS(p) для каж-
каждой точки реГ.
Эта теорема показывает, что определенное выше разбиение
пространства дает полную информацию о семействе диаграмм
Рис. 6.14. (а)—Двумерный аналог разбиения пространства, определяемого
касательными плоскостями; (Ь)—иллюстрация к доказательству теоремы 6.9.
Вороного высших порядков. Вопрос об алгоритмах построения
диаграмм Вороного будет рассмотрен в следующем разделе.
6.3.1.3. Построение диаграмм Вороного высших
порядков
Для разработки необходимого алгоритма исследуем
взаимосвязь между Vork(S) и Vorft+1(S). (Уместно отметить,
что VorAf-iE) называется также диаграммой Вороного дальней
точки, что вполне оправданно, так как каждый ее многоуголь-
многоугольник представляет множество точек плоскости, более близких
к одной из точек множества S—{р,} (для некоторого {), чем
к точке pi, т. е. множество точек, для которых р, является са-
самой дальней точкой множества S.)
6.3. Обобщения диаграммы 305
Начнем обсуждение со случая, когда множество S содержит
три точки ри рг и ръ (рис. 6.15). В этом случае имеется един-
единственная вершина диаграммы Вороного, являющаяся общей
точкой трех полупрямых (лучей), перпендикулярных отрезкам,
соединяющим пары точек, и делящих их пополам. Обычная
диаграмма Вороного показана на рис. 6.15 сплошными линия-
линиями. Если продолжить эти полупрямые за вершину диаграммы
(на рисунке это показано штриховыми линиями), то получив-
получившиеся три луча разбивают плоскость на три области так, что
,::¦¦.
Множество точек,
ек,
.:/¦ - Зля которых точка р,
' является самой дальней
Рис. 6.15. Диаграммы Вороного ближайшей и дальней точек для множества
из трех точек.
каждая точка в любой из этих областей находится ближе
к одной из двух заданных точек, чем к третьей точке. Таким
образом, мы получили диаграмму Вороного дальней точки мно-
множества S = {риР2,Рз}-
Рассмотрим теперь многоугольник V(T) диаграммы
Votk(S), где Т= {ри ..., pk). Известно, что V(T) является
выпуклым многоугольником. Пусть v — одна из его вершин.
Вершина v является общей для трех многоугольников диа-
диаграммы Vork(S): V(T), V(Ti) и V(T2). Различают два слу-
случая '):
A) |7-©7-,©7-2| = * + 2 (кфЫ-\),
B) \T®T1®T2\ = k-2 (кф\).
В случае A) вершина v называется вершиной ближнего типа,
а в случае B)—вершиной дальнего типа. Чтобы извлечь неко-
некоторую пользу из введенной классификации, отметим, например,
что в случае A) имеем
(a) T = R1[}{Pk), Tl = Rl[j{pk+1}, T2 = R1[){pk+2}, где Л, =
= {ри ••-, Pk-i}. Так что, если удалить R: из S, то вершина о
Символ Ф обозначает симметрическую разность множеств.
306 Гл. 6. Близость: варианты и обобщения
и инцидентные ей ребра (которые превратились теперь в бес-
бесконечные лучи) образуют диаграмму Вороного ближней точки
множества {pk, pk+\, Pk+z}- В противоположность этому в случае
B) обычно имеет место
(Ь) T = R2[j{pk.u Pk}, Tl = R2[}{pk_u pk+l},
T2 = R2\J{pk, Pk+i),
где R2={Pi, • ••> Pk-2i- Если снова удалить R2 из S, то вер-
вершина v и инцидентные ей ребра образуют диаграмму Вороного
дальней точки множества {pk-u Pk,pk+i} '). Интересен следую-
следующий факт: окружность Делоне с центром в точке v содержит
внутри k—1 точек множества S, если v вершина ближнего
типа, и k — 2 точек в противном случае.
Кроме того, предположим, что v — вершина ближнего типа
диаграммы VoTk(S). Пусть v является общей вершиной много-
многоугольников V(T), V(Ti) и V(T2), как и в случае (а) выше.
Если в некоторой подходящей окрестности вершины v заменить
каждое из трех инцидентных ей ребер на его продолжение за
вершину v, то вершина v станет общей вершиной трех новых
многоугольников, которыми, как нетрудно видеть, будут
V(T\}Ti), V(T[}T2) и ViTiUTt). Но \T\JTl\ = \T\jT2\ =
= | Т\ U Т2\ = k -f- 1. Таким образом, в результате замены ре-
ребер, инцидентных вершине ближнего типа, на их продолжение
в диаграмме Vorfc(S), эта вершина становится вершиной даль*
него типа диаграммы Vorfc+1(S)! Короче говоря, в этом заклю-
заключается основная идея для метода построения последовательно-
последовательности диаграмм Vor2 (S), Vor3 (S), ..., Vor/v-i (S).
Продолжая анализ механизма алгоритма построения диа-
диаграммы Вороного, предположим, что вершина ближнего типа v
диаграммы Vorfc(S) смежна с некоторой вершиной дальнего
типа v\ (рис. 6.16). Это значит, что вершина v была порождена
в Vorfc(S) в результате описанной выше операции продолже-
продолжения ребер, инцидентных вершинам ближнего типа диаграммы
Vorfc_!(S) (одной из таких вершин является вершина vi).
В свою очередь при построении Vorfc+i(S) будут продолжаться
ребра, инцидентные вершине v. При этом в ходе этого процесса
будет удалено ребро v\v и, таким образом, вершина v\ исчезает
из диаграммы Vorfc+i(S). Образно говоря, это обсуждение ил-
иллюстрирует жизненный цикл вершины диаграммы Вороного:
вершина появляется в двух диаграммах Вороного, имеющих
последовательные порядки, при этом сначала это вершина
ближнего типа, а затем дальнего типа.
') Заметим, что VoiV(S) содержит лишь вершины ближнего типа, а
yorN-\{S) —лишь вершины дальнего типа.
6.3. Обобщения диаграммы 30?
Построение диаграммы Vorfc+1E), по существу, сводится к
разбиению каждого многоугольника диаграммы VorfcE) на
части многоугольников диаграммы Vorfc+i E). Это эквивалентно
определению пересечения каждого многоугольника V(T) диа-
диаграммы VoTk(S) с обычной диаграммой Вороного VoriE — Т).
Однако для этого вовсе не обязательно вычислять Vori (S — Т)
полностью, а достаточно найти лишь ту ее часть, которая яв-
является внутренней для V(T). В частности, пусть е—ребро мно-
многоугольника V(Т), инцидентное некоторой вершине ближнего
типа v. Тогда е принадлежит границе двух многоугольников
V(T) и V(T'), где |ГФГ'| = 2, и находится внутри V(T\}T'),
Вершина. ^ ^
первого типа ч
в Vorn(S)
Вершина, второго типа в Vor/( (S)
Вершина первого типа в Vor^-j (S)
Рис. 6.16. Иллюстрация «жизненного цикла» вершины диаграммы Вороного.
являющегося многоугольником диаграммы Vor*+lE). Отсюда
следует, что если число вершин ближнего типа на границе мно-
многоугольника V(T) равно s, то V(T) будет разбит на s частей,
если он ограничен, и на (s + 1) частей, если он неограничен.
Так как вершины ближнего типа определяют подмножество
множества S — Т, влияющее на разбиение многоугольника
V(T), то последнее можно получить либо путем построения за
время О (slogs) обычной диаграммы Вороного, либо восполь-
воспользовавшись специальным методом, разработанным Ли [Lee,
A976, 1982)], который также требует время О (slogs). В лю-
любом случае, если число вершин ближнего типа в диаграмме
Vork(S) равно V^\ то диаграмма Vorft+1E) может быть полу-
получена за время, не превосходящее О {V^ log Vy>).
Ли [Lee A982)] провел подробный анализ различных пара-
параметров диаграммы VorftE). В частности, приведем без доказа-
доказательства следующую лемму:
Лемма 6.5. Число вершин ближнего типа уу> диаграммы
Voxk{S) ограничено сверху величиной
2k(N-l)-k(k-l)-tvi,
1
308 Fa. 6. Близость: варианты и обобщения
где v. — число неограниченных областей в диаграмме Vork(S).
Очевидно, что Уу) = О(?Лг). Отсюда следует, что Vorfc+1(S)
может быть получена из VorfcE) за время O{kN\ogN), а сум-
суммарное время построения Vorfc+1E), начиная с S, равно
? О (iN log N) = О {k2N log N).
Следующая теорема подводит итог сказанному:
Теорема 6.10. Диаграмма Вороного порядка k множества из
N точек может быть построена за время O(k2N\ogN).
Такой подход можно было бы применить для построения
всех диаграмм VorfcE), k=l, .... N—\, на что потребова-
потребовалось бы время O(N3\ogN). Однако, используя недавно разра-
разработанный подход [Edelsbunner, Seidel A986)], основанный на
теории, в общих чертах представленной в разд. 6.3.1.2, можно
построить разбиение пространства, определяемое семейством
{я(р): р е 5} плоскостей, касательных к параболоиду 3>, за-
затратив на это время, пропорциональное числу пересечений, об-
образуемых тремя плоскостями, т. е. за О(Лг3). Таким образом,
имеет место теорема 6.11:
Теорема 6.11. Совокупность всех диаграмм Вороного выс-
высших порядков множества из N точек можно построить за время
О (N3).
Этот раздел мы завершаем двумя замечаниями. Первое —
задача Б.6 о поиске ^-ближайших соседей сводится к задаче
определения положения точки в диаграмме Vork(S). Время ре-
решения этой задачи включает время поиска — определение по-
положения в Vork(S)—и время выдачи ответа. Очевидно, что
последнее равно O(k), в то время как первое пропорционально
log Vk, где Vk — число вершин диаграммы VorfcE). Вспоминая,
что Vk = Vy> -{- V*,1!, и что V(?I = O (kN), получаем, что поиск k
ближайших соседей выполняется за время O(\ogkN-\- k) =
= O(\ogN -f- k). Подводя итог сказанному, получаем следую-
следующую теорему (см. в разд. 2.2 соответствующий результат для
поиска):
Теорема 6.12. Если на плоскости задана некоторая точка, то
k ее блиоюайших соседей из числа N точек могут быть найдены
за время O(\ogN-\-k) с использованием предварительной об-
обработки с временем O(k2N\og N).
Второе замечание состоит в том, что понятие обобщенной
диаграммы Вороного объединяет задачи о ближайшей и даль-
6.3. Обобщения диаграммы
309
ней точках, так как множество точек, k ближайших соседей ко-
которых составляют множество Т, является также множеством
точек, для которых N — k наиболее удаленных от них точек со-
составляют множество 5—Т. Таким образом, диаграмма ближней
точки порядка k в точности совпадает с диаграммой дальней
точки порядка (N — k). Давайте рассмотрим одну из них более
V(S)
Эта область содержит
точки, для которых рамь/лг
дальним соседом является
точка, 4
•5
1/G)
1/B)
Рис. 6.17. Диаграмма Вороного дальней точки.
V(8)
Точки без номеров
не являются вершинами
3 выпуклой оболочки и соот-
• ввтствующив им области
" пусты
.4
подробно, а именно диаграмму ближней точки порядка (N—1)
или, что эквивалентно, диаграмму дальней точки порядка 1
(рис. 6.17).
С каждой точкой р, связана выпуклая многоугольная об-
область Vn-\(Pi) такая, что р,- наиболее удалена от каждой точки
в этой области. Эта диаграмма определяется только точками
выпуклой оболочки, так что в ней отсутствуют ограниченные
области. Конечно, VorN^i(S) можно построить, применив непо-
непосредственно описанный общий метод. Однако в этом случае
время решения задачи составило бы О (TV3) (по теореме 6.12).
Необходимо отметить, что существует прямой метод, основан-
основанный на подходе «разделяй и властвуй», аналогичный алгоритму
построения диаграммы ближней точки, позволяющий получить
результат за оптимальное время 0(Лlog TV) ISharnqs (JJ978);
Lee^2980b)J. Если уже найдены диаграммы левой и правой
половин множества, то разделяющая ломаная линия а обла-
обладает теми же свойствами, что и в случае диаграммы ближней
точки. Однако к этому моменту должны быть удалены все ча-
части ребер диаграммы Vor;v_i(Si), лежащие слева от а, а также
части ребер диаграммы VorAf_1E2), лежащие справа от а.
В следующем разделе у нас еще будет возможность обсудить
очень тесную связь, существующую между Von(S) и Vor/v_i(S).
310
Гл. 6. Близость: варианты и обобщения
6.3.2. Диаграммы Вороного ближней и дальней то-
точек в многомерных пространствах
Как мы уже видели ранее, обобщенные диаграммы
Вороного (всех порядков) на плоскости имеют топологию пла-
нарных графов. Из этого следует, что число вершин, число
граней и число ребер диаграммы имеют один и тот же поря-
порядок. Это позволяет разрабатывать оптимальные по времени
S2(N/2 точек)
(N/2 тачек*)
—<
t
J
(Ъ)
Рис. 6.18. Пример множества из N точек в трехмерном пространстве, диа-
диаграмма Вороного которого имеет Q(N2) ребер.
алгоритмы построения диаграмм Вороного ближней и дальней
точек.
Можно ли получить такой же результат для пространств
размерности, большей двух? Все надежды на это тут же ру-
рушатся, если учесть, что диаграмма Вороного ближней точки
множества из N точек в трехмерном пространстве может иметь
O(N2) ребер [Preparata A977)]. Легко построить пример, об-
обладающий этим свойством (рис. 6.18). Пусть S\ — множество
из N/2 точек, равномерно расположенных на окружности, ле-
лежащей в плоскости (х, у), центр которой находится в начале
координат. Кроме того, пусть S2 — множество из N/2 точек,
равномерно расположенных на г-оси, по N/4 точек выше и ниже
начала координат. Положим S = SiUS2- Утверждается, что
любой отрезок, соединяющий некоторую точку множества Si
с некоторой точкой множества S2, является ребром графа Де-
Делоне, т. е. оно является двойственным некоторому многоуголь-
многоугольнику диаграммы Вороного (грани некоторого политопа диа-
диаграммы Вороного). Это хорошо видно на сечении диаграммы
6.3. Обобщения диаграммы 311
Вороного плоскостью, содержащей г-ось и некоторую точку
множества Si (рис. 6.18(Ь)). (Читатель может легко воспроиз-
воспроизвести опущенные здесь детали.) Поэтому, хотя диаграмма Во-
Вороного содержит O(N) областей, она может иметь O(N2) вер-
вершин и ребер. Позже Кли [Юее A980)] развил эту идею для
пространств произвольной размерности d. Полученный резуль-
результат сформулирован в следующей теореме:
Теорема 6.13. M(d,N) — максимальное число вершин диа-
диаграммы Вороного множества из N точек в d-мерном простран-
пространстве удовлетворяет условию
м(d, Л0
для четных d и условию
для нечетных d.
Экспоненциальный рост сложности диаграммы Вороного
раскрывает любопытное сходство с поведением выпуклых обо-
оболочек в пространствах большой размерности. Это сходство, как
впервые заметил Браун [Brown A979b)], имеет глубокие кор-
корни, которые со всей очевидностью проявляются в контексте
преобразования инверсии, описанного в разд. 6.3.1.1.
Не теряя общности, рассмотрим диаграммы Вороного на
плоскости. Пусть S={/7i, ..., pN} — множество из N точек,
лежащих в плоскости z= 1 пространства Е3, С — образ этой
плоскости при преобразовании инверсии в Е3, aS' = {p[,...,
•••» p'n) — образ множества S при инверсии (точки множества
S' лежат на С, р1 и р\ являются образами друг друга). Рас-
Рассмотрим выпуклую оболочку CH(S') множества S' и разобьем
ее на две части, которые будем называть дальней стороной и
ближней стороной в зависимости от того, «видны» или нет их
точки из начала координат (на рис. 6.19 показан двумерный
аналог ситуации).
Пусть я — плоскость, содержащая грань F оболочки CH(S'),
определяемую тремя точками: р[, р'г и р'3 (предполагается, что
многогранник CH(S') является симплициальным, т. е. каждая
его грань является треугольником). Сфера С(я), являющаяся
образом плоскости я при инверсии, проходит через точки О,
Р\, Pi и ръ и пересекает плоскость z = 1 по окружности, опре-
определяемой точками р\, pi и р^ В зависимости от того, принад-
принадлежит F ближней или дальней стороне оболочки CH(S'), бу-
будем различать два случая:
312
Гл. 6. Близость: варианты и обобщения
A) F принадлежит ближней стороне оболочки СНE').В этом
случае полупространство, определяемое плоскостью я и не со-
содержащее начала координат, не содержит внутри ни одной
точки множества 5'. Так как это полупространство отображается
внутрь сферы С (я), то окружность, проходящая через точки ри
Pi и ръ является окружностью Делоне, центр которой является
вершиной диаграммы Vor^S). Таким образом, каждая грань
ближней стороны оболочки CH(S') определяет треугольник в
Ближняя
Conv (S*) сторона
Дальняя сторона
Рис. 6.19. Пример, иллюстрирующий связь выпуклых оболочек с диаграм-
диаграммами Вороного. Ближняя сторона выпуклой оболочки conv(S*) показана
сплошным отрезком, а дальняя — штриховыми.
триангуляции Делоне множества 5 (и с учетом двойственности
вершину диаграммы Vor^S)).
B) F принадлежит дальней стороне оболочки CH(S'). Сно-
Снова полупространство, определяемое плоскостью я и не содер-
содержащее начала координат, отображается внутрь сферы С (я).
Однако в этом случае полупространство содержит внутри N — 3
точек множества S", так что окружность, проходящая через
точки р\, р2 и р3, содержит внутри N — 3 точек множества 5.
Отсюда следует, что центр этой окружности является верши-
вершиной диаграммы Вороного дальней точки множества 51).
Это наблюдение не только устанавливает тесную связь меж-
между диграммами Vori(S) и Vor#_i(S), но также связывает диа-
диаграмму Вороного ближней точки множества из N точек в
d-мерном пространстве с выпуклой оболочкой N точек, лежа-
') В предположении, что никакие четыре точки множества S ие лежат
на Одной окружности, окружность, являющаяся пересечением сферы С (я)
и плоскости 2—1, проходит в точности через три точки множества S. Со-
Соответственно грань F определяется образами этих трех точек и никакими
другими точками множества S', а это значит, что F является треугольником
(a CH(S)—симплициальным политопом).
6.4. Промежутки и покрытия 313
щих на поверхности сферы в (d + 1) -мерном пространстве.
Следовательно, можно воспользоваться существующими мето-
методами построения выпуклых оболочек в многомерных простран-
пространствах (см. разд. 3.3) для получения многомерных диаграмм
Вороного. Соответствующая работа была выполнена Эйвисом
и Бхатачарья [Avis, Bhattacharya A983)] и Зейделем [Seidel
A982)].
6.4. Промежутки и покрытия
Рассмотрим теперь очень важный класс задач о бли-
близости, который мы коротко назвали «промежутки и покрытия».
Промежутки — это шары (в случае плоскости это круги), не
содержащие точек заданного множества, а покрытия — это
множества шаров, объединение которых содержит все точки
заданного множества. Начнем со следующей задачи:
Задача Б.11 (НАИМЕНЬШАЯ ОХВАТЫВАЮЩАЯ ОКРУЖ-
ОКРУЖНОСТЬI). На плоскости заданы N точек. Найти наименьшую
окружность, охватывающую все заданные точки.
Это классическая задача, которой посвящена обширная ли-
литература. Поиск эффективного алгоритма решения этой задачи
начался, по-видимому, в 1860 г. [Sylvester (I860)]. Наимень-
Наименьшая охватывающая окружность единственна, и, кроме того, она
либо является описанной окружностью для некоторой тройки
точек заданного множества, либо некоторая пара точек задан-
заданного множества служит диаметром этой окружности [Rade-
macher, Toeplitz A957), с. 16]. Таким образом, существует
прямой алгоритм решения этой задачи, который перебирает
все пары и тройки точек множества, строит определяемые ими
окружности и выбирает среди них наименьшую, охватывающую
при этом все исходное множество точек. Непосредственная реа-
реализация этой процедуры дала бы алгоритм со сложностью
О (Я4). Елзинга и Хирн [Elzinga, Hearn A972a, 1972b)] улуч-
улучшили этот метод, получив алгоритм со сложностью O(N2).
В исследовании операций задача об охватывающей окруж-
окружности известна под названием «минимаксная задача о разме-
размещении центра обслуживания». В этой задаче требуется найти
точку ро=(хо,уо) (центр окружности), для которой наиболь-
наибольшее из расстояний до точек заданного множества минимально.
Точка р0 определяется критерием
min max {{x{ — xQf + (у, — у0J}. F.5)
р» i
') Часто для этой задачи используется название МИНИМАЛЬНЫЙ
ПОКРЫВАЮЩИЙ КРУГ.
314 Гл. 6. Близость: варианты и обобщения
Такой минимаксный критерий используется при определении
местоположения пунктов экстренной помощи, таких как поли-
полицейские участки и станции скорой помощи, с целью минимизи-
минимизировать время оказания помощи в худшем случае [Toregas et a I.
A971)]. Он также используется при оптимальном размещении
радиопередатчика, обслуживающего N принимающих устройств,
чтобы минимизировать необходимую мощность радиопередат-
радиопередатчика [Nair, Chandrasekaran A971)]. По-видимому, критерий
F.5) ввел в заблуждение некоторых авторов, рассматривавших
задачу о наименьшей охватывающей окружности как задачу
непрерывной оптимизации, так как, на их взгляд, в постановке
задачи отсутствуют какие-либо ограничения на положение точ-
точки р0. Это привело к появлению ряда итеративных алгоритмов
решения этой задачи, хотя известно, что она является дискрет-
дискретной [Lawson, Zhukhovitsky, Avdeyeva A966)]. Этот пример ил-
иллюстрирует важный момент: тот факт, что задачу М- можно
сформулировать как частный случай задачи 33, не дает основа-
основания полагать, что общий метод, используемый для решения за-
задачи 33, является эффективным и для решения задачи s&. Мы
уже имели возможность убедиться в справедливости этого
принципа в связи с задачей о евклидовом минимальном остов-
ном дереве (разд. 6.1): хотя ее можно рассматривать в поста-
постановке для полного графа, определенного на заданном множе-
множестве точек, усилия, затраченные на поиск метода, использую-
использующего особенности задачи, были сполна вознаграждены разра-
разработкой оптимального алгоритма.
Теперь обратимся к следующей задаче:
Задача Б.12 (НАИБОЛЬШАЯ ПУСТАЯ ОКРУЖНОСТЬ).
На плоскости заданы N точек. Найти наибольшую окружность,
не содержащую внутри ни одной точки этого множества, центр
которой лежит внутри выпуклой оболочки множества точек
(рис. 6.20).
Ограничение на положение центра окружности необходимо,
так как при его отсутствии задача не имела бы ограниченного
решения. Эта задача является двойственной к задаче Б.11 в
том смысле, что она является максиминной. Иначе говоря, тре-
требуется найти точку ро, определяемую критерием
max min{(*i-*oJ+G/;-J/oJ}- F.6)
Ро е Hull (s) I
Очевидно, что могут существовать несколько точек р0, удов-
удовлетворяющих критерию F.6). Задача о наибольшей пустой
окружности является примером другой задачи о размещении
какой-либо службы или предприятия. Но в этом случае необ-
необходимо выбрать положение объекта так, чтобы он был макси-
максимально удален от других N заданных объектов. Размещаемый
6.4. Промежутки и покрытия 315
объект может быть источником загрязнения, поэтому его сле-
следует располагать таким образом, чтобы минимизировать эф-
эффект от такого соседства, либо это может быть новое производ-
производство и при этом желательно избежать конкуренции за окру-
окружающее пространство. Эти задачи возникают довольно часто
в промышленности [Francis, White A974)]. Один из ранних
алгоритмов решения данной задачи давал решение за время
О(№) в худшем случае [Dasarathy, White A975)].
Тот факт, что алгоритм, решающий задачу Б.12, имеет слож-
сложность О(Ы^), в то время когда, как нам кажется, можно полу-
получить лучший результат (O(N2)) для «двойственной» задачи,
приводит в полное недоуме-
недоумение. Имеется ли между этими
двумя задачами глубокое раз-
различие? Сейчас мы увидим, что
отличие между 0{N3) и O(N2)
отражает недостаточную глу-
глубину анализа задач, так как
с помощью диаграммы Воро-
Вороного обе ЭТИ задачи могут Рис. 6.20. Наибольшая пустая окруж-
быть решены за время ность с центром внутри выпуклой
O(NlogN). Тогда как время оболочки.
B(NlogN) является оптималь-
оптимальным для задачи Б.12, для задачи Б.11, как мы увидим, дости-
достижима оптимальная оценка получения решения, равная Q(N).
Начнем с того, как, используя диаграмму Вороного, можно
решить задачу Б.11. Мы знаем, что наименьшая охватывающая
окружность С полностью определяется либо диаметром задан-
заданного множества 5, либо тремя его точками. Напомним, что
окружность с центром в вершине диаграммы Вороного дальней
точки множества 5 (VorW-iE)) и проходящая через три точки
множества S, определяемые этой вершиной, охватывает все
точки множества S. Кроме того, окружность с центром в про-
произвольной точке, лежащей на ребре е диаграммы Vor#_i(S), и
проходящая через две точки такие, что ребро е перпендику-
перпендикулярно отрезку, соединяющему эти точки, и делит его пополам-л
также охватывает все точки множества S. Таким образом, если
окружность С определяется тремя точками множества S, то ее
центр находится в некоторой вершине диаграммы VorN-\(S).
В противном случае, если С определяется двумя точками, то ее
центр находится на некотором ребре диаграммы Voi>_i(S).
Возможен следующий подход к решению задачи [Shamos
A978)]. Сначала за время О (N log N) определяется диаметр
множества 5 (например, методом, рассмотренным в разд. 4.2.3)
и проверяется, охватывает или нет окружность, построенная на
этом диаметре, заданное множество точек. Если окружность
316 Гл. 6. Близость: варианты и обобщения
охватывает множество, то она и является искомой. Иначе
i\ центр с окружности С совпадает с одной из вершин диаграммы
>.Vor.tf_i(S). Эта диаграмма содержит лишь O(N) точек, а ра-
радиусы окружностей, связанных с каждой из ее вершин, равны
расстоянию от этой вершины до любой из трех точек, много-
многоугольники которых пересекаются в вершине. Мишш?лыю%:_до_ ¦
jcgM_BegHiHHa_M_ расстояние^мШ^МЩСи^кр^жносщ^. ЯсноГчто
эту процедуру мхжйо" выполнить за время O^NlogN), так как
и для определения диаметра множества S, и для построения
диаграммы Voi>_i(S) требуется время O{N\ogN). Кроме того,
дополнительно требуется время O(N) для просмотра вершин
диаграммы Votn-\ E)').
В теореме 6.14 резюмируется вышесказанное:
Теорема 6.14. Наименьшую охватывающую окружность мно-
множества из N точек можно определить за время O(NlogN).
Оптимален ли этот результат? Для определения минималь-
минимальной охватывающей окружности в действительности совсем не
требуется полной информации о диаграмме Вороного дальней
точки. Достаточно иметь лишь ту ее часть, которая попадает
в некоторую окрестность центра окружности. Именно эта идек-
позволила Меджиддо разработать оптимальный алгоритм
с оценкой Q(N) [Megiddo A983)]. Основываясь на исходной
формулировке F.5), Меджиддо рассматривал ее как задачу
выпуклого программирования. Этот новый изящный метод бу-
будет описан в разд. 7.2.5.
Обратимся теперь к задаче, двойственной к только что рас-
рассмотренной, т. е. к задаче о наибольшей пустой окружности.
Мы покажем, что на плоскости и в пространствах более высо-
высокой размерности эта задача может быть решена с помощью
диаграммы Вороного. Для простоты и большей конкретности
изложения мы будем рассматривать в основном двумерный
случай, хотя обобщение на многомерный случай не составляет
труда. Имеет место следующая теорема:
Теорема 6.15. Наибольшая пустая окружность для множе-
множества из N точек на плоскости может быть построена за время
O(NlogN).
Доказательство. Пусть на плоскости задано множество 5 из
N точек. Рассмотрим функцию f(x,y), значение которой равно
расстоянию между точкой р = (х, у) и ближайшей к ней точкой
множества 5. Так как условием задачи положение центра наи-
наибольшей пустой окружности ограничено выпуклой оболочкой
" Альтернативный подход, дающий ту же самую оценку сложности,
обсуждается в работе [Preparata A977)].
6.4. Промежутки и покрытия 317
множества S, то мы будем рассматривать пересечение диа-
диаграммы Vor(S) с выпуклой оболочкой conv(S). Это пересече-
пересечение представляет совокупность выпуклых многоугольников,
каждый из которых получается в результате пересечения мно-
многоугольника диаграммы Вороного с conv(S). Внутри много-
многоугольника диаграммы функция f{x,y) является выпуклой вниз
как по х, так и по у, и это справедливо для каждого много-
многоугольника рассматриваемого разбиения выпуклой оболочки.
Таким образом, f(x,y) достигает своего максимума в некоторой
вершине одного из таких многоугольников1). Эта вершина яв-
является либо вершиной диаграммы Вороного (и в этом случае
наибольшая пустая окружность является окружностью Дело-
Делоне), либо точкой пересечения ребра диаграммы Вороного с реб-
ребром выпуклой оболочки. Все вершины диаграммы Вороного
можно найти за время O(N\ogN), и, следовательно, остается
лишь показать, что можно достаточно быстро найти пересече-
пересечение выпуклой оболочки и диаграммы Вороного Vor(SJ). Но
сначала обратим внимание на следующие два факта.
Свойство 1. Ребро диаграммы Вороного пересекает не более
двух ребер оболочки СНE). Действительно, учитывая выпук-
выпуклость conv(S), пересечение любой прямой с conv(S) состоит из
единственного отрезка (возможно, пустого).
Свойство 2. Каждое ребро оболочки СНE) пересекает по
крайней мере одно ребро диаграммы Вороного. Действительно,
каждое ребро оболочки СНE) соединяет две различные точки
множества S, принадлежащие двум различным многоугольни-
многоугольникам Вороного.
«Закроем» условно каждый неограниченный многоугольник
Вороного отрезком на бесконечно удаленной прямой, лежащей
в плоскости (рис. 6.21).
Пусть е\, е2, ..., еп — последовательность ребер выпуклой
оболочки СНE), перечисленных в порядке обхода против ча-
часовой стрелки, а и — точка пересечения произвольно выбран-
выбранного ребра е/ с ребром г диаграммы Вороного (согласно свой-
свойству 2, точка и всегда существует). Считая, что ребро г ориен-
ориентировано в направлении из и во внешнюю для conv(S) область,
обозначим через V(i) многоугольник диаграммы, расположен-
расположенный слева от г. Если двигаться из точки и по границе много-
многоугольника V{i) (вне выпуклой оболочки conv(S)), обходя ее
против часовой стрелки, то вновь попадем в некоторую точку w
пересечения ребра СНE) с ребром диаграммы. Учитывая вы-
¦') Имеется в виду максимум на множестве conv E). — Прим. перев.
) Речь идет о пересечении ребер выпуклой оболочки с ребрами диа-
диаграммы Вороного. — Прим. перев.
318
Гл. 6. Близость: варианты и обобщения
пуклость многоугольника V(i) и свойство 2, точка да принадле-
принадлежит либо ребру е/, либо ребру е-,+\. Таким образом, каждое
ребро многоугольника V{i) проверяется на пересечение с двумя
ребрами оболочки СНE), что делается за постоянное время.
После того как найдена точка да, процедура обхода повторяется
вновь, только теперь вместо точки и он начинается из да, и
так до тех пор, пока вновь не будет достигнута точка и. Дей-
Действуя таким образом,
можно найти все точки
пересечения Vor(S) с
СНE).
При таком обходе
каждый посещаемый от-
отрезок диаграммы Vor(S)
проходится не более двух
раз. Так как, согласно
свойству 2, каждое ребро
имеет не более двух та-
таких отрезков, то каждое
ребро проверяется самое
большее четыре раза, и,
следовательно, пересече-
пересечение диаграммы Vor(S) с
оболочкой СНE) вычис-
вычисляется за время O(NI).
Здесь может появить-
появиться желание узнать, на-
насколько оптимален полу-
полученный результат. И, как обычно, для ответа на этот вопрос
обратимся к одномерному случаю. В этом случае задача сво-
сводится к поиску на прямой пары последовательных точек,
максимально удаленных друг от друга (МАКСИМАЛЬНЫЙ
ПРОМЕЖУТОК), так как в одномерном случае окружность
вырождается в отрезок. Нижняя оценка Q(N\ogN) времени
решения этой задачи, полученная Мэнбером и Томпа [Manber,
Tompa A982)] для модели линейных деревьев решений, не-
недавно была расширена Ли и By [Lee, Wu A986)] на более
общую математическую модель вычислений. (Их результат
основывается на сведении задачи МАКСИМАЛЬНЫЙ ПРО-
ПРОМЕЖУТОК к задаче ОДНОРОДНЫЙ ПРОМЕЖУТОК, рас-
рассматриваемой как задача-прототип.) Это контрастирует со сле-
следующим самым неожиданным результатом, полученным Гонза-
лесом [Gonzales A975)]: если изменить модель вычислений,
Рис. 6.21. Пример обхода диаграммы
Vor(S) при определении пересечений
Vor(S) с conv(S).
') Описанный подход связан с аналогичным результатом, полученным
Туссэном [Toussaint A983b)].
6.4. Промежутки и покрытия 319
то задачу можно решить даже за линейное время. Изменение
заключается в добавлении к стандартному набору функций
функции вычисления целой части « |_ J » (которая не является
аналитической). Здесь мы приводим этот выдающийся алго-
алгоритм Гонзалеса:
ргосеёигеМАКСИМАЛЬНЫй-ПРОМЕЖУТОК
Входные данные: N действительных чисел X[l : N]
(числа не упорядочены)
Выходные данные: MAXGAP — длина наибольшего
промежутка между последовательной
парой чисел упорядоченного
множества
begin MIN :=minZ[i];
MAX := max X[(]\ l)
(* разбить интервал между точками MIN и МАХ на
N — 1 равных отрезков. Массивы HIGH и LOW
используются для хранения соответственно
наибольшего и наименьшего значений на отрезках *)
for i := 1 until iV — 1 do
begin COUNT[t]:=0;
LOM[t] := HIGH[t] := Л
end; (* установлены начальные значения
параметров отрезков*)
(* распределение точек по отрезкам *)
for i := 1 until N — 1 do
begin BUCKET := 1 + 1{N - 1) X (X[t\ —
MIN)/(MAX - MIN)J;
COUNT[BUCKET]:= COUNT [BUCKET]+1;
LOW[BUCKET] := mln(V[t],
LOW[BUCKET]); 2)
HIGH[BUCKET] := max {ХЩ,
HIGH[BUCKET]); 2)
end;
(¦Заметим, что N — 2 точек распределены по N — l
отрезкам, и, следовательно, один из отрезков должен
быть пустым. Это значит, что наибольший промежуток
не может помещаться между двумя точками, попав-
попавшими в один и тот же отрезок. Теперь достаточно
выполнить однократный просмотр отрезков*)
MAXGAP := 0;
LEFT:=HIGH[1];
') MIN и МАХ присваиваются значения соответственно минимального н
максимального элементов массива X. — Прим. перев.
2) Здесь считается, что min(jc, Л) = max (х, Л) = л:.
320 Гл. 6. Близость: варианты и обобщения
for i := 2 until N - 1 do
if (COUNT[i] Ф 0) then
begin THISGAP := LOW[i] - LEFT;
MAXGAP := max(THISGAP,MAXGAP);
LEFT := HIGH[t]
end
end.
Этот алгоритм несколько проливает свет на вычислительную
мощность функции выделения целой части. Учитывая кажу-
кажущееся сходство задач МАКСИМАЛЬНЫЙ ПРОМЕЖУТОК и
БЛИЖАЙШАЯ ПАРА в одномерном случае, существование
алгоритма с линейной сложностью представляет выдающийся
результат. К сожалению, по-видимому, невозможно обобщить
этот результат на случай двумерного пространства.
6.5. Замечания и комментарии
Хотя евклидово минимальное остовное дерево мно-
множества точек на плоскости может быть построено за оптималь-
оптимальное время, построение ЕМОД в пространствах более высокой
размерности, вообще говоря, остается открытой задачей. Ис-
Используя геометрическую природу задачи, Яо [Yao A982)) раз-
разработал алгоритм построения ЕМОД множества из N точек в
d-мерном пространстве за время T(N, d) = O(N2~a{d)-
¦ (logN)v-a<-d)), где a(d) = 2-(d+1), имеющий оценку
O(N(logNI'8) для d = 3 (этот метод тесно связан с алгорит-
алгоритмом Яо для определения диаметра множества точек (см.
разд. 4.3)).
С диаграммой Вороного тесно связана задача построения
скелета многоугольника, являющегося предметом довольно
большого числа исследований, относящихся к распознаванию
образов, так как он довольно хорошо отражает «форму» много-
многоугольника. Скелет простого многоугольника Р — это множество
а его внутренних точек таких, что каждая точка pea равно-
равноудалена по крайней мере от двух точек на границе Р. В связи
с этим скелет многоугольника также называют срединными
осями [Duda, Hart A973)]. Образование скелета многоуголь-
многоугольника можно наглядно представить, наблюдая процесс «выгора-
«выгорания» многоугольника. Представьте, что по всей границе много-
многоугольника одновременно загорается огонь. Если предположить,
что огонь распространяется с постоянной скоростью, то точки,
в которых происходит встреча фронтов распространения огня,
образуют скелет многоугольника (этот процесс ассоциируется
с пожаром в прерии). В другой интерпретации скелет — это
подграф планарной карты, образованной областями близости
6.5. Замечания и комментарии 321
сторон многоугольника Р. Это приводит к расширению понятия
диаграммы Вороного на некоторое множество отрезков (являю-
(являющихся сторонами простого многоугольника).
Более сильное обобщение диаграммы Вороного, о котором
уже упоминалось в разд. 6.3, заключается в расширении этого
понятия на конечное множество точек и открытых отрезков,
расположенных произвольным образом. В этом случае ребра
диаграммы Вороного являются не только отрезками прямой, но
и дугами параболы, так как они отделяют области близости пар
объектов следующих типов: (точка, точка), (линия, линия),
(точка, линия). Пары последнего типа и порождают дуги пара-
парабол. Первые алгоритмы решения этой задачи, близкие к опти-
оптимальным, были предложены Драйсдейлом и Ли [Drysdale
A979); Lee A978); Lee, Drysdale A981)) (последний из этих
алгоритмов имеет сложность O(N\og2N) для смешанного мно-
множества из N объектов). Позднее Киркпатрик [Kirkpatrick A979))
нашел оптимальное решение задачи со сложностью B(iVlogiV).
Киркпатрик первым решил важную задачу объединения (слия-
(слияния) за линейное время диаграмм Вороного двух множеств
точек, не разделенных прямой. Затем он использовал этот
прием и алгоритм с линейной сложностью для получения мини-
минимального остовного дерева планарного графа (см. разд. 6.1)
для решения задачи в общей постановке. Заметим, что этот
метод неявно решает задачу о срединных осях.
Применение диаграммы Вороного дает изящный метод полу-
получения довольно эффективного решения задачи кругового регио-
регионального поиска. Задача заключается в следующем: на пло-
плоскости заданы множество S, содержащее N точек, и окруж-
окружность С с центром в точке q (запрос); требуется перечислить
точки множества 5, попавшие внутрь С. Как обычно для задач
регионального поиска, цель заключается в достижении оценки
O(f(N) + k), где k — размер множества точек, соответствующих
запросу. Если эта цель достижима, то алгоритм характеризует-
характеризуется парой (M(N),f(N)), где M(N) — требуемый объем памяти.
В главе 2 мы уже указывали на неадекватность подходов на
основе регионального поиска к данной задаче. Исходную идею
использовать диаграммы Вороного следует отнести на счет
Бентли и Маурера [Bentley, Maurer A979)). Они предложили
строить семейство диаграмм Вороного {Vor2,E): ? = 0, 1, ...
-•¦> L'0&2jVJ} с последующим просмотром этой совокупности
в порядке ? = 0, 1, 2, ... . При просмотре диаграммы опреде-
определяется область в Vor2i(S), содержащая центр окружности q, и
проверяется соответствующий список соседей. Просмотр окан-
оканчивается, как только обнаруживается, что текущий проверяе-
проверяемый список содержит точку, расстояние до которой от q боль-
больше г. Непосредственный анализ показывает, что этот алгоритм
11 Зак. 1075
322 Гл. 6. Близость: варианты и обобщения
характеризуется парой (N3, log Л^-log log jV) . Недавно эта идея
была несколько улучшена [Chazelle, Cole, Preparata, Yap
A986I. Применение общего подхода «фильтрующего поиска»,
обсуждавшегося в разд. 2.4, позволило получить алгоритм, ха-
характеризуемый парой (Л^ (log jV • log log Л^J, log Л^).
В разд. 6.1 отмечалось, что минимальное остовное дерево
(МОД) множества S из N точек на плоскости является подгра-
подграфом триангуляции Делоне (ТД). Имеются другие интересные
геометрические структуры, аналогичным образом связанные с
ТД и нашедшие приложения в распознавании образов и кла-
кластерном анализе. Это — граф Габриэля и граф относительного
соседства. Граф Габриэля (ГТ) множества 5 определяется сле-
следующим образом [Gabriel, Sokal A969)]: пусть круг (pt.Pi)—
круг с диаметром pip,; точки pt и р; множества 5 соединяются
ребром в ГГ лишь в случае, когда круг (pt, pj) не содержит
внутри точек множества S. Эффективный алгоритм построения
ГГ за время O(N\ogN) основан на удалении из ТД всех ре-
ребер, не пересекающих двойственных им ребер диаграммы Во-
Вороного [Matula, Sokal A980) J. Граф относительного соседства
(ГОС) определяется так [Toussaint A980b)]: точки pi и р/
множества 5 соединяются ребром тогда и только тогда, когда
dist (р{, /7УХ min (dist (/7,, рк), dist (pj, pk)).
кф 1,1
Это определение означает, что граф содержит ребро (pi, p/)
лишь в том случае, когда пересечение двух кругов радиусом
длина (piPi) с центрами в точках pi и р,- не содержит внутри
других точек множества 5. Построение ГОС значительно более
сложная задача, чем построение ГГ. Суповит [Supowit A983)]
разработал алгоритм со сложностью O(N\ogN). Между че-
четырьмя упомянутыми графами имеется интересная взаимосвязь:
MOD;=rOC!=rr<=TD. F.7)
В случае плоскости построение этих графов понято довольно
хорошо, но для пространств более высокой размерности изве-
известно очень мало. В частности, одна из известных открытых за-
задач заключается в разработке и анализе худшего случая алго-
алгоритма построения МОД в пространствах размерности три
и выше.
Наконец, упомянем класс задач о декомпозиции объектов,
заключающихся в разбиении заданного геометрического объекта
на совокупность более простых «примитивных» геометрических
объектов. Часто такими примитивными объектами являются
выпуклые многоугольники, звездные многоугольники и т. д.
Среди таких задач большой интерес представляет задача
разбиения внутренности простого многоугольника на треуголь-
6.6. Упражнения 323
ники, т. е. триангуляция простого многоугольника. Очевидно,
что для решения этой задачи можно применить общий метод
триангуляции с ограничениями, обсуждавшийся в разд. 6.2.
Следуя таким путем, мы получим алгоритм, имеющий слож-
сложность O(N\ogN), где N — число вершин многоугольника. Од-
Однако, как уже упоминалось ранее, нижняя оценка для задачи
триангуляции с ограничениями не применима в данном случае.
На протяжении почти десятилетия вопрос о том, можно ли, нс-
пользуя свойство простоты многоугольника, получить алгоритм
триангуляции многоугольника, имеющий временную сложность
o{N \og N), оставался без ответа, пока Тарьян и ван Вик
[Tarjan, van Wyk A987)] не разработали алгоритм решения
этой задачи, имеющий временную сложность О (Л'log log Л').
Однако их результат не исчерпывает вопроса, делая еще более
привлекательной цель, заключающуюся в разработке алго-
алгоритма с временной сложностью O(N).
По существу, имеются два типа задач, связанных с деком-
декомпозицией: задачи разбиения объекта на непересекающиеся ча-
части и задачи покрытия, когда получающиеся части могут пере-
перекрываться. Иногда в целях декомпозиции объекта на минималь-
минимальное число частей допускается введение дополнительных вершин,
называемых точками Штейнера. Подробное обсуждение задач
минимальной декомпозиции содержится в недавнем обзоре
Кейла и Сака [Keil, Sack A985)].
6.6. Упражнения
1. Детально разработать алгоритм построения минимального остовного
дерева множества 5 из N точек на плоскости, использовав для этого пира-
пирамиду содержащую ребра триангуляции Делоие множества S. Ребро, извле-
извлекаемое из пирамиды, отклоняется или принимается в зависимости от того,
образует оно цикл вместе с ребрами, принятыми ранее, нли нет. Показать,
что время работы этого алгоритма равно Q(N \ogN).
2. Привести контрпример к утверждению, согласно которому триангуля-
триангуляция Делоне является минимально взвешенной триангуляцией.
3. Привести контрпример к утверждению, согласно которому жадная
триангуляция является минимально взвешенной триангуляцией.
4. Ли. Показать, что в минимальном евклидовом паросочетании (зада-
(задача Б.10) отрезки, определяемые парами точек паросочетания, не пересекаются.
5. Зайдель. Пусть 5 = [х\, ..., xN) с R . Показать, что за линейное
время можно построить множество 5'= {pt, ..., pN) cz R2 вместе с триан-
триангуляцией множества S', где x(pi) = xi, I ^ i ^ N.
6. Диаграмма ?-го ближайшего соседа множества 5 из N точек пред-
представляет разбиение плоскости на области (не обязательно внутренне связан-
связанные) такие, что каждая область /?,¦ представляет множество точек плоскости,
для которых заданная точка р,- <= 5 является k-u соседом (т. е. для любой
точки q e R, длина отрезка qp-, является k-u элементом в упорядоченной
в порядке возрастания последовательности длин отрезков qpi, i = 1, ..., N).
324 Гл. 6. Близость: варианты и обобщения
Показать связь диаграммы k-то ближайшего соседа с диаграммами Vort_iE)
и Vor*(S), k > 1.
7. Показать, что в случае Z-i-метрики диаграмма Вороного дальней точки
множества 5 из N точек на плоскости (N ^ 4) состоит не более чем из
четырех областей.
8. Рассмотреть преобразование инверсии на плоскости, отображающее
точку vbv' = v(l/|v|2).
(a) Получить уравнение для образа прямой, определяемой уравнением
ах + by + с = 0 (образом прямой является окружность, проходящая через
начало координат).
(b) Доказать, что если окружность С содержит внутри начало коорди-
координат, то внутренность окружности С отображается иа внешность ее образа
при преобразовании инверсии.
9. Доказать лемму 6.4.
10. На плоскости задано множество 5 из N точек. Пусть / — прямая,
перпендикулярная отрезку pip,, pi, pt e5, и делящая его пополам. Предполо-
Предположим, что / содержит последовательность vu V2, ..., vs вершин диаграмм
Вороного, которые перечислены в порядке следования от одного конца пря-
прямой к другому. (Каждая вершина vt является центром окружности, описан-
описанной вокруг трех точек множества 5.) Покажите, что если луч, заканчиваю-
заканчивающийся в вершине vh является ребром диаграммы Vor/i(S), то луч, заканчи-
заканчивающийся в вершине vs, является ребром диаграммы Voi>-/i(S).
11. Доказать лемму 6.5.
12. Зайдель. Пусть 5 = {(*;, </;): 1 ^ i ^ N}cz R2 — множество из N то-
точек на плоскости. Обозначим через 51 множество, получающееся в резуль-
результате проецирования вдоль 2-оси множества 5 на параболоид вращения г =
= х2 + у2, т. е. 51 = {(*,-, у{, х\ + yff- 1 ^ ( ^ Лг} a R3. Рассмотрим выпук-
выпуклую оболочку Р множества S1.
(a) Показать по возможности наиболее прямым способом, что ортого-
ортогональная проекция па плоскость (х, у) граней оболочки Р, находящихся
в «нижней» части Р, совпадает с триангуляцией Делоне множества 5.
(b) Обобщить этот результат на случаи пространств более высокой раз-
размерности.
13. Зайдель. Рассмотрим следующее обобщение диаграмм Вороного (из-
(известное под названиями: комплексы ячеек Дирихле, диаграмма Пауэра или
диаграмма Лагерра). Пусть 5—множество из ЛГ точек в Е2. С каждой точ-
точкой peS связано действительное число гр. Для каждой точки ре5 опре-
определим множество
GVP (S) = {х е R2: d (р, хJ + rp < d (q, xJ + г,, V? е S),
называемое обобщенной областью Вороного точки р (относительно множе-
множества S). Назовем множество GVor(S) — {GVP (S): p e 5} обобщенной диа-
диаграммой Вороного множества 5.
(a) Показать, что для каждой точки psS область GVP(S) является
выпуклой и имеет прямолинейные ребра.
(b) Показать, что в случае гр = 0 для всех ре 5 обобщенная диаграм-
диаграмма Вороного превращается в обычную диаграмму Вороного множества 5.
(c) Показать, что при надлежащем выборе значений чисел г можно
добиться того, что для некоторых ре5 области GVP(S) будут пустыми.
(d) Разработать алгоритм построения обобщенной диаграммы Вороного
множества 5, имеющий сложность Q(N \og N). (Указание: воспользуйтесь
идеей, представленной в разд. 6.3.1 (диаграммы Вороного высших порядков).)
6.6. Упражнения 325
14. В задаче о НАИМЕНЬШЕЙ БОМБЕ требуется определить наимень-
наименьшую окружность, охватывающую не менее k из N заданных точек на пло-
плоскости. Разработать полиномиальный алгоритм, решающий эту задачу.
15. Доказать, что граф Габриэля множества 5 из N точек (определение
графа Габриэля дано в разд. 6.5) получается из триангуляции Делоне мно-
множества 5 в результате удаления из иее каждого ребра, которое ие пересекает
двойственное ему ребро диаграммы Вороного.
16. Доказать отношение F.7) в разд. 6.5.
