






















































































































































































































































































































































































































Автор: Рот К.
Теги: организация производственного процесса производственное планирование управление качеством компьютерные технологии общее машиностроение машиноведение машиностроение
ISBN: 5-217-00212-3
Год: 1995




Текст
к. Roth Konstruieren mit
Konstruktionskatalogen
Systematisierung und zweckmaBige Aufbereitung
technischer Sachverhalte
fur das methodische Konstruieren
Mit 276 Abbildungen in ca. 3000 Einzeldarstellungen,
38 Konstruktionskatalogen
und 476 Definitionen von Fachbegriffen
Springer-Verlag Berlin Heidelberg New York 1982
К. POT
КОНСТРУИРОВАНИЕ
С ПОМОЩЬЮ
КАТАЛОГОВ
ПЕРЕВОД С НЕМЕЦКОГО
КАНД. ТЕХН. НАУК В. И. БОРЗЕНКО
К. В. КАЗАРНОВСКОГО-КРОЛЯ,
А. Л. КОЛОСОВА
ПОД РЕДАКЦИЕЙ
ЧЛЕНА-КОРРЕСПОНДЕНТА РАН
Б.А. БЕРЕЗОВСКОГО
МОСКВА
«МАШИНОСТРОЕНИЕ»
1995
ББК 34.42
Р79
УДК 658.512.012.011.56:681.3.06
Издание выпущено в счет дотации,
выделенной Комитетом РФ по печати
Рекомендовано Государственным комитетом Российской Федерации
по высшему образованию в качестве учебного пособия для студентов
высших учебных заведений? обучающихся по направлению ’’Системный
анализ и управление” и специальности ’’Системы автоматизированного
проектирования”.
Рот К.
Р79 Конструирование с помощью каталогов / Пер. с нем. В.И. Бор-
зенко и др.; Под ред. Б.А. Березовского. — М.: Машиностроение,
1995. — 420 с.: ил.
ISBN 5-217-00212-3
Перевод книги немецкого автора является первым в нашей стране изложением
систематизированного подхода к конструированию широкого спектра изделий
машиностроения с помощью таблиц конструкторских решений (каталогов). При
этом подходе задача раскладывается на элементарные подзадачи, известные
варианты решения которых содержатся в каталогах. Наряду с большим числом
готовых каталогов книга содержит указания по составлению новых и дополнению
имеющихся каталогов. Изложенная концепция создает фундамент для автомати-
зации проектирования любого класса машин и механизмов.
Для специалистов по САПР и конструкторов в области машиностроения,
аспирантов и студентов вузов.
„ 2702000000-035 „ Л
Р ---------------- Без объявл.
038(01) —95
ББК 34.42
ISBN 5-217-00212-3
(Россия)
ISBN 3-540-09815-1
(Германия)
© Springer-Verlag Berlin/Heidelberg 1982
© Перевод на русский язык В.И. Борзенко,
К.В. Казарновский-Кроль, А.Л. Колосов, 1995
5
ОГЛАВЛЕНИЕ
Предисловие редактора перевода......................................... 10
Предисловие автора к русскому изданию.................................. 11
Предисловие............................................................ 12
1. Введение.......................................................... 15
1.1. Цели книги...................................................... 15
1.2. Метод вариации эффектов при выявленных частных функциях..... 15
1.2.1. Абстрагирование.......................................... 17
1.2.2. Конкретизация.............................................. 18
1.2.3. Морфологический ящик....................................... 18
1.3. Подборки решений и конструкторские каталоги для методического кон-
струирования ................................................... 24
1.4. Рациональная работа с морфологическим ящиком.................... 24
1.5. Список литературы............................................... 26
2. Общие принципы теории конструирования ............................ 28
2.1. Абстрактные величины теории конструирования..................... 28
2.2. Рабочий план для методического конструирования.................. 31
2.2.1. Рабочий план для алгоритмического метода выбора при конструи-
ровании с каталогами........................................... 32
1. Фаза формулирования задачи................................... 32
2. Функциональная фаза.......................................... 33
3. Предметная фаза............................................. 34
4. Последствия решений, принятых в различных фазах............. 37
5. Перескакивание фаз конструирования......................... 37
2.2.2. Переменный рабочий план.................................... 38
1. Разновидности конструирования................................ 38
2. Примеры решений при входе в различные фазы конструирования . 40
3. Сравнение с другими рабочими планами........................ 40
2.3. Список литературы............................................. 43
3. Конструкторские каталоги и их применение.......................... 45
3.1. Применение конструкторских каталогов в ходе конструирования. 45
3.2. Требования к конструкторским каталогам.......................... 46
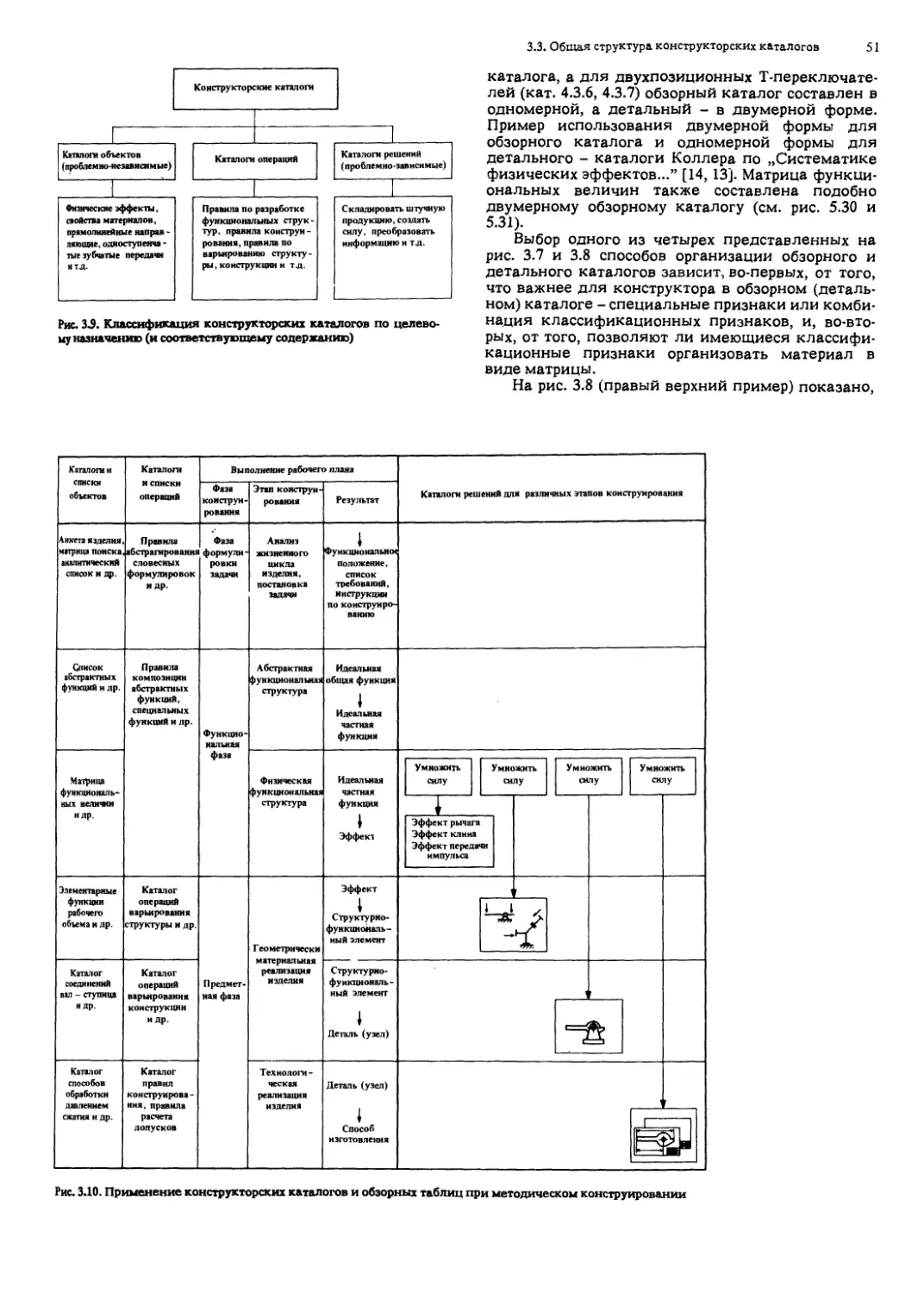
3.3. Общая структура конструкторских каталогов....................... 47
3.3.1. Каталоги с „одномерной” классификационной частью........... 47
3.3.2. Каталоги с .двумерной” классификационной частью............ 49
3.3.3. Каталоги с „трехмерной” классификационной частью и комбини-
рованные формы................................................. 49
3.3.4. Обзорные и детальные каталоги.............................. 49
3.4. Классификация конструкторских каталогов по содержанию........... 52
3.4.1. Каталоги объектов.......................................... 52
3.4.2. Каталоги операций.......................................... 52
3.4.3. Каталоги решений........................................... 52
3.4.4. Сравнение типов каталогов.................................. 52
3.5. Представление содержания каталогов.............................. 53
3.6. Практическое использование конструкторских каталогов............ 54
3.6.1. Применение каталогов решений............................... 54
1. Пример 1. Строительно-монтажный пистолет..................... 54
2. Пример 2. Механизм выключения сцепной муфты.................. 56
3.6.2. Применение каталогов объектов.............................. 58
1. Пример 3. Ручная клепальная машина........................... 59
2. Пример 4. Фиксация разъемных соединений...................... 59
3.6.3. Применение каталогов операций.............................. 61
1. Пример 5. Крыльчатка вентилятора двигателя................... 62
3.7. Составление конструкторских каталогов........................... 62
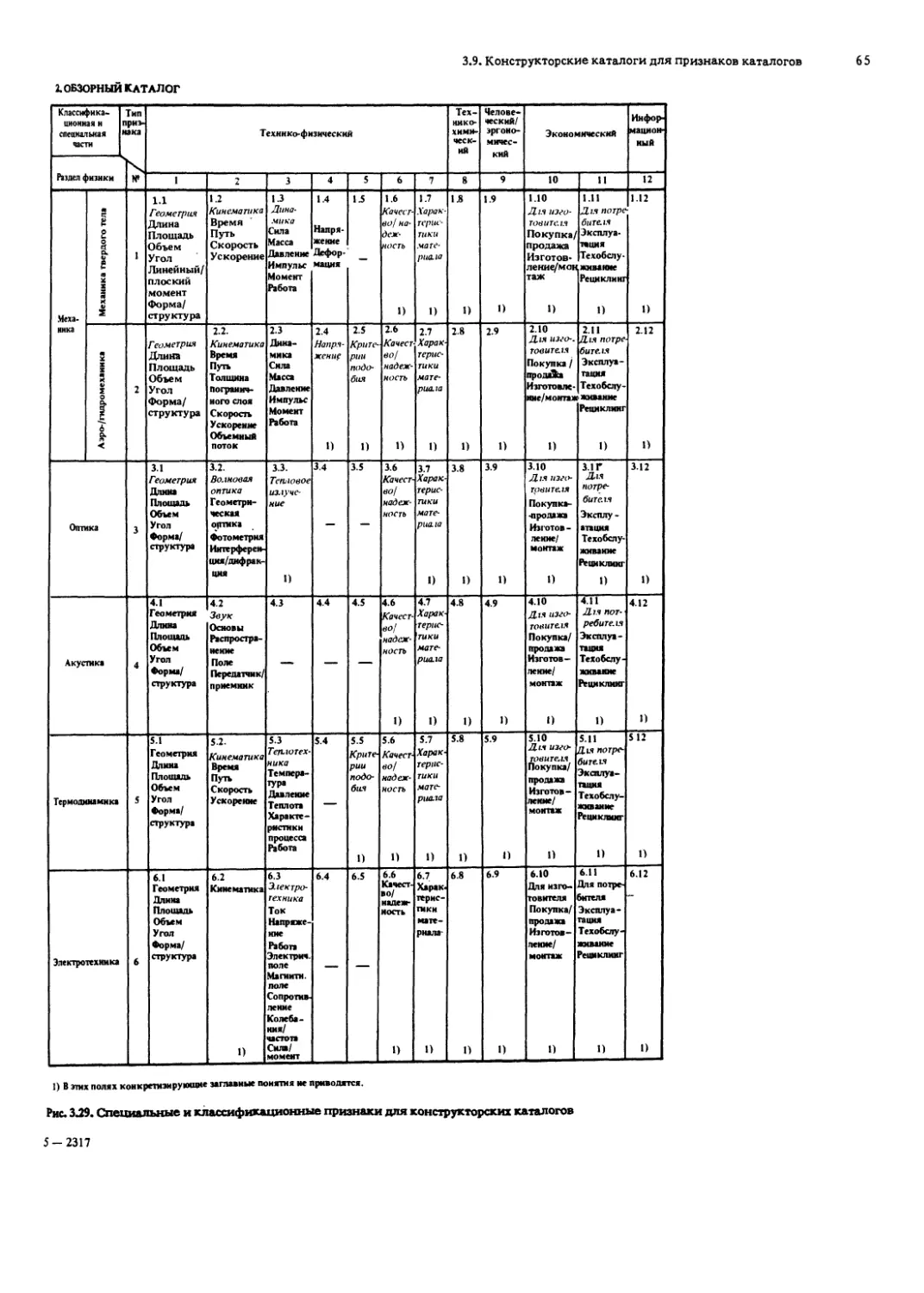
3.8. Список специальных и классификационных признаков для конструк-
торских каталогов............................................... 63
3.9. Конструкторские каталоги для признаков каталогов.............. 64
1. Список принципов к обзорному и детальному каталогам на
рис. 3.29 и 3.30............................................. 64
2. Обзорный каталог............................................. 65
3. Детальный каталог........................................... 66
3.10. Список литературы.............................................. 73
4. Собрание конструкторских каталогов................................ 74
4.1. Конструкторские каталоги для фазы формулировки задачи........... 74
4.1.1. Типы требований............................................ 74
1. Жесткие требования (Ж) как точечные.......................... 74
2. Жесткие требования (Ж) как нецелевые граничные и диапазонные 74
3. Целевые требования (Ц)....................................... 74
4. Необязательные требования — пожелания (П)................... 74
5. Примеры...................................................... 75
6. Список принципов к конструкторскому каталогу 4.1.1.......... 75
7. Конструкторский каталог 4.1.1: Типы требований............... 76
4.2. Передача сил, приведение в движение и ограничение движений.. 77
6
Оглавление
4.2.1. Типы связей................................................ 77
1. Элементарные и комбинированные связи........................ 79
2. Список принципов к конструкторскому каталогу 4.2.1 ......... 81
3. Конструкторский каталог 4.2.1: Типы связей.................. 82
4.2.2. Ограничить движение в одном направлении (односторонние упо-
ры) ..........................................................
1. Список принципов к конструкторскому каталогу 4.2.2.......... 84
2. Конструкторский каталог 4.2.2: Ограничить движение в одном на-
правлении (односторонние упоры) ............................ 85
4.2.3. Ограничить движение в двух направлениях (двусторонние упоры) 86
1. Список принципов к конструкторскому каталогу 4.2.3.......... 88
2. Конструкторский каталог 4.2.3: Ограничить движение в двух на-
правлениях (двусторонние упоры).............................. 89
4.2.4. Фрикционные системы с различными характеристиками.......... 90
1. Передаточные коэффициенты................................... 90
2. Изменение передаточного коэффициента...................... 90
3. Фрикционные системы с возможностью заклинивания............. 91
4. Сравнительный анализ силы трения и силы воздействия......... 91
5. Передаточный коэффициент и конструктивные величины......... 92
6. Список принципов к конструкторскому каталогу 4.2.4.......... 93
7. Конструкторский каталог 4.2.4: Фрикционные системы с различ-
ными характеристиками........................................ 94
4.2.5. Операции варьирования для функционального изменения фрик-
ционных систем.................................................. 95
1. Список принципов к конструкторскому каталогу 4.2.5.......... 95
2. Конструкторский каталог 4.2.5: Операции варьирования для функ-
ционального изменения фрикционных систем..................... 96
4.3. Логическое представление пар твердых тел........................ 97
4.3.1. Важнейшие кинематические и статические пары................ 97
1. Логическая матрица связей................................... 97
2. Список принципов к конструкторскому каталогу 4.3.1.......... 99
3. Конструкторский каталог 4.3.1: Важнейшие кинематические и
статические пары ......................................... 100
4.3.2. Логические комбинаторные функции и механизмы.............. 101
1. Логические комбинаторные механизмы........................ 102
2. Список принципов к конструкторским каталогам 4.3.2—4.3.5... 103
3. Конструкторский каталог 4.3.2: Базовые формы логических механиз-
мов отрицания.............................................. 104
4. Констоуктооский каталог 4.3.3: Варианты механизмов отрицания.. 104
5. Конструкторский каталог 4.3?4: Базовые формы логических механиз-
мов конъюнкции и дизъюнкции................................... 10^
6. Конструкторский каталог 4.3.5: Варианты механизмов конъюнкции
и дизъюнкции...............................................
4.3.3. Логические последовательные функции и механизмы........... 107
1. Механические RS-переключатели............................... Ю8
2. Механические Т-переключатели............................... 108
3. Список принципов к конструкторским каталогам 4.3.6 и 4.3.7. 111
4. Конструкторский каталог 4.3.6: Механические двухпозиционные ^-пере-
ключатели (клавишные переключатели)........................... 112
5. Конструкторский каталог 4.3.7: Варианты механических Г-переклю-
чателей (варианты клавишных переключателей)................. 115
4.4. Создание сил и изменение их параметров.......................... И7
4.4.1. Создать силу с помощью других величин..................... 117
1. Список принципов к конструкторскому каталогу 4.4.1......... 117
2. Конструкторский каталог 4.4.1: Создать силу с помощью других
величин..................................................... 118
4.4.2. Одноступенчатое умножение силы............................ 122
1. Соединение умножителей силы................................ 125
2. Дополнительные функции умножителей силы.................... 126
3. Усилитель мощности как умножитель скорости и силы.......... 128
4. Список принципов к конструкторскому каталогу 4.4.2......... 129
5. Конструкторский каталог 4.4.2: Одноступенчатое умножение силы 130
4.4.3. Механическое стопорение обратного хода.................... 132
1. Стопорение обратного хода с помощью фрикционной заклиниваю-
щей связи................................................... 132
2. Стопорение обратного хода с помощью геометрической связи... 134
3. Различные варианты применения стопоров обратного хода...... 134
4. Соединение стопоров обратного хода...................... 137
5. Примеры остановов с заклинивающей связью................... 137
6. Переключаемые стопоры обратного хода....................... 137
7. Список принципов к конструкторскому каталогу 4.4.3......... 138
8. Конструкторский каталог 4.4.3: Механическое стопорение обратно-
го хода..................................................... 139
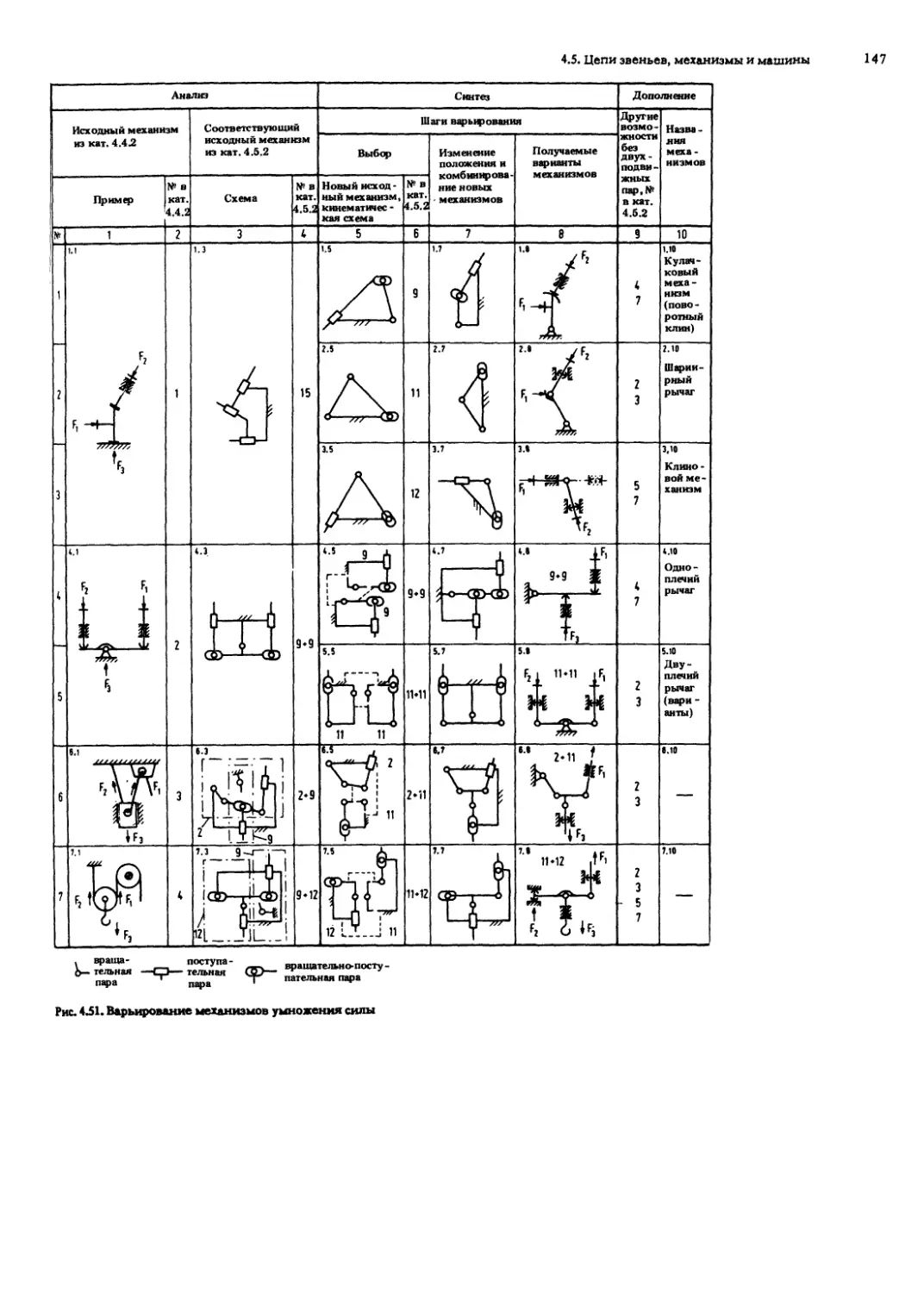
4.5. Цепи звеньев, механизмы и машины............................... 140
4.5.1. Замкнутые однозвенные пары, пары звеньев и цепи с числом
звеньев не более четырех....................................... 140
1. Список принципов к конструкторскому каталогу 4.5.1......... 143
2. Конструкторский каталог 4.5.1: Замкнутые однозвенные пары, па-
ры звеньев и цепи с числом звеньев не более четырех......... 144
4.5.2. Принудительные механизмы с числом звеньев 2—4 с вращательны-
ми, поступательными и плоскими вращательно-поступательными
парами......................................................... 146
Оглавление
7
1. Список принципов к конструкторскому каталогу 4.5.2......... 146
2. Конструкторский каталог 4.5.2: Принудительные механизмы с чис-
лом звеньев от 2 до 4 с вращательными, поступательными и пло-
скими вращательно-поступательными парами..................... 148
4.5.3. Разработка различных устройств на основе данной схемы меха-
низма.......................................................... 149
1. Список принципов к конструкторскому каталогу 4.5.3......... 149
2. Конструкторский каталог 4.5.3: Разработка различных устройств
на основе данной схемы механизма............................. 150
4.5.4. Варианты одноступенчатых фрикционных систем............... 151
1. Список принципов к конструкторскому каталогу 4.5.4......... 151
2. Конструкторский каталог 4.5.4: Варианты одноступенчатых фрик-
ционных систем на основе трехзвенных механизмов из каталогов
4.2.4 и 4.5.3................................................ 152
Детальный каталог 1: Клиновые системы..................... 152
Детальный каталог 2: Рычажные системы..................... 153
Детальный каталог 3: Тормозные ленточные системы.......... 153
4.6. Варьирование структуры......................................... 154
4.6.1. Операции варьирования структуры........................... 154
1. Список принципов к конструкторскому каталогу 4.6.1......... 155
2. Конструкторский каталог 4.6.1: Операции варьирования структуры 156
4.7. Передаточные механизмы равномерного хода....................... 157
4.7.1. Основные передаточные механизмы равномерного хода. Особые
виды зубчатых зацеплений....................................... 157
1. Список принципов к конструкторскому каталогу 4.7.1......... 161
2. Конструкторский каталог 4.7.1: Основные передаточные механиз-
мы равномерного хода ........................................ 162
4.8. Неподвижные соединения......................................... 164
4.8.1. Общие положения........................................... 164
4.8.2. Соединения и типы связей.................................. 164
4.8.3. Роль типов связи при изготовлении соединений.............. 164
4.8.4. Проектирование соединений............................... 168
4.8.5. Повышение прочности силовых соединений.................... 168
4.8.6. Возможности применения различных типов соединений......... 170
4.8.7. Заклепочные соединения.....................................171
1. К обзорному каталогу: Заклепочные соединения............... 172
2. К детальным каталогам: Заклепочные соединения двустороннего
и одностороннего доступа.................................... 172
3. Список принципов к конструкторским каталогам 4.8.1—4.8.3... 172
4. Конструкторский каталог 4.8.1: Заклепочные соединения (обзор-
ный каталог) ............................................... 173
5. Конструкторский каталог 4.8.2: Заклепочные соединения двусто-
роннего доступа („неслепые”) (детальный каталог)............ 174
6. Конструкторский каталог 4.8.3: Заклепочные соединения односто-
роннего доступа („слепые”) (детальный каталог)............... 178
4.8.8. Соединения вал — ступица.................................. 180
1. Общие положения............................................ 180
2. Список принципов к конструкторскому каталогу 4.8.4......... 181
3. Конструкторский каталог 4.8.4: Соединения вал — ступица (обзор-
ный каталог) ................................................ 182
4. Список принципов к конструкторскому каталогу 4.8.5......... 183
5. Конструкторский каталог 4.8.5: Соединения вал — ступица (деталь-
ный каталог)................................................. 184
4.9. Подвижные соединения........................................... 187
4.9.1. Направляющие поступательного движения..................... 188
1. Прямолинейные направляющие с одинаковой формой профиля .. 190
2. Прямолинейные направляющие с различными формами профиля. 190
3. Список принципов к конструкторским каталогам 4.9.1 и 4.9.2. 190
4. Конструкторский каталог 4.9.1: Прямолинейные направляющие с
одинаковой формой профиля.................................... 191
5. Конструкторский каталог 4.9.2: Прямолинейные направляющие с
различными формами профиля................................. 192
4.9.2. Направляющие вращательного движения (подшипники).......... 193
1. К обзорному каталогу: Подшипники........................... 193
2. Список принципов к конструкторскому каталогу 4.9.3......... 194
3. Конструкторский каталог 4.9.3: Направляющие вращательного
движения, подшипники (обзорный каталог)...................... 195
4. Подшипники скольжения...................................... 196
5. Список принципов к конструкторскому каталогу 4.9.4......... 197
6. Конструкторский каталог 4.9.4: Подшипники скольжения (деталь-
ный каталог) ................................................ 198
7. Подшипники качения......................................... 199
8. Список принципов к конструкторскому каталогу 4.9.5......... 199
9. Конструкторский каталог 4.9.5: Подшипники качения (детальный
каталог)..................................................... 200
4.9.3. Список литературы к каталогам подшипников................ 203
4.10. Варьирование контура и структуры.............................. 204
4.10.1. Операции варьирования конструкции....................... 204
1. Список принципов к конструкторскому каталогу 4.10.1....... 205
8
Оглавление
2. Конструкторский каталог 4.10.1: Операции варьирования конст-
рукции ................................................... 206
4.11. Способы обработки давлением ...................................... 206
4.11.1. К обзорному каталогу: Обработка давлением сжатия............. 206
1. Список принципов к конструкторскому каталогу 4.11.1........... 207
2. Конструкторский каталог 4.11.1: Обработка давлением сжатия
(обзорный каталог)........................................ 208
4.11.2. К детальному каталогу: Объемная штамповка.................... 209
1. Список принципов к конструкторскому каталогу 4.11.2........... 209
2. Конструкторский каталог 4.11.2: Объемная штамповка, при кото-
рой поковка находится целиком в полости штампа............ 210
4.12. Размеры с допусками................................................. 212
4.12.1. Предельные размеры, допуски и их расчет...................... 212
4.12.2. Векторный характер величин................................... 213
4.12.3. Расчеты с обобщенными размерами.............................. 213
4.12.4. Расчеты допусков............................................. 214
4.12.5. Размерные цепи............................................... 215
4.12.6. Расчет составляющих размеров при заданном результирующем
размере.............................................................. 215
4.12.7. Размерные цепи, включающие цилиндрические посадки....... 218
4.12.8. Смысл различных значений результирующего размера............. 219
4.12.9. Расчеты допусков в двух измерениях........................... 219
4.12.10. Правила расчета допусков.................................... 220
1. Список принципов к конструкторскому каталогу 4.12.1........... 220
2. Конструкторский каталог 4.12.1: Правила расчета допусков. 221
4.13. Список литературы................................................... 222
5. Модели и вспомогательные средства для конструирования в отдельных
фазах............................................................ 224
5.1. Модели изделия для этапов рабочего плана........................... 224
5.2. Вспомогательные средства для фазы формулировки задачи.............. 227
5.2.1. Постановка задачи............................................. 228
5.2.2. Функциональное положение...................................... 228
5.2.3. Список требований............................................. 233
5.2.4. Методы составления списка требований.......................... 235
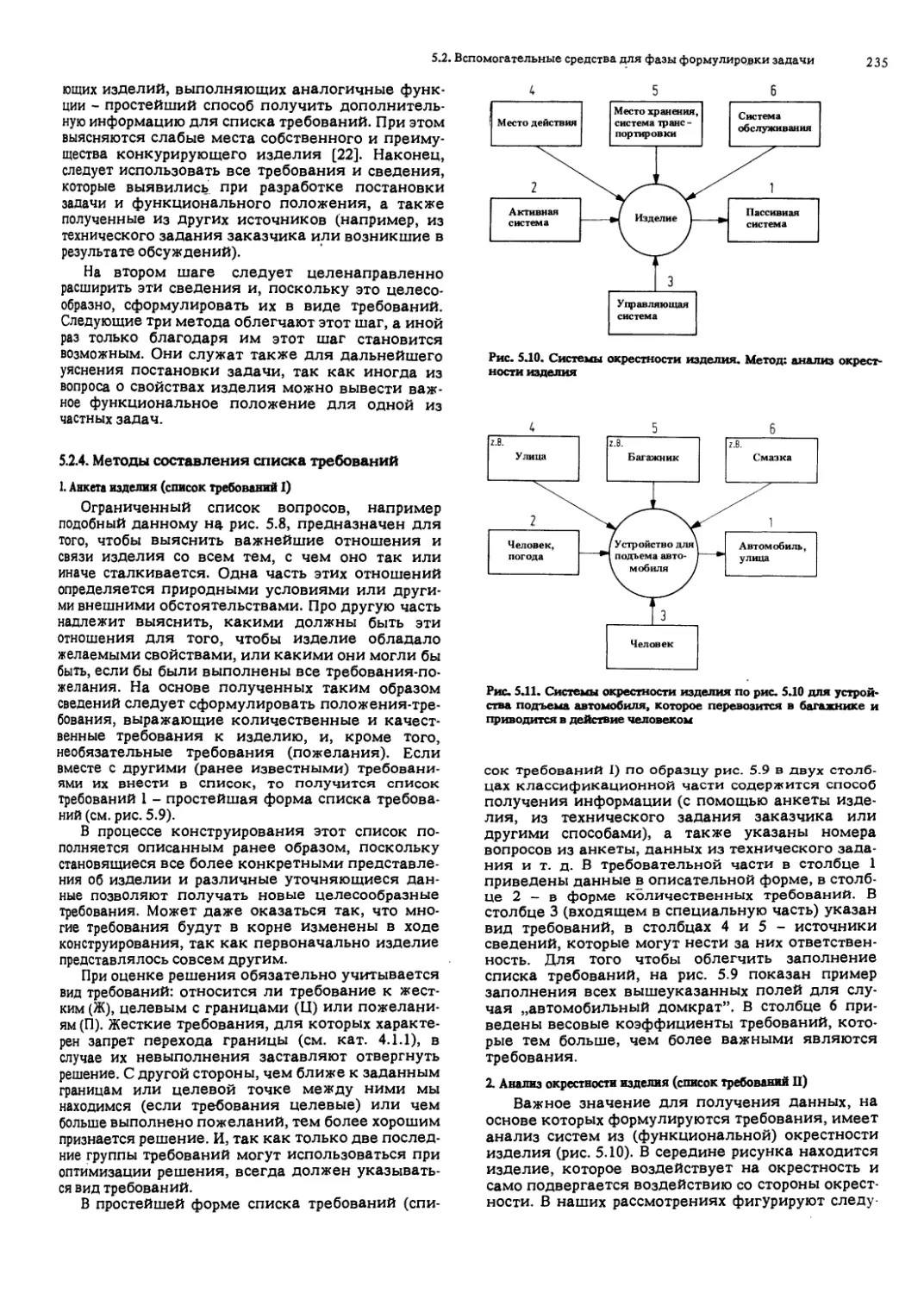
1. Анкета изделия (список требований 1}........................... 235
2. Анализ окрестности изделия (список требований II)............. 235
3. Анализ фаз жизненного цикла изделия (список требований III) ... 237
5.3. Функциональные структуры........................................... 247
5.3.1. Функциональные структуры с абстрактными величинами....... 247
1. Абстрактная функциональная структура (АФС)..................... 247
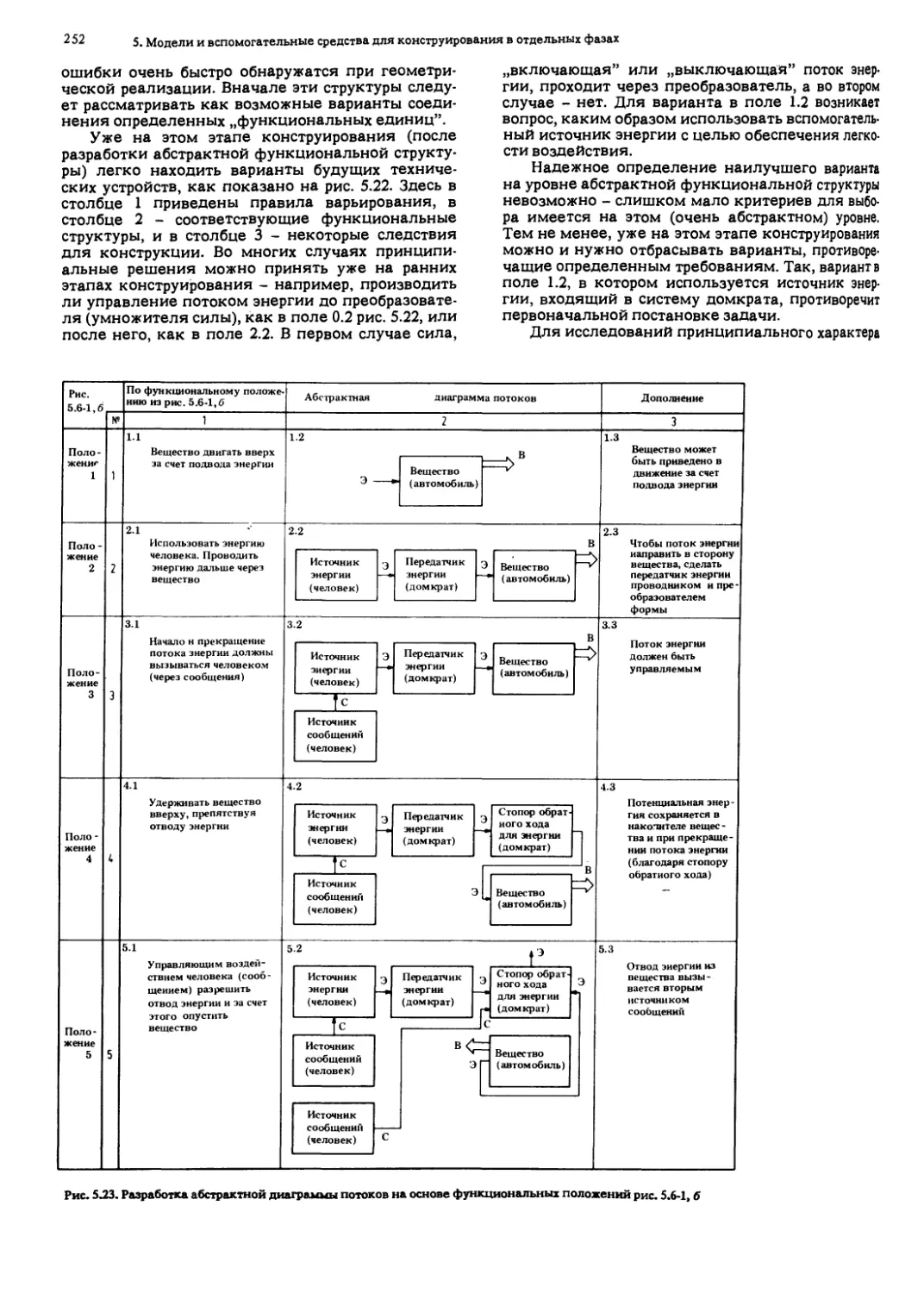
2. Абстрактная диаграмма потоков вещества, энергии и сообщений.. 253
5.3.2. Функциональные структуры с физическими величинами............. 254
1. Диаграмма потоков с интенсивностными и количественными ве-
личинами (специальная функциональная структура)................. 256
2. Список литературы к физическим уравнениям на рис. 5.32 ........ 281
3. Промежуточные шаги для комбинированных способов конструи-
рования ................................................... 282
5.3.3. Функциональные структуры с логическими величинами............. 284
5.4. Функциональные интеграция и разделение при переходе в предметную
фазу............................................................. 285
5.4.1. Различные виды функциональной интеграции...................... 287
5.4.2. Примеры различных видов функциональной интеграции........ 291
5.4.3. Систематический порядок действий при функциональной инте-
грации ......................................................... 293
5.5. Список литературы.................................................. 294
б. Новые модели для методического конструирования и конструирования с по-
мощью ЭВМ ........................................................ 296
6.1. Сравнительный анализ элементов функциональных структур............. 296
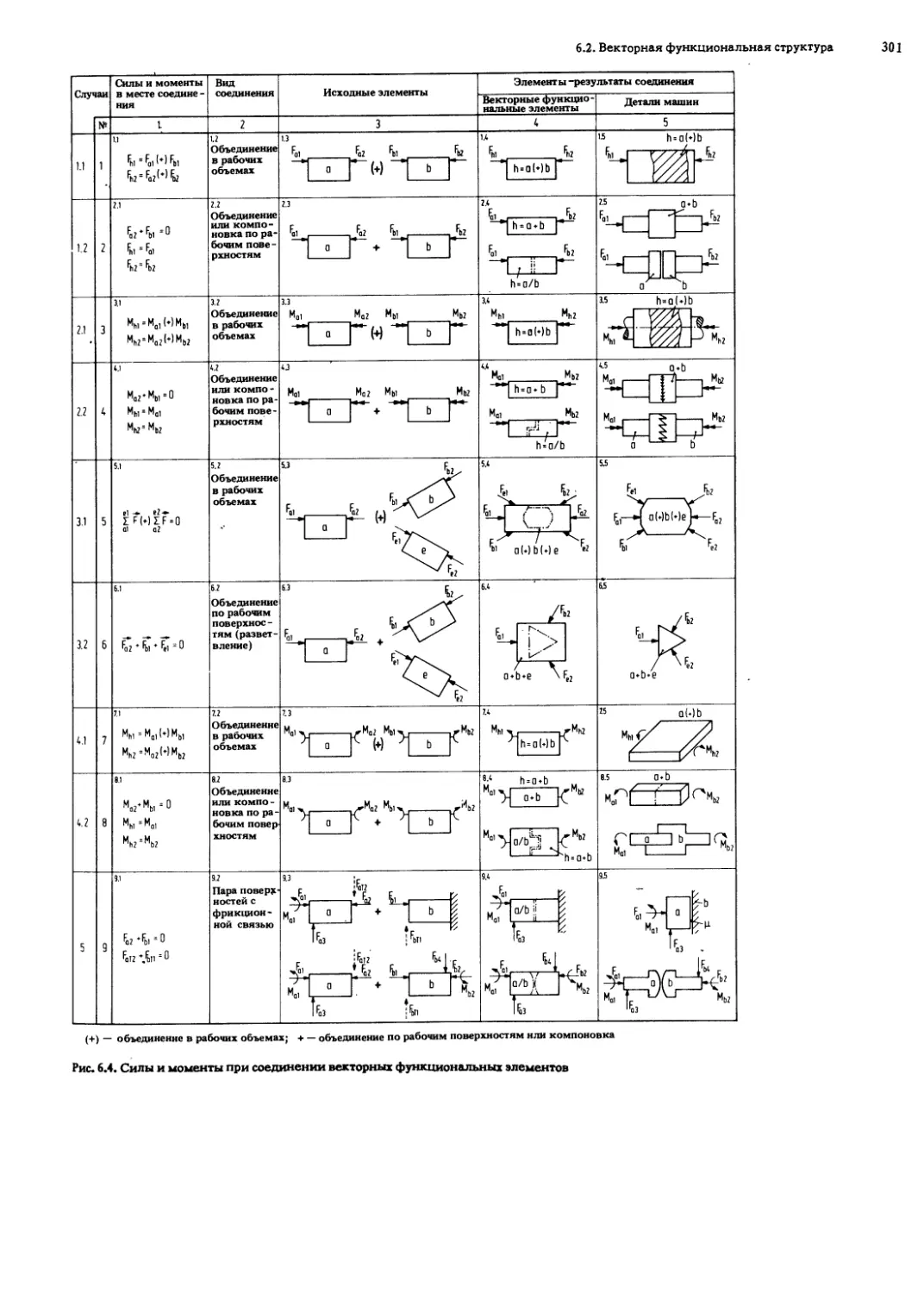
6.2. Векторная функциональная структура............................... 297
6.2.1. Свойства векторных функциональных элементов................... 298
6.2.2. Соединение векторных функциональных элементов................. 300
•1. Соединение сил и моментов..................................... 300
2. Соединение скоростей........................................... 300
6.2.3. Соединение комбинированных одно- и двухточечных величин ... 300
6.3. Создание напряженных циклов, напряженных сегментов и конструк-
ций с силовыми полями............................................ 305
6.3.1. Создание и поддержание силовых воздействий.................... 305
6.3.2. Напряженный цикл и его конструктивные свойства................ 308
6.3.3. Напряженные циклы и напряженные сегменты...................... 308
1. Устройство напряженных циклов и напряженных сегментов..... 308
2. Виды напряженных циклов и напряженных сегментов................ 312
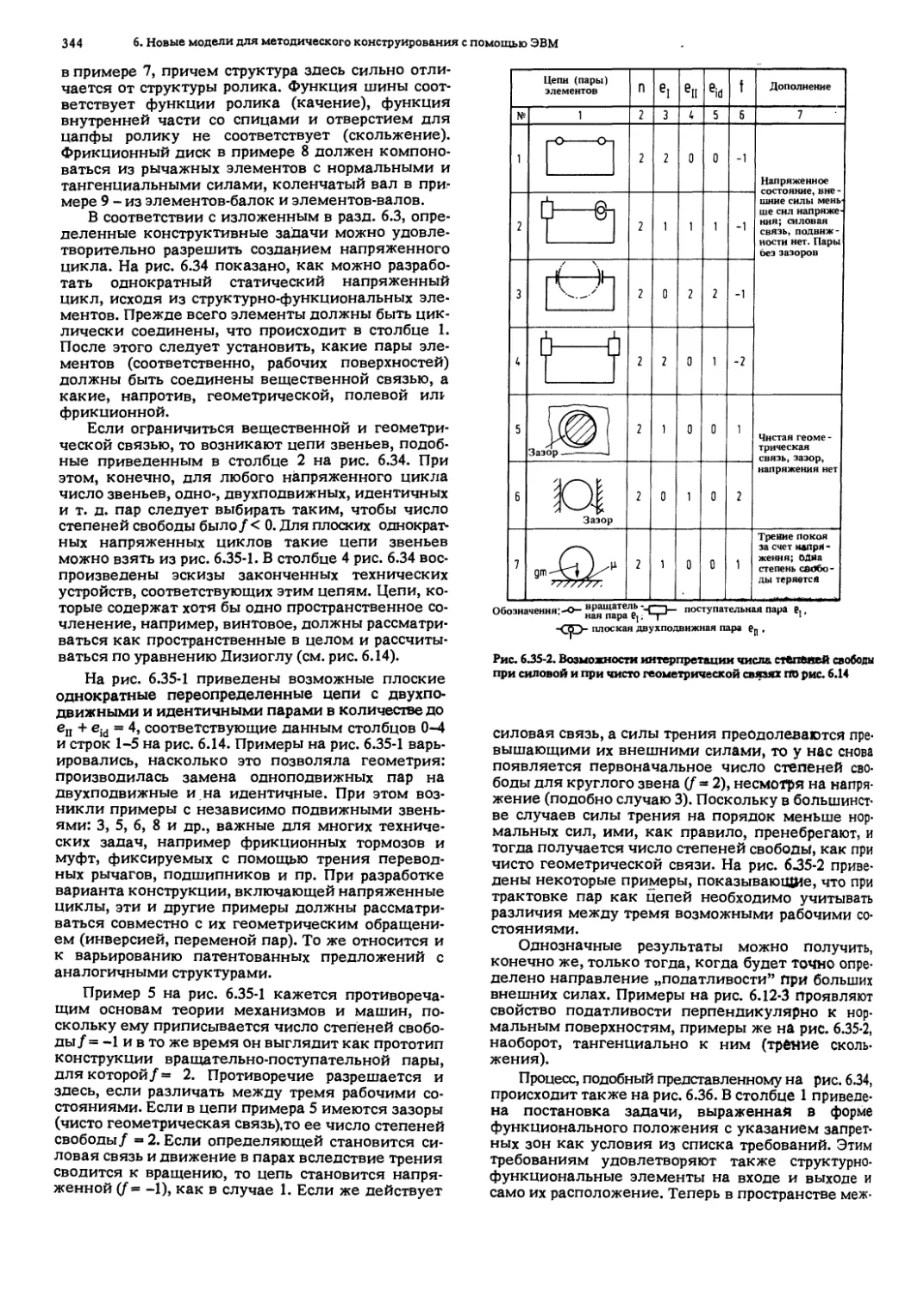
3. Три рабочих состояния цепей звеньев в передачах ............... 315
4. Практические примеры конструкций передач....................... 316
6.3.4. Статические упругие напряженные циклы......................... 319
6.3.5. Зарядка, удержание в заряженном состоянии и разрядка накопи-
телей энергии напряженных циклов.............................. 323
6.4. Геометрическая функциональная структура............................ 325
6.4.1. Особенности и назначение...................................... 325
6.4.2. Элементы геометрической функциональной структуры.............. 325
1. Объемные функции.............................................. 326
2. Поверхностные функции.......................................... 330
Оглавление
9
3. Элементы-источники....................................... 331
4. Полевые элементы......................................... 331
6.4.3. Операции со структурно-функциональными элементами....... 331
1. Варьирование............................................. 331
2. Соединение............................................... 332
3. Разделение............................................... 336
4. Объединяющая перестройка ................................ 336
5. Разъединяющая перестройка................................ 336
6. Примеры операций......................................... 336
7. Компоновка с использованием пар элементов (сочленений).. 337
6.4.4. Компоновка технического устройства из элементов......... 339
6.4.5. Конструирование с помощью векторной и геометрической функ-
циональной структуры.......................................... 349
6.5. Механизмы для логических функций............................ 350
6.6. Геометрическая цепная структура............................. 353
6.7. Список литературы........................................... 358
7. Обзор и определения основных понятий ..................... 359
7.1. Список конструкторских каталогов............................ 359
7.2. Список подборок решений и таблиц............................ 360
7.3. Список рисунков и каталогов по ключевым словам, соответствующим
важнейшим классам задач.......................................... 362
7.4. Определения основных понятий................................ 363
7.5. Сводный список существующих конструкторских каталогов и других
подборок решений................................................. 397
8. Предметный указатель.......................................... 408
10
ПРЕДИСЛОВИЕ РЕДАКТОРА ПЕРЕВОДА
Перед Вами - удивительная книга. Нелегко определить ее
жанр. Это и богатая идеями фундаментальная монография - и
составленный с немецкой основательностью справочник для
конструкторов, и отлично написанный учебник со множеством
примеров и иллюстраций - и толковый словарь по теории констру-
ирования, и методические разработки по созданию и использова-
нию иерархии моделей проектируемого объекта и конструктор-
ских каталогов - увлекательный рассказ о проблемах и методах
современного конструирования. Круг читателей, для которых эта
книга имеет все шансы стать настольной, весьма широк: в него
входят, по меньшей мере, творчески работающие теоретики и
практики конструирования, специалисты по теории машин и меха-
низмов, методологи и разработчики машиностроительных САПР,
не говоря уже о студентах и аспирантах соответствующих специ-
альностей.
В целом книга К. Рота посвящена актуальным проблемам
машиностроительного проектирования. Дело в том, что для повы-
шения эффективности проектирования на нынешнем уровне
развития техники огромное и все возрастающее значение имеет
возможность полноценного использования накопленного опыта
конструирования. Отсюда вытекает потребность в упорядочении
„мира конструктивных решений”, структуризации конструктор-
ских знаний, приобретающая особенную остроту в связи с разви-
тием коллективных форм проектных работ и применением ЭВМ в
проектировании. Сложившаяся ситуация во многом аналогична
той, которая имела место некоторое время назад в программиро-
вании и привела к возникновению, бурному развитию и повсеме-
стному признанию структурного подхода к разработке программ.
Именно благодаря этому качественному скачку появилась воз-
можность говорить о „науке программирования”.
Видимо, не будет преувеличением сказать, что книга, лежа-
щая перед Вами, - одна из первых серьезных монографий, созда-
ющих основу для аналогичного качественного скачка в констру-
ировании и для возникновения особой науки конструирования, не
сводящейся к механике и сопромату.
Не меньший интерес представляет книга К. Рота и с точки
зрения проблематики САПР. Дело в том, что до сих пор бытует
мнение, будто роль САПР преимущественно сводится к автомати-
зации рутинных функций проектировщика и, тем самым, к сокра-
щению трудозатрат. Это не так. САПР как средство повышения
качества проектируемых изделий не должна быть похожа на
„механическую лощадь”, запряженную в обычную телегу. Исполь-
зование ЭВМ в проектировании должно позволить решать задачи
проектирования на качественно новом уровне. Иными словами,
необходима радикальная перестройка всей технологии проектиро-
вания. Но, как известно, применение ЭВМ требует четкой структу-
ризации и максимальной формализации как используемой инфор-
мации - конструкторских знаний, так и способов ее обработки -
собственно процесса проектирования. Именно с этой точки зрения
представляет большой интерес книга К. Рота, которая, не затраги-
вая специфических проблем САПР, связанных с техническими и
программными средствами, содержит богатейший материал для
разработки новой технологии проектирования, принципиально
ориентированной на ЭВМ, а также для создания в рамках САПР
экспертных систем, аккумулирующих многообразие конструктор-
ских знаний.
В заключение хочу сказать о высоком качестве перевода.
Перед переводчиками стояла титаническая задача переноса на
русскую почву целостной системы понятий, состоящей из несколь-
ких сот сложно взаимосвязанных терминов, по большей части
новых даже для немецкого читателя. С этой задачей переводчики
справились. g д Березовский
и
ПРЕДИСЛОВИЕ АВТОРА К РУССКОМУ ИЗДАНИЮ
Бурное развитие вычислительной техники за последние 20 лет,
все большее ее использование для оптимизации технических
изделий и ускорения их производства, а также для управления
различными устройствами - требуют повышения значения совре-
менной теории и методики конструирования. Сущность сложив-
шейся ситуации можно выразить простой формулой: без современ-
ной методики конструирования и систематики конструкций нет
современной теории конструирования, без современной теории
конструирования нет надежды на полноценную автоматизацию
конструирования. Компьютер с его неподкупной логикой застав-
ляет нас представить весь накопленный опыт, насколько это
возможно, в алгоритмически описываемой взаимосвязи, а когда
это невозможно, - так упорядочить информацию, чтобы оказалось
возможным хранить ее как можно более компактно и извлекать с
учетом всего многообразия требуемых признаков. Возможным
способом такого представления информации являются специаль-
но организованные конструкторские каталоги.
Развитие техники в последние годы показало, что в задаче
автоматизации проектирования выкристаллизовываются две
узловые проблемы:
разработка моделей изделия, пригодных для компьютерной
обработки;
разработка систем знаний (экспертных систем), основой кото-
рых могут быть предлагаемые в книге конструкторские каталоги.
Если модели и формулируемые в задаче требования согласу-
ются с языком конструкторских каталогов, то удается (в насто-
ящее время только для простых задач) производить конструирова-
ние автоматически. Иными словами, появляется возможность,
задав компьютеру требуемые функции изделия, получить на
выходе принципиальные конструкторские решения, вплоть до
чертежей. Для дальнейшего развития такой процедуры проектиро-
вания не так важно повышать производительность современных
компьютеров (их аппаратного обеспечения), как развивать подхо-
дящие языки для графического представления характеристик
изделия (программное обеспечение САПР), которые давали бы
возможность единообразно представлять функцию, эффект и
конструкцию (устройство) изделия.
Найти путь к решению указанных задач, сделать его более
легким и удобным - цель данной книги. Она призвана осветить
основы методического конструирования и вести конструктора к
оригинальным и оптимальным решениям при планировании,
поиске функций, при работе над чертежной доской или дисплеем,
помочь ему все продумать при постановке задачи и уберечь от
досадных неудач. Подготовка необходимых для этого сведений
происходит по определенным правилам, так что ценой допусти-
мых затрат она может быть переложена на компьютер.
Решение о переводе этой книги свидетельствует о вниматель-
ном отношении к перспективным проблемам. Переводное издание
будет способствовать максимально широкому включению вычис-
лительной техники в процесс конструирования в СССР. Необходи-
мая для этого переориентация мышления конструктора - от
наглядных, понятных, но специальных моделей, - к абстрактным,
но общезначимым моделям, предложенным в книге, продолжает-
ся долго, и начинать ее нужно как можно раньше, что впоследст-
вии окажет неоценимое влияние на развитие техники.
Особую благодарность я приношу переводчикам, взявшимся за
кропотливую и трудную задачу передачи на русском языке слож-
ной системы многочисленных новых понятий. Пусть их работа
попадет на плодородную почву и поможет конструкторам созда-
вать производительные, высококачественные и недорогие в изго-
товлении технические изделия.
Брауншвейг, весна 1988 К. Рот
12
Моей жене Гертруде посвящается
ПРЕДИСЛОВИЕ
В книге изложены основы конструирования, описана его техно-
логия и исследованы взаимосвязи со смежными областями. Книга
предназначена для конструкторов во всех областях техники,
студентов, изучающих машине-, аппарате- и приборостроение,
преподавателей и научных сотрудников вузов; она заинтересует
также специалистов, работающих в смежных областях, таких как
строительство, электротехника, физика и т. п. Богатый опыт,
накопленный автором за 15 лет работы в конструкторском бюро и в
лаборатории, а также результаты обширных теоретических иссле-
дований в области конструирования, проводившихся в течение
последующих 15 лет на возглавляемой им кафедре вуза, убедили
автора в необходимости строить изложение от конструирования к
механике, теории механизмов и физике, а не наоборот.
Разнообразие условий нашей жизни и жизненных потребно-
стей находит отражение в разнообразии созданных нами конструк-
ций, что означает не только богатство возможностей, но и множе-
ство трудностей на тернистом пути конструктора.
Свести многообразие всевозможных конструкций к ограничен-
ному, хорошо обозримому набору исходных форм, а методику
конструирования - к нескольким основным правилам, научиться
синтезировать общие функции из элементарных - вот главная
задача этой книги. Решение этой задачи основывается прежде
всего на организации необходимого для конструктора материала в
систематической форме, подобной каталогу.
Мы будем называть конструкторским каталогом построенную
по строгим формальным принципам подборку решений элементар-
ных, повторяющихся задач конструирования, возможных и раци-
ональных вариантов исполнения простых деталей и узлов (объек-
тов) либо правил их соединения (операций). Такой каталог по-
зволяет выявить дополнительные закономерности, вытекающие из
местоположения объектов и операций в матрице каталога, отвеча-
ющей описанным в тексте формальным требованиям.
Строгий анализ материала, необходимый для составления
конструкторских каталогов, позволяет понять, что большинство
существующих конструкций могут быть сведены к относительно
небольшому числу базовых, а эти базовые конструкции, в свою
очередь - к реализации определенных функций с помощью обозри-
мого набора (.физических) эффектов.
Прообразом всех конструкторских каталогов является пери-
одическая система химических элементов, незаполненные клет-
ки которой в свое время стимулировали целенаправленный поиск
неизвестных элементов, убеждая исследователей в существова-
нии искомых „объектов”. Предпосылкой создания такой системы
было точное знание атомных масс и валентностей многих химиче-
ских элементов и предположительное знание строения атома. Как
и в этом примере из области химии, главное предназначение
конструкторских каталогов состоит в создании возможно более
подробной таблицы, которая со временем будет целиком заполне-
на. Пустые места в этой таблице призваны стимулировать разра-
ботку новых решений.
Кроме конструкторских каталогов и в дополнение к ним,
используются также неформальные подборки решений, которые
могут не отвечать строгим требованиям к полноте или представ-
лять не все разделы каталога, или же соответствовать лишь узкой
области интересов.
Еще одна задача этой книги заключается в том, чтобы органи-
чески включить использование конструкторских каталогов в
процедуру методического конструирования. С этой целью рамки
методического конструирования существенно расширены по
сравнению с тем, как они известны из литературы; кроме того, в
процесс конструирования введены соответствующие вспомога-
тельные средства.
Предисловие
13
В гл. 1 приведен наглядный пример методического подхода к
одной из задач конструирования. Изложение строится так, чтобы
быть понятным читателю без специальной подготовки. Обоснова-
на рациональность такого подхода и продемонстрированы связан-
ные с ним возможности.
В гл. 2 описан так называемый рабочий план методического
конструирования, а также показано, что с помощью трех субстан-
ций („основных величин”) теории конструирования - вещества,
энергии и информации (сообщений) - могут быть описаны все тех-
нические устройства, включая человека (рассматриваемого в
качестве „технического объекта”).
В гл. 3 описаны варианты структуры конструкторских катало-
гов и приведены вспомогательные средства для выбора классифи-
кационных и специальных признаков.
Центральное место в книге занимает гл. 4, содержащая конст-
рукторские каталоги и методику работы с ними, а также многочис-
ленные комментарии и рекомендации.
Оригинальные концепции, нашедшие отражение в каталогах
типов требований, фрикционных систем, логических механизмов,
правил расчета допусков и др., призваны способствовать лучшему
проникновению в существо проблемы. К каждому каталогу прила-
гается список принципов, содержащий цель создания каталога,
указания на область его применения, основные понятия, принци-
пы классификации, а также ссылки на примеры.
Применение конструкторских каталогов в рамках методиче-
ского поэтапного конструирования по рабочему плану обсужда-
ется в гл. 5. С высокой степенью детализации описана процедура
выработки точной постановки задачи, приведены многочислен-
ные вспомогательные средства и иллюстративные примеры. Глава
заканчивается описанием важнейших элементарных функций,
функциональных структур и методов функционального синтеза.
Приведены 177 уравнений, каждое из которых описывает взаимо-
связь двух физических величин, и предложены конструктивные
реализации этих зависимостей с помощью различных конструктив-
ных параметров, а также их комбинаций.
В гл. 6 описаны новые типы функциональных структур. Здесь
рассматриваются различные методы, облегчающие алгоритмиза-
цию соответствующих этапов конструирования; демонстрируется
использование структурно-функциональных элементов в качестве
новых структурных единиц при синтезе машин и функциональных
модулей. Основы теории напряженных циклов используются для
интерпретации способов передачи усилия в узлах и механизмах,
устанавливаются многочисленные связи с теорией механизмов, в
частности, путем анализа различных кинематических и статиче-
ских цепей. Все рассматриваемые классификации механических
элементов согласуются с теорией динамических систем, что позво-
ляет провести параллели с другими областями науки, например с
электротехникой. В конце главы рассматриваются механизмы,
реализующие информационные функции, а также первые попыт-
ки синтеза описанных ранее структур с помощью ЭВМ.
Гл. 7 поможет читателю лучше ориентироваться в содержании
книги. В ней приведен список имеющихся в книге конструктор-
ских каталогов и подборок решений, список рисунков, составлен-
ный по ключевым терминам, а также список литературы по всем
известным автору конструкторским каталогам. Важнейшей частью
этой главы является глоссарий, содержащий определения 476
терминов, который поможет читателю освоить изложенную в
книге теорию методического конструирования.
