



















































































































































































































































Автор: Белкин М.К. Кравченко Г.И. Скоробутов Ю.Г. Стрюков Б.А.
Теги: электротехника электроника радиотехника радиоэлектронные аппараты генераторы
Год: 1983



Текст
Сверх-
регенераторы
Под редакцией
М. К. Белкина
12
МОСКВА
«РАДИО И СВЯЗЬ»
1983
ББК 32.85
С24
УДК 621.396.621.5
АВТОРЫ: М. к. БЕЛКИН, Г. И. КРАВЧЕНКО,
Ю. Г. СКОРОБУТОВ, Б. А. СТРЮКОВ
Сверхгенераторы/ М. К- Белкин, Г. И. Крав-
С24 ченко, Ю. Г. Скоробутов, Б. А. Стрюков; Подред.
М. К- Белкина. — М.: Радио и связь, 1983.—
248 с., ил.
65 к.
Обобщены исследования по сверхрегенераторам (СР), выпол-
ненные в разное время и опубликованные в отечественной и за-
рубежной литературе. Приведен анализ усилительных и шумовых
свойств СР иа транзисторах, туннельных диодах и других актив-
ных элементах. Кроме обычных, классических, рассмотрены пара-
метрические СР для приема ФМ и ЧМ сигналов. Указаны спосо-
бы улучшения и оптимизации их характеристик. Приведены опи-
сания реальных схем и конструкций.
Для инженеров, занимающихся разработкой радиоприемной
и радиолокационной аппаратуры.
2402020000-203 ББК 32.85
С 046(01)-83 34’83 6Ф2.124
' Рецензенты; д-р техн, наук проф. И. М. КОГАН,
канд. физ.-мат. наук Ю. С. КОНСТАНТИНОВ
Редакция литературы по кибернетике и вычислительной технике
МАРК КОНСТАНТИНОВИЧ БЕЛКИН
ГЕОРГИЙ ИВАНОВИЧ КРАВЧЕНКО
ЮРИЙ ГРИГОРЬЕВИЧ СКОРОБУТОВ
БОРИС АЛЕКСЕЕВИЧ СТРЮКОВ
Сверхрегенераторы
Редактор Т. М, Бердичевская
Художник Ф. Н. Буданов
Художественный редактор Н. С. Шеин
Технический редактор И. Л. Ткаченко
Корректор Л, С. Глаголева
ИБ № 551
Сдано в набор 30.03.83. Подписано в печать 18.10.83. Т-20028
Формат 84ХЮ8/э2 Бумага типографская № 3 Гарнитура литературная
Печать высокая Усл. печ. л. 13,02 Усл. кр.-отт 13,23 Уч.-изд. л. 13,23
Тираж 5000 экз. Изд. № 19860 Зак. Na 3108 Цена 65 к.
Издательство <Радио и связь». 101000 Москва, Почтамт, а/я 693
Ордена Октябрьской Революции и ордена Трудового Красного Знамени
Первая Образцовая типография имени А. А. Жданова Союзполиграфпрома
при Государственном комитете СССР по делам издательств, полиграфии и
книжной торговли. Москва, М-54, Валовая, 28.
© Издательство «Радио и связь», 1983,
Предисловие .
Сверхрегенерация является одним из интересных и
сложных радиотехнических явлений как в теоретиче-
ском, так и в прикладном планах. Поэтому неудивитель-
но, что, хотя со времени появления сверхрегенераторов
(СР) прошло уже более полувека, они до сих пор при-
влекают к себе внимание широкого круга исследовате-
лей.
В развитии теории и техники сверхрегенерации мож-
но отметить несколько периодов. Первый период (20—
30-е годы) характеризуется появлением ламповых сверх-
регенеративных чувствительных приемников и интенсив-
ным развитием теории сверхрегенерации. Второй период
(40—50-е годы) интересен появлением СР на новых ак-
тивных элементах — транзисторах, туннельных диодах,
лампах бегущей волны, лавинно-пролетных диодах
и т. д., а также дальнейшим развитием теории. В треть-
ем периоде (60-е годы) появляются параметрические СР,
в частности на полупроводниковых диодах, т. е. пара-
метрические усилители в сверхрегенеративном режиме,
нашедшие применение в ряде областей радиотехники.
Четвертый период (70-е годы) характеризуется несколь-
кими особенностями. Во-первых, появляется ряд работ,
вскрывших процессы в СР, ранее ускользнувшие от вни-
мания исследователей, например ударные колебания.
Во-вторых, разрабатываются методы оптимизации и зна-
чительного улучшения качественных показателей СР,
делающих их конкурентоспособными с супергетеродина-
ми, а по ряду показателей и превосходящими их.
В-третьих, интенсивно разрабатываются не только при-
емники, как это было ранее, но и другие устройства,
в которых используется эффект сверхрегенерации: фазо-
вые триггеры (параметроны), квантователи фазы, сверх-
регенеративные локаторы в радио- и акустическом диа-
пазонах, радиовысотомеры и т. п.
Сверхрегенерации посвящена обширная литература,
но она ограничивается главным образом публикациями
в периодике и диссертациями, что потребовало привести
3
Ё книге большой список лйтературы. Кроме того, вопро-
сы теории и практики в указанных публикациях часто
излагаются с разных позиций с применением различных
методов анализа. Это также не способствует уяснению
проблемы в целом и ее дальнейшему развитию.
В предлагаемой книге на основе обобщения работ по-
следнего периода (в том числе и работ авторов) сделана
попытка создать теорию сверхрегенерации, которая
в основном опирается на единый математический аппа-
рат.
Книга построена так, что читатель может легко най-
ти интересующий его материал. Те, кого привлекают
прикладные аспекты сверхрегенерации, могут ограни-
читься знакомством с первой и двумя последними гла-
вами. Лица, интересующиеся расчетом и проектировани-
ем СР, найдут полезную информацию в гл. 3, а изучаю-
щие теорию должны обратиться к гл. 2 и 4.
Авторы благодарят М. Б. Борисова, В. Л. Гуревича,
Л. П. Мочалину за помощь, оказанную им при работе
над книгой.
Авторы выражают признательность рецензентам д-ру
техн, наук П. М. Когану и канд. физ.-мат. наук
Ю. С. Константинову, чьи замечания и советы во многом
способствовали улучшению изложения.
Глава 1, § 2.3, 3.10, гл. 4 (за исключением § 4.5 и 4.6),
гл. 5 (за исключением § 5.1, 5.7—5.10 и 5.13) и прило-
жение написаны М. К. Белкиным; гл. 2 (за исключением
§ 2.3—2.5), § 3.2, 3.8, 4.5, 4.6, 5.7, 5.8, 5.10 и 5.13, гл. 6
(за исключением § 6.5 и 6.6) — Г. И. Кравченко; § 2.5,
3.1, 3.9 и 6.6 — совместно М. К- Белкиным и Г. И. Крав-
ченко; § 3.3—3.6, 5.1—Ю. Г. Скоробутовым; § 6.5 напи-
сан Г. И. Кравченко и Ю. Г. Скоробутовым; § 2.4, 3.7 и
5.9 — Б. А. Стрюковым. Общее редактирование выполне-
но М. К- Белкиным.
Авторы с благодарностью примут все предложения и
замечания, которые следует направлять по адресу:
Москва, Почтамт, а/я 693, издательство «Радио и связь».
ГЛАВА 1
ОБЩИЕ СВЕДЕНИЯ О СВЕРХРЕГЕНЕРАТОРАХ
1.1. Краткий обзор развития техники и
теории сверхрегенерации
Первые СР появились в 1922 г. [11-3], когда существовали лишь
малочувствительные детекторные и регенеративные приемники, а су-
пергетеродины еще не получили широкого распространения. Чув-
ствительность регенераторов на трехэлектродиых лампах была отно-
сительно высокой лишь в крайне неустойчивом режиме, близком
к самовозбуждению. Кроме того, в таком режиме из-за узкой поло-
сы пропускания качество воспроизведения модулированных сигналов
было неудовлетворительным. Сверхрегенератор примирил противоре-
чивые для обычного регенератора требования, обеспечив высокую
чувствительность и удовлетворительную стабильность работы прием-
ника при достаточно широкой полосе пропускания. Однако в отно-
шении стабильности и особенно избирательности СР уступал супер-
гетеродину и поэтому в конце 30-х годов был им вытеснен из
обычных приемников, сохранив свои позиции в тех случаях, когда
к габаритным размерам, массе и экономичности приемных устройств
предъявлялись особо жесткие требования. '
Во время второй мировой войны СР применялись для приема
импульсных сигналов в радиолокационных и радионавигационных
системах метрового и дециметрового диапазонов, в устройствах опо-
знавания самолетов («свой — чужой»), для связи [92]. В послевоен-
ный, период области применения СР расширяются. Например, СР ис-
пользуются в спасательных маяках |[125]. Такие маяки могут работать
в режиме излучения кодированных импульсов йли двусторонней те-
лефонной связи, что значительно облегчает поиск потерпевших ава-
рию людей. Другим примером является широкое применение СР
в управляемых по радио моделях. Если в первые послевоенные
годы основной сферой приложения СР были любительские и демон-
страционные конструкции, то в последние годы надежность управ-
ляемых с помощью СР моделей и механизмов достигла такого уров-
ня, что их все чаще стали использовать в народном хозяйстве [21].
Так, СР внедряют в системы дистанционного управления локомоти-
вами и тракторами, подъемными кранами и другими строительными
механизмами, автомашинами для испытаний в условиях катастро-
фы и т. д.
Сверхрегенераторы по-прежнему применяют в малогабаритной
бортовой аппаратуре, где важнейшим требованием является эконо-
мичность и малая масса. Характерный пример — аэрологический зонд
РКЗ, в котором СР используется одновременно как передатчик ме-
теоинформации и активный ответчик на ^запросные радиоимпульсы
в канале измерения дальности до радиозонда [45, 52]. Такие СР
5
строились в 50-х годах на лампах, а в настоящее время в них
используются транзисторы в диапазоне около 2 ГГц [23, 24].
Весьма эффективным оказалось измерение высоты полета само-
летов и зондов с помощью радиовысотомеров, использующих прин-
цип сверхрегенеративного приема [65, 83, 122], а также применение
СР для целей ближней локации как в СВЧ [85, 92], так и в аку-
стическом [33, 34, 58] диапазоне. При этом для создания отрица-
тельного сопротивления, компенсирующего потери в колебательном
контуре, помимо традиционных ламп и транзисторов используются
другие электронные и полупроводниковые приборы, в частности
лампы бегущей и обратной волн, туннельные и лавинно-пролетные
диоды, диоды Ганна и т. п. [2, 18, 40, 95, 124].
Представляет определенный интерес использование сверхрегене-
ративного режима в молекулярных усилителях (двухуровневых ма-
зерах) [115]. Следует заметить, однако, что молекулярные СР до
настоящего времени не нашли применения в практических устрой-
ствах.
В начале 60-х годов появились новые сверхрегенеративные
устройства — параметрические усилители в сверхрегенеративном ре-
жиме. Такие СР позволяют получить примерно такое же усиление,
какое обеспечивает параметрический усилитель с супергетеродином
(правда, при несколько худших шумовых характеристиках), что
дало возможность использовать их в импульсных радиолокационных
системах [83, 97, ПО]. Достаточно эффективным можно считать
использование параметрических СР в пассивной радиолокации, ра-
диоастрономии и в других случаях, когда полезным сигналом явля-
ется шум [13, 109].
Однако эти примеры не исчерпывают области применения пара-
метрических СР. Оказалось полезным использование их в вычисли-
тельной технике [79, 117], в приборах для научных исследований,
например, в качестве датчиков ядерных квадрупольного и магнит-
ного резонансов [41, 42, 64]. В качестве квантователей фазы их
можно применять в системах цифровой обработки информации для
преобразования «фаза — цифра» без предварительного разрушения
информации об амплитуде [119].
Теоретический анализ как классических, так и параметрических
СР является достаточно трудной задачей, поскольку процессы в них
описываются неоднородными дифференциальными уравнениями с пе-
ременными коэффициентами. Первый значительный шаг в теории
сверхрегенерации был сделан Г. С. Гореликом и Г. М. Гинцем [30],
которые в процессе экспериментального исследования классического
СР в диапазоне метровых волн обнаружили ряд интересных свойств
этого устройства и дали им достаточно строгое математическое
обоснование. В частности, они указали на возможность получения
гребенчатой частотной характеристики в СР и исследовали явление
кратного резонанса. Следует особо подчеркнуть новаторский харак-
тер этой работы, проложившей путь последующим исследованиям
и не потерявшей своего значения до настоящего времени. Идеи, вы-
сказанные в первой работе, были развиты Г. С. Гореликом и для
любых систем с переменными параметрами [31, 32]. Большой вклад
в разработку методов исследований линейных и нелинейных узкопо-
лосных колебательных систем с переменными параметрами (в том
числе и СР) внесли работы Л. И. Мандельштама, Н. Д. Папалекси
[70], В. В. Мигулина, С. М. Рытова [74, 87].
Фундаментальное исследование классического СР было выпол-
6
иеио Л. С. Гуткнным [35 ... 37]. Им разработана общая теория
сверхрегенератнвного приема, впервые рассмотрено воздействие на
СР не только сигналов, но и помех, причем полученные результаты
доведены до расчетных формул. В более поздних работах советских
авторов исследуются и уточняются отдельные вопросы теории при-
менений СР. К числу этих работ относятся, например, работы по
СР с автосупернзацией [39], по использованию классических СР для
приема частотно-модулированных сигналов, по повышению избира-
тельности и усиления за счет специальных законов суперизации
[11, 107], по помехоустойчивости СР [12, 60], по применению в ка-
честве датчика ядериого квадрупольного пезоианса [67]. Были рас-
смотрены также особенности приема СР импульсных сигналов
[76, 111], исследованы СР с автоматической стабилизацией пежима,
оптимизированы формы сигналов и законы суперизации [601.
Из зарубежных исследований отметим интересные ранние рабо-
ты Ресслера и Эрделн, а также более позднюю монографию Уайт-
хеда [126]. Остальные работы Посвящены главным образом вопро-
сам практического построения СР [116], их инженерным расчетам
и применению для различных целей [80 ... 86, 120, 121].
Появление в начале 60-х годов параметрических СР вызвало
новый ряд исследований [90, 91, 93, 98, 112]. Особенностью анализа,
выполненного в работах этого цикла, является большое внимание,
уделяемое воздействию внешних и собственных шумов на СР. Среди
работ этого направления выделяются фундаментальные исследова-
ния С. М. Рытова, В. С. Эткина, Е. М. Гершензона и Ю. Е. Дьякова
[27, 44, 88, 109]. Другим интересным направлением явилось изуче-
ние параметрических СР в качестве фазовых триггеров [параметро-
нов), а также квантователей Фазы узкополосных сигналов. Большой
вклад в решение этой проблемы внесли С. А. Ахманов, В. П. Ко-
молов и И. Т. Трофименко [53, 541. Предложено применять пара-
метрические СР для регистрации сигналов ядерных магнитного [41,
55, 641 и квадрупольного [431 резонансов.
В 70-х годах появляются исследования, в которых вскрывают-
ся такие явления в СР, как ударные колебания [591, рассматривает-
ся возможность ввода информаций через канал суперизации [Фазо-
вые СР) [99, 1011 и т. п. Были изучены воздействия узкополосного
и широкополосного сигналов на параметрический СР [71], оценена
эффективность использования классических и параметрических СР
для обнаружения сигналов [49, 60], в локации [58], для квантова-
ния Фазы [54].
Исследованы процессы как в одноконтурных, так и в миогокон-
турных СР (классических и параметрических) [7, 25, 68, 73], рас-
смотрены процессы в параметрических СР на тонких Ферромагнит-
ных пленках [119], доказана возможность использования парамет-
рических СР для усиления видеоимпульсов (параметрические СР
с бигармоннческой накачкой) [16].
Развитие н изучение сверхрегенеративного приема вообще и па-
раметрической сверхрегенерации в особенности продолжается и
в настоящее время, так как не все вопросы теории, расчета и прак-
тического применения СР можно считать решенными.
1.2. Принцип действия сверхрегенератора
Регенератор представляет собой недовозбужденный
Генератор на транзисторе, лампе или другом активном
7
элементе. Благодаря наличию положительной обратной
связи между входом и выходом схемы (например, меж-
ду цепями базы и коллектора транзистора) в контур
вносится отрицательное сопротивление, частично ком-
пенсирующее его потери, что и определяет регенератив-
ный эффект. В. результате добротность эквивалентного
контура увеличивается, так что, если в этот контур вве-
сти сигнал, можно получить увеличение выходного На-
пряжения.
Оценим возможный выигрыш в добротности, который
можно получить в регенераторе (рис. 1.1). Как известно,
баланс напряжений в контуре регенератора при резо-
нансе для установившегося режима
1/?отр>Л11к = Е,
(1.1)
где Е, I и 1к — комплексные амплитуды ЭДС сигнала
в контуре, контурного и коллекторного тока соответст-
венно; /^^сопротивление
потерь в контуре; М—вза-
имоиндукция между це-
пями базы и коллектора.
Знак перед вторым чле-
ном левой части опреде-
ляется направлением вит-
ков в коллекторной ка-
тушке по отношению к
базовой, и его легко из-
менить на обратный пе-
реключением концов одной из катушек. Таким образом,
обратная связь может быть положительной при внесении
отрицательного сопротивления или отрицательной при
внесении положительного. Нас интересует только пер-
вый случай.
Напряжение на контуре UK и ток связаны'очевидным
соотношением
1 = jcoCoUK.
(1.2)
Пренебрегая для упрощения анализа реакцией кол-
лектора, можно записать
Ik^SUk, (1.3)
где 5 — крутизна транзистора в р-абочей точке. Прене-
брежение реакцией коллектора не меняет качественной
картины процесса и дает лишь небольшую количествен-
ную погрешность. Подставляя (1.2) и (1.3) в (1.1) и
8
оТйося |Е| к |tU получаем выражение для затуХаййй
эквивалентного (регенерированного) контура при оз—
-030= 1//ZA
</р=озоСо (/?о—SM/Со) —do—(oqSM. (1.4)
Как видно из (1.4), вследствие эффекта регенерации
уменьшается сопротивление потерь от Ro ДО Ro—SM/C0 '
или затухание от do до do—оз05Л4. Добротность контура -
соответственно увеличивается от Qo— ljd0 до Qv=1/dv,
т. е. схема дает выигрыш в добротности
Qp/Qo—do/ (do—озо5Л4).
(1-5)
Однако реальный выигрыш при регенерации ограни-
чивается по двум причинам. Первая заключается в зна-
чительной неустойчивости режима при сильной регене-
рации (обратной связи, при которой устройство близко
к самовозбуждению). Дей-
ствительно, в режиме, близ-
ком к критическому, доста-
точно незначительного из-
менения крутизны усили-
тельного прибора, которое
легко может быть вызвано
изменением питающих на-
пряжений, чтобы эквива-
Рис. 1.2. Структурная схема
свер'хрегенеративного прием-
ника
лентное затухание стало от-
рицательным и схема воз-
будилась. Поэтому стабиль-
ность работы при больших
степенях регенерации низка,
с полосой пропускания схемы
Вторая причина связана
. При сильной регенерации
эквивалентное сопротивление потерь в контуре и полоса
регенерированного контура становятся весьма малыми.
Между тем для приема информации при любом виде
модуляции необходимо пропустить определенный спектр
частот, и из-за чрезмерно узкой частотной характеристи-
ки регенератора с малым коэффициентом прямоугольно-
сти невозможно осуществить прием модулированного
сигнала без существенных искажений. В результате на
практике приходится ограничиваться лишь небольшим
увеличением добротности регенератора (в 5 ... 10 раз).
Существенное же улучшение параметров схемы, т. е. по-
вышение усиления, стабильности режима при расшире-
нии полосы пропускания и определенном улучшении
9
формы частотной характеристики, можно получить, при-
меняя режим сверхрегенерации.
Сверхрегенератор представляет собой регенератор,
у которого эквивалентное затухание контура медленно
меняется по сравнению с собственными колебаниями,
причем на некоторых интервалах времени оно становится
отрицательным и регенератор переходит в состояние са-
мовозбуждения. На практике обычно эквивалентное за-
тухание меняется со вспомогательной частотой F, кото-
рую часто называют частотой суперизации; она в не-
Рис. 1.3. Схемы ламповых СР с внешней суперизацией:
а —на сетку; б — на анод
сколько раз больше максимальной частоты модуляции
сигнала и значительно меньше (в 500 ... 1000 раз) час-
тот сигнала и резонансного контура.
На рис. 1.2 представлена структурная схема прием-
ника на основе классического СР, а на рис. 1.3 ... 1.5 —
несколько вариантов принципиальных схем классических
СР. В некоторых случаях функции сверхрегенеративного
усилителя, генератора суперизации ГС и детектора, вхо-
дящего в устройство обработки УО, выполняет один кас-
кад, также называемый СР.
В схеме на рис. 1.2 сигнал вводится в контур СР, ох-
ваченный положительной обратной связью, с помощью
активного элемента. Напряжение суперизации, поступаю-
щее от ГС, меняет крутизну этого элемента, а следова-
тельно, и вводимое в контур отрицательное сопротивле-
ние. В результате контур становится системой со знако-
переменным затуханием и возникает эффект
сверхрегенерации, обеспечивающий значительное усиле-
ние. Напряжение, снимаемое с контура, затем детектиру-
ется тем же усилительным прибором или отдельным де-
тектором УО и усиливается уже на частоте модуляции.
10
В СР на электронных лампах напряжение супериза-
ции может вводиться " последовательно со смещением
в сеточную цепь (рис. 1.3,а) или последовательно с анод-
ным напряжением (рис. 1.3,6). Аналогично строятся СР
на транзисторах, в которых напряжения суперизации по-
даются на базу (рис. 1.4,а) или на коллектор (рис. 1.4,6).
Во'всех этих случаях напряжение суперизации подается
извне, от отдельного генератора, поэтому такие схемы
называют схемами с внешней суперизацией. Однако
можно построить СР и без внешнего источника супери-
Рис. 1.4. Схемы транзисторных СР с внешней суперизацией:
а — на базу; б — на коллектор (Uc — напряжение суперизации)
зации, создав режим прерывистой генерации. Такие СР
с автосуперизацией (рис. 1.5)—малогабаритные и эко-
номичные приемники с высокой чувствительностью.
В диапазонах умеренно высоких частот (до 300 МГц)
выполняются СР на лампах и обычных транзисторах.
В диапазоне СВЧ СР можно реализовать на высокоча-
стотных транзисторах, а также на других вакуумных и
полупроводниковых приборах. Были построены СР на
магнетронах и отражательных клистронах [10], однако
они не нашли широкого применения из-за большого уров-
ня внутренних шумов. Лучшие результаты были получе-
ны при использовании ламп бегущей волны (ЛБВ) и
ламп обратной волны (ЛОВ) [4, 11, 17, 18, 40]. Еще
менее шумящими являются СР на полупроводниковых
диодах — туннельных или параметрических [72, 95, 124].
Схемы СР разных типов в диапазоне СВЧ приведены
в гл. 5.
11
Рис. 1.5. Схема транзисторного СР с автосупс-
ризацией
Процессы в схеме СР с суперизацией на базу тран-
зистора или на сетку лампы иллюстрированы рис. 1.6.
Напряжение смещения Ео выбирается достаточно боль-
шим, чтобы в отсутствие напряжения суперизации UG
крутизна была меньше критической, при которой возни-
Рис. 1.6. Изменение крутизны S(t), затухания d(t) и напря-
жения на контуре «(/) в СР ,
12
кает генерация. Если напрйжение суперизации имеет до-
статочную амплитуду, то в момент /3 крутизна достигает
своего критического значения и схема переходит в со-
стояние самовозбуждения, которое будет длиться до мо-
мента /5. При этом в контуре нарастают свободные ко-
лебания тем быстрее, чем больше (по абсолютному зна-
чению) отрицательное затухание и начальная ЭДС сиг-
нала в контуре. С момента /5 условия для самовозбуж-
дения исчезают и колебания затухают. В момент t's они
снова начинают нарастать и т. д. Таким образом, на вы-
ходе СР получается серия вспышек колебаний, причем
Рис. 1.7. Сигнал на' входе (а) и напряжение на контуре СР (б)
в линейном некогерентном режиме при AM сигнале и в линейном
когерентном режиме (в)
уровень, до которого успевают нарасти колебания в кон-
туре, определяется режимом схемы и амплитудой сигна-
ла. Если амплитуда сигнала будет меняться по какому-
либо закону, то по этому же закону (в линейном режи-
ме) должна меняться огибающая вспышек свободных
колебаний на контуре (рис. 1.7). Следовательно, при
надлежащем выборе параметров детектора можно на
выходе его получить напряжение, меняющееся по закону
амплитудной модуляции сигнала. При угловой модуля-
ции сигнала полезную информацию извлекают из фазы
заполнения вспышек СР.
13
Усиление, которое обеспечивает СР, ограничивается
уровнем внутренних шумов в контуре: ЭДС сигнала,
вводимого в контур, должна быть в несколько раз боль-
ше уровня шумов. Поскольку при обычно используемой
полосе эта ЭДС оказывается порядка нескольких микро-
вольт, а напряжение на выходе СР достигает нескольких
вольт, усиление СР достигает 105 ... 106.
Разновидностью классических являются фазовые СР
(ФСР). В подобных СР сравнительно низкочастотный
резонансный усилитель РУ с колебательным контуром
в качестве нагрузки охватывается обратной связью, ха-
Рис.. 1.8, Упрощенный вариант
структурной схемы фазового
СР
рактер которой (положи-
тельная, отрицательная) оп-
ределяется разностью фаз
Лфс между некоторым опор-
ным и внешним СВЧ коле-
баниями. При изменении
этой разности на 180° обрат-
ная связь меняется на про-
тивоположную. Обычно ча-
стоты опорного и внешнего
сигналов не равны друг другу, т. е. разность фаз Лфс
линейно меняется во времени, что приводит к периоди-
ческому возбуждению и срыву колебаний в РУ. В итоге
разность частот (измеряемая величина) опорного и
внешнего СВЧ сигналов становится частотой повторения
вспышек генерации низкочастотного РУ (частотой супе-
ризации), которую можно определить обычными спосо-
бами. На практике ФСР используются для оценки доп-
леровского смещения частоты в локационных СВЧ при-
борах.
В упрощенном ФСР (рис. 1.8) в цепи обратной связи
РУ использованы два перемножителя сигналов.
Пусть внешнее ес(/) и опорное е0(/) колебания имеют
форму
ес(/) =cos (<>)о/+Лфс);
Лфс = Ло)о/;
во (0 =cos фо/,
а входное «1 (/) и выходное м2(/) напряжения РУ
щ (/) =cosQf;
u2 (/)= — Кру cosQ/,
14
где KPS — резонансный коэффициент усиления РУ;П--
резонансная частота контура РУ; <о0 — частота опорного
колебания; Д<о0—измеряемая разность частот.
Считаем, что РУ усиливает сигналы только в малой
окрестности частоты й. Тогда в произведении
необходимо учитывать лишь составляю-
щую
—0,25/Сру cos (Qt Д<рс).
Для самовозбуждения РУ достаточно, например, чтобы
Лфс=180° и Дру >4). При Дфс = А(О(Ф система возбужда-
ется один раз за период 2л/Да>0, т. е. разностная часто-
та Д(0о/2л определяет частоту повторения вспышек ге-
нерации РУ. Амплитуда .'Сигнала, при которой схема мо-
жет нормально функционировать, в данном примере чис-
ленно должна несколько превышать 4/Кру .
На практике перемножители сигналов заменяются
амплитудным модулятором и фазовым детектором. При
этом наряду с операцией перемножения сигналов осуще-
ствляется дополнительная фильтрация.
Возможны другие варианты ФСР, когда разность фаз
опорного и внешнего сигналов превращается в фазовый
сдвиг цепи обратной связи более сложным образом, на-
пример с помощью угловой модуляции входного сигна-
ла. Теоретический анализ ФСР при различных способах
модуляции сигнала проведен в гл. 2, методы расчета ре-
жимов и характеристик — в гл. 3.
В отличие от описанных выше классических СР, су-
ществует класс параметрических СР. Основой парамет-
рического СР является параметрический генератор,
в цепь которого введена внешняя ЭДС сигнала. Колеба-
тельный контур емкостного параметрического генерато-
ра состоит из постоянного активного сопротивления R>
>0, постоянной индуктивности L и меняющейся во вре-
мени с коэффициентом модуляции т емкости C(t). Ча-
стота /н изменения емкости (частота накачки) приблизи-
тельно в два раза превышает резонансную частоту кон-
тура. При т>т1ф, где ткр — некоторый порог, завися-
щий от R, в контуре возникают и развиваются колебания
с частотой fH/2, т. е. колебания на второй субгармонике
накачки (имеет место основной параметрический резо-
нанс). Энергия, необходимая для поддержания субгар-
15
ионических колебаний, поступает от устройства, моду-
лирующего емкость.
Если устройство, производящее модуляцию емкости
(генератор накачки), включать и выключать с частотой
суперизации или с этой же частотой подключать парал-
лельно контуру шунтирующее сопротивление, параметри-
ческий генератор с введенной в контур ЭДС сигнала пре-
вращается в параметрический СР, в данном случае ем-
костный.
Аналогично можно прийти к схеме индуктивного па-
раметрического СР, в котором вместо емкости с частотой
накачки осциллирует индуктивность. Особую разновид-
ность параметрических СР составляют резистивные СР.
В них с частотой накачки меняется не энергоемкий па-
раметр — индуктивность или емкость, а знакопеременное
активное сопротивление. При этом энергия, необходимая
для существования субгармонических колебаний, постав-
ляется активным, сопротивлением в те промежутки вре-
мени, когда оно имеет отрицательный знак. Возможны
комбинированные схемы, в которых с частотой накачки
осциллируют одновременно два элемента, например ем-
кость и активное сопротивление.
В отличие, от классических СР, в которых вспышки
генерации имеют частоту заполнения, равную резонанс-
ной частоте контура, и любую, зависящую от внешнего
сигнала начальную фазу, в параметрических СР анало-
гичные вспышки возникают на частоте /д/2 и могут иметь
лишь два значения фазы, отличающееся на 180°. При
этом между параметрами вспышки и внешнего сигнала
существует'следующая связь. Если на систему действует
сигнал с частотой fc, равной частоте субгармоники (син-
хронный сигнал), амплитуда вспышек пропорциональна
|AccosA<pc| (Ас—амплитуда сигнала; Афс=фс—Фо;
фс — фаза сигнала; <р0 — некоторая величина, определяе-
мая параметрами СР и фазой накачки), а фаза прини-
мает одно из двух значений в зависимости от sgn cos Афс.
Для. несинхронного сигнала (/с=/=/н/2) имеем ту же за-
кономерность, но при Афс—А(ос/—фо> где А(ос=
=2a(fc—fu/2). Таким образом, в общем случае огибаю-
щая вспышек параметрического СР и закон изменения
амплитуды внешнего сигнала отличаются друг от друга.
Кроме того, непрерывная фаза сигнала преобразуется
в дискретные значения фазы вспышек, т. е. квантуется.
Это диктует особые условия применения парамеТриче-
16
Скйх СР и обработки их выходных колебаний. Часто па-
раметрические СР используются в качестве фазовых
триггеров — параметронов — и квантователей фазы узко-
полосных сигналов.
Параметрические СР могут также использоваться для
усиления колебаний с амплитудной модуляцией. В этом
случае выходные вспышки колебаний необходимо пропу-
скать через фильтр с полосой пропускания, меньшей
А(Ос.
1.3. Режимы и основные свойства сверхрегенератора
Режимы в СР можно классифицировать по виду ам-
плитудной (линейный и нелинейный) или частотно-вре-
менных (некогерентный и когерентный) характеристик.
В линейном режиме (см. рис. 1.7) максимальное зна-
чение, до которого успевают за активное время ta=ts—13
(см. рис. 1.6) нарасти свободные колебания ишах, в не-
сколько раз меньше t7sn— предельного напряжения ста-
ционарных колебаний при самовозбуждении, определяе-
мого нелинейностью вольт-амперной характеристики ак-
тивного элемента. В подобном режиме амплитудная ха-
рактеристика, под которой понимают зависимость ам-
плитуды вспышек свободных колебаний от амплитуды,
вводимой в контур ЭДС, представляет собой прямую ли-
нию, выходящую из начала координат. Достоинствами
линейного режима являются низкий уровень выходных
шумов в отсутствие полезного сигнала и малый уровень
нелинейных искажений при усилении AM колебаний.
В этом режиме работают сверхрегенеративные приемни-
ки радиолокационных и радионавигационных систем.
Если начальная амплитуда или усиление в схеме на-
столько велики, что к моменту t5 амплитуда свободных
колебаний Umax достигает порога Usa (см. рис. 1.6) или
приближается к нему, в схеме устанавливается нелиней-
ный режим. В подобном режиме под амплитудной ха-
рактеристикой часто понимают зависимость приращения
площади вспышки (рис. 1.9,6) от амплитуды входной
ЭДС. Эта зависимость обычно является логарифмиче-
ской функцией, поэтому нелинейный режим называется
также логарифмическим. Такой режим характеризуется
большим динамическим диапазоном по входу и наличием
автоматической регулировки усиления (АРУ). Основным
недостатком нелинейного режима, если речь идет об
2—3108 17
усилении AM колебаний, следует считать большой уро-
вень нелинейных искажений. Другим недостатком явля-
ется высокий уровень выходных шумов в отсутствие по-
лезного сигнала, что характерно вообще для всех систем
с АРУ.
В нелинейном режиме уменьшается избирательность
и расширяется частотная характеристика, если их оце-
нивать по гармоническому сигналу. Однако реальная из-
г)
Рис. 1.9. Напряжение на контуре при немодулированном сигнале
в разных режимах:
а~ линейном; б — нелинейном; в — при слабом сигнале в схеме с автосупе-
ризацией; г — при сильном сигнале в схеме с автосуперизацией
бирательность, определяемая при одновременном воздей-
ствии сигнала и помехи, при этом не ухудшается. Как и
в супергетеродинном приемнике с ограничителем ампли-
туды, в нелинейном СР при большом усилении даже
сильно расстроенная помеха создает на выходе напряже-
ние, равное Us„. Но если одновременно с помехой дейст-
вует сильный сигнал, происходит подавление помехи
сигналом и отношение сигнала к помехе получается при-
мерно таким же, как в линейном режиме.
Виды огибающих напряжений на контуре СР при не-
модулированном сигнале на входе показаны на рис. 1.9.
18
В линейном режиме выходные сигналы различаются по
уровню и площади, а в нелинейном — только По площа-
ди, ограниченной огибающей и осью времени (рис.
1.9,а, б).
Сверхрегбнератор в нелинейном режиме используется,
когда необходимо принимать как сильные, так и слабые
сигналы, при этом уровень нелинейных искажений суще-
ственного значения не имеет, (например, в портативных
радиотелефонных приемопередающих устройствах, в уп-
равляемых по радио моделях).
В СР с автосуперизацией процессы сложнее. Пара-
метры этих СР выбирают так, чтобы установился режим
прерывистой генерации. Амплитуда, до которой успева-
Рнс. 1.10. Выходной сигнал в СР при модулированном сигнале на
входе:
а —огибающая ситнала на входе; б — сигнал на выходе в линейном режиме;
в — сигнал на выходе в нелинейном режиме; г — сигнал на выходе в схеме
с автосуперизацией ч
ют нарасти колебания, определяется режимом и пара-
метрами схемы генератора. Если при этом в контур по-
дать сигнал, максимум напряжения будет достигнут бы-
стрее и интервал между двумя соседними импульсами
уменьшится. В общем случае степень увеличения часто-
ты суперизации будет определяться уровнем сигнала
в контуре, тогда как форма каждого импульса в отдель-
ности должна оставаться почти неизменной (рис.
1.9,в, г) .
2* 19
Продетектированные импульсы на выходе СР в раз-
личных-режимах показаны на рис. 1.10. В линейном ре-
жиме огибающая высокочастотных импульсов на конту-
ре меняется по закону амплитудной модуляции внешнего
сигнала (см. рис. 1.7), вследствие чего можно воспроиз-
вести модулирующее колебание после пикового детек-
тора. В логарифмическом режиме увеличивается или
уменьшается в зависимости от амплитуды сигнала шири-
на (площадь) огибающей импульсов. В СР с автосупе-
ризацией по закону модуляции меняется частота следо-
вания высокочастотных импульсов.
Как уже отмечено, существуют еще два реждма СР—
когерентный и некогерентный. Если в течение той части
периода, когда затухание положительно, амплитуда сво-
Рис. 1.11. Амплитудно-частотные характеристики СР:
а — гладкая кривая при np>F (—); б — волнистая при Пр~Г; в — многоре-
зонансная при np<F
/
бодных колебаний уменьшается до уровня внутренних
шумов, а при отрицательном затухании начальная ам-
плитуда, с которой начинается нарастание колебаний,
определяется только значением ЭДС сигнала и шумами
(см. рис. 1.7,6), режим называется некогерентным. Для
этого режима характерны соотношение ПР>Е,' где Пр—
полоса пропускания регенерированного контура; F — ча-
стота суперизации, и гладкая форма АЧХ (рис. 1.1 Г,а).
Если же при положительном затухании свободные
колебания не успевают значительно уменьшиться и на-
чальная амплитуда в следующем периоде суперизации
будет определяться не только сигналом и шумом в кон-
туре, но и свободными колебаниями от предыдущего пе-
риода суперизации (см.’рис. 1.7,в), режим называют ко-
герентным. Для этого режима характерна волнистая
(рис. 11,6) или зубчатая (рис. 1.11,в) резонансная кри-
20
вая в зависимости от степени когерентности колебаний
и соотношение ПР<А. При когерентном режиме в систе-
ме имеет место кратный резонанс на частотах, отстоя-
щих от резонансной частоты контура на ±kF, 2,
3, .... и АЧХ напоминает характеристику гребенчатого
фильтра.
На практике отдается предпочтение некогерентному
режиму, обеспечивающему более равномерную АЧХ и
большую стабильность усиления. Действительно, в ко-
герентном режиме требуются более сильная регенерация,
поскольку np=dp/0<F, и малое среднее затухание dp,
поэтому даже небольшое изменение крутизны активного
элемента может вызвать непрерывное возбуждение.
В некогерентном режиме степень регенерации меньше,
среднее затухание больше и поэтому устойчивость ра-
боты схемы и стабильность усиления выше.
Заметим, что в зависимости от параметров и режима
схемы СР в каждом из этих режимов можно получить
как линейную, так и нелинейную АЧХ.
Аналогичные режимы — когерентный и некогерент-
ный, линейный и нелинейный — наблюдаются и в пара-
метрических СР. Следует лишь заметить, что здесь дей-
ствуют различные механизмы ограничения амплитуды:
расстроенный, диссипативный, реакция генератора на-
качки и др. Поэтому процессы нелинейного установления
колебаний в подобных СР достаточно сложны и в каж-
дом конкретном случае являются предметом самостоя-
тельных исследований.
Как классические, так и параметрические СР помимо
усиления осуществляют селекцию сигналов по частоте и
во времени. Такое совмещение функций неблагоприятно
сказывается на выходном отношении сигнал-шум, если
на входе присутствует смесь сигнала с узкополосной мо-
дуляцией (амплитудной или угловой при малых индек-
сах модуляции) и широкополосного шума. Чтобы не по-
терять полезную информацию, заложенную в закон мо-
дуляции, при временной селекции (СР воспринимает
внешние сигналы лишь на небольшом интервале време-
ни перед возникновением вспышки) частоту суперизации
приходится выбирать больше удвоенной частоты моду-
ляции. В свою очередь, полоса пропускания СР в неко-
герентном режиме в несколько раз превышает частоту
суперизации. Таким образом, указанная полоса должна
быть значительно больше ширины спектра полезного ко-
21
лебания, что неблагоприятно сказывается на выходном
отношении сигнал-шум.
Это отношение улучшается, если СР принимает сиг-
налы с широкополосной угловой модуляцией или им-
пульсные сигналы. Если же возникает необходимость,
например, в обработке AM колебаний на фоне широко-
Рис. 1.12. Различные законы изменения затухания:
а — прямоугольный симметричный; б — прямоугольный несимметричный; в --
синусоидальный; г — пилообразный (6р — среднее значение декремента зату-
хания за период суперизации)
полосных помех, перед СР можно поставить узкополос-
ный фильтр, тогда расширение полосы СР, вызванное
увеличением частоты суперизации, уже не будет приво-
дить к ухудшению отношения сигнал-шум. Заметим, что
максимизация этого отношения является важнейшим
требованием при выборе не только схемы СР, но и ре-
жима его работы.
22
В СР с внешней суперизацией затухание в контуре
в момент перехода от положительного значения к отри-
цательному может изменяться скачкообразно (рис.
1.12,а, б) или плавно (рис. 1.12,в, г) в зависимости от
закона изменения напряжения суперизации.
1.4. Эквивалентные схемы и основные уравнения
сверхрегенератора
Как было отмечено выше, все известные СР можно
разделить на две основные группы: классические, у ко-
торых индуктивность и емкость контура постоянны,
а сопротивление меняется с частотой суперизации, и
параметрические. Последние, в свою очередь, подразде-
ляются на индуктивные, емкостные, резистивные и ком-
бинированные (смешанные).
Наибольшее распространение получили одноконтур-
ные классические СР (рис. 1.13). Процессы в таком СР
описываются дифференциальным уравнением второго по-
рядка с переменным коэффициентом при первой произ-
водной
ЛЛ + /?(О7+7/Со=е(О, (1-6)
где q — заряд на емкости; q и q — его вторая и первая
производные; Lo, Со—-индуктивность и емкость; R(t)—
знакопеременное активное сопротив-
ление; е(/)—внешнее воздействие.
Решая уравнение (1.6) для конкрет-
ного закона изменения R(t), можно
определить основные параметры и
свойства СР, его временные и час-
тотные характеристики. Как прави-
ло, частота контура классического
СР постоянна, но она может в не-
которых пределах и изменяться, на-
пример, под воздействием импуль-
Рис. 1.13. Эквива-
лентная схема клас-
сического СР
сов суперизации, которые изменяют емкость р—л-пере-
ходов транзисторов, расстраивающих контур. В этом
случае СР представляет собой контур, у которого ин-
дуктивность постоянна, a R и С меняются одновремен-
но с частотой суперизации.
Если в классическом СР затухание изменяется скач-
кообразно с помощью симметричных или несимметрич-
ных видеоимпульсов суперизации, подаваемых на нели-
нейный элемент, в СР часто возникают ударные колеба-
23
Нйй, ограничивающие его чувствительность. Их можно
избежать, применяя схемы безударного запуска.
В параметрических СР чаще всего индуктивность или
емкость меняются быстро с частотой накачки, а затуха-
ние— значительно медленнее с меньшей частотой супе-
ризации.
Как уже отмечалось реализация сверхрегенеративного
режима в параметрических СР возможна в двух вари-
антах. В первом напряжение суперизации можно пода-
вать непосредственно па нелинейный элемент контура,
Рис. 1.14. Структурная схема параметрического СР:
а — при подаче напряжения суперизации на нелинейный элемент; б — прн
AM напряжении накачки (ГС — генератор суперизации, ГН — генератор на-
качки, УО — устройство обработки)
например на параметрический диод, одновременно с на-
пряжением накачки постоянной амплитуды (рис. 1.14,а).
При этом происходит периодическое смещение рабочей
точки на вольт-фарадной характеристике диода с часто-
той суперизации и в течение некоторой части периода
суперизации результирующее сопротивление контура
оказывается отрицательным, что и определяет сверхре-
генеративный эффект.
Такой принцип можно реализовать в схеме емкостно-
го параметрического СР, показанной на рис. 1.15, пода-
вая на вход 1 напряжение суперизации Uc, а на вход 2
немодулированное напряжение накачки. В этом случае
получаем эквивалентную схему, показанную на рис. 1.16.
Описывающее ее дифференциальное уравнение
+ = (1-7)
Во втором варианте сверхрегенеративный режим по-
лучают в обычном- параметрическом усилителе, если мо-
дулируют по амплитуде напряжение накачки, вводимое
в контур для изменения его реактивности (см. рис.
24
1.14,6). Такой принцип, реализуется в емкостном пара-
метрическом регенераторе, схема которого показана на
рис. 1.15, если подать на вход 1 постоянное смещение,
а на вход 2 МЛ напряжение накачки. При достаточно
глубокой модуляции в течение части периода супериза-
ции затухание станет отрицательным и в схеме устано-
вится сверхрегенеративный режим. В этом случае экви-
валентная схема для параметрического усилителя соот-
Рис. 1.15. Схема емкостного па-
раметрического СР
Рис. 1.16. Эквивалентная
схема комбинированного
параметрического СР
ветствует изображенной на рис. 1.16 при /?(£)=const,
а дифференциальное уравнение принимает вид
L;q + /?<? + qlC(t)=^s (t). (1.8)
где C{t) изменяется по закону AM напряжения накачки.
Процессы в индуктивном параметрическом СР (рис.
1.17) описываются уравнением
L(t)q + R(t)q + qlC0 = S(t), (1.9)
где L(t)—меняющаяся с частотой накачки индуктив-
ность; R(t)—меняющееся с частотой суперизации ак-
тивное сопротивление.
Если в’ контуре с постоянными индуктивностью и ем-
костью знакопеременное сопротивление R(t) состоит из
двух частей: одной, изменяющейся быстро с частотой
накачки, и другой — с частотой суперизации, — получают
резистивный параметрический СР. Процессы в нем опи-
сываются уравнением (1.6), однако R(t) теперь меняет-
ся по сложному закону (AM нпряжения накачки).
Принципиальная схема одного из вариантов резистивно-
го параметрического СР не отличается от схемы на рис.
1.15 при замене варикапов туннельными диодами.
Возможны комбинированные параметрические СР,
у которых накачка меняет одновременно реактивность и
25
затухание. В этом случае процессы в схеме описываются
уравнением (1-7) или (1-9), но законы изменения R(t) и
C(t) или L(t) будут более сложными.
В заключение сформулируем, в чем состоят сходство
и различие классических и параметрических СР. Для
обоих типов СР характерны: возможность получения
большого усиления за счет сверхрегенеративного эффек-
та, простота схемы, экономичность, малые габаритные
размеры и масса (особенно в диапазоне СВЧ). В то же
время между классическим и параметрическим СР суще-
АМ напряжение накачки
Рис. 1.17. Схема индуктив-
ного параметрического СР
Он <5 МГц)
ствуют и принципиальные
отличия. Основное отличие
состоит в механизме внесе-
ния энергии в колебатель-
ную систему: в классичес-
ком СР энергия вносится
через отрицательное сопро-
тивление, в параметриче-
ском (кроме резистивно-
го) — посредством измене-
ния с частотой накачки па-
раметров энергоемких эле-
ментов. В классическом СР
амплитуда вспышек генера-
ции не зависит от фазы сигнала, в параметрическом та-
кая зависимость имеет место. Параметрические СР име-
ют паразитные каналы приема, в классических СР таких
каналов нет. Имеются, конечно, значительные схемные
и конструктивные различия. Настройка и эксплуатация
параметрических СР сложнее, чем классических.
Вероятно, неправомерна будет постановка вопроса:
какие СР лучше — классические или параметрические?
Каждый вид СР имеет свою область применения. Клас-
сический СР применяют главным образом как экономич-
ный, малогабаритный приемник с малой массой, чаще
всего в диапазоне СВЧ, вплоть до сантиметрового и мил-
лиметрового диапазонов, а также в локационных систе-
мах с совмещенными приемником и передатчиком прак-
тически на всех частотах, включая акустические. Пара-
метрические СР применяют для относительно малошумя-
щего усиления на СВЧ, квантования фазы узкополосной
смеси сигнала и шума, в качестве фазовых триггеров
(параметронов) для вычислительных машин.
Сравним сверхрегенеративные приемники с регенера-
20
тором и супергетеродином. По сравнению с регенерато-
ром СР обладает неоспоримыми преимуществами: высо-
кой чувствительностью, более широкой полосой пропу-
скания и большей стабильностью режима усиления. По
сравнению с супергетеродином СР проигрывает в некото-
рых отношениях: чувствительность, избирательность и
стабильность коэффициента усиления и полосы пропу-
скания у СР ниже, а уровень шумов и нелинейные иска-
жения (особенно в логарифмическом режиме) выше, чем
у многокаскадного супергетеродина. В СР более интен-
сивное, чем в супергетеродине, паразитное излучение
в антенну. При одной и той же частоте модулирующего
сигнала в СР требуется более широкая полоса, чем в су-
пергетеродине, что затрудняет использование СР в диа-
пазонах волн ниже метрового. По-видимому, основным
недостатком СР является сравнительно низкая стабиль-
ность коэффициента усиления. Однако применение спе,-
циальных схем автоматической стабилизации режима по-
зволяет использовать его в широком интервале темпера-
тур и напряжений питания. В гл. 3 приведены некото-
рые инженерные решения, позволяющие существенно
улучшить качественные показатели СР.
Сверхрегенератор обладает и существенными преиму-
ществами перед супергетеродином: значительно меньши-
ми габаритными размерами и массой (особенно в диапа-
зоне СВЧ), высокой экономичностью, т. е. небольшой
мощностью, потребляемой от источника питания. Как
уже отмечалось, однокаскадный СР может дать усиле-
ние порядка 105 ... 106; такое усиление можно получить
лишь в многокаскадном супергетеродине. Еще одним до-
стоинством СР является возможность совмещения в од-
ном активном приборе (транзисторе, туннельном диоде
и др.) функций приема и передачи сигналов, что весьма
существенно для некоторых приложений. Принятый СР
сигнал можно использовать для перевода СР в режим
непрерывной генерации и посылки ответного сигнала,
как это делается в некоторых устройствах опознавания,
а также в радиолокационных и радионавигационных си-
стемах с активным ответом.
Сверхрегенератор интересен еще в одном отношении—
он способствовал освоению все более высокочастотных
диапазонов. Дело в том, что все активные элементы
(лампы, транзисторы, диоды с отрицательным сопротив-
лением и др.) в режиме генерации имеют более высокий
27
Частотный предел, чем в режиме усиления. Как известно,
первые генераторы появились в диапазоне СВЧ раньше
усилителей. И поскольку механизм усиления в сверхре-
генеративном режиме связан с генерацией, именно в диа-
пазонах СВЧ СР появились раньше, чем приемники пря-
мого усиления и супергетеродины.
ГЛАВА 2
ТЕОРИЯ СВЕРХРЕГЕНЕРАЦИИ
2.1. Классический сверхрегенератор
в линейном режиме
Качественный анализ процессов. Эквивалентная схе-
ма линейного классического СР представляет собой кон-
тур, состоящий из постоянных индуктивности Lo, емко-
сти Со, источника сигнала вЦ) и изменяющегося во вре-
Рнс. 2.1. Закон изменения 6(/) при од-
нократном запуске
мени знакопеременного активного сопротивления
(см. рис. 1.13). Считаем, что период изменения R(t)
(период суперизации) намного больше периода 2л/ш0
собственных колебаний системы (>о)о= 1//С0С0). Кроме
того, полагаем, что среднее значение R(t) за период су-
перизации положительно, причем
|/?(0|/о)оСо«:1. (2.1)
Перед составлением и решением дифференциального
уравнения, описывающего СР, дадим качественную
трактовку процессов в схеме, задавшись некоторым за-
коном суперизации.
Пусть имеет место однократный запуск СР, при кото-
ром указанное сопротивление положительно на всей
временной оси, за исключением одного интервала (t3 ...
... /5) (рис. 2.1). Интервал (t3 ... t5) назовем активным.
28
Кроме моментов /3 и отметим на оси времени еще пять
точек, соответствующих условию
^2 ^3 it ti
^8(t)dt = J 8 (0 dt = - J 8 (t) dt =- J 8 (/) dt =
Л ^2 :
£6 t?
=^(t)di= ^{l)dt = S, (2.2)
5 /в
где 8 (^) = 7?(^)/2L0.
Ниже будет показано, что через площадь S, фигури-
рующую в (2.2), определяется такой важный показатель
СР, как коэффициент усиления за счет сверхрегенера-
ции, а точки tlt t2..t7 ограничивают временные интер-
валы, на которых колебания в системе различаются ка- '
чественно и количественно.
Полагаем для простоты, что вне интервала (^ ... t7)
выполняется требование R (£)=const>0. Обозначим че-
рез x(t) напряжение на емкости, записав его в форме
х (/) =А (t) cos [®о^-рф (£) ], (2.3)
и выясним поведение амплитуды А(£) и фазы ф(/) на
каждом из интервалов, ограниченных точками —оо, ti,
t2, •••, ti, °°, при некоторых простейших воздействиях
е(/). Считаем, вначале, что е(^)—гармоническое воз-
действие с частотой coo.
Интервал (/3 ... £4). В точке t\ сопротивление R(t)
=const>0, поэтому в схеме наблюдается установивший-
ся режим келебаний, при котором запасенная контуром
энергия и, следовательно, амплитуда A(t) постоянны.
В любой момент времени мощности, отдаваемые источ-
ником е(0 и поглощаемые сопротивлением R(t), равны.
Интервал (ti ... t3). Начиная с момента t3, сопротив-
ление R(t) уменьшается. Это вызывает некоторое уве-
личение как запасенной энергии, так и амплитуды А(0-
Интервал (t3...ti). В точке ti сопротивление R(t)
меняет знак и превращается из потребителя в источник
энергии. Поэтому после t3 наблюдается поступление энер-
гии в контур уже не от одного, а от двух источников, что
вызывает сравнительно быстрый рост А (0- Оценим энер-
гетические вклады каждого источника.
Известно, что мощность, отдаваемая отрицательным
или поглощаемая положительным активным сопротивле-
нием, пропорциональна квадрату контурного тока. В рас-
сматриваемой системе амплитуды контурного тока и на-
29
пряжения на емкости с точностью до постоянного мно-
жителя совпадают. Следовательно, энергетический вклад
в единицу времени активного сопротивления зависит от
квадрата, а источника e(t) —от первой степени амплиту-
ды A (t).
Непосредственно после момента t3 амплитуда А(^)
достаточно мала, поэтому мощности, отдаваемые в кон-
тур сопротивлением R(t) и источником e(t), соизмери-
мы. По мере роста А(/) вклад е(0 уменьшается, a R(f)
увеличивается, и к концу рассматриваемого интервала
влиянием e,(t) уже можно, в первом приближении, пре-
небречь.
Интервал (t4 ... ^5). После момента /4 происходит ин-
тенсивное накопление энергии, вносимой только отрица-
тельным -сопротивлением, что вызывает быстрое нара-
стание A(t). Очевидно, что в точке t5 запасенная энергия
максимальна, поэтому здесь А(1) имеет наибольшее
значение.
Интервал (t$ ... t6). При t>t3 сопротивление /?(/)
вновь становится положительным и начинает поглощать
энергию, вследствие чего амплитуда А (I) резко умень-
шается. Однако до момента она еще сравнительно ве-
лика, так что влияние источника е(/) на процессы в кон-
туре по-прежнему незначительно.
Интервал (t6 ... t7). Здесь A(t) уменьшается до уров-
ня, при котором мощность, поглощаемая активным со-
противлением, приближается сверху к мощности, отда-
ваемой источником е(0- Следствием этого являются за-
медление спада амплитуды A(t) и постепенное восста-
новление ее «чувствительности» к воздействию е(/)-
К моменту t7 практически вся энергия, внесенная отри-
цательным сопротивлением на активном интервале, те-
ряется.
Интервал (t7 ... <х>). Начиная с момента t7, наблюда-
ется установившийся режим с постоянной амплитудой
A(t) и неизменным запасом энергии в контуре.
Легко видеть, что при гармоническом воздействии
с частотой (£>о на всех временных отрезках фаза ф(^)
остается неизменной и отличается от начальной фазы
сигнала на л/2.
Пусть теперь е(/) представляет собой стационарное
случайное колебание. При этом до момента ti амплиту-
да A(t) и фаза ф(£) ведут себя как случайные стацио-
нарные функции времени, а средняя мощность, отдавае-
30
мая источником e(Z), равна средней мощности, погло-
щаемой сопротивлением R(t). На интервале ... t3)
сопротивление R(t) уменьшается, вследствие чего энер-
гия кбнтура в среднем (имеется в виду среднее по ан-
самблю) увеличивается, вместе с ней увеличивается и
среднее значение амплитуды A (t).
На отрезке (4 ... /4) влияние случайного источника
е(/) постепенно уменьшается в противовес влиянию де-
терминированного отрицательного сопротивления. Это
приводит к тому, что на следующем интервале (/4 ... t6)
процесс x(t) представляет собой радиоимпульс,'ампли-
туда которого случайна, так как зависит от энергии, вне-
сенной в контур источником е(/) на предыдущем этапе,
а форма огибающей детерминирована и определяется
законом изменения R(t). Очевидно, что фаза заполнения
радиоимпульса имеет случайное, но постоянное (внутри
радиоимпульса) значение.
После момента t6 роль случайного сигнала e(Z) по-
степенно возрастает, и при t>t7 функции A (t) и ф(/)
вновь становятся случайными и стационарными.
Выбор метода решения дифференциального уравне-
ния. Дифференциальное уравнение, описывающее про-
цессы в схеме на рис. 1.13,
-§-+25(/)-^+u>2ox = «>%s(0. (2.4)
При построении теории СР, справедливой для широ-
кого класса детерминированных или случайных воздей-
ствий, необходимо найти решение этого уравнения для
произвольного внешнего воздействия. Выберем и обос-
нуем метод подобного решения.
Учитывая условие (2.1) и допуская, что процесс x(t)
является узкополосным, интегрирование (2.4) можно
провести методом медленно меняющихся амплитуд [3].