17. Ли. Показать, что в случае /^-метрики граф относительного сосед-
соседства N точек на плоскости по-прежнему является подграфом соответствую-
соответствующей триангуляции Делоне. Разработайте алгоритм построения этого графа.
18. Разработать алгоритм со сложностью O(N log N) построения сре-
срединных осей выпуклого iV-угольника (определение срединных осей дано
в разд. 6.5).
7
ГЛАВА
Пересечения
Основной причиной изучения задач о пересечениях
явился тот простой факт, что два объекта не могут одновре-
одновременно находиться в одном и том же месте. Программа, пред-
предназначенная для архитектурного проектирования, должна вни-
внимательно позаботиться о том, чтобы двери не оказались там,
где их невозможно открыть, а коридоры не проходили через
шахту лифта. В машинной графике один объект, подлежащий
выводу, заслоняет другой, если их проекции на картинную пло-
плоскость пересекаются. Выкройки можно вырезать из одного
куска материи только тогда, когда их удается разложить так,
что они не накрывают одна другую. Важность разработки
эффективных алгоритмов определения пересечений станет яс-
ясной, если учесть, что в промышленных приложениях происхо-
происходит постоянный рост сложности задач: сложное графическое
изображение может состоять из сотни тысяч векторов, архитек-
архитектурная база данных зачастую содержит свыше миллиона эле-
элементов, а одна интегральная схема может содержать миллионы
компонентов. В подобных случаях даже квадратичные алго-
алгоритмы неприемлемы.
Другая причина для исследований сложности алгоритмов
пересечения заключается в том, что они проливают свет на
глубинную структуру геометрических задач и позволяют поста-
поставить ряд фундаментальных вопросов. Например, какова слож-
сложность решения вопроса о простоте многоугольника? Исследова-
Исследования подобных вопросов были бы оправданны, даже если бы
они не имели никаких практических приложений, тем более что
будет показано то, как широко используются алгоритмы данной
главы. Поскольку две фигуры пересекаются только тогда, когда
одна из них содержит хотя бы одну точку другой1), то есте-
естественно, что в алгоритмах пересечения не обойтись без про-
1) Это зависит от того, как определено пересечение границ.
7.1. Примеры из приложений
327
верки принадлежности точки. Поэтому можно считать задачи
о пересечениях естественным расширением задач о принадлеж-
принадлежности, рассмотренных в контексте геометрического поиска
в гл. 2.
Для того чтобы лучше представить себе данную область,
рассмотрим теперь более детально ряд характерных прило-
приложений.
7.1. Примеры из приложений
7.1.1. Задачи удаления невидимых линий
и поверхностей
Одной из важных задач машинной графики, привлек-
привлекшей к себе внимание многих исследователей [Desens, 1969);
Freeman, Loutrel A967); Galimberti, Montanari A969); Loutrel
A970); Matsushita A969); Newman, Sproull A973); Sutherland
A966); Warnock A969); Watkins A970)], является задача уда-
удаления невидимых линий и поверхностей. Двумерным образом
Рис. 7.1. Удаление невидимых линий.
трехмерной сцены всегда является какая-нибудь ее проекция.
Однако нельзя просто спроецировать каждый из объектов на
картинную плоскость, поскольку некоторые объекты могут быть
частично или полностью скрыты от наблюдателя. Чтобы создать
правдоподобный чертеж, необходимо удалить те линии, кото-
которые не смог бы увидеть реальный зритель. На рис. 7.1 пока-
показана сцена до и после удаления невидимых линий.
Один объект заслоняет другой, если их проекции пересе-
пересекаются, поэтому определение пересечений и их построение яв-
является сердцевиной задачи удаления невидимых линий. В раз-
разработку технического обеспечения для решения этой задачи
были сделаны значительные инвестиции, поскольку она осо-
особенно трудна на практике ввиду предъявляемых к графическим
дисплейным системам требований работы в реальном времени
и так как объекты обычно находятся в движении.
С точки зрения усилий, затраченных на развитие графиче-
графической аппаратуры, вызывает удивление то, что вопросу о слож-
сложности решения задачи удаления невидимых линий уделялось
328 Гл. 7. Пересечения
так мало внимания, поскольку именно здесь можно получить
наибольший выигрыш. Конструирование черного ящика, снаб-
снабженного микропрограммой даже при использовании параллель-
параллельных вычислений, не способно, как правило, дать эффект, срав-
сравнимый с тем, что дает использование новейших алгоритмиче-
алгоритмических методов (причем разрыв растет при увеличении разме-
размеров задачи).
Во многих случаях, особенно для векторных дисплеев, ком-
компонентами сцены являются многоугольники. Если проекциями
двух объектов являются многоугольники Pi и Р2, а Pi ближе
к зрителю, чем Р2, то необходимо изобразить Pi и РгП-Pi (по-
(понятно, что Р2[)Р\— это пересечение Р2 и дополнения к Pi).
Таким образом, основная вычислительная задача при уда-
удалении невидимых линий состоит в формировании пересечения
двух многоугольников. На практике нужно сделать нечто боль-
большее, ибо изображение будет складываться из множества раз-
разных многоугольников, каждый из которых необходимо вывести,
и тем не менее можно ожидать, что в основе алгоритма оста-
останется определение попарных пересечений. Не обладая опти-
оптимальным алгоритмом пересечения многоугольников, нельзя рас-
рассчитывать на эффективную реализацию удаления невидимых
линий. В данной главе будут получены точные оценки алго-
алгоритмов пересечения для выпуклых, звездных и произвольных
многоугольников. Задача с многоугольниками является приме-
примером первого типа из числа рассматриваемых нами задач о пе-
пересечениях. Для сохранения желаемого уровня общности рас-
рассуждений будем указывать род геометрических объектов, ко-
которые могут быть многоугольниками, отрезками, полиэдрами
и т. п., только тогда, когда это потребуется в конкретном при-
приложении. Итак, имеется:
Задача типа С.I1) (ПОСТРОЕНИЕ ПЕРЕСЕЧЕНИЯ). Даны
два геометрических объекта. Надо построить их пересечение.
7.1.2. Разпознавание образов
Одним из основных методов распознавания образов
является классификация путем контролируемого обучения2).
Даны N точек, каждая из которых идентифицируется по при-
принадлежности к одному из m классов; нужно их предварительно
обработать таким образом, чтобы любую новую точку (проб-
(пробную точку) можно было корректно классифицировать. На
рис. 7.2 показан двумерный пример, на котором оси соответ-
') С — аббревиатура слова «сечение». — Прим. перев.
2) Детали многих геометрических задач, возникающих при распознава-
распознавании образов, можно найти в работах [Andrews A972), Duda, Hart A973),
Meisel A972)].
7.1. Примеры из приложений 329
ствуют весу и росту людей, принадлежащих к некой группе
сверстников. Мужчины обозначены буквой «М», женщины —
буквой «Ж»- Буквой «Ч» обозначен человек, чьи вес и рост
известны. Можно ли классифицировать Ч, основываясь только
на значениях этих параметров? Каким решающим правилом
надлежит воспользоваться?
Желательно получить, если это возможно, линейный клас-
классификатор, т. е. такую линейную функцию f, чтобы для опре-
определения класса, к которому относится Ч, было достаточно
1
жв
ж*
>.
Же \
Же
ж»
•м
\
ж*
s
\
\
•м
•М
• м
•м
Линейный
классификатор
Вес
Рис. 7.2. Задача классификации с двумя переменными.
одного вычисления (собственно вычисления линейной функции
и сравнения):
if / (*ч> Уч) > Т then Ч е М else Ч е Ж-
В последнем выражении через Т обозначено пороговое значе-
значение. В пространстве k измерений f(xu х2, ..., Xk)= T является
гиперплоскостью; при двух измерениях это прямая. Линейный
классификатор считается хорошим, если он разделяет классы
друг от друга так, что все точки типа М лежат по одну его
сторону, а все точки Ж — по другую.
Определение 7.1. Два множества называются линейно раз-
разделимыми тогда и только тогда, когда существует такая гипер-
гиперплоскость Я, которая их разделяет.
Тем самым определение факта существования линейного
классификатора является средством решения вопроса о разде-
разделимости обучающих выборок. Разделимость — это классическая
задача комбинаторной геометрии. Основной критерий линейной
разделимости дает следующая теорема:
Теорема 7.1 [Stoer, Witzgall A970), теорема 3.3.9]. Два
множества точек линейно разделимы тогда и только тогда, когда
их выпуклые оболочки не пересекаются.
330 Гл. 7. Пересечения
Эта теорема проиллюстрирована для плоского случая на
рис. 7.3. Поскольку известно, что выпуклой оболочкой конеч-
конечного множества точек является выпуклый политоп, то линей-
линейная разделимость определяется проверкой пересечения двух
выпуклых политопов. Последняя задача является примером
задач следующего типа.
Разделимы Неразделимы
Рис. 7.3. Два множества разделимы тогда и только тогда, когда их выпук-
выпуклые оболочки не пересекаются.
Задача типа С.2 (ПРОВЕРКА ПЕРЕСЕЧЕНИЯ). Даны два
геометрических объекта. Пересекаются ли они?
Позднее будет показано, что проверка пересечения зачастую
проще, чем соответствующая ей задача построения.
7.1.3. Трассировка и размещение
Поскольку микроминиатюризация в электронике до-
достигла фантастических темпов, то количество компонент в чи-
чипах, проводников на платах и проводов в схемах выросло на-
настолько, что подобное оборудование невозможно спроектировать
без помощи ЭВМ. Число элементов в одной интегральной схеме
вполне может превысить миллион, и каждый из них должен
быть размещен конструктором с учетом множества физических
и геометрических ограничений. Используемые при этом про-
программы основаны на эвристиках и часто дают некорректные
решения, например наложения компонент схемы или пересече-
пересечения проводников (см. [Akers A972); Hanan, Kurzberg A972);
Hanan A975)]). Эвристические методы используются, посколь-
поскольку некоторые из задач, связанных с размещением компонент,
являются ЛФ-полными [Garey, Johnson, Stockmeyer A976)].
Следовательно, решения необходимо подвергать тщательной
проверке, состоящей из попарных сравнений всех элементов
чипа, что дорого и требует много времени. Это приводит к сле-
следующему теоретически важному классу задач.
Задача типа С.З (ПОПАРНЫЕ ПЕРЕСЕЧЕНИЯ). Даны
N геометрических объектов. Надо определить все их попарные
пересечения.
7.1. Примеры из приложений 331
Разумеется, мы будем искать такой алгоритм, при котором
не надо сравнивать каждый элемент со всеми остальными. Ре-
Решение задачи этого типа, которое будет дано в разд. 7.2.3,
имеет много практических и теоретических приложений (см.
также гл. 8).
7.1.4. Линейное программирование
и общее пересечение полупространств
Линейное программирование можно отнести к чет-
четвертому типу задачи пересечения. Областью допустимых реше-
решений задачи линейного программирования является пересечение
полупространств, определенных множеством ее ограничений.
Целевая функция достигает максимума в одной из вершин вы-
выпуклого полиэдра, способ описания которого отличается от
того, что рассматривался в гл. 3. Здесь у нас нет множества
точек, среди которых следует найти вершины оболочки, вместо
этого имеется набор полуплоскостей, ограничивающих эту обо-
оболочку, а нам нужно найти вершины. Очевидно, что после по-
построения общей области для данных N объектов мы сможем
получить решение задачи линейного программирования. Однако
нам нужно найти лишь ту вершину, на которой целевая функ-
функция экстремальна (максимальна или минимальна) и нет осно-
оснований полагать, что даже для случая малой размерности необ-
необходимо построение всей полиэдральной области.
Одномерная задача линейного программирования тривиаль-
тривиальна. Ее можно сформулировать следующим образом:
ax-rb-+max при арс + б^О, t = l N. G.1)
Допустимая область тут пуста, является отрезком, или лучом,
поскольку возможно такое пересечение лучей, которое продол-
продолжается в —оо или -\-оо.
Пусть L — самая левая из точек положительно ориентиро-
ориентированных лучей, a R— самая правая из точек отрицательных
лучей. Если L~> R, то допустимая область пуста. Если L ^ R,
то ею является отрезок [L, R]. Очевидно, что L и R можно вы-
вычислить за линейное время, поэтому оценка по времени для
одномерной задачи линейного программирования пропорцио-
пропорциональна O(N). При большем числе измерений задачу линейного
программирования можно решить путем построения общей об-
области (пересечения) полупространств. Однако эти две задачи
не эквивалентны, как будет показано более точно в разд. 7.2.5.
Теперь обсудим несколько основных алгоритмов, предназна-
предназначенных для решения вышеописанных задач. Большинство этих
алгоритмов создано для задач типа ПОСТРОЕНИЕ ПЕРЕСЕ-
ПЕРЕСЕЧЕНИЯ (задачи типа С.1), и тем не менее всюду, где это
332 Гл. 7. Пересечения
уместно, будет проводиться сопоставление с соответствующими
задачами типа «проверки». Мы начнем с плоских приложений,
а затем перейдем к пространственным примерам. Нужно ли по-
повторять, что уровень знаний в этой области при росте числа
измерений отражает картину, знакомую сегодня во всей вы-
вычислительной геометрии.
7.2. Плоские приложения
7.2.1. Пересечение выпуклых многоугольников
В данном разделе под «многоугольником» будем по-
понимать его границу и внутренность; цикл из ребер многоуголь-
многоугольника будет явно называться его границей. Сформулируем за-
задачу:
Задача С.1.1 (ПОСТРОЕНИЕ ПЕРЕСЕЧЕНИЯ ВЫПУК-
ВЫПУКЛЫХ МНОГОУГОЛЬНИКОВ). Даны два выпуклых много-
многоугольника: Р с L вершинами и Q с М вершинами. Надо по-
построить их пересечение.
Без потери общности положим, что L ^ М.
Теорема 7.2. Пересечением выпуклых L-угольника и М-уголь-
ника является выпуклый многоугольник, имеющий не более
L -\- М вершин.
Доказательство. Пересечение Р и Q образовано пересече-
пересечением L-\-М внутренних полуплоскостей, определяемых реб-
ребрами этих двух много-
многоугольников. Что и требо-
требовалось доказать.
Граница Р [) Q состоит
из чередующихся цепей
вершин этих двух много-
многоугольников, разделенных
точками пересечения их
границ (рис. 7.4).
Очевидный метод фор -
мирования пересечения
Рис. 7.4. Пересечение выпуклых много- СОСТОИТ B °бх0Де границы
угольников. Р ребро за ребром, в
процессе которого просто
и безыскусно определяются все точки пересечения с границей Q
(не более двух на каждое ребро) и попутно ведется список то-
точек пересечения и вершин. Это потребует затраты времени
O(LM), поскольку будет проверено пересечение каждого реб-
ребра Р с каждым ребром Q. Естественно для сокращения вычис-
7.2. Плоские приложения 333
лительной работы попытаться использовать факт выпуклости
многоугольников.
Один из подходов заключается в разбиении плоскости на
области, в каждой из которых пересечение этих двух много-
многоугольников можно вычислить легко. Построение новых геомет-
геометрических объектов для решения поставленной задачи не ред-
редкость в вычислительной геометрии; читатель может вспомнить
исключительное значение этого приема во многих методах гео-
геометрического поиска, показанных в гл. 2. В данном случае бу-
будет адекватным простейшее разбиение плоскости — индуциро-
индуцированное пучком лучей [Shamos, Hoey A976)]. Выберем произ-
произвольную точку О на плоскости. (Эту точку О можно взять на
бесконечности; в действительности исходный метод Шеймоса —
Хоуи основан на выборе О в бесконечности на оси у.) Из О
проводим лучи через все вершины многоугольников Р и Q.
Эти лучи разбивают плоскость на секторы. Мы хотим упорядо-
упорядочить этот набор лучей по углу вокруг точки О. К счастью, это
легко сделать. На самом деле, если О лежит внутри много-
многоугольника, скажем, Р, то лучи к вершинам Р, очевидно, упоря-
упорядочиваются относительно О так же, как и вершины, порядок
которых задан. Если же О лежит вне Р, то вершины Р обра-
образуют две цепи (обе они заключены между теми двумя верши-
вершинами Р, которых касаются опорные прямые из О), а для каж-
каждой цепи соответствующие ей лучи из О отсортированы по
углу. Поэтому в любом случае эти секторы, определяемые
вершинами Р, упорядочиваются по углу за время, линейно за-
зависящее от числа вершин. Если эти две последовательности
(одна для Р и одна для Q) известны, то их можно слить за ли-
линейное время.
Ключевым является наблюдение, что пересечение каждого
сектора с выпуклым многоугольником образует четырехуголь-
четырехугольник (трапецию, если О — бесконечно удаленная точка). По-
Поэтому внутри каждого сектора пересечением Р и Q будет пе-
пересечение двух четырехугольников, которое можно найти за
константное время. Результирующие куски можно собрать во-
воедино за один обход секторов, на который понадобится линей-
линейное время. А затем потребуется очищающий просмотр для уда-
удаления ложных вершин, которые возникают на границах между
секторами.
Теорема 7.3. 'Пересечение выпуклых L-угольника и М-уголь-
ника можно построить за время Q(L -\-M).
На рис. 7.5 проиллюстрирован метод, где точка О выбрана
так, как предложили Шеймос и Хоуи. В данном случае секторы
называются полосами, а полярный угол относительно О за-
заменен значением абсциссы х.
334
Гл. 7. Пересечения
Другой подход является, как это ни удивительно, элегантным
усовершенствованием [O'Rourke, Chien, Olson, Naddor A982)]
того грубого метода, который был описан в начале данного
j Пересечение полосы с калсдым
' многоугольникам образует
трапецию
Рис. 7.5. Полосы, определенные вершинами двух выпуклых многоугольников.
раздела. Его основная идея неформально следующая. Предпо-
Предположим, что Pf\Q^=0, и рассмотрим многоугольник Р* А Р (] Q.
Границей Р* является чередующаяся последовательность уча-
участков границ Р и Q. Если одним из таких участков является
кусок границы, скажем, Р, то некий участок границы Q окру-
окружает ее во внешней области Р* (рис. 7.6). Благодаря выпук-
выпуклости обоих многоугольников в каждой паре таких смежных
Рис. 7.6. Два пересекающихся многоугольника. «Серпы» заштрихованы
участков естественно выделяются внешняя и внутренняя цепи,
которые можно назвать в совокупности «серпом» для удобства
последующего описания. Серп ограничен парой точек пересе-
пересечения, именуемых начальной и конечной в соответствии с еди-
единой ориентацией границ Р и Q. Говорят, что вершина (из Р или
Q) принадлежит серпу, если A) она лежит между начальной
и конечной точками пересечения (на любой цепи) или B) яв-
7.2. Плоские приложения
335
ляется концом ребра внутренней цепи, содержащего конечную
точку серпа (рис. 7.7). Заметим, что существуют вершины, при-
принадлежащие двум серпам.
^Движение
Начальное пересечение
серпа
Конечное пересечение
серпа
Рис. 7.7. Названия элементов серпа. Выделенные вершины принадлежат за-
заштрихованному серну.
Для создания механизма продвижения положим, что (р\,
р2, ..., Pl) и (<7i, <7г, •¦•> Ям) — это списки вершин Р и Q соот-
соответственно, перечислен-
перечисленных при обходе их про-
против часовой стрелки (так
что многоугольник счи-
считается расположенным
«слева» от своей грани-
границы). Предположим, что
продвижение осуществ-
осуществляется одновременно по
обеим границам и что р,-
и q/ — текущие вершины
заданных многоугольни-
многоугольников, а, кроме того, теку-
текущие ребра оканчиваются
в pi и q,-; возможны че-
четыре разные ситуации,
которые показаны на рис.
7.8. (Остальные ситуации
сводятся к данным четы-
четырем путем замены ролей
Р и Q.) Пусть h{pi) обо-
обозначает полуплоскость,
Случай A)
/Движение
Случай B)
Случай (д)
Случай D)
Рис. 7.8. Иллюстрация механизма продви-
продвижения. Мы продвигаемся по одной или по
другой границе в зависимости от относи-
относительного расположения текущих вершин pi
и q/ (текущие ребра показаны жирными
прямыми).
определенную pi-\pi и со-
содержащую Р (аналогич-
(аналогично определяется и h{q,)).
Очевидно, что Р* содер-
содержится внутри пересечения h(pi) и h(qi), т. е. в заштрихованных
областях на рис. 7.8.
336 Гл. 7. Пересечения
Идея заключается в том, чтобы не двигаться по той гра-
границе (Р или Q), текущее ребро которой еще может содержать
необнаруженную точку пересечения. Тогда в случае B) мы
продвинемся по Р, поскольку текущее ребро Ц\-\Ц\ из Q может
содержать еще не обнаруженную точку пересечения; по тем же
причинам в случае C) мы продвинемся по границе Q. В слу-
случае D) все пересечения на текущем ребре из Р уже обнару-
обнаружены, в то время как текущее ребро из Q все еще может со-
содержать необнаруженное пересечение; поэтому мы продвинем-
продвинемся вдоль Р. Наконец, в случае A) выбор произволен, и выбе-
выберем, например, Q. Рассмотрение этих четырех случаев пол-
полностью определяет механизм продвижения в данном методе,
осуществляемый подпрограммой ДВИЖЕНИЕ. Выражение
«ДВИЖЕНИЕ реализует случай (/)» (при / = 1, 2, 3, 4) озна-
означает, что продвижение, соответствующее случаю (/), выпол-
выполняется корректно.
Если пренебречь для ясности и простоты вырожденными
случаями (когда граница Р содержит вершину Q и наоборот),
которые требуют особого внимания1), то можно формализо-
формализовать алгоритм. Заметим, что pi и qM непосредственно предше-
предшествуют р\ и q\ соответственно (это означает, что, как обычно,
Ро = Pl и q0 = qM).
procedure ПОСТРОЕНИЕ-ПЕРЕСЕЧЕНИЯ-
выпуклых-многоугольников
begin i:= j :=k := 1:
repeat
begin if (pi^tfi и <7/_i<7/ пересекаются) then
вывод пересечения;
ДВИЖЕНИЕ (* i или / увеличивается *);
k:=k-\- 1
end;
until k = 2 (L + AT);
if (не найдено пересечений) then
begin if pi^Q then PeQ
else if ?,• <= P then Q s P
else Pf]Q=0
end;
end.
Теперь установим корректность данного алгоритма. Если р,
и <7,- принадлежат одному серпу, то подпрограмма ДВИЖЕНИЕ
гарантирует достижение конечной точки пересечения данного
серпа (как очередного пересечения), поскольку не допускается
') Подробности можно найти в первоисточнике [O'Rourke et с/. A982)].
7.2. Плоские приложении
337
продвижения по той границе, текущее ребро которой может
содержать искомую точку пересечения. Это в свою очередь га-
гарантирует, что поскольку обе текущие вершины принадлежат
одному и тому же серпу, то все серпы будут построены после-
последовательно. Для завершения доказательства необходимо убе-
убедиться, что данный алгоритм обнаруживает хотя бы одну точку
пересечения, если она существует. Заметим, что точки пересе-
пересечения образуют пары, поэтому будет по крайней мере две точки
Случаи
Случаи (J)
Случаи. G)
Случаи D)
Случаи B)
(а)
Рнс. 7.9. Иллюстрация к доказательству того, что алгоритм находит по край-
крайней мере одну точку пересечения, если Р н Q пересекаются.
пересечения. Пусть pi-\pi — текущее ребро Р — содержит точку
пересечения v с ребром qr-\qr, так что qr^h(pi) (рис. 7.9).
Обозначим через w следующую точку пересечения в серпе, на-
начавшемся в точке у; существуют еще две важные точки в Q:
вершина qr, уже определенная, и вершина qs, наиболее удален-
удаленная в h(pi) от прямой, несущей ребро pi-ip;. Граница Q разби-
разбивается этими двумя вершинами на две ориентированные цепи
Сг и Cs, которые оканчиваются в вершинах qr и qs соответ-
соответственно. Считая, как обычно, что qi-iq,- обозначает текущее
ребро в Q, будем различать следующие два случая:
A) qj^Cr. Подпрограмма ДВИЖЕНИЕ последовательно
обрабатывает случаи (каждый из которых может оказаться
пустым) B), D), A) и C), как показано на рис. 7.9(а). Про-
Продвижение ведется вдоль Q, в то время как ребро pi-ipi остается
неизменным вплоть до того, как обнаруживается v.
B) ^eCs (рис. 7.9(b)). Пусть I — прямая, несущая qi-iqj.
Существуют две опорные прямые к Р, параллельные I. Пусть
рт — та вершина, принадлежащая одной из этих опорных пря-
338
Гл. 7. Пересечения
мых, которая встретится первой при просмотре границы Р, на-
начиная с pi. Очевидно, что подпрограмма ДВИЖЕНИЕ (случаи
B) и D)) проходит от р,- до рт, в то время как ребро q\-\q\
остается неизменным. Затем, если ртф.к{ц{), то ДВИЖЕНИЕ
далее проследует к первой вершине pt^h(qj). В любом слу-
случае текущими вершинами остаются q,- и р* е Р (р* = рт или
p* = pt)y лежащие внутри h(q,). Заметим, что данная ситуация
не отличается от такой, как если бы одна вершина q заменила
подцепь (qr, qr+u ..., q,--\), где q — пересечение прямых, несу-
несущих qr-\qr и <7/_i<7/ соответственно. Поэтому можно считать,
как будто <7,- и р* принадлежат к одному и тому же серпу,
а в этом случае подпрограмма ДВИЖЕНИЕ обязательно при-
приведет к конечной точке этого серпа.
Если ребро, подобное pi-ipi, существует (т. е. границы Р
и Q пересекаются), то после (L-\-М) шагов подпрограммы
ДВИЖЕНИЕ оно обязательно будет достигнуто; действительно,
после (L-\-М) шагов граница по крайней мере одного много-
многоугольника будет полностью пройдена, а каждый многоугольник
имеет по крайней мере одно ребро, подобное Pi-iPi. Легко убе-
убедиться в том, что затем понадобится еще не более (L-\-М)
1.13,28
0,12,27
Рис. 7.10. Иллюстрация рабо-
работы алгоритма О'Рурка и др.
Ребро, помеченное числом /',
обрабатывается подпрограм-
подпрограммой ДВИЖЕНИЕ на /-й ите-
итерации. Начальные ребра вы-
выделены жирной линией.
дополнительных шагов подпрограммы ДВИЖЕНИЕ, чтобы
построить всю границу Р {] Q. Итак, заключаем, что если после
2(L-\-M) шагов подпрограммы ДВИЖЕНИЕ данный алго-
алгоритм не смог обнаружить ни одной точки пересечения, то гра-
границы исходных многоугольников вовсе не пересекаются. С точ-
точки зрения оценки работы ДВИЖЕНИЕ завершается за время
O(L -\- M); кроме того, O(L-\-M) шагов нужны, чтобы сделать
выбор, если это необходимо, между следующими альтернати-
альтернативами: PsQ, Q ^ Р, Р П Q = 0. Поэтому данный метод служит
еще одним доказательством теоремы 7.3.
Иллюстрация работы этого алгоритма дана на рис. 7.10.
Ребро там получает метку /, если цикл repeat (шаг подпро-
подпрограммы ДВИЖЕНИЕ) достигает его на /-й итерации. Пара
исходных ребер (одно из Р и одно из Q выделены жирными
линиями) корректно помечена нулями.
7.2. Плоские приложения
339
7.2.2. Пересечение звездных многоугольников
Поскольку звездные многоугольники легко описывать
в полярной системе координат — таким же свойством обладают
и выпуклые многоугольники, — то можно было бы ожидать, что
и их пересечения удастся находить столь же быстро. Однако
это не так, что и показано на рис. 7.11.
Пересечение Р и Q уже само по себе оказывается не много-
многоугольником, а объединением многих многоугольников. Если
и Р, и Q имеют по N вершин, а каждое ребро Р пересекает
каждое ребро Q, то их пе-
пересечение имеет порядок
N2 вершин. Отсюда полу-
получаем тривиальную ниж-
нижнюю оценку:
Теорема 7.4. Поиск пе-
пересечения двух звездных
N-угольников занимает в
худшем случае Q(N2) вре-
времени.
Это означает, что за-
задача об удалении неви-
невидимых линий для произ-
произвольных многоугольников
также должна потребо-
потребовать в худшем случае
квадратичного времени просто потому, что для того, чтобы на-
нарисовать их пересечения, необходимо Q(N2) векторов. В сле-
следующем разделе будет показан удивительный результат, состоя-
состоящий в том, что если нужно установить только факт пересечения
Р и Q, то нет необходимости тратить так много времени.
7.2.3. Пересечение прямолинейных отрезков
Один из главных выводов вычислительной геометрии
состоит в том, что большой набор, казалось бы, независимых
задач можно решить одним и тем же способом, если только
удается выделить общие для них алгоритмические особенности.
В данном разделе показано, как множество различных прило-
приложений можно унифицировать и свести к решению задачи о том,
будут или нет попарно непересекающимися N прямолинейных
отрезков из заданного множества.
Задача С.2.1 (ПРОВЕРКА ПЕРЕСЕЧЕНИЯ ПРЯМОЛИ-
ПРЯМОЛИНЕЙНЫХ ОТРЕЗКОВ). Даны ^V прямолинейных отрезков на
плоскости. Надо определить факт пересечения хотя бы двух
из них.
Рис. 7.11. Пересечение двух звездных мно-
многоугольников.
340 Гл. 7. Пересечения
Алгоритм решения этой задачи был бы весьма полезен для
приложений типа трассировки или размещения, описанных в
разд. 7.1.3. Прежде чем взяться за решение задачи С.2.1, опи-
опишем дополнительно ее важные приложения.
7.2.3.1. Приложения
Задача С.2.2 (ПРОВЕРКА ПЕРЕСЕЧЕНИЯ МНО-
МНОГОУГОЛЬНИКОВ). Даны два простых многоугольника Р и Q
с М и N вершинами соответственно. Пересекаются ли они?
Пересечение
Q >— Р Границы не пересекаются
Рис. 7.12. PcQ, или QcP, или же есть пара пересекающихся ребер.
Как указано в разд. 7.2.1 для выпуклых многоугольников,
если Р и Q пересекаются, то или Р содержит Q, или Q содер-
содержит Р, или некоторое ребро Р пересекает одно из ребер Q
(рис. 7.12).
Поскольку Р и Q оба просты, то при любом пересечении их
ребер эти ребра будут принадлежать разным многоугольникам.
Обозначим через T(N) время, необходимое для решения за-
задачи С.2.1. Тогда можно определить факт пересечения ребер Р
и Q за T(N -\-М) операций. И если пересечений не найдено, то
останется только проверить Р с Q или Q с Р.
Если Р лежит внутри Q, то все вершины Р лежат внутри Q,
поэтому можно один раз применить проверку принадлежности
точки за время O(N) (по теореме 2.1), используя любую вер-
вершину Р. Если эта вершина лежит вне Q, то можно тем же са-
самым способом установить, верно ли, что Q<^:P, за время О(М).
Отсюда имеем следующую теорему:
Теорема 7.5. Пересечение простых многоугольников преоб-
преобразуется за линейное время к проверке пересечения прямоли-
прямолинейных отрезков:
ПРОВЕРКА ПЕРЕСЕЧЕНИЯ МНОГОУГОЛЬНИКОВ
осд, ПРОВЕРКА ПЕРЕСЕЧЕНИЯ ПРЯМОЛИНЕЙНЫХ
ОТРЕЗКОВ
7.2. Плоские приложения 341
Мы уже видели, что сложность алгоритмов, работающих с мно-
многоугольниками, может зависеть от того, известна или нет про-
простота этих многоугольников. Например, выпуклую оболочку
для простого многоугольника можно найти за время 8(М)
(теорема 4.12), в то время как Q.(N\ogN) является нижней
границей для непростых многоугольников. Поэтому было бы по-
полезно иметь алгоритм проверки простоты.
Задача С.2.3 (ПРОВЕРКА ПРОСТОТЫ МНОГОУГОЛЬ-
МНОГОУГОЛЬНИКА). Дан многоугольник. Прост ли он?
Простой и непростые многоугольники показаны на рис. 7.13.
Поскольку многоугольник прост тогда и только тогда, когда
Простой Непростые
Рис. 7.13. Простой и непростые многоугольники.
никакая пара его ребер не пересекается, то немедленно имеем,
что:
ПРОВЕРКА ПРОСТОТЫ МНОГОУГОЛЬНИКА ocw ПРО-
ПРОВЕРКА ПЕРЕСЕЧЕНИЯ ПРЯМОЛИНЕЙНЫХ ОТРЕЗКОВ
7.2.3.2. Алгоритмы пересечения отрезков
Предположим, что заданы ^V интервалов на действи-
действительной оси и необходимо узнать, не перекрываются ли какие-
нибудь два из них. Ответ можно получить за время O(N2), про-
проверив все пары интервалов, но тут же на ум приходит намного
лучший алгоритм, основанный на сортировке. Если упорядочить
2N концевых точек этих интервалов и обозначить их как левые
(Л) или правые (П), то эти интервалы не перекрываются тогда
и только тогда, когда концы их образуют чередующуюся после-
последовательность: Л, П, Л, П, ..., П, Л, П (рис. 7.14). Эту про-
проверку можно провести за O(N\ogN) времени.
Хотелось бы ответить на два вопроса: можно ли улучшить
этот алгоритм и обобщается ли он на случай двух измерений?
Чтобы получить нижнюю оценку, продемонстрируем соот-
соответствие между задачей о наложении интервалов и известным
фундаментальным вопросом из теории множеств: ПРОВЕРКОЙ
УНИКАЛЬНОСТИ ЭЛЕМЕНТОВ (даны N действительных чи-
чисел; все ли они различны? (разд. 5.2)). Ранее было показано,
342 Гл. 7 Пересечения
что эта задача легко разрешима за время O(N\ogN) методом
сортировки, и, хотя нет простого способа показать, что сорти-
сортировка необходима, тем не менее известно (из результатов
Добкина и Липтона [Dobkin, Lipton A976)] и Бен-Ора [Веп-
Ог A983)]), что необходимо затратить O(N\ogN) времени в
i i 1 1 i—i i
~л Ь л л л п л
Л и Л чередуются. Нет наложении
Г"
л
г
Л
л г "
-А У-у
1 I ,
л ли
-1
1 г
1 1
пл
1—
-4 —
1
л
—1
1
п
1
1
л
-[
\
п
—1
п
Л и П не чередуются
Рис. 7.14. Определение наложений интервалов.
модели вычислений типа дерева решений (следствие 5.1). Те-
Теперь покажем, что
УНИКАЛЬНОСТЬ ЭЛЕМЕНТОВ ocw НАЛОЖЕНИЕ ИН-
ИНТЕРВАЛОВ
Заданный набор из N действительных чисел {хг} можно пре-
преобразовать в набор из iN интервалов {[х,-,х;]} за линейное вре-
время. Эти интервалы перекрываются тогда и только тогда, когда
исходные числа не уникальны, и это доказывает следующую
теорему:
Теорема 7.6. Для того чтобы определить, перекрываются ли
N интервалов, необходимо и достаточно Q(N\ogN) сравне-
сравнений, при условии что можно использовать лишь алгебраические
функции на входе.
Насколько строгим является это ограничение на алгебраиче-
алгебраические функции? С одной стороны, оно запрещает использовать
функцию «целая часть», которая, как было показано в разд. 6.4,
является очень мощной операцией. (Напомним, что использо-
использование этой функции позволило Гонзалесу [Gonzales A975)]
решить задачу MAXGAP за GGV) времени.) Методы, которые
позволили бы доказать теорему 7.6 с использованием функции
«целая часть», не известны, однако можно предположить, что
ее добавление вряд ли повлияет на нижнюю оценку, тем более
что теорема 7.6 приложима к случаю любого числа измерений.
В частности, для проверки пересечения N отрезков на плоско-
плоскости необходимо Q(N\ogN) операций.
Теперь посмотрим, что же происходит на самом деле при
сортировке для выявления наложений. Мотивом для этого ис-
7.2. Плоские приложения 343
следования служит отсутствие естественного полного упорядо-
упорядочения отрезков на плоскости, поэтому на обобщение, основан-
основанное только на сортировке, не приходится рассчитывать. Однако
если мы сможем понять существенные черты одномерного алго-
алгоритма, то нам удастся обобщить его и на плоский случай.
Два интервала перекрываются тогда и только тогда, когда
они содержат хотя бы одну общую точку. Каждая точка на дей-
действительной оси связана с множеством, состоящим из накры-
накрывающих ее интервалов. Это соответствие определяет функцию
С: R-»-{О, \}N, отображающую действительные числа на под-
подмножества множества {1, ..., N}. Значение функции С может
меняться только на множестве из 2N концевых точек заданных
интервалов. Если мощность {С(х)} превышает мощность по-
последнего множества, то интервалы перекрываются. Чтобы обна-
обнаружить это, отсортируем концы интервалов и создадим простей-
простейшую структуру данных, состоящую всего лишь из одного целого
числа, т. е. числа интервалов, накрывающих текущую абсциссу.
Просматривая концы отрезков слева направо, ВСТАВЛЯЕМ
интервал в эту структуру данных в тот момент, когда встречен
его левый конец, и УДАЛЯЕМ его в момент встречи правого
конца. Всякая попытка ВСТАВИТЬ в структуру, в которой уже
хранится число один, свидетельствует о наложении; в против-
противном случае наложений нет. Поскольку обработка каждой кон-
концевой точки при таком подходе занимает лишь константное
время, то процесс проверки (после сортировки) требует не бо-
более чем линейного времени. v
При двух измерениях необходимо определить иное отноше-
отношение порядка и использовать более совершенную структуру
данных1). Рассмотрим пару непересекающихся отрезков S[ и s2
на плоскости. Будем считать, что s{ и s2 сравнимы в абсциссе х,
если существует такая вертикаль, проходящая через х, которая
пересекает оба отрезка. Введем отношение выше в х следую-
следующим образом: Si выше s2 в х (пишется S] > xs2), если Si и s2
сравнимы в х, а точка пересечения S\ с вертикалью х лежит
выше точки пересечения s2 с ней же2). На рис. 7.15 показаны
следующие отношения между отрезками sb s2, s3 и s4:
So >ц S4, Sj >u S'2, S2 >D S4, Sj >„ S4.
Отрезок s3 не сравним ни с каким другим отрезком.
') Для простоты изложения предположим, что нет вертикальных от-
отрезков и что никакие три отрезка не пересекаются в одной точке. Если
нарушить любое из этих условий, то разрабатываемые алгоритмы станут
длиннее в деталях, но не в асимптотической оценке времени работы.
2) Это отношение порядка и алгоритм, следующий из него, были пред-
предложены Дэном Хоуи. Доказательство корректности этого алгоритма было
дано М. Шеймвсом. Оба результата были опубликованы в работе FShamns,
Ноеу A976)].
344
Гл. 7. Пересечения
Заметим, что отношение >* задает полное упорядочение,
которое изменяется по мере того, как вертикаль скользит слева
направо. Отрезки входят в это упорядочение и покидают его,
но оно всегда остается полным. Упорядочение может изменять-
изменяться только в трех случаях:
1. Встретился левый конец отрезка s. В этом случае s надо
добавить к структуре данных.
2. Встретился правый конец отрезка s. В этом случае s надо
удалить из структуры данных, поскольку он больше не срав-
сравним с оставшимися отрезками.
3. Обнаружена точка пересечения отрезков sx и s2. Тогда
s\ и s2 меняются местами в структуре данных.
Рис. 7.15. Отношение порядка между отрезками.
Заметим, что необходимое условие пересечения двух отрез-
отрезков si и s2 состоит в том, что существует такая абсцисса х,
в которой Si и s2 смежны в упорядочении >*. Отсюда немед-
немедленно следует, что последовательность пересечений множества
отрезков с вертикалью в х (т. е. отношение >*) содержит всю
необходимую информацию для поиска пересечений отрезков и
что естественным методом для решения задач этого класса яв-
является «плоское заметание» (см. разд. 1.2.2, где дана общая
формулировка этого алгоритмического метода). Напомним, что
в методе плоского заметания используются две главные струк-
структуры данных: статус заметающей прямой и список точек со-
событий.
Как указано выше, статус заметающей прямой является
описанием отношения >Л; значит, он представляет собой после-
последовательность элементов (отрезков). Если вспомнить ранее
описанный механизм, в котором отношение >* изменяется на
конечном множестве абсцисс при плоском заметании, то станет
очевидно, что в структуре данных 3:', реализующей статус за-
заметающей прямой, должны быть предусмотрены следующие
операции:
7.2. Плоские приложения
345
a. ВСТАВИТЬ (s, 2). Вставить отрезок s в полное упорядо-
упорядочение, представленное в 2.
b. УДАЛИТЬ (s, 2). Удалить отрезок s из 2.
c. НАДE,2). Найти имя отрезка, расположенного непо-
непосредственно над s в 2.
d. YlOJX(s, 2). Найти имя отрезка, расположенного непо-
непосредственно под s в 2.
Подобная структура данных известна как словарь (см.
разд. 1.2.3), а все вышеописанные операции можно реализовать
Рис. 7.16. Точка пересечения р обнаружена при х = Х\, когда отрезки st
и s2 впервые стали смежными. Однако события с абсциссами х2, хъ и xt
необходимо обработать раньше, чем точку р с абсциссой х$.
за время, логарифмически связанное с его размером. На
практике использование прошитого словаря (с прямым упо-
употреблением указателей, если адрес s известен) позволяет реа-
реализовать функции НАД(х) и П0ДE) за константное время.
Относительно списка точек событий заметим, что для реги-
регистрации всех пересечений нужно уметь поддерживать отноше-
отношение >* в течение всего процесса заметания плоскости. Как
указано ранее, упорядочение >* изменяется только в некото-
некоторых абсциссах (см. случаи 1, 2 и 3 выше), которые являются
концами отрезков или точками их пересечения. В то время как
все концы отрезков заданы заранее, точка пересечения, найден-
найденная плоским заметанием, динамически порождает событие, ко-
которое, вообще говоря, должно запоминаться и обрабатываться
алгоритмом в нужный момент. Заметим, что в действительно-
действительности, возможно, придется обработать несколько других событий
за время, прошедшее с момента обнаружения какой-нибудь
346 Гл. 7. Пересечения
точки пересечения до момента ее обработки. На рис. 7.16 дан
пример подобной ситуации: там точка пересечения р обнару-
обнаружена в момент хх (когда отрезки sY и s2 стали смежными);
однако необходимо обработать абсциссы х2> хъ и х4 перед об-
обработкой соответствующего р события х5. Следовательно, пока-
показано, что для отчета обо всех пересечениях структура данных
<%', создаваемая для работы со списком точек событий, должна
поддерживать следующие операции (в & хранится полное упо-
упорядочение точек событий):
a. МШAГ). Определить наименьший элемент в & и уда-
удалить его.
b. ВСТАВИТЬ(х,^). Вставить абсциссу х в полное упоря-
упорядочение, хранимое в &'.
В дополнение к этим важнейшим операциям необходимо,
чтобы & поддерживала также операцию:
c. ЧЛЕН(х, (%). Узнать, является ли абсцисса х членом (8.
Указанная структура данных представляет собой очередь
с приоритетом (см. разд. 1.2.3), и, как хорошо известно, она
поддерживает все три описанные операции за время, логариф-
логарифмически связанное с ее размером.
Теперь можно описать алгоритм: при заметании плоскости
вертикалью в каждой точке события структура данных 3? кор-
корректируется и все пары отрезков, которые становятся смеж-
смежными при этой корректировке, проверяются на пересечение.
Если какое-нибудь пересечение обнаружено впервые, о нем
дается отчет (вывод на печать), и его абсцисса вставляется в
список точек событий &. Более формально приведенные рас-
рассуждения выражены в процедуре (здесь очередь ^ — рабочий
параметр процедуры) [Bentley, Ottmann A979)]:
procedure ПЕРЕСЕЧЕНИЕ-ОТРЕЗКОВ
1. begin сортируем 2 N концов отрезков лексикографически
по х и у и помещаем их в приоритетную
очередь &:
2. st:=0;
3. while {& ф 0) do
4. begin p:=MIN (f);
5. if (p — левый конец) then
6. begin s := отрезок, концом которого служит р;
7. ВСТАВИТЬ {s,S)\
8. s,:=HAfl(s,2^;
9. s2:=n0JHs,&);
10. if (s, пересекает s) then s4-<=(slts);
H. if (s2 пересекает s) then &<={s,s2)
end;
7.2. Плоские приложения 347
12. else if (p — правый конец) then
begin s := отрезок, концом которого
служит р;
A 2
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
29.
end
end.
s,:=HAA(s, it);
s2 := ПОJX(s,56);
if (s, пересекает s> справа от p)
then s^<=(si, s.>);
УДАЛИТЬ^, .г)
end
else(* p — точка пересечения*)
begin(s, ,s2) := отрезки, пересекающиеся
в р; (* причем s{ = НАД($2) слева от р *)
s3:= НАДE1,2');
с • ГТОГТ/с О^\»
if(s3 пересекает s2) then s4-<= (s3, s2);
if (s, пересекает s4) then «s^^= (s^J;
поменять местами S\ \\ s2 ъ 3?
end
(* теперь найденные пересечения следует обра-
обработать *)
while (э1ф0) do
begin (s,s')<=s4-\
x := общая абсцисса s и s';
if (ЧЛЕН(х,^) = ЛОЖЬ) then
begin вывод {s,s');
ВСТАВИТЬ^, сГ)
enu
end
При таком алгоритме не будет пропущено ни одного из
пересечений, поскольку могут пересечься только смежные от-
отрезки, причем все смежные пары корректно проверяются по
крайней мере однажды. Более того, каждое пересечение реги-
регистрируется ровно один раз, поскольку, когда его абсцисса
вставляется в <?', проверка в строке 27 предупреждает нежела-
нежелательные повторы1).
С точки зрения оценки заметим: операция строки 1 (на-
(начальная сортировка) выполняется за время O(N logN). Бло-
Блоки 6—11, 13—16 и 18—23 выполняются каждый за время
О (logN), поскольку каждая операция на & укладывается в
') Для обработки возможной ситуации, когда разные пересечения об-
обладают одной и той же абсциссой, достаточно так строить &', чтобы точки
пересечения перечислялись в лексикографическом порядке пар [х,у).
348 Гл. 7. Пересечения
такую временную оценку в худшем случае, а проверка попар-
попарного пересечения требует константного времени. Для каждого
события, т. е. для каждого исполнения главного цикла while
(строка 3), эти три блока являются взаимоисключающими.
Если через К обозначить число пересечений, встреченных алго-
алгоритмом, то главный цикл while выполняется ровно BN + К)
раз. Единственное обстоятельство, которое все еще заслужи-
заслуживает пристального внимания, относится к структуре данных
<?', а именно сколько раз будет выполняться проверка, поме-
помещенная в строке 27? Между прочим, заметим, что какое-нибудь
одно пересечение можно повторно обнаруживать очень много
раз; однако если соотнести каждую пересекающуюся пару
с тем выполнением главного цикла while, на котором она обна-
обнаружена, то станет ясно, что общее число обнаруженных пересе-
пересечений равно O(N + /C). Поэтому строка 27 выполняется О(Л/ +
+/С) раз, а каждое выполнение требует O(\og(N + К)) =
= O(\ogN) времени, поскольку К = 1 „) = O(N2). Следова-
Следовательно, общая оценка времени, потребляемого главным циклом
while, равна O((N -^ K)\ogN), что, очевидно, превосходит
оценку шага начальной сортировки. Отсюда имеем следующую
теорему:
Теорема 7.7 [Bentley, Ottmann A979)]. На множестве из
N отрезков можно обнаружить К пересечений за время O((N-\-
+ K)\ogN).
Заметим, что вышеописанный алгоритм решает следующую
задачу (отличную от поставленной в начале данного раздела):
Задача С.1.2 (ПЕРЕСЕЧЕНИЕ ОТРЕЗКОВ). Даны N пря-
прямолинейных отрезков. Надо найти все их пересечения.
Наиболее важной чертой приведенного выше алгоритма
является простота, однако, характеристики его работы не опти-
оптимальны. Действительно, нижняя оценка по времени для этой
задачи равна Q(K + N \ogN) поскольку компонента Q(N\ogN)
следует из теоремы 7.6, а О (К) тривиально получается из
оценки объема выводного файла. Понятно, что такое не-
несовпадение оценок привлекло к себе большой интерес исследо-
исследователей, который достиг кульминаций после серии последова-
последовательных улучшений построения алгоритма с оптимальной вре-
временной оценкой Q(K + N\ogN). Это сделали Чазелле и Эдельс-
бруннер [Chazelle, Edelsbrunner A988)]. Эти результаты бу-
будут далее проиллюстрированы в разд. 7.4.
Если отказаться от мысли найти все пересечения и заняться
соответствующей задачей проверки («Найти одно пересечение,
7.2. Плоские приложения 349
если их число больше нуля»), то все сильно упрощается. Фак-
Фактически можно работать как в одномерном алгоритме. Однако
в данном случае нельзя ограничиться единственным объектом
в структуре данных: она должна быть пригодна для хранения
полного упорядочения на множестве отрезков, пересеченных за-
заметающей прямой, и совпадает с использованным ранее слова-
словарем 2. Главное различие алгоритмов построения и проверки
пересечений заключается в структуре данных для списка точек
событий, который в последнем случае является простым мас-
массивом, содержащим 2N исходных концевых точек. Имеем сле-
следующий алгоритм:
procedure ПРОВЕРКА-ПЕРЕСЕЧЕНИЯ-ОТРЕЗКОВ
begin сортируем лексикографически 2N концов по х
и у и помещаем их в действительный массив
ТОЧКА[1 : 2N];
for i := 1 until 27V do
-'. begin p := ТОЧКАМ;
s:= отрезок, концом которого является р;
if (р — левый конец) then
begin ВСТАВИТЬ^,.г);
52:=ПОДE,<?);
if (s{ пересекает s) then вывод (s^s)
if (s2 пересекает s) then вывод {s2,s)
end;
else (* p— правый конец s*)
begin Sl:=HAms,&);
s2:= ПО Д($, S);
if (sj пересекает s2) then вывод (slts2);
УДАЛИТЬE2')
end
end
end.
Следующая теорема устанавливает корректность этого алго-
алгоритма:
Теорема 7.8. Алгоритм ПРОВЕРКА-ПЕРЕСЕЧЕНИЯ-ОТ-
ПРОВЕРКА-ПЕРЕСЕЧЕНИЯ-ОТРЕЗКОВ находит пересечение, если оно существует.