Работать с этой книгой можно по-разному - в зависимости от
поставленных целей. Вместо полной последовательной проработ-
ки можно, например, просмотреть гл. 1 и 2, а также интересующий
Вас раздел в гл. 4, затем изучить один из трех подробных списков
требований в гл. 5, а далее использовать в работе те разделы,
которые указаны в подходящем для Вас „маршруте” на рис. 5.24 и
5.25. Если Вы пользуетесь каталогами систематически, го Вам
будет полезно ознакомиться с соответствующими разделами гл. 4,
а если Вы хотите сами разрабатывать конструкторские каталоги,
Вам следует изучить гл. 3. Кроме того, книгой можно пользовать-
ся как справочником по теории конструирования — в этом Вам
14
Предисловие
поможет словарь важнейших терминов (разд. 7.4), а также другие
разделы гл. 7 и подробный предметный указатель. Читателям,
интересующимся последними достижениями теоретического
конструирования, мы рекомендуем обратить внимание на гл. 5 и 6.
Конструкторские каталоги и подборки решений (большая часть
которых перечислена на рис. 3.2) можно применять и вне рамок
методического конструирования, однако владение методическим
конструированием значительно увеличивает эффективность
поиска решений.
Значительная часть информации в книге заключена в рисун-
ках, что согласуется с характером деятельности и мышления
конструктора. Расположение этой информации в определенных
местах таблицы всегда выражает некоторую дополнительную
идею, подобно тому, как множество пар значений на графике дает
представление о функции в целом.
В конце каждой главы приведен список цитированной литера-
туры, при ссылках в данной главе номер главы не указывается. В
нумерации рисунков и уравнений перед порядковым номером
стоит номер главы; конструкторские каталоги нумеруются тремя
числами (номер главы, номер раздела, порядковый номер катало-
га), рисунки - двумя (номер главы и порядковый номер рисунка).
В заключение я хотел бы выразить особую благодарность
Урсуле Гент за безграничное терпение, проявленное ею в кропот-
ливой работе над рисунками для гл. 1-4, и канд. техн, наук Хайн-
цу Пилеру за эскизы для рисунков к гл. 5 и 6. Большую машинопис-
ную и другую техническую работу блестяще выполнили Рената
Метье, Мета Вальтер и Урсула Бойтнагель.
За ценные советы в области теории механизмов я благодарю
д-ров техн, наук профессоров Б. Дизиоглу и Г. Кипера, за физиче-
скую интерпретацию понятий „эффект”, „закон” и др. д-ра естеств.
наук проф. Г. Лаутца, за ссылки в разделе определений д-ра техн,
наук проф. X. В. Мюллера, а за содержание рис. 2.7 и 2.8 д-ра техн,
наук проф. И. Клекера. Моих прежних и теперешних научных
сотрудников, в особенности д-ра техн, наук Г. Дикженера, я благо-
дарю за многочисленные ценные предложения по составлению
конструкторских каталогов и полезные обсуждения; за советы и
просмотр корректуры - д-ров техн, наук У. Хаупта, X. Биркхофера,
Г. Якобса и инженеров Ф. Колленротта и X. Кехера.
Выражаю благодарность издательству „Шпрингер” за большое
терпение в совместной работе со мной, за понимание специфики
книги и за ее великолепное оформление; выражаю особую благо-
дарность моей жене, сердечное участие и поддержка которой
позволили мне вовремя закончить работу.
Надеюсь, что предлагаемое пособие окажется полезным кон-
структорам и тем, кто связан с конструированием по роду своей
деятельности, всем остальным она облегчит понимание современ-
ной проблематики конструирования.
Брауншвейг, осень 1981 г.
К. Рот
15
1. ВВЕДЕНИЕ
1.1. Цели книги
В последние годы потребности промышленно-
сти стимулируют интенсивное развитие теории
конструирования, т. е. учения о правилах и при-
емах конструирования с использованием система-
тизированных сведений о технических объектах
(базы данных технических решений) и различных
вспомогательных средств. Использование термина
методическое конструирование подчеркивает на-
личие определенной методики. Области приложе-
ния этой научной дисциплины постоянно расши-
ряются, и становится очевидной ее принципиаль-
ная полезность для решения практических задач
[18,19,15]. К сожалению, возможности применения
этой теории в повседневной конструкторской
работе до сих пор ограничены довольно тесными
рамками, поскольку в настоящее время у нас нет
ни достаточного многообразия отработанных ме-
тодов, алгоритмически применимых ко всему раз-
ветвленному множеству технических конструк-
ций, ни надежных знаний, систематизированных и
представленных в удобной форме.
Всевозможные же ограничения вообще, соглас-
но Палю и Байтцу [20],меняются от случая к слу-
чаю в зависимости от особенностей изготовления
и (функциональной) окрестности изделия. Это
затрудняет обобщение и приводит к тому, что ог-
раничения приходится вводить в диалоге с ЭВМ
каждый раз заново.
По всей вероятности, только вопросом времени
являются как поиск новых методов конструирова-
ния, оптимальных в конкретных областях, так и
анализ и систематизация знаний в области теории
аппаратов, машин и приборов с новой точки зре-
ния. Точно так же в недалеком будущем должны
появиться возможности обработки на ЭВМ соот-
ветствующим образом подготовленной конструк-
торской документации [12].
Нельзя, однако, не отметить, что даже для
тривиальных конструкций часто требуются обшир-
ные сведения об ограничениях, а также сведения
общего характера, которые накапливаются специ-
алистом лишь за долгие годы.
Главная задача этой книги - свести постоянно
применяемые конструктивные решения (детали и
узлы) и их варианты в обозримые таблицы специ-
ального вида - так называемые конструкторские
каталоги, упорядочить их с единой точки зрения и
снабдить конструктора удобными средствами
поиска решений в каталоге. Из-за обилия матери-
ала создание таких каталогов имеет смысл только
в том случае, если дополнительно будет выясне-
но, какая документация и для каких методов
действительно необходима, а сложные конструк-
тивные закономерности будут, по возможности,
разлагаться на простые и обозримые. В этой связи
в книге предлагается единый подход, который
наряду с использованием различных частных
приемов на отдельных этапах конструирования
предполагает систематическое применение конст-
рукторских каталогов.
Каталоги и табличные подборки, естественно,
вписываются в методику конструирования, изло-
женную в гл. 2, однако применение каталогов само
по себе отнюдь не предполагает использования
именно этой методики. Каталоги, составление
которых описано в гл. 3, можно применять незави-
симо, а в гл. 4 каждый из каталогов рассматрива-
ется отдельно. В описание каждого каталога
включено введение, поясняющее основные идеи,
примеры и соответствующий список принципов. В
гл. 5 предлагаются вспомогательные средства
методического конструирования по рабочему
плану.
В гл. 6, среди прочего, предложены совершенно
новые геометрические структурные элементы,
разработанные для компоновки из них схем на
экране дисплея с помощью светового пера. Однако
и не работающий с ЭВМ конструктор сможет уви-
деть с их помощью сочетание многих физических
функций в столь, казалось бы, простых элементах
механизмов, - а системотехник усмотрит в них
конструктивно реализуемую модель отношений
между механическими интенсивностными характери-
стиками, во многом аналогичную многополюсни-
кам в электротехнике.
Для лучшего понимания многочисленных
новых терминов в одном из разделов справочной
гл. 7 собраны точные формулировки примерно 475
определений.
1.2. Метод вариации эффектов при выявленных
частных функциях
Существует множество методов конструирования,
перечислять которые здесь мы не намерены.
Общим для многих из них, однако, является то,
что отправной точкой поиска служит выполня-
ющая нужную функцию известная конструкция,
обычно уже проверенная на практике. Так, часто
предполагается, что для движения вала или
ползуна необходимы подшипники качения или
скольжения с соответствующей смазкой. Если
первое предположение не изменяется (например,
по правилам теории конструирования) и целесооб-
разность его не вызывает сомнений, то часть
конструкции уже готова и, в сочетании с другими
решениями, заимствуемыми без изменений,
образует завершенную конструкцию.
Приведенные ниже примеры показывают, как
развитие этой идеи приводит к методу вариации
эффектов при выявленных частных функциях. Рог’
абстрагирования в этом методе подчеркнута в ра-
ботах Паля [17], Рота, Франке, Симонека [24] и
Штойера [26]. Пример двух вариантов конструкции
саморазгружающегося контейнеровоза иллюстри-
рует основные понятия, а пример конструкции
замка освещает некоторые тонкости и показывает,
что число практических конструктивных решений
может быть очень велико.
Важную роль в дальнейшем изложении играет
16
1. Введение
Рис. 1.1. Разложение общей задачи на частные на
примере задачи подъема контейнера на грузовой
автомобиль
понятие „ физический эффект”1 или просто „эф-
фект”, и поэтому здесь следует обсудить его связь
с такими понятиями, как „закон”, „положение”
и „правило”.
Прежде всего заметим, что хотя применение
рассматриваемых терминов к новым знаниям в
физике можно считать вполне устоявшимся, мно-
гие давно известные явления сохраняют свои
традиционные названия, порождая некоторый
разнобой в терминологии.
За исключением подобных случаев под „эф-
фектом” в физике понимают физическое событие
или течение физического процесса (например,
„эффект рычага” или.„эффект клина”).
Под „законом” или „закономерностью” в
физике понимают количественно выраженное
соотношение между физическими величинами,
при необходимости включающее в себя константы,
характеризующие свойства материала. В „законе”
может найти свое количественное выражение
„эффект” (например, в „законе рычага”- „эффект
рычага”). Различие между „законом” и „законо-
мерностью” довольно-таки субъективно и послед-
нее обычно отражает некоторое сомнение в обще-
значимости „закона”.
„Положение” можно довольно четко отграни-
чить от „закона”: „положение” - это некоторое
физическое высказывание, которое, по сути,
должно быть законом, в справедливости которого
исследователь убежден, но которое при этом не
может быть экспериментально доказано в полном
объеме или даже вообще в принципе (например,
второе и третье начала термодинамики).
У понятия „правило” в физике нет однознач-
ного употребления. Наряду с правилами, которые
по существу являются законами или эффектами,
можно найти немало примеров правил, которые
обобщают данные опыта и вполне допускают
исключения.
При использовании теории конструирования в
первую очередь ставится вопрос, существует ли
вообще физический процесс, который позволяет
реализовать в техническом изделии чисто фор-
мальное условие, содержащееся в постановке
задачи. При этом абсолютно безразлично, можно
ли назвать этот процесс „законом”, „положением”
или „эффектом”. В последующем изложении мы
будем поэтому всегда говорить об эффекте, не
1 Материал по соотношению понятий ,.эффект”, .закон”,
„положение” и ,.правило” любезно предоставлен мне д-ром
естеств. наук проф. Г. Лаутцем, зав. кафедрой электрофизики
Брауншвейгского технического университета, и в сокращенной
форме изложен здесь. — Прим. авт.
обращая внимания на то, окажется ли он общезна-
чимым законом или только положением.
Итак, пусть перед нами стоит задача: спроекти-
ровать устройство, устанавливаемое на грузовом
автомобиле, которое поднимало бы контейнер и
ставило бы его на грузовую платформу автомоби-
ля. Эта задача, связанная с целым рядом процес-
сов, называется общей задачей и разлагается на
более мелкие процессы - частные задачи (рис. 1.1).
Возможность более или менее подробного разло-
жения общей задачи на частные связана с правдо-
подобным предположением, что сложную общую
задачу можно свести к обозримому числу более
простых задач (ср. с методом структурных схем
[11] и системотехникой [2, 1, 4, 30]), для которых
уже имеются проверенные варианты решений. Эти
частные задачи в несколько измененном виде могут
быть „соединены” для выполнения общей задачи.
Таким образом, общая задача „создать устройство
для подъема контейнера” (см. рис. 1.1) сводится к
частным задачам: сконструировать устройство,
чтобы „прикрепить контейнер к грузоподъемни-
ку”, „подвести энергию”, „умножить силу”, „пере-
местить контейнер”, „отделить контейнер от
подъемного механизма”. Подобные задачи можно
выделить в случае многих других технических
изделий, и способы их решения нам известны.
Гораздо проще выделить частные задачи, если
решение общей задачи мы уже знаем (рис. 1.2), что
и используется в предлагаемом методе. Мы выде-
ляем, например, частную задачу „создать устрой-
ство для умножения силы ” и ищем технические
устройства, которые служат для этой цели. В
решении на рис. 1.2 - это гидравлический цилиндр,
реализующий эффект распространения давления в
жидкости (от входного поршня меньшей площади
к выходному поршню большей площади). Говоря
более абстрактно, назначение гидравлического
цилиндра состоит в умножении силы при передаче
энергии от входного поршня к выходному.
Рис. 1.2. Перенос контейнера на автомобиль (умножение силы с
помощью гидравлических цилиндров 1; эффект распростране-
ния давления в жидкости)
1.2. Метод вариации эффектов при выявленных частных функциях
17
Метод вариации эффектов при выявленных частных функциях (пример)
Переход
Рис. 13. Установление соответствия
между известной частной задачей и
выявленной в результате абстрагирова-
ния частной функцией. Альтернатив-
ные решения, возникающие при пе-
реходе к новым эффектам (см. кат.
4.4.2), и соответствующие детали или
узлы. Метод вариации эффектов при
выявленных частных функциях
Частная
задача
Частная
функция
(в форме
функцио-
нального
положения)
Эффекты
Детали, узлы
Исходное решение
Полученные альтернативные решения
Определить
частные функции,
выполняющие
частные задачи
Подобрать эф-
фекты , реализую -
щие частные
функции
Подходящие
детали и узлы
сопоставить с
эффектами
Функция, соответствующая частной задаче
„создать устройство для умножения силы” - это,
очевидно, „умножить силу” (рис. 1.3). Она являет-
ся частью общей функции, решает частную зада-
чу и называется поэтому частной функцией. Не-
трудно понять, какие другие эффекты, кроме
распространения давления в жидкости, позволяют
реализовать эту частную функцию. Ответ дает
рис. 1.3, который создан на основе систематизирован-
ной подборки решений - кат. (каталога) 4.4.2. Дру-
гие возможные эффекты: - разложение силы, сло-
жение сил, преобразование „сила - момент силы”.
Пока речь идет о механических системах, переда-
ющих энергию, этот перечень заведомо полон.
На следующем шаге от найденных эффектов
следует перейти к конструкциям, позволяющим
реализовать эти эффекты. Разложить силу на
малую входную и большую выходную составля-
ющие можно с помощью наклонной плоскости,
клина, рычага и т. п. В результате возникают
альтернативные решения, одно из которых, постро-
енное на использовании наклонной плоскости,
схематически изображено на рис. 1.4.
Примечательно, что описанный метод включал
в себя три перехода: от частной задачи к частной
функции, от частной функции к эффекту и от
Рис. 1.4. Втягивание контейнера на автомобиль (умножение си-
лы с помощью наклонной плоскости; эффект клина):
1 — механическая лебедка; 2 — наклонная плоскость
эффекта - к детали или узлу. Если для реализа-
ции эффекта было рассмотрено несколько возмож-
ностей, то для частной функции абстрагирование
на основе исходного примера дало лишь одну воз-
можность - „умножить силу”. Другая возможность,
основанная на частной функции „создать силу”
(кат. 4.4.1), в данном случае осталась вне нашего
поля зрения. На основе этой частной функции
можно было бы вывести целый ряд нетривиальных
решений, например катапультирование контейне-
ра с помощью механического или химического
накопителя энергии и т. п. Таким образом, метод
вариации эффектов при выявленных частных
функциях порождает целый ряд различных, но, в
каком-то смысле, однотипных решений (в рассмот-
ренном примере - на основе систем передачи энергии).
Общей задачей второго примера является
конструирование замка (запора, затвора, крепле-
ния, пробки, зажима и т. п.), т. е. приспособления, с
помощью которого посредством запирающего
движения можно соединять два узла или два
конца одной деформируемой детали, а посред-
ством отпирающего движения - разъединять.
1.2.1. Абстрагирование
Рассмотрим в качестве примера исходной
конструкции замок, изображенный на рис. 1.5.
Важнейшие частные задачи в этом случае можно
Рис. 1.5. Замок с защелкой в
качестве прототипа и исходного
решения для различных зам-
ков:
а, b ~ прямолинейные направля-
ющие; с ~ штифт; d — нажим-
ная кнопка; е — пружина; v —
запирающий элемент; Vj —
клин; v2 — зацепной выступ
2 — 2317
18
1. Введение
Выявление частных функций замка
Форм,
представления
1 Общая задача
Частные
задачи
Частные
функции
(в форме
функциона-
льного по-
ложения)
4 Эффекты
Основные
детали и узлы
g исходного
решения
Обычным
(неформаль -
ным) языком
с использова-
нием точных
формулиро-
вок и техни -
ческих тер -
минов
В физических,
логических
терминах либо
формулами
Закономер-
мости
Чертежи
важнейших
деталей и
узлов
2
3
Рис. 1.6. Выявление и абстрагирование наиболее важных частных функций для замка, исходя из известного решения (см. рис. 1.5) и из-
вестной частной задачи
сформулировать, наблюдая за медленным выпол-
нением процесса запирания и отпирания (рис. 1.6,
строка 2). Затем следует определить конструкции,
реализующие соответствующие частные функции, и
занести их в клетки строки 5. Теперь попытаемся
выяснить, с какими физическими или логически-
ми соотношениями между входными и выходными
величинами была связана каждая из частных
задач, а также какие общезначимые эффекты
(математические, логические, геометрические,
физические закономерности) сделали возможным
процесс отпирания и запирания, чтобы поместить
их в клетки строки 4. Входные и выходные величи-
ны определяют частные функции в строке 3. На
этом процесс поиска частных функций путем
абстрагирования закончен, и осуществляется
конкретизация от выявленной частной функции к
новым эффектам, т. е. вариация эффектов.
1.2.2. Конкретизация
Методика здесь точно такая же, как и в первом
примере (см. рис. 1.3). Детали, эффекты и частные
функции для исходного примера „замок” уже
описаны на рис. 1.6, откуда их следует теперь
перенести в соответствующие клеточки рис. 1.7.
Детали, пригодные для реализации эффектов,
обозначаются буквами в клеточках нижнего ряда.
При практическом конструировании следует
описать на рисунке частные функции и эффекты, а
от них перейти к деталям.
1.2.3. Морфологический ящик
Отыскивая альтернативное решение, как мы
видим, нет необходимости изменять все эффекты,
- часто достаточно варьировать только один из
них. Кроме того, не все эффекты или конструкции,
1.2. Метод вариации эффектов при выявленных частных функциях
19
\ Решение
Зшш-\
рающее \
движение "JJ7
Наименование
Рис. 1.7. Получение альтернативных ре-
шении общей задачи выполняемой
цепью частных функций, путем перехо-
да от одних и тех же пяти частных функ-
ций к различным эффектам и деталям:
Ш - частная функция 4; (4.11 -
частная функция 4, реализованная эф-
фектом 1; И (и другие буквы) — де-
таль е, необходимая для реализации
эффекта (номера эффектов взяты из
рис. 1.13)
Типичный пример
и
Чисто
штекерный
замок
ПЯЯП 5
Винтовой
замок
Накопи-
тель
энергии
2
1 2
Заря-
жается
Заря-
жается
Примеча-
ние
Раэра- Магинт-
жается ин*
замок
Эластич-
ное уплот-
нение
Упругая
деформа-
ция в
разъеме
Создать
открываю-
щуюсилу
42
(F)
Заря-
жается
43
а-крышка,
Ь-зацепная
головка
с-основа-
ние
/•'-накопи-
тель энер-
1гии
2
_______3
1 з
Рис. 1.8. Виды запирающих движений для различных замков
(штриховой стрелкой обозначена необходимая поступательная
компонента):
v - препятствующий самопроизвольному отпиранию, т. е. за-
пирающий элемент
Рис. 1.9. Зарядка и разрядка потенциального накопителя энер-
гии, обеспечивающего создание силы для различных частных
функций
реализующие их (носители эффектов [13]), совме-
стимы друг с другом. Поэтому целесообразно
представить их в форме морфологического ящика
[31], как на рис. 1.13, и осмысленные комбинации
обозначить числовыми индексами. Тем самым
частные функции 1-5 на рис. 1.6 реализуются эф-
фектами, указанными на рис. 1.13 в следующих
полях: 1.1-2.1-3.2-4.1-(5.1.1) 5.1.2 -(5.2.5) 5.2.1. Фик-
сация устроена здесь несимметрично и поэтому
требует более двух ссылок на поля рисунка. Ин-
дексы обеих последних групп, не заключенные в
скобки, относятся к запирающему движению,
а заключенные в скобки - к отпирающему. Теперь
с помощью введенных в рассмотрение эффектов и
частных решений в морфологическом ящике
(см. рис. 1.13) могут быть порождены многочислен-
ные альтернативные решения. Все совместимые
последовательности должны приводить к реше-
нию. Если, например, от частных функций 1-5 пе-
рейти к эффектам 1.2-2.1-3.5-4.1-5.1.2-(5.2.5) 5.2.1,
то получится замок типа „задвижка-штекер”,
подобный изображенному на рис. 1.14, пример 6;
если же осуществлять переход от эффектов
1.1-2.1-3.2-4.2-5.1.2-(5.2.5) 5.2.1. то получается ..за-
20
1. Введение
Способ создания силы,
препятствующей
самооткрыванию
Геометрическая связь
Силовая связь (нор- мальная) Сила упругости
Сила поля
Силовая (фрикцион- ная) связь Линейная сила трения
(тангенци- альная) Возрастаю- щая сила трения (за- клиниваю - щая связь)
Рис. 1.10. Создание силы, препятствующей самооткрыванию, с
помощью связей различных типов
Связь с
проме-
жутком
Сила
упругости
Сила поля
Связь с упором и
промежутком
Г еометрнческая
связь - упругая ] ]
связь
Упругая связь —
упругая связь
Полевая связь -
упругая связь *-’
Фрикционная
связь - упругая 1.4
связь_______________
Геометрическая . .
связь—попев, связь '
Упругая связь - _ -
полевая связь
Полевая связь — т п
полевая связь
Фрикционная связь т >
— полевая связь
Геометрическая _
связь — фрикцион- 3.1
ная связь____________
Сила Упругая и фрик- j 2
трения цнонная связь
Полевая и фрик- « -
цнонная связь
Фрикц. заклинив,
и фрикцион, связь 3.4
Решения при одинаковых
способах фиксации (примеры)
О 1
Комбинации (упор - промежуток)
Упор Упор
Промежуток
Рис. 1.11. Реализация двух устойчивых конечных положений с
помощью симметричных промежутков и упоров. Варианты ком-
бинаций упор —промежуток:
р — угол трения
Уплотнительные поверхности Запирающее 'ч Цилиндры, призмы, винтовые поверхности Конусы, шары, цилиндры Плоскости Конусы, шары, цилиндры Цилиндры, призмы, винтовые поверхности
движение N* 1 2 3 4 5
Нав- стречу ответ- ной по- верх* кости Вариан- ты 1.1 Ю 1.1.1 1 1 1.1.2 1.1.3 1.1.4 1.1.5
Вариан- ты 1.2 1Ь 1.2.1 |^j i 1.2.2 1.2.3 и 1.2.4 1.2.5
По ответной поверхности 2 2.1 2.2 2.3 2.4 2.5
Рис. 1.12. Уплотнительные поверхности затворов для жидкостей
Функцио-
нальная
структура
1
1
2
3
4
5
I
6
Функциональное положение для частной функции Различные эффекты и частные решения, реализующие частные функции Возмож- ное ре- шение
1. Вдвигать одну деталь в другую 1.1 Эффект направляющей: поступательное движение 1 1 1.2 Вращательное движение 1.3 Поступательное и вращательное движения 1.4 Поворотное двустороннее движение 1.5 Винтовое движение 1.6 Комбинированные движения 1.7 Рис. 1.8 (см. подпись)
2. Накопитель энергии зарядить, удерживать в заряженном состоянии, разрядить (вид энергии) 2.1 J Потенциальная энергия упругой деформации х. 2.2 Потенциальная энергия поля 2.3 Кинетическая энергия (сосредо- точенная сила) 2.4 Кинетическая энергия (сила поля) 2.5 Тепловая энергия 2.6 Электромагнитная энергия 2.7 Химическая энергия и тл. 2.8 Рис. 15, кат. 4.4.1
3. Умножить силу путем ее разложения (конструкция) 3-1 Без умножения 3.2 Клин 3.3 Поворотшй клин или винт 3.4 Рычаг 3.5 Шарнирный рычаг 3.6 Другие умножители силы 3.7 Кат. 4.4.2
4. Создать силу, препят - ствующую самооткры- ванию (тип связи) 4.1 Геометрическая связь 4.2 Упругая силовая связь 4.3 Полевая силовая связь 4.4 Фрикционная связь (трение скольжения) 4.5 Фрикционная заклинивающая связь (трение покоя) 4.6 Рис. 1.10, кат. 4.2.1
5. Создать два устойчивых конечных положения 5.1 Способ фик- сации в запер* том состоя " НИИ 5.1.1 Геометрическая связь 5.1.Г Упругая силовая связь 5.1.3 Полевая силовая связь 5.1.4 Фрикционная связь (трение скольжения) 5:1.5 Фрикционная заклиниваю- щая связь (трение покоя) 5.6 Рис. 1.11
5.2 Способ фик- сации в отпер- том состоя- нии 5.2.1 Геометрическая связь 5.2.2 Упругая силовая связь 5.2.3 Полевая силовая связь 5.2.4 Фрикционная заклинивающая связь (трение покоя) 5.2.5 Отсутствие связи
6. Уплотнить запираемый объем (уплотнительные поверхности) 6.1 ^Соосные цилиндрические поверхности 6.2 Соосные конические поверхности 6.3 Плоские поверхности 6.4 Соосные винтовые поверхности 6.5 Соосные шаровые поверхности 6.6 Комбинированные поверхности, соприкасающиеся по линиям 6.7 Рис. 1.12
7 Создать уплотняющую силу 7.1 Различные заряжаемые накопители энергии. Вид силы: Сила упругости 7.2 Сила тяжесть 7.3 Магнитная сила 7.4 Электрическая сила 7.5 Сила инерции 7.6 Молекулярная сила 7.7 Кат. 4.4.1
Рис. 1.13. Морфологический ящик для синтеза запоров для твердых тел и жидкостей
1.2. Метод вариации эффектов при частных функциях
22
1. Введение
Замки для твердых тел
Затворы для жидкостей
Реализация частных фун- кций (1W полей по рис. 1.13) Пример Реализация частных фун- кций (N*N* полей по рис. 1.13) Пример
Эскиз Название № Эскиз Название №
Фрик-
ционная
затычка
(пробка)
1.1-2,1-3.2-
4.1-5.1.2
-15.2.5)5.2.1
Штекер- ный за - мок с 1.1-2.1-3.2 4.5-5.1.4 - 15.2.5)5.2.5- 5.1-7.1
защел- кой 1 1.1-2.1- 3.4 (3.3)- 4.5
Для рычага
5.1.2-5.2.1-
1.1-2.1-3.2-
4.2-5.1.2-
-15.2.5)5.2.1
1.1-2.1-3.2-
4.5-5.1.4-
-15.2.515.2.1
1.1 -2.1-3.2-
4.2-5.1.4-
-15.2.5)5.2.1
1.2-2.1-3.3
- 4.1 -5.1.2-
15.2:5)5.2.1
Замок "Зашел - ка-ште - кер" (одежная кнопка) 2 -6.1-7.1
1.1-2.1 - 3.3-4.5-
Для винта 5.1.4- 5.2.1(5.2.51-
Фрик - ииоияый штекер - ный замок (электри- ческий штекер) 3
6.1-7.1
1.1-2.1-3.4 (3.3)- 4.1-
Для рычага 5.1.4-15.2.5)5.2.1
Сдвиж- ной ште- керный замок 4
-6.1-7.1
1.1-2.1 - 3.2 -4.5- 5.1.4 - 15.2.5)5.2.2
Замок с зашел - кой 5
1.5-2.1-3.3 - 4.5-5.1.4- (5.2.5) 5.2.2- 6. 3-7.1
Рычажная
затычка
Винтовая
затычка
1.2- 2.1-3.5
-4.1-5.1.2 -
15.2.5)5.2.1
Замок
"задвиж-
ка-ште-
кер"
(пате- 6
фониый)
1.1 - 2.1-3.2-
4.2 - 5.1.2 -
15.2.5)5.2.1-
5.3 -7.1
1.1-2.1-3.2
4.5-5.1.4- i
15.2.5)5.2.1-1
6 1-7.1
Рычажная крышка 10
Клиновая крышка 11
Винтовая крышка 12
Крышка- защелка 13
Фрик- ционная ) Крышка j 14
Рис. 1.14. Детальные исполнения замков и способы реализации их частных функций
1.2. Метод вариации эффектов при частных функциях
23
щелка-штекер”, подобная изображенной на
рис. 1.14, пример 2. Систематическую разработку
для решений, относящихся к отдельным частным
функциям, содержат рис. 1.8-1.11.
Некоторые функционально различные реше-
ния, которые могут быть найдены, например, с
помощью морфологического ящика, представлены
на рис. 1.14, слева. Если пополнить список общих и
частных задач рис. 1.6 частными задачами 6 (со-
здать уплотнение запираемого объема) и 7 (преду-
смотреть приспособление для создания уплотня-
ющей силы), то этот метод может быть распростра-
нен на пробки для сосудов с жидкостями (затворы
для жидкости). Реализацию частной функции 6
находим на рис. 1.12,’ а эффекты для частной
функции^ 7 - в конструкторском каталоге 4.4.1
(создать силу с помощью других величин). Пробки
для бутылок воспроизведены на рис. 1.14, примеры
7-14.
При работе с морфологическим ящиком следу-
ет обратить внимание на следующее: на рис. 1.13,
слева от ящика, находятся блоки, соединенные
стрелками (направление потока) в цепочку, с
номерами отдельных частных функций. Перед
нами возникает функциональная структура в ее
простейшей форме, а именно: „цепь”.
Итак, использование морфологического ящика
расширяет возможности метода вариации эффек-
тов при выявленных частных функциях на этапе
конкретизации. Он позволяет составлять новые
решения путем сочетания совместимых эффектов,
в данном, случае - соединяя соответствующие
клетки ящика (см. рис. 1.13). Однако, поскольку
метод морфологического ящика соответствует
формализации довольно высокого уровня, следует
постоянно держать в памяти условия корректной
применимости этого метода, а именно:
частные функции должны быть в основном
независимы друг от друга;
Рис. 1.15. Вариация исходно-
го замка путем изменения
деталей: деталь е из рис. 15
изменена
Рис. 1.16. Вариация исходно-
го замка путем разделения
деталей: деталь d из рис. 15
заменена на детали d^ и d2,
что ‘ означает разделение
функций исходной детали
Рис. 1.17. Вариация исходного замка уменьшением числа дета-
лей детали: детали d и v из рис. 15 заменены на одну деталь, то
хе- для деталей с, е, ▼, что означает интеграцию в одной дета-
ли функций нескольких прежних деталей
Рис. 1.18. Вариация исходного замка (рис. 15) со значительной
интеграцией функций за счет уменьшения числа деталей и пе-
рехода к полимерным материалам:
а — замок из двух деталей; б — замок из гибкой упругой детали
(хомутик); в — замок из одной детали с пластмассовой пружиной
(зажим для кабеля)
эффекты соединенных частных функций
должны быть совместимы (см. также [14] и [3]);
ветвь частных функций, рассматриваемая при
анализе функциональной структуры, должна быть
цепью (т. е. не должна иметь разветвлений).
Переход к деталям и узлам. Если применять к
нашей задаче о замке (рис. 1.5) метод вариации
эффектов при выявленных частных функциях на
более высоком уровне конкретизации, то останет-
ся только возможность варьировать детали a-v: мо-
дифицировать их, разделять некоторые из них на
несколько деталей или, наоборот, несколько дета-
лей заменять одной, а также сопоставлять их с
другими функциями (см. гл. 5), что, впрочем,
сводится к тем же действиям. В самом деле, при
реализации частных функций посредством опреде-
ленного эффекта не разрешается ничего изме-
нять, кроме формы деталей или их комбинации.
Хотя множество возможных вариантов все еще
остается очень большим, в нем, тем не менее, от-
четливо выделяется один ограничительный функ-
циональный принцип - принцип исходного реше-
ния. На рис. 1.15 представлен пример варьирова-
ния элементарной конструкции е, на рис. 1.16 -
увеличение числа деталей до семи, а на рис. 1.17 и
1.18 - превращение группы из четырех деталей в
группу из двух деталей и даже в одну деталь. Если
устройство состоит из одной детали, то оно должно
быть упругим или содержать встроенную пружину.
Хорошие замки этого типа получаются из пласт-
масс: на рис. 1.18 изображены штекерный замок
(а), хомутик (б) и зажим с защелкой (в).
Итак, если ранее мы ставили своей целью пере-
ход от Частных функций к определенным эффек-
там, то на данном этапе конструирования центр
тяжести переносится на переход от выбранных
эффектов к деталям и их комбинациям. Этот
переход является важнейшей частью конструктор-
24
1. Введение
ской работы. Ясно также, что альтернативные
решения при вариации элементарных конструкций
оказываются гораздо более похожими одно на
другое, чем при вариации эффектов (ср. рис. 1.14 и
рис. 1.15-1.18).
1.3. Подборки решений и конструкторские
каталоги для методического конструирования
На двух приведенных выше примерах было
показано, как, следуя методу вариации эффектов
при известных частных функциях, можно быстро
получить целый ряд различных вариантов реше-
ния. При этом конструктор, не привыкший мыс-
лить в категориях методического конструирова-
ния, сразу же столкнется с двумя трудностями:
выявление частных функций, т. е. абстрагиро-
вание и декомпозиция исходного устройства на
детали и соответствующие им эффекты;
переход от полученных абстрагированием
частных функций к достаточно большому числу
новых эффектов.
Чтобы научиться решать первую из указанных
проблем, следует постоянно анализировать суще-
ствующие конструкции в терминах теории констру-
ирования, например: „подвести (или передать,
умножить, направить) силу” и т. п. Переход от
выявленных (с помощью абстрагирования) част-
ных функций к эффектам и к их реализации
деталями изделия облегчают подборки решений.
При этом очень хотелось бы получить конечный
список возможных частных функций, отвечающих
различным частным задачам, а также организо-
вать в виде подборок решений необходимые эф-
фекты и их возможные реализации на уровне
деталей. К сожалению, это невыполнимо из-за,
поистине, необъятного числа имеющихся задач и
их решений. В этой связи в гл. 3 представлена
классификация, а в гл. 4 - собрание так называ-
емых конструкторских каталогов, содержащее как
чистые подборки решений, так и подборки конст-
руктивных элементов, дающие требуемые реше-
ния в результате варьирования и комбинирования
по определенным правилам. Значение таких
каталогов постоянно возрастает, однако составле-
ние их требует значительных затрат, поэтому
следует стремиться наполнять конструкторские
каталоги фундаментальными техническими
сведениями, полезными для решения самых
разнообразных задач, и с помощью соответству-
ющих правил варьирования получать целесообраз-
ные модификации существующих решений.
В описанных выше примерах мы уже столкну-
лись с принципиальными трудностями поиска
новых решений. Несмотря на это, до сих пор мы
стремились обойтись минимальным числом поня-
тий теории методического конструирования.
Предложенный для этого метод прост и надежен,
однако он редко позволяет найти качественно
новые решения. В этой связи целесообразно дей-
ствовать по всеобъемлющей методике конструиро-
вания [1,8-10, 13, 16, 20-23, 28], которая, в частно-
сти, предоставляет принципы создания рациональ-
но и целенаправленно организованной системы
конструкторских каталогов.
1.4. Рациональная работа с морфологическим
ящиком
Метод морфологического ящика широко
распространен и может быть применен на разных
стадиях конструирования, поэтому при его состав-
лении важно действовать рационально, экономя
время и силы. Наличие различных вариантов
применения морфологического ящика видно уже
из того, что вместо частных функций в заголовоч-
ном столбце (см. рис. 1.13) можно поместить част-
ные задачи, а вместо эффектов на полях рисунка -
известные или взятые из каталога частные реше-
ния. Общий принцип состоит в том, чтобы связать
содержимое поля одной строки с содержимым
поля следующей строки, причем, если для каждой
частной функции указать различные эффекты, то
образуются всевозможные комбинации цепочек
эффектов, а если указать частные решения, то
можно определить все наборы частных решений,
позволяющие получить общее решение.
При этом очень скоро возникает „проблема
больших чисел”: если бы на рис. 1.13 все эффекты
каждой строки были бы совместимы со всеми эф-
фектами следующей строки, то получилось бы
Nx = 6- 6*6-5-5-5-6-6 = 65-53 = 972 000 возможных
цепочек эффектов.
Чтобы выбрать подходящую цепочку из множе-
ства возможных с меньшими затратами, последу-
ем предложению Биркхофера [3], проиллюстриро-
ванному на рис. 1.19 четырьмя примерами, где
к,,..., кх—число клеток (эффектов, частных реше-
ний и т. п.) соответственно в строке I , ... , х (х-чис-
ло строк, т. е. частных задач, частных функций
и т. п.); - общее число клеток в ящике; N2,
..., Nn , ... - число образуемых из них цепочек
длины 2, 3,..., п,....
Затраты на получение этих цепочек и провер-
ку их на совместимость при фиксированном числе
общих решений Nx (на рис. 1.19 Nx * 81) зависят в
основном от Ni и N2 .
На рис. 1.19 для различных морфологических
ящиков (помещенных в левом верхнем углу)
схематически воспроизведены деревья решений
для всевозможных цепочек. В общем случае число
полных цепочек
^х = Мп* ..../сх. (1.1)
В случае kY = кп = ... = кх = к равенство (1.1)
упрощается:
Nx = к- . (1.2)
В этом случае общее число клеток, а также их ком-
бинаций по 2 и по п , т. е. число цепочек соответст-
вующей длины1:
Ni=/cx; (1.3)
^2 = ^(х); (1.4)
2
= кп (х). (1.5)
п
Как было указано выше, основные затраты при-
зе (х — 1) •... • (х—п +1)
---------;---------— число сочетаний из х эле-
п!
ментов по п. В отечественной литературе используется также
обозначение С^.— Прим. пер.
1.4. Рациональная работа с морфологическим ящиком
25
Рис. 1.19. Выбор наилучшего распределения частных решений или эффектов в морфологических ящиках и рабочих планах:
Nx - число всех общих решений при х строках; к^ - число частных решений в строке I;... кх - число частных решений в строке х; х —
число строк для частных задач, частных функций и т. д.; Nj — общее число частных решений; N2 — число пар частных решений (проверок
на совместимость); Nn — число комбинаций по п частных решений; п — число решений, входящих в комбинацию (цепочку) для fcj = кц =
= .,.=кх = к имеем Nn = к(^) и$?х = кх
1 1.1 1.2 1.3 1.4 1.5 1.5 1.7 1.8 1.9
п 2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9
I 1.1 11.2 | 1.3 11.4 {1.5
П 2.1 2.2 2.3 2.4
Ш 3.1 3.2 3.3 3.4
I 1.1 1.2
I 2.1 2.2
.1 11 3.2
И 4.1 4.2
I 5.1 5.2
26
1. Введение
ходится на поиск частных решений и на про-
верку каждой из Ni паР этих решений на совме-
стимость. Теперь несложно вычислить оптималь-
ные значения к и х при заданном Nx, т. е. такие,
при которых величины Nj и N2 достигают мини-
мума.
Для нахождения минимального числа Nx част-
ных решений имеем:
fciopt”6; <L6)
xlopt=lnNx; (I-7)
^Imin ~ & ^lopt • (1*®)
Для нахождения минимального числа N2 ПР0'
верок на совместимость имеем:
^2oPt = e°; (1-9)
x2opt= lnNx/а; (1.10)
N2min=e2^2opt(x2opt-l)/2, (1.11)
где
а = 0,5 [ In Nx + 0,5 -
- /(In Nx + 0,5)* - 4 In Nx ]. (1.12)
Таким образом, если требуется обойтись мини-
мальным общим числом клеток (частных реше-
ний, эффектов и т. д.) всего морфологического
ящика, то в каждой строке должно быть только
кг = к = е % 3 клетки, и число строк хх должно быть
равно натуральному логарифму числа Nx общих ре-
шений (Xj = In Nx ).
Для достижения минимального числа прове-
рок на попарную совместимость, необходимых для
построения цепочек решений, следует использо-
вать формулы (1.9) - (1.11). Числа строк и столбцов
для обоих случаев очень мало отличаются одно от
другого при обычно встречающихся числах
Nx общих решений (рис. 1.20), поэтому всегда
можно достичь компромисса, тем более что эти
числа округляются до целых.
Примеры, представленные на рис. 1.19 под-
тверждают наши выводы. Пример 1 представляет
собой схематическое изображение морфологиче-
ского ящика, содержащего всего две строки (част-
ные задачи, частные функции) и девять столб-
цов (клеток в строке). Множество возможных цепо-
чек наглядно представлено деревом решений
(Nx = 81). Показатели затрат: = 18 частных ре-
шений и N2 = 81 проверка на попарную совмести-
мость. В примере 2 число клеток для каждой
строки уменьшено и не во всех строках одно и то
же. При почти том же числе М2 = 80 общих реше-
ний получаются Ni = 13 частных решений и N2 =56
проверок на попарную совместимость. Наиболее
удачно распределение в примере 3, где Nx = 81,N1 =
= 12, N2 = 54. Эти значения ближе всего к опти-
мальным (см. рис. 1.20, столбец 2). Несколько ме-
нее удачен пример 4.
Мы видим, что нет необходимости и далеко не
всегда целесообразно подразделять все строки на
одно и то же число клеток (частных решений), но
чтобы минимизировать затраты труда, следует
выбирать это число возможно ближе к оптималь-
ному.
На вопрос, для какой частной задачи или
частной функции (т. е. строки) следует предусмот-
реть больше всего частных решений, отвечает
Франке [7]. Чтобы иметь наибольшую вероятность
найти оптимальное общее решение, следует
предусмотреть больше всего решений для той
частной задачи или частной функции, для которой
критерии выбора или исключения наиболее неоп-
ределенны и ненадежны. При образовании вариан-
тов по рабочему плану (см., например, рис. 2.18)
таковыми являются варианты, полученные в
верхней, абстрактной, фазе, поскольку для них
критерии выбора в списке требований позволяют
находить оптимальное частное решение с мень-
шей надежностью, чем в следующей, конкретной,
фазе.
Часпше решетя X. Общие х^решеяш ОптимиХ. «mvMbtaa X Nx“404 lnNx>6.001. Nx«81 lnNx> 4,3944 Nx-55 InNx» 4,007
веййчина N* 1 2 3
Отдельные решения ki 1 e-2,718 1.Z e-2,72 1.3 e-2,72
Xi 2 Z.1 6,00 Z.Z 4,39 2.3 4,01
Ni 3 3.1 16,31 3.Z 11,95 3.3 10,89
Попарные комбина- ции kz 4 4.1 3,05 4.Z 3,27 4.3 3,61
Xz 5 5.1 5,39 5.Z 3,71 5.3 3,29
Nz 6 6.1 109,68 6.Z 53,72 6.3 43,05
Рис. 1.20. Оптимальные значения для числа столбцов к и числа
строк х морфологического ящика (строки 1—3 соответствуют оп-
тимальному значению Nj числа частных решений, а строки
4 — б — оптимальному значению N2 числа проверок на попарную
совместимость)
1.5. Список литературы
1. Beitz, W.: Systemtechnik in der Konstruktion. DIN-Mit-
teilungen 49 (1970) 29J 302.
2. Beitz, W.: Systemtechnik im Ingenieurbereich. VDI-Be-
richte Nr. 174. Dusseldorf: VDI-Verlag 1971.
3. Birkhofer, H.: Analyse und Synthese der Funktionen
technischer Produkte. Diss. TU Braunschweig 1980.
4. Biichel, A.: Systems Engineering. Industrielle Organisa-
tion 38 (1969) 373-385.
5. Diekhoner, G.: Erstellen und Anwenden von Konstruk-
tionskatalogen im Rahmen des methodischen Konstruie-
rens. Diss. TU Braunschweig 198.0.
6. Diekhoner, G.; Lohkamp, F.: Objektkataloge - Hilfsmit-
tel beim methodischen Konstruieren. Konstruktion 28
(1976) 359-364.
7. Franke, H.-J.: Untersuchungen zur Algorithmisierbarkeit
des KonstruktionsprozCsses. Diss. TU Braunschweig
1976.
8. Hansen, F.: Konstruktionswissenschaft - Grundlagen
und Methoden. Miinchen, Wien: Hanser 1974.
9. Hubka, V.: Theorie der Konstruktionsprozesse. Berlin,
Heidelberg, New York: Springer 1976.
10. Kesselring, F.; Arn, E.: Methodisches Planen, Entwickeln
und Gestalten technischer Produkte. Konstruktion 23
(1971) 212-218.
11. Klaus, G.: Worterbuch der Kybernetik. Berlin: Dietz
1968.
1.5. Список литературы
27
11 Koller, R.: Kann der Kon^ruktionsprozeB in Algorith-
men gefaBt und dem Rechner iibertragen werden. VD1-
Berichte Nr. 219. Dusseldorf: VDI-Verlag 1974.
11 Koller, R.: Konstruktionsmethode fur den Maschinen-,
Gerite- und Apparatebau. Berlin, Heidelberg, New York:
Springer 1976.
II. Krumhauer, P.: Rechnerunterstiitzung fur die Konzcpt-
phase der Konstruktion. Diss. TU Berlin 1974.
15. NN: Rationalisieren dutch Methodik. Produktion (1977)
31-35.
16. Pahl, G.: Die Arbeitsschritte beim Konstruieren. Kon-
struktion 24 (1972) 149-153.
17. Pahl, G.: Analyse und Abstraktion des Problems, Aufstel-
len von Funktionsstrukturen. Konstruktion 24 (1972)
235-240.
18. Pahl, G.: Methodisches Konstruieren. VDI-Berichte Nr.
219. Dusseldorf: VDI-Verlag 1974.
19. Pahl, G.: ROckblick zur Reihe „Fur die Konstruktions-
praxis". Konstruktion 26 (1974) 491-495.
20. Pahl, G.; Beitz, W.: Konstruktionslehre. Berlin, Heidel-
berg, New York: Springer 1977.
21. Rodenacker, W.G.: Methodisches Konstruieren. Kon-
struktionsbucher Bd. 27. Berlin,'Heidelberg, New York :
Springer 1970, 2. Aufl. 1976.
21 Roth, K.: Aufbau und Handhabung von Konstruktions-
katalogen. VDI-Berichte Nr. 219. Dusseldorf: VDI-Ver-
lag 1975.
22 .1 Roth, K.: Grundlagen methodischen Vorgehens beim
Konstruieren. VDI-Z 121 (1979) 989-997.
23. Roth, K.; Franke, H.-J.; Simonek, R.: Algorithmisches
Auswahlverfahren zur Konstruktion mit Katalogen. Fein-
werktechnik 75 (1971) 337-345.
24. Roth, K.; Franke, H.-J.; Simonek, R.: Die Allgemeine
Funktionsstruktur, ein wesentliches Hilfsmittel zum me-
thodischen Konstruieren. Konstruktion 24 (1972) 277-
282.
25. Roth, K.; Franke, H.-J.; Simonek, R.: Aufbau und Ver-
wendung von Katalogen fiir das methodische Konstruie-
ren. Konstruktion 24 (1972) 449-458.
26. Steuer, K.: Theorie des Konstruierens in der Ingenieur-
ausbildung. Leipzig: VEB Fachbuchverlag 1968.
27. VDI-Fachgruppe Konstruktion (ADKI): EngpaB Kon-
struktion. Konstruktion 19 (1967) 192-195.
28. VDI-Richtlinie 2222 Blatt 1: Konzipieren technischer
Produkte. Dusseldorf: VDI-Verlag 1973.
29. VDI-Richtlinie 2222 Blatt 2 (Entwurf): Erstellung und
Anwendung von Konstruktionskatalogen. Dusseldorf:
VDI-Verlag 1977.
30. Zangemeister, C.: Zur Charakteristik der Systemtechnik.
TU Berlin: Aufbauseminar Systemtechnik 1969.
31. Zwicky, F.: Entdecken, Erfinden, Forschen im Morpho-
logischen Weltbild. Munchen, Zurich: Droemer-Knaur
1966/1971.
28
2. ОБЩИЕ ПРИНЦИПЫ ТЕОРИИ КОНСТРУИРОВАНИЯ
Выше, при обсуждении различных конструк-
ций замка, говорилось о функциях устройства,
требуемых при постановке задачи, но ничего не
было сказано о субстанциях, связанных с выпол-
нением этих функций. Было бы желательно опре-
делить минимальный набор таких субстанций,
достаточный для описания работы всех аппаратов,
машин и приборов. Исследование потоков этих
субстанций и работы с ними на различных этапах
конструирования - вот что стало бы тогда главной
задачей теории конструирования.
2.1. Абстрактные величины теории
конструирования
Из истории технической эволюции мы знаем,
что освоение некоторых субстанций приводило к
скачкам в развитии техники, т. е. к техническим
революциям. Действительно, всякий раз, когда
техника овладевала'веществом, энергией или инфор-
мацией на новом уровне, происходило скачкооб-
разное увеличение ее эффективности - появля-
лась возможность переложить на машины те виды
деятельности, которыми прежде вынужден был
заниматься человек (рис. 2.1). Сначала человек
заменил свою руку, используемую как инструмент,
на деревянный или каменный клин (рис. 2.2 [16]), а
затем - руку или все свое тело в той же роли - на
техническое устройство (рис. 2.3 [62]). Однако еще
долго единственным источником энергии остава-
лась мышца человека или животного, пока, нако-
нец, не стало возможным использование кинети-
ческой энергии воды (рис. 2.4 [1]) и ветра. Изобрете-
ние же паровых машин (рис. 2.5 [32]) впервые дало
возможность в любое время и в любом месте иметь
в распоряжении кинетическую энергию, не исполь-
зуя работу мышц.
Освоение техникой третьей субстанции -
информации - началось с использования перфо-
карт для получения на ткацком станке узора по
образцу [32] (рис. 2.6). Этот шаг - начало автомати-
зации - повлек за собой сегодняшнее бурное раз-
витие техники, для которого характерно примене-
ние логических управляющих устройств, в том
числе и программируемых. Однако и сегодня во
многих сферах деятельности, например в спорте,
используются технические устройства всех указан-
ных уровней (рис. 2.7).
Можно предположить, что все мыслимые
Вещество Энергия Информация Исторические периоды С качкооиразный прогресс
Инструмент Устройство из окружаю- щей среды произведенная Управление, регулирование Логические решения
Рука Живой организм Огонь, набухающее дерево Мышца Биологические органы для управления и регулирования Биологические органы для принятия логических решений Австралопитек 4 млн. лет назад
Дерево, камень Доисторичес - кий период 800 9 тыс. лет назад
Медь, бронза, железо Рычаг, клин, винт Первые цивилизации 8 тыс. лет наза£1 ф Механичес- кие устрой ства
Простые элементы механизмов Течение воды, ветер Древний мир. средневековье (Леонардо да Винчи) 4 тыс. лет назад
Сложные элементы механизмов Тепловые машины 18. XYII1 век 200 лет назад Энергети - чески е устройства
Овладение свойствами материалов Синтетические материалы Машинное производство Механические транспортные средства • Электричес - кие машины Центробежный регулятор 19 _ XIX век 100 лет назад
Атомная энергия Управляющие и регулирую- щие устройства Устройства обработки данных, ЭВМ 20. XX век 40 лет назад Кибернети- ческие устройства
Рис. 2.1. Три технические революции [(1) — (3)] как следствия технологического покорения человеком вещества, энергии и информации
2.1. Абстрактные величины теории конструирования
29
Рис. 23. Использование тепловой энергии водяного пара: паро-
вая машина Уатта, 1765 г.
Рис. 2.2. Использование
вещества (материала) в
инструментах: папуас из-
готовляет технически
продуманный каменный
топор
Рис. 23. Использование вещества (материала) в технических уст-
ройствах: винтовая поверхность в устройстве для перекачива-
ния воды из реки (Египет, 200 лет до н. э.)
Рис. 2.6. Кодирование и запоми-
нание информации, постоянно
требующейся в технологиче-
ском процессе: первое использо-
вание перфокарты Бюшоном
для получения на ткацком
станке узора по образцу, 1725 г.
Рис. 2.4. Использование кинетической энергии воды: водяная
мельница с водяным колесом и цевочной зубчатой передачей,
приводящими в движение жернова (Европа, ХУШ век)
категории машинных систем возникли в результа-
те попыток освободить человека от работы с веще-
ством, энергией и информацией и переложить эти
функции на технические устройства. Иначе гово-
ря, машина (под которой понимается также аппа-
рат и прибор) - это техническое устройство, в
котором вещество, энергия и сообщения (или
информация) хранятся, передаются, преобразовы-
ваются или комбинируются.
Такой подход дает нам возможность не только
единообразно описывать: различные технические
устройства от телевизора до автомобиля и от
технологической установки до фотоаппарата, но и
рассматривать как машину даже самого человека.
Так, взаимодействие трех субстанций в одном
процессе показано на примере заготовки дров (рис.
2.8-1). Здесь видны три хорошо согласованных
потока: поток энергии от мышц к инструменту при
взмахах топором и, наконец, поток сообщений,
управляющий движениями рук. Для работы необ-
ходима система инструментов и приспособлений,
система обеспечения энергией, а также система
обработки сообщений. На рис. 2.8-2 описанный
процесс изображен символически, а также приве-
дена его возможная функциональная структура
(так называемая абстрактная функциональная
структура, см. гл. 5). Такая функциональная струк-
тура могла бы служить отправной точкой при кон-
струировании деревообрабатывающей машины.
В связи со сказанным интересно отметить, что
30
2. Общие принципы теории конструирования
Абстрактная х. величина Технические^, средства Вещество Энергия Информация
Инструмент Устройство Природная j Произведенная Управление, регулирование | Логический г г ; анализ
Отсутствуют 1 1 1 1 1 I 1 1 1 1 1 1
Ласты 1 1 1 1 i । ।
Гребная лодка О А 1 1 м \| i i i
Парусная лодка ° ° /| 1 i i i i i
Моторная лодка ° о О 1 1 1 । i i У । I |
Катер с автопилотом 0 ° О । । 1 ° 1 1 i 1 i
Рис. 2.7. Использование различных технических средств для преодоления водной преграды: последовательное освобождение человека
от выполнения материальных, энергетических и информационных (управляющих) функций и перенос их на аппараты, машины и
приборы (ср. с рис. 2.1)
Рис. 2.8. Представление машинной системы для изготовления дров
Рис. 2.8-1. Неолитический человек за заготовкой дров (полная „машинная система** с потоками вещества, энергии и сообщений)
Рис. 2.8-2. Функциональная схема машинной системы „машина для изготовления дров” (символическое изображение потоков вещества,
энергии и сообщений, их накопления, передачи, преобразования и комбинирования, см. также рис. 5.19 и 5.20)
фон Вайцзаккер [71], рассматривая понятия мате-
рии, энергии и информации с позиций философии
естествознания, считает их понятиями одного
рода, хотя, в то время как родство материи и энер-
гии сегодня не вызывает сомнений, информация,
казалось бы, должна относиться к другим катего-
риям. На самом деле, по фон Вайцзаккеру, как
материя не существует без энергии, точно так же
она немыслима и без информации (т. е. формы).
Так, например, понятие энтропии, которое вводит*
ся как в термодинамике (по Больцману), так и в
теории информации (по Шеннону), указывает н&
близость тех свойств энергии и информации,
которые связаны с вероятностью того или иного
2.2. Рабочий план для методического конструирования
31
Двигатель
Критерии:
количественный
Производительность
число деталей
~ время
Мощность
работа
“время
качественный
Относительная _ Т
точность ” ы
Ретранс-
лятор
гп гл г - Неискаженный
Частота
число знаков
время
р
КПД -- Уровень искажений = ^-Тп)*(ДТт)
Qs
Рис. 2.9. Сопоставление важнейших техни-
ческих критериев оценки машин для
работы с веществом, энергией и сообщени-
ями (аппаратов, машин и приборов):
ag — наименьшая продолжительность
импульса; N — номинальный размер; Р —
мощность; Т — допуск; Д Т — наибольшее
изменение продолжительности импульса
события или состояния и в обоих случаях описы-
вают необратимые процессы.
С помощью трех абстракций - „вещество”,
„энергия” и „информация” - и строится вся теория
конструирования [49, 53, 54, 55]. В этой книге соот-
ветствующие субстанции называются абстрактны-
ми величинами теории конструирования.
Теперь мы можем разделить все многообразие
технических устройств на классы. Для этого следу-
ет рассмотреть характер функции, наиболее важ-
ной для данного технического устройства, т. е.
главной функции. Так, для технологического
аппарата, станка или транспортного средства глав-
ная функция окажется материальной, для двига-
теля или электрической батареи - энергетической,
а для системы автоматического регулирования,
телевизора или устройства обработки данных -
информационной.
Для главной функции всегда можно задать
количественный и качественный критерии оценки
[53]. В случае „машин для работы с веществом” (ап-
паратов) количественным критерием может быть
отношение числа условных изделий к массе аппа-
рата при условии выдерживания соответствующих
допусков (если речь шла об обработке) или невре-
димости (при транспортировке) - качественный
критерий; в случае „машин для работы с энергией”
(машин) это - отношение работы в единицу време-
ни к массе (или объему) и коэффициент полезного
действия; а в случае „машин для обработки сооб-
щений” (приборов) - это отношение числа знаков
(бит) в единицу времени к массе (или объему) и
уровень искажений (рис. 2.9). При оценке техниче-
ского изделия следует в первую очередь прини-
мать во внимание критерии оценки для главной
функции, и только если они удовлетворяются,
рассматривать другие, побочные, функции. Вряд
ли стоило бы, например, оценивать телевизор в
первую очередь по его КПД, а двигатель - по расхо-
ду охлаждающей жидкости.
Заметим, что работа любой машинной системы
связана с изменением, по меньшей мере, двух (а
чаще и всех трех) абстрактных величин. Это еще
один аргумент в пользу того, чтобы положить в
основу методики конструирования целенаправ-
ленное изменение и комбинирование этих вели-
чин.
Методика конструирования включает в себя, с
одной стороны, общий план действий, а с другой, -
более или менее абстрактные элементы, которые
используются в отдельных фазах этого плана, а
также правила их композиции (операции). Эле-
менты и правила их композиции будут подробно
рассмотрены в гл. 5. Сейчас для нас важно сформу-
лировать единый план действий для методическо-
го конструирования, который мы будем называть
рабочим планом.
2.2. Рабочий план для методического
конструирования
В последние десятилетия не было недостатка
в различных программах, предлагающих тот или
иной порядок действий при конструировании.
Одна из первых - рабочий план для кинетического
Синтеза машин - принадлежит Рэло [46]. Гораздо
позже Вегебауэр [73] составил свой „план задач
для соединения частных конструктивных задач в
систему”, довольно близкий по своим идеям к
нашим нынешним представлениям. О вкладе,
сделанном Цвикки [74], о его морфологическом
ящике - было сказано выше. Затем появились
работы Матоузека [35], Бишоффа и Ханзена [6],
Кессельринга [24], Профоса [44], а также работа
Роденаккера [49], принявшего за основу своего
подхода физические~события, - эта работа содер-
жала достижения, принципиальные для немецко-
язычной литературы. Потом последовали работы
Рота [52], Коллера [27], Паля [39], Байтца [4], Паля
и Байтца [42], Хубки [18], Зайферта [61] и предло-
жение нормативов Союза немецких инженеров
(ФРГ) (VDI2222/1 [63]). Из англоязычных авторов
следует прежде всего упомянуть Азимова [3],
Пенни [43], Крика [30], Гордона [15] и Осборна
[37.1]. Конструкторской деятельностью общего м:
специального назначения занимались главным
образом Эверсхайм [11], Федерн [12], Финдайзен
[13], Мартирер [34] и Опитц [37]. Особенности
конструирования как процесса обработки инфор-
мации подчеркнули Мюллер [36] и Вехтлер [70, 69].
Впервые достаточно полный обзор различных
подходов и попытку совместить их в рабочем
плане осуществили Паль и Байтц в серии статей
„Для конструкторской практики” [14]. Роденаккер
32 2. Общие принципы теории конструирования
и Клауссен [50] опубликовали систему правил для
методического конструирования. Эрленшпиль [10]
предпринял попытку систематически исследовать
возможности уменьшения издержек производства
и полнее, чем его предшественники, учел эти
возможности в общей методике.
Ниже мы сначала сформулируем наш рабочий
план для алгоритмического метода выбора при
конструировании с каталогами, а затем сравним
его с важнейшими из известных рабочих планов.
2.2.1. Рабочий план для алгоритмического метода
выбора при конструировании с каталогами
Этот рабочий план был первоначально опубли-
кован в сборниках [52, 56], а затем дополнен в
статьях [55.1, 55.2, 58]. В наглядной упрощенной
Рис. 2.10. Общий рабочий план для применения в рамках алго-
ритмического метода выбора при конструировании с каталога-
ми (АМВК)
форме он представлен на рис. 2.10. Рабочий план
служит основой алгоритмического метода выбора
при конструировании с каталогами, используемого
в дальнейшем, однако его общая структура имеет
в принципе более широкую область применения.
Такая структура - с циклами возврата, обеспечи-
вающими итеративность процесса, и с вводом
требований в отдельных фазах - давно служит
образцом при разработке рабочих планов. Как
видно на рисунке, процесс конструирования мож-
но разделить на три существенно различные фазы:
формулировки задачи, функциональной реализа-
ции (функциональной фазы) и предметной реали-
зации (предметной фазы).
Работа начинается с уяснения и уточнения
стоящей задачи с выработкой достаточно полной и
четкой ее формулировки.
1. Фаза формулирования задачи
В этой фазе исходная, обычно неточная, поста-
новка задачи должна быть проанализирована,
дополнена отсутствующими в ней элементами,
техническое содержание задачи должно получить
точную, исчерпывающую формулировку. В резуль-
тате возникает постановка задачи, содержащая
(иногда неявно) положения трех типов:
инструктивное положение, содержащее раз-
личные указания и инструкции, а также описания
действий, которые требуются для составления
необходимой конструкторской и технологической
документации;
функциональное положение, содержащее опи-
сание воздействий, процессов, а также техниче-
ских, физических, химических и других явлений,
необходимых для реализации главной функции
(см. гл. 5);
положения-требования,' сведенные в список
требований [38], т. е. список всех существенных
дополнительных ограничений, которым должно
удовлетворять изделие (например, жесткие, целе-
вые, граничные и диапазонные требования, см.
кат. 1.1.1).
Составление списка требований связано с
поиском новой информации и непосредственно
примыкает к предшествующему процессу планиро-
вания изделия [7, 14, 21, 29, 60, 67]. Для этой дея-
тельности разработаны три следующих метода,
которые будут подробно описаны в гл. 5: анкета из-
делия, анализ (функциональной) окрестности из-
делия и исследование фаз жизненного цикла
изделия [14].