Данный метод, однако, разработан лишь для конкрет-
ных воздействий e(t). В рассматриваемом случае его
необходимо приспособить для анализа произвольного
внешнего воздействия.
Запишем уравнение (2.4) в стандартном виде
-ф-л = 61/ (т’ -%, х)-|- е (т)], (2-5)
где x — dx/ch; x = d2x/di>2; 6<1; t —«Vi
6f(t, x, x) = — 5(t/o)0)x; 6e (t) = e (t/cdJ,"
31
e(i)—произвольная ограниченная функция. К подобно-
му же виду приводятся уравнения, описывающие нели-
нейный классический, а также линейный и нелинейный
параметрические СР. Поэтому изложенная ниже проце-
дура решения используется в последующих параграфах
и при исследовании перечисленных устройств.
Используя метод медленно меняющихся амплитуд,
решение x(t) необходимо отыскивать в форме
х.(т) ,=а (т) cos т-ф-Ь (т) sin т,
где а(т), Ь(т)—медленно меняющиеся коэффициенты.
В рамках метода для отыскания функций а(т) и Ь(х)
исходное соотношение (2.5) заменяют системой
а = — 6 [f (т, a cos т -ф b sin т, — a sin т -ф b cos т) sin т -ф
+ (')];
/> = a cos т -\-Ь sin т, --a sin cos т) cos
(2.6)
где Fa(F) =—е(т) sint; Fb(x) — e(r) cost.
Поскольку эта система не менее сложна, чем исход-
ное уравнение, правые части (2.6) стараются тем или
иным способом упростить (укоротить). Обычно при уко-
рачивании, для того чтобы освободиться от второстепен-
ных быстроосциллирующих членов, все слагаемые пра-
вых частей (2.5) подвергают действию оператора усред-
нения
Но В произвольных функциях Fa>b(x) (эти функции
произвольны, так как имеют произвольные сомножите-
ли) удержать каким-либо способом основные и отбро-
сить второстепенные члены невозможно. Поэтому есте-
ственным вариантом упрощения (2.6) является частич-
ное укорачивание, при котором функции Ра,ъ(х) не ус-
редняются [48].
Корректность такого подхода подтверждается следующими рас-
суждениями.
Пусть вместо ,(2.6) задана стандартная система
x = 9[X(t, х)+<= (/)],
где х и е(0—точки n-мерного евклидова пространства; 0 — малый
параметр. Допускаем, что частичное укорачивание преобразует это
32
выражение к виду
У=Ь[Х, (у)+<«)],
где X0(y)~M{X(t, у)}.
Процедуру частичного укорачивания будем считать корректной,
если разность между точным решением x(t) и приближением у(1)
может быть сделана сколь угодно малой за счет выбора достаточно
малых значений параметра 0 на сколь угодно большом конечном
интервале времени.
Считаем, что удовлетворены требования:
М{Х(/, х)}=Хо(х);
X(t, х) является периодической по t функцией с периодом 2л;
для некоторой области G можно найти такие постоянные Л>0,
В>0, С>0, которые при любых х, хь t>ta отвечают неравенствам
|е(0|<Л, |^(/, х)|<В; \X(t, x)-^X(t, х,)|<С(х—х,).
Докажем, что для любого сколь угодно малого числа р>0
и сколь угодно большого числа D>0 существует некоторое зна-
чение 0, при котором справедливо неравенство
|х(0—yi(OI<P
на интервале [/0> О/0-Но] для функции y(t), лежащей в области G
вместе со своей сколь угодно малой a-окрестностью и удовлетво-
ряющей условию x(t0)=y(t0).
Возьмем произвольные р и D и положим, что
8 < max {p/SeCD> a/SeC0};
S=4C (Л4-В) л’Д4-4лВ.
Найдем решение x(t) методом последовательных приближений,
используя в качестве нулевого приближения y(t). Для первого при-
ближения имеем
t
(0 = Xe-]-8 f (т, 1/(т))4-е (т)] dx, 7
*0
t
где у (f) = x,-|-e J [X (у)4-е (т)] dt.
to
Оценим |xk(/)—y(t) | (здесь k — номер приближения).
Используя результаты, полученные в |[3], имеем:
|х> (0-У (0 I < OS;
|%г (0-У (0 I < es (1+со);
I xk (0-у (0 I < 9S (1 +C'D4-CI 2£>2/2! + ...)<8SeCD. -
Но если £->оо, х*(/)->х(0. Следовательно, |х(/)—y(t)\<
<0S exp (CD) <p.
Поскольку p может иметь сколь угодно малые зна-
чения, корретность процедуры частичного укорачивания
считаем доказанной.
3—3108 ’ 33
Итак, при частичном укорачивании (2.6) получаем
а = — 0_{Л1 [f (t, a cos т b sin т,
— a sin т + b cos т) sin т] Ц- Fa (т)};
6==0{Л1 [f(x, acos't-|-6'sin't,
— a sin t + b cos t) cos t] Fb (t)}.
Дальнейшее исследование найденных уравнений при
ограниченных произвольных функциях Fa,b зависит от
вида правых частей и в ряде случаев не вызывает труд-
ностей.
Заметим, что в целом процедуру частичного укорачи-
вания можно трактовать как отказ от усреднения не
только внешних воздействий, но и других слагаемых
в (2.6)., Если это уравнение относится к разряду линей-
ных, требование ограниченности внешнего воздействия
е(т) отпадает, что позволяет в качестве е(т) использо-
вать, например, дельта-функцию и определять таким пу-
тем импульсную характеристику системы.
Решение дифференциального уравнения. При реше-
нии уравнения (2.4) вначале будем рассматривать такие
законы (законы суперизации), которые обеспечива-
ют однократный запуск системы, затем полученные ре-
зультаты распространим на случай многократных запу-
сков, Решение будем искать в форме
х(0=Р{6(/)},
где Р— линейный нестационарный оператор, представ-
ленный в виде произведения или суммы элементарных
операторов (умножения на заданную функцию времени,
интегрирования с переменным пределом и т. п.); e(f) —
произвольная в определенной мере функция. Некоторые
ограничения будут наложены на е(/) в процессе упро-
щения оператора Р.
Функция б(0> обеспечивающая однократный запуск,
показана на рис. 2.1. Считаем, что она подчиняется не-
равенству |6 (/) | и медленно меняется по сравнению
с 6(f) cos coof при непрерывном законе изменения зату-
хания или его производной. Если имеют место разрывы
производной (например, при прямоугольном законе су-
перизации), эти условия должны соблюдаться между
точками разрыва производной df>(t),ldt, причем эти точ-
ки должны отстоять друг от друга по оси / на интерва-
лах, значительно больших, чем 2л/®о.
34
Решаем (2.4) методом медленно меняющихся ампли-
туд, используя процедуру частичного укорачивания, для
чего раскладываем x(t) на квадратурные составляющие:
x(t)=a(t) sin mot—b (/) cos (Hot. J2.7)
Опуская промежуточные выкладки, сразу запишем
укороченные уравнения для переменных а и Ь:
da,]dt=:—5(/) (i) cos ©о/;
db/dt=—^&(/) &+<оое(/) sin too/. (2.8)
Система (2.8) имеет известное решение [57]
( t Ч t ( t ч
( ь )=tDoexP |~• JexP[ J8(z)dz\8(^)X
—00 ' —00 —00 1
X(^^y\dy- (2.9)
\sin tooy j
Видоизменим (2.9): внесем внешнюю экспоненту под
знак интеграла
t г t ч
(ь )==ш» fexp{—f8 (2WeWcr“oy)^ (2Л0)
\° J J I J I \sin ыоу /
—со у
и проведем преобразование
# ^8 ^5 t
— £ 8 (z) dz= — 8 (z) dz — 8 (z) dz — f 8 (z)dz.
У У t, ts
В итоге вместо (2.9) получаем
t
(ab]=K^(t)^ [M/W)(C°SWo'W (2.11)
\ ° / J \sinwof/
—00
где
( * 1
/г, (Z) = exp 2 Г 8 (z) б/z s; (2.12)
I J
— js(z)c/zl; (2.13)
J
Z(c = expj—j 8 (z) dzl=e2S= p.-2; (2.14)
I J
3*
35
р, —обычно малая величина. По установившейся терми-
нологии Кс называется коэффициентом усиления за счет
сверхрегенерации [11];
Искомое решение получаем после подстановки (2.11)
в (2.7):
t
sin w,t § (t) Kte (t) cos <oftdt —
—eo
x(tj = ht (О®,
— cost»/ j ht (t) Kee (t) sin W'tdt • '(2-15)
-0» J
Амплитуда A(Z) и фаза ф(/), соответствующие фор-
муле (2.3), равны:
А(О = Ка*(О + ^(О ; (2-16)
<p(/) = arctgy^- (2.17)
Заметим, что анализ выражения (2.15) даже’при гар-
моническом сигнале е(0 достаточно труден. Это связано
с относительной сложностью функций hj,2 (0 (рис. 2.2,
где 1/VX, 1/Кс)-
Упростим (укоротим) указанные функции, допуская
некоторую погрешность в решении x(t). Перед этим от-
метим два условия, которые характеризуют практическое
36
йсйользование СР. В реальных устройствах СР ставят-
ся в режимы.с большим'усилением Кс (как правило,
/Сс>Ю3). Кроме того, обычно выполняется неравенство
‘'W' <2J8>
ti t
где tm, tn — любые точки, лежащие одновременно справа
или слева от интервала (t2 ... t4).
Неравенство (2.18) означает, что средняя мощность,
отдаваемая источником е(0 на интервале (^..-М, не
меньше, чем деленная на Кс аналогичная мощность вне
данного интервала.
Действительно, СР применяют для усиления весьма
слабых сигналов, мощность которых соизмерима с мощ- '
ностью внутренних шумов или несколько превышает их
(обычно не больше, чем на один порядок). Поскольку
внутренние шумы СР являются стационарными случай^
ными процессами, a e(i) учитывает как внешние сигна-
лы, так и внутренние шумы, неравенство (2.18) имеет
большую степень достоверности даже в самом неблаго-
приятном случае, когда импульсный сигнал приходит
в момент времени вне интервала (t2 ... t4).
Отмеченные условия дают возможность ограничиться
воздействиями, которые обеспечивают выполнение не-
равенства (2.18), и, допуская при вычислениях аб-
солютную погрешность заменить в (2.15) функ-
ции /г,,^) более простыми, укороченными, функциями
/7,(0 = МО-
Я, (0 = 0,
(2.19)
/7а (/) =/га (/),
лга(О = о.
для различных применяемых на практике напряжений
суперизаций — прямоугольного, пилообразного, синусои-
дального и т. п. Замену функций hi,2(t) их укороченны-
ми аналогами Hit2(0 по формулам (2.19) назовем ц-при-
ближением.
37
Когда точность ц-приближения оказывается недоста-
точной (Кс мало), можно проводить анализ в рамках
^-приближения, для чего укороченные функции //1,2 (О
определяются следующим образом:
НЛ) = М)’
ягЮ=о,
Укороченные функции //1,2 (0 для ц-приближения
изображены на рис. 2.3,а, б. Если КС>Ю3, верхняя гра-
ница погрешности ц=3,3-10-2.
Рис. 2.3. Укороченные функции #1,2 (О (а, б), вспьийка колебаний
на выходе СР (в), ее огибающая (г) и фаза заполнения (<?)
38
Подставляя (2.19) в (2.11) и (2.15), получаем:
t
( а ) «ед (г) % [ И, (!) s (!) (c°s Ш’Ч dt-, (2.20)
\ ° J J \sinwof/
х (t) — a (t) sin %! — b (t) cos wj —
[i
sin mJ j Hi (t) s (!) COS (oQtdt —
t
— cos <b0! J //, (f) e (t) sin wjdt •
“00
(2-21)
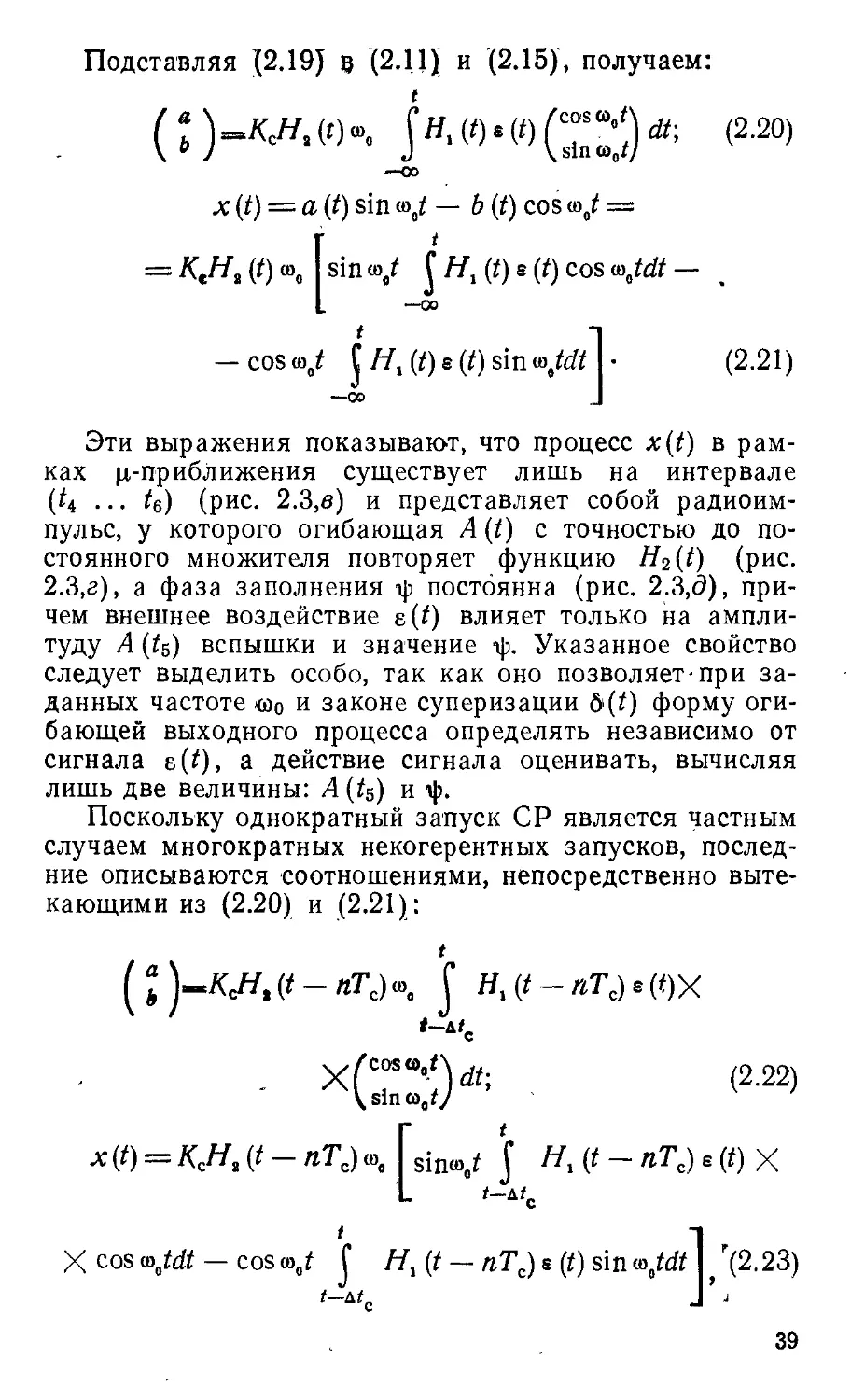
Эти выражения показывают, что процесс x(t) в рам-
ках p-приближения существует лишь на интервале
(ti ... !6) (рис. 2.3,в) и представляет собой радиоим-
пульс, у которого огибающая A (t) с точностью до по-
стоянного множителя повторяет функцию H2(t) (рис.
2.3,г), а фаза заполнения ф постоянна (рис. 2.3,д), при-
чем внешнее воздействие e(t) влияет только на ампли-
туду A (t5) вспышки и значение ф. Указанное свойство
следует выделить особо, так как оно позволяет-при за-
данных частоте и законе суперизации &(!) форму оги-
бающей выходного процесса определять независимо от
сигнала e(t), а действие сигнала оценивать, вычисляя
лишь две величины: A (is) и ф.
Поскольку однократный запуск СР является частным
случаем многократных некогерентных запусков, послед-
ние описываются соотношениями, непосредственно выте-
кающими из (2.20) и (2.21):
t
f H^-nTj^X
sin<o/ J (^ е (О X
л(о=ед^-лтс)<о0
t 1
X cos w^tdt — cos o\t j Ht (t — nTc)s (!) sinw^dt I r(2.23)
t—atc J j
39
где АА=^4—h\ п=0, 1, 2, ... — номер запуска; Тс — пе-
риод суперизации (период запусков). Некогерентность
(независимость) запусков будет иметь место при TQ^>
>(f7... Л).
Укажем на еще одно эквивалентное условие некоге-
рентности. Для этого вычислим в пределах одного пери-
ода суперизации площади S_ и S+ (S_ — площадь, огра-
ниченная осью времени и кривой Д (/) <0; S+— площадь,
ограниченная осью времени и кривой 6(/)>0). Некоге-
рентность будет иметь место, если S+»S_.
Схемы, реализующие преобразования (2.21) и (2.23),
показаны на рис. 2.4. Решения (2.21), (2.23), а также
Рис. 2.4. Математические модели СР в некогереитном режиме при
однократном (а) и многократном (б) запусках
схемы позволяют легко сравнивать СР с другими устрой-
ствами обработки сигналов, находить реакцию СР на
случайные и детерминированные воздействия, синтези-
ровать на основе СР локационные, связные и другие си-
стемы с высокой помехоустойчивостью. Аналогичные ре-
шения и соответствующие им схемы будут найдены
(в тех случаях, когда это ие будет связано с большими
математическими трудностями) и для параметрических
СР.
40
2.2. Емкостный, индуктивный и резистивный
параметрические сверхрегенераторы
в линейном режиме
Построение теории параметрических СР связано сре-
тением различных (при различных способах супериза-
ции) и достаточно сложных дифференциальных уравне-
ний, что не позволяет проводить анализ всех режимов и
схем в рамках одного математического метода. Ниже
предлагаются два различных подхода к изучению явле-
ний параметрической сверхрегенерации. Первый основан
на применении метода медленно ме-
няющихся амплитуд с использова-
нием процедуры частичного укора-
чивания. Он ставит своей целью по-
лучение математических моделей
СР в ситуациях, когда закон супе-
ризации и внешнее воздействие про-
извольны. К сожалению, такую за-
Рис. 2.5. Эквивалент-
ная схема емкостио-
дачу удается решить полностью лишь го параметрического
тогда, когда укороченные уравнения генератора
приводятся к нормальному виду,
что соответствует небольшим расстройкам собственной
частоты параметрического контура относительно частоты
субгармоники, а также определенным способам супери-
зации. Второй подход базируется на традиционном ре-
шении дифференциального уравнения СР и позволяет
рассматривать большие расстройки и различные спосо-
бы суперизации, но при конкретных законах супериза-
ции и формах внешнего воздействия. Этот Подход ха-
рактерен для анализа параметрических СР, которые ис-
пользуются для усиления сигналов с амплитудной мо-
дуляцией или манипуляцией.
С помощью метода медленно меняющихся амплитуд
в данном параграфе анализируются емкостные, индук-
тивные и резистивные параметрические СР при периоди-
ческом шунтировании внешним активным сопротивлени-
ем. Возможности традиционного решения дифференци-
ального уравнения СР иллюстрируются в § 2.3, где ис-
пользуется комбинированный параметрический СР с
амплитудной модуляцией напряжения накачки.
Емкостный параметрический СР. В линейном режиме
он строится на базе емкостного параметрического гене-
41
рат-ора, схема которого изображена на рис. 2.5. Здесь
C(i/)=C0(14-4wsin2v/)-1, (2.24)
2v — частота накачки; 4/л — коэффициент модуляции
емкости.
Как показано в [29], подобный контур при выполне-
ний неравенства
т > (/?/2%L0) V1 + (2L0Av//?)2 , (2.25)
где % == 1 /]/"L0C0, Av = v —<о0, теряет устойчивость, и
в нем выполняются условия для возникновения и разви-
тия субгармонического (по отношению к накачке) про-
цесса с частотой v. Сверхрегенеративный режим будет
иметь место, если один из параметров контура каким-
либо образом меняется так, чтобы в определенные мо-
менты времени изменялось направление неравенства
(2.25). Чаще всего прибегают к вариациям т или R,
что соответствует амплитудной модуляции напряжения
накачки или периодическому шунтированию схемы
внешним активным сопротивлением.
Остановимся на изменении R и обратимся к соответ-
ствующей эквивалентной схеме (см. рис. 1.16). Диффе-
ренциальное уравнение,’’описывающее схему,
4-gf-4-/?(O-g-+^(1+4mSin2W)^e(O, (2.26)
где q — заряд на емкости С(1).
Введем обозначения:
5=7,«/vs-l); x=g/Ce(2E+l);
d(t)=R(t)/2vL0.
Будем полагать также, что /п<1 и |£|С1- Это дает воз-
можность пренебречь слагаемым 8/n|v2x sin 2vt высоко-
го порядка малости и привести уравнение (2.26) к виду
^4-2vd(/)-^-4~v2 (1 4/ц sin 2vt) jc-j- 2v4x = v'e (f).
(2.27)
Решаем данное уравнение методом медленно меняющихся
амплитуд, используя процедуру частичного укорачивания. Считаем
d(t) малой в сравнении с единицей и медленно меняющейся
в сравнении с d(t) cosvi функцией для любого момента t при не-
прерывном законе измеиеиия затухания или его производной. При
законах измеиеиия затухания с разрывом производной (например,
прямоугольном) точки разрыва должны отстоять друг от друга по
оси t на интервалах, значительно ’больших, чем 2n/v.
42
Решение ищем в виде
x(Z) — a(f) cos vZ-]-b(Z) sin vZ, (2.28)
где a(t), b,(t)—медленно меняющиеся амплитуды. Опустив проме-
жуточные выкладки, запишем сразу для а и .Ь укороченные урав-
нения:
1 da
—-^-=[—d(04-m] a+tb~i(t) sinvt;
1 db
— -dF=[~d (0 — (0 cosvt. (2.29)
Осуществим линейное преобразование координат
о=Х—ХУ, &—ЛХ-|-У, (2.30)
где Х=
Независимые уравнения для переменных X и У (которые часто
называют нормальными [3, 50]) имеют вид
2С= —8 (Z) 2С—v sin [vZ+<?.]: (2.31)
У = - у (Z) У+ v е (Z) cos [vZ- ?,],
где
8(Z) = v[d(Z) — К®’—5*]: y(0 = v [d(Z)4-/«s— $*];
<Ро = — arctg X.
Учитывая, что | £ | <т, выберем закон изменения J?(Z) так, чтобы
функция 6(Z) подчинялась графику иа рис. 2.1, т. е. была положи-
тельной на всей временной оси, за исключением интервала (f3 ... t5)
(однократный запуск). При этом всегда y(Z)>0 и, если exp2S»l,
t,
где 2S = J 6 (Z) dt, исследование эффекта сверхрёгеиерации
G *
можно связывать с изучением только переменной X, т. е. полагать
что Y(t)=Q.
Уравнение (2.31) для переменной X имеет известное [57] ре-
шение
у
v cos<p0
cos 2у0
ехр
8 (z) dz] X
—оо
X = (У) sin (vz/+<f<,) dy.
(2.32)
После преобразований получаем
t
V COS «„ с
X^ = -43r^-KcoMZ) j A,(Z)e(Z)sin(vZ + ?0)dZ, (2.33)
—ОО
43
где
^сотеехР
8 (z)dz
(2-34)
а функции fti,s<t) определяются (2.12) и (2.13).
Подставляя (2.33) в (2.30) и (2.28) и учитывая, что y(i)«0,
приходим к выражению
x(i)= — КсМ0*
j (i) Е (0 sin (vi + fo) dt
—во
cos (v£—<рв),
(2.35)
где Kc=Kco/cos 2<ро-
Отметим на оси времени кроме моментов is и is еще пять точек
(см. рис. 2.1), отвечающих условию (2.2). Величину expS=l/yrKc
обозначим через р, и положим, что ц<С1 (наиболее интересный
с практических позиций случай). Дальнейший анализ проводим
в рамках ^-приближения (см. § 2.1). При этом функции h1>2(t)
(см. рис. 2.2) заменяются их укороченными аналогами Hi.stt) [см.
рис. 2.3,а, б и выражение (2.19)], а (2.35) записывается в форме
х (0 е —
KcH2(t)v
Ht (0 Е (0 sin (vi +?„) dt
cos (vi — cp0).
(2.36)
Схема, отражающая преобразование (2.36) (функци-
ональная математическая модель параметрического СР),
показана на рис. 2.6,а.
Иногда функцию x(t) записывают в виде
х(/)=Л(/) cos (v/—ф),
H,(t)sin(vt+(fo) ~H2(t)cos(vt-tpe)
lxiW
•М-»
a)
Ht(t-nTc)sin(vt-cp0) -Hjft-nTclcostvt-cp,.')
kx(t)
x)-*
6)
Рис.' 2,6. Математические модели параметрического СР в режиме
однократного (а) и многократного (б) запусков:
— безынерционный усилигел*
44
где A (t) >0. Очевидно, что
A(t).=
(/) s (f) sin (yt + <f>0) dt ; (2.37)
—о©
cos (<[> — <f>0) = sgn J Ht (t) 8 (t) sifi (yt 4- ?o) dt. (2.38)
Напряжение на емкости u(t) выражается через x(f)
следующим образом:
«(f)=x(f) (1-42|) (1+4/nosin2vf).
При ||| <1 и /п<С1 с достаточной для практики точ-
ностью можно считать, что u(t)=x(t)/
В классическом СР амплитуда вспышек- не зависит
от фазы сигнала, в то время как в параметрическом СР
эта зависимость имеет место. В этой связи заметим, что
для определенного класса сигналов на основе классиче-
ского СР можно построить квадратурно-корреляционный
[60], а на основе параметрического СР — корреляцион-
ный [49] обнаружители. Как известно, в квадратурно-
корреляционном обнаружителе выходной сигнал не за-
висит, а в корреляционном — зависит от фазы сигнала.
Однократный запуск параметрического СР является
частным случаем многократных некогерентных (незави-
симых) запусков. Последние описываются соотношением,
вытекающим из (2.36):
t
x(t) = — KcH,(t — nTJv cos (yt — <р0) у Ht(t —
— nTc) e (f) sin (yt cp0) dt. (2.39)
Здесь A/c.^4—f2; /1=0, 1, 2, ... — номер запуска. Неко-
герентность (независимость) запусков будет иметь ме-
сто, как и в классическом СР, при Tc^>t7—ty
Математическая модель параметрического СР в ре-
жиме многократных независимых запусков в соответст-
вии с выражением (2.39) показана на рис. 2.6,6.
Поставленное выше условие |£| <т означает, что пе-
реходный процесс по огибающей A (t) в автономной си-
стеме имеет апериодический характер, т. е. при б(/)^0
всегда dA/dt^z.0. Если | £| >т, этот же процесс приобре-
тает колебательный характер.
Индуктивный и резистивный параметрические СР.
В индуктивном параметрическом СР индуктивность из-
45
меняется с частотой накачки по закону
L(/)=?L0(l+4m sin 2v/)-1.
Эквивалентную схему такого СР удобно представлять
в виде, показанном на рис. 2.7. Дифференциальное урав-
нение, описывающее процессы в схеме,
с» ~di^+ ' jt+tt (1 + 4m sin 2v0ф=1(0- (2-40)
где Ф — потокосцепление индуктивности; i (0 — внешнее
воздействие.
Введем обозначения:
г=Ф/£о(1+2£У; Q (0=l/2vfl (0 Со
и положим, как и выше, что т<1 и | £| < 1. Это дает
возможность пренебречь слагаемым 8m£v2 Ф sin 2vt и
привести уравнение (2.40) к виду, аналогичному (2.27):
z-[-2vQ(0z-|-v!(1 4-4msin2t)z + 2v^z = vsj(0. (2.41)
Следовательно, индуктивный СР дает для функций z(t)
и i(t) те же модели (см. рис. 2.6), что и емкостный. Вы-
ходное напряжение индуктивного СР определяется фор-
мулой
^вых==Д) (dz]dt).
Резистивный параметрический СР строится на осно-
ве резистивного параметрического генератора [89]. Эк-
вивалентная схема такого генератора показана на рис.
2.8,а, где Д>0, а знакопеременное сопротивление 2?н(0
меняется с частотой накачки:
Рн (0" ~~Pniax COS 2vf.
Если выполнено неравенство (2.25), в котором через
т обозначено отношение /?max/4vL0> данный контур теря-
ет устойчивость и в нем су-
ществуют условия для воз-
никновения и развития про-
цесса с частотой v. Сверхре-
генеративный режим в си-
стеме реализуется, если R
или /?тах изменяется так,
чтобы в заданные моменты
Рис. 2.7. Эквивалентная схема
индуктивного параметрическо-
го СР
времени неравенство (2.25)
меняло направление. Ниже рассматривается случай,
когда меняется R.
Эквивалентная схема резистивного СР изображена на
46
рис. 2.8,6. Дифференциальное уравнение, отражающее
процессы в этом СР,
b.-S-+lRW+R~cos2'''l -зг+-гг’=,й-
При малых т и £ оно сводится к форме
х -|- 2 [d (/) 4-2т cos 2т]|х + х + 2?х = е (/),
где х, d(f) и | соответствуют обозначениям, принятым
в (2.27).
Как показывает анализ, укороченные уравнения для
а и Ь, получаемые из последнего уравнения, совпадают
с (2.29). Следовательно, анализ резистивного парамет-
рического СР, начиная с укороченных уравнений, может
проводиться по аналогии с анализом емкостного СР.,Ма-
тематические модели резистивного СР соответствуют
рис. 2.6.
2.3. Комбинированный параметрический
сверхрегенератор в линейном режиме
Очень часто емкостные параметрические СР исполь-
зуются в качестве усилителей слабых сигналов, когда
основной интерес представляет информация об амплиту-
де входного воздействия. При этом требуется учесть ре-
зультаты обработки не одной вспышки, а ансамбля
вспышек с последующим их усреднением. В этих случа-
ях часто имеют место большие расстройки и наблюда-
ется колебательный характер переходного процесса Л(/),
поэтому здесь не будем вводить ограничение | <т,
которое является условием апериодичности переходного
процесса. Рассмотрим сначала наиболее сложный и об-
щий случай — комбинированный параметрический СР,
у которого с частотой накачки меняются одновременно
емкость и активное сопротивление. Такую ситуацию на-
блюдают в полупроводниковом параметрическом усили-
теле в сверхрегенеративном режиме при большой ампли-
туде накачки, когда рабочая точка на вольт-фарадной
характеристике параметрического диода заходит в об-
ласть проводимости.
Эквивалентная схема для этого случая представлена
на рис. 1.16, а процессы в ней описываются выражением
(1.7), которое мы еще раз воспроизведем, конкретизиро-
47
вав законы изменения накачки:
Laq + R (z) q + q/C (z) = s (z),
где q— заряд; R(z) и C(z) —сопротивление и емкость,
изменяющиеся во времени; e(z)—внешняя ЭДС; z —
время.
Для удобства дальнейших вычислений перейдем
к безразмерному времени Z=vz; кроме того, для упро-
щения задачи примем, что сопротивления и емкость ме-
няются по закону модулированной накачки, т. е. R(t) =
=Rop(t) и где Ro и Са — начальные со-
противление и емкость; т и р — коэффициенты модуля-
ции емкости и затухания:
р (/) = 1 — р (1 -|-п cos у/) cos (2t -ф- ф);
/га (/) = (! -|-250) [1 — /га(1 -\-hcos^t) cos2/]; (2.42)
h — глубина модуляции емкости; п — глубина модуляции
затухания (глубина суперизации); go=coo/v—l—рас-
стройка контура относительно половины частоты накач-
ки; <aH=2v — частота накачки; = 1/]/Д0С0; y=Q/v«tC
<С1; Я — частота модуляции емкости и сопротивления
(частота суперизации); d=Rol<syzL=^dol2— затухание.
С учетом принятых обозначений уравнение, описыва-
ющее процессы в контуре, можно привести к виду
? + 2dp(09 + m(/)9 = /(/). (2.43)
где f (/) —е (/) /w2oLo — внешнее воздействие.
Решение однородного уравнения, соответствующего
(2.43), приведено в приложении.
Поскольку общее решение однородного уравнения из-
вестно, для решения неоднородного уравнения достаточ-
но найти частное решение
ьуе=[/(/, ta, Т)ьу0+jt/(t Х)Ф(tydt^, (2.44)
to
где первый член правой части представляет собой сво-
бодные колебания, а второй — вынужденные колебания
/ 0 \
в системе; Ф(/1) =( f (Л) ) характеризует внешнее воздей-
ствие. Примем, что в контуре действует сигнал
/(О=^о cos [(1-Ь£с)Н~Фо], (2.45)
где go=(oc/v—1—расстройка сигнала относительно по-
ловины частоты накачки; X0=X/v2Lo — амплитуда сигна-
ла; фо — начальная фаза.
48
После подстановки матрицы (П.6) и (2.45) в инте-
грал правой части (2.44) и преобразований можно По-
лучить формулу, характеризующую вынужденные коле-
бания:
jW YWO^-^-Re
G -
?i (°) da
Xe-(a+J3)HdueJ1(1+?c’ f+’P°1
+wRe
:—U
?1 (a) da е~(а-^и
, I [(1-Ес) t~ <Ро]
X due с
(2.46)
В этом выражении интегралы, стоящие перед экспо-
нентами, представляют собой медленно меняющиеся
функции. Следовательно, решение содержит два семей-
ства частот с несущими й)>=(1±£с)ч модулированными
медленно меняющимися функциями. При законе модуля-
ции параметров, определяемом (П.11), спектр выходного
сигнала состоит из несущей с частотой <ос= (1 +£с)v и
эквидистантных спутников на частотах, отстоящих от
(l+£c)'v на гДе k — натуральный ряд чисел. Ам-
плитуды напряжений этих спутников приближенно опре-
деляются функциями Бесселя. Это видно из формулы
(2.47), полученной из (2.46) после некоторых вычисле-
ний и перехода от заряда к току, а затем к напряжению
на нагрузке в контуре, настроенном на частоту а>с:
00
( 1 )^экв/8£ (8)
dS3KB + (k + ^)s
и ~ —
umax— QBH
k=—00
(2-47)
где t/щах — амплитуда напряжения на нагрузке: Л(Р) —
модифицированная функция Бесселя k-ro порядка пер-
вого рода от мнимого аргумента;
dSKB = d- (ml4z±d?l2)=Q-\ (2.48)
4—3108
49
— эквивалентное затухание системы;
р = mh/Ay ± d?n[2^.
(2.49)
— аргумент функции Бесселя; Qbh=«»Lo/^h — внешняя
добротность; /?н—сопротивление нагрузки, включенное
в контур, которое является частью общего сопротивле-
ния.
Спектр комбинационных частот, расположенных во-
круг частоты (ор= (1—gc)v, имеет аналогичную структу-
ру, но уровень несколько меньший, что видно из (2.46).
Рис. 2.8. Эквивалентные схемы резистивного параметрического ге-
нератора (а) и СР (б)
Однако при большом усилении, когда п не слишком
т
близко к нулю, можно принять th £ (о) da 1, и тог-
да уровни соответствующих составляющих спектров на
частотах а>с и ®р примерно одинаковы. Все сказанное
иллюстрируется рис. 2.9.
Выражение (2.47) позволяет рассмотреть отдельные
частные случаи. Допустим, что k=0, и оценим амплиту-
ду основной составляющей спектра в разных режимах.
Параметрическая регенерация без суперизации. Если
супер из ация отсутствует, т. е. h = n = 0, то в контуре
устанавливается режим простой параметрической реге-
нерации. Расстройка £с уменьшает амплитуду усиленно-
го сигнала. При gc=0 усиление определяется только ве-
личиной г/Экв — эквивалентным затуханием регенериро-
ванного контура (2.48). При отсутствии модуляции за-
тухания й?экв==^о/2—zn/4 и получается обычный режим
параметрического усиления, подробно изученный во
многих работах. Условие устойчивости этого режима
m<2d<>.
Наличие дополнительной модуляции затухания с ча-
стотой накачки приводит к увеличению регенерации при
50
угле сдвига фаз между накачками ф=л/2 и уменьше-
нию ее при ф=—л/2. Усиление также определяется лишь
эквивалентным затуханием, которое находится из выра-
жения (2.48), т. е. г/экв—т/4, и ограничивает-
ся условием устойчивости, которое для этого случая
можно получить из (2.48):
/n<2c?0(l=Fp/2).
Заметим, что при исследовании двух- и многоконтур-
ных систем с модулируемыми емкостью и сопротивле-
нием (без суперизации) был получен такой же резуль-
тат: усиление максимально, когда накачка емкости от-
стает на л/2 от накачки сопротивления.
Рис. 2.9. Спектры сигналов на входе (а) и выходе (б) параметри-
ческого СР:
юс>»^+Д<В; Bp“V—Д<в
Параметрическая регенерация при модулированной
накачке. Появление напряжения суперизации делает ар-
гумент функции Бесселя (2.49) отличным от нуля:
0=/пЛ/4у. (2.50)
Если модуляция сопротивления отсутствует (р=0),
аргумент функции Бесселя, а следовательно, и усиление
получаются такими же, как и для сверхрегенеративного
параметрического усилителя на полупроводниковом дио-
де с модуляцией одной емкости [13]. Появление допол-
нительной модуляции сопротивления приводит к увели-
4* 51
пению усиления при ip=jr/2 и уменьшению усиления при
ф=—л/2, так как усиление определяется значением
функции Бесселя. Второй член правой части (2.49) мень-
ше первого примерно на порядок, поэтому влияние супе-
ризации емкости больше, чем влияние суперизации за-
тухания. Следовательно, при р или п, отличном от нуля,
р должно определяться по формуле (2.49). В этом со-
стоит отличие режима СР с переменными /? и С от ре-
жима сверхрегенеративного параметрического усилителя
с переменной С.
Усиление по мощности можно найти для k-vo пика из
(2.47):
(-1)Чкв/Ш
^2SKB + (Sc 4" &Т) 1
(2.51)
Отсюда видно, в частности, что усиление максимально на
синхронных расстройках, когда |с=—by- С увеличением
расстройки и номера пика усиление падает. При исполь-
зовании центрального максимума усиление максималь-
но и равно
tfp0=/M'₽)QWQ2BH.. (2.52)’
Итак, дополнительная модуляция затухания приводит
при сдвиге фаз между накачками л/2 к увеличению и
при ф=—л/2 к уменьшению усиления как в режиме
обычного параметрического усиления, так и в режиме
сверхрегенеративного усиления. Таким образом, супери-
зация, не меняя характера регенерации, лишь увеличива-
ет усиление и расширяет полосу за счет дополнительных
составляющих отклика, характеризуемых коэффициента-
ми Бесселя, которые отражают сверхрегенеративный эф-
фект.
Предложенную методику решения задачи можно ис-
пользовать не только для модулированной накачки, но
для более сложных законов изменения параметров си-
стемы.
2.4. Фазовый сверхрегенератор
Фазовые сверхрегенераторы являются разновидно-
стью классических СР. Они предназначены главным об-
разом для выделения информации, содержащейся в фазе
маломощных СВЧ колебаний. В соответствии с описани-
52
ем, приведенным в § 1.2, ФСР обеспечивают регистрацию
изменений фазы принимаемых СВЧ колебаний относи-
тельно опорной на значение, кратное л. Опорная фаза
задается сигналом некоторого источника, входящего в со-
став ФСР, а регистрация изменений фазы связана с по-
явлением вспышек генерации ФСР. Вспышки генерации
формируются на низких частотах, а частота их следова-
ния соответствует разностной частоте между принимае-
мыми СВЧ сигналом и колебанием опорного источника.
Перенос полезной информации о текущей разности фаз
между внешним и опорным СВЧ колебаниями на низко-
частотные вспышки генерации с большой амплитудой га-
Рис. 2.10. Основные вари-
анты структурных схем
ФСР:
а — с амплитудной модуляцией;
б — с частотной модуляцией;
в — с фазовой модуляцией
6)
рантирует удобство последующей обработки выходного
сигнала ФСР и уменьшение влияния низкочастотных по-
мех.
Указанные свойства выгодно отличают ФСР от изве-
стных устройств выделения разностной частоты между
опорным и внешним колебаниями- (например, диодных
устройств выделения доплеровской частоты в РЛС).
Основу ФСР составляют схемы трех типов (рис. 2.10).
В состав ФСР любого, типа входит резонансный усили-
тель РУ, охваченный обратной связью с включенными
в нее формирующими элементами. Элементы обратной
связи изменяют ее характер в зависимости от текущей
разности ^фаз между принимаемым впр(0 и опорным
еоп(/) СВЧ колебаниями.
На рис. 2.11,а, б разность фаз между принимаемым
и опорным сигналами равна нулю, что дает положитель-
ную обратную связь для РУ, на рис. 2.11,а, в указанная
разность равна 180°, а обратная связь отрицательна.
Если фаза принимаемого сигнала изменяется линейно во
времени относительно фазы опорного, на выходе РУ фор-
мируются вспышки генерации, следующие друг за дру-
53
гом С-частотой, равной разности частот принимаемого и
опорного колебаний.
Аналогичные явления наблюдаются и в схемах ФСР,
показанных на рис. 2.10,6, в, где УПР — управитель ча-
стотой опорного СВЧ генератора Г. Таким образом,
общим для всех схем ФСР является управление
низкочастотной автоколебательной системой с помощью
фазы принимаемого СВЧ сигнала, а различие заключа-
ется в способе управления. Отличие ФСР от СР состоит
Рис, 2.11. Векторные и временные
диаграммы напряжений ФСР
в том, что закон супери-
зации (изменение состоя-
ния обратной связи) реа-
лизуется с помощью при-
нимаемого сигнала епр(/),
воздействующего опреде-
ленным образом на эле-
менты обратной связи.
В зависимости от спо-
соба взаимодействия эле-
ментов обратной связи с
принимаемым сигналом
ещ>(0 различают ФСР с
амплитудной, частотной
или фазовой модуляцией
в цепях обратной связи
РУ.
Фазовый СР с ампли-
тудной модуляцией
(ФСРАМ) — устройство,
в котором элементы об-
ратной связи осуществля-
ют амплитудную модуля-
цию принимаемого (либо
опорного) сигнала (см. рис. 2.10,а). Соответственно ФСР,
в которых элементы обратной связи осуществляют ча-
стотную либо фазовую модуляцию принимаемого (либо
опорного) сигнала, названы фазовыми СР с частотной
(ФСРЧМ) или фазовой (ФСРФМ) модуляцией (см. рис.
2.10,6, в).
Недостатком рассмотренных схем являются зависи-
мости глубины обратной связи (глубины суперизации)
от амплитуды принимаемого сигнала, что приводит
к срыву работы ФСР при достаточно малых входных
сигналах. Этот недостаток можно устранить, если ввести
54
в ФСР дополнительную суперизацию, глубина которой
больше глубины основной, информационной, супериза-
ции. Схемы ФСР с дополнительной суперизацией
(ФСРДС) (рис. 2,12) в принципе не отличаются от тех,
что изображены на рис. 2.10, однако имеют дополни-
тельный источник импульсов суперизации, подключае-
мый к РУ.
Анализ ФСР с амплитудной, частотной и фазовой
модуляцией. Полагаем, что входящий в ФСР РУ имеет
передаточную функцию
“’ру (Р) = иРу (Р) =КарКр' + 280р4-о)20), (2.53)
где бо=®о^/2; d—R/(i>0L0-, d — затухание колебательного
контура РУ, образованного емкостью Со, индуктивностью
Lo и имеющего активное сопротивление /?; Кп=У2\1С^,
У21—параметр применяемого в РУ усилительного при-
бора; Upy(p)—выходное напряжение РУ; ^фдСр)—
выходное напряжение ФД (входное напряжение РУ).
Считаем выполненными следующие условия:
Дпр = const, (2.54)
принимаемым и опорным
Рис. 2.12. Структурная схема
ФСР с дополнительной супе-
ризацией
где фд — разность фаз межд
сигналами; £Пр — амплиту-
да принимаемого сигнала.
Соотношения (2.53) и
(2.54) позволяют составить
дифференциальное уравне-
ние для ФСР различных ти-
пов. В схеме ФСРАМ (см.
рис. 2.10,а) выходной сигнал
РУ, поступая на модулятор-
ный вход AM, модулирует принимаемый сигнал ецр(0
по амплитуде. В результате формируется сигнал, имею-
щий частоту несущей входного сигнала fc и амплитуду
«ам(/)=£пр(1+/исоз<йоО, (2.55)
где т — коэффициент модуляции (т < 1); <о0 = 1 L0C0.
Сигнал иАм(0 поступает на ФД, на другом входе ко-
торого действует сигнал опорного генератора еоп(0>
имеющий частоту /оп и амплитуду Еоп. Считая, что
Бпр>
можно записать выражение для выходного напря-
55
жения ФД
^фд (О—^фд^ам (О COS <рд (/), (2.56)
где /(фд — коэффициент передачи ФД.
Используя (2.55) и (2.56), получаем
«ФД (0 = -Кфд^пр 0 + tn cos «V) cos (О-
Выходное напряжение мфд(/) поступает на вход РУ,
обладающего избирательными свойствами, поэтому мож-
но ограничиться рассмотрением только осциллирующего
члена
ы'фд (0 = cos <рд (0 cos ^t.
При этом, полагая, что в (2.53) ифд(р)==и'фд (/?) и
учитывая условие (2.54), получаем следующее диффе-
ренциальное уравнение ФСРАМ;
ыру + 5 am (z) “ру + “V'py = “V (О* (2-57)
где
8Ам(^)~28о ^AMC0S?aW; ^АМ~ ^о^ФД^^пр/^РУ’ (2-58)
б(0 —внешнее воздействие, которым являются внутрен-
ние шумы РУ.
Аналогично можно составить дифференциальные
уравнения для схем ФСРЧМ и ФСРФМ. Для ФСРЧМ
получаем
wpy Д- 8qM (/) «ру и 0Нру — <o!0s (t), (2.59)
где
8чм(О = 28о-/<чмз1п7д(^);
Кчм=2^ЛФдЛ (<pmaxW; ' (2-60)
/С — коэффициент передачи управителя ФСРЧМ;
Л (фтах)—функция Бесселя 1-го рода от аргумента фтах;
Af — девиация частоты генератора ФСРЧМ; фд, фтах —
величины, ависящие от режима работы ФСРЧМ.
В ФСРЧМ воможны два режима работы:
прием сигнала, сформированного некоторым внешним
источником излучения;
прием опорного сигнала, задержанного на некоторое
время т.
56
Первый режим имеет место, например, в линиях свя-
зи, когда сигнал излучается передатчиком одного або-
нента, а принимается с помощью ФСР, имеющегося
у другого абонента. При этом
<рд=2и| Af, (t')dt',
о
где Af—разность частот принимаемого и опорного
колебаний. *
Второй режим работы ФСРЧМ наблюдается при ра-
боте его, например, в доплеровском измерителе скорости
(ДПС), у которого опорный сигнал еоп(0 для ФСРЧМ
формируется передатчиком ДИС, входящим в ФСРЧМ
в качестве опорного генератора. При этом
^ax = 47t^7Sin2:4> =
Для ФСРФМ имеем следующее уравнение:
«ру + 8фм W «ру + <"ру = <s (2-61)
где
8ФМ (0 ~ 28о ^ФМ sin ?Д (0’
^ФМ = 2Дпр/<фд^'фм/1(?тах)/?тах’ (2.62)
/С'ФМ — коэффициент передачи фазового модулятора
ФСРФМ; <ртах — индекс фазовой модуляции; <рд и ?тах —
величины, зависящие от режима работы ФСРФМ.
В ФСРФМ также возможны два режима работы, ана-
логичные рассмотренным для ФСРЧМ. Прй этом в пер-
вом режиме, когда ведется прием сигнала, сформиро-
ванного некоторым внешним источником излучения,
‘Ртах ~ ^ФМ«РУ’ Рд = АРо Р1(0 ’
где Дфо — начальная разность фаз принимаемого и опор-
ного сигналов; ф1 (/)—переменная фаза принимаемого
сигнала.
Во втором режиме
Ртах = *ФМ«РУ Sin (°V/2)
?д=2<пг.
57
Сравнивая соотношения (2.57), (2.59) и (2.61), за-
ключаем, что различные типы ФСР описываются одним
и тем же дифференциальным уравнением
«ру Ч- 8 (0 «Ру + “’.«ру = >' (0 - (2-63)
где
8(0 = 280 -Kcos(?a-<Pi), (2.64)
причем К = КАМ при амплитудной модуляции (2.58); К =
— КЧ}Л при частотной модуляции (2.60); К — /СФМ при
фазовой модуляции (2.62); о = 0 в ФСРАМ и o. = 3it/2
в ФСРЧМ и ФСРФМ.
Таким образом, (2.63) является обобщенным уравне-
нием ФСР. Оно позволяет ввести в рассмотрение экви-
валентную схему ФСР (рис. 2.13), в которой
7?э(?д)=2£о8(0.
Схема представляет собой контур, состоящий из по-
стоянных индуктивности Lo, емкости Со, изменяющегося
во времени знакопеременного (при 2б0</С) активного
сопротивления /?э(фд) и источника стационарного шума
б'(/). Закон изменения активного сопротивления /?э(фд)
определяется законом изменения
разности фаз фд принимаемого и
опорного сигналов.
Обобщенное уравнение (2.63) ни-
чем, кроме обозначения переменной,
не отличается от уравнения класси-
ческого СР (2.4). Однако в связи с
тем, что полезная информация в
ФСР вводится не через воздействие
е (0, а через суперизацию б(/),
свойства ФСР во многом не совпа-
дают со свойствами классического
СР. Основное отличие ФСР от СР состоит в том, что он
имеет порог по амплитуде принимаемого сигнала. Дей-
ствительно, закон суперизации ФСР подчиняется выра-
жению (2.64), где коэффициент К пропорционален ам-
плитуде ЕПр принимаемого сигнала. Для реализации
сверхрегенеративного режима необходимо, чтобы функ-
ция 6(0 была знакопеременной, что наблюдается лишь
при /<>2б0. Это, означает, что амплитуда Ецр должна
превышать некоторый порог, определяемый параметром
58
Рис. 2.13. Эквива-
лентная схема
ФСР
6о. Особенностью ФСР является Такэке то, Что в нем
предпочтение отдается когерентному режиму, так как
при этом ослабляется чувствительность системы к флюк-
туационному воздействию б'(0> т- е- повышается выход-
ное отношение сигнал-шум.
К недостаткам ФСР относятся сравнительно высокий
порог по амплитуде Ещ, и невозможность реализации ко-
герентного режима при малых сигналах. Поэтому ФСР
Рис. 2.14. Эквивалент-
ная схема ФСР с допол-
нительной суперизацией
применяются лишь для измерения частоты достаточно
сильных сигналов. Если амплитуда мала, можно усовер-
шенствовать ФСР, снабдив его
устройством дополнительной су-
перизации.
Анализ ФСРДС. Как уже от-
мечалось, ФСРДС представляет
собой разновидность ФСР и отли-
чается лишь тем, что в его колеба-
тельный контур вводится напря-
жение дополнительной супериза-
ции, обеспечивающей когерентное
формирование вспышек. Это оз-
начает, что ФСРДС можно реализовать на базе любого
типа ФСР, а эквивалентная схема ФСРДС (рис. 2.14)
отличается от эквивалентной схемы ФСР (см. рис. 2.13)
лишь наличием еще одного знакопеременного сопротив-
ления Дг(/).
В соответствии со структурной схемой можно соста-
вить дифференциальное уравнение ФСРДС, которое от-
личается от (2.63) коэффициентом &(/), имеющим сле-
дующий закон изменения во времени
S (0 = 28. - К cos ?д (t) + Rt (2.65)
Если положить, что Дз(О во времени изменяется пе-
риодически с частотой £2 и выполнены условия
?я<й>
работу ФСРДС можно пояснить следующим образом.
Член <б2(0=2бо4-/?2(t)J2L0, входящий в (2.65), обес-
печивает когерентный режим формирования вспышек.
Для этого частота дополнительной суперизации 2nF=
=Q выбирается таким образом, чтобы выполнялось ус-
ловие когерентности. Слагаемое Ксозфд(/) изменяет
глубину суперизации в зависимости от текущей разности
фаз фД. В результате изменяется коэффициент усиления
59
системы, а следовательно, и амплитуда вспышек. Изме-
нение коэффициента усиления А/G за счет слагаемого
/(cos фд(/)
AKs = KhoMc + /<Co^h. (2.66)
где Кно и /Ссо — коэффициенты накопления и усиления
за счет сверхрегенерации при К cos срд(/)=О (т. е. при
отсутствии принимаемого сигнала);
Л/^с =~dST д(К cosfj C0S ¥д
^=44 (2-67)
При этом, поскольку дКн/dS^—Q и dKddS-=2Kc, для
оценки AKs достаточно найти dS_/d(/(cos фд) примени-
тельно к различным законам суперизации.
Характеристика 6(0 для прямоугольного напряже-
ния суперизации при отсутствии (К cos <рд=0) и наличии
(/Ссо8фд#=0) сигнала показана на рис. 2.15 (кривые 1
и 2 соответственно). Из рисунка следует, что при изме-
нении 6(0 на А6=/(со8фд площадь S_ изменяется на
AS-=TcKoos фд. • '
Отсюда
Характеристика 6(0 для симметричного пилообраз-
ного напряжения суперизации при отсутствии (/(со8фд=
=0) и наличии (/(cos фд=7^0) сигнала показана на рис.
2.16 (кривые 1 и 2 соответственно). Из рисунка следу-
ет, что при изменении 6(0 на А6=/(со8фд площадь S_
изменяется на
AS_ = 8,/( cos <рд etgа (1 /2) К cos —
— К cos <рд (28 — К cos <рд) etg а,
где ctga=Tc/(2624-26) . Отсюда
dS./d (К cos ?д) = AS_/А8 = 8,Тс/2 (8,4- 28) (2.69)
при 6i^>Kcosфд, что выполняется при малой мощности
принимаемого сигнала.
Характеристика 6(0 Для синусоидального напряже-
ния суперизации при отсутствии (/(созфд=0) и нали-
чии сигнала (/( cos фд=^0) сигнала показана на рис. 2.17
(кривые 1 и 2 соответственно). Из рисунка следует, что
60
йрй заданном 6(f) площадь S_ определяете^ соотноше-
нием S_=2d27’c при 162| >26.
Отсюда, полагая, что 6i=6o+^ cos <рд, искомую про-
изводную определяем следующим образом: '
dS_/<?(Keos?,) = 2Tc. ' ' (2.70)
Подставляя значения (2.67) ... (2.70) в (2.66), полу-
чаем значения ДЛ2 при различных формах напряжения
супёризации.
Соотношения (2.67) ... (2.70) показывают, что при
увеличении Q приращение Д/<2 ФСРДС уменьшается.
Рис. 2.15. Закон изме-
нения затухания в
ФСРДС при прямоуголь-
ном напряжении допол-
нительной суперизации
Рис. 2.16. Закон изменения
затухания в ФСРДС при сим-
метричном пилообразном напря-
жении дополнительной суперн-
зацни
Поэтому целесообразно стремиться к уменьшению Q до
значения
(2-71)
где фдщах—максимальная скорость изменения фазы.
Если при этом не будет выполняться условие коге-
рентности, необходимо принимать меры по регенерации
контура ФСРДС.
Наиболее простым вариантом решения этой задачи
является использование следующего закона изменения
затухания за счет дополнительной суперизации:
Д8(0=^(0/2Ьв = Д8а + Д81(0- (2-72)
где A62 = const<0; A6i(f)—переменная составляющая,
имеющая симметричный закон, подобный ранее рассмот-
ренным.
61
Подставляя (2.72)' в (2.65), находим результирующий
закон суперизации
8(0 = 28p-tfcos<pa(/) + AM)-
где 26р=26о~ЬД'бг-
Дополнительную регенерацию Дбг можно определить
исходя из соотношения
Д8, = — 28„ 4- 5д>
2 о I ijrr.a?.'
Таким образом, можно считать, что в ФСРДС всегда
можно обеспечить когерентный режим и максимально
Рис. 2.17. Закон изменения зату-
хания в ФСРДС при синусои-
дальном напряжении дополнитель-
ной суперизации
возможные приращения ДК2 коэффициента усиления при
Q=Qmin- Величина этого приращения при |бг| 3>б0 не-
зависимо от типа суперизации определяется соотноше-
нием
ДК2 (КсКН<Л/?д max) C0S V д-
Подводя итог, можно сказать, что для обеспечения
условий нормального функционирования (когерентности
режима) фазовых СР более предпочтительными являют-
ся схемы с дополнительной суперизацией (ФСРДС),
Применяя специальные меры, в ФСРДС практически
всегда можно обеспечить когерентный режим. ' .
2.5. Сверхрегенератор в нелинейном режиме.
Схемы с автосуперизацией
Классический GP. Нелинейный режим в классическом
СР характеризуется зависимостью 7? от текущего зна-
чения амплитуды А. Это означает, что в уравнениях
(2.8) вместо коэффициента 8(t)=R (0/2Д> необходимо
подставлять функцию двух переменных б (t, А). При этом
указанные уравнения принимают вид
dajdt — — 8 (t, А) а %е (О cos ;
dbjdt = — 8 (t, А) b «>ое (/) sin
62
В практических схемах СР нелинейность сказывает-
ся лишь при достаточно больших значениях А, не мень-
ших 0, 2 ... 1 В. Поэтому, если внешний сигнал мал, при
однократном запуске нелинейность можно учитывать
лишь на интервале ... ts), поскольку вне данного ин-
тервала амплитуда А также мала. Но внутри этого ин-
тервала внешним воздействием можно пренебречь (см.
§ 2.1) и записать _
dafdt = — 8 (Л А)а\ dbfdt = — 8 (Л А)Ь.
Учитывая (2.7) и (2.16), из этих соотношений полу-
чаем уравнение
dA/dt=-8(t, А)А, (2.73)
которое описывает влияние нелинейности на колебания
в СР, так как фазы заполнения вспышки в линейном и
нелинейном режимах совпадают.