Доказательство. Поскольку алгоритм сообщает о пересе-
пересечении, только если оно действительно найдено, то он не объ-
объявит о ложном пересечении, и поэтому заслуживает внимания
лишь тот случай, когда существующее пересечение может
остаться необнаруженным. Покажем, что данный алгоритм
корректно находит самую левую из существующих точек пере-
350 Гл. 7. Пересечения
сечения — qt. Действительно, если qL совпадает с левым кон-
концом р какого-нибудь отрезка, то qL обнаруживается при обра-
обработке р. Поэтому предположим, что qL — не левый конец от-
отрезка. Слева от qL структура данных 9? содержит корректное
представление отношения >Л. Поскольку слева от qL суще-
существует некий небольшой непустой интервал абсцисс, на котором
два отрезка, пересекающиеся в qt, становятся смежными, то qL
обнаруживается так, как и ожидалось. Теорема доказана.
Несмотря на то что вышеописанный алгоритм кажется про-
простым, он обладает рядом любопытных свойств. Так, хотя самое
левое пересечение действительно находится, однако это вовсе
не означает, что оно найдено первым. (Читатель может про-
проверить свое понимание этого алгоритма, точно указав, какое
пересечение обнаруживается первым.) Поскольку этот алго-
алгоритм выполняет только O(N) проверок пересечения, он также
может не обнаружить некоторые пересечения. Главный блок //
(проверка пересечений) выполняется, очевидно, за время
O(logjV) в худшем случае. Итак, получаем в заключение сле-
следующую теорему (повторим опять, что оптимальность следует
из теоремы 7.6):
Теорема 7.9. Факт пересечения какой-нибудь пары из N от-
отрезков на плоскости можно определить за оптимальное время
Q{N\ogN).
Из этого результата немедленно вытекает
Следствие 7.1. Следующие задачи можно решить за время
O(NlogN) в худшем случае:
Задача С.2.2 (ПРОВЕРКА ПЕРЕСЕЧЕНИЯ МНОГО-
МНОГОУГОЛЬНИКОВ). Пересекаются ли два заданных многоуголь-
многоугольника?
Задача С.2.3 (ПРОВЕРКА ПРОСТОТЫ МНОГОУГОЛЬ-
МНОГОУГОЛЬНИКА). Прост ли заданный многоугольник?
Задача С.2.4 (ПРОВЕРКА УКЛАДКИ ГРАФА). Пересе-
Пересекаются ли ребра заданной прямолинейной укладки планарного
графа?
Другие результаты, полученные с использованием вариан-
вариантов процедуры ПРОВЕРКА-ПЕРЕСЕЧЕНИЯ-ОТРЕЗКОВ,
можно найти в работе [Shamos, Hoey A976)]. Процитируем
оттуда
Следствие 7.2. Факт пересечения какой-нибудь пары из N
окружностей можно определить за время О (N log N).
7.2. Плоские приложения 351
7.2.4. Пересечение полуплоскостей
Построение общей области Л^ полуплоскостей экви-
эквивалентно поиску области решений множества из Л^ линейных
неравенств {ограничений) типа
a,* + % + c,<0, i = l, 2, .... N. G.2)
Любое решение G.2) обычно называется допустимым реше-
решением, а все их множество называется допустимой областью.
Иллюстрация данной задачи приведена на рис. 7.17.
ограничения
Рис. 7.17. Допустимая область множества линейных ограничений.
Существует простой квадратичный алгоритм для построе-
построения пересечения N полуплоскостей. Предположим, что уже из-
известно пересечение первых i полуплоскостей. Это некая выпук-
выпуклая многоугольная область, ограниченная не более чем i сто-
сторонами, хотя и необязательно конечная. Пересечение этой об-
области с очередной полуплоскостью есть не что иное, как ее раз-
разрезание прямой линией и сохранение правого или левого куска.
Это можно проделать очевидным способом за время O(i). Сум-
Суммарная работа потребует O(N2) времени, однако преимущество
данного алгоритма в том, что он открытый.
Рассмотрим вопрос о возможном улучшении алгоритма с по-
помощью метода «разделяй и властвуй». Формальная постановка
нашей задачи такова:
Задача С. 1.3 (ПЕРЕСЕЧЕНИЯ ПОЛУПЛОСКОСТЕЙ).
Даны N полуплоскостей Нь Н2, ..., HN. Нужно построить их
пересечение: Нх Л Н2 Л ... П HN.
352 Гл. 7. Пересечения
Поскольку оператор пересечения ассоциативен, то его ком-
компоненты можно произвольно разбить на части:
(Я, П • • • П НЩ2) П (Hnp+i П • • • П Ядг). G.3)
Член в левых скобках является пересечением N/2 полуплоско-
полуплоскостей и, следовательно, выпуклой многоугольной областью с не
более чем N/2 сторонами. То же самое относится и к члену
в правых скобках. Поскольку пересечение пары выпуклых мно-
многоугольных областей, содержащих по k сторон каждая, можно
построить за время О (k) по теореме 7.3, то серединную опера-
операцию пересечения в формуле G.3) можно проделать за время
O(N). Отсюда следует такой рекурсивный алгоритм:
procedure ПЕРЕСЕЧЕНИЕ ПОЛУПЛОСКОСТЕЙ
Вход: N полуплоскостей, заданных ориентированными прямо-
прямолинейными отрезками.
Выход: Их пересечение, выпуклая многоугольная область.
1. Разбиение заданных полуплоскостей на два подмноже-
подмножества приблизительно равной мощности.
2. Рекурсивное построение пересечения полуплоскостей для
каждой из этих подзадач.
3. Слияние решений этих подзадач путем пересечения двух
результирующих выпуклых многоугольных областей.
Если обозначить через Т (N) время, используемое этим алго-
алгоритмом для построения пересечения полуплоскостей, получаем
Т (N) = 27 (N/2) + O(N) = O(N log N). G.4)
Подведем итог:
Теорема -*.1О. Пересечение N полуплоскостей можно по-
построить за оптимальное время Q(N\ogN).
Доказательство. Верхняя оценка следует из уравнения G.4).
Для доказательства нижней оценки покажем, что
СОРТИРОВКА ос„ ПЕРЕСЕЧЕНИЕ ПОЛУПЛОСКОСТЕЙ.
Пусть заданы N действительных чисел х\, ..., xn, и пусть Я,-—
полуплоскость, содержащая начало координаты и определяе-
определяемая касательной к параболе у = х2 в точке с координатами
{xt, х]), т. е. прямой у = 2xtx — х\ (рис. 7.18). Пересечением
таких полуплоскостей является выпуклая многоугольная об-
область, последовательные ребра которой упорядочены по углу
наклона. Если построить указанную область, то можно будет
считывать заданные {xi) в отсортированном порядке. Теорема
доказана.
7.2. Плоские приложения
353
Общий результат теоремы 7.10 имеет важное приложение:
Следствие 7.3. Общую область N выпуклых k-угольников
можно построить за время O(NklogN).
Доказательство. Можно прямым методом получить оценку
по времени O(Nklog Nk) путем построения пересечения Nk
левых полуплоскостей, ограничивающих исходные многоуголь-
многоугольники. Для сокращения этой оценки будем обрабатывать задан-
заданные многоугольники как N эле-
элементов, а не как набор из Nk ре-
ребер. Обозначим через T(N,k)
время, необходимое для решения
поставленной задачи. Пересече-
Пересечением N/2 штук ^-угольников яв-
является выпуклый многоугольник
с не более чем Nk/2 сторонами.
Пересечение двух таких много-
многоугольников можно построить за
время ckN, где с — константа.
Поэтому рекурсивно подразби-
вая поставленную задачу, полу-
получаем, как и в случае задачи ПЕ-
ПЕРЕСЕЧЕНИЕ ПОЛУПЛОСКО-
ПОЛУПЛОСКОСТЕЙ:
Рис. 7.18. Пример того, как СОР-
СОРТИРОВКУ можно преобразовать
в ПЕРЕСЕЧЕНИЕ ПОЛУПЛО-
ПОЛУПЛОСКОСТЕЙ.
k)=*2T(N/2, k) +
= O (Nk log N),
что и требовалось доказать.
7.2.5. Линейное программирование
с двумя переменными
Постановка задачи G.2) о пересечении N полупло-
полуплоскостей (обманчиво) напоминает стандартную постановку за-
задачи линейного программирования [Gass A969)] для двух пе-
переменных. В действительности же последняя задача формули-
формулируется так:
Задача С.1.4 (ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ
С ДВУМЯ ПЕРЕМЕННЫМИ). Нужно минимизировать функ-
функцию ах + by, при условии что
=1, .... N.
G.5)
По-прежнему допустимой областью задачи линейного про-
программирования является множество точек (х, у), удовлетво-
удовлетворяющих ограничениям G.5), которые определяют, очевидно,
354
Гл. 7. Пересечения
пересечение N полуплоскостей. Целевая функция определяет
семейство параллельных прямых ах + by -f-A = О, где А— дей-
действительный параметр. Те прямые из этого семейства, которые
являются опорными для допустимой области, проходят через
ее вершины, доставляющие минимальное и максимальное зна-
значения целевой функции (рис. 7.19).
Рис. 7.19. Задача линейного программирования с двумя переменными.
Верхняя стрелка указывает целевую функцию, заданную семейством парал-
параллельных прямых. Нижняя стрелка указывает минимизирующую вершину,
определенную прямой, опорной к допустимой области.
Поскольку мы уже умеем определять прямые, опорные к вы-
выпуклому Л^-угольнику, за время O(\ogN) (см. разд. 3.3.6), то
получаем преобразование
ЛИНЕЙНОЕ ПРОГРАММИРОВАНИЕ С ДВУМЯ ПЕРЕ-
ПЕРЕМЕННЫМИ ос*, ПЕРЕСЕЧЕНИЕ ПОЛУПЛОСКОСТЕЙ,
и, используя результат предыдущего раздела (теорему 7.10),
получаем следующую теорему:
Теорема 7.11. Задачу линейного программирования с двумя
переменными и N ограничениями можно решить за время
O(N\ogN). После того как она решена, экстремум новой це-
целевой функции можно найти за время O(\ogN).
Во-первых, сравним этот подход с симплекс-методом
[Gass A969)]. Если известно одно начальное допустимое ре-
решение, то симплекс-метод реализует движение от вершины
к вершине по допустимой области, тратя O(N) времени на
7.2. Плоские приложения 355
каждом шаге. Легко видеть, что в худшем случае в симплекс-
методе придется посетить все вершины с затратой общего вре-
времени O(N2). (В этом отношении он очень похож на алгоритм
Джарвиса из разд. 3.3.2.) Далее для максимизации новой це-
целевой функции симплекс-метод должен проверить каждое огра-
ограничение, и поэтому он потратит O(N) времени. Другими сло-
словами, симплекс-метод неоптимален.
Необходимо указать, что метод явного построения допусти-
допустимого политопа нереалистичен для задачи линейного програм-
программирования при больших размерностях, поскольку число вершин
может зависеть экспоненциально от числа размерностей (см.
разд. 3.1).
Одна из поразительных черт алгоритма симплекс-метода
состоит в том, что, хотя известна его экспоненциальная зави-
зависимость от числа измерений в худшем случае (и квадратичная
оценка при двух переменных), его реальное поведение на прак-
практике почти всегда превосходно1). Аналогичное поведение де-
демонстрирует и метод, основанный на пересечении полуплоско-
полуплоскостей для широкого класса исходных данных [Bentley, Shamos
A978)]. Этот подход уже использовался нами, например, в
разд. 4.1.1, а именно: если математическое ожидание размеров
решений подзадач мало, то шаг слияния в алгоритме «разделяй
и властвуй» можно реализовать за менее чем линейное время.
Это будет иметь место, если многие из полуплоскостей избы-
избыточные, т. е. не образуют ребер допустимой области. А сейчас
покажем, что для случайных исходных данных, как можно
ожидать, большинство полуплоскостей будут избыточными.
Интуитивно понятно и практически легко представимо ка-
какое-либо естественное распределение вероятности положения
случайных точек на плоскости; менее очевдино то, как можно
моделировать случайный выбор полуплоскостей. Однако если
прибегнуть к фундаментальному геометрическому преобразо-
преобразованию, введенному в разд. 1.3.3 и известному как поляритет
(двойственность) (которое найдет себе важное применение
в разд. 7.3), то можно сделать следующее наблюдение. Поля-
Поляритет— это инволютивное преобразование «точка -<->- прямая».
С каждой прямой свяжем полуплоскость (содержащую начало
координат). Предположим, что нам досталось множество S из
N случайных точек, лежащих в какой-нибудь области (скажем,
в единичном круге), и мы отображаем их в полуплоскости.
Точки, лежащие на выпуклой оболочке S, перейдут в такое
множество прямых, каждая из которых содержит ребро из
общей области пересечения этих полуплоскостей. Поэтому,
вспоминая результаты, процитированные в разд. 4.1.1, полу-
') То есть полиномиально. — Прим. перев.
12*
356 Гл. 7. Пересечения
чим, что математическое ожидание числа неизбыточных полу-
полуплоскостей в множестве из N полуплоскостей для данного слу-
случая равно O(Np), p <С 1; похожие результаты справедливы и
для других, достаточно естественных случайных моделей. От-
Отсюда следует, что для задачи пересечения N полуплоскостей по-
получается линейная оценка среднего поведения алгоритма. А это
немедленно ведет к оценке O(N) для среднего поведения алго-
алгоритма решения задачи линейного программирования с двумя
переменными. Мы видим, что математическое ожидание числа
избыточных полуплоскостей — таких, которые не определяют ре-
ребер допустимой области, — очень велико, что может, в частно-
частности, объяснить прекрасное поведение симплекс-метода.
Однако нельзя успокаивать себя тем, что математическое
ожидание временной оценки алгоритма построения допустимой
области пропорционально O(N), поскольку, как упоминалось в
разд. 7.1.4, такое построение не является необходимым для ре-
решения задачи линейного программирования! Многие годы это
наблюдение было бесплодным, до тех пор пока недавно чрезвы-
чрезвычайно удачный метод, основанный на нем, не был независимо
открыт Меджиддо [Megiddo A983)] и Дайером [Dyer A984)].
Этот метод (который легко адаптируется для случая трех изме-
измерений и был обобщен Меджиддо [Megiddo A983)] на любое
число измерений) отбрасывает не только избыточные ограниче-
ограничения (т. е. такие, которые не нужны и в задаче о пересечении
полуплоскостей), но также и ограничения, гарантирующие от-
отсутствие вершины, доставляющей экстремум целевой функции
(называемой оптимальной вершиной). Этот метод основан на
применении к точкам плоскости такого линейного преобразова-
преобразования, при котором целевая функция становится равной одной из
двух координат, скажем ординате этой плоскости. После этого
задача сводится к поиску экстремального значения некой ку-
кусочно-линейной выпуклой функции от абсциссы. Ключевой мо-
момент заключается в том, что поскольку требуется лишь опреде-
определить экстремальное значение х0, то нет нужды явно строить эту
выпуклую функцию, которая неявно задана множеством линей-
линейных ограничений.
Более точно, исходную задачу ')
минимизировать ах-\-Ьу
при условиях atx + Ь{у + с, < 0, i= 1, 2, . .., N, '
можно преобразовать, полагая У' = ах + by и X = х, следую-
следующим образом (поскольку здесь а и b одновременно не равны
') В данной формулировке предположим без потерн общности, что це-
целевую функцию нужно минимизировать.
7.2. Плоские приложения
357
нулю, предположим без потери общности, что b ф 0):
( минимизировать Y
\ при условиях atX -f- ргУ + cf ^ 0, /=1,2 N,
G.7)
где а,-= (ai — (a/b)bi), a §i = bi/b. В новой задаче нужно вы-
вычислить наименьшее значение У на вершинах выпуклого много-
многоугольника Р (допустимой области), определенного этими ограни-
ограничениями (рис. 7.20). Чтобы избежать построения всей грани-
границы Р, поступим следующим образом. В зависимости от того,
Оптимальная вершина
Рис. 7.20. После преобразования координат нужно найтн наименьшую орди-
ординату в допустимой области.
будет ли р« нулем, отрицательным или положительным числом,
разобьем множество индексов {I, ..., N} на подмножества
/о, /-, /+ соответственно. Все ограничения с индексами из /0
являются вертикальными прямыми (т. е. параллельными оси
Y) и определяют допустимый интервал для X следующим обра-
образом (рис. 7.21):
Щ
«1 = max {— сг/аг: /
С другой стороны, полагая б,А — (а(/р,) и v«"='— (С*/Р*) > полу-
получаем, что все ограничения из /+ имеют вид
358
Гл. 7. Пересечения
так что они, вместе взятые, определяют кусочно-линейную,
выпуклую вверх функцию F+(X) вида
Аналогично ограничения из /_ в совокупности определяют ку-
кусочно-линейную, выпуклую вниз функцию F-(X) вида
Затем получаем преобразованное ограничение /7_(Х)^У^
F(X), а поскольку решается задача линейного программи-
Рис. 7.21. Иллюстрация функций F_(X), F+(X) и величин щ, и2 при пере-
переформулировании задачи линейного программирования.
рования на минимум, то F~(X) и является нашей целевой функ-
функцией. Задача принимает следующий вид:
минимизировать F_(X)
при условиях F_(
Эта новая ситуация изображена на рис. 7.21, где показаны связи
между ыь М2, F-(X)f F+(X) и границей Р.
Элементарной операцией, используемой в этом методе, яв-
является вычисление функций F-(X/), F+(X') и их наклонов по
обе стороны от заданного значения X' е X. (Обозначим через
f(f> (X') и /(^> (X') наклонитF_ (X') слева и справа от X' соответ-
соответственно; аналогично определяются f<_?> н fW.) Покажем теперь,
что эту элементарную операцию, названную вычислением, функ-
7.2. Плоские приложения 359
ций, можно выполнить за время O(N). Обращаясь для кратко-
краткости лишь к F_(X), имеем выражение
F_ (Г) = max F,Г + Y/),
которое можно вычислить за время, пропорциональное |/_| =
= О (N). Если существует только одно значение i, равное г0,
на котором достигается F_(X'), то f^)(X') = f^)(X') = 6l<i, иначе
(если существуют два таких значения г, и г2), то f{t)(X') =
= minF;i> 6.J и /^)(X') = maxF.i, 6.), поскольку F_ выпукла
вниз.
Справедлино утверждение, что для любого X'e[MbM2] мож-
можно получить один из следующих результатов за время O(N):
1. X' недопустимо, а задача не имеет решений;
2. X' недопустимо, но известно, по какую сторону от X' (сле-
(слева или справа) могут лежать все допустимые значения X;
3. X' допустимо, и известно, по какую сторону от X' лежит
минимум F-(X);
4. X' доставляет минимум функции F~(X).
Действительно, если функция Н(Х)= F-(X)—F+(X) поло-
положительна в точке X', то X' недопустимо. Рассматривая наклоны
F-(X) и F+(X) при Х = Х', имеем (рис. 7.22): если №(Х')>
>/+* (X'), то Н (X) возрастает в X', и допустимые значения X мо-
могут располагаться только слева от X' (рис. 7.22(а), случай 2);
если /(^> [X') < /W (X'), то аналогично допустимые X могут быть
только справа от X' (рис. 7.22(Ь), случай 2); наконец, если
№{Х')<Р?ЧХ') и /<5(X')> /<*> (X'), то Н(Х) достигает мини-
минимума на X' — задача неразрешима (рис. 7.22(с), случай 1).
Пусть теперь Н (Х')^О, т. е. X' допустимо. Оставляем в
качестве упражнения вопрос о выборе между случаями 3 и 4
опять на базе информации о четырех наклонах: /(^>(^')> №{Х'),
ff(X'), ff(X').
Теперь стратегия решения начинает проясняться. Нужно
пытаться так выбирать абсциссу X', в которой производится
вычисление, чтобы если алгоритм и не завершается сразу же,
то по крайней мере фиксированную долю а от числа активных
в данный момент ограничений можно было «вывести из игры»
или отсечь (причем каждое отсекаемое ограничение, наверняка,
не должно содержать крайних вершин). Если эта цель достиг-
достигнута, то после \og\/(\-a)N шагов мощность множества ограниче-
ограничений становится достаточно малой и приемлемой для прямого
решения задачи. При таком предположении на i-m шаге число
активных ограничений не превосходит A —a)*-W, и требуе-
требуемая обработка завершится за время, не большее чем К{\ —
360
Гл. 7. Пересечения
— a)l~xN, где К — некая константа. Поэтому суммарное время
работы T(N) оценивается сверху следующим образом:
К
т. е. оно линейно зависит от N, и это оптимально! Сейчас будет
показано, что можно получить величину a = 1/4.
Область
возможно
допустимых
значений.
F. (X)
FJX)
X'
(a)
Область
возможно
допустимых
значений.
F.W
Г, (X)
Рис. 7.22. Иллюстрация возможных случаев, при которых F_(X)> F+(X).
На начальной стадии пусть /_ и /+ будут множествами
индексов, определенных ранее, а |/+| + |/_| = М (т. е. на этой
стадии имеется М активных ограничений, разбитых на два мно-
множества S+ и S-). Разобьем каждое из множеств S+ и S_ на
пары ограничений, причем по одному ограничению в каждом
множестве может остаться без пары. Допустим i, /e/+ и об-
обратимся к рис. 7.23. Если 6; = б/, то соответствующие прямые
параллельны и одну из них можно сразу удалить (в данном
случае ту, у которой больше значение у) (рис. 7.23(а)). В про-
7.2. Плоские приложения
361
тивном случае, обозначив через Хц абсциссу точки пересечения
ограничений, имеем следующие три случая: если Хц < uit то
удаляем ограничение с большим значением б (рис. 7.23 (Ь));
если Xij > ы2, то удаляем ограничение с меньшим значением б
(рис. 7.23(с)); если же и\ ^ Хц ^ и2, то ничего не удаляем
Удалено
(а)
Рис. 7.23. Для каждой пары ограничений находим, к какому из этих четырех
случаев она относится, после чего одно из ограничений удаляется.
(рис. 7.23(d)). Затем точно так же обрабатывается множество
5_. Для тех пар, ни один из членов которых не был удален,
вычисляем абсциссу точки их пересечения.
Итак, если k ограничений были удалены сразу, то получаем
множество из I (М — k)/2\ абсцисс пересечений, причем тра-
тратим на это О(М) времени. Затем применяем к этому множе-
множеству абсцисс алгоритм поиска медианы [Blum, Floyd, Pratt,
Rivest, Tarjan A973); Schonhage, Paterson, Pippenger A976)],
обладающий линейной оценкой по времени, и получаем его
медиану X. Значение X является абсциссой, для которой прово-
проводится очередное «вычисление»; очевидно, что эта операция зай-
займет О(М) времени. Если в точке X нет экстремума, то поло-
362 Гл. 7. Пересечения
вина из вычисленных абсцисс {Хц} лежит в той области, о ко-
которой известно, что в ней нет экстремума. Для каждого Хц из
этой области можно удалить одно ограничение из пары непо-
непосредственно. (Например, если Xi,- находится слева от X, а опти-
оптимум— справа, то из пары прямых, пересекающихся в Хц, уда-
удаляем ту, у которой меньше наклон, и т. д.) Завершаем шаг
алгоритма с тем результатом, что удалено не менее k +
+ Г \.Ш — &)/2J/2l;3s LM/4J ограничений. Это подтверждает
получение ранее обещанного значения а = 1/4, и мы имеем
следующий удивительный результат:
Теорема 7.12. Задачу линейного программирования с двумя
переменными и N ограничениями можно решить за оптимальное
время Q(N).
Как упоминалось ранее, этот метод можно модифицировать
для соответствующей трехмерной задачи, опять получая алго-
алгоритм с оптимальной оценкой по времени Q(N). Читатель отсы-
отсылается к ранее цитированным статьям Меджиддо и Дайера
для изучения деталей этого замечательного метода.
Замечание 1. Как показал Меджиддо, общий метод, описан-
описанный выше, можно применить к немного отличающимся ситуа-
ситуациям. Одним из таких примеров является вычисление наимень-
наименьшей окружности, охватывающей множество S = {pi, р2, ..., pn},
состоящее из N точек, где pc = (xi,yi). Как показано в разд. 6.4,
определение наименьшей охватывающей S окружности означает
вычисление
min max (xt - хJ + (yt — уJ. G.8)
x, у 1=1
Если ввести переменную 2, то выражение G.8) можно пере-
переформулировать как следующую задачу математического про-
программирования:
( минимизировать, z
\ при условиях z>{х, - xf + (yt - уJ, i=\ N. ^'9)
(Заметим, что значение координаты z в точке решения равно
квадрату радиуса этой окружности.) Задача G.9) не является
задачей линейного программирования, поскольку ее ограниче-
ограничения являются квадратичными. Однако исходное ограничение
можно переписать в виде
ci + (x2 + y2), G.10)
где ci — х\ + у\. Отсюда видно, что правая часть G.10) состоит
из линейного выражения —2х;х — 2у;у + с,-, зависящего от i, и
из ¦ квадратичной составляющей (х2-\-у2), не зависящей от I.
7.2. Плоские приложения
363
Множество линейных ограничений
z>-2xix-2yiy + ci, i = \,
G.11)
¦у)
определяет полиэдр, граница которого задается уравнением
z = f(x,y), где / — выпуклая вниз функция. Поскольку (х2 +
-\-у2) — тоже выпуклая вниз функция, то функция ф(л;, г/)А
f(x, у) -\- х2 + у2 является суммой двух выпуклых вниз функций.
В качестве простого упражнения читатель может проверить
сходство поверхности z = cp(x, у) с полиэдральной поверх-
поверхностью в том смысле, что
она имеет вершины, образо-
образованные пересечением трех1)
дуг парабол (ребер), лежа-
лежащих в вертикальных пло-
плоскостях, и что ее гранями
являются участки поверх-
поверхностей параболоидов. Дву-
Двумерной иллюстрацией слу-
служит рис. 7.24. Простой ана-
анализ позволяет убедиться, что
описанный выше метод уда-
удаления ограничений пол-
полностью применим также к
данной ситуации. Единст-
Единственное существенное разли-
различие заключается в том, что
вершина до, доставляющая
минимальное значение z
(среди других вершин), мо-
может не совпадать с искомым минимумом (хотя в случае линей-
линейного программирования эти минимумы всегда совпадают). По-
Поэтому поиск завершается проверкой тех «ребер» функции
z = (p(x,у), которые инцидентны вершине до, и, если это необ-
необходимо, локализацией минимума на одном из этих ребер.
Следовательно, наименьшую охватывающую окружность
можно получить в результате решения варианта трехмерной за-
задачи линейного программирования. Комбинируя этот результат
с аналогом теоремы 7.12 для трех измерений, получаем следую-
следующее усиление теоремы 6.14:
Следствие 7.4. Наименьшую окружность, охватывающую
N-точечное множество, можно вычислить за оптимальное вре-
время 6(jV).
Рис. 7.24. Иллюстрация плоского сече-
иия поверхностей z = f(x,y) и z =
') Здесь для простоты исключается возможность существования четырех
точек из S, лежащих иа одной окружности..
364 Гл. 7. Пересечения
Замечание 2. Особенно интересным приложением линейного
программирования является задача о линейной разделимости
(рассматриваемая здесь в Ed).
Определение 7.2. Говорят, что два точечных множества S\
и Sa в Ed являются линейно разделимыми, если существует та-
такое линейное (d—1)-мерное многообразие л, что S\ и S2 ле-
лежат по разные его стороны. (Для двух измерений я— прямая,
а для трех — обычная плоскость.)
Покажем теперь, что линейная разделимость является за-
задачей линейного программирования. Пусть даны два множе-
множества точек в d-мерном пространстве: S,={(jc(/\ •••> xdl)) '•
||} {^ ">) / 111 [SI
|} ( 11 [I
+ |S2|}, где IS, | + |S2| = Af; ищем одну из плоскостей
рххх + ... + pdxd + pd+i = 0, удовлетворяющих условиям:
Pla\')+... +Pday + pd+1 <0 при
0 при
Очевидно, что эта задача является задачей линейного програм-
программирования, и, согласно предыдущим результатам, ее можно
решить за время O(N) при двух и трех измерениях.
7.2.6. Ядро плоского многоугольника
В разд. 2.2.1 было показано, что поиск точки в ядре
звездного многоугольника является важным шагом при пред-
предобработке, необходимой для ответа на соответствующий вопрос
о принадлежности. Тогда мы отложили разработку алгоритма
построения ядра до тех пор, пока не появятся необходимые для
этого средства. Задача ставится следующим образом:
Задача С.1.5 (ЯДРО МНОГОУГОЛЬНИКА). Дан ЛГ-вер-
шинный (не обязательно простой) многоугольник на плоскости.
Надо построить его ядро.
Во-первых, заметим, что ядром является пересечение N
полуплоскостей. Действительно, каждое ребро многоугольника
Р определяет одну полуплоскость, в которой должно лежать
это ядро (рис. 7.25). Такие полуплоскости называются внутрен-
внутренними (или левыми полуплоскостями сообразно с обходом гра-
границы ядра против часовой стрелки). Известно [Yaglom,
Boltyanskii A961)], что ядро многоугольника является пере-
7.2. Плоские приложения
365
сечением его левых полуплоскостей. Поэтому непосредственно
получаем, что
ЯДРО МНОГОУГОЛЬНИКА ocw ПЕРЕСЕЧЕНИЕ ПОЛУ-
ПОЛУПЛОСКОСТЕЙ,
и, используя результат разд. 7.2.4 (теорему 7.10), имеем
Следствие 7.5. Ядро произвольного N-угольника можно по-
построить за время O(N\ogN).
Заметим, однако, что нижняя оценка Q(jVlogjV), доказан-
доказанная в теореме 7.10, неприменима к задаче о построении ядра,
поскольку ребра простого многоугольника не могут занимать
Допустимая (внутренняя)
полуплоскость, определен-
определенная ребром V; иг
Запретная
полуплоскость
Из этого региона вершина V,
не видна, поэтому ядро
не лгоэкет располагаться
здесь
Рис. 7.25. Каждое ребро многоугольника Р определяет допустимую полу-
полуплоскость.
произвольных положений, а значит, нет сводимости к задаче
о сортировке. Другими словами, нет оснований считать, что не-
необходимо затратить более чем линейное время для построения
_я_гща'г более того, сейчас будет показано, что такой алгоритм
существует [Lee, Preparata A978)].
Входной многоугольник Р представлен последовательностью
вершин (у0, i>i, ..., vn-\), где N ^ 4, а e,- = y,-_iy,- при i = 1,
2, ..., N—1 есть ребро, связывающее вершины vi-\ и у,- (е0 =
= Vn-iVq). Для простоты ссылок опишем Р циклическим спис-
списком чередующихся вершин и ребер Voe\V\e2 ... eN-iVN-\eoVo.
Предположим также, что граница Р ориентирована против ча-
часовой стрелки, т. е. внутренность Р лежит слева от каждого из
ребер. Будем говорить, что вершина у,- вогнута, если внутрен-
внутренний угол при у,- больше 180°, и выпукла в противном случае;
без потери общности предположим, что нет внутренних углов,
равных 180°. Если К{Р) (ядро Р) не пусто, то результатом
работы также станет последовательность вершин и ребер
К(Р).
366 Гл. 7. Пересечения
Алгоритм просматривает вершины Р по порядку и строит
последовательность выпуклых многоугольников К\, Кг, ¦¦¦
..., Kn-\- Каждый нз этих многоугольников может быть либо
ограниченным, либо нет. Позднее будет показано (лемма 7.1),
что Ki является общим пересечением полуплоскостей, лежащщс
][ ориентированных ребер ер, в\, ..., е,. Отсюда, оче-
K К(Р) К Д К
?j^][j_ орир рр р, \, , , д,
видно,. следует, что Kn-\ = К(Р) и что К\ э Д2 э ... э Кг, по-
последнее означает, что существует такое г о > 1, что Ki будет
неограниченным или ограниченным в зависимости от условия
i <С г0 или i ^ го соответственно.
Если точки Wi и wl+l лежат на прямой, несущей es. —
ребро Р, то обозначим через W[es.wi+i отрезок этой прямой,
u
Рис. 7.26. Иллюстрация к определению вершин Ft н I/.
заключенный между ш,- и wl+\ и ориентированный от ш,- к Wi+i.
Если многоугольник /Сг не ограничен, то два его ребра — лучи;
поэтому обозначим через Леш луч, заканчивающийся в точке ш
и ориентированный как ребро е, а через шеЛ луч, дополняющий
первый до прямой.
В процессе работы алгоритма граница К хранится в виде
дважды связанного списка вершин и связывающих их ребер.
Этот список будет линейным или циклическим в зависимости от
того, является ли Ki соответственно неограниченным или огра-
ограниченным. В первом случае первый и последний члены списка
называются соответственно головой и хвостом списка.
Среди вершин Ki выделим две — F, и Li, определяемые сле-
следующим образом. Рассмотрим пару опорных к Ki прямых, про-
проходящих через вершину у,- из Р (рис. 7.26). Пусть /,• и /,• — та-
такие два луча на этих прямых, которые содержат опорные точки,
и названные так, что угол, отсчитанный по часовой стрелке от
ft до U в клине плоскости, содержащем Ki, не превосходит л
(рис. 7.26). Обозначим через Ft такую точку, общую для /, и
Ki, которая наиболее удалена от vr, аналогично определяется
7.2. Плоские приложения 367
и точка Li. Эти две вершины играют важную роль при построе-
построении Ki+i по Ки
Если в Р нет вогнутых вершин, то Р выпуклый и, очевидно,
К{Р) = Р. Поэтому пусть vo — вогнутая вершина Р. Теперь
можно описать алгоритм построения ядра.
Рис. 7.27. Пример многоугольника К\-
Начальный шаг. (* К\ обозначает пересечение полуплоско-
полуплоскостей, лежащих слева от ребер е0 и еь см. рис. 7.27 *)
= точка на бесконечности на луче
= точка на бесконечности на луче иоеоЛ.
Общий шаг. (Переход от Ki к Кг+\.) Предположим, что вер-
вершины Ki занумерованы последовательно при обходе против ча-
часовой стрелки: w\, ш2) .... Будем различать следующие случаи:
A) Вершина vt вогнута (рис. 7.28 и 7.29).
A.1) Fi лежит на луче A<?i+1u;+i или справа от него (рис. 7.28).
Обходим границу Ki против часовой стрелки, начиная
с Fi, до тех пор, пока не достигнем единственного ребра
Wt-\Wt из Ki, которое пересекает луч Ле,-+1и,-+ь или пока
не достигнем L,, не найдя подобного ребра. В последнем
случае закончим работу алгоритма (К(Р)= 0). В пер-
первом случае предпримем следующие действия:
A.1.1) находим точку w' пересечения wt-\Wt с Aei+\Vi+\;
A.1.2) обходим границу Ki no часовой стрелке от Fi до
тех пор, пока не достигнем ребра ws-\Ws, пересе-
пересекающего Aei+iVi+\ в точке w" (это наверняка про-
произойдет, если Ki ограничен) или (если только Ki
неограничен) пока не достигнем головы списка, не
368
Гл. 7. Пересечения
найдя подобного ребра. В первом случае, обозна-
обозначая Ki = aws ... wt-ifi (где а и Р— последова-
последовательности чередующихся ребер и вершин), пола-
полагаем Kt+\ := aw"ei+iw'$; во втором случае (когда
Kt неограничен) необходимо проверить, будет Ki+i
ограниченным или нет. Если наклон луча Aei+iVi+i
заключен в пределах между наклонами началь-
начального и конечного лучей Kt, то Ki+i := Aei+iw'$
Рис. 7.28. Действия на общем шаге, если и\ — вогнутая вершина, a Fi лежит
на луче Aet+iVi+l или справа от него.
также неограничен. В противном случае начнем об-
обход границы Kt no часовой стрелке от хвоста спи-
списка до тех пор, пока не достигнем ребра wr-\wr,
которое пересекает луч Aet+iVt+i в точке до"; обо-
обозначая Ki = ywt-i&wri), полагаем Ki+\ := бш'^адш',
и список становится циклическим.
Выбор Fi+i производится так: если Aet+\Vt+i имеет ровно
одну точку пересечения с Ki, то Fi+\ := (бесконечная точ-
точка луча Aet+iVi+\); иначе Fi+\:=w". Для определения
Li+i обходим Ki против часовой стрелки от Li до тех пор,
пока или не найдена такая вершина до„ на Ki, что wu+\
лежит слева от луча Vi+i(Vi+\wa)A, или не исчерпан весь
список Ki, а подобная вершина не найдена. В первом слу-
случае Li+i:=wu\ в другом случае (который может встре-
встретиться, только если Ki неограничен) Li+\ := L,-.
A.2) Ft лежит слева от луча Aei+\Vi+\ (рис. 7.29). В этом слу-
случае Ki+\ := Kh но Ft и Li нужно скорректировать. Для
определения F,+\ обходим К; против часовой стрелки от
Fi до тех пор, пока не найдена такая вершина wt на Ki,
7.2. Плоские приложения
369
что wt+i лежит справа от луча vi+\ {Vi+\Wt)A; затем поло-
положим Fi+\\=Wt. Определение точки Li+\ проводится так
же, как в случае A.1).
Рис. 7.29. Действия на общем шаге, Рис. 7.30. Действия на общем шаге,
если vi — вогнутая вершина, a Fi ле- если v — выпуклая вершина, a Li ле-
лежит слева от луча Aei+id+i- жит «а луче viei+iA или справа от не-
него.
B) Вершина vi выпукла (рис. 7.30 и 7.31).
B.1) Li лежит на луче Viet+\A или справа от него (рис. 7.30).
Обходим границу Ki no часовой стрелке от Lt до тех пор,
пока не достигнем или того единственного ребра wt-\Wt,
Рис. 7.31. Действия на общем шаге, если vi — выпуклая вершина, a Lt лежит
слева от луча v&i+\A.
которое пересекает луч Vtet+xA., или вершины Fi, не обна-
обнаружив подобного ребра. В последнем случае заканчиваем
алгоритм (К(Р)=0). В первом случае предпримем сле-
следующие действия:
B.1.1) находим точку до' пересечения до^до* с y,-e,-+tA;
370 Гл. 7. Пересечения
B.1.2) обходим границу Ki против часовой стрелки от Li
до тех пор, пока не достигнем или единственного
ребра Ws-iws, пересекающего луч viei+\A в точке
до" (что наверняка произойдет, если Ki ограничен),
или хвоста списка, не найдя подобного ребра
(только в случае неограниченности Ki). Обозна-
Обозначая Ki = awt ¦ ¦ ¦ a>s-iP, в первом случае полагаем
/G+i := адо'е,-+1до"Р; во втором случае (когда Ki
неограничен) нужно проверить, будет Ki+\ огра-
ограниченным или нет. Если наклон луча viei+iA за-
заключен в пределах между наклонами начального
и конечного лучей Ki, то Ki+\ := aw'et+iA также
неограничен. В противном случае начнем обход
границы Ki против часовой стрелки от головы
списка до тех пор, пока не найдено ребро wr-iwr,
которое пересекает луч viei+iA в точке до"; обо-
обозначая Кс.= ywr+ibwtf\, полагаем Ki+i : =
:— bw'ei+lw", и список становится циклическим.
Выборы точек Fi+\ и L-,+\ зависят от позиции vi+\ на луче
Viei+\A и от того, будет ли этот луч иметь одну или две
точки пересечения с Ki. Рассмотрим эти два луча по от-
отдельности:
B.1.3) у,е,+1Л пересекает Ki в точках w' и w". Если
Vi+i e [Viei+\w'], то выбираем F,+1 так же, как в
случае A.2). Иначе положим Ft+\\=w. Если
vi+i е[у,-е,-+1до"], то положим Li+\:—w". Иначе
L,+i выбирается так же, как в случае A.1), за ис-
исключением того, что Ki+\ обходится против часо-
часовой стрелки от до".
B.1.4) v,-ei+\A пересекает К/ только в точке до''. Если
vt+\ e [vid+iw'], то выбираем F,-+\ так же, как в
случае A.2); иначе положим Fi+\\=w'. В каче-
качестве L,+i выберем бесконечную точку на луче
vtei+iA.
B.2) Li лежит слева от луча Viei+iA (рис. 7.31). В этом случае
Ki+\'-:=Ki. Fi+i определяется так же, как в случае A.2).
Если Ki ограничен, то Li+\ определяется так же, как в
случае A.1); иначе Lt+\ := Li.
Корректность данного алгоритма доказывается в следующей
лемме, где через Я,- обозначена полуплоскость, лежащая слева
от прямой Ле,-Л.
Лемма 7.1. Многоугольник Кц-\ является пересечением полу-
полуплоскостей Но, #i, • •., Я,+1 при / = 0, 1, N — 2.
7.2. Плоские приложения
371
Доказательство. По индукции. Заметим, что Ki по опреде-
определению есть пересечение Но и Н\ (начальный шаг данного алго-
алгоритма). Предположим индуктивно, что Ki = Н0[)Н^[) ... [\Hi.
Поскольку во всех случаях, рассмотренных для общего шага,
конструктивно строилось пересечение Ki и Я,+1, то доказатель-
доказательство завершено.
Хотя лемма 7.1 гарантирует, что изложенный алгоритм кор-
корректно строит К(Р), необходимо проделать небольшую, но
важную модификацию общего шага для повышения его эффек-
эффективности. Фактически существуют случаи (рис. 7.32) много-
многоугольников с пустым ядром, для которых можно затратить
VN/3*t
Рис. 7.32. Случай, когда немоднфнцнрованнын алгоритм затрачивает O(N2)
времени. #-сторонннй многоугольник Кк/2 заштрихован. Затем алгоритм де-
делает вокруг Kn/2 JV/12 оборотов, прежде чем достигает вершины Vjv/s+i>
в которой выясняется, что К(Р)= 0.
O(N2) времени на всю работу алгоритма. Этого можно избе-
избежать путем проведения дополнительной проверки для опреде-
определения ситуации, показанной на рио. 7.32. Здесь для краткости
опущены детали этой проверки, а читатель отсылается к работе
[Lee, Preparata A978)], которая содержит полное доказатель-
доказательство. Достаточно сказать, что после проведения обсуждаемой
модификации алгоритм гарантированно остановится после того,
как он обойдет границу Р, совершив поворот на угол Зл вокруг
любой точки частичного ядра Ki-
Теперь оценим эффективность этого алгоритма. Удобно про-
проанализировать порознь два основных типа действий, производи-
производимых алгоритмом построения ядра. Первое связано с корректи-
корректировкой ядра путем пересечения Ki с лучом Ae,+iA для получе-
получения Ki+i; второе связано с корректировкой Ft и L,- и состоит
372 Гл. 7. Пересечения
в обходах Ki против часовой стрелки (или прямых обходах)
для получения новых опорных вершин (однако заметим, что в
ряде случаев, таких как A.1) и B.1), корректировка Ki непо-
непосредственно приводит к корректировке той или иной опорной
вершины).
Начнем с рассмотрения корректировок пересечений. В слу-
случае A.1) (когда алгоритм не завершается) обходим Ki, начи-
начиная с Fi, как по часовой стрелке, так и против нее (при этом
обходе ищется также Fi+\). Обозначим через v, общее число
ребер, пройденных перед обнаружением двух точек пересечения
w' и w". При этом фактически v,- — 2 ребер удаляются из Ki (те,
которые заключены между ws и wt-\ на рис. 7.28), а поскольку
все удаленные ребра коллинеарны. различным ребрам Р, то
? (v,- — 2) s^W. Итак, ? v, — общее число вершин, пройден-
пройденных алгоритмом при обработке случая A.1), — ограничено
сверху числом 3N, т. е. равно O(N). Такое же рассуждение
с небольшими видоизменениями применимо к случаю B.1).
Теперь рассмотрим те корректировки опорных вершин F и
L, которые явно выполняются в процессе построения пересече-
пересечения. Такие корректировки проводятся для L во всех случаях —
A.1), A.2), B.3), B.4), а для f в случаях A.2) и B.4). Заме-
Заметим, что во всех этих случаях опорные вершины продвигаются
вперед по границе Ki. Рассмотрим, например, корректировку L
в случае A.1); другие случаи можно трактовать аналогично.
Рассмотрим множество тех ребер Ki+u которые пройдены ал-
алгоритмом перед определением L/+i; посещение ребра, следую-
следующего непосредственно за Ll+\, будет называться перелетом.
Очевидно, что при обработке случая A.1) общее число переле-
перелетов равно O(N), поскольку совершается не более одного пере-
перелета в расчете на вершину Р. Теперь докажем, что если
игнорировать перелеты, то любое ребро будет пройдено не бо-
более чем дважды. Предположим обратное, что при обработке сх-
сходно из ребер было пройдено в третий раз. Поскольку обход
всегда ведется в положительном направлении, отсюда следует,
что граница Р обернулась вокруг Ki по меньшей мере дважды,
т. е. существует такая точка q e Ki, вокруг которой граница
при обходе повернулась на угол ^4я, а это противоречит ра-
ранее высказанному утверждению.
Поэтому оценка корректировки в случае A.1), так же как
и в случаях A.2), B.3) и B.4), равна O(N). Наконец, все
корректировки F и L заканчиваются нахождением точек w'
и w". Следовательно, время работы всего алгоритма пропор-
пропорционально числу вершин Р и доказана
Теорема 7.13. Ядро N-вершинного многоугольника можно
вычислить за оптимальное время Q(N).
7.3. Трехмерные приложения 373
7.3. Трехмерные приложения
7.3.1. Пересечение выпуклых полиэдров
Задача ставится следующим образом:
Задача С.1.6 (ПЕРЕСЕЧЕНИЕ ВЫПУКЛЫХ ПОЛИЭД-
ПОЛИЭДРОВ). Даны два выпуклых полиэдра — Р с L вершинами и Q
с М вершинами. Требуется построить их пересечение.
Для доказательства выпуклости полиэдра, образованного пе-
пересечением Р П Q, используются те же аргументы, что и в тео-
теореме 7.2. Самый грубый подход к вычислению Р П Q состоит
в проверке пересечения каждой грани Р с каждой гранью Q.
Если такие пересечения существуют, то результат можно про-
просто построить; если же попарных пересечений нет, то P[\Q
пусто или один из полиэдров расположен внутри другого. По-
Поскольку поверхность каждого полиэдра топологически является
планарным графом, то из теоремы Эйлера о планарных графах
следует, что изложенный подход может потребовать O((L-\-
+ МJ) времени').
Коль скоро этот подход отвергается как негодный, другой
попыткой может стать адаптация к случаю трех измерений тех
двух методов построения пересечения пары выпуклых много-
многоугольников, которые были приведены в разд. 7.2.1. Метод Шей-
моса — Хоуи [Shamos, Ноеу A976)] (разбиение плоскости и вы-
вычисление пересечения Р и Q в каждой области этого разбиения)
можно было бы обобщить, разрезая пространство семейством
параллельных плоскостей, каждая из которых проходит через
вершины Р U Q. Однако в каждом из получающихся при этом
слоев пространства (или «полосах», как их часто называют)
соответствующая порция каждого полиэдра не является про-
простым геометрическим объектом, как было в плоском случае.
В действительности получается некий «блин», ограниченный
с двух сторон плоскими многоугольниками, в каждом из кото-
которых может быть О(|число граней|) ребер. Поэтому этот под-
подход привел бы также к 0((L + МJ)-алгоритму. Что же ка-
касается метода [O'Rourke, Chien, Olson, Naddor A982)], то обоб-
обобщить его кажется невозможно.
Абсолютно иной подход, который, конечно, можно успешно
приспособить и к случаю двух измерений, был предложен Мал-
лером и Препаратой [Muller, Preparata A978)] и обсуждается
ниже. Альтернативный и очень привлекательный подход [Hertel,
Melhorn, Mantyla, Nievergelt A985)], основанный на простран-
') Из теоремы Эйлера следует лишь, что число граней F не превосходит
0(N), где N — число вершин графа. В самом деле, по формуле A.2) F^
^ 2N — 4. Отсюда следует, что более точная оценка времени грубого ал-
алгоритма равна O(L-M). — Прим. перев.
374 Гл. 7. Пересечения
ствеином заметании, был предложен совсем недавно, и он бу-
будет кратко рассмотрен в разд. 7.4.
Центральная идея метода Маллера — Препараты состоит
в том, что если одна из точек пересечения — р известна, то пе-
пересечение можно построить с использованием известной тех-
техники двойственности. Действительно, если точка р из Р П Q
существует, то простым переносом можно совместить с ней
начало координат. Поэтому можно предположить, что начало
пространственной системы координат лежит внутри как Р, так
и Q. Обозначая через х\, х% и х3 координаты в этом простран-
пространстве, свяжем с каждой гранью / из Р или Q некое полупро-
полупространство:
л, (/)*, + М/)*2 + Лз(/)*з <<*(/)• GЛ2)
Поскольку любая точка из Р П Q удовлетворяет всем неравен-
неравенствам G.12) для каждой грани каждого полиэдра, а начало
координат @,0, 0) является точкой из РП Q, то все неравен-
неравенства можно нормировать так, что d(f)=l. (Напомним, что по
предположению начало координат лежит внутри как Р,
так и Q.)
Если теперь интерпретировать тройку (n\(f), n2(f), n3(f))
как точку, то получится эффективно определенное инволютив-
ное преобразование между плоскостями граней (т. е. плоско-
плоскостями, которые несут грани) и точками. Это преобразование
является обычным преобразованием двойственности (полярите-
(поляритетом) относительно единичной сферы с центром в начале коор-
координат, которое обсуждалось в разд. 1.3.3. При таком преобра-
преобразовании точки на расстоянии / от начала координат отобра-
отображаются на плоскости на расстоянии 1/7 от этого начала и на-
наоборот.
Введем обозначение б( ) для этого преобразования, т. е.
б(р) обозначает плоскость, двойственную к точке р, а 8 (я) —
точку, двойственную к плоскости я.
Двойственное преобразование выпуклого многоугольника
имеет смысл только тогда, когда он содержит внутри себя на-
начало координат. Действительно, в этом случае имеется следую-
следующее важное свойство:
Лемма 7.2. 'Пусть Р — выпуклый многоугольник, содержа-
содержащий начало координат, a S — множество точек, двойственных
к плоскостям, несущим грани Р. Тогда любая точка р, лежа-
лежащая внутри Р, отображается в такую плоскость 8(р), которая
не пересекается с полиэдром conv(S).