Приведенные методы дают возможность очер-
тить функциональную окрестность задачи, так что
в результате их применения мы получаем не
только искомые положения-требования, но и
точную формулировку функционального положе-
ния. Требования фиксируются в списке требова-
ний [52, 39, 40, 14, 42]. Разделение функционально-
го положения и списка требований, отсутствующее
у других авторов, имеет то преимущество, что каж-
дая из частей может использоваться отдельно от
другой. Если функциональное положение, пред-
назначенное для формулировки идеальных функ-
ций (их обобщения и подразделения), может быть
изменено в ходе работы, то конкретные данные,
собранные в списке требований, сохраняются
неизменными. Требования могут быть распреде-
лены по фазам, они всегда готовы к использова-
2.2. Рабочий план для методического конструирования
33
Фаза кон-
струиро-
вания
Результат
Пример
Переход
Общая
задача
Фаза
формули-
ровки
задачи
Частные
задачи
Функцио-
нальная
фаза (абст-
рактная
функцио -
нальная
структура)
Функцио -
нальные
положения
для идеаль-
ных фуик -
ций
Осмос, эффект
мышечного
сокращения
Г альванические
элементы,
электромагнит
Адиабатичес -
кий и другие
процессы
1
Электро-
магнит
-----1-----
От общей
задачи к
частным
От частных
задач к
частным
функциям
Предмет -
мая фаза
Эффекты
н носи- -
телн эф -
фектов
Реализация
эффектов
Мышца
Аккумулятор
и электродвн-
гатель
Тепловая
машина
Электро -
двигатель
От частных
функций к
эффектам
(налр. рис.
2.12)
От эффектов
к деталям,
узлам или
устройствам
Рис. 2.11. Методика конструирования. Переход от частных функций к эффектам на этапе абстрактной функциональной структуры и
последующий переход от эффектов к деталям и узлам на примере автомобильного двигателя
нию и пополняются по ходу дела. (Стрелки в пра-
вой части рис. 2.10 указывают на рекомендуемые
моменты использования этих неизменных ограни-
чений.)
Если оказывается, что формулировка функци-
онального положения еще не удовлетворительна,
то, согласно рабочему плану, следует возврат в
начальное положение. В данном случае, как и в
самом первом примере (см. рис. 1.1), следует разло-
жить общую задачу на частные, перейти от общей
задачи к общей функции, а от частных задач - к
частным функциям. Все эти функции - идеаль-
ные. Существенное расхождение между идеальны-
ми и реальными функциями возникает оттого, что
идеальные функции - это желаемые, еще только
подлежащие реализации функции в их идеальном
виде, в то время как реальные функции - это
функции, измеряемые на реальном объекте и
фактически реализованные в нем. Идеальная
функция соответствует функциональному поло-
жению, точно сформулированному в физических,
логических и других терминах, а реальная функ-
ция - фактически измеренному результату и
получается сопоставлением соответствующих
величин на входе и выходе.
Деятельность конструктора в фазе формулиро-
вания задачи можно назвать „формулированием”.
2. Функциональная фаза
За фазой формулирования задачи следует фаза
функциональной реализации, или функциональ-
ная фаза. Здесь еще не встает вопрос о геометриче-
ски материальной реализуемости, а осуществляет-
3-2317
ся лишь поиск частных функций, их соединение в
общую функцию и переход к эффектам. Каждая из
отдельных идеальных функций должна быть
реализована наилучшим образом. Аналогичная
процедура применяется при анализе стоимости [8,
65, 68, 66, 9): функциональная декомпозиция
изделия производится для того, чтобы, перейдя к
стоимости функций, выявить в изделии экономи-
чески слабые места и избавиться от них. Действия
конструктора в этой фазе в значительной мере
следуют описанной в начале книги процедуре
выбора эффектов путем конкретизации частных
функций.
Функциональная фаза подразделяется на два
шага (этапа). На первом этапе делается попытка
описать идеальную функцию через абстрактные
функции [57], т. е. через функции, связанные
только с накоплением, передачей, преобразовани-
ем и комбинированием вещества, энергии и ин-
формации (см. пример на рис. 2.8-2). Лишь на
втором этапе элементам разработанной схемы (так
называемой абстрактной функциональной струк-
туры) сопоставляются определенные физические
эффекты, - на первом же этапе конструирования
все процессы могут описываться только в терми-
нах абстрактных величин - вещество, энергия и
сообщения. Так, при разработке автомобильного
двигателя на этом этапе следует определить тип
превращения энергии (электрической или хими-
ческой в механическую). Описанная процедура
наглядно представлена на рис. 2.11.
Эффективным вспомогательным средством
для поиска нужных эффектов прямого преобразо-
34
2. Общие принципы теории конструирования
Выход Механическая энергия Тепловая энергия Энергия излучения Электрическая энергия Химическая энергия
Вход № 1 2 3 4 5
Механичес- кая энергия 1 1.1 Простые механизмы 1.2 Теплота трения, тепловой насос, холодильный агрегат 1.3 Триболюми- несценция 1.4 Динамомашнна, микрофон 1.5
[U-2.4) МГД-генератор
Тепловая энергия 2 г.1 Тепловая машина г.г Абсорбционный холодильный агрегат 2.3 Лампа накаливания 2.5 Эндотермические химические реакции
2.4 Эффект Зеебека, электровакуумные термоэлементы
Энергия излучения 3 3.1 Радиометр 3.Z Поглощение излучения 3.3 Флюоресценция 3.4 Запирающий слой, фотоэлемент (солнечный элемент) 3.5 Фотосинтез, фотолиз
Электрнчес - кая энергия 4 4.1 Электродвигатель, электроосмос, МГД насос 4.г Эффект Пельтье, эффект Томсона 4.3 Газоразрядная лампа, люминес - центная лампа 4.4 Накопление в акку - муляторе или на гид- роак кумулирующей электростанции 4.5 Электролиз, электродиализ
Химическая энергия 5 5.1 Осмос, мышца 5. г Экзотермические химические реак- ции, контроли- руемое горение 5.3 Химическая люминесценция (светлячок) 5.4 Г альванические или топливные элементы 5.5 Химическая ре - акция в топлив- ных элементах
Рис. 2.12. Матрица прямого превраще-
ния энергии по Юсти [19,20];
МГД — магнитогидродинамический
вания вида (превращения) энергии служит матри-
ца Юсти [19, 20] (рис. 2.12]. В данном случае речь
идет об одном из видов двумерного каталога
решений (см. п. 3.3.2), где на пересечении строки и
столбца, соответствующих входной и выходной
энергии, указывается обеспечивающий прямое
превращение энергии эффект или реализующий
его механизм.
На описанном этапе эффекты не рассматрива-
ются в терминах физических величин, связанных с
энергией, таких как сила, скорость и т. п. Для этого
служит следующий, второй, этап, с физической
функциональной структурой. Здесь частные функ-
ции связаны с такими величинами, как сила,
скорость, момент, импульс, путь, напряжение,
сила тока, температура, энтропия и т. п. [33]. Если
до сих пор не представилась возможность опреде-
лить частную функцию в рамках абстрактной
функциональной структуры и перейти от этой функ-
ции к эффекту, то величину „энергия” следует теперь
представить через описывающие ее компоненты,
например силу и путь (в данном же случае - через
силу и скорость), определить соответствующую
частную функцию и перейти от нее к эффекту. В
противоположность процедуре, приведенной на
рис. 2.11, на рис. 2.13 переход к эффектам произво-
дится на рассматриваемом здесь этапе физиче-
ской функциональной структуры. Процедура
описана на примере механизма переключения
передач. Так, например, преобразование энергии
из формы с малым моментом и большой угловой
скоростью в форму с большим моментом и малой
угловой скоростью (понижающая передача) отно-
сится к этапу физической функциональной струк-
туры в функциональной фазе (см. рис. 2.10).
После каждого этапа в функциональной фазе
производится сравнение реальной и идеальной
функций. Если полученная реальная функция
недостаточно близка к идеальной, производится
возврат к тому или иному пункту плана.
Эти постоянные переходы по рабочему плану
весьма характерны для деятельности конструкто-
ра. В самом деле, поскольку kohctdvktodv редко
удается предусмотреть все ограничения, список
требований постоянно пополняется благодаря
полученным на текущем этапе сведениям, и тот
же этап проходится повторно.
Относящаяся к тому же этапу конструирова-
ния логическая функциональная структура охва-
тывает все схемы, строящиеся из логических
элементов; схемы, которые, помимо всего прочего,
служат для управления, регулирования в техниче-
ских установках, в данном же случае используют-
ся для обработки сообщений.
Если положить в основу методики собственно
рабочий план, а не алгоритмический метод выбо-
ра при конструировании с каталогами (АМВК), то
получится структура, подобная функциональной
структуре, но не со стандартными функциями (см.
рис. 5.18 и 5.19), а с диаграммой потоков, которая
содержит в черных ящиках для частных функций
описывающий их объект (прямое дополнение) и
предикат (сказуемое), например, „приводить в
движение транспортное средство”. Потоки вещест-
ва, энергии и информации должны быть тогда
обозначены в диаграммах потоков [42]. Описание
физической реализации и в этом случае начинает-
ся только на втором этапе данной фазы констру-
ирования.
Переход от функциональной фазы к предмет-
ной фазе при алгоритмической процедуре вызыва-
ет всегда наибольшие трудности. Как и в первом
примере, здесь должен быть произведен переход
от эффектов к деталям. Но этот переход не всегда
может быть выполнен автоматически, и конструк-
торские каталоги сослужат здесь особенно хоро-
шую службу.
Деятельность конструктора в функциональной
фазе может быть названа „функциональной реали-
зацией”, или „проектированием”.
3. Предметная фаза
Фаза предметной реализации, или предметная фаза,
делится на этапы геометрически материальной и
технологической реализации изделия. Если на
2.2. Рабочий план методического конструирования
35
Рис. 2.13. Методика конструирования. Переход к эффектам на этапе физической функциональной структуры и последующий переход от
эффектов к механизмам на примере механизма переключения коробки передач
функциональном уровне можно было двигаться
лишь в „одном измерении”, то здесь мы сразу же
попадаем в трехмерное пространство и сталкива-
емся с таким многообразием возможностей, кото-
рое при систематическом варьировании требует
несравненно больше ограничительных условий,
чем в функциональной фазе. Одно только ортого-
нальное расположение трех кубиков в пространст-
ве возможно 65 = 7776 способами1. Выход здесь в
том, чтобы придерживаться модельных представ-
лений и образцов или как можно раньше исклю-
чать из рассмотрения малоперспективные ре-
шения.
На первом этапе - этапе геометрически мате-
риальной реализации - следует сначала разрабо-
тать линейно-структурную схему, затем постепен-
но превратить ее в контурное представление (чер-
теж, эскиз) и, наконец, - руководствуясь геометри-
ческими соображениями, принципами выбора
размеров, а также сведениями по материаловеде-
нию - реализовать ее с помощью наиболее простых
в изготовлении тел. Возможность монтажа, а
также изготовления деталей часто достигается
только путем дополнительного разделения неко-
торых деталей на части и последующей их сборки.
На рис. 2.14 (пример кривошипно-ползунного
механизма и шатуна) предметная фаза подразде-
лена на девять подэтапов. Необходимые принци-
пы и переходы в процессе разработки шатуна
становятся ясными из эскизов в средней части
рисунка и текста в его правой части. Важное зна-
чение на первом этапе предметной реализации
1 Приведем известный пример „кубика Рубика”. Каждая из
шести граней кубика имеет свой цвет и подразделяется на
девять квадратов. При помощи хитроумного механизма эти
квадраты могут переставляться почти произвольным образом,
при этом получается 43 252 003 274 489 856 000 цветных комбина-
ций, т. е. около 43 • 101® расстановок наружных элементов куби-
ка. Играющий должен восстановить первоначальное располо-
жение, что невозможно без использования определенных
правил. - Пром. авт.
изделия имеют принципы промышленного дизай-
на, в первую очередь связанные с внешним видом
изделия и человеко-машинными отношениями
[26.1].
На втором этапе - технологической реализа-
ции- выполняется детальное конструирование,
дается окончательное исчерпывающее описание
всех деталей изделия. Не позднее, чем на этом
этапе, а еще лучше - на этапе геометрически мате-
риальной реализации - должны определяться тех-
нико-экономические показатели (например, со-
гласно [23, 64, 22]). Здесь снова следует сравнение ре-
альной функции с идеальной и, возможно, очередной
возврат. Проверка рентабельности технических ре-
шений и предложений - главная задача анализа
стоимости. Возможности такого анализа и его
место в системе методического конструирования
обсуждаются в работах Эрленшпиля [10,9]. В рас-
сматриваемой фазе важную роль играют операции
варьирования структуры и конструкции (кат. 4.6.1,
4.10.1).
Деятельность конструктора в предметной фазе
может быть названа „предметной реализацией”,
или „конструированием”.
В результате выполнения рабочего плана,
описанного здесь для случая оригинального кон-
струирования (новой разработки), должен возник-
нуть полный комплект рабочих чертежей. Во всех
трех фазах рабочего плана помимо конструктор-
ских каталогов могут быть использованы также
вспомогательные средства, описанные в гл. 5, в
частности различные обзорные таблицы и методи-
ческие приемы.
В связи с рабочим планом следует обсудить
еще два важных обстоятельства:
последствия верных и неверных решений,
принятых в различных фазах [52];
пропуск (перескакивание) фазы конструирова-
ния.
36
2. Общие принципы теории конструирования
Фаза и этап конструирования
Пример
Переход,операция
предметной фазы
Функциональ -
ная фаза
Эффект
О
Преобразование сила - момент силы
Предметная фаза
Геомет-
рически
матери -
альный
этап
Рабочий
чертеж
Контур
Структура
деталей
Носители
эффектов
Первоначальная
геометрическая
линейная
структура
Контур н функ-
циональные
поверхности
детали
Улучшенная
геометрнчес кая
линейная
структура
Струк-
тура
Технологичес-
кий этап
Сталь 37MnSi 5 (37 СТ в
СССР), улучшенная до
= 900 . 950 МПа
Переход к носителям эф -
фектов (например, взятым
из таблицы элементарных
функций рабочего объема,
см. рис. 6.22-1,6.24, 6.27)
Разработка кинематической
модели путем перехода от
структурно-функциональных
элементов к подходящим
шарнирам
Улучшение геометрической
линейной структуры
(например, путем инверсии
в паре с d)
Вычленение
деталей
Переход к возможному исходному контуру Разработка контура дета- ли а (одно- временйо разработка контуров дру- гих деталей н проверка на пространствен- ную совмес - тимость)
Изменение детали с целью оптимизации размеров сечений (материал)
Изменение детали с целью уменьшения н перераспре- деления массы
Разделение детали на части для обеспечения возможности монтажа
Окончательная реализация де- тален, учиты- вающая свой ства матерка- ла, требуемую точность и тре- буемую обра- ботку поверх- ности Разработка способов изготовления деталей
Рис. 2.14. Этапы предметной фазы конструирования. Предметная реализация шатуна (см. также рис. 4.81)
2.2. Рабочий план для методического конструирования
37
4. Последствия решений, принятых в различных фазах
Мы уже видели на примере замка (см. также
рис. 2.15), что при переходе на исходную позицию
более высокого уровня возникает довольно много
решений, а также немало возможностей для вари-
ации и оптимизации (на примерах из области
инструментального машиностроения это положе-
ние продемонстрировали Салье и Редеккер [59,
45]). При этом, если мы приняли, например в функ-
циональной фазе, недальновидное, а тем более
неверное решение, то улучшить получающиеся
конструкции (да и то лишь отчасти) мы сможем
только особенно тщательно и добросовестно про-
рабатывая следующую, предметную, фазу. Поэто-
му экономическая ответственность [10] в „верх-
них” фазах несравненно выше, чем в „нижних”.
Примеры. Выбор механических функций вме-
сто электронных при конструировании настольной
счетной машины привел бы к появлению неконку-
рентоспособного изделия, даже если геометриче-
ски-материальная реализация изделия была бы
выполнена наилучшим образом. То же самое
справедливо и в отношении попыток оптимизации
на отдельных этапах конструирования, например
на геометрически материальном и технологиче-
ском. Неверный выбор профиля зуба уже не мог бы
быть исправлен впоследствии, сколь бы хорошей
ни оказалась технология нарезания и последу-
ющая обработка поверхности зуба.
Поскольку из результата вышестоящей фазы
выводится постановка задачи для следующей
фазы, все изменения, сделанные в вышестоящей
фазе, повлекут за собой существенные изменения
в последующей. Поэтому нужно руководствовать-
ся следующими принципами:
задача оптимизации конструкции должна быть
поставлена в возможно более „высокой” фазе,
поскольку оптимизация в „нижней” фазе гораздо
менее эффективна;
всегда оправдывает себя основательная прора-
ботка первых фаз конструирования, включая фазу
формулировки задачи, так как именно здесь
намечаются удачные (или, наоборот, не очень
удачные) направления работы, которые едва ли
можно изменить позднее;
улучшение в „верхних” фазах конструкций, в
производство которых уже были сделаны большие
капиталовложения, очень дорого, поскольку оно
окажет влияние на последующие фазы и, возмож-
но, сделает бесполезной большую часть капитало-
вложений.
5. Перескакивание фаз конструирования
Ясно, что в случае оригинального конструиро-
вания нельзя пропускать ни одной фазы и ни
одного этапа конструирования, однако и в других
случаях также не следует перескакивать фазы и
этапы. Если это условие не выполняется, то потом
приходится вносить столько изменений, что в
результате теряется гораздо больше времени, чем
было сэкономлено, нарушается непрерывность
процесса конструирования, а разработанное изде-
спектра решений
Рис. 2.15. Переменный рабочий план с указанием возможностей входа в различные фазы конструирования. Соответствующие разновид-
ности конструирования и спектры решений
38 2. Общие принципы теории конструирования
лие, как правило, оказывается технически несо-
вершенным и дорогим. Уже не раз опыт показы-
вай, что попытки побыстрее изготовить „незре-
лые” конструкции не давали выигрыша во времени,
несмотря на огромные затраты сил и средств.
2.2.2. Переменный рабочий план
Нам могут возразить, что новые разработки в
повседневной практике очень редки, что гораздо
чаще возникает потребность в модификации
отдельных деталей, вариации структуры при тех
же функциях, реже - изменение частных функций
при той же общей функции, и что поэтому бессмыс-
ленно всякий раз выполнять рабочий план в
полном объеме. Проблему решает переменный ра-
бочий план (см. рис. 2.15). В этом случае имеюща-
яся задача формулируется в точности на таком
уровне абстракции, какой требуется при входе в
соответствующую фазу конструирования. В резуль-
тате мы получаем возможность войти в каждую
фазу и в каждый этап конструирования. Так, если
нужно что-либо сделать только для улучшения
технологии или для изменения одной детали,
например заменить материал, то задача должна
быть сформулирована применительно к изготовле-
нию при известной конструкции. Если требуется
изменить конструкцию при тех же функциях, то
постановка задачи должна быть расширена приме-
нительно к этапу геометрически материальной
реализации. Далее, может понадобиться ввести в
физическую структуру другие функции и другие
эффекты (например, вместо вращательного - по-
ступательное движение, вместо электрической -
механическую функциональную цепь), - и тогда
задача должна формулироваться применительно к
новой функциональной структуре. В тех же случа-
ях, когда устройство должно реализовывать совсем
другие потоки вещества, энергии и сообщений
(например, нужен глиссер на воздушной подушке
вместо колесного транспортного средства или
должно использоваться превращение электриче-
ской энергии в механическую вместо превращения
химической), вход должен производиться на
уровне абстрактной функциональной структуры. В
каждом случае - своя разновидность конструиро-
вания.
Пример входа на второй этап функциональной
фазы мы видели на рис. 2.13. Уже в самой поста-
новке задачи речь шла о величинах физической
функциональной структуры (крутящий момент и
угловая скорость), поэтому было бы бессмысленно
входить в абстрактную функциональную структу-
ру, т. е. на первый этап функциональной фазы.
1. Разновидности конструирования
Учитывая характер формулировки задачи и
точку входа в рабочий план, мы можем выделить
следующие разновидности конструирования.
7ёхнологическое конструирование (разработка
технологии). Поставленная задача формулирует-
ся применительно к изготовлению имеющейся
или наперед заданной конструкции, вход осущест-
вляется на этап технологической реализации
изделия.
Предметное конструирование. Поставленная
задача формулируется применительно к предмет-
ной реализации имеющихся или наперед задан-
ных физических функций, вход осуществляется на
этап геометрически материальной реализации
изделия.
Функциональное конструирование (специаль-
ное). Постановка задачи исходит из имеющейся
или наперед заданной абстрактной функциональ-
ной структуры и формулируется применительно к
физическим или логическим функциям. Вход
осуществляется на этап физической (или логиче-
ской) функциональной структуры.
Функциональное конструирование (абстрактное).
Имеется точная формулировка поставленной
задачи. Вход осуществляется на этап абстрактной
функциональной структуры.
Оригинальное конструирование (новая разработ-
ка). Поставленная задача формулируется в тот
момент, когда еще отсутствуют сведения о функ-
циональной структуре. Вход осуществляется в
фазу формулировки задачи (см. гл. 5).
Анализ окрестности изделия с целью получения
списка требований и нового желаемого соответст-
вия между идеальной функцией, эффектом,
деталью или способом изготовления проводится
при любой разновидности конструирования. Разу-
меется, в одном и том же устройстве может присут-
ствовать некоторое число оригинальных деталей и
довольно много узлов, являющихся результатом
функционального, предметного или технологиче-
ского конструирования. Выделение в соответствии
с [42] таких разновидностей конструирования, как
модификационное, адаптационное и варьиру-
ющее, указывает скорее на внешние причины, чем
на интересующие нас разновидности самого про-
цесса конструирования. Например, модификаци-
онное конструирование в отношении одних узлов
может оказаться оригинальным, в отношении
других - технологическим, предметным или
функциональным конструированием.
При входе в различные фазы рабочего плана
спектр возможных решений оказывается различ-
ным, что проиллюстрировано номограммой в левой
части рис. 2.15. Мы видим, что спектр возможных
решений тем шире, чем более абстрактной являет-
ся формулировка задачи. С ростом затрат труда на
проведение абстрагирования при формулировке
задачи и на неразрывно связанную с этим конкре-
тизацию непрерывно растут шансы найти новые,
совершенно неизвестные нетривиальные техни-
ческие решения. Если дополнительные затраты
при входе в вышележащие фазы конструирования
характеризуются линейным ростом, то достига-
емая при этом широта спектра решений растет в
результате увеличения возможностей комбиниро-
вания экспоненциально.
Подразделение процесса конструирования на
различные фазы и этапы существенно облегчает
работу на отдельных этапах, но при этом обнаружи-
вает отчетливо видимые разрывы, преодоление
которых требует использования более или менее
произвольных сопоставлений. Совокупность этих
сопоставлений, кроме возможности образования
вариантов, создает также мысленное пространство
объектов конструирования, по которому проходит
много путей, ведущих к различным решениям
одной и той же задачи. Можно, конечно, пытаться
действовать в этом пространстве, руководствуясь
механически выполняемыми правилами (алго-
ритмами), однако гораздо полезнее здесь подбор-
ки испытанных решений для отдельных частных
функций, например конструкторские каталоги.
Разновидности конструирования
применительно к которым
формулируется задача
Решения
1. Исходная конструкция
6. Зубчазая синюрно-транс-
пор(ирующая рейка (ico-
ме|рическая и фрикцион-
ная спя и> в ра изичных
фазах patiouei о цикла)
2 . Улучшенное транс-
портирующее колесо
3. Улучшение конструкции
путем функциональной
инте| рации
4. Новая функция стонор-
но-транспор|Мрующего
колеса
2 Фрикционные колеса
(фрикционная снять
во всех фазах рабо-
чею цикла)
5. Грейфер (геометричес-
кая свить во всех фазах
рабочет о цикла)
Рис. 2.16. Конструктивные решения, получающиеся при входе в различные фазы рабочего плана, на примере узла продвижения перфоленты. Чем больше рабо-
чих циклов (знаков) в секунду (с"1)» тем ценнее решение; чем абстрактнее постановка задачи, тем шире спектр решений. Эскизы содержат следующие реше-
ния: 1. Храповой механизм с храповиком и транспортирующим штифтовым колесом; 2. Штампованное транспортирующее колесо; 3. Объединенные храппри* и
транспортирующее колесо, фрикционный стопор; 4. Стопорно-транспортирующее колесо с приводной проскальзывающей муфтой; 5. Транспортирующий грей-
фер с эквидистантным профилем; 6. Зубчатая рейка с магнитным приводом; 7. Фрикционное транспортирующее колесо а и фрикционный тормоз Ь
2.2. Рабочий план для методического конструирования
40
2. Общие принципы теории конструирования
2. Примеры решений при входе в различные фазы
конструирования
Примеры, приведенные на рис. 2.16, наглядно
демонстрируют зависимость получаемого решения
от того, применительно к какой фазе конструиро-
вания формулируется задача. Рабочий план,
взятый из рис. 2.15, представлен здесь так, чтобы
яснее была видна возможность войти в него в
различных фазах. В то же время становится ясным,
что такая форма рабочего плана может понимать-
ся как обобщение метода вариации эффектов при
выявленных частных функциях: действительно, в
обоих случаях производится подъем (при абстраги-
ровании поставленной задачи) и спуск (при реали-
зации изделия с использованием различных
эффектов).
На рис. 2.15 мы видим конструктивную эволюцию
узла продвижения перфоленты. Перед нами стоит
задача (см. решение 1): с помощью штифтового
колеса передвинуть перфоленту на одно деление,
остановить ее для считывания или перфорации и
снова передвинуть. Чем больше рабочих циклов
совершает устройство в единицу времени, тем
„лучше” устройство, т. е. решение (см. также рис.
2.9). В данном случае это число, равное числу
знаков в секунду (с-1), дает возможность непосред-
ственно определить техническую эффективность
[23,64] решения.
Следуя методу вариации эффектов при выявлен-
ных частных функциях, мы исходим из решения 1,
т. е. хорошо известной, привычной конструкции:
кулачок е приводит в действие собачку d, собачка
передвигает храповик b (а вместе с ним штифто-
вое колесо а) на одно деление. При обратном ходе
собачки рычаг с обеспечивает фиксацию храпови-
ка и штифтового колеса. В решении 2 штифтовое
колесо изготовляется штамповкой, а не с исполь-
зованием вытачиваемых штифтов. Функция -
такая же, как и в решении 1. В решении 3 штифто-
вое колесо а объединено с храповиком Ъ (а + Ь) и
стопор (обратного хода) с изменен: вместо сило-
вой связи используется фрикционная. Скорость
повысилась до 25 с-1. В решении 4 используются за-
крепленная управляемая электромагнитом собач-
ка а и приводимый в движение проскальзыва-
ющей муфтой храповик Ь. Частота колебаний
якоря обеспечивает продвижение храповика
вперед ровно на один зуб, а перфоленты - ровно на
одну позицию. Скорость составляет 200 с-1. В реше-
нии 5 грейфер а приводится в движение эквиди-
стантным профилем, совершает движение по пря-
моугольнику и передвигает перфоленту соответ-
ствующим штифтом (скорость - 30 с-1). В решении 6
используется зубчатая рейка а, которая, зацепляя
перфоленту за отверстия, обеспечивает ее продви-
жение. Роль стопора играют считывающие щетки
с (скорость - 50 с-1). В решении 7 применено фрик-
ционное колесо а, прижим к которому осуществ-
ляется с помощью магнита b и магнитоуправля-
емого фрикционного тормоза с. Постоянное вра-
щение колеса а и переменное действие магнитов
b и с обеспечивают продвижение и остановку
перфоленты (скорость -1000 с-1).
Стоимость подобных решений колеблется в
пределах 15—1000 марок ФРГ. Здесь, правда, не
принимались в расчет дополнительные затраты на
электронную аппаратуру, которые тоже растут с
ростом скорости и тоже должны учитываться при
определении капиталовложений.
На основании рис. 2.16 и учитывая, что рабочий
план предусматривает систематическое и разви-
тое абстрагирование и конкретизацию частных
функций, можно сделать следующие выводы:
если начинать работу с известной исходной
конструкции, то облегчается разложение общей
функции в частные, а вместе с этим получение
абстрактной формулировки задачи;
чем более общей является формулировка
задачи, тем выше находится фаза, в которой
возможен вход в рабочий план, и тем шире и
разнообразнее спектр решений, но тем выше и
затраты на конструирование;
спектр решений верхней фазы включает в себя
как спектр решений нижней фазы (для тех же
категорий решений), так и еще много новых реше-
ний, среди которых встречаются как худшие, чем в
нижней фазе (решения 5, 6), так и лучшие (реше-
ние 7);
затраты, необходимые для повышения техни-
ческой эффективности в нижней фазе, очень
велики, а эффективность меняется не очень
сильно (решения 1 и 3); существенного улучшения
можно ожидать, ’ только поднявшись на более
высокую фазу (решения 1 и 4 или 1 и 7); дополни-
тельные издержки в этом случае, как правило,
невелики, поэтому не стоит пытаться сохоан°"ь
функционально плохое решение, внося улучше-
ния в низшей фазе;
несмотря на сказанное, в низших фазах все-та-
ки можно существенно повысить экономическую
эффективность [23, 64], применив лучший способ
изготовления (решение 2) или лучший переход от
частных функций к деталям, т. е. благодаря функ-
циональной интеграции (решение 3) или функци-
ональному разделению; при этом, однако, не
исключается, что совершенно новые решения
могут быть проще реализованы и оказаться эконо-
мически более выгодными, т. е. более дешевыми.
3. Сравнение с другими рабочими планами
В литературе по теории конструирования
можно найти целый ряд различных рабочих пла-
нов. На рис. 2.17 четыре из них сравниваются с
только что рассмотренным. Наиболее близок к
нему рабочий план по Палю и Байтцу [42, 47],
который подразделяется на те же фазы констру-
ирования, но названные иначе. В функциональной
фазе, которая озаглавлена „предварительное
проектирование55, у Паля и Байтца предусмотрен
вместо двух этапов конструирования только один.
„Предварительное проектирование” у нас названо
„проектированием”, или „функциональной рёали-
зацией”. В предметной фазе геометрически мате-
риальная и технологическая реализация изделия
обозначены у Паля и Байтца соответственно как
„проектирование” и „разработка”. Содержание
этапа конструирования „геометрически матери-
альная реализация” не полностью покрывается
„проектированием” у Паля и Байтца, в то время
как „технологическая реализация” в точности
совпадает с „разработкой”. Отличие нашего „гео-
метрически материального” этапа заключается в
том, что все решения, описанные посредством
предметных признаков, относятся к предметной
фазе, в то время как у Паля и Байтца „принципы
решений” [42], входящие в „предварительное
проектирование”, причисляются тем самым к
функциональной фазе. У нас эти принципы были
2.2. Рабочий план для методического конструирования
41
Рабочий план в работах различных авторов
Рот Паль и Байта VLX -2222/1 Коллер Роденаккер
Задача Фаза формулировки задачи (формулирование) Постановка задачи, фун- кциональное положение, список требований Задача Уяснение задачи Планирование Предварительное проек тирование Планирование изделия Задача
Уяснение постановки задачи, список требо- ваний Уяснение постановки задачи, список требо - ваний 1 Уяснение постановки | задачи Требуемая взаимосвязь воздействий
Функциональная фаза (проектирование) Предварительное проектирование Синтез функциональной структуры Функция
Абстрактная функцио- нальная структура Функциональная струк- тура, принципы реше- ний, технико-эконо- мическая оценка Разложение общей фун- кции на частные, ком - бинирование, варьиро- вание, технико-эконо- мическая оценка Общая функция, струк- тура из частных функ - ций,структура из эле- ментарных функций, структура из основных операций, технико-эко- номическая оценка Логическая взаимосвязь воздействий
. Физическая, логическая функциональная струк- тура Физическое событие Физическая взаимосвязь воздействий
И Предметная фаза ' (разработка формы) Геометрически мате - риальная реализация изделия Проектирование
П роек тирование Качественный синтез Место действия
Грубое конструирование, точное конструирование, оценка Масштабный проект, технико-экономическая оценка, оптимизации Варианты эффектов, варианты носителей эффектов, варианты принципов работы, варианты конструкции деталей, узлов и систем, технико-эконо мнчес - кая оценка Кинематическая взаимосвязь воздействий Конструктивная взаимосвязь воздействий Т ехнологическая взаимосвязь воздействий
Разработать структуру Разработать контур Подвергнуть технико- экономической оценке Заключительное конструирование
(Разработка технологии) Разработка Разработка
Количественный синтез
Т ехнологическая реализация изделий Пополнение технологи- ческой документации, инструкции по сборке и транспортировке, проверка документации Констпуирование деталей, оценка стоимости Расчет, определение размеров, технико-эко- номическая оценка, испытание, подписание, окончательный проект, деталировка, технологи- ческая документация
Конструировать с учетом требований изготовления, сборки, транспортиров- ки, возобновления н тл. Подвергнуть технико- экономической оценке, разработать инструкции
Рабочий чертеж
Рис. 2.17. Сопоставление рабочих планов конструирования по Роту, Палю и Баитцу, Нормативам Союза немецких инженеров VDI-2222/1,
Коллеру, Роденеккеру
бы отнесены к предметной фазе, поскольку они
представляют собой эскизы с предметными при-
знаками.
Деятельность на отдельных этапах характеризует-
ся у нас как „формулирование”, „разработка”, „проек-
тирование формы”, „проектирование технологии”, а у
Паля и Байтца - как „выяснение задачи”, „предвари-
тельное проектирование”, „проектирование” и „разра-
ботка”. Рабочий план нормативов VDI2222/1 (ФРГ) [63]
восходит к Кессельрингу [25]. В нем фазы форму-
лировки задачи и функциональной реализации
объединены в одну, но при этом подразделяются
на те же этапы, что у Паля и Байтца, а предметная
фаза ограничена, как и у нас, двумя этапами. Хотя
номенклатура фаз конструирования различна, но в
основе их всех лежат одни и те же соображения,
так что рассмотренные выше закономерности
нашего рабочего плана могут быть перенесены и
на эти рабочие планы.
Существенно больше отличий в предложении
Коллера [27,28] как по номенклатуре, так и в отно-
шении используемых элементов. Обозначения в
плане уже содержат указания на элементы и
операции для отдельных шагов. В функциональ-
ной фазе не обнаруживается принципиальных
отличий в предписываемых действиях. В предмет-
ной фазе геометрически материальный этап
обозначен как качественный”, а технологический -
как „количественный” синтез. Это деление и
элементы, используемые в функциональной фазе,
все-таки существенно отличаются от нашей мето-
дики и методики по Палю и Байтцу. У Коллера
очень важное значение придается эффектам, и
появляются они у него раньше, чем это необходи-
мо [27,28]. В рабочем плане по Роденаккеру [49, 50]
задача понимается как „требуемая взаимосвязь
воздействия”, функции рассматриваются в первую
очередь с логической точки зрения, и основой их
реализации в техническом устройстве становится
„физическое событие”. Затем следует рассмотре-
ние кинематических взаимосвязей, хорошо знако-
мых из теории механизмов, а также учет конструк-
42
2. Общие принципы теории конструирования
а Функциональ-I--------------------------1 Геометрическая струи-
ное положение K-z УНК1*И’’Эффект |____। тура деталь узел Выбранные варианты [~\ Требования ф Процедура выбора
/\ ^тернап.вная ESSSSSSSjj Результат изображенного процесса конструирования
Рис. 2.18. Символическое представление методики конструирования в соответствии с алгоритмическим методом выбора при конструиро-
вании с каталогами (образование вариантов, процесс выбора и интеграция выбранных деталей на схеме отражены, а процессы итерации»
возврата опущены)
2.3. Список литературы
43
тивных и технологических требований.
Как уже было показано на рис. 2.11 и 2.13, при
конструировании в функциональной фазе (как,
впрочем, и в других фазах) никогда не следует
надеяться на единственное решение, но следует
пытаться найти различные варианты, выполня-
ющие поставленную задачу, и выбрать из них
наилучший. Еще один принцип: сложные задачи,
функции или машины следует разлагать на обо-
зримые, более простые, искать для них решения и
предметные формы, а потом объединять их в иско-
мом устройстве. Подобные структурные рабочие
планы предлагаются в [42, 63].
На рис. 2.18 изображено разбиение на частные
задачи, частные функции, детали и т. д. (а также
образование и выбор вариантов и интерпретация
результатов) для рабочего плана, приведенного на
рис. 2.10. В заголовочные столбцы внесены фазы и
этапы конструирования, а также термины, для
которых используются символы. В столбце 1 нахо-
дится рабочий план в виде структурной схемы, в
столбце 2 помещены символы для необходимых
требований и процесса выбора в ключевых местах.
Из рис. 2.18 можно извлечь методический
принцип. Общая задача, например, варьируется с
учетом известных требований (поле 1.1); наилуч-
ший вариант отыскивается и с ним сопоставляет-
ся общая функция (поле 3.1). Кроме того, можно
также разложить общую задачу поля 1.1 (обозна-
ченную треугольником с точками) на частные
задачи поля 2.1, варьировать их и каждой из вы-
бранных частных задач сопоставлять частную
функцию (поле 3.1). Если следовать первому из
описанных путей, то теперь общую функцию поля
3.1 можно разложить на частные, последние варь-
ировать и найденные варианты свести в различные
функциональные структуры, например в абстракт-
ную функциональную структуру (аналогичную
структуре, представленной на рис. 5.21). Наилуч-
ший вариант отбирается. Аналогичная процедура -
переход от абстрактных функций к физическим
(см. рис. 5.37), их вариация и выбор в рамках соот-
ветствующей функциональной структуры - осуще-
ствляется в поле 4.1. Наконец, следует переход от
частных функций к эффектам (по рис. 5.31), вари-
ация эффектов (например, как на рис. 2.13), а
также их выбор (поле 5.1, рис. 2.18).
Переход от эффектов к структурным элемен-
там (т. е. символам, обозначающим детали и их
рабочие поверхности, см. рис. 6.10-2) и их функци-
ональная интеграция приводят (поле 6.1) к пер-
вым предметным решениям: проектам на уровне
структурных или принципиальных схем. Версия
решения выбрана. Далее (поле 7.1) определяются
детали, соответствующие структурным элементам,
эти детали варьируются и, насколько возможно,
функционально интегрируются. Возникают первые
проекты на уровне чертежей. Один из них выбира-
ется. Проработка слабых мест (поле 8.1) путем
выработки альтернатив для некоторых участков и
согласование найденных решений ведут к улучше-
нию проекта, а в результате деталировки появля-
ется, наконец, рабочая (технологическая) доку-
ментация. На примере машины для крепления
кнопок на ткани эта процедура показана на рис.
5.38.
На рис. 2.18, столбец 1, мы видим, что в процес-
се конкретизации приходится пересекать много-
численные плоскости переходов (ПП), важнейшие
из которых разделяют фазы. Укажем, что пло-
скость перехода для строк 5 и 6 тесно связана с
понятием „органоподобная техника пространст-
венной компоновки” в [51]. Эта техника, типичная
для обычного конструирования из твердых тел,
создает предпосылки для далеко идущей интег-
рации функций, эффектов и т. д. В столбце 2 на рис.
2.18 отражен постоянный рост числа необходимых
требований при выборе вариантов - список требо-
ваний дополняется в процессе конструирования
изделия.
Интересное обобщение обсуждавшегося до сих
пор „двумерного” представления рабочего плана
предложил Бернс [5]. Он различает, как и автор,
„вертикальные” плоскости (так называемые
области) и „горизонтальные” плоскости (так
называемые фазы). Новым в этом представлении
является то, что три области - область обеспече-
ния информацией, область поиска решения и
область оценки - воспроизводятся как своего рода
рабочие планы в виде плоскостей в пространстве,
которые по спирали можно проходить только одну
за другой, точно так же, как и описанные выше
рабочие планы.
2.3. Список литературы
I. d'Alembert, J.-B.; Diderot, D.: Encyclopedic Bd. 1 1751.
2. Anschutz, H.: Kybernetik kurz und bundig. Wurzburg:
Vogel 1967.
3. Asimow, M.: Introduction to design. Englewood Cliffs,
N.J.: Prentice Hall 1962.
4. Beitz, W.: Methodisches Konzipieren technischer Sy-
steme, gezeigt am Beispiel einer Kartoffel-Vollerntema-
schine. Konstruktion 25 (1973) 65-71.
5. Berns, H.: Denkmodell fur methodisches und wirtschaft-
liches Konstruieren und Gestalten. Konstruktion 32
(1980) 13 18.
6. Bischoff, W.; Hansen, F.: Rationelles Konstruieren. Kon-
struktionsbiicher Bd. 5. Berlin: VEB-Verlag Technik
1953.
7. Brankamp, K.: Produktplanung - Instrument der Zu-
kunftssicherung im Unternehmen. Konstruktion 26 (1974)
319-321.
8. DIN 69 910: Wertanalyse, Begriffe, Methode. Berlin,
Koln: Beuth-Vertrieb 1973.
9. Ehrlenspiel, K.: Wertanalyse und methodisches Kon-
struieren. VDI-Berichte Nr. 293. Dusseldorf: VDI-Verlag
1977.
10. Ehrlenspiel, K.: Moglichkeiten zum Senken der Produkt-
kosten - Erkenntnisse aus einer Auswertung von Wert-
analysen. Konstruktion 32 (1980) 173-178.
11. Eversheim, W.: Eine analytische Betrachtung von Kon-
struktionsaufgaben. Industrieanzeiger 91 (1969) H. 87.
12. Federn, K.: Wandel in der konstruktiven Gestaltung.
Chem.-Ing.-Tech. 42 (1970) 729-737.
13. Findeisen, D.: Dynamisches System Schwingprufma-
schine. VDI-Fortschritt-Berichte, Reihe II, Nr. 18. Dus-
seldorf: VDI-Verlag 1974.
14. Franke, H.-J.: Methodische Schritte beim Klaren kon-
struktiver Aufgabenstellungen. Konstruktion 27 (1975)
395-402.
15. Gordon, W.J.J.: Synectics, the development of creative
capacity. New York: Harper 1961.
16. Harrer, H.: Ich komme aus der Steinzeit. Frankfurt/M„
Berlin: Ullstein 1963.
17. Hauff, V.: Wdrterbuch der Datenverarbeitung. Begriffe,
Erlauterungen, Abkiirzungen. Stuttgart: Telekosmos-Ver-
lag bei Frankh.
18. Hubka, V.: Theorie der Konstruktionsprozesse. Berlin,
Heidelberg, New York: Springer 1976.
19. Justi, E.: Leitungsmechanismus und Energieumwandlung
in Festkorpern. Gottingen: Vandenhoeck & Ruprecht
1965.
20. Justi, E.: Stand und Chancen der Energie-Direkt-Um-
wandlung (Teil I). Physikalische Blatter 29 (1973) Nr.
1, 20 u.f.
44
2. Общие принципы теории конструирования
21. Kehrmann, Н.: Die Entwicklung von Produktstrategien.
Diss. TH Aachen 1972.
22. Kesselring, F.: Die Starke Konstruktion. VDI-Z 86 (1942)
321 330, 749-752.
23. Kesselring, F.: Bewertung von Konstruktionen. Dussel-
dorf: VDI-Verlag 1951.
24. Kesselring, F.: Technische Kompositionslehre. Berlin,
Gottingen, Heidelberg: Springer 1954.
25. Kesselring, F.; Am, E.: Methodisches Planen, Entwickeln
und Gestalten technischer Produkte. Konstruktion 23
(1971) 212-218.
26. Klaus, G.: Worterbuch der Kybemetik. Berlin: Dietz 1968.
26.1 Klocker, I.: Feinwerktechnik und Industrial Design.
Feinwerktechnik 85 (1981), Heft 4.
27. Koller, R.: Eine algorithmisch-physikalisch orientierte
Konstruktionsmethodik. VDI-Z 115 (1973) 147-152, 309-
317. 1078-1085.
28. Koller, R.: Konstruktionsmethode fur den Maschinen-,
Ge rate- und Apparatebau. Berlin, Heidelberg, New York:
Springer 1976.
29. Kramer, F.: Produktinnovations- und Produkteinfiih-
rungssystem eines mittleren Industriebetriebes. Konstruk-
tion 27 (1975) 1-7.
30. Krick, E.V.: An introduction to engineering design, 2nd
ed. New York, London. Sydney, Toronto: Wiley & Sons
1969.
31. Kuhlenkamp, A. : Entwerfen und Gestalten in der Fein-
werktechnik. Feinwerktechnik 73(1969) 193-199.
32. LIFE: Wunder der Wissenschaft. Die Energie, Time Inc.
1963; Die Maschinen, Time Inc. 1964.
33. Macfarlane, A.G.J.: Analyse technischer Systeme. Mann-
heim: Bibliographisches Institut 1967.
34. Martyrer, E.: Der Ingenieur und das Konstruiertn. Kon-
struktion 12 (1960) 1-4.'
35. Matousek, R.: Konstruktionslehre des allgemeinen Ma-
schinenbaus. Berlin, Heidelberg, New York: Springer
1957, Reprint 1974.
36. Muller, J.: Grundlagen der systematischen Heuristik.
Schriften zur soz. Wirtschaftsfuhrung. Berlin: Dietz 1970.
37. Opitz, H.; u.a.: Die Konstruktion - ein Schwerpunkt
der Rationalisierung. Industrie-Anzeiger 93 (1971) 1491-
1503.
37.1 Osborn, A.F.: Applied Imagination - Principles and
Procedures ofCreative Thinking. New York: Scribner 1957.
38. Pahl, G.: Wege zur Losungsfindung. Industrielle Organi-
sation 39 (1970) 156-157.
39. Pahl, G.: Die Arbeitsschritte beirn Konstruieren. Kon-
struktion 24 (1972) 149-153.
40. Pahl, G.: Klaren der Aufgabenstellung und Erarbeitung
der Anforderungsliste. Konstruktion 24 (1972) 195-199.
41. Pahl, G.; Beitz, W.: Fur die Konstruktionspraxis. Auf-
satzreihe in der Konstruktion 24 (1972), 25 (1973) und
26 (1974).
42. Pahl, G.; Beitz, W.: Konstruktionslehre, Berlin, Heidel-
berg, New York: Springer 1977.
43. Penny, R.K.: Principles of engineering design. Postgra-
duate 46 (1970) 344-349.
44. Profos, P.: Feintechnik und akademische Lehre. Indu-
strielle Organisation 34 (1965) 439-446.
45. Redeker, W.: Systematische Konstruktion spanender
Werkzeugmaschinen. Diss. TU Braunschweig 1977.
46. Reuleaux, F.; Moll, C.: Konstruktionslehre fur den Ma-
schinenbau. Braunschweig: Vieweg 1854.
47. Richter, A.: Nichtlineare Optimierung signalverarbciten-
der Gerate. VDl-Berichte Nr. 219. Dusseldorf: VDI-Ver-
lag 1974.
48. Richter, A.; Aschoff, H.-J.: Problemstellungen bei der
funktionsorientierten Konstruktionssynthese signalverar-
beitender Gerate aus der Sicht der Systemdynamik. Fein-
werktechnik 75 (1971) 374-379.
49. Rodenacker, W.G.: Methodisches Konstruieren. Kon-
struktionsbucher Bd. 27. Berlin, Heidelberg, New York:
Springer 1970; 2. Aufl. 1976.
50. Rodenacker, W.G.; Claussen, U.: Regeln des Metho-
dischen Konstruierens. Mainz: Krausskopf 1973/74.
50.1 Rohrbach. B.: Kreativ nach Regeln - Methode 635, eine
neueTechnikzum Losen von Problemen. Absatzwirtschaft
12 (1969) 73 75
51. Roth, K.: Kennzeichnende Merkmale feinwerktech-
nischer Konstruktionen. VDI-Z 105 (1963) 1017-1025,
1125-1129.
52. Roth, K.: Gliederung und Rahmen einer neuen Ma-
schinen-. Gerate-Konstruktionslehre. Feinwerktechnik 72
(1968) 521-528.
53. Roth. K.: Die Feinwerktechnik im Blickpunkt ihrer
Nachbargebiete. Industrielle Organisation (1968) Heft 4.
54. Roth, K.; Gerber, H.: Logische Funktionsplane mecha-
nischer Nachrichtengerate und ihre Bedeutung fur die
Konstruktion. Feinwerktechnik 73 (1969) 369-376.
55. Roth, K.: Systematik der Maschinen und ihrer rnecha-
nischen elementaren Funktionen. Feinwerktechnik 74
(1970) 453 460.
55.1 Roth, K.: Grundlagen methodischen Vorgehens beim
Konstruieren. VDI-Z 121 (1979) 989-997.
55.2 Roth, K.: Foundation of methodical procedures in
design. Design vol. 2 (1981) p. 107-115.
56. Roth, K.; Franke. H.-J. ; Simonek, R.: Algorithmetisches
Auswahlverfahren zur Konstruktion mit Katalogen. Fein-
werktechnik 75 (1971) 337-345.
57. Roth, K.; Franke, H.-J.; Simonek, R.: Die Allgemeine
Funktionsstruktur, ein wesentliches Hilfsmittel zum me-
thodischen Konstruieren. Konstruktion 24 (1972) 277-
282.
58. Roth, K.; u.a.: Beschreibung und Anwendung des Algo-
rithmischen Auswahlverfahrens zur Konstruktion mit Ka-
talogen (AAK). Konstruktion 27 (1975) 213-222.
59. Salje, E.: Elemente der spanenden Werkzeugmaschinen.
Munchen: Hanser 1968.
60. Schmitz, H.: Produktplanung. VDI-Taschenbuch T 32.
Dusseldorf: VDI-Verlag 1972.
61. Seifert, H. : Grundlagen des methodischen Vorgehens bei
Neukonstruktionen des Maschinen- und Geratebaues.
Bochum: Schriftenreihe des Institute fur Konstruktions-
technik der TU, I (1980) Heft 80.5.
62. Sprague de Camp, L.: Die Ingenieure der Antike. Dussel-
dorf, Wien: Econ 1964.
63. VDJ-Richtlinie 2222 Blatt 1: Konzipieren technischer
Produkte. Dusseldorf: VDI-Verlag 1973.
64. VDI-Richtlinie 2225: Technisch-wirtschaftliches Kon-
struieren. Dusseldorf: VDI-Verlag 1969.
65. VDI-Richtlinie 2801 Blatt 1-3: Wertanalyse. Dusseldorf:
VDI-Verlag 1970/71.
66. VDI-Taschenbuch 135: Wertanalyse - Idee, Methode, Sy-
stem Dusseldorf: VDI-Verlag 1972.
67. VDI-Taschenbuch T 46. Systematische Produktplanung
ein Mittel zur Untemehmenssicherung. Dusseldorf:
VDI-Verlag 1975.
68. Voigt, C.-D.: Systematik und Einsatz der Wertanalyse,
3. Aufl. Munchen: Siemens-Verlag 1974.
69. Wachtler, R.: Beitrag zur Theorie des Entwickelns (Kon-
struierens). Feinwerktechnik 71 (1967) 353-357.
70. Wachtler, R.: Die Dynamik des Entwickelns (Konstruie-
rens). Feinwerktechnik 73 (1969) 329-333.
70.1 Weege, R.-D.: Recyclinggerechtes Konstruieren. VDI-
Verlag: Dusseldorf 1981.
71. Weizsilcker von, C.F.: Die Einheit der Natur - Studien.
Munchen: Hanser 1971.
72. Wiener, N. ; Informationstheorie. Die Naturwissenschaf-
ten von E. Lamia u. E. v. Holst. Berlin, Gdttingen, Heidel-
berg: Springer 1961, Bd. 48, S. 174.
73. Wogerbauer, H.: Die Technik des Konstruierens, 2. Aufl.
Berlin, Munchen; Oldenbourg 1943.
74. Zwicky, F.: Entdecken, Erfinden, Forschen im Morpho-
logischen Weltbild. Munchen, Zurich: Droemer-Knaur
1966/1971.
45
3. КОНСТРУКТОРСКИЕ КАТАЛОГИ И ИХ ПРИМЕНЕНИЕ
Выше, в изложении основных принципов и при
разборе примеров, мы постоянно ссылались на
некие источники сведений, из которых в ходе
конструирования [1] могут извлекаться различные
данные или даже готовые частные решения. На
самом деле речь шла о так называемых табличных
подборках решений и о конструкторских катало-
гах, составленных с учетом требований к содержа-
нию, структуре и полноте (для каталогов эти тре-
бования обязательны, а для произвольных таблич-
ных подборок, вообще говоря, - нет). Точнее, под
конструкторскими каталогами (см. определение в
разд. 7.4) понимаются специальные таблицы,
которые по содержанию, возможностям выборки и
структуре ориентированы на нужды методическо-
го конструирования. Отличительной чертой ката-
логов является высокая степень полноты, четкие
принципы классификации и, как правило, сущест-
вование графы специальных признаков поиска
[25.1,25,24,26.1,31,4, 23,15].
3.1. Применение конструкторских каталогов
в ходе конструирования
Как подборки решений, так и конструкторские
каталоги можно с большой пользой применять при
конструировании - они часто аккумулируют сведе-
ния из многих, в том числе малодоступных, источ-
ников информации, способствуют рационализации
конструирования и, наконец, часто побуждают
конструктора к поиску нетривиальных решений.
Кроме того, они облегчают синтез конструкций [2],
который, по-существу, есть не что иное, как состав-
ление общего решения из малого числа оригиналь-
ных и большого числа известных частных реше-
ний. Чем элементарнее уровень этих решений, тем
скорее они окажутся уже известными в технике, и
тем меньше их вероятное общее число. Тем самым
появляется возможность собрать постоянно встре-
чающиеся элементарные решения, чтобы единооб-
разно и максимально полно описать их в хорошо
обозримой форме в каталоге. Каждое из этих
элементарных решений будет представлять целое
семейство родственных вариантов, подобно тому,
как исходный профиль рейки представляет все
зубчатые колеса с числом зубьев от -00 до + ».
Элементарные решения, в нашем смысле, - это
не что иное, как различные варианты реализации
основных переходов - от функционального поло-
жения к идеальным функциям, от идеальных
функций - к эффектам, от эффектов - к структур-
ным элементам - носителям эффектов [13, 14], от
структурных элементов - к контурным (геометри-
ческим) элементам (т. е. деталям или группам
деталей), и, наконец, от деталей - к определен-
ным способам их изготовления (рис. 3.1).
Так, например, если функциональное положе-
ние „умножить силу” требуется превратить в
соответствующую функцию и в техническое
устройство, то очень полезным для этого может
Переходы при конкретизации изделия Фаза или этап конструирования Вспомогательные средства для выполнения переходов
Задача ) Функциональное г положение ' Идеальная функция > Эффект > Структурный элемент > Контурный элемент ? Узел, деталь *] Способ изготовления > Фаза формулировки задачи Вопросники, матрица поиска Различные подборки решений
Функциональная фаза Геометрически материальный этап Технологический этап 1
Рис. 3.1. Конструкторские каталоги и другие вспомогательные
средства для выполнения переходов в процессе конструиро-
вания
оказаться конструкторский каталог (в данном
случае кат. 4.4.2), содержащий всевозможные
эффекты и предоставляющий для их выбора
наиболее удобные специальные признаки. В тех
случаях, когда неясно, как выполнять переходы
или они оказываются недостаточно определенны-
ми, можно использовать различные вопросники
(см. рис. 5.8, 5.12 и 5.14) и неформальные подборки
решений.
Выполнение упомянутых выше переходов
занимает важное место в деятельности конструк-
тора. Для их осуществления мы часто обращаемся
к известным образцам - моделям, в которых соот-
ветствующий переход выполнен наилучшим
образом. Типичный недостаток этого метода
состоит в том, что вместе с эффектом заимствуют-
ся также реализующие его деталь или узел, а
иногда - даже и способ изготовления. В то же
время ясно, что часто стоит проверить, не окажет-
ся ли более оправданным выбор в качестве носите-
ля требуемого эффекта (например, эффекта на-
правляющей в подшипниках, см. кат. 4.9.1-4.9.5)
какой-нибудь другой детали. Для изготовления
деталей также полезно рассмотреть несколько
вариантов технологии. Следует обратить внима-
ние на то, что запас модельных решений-образцов
далеко не одинаков у различных конструкторов и
часто довольно узок и односторонен. При .этом
пополнять его из книг, чертежей или других
разрозненных источников информации - дело
очень утомительное, долгое и часто неблагодар-
ное. В этой связи для алгоритмического метода
выбора при конструировании с каталогами и
предлагаются многочисленные конструкторские
каталоги и табличные подборки решений, важней-
шие из которых перечислены на рис. 3.2. Кроме
того, большую пользу при поиске решений прино-
сят рассмотрение аналогий в области техники [18,
27, 9] и сравнительный анализ биологических
конструкций [10,21,22].
46
3. Конструкторские каталоги и их применение
Рабочий план
Конструкторские каталоги и важнейшие рисунки для
методического конструирования
Планиро-
мжне
изделия
Рис. 5.38. Конкретный пример методического конструирования (АМВК)
Рис. 5.2. Модели изделия
Рис. 5.7. Использование моделей изделия при конструировании по рабочему плану
Фаза
формули-
ровки
задачи
Функцио-
нальная
фаза
Рис. 5.3. Выделение положений трех типов в постановке задачи
Рис. 5.8. Анкета изделия к рис. 5.9
Рис.5.12. Вопросник к ’’окрестности изделия” по рис. 5.13
Рис. 5.14. Матрица поиска к ’’жизненному циклу изделия” по рис. 5.17
Рис. 5. fS. Аналитический список к ’’жизненному циклу изделия” по рис. 5.17
Рис. 5.4. Функциональные положения для общей и частных задач
Рис. 5.5. Абстрагирование функционального положения
Рис. 5.6. функциональные положения для различных функциональных структур
Рис. 5.9. Список требований 1 (8 вопросов)
Рис. 5.13. Список требований II (~ 100вопросов)
Рис. 5.17. Список требований Ш (200 — 1000 вопросов)
Кат. 4.1.1. Типы требований
Рис. 5.18. Операции абстрактной функциональной структуры (АФС)
Рис. 5.19. Абстрактные функции
Рис. 3.21. Разработка абстрактной функциональной структуры
Рис. 5.22. Привила варьирования для абстрактной функциональной структуры
Рис. 5.23. Разработка абстрактной диаграммы потоков
Рис. 2 J 2. Прямое превращение энергии (матрица Юсти)
Кат. 4.4.1. Создать силу
Кат. 4.4.2. Одноступенчатое умножение силы
Кат. 4.4.3. Механическое стопорение обратного хода
Рис. 5.26. Интенсивные и количественные величины для СФС
Рис. 5.31. Матрица функциональных величин
Рис. 5.32. Уравнения н эффекты для матричных полей (рис. 5.31)
Рис. 5.36. Разработка диаграммы потоков на уровне СФС
Рис. 5. 37. Переход от АФС в ВФС и СФС
Рис. 6.3. Элементарные векторные функции
Рис. 6.8. Разработка диаграммы потоков на уровне ВФС
Рис. 6.22г-1. Элементы геометрической функциональной структуры (ГФС)
Рис. 6.28. Операции со структурно-функциональными элементами
Рис. 6.32 и 6.33. Разработка геометрической функциональной структуры
"Кат. 4.3.2. Логические механизмы отрицания
Кат. 4.3.4. Логические механизмы конъюнкции и дизъюнкции
Рис. 4.18. Три логические комбинаторные функции
Рис. 4.22. Две логические последовательные функции
Рис. 4.23. Разработка механических RS-переключателей
Рис. 3.20 и 3.21. Механические RS-переключатели
Рис. 4.24. Замкнутая относительная траектория механических Т-переключателей
Кат. 4.3.6. и 4.3.7. Механические Т-переключатели
Рис. ЗЛ, Важнейшие конструкторские каталоги и другие подборки решений для алгоритмического метода выбора при конструировании
с каталогами (АМВК) (Лист 1)
3.2. Требования к конструкторским каталогам
Чтобы конструкторские каталоги были свобод-
ны от произвольности, характерной для нефор-
мальных подборок решений, имели широкий
спектр применимости, а также сочетались с новы-
ми методами конструирования, они должны отве-
чать следующим требованиям:
обеспечивать быструю выборку информации в
удобной форме и удовлетворять запросы широкого
круга пользователей;
хорошо вписываться в процесс конструирова-
ния; не содержать противоречий как внутри одно-
го каталога, так и между различными каталогами;
согласовываться с положениями и процедурами
методического конструирования; обладать макси-
мальной полнотой в соответствующей области;
обеспечивать возможность расширения и
изменения содержания при неизменных принци-
пах организации материала и содержать сведения
об этих принципах.
И полезность таких каталогов, и трудоемкость
их составления вполне очевидны. Так, стремление
к максимальной полноте требует особенно безуп-
речной, верифицируемой терминологической
структуры классификационных принципов. Зато
3.3. Общая структура конструкторских каталогов
47
^.Средства Фазы X. Рабочий план (продолжение) Конструкторские каталоги и важнейшие рисунки для методического конструирования
Предметная фаза Кат. 4.2.1. Типы связей Рис. 4.2. Объемные, поверхностные связи и их комбинации Кат. 4.2.2 и 4.2.3. Ограничить движение Рис. 4.4. Односторонние и двусторонние упоры Кат. 4.2.4 и 4.2. S. Фрикционные системы Кат. 4.5.4. Варианты фрикционных систем Рис. 4.9 и 4.10. Схемы зависимости типа фрикционной системы от конструктивных параметров Кат. 4.3.1. Важнейшие кинематические и статические пары Рис. 4.13 и 4.14. Последовательное н параллельное соединение пар Кат. 4. 5.1 и 4.5.2. Пары и замкнутые цепи звеньев Рис. 6.1 Г. Однократно переопределенные цепи с. вращательными парами Рис. 6.13 и 6.14. Определение <шсла степеней свободы цепи звеньев Рис. 6.18. Звездчатые замкнутые цепи звеньев Рис. 6.29. Фильтрация движений с помощыо сочленений Рис. 6. 35. Однократно переопределенные цепи звеньев с вращательными, поступательными и вращательно-поступательными парами Рис. 4.41. Заклинивающие стопоры обратного хода Кат. 4.6.1. Операции варьирования структуры Рис. 4.37. Особые свойства важнейших умножителей силы Рис. 4.33—4.36. Конструктивные реализации типичных умножителей силы Рис. 4.43—4.47. Конструктивные реализации типишых стопоров обратного хода Рис. 4.48 и 4.49. Переход от структуры к контуру Кат. 4.7.1. Передаточные механизмы равномерного хода Рис, 4. 56-4.60. Особые виды зубчатых зацеплений Рис. 4.61. Обзорная классификация соединений Рис. 4.62-4.65. Цепи связей в неподвижных соединениях Кат. 4.8.1-4.8.3. Заклепочные соединения Кат. 4.8.4 и 4.8.5. Соединения вал - ступица Рис. 4. 71—4. 73. Задачи, формы профиля и варианты исполнения направляющих Кат. 4.9. 1 н 4.9. 2. Прямолинейные направляющие Рис. 4. 74 и 4. 75. Форма и классификация тел качения Кат. 4.9. 3-4.9. 5. Направляющие вращательного движения (подшипники) Рис. 4.80. Элементы конструктивной структуры устройства Кат. 4.10.1, Операции варьирования конструкции Рис. 4.81 и 4.82. Примеры применения операций варьирования конструкции Рис. 4. 83. Способы обработки давлением Кат. 4.11.1. Обработка давлением сжатия Кат. 4.11.2. Объемная штамповка Кат. 4.12.1. Правила расчета допусков на предельные размеры Рис. 4. 84—4.92. Составление размерных цепей и примеры расчетов допусков
Геометрически материальная реализация изделия Разработка структуры Разработка контура 1 । "““I 1
1 1 1 1 1
Технологическая реализация изделия
Рис. 32. Лист 2
впоследствии уверенный в полноте каталогов
конструктор спокоен, зная, что он учел все суще-
ственное и может не опасаться претензий патент-
ного характера.