Функция i6(f, А) определяется характеристиками ак-
тивного прибора, на котором построен СР (лампа, тран-
зистор, туннельный диод и т. п.), а также способом су-
перизации. Допустим, что 6(t, А) можно представить
в виде суммы двух членов, один из которых зависит
только от времени, а второй — только от амплитуды:
b(t, А)=6л(0+бн(А).
При этом (2.73) переписывается в форме
^АНД#= — [8л(/)-|-8н (А)] Ан, (2.74)
где Ан—амплитуда процесса x(t) с учетом нелинейно-
сти.
Запишем также линейное уравнение
dAJdt = - [8Л (t) +.8Н (0)]|Ал, (2.75)
в котором Ал — амплитуда того же процесса в предпо-
ложении, что нелинейность отсутствует.
Зависимости Ан(0 и Ал(0> полученные в результате
решения этих уравнений, связаны формулой As(t) —
=6(АЛ)АЛ(/), где б(Ал)—некоторая функция аргу-
мента Ал, которую можно трактовать как коэффициент
передачи огибающей четырехполюсника, производящего
операцию преобразования амплитуды процесса хл(/) без
изменения заполнения [хл(£) —решение дифференциаль-
ного уравнения СР без учета нелинейности]. В итоге не-
линейный СР моделируется с помощью схемы, состоя-
63
Щей из линейной части (линейного СР) и нелинейного
каскада. Последний достаточно близок по своим свойст-
вам к ограничителю амплитуды.
Легко видеть, что б(Ал) в рассмотренном примере
не зависит от закона суперизации бл(/). ® общем случае
функцию б(/, А) разбить на слагаемые 6Л(/) и бн(0 не
удается. При этом моделирующая схема «линейный
СР—ограничитель амплитуды» по-прежнему остается
справедливой, однако инвариантность преобразования
б(Ал) по отношению к закону суперизации не соблю-
дается.
На практике свойства нелинейного СР иногда оцени-
вают с помощью зависимости амплитуды вспышек от ча-
стоты гармонического воздействия. Очевидно, что по-
добная зависимость имеет вид
Ан(Аи) =gG (Ал); Ал(Асо) = |51(/Асо) |,
где g— нормирующий множитель. При определении за-
висимости площади Sb вспышек от частоты сигнала по-
лучают выражение
SB(Aco) =£С8(Ал) |S, (/А®) |,
где С8(Ал)—как правило, логарифмическая функция.
Параметрический СР. Как показано выше, в класси-
ческом СР при однократном запуске действие нелиней-
ностей проявляется лишь на интервале (/4 ... tg), где
собственные колебания системы имеют достаточно боль-
шую амплитуду. В параметрическом СР процессы значи-
тельно сложнее. Здесь наряду с собственными (субгар-
моническими) колебаниями, которые имеют большую
амплитуду и «включают» нелинейности на том же ин-
тервале (ti ... tg), в любой момент времени существуют
большие колебания накачки. Дело в том, что единствен-
ным способом изменения с высокой частотой энергоем-
ких или активных параметров является внешнее воздей-
ствие на нелинейные реактивные или активные элементы
переменным током или напряжением накачки. Сущест-
вование колебаний накачки заставляет учитывать нели-
нейности на всех временных интервалах. При этом ис-
следование дифференциального уравнения СР выливает-
ся в весьма трудоемкую задачу, решить которую в за-
мкнутом виде удается лишь для стационарных режимов
[50]. Переходные же процессы, которые представляют
наибольший интерес для теории'СР, анализируются вча-
64
стных случаях с помощью ЭВМ [91]. В этой связи изу-
чение нелинейных явлёний в параметрических СР мы
проведем поэтапно на некоторых сравнительно простых
примерах с тем, чтобы создать некоторую модель нели-
нейного режима и затем перенести ее с определенными
оговорками на более общие случаи.
Допустим вначале, что нам удалось каким-либо спо-
собом осуществить чисто параметрическое синусоидаль-
ное воздействие [73] на систему со стороны устройства
накачки. Это означает, что в контуре СР отсутствуют
электрические колебания накачки или ее гармоник. Да-
лее положим, что в схеме действует так называемый
диссипативный механизм ограничения амплитуды, кото-
рый обусловлен действием поглощающих активных нели-
нейных сопротивлений [50]. Тогда дифференциальное
уравнение, например, емкостного параметрического СР
будет отличаться от уравнения (2.27) лишь затуханием
6(f, А), которое в данном случае должно зависеть не
только от времени, но и от амплитуды А. Проводя ана-
лиз так же, как и для нелинейного классического СР,
легко приходим к моделирующей схеме «линейный пара-
метрический СР — нелинейное устройство, производящее
преобразование амплитуды процесса хл(£) без измене-
ния заполнения». Коэффициент передачи амплитуды
указанного устройства во многих случаях с достаточной
для практики точностью можно аппроксимировать кусоч-
но-линейной функцией, характерной для ограничителя
амплитуды.
Если в схеме параметрического СР наряду с актив-
ной присутствует реактивная нелинейность, модель «ли-
нейный параметрический СР — нелинейное устройство»
остается справедливой, однако нелинейное устройство
при этом должно характеризоваться двумя показателя-
ми—коэффициентом передачи по огибающей б(Ал) и
сдвигом фазы заполнения ф(Ал) процесса Xi(f).
Считаем теперь, что накачка системы осуществляется
электрическим способом — внешним электрическим воз-
действием на нелинейный элемент. Анализ этого случая
для стационарных режимов при использовании в качест-
ве нелинейного элемента барьерной емкости р—«-пере-
хода проведен в [50], где показано, что наличие напря-
жения накачки качественно не изменяет механизма огра-
ничения амплитуды субгармоники. Следовательно, нели-
нейная часть модели сохраняется. В той части модели,
5—3108 I 65
которую мы считали линейной, напряжение накачки су-
щественно изменяет процессы.
Дело в том, что внешний сигнал и напряжение накач-
ки, воздействуя на нелинейность, создают комбинацион-
ные и обычно не учитываемые продукты преобразования
с частотой, совпадающей с частотой субгармоники, и по-
падающие в полосу пропускания СР при большой рас-
стройке между частотами сигнала и субгармоники. По-
добный эффект в технике радиоприема называется при-
емом по паразитным каналам. Частоты основного и па-
разитных каналов в рассматриваемом случае находятся
из уравнения
± (»c±2/zv — v, (2-76)
где (о0 — частота сигнала, га—О, 1, 2, 3, ... Уравнение
дает следующие решения: coo=v — основной канал, ха-
рактерный для линейной системы; coc=3v, 5v, ...
..., (2га—l)v, ...—паразитные каналы. Вес любого из
паразитных каналов (по отношению к основному) зави-
сит от характеристик нелинейности СР.
Как известно, многочастотный прием можно осущест-
вить с помощью преобразователя частоты на нелинейном
элементе. При этом всегда имеется принципиальная воз-
можность использовать преселектор и его частотную ха-
рактеристику подобрать так, чтобы реализовать задан-
ное весовое распределение паразитных каналов. Это по-
зволяет нелинейный параметрический СР моделировать
с помощью схемы «преобразователь частоты с преселек-
тором— линейный параметрический СР — нелинейное
устройство с коэффициентом передачи по огибающей
б(Лл) и фазовой характеристикой ф(Ал)»- Предполага-
ется, что преобразователь частоты (с преселектором) по
основному каналу имеет коэффициент передачи, равный
единице. Кроме того, для получения дополнительных
каналов приема в соответствии с уравнением (2.76) не-
обходимо предположить, что преобразователь состоит из
нелинейного смесителя и гетеродина с частотой 2v. В по-
лученной самой общей модели преобразователь частоты
создает эффект приема по паразитным каналам, пресе-
лектор устанавливает веса этих каналов в соответствии
с реальной ситуацией, а выходное нелинейное устройство
моделирует механизмы ограничения амплитуды субгар-
моники.
Таким образом, нелинейные элементы в параметри-
ческом СР не только деформируют огибающую выход-
66
ПЫХ вспышек (как это наблюдается в классическом СР)
или изменяют фазу их заполнения, но и приводят к воз-
никновению паразитных каналов приема. Это следует
считать одним из существенных недостатков параметри-
ческих СР, так как паразитные каналы повышают ко-
эффициент шума системы.
Сверхрегенератор с автосуперизацией. Точный анализ
схем СР с автосуперизацией связан со значительными
математическими трудностями. Поэтому ограничимся
приближенным рассмотрением процессов в СР с автосу-
перизацией на примере схемы, показанной на рис. 2.18.
Рис. 2.18. Схема СР с автосуперизацией
Первый каскад на транзисторе Т1 — усилитель высокой
частоты, второй — на транзисторе Т2— СР. Обратная
связь между цепями коллектора и эмиттера достаточно
сильна для самовозбуждения колебаний.
Для получения режима прерывистой генерации в СР
с автосуперизацией постоянная времени цепочки в цепи
эмиттер — база должна быть больше постоянной време-
ни контура тк, чтобы напряжение на контуре успевало
затухать быстрее, чем спадает напряжение на емкости
в цепи смещения. Из контура ЛКСК в коллекторе напря-
жение положительной обратной связи подается на эмит-
тер Т2 через емкость 15 пФ для самовозбуждения. Дрос-
сель служит для предотвращения короткого замыкания
на высокой частоте. Благодаря сильной положительной
обратной связи на контуре быстро нарастают колебания,
достигающие уровня насыщения. Us. При этом конденса-
тор С заряжается через транзистор Т2 до тех пор, пока
5* ' 67
’Транзистор не закроется и произойдет срыв колебаний.
Колебания (рис. 2.19) начинают затухать и одновремен-
но уменьшается напряжение на емкости С вследствие
разряда ее на сопротивление до тех пор, пока потенциал
базы не станет больше потенциала эмиттера и схема
снова возбудится. Затем процесс повторяется.
Если в момент, когда возникает самовозбуждение
в контуре, поступает сигнал, колебания будут начинать-
ся с нового (большего, чем шум) уровня и поэтому рань-
Рис. 2.19. Процессы в СР с автосуперизацией:
а — напряжение на емкости С; б — напряжение на контуре; в —
постоянная составляющая коллекторного тока
ше достигнут того же уровня насыщения (штриховые
кривые на рис. 2.19). Сдвиг кривых влево, уменьшение
соответственно этому периода и увеличение частоты су-
перизации будут тем больше, чем больше уровень сигна-
ла на входе.
Зависимость среднего значения тока коллектора от
времени представлена на рис. 2.19,в. Ток увеличивается
по мере уменьшения отрицательного смещения на базе.
В течение вспышек колебаний ток резко увеличивается,
поэтому чем больше сигнал, а следовательно, и частота
68
суйерйзаЦйи; тем больше среднее значение тока. Если
амплитуда сигнала меняется по закону модуляции, то и
ток будет меняться по этому же закону. Следовательно,
в схеме одновременно происходит и детектирование.
Анализ режима показывает, что ток транзистора поч-
ти не зависит от формы импульсов высокочастотных ко-
лебаний, а -определяется только частотой вспышек, т. е.
частотой автосуперизацйи.
Определим период прерывистой генерации. В первом
приближении можно полагать, что этот период опреде-
ляется временем разряда конденсатора С на R:
С1 n (t/c тах/mjn),
т. е. имеет тот же порядок, что и постоянная времени
RC. Напряжение суперизации пилообразное.
Если на вход поступает AM сигнал, то период пре-
рывистой генерации становится переменным и будет ме-
няться по закону модуляции
Т — То—21n(l+msin QmaxQ/2,
где То — период прерывистой генерации при отсутствии
внешней ЭДС; m — глубина модуляции; Qmax— макси-
мальная частота модуляции.
В СР с автосуперизацией происходит детектирование,
в результате которого в коллекторном токе появляется
составляющая низкой частоты. Средний коллекторный
ток за период прерывистой генерации равен суммарной
площади под кривой коллекторного тока, поделенной на
Т. Разлагая в ряд
In (1 + m sin Qmax0 = m sin Qmaxf +
+^L sin2Qm J +-f- sin3S2maxZ +...,
можно найти выражения для постоянной и переменной
составляющих этого тока, а по ним и коэффициент гар-
моник
\kT=m (24-яг2) /8 (4+^2) •
Значение среднего затухания необходимо выби-
рать для стабильного режима dp=(0,2 ... 0,3) d0. Это
обеспечивает достаточную устойчивость схемы и макси-
мально возможную избирательность.
Частотной характеристикой СР с автосуперизацией
является характеристика резонансного контура с затуха-
нием, равным среднему затуханию dp, т. е. затуханию
69
регенерированного контура. Естественно, что его йолбса
пропускания определится как 77p=tZpf0.
Сверхрегенератор с автосуперизацией имеет такие же
амплитудные и частотные характеристики, как и СР
с независимой суперизацией, работающий в логарифми-
ческом режиме. Таким образом, СР с автосуперизацией
не может работать в линейном режиме и является одной
из разновидностей СР в логарифмическом режиме.
Достоинствами СР с автосуперизацией являются вы-
сокая чувствительность, простота, наличие автоматиче-
ской регулировки усиления, малая чувствительность к им-
пульсным помехам. Недостатками являются невысокая
стабильность, большой уровень нелинейных искажений и
наличие несколько большего, чем' у других схем СР, ме-
шающего излучения. Для борьбы с последним недостат-
ком очень часто применяется включение каскада УРЧ
до СР (на рис. 2.18 включен апериодический каскад УРЧ
на транзисторе Т1).
ГЛАВА 3
РАСЧЕТ СВЕРХРЕГЕНЕРАТОРОВ И ВОПРОСЫ
РЕАЛИЗАЦИИ
3.1. Усиление, временные и частотные характеристики
классического сверхрегенератора
Временные [импульсная, переходная, Д1,г(0] и час"
тотные [амплитудно- и фазочастотная, Si,2 (jА<о) ] харак-
теристики СР определяют его параметры во временной
и спектральной областях.
Сверхгенератор в линейном режиме является линей-
ной нестационарной цепью, импульсная характеристика
g(t, Д и передаточная функция X(jco, t) подобных цепей
зависят от двух аргументов. В частности, g(t, £) зависит
от t и £, где t — текущее время, t,=t—10, to — момент при-
ложения дельта-функции, a /((jco, 0. — °т t и со, где со —
текущая частота.
Импульсную характеристику СР в рамках р-прибли-
жения можно получить из (2.21), считая, что е(Д явля-
ется дельта-функцией, действующей в момент to, и, кро-
ме того, полагая, что [для выполнения требо-
70
вания (2,18)]:
g(t, £)=Ксю0Н2(/)Н1(г-£) [cos®o(/-?)X
Xsin (о0/—sin<B0(/—?) cosg)o(|-
Зависимость K(j(o, t) находится как фурье-преобра-
зование импульсной характеристики по аргументу
К (j®, 0= Qexp(—
—00
Эти выражения можно конкретизировать для различных
законов суперизации, однако в инженерной практике ха-
рактеристики g(t, £) и К(]’ю, t) не получили распростра-
нения из-за трудностей их вычисления и эксперименталь-
ного определения.
Из выражения для g(t, £) вытекает, что при извест-
ной частоте соо свойства СР во временной области пол-
ностью определяются функциями Hi<2(t). Последние яв-
ляются функциями одного аргумента, легко определяют-
ся экспериментально, и поэтому целесообразно именно
их считать временными характеристиками СР. Назовем
сигнальной функцией, H2(t) нормированной оги-
бающей выходного колебания. Заметим, что Hi(t) ха-
рактеризует изменение чувствительности СР во времени
и поэтому может быть названа также функцией чувст-
вительности.
По аналогии в частотной области вместо одной зави-
симости К(jco, 0 для описания СР удобно рассматри-
вать две спектральные функции одного аргумента Лю:
СО I 00
5i,2(jA®)= у Н1>2(/)ехр(—jAco/)^ / уя, 2(/)Л (ЗД)
—00 / —СО
(здесь Аю=ю—ю0).
Зависимость Si(jA<o) является нормированной по мо-
дулю частотной характеристикой СР; S2(jAo))—норми-
рованной по модулю спектральной плотностью.огибаю-
щей выходного колебания. Как видим, при Н](/) =
—H2(t—т), где T=const, по форме |S, (]’Лю) | совпадает
с |S2(jAco)|, т. е. АЧХ совпадает с огибающей спектра
выходного колебания (в этом смысле СР является уни-
кальной системой). Это свойство СР, как будет показано
ниже, можно использовать для оптимизации канала,
в котором СР является приемопередатчиком импульсных
сигналов,
71
В расчетах СР удобно использовать функции //1,2 (О,
|5i,2(jiAco) | и argSi,2(jAco). В табл. 3.1 приведены выра-
жения для //1,2(0 и |51>2(jA©)| применительно к трем
видам напряжения суперизации — прямоугольному, пи-
лообразному и синусоидальному, а также даны полосы
пропускания Пср для |5i(jAft>) |.
Отметим, что в общем случае справедлива формула
arg 5i. 2 (jА®) = — Д®0.5 + а,, 2 (Д®),
где ai,2(А©).— некоторые функции переменной А®, зави-
сящие от закона изменения 6(0 на интервалах (0 • • • 0)
и (0 ... 0). При малых значениях Лю можно считать,
что 01,2 (Лео) =const А®.
Если на интервалах (0 ••• О) и (0 ... 0) напряже-
ние суперизации 6(0 имеет центр симметрии в трчках
72
t а б л и ц a 3. i
Я3 (!) 1 5, (JA<o) | 1 S2 (j Aw) | Пср2“
е-^ Ц~Л>), 1 1 1, 35
! < /»; [/1 +(Д«/ Si)a X [/1 + (Aw/5,)» X при Sj=—S2 = 6
е—, , -С t X V1 +(Aw/S2)’J X /1 +(Aw/82)»]
~ а- е 2 > t t /« е-(Д«)>/8У1 e-(A<»)»/8/G з,з КкГ
-A- (/-?.)» е z !t sS t < tt е-(Д«)»/8К e—(Awj’/Stf 3,3 VT
tz и соответственно (симметричное пилообразное, си-
нусоидальное, а также прямоугольное при 61=|62|),
01,2(Aw) =0. Для прямоугольного напряжения супериза-
ции при 6]^ 162| и малых Асо
± Аш(1/81 + 1/5г).
Будем полагать в дальнейшем, что указанная симметрия
имеет место, поэтому
arg5>,2(jA»)=-АЧ. 6-
Заметим, что функции |Si>2 (jАю) | для прямоугольно-
го напряжения суперизации совпадают по форме с АЧХ
двух слабо связанных контуров с затуханиями d1=26i/w0
и d2=—262/со0. При пилообразном и синусоидальном на-
пряжении суперизации и |S1;2(jAco)| изменяются
73
По Гауссовскому закону, причем острота кривых опреде-
ляется значениями коэффициентов Xi,2-
Для облегчения расчетов и определения границ режи-
мов удобно ввести в рассмотрение dv — затухание реге-
нерированного контура (т. е. среднее значение d(t)) и
полосу пропускания регенерированного контура Пр=
—dpf0. Обычно входной (нерегенерированный) контур
СР на СВЧ обладает широкой полосой пропускания По,
поэтому полоса СР 77ср и тем более полоса регенериро-
ванного контура Пр всегда меньше По (рис. 3.1). Вооб-
Рис. 3.1. Амплитудно-частотные характеристики:
1 — нерегенерированного контура; 2 — СР в некогерентном режиме (и огиба-
ющая АЧХ в когерентном режиме); 3— СР в когерентном режиме
ще же говоря, как отмечалось еще в [88], понятие поло-
сы пропускания СР как системы с переменными пара-
метрами нуждается в уточнении, поскольку в СР проис-
ходит преобразование входной частоты в линейчатый
спектр на выходе и, наоборот одной частоте на выходе
соответствует набор (гребенка) дискретных частот на
входе. Поэтому под полосой СР (на уровне 0,7) усло-
вимся понимать полосу, соответствующую гладкой кри-.
вой при некогерентном режиме или огибающей макси-
мумов при когерентном режиме (см. рис. 3.1). Заметим,
что эквивалентные (шумовые) полосы СР в некогерент-
ном и когерентном режимах оказываются одного поряд-
ка; обычно Пср^(2,5 ... 3,2)F в некогерентном режиме
и ПСР=^(4 ... 5) Пр в когерентном режиме.
Определим параметры вспышек СР при некоторых
детерминированных воздействиях.
74
Воздействие одним гармоническим сигналом. Пусть
S (f) = Ас sin [(«„ - Д») t + фс]. (3.2)
Подставляя (3.2) в (2.20) и учитывая (2.16), (2.17)
и (3.1), для однократного запуска находим:
х (t) = — А (0) Н2 (0 cos (%/-Н);
A(ts) = KzAc- К^КСКН; (3.3)
Ф = Фс+аги51(1Д»)=:Фс-ДЧ- (3-4)
Суммарный коэффициент усиления является произ-
ведением коэффициента усиления за счет сверхрегенера-
ции Ке и множителя Кв, определяемого формулой
KH = 4-%|S1(jAo>)| j4(0^. (3.5)
—со
Если Лю = 0,
= ф = (3-6)
ks=a(/M=kx (3.7)
Множитель Кв называется коэффициентом накопле-
ния. Он показывает, во сколько раз амплитуда А (f5)
вспышки СР увеличена в сравнении с амплитудой Ас
только за счет энергии, внесенной в контур источником
внешнего сигнала на интервале (t2 ... t4).
Воздействие двумя гармоническими сигналами. По-
ложим, что e(i)=ei(/)+e2(/):
Е. (0=4i sin [(»„ -- Д^И+Фс1];
е2 (0 = 42 sin [(«>„ - Д%) t + фС2].
Поскольку система линейна, находим ее реакцию на
£1(0 и е2(/) отдельно и затем результаты складываем.:
х (0 = КйК„0Нг (t) [Д,1S, ((Дю,) | cos (<»„/ + ф,) +
+ As I 5, (]Д»2) | cos (<»„/ 4- ф2)]; (3.8)
Ф1,2 = Ч. С2 + arg S, (jДю,, 2). (3.9)
При многократных независимых запусках с частотой
F получаем последовательность вспышек с амплитудной
модуляцией, частота которой определяется произведени-
75
ем F на дробную часть отношения |Acoi—Асо2l/SjrF,
а глубина оценивается формулами
при 41|51(jA<B1)|<A2|S1(jAcn2)|;
(3.10)
т = при Is- I < Ас. I s, (jAi»,)
Воздействие узкополосным сигналом. Полагаем, что
сигнал е(0 имеет достаточно малую ширину спектра
(в несколько раз меньшую полосы пропускания Пср).
При этом амплитуда Лс(0 и фаза фс(/) сигнала
8 (0 = А (0.s5n [(% - + Фс (0] (З-И)
— медленно меняющиеся функции. Следовательно, на
интервале (t2 ... А) их можно отождествлять с постоян-
ными величинами, равными соответственно Лс(/з) и
фс(М, и узкополосное воздействие анализировать так
же, как гармоническое с амплитудой Лс(/3) и фазой
фс(М
А (?) = Ас (f3) КДН0Я2 (01S, (j-Лш) |; (3.12)
^='M^)+args1(jA(fl); (3.13)
ЛА)=Лс(/3)КЛН0|51()Дш)|. (3.14)
Соотношение (3.14)" показывает, что амплитуда
вспышки А (М с точностью до постоянного множителя
повторяет амплитуду сигнала Ac(t) в момент t2. Други-
ми словами, СР осуществляет «считывание» (дискрети-
зацию) функции Дс(0’ в точке ts и переносит значение
Лс(М на амплитуду вспышки с усилением
KcKhoIs/GA®)!.
Раскрывая argSi(/A<o) в (3.13), находим
ф==фс(^з)'—Аи(3. (3.15)
Если сигнал (3.11) записать в форме
е(0'=Ао(0 sin [®о<+<Рс'(<•)].
где <рс=—Аю/+фс(0> выражение (3.13) с учетом (3.15)
можно представить в виде
ф=фс(М- (3.16)
Таким образом, фаза заполнения вспышки повторяет
значение фазы <рс(0 в точке /з, следовательно, по отно-
шению к узкополосному воздействию СР является дис-
76
кретизатором не только амплитуды Ас(/), но и фазы
<Рс(О-
Способность СР «считывать» мгновенные значения
амплитуды и фазы узкополосного воздействия использу-
ется на практике при усилении и обработке модулиро-
ванных колебаний.
Найдем максимальную ширину спектра сигнала е(/),
который может быть усилен СР в режиме многократных
запусков «без искажений», т. е. без потерь информации,
заложенной в законы изменения амплитуды Ас(0 и фа-
зы <ро(0- С этой целью зададимся периодом суперизации
Тс, считая, что выполнено условие некогерентности (не-
зависимости запусков). Потребуем, чтобы спектр коле-
бания е(0 располагался симметрично вокруг точки ио-
При этом ширина спектров функций Ас(/) и <рс (/) сиг-
нала е(0 будет в два раза меньше ширины спектра са-
мого сигнала.
По теореме Котельникова [29] дискретизация любого
непрерывного процесса без потерь информации возмож-
на с периодом ТсйС1/2Ль, где Fb — наивысшая частота
процесса. Отсюда вытекает, что искомая ширина спектра
колебания е(/), отвечающая «неискаженному» усилению,
равна 1/Тс.
Интересно сравнить данную величину с полосой про-
пускания СР. Положим, что все интервалы \ti=ti—ti-i
на рис. 2.1 между собой равны. По порядку величина
ПСр сравнима с 1/2А/г-. Условие некогерентности выпол-
няется, если 7’С>6АЛ'. Следовательно, максимальная ши-
рина спектра сигнала должна быть меньше, чем Пср/3.
Воздействие радиоимпульсом. Пусть на СР действует
радиоимпульс
«.(f) = АСЯС (/) sin [(ю0 — Дш) t + фс], Ас, фс = const, (3.17)
где Ас — амплитуда; Hc(t) — нормированная безразмер-
ная огибающая.
Анализ этого воздействия легко свести к анализу
гармонического внешнего воздействия, если ввести в рас-
смотрение эквивалентную сигнальную функцию
я1э(0=^.(0^с(0 (3.18)
и эквивалентный гармонический сигнал
еэЮ = Ас8т [(«>„ — Д<о)/-|-фс]. (3.19)
77
Подставляя в (2.20) и еэ(0 вместо Hi (О и
е(0, по аналогии с вышеизложенным получаем:
Л&) =КЛоА|51э(»|;
Ф'—Фс + arg S]3(jA®),
(3.20)
(3.21)
где
СО
кноэ=-^ (3.22)
—СО
51Э(1Д®) = ^Я19(0е~]'д“'Л / J/719(0< (3-23)
—со / —со
Поскольку Н1Э(/)^1 и Нс (0^1, имеют место нера-
венства Кноэ^Кно, |5э(]'Лю) | |Si (/Лео) |.
Перейдем к выводу формул для коэффициентов уси-
ления СР. Выражения (3.6) и (3.7), характеризующие
усиление резонансного гармонического сигнала, можно
конкретизировать для различных законов суперизации.
Усиление при прямоугольном напряжении супериза-
ции. Общее усилениё СР определяется выражением
(3.7). Найдем первый сомножитель Ки0 из формулы
(3.6) и табл. 3.1:
^4 t»
= рхр8,(/-/3)Л +
^3
t.
exp 82 (^ — £s) (# •
t, J
• После замены переменных t—t$=x получаем
ОО
exp 6, (х) dx J exp 82 (x) dx
о
(3-24)
Здесь 2—261,2/(1)0, 6i,2 определены в табл. 3.1.
Выражение (3.24) совпадает с формулой для усиле-
ния за счет регенерации, полученной в [11]. Это усиле-
ние можно условно рассматривать как добротность не-
которого эквивалентного контура Q3, в котором образу-
ется сигнал с начальной амплитудой
Л. = лдкв = ,4С (</, +1 dt \)ldt И |, (3.25)
78
ййрабтающей экспоненциально на участке отрицатель-
ного затухания. Усиление на этом участке, т. е. усиление
за счет сверхрегенерации, найдем из (2.14):
{^5 1
—J 8(z)c?zl=expirfoc?/a, (3.26)
*3 J
где /а=^5—fa — активное время, на протяжении которого
затухание отрицательно.
Общее усиление определится как произведение (3.24)
и (3.26). Если ^а=Т'с/2 и у—й/®0, максимальное усиле-
ние
К —К К —-rf' + Иа I „
Л2 Лв<Лс— rfi|rf2| ехР
• (3.27)
fz =ехр S
Как следует из (3.27), общее усиление однозначно
определяется затуханиями di и d2, а также соотношени-
ем частот сигнала и суперизации. В линейном режиме
при неизменных d} и d2 с уменьшением частоты супери-
зации усиление растет.
На протяжении активного времени /а—/3 ... ts (см.
рис. 2.3) колебания нарастают и достигают максимума
в момент /5. Затем происходит затухание колебаний, ко-
торое характеризуется коэффициентом затухания
К3 = ехр
где S+— площадь положительного затухания в пределах
периода суперизации.
В зависимости от соотношения между коэффициентом
затухания и полным коэффициентом усиления GP может
работать в когерентном или некогерентном режиме. При
Кг<Кз наблюдается некогерентный режим, при котором
к концу пассивного времени колебания предыдущей
вспышки свободных колебаний намного меньше вынуж-
денных колебаний, вызванных сигналом или шумом.
Этот режим предпочтителен, поскольку имеет лучшие
качественные показатели.
Когерентный режим при Kz>K3 характеризуется тем,
что к концу пассивного времени свободные колебания
недостаточно малы и суммируются с новыми колебания-
ми последующего цикла. Как уже отмечалось, в этом
режиме резко снижаются чувствительность и избира-
тельность, резонансная кривая становится волнистой или
многогорбой, стабильность параметров схемы падает.
79
Для предотвращения когерентного режима необходимо,
чтобы коэффициент Кз был больше Ks, по крайней мере,
в 10 ... 20 раз. Коэффициент Кз можно вычислить по
формуле (3.28) или графическим интегрированием.
При симметричном прямоугольном напряжении супе-
ризации, когда ta=Tcl2,
К3 = ехр5(та/1/2у). (3.29)
Легко видеть, что условие некогерентности в этом
случае будет выполнено при di^>|d2|- Для несиммет-
ричного закона изменения затухания при di=|d2| неко-
герентность имеет место, если ta<^Tc.
Синусоидальное напряжение суперизации. Резонанс-
ный коэффициент накопления Км, т. е. усиление за счет
регенерации, как и в предыдущем случае, найдем из
(3.6) и табл. 3.1:
tfH, = -r-Jexp Г_А(/-^р.
После замены переменных t—t3=x получаем
00
кт™ J ехР (—г х*)dx = y™j\d' I»
о
где d'(t) — (djdt)d(t); k определяется из табл. 3.1. Это
выражение совпадает с усилением за счет регенерации,
полученным в [И]. Для определения усиления за счет
сверхрегенерации подставим в (2.14) подынтегральную
функцию
8(z) = 8p(l -j-ncosQz),
где 6j)=(dodp/2; <Zp— среднее значение затухания, ап —
глубина модуляции затухания. Интегрируя (2.14) и ис-
пользуя известное из теории функций Бесселя разложе-
ние
со
—со
где /fe(P) — модифицированная функция Бесселя k-vo
порядка первого рода от аргумента 0, после несложных
вычислений получаем
со
Л&) = 4ДЛ(р)£ 4(Р) (3.30)
—со
80
(здесь Qp=l/Jp — «средняя» добротность контура,
=ч/рге/2у — аргумент функции Бесселя).
Выражение (3.30) позволяет сделать вывод о спек-
тральном составе сигнала на выходе СР. В отличие от
системы с постоянными параметрами, при поступлении
на вход СР гармонического сигнала спектр его выходно-
го напряжения состоит из семейства колебаний, имею-
щих дискретные частоты вида <йо±^П, где А=0, 1, 2 ...
Рис. 3.2. Модуль спектральной функции колебания на выходе СР
при гармоническом напряжении суперизации:
а — огибающая; б — дискретные составляющие иа частотах ю0±4£2
(рис. 3.2,6). Выражение (3.30) описывает отклик СР на
гармонический сигнал. Заметим, что относительный уро-
вень эквидистантных спутников неизменен и определя-
ется отношением
ад=4(₽)/7о(0). (3.31)
Нетрудно видеть, что огибающей значений ад на рис. 3.2
является функция |52(jAa>) I, определяемая выражением
(3.1).
Усиление за счет сверхрегенерации получаем из
(3.30)
tfc = QpZ0$)Szfe(p). - (3.32)
*
Дальнейшие вычисления зависят от способа исполь-
зования выходного сигнала. После СР можно поставить
узкополосный фильтр, например супергетеродинный при-
емник, вырезающий лишь узкую полосу вблизи k-vo ма-
ксимума, обычно центрального. В этом случае в сумме
(3.32) следует удержать лишь один член. Если учесть
в эквивалентной схеме сопротивление нагрузки Ru
(рис. 3.3) и перейти к коэффициенту усиления по мощ-
6—3108 81
йббтй, прй поступлении сигнала на частоте й
снятии колебаний на частоте ш0 из (3.32) находим
^=/\(P)/%(P)Q2P/Q2BH- (з.зз)
где Qzii—aLofRn — внешняя добротность.
В частном случае, когда сигнал поступает и снимает-
ся на резонансной частоте, усиление будет максималь-
ным:
Kp1 = 7\(P)Q2p/Q2bH. (3.34)
Возможен другой способ использования СР, когда на
его выходе включают детектор или широкополосный уси-
литель, пропускающий весь спектр выходного напряже-
ния. При этом, в отличие от (3.33),
Kv=I2k (р) /о (2 р) Q2p/Q2bh, (3.35)
поскольку 2 /\ (Р) — /, (2р). Очевидно, что усиление будет
k
максимальным при'отсутствии расстройки входного сиг-
нала относительно частоты настройки контура и анало-
гом формулы (3.34) будет
Кр2=/2о (Р) /о (2 р.) Q2p/Q2bh. (3.36)
Усиление по мощности в этом случае должно быть
больше, чем в предыдущем, в р раз, где
Р = KP2/KPi = /о (2 Р) //2о (Р) = 1 +2Sa2/i. (3.37)
Заметим, что для получения стабильного усиления
Рис. 3.3. Уточненная эквива-
лентная схема классическо-
го СР:
— вносимое сопротивление;
^—сопротивление потерь; /^ы—
сопротивление нагрузки
в СР необходимо, чтобы сред-
нее затухание за период су-
перизации составляло dp=
— (0,2 ... 0,25) с/0, т. е. сред-
няя добротность определялась
формулой Qp=(4 ... 5)Q0.
При таких соотношениях
t/р и с/0 условие некогерентно-
сти будет автоматически вы-
полнено. Действительно, как
уже отмечалось при обсужде-
нии формулы (3.28), для по-
лучения некогерентного режи-
ма необходимо, чтобы коэффи-
циент затухания был значитель-
но больше коэффициента усиления. При синусоидальном
напряжении суперизации коэффициент затухания опреде-
лим из формулы (3.34) или (3.36) после замены QP на Qqh
82
в аргументе функции Бесселя dv на do. Поскольку первая
замена приводит к уменьшению КР всего примерно на
два порядка, а вторая — к увеличению затухания на не-
сколько порядков, условие некогерентности автоматиче-
ски выполняется.
3.2. Расчет параметрических сверхрегенераторов
В параметрических СР, в некогерентном режиме, ко-
торые описываются уравнениями (2.29), (2.42) и (2.43),
выходной процесс определяется формулой (2.37), где
фигурируют характеристики Я],2(0- Эти функции можно
найти из соотношений (2.12), (2.13) и (2.19), если пред-
варительно определен закон суперизации 6(f) в (2.33).
Спектральные характеристики Sli2(jA®) получим из
(3.1), полагая, что Ли=сос—V. Временные Я],2(f) и мо-
дули спектральных |Si,2(jAco) | характеристик для пря-
моугольного, пилообразного и синусоидального напря-
жений суперизации при нскогерентном режиме приведе-
ны в табл. 3.1.
Частотные характеристики параметрических СР для
любого режима довольно громоздки, и их целесообразно
рассчитывать с помощью ЭВМ. Это сделано в работе
[26], где получены частотные характеристики для пара-
метрического СР при ПР<А (рис. 3.4) и ПР>К (рис. 3.5).
На рис. 3.4,а кривая 1 —АЧХ параметрического усили-
теля с усилением, равным усилению параметрического
СР; кривая 2— зависимость уровня сигнала частоты (ос
на выходе от частоты входного сигнала <вс- Как видим,
ширина полосы пропускания кривой 2 даже для основ-
ного максимума значительно шире, чем у кривой 1. Кри-
вые 3 и 4 являются зависимостью уровня сигналов на
выходе частот ис—Q и сос—2Q соответственно от частоты
входного сигнала ис- Эти две кривые асимметричны от-
носительно половины частоты накачки. Например, если
сигнал будет поступать на частоте (oc=v~f-Q, то на цен-
тральной частоте v (кривая 3) можно отфильтровать еще
высокий уровень сигнала. Но если сигнал подавать на
coc=v, то на частоте v—Q может быть снят уже более
слабый сигнал. Зато при подаче сигнала на частоте <ос=
=v-|-2Q выходное напряжение на частоте v+Q оказыва-
ется большим.
Кривая 5 представляет собой АЧХ регенерированно-
го контура до включения напряжения суперизации.
6* 83
Рис. 3.4. Характеристики параметрического СР для Пр = 0,2Г:
а — амплитудно-частотные; б — фазочастотные
Рис. 3.5. Характеристики параметрического СР для ПР = 4Е-
а — амплитудно-частотные; б — фазочастотные
84
И усиление, и полоса в этом случае значительно меньше,
чем при сверхрегенеративном режиме. Кривая 6 соответ-
ствует случаю, когда отфильтровывается не одна часто-
та на выходе, а весь отклик СР на сигнал, поступающий
на вход с частотой йс. Как видно из рисунка, уровень
сигнала на выходе при этом в несколько раз выше, чем
при приеме одной частоты. Такой же вывод был получен
аналитически при сопоставлении формул (3.34) и (3.36).
На рис. 3.5,а кривая 1 представляет собой АЧХ для
сигнального компонента, т. е. зависимость уровня сигна-
ла <Вс на выходе от частоты входного сигнала <ос; кри-
вая 2 — зависимость первого компонента сос—Q, а кри-
вая 3 — второго компонента сос—2Q от частоты сигнала
(вс- В отличие от кривых на рис. 3.4,а, АЧХ на рис. 3.5,а
гладкие. Фазовые характеристики (см. рис. 3.4,а и 3.5,а)
имеют удовлетворительную линейность, особенно при
ПР>Л Поэтому можно считать, что параметрический СР
не вносит существенных фазовых искажений.
Рассмотрим теперь результаты некоторых детермини,-
рованных воздействий на параметрический СР.
Воздействие одним гармоническим сигналом. Пусть
e(f)=Acsin (-vi—А<о^-ф--фс), (3.38)
где A(B=v—(ос; «с — частота сигнала.
Подставляя (3.38) в (2.36) и учитывая (3.1), полу-
чаем
x(t)=AcK.nK.cH2(t) cos (vH-<Po), (3.39)
где
Кн=—Кно|51()Дсо) | cos [фс—<po+argSi(jA(B)]
(3.40)
— коэффициент накопления;
Кн0=-^- (3.41)
—ОО
— коэффициент накопления при Дсо=0 и фс=фо.
Амплитуда А(^) и фаза ф вспышки в соответствии
с формулами (2.37) и (2.38) определяются выражения-
ми:
А(/5) =Ас|Ан|Ас; (3.42)
cos ф=—sgn cos [фс—фо-f-argSj (]'До>)]. (3.43)
85
Раскрывая значение argSi(jAco) в (3.40) и (3.43),
находим:
Кя=Кпо | Si (jAco) | cos (фс—фо—Лш^з); (3.44)
cos ф=—sgn cos (фс—фо—Аш^з). (3.45)
При Аи=0 имеет место синхронное с субгармоникой
воздействие, когда i*
7Сн==/СнО COS (фс фо), (3.46)
COS ф=—Sgn cos (фс—фо) • (3.47)'
Оптимальная фаза синхронного сигнала фс, обеспечива-
ющая максимум |/Сн|, как вытекает из выражения
(3.46), равна ф0 или фо+л.
В отличие от классического СР, у которого амплиту-
да и фаза вспышек в режиме многократных запусков
при постоянных значениях Ас, Ли и фс неизменны, в па-
раметрическом СР в тех же условиях наблюдаются не-
прерывная модуляция амплитуды п дискретная модуля-
ция (манипуляция) фазы заполнения вспышек по зако-
нам |cos (фс—фо—АюО | и —фо+arccos [—sgn cos (фс—
—фо—Асо^)] соответственно.
Если частота внешнего воздействия hc=v, т. е. имеет
место синхронное с субгармоникой накачки воздействие
(Ан—0), спектры входного и выходного сигналов полу-
чаются такими же, как у классического СР (см. рис. 3.2),
но, в отличие от последнего, коэффициент усиления как
на основной частоте <oc=v, так и на частотах эквиди-
стантных спутников будет зависеть от начального сдвига
фаз ф0. Если никаких мер для стабилизации фазы сиг-
нала в параметрическом СР не принимается, фс будет
плавно меняться, а вместе с ним будет изменяться и
усиление.
Если Аи=#0, как уже отмечалось в § 2.3, спектр вы-
ходного колебания раздваивается: кроме семейства ча-
стот v-j-Aco+foQ (см. рис. 2.9) появляется семейство час-
тот v—Aco+AQ—cop+AQ, где k—0, I, 2 ... На частоте
каждого эквидистантного спутника, как и на централь-
ной частоте, имеет место фазовая селекция. Относитель-
ный уровень спутников при синусоидальном законе супе-
ризации определяется, как и в классическом СР, соот-
ношениями между коэффициентами функций Бесселя ад
(3.31).
Воздействие узкополосным сигналом. Полагаем, что
ширина спектра сигнала в несколько раз меньше полосы
86
Пропускания ПСр. Тогда функции Дс(0 и фс(/) в выра-
жении.
е (/) =Ас (/) sin [W—Ли/-Нс (0 ] (3.48)
можно считать медленно меняющимися и анализ прово-
дить так же, как для сигнала (3.38), считая, что Ас=
=Ac(t3) и ipc=ipc(^s).
Из (3.42), (3.44) и (3.45) получаем:
А (/6) = Л’ЛоА (Q I S, (jA®) 11 cos [фс (Q — <р0 — Д®/3] |; (3.49)
cos ф = — sgn cos [фс (/3) — % — Дш^3]. (3.50)
Если обозначить -фс(О—Aat через фс(/)> последняя
формула приобретает вид
cosi|9=—sgneos [фсИз)—фо]. (3.51)
Наличие множителя |со8[фс(/з)—фо—Аа>^3] | в пра-
вой части соотношения (3.49) исключает применение па-
раметрического СР в качестве дискретизатора амплиту-
ды. В то же время связь (3.51) между ф и фс(0 указы-
вает на возможность использования этого СР в роли
квантователя фазы фс(/) по значениям и по времени.
Легко видеть, что временное квантование (дискретиза-
ция) сводится к определению выборочного значения
фс(/з), а квантование по значениям на два уровня опре-
деляется формулами
ф = 0, — «/2 < [<рс(/3) — <p0]<it/2; (3.52)
ф = тг, те/2,< [<рс (Q - <р„] < 3/2тг.
Чтобы исключить при квантовании фазы изменения
амплитуды вспышек, их необходимо подвергнуть глубо-
кому амплитудному ограничению. Подобное ограничение
можно получить и в самой схеме СР. В режиме с огра-
ничением амплитуды параметрические СР используются
для бинарного квантования фазы узкополосных сигналов
[54, 78].
Воздействие радиоимпульсов. Радиоимпульс имеет
форму
е (/) —А/1^ (/) sin (yt — Дш/ -ф- фе), (3.53)
где Ас — амплитуда; Лс(0 —нормированная безразмер-
ная огибающая.
По аналогии с § 3.1 находим:
А (/6) = КСКНОЭ | S13 (]Дш) 11 cos [фс - % + arg S13 (]Дш)] |; (3.54)
cos ф = — sgn cos [фс — % + arg S13 (]Д®)]. (3.55)
87
Велйчййы Хноэ и Sia(jAto) соответствуют формулам
{3.22) и (3.23).
Коэффициенты усиления. Показатели усиления /С2,
Кс и Кно при воздействии гармонического синхронного
-(Дсо—0) сигнала с оптимальными фазами (фс=ф0, фс=
=Фо+л) оцениваются выражениями
[/а
— p(z)dz .
Г3
Значение Хн0 определяется выражением (3.41).
В отсутствие расстройки £(соз2фО=1) коэффициент
Лс=Хсо для прямоугольного и синусоидального напря-
жений суперизации можно найти по формулам (3.26) и
(3.32) соответственно. Резонансный коэффициент накоп-
ления Кно для прямоугольного напряжения суперизации
вычисляется с помощью выражения (3.24), для синусои-
дального— с помощью выражения (3.30).
3.3. Реальная частотная и временная избирательность
и способы ее повышения
Частотную избирательность приемного устройства
обычно оценивают по АЧХ его линейного тракта. Однако
при экспериментальном определении избирательных
свойств сверхрегенеративного приемника удобно изме-
рять не высокочастотное напряжение на выходе линей-
ного тракта, что сопряжено иногда с техническими труд-
ностями (особенно в диапазоне СВЧ), а напряжение на
выходе детектора, часто совмещаемого с СР в одном
приборе. Амплитудно-частотные характеристики, снятые
по выходному напряжению детектора, и определяемую
по ним избирательность иногда называют реальными.
Реальные АЧХ могут существенно отличаться от АЧХ,
вычисленных по формулам, приведенным в гл. 2 или
других работах, например в [11]. Дело в том что при
вычислении АЧХ СР используются формулы для малых
расстроек. При этом принимается, что амплитуда сво-
бодных колебаний на контуре СР в конце активного вре-
мени A (ts) много больше, чем в пассивное время, что
действительно имеет место в области малых расстроек.
В области относительно больших расстроек реальная из-
бирательность СР получается хуже рассчитанной, что
объясняется воздействием на детектор вынужденных ко-
лебаний в пассивное время, т. е. прямым детектирова-
нием принимаемого сигнала.
88
Для обсуждения вопроса о реальной избирательности восполь-
зуемся введенным Л. С. Гуткиным понятием «эффективной ампли-
туды сигнала на выходе СР, т. е. на входе детектора Лэ (35],
удобным для описания процессов в СР с детектором средних зна-
чений. Напряжение частоты модуляции иа выходе детектора при
это принимается пропорциональным эффективной амплитуде, а ре-
альная кривая избирательности будет иметь вид:
</р(£)=А(ША(0), (3.56)
где — относительная расстройка. При линейном детекторе Аа=
Лтах(0> а при квадратичном Aa = V Л2тах(0- где Л max (О
—амплитуда напряжения на контуре СР в момент t, а черта сверху
означает усреднение за период суперизации.
Сделаем еще одно замечание относительно коэффициента усиле-
ния СР. В § 3.1 были получены выражения для коэффициента уси-
ления СР, которые представляют собой отношение максимального
напряжения, снимаемого с контура СР Л(4), или соответствующей
максимальной мощности к амплитуде ЭДС сигнала -в контуре Лс.
Этот коэффициент усилении естественно назвать общим, максималь-
ным или пиковым. Одиако нужно иметь в виду, что и в отсутствие
эффекта сверхрегеиерации мы имели бы увеличение ЭДС' контура
в Qo раз (Qo — добротность нерегенерированного контура) с Лс до
Лоо, следовательно, эффективность СР как усилителя можно оцени-
вать дополнительным усилением, получаемым в СР, с Л со до Л (/5),
или лучше
Кд=Лэо/Лсо- (3.57)
Итак, на входе детектора присутствуют как свободные колеба-
ния высокой частоты в активное время с амплитудой Лза, так и
вынужденные колебания в пассивное время с амплитудой Лэп.
Правда, эти колебания существуют в разное время, но, поскольку
нагрузка детектора является инерционной для частоты супериза-
ции, их эффект будет аддитивным. Поэтому эффективная амплитуда
на выходе СР при расстройке
Л,(£)=Л9а(5)4-ЛЭп(5). (3.58)
Подставляя (3.58) в (3.56) и учитывая, что при отсутствии рас-
стройки Лэп(0)«ЛЭа(0)=Лэ(0), найдем уточненное выражеиие^для
кривой избирательности СР
Ур(Ю=Уа(£)+М£)- (3.59)
Здесь первый член правой части определяется максимальной ампли-
тудой напряжения на контуре в момент 1$ при расстройке |
Уа(5)=ЛЭа(^)/Л9а,(О)==Л(5, /5)/Л(0, h)
и является другой формой записи выражения (3.1) для |Si(jA(o) | —
уравнения АЧХ СР в области малых расстроек без учета вынуж-
денных колебаний в пассивное время. Второе слагаемое в (3.59)
Уп (?) = Ап (?)/Аа (0) = 1/Кд К!+ W (3.60)
учитывает эти колебания, что особенно существенно при больших g,
поскольку с ростом расстройки Pa(g) уменьшается значительно
быстрее, чем уп(?). Выражение (3.60) является уравнением резо-
нансной кривой контура с добротностью Qo, увеличенной в раз-
89
Для проверки справедливости высказанных соображений был
выполнен эксперимент на специальном макете. Сначала была снята
экспериментально кривая избирательности СР по той же методике,
что и АЧХ линейной части супергетеродина, т. е. уровень входного
сигнала на входе приемника изменялся при расстройке частоты сиг-
нала таким образом, чтобы напряжение на выходе детектора пре-
вышало напряжение шума при отсутствии сигнала в заданное число
раз. Влияние вынужденных колебаний и эффекта прямого детекти-
рования на избирательность СР видно из рис. 3.6.
Эффект прямого детектирования сигнала оказывает влияние и
на временную избирательность СР. Так как СР не усиливает сигна-
лы, приходящие в промежутках времени между вспышками свобод-
ных колебаний, помехоустойчивость СР по отношению к импульс-
ным помехам лучше, чем у супергетеродина с такой же полосой
80
Рис. 3.6. Кривые избирательно-
сти СР при больших расстрой-
ках:
--------- эксперимент; — • — ---
расчет;----------расчет без учета
колебаний в пассивное время
пропускания (см. § 4.4).
Однако свойства временной
селекции СР для сильных
импульсных помех из-за
эффекта прямого детектиро-
вания сигнала в значитель-
ной степени утрачивается.
Таким образом, эффект
прямого детектирования
сигнала в СР приводит
к ухудшению его частотной
селекции в области боль-
ших расстроек и временной
селекции для сильных сиг-
налов.
Для уменьшения коэф-
фициента шума приемника,
снижения влияния антенны
на настройку СР, а также
подавления паразитного из-
лучения в антенну в сверх-
регенеративных приемниках
часто применяют УРЧ. Од-
приемника, особенно при работе
нако это ухудшает экономичность
его в диапазоне частот от десятков мегагерц и выше, поскольку на
этих частотах невозможно использовать транзисторы в микроточном
режиме.
Сверхрегенеративный приемник с УРЧ можно сделать экономич-
нее, введя суперизацию УРЧ, которая одновременно позволяет
уменьшить и влияние эффекта прямого детектирования (рис. 3.7,
3.8). В описываемом приемнике используется напряжение супери-
зации прямоугольной несимметричной формы. Ниже рассматривают-
ся процессы и особенности работы такого СР.
В качестве генератора напряжения суперизации в приемнике
используется несимметричный мультивибратор, работающий в авто-
колебательном режиме. Выход генератора суперизации ГС соединен
с УРЧ через цепь R1, С1 и с СР через интегрирующую цепь R2,
С2. Рассмотрение процессов в приемнике начнем в момент време-
ни ta — начало импульса мультивибратора. До момента ta УРЧ и
СР закрыты и сигнала в контуре СР нет. С момента времени ta
начинается быстрый заряд конденсатора С1 через резистор R1, на-
пряжение на входе стробирования УРЧ увеличивается, достигая
90
цепи R2, С2 выбирается в несколько
Рис. 3.7. Структурная схема сверхре-
генеративного приемника с супериза-
цией УРЧ
Напряжения открывания U6o й момент времени /ь.бткрытие УРЧ
приводит к появлению напряжения сигнала на контуре СР. Это на-
пряжение нарастает на интервале tb ... tc от нуля до значения,
близкого к напряжению в установившемся режиме. В момент откры-
тия УРЧ в контуре СР возникают свободные быстрозатухающие
колебания ударного возбуждения, обусловленные нарастанием тока
через транзистор УРЧ. Однако благодаря наличию цепочки Rd, С1
ток нарастает плавно, вследствие чего амплитуда колебаний удар-
ного возбуждения получается небольшой и к моменту времени tc
колебания успевают уменьшиться до уровня шумов.
На рис. 3.8 колебания ударного возбуждения не показаны, по-
скольку при анализе работы приемника ими можно пренебречь, если
интервал времени tb ... tc достаточен для их затухания. Постоян-
ная времени интегрирующей
раз больше, чем у цепи R1,
С1, поэтому напряжение на
входе суперизации СР до-
стигает U60 при t=te>ib,
т. е. позже, чем на входе
стробирования УРЧ, вслед-
ствие чего транзистор СР
открывается с запозданием
относительно момента tb.
По мере роста напряже-
ния суперизации коэффи-
циент усиления транзистора
СР возрастает.
Коэффициент усиления
транзистора СР возрастает,
затухание его контура умень-
шается, а напряжение сигнала на контуре увеличивается.
При t—td напряжение суперизации достигает критического
значения U«p, при котором затухание контура обращается
в нуль. При i>td затухание контура становится отрицательным и
СР переходит в режим генерации. Заметим, что интервал времени
tc, ... td обычно значительно меньше интервала tb ... tc, поэтому
в первом приближении можно принять t^td и считать точку С
началом вспышки свободных колебаний. Абсолютное значение отри-
цательного затухания контура увеличивается вплоть до момента
времени te, соответствующего максимальному значению напряжения
суперизации. После окончания импульса мультивибратора при t=tf
процесс нарастания колебаний на контуре продолжается до тех пор,
пока напряжение на конденсаторе С2 в процессе его разряда не
уменьшится до С7кр, при котором затухание контура вновь становит-
ся равным нулю. При />/д затухание контура плавно увеличивает-
ся до исходного значения d0, а вспышка колебаний затухает.
Таким образом, все процессы в СР с суперизацией УРЧ проте-
кают так же, как в обычном СР, за исключением процесса нараста-
ния вынужденных колебаний сигнала перед возникновением
вспышки.
Импульсный режим работы УРЧ приводит к уменьшению сред-
него тока, потребляемого УРЧ от источника питания, при этом чув-
ствительность приемника не изменяется, так как для нормальной
работы сверхрегеперативиого каскада достаточно наличия сигнала
на его входе только в момент возникновения вспышки свободных
91
колебаний и в начальной стадии ее нарастания. Выигрыш в эконо-
мичности получается тем больше, чем больше скважность импуль-
сов, открывающих УРЧ, поэтому суперизацию УРЧ особенно выгод-
но применять при резко асимметричном законе изменения затуха-
ния контура СР, когда пассивное время в несколько раз больше
активного.
Рис. 3.8. Временные диаграммы сверхрегенеративного приемника
с суперизацией УРЧ:
а — выходное напряжение мультивибратора; б — напряжение на базе УРЧ;
в—ток коллектора УРЧ; г—напряжение на базе СР; д — ток коллектора СР;
е — затухание контура; ж — высокочастотное напряжение на контуре СР
Избирательные свойства СР с суперизацией УРЧ определяются
так$ке выражением (3.59), однако для составляющей, отражающей
вынужденные колебания, теперь вместо выражения (3.60) следует
92
ЗаПЙСЭТЬ
У* (^) = 7WW; [ C0S ^“Л+atctg №)] ,
где go — скважность радиоимпульсов на выходе УРЧ; L — коэффи-
циент, зависящий от режима СР; ty — tc—h — время нарастания
вынужденных колебаний в контуре СР, отсчитываемое от момента
открытия УРЧ 1ъ до момента открытия сверхрегенеративного кас-
када tc (см. рис. 3.8).
Наличие в уп(^) составляющей, содержащей косинус, приводит
к образованию боковых лепестков АЧХ, не связанных с когерент-
ностью режима СР. Причиной появления боковых лепестков являет-
ся колебательный характер нарастания сигнала на контуре после
открытия УРЧ при несовпадении частоты сигнала с резонансной
частотой контура. Боковые лепестки кривой избирательности стано-
вятся незаметными при выполнении неравенства
1/К Уя7 > e-d““»V2 cos (Wp+arctg 2^0)/КЧ.
Поскольку практически всегда выполняются условия К^Ю3, ?о^Ю,
для выполнения этого неравенства достаточно иметь
^>3/dofo. (3.61)
Длительность импульса, открывающего УРЧ, примерно равна
(см. рис. 3.8), поэтому формулу (3.61) можно использовать для
инженерных расчетов при выборе параметров генератора напряже-
ния суперизации. Выбирать длительность выходного импульса ге-
нератора напряжения суперизации существенно больше З/dofo не-
целесообразно, так как при этом ухудшается экономичность при-
емника и увеличивается вредное влияние на параметры приемника
эффекта прямого детектирования.
При выполнении условия (3.61) можно считать
У'№ = Уа (« + W К1 + Wo.
Это выражение отличается от уравнения кривой избирательности
СР без суперизации УРЧ наличием множителя Vq^. Поскольку
V q9 > 1. то введение суперизации УРЧ улучшает избирательность
приемника в области больших расстроек, когда «/а (£) <Оп (s) •
Кривые избирательности СР без суперизации и с суперизацией
УРЧ при различных значениях tv приведены на рис. 3.9.
Выше отмечалось, что СР обладает свойством вре-
менной селекции сигналов, что улучшает его помехоус-
тойчивость к импульсным помехам. Однако в сверхреге-
неративных приемниках без суперизации УРЧ это свой-
ство при сильных помехах в значительной мере утрачи-
вается, так как из-за наличия прямого детектирования
сильные помехи могут проходить на выход детектора вне
зависимости от их временного положения относительно
вспышек свободных колебаний. При суперизации УРЧ
прохождение помех на вход детектора при закрытом
УРЧ исключается. Следовательно, суперизация УРЧ
93
улучшает й временную Селективность сверхрегенератйй-
ного приемника.
Для повышения избирательности СР целесообразно
выбирать оптимальные (с этой точки зрения) законы
суперизации, использовать УРЧ, а также узкополосные,
высокостабильные избирательные устройства.