Доказательство. Пусть неравенство щх\ + ЬгХ2 + С{Х3^.\
определяет полупространство, ограниченное гранью /, из Р, при
i= 1, .., |5|. (Напомним, что это полупространство содержит
7.3. Трехмерные приложения 375
начало координат.) Теперь рассмотрим любую точку р =
= (хи х2, х3), лежащую внутри Р. Имеем
CLiXx + &i*2 + CtX3 < 1 > * = 1. 2. • ¦ ¦ . \S\-
Эти неравенства можно интерпретировать следующим образом.
Плоскость 6(р), двойственная к р, имеет уравнение xtxi +
-{-х2х2-{-Х3Х3 = 1; если взять точку 6 (я,), двойственную к пло-
плоскости яг, несущей грань f«, то данные неравенства означают,
что все точки 6(я«) при i— 1, 2, ..., \S\ лежат по одну сто-
сторону от плоскости б(р) и не лежат на ней, т. е. б(р) не имеет
пересечений с conv(S). Что и требовалось доказать.
Полученный результат приводит к следующему утверж-
утверждению:
Теорема 7.14. Если Р — выпуклый полиэдр, содержащий на-
начало координат, то таким же является и двойственный к нему
полиэдр Р<6>.
Доказательство. Пусть я*— плоскость, несущая грань /, из
Р. Определим точечное множество SA{5(jif): i=l, ••-, |5|}
и рассмотрим его выпуклую оболочку CH(S). Докажем, что
каждая точка S является вершиной СН E). Действительно,
если б (я,) лежит внутри conv(S), то я, не имеет пересечений
с Р по лемме 7.2, а это противоречит тому, что я, несет грань
/,. Поэтому CH(S) — это двойственный к Р полиэдр Р(б). Что
и требовалось доказать.
Приведенное доказательство демонстрирует также тот факт,
что если Р содержит начало координат, то любая внешняя к Р
плоскость отображается в точку внутри РF> и наоборот. Хотя
эти соображения приложимы ко всем полиэдрам, удовлетво-
удовлетворяющим предположениям теоремы 7.14, далее будем считать,
что начало координат лежит строго внутри Р (и, следователь-
следовательно, РF>). Читатель может проверить, что отсюда следует огра-
ограниченность как Р, так и РF'.
Пусть V$ и V^ -обозначают множество вершин соответ-
соответственно РF> и QF'. Если вспомнить, что каждый элемент
V(p' U V(Q6' является двойственным к какой-нибудь из плоскостей,
несущих грань одного из исходных полиэдров, и заметить, что
PRQ — это множество таких точек, которые одновременно ле-
лежат во всех полупространствах, определенных этими гранями
и содержащими начало координат, то можно утверждать, что
полиэдр Р П Q является двойственным к выпуклой оболочке
V^UV^. Значит, для вычисления PRQ можно использовать
алгоритм Препараты — Хонга (см. разд. 3.4.3), который опре-
определяет conv (Vf U y(Q6)) за время О (N log N) (где N Д L + М);
376 Гл. 7. Пересечения
если затем взять фигуру, двойственную к этому результату, то
получится искомый полиэдр. Двумерной иллюстрацией этого
метода служит рис. 7.33.
Здесь необходимо сделать замечание. Изложенный метод
включает обработку множества троек {(tii(f), n2(f),n3(f): f —
грань Р или Q}. Эти тройки интуитивно интерпретировались как
точки, но с тем же успехом их можно было бы считать плоско-
плоскостями. Единственной причиной предпочтения первой интерпре-
интерпретации является то, что получаемый при этом метод полностью
'2
Рис. 7.33. Иллюстрация метода построения пересечения двух выпуклых мно-
многоугольников с использованием двойственного подхода. Два исходных мно-
многоугольника изображены тонкими сплошными линиями, а двойственные им
фигуры (также выпуклые многоугольники) — штриховыми линиями. Опорные
прямые выпуклой оболочки объединения последних фигур показаны жирными
линиями, каждая из которых является двойственной к одной из вершин ис-
искомого пересечения (двойственные элементы помечены одинаково.
опирается на интуицию, а при второй интерпретации это менее
заметно. Следовательно, двойственность поляритета не изме-
изменяет природы геометрических объектов (в отличие от преобра-
преобразования инверсии— см. разд. 6.3.1.1), но существенно помогает
нашей интуиции. Итак, если одна точка внутри PflQ известна,
то пересечение можно построить стандартными алгоритмами.
Но как найти такую точку, если P[\Q, вообще говоря, непусто?
Поступим следующим образом.
Пусть дан выпуклый полиэдр Р, рассмотрим множество его
опорных плоскостей, параллельных оси х3, которые для крат-
краткости назовем вертикальными. Пересечением Р с его вертикаль-
вертикальными опорными плоскостями будет, вообще говоря, кольцеоб-
кольцеобразная область R(P) на поверхности Р, которая в невырожден-
невырожденных случаях сводится к кольцу его ребер. Проекцией R(P) на
плоскость (л'1, х2) является выпуклый многоугольник Р*
(рис. 7.34), совпадающий с выпуклой оболочкой проекций то-
точек из Р на эту плоскость,
7.3. Трехмерные приложения
377
Область R(P) легко вычисляется. Для любой грани /, из Р
нормалью к ft является вектор (пи (/,-), ri2(ft), tuifi)). Он пер-
перпендикулярен /,, и направлен внутрь Р. Пусть ft и // — грани,
смежные ребру е из Р. Тогда e^R(P) в том и только том
случае, когда
0. G.13)
Следовательно, начнем с обхода ребер Р до тех пор, пока не
обнаружим такое ребро е, которое принадлежит R(P), прове-
проверяя условие G.13). Затем выберем одну из двух вершин е, на-
назвав ее v. Среди ребер, инцидентных v, есть одно или два новых
Рис. 7.34. Выпуклый полиэдр Р, кольцеобразная область R(P) и много-
многоугольная проекция Р*.
ребра, отличных от е, которые принадлежат R(P) и могут быть
без труда найдены. (Предполагается, конечно, что поверхность
Р — планарный граф — представлена структурой данных типа
РСДС, которая была описана в разд. 1.2.3.2.) Поэтому можно
продолжить построение R(P), которое будет завершено при по-
повторной встрече исходного ребра е. После вычисления R(P)
можно тривиально получить Р*. Итак, получены два первых
шага алгоритма:
Шаг 1. Построить Р* и Q*. (Это займет O(N) времени.)
Шаг 2. Построить пересечение многоугольников Р* и Q* (ис-
(используя любой из линейных по времени алгоритмов, описанных
в разд. 7.1). Если P*(]Q*=0, то останов, ибо P[\Q при этом
также пуст. (Этот шаг займет O(N) времени.)
Если P*nQ*=/=0, то обозначим через 3) замкнутую (вы-
(выпуклую) область, ограниченную P*[}Q*. Через каждую точку
р = (х\, х2) из 2) проведем вертикаль. Ее пересечением с Р
является отрезок еР(р); аналогично определяется и eQ(p) (как
378
Гл. 7. Пересечения
вр(р), так и Bq{p) могут выродиться каждый в единственную
точку). Наша цель состоит в том, чтобы решить вопрос о су-
существовании некой точки р из 3), для которой ер(р) и ер(р)
перекрываются (рис. 7.35). Полагая без потери общности, что
существует такая точка ней, для которой низ отрезка еР(и)
лежит выше верха отрезка eQ(u), определим ближние стороны Р
и Q как множества точек соответственно низ[ея(ы)] и
Рис. 7.35. Поперечное сечение Р и Q плоскостью Х\ =Х\. Иллюстрация
к определению е?( ), eQ( ) и d( ).
верх[eQ(и)] и функцию d(u), именуемую вертикальным рас-
расстоянием, следующим образом:
d (и) := низ [еР (и)] — верх [eQ (и)]. G.14)
Итак, следует решить вопрос о существовании такой точки
ке®, чтобы d(u)^ 0. Ответ на этот вопрос будет, разумеется,
получен, если определить такую точку п, в которой достигает
минимума функция d:
d (п) — min d (и).
Очевидно, на практике поиск точки и будет фактически прекра-
прекращен только при условии, что с?(й)>>0, причем в этом случае
два наших полиэдра не пересекаются. В противном случае этот
поиск можно прекратить, как только будет обнаружена некая
точка ое®, для которой d(v)^ 0.
Метод решения данной задачи, который сейчас будет опи-
описан, принадлежит Дайеру [Dyer A980)], а технически он зна-
значительно проще первоначального метода [Muller, Preparata
7.3. Трехмерные приложения
379
A978)] (хотя он и не демонстрирует сколько-нибудь значитель-
значительного улучшения эффективности).
Прежде всего заметим, что функция d(u) выпукла на Ф.
Действительно, пусть Sp — такой участок поверхности Р, на
котором х3 = низ[ер(«)] для ие2); аналогично определяется
SQ, где хг = верх[ео(«)]. Другими словами, SP и Sq— проти-
противолежащие стороны двух полиэдров. Если теперь спроецировать
SP на плоскость х% = 0, то получится планарный граф GP, со-
стоящий из выпуклых ячеек; аналогично определяется Gq.
-X,
Рис. 7.36. Иллюстрация к определениям величин Х\, Х2(х\) и у(х{).
Представим себе наложение GP и Gq. Результирующий
граф G* является пересечением двух плоских карт, а его вер-
вершинами являются исходные вершины Gp и Gq (условно именуе-
именуемые настоящими вершинами) и точки пересечения ребер GP
с ребрами Gq (условно именуемые псевдовершинами). Поэтому
область ?Е> разбивается графом G* на множество выпуклых
подобластей. Заметим, что внутри любой подобласти из GP
функция ннз[еР(и)] линейна по координатам (хих2) точки и;
точно так же, как и функция верх[ео(«)] внутри любого ре-
региона Gq. Поэтому внутри любого региона, образованного гра-
графом G* в S), функция d(u) линейна по х\(и) и х2(и). Более
того, функция ннз[ер(и)] выпукла вниз, а верх[ер(«)] выпукла
вверх; отсюда следует, что d(u) является функцией выпуклой
вниз. Значит, минимум d(u) находится в одной из вершин G*.
Заметим, что число вершин графа G* может достигать О (Л'2):
380
Гл. 7. Пересечения
фактически можно без труда построить два таких планарных
графа, каждый из которых имеет по v вершин, чтобы при их
наложении получалось (v—IJ точек пересечения их ребер.
Обратимся к рис. 7.36; пусть Х\ будет интервалом
[т\пхх{и),
Хх
i()]
its 3)
Пусть Х2{х\) обозначает интервал
[min х2 (и), max х2 (и)] для хх
(т. е. отрезок, получающийся в сечении 3) прямой х\ = х\). По-
Поскольку d(xux2)= d(u) выпукла в 2), то по хорошо известному
результату из выпуклого анализа [Rockafellar A970)] функция
d(xu x2) при Xi^Xi
х2 е X, (х,)
будет выпуклой в Х\. Поскольку
min \
i) = min d (и),
то задача свелась к оценке минимума у(х\) на интервале Х\.
Прежде всего отметим, что вычисление v(-^i) ПРИ заданном
Х\ выполнимо за время O(N). Рассматривая только один из
полиэдров, скажем Р, определим прямым методом за время
Проход па
поверхности Р
Рис. 7.37. Вычисление функции низ[еР( )] на многоугольнике, образованном
в сечении Р плоскостью х\ = х\, производится простым проходом по РСДС.
O(L) значение функции низ[еР(п)] для точки п в плоскости
х3 = 0 на пересечении прямой х\ = х\ с границей Р*. Затем
простым проходом по поверхности Р с помощью РСДС можно
определить также за время O(L) значения функции низ[ер( )],
соответствующие пересечениям каждого ребра из Р с пло-
плоскостью х\ = х\ (рис. 7.37). Таким же способом можно обра-
обработать Q за время О(М). Функции низ[ея(у)] и Bepx[<?<j(i>) ]
для X\(v) = xi показаны на рис. 7.38. Значит, функция d(v)
7.3. Трехмерные приложения
381
при ое2) и x\(v) = x\ вычисляется за время O(L-{-M) =
= 0(N), при этом также вычисляется ее минимум у(х\).
Следующим вопросом является вычисление экстремума уни-
унимодальной функции1) (заметим, что выпуклая функция уни-
унимодальна). Хорошо известен и прост тот факт, что экстремум
унимодальной функции, определенной на N дискретных точках
действительной оси, можно определить методом модифицирован-
модифицированного двоичного поиска, проведя O(\ogN) вычислений функции
и O(logN) сравнений.
Верх [eQ( )]
Рис. 7.38. Иллюстрация функций d(v) и
плоскостью х{ = х\.
Показано сечение Р и Q
Теперь можно сформулировать третий шаг поиска, предпо-
предположив без потери общности, что L ^ М:
Шаг 3. Отсортировать множество {х\\ х\ = x\(v), где v — вер-
вершина на нижней стороне Р} в порядке возрастания; обозначим
через V упорядоченную последовательность. Поскольку у(х{)
унимодальна на последовательности V, то надо найти един-
единственный отрезок [xj, Xj'], ограниченный точками из V, кото-
который гарантированно содержит минимум у(х\) при х^.Х\.
(Очевидно, что этот поиск прекратится, если будет найдено та-
такое значение х\, при котором y(-?i) = 0.)
Чтобы проанализировать время работы шага 3, заметим
прежде всего, что O(LlogL) времени уйдет на начальную сор-
сортировку абсцисс. Затем для заданного хх вычисление у(х:)
'J Функция f(x) называется унимодальной вниз на интервале [хьХг],
если существует такое хо^[хиХ2], что f(x) не возрастает на [хи х0] и не
убывает на [хо, хг\. Аналогично определяется и унимодальная вверх функция.
382 Гл. 7. Пересечения
можно выполнить за время O(N) методом, который был описан
ранее. Наконец, благодаря унимодальности у на Xi методом
модифицированного двоичного поиска получаем отрезок
[х[, х"], вычислив y О (logL) раз. Итак, общее время работы
составляет ровно O(L \ogL)-\- O(N logL) = O(N logL).
Заметим теперь, что по построению отрезок [х[, х['] не со-
содержит внутри себя абсцисс вершин нижней стороны Р. По-
Поэтому полоса x'^Xj^.^' не содержит внутри себя ни одной
вершины Gp, а, значит, множество & из ребер Gp, пересекаю-
пересекающих эту полоосу, можно упорядочить (рис. 7.39). Рассмотрим
Множество
из. ребер Gp
Рис. 7.39. Часть проекции нижней стороны Р на плоскость хз = 0 в пределах
полосы ?*j, xl ]. Внутри этой полосы нет вершин графа Gp.
такое ребро е из Gq, которое имеет непустое пересечение с по-
полосой XjS^XjS^x". Функция с1(хьх2) вдоль этого ребра вы-
выпукла вниз, а ее минимум совпадает с одной из вершин графа
G* (эта вершина является либо одним из концов е, либо точкой
пересечения е с одним из ребер <g). Поскольку последние ребра
упорядочены, то этот минимум можно определить весьма эф-
эффективно. Действительно, предположим, что элементы g орга-
организованы в дереве двоичного поиска элементарными операция-
операциями которого являются определение точки пересечения v пары
ребер и вычисление функции d(v) (эти операции реализуются
за время 0A)). Кроме того, для обработки одного ребра из
GQ требуется О (logL) времени, что следует из предшествовав-
предшествовавшего обсуждения свойств унимодальных функций. Итак, полу-
получен последний шаг процедуры поиска:
Шаг 4. Определить минимум функции d(xux2) на каждом реб-
ребре е из GQ, которое пересекает полосу x'^x^x'f. Наимень-
Наименьший из этих минимумов является глобальным минимумом d
на 3). (Вновь заметим, что поиск прекращается, если обнару-
обнаружено такое ребро, на котором минимум d неположителен.)
Поскольку число ребер, обработанных на шаге 4, не превос-
превосходит числа ребер в Q (равного 0(М)), а обработка одного
ребра требует О (logL) времени, то шаг 4 завершается за время
7.3. Трехмерные приложения 383
O(MlogL). Отмечая, что, поскольку и L < N', и Af < N, по-
постольку потребуется O(N\ogN) времени на обнаружение или
такой точки и, для которой к(и)^0, а следовательно, она
принадлежит Pf[Q, или факта пустоты множества Pf[Q. Объ-
Объединяя этот результат с ранее полученным результатом, кото-
который относился к построению Pf\Q при условии, что одна из
его точек известна, получаем следующую теорему:
Теорема 7.15. Пусть даны два выпуклых полиэдра: Р с L
вершинами и Q с М вершинами; обозначим М = L -\- М.Для по-
построения их пересечения P{]Q нужно затратить O(N\ogN)
времени.
К сожалению, единственная нижняя оценка, которую мы
можем предложить для этой задачи, тривиальна — Q(N). По-
Поэтому неизвестно, является ли результат теоремы 7.15 опти-
оптимальным. На сегодняшний день небезосновательно предполо-
предположение, что может существовать метод решения этой задачи,
обладающий линейной оценкой по времени.
7.3.2. Пересечение полупространств
Самым естественным подходом к решению любой
трехмерной задачи является попытка обобщения наиболее изве-
известного метода решения соответствующей двумерной задачи.
В нашем случае двумерным аналогом является задача о пере-
пересечении полуплоскостей, решенная в разд. 7.2.4 методом «раз-
«разделяй и властвуй», на шаге «слияние» которой решалась задача
о пересечении двух выпуклых многоугольников. Соответственно
в случае трех измерений шагом слияния становится пересечение
двух выпуклых полиэдров, которое изучалось в предыдущем
разделе. Однако если пересечение двух выпуклых многоуголь-
многоугольников с L и М вершинами (где L-\-MJ±,N) можно построить
за время Q(N), то пересечение двух выпуклых полиэдров с ана-
аналогичными параметрами строится уже за время О (N log N).
Поэтому обобщение двумерного алгоритма дало бы оценку
O(N\og2N). Противопоставление этого результата нижней
оценке Q(N log Л/), полученной в разд. 7.2.4, заставляет пола-
полагать, что, прежде чем констатировать факт разрыва между
оценками, который мы не можем заполнить, стоило бы попы-
попытаться поискать какой-нибудь другой метод решения.
И действительно, сейчас мы покажем, что существует опти-
оптимальный метод [Preparata, Muller A979); Brown A978)], ко-
который, не относясь к типу «разделяй и властвуй», использует
алгоритмы как пересечения полиэдров, так и разделяющей
плоскости (см. разд. 7.2.5). Как и описанный метод построения
пересечения полиэдров, этот метод основан на активном ис-
использовании двойственного подхода по отношению к единичной
384 Гл. 7. Пересечения
сфере. Необходимо указать, что для упрощения иллюстраций,
а в некоторых случаях и просто для опоры на интуицию (иначе
нам пришлось бы представлять себе четырехмерные объекты!)
все наши примеры будут относиться к двумерным ситуациям.
Однако важно подчеркнуть, что это не повлияет на справедли-
справедливость доказательств.
Общая задача ставится следующим образом:
Задача С.1.7 (ПЕРЕСЕЧЕНИЕ ПОЛУПРОСТРАНСТВ).
Найти множество решений (х, у, z) (допустимых точек) для
множества из N линейных неравенств:
aiX + biy + dz + di^Q при г = 1, 2, .... N, G.15)
где a,-, bi, Ci и di — действительные числа, не равные одновре-
одновременно нулю.
Решение ищется в форме описания выпуклой полиэдральной
поверхности, ограничивающей область допустимых точек. Каче-
Качественно это решение может принимать одну из следующих
форм (с увеличением размерности):
1. Пустое множество (уравнения G.15) несовместны).
2. Точка.
3. Отрезок.
4. Выпуклый плоский многоугольник.
5. Выпуклый полиэдр.
Случаи 2, 3 и 4 вырождены; интересны лишь случаи 1 и 5.
Один простой случай получается, когда для всех i=\, ...
..., N выполняется di ^ 0. Действительно, при этом начало
координат @, 0, 0) удовлетворяет всем ограничениям, т. е. оно
содержится внутри общей области этих полупространств. Тогда,
произведя двойственное преобразование плоскости я,-, заданной
уравнением aix + biy + ca-\- di = 0, в точку (ai/di, bi/di,
d/di) и вычислив за время O(NlogN) выпуклую оболочку по-
полученного множества точек, мы построим выпуклый полиэдр,
двойственным к которому будет искомое пересечение.
Ситуация становится значительно более сложной, когда di
произвольны. Для простоты предположим здесь, что никакие из
di не равны нулю, так что множество индексов {1, ..., N} мож-
можно разбить на такие два подмножества /+ и /_, что i e /+, если
di > 0, и / е /_ если di < 0. Предположим также без потери
общности, что di = ±1 ')•
Чтобы понять этот механизм, удобно рассмотреть нашу за-
задачу в однородных координатах, осуществив преобразование
*=:г; у=т-' z = t-- GЛ6)
*4 #4 *4
!) Задача в общей постановке, допускающей di = 0, изложена в работе
[Preparata, Muller A979)].
7.3. Трехмерные приложения
385
Как было показано в разд. 1.3.2, в котором были введены одно-
однородные координаты, любую точку (х, у, z) из Е3 можно интер-
интерпретировать как прямую (cx,cy,cz, с) из Е4, где ceR. Если
обозначить координаты в Е* через х\, х2, хъ и х4, то в такой
интерпретации обычное пространство Е3 становится гиперпло-
гиперплоскостью Хк = 1 в Ек (см. рис. 7.40, показывающий аналогию
с размерностью, на единицу меньшей). Точно так же если
спроецировать гиперплоскость х4 = 1 на единичную гиперсферу
Единичная сфера в Е
Рис. 7.40. Иллюстрация соответствия между обычными координатами в ?*
(на плоскости х% = 1) и однородными координатами в Е3. Каждая точка
на ЕР- соответствует прямой, проходящей через начало координат в Е3.
S4, центр которой помещен в начало координат, то каждой
точке р из Ег будет соответствовать единственная точка р* на
S4 (при X4>0), получающаяся при пересечении S4 с отрезком,
соединяющим р с началом координат О. Точки на S4 с х4 > 0
и х4 < 0 образуют соответственно положительную и отрица-
отрицательную открытые полусферы; те точки, для которых х4 = 0,
экватор, соответствуют бесконечно удаленной плоскости в Е3.
Преобразование координат G.16) переводит каждое полу-
полупространство atx -\- biy -j- CiZ + di ^ 0 из Е3 в полупространство
atxx + btx2 + CiXb + dtX4 <J 0
в Ek, для которого ограничивающая его гиперплоскость прохо-
проходит через начало координат, а вектор Vi = (at,bi,Ci,di) норма-
нормален к этой гиперплоскости и направлен вне этого полупро-
полупространства. Указанная гиперплоскость пересекает S4 по «боль-
«большой окружности» Ct. Кроме того, ограничение aLx-\-biy-\-
13 Зак. 1075
386
Гл. 7. Пересечения
+ Ciz -f- di ^ О определяет единственную полусферу, ограничен-
ограниченную этой большой окружностью Си Эта полусфера содержит
начало координат Еъ тогда и только тогда, когда d,; = —1.
Рис. 7.41. Пересечением полусфер на S3, которые соответствуют ограничениям
(полуплоскостям на Е2), является связная область D на поверхности S3.
Поэтому для заданного множества из N линейных ограничений
в Ег их общая область соответствует связной области 3) (воз-
(возможно, пустой), лежащей на поверхности S4 (рис. 7.41). Об-
Область ЯЬ разбивается на две (возможно, пустые) связные об-
области ?D+ и 3)-, лежащие на соответственно положительной
{Общая наружность)
JO+ (общая внутренность)
Рис. 7.42. Соотношения между областями D+, D-, а также общими внут-
внутренностью и внешностью (наружностью) для заданных ограничений.
и отрицательной полусферах (рис. 7.42). Теперь предположим,
что реализуется проецирование 3) с центром в начале коорди-
координат, причем 3)+ проецируется на выпуклую область ЗУ±, лежа-
лежащую на гиперплоскости х4=1 (т. е. в обычное пространство
7.3. Трехмерные приложения 387
Е3), а 3)- проецируется на выпуклую область 3>*_, лежащую
на гиперплоскости х4 = —1. Точки на ЗТ+ являются общим
пересечением (или общей внутренностью) полупространств,
определенных ограничениями. С другой стороны, точки на ЗУ_
имеют любопытную интерпретацию. Поскольку *4=—1, то
ЗТ_ является множеством точек [х\,хг,хъ,—1), для которых
для t = l, 2, ..., N.
Если теперь отобразить каждую такую точку, лежащую на ги-
гиперплоскости х4=1, преобразованием симметрии по отноше-
отношению к началу координат в Е* (это преобразование заменяет xi
на —Xi для /= 1, 2, 3), то получится множество таких точек,
для которых щх\ + biX2 + CiX3 + d; ^ 0, / = 1, ..., N, или
atx + bty + ctz + dt>Q, i=l,2,...,N. G.17)
Если сравнить эти неравенства с ограничениями G.15), то ста-
станет очевидно, что они определяют общую внешность заданных
полупространств. Следовательно, на гиперплоскости х4 = 1
объединенное множество точек может состоять из двух отдель-
отдельных неограниченных выпуклых множеств, одно из которых бу-
будет общей внутренностью, а другое — общей внешностью за-
заданных полупространств, как это показано для случая двух
измерений на рис. 7.42. Назовем такую ситуацию гиперболиче-
гиперболическим случаем. Если все точки решения проецируются на поло-
положительную (или отрицательную ) открытую полусферу, то со-
соответствующее множество из Е3 будет ограниченным, и такая
ситуация называется эллиптическим случаем. Параболический
случай имеет место тогда, когда существует единственное, но
неограниченное множество в Е3, т. е. когда на S4 имеются как
экваториальные, так и положительные (или отрицательные)
точки. Во всех трех случаях множества точек образуют то, что
мы будем называть обобщенным выпуклым полиэдром. Толь-
Только эллиптический случай соответствует обычному ограниченному
полиэдру.
Нашей целью является совместное вычисление и общей
внутренности, и общей внешности. Заметим, что область 3)
всегда содержится в одной из полусфер на S4, ограниченной
гиперплоскостью я, заданной уравнением р\Х\ + р2х2 + Рз*з +
+ р4х4 = 0. Луч (ррь рр2, ррз, рр4) при р ^ 0, нормальный к я,
протыкает S4 в точке и. Если приложить к Е4 преобразование
вращения R, которое переведет начало координат Е3 в точку и,
то вся область 2) окажется в положительной полусфере. Огра-
Ограничимся далее только эллиптическим случаем, который ре-
решается ранее описанным методом. Если бы был известен по-
13*
388 Гл. 7. Пересечения
лиэдр, образованный пересечением полупространств, то, при-
применив к нему обратное преобразование вращения R-1, мы пе-
перевели бы его опять в искомые общую внутренность и общую
внешность. Поэтому цель состоит в поиске вектора р = (рьР2,
Рз,р4).
Поскольку Ю содержится в полупространстве р\Хх + Р2*2 +
+ Рз#з + Р4#4 ^ 0, то, полагая V; = (а«, hi, a, di), получаем
p-vJ"<0, *— 1, 2, .... N
(где «•» обозначает, как обычно, скалярное произведение). Это
можно переписать так:
b,p2 + с,р3 + dtpit i = 1, 2, . .., N,
т. е.
( atpx + Ь{р2 + c,p3 + p4 < 0 при di = + l,
\ —aipl — biP2 — CiP3 + p4 > 0 при di = — 1.
Теперь дадим интерпретацию этим условиям. Пусть р\Х -\- р2у -\-
+ Рз2 + Pi = 0 обозначает плоскость в Ег. В зависимости от
того, будет d,- = +l или di = —1, точка (а,-, 6;, ci) или точка
(—а1у—6»,—ci) будет двойственной к плоскости aiX-\-biy-\-
+ c;z + di• = 0 при обычном поляритете. Поэтому плоскость
а^ + 6,y + c,z 4-^ = 0 разделяет двойственные образы тех
плоскостей, чьи индексы принадлежат соответственно /+ и /_.
Это немедленно приводит к методу поиска р:
1. Образовать двойственные множества S+ из {я,: /е/+}
и S~ из {nr. j'e/_}. Построить выпуклые оболочки S+ и S~.
[За время O(N\ogN).]
2. Если пересечение этих выпуклых оболочек непусто (т. е.
обладает внутренностью), то множество неравенств несовме-
несовместно. Иначе, построить разделяющую плоскость р\Х -\- р2у -\-
+ р32 + р4 = 0. [За время O(N), используя метод, упомяну-
упомянутый в замечании 2 в разд. 7.2.5.]
Теперь можно построить соответствующее преобразование
вращения Е* и применить его за время O(N), после чего за-
завершить решение задачи, затратив дополнительно O(N\ogN)
времени, с помощью методов, описанных ранее.
Теорема 7.16. Общую внутренность и общую внешность мно-
множества из N полупространств в Е3 можно построить за время
9(TVlogiV) (г. е. за оптимальное время).
Оптимальность следует из того факта, что нижняя оценка
Q(yVlogyV), полученная для пересечения N полуплоскостей,
тривиально применима к рассматриваемой задаче.
7.4. Замечания и комментарии 389
7.4. Замечания и комментарии
Методы и результаты, продемонстрированные в пре-
предыдущих разделах, не покрывают полного каталога богатой
литературы по задачам о геометрических пересечениях. В дан-
данном разделе делается попытка по крайней мере частично устра-
устранить этот пробел посредством краткого упоминания многих до-
дополнительных важных результатов.
Подход, предложенный Чазелле и Добкином [Chazelle,
Dobkin A980)] для решения задач о пересечениях, аналогичен
обработке массовых запросов. В частности, вместо того, чтобы
рассматривать пару геометрических объектов и вычислять их
пересечение, они предложили рассматривать большие множе-
множества таких объектов и предобрабатывать их так, чтобы потом
их попарные пересечения можно было проверять очень быстро
(задача типа С.З). Они занимались объектами типа точек, пря-
прямых, плоскостей, многоугольников и полиэдров; для любых пар
объектов такого типа (т. е. пар (многоугольник, многоугольник)
или (плоскость, полиэдр) и т. п.) они предложили алгоритмы
проверки факта их пересечения, принадлежащие классу «поли-
«полилог»1). Например, случай пары (точка, полиэдр) был решен
ими методом локализации точки на плоскости (разд. 2.2) пу-
путем стереографического проецирования этих полиэдра и точки
на подходящую плоскость; в свою очередь решение этой за-
задачи приводит путем прямого применения дихотомии
(разд. 1.3.3) к решению задачи типа (плоскость, полиэдр).
Еще один класс задач о пересечениях, к которому, в част-
частности, относится задача о пересечении отрезков, представлен-
представленная в разд. 7.2.3, это отчет обо всех К пересекающихся парах
на множестве из N объектов. Цель состоит в разработке алго-
алгоритмов, время работы которых равнялось бы O(f(N)-\- К),
т. е. оно содержит фиксированную верхнюю оценку O(f(N)),
а кроме того, пропорционально размеру искомого подмноже-
подмножества. В алгоритме из разд. 7.2.3 эта цель не достигается, по-
поскольку оценка времени его работы равна О ((/( + N)logN),
а соответствующая нижняя оценка для данной задачи равна
п(К-\- NlogN). Это несовпадение оценок, привело к большой
исследовательской работе. Поскольку была широко распро-
распространена уверенность в том, что несовпадение оценок объяс-
объясняется скорее неэффективностью предложенного алгоритма,
чем неадекватностью нижней оценки, то велся поиск более эф-
эффективных методов решения для частных случаев задачи,
когда на отрезки налагаются некоторые ограничения. Первый
') Это — сокращение словосочетания «полиномиально-логарифмический»
и относится к оценкам вида O(logcn). — Прим. перев.
390 Гл. 7. Пересечения
шаг в этом направлении был сделан Нивергельтом и Препара-
той [Nievergelt, Preparata A982)], которые рассмотрели пере-
пересечение двух плоских карт (случай, когда отрезками являются
ребра двух планарных графов, уложенных на плоскости); они
показали, что если грани каждого из графов выпуклы, то до-
достижима оценка по времени О (N log N + К). Фактически тре-
требование выпуклости не обязательно, как следует из более позд-
позднего результата, полученного Мэйрсоном и Столфи [Mairson,
Stolfi A983)]: пересечение двух наборов Л и В, каждый из
которых состоит из непересекающихся отрезков, и таких, что
|Л| + |В| = Af, можно определить за время О(NlogN + К),
где К — число пересечений. Еще один пример задач подобного
рода возникает, когда каждый набор (А и В) содержит парал-
параллельные отрезки; очень простой метод решения этой задачи,
обладающий такой же временной оценкой, будет изложен в
гл. 8. Все эти методы относятся к типу плоского заметания;
для них в общем случае операция динамической вставки точки
пересечения в список точек событий требует О (К log К) вре-
времени. Полностью отказавшись от использования методов типа
заметающей прямой, Чазелле [Chazelle A983a)] предложил
алгоритм для пересечения отрезков, основанный на иерархиче-
иерархическом подходе и требующий О (К-\-N log2 N/\og log N) времени.
Затем Чазелле и Эдельсбруннер [Chazelle, Edelsbrunner
A988)] предложили алгоритм решения данной задачи с опти-
оптимальной оценкой по времени равной О (N log N -\- К). Этот ал-
алгоритм является оригинальной комбинацией ряда известных
методов, таких как плоское заметание, деревья отрезков, топо-
топологическое заметание, амортизация затрат и т. д. Хотя основ-
основным методом здесь по-прежнему осталось плоское заметание,
однако, алгоритм поддерживает не просто статус заметающей
прямой, а скорее всю сцену справа от нее, образованную пере-
пересекающими ее отрезками. В отличие от близкого к оптималь-
оптимальности алгоритма Бентли — Оттмана, использующего О (N) па-
памяти, в обсуждаемом алгоритме используется O(N-\-K) па-
памяти. Следовательно, вопрос о возможности одновременного
достижения оптимальных оценок по времени памяти остается
открытым.
Если вместо перечисления пересечений N отрезков тре-
требуется просто получить их число (подсчет числа пересечений
отрезков), то задача существенно изменяется. Существует оче-
очевидная преобразуемость этих двух задач, поскольку любой
алгоритм перечисления пересечений можно использовать для
решения соответствующей задачи подсчета; однако эффектив-
эффективность может ухудшиться, так как число пересечений К может
достигать величины Q(N2). Лучшим результатом, не зависящим
от К среди известных на сей день, является алгоритм, принад-
7.4. Замечания и комментарии 391
лежащий Чазелле [Chazelle A983a)], который требует
q (#1,695 iOg щ времени и использует линейную память.
В разд. 7.2.3.2 было показано, что для определения факта
отсутствия пересечений среди N отрезков на плоскости доста-
достаточно Q{N\ogN) операций. Что произойдет, если потребовать,
чтобы эти N отрезков были ребрами какого-нибудь многоуголь-
многоугольника? В этом случае задача определения пересечения сводится
к проверке простоты многоугольника, и было бы интересно
исследовать вопрос о том, приводит ли это дополнительное
условие к упрощениям алгоритма. По сей день для задачи
о ПРОВЕРКЕ ПРОСТОТЫ МНОГОУГОЛЬНИКА не удается
дать оценку сложности. Недавно появилось сообщение о про-
прогрессе в решении близкой задачи о ПЕРЕСЕЧЕНИИ РЕБЕР
МНОГОУГОЛЬНИКА; для заданного Af-угольника Р требует-
требуется перечислить все его ребра, которые пересекаются (с ка-
какими-нибудь другими ребрами). Для этой задачи необходимо
Q(N\ogN) операций, как показал Яромчик, используя общую
теорию Бен-Ора [Jaromczyk A984)]. К сожалению, эта оценка
не повлияла на оценку сложности решения задачи о ПРО-
ПРОВЕРКЕ ПРОСТОТЫ МНОГОУГОЛЬНИКА, поскольку преоб-
преобразование последней к задаче о ПЕРЕСЕЧЕНИИ РЕБЕР
МНОГОУГОЛЬНИКА направлено в обратную сторону. По-
Поэтому вопрос об оценке сложности задачи о ПРОВЕРКЕ ПРО-
ПРОСТОТЫ МНОГОУГОЛЬНИКА остается замечательной нере-
нерешенной проблемой вычислительной геометрии.
Оптимальный по времени алгоритм построения пересечения
двух выпуклых многоугольников, изложенный в разд. 7.2.1,
является плоским заметанием. Его непосредственное обобще-
обобщение на случай трех измерений оказывается неоптимальным по
причинам, приведенным в начале разд. 7.3.1. Однако коррект-
корректное обобщение было недавно получено Гертелем и др. [Hertel,
Melhorn, Mantyla, Nievergelt A985)]; их метод не только яв-
является очень важным примером алгоритма пространственного
заметания, но и представляет собой альтернативу технике по-
построения пересечения многоугольников, изложенной в
разд. 7.3.1, и может служить эталоном элегантности (а также
высокой производительности). Чтобы дать представление об
этом методе, возьмем его двумерный аналог в форме плоского
заметания, при котором вычисляются точки, являющиеся пе-
пересечениями границ двух многоугольников Р{ и Р2; затем обхо-
обходом попеременно по границам Pi и Р2 между точками их пе-
пересечения строим границу Р{ (] Р2. Паре ребер многоугольника
Pi (i = 1, 2), пересеченных заметающей прямой в Е2, соответ-
соответствует кольцо из многоугольников (именуемое короной), пере-
пересеченных заметающей плоскостью в Е3, а роль точек пересече-
пересечения в Е2 играют многоугольные кольца в Е3. Авторы метода
392 Гл. 7. Пересечения
показали, что пространственное заметание эффективно коррек-
корректирует эти короны и определяет по меньшей мере одну из
вершин в каждом многоугольном кольце, начиная с которой
можно легко построить всю границу. Доказано, что этот алго-
алгоритм требует O(N\ogN) времени. Соответствующая задача
проверки, безусловно, не сложнее задачи построения, а, ве-
вероятно, даже проще. И действительно, Добкин и Киркпатрик
[Dobkin, Kirkpatrick A984)] изобрели алгоритм для решения
этой задачи с оценкой Q(N}, а также отметили, что Дайер не-
независимо получил аналогичный результат.
Задача построения ядра простого многоугольника
(разд. 7.2.6) представляет интересный большой класс, к кото-
которому относят задачи видимости (ядро фактически — это мно-
множество таких точек, из которых видимы все вершины). Подоб-
Подобные задачи возникают во многих приложениях в машинной гра-
графике, анализе сцен, робототехнике и т. д. Основная идея за-
заключается в том, что две точки р\ и р2 (обоюдно) видимы, если
отрезок pip2 не пересекает никакой «запретной» кривой. Види-
Видимость обычно определяется по отношению к некой точке р.
В плоском случае, если запретными кривыми являются от-
отрезки, то локус точек, видимых из р и называемых многоуголь-
многоугольником видимости для р, представляет собой звездный много-
многоугольник (возможно, неограниченный). Многоугольник види-
видимости ограничен, если р лежит внутри простого многоугольника
Р, а граница Р является запретной кривой. Для случая, когда
множество отрезков на плоскости представляет собой един-
единственный простой многоугольник, известны по меньшей мере
два алгоритма с линейной оценкой по времени [ElGindy, Avis
A981); Lee A983b)]. Используемый при этом подход близок
к идее сканирования по Грэхему: здесь сначала определяется
одна точка, видимая из р, а затем (используя свойство просто-
простоты) вершины Р сканируются, а невидимые из р участки Р уда-
удаляются. В том случае, когда множество отрезков представляет
собой m несвязанных выпуклых многоугольников, обладающих
в сумме N ребрами, а К—число ребер в искомом ядре, данную
задачу можно решить за время О (mlog N + К) [Lee, Chen
A985)]. Эдельсбруннер и др. [Edelsbrunner, Overmars, Wood
A983)] также изучали эту задачу и исследовали вопрос о под-
поддержании многоугольников видимости в том случае, когда
разрешены операции вставки или удаления, и, кроме того,
вопрос о когерентности, когда разрешены перемещения направ-
направления взгляда или заданных точек. Реализуя теоретико-мно-
теоретико-множественные операции на многоугольниках видимости, можно
определить специальные типы видимости; за сжатым обзором
этого материала читатель отсылается к работе Туссена
[Toussaint A980)].
7.5. Упражнения 393
7.5. Упражнения
1. Заданы два выпуклых многоугольника PY и Яг. число вершин кото-
которых в сумме равно N. Построить алгоритм типа плоского заметания, кото-
который вычислял бы пересечение Л и Р2 за время O(N) следующим образом:
(a) определял бы .У-множество всех пересечений границ Я[ и Р2;
(b) используя Э', строил бы границу Pi fl Я2.
2. Задан набор S, состоящий из N отрезков на плоскости; построить
алгоритм, который решал бы вопрос о существовании прямой /, пересекаю-
пересекающей все отрезки из S (прокалывающей прямой), и, если она есть,
строил бы ее.
3. Задан набор S, состоящий из N отрезков на плоскости, и пробный
отрезок s*; надо предварительно обработать S так, чтобы получить эффек-
эффективный алгоритм для проверки факта пересечения s* с произвольным эле-
элементом S.
4. Пусть Р — выпуклый полиэдр. Запрос заключается в проверке пере-
пересечения отрезком s из Е3 полиэдра Р. Предполагая, что работа ведется с ти-
типовыми запросами, предварительно обработать Р и построить эффективный
алгоритм обработки запросов.
5. Заданы два выпуклых полиэдра Р и Q, число вершин которых в сумме
равно N. Можете ли вы придумать алгоритм, проверяющий факт пересече-
пересечения Р и Q за время 8(N)?
6. Преобразовать алгоритм построения пересечения двух выпуклых по-
полиэдров (данный в разд. 7.3.1) в тест, проверяющий факт линейной раздели-
разделимости двух полиэдров Р и Q и, если таковая обнаружена, строящий одну
из разделяющих плоскостей п. Этот алгоритм должен затрачивать время,
линейно зависящее от общего числа вершин в Р и Q.
8
ГЛАВА
Геометрия прямоугольников
Методы, которые были ранее разработаны для задач
о пересечении плоских выпуклых многоугольников, безусловно,
применимы и к прямоугольникам. Точно так же набор отрез-
отрезков, каждый из которых параллелен или перпендикулярен лю-
любому другому элементу из этого набора, можно обработать
обычными методами решения задач о пересечениях, которые
были описаны в предыдущих главах. Однако весьма специаль-
специальный вид отрезков, параллельных ровно двум ортогональным
прямым, или прямоугольников, сторонами которых являются
подобные отрезки, заставляет предположить, что можно раз-
разработать и более эффективные методы, учитывающие специ-
специфику этих в высшей степени структурированных случаев.
А в процессе изучения задач этого класса можно приобрести
более глубокое понимание геометрических свойств, которыми
обладают вышеупомянутые объекты — прямоугольники и орто-
ортогональные отрезки, — а также охарактеризовать более широкий
класс задач, к которым применимы указанные методы.
Все это было бы интересным, хотя и довольно бесполезным
упражнением, если бы прямоугольники и ортогональные отрезки
не являлись важнейшими компонентами многих приложений,
часть из которых обладает чрезвычайной важностью в области
современных передовых технологий, особенно в области цифро-
цифровых схем с очень высоким уровнем интеграции (СБИС). По-
Поэтому, перед тем как начать подробное обсуждение алгоритми-
алгоритмического материала, стоит потратить немного времени на описа-
описание ряда важных приложений.
8.1. Некоторые приложения геометрии
прямоугольников
8.1.1. Проектирование СБИС
Фотошаблоны, используемые при изготовлении инте-
интегральных схем, зачастую представляют собой наборы прямо-
прямоугольников, стороны которых параллельны двум взаимно орто-
8.1. Некоторые приложения геометрии прямоугольников
395
тональным направлениям. Каждый из этих прямоугольников
является или участком проводника, или областью ионной им-
имплантации, или межслойным контактом и т. п., как показано на
рис. 8.1 [Lauther A978); Baird A978); Mead, Conway A979)].
Рис. 8.1. Типичная геометрия одной интегральной схемы.
Эти прямоугольники размещаются на плоскости в соответ-
соответствии с конкретными техническими требованиями, которые
определяют минимальные зазоры между одними типами пря-
прямоугольников, минимальные наложения для других типов
и т. д. Условия на зазоры и наложения возникают из-за конф-
конфликтующих требований минимизировать общую используемую
Рис. 8.2. Проверить величину минимального зазора X вокруг прямоуголь-
прямоугольника R можно путем расширения R во все стороны на % (для формирования
R') н контроля наложений.
площадь (это очевидное экономическое ограничение) и выпол-
выполнить необходимые электрические условия (изоляцию или кон-
контакт) с учетом возможных отклонений при производстве. (Оче-
(Очевидно, что, чем меньше зазор, тем больше вероятность возник-
возникновения нежелательного контакта.)
Следовательно, важнейшей задачей при проектировании
фотошаблонов ИС (интегральных схем) является проверка вы-
выполнения проектных норм, или, выражаясь иначе, «контроль
соблюдения проектных норм». На рис. 8.2 показан пример того,
396
Гл. 8. Геометрия прямоугольников
как можно проверить нарушение минимальной величины К за-
зазора между прямоугольником R- и соседствующими с ним пря-
прямоугольниками. Для этого можно увеличить R, добавив к нему
полосу ширины К, и проверить, не будет ли увеличенный прямо-
прямоугольник R' пересекаться с какими-нибудь из своих соседей.
Значит, задача проверки зазора преобразуется в задачу о пере-
пересечении прямоугольников. Разновидности подобного подхода
можно использовать при проверке выполнения и других техни-
технических требований, таких как наложения, покрытия и т. п.
В то время как описанные выше этапы связаны в опреде-
определенном смысле с «синтаксической» корректностью фотошаб-
фотошаблона, другая важная задача заключается в проверке того, что
Рис. 8.3. Определение компонент связности иа множестве прямоугольников
можно использовать прн решении задачи выделения электрических цепей.
фотошаблон функционально корректно реализует заданную схе-
схему. Первым этапом этой задачи является интерпретация гео-
геометрии фотошаблона как электрической схемы, т. е. идентифи-
идентификация таких подмножеств прямоугольников, все элементы ко-
которых электрически связаны. Такая работа называется восста-
восстановлением принципиальной схемы. Выражаясь несколько более
абстрактными терминами, можно представить себе граф, вер-
вершины которого соответствуют прямоугольникам и такой, что
пара вершин соединена ребром, если соответствующие прямо-
прямоугольники имеют непустое пересечение. В такой формулировке
восстановление принципиальной схемы сводится к задаче обна-
обнаружения компонент связности данного графа. Однако выделе-
выделение компонент связности дает несколько меньше информации,
чем требуется для указанного восстановления, поскольку на
самом деле нужно очертить границу (так называемый контур)
каждой компоненты связности (рис. 8.3).
Итак, мы видим, что проектирование интегральных схем
служит источником многих геометрических задач, связанных
с прямоугольниками, из числа которых были проиллюстриро-
проиллюстрированы лишь некоторые важные задачи.
8.1. Некоторые приложения геометрии прямоугольников 397
8.1.2. Конфликтующие запросы к базам данных
Одна интересная геометрическая модель была раз-
разработана недавно для конфликтующих запросов к базе данных
от нескольких пользователей [Yannakakis, Papadimitriou, Kung
A979)]. Обычно транзакция одного пользователя является по-
последовательностью шагов, каждый из которых адресуется к
одному элементу базы данных (переменной) и корректирует
его. Такая корректировка переменной, однако, имеет опреде-
определенную продолжительность. В течение этого промежутка вре-
времени необходимо предотвращать любые попытки других поль-
пользователей обращаться к этой же переменной. (Более конкрет-
конкретный пример: если запрашиваемой переменной является пасса-
пассажирское место в авиалайнере, то очевидно, что для сохранения
правильного учета все транзакции, использующие эту перемен-
переменную, должны обрабатываться последовательно.) Весьма рас-
распространенным методом разрешения таких конфликтов яв-
является блокировка [Eswaran, Gray, Lorie, Traiger A976)],
когда пользователь «блокирует» переменную в начале коррек-
корректировки и «деблокирует» в конце. Блокированная переменная
недоступна другим пользователям.
Эту ситуацию можно промоделировать следующим образом.
Работа каждого пользователя является последовательностью
шагов типа «блокировка х», «корректировка х» и «деблоки-
ровка х», где х—переменная. Если существует d пользовате-
пользователей, то каждому из них сопоставляем одну из осей d-мерного
декартова пространства Ed и для каждой оси устанавливаем
взаимно однозначное соответствие между шагами транзакции
и точками с целочисленными координатами. При этом коррек-
корректировке переменной соответствует интервал (интервал блоки-
блокировки) на оси, который ограничен точками, соответствующими
шагам блокировки и деблокировки. Поэтому, если k пользова-
пользователей (k ^ d) обращаются к одной и той же переменной, то
декартово произведение соответствующих интервалов блоки-
блокировки образует 6-мерный прямоугольник. Для случая двух
пользователей LJ\ и U2 эта ситуация проиллюстрирована на
рис. 8.4(а). Состояние базы данных представимо точкой на
координатной плоскости {Ui,U2), фиксирующей историю ра-
работы каждого пользователя; например, точка с координатами
(8,3) на рис. 8.4(а) обозначает, что шаги 8 и 3 пользователей
соответственно U\ и U2 выполнялись одновременно. Ясно, что
в системе транзакций с блокировкой точка состояния не может
лежать внутри прямоугольника, связанного с переменной.
Как указывалось ранее, любой пользователь может обра-
обращаться к нескольким переменным. Каждый доступ к перемен-
переменной х состоит из последовательности шагов «блокировка х»,
398
Гл. 8. Геометрия прямоугольников
(а)
•Деблощровпл
Корректпировка
Блокировка
(b)
Зг6 де&гокирша xs
¦5и деблокировка х2
S& ded/гокиравка xt
Stf блокировка X-z
$2z блокировках^-
Последовательное расписание
i Последовательное
^
Наняло
Рис. 8.4. Моделирование базы данных с блокировкой транзакций, (а)—два
пользователя, одна переменная; (Ь) —два пользователя, три переменные.
«корректировка х» и «деблокировка х»\ последовательность
шагов определенного пользователя (его работа) изображается
посредством множества точек на соответствующей ему оси, как
это показано на рис. 8.4(Ь) для случая двух пользователей.