Итак, конструкторскими каталогами могут
называться только такие подборки технических
объектов и отношений, которые могут претендо-
вать на максимальную полноту и содержат класси-
фикационную, главную и специальную части.
Идея построения каталогов в подобной форме уже
выдвигалась и обсуждалась в многочисленных
публикациях [25, 24, 26.1, 4, 6, 3, 36, 23, 37, 19, 20], а
также - очень обстоятельно - в нормативах VDI
2222 (ФРГ), лист 2 [31]. Большие надежды, вполне
обоснованно возлагаемые на каталоги в теории и
практике, по очевидным причинам не могут оправ-
даться сразу, - тем более поразительны отдельные
успехи, уже достигнутые с их помощью. На рис. 3.2
указаны важнейшие из содержащихся в этой книге
конструкторских каталогов и рисунков для алго-
ритмического конструирования, соотнесенные с
фазами рабочего плана.
3.3. Общая структура конструкторских каталогов
Ясно, что применять конструкторские катало-
ги гораздо легче, если их структура единообразна
и соответствующая терминология точна [32].
Особенно хороши в этом отношении „одномерные”
(рис. 3.3) и „двумерные” (рис. 3.4) каталоги. Груп-
пировка содержания каталога соответствует в
первом случае одномерной, а во втором - двумер-
ной классификации (ср. также с многообразием
упорядоченных схем по Драйбхольцу [5]).
33.1. Каталоги с „одномерной”
классификационной частью
Эта форма наиболее распространена и, как
правило, наиболее удобна. Каталог состоит из
классификационной, главной и специальной
частей (см. рис. 3.3).
Классификационная часть содержит те суще-
ственные принципы, которые классифицируют
элементы главной части, т. е. собственно содержа-
48
3. Конструкторские каталоги и их применение
£ис. 3.3. Конструкторский каталог с „одномерной” классифика-
ционной частью
Рис. 3.4. Конструкторский каталог с „двумерной” классификаци-
онной частью (слипя/учотцей со специальной частью)
ние каталога, и предоставляют пользователю
возможность проверки полноты, например, следу-
ющим образом.
В кат. 4.4.1 (Создать силу) мы можем прежде
всего указать силы тяжести. Вслед за тем возни-
кает вопрос: Какие еще бывают силы? Их перечис-
ление - силы инерции, электрические, магнитные
и т. п. - побуждает составителя пополнять ката-
лог, а пользователя - проверять, все ли ему извест-
ные силы были учтены при классификации. Чем
лучше с содержательной и формальной точки
зрения устроена классификация, тем скорее
может быть достигнута и проверена желаемая
полнота каталога.
Главная часть - это, собственно, содержание
каталога. В зависимости от вида каталога речь
здесь идет об объектах, операциях (правилах) или
решениях. Все они могут быть представлен^ в
форме эскизов, уравнений или текстов. Очень
уместны здесь хорошо продуманные и освобожден-
ные от второстепенных подробностей эскизы. Для
всех примеров эти эскизы должны иметь одинако-
вую степень абстрактности, т. е. они должны быть
графами, электрическими схемами, структурными
схемами или чертежами. Пример, изображенный в
каталоге, выбирается в качестве типичного объ-
екта или типичного решения, из которого затем
выводятся варианты, т. е. все другие объекты
(соответственно решения). Порядковая нумерация
облегчает поиск решения, содержащегося всегда в
единственном поле каталога.
Специальная часть, характерная для конст-
рукторских каталогов, должна быть удобной для
пользователя. Если классификационная и главная
части строятся по очень строгим правилам (напри-
мер, в классификационной части недопустимы
пропуски), то выбор специальных признаков по-
иска неформален и ориентирован на удобство
применения и даже на отраслевые особенности.
Специальные признаки должны позволять легкф
отбирать решения, удовлетворяющие имеющимся
ограничениям, и исключать из рассмотрения
неподходящие.
Рис. 3.3 позволяет понять суть процедуры
„просеивания” - отбора решений. Штриховкой на
этом рисунке обозначено то, что по признаку 1
объект 3 и объект 7 не подходят. Точно так же по
признаку 2 не подходит объект 3, по признаку 3 -
объект 5, по признаку 4 - объекты 1 и 2, а по при-
знаку 5 - объект 2.
Всеми нужными свойствами обладают только
объекты или решения 4 и 6. Они и оставлены
после „просеивания” для дальнейшей работы.
В качестве специальных признаков можно
указывать совсем общие, например предельный
или номинальный коэффициент умножения силы
для функции „умножить силу” (кат. 4.4.2), порядок
величин (переносимых сил, скоростей, весов, масс,
размеров) либо приемлемые варианты технологии.
Признаки общего характера, не связанные с конк-
ретной отраслью, на практике нередко оказывают-
ся бесполезными. Однако, поскольку специальная
часть может расширяться без изменения других
частей, каталоги можно пополнять полезными
признаками. При оценке решения по тому или
иному спецпризнаку не следует употреблять
общих оценочных суждений типа „неблагоприят-
но” или „ненадежно”, а следует давать конкрет-
ные указания типа „большие потери на трение”
или в указанных условиях часты усталостные
разрушения”.
К сожалению, до сих пор не удалось разрабо-
тать общеобязательные правила для выбора спе-
циальных признаков, - поэтому составителю
каталога приходится самому выбирать их в каж-
дом конкретном случае.
Для сокращения и облегчения этого процесса
на рис. 3.29 и 3.30 приведен составленный Дикхене-
ром обзор и список специальных и классификаци-
онных признаков для составления конструктор-
ских каталогов, подробности обсуждаются там же
в тексте. Найденные таким образом в каталоге
признаков специальные признаки следует, по
возможности, соотнести с типами конструкций, их
параметрами или указать как факторы сравнения.
В данном случае поиск в каталоге (см. рис. 3.29 и
3.30) проводится с помощью классификационных
признаков. Для некоторых видов каталогов, на-
пример „многомерного”, последний способ являет-
ся правилом.
И наконец, вслед за специальной частью в
каталог можно поместить дополнение с различ-
ными замечаниями к отдельным решениям, как
это сделано на рис. 3.3, а также в кат. 4.1.1, 4.4.2,
4.8.1,4.8.2 и др.
Заметим, что разделение конструкторского
каталога на классификационную, главную и спе-
циальную части точно соответствует по форме
структуре научной книги. В соответствии с этим
оглавление играет роль классификационной
части, собственно, содержание книги с текстом,
уравнениями и иллюстрациями - роль главной
части, а предметный указатель - роль специаль-
ной части. Предметный указатель, так же как и
специальная часть, может быть более или менее
подробным, а в оглавлении, наоборот, как и в
классификационной части, ни один из основных
3.3 Общая структура конструкторских каталогов
49
разделов не может быть опущен. Все сказанное о
каталогах в связи с удобством их применения,
целенаправленной подготовкой материала и
хорошими возможностями поиска в них справед-
ливо также и для научных книг.
332. Каталоги с „двумерной” классификационной
частью
Цель создания „двумерных” каталогов - орга-
низовать материал в форме, позволяющей нахо-
дить нужную информацию по двум существенным
параметрам. Преимущество двумерной формы
каталога по сравнению с одномерной состоит в
том, что она позволяет представить материал
более сжато и наглядно, недостаток же - в отсут-
ствии отдельной графы специальных признаков.
Поиск в каталоге в данном случае может прово-
диться только по классификационным признакам.
Главная часть размещается в клетках матрицы,
причем искомая информация находится на пере-
сечении строки и столбца, соответствующих требу-
емым значениям признаков (см. рис. 3.4).
Классификационные признаки для строк и
столбцов могут быть одинаковы, например, когда
они соответствуют входу и выходу (как в матрице
Юсти, см. рис. 2.12, или в матрице функциональных
величин [28], см. рис. 5.31). В других случаях,
когда искомое решение должно одновременно
обладать двумя разнородными свойствами (как,
например, в случае элементарных функций рабо-
чего объема, см. рис. 6.22-1), классификационные
признаки различны.
333. Каталоги с „трехмерной” классификацион-
ной частью и комбинированные формы
Возможный способ трехмерной организации
каталогов проиллюстрирован на рис. 3.5. Третье
измерение реализуется путем размещения матери-
ала на нескольких листах. Искомую информацию в
таком каталоге находят уже по трем классифика-
ционным координатам. Физически трехмерный
каталог реализуется в виде набора карточек или в
виде тетради. Создание такого каталога весьма
трудоемко, однако в ряде случаев оно оправдано,
если для конструктора существенны ровно три
параметра.
Как было указано выше, в двумерной форме
„нет места” для графы специальных признаков.
Тем не менее, чтобы учесть эти признаки, можно
использовать следующий прием: для каждого из
Рис. 3.5. Конструкторский каталог с „трехмерной” классифика-
ционной частью (включающей в себя специальную часть)
признаков сделать копию каталога на прозрачном
листе и закрасить клетки, не подходящие по этому
признаку (рис. 3.6). Если теперь эти копии нало-
жить друг на друга, то прозрачными останутся
только клетки, подходящие по всем признакам.
Чтобы учесть специальные признаки, можно
также использовать и другие - отличные от „трех-
мерного” каталога - комбинированные формы.
Например, двумерный каталог можно организо-
вать в виде нескольких одномерных каталогов на
разных листах, соответствующих различным
значениям второго классификационного призна-
ка. Добавив к этому набору одномерных каталогов
лист, на котором тот же материал, исключая
специальные признаки, представлен в двумерной
форме, мы получим еще одну комбинированную
форму, обладающую преимуществами как одно-
мерной, так и двумерной форм.
33.4. Обзорные и детальные каталоги
Для представления материала большого
объема применяются пары каталогов, один из
которых - обзорный, а другой - детальный. На рис.
3.7 изображена одномерная форма для обзорного
каталога, а на рис. 3.8 - двумерная форма. Деталь-
ный каталог также можно сделать одномерным
или двумерным. Так, например, в случае соедине-
ний „вал-ступица” (кат. 4.8.4, 4.8.5) выбрана одно-
мерная форма и для детального, и для обзорного
Рис. 3.6. Конструкторский каталог с, двумерной” классификационной частью и его прозрачные копии для учета специальных признаков
4-2317
50
3. Конструкторские каталоги и их применение
Обзорный каталог
Классифика- ционная часть Главная часть Специальная часть
1 2 1 2 N* 1 2 3 4 5 классификационной
Q а 1 “ частью
Р 2
Ь а 3
Р 4
С а 5
Детальный каталог
с "одномерной” классификационной частью
Классифнка - ционная часть Главная часть Специальная часть
N*
1 2 3 1 2 1 2 3
Q а А 1
В 2
С 3
0 4
Р А 5
В 6
с ’’двумерной" классификационной частью
Классифи- кационно' специаль- ные части П А В С 0
I № 1 2 3 4
а • а 1
а • р 2
b а 3
Ь- р 4
с • а 5
Рис. 3.7. „Одномерный” обзорный каталог и относящиеся к нему детальные каталоги с, ддномерной”и „двумерной” (совпадающей со
специальной) классификационными частями
Обзорный каталог
с "двумерной” классификационной и специальной частью
Классифи- кационная и специаль- ная части п а Р Y 6
I № 1 2 3 4
а 1 а-а а-р Q-Y а • б
b 2 Ь-а ь-р b-Y b-б
с 3 с-а с-р c-y с • б
d 4 d -а d-p d -y d -б
с ’’двумерной" классификационной и ’’двумерной" специальной частью
ио ныбору
Класси- фикаци- Д он-части I \ 1 а Р Y 6 Классики- X кацион. часть /^^Спе- jr J/циаль- »Хная часть!
1 2 N* 1 2 3 4 1 2
о 1 а-а а-р а-у а-б о' Ь' о'
Ь-с ь 2 Ь-а ь-р b-Y Ь-б Ь'
с 3 с-а с-р c-y с • 5 с'
Классифн-/ кацион-/ ная / часть / Спе - [/циаль- /'ная частьЦ 1 а1- ₽‘ Y1 б' D I Специаль- ные части
2 а' Р'
Детальный каталог
с’’одномерной" классификационной и специальной частью
Классифи- кационная часть Главная часть Специальная часть
1 п Ш №
1 2 1 2 1 2 3 4 5
а • а А 1
В 2
С 3
а-р А 4
8 5
с "двумерной” классификационной н специальной частью
Классифи- кационная н специаль- ная части Ш А В с D
т.п № 1 2 3 4
а - а 1
а • р 2
а • y 3
а • б 4
b • а 5
Рис. ЗЛ „Двумерные” обзорные каталоги и относящиеся к ним детальные каталоги в „одномерной” и .двумерной” формах. Несмотря на
„двумерность” правый обзорный каталог содержит отдельную специальную часть
3.3. Общая структура конструкторских каталогов
51
Рис. 33. Классификация конструкторских каталогов по целево-
му назначению (и соответствующему содержанию)
каталога, а для двухпозиционных Т-переключате-
лей (кат. 4.3.6, 4.3.7) обзорный каталог составлен в
одномерной, а детальный - в двумерной форме.
Пример использования двумерной формы для
обзорного каталога и одномерной формы для
детального - каталоги Коллера по „Систематике
физических эффектов...” [14, 13]. Матрица функци-
ональных величин также составлена подобно
двумерному обзорному каталогу (см. рис. 5.30 и
5.31).
Выбор одного из четырех представленных на
рис. 3.7 и 3.8 способов организации обзорного и
детального каталогов зависит, во-первых, от того,
что важнее для конструктора в обзорном (деталь-
ном) каталоге - специальные признаки или комби-
нация классификационных признаков, и, во-вто-
рых, от того, позволяют ли имеющиеся классифи-
кационные признаки организовать материал в
виде матрицы.
На рис. 3.8 (правый верхний пример) показано,
Каталоги н
списки
объектов
Каталоги
и списки
операций
Выполнение рабочего плана
Фаза конструи- рования Этап конструи- рования Результат
Каталоги решений для различных этапов конструирования
Анкета изделия, Правила
матрица поиска, абстрагирования
аналитический словесных
список и пр. формулировок
Фаза
формули-
ровки
задачи
Анализ
жизненного
цикла
изделия,
постановка
задачи
I
Функционально*
Положение,
список
требований,
инструкции
по коиструиро-
Список абстрактных функций и др. Правила композиции абстрактных функций, специальных функций и др. Функцио- налы! ая Абстрактная функциональная структура Идеальная общая функция Идеальная частная функция
фаза
Матрица Физическая Идеальная
функциональ- функциональная частная
ных величии структура функция
НДр. 1 Эффект
Умножить силу Умножить силу Умножить силу Умножить силу
Эффект рычага
Эффект клина
Эффект передачи
импульса
Элементарные функции рабочего объема и др. Каталог операций варьирования структуры и др.
Каталог соединений вал - ступица и др. Каталог операций варьирования конструкции и др.
Каталог способов обработки давлением сжатия н др. Каталог правил конструирова- ния, правила расчета допусков
Предмет-
ная фаза
Эффект I
1 Структурно- функциональ-
Геометрически материальная иый элемент
реализация Структурно-
изделия функциональ- ный элемент
I
Деталь (узел)
Технологи - ческая реализация изделия Деталь (узел) 1
♦ Способ
изготовления
Рис. 3.10. Применение конструкторских каталогов и обзорных таблиц при методическом конструировании
52 3. Конструкторские каталоги и их применение
что двумерный каталог иногда можно организо-
вать так, что классификационная и специальная
части разделены и соответствуют различным при-
знакам.
Еще одна форма каталога, особенно удобная
для организации текстов, приведена на рис. 3.30.
Классификационная и специальная части в этом
случае размещены не только в заголовочных
строках и столбцах, но и непосредственно в тексте,
где выделены нумерацией и подчеркиванием. Рис.
3.29 служит доказательством того, что этот каталог
практически полон.
3.4. Классификация конструкторских каталогов по
содержанию
Если в разд. 3.3 мы различали каталоги по спо-
собу их организации, то в настоящем разделе
классификация будет проводиться в зависимости
от содержания (т. е. от материала каталогов). В
соответствии со своим назначением каталоги
делятся на три класса (рис. 3.9): объектов, опера-
ций и решений [24,31,26.1].
3.4.1. Каталоги объектов
Конструкторские каталоги этого класса содер-
жат сведения общего характера, не зависящие от
конкретной задачи (проблемно-независимые). В
частности, это сведения из области физики, гео-
метрии, технологии и материаловедения. Органи-
зуются каталоги объектов с помощью средств
классификации того или иного типа. Как видно из
рис. 3.10, содержащиеся в каталоге объектов „стро-
ительные блоки” - хорошо организованные обще-
технические знания - помогают конструктору при
решении различных задач.
Каталоги объектов могут представлять собой под-
борки тех или иных способов изготовления, носите-
лей эффектов, самих эффектов, а также идеаль-
ных функций. Иногда каталоги этого класса охва-
тывают более узкие области: только технологиче-
ские процессы, только сведения о площадях,
объемах, центрах тяжести, моментах инерции
важнейших для конструирования геометрических
тел, сведения о физических или технологических
свойствах различных материалов и т. п. В качестве
объектов могут выступать также однотипные
конструкции, как то: шариковые подшипники,
четырехзвенные принудительные механизмы (кат.
4.5.2), одноступенчатые передаточные механиз-
мы (кат. 4.7.1) и т. д.
Таким образом, в каталогах объектов содер-
жатся обширные, однако никак не соотнесенные с
конкретными функциями или задачами - сведе-
ния по конструированию. Заметим, наконец, что
эти каталоги могут быть полны в строгом смысле, а
не только практически, - примером такого катало-
га является периодическая система химических
элементов.
3.4.2. Каталоги операций
Конструкторские каталоги этого класса содер-
жат операции (шаги процедур) или последователь-
ности операций (процедуры), представляющие
интерес при методическом конструировании, а
также сведения о моментах их применения и усло-
виях их применимости.
В каталогах операций собираются, упорядочи-
ваются и по возможности полно систематизируют-
ся правила, необходимые для реализации различ-
ных функциональных структур, т. е. правила, по
которым следует соединять элементы в модели
изделия, а также правила варьирования конструк-
ции (кат. 4.10.1), выбора решений, расчетов на
прочность или расчетов допусков (кат. 4.12.1)
ит. д.
Каталоги операций всегда связаны с вполне
определенными объектами, и при этом удобно,
если эти объекты, в свою очередь, представлены в
каталогах объектов. Правда часто число объектов
настолько мало, что вполне можно обойтись без
каталога объектов (например, если мы имеем дело
с типами уравнений - для применения алгебра-
ических правил или формами контуров - для
правил варьирования конструкции).
Каталоги операций призваны, в частности,
предоставлять конструктору средства для разра-
ботки функциональных структур, алгоритмиче-
ского целенаправленного варьирования решений,
а также для соединения различных объктов.
3.4.3. Каталоги решений
В конструкторских каталогах этого класса с
известными задачами^сопоставляются функции, с
функциями - эффекты, с эффектами - подходя-
щие носители этих эффектов, с носителями эф-
фектов - детали нужной формы и, наконец, с
деталями - способы их изготовления. Каталоги
этого класса всегда содержат решения задач
в пределах одного этапа конструирования. Чаще
всего каталоги решений составляются для поиска
реализаций тех или иных идеальных функций.
При этом вполне может оказаться, что уровень
конкретизации содержащегося в каталоге реше-
ния соответствует не данному, а одному из после-
дующих этапов. Так, например, каталог „умножить
силу” может содержать решения на уровне эффек-
тов, схем конструкций, эскизов носителей эффек-
тов и даже на уровне рабочих чертежей (см. рис. 3.10,
справа). В любом случае, это каталог решений для
одних и тех же функций, однако в разных по уров-
ню конкретизации формах представления. При
этом, чем конкретнее представление решений в
каталоге, тем больше появляется вариантов, и тем
труднее становится удовлетворить требованию
полноты. Опыт показывает, что функциональные
решения разумно представлять на уровне принци-
пиальных схем или эскизов. Ведь чем больше
этапов конструирования мы пропускаем, тем
более частное получаем решение и тем менее
очевидными становятся варианты, которые это
решение должно представлять.
3.4.4. Сравнение типов каталогов
Различия в использовании трех типов катало-
гов хорошо видны на рис. 3.10. Если каталоги
объектов и операций содержат сведения об общих,
замкнутых в себе множествах объектов или дейст-
вий, то каталоги решений ориентированы на конк-
ретную поставленную задачу.
Каталоги объектов и операций хороши тем, что
довольно небольшое число каталогов охватывает
обширные группы задач, но, за немногими исклю-
чениями, они содержат при этом только часть
возможных решений. Каталоги решений, наобо-
рот, содержат сведения только о некоторых функ-
3.5. Представление содержания каталогов
53
циях, классах функций и т. п., - но при этом позво-
ляют найти (при условии полноты) практически
все решения, оказывающиеся в установленных
границах. Такая полнота каталогов решений
заставляет предпочесть в работе именно их, - если
только для поставленной задачи найдется соот-
ветствующий каталог. Однако такой каталог име-
ется далеко не всегда: слйшком велико число
различных конструкторских задач, чтобы можно
было надеяться для всех них составить каталоги
решений.
Имеет смысл провести сравнительную оценку
трех типов каталогов и выяснить, в каких случаях
полезнее составлять каталоги объектов, а в ка-
ких - каталоги решений:
1) готовые костюмы (каталоги объектов) явля-
ются правилом, они не скроены на определенного
человека (задачу), и поэтому во многих случаях
они не вполне подходят;
2) костюмы на заказ (каталоги решений) явля-
ются исключением, они скроены на определенного
человека (задачу) и подходят поэтому в каждом
конкретном случае;
3) имея готовый костюм (из каталога объектов)
и изменяя его по определенным правилам (из
каталога операций), можно получить для данного
человека (задачи) вполне подходящий ему ко-
стюм (из каталога решений);
4) случайно может оказаться, что готовый
костюм (из каталога объектов) настолько подой-
дет определенному человеку (задаче), как будто
бы он был скроен именно на него (взят из каталога
решений).
Первое положение означает, что с помощью
каталогов объектов можно, хотя и не оптимально,
покрыть значительную часть пространства задач;
второе - что каталоги решений необходимы, если
требуется исчерпать все возможности без исключе-
ния; третье - что с помощью каталогов объектов и
операций можно получать новые решения; а
четвертое - что в каталогах объектов могут непо-
средственно содержаться нужные нам решения.
Сказанное в четвертом положении изображено
на рис. 3.11 с помощью диаграммы Эйлера - Венна.
Здесь поставлена задача „умножить момент”, и
ничто не мешает сделать это при помощи трех-
звенных кинематических цепей. В соответству-
ющем каталоге объектов содержатся цепи, среди
которых можно найти подходящую для решения
данной задачи. Отсюда, согласно [4], ясна методи-
ка составления каталогов решений (рис. 3.12): из
имеющихся в распоряжении каталогов объектов
берутся необходимые объекты, из которых потом
составляется искомый каталог решений.
Каталог объектов Каталог решений
(Трехзвенные Умножить
кинематичес- И/ZZj момент
кие цепи К/х/7
Умножить момент с помощью
трехзвенных кинематических цепей
Рис. 3.11. Диаграмма Эйлера-Венна, иллюстрирующая исполь-
зование в роли решений элементов из каталога объектов ввиду
отсутствия каталога решений
Каталог объектов
Рис. 3.12. Составление каталога решений с помощью каталога
объектов
3.5. Представление содержания каталогов
Наглядность и полезность каталога в значи-
тельной мере зависят от выбранной формы пред-
ставления. Особое внимание следует обратить на
степень абстрактности и на комплексность конк-
ретного содержания, измеряемую, например,
числом деталей.
Вопроса о степени абстрактности мы уже
неоднократно и с разных сторон касались в ходе
изложения (см. рис. 3.10). В первом примере этого
рисунка каталог решений „умножить силу” пред-
ставлен очень абстрактно и содержит только
перечень эффектов, во втором - осуществлена
конкретизация до уровня структур носителей
эффектов, в третьем - до геометрической формы
(контуров) носителей эффектов и в четвертом - до
их рабочих чертежей.
Если при работе в одной фазе используется
несколько каталогов, то уровень абстрактности в
них должен быть одним и тем же, - как для клас-
сификационной части, так и для изображений
главной части. Для идеальных функций оказыва-
ется наиболее выгодным представление решений
в виде эскизов. При этом на эскизе отражают такие
существенные геометрические параметры, как
длину и угол, а пренебрегают в первую очередь
многообразием вариантов контуров и материала.
Сложность содержания каталога определяется
тем, состоят ли решения из немногих элементов
или же из большого числа разнородных узлов.
Рекомендуется, по-возможности, разлагать узлы
на более простые, удобные в обращении единицы,
лучше всего - на отдельные элементы. Чем эле-
ментарнее изображаемые объекты, тем меньше их
общее число и тем скорее можно достичь полноты.
Все объекты, операции, решения каталога должны
быть представлены на одном уровне Сложности.
Согласно [12], если под сложностью конструкции
понимать степень разнородности элементов, а под
комплексностью - число отношений между эле-
ментами, то окажется, что оба показателя растут с
увеличением числа элементов (деталей). Поэтому
при составлении каталога для начальных фаз
наиболее рационально выбирать представления
абстрактные и состоящие из немногих элементов,
а для заключительных фаз - конкретные, состо-
ящие из большого числа элементов. Тем самым
„координаты каталога” должны задавать точку,
лежащую в заштрихованной треугольной области
рис. 3.13.
54
3. Конструкторские каталоги и их применение
Рис. 3.13. Рекомендуемая область для формы представления со-
держания каталога:
3 — фаза формулировки задачи; П — предметная фаза; Ф — функ-
циональная фаза
Франке [7] предлагает использовать в тех же
целях степень комплексности, учитывающую как
общее число отношений между элементами, так и
количество информации в них (энтропию по Шен-
нону).
3.6. Практическое использование конструкторских
каталогов
Конструкторские каталоги предназначены в
первую очередь для решения следующих задач
при методическом конструировании:
существенно расширить спектр возможных
решений;
облегчить выбор оптимальных решений (для
используемой методики это означает: наилучшим
возможным образом осуществить переход от зада-
чи к функциональному положению, от функци-
онального положения - к идеальной функции, от
идеальной функции - к эффекту и т. д.);
способствовать большей систематичности и
целенаправленности процесса конструирования.
Поскольку число имеющихся у конструктора
каталогов всегда ограничено, а их содержание
может и не подойти в конкретном случае, процесс
конструирования мы проиллюстрируем на таких
примерах, когда у нас есть следующие каталоги:
1) каталог решений для нашей задачи;
2) каталог решений для другой задачи, однако
сводящейся к тем же эффектам;
3) каталог объектов с некоторым множеством
решений;
4) каталог объектов с некоторым множеством
решений, сводящихся к тем же эффектам;
5) необходимые каталоги операций.
3.6.1. Применение каталогов решений
Общие положения. Так как каталог решений
предоставляет в распоряжение конструктора мак-
симально широкий спектр реализаций для опреде-
ленной задачи, то с помощью этого каталога
можно быстрее всего достичь цели. Поэтому при
определении частных функций следует прежде
всего проверить, не содержат ли каталоги постав-
ленной задачи. Если содержат, то можно действо-
вать в соответствии со следующим (впрочем,
необязательным) предложением.
Предложение. Каталог решений для нашей
задачи имеется. Рекомендуется проделать следу-
ющие шесть шагов:
1) исследовать требования нашей конструктор
ской задачи, учитывая признаки, содержащиеся в
специальной части каталога;
2) определить, какие из специальных призна-
ков каталога имеют в данном случае решающее
значение;
3) найти ограничения, не охватываемые специ-
альными признаками каталога;
4) просмотреть каталог с точки зрения найден-
ных признаков и ограничений (произвести „просе-
ивание”, как на рис. 3.3);
5) провести сравнительную оценку оставшихся
после просеивания решений (возможно, с исполь-
зованием уточненных целевых требований в спи-
ске требований, кат. 4.1.1);
6) выбрать решения и продолжить работу.
Что касается техники выбора при различных
способах оценки, то здесь следует сослаться на
соответствующую литературу [11, 33, 17, 35, 16, 29,
30].
Следующий пример строительно-монтажного
пистолета (устройства для забивания штырей или
нагелей) разработан специально для нормативов
VD1 2222/2 (ФРГ) [31] и воспроизведен здесь
частично.
1. Пример 1. Строительно-монтажный пистолет
Одномерный каталог решений для задачи
имеется.
Подобные устройства используются для того,
чтобы закреплять штыри (каленые нагели), осна-
щенные дополнительными элементами, в стенах
из бетона, камня (строительство) или из стали
(судостроение).
Постановка задачи. Для употребления в быту
должна быть разработана уменьшенная модель,
приводимая в действие (по соображениям безопас-
ности) не взрывчатым веществом, а одним из
имеющихся в быту источников энергии.
Список требований (извлечение):
пригодность для крепления штырей различной
величины (массой 2 ... 15 г, длиной 20 ... 90 мм, диа-
метром 3... 8 мм);
скорость движения штыря на выходе
100... 150 м/с;
размеры, позволяющие держать устройство в
руках, и умеренная отдача;
энергия для работы от рук (мускульная), элект-
росети, баллона со сжатым газом и т. д.;
безопасность: штырь должен начинать движе-
ние лишь после упора пистолета в стену.
Функциональную структуру (здесь в форме
абстрактной диаграммы потоков) можно легко
получить абстрагированием до частных функций
(разд. 1.2). Их формулировки (рис. 3.14) означают,
что заряжаемый и разряжаемый накопитель
дозируемой энергии, управляемый сообщениями,
совершает работу в подходящей форме для того,
чтобы разогнать штырь, ранее перенесенный в
пусковую позицию из магазина.
Для демонстрации применения каталога из
всей функциональной структуры выберем только
частную функцию „разогнать штырь”, для выпол-
нения которой необходимо осуществить превраще-
ние энергии с целью получить ускоряющую силу.
Для этого воспользуемся кат. 4.4.1 (Создать силу с
3.6. Практическое использование конструкторских каталогов
55
Рис. 3.14. Абстрактная диаграмма потоков (абстрактная функ-
циональная структура) строительно-монтажного пистолета
помощью других величин). В терминах рабочего
плана (см. рис. 2.10 и 3.1) нам нужно перейти от
идеальной функции к подходящему эффекту и к
соответствующему носителю эффекта на уровне
структурных или контурных элементов.
В соответствии с предложенной процедурой
(шаг 1), следует выбрать из списка требований те
признаки и критерии, которые (прямо или косвен-
но) позволяют решить, удовлетворяет ли решение
специальным признакам или оно исключается из
рассмотрения.
Далее, чтобы решить этот вопрос, следует рас-
смотреть (шаг 2) следующие признаки специаль-
ной части кат. 4.4.1 в порядке их важности:
столбец 5, величина создаваемой силы;
столбец 7, конструктивные параметры;
столбец 4, способность совершать работу;
столбец 2, величины, существенные в процессе
создания силы.
Поскольку критериев достаточно, шаг 3 пропу-
скается.
Теперь следует просмотреть (шаг 4) каталог,
отмечая все клетки, в которых значения рассмат-
риваемых признаков противоречат требованиям.
Возникает „сито”, оставляющее свободными
только те строки, решения в которых удовлетворя-
ют всем требованиям. На рис. 3.15 (извлечение из
кат. 4.4.1) - это строки 7-10.
Для выбранного эффекта нужно теперь подо-
брать подходящие носители эффектов, часто
отличные от содержащихся в каталоге, и реализо-
вать их на уровне схем (например, как на рис. 3.16).
Промежуточные шаги перехода от рис. 3.15 к рис.
3.16 помогает сделать интуиция, здесь они опу-
щены.
Теперь наступает черед оценки и выбора
лучшего решения (шаги 5 и 6). Требуемые значе-
ния начальной скорости достигаются, при сделан-
ных предположениях, только для решения 7 и 10
на рис. 3.15 (решения 1 и 4 на рис. 3.16). Перед тем,
как сделать окончательный выбор, рекомендуется
сделать эскизы перспективных решений с учетом
пропорций, что позволит увидеть трудности,
возникающие из-за дополнительных условий.
Название эффекта Строка в кат. 4.4.1 Специальная часть (извлечение) Поряд- ковый номер решения
5 7 4 2
Величина создаваемых сил Конструктив- ные параметры Способность совершать работу Существенные величины
Давление электромагнит- ного излучения 25 WW чЭчень малая/ 'А///АА 'бреда распро- странения, А' а////АА, Есть, малая/ '/////Л '///// /, Излучение А г ' частиц /А У / S У ' //
Деформация пружины 26 Большая Жесткость с Есть. Деформация 7
Электрострикции 27 ХМатернал X Яапряженносп электриче-/ ского поля /
Магнитострикция 28 Напряженносл магнитного > поля XX, ////А А
Тепловое расширение 29 Большая Материал Есть Тепловой * поток z У
Изотермическое сжатие 30 Вид и состояние газа, А Изменение объема 8
Адиабатическое сжатие 31
Изохорическое сжатие 32 Очень большая V77//// А/77//. X
Трение скольжения 33 — д Есть Сила и скорость 9
Эффект Магнуса 38 ХЖ 7////Л W У/М7/, ТАУ/аЛ , 1 , Скорость, угловая ' скорость
Упругий удар 39 Большая с,ш Есть, кратко- временная Скорость 10
Сопло Лаваля 40 рабочего''/ ^вещества^А' W УАА/А/. вещества ) <7777//. ж
Рис. 3.15. Выбор эффекта для строительно-монтаж-
ного пистолета из кат. 4.4.1 с помощью специальных
признаков (способ дешета’Э- Извлечение из
кат. 4.4.1
56
3. Конструкторские каталоги и их применение
Описание работы
Аналог
Эскиз
2
, и
Решение 7
Штырь t с помощью ползуна 2
разгоняется пружиной 3 после
нажатия на спусковой крючок 4.
Скорость штыря ~ 110 м/с
Решение s
Штырь 1 разгоняется в трубе 2
давлением воздуха из резервуа-
ра 4 после перемещения задвиж -
ки 3. Скорость штыря " 90 м/с
р= 0,6 МПа; р0 = 0,1 МПа
Решение 9
Штырь 1 с помощью промежуточ-
ной детали 2, в нужный момент
поджимаемой роликом 3.
разгоняется маховым колесом !.
Скорость штыря'60 м/с
Решение 10
Штырь 1 получает через
промежуточную деталь 2 импульс
от махового колеса 5 после того,
как центробежн. выключатель 4
освобождает толкатель 3.
Скорость штыря ' 120 м/с
Арбалет
2.3
Пневмати-
ческое
ружье
Рис. 3.16. Возможные реализации эффектов, выбранных из
рис. 3.15. Переход от эффектов к подходящим геометрическим
структурам
2. Пример 2. Механизм выключения сцепной муфты
Применяемый двумерный каталог решений не
содержит непосредственно нужных решений, а
только возможные реализации некоторого эф-
фекта.
Механизм переключения (например, механиче-
ские двухпозиционные RS-переключатели) приме-
няют в тех случаях, когда из двух дискретных
состояний механизма требуется сохранять вклю-
ченное последним. Эти два состояния, как прави-
ло, оазделяет промежуточное „положение опроки-
дывания”. Мы встречаем подобные механизмы в
выключателях, замках, монтажных приспособле-
ниях, а также в сцепных муфтах. Пример такой
муфты показан на рис. 3.17.
Постановка задачи. Для механизма выключе-
ния сцепной муфты требуется найти простые
основополагающие варианты устройства, обеспе-
чивающие возможность его фиксации во включен-
ном и выключенном состояниях с помощью упру-
гих, гидравлических, магнитных и/или гравитаци-
онных сил.
Список требований (извлечение):
наличие положения опрокидывания между
конечными состояниями;
возможность умножения прикладываемой
силы;
использование мускульной силы рук для
управляющего воздействия.
Функциональную структуру (рис. 3.18) легко
разработать, имея эскиз готовой муфты (см. рис.
3.17). Заметим, что для данного устройства опреде-
ляющими являются два потока - сообщений и
энергии. Поток сообщений - главный поток, он
используется для принятия решений о выборе
(пусть в данном случае речь идет всего лишь о
выборе одной из двух альтернатив), выбранное
положение сразу же запоминается. Поток энергии -
дополнительный поток. Носителем информации
является довольно слабый импульс энергии, изме-
няющий положение переключающего элемента
(деталь а - ползун на рис. 3.17). Чтобы воздейст-
вовать на поток энергии через контактные поверх-
ности детали с, сообщение должно дойти до это-
го места, а сила его носителя - импульса - должна
быть умножена. Это осуществляется за счет скоса
ползуна а и рычага Ь.
Займемся теперь одной из идеальных функ-
ций, выраженной в функциональном положении:
„запомнить сообщение с помощью механических
конструкций” (см. рис. 3.18). Так как в постановке
задачи говорится о простом устройстве, то катало-
ги решений 4.3.6 и 4.3.7 (двухпозиционные Т-пере-
ключатели) не подходят. Каталог решений 4.2.3
(Двусторонне ограничить движение) содержит
Рис. 3.17. Сцепная муфта с потоками энергии Э и сообщений С,
Фиксация установленного состояния осуществляется механиз-
мом переключения (двухпозиционным До-переключателем):
а — переключающий элемент; Ь — рычаг для умножения силы;
с —упругое фрикционное кольцо (см. также рис. 4.23)
Рис. 3.18. Абстрактная диаграмма потоков (абстрактная функ-
циональная структура) сцепной муфты, показанной на рис. 3.17
(для включенного состояния)
3.6. Практическое использование конструк орских каталогов
57
Нанлучшм форма силовой характеристики для создания
еусгойшвого промежуточного положения
Рис. 3.19. Разработка конструкции с неустойчивым промежуточ-
ным и устойчивыми конечными положениями (механический
двухпозиционный ДО-переключатель):
Fp F2 - силы установки и сброса; FB — сила воздействия; К —
точка опрокидывания;/? —сброс; S — установка; 5— перемеще-
ние
идеи решений с неустойчивым положением равно-
весия, т. е. тем самым положением опрокидыва-
ния, о котором идет речь в списке требований.
Этот каталог - двумерный и не содержит
отдельной специальной части, поэтому решения
невозможно „просеивать” по специальным приз-
накам - их нужно искать, ориентируясь на жела-
емые свойства в классификационной части. Если
способ реализации „опрокидывания” уже найден,
то после этого из кат. 4.2.2 могут быть получены
односторонние ограничители для обоих конечных
положений, подобные изображенным на рис. 3.19,
где показана также оптимальная форма графика
зависимости силы от перемещения для механиз-
ма опрокидывания с упорами (геометрическая
связь) в конечных положениях. Эти конечные
положения фиксируются с помощью переключа-
ющего элемента тем надежнее, чем круче характе-
ристика и чем больше силы, действующие в конеч-
ных положениях; удачна в этом отношении, напри-
мер, S-образная форма результирующей характери-
стики.
Решения, полученные в результате поиска в
кат. 4.2.3 и снабженные концевыми упорами из
кат. 4.2.2, показаны на рис. 3.20.
Рис. 3.20. Взятые из кат. 4.23 способы
создания положения опрокидывания с
двусторонними ограничителями движе-
ния (механические двухпозиционные
PS-переключатели)
58
3. Конструкторские каталоги и их применение
Рис. 3.21. Варианты опрокидывающихся” механизмов, пригодные для выполнения функции ^^-переключателей, разработанные на
основе решения 33 из рис. 330. Различные накопители энергии для создания силы реакции и различные перемещения отдельных
элементов
Используя диаграммы кат. 4.2.3, простым
сложением сил можно получить характеристиче-
скую кривую (как на рис. 3.19). При этом оказывает-
ся, что четыре варианта (поля 3.3, 3.3, 4.3 и 4.4 на
рис. 3.20) имеют наилучшую форму характеристики
для реализации опрокидывания (т. е. S-образную
форму). В других случаях форма характеристики
для переключающего элемента гораздо более
плоская и не исключает вероятности остановки в
промежуточном положении. Как правило, форма
характеристики оказывается наиболее благопри-
ятной в том случае, когда она складывается из
двух возрастающих сил (например Fi и F2 на рис.
3.19).
Одно из подходящих решений (поле 3.3 рис.
3.20) варьируется на рис. 3.21. В одном из вариантов
(решение 1.1 на рис. 3.21) считывание информации
производится не с переключающего элемента
а, а с направляющей Ь; можно также сделать на-
клон несимметричным, как на рис. 3.22. Преиму-
ществом этого решения является дополнительное
увеличение выходной силы и блокировка обратно-
го хода при нагрузке на выходе, а недостатком -
малое расстояние между конечными положени-
ями.
Действуя описанным в примере 2 способом, мы
не получаем всего спектра решений: остались
нерассмотренными, например, напряженные
шарнирные четырехзвенники [34] и фрикционные
переключатели [8]. Последние, правда, заранее
исключались требованием о наличии положения
опрокидывания.
3.6.2. Применение каталогов объектов
Общие положения. Каталоги объектов, как это
следует из определения, содержат не множество
всех решений для какой-нибудь частной функции,
а некоторые объекты и их свойства в форме, не
а)
S 0 1
Рис. 3.22. Механизмы с положением опрокидывания и двумя
дискретными конечными положениями, пригодные для RS-ne-
реключателей. Умножение силы, передаваемой от входного
элемента а к выходному элементу Ь, блокировка возврата эле-
мента а с помощью элемента Ъ. Варианты решений 1.1, 3.1 и IV
из рис. 3.21. В сцепной муфте (см. рис. 3.17) использовано реше-
ние 1 с другим расположением пружины
З.б. Практическое использование конструкторских каталогов
59
зависящей от конкретной задачи. Поэтому катало-
ги объектов очень хорошо подходят для хранения
общетехнической информации. Кат. 4.5.2 (Прину-
дительные механизмы с числом звеньев от двух до
четырех) содержит, например, различные механиз-
мы данного типа, но не все механизмы, пригодные
для передачи крутящего момента. Исключением
является только тот случай, когда выполнить
некоторую частную функцию может только опре-
деленный объект, - тогда каталог является одно-
временно каталогом решений и каталогом объек-
тов.
Каталоги объектов можно успешно применять
для поиска решений, в особенности если специ-
альные признаки связаны с наиболее распростра-
ненными частными функциями. В результате (за
указанным выше исключением) получаются не все
виды, а только определенный класс решений. С
подобной ситуацией мы уже столкнулись в гл. 1:
исходя из имеющегося замка (объекта) были
найдены альтернативные решения только в преде-
лах этого класса замков. На следующем примере
[31] мы еще раз коснемся этого вопроса.
1. Пример 3. Ручная клепальная машина
В нашем распоряжении имеется каталог объ-
ектов с некоторым (неполным) набором решений.
Постановка задачи. Требуется сконструиро-
вать рабочий механизм ручной клепальной ма-
шины.
Список требований (извлечение):
число звеньев механизма не более четырех;
рабочее усилие прикладывается к поворотно-
му рычагу (эргономическое условие);
движение обжимки поступательное;
передаточное отношение...;
график движения... и т. д.
Решить задачу в этой ограниченной постанов-
ке можно, если найти способ, позволяющий выпол-
нить две следующие функции, выраженные в
форме функционального положения:
преобразовать входное вращательное движе-
ние в выходное поступательное;
умножить силу.
Процедура в этом случае совпадает с описан-
ной в примере 1, поэтому мы рассмотрим дальше
только то, что связано с особенностями данной
задачи.
Первое требование дает указание на то, где
следует искать решение: в кат. 4.5.2 (Принуди-
тельные механизмы с числом звеньев от двух до
четырех).
Первая частная функция требует преобразо-
вать вращательное движение в поступательное,
вторая - умножить силу, например с помощью эф-
фекта рычага. Эти частные функции отражаются в
специальных признаках 1 и 5 кат. 4.5.2. Используя
эти*признаки по методу „сита”, выбираем из ката-
лога решения 2, 4, 7 и 9. Все механизмы нам подхо-
дят, хотя объект 7 подходит весьма условно.
На рис. 3.23 изображены схемы механизмов
вместе с эскизами вариантов реализации. Эти
решения было бы интересно сравнить с решениями
другого типа, например на основе гидравлики. Для
гидравлических решений обе функции - преобра-
зование вращательного движения в поступатель-
ное и умножение силы - осуществляются гидрав-
лически, для „смешанных” решений одна из
функций может быть реализована гидравлически,
а другая - механически.
Рис. 3.23. Передача силы в ручной клепальной машине. Реше-
ния и их номера взяты из кат. 4.5.2
Рис. 3.24. Удержание в собранном состоянии узла типа цепочки
бус с помощью запирающего элемента т:
а — цепочка бус; б — детали на оси; а — деталь, пронизывакиця я
все другие детали; b, с, t — другие детали узла (бусины)
2. Пример 4. Фиксация разъемных соединении
В нашем распоряжении каталог объектов с
некоторым (неполным) набором решений, основан-
ных на одинаковых эффектах.
Общие положения. Если каталог непосредст-
венно не содержит варианта искомого решения, то
60
3. Конструкторские каталоги и их применение
Разборка невозможна
Поступательное
движение
Винтовое
движение
Больше
демон -
тажиой
силы
для V
Меньше
демон -
тажной
силы
для V
Рис. 3.25. Варианты устройства запирающего элемента, использующего различные типы связей:
а — защищаемый от саморазборки узел; F — рабочая нагрузка; М — рабочий момент; s — линейное перемещение; v — запирающий эле-
мент; (р — угловое перемещение
следует выяснить, какие в нем есть эффекты и
принципы, относящиеся к поставленной задаче.
Чтобы найти их, необходимо провести небольшой
анализ уже известного решения задачи (см. метод
вариации эффектов при выявленных частных
функциях).
Анализ. Соединения двух или более деталей
всегда содержат один „последний элемент” (так
называемый запирающий элемент [26]), защищен-
ный от самопроизвольного отделения (законтрен-
ный) и потому удерживающий, как бусы в цепочке
(рис. 3.24, а), другие элементы в соединении (рис.
3.24, б). Запирающий элемент v при монтаже совер-
шает поступательное или вращательное движение
(или, по крайней мере, имеет поступательную
компоновку, см. рис. 1.8). Он воспринимает силы,
направленные на демонтаж соединения, перпен-
дикулярно или вдоль по отношению к направле-
нию монтажного движения. В этой связи можно
разделить соединения на большие классы с уче-
том характера движений (рис. 3.25). Зафиксировать
запирающий элемент можно с помощью различ-
ных связей.
Постановка задачи. Для разъемного соедине-
ния деталей должен быть разработан (или найден)
запирающий элемент, выдерживающий большие
нагрузки и хорошо защищенный от самопроизволь-
ного отделения.
Список требований (извлечение):
силы для сборки (монтажные) и разборки
(демонтажные) не должны быть слишком велики
(использование ручного инструмента допуска-
ется);
должна быть возможна сколь угодно частая
разборка.
Теперь следует найти частные функции, созда-
ющие силовую связь, противодействующую демон-
тажному движению запирающего элемента.
Возможные типы связей между двумя деталя-
ми собраны в кат. 4.2.1. Если запирающий элемент
(с возможностью демонтирования) должен иметь
положение устойчивого равновесия, то оно дости-
гается при минимальном уровне энергии, т. е.
движение в любом направлении должно требовать
совершения работы, а значит и приложения силы.
Если эта сила больше демонтажной силы для
соединения, то демонтажные направления соеди-
нения и запирающего элемента могут совпадать;
3.6. Практическое использование конструкторских каталогов
61
Г -образное движение
Поступательное движение
Фиксацию
обеспечивает
Сила упругости
Сила тяжести
Действие
силы
В одном направлении
В двух направлениях (переключатель)
Силовая
характе -
ристика,
состояние
накопите -
ля энергии
Зарядка (необратимая)
Сбор -
ка
Рис. 3.26. График изменения силы и состояния накопителя энергии при движении запирающего элемента v в устойчивое положение
для фиксации соединения
Рис. 3.27. Варианты устройства запирающего элемента v (см. рис. 3.25, поле 1.1). Защита устойчивого положения запирающего элемента с
помощью различных создающих силу накопителей энергии
если же эта сила меньше, то демонтажная сила
запирающего элемента должна иметь другое
направление, лучше всего - перпендикулярное
демонтажной силе соединения.
Рис. 3.25 подтверждает, что восприятие боль-
ших сил осуществляется лучше в том случае,
когда демонтажное направление запирающего
элемента перпендикулярно демонтажному на-
правлению соединения деталей. Такие конструк-
ции допускают при небольших рабочих нагрузках
(силах) использование небольших монтажных и
демонтажных сил. Поэтому первому требованию
удовлетворяют примеры в первых двух строках рис.
3.25.
Второму требованию (возможности сколь
угодно частой разборки) лучше всего удовлетво-
ряют примеры в первых двух столбцах рис. 3.25. В
результате выбранными оказываются конструкции
1.1, 1.2, 2.1, 2.2. В этих соединениях мы реализуем
теперь необходимые типы связей и заботимся о
том, чтобы, как показано на рис. 3.26, при движе-
нии запирающего элемента из запертого (смонти-
рованного) положения заряжался бы накопитель
энергии. Этого нужно достичь с помощью конст-
рукций, подобных показанным на рис. 3.20-3.22
(ведь и здесь речь идет о двух противопоставлен-
ных состояниях, разделенных таким положением,
которого можно достичь, только совершив работу).
На рис. 3.27 приводятся окончательные вариан-
ты решений, в результате оценки и выбора с уче-
том дополнительных требований.
3.6.3. Применение каталогов операций
Общие замечания. Каталоги операций содер-
жат отдельные шаги (процедур), выполняя кото-
рые, можно получать систематизированные набо-
ры решений, варьировать или оценивать имеющи-
еся объекты и т. д. Такими каталогами следует
пользоваться во всех тех случаях, когда процедуру
нельзя определить с помощью простой инструкции
(например, „общую задачу разложить на частные”)
и необходим целый ряд шагов. Поэтому возникает
следующая зависимость между каталогами объек-
тов и необходимыми для вариации их содержимо-
го каталогами операций: если объекты очень эле-
62 3. Конструкторские каталоги и их применение
ментарны и их мало, то требуется большое число
операций для комбинации их в более крупные
единицы; если же они сложны и многочисленны,
то достаточно небольшого числа правил (опера-
ций) для работы с ними. Конструкторская практи-
ка подтверждает это положение: конструкторы по
возможности используют узлы, выполняющие
значительную часть поставленной задачи, а вовсе
не стремятся собирать все из мельчайших деталей.
К сожалению, в принципе не существует обще-
значимых правил, охватывающих все шаги процес-
са конструирования, поскольку эти правила для
отдельных случаев часто противоречат друг другу.
Обычно также невозможно определить специаль-
ную часть для каталогов операций, - так что во
многих случаях можно предпочесть двумерный
каталог (см. также кат. 4.6.1, 4.10.1). Наиболее
целесообразно поступать при этом следующим
образом: просматривать список различных опера-
ций и оценивать, окажет ли их применение жела-
емое действие. Наличие соответствующих при-
знаков облегчает эту проверку.
1. Пример 5. Крыльчатка вентилятора двигателя
В нашем распоряжении каталог операций для
вариации конструкции детали.
Постановка задачи. Конструкция (форма и
материал) крыльчатки вентилятора должна систе-
матически изменяться применением операций
варьирования.
Список требований (извлечение):
основная форма диска, к которому крепятся
лопасти, остается неизменной;
должен быть возможен частый монтаж и
демонтаж;
для сохранения темпов производства изготов-
ление разрабатываемой конструкции должно
осуществляться методами пластического формо-
образования (обработки давлением) и т. д.
Кат. 4.10.1 (Операции варьирования конструк-
ции) предоставляет богатые возможности по
изменению исходной формы и материала детали
(в нашем случае - крыльчатки). На рис. 3.28 в
первом столбце помещены операции, во втором -
их номера, в третьем - исходные конструкции, а в
четвертом - измененные конструкции. На основе
опущенных здесь требований можно осуществить
их оценку и выбор наилучшей конструкции.
3.7. Составление конструкторских каталогов
Составление каталога - это весьма трудоемкий
процесс, поэтому тема каталога должна выбирать-
ся очень тщательно. Перечислим некоторые прин-
ципы, которыми следует руководствоваться при
выборе темы каталога:
следует предпочитать постоянно встречающи-
еся функции (объекты, правила);
тема должна иметь принципиальное значение;
весь необходимый материал должен быть под
рукой или должна быть возможность его разра-
ботать.
Новые каталоги должны найти свое место в
системе каталогов, заполняя в совокупности
промежутки, при этом следует стремиться к сле-
дующему:
учитывать предписываемые методикой шаги
процесса конструирования;
Операция варьирования Исходная конструкция Измененная конструкция
Описание Поле в кат. 4.10.1
Изменить форму поверхности 1.2 1
Изменить размеры поверхности 1.4 п
Изменить размеры детали 2.4 111
Изменить число элементов 3.1 IV
Изменить топологию узла 3.3 V
Изменить размеры узла За VI
Изменить материал 4.3 Крыльчатка из чугуна Крыльчатка из пластмассы
Рис. 3.28. Изменение исходной конструкции крыльчатки с по-
мощью различных операций варьирования, взятых из кат. 4.10.1
обеспечивать наиболее точное соответствие
каждого каталога одному из этих шагов;
избегать противоречий в содержании каталога;
образовывать перекрестные связи между ката-
логами, относящимися к смежным областям кон-
струирования.
Организация имеющегося материала в форме
каталога окажется успешной только при условии,
что для всех примеров их общие свойства будут
выяснены во время предварительного анализа и
смогут быть рассмотрены с единых позиций. В
большинстве случаев эти позиции необходимо
уточнить, сформулировать соответствующие опре-
деления. Так, например, что такое двухпозици-
онный Т-переключатель, установлено твердо, а
определения связи в литературе встречаются раз-
личные.
И если на основе имеющегося, пусть неполно-
го, но достаточно представительного материала,
удастся разработать классификационные призна-
ки, позволяющие систематизировать все без иск-
лючения примеры, то тем самым будет сделан
очень важный шаг на пути создания каталога. Не
следует недооценивать условие „все без исклю-
чения”, которое предполагает знание внутренних
взаимосвязей, а подчас даже новую систематику.
Совсем непросто, например, дать определение
понятия направляющей, которое бы охватывало при
этом все, что мы хотим иметь в виду: от подшипни-
ков качения до воздушных опор, от направляющих
вращательного до направляющих поступательного
движения. Периодическая система химических
элементов - предшественница и прообраз конст-
рукторских каталогов - смогла быть разработана
3.8. Список специальных и классификационных признаков для конструкторских каталогов
63
лишь только после того, как стали известны общее
строение атома и атомные веса. Следующие реко-
мендации (подробнее см. в [24, 31, 3]) могут быть
полезны при составлении новых конструкторски:
каталогов:
собирать разнообразные решения, объекты и
операции по избранной теме каталога;
осуществлять поиск (см. рис. 3.29 и 3.30) упоря-
дочивающих классификационных принципов для
каталога (в применении к функции „создать силу”
таким принципом является, например, физиче-
ская природа сил);
строить классификацию по иерархическому
принципу;
проверять, не окажется ли смысл заглавного
понятия слишком широким, так что некоторые
входящие в него категории исключат одна другую
или, наоборот, не окажется ли смысл понятия
слишком узким, не охватывающим всю нужную
область;
предпринимать при необходимости дальней-
шее подразделение заглавных понятий до тех пор,
пока все известные примеры не смогут быть вклю-
чены в систему;
выбирать новые классификационные принци-
пы, если не все примеры охватываются старыми, а
также проверять, не слишком ли ограничена
система (если, например, пружинные шарниры
должны войти в систему направляющих, то эта
система должна включать в себя также веществен-
ную связь, а не только связи между парами поверх-
ностей);
выбирать классификационные принципы
таким образом, чтобы была возможна проверка на
полноту (см. также разд. 3.8, список специальных и
классификационных признаков для каталогов);
составлять в начале работы полный список
выбранной литературы и других источников ин-
формации (многие каталоги приходилось состав-
лять повторно, если какие-то сведения впоследст-
вии оказывались недостоверными, причем источ-
ник и автор сведений оставались неизвестными,
так как при составлении каталога в первый раз
используемая литература не была зафиксирована);
стремиться к наилучшей форме представления
примеров в главной части (такой формой могут
служить и математические уравнения, и унифици-
рованные, свободные от лишних деталей эскизы, и
диаграммы, и словесные описания);
добавлять новые примеры, если, исходя из
полноты классификационных признаков, обнару-
жатся пустые поля в каталоге;
разрабатывать специальные признаки, характе-
ризующие такие свойства примеров, которые не
охватываются классификационными признаками
(ср. разд. 3.8).
3.8. Список специальных и классификационных
признаков для конструкторских каталогов
Идя навстречу желанию конструкторов полу-
чить в свое распоряжение средства для самосто-
ятельной разработки конструкторских каталогов,
Дикхенер [3] разработал структурированный спи-
сок, содержащий все существенные признаки,
требующиеся при составлении произвольного
каталога.
С этой целью в обзорном каталоге (рис. 3.29)
собраны сведения, позволяющие сделать первый
грубый набросок будущего каталога. В обзорном
каталоге использована двумерная классифика-
ция, наглядно подразделяющая заглавные поня-
тия - „кандидаты в признаки” - и этим облегча-
ющая и ускоряющая выбор важных для будущего
каталога классов признаков.
На следующем шаге мы обращаемся к подбор-
ке детализирующих признаков для каждого из
(помещенных в обзорном каталоге) обобщенных
понятий, причем для удобства пользования все
конкретные признаки, относящиеся к заглавному
понятию, приводятся в алфавитном порядке. На
рис. 3.30 отдельно для каждого заглавного поня-
тия приведены все относящиеся к нему конкрети-
зирующие признаки. В зависимости от постановки
задачи эти понятия можно использовать как клас-
сификационные или специальные признаки.
Чтобы множество собранных признаков пред-
ставить в наглядной форме, весь спектр признаков
изображен на рис. 3.31 двумя взаимосвязанными
способами. Изображение в верхней части рисунка
соответствует обзорному каталогу (см. рис. 3.29), а
в нижней - детализирующему списку признаков
(см. рис. 3.30).
В заключение добавим еще некоторые замеча-
ния по использованию каталога признаков. Эле-
менты главной части этого двумерного конструк-
торского каталога расположены на пересечении
соответствующих „горизонтальных” и „вертикаль-
ных” классификационных признаков. При поиске
признаков для нового конструкторского каталога
следует в первую очередь последовательно про-
смотреть обзорный каталог и отметить классы
понятий, относящихся к поставленной задаче. В
главной части обзорного каталога находятся
названные выше обобщенные понятия, уточня-
ющие содержание клетки пересечения (соответ-
ствующей данному разделу физики и данному
типу признака). Если обобщенные понятия при-
годны для использования в специальной или клас-
сификационной части, то на рис. 3.30 в соответству-
ющих классах ищется их дальнейшая конкретиза-
ция.