Применение в сверхрегенеративном каскаде кварце-
вой стабилизации частоты позволяет добиться высокой
избирательности приемника. Однако некогерентность
режима в СР с кварцевой стабилизацией из-за высокой
добротности кварцевого резонатора можно обеспечить
Рис. 3.9. Экспериментальные кривые избирательности СР при нали-
чии и отсутствии суперизации УРЧ:
— без суперизации;------суперизации при малом -------------су-
перизация при большом ty ,
лишь при очень низких частотах суперизации. Вследст-
вие этого приемники с кварцевой стабилизацией частоты
сверхрегенеративного каскада можно использовать толь-
ко при очень малых значениях отношения частоты моду-
ляции Fm к несущей частоте f0. Экспериментальные ис-
следования показывают, что достижимое отношение
Fmlfo не превышает 3-10~6. Поэтому кварц в контуре СР
может эффективно использоваться в тех случаях, когда
быстродействие не играет решающей роли.
Радикальным методом повышения частотной избира-
тельности СР является использование узкополосного
преселектора, например кварцевого фильтра. Но такие
фильтры имеют потери в полосе прозрачности от 3 до
10 дБ и более. Потери особенно велики в сложных, мно-
горезонаторных фильтрах и в фильтрах, использующих
механические гармоники кварца. Поэтому для предот-
94
вращения снижения чувствительности приемника между
антенной и узкополосным преселектором необходимо
включить УРЧ. При достаточно большом коэффициенте
усиления УРЧ коэффициент шума такого приемника
практически полностью определяется коэффициентом
шума УРЧ, а чувствительность приближается к чувстви-
тельности супергетеродина с полосой пропускания, рав-
ной полосе прозрачности кварцевого фильтра. Однако
приемник с УРЧ перед узкополосным преселектором име-
ет и недостатки: ухудшается помехоустойчивость за счет
возможной перегрузки УРЧ сильными помехами, замет-
но увеличивается ток, потребляемый приемником от ис-
точника питания, так как суперизации УРЧ, включенного
перед узкополосным преселектором, оказывается невоз-
можной из-за инерционности преселектора.
Рассмотрим влияние преселектора на режим сверхре-
генеративного каскада [96]. При генерации вспышки сво-
бодных колебаний в СР в преселекторе также возникают
колебания, которые могут оказать воздействие на сверх-
регенеративный каскад, если к моменту возникновения
следующей вспышки они не успеют уменьшиться до уров-
ня, в несколько раз меньшего уровня шума. Таким обра-
зом, остаточное напряжение на контуре СР теперь уже
будет определяться не только затухающими колебания-
ми в самом контуре Uc, но и затухающими колебаниями
в преселекторе, которое попадает в контур СР Un.
Поскольку полоса пропускания узкополосного пресе-
лектора обычно в десятки раз меньше полосы пропуска-
ния СР, колебания в преселекторе затухают намного
медленнее, чем в контуре СР, поэтому Ua^>Uc, что за-
трудняет получение некогерентного режима. Для умень-
шения Uu между СР и преселектором необходимо вклю-
чать буферные каскады, снижающие напряжение, по-
ступающее с контура СР на преселектор.
Колебания в узкополосном преселекторе нарастают
и затухают, по сложному закону, зависящему как от
числа резонаторов преселектора, так и от их парамет-
ров, при этом нарастание и затухание амплитуды коле-
баний может иметь колебательный характер, обусловлен-
ный биениями между вынужденными и свободными ко-
лебаниями резонаторов преселектора. Для упрощения
анализа заменим узкополосный преселектор одиночным
колебательным контуром, полоса пропускания которого
равна полосе преселектора. Несмотря на принятое допу-
95
щение, полученные результаты, как показывает опыт, по-
зволяют с достаточной для практики точностью опреде-
лить требования, предъявляемые к буферным каскадам
для обеспечения некогерентности режима СР.
Ограничимся рассмотрением прямоугольного закона
изменения затухания контура СР. Будем полагать, что
частота настройки преселектора совпадает с резонансной
частотой контура СР f0, а параметры самого СР выбра-
ны так, что условие некогерентности режима в нем заве-
домо выполняется при отключении преселектора. Обо-
значим коэффициент передачи по напряжению буферных
каскадов в установившемся режиме в прямом направ-
лении— от выхода преселектора до контура СР — через
Кп, а коэффициент передачи напряжения в обратном
направлении через Ко-
Принимая, что остаточное напряжение будет
меньше среднеквадратического значения шумов в е2 раз,
можно получить при линейном режиме работы СР
с узкополосным преселектором следующее условие неко-
герентности:
К& < (8г/8п) exp |8П (Тс - ta) - 8Л - 2], (3.62)
где бп=л^п; da~ затухание преселектора.
Поскольку 82, ta и Тс были выбраны ранее из усло-
вий получения необходимого усиления, Ко, Ки и 6П мож-
но выбрать по формуле (3.62).
Формулу (3.62) можно использовать для инженерных
расчетов при выборе параметров буферных каскадов и
при законах изменения затухания контура, отличающих-
ся от прямоугольного. В этом случае при подстановке
в формулу (3.62) максимального значения 82 условие не-
когерентности режима будет выполняться с запасом. За-
метим, что буферные каскады, в отличие от УРЧ, вклю-
ченного перед преселектором, могут работать в режиме
суперизации, а их коэффициент усиления по напряже-
нию Ktl обычно выбирается близким к единице. Поэтому
среднее значение тока, потребляемого этими каскадами
от источника питания, невелико.
3.4. Автоматическая стабилизация режима
в сверхрегенераторе
Для повышения стабильности параметров СР приме-
няют систему автоматической стабилизации режима
(АСР) [11], которая работает по принципу автоматичен
90
ской регулировки усиления. Для повышения эффектив-
ности работы этой системы в транзисторных СР целесо-
образно использовать принцип усиленной АРУ
(рис. 3.10).
Вспышки свободных колебаний СР после детектиро-
вания в Д преобразуются в последовательность видеоим-
пульсов, которые усиливаются видеоусилителем ВУ, на-
груженным на фильтр нижних частот ФНЧ. Параметры
ФНЧ выбираются так, что напряжение на его выходе
пропорционально среднему значению напряжения посту-
пающих на него видеоим-
пульсов, а составляющие на-
пряжения суперизации и на-
пряжения частоты модуля-
ции подавляются. Выходное
напряжение ФНЧ управляет
работой регулятора напря-
жения PH, через который по-
дается питание на генератор
напряжения суперизации
ГС. В качестве ГС обычно
Рис. 3.10. Структурная схема
еверхрегенеративного приемника
с системой АСР и суперизацией
УРЧ
используется несимметрич-
ный мультивибратор. Выход-
ное напряжение ГС близко
к напряжению его питания
и через интегрирующую
цепь ИЦ подается на СР. Если под влиянием дестаби-
лизирующих факторов среднее значение напряжения
вспышек свободных колебаний на контуре СР увели-
чится, то это приведет к увеличению напряжения
на выходе ФНЧ и к уменьшению напряжения на выходе
PH, которое исцользуется для питания ГС. Вследствие
этого напряжение суперизации на выходе ГС уменьшит-
ся, а это повлечет за собой уменьшение коэффициента
усиления СР, таким образом напряжение вспышек сво-
бодных колебаний стабилизируется.
Описанная структурная схема АСР не является един-
ственно возможной. Так, выходное напряжение PH мож-
но использовать для питания всех высокочастотных уз-
лов приемника, а не только ГС, возможно также вклю-
чение PH в цепь петли регулирования после ГС и т. д.
Рассмотрим работу системы АСР при воздействии на
приемник дестабилизирующих факторов, например из-
менения температуры или напряжения питания. Эти воз-
П7
действия можно моделировать генератором напряжения
с ЭДС Ев, включенным последовательно с источником
напряжения суперизации, подаваемым на СР. Частоту
генератора Ев будем полагать равной нулю, так как
промежуток времени, за который Ев изменится на ощу-
тимое значение, всегда много больше длительности лю-
бых переходных процессов в приемнике. Сверхрегенера-
тивный каскад, генератор напряжения суперизации, де-
тектор и элементы системы АСР образуют замкнутую
петлю регулирования, в которой происходят нелинейные
преобразования сигнала. Под воздействием ЭДС Ев
уровни сигналов в петле регулирования изменяются, т. е.
получают приращения того или иного знака. При высо-
кой стабилизации режима приращения сигналов в петле
регулирования невелики, поэтому все ее элементы для
этих приращений могут рассматриваться как линейные.
Это позволяет упростить анализ процессов, в АСР и рас-
сматривать замкнутую петлю регулирования как обыч-
ный линейный усилитель с последовательной отрицатель-
ной обратной связью по напряжению. «Входом» эквива-
лентного линейного усилителя будем считать вход на-
пряжения суперизации сверхрегенеративного каскада,
«выходом»—выход СР, а входным напряжением Ев. При
этом коэффициент усиления эквивалентного линейного
усилителя по напряжению будет равен KUy=AUBaXy/EB
при разомкнутой И Аиз=АПвыхз/£'в при замкнутой пет-
лях регулирования, причем Аиз=Дир/(1+0Лир), где
А^выхр И АПвыхз — приращения выходного напряжения
СР соответственно при разомкнутой и замкнутой петлях
регулирования; р — коэффициент отрицательной обрат-
,ной связи.’ Поскольку в составе петли регулирования
имеется видеоусилитель, включенный в цепь отрицатель-
ной обратной связи, то р^>1. Поэтому т]=
=А^выхр/А^выхз^>1, т. е. в системе осуществляется ста-
билизация режима СР. Величину т] будем называть ко-
эффициентом стабилизации. Практически в транзистор-
ных СР с системой АСР легко достижимо ц^ЮО.
Экспериментальные исследования подобного прием-
ника показали, что его чувствительность и полоса про-
пускания высокочастотной части по уровням 3 и 60 дБ
изменяются в пределах не более ±15 % при изменениях
температуры —10 ... 65°С и питающего напряжения
1 ... 2 В. Напряжение на выходе PH, используемое
в приемнике .для питания всей высокочастотной части,
98
Изменяется при Нормальной температуре на И мЁ прй
изменении напряжения питания 1 ... 2 В. Зависимость
этого напряжения от температуры показана на рис. 3.11.
При снижении температуры напряжение питания высо-
кочастотной части приемника возрастает, компенсир^
дестабилизирующее действие изменения температуры.
Для сравнения отметим, что в том же приемнике при
выключенной системе АСР и нормальной температуре
достаточно изменить напряжение источника питания
всего лишь на 50 мВ, чтобы перейти из режима отсут-
ствия генерации к когерентному режиму. При оптималь-
выставленном для нормаль-
ном напряжении питания,
ной температуры и не из-
менявшемся в процессе
испытаний, при темпера-
туре 0 °C наблюдался
срыв свободных колеба-
ний в СР, а переход по-
следнего в когерентный
режим отмечен при тем-
пературе -|-55 °C.
При снятии супериза-
ции УРЧ и питании УРЧ
непосредственно от источ-
ника питания воздействие
системы АСР на УРЧ
Рис. 3.11. Зависимость регулирую-
щего напряжения от температуры
исключается, при этом стабильность параметров при-
емника в целом резко ухудшается, в частно-
сти чувствительность приемника и ток, потребляемый им
ют источника питания, изменяются более чем в 5 раз.
Это объясняется низкой стабильностью УРЧ, питаемого
ют низковольтного источника питания: эмиттерная ста-
билизация режима транзисторов в УРЧ неэффективна
из-за вынужденного применения в эмиттерных цепях низ-
:коомных резисторов. Очевидно, что при использовании
.такого УРЧ в супергетеродинном приемнике стабиль-
ность параметров последнего также будет низкой. Как
показывает опыт, при низковольтном источнике питания
сверхрегенеративный приемник с суперизацией УРЧ с си-
стемой АСР обладает лучшей стабильностью парамет-
ров, чем супергетеродинный. При более высоком напря-
жении питания (4 В и более) собственную стабильность
параметров УРЧ, как и других каскадов супергетероди-
на, можно существенно улучшить и по стабильности па-
7*
99
раметров супергетеродин приблизится к сверхрегенера^
тивному приемнику с суперизацией УРЧ и системой АСР.
В петле регулирования АСР, так же как и в линей-
ном усилителе с обратной связью или в приемнике с си-
стемой АРУ, возможно самовозбуждение, поскольку
в области относительно высоких частот отрицательная
обратная связь может стать положительной из-за фазо-
вых сдвигов в элементах петли. В приемниках с АРУ
самовозбуждение, как известно, устраняется увеличени-
ем постоянной времени АРУ, что приводит к уменьше-
нию коэффициента усиления в петле АРУ в области вы-
соких частот. Этот же метод вполне приемлем и для си-
стемы АСР, поскольку ее принцип действия аналогичен.
Более того, система АСР одновременно выполняет и
функцию АРУ, так как при увеличении уровня входного
сигнала среднее значение напряжения вспышек свобод-
ных колебаний возрастает, что. приводит к уменьшению
напряжения суперизации и коэффициента усиления СР.
Остановимся еще на одной особенности системы
АСР, которую необходимо учитывать при проектирова-
нии приемника. Для нормальной работы системы АСР
необходимо, чтобы
dK^dUBm<Q, (3.63)
где Ах — резонансный коэффициент усиления сверхреге-
неративного каскада; [7ВЫх— его выходное напряжение.
Для выполнения неравенства (3.63) достаточно
иметь;
dKs/dUc>Q\ (3.64)
< 0, (3.65)
где Uc — напряжение суперизации.
Для СР, работающего в некогерентном режиме, усло-
вие (3.64) всегда выполняется. Выполнение неравенства
(3.65) должно быть обеспечено выбором схемы и пара-
метров системы АСР. Предположим, что условие (3.(55)
не выполняется во всем диапазоне изменения [/вых.
а график зависимости Uc от имеет вид, представ-
ленный на рис. 3.12. В этом случае одному и тому же
значению напряжения суперизации U'Q будут соответ-
ствовать два различных значения выходного напряже-
но
Ййя: t/выхг (точка А) и t/выхг (точка Ё), прй этом толь*,
ко точка А является точкой устойчивого равновесия.
Если на входе приемника хотя бы кратковременно по-
явится такой сильный сигнал, при котором (7вых превы-
сит (7Выхкр, то по окончании действия этого сигнала при-
емник не возвратится в исходный режим, а напряжение
суперизации достигнет t7Cmax (точка С), что приведет
к переходу СР. в когерентный режим и потере чувстви-
тельности. При этом возвратить приемник в исходный
режим удается только выключением и последующим
включением источника питания. Очевидно, что подобный
эффект «залипания» системы АСР недопустим.
Характеристика Uc(Ubkx) может иметь участок с по-
ложительной крутизной в том случае, если при работе
какого-либо из узлов системы АСР используется падаю-
щий участок его амплитудной характеристики £7Выху=
=f(t^Bxy) (рис. 3.13). Поэтому для предотвращения эф-
Рис. 3.’12. Зависимость напря-
жения суперизации от выходно-
го напряжения при наличии
эффекта «залипания» ЛСР
Рис. 3.13. Амплитудная харак-
теристска узла АСР
фекта, залипания и выполнения условия (3.65) при про-
ектировании приемника необходимо учитывать допусти-
мые пределы изменения входного сигнала для каждого
узла, входящего в систему АСР. Практических трудно-
стей это не вызывает, так как благодаря работе системы
АСР в качестве АРУ динамический диапазон выходных
сигналов СР невелик (обычно меньше 20 дБ) даже при
большем динамическом диапазоне входных сигналов
приемника (60 дБ и более).
101
3.5. Методы подавления паразитного излучения
Паразитное излучение характерно для всех типов
приемных устройств, имеющих в своем составе генера-
тор высокочастотных колебаний. Приемное устройство
с таким генератором является потенциальным источни-
ком помех для других радиотехнических устройств, рас-
положенных в непосредственной близости.
В отличие от монохроматического излучения гетеро-
дина, в супергетеродинном приемнике СР изучает
спектр частот, ширина которого определяется длительно-
стью вспышки высокочастотных колебаний в СР. Макси-
мум спектра паразитного излучения в транзисторных СР
обычно несколько смещен относительно частоты настрой-
ки приемника в сторону более низких частот. Это объ-
ясняется изменением емкости коллекторного перехода
транзистора сверхрегенердтивного каскада при его от-
крывании напряжением суперизации, а также тем, что
частота генерации вспышек отличается от резонансной
частоты контура из-за вносимого транзистором дополни-
тельного фазового сдвига. Другой характерной особенно-
стью излучения СР является наличие шумовой модуля-
ции при отсутствии принимаемого сигнала. Эти особен-
ности паразитного излучения СР необходимо учитывать
при решении вопроса об электромагнитной совместимо-
сти СР с другими радиотехническими устройствами.
Паразитное излучение приемника может распростра-
няться по различным цепям: через антенну, цепи пита-
ния, за счет недостаточной экранировки, а также по це-
пям, соединяющим приемник с другими устройствами,
в частности с источником питания. Остановимся на во-
просах подавления излучения в антенну через элементы
связи антенны приемника со сверхрегенеративным кас-
кадом. При этом будем учитывать только те элементы
связи, которые предусмотрены схемой приемника, по-
скольку методы борьбы с излучением за счет паразит-
ных связей или плохой экранировкой известны. v
Рассмотрим некоторые из возможных методов подав-
ления паразитного излучения СР в антенну.
Уменьшение средней мощности вспышек свободных
колебаний СР. Эту мощность можно свести до миниму-
ма без ухудшения остальных параметров приемника при
выполнении следующих условий:
102
напряжение вспышки свободных колебаний на кон-
туре СР не должно превышать уровня, необходимого для
неискаженного детектирования сигнала;
закон изменения затухания контура СР должен быть
резко асимметричным, при этом интервал времени меж-
ду вспышками должен в несколько раз превышать дли-
тельность вспышки.
Выполнение указанных условий облегчается при ис-
пользовании в приемнике системы АСР, позволяющей
поддерживать среднее значение напряжения вспышек на
контуре СР на минимально необходимом для детектиро-
вания уровне при воздействии всех дестабилизирующих
факторов.
Ослабление связи СР с антенной. Достоинством этого
метода является простота практической реализации,
а очевидным недостатком — уменьшение чувствительно-
сти приемника по полю. Применение этого метода целе-
сообразно в тех случаях, когда реальная чувствитель-
ность приемника по полю определяется уровнем внеш-
них помех, а не внутренними шумами.
Включение УРЧ между антенной и СР. Применение
в сверхрегенеративном приемнике УРЧ позволяет умень-
шить паразитное излучение СР в антенну в десятки и
сотни раз, при этом дополнительным выигрышем явля-
ется увеличение чувствительности приемника. Наиболее
приемлемыми схемами включения транзисторов в УРЧ
являются схемы с общей базой и каскодная схема «об-
щий эмиттер—общая база», поскольку усилители, по-
строенные по этим схемам, имеют низкий коэффициент
обратной передачи по напряжению при- достаточно вы:
соком коэффициенте усиления.
Использование СР с пониженным уровнем папазит-
ного излучения. На рис. 3.14 приведена схема СР. вы-
полненного на транзисторе Т2 по схеме с общей базой
с автосуперизацией. Рассматриваемый каскад отличает-
ся тем, что конденсатор СЗ, соединяющий базу транзи-
стора СР с корпусом приемника, включен последова-
тельно с основным конденсатором С2 контура, являю-
щегося нагрузкой УРЧ, выполненного на транзисторе Т1.
Емкость конденсатора СЗ выбирается много больше ем-
кости конденсатора С2, поэтому модуль полного сопро-
тивления между базой транзистора Т2 и корпусом не-
большой. что обеспечивает возможность работы тоан-
зистора Т2 в качестве СР по схеме с общей базой. При
: ' ' 103
Рис. 3.14. Схема СР с пониженным
уровнем паразитного излучения
генерации вспышки свободных колебаний высокочастот-
ное напряжение t7g на базе транзистора Т2 много мень-
ше, чем на остальных его электродах. Это напряжение
передается на коллектор транзистора Т1 с коэффици-
ентом трансформации йт, причем Q>i&t>1, где Q — до-
бротность контура L1C2C3. Однако из-за малого t7g на-
пряжениена коллекторе транзистора Т1 все же значи-
тельно меньше, чем при соединении выхода УРЧ с кол-
лектором или эмиттером транзистора Т2, чем и объяс-
няется снижение уровня
паразитного излучения по
сравнению со сверхреге-
неративными приемника-
ми, в которых напряже-
ние сигнала подводится
непосредственно к конту-
ру СР. Транзистор Т2 вы-
полняет одновременно и
функцию дополнительно-
го УРЧ, работающего по
схеме с общим эмиттером,
что позволяет компенси-
ровать потерю в усилении
УВЧ на транзисторе Т1,
обусловленную наличием
на его выходе делителя
напряжения сигнала, об-
разованного конденсато-
рами С2 и СЗ. Использованием транзистора Т2 в качест-
ве УРЧ объясняется и другое интересное свойство рас-
сматриваемого сверхрегенеративного каскада — автома-
тическая регулировка усиления в нем эффективнее, чем
в обычном СР с автосуперизацией.
Недостатком предложенной схемы приемника являет-
ся необходимость применения в качестве нагрузки основ-
ного УРЧ отдельного колебательного контура, содержа-
щего трудно поддающуюся миниатюризации индуктив-
ность.
Экспериментальные исследования СР, выполненного
по описанной выше схеме и работающего на частоте
3,1 МГц, показали, что излучаемая им мощность при-
мерно на 30 дБ меньше, чем у сверхрегенеративного при-
емника, в котором контур УРЧ соединен с контуром СР
194
Через конденсатор связи, при этом чувствительность обо-
их приемников получилась одинаковой.
Применение узкополосного преселектора. В § 3.3 бы-
ла показана возможность применения узкополосного
преселектора для повышения избирательности СР. Однако
роль узкополосного преселектора этим не ограничивает-
ся: он подавляет паразитное излучение СР на частотах,
лежащих за пределами его полосы пропускания, при
этом мощность, излучаемая сверхрегенеративным каска-
дом, ослабляется пропорционально отношению Д/С/Пп,
где Afc —ширина спектра колебаний, генерируемых СР;
Пп — полоса пропускания преселектора. Нетрудно пока-
зать, что при прямоугольном законе изменения затуха-
ния контура СР ослабление паразитного излучения, по-
лучаемого за счет узкополосного преселектора,
Л = лс^о/'Коп^п > (3.66)
где Коп—коэффициент обратной передачи преселектора
по мощности; d2^10~2; do«t4O~2; dn^lO-4; Коп^С0,3. При
этих условиях %^103, т. е. более 30 дБ. Буферные кас-
кады, включенные между СР и преселектором, обычно
ослабляют паразитное излучение не менее чем на 70 ...
... 80 дБ. Отсюда следует, что на входе сверхрегенера-
тивного прйемника с узкополосным преселектором мощ-
ность паразитного излучения будет примерно на 100 дБ
ниже мощности, выделяемой в контуре СР, при условии
подавления излучаемой мощности по паразитным цепям.
,, г 4^
3.6. Улучшение параметров пикового детектора
после сверхрегенератора
Как отмечалось выше, в линейном режиме после СР
можно использовать как пиковый детектор, так и детек-
тор средних значений., При использовании пикового де-
тектора повышаются абсолютная величина напряжения
частоты модуляции на выходе детектора, отношение на-
пряжения частоты модуляции к напряжению частоты су-
перизации, вследствие чего облегчается подавление со-
ставляющих спектра напряжения суперизации и умень-
шается требуемый коэффициент усиления низкочастот-
ной части приемника. Постоянная времени нагрузки пи-
105
Рис. 3.15. Структурная схема СР с безынерционным пиковым детек-
тором
кового детектора /?НСН должна удовлетворять условиям
[И]:
7?HCH^10/F; , (3.67)
/п2 j2nFrnm,
(3.68)
где т — коэффициент модуляции детектируемого сигна-
ла; F— частота суперизации; Fm— частота модуляции.
Неравенство (3.67) является условием пикового де-
тектирования, а (3.68) —условием безынерционности де-
тектора для частоты модуляции. При близких значениях
F и Fm одновременное выполнение этих неравенств не-
возможно даже при малых значениях т.
Поскольку частота суперизации должна быть
в 400 ... 1000 раз меньше несущей частоты, то ее уве-
Рис. 3.16. Осциллограммы напря-
жений в СР с безынерционным пи-
ковым детектором (напряжения
показаны в точках, обозначенных
на рис. 3.15)
личение для выполнения
неравенства (3.68) воз-
можно лишь при доста-
точно больших значениях
отношения несущей час-
тоты к частоте модуляции.
В сверхрегенератив-
ных приемниках с отдель-
ным генератором напря-
жения суперизации, для
которого характерен рез-
ко асимметричный закон
изменения затухания кон-
тура, указанный недоста-
ток можно устранить, ес-
ли использовать пиковый
детектор с «обнуляющим» ключом, управляющий элек-
трод которого соединен с выходом генератора напряже-
ния суперизации через дифференцирующую цепь.
106
На рис. 3.15 приведена структурная схема такого при-
емника, а на рис. 3.16 — осциллограммы напряжений,
иллюстрирующие принцип его работы. Генератор напря-
жения суперизации ГС представляет собой несимметрич-
ный мультивибратор, с выходом которого соединен через
интегрирующую цепь ИЦ СР, а также управляющий
электрод обнуляющего ключа ОК —через дифференци-
рущую цепь ДЦ, что обеспечивает быстрый разряд кон-
денсатора С пикового детектора в течение фронта им-
пульса суперизации. Заряд конденсатора С осуществля-
ется через зарядное устройство ЗУ видеоимпульсом, по-
лученным в результате детектирования вспышки свобод-
ных колебаний импульсным детектором ИД. Максимум
амплитуды вспышки- свободных колебаний несколько за-
паздывает во времени относительно среза импульса су-
перизации, поэтому каждый заряд конденсатора С осу-
ществляется после предварительного разряда («обнуле-
ния»), а напряжение на конденсаторе С после каждой
вспышки свободных колебаний определяется только ма-
ксимальной амплитудой последней вспышки и не зависит
от амплитуд предыдущих, что и обеспечивает безынер-
ционность детектора.
В течение промежутка времени, приблизительно рав-
ного длительности импульса мультивибратора, напряже-
ние на конденсаторе пикового детектора имеет фиксиро-
ванное и малое значение, а в течение остальной, боль-
шей части периода суперизации напряжение на конден-
саторе остается почти постоянным, пропорциональным
пиковому напряжению последнего видеоимпульса, сня-
того с импульсного детектора. Таким образом, напряже-
ние на выходе пикового детектора представляет собой
последовательность видеоимпульсов, форма которых
близка к прямоугольной, а пиковое значение подчиняет-
ся закону изменения амплитуд коротких импульсов, сни-
маемых с импульсного детектора. Следовательно, пико-
вый детектор является расширителем импульсов во вре-
мени, а сигнал на его выходе имеет амплитудно-импульс-
ную модуляцию второго рода (АИМ-2). Частотный
.спектр таких сигналов определяется формулой [108]
5 (») = ^ +^- т sin Ш + 0СО) +
107
-77 Js(«Q) cos (nSlt + 0„o) +
n=l
s («Й + Qm) cos [(пй + QJ t + 0nl] -
—y- S («Й - QJ cos |(лй - QJ14- 0„_ J,
где S(co) —спектральная плотность; йт— частота моду-
ляции; Tc — период суперизации; Й— частота супериза-
ции; 0 — фазовые сдвиги.
Характерной особенностью спектра сигнала АИМ-2
является то, что амплитуды компонентов боковых частот
пй+йт и «й—Qm определяются значениями спектраль-
ных плотностей для этих частот, а не для частот лЙ,
кратных частоте следования импульсов, как это имеет
место при амплитудно-импульсной модуляции первого
рода (АИМ-1). Таким образом, амплитуды компонентов
боковых частот лй-]-йт и лй—Йт при АИМ-2 не равны,
а амплитуда компонентов частоты модуляции Йт зави-
сит ОТ Йт.
В [108] показано, что если йт удовлетворяет усло-
вию
- (3.69)
то из спектра сигнала АИМ-2 можно выделить полезный
компонент с круговой частотой Йт, если выполняется
требование теоремы Котельникова
^=Я/«ттт>2- (3.70)
где йттах — максимальная частота модуляции.
Отметим также, что в СР с пиковым детектором да-
же при резко асимметричном законе изменения затуха-
ния контура обычно выполняется условие
/п.д/Тс<0,9, (3.71)
где ^Пд — длительность импульса на выходе пикового де-
тектора. Для определения неравномерности коэффициен-
та передачи пикового детектора с обнуляющим ключом
в полосе модулирующих частот, удовлетворяющих усло-
виям (3.69) и (3.70), воспользуемся соотношением, при-
веденным в [108]:
•=S «. ™).«(°)=si” (j- 17) I JfK
108
При подстановке в эту формулу предельных значений ц
из неравенства (3.70) и £пд/Тс из неравенства (3.71) по-
лучаем ст=0,7. Следовательно, частотные искажения за
счет пикового детектора всегда будут меньше 3 дБ. Час-
тотные искажения можно уменьшить, увеличив ц или
уменьшив £Пд/Тс. Например, при р=3 и /пд/Тс=0,75 по-
лучаем ст=0,9, что почти всегда приемлемо для практи-
ческих целей. Спектральная плотность S(Qm), как и
S(0), пропорциональна площади импульса, поэтому да-
же при использовании в зарядном устройстве конденса-
тора С эмиттерного повторителя напряжение частоты
модуляции на выходе пикового детектора за счет увели-
чения длительности импульсов получается в несколько
раз больше, чем на входе, т. е. пиковый детектор усили-
вает компонент частоты модуляции. Можно доказать, что
при этом увеличивается не только абсолютное значение
напряжения частоты модуляции, но и его отношение
к суммарному напряжению компонентов частоты супе-
ризации и ее гармоник. Очевидно, что при этом снижа-
ются требования как к коэффициенту усиления низко-
частотной части приемника, так и к ФНЧ, выделяющему
частоты модуляции и подавляющему компоненты часто-
ты суперизации и ее гармоник, что позволяет упростить
эти узлы приемника.
3.7. Расчет фазовых сверхрегенераторов
В соответствии с изложенным в § 2.4 можно сказать,
что ФСР являются более простыми, но менее чувстви-
тельными приборами по сравнению с ФСРДС. Фазовые
СР следует применять для приема относительно сильных
сигналов. Для приема слабых сигналов предпочтитель-
нее более сложные, но более чувствительные ФСРДС.
Поэтому первой задачей, которая формулируется при
расчетах фазовых СР, является выбор наиболее рацио-
нального варианта построения схем (ФСР либо
ФСРДС). Данная задача должна решаться с учетом тре-
бований, предъявляемых к ФСР системой более высо-
кого иерархического уровня, на основании расчета основ-
ных параметров ФСР и ФСРДС и сравнения их между
собой. Отсюда следует, что второй задачей расчета фа-
зовых СР является определение их параметров.
В § 1.2 и 2.4 отмечалось, что ФСР и ФСРДС отлича-
ются тем, что принимаемый ими сигнал управляет авто-
109
колебательной системой, он не усиливается, как это
имеет место в классическом СР, а обеспечивает качест-
венные либо количественные изменения поведения авто-
колебательной системы в зависимости от текущей фазы,
отсчитываемой относительно фазы опорного напряжения.
Указанные изменения в ФСР проявляются в появлении
вспышек генерации, следующих с разностной частотой
между частотами принимаемого и опорного сигналов,
в ФСРДС — в изменении амплитуды вспышек генерации
с той же разностной частотой. Это означает, что в обыч-
ные параметры, характеризующие классический СР, не-
обходимо ввести некоторые коррективы, учитывающие
отмеченные особенности фазовых СР.
Основными параметрами и характеристиками, опре-
деляющими свойства ФСР, являются коэффициент уси-
ления и частотная характеристика.
Под коэффициентом усиления ФСР будем понимать
отношение амплитуды переменной составляющей выход-
ного сигнала (7тах (в ФСР — амплитуды вспышек,
в ФСРДС — изменения амплитуды вспышек генерации)
к амплитуде сигнала Ещ>. Заметим, что в этом определе-
нии есть известная условность. Дело в том, что Um^
определяется напряжением на колебательном контуре,
вызванном шумами, а не напряжением сигнала, так как
в фазовых СР входной сигнал выполняет функции на-
пряжения суперизации, а усиливаются в обычном пони-
мании лишь шумы контура и резонансного усилителя.
Поэтому амплитуда вспышки колебаний на контуре,
обычно близкая к напряжению насыщения усилительно-
го прибора, формально не может рассматриваться как
усиленный сигнал. Однако, поскольку сигнал Кир также
определяет амплитуду вспышек, можно с учетом сделан-
ных замечаний для ФСР записать
Ку= U шо/Кдр=И max/Е пр
где [/шо = ]/5оПшКЕКру - среднеквадратическое значение
шума на выходе (амплитуда выходного сигнала ФСР);
So —спектральная плотность шумов контура и резо-
нансного усилителя, пересчитанных на вход РУ; Ks,
Пщ — коэффициент усиления и шумовая полоса регене-
рированного контура СР, напряжение суперизации кото-
рого соответствует входному сигналу ФСР; Кру коэф-
фициент усиления резонансного усилителя.
110
(3.72)
Для ФСРДС полезным эффектом является прираще-
ние амплитуды вспышек, пропорциональное приращению
коэффициента усиления ЛКт- Поэтому коэффициент уси-
ления ФСРДС
= ПшД^ру/£пр = Цпах/£'пр, (3.73)
где Цц = /5П0Ш
Значения /С2, ЛК2, Пш, фигурирующие в (3.72) и
(3.73), можно рассчитать по методике, изложенной
в § 2.4 и 3.1.
Частотная характеристика ФСР представляет собой
зависимость коэффициента усиления Ку от частоты сиг-
нала (ос. Так как частота сигнала и частота суперизации
й связаны соотношением й=а>с—юОп, частотную харак-
теристику ФСР можно трактовать как зависимость КУ
от частоты суперизации Й.
Частотные характеристики /СУ(Й) ФСР и ФСРДС
можно рассчитать на основании (3.72) и (3.73) соответ-
ственно, если раскрыть зависимость Кт. и АКт для раз-
личных напряжений суперизации. Для ее определения
удобно использовать соотношение вида
F(x)—ei,x/x, (3.74)
одинаковое для различных типов ФСР и напряжений
суперизации. В (3.74) х — некоторая переменная, линей-
но зависящая от частоты
суперизации Й и различ-
ная для разных законов
суперизации; F(x) —
функция, пропорциональ-
ная ХУ(Й).
Особенностью зависи-
мости F(x) (3.74) (рис.
3.17) является ограниче-
ние области изменения х
снизу (х>Хо)- Это означа-
ет, что ФСР имеет нера-
бочую область, в преде-
лах которой нарушается
Рис. 3.17. Частотная характеристи-
ка ФСР при прямоугольном на-
пряжении суперизации
условие когерентности
режима, а на выходе ФСР формируются случайные
вспышки генерации. При уменьшении принимаемого сиг-
нала нерабочая область х увеличивается до бесконечно-
сти, когда ФСР становится неработоспособным. По мере
111
увеличения амплитуды принимаемого сигнала нерабочая
область уменьшается, стремясь к некоторому предельно-
му значению Хпр.
Выражения F(x), х, хпр и условия достижения Хпр
для различных законов изменения фазы приведены
в табл. 3.2, где (7ш1 = ]/'50ПшКру. Используя данные
таблицы, можно найти Ay(Q) для ФСР.
Частотные характеристики ФСРДС при различных
законах суперизации определяются соотношением
Уд max £пр ’
(3.75)
где Z('y(Q) —частотная характеристика ФСР, которую
можно рассчитать в соответствии с формулами табл. 3.2,
если положить в них
A sin <рД1 = А cos <рД2 = ДЗ = 8г = А; (3.76)
Т а б л и ц и 3.2
Форма на- пряжения супериза- ции F (х) X Условия до- стижения жпр
Прямо- угольная да/су(й) £„р а 2да К cos <рд2 > >28 А 8Д
Симмет- ричная ^у(2) А,р аде Д8 Js> 28 8р
®р Цп1 2л(Д8 —28)г да
пилообраз- Х(Д8 — 28)2/2Д8
НЯ
Синусои- дальная 2АУ(3) Дпр ^Ш1 Х(К sin?al — (К sin ¥д1 4- + 2®<рД2) 2/4, К>28 8р 2Д'
- 23?д2) <Рд, = arccos 26/К
д2— предельное отрицательное значение дополнительной
функции суперизации, удовлетворяющее неравенству
б2^5фдтах/2; 0 = £2д; йд— частота дополнительной супе1
ризации.
Анализируя (3.76) и данные табл. 3.2, можно заклю-
чить, что при выборе частоты дополнительной супериза-
ции, равной £2д=5фдтах, и полосы пропускания, равной
112
2лП=фДтах, значение фигурирующее в (3.75),
определяется как
Л'у(Й) = 0,1е1/л, . (3.77)
где х = 0,512 д/б2-
Пример расчета ФСР приведен в § 5.9.
3.8. Обработка выходных колебаний сверхрегенератора
На выходе СР должны стоять устройства, которые
извлекают информацию из одной или нескольких вспы-
шек СР или преобразуют ее в удобную для дальнейше-
го использования форму. Рассмотрим схемы таких
устройств, а также обсудим ситуации, в которых они со-
вместно с СР решают наилучшим образом такие зада-
чи, как усиление и детектирование модулированных ко-
лебаний, обнаружение сигналов, дискретизация аналого-
вых сигналов и т. п.
Пиковый детектор. Этот детектор производит «считы-
вайте» и интерполяцию максимальных значений (ампли-
туд) огибающей вспышек. Применяется совместно с клас-
сическим СР и выдает в этом случае при правильно рас-
считанных параметрах непрерывное напряжение, которое
с точностью до постоянного временного сдвига является
копией закона амплитудной модуляции узкополосного
колебания e(Z) на выходе СР. Обеспечивает неискажен-
ное воспроизведение модулирующей функции лишь
в рамках линейного режима СР. В сочетании с нелиней-
ным СР, который искажает закон амплитудной модуля-
ции, может использоваться для приема импульсных сиг-
налов. Реализация пикового детектора с повышенным
коэффициентом передачи описана в § 3.6.
Детектор средних значений выдает напряжение, про-
порциональное площади, ограниченной осью времени и
огибающей вспышки, усредненной за период супериза-
ции. Имеет меньший в сравнении с пиковым детектором
коэффициент передачи. Применяется в сочетании с ли-
нейным и нелинейным классическими СР.
Если детектор используется совместно с линейным
СР, закон амплитудной модуляции воспроизводится без
искажений. Нелинейный СР и детектор средних значе-
ний осуществляют нелинейное преобразование амплиту-
ды сигнала, которое мы рассмотрим подробнее. На рис.
3.18 показаны огибающие вспышек в нелинейном режи-
8—3108 113
Мё ДЛЯ Двух значений амплитуды сигнала Аса и Ась,
причем Аса>Асъ- Разность площадей AS заштрихована.
Определим, как связано приращение площади AS
с приращением ААс=Аса—Ась амплитуды входного сиг-
нала. При небольших значениях отношения ААс/Ась
можно считать, что AS=AC(4—ta)- Полагая, что при
A(t)<Ac СР линейный, находим
Аса^2 (^а) ^^Acb^Z (^b) •
Раскрывая значения H2{ta,b) по формулам (2.13) и
(2.19), после несложных преобразований получаем
AS—COnst In (Aca/Acb)=COnst In (l+AAc/Acb).
Это выражение показывает, что приращение площади
AS (приращение выходного напряжения) и приращение
амплитуды сигнала связаны логарифмической зависи-
мостью. Таким образом, схема «нелинейный классиче-
Рис. 3.18. Огибающие вспышек
свободных колебаний в СР в не-
линейном режиме при сильном
сигнале
ский СР—детектор средних
значений» воспроизводит за-
кон амплитудной модуля-
ции с нелинейными искаже-
ниями и поэтому применяет-
ся в основном для приема
импульсных сигналов.
Узкополосный фильтр+
-j-частотный детектор. Та-
кая схема подключается к
нелинейному классическому
СР и предназначена для
усиления и демодуляции сигналов с частотной модуля-
цией [И]. Неискаженное воспроизведение закона час-
тотной модуляции возможно, если СР настроен на несу-
щую частоту модулированного колебания и, кроме того,
имеет полосу пропускания, в несколько раз большую в
сравнении с шириной спектра сигнала. СР в нелинейном
режиме является усилителем-ограничителем, а полосовой
фильтр превращает последовательность вспышек с дис-
кретными значениями фазы в непрерывное колебание с
частотной модуляцией. Полоса пропускания фильтра
должна быть меньше, чем частота суперизации.
Детектор огибающей-|-пороговое устройство. Детек-
тор подключается к выходу линейного классического СР
и выдает напряжение, повторяющее закон изменения
114
A (/). Это напряжение в пороговом устройстве сравни-
вается с опорным постоянным напряжением Eq. На вы-
ходе порогового устройства получают бинарный' сигнал
Х=± 1 в зависимости от того, выполнилось или не вы-
полнилось неравенство A(t)>E0. Схема вместе с линей-
ным классическим СР решает задачу обнаружения ра-
диоимпульса на интервале (/2 h)- Максимальные
ошибки обнаружения на фоне белого шума наблюдают-
ся в тех случаях, когда радиоимпульс имеет частоту за-
полнения, равную <оо, и огибающую, которая с точностью
до постоянного множителя повторяет функцию Hi(t)
[60]. По отношению к указанному радиоимпульсу схема
«линейный классический СР — детектор огибающей —
пороговое устройство» является квадратурно-корреляци-
онным обнаружителем.
Узкополосный фильтр—амплитудный детектор непре-
рывного сигнала. Эта схема может использоваться сов-
местно с классическим и параметрическим СР. После
классического СР включают фильтр с полосой пропуска-
ния, меньшей, чем F. При этом последовательность
вспышек (радиоимпульсов) превращается в непрерыв-
ное колебание с амплитудной модуляцией. Детектирова-
ние подобного колебания является более простой зада-
чей в сравнении с детектированием вспышек (радиоим-
пульсов). В качестве детектора в этом случае можно
применить любую схему, детектирующую непрерывные
AM сигналы (например, диодный детектор с 7?С-цепоч-
кой, имеющей постоянную времени, меньшую, чем пери-
од модуляции).
После параметрического СР полоса пропускания
фильтра должна быть меньше не только частоты супери-
зации F, но и разностной частоты |<вс—v|/2n. При этом
фильтр устраняет паразитную амплитудную модуляцию
выходного процесса на частоте суперизации и на разно-
стной частоте |ас—v|. Максимальная частота амплитуд-
ной модуляции входного сигнала должна быть меньше,
чем половина полосы пропускания фильтра (чтобы она
не подавлялась фильтром). Схема подобной обработки
выходных колебаний применяется главным образом
в диапазоне СВЧ.
Фазовый детектор. Фазовый детектор применяется
только совместно с параметрическим СР. Чаще всего
ФД подключается к нелинейному параметрическому СР.
В зависимости от внешнего воздействия эту схему ис-
8* 115
пользуют в двух качествах. Если воздействие е(0 пред-
ставляет собой узкополосный процесс (ширина спектра
е(/) в несколько раз меньше полосы пропускания СР),
ее применяют как квантователь фазы [54, 78]. Подобные
квантователи необходимы в цифровых системах обра-
ботки аналоговых сигналов с фазовым представлением
информации, например в устройствах фазового обнару-
жения или оценки параметров узкополосных сигналов на
фоне узкополосного шума, в приборах для прецизион-
ных частотных или фазовых измерений [19].
Если ъ(1) является широкополосным колебанием, на-
пример смесью полезного сигнала и широкополосного
шума, указанную схему можно применять как устройст-
во обнаружения импульсных сигналов [61]. В данной
схеме минимальная вероятность пропуска сигнала при
вероятности ложной тревоги 0,5 достигается в ситуаци-
ях, когда полезный сигнал представляет собой радиоим-
пульс с частотой заполнения v, начальной фазой <р0 и
формой огибающей, которая с точностью до постоянного
множителя повторяет функцию Недостаток схе-
мы — высокая вероятность ложной тревоги. Способ
уменьшения данной вероятности предложен в [49], где
рекомендуется на вход СР подавать дополнительный
гармонический сигнал en(t) с частотой v, амплитудой
Ая и фазой —ф0. При этом вероятность ложной тревоги
может быть установлена сколь угодно малой в зависи-
мости от амплитуды Ая. Вместе с источником вспомога-
тельного сигнала ед(/) устройство «нелинейный парамет-
трический СР — ФД» по отношению к оптимальному сиг-
налу является корреляционным обнаружителем.
3.9. Прием сигналов с амплитудной и угловой
модуляциями. Особенности приема импульсных
сигналов
При поступлении на вход приемника непрерывного
сигнала с амплитудной или угловой модуляцией на фоне
широкополосного шума подключение СР (параметриче-
ского или классического) непосредственно к антенне не-
выгодно, так как полоса пропускания СР для неиска-
женного воспроизведения закона модуляции должна
быть в несколько раз больше ширины спектра сигнала,
что приводит к относительно низкому отношению сигнал-
шум на выходе СР, Чтобы исключить действие шума,
116
который попадает в полосу пропускания СР, но не со-
впадает со спектром сигнала, между антенной и СР
можно поставить фильтр, полоса пропускания которого
равна ширине спектра сигнала. Далее между СР и филь-
тром целесообразно поместить развязывающее устрой-
ство (например, резистивный каскад на транзисторе)
для устранения реакции фильтра на вспышки генерации
СР [96]. В итоге правильно спроектированный приемник
на основе СР приобретает структуру «антенна — полосо-
вой фильтр—развязывающее устройство—СР—устрой-
ство обработки выходных колебаний СР».
Дополнительными каскадами, обслуживающими СР,
являются генератор суперизации и генератор накачки.
Последний применяется лишь в параметрических СР.
Ниже рассматриваются особенности построения неко-
торых из этих блоков и режимы работы приемников
в целом применительно к обработке сигналов с ампли-
тудной и угловой модуляциями при использовании как
линейных, так и нелинейных классических и параметри-
ческих СР. Кроме того, обсуждаются возможности при-
ема импульсных сигналов с помощью классического СР,
суперизация которого не зависит от входного сигнала.
Прием сигналов с амплитудной модуляцией. Для об-
работки сигналов с непрерывной амплитудной модуля-
цией можно применять как классический, так и пара-
метрический СР.
При использовании классического СР в линейном или
нелинейном режиме, например, совместно с пиковым де-
тектором или детектором средних значений реализуются
некогерентное усиление и детектирование сигнала. Па-
раметрический СР дает возможность строить приемники
как с когерентным, так и некогерентным детектирова-
нием.
Для некогерентного детектирования схема обработки
вспышек параметрического СР должна содержать
фильтр, устраняющий паразитную амплитудную модуля-
цию на разностной частоте |<вс—v| (имеется в виду слу-
чай, когда разностная частота меньше половины часто-
ты суперизации), и амплитудный детектор.
В функциональной схеме приемника на основе линей-
ного параметрического СР (рис. 3.19) приняты следую-
щие обозначения: А — антенна, ПФ — полосовой фильтр,
РУ — развязывающее устройство, ПСР — параметриче-
ский СР в линейном режиме, ГС — генератор супериза-
117
ции, АД — амплитудный детектор, ФАПЧ — фазовая ав-
топодстройка частоты, ФНЧ — фильтр низкой частоты.
Система ФАПЧ обеспечивает СР накачкой, частота ко-
торой в два раза превышает частоту несущего колебания
на входе приемника, а фаза совпадает с одной из опти-
мальных фаз (<ро или —фо) параметрического СР. При
этом устройство «ПСР — АД — ФНЧ» выполняет функ-
ции синхронного детектора. Система ФАПЧ (она описы-
вается ниже) может быть построена также на базе па-
раметрического СР.
Прием сигналов с угловой модуляцией. Классический
СР в этом случае применяется для обработки ЧМ сиг-
налов. В простейшем варианте устройство обработки по-
Рис. 3.19. Структурная схема
приемника AM сигналов с
параметрическим СР
добных сигналов после развязывающего устройства со-
держит нелинейный классический СР и детектор сред-
них значений. Зависимость выходного напряжения схе-
мы «нелинейный СР — детектор средних значений» от
частоты сигнала имеет в первом приближении параболи-
ческий вид. Следовательно, если эту схему настроить
так, чтобы несущая частота ЧМ колебания находилась
на склоне указанной характеристики, частотная модуля-
ция на выходе СР будет превращаться в амплитудную
модуляцию вспышек, а после амплитудного детектора—
в колебания низкой частоты. Нелинейные искажения, со-
провождающие такое преобразование, могут быть суще-
ственными. Кроме того, отсутствие амплитудного огра-
ничения сохраняет обусловленную шумом амплитудную
модуляцию сигнала, что дает низкое отношение сигнал-
шум на выходе. Схему целесообразно применять лишь
при наличии сильных полезных сигналов, например вбли-
зи радиовещательных ЧМ передатчиков [11].
Более совершенной является система, показанная на
рис. 3.20, где ПФ1 и ПФ2 — полосовые фильтры, имею-
щие полосы пропускания, равные ширине спектра сиг-
нала. Классический СР поставлен в глубоко нелинейный
(логарифмический) режим и поэтому осуществляет эф-
118
фективное амплитудное ограничение. Полезная информа-
ция содержится в последовательности начальных фаз за-
полнения вспышек. Отношение сигнал-шум на выходе
этого устройства такое же, как и устройства «полосовой
фильтр — ограничитель амплитуды — ЧД».
При малых отношениях сигнал-шум на входе прием-
ника для обработки сигналов с угловой модуляцией це-
Рис. 3.20. Структурная
схема приемника ЧМ сиг-
налов на основе класси-
ческого СР
лесообразно применять систему ФАПЧ. Вариант прием-
ника с подобной системой, построенной на основе нели-
нейного параметрического СР, изображен на рис. 3.21.
Управляемый генератор накачки УГН изменяет свою ча-
стоту под действием
напряжения, поступаю-
щего с ФНЧ. Послед-
ний является корректи-
рующим звеном и пред-
ставляет собой инте-
грирующую или про-
порционально-интегри- рис 3 21 Структурная схема пара-
рующую цепочку. метрического СР с ФАПЧ
Опорное напряжение на
ФД поступает с делителя частоты на два (ДЧ). Нелиней-
ный параметрический СР используется в качестве кванто-
вателя фазы. В данном случае блоки ГС, ПСР, ФД,
ФНЧ, УГН и ДЧ решают две задачи — фазовой авто-
подстройки частоты и ограничения амплитуды.
Пусть фаза сигнала имеет значение <ро±л/2. Тогда
последовательность вспышек СР имеет фазы, определяе-
мые только шумом, После ФД она превращается в по-
следовательность разнополярных* видеоимпульсов, сред-
нее значение которых равно нулю. Корректирующий
фильтр усредняет выходное напряжение ФД. Таким об-
разом, фазы сигналов <р0±л/2 соответствуют стационар-
ным состояниям системы, одно из которых является
устойчивым.
Динамика схемы и, в частности, ошибки слежения за
фазой внешнего сигнала определяются корректирующим
фильтром ФНЧ. Вместо этого фильтра можно использо-
вать цифровую схему, например реверсивный счетчик
49
йМйулЬсов. Напряжение, пропорциональное частоте при-
нимаемого сигнала, снимается с выхода УЗЧ. При дру-
гих видах угловой модуляции (в частности, фазовой)
это напряжение необходимо пропускать через соответст-
вующий фильтр (например, через интегратор). Впервые
система ФАПЧ на основе параметрического СР описана
в [54].
Прием импульсных сигналов. Классические СР часто
используются в качестве приемников импульсных сигна-
лов в ситуациях, когда частота суперизации СР и часто-
та повторения внешних импульсов независимы. Примера-
ми подобного использования СР являются радиолокаци-
онный ответчик «свой — чужой» [11], дальномерный ка-
нал в устройствах зондирования атмосферы [52] и т. п.
Для хорошего воспроизведения огибающей импульса
необходимо, чтобы его длительность 0 была в 3—4 раза
больше периода суперизации Тс. В противном случае
могут наблюдаться сокращение длительности импульса,
резкое искажение его формы или даже пропуск.
Рассмотрим зависимость выходного сигнала от про-
должительности и фазы прихода высокочастотного им-
пульса. Если сигнал действует в течение времени Q^>TC,
в процессе сверхрегенеративного усиления вместо одного
импульса образуется серия вспышек свободных колеба-
ний. После детектирования опять появляется импульс,
форма которого определяется постоянной времени на-
грузки детектора (рис. 3.22). Выходной импульс может
запаздывать относительно импульса на входе на период
суперизации.
Если 0 = 7’с, всегда бу-
дет наблюдаться, по
крайней мере, одна
вспышка свободных ко-
лебаний, но длительность
импульса на выходе мо-
жет оказаться укорочен-
ной по сравнению с дли-
тельностью импульса на
Рис. 3.22. Сверхрегенеративный
прием импульсных сигналов при
0>Гс:
а — ЭДС сигнала на входе; б— за-
кон суперизации; в ~ сигнал на кон-
туре СР; г — сигнал иа выходе де-
тектора
120
входе, а выходной импульс — сдвинутым по сравнению
с входным почти на целый период суперизации
(рис. 3.23,г).
Если 7’с/2<0<7’с и поступление высокочастотного
импульса приходится на начало полупериода отрица-
тельного затухания, прием будет нормальным и усиле-
ние достигнет максимального значения (рис. 3.23,в).
Если же импульс приходит в конце полупериода отрица-
тельного затухания, усиление будет неполным и импульс
Рис. 3.23. Прием импульсных сигналов СР:
а — закон суперизации; б — 0 = 7'с/2; в ~-7'с/2<0<7’с; г — 0<7'с/2; е(0 — им-
пульсы па входе, u(t) — напряжение на контуре
практически может быть пропущен. Возможны также
сдвиг фронта импульса и укорочение последнего при-
мерно до полупериода напряжения суперизации.
Если 0<Тс/2, то выходное напряжение будет резко
зависеть от фазы прихода импульса (рис. 3.23,6). Как и
в предыдущих случаях, максимальное усиление полу-
пится лищь при поступлении сигнала в начале полупери-
121
ода отрицательного затухания, когда чувствительность
приемника максимальна. Однако вследствие малой про-
должительности импульса вероятность такой начальной
фазы уменьшается. При поступлении импульса с другой
начальной фазой усиление будет неполным или его во-
все не будет. Кроме того, при 0<7’с/2 импульс может
оказаться удлиненным примерно до Тс/2. На рис. 3.23,а
показан закон суперизации.
Из рис. 3.22 и 3.23 следует, что для сохранения фор-
мы огибающей, начальной фазы и длительности импуль-
са желательно, чтобы выполнялось неравенство 0^ТО.
Поскольку длительность импульса задана, по этому ус-
ловию выбирают максимальную частоту суперизации.
Предел частоты определяется значением Fmax, ПрИ КОТО-
РОЙ начинается когерентный режим.
Недостаток приемников импульсных сигналов при
непосредственном подсоединении СР к антенне и неза-
висимой суперизации — Низкая помехоустойчивость, так
как длительность принимаемого сигнала должна быть
в несколько раз больше приемного «окна» СР, когда чув-
ствительность СР максимальна. Вследствие этого боль-
шая часть энергии сигнала приемником не воспринима-
ется. Уменьшать же длительность сигнального импульса
невыгодно, так как это снижает вероятность попадания
сигнала в указанное «окно» и в итоге увеличивает веро-
ятность пропуска сигнала.
Этот недостаток можно частично ликвидировать
предварительной фильтрацией входной смеси сигнал-
шум, для чего между антенной и СР помещается фильтр
с полосой пропускания, приблизительно равной 1/Тс,
а также развязывающее устройство. При этом на вход
приемника могут поступать импульсы, длительность ко-
торых меньше Тс- После прохождения через фильтр им-
пульсы «растягиваются», приобретая длительность Тс, и
с вероятностью, равной единице, попадают в приемное
«окно» СР.
3.10. Паразитная сверхрегенерация
В некоторых радиотехнических устройствах явление
сверхрегенерации нежелательно. В транзисторных авто-
генераторах для получения «мягкого» самовозбуждения
и гармонического генерируемого напряжения обычно
включают наряду с начальным смещением Е цепочку
122
автоматического смещения $дСэ (рис. 3.24). Аналйа про»
цессов в таком устройстве показывает, что при опреде-
ленных условиях в нем возникает паразитная сверхреге-
нерация (прерывистая генерация) [56].
Можно построить зависимости средней крутизны от
амплитуды Scp=f(A) (рис. 3.25). При Яэ=0 кривая мо-
нотонно растет, при больших /?э— монотонно падает,
а при промежуточных значениях имеет максимум. Ста-
ционарные решения соответствуют точкам пересечения
прямой S,o=arfo/wM с кривой Scp(А). Если прямая прохо-
Рис. 3.24. Схема автогенера-
тора на транзисторе
Рис. 3.25. Кривые средней кру-
тизны при различных значе-
ниях 7?о
дит выше кривой и не пересекает ее, стационарных ре-
шений нет. Пересечению прямой с кривой Scp(A) в точ-
ке а соответствует неустойчивое решение, а в точке б—
устойчивое или неустойчивое решение в зависимости от
того, выполняется или не выполняется одно дополни-
тельное условие.
Условием самовозбуждения схемы является
do—®oMS cp=0,
где Sep — средняя крутизна. При этом возникают стаци-
онарные или прерывистые колебания (рис. 3.26,6). По-
скольку подробный анализ процесса затруднителен, ог-
раничимся качественным рассмотрением в предположе-
нии, что Сэ достаточно велика. При соблюдении этого
условия можно полагать, что напряжение на конденса-
торе за несколько циклов автоколебаний меняется не
очень существенно. Поэтому при возиикиовении колеба-
123
Ййи, когда напряжение на нем егЦе не успело возрасти,
амплитуда определяется кривой 1, построенной при по-
стоянном смещении и рабочей точке б (рис. 3.26,а).
При достаточно больших напряжениях на контуре Сэ
начинает заряжаться и кривая Sep (Л) деформируется и
понижается до тех пор, пока не перестанет пересекать
прямую (кривая 2 на рис. 3.26,а), тогда амплитуда коле-
баний станет уменьшаться. Затем произойдет разряд ем-
кости на сопротивление R:i, повышается средняя крутиз-
на до возникновения самовозбуждения и т. д. Заметим,
что в этих рассуждениях не учитывалась реакция кол-
лектора, которая несколько усложняет картину.