Расписание иллюстрирует реальное изменение базы данных
и складывается случайным образом путем объединения работ
каждого из пользователей. Поскольку работа каждого является
последовательностью шагов, то допустимое расписание изобра-
8.1. Некоторые приложения геометрии прямоугольников
399
жается монотонно неубывающей ступенчатой кривой на пло-
плоскости (U\,U2) рис. 8.4(Ь). Начальный участок такой кривой
описывает частичное расписание.
'Последовательным называется такое расписание, при кото-
котором пользователи работают поочередно, т. е. пользователь по-
получает доступ к базе данных и сохраняет его до конца своей
работы. Очевидно, что для d пользователей существует d\ по-
последовательных расписаний (а для двух пользователей будет
ровно два таких, которые показаны на рис. 8.4(Ь)). Система
работы с базой данных считается безопасной, если результат
Рис. 8.5. Иллюстрация ЮЗ-замыкаиия для объединения прямоугольников.
Любое расписание, исключающее эту область, будет свободным от тупиков.
работы по любому законному расписанию (т. е. расписанию,
обходящему прямоугольники) совпадает с результатом работы
по последовательному расписанию. Это условие можно выра-
выразить в чисто геометрических терминах [Yannakakis, Papadi-
mitriou, Kung A979)], если потребовать, чтобы любое безопас-
безопасное расписание было гомотопно (т. е. преобразуемо непрерыв-
непрерывной деформацией, избегающей прямоугольники) последователь-
последовательному расписанию.
С другой стороны, такая система может достигнуть условия
безвыходности {тупика), в котором она будет пребывать не-
неопределенное время без постороннего вмешательства. Эта си-
ситуация представлена, например, частичным расписанием с,
показанным на рис. 8.4 (Ь) и состоящим из последовательности
шагов 5г1, 5ц, S22, Si2, S23. Шаг Si2 (блокировка хх) не может
выполниться, поскольку х\ уже блокирована (на шаге 52i);
поэтому Si2 должен ожидать, а управление передается пользо-
пользователю U2, которому нужно выполнить шаг 523 (блокировку
х2). Но х2 уже заблокирована (на шаге Su), поэтому никакая
дальнейшая работа невозможна, ибо оба пользователя пы-
пытаются проделать невыполнимые шаги.
Условия безопасности и отсутствия тупиков хорошо видны на
диаграмме транзакций к базе данных. Прежде всего, кривая,
400 Гл. 8. Геометрия прямоугольников
изображающая расписание, не может заходить внутрь объеди-
объединения прямоугольников транзакций. Это объединение будет
представлять собой набор компонент связности (рис. 8.5). Но
одно это условие не гарантирует, что в системе будут отсутство-
отсутствовать тупики. На самом деле нужно описать некую область, со-
содержащую прямоугольники транзакций и такую, что в любом
расписании (т. е. в любой монотонно неубывающей кривой),
внешнем по отношению к ней, не было бы тупиков. Такая об-
область показана на рис. 8.5, где заштрихованные области были
добавлены к объединению прямоугольников транзакций. Те-
Теперь интуитивно ясно, что подобное расширение объединения
прямоугольников удовлетворяет заданному требованию. Эта
область называется ЮЗ-замыканием (юго-западным замыка-
замыканием) объединения прямоугольников [Yannakakis, Papadimit-
riou, Kung A979); Lipski, Papadimitriou A981); Soisalong
Soininen, Wood A982)] и будет строго определена в разд. 8.6.
8.2. Область применения результатов
Хотя наборы прямоугольников и были исходными
объектами, вызвавшими большую часть объема исследователь-
исследовательской работы в данной области, и практически все результаты
формулируются в терминах взаимно ортогональных направле-
направлений (обычно координатных осей), было бы уместно попытаться
именно сейчас определить максимальную сферу применения
данной теории.
Начнем с рассмотрения двух наборов Si и S2, каждый из
которых содержит параллельные отрезки, причем направления
отрезков из Si и S2 взаимно ортогональны. Прямые, несущие
эти отрезки, образуют сетку на плоскости. Представим теперь
точки в однородных координатах {хих2,хг) (см. разд. 1.3.2
и 7.3.2) и применим к точкам этой плоскости обычное невырож-
невырожденное преобразование проецирования, т. е. преобразование,
описываемое невырожденной матрицей третьего порядка зФ.
Хорошо известно (см., например, [Ewald A971)] или [Birkhoff,
MacLane A965)]), что это преобразование переводит точки в
точки, а прямые в прямые и сохраняет инцидентность, т. е. лю-
любое такое преобразование не меняет структуру сетки. Если мат-
матрица зФ имеет вид
0
. 0
о о!
где 31 — невырожденная матрица второго порядка, и а ф 0, то
прямая на бесконечности переходит сама в себя, а два на-
8.2. Область применения результатов
401
I I
ж
I I
правления, которые были вначале ортогональны, становятся
теперь произвольными. Если же невырожденная матрица s?
не обладает блочной формой, то одна или обе точки, лежащие
на бесконечности на двух указанных исходных направлениях,
перейдут в конечные точ-
точки, причем пропадает да-
даже свойство параллель-
параллельности прямых в каждом
из наборов. Одна из ти-
типичных ситуаций такого
рода показана на рис. 8.6.
Приведенные сообра-
соображения, по сути, характе-
характеризуют область примене-
применения так называемой гео-
геометрии прямоугольников
и приводят к следующим
определениям:
Определение 8.1. Мно-
Множество четырехугольни-
четырехугольников М называется изоте-
тичным1), если стороны
каждого из элементов 31
принадлежат одному из
двух пучков прямых ли-
линий с центрами в точках
р\ и р2 соответственно
(pi и р2 могут принадле-
принадлежать прямой на бесконеч-
бесконечности в этой плоскости),
и все элементы М лежат
полностью по одну сто-
сторону от прямой, про-
проходящей через точки р\ Рис. 8.6. Пример невырожденного проек-
тивного преобразования применительно к
плоской фигуре, образованной ортогональ-
ными отрезками.
После этого пояснения
для простоты представ-
представления далее будем рассматривать тот случай, когда р\ и р2 оп-
определяют ортогональные направления.
') «Изотетичные» означает «одинаково расположенные» от греческих
слов isos (одинаковый) и tithenai (располагать). Существует заметная тер-
терминологическая неопределенность данного понятия между оценками понятий
«прямолинейные», «ортогональные», «выравненные», «нзоориентнрованные>.
Хотя смыслы последних понятий однозначны (за исключением, вероятно, по-
понятия «прямолинейные:»), понятие «изотетичные» по смыслу ближе всего
именно к нему.
402 Гл. 8. Геометрия прямоугольников
Алгоритмы, о которых будет идти речь в данной главе, свя-
связаны с определением различных свойств множеств прямоуголь-
прямоугольников (или ортогональных отрезков). Можно предложить одну
фундаментальную классификацию этих алгоритмов, зависящую
от базисного типа операций, т. е. зависящую от того, будем ли
мы работать в статической или динамической среде. В первом
случае вся информация, необходимая для решения задачи, пол-
полностью известна до начала вычислений; во втором случае до-
допустимы также динамические корректировки данных путем
операций вставки и удаления.
Операции этих двух типов — статические и динамические —
подразумевают, как и следовало ожидать, использование суще-
существенно различающихся структур данных. В то время как
работа в статическом режиме в настоящее время хорошо изу-
изучена, исследование более сложных динамических операций пре-
пребывает в стадии активного развития. Поэтому целесообразно
дать здесь детальное описание алгоритмов именно статиче-
статического типа; отсылки к продолжающимся исследованиям алго-
алгоритмов динамического типа будут приведены в конце настоя-
настоящей главы.
Последующее изложение будет относиться в основном к дву-
двумерным приложениям. Но там, где это уместно, будет дано
обобщение на d-мерный случай либо о нем будет упоминаться.
8.3. Общие замечания по алгоритмам
статического типа
Уникальная особенность набора изотетичных прямо-
прямоугольников (или, что то же самое, двух ортогональных наборов
параллельных отрезков) состоит в том, что плоскость разби-
разбивается на полосы (например, на вертикальные), в каждой из
которых задача становится одномерной. (Аналогично простран-
пространство Ел можно разбить на {d— 1)-мерные бруски.) В частно-
частности, если взять абсциссы вертикальных сторон этих прямо-
прямоугольников, то внутри каждой полосы, заключенной между
смежной парой этих абсцисс, все вертикальные сечения будут
одинаковыми и будут состоять из ординат тех горизонтальных
сторон, которые пересекают эту полосу. Поэтому такие вер-
вертикальные сечения на плоскости разбиваются на классы экви-
эквивалентности (каждый из этих классов будет множеством сече-
сечений, заключенных между парой последовательных абсцисс вер-
вертикальных сторон прямоугольников). Кроме того, будет пока-
показано, что сечение, принадлежащее определенной полосе, можно
получить в результате небольшой модификации сечений, при-
принадлежащих одной или двум смежным полосам.
8.3. Общие замечания по алгоритмам статического типа 403
Некоторые из интересных с вычислительной точки зрения
задач, связанных с множеством прямоугольников (таких, как
определение площади их объединения, периметра этого объеди-
объединения, его контура, регистрации пересечений и т. д.), обладают
одним очень полезным свойством. Произвольная вертикальная
прямая определяет собой две полуплоскости; решение же ис-
исходной задачи, как правило, соотносится весьма просто с реше-
решениями аналогичных подзадач для каждой из этих полуплоско-
полуплоскостей. Это простое соотношение иногда выступает в виде теоре-
теоретико-множественного объединения (для отчета о пересечениях),
или арифметической суммы (для вычисления площади и
периметра), или простого сцепления компонент (для контура).
Во всех этих случаях пересечение разделяющей прямой с мно-
множеством прямоугольников содержит всю необходимую для
комбинации частных решений информацию. Более того, пред-
предполагается, что решение, получаемое в результате реализации
операций статического типа для, скажем, левой полуплоскости
является окончательным (т. е. не изменяемым корректиров-
корректировками, возможными в будущем), так что глобальное решение
можно получить последовательным расширением текущего ре-
решения вправо. Мы видим, что это типичная ситуация, когда
оправданно использование метода плоского заметания, а имен-
именно: заметающая прямая параллельна одному из направлений,
а движение осуществляется вдоль перпендикулярного ему на-
направления.
Обращая внимание на характерное вертикальное сечение
множества прямоугольников, которое является просто последо-
последовательностью ординат, заметим, что, поскольку пересеченные
отрезки параллельны, последовательность ординат этого сече-
сечения всегда будет подпоследовательностью упорядоченной по-
последовательности ординат всех горизонтальных отрезков. Пу-
Путем предварительной нормализации, при которой множество
ординат сортируется, а каждая ордината заменяется ее номе-
номером в этом упорядочении, последовательность ординат можно
уподобить ряду последовательных целых чисел. Поэтому ка-
кажется, что для поддержки статуса заметающей прямой нет
необходимости в повторной сортировке общей отсортированной
последовательности, поскольку можно воспользоваться более
эффективными структурами данных, подобранными именно для
этой ситуации. Такие структуры полностью определяются (по
крайней мере скелетно) множеством ординат всех горизонталь-
горизонтальных отрезков, а каждое отдельное сечение можно получить,
пользуясь «скелетной» метафорой, путем «наделения плотью»
части скелета. Одним из примеров такой структуры является
дерево отрезков, которое уже изучалось и использовалось
ранее в данной книге (см. разд. 1.2.3.1); другой пример — де-
404 Гл. 8. Геометрия прямоугольников
рево интервалов [McCreight A981); Edelsbrunner A980)], ко-
которое будет описано в разд. 8.8.1.
Для удобства напомним, что каждый узел v из дерева от-
отрезков характеризуется интервалом [В[и], ?[и]] и некото-
некоторыми дополнительными параметрами, необходимыми для вы-
выполнения особых вычислений. Один из этих параметров С[v] —
степень узла — возникает во всех приложениях, поскольку он
обозначает число отрезков, отнесенных к узлу v; другие же
параметры имеют смысл только для тех или иных приложений.
Элементарными операциями на дереве отрезков являются
вставка и удаление. В частности, если [Ь, е] обозначает интер-
интервал, то на узле v определены операции ВСТАВИТЬ(&,е; v) и
УДАЛИТЬ(b, e; v). Обычно в следующих разделах процедура
ВСТАВИТЬ будет иметь такой вид:
procedure ВСТАВИТЬ(&,е; v)
1. begin if F<J5[o]) and (?[o]<e) then C[o]:=C[o]+l
2. else begin if (b < lB[v] + E[v])/2j) then
ВСТАВИТЬF,е; ЛСЫН[о]),
3. if d(B[v] + ?[t»l)/2J < e) then
ВСТАВИТЬF,е; ПСЫН[о])
end;
4. КОРРЕКТИРОВАТЬ(и) (* корректировка особых
параметров v*)
end.
Важнейшей характеристикой этой процедуры, изменяющейся
от приложения к приложению, является функция КОРРЕКТИ-
КОРРЕКТИРОВАТЬ (v) из строки 4, частные случаи которой будут обсуж-
обсуждаться в соответствующих местах. Аналогичные соображения
применимы и к процедуре УДАЛИТЬ (ft, e; v).
В заключение заметим, что метод плоского заметания и
использование структур данных, ориентированных на хранение
интервалов, являются естественными средствами для решения
множества задач, возникающих в геометрии прямоугольников.
Приведенные ниже разделы посвящены детальному разбору
специальных методов.
8.4. Мера и периметр объединения
прямоугольников
В одной статье [Klee A977)], которая представляет
заметный интерес и может считаться началом целого направ-
направления исследований, Кли поставил следующий вопрос: «Заданы
N интервалов [aub\], ..., [aN,bN] на действительной прямой,
надо найти меру их объединения. Какой может быть трудо-
трудоемкость этой процедуры?».
8.4. Мера и периметр объединения прямоугольников 405
Такая постановка дает простейший (одномерный) пример
задачи о мере объединения. (Будем называть задачу о вычис-
вычислении меры объединения для произвольного числа измерений
задачей 0.1.') Кли сразу же построил алгоритм решения этой
задачи с оценкой O(JVlogJV), основанный на предварительной
сортировке абсцисс аи Ьи ..., aN, bN в массиве X[l:2N]. До-
Дополнительное свойство этого массива состоит в том, что если
а,- помещено в Х[Л], Ь/ — в X[k] и а,- = Ь,-, то h <. k (т. е.
правая концевая точка помещается в нем после левой точки,
обладающей такой же абсциссой). Вычисление завершается
простым просмотром массива X[l : 2N] за линейное время (ни-
(нижеследующий алгоритм представляет собой адаптацию алго-
алгоритма Кли, удобную для последующих обобщений):
procedure МЕРА-ОБЪЕДИНЕНИЯ-ИНТЕРВАЛОВ
1. begin X[l '. 2N] := упорядоченная последовательность
абсцисс концов интервалов;
2. Х[0]:=Х[1];
3. m := 0; (* пг — мера*)
4. С:=0; (* С — число перекрывающихся интервалов*)
5. for /:=1 until 2JV do
6. begin if (С Ф 0) then m:=m-{- X[i] — X[i — 1];
7. ifpty] — левая концевая точка) then
8. C:=C+1 else С:= С—1
end
end.
В своей статье Кли также отметил, что, хотя сортировка
является ключом к получению вышеизложенного результата,
она не является априорно необходимой, и поставил вопрос о су-
существовании какого-нибудь метода решения, требующего
o(iVlogiV) операций.
Ответ на этот вопрос был получен Фредменом и Вайде
[Fredman, Weide A978)] для модели вычислений с линейным
деревом решений (к которой относится и вышеизложенный
алгоритм); применение общего метода Бен-Ора (разд. 1.4) рас-
расширяет пределы этого результата на произвольные алгебраи-
алгебраические деревья решений. Закономерно, что доказательства по-
подобного типа укладываются в уже знакомую схему, встречав-
встречавшуюся ранее в связи с исследованиями выпуклых оболочек
(разд. 3.2), максимумов на множестве векторов (разд. 4.1.3),
уникальности элементов (разд. 5.2) и максимального проме-
промежутка (разд. 6.4). В основе лежит симметрическая группа сте-
степени N, которая вновь является ключом к доказательству. Здесь
будет использован следующий вычислительный прототип:
') О — аббревиатура слова «ортогональность». — Прим. перев.
406
Гл. 8. Геометрия прямоугольников
Задача 0.2 (е-БЛИЗОСТЬ). Дано N+1 действительных
чисел xi, X2, ¦ ¦ ¦, Xf/ и е > 0. Надо определить, будут ли какие-
нибудь два числа xi и х,- (i Ф у) находиться на расстоянии,
меньшем чем е одно от другого.
Прежде всего покажем, что можно легко установить пре-
преобразование
е-БЛИЗОСТЬ ос„ МЕРА ОБЪЕДИНЕНИЯ ИНТЕРВАЛОВ.
Действительно, построим интервалы [л:,-, х, + е] для i= 1, 2, ...
.., N. Эти интервалы будут входом для процедуры МЕРА-
ОБЪЕДИНЕНИЯ, результатом работы которой будет веще-
вещественное число т. Теперь ясно, что никакие два числа из
(а)
Рнс. 8.7. Иллюстрация (в случае Е2) различия между множествами истин-
истинности в задачах об УНИКАЛЬНОСТИ ЭЛЕМЕНТОВ (а) и е-БЛИЗО-
СТИ (Ь).
{хи ..., хм} не будут находиться на расстоянии, меньшем чем
е друг от друга, тогда и только тогда, когда т = Ne.
Существует близкое сходство между е-БЛИЗОСТЬЮ и
УНИКАЛЬНОСТЬЮ ЭЛЕМЕНТОВ, изложенной в разд. 5.2.
Однако УНИКАЛЬНОСТЬ ЭЛЕМЕНТОВ не является частным
случаем е-БЛИЗОСТИ, поскольку значение е = 0, необходимое
для получения указанного частного случая, недопустимо. Раз-
Различие этих задач выразительно проиллюстрировано на рис. 8.7
для двумерного случая: если речь идет об УНИКАЛЬНОСТИ
ЭЛЕМЕНТОВ, то непересекающиеся связные компоненты мно-
множества истинности W (см. разд. 1.4 и 5.2) представляют собой
открытые множества, разделенные только их общей границей;
если же речь идет об е-БЛИЗОСТИ, то компоненты представ-
представляют собой замкнутые множества и расстояние между ними
положительно. Если исключить это различие, то доказательство
того, что множество W для задачи об е-БЛИЗОСТИ распадается
на JV! непересекающихся компонент связности, будет анало-
8.4. Мера и периметр объединения прямоугольников
407
гично доказательству, приведенному в разд. 5.2; отсюда выте-
вытекает следствие из теоремы 1.2:
Следствие 8.1. Любой алгоритм, который использует мо-
модель алгебраического дерева решений, для определения суще-
существования некоторой пары чисел из N-элементного множе-
множества, удаленных друг от друга на расстояние, меньшее чем е,
затратит Q(JV log N) проверок.
Следствие 8.1 доказывает оптимальность результата Кли
для задачи о вычислении меры в случае одного измерения, но
оставляет открытым вопрос об оптимальной оценке при d > 2.
Рис. 8.8. Применение метода плоского заметания к задаче определения меры
объединения прямоугольников для случая двух измерений.
Бентли [Bentley A977)]1) взялся за эту задачу и преуспел
в создании оптимального алгоритма для вычисления меры объ-
объединения при d = 2. Его подход является простой и разумной
модификацией одномерного метода. В частности, при одном
измерении длина интервала [A[i — I], X[i] ] добавляется к ис-
искомой мере (строка 6 в алгоритме МЕРА-ОБЪЕДИНЕНИЯ-
ИНТЕРВАЛОВ) в зависимости от того, будет ли хотя бы один
отрезок накрывать его или нет, или, что то же самое, будет ли
параметр С ненулем или нулем соответственно. Следовательно,
') Этот результат изложен также в работе [Van Leeuwen, Wood A981)].
408 Гл. 8. Геометрия прямоугольников
необходимо знать только значение С (строка 7). В случае двух
измерений (рис. 8.8) вертикальная полоса, заключенная между
X[i—1] и Х[с], вносит в меру объединения прямоугольников
вклад, равный величине (Х[Ц— X[i—l])m,-, где m,— длина
пересечения произвольной вертикальной прямой из этой поло-
полосы с объединением прямоугольников. Поэтому величина mi
(являющаяся константой и равная 1 в случае одного измере-
измерения)— это ключевой параметр для двумерной техники. Если
бы mi можно было вычислять и корректировать за время, не
превышающее O(logN), то времена сканирования и предвари-
предварительной обработки были бы равны и был бы получен оптималь-
оптимальный алгоритм g оценкой Q(N logiV).
Поскольку ординаты горизонтальных сторон прямоугольни-
прямоугольников известны заранее, то определение т; можно реализовать
посредством дерева отрезков (см. разд. 8.3). Вспоминая общий
формат элементарных операций на дереве отрезков ВСТАВИТЬ
И УДАЛИТЬ (см. разд. 8.3), определим для текущего прило-
приложения следующий дополнительный параметр узла:
m (v) := вклад интервала [В[и],?[и]] в величину пц.
Вычисление m[v] проводится следующей процедурой (вызы-
(вызываемой в строке 4 из процедуры ВСТАВИТЬ):
procedure КОРРЕКТИРОВАТЬ(и)
begin it(C[v]=?0) then m[v] •—E[v] — B[v]
else ii(v не лист) then т[»]:=т[ЛСЫН[о]]-|-
т[ПСЫН[о]]
else m[v] := 0
end.
Ясно, что mi = m [корень дерева отрезков]. Как общий пара-
параметр C[v], так и специальный параметр m[v] можно легко
корректировать (за константное время на один узел) при
вставке или удалении одного отрезка (вертикальной стороны
прямоугольника) из дерева отрезков. Итак, корректировку де-
дерева отрезков и вычисление mi можно реализовать за время
O(logiV) для одной вертикальной стороны прямоугольника;
тем самым достигается ранее поставленная цель. Теперь можно
сформулировать алгоритм, где bt и ei обозначают соответ-
соответственно минимальную и максимальную ординаты вертикальной
стороны, имеющей абсциссу X[i]. (Заметим, что этот алгоритм
является непосредственным обобщением одномерного алгорит-
алгоритма, приведенного ранее.)
procedure МЕРА-ОБЪЕДИНЕНИЯ-
прямоугольников
1. begin X[l : 2N] := упорядоченная последовательность
абсцисс вертикальных сторон;
S.4. Мера и периметр объединения прямоугольников 409
2. [
3. пг:=0;
4. построить и инициализовать дерево отрезков Т
для ординат сторон прямоугольника;
5. for i := 1 until 2N do
6. begin m :=т[корень(Г)];
7. m:=m + m'(X[i]~X[i— 1]);
8. if (X[i] — абсцисса левой стороны) then
ВСТАВИТЬ^,,е,; корень(Г))
9. else УДАЛИТЬ^ ,е,; корень(Г))
end
end.
Завершим это обсуждение следующей теоремой:
Теорема 8.1. Меру объединения N изотетичных прямоуголь-
прямоугольников на плоскости можно вычислить за оптимальное время
%(N\ogN).
Возвращаясь к последнему алгоритму, мы сразу же увидим,
что он относится к категории плоского заметания (см. разд. 8.3),
где списком точек событий служит массив X[l:2N], а статус
заметающей прямой задается деревом отрезков. Подобная реа-
реализация допускает непосредственное обобщение этого метода
на случаи более чем двух измерений. Действительно, техника
заметания позволяет преобразовать исходную d-мерную задачу
(на N гиперпрямоугольниках в Ed) в «последовательность», со-
состоящую из N штук (d—1)-мерных подзадач (каждая на не
более чем N гиперпрямоугольниках в Ed~l). Для d = 3 эти под-
подзадачи становятся двумерными, и по теореме 8.1 каждую из
них можно решить за время O(NlogN); поэтому задачу~сГ мере
объединения при трех измерениях можно решить за время
O(N2log N). Это устанавливает базис для индуктивного дока-
доказательства, приводящего к следствию 8.2.
Следствие 8.2. Меру объединения N изотетичных гиперпря-
гиперпрямоугольников в пространстве d ^ 2 измерений можно вычислить
за время О (Nd~l log N).
Сильным недостатком описанного метода при d ^ 3 яв-
является тот факт, что при заметании мы не смогли использовать
«когерентность»1) между двумя последовательными сечениями.
(При d — 2 дерево отрезков позволяет воспользоваться коге-
когерентностью смежных сечений путем эффективного вычисления
текущего сечения за счет простой корректировки предыдущего
сечения.) Эта идея была впоследствии перенесена на случай
') То есть согласованность, взаимозависимость. — Прим. перев.
410
Гл. 8. Геометрия прямоугольников
21 ячеек
СЗ
<?""'- квадрат
СВ
?1'1-кеадрат
ЮЗ
2'''- квадрат
ЮВ
Z1''-квадрат
трех измерений Ван Леювеном и Вудом [Van Leeuwen, Wood
A981)], которые предложили использовать в качестве струк-
структуры данных «квадродерево» [Finkel, Bentley A974)]. Квад-
родерево можно считать двумерным обобщением дерева отрез-
отрезков, но весьма курьезно, что оно было предложено раньше, чем
эта более простая структура. Сейчас мы кратко опишем его ор-
организацию.
Квадродерево — это способ организации ортогональной сет-
сетки, состоящей из NXM ячеек, определенных (JV+1) горизон-
горизонтальными и (М+1) вертикаль-
вертикальными прямыми. (Дерево отрез-
отрезков — это соответственно способ
организации N смежных интер-
интервалов.) Для простоты изложения
предположим, что N = М = 2к.
Квадродерево Т — это дерево со
степенями исхода, кратными че-
четырем, у которого с каждым уз-
узлом связан участок сетки разме-
размером 2' X 2' (именуемый 2'!-квад-
ратом) (г = 0,1, ..., k). 2'-квад-
рат, связанный с заданным узлом
v из Т (при />0), разбивается
на четыре 2'~1-квадрата верти-
вертикальным и горизонтальным деле-
делениями пополам (рис. 8.9); каж-
каждый из этих четырех квадратов
(именуемых СЗ, СВ, ЮВ и ЮЗ
квадратами) связывается с одним из четырех потомков узла v.
Данное построение начинается со связывания всей сетки с кор-
корнем Т, а заканчивается тогда, когда процесс четвертования дает
2°-квадраты (листья Т). Поскольку Т обладает N2 листьями, то
его построение занимает 0{N2) времени и использует O(N2)
памяти.
Теперь мы рассмотрим вопрос о хранении прямоугольникаR
в квадродереве. Исходная сетка образована 2N абсциссами и
2N ординатами сторон заданных N прямоугольников, и квадро-
квадродерево Т строится на этой сетке. Каждый узел v из Т обладает
одним целочисленным параметром C[v], который вначале ра-
равен 0 (такое квадродерево называется скелетным). Прямо-
Прямоугольник R вносит 1 в C[v] тогда и только тогда, когда A) R
содержит квадрат, относящийся к v, и B) ни один из предков
v в Т не обладает таким же свойством. Очевидно, что таким
образом определяется однозначный способ разбиения R на квад-
квадраты, каждый из которых связан с одним узлом v. В то время
как в дереве отрезков каждый отрезок разбит на не более чем
Рис. 8.9. Пример разбиения пло-
плоской сетки, осуществляемого од-
одним из узлов квадродерева, ко-
который соответствует 2'-квадрату.
8.4. Мера и периметр объединения прямоугольников
411
O(logN) интервалов, для квадродерева можно относительно
просто показать1), что один прямоугольник разбивается на не
более чем О (Л') квадратов. Поэтому процедуры вставки и уда-
удаления в квадродереве, а также определение меры объединения
(площади) можно реализовать каждую за O(N) операций.
Отсюда следует, что последовательная корректировка сечений
Зхлад в периметр _
нес абсциссе X[i-f\
Рис. 8.10. Иллюстрация к вычислению суммарной длины вертикальных
сторон.
при пространственном заметании занимает O(N) времени, а по-
поскольку существует 2N сечений, то решение задачи определе-
определения меры объединения в трехмерном пространстве займет в
сумме O(N2) времени. Именно данный метод — а не двумер-
двумерный, основанный на дереве отрезков, — можно использовать в
качестве базиса индукции и доказать следующий результат:
Теорема 8.2. Меру объединения N изотетичных гиперпрямо-
гиперпрямоугольников при d ^ 3 измерениях можно вычислить за время
0{Nd~l).
Хотя кажется, что улучшить этот результат будет весьма
трудно, нет никаких данных о его возможной оптимальности.
Замечание. Приведенный алгоритм вычисления меры объ-
объединения прямоугольников можно модифицировать для реше-
решения следующей задачи.
') Доказательство можно найти в статье [Van Leeuwen, Wood A981)].
412 Гл. 8. Геометрия прямоугольников
Задача 0.3 (ПЕРИМЕТР ОБЪЕДИНЕНИЯ ПРЯМО-
ПРЯМОУГОЛЬНИКОВ). Дано объединение F, состоящее из N изоте-
тичных прямоугольников. Найти периметр F, т. е. длину его
границы.
Метод решения основан на следующем наблюдении. Пред-
Предположим, что на i-и итерации некий прямоугольник вставляется
в дерево отрезков или удаляется из него (мы условились гово-
говорить, что прямоугольник вставляется или удаляется, если заме-
заметающая прямая касается его левой или правой стороны соот-
соответственно). Обращаясь к рис. 8.10, напомним, что пц обозна-
обозначает суммарную длину вертикального сечения непосредственно
слева от X [i] (см. строку 6 алгоритма МЕРА-ОБЪЕДИНЕНИЯ-
ПРЯМОУГОЛЬНИКОВ). Суммарная длина вертикальных кус-
кусков границы F на сечении X[i—1] равна разности длин вер-
вертикальных сечений F непосредственно слева и справа от
X[i—1]. В то время как первая из этих длин равна пц-\ по
определению, вторая равна пц, поскольку сечение неизменно на
всем интервале [X[i—1], -X" [i] ]. Поэтому искомая суммарная
длина равна \пц — nii-\\l). Кроме того, необходимо учесть
вклад горизонтальных граничных сторон, расположенных
внутри вертикальной полосы. В интервале [X[i—1],-X[i]] этот
вклад, очевидно, равен (X[i] — X[i — 1] )Х а<» где целое число
аг равно количеству горизонтальных сторон границы F внутри
рассматриваемой вертикальной полосы. Параметр а,-, по сути,
весьма похож на т,-. Действительно, введем для каждого узла v
в дереве отрезков три новых специальных параметра, один чет-
четный целый параметр a [v] и два двоичных параметра ЛК?Ы
и ПКР [v]2). Обозначая через ?/ текущее вертикальное сечение
F {& — набор не связанных между собой интервалов), опреде-
определяем эти параметры следующим образом:
a[v]: = удвоенное число компонент связности & Л [В Ы ,
E[v]];
ЛКР [v] := 1 или 0 в зависимости от того, будет или нет
В [v] нижним концом интервала из & f| [В [v], E [v];
ПКР [v] := 1 или 0 в зависимости от того, будет или нет
Е [v] верхним концом интервала из & f| [В [v], E [v]].
Эти три специальных параметра вначале равны нулю, а их вы-
вычисление выполняет нижеследующая конкретизация подпро-
') Заметим, что возможно равенство X[i — 1] и X[i], т. е. две верти-
вертикальные стороны имеют одинаковые абсциссы. В этом случае введем для
них удобное лексикографическое упорядочение (например, по ординатам их
нижних концов) и представим себе, что две такие стороны фиктивно раз-
раздвинуты на величину е в направлении оси х.
2) ЛКР и ПКР — аббревиатуры выражений «левый край» и «правый
край». — Прим. перев.
8.4. Мера и периметр объединения прямоугольников
413
граммы КОРРЕКТИРОВАТЬ, вызываемой в строке 4 процеду-
процедуры ВСТАВИТЬ (см. разд. 8.2):
procedure КОРРЕКТИРОВАТЬ (у);
1. begin if (C[v]>0) then
2. begin a[w]:=2;
3. []
4.
end
5. else begin a[v] :=а[ЛСЫН[с]] + а[ПСЫН[и]] -
-2 • ПКР[ЛСЫН[у]] ЛКР[ПСЫН[и]];
6. ЛКР[у]:=ЛКР[ЛСЫН[у]];
7. ПКР[у]:=ПКР[ПСЫН[с]]
end
end.
Корректность процедуры КОРРЕКТИРОВАТЬ доказывается
легко. Если C[v]^l, т. е. интервал [? [d] , Z:[d]] полностью
накрыт, то в составе «STIt^M. Щ^]] будет ровно один эле-
элемент, причем а[и] = 2, ЛКР [v] = YIKP [v] = 1, как указано в
Лряма/гольник, который
будет вставлен
Текушдя абсцисса
Рис. 8.11. Вклад в величину периметра на текущем шаге состоит из длин
горизонтальных и вертикальных ребер.
строках 2—4. Если же C[v] = 0, то число элементов в ?/[\
[\\B\v\, E\v\\ равно сумме чисел таких элементов для двух по-
потомков узла v, за исключением того случая, когда сечение &
содержит один интервал, соединяющий точку /:[ЛСЫН[и] ] =
= 51ПСЫН[у]]; в последнем случае ПКР 1ЛСЫН[г/\\ =
= ЛКР[ПСЫН[у]] = 1. Этим доказывается корректность
строк 5—7 алгоритма. Кроме того, не составит большого труда
показать, что дополнительные параметры а, ЛКР и ПКР вы-
414 Гл. 8. Геометрия прямоугольников
числяются за константное время в расчете на один пройденный
узел.
Теперь очевидно, что а, = а [корень (Т)]. Следовательно,
алгоритм вычисления периметра F получается путем простой
модификации соответствующего алгоритма вычисления меры
этого объединения. Заметим, однако, что в то время, как в ал-
алгоритме вычисления меры объединения к площади F добав-
добавляется площадь только что заметенной вертикальной полосы
(так что корректировка дерева отрезков следует за суммирова-
суммированием этой площади), в обсуждаемом алгоритме ситуация не-
несколько иная. Обратимся к рис. 8.11; вклад текущего шага
в периметр состоит из двух частей: от горизонтальных ребер в
полосе [X[i—l],X[i]] он равен а, X (X[i] — X[i — 1]) и от
вертикальных ребер на абсциссе X[i] он равен \пц+\ — пц\.
Поэтому величину а; необходимо извлечь из дерева отрезков
до его корректировки, а величину m,>i — после. Итак, полу-
получаем:
procedure ПЕРИМЕТР-ОБЪЕДИНЕНИЯ-
прямоугольников
begin X[l : 2N] := упорядоченная последовательность
абсцисс вертикальных сторон;
[0][]
то:=О;
р:=0;
построить и инициализировать дерево Т, состоящее
из ординат сторон прямоугольников;
for i := 1 until 2N do
begin a*:=a [корень(Г)];
if (X[i] — абсцисса левого конца)
then ВСТАВИТЬ^,-, ^, корень(Г))
else УДАЛИТЬ(Ь,,е(-; корень(Г));
тп := т[корень(Г)];
р :== р + аГ X (ХЩ - X\i - 1]) + | m - tn01;
т0 := тп"
end
end.
В заключение получаем:
Теорема 8.3. Периметр объединения N изотетичных прямо-
прямоугольников можно вычислить за время O(NlogN).
8.5. Контур объединения прямоугольников
Тот же самый общий подход (плоское заметание,
основанное на дереве отрезков) можно с успехом применить
для решения другой интересной задачи: определения контура
8,5. Контур объединения прямоугольников
415
объединения F, состоящего из N изотетичных прямоугольников
Ru ..., RN. Вновь F = Ri [} ... [}Rn может состоять из одной
или более не пересекающихся компонент связности, а каждая
компонента может содержать или не содержать внутренние
дыры (заметим, что дыра может содержать внутри себя некото-
некоторые из компонент связности F). Контур (граница) F состоит из
набора непересекающихся циклов, образованных (чередующи-
(чередующимися) вертикальными и горизонтальными ребрами. Условимся,
что любое ребро ориентировано так, что фигура расположена
слева от него; другими словами, цикл ориентирован по часовой
стрелке, если он ограничивает дыру, и против часовой стрелки,
если он является внешней границей компоненты связности. Мы
имеем:
Задача 0.4 (КОНТУР ОБЪЕДИНЕНИЯ ПРЯМОУГОЛЬ-
ПРЯМОУГОЛЬНИКОВ). Дан набор из N изотетичных прямоугольников. Тре-
Требуется определить контур их объединения.
Во-первых, заметим, что периметр (для вычисления кото-
которого в предыдущем разделе был описан довольно простой алго-
алгоритм) является не чем иным, как длиной искомого контура.
Однако мы увидим, что
вычислить периметр зна- е3> 1е6
чительно проще, чем сам
контур, как набор непе- ei
ресекающихся циклов.
Алгоритм лучше все-
всего описать неформально,
на примере. Он состоит
из двух главных этапов.
На первом этапе опреде-
определяется множество V, со-
состоящее из вертикальных
ребер контура (ребра от
е\ до ею на рис. 8.12);
на втором этапе эти вер-
вертикальные ребра соеди-
соединяются горизонтальными
ребрами для формирования ориентированных циклов контура
[Lipski, Preparata A980)].
Обозначим через (х; b, t) вертикальное ребро с абсциссой х,
для которого Ь и t (b <Z t) являются соответственно нижней и
верхней ординатами; аналогично {у; /, г) обозначает горизон-
горизонтальное ребро с ординатой у, для которого / и г (/ < г) яв-
являются соответственно левой и правой абсциссами.
Для получения множества V просканируем слева направо
абсциссы, соответствующие вертикальным сторонам прямо-
,.еэ
•:е4
¦Ув
-у?
-у6
-У5
•У4
-Уз
7
*8
Рнс. 8.12. Иллюстрация к задаче построе-
ния контура объединения прямоугольников.
416 /л. S. Геометрия прямоугольников
угольников. Для произвольной абсциссы с сечение & (с) объ-
объединения F вертикальной прямой х = с является набором непе-
непересекающихся интервалов. Такое сечение не изменяется между
двумя последовательными вертикальными сторонами прямо-
прямоугольников, но корректируется при сканировании всякий раз,
когда встречается такая сторона. Если s является левой вер-
вертикальной стороной с абсциссой с для какого-нибудь прямо-
прямоугольника R, то участок контура F, определяемый s, задается
sf\3(c-), где 3(с_) обозначает объединение интервалов, ле-
лежащих непосредственно слева от абсциссы с, а 3 (с_) обозна-
обозначает его теоретико-множественное дополнение. Аналогично,
если s — правая вертикальная сторона R с абсциссой с, то
вклад s в контур равен sf\3(c+); смысл обозначений очевиден.
Запоминание и корректировка сечения 3 и эффективное опре-
определение s[\&{c-) или sf\3'(c+) являются наиболее сложной
частью алгоритма и будут рассмотрены позднее.
Предположим пока, что множество V уже получено и в со-
согласии с принятым условием об ориентации контура каждое
ребро V направлено вверх или вниз в зависимости от того, при-
принадлежат его ординаты соответственно правой или левой сто-
стороне прямоугольника.
Заметим теперь, что если множество вертикальных ребер V
известно, то горизонтальные ребра можно определить прямым
методом. Действительно, если (y;xi,x2)—горизонтальное ребро
(рис. 8.13), то существуют два вертикальных ребра с абсцис-
абсциссами х\ и Х2 соответственно, причем у каждого из них один из
концов имеет ординату у. Предположим далее, что для вер-
вертикального ребра е/ = (xf, bj, t,) из V сформированы две трой-
тройки (xf, b}; tj} и О/, t/\ bf). Каждую из этих троек следует счи-
считать точкой (координаты которой совпадают с первым и вто-
вторым элементами тройки), в совокупности эти две точки являются
концами ребра еу, третий член каждой тройки является просто
ссылкой на противоположный конец е\. Упорядочим множество
троек лексикографически по возрастанию (сначала по орди-
ординате, затем, по абсциссе). Для примера на рис. 8.12 получается
следующая последовательность:
(х2, b2; t2)(x4, b4; t4)(x4, t4; b4)(x9, b9; t9)(x9, t9; b<,)(xlQ, bm; tlQ)
(*s. h; t5)(x7, b7; tT)(xu fe,; f,)(x2, t2; b2)(x5, t5; b5)(x7, b7; t7)
(xu tx; bi){x3, b3; t3)(x6, b6; t6)(x8, b8; t8)(x8, t8, b8)(x10, t10; b10)
(x3, h; b3)(x6, t6; b6).
Причина выбора такого расположения заключается в сле-
следующем. Пусть а\, а2, ..., ар (р четно) представляет собой
результирующую последовательность. Легко видеть, что гори-
8.5. Контур объединения прямоугольников
417
зонтальные ребра контура могут быть получены как отрезки,
соединяющие вершины a2k-i и a2k для k= 1, 2, ..., р/2. Более
точно, пусть a2k-i = </, у: #i>, a2k = <г, у: у2>- Горизонтальное
ребро (у; I, г) ориентируется слева направо, если ребро, соот-
соответствующее тройке </, у; у{), ориентировано вниз и у < ух или
если </, у; у{) ориентировано вверх') и у\ < у; иначе ребро
(у; I, г) ориентируется справа налево. Для вышеприведенного
примера пара (аи а2) = ((х2, Ъ2: ?>>, <л:4, Ь4: /4>) при Ь2 = Ь4 по-
порождает горизонтальное ребро (Ь2; х2, хА), ориентированное
слева направо, поскольку ребро е2, соответствующее (х2, b2; t2},
направлено вниз и b2 < t2; на-
напротив, пара (an,aia) = (lx8,ta;
&s>, <xio,tio;bioy) при ^ = ^10 по-
порождает ребро (fe; х&, хю), ориен-
ориентированное справа налево, по-
поскольку е8 направлено вверх, а
/8 <t Ь8- Очевидно, что за один
проход по последовательности
аи ..., ар можно породить все
горизонтальные ребра и дважды
связать каждое из них с двумя
смежными вертикальными реб-
ребрами. Результирующие списки
дают в точности искомые циклы
контура. Кроме того, если
цикл посредством его ребра
Рис. 8.13. Любое горизонтальное
ребро смежно с парой вертикаль-
вертикальных ребер.
идентифицировать каждый
с минимальной абсциссой,
то направление такого ребра определяет, будет ли этот цикл
границей дыры (тогда указанное ребро направлено вверх)
или участком внешней границы (тогда указанное ребро направ-
направлено вниз).
Оценим теперь работу алгоритма. Читателя не должна бес-
беспокоить повторная операция сортировки 2р элементов (лекси-
(лексикографическое упорядочение, которое было описано ранее).
Действительно, путем предварительной сортировки абсцисс и
ординат сторон прямоугольников (за O{N\ogN) операций)
можно нормализовать эти координаты и заменить их на по-
последовательные целые числа. После этого 2р троек, которые
нужно упорядочить лексикографически, будут состоять из це-
целых чисел. Используя стандартный метод сортировки вычерпы-
вычерпыванием [Knuth A973)], получаем искомое упорядочивание за
время О(р); еще О(р) времени используется для порождения
горизонтальных ребер и контурных циклов.
') Точнее сказать, вверх ориентировано ребро, соответствующее данной
тройке.— Прим. перев.
418 Гл. 8. Геометрия прямоугольников
Сосредоточим теперь внимание на эффективной реализации
первого этапа алгоритма, т. е. на построении множества V вер-
вертикальных ребер контура. Как и следует ожидать, предлагае-
предлагаемый метод является плоским заметанием, опирающимся на де-
дерево отрезков Т. Напоминая об общей схеме, введенной в
разд. 8.3, укажем, что специальным узловым параметром, ис-
используемым в этом приложении, является СТАТУС [v], даю-
дающий грубую классификацию меры ^П[^[у]. ^МЬ А именно
СТАТУС может принимать одно из следующих значений:
полон, если C[v]>0;
неполон, если C[v] — Q, но С[ы]>0, где
СТАТУС [о] =
и — один из потомков v;
пуст, если С [и] = 0 для любого и
в поддереве с корнем в v.
Согласно этому определению, текущее сечение 3 является объ-
объединением всех отрезков [5[d],Z:[d]] для всех узлов дерева
отрезков, чей СТАТУС полон.
Для заданного отрезка s = (х; Ь, е) (вертикальной стороны
прямоугольника) множество s[\3f показано на рис. 8.14; s |~| &
является последовательностью промежутков между смежными
элементами ?У в интервале [Ь, е]. Сторона s, помещенная в де-
дерево отрезков, разбита на O(logN) фрагментов хорошо изве-
известным способом.
Было бы удобно иметь s[\?/ в форме объединения вкладов
от каждого из фрагментов. (Напомним, что каждый та-
такой фрагмент соответствует узлу v дерева Т, для которого Ь ^
^ В [v] < E[v] ^ г.) Легко убедиться, что вклад узла v в
s П3 (вклад (v)), соответствующий одному из фрагментов s,
задается так:
0, если СТАТУC[v] полон
или СТАТУС[ы]
полон для какого-
вклад (v) = _
[B[v],E[v]](\& =
нибудь предка v в Т;
[B[v], E[v]], если СТАТУС^] пуст;
вклад (Л СЫН [v]) U вклад (ПСЫН[о]),
если СТАТУСН
неполон.
Отсюда следует, что поиск в поддереве с корнем v нужно про-
проводить, только если СТАТУС [v] неполон. Позже мы вернемся
к реализации этого поиска.
Предположим временно, что последовательность (вклад (v),
где v соответствует фрагменту s) уже получена; для того чтобы
8.5. Контур объединения прямоугольников
419
каждое контурное ребро получалось как единый элемент, смеж-
смежные интервалы необходимо объединить. Эта ситуация пока-
показана на рис. 8.15. Там отрезок s = (х; Ь, е) разбит деревом Т на
пять фрагментов, каждый из которых соответствует одному
Рнс. 8.14. Пример множества интервалов s П 9. (Заметим, что s является
горизонтальным отрезком.)
из узлов Т. Каждый из таких узлов порождает, вообще говоря,
набор интервалов из а П 3f ¦ Любые два смежных интервала,
которые порождены разными узлами дерева отрезков, должны
быть объединены. Для реализации этого интервалы из вклад (v)
помещаются в СТЕК, что соответствует проходу снизу вверх
Ч Отрезок $
I—| Разбиение s
5n
Объединение
Объединение I
е
Рис. 8.15. Объединение смежных интервалов, производимое прн вычислении
s П 3. (Вновь s изображается как горизонтальный отрезок.)
по плоской фигуре. На вершине СТЕКА всегда будет распола-
располагаться верхний конец последнего из вставленных интервалов.
Если нижний конец следующего интервала, который должен
быть добавлен к СТЕКУ, совпадает с вершиной СТЕКА, то
последняя удаляется из СТЕКА прежде, чем верхний конец сле-
следующего отрезка будет добавлен к нему, реализуя тем самым
желаемое объединение.
Теперь можно описать поиск промежутков в & на отрезке
s~(x\b,e). В оригинальной работе Липски и Препараты ис-
использовалась стандартная структура данных и подпрограмма
14*
420 Гл. 8. Геометрия прямоугольников
ВКЛАД(Ь,е; корень (Г)), которая вычисляет множество [Ь, е](]
ПУ на общей для них абсциссе.
procedure КОНТУР-ОБЪЕДИНЕНИЯ-
ПРЯМОУГОЛЬНИКОВ >)
begin X[l : 2N] := упорядоченная последовательность абсцисс
вертикальных сторон; (* см. комментарий после
процедуры *)
j^:=0; (* s4- — множество вертикальных ребер*)
построить и инициализировать дерево отрезков Т,
состоящее из ординат сторон прямоугольников;
for i := 1 until 2N do
if (X[i] — абсцисса левой стороны) then
begin s4-:= ВКЛАДА,et\ корень (T))[)s&;
ВСТАВИТЬ^,-, е,; корень(Г))
end
else begin УДАЛИТЬ(Ь,,е<; корень(Г));
^:=ВКЛАД(Ь,-,ег; корень(Г)) U-^
, end
end.
Стоит подчеркнуть, что корректировка множества вер-
вертикальных ребер должна предшествовать вставке левой сто-
стороны, однако удаление правой стороны должно идти перед ней.
Отсюда вытекает, что если какие-нибудь правая и левая стороны
обладают одинаковой абсциссой, то обработка левой стороны
должна предшествовать обработке правой стороны; поэтому
этап сортировки в предыдущем алгоритме должен выполняться
с учетом данного условия.
Осталось обсудить еще два момента. Первый связан с кор-
корректировкой специальных параметров (в данном случае СТА-
СТАТУС [v]) в процедурах ВСТАВИТЬ и УДАЛИТЬ, второй — это
подпрограмма ВКЛАД.
Что касается первого момента, то предлагается следующая
процедура, которая, очевидно, выполняется за константное
время в расчете на один просмотренный узел:
procedure КОРРЕКТИРОВАТЬ(о)
begin M(C[v]>0) then СТАТУС[о] := полон
else if (ЛСЫН[»] = Л) then СТАТУС[о] := пуст
(* V — ЛИСТ *)
else 1!(СТАТУС[ЛСЫН[о]] =
СТАТУС[ПСЫН[о]] = пуст)
then СТАТУС[о] := пуст
, else СТАТУС[и] := неполон
') Строго говоря, эта процедура реализует лишь первый этап построе-
построения контура объединения прямоугольников: она строит множество верти-
вертикальных ребер этого контура. — Прим. пецев.
8.5. Контур объединения прямоугольников 421
Теперь опишем подпрограмму ВКЛАД:
function ВКЛАД (b, е; v)
(* данная подпрограмма использует внешний параметр СТЕК-
В начале работы при вызове данной подпрограммы с парамет-
параметрами ВКЛАД (Ь,е; корень G")) из главной процедуры СТЕК
пуст. Подпрограмма заносит в СТЕК последовательность от-
отрезков, представляющих собой [b, e]f\ вклад (v). Содержание
СТЕКА возвращается при вызове ВКЛАД (Ь, е; корень G")) *)
begin
1. if СТАТУС[у] Ф полон) then
2. if (ft<B[o]) and(?[o)<e) and(CTATyC[w] = пуст) then
(* вклад отрезка [i3[u],?"[w]] уже учтен*)
3. begin if (B[v] = вершина (СТЕКА)) then (* объедине-
объединение смежных отрезков *)
4. удалить вершину (СТЕКА)
5. else CTEK«*=.B[d] (* начало ребра*);
6. СТЕК <=Е[ v] (* текущий конец ребра*)
end;
7. else begin if (b < l(B[v] + E[v])/2\) then
8. ВКЛАДА,e; ЛСЫН[о]);
9. if (l(B[v] + E[v})/2\ < e) then
10. ВКЛАДА, e; ПСЫЩо])
end
end.