64
3. Конструкторские каталоги и их применение
3.9. Конструкторские каталоги для признаков каталогов
1. Список принципов к обзорному и детальному каталогам на рис. 3.29 и 3.30
1. Цель создания конст- рукторского ката- лога 2. Момент применения при методическом конструировании 3. Использование каталога 4. Определения основ- ных понятий 5. Классификация в каталоге 6. Ссылки на варианты 7. Примеры Собрать и представить в наглядной форме существенные специальные и классификационные признаки, необходимые для составления кон- структорских каталогов Во всех фазах рабочего плана Выбор признаков для конструк- торского каталога. Двухступенча- тое подразделение на „обзорный каталог” и .детальный каталог” делает возможным целенаправлен- ный поиск и выборку признаков, относящихся к составляемому ка- талогу. Выбор классов признаков (обобщенных понятий) осуществ- ляется с помощью обзорного ката- лога, а их конкретизация и уточ- нение — с помощью соответству- ющих списков детального каталога Классификационные признаки — это такие заглавные понятия, по которым содержание каталога под- разделяется однозначно, макси- мально полно и непротиворечиво. Их выбор должен производиться так, чтобы классификация была наглядной, легко проверяемой и допускала последующее включе- ние в каталог новой информации Специальные признаки — это та- кие заглавные понятия, которые выражают существенные для кон- структора свойства и ограничения, связанные с содержащейся в ка- талоге информацией. Они исполь- зуются для выбора из каталога подходящих объектов или реше- ний (в зависимости от обстоя- тельств их число может меняться) Двумерная классификация эле- ментов каталога по разделам физики (механика, оптика, акусти- ка, термодинамика, электротех- ника) и типу признака (технико- физический, технико-химический, человеческий / эргономический, экономический). Элементы, ука- занные в главной части обзорного каталога, конкретизируются в де- тальном каталоге и подразделяют- ся дальше с учетом специфики отдельных отраслей. Все класси- фикационные признаки могут быть также использованы как специальные [3]
3.9. Конструкторские каталоги для признаков каталогов
65
2. ОБЗОРНЫЙ КАТАЛОГ
Классифика- ционная н п специальная к части Тип риъ »ка Технико-физический Тех- нико- хими- ческ- ий Челове- ческий/ эргоно- мичес- кий Экономический Инфор- мацион- ный
Раздел физики N*
1 2 3 4 5 6 7 8 9 10 11 12
Меха- Механика твердого тела 1 1.1 Геометрия Длина Площадь Объем Угол Линейный/ плоский момент Форма/ структура 1.2 Кинематика Время Путь Скорость Ускорение 1.3 Дина- мика Сила Масса Давление Импульс Момент Работа 1.4 Напря- жение Дефор- мация 15 1.6 Качест- во! на- деж- ность 1) 1.7 Харак- терис- тики мате- риала 1) 1.8 1) 1.9 1) 1.10 Д1я изго- товителя Покупка/ продажа Изготов- ление/мои таж 1) 1.11 Д1Я потре бителя Эксплуа- тация Техобслу- живание Рециклинг 1) 1.12 1)
инка I Аэро-/гидромехаиика 2 Геометрия Длина Площадь Объем Угол Форма/ структура 2.2. Кинематика Время Путь Толщина погранич- ного слоя Скорость Ускорение Объемный поток 2.3 Дина- мика Сила Масса Давление Импульс Момент Работа 2.4 Напря- жение 1) 2.5 Крите- рии подо- бия 1) 2.6 Качест во/ надеж- ность 1) 2.7 Харак- терис- тики мате- риала 1) 2.8 1) 2.9 0 2.10 Дм изго-. товителя Покупка / продаЗа Изготовле- нне/моитав 1) 2.11 Д|.ч потре бителя Эксплуа- тация Техобслу- живание Рециклинг 1) 2.12 В
Оптика 3 3.1 Геометрия Длина Площадь Объем Угол Форма/ структура 3.2. Волновая оптика Геометри- ческая ортака Фотометрия Иитерферен- ция/дифрак- ция 3.3. Тепловое излуче- ние 1) 3.4 3.5 3.6 Качест- во/ надеж- ность 3.7 Харак- терис- тики мате- рий. ia 1) 3.8 1) 3.9 0 3.10 Д1Я изго- товителя Покуй ка- •продажа Изготов- ление/ монтаж 1) 3.1 Г Для потре- бителя Эксплу- атация Техобслу- живание Рециклинг 1) 3.12 В
Акустика 4 4.1 Геометрия Длина Площадь Объем Угол Форма/ структура 4.2 Звук Основы Распростра- нение Поле Передатчик/ приемник 4.3 4.4 4.5 4.6 Качест- во/ надеж- ность 1) 4.7 Харак- терис- тики мате- риала 1) 4.8 1) 4.9 1) 4.10 Дтя изго- товителя Покупка/ продажа Изготов- ление/ монтаж 1) 4.11 Дгя пот- ребителя Эксплуа- тация Техобслу- живание Рециклинг 1) 4.12 В
Термодинамика 5 5.1 Геометрия Длина Площадь Объем Угол Форма/ структура 5.2. Кинематика Время Путь Скорость Ускорение 5.3 Теплотех- ника Темпера- тур» Давление Теплота Характе- ристики процесса Работа 5.4 5.5 Крите- рии подо- бия 1) 5.6 Качест- во/ надеж- ность 0 5.7 Харак- терис- тики мате- риала 1) 5.8 0 5.9 1) 5.10 Дтя изго- товителя Покупка/ продажа Изготов- ление/ монтаж П 5.11 Для потре- бите^ Эксплуа- тация Техобслу- живание Рециклинг 1) 512 В
Электротехника 6 6.1 Геометрия Длина Площадь Объем Угол Форма/ структура 6.2 Кинематика 1) 6.3 Электро- техника Ток Напряже- ние Работа Электрич. поле Магнита, поле Сопротив- ление Колеба- ния/ частота Сила/ момент 6.4 6.5 6.6 Качест- во/ надеж- ность 1) 6.7 Харак. герме- тики мате- риала 0 6.8 1) 6.9 1) 6.10 Для изго- товителя Покупка/ продажа Изготов- ление/ монтаж 1) 6.11 Для потре- бителя Эксплуа- тация Техобслу- живание Рециклинг 1) 6.12 В
1) В этих полях конкретизирующие заглавные понятая не приводятся.
Рис. 3.29. Специальные и классификационные признаки для конструкторских каталогов
5-2317
66 3. Конструкторские каталоги и их применение
3. ДЕТАЛЬНЫЙ КАТАЛОГ
МЕХАНИКА ТВЕРДОГО ТЕЛА
ТЕХНИКО-ФИЗИЧЕСКИЕ ПРИЗНАКИ
I. 1. ГЕОМЕТРИЯ
Длина
Волновое число
Высота
Высота неровностей
Г абарит
Г лубина
Диаметр
Длина волны
Длина зацепления
Длина кривой
Длина продольного изгиба
Длина пути
Периметр
Радиус
Радиус инерции
Радиус кривизны
Толщина
Ширина
Площадь
Площадь поверхности
Площадь сечення
Поверхность соприкосновения
Поверхность зела
Объем
Емкость
Занимаемый объем
Свободное пространство
Угол
Плоский угол
Телесный угол
Угол давления
Угол закручивания
Угол контакта
Угол охвата
Угол скручивания
Угол трения
Линейны и/н. юс-кий момен т
Линейный момент 2-го порядка
Момент инерции относительно оси
Момент инерции относительно точки
Плоский момент 1-го порядка
Плоский момент 2-го порядка
Центробежный момент инерции
Форма / структура
Вещественная связь
Вид поверхности соприкосновения
Внешний вид
Геометрическая связь
Зацепление
Контакт
Крутизна
Наклон
Непрерывность
Неравномерность
Отношение плеч рычага
Передаточное отношение
Перекрытие
Плоскопараллельность
Положение нулевой линии
Положение оси вращения
Расположение деталей
Силовая связь
Симметричность
Степень гибкости
Степень свободы
Структура поверхности
Упругая связь
Фрикционная связь
Число деталей
Шаг (резьбы)
Эксцентриситет
1.2. КИНЕМАТИКА
Время
Время переключения
Длина периода
Длительность
Момент наступления события
Период колебаний
Продолжительность
Продолжительность столкновения
Продолжительность цикла
Промежуток времени
Путь
Амплитуда
Длина пути
Направление вращения
Отклонение
Сдвиг
Угол поворота
Упругая деформация
Скорость
Абсолютная скорость
Групповая скорость
Окружная скорость
Особенности распространения
Относительная скорость
Переносная скорость
Скорость вращения
Скорость распространения
Угловая скорость
Фазовая скорость
Частота
Частота возбуждения
Ускорение
Абсолютное ускорение
Кориолисово ускорение
Коэффициент возрастания
Коэффициент затухания
Отклонение
Относительное ускорение
Переносное ускорение
Рывок
Темп ускорения
Торможение
Угловое ускорение
Ускорение силы тяжести
Центростремительное ускорение
1.3. ДИНАМИКА
Сила
Вес
Внешние силы
Внутренние силы
Возмущающая сила
Вредная сила
Грузоподъемность
Изгибающая сила
Изменение импульса
Инерция
Контактное напряжение
Кориолисова сила
Линейные силы
Массовые силы
Нагрузка
Наличие силовых связей
Направляющая сила
Напряжение сдвига
Напряжение среза
Несущая способность
Объемные силы
Периодическая сила
Поверхностные силы
Повторяемость силовых
воздействий
Приводное усилие
Пульсирующая сила
Сила демпфирования
Сила ииерцин
Сила нажнма
Сила растяжения
Сила реакции
Сила сжатия
Сила трения
Сила тяги
Сопротивление
Сопротивление воздуха
Тангенциальная сила
Удельная нагрузка
Центральная сила
Центробежная сила
Масса
Гравнтационная масса
Динамический дисбаланс
Инерционная масса
Статический дисбаланс
Уравновешивание
Давление
Абсолютное давление
Атмосферное давление
Избыточное давление
Давление на опору
Давление на стеикн
отверстия
Опорное давление
Перепад атмосферного
давления
Удельное давление
Импульс
Количество движения
Вибрация
Линейный удар
Момент импульса
Нецентральный удар
Прямой удар
Упругий удар
Центральный удар
Момент
Вращающий момент
Изгибающий момент
Крутящий момент
Момент количества движения
Момент инерции
Момент пары снл
Момент'силы
Момент сопротивления
Момент трения
Напряжение изгиба
Опрокидывающий момент
Прокрутка
Скручивающий момент
Работа
Живая сила
Кинетическая энергия
Механический эквивалент
калории
Мощность
Накопление энергии
Плотность энергии
Полезная работа
Потенциальная энергия
Работа вытеснения
Удельная работа
Энергия деформации
Энергия связи
1.4. ПРОЧНОСТЬ
Напряжение
Внутренние напряжения
Главное напряжение
Местное напряжение
Нагрузочное отношение
Напряжение изгиба
Напряжение продольного
изгиба
Напряжение растяжения
Напряжение сдвига
Напряжение сжатия
Нормальное напряжение
Пик напряжения
Температурные
напряжения
Деформация
Выгиб
Деформация прн сжатн:.
Деформация сдвига
Закручивание
Излом
Кручение
Линейная деформация
Образование шейкн (
Объемная деформация
Объемное расширение
Относительная обьемная
деформация ’
Пластическая деформация:
Поперечное расширение
Поперечное сжатие
Продольная деформация
Продольный изгиб
Растяжение
Сгиб
Сдвиг
Скручивание
Тепловое расширение
Упругая деформация
Удлинение
1.5
Рис. ЗЛО. Список специальных и классификационных признаков для конструкторских каталогов. Лист 1
3.9. Конструкторские каталоги для признаков каталогов
67
1.6 КАЧЕСТВО/НАДЕЖНОСТЬ 1.8 ТЕХНИКО-ХИМИЧЕСКИЕ
Допуск ПРИЗНАКИ Прозрачность Техобслуживание
Защита окружающей среды Агрессивность Простота обслуживания Возможность восстановления
Защита от загрязнении Атмосферные влияния Пыль Возможность переработки
Защитные мероприятия Влияние атомного строения Раздражающее действие Возможность регенерации
Надежность в работе Влияние влажности Распознаваемость рабочего Восстановление
Переключаемость Вязкость СОСТОЯНИЯ Длительность ремонта
Раскачка Газификация Сила звука Затраты времени
Резонанс Дегазация Структурирование Защитное покрытие
Способность выдерживать Диффузия Тембр Издержки обслуживания
перегрузки Едкость Удобство в обращении Легкость замены важнейших
Стабильность Жаростойкость Форма функциональных единиц
Степень надежности Защитное покрытие Характер ввода-вывода Потребность в обслуживании
Угловая погрешность Кисло гостой к ость Цвет Регулируемость
Устойчивость Коррозия Шум Сервис
Устойчивость к внбрацнн Концентрация Ядовитость Частота профилактических осмотров
Ходовые качества Летучесть Яркость Чистка
1.7 ХАРАКТЕРИСТИКИ Набухаем ость Яркость красок Рециклинг
МА1ЕРИАЛА Длительная прочность Однородность Омыление ЭКОНОМИЧЕСКИЕ ПРИЗНАКИ Браковка Затраты на превращение в лом
Длительная устойчивость Опасность взрыва 1 10 ДЛЯ ИЗГОТОВИТЕЛЯ Переоцен ка
Жесткость пружины Опасность коррозии Переработка
Коэффициент продольного Осаждение Купля/продажа Повторное использование
изгиба Перегонка Возможность поставки Разборка
Коэффициент Пуассона Пластичность Качество Регенерация
Коэффициент теплового Потери на диффузию Налоги Утилизация отходов
расширения Разрыхлительное действие Перспективность
Коэффициент грення Растворимость Принадлежность ИНФОРМАЦИОННЫЕ ПРИЗНАКИ
Коэффициент трения Склонность к образованию Репутация
сцепления химических соединений Таможенная пошлина 1 12
Коэффициент трения С корпеть реакции Транспортны? расходы Адрес
скольжения Стабильность Цена Алфавит
Крупность зерен Старение И зг< 1 г< >в. ieitue/м (>п гож Аналоговый
Материалы Стерилизация
Модуль сдвига Стойкость Автоматизируемость
Модуль упругости Упругость Величина серин
Направлен не волокон Устойчивость к коррозии Группа типовых деталей Булево Ввод
Однородность Передающая среда Химический потенциал Химический состав Испытания Контроль
Плотность Холодостой кость Материал Визуальный индикатор
Предел текучести Предел текучести при растяжении Чистота Чувствительность к химическим Монтаж Настройка Время выборки Время реакции
Проницаемость веществам Объем партии Вывод
Прочность Шлакообразование Опасность повреждений Г рафопостроитель
Прочность кромок Шламообразован не Отходы при обработке резанием Данные
Прочность на разрыв Эластичность Регулировка Двоичный код
Сминаем ость 1.9. ЧЕЛОВЕЧЕСКИЕ/ЭРГОНО- Сборка Дешифратор
Сопротивление деформации МИЧЕСКИЕ ПРИЗНАКИ Системность Знак
Сопротивление кручению блеск Стандартизация Инструментальная система
Способность к деформации Болевой порог Технология изготовления Иитерпретатоп
Структура Верхний предел слышимости Унификация узлов Информационная избыточность
Твердость при вдавливании Влияние иа утомление 1.11. ДЛЯ ПОТРЕБИТЕЛЯ Информация
шарика Возможность взятия пробы Эксп. i гатаци.ч Исполнительная система
Термическая прочность Возможность отбора образцов Код
Термостойкость Гармоничность Годовое потребление Кодировать
Диссонанс Допустимая температура Код операции
Ударная вязкость Доступность Издержки производства Количество информации
Ударная прочность Дымление Износ Компилятор
Удельный вес Запах Коэффициент полезного действия Логический элемент
Удельный обьем Защита от неверного Маслоем кость Машинный язык
Удлинение использования Область применения Набоп знаков
Усталость Зеркальность Охлаждение Носи тель данных
Усталостная прочность Консонанс Потери Обработка данных
при нагружении Контраст Потерн на трение Операционная система
симметричным циклом Надежность Расход воздуха Операция И (конъюнкция)
Усталостная прочность Насыщенность Расходы на устранение Основание системы счисления
прн пульсирующем Незамаскнрованность обледенения Память
цикле нагружения Нижннй предел слышимости Смазочные метерналы Параллельно-последовательный
Холодостойкость Объем Срок службы преобразователь
Хрупкость Опасность взрыва Т ранспортабел ьность Последовательно-параллельный
Число перегибов Опасность вибрации Эксплуатационные расходы преобразователь
Число соударений Опасность для обслуживающего Экономичность конструкции Преобразователь кода
Ч увствнтел ьность персонала Энергоемкость Программа
к концентрации напряжений Неослепляющее воздействие Расстояние Хеммннга Режим диалога Режим реального времени Сигнал Символ Слово Сообщение Транслировать Транслятор Триггер Цифровой Цикл Энтропия (по Шеннону) Язык программирования
Рис. 330. Продолжение. Лист 2
5»
68
3. Конструкторские каталоги и их применение
АЭРО-/ГИДРОМЕХАНИКА ТЕХНИКО-ФИЗИЧЕСКИЕ ПРИЗНАКИ
2. 1. ГЕОМЕТРИЯ Толщина пограничного слоя 2. 5. КРИТЕРИЙ ПОДОБИЯ
Длина Число Вебера
Волновое число Толщина диффузионного Временное локальное Число Коши
Высота пограничного слоя изменение давления Число Маха
Высота неровностей Толщина зоны вытеснения Давление воздушного потока Число Нуссельта
(шероховатость) поверхности в пограничном слое Давление воздуха Число Пекле
Габарит Толщина зоны потерн импульса Динамическое давление Число Прандтля
Глубина Диаметр в пограничном слое Толщина зоны потерь энергии в пограничном слое Дросселирование Избыточное давление Напор Число Рейнольдса Число Фруда
Длина волны Толщина теплового Падение давления Число Фурье
Длина дуги Длина хода пограничного слоя Скорость Перепад атмосферного давления Полное давление Число Штроугала Число Эйлера
Периметр Абсолютная скорость Противодавление 2. 6. КАЧЕСТВО/НАДЕЖНОСТЬ
Радиус Истинная воздушная скорость Разрежение Сжатие Величина зазоров
Средняя высота неровностей Окружная скорость Вихреобраэование
Толщина Особенности распространения Статическое давление Защита от загрязнения
Условный проход Относительная скорость Удельное давление Защитные мероприятия
Ширина Скорость вращения Импульс Кавитация
Площадь Скорость звука Импульс на входе Коэффициент момента
Площадь поверхности Площадь поперечного сечения Скорость Лаваля Скорость распространения Импульс на выходе Разность импульсов Коэффициент подъемной силы Коэффициент сопротивления
Площадь проекции Скорость турбулентности Поток импульса Коэффициент трення в трубе
Поверхность соприкосновения Угловая скорость Момент Надежность в работе
Поверхность тела Частота Вращающий момент Опасность взрыва
Объем Частота возбуждения Момент сопротивления Опасность воспламенения
Вместимость Ускорение Момент трения Переключаемость
Емкость Коэффициент возрастания Работа Способность выдерживать перегрузки
Занимаемый объем Коэффициент затухания Кинетическая энергия Стабильность
Рабочий объем Кориолисово ускорение Мощность Степень надежности
Расход газа Отношение ускорений Плотность мощности Турбулентность
Свободное пространство Ускорение силы тяжести Плотность энергии Угловая погрешность
Угол Объемный поток Полезная работа 2. 7. ХАРАКТЕРИСТИКИ МАТЕРИАЛА
Абсолютный угол Объемный расход Потенциальная энергия Вязкость
Относительный угол Средняя скорость в сечении Поток энергии Газовая постоянная
Плоский угол Расход Работа перемещения Г азопроницаемость
Телесный угол 2.3. ДИНАМИКА Удельная энергия Динамическая вязкость
Угол атаки Сила Энергия связи Изеитропический показатель
Угол лопатки Аэро-/гндро динамическое 2.4. НАПРЯЖЕНИЕ Капиллярность
Угол потока сопротивление Угол сноса ®ес Фазовый угол Волновое сопротивление Форма/структура Индуцированное сопротивление Внд поверхности соприкосновения Кориолисова сила Внешний внд Массовые силы Напряжение сдвига Пик напряжения Поверхностное напряжение Поверхностное натяжение на границе раздела фаз Кинематическая вязкость Материады Молекулярный вес Передающая среда Плотность Политропический показатель
Закрутка крыла Нагрузка Проницаемость
Крутизна Поверхностное сопротивление Сжимаемость
Наклон Повторяемость силовых Состав газа
Непрерывность Неравномерность воздействий Подъемная сила Т ермостойкость Удельный вес
Применимость модельных законов^ н _ , Сила сопротивления Расположение деталей „ Удельный объем
Симметричность сила трения Сила жидкостного трения
Структура поверхности Число деталей 2. 2. КИНЕМАТИКА Сила тяги Сопротивление воздуха
Время Время падения Сопротивление потока Центробежная сила
Момент наступления события Период Период колебаний Инерционная масса Гравитационная масса Поток массы
Путь Плотность потока массы
Длина пути Давление
Направление вращения Абсолютное давление
Угол поворота Атмосферное давление Вакуум
ТЕХНИКО-ХИМИЧЕСКИЕ ПРИЗНАКИ ЧЕЛОВЕЧЕСКИЕ/ЭРГОНОМИЧЕСКИЕ ПРИЗНАКИ
2.8 2.9
Те же, что и в 1.8 Те же, что н в 1.9
ЭКОНОМИЧЕСКИЕ ПРИЗНАКИ ИНФОРМАЦИОННЫЕ ПРИЗНАКИ
2. 10. ДЛЯ ИЗГОТОВИТЕЛЯ 2. 11. ДЛЯ ПОТРЕБИТЕЛЯ 2. 12
Те же, что н в 1. 10 1е же, что н в 1. 11. дополнительно: Те же, что и в 1. 12
Эксплуатация Образование накипи Потребность в газе Утечка через зазоры
Рис. 330. Продолжение. Лист 3
3.9. Конструкторские каталоги для признаков каталогов
69
ОПТИКА
ТЕХНИКО-ФИЗИЧЕСКИЕ ПРИЗНАКИ
3 1. ГЕОМЕТРИЯ
Дитна
Высота
Глубина
Диаметр
Длина пути
Периметр
Радиус
Толщина
Ширина
Площадь
Площадь поверхности
Площадь поперечного сечения
Поверхность тела
Объем
Вместимость
Ем кость
Занимаемый объем
Свободное пространство
Угол
Плоский угол
Телесный угол
Форма/структура
Внешний вид
Непрерывность
Неравномерность
Плоскопараллельнос।ь
Расположение деталей
Симметричность
Структура поверхности
Число деталей
3 2 ВОЛНОВАЯ ОПТИКА
I еометрическая оптика
Апертурный угол
Вогнутый
Выпуклый
Глубина резкости
Диафрагма
Относительное отверстие
Параллакс
Разрешающая сила
Скорость света
Увеличение
Угол разрешения
Угол раствора
Фокусное рассюяние
Цифровая апертура
Фотометрия
Интенсивность излучения
Лучистая энергия
Мощнопь излучения
Облучение
Облученная поверхность
Освещенность
Продолжительность послесвечения
Просвечиваемый обьем
Световой поток
Световая энергия
Светосила
Сила света
У юл излучения
Фотометрический эквивалент
Экспозиция
Экспозиционное число
Знерт ия излучения
Ии терференция дифракция
Волновое число
Длина волны
Постоянная решетки
Разность фаз
Фазовый угол
Частота
3.3 . ТЕПЛОВОЕ ИЗЛУЧЕНИЕ
Интенсивность излучения с поверхности
Отражающая способность
Поверхность
Поглощающая способность
Теплопроводность
3.4
3.5
3. 6. КАЧЕСТВО/НАДЕЖНОСТЬ
Асимметрия
Астигматизм
Защита от загрязнения
Дисторсия
Защитные мероприятия
Искажение цветопередачи
Искажения
Искажение при отражении
Искривление поля изображения
Надежность в работе
Нарушение закона синуса
Переключаемость
Способность выдерживать перегрузки
Стабильность
Степень надежности
Сферическая аберрация
Хроматическая аберрация
Четкость изображения
ТЕХНИКО-ХИМИЧЕСКИЕ ПРИЗНАКИ
3.8
Те же, что и в 1,8
ЭКОНОМИЧЕСКИЕ ПРИЗНАКИ
3. 10. ДЛЯ ИЗГОТОВИТЕЛЯ
Те же, что и в 1. 10
3.11. ДЛЯ ПОТРЕБИТЕЛЯ
Те же, что й в 1. 11.
допол ннтел ьно:
Эксплуатация
Потерн из-за отражения
Потерн из-за поглощения
Светоотдача
Тепловые потери
3. 7.ХАРАКТЕРИСТИКИ МАТЕРИАЛА
Двойное преломление
Дисперсия
Коэффициент излучения
Коэффициент передачи
Коэффициент поглощения
Коэффициент пропускания
Люминесценция
Материалы
Передающая среда
Плотность
Показатель преломления
Степень поляризации
Термостойкость
Удельный вес
ЧЕЛОВЕЧЕСКИЕ/ЭРГОНОМИЧЕСКИЕ
39 ПРИЗНАКИ
Те же, что ив 1.9
ИНФОРМАЦИОННЫЕ ПРИЗНАКИ
3. 12
Те же, что н в 1. 12
Рис. 330. Продолжение. Лист 4
70
3. Конструкторские каталоги и их применение
АКУСТИКА ТЕХНИКО-ФИЗИЧЕСКИЕ ПРИЗНАКИ
4.1. ГЕОМЕТРИЯ M.IUIIU Высота Г абарнт Глубина Диаметр Длина дуги Периметр Радиус Толщина Ширина Паощадъ Площадь поверхности Площадь поперечного сечения Поверхность тела Объем Вместимость Емкость Занимаемый объем Свободное пространство Угон Плоский угол Телесный угол Форма/структура Внешний вид Непрерывность Неравномерность Плоскопараллельное ь Расположение деталей, Симметричность Структура поверхности Число деталей 4.2. ЗВУК 4.6. КАЧЕСТВО/НАДЕЖНОСТЬ Основы Диапазон частоты Амплитуда Защита от загрязнения Звуковые явления Защитные меры Отношение амплитуд обергона Коэффициент нелинейных искажений Переходный процесс Надежность в работе Скорость звука Переключаемость Тембр Стабильность Частота Степень надежности Способность выдерживать перегрузки Распространение Угловая погрешность Волновое число Длина волны Огибание Отражение Поглощение Преломление Продолжительность реверберации Скорость звука Фазовый угол Эквивалентная площадь поглощения Эхо 4.7. ХАРАКТЕРИСТИКИ МАТЕРИАЛА Попе Акустическое волновое сопротивление Амплитуда давления Коэффициент звукопоглощения Давление в звуковой волне Коэффициент отражения Давление звука Коэффициент пропускания Интенсивность звука Коэффициент Пуассона Мощность звука Материалы Плотность звука Модуль кручения Модуль сдвига //ередатчнк/приемник Модуль упругости Высшая гармоника Передающая среда Затухающие колебания Плотность Излучение звука Показатель преломления Незатухающие колебания Термостойкость Обратная связь Удельный вес Основная частота Основное колебание Резонанс Свободные колебания Частота колебаний 4. 3 4. 4 4.S
ТЕХНИКО-ХИМИЧЕСКИЕ ПРИЗНАКИ 4.8 Те же, что и в 1.8 ЧЕЛОВЕЧЕСКИЕ/ЭРГОНОМИЧЕСКИЕ ПРИЗНАКИ 4.9 Те же, что и в 1.9
ЭКОНОМИЧЕСКИЕ ПРИЗНАКИ 4.10. ДЛЯ ИЗГОТОВИТЕЛЯ Те же, что ив 1.10 4. 11. ДЛЯ ПОТРЕБИТЕЛЯ Те же. что и в 1. 11. Дополнительно: Эксплуатация Рассеяние ИНФОРМАЦИОННЫЕ ПРИЗНАКИ 4. 12 Те же, что и в 1. 12
Рис. 330. Продолжение. Лист 5
3.9. Конструкторские каталоги для признаков каталогов
71
ТЕРМОДИНАМИКА ТЕХНИКО-ФИЗИЧЕСКИЕ ПРИЗНАКИ
5.1. ГЕОМЕТРИЯ Скорость Характеристики процесса 5.6. КАЧЕСТВО/НАДЕЖНОСТЬ
Длина Окружная скорость Воздушное охлаждение Зашита от загрязнения
Волновое число Особенности распространения Воздушные пробки Защитные меры
Высота Скорость вращения Воспламенение топлива Надежность в работе
Глубина Скорость звука Дымление Опасность взрыва
Диаметр Скорость потока Задержка воспламенения Опасность воспламенения
Длина волны Скорость распространения Искровое зажигание Опасность преждевременного
Длина дуги Периметр Радиус Средний диаметр Толщина Частота Угловая скорость Ускорение Коэффициент возрастания Испарение Карбюрация Квазистационарный Конденсация Начальные условия самовоспламенения Охрана окружающей среды Переключаемость Противопожарная защита Способность выдерживать перегрузки
Ширина Коэффициент затухания Нестационарный
Эквивалентый диаметр Отношение ускорений Непрерывный
Площадь Площадь поверхности 5.3. ТЕПЛОТЕХНИКА Температура Критическая температура Постоянная времени Прерывистый Сгорание Угловая погрешность 5. 7. ХАРАКТЕРИСТИКИ МАТЕРИАЛА
Площадь поперечного сечения Нагрев Скорость охлаждения Влияние мороза Бризантность Г орючесть Детонационная стойкость
Поверхность нагрева Охлаждение Скорость подогрева
Поверхность охлаждения Разность температур Скорость реакции
Поверхность соприкосновения Температура воспламенения Циркуляция
Поверхность тела Температура впуска Динамическая вязкость
Поверхность теплообмена Температура в тройной точке Работа Зольность
Температура выпуска Изменение внутренней энергии. Индивидуальные газовые
Объем Температура замерзании Изменение свободной внутренней постоянные Кинематическая вязкость Количество вещества Коэффициент линейного расширения Коэффициент объемного
Вместимость Емкость Температура кипения Температура плавления энергии Изменение свободной энтальпии
Занимаемый объем Свободное пространство Температура размягчения Температурная зависимость Изменение энтальпии Мощность
Термодинамическая температура Полезная работа
Угол Точка росы Работа потерь расширения
Плоский угол Давление Расширение Коэффициент
Телесный угол Сжатие температуропроводности
Фазовый угол Вакуум Трение Коэффициент теплового
Давление в тройной точке Энергия связи расширения
Форма/структура Давление кипения Коэффициент теплоотдачи
Внешний вид Давление плавления 5.4 Коэффициент теплопередачи
Непрерывность Давление при расширении Коэффициент теплопроводности
Неравномерность Дросселирование 5.5. КРИТЕРИИ ПОДОБИЯ Критические параметры состояния
Плоскопараллельность Критическое давление Число Г расгофа Масса
Расположение деталей Парциальное давление Число Нуссельта Материалы
Симметричность Предварительное сжатие Число Пекле Отношение удельных теплоемкостей
Структура поверхности Степень сжатия Число Прандтля Передающая среда
Число деталей Число Рейнольдса Проницаемость
5.2. КИНЕМАТИКА Теплота Число Фурье Тепловое сопротивление
Время Количество теплоты Теплоемкость
Период Отходящая теплота Термический коэффициент давления
Период колебаний Плотность теплового потока Термостойкость
Путь Длина пути Тепловой поток Удельный вес
Термодинамические краевые условия Удельные газовые постоянные Удельный объем
Направление вращения Удельная теплоемкость Удельная теплота сгорания
Угол поворота Удельная теплота Удельная теплотворная способность
Холод Холодостойкость
ТЕХНИКО-ХИМИЧЕСКИЕ ПРИЗНАКИ ЭКОНОМИЧЕСКИЕ ПРИЗНАКИ ИНФОРМАЦИОННЫЕ ПРИЗНАКИ
5.8 5.10. ДЛЯ ИЗГОТОВИТЕЛЯ X и Те же, что и в 1.12
Те же, что н в 1.8 Те же, что и в 1.10 5.11. ДЛЯ ПОТРЕБИТЕЛЯ Те же, что и в 1. 11, дополнительно:
ЧЕЛОВЕЧЕСКИЕ/ЭРГОНОМИЧЕСКИЕ ПРИЗНАКИ Эксплуатация
Коэффициент мощности
5.9 КПД цикла Карно
Те же, что и в 1 ? Необратимость Потери смешивания
Потери теплоты с отработавшими газами
Потребность в кислороде Потребность в питательной воде Потребность в топливе Рассеяние теплоты Расход угля Сортность топлива Тепловой КПД Тепловые потери Турбулентность
Рис. 330. Продолжение. Лист б
72
3. Конструкторские каталоги и их применение
ЭЛЕКТРОТЕХНИКА
ТЕХНИКО-ФИЗИЧЕСКИЕ ПРИЗНАКИ
6. 1. ГЕОМЕТРИЯ Длина Воздушный зазор Глубина 6. 3. ЭЛЕКТРОТЕХНИКА Ток Линейная плотность Количество электричества Период колебаний
электрического тока Напряженность электрического Постоянная времени
Диаметр Длина волны Плотность поля Фазовая скорость
электрического тока Относительная диэлектрическая Частота возбуждения
Длина дуги Сила тока проницаемость Плотность заряда Сила/момент
Радиус Сечение провода Напряжение Плотность смещения Магнитный момент
Импульс Распределение поля Момент тока
Толщина Ширина Коэффициент высших гармоник Коэффициент первой гармоники Ток смещения Электрический поток Сила магнита Электрический дипольный момент
Напряжение гашения Электрический заряд Электродвижущая сила
Площадь Напряжение ионизации Элементарный заряд Электромагнитный момент
Площадь поверхности Площадь поперечного сечения Поверхность тела Напряжение скольжения в асинхронной машине Напряжение трехфазиого тока Падение напряжения Магнитное поле Абсолютная магнитная проницаемость вакуума 6.4. ... 6.5.... 6.6. КАЧЕСТВО/НАДЕЖНОСТЬ Защита от загрязнения
Объем Вместимость Емкость Занимаемый объем Свободное пространство Переменное напряжение Полярность Постоянное напряжение Потенциал деионизации Пробивное напряжение Взаимная индуктивность Гистерезис Индуктивность Коэффициент рассеяния Коэффициент взаимоиндукции Защитные меры Надежность в работе Опасность взрыва Опасность воспламенения Охрана окружающей среды
Прямоугольное напряжение связи Переключаемость
Угол Распределение потенциалов Магнитное возбуждение Свойства контактов
Плоский угол Синусоидальное напряжение Магнитная восприимчивость Способность выдерживать
Телесный угол Структурный фактор Магнитная индукция перегрузки
Угол отклонения Электрическое напряжение Магнитная нолярнэация Стабильность
Форма/структура Электролитическое напряжение Магнитный поток Степень надежности
Ампер-витки Внешний вид Электростатический потенциал Намагниченность Намагничивающая сила Угловая погрешность 6. 7. ХАРАКТЕРИСТИКИ
Непрерывность Работа Напряженность магнитного поля МАТЕРИАЛА
Неравномерность Плоскопараллельность Расположение деталей Симметричность Структура поверхности Аккумулирование энергии Активная мощность Коэффициент диэлектрических потерь Коэффициент мощности Относительная магнитная проницаемость Передача Плотность магнитного потока Распределение поля Восприимчивость Глубина проникновения (скин-эффект) Диэлектрическая проницаемость
Мощность потерь Число витков Коэффициент диэлектрических потерь
Форма электродов Число деталей Мощность скольжения в асинхронной машине Эффект Холла Магнитная проницаемость Магнитное сопротивление
Число жгутов (стренг) Передача энергии Сопротивление Материалы
6.2. КИНЕМАТИКА Плотность мощности Активное сопротивление Объемное сопротивление изоляции
Асинхронная скорость вращения Время Плотность потока энергии Полезная работа Омическое сопротивление Полная проводимость Передающая среда Переходное сопротивление контакта
Окружная скорость Полная мощность Полное сопротивление (импеданс) Проницаемость
Путь Реактивная мощность Проводимость Сопротивление растеканию
Скорость вращения Угловая скорость Согласование по мощности Энергия поля в воздушном зазоре Реактивная проводимость Реактивное сопротивление Сопротивление утечке Температурная чувствительность Ток утечки
Ускорение Энергия связи Электропроводность
Частота скольжения в асинхронной Энергия электрического поля Угол диэлектрических потерь Удельный вес Электролитические эффекты
машине Энергия магнитного поля Электрическая энергия Колебания/частота Волновое число
Электромагнитная энергия Групповая скорость Длина волны
Электрическое поле Длина периода
Абсолютная диэлектрическая Затухание
проницаемость вакуума Коэффициент возрастания
Диэлектрическая поляризация Коэффициент затухания
Емкость Резонанс
ТЕХНИКО-ХИМИЧЕСКИЕ ПРИЗНАКИ ЧЕЛОВЕЧЕСКИЕ/ЭРГОНОМИЧЕСКИЕ ПРИЗНАКИ
6.8 6.9
Те же, что и в 1.8 Те же, что н в 1.9
ЭКОНОМИЧЕСКИЕ ПРИЗНАКИ ИНФОРМАЦИОННЫЕ ПРИЗНАКИ
6. 10. ДЛЯ ИЗГОТОВИТЕЛЯ 6. 11. ДЛЯ ПОТРЕБИТЕЛЯ 6. 12
Те же, что и в 1.10 Те же, чтон в 1. 11, Джоулевые потерн Те же, что н в 1. 12
дополнительно: Катодные потерн
Экспл уатация Омические потерн
Анодные потери Потери в диэлектрике
Выгорание электродов Потери на вихревые токи
Высокочастотные потерн Потерн на гистерезис Потерн при запуске Потерн энергии
Рис. 3 30. Продолжение. Лист 7
3.10. Список литературы
73
Обзорный каталог
X. Тип признака Технико-физический Технико- хими- ческий Челове- ческий/ эргоно- мический Экономи- ческий Информа- ционный
Раздел физики № 1 2 3 4 5 6 7 8 9 10 11 12
Механика 1 1.1 1.2 13 1.4 — 1.6 1.7 1.8 1.9 1.10 1.11 1.12
2 2.1 2.2 Л 2.3 2.4 2.5 2.5 2.7 2.8 2.9 2.10 2.11 2.12
Оптика 3 3.1 3.1 3.3 — — 3.6 3.7 3.8 3.9 3.10 3.11 3.12
Акустика 4 4.1 4.2 V 4.6 4.7 4.8 4.9 4.10 4.11 4.12
Термо- динамика 5 5.1 5.2 5.3 V 5.5 5.5 5.7 5.8 5.9 5.10 •5.11 5.12
Электро- техника 6 5.1 6.2 6.3 .А 6.6 6.7 6.8 6.9 6.10 6.11 6.12
Детальный каталог (извлечение)
1.3 ДИНАМИКА
Сила
Импульс
Масса
Момент
Давление
Работа
17. Maser, S.: Nutzwertanalyse, ein Instrumentarium fur den
Sachverstandigen. Vorlesungsmanuskript der Staatlichen
Hochschule fur Bildende Kiinste. Braunschweig 1974.
18. Pahl, G.; Beitz, W.: Konstruktionslehre. Berlin, Heidel-
berg, New York: Springer 1977.
19. Presse, G.: Aufbau von Katalogen zur Prinzipfindung
in der Geratekonstruktion. Berichtsheft 22. Intern. Wiss.
Roll. TH Ilmenau 1977, S. 7-10.
20. Presse, G.: Aufbau und Anwendung eines Kataloges phy-
sikalischer Effekte. Maschinenbautechnik 26 (1977) 330-
333.
Рис. 331. Взаимосвязь обзорного и детального ката-
логов в списке и классификационных
признаков для конструкторских каталогов (см. рис.
3.29 и 330)
3.10. Список литературы
I. Berns, Н.: Denkmodell fur methodisches und wirtschaft-
liches Konstruieren und Gestalten. Konstruktion 32
(1980) 13-18.
2. Diekhoner, G.: Systematische Losungsfindung mit Kon-
struktionskatalogen. VDI-Z 120 (1978) 351-357.
3. Diekhoner, G.: Erstellen und Anwenden von Konstruk-
tionskatalogen im Rahrnen des methodischen Konstruie-
rens. Diss. TU Braunschweig 1980.
4. Diekhoner, G.; Lohkamp, F.: Objektkataloge - Hilfsmit-
tel beim methodischen Konstruieren. Konstruktion 28
(1976) 359-364.
5. Dreibholz, D.: Ordnungsschemata bei der Suche von Lo-
sungen. Konstruktion 27 (1975) 233-240.
6. Ewald, O.: Losungssammlungen fur das methodische
Konstruieren. Dusseldorf: VDI-Verlag 1975.
7. Franke, H.-J.: Untcrsuchungen zur Algorithmisicrbarkcit
des Konstruktionsprozesses. Diss. TU Braunschweig
'976.
8. Gerber, H.: Bauweisen tnechanischer Flipflops, feinwerk-
technik + micronic 76 (1972) 58-62.
9. Gerhard, E.: Ahnlichkeitsgesetze beim Entwurf elektro-
mcchanischer Gerate. VDI-Z 111 (1969) 1013-1019.
10. Hertel, H.: Biologie und Technik - Struktur, Form, Bewc-
gung. Mainz: Krausskopf 1963.
11. Kesselring, F.: Bewertung von Konstruktionen. Dussel-
dorf: VDI-Verlag 1951.
12. Klaus, G.; Worterbuch der Kybernetik. Berlin: Dietz
1968.
13. Koller, R.: Eine algorithmisch-physikalisch orienticrte
Konstruktionsmethodik. VDI-Z 115 (1973) 147-152, 309-
317, 1078-1085.
14. Koller, R.: Konstruktionsmethodc fur den Maschinen-,
Gerate- undiApparatebau. Berlin, Heidelberg, New York:
Springer 1976.
15. Koller, R.: Methodisches Konstruieren: Integralbau-
weise. Konstruieren und GieBen (1978) H. 1, 12-26.
16. Lowka, D.: Methoden zur Entscheidungsfindung im
KonstruktionsprozeB. Feinwerktechnik und MeBtechnik
83(1975) 19-21.
21. Rechenberg, I.: Evolutionsstrategic. Stuttgart: From-
mann 1973.
22. Roth, K.: Gliedcrung und Rahrnen einer neuen Ma-
schinen- und Gerate-Konstruktionslehre. Feinwerktech-
nik 72 (1968) 521-528.
23. Roth, K.: Systematik tnechanischer Flipflops uftd ihre
Bedeutung fur die Konstruktion von Schaltelementen.
Feinwerktechnik und MeBtechnik 82 (1974) 384-392.
24. Roth, K.: Aufbau und Handhabung von Konstruktions-
katalogen. VDI-Berichtc Nr. 219. Dusseldorf: VDI-Ver-
lag 1974.
25. Roth, K.; Franke, H.-J.; Simonek, R.: Algorithmisches
Auswahlverfahren zur Konstruktion mit Katalogen. Fein-
werktechnik 75 (1971) 337-345.
25.1 Roth, K..; Franke, H.-J.Simonek, R.: Aufbau und Ver-
wendung von Katalogen fur das methodische Kon-
struieren. Konstruktion 24 (1972) 449-458.
26. Roth, K.: VerschluBglieder und Vcrschliisse aus Kunst-
stofftcilcn mit Viclfachfunktionen. Konstruktion 28
(1976) 249-258.
26.1 Roth, K.: Konstruktionskatalogc und ihr Einsatz beim
methodischen Konstruieren. VDI-Z 123 (1981) 413-418.
27. Schlosser, W.M.J.; Olderaan, W.F.T.C.: Eine Analogon-
theorie der Antriebe mit roticrcnder Bewegung. Glhydrau-
lik und Pneumatik 5 (1961) 413-418.
28. Simonek, R.: Ein Beitrag zur Ermittlung dcr Speziellcn
Funktionsstruktur in der Konstruktion. Diss. TU Braun-
schweig 1973.
29. Stabe, H.; Gerhard, E.: Anregungen zur Bewertung tech-
nischer Konstruktionen. Feinwerktechnik und MeBtech-
nik 82 (1974) 378-383 (einschl. weitercr Literatur-
hin weise).
30. Stahl, U.: Oberlegungen zum EinfluB der Gewichtung
bei der Bewertung von Altcrnativen. Konstruktion 28
(1976) 273-274.
31. VDI-Richtlinie 2222 Blatt 2 (Entwurf): Erstcllung und
Anwendung von Konstruktionskatalogen. Dusseldorf:
VDI-Verlag 1977.
32. VDI-Richtlinie 2223: Begriffe und Bezeichnungen im
Konstruktionsbereich. Dusseldorf: VDI-Verlag 1969.
33. VDI-Richtlinie 2225: Technisch-wirtschaftliches Kon-
struieren. Dusseldorf: VDI-Verlag 1969.
34. Wilhelms, W.: Untcrsuchung von ebenen, vierglicdrigen
Gelenkgetrieben mit Federverspannung zur Erzielung
vorgebbarer Gleichgewichtslagen. Diss. TU Braunschweig
1974.
35. Zangemeister, C.: Zur Charakteristik der Systcmtechnik.
TU Berlin: Aufbauseminar Systcmtechnik 1969.
36. Zimmermann, D.: ZAFO - Eine allgemeinc Formenord-
nung fur Werkstuckc. Stuttgart: Grossmann 1967.
37. Zimmermann, D. : Strukturgerechte Datenorganisation.
Bd. 10 der Reihc Wirtschaftsfuhrung-Kybemetik-Datcn-
verarbeitung. Ncuwied: Luchterhand 1971.
74
4. СОБРАНИЕ КОНСТРУКТОРСКИХ КАТАЛОГОВ
Расположение каталогов в этой главе в основ-
ном согласовано с их местом в процессе констру-
ирования. От сплошной нумерации их строгой
классификации мы отказались, так как хотя
предлагаемое собрание каталогов представляет
собой хорошо структурированную систему, оно, тем
не менее, еще не содержит многих важных катало-
гов. Заполнение имеющихся пробелов потребует,
по-видимому, немалого времени и новых знаний.
По сравнению с известными ранее подборками
решений [78, 72, 91,21, 43] новым является то, что
для каждого каталога приводятся общие принци-
пы классификации и различные обстоятельства,
определяющие его структуру. Для этого служит спи-
сок принципов, подобный предложенному Фель-
керсом [104], в котором содержатся: цель создания
каталога, момент применения в процессе констру-
ирования, области использования, описание
задачи, объекта, операции (определения основных
понятий), описание классификационных призна-
ков, ссылки на возможные варианты и на поясня-
ющие примеры.
4.1. Конструкторские каталоги для фазы
формулировки задачи
Составление конструкторских каталогов для
фазы формулировки задачи сопряжено с наиболь-
шими трудностями. Вспомогательным средством
для облегчения формулировки функциональных
положений может служить список ключевых слов
для выражения технических понятий, например,
список глаголов на рис. 5.6-2. Эти понятия можно
снабдить различными поисковыми признаками.
Говоря же о способах составления списка требова-
ний, необходимо отметить ту основную трудность,
что этот список получает окончательную формули-
ровку только в процессе конструирования. По-
скольку с формально-логической точки зрения
существуют различные типы требований, по-разно-
му влияющие на оптимизацию конструкции, то
требования в списке, пусть и неполные, следует с
самого начала отнести к одному из этих типов.
Удачная классификация требований предложена
в кат. 4.1.1.
4.1.1. Типы требований
Список требований, составленный по опреде-
ленным формальным критериям с грубой класси-
фикацией типов требований вместо известных,
весьма несовершенных, форм представления
технического задания, был впервые предложен
Палем [52]. Тонкую классификацию различных
типов требований по характеру цели, близкую к
использованной в этом каталоге, предложил
Франке [25]. С формально-логической точки зре-
ния различают следующие типы требований.
1. Жесткие требования (Ж) как точечные
Жесткие требования этого типа - это требова-
ния, при которых определенные значения каких-
либо величин должны быть выдержаны точно.
Если вариант конструкции не отвечает этим тре-
бованиям, то он должен быть отвергнут. С другой
стороны, если выполнить жесткое требование
никак не удается, то его следует изменить или
вообще отбросить.
2. Жесткие требования (Ж) как нецелевые граничные
и диапазонные
Это требования, которые считаются невыпол-
ненными только тогда, когда величина выходит за
установленные границы. При этом расстояние до
границы не играет роли до тех пор, пока не про-
изойдет переход через нее. Как и в случае точеч-
ных требований, конструкция рассматривается
далее, только если выполнение требования пред-
ставляется возможным. В противном случае сле-
дует отбросить конструкцию или изменить требо-
вание.
3. Целевые требования (Ц)
Это требования, которые можно выполнить в
различной степени. Чаще всего мы ищем опти-
мальный вариант в условиях, когда задана неко-
торая граница, диапазон (интервал значений) с
предпочтительной границей, конечная целевая
точка или определенное целевое направление
(целевая точка в бесконечности). В соответствии с
этим различают требования с нижней и верхней
границами (Н и В), целевые диапазонные требова-
ния (ЦЦ), а также целевые требования без границ
(ЦБ). Эти требования почти никогда не выполня-
ются точно и поэтому степень их выполнения
(близость к целевой точке) может быть использо-
вана для оценки конструкции (конструктивного
варианта). Эта оценка может проводиться метода-
ми анализа полезности (см. 3.10 [17]). Напротив,
все виды жестких требований (точечные, нецеле-
вые граничные и диапазонные) не могут быть
использованы для оценок, поскольку всегда
должны быть выполнены в точности.
4. Необязательные требования — пожелания (П)
Имеются в виду дополнительные требования
любого типа из приведенных выше. Их можно
включать или не включать в список требований, а
при оценке решения - учитывать, выполняются
эти требования или нет, а если выполняются, то в
какой степени.
Для списка требований в целом следует доби-
ваться непротиворечивости и, по возможности,
взаимной независимости требований. В первых
публикациях Паля [52] рассматриваются жесткие
требования, требования с нижней границей и по-
желания, а в работе [53] встречаются только жест-
кие требования и пожелания. При рассмотрении
кат. 4.1.1 может показаться, что в первом предло-
жении Паля, где вводятся по меньшей мере три
4.1. Конструкторские каталоги для фазы формулировки задачи
75
категории требований, существо дела отражено
лучше, чем во втором. Но представление системы
требований в кат. 4.1.1 с очевидностью показывает,
что требования с верхней границей и нецелевые
граничные можно свести к требованиям с нижней
границей. Границы, диапазоны и целевые точки
символически изображены на числовой прямой в
главной части каталога. Формулы в дополнении к
каталогу дают числовую оценку степени выполне-
ния требований, причем нуль соответствует худ-
шему, а единица лучшему решению.
5. Примеры
Для лучшего понимания типов требований,
включенных в кат. 4.1.1, приведем следующие
примеры
Т Точечное требование: мощность двигателя должна составлять
51 кВт, не меньше и не больше (№ 1)
Г Нецелевое граничное требование (с нижней границей): мощ-
ность двигателя должна быть не меньше 45 кВт (№ 3)
Д Нецелевое диапазонное требование (внутри интервала): мощ-
ность двигателя должна быть не менее 48 и не более 52 кВт
(№5)
Н Целевое требование с нижней границей (точечная цель):
мощность двигателя должна быть больше 40 кВт, и при этом
как можно ближе к 43 кВт (№ 8)
В Целевое требование с верхней границей (цель на верхней
границе): мощность двигателя, не превышая 52 кВт, должна
быть как можно ближе к этой границе (№ 10)
ЦД Целевое диапазонное требование (цель на нижней границе):
мощность двигателя должна быть больше 40 кВт и меньше
49 кВт, при этом как можно ближе к нижней границе (№ 15)
ЦБ Целевое требование без границ (точечная цель): мощность
двигателя должна быть как можно ближе к 43 кВт (№ 17)
П Необязательное требование: желательно, чтобы при длитель-
ной работе мощность двигателя все время была вблизи верх-
ней границы диапазона 40 ... 49 кВт (№ 13 как пожелание)
6. Список принципов к конструкторскому каталогу 4-1.1
1. Цель создания кон- структорского ката- лога 2. Момент применения каталога при методи- ческом конструирова- нии 3. Использование ката- лога 4. Определение основ- ных понятий 5. Классификация в ка- талоге 6. Варианты 7. Пример Представить-различные типы требо- ваний в соответствии с их точечным, целевым и диапазонным характе- ром, а также пригодностью для оце- нок. Побуждать к четкой формули- ровке требований Составление списка требований Для всех типов требований Требования к изделию — это поло- жения, которые определяют все не- обходимые свойства, дополнитель- ные условия и ограничения, вы- ражающиеся количественно и не входящие в функциональное поло- жение. Если допустима (или необ- ходима) вариабельность, то они за- дают направление оптимизации или целевую точку Формально-логическая классифи- кация требований по наличию /от- сутствию целевой точки, по их обя- зательности/ желательности и по пригодности для оценки изделия Возможны для всех требований, кроме жестких Для мощности двигателя (см. текст выше)
76 4. Собрание конструкторских каталогов
7. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.1.1: ТИПЫ ТРЕБОВАНИЙ
Классификационная часть Главная част*- Специальная часть Дополнение
Условие Цель Изображение на числовой прямой Тип требования Возможность оценки с помощью нормирован- ного показателя
1 2 1 № 1 2 1 2
Х« Х| — Х1 i I Жесткое требование Ж I Т Точечное требование Одно - кратное нет —
x«x1?x2,x3 X, х2 х3 2 Много - кратное
ХН*Х — 0-1 ► хм 3 Г Нецелевое граничное требование С нижней границей нет —
х«хв о 4 С верхней границей
X„SX«X, (1ХхЯ X Р хХ О 5 Д Нецелевое диапазон- ное требо- вание Внутри интервала
XS»H xBsx о Xх ЯР х о> 6 Вне интервала
х*хн. X -»оо f f Я Я х О 7 Целевое требование Ц Н Требова- ине с ниж- ней грани- цей Максимн - зационное Только при X гхн Х-ХН X
Опт м—0—► XN Хежт 8 С точечной целью Х ОПТ Х ' Х Н
X2 Xoftr-XH
х -* Хн °~Я ► хн 9 С целью на нижней границе Хн X
xsxe X — Хв К ж f о 10 В Требование с верхней границей С целью на верхней границе Только при хахв X ха
X— хвпт 11 С точечной целью х(хв-х )
ХОПТ X в холт ^хв’ Хопт^
X- 0 (х-* -со) ° н* хв 12 Миними- зационное Хв-Х X
XKSX3X& X —хв о X 1 13 цд Целевое диапазон- ное требо- ванне С целью на верхней границе Только при х*хв-- и Х£ Хн Х-Хн хв-хн
х*холт хн хопт хв 14 С точечной целью (х - Хн) (ха-х)
<хопт-хк) (*а-хопт)
х“*хн ZV 4 К - 15 С целью на нижней границе X(Xg-X )
° 1 V. * хн хв ХН(Х6-Х )
— л — со о ► X 16 ЦБ Целевое требование без границ Макси- мальное Всегда X х ♦ к
X "* Х0ЛТ о о холт 17 С точечной целью x*0ltT*l< х х2*к Хдпт
х-0 (х-* -со) о ► X 18 Миними- з анионный к к ♦ х
Пожелания (необязательныетребования П) см. в тексте.
4.2. Передача сил, приведение в движение и ограничение движений
42 Передача сил, приведение в движение и
ограничение движении
Проектирование нового механизма конструк-
тор, в сущности, начинает с рассмотрения силовых
взаимодействий между двумя деталями, способов
использования сил для приведения деталей в
движение и ограничения движений. Уже одна
только сила земного тяготения, действующая на
все тела, заставляет конструктора начинать имен-
но с этого. Отметим здесь же, что приводить в
движение и ограничивать его можно с помощью
как нормальных, так и тангенциальных сил [33].
Материалы, из которых делаются наши техниче-
ские устройства, сами состоят из мельчайших
частиц, в свою очередь связанных друг с другом
посредством силового взаимодействия, поэтому
совершенно естественно, что проектирование
механической конструкции в конечном счете
основано на использовании сил, действующих в
веществах и на вещества и самым разным образом,
жестко или подвижно, соединяющих их друг с
другом. Предлагаемые каталоги содержат способы
передачи сил при различных типах связи [74], со-
ответствующие им способы приведения в движе-
ние и ограничения движений, а также описание
поведения фрикционных систем.
421. Типы связей
При передаче сил через несколько деталей в
простейшем случае возникает цепь звеньев в том
виде, как она изображена на рис. 4.63. В этой цепи
сила передается через чередующиеся рабочие объ-
емы и рабочие поверхности. Иными словами, возни-
кает силовая связь между двумя смежными рабо-
чими поверхностями одного рабочего объема или
77
между двумя смежными рабочими поверхностями
различных рабочих объемов. Даже если две смеж-
ные детали непосредственно не соприкасаются,
можно рассматривать как рабочие те их поверхно-
сти, через которые „проникает” действие силы
какого-либо физического поля. В результате все
(элементарные) связи в цепи звеньев можно разде-
лить на внутренние (объемные) и внешние (по-
верхностные) (см. рис. 4.1, 4.63). При этом свойства
общей связи цепи звеньев всегда определяются
свойствами этих элементарных связей.
Объемные и поверхностные элементарные
связи. На рис. 4.2-1 представлены различные
объемные (внутренние) связи. Они охарактеризо-
ваны с помощью хорошо известных свойств, таких
как жесткость, упругость, пластичность (столбцы
1-3). Свойство вязкость (столбец 4) относится к
силам, возникающим вследствие внутреннего
трения в жидкостях. Свойства динамической свя-
зи (столбец 5) присущи силам, возникающим при
изменении импульса физического тела (и соответ-
ствующим силам упругости). Строго говоря, „жест-
кость” и „упругость” различаются только величи-
ной действующих сил, но на практике такое разли-
чие очень полезно. В строке 3 рисунка указано,
является ли действие силы односторонним или
двусторонним, а в строке 5 - может ли рабочий
объем служить накопителем энергии. Оба этих
свойства имеют важное значение для построения
цепи звеньев.
Связи другого типа, поверхностные (внешние),
представлены на рис. 4.2-2. Для поверхностных
связей характерно наличие возможности передачи
сил через рабочие поверхности.
Вещественная связь [81, 109], обеспечивающая
соединение деталей (столбец 1), отнесена здесь к
Класс вфикация Связывающие силы Тип связи Пример использования
Определение Схема
Объемная (внутренняя) связь Внутри рабочего объема, возни- кающие ГфИ любом движении О Объемные жесткая, упругая, пластическая и жидкая Рис. 4.2—1
Поверхностная (внешняя) Контактная Между соприкасающимися рабочими поверхностями При сжатии -J?- При растяжении I! +♦ При сдвиге Г еометрическая, полевая силовая Трением покоя (заклинивающая), трением скольжения Рис. 4.2-2
Бесконтактная Между песо прикасающимися рабочими поверхностями При приближении При удаленки Полевая силовая
Рис. 4.1. Силы, действующие в объемных и поверхностных связях
78
4. Собрание конструкторских каталогов
Рис. 4.2. Классификация и комбинации элементарных связей:
— Объемн ые (внутренние) связи
— № 1 2 3 4 5
Название 1 1.1 Жесткая объемная связь 1.2 Упругая объемная связь 1.3 Пластическая объемная связь 1.4 Вязкая объемная связь 1.5 Динамичес- кая связь
Пример 2 г-’ S Жесткая Упругая ?-3 Р Пласти- ческая 2-4 v г 0'^ Масса
Жидкая
Действие связи 3 3.' Двустороннее 3.2 Двустороннее 3.3 Двустороннее 3.4 Односторон- нее 3.5 Односторон - нее, против ускорения или замедле- ния
Свойства материала 4 4.1 Жесткость материала или приданной формы 4.2 Упругость материала или приданной формы 4.3 Пластичность 4.4 Вязкость 4.5 Инерцион- ность массы и ускорение
Способ- ность рабо- чего объема к обратимо- му накопле- нию энергии 5 5.1 Нет 5.2 Есть 5.3 Нет 5.4 Нет (если не- сжимаемый) , есть (если сжимаемый) 5.5 Есть
Рис. 4.2-1. Классификация объемных элементарных связей
Название
Поверхностные (внешние) связи
Пример
Действие
связи
Вещественная
связь (пары
поверхностей)
Г еометрическая
связь
Полевая связь
Фрикционная
связь (связь
трением)
Промежуточ. слои
Масса
3
Одностороннее
(соприкоснове -
ние обяза -
тельно)
Двустороннее
(соприкоснове -
ние обяза-
тельно)
[Maccaj
Одностороннее
(соприкосно-
вение необяза-
тельно)
Двустороннее
(соприкосно-
вение обяза-
тельно)
Способ-
ность пары
рабочих по-
верхностей
к обратимо-
му накопле-
нию энер-
гии
Нет
Нет
Есть
Нет
2
3
4
Рис. 4.2-2. Классификация поверхностных элементарных связей
поверхностным связям, так как обычно она „за-
полняет” только пространство между двумя рабо-
чими поверхностями. Кроме того, слой вещества-
наполнителя в большинстве случаев настолько
тонок, что его свойства ближе к свойствам рабочих
поверхностей, чем к свойствам объемных матери-
альных тел. В случае более толстого промежуточ-
ного слоя или нескольких слоев (например, для
клеевых соединений) следует рассматривать эти
слои как рабочие объемы, связанные между собой
силами адгезии (межмолекулярного сцепления),
действующими между рабочими поверхностями.
Полевые силы, возникающие при взаимодей-
ствии тел через те или иные физические поля
(столбец 3), по аналогичным причинам целесооб-
разно представлять подобно силам, передаваемым
через рабочие поверхности (столбец 2), т. е. отно-
сить их к поверхностным связям.
Наконец, силы внешнего трения (столбец 4)
возникают только между рабочими поверхностями
и поэтому также создают поверхностную связь.
В случае поверхностных связей, так же как и в
случае объемных, важное значение при образова-
нии цепи звеньев и соединения имеют такие их
свойства, как возможность передачи силы в одном
или в двух направлениях (строка 3) и возможность
использования в качестве накопителя энергии
(строка 4).
4.2. Передача сил, приведение в движение и ограничение движений
79
1. Элементарные и комбинированные связи
Объемные и поверхностные связи обязательно
чередуются в цепи звеньев, и поэтому свойства их
комбинаций определяют свойства общей связи
соединения. Более того, попросту невозможно
заставить элементарную связь действовать на
себя. На рис. 4.2-3 представлены попарные комби-
нации элементарных объемных и поверхностных
связей (см. рис. 4.2 -1 и 4.2 -2). Каждая такая комби-
нированная связь образуется „последовательным
соединением” объемной и поверхностной связей.
Характеристическое свойство комбинированной
связи определяет при этом более „податливая” из
элементарных связей.
В табл. 4.1 приведены свойства комбинирован-
ной связи, поля таблицы соответствуют полям
рис. 4.2-3, а обозначения связей взяты из группы рисун-
ков 4.2. Поясним, как нужно понимать формулы в
таблице. Пусть, например, за упругой связью „У”
следует геометрическая связь „г” (поле 2.2). Тогда
комбинированная связь окажется упругой „У”.
Если же за упругой связью „У” следует фрикцион-
ная „т” (поле 2.4), то комбинированная связь
окажется „У” или „т” в зависимости от того, какая
связь более „податлива”. Знак операции Л был вы-
бран потому, что при последовательном соедине-
нии звеньев результат соответствует конъюнкции
(умножению) в алгебре логики, если возможность
свободного перемещения (свободу) обозначить че-
рез 0, а включенный последовательно запрет [71] (ог-
раничение) через 1 (см. также рис. 4.13 и 4.18).
Таблица 4.1. Свойства комбинированных типов связей
(обозначения см. рис. 4.2-3)
1.1 1.2 1.3 1.4
ЖЛв = Ж ЖЛг=г ЖЛп^п Ж Л т — т
2.1 2.2 2.3 2.4
УЛв = У УЛг^У У Л п — У или п У Л т — У или т
3.1 3.2 3.3 3.4
ПЛв=П ПЛг = П П Л п = П или п —
4.1 4.2 4.3 4.4
- В Л г = В В Л п = В или п В Л т = В или т
5.1 5.2 5.3 5.4
— ДЛг^Д Д Л п = Д или п Д Л т — Д или т
Опираясь на описанные свойства комбиниро-
ванных типов связей, часто можно целую цепь
звеньев рассматривать как одну элементарную
связь, не обращая внимания на последователь-
ность связей различных типов. Поэтому допустимо
также (см., например, рис. 4.62) помещать в матри-
Фрикц.связь
Поверхностные
связи
(внешние)
Объемные
связи
(внутренние)
Эл ем ен тар ная связь Заряжаемый накопитель энергии Действие
Жесткая объемная связь Нет
Упругая объемная связь ^1 Есть' г //7/// 15
Пласти- ческая объемная связь Нет £ X о О О
Ьязкая объемная связь
Динами- ческая связь Ж 7 // о Есть'
Плас -
тичная
Нет
Двустороннее
Вегцеств.связь | Геометр.связь Полевая связь
Нет
Двустороннее
Одностороннее
S
п г------1
I Масса I
Схема
7777777.