При наличии прерывистой генерации в автоколеба-
тельной системе могут иметь место следующие режимы,
характерные для СР: когерентный режим, некогерентный
Рис. 3.26. Кривые средней крутизны (а) 'и график прерывистой ге-
нерации (б)
б)
режим с ударными колебаниями. При когерентном ре-
жиме свободные колебания предыдущего цикла колеба-
ний определяют начальные условия для следующей
вспышки генерации. В этом случае выходной сигнал
представляет собой серию радиоимпульсов с постоянны-
ми амплитудами. Некогерентный режим с большим
уровнем ударных колебаний также дает серию вспышек
с постоянными амплитудами, однако в этом случае сиг-
налом являются видеоимпульсы, которые появляются
в результате разряда емкости на сопротивление 7?э.
Ударные колебания преобладают над другими воздейст-
виями при большой крутизне этих импульсов. Некоге-
рентный режим с малым уровнем ударных колебаний
возникает при малой крутизне этих импульсов' когда
определяющим внешним воздействием являются собст-
венные шумы системы. При этом режиме вспышки гене-
рации флуктуируют по амплитуде.
124
Паразитная сверхрегёйераций может возникать Й
в других полупроводниковых генераторах СВЧ, напри-
мер в схемах с ЛПД и диодами Ганна. В генераторах на
ЛПД иногда возникают релаксационные колебания в це-
пи питания, обусловленные нелинейными свойствами
ЛПД.» При этом в системе устанавливается режим пре-
рывистой генерации, который недопустим в генераторах,
но может оказаться полезным при использовании устрой-
ства в качестве сверхрегенеративного усилителя с авто-
суперизацией. Аналогичные явления возникают в генера-
торах на диодах Ганна при определенных соотношениях
между низкочастотными параметрами колебательного
контура и увеличении напряжения питания сверх порого-
вого значения.
Возникающая при этом отрицательная проводимость
по низкой частоте приводит к появлению прерывистой
генерации, причем форма этих паразитных колебаний
при изменении напряжения питания меняется от почти
прямоугольной до близкой к синусоидальной.
Появления прерывистой генерации можно избежать,
уменьшив Сэ и М, а также надлежащим образом подо-
брав режим активного элемента.
ГЛАВА 4
ПОМЕХИ И ШУМЫ В СВЕРХРЕГЕНЕРАТОРЕ
4.1. Оценка шумовых свойств сверхрегенератора
Важнейшим параметром любого приемника и, в част-
ности, СР является коэффициент шума Ш, который оп-
ределяет пороговую чувствительность РМр и эквивалент-
ную шумовую температуру Тш. Именно эти параметры
определяют в конечном счете перспективность СР и воз-
можность применения их для решения тех или иных при-
кладных задач, связанных с приемом слабых сигналов.
Коэффициент шума определяется известным соотно-
шением [108]
Ш=Рш Вых/РШ вх/СР, (4.1)
где Рщвых — полная мощность шумов на выходе, опре-
деляемая как внешними шумами, поступающими на вход
линейного четырехполюсника, так и внутренними;
Ршвх — мощность шумов на входе от внешнего источни-
125
ка (генератора, антенны); КР— коэффициент усилений
сигнала по мощности. Отношение Рш вых/Лп вх можно
рассматривать как коэффициент усиления шума по мощ-
ности и поэтому вместо (4.1) записать
Ш—ТСш/Лр. (4.2)
Коэффициент усиления СР по мощности для сигнала
КР определяется выражением (3.33). Для определения
коэффициента усиления СР по шуму необходимо решить
основное уравнение (1.6), подставив в правую часть его
вместо детерминированного сигнала случайное воздейст-
вие в виде белого шума. Решение уравнения показывает,
что в этом случае на выходе получается нестационарный
случайный процесс. Можно найти выражение для кор-
реляционной функции этого процесса, а из нее и диспер-
сию шума на выходе.
Заметим, что использовать СР в приемном канале
можно в двух вариантах. Поскольку усиления СР иногда
оказывается недостаточно, после СР включают узкопо-
лосный усилитель, например супергетеродинный прием-
ник, полоса которого близка к полосе регенерированного
контура (первый вариант). Во втором варианте, когда
усиления СР достаточно, после СР включают обычный
детектор с последующим УЗЧ или при широкополосном
сигнале — видеодетектор с видеоусилителем. Рассмотрим
эти варианты.
В первом отфильтровывается лишь шум в области
центрального пика и средний квадрат напряжения шума
на выходе
&2Ш1 = Л(W20 (?) SBbIxnpiIIQ2p/Q\H, (4.3)
где волнистая черта означает усреднение по времени,
а прямая—по ансамблю; ЗВЫх—спектральная плотность
шума на выходе, учитывающая вклад шумов генератора
и всех других источников шумов (контура, входных со-
противлений ц дробовых шумов полупроводниковых или
вакуумных приборов и т. д.); Прш — интегральная поло-
са регенерированного контура. Для получения коэффи-
циента_усиления СР по шуму отнесем (4.3) к шуму на
входе Е2=ЗвхПрш, где SBX — спектральная плотность шу-
ма на входе:
Дцц=70 (2₽) /2о (₽) IU0Q2p/iQ2BH (4.4)
126
(здесь Ш0=5выхА$вх — коэффициент шума схемы без
учета эффекта ’сверхрегенерации). Коэффициент шума
СР найдем, отнеся (4.4) к (3.34) — коэффициенту уси-
ления схемы по сигналу:
Шср^лп/Кр^Шо/о (2₽) /72О (₽) =рШ0. (4.5)
Если SBbix=Ti7?r+T2-Ro, a SBX=T1Pr (Рг — сопротив-
ление источника), то Ш0=1+Р07’2/Рг7’1.
Как видим, коэффициент шума СР Шср больше Ш<>—
коэффициента шума этой же схемы без сверхрегенера-
ции (например, регенерированного контура) в р раз [р
определяется выражением (3.37)]. Этот результат мож-
но легко объяснить с помощью следующих простых фи-
зических рассуждений. Если сигнал поступает на резо-
нансной частоте (рис. 4.1,а), на выходе появляется сиг-
нал с линейчатым спектром, компоненты которого отсто-
ят друг от друга на частоту суперизации и имеют уров-
ни, определяемые функциями Бесселя. Если сигнал по-
ступает не на центральной частоте, а на частотах fo±kF
(рис. 4.1,6, в), спектр сохраняет свою структуру, но
уровни компонентов соответственно уменьшаются. На-
пример, неизменный по уровню входной сигнал вызовет
в первом случае на частоте fo сигнал /2о(ф), во втором—
72i (Р), а в третьем — 722 (Р).
При воздействии шума на СР вблизи каждой из час-
тот fo+kF действуют ЭДС шума, которые приводят
к возрастанию шума в центральной полосе. Следователь-
но, если после СР включить фильтр с полосой Пр, рав-
ной полосе регенерированного контура (рис. 4.1,а), то
в эту полосу будут как бы перекачиваться шумы из всех
полос, расположенных на интервалах -+kF от централь-
ной частоты (рис. 4.2). Поскольку шумы имеются не
только справа, но и слева от центральной частоты, мощ-
ность шума на выходе должна увеличиться по отноше-
нию к мощности шума РШо в полосе Прш в р раз, т. е.
^=^«(1+2 2 а’ХЛлоР.
\ *=i 7
где а*. — координаты резонансной кривой на частотах
fozhkF.
Во втором варианте на выходе СР стоит широкопо-
лосный фильтр или детектор, поэтому принимается весь
, L 5«. . 127
отклик на внешнее воздействие и шум на выходе опре-
делится формулой
Е/!Ш2=/\(2р)шор2р/с\н
(4-6)
Разделив_(4.6) на среднеквадратическое значение шума
на входе £2ш = 5вхПрШ, найдем коэффициент усиления по
шуму
/(ra2=/2o(2p)moQ%/Q2BH. (4.7)
Относя (4.7) к (3.36) —усилению сигнала для этого
случая, найдем коэффициент шума
Шер—KuizIKpz,—Ш07 о (2р)//2о (р) —рШо.
Как
видим, это выражение не отличается от (4.5).
Это вполне естественно:
।______в этом случае и сигнал,
I и шум увеличатся в р раз,
i_L. 14.1.1^.
"М _________
ит f
L--t-1-l^l ।__»
Рис. 4.2. Преобразование шу-
мов в СР:
а — шумы па частотах f0±kF; б—
шумы па основной частоте
Рис. 4.1. Спектры сигна-
лов на входе и выходе
СР:
а — при сигнале па частоте
настройки; б, в — при рас-
стройке; г — частотная ха-
рактеристика фильтра на вы-
ходе СР
так что отношение сигнала к шуму не должно измениться.
На рис. 4.3 показана зависимость р от р. Поскольку
обычно на практике 0=4 ... 5, коэффициент шума уве-
личится на 4 ... 6 дБ. Естественно, что при этом умень-
шается и пороговая чувствительность, которая должна
вычисляться по формуле
Рпор=^ТПрш(рШ0+/а—1), (4.8)
где ta — относительная шумовая температура. Заметим,
что при измерении коэффициента шума с помощью шу-
мового генератора его увеличение не обнаруживается,
так как в этом случае компоненты шума присутствуют
во всей полосе нерегенерированного контура, т. е. тоже
увеличиваются в р раз.
Если /а~1, получаем приближенное значение по-
роговой чувствительности
Рпор^^ТПршрШо. Поскольку
рПрш=Псрш, можно запи-
сать РПор^ТПсршШ0. Из
этого выражения можно сде-
лать вывод, что пороговая
чувствительность СР такого
же порядка, как у суперге-
теродина с коэффициентом
шума Ш(н при условии, что
шумовая полоса последнего
равна шумовой полосе СР.
Таким образом, коэффици-
ент р можно рассматривать
в соответствии с (4.5) либо
как коэффициент увеличе-
ния коэффициента шума,
либо в соответствии с (4.8)
как коэффициент увеличения полосы при неизменном
коэффициенте шума.
Эквивалентная шумовая температура СР
Тш ср=рТш,
где Тш — шумовая температура приемника с постоянны-
Рис. 4.3. Увеличение коэффици-
ента шума в СР по сравнению
с усилителем с постоянными па-
раметрами (р) в зависимости от
аргумента функции Бесселя (при
постоянных Q и у — от глубины
суперизации п)
ми параметрами.
. 4.2. Сигнал и шум на выходе детектора
после сверхрегенератора
До сих пор рассматривалось отдельно воздействие
детерминированного сигнала и стационарного шума.
Между тем сигнал и шум воздействуют на СР одновре-
9—3108 129
менно. Для СР в линейном режиме такое независимое
рассмотрение справедливо в силу действия принципа
суперпозиции. Для нелинейного режима необходим дру-
гой подход. Кроме того, следует учесть влияние детек-
тора, включенного после СР, так как в детекторе про-
Рис. 4.4. Спектральное распределение шума на выходе квадратично-
го детектора при совместном действии шума и немодулированной
несущей на входе СР:.
с —частотная характеристика К(со) и спектр сигнала на выходе СР 5(со),
т. е. на входе детектора: б, в, г — спектры шума при поступлении сигнала иа
частотах со0, (Oo4-2rtF и (0{)4-4rtF соответственно; д — спектр низкочастотной обла-
сти шума при поступлении сигнала с указанным на рисунке спектром. Отно-
шение сигнал-шум = 1
130
исходят биения между компонентами сигнала и шума и
меняется функция распределения случайного процесса.
Поэтому в настоящем параграфе рассматривается эф-
фект на выходе линейного и квадратичного детекторов,
включенных после СР, при воздействии на вход послед-
него смеси немодулированного или импульсного сигна-
ла и флуктуационной помехи.
При приеме модулированных сигналов, а также им-
пульсных с длительностью импульса 0, равной несколь-
ким периодам суперизации 7С, на выходе линейной ча-
сти СР получают серию вспышек колебаний. Но если
длительность импульса будет много больше периода су-
перизации, то спектр выходного напряжения СР в пер-
вом приближении можно рассматривать как линейчатый.
Взаимодействие такого сигнала со спектральными со-
ставляющими флуктуационного шума в детекторе .будут
отличаться от того, какой имеет место в обычных при-
емниках, а это приводит к ухудшению отношения сиг-
нал-шум. Рассмотрим сначала качественную сторону
процесса.
Пусть с выхода СР на вход квадратичного детектора
поступает сигнал со спектром 8 (и) (рис. 4.4,а). Если
бы поступил сигнал от обычного приемника, то при АЧХ
/((©) (для простоты она принята прямоугольной) спек-
тральное распределение на выходе было бы таким, как
показано на рис. 4.4,6. Как известно, спектр шума на
выходе детектора распадается на два участка: вблизи
нулевой частоты (в пределах полосы Ай=2лПСр) и в
районе 2<оо. В каждой , из этих областей спектральная
плотность состоит из двух составляющих: 8ШШ(®) —
обусловленной биениями между компонентами шума (на
рис. 4.4 они определяются штриховыми треугольниками)
и 8сш.(<»),—обусловленной биениями между компонен-
тами сигнала и шума (они определяются штриховыми
прямоугольниками). Так как шумы типа 8Шш(ю) и
8Сш((й) статистически независимы, их низкочастотные
компоненты можно сложить: треугольники суммируются
с прямоугольниками, образуя более сложные фигуры.
При этом высокочастотные участки спектра можно не
учитывать, так как они отфильтровываются в нагрузке
детектора [14].
Поскольку в СР имеется не один сигнал, a k сигна-
лов на дискретных частотах, отстоящих от несущей на
картина усложняется и,появляются дополнитель-
9* 131
йые шумы. Вклад шумовых компонентов показан на
рис. 4.4,8 при k=\, на рис. 4.4,г при k=2. Для простоты
рассмотрения сигнал пока принимался в виде немоду-
лированной несущей ®с=®о или ®C=®,O±^Q. Рисунки
4.4,в, г учитывали только ®с, но слева от ®0 есть сим-
метричная частота ®'с, поэтому на рис. 4.4,д площадь
фигуры в области низких частот удваивается. В дейст-
вительности картина будет более сложной, так как при
модулированном или импульсном сигнале спектр сигна-
ла, а следовательно, и спектр шумов типа 5Сш(ю) услож-
няются.
Рассмотрим теперь некоторые количественные соотношения.
Пусть на вход квадратичного детектора с характеристикой
i=f(u)=u2 (4.9)
поступает сигнал с выхода СР. Под сигналом будем понимать при-
ращение постоянной составляющей, вызванное появлением сигнала
Jc=oV, (4.Ю)
где о2 — дисперсия шума на выходе СР; q = ticlv 2о— отношение
эффективного значения напряжения сигнала к среднеквадратическо-
му значению шума, т. е. к корню из дисперсии.
Под шумом понимаем интенсивность низкочастотных флуктуаций
на выходе детектора
(l-|-2q2). (4.11)
Заметим, что первый член правой части характеризует биения
типа шум — шум, а второй член—биения типа сигнал — шум. По-
скольку в СР имеется не один, a k сигналов на дискретных часто-
тах, отстоящих от несущей на +kQ, шум на выходе детектора,
включенного7 после СР, определяется формулой
J2 т'=а4
шЕ
где ak—Uck/Uci', Um — амплитуда основной частоты; Uck — ампли-
туда /г-й компоненты эквидистантного спутника на частотах a0+k£l.
Степень увеличения уровня шумов и уменьшения отношения
сигнал — шум в сверхрегенеративном приемнике по сравнению
с обычным можно определить количественно, используя соотноше-
_ ния (4.9) —(4.12). Для обычного приемника
(с/ш)вых = 97^1+2?- (4.13)
для сверхрегенеративного
/ оо '
1+2^, 1+21>А
(4.12)
132
Обозначая, как и прежде, 1+22<гд=р и имея в виду, что ай
определяются отношениями функций Бесселя k-ro и нулевого по-
рядков [11, 35], по формулам (4.13) и (4.14) можно построить
график, представленный на рис. 4.5. Из рисунка видно, что при пе-
реходе от обычного приемника (р=1) к СР отношение сигнал-шум
на выходе детектора уменьшается тем в большей степени, чем глуб-
же суперизация.
Аналогичные формулы были получены для линейного детектора,
Рис. 4.5. Зависимость отношения сигнал-шум на выходе квадратич-
ного детектора, включенного после СР, от отношения сигнал-шум
на входе при разной глубине суперизации
Рис. 4.6. Зависимость отношения сигнал-шум на выходе линейного
детектора, включенного, после СР, от отношения сигнал-шум на
входе при разной глубине суперизации
133
графиков на рис. 4.5 и 4.6 показывает, что при одних и тех же зна-
чениях q и р отношение сигнал-шум на выходе линейного детектора
выше, чем у квадратичного.
Рассмотрим роль инерционности нагрузки. Если нагрузка инер-
ционна и время усреднения результатов наблюдения равно Т, интен-
сивность флуктуаций должна вычисляться не но формуле (4.11),
справедливой лишь для безынерционного детектора, а по формуле
т
___ 2 Cl М
^ашг = “ Н1-Т')ЧГ (4J5)
О
где 'Р(т)—корреляционная функция процесса на выходе детектора,
для низкочастотных составляющих на выходе квадратичного детек-
тора ее вычисляют по формуле
'Р(т)=аф'2(т—2<72г(т))], (4.16)
где г(т) — нормированная корреляционная функция узкополосного
случайного процесса на входе детектора, зависящая от вида изби-
рательной системы.
Подставляя (4.16) в (4.15) и интегрируя, найдем интенсивность
шума, которую надлежит поставить в знаменатель формулы (4.13)
Рис. 4.7. Зависимость отношения сигиал-шум на выходе квадратич-
ного детектора от отношения сигнал-шум на входе при инерционной
нагрузке
для определения отношения сигнал-шум на выходе квадратичного
детектора при инерционной нагрузке. Заменяя q2 на q2p в формуле
(4.16), подставляя затем (4.16) в (4.15) и выполняя интегрирова-
ние, получаем выражение для шума, которое следует подставить
в знаменатель формулы (4.14) для определения отношения сигнал-
шум на выходе квадратичного детектора, включенного после СР при
инерционной нагрузке. По результатам этих вычислений построены
кривые, представленные на рис. 4.7. Из сопоставления кривых па
рис. 4.5 и 4.7 видно, что с увеличением Т отношение сигнал-шум па
выходе возрастает по сравнению с безынерционной нагрузкой (штри-
ховая кривая), однако это увеличение будет тем менее значитель-
ным, чем глубже суперизация.
134
Таким образом, можно сделать следующие выводы:
отношение сигнал-шум на выходе линейного и квад-
ратичного детекторов, включенных после СР, будет
меньше, чем на выходе детекторов, включенных после
обычного приемника;
степень ухудшения отношения сигнал-шум на выхо-
де возрастает с глубиной суперизации и обычно состав-
ляет несколько единиц;
с увеличением инерционности нагрузки детектора от-
ношение сигнал-шум на выходе возрастает, но тем
в меньшей степени, чем глубже супсризация, однако уве-
личение Т ограничивает длительность импульса, кото-
рая должна быть соизмерима с 0;
'при прочих равных условиях (одинаковых q и 7) ли-
нейный детектор на выходе СР даст лучшее отношение
сигнал-шум на выходе, чем квадратичный.
• Если на входе СР действует модулированное часто-
той Fm колебание, под сигналом на выходе детектора
нужно понимать низкочастотное напряжение с амплиту-
дой Umnx. Тогда, как показано в [35], отношение сиг-
нал-шум на выходе УНЧ после квадратичного или ли-
нейного детектора будет в / р раз хуже, чем у супер-
гетеродина:
(с/ш)сг^ /П A2AF + 2/~), (4.17)
где П1п — шумовая полоса до детектора; AF—'полоса
пропускания после детектора; y=c/in на входе детек-
тора. При весьма вероятных значениях ПШ=2АГ и
«к0,7 выражение. (4.17) .превращается в (4.13). Таким
образом, кривые для р=1 на рис. 4.5 и 4.6 можно рас-
сматривать как соответствующие AM сигналу для су-
пергетеродина. Легко показать, что и выражение (4.14)'
характеризует Ьтношение сигнал-шум на выходе СР при
модулированном сигнале.
Отсюда можно сделать вывод, что все результаты,
полученные выше, в частности графики на рис. 4.5, и
4.6, справедливы не только для импульсных сигналов,
но и для AM сигналов при сделанных выше оговорках.
Следовательно, отношение сигнал-шум на выходе детек-
тора для амплитудно-модулировэнных или амплитудно-
манипулированных (импульсных) сигналов меньше, чем
аналогичное отношение для супергетеродина в / р раз.
Например, в типовом стабильном режиме при аргументе
135
функции Бесселя 0=5 ... 6 это ухудшение, как видно
из рис. 4.3, равно примерно двум.
Рассмотрим статистические характеристики смеси
сигнала и шума на выходе детектора, включенного по-
сле СР. При поступлении на вход СР гармонического
сигнала без шума спектр выходного напряжения линей-
Рис. 4.8. Спектр колебаний на выходе детектора для:
а ~ немодулированного сигнала; б — модулированного; в — смеси chi вала и
шума
чатый. После детектирования такого сигнала получаем
напряжение, спектр которого представлен на рис. 4.8,а.
Если входной сигнал был модулирован частотой Fm, то
вокруг частотных компонентов, отстоящих друг от друга
на F, появятся боковые частоты, сдвинутые относитель-
но kF на ±Fm (рис. 4.8,6).
Если на вход приемника поступает слабый сигнал,
соизмеримый с шумом, вместо последовательности им-
пульсов одинакового уровня при немодулированном сиг-
нале получим серию импульсов одинаковой формы, но
Рис. 4.9. Последовательность продетектированных импульсов после
детектора
136
разного уровня, следующих с частотой суперизации. По-
сле детектирования _такой последовательности импуль-
сов получим сигнал, представленный на рис. 4.9. Он ха-
рактеризуется среднеквадратическим значением (и—и)2
(т. е. дисперсией) напряжения, а также корреляционной
функцией и энергетическим спектром.
Спектр смеси сигнала и шума состоит из двух час-
тей. Первую представляет линейчатый спектр, характе-
ризующий сигнал (см. рис. 4.8,в). Огибающая этого спек-
тра пропорциональна спектральной плотности одной
вспышки колебаний. Другая часть спектра распределена
непрерывно и также убывает по закону огибающей спек-
тра единичной вспышки. Эта часть характеризует шум,
ибо она обусловлена флуктуациями уровня импульсов
вокруг среднего значения. Чем больше отношение сиг-
нал-шум на входе, тем большая часть выходной мощно-
сти соответствует линейчатому спектру и меньшая —
непрерывному.
4.3. Шумы в емкостных и комбинированных
параметрических сверхрегенераторах с амплитудно-
модулированным напряжением накачки
Рассмотрим наиболее интересный с практической точ-
ки зрения случай, когда в параметрическом СР одновре-
менно по закону AM напряжения накачки изменяются
затухание и емкость (см. рис. 1.16). Процессы в схеме
в общем случае описываются уравнением (1.7). Частный,
но наиболее важный случай AM накачки был рассмот-
рен для гармонического сигнала в § 2.3. Теперь надле-
жит решить основное уравнение (2.43) при случайном
воздействии, т. е. полагая в правой части уравнения бе-
лый шум. Эта задача была решена в [9].
Дисперсия шума на выходе системы с переменными
п-араметрами при случайном воздействии на входе зави-
сит от момента отсчета и при известной импульсной ха-
рактеристике может быть вычислена по формуле
У)ё«, z)B(y, z)dydz,
о о
где g(t, у)—импульсная характеристика системы;
В (у, z)—Нормированная для безразмерного времени
корреляционная функция шума на входе. Для белого
137
шума
В {у, z) = (S0/2)b(y — 2),
где So —нормированная спектральная плотность. В этом
случае
X
о
Подставляя сюда найденное в [9] выражение для им-
пульсной характеристики
g(t, = /ch<p (t, у) [sin(Z — у) —
— th?(t у) cos (i -]-yj\,
вычисляем приближенное значение усредненной во вре-
мени дисперсии шума на выходе. Для частоты супери-
зации F, значительно большей полосы регенерированно-
го контура Пр=с?оЛЛ (А,—-параметр регенерации), полу-
чаем выражение для среднего квадрата тока шума
72IU = Z20(2p)S;npuiQ2SKB/r, (4.18)
где S; — спектральная плотность по току; Прш=Прл/2 —
шумовая полоса регенерированного контура; Qэкв До-
бротность эквивалентного контура, определяемая по
формуле (2.48). Умножая (4.18) на квадрат сопротивле-
ния нагрузки и переходя к спектральной плотности по
напряжению Su, получаем средний квадрат выходного
напряжения шума
^m = /2o(2p)SJlpulQ2SKB/Q2BH. (4.19)
Дальнейшие вычисления зависят от способа исполь-
зования отклика параметрического СР на внешнюю си-
лу. Как и в классическом СР (см. § 4.1), здесь возмож-
ны отфильтровывание частот вблизи центрального ма-
ксимума или прием всего отклика. В §4.1 было показано,
что коэффициент' шума в обоих вариантах получает-
ся одинаковым. Поэтому достаточно рассмотреть какой-
либо один случай, например второй — прием всего от-
клика, определяемого по формуле (4.19). Отнеся уро-
вень шума на выходе (4.19) к уровню шума на входе
£'2швх=4^7’17?гПРш, где Rr— сопротивление источника,
a 7\— его абсолютная температура, можно найти коэф-
фициент усиления по шуму. Поскольку в (4.19) спек-
138
тральная плотность определяется как Su=4fe(7'i/?r-]_
+7'2/?0), получаем коэффициент усиления по шуму
. Кш2 = 1\ (2р) [ 1 + • <4-20)
Для определения коэффициента шума, как и в § 4.1,
отнесем коэффициент усиления шума к коэффициенту
усиления сигнала для этого случая:
ш«.=%г=О[1+^-4]- (421>
птах
Рис. 4.10.
па входе
ЭДС (а),
зации (б)
мехи на выходе СР (s)
Импульсная помеха
СР в виде скачка
напряжение супери-
и напряжение по-
Это выражение справедливо при работе параметри-
ческого СР с циркулятором, обычно используемым в схе-
мах малошумящих усилителей регенеративного типа.
Включение на входе преселектора фильтра, исключа-
ющего шумы из зеркального (разностного) канала, при
наличии фильтра, настроенного на частоту основного
сигнала на выходе, позволяет уменьшить коэффициент
шума на 1 ... Г,5 дБ.
Аналогичные результаты были получены в [88, 109]
другим путем и для более простого случая — для изме-
нения только емкости. Выражение, стоящее в квадрат-
ных скобках в правой части (4.21), представляет собой
коэффициент шума Шпу параметрического усилителя
в синхронном режиме, а ко-
эффициент /0(2р)//20(р) ха-
рактеризует степень увели-
чения коэффициента шума
этого усилителя за счет
сверхрегенеративного режи-
ма. Легко заметить, что этот
коэффициент численно ра-
вен коэффициенту р для
простого СР.
Таким образом, допол-
нительная модуляция затуха-
ния в параметрическом СР,
влияющая на усиление, не
приводит к изменению общих
выражений для выходных
сигналов и шумов. Однако
при вычислении усиления и
коэффициента шума под ар-
гументом функции Бесселя
139
следует понимать не mhj2y, а более сложное выражение
p=m/i/4y—dpn/2y, которое учитывает специфику про-
цесса при одновременной модуляции двух параметров
схемы— реактивности и затухания.
Количественные данные о коэффициенте шума и по-
роговой чувствительности параметрических СР на полу-
проводниковых диодах приведены в гл. 5.
4.4. Воздействие импульсных помех
на сверхрегенератор
Рассмотрим воздействие на классический СР импульсных помех
в виде единичных или периодических видеоимпульсов [35]. Пусть на
входе СР с прямоугольным напряжением суперизаций действует
импульсная помеха (рис. 4.10,а), появляющаяся в наиболее небла-
гоприятный момент скачка затухания от положительного значения
к отрицательному (/=0, рис. 4.10,6). Тогда мгновенное значение на-
пряжения помехи (рис. 4.10,в) будет определяться выражением
ип (1) — Е^2* cos и01.
Амплитуда напряжения помехи достигнет максимума в момент •
^птаХ=Епе527'с/2. (4.22)
Напряжение сигнала' в этот момент также достигнет максимума:
^стаХ=^/2^^е52Тс/2, (4.23)
“max
где Uo — начальная амплитуда, которая в стабильном режиме и при
глубокой Суперизации равна Примерно 2£'max/dmax.
Относя (4.22) к (4.23) и учитывая, что Пш//о~л^т/4, находим
отношение помехи к сигналу на выходе СР
^ыхтах = Лвх(2/^ (Пш/70), (4.24)
где Лвх — отношение помехи к сигналу на входе СР. Выражение
(4.24) не отличается от .формулы для обычного приемника, поэтому,
если импульс помехи придет в момент 1=0, он произведет такой же
эффект, как и в супергетеродинном приемнике. Однако вероятность
прихода помехи в момент 1=0 Невелика.
В общем случае, если помеха придет в произвольный момент
времени +1<, ее максимальное значение будет
U' е~5п1ах
w птах птах ’
а отношение максимальных значений помехи и сигнала
ЛвыХ=АЬ1хтахе (4.25)
где bi=tt/Ta характеризует фазу прихода импульса и лежит в пре-
делах —0,5 ... 4-0,5; р—аргумент функции Бесселя.
Как видно из графика, построенного по формуле (4.25)
(рис. 4.11), СР обладает острой временной (фазовой) избирательно-
стью, причем она возрастает при увеличении глубины суперизации,
140
характеризуемой коэффициентом (3. Наибольшее мешающее действие
оказывает импульс, приходящий в момент скачка, т. е. в момент
f₽=0.
Иногда действие помехи оценивается по интегральному эффек-
ту, создаваемому импульсом помехи на протяжении всей его дли-
тельности:
=J (0dt = е 5тах (Гс-2^’ . (4.26)
о
Интегральный эффект- сигнала на выходе СР за период суперизации
т /2 ‘
4 = ( = а е (4.27)
J maxu max
0
Разделив (4.26) на (4.27), получим
агт -4^6.з
ст вых — £ s 4 е
Рис. 4.11. к воздействию им-
пульсных помех на СР
Легко заметить, что Hsax, т. е. временная избирательность,
оцениваемая по интегральному
эффекту, проявляется еще в
большей степени, чем оценивае-
мая по максимальным значениям
помехи и сигнала [см. (4.25)].
Анализ показывает, что со-
отношение между максимальны-
ми значениями помехи на выхо-
де УЗЧ, включенного после квад-
ратичного детектора, в СР и
в обычном приемнике такое же,
как соотношение между инте-
гральными эффектами на входе
детектора и обычного прием-
ника. Поэтому сравнение СР и
обычного приемника по инте-
гральному эффекту справедливо
и при сравнении действия помехи
на выходе УЗЧ приемника (если
полоса УЗЧ Пузч <^ПШ) [35].
Хотя выполненный анализ
справедлив для линейного режима,
полученные выводы можно распространить и па нелинейный режим.
Действительно, резонансные свойства СР определяются главным
образом процессом нарастания начальной амплитуды UB, которая
формируется при малых уровнях сигналов, когда нелинейность ре-
жима еще.не сказывается (в иекогерентном режиме).
4.5. Ударные колебания и пороговая чувствительность
классических свер)фегенераторов
Основным фактором, ограничивающим пороговую
чувствительность СР, являются флуктуационные шумы,
’ Hl
обусловленные главным образом приборами, создающи-
ми эффект отрицательного сопротивления (транзистора-
ми, туннельными диодами и т. п.). Однако такие шумы
могут быть не единственным видом помех. Во многих СР
к ним добавляется еще одна помеха, имеющая не слу-
чайный, а детерминированный характер. Этой помехой
являются, импульсы суперизации, которые не только из-
меняют параметры системы, но и вызывают паразитные
процессы — ударные колебания [59, 105].
Дело в том, что классический СР, описываемый урав-
нением (2.4) , находится одновременно под силовым и па-
S)
Рис. 4.12. Эквивалентные схемы СР (а, б) с нелинейным элемен-
том, обладающим вольт-амперной характеристикой вида (в)
раметрическим воздействиями [73]. Силовое воздействие
обусловлено внешней силой е(^), а параметрическое дол-
жно приводить к изменению коэффициента б(/) перед
производной dx/dt.
Параметрическое воздействие можно реализовать, на-
пример, механическим способом. Однако практически та-
кой способ неприемлем из-за низкого быстродействия.
Поэтому в контур СР часто вводят нелинейный активный
элемент, на который -подают импульсы суперизации.
В результате действия импульсов суперизации изменяет-
ся параметр &(£) (полезный эффект) и одновременно
возникают паразитные (ударные) колебания на часто-
те £Оо-
Для иллюстрации рассмотрим одну из возможных
реализаций СР [59] с нелинейным элементом (рис.
142
4.12,а), содержащую индуктивность Lo, емкость Ср, ис-
точник полезного сигнала e(t), постоянное отрицатель-
ное сопротивление 7?i<0 и нелинейную цепь, вносящую
в контур изменяющееся во времени положительное со-
противление. Последняя состоит из диода и генератора
тока суперизации l(i). Для упрощения анализа ток l(t)
(рис. 4.13,а) выбран пря-
моугольной формы.
В линейном приближении
источник тока I (/) и диод
Д можно заменить последо-
вательным включением со-
противления R2(t) =df(i) jdi
(рис. 4.13,6) и генератора
напряжения E(t)=f{I(t)}
(рис. 4.13,в), а затем сопро-
тивления Ri и /?2(0 объеди-
нить:/?14-/?2(0=^ (О- Тогда
схема СР примет вид, пока-
занный на рис. 4.12,6, а урав-
нение, описывающее ее, со-
впадет с уравнением (2.4),
если принять, что 6(0 =
—R(t)/2L0 (см. рис. 3.13,г) и
е(0 . Причина
возникновения ударных ко-
лебаний — дополнительное
внешнее воздействие E(t).
Обсудим «чистый» эф-
фект ударных колебаний,
Рис. 4.13. Графики, поясняющие
процессы в схемах рис. 4.12
для чего положим e(t)=O, и вспышку, обусловленную
воздействием одного импульса E(t), обозначим через
x(t)=A7H2(t) cos (®ot—фу), (4.28)
где Ау, фу—амплитуда и фаза ударной вспышки.
Допустим, что функции 6(0 и E(t) одновременно
сдвинуты во времени в сторону запаздывания на интер-
вал Тс. При этом вместо (4.28) имеем
х(0 =AvH2(t—Tc)cos[a)0(/—Тс)—фу].
Многократные сдвиги на Тс, т. е. многократные пери-
одические запуски с периодом Тс, описываются форму-
лой
x(t) =AyH2(t—nTc)cos[(Oo(^—пТс)—фу],
где п — номер запуска.
143
Поскольку cosz является периодической функцией
аргумента z с периодом 2л, последнее выражение можно
представить так:
x(t)—AyH2(t—nTc) cos [<D0/—Лсоу/зп—фу],
где Дсоу=2яа/7’С; а — дробная часть отношения чооТ’с/Зл;
/зп — моменты пересечения функцией б (/) оси времени
сверху вниз при /i-м запуске. Эта же формула, как было
показано выше, описывает последовательность вспышек
СР при гармоническом воздействии с частотой соо—Асоу.
Поэтому в эквивалентной схеме видеоимпульсы Е (/)
можно заменить равноценным гармоническим сигналом
е„(/) = Л су sin [ (too—АсоуН+фсу], где Асу, фсу— некоторые
постоянные. Амплитуда Асу эквивалентного сигнала
в рассматриваемом примере зависит от разности Е2—Е\.
В общем случае, когда E(t) и &(/) в окрестности точек
t2n меняются плавно, Асу пропорциональна производной
dE(t)ld>t в точках /Зп [59].
Эквивалентный сигнал еу(/) является внутренней по-
мехой й в отсутствие внешнего воздействия е(/) при
многократных запусках СР вызывает появление после-
довательности вспышек с постоянной амплитудой. В ре-
зультате по отношению к внешнему сигналу СР стано-
вится пороговой системой, свойства которой можно оце-
нить пороговой чувствительностью.
Пусть наряду с импульсами Е (/) на систему действу-
ет внешний гармонический сигнал е(/) с частотой со0—Aw
и амплитудой Ас. При этом вспышки СР будут соответ-
ствовать воздействию двумя гармоническими сигналами
(см. § 3.1), т. е. будут иметь амплитудную модуляцию
с частотой | Aw—Асоу | и коэффициентом
т—Асу/Ав. при Асу^Ас, т=Ас/АСу при АСу^Ас.
Последние формулы выведены в предположении, что
А<л<с2лП, Ао)у<с2лП, и поэтому |Si(jAto) |^1 и
|Si(jA<Dy) |«^1. Они показывают, что коэффициент ам-
плитудной модуляции вспышек равен единице лишь тог-
да, когда Ас—Асу. Во всех остальных случаях (Acy>Ac
или Асу<Ас) т<1.
Пороговой чувствительностью СР при наличии удар-
ных колебаний (флуктуационные шумы не учитываются)
назовем амплитуду Ас внешнего гармонического сигнала
е(/), равную амплитуде Асу эквивалентного сигнала
еу(/). Измерение пороговой чувствительности можно све-
144
сти к измерению амплитуды внешнего сигнала, обеспечи-
вающего 100%-ную амплитудную модуляцию вспышек
при многократных запусках системы [59].
Практически СР необходимо строить так, чтобы ма-
ксимально подавлять ударные колебания, т. ет добивать-
ся минимально возможных значений ЛСу- Отметим два
метода построениявысокочувствительных СР.
'Первый метод [105] связан с понижением крутизны
импульсов суперизации в точках Ьп. При этом в тех же
точках снижается и крутизна функции 6(0> что влечет
за собой сужение полосы пропускания СР. На практике
малые значения указанной крутизны реализуются лишь
при малых значениях частоты суперизации F, что не
всегда желательно. Данным методом удается снизить
ЛСу до уровня флуктуационных шумов при у<10~3.
Второй метод [59] состоит в электрической развязке
СР и источника импульсов суперизации и приближает
процедуру суперизации к параметрическому воздейст-
вию. Для развязки в качестве изменяющегося активного
сопротивления в контуре СР или в связанных с ним це-
пях необходимо использовать параметрические резистив-
ные элементы, например резистивные оптроны (в низко-
частотных СР) или транзисторные модуляторы. Супери-
зация с помощью параметрических элементов называет-
ся параметрической или безударной.
Рекомендуется следующая методика построения СР
с безударной суперизацией. Сначала в качестве основы
СР выбирается любой автогенератор гармонических ко-
лебаний. Сопротивление стационарного резистора опре-
деляет степень регенерации системы. Данный резистор
заменяется параметрическим резистивным элементом
(резистивным оптроном, транзисторным модулятором
и т. п.), на вход которого (например, на светодиод оп-
трона) подаются импульсы суперизации. Безударная
суперизация будет иметь место, если в окрестности мо-
ментов t3n через параметрический элемент не протекают
постоянные токи и не выделяются постоянные напряже-
ния.
Рассмотрим СР с безударной суперизацией (рис.
4.14). Если между точками р и q вместо транзисторного
модулятора Т2 включить резистор с достаточно большим
сопротивлением, схема на транзисторе Т1 будет функ-
ционировать как обычный автогенератор с трансформа-
торной обратной связью. При уменьшении сопротивления
10—3108 , 145
Зтого резистора колебания срываются. Замена рези-
стора модулятором Т2, на базу которого поданы им-
пульсы суперизации, переводит каскад в режим сверх-
регенерации с малым уровнем ударных колебаний.
На радиочастотах в качестве параметрических рези-
стивных элементов удобнее всего использовать модуля-
торы на биполярных или полевых транзисторах. Однако
эти модуляторы не обеспечивают полной развязки СР
и источника импульсов суперизации, так как на выходе
Рис. 4.14. Сверхрегенератор с безударной супе-
ризацией
модуляторов наблюдаются остаточные напряжения и
протекают импульсы тока во время переходных процес-
сов. Кроме того, возможно проникновение импульсов су-
перизации в схему СР через обслуживающие цепи, на-
пример через цепи питания. Поэтому на практике потен-
циальные возможности СР по чувствительности реализу-
ют за счет развязки и одновременного уменьшения кру-
тизны импульсов суперизации. При этом ударные коле-
бания не проявляются уже при y = Fc/fo<0,01.
4.6. Ударные колебания и пороговая чувствительность
параметрических сверхрегенераторов
В параметрических СР, описываемых уравнениями
(2.27), (2.40) и (2.41), осуществляются два параметри-
ческих воздействия — с частотой суперизации и с часто-
той накачки. При этом в емкостном СР в соответствии
с уравнением (2.27) на частоте суперизации изменяется
коэффициент при dx/dt, а на частоте накачки — коэффи-
146
циент при х, в индуктивном СР в соответствии с урав-
нением (2.40) на частоте суперизации изменяется коэф-
фициент при dzfdt, а на частоте накачки — коэффициент
при z. В обоих случаях на частоте суперизации измене-
ниям подвергается активное сопротивление, а на частоте
накачки — энергоемкие элементы (индуктивности или
емкости). В резистивном СР, который описывается урав-
нением (2.41), одновременно с частотами накачки и су-
перизации изменяется знакопеременное активное сопро-
тивление. В схемах с модуляцией накачки реализуется
лишь одно параметрическое воздействие — на частоте
накачки, однако с изменяющейся амплитудой.
Если параметрические воздействия заменяются сило-
выми (электрическими) воздействиями на нелинейные
элементы, которые тем или иным образом включены
в схемы СР, то набл'юдаются два эффекта: изменение
необходимых параметров (полезный эффект) и переход-
ные процессы на собственной частоте системы, обуслов-
ленные прямым действием на контур СР напряжений
(токов) накачки и суперизации (паразитный эффект).
Паразитные переходные процессы, называемые ударны-
ми колебаниями, впервые описаны в [28, 89].
Попытаемся выяснить, как нелинейные суперизация
и накачка вызывают паразитные колебания, после чего
определим пороговую чувствительность параметрических
СР при наличии этих колебаний и обсудим методы ее
повышения. Анализ показывает, что характер ударных
колебаний во всех параметрических СР в основном оди-
наков. Поэтому имеет смысл рассмотреть эти колебания
лишь в одном, например, резистивном СР. Предполо-
жим, что требуется реализовать резистивный СР, кото-
рая описывается уравнением (2.41). Для этого необхо-
димо построить контур, содержащий индуктивность Lo,
емкость Со, источник некоторого внешнего воздействия
е(0 и знакопеременное активное сопротивление, изменя-
ющееся по закону 7?(0=^o(0+^maxcos2v/, где До(0 —
резистор, меняющийся с частотой суперизации. Обсудим
три реализации подобного контура.
Первый вариант. Считаем, что каким-либо образом
удалось воспроизвести параметрическое воздействие на
частоте накачки, т. е. реализовать без сопутствующих
эффектов сопротивление RB(/) —Rtaax cos 2vL Что же ка-
сается резистора 7?о(0> то его реализацию будем свя-
зывать с использованием нелинейного элемента (НЭ)
10* 147
с вольт-амперной характеристикой u=rf(i). Включим этот
элемент вместе с источниками тока суперизации l(t) и
полезного сигнала e(t) в контур СР. В итоге получим
схему, показанную на рис. 4.15,а.
Полагая, что ток суперизации протекает только по
нелинейному элементу, его вместе с источником l(t)
в линейном приближении заменяем последовательно
d
включенными резистором = {/= [/(0]} и источ-
ником напряжения £(/)—/[/(/)]• В результате 'прихо-
дим к эквивалентной схеме, изображенной на рис. 4.15,6.
Рис. 4.15. Эквивалентные схемы резистивного параметрического СР
с нелинейными элементами в цепях суперизации и накачки
В этой схеме е(0=е(0+^(0> т. е. наряду с полезным
сигналом е(/) присутствуют видеоимпульсы £(/), вызы-
вающие ударные колебания.
Эффект «чистых» ударных колебаний можно описать
с помощью уравнения (2.41), если положить, что e((js
=£(^)_ Решение этого уравнения имеет вид (2.39).
Пусть осуществляется однократный запуск СР, когда
на схему подан один импульс E(t). Запишем этот им-
пульс в форме £, где £тах — амплитуда
импульса; —нормированная безразмерная функ-
ция. Подставив данный импульс в выражение (2.39),
получим выходной процесс СР
х (0 = - ЕтахН2 (0 v|Kc cos (yt - <р0) X
+ (4.29)
^2
Обозначим далее через /ЛэЦ) произведение
Hi(f)Hv(t) и воспользуемся спектральной функцией
Sia(jA®), найденной по формуле (3.1) при подстановке
в нее вместо //1,2(0 зависимости Hl3(t). После неслож-
148
них преобразований находим
* (О’= ~ ^птх^н.эVA (О C«S [v/ - <?„],
где
ti
Кн.э^Кн.э, I SJjM | sin (<p0 - v/3); K„.s0 = J tf13 (t) dt.
При многократных запусках с периодом TQ имеем
X (/) = —£щах/<н.эоКсН2(/—пТс) X
Х51э (j Асо) sin (фо—vt3n) cos (yt—фо), (4.30)
где п — номер запуска; t3n— точки пересечения функци-
ей 6(/) оси времени сверху вниз. •
Поскольку sin г является периодической функцией
аргумента z с периодом 2л, величину vt3n можно заме-
нить на &uiyt3n, где Л(ог/=2ла/Тс; а — дробная часть от-
ношения. vTc/2nj а выражение (4.30) записать в виде
x(t) = —EmaxKH30KQH2(t—nTQ) X
X |S13 (jАсо) I sin (фо—Аоь/зп) cos (v/—ф0) .
Это выражение показывает, что действие импульсов
E(t) на параметрический СР в режиме многократных
запусков равноценно действию гармонического сигнала
есу(/)=Дсуsin [(v—Awy)Z+фсу) с некоторыми постоян-
ными амплитудой АСу и фазой фсу. Амплитуда Асу экви-
валентного сигнала пропорциональна амплитуде видео-
импульсов E(t) и зависит от их формы, в частности от
крутизны в точках t3n, так как при уменьшении этой
крутизны во столько же раз уменьшается произведение
Кн.эО | S1 э (jv) | .
Таким образом, подобно тому как это было в класси-
ческом СР, в параметрическом устройстве нелинейная
суперизация вызывает ударные колебания, которые по
своему проявлению эквивалентны действию гармониче-
ского сигнала с амплитудой, пропорциональной крутизне
импульсов суперизации в точках t3n.
Второй вариант. Положим, что воздействие на часто-
те суперизации является параметрическим, а с помощью
нелинейного элемента изменяются параметры на частоте
накачки. Это означает, что в Данном случае сопротивле-
ние Ro(t) реализовано с помощью некоторого парамет-
149
рического элемента, а сопротивление /?H(/)=7?maXcos2W
воспроизводится за счет протекания тока накачки Ia(t)
через НЭ. Дифференциальное сопротивление этого эле-
мента
4-fl/„ml = (RP+'?„„,cos2v<)>0.
Искомое сопротивление Ra(t), получим, если последова-
тельно с НЭ включим отрицательное сопротивление /?0Тр,
численно равное (рис. 4.15,е).
Положим, что сигнал e(t) отсутствует и имеет место
суперизации прямоугольным напряжением, когда рези-
стор Ro(t) в момент t3 при однократном запуске умень-
шается скачком. Так как на частоте накачки схема
устойчива, можно говорить о двух вынужденных коле-
баниях накачки xHi(0 при t<t3 и хпг(0 при t>t3. По-
скольку %н1 (0^хи2(0, непрерывность функции x(t)
обеспечивается переходным процессом на собственной
частоте системы, т. е. в данном примере также имеют
место ударные колебания. При многократных запусках
эти колебания можно заменить действием эквивалентно-
го гармонического сигнала с амплитудой АСу и фазой
фсу- Амплитуда АСу пропорциональна в общем случае
крутизне функции R0(t) в точках t3n.
Третий вариант. Оба процесса — и накачка, и супери-
зация — нелинейны, т. е. обеспечиваются протеканием
токов суперизации и накачки через один или несколько
нелинейных элементов. При этом паразитные переход-
ные процессы (ударные колебания), описанные в первых
двух примерах, в линейном приближении налагаются и
их действие также можно отождествлять с действием
эквивалентного гармонического сигнала, амплитуда ко-
торого пропорциональна крутизне импульса супериза-
ции.
Аналогичные закономерности наблюдаются и в схе-
мах, где на нелинейный элемент подается напряжение
накачки с амплитудной модуляцией. В последнем случае
влияние ударных колебаний пропорционально крутизне
огибающей накачки в точках t3n-
Пороговой чувствительностью параметрического СР
при наличии ударных колебаний (флуктуационные-про-
цессы не учитываются) назовем амплитуду Ас внешнего
гармонического сигнала e(t), равную амплитуде АСу
эквивалентного сигнала е^у(0. Для оценки этой чувст-
150
вительности достаточно на СР подать гармонический
синхронный (с частотой -v) сигнал с начальной фазой ф,0
и уменьшать или увеличивать его амплитуду до тех пор,
пока коэффициент амплитудной модуляции вспышек не
достигнет значения, равного единице. В этот момент ам-
плитуда Ас внешнего сигнала будет равна Лсу, так как
при Лс^Лсу всегда m^l.
Существуют два дополняющих друг друга метода
уменьшения уровня ударных колебаний. Первый связан
с уменьшением крутизны закона суперизации в точках
13п, второй — с реализацией параметрического воздейст-
вия на частотах суперизации и накачки. Параметриче-
Рис. 4.16. Схемы резистивного (а) и емкостного (б) параметриче-
ских СР с безударным запуском
ское воздействие на активные сопротивления может осу-
ществляться с помощью транзисторных модуляторов, на
реактивные элементы (индуктивности, емкости)—с по-
мощью балансных схем.
Схемы емкостного и резистивного параметрических
СР с параметрическим воздействием по частоте накачки
показаны на рис. 4.16. В контур резистивного СР (рис.
4.16,а) постоянное отрицательное сопротивление вносит-
ся со стороны транзистора Т1, а меняющееся по закону
модулированной накачки положительное сопротивле-
ние— со стороны модулятора Т2. В данном случае пара-
метрическое воздействие реализуется с помощью транзи-
сторного модулятора. В емкостном СР (рис. 4.16,6) мо-
дулированная накачка поступает в диагональ моста, об-
разованного в.арикапами Д1 ... Д4, через трансформа-
тор Тр. Цепи смещения варикапов на рисунке не пока-
151
заны. Вторая диагональ этого моста включена в контур
СР. При тщательной балансировке моста напряжение
накачки в контуре СР отсутствует, а сам мост является
меняющейся емкостью. Таким образом, в схеме реали-
зуется параметрическое воздействие на емкость.
ГЛАВА 5
ПРАКТИЧЕСКАЯ РЕАЛИЗАЦИЯ
СВЕРХРЕГЕНЕРАТИВНЫХ УСТРОЙСТВ И
ЭКСПЕРИМЕНТАЛЬНЫЕ РЕЗУЛЬТАТЫ
5.1. Экономичный транзисторный сверхрегенератор
с суперизацией УРЧ, автоматической стабилизацией
режима и безынерционным пиковым детектором
в диапазоне умеренно высоких частот
Транзисторные СР применяются в аппаратуре радио-
телеуправления объектами, длительно работающими без
обслуживающего персонала от автономных источников
питания. К числу таких объектов относятся, например,
автоматические маяки-ответчики, аппаратура сигнализа-
ции в лавинноопасных горных районах, автоматическая
аппаратура для сбора синоптических данных и т. д.
Большая часть такой аппаратуры обычно работает крат-
ковременно, а приемник сигналов телеуправления-—^не-
прерывно в течение длительного времени, в связи с чем
к его экономичности предъявляются особо жесткие тре-
бования.
На рис. 5.1 приведена схема транзисторного сверхре-
генеративного приемника, при разработке которого ос-
новное внимание было уделено повышению его эконо-
мичности. Низкочастотная часть приемника на схеме не.
раскрыта, поскольку в последней использованы широко
известные технические решения. Приемник предназначен
для работы в системе телеуправления в диапазоне мет-
ровых волн и рассчитан па прием AM сигналов с дис-
кретными значениями частот модуляции. Каждая коман-
да телеуправления формируется последовательным на-
бором модулирующих частот, следующих в определен-
ном порядке.
Основные параметры приемника: частота настройки
приемника фиксирована и устанавливается в процессе
152
Рис. 5.1. Принципиальная схема транзисторного СР с суперизацией УРЧ и автоматической стабилизацией ре-
жима
производства в диапазоне 100 ... 120 МГц, относитель-
ная полоса пропускания высокочастотной части по уров-
ню 3 дБ — около 0,7-10~2, а по уровню 60 дБ — не более
4-10-2, полоса пропускания низкочастотных фильтров,
настроенных на частоты модуляции, — около 100 Гц,
входное сопротивление 75. Ом, чувствительность прием-
ника при отношении с/ш=5 на выходе низкочастотных
фильтров — не хуже 1,5. мкВ, динамический диапазон
входных сигналов — не менее 80 дБ, напряжение источ-
ника питания 1,5±0,5 В, ток, потребляемый высокочас-
тотной частью, не более 0,5 мА. Указанные параметры
сохраняются при изменении температуры в диапазоне
— 10 ... +65°C и питающего напряжения 1 ... 2 В.
Приемник содержит УРЧ, сверхрегенеративный кас-
кад, генератор напряжения суперизации, импульсный и
пиковый детекторы, цепь автоматической стабилизации
режима '(АСР)', состоящую из видеоусилителя, ФНЧ и
регулятора напряжения, й низкочастотную часть, вклю-
чающую’ в себя УЗЧ, фильтры модулирущих частот, по-
роговые устройства, дешифратор и исполнительное
устройство.
В приемнике применен двухкаскадный УРЧ. Первый
каскад выполнен на транзисторе Т1 по схеме с общим
эмиттером и резистивной нагрузкой, а второй — на тран-
зисторе ТЗ по схеме с общей базой. Нагрузкой второго
каскада УРЧ является контур СР, образованный первич-
ной обмоткой трансформатора Тр2 и конденсаторами
С12 и С13. Сверхрегенератор выполнен на транзисторе
Т5 по схеме емкостной трехточки с общей базой. Гене-
ратор напряжения суперизации представляет собой не-
симметричный мультивибратор на транзисторах Т2 и Т4.
Импульсы напряжения суперизации длительностью
3 мкс при периоде повторения 16 мкс через резисторы
1^1 и R7 подаются на базы УРЧ и через резистор R10
на базу СР. Постоянная времени базовой цепи СР
R10C10 в несколько раз больше, чем базовых цепей
УРЧ R1 СЗ и R7 С6, что обеспечивает задержку начала
вспышки свободных колебаний в контуре СР относитель-
но момента открывания УРЧ. В импульсном детекторе
используется транзисторная сборка Т7, один из транзи-
сторов которой в диодном включении обеспечивает соз-
дание начального смещения на базе второго транзистора
для того, чтобы последний был «на грани открывания»
154
при Отсутствии высокочастотного сигнала и Сохранял это
состояние во всем диапазоне рабочих температур. От-
метим попутно, что остальные транзисторы в диодном
включении (T9, Т10 и Т12-2), применяемые в других
узлах приемника, выполняют аналогичную функцию.
Пиковый детектор выполнен на транзисторе Т1Г,
включенном по схеме эмиттерного повторителя. Конден-
сатор пикового детектора С19 нагружен на вход низко-
частотной части приемника с большим входным сопро-
тивлением. К конденсатору С19 подключен также двух-
каскадный «обнуляющий» ключ на транзисторе Т13 и
транзисторной сборке Т12. База транзистора Т12-1 со-
соединена с выходом генератора напряжения супериза-
ции через конденсатор С18, образующий совместно со
входным сопротивлением обнуляющего ключа диффе-
ренцирующую цепь. Транзистор Т12-1 открывается на
короткий промежуток времени, совпадающий с фронтом
импульса суперизации, вследствие чего транзистор Т13
переходит в режим насыщения, а конденсатор С19 за-
ряжается до напряжения, почти равного напряжению
питания, за счет чего и осуществляется обнуление пико-
вого детектора. Во время вспышки свободных колебаний
на базу транзистора Т11 поступает видеоимпульс, при
этом напряжение на конденсаторе С19 уменьшается на
величину, пропорциональную максимальному напряже-
нию вспышки свободных колебаний благодаря разряду
конденсатора С19 через эмиттер транзистора Т11. После
окончания вспышки свободных колебаний напряжение на
конденсаторе С19 остается практически постоянным
вплоть до появления следующего импульса суперизации,
так как в течение этого времени транзисторы Т12-1 и
Т13 закрыты, а подзаряд конденсатора С19 через низ-
кочастотную часть приемника незначителен.
Пиковый детектор и обнуляющий ключ питаются от
стабилизированного напряжения 0,95 В, снимаемого
с низкочастотной части приемника. Выходное напряже-
ние импульсного детектора через конденсатор С16 пода-
ется и на вход видеоусилителя системы АСР, выпол-
ненного на транзисторе Т8 по схеме с общим эмиттером.
В коллекторной цепи этого транзистора включен конден-
сатор С14 с емкостью, достаточной для подавления со-
ставляющих частот суперизации и частот модуляции.
Выход видеоусилителя гальванически соединен с базой
транзистора Тб, выполняющего функцию регулятора на-
155
пряжения питания генератора напряжения суперизаЦйй,
УРЧ, СР и импульсного детектора.
В процессе регулировки приемника производятся
установка длительности и периода следования импуль-
сов суперизации подбором резисторов R3 и R9, грубая
настройка входной цепи приемника и контура СР на
заданную частоту подбором конденсаторов Cl, С12 и
С13 и точная настройка с помощью подстроечных сер-
дечников катушек трансформаторов Тр1 и Тр2, а также
установка режима СР подбором резистора R12 в цепи
эмиттера транзистора Т5. Режим СР устанавливается
таким образом, чтобы вспышки высокочастотных коле-
баний в контуре СР возникали при напряжении на вы-
ходе регулятора напряжения (коллектор транзистора Тб)
около 0,85 ... 0,9 В. Появление вспышек высокочастот-
ных колебаний фиксируется с помощью осциллографа,
подключенного к выходу импульсного или пикового де-
тектора. Как показывают измерения, такой приемник
значительно более экономичен, чем супергетеродин с
аналогичными параметрами.