Маршрут, пройденный процедурой ВКЛАД в дереве отрезков
(т. е. последовательность обработанных ею узлов), существенно
пересекается с аналогичной последовательностью, соответствую-
соответствующей процедуре ВСТАВИТЬ (или УДАЛИТЬ), однако есть два
важных отличия, которые сейчас будут обсуждены на примере
процедуры ВСТАВИТЬ (без потери общности). Хорошо извест-
известно, что маршрут процедуры ВСТАВИТЬ имеет типичную струк-
структуру, которая уже изучалась в разд. 1.2.3.1 и воспроизведена на
рис. 8.16 для удобства читателей). Начальный путь (возможно,
пустой) Р„ач приводит к узлу, именуемому развилкой, из кото-
которого выходят два (возможно, пустых) пути Рл и Р„; изобра-
изображено также множество узлов отнесения, определяющих сегмен-
сегментацию вставленного интервала. Подпрограмма ВКЛАД тоже
проходит Рнач. Рл и Р„\ однако если какой-нибудь узел на лю-
любом из этих путей имеет полный СТАТУС, то проход по этому
пути прерывается (строка 1 в подпрограмме ВКЛАД). Это про-
происходит потому, что у-интервал отрезка s (или участок этого
интервала) «перекрывается» & и его вклад в s П & пуст. Когда
СТАТУС любого назначенного узла v, которого достигла под-
подпрограмма ВКЛАД, не является полным, тогда, если он пуст,
422
Гл. 8. Геометрия прямоугольников
вклад всего отрезка [.В [u], ?[w]] уже учтен; в противном слу-
случае ВКЛАД начинает поиск в поддереве с корнем v (строки
7—10) (это происходит, конечно, только если СТАТУС [с] не-
неполон). Этот поиск является наиболее времяемкой частью всей
задачи, как будет сейчас показано. На рис. 8.16(Ь) видно, что
для каждого отрезка и из ^ П [-6 М > ?[^]] существуют два
уникальных узла в поддереве с корнем v, которые соответ-
соответствуют самому левому и самому правому участкам и. Простой
Узел отнесения V
/ СТАТУС [и] неполон
Развил/fa
" Множество
уз.~ов отнесения
Рис. 8.16. (а)—типичная подструктура в Т, пройденная процедурой ВСТА-
ВСТАВИТЬ или УДАЛИТЬ; (Ь) —для каждого узла отнесения с неполным СТА-
СТАТУСОМ, достигнутого подпрограммой ВКЛАД, производится последующий
проход по всем путям, ведущим к узлам, которые соответствуют концам
отрезков из Э П [B[v], E[v]].
анализ показывает, что подпрограмма ВКЛАД выполняет про-
прохождение в прямом порядке путей, ведущих из v к указанным
узлам, при этом затрачивается фиксированное количество ра-
работы на каждый пройденный узел и, возможно, на его братьев
по дереву. Поэтому суммарная работа пропорциональна сумме
длин этих путей. Согласно общему свойству двоичных деревьев
[Lipski, Preparata A980)], если в поддереве существует v кон-
концевых узлов, то искомая суммарная длина путей ограничена
величиной v \og(\6N/v). Обозначим через n; число отдельных
кусков в Si, П У, где si — это i-я сторона прямоугольника, кото
рую обрабатывает данный алгоритм. Тогда общая работа под-
подпрограммы ВКЛАД ограничена величиной
Г V 1 167V ~ „ , 32jV2
С 2, "/ log — < СР log -у-.
8.5. Контур объединения прямоугольников
423
где р обозначает суммарное число ребер контура, а С — кон-
константа. Объединяя последнюю оценку с результатами анализа
процедур ВСТАВИТЬ и УДАЛИТЬ, а также с оценкой работы
второго этапа данного метода (на котором соединяются гори-
горизонтальные и вертикальные ребра), получаем следующую тео-
теорему;
Теорема 8.4. Контур объединения N изотетичных прямоуголь-
прямоугольников, состоящий из р ребер, можно получить за время
O\ p\og(N2/p)).
Если поставить вопрос об оптимальном алгоритме, то заме-
заметим, что известна нижняя оценка для этой задачи, равная
Q (./V log N + р). Действительно, О(р) — тривиальная оценка,
следующая из размера контура, a Q(N\ogN) — это нижняя
оценка, полученная преобразованием СОРТИРОВКИ к по-
построению контура (свободного от дыр) объединения прямоуголь-
прямоугольников, как вытекает из следующей теоремы:
Теорема 8.5. Сложность построения контура для F = Ri U
U #2 U ¦ ¦ ¦ U Rn, где F не содержит дыр, равна п (N log N) при
работе с моделью дерева решений.
Доказательство. Покажем, что задача сортировки N чисел
Х\, ..., хц преобразуется за время O(N) в нашу задачу. Дей-
Действительно, пусть для заданного х-, Ri будет декартовым произ-
произведением ^-интервала [0, х-,} и (/-ин-
(/-интервала [О, М — xi], где
М= max xt + 1
М
(рис. 8.17; без потери общности м~
предположим, что х\, ..., xN>Q).
Ясно, что F = Ri\} ... \}RN не
имеет дыр и что по контуру F мож-
можно получить упорядоченную после- „ о ,п п ,
г 1 ^w»r7 Рис. 8.17. Преобразование про-
довательность {*,} за время O(N). тдуры СОРТИРОВКА к за-
п даче поиска контура объедине-
Для предыдущего алгоритма ння прямоугольников, которое
не удалось добиться верхней оцен- не имеет дыр.
ки, которая бы совпадала с ниж-
нижней. Действительно, нетрудно обнаружить некоторую
неэффективность поиска в поддеревьях для узлов отне-
отнесения с неполным статусом, поскольку затраты на
прохождение по длинным путям приписываются только их
конечным узлам. Это ограничение было преодолено Гютингом
[Giiting A984)], построившим изумительную структуру дан-
данных для перечисления дыр в каждом поддереве за время,
пропорциональное их числу, и тем самым создавшим
424 Гл. 8. Геометрия прямоугольников
асимптотически оптимальный алгоритм. Как и следовало пред-
предполагать, структура данных Гютинга чрезвычайно сложна в ра-
работе. За описанием метода Гютинга читатель может обратиться
к его статье.
8.6. Замыкание объединения
прямоугольников
Начнем с того, что дадим строгое определение замы-
замыканию объединения прямоугольников. Говорят, что две точки
р{ = (xi, i/i) и рг = (*2, </г) на плоскости несравнимы, если они
не связаны отношением «доминирования» (см. разд. 4.1.3), т. е.
если {х\—Х2) (yi — Уг)<0. Если предположить без потери
общНОСТИ, ЧТО ;С2>*1,ТО,
Р,=(х,,У]) цг = СВ-сопряжение следуя удобной термино-
терминологии [Soisalon-Soininen,
Wood A982)], назовем
ЮЗ- и СЪ-сопряжениями
для pi и р2 две точки
соответственно (рис.
qr; = ЮЗ-сопряжение Рг=(хг>Уг) 8.18). Если задана пло-
плоская область R (не обя-
Рис. 8.18. Две точки рг и р2, несравнимые Зательно связная) то го-
по доминированию, и сопряженные им '
точки </, н <тГ ворят, что две точки свя-
связаны в R, если существует
кривая, полностью расположенная в одной из компонент связ-
связности R и соединяющая эти две точки. Введем теперь следую-
следующее определение:
Определение 8.2. Плоская область R называется СВ-замкну-
той, если для любых двух несравнимых точек р\ и р2, которые
связаны в R, их СВ-сопряжения тоже расположены в R. Ана-
Аналогично определяется и ЮЗ-замкнутая плоская область.
Определение 8.3. СЪ-замыканием плоской области 5 назы-
называется наименьшая из СВ-замкнутых областей, содержащих S;
она обозначается СВE). Аналогично определяется и ЮЗ-замы-
кание S, обозначаемое ЮЗ E). СВЮЗ-замыканием (или про-
просто замыканием для краткости) называется наименьшая об-
область, содержащая 5 и такая, что она СВ-замкнута и ЮЗ-замк-
нута одновременно; она обозначается CBKK(S).
Теория замыкания была развита в работах [Yannakakis,
Papadimitriou, Kung A979); Lipski, Papadimitriou A981);
Soisalon-Soininen, Wood A982) J. Для дальнейшего изложения
нам необходимо подчеркнуть некоторые важные свойства изу-
изучаемых объектов.
8.6. Замыкание объединения прямоугольников
425
Говорят, что плоская кривая Г является х-монотонной, если
для любых двух точек (Х\, yi) и (х2, уъ), лежащих на Г, спра-
справедливо условие: х2 > Х\ =>- у2 ^ У\. Если на плоскости задана
запретная область D, то две плоские кривые Fi и Гг называются
гомотопными, если их можно совместить непрерывной дефор-
деформацией, не пересекая D.
Если обозначить через R(F) минимальный изотетичный пря-
прямоугольник, охватывающий заданную (не обязательно связ-
связную) плоскую область F, то будут справедливы следующие
очевидные соотношения:
Fj=CBK>3?F) s'/? (F).
Если СВЮЗ (F) связно, то легко видеть, что СВ- и ЮЗ-угловые
точки R{F) (рис. 8.19(а)) принадлежат этому замыканию F.
Кроме того, для любой связной компоненты G из СВЮЗ (F)
Верхняя левая граница R(G)
СВ-угол _J_
Нижняя правая граница
(Ь) (с)
Рнс. 8.19. (а)—плоская фигура F и минимальный охватывающий ее (коор-
динатно-ориентнрованный. — Перев.) прямоугольник R(F)\ (b)—связная
компонента G СВЮЗ-замыкання плоской фигуры F; (с) — разделимость двух
компонент связности СВЮЗ(.Р).
(рис. 8.19 (Ь)) граница СВЮЗ(/7) состоит из двух jc-монотонных
кривых, гомотопных соответственно верхнему левому и ниж-
нижнему правому участкам границы R{G). Каждая из указанных
двух х-монотонных кривых является экстремальной в собствен-
собственном классе гомотопных кривых, не пересекающих G. Поэтому
эти кривые можно называть верхним и нижним контурами
замкнутой области СВЮЗ(/7). В общем случае для произволь-
произвольной области F замыкание СВЮЗ(/7) состоит из одной или бо-
более компонент; если число таких компонент больше единицы,
то любые две из них можно разделить х-монотонной кривой
(иначе будет нарушено условие замкнутости) (рис. 8.19(с)).
426 Гл. 8. Геометрия прямоугольников
Сойсалон-Сойнинен и Вуд установили также следующее
важное свойство, справедливое для любой плоской фигуры F:
СВЮЗ(Л = СВ(ЮЗ(Л) = ЮЗ(СВ(Л). (8-1)
Для практических приложений наиболее интересен случай,
когда F является объединением изотетичных прямоугольников:
Задача 0.5 (ЗАМЫКАНИЕ ОБЪЕДИНЕНИЯ ПРЯМО-
ПРЯМОУГОЛЬНИКОВ). Дан набор из N изотетичных прямоугольни-
прямоугольников. Надо построить замыкание их объединения.
Свойство (8.1) позволяет предложить два эквивалентных
алгоритма для вычисления замыкания заданной фигуры F.
Например, равенство СВЮЗ (F) = ЮЗ (СВ (F)) позволяет вы-
вычислить сначала СВ-замыкание F, а затем завершить решение
этой задачи путем вычисления ЮЗ-замыкания для CB(F). Эти
две задачи сильно упрощаются, когда F является объединением
изотетичных прямоугольников, поскольку верхний и нижний
контуры любой компоненты СВЮЗ(/7) являются при этом х-мо-
нотонными ступенчатыми кривыми. Данный алгоритм будет
работать следующим образом. Он состоит из двух плоских за-
заметаний в противоположных направлениях. Первое из них, про-
проводимое слева направо, строит СВ-замыкание для фигуры F
(объединения изотетичных прямоугольников), т.е. оно опреде-
определяет СВ-замкнутые компоненты связности. Второе плоское за-
заметание (справа налево) строит ЮЗ-замыкание для CB(F),
т. е., начиная со связных компонент CB(F), оно определяет
в результате компоненты ЮЗ(СВ(/7)) (и тем самым
СВЮЗ (/=¦)).
Компонента CB(F) называется активной (при плоском за-
заметании), если ее пересекает заметающая прямая; очевидно,
что компонента CB(F) активна тогда и только тогда, когда она
содержит по крайней мере один прямоугольник из F, пересе-
пересекаемый заметающей прямой (он называется активным прямо-
прямоугольником) .
Во-первых, исследуем те две основные ситуации, которые
встречаются при плоских заметаниях (для конкретности; речь
будет идти о заметании слева направо, которое строит CB(F)).
Очевидно, что точками событий являются абсциссы вертикаль-
вертикальных сторон прямоугольников. Если текущим событием является
встреча с левой стороной, то производятся следующие действия:
A) инициализируется активная компонента, или B) расши-
расширяется активная компонента, или C) объединяются две или
более активные компоненты; с другой стороны, завершение ра-
работы с активной компонентой (и ее деактивация) может про-
произойти только при встрече с правой стороной какого-нибудь
прямоугольника. Активная компонента характеризуется актцв*
8.6. Замыкание объединения прямоугольников
427
ным интервалом (вдоль заметающей прямой), который являет-
является плоской полосой, заключенной между максимальной орди-
'?'
Максимальная ордината
' для всех прямоугольников,
просмотренных к настоящему
моменту в данной компоненте
Активный.^ интервал
для данной компоненты
I
-I-
._'._ Минимальная ордината
среди текущих активных
прямоугольников компоненты
Рис. 8.20. Активная компонента и ее активный интервал. (Заштрихованная
полоса будет использоваться здесь и далее для обозначения активных ин-
интервалов.)
(с)
Рнс. 8.21. Ситуации, которые могут возникнуть при встрече заметающей пря-
прямой с левой стороной, (а) — начинается новая компонента; (Ь) —расширя-
—расширяется одна из уже существующих компонент; (с) — две (илн больше) ком-
компоненты соединяются. (Показаны активные интервалы после операции
вставки.)
натой для всех просмотренных к данному моменту прямоуголь-
прямоугольников, принадлежащих указанной компоненте, и минимальной
ординатой среди активных в этот момент прямоугольников этой
компоненты (типичная ситуация показана на рис. 8.20). Актив-
Активный интервал играет важнейшую роль при определении типа
одной из трех возможных ситуаций, которые возникают при
428
Гл. 8. Геометрия прямоугольников
встрече заметающей прямой с левой стороной прямоугольника,
как это показано на рис. 8.21.
Когда текущее событие является правой стороной какого-ни-
какого-нибудь прямоугольника R, могут возникнуть также три ситуации:
A) R перестает быть активным прямоугольником, не влияя на
величину активного интервала (рис. 8.22(а)); или B) R пере-
перестает быть активным прямоугольником, а активный интервал
поджимается кверху (рис. 8.22 (Ь): это происходит, только если R
является самым нижним из активных прямоугольников данной
44-
(с)
Рис. 8.22. Ситуации, которые могут возникнуть при встрече заметающей
прямой с правой стороной прямоугольника, (а)—прямоугольник деактиви-
руется, не влияя на величину активного интервала; (Ь)—прямоугольник
деактивируется, приводя к сужению активного интервала; (с)—компонента
завершается. (Вновь активные интервалы показаны после операции уда-
удаления.)
компоненты); или C) компонента завершается (рис. 8.22(с):
это происходит, только если R оставался единственным актив-
активным прямоугольником в данной компоненте).
Для проведения вышеописанных действий статус заметаю-
заметающей прямой реализуется на несколько усложненной структуре
данных. Первичная структура организована в форме сбаланси-
сбалансированного по высоте дерева Т, листья которого содержат концы
активных интервалов. В каждом листе Т, кроме нижнего конца
активного интервала, хранится указатель на вторичную струк-
структуру, являющуюся также сбалансированным по высоте дере-
деревом, в котором хранятся все активные прямоугольники в дан-
данной компоненте. Вставки (левых сторон прямоугольников) и
удаления (их правых сторон) выполняются следующим об-
образом.
Когда нужно обработать левую сторону [1/1,1/2], то сначала
yi локализуется в Г, а затем просматривается последователь-
последовательность листьев до тех пор, пока не найдется также 1/2- Эта опе-
операция исполняется за время O(\ogN-\-h), где h — число объ-
8.6. Замыкание объединения прямоугольников 429
единенных активных интервалов (рис. 8.21 (с)); уг вставляется
также и во вторичную структуру, и если h ^Э=2, то соответ-
соответствующие вторичные структуры сцепляются (как сцепляемые
очереди). Затраты на конкатенацию вторичных структур за
время работы алгоритма легко оценить, если O(logyV) опера-
операций, затраченных на сцепление двух подобных структур Ах и
Лг, отнести на счет крайнего правого активного прямоуголь-
прямоугольника А\\ а поскольку на каждый прямоугольник такие затраты
могут относиться не более одного раза, то верхняя оценка за-
затрат на сцепление равна O(N\ogN).
Когда нужно обработать правую сторону [уи уг] вновь, сна-
сначала находим yi в активном интервале (в первичной струк-
структуре Т). Затем элемент yi находится также в соответствующей
вторичной структуре и удаляется из нее, а если он совпадает
с минимальным элементом этой вторичной структуры, то кор-
корректируется и значение нижнего конца активного интервала
(рис. 8.22 (Ь)). Наконец, если yi является единственным эле-
элементом вторичной структуры, то соответствующий активный
интервал удаляется также из первичной структуры. Очевидно,
что обработку любой правой стороны можно выполнить за
время O(logyV).
Плоское заметание справа налево, при котором строится
ЮЗ(СВ(/Г)), проводится аналогично, поэтому справедлива
Теорема 8.6. СВЮЗ-замыкание объединения N изотетичных
прямоугольников можно построить, затратив оптимальные вре-
время Q(N\ogN) и память Q(N).
Доказательство (набросок). Действительно, после предва-
предварительной сортировки абсцисс сторон прямоугольников обра-
обработка этих 2N сторон займет также время O(N\og N), как по-
показано выше. Структуры данных для этой работы занимают
O(N) памяти. Эти оценки оптимальны, поскольку задачу об
уникальности элементов можно легко преобразовать в задачу
о замыкании объединения прямоугольников.
Замечание. Вышеизложенный метод легко приспособить для
вычисления связных компонент множества прямоугольников
с сохранением таких же оценок по времени и памяти1). Дей-
Действительно, легко убедиться, что все отличие состоит в замене
(единственного) активного интервала для каждой компоненты
(как описано выше) набором непересекающихся интервалов,
представляющих собой сечения, образованные заметающей пря-
прямой и активными прямоугольниками из этой компо-
компоненты.
') См. также [Edelsbrunner, Van Leeuwen, Ottman, Wood A981I.
430
Гл. 8. Геометрия прямоугольников
8.7. Внешний контур объединения
прямоугольников
В предыдущем разделе было показано, как один ос-
основной метод — плоское заметание — можно приспособить для
решения множества разных задач, связанных с объединением
изотетичных прямоугольников, таких как вычисление их пло-
площади, периметра, замыкания и контура (задачи 0.1, 0.3, 0.4 и
0.5). Как указывалось раньше (см. разд. 8.5), контур объеди-
объединения N прямоугольников может иметь 0(Л/'2) ребер, однако это
неверно для подмножества контура, задаваемого следующим
определением:
Определение 8.4. Внешним контуром объединения изотетич-
изотетичных прямоугольников F называется граница между F и беско-
бесконечной областью плоскости.
Покажем теперь, что внешний контур имеет 0(N) ребер.
Этот результат устанавливается легко, если использовать два
интересных супермножества внешнего контура, первое из кото-
которых вводится следующим определением:
Определение 8.5. Нетривиальным контуром объединения изо-
изотетичных прямоугольников F называется множество таких кон-
контурных циклов, каждый из которых содержит по меньшей мере
одну вершину какого-нибудь из исходных прямоугольников.
Примеры этих трех объектов — контура, нетривиального
контура и внешнего контура — даны на рис. 8.23. Из этого ри-
рисунка непосредственно видно, что внешний контур является
подмножеством нетривиального контура.
(а)
(Ь)
Рис. 8.23. Примеры: (а) — контура, (Ь) — нетривиального контура и (с) —
внешнего контура для объединения прямоугольников.
Для дальнейшего изложения будет удобно считать каждое
ребро состоящим из двух дуг, ориентированных в противопо-
противоположных направлениях и лежащих по разные стороны от исход-
исходного ребра, как показано на рис. 8.24. Ребра прямоугольников
Ri, ..., Rn разбивают плоскость на области, одна из которых
бесконечна. После введения вспомогательных дуг границы всех
8.7. Внешний контур объединения прямоугольников
431
областей этого разбиения порождают набор ориентированных
цепей, состоящих из дуг; подобная цепь называется внешней
или внутренней в зависимости от того, будет ли она ориентиро-
ориентирована по часовой стрелке или против. Дуга в цепи называется
I
Рис. 8.24. Соглашения относительно направлений объединяющих дуг для
заданного ребра.
концевой, если она содержит концевую точку того исходного
отрезка (стороны прямоугольника), которому она принадлежит.
Цепь называется нетривиальной или тривиальной в зависимо-
зависимости от того, содержит она или нет концевую дугу. Множество
Рис. 8.25. Нетривиальные цепи для объединения прямоугольников, изобра-
изображенного на рис. 8.23.
нетривиальных цепей для примера с рис. 8.23 проиллюстриро-
проиллюстрировано на рис. 8.25. Теперь можно поставить следующие задачи:
Задача 0.6 (НЕТРИВИАЛЬНЫЙ КОНТУР ОБЪЕДИНЕ-
ОБЪЕДИНЕНИЯ ПРЯМОУГОЛЬНИКОВ). Дан набор из N изотетичных
прямоугольников. Надо найти нетривиальный контур их объ-
объединения.
432
Гл. 8. Геометрия прямоугольников
Задача 0.7 (ВНЕШНИЙ КОНТУР ОБЪЕДИНЕНИЯ ПРЯ-
ПРЯМОУГОЛЬНИКОВ). Дан набор из ./V изотетичных прямоуголь-
прямоугольников. Надо построить внешний контур их объединения.
Непосредственно видна справедливость следующей цепочки
включений:
Внешний контур s Нетривиальный контур s Нетривиальные
цепи.
Важное свойство этих множеств состоит в том, что число
дуг в нетривиальных цепях равно 0(N), как это следует из
теоремы 8.7:
Теорема 8.7. Общее число дуг в нетривиальных цепях объ-
объединения N изотетичных прямоугольников равно 0(N).
Доказательство. Присвоим вершине тип i (t=l, 3), если
угол поворота по часовой стрелке между дугами, инцидентными
этой вершине (и ориентированными согласно направлению
Вершина типа
Рис. 8.26. Типы вершин.
Вершины типа 3
цепи), равен Ы/2 (рис. 8.26). Обозначим также через v* число
вершин типа i в заданной цепи. Тогда для любой цепи спра-
справедливо следующее соотношение:
4 для внутренней (ориентированной против
часовой стрелки) цепи,
—4 для внешней (ориентированной по часовой
стрелке) цепи.
v3 — v, = ¦
Следовательно, общее число v вершин в цепи (т. е. число дуг)
выражается так:
v = vi + v3 = 2v! ± 4
4.
Суммируя v по всем нетривиальным цепям, получаем оценку
для общего числа дуг t:
8.7. Внешний контур объединения прямоугольников 433
Данная теорема показывает, что если (общий) контур состоит
из O(N2) дуг, то большая их часть принадлежит тривиальным
цепям. Поэтому, если необходимо построить именно нетри-
нетривиальный или внешний контуры, то придется разработать спе-
специальные методы, позволяющие избавиться от накладных рас-
расходов, создаваемых тривиальными цепями. Однако, прежде
чем приступить к решению последней задачи, отметим, что
нижней оценкой ее трудоемкости будет Q(N logN), поскольку
в данной ситуации верны те же самые рассуждения, которые
были использованы при доказательстве теоремы 8.5 (в
разд. 8.5); действительно, в том доказательстве понятия об-
общего, нетривиального и внешнего контуров совпадали.
V.O
1\
vL0 Q
¦\
/г
Случаи 7 Случай Z
Рис. 8.27. Ситуации, возникающие в алгоритме на этапе движения.
Данную задачу вряд ли возможно решить методом плоского
заметания, поскольку определить факт тривиальности цепи
можно только при окончании процесса заметания (а не в его
начале). Недавно был предложен метод [Lipski, Preparata
A981)], осуществляющий «обход» цепей того контура, который
следует построить, добавляя по одной дуге на каждом шаге.
Ясно, что если обработка каждой дуги потребует О (logN) вре-
времени, то, согласно теоремам 8.5 и 8.7, будет получен оптималь-
оптимальный алгоритм. Приступим к описанию этого метода.
Основной частью процедуры обхода является механизм, дви-
движения, согласно которому мы отправляемся из текущей вер-
вершины v\ (рис. 8.27) и продвигаемся по текущему отрезку h в
заданном направлении, причем может возникнуть одна из сле-
следующих двух ситуаций.
1. Существует такой отрезок /2, ближайший к V\, который
пересекает h и заходит внутрь области, лежащей слева от 1\.
В этом случае делаем левый поворот, т. е. точка пересечения
i»2 становится текущей вершиной, a h — текущим отрезком.
2. Достигнута концевая точка и3 отрезка /ь совпадающая
с концевой точкой отрезка /2 (очевидно, /2 не заходит внутрь
области, лежащей слева от Л). В этом случае делаем правый
434
Гл. 8. Геометрия прямоугольников
поворот, т. е. из становится текущей вершиной, а /2 — текущим
отрезком.
Вышеописанный шаг движения можно реализовать путем
поиска на двух подходящих геометрических структурах, име-
именуемых горизонтальной и вертикальной картами смежности, ко-
которые будут сейчас изложены. Ограничимся горизонтальной
картой смежности (ГКС), поскольку все рассуждения в полной
мере применимы к вертикальной карте смежности (ВКС).
Рассмотрим множество V, состоящее из вертикальных отрез-
отрезков, которые явлются вертикальными сторонами исходных пря-
прямоугольников (рис. 8.28). Через каждую концевую точку р
(а)
(Ъ)
Рис. 8.28. Множество вертикальных отрезков V и результирующая горизон-
горизонтальная карта смежности.
каждого отрезка из V проведем пару горизонтальных лучей:
один вправо и один влево; каждый из этих лучей или заканчи-
заканчивается на ближайшем к р вертикальном отрезке, или если по-
подобного пересечения не существует, то луч продолжается в бес-
бесконечность. Таким образом плоскость разбивается на области,
две из которых являются полуплоскостями, а все прочие — пря-
прямоугольниками, возможно бесконечными в одном или обоих
горизонтальных направлениях. Эти области будем называть
«обобщенными прямоугольниками». Каждый обобщенный пря-
прямоугольник является классом эквивалентности для точек на
данной плоскости по отношению к их горизонтальной смежно-
смежности вертикальным отрезкам (отсюда и название «горизонталь-
«горизонтальная карта смежности»). Можно простым индуктивным доказа-
доказательством проверить то, что общее число областей в ГКС не
превосходит 3|У|+ 1-
Горизонтальная карта смежности является просто частным
случаем разбиения плоскости, порожденного укладкой планар-
ного графа. Если предположить, что текущий отрезок 1\ гори-
горизонтален (рис. 8.27), то локализация текущей вершины v\ в од-
одной из областей исходной карты (т. е. определение того обоб-
обобщенного прямоугольника, который содержит v\) означает опре-
8.7. Внешний контур объединения прямоугольников 435
деление вертикальных сторон этой области. Легко убедиться,
что это все, что требуется для реализации шага движения.
Действительно, предположим, что v\ = (х\, у\), а 1\ лежит на
прямой у = у\ в интервале [лть^з]. Локализуем точку {х\,у\)
в ГКС и получаем абсциссу х2 для ближайшего вертикального
отрезка, лежащего справа от (х\,у\). Если х2 ^ х3, то надо сде-
сделать левый поворот (случай 1); если х2 > х3, то надо сделать
правый поворот (случай 2). Три оставшихся случая располо-
расположения текущего отрезка (слева, сверху и снизу от текущей вер-
вершины) обрабатываются совершенно аналогичным образом. По-
Поэтому добавка одной дуги к нетривиальной цепи занимает
столько же времени, сколько одно обращение к любой из карт
смежности.
Для реализации процедуры обращения к карте смежности
(т. е. для локализации точки на плоскости) можно прибегнуть
к одному из многих методов поиска, описанных в разд. 2.2, и
с оценкой по времени O(logN). Особенно удобен для данной
ситуации так называемый метод трапеций (на основе медиан)
(разд. 2.2.2.4), причем благодаря природе исходной плоской
карты (определенной множеством параллельных отрезков)
указанные чрапеции становятся прямоугольниками. Для O(N)
точек (как в нашем случае, поскольку число вершин исходных
изотетичных прямоугольников равно AN) данный метод тра-
тратит на поиск O(logN) времени, используя структуру данных
(двоичное дерево поиска), которую можно построить за время
O(NlogN). Нежелательным аспектом этого, в остальном весь-
весьма простого метода является то, что в худшем случае он тре-
требует O(NlogN) памяти вместо 6(./V). Однако вероятностный
анализ [Bilardi, Preparata A982)], надежно базирующийся на
большом экспериментальном материале, показал, что для ши-
широкого класса гипотез относительно статистического распреде-
распределения отрезков средний объем необходимой памяти равен
Q(N) с очень малой, практически приемлемой мультипликатив-
мультипликативной константой (равной примерно 6).
Нетривиальный контур (и, следовательно, внешний контур)
можно получить, систематически построив множество всех не-
нетривиальных цепей, а затем удалив нежелательные его эле-
элементы. Порождение нетривиальных цепей можно осуществить
в результате применения вышеописанного шага движения к вер-
вершине прямоугольника и той дуге, которая выходит из нее и на-
направлена вовне прямоугольника. Тем самым каждая вершина
прямоугольника становится «ростком цепи». Вначале все вер-
вершины занесены в память (массив) и помечены. Они извле-
извлекаются поочередно из указанного массива для генерации всех
нетривиальных цепей, а этот процесс прекращается, когда мас-
массив становится пустым. Поскольку в нетривиальных цепях
436 Гл. 8. Геометрия прямоугольников
имеется 0(N) дуг, а построение одной такой дуги можно про-
проделать за время O(\ogN), то все множество нетривиальных це-
цепей можно построить за время О (./V log ./V), включая сюда и
время предварительной обработки для построения деревьев по-
поиска на картах смежности.
Для завершения построения внешнего контура необходимо
удалить те цепи, которые не отделяют F от его внешности. Что-
Чтобы отличить нетривиальные цепи, которые принадлежат внеш-
внешнему контуру, от тех, которые не принадлежат ему, можно соз-
создать процедуру плоского заметания, требующую O(N\ogN)
времени (см. упр. 1 в конце данной главы).
Теорема 8.8. Нетривиальный и внешний контуры объедине-
объединения из N изотетичных прямоугольников можно построить за
оптимальное время Q(N\ogN), затратив в худшем случае
O(N\ogN) памяти.
8.8. Пересечения прямоугольников и
связанные с этим задачи
В предыдущих разделах обсуждались методы вычис-
вычисления некоторых глобальных свойств множества изотетичных
прямоугольников, таких как мера, периметр и т. п. В настоя-
настоящем разделе будет, напротив, рассматриваться задача вычис-
вычисления двух отношений, которые естественным образом опреде-
определены на множестве прямоугольников. Эти два отношения «пе-
«пересечение» и «включение» (или, как иногда говорят, «охват»)
рассматриваются по отдельности в следующих разделах.
8.8.1. Пересечения прямоугольников
Два изотетичных прямоугольника пересекаются тог-
тогда и только тогда, когда у них есть по крайней мере одна
общая точка. Простейшим примером является случай одного
измерения, где «прямоугольники» — это интервалы на прямой
линии. Поскольку с(-мерный прямоугольник является декарто-
декартовым произведением d интервалов, каждый из которых опреде-
определен на соответствующей координатной оси, то два d-мерных
прямоугольника пересекаются тогда и только тогда, когда пе-
пересекаются их проекции (два интервала) на ось х/ для всех
/ = 1, 2, ..., d. Итак, очевидно, что одномерный случай играет
фундаментальную роль, поэтому он будет изучен прежде
всего.
Пусть заданы два интервала: R' = [x\, х'2] и R" = [x", х"];
условие R'[\R" ф 0 эквивалентно одному из следующих взя-
8.8. Пересечения прямоугольников
437
имно исключающих условий:
(8.2)
- Новый
прямоугольник К
Четыре возможных ситуации взаимного расположения кон-
концов интервалов, соответствующих условию R' fl R" Ф 0, фак-
фактически охватываются соотношениями (8.2) и (8.3), что может
быть проверено непосредственным образом. Поэтому для про-
проверки пересечения R' и R" достаточно проверить факт попада-
попадания или левого конца R'
внутрь R", или левого конца
R" внутрь R'.
Указанное свойство од-
одномерной задачи играет
важнейную роль при реше-
решении следующей задачи:
Задача 0.8 (ОТЧЕТ О
ПЕРЕСЕЧЕНИИ ПРЯМО-
ПРЯМОУГОЛЬНИКОВ). Дан на-
набор из N изотетичных пря-
прямоугольников. Надо пере-
перечислить все их пересекаю-
пересекающиеся пары.
Для решения этой зада-
задачи представляется естествен-
естественным обращение к методу
плоского заметания,где точ-
точками событий являются, как
обычно, абсциссы верти-
Условие F:2) {//У/у//,
Ух
Заметающая прямая I
Рис. 8.29. Ситуация, возникающая при
достижении заметающей прямой левой
стороны прямоугольника R. Показаны
только активные прямоугольники.
кальных сторон прямоуголь-
прямоугольников. Статус заметающей прямой задается пересечениями
исходных прямоугольников с этой заметающей дрямой; для
упрощения формулировок назовем вновь прямоугольники,
пересеченные заметающей прямой, активными (см. разд. 8.6).
Предположим, что в процессе плоского заметания слева на-
направо текущей точкой события стала левая сторона (вновь
встреченного) прямоугольника R = [х\, х2] X [у\, г/2]. Очевидно,
что абсцисса заметающей прямой х\ (которая совпадает с ле-
левым концом х-интервала для R) принадлежит х-интервалам для
каждого из активных прямоугольников; поэтому все, что не-
необходимо сделать, состоит в определении того, для каких из
активных прямоугольников выполнены условия или (8.2), или
(8.3) на их {/-интервалах (рис. 8.29). Кажется, что необходим
двукратный поиск: один раз для проверки условия (8.2), а вто-
второй для проверки условия (8.3). Двойственная природа этих
438 Гл. 8. Геометрия прямоугольников
двух проверок (одна для определения всех интервалов, содер-
содержащих некую точку; другая для определения всех точек, по-
попавших в некий интервал) может навести на мысль об исполь-
использовании двух разных структур данных и о разработке не-
несколько более сложных алгоритмов [Bentley, Wood A980);
Six, Wood A980)].
Превосходное решение было получено в результате введе-
введения [McCreight A981); Edelsbrunner A980)] новой структуры
данных, названной Эдельсбруннером деревом интервалов. Хотя
возможна и более совершенная динамическая версия интер-
интервального дерева, мы ограничимся простым статическим вариан-
вариантом, пригодным для наших целей.
Если [&<'>, е(г)] обозначает {/-интервал для прямоугольника
R('\ то пусть (t/i, г/г. • • ¦. Уъы) обозначает упорядоченную по-
последовательность концов ./V штук г/-интервалов. (Статическое)
дерево интервалов имеет скелетную структуру (именуемую
первичной структурой), которая статически зависит от задан-
заданной последовательности точек (в нашем случае от последова-
последовательности (г/ь ..., г/2#), хотя в ней можно хранить произволь-
произвольное подмножество (активное подмножество) интервалов, чьи
концы принадлежат множеству {у\, г/2, .... Uin). Тогда дерево
интервалов Т на последовательности (г/i, г/2, • • •, Uin) и мно-
множестве интервалов / S {[&((), е(()]: i= 1, ..., ./V}, определяется
следующим образом:
1. Корень w дерева Г имеет дискриминант 6(оу) = (г/# +
+ уы-\)/2 и два указателя на (вторичные) списки S(w) и h(w).
Списки 2?(w) и 9l(w) содержат упорядоченные списки соот-
соответственно левых и правых концевых точек тех интервалов из /,
которые содержат h(w). B'(w) и 3i(w) упорядочены по воз-
возрастанию и убыванию соответственно.)
2. Левым поддеревом для w является дерево интервалов на
последовательности (г/i, ..., уы) и подмножестве интервалов
/i?s/, ординаты правых концов которых не превосходят b(w).
Аналогично определяется и правое поддерево для w.
3. Каждый первичный узел в Г считается или «активным»,
или «неактивным». Узел активен, если его вторичные списки
непусты или если в обоих его поддеревьях есть активные узлы.
Статическое дерево интервалов обладает рядом интересных
свойств, следующих прямо из вышеизложенного определения:
A) Первичная структура Т является сбалансированным
двоичным деревом, листья которого связаны с величинами
Уи • • ¦, У2М, и прохождение по Т во внутреннем порядке дает
упорядоченную последовательность (г/ь ..., у2ы).
B) На вторичных списках 3' (v) и SI (v) для нелистового
первичного узла v должны быть определены операции вставки
8.8. Пересечения прямоугольников
439
и удаления элементов. Эти списки удобно реализовать как сба-
сбалансированные по высоте или весу деревья.
C) Активные узлы можно однозначно связать в структуру,
представляющую собой двоичное дерево 0~, каждая дуга кото-
которого соответствует пути (или его части), исходящему из корня
Т. Поэтому каждому первичному узлу v припишем два указа-
указателя: ЛУ (левый указатель) и ПУ (правый указатель), исполь-
используемые для реализации дерева 9~. Если узел v неактивен, то
ЛУ[у] = Л и ПУ[у] = Л; однако если v активен, то ЛУ[и]ф
ф Л только тогда, когда существуют активные узлы в левом
Интер-
Интервалы
Рис. 8.30. Пример отнесения множества интервалов в статическом дереве
интервалов. Дуги, обозначенные сплошными линиями, образуют первичную
структуру; пунктирные дуги образуют вторичные структуры; штрих-пунктир-
штрих-пунктирные линии образуют особую сверхструктуру Э~.
поддереве узла v, и аналогично ПУ [v] ф Л только тогда, когда
существуют активные узлы в правом поддереве v. Заметим, что
больше половины активных узлов имеют непустые вторичные
списки.
На рис. 8.30 приведен пример отнесения интервалов в ста-
статическом дереве интервалов.
Во-первых, рассмотрим вопрос об управлении вставками и
удалениями в статическом дереве интервалов. Заметим, что
как первичная структура, так и каждый из вторичных списков
реализуются посредством двоичных деревьев глубины O(logjV).
Вставка интервала [Ь, е] заключается в проходе пути в Г от
корня до первого узла v* такого, что b ^ б(у*)^ е (развилки);
в этот момент ордината Ь вставляется в &(v*), а ордината е —
в 5?(и*). Проверка того, что при этом левые и правые указа-
указатели можно поддерживать за константное время в расчете на
один узел, является достаточно простым упражнением. По ана-
аналогии с незначительными изменениями можно выполнить и
удаление. Каждая из этих операций требует время O(log./V).
440
Гл. 8. Геометрия прямоугольников
Теперь проанализируем поиск на интервальном дереве, т. е.
определение пересекающихся пар интервалов при вставке интер-
интервала [Ь, е] в Т. Опять пройдем по некоему (возможно, пус-
пустому) пути от корня к первичному узлу v* (развилке) такому,
что b ^8(v*)^ е. Затем, начиная от v*, пройдем по двум раз-
разным путям к двум листьям в поддереве с корнем в v*, которые
связаны с величинами Ъ и е соответственно (рис. 8.31). Пусть
Корень
Лист
Лист
Рис. 8.31. Поиск в интервальном дереве. Закрашенные треугольники обо-
обозначают вторичные списки, которые следует обойти. Поименованные под-
поддеревья также необходимо обойти (с помощью ЛУ и ПУ).
РНач обозначает последовательность узлов от корня до узла,
предшествующего v*; кроме того, пусть Рл — последователь-
последовательность узлов от v* до листа Ь, а Р„ — последовательность узлов
от v* до е. Рассмотрим два основных случая:
1. и е Ряач. В этом случае [Ь, е] лежит слева или справа от
б (и). Предположим без потери общности, что е^б(и). По-
Поэтому прежде всего надо проверить возможность пересечения
[Ь, е] с какими-нибудь из активных интервалов, содержащих
б (и). Для любого такого активного интервала [Ы1\ еA)] эта
проверка производится путем выяснения справедливости усло-
условий Ь ^ Ы11 ^ е или &('> ^ Ь ^ е<'>. Но поскольку Ъ < е ^
s? б (и) <С е(г), то характеристическим условием пересечения ин-
интервалов [Ы'\ е<'>] и [Ь, е] является только 6(i) ^ е; оно про-
проверяется путем сканирования SB (v) в порядке возрастания н
перечисления всех тех интервалов, для которых это условие
8.8. Пересечения прямоугольников 441
выполнено. Делается эта работа эффективно за время, пропор-
пропорциональное числу найденных пересечений (без лишнего по-
поиска).
2. v e Рл (и аналогично с соответствующими изменениями
»еРп). Если 8(v)^b, то рассуждая так же, как при о е Рнач,
необходимо просмотреть правый список узла v — Я(v) в убы-
убывающем порядке (опять без лишней работы). Если же Ь <
<6(и), то известно, что [Ь, е] пересекает не только все актив-
активные интервалы, отнесенные к v, но также и все интервалы, от-
отнесенные к узлам из правого поддерева v. Первое из этих мно-
множеств получается простым перечислением тех интервалов, чьи
правые концы находятся в 5?(v). Второе множество получается
в результате обхода активных узлов правого поддерева. Для
эффективного решения последней задачи будут использованы
дуги, определяемые значениями ЛУ и ПУ. Согласно предыду-
предыдущим рассуждениям (менее половины активных узлов в этом
поддереве имеют пустые вторичные списки), число пройден-
пройденных узлов по порядку будет равно числу перечисленных ин-
интервалов.
Анализ трудоемкости вышеописанного метода не составляет
труда. Прежде всего статическое дерево интервалов для на-
набора из N интервалов требует O(N) памяти, поскольку в нем
будет AN—1 первичных узлов, и еще не более 2N элементов
необходимо запомнить во вторичных списках. Скелетная пер-
первичная структура строится за время O(N\ogN), поскольку не-
необходима предварительная сортировка абсцисс. Каждый интер-
интервал вставляется или удаляется за время O(logN), как упоми-
упоминалось выше. Поиск в дереве требует O(\ogN) времени для
прослеживания поисковых путей (см. опять рис. 8.31), хотя на
каждый обнаруженный интервал тратится константное время;
единственные накладные расходы, относящиеся к соответствую-
соответствующему первичному узлу, пропорциональны числу вторичных
списков, обрабатываемых в процессе данной работы. Заметим,
кроме того, что если поиск в дереве осуществляется только в
связи со вставкой прямоугольника (т. е. при вставке его левой
стороны), то каждая пересекающаяся пара будет обнаружена
ровно один раз. В заключение подведем итог предыдущему об-
обсуждению следующей теоремой:
Теорема 8.9. Обнаружить s пересекающихся пар в наборе
из N изотетичных прямоугольников можно за оптимальное вре-
время Q(N\ogN-\- s), затратив O(NlogN) времени на предвари-
предварительную обработку и используя оптимальную память 9 GV).
Доказательство. Верхние оценки по времени и памяти были
установлены ранее. Поэтому ограничимся доказательством оп-
A4U Pa. 8. Геометрия прямоуёольников
тимальности. Оптимальность по памяти очевидна. Что же ка-
касается оптимальности по времени, заметим, что задачу об уни-
уникальности элементов, для которой справедлива нижняя оценка
Q(N\ogN) на модели дерева решений (см. гл. 5), можно три-
тривиально преобразовать в нашу задачу. На самом деле пусть
даны N действительных чисел {z\, ..., Zn} и выбран интервал
[Ь, е]; по Zi построим прямоугольник [Ь, е] X [zi, Zi] и приме-
применим к нему алгоритм поиска пересечений прямоугольников.
Если пересечений не обнаружено, то все числа различны.
8.8.2. Другой подход к задаче о пересечении
прямоугольников
Как отмечено в начале разд. 8.8.1, два интервала
R'— {х[, х'Л и R" = \x"t x"~\ пересекаются, если выполнено
любое из следующих условий:
A) *;<<<х2'; (8.2)
B) <<*;<<. (8.3)
Легко видеть, что дизъюнкция двух предыдущих условий экви-
эквивалентна конъюнкции двух следующих условий1):
х" <.х' х' < х"
которые можно тривиально преобразовать так:
-х'2^-х[', *[<<. (8.4)
Последнее условие выражает отношение «доминирования» «<
на плоскости (см. разд. 4.1.3) для точек (—*", х") и (— х'2, х[).
В такой интерпретации задача определения всех пересекаю-
пересекающихся пар интервалов из набора, в котором их N штук, пре-
преобразуется следующим образом. Пусть задано множество
# = {/?(/) = [*</>, xf\. j= I, ..., N), состоящее из N интерва-
интервалов; определим, во-первых, функцию Сто: Я-^Е2, отображаю-
отображающую интервал [хих2] в точку (хих2) на плоскости (рис. 8.32;
заметим, что точка (хи х2) лежит выше биссектрисы Х\ = х-2
первого квадранта). Теперь определим отображение ст': Е2-*-
-ь-Е2, которое является преобразованием симметрии плоскости
относительно оси х2 (т. е. точка (х\, х2) отображается в точку
(—Xi, X2))- Наконец, определим отображение о": Е2~*-Е2, ко-
') Действительно, пусть Рг := (х[ < х"), Р2 := (х" < х'2), Р3 := (х"^х[)
и Р4:= (х'^х"). В символической записи: Р{Р2 V Р3Р4=Т -*=*-(Pi V Р3) *
1 (Р* V Рз) (Pi V Pa) (Pt V Pt) =« Т. Поскольку Р, =- Р3, Pi V Р4 = Т,
Р3 V Р» = Т, то имеем: Р»Р4 (Р» V Ра) = Р»Р* = Т.
8.8. Пересечения прямоугольников
443
торое является преобразованием симметрии плоскости относи-
относительно биссектрисы х2 = —х\ второго квадранта (т. е. точка
(—Х\,х2) отображается в точку (—х2,х\)). Для упрощения
ч
\ р'=Ы
ч &*
>\
J^ Ч
// / ^* ^
Р = ( ~ & 9 3* 1) ^
1 ,хг)
\
ч
\
\
ч
ч
/
/
/
/
3'
—
р = {о
/
/
/
/
/
/
ч
\
ч
—щ
/
/
/
/
/
/
/
/
/
/
/
/
Рис. 8.32. Отображение интервала в две точки р' и р" на плоскости.
выражений обозначим через р' и р" композиции отображений
а'а0 и о"а'(У0 соответственно. Убедимся в эквивалентности сле-
Рг=(-7,3)
Рис. 8.33. Пары точек, связанных отношением доминирования; каждая пара
эквивалентна пересечению интервалов.
дующих соотношений, которая непосредственно следует из оп-
определений р'', р" и (8.4):
/?"> Л #(/) Ф 0 <=> р' (Ril)) > Р" (RU)) *> р' (Rm) > р" (R{i)).
Эта ситуация иллюстрируется на примере (рис. 8.33). Заме-
Заметим, что каждая пара пересекающихся интервалов порождает
две пары отношений доминирования.
444 Гл. 8. Геометрия прямоугольников
Теперь обратим внимание на задачу 0.8 (перечисление всех
пересекающихся пар из множества прямоугольников Я — дву-
двумерный случай). Пусть дан произвольный прямоугольник
R = [xux2]X[yi,y2]\ сначала отобразим его в пару точек
р'(Я) = (—хиХ2,—уиу2) и p"(R) = (—х2, хи— у2, У\), лежащих
в пространстве ?4 с координатными осями и\ и2, «з, ua- Затем
сформируем два множества точек в ?4:
S" = {p" {R):R^&}.
Вышеизложенные соображения свидетельствуют о том, что
два прямоугольника R\ и R2 из <Й. пересекаются тогда и только
тогда, когда р' (R\)> p" (R2) (или, что то же самое, р'(/?2)>
У~ р"(Ri))- Поэтому задача 0.8 о перечислении всех пересекаю-
пересекающихся пар является частным случаем следующей общей задачи
о доминировании'):
Задача 0.9 (СЛИЯНИЕ ДОМИНИРОВАНИЙ). Даны два
множества точек Si и S2 в Ed. Надо найти все пары pie Si
и р2 е 52 такие, что рх >- р2.
О том, что наш случай является частным случаем этой об-
общей задачи, свидетельствует тот факт, что у нас S' и S" раз-
разделены двумя гиперплоскостями и\ + u2 = 0 и и3 + «4 = 0 в
четырехмерном пространстве. Применяя алгоритм, который бу-
будет описан в следующем разделе, можно решить задачу о пе-
перечислении всех пересекающихся пар за время O(N\og2N-{-
+ s) вместо оптимального времени Q (N logN-{-s), затрачивае-
затрачиваемого алгоритмом из разд. 8.8.1. Разрыв между этими двумя
оценками, вероятно, следует скорее из неспособности использо-
использовать специфику нашей постановки этой общей задачи, а не из
неадекватности общего алгоритма решения задачи о слиянии
доминирований.
8.8.3. Охват прямоугольников
Задача об охвате (или о принадлежности или
включении, как часто говорят) прямоугольников является в не-
некотором смысле частным случаем задачи о пересечении и фор-
формулируется следующим образом:
Задача 0.10 (ОХВАТ ПРЯМОУГОЛЬНИКА). Дано множе-
множество S, состоящее из ./V изотетичных прямоугольников на пло-
') Заметим, что имеет место некоторая избыточность получающегося
решения, и не только потому, что каждая искомая пара будет перечислена
дважды, но еще и потому, что все тривиальные пары типа (R, R) также
будут перечислены.