Промежут. слон
Схема
Ж
Жесткая
Масса
Уп-
ру-
гая
Плас-
тичная
масса
Жесткая I
масса
Упругая
Элемент, связь
Заряжаемый
накопитель
энергии
Действ, связи
Жесткая
ш
Жидкая
Жесткая
Плас- тичная □
Плас-
тичная
13 |Плас -
тичная
масса
Трение в пог-
раничном слое
□
7
Рис. 4.2-3. Комбинация объемных и поверхностных связей
80
4. Собрание конструкторских каталогов
Реализация
цепи
Вид цепи
№
Пример
Строение цепи
Указание
2
Структура
Элементарные связи
3
Свойства
связи меж-
ду А и В
4
Последова-
тельная
А
В
Связь между А и В
соответствует эле-
ментарной допус-
кающей движение
(конъюнкции
ограничений);
Упругая
Жесткая / Жесткая
Рч- ч' |
1.4
Упругая
Контур
I------й-------II-----1
Двусторонне \
Односторонне
действующая
Односто -
ронне дей-
ствующая
Парал-
лельная
Структура
Контур
Связь между А и В
(параллельными
участками) соответ-
ствует элементарной,
запрещающей движе-
ние (дизъюнкция
ограничения)
Жесткая
Упругая
Двусторонне
Односторонне
действующая
Структура
Открытая
(последова-
тельная)
3
А
В
3.2
Открытые связи не
распадаются только
тогда, когда все
элементарные свя-
зи - двусторонние
Жесткая Пластическая
Двусторонне
действующая
Контур
Замкнутая
(последова-
тельная )
Контур
Замкнутые цепи не
распадаются и в слу-
чае односторонних
элементарных связей
если для каждого
элемента симметрич-
но устроенные повер-
хностные связи нахо-
дятся в равновесии
с объемной связью
Зазоры отсутствуют,
если заряжаемый на-
копитель энергии
уменьшает расстоя -
ния, действуя в нор-
мальном к рабочим
поверхностям
направлении
Односторонне действу-
ющая, симметричная
Накопитель энергии
2.4
Жесткая
Двусто-
ронне дей-
ствующая
3.4
Обеспечи-
вается не-
распадае-
мость
Обеспечи -
вается не-
распадае-
мость.
Зазоры
имеются
Обеспечи -
вается не -
распадае-
мость.
Зазоры от-
сутствуют
Рис. 4.3. Объединение элементарных связей в общую связь цепи
цу упругую или полевую связь в тех случаях, когда
в действительности имеется комбинация этих
связей с геометрической.
На рис. 4.3 приведены важнейшие типы связей,
а также указания для определения типа комбини-
рованных связей и соответствующие примеры. Эти
указания (столбец 2) можно считать инструкциями
по синтезу цепей связей. На основе рис. 4.3 можно
сделать следующие выводы:
в параллельных отрезках цепей тип комбини-
рованной связи определяет наименее податливая
элементарная связь;
при использовании однонаправленно действу-
ющих элементарных связей цепь должна быть
замкнутой во избежание разъединения.
Следовательно, комбинация всех элементар-
ных геометрических связей в соединении должна
образовывать замкнутую цепь. Если в цепи найдет-
ся механический накопитель энергии, в заряжен-
ном состоянии создающий силу (при уничтожен-
ном зазоре), то возникнет силовая связь или квази-
геометрическая связь; если же такого накопителя
в цепи не окажется, то возникнет „чисто геометри-
ческая” связь, имеющая зазоры.
Замкнутая цепь элементов с силовыми связя-
ми называется напряженным циклом (см. разд. 63).
Из напряженных циклов составляются все стати-
чески нагруженные конструкции.
На рис. 4.64 более подробно показано, какое
влияние на тип цепи связей и на тип соединения
оказывают одно- и двусторонне действующие
комбинации связей, имеющие объемные или
поверхностные накопители энергии.
В кат. 4.2.1 типы связей распределены по
классам на основе типа общей связи пары (веще-
ственной, геометрической, силовой, полевой,
динамической и фрикционной), образующей наи-
меньшую возможную цепь. Грубая классифика-
ция проводится по наличию /отсутствию связыва-
ющей силы до приложения внешней нагрузки,
тонкая - по физическим эффектам, создающим
характеристическую связь цепи. В каталог вклю-
чена фрикционная заклинивающая связь, во
многом родственная геометрической связи. В спе-
циальной части содержатся важные для конструк-
тора признаки, такие как ограничение передава-
4.2. Передача сил, приведение в движение и ограничение движений
81
емой силы, направления действия связи и пр.
Используемые всюду в дальнейшем понятия
„геометрическая связь”, „силовая связь” и т. д.
будут относиться к общей связи цепи, содержащей
соответствующие звенья.
1 Список принципов к конструкторскому каталогу 4.2.1
1. Цель создания конст- рукторского каталога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определение основ- ного понятия 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры . Показать возможные типы связей как основу для передачи силового взаимо- действия между телами (в предель- ном случае между веществами в раз- личных агрегатных состояниях) Переход от функциональной к пред- метной фазе Для неподвижных и подвижных со- единений, для внутренней передачи силы в веществах и телах и внеш- ней — через поверхности Связь — это силовое взаимодействие между двумя материальными элемен- тами, которыми могут быть атомы, мо- лекулы, твердые тела или жидкости. Связь является внутренней, если она существует внутри рабочего объема, и внешней, если она возникает меж- ду рабочими поверхностями. В зави- симости от того, соприкасаются или нет рабочие поверхности, говорят о контактной и бесконтактной связи (см. рис. 4.1). Связь может действовать в одном или двух противоположных Направлениях (другие определения см. в гл. 7) Классификация основана на том, действуют ли силы в рабочем объеме или между рабочими поверхностями Рис. 4.2 -1—4.3
6 — 2317
82 4. Собрание конструкторских каталогов
3. КОНСТРУКТОРСКИЙ КАТАЛОГ 4 2. .1: ТИПЫ СВЯЗЕЙ (лист 1)
Классификационная часть Главная часть Специальная часть Дополнение
Наличие СВЯЗЬ!' вающей силы бе- внешней нагруэк! Общая связь пары Способ создания связи (эффект) Пример Величину передава- емых СИЛ ограни- чивает Возможные движения против связыва- ющей силы Необ- ходим совер- шения рабоп Направ- • ления действия связи Условия, ссылки
1 2 3 1 № 1 2 3 4 '5
Есть (в рабо- чем объеме Вещест- венная связь Первичное формо- образование 1 Прочность 2*- 1 - 2 Никакие Нет 2*- 1 — 2 Вещест- венная связь Непрерывный материальный мостик
Нет Гео- метри чес кая связь Пара поверхностей твердых тел \ Л 2 Допустимо* контактное напряженш 1 — 2 Никакие 1 — 2 Г еометри- ческая связь Соприкосновение рабочих поверхностей
Вытеснение жидкости 1 2 3 Давление жидкости Несжимаемость жидкости
Есть Упругая силовая связь Упругость ' твердого тела 1 2 4 Допустимое натяжение пружины 1 -* 2 Ограни- ченное 1 — 2 Силовая связь — Дальней- шие при меры: кат. 4.4.1 (Создать силу) — Силы упру- гости
Вытеснение жидкости аЫ р*р0 5 Р ~ Ртох Сжима- емость жидкости
Полевая силовая связь Гравита- ционное поле Земное тяго- тение //////////~ /»//////// 6 f Неограни- 1 ченное Гравитац. 1 Гео- । метрич. связь Дальнейшие примеры: кат. 4.4.1 (Создать силу) — Гравитационные силы
Магнит- ное поле Постоян- ный магнит 7 1 7 2 Л Г W 1 2 -J 1 2 7 Сила магнита Поле 7.8 ; 8.1 — 1,2 — неограни- ченное 7.2; 8.2 1 — 2 ограничен- ное 7.1 ; 8.1 *1 , 2 * Полевая связь 1 2 Геометрии. связь 7.2 ; 8.2 1*2 Полевая связь * 1.2 * Г еометрич. связь Дальнейшие примеры: кат. 4.4.1 (Создать силу) — Магнитные силы
Электро- стати- ческое поле Конден- сатор 9 1 1 9 2 2 1 2 8 Заряд, расстояние между пластинами Дальнейшие примеры :кат. 4.4.1 (Создать силу) — Электрические силы
Молеку- лярные силы Адгезия 1^ 1 2 9 Шерохо- ватость поверх- ностей Поле -1 2-* неограни- ченное Полевая связь - 1—2 I еометрич. связь Дальнейшие примеры: кат. 4.4.1 ^Создать силу) — Молекулярные силы
Динами- ческая связь (за счет измене- ния им- пульса) Силы инерции Реак- тивный принцип vA | 10 Отдача Поле 1 -* неограни- ченное Есть 1 — Динами- ческая связь за счет изменения импульса) 1 Геометри- , ческая связь Дальнейшие тримеры: кат. 4.4.1 (Создать силу) — Силы инерции, Силы излучения
Центро- бежная сила m ll5_z ш Й— Т 2 11 Масса, радиус, угловая скорость Поле 1 2 ограни- ченное Нет
Силы инерции и упру- гости 2 1 v у, 2 Допусти- мое сонтактное напряже- ние Поле 2 — 1 ( неограни- ченное Р 2сть при тлит- аботе) Дальнейшие гримеры: кат. 4.4.1 Создать силу) — Упругость и инерция
4.2. Передача сил, приведение в движение и ограничение движений 8 3
КОНСТРУКТОРСКИЙ КАТАЛОГ 4.2.1 (лист 2)
Классификационная часть Главная часть Специальная часть Дополне- ние
Наличие связыва- ющей си- лы без внешней нагрузки Общая связь в танген - циаль- ном нап- равлении В нормальном направлении В тангенци- альном на- правлении Пример Величину передавае- мых сил ог- раничивает Возмож- ные движе- ния против связываю- щей силы Необ- ходи- мость совер- шения работы Направле- ния дейст- вия связи Условия, ссылки
Способ создания связи
1 2 3 4 1 № 1 2 3 4 5
Норма- льное направ- ление : есть Танген - циаль- ное на- прав- ление : нет Фрикционная связь (связь трением) Твердое тело/твердое тело Сило- вая (ква- зигео- метри- чес- кая) связь Соот- ветст- венно №2,4 Фрикцион- ная закли- нивающая связь 1**^ d -h ; 13 Прочность 1 |Никакие 2 Нет 1 1 2 Заклини- вающие системы
Связь тре- нием покоя Связь трен» скольжения 14 Сила трения 1 Ограни- ченное | конструк- 2 цией и ц Различные фрикцион- ные систе- мы в зави- симости °т
77 * Г) н
Соот- ветстг вен но № 3,4 Фрикц. заклинив, связь A|/A?s2p V 1 I / А| 1 * 1 / Aj 15 Прочность 1 | Никакие 2 Заклини- вающие системы Несжима- емость жидкости Различные фрикцион- ные систе- мы в зави- симости от А (/А 2
1»
• * 1
Связь трением покоя или скольж-я Ai/A2>2ji 16 Сила трения Ограни - 1 ценное | конструк- цией и р
77 77
Соотв. № 2, 4-12 Фрикц. заклинив, связь \ а F — v < 1 2 17 Прочность 1 — 2 Никакие Зави- сит от спосо- ба соз- дания силы в норма- льном напра- влении 2-1 — 2 Заклини- вающие системы
Связь трением покоя или скольж-я а 18 Сила трения 1 — 2 Ограни- ченное /J. и кон- струкцией Различные фрикцион- ные систе- мы в зави- симости от a, v
Давле- ние есть Жидкость/ твердое тело Соотв. № 2, 4-9, 11, 12 Связь трением сколь- жения 19 Вязкость и относи- тельная скорость 1 — 2 Ограничен- ное длиной твердого тела Есть 2—1 — 2 Вязкость жидкости и твердость основания
Жидкость/ жидкость Сило- вая связь Соотв. № 4-9, 11,12 Трение в жидкос- тях л 1 20 Неограни- ченное Есть Все напра- вления Внутрен- нее трение в жидкос- ти, как и в строке 19
1. Список принципов к конструкторскому каталогу 4.2.2
84 4. Собрание конструкторских каталогов
4.2.2. Ограничить движение в одном направлении
(односторонние упоры)
Силовое взаимодействие, возникающее в
связях, может вызывать движение или ограниче-
ние движения [100, 101], а также может поддержи-
вать напряжение между двумя деталями. В кат.
4.2.2 показано, каким образом связи из кат. 4.2.1
(Типы связей) могут использоваться для односто-
роннего ограничения движения. Слово „упор”
обычно употребляется в тех случаях, когда огра-
ничение движения не приводит к изменению
траектории (в крайнем случае оно может вызвать
возврат в исходное положение), причем накоплен-
ная энергия уничтожается. Конструкции такого
вида мы будем называть упорами в узком смысле
слова, а все другие односторонние ограничители
движения - „упорами в широком смысле”.
Роль упоров в конструировании, поистине,
фундаментальна, т. к. любое соединение деталей,
любое ограничение их относительных движений
осуществляется посредством одного или несколь-
ких упоров. В качестве классификационных при-
знаков, наряду с типами связей, целесообразно
использовать наличие /отсутствие в цепи накопи-
теля энергии, а также действующие эффекты.
Наличие механического заряжаемого накопи-
теля потенциальной или кинетической энергии
характерно для силовой или квазигеометрической
цепи звеньев (соединения). Если же в цепи нет
такого накопителя энергии, а элементарными
связями являются жесткие объемные связи (на-
пример, в замкнутых цепях), то мы имеем дело с
геометрической связью с зазорами между элемен-
тами.
В главной части кат. 4.2.2 содержатся комбина-
ции деталей, образующие упор. Стрелка показыва-
ет направление движения к ограничивающему его
упору. Особенности конечного положения описа-
ны в специальной части, в столбце 1 - общая
характеристика, в столбце 2 - график зависимости
силы от пути.
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определение основ- ных понятий 5. Классификация в ка- талоге 6. Ссылка на варианты 7. Примеры Показать способы создания „упоров” в узком и широком смысле Переход от функциональной к пред- метной фазе и сама предметная фаза Ограничение поступательного и вра- щательного движений, образование подвижных и неподвижных соеди- нений „Упор” (в широком смысле) — это ограничитель движения одной дета- ли в определенном направлении посредством односторонне действу- ющей связи с другой деталью. Для упоров (в узком смысле) это ограни- чение движения происходит очень резко, на протяжении крайне корот- кого отрезка пути (дальнейшие оп- ределения см. в гл. 7) По классам связей из кат. 4.2.1 (Типы связей) Рис. 4.2-3 В главной части каталога
4.2. Передача сил, приведение в движение и ограничение движений
85
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.2.2: ОГРАНИЧИТЬ ДВИЖЕНИЕ В ОДНОМ
НАПРАВЛЕНИИ (ОДНОСТОРОННИЕ УПОРЫ)
Классификационная часть Главная часть Специальная часть
Общая связь пары Связь упора Связывающая сила Пример Конечное положение График зависи- мости силы от пути Особенности
1 1 3 1 № 1 2 3
Геометрическая связь В направлении стрелки встроенный накопитель энергии не действует Нормальная сила (сила реакции опоры) Направление упора 1 Не меняющееся F » s Соприкосновение рабочих поверхностей
Сила трения (заклинивающая связь). Т 1 — 2 2 Не меняю- ” щееся Как 13. >F , S Для образования связи необходима внешняя сила с норм, компонент.
Давление жидкости 1 -«ЧТТ \ 2 3 Не меняющееся F Жидкость несжимаема
а 0 § В нормальном направлении В направлении стрелки силовое воздействие встроенного накопителя энергии Сила 4 Зависящие от силы F — — s В строках 4—12 сила создается заранее заряжен, накопителем эн ер гий
Сила упругости в жидкости 1 \ 2 5 F *s Жидкость сжимаема
Сила тяжести m i_2 6 Определенное — при малых силах, неопределенное - - при больших ♦ F s Для больших сил; m масса: g У с кор свобод, падения; малые силы < rug большие силы > mg
s t 1
(Электро) магнитная сила 7 Зависящие ОТ силы F Расстояние между полюсами — 1 мм ... до 1 см
(Электро) статическая сила 8 f Расстояние между пластинами ~1 мкм " до t мм
Статическое постоянное давление в жидкости 1 = сог |^2 ist;F 9 Неопределенное F | ► s Давление р не меняется при изменении объема
Динамическое давление в жидкости Жидкость 10 Зависящие от силы F -s Расстояние 1 м км 0,1 мм, постоян- ный подвод энерг.
Сила отдачи 1 11 Неопределенное F Необхо 1нм постоянный подвод энергии
Центробежная сила & m 12 Зависящие от силы F —*>S Необходим постоянный подвод энергии
В нормальном итангенциальн. направлениях (фрикц. связь) В направлении стрелки встроенный накопитель энергии не действует Силы трения между твердыми телами 13 Трение покоя - не меняющееся, трение скольже- ния - нсопределен ное F . -$ Постоянная внешняя сила с нормальной компонентой
Силы трения между твердым телом и жидкостью 1\ : 1 14 1 ^определенное F Ls Сила возникает только при относительном движении Необходим постоянный подвод энергии
Силы трения между жидкостями 7, J 1 ,‘j i... -4 1 . * 1 t 1 15 Г'
86
4. Собрание конструкторских каталогов
4.2.3. Ограничить движение в двух направлениях
(двусторонние упоры)
На основе односторонне действующих упоров
из кат. 4.2.2 теперь могут быть получены ограничи-
тели движений, действующие в двух противопо-
ложных направлениях. Для каждого из направле-
ний могут быть использованы различные элемен-
тарные связи или их комбинации. В положении
между упорами ограниченное движение может
существовать, а может и не существовать. Осново-
полагающие варианты конструкций одно- и дву-
сторонних упоров, в соответствии с указанными
принципами классификации, содержатся на рис. 4.4.
Наконец, комбинируя одно- и двусторонние
упоры, можно создавать конструкции с тремя и
четырьмя упорами для одного направления (или
двух противоположных).
В большинстве соединений и направляющих
имеются два vnopa, действующие в противополож-
ных направлениях. Если две детали должны для
определенного направления образовывать непо-
движное соединение (крепление), то можно вы-
брать поле 3.1 рис. 4.4, а также 5.1 и 7.1. Для посту-
пательно-подвижного соединения подходят кон-
струкции поля 4.1, а также 6.1 и 8.1. С помощью
комбинации коснтрукций 4.1 и 7.1 можно полу-
чить сочетание двух конечных положений и
фиксированного промежуточного положения, с
помощью комбинации 4.1 и 7.3 - сочетание двух
конечных положений и неограниченного числа
промежуточных положений безразличного равно-
весия.
Важную роль часто играет тип положения
равновесия, образующегося при наложении двух
разным образом действующих силовых связей,
например пружин с разными характеристиками.
Основные комбинации характеристик представле-
ны на рис. 4.5. На рис. 4.5, а, например, каждая из
двух пружин сжатия (графики айв) одним кон-
цом прикреплена к основанию, а другие их концы
упираются друг в друга в центре конструкции.
Пружина ~а заряжается при движении в отрица-
тельном направлении пути s, пружина в - при дви-
жении в положительном направлении. Средний
график а + в показывает результирующую силу и
одновременно силовую характеристику пары пру-
жин в месте их соединения. В точке, в которой
Рис. 4.4. Обзор простых (односторонних) и двойных (двусторонних) упоров на основе геометрической и силовой связей
4.2. Передача сил, приведение в движение и ограничение движений
87
Точка устойчивого равновесия
Точка опрокидывания
Рис. 4.5. Создание различных положений равновесия путем комбинирования характеристики а пружины с характеристикаwm b, си d:
а-д — соответственно устойчивое, безразличное и неустойчивое положения; г — положения всех типов
системы
Точка устойчивого
равновесия или
опрокидывания
график проходит через ноль, достигается состо-
яние с наименьшей потенциальной энергией. При
любой попытке изменить это состояние возникает
противодействующая сила. Это состояние устойчи-
во и может быть изменено только за счет подвода
энергии, определяемой площадями Е j (соответст-
венно Е2)« Чем больше наклон результирующей
характеристики а + в, тем более устойчивым явля-
ется положение равновесия. Предельный случай
комбинации силовых характеристик представляет
рис. 4.5, б, где результирующая характеристика
a + d0 является нулевой (безразличное равнове-
сие). Изменение положения не требует подвода
энергии (правда, только в теории, так как реально
необходимо ускорение массы в начале движения,
да и от силы трения полностью избавиться невоз-
можно). Соответствующим вычислением можно
убедиться, что в этом случае профиль ползуна
должен совпадать с дугой окружности.
Характеристик с и d (рис. 4.5, в) у обычных пру-
жин, как правило, не бывает (за исключением та-
рельчатых), так как разрядка здесь сопровождает-
ся возрастанием силы. Такую характеристику,
однако, можно получить, заставляя конец пружи-
ны двигаться по криволинейному ползуну. Для
комбинации (суммы) таких характеристик точка
перехода через нуль является положением не-
устойчивого равновесия, т. е. точкой опрокидыва-
ния. Сколь угодно малая сила вызывает разрядку
системы. Чем круче характеристика, тем более
неустойчиво равновесие в точке опрокидывания.
Обычно такие характеристики оказываются нели-
нейными, но для наглядности на рисунке они
изображены линейными. Точки опрокидывания
необходимы для создания бистабильных (т. е. ве-
дущих к двум устойчивым состояниям) состояний
опрокидывания в переключателях, защелках и пр.
Как правило, желательна высокая степень не-
устойчивости положения опрокидывания, исклю-
чающая остановку в любом промежуточном поло-
жении. Движение в направлении разрядки в этом
случае ограничено с обеих сторон двумя добавоч-
1. Список принципов к конструкторскому каталогу <2.3
88 4. Собрание конструкторских каталогов
ними устойчивыми конечными положениями
(примеры см. на рис. 1.11,3.19-3.22).
На рис. 4.5, г, показано, каким образом по
одной характеристике можно определить вторую,
чтобы их комбинация обеспечивала устойчивое
(а + di), безразличное (а + d0) и неустойчивое (а +
+ 4/2) положение равновесия. Для этого сначала
нужно провести линию dQ, симметричную а (разряд-
ка - в противоположном направлении по сравне-
нию с а), затем задать положение „точки равнове-
сия”, после чего для создания устойчивого равно-
весия начертить характеристику, которая слева от
точки равновесия проходит выше, а справа - ниже
характеристики d0; для создания же неустойчи-
вого равновесия слева от точки равновесия харак-
теристика должна быть ниже, а справа - выше, чем
dQ. Сама dQ соответствует безразличному равнове-
сию.
Двусторонние упоры с различными типами
положения равновесия (см. рис. 4.4, поля 6.1-6.3)
используются очень часто, и в кат. 4.2.3 их разно-
видности представлены в частях А, В и С. Комби-
нации различных силовых характеристик дают со-
ответствующий тип положения равновесия. Часть
А содержит двусторонние ограничители движе-
ния, прикрепленные к основанию только с одной
стороны, а части В и С - двусторонние ограничи-
тели, прикрепленные-к основанию с двух сторон.
Части D, Е и F каталога содержат конструк-
ции с двусторонне действующими связями, пред-
назначенные для ускорения материальных тел
(масс) и имеющие возрастающую, горизонтальную
или убывающую силовую характеристику.
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определение основ- ных понятий 5. Классификация в ка- талоге б. Ссылки на вариан- ты 7. Примеры Показать способы создания положе, ний устойчивого, безразличного и не- устойчивого равновесия, способы ограничения движений Переход от функциональной к пред- метной фазе и сама предметная фаза Фиксация в неподвижных и подвиж- ных соединениях, создание биста- бильных „опрокидывающихся” кон- струкций для механических двух- позиционных переключателей (флип- флопов), ограничение движений си- лами с различным поведением ха- рактеристики Движение ограничено в двух на- правлениях — это значит, что име- ются два упора, действующие на тело в двух противоположных на- правлениях и не позволяющие ему свободно перемещаться. При этом нужный вид положения равновесия или характера движений создается комбинацией связей с определен- ными силовыми характеристиками По виду силовой характеристики Приведенные в каталоге типн свя- зей (упругая, магнитная и т. д.) были выбраны совершенно произвольно, вместо них могут быть другие с той же силовой характеристикой В настоящем каталоге и рис. 1.11, 3.19-3.22
4.2. Передача сил, приведение в движение и ограничение движений
89
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.2.3 :
ОГРАНИЧИТЬ ДВИЖЕНИЕ В ДВУХ НАПРАВЛЕНИЯХ (ДВУСТОРОННИЕ УПОРЫ)
Сжатие
Растяжение
Строки4-5-6
Упор слева
Упор
сггоа-
Классификац.
и специаль
ная часть
Характер
нагрузки и
силовая характ
s
убывающая
убывающая
устойчивое
р<
Й£Ц
промежуточное
неустойчивое-
постоянная
возрастающая
возрастающая
возрастающая
неустойчивое
возрастающая
убывающая,
возрастающая
убывающая
возрастающая
Строки4;5;б
у
Строки 4;5,-6
i
И-
1
/
Положение:
устойчивое
р=с
Сила:
убывающая
устойчивое,
промежуточное,
неустойчивое
убывающая
возрастающая
убывающая
устойчивое
неустойчивое
возрастающая
промежуточное
устойчивое
устойчивое
у бы вающая
устойчивое
устойчивое
устойчивое,
промежуточное,
неустойчивое
F ,
F ,
F ,
примеров
устоичивое,
промежуточное,
неустойчивое
неустойчивое
неустойчивое
неустойчивое
Jn] jsjjvwsj
устойчивое,
промежуточное,
неустойчивое ;неустойчивое
mq=ApД
промежуточное
р = с
убывающая,
возрастающая
Односторонние упоры,
лежащие в основе
р=с
Наиболее показательные решения, типичные в отношении положения равновесия
и силовой характеристики, расположены на обеих главных диагоналях;
F — Сила;
Р — Давление;
С“ Постоянная;
S- Путь;
т** Масса;
N — северный
магнитный полюс; Пружина сжатия;
S — южный
магнитный полюс; CAWWD Пружина растяжения;
—*• Направление действия упора;
Направление действия силы:
положительное — вправо,
отрицательное — влево;
Упоры: ОДНО- двусторон- ние
Для креплений А 8 С
Для приводов 0 Е F
90
4. Собрание конструкторских каталогов
4.2.4. Фрикционные системы с различными
характеристиками
Фрикционными системами [59] называются ме-
ханические конструкции, содержащие хотя бы
одну фрикционную пару, т. е. пару рабочих поверх-
ностей, в которых при относительном движении
возникает тангенциально направленная противо-
действующая сила. Величина силы трения FT зави-
сит не только от коэффициента трения ц, но и от
конструктивных свойств деталей, образующих
фрикционную пару. Коэффициент трения пред-
ставляет собой отношение силы трения к силе
нормального давления:
U=Ft/Fh (4.1)
и отражает только свойства трущихся поверхно-
стей (при относительном движении).
Передаточный коэффициент представляет
собой отношение силы трения к силе воздействия,
вызывающей в конечном счете силу трения:
X=FT/F (4.2)
и учитывает также свойства конструкции в целом.
Различие между двумя числами еще и в том, что
коэффициент трения обычно находится в преде-
лах 0 < ц < 1, а для передаточного коэффициента
- оо Л + оо. при постоянной силе воздействия
F (например, для сцепных муфт) передаточный ко-
эффициент к пропорционален силе трения FT.
На графике зависимости передаточного коэф-
фициента X от коэффициента трения ц (рис. 4.6;
кат. 4.2.4, строка „Л - р -характеристики”) хорошо
заметно дополнительное влияние свойств конст-
рукции на силу трения. Отклонения графика от
прямой Л = р являются проявлением особенно-
стей конструкции (мы предполагаем, что при
изменении коэффициента трения р все другие
свойства трущихся поверхностей и относительных
движений не меняются). Учитывая сказанное,
будем различать три типа фрикционных систем
(см. рис. 4.6): I - линейная, II - дегрессивная, III -
прогрессивная. Прогрессивные системы, в свою
очередь, делятся на системы с возможностью за-
клинивания и системы без возможности заклини-
вания.
Приведенные графики показывают зависи-
мость коэффициентов X и ц друг от друга только
при условии, что величина коэффициента трения
Р определена, т. е. для чистого режима трения
скольжения или в момент перехода от трения
покоя к трению скольжения или наоборот. В обла-
сти заклинивания (см. п. 3), где, очевидно, дейст-
вует только сила трения покоя, значения на гра-
фике соответствуют вполне определенной силе,
разъединяющей фрикционную пару (разъединя-
ющей силе).
Три типа фрикционных систем характеризуют-
ся тем, что при прочих равных условиях значения
Л различны при одинаковых значениях ц и различ-
ным образом реагируют на изменения коэффици-
ента трения р. В этой связи для разных конструк-
ций оказываются оптимальными фрикционные
системы различного типа.
Опишем основные свойства трех типов фрик-
ционных систем; примеры реализации систем
даны в кат. 4.2.4.
1. Передаточные коэффициенты
Рассмотрим конструкции, представленные в
одной строке кат. 4.2.4. Они устроены практически
одинаково, однако являются фрикционными
системами различного типа. Такие конструкции в
дальнейшем называются однородными.
Для однородных конструкций при одинаковом
значении рс передаточный коэффициент (см. рис.
4.6)
ku< A-i< Хш.
(4.3)
При равенстве силы воздействия
Fi= Fu=Fin (4.4)
сила трения оказывается различной:
T1I Гт1 г -НИ-
(4.5)
Поэтому в тех случаях, когда требуется многократ-
ное увеличение внешней силы воздействия,
должны использоваться системы прогрессивного
типа.
2. Изменение передаточного коэффициента
Для однородных конструкций при одинаковом
изменении Др коэффициента трения изменение
передаточного коэффициента
Рис. 4.6. График зависимости передаточного коэффициента А. от
коэффициента трения ц для линейной (I), дегрессивной (II) и
прогрессивной (Ш) систем в однородных конструкциях. Измене-
ние передаточного коэффициента ДА. при изменении коэффи-
циента трения Дц
Рис. 4.7. Поведение линейной (I), дегрессивной (П) и прогрес-
сивной (Ш) фрикционных систем при одинаковой силе трети
Fth одинаковом коэффициенте трения цс. Различное измене-
ние силы трения AFT при изменении коэффициента трения Др
4.2. Передача сил, приведение в движение и ограничение движений
91
ДХц< ДЛщ. (4.6)
При равенстве силы воздействия Fj= Fu= Fiuh оди-
наковом Д м (рис. 4.7)
AFTII<AFTI<AFTIII. (4.7)
Изменение силы трения вследствие изменения
коэффициента трения наименьшее - для дегрес-
сивных систем и наибольшее - для прогрессивных.
Поэтому в тех случаях, когда требуется значитель-
ное постоянство тормозящей силы трения (для
каких-либо автомобильных тормозов), должны
использоваться дегрессивные, иногда - линейные,
но не прогрессивные (как в колодочных автомо-
бильных тормозах) системы.
3. Фрикционные системы с возможностью заклинивания
В прогрессивных фрикционных системах может
возникнуть заклинивание, если при допустимых значе-
ниях коэффициента трения ц коэффициент X -* <» или
X < 0 (кат. 4.2.4, (X -^-зависимость справа ввер-
ху)-
Коэффициент трения ц = цк называется коэффи-
циентом трения заклинивания. Он является харак-
теристическим параметром каждой фрикционной
системы с возможностью заклинивания. (X - ц - за-
висимость имеет в этой точке (й = |1К) полюс Х-*
•*00. В области заклинивания действует трение
покоя, а характеристика лежит в области отрица-
тельных значений. Передаточный коэффициент в
этой области, по определению, обратно пропорци-
онален величине разъединяющей силы (силы, не-
обходимой для разъединения фрикционной пары).
Она приложена к той же точке, что и сила F, но
действует в противоположном направлении. Иными
словами, как только началось заклинивание, не
только исчезает необходимость в приложении внеш-
ней силы, удерживающей фрикционную пару в
зацеплении, но можно даже прилагать силу в
направлении разъединения пары, лишь бы ее
значение в соответствии с формулой (4.2) не прево-
сходило F = FT/\
Замечание. Сила пружин, первоначально
создававшая воздействующую силу пары FB, не ме-
няет своего направления при возникновении за-
клинивания, и поэтому ее преодоление требует
дополнительных усилий. Отсюда, абсолютная
величина разъединяющей силы на самом деле
определяется выражением
I Fp I = I F, I + | -£|. (4.8)
Вследствие очень большой крутизны характе-
ристики вблизи полюса, при малейшем изменении
коэффициента трения в этой области заклинива-
ние возникает или исчезает скачком. Сложная
задача стоит перед конструктором при выборе
положения границы области заклинивания. Если
взять соответствующий коэффициент трения
существенно меньше фактического, то может
оказаться слишком велика разъединяющая сила;
если же выбрать этот коэффициент для границы
слишком близко к фактическому, то из-за сглажи-
вания поверхностей в процессе работы может
исчезнуть способность к заклиниванию.
4. Сравнительный анализ силы трения и силы воздействия
Если мы хотим, чтобы сила трения FT во фрик-
ционных системах одной строки кат. 4.2.3 была
одинаковой при одинаковом коэффициенте тре-
ния ц (несмотря на различие характеристик)
(рис. 4.7), то воздействующие силы должны быть
различными. Таким образом, при
Л _ ~р~ 5 (см. 4.2)
Гт1=^тп = ^тШ (4.9)
имеем:
Fn = —Fr; (4.10)
Fin = -~Fi- (4.11)
Тогда, учитывая неравенство (4.3) (см. также
рис. 4.6), при одинаковом коэффициенте ц = ц0 для
всех систем
Fn > Fi > Fni •
(4-12)
Даже в этом случае для систем все еще остает-
ся справедливым неравенство (4.6).
Если, например, фрикционный тормоз прогрес-
сивного типа (автомобильный тормоз с внутрен-
ним расположением колодок) должен быть заме-
нен на линейный (дисковый тормоз) или даже на
дегрессивный, с целью уменьшить влияние неста-
бильности коэффициента трения, то сила воздей-
ствия (F) должна соответственно увеличиться;
характеристика для этого случая показана на
рис. 4.7.
Многоугольники сил
Рис. 4.8. Передаточный коэффициент X в зависимости от угла на-
клона а при постоянном коэффициенте трения для „клиновых”
фрикционных систем. При а = arctgp. = р + m начало области
заклинивания для коэффициента трения Ц. Вверху: многоуголь-
ники сил для равновесия на фрикционной поверхности при раз-
личных углах наклона а (обозначения см. на рис. 4.42)
92
4. Собрание конструкторских каталогов
5. Передаточный коэффициент и конструктивные величины
Передаточный коэффициент можно предста-
вить как функцию одной из конструктивных вели-
чин (параметров), таких как угол наклона а для
„клиновых” фрикционных систем, отношение
плеч li/lz для „рычажных” систем или угол охва-
та Ф для „тормозных ленточных систем”. Коэффи-
циент ц при этом считается постоянным.
На рис. 4.8 показан график этой функции для
клиновых систем при Ц = 0,1. Конструктор может
теперь задать передаточный коэффициент Л выбран-
ной фрикционной системы и по графику опреде-
лить необходимый угол наклона а. Заметим, что
для значения Л = 0 фрикционной системы не су-
ществует. Кроме того, влияние угла наклона суще-
ственно только вблизи полюсов.
Выражение для передаточного коэффициента
X в рассматриваемом случае может быть получе-
но из многоугольника сил на рис. 4.8 (например,
левого). Кроме того, можно воспользоваться схе-
мой в поле 1.3 кат.4.2.4.
Наглядное представление клиновых фрикци-
онных систем различных типов в зависимости от
угла наклона а дает круговая схема на рис. 4.9.
Обратим внимание, что прогрессивными могут
быть не только „вталкивающие” (второй, т. е. ле-
вый верхний квадрант), но и „вытягивающие” (чет-
вертый квадрант) фрикционные системы; с другой
стороны - „вталкивающие” системы в третьем
квадранте дегрессивны.
Полосы в схеме для рычажных фрикционных
систем (рис. 4.10) показывают, что здесь смена
типа системы происходит не по квадрантам, а по
полосам. В зависимости от расположения трущих-
ся поверхностей или левая половина - дегрессив-
ная, а правая - прогрессивная, или наоборот. Для
аналогично устроенных направляющих (опор)
г2 направлен в ту же сторону, что и i>; перед ним ставится
знак "минус”, если острие его стрелки показывает на
фрикционную поверхность, лежащую в зоне центра вра-
щения. Величины в скобках соответствуют положению
центра вращения в правой зоне.
Рис. 4.10. .Рычажные” фрикционные системы. Схема, выража-
ющая зависимость типа системы от положения рычага Ь. Начало
области заклинивания при К . Имеющееся или заторможен-
ное движение между стержнем а и рычагом b показано стрел-
кой. Трением в направляющих пренебрегают (см. также кат.
4.2.4)
Рис. 4.9. „Клиновые” фрикционные системы. Схема, выража-
ющая зависимость типа системы от угла наклона а. Начало об-
ласти заклинивания при X-* °°. Имеющееся или заторможен-
ное относительное движение между основанием а и приводным
рычагом b показано стрелкой (см. также рис. 4.42 и кат 4.5.4)
всегда желательно, чтобы точка вращения (или
крепления) находилась в дегрессивной полосе.
Кат. 4.2.4 в строках 1-3 содержит „клиновые”,
„рычажные” и „ленточные тормозные” фрикцион-
ные системы, а в столбцах 1-3 - их свойства как
систем линейного, дегрессивного и прогрессивного
типа.
Единая форма представления (геометрическая
схема), в которой отражены только существенные
свойства фрикционных систем, дает возможность
получить 46 различных вариантов систем примене-
нием операций варьирования (кат. 4.5.4) к исход-
ному решению.
Заметим, что далеко не всегда можно сразу
определить тип фрикционных систем, встреча-
ющихся на практике. В этих случаях следует найти
выражение для передаточного коэффициента
А в зависимости от коэффициента трения ц и про-
анализировать характер зависимости. Далее, фрик-
ционные системы - это не только сцепные муфты
и тормоза, но и зубчатые зацепления [44, 45], кото-
рые являются прогрессивными, когда точка зацеп-
ления расположена перед точкой касания началь-
ных окружностей, и дегрессивными - после нее.
Смена типа фрикционной системы на каждом
шаге для очередной пары зубьев приводит, даже
при идеальной форме зубьев, к постоянной пульса-
ции силы трения и силы нормального давления.
На рис. 4.11 показаны некоторые фрикционные
муфты, содержащие фрикционные системы раз-
личных типов.
4.2. Передача сил, приведение в движение и ограничение движений
93
Рис. 4.11. Примеры практического использования различных фрикционных систем в сцепных муфтах и
6. Список принципов к конструкторскому каталогу 4.2.4
1. Цель создания конст- рукторского катало- га 2. Момент примене- ния при методиче- ском конструирова- нии 3. Использование ката- лога 4. Определение основ- ных понятий 5. Классификация в каталоге 6. Ссылки на варианты 7. Примеры Показать литейные, дегрессивные и прогрессивные фрикционные систе- мы и их основные конструктивные свойства Функциональная и предметная фазы конструирования При разработке муфт, тормозов, зуб- чатых колес, замков, стопоров, зажи- мов Передаточный коэффициент . сила трения FT сила воздействия F в противоположность коэффициенту трения сила трения FT ц= — сила нормального давления FH учитывает также свойства конструк- ции, влияющие на силу трения По виду X - Ц - характеристик и по основному для конструкции эф- фекту Кат. 4.2.5, 4.5.4 Рис. 4.11
94
4. Собрание конструкторских каталогов
7. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.2.4: ФРИКЦИОННЫЕ СИСТЕМЫ С РАЗЛИЧНЫМИ ХАРАКТЕРИСТИКАМИ
Классификацией -
ная и специальная
части
X - ц —
характе-
ристики
Линейная I
Дегрессивная II
С возможно-
стью заклини
вания /к
Прогрес-
сивная III
Без воз -
ЛХ в
ЛИ £ Х” Й-*
9/ Область
И заклинивания
и
F
О
Способ умножения
сил
1
Клин
(шарнир-
ный
рычаг)
Xi-Ц Ап = ~ D l + |i ctga Заклинивание Хш *0 . И Начало » Лщ*. заклинив. Лш*°= l-nctga Mk=tga
Разло-
жение
силы
Рычаг 2
Сложе- Тормоз-
ние сил ная лента
Хн .1-е
Без возможности
Хц]«е^*-1 заклинивания,
так как 0 «Хщ •< оо
FT«XF
•Трением в направляющих пренебрегаем
4.2. Передача сил, приведение в движение и ограничение движений
95
4.2.5. Операции варьирования для
функционального изменения фрикционных
систем
Как правило, после выбора подходящего эф-
фекта, соответствующая конструкция полностью
определяет вид функциональной зависимости
между входными и выходными величинами. При
этом очень удобно, если эту функцию можно
изменять варьированием только одного конструк-
тивного параметра: угла клина, длины рычага или
угла охвата ленты. Отметим также то, что прогрес-
сивные и дегрессивные фрикционные системы
конструктивно очень похожи друг на друга, более
того, почти идентичны (кат. 4.2.4, 4.2.5, 4.5.4). В
самом деле, дегрессивную систему можно превра-
тить в прогрессивную, например, изменением
направления движения на противоположное.
В кат. 4.2.5 показано, какими операциями
можно осуществлять функциональное изменение
нелинейных фрикционных систем. В полях 1-3
представлены различные по основному эффекту
дегрессивные системы, а в строках 1-4 операции
варьирования превращают их в прогрессивные.
Применять операции варьирования к линейным
системам не имеет особого смысла - они все равно
остались бы линейными. Одна из операций, изме-
нение фрикционной системы путем перестановки
точки крепления прижимного элемента относи-
тельно фрикционной поверхности, была использо-
вана в конструкции переключаемого стопора
обратного хода (см. рис. 4.47).
1. Список принципов к конструкторскому каталогу 4.2.5
Щель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге б. Ссылки на варианты 7. Примеры Показать способы функционального изменения фрикционных систем пу- тем изменения их конструкции В цикле возврата от предметной к функциональной фазе, в предмет- ной фазе (функциональная интег- рация) Для изменения фрикционных си- стем, не меняющего их детали Операции варьирования - это дейст- вия, заключающиеся в систематиче- ском изменении определенных пара- метров рассматриваемой системы, модели или объекта для изменения их свойств в требуемом направле- нии. В данном случае применением операций варьирования к объекту „фрикционная пара” меняется тип системы, например, из дегрессивного в прогрессивный По применяемым операциям варьиро- вания Кат. 4.5.4 (Детальный каталог вари- антов трехзвенного механизма) Рис. 4.47
96 4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.2.5:
ОПЕРАЦИИ ВАРЬИРОВАНИЯ ДЛЯ ФУНКЦИОНАЛЬНОГО ИЗМЕНЕНИЯ ФРИКЦИОННЫХ СИСТЕМ
Операции
варьирования
№
Изменение
направления
движения
Смена стойки
(использование
другого звена
в качестве 2
стойки)
Зеркальное
изображение
прижимного
элемента
относительно
нормали к 3
фрикционной
поверхности в
ее средней точ-
ке
Изменение
положения точ-
ки крепления
прижимного
элемента по
отношению к 4
фрикционной |
поверхности
Дегрессивные фрикционные системы (II)
Прогрессивные фрикционные системы (III)
2
3
4- 3 Здесь изменяется
направление прижима
(как 3.4)
4.3. Логическое представление пар твердых тел
97
4.3. Логическое представление пар твердых тел
43.1. Важнейшие кинематические и статические
пары
Если образуется связь (например, в результате
соприкосновения двух или нескольких звеньев
или концов одного деформируемого звена), то
большие или меньшие ограничения относитель-
ных движений [13,71, 19] зависят от числа и поло-
жения точек соприкосновения. Эти ограничения
могут относиться как (по меньшей мере) к одному,
так и ко всем двенадцати направлениям. Если
движение ограничено лишь по всем поступатель-
ным направлениям (кат. 4.3.1, случаи 4 и 8), то
образуется подвижное, вращательное соединение.
Если же движение ограничено по всем 12 направ-
лениям, то образуется неподвижное соединение.
Поскольку просто соединяя два звена, невозмож-
но получить никакого соединения, то всегда
приходится исходить из нескольких (кинематиче-
ских) пар элементов (см. также рис. 1.8), имеющих
хотя бы одну поступательную степень свободы
(кат. 4.3.1, случаи 7 и 10), а желательно даже одно
направление свободы, движение в котором ограни-
чивается в результате сборки. Кроме того, с помо-
щью одной пары элементов невозможно реализо-
вать произвольную комбинацию вращательных и
поступательных свобод и ограничений. Это, одна-
ко, становится возможным, если несколько пар
соединить последовательно или параллельно.
В главной части каталога рядом с изображени-
ем пар приведены соответствующие им матрицы
связей [71]. Эти матрицы указывают, какие на-
правления являются свободными, а какие запре-
щенными, и используются для логического синте-
за новых подвижных соединений с точки зрения
свобод и ограничений (запретов) (а также переоп-
ределенностей).
В специальной части каталога матрицы связей
для тех же пар изображаются при помощи букв
а, в и с. Эти. буквы соответствуют строкам 1, 2 и 3
матрицы из главной части.
Каким образом получается матрица, в логиче-
ской форме изображающая сочленения, объясня-
ется ниже.
1. Логическая матрица связей
В этой матрице [71] ограничения и свободы
пары изображаются с помощью бинарных логиче-
ских [39] величин. Если элементы пары соприкаса-
ются в одной точке, то движение ограничивается в
одном (ранее свободном) направлении, но не для од-
ной степени свободы, которая соответствует двум про-
тивоположным направлениям. В результате в матри-
це связей оказывается максимум 12 мест, в которые
заносятся бинарные величины. Единица в каком-
либо месте матрицы соответствует запрещенному
направлению, а нуль - свободному направлению.
Соответствие элементов матрицы направлениям
движений устанавливается на рис. 4.12. На рис. 4.12, а
изображена система координат, а на рис. 4.12, б -
вращательно-поступательная пара и ее матри-
ца связей. Нули в матрице показывают, что
звено а ^первое в индексе „а, q”) может переме-
щаться в направлении поступательного движения
dxt dx и в направлениях вращательного движения
dyz, dyz. Звено q, последнее в индексе при S, счи-
тается закрепленным. Во всех направлениях, со-
/dx dx
SQ q = dy dy
\dz dz
Рис. 4.12. Матрица связей пары:
а — соответствие между позициями матрицы и движениями в 12
направлениях, б — матрица связей пространственной враща-
тельно-поступательной пары; 0 — свободы; 1 — ограничения
ответствующих единицам в матрице, движение
невозможно.
С матрицами связи можно производить вычис-
ления по правилам булевой алгебры, при этом
логические операции соответствуют операциям
соединения кинематических пар. Следует иметь в
виду, что операции всегда производятся поэле-
ментно. По правилам, описанным далее для
операций конъюнкции (логического умножения -
И) и дизъюнкции (логического сложения - ИЛИ),
можно обращаться с матрицами связей, содержа-
щимися, например, в строках 3 и 5 главной части
кат. 4.3.1.
Для операции конъюнкции
/ 1 1 0 0\ /11
0 0\ / 1 1 0202\
00 = 0 0 0202 .
11/ \о2о2оо/
(4.13)
Для операции дизъюнкции
/1 1 0 0 \ / 1 1 0 0\ / 12120 0\
SfflJinASm5)n= 1100 V 00 00 = 1 1 00 .
\00 00/ \0011/ [ООН/
(4.14)
(Смысл, приписываемый показателям степени,
разъясняется далее в тексте.)
Если нужно изобразить только плоскость
ху или только направление х, то в матрице запол-
няются только соответствующие позиции, а в ос-
тальных ставятся прочерки, например:
/1 1
Srn5’n= (4Л5)
или
Sm5,n=(ll). (4.16)
Операция конъюнкции соответствует последо-
вательному, а дизъюнкции - параллельному со-
единению пар. Поясним на примере (рис. 4.13):
изображенная вверху пара элементов описывается
уравнением
Sa>q=(dx,dx) = (10), (4.17)
т. е. если зафиксировать элемент q, то элемент а
не может быть перемещен в направлении dx (dx=
=_1), но может быть перемещен в направлении
dx (dx- 0).
При этом следует помнить важное соглашение,
7 — 2317
98
4. Собрание конструкторских каталогов
$o,q = ( Ю )
Последовательная цепь
Sc(b,c),q = $с,Ь ASbjC Л$с,ч
$a.b
Последовательно
(умножение)
1 \Lb j J
Г777Т7777777Т77777\
Параллельная цепь
^a(b,c),q ~ a (b).q v ^a(c),q
Рис. 4.13. Ограничения и свободы движений элементов в раз-
личных цепях звеньев. Логическое умножение (И) матриц
связей для последовательных цепей и логическое сложение
(ИЛИ) для параллельных
Параллельно
(сложение)
Рис. 4.14. Последовательное и параллельное соединение пар i
новые комбинации
что всегда элемент, соответствующий последнему
индексу, фиксируется, элемент, соответствующий
первому индексу - подвергается перемещению, а
заключенные в скобки индексы соответствуют
промежуточным элементам. Другие пары соеди-
няются аналогичным образом. Поэтому в средней
части рис. 4.13
Sa,b = Sb,c = Sc,^(10). (4.18)
Совокупность элементов здесь образует последо-
вательную цепь. Для этой цепи верно равенство:
5a(b,c)g = 5abASbcASc<J=(l 0) А (1 0)А(10) =
= (1 А 1 А 1; О А О А 0) = (1 О3). (4.19)
Это равенство показывает, что между а и q только
тогда действует связь в (направлении dx, когда во
всех промежуточных парах действует такая же
связь (конъюнктивное отношение).
Если есть разветвления, как на рис. 4.13 внизу,
то мы имеем дело с параллельной цепью. Связь
между а и q может действовать по пути a, b, q, по
пути а, с, q или по обоим путям. В этом случае
имеем:
Sa(ь, c)g = Sa(b)>q v Sa(c)>q = [ (1 0) A (1 0) ] V
V[ (10) A (1 0) ] = [ (1 A 1; 0A0)]V[(lAl; 0A
A 0)] = (l202). (4.20)
To обстоятельство, что здесь взаимодействие
осуществляется не одним, а двумя путями (пере-
определенность), изображается показателем
степени при единице [71], что не предусмотрен в
булевой алгебре [85, 24, 107]. Мы вводим показа-
тель степени, не меняющий двоичных величин, но
служащий в нашем случае для полезного расшире-
ния булевой алгебры. Показатель степени при
нуле показывает, что в цепи концы одного звена
или группы звеньев имеют более одной степени
свободы (идентичные степени свободы). Правила
операций с показателями степени ясны из следу-
ющих равенств. Например:
IV 1 V 1 А 1 = I3 или 0 А 0 A 0V 0 = О3.
В общем случае согласно [71]:
lmvin=ln?+n; (4.21)
lmV 0n = lm; (4.22)
Рис. 4Л5. Схема опоры на двух шариковых подшипниках. Про-
верка результирующих ограничений и свобод в х-направлении с
помощью матрицы связей. Возможность монтажа на валу или в
корпусе не учитывается
0тА0п=0т+п; (4.23)
0mAF = 0m; (4.24)
0тА0п = 0п для п>т; (4.25)
1т А 1п = 1п для п > т , (4.26)
где т, п - положительные целые числа.
Другие примеры соединения изображены на
рис. 4.14, в верхней части - последовательное, в
нижней - параллельное. Используется матрица 9
кат. 4.3.1 для плоскости ху в двух различных поло-
жениях. Операция конъюнкции (последователь-
ная цепь) дает
/00--\ /1 1 --\ /00--\
Sa(b),q~ Sa bA Sb><3 = U--A00-- = 00--.
\—11/ \ — 11/ \--ll/
(4.27)
Соединение соответствует направляющим для по-
ступательного движения в двух направлениях,
никакое вращение невозможно (например, привод
головки графопостроителя). Такую конструкцию
невозможно реализовать одной парой элементов.
Операция дизъюнкции дает
/00—\ / 1 1 —\ /11 — — \
Sa(b),q~ Sa qV Sb q— 11-- V 00 — = 11 — .
\--и/ \--ii/ \ —1М
(4.28)
Получается неподвижное соединение (рис. 4.14
внизу справа) с переопределенностью во враща-
тельном направлении.
На рис. 4.15 изображена часть вала с двумя
шариковыми подшипниками. Нужно определить,
каковы результирующие ограничения и свободы в
направлении х вала а по отношению к корпусу д.
4.3. Логическое представление твердых тел
99
Рис. 4.16. Образование комбинированных пар из пар 3 и 5 кат.
43.1 путем параллельного соединения в различных относитель-
ных положениях (а-в)
/1100\ / 0000\
Sm3,nVSm5in= 1100 V ООП =
\oooo/ \lioo/
1 1 о о \
1111.
1 100/
(4.37)
Так как есть два пути, по которым вал связан с
корпусом, то мы имеем дело с разветвлением, т. е.
параллельной цепью. Итак,
5а,ь=(1 1);
Sa,c= (01);
Sb,g=(O 1);
5с,д=(1 1)
(4.29)
(4.30)
(4.31)
(4.32)
&а (b,c),q ~ ($а, b $Ь, q ) V (^a, с &с, q )
= [(1 1) А (0 1)] V [(0 1) А (1 1)] = [(0 1)] V [(0 1)] =
= (0 12). (4.33)
Направление dx свободно, направление dZдважды
ограничено (переопределенность). При правиль-
ном использовании фиксированных и плавающих
подшипников должно быть
5а(Ьс))<г= (1 1). (4.34)
Это единственная комбинация без переопреде-
ленностей. Буквы а, b и с заменяют соответст-
венно первую, вторую и третью строки матрицы в
столбце 1 главной части кат. 4.3.1.
Точно также, выполняя операции над матри-
цами, соответствующие последовательному или
параллельному соединению, можно получить
всевозможные комбинации пар из кат. 4.3.1 в
одном сочленении. При этом, если нам нужно
неподвижное соединение, то в результирующей
матрице на всех местах должны стоять единицы,
для подвижного же - куда-нибудь должен быть
помещен нуль.
Теперь осталось только с помощью программы
для ЭВМ по результирующей матрице определить,
какими комбинациями пар 1-11 кат. 4.3.1 ее мож-
но получить. Пары можно соединять различным
образом - по 3, по 4 и т. д. Если требуется, чтобы не
возникало переопределенностей или лишних (не
меняющих свойств соединения) звеньев, то для
операции ИЛИ в одинаковых позициях матриц не
должно стоять более одной единицы, а для опера-
ции И - более одного нуля.
Пример:
(ll)V(10)V(10) = (l3l) (4.38)
(двойная переопределенность);
(1 1) А (1 0) А (1 0) = (1 О2) (4.39)
(промежуточная деталь в соединении лишняя,
идентичные поступательные степени свободы).
Поэтому свобода в направлении dx и переопре-
деленность в направлении dx на рис. 4.15 являет-
ся ошибкой конструкции.
Еще один пример - параллельное соединение
пар 3 и 5 кат. 4.3.1 на рис. 4.16. В этом случае мы
получаем:
для варианта ориентации (а/Ь/с) пары 5 ката-
лога (рис. 4.16, а)
$т 3,п
V Sm 5,п
1 1 о 0\ / 1100\ / 121200\
1 1 00IV 0000 U 1100;
0000 / \ 0000; \ 0 0 1 1 /
(4.35)
для варианта ориентации (с/a/b) (рис. 4.16, б)
/ 1 1 0 0\ / 0 0 1 1 \
Sm3>nvsm5>n= 1100 V 1100 =
\oooo/ \oooo/
2. Список принципов к конструкторскому каталогу 4.3.1
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на вариан- ты 7. Примеры Показать способы образования важ- нейших пар (из двух звеньев) и соот- ветствующие матрицы связей В начале предметной фазы Для образования и варьирования пар элементов, сочленений и соединений. Для реализации пар рабочих поверх- ностей Пара элементов возникает при со- прикосновении двух подвижных звеньев в одной или многих точках, лежащих на их поверхностях. Сопри- косновение элементов пары может происходить по точкам, линиям или поверхностям По форме тел и характеру соприкос- новения (по линии, точке или по- верхности) [13, 14, 90, 42, 71], рисунки по Дизи- оглу В тексте, предваряющем настоящий каталог
1 1 11 \
I2 I2 0 0 ;
оооо/
(4.36)
для варианта ориентации (b/c/а) (рис. 4.16, в)
100
4. Собрание конструкторских каталогов
3. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.1; ВАЖНЕЙШИЕ КИНЕМАТИЧЕСКИЕ И СТАТИЧЕСКИЕ ПАРЫ
Классификационная часть Главная часть Специальная часть
Тело Геометричес- кое место то- чек соприкос- новения Матрица связей Sm п с последо-/0\ вательнос- Ь тью строк \с/ Эскиз Число степе - ней сво- боды Ортогональные варианты распо - ложения (другие последователь - ности строк) Воз - мож- ность мон - тажа Комбинации соприкасаю - щихся повер- хностей
1 2 1 2 № 1 2 3 4
Произ- вольное Соприкосно- вения нет /00 001 00 00 \00 00/ ,'П 1 6 Есть Произволь- ные
г m
Шар Точка /11 00\ 00 00 \00 00/ 7i - —n 2 5 /Ь\ /bl Q ; С \с/ \а / Есть 2 раза: сфе- ра — плос- кость
Линия 2-го порядка /11 00\ 11 00 100 00/ 3 4 /а\ /с \ с ; а \Ь/ \ Ь/ Есть Сфера — ци- линдр
Поверхность 2-го порядка /11 00\ 11 00 \11 00/ m 4 3 — Нет Сфера — сфера
Цилиндр Линия 1-го порядка /11 00\ 00 00 \00 11/ x* m <n 5 4 /а \ /Ь\ /Ь\ /с\ /с) с ; а ; с ; а ; Ь [bl \с/\а/\ь/ \а/ Есть 2 раза: ци- линдр — плос- кость
Линия 1-го порядка, поверхность 1-го порядка /00 11\ 11 11 \11 00/ 1 / ^\ГИ —m 6 2 Как в строке 4 Есть 2 раза:ци- линдр — плос- кость, 2 раза: плоскость — плоскость
Поверхность 2-го порядка /11 11\ 00 00 \11 11/ n m 7 2 /о\ /ЬХ С ; а \ Ь/ \ с / Есть Цилиндр — цилиндр
Поверхность 2-го порядка, точка /11 11\ 11 00 \11 11/ n Д' 8 1 Как в строке 5 Нет Цилиндр — цилиндр, плоскость — сфера
Паралле- лепипед Поверхность 1-го порядка /11 00\ 00 11 \00 11/ 9 3 Как в строке 2 Есть 2 раза: плос- кость — плос- кость
Z m
Поверхность 1-го порядка /11 11\ 00 11 \11 11/ n 10 1 Как в строке 5 Есть 4 раза: плос- кость — плос- кость
Поверхность 1-го порядка, точка /11 111 11 11 \11 11/ 11 0 —- Нет 4 раза: плос- кость — ПЛОС кость, 2 раза : плот - кость — сфера
4.3. Логическое представление пар твердых тел
101
43.2. Логические комбинаторные функции
и механизмы
Поток сообщений (информации) является су-
щественной составной частью машинных систем,
функционирующих автономно и адекватно реаги-
рующих на внешние воздействия (см. рис. 2.8).
Часто считают, что системами обработки информа-
ции занимается только электроника и что носите-
лем информации может быть только электромаг-
нитный сигнал. Это справедливо только отчасти. В
принципе безразлично, какой именно энергетиче-
ский носитель выбрать для переработки и пред-
ставления информации. И сегодня остаются меха-
ническими как начальные завенья в цепи обработ-
ки информации - кнопки, рычаги и пр. (для ввода
ее в машину), так и конечные звенья этой цепи -
исполнительные механизмы, устройства печати и
пр. Различные технические средства для реализа-
ции информационных функций и происходящие
при этом процессы представлены на рис. 4.17. Из
приведенного списка более всего нас сейчас инте-
ресуют операции накопления и комбинации,
наиболее часто встречающиеся в машинных систе-
мах и реализуемые с помощью логических после-
довательных [39] и логических комбинатор-
ных1 механизмов [75, 69,28, 79].
Логические механизмы, в дополнение к элект-
ронным логическим устройствам, используются
прежде всего для дублирования. В этом случае при
отказе электронного управления либо исполни-
тельный механизм не прекращает работу, либо
блокируется все устройство. Различные отказы в
системах интерлочных трикотажных машин очень
хорошо описаны В. Рихтером [54.1].
Наши рассмотрения касаются здесь только
цифровых, в первую очередь бинарных (булевых)
механизмов. Входные и выходные величины в этих
механизмах могут быть равны только нулю или
единице. Наиболее предпочтительно, когда 0 и 1
соответствуют двум пространственным положени-
ям какой-либо детали механизма, т. е. двум раз-
личным неподвижным состояниям. Если удается
логические величины 0 и 1 сопоставить с механи-
ческими величинами - носителями информации, то
логические отношения в механизме можно выра-
зить в математической форме с помощью алгебры
релейных схем.
Предлагается следующий порядок конструиро-
вания логических устройств: составление логиче-
ского уравнения, его минимизация, разработка
логической схемы соединений и реализация эле-
ментов-комбинаторов и элементов-накопителей
посредством логических механизмов. Логические
механизмы можно брать из каталогов.
При этом оказывается целесообразным, по
образцу алгебры релейных схем, положить в основу
три операции, комбинацией которых получаются
все сложные логические функции. Это операции:
отрицания (НЕ), конъюнкции (И) и дизъюнкции
(ИЛИ). Все три основные операции легко реализо-
вать с помощью технических средств.
Система аксиом для булевой алгебры по Хан-
тингтону [24] требует выполнения коммутативно-
1 Название означает не .комбинаторную” или „последова-
тельную” логику, а способ ее реализации с помощью элементов,
срабатывающих одновременно или последовательно один за
другим. - Прим. авт.