5.2. Сверхрегенераторы на вакуумных приборах
в диапазоне СВЧ
В СР сантиметрового диапазона СВЧ в качестве ак-
тивного элемента могут применяться маломощные маг-
нетроны, отражательные клистроны, ЛБВ и ЛОВ. Маг-
нетроны в СР не применяют из-за громоздкости и не-
большого усиления в стабильном режиме. Отражатель-
ные клистроны были использованы в нескольких СР, но
при этом был получен большой коэффициент шума. Бо-
лее перспективными являются СР на ЛБВ и в особенно-
сти на ЛОВ, которые могут применяться даже на мил-
лиметровых волнах.
Сверхрегенератор на отражательных клистронах. Отражательные
клистроны широко применяются в качестве гетеродинов в суперге-
теродинных приемниках на СВЧ. Но их можно использовать и в СР.
Для этого на клистрон подается напряжение питания для обеспече-
ния работы в одной из рабочих зон его характеристики. В цепь пи-
тания отражателя вводится напряжение суперизации, желательно
в форме прямоугольных несимметричных импульсов. При использо-
вании синусоидального напряжения суперизации наблюдается .час-
тотная модуляция .колебаний клистрона, что нежелательно. Сигнал
вводится в объемный резонатор клистрона с помощью циркулятора
или другим способом.
156
При прямоугольном напряжении суперизации обычной (симмет-
ричной) формы были получены коэффициенты шума 40 ... 50 дБ
и пороговые чувствительности 10-7 ... 10-8 Вт, а при использовании
напряжения суперизации специальной (квазиоптимальиой) формы,
характеризующейся асимметрией отрезков положительного и отри-
цательного затуханий и наличием регенеративной части периода
(см. рис. 6.4), коэффициенты шума 30 ... 35 дБ и пороговые чув-
ствительности примерно 10~9 ... 10~10 Вт [И, 105]. Большие шумы
и низкая пороговая- чувствительность объясняются большими дробо-
выми шум’ами электронного пучка и низкой добротностью резонато-
ра. При уменьшении дробовых шумов,- улучшении конструкции элек-
тронной пушки или повышении. добротности контура за счет реге-
нерации коэффициент шума уменьшается на несколько децибел,
однако он все же остается значительным. Поэтому СР с отража-
тельными клистронами могут применяться лишь там, где ие тре-
буется высокая чувствительность приемника, например при приеме
прямых сигналов обнаружителя, для опознавания и других целей.
дБ при
Рис. 5.2. Структурная схема экспе-
риментального макета СР на ЛБВ
можно
использовании .
активного эле-
Начальиое иа-
В работе [118] описаны результаты применения отражательных
клистронов- в качестве регенеративных усилителей и детекторов
в сантиметровом и миллиметровом диапазонах. Применение одного
из таких усилителей в трехсантиметровом диапазоне позволило по-,
высить чувствительность приемника с 98 до 108 дБ, т. е. на 10 дБ.
Другой усилитель на частоте 9360 МГц имел усиление 60
полосе 2,4 МГц и коэффициен-
те шума 16 дБ. В этой связи
можно заметить, что усилители
работают не в сверхрегенера-
тивном, а в регенеративном
режиме; при этом остаются
в силе недостатки, присущие
этому режиму; узкая полоса
и малая стабильность при .
большом усилении.
Сверхрегеиератор на ЛБВ.
Лучшие результаты
получить при
в качестве
мента ЛБВ.
пряжение на управляющем элктроде ЛБВ устанавливается та-
ким, что в схеме создается регенеративный режим, а дополнитель-
ное напряжение суперизации, подаваемое на этот электрод, перево-
дит режим в сверхрегенеративный. Сверхрегенератор на ЛБВ экспе-
риментально исследовался па специальной установке, работавшей
в трехсантиметровом диапазоне [11] (рис. 5.2). Сигнал от генера-
тора Г через направленный ответвитель НО-1 и диодный коммута-
тор К поступает в объемный резонатор Р. Далее сигнал усиливает-
ся в ЛБВ, которая работает в режимах обычного, регенеративного
или сверхрегенеративиого усиления. В последних случаях часть уси-
ленного сигнала снимается с- направленного ответвителя НО-2, ре-
гулируется аттенюатором Ат, фазовращателем ФВ и вводится иа
вход усилителя, обеспечивая положительную обратную связь. Для
осуществления сверхрегенеративиого режима напряжение от генера-
тора суперизации ГС подается иа управляющий электрод ЛБВ.
Одновременно при сложных формах напряжения суперизации. с по-
157
MoiUbfo диодного коммутатора К в течение части периода супериза-
ции шунтируется резонатор.
Усиленный сигнал детектируется детектором Д, усиливается ви-
деоусилителем ВУ и просматривается на экране осциллографа ОСЦ.
При измерениях усиления и снятии частотных характеристик вместо
осциллографа включается вольтметр. Для определения усиления
сигнал, наблюдаемый на выходе схемы, представленной на рис. 5.2,
сравнивается с сигналом, получаемым при подключении выхода ге-
нератора Г непосредственно к детекторной секции Д.
Усиление СР зависит от начального напряжения на управляю-
щем электроде, определяющем степень регенерации, от амплитуды
напряжения суперизации и глубины обратной связи. Характеристики
усиления в зависимости от степени регенерации и амплитуды напря-
жения суперизации показаны на рис. 5.3. Как видно из рисунка,
выигрыш за счет сверхрегенеративного эффекта возрастает с уве-
личением степени регенерации и амплитуды суперизации и состав-
ляет 20 ... 40 дБ.
На основании экспериментальных АЧХ усилителя можно заклю-
чить, что линейный режим сохраняется до РВ1=10~8 ... 10~9 Вт.
Максимальная чувствительность была получена порядка 10-11 Вт.
Из расчета, выполненного по обычным формулам, видно, что такая
чувствительность соответствует коэффициенту шума СР, равному
22 дБ. .
Использование напряжений сигнала и суперизации оптимальных
форм позволило повысить чувствительность СР на ЛБВ еще на один
порядок, т. е. до 10~12 Вт. По-видимому, применение менее шумя-
щих ЛБВ сделает возможным дальнейшее повышение чувствитель-
ности.
В работе [105] сообщается о СР на ЛБВ в этом же диапазоне
с усилением по мощности 100 дБ и коэффициентом шума 10 дБ.
Автор утверждает, что если в период молчания выключить ток пуч-
ка, чтобы уменьшить дробовые шумы, можно снизить коэффициент
шума примерно до 2 ... 3 дБ.
Сверхрегенератор на ЛОВ. Цаиболее подходящим
активным элементом для СР из всех электронных при-
боров, по-видимому, является ЛОВ, которая обычно ис-
пользуется в качестве маломощного генератора в диа-
пазоне СВЧ. Лампа обратной волны выгодно отличает-
ся от клистрона значительно меньшим уровнем шумов и
большим диапазоном электронной перестройки. В схеме
СР лучше использовать ЛОВ, чем ЛБВ, поскольку для
нее' не требуется цепи положительной обратной связи и
специального резонатора. В СР на ЛОВ в качестве вы-
сокочастотного контура используется линия задержки,
связанная с электронным пучком.
Гармоническое напряжение суперизации с частотой
несколько мегагерц подводится к первому аноду ЛОВ,
который управляет током пучка, поочередно делая его
больщим или меньшим начального пускового тока, при
158
Рис. 5.3. Зависимость усиления
в регеиеративиом (Кр) и сверх-
регеиеративном (Кср) режимах
от степени регенерации при раз-
ных амплитудах суперизации
Ус:
I — ток пучка, /о —ток пучка, при
котором возникает самовозбуждение
котором возникает генерация. С выхода СР сигнал по-
ступает на дополнительный узкополосный усилитель или
детектор.
Большое усиление СР обеспечивается большой отри-
цательной проводимостью, которая наблюдается в гене-
раторе на ЛОВ в течение времени нарастания. Сверх-
регенеративный режим в усилителе на ЛОВ отличается
большой стабильностью, поскольку нет необходимости
в том, чтобы ток пучка поддерживался длительное время
близким к пусковому (как
в регенеративном режиме).
Коэффициент усиления СР
на ЛОВ в десятисантимет-
ровом диапазоне на 30 дБ
превышал усиление, кото-
рое получалось на этой же
лампе в регенеративном ре-
жиме [17,18]. Коэффициент
шума при этом примерно
того же порядка (12 ...
14 дБ). Амплитудная харак-
теристика линейна до 10~4 Вт
на выходе усилителя.
В работе [4], также для
десятисантиметрового диа-
пазона, были получены ана-
логичные результаты. На
рис. 5.4 показана зависи-
мость усиления СР от напря-
жения суперизации при
различных напряжениях на
первом аноде. Дополнитель-
ное усиление, обеспечивае-
мое сверхрегенеративным эффектом при использовании
сигнала, снимаемого в полосе центрального пика резо-
нансной кривой, составляет 35 ... 40 дБ. Как следует из
рис. 5J5, на котором показаны зависимости коэффициен-
та шума от напряжения и частоты суперизации, с повы-
шением напряжения и частоты суперизации коэффици-
ент шума возрастает.
Увеличение коэффициента шума в сверхрегенератив-
ном режиме по сравнению с регенеративным составляет
несколько децибел, что совпадает с теоретическими ре-
зультатами, полученными в гл. 4,
159
На основании экспериментального исследования СР
на ЛОВ можно сделать следующие выводы. Стабильный
выигрыш в усилении составляет 30 ... 45 дБ по сравне-
нию с регенеративным режимом. Ширина полосы пропу-
скания СР определяется режимом ЛОВ и частотой су-
суперизации Uc при разных иа-
перизации и составляет несколько десятков мегагерц.
Возможна электронная перестройка рабочей частоты
в широких пределах. Коэф-
фициент шума СР, измерен-
ный с помощью шумового
генератора, также зависит
от режима и меняется от 10
до 20 дБ.' Выбирая режим
ЛОВ оптимальным по на-
пряжению и частоте супе-
ризации, можно получить
большое усиление в сверх-
регенеративном режиме
(50 ... 60 дБ), что эквива'-
лентно применению, двух-
каскадного УРЧ, при незна-
чительном ухудшении коэф-
фициента шума. Таким об-
разом, можно построить
сверхрегенеративный при-
емник на ЛОВ с высокой
избирательностью, высокой
чувствительностью и пере-
страиваемый в широкой по-
лосе частот, что необходимо
для многих приложений.
Сверхрегенератор в мил-
лиметровом диапазоне’на ча-
стоте 75 ГГц позволяет по-
лучить выигрыш по усиле-
нию в 2 раза (около 50 дБ)
и по полосе в 4 раза по
сравнению- с регенератив-.
пым режимом. Аналогичные
пряже.ниях на первом этапе
UaI:
X — экспериментальные значения
Рис. 5.5. Зависимость коэффи-
циента шума СР иа ЛОВ от
частоты и напряжения супери-
зации
результаты были получены
на частоте 36,5 ГГц. Коэффициент шума в сверхрегене-
ративном режиме был даже меньше, чем в регенератив-
ном (31 дБ по сравнению с 40 дБ). По-видимому,
здесь сказались погрешности измерения [40].
J6Q
5.3. Малошумящие сверхрегенераторы
на туннельных диодах
В качестве активного элемента с отрицательной про-
водимостью в СР может быть использован и ТД. По
сравнению с другими электронными или полупроводни-
ковыми приборами, которые можно использовать для
подобных целей, ТД имеют следующие преимущества:
малые габаритные размеры, незначительную мощность
потребления от источников питания, широкий интервал
рабочих температур (от температуры жидкого гелия до
400°C), высокую нелинейность вольт-амперной характе-
ристики, малую подверженность действию радиации,
uc(t)
Рис. 5.6. Простейшая схема СР на
ТД
малый уровень шумов. Поэтому ТД целесообразно ис-
пользовать в схемах СР. Поскольку его вольт-амперная
характеристика имеет падающий участок, можно ском-
пенсировать потери в контуре на частоте сигнала и соз-
дать .отрицательное сопротивление, что приведет к нара-
станию напряжения собственных колебаний по экспонен-
циальному закону. Для этого необходимо подключить ТД
(полностью или частично) параллельно колебательному
контуру.
Рассмотрим некоторые результаты сверхрегенератив-
ного приема иа ТД [2, 39, 120, 124]. В схеме, представ-
ленной на рис. 5.6, ТД подключается параллельно коле-
бательному контуру последовательно со смещающим на-
пряжением Ео и генератором напряжения суперизации
uc(t). Выбором напряжений Ео и ис можно обеспечить
необходимый сверхрегенеративный режим.
Большая нелинейность вольт-амперной характеристи-
ки ТД позволяет осуществить одновременно со сверхре-
генеративным усилением и детектирование амплитудно-
П-ЗЮ§ ' 161
ухудшаются, а улучшаются,
детектированных сигналов [124]. Для этого необходимо
в цепь постоянной составляющей ТД включить нагрузку
для продетектиров-анного тока, с которой снимается на-
пряжение, меняющееся по закону огибающей входного
сигнала, для последующего усиления.
Создание схем СР на ТД с автосуперизацией услож-
няется. В отличие от всех других сверхрегенераторов
(ламповых, транзисторных, параметрических и др.), где
при нарастании автоколебаний'они детектируются и вы-
прямленное напряжение меняет режим активного эле-
мента таким образом, что создаются условия для их за-
тухания, в схемах с ТД при нарастании колебаний воз-
растаю'щее продетектированное напряжение изменяет ре-
жим ТД так, что условия существования Колебаний не
поскольку рабочая точка
попадает на участок с
большей отрицательной
проводимостью. Поэтому
обычная схема СР с од-
ним. ТД и одним конту-
ром не может работать
в режиме автосупериза-
ции. Для реализации та-
кого режима нужно при-
менить двухконтурную
колебательную систему.
Однако возможна реа-
лизация СР на ТД с ав-
тосуперизацией и с це-
почкой нагрузки 7?нСб
в обычной схеме, если
нелинейное сопротивление,
например обращенный диод [39]. Это видно из рис. 5.7.
Кривые 1 и 2 пересекаются в трех точках, поэтому со-
ответствующие решения неустойчивы; кривые 1 и 3 пе-
ресекаются в одной точке, поэтому решение устойчиво.
Нелинейное сопротивление должно быть выбрано с боль-
шим отношением сопротивления по постоянному току
к. дифференциальному сопротивлению в заданной рабо-
чей точке.
Возможны и другие варианты схем СР на ТД. На-
пример, связь .источника сигнала с контуром можетосу-
ществляться не через конденсатор связи, а трансформа-
торным или автотрансформаторным способом, ТД иног-
162
Рис. 5.7. Вольт-ампернаи характе-
ристика ТД (7) и нагрузочные ха-
рактеристики при линейном (2) и
нелинейном (3) сопротивлениях
нагрузки в схеме
в качестве 7?н применить
Да подключается не ко всему контуру, а к его пасти, прн
этом улучшается форма нарастающих колебаний. В та-
ких случаях могут возникнуть паразитные колебания,
так как при этом создается система уже не с одним,
а с двумя контурами.
Для сверхрегеиеративных детекторов на ТД характерны две
особенности. Во-первых, вследствие малого обратного сопротивления
ТД в схеме не удается осуществить пиковое детектирование, поэто-
му и в линейном и в нелинейном режимах применяется детектиро-
вание с усреднением. Во-вторых, в цепи нагрузки ТД помимо про-
детектированного сигнала имеется значительно превышающее его
напряжение суперизации, которое приходится отфильтровывать
(рис. 5.8). В подобных схемах сверхрегенеративного детектора в ка-
честве емкости нагрузки
можно использовать ем-
кость монтажа; Дф и Сф
образуют фильтр, препят-
ствующий проникновению
напряжения суперизации на
выход; Со блокирует ис-
точник постоянного смеще-
ния на ТД.
. В диапазоне СВЧ СР
на ТД включают через цир-
куляторы. При этом основ-
ной интерес представляют
не столько усилительные,
сколько шумовые свой-
ства СР. Для расчета
Рис. 5.8. Схема СР на ТД
коэффициента шума СР
на ТД рассмотрим эквивалентную схему СР с учетом всех источни-
ков шумов (рис. 5.9). Здесь обозначены: gv — проводимость цирку-
лятора, пересчитанная в контур;/ш ц — генератор шумового тока цир-
кулятора; gK— проводимость контура; /ш к — генератор шумового
тока контура; §экв—эквивалентная шумовая проводимость ТД, пе-
ресчитанная в контур; /Шэкв — генератор шумового тока ТД, пере-
считанного в контур. *
Среднеквадратическое значение шумового тока ТД
акв34Й7'^аквПш.
Все проводимости, составляющие эквивалентную шумовую схе-
му, за исключением йЪкв, являются активными, а соответствующие
им генераторы шумового тока являются источниками термических
флуктуаций.
Если рабочая точка выбрана на падающем участке вольт-ампер-
ной характеристики ТД, термическими шумами в первом приближе-
нии по сравнению с дробовыми шумами можно пренебречь [120].
Для удобства анализа дробовой шум представляется генератором
эквивалентного ему теплового шума /ш эк в с проводимостью
geKB—eI0/2kT. (5.1)
В отличие от электронных ламп, в ТД дробовой ток не равен
току в рабочей точке на начальном (восходящем) участке вольт-
11* 163
амперной характеристики. Однако на падающем участке характери-
стики за дробовой ток можно принимать ток в рабочей точке ха-
рактеристики.
Анализируя эквивалентную шумовую схему (см. рис. 5.9), по-
лучаем выражение для коэффициента шума
Ш=( 1 -|~ (й'к-гй'а к в ) Тц/То§ц]р,
где Гц — температура источника; р — коэффициент, определяемый по
формуле (3.37). Принимая
Тц = То и вычисляя по форму-
ле (5.1) эквивалентную шумо-
вую проводимость для /0=
= 0,1 мА, видим, что коэффи-
циент шума получается поряд-
ка 6 ... 8 дБ.
На рис. 5.10 и 5.11 пред-
ставлены результаты экспе-
риментального исследования
усилителя на ТД в трехсан-
тиметровом диапазоне в ре-
генеративном и сверхрегенеративном режимах. Как видно из
рис. 5.11, сверхрегенеративный режим обладает большей стабильно-
стью. ।
Конструктивное оформление СР на ТД определяется
диапазоном, в котором они используются. В схемах су-
перизации используются цепи с сосредоточенными посто-
Рис. 5.10. Зависимость чувствительности от смещения на ТД ия при
различных напряжениях суперизации Uc
янными, поскольку рабочие частоты находятся значи-
тельно ниже диапазона СВЧ. Высокочастотные цепи
в дециметровом диапазоне строятся на коаксиальных
контурах, в сантиметровом — на объемных резонаторах.
Сверхрегенератор на ТД в дециметровом диапазоне на
частоте 600 МГц при частоте суперизации 55 кГц и поло-
164
сё частот 8 МГц имел усиление (ё ... 8) -16® и чувстви-
тельность 5 мкВ [2]. Туннельные диоды были использо-
ваны и для детектирования и генерирования напряжения.
Такой СР работал в широком диапазоне частот
100 МГц ... 6 ГГц [124]. Сверхрегенераторы на ТД на
частотах 100, 325 и 930 МГц имели чувствительности по-
Рис. 5.11. Нестабильность усиления гари изменении температуры уси-
лителя на ТД в регенеративном (/) и сверхрегеиеративном (2) ре-
жимах
рядка 0,3 мкВ или около 10~12 Вт [95]. Таким образом,
СР на ТД имеют довольно высокую чувствительность
в широком диапазоне сверхвысоких частот.
5.4. Сверхреген^раторы на лавинно-пролетных диодах и
диодах Ганна в диапазоне СВЧ
Сверхрегенератор для диапазона СВЧ можно постро-
ить и на других полупроводниковых активных элементах
с отрицательной проводимостью: ЛПД и ДГ. Как изве-
стно, ЛПД был впервые создан в СССР на основе обна-
руженного в 1959 г. А. С. Тагером и его сотрудниками
эффекта генерации когерентных колебаний СВЧ при ла-
винном пробое германиевых диффузионных диодов
[102]. Сверхрегенераторы на ЛПД можно выполнить
как с внешней суперизацией, так и с автосуперизацией.
Схема СР на ЛПД не отличается от схемы СР на ТД.
При внешней суперизации напряжение суперизации под-
водится к ЛПД последовательно с напряжением пита-
ния. В СР на ЛПД роль напряжения автосуперизации
могут выполнять релаксационные колебания в цепи пи-
тания, обусловленные нелинейными свойствами ЛПД.
165
Нелинейность ЛПД приводит к тому, что При генерации
с увеличением высокочастотного напряжения на р—п-
переходе уменьшается постоянная составляющая (т. е.
напряжение смещения) на диоде. Можно получить ре-
жим, при котором значение тока смещения станет ниже
' стартового, при котором возникают колебания, и генера-
ция прекратится. При этом напряжение и ток смещения
восстанавливаются до первоначальных значений, что
вновь приводит к генерации и т. д.
Процесс прерывистой генерации СВЧ может исполь-
зоваться для сверхрегенеративного усиления внешнего
сигнала, при котором низкочастотные колебания будут
выполнять роль напряжения автосуперизации. Амплиту-
да и частота низкочастотных колебаний определяются
как процессами в СВЧ Контуре, в частности процессом
установления высокочастотных колебаний, так и свойст-
вами низкочастотной цепи диода.
Наличие у ЛПД отрицательного динамического со-
противления позволяет использовать его не только для
генерации, но и для регенеративного усиления СВЧ ко-
лебаний. Однако широкому использованию. ЛПД в ре-
генеративных усилителях препятствуют высокий уровень
шумов и нестабильности при усилении больше 15 дБ.
Шум в ЛПД состоит в основном из трех компонентов:
шума лавины, шума, обусловленного преобразованием
низкочастотного шума в высокочастотный за счет моду-
ляции им сигнала; и теплового шума. Самым существен-
ным из них можно считать шум лавины, являющийся
разновидностью дробового шума.
Переход к сверхрегенеративному режиму позволяет
значительно повысить стабильность режима при удов-
летворительных шумовых характеристиках усилителя,
особенно если использовать оптимальные режимы и фор-
мы напряжений сигналов и суперизации [127].
На рис. 5.12 и 5.13 приводятся некоторые результаты
экспериментального исследования СР на ЛПД в трех-
сантиметровом диапазоне волн. Исследование проводи-
лось на германиевых ЛПД, серийно выпускаемых про-
мышленностью; использовался также серийный цирку-
лятор. Лавинно-пролетный диод размещался в электро-
динамической сйстеме, представляющей собой широко-
полосный отрезок волновода. С волноводом циркулято-
ра электродинамическая система с ЛПД стыкуется с по-
мощью согласующего трансформатора. Подстройкаэлек-
166
тродинамической системы производится закорачиваю-
щим поршнем; ЛПД устанавливается несимметрично по
широкой стороне стенки волновода для согласования со-
противления ЛПД с сопротивлением волновода.
Как видно из рис. 5.12, введение напряжения супери-
зации около 1 В дает выигрыш в усилении примерно
20 ... 26 дБ. Из рис. 5.13 следует, чтб параметры СР
значительно меньше подвержены влиянию температуры,
чем у регенератора. Из экспериментальных исследова-
Рис. 5.12. Зависимость усиле-
ния в усилителе на ЛДП в ре-
генеративном (Uc = 0) и сверх-
регеиеративном (До=й=0) режи-
мах от тока диода при разных
амплитудах напряжения супе-
ризации
Рис. 5,13. Изменение чувствитель-
ности Рвх и усиления Ку СР иа
ЛПД при изменении температуры
ний можно сделать вывод о том, что оптимизация СР по
току ЛПД, амплитуде и частоте суперизации позволили
получить чувствительность порядка 65 ... 71 дБ/мВт
при отношении с/ш—3/1, что эквивалентно значению
74 ... 80 дБ/мВт при отношении с/ш—1 (PBXz=10.-11 Вт).
Это соответствует коэффициенту шума СР, равному
27 ... 21 дБ. Использование ЛПД, выполненного на
основе арсенида галлия и имеющего более низкий соб-
ственный коэффициент шума, по-видимому, позволит
создать СР с чувствительностью того же порядка, что и
чувствительность приемников прямого усиления с пред-
варительным усилителем на пакетированных ЛБВ и ви-
деодетектором.
167
В [69] описан СР на ДГ с автосуперизацией, возни-
кающей за счет отрицательной проводимости по низкой
частоте. В подобных схемах при определенных соотноше-
ниях между низкочастотными параметрами колебатель-
ного контура с увеличением напряжения питания сверх
порогового значения форма напряжения суперизации ме-
няется от почти прямоугольной до близкой к синусои-
дальной. Схема СР на ДГ не отличается от схемы СР
на ТД или ЛПД. Экспериментально исследовался СР на
ДГ типа ЗА7ОЗБ в режиме автосуперизации, возникав-
шем при напряжениях питания 4 ... 8 В. Конструктивно
Рис. 5.14. Зависимость коэффици-
ента усиления Ку и полосы про-
пускания П СР на ДГ от уровня
входного сигнала Ре при t/c = 6 В
8600 9000 9900 9000 f\ МГц
Рис. 5.15. Зависимость формы
АЧХ в СР на ДГ от уровня
входного сигнала
он представлял собой обычную волноводную колебатель-
ную систему в трехсантиметровом диапазоне волн, пере-
страиваемую поршнем. В диапазоне частот 8 ... 11 ГГц
внешняя добротность колебательной системы изменялась
от 1000 до 40. Частота суперизации изменялась от не-
скольких килогерц до десятков мегагерц.
Как следует из рис.'5.14, на котором приведены зави-
симости усиления и полосы от уровня входного сигнала,
линейный режим сохраняется только при малых уровнях
входного сигнала (Рс = 75 дБ/Вт), тогдГ как при боль-
ших Рс режим становится близким к логарифмическому.
Отметим, что с повышением уровня входного сигнала
(рис. 5.15) полоса пропускания значительно расширяет-
ся при смещении максимума. Это не наблюдается в СР
на ТД и ЛПД. По-видимому, это свидетельствует о рез-
ко нелинейном характере механизма усиления в данной
схеме. Чрезмерно большими оказались и шумы в схеме:
при усилении порядка 60 дБ и полосе 300 МГц коэффи-
циент шума был не менее 40 дБ. Для его уменьшения
168
СЛеДуёт использовать ДГ с малыми собственными шума-
ми, а также применять оптимальные режимы ДГ и опти-
мальные формы напряжений сигнала и.суперизации.
5.5. Малошумящие параметрические
сверхрегенераторы на полупроводниковых диодах
в диапазоне СВЧ
Теория емкостных и комбинированных параметриче-
ских СР была рассмотрена в гл. 2. Здесь приводятся
данные о реализациях параметрических СР в децимет-
ровом и сантиметровом диапазонах, а также некоторые
результаты экспериментальных исследований таких
устройств.
Параметрические СР, как и классические, можно реа-
лизовать в двух вариантах: с внешней суперизацией и
с автосуперизацией. В первом случае внешний генератор
суперизации воздействует на параметрический диод, ме-
няя смещение на нем, или на генератор накачки, изме-
няя его мощность или частоту. Можно создать схемы,
в которых внешний генератор суперизации изменяет про-
водимость резонатора. Чаще применяется метод модуля-
ции генератора накачки. Поскольку в сантиметровом
диапазоне генератором накачки часто является клистрон,
AM накачка очень легко реализуется подачей напряже-
ния суперизацци на отражатель.
Как известно, существует включенная параллельно
диоду цепь, состоящая из его сопротивления утечки и
емкости. При нарастании колебаний в процессе усиления
одновременно происходит и детектирование в цепи па-
раметрического диода. Создающееся при этом выпрям-
ленное напряжение при достаточно большой амплитуде
колебания приводит к срыву генерации подобно тому,
как это происходит в схеме генератора при прерывистой
генерации. После разряда емкости на сопротивление
утечки снова создаются условия для нарастания колеба-
ния и т. д. Этот процесс повторяется и имеет релаксаци-
онный характер, т. е. имеет место автосуп ер и зация. Ча-
стота срыва колебания является частотой суперизации.
В сверхрегенеративном режиме могут работать одно-
контурные и многоконтурные усилители. Схема парамет-
рического СР определяется его типом и диапазоном,
В котором он используется.
169
Йараметрические СР в дециметровом диапазоне.
В СР, схема которого показана на рис. 5.16, сигнальный
контур так же, как и устройство ввода и вывода сигнала,
коаксиального типа. Накачка на частоте 10 ГГц вводит-
ся через волновод. Холостой контур н-а-раз костную час-
тоту выполнен в виде объемного резонатора. Параметри-
ческий кремниевый точечный диод связывает сигнальный
и холостой контуры.
Параметрический СР, работающий на частоте
780 МГц с внешней и автосуперизацией, описан в [110].
Такой усилитель в обычном
режиме обеспечивает усиле-
ние 23 дБ при полосе
150 кГц. Введение сверхре-
генеративного режима уве-
личивало усиление до 56 дБ
при полосе 1,5 МГц (можно
получить и большее усиле-
ние, но при более узкой по-
лосе). Частота суперизации
выбрана менее 1 МГц, ко-
эффициент шума — порядка
0,8 дБ (Т = 65 К). С увели-
чением частоты суперизации
до 1 МГц полоса расширя-
ется до 4 МГц, но зато уве-
личивается и коэффициент шума, достигая 2 дБ. Полу-
чена- реальная чувствительность 0,4-10~14 Вт.
Важным преимуществом параметрического СР явля-
ется лучшая стабильность, т. е. меньшая зависимость
усиления от изменения питающих напряжений и темпе-
ратуры окружающей среды.
В сверхрегенеративном режиме усилитель при внеш-
ней суперизации дает лучшие результаты, чем простой
параметрический усилитель со стабилизацией, при усло-
вии, что стабилизирован источник питания накачки. Од-
ной из интересных особенностей СР с автосуперизацией
является тот факт, что изменение смещения диода при-
водит к появлению огибающей сигнала на выходе. По-
этому продетектированное выходное напряжение, т. е.
видеосигнал, можно снять непосредственно с параметри-
ческого диода (см. рис, 5.16).
О параметрическом С1Р на несколько более высокой
частоте сигнала сообщается в [114]. В усилителе осуще-
170
Выход
Вход
Накачка
Выход видеочастоты
Рис. 5.16. Схема параметриче-
ского СР на частоте 780 МГц
ствлена внешняя суперизация микросекундными импуль-
сами с частотой повторения 2 кГц. При полосе Пср=
—3 МГц получены чувствительность 0,4 -10~13 Вт и ко-
эффициент шума Ш—5 дБ.
Параметрические СР в сантиметровом диапазоне.
Параметрический СР в десятисантиметровом диапазоне
[НО] выполнен на коаксиальных контурах и работает
как с внешней суперизацией, так и с автосуперизацией
(рис. 5.17). Сверхрегенератор — одноконтурный с часто-
той накачки 6 ГГц, в два раза превышающей частоту
сигнала. При работе с источником внешней суперизации
на частоте 2 МГц- чувствительность 10~13 Вт. В режиме
автосуперизации усиление, полоса и частота суперизации
определяются мощностью накачки. При полосе 1,2 МГц
ф (3
Вход сигнала Г Г Гц Вход накачки 6 ГГц
Рис. 5.17. Схема параметрического СР в десятисаитиметровом диа-
пазоне
усиление 87 дБ, а при Пср= 12 МГц /(=35 дБ. Усиление
и полоса, изменяются установкой определенного уровня
накачки. При уменьшении усиления и увеличении поло-
сы увеличивается частота суперизации, которая была
равна примерно 56 МГц. В режиме автосуперизации при
изменении смещения диода появляется огибающая вы-
сокочастотного сигнала на выходе и продетектированный
видеосигнал можно снять с выхода параметрического
диода.
Параметрический СР на частоте 5285 МГц
«=5,7 см), работающий в режиме автосуперизации, опи-
сан в [97]. Для увеличения частоты автосуперизации па-
раметрический диод шунтирован сопротивлением 1 МОм.
По высокой частоте СР представляет одноконтурный
параметрический усилитель вырожденного типа. Резона-
тор рассчитывают так, чтобы для частоты сигнала он
был в резонансе для колебаний типа ТЕюь а для накач-
ки— для колебаний типа ТЕюз- Диод помещен поперек
резонатора, чтобы он находился в максимуме электри-
171
ческого поля для обоих типов колебаний. Мощность на-
качки 90 мВт.‘Часть мощности через направленный от-
ветвитель поступает в волномер для измерения частоты
и в индикатор для оценки мощности накачки. Основная
часть мощности накачки через аттенюатор для регули-
ровки уровня накачки поступает в резонатор с парамет-
рическим диодом. В режиме параметрического усиления
на диод подается принудительное смещение, которое
в режиме сверхрегенеративного усиления снимается, и
при достаточном уровне мощности накачки образуется
усиленное напряжение с пилообразной огибающей. Это
пилообразное напряжение наблюдалось иа осциллогра-
фе, причем период его изменялся при изменении уровня
сигнала на входе.
Усиление схемы в регенеративном режиме 33 дБ при
полосе 2,5 МГц. В сверхрегенеративном режиме при той
же полосе можно получить усиление на несколько де-
сятков децибелл больше, что обеспечивает чувствитель-
ность усилителя 10-12 Вт.
При очень узкой полосе
чувствительность схемы
можно довести до 1СН6 Вт,
а при полосе 10 МГц—до
10~10 ... 10-11 Вт.
В [123] описана схема,
где мощность накачки соз-
дается сверхрегенеративным
усилителем, в который посту-
пают колебания с удвоите-
ля частоты на выходе пара-
метрического усилителя ПУ (рис. 5.18). Выходной спектр
при наличии сигнала кроме линий, обусловленных сиг-
налом, содержит непрерывную шумовую составляющую.
При подаче части усиленного сигнала через НО на удво-
итель и сверхрегенеративный усилитель, являющийся те-
перь генератором накачки, его колебания будут когерент-
ными с сигналом. После того как входной сигнал превы-
сит некоторое пороговое значение, шумовая составляю-
щая выходного спектра исчезает. Однако это не означа-
ет, что усилитель работает без шумов: при напряжениях,
меньших порогового значения, в спектре выходного ко-
лебания наблюдаются шумовые составляющие. •
Исследования параметрических СР. В параметриче-
ском СР, как ц в простом параметрическом усилителе,
172
Рис. 5.18. Схема параметриче-
ского СР с синхронизацией ге-
нератора накачки
полоса пропускания уменьшается с увеличением усиле-
ния. Однако, в отличие от обычного ПУ, произведение
усиления на относительную полосу растет с увеличением
усиления, так как усиление увеличивается быстрее, чем
уменьшается полоса (рис. 5.19).
Сопоставляя результаты, полученные в параметриче-
ском СР и параметрическом усилителе, видим преиму-
щества СР в отношении усиления и полосы. При мощно-
сти накачки одного порядка усиление в СР на 30 ...
... 50 дБ выше, чем в параметрическом усилителе, а по-
Рис. 5.19. Кривые зависимости усиления Кр, полосы П и про-
изведения усиления на относительную полосу в параметриче-
ском СР па частоте 3 ГГц от мощности накачки
лоса пропускания в 5 ... 15 раз шире. Произведение
усиления на относительную полосу в СР также значи-
тельно выше. Максимальное устойчивое усиление в СР
составляет около 80 дБ, тогда как в параметрическом
усилителе оно не превышает 35 ... 40 дБ при узкой по-
лосе пропускания.
Исследование зависимости усиления от напряжения
суперизации (рис. 5.20) показывает, что зависимость
усиления от напряжения суперизации неодинакова при
разных способах суперизации. При подаче напряжения
суперизации на отражатель кривая монотонна; с увели-
чением напряжения суперизации усиление растет. С уве-
личением напряжения суперизации, подаваемого на ди-
од, усиление сначала растет, достигает максимума ц
173
начинает падать. По-видимому, падение усиления объяс-
няется заходом рабочей точки в правую часть вольт-фа-
радной характеристики диода, вследствие чего увеличи-
ваются потери и уменьшается глубина модуляции диода.
Большой интерес представляет стабильность реаль-
ного параметрического СР, а также сравнение ее со
стабильностью обычного параметрического усилителя.
Была снята зависимость выходной мощности в функции
от напряжения питания (рис. 5.21). Параметры имеют
К^Б
80
60
40
20
0 0,5 1,0 1,5 7" и..
Рис. 5.20. Зависимости усиле-
ния в параметрическом СР от
напряжения суперизации:
1 — суперизации на диод; 2 — напря-
жение на отражатель
Рис. 5.21. Зависимость вы-
ходной мощности ПУ и ПСР
на отражателе (/) и диоде
(2) от напряжения питания
большой разброс, поэтому на графике показана не одна
кривая, а целая область. По оси абсцисс отложено на-
пряжение сети, по оси ординат — отношение выходной
мощности при данном напряжении сети к выходной
мощности при номинальном напряжении сети 220 В. Со-
поставляя данные для параметрических'усилителя и СР,
видим, что последний имеет большую стабильность.
Более высокая стабильность параметрического СР
является его основным преимуществом по сравнению
с параметрическим усилителем. Действительно, расши-
рить полосу в параметрическом усилителе можно и дру-
гими способами, например применяя специальные филь-
тры и связанные контуры, а повысить стабильность зна-
174
чительйо труднее. Таким образом, Достоинствами Аэро-
метрических СР являются высокая стабильность, боль-
шое усиление и широкая полоса усиливаемых частот.
5.6. Радиолокационные высотомеры
В малогабаритных радиолокационных высотомерах '
нелинейный классический СР используется одновременно
как передатчик и приемник, подключенный к приемопе-
редающей антенне [65, 66, 122]. Вспышки колебаний СР
излучаются антенной и затем отраженные сигналы уси-
ливаются тем же СР.
Пусть период суперизации Тс меняется, например, по
пилообразному закону. Тогда в моменты времени, когда
задержка отраженных сигналов Ts—2hjc (ft —высота
полета бортового устройства; с— скорость света) равна
или кратна периоду суперизации Тс, сигнал 17вьп на вы-
Рис. 5.22. Зависимость выходного
напряжения СР от периода Супе-
ризации ~
ходе СР, пропорциональный площади огибающей вспы-
шек, имеет локальный максимум (рис. 5.22). Этот ма-
ксимум может быть зафиксирован измерительным
устройством, которое одновременно оценивает период су-
перизации и напряжение ивых. Для повышения точности
измерения необходима следящая система, в которой пери-
од суперизации непрерывно поддерживается на уровне Т3.
Структурная схема вдсотомера, в котором реализо-
вана подобная система (система фазовой ..автоподстрой-,
ки частоты суперизации), показана на рис. 5.23. На СР
подаются импульсы суперизации, вырабатываемые уп-
равляемым генератором УГ и формирователем Ф. После
усилителя У выходное напряжение С/ВЫх подается на
175
Рис. 5.23. Структурная схема
высотомера с СР
фазовый детектор ФД. Частота суперизации 1/Тс изме-
няется под действием двух напряжений: напряжения,
снимаемого с интегратора И, и напряжения вспомога-
тельного генератора ВГ, имеющего частоту FB<C1/Tc.
В режиме слежения, когда среднее значение частоты су-
перизации равно 1/Т3у выходное напряжение ФД равно
нулю вследствие того, что на один его вход подано сину-
соидальное напряжение от ВГ, » на другой—-косинусо-
идальное напряжение UBblx (t). Последнее меняется с ча-
стотой FB в связи с тем, что
на УГ вместе с напряжени-
ем ФД подан возмущающий
сигнал от ВГ, производя-
щий частотную модуляцию
импульсов суперизации во-
круг значения 1/Т3.
Описанный высотомер
был использован для измере-
ния высоты полета метеоро-
логических шаров-зондов.
Несущая частота системы 430 МГц, длительность вспы-
шек 0,5 мкс, частота суперизации (0,5 ... 1) • 104 -Гц. При
массе высотомера 160 г и потребляемой мощности 0,7 Вт
он обеспечивал измерение высоты 2 ... 20 км с точ-
ностью 10 м.
5.7. Квантователи фазы
Для обработки непрерывных сигналов в цифровых
системах фазового обнаружения и измерения параметров
радиосигналов непрерывная функция <рс(/), которая яв-
ляется фазой узкополосной смеси полезного колебания и
шума, должна быть преобразована в цифровую форму.
Такое преобразование состоит из двух операций: дискре-
тизации по времени, и квантования по значениям (чаще
всего бинарного). Эти операции, как показано в § 2.2,
производит нелинейный параметрический СР, именуемый
при этом параметрическим квантователем фазы. Для
преобразования вспышек СР в последовательность би-
нарных видеоимпульсов используется ФД. Таким обра-
зом, на практике в роли согласующего устройства между
источником непрерывных сигналов и цифровдй системой
обработки используется система «параметрический СР—
.176
ФД». Опорное напряжение для ФД формируется ИЗ Ий-
пряжения накачки посредством деления его частоты на
2. Детальное рассмотрение вопросов теории и примене-
ния параметрических квантователей фазы проведено
в [15, 16, 22, 41 ... 43, 53 ... 55, 64, 93, 106].
Когда полезный сигнал принимается на фоне широ-
кополосного шума, процедуре квантования фазы должна
предшествовать узкополосная фильтрация. Собственный
широкополосный шум квантователя, естественно, подоб-
ной фильтрации подвергнуть нельзя. Поэтому парамет-
рические квантователи имеет смысл применять лишь
в тех случаях, когда мощность внешнего отфильтрован-
ного шума на один-два порядка превышает значение
Суперизации
Рнс. 5.24. Параметрический СР с шунтирующими дио-
дами
Mitlm, где AZq — спектральная плотность мощности собст-
венных шумов параметрического СР; Пш— шумовая по-
лоса, которая определяется обычными методами через
|Si(jAco)|.
Конструкции и схемы параметрических квантователей
фазы, являющихся разновидностью параметрических СР
в глубоко логарифмическом режиме, изменяются в зави-
симости от диапазона частот и способа суперизации. На
рис. 5.24 показана схема квантователя с шунтирующими
диодами, который использовался для сравнения частот
высокостабильных генераторов—цезиевых стандартов
частоты на частоте 5 МГц [19]. Через разделительный
конденсатор С1 в качестве накачки подается колебание
опорного (эталонного) генератора, через С5 — сигнал
испытуемого генератора с амплитудой 1 мВ. Двухполяр-
ные видеоимпульсы суперизации вырабатываются релак-
сационным устройством, которое синхронизируется коле-
баниями опорного генератора. Эти видеоимпульсы сме-
12—3108 177
iltaiot рабочие точки шунтирующих диодов ДЗ, Д4 и обе-
спечивают прерывистую генерацию -СР (элементы Д1,
Д2, С2, СЗ, L1).
Благодаря синхронизации между опорным' генерато-
ром и устройством суперизации ударные колебания в СР
приводят лишь к асимметрии .интервалов квантования
фазы и не вносят дополнительных погрешностей в про-
цедуру сравнения частот.. Вспышки СР через С4 пода-
ются на ФД, подключенному вторым входом к опорному
генератору. На выходе ФД подсчитывалось число видео-
импульсов в двух соседних разнополярных пачках. От-
носительная погрешность сравиейия частот составила
5 • 10-12 за 1 с.
На рис. 5.25 изображена схема квантователя, супери-
зация которого осуществляется посредством амплитуд-
ной модуляции накачки [54]. Ударные колебания здесь
С1
Ц"*— Вход
Рис. 5.25. Схема балансного параметрического. СР
с AM. накачкой
устраняются подбором варикапов Д1, Д2 и тщательной
балансировкой контура. Баланс схемы по напряжению
накачки производится с помощью резистора R3, который
позволяет получать противофазные колебания накачки
на вторичной обмотке трансформатора Тр. Токи накачки
через варикапы выравниваются регулировкой резистора
R2. Резистор R1 позволяет получать необходимые напря-
жения смещения на каждом варикапе. Конденсаторы
С1 ... С4, С6 и С7 — разделительные, С5 шунтирует ис-
точник смещения по переменному току. Точность балан-
сировки контролируется измерением напряжения накач-
ки иа L1. , -
178
Воздействие напряжением накачки будет тем более
близким к параметрическому воздействию, чем тщатель-
нее отбираются диоды и производятся балансировка и
экранировка плеч моста. Это усложняет изготовление и
настройку СР. Сравнительно простой в этом плане явля-
ется реализация параметрического воздействия с помо-
щью транзисторных модуляторов. Подобное воздействие
на частоте накачки или суперизации можно осуществить
в резистивных параметрических СР. Пример схемы ре-
зистивного параметрического СР приведен на рис. 4.16,а.
В диапазоне СВЧ при сравнительно низкой частоте
суперизации (сотни килогерц)' и, следовательно, малой
крутизне закона суперизации ударные колебания имеют
небольшой вес, что позволяет строить небалансные схемы
квантователей. Однако с повышением частоты супериза-
ции влияние ударных колебаний увеличивается. Это за-
ставляет применять методы подавления таких колебаний
и на СВЧ. В [54], в частности, описан вариант пара-
метрического СВЧ квантователя фазы с высокой поро-
говой чувствительностью, полученной за счет баланси-
ровки схемы по напряжению накачки.
5.8. Сверхрегенератсфы в вычислительной технике
В вычислительной технике нелинейный параметриче-
ский СР может использоваться в качестве фазового
триггера-параметрона [78, 79, 117]. Достоинства пара-
метрона как двухстабильного (если имеется в виду од-
ноконтурный СР), так и многостабильного (при исполь-
зовании многоконтурного СР) управляемого элемента —
высокая эксплуатационная надежность, малое потребле-
ние энергии и быстродействие (для СВЧ параметронов).
Известны схемы емкостных [46, 51, 91], индуктивных
[47, 63, 79], в том числе пленочных [1, 117], и резистир-
ных [89] параметронов. Индуктивные, емкостные и ре-
зистивные параметроны строятся на основе соответству-
ющих параметрических СР. Пленочный параметрон
'представляет собой разновидность индуктивного СР,
у которого в качестве управляемой индуктивности ис-
пользуется тонкая ферромагнитная пленка с двумя орто-
гональными катушками, Одна из них включается в кон-
тур СР, а на другую подается напряжение накачки.
В одноконтурном параметрическом СР -в установив-
шемся режиме фаза колебаний субгармоники может
12* - 179
иметь одно из двух значений, отличающихся на 180°.
Следовательно, параметрический СР можно рассматри-
вать как управляемый двухстабильный элемент, запуск
которого осуществляется импульсом суперизации, а уп-
равление состоянием, т. е. управление по фазе,— малым
сигналом, который подается на вход СР перед запуском.
Для получения стабильных по амплитуде выходных ко-
лебаний СР ставят в глубоко логарифмический режим,
когда в течение одного запуска большую часть времени
амплитуда субгармоники имеет постоянное значение.
Специфику работы параметронов в вычислительном
устройстве можно проиллюстрировать на примере после-
довательного регистра. Пусть имеется цепочка парамет-
ронов, как это показано на рис. 5.26. Считаем, что все
параметроны находятся в возбужденном состоянии. По-
8x1 Вх2 ВхЗ Вх4 Вх5 ВхВ Вх7
Рис. 5.26. Регистр сдвига на параметронах
дадим импульс сброса (видеоимпульс, смещающий рабо-
чую точку на параметрических элементах) на вход 2.
В результате колебания в параметроне 2 сорвутся, и он
будет подготовлен для приема новой информации.
Поскольку вход и выход параметрона объединены,
информация на параметрон 2 поступает от параметро-
нов 1 и 3, поэтому параметрон 2 правильно воспримет
информацию только в том случае, когда параметроны 1
и 3 несут: одну и ту же информацию (имеют одно и то
же фазовое состояние). Если потребовать, чтобы пара-
мётрон 2 воспринимал информацию только от парамет-
рона 1, а информация в параметроне 3 не воздействова-
ла на параметрон 2, необходимо колебания в параметро-
не 3 сорвать, т. е. подать импульс сброса не только на
вход 2, но и на вход 3. Тогда поток информации будет
направлен слева направо. Если подать импульсы на вход
1 и 2, то параметрон 2 воспримет информацию от пара-
метрона 3 и информация будет двигаться справа налево.
Таким образом, чтобы осуществить однонаправлен-
ное движение информации, т. е. реализовать последова-
тельный регистр, необходимо подавать импульсы сброса
одновременно на два соседних параметрона, оставляя
180
в возбужденном состоянии каждый третий параметрон.
Например, в схеме на рис. 5.26 следует сначала пода-
вать импульсы сброса одновременно на входы 2, 3, 5,
6 ..., затем на 1, 3,4,6, 7 ..., затем на 1, 2, 4, 5, 7 ...
и т. д. Другими словами, для цепочки параметронов не-
обходимо создавать так называемое трехтактное пита-
ние или трехтактную суперизацию.
Переносчиком информации в параметронных схемах
является напряжение субгармоники с бинарной фазовой
манипуляцией. Если на вход какого-либо параметрона
поступает несколько входных сигналов от других пара-
метронов, после восприятия и преобразования входной
информации в нем установятся колебания, фаза которых
будет совпадать с той фазой, которую имеет большинст-
во входных сигналов [46]. Следовательно, параметрон
выполняет логическую операцию мажоритарности.
В последние годы интерес к параметронам как эле-
ментам вычислительных устройств заметно снизился. Это
объясняется трудностями размещения нескольких пара-
метронов в малом объеме и одновременной развязки их
на частотах накачки и субгармоники.
5.9. Доплеровские измерители скорости
Доплеровский измеритель скорости (ДИС) может
быть построен на базе фазовых СР. Рассмо’грим возмож-
ные варианты структурных схем ДИС и выполним их
расчет. Предположим, что ФСР предназначается для ис-
пользования в качестве приемного устройства доплеров-
ского измерителя скорости движения автомобиля. Из-
меритель должен строиться на базе антенной системы и
передатчика ДИС «Фара» и рассчитан на работу с це-
лями, имеющими эффективную поверхность рассеяния
(ЭПР) о«1 м2. Мощность излучения передатчика
РпРд=40 мВт, рабочная частота /прд=Ю10 Гц, коэффици-
ент усиления антенны G=103. Основная задача, стоящая
при разработке ФСР, заключается в обеспечении реги-
страции скорости движения автомобиля на наибольшей
дальности, определяемой чувствительностью измерителя
частоты ДИС «Фара» t7np^0,01 В. Диапазон регистри-
руемых скоростей движения автомобиля Vmin=5 км/ч;
Ртах—100 КМ/Ч.
Поскольку в ДИС «Фара» передатчик построен на клистроне
К-72, для упрощения конструкции измерителя при введении в него
_____ ________ 181
ФСР применим СР с частотной модуляцией клистрона. Структурные
схемы ДИС с ФСРЧМ и ДИС с ФСРДСЧМ (см. § 2.4) показаны
соответственно на рис. 5.27 и 5.28. Схемы отличаются только нали-
чием генератора дополнительной суперизации ГДС. Поэтому можно
предположить, что при реализации в ФСР и ФСРД используются
одинаковые резонансные усилители, имеющие полосу пропускания
11=50 кГц иа частоте /о=Юв Гц.
Примем также, что КгК„К.фц== 101’ Гц/В. Тогда
АЧм ~2л 1016ЗД (5.2)
Поскольку в рассматриваемом примере ФСР работает по отра-
женному от цели сигналу, можно полагать
<рт=й2лД)т при «от/ 2 «С л/4, (5.3)
где т — время задержки принимаемого сигнала-'относительно излу-
чаемого, равное 2//с; / — расстояние от измерителя до отражающей
сигнал цели.
Рис. 5.27. Структурная схе-
ма ДИС с ФСРЧМ
Рис. 5.28. Структурная схема
ДИС с ФСР с дополнительной
суперизацией и частотной моду-
ляцией (ФСРДСЧМ)
Используя значение (5.3), получаем
71 (фт)/Д/=2лт/1 (2лД)т) /2лД/т. (5.4)
Зависимость 7i(z)/z показана на рис. 5.29. Примем, что усло-
вия, работы ДИС таковы, что 2лД/т^2 рад. Тогда, полагая
/1(2лД/т)/2лД/т=--0,5, приведем (5.4) к виду
/1 (фт) /Af=JIT.
При этом
Дчм = 2л-101в£ПрТ. (5.5)
В соответствии с принятыми условиями для расчета ФСР опре-
деляем максимальную доплеровскую частоту, которая должна ре-
гистрироваться:
Fa max ~2umaifnPfl/c«20 кГц.
При ЭТОМ
П=5*104 Гц^-Гдтах-
Это означает, что примеиеиие ФСР нецелесообразно, так как не
выполняется условие когерентности. Для решения сформулирован-
ной задачи может применяться только ФСРДС,
182
Выберем для .ФСРДС частоту дополнительной супё^изаДйй
Пд = 5фд mas—ЮлГд тах==^5‘Ю® рад/с.
Тогда, полагая, что амплитуда дополнительной суперизации вы-
брана так, что предельное отрицательное значение функции супери-
зации
б2=2,5фд та1~0,5Сд,
согласно (3.78) определяем х=1.
Подставляя данное значение в (3.77) и используя (3.75), в ко-
тором К=Кчм (5.5), находим коэффициент усиления ФСРДС
Ку —14 • 1О'Чиш1 == Т/ш/Епр. < (5.8)
По условию задачи ФСР будет обеспечивать функционирование
ДИС, если 7/ш^17пр = О,О1 В. В соответствии с (5.6) определяем
иь,...
Рис. 5.29. Зависимость 7i(z)/z от z
минимальную амплитуду принимаемого сигнала, необходимую для
ФСР (чувствительность ФСР):
Едр min^S-10~^/т?7/ш1.
Используя уравнение радиолокации
' Рдр min^С2О!А(2Рпрд/(4зт)а7?<тах»
где Х=сДПрд; Етах — максимальная дальность, на которой может
использоваться ДИС, И учитывая, ЧТО Рпр mln=E2np min/Enp, где
Епр«50 Ом —входное сопротивление приемного канала ДИС, мож-
но определить
7?mai“2 • 10<17ш1. . (5.7)
Предположим, что коэффициент усиления резонансного усилите-
ля Кру ФСРДС выбран так, что (7Ш1 = /зоПшКру^1В; So =
= 10-20 Вт/Гц; Пш«П=5-104 Гц; КРУ«5-.1О5. Тогда согласно (5.7)
ФСРДС, применяемый в качестве приемного устройства ДИС, обе-
спечит измерение скорости цели с ЭПР о=1 м2 на максимальной
дальности 200 м, если его параметры выбраны следующим образом:
КгКоКфд = 1О16 Гц/В; йд=6-105 рад/с; йд/2=й2; Кру =5-105; П=*
= 5- IO'4 Гц; Л>= Ю8 Гц.
Приведенные результаты расчета ФСРДС достаточно хорошо
согласуются с экспериментальными, полученными прн исследовании
возможностей повышения дальности действия ДИС «Фара». В ходе
183
йатурйых экспериментов было показано, что использование ФСРДС
позволяет повысить дальность действия ДИС «Фара» в 2 ... 3 раза,
обеспечивая измерение скорости движения автомобиля типа «Жигу-
ли» (а«1 м2) на предельных дальностях примерно 200 м.
5.10. Сверхрегенератрры в аппаратуре
для метеорологических исследований
Сверхрегенераторы широко применяются в системах
радиозондирования атмосферы [62], которое произво-
дится для определения пространственного распределения
метеорологических величин в тропосфере и стратосфере.
Системы радиозондирования должны определять коор-
динаты зондируемых точек пространства и соответству-
ющие им метеовеличины. Для решения такой задачи ис-
пользуются подъем радиозонда с помощью газонапол-
ненного шара-пилота и слежение за ним, а также прием
информации о метёовеличинах с помощью наземного ра-
диокомплекса. Возможно так называемое «обратное»
зондирование, когда радиозонд быстро доставляется
с помощью ракеты, или снаряда на заданную высоту и
медленно опускается на землю с помощью'парашюта.
Координаты радиозонда определяются радиолокаци-
онными, радиотеодолитными или радионавигационными
методами. Чаще всего определяются полярные коорди-
наты: наклонная дальность, угол места и азимут. В этом
случае при определении координат можно выделить два
информационных канала: дальномерный и угломерный.
Третий канал системы — телеметрический.
Применение в радиозонде сверхрегенеративиого при-
емопередатчика позволяет совместить указанные каналы
по несущей частоте, существенно упростить структуру
системы зондирования и уменьшить объем аппаратуры.
На рис. 5.30 приведена упрощенная структурная схе-
ма системы зондирования, построенной на одном радио-
канале с применением сверхрегенеративиого приемопе-
редатчикауна радиозонде. Последний содержит датчики
метеовелйчин 1, вторичный преобразователь с коммута-
тором датчиков 2, водозаливной электрохимический ис-
точник питания 3, сверхрегенеративный приемопередат-
чик 4 и антенную систему 5. Наземный комплекс содер-
жит антенну 6, антенный переключатель 7, передатчик
запросных радиоймпульсов 8, приемную систему 9 и ап-
паратуру обработки информации угломерного 10, теле-
метрического 11 и дальномерного 12 каналов.
184
Работает система следующим образом. Сверхрегене-
ративный приемопередатчик радиозонда [24] излучает
последовательность радиоимпульсов с несущей частотой
(1782±10) МГц, длительностью (0,15 ... 0,25) мкс и ча-
стотой повторения (800+25) кГц; задаваемой генерато-
ром суперизации. Наземный комплекс излучает запрос-
ные радиоимпульсы с той же несущей частотой, длитель-
ностью 1 мкс и частотой повторения около 800 Гц. При
попадании запросного радиоимпульса в приемное «окно»
(приемный интервал) СР изменяются параметры одной
Рис. 5.30. Упрощенная структурная схема системы радиозондиро-
вания атмосферы с сверхрегенеративным приемопередатчиком
или нескольких вспышек, что воспринимается дальномер-
ным каналом как активный ответ на запросный сигнал.
Вид ответного сигнала зависит от режима работы СР.
При работе в линейном режиме изменяется амплитуда
вспышек, в нелинейном режиме — длительность вспы-
шек.
Угломерный канал работает по методу равНосигналь-
ной зоны. Передача телеметрической информации осу-
ществляется путем изменения амплитуды или частоты
повторения (частоты суперизации) радиоимпульсов СР.