8.8. Пересечения прямоугольников 445
скости. Надо перечислить все такие упорядоченные пары эле-
элементов 5, что первый элемент охватывает второй.
(Заметим, что, в то время как пересечение является сим-
симметричным отношением, охват является отношением частичного
порядка.)
Опять введем обозначение 91 = {RA\ ..-, RN}. В раннем
решении задачи об охватах в качестве структур данных исполь-
использовались деревья отрезков и регионов [Vaishnavi, Wood A980)];
соответствующий алгоритм тратит время O(N log2 N + s) и ис-
использует O(N log N) памяти. Теперь покажем, что преобразова-
преобразование задачи об охвате прямоугольника к задаче о доминировании
точек позволяет достигнуть оптимальной оценки по памяти
0(jV), сохранив прежнюю оценку по времени [Lee, Preparata
A982)].
Обозначая, как обычно, R(i) = [*<'>, 4г)] X [yf, vf\> иМеем.
что /?<Л?/?(г) тогда и только тогда, когда выполнены одновре-
одновременно следующие четыре условия:
4*> < *</>, 4Л < 4°. yf < у\!)> yf < yf- (8-5)
Очевидно, что эти условия эквивалентны следующим:
-4/)<-*(Л 4/><4'). - yf < - yf' yf<yf< (8-6)
которые выражают хорошо известное отношение «<^» доминиро-
доминирования между двумя четырехмерными точками, т. е.
(- *</>, 4», - yf, yf) < (- 4°. 4°> - yf' yf)- (8-7)
Поэтому после отображения каждого прямоугольника /?<'> е 31
в соответствующую ему четырехмерную точку задача об охвате
прямоугольника становится задачей о доминировании точек в
четырехмерном пространстве1). А именно:
Задача 0.11 (ДОМИНИРОВАНИЕ). Дано множество точек
5 = {pi, ..., pn} в d-мерном пространстве. Надо найти для каж-
каждой точки pt^S такое подмножество Dt S 5, что Di = {р: ре
?5, p-Kpi}.
Метод решения задачи 0.11, который будет описан, сильно
напоминает (что не удивительно) метод, который был предло-
предложен ранее для решения задачи поиска максимумов на множе-
множестве векторов (в разд. 4.1.3). По-прежнему при d = 4 обозначим
через иь и2, щ и и4 координаты в ?4. Первый предварительный
шаг состоит в преобразовании каждого J?(')e^ в точку p(RU))
из ?4, где функция р( ) описывается приведенными выше соот-
') Это соответствие было отмечено также в работе [Edelsbrunner, Over-
mars A982)].
446 Гл. 8. Геометрия прямоугольников
ношениями (8.6) и (8.7). Итак, получено множество 5 =
= {р(#A)): #<!) е $) = (рь ¦¦¦' Р"}' индексы элементов кото-
которого следует изменить так, чтобы (i < /) =*- (щ (pi) ^ щ (р/)).
Теперь имеем
procedure ДОМИНИРОВАНИЕ
Д1. (Разделение) Разбить 5 на EР S2), где S1 = {p1, ..., pLA,/2J},
a S2 = {pLW2J+1, ..., pN).
Д2. (Рекурсия) Решить задачу о доминировании точек на мно-
множествах Si и S2 независимо.
ДЗ. (Слияние) Найти все такие пары p;<^pj, у которых р,- е
eSi, а р7- е 52.
Теперь обсудим реализацию шага ДЗ. Заметим, что на этом
шаге решается задача 0.9 о слиянии доминирований. Для пары
р,-е Si и p,-^S2, поскольку по построению Ui(pi) ^ Ui(p/), то
Pi <^ р, тогда и только тогда, когда ui (р,-) ^ м; (р/) для / = 2,
3, 4. Поэтому шаг ДЗ фактически является трехмерной зада-
задачей. Опять воспользуемся методом «разделяй и властвуй» и
обозначим через ы2 медиану {иг(р(): p;ES2}.
procedure СЛИЯНИЕ-ДОМИНИРОВАНИЙ
С1. (Разделение) Разбить Si на (Sn, S12), a S2'Ha (S21, S22) так,
чтобы Sn = {p: p^Su м2(р)<м2}, S2i = {p: p^S2, м2(р)<м},
a Si2 = Si — Sn, S22:=S2 — S2i.
C2. (Рекурсия) Решить задачу слияния на парах множеств
(Sn, S2i) И (S12, S22)-
СЗ. (Объединение) Найти все такие пары р{ <^ pjt у которых
PfeSii, a p/^S22-
Чтобы установить корректность описанного выше метода,
заметим, во-первых, что S разбито на множества Sn, Si2, S2i
и S22. Обращаясь к рис. 8.34 (где каждая подзадача обозна-
обозначена дугой), видим, что на каждом из указанных четырех под-
подмножеств решается задача о доминировании точек на шаге Д2;
остается рассмотреть вопрос о дугах, соединяющих пары этих
подмножеств. Две из шести пар — (Sn,Si2) и (S2i, S22) — также
обрабатываются на шаге Д2; пары (Sn,S2i) и (S[2, S22)—на
шаге С2; пара (Su,S22) — на шаге СЗ, а пару (S[2, S2i) не
надо рассматривать, поскольку для каждых р,- е Si2 и р/е S2i
верно, что U\(pi)^ui(pf) и и2(р<) > м2(р,-). Отметим также,
что шаг СЗ (Объединение) является двумерной задачей (на
координатах м3 и и4).
Очевидно, что ключевой операцией всей задачи является
реализация шага СЗ — двумерное слияние (или объединение).
Действительно, все вычисление сводится к аккуратному выпол-
выполнению последовательности шагов, подобных шагу СЗ; поэтому
8.8. Пересечения прямоугольников
44?
в последующем надо сосредоточить внимание на разработке
эффективной реализации шага «Объединение». Будет показано,
что «Объединение» можно выполнить за время, линейно завися-
зависящее от размера входных данных, с затратой O(N\ogN) вре-
времени на предварительную сортировку, которую можно отнести
на счет общей процедуры. Позднее мы увидим, как этот ре-
результат влияет на оценку всей задачи.
Множества Sn и 5i2, возникающие на шаге СЗ, являются
наборами двумерных точек на плоскости (из, и*). Создадим для
Рис. 8.34. Представление алгоритма для решения задачи СЛИЯНИЯ-ДОМИ-
СЛИЯНИЯ-ДОМИНИРОВАНИИ методом «разделяй и властвуй» в качестве ориентированного
графа. Каждое подмножество является узлом, а каждая подзадача — дугой.
каждого из этих множеств дважды прошитый двусвязный спи-
список следующим образом: каждой точке р сопоставим узел, со-
содержащий информацию (uz(p),Ui(p))\ кроме того, имеется два
указателя СЛЕДЗ и СЛЕД4, описывающие упорядочение по
осям и3 и «4 соответственно. Связи в обратном направлении
устанавливаются двумя дополнительными указателями ПРЕДЗ
и ПРЕД4. Временно пренебрежем затратами на построение
дважды прошитых списков.
Обозначим через НАЧ31 и НАЧ32 указатели на начальные
(первые) элементы по координате мз в списках 5ц и S22 соот-
соответственно. Предлагаемый алгоритм имеет общую форму пло-
плоского заметания, точками событий которого являются коорди-
координаты мз точек множества 5ц U 5гг, а статус заметающей прямой
представлен списком 3:'. Этот список содержит упорядоченную
по возрастанию координаты и\ последовательность точек из Sn
(а именно м^координаты тех точек из 51Ь чьи координаты по
оси мз не превосходят текущего значения в процессе замета-
заметания). Временно будем использовать обозначения С ЛЕД.*? и
HA4i? для прямого и начального указателей в списке &, хотя,
448 Гл. 8. Геометрия прямоугольников
как будет показано ниже, СЛЕД27 можно заменить на СЛЕД4.
Предлагается следующий алгоритм:
procedure ОБЪЕДИНЕНИЕ
1 begin /,:=НАЧ31; /2:=НАЧ32;
2 while Ц2Ф Л) do
3 begin \г{щ[н\<щ[}2]) then
4 begin вставить щ[]х\ в S
с сохранением упорядоченности;
5 /, := СЛЕДЗ[/,];
end
6 else begin l:=WK4SS;
7 while (/ Ф Л) and (и4[/2] > и4[/]) do
8 begin печать (j2,l)',
9 / :
end;
10 /2:=СЛЕДЗ[/2];
end
end
end.
Такой алгоритм, очевидно, по структуре относится к типу ал-
алгоритмов слияния. В строке 3 производится проверка возмож-
возможности продвижения по Sn или по S22. В первом случае надо
вставить U4[/i] в 2? (строка 4). Во втором случае (строки 6—9)
надо просмотреть список 3?, начиная с самого малого из его
элементов, и определить при этом все такие точки, над кото-
которыми доминирует р,-2; эта часть алгоритма работает последова-
последовательно и затребует времени, пропорционального числу выданных
на печать пар (/2, I).
Самая важная часть процедуры находится в строке 4:
«Вставить и4[/] в 3? с сохранением упорядоченности». Дей-
Действительно, на первый взгляд кажется, что на это понадобятся
затраты времени, пропорциональные |Sn|2, поскольку каждая
вставка может потребовать полного обхода 3S; однако более
совершенная структура данных для Я? — перестраиваемое дерево
(т. е. дерево, сбалансированное по высоте или по весу) — сокра-
сократила бы затраты общего времени до 0(|5ц | log|5n |). Вместе с
тем существует один интересный способ организации решения
данной задачи, такой, что его суммарные затраты времени равны
O(|Sn|). Наша цель состоит в том, чтобы создать расписание
вставок в список 3? элементов из и4-списка для Sn. Обращаясь
к рис. 8.35, реализуем эту цель следующим образом. Ясно, что
координату по оси и4 крайнего справа элемента 5ц, т. е. р$,
надо вставить в список 3? (т. е. в упорядоченную по координате
«4 последовательность точек, лежащих слева от р8) между
м4[3] и и4[5]. Но и4[3] — это не что иное, как ПРЕД4[8]; еле-
8.8. Пересечения прямоугольников
449
довательно, ПРЕД4[8] и указывает ту позицию, в которой надо
вставить «4 [8] в 9S. Теперь, удалив р8 из игсписка и повторяя
процедуру для остатка этого списка, получим позицию для
вставки нового элемента и\ [7]. Сканируя подобным образом
-°Р4
: Сканирование
(a)
Рис. 8.35. Пример множества Sn = {pi, . ¦., ps} и соответствующего ему
дважды прошитого списка. Приведены связи для указателей СЛЕДЗ и
СЛЕД4.
мз-список в порядке убывания, получаем расписание вставок
всех элементов из «4-списка; формальной записью этой идеи
является следующий алгоритм:
begin /:= ПОСЛЕДНИЙ ЭЛЕМЕНТ (м3-списка);
while (ПРЕДЗИ Ф НАЧЗ) do
begin СЛЕД4[ПРЕД4[Щ:=СЛЕД4[/];
ПРЕД4[СЛЕД4[Щ := ПРЕД4М;
/:= ПРЕДЗИ
end
end.
Пример. Для множества 5ц, изображенного на рис. 8.35(а),
на рис. 8.35(Ь) показана начальная конфигурация и3- и «4-спи-
сков. Начальная конфигурация массива ПРЕД4 такова:
J:
ПРЕД4:
1
7
5
4
1
8
2
НАЧ
3
15 Зак. 1075
450
Гл. 8. Геометрия прямоугольников
Эволюция этого массива в процессе сканирования компактно
изображена в следующей таблице (корректируемые элементы
обведены кружками):
Таблица 1
На чальныи,
ЛРЕДА
2 3 4 5 В
ф
(расписание
вставок)
7
7
(НАЧ)
НАЧ
НАЧ
НАЧ
НАЧ
НАЧ
5
5
5
5
©
3
©
7
4
4
4
4
©
7
7
1
1
1
1
1
7
7
S
©
3
3
3
3
3
2
г
г
2
2
г
г
г
НАЧ
НАЧ
НАЧ
НАЧ
НАЧ
НАЧ
НАЧ
НАЧ
3
3
J
3
3
3
3
3
После
8 сканирование
Pa
Рт
Ре
PS
Pi
Pi
Pz
Следовательно, окончательная конфигурация массива ПРЕД4
полностью определяет расписание вставок в список 3? (кото-
(который становится ^-списком после окончания сканирования), и
строку 4 процедуры ОБЪЕДИНЕНИЕ можно выполнить за
константное время. Это доказывает тот факт, что вся процедура
ОБЪЕДИНЕНИЕ затрачивает |5ц| + |522| времени плюс еще
столько времени, каково число найденных пар доминирований
точек. Имея теперь в своем распоряжении процедуру ОБЪ-
ОБЪЕДИНЕНИЕ, мы можем заняться организацией всей про-
процедуры ДОМИНИРОВАНИЯ-
Сначала займемся структурой данных. После сортировки
множества S по каждой из четырех координат получаем четы-
четырежды прошитый список (ЧПС). Как и в упомянутом ранее
дважды прошитом списке, здесь все связи будут двусторонними,
а указатели СЛЕД/ и ПРЕД/ будут использоваться для и,-
списка. Очевидно, что построение ЧПС для S потребует
O(N\ogN) времени. ЧПС весьма естественно подходит для
реализации за линейное время операций по разбиению мно-
множеств, определяемых на шагах Д1 и С1 в ранее изложенных
алгоритмах. Действительно, предположим, что надо разбить 5
на пару (Si, S2) и пометить элементы Si. Тогда, если пройти
по ЧПС с помощью любого выбранного указателя СЛЕД/ при
i = 1, 2, 3, 4, то список, соответствующий этому указателю,
можно разбить на два списка, которые соответствуют двум под-
подмножествам разбиения: Si и S2. Аналогично, если заданы Si
и S2, то можно слить два соответствующих им списка, исполь-
используя «естественное слияние» [Knuth A973)], за линейное время.
8.8. Пересечения прямоугольников 451
Заметим, что операции разбиения и слияния заключаются про-
просто в модификации указателей и использовании дополнительной
памяти для промежуточных данных. Чтобы проанализировать
работу предложенного метода, заметим:
A) Вся работа ведется на одной и той же памяти с исполь-
использованием массивов ЧПС и сводится лишь к преобразованиям
указателей. Поэтому используемая память равна Q{N).
B) Что касается времени работы, то каждая пара домини-
доминирования (т. е. каждая пара прямоугольников, один из которых
охватывает другой) обнаруживается только один раз и за кон-
константное время в цикле типа while (строки 7—9) процедуры
ОБЪЕДИНЕНИЕ. Поэтому, если S — число таких пар, то на
данную работу уйдет оптимальное время 0E). Остальное за-
затраченное время зависит только от N— мощности множества
S; обозначим его через D(N). Обозначим через Ma(r,s) время
работы алгоритма СЛИЯНИЯ ДОМИНИРОВАНИЙ на паре
множеств, состоящих из г и s d-мерных точек, где d = 2, 3.
Предполагая для простоты, что N четно, имеем
D (N) = W {N12) + М3 {N12, N/2) + О (N), (8.8)
где 0{N) времени займет шаг Д1 — «разделение». Аналогично
имеем (полагая, что |S2i| = m, a r—четно)
М3 (г, s) = М3 {г/2, т) + Мг {г 12, s - т) +
+ М2 {г/2, max (m, s-m))+O{r + s), (8.9)
где 0{r-{-s) — это опять время, нужное для реализации раз-
разбиения множества. Верхняя оценка для M3{r,s) получается в
результате максимизации правой части (8.9) относительно па-
параметра т. Поскольку верхней оценкой для M2{r',s') является
O(r'-\-s'), то повторяя рассуждения из работы [Kung, Luccio,
Preparata A975)], получаем M3{r, s) = 0{{r + s)log(r + s)),
и, следовательно, D{N)= O{N\og2N).
Тем самым доказана следующая теорема:
Теорема 8.10. Задача об охватах, поставленная на N пря-
прямоугольниках {и эквивалентная ей задача о ДОМИНИРОВА-
ДОМИНИРОВАНИИ в четырехмерном пространстве), может быть решена за
время О {N log2 N-{-s) с оптимальной затратой памяти Q{N),
где s — это число пар объектов, связанных отношением доми-
доминирования.
Безусловно, остается открытым вопрос о существовании
лучшего алгоритма для решения двух вышеупомянутых экви-
эквивалентных задач. Вместе с тем установление для них в качестве
нижней оценки по времени Q(N\ogz N) является весьма мало-
маловероятной перспективой.
452 Гл. 8. Геометрия прямоугольников
8.9. Замечания и комментарии
Некоторые из задач, обсуждавшихся в данной главе,
допускают интересные обобщения. Например, задачу о пере-
перечислении пересечений N прямоугольников на плоскости можно
обобщить на произвольное число измерений. Обозначим через
К число пересекающихся пар гиперпрямоугольников, а через d
число измерений. Сикс и Вуд [Six, Wood A982)] построили
алгоритм с оценками О {N \ogd^ N-\-К)—по времени и
O(N\ogd~lN) — по памяти; оценка этого алгоритма по времени
позднее была улучшена Эдельсбруннером [Edelsbrunner A983)]
до O{N\ogd~2N). Чазелле и Инчерпи [Chazelle, Incerpi A983)],
а также Эдельсбруннер и Овермарс [Edelsbrunner, Overmars
A985)] снизили оценку по памяти до Q{N), которая, очевидно,
является оптимальной, сохранив прежнюю оценку по времени.
Соответствующую задачу подсчета в отличие от случая пере-
пересечения отрезков (см. разд. 7.2.3) можно решить за время
O(N\ogd~l N) с затратой O(N \ogd~2 N) памяти, слегка моди-
модифицировав алгоритм перечисления пересечений, принадлежа-
принадлежащий Сиксу и Буду, в то время как алгоритм Чазелле и Ин-
Инчерпи нельзя адаптировать для эффективного решения данной
задачи.
Интересным обобщением задачи о пересечении прямоуголь-
прямоугольников является задача, обычно называемая ПОИСК ПЕРЕСЕ-
ПЕРЕСЕЧЕНИЙ С ОРТОГОНАЛЬНЫМИ ОБЪЕКТАМИ, в которой
среди заданных N изотетичных объектов надо найти все объ-
объекты, которые пересекают заданный, изотетичный им запросный
объект. (Разумеется, что канонической формой изотетичного
объекта в Ed является декартово произведение d интервалов,
каждый из которых может вырождаться в единственное значе-
значение. Например, точка, изотетичный прямоугольник, а также
горизонтальный и вертикальный отрезки прямых являются ор-
ортогональными объектами.) Примером подобной задачи, об-
обсуждавшимся в гл. 2, является многомерный региональный
поиск в обеих своих формах: «отчета» и «подсчета». ОБРАТ-
ОБРАТНАЯ ЗАДАЧА РЕГИОНАЛЬНОГО ПОИСКА или ОХВАТА
ТОЧКИ также относится к этому классу; она ставится так:
среди заданных N изотетичных прямоугольников надо найти
такие, которые охватывают некую запросную точку. Вайшнави
[Vaishnavi A982)] предложил структуру данных, которая обес-
обеспечивает поиск с затратами O(logAf + КI) времени на один за-
запрос и O(N\ogN) памяти. Чазелле [Chazelle A983c)] создал
оптимальный алгоритм для этой задачи, т. е. его оценки равны
Q(N) — по памяти и 8 (log N + К) — по времени запроса. Еще
') Здесь, как обычно, К обозначает мощность результата. — Прим. перев.
8.10. Упражнения 453
одним примером такой задачи является задача о ПОИСКЕ
ПЕРЕСЕЧЕНИЙ С ОРТОГОНАЛЬНЫМИ ОТРЕЗКАМИ, в
которой требуется найти среди N заданных горизонтальных
и вертикальных прямолинейных отрезков все пересекающие
заданный ортогональный запросный отрезок. Эту задачу иссле-
исследовали Вайшнави и В уд [Vaishnavi, Wood A982)], предло-
предложившие алгоритм, который обладает следующими оценками: по
времени запроса — O(\ogN-\-K), а по времени предваритель-
предварительной обработки и по памяти — O(N\ogN). Оценку по памяти
можно снизить до Q(N) [Chazelle A983c)]. Для случая, когда
в данной задаче разрешены вставки и удаления отрезков, Мак-
крейт предложил динамическую структуру данных [McCreight
A981)], которая требует O(N) памяти и O(log2 N -\- К) времени,
где O(N) выражает мощность множества различных значений
координат. Для этого же случая Липски и Пападимитриу
[Lipski, Papadimitriou A981)] предложили алгоритм с оцен-
оценками по времени — О (log Л^-log log Л^ + К), а по памяти —
O(N\ogN). Недавно Эдельсбруннер и Маурер [Edelsbrunner,
Maurer A981)] унифицировали некоторые из ранее упомяну-
упомянутых методов решения данного класса задач о поиске пересече-
пересечений и получили следующие результаты. Для задач статиче-
статического типа существует структура данных, обеспечивающая сле-
следующие оценки эффективности: для времени запроса —
O(logd-' N -+- К), для времени предварительной обработки и
памяти — по O(N\ogdN). Оценка по памяти позднее была до-
доведена до O{N\ogd~l N-log logN) [Ghazelle, Guibas A984)].
Что же касается динамического случая, то существует динами-
динамическая структура данных, обеспечивающая следующие оценки
эффективности: для времени запроса—O(\ogdN + К), для па-
памяти— O{N\ogdN), для времени корректировки—O(\ogdN)
[Edelsbrunner A980)].
8.10. Упражнения
1. Дано множество нетривиальных цепей для объединения, состоящего
из N изотетичных прямоугольников. Построить алгоритм, который выбирает
среди них цепи, формирующие нетривиальный контур. (Цель состоит в по-
получении алгоритма с оценкой по времени O(N log N).)
2. ТРЕХМЕРНОЕ ДОМИНИРОВАНИЕ. Дано множество из N точек
в Е3. Создать алгоритм, находящий s пар доминирования за время
O(N log N + s) с затратой d(N) памяти.
3. ТРЕХМЕРНОЕ ДОМИНИРОВАНИЕ. Доказать, что нижней оценкой
времени, необходимого для поиска пар доминирования среди N точек в Е3,
является Q(N log N+s).
4. Охваты квадратов. Задачу об ОХВАТАХ КВАДРАТОВ можно полу-
получить заменой слова «прямоугольник» словом «квадрат» в формулировке за-
454 Гл. 8. Геометрия прямоугольников
дачи 0.10. Показать, что задача об ОХВАТАХ КВАДРАТОВ эквивалентна
задаче о ТРЕХМЕРНОМ ДОМИНИРОВАНИИ.
5. Показать, что задача о СЛИЯНИИ ДОМИНИРОВАНИИ в ?4, опре-
определенная на множестве, состоящем из N точек, может быть решена за время
O(N log2 N + s), где s — число обнаруженных пар.
6. Маршрут в лабиринте. Лабиринт образован двумя наборами отрезков
(в сумме их N штук), каждый из которых содержит параллельные отрезки
(для простоты будем считать, что направления отрезков из разных наборов
ортогональны). Лабиринт разбивает плоскость на связные области. Для двух
заданных на плоскости точек s и t маршрутом называется соединяющая
их кривая, не пересекающая ни одного заданного отрезка
(a) Построить алгоритм, проверяющий факт существования маршрута,
соединяющего s и t.
(b) Построить алгоритм, соединяющий s и. t маршрутом (если таковой
существует).
Литература1
1A. V. Aho, J. E. Hopcroft and J. D. Ullman, The Design and Analysis of Computer
Algorithms, Addison-Wesley, Reading, Mass., 1974.
aS. B. Akers, Routing, in Design Automation of Digital Systems, M. Breuer, ed.,
Prentice-Hall, Englewood Cliffs, NJ, 1972.
S. G. Akl, Two remarks on a convex hull algorithm, Info. Proc. Lett. 8,108-109 A979).
S. G. Akl and G. T. Toussaint, Efficient convex hull algorithms for pattern recognition
applications, Proc. 4th Jnt'I Joint Conf on Pattern Recognition, Kyoto, Japan, pp.
483-487A978).
A. M. Andrew, Another efficient algorithm for convex hulls in two dimensions, Info.
Proc. Lett. 9, 216-219 A979).
H. C. Andrews, Introduction to Mathematical Techniques in Pattern Recognition,
Wiley-Interscience, New York, 1972.
M. J. Atallah, A linear time algorithm for the Hausdorff distance between convex
polygons, Info. Proc. Lett. 8, 207-209 (Nov. 1983).
D. Avis, On the complexity of finding the convex hull of a .set of points, McGill
University, School of Computer Science; Report SOCS 79.2, 1979
D, Avis and В. К. Bhattacharya, Algorithms for computing rf-dimensional Voronoi
diagrams and their duals, in Advances in Computing Research. Edited by F. P.
Preparata. 1, JAI Press, 159-180A983).
H. S. Baird, Fast algorithms for LSI artwork analysis, Design Automation and Fault-
Tolerant Computing, 2, 179-209 A978).
R. E. Barlow, D. J. Bartholomew, J. M. Bremner and H. .D. Brunk, Statistical
Inference under Order Restrictions, Wiley, New York, 1972.
M. Ben-Or, Lower bounds for algebraic computation trees, Proc. 15th ACM Annual
Symp. on Theory ofComput., pp. 80-86 (May 1983).
R. V. Benson, Euclidean Geometry and Convexity, McGraw-Hill, New York, 1966.
J. L. Bentley, Multidimensional binary search trees used for associative searching,
Communications of the ACM 18, 509-517 A975).
J, L. Bentley, Algorithms for Klee's rectangle problems, Carnegie-Mellon University,
Pittsburgh, Penn., Department of Computer Science, unpublished notes, 1977.
J.L, Bentley, Decomposable searching problems, Info. Proc. Lett. 8, 244-251 A979).
') Цифровыми индексами отмечены работы, вышедшие на русском языке
или в русском переводе, которые входят под соответствующим номером в от-
отдельный список, приведенный далее. Звездочкой отмечены работы, уточнен^
ные выходные данные которых приведены в списке дополнительной литера-
литературы к русскому изданию.
456 Литература
J. L. Ikniley. Multidimensional divide and conquer, Comm ACM 23D), 214-229
A980).
.1. L. Bcntlc)<, G. M. Faust and F. P. Preparala, Approximation algorithms for convex
hulls, Comm. ACM 25, 64-68 A982),
J. L. Bentlcy, H. T. Kuhg, M. Schkolnick and C. D. Thompson, On the average
number of maxima in a sel of vectors, /. ACM25, 536-543 A978).
J, L, Bentley and H. A. Maurer, A note on Euclidean near neighbor searching in the
plane, 'inform. Processing Lett. 8,133-136 A979).
J. L, Bentley and H, A. Maurer, Efficient worst-case data structures for range search"
ing, Aeta hifoiwalka 13, 155-168 A980).
J, I,, Bentley and T. A. Otlmann, Algorithms for reporting and counting geometric
intersections, IEEE Transactions on Computers 28, 643-647 A979).
J. L, Bentley and M. I. ShamoS, Divide-and-Conqucr in Multidimensional Space,
Proc. Eighth ACM Annual Symp. on Tfworv of Сотри и pp. 220-230 (May
1976).
J. L, Bentley and M, I. Shames, A problemin multivarinlc statistics: Algorithms, data
structure, and applications, Proceedings of the 15th Annual Allerton Conference on
Communication, Control, and Computing, pp. 193-201 A977).
J. L. Bcntlcy and M. I. Shamos, Divide and conquer for linear expected time, Info,
Proc. Lett. 7, 87-91A978).
J. L, Bcnllcv and D, F. Stanat, Analysis of range, searches in quad trees, Info. Proc.
Le/ОЛ70-173 A975).
J. L. Bcntlcy and D. Wood, An optimal worst case algorithm for reporting intersection
of rectangles, IEEE Transactions on Computers 29, 571-577 A980).
P, Bczier, Numerical Control—Mathematics and Applications. Translated by A. R.
_ Forrest. Wiley, New York, 1972.
B. B'hattacbarya, Worst-case analysis of a convex hull algorithm, unpublished manu-
manuscript, Depr. of Computer Science, Simon Fraser University, February 1982.
O. Bilardi and F. P, Preparata, Probabilistic analysis of a new geometric searching
technique, unpublished manuscript, 1981.
G. Birkhoff and S. MacLane, A Survev of Modern Algebra, McMillan, New York,
1965.
M. Blum, R. W. Floyd, V. Pratt, R. L. Rivcst and R. B. Tarjan, Time bounds for
selection, Jour. Compt, Sys. Scl. 7, 448-461 A973).
B. Bollobas, Graph Theory, Anlntroductory Course, Spxinger-Vcuag, New York, 1979.
K. Q. Brown, Fast intersection of half spaces. Carncgic-Mcllon University, Pittsburgh,
Pennsylvania, Department of Computer Science; Report CMU-CS-78-129,1978.
K, Q. Brown, Geometric transformations for fast geometric algorithms. Ph. D, thesis,
Dcpt, of Computer Science, Carnegie Melton Univ.. Dec. 1979a,
K. Q. Brown, Voronoi diagrams from convex hulls. Info, Proc. Lett. 9. 223-228
A979b),
W. A. Burkhard and R. M, Keller, Sonic approaches to best match filo searching,
Comm. Л CM'16, 230-236 A973).
A, Bykat, Convex hull of a finite set of points in two dimensions. Info. Proc. Lett. 7,
296-298A978).
J, С Cavendish, Automatic triangulation of arbitrary planar domains for the finite
clement method, Int'lJ. Numerical Methods in Engineering 8, 679-696 A974).
D. R. Chand and S. S. Kapur, An algorithm for convex polyiopes, JACM 17A), 78-86
(Jan. 1970).
B. M. Chazclle, Reporting and counting arbitrary planar intersections. Rep, CS-83-I6,
Dcpt. ol'Comp, Sci., Brown University, Providence, Rf, 1983a.
В. М. Chazelle, Optimal algorithms for computing depths and layers, Proc. 21st
Allenon Conference on Comm,, Control and Сотрш., рр, 427-436 (Oct< 1983b).
B, M. Chazelle, Filtering search; A new approach to query answering, Proc. 24th IEEE
Литература 457
Symp, on Foundations of Сотр. SW., Tucson, AZ, 122-132 Nov, 1983c,
*B. M. Cha/elle, R. Cole, F. P. Preparala, and С. К. Yap, New upper bounds for
neighbor searching, submitted for publication A984).
B. M. Cha/elle and D. P, Dobkin, Detection is easier than compulation, Proc, 12th
ACM Annual Symp. on Theory of Сотри/., pp. 146-153, (May 1980).
*B. M. Chazelle and H. Edclsbrunncr, Optimal solutions for a class of point retrieval
problems. Tech. Rep. CS-84-16. Dcpl. of Computer Science, Brown University,
July 19X4.
B. M. Cha/elle and L. J. Guibas. Fractional'cascading: A data structuring technique
with geometric applications, manuscript, 1984.
B. M. Cha/elle, I,. J. Guibas and D. T. Lee, The power of geometric duality, Proc. 24th
IEEE Animal Symp. on Foundations of Сотри/, Set',, pp. 217-225 (Nov. 1983)..
В. M. Chazellc and j. Inccrpi, Triangulating a polygon by divide-and-conquer, Proc.
21st Allevton Conference on Comtn. Control andComput,, pp. 447-456 (Oct. 1983).
D. Chcrilon and R. E. Tarjan, Finding minimum spanning trees. SI AM J, Comput.
5D), 724-742 (Dec. 1976).
F. Chin and С A. Wang, Optimal algorithms for the intersection and the minimum
distance problems between planar polygons, IEEE Trans. Comput, C-32A2),
1203-1207A983).
F. Chin and С A. Wang, Minimum vertex distance between separable convex poly-
polygons, Info. Proc. Lett. 18, 41-45 A984).
N. Christofidcs, Worst-case analysis of a new heuristic for the travelling salesman
problem, Symposium on Algorithms and Complexity. Department of Computer
Science, Carnegie-Mellon University, Apr. 1976.
V. Chvatal, A combinatorial theorem in plane geometry, J. Comb. Theory В. 18, 39-41
A975).
J. L. Coolidgc, A Treatise on the Circle and the Sphere, Oxford University Press,
Oxford, England, 1916. Reprinted 1971 by Chelsea.
B. Dasarathy and L. J. While, On some maximin location and classifier problems,
Computer Science Conference. Washington, Q.C., 1975 (Unpublished lecture).
P. J. Davis, Interpolation and Approximation, Blaisdell, NY A963). Reprinted 1975 by
Dover, New York,
5B. Delaunay, Sur la sphere vide. Bull. Acad. Sci, USSR(VH), Classe Sci. "Mat. Nat.,
793-800A934).
R. B. Desens, Computer processing for display of three-dimensional structures, Tech-
Technical Report CFSTI AD-7006010, Naval Postgraduate School, Oct. 1969.
E. W. Dijkstra, A note on two problems in connection with graphs, Numer. Math, 1E),
269-271 (Oct. 1959).
D. P. Dobkin and D. G. Kirkpatrick, Fast algorithms for preprocessed polyhedral
intersection detection, submitted for publication A984),
David Dobkin and Richard Lipton, Multidimensional searching problems, SI AM J.
Comput, 5B), 181-186 (June 1976).
David Dobkin and Richard Liplon, On the complexity of computations under varying
set of primitives. Journal of Computer and Systems Sciences 18, 86-91 A979),
R. L. Drysdale, III, Generalized Voronoi diagrams and geometric searching, Ph.D,
Thesis, Dept, Сотр. Sci,, Stanford University, Tech. Rep. STAN-CS-79-705
A979).
R. O. Duda and P. E. Hart, Pattern Classification and Scene Analysis, Wiley-
Interscience, New York, 1973.
R, D. Diippe and H. J, Gottschalk, Automatische Interpolation yon Isolinien bei
willkiirlich verteilten Stiitzpunkten, Allgemeine Vermessungsnachrichten 77,
423-426A970).
M. E. Dyer, A simplified O(nlogn) algorithm for the intersection of 3-polyhedra,
Teesside Polytechnic, Middlesbrough, United Kingdom, Department of Math-
458 Литература
ematics and Statistics; Report TPMR 80-5, 1980.
M. E. Dyer, Linear time algorithms for two- and three-variable linear programs,
S/AMJ. Сотр. 13A), 31-45 (Feb. 1984).
M, I. Edahiro, I Kokubo and T. Asano, A new point-location algorithm and its
practical efficiency—comparison with existing algorithms, Res. Memo. RMI 83-
04, Dept: Math. Eng. В Instrumentation Physics, Univ. of Tokyo, Oct, 1983.
W. Eddy, A new convex hull algorithm for planar sets, ACM Trans. Math, Software
3D), 398-403A977).
H. Edelsbrunner, Dynamic data structures for orthogonal intersection queries, Rep.
F59, Tech. Univ. Graz, Institute fur Informationsverarbeitung J980.
H. Edclsbrunner, Intersection problems in computational geometry, Ph, D, Thesis,
Rep. 93, IIG, Technischc Uniycrsitat Graz, Austria, 1982.
H. Edelsbrunner, A new approach to rectangle intersections, PartII. Intl. J. Comput,
Math. 13, 221-229A983).
E. Edelsbrunner, L. J. Guibas and J. Stolfi, Optimal point location in a monotone
subdivision, SIAM J. Comput., to appear A985).
H. Edelsbrunner, J. van Leeuwen, T, A. Ottman,.and D. Wood, Connected compo-
components of orthogonal geometric objects, McMaster University. Hamilton. Ontario.
Unit for Computer Science, Report 8 l-CS-04, 1981.
H. Edelsbrunner and-H. A. Maurer; On the intersection of orthoaonal objects* Info.
Proc. Lett. 13, 177-181 A981).
H. Edelsbrunner and M. H. Overmars, On the equivalence of some rectangle problems.
Information Processing Letters 14C), 124-1 i%(May 19.82).
H. Edelsbrunner and M. H. Overmars, Batched dynamic solutions to decomposable
searching problems, J.. Algorithms, to appear A985).
H. Edelsbrunner, M. H. Overmars and D. Wood. Graphics in flatland: A case study, in
Advances in Computing Research. Edited by F. P. Preparata. Vol. 1, JAI Press.
^ 35-59A983).
H. Edelsbrunner and R. Seidel, Arrangements of planes and Voronoi diagrams, 'in
preparation A985).
H. Edelsbrunner and E. Welzl, Halfplanar range search in linear space and O(n**
0.695) query time, Rep. Ill, TIG. Technischc Universitiit Graz. Austria. 1983.
¦J. Edmonds, Maximum matching and a polyhedron with 0.1 vertices. J. Res. .XBS.
69B, 125-130 (Apr.-June 1965).
B. Efron, The convex hull of a random set of points. Bionietrika 52. 331-343 A965J.
H. El Gindyand D. Avis, A linear algorithm for computing the visibility polygon from
a point,/. Algorithms 2B). 186^197A981).
D. J. Elzinga and D. W. Hearn. Geometrical solutions for some minimax location
problems, Transportation Science 6. 379-394 A972a).
D. J. Elzinga and D. W. Hearn. The minimum covering sphere problem, Mgmt. Sci.
19A), 96-104 (Sept. 1972b).
P. Erdos, On sets of distances of n points. Amcr. Math. Monthly 53, 248-250 A946).
P. Erdos, On sets of distances of n points in Euclidean space, Magy. Tud. Akad. Mat.
Kut. Int. Kozi. 5, 165-169 A960).
K. P. Eswaran, J. N. Gray. R. A. Lorie and L L. Traiger. The notions of consistency,
and predicate locks in a database system. Comm. ACM 19, 624-633 A976).
S. Even, Graph Algorithms. Computer Science Press. Potomac, MD, 1979.
H. Eves, A Survey of Geometry, Allyn and Bacon, Newton, Mass.. 1972.
G. Ewald, Geometry: An Introduction, Wadsworth, Belmont, Calif., 1971.
I. Fary. On straielit-linc representation of planar graphs, Ada Sci. Math. Szeged. 11,
229-233 0^48).
R. Л. Finkcl and .1, L. Bent ley. Quad-trees; a data structure for retrieval on composite
keys, Ada Inform. 4. 1-9 A974).
Д. R. Forrest. Computational Geometry. Proc. Royal Society London.. 321 Sena 4.
Литература . 459
187-195A971).
К. L. Francis and J. A. White, Facility Layout and Location: An Analytical Approach.
Prentice-Hall, Englewood Cliffs, NJ, 1974.
M. L. Fredman, A lower bound of the complexity of orthogonal range queries, J.ACM
28,696-705A981).
M. L. Fredman and B. Weide, The complexity of computing the measure of I) [a,, bs],
Comm. ACM 21G), 540-544 (July 1978).
H. Freeman, Computer processing of line-drawing images, Comput. Surveys 6, 57-97
A974).
H. Freeman and P. P. Loutrel, An algorithm for the solution of the two-dimensional
hidden-line problem, IEEE Trans. Elec. Сотр. ЕС-16F), 784-790 A967).
H. Freeman and R. Shapira, Determining the minimum-area encasing rectangle for an
arbitrary closed curve, Comm. ACM. 18G), 409-413 A975).
J. H. Friedman, J. L. Bentley and R. A. Finkel, An algorithm for finding best match in
logarithmic expected time, ACM Trans. Math. Software 3C), 209-226 A977).
H. Gabow, An efficient implementation of Edmond's maximum matching algorithm.
Technical Report 31. Computer Science Department, Stanford Univ.. 1972.
K. R. Gabriel and R. R. Sokal, A new statistical approach to geographic variation
analysis, Systematic Zoology 18, 259-278 A969).
R. Galimberti and U. Montanari, An algorithm for hidden-line elimination. CACM
12D),'206-211 A969).
M. R. Garey, R. L. Graham and D. S. Johnson, Some NP-complete geometric
problems, Eighth Annual Symp. on Theory of Сотри!., pp. 10-22 (May 1976).
*M. R. Garey and D. S. Johnson, Computers and Intractability'. A Guide to the Theory
of NP-Completeness. W. H. Freeman. San Francisco, 1979.
M. R. Garey, D. S. Johnson and L. Stockmeyer, Some simplified NP-complete graph
problems, Theor. Сотр. Sci. 1, 237-267 A976).
M. Garey, D. S. Johnson, F. P. Preparata. and R. E. Tarjan. Triangulating a simple
polygon. Info. Proc. Lett. 7D), 175-180 A978).
S. I. Gass, Linear Programming, McGraw-Hill. New York. 1969.
J. Gastwirth. On robust procedures, J. Amer. Stat. Assn. 65. 929-948 A966).
J. A. George. Computer implementation of the finite element method. Technical
Report STAN-CS-71-208. Computer Science Department. Stanford University,
1971.
P. N. Gilbert. New results on planar trianeulations. Tech. Rep. ACT-15, Coord. Sci.
Lab., University of Illinois at Urbana. July 1979.
T. Gonzalez, Algorithms on sets and related problems. Technical Report. Department
of Computer Science. University of Oklahoma. 1975.
J. C. Gower and G. J. S. Ross. Minimum spanning trees and single linkage cluster
analysis. Appl. Stat. 18A)/54-64 A969).
R. L. Graham. An efficient algorithm for determining the convex hull of a finite planar
set. Info. Proc.-Lett. 1. 132-133 A972).
R. L.Graham and F. F. Yao. Finding the convex hull of a simple polygon, Tech. Rep.
No. STAN-CS-81-887. Stanford University, 1981; also J. Algorithms 4D),
324-331 A983).
P. J. Green and B. W. Silvcrman. Constructing the convex hull of a set of points in
the plane. Computer Journal 22. 262 266 A979).
B. Grtinbaum, A proof of Vazsonyi's conjecture, Bull. Res. Council Israel 6(A) 77-78
A956).-
B. Griinbaum. Offfivex Polytopes, Wiley-Interscience, New York, 1967.
R. H. Giiting. An optimal contour algorithm for isooriented rectangles, Jour, of
Altioiitlnns 5C). 303-326 (Sept. 1984).
27H. Haciwigerand H. Debrunner, Combinatorial Geometry in the Plane, Holt, Rinebart
and Winston, New York, 1964.
460 Литература
М, Hanan and J. M. Kurt/berg, Placement techniques, in Design Automation of Digital
Systems. Edited by M. Breucr. Prentice-Hall, Englcwood Cliffs, NJ, 1972.
M. Hanan, Layout, interconnection, and placement, Networks 5, 85-88 A975).
J. A. Hartigan, Clustering Algorithms, Wiley, New York, 1975.
T. L. Heath, A History of Greek Mathematics, Oxford University Press, Oxford,
England, 1921.
S. Hcrtcl, K.Mchlhorn, M. Mantyla and J. Nievcrgelt, Space sweep solves intersection
of two convex polyhedron elegantly, Acta Informatka (to appear) A985).
3D. Hilbcrt, Foundations of Geometry, A899). Repr. 1971 by Open Court, La Salic, 1L.
J. G. Hocking and G. S. Young, Topology, Addison-Wcsley, Reading, MA, 1961.
C. A. R. Hoiirc, Quicksort, Computer Journal 5,10-15 A962).
1. Hodder and С Orion, Spatial Analysis in Archaeology, Cambridge University Press,
Cambridge, England, 1976.
P. G. Hocl, Introduction to Mathematical Statistics, Wiley, New York, 1971.
P. J. Huber, Robust statistics: A review, Ann. Math. Stat. 43C), 1041-1067 A972).
F. K. Hwang, An O(nlog)/) algorithm for rectilinear minimal spanning tree, /. ACM
26, 177-182A979).
J. W. Jaromczyk, Lower bounds for polygon simplicity testing and other problems,
Proc. MFCS-84, Prague (Springer-Vcrlag), 339-347 A984).
R. A. Jarvis, On the identification of the convex hull of a finite set ofpoints in ihc plane,
Info. Proc. Lett. 2, 18-21 A973).
S. C, Johnson, Hierarchical clustering schemes, Psychome/ricka 32, 241-254 A967),
M. Kallay, Convex hull algorithms in higher dimensions, unpublished manuscript,
Dept. Mathematics, Univ. of Oklahoma, Norman, Oklahoma, 1981.
8R. M. Karp, Rcducibility among combinatorial problems, in Complexity of Computer
Computations. Edited by R. E. Miller and J. W. Thatcher. Plenum Press, New
York; 1972.
J. M. Kcil and J. R. Sack, Minimum decomposition of polygonal objects, in Сотри*
tational Geometry, Edited by G. T. Toussaint. North-Holland, Amsterdam, The
Netherlands A985).
9 M. G. Kendall and P. A. P. Moran, Geometrical Probability, Hafncr.Nc» York, 1963,
D. G. Kirkpatrick, Efficient computation of continuous skeletons, Proc. 20th 1EF.E
Annual Symp. on Foundations ofComput. Sci., pp. 18-27 (Oct. 1979).
D. G. Kirkpatrick, Optimal search in planar subdivisions, SIAM J. Comput. 12A),
28-35A983).
*D. G. Kirkpatrick and R. Seidel, The ultimate planar convex hull algorithm? Tech.
Rep. 83-577, Dept. Comput. Sci., Cornell Univ., Oct. 1983,
V. Klec, Convex polytopes and linear programming, Proc. IBM Sci. Comput, Symp:
Combinational Problems, IBM, White Plains/NY, pp. 123-158 A966),
V. Klcc, Can the measure of и[я„ b,] be computed in less than O(n\ogn) steps?, Amcr.
Math. Monthly, 84D), 284-285 (April 1977).
V. Klec, On the complexity of ^-dimensional Yoronoi diagrams, Archiv cler Mathe*
matik, 34, 75-80A980).
10F. Klein, Das Erlangen Programm: vergkichende Betrachtungen iiber neuerc gco-
metrisches Forschungen, 1872. Reprinted by Akademischc VcrlagsGcscllsehaft
Grccst und Portig, Leipzig, 1974.
11D. E. Knuth, The Art of Computer Programming. Volume I: Fundamental Algorithms,
Addison-Wcsley, Reading, MA, 1968.
1ZD. E. Knut'h, The Art of Computer Programming. Volume III.- Sorting and Searching,
Addison-Wcsley, Reading, Mass., 1973.
D. E. Knuth, Big omicron and big. omega and big thcta, SIGACT News Щ2), IS 24
(April -June 1976).
J. F. Kolars and J. D. Nystucn, Human Geography, McGraw-Hill, New York, 1974.
J. B. Kruskal, On the shortest spanning subtree of a graph and the traveling salesman
Литература 461
problem, Proc. AMS 7, 48-50 A956).
H. T. Rung, F. Luccio and F. P. Preparata, On finding the maxima of a set of vectors,
JACM 22D), 469-476 (Oct. 1975).
U. Lauther, 4-dimensional binary search trees as a means to speed up associative
searches in the design verification of integrated circuits. Jour, of Design. Auto-
Automation and Fault Tolerant Computing, 2C), 241-247 (July 1978).
С L. Lawson, The smallest covering cone or sphere, SIAM Rev. 7C), 415-417 A965).
С L. Lawson, Software for C1 surface interpolation, JPL Publication, pp. 77-30
(Aug. 1977).
D. T. Lee, On finding к nearest neighbors in the plane, Technical Repojt. Department
pf Computer Science, University of Illinois, 1976.
D. T, Lee, Proximity and reachability in the plane, Tech. Rep. No. R-831, Coordinated
Sci. Lab., Univ. of Illinois at Urbana, IL, 1978.-
D. T. Lee, On k-nearest neighbor Voronoi diagrams in the plane, IEEE Trans. Comput.
C-31F), 478-487 (June 1982).
D. T. Lee, Two dimensional Voronoi diagram in the /^-metric, J. ACM 27, 604-618
A980a).
D, T. Lee, Farthest neighbor Voronoi diagrams and applications, Tech. Rep. No. 80-
ll-FC-04, Dpt. EE/CS, Northwestern Univ., 1980b.
D. T. Lee, On finding the convex hull of a simple polygon. Tech. Rep. No. 80-03-FC-
01, EE/CS Dept., Northwestern Univ., 1980. See also /л/У/. Comput. and Infor.
Sci. 12B), 87-98 A983 a).
D, T, Lee, Visibility of a simpl* polygon, Computer Vision. Graphics and Image
. Processing 22, 207-221 A983b).
D. T. Lee and I. M. Chen, Display of visible edges of a set of convex polygons, in
Computational Geometry. Edited by G. T. Toussaint. North Holland, Amster-
Amsterdam, to appear A985).
D. T. Lee and R. L, Drysdale HI, Generalized Voronoi diagrams in the plane, SIAM
J. Comput. 10, l,,73-87 (Feb. 1981).
D. T, Lee and F. P. Preparata, Location of a point in a planar subdivision and its
applications, SIAM Journal on Computing 6C), 594-606 (Sept. 1977).
D. T. Lee and F. P. Preparata, The all nearest neighbor problem for convex polygons,
Info. Proc'Lett, 7, 189T192 A978).
D, T. Lee and F. P. Preparata, An optimal algorithm for finding the kernel of a
polygon, Journal of the ACM 26, 415-421 A979).
D. T. Lee and F. P. Preparata, An improved algorithm for the rectangle enclosure
problem, Journal of Algorithms, 3C), 218-224 A982).
D, T, Lee and B. Schachter, Two algorithms for constructing Delaunay triangulations,
Inl'lJ. Comput. and Info. Sci. 9C), 219-242 A980).
D. T. Lee and С. К. Wong, Worst-case analysis for region and partial region searches
in multidimensional binary search trees and balanced quad trees, Ada Informa-
»ca 9, 23 -29A977).
D. T. Lee and C. K.Wong, Voronoi diagrams in ?,-(?„„-} metrics with 2-dimensional
storage applications, SIAM J. Comput. 9A), 200-211 A980).
J. van Leeuwen and D. Wood, Dynamization of decomposable searching problems,
Info. Proc. Lett. 10, 51-56 A980).
J. van Leeuwen and D. Wood, The measure problem for rectangular ranges in (/-space,
J. Algorithms 2, 282-300 A981).
E. Lemoine, Geometrographie, C. Naud, Paris, 1902.
W. Lipski, Jr. and С. Н. Papadimitriou, A fast algorithm for testing for safety and
detecting deadlocks in locked transaction systems, Journal of Algorithms 2,
211-226A981).
W. Lipski, Jr. and F. P. Preparata, Finding the contour of a union of iso-oriented
rectangles, Journal of Algorithms 1, 235-246 A980).