Операции для абстрактной величины ’’Сообщения” Технические средства Описание процесса
№ 1 2
Накопле- ние (запо- минание) 1 Триггеры, пере - ключатели (на- пример, логичес- кие последова- тельные механиз- мы) Сохранение двоичного выс- казывания путем установки определенного элемента в одно из двух возможных состояний
Передача (проведе - ние) 2 Энергетические носители (напри- мер, электричес- кие, механичес- кие импульсы) Транспортирование двоичных высказываний путем времен ных двоичных изменений состояния соединительного элемента
Преобразо- вание формы 3 Пар алле льн о- пос- леде нательный И последовательно- параллельный преобразователь Преобразование одинаково закодированных сообщений из параллельной формы представления в последова- тельную, и наоборот
Преобраэа ваяие вида 4 Преобразователь кода Преобразование сообщения из одного способа кодиро- вания в другой
Комбини - рованне 5 Логические ком- бинаторные (опе- рационные) эле- менты (например логические ком- бинаторные механизмы) Комбинирование двоичных высказываний в соответст- вии с логическими функци- ями (логические операции) путем изменения состояний подходящих устройств
Рис. 4.17. Технико-механические средства, используемые для
выполнения операций с сообщениями (см. также рис. 6.41)
го1 и дистрибутивных2 законов, и, кроме того,
следующего:
существования элемента О такого, что для
любого х
х V О = х; (4.40)
существования элемента I такого, что для лю-
бого х
xAI-x (4.41)
и для каждого элемента х-существования элемен-
та х такого, что
xVx = I; (4.42)
хАТ=О. (4.43)
Если положить теперь О = 0и1= 1, то функ-
ции „отрицание” соответствует таблица значений
в поле 3.1 рис. 4.8, функции „конъюнкция” - табли-
ца в поле 3.2, а функции „дизъюнкция” - таблица
в поле 3.3.
Число возможных значений функций настоль-
ко мало (0 и 1), что функции можно определять
через таблицы, как это и сделано на рис. 4.18. В
таких таблицах для каждой комбинации значений
независимых величин указаны соответствующие
значения зависимой величины. Таблица в поле 3.1
рис. 4.18 определяет одно из четырех возможных
распределений 0 и 1 для величины у, таблицы в
полях 3.2 и 3.3 - два из шестнадцати возможных
распределений величины у. Приведенные нами
три логические функции, хотя и являются самыми
важными, но все же это только три из общего
числа двадцати возможных функций одной и двух
переменных.
В терминах бинарных состояний (движок сле-
ва - движок справа, импульс тока - пауза и пр.)
можно хорошо описывать многие свойства техни-
} х + у = у + х; ху = ух - Прим. авт.
(x + y)z = xz + yz; xy + z = (x + z)(y + z)—Прим. авт.
102
4. Собрание конструкторских каталогов
Функция Отрицание Конъюнкция Дизъюнкция
Операция Дополнение Умножение Сложение
Логическое значение НЕ и или
№ 1 2 3
Алгебраичес - кая запись 1 1.1 У =х 1.2 y=Xi л х2 1.3 y=XiVX2
Обозначение на схеме 2 г.1 х —D—у 2.2 х1 —Г\ х2Ч>-у 2.3 х, Х2=Р—У
Рис- 4.18. Три важнейшие логические комбинаторные (булевы)
функции и возможные механизмы для их механической реали-
зации
ческих систем. Точно так же три основные логиче-
ские функции очень хорошо конструктивно реали-
зуются (см. кат. 4.3.2, 4.3.4). Оставшиеся 17 логиче-
ских функций можно получить, комбинируя три
основные.
1. Логические комбинаторные механизмы
Рассмотрим сначала логические комбинатор-
ные функции, а затем, в п. 4.3.3 - логические по-
следовательные функции.
На рис. 4.18 в строке 1 приведены алгебраиче-
ские обозначения трех основных логических функ-
ций, в строке 2 - их обозначения в схемах, в стро-
ке 3 - их таблицы истинности, и в строке 4 возможная
реализация их логическими механизмами. Эти
три механизма, взятые из кат. 4.3.2 и 4.3.4, как легко
видеть, реализуют функции в соответствии с
их таблицами истинности. На словах эти функции
можно описать следующим образом.
Отрицание: событие на выходе должно быть
логическим (двоичным) дополнением события на
входе (операция НЕ).
Пример: вход - да, выход - нет; вход - верх,
выход - низ.
Конъюнкция: событие на выходе - только если
события на обеих входах (операция И).
Примеры: оба входа - да, выход - да, иначе
выход - нет; оба входа - верх, выход - верх, иначе
выход - низ.
Дизъюнкция: событие на выходе - если собы-
тие на одном или обоих входах (операция ИЛИ).
Примеры: один или оба входа - да, выход -
да, иначе выход - нет; один или оба входа - верх,
выход - верх, иначе выход - низ.
Важное значение имеет способ кодирования
сообщений, т. е. определение, какое положение
Тип функ- циональ- ной Пример Описание
связи № 1 2
б/б 1 1 ^1 В обоих направлениях безусловная принудительная
6/0 2 —► В одном направлении безусловная принуди- тельная, в другом — отсутствует
б/у 3 1—М РАУДЫ В одном направлении безусловная принуди - тельная, в другом — условная принуди- тельная
у/0 4 —► В одном направлении условная принудитель- ная, в другом — от- сутствует
у/У 5 В обоих направлениях условная принудительная
Рис. 4.19. Типы логических функциональных связей между дву-
мя элементами логических механизмов
соответствует 0, а какое 1. Не зная способа кодиро-
вания, невозможно определить, например, явля-
ется ли данная логическая функция отрица-
нием, конъюнкцией или дизъюнкцией. Это обсто-
ятельство используется в кат. 4.3.4; устройство
механизмов, реализующих конъюнкцию и дизъ-
юнкцию, одинаково, и различаются они толь-
ко способом кодирования. Если рассмотреть один
и тот же способ кодирования для нескольких
механизмов, например 1 для верхнего, 0 для ниж-
него положения, то проявятся и конструктивные
различия механизмов.
Базовые механизмы кат. 4.3.2 и 4.3.4 варьиру-
ются в кат. 4.3.3 и 4.3.5. В то время как в кат. 4.3.3
варьирование механизма отрицания производится
только изменением отдельных элементов (с одно-
или двусторонними геометрическими связями), в
кат. 4.3.5 варьирование основано на применении
другого принципа действия механизма, а именно -
принцип сложения вместо принципа упора (варь-
ирование эффекта). Разумеется, кроме варьирова-
ния эффекта можно применять к этим механиз-
мам и операции варьирования конструкции.
Если несколько входных элементов влияют на
выход, как, например, в полях 4.2 и 4.3 рис. 4.18, то они
должны влиять и друг на друга хотя бы по одному
направлению (через „условную” функциональную
связь, например, силовую). Аналогичные явления
имеют место и в тех случаях, когда механизмы
соединяются последовательно. На рис. 4.19 пред-
ставлены различные типы функциональных (логи-
ческих) связей элементов логических механизмов.
Практическое применение каталогов можно
проиллюстрировать на следующем примере: скон-
струировать устройство, позволяющее включить
штамповочную машину только при воздействии
двумя руками, так чтобы рука рабочего не могла
попасть в опасную зону. Функциональное положе-
ние, идеальная функция и техническое решение
(схема механизма) приведены на рис. 4.20. По-
скольку речь идет о чисто логической задаче, то
идеальная функция представляется с помощью
логической формулы, согласно которой у только
4.3. Логическое представление пар твердых тел
103
тогда равно 1, когда отрицание х^ и отрицание х2
одновременно равны 1 (конъюнкция, поле 3.2
рис. 4.18). Запишем эту формулу
y = x2Axi. (4.44)
Входные сигналы подвергаются отрицанию, по-
скольку при выбранном способе кодирования вход-
ное воздействие соответствует переходу от 1 к 0, а
движение на выходе - переходу от 0 к 1. В строке 4
рис. 4.20 приведена логическая схема, в строке 5 -
найденные в кат. 4.3.2 и 4.3.4 механизмы для реа-
лизации этой схемы, в строке 6 - для проверки
приведена таблица истинности. Не изменяя общей
функции, можно каждый отдельный логический
механизм заменить другим его вариантом из кат.
4.3.3 и 4.3.5.
Процедура разработки логических механизмов,
исходя из логических формул открывает интерес-
ную возможность для оптимизации. Эта возмож-
ность состоит в том, что сложные выражения
можно упрощать, не меняя таблицы истинности,
т. е. самой логической функции. Каждая опера-
ция, исключенная при минимизации, в дальней-
шем обернется сэкономленным элементарным
логическим механизмом. Таким образом, уже в
функциональной фазе возникают интересные
возможности варьирования, связанные с тем, что
одной и той же логической функции могут соот-
ветствовать различные логические выражения. В
самом деле, согласно правилам де Моргана,
х2 A Xi = X2V*1; (4.45)
^2 Vxi = х2Лх';. (4.46)
Применив отрицание к обеим частям равенств,
получаем:
х2Л Xi =х2 Vx! ; (4.45 а)
Фаза конст - руироваиия Модель № Результат
Задача Представ - леиие обыч- ным язы- ком 1 Только когда оба рычага за - пуска окажутся в нижнем по- ложении, переключательный элемент разрешает пуск машины
Постановка задачи: абстра- гированное функциональ- ное положение Представ- ление язы- ком логи- ки выска- зываний 2 Только когда не происходит одновременно событий Xj и X । , наступает событие у
Функ- циона- льная фаза Идеа- льная функ- ция Логическая функция 3 У8Х2аХ1
Логи- ческая функц. струк- тура Логическая схема 4 х2 —ГЧ xi —У
Предметная фаза Логический комбинато- рный меха- низм из кат 4.3.2 и 4.3.4 5 х2 X, 1 .ж 1
‘ * ( G3 —• 4 fMAM о| 1
Контроль по таблице значений 6 х2 Х1 х2 Х1 ухглх!
0 0 1 1 0 1 0 1 1 1 0 0 1 0 1 0 1 0 0 0
Рис. 4.20. Разработка логического механизма для устройства
включения штамповочной машины
x2Vxi = x2Ax1} (4.46 а)
т. е. еще одно выражение для конъюнкции и
дизъюнкции. Если теперь исследовать вместо
левой части равенства (4.45) его правую часть, то
мы придем к механизму, процесс конструирования
которого показан на рис. 4.21. Логические соотно-
шения между входом и выходом совершенно такие
же, как и в первом решении, при этом конструкции
существенно различны.
Фаза конст -
руироваиия
Задача
Постановка
задачи
№
Идеа-
льная
функ-
Функ-
циона- Ц*01
льная
фаза
Модель
Результат
Обычный
язык
Как на рис. 4.20
y = X2vXl
Логика вы -
сказываний
Логическая
функция
Контроль
по таблице
значений
Логическая
схема
Логический
комбинато-
рный меха-
низм из кат.
4.3.2 и 4.3.4
6
У _1
©лян---О
Логи-
ческая
функ-
циона-
льная
струк-
тура
Предметная
фаза
Рис. 4.21. Функциональные варианты логического механизма
для штамповочной машины (см. рис. 4.20). Применение правил
де Моргана
2. Список принципов к конструкторским каталогам 4.3.2—4.3.5
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в каталоге 6. Ссылки на варианты 7. Примеры Разработка механизмов для реали- зации логических функций При переходе от функциональной к предметной реализации потока со- общений (см. абстрактную функци- ональную структуру) Реализация логических схем. При- менение простейших логических механизмов в качестве элементов для реализации логических схем Отрицание, конъюнкция, дизъюнк- ция. Определяются соответствующи- ми таблицами истинности на рис. 4.18 По взаимному расположению входов и выходов, по виду воздействия — наг жатием/вытягивалием, по принци- пу - сложения/упора [75, 28] Рис. 4.20 и 4.21 1
104 4. Собрание конструкторских каталогов
3. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.32 : БАЗОВЫЕ ФОРМЫ ЛОГИЧЕСКИХ МЕХАНИЗМОВ ОТРИЦАНИЯ
Классификаци- Вид воз -
онная и специ- действия
альная части
Взаимное располо -
жение входа и выхода
е ии
параллельны
Кодирование
в одном
направлении
с на перпен-
дикулярны ( 90°)
2
Нажатие
1
Кодирование
в двух
направлениях
1
О
е и а
параллельны (]QQ°)
Кодирование в
противоположных
направлениях (отри-
цательная логика)
3.3
4. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.3 :
ВАРИАНТЫ МЕХАНИЗМОВ ОТРИЦАНИЯ
Класси-
фикаци*
онная и
специаль
пая части
Три поступательных звена
Два поступательных звена, одно вращательное
4.3. Логическое представление пар твердых тел
105
5. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.4:
БАЗОВЫЕ ФОРМЫ ЛОГИЧЕСКИХ МЕХАНИЗМОВ КОНЪЮНКЦИИ И ДИЗЪЮНКЦИИ
Классифи- кационная испециалъ ная части взаимное зположе- , воздей- ие Вход le2 la Выход Вход (ei 1е2)1« Выход Вход е2 1 «1 9а Выход
Вид воздействия Вид воздействия Вид воздействия
Нажатие Вытягивание Нажатие Вытягивание Нажатие Вытягивание
Логическая4^
функция № 1 2 3 4 5 6
Кодирование конъюнкции (И) в| л e?sQ Й)-’ 1 е ° Ы R* [Р* 1 го II II 2.1 е1 ег - 0 - 1 22 0 111 И | | Хт1'1 - - 1 - ° 23 Е 1 0 41 I I 1 ei 1 е? е Е Г - ' 5J Е 0 0 1 t 1 । .Ч-Ц—1ег - 1 з -0 е. _0 S ’ . х , - 1
У * 1 и R й! 1
Е : - о 1 1
я Е f =! А 1 1 / -* <=> S3 ^<о
Кодирование дизъюнкции (ИЛИ) e|ve2«o е2=Р-° 2 е 1.2 Г Т “ ° - 1 У77Л - о Q — 1 2.2 ei е2 _ 1 - о 23 I 1 о12 и 1 1 - - 0 -1 Е Е 0 1 42 и I I Ч || ₽i е 22 ’Г"" у В II < II _ С= 7 Г ~~ ° ₽1 а: -1 67 2 ° 0 1 1 1 14 и, X й1 р \ е2 : - 1 ь - 0
а г » - 0 "й С2 г=1
Классификационная
часть
Принцип действия
1 | 2 | 3
Базовые формы
из кат. 4.3.4
о
&
£
х
S
S
я
X
*8
ф
&
g
1
>х
S
ф
§
я
п
о
й
а
*8
ф
&
Сложение сил
Главная часть
Специальная часть
Направление движения входных и выходных звеньев (масштабная схема) Затраты и число деталей В системе возможны колебания Влияние трения Элементы, порожда- ющие импульс на выходе Возмож- ность увеличения выходной силы для ”0-1”
е] II е2 lia е1 II е 2 _L a е2 1 б; Ila
Другие логи-
ческие функ-
ции, реализу-
емые тем же
механизмом
2 3 4 5
Да Вариант 1 -очень малое, варианты 2нЗ - малое Пружина Нет
Нет Малое Входы Да
Да Большое В ходы Да
Да Вариант 1 -очень малое, варианты 2н 3 - малое Входы Вариант 1 — нет, вариант 2 — да, вариант 3 — только сверх
6
Все, кроме
совпадения
и несов-
падения
Все
Ограничение
обратного
действия
выхода
на вход
7
Только в
одном
направлении
Все, кроме
совпадения
и
несовпадения
Ни в одном
направлении
Только в
одном
направлении
6. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.5:
ВАРИАНТЫ МЕХАНИЗМОВ КОНЪЮНКЦИИ И ДИЗЪЮНКЦИИ
Все, кроме
Во всех
совпадения и направлениях
несовпадения
4.3. Логическое представление пар твердых тел
107
4.3.3. Логические последовательные функции
и механизмы
Наряду с логическими комбинаторными,
применяют также логические последовательные
функции, связывающие между собой сообщения
из различных (тактовых) моментов времени. Физи-
чески они реализуются с помощью элементов,
обладающих памятью. Для каждого запоминаемо-
го бита предусматривается такой элемент. В то
время как для комбинаторных логических функ-
ций выходное значение (состояние) зависит толь-
ко от комбинации входных состояний в данный
момент и сразу изменяется при их изменении, для
последовательных функций новое выходное
состояние Qn+l зависит от входных состояний и
от предыдущего выходного состояния Qn . Послед-
нее выходное состояние может сохраняться до тех
пор, пока оно не будет изменено появлением соответ-
ствующего сигнала на входе (входного состояния).
Логические последовательные функции описыва-
ют простейшее возможное устройство обновляемо-
го накопителя сообщений (с возможностью новой
записи).
Логические последовательные функции и
соответствующие механизмы могут иметь как два
входа, так и один вход. Примерами таких механиз-
мов могут служить два различных выключателя
для лампы. Один из. них, перекидной выключа-
тель, переключается при помощи наклонной
пластины: он включает лампу при воздействии на
один конец и выключает ее при воздействии на
другой конец этой пластины. Лампа останется
включенной (или выключенной), когда выключа-
тель не подвергается никакому воздействию
(запоминание), равно как и при многократном
воздействии на нажатый конец пластины. Другой
выключатель, однокнопочный, работает совер-
шенно иначе. Он включается при нажатии на
кнопку, выключается при следующем нажатии на
нее, и т. д. Он также запоминает последнее вы-
ходное состояние, но изменяет его при каждом
новом воздействии.
На рис. 4.22 изображены все функции памяти,
абстрактные функции накопления, их представ-
ления в виде формул и соответствующие механиз-
мы. Логическая последовательная функция с
двумя входами соответствует двухпозиционному
RS-переключателю (RS-флипфлопу)* 1 без выделен-
ного положения (известен целый ряд других).
Логическая функция с одним входом соответству-
ет Т-переключателю (Т-флипфлопу). В строке 1
рис. 4.22 приведено алгебраическое представление по-
следовательных функций, причем индекс п в этих
формулах не является показателем степени, а
указывает, какому такту соответствуют значения
переменных и результата. Условные графические
обозначения в строке 2 всегда имеют два взаимно
противоположных по значению выхода, из кото-
рых можно использовать один или оба.
В строке 3 приведены таблицы значений, одно-
значно определяющие функции. Таким образом,
на выходе -RS-переключателя получается 1, если
на вход S была подана 1. Это состояние сохраня-
ется и тогда, когда на S снова станет 0. На выходе
1 Понятие „триггер” автор применяет только для электрон-
ных схем, поэтому в качестве общего обозначения для анало-
гичных механических и электронных устройств впервые исполь-
зуются ,двухпозиционный переключатель” и „флипфлоп”. —
Прим. пер.
Функция
Способ
Логическое
значение
Тип
переключателя
Накопление (запоминание) одного бита
Изменение пространственного двоичного
состояния определенного элемента
Установление зависимости между изменяющимися
во времени входными и выходными состояниями
Я 5-первключатель, один
вход для установ ( SET),
друг. вх. для c6p.(RESET)
Г-переключатель, один
вход для установки
и сброса
2
0n*’ = S"v(Ra Q)n
ап’’=(алт)"у (алт)"
№
Алгебраич.
запись
Обозначен.
— Q
Sn -
2
на схеме
1“ Q1
Rn ~I
Таблица
значений
— последовав
состояния)
Логическая
схема
Q.Q
механизм
.3
Логический
последоват.
Рис. 4.22. Представление двух важнейших логических последо-
вательных (булевых) функций и их возможных реализаций с
помощью механизмов
получается и только тогда, когда на вход R будет
подана 1. На оба входа одновременно подавать
1 нельзя (см. пример лампы с перекидным выклю-
чателем).
Т-переключатель дает на выходе Qn + 1 =1, если
перед этим выход Qn = 0, а на входе Тп = 1. На выхо-
де остается 1, когда Т снова обращается в 0. На
выходе Qn + 1 получается 0, если предыдущий вы-
ход Qn--1, а на вход Р поступила 1. На выходе Qn+1
сохраняется 0 и тогда, когда на входе Т снова ока-
зывается 0 (см. пример лампы с однокнопочным
выключателем).
Строка 4 содержит две схемы, которые функ-
ции „последовательной логики” сводят к „комби-
наторным”. Они, однако, имеют силу только для
синхронной последовательной логики, при кото-
рой время разбивается на такты одинаковой дли-
тельности. В начале очередного такта осуществля-
ются операции „комбинаторной логики”, результат
которых, благодаря внесению задержки на такто-
вый интервал, попадает в следующий такт.
При использовании механических элементов
108
4. Собрание конструкторских каталогов
„последовательной логики” не требуется генера-
тора тактовых импульсов и элемента задержки,
поскольку вход и выход согласованы во времени,
что обеспечивается передачей обратного сигнала с
выхода при воздействии на вход за счет положе-
ния рабочей кромки, рис. 4.22, поле 5.1. Недопусти-
мая комбинация входных значений исключается
благодаря жесткости перекидного элемента. Из
схемы в поле 4.2 рис. 4.22 видно, что Т-переключа-
тель обязательно включает в себя PS-переключа-
тель. Однако до сих пор для механических Т-пе-
реключателей это было очевидно только для при-
мера рис. 4.22, поле 5.2. Поэтому Т-переключатели
кат. 4.3.6 и 4.3.7 разрабатывались не на основе
PS-переключателей.
1. Механические RS-переключатели
Переключатели этого типа [27] можно созда-
вать на основе механизмов, имеющих два устойчи-
вых конечных положения и два входа для пере-
ключения. На практике они часто применяются в
качестве механических выключателей, равно как
и в качестве составных частей запирающих меха-
низмов. Механизмы с двумя устойчивыми состо-
яниями и положением опрокидывания показаны
на рис. 3.19-3.22. Типичный пример такого меха-
низма воспроизведен в поле 1.1 рис. 4.23. Конечные
положения обеспечиваются в одном направлении
геометрической связью, а в другом - силовой.
Требование наличия двух устойчивых конечных
положений (правда, без положения опрокидыва-
ния в середине) можно выполнить также с помо-
щью фрикционных систем. Фиксация в устойчивых
положениях в этом случае обеспечивается в одном
направлении геометрической связью, в другом -
фрикционной. Типичный пример такого механиз-
ма показан в поле 2.1 рис. 4.23. В полях 1.2 и 2.2
добавлены необходимые для полноценного пере-
ключателя (флипфлопа) входные элементы,
работающие в столбце 2 в одном направлении, а в
столбце 3 - в противоположных направлениях. В
случае противоположных направлений реализу-
ющий механизм очень прост, но требуется разная
кодировка входов. В поле 3 изображен .RS-переклю-
чатель, часто применяемый для стационарных сцеп-
ных муфт (см. также рис. 3.17). В процессе включения
он работает как чисто фрикционный переключатель
без положения опрокидывания, в процессе выключе-
ния - как „упругий”, с положением опрокидывания.
При переключении происходит процесс, подобный
опрокидыванию, что обеспечивается резким уменьше-
нием требуемой для воздействия на S силы после пе-
рехода конца рычага через наклонный край дета-
ли Q. Фактическая сила воздействия остается по-
стоянной и за счет этого движение до упора уско-
ряется. Фиксация в правом конечном положении
обеспечивается в одном направлении геометриче-
ской связью, в другом - силовой; в левом - геомет-
рической и фрикционной связями.
2. Механические Т-переключатели
Переключатели этого типа [69] применяются
на практике главным образом в клавишных пере-
ключателях, в шариковых авторучках, в запорных
механизмах, вообще там, где одним входным
воздействием нужно что-либо инициировать, а
следующим таким же воздействием - отменить.
Итак, одни и те же последовательные входные
воздействия на некоторое звено должны приво-
дить к различным выходным состояниям другого
подвижно с ним связанного звена. Следовательно,
должны наблюдаться некоторые периодические
движения. То же можно сформулировать иначе:
В любом механическом Т-переключателе неко-
Геометр и -
ческая сило- ___
вая и геомет- з
рическая
фрикцион-
ная связь
(с положе- 3
нием опро-
кидывания
при выклю-
чении)
Рис. 4.23. Разработка механических RS-переключателей на
основе различных базовых механизмов
4.3. Логическое представление пар твердых тел
109
№ 3
из кат. 4.3.6
№ 2
из кат. 4.3.6
Замкнутая плос-
кая относитель-
ная траектория
№ 5
из кат. 4.3.6
№ 4
из кат. 4.3.6
№ 9
из кат. 4.3.6
I Замкнутая плос
т кая относитель -
ная траектория
Замкнутая гфостранст-
венная относительная
Рис. 4.24. Замкнутая относительная траектория в различных ме-
ханических Т-переключателях
торая точка входного звена должна совершать
движение по замкнутой траектории (плоской или
пространственной) относительно некоторой точки
выходного звена в одном направлении.
Это положение, справедливое для всех извест-
ных механических Т-переключателей, помогает
также находить новые варианты механизмов
таких переключателей. На рис. 4.24 показана замк-
нутая траектория относительного движения для
некоторых Т-переключателей. Она не обязательно
должна быть окружностью, как для примера 3, а
может быть кардиоидой (сердечником), как для
примера 2, может лежать на цилиндрической
поверхности (пример 7) и даже иметь форму двой-
ной восьмерки, как для примера 4. Эта траектория
всегда замкнута, позволяет создать два устойчи-
вых положения, всегда проходится в одном на-
правлении, что обеспечивают по меньшей мере
два стопора обратного хода.
Для механических ^-переключателей харак-
терна проходимая в обоих направлениях незамк-
нутая траектория относительного движения с дву-
мя устойчивыми положениями, а также с положе-
нием опрокидывания или „гистерезисом” (в
стопорах обратного хода). Для механических
Т-переключателей характерна проходимая в одном
направлении замкнутая траектория относительно-
го движения по меньшей мере с двумя устойчивы-
ми положениями и по меньшей мере с двумя
стопорами обратного хода.
В кат, 4.3.6 и 4.3.7 собраны известные модели
клавишных переключателей [69]. Кат. 4.3.6 содер-
жит конструкции, в основе которых лежат различ-
ные схемы механизмов, в кат.4.3.7 включены неко-
торые их варианты. Для классификации в кат. 4.3.6
используются признаки: вид цепи (плоская или
пространственная), число звеньев, число и вид пар,
стопоров обратного хода и тип запирающих эле-
ментов. Входное движение всегда является посту-
пательным и предполагает наличие поступатель-
ной пары. Дальнейшие движения обеспечиваются
вращательными и вращательно-поступательными
парами. Криволинейная траектория образуется
центром одной из вращательно-поступательных
пар.
Для обеспечения повторных переключений
применяются храповые колеса и кардиоидные
направляющие. Принцип повторных переключе-
ний состоит в том, что при первом нажатии на
кнопку храповое колесо или переключающий
элемент проходит лишь часть пути, при этом
кнопка может оставаться в промежуточном поло-
жении, а при следующем нажатии проходится
остаток пути (траектория замкнута) и достигается
исходное состояние, при этом кнопка возвращает-
ся в верхнее положение. Два положения кнопки
используются, например, для замыкания/размы-
кания контактов.
Многие известные Т-переключатели (клавиш-
ные переключатели) по существу являются разно-
видностями 13 моделей из кат. 4.3.6.
На рис. 4.25 отражены основные возможности
вариации механизмов Т-переключателей, а также
их траектории, одновременно используемые для
классификации. Каждому переключателю ставит-
ся в соответствие набор чисел. На первом месте в
этом наборе стоит число звеньев, далее два числа,
характеризующие комбинации пар (номер набора и
перестановки), затем - число стопоров обратного
хода и, наконец, положение и устройство относи-
тельной траектории. На рис. 4.25 даны также
примеры обозначения возможных перестановок
пар в цепи, соединения отдельных звеньев веще-
ственной связью, а также иллюстрируется прин-
цип шестиместной классификационной нумера-
ции. Кроме того, этот рисунок делает понятным
устройство классификационной части кат. 4.3.6.
Данный каталог является одномерным и содержит
известные механизмы Т-переключателей, упоря-
доченные в соответствии с указанными призна-
ками.
Специальные-признаки отражают существен-
ные свойства конструкции, например можно ли
определить включенное состояние по положению
кнопки, происходит ли вращение на выходе Q (для
целей организации последовательности переклю-
чений) и т. д. Систематическое рассмотрение Т-пе-
реключателей позволяет также понять, что в отно-
шении надежности переключения и простоты
изготовления наиболее предпочтительны плоские
четырехзвенные и пространственные трехзвенные
механизмы (мы всегда рассматриваем механизм
только в том состоянии, когда входной элемент
соприкасается с криволинейным звеном).
Сумма чисел степеней свободы всех пар для
этих принудительных плоских механизмов всегда
должна быть равна 4, а для пространственных -
всегда 7 (см. рис. 6.14). Кат. 4.3.6 и 4.3.7 одновре-
менно являются близкими к реальным примерами
операций варьирования, которые представлены
110
4. Собрание конструкторских каталогов
№ позиции
в класси-
фикацион-
ном набор<
Характеристики механизмов Т-переключателей
Число звеньев
Комбинации пар
Число стопоров
обратного хода
на цикл переключений
2
3
Положение
относительной
121212121212 траектория 121212121212
1 — открытая (с односторонней направляющей); •• пара с двумя степенями свободы,
2 — закрытая (с двусторонней направляющей); описывающая криволинейную траекторию.
Примеры правильной классификации вариантов
Перестановки в комбинациях пар
Функциональная интеграция
двух смежных звеньев
1.1 1.2 1.3
б! еп б)
б| -е. "бп
еа si 6i
3.1 3.2 3.3 3.4 3.5
б! ei б| бщ •бш
б! б| бц б| би
е1 б! б| б| б)
"еШ "еШ "еш еП е(
1.2(23) 1.3(31)
Расшифровка примера классификационного номера
1
Три звена ----------------1
Комбинация пар ------
Последовательность пар
в комбинации
Интеграция звеньев 3 и 1 --
. 2
I__закрытая криволинейная траектория
Криволинейная траектория
------------ с верхним пиком
Один стопор обратного хода
Рис. 4.25. Классификация механизмов Т-переключателей с тремя и четырьмя звеньями без учета смены стойки и инверсии в паре
4.3. Логическое представление пар твердых тел
111
также в кат. 4.10.1 и на рис. 3.22. Операции инвер-
сии в паре и смены стойки при этом не применя-
лись.
В то время как большинство моделей исполь-
зуются в качестве клавишных или кнопочных
переключателей, модель 9 в кат. 4.3.6 представ-
ляет собой замок для шкафа. Эта модель может
выдерживать более мощные нагрузки, чем другие.
Звено а здесь связано с дверью шкафа, звено b обе-
спечивает пространственную кардиоидную траек-
торию, причем выступ ау вызывает осевое переме-
щение выступа Ь3 звена Ь.
Подобно модели 9 модель 10 также содержит
элемент, пространственное перемещение которо-
го используется для переключения и фиксации.
Механизм Т-переключателя встроен здесь между
якорем и контактами реле, так что любое состо-
яние (ВКЛ или ВЫКЛ) сохраняется даже тогда,
когда реле выключится. За счет воздействия
якоря контакты попеременно включаются или
выключаются.
При переборе возможностей, по способу рис. 4.25,
могут быть получены многочисленные даль-
нейшие варианты, что показано для примеров № 5
и № 4 кат. 4.3.6 в кат. 4.3.7. Из классификационных
номеров в кат. 4.3.7 ясно видно, что представлен-
ные варианты образуют лишь ничтожную часть
всех возможных. Особенно следует обратить вни-
мание на функционально-интегрированные моде-
ли полей 1.3, 2.1, 2.2, 2.3, в которых число деталей
уменьшено (см. также рис. 5.47). В основе вариан-
тов в полях 5.1 и 5.2 лежит модель № 4 кат. 4.3.6.
Неинтегрированный механизм переключателя
рассматриваемого примера в поле 5.2 имел бы
п = 5, ej= 5, eu= 1 звеньев (деталей) и пар. S-образ-
ная пружина соединяет в себе два звена и одну
пару.
3. Список принципов к конструкторским каталогам 4.3.6 и 4.3.7
1. Цель создания конст- рукторского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на вариан- ты 7. Примеры Представить механизмы, выполня- ющие функцию Т-переключателя Переход от функциональной к пред- метной фазе при проектировании устройств для работы с потоком со- общений Реализация функций накопления (памяти) для парных состояний. Конструирование клавишных пере- ключателей и механических систем, которые при воздействии на них по- переменно закрываются и открыва- ются Флипфлоп, или бистабильный (двухпозиционный) переключаемый элемент. Определение с помощью таблиц истинности на рис. 4.22. RS-переключатель: два входа, один для установки (set), другой для сброса (reset) Т-переключатель: один вход и для установки, и для сброса (счетный вход) (toggle) По числу звеньев, числу степеней свободы и относительному положе- нию пар [69] В настоящем каталоге
112
4. Собрание конструкторских каталогов
4. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.6: МЕХАНИЧЕСКИЕ ДВУХПОЗИЦИОННЫЕ Т-ПЕРЕКЛЮЧАТЕЛИ
(КЛАВИШНЫЕ ПЕРЕКЛЮЧАТЕЛИ, лист 1)
Классификационная часть
Раз-
мер -
ность
цепи
зве-
ньев
Чис-
ло
зве-
ньев
Схема ме-
ханизма,
устройство
пар
Реали-
зация
сто-
поров
обрат-
ного
хода
4
Сто-
пор-
ные
меха-
низмы
Главная часть
Примеры конструкций
Положен•
кнопки
указыв. :
на состо-
яние пе-
реклю-
чателя
• Возмо-
жно не
зависим,
пере-
ключен-
дополи,
звена
Специальная часть
Возмож -
ность ор-
ганизации
цикла пе -
реклю-
чений
Критиче-
ские ус-
ловия эк-
сплуа-
тации
Области
приме-
нения
। Замкну-
тая отно
с ит ель-
ная тр'ае
ктория
3
Про-
стран-
ствен-
ная
Плос-
кая
£
еП
В точ-
ках
1 и 3
5
Меха-
низм
спуска
ВЫ К Л
Ц»1
ВКЛ
Т-0
Q.0 Ч
1
о lie
Храпо-
вик с
внут-
ренни-
ми н
внеш-
ними
зубья-
ми
В точ-
ках 1
н 3 от-
носн-
тель-
ной
траек-
тории
Закры-
тая с
дву-
сторон-
ней на-
правля
ющей,
криво-
линей-
ная
траек-
тория
с фик-
сирую-
щей
впа-
диной
- О
- 1
2
3
4
5
6
Да
Путем
прокру-
чивания
храпо-
вого
колеса
Да
Нет
Радиа-
льный
и осе-
вой
(не по-
казан-
ный на
рнс.)
храпо-
вики
Пере -
ключа-
тель-
ный
крест
и осе-
вой
храпо-
вик
Смена
поло-
жений
разде-
литель-
ного
выс -
тупа
Шар-
нир -
ный
рычаг
вкл
выкл
т*°ГТ°“ I1’1 Ад т. 0 1 т.1 -0
t/ХЛ
b'^UF-c ok ЭД
Осевой хра-
*7, повнк не по-
Q.0 Q.1 Q.1 Q.1 казан
1 2 3 4
ВЫКЛ ВКЛ
т.0 т.1 т .0 Т.1
С помо-
щью пе-
реклю-
чатель -
ного
креста b
Да
Крю-
чок-за-
щелка
Q.0
1
Т«0
ВЫКЛ
Фаза
4—1
С помо-
щью оп-
рокиды-
вающе-
го звена
Да
Опасность
заклини-
вания
(при недо
статочном
угле нак-
лона ра-
бочих по-
верхнос-
тей хра-
повика)
Плос-
кая мио
гократ-
ная тра-
ектория
Наруше- ние фун - кциони- рования из-за не- точности началь- ного по - лож ей ия (напри- мер, вслед- ствие пружи- ны) Прибо- ростро- ение Плос- кая кар- диоид- ная од- нократ- ная тра- ектория
Сущест-
венных
нет
(Теле-,
радиоап-:
параты и
другие
прибо- '
ры)
Заменя-
ют реле
Попада-
ние на
раздели-
тельный
выступ
Плос-
кая мно
гократ-
ная тра-
ектория
Сило-
вые вы -
ключа-
тели
Плос -
кая од-
нократ-
екто-
рия в
форме
вось-
мерки
Да Нет Повы- шенное трение на криво- линейной
С помо- траекто -
щью ры- чага b рии прн слишком малом угле
наклона
Прибор-
ные вы -
ключа-
телн
Прост-
ранст-
венная
. кардио-
идная од-'
некрат-
ная тра-
ектория
4.3. Логическое представление пар твердых тел
ИЗ
КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.6 (лист 2)
Классификационная часть
Главная часть
Специальная часть
Раз-
мер-
ность
цепи
зве-
ньев
Чи-
сло
зве-
ньев
Схема ме-
ханизма,
устройство
3 пар
Реали-
зация
стопо-
ров о&
ратно-
го хода
Сто-
пор-
ные
меха-
низ-
мы
Примеры конструкций
Полож. '
кнопки
указы- 1
вает на '
состоян.
переклю
чателя
Возмож.
независ-
пере клю
чениес
помощ.
дополи.
звена
Возмож-
ность ор-
ганиза-
ции цик-
ла перек-
лючений
Критиче-
ские ус-
ловия
эксплуа-
тации
Облас-
ти при-
мене-
ния
Зам-
кнутая
относи-
тельная
траек-
тория
Про-
стран-
ствен-
ная
2
2
2
Осе-
вые
храпо-
вики
b ad
Форма
зуба в
точках
1 и 3
В точ-
ках
1,2 и 3
Крюч-
ки О)
и Ь3
5
Плас-
тина—
защел-
ка с
кри-
воли-
нейной
траек-
торией
Хра-
повой
венец
с
Хра-
пови-
ки
Крю -
чок-за-
щелка
8-2317
6
5
4
а
Q
ВЫКЛ
т.о
1
ВКЛ
т.о
Да
Развертка
выкл
вкл
Пово-
ротом
плас -
тины d
Т.0
ВКЛ
Г
ВЫКЛ
0*0
О _
Фаза
1*2
Как № 5,
дополни-
тельное
тормо-
жение
пластн-
ны d фри-
кцион-
ным ко-
лесом
Прибор-
ные вы-
ключа-
тели
Прост-
ранст-
венная
кардио-
идная
одно-
кратная
траек-
тория
Истира-
ние пла-
стмас-
совых
храпо-
вых вен-
цов с И d
Шари-
ковые
авто -
ручки
Пило-
образ-
ная мно-
гократ-
ная тра-
ектория
на цили-
ндре
Истира- Насто-
ние осе - льные
вого хра- повика о пласт- массо- вую кно- пку а лампы
Пило-
образ-
ная дву-
кратная
траекто-
рия иа
цилин-
дре
Износ
крюч-
ка а ।
Дверцы
шкафов
Прост-
ранст-
венная
одно-
кратная
траек-
тория
114
4. Собрание конструкторских каталогов
КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.6 (лист 3)
Классификационная часть
Раз-
мер-
ность
цепи
зве-
ньев
Чи-
сло
зве-
ньев
Схема меха-
низма, ус-
тройство '
пар
Реали-
зация
стопо-
ров об-
ратно-
го хода
Сто-
пор-
ные
меха-
низмы
Главная часть
Примеры конструкций
Полож.
кнопки
указы-
вает на
состоян.____
переклю дополн.
чате ля ——
Специальная часть
Возмож.
независ.____ .
переклю ганиза-
чение с -------
помош-
звена
Возмож-
ность ор-
ции цик-
ла перек-
лючений
Критиче-
ские ус-
ловия
эксплуа-
тации
Облас-
ти при-
мене-
ния
Зам-
кнутая
относи-
тельная
траек-
тория
Про-
стр яв-
ствен-
ная
2
2
Те же
точки
как
для
№ 5)
Те же
точки
как
для
№2)
(Кром-
ки
Ь,,Ьг и
выс-
туп с)
5
Ком-
бина-
ции
впа-
дин
Заиры
тая (с
двусто
ронней
напра-
вляю-
щей)
криво
линей
иая
траек-
тория
с впа-
дина-
ми
Откры
тая
криво-
линей-
ная
траек-
тория
с впа-
дина-
ми
Закры-
тая (с
двусто
ронией
напра-
вляю-
щей)
криво-
линей-
ная
траек-
тория
с впа-
дина-
ми иа
языч-
ке
2
вкл
ПР
т „ выкл
3
4
5
6
Износ
кромок
lh и
Комму-
тацион-
ные
реле
Прост-
ранст-
венная
одно-
кратная
траек-
тория
Неточ-
ность на-
чального
положе-
ния ци-
линдра
(см. №2),
трение
иа криво-
линей-
ной трае-
ктории
Прост-
ранст-
венная
кардио-
идная
одно-
кратная
траек-
тория
иа ци-
линдре
Трение
в шар-
нирах
Прибо-
ростро-
ение
Закли-
нивание
верхне-
го ШЕф-
иира
Плос-
кая кар-
диоид-
ная од-
нократ-
ная тра-
екто-
рия
4.3. Логическое представление пар твердых тел
115
5. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.3.7 : ВАРИАНТЫ МЕХАНИЧЕСКИХ Т-ПЕРЕКЛЮЧАТЕЛЕЙ
(ВАРИАНТЫ КЛАВИШНЫХ ПЕРЕКЛЮЧАТЕЛЕЙ, лист 1) __________________
8*
116 4. Собрание конструкторских каталогов
КОНСТРУКТОРСКИЙ КАТАЛОГ 4 Л.7 (лист 2)
Квалифи- к анионная часть № 1
2.1.4.2.1.1 (№ по рис. 4.25)
4.4. Создание сил и изменение их параметров
117
4.4. Создание сил и изменение их параметров
Рассмотрение большого числа машин и прибо-
ров, [29, 4] показало, что в энергетических процес-
сах чаще всего реализуются те идеальные функ-
ции, в которых требуется создать силу, умножить
силу или, в зависимости от текущих параметров
движения, „включить” или „выключить” силу. И
это неудивительно, поскольку и привести в движе-
ние, и затормозить материальное тело можно
только с помощью приложенных к нему сил. Эти
силы должны быть созданы, их параметры (такие,
как величина и направление) изменены для со-
гласования с условиями работы. Наконец, может
понадобиться их устранить („выключить”) в зави-
симости от направления движения. В каталогах
этой главы собраны решения, выполняющие эти
функции.
4.4.1. Создать силу с помощью других величин
Решения в каталоге расклассифицированы по
физической природе сил, по действующим физиче-
ским законам, и наконец, по реализующим эффек-
там. (Каталог не содержит некоторых редко встре-
чающихся эффектов, таких, как, например, эффек-
ты Эйнштейна-де-Газа, отдачи при радиоактивном
излучении, использования аномальной воды или
набухающего дерева).
На примере этого каталога [78] лучше всего
видно, насколько полезно при разработке решений
иметь их классификацию. Сначала мы определя-
ем, какой физической природы силы нам требуют-
ся - механические, магнитные или другие, а затем
какие из эффектов могут быть использованы для
того, чтобы при помощи других величин „создать”
нужную силу. После этого можно выбирать уже
отдельные эффекты. Непосредственный поиск
этих отдельных эффектов был бы несравненно
труднее.
Выражение „создание сил” означает здесь
использование как уже существующих сил в нако-
пителях потенциальной энергии, например в
сжатой пружине или заряженном конденсаторе,
так и сил, возникающих при преобразовании вида
или формы энергии, например в электродвигателе
или на лопатке турбины.
Для создания сил, в противоположность их
умножению, характерно установление соответст-
вия между силой (или парой сил) и другой величи-
ной. Приведенные уравнения, вообще говоря,
можно использовать только для прикидочных
расчетов, так как они не учитывают особенностей
каждой конкретной реализующей конструкции,
например конденсатора или электродвигателя.
Уравнения в каталоге предназначены, главным
образом, для того, чтобы обозначить входящие в
них параметры и показать характер зависимости
(линейный, квадратичный и т. д.).
Признак „необходим постоянный подвод
энергии” соответствует тем процессам, в которых
сила создается до тех пор, пока расходуется энер-
гия заряженного накопителя энергии, например
на трение, а также если сила возникает только при
разрядке накопителя энергии.
1. Список принципов к конструкторскому каталогу 4.4.1
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на вари- анты 7. Примеры Указать физические законы (эффек- ты), приводящие к возникновению силы В функциональной фазе при состав- лении физической функциональной структуры При выборе подходящего физическо- го закона (эффекта) для реализации идеальных функций, на выходе кото- рых находится сила, а на входе — дру- гие величины Сила — это одна из производных кон- структивных величин1 , связанная с . массой, длиной и временем соотно- шением: = Единицей измерения силы является ньютон (Н): [Fl = 1 Н, размерность кото- рого кг • м - с~2 [51] По физической природе сил (упруго- сти, электрические, магнитные и т. д.) и по соответствующим эффек- там См. текст и статьи [78, 91] [72, 91]
* Обердорфер [51] вместо этого термина использует в том же
значении термин „рабочие величины”. — Прим. авт.
118
4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.4.1: СОЗДАТЬ СИЛУ С ПОМОЩЬЮ ДРУГИХ ВЕЛИЧИН (лист 1)
Классификационная часть Главная часть Специальная часть
Природа сил Физический закон Эффект Уравнение Примеры конструкций Материала ные усло- вия дейст- вия сил Интенсив- ные или полевые величины, существен ные при создании силы Необходим постоянный подвод энергии Способ- ность силы совершать работу Значения создава- емых сил Характер- ные раз- меры —
1 2 3 1 2 № 1 2 3 4 5 6
I Гравитационные силы и U. Земное тяготе- ние р-р. Г2 1 Два мас- сивных тела Гравита- ционное поле Нет Да Средняя fap
Вес (на поверх- ности Земли) F»m-g 2 Большая
Архиме- дова сила F-p-g-V ЖиД-^Ь-^-д I5 3 Пассивное тело в жид кой среде
Силы инерции Второй закон Ньютона 7 d(mV) r’ dt Танген- циальное ускоре- ние F«m-o m. F^ |W^%v'Or 4 Инертное твердое тело или жидкость Скорость Да (трение) Непосредственно толь- | ко над телами во враща ющейся системе 1 3/тф*
Центро- бежная сила F«m-w*r < чш m 5 г
Корио- лисова сила F*2mwvr ®-+-— Tf 6
Сила давление струн Iскорост напор) F« m-v(l-cosa) I _ m.v j Ц Ж * 7 Твердое тело и жидкость Поток массы (скорость) Да Да —
Принцип реактив- ного дви жения F=mvr 8 Очень большая
Ускоре- ние При сужении потока ^рЁ^^р}*2 9 Большая Км1
Электрические силы Закон Кулона [ с.» Qi'Q? e r2 Кулоно- ва сила F=Q-E - »E 10 Твердый носитель заряда Напряжен электрост поля Нет Очень малая —
Эффект конден- сатора it 11 Напряжен- ность элек гр ос тати- веского по ля (напря- жение) Средняя
Эффект Джои- сона — Рабека F.k-U-A Провод-1F ник i—i Полупроводник 12 Электри- ческий про водник и полупро- водник Да (ненуг левое соп- ротивленж перехода) Да, очень малая Средняя
Диэлект; рик в не однород- ном поле г г3еЛ4Е I e»2 ds 13 Диэлект- рик Нет 1 Очень малая j . ! Размеры области действия поля
Диэлект- рическая жидкост в поле F-AS>(E-i)E2 2 cA^| 1 + d Же 14
Магнитные силы I Первое уравнение Максвелла I Постоян- ный маг- нит ЬШй-Fe 15 Ферромаг- нитное тело Напряжен- ность маг- нитного поля Да Средняя ViwF
Электро магнит T —Fe 16 Напряжен-! мость маг- нита огопо ля (ток) Да,(джо- улево теп-i ло) Большая УГ
Сила Лоренца F.Q-v-B -в 17 Носитель заряда Напряжен, магнитно- го поля и скорость Да Малая Размеры области действия поля
Сила Ампера F-LI-B Fj-y-^ - 18 Электр иче с кнй про- водник Напряжен- ность маг- нитного по ля и ток Большая 1
Диа- и па рамагне- гики в не одйород iHMi поле M /н 19 Диа- или парамаг- нитное тело Градиент напряжен- ности Нет Очень малая Размеры области действия поля
Опыт Элью — Томсона F-k-I2 Алюми- ниевое кольцо La —сго-о <5 20 Электр ич. проводник и ферро- магнит Электри- ческий ток Да, крат- ковремен- но Белый а я
4.4. Создание сил и изменение их параметров
119
Важнейшие конструк- тивные па- раметры Примени- мы толькс твердые тела 1геометри веские ус- ловия дей ствия сил Продолжи тельное ть действия сил Кинемати- ческие ус- ловия дей ствия сил Типичный "пример (примене- ния, про- явления)
7 8 9 10 11 12
Г.Л) Да Располо- жение в области для дей- ствия на покоя- щуюся сис тему ~' произ- Спутник
ш Разность высот Весы
V.P Нет Глубина погруже- ния вольная Корабли
ш Да — Ограни- ченная Ускорение в иници- альной сис теме отеле га Акселе- рометр
m,r Расстоя- ние г до центоа вращения Произ- вольная Вращение Центри- фуга
m — Ограни- ченная длиной пути Радиальная скорость эо вращаю щеися сис теме Маятник Фуко
ft,а Нет Располо- жение те- ла в струе Для дей- ствия на покоящук ся систему — произ- вольная, иначе — ограни- Относите- льная ско- рость твер дого тела и жидко- сти Гидроста- тический подшип- ник
ft — Ракета
A>A|.Aj,p Уменьше- ние сече- ния, Аг <А 1 • Карбю- ратор
Q Да Достаточ- но малые размеры тела Электрон- нолуче- вой осцил- лограф
A.I.e Расстоя- ние/ дос- таточно мало Электро- статичес- кий вольт* метр
Материалы пары. A, Я t Расстоя- ние близ- ко к нулю Быстро- действую- щие тор- моза и му фты
f.t Неодноро дность поля допусти- мыми дви- жениями или разме- рами обла- сти дейст- вия поля
Электро- статичес- кий пуле- уловитель
A.c Нет Достаточ- но малые размеры Измерение диэлект- рической проницае- мости
Материал, m Да Относи- тельно ма- лое расс- тояние/ Дверные магнит- ные за - щелки
I.A,w Реле
O.B Относи- тельно ма- лые раз- меры Ограни- ченная Компонен- та скорос- ти, перпен- дикуляр- ная на пр а- влению поля Вихрето- ковый тормоз
I Ненулевой угол меж- ду провод* ником и направле- нием поля Произвол ь пая для пюкоящей- •я систе- мы Электро- двигатель
Геометрия полюса, Г к Сортиров- щик руды
Неодноро Дность ПОЛЯ
Материал Да Зимметр» IHOCTb конструк- ции Малая Бетатрон
120
4. Собрание конструкторских каталогов
КОНСТРУКТОРСКИЙ КАТАЛОГ 4.4.1 (лист 2)
Классификационная
часть
Главная часть
Специальная часть
При-
рода
<_ ил
Физи-
ческий
закон
Эффект
Уравнение
Примеры
конструкций
1 2 3 1 2 №
; Молекулярные силы 1 Различные 1 е г Осмос F«A^R1 количес - * тво молей lijF ГД
I д9>НН' Ji *ac~ гвор <a 21
< По; lynp.CTeHi
pOp.j Капил - лярный эффект F«2icrcfc х noBqaxH. натяжен. ^4^ 22
Адгезия 23
F.f (матер/* f). i F 1
ц t- высота микронеро!
ЕС 1 S Ф s Е 4) я £ Я S4 я 2 rT d(mv) di Звуко- вое да- вление F»pvc-A v-c кор ость частиц 24
Силы д ния изл Второй' закон Н Давлен электро- магнита излучен. рв2-§-.Дплот С и ость потока эне- ргии ' Зеркало1>ис 25
S У £ Закон Гука | Дефор- мация пружи- ны F«c- s 26
LU U-|<< Элек- тростри- кция F.c-fl(E)-l(E0H 1иэлектр. 1|—-J % 27
Магни- тостри- кция F-c-[l(B)-l(M a- 28
Тепло- вое рас- шире- ние F«c-[im-i(T0)] -I ^Жесткий to 29
i Изохо- ричес- кое сжатие г _ AV 4 F*P|) V ’А . Пр ед. случаи несж.жидк, P<r A' ^V 30
Ci -Закон Бойля — Мар отта — Г ей-Люссака - Л J
Адиаба- тичес- кое сжатие F*Pb ₽0' 31
Изотер- мическ. сжатие (статич- давлеи )
с? и U-I-* г „ АТ д F-Ro То -А EiFTl 32
Силы трения — ... — Кулона] J-Tl.J Трение сколь- жения F*sign(v)p-F If ♦—i Г“ 33
законы 1 : Ньютона 1 -о 1 u_ «t Сопроти- вление ламина- рного течения F«6nT)r-v Жидкость (т?) 34
Сопрот. турбуле- нтного течения f.T. 1.£.у*.Д HXd 2 v 1 <1 щанкат 35
Трение и инерция Закон Рейнольдса | s 1 Ф X X F трения 1 Динами- ческое сопроти- вление F»c у vz-A 36
Динами- ческая подъем- ная сила F«c |v2-A 37
ей Эффект Магнуса F«2nr2p-w-v-b —•> _fF Шири- H 38
Сопло
Лаваля
Упру-
гий удар
F^Vc/rn-niv
F-A-pjCjfM
скорость
звука
Материа- льные ус- ловия действия сил Интенсивн или поле- вые велич существ. при созда- нии силы Необхо- дим пос- тоянный подвод энергии Способ- ность си- лы совер- шать работу
1 2 3 4
Твердое тело и жидкость Градиент концеи - трации Нет Да
Молеку- лярное взаимо- действие Да, малая
Твердое тело или жидкость
Корпус- кулярное излучение Да
Твердое тело Дефор- мация Нет Да
Напряжен электро - стапяес- кого поля Да, малая
Напряжен ность маг- нитного поля Да (потери)
Тепловой поток Да (охлажде- ние) Да
Твердое тело и жидкость Измене- ние объема Для крат- ковремен- ного дей- ствия — нет, иначе — да (охлаж- дение и утечки)
Тепловой поток Нет
Пара твердых тел Сила и скорость Да Да
Твердое тело и жидкость Скорость
Скорость и угловая скорость
Два упругих тела Скорость Нет Да, крат- ковре- менно
Твердое тело и уп- ругая жид кость Поток . массы Да Да
Значения
создавае-
мых сил
Средняя
Малая
Очень
малая
Большая
Малая
Большая
Очень
большая
Очень
большая
Малая
Средняя
Большая
5
Характер-
ные раз-
меры
6
VFT
Vm/p'
4.4. Создание сил и изменение их параметров
121
Важней* шиекон структив ные пара метры Примени мы толь- - ко твер- дые тела Геомет- рические условия действия сил Продол- житель - иость дей ствия сил Кинема- тические условия действия сил Типичный пример (приме- нения, прояв- ления)
7 8 9 10 11 12
A.v.r Нет — Для дей- ствия на покоя - щуюся систему- произ- вольная — Перенос веществ в биолог, системах
Характер смачивае мости, г Достаточ- но малая поверх- ность Измерен, поверхно- стного на- тяжения
Матери- ал, Rt Да Достаточ- но малое расстоя- ние Отсутст - вне отно- сительи. движения Рейсмус, плоскопа- раллельн- ая плитка
Проме- жуточная среда, Л Нет — Компон- ент скоро сти, перпе ндикуля- рный по- верхнос- ти тела Микро- фон
Да Декора- тивная световая крыльчат.
С Ненуле- вое пере - мещение Непод- вижность или двн- жение < скорости звука Пружин- ные весы
Матери- ал,/ Ненуле- вая длина в направ- лении силы При пос- тоянном .подводе 'энергии и действии на покоя- щуюся систему— произ- вольная Ультра- звуко- вой из- лучатель
Ультра- звуко- вой из - лучатель
Биметал- лический выклю - чатель
Вид наг- рет атное состояние ЖИДКОСТИ (газа) ,А Нет Ненуле- вой объ- ем и по- верх- ность жи- дкости Пневма- тические подвески
Такт сжатия в ДВС
Взрыв - ные про- цессы
И Да Нормальи. давление на поверх трения Произво- льная при вращении Относи- тельная скорость Фрикци- онные тормоза
СП Нет Ненуле- вое сечение Произво- льная Относи тельная скорость жидкос- ти и твер- дого тела Демпфи- рование
d.l.X.p Нену лев. длина в направле- нии силы Сопротив- ление по- току в трубе
А.с ,р Сила и скорость паралле- льны Тормоз- ные щитки
А.с ,р Сила и скорость перпен - дику- лярны Крыло самолета
г.Ь Ротор Флеттне- ра
с.т Да — Малая Относи- тельная скорость Литер- ный мо- лоточек
Вид рабо-| чего ве- щества, Л J Нет Ненуле- вое выхо- дное сече- ние Для поко- ящейся системы- произвол* Турбина Лаваля
122 4. Собрание конструкторских каталогов
4.4.2. Одноступенчатое умножение силы
Из трех поставленных задач - создания, умно-
жения и устранения сил - вторая встречается
наиболее часто. С помощью различных накопите-
лей энергии мы получаем силы, величина которых
не совпадает с требующейся. Затем, чтобы полу-
чить силу нужной величины, применяем различ-
ные механизмы умножения сил1 [77], так называ-
емые умножители силы, или мультипликаторы
(определения в разд. 7.4). Рассматривая преобразо-
вание полной (механической) энергии в этих меха-
низмах, мы получим, что в системах передачи энер-
гии выходная энергия равна входной за вычетом
неизбежных потерь на трение. В каталоге не содер-
жатся механические усилители мощности, в
которых, как и в электронных усилителях, вход-
ная мощность управляет величиной выходной
мощности с использованием дополнительного
источника энергии. Многие из них вполне можно
использовать как умножители силы.
Механический накопитель потенциальной
энергии разряжается всегда в направлении мень-
шей противодействующей силы. Поэтому силу
можно увеличивать или уменьшать, изменяя
параметры мультипликатора в ключевых местах и
задавая тем самым соответствующее направление
потока. На рис. 4.26 показано использование рыча-
га в качестве умножителя и делителя силы.
В кат. 4.4.2 в столбце 2 классификационной
части помещены эффекты, с помощью которых
достигается умножение силы. В наиболее важных
из них используется разложение силы по пересе-
кающимся или параллельным направлениям и
сложение сил. Для этих четырех случаев типичны-
ми примерами умножителей являются клин,
рычаг, блок скольжения и блок (качания). В груп-
пе клиновых мультипликаторов находятся также
шарнирный рычаг, винт и поворотный клин. При
этом выполнить разложение входной силы удает-
ся только тогда, когда ее линия действия не
совпадает с линией действия выходной силы. По
соображениям равновесия, помимо выходной
силы, должна присутствовать еще, по крайней
мере, одна сила реакции. Одно и то же физическое
явление здесь можно толковать двумя различны-
ми способами: можно выделять только входную
силу Fx и одну из сил реакции, F2 или F$, как вы-
ходную. При этом оставшаяся сила реакции, хотя и
присутствует и также воспринимается основани-
ем, ничем остальным особо не интересна; можно
две силы, близкие по направлению, рассматривать
как входные, а третью, их уравновешивающую, как
выходную.
В результате мы получаем мультипликаторы
строк 1-4 кат. 4.4.2. Мультипликатор в строке 5
основан на эффекте распространения давления в
жидкости, разложение силы в нем аналогично
строке 1.
Особыми свойствами обладает мультиплика-
тор в строке 6. Выходная сила F2 не изменяется в
нем при изменении входной силы Fj. Это очень
желательно для многих конструкций, содержащих
переключающие элементы, на которые действует
сила от органов управления (рукояток). На рис. 4.27
показаны 4 примера подобных мультиплика-
1 Такие же или похожие механизмы можно выполнить как
умножители импульса, скорости или перемещения [21]. Здесь
эти возможности подробно не рассматриваются. — Прим. авт.
Е
Fi rti’F2r2
Неподвижность,
отсутствие
потока энергии
F| г1.2 * F? г2
Вращение против
часовой стрелки,
поток энергии от
входа 1 к входу 2
S г1.з * F, гг
Вращение по часо-
вой стрелке, поток
энергии от входа 2
к входу 1
Рис. 4.26. Прекращение или пропускание потока энергии в ре-
зультате изменения одного из конструктивных параметров (ра-
диуса гi) при постоянных силах F и постоянном радиусе rj
Рис. 4.27. Умножение силы с использованием эффекта трения
(мультипликаторы с собачкой):
а — язычок дверной защелки; б — фиксатор борта грузового ав-
томобиля; в — спусковая собачка проскальзывающей муфты; г -
спусковое устройство; FBX — входная сила; FBbIX — выходная
сила
Рис. 4.28. Коэффициент умножения к для умножителей силы в
упругом рабочем объеме с различной жесткостью по различным
направлениям (см. также кат. 4.42, строка 7):
а — различные деформации по различным направлениям для
одного упругого тела; б — накопление энергии; в — зависимость
коэффициента х = F2/Fi от отношения деформаций v = s2/si
4.4. Создание сил и изменение их параметров
123
Рис. 4.29. Последовательное соединение умножителей силы для
повышения результирующего коэффициента умножения:
а - рычажный и клиновой умножители; б — умножители с со-
бачкой
торов. Противоположными свойствами обладает
мультипликатор в строке 8 кат. 4.4.2, в качестве
примера взят молоток. Здесь выходная сила F2 не
влияет на входную силу Fi.
Мультипликатор в строке 7 использует свойст-
во многих упругих тел, закрепленных определен-
ным образом, при деформации в одном направле-
нии деформироваться также и в другом. Однако в
разных направлениях они могут обнаруживать
разную жесткость и разные деформации. При опре-
деленных предположениях зависимость между
входной и выходной силами прямо пропорциональ-
ная и определяется коэффициентом умножения
(рис. 4.28, в). На основе диаграмм (рис. £.28, а и б)
получаются следующие уравнения. Работа совер-
шенная на входе, складывается из работ Wi и W2 в
направлениях действия упругих сил 1 и 2:
W1= iVi + W2; (4.47)
Рис. 4 JO. Последовательное соединение важнейших умножителей силы
124
4. Собрание конструкторских каталогов
Рис. 4.31. Важнейшие варианты соединения умножителей силы на основе рычагов и блоков
Конструктивное исполнение
Рычаг Блок
2 3
Fi Ft si F2 s2
----=-------+-------
2 2 2
(4.48)
Обозначая и = F2/Fl и v = . после преоб-
разований получаем выражение для коэффициен-
та умножения
(4.49)
в предположении, что вся совершенная на входе
работа перешла в энергию, накопленную в обоих
направлениях. Для использования такого умножи-
теля деформация s2 должна быть очень малой, а
деформация на входе si - относительно неболь-
шой. Это требуется в зажимных приспособлениях
и осуществляется, например, с помощью скручен-
ной проволоки. Коэффициент умножения окажет-
ся большим, только если отношение жесткостей
по направлениям очень велико. Для коэффици-
ента умножения оптимально следующее равенст-
во между отношением деформаций и жесткостей:
4.4. Создание сил и изменение их параметров
125
(4.50)
При этом условии и С] /С2 = Ю~2... 10~4 коэффици-
ент умножения итах = 5 ... 50.