На основе транзисторного сверхрегенеративиого при-
емопередатчика СВЧ, описанного в [24], разработан зонд
с полетной массой 0,35 кг. Приемопередатчик содержит
тр'анзистор и резонансный контур, образованный отрез-
ком разомкнутой микрополосковой линии, включенной
в цепь база — коллектор транзистора. Емкость обратной
связи, образованная коротким отрезком микрополоско-
вой линии, включена в цепь эмиттер — коллектор транзи-
стора. Нагрузка 50 Ом (четвертьволновый штырь антен-
ной системы радиозонда) подключена кондуктивно кли-
ник, образующей резонансный контур. Вносимое в схему
сопротивление со стороны нагрузки определяется местом
подключения антенны.
Постоянное питающее напряжение и импульсы супе-
ризации подаются через два дросселя, образованные вы-
185
сокоомными четвертьволновыми микрополосковыми ли-
ниями и снабженные двумя блокировочными конденса-
торами. Схема работает в логарифмическом режиме.
Излучаемая мощность в импульсе 1 Вт. Это обеспечива-
ет дальность автосопровождения со стороны наземного
комплекса около 200 км.
5.11. Сверхрегенеративные датчики ядерного
и квадрупольного магнитных резонансов
Параметрические и классические СР применяются
для регистрации сигналов ядерного магнитного резонан-
са* (ЯМР) [41; 42] и ядерного квадрупольного резонанса
(ЯКР) [43, 67]. Приведем для примера [42] структур-
ную схему установки для наблюдения ЯМР дейтерия на
частоте 3,8 МГц, в которой используется внешнее чвоз-
буждение образца, а в качестве датчика сигналов ЯМР
применяется нелинейный- параметрический СР (рис.
5.31). Установка позволяет наблюдать сигналы ЯМР от
0,1% ИгО в объеме 1 см5.
В отсутствие полезного сигнала, когда нет исследуе-
мого образца в катушке СР, вероятности возбуждения
параметрических колебаний со стационарными фазами 0
и л относительно фазы накачки одинаковы. При появ-
лении сигнала ЯМР в контуре параметрического СР
Рис. 5.31. Структурная схема
установки для наблюдения сигна-
лов ядерного магнитного резонан-
са с параметрическим СР
одна из фаз начинает
преобладать в тем боль-
шей степени, чем интен-
сивнее сигнал ЯМР. Это
приводит к изменению
числа импульсов опреде-
ленной полярности на вы-
ходе фазового детектора,
которое регистрируется
счетчиком.
Исследуемый образец
помещается в катушку
контура 2 параметриче-
ского СР 9, находя-
щуюся в поле постоян-
ного магнита 4, свипируемого катушкой 3, и одно-
временно в высокочастотном поле катушки 7, возбуж-
даемой генератором 7. Радиоимпульсы накачки С часто-
той повторения 1 ... 2 кГц формируются в блоке 8, по-
186
лучающем задающее напряжение от кварцевого генера-
тора накачки 5 на частоте 7,6 МГц. Этот же сигнал пре-
вращается в блоке 6 в опорное напряжение, поступаю-
щее на один из входов фазового детектора 12. На другой
его вход поступает напряжение с выхода параметриче-
ского СР 9 после электронного ключа 10, управляющего
также системой срыва колебаний 11 и формирователем
напряжения накачки 8. Ключ 10, как и формирователи
накачки 8 и высокочастотного поля 7, а также кварце-
вый генератор накачки 5 управляются тактовыми им-
пульсами, вырабатываемыми в блоке 17. Выходное на-
пряжение фазового детектора формируется в блоке 13
и поступает в блоки аналоговой 15 и цифровой 14 инди-
кации. С блоком 14 связана ЭВМ 16, управляющая ка-
тушками свипирования магнитного поля 3.
Структурная схема установки в режиме самосогласо-
ванного поля с нелинейным параметрическим СР для из-
мерения частоты ЯКР [43]
показана на рис. 5.32. На рис.
5.33 изображена принципи-
альная схема параметриче-
ского СР. Высокостабильный
задающий генератор ЗГ вы-
дает напряжения для форми-
рователя накачки ФН и блока
опорного напряжения БОН.
В фазовом детекторе ФД срав-
ниваются фазы выходного сиг-
нала ПСР и опорного напря-
жения. Частота повторения
Рис. 5.32. Структурная схе-
ма установки для- регистра-
ции сигналов ядерного квад-
рупольного резонанса с па-
раметрическим СР
видеоимпульсов на выходе ФД
измеряется частотомером ЧМ. После умножения по ча-
стоте на два в блоке У эти импульсы используются для
синхронизации тактового генератора ТГ (генератора
суперизации).
Если умножитель частоты У отсутствует, на выходе
ФД наблюдаются различные структуры видеоимпульсов
в зависимости от разности |v—<ос|, где v— частота па-
раметрической генерации; wc— резонансная частота спи-
новой системы. При —<вс|=2лЕ (F — частота супери-
зации) имеет место однополярная последовательность
с частотой повторения F, при |v—<Bc|=nF — двухполяр-
ная последовательность с частотой повторения F/2.
Удвоитель частоты У осуществляет обратную связь по
187
частоте суперизаций, в результате чего в системе авто-
матически поддерживается режим, при котором
| v—ис | =*aF.
Параметрический СР — балансного типа на кремни-
евых варикапах КВ106Б. Радиоимпульсы накачки с ча-
стотой заполнения 56 МГц подаются на ПСР через сим-
метрирующий трансформатор на ферритовом кольце.
При строгой балансировке в схеме отсутствуют ударные
колебания. Резисторы и подстроечные конденсаторы, по-
казанные на рисунке, служат для балансировки схемы.
Исследуемый образец помещается в катушку 2.
В [5] описан ЯКР термометр, построенный на осно-
ве классического СР, функционирующего в режиме за-
Рис. 5.33. Принципиальная схема параметрического СР для реги-
страции сигналов ЯКР
хвата частоты внешним сигналом. Этот режим наблюда-
ется при воздействии на СР достаточно большого гармо-
нического колебания, частота которого близка к часто-
те СР. При захвате колебания СР имеют частоту внеш-
него сигнала, а режим из некогерентного превращается
в когерентный.
В [67] отражены результаты исследования ЯКР тер-
мометра, у которого в качестве датчика ЯКР использу-
ется классический СР с автосуперизацией на полевых
транзисторах ([=28 МГц) с автоматическим запуском и
регулировкой коэффициента усиления.
188
Рис. 5.34. Принципиальная схема СР типа Varioton-S
5.12. Сверхрёгенёраторы в Системах 0аДидупрабЛёйиЗ
В последние годы надежность радиоуправления ма-
лыми объектами (например, моделями) достигла такого
уровня, что оно стало широко применяться в различных
отраслях народного хозяйства. Аппаратура радиоуправ-
ления малыми объектами применяется: на транспорте
для дистанционного управления локомотивами (Бельгия,
Швеция, ФРГ), в сельском хозяйстве для дистанционно-
го управления несколькими тракторами (СССР, Англия,
Австралия), в здравоохранении для дистанционного уп-
Рис. 5.35. Принципиальная схема субминиатюрного СР с автосу-
перизацией
равления тележками с инструментами в операционном
зале (Франция), в промышленности для дистанционного
управления тележками с деталями и инструментами, об-
служивающими рабочие посты у конвейера (США),
и т. д. Во всех этих системах наряду с супергетеродин-
ными приемниками широко применяются и СР, которые
серийно выпускаются промышленностью. Почти все про-
мышленные сверхрегенераторные приемники имеют УРЧ
на входе, чувствительность 2 ... 10 мкВ, полосу пропу-
скания 300 ... 500 кГц и работают на частоте 27 МГц.
Используются СР преимущественно с автосуперизацией,
что обеспечивает эффективную автоматическую регули-
190
ровку усиления, малую чувствительность к импульсным
помехам и перегрузке со стороны близкорасположенного
передатчика. Отдельных детекторов обычно не ставят и
транзистор СР, работая в логарифмическом режиме, од-
новременно используется как детектор средних значений.
Несмотря на такое универсальное использование транзи-
сторов, параметры СР мало зависят от напряжения пи-
тания: при номинальном напряжении питания 6 В СР
устойчиво работает при напряжениях 3 ... 9 В. Масса
приемника обычно в пределах 30 ... 50 г [21].
Ниже приводятся в качестве примеров приемников
радиоуправления схема СР с внешней суперизацией
(рис. 5.34) и две.схемы СР с автосуперизацией (рис. 5.35
Рис. 5.36. Принципиальная .схема СР с автосуперизацией типа
TE-10KS (фирма Renter, ФРГ)
и 5.36). В схеме на рис. 5.34 первый каскад использует-
ся как УРЧ, второй является одновременно генератором
суперизации и СР, затем следуют два' каскада УЗЧ й
эмиттерный повторитель. Чувствительность приемника
6 мкВ, масса 29 г.
Субминиатюрный приемник, схема которого показана
на рис. 5.35, имеет массу всего 14 г при габаритных раз-
мерах 35x25X15 мм. Он обеспечивает дальность дейст-
вия 400 м при мощности передатчика 0,2 Вт. Нагрузкой
является микродвигатель. Приемник, схема которого по-
казана на рис. 5.36, выполнен на кремниевых транзисто-
рах. К приемнику придается двухканальный блок с LC-
фильтрами или блок с безрелейным выходом.
191
5.13, Светоэлектронные сверхрегенераторы
ГВт
Для наблюдения светоэлектронной сверхрегенерации
можно использовать систему, состоящую из фотокатода
ФК и флуоресцирующего экрана ФЭ, между которыми
создано ускоряющее электрическое поле (рис. 5.37); ФК
и ФЭ подсоединены к источнику ускоряющего напряже-
ния Uy(f). Пусть t/y(/)=const и на ФК, начиная с неко-
торого момента времени, падает первичный световой по-
ток Фп=сопз1. Это вызовет эмиссию электронов с ФК и
появление тока I(t) во внешней цепи. Ускоряясь в элек-
трическом поле, электроны бомбардируют ФЭ, застав-
Рис. 5.37. Схема светоэлектронного СР:
— — — световой поток, —— электронный поток
ляя его светиться. Часть светового потока ФЭ попадает
на ФК, дополняя первичный поток Фп, что приводит
к увеличению фотоэлектронного тока на Д/. Дальнейший
ход процессов зависит от отношения
а=Д///,
называемого коэффициентом обратной связи. При а>1
ток I(/) и вторичный световой поток Фв(0 неограничен-
но возрастают. Если а<_1, то имеет место стационарный
режим, когда 1(1) и Фв(0 после переходного процесса
подходят к постоянным значениям, зависящим от а и
ФП. Эффект сверхрегенерации в системе получают, заме-
няя при а>1 постоянное ускоряющее напряжение им-
пульсным. В рабочем режиме слабый меняющийся во
времени первичный поток Фп(0 превращается в после-
довательность интенсивных вспышек Фв(0=^2^2(^—
—пТс) Фп (hn), где Тс—период импульсов ускоряющего
напряжения (период суперизации); п — номер запуска;
#2 (0—нормированная вспышка, Ks — коэффициент
усиления; ,t3n— моменты n-го включения ускоряющего
напряжения. Графики, иллюстрирующие процессы в дай*
ном СР, изображены на рис. 5.38.
Линейный режим светоэлектронного СР реализуется,
если в действие не вступают такие факторы, кдк насы-
щение ФК, падение напряжения на внутреннем сопро-
тивлении источника и уменьшение коэффициента свето-
отдачи ФЭ по мере увеличения падающего на него элек-
тронного потока. Экспериментально переход от линейно-
го к нелинейному режиму
осуществляют, удлиняя
импульсы суперизации.
Эффект светоэлек-
троиной сверхрегенерации
изучался с помощью ва-
куумной трубки, внутри
которой размещались ФК,
активированный парами
цезия, и ФЭ на пла-
тиновой подложке с на-
несенным на нее слоем
Рис. 5.38. Суперизации, входной и
выходной процессы в светоэлек-
тронном СР
люминофора ФК-Н6.
Ускоряющее напряжение достигало 3 ... 4 кВ. Расстоя
ние между катодом и экраном регулировалось с по-
мощью специального магнитного приспособления. При
расстоянии между катодом и экраном 1 см удалось по-
лучить общее усиление светового потока около 105 [77].
ГЛАВА 6
ПЕРСПЕКТИВЫ СОВЕРШЕНСТВОВАНИЯ И
ДАЛЬНЕЙШЕГО ПРИМЕНЕНИЯ СВЕРХРЕГЕНЕРАТОРОВ
6.1. Оптимизация сигналов для сверхрегенератора
Классический СР. Найдем оптимальный сигнал Для
классического СР по максимуму выходного отношения
сигнал-шум вначале для линейного режима [60], пола-
гая, что входной процесс е(/) состоит из стационарного
шума (помехи) и полезного сигнала e(t). Под от-
ношением сигнал-шум на выходе понимаем частное от
деления приращения некоторого параметра вспышки,
вызванного действием полезного сигнала, к среднеквад-
ратическому отклонению этого же параметра, обуслов-
13—3108 193
ЛёййОТО действием шума. Очевидно, что при заданйЫХ
характеристиках СР выходной эффект, вызванный шу-
мом, не зависит от параметров полезного сигнала (систе-
ма линейная). Поэтому для нахождения оптимальной
формы e(t) достаточно при однократном запуске СР
среди полезных воздействий, имеющих одинаковую энер-
гию, выбрать такое, которое обеспечивает максимальное
значение наблюдаемого (измеряемого) параметра.
Пусть после СР включен пиковый детектор. В этом
случае измеряемым параметром является амплитуда
вспышки и необходимо подобрать такую форму e(t),
которая гарантирует максимум А (/5). Ограничение на
энергию сигнала формулируется обычным образом:
j е2 (t) dt — const. (6.1)
-Оптимальное воздействие отыскиваем в классе функ-
ций
е(/)=Еп1ахЯс(0 sin [W-hMO.L
где Нс — нормированная огибающая.
Используя (2.16) и (2.20), получаем:
A(Q=/[a(Qr + [6(Mr; (6-2)
(0 е (0 Г (6.3)
х.'чы?/ J \sin
—СО
Считая (6.2) и (6.3) функционалом относительно
е(/), находим при ограничении (6.1) его экстремаль e<j(t)
[60]:
еО(0=£'тахЯ1(0 sin (W+фс) , (6.4)
где фс — произвольная начальная фаза. Таким образом,
наилучшим с позиций выходного отношения сигнал-шум
при пиковом детектировании вспышки является сигнал,
имеющий частоту заполнения «о, равную резонансной
частоте койтура СР, произвольную начальную фазу фс
и нормированную огибающую, совпадающую с сигналь-
ной функцией СР Hi(t). Рис. 6.1 иллюстрирует получен-
ный результат.
Если на выходе СР используется детектор средних
значений, определяющий площадь огибающей вспышки,
оптимальная форма e(t) также подчиняется выражению
(6.4), поскольку площадь вспышки пропорциональна ее
194
амплитуде A(t5). Аналогично показывается, что опти-
мальность (6.4) сохраняется и в нелинейном режиме,
так как отношение приращений амплитуды (площади
огибающей) вспышки, вызванных сигналом и шумом
в нелинейном режиме, пропорционально тому же отно-
шению в линейном режиме.
При многократных запусках СР оптимальный сигнал
представляет собой последовательность радиоимпульсов
с частотой заполнения <оо, огибающей H\(t—пТс) и про-
Рис. 6.1. Процессы в СР при опти-
мальном сигнале
извольной внутри каждого радиоимпульса начальной фа-
зой.
Параметрический СР. Постановка задачи та же, что
и для классического СР [49]. Оптимальный сигнал
отыскиваем в классе функций
е (/)=£ (/) sin [vZ+фс (0 ] •
При пиковом детектировании на выходе СР в линей-
ном режиме указанный сигнал находится из (2.37) как
экстремаль функционала
Л(^) =
Acv J Нг (t) е (/) sin (yt -|- <р0) dt
-95 ' .
13*
195
при ограничении (6.1). Экстремаль
(О = ЕтахН 1 (0 sin № + фс)- фс = fСр” (6.5)
’ ?о Ч-1С>
где <ро'—начальная фаза, удовлетворяющая соотноше-
нию (2.31). Таким образом, оптимальным воздействием
на фоне стационарных помех для параметрического СР
в режиме однократного запуска является радиоимпульс,
имеющий частоту заполнения, равную частоте субгармо-
ники V, вполне определенные, а не произвольные, как это
характерно для классического СР, значения начальной
фазы и нормированную огибающую, совпадающую с сиг-
нальной функцией Я1(0.
При измерении площади огибающей вспышки в ли-
нейном или нелинейном режиме, а также при измерении
фазы заполнения оптимальность (6.5) сохраняется.
Если параметрический СР используется в режиме
многократных запусков, наилучшим воздействием на фо-
не стационарных помех является последовательность ра-
диоимпульсов с частотой заполнения, равной частоте
субгармоники с огибающей Я1(/—пТс) и начальной фа-
зой кро или <ро+л, т. е. последовательность радиоимпуль-
сов с бинарной фазовой манипуляцией.
Оценим выигрыш в отношении сигнал-шум, если на
вход СР вместо непрерывных модулированных колеба-
ний подаются эквивалентные по энергии (за период су-
перизации) оптимальные радиоимпульсы е0(/). Рассмот-
рим сначала прием модулированных колебаний е(/)'
классическим СР. Полагаем, что отсутствует расстрой-
ка. Для неискаженного усиления максимальная частота
модуляции должна быть в несколько раз меньше часто-
ты суперизации. Поэтому на протяжении периода супе-
ризации сигнал e(t) можно считать немодулированным.
Его энергия на интервале Тс равна Етях2Те12. Энергия
оптимального воздействия е0(/) на том же интервале
определяется выражением -j- f2max JН\ (t)dt.
Те
При равенстве энергий отношение амплитуд вспышек
Очевидно, что выигрыш в отношении сигнал-шум также
равен г.
Если йкёй гйуЪсовсиую форму {пилообразное,
Синусоидальное напряжение суперизации) и частота су-
перизации выбрана максимально возможной (на грани-
це когерентного и некогерентного режимов), дБ. На
практике выигрыш может быть больше, так как обычно
предпочтение отдается некогерентному режиму.
Такое же значение г характерно и для параметриче-
ского СР, если вместо непрерывного воздействия с ча-
стотой v и оптимальной фазой ф0 на его вход подаются
оптимальные радиоимпульсы (6.5). Существенно боль-
ший выигрыш дает переход к оптимальному сигналу от
несинхронного непрерывного воздействия, когда
Если интервал корреляции шумов т](/) больше пери-
ода суперизации, т. е. если шум узкополосный, оптималь-
ную обработку смеси можно осуществить и после СР.
Рис. 6.2. Структурная схема экспериментальной установки
для проверки эффективности оптимального сигнала
При этом СР используется только в качестве неискажа-
ющего дискретизатора аддитивной смеси сигнала н
шума.
В работе [8] была экспериментально проверена эф-
фективность использования оптимальных сигналов для
классического СР. Импульсный генератор ИГ (рис. 6.2)
использовался для манипуляции напряжения одного из
двух задающих генераторов — обычного генератора гар-
монических сигналов ГГС или генератора оптимальных
сигналов ГОС, вырабатывавшего пакет колоколообраз-
ных импульсов. На второй вход сумматора подавался
шум от генератора шумового сигнала ГШС. Аддитивная
смесь сигнала и шума усиливалась в У и подавалась на
вход приемного тракта. Эксперимент проводился на час-
тоте около 5 МГц. Принятый сигнал усиливался в СР,
просматривался на экране осциллографа Осц и измерял-
ся измерительным прибором ИП. Генератор суперизации
14—3108 197
ГС вырабатывал гармоническое напряжение с частотой
20 кГц, подававшееся в ГОС непосредственно, а в СР.
через фазовращатель ФВ индуктивного типа, позволяв-
ший менять фазу напряжения суперизации от 0 до 360°.
Была принята следующая методика эксперимента.
Сначала устанавливался определенный уровень выходно-
го сигнала сверхрегенератора при приеме обычного сиг-
нала (ключ К в положении 1). Затем ключ К переводил-
ся в положение 2, и устанавливался такой уровень сиг-
нала в ГОС, чтобы на выходе приемника сохранился
прежний уровень сигнала. Отношение амплитуд входных
сигналов СР обычной формы, снимаемых с ГСС, и опти-
мальной формы, снимаемых с ГОС, с учетом поправки
иа уровень, необходимый для излучения одинаковой
энергии в течение длительности импульса, и определяет
выигрыш, подаваемый оптимальным сигналом. Такая же
методика сохранялась при подмешивании в сигнал глад-
кого шума от ГШС.
_ Результаты эксперимента показали, что при опти-
мальном сдвиге фаз <p0₽t между напряжениями супери-
зации в СР и ГОС выигрыш, обеспечиваемый применени-
ем оптимального сигнала, порядка 8 дБ. При отклонении
Ф относительно форг выигрыш падает примерно до 2 дБ
при Дф=|ф—(popt| порядка 100°.
6.2. Оптимизация законов суперизации
Оптимизировать закон суперизации СР можно с раз-
личных позиций: для получения максимальных отноше-
ний сигнал-шум, усиления, пороговой чувствительности,
минимальной полосы пропускания и т. п. Ниже решают-
ся задачи выбора 6(/) для получения наибольшего отно-
шения сигнал-шум и минимальной полосы пропускания.
Рассмотрим классический СР й положим, что на его
вход подана смесь e(Q=e(/)-Hi(0> состоящая из нор-
мального белого шума т](0 с односторонней спектраль-
ной плотностью So и полезного сигнала е(0 =£тах#с(0Х
Xsin (чвсН-фс) с нормированной огибающей
Задачу оптимизации б(/) будем решать применитель-
но к таким сигналам e(t), которые при заданной энергии
и надлежащем выборе &(/) могут обеспечить максималь-
ное отношение сигнал-шум. Очевидно, что расстройка ча-
стоты сигнала сое относительно собственной частоты ио
всегда будет уменьшать указанное отношение, поэтому
198
естественно анализировать случай, когда <ос=»о- Далее,
обработка колебания е(/) в СР осуществляется лишь на
сравнительно коротком интервале. Следовательно, имеет
смысл ограничиваться ситуациями, при которых Hc(t)
является импульсом, т. е. обладает максимумом внутри
некоторого временного интервала и характеризуется ма-
лыми значениями за его пределами. Концы данного ин-
тервала обозначим через и 1ц и выберем их так, чтобы
выполнялось требование ЯС(^)=ЯС (£4) <С 1.
Если e(t) отвечает перечисленным условиям, отноше-
ние сигнал-шум на выходе классического СР достигает
максимума вместе с функционалом
F {Ъ (0} = (0 я, (0 dt I J н\ (t) dt,
*2 /
; который может иметь экстремаль Яю(/) в классе непре-
рывных на временном отрезке /2 ••• ti функций Hi(t).
Приравнивая вариацию Е{Я1(^)} нулю, приходим
- к тождеству
Я1Ь(О = Hc(t),
которое обеспечивает квадратурно-корреляционную об-
работку e(t).
Оптимальный закон суперизации бо(О на интервале
(t2 ... tt) находится из формулы
t
СМ0Л=1пЯ1О(0 = 1пЯс(0-
Гз
где ^з —точка максимума Очевидно, что
8о(0=-згШЯ10(0. (6.6)
Точку ts, в которой функция бо(0 пересекает ось вре-
мени снизу вверх, выбираем произвольно и затем график
6b(f) на интервале (f4 ... t$) строим так, чтобы выпол-
нить равенство .
ts
J 8о(О^= (6.7)
* 3 G
Для найденной функции do(O коэффициент усиления
за счет сверхрегенерации Кс=[Я(.(^)]-2.
Тодки Дз и ti при монотонно спадающей по обе сто-
роны от максимума огибающей H0(t) необходимо выби-
14* _ 199
рать так, йтобы обесйеййть за^айей Задаййое ШйВ‘
ние /<с»
Рассмотрим пример. Пусть
Выберем точки /а н так, чтобы Нс((2)=На(14)=^
= 1/]Л/(с (рис. 6.3,а). Из (6.6) получаем
до (/) =—2а (/—.
Наносим произвольную точку /з и между и t$ стро-
им график бо(0. в соответствии с (6.7) (рис. 6.3,6). Вне
отрезка (t2 ... is) зависимость 6o(t)>0 может быть про-
извольной (имеется в виду однократный запуск систе-
мы).
По той же методике находится оптимальный закон
суперизации для параметрического СР. Необходимо
лишь учитывать, что оптимальная форма 6(/) в послед-
нем случае находится применительно к полезным сигна-
лам
*?(/) =±EmaxHc(t) sin Ы+фо),
где <ро зависит от фазы накачки и расстройки
При использовании в СР вакуумных активных при-
боров в диапазоне СВЧ (клистронов, ЛБВ, ЛОВ) для
предотвращения электрон-
ной расстройки необходимо
применять прямоугольное
напряжение суперизации.
В этих случаях оптималь-
ной или, точнее, квазиопти-
мальной формой супериза-
ции будет кривая, показан-
ная на рис. 6.4. Эта кривая
отличается от прямоугольно-
го закона изменения затуха-
ния наличием асимметрии и
части периода с затуханием,
близким к нулю. Коэффици-
ент шума будет тем меньше,
чем меньше затухание и
больше интервал Это объясняется тем, что при зату-
хании 61, равном нулю, контур становится идеальным
интегратором, в котором напряжение сигнала нарастает
пропорционально времени t, тогда как напряжение шу-
мов увеличивается лишь пропорционально Yt.
200
Рис. 6.3. Кривые Hc(t) (а) и
затухания о0(0 (б) при опти-
мальном законе суперизации
Чтобы к концу интервала Л (иногда этот интервал
называют периодом накопления)' образовалось сущест-
венное превышение сигнала над шумом, необходимо, что-
бы сигнал вводился в контур на протяжении всего отрез-
ка Л. Это можно выполнить при непрерывных сигналах
или при импульсах, длительность которых равна периоду
накопления.
По окончании периода Л затухание становится отри-
цательным и начинается экспоненциальное нарастание
сигнала. Абсолютное значение 62 должно быть велико,
особенно когда в течение интервала /2 в контуре наво-
дятся дробовые шумы. Чем быстрее будет нарастать сиг-
нал за Время f2, тем меньше будет сказываться влияние
шумов. Затем наступает интервал t0, в течение которого
собственные колебания быстро затухают. Затухание до
должно быть большим,
a to — минимальным,
но таким, чтобы обес-
печивался некогерент-
ный режим.
Перейдем к опреде-
лению б(0> которое
обеспечивает мини-
мальную полосу про-
пускания П. Считаем
Рис. 6.4. Квазиоптимальнаи форма
напряжения суперизации
заданными значения
t2, ti и Кс- Заметим, что минимум полосы пропускания
также отвечает наибольшему отношению сигнал-шум на
выходе СР, если только на входе наблюдается смесь
шума и полезного сигнала e(f) с медленно меняющимися
параметрами.
Задача сводится к отысканию на временном отрезке
t2 ... ti функции Яю(0 (имеющей значения Hw{t2y=
==Я1о(<4)'= VKKc на концах и Ню(0=1 в любой точке
внутри данного отрезка)’, которая характеризуется наи-
меньшей шириной на уровне 0,7 нормированной частот-
ной характеристики |Si (JA®) |. Подобным свойством об-
ладает гауссовская функция
710(f) = exp[-a(/-^),J,
где = (’/,)& —7г); a = {lnKc2]/(^ — 7)’. Искомый 33-
кон суперизации связан с оптимальной функцией Яю(0
соотношением (6.6),
201
Задачи минимизации полосы пропускания для клас-
сического и параметрического СР решаются одинаково.
6.3. Сверхрегенеративные обнаружители
Использование СР в локационных устройствах радио-
и акустического диапазона частот существенно упрощает
аппаратуру’и повышает ее экономичность. Примером по-
добного использования может служить высотомер, опи-
санный в § 5.6.
Так как в локационных приложениях на вход СР по-
даются оптимальные или квазиоптимальные отраженные
сигналы, обеспечивающие высокую помехоустойчивость
СР при действии широкополосных шумов, можно счи-
тать, что простота и экономичность сверхрегенеративных
устройств во многих случаях сочетаются с малыми ошиб-
ками обнаружения и измерения параметров локацион-
ных целей.
Ниже на уровне упрощенных функциональных схем
рассматриваются принципы действия и основные свойст-
ва сверхрегенеративных обнаружителей неподвижных
или движущихся в заданной области прос/ранства объ-
ектов. В качестве дополнения к материалу приводятся
практические схемы акустических устройств обнаруже-
ния (датчиков положения) транспортных объектов, при-
меняемых в системах автоматического управления тех-
нологическим транспортом.
Неадаптивный обнаружитель на основе классическо-
го СР с отдельным передатчиком. Структурная схема
этого прибора (рис. 6.5,а) содержит задающий генера-
тор ЗГ, модулятор М, импульсный генератор ИГ, излу-
чающий П1 и приемный П2 преобразователи (антенны)'.,
импульсную линию задержки ЛЗ, СР и пороговое уст-
ройство ПУ, сравнивающее амплитуду вспышек СР с не-
которым порогом Ео.
Устройство действует следующим образом. Гейератор
ИГ выдает последовательность видеоимпульсов 2, кото-
рая модулирует гармоническое колебание 1, получаемое
от ЗГ. Таким образом, на передающий преобразователь
Ш подается последовательность радиоимпульсов 3. От-
раженные от объекта и задержанные на время т радио-
импульсы 4 поступают на СР от преобразователя- П2:
Импульсы суперизации 5 для СР получаются в резуль-
тате задержки исходной последовательности 2 на время
202 ’ , ''
т3 с помощью ЛЗ. В зависимости от времени задержки
отраженных импульсов т можно получить «непопадание»
или «попадание» отраженных сигналов в окна чувстви-
тельности СР и в соответствии с этим — малую (первый
импульс на осциллограмме 6) или большую (второй им-
пульс на той же осциллограмме) амплитуду вспышек.
Порог Ео для ПУ устанавливается так, чтобы исключить
многозначность обнаружения при времени запаздывания
т+шТс, /п=1, 2, 3, ... (рис. 6.5,в).
Режим работы устройства подбирается так, чтобы
огибающая отраженного импульса с точностью до посто-
янного временного сдвига совпадала с сигнальной функ-
Рис. 6.5. Структурная схема (а), диаграммы процессов (б) и за-
висимость огибающей вспышек от времени запаздывания отражен-
ных импульсов (в) в сверхрегенеративном обнаружителе:
D — радиальная дальность, с — скорость звука
цией 7/1(0- При этом СР вместе с пороговым устройст-
вом выступает в ррли квадратурно-корреляционного
устройства и обеспечивает малые ошибки обнаружения,
которые в данном случае легко определяются по извест-
ным методикам [103, 104]. Дополнительно при настрой-
203
ке прибора частоту ЗГ выставляют равной собственной
частоте СР, а. регулировкой времени т3 добиваются не-
обходимого расположения зоны обнаружения. Размер
зоны обнаружения зависит от диаграмм направленности
преобразователей и длительности зондирующих импуль-
сов. В первом приближении можно считать, что размер
зоны в радиальном направлении оценивается произведе-
нием ^АтиС, где Ати — длительность зондирующего им-
пульса, g — коэффициент, зависящий от порога Ео и эф-
фективной площади отражения объекта, обычно g=
=(1 ••• 1.5).
Неадаптивный обнаружитель на основе классическо-
го СР с совмещенными приемником и передатчиком.
Данное устройство (рис. 6.6,а)’ работает по аналогии
Рис. 6.6. Структурная схема (а) и диаграммы процессов (б) не-
адаптивного обнаружителя с совмещенными приемником и пере-
датчиком
с предыдущим обнаружителем. Его особенностью явля-
ется совмещение в одном каскаде СР функций приемни-
ка и передатчика зондирующих радиоимпульсов. На СР
со стороны ИГ подаются две последовательности видео-
импульсов 1 и 2. Видеоимпульсы 1 осуществляют удар-
ный запуск СР, вызывая появление вспышек с достаточ-
но большой амплитудой. Эти вспышки используются
в качестве зондирующих радиоимпульсов. Видеоимпуль-
сы 2 обеспечивают безударный запуск СР и гарантиру-
ют высокую чувствительность схемы. Если время запаз-
дывания т отраженных импульсов приблизительно равно
времени т3, показанному на рисунке, безударная вспыш-
ка имеет большую амплитуду (на диаграмме 4 позиция
204 ' <>
А). В противном случае безударные вспышки обуслов-
лены не отраженным сигналом, а собственными шумами
СР и имеют малую амплитуду (на той же диаграмме
позиция В).
Стробируемый каскад СК пропускает на ПУ только
безударные (информационные) вспышки. Управляется
СК видеоимпульсами 3 от ИГ. При достаточно большом
периоде Тс неоднозначность обнаружения не проявляет-
ся. !
Как в предыдущем случае, помехоустойчивость систе-
мы будет высокой, если огибающая зондирующей (удар-
ной) вспышки с точностью до временного сдвига совпа-
дает с функцией Hi (/) для безударного запуска.
Адаптивный обнаружитель на основе классического
СР с совмещенным передатчиком и приёмником:. Этот
обнаружитель (рис. 6.7,а) имеет наиболее простую схе-
Рис. 6.7. Структурная схема (а) и диаграмма процессов (б) адап-
тивного обнаружителя
му, однако принцип его действия в сравнении с преды-
дущими устройствами сложнее. Предположим, что в зо-
не обнаружения объект отсутствует. Тогда СР работает
в линейном режиме и огибающая его вспышек, обуслов-
ленных’ внутренними или внешними шумами, имеет ма-
лую амплитуду, флуктуирующую около некоторого сред-
него значения Аш (рис. 6.7,6 при f<4). Появление цели
в указанной зоне в момент /п приводит к возникновению
положительной обратной связи в системе (отраженные
импульсы поступают на СР в моменты зарождения оче-
редных вспышек) , что вызывает инкрементный импульс-
ный процесс, который заканчивается на некотором уров-
не Ап, когда в СР вступает в действие механизм ограни-
чения амплитуды (рис. 6.7,6 при Уходу объ-
екта из зоны обнаружения в момент соответствует
смена в течение одного периода суперизации режима
больших на режим малых колебаний (рис. 6.7Д t>ty).
. , 205
Пороговое устройство ПУ сравнивает амплитуду вспы-
шек с заданным уровнем Ео и выдает решение о нали-
чии объекта.
Как следует из принципа действия, амплитуда излу-
чаемых импульсов непостоянна и зависит от того, нахо-
дится ли объект в зоне обнаружения. Другими словами,
обнаружитель обладает адаптивностью по излучаемой
мощности и повышает уровень излучения только при на-
личии объекта в зоне обнаружения. Мерой адаптивности
является отношение П=Ап/Аш.
Для получения высокой помехоустойчивости системы
необходимо СР настроить так, чтобы выполнялось соот-
ношение
Я1(0=Я2(Жс)=Яо(0, (6.8)
где тс=/5—ts (см. рис. 2.1). При этом СР с точностью
до постоянного сдвига rto фазе заполнения вспышки (не-
принципиального в рассматриваемом случае) превраща-
ется в неискажающий активный четырехполюсник без
демодуляции [94] или, другими словами, становится са-
мосогласованным. Самосогласование, как это следует из
(6.8), означает, что нормированная огибающая вспышки
СР [функция Ihit)] с точностью до постоянного сдвига
во времени повторяет сигнальную функцию #t(f).
Докажем, что при выполнении условия (6.8) СР яв-
ляется неискажающим активным четырехполюсником
без демодуляции. Допустим, что вместо (2.7) на выходе
СР . наблюдается процесс х(/)=«(/) cos (®0Н~Ф) +
+Ф(0 sin (ио/Ц-ф), где ф=—®отс.
Тогда формулу, связывающую внешнее воздействие
е(0 и выходное напряжение x(f), можно записать так:
х (t) — ш0Кс На (t — tc) cos ®0 (t — тс)Х
. t
X J (/) S (t) cos <o0tdl — Tc) sin % (t —
—00
—лс) H„ (t) 5 (/) sin
'206
При многократных независимых запусках с периодом Тс
х (/) = №Дс Но (t — tc — /гТс) cos <о0 (t — tc) X
X $ — nT^cos^tdt-^H.^t
’c - nTc) X
Xsin®0(/~ xc) J Ha(t~ nTc) sin<n0O
<-<C J’
где n — номер запуска.
Последняя формула есть алгоритм работы неискажа-
ющего четырехполюсника без демодуляции. Функцио-
нальная схема, реализующая этот алгоритм (см. на
Рис. 6.8. Линейная математическая модель адаптивного обнаружи-
теля
рис. 6.8 фрагмент, обведенный штриховой линией), яв-
ляется математической моделью Самосогласованного СР.
Модель обнаружителя в целом (линейный вариант)'
получаем, дополняя СР’ линией задержки т и аттенюато-
ром р (рис. 6.8). Значение (5 соответствует отношению’
амплитуд зондирующего и отраженного сигналов на за-
жимах несовмещенного преОбразователяГТаКим образом'
обнаружитель представляет собой замкнутую импульс-'
ную систему; два эвена которой" учитывает характера.-.,
етйкй объекта обнаружения. ! ’ • " . ?. • ” Г -•
: 2°7
Определим свойства этой схемы, для чего мысленно
разомкнем ее между аттенюатором р и усилителем 7Сс и
проведем следующий эксперимент. Подадим на вход уси-
лителя последовательность импульсов BiH0(t—п.Тс—т—
—Тс)'cos (<W"H|>i), Bi, i|>i=const, где т —задержка сиг-
нала при отражении от цели, и затем измерим амплиту-
ду В2 импульсов на выходе аттенюатора. Отношение
B2fB\ обозначим через S и назовем его коэффициентом
передачи разомкнутой системы. Затем изменим зна-
чения тир так, чтобы воспроизвести дискретное ради-
альное перемещение объекта. После этого повторим из-
мерение S. По множеству, аналогичных опытов получим
зависимость S(t), которая имеет вид
S (т) — const р (т) So (и — тТс — тс);
Se(t)= ^He(y-t)H0(y)dy, .
где m=l, 2, 3, ... — номер зоны обнаружения; р(т) —
функция ослабления р от времени запаздывания. Зави-
симость 5(т) показана на рис. 6.9.
Рис. 6.9. Коэффициент передачи разомкнутой схемы адаптивного
обнаружителя как функция времени запаздывания
Возвращаясь к замкнутой схеме, заключаем, что она
будет терять устойчивость на интервалах Дг, где S(t)>
>1.
В реальном обнаружителе существует некоторый ме-
ханизм ограничения амплитуды на уровне Лп. При этом
области устойчивости в линейном и нелинейном режимах
208
ббййШй? (т—вне Шершав At). Что >кё касается
значений т внутри'интервалов Ат, то здесь неустойчиво-
му состоянию линейной системы соответствует устойчи-
вое состояние с амплитудой Ап нелинейного устройства.
Таким образом, обнаружитель можно трактовать как
прибор, у которого устойчивым состояниям соответству-
ют два уровня излучаемых импульсов: Аш и Аа, причем
«переключение» схемы из состояния Аш в состояние Аи
(и наоборот) осуществляется объектом обнаружения.
Определим качество обнаружения системы. Для этого
положим, что на вход СР поступают не только отражен-
ные сигналы e(t), но и нормальный дельта-коррелиро-
ванный шум т](0> имеющий одностороннюю спектраль-
ную плотность jV0: е(т) =е(0+л(0- Рассмотрим про-
стейшую ситуацию, когда объект мгновенно появляется
в центре любой зоны обнаружения.
Поскольку самосогласованный СР осуществляет
квадратурно-корреляционную обработку отраженных
вспышек (см. рис. 6.8), характеристики обнаружения
нашей системы совпадают с аналогичными характери-
стиками импульсного обнаружителя, который снабжен
квадратурно-корреляционным приемником н излучает
импульсы, совпадающие со вспышкой СР в режиме боль-
ших колебаний (в состоянии Ап). Наша система отлича-
ется от указанной большим временем обнаружения и на-
личием порога по площади отражения объекта.
Время обнаружения Тоби в рассматриваемом случае
равно длительности перехода системы из состояния Аш
в состояние Ап. Для вычисления ТОбн воспользуемся фор-
мулой
An=S(t)An-b
где Ап, An-i — амплитуды л-й и п—1-й вспышек во вре-
мя переходного процесса. Из нее вытекает
Тоби = Тс In D/ln S (т) > Тс.
Найденное выражение не только оценивает ТОби, но и
показывает, что система имеет порог по площади отра-
жения объекта. Пороговым условием является неравен-
ство 5 (т)>1: объекты, имеющие недостаточную площадь
отражения и не обеспечивающие выполнение этого нера-
венства, не обнаруживаются.
Для объектов, находящихся в центре любой зоны об-
наружения, условие S(t)>1 будет выполнено, если
2Ec=N$,
209
где Д—-энергия отраженного сигнала на входе СР в ре-
жиме малых колебаний (в состоянии «Аш»).
Адаптивный доплеровский обнаружитель движущихся
объектов на основе параметрического СР. В схеме на
рис. 6.10,а использованы следующие обозначения: ПСР—
параметрический СР, ГН — генератор накачки, АД —
амплитудный детектор,-ИГ — импульсный генератор (ге-
нератор суперизации). Данная схема совместно с допол-
нительными полосовым фильтром, амплитудным детек-,
тором и пороговым устройством (которые включаются
РиС'.' 6.10. Структурная схема (а) и математическая модель (б)
адаптивного доплеровского обнаружителя на основе' параметриче-
ского СР
после АД и на рисунке не показаны) позволяет обнару-
живать объекты, пересекающие зону обнаружения с ра-
диальной скоростью, лежащей в некотором диапазоне,
который определяется полосой пропускания дополнитель-
ного фильтра. Это объясняется тем, что радиальное пе-
ремещение объекта в зоне обнаружения сдвигает часто*
ту заполнения отраженных радиоимпульсов и вызывает
появление на выходе АД переменного напряжения с уд-
военной доплеровской частотой.
Покажем это, для чего рассмотрим детально принцип
Действия схемы на рис. 6.10, обратившись к математи-
ческой модели параметрического СР в режиме много-
кратных запусков (рис. 2.6,6). Полагаем, что парамет-
рический СР самосогласован, т. е. его временные харак-
теристики подчинены условию
(здесь т0=^5—М- Математическая модель параметриче-
ского СР в режиме самосогласования строится на осно-
ве рис* 2.6,6 в предположении; что tp<j=—af2 и фаза за-
полнения вспышек отличается от действительной фазы
210
йа некоторую, йостойнную Величину. Эта модель на рйё.
6.10,6 обведена штриховой линией. Модель обнаружителя
в целом в линейном приближении получаем, соединив
вход и выход модели СР линией задержки т и аттенюа-
тором 0 (рис. 6.10,6).
Разомкнем модель обнаружителя между усилителем
Ас и аттенюатором р и мысленно проведем следующий
эксперимент. Подадим на вход усилителя Лс последова-
тельность радиоимпульсов
BxHo(t—пТс—т?—Тс) cos (vZ-f-Tpi); Blt i|>i=const,
и затем измерим амплитуду В2 и фазу заполнения фг
радиоимпульсов на выходе аттенюатора р. Величину
Вг cos Аф/Д, где Аф— разность фаз заполнения входной
и выходной последовательностей, обозначим через S и
назовем коэффициентом передачи разомкнутой схемы.
Далее, одновременно изменяя значения р и т так, чтобы
воспроизвести радиальное перемещение объекта, повто-
рим измерение S. На основании множества аналогичных'
опытов получим зависимости
S (*) = constJ3 (т) S„ (t — tnTc — тс);
S0(t)= ^Н„(у — t)cosv(z/ — v) Нt (у) cos vydy,
—00
где tn — номер зоны обнаружения. График S (т) для
т=1 показан на рис. 6.11,д.
Возвращаясь к замкнутой схеме, заключаем, что она
будет терять устойчивость при |5(т) | >1.
В СР существует механизм ограничения амплитуды
на уровне Ап. Учет этого механизма (нелинейности) по-
казывает, что области устойчивости | S (т) ] <1 в линей-
ном и нелинейном режимах совпадают. Что же* касается
значений т, для которых |S(t) | >1, то здесь неустойчи-
вости линейной модели соответствует устойчивое состоя-
ние нелинейного устройства с некоторой амплитудой
вспышек Ап. Следовательно, зависимость амплитуды
вспышек А от времени запаздывания т (от радиальной
дальности) будет иметь вид, показанный на рис. 6.11,6.
Из рисунка вытекает искомое свойство системы: при дви-
жении объекта в пределах зоны обнаружения Дг, когда
запаздывание т меняется во времени линейно, на выходе
АД появляется напряжение, меняющееся с удвоенной
...Л'’ .. . ' . . 211
ДОЙЛе])Овекой ЙЗёФбТой. 3tbt Жё рисунок определяет Й
такое свойство системы, как адаптивность по излучаемой
мощности, поскольку в отсутствие объекта в зоне об-
наружения (т находится вне интервала Ат) амплитуда
излучаемых импульсов близка к нулю (фактически к не-
Рис. 6.11. Коэффициент передачи разомкнутой схемы (а) и зави-
симость амплитуды вспышек от времени запаздывания (б) для
следящего по скорости обнаружителя
которому среднему значению Аш, определяемому шума-
ми на входе СР).
Практические схемы обнаружителей. Ниже описаны
практические схемы акустических обнаружителей на ос-
Рйс. 6.12. Структурная схема не-
адаптивного обнаружителя
нове классических СР. В частности, рассмотрены неадап-
тивиый и адаптивный обнаружители, а также одна из
модификаций адаптивного обнаружителя, использующе-
го двустороннее преобразование частоты [128, 129].
212
Рис. 6.13. Принципиальная схема неадаптивного акустического об-
наружителя
Структурная схема неадаптивного' акустического об-
наружителя (более детальная в сравнении со схемой
рис. 6.7,а) показана на рис. 6.12. На рис. 6.13 изображе-
на его принципиальная схема, а на рис. 6.14 — диаграм-
мы напряжений в отмеченных на схеме точках. В каче-
ртве приемопередающего преобразователя в приборе ис-
?13
пользуется конденсаторный преобразователь КП с'шири-
ной диаграммы направленности 10°. Характеристики
устройства: дальность обнаружения объектов с большой
площадью отражения (автомобиль, вагон и т. п.) 2 ...
... 20 м, частота заполнения вспышек 27 кГц, ширина
зоны обнаружения в радиальном направлении около
2 м, ширина мертвой зоны 2,5 м, время обнаружения при
максимальном расстоянии до объекта 160 мс, потребляе-
мая мощность (без индикаторной лампы накаливания)
150 мВт, напряжение питания 12 В.
Генератор суперизации ГС выполнен по схеме несим-
метричного мультивибратора на транзисторах Tl, Т2 (см.
рис. 6.13) и вырабатывает последовательность импульсов
с периодом повторения Тс (диаграмма 1, рис.6.14). Рези-
Рис. 6.14. Осциллограммы напряжений в различных точках схемы
на рис. 6.13
сторы R2 и R4 позволяют регулировать Тс и те. С выхода
ГС напряжение подается на формирователь приемных им-
пульсов суперизации ФПИ (интегрирующая цепь R7C5}.
Процесс формирования сводится к сглаживанию фрон-
тов импульсов суперизации для получения безударного
запуска СР. Одновременно выходное напряжение ГС по-
дается на устройство задержки УЗ, выполненное на
Транзисторе которое генерирует имйульс длительно-
стью т3 (диаграмма 2). Срезом этого импуЛьса запуска-
ется-одновибратор Т4, Т5, который является формирова-
телем зондирующих импульсов суперизации ФЗИ'. На
вход модулятора М (транзистор Тб) импульсы с ФЗИ и
ФПИ подаются через развязывающие диоды Д13, Д14
(диаграмма 5),
Сверхрегенератор выполнен на транзисторе Т7 по ;
схеме с общим коллектором. Модулятор Тб меняет глу-
бину положительной обратной связи с частотой супери-
зации. Подобный СР имеет широкий динамический диа-
пазон по входу и отличается высокой стабильностью
усиления при изменениях температуры и напряжения пи-
тания. Частота заполнения вспышек определяется резо-
нансной частотой контура, образованного индуктивно-
стью L и емкостью преобразователя КП, подключенного
к индуктивности через разделительный конденсатор С13.
Напряжение смещения для КП вырабатывается пиковым
детектором Д1б, Д17, С12, С14 и подается на КП через
резистор iR26.
Вспышки СР показаны на диаграмме 4. Для исклю-
чения флуктуаций амплитуды зондирующих вспышек на
вход СР через небольшую емкость С8 подаются корот-
кие импульсы, полученные в результате дифференциро-
вания фронтов импульсов ФЗИ. Таким образом реализу-
ется ударный запуск для зондирующих и безударный—
для приемных вспышек.
В отсутствие объекта амплитуда приемных вспышек
мала и определяется собственными шумами СР и КП.
Если объект появляется в зоне обнаружения в момент
ti, то амплитуда приемных вспышек увеличивается. Рас-
стояние между КП и зоной обнаружения
/г = с(Тс—Тз—Ту—тс±Дт/2)/2,
где Ту — длительность зондирующего импульса супериза-
ции; тс=^5—t9; Ат=.ДЕ>/с, &D— размер зоны обнаруже-
ния в радиальном направлении.
Выделение приемных вспышек из общей последова-
тельности сигналов на выходе СР и их детектирование
осуществляются схемой стробирования СС (транзисторы
Т8, T9). На Т8 подаются стробирующие импульсы (диа-
грамма 2), на T9—сигналы СР (диаграмма 4). В ре-
зультате на выходе схемы наблюдается огибающая толь-
ко приемных вспышек в то время, когда их амплитуда
215
Превышает Некоторый порог, устанавливаемый делите-
лем R21, R22.
В обнаружителе применяется специальное устройство
обработки выходного сигнала УО с бинарным выходом,
которое может быть легко согласовано с системами циф-
ровой автоматики. В данном случае бинарный сигнал
УО поступает на блок индикации (Инд), состоящий из
транзистора Т12 и лампы накаливания Л.
Работа УО иллюстрируется диаграммами 5, 6, 7. На
один из входов симметричного триггера Т10, Т11 пода-
Рис. 6.15. Принципиальная схема адаптивного обнаружителя
ются устанавливающие импульсы, которые формируют-
ся (дифференцируются) из фронта импульсов задержки
(диаграмма 5). На другой вход поступает выходное
напряжение схемы стробирования. На выходе триггера
(диаграмма 7) наблюдаются низкий потенциал (сигнал
«О») в отсутствие объекта и практически постоянный вы-
сокий потенциал (сигнал «1») при появлении объекта.
Экспериментальные исследования показали, что ха-
рактеристики обнаружения данного устройства совпада-
216
ют с подобными же характеристиками импульсного об-
наружителя с квадратурно-корреляционным приемником.
В адаптивном обнаружителе на основе классического
СР (рис. 6.15) СР на транзисторе Т4 генерирует зонди-
рующие вспышки, которые формируются отраженными
сигналами. Генератор суперизации TI, Т2 управляет со-
противлением модулятора ТЗ, осуществляющего безудар-
ный запуск СР. Пьезокерамический преобразователь
ПКП, включенный в контур СР, излучает зондирующие
вспышки с частотой заполнения 22,5 кГц и принимает ;
отраженные сигналы. Режим больших колебаний имеет
место при появлении объекта в зоне, находящейся на
расстоянии
h=c (Тс— тс± Ат/2) /2
от ПКП. В отсутствие объекта СР работает от собствен-
ных шумов в режиме малых колебаний. Отношение ам-
плитуд выходных вспышек в режимах больших и малых
колебаний (адаптивность £>) достигает 60 дБ при обна-
ружении объектов на расстоянии 3 м.
Время обнаружения прибора зависит от коэффици-
ента адаптивности D, расстояния h и эффективной пло-
щади отражения объекта. Например, объект типа желез-
нодорожного вагона обнаруживается на расстоянии 10 м
за 430 мс (Л—100). Для сравнения отметим, что время
обнаружения для неадаптивного локатора при тех же
условиях составляет 60 мс.
Адаптивный обнаружитель можно получить с помо-
щью несложного изменения схемы на рис. 6.13. Для это-
го достаточно отключить ФЗИ от УЗ (разорвать цепь
конденсатора С4) и резистором R4 выставить амплитуду
вспышек СР, достаточную для возникновения инкремент-
ного процесса при появлении объекта в зоне.
Иногда необходимо изменять в широких пределах
размеры зоны обнаружения и мертвой зоны. Размер зо-
ны обнаружения в радиальном направлении определяет-
ся длительностью вспышки СР, которая в свою очередь
жестко связана с собственной частотой системы. Эта ча-
стота выбирается с учетом резонансных свойств преоб-
разователя и условий распространения акустических ко-
лебаний в среде. Поэтому для каждого конкретного об-
наружителя размеры зоны обнаружения и мертвой зоны
фиксированы. Например, обнаружитель на основе СР
с собственной частотой 13 кГц, работающий в воздушной
15-ЗЮ8 ?17
среде, имеет мертвую зону около 5 м при ширине зоны
обнаружения около 3 м.
Для изменения размеров указанных зон при задан-
ной частоте заполнения зондирующих импульсов можно
использовать двустороннее преобразование частоты. По-
казатели адаптивного обнаружителя с подобным преоб-
разованием (рис. 6.16): собственная частота СР 80 кГц,
частота заполнения зондирующих вспышек 13 кГц, ши-
рина мертвой зоны 0,3 м, ширина зоны обнаружения
0,1 м, дальность обнаружения до 35 м, потребляемая
Рис. 6.16. Принципиальная схема адаптивного обнаружителя с пре-
образованием частоты
мощность в режиме малых колебаний 20 мВт, в режиме
больших колебаний 300 мВт, напряжение питания 12 В.
Сверхрегенератор (транзистор Т1) построен на осно-
ве трансформаторного автогенератора, в цепь обратной
связи которого включен модулятор Т2. Подобное устрой-
ство отличается высокой экономичностью (ток потребле-
ния 0,8 мА). На вход модулятора импульсы с ГС пода-
ются через интегрирующую цепочку R8C6. Прямое и об-
ратное преобразования частоты производятся балансны-
ми смесителями Д8, Д9 и Д6, Д7, а также общим гете-
родйном на транзисторе Т5. Частота гетеродина равна
93 кГц. Транзистор Т4 выполняет роль фазоинвертора.
Вспышки СР через эмиттерный повторитель ТЗ поступа-
ют на смеситель Д8, Д9, на выходе которого после филь-
тра R9C8 наблюдаются радиоимпульсы с частотой за-
полнения 13 кГц. Эти радиоимпульсы усиливаются и
подаются на излучающий преобразователь ПКП2. Уси-
литель (выходная мощность 200 мВт) работает в клас-
се В. Отраженные импульсы воспринимаются преобра-
зователем ПКП1, который подключен к смесителю Д6,
Д7 через согласующую индуктивность L1. Роль фильтра
на выходе смесителя выполняет непосредственно СР.
Устройство индикации (Инд) подсоединено к выходу
усилителя и фиксирует превышение амплитудой вспышек
некоторого порогового уровня.
Использование усилителя на выходе СР существен-
но повышает мощность зондирующих импульсов и уве-
личивает дальность обнаружения. В то же время благо-
даря адаптивности по излучаемой мощности применение
усилителя почти не увеличивает ток потребления схемы
обнаружителя, если только .объект появляется в зоне
обнаружения достаточно редко. Это объясняется тем,
что большую часть времени схема работает в режиме
шумовых вспышек, когда ток, потребляемый усилителем
в классе В, мал.
Описанные выше устройства применяются в системах
автоматического управления в качестве датчиков поло-
жения технологического транспорта и устройств преду-
преждения столкновения движущихся объектов.
6.4. Сверхрегенеративные дальномеры
Сверхрегенеративные дальномеры в большинстве слу-
чаев являются развитием обнаружителей, построенных
на основе классических или параметрических СР. Их
особенность заключается в перестройке периода супери-
зации или накачки так, чтобы непрерывно поддерживать
равенство между временем запаздывания и Тс или пТи,
где Гн — период накачки; п — некоторое целое число.
Примером устройства с перестройкой периода супериза-
ции Гс является высотомер, описанный в § 5.6.
Ниже описывается следящий дальномер на основе
классического СР, в котором подстройка периода супе-
ризации осуществляется более простым способом. Кро-
15* 219
ме того, приводится функциональная схема и поясняется
принцип действия дальномера на основе параметриче-
ского СР. Последний характеризуется высокой точностью
и неоднозначностью измерения дальности.
Адаптивный дальномер на основе классического СР.
Он состоит (рис. 6.17,а) из СР, амплитудного детектора
АД, управляемого по частоте генератора суперизации
УГС и корректирующего фильтра Ф. Зависимость управ-
ляющего напряжения Е от периода суперизации Тс
в присутствии обнаруживаемого объекта показана на
Рис. 6.17. Структурная схема дальномера с классическим СР (а) и
поясняющие графики (б)
рис. 6.17,6 (кривая 2). На этом же рисунке (кривая /)
изображена характеристика ТС(Е) для УГС. Точки пере-
сечения Р и Q обоих графиков определяют стационар-
ные состояния системы, одна из них устойчивая (точка
Р), другая — неустойчивая (точка Q). При перемещении
объекта зависимость Е(ТС) смещается вдоль оси Тс (см.
штриховую кривую), одновременно изменяется и поло-
жение стационарных точек, что вызывает изменение ча-
стоты суперизации. Измерение дальности до объекта
осуществляется с помощью измерения периода супериза-
ции. Схема подобного измерения на рис. 6.17,а не пока-
зана.
В отсутствие обнаруживаемого объекта период супе-
ризации равен Гешах- Режим захвата реализуется в про-
цессе приближения объекта к обнаружителю в момент,
когда время запаздывания т становится равным ГСтах-
Как и адаптивный обнаружитель на основе класси-
ческого СР, данное устройство обладает адаптивностью
по излучаемой мощности, поскольку без объекта мощ-
ность вспышек СР мала и определяется лишь внутрен-
ними или внешними шумами.
Точность измерения дальности оценивается величиной
тис, где с—скорость света или звука в зависимости от
типа обнаружителя; ти — длительность зондирующего
импульса.