462 Литература
W. Lipski, Jr. and F. r. Preparata, Segments, rectangles, contours, Journal oj Al-
Algorithms 2, 63-76 A981).
R. J. Lipton and RE. Tarjan, A separator theorem for planar graphs. Conference on
Theoretical Computer Science, Waterloo, Ont., pp. I 10 (August 1977a).
R. J. Lipton and R. E. Tarjan. Applications of a planar separator theorem, Proc. 18th
IEEE Annual Symp. on Found, of Сотр. Sci., Providence, RI, pp. 162-170
(October 1977b).
R. J. Lipton and R. F. Tarjan, Applications of a planar separator theorem, SI AM J.
Comput. 9C), 615-627 A980).
С I.. Liu, Introduction to Combinatorial Mathematics, McGraw-Hill, New York. 1968.
L. I.. Lloyd, On triangulations of a set of points in the plane, Proc. 18th IEEE. Annual
Svmp. on Foundations of Comput. Sci., pp. 228-240 (Oct. 1977).
H. Loberman and A. Weinberger, Formal procedures for connecting terminals with a
minimum total wire length, JACM 4, 428-437 A957).
D. O. Loftsgaarden and C. P. Queensberry, A nonparametric density function, Ann.
Math. Stat. 36, 1049 .1051 A965).
P, P. Loutrel, A solution to the hidden-line problem for computer-drawn polyhedra.
IEEE Trans. Сотр. С-19C), 205-215 (March 1970).
G. S. Lueker, A data structure for orthogonal range queries. Proceedings of the 19th
Annual IEEE Symposium on Foundations of Computer Science, pp. 28-34 A978).
U. Manber and M. Tompa, Probabilistic, nondeterministic and alternating decision
frees. Tech. Rep. No. 82-03-01, Univ. Washington, 1982.
H. G. Mairson and J. Stolfi, Reporting line segment intersections in the plane, Tech.
Rep., Dept. of Computer Sci., Stanford University, 1983.
Y. Matsushita, A solution to the hidden line problem, Technical Report 335. Depart-
Department of Computer Science, University of Illinois, 1969.
D. W. Matula and R. R. Sokal, Properties of Gabriel graphs relevant to geographic
variation research and the clustering of points in the plane, Geographical Analysis
¦12, 205-222 (July 1980).
D. McCallum and D. Avis, A linear algorithm for finding the convex hull of a simple
polygon, Info. Proc. Lett. 9, 201-206 A979).
E. M. McCreight, Priority search trees. Tech. Rep. Xerox PARC CSL-81-5. 1981.
P. McMullen and G. C. Shephard, Convex Polytopes and the Upper Bound Conjecture,
Cambridge University Press, Cambridge, England, 1971.
С A. Mead and L. Conway, Introduction to VLSI Systems, Addison-Wesley, Reading,
Mass., 1979.
N. Mcgiddo, Linear time algorithm for linear programming in Л3 and related prob-
problems, SI AM J. Comput. 12D), 759-776 (Nov. 1983).
W. S. Meisel, Computer-Oriented Approaches to Pattern Recognition, Academic Press,
New York, 1972.
Z, A. Melzak, Companion to Concrete Mathematics, Wiley-Interscience. New York,
1973.
J. Milnor, On the Betti numbers of real algebraic varieties, Proc. A MS 15, 2745-280
A964).
J, Milnor, Singular Points of Complex Ну per surfaces, Princeton Univ. Press,
Princeton. NJ, 1968.
1SM. 1. Minski and S. Papert. Pcrceptrons, MIT Press, Amherst, Mass., 1969.
J. W. Moon, Various proofs of Cayley's formula for counting trejs, in A Seminar on
Graph Theory. Edited by F. Harary. Holt, Rinehart and Winston, New York,
n 1976'
D. E. Muller and F. P. Preparata, Finding the intersection of two convex polyhedra,
Theoretical Computer Science 7B), 217-236 (Oct. 1978).
К. Р. К. Nair and R. Chandrasekaran, Optimal location of a single service center of
certain types, Nav. Res. Log. Quart 18, 503-.510 A971).
Литература 463
16 W. M. Newman and R. 1-". Sproull, Principles of Interactive Computer Graphics,
McGraw-Hill. New York, 1973.
J. Nievcrgclt and F. Prcparata, Plane-sweep algorithms for intersecting geometric
figures, Comm. ACM 25A0), 739-747 A982).
A Nijcnlniis and H. S. Wilf, Combinatorial Algorithms, Academic Press, New York,
975.
J, O'Rourkc, C.-B Chicn, T. Olson and D, Naddor, A new linear algorithm for
intersecting convex polygons, Computer Graphics and Image Processing 19,
384-391 A982).
R, E. Obleen and P. P. Lin, Picture skeletons based on eccentricities of points of
minimum spanning trees, SIAM J. Comput. 3A), 23-40 (March 1974).
M. H. Ovcrmars, The design of dynamic data structures, Ph. D. Thesis; University of
Utrecht, The Netherlands A983).
M. H. Ovcrniars and J. van Lccuwcn, Maintenance of configurations in the plane, J.
Com/nit. andSyst. Sci. 23, 166-204 A981).
C. 11 I'apadimitriou, The Euclidean traveling salesman problem is NP-cpmplctc,
Theorct. Comput. Sci. 4, 237-244 A977).
СП. Papadimitriou and K, Stciglitz, Some complexity results for the traveling
salesman problem, Eighth ACM Annual Synip. on Theory of Comput., pp. 1-9
(May 1976).
E. Piclou, Mathematical Ecology, Wiley-Interscicncc, New York, 1977.
F. P. Preparata, Steps into computational geometry, Technical Report. Coordinated
Science Laboratory, University of Illinois, 1977.
F. P. Prcparata, An optimal real time algorithm for planar convex hulls, Comm. ACM
22,402-405A979).
F. P. Prcparata. A new approach to planar point location, SIAM J. Comput. 10C),
473-482A981).
F. P. Prcparata and S. J. Hong, Convex hulls of finite sets of points in two and three
dimensions, Comm. ACM 2B0), 87-93 (Feb. 1977).
F. P. Preparata and D. E. Muller, Finding the intersection of n half-spaces in time
O(n log»). Theoretical Computer Science 8A), 45-55 (Jan. 1979).
F. P. Preparata and K. J. Supowit, Testing a simple polygon for monotonicity, Info.
Proc. Lett. 12D), 161-164 (Aug. 1981).
R. C. Prim, Shortest connecting networks and some generalizations, BSTJ 36,
1389-1401 A957).
MO. Rabin, Proving simultaneous positivity of linear forms, Journal of Computer and
'System Sciences 6, 639-650 A972).
H. Rademachcr and O. Tocplitz, The Enjoyment of Mathematics; Princeton University
Press, Princeton, NJ, 1957.
11. Raynaud, Sur l'envcloppe convexc des images des points alcatoircs dans R", I, J.
: Appl. Prob. 7, 35-48A970).
E, M. Reingokl. On the optimally of some set algorithms, Journal of the ACM 19,
649-659A972).
E. M. Reingold, J. Nicvcrgelt, and N. Deo, Combinatorial Algorithms: Theory and
Practice. Prentice-Hall, Englcwood Cliffs, NJ, 1977.
A. Renyi and R. Sulankc, Ucbcr die konvexe Hulle von n zufallig gewahltcn Punkten,
I, Z. Wcduschem, 2. 75-84 A963).
R. Ricscnfeld. Applications of b-splinc approximation to geometric problems of
computer-aided design, Technical Report UTEC-CSc-73-126, Department of
Computer Science, University of Utah, 1973.
R. T. Rockafellur, Convex Analysis, Princeton University Press, Princeton, NJ 1970.
2'C. A. Rogers. Packing and Corerinc/, Cambridge University Press, Cambridge, Eng-
England. 1964.
Л. Kobciilcld, Picture Processing by Computers, Academic Press, New York, 1969,
464 Литература
D. J. Rosenkrantz, R. E. Stearns and P. M. Lewis, Approximate algorithms lor the
traveling salesperson problem, Fifteenth Annual IEEE Symposium on Switching
and Automata Theory, pp. 33-42 (May 1974).
T. L. Saaty, Optimization in Integers and Related Extremal Problems, McGraw-Hill,
New York, 1970.
2SL. A. Santalo, Integral Geometry and Geometric Probability, Encyclopedia of Math-
Mathematics and Its Applications, Vol. I. Addison-Wesley, Reading, Mass., 1976.
J. B. Saxe, On the number of range queries in k-spacc. Discrete Applied Mathematics 1.
217-225A979).
J. B. Saxe and J. L, Bentley, Transforming static data structures into dynamic struc-
structures, Proc. 20th IEEE Annual Symp. on Foundations oj Comput. Sei., pp. 148 168
A979).
A. M. Schonhage, M. Paterson and N, Pippenger, Finding the median, J, Comput. and
Syst.Sei. 13, 184-199A976).
J. T. Schwartz, Finding (he minimum distance between two convex polygons. Info.
Proc. Lett. 13D), 168-170A981).
D. H. Schwartzmann and J. J. Vidal, An algorithm for determining the topological
dimensionality of point clusters, IEEE Trans. Сотр. C-24(I2), 1175 1182 (Dec.
1975).
R. Seidel, A convex hull algorithm optimal for points in even dimensions. M.S. thesis,
Tech. Rep. 81-14, Dept. of Comput. Sei., Univ. ol British Columbia. Vancouver,
Canada. 1981.
R. Seidel, The complexity of Voronoi diagrams in higher dimensions. Proc. 20th
Allerion Conference on Comm., Control and Comput., pp. 94-95 A982). See also
Tech. Rep. No. F94, Tcchnische Universitat Graz, Austria, 1982.
M. I. Shamos, Problems in computational geometry, unpublished manuscript, 1975a.
M. I. Shamos, Geometric Complexity, Seventh ACM Annual Symp. on Theory of
Comput., pp. 224-233 (May 1975b).
M. I. Shamos, Geometry and statistics: Problems at the interface, in Recent Results and
New Directions in Algorithms and Complexity. Edited by J. F. Traub. Academic
Press A976).
M. I. Shamos, Computational geometry, Ph.D. thesis, Dept. of Comput. Sei., Yale
Univ., 1978.
M. I. Shamos and D. Hoey, Closest-point problems, Sixteenth Annual IEEE Sym-
Symposium on Foundations of Computer Science, pp. 151 -162 (Oct. 1975).
M. I. Shamos and D. Hoey, Geometric intersection problems, Seventeenth Annual
IEEE Symposium on Foundations of Computer Science, pp. 208-215 (Oct. 1976).
H. W. Six and D. Wood, The rectangle intersection problem revisited, BIT20,426-433
A980).
H. W, Six and D. Wood, Counting and reporting intersections of (/-ranges, IEEE
Trans. Comput. C-31, 181-187 A982).
J, Sklansky, Measuring concavity on a rectangular mosaic, IEEE Trans. Сотр. С-21,
1355-1364A972).
E. Soisalon-Soininen and D. Wood, An optimal algorithm for testing for safety and
detecting deadlock in locked transaction systems, Proc. of ACM Symposium on
Principles of Data Bases, Los Angeles, March 1982; pp. 108-116.
J. M. Steeleand A.C. Yao, Lower bounds for algebraic decision trees,/. Algorithms 3,
1-8A982).
J. Stoer and С Witzgall, Convexity and Optimization in Finite Dimensions I, Spjinger-
Verlag, New York, 1970.
^6G. Strang and G. Fix, An Analysis of the Finite Element Method, Prentice-Hall,
Englewood Cliffs, NJ, 1973.'
K. J. Supowit, The relative neighborhood graph with an application to minimum
spanning trees, /. ACM 30C), 428-447 (July 1983).
Литература 465
I.E. Sutherland, Computer graphic;,: ten unsolved problems. Datamation 12E), 22-27
(May 1966).
J. J. Sylvester. On Ponceict'.s approximate linear valuation of surd forms, Phil. Mag,
Ser. 4,20,203-222A860).
R. Thom, Sur Phomologic.des varictes algcbni7qu.es jeelles, Differential and Com-
Combinatorial Topology. Edited by S. S. Cairns. Princeton Univ. Press, Princeton, NJ,
1965.
C. Toregas. R. Swain, C. Revclle and L. Bergman, The location of cnierccncy service
facilities, Operations Research 19, 1363-1373 A971),
G. T. Toussaint, Pattern recognition and geometrical complexity, Proc. 5th Int'l
Conference on Pattern Recognition, pp. 1324-1347 (Dec, 1980a).
G. T. Toussaint, The relative.neighborhood graph'of a finite planar set, Pattern
Recognition l'2D), 261-268 A980b).
G. T. Toussaint, An optimal algorithm for computing the minimum vertex distance
between two crossing convex polygons, Proc. 2.1st Allerton Conference on
Convn..Control and Comput., pp. 457-458 A983a),
G. T. Toussaint, Computing.largest empty circles with location constraints, Int'l J,
Computer and Info. Set. 12E), 347-358 A983b),
V. Vaishnavi, Computing point enclosures, Pattern Recog. 15. 22-29 A982).
V. Vaishnavi and D. Wood, Data structures for the rectangle containment and
enclosure problems, Computer Graphics and Image Processing 13,372-384A980).
V, Vaishnavi and D. Wood, Rectilinear line segment intersection, layered segment
"trees, and dynamization, J. Algorithms 3, 160- 176 A982).
F. A. Valentine, Convex Sets, McGraw-Hill, New York, 1964.
G. Voronoi, Nouvelles applications des paramctres continus a la theorie des formes
quadratiques. Deuxicme Mcmorie: Rccherehes sur les paralleloedres primilifs, /,
reineangew. Math. 134, 198 287 A908).
J. E, Warnock, A hidden-surface algorithm for computer generated halftone pictures,
Technical Report TR 4-15. Computer Science Department, University of Utah,
1969.
G. S. Watkins, A real-time visible surface algorithm, Technical Report UTECH-CSe-
70-101. Computer Science Department, University of Utah. June 1970.
D. E. Willard, Predicate-oriented database search algorithms, Harvard University,
Cambridge, MA, Aiken Computation Laboratory. Ph.'D. Thesis, Report TR-20-
78, 1978.
2 D. E. Willard, Polygon retrieval, SIAMJ. Comput. 11, 149-165 A982),
N. Wirth, Algorithms + Data Structures ~ Programs, Prentice-Hall, Englcwood
Cliffs, NJ, 1976.
301. M. Yagiom and V, G. Boltyanskii, Convex Figures, Holt, Rineharl and Winston,
New York, 1961.
A. C. Yao, An 0(?loglog V) algorithm for finding minimum spanning lrccs, Info.
Ptoc.Lett 4,21-23 A975).
A. C. Yao, A lower bound to finding convex hulls, J, ACM 28, 7S0 787 A981),
A. C, Yao, On conducting minimum spanning trees in k-dimcnsional space and
related problems, SI AM J. Com put. 11D). 721 736 A982),
M.Z. Yannakakis.C H, Papadimitriouand ILT. Kung. Locking policies: safety and
freedom for deadlock, Proceedings- 20th Annual Symposium on Foundations of
Computer Science, pp. 286 297 A979).
C. T. Zalin, Graph-theoretical methods for delecting and describine 'Jrestalt clusters,
IEEE Tnms. С imp C-20(l), 68 86 (Jan. 1971).
7S. I. Zhukhovitsky and L. I. Avdcyeva, Linear and Convex Programming Saundcrs,
Philadelphia. 1966.
466 Литература
Работы вышедшие на русском языке или
в русском переводе
1. Ахо А., Хопкрофт Дж., Ульман Дж. Построение и анализ вычислитель-
вычислительных алгоритмов. — М.: Мир, 1979.
2. Вирт Н. Алгоритмы + структуры данных = программы. — М.: Мир, 1985.
3. Гильберт Д. Основания геометрии.—М. — Л.: Гостехиздат, 1948.
4. Гэри М., Джонсон Д. Вычислительные машины и труднорешаемые за-
задачи. — М.: Мир, 1982.
5. Делоне Б. Н. О пустом шаре. — Известия АН СССР, 1934, VII серия,
6, с. 793—800.
6. Дуда Р., Харт П. Распознавание образов и анализ сцен. — М.: Мир, 1976.
7. Зуховицкий С. И., Авдеева Л. И. Линейное и выпуклое программирова-
программирование.— М.: Наука, 1964.
8. Карп Р. М. Сводимость комбинаторных проблем. — Кибернетический
сборник, вып. 12. — М.: Мир, 1975, с. 16—38.
9. Кендэл М., Моран П. Геометрические вероятности. — М.: Наука, 1972.
10. Клейн Ф. Сравнительное обозрение новейших геометрических исследова-
исследований. (Программа при вступлении в университет в Эрлангене). — Казань,
Имп. университет, 1896.
11. Кнут Д. Искусство программирования для ЭВМ. Т. 1. Основные алго-
алгоритмы.— М.: Мир, 1976.
12. Кнут Д. Искусство программирования для ЭВМ. Т. 3. Сортировка и по-
поиск. — М.: Мир, 1978.
13. Маллер Д., Препарата Ф. Нахождение пересечения двух выпуклых мно-
многогранников.— Кибернетический сборник, вып. 20. — М.: Мир, 1983,
с. 5—29.
14. Милнор Дж. Особые точки комплексных гиперповерхностей. — М.: Мир,
1974.
15. Минский М., Пейперт С. Персептроны. — М.: Мир, 1971. — 261 с.
16. Ньюмен У., Спрулл Р. Основы интерактивной машинной графики. — М.:
Мир, 1976.
17. Препарата Ф., Маллер Д. Нахождение пересечения п полупространств
за время O(nlogn). — Кибернетический сборник, вып. 21. — М.: Мир,
1984, с. 55—68.
18. Прим Р. К. Кратчайшие связывающие сети и некоторые обобщения.—
Кибернетический сборник. — М.: Иностранная литература, 1961, с. 95—107.
19. Радемахер Г., Теплиц О. Числа и фигуры. Опыты матем. мышления.—
М.: Физматгиз, 1962.
20. Рейнгольд Э., Нивергельт Ю., Део Н. Комбинаторные алгоритмы: теория
и практика. — М.: Мир, 1980.
21. Роджерс К. А. Укладки и покрытия. — М.: Мир, 1968.
22. Розенфельд А. Распознавание и обработка изображений с помощью вы-
вычислительных машин. — М.: Мир, 1972.
23. Рокафеллар Р. Т. Выпуклый анализ. — М.: Мир, 1973.
24. Саати Т. Целочисленные методы оптимизации и связанные с ними экстре-
¦ мальные проблемы. — М.: Мир, 1973.
25. Сантало Л. А. Интегральная геометрия и геометрические вероятности. —
М.: Наука, 1983.
26. Стренг Г.> Фикс Дж. Теория метода конечных элементов. — М.: Мир, 1977.
27. Хадвигер Г., Дебруннер Г. Комбинаторная геометрия плоскости. — М.:
Наука, 1965.
28. Ханан М„ Курцберг Дж. Методы размещения. — В кн.: Теория и методы
автоматизации проектирования вычислительных систем. — М.: Мир 1977,
с. 147—225.
Литература 467
29. Эйкерс Ш. В. Трассировка. — В кн.: Теория и методы автоматизации
проектирования вычислительных систем. — М.: Мир, 1977, с. 226—295.
30. Яглом И. М. и Болтянский В. Г. Выпуклые фигуры. М. — Л.: Гостехиздат,
1951.
Список дополнительной литературы
к русскому изданию ')
1. Aggarwal A., Guibas L., Saxe J., Shor P. W. A linear time algorithm for
computing the Voronoi diagram of a convex polygon, Proc. 19th ACM
Annual Symp. on Theory of Comput. pp. 39—45, May 1987.
*2. Chazelle B. M., Cole R., Preparata F. P., Yap С. К- New upper bounds
for neighbor searching, Information and Control, 68A—3), p. 105—124
A986).
*3. Chazelle В. М., Edelsbrunner H. Optimal solutions for a class of point
retrieval problems, J. Symbol Comput. 1, p. 47—56, 1985.
4. Chazelle В. М., Edelsbrunner, An optimal algorithm for intersecting line
segments, manuscript, 1988.
*5. Edahiro M. I., Kokubo I., Asano T. A new point-location algorithm and
its practical efficiency — comparison with existing algorithms, ACM
Trans, on Graphics 3B), p. 86—109, 1984.
*6. Edelsbrunner E., Guibas L. J[., Stolfi J. Optimal point location in mono-
monotone subdivision, SIAM J. Comput., 15B), p. 317—340, 1986.
*7. Edelsbrunner H., Overmars M. H. Batched dynamic solutions to decompo-
decomposable searching problems, J. Algorithms, 6, p. 515—542, 1985.
*8. Edelsbrunner H., Seidel R. Voronoi diagrams and arrangements, Discrete
Comput. Geom. 1, p. 25—44, 1986.
*9. Edelsbrunner H., van Leeuwen T. A., Ottman T. A., Wood D. Computing
the connected components of simple rectilinear geometric objects in
d-space, RAIRO Inf. Th. h8, p. 171—183, 1984.
*10. Edelsbrunner H., Welzl E. Halfplanar range search in linear space and
0(nOM5) query time, Info. Proc. Lett., 23F), p. 289—293, 1986.
11. Griffiths J. G. Bibliography of hidden-line and hidden-surface algorithms,
Computer Aided Design, 10C), p. 203—206, 1978.
12. Giiting R. H., Ottmann T. New algorithms for special cases of hidden-
line elimination problems, Lecture Notes Comput. Sci. 182, p. 161—172,
1985.
*13. Hertel S., Mehlhorn K., Mantyla M., Nievergelt J. Space sweep solves
intersection of two convex polyhedron elegantly, Acta Informatica, 21,
p. 501—519, 1984.
*14. Jaromczyk J. W. Lower bounds for polygon simplicity testing and other
problems. Lecture Notes Comput. Sci., 176, p. 339—347, 1984.
*15. Kirkpatrick D. G. Seidel R. The ultimate planar convex hull algorithm?
SIAM J. Comput., 15A), p. 287—299, 1986.
16. Lee D. Т., Wu Y. F., Geometric complexity of some location problems,
Algorithmica, 1, p. 193—211, 1986.
*17. Manber U., Tompa M. The complexity of problems on probabilistic, non-
deterministic and alternating decision trees, J. ACM, 32C), p. 720—732,
1985.
l) Работы с номерами 11, 12, 21 добавлены переводчиком.
468 Литература
•18. Mairson Н. G., Stolfi J. Reporting and counting intersections between two
sets of line segments, Proc. NATO Adv. Study Inst. on Theoret. Found.
Comput. Graphics and CAD, Sprihger-Verlag, 1987.
*19. McCreight E. M., Priority Search Trees, SIAM J. Comput., 14B),
p. 257—276, 1985.
20. Tarjan R. E., van Wyk C. J. An O(n loglog n)-time algorithm for triangu-
triangulating a simple polygon, SIAM J. Comput'., 17, p. 143—178, 1988.
21. Фокс А., Пратт М. Вычислительная геометрия. Применение в проекти-
проектировании и на производстве. — М.: Мир, 1982.
Именной указатель
Абель (Abel N.) 11, 12
Аккермаи (Ackerman) 24
Архимед 11
Аталла (Atallah M.) 277
Ахо (Aho A.) 16, 17
Безье (Bezier P.) 15
Беи-Op (Ben-Or M.) 47, 49, 51,
123, 342
Беитли (Bentley J.) 24, 103, 111,
202, 321, 407
Браун (Brawn K-) 311
Бхаттачарья (Bhattacharya В )
180, 313
121,
186,
160,
Вайде (Weide В.) 405
Вайшиави (Vaishnavi V.) 452, 453
Ваи Вик (van Wyk) 323
Ван Леювеи (van Leeuwen J.) 112,
151, 213, 410
Васони (Vaszonyi) 224
Вигиер (Wigner) 251
Вонг (Wong С.) 97, 98, 272
By (Wu) 318
Вуд (Wood D.) 112, 410, 426, 452,
453
Гэствирт (Gastwirth J.) 210, 211
Гютииг (Guting R.) 423
Дайер (Dyer M.) 180, 356, 362, 378,
392
Дейкстра (Dijkstra E.) 230
Делоие 255
Джарвис (Jarwis R.) 133, 134, 212
Джильберт (Gilbert P.) 287
Джоисои (Johnson D.) 33, 230, 282
Дирихле (Dirichlet) 251
Добкии (Dobkin D.) 47, 49, 63, 80,
110, 217, 342, 389, 392
Драйсдейл (Drysdale R.) 321
Евклид 10, 11
Едмоидс (Edmonds) 283
Елзинга (Elzinga) 313
Жор дай 58
Зейдель (Seidel R.) 113, 180, 181, 301,
313, 323, 324
Зейтц (Seitz) 251
Иичерпи (Incerpi J.) 452
Габоу (Gabow H.) 284, 285
Габриэль (Gabriel K.) 322
Галуа (Galois E.) 13
Гаусс (Gauss K.) 11
Гертел (Hertel S.) 391
Гибас (Guibas) 113
Гильберт (Hilbert D.) 12, 13, 33
Гоизалес (Gonzales T.) 318, 342
Грэхем (Graham R.) 128, 129, 143,
204, 230, 282
Гэри (Garey E.) 13
Капур (Kapur S.) 136, 160, 180
Кейл (Keil J.) 181, 323
Кейли (Kallay M.) 167, 180, 181
Киркпатрик (Kirkpatrick D.) 75, 88,
113, 180, 181, 321, 392
Клейи (Klein F.) 14
Кли (Klee V.) 311, 404, 405, 407
Киут (Knuth D.) 16, 52, 99
Краскал (Kruskal J.) 230
Кристофидес (Christofides) 281, 284
Кэли (Cayley A.) 230
470
Именной указатель
Лемуан (Lemoin E.) 12, 13
Ли (Lee D.) 66, 97, 98, 111, 204, 268,
272—275, 307, 318, 321, 323
Липски (Lipski W.) 419, 453
Липтон (Lipton R.) 47, 49, 63, 74,
75, 80, ПО, 342
Ллойд (Lloyd E.) 286
Люкер (Lucker G.) 92, 108, 113
Маккаллум (McCallum D.) 204
Маккрейт (McKreight E.) 453
Маллер (Muller D.) 373
Манро (Munro I.) 217
Maypep (Maurer H.) 103, 321, 453
Меджнддо (Megiddo N.) 180, 316,
356, 362
Милнор (Milnor J.) 49
Минковский (Minkowski) 272
Минский (Minsky M.) 15
Mop (Mohr G.) 13
Мэйрсон (Mairson H.) 390
Мэнбер (Manber U.) 318
Нивергельт (Nievergelt J.) 390
Стронг (Strong G.) 242
Суповит (Supowit К.) 322
СэПкс (Saxe J.) Ill
Тарьян (Tarjan R.) 278, 279, 323
Тиссен (Thiessen) 251
Tom (Thorn R.) 49
Томпа (Tompa M.) 253
Туссен (Toissaint G.) 318, 392
Тьюкп (Tnkey) 211
Уиллард (Willard D.) 108, 111, 113
Фредмен (Fredman M.) 93, 405
Фримен (Freeman H.) 192
Хартиган (Hartigan J.) 216
Xacce (Hasse) 118
Хванг (Hwang F.) 272
Хирн (Hearn D.) 313
Хонг (Hong S.) 143, 187
Хоуи (Ноеу D.) 243, 251, 333, 343
Овермарс (Overmars M.) 113, 151,
213, 452
Пападимитрну (Papadimitriou C.) 282,
453
Пейперт (Papert S.) 15
Пиелоу (Pielou E.) 228
Препарата (Preparata F.) 66,111,143,
146, 187, 373, 390, 419
Прим (Prim R.) 230
Чазелле (Chaselle B.) Ill, 213, 348,
389, 390, 391
Чанд (Chand D.) 136, 160, 180
Черитон (Cheriton D.) 278, 279
Шварц (Shwartz J.) 274
Шеймос (Shaimos M.) 121, 141, 145,
186, 243, 333, 343
Шехтер (Schechter B.) 273
Штейнер (Steiner) 230, 323
Штейниц (Steinitz) 119
Рейнгольд (Reingold H.) 16
Ризенфельд (Riesenfeld R.) 15
Саати (Saaty T.) 228
Сак (Sack J.) 323
Сикс (Six H.) 452
Сойсалон-Сойнинен (Soisalon-Soini-
nen E.) 426
Стайглиц (Steiglitz K.) 282
Стили (Steele J.) 47, 121
Столфи (Stolfi J.) 113, 390
Эдельсбруннер (Edelsbrunner H.) 113,
301, 348, 390, 392, 438, 452, 453
Эйвис (Avis D.) 122, 204, 313
Эйзенстат (Eisenstat S.) 94
Экл (Akl S.) 132, 134
Эндрью (Andrew A.) 132, 137, 152,
189
Эрдёш (Erdos P.) 223
Яо (Yao A.) 204, 225, 320
Яромчик (Jaromczik J.) 391
Предметный указатель
Активная компонента (active compo-
component) 426
Алгол (Algol) 17
Алгоритм (Algorithm) 16, 17
— Бентли — Оттмана (Bentley — Ott-
man) 390
— БЫСТРОБОЛ (QUICKHULL) 136,
138, 139
— БЫСТРСОРТ (QUICKSORT) 136,
139
— Гонзалеса (Gonzales) 319
— Джарвиса (метод обхода) (Jar-
vis's march) 134, 135, 161, 179,
183
сложность в среднем 185
— динамический (dinamic) 402
— закрытый (off-line) 143
— Ли (Lee) 204
— Маккаллума—Эйвиса (McCallum—
Avis) 204
— открытым (on-line) 133, 143, 144,
146
— предельный (ultimate) 180
— Препараты — Хонга (Preparata —
Hong) 187, 191, 375
— «разделяй и властвуй» (divide-
and-conquer) 173, 185, 186
сложность в среднем 186
— реального времени (real-time)
144
— слияния (merge) 141
— статический (static) 402
— Чанда — Капура (Chand — Kapur)
180
Асимптотический анализ (asymptotic
analysis) 20
Аффинная геометрия (affine geomet-
geometry) 35
— группа (group) 35
— комбинация (combination) 115, 116
— оболочка (hull) 116
Аффинное многообразие (affine varie-
variety) 115
— отображение (mapping) 34—36
Балансирование по весу (weighted
balance) 74
Балансировка (balance) 82, 86
Безопасность (safeness) 399
Блокировка (locking) 397
Вершина ближнего типа (close-type
vertex) 305
— вогнутая (concave) 147, 155, 171,
365
— выпуклая (reflex) 147, 155, 171,
365
— дальнего типа (far-type) 305
— критическая (event vertex) 205
— опорная (supporting) 147, 155,
— оптимальная (optimum) 356
— регулярная (regular) 68
Вес ребра (weight) 69
Внешность общая (common exterior)
387, 388
Внутренность общая (common inte-
interior) 387, 388
Возврат (return) 18
Восстановление принципиальной схе-
схемы (circuit extraction) 396
Выборка (retrieval) 91
Выбросы (outliers) 210
Выражение 18
Вычисление функции (evaluation) 358
Геометрия аффинная см. Аффинная
геометрия
— инверсная см. Инверсная геомет-
геометрия
472
Предметный указатель
Геометрография (geometrography) 12
Гипергрань (subfacet) 117
Гипотеза Васони (Vaszonyi conjectu-
conjecture) 224
Глубина множества (depth of a set)
217
— точки (depth of a point) 211
Голова списка (list-head) 366
Гомотопные кривые (homotopic cur-
curve) 425
Грань (face) 117
fe-грань (fe-facet) 117
Граф Габриэля (Gabriel graph) 322,
325
— граней политопа (facial graph) 118
— относительного соседства (relative
neighborhood) 322
— пленарный (planar) 27, 31, 62, 63,
119
— плоский 27
прямолинейный (planar stra-
straight-line) 62, 63, 72
— регулярный (regular) 68
Группа аффинная см. Аффинная груп-
группа
— подобия (similarity group) 35, 36
— проективная (projective group) 38
Делоне теорема 255
Дерево (tree) 46
— двоичное (binary) 46, 47
многомерное (k-D дерево) (mul-
(multidimensional binary) 94, 97
прошитое (threaded binary) 93,
105
— интервалов (interval) 403, 404, 438
статическое (static interval) 438
— минимальное остовное (minimum
spanning) 276, 277
евклидово 229, 276, 277, 280,
320
— оболочки (hull) 157
— отрезков (segment) 24, 25, 27, 105,
403, 408
— регионов (range) 105, 108
— — расслоенное (layered range)
109
— решений (decision) 47
алгебраическое (algebraic deci-
decision) 46, 123, 407
— сбалансированное B-3 дерево) (ba-
(balanced) 23, 65, 153
АВЛ-дерево 23
Движения (rigid motions) 36
Двойственные образы (dual images)
388
Диагональ (diagonal) 293
Диаграмма Вороного (Voronoi dia-
gramm) 251, 257, 258, 269, 271,
295
вершины (vertices) 251, 252
порядка к 297
ребра 251, 252
— Лагерра (Laguerre) 324
— Пауэра (Power) 324
— Кассе (Hasse) 38, 118, 168
— частичных сумм (cumulative sum)
215
Диаметр кластера (diameter of the
cluster) 216
Диаметр многоугольника выпуклого
(convex polygon diameter) 218,
223
простого 223
— множества (set diameter) 216, 218,
223
Дискриминация (discrimination) 66,
68, 73
Дихотомия см. Двоичный поиск
Доминирование (dominance) 54, 192,
444, 445
— векторное (vector) 54
Доминирующее подмножество (domi-
(dominance hull) 225
Допустимая область (feasible region)
351
Допустимое решение (feasible solu-
solution) 351
Дуга концевая (terminal arc) 431
Дыра (hole) 415
Жордана теорема 31, 58
Задача видимости (visibility problem)
392
— о выпуклой оболочке простого
многоугольника (convex hull of
a simpe polygon) 204
коммивояжере (traveling sales-
salesman) 281, 282, 284
максимумах множества точек
(maxima of a point set) 192, 193,
202, 203
— — принадлежности выпуклой обо-
оболочке 202
регрессии (regression) 214
монотонной (isotonic reg-
regression) 214
Задержка поступления данных (in-
terarriving delay) 143
Предметный указатель
473
Заметание (sweep) 20, 87
— плоское (plane) 21, 71, 391, 403,
437
вертикальное 21, 71
— пространственное (space) 21
Замыкание (closure) 400, 424
СВ-замыкание (NE-closure) 424
ЮЗ-замыкание (SW-closure) 400, 424
Запоминание динамическое (dynamic
fashion) 25, 58
Запрос (query) 53, 88
— массовый (repetitive mode) 53
— ортогональный 89
— региональный (range) 88
— уникальный (single-shot) 53, 58,
89
Инвариантность (invariant) 35
Инверсия (inversion) 298, 299
Инверсная геометрия (inversion geo-
geometry) 297
Индивидуальная задача 33
Интервал (interval) 25
— активный (active) 426
— стандартный (standard) 25
— элементарный (elementary) 25
Инцидентность (incidence) 35, 39, 400
Карта см. Пленарное подразбиение
— смежности вертикальная (vertical
adjacency map) 434
горизонтальная (horisontal) 434
Квадродерево (quad-tree) 410
— скелетное (skeletal) 410
Кластеризация (clustering) 216
k-кластеризация 216
Комбинация аффинная см. Аффинная
комбинация
— выпуклая (convex combination) 116
Компоненты связности (connected
components) 396, 400
Коника (conic) 40
Контролируемое обучение (supervi-
(supervised learning) 328
Контур (contour) 396
— внешний (external) 430, 436
— нетривиальный (поп trivial) 430
436
Координаты однородные (homoge-
nious coordinates) 37
Корона (crown) 391
Линейная модель (lineary model) 46
Линейное программирование (linear
programming) 353
Линейный классификатор (linear clas-
classifier) 329
Локализация (location) 57
— точки (point-location) 57, 66, 68,
74
Ломаная линия (polygonal line) 66
Локусы (loci) 54
Максимальный элемент см. Максимум
множества
Максимум множества (maximum) 193,
195, 202
Машина с произвольным доступом к
памяти (random-access machine)
(RAM) 43
вещественнознач-
ная (real) 43
Мера объединения (measure of the
union) 409, 411
Метод Бен-Ора 405
— детализации триангуляции (trian-
gulation refinement method) 75,
ПО
— заворачивания подарка (gift wrap-
wrapping) 136, 160, 163, 165, 166
— заметания плоскости (plane-sweep
technique) 20, 21, 64, 65
— локусов (locus method) 54
— Маллера—Препараты 374
— обхода Грэхема (Graham scan)
131, 132, 142
Джарвиса 212
— Овермарса — Ван Леювена 213
— открытый 172
— «под-над» (beneath-beyond met-
method) 167, 172
— полос (slab method) 63, 80, 160
— преобразования задач (transforma-
bility) 44
— «разделяй и властвуй» (divide-
and-conquer) 139, 140, 198, 199
— трапеций (trapezoid method) 79,
ПО, 111
— цепей (chain method) 66, 75,
ПО
— Шеймоса — Хоуи 333, 373
— k-D-дерева 100
Метрика (metric) 14
— Минковского (Minkowski metric)
272
Многообразие выпуклое (convex va-
variety) 31
— двойственное (dual) 39
— линейное (linear) 30, 39
Многоугольник (polygon) 31
— видимости (visibility polygon) 392
474
Предметный указатель
— Вороного (Voronoi polygon) 251
обобщенный (generalized) 296
— выпуклый (convex) 31, 61
— звездный (star-shaped) 339
— монотонный (monotone) 66, 74,
290
— обыкновенный (general) 61, 67
— простой (simple) 31, 58, 61, 204
Многоуровневые k-регионы (multile-
(multilevel k-ranges) 103
Множества линейно разделимые (li-
(linearly separable sets) 329, 364
Множество аффинное см. Аффинное
множество
— выпуклое (convex set) 116
— изотетичное (isotonic) 401
— истинности (decision) 121
— монотонных цепей полное (mono-
(monotone complete set of chains) 68
— полиэдральное (polyhedral set)
117
— фиксированное 24
Моделирование (simulation) 13
Модель вычислений (computational
model) 41
ограниченная (restricted) 11
Мощность множества (cardinality)
91
х-монотонность (x-monotonic curve)
425
Наблюдаемое поведение (observed
behavior) 20
Накрывающие ребра (spanning ed-
edges) 81, 82
Нормализация (normalisation) 101
Область внешняя (exterior) 31, 32
— внутренняя (interior) 31, 32
— гиперпрямоугольная (hyperrectan-
gular) 89
— СВ-замкнутая (NE-closed) 424
— ЮЗ-замкнутая (SW-closed) 424
Оболочка аффинная см. Аффинная
оболочка
— верхняя (upper-hull) 132, 152,153,
204
— в трехмерном пространстве 172
— выпуклая (convex hull) 31, 48,
114, 116, 117, 120, 131, 144
— — приближенная (approximate)
190
— нижняя (lower-hull) 132, 152, 215
Объем 36
Операция очистки (clean-up activity)
279
Отрезок (line segment) 30
— прямолинейный (straight line seg-
segment) 30, 339
Оценка Гэствирта (Gastwirth estima-
estimation) 211
Очередь (queue) 23
— с приоритетом (priority queue)
346
— сцепляемая (concatenable) 148, 154
Пара вершин диаметральная (diamet-
(diametral pair) 223
— взаимная (reciprocal) 228
Паросочетание минимальное взве-
взвешенное (minimum weighted mat-
matching) 283
Перелет (overshoot) 372
Перенос (translation) 34, 115
Пересечение прямоугольников (inter-
(intersection of rectangles) 436
Периметр (perimeter) 412
Пик внутренний (interior cusp) 291
Пленарное подразбиение (planar sub-
subdivision, map) 31, 32, 57, 66
Плоскость (plane) 30
Поворот левый (left turn) 208
— правый (right turn) 208
Подгруппа ортогональная (orthogonal
subgroup) 36
— унимодулярная (unimodular) 36
Поддержка динамическая (dinamic
support) 151, 159
Поиск (search) 91
— двоичный (bisection) 56, 62, 68,
93, 94
— в диске (disk search) 112
переменном (variable disk
search) 112
полуплоскости (half-planar
search) 112
— геометрический (geometric sear-
searching) 52, 57
— медианы (find median) 82, 83, 86
— на ограниченном расстоянии (boun-
(bounded distance search) 89
— региональный круговой (circular-
range search) 89, 93, 112
— фильтрующий (filtering) 91, 110
Покрытия (cover) 313
Политоп (polytope) 160
— выпуклый (convex polytope) 160
d-политоп выпуклый (convex d-poly-
tope) 117, 118
— простой (simple) 118
— симплициальный (simplicial) 118,
161
Предметный указатель
475
Полиэдр (polyhedrron) 32, 52
— вершины (vertices) 32
— внешняя область (exterior) 32
— внутренняя область (interior) 32
— выпуклый (convex) 32
обобщенный (generalizide con-
convex) 387
— грани (facets) 32
— простой (simple) 32
— ребра (edges) 72
Полюс (pole) 40
Поляра (polar) 40
Поляритет (polarity) 40, 355, 374
Порядок дерева (order) 46
Построение Евклидово (Euclidian
construction) 10
Преобразование двойственности (dua-
(duality transformation) 39
— линейное (linear mappings) 34
Преобразуемость (transformability)
44
(N)-преобразуемость ((N)-transfor-
((N)-transformability) 44
Приведение к абсурду (reductio ad
absurdum) 10
Присваивание (assignment) 18
Промежутки (gaps) 313, 418
Простота (simplicity) 12
Противолежащие пары (antipodal)
219
Процедура (procedure) 17
Прямая (line) 30
— опорная (supporting) 142, 143, 146
Прямолинейный объект (flat) 115
Прямолинейный отрезок см. Отрезок
прямолинейный
Прямоугольник активный (active re-
rectangle) 426, 437
— обобщенный (generalized) 94, 98
Псевдоалгол (Pidgin Algol) 17
Псевдовершины (pseudovertices) 379
Разбиение планарное 63
Развилка (fork) 26, 421
Разделимость линейная (linearly se-
separated) 260, 262
Расписание (schedule) 398, 399
— гомотопное (homotopic) 399
—- последовательное (serial) 399
— частичное (partial) 399
Расслоение (layering) 108
Расстояние (distance) 36
— вертикальное (vertical distance)
378
— хаусдорфово (Hausdorff) 277
Расцепление 158, 159
Реберный список с двойными связями
(double-connected-edge-list) 27,
74, 174
Ребро (edge) 31, 32, 117
Регуляризация (regularitation) 71,72
Режим отчета (report mode query)
91—93, ПО
— подсчета (count-mode query) 91,
93
Робастность (robustness) 210
№-распределения (№-distributions)
185
Сведение (reduction) 87, 194
— транзитивное (transitive) 87
Связанные точки (connected points)
424
Сдвиг циклический (rotate) 99
Симплекс-метод (simplex algorithm)
354
d-симплекс (d-simplex) 118
Скелет (skeleton) 320
Словарь (dictionary) 345
Сложность алгоритма (algorithm com-
complexity) 173
— в среднем случае (average case)
20
худшем случае (worst-case) 20,
186
— временная (time) 20
— пространственная (space) 20
Сопряжение (conjugate) 424
СВ-сопряжение (NE-conjugate) 424
ЮЗ-сопряжение (SW-conjugate) 424
Сортировка (sorting) 120, 133
— топологическая (topological sor-
sorting technique) 88
Список (list) 23, 108
— реберный 119
— смежности 119
— точек событий (event-point sche-
schedule) 21, 64, 344, 409
Срединные оси (medial axis) 320
Статус заметающей прямой (sweep-
line status) 21, 65, 71, 84, 344,
403, 409, 437
Стек (stack) 23
Степень доминирования (dominance
depth) 225
— узла (node count) 404
Структура данных (data structure)
22
динамическая (dynamic) 90, 93
статическая (static) 24, 90
— первичная (primary) 438
Сцепление 158, 159
476
Предметный указатель
Точка (point) 30
— крайняя (extreme) 120, 125, 145
Точки аффинно независимые (affine-
ly independent points) 115
— Штейнера (Steiner points) 323
Транзакция (transaction) 397, 399,
400
Трапеция (trapezoid) 80
Триангуляция (triangulation) 32, 74,
76, 175, 270, 285
— Делоне 273, 280, 286
— жадная (greedy) 286, 287, 290
— Киркпатрика 75
— конечного множества точек (of a
finite set) 32
— монотонного многоугольника 292
Тупик (deadlock) 399
— унимодальная (unimodal function)
381
Хвост списка (list-tail) 366
Центральное проецирование (central
projection) 37, 40
Центроид 59, 128
Цепь (circuit) 66, 72, 431
— внешняя (external) 431
— внутренняя (internal) 431
— монотонная (monotone) 67, 68
— нетривиальная (nontrivial) 431
— ориентированная (directed) 431
— тривиальная (trivial) 431
Цикл (loop) 18
Угол выпуклый (convex angle) 162
Узел непродуктивный (unproductive
node) 98
— продуктивный (productive) 98
— реберный (edge) 28
Узлы отнесения (allocation nodes)
26, 105, 421
Указатель Уилларда—Люкера 110
Условие (condition) 18
Функция (function) 18
— взятия целой части (flor function)
189
— регрессии (regression function)
214, 215
монотонная (isotonic) 215, 216
Шаг продвижения (advancing step)
205
— слияния (merge step) 198
Эйлера теорема 65, 78
— формула 32, 75, 79, 119, 160, 258
Экватор (equator) 385
Эквивалентность (equivalent) 44
Элементарная операция (primitive
operation) 41
Этап (stage) 278
Ядро (kernel) 31, 61, 392
— плоского многоугольника 364
Ячейки Дирихле (Dirichlet cell comp-
complexes) 324
Оглавление
Предисловие редактора перевода 5
Предисловие автора к русскому изданию 7
Предисловие 8
Глава 1. Введение 10
1.1. Исторический обзор 10
1.2. Алгоритмические основы 16
1.3. Геометрические предпосылки 29
1.4. Модели вычислений 41
Глава А. Геометрический поиск 52
2.1. Введение в геометрический поиск 52
2.2. Задачи локализации точки 57
2.3. Задачи регионального поиска 88
2.4. Замечания и комментарии 110
2.5. Упражнения 113
Глава О. Выпуклые оболочки: основные алгоритмы 114
3.1. Предварительные сведения 115
3.2. Постановка задачи и нижние оценки сложности 120
3.3. Алгоритм построения выпуклой оболочки на плоскости 125
3.4. Выпуклые оболочки в пространствах размерности большей двух . . 159
3.5. Замечания и комментарии 178
3.6. Упражнения 181
Глава 4. Выпуклые оболочки: расширения и приложения . . . 183
4.1. Расширения и варианты 183
4.2. Приложения в статистике 210
4.3. Замечания и комментарии 223
4.4. Упражнения 225
478 Оглавление
Глава О. Близость: основные алгоритмы 226
5.1. Набор задач 227
5.2. Задача о единственности элементов 233
5.3. Нижние оценки 235
5.4. Решение задачи о ближайшей паре методом «разделяй и властвуй» 238
5.5.. Решение задач о близости методом- локуеое; диаграмма Вороного 249
5.6. Решение задач о близости с помощью диаграммы Вороного .... 269
5.7. Замечания и комментарии 272
5.8. Упражнения 274
Глава О. Близость: варианты и обобщения 276
6.1. Евклидовы минимальные остовные деревья 276
6.2. Пленарные триангуляции 285
6.3. Обобщения диаграммы Вороного 295
6.4. Промежутки и покрытия 313
6.5. Замечания и комментарии 320
6.6. Упражнения 323
Глава /. Пересечения 326
7.1. Примеры из приложений 327
7.2. Плоские приложения 332
7.3. Трехмерные приложения 373
7.4. Замечания и комментарии 389
7.5. Упражнения 393
Глава О. Геометрия прямоугольников 394
8.1. Некоторые приложения геометрии прямоугольников 394
8.2. Область применения результатов 400
8.3. Общие замечания по алгоритмам статического типа 402
8.4. Мера и периметр объединения прямоугольников 404
8.5. Контур объединения прямоугольников 414
8.6. Замыкание объединения прямоугольников 424
8.7. Внешний контур объединения прямоугольников 430
8.8. Пересечения прямоугольников и связанные с этим задачи .... 436
8.9. Замечания и комментарии 452
8.10. Упражнения 453
Литература 455
Именной указатель 469
Предметный указатель 471
УВАЖАЕМЫЙ ЧИТАТЕЛЬ!
Ваши замечания о содержании книги, ее
оформлении, качестве перевода и другие
просим присылать по адресу: 129820, Мо-
Москва, И— ПО, ГСП, 1-й Рижский пер., д. 2,
издательство «Мир».
Научное издание
Франко Препарата
Майкл Шеймос
ВЫЧИСЛИТЕЛЬНАЯ ГЕОМЕТРИЯ:
ВВЕДЕНИЕ
Зав. редакцией чл.-корр. АН[СССР В/ И. Арнольд
Зам. зав. редакцией А. С. Попов
Научи, редактор. М. В. Хатунцева
Мл. научи, редактор Л. А. Королева
Художник Г. М. Чеховский
Художественный редактор В. И. Шаповалов
Технический редактор 3. И. Резннк
Корректор М. А. Смирнов
И Б № 6477
Сдано внабор 17.05.88. Подписано к печати 27.12.88.
Формат 60X90'/и. Бумага кн.-журн. Гарнитура ла-
латинская. Печать высокая. Объем 15 бум. л.
Усл. печ. л. 30. Усл. кр.-отт. 30. Уч.-изд. л.
30.42. Изд. №1/5697. Тираж 10 000 экз. Заказ
471. Цена 2 р. 80 к.
Издательство «Мир»
Москва, 1-й Рижский пер., 2-
Отпечатано с набора Ленинградской типографии
№ 2 головного предприятия ордена Трудового
Красного Знамени Ленинградского объединения
«Техническая книга» нм. Евгении Соколовой
Союзполнграфпрома прн Государственном ко-
комитете СССР по делам издательств, полигра-
полиграфии и книжной торговли. 198052, г. Ленинград,
Л-52, Измайловский пр., 29 в Ленинградской ти-
типографии № 4 ордена Трудового Красного Зна-
Знамени Ленинградского объединения «Техническая
книга» им. Евгении Соколовой Союзполнграф-
Союзполнграфпрома при Государственном комитете СССР по
делам издательств, полиграфии и книжной тор-
торговли. 191126, Ленинград. Социалистическая
ул., 14.