220
Адаптивный дальномер на основе параметрического
СР. Это устройство (рис. 6.18,а) состоит из параметри-
ческого СР (ПСР), амплитудного детектора АД, коррек-
тирующего фильтра Ф, управляемого по частоте генера-
тора накачки УГН и импульсного генератора (генерато-
ра суперизации) ИГ. Для пояснения принципа действия
этого устройства найдем две зависимости: зависимость
£'(7’н), где Е— постоянное напряжение на выходе филь-
тра Ф (это напряжение можно наблюдать при фиксиро-
ванном положении обнаруживаемого объекта в зоне об-
Рис. 6.18. Структурная схема дальномера с параметрическим СР
(а) и поясняющие графики (б)
наружения), Ти — период напряжения накачки, и зави-
симость Та(Е), которая определяется свойствами УГН.
Функция Е(Тц) изображена кривой 1 на рис. 6.18,6,
где ТН1—т;[п; Ти2=т/(п—1); 7’н3=т/ (л—2); п — некоторое
целое число; т — время запаздывания. Характеристика
Тц(Е) нанесена на том же рисунке кривой 2. Точки пе-
ресечения функций Е(Т„) и ТН(Е) определяют стацио-
нарные состояния системы, причем точки Р соответству-
ют устойчивым, а точки Q — неустойчивым состояниям.
Пусть система находится в одном из устойчивых со-
стояний. Перемещение объекта в радиальном направле-
нии вызовет смещение зависимости £'(7’н) на оси Т,_, и
соответствующее изменение периода накачки. Непрерыв-
ное измерение периода накачки (схема измерения Ти на
рис. 6.18,а не показана) дает возможность следить с точ-
ностью до постоянного слагаемого за дальностью.
Для расширения пределов слежения напряжение на-
качки целесообразно подавать в качестве синхронизиру-
ющего сигнала на ИГ.(см. рис. 6.18,а). При этом движе-
ние объекта будет сопровождаться изменением не толь-
ко периода накачки, но и периода суперизации, что обес-
печит в соответствии с перемещениями объекта переме-
щение в пространстве лоцируемой зоны. Достоинство
данного дальномера — более высокая точность слежения
221
в сравнении с дальномером на основе классического СР.
Эта точность при соответствующей настройке оценивает-
ся величиной 7нС<Стиб’. Недостаток — неоднозначность
определения дальности.
6.5. Системы связи с оптимальными
для сверхрегенератора сигналами, многоканальные
сверхрегенеративные системы
В § 3.9 было показано, что для повышения отношения
сигнал-шум на выходе параметрического или классиче-
ского СР (при обработке импульсных сигналов или сиг-
налов с непрерывной амплитудной или угловой модуля-
цией на фоне широкополосного шума) перед СР необхо-
димо помещать узкополосный фильтр, настроенный на
несущую частоту сигнала. Реализация такого фильтра
на высоких частотах без преобразования частоты пред-
ставляет собой трудную задачу. Более того, во многих
ситуациях подобный фильтр вообще может быть беспо-
лезным, например, когда основную роль играют внутрен-
ние шумы СР, которые предварительной фильтрации не
подвергаются. Поэтому представляют интерес такие ка-
налы связи, которые обеспечивают поступление на вход
СР в приемнике оптимальных сигналов, определенных
в § 6.1. Подобные сигналы без предварительной филь-
трации гарантируют максимум отношения сигнал-шум на
выходе СР при любых стационарных помехах, в том чис-
ле и широкополосных.
Пусть классический СР на приемном конце канала
связи периодически возбуждается в моменты t3n. Тогда
оптимальным сигналом для него является последова-
тельность радиоимпульсов с несущей частотой соо, огиба-
ющей Hi (J—пТс) и произвольными начальными фазами
фсп внутри каждого радиоимпульса:
шах пН 1 (t пТс) sin (сОо^^рфсп).
Амплитуды импульсов .Стах п МОГуТ ПрИНИМЭТЬ ПрОИЗВОЛЬ-
ные (для каждого п) значения. Без нарушения опти-
мальности сигнала полезную информацию на передаю-
щем конце линии связи можно закладывать в последо-
вательность непрерывных значений £ШахВ или фСп.
Для реализации канала связи с оптимальным для
классического СР сигналом необходимо решить три за-
дачи: обеспечить равенство несущей частоты передавае-
222
мого сигнала и собственной частоты СР, обеспечить со-
впадение с точностью до постоянного сдвига во времени
весовой функции Н{ (/) и нормированной огибающей
каждого радиоимпульса на входе СР и, наконец, обес-
печить попадание моментов t3ri на максимумы огибаю-
щей принимаемых радиоимпульсов.
Первые две задачи решаются сравнительно просто,
так как выравнивание собственной частоты СР и часто-
ты сигнала, а также выбор нормированной огибающей
сигнала, совпадающей с точностью до временного сдвига
с функцией Hi(t—nTJ, можно произвести предваритель-
но при настройке системы связи. Решение третьей зада-
чи вызывает определенные трудности, так как подстрой-
ку (синхронизацию)' моментов t3n под моменты макси-
мумов огибающей входных радиоимпульсов необходимо
осуществлять непрерывно в процессе передачи информа-
ции.
Существуют две возможности указанной подстройки.
Первая связана с передачей вспышек СР по обратному
каналу на передающий конец, где в результате их ана-
лиза задается положение передаваемых импульсов во
времени. Вторая основана на синхронизации или под-
стройке генератора суперизации с помощью -видеоим-
пульсов, получаемых в процессе детектирования прини-
маемого сигнала. Такая подстройка может производить-
ся стандартной системой ФАПЧ на частоте суперизации.
Однако, чтобы заставить функционировать подобную
ФАПЧ, необходимо предварительно усиливать обычными
средствами входную последовательность радиоимпуль-
сов, что значительно усложняет приемник. Поэтому схе-
му подстройки импульсов суперизации целесообразно
также строить на основе СР.
Схема подстройки частоты суперизации на основе СР
практически совпадает со схемой следящего дальномера
(см. рис. 6.17), если в нем на вход СР подается прини-
маемая последовательность радиоимпульсов. При этом
искомые видеоимпульсы синхронизации следует снимать
с выхода управляемого генератора суперизации. После
необходимого сдвига во времени они могут поступать
в качестве запускающих импульсов на СР основного
приемника.
Для примера на рис. 6.19,а показана схема приемни-
ка сигналов с амплитудно-импульсной модуляцией. По-
следовательность радиоимпульсов с амплитудной моду-
223
ляцией (сигнал АИМ) поступает вместе с шумом с ан-
тенны на вход классического СР (КСР). Импульсы супе-
ризации вырабатываются формирователем напряжения
суперизации (ФНС). На формирователь подаются син-
хронизирующие импульсы СИ, поступающие со стороны
ФАПЧ. Схема ФАПЧ (рис. 6.19,6) также построена на
основе КСР и получает сигналы АИМ с антенны. В ре-
жиме слежения управляемый генератор суперизации
УГС имеет на входе постоянное напряжение, снимаемое
с корректирующего ФНЧ. При этом частота и фаза УГС
устанавливаются таким образом, что приемные «окна»
Рис. 6.19. Структурные схемы СР
для приема АИМ сигналов:
а — приемника; б — системы ФАП ча-
стоты суперизации
КСР частично перекры-
вают временные интерва-
лы, на которых располо-
жены сигнальные радио-
импульсы.
Так как в данном при-
емнике от одной антенны
работают два СР, запу-
скаемые практически
одновременно, необходи-
мо каким-либо образом
уменьшить их влияние
друг на друга. Для этого, к примеру, УГС в устройстве
синхронизации можно настроить на субгармонику, т. е.
на частоту, значительно меньшую частоты првторения
сигнальных радиоимпульсов. При этом синхронизирую-
щие видеоимпульсы будут иметь малую частоту и в схе-
ме ФНС их придется подавать на умножитель частоты.
Однако это окупается тем, что СР в схеме ФАПЧ запу-
скается значительно режр в сравнении с основным СР,
причем во время запусков СР в схеме ФАПЧ сверхреге-
неративный каскад в основном приемнике может не ра-
ботать.
Оптимальная последовательность радиоимпульсов
для параметрического СР
e(t) = Emax пн! (t—nTс) sin (W+фсп).
Здесь начальная фаза фсп заполнения радиоимпульсов
принимает два значения: <p0 или —фо- Оптимальный сиг-
нал может подаваться на вход параметрического СР без
предварительной фильтрации. Информация закладыва-
ется в последовательность непрерывных значений ампли-
туд или дискретных значений фаз.
224
Так же, Как для классического СР, для реализации
канала связи с параметрическим СР необходимо его за-
кон суперизации предварительно подобрать так, чтобы
обеспечить совпадение (с точностью до временного сдви-
га) нормированной огибающей входных радиоимпульсов
и сигнальной функции а также построить схему
синхронизации по частоте запусков. Дополнительным
устройством здесь должна являться система ФАПЧ для
формирования напряжения накачки, имеющей частоту и
фазу, которые обеспечивают когерентный прием сигна-
ла. Схема подобной ФАПЧ описана в § 3.9.
Так как СР являются устройствами, обладающими
избирательностью по частоте и по времени (а парамет-
рические СР еще й по фазе), представляет интерес рас-
смотреть возможности построения приемных сверхреге-
неративных многоканальных схем. При этом в одной
схеме могут выполняться функции не только разделения,
но и усиления сигналов.
Рассмотрим один из вариантов многоканальной схе-
мы АИМ, которая строится на основе классических СР.
Пусть имеется последовательность принимаемых радио-
импульсов е(^) =£max (/—пТс) sin (<о^+фсп), частота
заполнения которых принимает дискретные внутри каж-
дого радиоимпульса значения i=0, 1, 2, .. ., М. Одно
из этих значений соо используется в канале синхрониза-
ции, остальные позволяют передавать полезную инфор-
мацию. Радиоимпульс с частотой заполнения <во появля-
ется через каждые N временных позиций, т. е. частота
его повторения в А-j-l раз меньше 1/Тс.
Устройство синхронизации запусков работает на не-
сущей частоте соо с периодом повторения выходных им-
пульсов 7'с(А+1) -
Многоканальная схема состоит из М объединенных
по входу устройств (рис. 6.20), каждое из которых со-
держит классический СР (КСР), настроенный на часто-
ту <0г, формирователь напряжения суперизации ФНС и
электронный коммутатор КМ, поочередно с частотой 1JTG
соединяющий амплитудный детектор АД с одним из N
выходов. Блоки ФНС и КМ управляются импульсами
синхронизации ИС, причем в ФНС дополнительно осу-
ществляется их задержка, а в КМ — умножение частоты.
Таким образом, система обеспечивает прием информации
по MN независимым каналам, уплотненным по времени
и частоте.
225
Рис. 6.20. Структурная схе-
ма многоканальной системы
АИМ с повышенной поме-
хоустойчивостью
В практике радиосвязи иногда необходимо применять
многоканальные приемники модулированных сигналов,
работающие от автономных антенн на общую нагрузку—
низкочастотную часть. Это имеет место, например, при
приеме сигналов на разнесенные антенны и сигналов
с заранее неизвестной поляризацией. Применение в та-
ких системах СР, работающих на одной частоте и имею-
щих общий генератор суперизации, затрудняется из-за
паразитных связей. Сверхрегенеративные приемники
имеют чувствительность порядка единиц (реже десятых
долей) микровольт, а напря-
жение вспышки свободных ко-
лебаний на контуре СР до-
стигает десятых долей или
единиц вольт.
При совместной работе
приемников, настроенных на
одну частоту, между колеба-
тельными контурами их
сверхрегенеративных каска-
дов должна быть обеспечена
развязка не менее 100 ...
... 120 дБ, так как в против-
ном случае взаимные помехи
не позволяют реализовать их
чувствительность. Для обеспечения такой развязки необ-
ходимо тщательно экранировать СР друг от друга, при-
менять высокоэффективные фильтры в цепях, общих для
любой пары приемников, уменьшать паразитное излуче-
ние в антенну. Все это приводит к заметному усложне-
нию системы в целом, в результате чего основные досто-
инства СР — простота, малые масса и габаритные раз-
меры— оказываются утраченными.
Проблема совместимости СР может быть решена вы-
бором такой схемы включения сверхрегенеративных кас-
кадов, при которой они, сохраняя свои качества, были
бы нечувствительны к взаимным помехам. Такую систе-
му можно построить при использовании многофазной су-
перизации. В многоканальном сверхрегенеративном при-
емнике (рис. 6.21) все п СР управляются от общего п-
фазного генератора напряжения суперизации. Форма на-
пряжения суперизации и фазовые сдвиги между напря-
жениями, подаваемыми на различные сверхрегенератив-
ные каскады, должны быть выбраны так, чтобы вспышки
226 ...
свободных колебаний в СР возникали поочередно.
Идею чередования вспышек свободных колебаний
в сверхрегенеративных каскадах многоканального при-
емника можно использовать и для построения системы,
состоящей из нескольких приемников, в каждом из кото-
рых имеется своя низкочастотная часть. В этой системе
в любой момент времени сигнал будет приниматься толь-
ко одним приемником, а общий для всех каналов «-фаз-
ный генератор напряжения суперизации будет выполнять
Рнс. 6.21. Структурная схема многоканального сверхрегенера-
тивного приемника
функцию коммутатора каналов. Такая система может
найти применение при использовании одной радиолинии
для одновременной связи с несколькими абонентами.
6.6. Другие возможные применения и перспективы
дальнейшего использования сверхрегенераторов
Сверхрегенераторы в аварийно-спасательных маяках.
Сверхрегенераторы часто используются в аварийных
приборах, где необходимы малогабаритность и эконо-
мичность [125], например в портативных радиомаяках,
облегчающих поиск отдельных лиц или целых групп лю-
дей, потерпевших аварию или оказавшихся вдали от на-
селенных пунктов, на суше или на море. Эти маяки мо-
гут работать в режимах излучения кодированных им-
пульсов или двусторонней телефонной связи. Вместе
с источником питания маяк весит примерно 1 кг, легко
пристегивается к спасательному костюму, имеет неболь-
шие габаритные размеры, может непрерывно работать
20 ч. Маяк работает на частоте 200 ... 250 МГц, радиус
227
действия свыше 100 км при взаимодействии с самоле-
том, летящим на высоте 3300 м.
Основным элементом маяка (рис. 6.22) является
сверхрегенеративный каскад. В режиме приема сигналов
(рис. 6.22,а), излучаемых станцией самолета, ведущей
поиск, СР с автосуперизацией выдает сигнал звуковой
частоты, который после усиления в двухкаскадном УЗЧ
прослушивается в телефоне. Частота суперизации уста-
навливается от 50 до 100 кГц. В режиме передачи (рис.
6.22,6) телефон используется как микрофон, а УРЧ.—
в качестве модулятора, который управляет частотой сле-
дования высокочастотных импульсов постоянной дли-
Рис. 6.22. Структурная схема аварийно-спасательного маяка;
/ — сверхрегенератор; 2 — фильтр; 3 — УРЧ; 4 —телефон, 5 — кодирующее
устройство
тельности (порядка 2 мкс) и уровня (порядка 3 Вт), ге-
нерируемых тем же сверхрегенеративным каскадом, но
уже в режиме генерации. Таким образом, на выходе по-
являются такие же импульсы, как в обычном СР с авто-
суперизацией. Эти импульсы принимаются и демодули-
руются в приемнике самолета. Наконец, в режиме маяка
(рис. 6.22,в) излучаются просто кодированные импульсы,
следующие попарно с интервалом от 100 до 300 мкс с ча-
стотой повторения порядка 200 Гц. Импульсы маяка
принимаются устройством самолета, определяющим на-
правление на маяк и расстояние до него с точностью до
30 м.
СР как спусковое устройство. Одним из направлений
развития систем дискретной автоматики является ис-
пользование радиоимпульсов для хранения и переработ-
ки информации. Для получения нескольких устойчивых
состояний АЧХ радиоимпульсного спускового устройства
должна быть многогорбой. Такую_ характеристику имеет
СР в когерентном режиме. Сверхрегенератор, используе-
мый в качестве спускового устройства, называется ам-
плитроном [20].
В контур амплитрона (рис. 6.23) вводятся напряже-
ния сигнала и суперизации. Резонансная частота конту-
ра изменяется, с помощью варикапа при разомкнутом
228
ключе К, управляющем напряжением Uy, и вся гребенка
I на рис. 6.24 смещается относительно частоты сигнала,
которая должна совпадать с частотой одного из спутни-
ков fQ+kF, где k=l, 2 ... Если замкнуть ключ А, т. е.
петлю обратной связи, на систему налагается условие
^вых=^вх (кривая II). Точки пересечения линии обрат-
ной связи II с АЧХ (кривая /) будут точками равнове-
сия системы, поскольку они соответствуют результату
совместного графического решения системы уравнений,
заданных кривыми I и II.
Состояниям устойчивого равновесия соответствуют
точки 1, 3, 5, 7, 9, в которых при небольшой расстройке
контура относительно рабочей частоты амплитуда радио-
импульсов на контуре, а следовательно, и продетектиро-
ванного напряжения с выхода СР изменяется и пере-
страивает контур так, что эта расстройка компенсирует-
ся, т. е. имеет место отрицательная обратная связь.
Высокоэкономичный и стабильный СР на транзисторе
в диапазоне СВЧ. Оригинальный СР универсального на-
значения на одном транзисторе, имеющий повышенные
экономичность и стабильность (рис. 6.25), отличается
возможностью получения более высокой частоты супери-
зации (1 МГц и выше), что делает его пригодным для ис-
пользования в диапазоне СВЧ. Хотя СР работает с авто-
суперизацией, в нем отсутствуют цепи смещения, утечки
и развязки, делающие СР зависимым от рабочих пара-
метров транзисторов, что уменьшает стабильность
устройства [85]. Сверхрегенератор состоит из транзи-
стора Т, между базой и коллектором которого включен
контур LC, зашунтированный (для быстрейшего затуха-
229
ния колебаний) резистором /?. Сигнал вводится из ан-
тенны в катушку связи £Св, связанную с L. Между эмит-
тером и коллектором включен накопительный конденса-
тор Сн, заряжающийся от источника через резистор Дф.
Дроссель Др изолирует коллектор от Сн по высокой ча-
стоте.
При включении источника напряжение на Сн равно
нулю, колебаний нет и начинается заряд Сн через со-
противление Дф. Когда напряжение на Сн достигнет
уровня, достаточного для возникновения колебаний, кон-
тур начнет генерировать. При этом конденсатор Сн раз-
Рис. 6.24. Частотная характери-
стика СР в когерентном режиме
(/) и линия обратной связи (//)
Рис. 6.25. Принципиальная
схема высокоэкономичного
и стабильного СР на СВЧ
ряжается через открытый транзистор, что вскоре приво-
дит к срыву колебаний. Затем процесс повторяется. Из-
за низкого сопротивления в цепи разряда частота супе-
ризации может быть очень высокой.
Напряжение суперизации и продетектированный сиг-
нал выделяются на резисторе Дф. Напряжение супери-
зации подавляется фильтром низких частот или входным
сопротивлением активных фильтров, которые подключа-
ются к точке «выход» для последующего усиления.
Заметим, что особенностью схемы является отсутст-
вие постоянного напряжения на переходе коллектор —
база. Несмотря на это, транзистор находится в активном
усилительном режиме, поскольку указанный переход
смещен в обратном направлении контактной разностью
потенциалов.
В заключение укажем на основные направления, по
которым, на наш взгляд, будут развиваться теория и
практика сверхрегенеративных устройств:
230
совершенствование схем СР (расширение ассортимен-
та приборов, создающих эффект отрицательного сопро-
тивления, освоение новых диапазонов частот, снижение
уровня собственных шумов, разработка новых методов
параметрических суперизации и накачки);
повышение отношения сигнал-шум на выходе СР при
различных видах помех и сигналов;
совершенствование схем обработки сигналов с пред-
варительной фильтрацией (параметрические квантовате-
ли фазы, высокоэкономичные приемники сигналов с ам-
плитудной или угловой модуляцией с потреблением тока
от десятков до сотен микроампер);
разработка локационных и связных систем с опти-
мальными для СР сигналами (обнаружители, дально-
меры, системы связи с импульсной модуляцией);
оптимизация сверхрегенеративных устройств для ре-
гистрации сигналов ЯМ.Р и ЯКР;
разработка новых и улучшение параметров сущест-
вующих фазовых СР (доплеровские обнаружители СВЧ
диапазона);
создание теории обработки сигналов в многоконтур-
ных и апериодических СР (последние описываются диф-
ференциальными уравнениями первого порядка);
дальнейшее совершенствование конструкций, глав-
ным образом разработка конструкций сверхрегенератив-
ных устройств в интегральном исполнении.
ПРИЛОЖЕНИЕ.
Решение однородного уравнения с переменными
коэффициентами
При анализе схемы комбинированного параметрического СР
использована методика решения линейных дифференциальных урав-
нений с медленно меняющимися коэффициентами, восходящая к ра-
ботам школы Н. М. Крылова и Н. Н. Боголюбова. В [38] эти ме-
тоды применены к уравнениям, содержащим кроме медленно ме-
няющихся коэффициентов, быстро колеблющиеся множители, что
сделало возможным решение поставленной задачи.
Выразим d, и т через у. Величины d=ay, с0 = Ру и т=цу
малы по сравнению с единицей. Обозначив у^=т, уравнение (2.43)
с учетом (2.42) можно привести к векторно-матричной форме
1
— Bke^12ktw+<P(t), (П.1)
231
где
Рассмотрим сначала однородное уравнение
= ^e-i24z, (П.З)
соответствующее уравнению (П.1). Его решение можно представить
в виде
w(t)=U(t, to) Wo,
где wo = w,(to), U(t, to) — матричная функция, удовлетворяющая
тому же уравнению (П.З) и условию U(t, t0)—I. Будем искать эту
функцию в виде
Utt, to, y)=Yi(t, to, y)Ui(t, to, Y)+y_i(t, to, y)X
XU-^t, to, Y)>
(П.4)
где функции У j (t, t0, 7) имеют вид
1« 1
£ (т, Y) d? > , s = + 1,
to . J
а функция Qs и матрица представимы в виде разложений
оо оо
= Х 1%г(х); ^(г, 7) = S 4rUsr^- (П.5)
г=о г=о
Коэффициенты Qsr и неизвестны, но, подставляя разложе-
ния (П.4) в исходное уравнение и приравнивая коэффициенты при
членах вида exp[jk2(£—/o)jysY™, получаем систему рекуррентных
соотношений для них. Эти соотношения можно последовательно ре-
шить, выполняя обычные операции над матрицами. Учитывая лишь
члены разложения (П.5) не выше первого, можно получить матри-
232 ... -
цу, являющуюся решением уравнения (П.2):
U(t, to, t)
е (— а + j 3) (t—to)
Хе
eJ (l M ..I..д'.. x (Tj T())
(Т>, Т0) Цт,
где
a-j₽) (T—To)e T0
¥ (т:) = а1 —j Ь
e~j (t+to)
(П.6)
ар (1 -j-п cos т) (1 h cost),
а функ-
цня xt (t, t0) ==X-! (t, t;0) удовлетворяет дифференциальному уравне-
нию типа Риккати
A+l^i+'f (т) л1!—<р (т)=0 (П.7)
при условии Х1(То, То)=0.
Таким образом, решение получено в виде произведения быстро
меняющегося периодического члена eJ на медленно меняющую-
ся функцию, для окончательного вычисления которой нужно еще
найти решение дифференциального уравнения (П.7). Приведем это
уравнение к линейному. Для этого рассмотрим медленно меняющую-
ся функцию
F (т) = ехр
. Нетрудно убедиться, что функция
Z (т) = Е2 (т) = ехр j <р (т,) Xt (Tj, To)
To
(П.8)
(П.9)
удовлетворяет уравнению
,г"-Н]2р+ф'(т)/ф(т;)]г'—|ф(т) |2z=0 (П.10)
И условиям г(То, То) = Г, z'(To, то)=О.
Это уравнение с периодическими коэффициентами. Его прибли-
женное решение можно получить методами, применяемыми в теории
уравнений Хилла.
Рассмотрим один частный случай, когда это решение сводится
к квадратурам. Примем (}=0 и ф=+л/2, т. е. полагаем контур на-
строенным на половину частоты накачки, а сдвиг между гакачками
емкости и сопротивления полагаем равным ±л/2. Тогда cp = jcpi и
Ф1 вещественна:
ф1=(ц/2) (1-l~h cosT)-|~a<7(14~n cos т).
(П.Н)
233
16—3108
Сравнение (11.10) упрощается, и его решением, удовлетворяю-
щим требуемым условиям, является
z = ch J <?, (о) da.
-9
Теперь
X - , (г, т0) = %! (т, т0) = j th j <f i (a) da
io
и можно записать выражение для пары фундаментальных решений
уравнения в виде (при То=О)
(П.12)
Список литературы
1. Адерихин В. И., Жигальский Г. П., Потемкин В. В. Исследо-
вание статистики фазы в тонкопленочном параметроне с по-
перечной накачкой. — Радиотехника и электроника, 1968, № 12,
с. 2268.
2. Акчурин Э. А., Рудь В. В., Спирин В. Я. Туннельные диоды
в технике связи.—М.: Связь, 1971. — 136 с.
3. Аидроиов А. А., Витт А. А., Хайкин С. Э. Теория колебаний.—
М.: Физматгиз, 1968.
4. Антропов В. М., Белкин М. К-, Бородина Н. Г. Эксперимен-
тальное исследование сверхрегенеративного приемника на лам-
пе обратной волны.—Труды Киевского политехи, ин-та. Сер.
Радиотехника и электроакустика, 1973, № 10.
5. Анферов В. П., Гречишкин В. С. Явление захвата в ЯКР тер-
мометрах.— Изв. АН СССР. Сер. Физическая, 1975, № 12,
с. 2645.
6. А. С. 476692 (СССР). —Опубл, в Б. И., 1975, № 25.
7. Ахмаиов С. А., Комолов В. П., Рошаль А. С. Переходные про-
цессы в троичном параметроне. — Радиотехника, 1967, Ng 5,
с. 87.
8. Белкин М. К., Бондаренко В. Г. К вопросу об оптимальной
фильтрации импульсных сигналов в сверхрегенераторе.'—Ра-
диотехника, 1969, № 8.
9. Белкин М. К., Бондаренко В. Г. Параметрический сверхрегене-
ратор под случайным воздействием. — Радиотехника, 1974, № 9.
10. Белкин М. К. Исследование суперрегенеративного приемника на
отражательном клистроне. — Научные доклады высшей школы:
Радиотехника и электроника, 1958, № 2.
234
11. Белкин М. К. Сверхрегенеративный радиоприем.—Киев: Тех-
ника, 1968. — 202 с.
12. Белкин М. К. Сигнал и шум на выходе сверхрегенеративного
приемника. — Изв. вузов СССР. Радиотехника, 1959, № 1.
13. Богаткова О. М., Гершензон Е. М., Домбровская Т. М. и др.
Одноконтурные регенеративные и сверхрегенератнвные усилите-
ли на полупроводниковых диодах. — Полупроводниковые прибо-
ры н их применение/ Под ред. Я. А. Федотова. — М.: Сов. ра-
дио, 1960, вып. 6.
14. Бунимович В. И. Флуктуационные процессы в радиоприемных
устройствах. — М.: Сов. радио, 1951.
15. Бурунсузян Э. С., Халпахчян С. Г. Параметрон как индикатор
фазы. — Электросвязь, 1976, № 6.
16. Вечканов Г. П. Влияние тепловых шумов на ошибку различе-
ния фазы в параметрическом генераторе. — В ки.: Исследования
по акустике, электрофизике и радиоэлектронике/ Куйбышев,
ун-т, 1975, вып. 3, с. 73.
17. Викулов И. К., Иванов В. А., Мноян В. И. и др. Сверхрегене-
ративный усилитель обратной волны. — Радиотехника и элек-
троника, 1966, № 1.
18. Викулов И. К., Иванов В. А., Мноян В. И. и др. Эксперимен-
тальное исследование сверхрегенеративного усилителя обратной
волны. — Вопросы радиоэлекроники. Сер. Электроника, 1965,
№ 2, с. 71.
19. Винников Е. И., Грановский В. А., Кравченко Г. И. Парамет-
рический генератор в устройствах сличения образцовых мер
частоты. — Измерительная техника, 1971, № 5, с. 54.
20. Вишневеский А. П. Использование сверхрегенератора для соз-
дания спусковых устройств. — Изв. СО АН СССР. Сер. техн,
наук, 1965, № 10, с. 28.
21. Войцеховский Я. Дистанционное управление моделями: Пер.
с польского. — М.: Связь, 1977.
22. By Ань Фи, Медведев В. И. Аналитический расчет процесса
установления колебаний в параметрическом генераторе с авто-
смещением.— Вестник МГУ. Физика, астрономия, 1976, № 2,
с. 187.
23. Гайнанов X. Н., Иванов В. Э., Нейман Ю. В. О повышении
чувствительности транзисторного сверхрегенератора в нелиней-
ном режиме. — Труды Уральского политехи, ин-та, 1975,
вып. 240.
24. Гайнанов X. Н., Иванов В. Э., Казанцев Ю. Ф. и др. Инте-
гральный транзисторный СВЧ автогенератор для передатчика
аэрологического радиозонда с выходной мощностью 0,6 Вт на
частоте 1,8 ГГц. — Электронная техника. Сер. 11, 1976, вып. 2.
25. Герценштейн М. Е., Кинбер Б. Е. Устойчивость сверхрегенера-
тивного режима усилителя со сложными контурами. — Радио-
техника и электроника, 1962, № 3, с. 397.
26. Гершензон Е. М., Любимова Т. Ф., Птицина Н, Г. и др.
К исследованию сверхрегенеративиого режима в одноконтурных
параметрических усилителях. — Изв. вузов СССР. Радиофизика,
1961, № 1.
27. Гершензон Е. М., Эткин В. С. О спектральных и амплитудно-
частотных характеристиках сверхрегенеративных параметриче-
ских усилителей. — Радиотехника и электроника, 1961, № 5.
28. Головин Э. С., Кравченко Г. И. О механизмах возникновения
16* 235
детерминированных фаз в небалансных параметрических гене-
раторах. — Радиотехника и электроника, 1970, № 12, с. 2580.
29. Гоноровский И. С. Радиотехнические цепи и сигналы. — М.:
Сов. радио, 1977.
30. Горелик Г. С., Гинц Г. М. Исследование суперрегенеративного
приемника метровых волн. — Техника радио и слабого тока,
1932, № 12.
31. Горелик Г. С. К теории суперрегенеративного приемника.—
ЖТФ, 1933, вып. 1.
32. Горелик Г. С. Линейные резонансные явления в суперрегене-
ративном приемнике. — Электросвязь, 1939, № б.
33. Гуревич В. Л. Ультразвуковой дальномер для маркшейдерских
измерений.— Изв. вузов СССР. Горный журнал, 1980, № 6.
34. Гуревич В. Л. Ультразвуковой обнаружитель объектов на осно-
ве сверхрегенератора. — Изв. вузов СССР. Горный журнал,
1980, № 8.
35. Гуткин Л. С. Действие помех на суперрегенератор. Ч. 1—3.—
Радиотехника, 1946, т. 1, № 9; 1947, т. 2, № 4; 1949, т. 4, № 1.
36. Гуткин Л. С., Лебедев В. Л., Сифоров В. И. Радиоприемные
устройства. Ч. I. — М.: Сов. радио, 1961. — 703 с.
37. Гуткин Л. С. О коэффициенте шума и чувствительности сверх-
регенератора. — Научные доклады высшей школы. Радиотехни-
ка и электроника, 1958, № 1.
38. Далецкий Ю. Л. Асимптотический метод для некоторых диффе-
ренциальных уравнений с осциллирующими коэффициентами. —
ДАН СССР, 1962, № 5.
39. Данилов А. Н. О возможности построения сверхрегенеративно-
го усилителя на туннельном диоде с самогашеиием за счет
использования цепочки RC. — Радиотехника н электроника,
1967, № 4, с. 740.
40. Дей. Сверхрегенеративные усилители на лампе обратной вол-
ны,—ТИИЭР, 1964, № 6.
41. Дзбановский Н. Н., Комолов В. П. и др. — Применение метода
квантования фазы для наблюдения сигналов ядерного магнит-
ного резонанса — Радиотехника и электроника, 1971, № 3,
с. 440.
42. Дзбановский Н. Н., Комолов В. П., Константинов Ю. С. Уста-
новка для наблюдения слабых сигналов ЯМР методом кванто-
вания фазы. — Приборы и техника эксперимента, 1973, № 1,
с. 156.
43. Дзбановский Н. Н., Константинов Ю. С., Рознятовский В. А.
ЯКР спиновый генератор. — Изв. АН СССР. Сер. физическая,
1975, № 12, с. 2642.
44. Дьяков Ю. Е. О передаточной функции сверхрегеиеративного
параметрического усилителя. — Радиотехника н электроника,
1961, № 5, с. 838.
45. Ермаков В. И., Кузенко А. Ф. Исследование работы сверхреге-
иеративного передатчика-ответчика. — Труды ЦАО, 1971,
вып. 91.
46. Ершов В. Н., Рассохин Г. И., Яновский Е. А. Емкостные па-
раметроны.— М.: Изд. ВЦ АН СССР, 1966.
47. Кантор Р. М. Теория колебаний в параметрических резонаторах
(параметронах) с ферритовыми сердечниками. — Известия ву-
зов СССР. Радиотехника, 1961, № 3.
48. Карасик Г. Я-, Кравченко Г. И., Марков В, Ф. Обоснование
236
метода частичного укорачивания. — Радиотехника и электрони-
ка, 1974, № 8, с. 1775.
49. Карасик Г. %., Кравченко Г. И., Марков В. Ф. Оптимизация
обнаружителя сигналов на основе параметрического генерато-
ра.—Изв. вузов СССР. Радиофизика, 1975, № 4, с. 537.
50. Каплан А. Ё., Кравцов Ю. А., Рылов В. А. Параметрические
генераторы и делители частоты. — М.: Сов. радио, 1966.—
334 с.
51. Кнорре К. Г., Тузов В. М., Шур Г. И. Фазовые и частотные
информационные СВЧ элементы.—М.: Сов. радио, 1975, с. 53.
52 Коковин Н. С. Радиотелеметрия зондирования атмосферы.’—
М.: Гидрометеоиздат, 1966.
53. Комолов В. П., Маслов В. Ю., Трофименко Т. И. Диапазонный
квантователь фазы несинхронного сигнала.—Изв. вузов СССР.
Радиофизика, 1969, № 12.
54. Комолов В. П., Трофименко И. Т. Квантование фазы при обна-
ружении радиосигналов.'—М.: Сов. радио, 1976.
55. Константинов Ю. С. О влиянии ядерных магнитных моментов
иа работу параметрического сверхрегенератора. — Радиотехни-
ка и электроника, 1974, № 7, с. 1551.
56. Конторович М. И. Нелинейные колебания в радиотехнике. —
М.: Сов. радио, 1979, с. 320.
57. Корн Г., Корн Т. Справочник по математике. — М.: Наука,
1973, с. 269.
58. Кравченко Г. И., Гуревич В. Л., Мочалина Л. П. Сверхрегене-
ративный обнаружитель. — Радиотехника, 1979, № 9, с. 50.
59. Кравченко Г. И., Марков В. Ф., Гуревич В. Л. и др. Удариые-
колебания и пороговая чувствительность сверхрегенеративиых
усилителей. — Радиотехника, 1973, № 6, с. 15.
60. Кравченко Г. И., Марков В. Ф., Мочалина Л. П. Исследование
сверхрегенеративного обнаружителя сигналов. — Радиотехника,
1976, № 5, с. 14.
61. Кравченко Г. И., Марков В. Ф. Обнаружение сигналов с по-
мощью параметрического генератора. — Изв. вузов СССР. Ра-
диофизика, 1973, № И, с. 1703.
62. Кузенков А. Ф., Ермаков В. Н. Измерение чувствительности
сверхрегенеративного дриемо-передатчика в режиме активного
ответа. — Труды ЦАО, 1971, вып. 102.
63. Кузовкин В. А. Об управлении фазой параметрического генера-
тора.— Радиотехника и электроника, 1971, № 1.
64. Кушнир В. Ф., Слопченко Г. И. О применении одноконтурного
параметрического генератора в аппаратуре ЯМР. — Изв. вузов
СССР. Приборостроение, 1964, № 2, с. 53.
65. Леванон Н., Стремлер Ф., Суоми В. Новый подход к созданию
малогабаритных радиолокационных высотомеров. — ТИИЭР,
1974, № 6, с. 159.
66. Леванон Н., Стремлер Ф. Точный импульсный радиолокацион-
ный высотомер для метеорологических шаров-зондов. — ТИИЭР,
1969, № 10, с. 106.
67. Леновенко А. М., Каминский Р. Н., Осыка М. И. ЯКР-термо-
метр. — Изв. АН СССР. Сер. физическая, 1975, № 12, с. 2648.
68. Лихарев К. К- О переходных процессах в трехстабильном па-
раметрическом генераторе. — Радиотехника и электроника, 1967,
№ 7.
69. Малышев В. А., Раздобудько В. В. Исследование сверхрегене-
237
ративного усилителя СВЧ на диоде Ганна с автосупериза-
цией.— Изв. вузов СССР. Радиоэлектроника, 1979, Xs 10, с. 78.
70. Мандельштам Л. И., Папалекси Н. Д. К вопросу о параметри-
ческой генерации. — ИЭСТ, 1935, № 3.
71. Маркелов В. А. О чувствительности приемной системы с пара-
метроном.— Изв. вузов СССР. Радиофизика, 1970, № 9, с. 1367.
72. Маттей. Достижения в области приборов на основе твердого
тела. — Зарубежная радиоэлектроника, 1965, Xs 8.
73. Мигулин В. В., Медведев В. И., Мустель Е. Р. и др. Основы
теории колебаний. — М.: Наука, 1978.
74. Мигулин В. В. Резонацсные явления в системе с двумя степе-
нями свободы.—ЖТФ, 1937, вып. 6.
75. Молчанов А. П., Занадворов В. Н. Курс электротехники и ра-
диотехники.— М.: Наука, 1969, с. 408.
76. Ольдерогге Г. Б. Реакция сверхрегенератора на внешнюю ЭДС
непрерывного и импульсного характера. — Радиотехника, 1959,
№ 10.
77. Ощепков П. К. Светоэлектронная сверхрегенерация. — М.:
Энергия, 1969.
78. Параметроны в цифровых устройствах/ Комолов В. П., Ро-
шаль А. С., Трофименко И. Т., Фельдман Б. Я- — М.: Энергия,
1968.
79. Параметроны: Пер. с япон. и англ. — М.: ИЛ, 1962.
80. Пат. 2.311.454 (Франция) МКН НО4 В1/40.
81. Пат. 3.045.115 (США) НКИ 325/429.
82. Пат. 3.538.507 (США) НКИ 343/7.
83. Пат. 3.543.270 (США) НКИ 343/13.
84. Пат. 3.671.868 (США) НКИ 325/445.
85. Пат. 4.143.324 (США) НКИ 325/429.
86. Пат. 7.425.664 (Франция) МКИ НОЗ 5/14.
87. Рытов С. М., Дивильсковский М. А. К вопросу о самовозбуж-
дении и резонансе в системе с периодически изменяющимися
параметрами. — ЖТФ, 1936, Хе 8.
88. Рытов С. М., Кравцов Ю. А., Горышник Л. Л. Теория пара-
метрических усилителей на полупроводниковых диодах. — На-
учные труды РИАН СССР, 1960, вып. 3.
89. Редько В. А. Резистивные параметроны.'—Рига: Зинатне, 1968.
164 с.
90. Самойленко В. И., Миляев Н. А. Параметрический резонанс
в контуре с нелинейной емкостью р— «-перехода. — Труды
МАИ, 1966, вып. 166, с. 5.
91. Самойленко В. И., Струков А. 3. Исследование процессов в па-
раметроне с амплитудной модуляцией напряжения подкачки. —
Труды МАИ, 1966, вып. 166, с. 15.
92. Сверхрегенераторы в радиолокационной технике. — Вестник
информации, 1954, Xs 13.
93. Свириденко С. С. О вероятности перехода фазы колебаний
в параметрическом генераторе, находящемся под воздействием
регулярного сигнала и флуктуаций. — Радиотехника, 1965, Xs 5.
94. Свистов В. М. Радиолокационные сигналы н их обработка. —
М.: Сов. радио, 1977.
95. Скальский, Кабасервис. Результаты, полученные в сверхрегене-
ративных приемниках на туннельных диодах. — ТИРИ, 1962,
Xs 2.
238
96. Скоробутов Ю. Г'. О повышении селективности сверхрегенера-
тивного приемника. — Радиотехника, 1974, № 8, с. 82.
97. Стендли. Суперрегеиеративный детектор для радиолокационных
ответчиков, работающих в диапазоне около 6 см.—Зарубеж-
ная радиоэлектроника, 1962, № 10.
98. Струков А. 3, Процессы в параметроне при различных формах
балансно-модулированного напряжения подкачки,— Труды МАИ,
1970, вып. 215, с. 61.
99. Стрюков Б. А., Зверев Ю. М. Влияние просачивающегося сиг-
нала на работу фазового регенератора. — Радиотехника, 1979,
№ 2.
100. Стрюков Б. А., Зверев Ю. М. Эффект фазовой регенерации и
его применение для приема ЧМ сигналов. — Радиотехника, 1974,
№ 5.
101. Стрюков Б. А., Зверев Ю. М. Явление фазовой регенерации
в системах ФАПЧ. — Радиотехника, 1976, № 3.
402. Тагер А. С., Вальд-Перлов В. М. Лавинно-пролетные диоды и
их применение в технике СВЧ. — М.: Сов. радио, 1968.
103. Теоретические основы радиолокации/ Под ред. В. Е. Дулеви-
ча.—М.: Сов. радио, 1978.
104. Теоретические основы радиолокации/ Под ред. Я- Д- Ширма-
иа. — М.: Сов. радио, 1970.
105. Томсон. Суперрегенеративные усилители на сантиметровых вол-
нах.— Зарубежная радиоэлектроника, 1962, № 8, с. 105.
106. Трофименко И. Т., Целиковский А. Ф. Генератор субгармоники
СВЧ диапазона в режиме бинарного квантования фазы. — Изв.
вузов СССР. Радиофизика, 1964, № 4.
107. Хевролин В. Я. К теории суперрегенератора, работающего в ли-
нейном режиме. — Радиотехника, 1958, № 1.
108. Чистяков Н. И., Сидоров В. Н., Мельников В. С. Радиоприем-
ные устройства. — М.: Связьиздат, 1958, с. 896.
109. Эткин В. С., Гершензон Е. М. Параметрические системы на
полупроводниковых диодах. — М.: Сов. радио, 1964.
НО. Юнгер и др. Параметрические усилители как сверхрегенератив-
ные детекторы. — Радиотехника и электроника за рубежом,
1959, № 6.
111. Явич Л. Р. Прием импульсных посылок произвольной формы
на сверхрегенератор. — Радиотехника и электроника, 1956,
№ 11.
112. Alexander Т. W. On linear and non-linear negative-resistance and
negative-conductance parametric amplifiers and oscillators. — Int.
J. Electron., 1974, № 6.
113. Armstrong E. H. Some recent developments in regenerative cir-
cuits.— Proc. IRE, 1922, № 8.
114. Bossard B., Frost E., Fishbein W. X-Band superregenerative pa-
rametric amplifier. — Proc. IRE, 1969, № 7.
115. Chester R. F., Bolef D. Y. Supperregeneraiive masers.—Proc.
IRE, 1957, № 9, p. 1287—1289.
116. Chow W. F. Transistor superregenerative detection. — IRE Trans,
on curcuit theory, 1956, № 1.
117. Goto E. Parametron and its future. — Trade and Ind. Japan,
1960, № 32, p. 65.
118. Ishii K. Reflex klystron as receiver amplifier. — Electronics, 1960,
№ 2.
239
119. Johnson A. R. Magnetic film phase-locked oscillator. — IEEE
Trans., 1965, v. Ge-8, № 1, p. 26.
120. Jordan A. G., Elco R. The tunnel diode superregenerative ampli-
fier.— J. Electron and Control, 1961, № 1.
121. Kalmus H. P. Some notes on superregeneration with particular
emphasis on its possibilities for frequency modulation. — Proc.
IRE, 1944, № 10.
122. Levanon N. Ballonn — borne radio altimeter. — IEEE Trans., 1970,
v. Ge-8, '№ 1, p. 19—30.
123. Pulfer I. U. Microwave superregenerative amplifiers.'—Microwa-
ve J., 1961, № 2.
124. Reindel J. A Tunnel diode superregenerative detectors. — Proc.
IEEE, 1963, № 11.
125. Sarah (search and rescue and homing) equipment instruction
manual — ultra electronics limited. — London, 1959.
126. Whitehead I. R. Super-regenerative receivers. — Cambriage Univ.
Press., 1950.
127. Белкии M. К., Борисов M. Б. Сверхрегенеративный усилитель
на лавинно-пролетных диодах. — Радиотехника, 1982, № 6.
128. Гуревич В. Л. Ультразвуковой обнаружитель объектов на не-
охраняемых переездах. — Автоматика, телемеханика н связь,
1982, № 7.
129. Кравченко Г. И., Гуревич В. Л., Мочалина Л. П. Устройство для
предупреждения , столкновения кранов-штабелеров. — Механиза-
ция и автоматизация производства, 1982, № 1.
Список условных обозначений
Временные и частотные характеристики
g(t, £) —импульсная характеристика
//Д/) —сигнальная весовая функция
НД1)—нормированная огибающая выходного колебания
K(jw, t) —частотио-временная характеристика
SJ/Дсо) —частотная характеристика
S2(jA(o)—спектральная плотность огибающей выходного колебания
/а—активное время
Тс — период суперизации
Параметры контура
</эк»— затухание эквивалентного контура
Со — емкость контура
Lo — индуктивность контура
Qo — добротность ненагруженного контура
QBH — внешняя добротность
Qp—добротность регенерированного контура (средняя доброт-
ность)
Ro — сопротивление потерь в контуре
Р-а — сопротивление нагрузки
R(t) —переменное сопротивление контура
Частоты, расстройки, полосы частот
у — отношение частоты суперизации к половине частоты на-
качки или к резонансной частоте контура
До) — расстройка сигнала относительно контура
й, F — частота суперизации
О)о — частота настройки контура
coH=2v — частота накачки
о)с — частота сигнала в контуре
Пр — полоса регенерированного контура
Пер — полоса сверхрегенерированного контура
ПрШ — интегральная полоса регенерированного контура
ЭДС, заряд, напряжения, токи
Л с — амплитуда входного сигнала
Лэ — эффективная амплитуда
— шумовой ток в параметрическом QP
ImYi — шумовой ток на выходе детектора
q — заряд на емкости контура
Uc — напряжение суперизации
Um — шумовое напряжение в параметрическом СР
в(/) —ЭДС внешнего воздействия в контуре
Разные величины
h — глубина модуляции емкости
КР —коэффициент усиления сигнала по мощности
Кз — коэффициент затухания
Дн — коэффициент накопления
Дс — коэффициент усиления за счет сверхрегепсрации
Кш — коэффициент усиления шума по мощности
Ks — общий коэффициент усиления
т — коэффициент модуляции емкости
п — глубина модуляции затухания
|J> — аргумент функции Бесселя
р — коэффициент модуляции затухания
Шпер — коэффициент шума параметрического СР
Шер — коэффициент шума классического СР
Предметный
А
Аварийно-спасательный маяк
227
Автоматическая стабилизация
режима 96
-----схема 153
Автосуперизация 19
— анализ 68’
Амплитудно - модулированная
накачка 48
АЧХ СР ,20
---параметрического 84
В
Воздействие гармонического
сигнала 75
— двух гармонических сигна-
лов 75
— случайное 137
— узкополосное 76
Временная селекция сигналов
88
Временные характеристики 71
Высотомер с СР 175
Д
Дальномер адаптивный с клас-
сическим СР 220
------параметрическим СР
221
Детектор пиковый безынер-
ционный 105
------реализация 155
------ структурная схема 106
------ теория 107
Добротность ненагружеиного
контура 9
— регенерированного контура
9
— средняя 9
3
Закон суперизации 22
Запуск многократный 39
Затухание переменное 28
— при прямоугольной супери-
зации 22
— эквивалентного контура 49
указатель
и
Избирательность СР реальная
90, 94
Импульсная характеристика
71, 138
Импульсные помехи 140
К
Квантователь фазы 176
Коэффициент затухания 79
— модуляции емкости 48
---- затухания 48
— накопления 75, 78, 80
— усиления за счет регенера-
ции 75
----сверхрегенерации 35,
79, 81
----общий 75, 79
— шума 125, 127, 128
----параметрического СР 139
М
Метод медленно меняющихся
амплитуд 31, 42
— частичного укорачивания 32,
42
Метеорологические радиозонды
с СР 185
Модулированная накачка 48,
51 '
Н
Накачка параметрического СР
15
Нормированная огибающая
выходного колебания 37
— спектральная плотность 71
— частотная характеристика
71
О
Обнаружитель адаптивный 205
---- доплеровский 210
----с классическим СР и со-
вмещенными передатчиком и
приемником 205
----с преобразованием часто-
ты 218
243
— неадаптивный 213
---- акустический 213
----с классическим СР и от-
дельным передатчиком 202
----и совмещенными
передатчиком и приемником
204
— сверхрегенеративный 203
---- принципиальная схема
213, 216, 218
---- теория 202
— следящий по скорости 181
Оптимальные сигналы для
классического СР 193
-------параметрического СР
195
Отрицательное затухание 22,
72
П
Паразитная сверхрегенерация
122
Паразитное излучение 102
Параметрический СР 7, 24, 26,
64
----АЧХ 84
----в дециметровом диапазо-
не 169
----в сантиметровом диапа-
зоне 171
---- на полупроводниковых
диодах 168
----спектр сигнала на выхо-
де 51
---- структурная схема 24
---- расчет 83
---- теория 41
----фазочастотные характе-
ристики 84
---- эквивалентная схема 25
Параметрон 7, 179
Период суперизации 77
Полоса пропускания СР 20,73
— интегральная 126
Потокосцепление 46
Преобразователь емкостной
168
Прием АИМ сигналов 224
— AM сигналов 19, 117
— импульсных сигналов 120
— ЧМ сигналов 118
Р
Регенератор 7
Регенерированный контур 9
2-44
Регистрация ядерного магнит-
ного резонанса 186—187
Режим когерентный 20
— нелинейный 19, 62, 114
— некогерентный 20
Риккати уравнение 233
С
Сверхрегенератор (СР) 10
— АЧХ 20
— балансный 178
— высокоэкономичный 229
— качественный анализ 28
— классический 64
— классификация 15
— математические модели 24,
40, 207
— многоканальный 227
— молекулярный 6
— на диодах Ганна 168
----лавинно-пролетных дио-
дах 161
----лампах бегущей волны
157
------обратной волны 158
----отражательных клистро-
нах 156
---- транзисторах 11
----туннельных диодах 161
----электронных ' лампах 10
— параметрический емкостной
25
------теория 42
------ эквивалентная схема
25
---- индуктивный 26
------теория 45
------ эквивалентная схема
46
---- комбинированный 25
------теория 47
------эквивалентная схема
25
----малошумящий 168
----резистивный 46
------ эквивалентная схема
50
— принцип действия 10
— процессы 10, 13, 28
— расчет 72
— режимы 17
— с автосуперизацией 12, 67,
191
— светоэлектронный 192
— с внешней суперизацией
10—11
— С суперизуемым УВЧ 91
— структурная схема 9
— теория 23, 31
— эквивалентная схема 23, 82
Сверхрегенерация 3
Сигнальная весовая функция
37
Сигналы оптимальные 193, 222
Система многоканальная 225
— связи с оптимальными сиг-
налами 222
Спектральные характеристики
СР 71
Спектр шума на выходе детек-
тора 136
---------СР 128
Спусковое устройство на СР
228
Суперизации безударная клас-
сических СР 145
----параметрических СР 146
— квазиоптимальная 201
— пилообразная 22
----огибающая выходного
колебания 73
------ сигнальная весовая функ-
ция 73
----спектр выходного коле-
бания 73
---- частотная характеристи-
ка 73
— синусоидальная 22, 80
----огибающая выходных ко-
лебаний 73
----сигнальная весовая функ-
ция 73
----спектр выходного коле-
бания 73
---- частотная характеристи-
ка 73
У
Ударные колебания в класси-
ческих СР 141
--------- подавление 145
---------теория 142
— — параметрических СР 146
------•— подавление 149
-------- — теория 148
Укороченные уравнения 33
— функции 38
Управляемые модели 190
Усиление при прямоугольной
суперизации 78
----синусоидальной супери-
зации 81
Ф
Фазовые СР (ФСР) 14, 52,
53, 109, 182
----с амплитудной модуля-
цией (ФСРАМ) 53, 55
---- с дополнительной супери-
зацией (ФСРДС) 55, 59—60
— — с дополнительной супери-
зацией и частотной модуля-
цией (ФСРДСЧМ) 182
— — с фазовой модуляцией
(ФСРФМ) 53, 57
----с частотной модуляцией
(ФСРЧМ) 53, 156, 182
Функция Бесселя 49, 80
Ч
Частота накачки 42
— настройки контура 9
— суперизации 22
Частотный спектр 71
Чувствительность классическо-
го СР 129, 141
----параметрического СР
146, 150
Ш
Шумовая полоса регенериро-
ванного контура 126
Шумы в параметрическом СР
137
----СР 125
— на выходе детектора 129
ОГЛАВЛЕНИЕ
Предисловие.............................................3
Глава 1.
ОБЩИЕ СВЕДЕНИЯ О СВЕРХРЕГЕНЕРАТОРАХ ... 5
1.1. Краткий обзор развития техники и теории сверхреге-
нерации .............................................5
1.2. Принцип действия сверхрегенератора..............7
1.3. Режимы и основные свойства сверхрегенератора . . 17
1.4. Эквивалентные схемы и основные уравнения сверхре-
генератора .........................................23
Глава 2.
ТЕОРИЯ СВЕРХРЕГЕНЕРАЦИИ................................28
2.1. Классический сверхрегенератор в линейном режиме 28
2.2. Емкостный, индуктивный и резистивный параметриче-
ские сверхрегенераторы в линейном режиме . . . .41
2.3. Комбинированный параметрический сверхрегенератор
в линейном режиме...................................47
2.4. Фазовый сверхрегенератор.......................52
2.5. Сверхрегенератор в нелинейном режиме. Схемы с авто-
суперизацией . 62
Глава 3. . - : .
РАСЧЕТ СВЕРХРЕГЕНЕРАТОРОВ
И ВОПРОСЫ РЕАЛИЗАЦИИ...................................70
3.1. Усиление, временные и частотные характеристики
классического сверхрегенератора ................... 70
3.2. Расчет параметрических сверхрегенераторов ... 83
3.3. Реальная частотная и временная избирательность и
способы ее повышения................................88
3.4. Автоматическая стабилизация режима в сверхрегене-
раторе ........................................... 96
246
3.5. Методы подавления паразитного излучения . . .102
3.6. Улучшение параметров пикового детектора после
сверхрегенератора .................................. '00
3.7. Расчет фазовых сверхрегенераторов...............109
3.8. Обработка выходных колебаний сверхрегеператора . ИЗ
3.9. Прием сигналов с амплитудной и угловой модуляция-
ми. Особенности приема ампульсных сигналов . . . .116
3.10. Паразитная сверхргенерация.....................122
Глава 4.
ПОМЕХИ И ШУМЫ В СВЕРХРЕГЕНЕРАТОРЕ . . . .125
4.1. Оценка шумовых свойств сверхрегенератора . . . 125
4.2. Сигнал и шум на выходе детектора после сверхреге-
нератора ............................................129
4.3. Шумы в емкостных и комбинированных параметриче-
ских сверхрегенераторах с амплитудно-модулированпым на-
пряжением накачки....................................137
4.4. Воздействие импульсных помех на сверхрегенератор 140
4.5. Ударные колебания и пороговая чувствительность
классических сверхрегенераторов......................141
4.6. Ударные колебания и пороговая чувствительность па-
раметрических сверхрегеиераторов ................... 146
Глава 5.
ПРАКТИЧЕСКАЯ РЕАЛИЗАЦИЯ
СВЕРХРЕГЕНЕРАТИВНЫХ УСТРОЙСТВ
И ЭКСПЕРИМЕНТАЛЬНЫЕ РЕЗУЛЬТАТЫ..........................152
5.1. Экономичный транзисторный сверхрегенератор с супе-
ризацией УРЧ, автоматической стабилизацией режима и
безынерционным пиковым детектором в диапазоне уме-
ренно высоких частот '.......................... . . 152
5.2. Сверхрегенераторы на вакуумных приборах в диапа-
зоне СВЧ.............................................156
5.3. Малошумящие сверхрегенераторы на туннельных
диодах.............................................. 161
5.4. Сверхрегенераторы на лавинно-пролетных диодах и ди-
одах Ганна в диапазоне СВЧ...........................165
5.5. Малошумящие параметрические сверхрегенераторы на
полупроводниковых диодах в диапазоне СВЧ .... 168
5.6. Радиолокационные высотомеры.....................175
5.7. Квантователи фазы . 176
5.8. Сверхрегеиераторы в вычислительной технике . . ,179
5.9. Доплеровские измерители скорости................181
247
5.10. Сверхрегенераторы в аппаратуре для метеорологиче-
ских исследований...................................184
- 5.11. Сверхрегенеративные датчики ядерного и квадруполь-
ного магнитных резонансов ............................186
5.12. Сверхрегенераторы в системах радиоуправления . . 190
5.13. Светоэлектронные сверхрегеператоры............192
Глава 6.
ПЕРСПЕКТИВЫ СОВЕРШЕНСТВОВАНИЯ И
ДАЛЬНЕЙШЕГО ПРИМЕНЕНИЯ СВЕРХРЕГЕНЕРАТОРОВ 193
6.1. Оптимизация сигналов для сверхрегенератора . . . 193
6.2. Оптимизация законов суперизации................198
6.3. Сверхрегенератнвные обнаружители...............202
6.4. Сверхрегенеративные дальномеры.................219
6.5. Системы связи с оптимальными для сверхрегенератора
сигналами, многоканальные сверхрегенеративные системы 222
6.6. Другие возможные применения и перспективы даль-
нейшего использования сверхрегенераторов .......... 227
Приложение. Решение однородного уравнения с переменными
коэффициентами........................................231
Список литературы.....................................234
Список условных обозначений...........................241
Предметный указатель..................................243
На~ обороте титульного листа допущена опечатка: на 6 строке
сверху вместо «Сверхгенераторы» следует читать «Сверхрегеиера-
юры»