Умножитель этого типа применен во втулке
Шпита (кат. 4.8.5, пример 23).
1. Соединение умножителей силы
Эффект мультипликаторов можно существен-
но увеличить, если соединить их последовательно.
На рис. 4.29 показаны два варианта соединения:
а - последовательное соединение рычага и клина;
б-двух клиновых умножителей. Результирующий
коэффициент умножителя в первом случае (без
учета трения):
fkblx^_£2_Z2 = -r_1.. 1 . (4.51)
Fax r2 sin a
зо втором случае:
^±_х = _£2_£2 = _1—L, (4.52)
FBX Fi F2 gl ц2
т. e. он всегда является произведением коэффици-
ентов для отдельных умножителей.
На рис. 4.30 в клетках матрицы-таблицы пока-
заны все варианты попарных соединений мульти-
пликаторов, являющихся системами передачи
энергии. Во всех случаях справедливо, что (без
учета потерь на трение) коэффициенты умноже-
ния перемножаются:
Хрез= Х1Х2... ип. (4.53)
Из примеров, приведенных на рис. 4.30, видно,
что удобнее всего в работе такие комбинации
мультипликаторов, в которых на входе находится
рычаг, а также блок скольжения (строки 3-5). Для
удобства же образования соединения наилучшими
являются те комбинац. и, в которых выходное
перемещение в первом мультипликаторе и вход-
ное во втором согласованы при близких габаритах
мультипликаторов. Кроме того, желательно, чтобы
конструкция собиралась из немногих деталей
(например, рычаг или ворот в поле 3.4). Рычаг оказы-
вается идеальным входным элементом не только
потому, что его приятно взять в руки, но и потому,
что он хорошо сочетается с самыми разными кон*
струкциями (см. на рис. 4.27 дверную защелку,
фиксатор заднего борта грузовика и спусковое
устройство). Наконец, следует отметить еще и
прогрессивный характер умножения силы во всех
рычажных комбинациях - дополнительное неред-
ко используемое свойство этих мультипликаторов.
На рис. 4.31 отражена попытка получить новый,
комбинированный мультипликатор, различным
образом соединяя простейшие мультипликаторы
(каждый с тремя „выводами”). Они реализованы с
помощью рычажных и блочных механизмов, при-
чем в основе их лежит как разложение, так и
сложение сил (кат. 4.4.2). Среди примеров, как это
обычно и бывает при систематическом синтезе,
есть очень хорошие конструкции, есть похуже, а
есть вовсе не имеющие практического значения.
Столбец 1 рис. 4.31 содержит схемы соединений,
столбцы 2 и 3 - возможные реализации, стол-
бец 4 - формулы для результирующего коэффици-
ента умножения ирез. Число степеней свободы
механизма должно быть f = 1, без учета звеньев,
создающих силу.
У соединения в поле 1.1 эффект умножения
имеется только тогда, когда коэффициент умно-
жения не равен единице (хп ¥=1). Поэтому такое со-
единение может быть использовано в передаточ-
ном механизме (поле 1.2), а также в блочном, но не
в обычном, а только в дифференциальном. Для
механизмов сложения сил, типа блочных, больше
подходит способ соединения в строке 2.
В строке 3 содержатся комбинированные вари-
анты, в которых в параллельном соединении силы
складываются, а в последовательном - разлагают-
ся. В строке 4 также содержатся реализации ком-
бинированного, последовательно-параллельного
соединения. В том его варианте, в котором коэф-
фициент умножение между входом 1 и выходом 2
равен единице (мп2= 1), а для выхода 3 не равен
единице (хп3> 1), получается схема очень распрост-
раненных мультипликаторов, например обычных
полиспастов. К подобной схеме, правда, с одним
четырехвходовым элементом - кватернарным зве-
ном - сводятся механизмы обычных десятичных
весов.
Параллельные соединения строк 5 и 6, как
правило, соответствуют только механизмам с ре-
зервированием, и, кроме распределения нагрузок,
они не показывают нам ничего нового.
На рис. 4.32 варьируется полиспаст поля 4.3
рис. 4.31. Оси роликов все время остаются парал-
лельными, что позволяет получить очень удачные
варианты конструкции. То же справедливо и в
отношении шнуровок. Здесь представляет интерес
пример в поле 1.1 рис. 4.32, часто .используемый в
ботинках и туристских палатках. Трением в дыроч-
ках пренебречь здесь нельзя. Согласно [77] и = 4,5-
это наибольший коэффициент умножения, кото-
рый можно получить в таком соединении, при
Рис. 432. Варианты компоновки полиспаста и шнуровки по схе-
ме 4.1 на рис. 431
126
4. Собрание конструкторских каталогов
Дополнитель-
ные свойства
Удобство
манипулиро
вания, боль-
шой коэф -
фициент
умножения
Прогрессив-
ное умноже-
ние силы,
цен1риро-
вание
Изменение
направления
силы,допол-
нительное
умножение
результи -
рующие
свойства
Рис. 433. Последовательное соединение умножи-
телей силы в кусачках. Перемножение коэффи-
циентов умножения и интеграция дополнитель-
ных свойств. Достигнуто увеличение коэффици-
ента умножения силы, желательное в связи с
увеличением ширины фронта резания при
сближении режущих кромок
сколь угодно большом числе дырочек и коэффици-
енте трения ц= 0,1. С другой стороны, входная
сторона шнуровки почти никогда не бывает макси-
мально нагружена, и при большом числе дырочек
трение дает также некоторую гарантию от самоот-
крывания.
2. Дополнительные функции умножителей силы
Различные схемы соединений (см. рис. 4.31) в
принципе могут строиться из любых мультиплика-
торов с двумя „выводами”, однако часто более
целесообразно соединять последовательно не
одинаковые, а различные мультипликаторы. В
этом случае можно, наряду с увеличением коэф-
фициента умножения, дополнить общую функцию
устройства различными полезными свойствами.
Примером могут служить кусачки на рис. 4.33. О
достоинствах последовательности рычаг - шарнир-
ный рычаг уже говорилось. Здесь следует доба-
вить, что прогрессивный характер умножения силы
шарнирно-рычажных мультипликаторов означаете
данном случае возрастание режущего усилия. Это
свойство особенно ценно, так как в процессе реза-
ния круглого стержня ширина фронта резания
растет, и в связи с этим требуется возрастание
режущего усилия. Важнейшие свойства отдельных
мультипликаторов указаны в соответствующих
клетках на рис. 4.33. Относительно небольшой
коэффициент умножения шарнирного рычага
объясняется величиной его входного перемеще-
ния и имеющимися допусками. Коэффициент
умножения можно значительно, практически
неограниченно увеличивать, устанавливая (регу-
лировочным механизмом) исходное положение
шарнирного рычага в соответствии с размером
разрезаемой детали, так как раствор ножниц при
большом коэффициенте умножения очень мал.
Из-за малой величины рабочих перемещений все
детали в ножницах должны быть очень жесткими.
На рис. 4.34 показано камнедробильное устройст-
во, в котором грубая подстройка под размеры
камня выполняется установкой на нужное звено
цепи, а тонкая - перемещением шарнирного
рычага с помощью деталей с, Ь, к.
Примером неверного применения прогрессив-
ного мультипликатора может служить механизм
щипцов для колки орехов на рис. 4.35. Сила возра-
стает при смыкании щипцов и раздавливает уже
расколотый орех. На самом деле здесь требуется
дегрессивная характеристика: сжимающая сила
Рис. 434. Устройство для дробления камней с установочным
приспособлением и цепью для настройки на размер камня:
а — приводной рычаг; Ь — вороток с установочным винтом; с -
установочная серьга; d, е — зажимные рычаги; f — звено цеп?;
S — камень; h — основание; к — ползун; I — рвжутций ролик
4.4. Создание сил и изменение их параметров
127
Дополни-
тельные
свойства:
Удобство
манипулиро-
вания, боль-
шой коэффи-
циент умно-
жения силы
Прогрессив-
ное умноже-
ние силы
Увеличение
рабочего хо-
да, измене-
ние точки
приложения
силы
Результирую-
щие свойства
Рис. 4.35. Последовательное соединение умножите-
лей силы в щипцах для колки орехов. Перемноже-
ние коэффициентов умножения силы и интеграция
дополнительных свойств. Нежелательный прогрес-
сивный характер умножения силы при сдавливании
уже расколотого ореха
Коэффнциеш
умножения
силы
F6 /F, = 27. 216
Удобство
манипулиро-
вания, воз-
можность об-
ратного хода,
умнож, силы
Стопорение
обратного хо-
да, умноже-
ние ситца, из-
менение на-
правл.силы
Прямолиней-
ное движение,
дегрессивное
увеличение
высоты иодье
ма, изменение
направл. силы
Дополнитель-
ные свойства
Результирую-
щие свойства
Рис.4.36. Последовательное соединение
умножителей силы в автомобильном дом-
крате. Перемножение коэффициентов
умножения силы и интеграция дополни-
тельных свойств. Применение мультипли-
катора, выполняющего одновременно
функцию стопора обратного хода
должна быть максимальна в начале, при раскалы-
вании твердой скорлупы, а затем убывать.
Следующий пример - автомобильный домкрат
[76] (рис. 4.36). Здесь умножители сил - рычаг,
винт, шарнирный рычаг. В первой стадии подъема
шарнирный рычаг играет роль умножителя скоро-
сти, а не силы. Это вполне целесообразно, т. к. до
момента соприкосновения с днищем автомобиля
на домкрат не действует никакая нагрузка, и
желательно побыстрее сократить имеющееся
расстояние. По мере подъема площадки домкр _
возрастает ложащаяся на нее нагрузка и одновре-
менно - коэффициент умножения шарнирного
рычага. Использование ходового винта (клин)
служит не только для повышения результирующе-
го коэффициента умножения, но и для стопорения
обратного хода (за счет самоторможения) - так что
автомобиль не может сам собой снова опуститься.
При необходимости автомобиль можно плавно
опустить с помощью того же рычага и ходового
128
4. Собрание конструкторских каталогов
Эффект, используем ДЛЯ УМНОЖ; силы Свойства Примеры Изменение направле- ния силы Изменение точки приложения силы Прогрессив ное умно - жение силы Стопорение обратного хода Движение (я) Входное пер ем еще ние Уменьше- ние вых. перемеще ння обяза тельно Удобство маннпули рования Компакт- ность конс- трукции
перпен, к направлен ствия в направ- лении ден ствия неограни чено обратимо
Наименов Эскиз № 1 2 3 4 5 6 7 8 9 10 11
Разложение силы по пересекающимся направлениям Клин 2 1 На ~ 90° Нет Нет В зависи- мости от конструк- ции Да, если р > а От выхода к входу Нет Нет Мало, т. е. сравнимо с размерами ведомых звеньев Да Нет Да
Поворот- ный клин 4: 2
Винт 2 ин- 3g i 1 3 Нет
Шарнирн рычаг 1 ^^=0-^4 2 4 Да Нет Различная
Разложение силы по параллельным нащ> явлениям Двуплечий рычаг •Км* Л 5 Для сово- купности конструк- ции — про- извольное Да Нет Нет Да Велико, т. е больше размеров ведомых ' звеньев; годится для ручного воздей- ствия на вход Да Для вых одной части механизма —да
Одноплечий рычаг 6 Нет
Двойное колесо ZbH 1 7 Произволь- ное Да Да Нет
Сложение сил 1 Блок скольже - иня '2 8 135'- 180* Нет Да Нет Нет
Блок 1 9 180* Да Нет
Распростр. давления Гидро- цилиндр 2 1— 1 10 Произволь- ное Да В опре- деленных случаях Сильно различа- ется Нет Да
Трение Собачка 2 т 11 90* Нет Нет От входа к выходу Мало Нет
Импульс Молоток X 2 12 180* Нет Да Нет Нет Велико Для выход- ной части механизма — да
1 — вход; . 2 — выход
Рис. 437. Особые свойства важнейших умножителей силы
винта. И в этом примере правильный выбор муль-
типликаторов с учетом дополнительных свойств
ведет к очень удобным и простым конструкциям. В
новой модели автомобильного домкрата конструк-
торы отказались от его симметричности (при тех
же элементарных мультипликаторах) и использу-
ют только три детали.
На рис. 4.37 в дополнение к классификацион-
ной части кат. 4.4.2 приведены существенные
дополнительные свойства различных мультипли-
каторов. Один из примеров конструирования
состоит в том, чтобы уже отдельные детали выби-
рать или разрабатывать таким образом, чтобы их
дополнительные свойства были непосредственно
желательными для всей конструкции, а нежела-
тельных бы не было. Что из этого получается, мож-
но увидеть, если сравнить кусачки с щипцами для
орехов.
3. Усилитель мощности как умножитель скорости и силы
Мы уже отметили, что осуществить умножение
силы можно также с помощью усилителей мощно-
сти. Они, однако, имеют гораздо меньшее значе-
ние, чем „чистые” умножители силы. При констру-
ировании из одних только твердых тел всегда
затруднительно отмерять энергию какого-либо
источника (кинетической энергии) небольшими
порциями в зависимости от некоторой механиче-
ской величины, - а именно такую задачу прихо-
дится решать, пытаясь с помощью усилителя мощ-
ности умножить силу или скорость.
Изменение механической мощности может
быть вызвано изменением силы, скорости или
обеих этих величин. В результате мы получаем
[77]:
AP=FBXA v + vBXAF+ Д vA F. (4.54)
Если повышение мощности основано на изме-
нении скорости, то механический усилитель
мощности может использоваться только как
умножитель скорости (рис. 4.38, а), если на изме-
нении силы (б), - то только как умножитель силы.
Если же изменяются обе величины (в), то усили-
тель мощности можно использовать как умножи-
тель и скорости, и силы. Как правило, для исполь-
зования в качестве усилителей мощности наибо-
лее пригодны прогрессивные фрикционные систе-
мы (кат. 4.2.4). Фрикционные системы предостав-
ляют для механических устройств возможность
непрерывно изменять силу на выходе под управле-
нием силы на входе.
На рис. 4.39 представлены еще два поучитель-
ных примера усилителей: а - аналоговый усили-
4.4. Создание сил и изменение их параметров
129
F3.F,.O
*3 = V, ♦ v2 --v,. 2 ш2 Г2
Av=v3 -V, = 2ш2 r2
21 i. 2 о)2 r2
*1 ‘ V|
4
=vrv’ (v2 v,)
AF’F3-F, =F2
f2
F3/F-bf
тель, похожий на усилитель, показанный на
рис. 4.38, б); б - дискретный. В аналоговом усили-
теле крутящий момент от двигателя передается на
барабаны а, Ь, вращающиеся с одинаковой скоро-
стью в разные стороны. На правый барабан (выход
Р3) намотан левоспиральный ленточный тормоз,
который его разгоняет, а на левый барабан (выход
Pi) - правоспиральный, который его тормозит. Бла-
годаря умножению силы выход вращается син-
хронно со входом.
Изображенный на рис. 4.39, б дискретно работа-
ющий усилитель мощности с геометрической
связью способен передавать точно дозированные
импульсы за доли миллисекунды. Речь идет о
приводе ударного молоточка на быстропечатающем
устройстве. Описание работы: собачка 1 вдвигает-
ся во впадину быстро вращающегося ударного ко-
леса 2, что в кратчайшее время приводит в движе-
ние молоточек 3. Сила и мощность, необходимые
для движения собачки, гораздо меньше, чем дей-
ствующие на молоточек. В этом и состоит эффект
усиления. Входная и выходная силы здесь никак
не связаны друг с другом (кат. 4.4.2, строка 8).
Вращающееся ударное колесо (в реальном устрой-
стве - вал) представляет собой очень просто изго-
тавливаемый механический источник энергии.
Рис. 438. Усилители мощности трех типов, используемые в
качестве умножителей скорости (а), силы (6), скорости и силы (в)
Р?
Pj — управляющий вход,
Рг — силовой вход,
Р3 — выход
Бумага
/
/Литерный
диск
1 — управляющий вход (собачка),
2 — силовой вход (накопитель
кинетической энергии),
3 —выход (ударныймолоточек)
Красящая леита
Рис. 439. Механизм на основе тормозных лент (а) и привод
ударного молоточка (6), являющиеся одновременно усилителя-
ми мощности и силы
4. Список принципов к конструкторскому каталогу 4.4.2
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определение основ- ных понятий 5. Классификация в каталоге 6. Ссылки на вариан- ты 7. Примеры Показать физические эффекты, с помощью которых производится од- ноступенчатое умножение силы, представить примеры, их конструк- тивной реализации и описать свойст- ва умножителей силы На этапе физической функциональ- ной структуры и при геометрически материальной реализации изделия Для получения больших сил из малых с целью согласования с установленны- ми ограничениями, для придания по- току механической энергии желаемо- го направления, для ускорения масс, для осуществления различных движений и т. д., в частности исполь- зование конструкций в качестве умножителей скорости или умножи- телей (и делителей)пути Умножитель силы (или мультипли- катор) — это механическое устройст- во, осуществляющее изменение (чаще всего умножение) силы при передаче ее от входа к выходу. Для умножения силы не требуется никаких дополнительных источни- ков энергии По типу систем — передающих, ком- бинирующих или накапливающих энергию Рис. 4.29-4.31 Рис. 4.27, 4.28, 4.32-4.37
9-2317
130
4. Собрание конструкторских каталогов
5. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.4.2 :
ОДНОСТУПЕНЧАТОЕ УМНОЖЕНИЕ СИЛЫ
Классификационная часть Главная часть
Класс системы Эффект Линия действия сил Уравнение Принци- пиаль- ная При- мер
1 1 3 1 2 3 №
Системы передачи энергии (проводя- щие и пре- образую- щие) Разложение силы Пересекаю- щиеся с sin а г z*sin0 г sin (а* 0) с 3 sin 0 1 =[sin(a*0)/sin a]F2 0-Z z / J» a F> \ 1
Параллель- ные l2 ' f 1 fz |F, 1? h ** 2
b
Сложение сил Пересека- ющиеся F3 = F,cosa*F2cos 0 !>/ >F’ a 9 ♦F3 3
Парал- лельные z CL F, 4
и 1 1. F3 к
Распростра- нение Дав- ления Произволь- ные F F 7 A, 1 A2^ f • - Г 5
7
Системы, комбиниру- ющие энер- гию Трение Перпенди- кулярные F2 = —F, : 2 ц К p = tanp L Л Vp ZrF’ 6
Г— h
Различная жесткость Пересекаю- щиеся F .-J F, ; V Z1 V«S2/s, c, > ч F2 F 7
Системы, на- капливающие энергию Передача импульса Лежащие на одной прямой г 4,1 i f" SG F’ Г,.Л; •—5 ЛЦ *1 fn2 «f-ч v *1 - I' At? 8
Отдача Произволь- ные f2^zf, i/l ATI Ai»A2*A atL • / * * -Ji—p. X—* ffir* -7 P0 9
4.4. Создание сил и изменение их параметров
131
Специальная часть Допол- нение
Обычные значе- ния коэффици- ента умножения силы выходная ^входная Условия умножения силы Коэффици- ент умно- жения ог- ранжива- ют Коэффициент умножения при движении огранживают Харак- тер движе- ния и переда- чи сил Влияние Конструк- тивные предпо- сылки Изменение направленна (или знака) силы и пе- ремещения Примеры реализа- ции эф- фекта
F, -
№ 1 2 3 4 5 6 1 8 9 10
1 ншах * * 5...10 (с трением) sin а» sin р sin(a*p)»sinp Трение, прочность деталей Размеры но- сителей функ- ций (напри- мер, длина клина) Непре- рывный Да Да 4-звенный (или с тем же числом степеней свободы) механизм Натрав- лен ня силы и переме- щения Клин, шарнир- ный ры- чаг, винт, поворот- ный клин
2 xMI-50(100) h > l2 6-звенный (или с тем же числом степеней свободы) механизм Знак переме- щения Рычаг
3 X обычное w * 2 F, sin а (с а» co' P)*1, a ₽ 2 cos a *1 Тренне об отверстие, растяжимость тросов Направ- ления силы н переме- щения Блок сколь- жения, шнуров- ка
4 хобычное 35 * 8(10) F^O Размеры функ- циежальных элементов Знак переме- щения Блок, поли- спаст
5 хобычное * * 2...10 A2» At Сжимаемость среды, утеч- ка, трение, прочность деталей Размеры фун- кциежальных элементов (например, длина хода поршня) Замкнутая система с рабочими поверхнос- тями раз- личной площади Гидрав- личес- кий дом- крат
6 xw,-5...1O M * 1 Трение, прочность деталей — Удар- ный Нет Фрикцион- ная пара Направ- ление силы Двер- ная защел- ка
7 х«5 р-«юо с» Ci« c2 Жесткость деталей Пере- дача силы непре- рывна Да Разлжная жесткость вразлж- ных направ- лениях Натяж- ное приспо- собле- ние
8 м-10—10* (10’) Д12« ДЦ Упругость и пластичность деталей Удар- ный Нет Знак силы Моло- ток
9 х* 2 Л-*’. Сжимаемость среды, утеч- ка, трение, грОЧНОСТЬ деталей Размеры функцио- нальных элементов Неп- рерыв- ный Да Резервуар с 2 отвер- стиями Л 1 = Л 2 Направ- ления силы и переме- щения Неиз- вестны
9*
132
4. Собрание конструкторских каталогов
4.4.3. Механическое стопорение обратного хода
Пусть у нас есть ведомое звено а (рис. 4.40),
для которого возможность движения в одном
направлении должна исключаться, а в другом -
иметься. Тогда должно найтись звено, выполня-
ющее эту функцию, например Ь4 (поле 2.1), такое,
что в одном направлении между ним и звеном а
действует геометрическая связь, а в другом - сило-
вая. Стопором обратного хода может также слу-
жить и фрикционная система (звено bi в поле 1.1),
поскольку фрикционная заклинивающая связь
(п. 4.2.1) может рассматриваться как геометриче-
ская, порожденная тангенциальной силой трения.
Всего существует три возможности, которые содер-
жатся в кат. 4.4.3, для того, чтобы застопорить дви-
жение ведомого звена:
фрикционная заклинивающая связь;
геометрическая связь;
комбинация силовой и геометрической связи.
Задача обеспечения беспрепятственного дви-
жения в другом направлении не создает новых
сложностей, т. к. упомянутые конструкции (см.
рис. 4.40) и без того запирают только одно направ-
ление.
Стопорение обратного хода [84] играет очень
важную роль в конструировании, так как только
эта функция позволяет заряжать накопитель
потенциальной энергии (например, пружину),
действуя в одном направлении, и в то же время не
дает ему разряжаться - в противоположном. Заря-
жаемые же накопители энергии, в свою очередь,
создают статическую силу, удерживающую деталь
в соединении (заклепочном, винтовом и пр.).
Близкие задачи и ситуации имеются в виду
при употреблении понятия „останов направлен-
ного действия” и „свободный ход”.
1. Стопорение обратного хода с помощью фрикционной
заклинивающей связи
Рассмотрение примеров в полях 1 и 1.1, а также
2 и 1.2 кат, 4.25 показывает, что прогрессивные
фрикционные системы с заклиниванием очень
хорошо подходят на роль стопоров обратного хода,
т. к. при изменении направления движения они
Силы, обеспечи-
вающие стопорное
действие
Примечания
Y ж 90
0«asp
М- = tg р
1.3 Тангенциальные
силы, возникаю-
щие при заклини -
ванин
1.4 Стопорение и
разъ ед иняющая
сила зависят от
трения
С геоме
1ри чес-
кой
связью
С квази*
геоме -
Фрес-
кой
связью
3.2
-90"-^ 90“
Р * 90“
0«asp
tg р
2.2
-90<у<9(Г
О‘«Р^9О°
г 3 Компонента При 3 < 90°
нормаль ной силы необходима до-
полнительная
работа для осво-
бождения собачки
при 0 = 90° —
3.3 Компонента
равнодействую-
щей вмес те с си -
лой трения
действующей в
нормальном
направлении
преодоление сил
трения
3-1 Наименьшая
работа,
совершаемая при
освобождении со-
бачки. Для надеж-
ности должно бып
а< р
Рис. 4.40. Основополагающие способы создания механических
стопоров обратного хода с собачками (см. также кат. 4.4.3)
превращаются в дегрессивные. Будучи прогрес-
сивными, они препятствуют движению в одном
направлении, а становясь дегрессивными - порож-
дают гораздо меньшие тормозящие силы трения,
чем линейные системы.
При синтезе фрикционных систем с заклини-
ванием с целью получить из них стопоры полезно
иметь в виду, что в них возникает обратная связь
через умножитель силы - между силой трения
FT и порождающей ее силой нормального давле-
ния FH[46]. Это хорошо видно на примере 3
рис. 4.41. Уменьшение силы из-за умножения на
коэффициент р < 1 при переходе от силы давле-
ния к силе трения компенсируется с помощью
мультипликатора, создающего обратную связь
силы трения с силой давления. В зависимости от
того, что больше - коэффициент умножения или
величина, обратная коэффициенту трения - за-
клинивание возникает или не возникает. Правило
синтеза в этом случае гласит: следует взять линей-
ную фрикционную систему и установить обратную
связь между ее выходом (например, силой FT) и вхо-
дом (например, силой F) через один из умножите-
лей силы из кат. 4.4.2, групп 1-5 и 7.
Приведенное выше описание явлений, возни-
кающих при установлении обратной связи, выво-
дится из уравнений для фрикционных систем
(кат. 4.4.2, столбец 1 главной части). При этом
возникает принципиально важный вопрос о связи
между передаточными коэффициентом фрикци-
онных систем А. и коэффициентом умножения си-
лы в мультипликаторе и .
Зависимость между коэффициентом умноже-
ния и и коэффициентом трения ц, как правило,
выражается через X. Из уравнений (4.1) и (4.2)
[p=FT/jF^; А. = FT/F] видим, что выражения для
Ц и А. являются отношениями действующих сил
(трения и давления, трения и воздействия). В вы-
ражение для коэффициента умножения входят
только силы на выходе и на входе:
и FBblx / FBX.
(4.55)
Его связь с А. определяется конкретными услови-
ями, так как заранее неизвестно, является ли выход-
ной силой сила трения FT или сила воздействия F,
или (как в клиновых умножителях) сила давления
FH. В принципе, взяв любые две силы из всех дей-
ствующих во фрикционной системе, можно их
отношение объявить коэффициентом умножения.
При этом для прогрессивных клиновых систем
(кат. 4.2.4, рис. 4.9 и многоугольник сил на рис. 4.8)
возникает 12 способов интерпретации их как
мультипликатора, в зависимости от того, какие из
сил Fb FT, Fp, FH считать входными, а какие -
выходными. Напишем соответствующие равенст-
ва, где в числителе стоит выходная, а в знамена-
теле - входная сила:
F 1
х=-^ = -^;
F sin a
(4.56.1)
(4.56.2)
(4.57.1)
4.4. Создание сил и изменение их параметров
133
Пример Коэффициент умножения к и условие заклинивания Дополнение
Эффект умножителя Схема Умножитель силы
силы № 1 2 3 4
Клин 1 и F Ц F.t -a-J Ц) » Заперто 1.2 Начал закли ГфИ / FH 3 FH Клин о области [нивания > 0 ' 7 FT a/Fp /В области аклинивалия FT 4F < 0 a/Fp 1.3 F ^входная FT х= р 1—д ctg а Заклинивание, если 1—v ctga< 0, т. е.р > tga; 1.4 возможно толь- ко в прогрес- сивных систе- мах. Здесь н = X, в противополож - ность умножи- телям с собач- кой, см. кат. 4.4.2,4.4.3
Преобразование сил и движений (рычаг) Однократный 2 z.i м ь ®-F" Зг X Заперто 7 2 Рычаг MCt~F« Г, FT—4 2.3 K = X=2M/f“ т- . 2ri*h Заклинивание, 7™2r,*h МтАг zn*n 2.4 и. как в поле 1.4, см. кат. 4.4.3
Двойной 3 - Д р 1 fa * <Ч > , fa Г ГУ > F H2 FH1 r, — FT Заперто 3.2 (за» F+fu! Ч -и г FT Рычаг слинивание). Q Г2 —Fhj „ = —F" — FHI ri ri F< 3.3 н.Ь.х rl Заклинивание, если < 0, т. e. д > — • ri 3.4 и как в поле 1.4, см. кат. 4.4.3, соедине- ние функцио- нально-стру к - турных элемен- тов см. гл.6
Рис. 4.41. Возникновение стопоров обратного хода (заклинивающих остановов) как следствие образования обратной связи между силой
трения и вызывающей ее силой F через умножитель силы
F sin а
И =-^г = Actg ft + 1;
F 1
и =-------------;
FH Actga+l
FT .
м = —— = sin а;
Fp
fp 1
X =--£ ------;
FT sin а
(4.57.2)
(4.58.1)
(4.58.2)
При ft = ± л/2 система линейна, при л/2 < ft<
<л или 0>« >-л/2 дегрессивна. Как легко ви-
деть, коэффициент умножения, определенный вы-
ражениями (4.59) и (4.60), не зависит от передаточ-
ного коэффициента X. На роль умножителей для
систем с заклиниванием могут подойти только те
системы, в которых
К > 1,
(4-62)
Л — " — — j
FH Xcosa+sinft
FH sin ft
и =---= cosa + —-—.
Fp X
(4.59.1)
(4.59.2)
(4.60.1)
(4.60.2)
(4.61.1)
(4.61.2)
и которые устроены таким образом, что выходная
сила увеличивает твходную (положительная обрат-
ная связь). Коэффициент умножения велик, как
правило, тогда, когда в равенствах с прямыми
величинами (4.56.1-4.61.1) передаточный коэффи-
циент велик, а в равенствах с обратными величи-
нами (4.56.2-4.61.2) - мал.
Если исходить из линейных систем, то их
можно превратить в нелинейные изменения силы
воздействия F с помощью умножителя для силы
трения.
На рис. 4.41, примеры 1 и 2, представлены эле-
ментарные фрикционные стопоры. Наличие в них
мультипликатора сразу не очевидно. Однако здесь
следует учесть то обстоятельство, что при разло-
жении силы на нормальную и тангенциальную
составляющие они оказываются непосредственно
связанными друг с другом через поводок b. Напро-
тив, в примере 3 сразу заметно подключение
рычажного мультипликатора к ранее линейной
134
4. Собрание конструкторских каталогов
Пример Тиг!\. V япя хгтр Фрикционная система X—p - характеристика Пригодность
ристики № 1 2 3 4 5
Линейная 1 1.1 F ,1,—F- Fh 1.2 t X 1.3 Для фрикционных остановов, для мультипликаторов с собачкой, кат. 4.4.2, строка 6, коэффициент умножения силы X *
Ц —
Дегрес- сивная 2 2.1 Йк. (XI у !fh 2.2 Прогрессивная характе- ристика Дегрессив- ная харак - тер нс тика
T X
2.3 Стопор об- ратного хо- да (заклини- вающий оста- нов) при X со, X < 0 тогда х * X х =ft/f 2.4 Фрикционный останов, муль- типликатор с собачкой при 0«Х<1 Х.1 = £ X FT При со »Х > 1 фрикционный мультиплика- тор с И « X, от- сутствие само- торможения 2.5 Фрикцион- ный останов, мультипли- катор с со- бачкой, х=1=1. X FT отсутствие самотормо- жения
Прогрес - сивная ^оЯ-i X» Ft IFH I X Область !Ь.закли- нива- J | НИЯ -X ; И —
Р - — коэффициент трения, X = —----передаточный коэффициент
Ан t'
Рис. 4.42. Пригодность линейных, дегрессивных и прогрессивных фрикционных систем для использования в стопорах (см. также рис. 4Л -
4.11 и кат. 4.5.4)
фрикционной системе. Кроме того, приведены
данные о связи между условиями заклинивания и
коэффициентом умножения. На рис. 4.42 изобра-
жены все типы (линейные и нелинейные) фрикци-
онных систем и указано, пригодны ли они для
различного рода стопоров.
2. Стопорение обратного хода с помощью геометрической связи
Обсуждавшиеся до сих пор стопоры приведены
в кат. 4.4.3 под номерами 1-3. Стопор 4 в одном
направлении действует с помощью геометриче-
ской, а в другом - упругой силовой связи (рис. 4.40,
звено Ь4). Чтобы увеличить ход звена а (сверх зо-
ны контакта), в нем предусмотрено несколько иду-
щих подряд упорных площадок (стопорных зубь-
ев). В этом стопоре упругая силовая связь не позво-
ляет стопору выходить из зацепления и обеспечи-
вает прижим к впадине (а > 0), в то время как для
стопора 5 все обстоит иначе. Там 0 > а, причем! а 1<
< р , т. е. угол контактной поверхности сделан
таким, чтобы стопоримое звено b выжимало сто-
пор а (здесь - поворотный клин), так чтобы не
получалось самоторможения. Ограничитель в за-
пираемом направлении действует здесь, собствен-
но говоря, при помощи силовой связи, но в данном
случае за счет дополнительных сил трения его
действие аналогично действию геометрической
связи. Подобные стопоры применяются в тех
случаях, когда требуется прекращать обратный
ход на короткое время, совершая при этом мини-
мальную работу над управляемым элементом
(движком) (например, стопоры-собачки, см. рис.
4.27, 4.29). Но они же работают и в тех случаях,
когда только за счет эффекта самоторможения из
силового соединения получается квазигеометри-
ческое (например, винты).
3. Различные варианты применения стопоров обратного хода
Разнообразные возможности применения
стопоров показаны на рис. 4.43, 4.44. Здесь можно
выделить три большие группы:
неразъемные соединения (статическое приме-
нение), механизмы свободного хода и „выпрями-
тели сил” (кинематическое применение);
разъемные соединения и устройства (статиче-
Схемы
функции
переклю-
чения
(относи-
тельное
движе-
ние а-с)
Ь1
Примене-
ние
3.1
Неразъемные соеди-
нения, механизмы
3 свободного хода,
выпрямители
скорости в силы
3.2
Разъемные соединения,
приспособления
3.3
Стопорение обратного
хода в накопителях по •
тенциальной энергии,
например в насадочных
механизмах
у Движение в направлении стрелки, запирание в противоположном направлении.
—Индекс при Ь указывает строку в кат. 4.4.3, содержащую соответствующий
стопор обратного хода
Рис. 4.43. Возможность применения стопоров обратного хода в
разъемных и неразъемных соединениях, а также в переключа-
емых остановах
4.4. Создание сил и изменение их параметров
135
Индекс при Ь указывает строку в кат. 4.4.3, содержащую соответствующий стопор обратного хода
Рис. 4.44. Примеры применения стопоров обратного хода в неподвижных неразъемных и разъемных соединениях и в переключаемых
остановках. Звено b осуществляет стопорное действие. Индекс при b указывает на базовую форму стопора в кат. 4.4.3
ское применение), разъемные стопоры, выпрями-
тели сил (кинематическое применение);
переключаемые стопоры и выпрямители сил
(кинематическ ое).
Когда конструктор использует стопорные меха-
низмы для создания режима обратного хода, реа-
лизуя при этом определенные функции (на кото-
рые указывает само название „останов направлен-
ного действия”), из поля его зрения выпадают
другие возможности - использовать их запира-
ющее действие [99, 120, 101] для образования
соединений. Разнообразие современных конструк-
ций соединений, особенно в области строительст-
ва, показывает, какие замечательные решения
здесь были ранее скрыты. Все то, что при система-
тическом образе действий могло бы быть найдено
относительно просто, прежде было отдано на волю
случая и найдено лишь в результате многолетних
усилий.
Конструкции первой группы (см. рис. 4.43, поле
1.1) содержат стопорное звено blt которое после сбор-
ки становится скрытым и недоступным. Если движе-
ние звена а в прямом направлении ограничивает-
ся упором, то получается неподвижное соедине-
ние: движению в одном направлении препятству-
ет упор (элемент звена с), а в другом - стопорное
звено bj. В этом примере отражена основная идея
соединений, сборка которых производится раз и
навсегда путем вдвигания одной детали (см.
также рис. 4.44, столбец 1).
Если же никакого упора нет, а звено а выполне-
но в виде замкнутого кольца, то получается меха-
низм свободного хода или же „выпрямитель сил”.
Стопоры обратного хода второй группы (см.
рис. 4.43, поле 1.2) используются в соединениях и мон-
тажных приспособлениях. Стопорному звену
bi второй, геометрический стопор (звено Ъ5 кат. 4.43,
строка 5) может оставлять небольшой свободный
ход (люфт), может служить пружинным упором
или жестко прижимать. В результате получаем три
способа использования стопора: для реализации
монтажно-демонтажных движений, режима сво-
бодного хода и неподвижных соединений (см.
рис. 4.44, столбец 2), Подчеркнем, что в последнем
случае используются совместно два стопора, пер-
вый из которых (соответствующий строкам 1-4
кат. 4.4.3) используется при сборке, а второй (стро-
ка 5 кат.4.4.3) - для создания сил, обеспечивающих
фиксацию соединения.
В третью группу (см. рис. 4.4.3, поле 1.3) входят
переключаемые стопоры обратного хода, которые с
помощью рычага d можно выключать. Различные
исполнения этих стопоров для вращательного
движения показаны на рис. 4.44, столбец 3.
Схемы соединений для описанных групп (см.
рис. 4.43, строка 2) могут быть использованы при
разработке других конструктивных реализаций
стопоров обратного хода. Стрелка на схеме с попе-
речной чертой на конце указывает направление
свободного хода при блокировке движения в
обратном направлении. Стрелка без поперечной
черты обозначает только возможность движения в
указанном направлении, ничего не утверждая про
обратное движение.
136
4. Собрание конструкторских каталогов
Геометрические и
квазигеометрические
остановы
Фрикционные остановы с заклиниванием (д > дк)
Дополнение
1
Клиновой усилитель
2
Соединен-
ные через
звено а
Рычажный усилитель
3
4
Два
останова с
различны-
ми направ-
лениями
запирания
Соединен-
ные через
звено b ]
1.4
См. также рис.
4.40 и обозна-
чения иа рис.
4.42. Дальней-
шие варианты
получаются
изменением
стойки и вида
шарниров, кат.
4.5.2, строки
8-15__________
?Л
Применение:
в разъемных и
регулируемых
неподвижных
соединениях
(поступатель-
ное движение,
вращение)
3.4
Применение:
для преобразо-
вания возврат-
но- посту пате -
льного движе-
ния в однона-
правленное
(поступатель-
ное движение)
Два останова с одинако- выми нал- Соединен- ные через звено а
р явления- ми запира- ния
Соединен-
ные через
звено b
4.4
Применение
для механиз-
мов подачи с
фиксацией
(поступатель -
ное движение,
вращение)
5.4
Применение
для суммиро -
вания иа a t дви-
жений о ] и. а 2
(поступатель -
ное движение,
вращение)
Рис. 4.45. Разработка соединений остановов для различных целей на основе базовых форм 4.1 и 2 из кат. 4.43. Звено b
стопорное действие
4.4. Создание сил и изменение их параметров
137
4. Соединение стопоров обратного хода
Приведенные в кат. 4.4.3 элементарные стопо-
ры можно соединять друг с другом для совместно-
го выполнения дополнительных функций. Соеди-
нение стопоров показано на рис. 4.45 на примере
стопоров типа 4 (храповой останов) и типов 1 и 2
(фрикционный останов). Остановы направленного
действия проявляют для различных направлений
различные свойства. При параллельном соедине-
нии двух стопоров, действующих в противополож-
ных направлениях (см. рис. 4.45, поля 2.1, 2.2 и 2.3),
получаются механизмы типа жесткого или закли-
нивающего останова. При последовательном
соединении (см. рис. 4.45: поля 3.1, 3.2 и 3.3) полу-
чаются механизмы типа храпового или фрикцион-
ного останова, а также сцепных муфт.
Причина результатов параллельного и после-
довательного соединения состоит в том, что при
параллельном соединении механических логиче-
ских механизмов их запирающие действия (огра-
ничения) логически складываются, а при после-
довательном - свободы (отсутствия ограничений)
логически перемножаются (см. п. 4.3.1, „1. Логиче-
ская матрица связей”). Иными словами, если в
параллельной цепи невозможно движение хотя бы
одного звена в каком-то направлении, то невоз-
можно движение всей цепи в этом направлении.
Если же в последовательной цепи хотя бы одно
звено свободно (имеет возможность движения), то
возможно движение всей цепи.
5. Примеры остановов с заклинивающей связью
В строке 5 кат. 4.4.3 представлен геометриче-
ски действующий фрикционный останов, т. е. за-
клинивающий останов. Его действие основано на
том факте, что при угле d, близком к 0°, между по-
воротным клином и рычагом возникает фрикцион-
ная связь, действующая как геометрическая -
заклинивающая связь. Она сохраняется до тех пор,
пока а < р, где р - угол трения. С другой стороны,
наклонная плоскость с небольшим углом наклона
обладает тем свойством, что перемещения вдоль
поверхности соприкосновения при небольшом
угле ее наклона вызывают изменения расстояния
между деталями в направлении действия внеш-
ней силы. Все это хорошо соответствует кинемати-
ке клина.
Наиболее употребителен этот тип стопора в
клиновых и винтовых парах. Клин и винт с углом
наклона а < р создают условия для использова-
ния этих двух эффектов. Один из них - это умно-
жение силы путем ее разложения, второй - эффект
заклинивания фрикционных систем. В результате
получается, что сила реакции на наклонной пло-
скости оказывает такое же действие на относи-
тельное движение, как если бы плоскость не была
наклонной, а действующая при этом связь была бы
чисто геометрической. Угол подъема резьбы
обеспечивает движение винта в осевом направле-
нии и умножение силы, а самоторможение в резь-
бовых поверхностях позволяет считать их парал-
лельными плоскости головки винта (см. рис.
4.46, поля 1.1-1.4).
Для обычного винта (см. рис. 4.46, поле 1.2) это
означает, что возможность обратного хода по
отношению к поступательному движению отсутст-
вует, а по отношению к вращательному - сохраня-
ется (поле 1.4). При этом прикрепляемая деталь
а не должна совершать никаких винтовых движе-
ний, а только двигаться поступательно, так как
вращательная пара (а, b ) разделяет первое и вто-
рое движения. Для сильно нагруженных соедине-
ний должны быть заперты те движения, которые
до сих пор оставались свободными (контровка со-
единений).
При очень большом угле подъема резьбы само-
торможение относится уже не к поступательной,
а к вращательной компоненте движения. Можно
перенести на этот случай винтового гвоздя законо-
мерности, разобранные для случая винта. Напря-
жение между деталями о и с создается крутящим
моментом, возникающим при забивании детали
b (например, молотком). И в этом случае для силь-
но нагруженных соединений встает вопрос о до-
полнительном ограничении свободных движений
(см. рис. 4.46, поле 2.4).
6. Переключаемые стопоры обратного хода
Рассмотрим поля 1 и 2.1 в кат. 4.2.5 (Вариация фрик-
ционных систем), где в одном и том же устройстве тип
системы меняется из дегрессивного в прогрессивный,
если жестко соединить корпус не с монтажной плитой, а
с фрикционным рычагом. На рис. 4.47, а для этой си-
Пример
Функция сто-
пора обрат-
ного хода
3
и
Подвод энер-
гни при враще-
нии элемента Ь,
высвобоокде -
нию энергии
при поступа-
тельном дви-
жении препя-
тствует само-
торможение
Подвод энер-
гии при посту -
нательном дви-
жении элемен-
та Ь, высвобо-
ждению энер-
гии при враще-
нии препятст-
вует самотор-
можение
Относительные
движения
4
Свободны с точно-
стью до трения по-
коя: винтовое дви-
жение b с, враще-
ние с-с, враще-
ниса-Д. Заперты
(самоторможение):
поступательное
движениеа-с,
поступательное
движение Ь-с
М
Свободны с точно-
стью до трения по
кож винтовое дви-
жениеЛ-с, посту-
пательное движе-
ние e-с; поступа-
тельное движе-
ние а-Ь. Заперты
(самоторможе -
ние):
вращение а-с9
вращение Ъ -с
Рис. 4.46. Применение стопоров обратного хода в крепежных
винтах
Рис. 4.47. Простые способы переключения направления запира-
ния в стопорах обратного хода:
а, б — стопоры обратного хода с клиновым и рычажным муль-
типликаторами соответственно; а — запираемая лента; Ь —
запирающий элемент; с — стойка; d — переключательный эле-
мент
138
4. Собрание конструкторских каталогов
7. Список принципов к конструкторскому каталогу 4.4.3
стемы приведено исполнение с переключением. В
зависимости от того, находится ли рычаг в положе-
нии 1 или 0, стопор действует при движении слева
направо или наоборот. Аналогично на основе
системы полей 2 и 4.2 в кат. 4.2.5 можно по-
лучить переключаемый стопор, изображенный на
рис. 4.47, б.
Переключаемые стопоры в соответствующем
исполнении могут с большой пользой применяться
для смены направления движения деталей (тор-
моза) или для приведения их в движение (сцеп-
ные муфты).
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге б. Ссылки на вариан- ты 7. Примеры Показать способы застопорить дви- жение в одном из двух направлений в сочленении (вращательном, посту- пательном или вращательно-посту- пательном) На этапе физической функциональ- ной структуры и при геометрически материальной реализации изделия Стопоры могут служить входом ме- ханических накопителей потенци- альной энергии, механическим .выпрямителем” движений и энер- гетических потоков, для выбора од- ного из двух направлений движения (свободный ход и т. п.), для фикса- ции деталей в соединении Стопор обратного хода — это меха- ническое устройство, которое с по- мощью силовых связей препятству- ет (постоянно или определенное время) движению в одном из двух возможных направлений какого-ли- бо звена, не мешая его движению в другом направлении. При необ- ходимости должна быть обеспечена возможность передавать в запертом направлении относительно большие усилия на смежное звено По способу стопорения — с помощью тангенциальных (заклинивающие связи) или (и) нормальных сил [99,100,101] Рис. 4.43—4.47
Классификационная часть Главная часть Специальная часть
Вид за- пираю- щей силы Способ увели ~ чения норма- льной силы Передача силы Характеристи- ческие уравне- ния Пример Число по- ложен ИЙ фикса- ции Силы в подшип- никах Зашфа- ющая си- ла зави- сит от коэффи- циента трения Харак- тер ис- тичес- кие па- раметры Число поверх- ностей под на- грузкой Время срабаты- вания Минима- льное число звеньев
1 2 .3 1 2 № 1 2 3 4 5 6 7
Танген- циаль- ная сила Раз- ложе- ние силы По пере- секаю- щимся направ- лениям Через клиновое звено fr" . !L_.f 1 - ц. ctg а Ц.2: tga Момент ц р запира- I нияМэ V a 1 .Сколь угодно велико Велики (по срав- нению с гт) Да a 3 Относи- тельно мало 3
По пара - ллель- ным на- врав пе- ниям Через рычаж - ное звено Тренне в эле- ментах, к кото- рым прило- жен момент силы Ft- 2 ц И —н —И 2 Сравни- мы с Fr П г2 Hl Н2 4 Относи- тельно велико 3
г’ Го Щ-Щ’И
Тренне в зле - ментах, к кото- рым прило- жена сила Fr« F f7 -rj- М f f $—J— IF 3 Велики (по срав- нению с 1 Г2 И 5 Среднее 5
Норма- льная сила Малый коэф- фициент тре- ния между храповым ко- лесом и собач- кой Через звено- собачку Для а с 0 са- мопроизволь- ный выход из зацепления исключается при tga| г i 4 Ограни- чено Сравни- мы с за- пираю- щей си- лой Нет, ес- ли g > >ltgaf a 3 Относи- тельно велико 3
Норма- льная и танген- циаль- ная силы Малый коэф- фициент тре- ния для дви- жения запира- ющего звена Через клиновое звено Н- 1 tga| о LL. |л X /гС Зх v 5 Сколь угодно велико Нет, ес- ли g > > |tga| а.ц 3 Относи- тельно мало 3
8. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.4.3: МЕХАНИЧЕСКОЕ СТОПОРЕНИЕ ОБРАТНОГО ХОДА
140
4. Собрание конструкторских каталогов
4.5. Цепи звеньев, механизмы и машины
4.5.1. Замкнутые однозвенные пары, пары звеньев
и цепи с числом звеньев не более четырех
Использование при разработке механизмов и
машин метода кинематических цепей - неотъем-
лемой части теории механизмов и машин [54, 13,
31,106,26,41] - далеко не столь широко распростра-
нено в конструкторской практике, как хотелось
бы. К достоинствам метода относится в первую
очередь его наглядность. Еще одним его достоин-
ством является универсальность: все подвижные и
неподвижные конструкции, образованные из
твердых тел, можно свести к небольшому списку
статических и кинематических цепей. При малом
числе звеньев можно добиться того, чтобы этот
список был полон. Затем, исходя из некоторой
цепи с определенными свойствами, можно полу-
чить множество различных механизмов, устанав-
ливая конкретный вид ее элементов. Пары с одной
степенью свободы можно реализовывать, напри-
мер, как вращательные или поступательные; пары
же с двумя степенями свободы - как плоские или
Замкнутые
статические и
кине матичес -
кие ’’цепи”
Замкнутые
циклы сочле -
нений и меха -
низмы
Соединения и устройства
Число
степе-
ней
сво -
боды
Дополнение
1
2
4
1.4
-2
5
1.5
Двукратно -
напряженное.
Плохо монти -
руемо
2.4 2.5
Однократно на -
пряженное. При -
_j годно для переда-
чи сил в листовых
пружинах. Хоро -
шо монтируемо
14 15
Однократно на -
пряженное. При -
-1 годно для шарнир
ного крепления
проволочных пру-
жин. Хорошо
______монтируемо
4.4 4.5
Замок с защел -
кой. Крышка без
О пружины :цепь в
I . i поле 4.1 (крыш-
' ка с пружиной
цепь в поле 3.1)
Подвижность как
в шарнирном че-
тырехугольнике,
две жестких де -
тали соединяются
без зазоров
7.2
8.3
13.3
6.5
Идеальный спо-
соб придать жест
кость, не созда -
вая внутренних
напряжений
7.5
При усложнен-
ных профилях
тел возможна рав-
номерная переда-
ча движений
8.5
Неравномерная
передача движе -
ний с помощью
вращательных и
поступательных
пар
одноподвижная
О вращательная пара
• двухподвижная пара
вращательная пара
—Г~У- поступательная пара
... одноподвижная
вращательно-поступательная пара ... двухподвижная
Рис. 4.48. Замкнутые однозвенные пары, пары
звеньев и обычные цепи (в соответствии с
кат. 43.1), а также разработанные по ним
схемы механизмов соединения и устройства
4.5. Цепи звеньев, механизмы и машины
141
в скобках относятся к пространственному случаю
Рис. 4.49. Соединения, разработанные на основе однозвенных пар и замкнутых пар звеньев. Выбор конструкции в соответствии с допу-
сками
142 4. Собрание конструкторских каталогов
пространственные вращательно-поступательные.
Определяется также длина звеньев и начальное
положение.
Разработка такого рода способов синтеза -
главная задача теории конструирования. Иными
словами, мы хотим научиться образовывать мно-
жество осмысленных вариантов конструкций,
применяя определенные операции к немногим
универсальным элементам, структурам и т. д.
Чтобы иметь возможность описывать любые (в том
числе статические) конструкции, понятие „цепь”
мы будем применять также к однозвенным парам
(рис. 4.48, строки 1 и 2) и к парам из двух звеньев
(строки 3-5). Кинематические цепи соответствуют
подвижным соединениям, причем относительная
подвижность элементов пар ограничивается в них
взаимным соприкосновением этих элементов [13].
Кат. 4.5.1 содержит только простейшие цепи, но
при этом включает статические. Все эти цепи,
кроме трех, замкнуты. Они служат также приме-
рами напряженных циклов (см. разд. 6.3).
Важное значение имеет классификация по
числу степеней свободы1 (столбцы 1-4). Этим
числом часто определяется пригодность цепи для
выполнения определенной задачи (создание со-
единения, передача движений и т. д.). Число
звеньев как классификационный и специальный
признак (соответствующий строкам каталога),
дает представление как о пригодности цепей для
решения различных задач, так и о возможных
затратах. Наконец, число двухподвижных пар
еи определяет вид будущего соединения, а общее
число пар е - сложность цепи. Непривычным
здесь кажется распространение понятия „цепь” на
одно звено, что не согласуется с первоначальным
определением „кинематической цепи”. Поэтому
пришлось ввести понятие „статической цепи”.
Некоторая „кинематичность” - пусть очень огра-
ниченная - имеется у всех цепей в тех или иных
фазах жизненного цикла конструируемого изде-
лия. Она может быть обусловлена тепловым рас-
ширением, движениями при сборке, смещениями
вследствие допусков, а часто также упругими
деформациями звеньев. Кроме того, при функци-
ональной интеграции некоторые шарниры в много-
звенной цепи могут быть заменены упругими
звеньями.
Таким образом, цепи звеньев с числом степе-
ней свободы f < 0 названы здесь „статическими”, а
с числом степеней свободы / > 0 - „кинематиче-
скими”. При любом числе звеньев цепи с числом
степеней свободы / = -1 пригодны для использо-
вания в качестве креплений и неподвижных со-
единений, имеющих внутренние напряжения (см.
разд. 6.3), цепи с / = 0 - для использования в каче-
стве ненапряженных неподвижных соединений,
допускающих, например, тепловое расширение
или неточности в изготовлении (это конструкции с
одной узловой точкой крепления), а цепи с чис-
лом степеней свободы / = 1 - это главным образом
принудительные механизмы.
1В теории механизмов и машин принято говорить, в случае
пары звеньев (п=2) — о числе степеней свободы, а в случае
кинематической цепи — о степени подвижности ведомого звена
по отношению к ведущему. Поскольку в данном изложении мы
придерживаемся той точки зрения, что во многих отношениях
между этими двумя случаями нет принципиального различия,
то мы всегда будем говорить о степенях свободы — независимо
от того, состоит ли цепь из одного или большего числа звень-
ев. — Прим. пер.
Переход от замкнутой кинематической цепи к
схеме механизма, а от него - к соединениям с шар-
нирами и к устройствам (машинам) - представлен
в наглядной форме на рис. 4.48. В столбце 2 в схеме
механизма определяется также конкретный вид
одно- и двухподвижных пар (вращательная, посту-
пательная или вращательно-поступательная
пара). Столбец 3 содержит примеры реализации со-
единения или механизма, а столбец 4 - число сте-
пеней свободы. Уже по этому рисунку видно, что
цепи с числом звеньев не более трех применяются
главным образом в соединениях, а с тремя звень-
ями и более - в (подвижных) механизмах. Распо-
ложение цепей в кат. 4.5.1 таково, что в зоне оди-
накового числа звеньев по убывающей диагонали
расположены однотипные структуры с равным
числом пар (сочленений), а по возрастающей диа-
гонали - структуры, у которых число одноподвиж-
ных пар одинаково, а число двухподвижных пар
меняется каждый раз на единицу.
В столбце 2 кат. 4.5.1 показаны статические
цепи, которые могут служить моделями соедине-
ний. На рис. 4.49 приведены примеры конструктив-
ной реализации двух- и однозвенных цепей ката-
лога. Будучи плоскими, эти цепи содержат только
вращательные, поступательные и вращательно-по-
ступательные пары. Оценка решений рис. 4.49 с
учетом допустимых отклонений, показанных на
рис. 4.50, дает следующие результаты: цепи в стро-
ках 1 и 2 рис. 4.49 можно использовать в качестве
соединений, так как их можно собирать, не созда-
вая напряжений, несмотря на допускаемые откло-
нения в размерах А х и Ду и в угле Да (рис. 4.50).
В первом случае (строка 1) при сборке можно кор-
ректировать угловое положение, во втором (стро-
ка 2) - положение по оси х.
Цепи в строках 3-6 наиболее часто используют-
ся в качестве соединений. Два способа (строки 4 и
5) - хороши, а два - плохи. Цепи в строках 7-16
плохо подходят на роль соединений и, если только
не применяются деформируемые звенья, их сле-
дует избегать.
Тем самым цепи в столбце 2 в кат. 4.5.1 лучше
всего подходят для использования в соединениях,
так как они нечувствительны к допустимым от-
клонениям параметров (линейных и угловых) и
эти отклонения можно скомпенсировать при сбор-
ке. Для цепей в столбце 1 это невозможно. Для
цепей в столбце 2 нет также необходимости допол-
нительно запирать лишние степени свободы,
например, с помощью* фрикционной связи. Отме-
тим, правда, что при некоторых особых вариантах
расположения звеньев цепи с числом степеней
свободы /= 0 не годятся в соединения: они могут
оказаться недостаточно жесткими (см. рис. 6.13).
Рис. 4.50. Возможные, обусловленные допусками отклонения в
расположении Дх, Ду, Да на плоскости при двух крепежных
отверстиях в соединении
4.5. Цепи звеньев, механизмы и машины
143
Различные цепи могут быть получены из цепей
на рис. 6.11-3 способом, показанным на рис. 6.11-2.
Номера полей в рамочке в кат. 4.5.1 являются
ссылками на поля рис. 6.11-3, содержащие исход-
ные цепи для цепей каталога.
1. Список принципов к конструкторскому каталогу 4.5.1
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ка- талога 4. Определение основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Показать способы получения шар- нирных соединений с числом звень- ев от 1 до 4 и с числом геометриче- ских степеней свободы /=— 1; 0; 1; 2. Ограниченность: отсутствуют цепи с идентичными степенями свобо- ды [13] Разработка (кинематической) схемы механизма (в том числе шарнирных соединений) в начале геометриче- ски материального этапа конструи- рования Для поиска новых механизмов и машин, новых шарнирных соедине- ний; в основе многих механических конструкций лежат одни и те же ки- нематические цепи Кинематическая цепь — это по- движное соединение твердых тел, образованное с помощью пар, по- движность элементов в которых ограничивается их взаимным сопри- косновением. Подвижно соединенные тела называются .звеньями цепи” [13]. Цепи звеньев - см. разд. 7.4 По числу звеньев и по числу двух- подвижных пар Варианты получаются увеличением числа звеньев и числа степеней свободы пар. Возможные числа звеньев и пар можно взять из рис. 6.4. См. также рис. 6.11-3 (Базо- вые цепи) Рис. 4.48,4.49 [13, 31,106, 26, 41]
144
4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.5.1:
ЗАМКНУТЫЕ ОДНОЗВЕННЫЕ ПАРЫ, ПАРЫ ЗВЕНЬЕВ И ЦЕПИ С ЧИСЛОМ
ЗВЕНЬЕВ НЕ БОЛЕЕ ЧЕТЫРЕХ (лист 1). (см. также рис: 6.11- 1-6.11- 3)
Возможности
использования
Число
Кл
сифика^
циоино-сп
циальиая час
Зажимные приспособлен Фермы, соединения,
ния, напряженные сое-
динения, напряженные I
циклы,статически одно-*
кратно переопределен-
ные цепи_____________
конструкции с ’’узло-
вой точкой”, статически
определенные цепи
Преобразователи и пере-Механизмы р ас пр ед еле-
дачн силы и движения,
мультипликаторы,
фрикционные системы.
принудительные цепи
ния и сложения,
дифференциалы,
двукратно свободные
цепи
звеньев
п
Число
элемен-
тарных
пар
исло сте-
. исчреней 1
ло Двух-слот
подвиж^ »ОДЫ-
пых пар ”
№
-1
1
3
17,11 поле иа рис. 6.11-3 с базовыми цепями
—0х вращательная
одноподвижная пара ej
вращательно-поступательная
двухподвижная параед
4.5. Цепи звеньев, механизмы и машины
145
КОНСТРУКТОРСКИЙ КАТАЛОГ 4.5.1 (лист 2)
—«х''- вращательная
одноподвижная пара ег
вращательно-поступательная |5.1| Число степенен свободы (ЧСС)
двухподвижная пара еп
10 — 2317
146
4. Собрание конструкторских каталогов
4.5.2. Принудительные механизмы с числом
звеньев 2-4 с вращательными, поступательными
и плоскими вращательно-поступательными
парами
Для различных механизмов обычно наиболь-
шее значение имеют „принудительные кинемати-
ческие цепи”, т. е. цепи с числом степеней свобо-
ды /= 1, состоящие из двух и более звеньев (стол-
бец 3 в кат. 4.5.1). Как видно на рис. 4.48, эти цепи
можно превратить в различные механизмы. При
этом одно из звеньев принимают за неподвижное
(стойку); можно изменять как устройство отдель-
ных пар, так и их положение по отношению к стой-
ке. Для цепей из полей 4.3, 8.3 и 13.3 кат. 4.5.1 одна
из возможных схем механизма показана соответ-
ственно в полях 5.2, 7.2 и 8.2 рис. 4.48. Различные
варианты реализации этих же цепей приведены в
кат. 4.5.2 (на уровне схем механизмов). Классифи-
кация осуществляется по числу пар, по расположе-
нию и числу шарниров (вращательных пар) и виду
пар (вращательные, поступательные), смежных со
стойкой.
В специальной части каталога для каждого
механизма указывается для выполнения каких
функций он пригоден.
Каталог был разработан для Нормативов Союза
немецких инженеров [91] и здесь приведен в до-
полненном виде. Многочисленные варианты меха-
низмов содержатся в [13]. В этих вариантах изме-
няется длина, форма звеньев, характер движений
для двух-, трех- и четырехзвенных механизмов.
При варьировании исходной цепи некоторые
вращательные пары заменяются на поступатель-
ные. В принципе это вполне возможно [32], однако
должны учитываться некоторые ограничения,
связанные с тем, что число степеней свободы
механизма f = 1 должно оставаться неизменным.
Грюблер [30] формулирует их следующим образом:
если звено механизма соединено с другими
звеньями цепи только через поступательные пары,
то направления их перемещений не должны быть
параллельными (не должно быть идентичных сте-
пеней свободы)’,
не должны непосредственно соединяться друг
с другом звенья с одной двойной парой или двумя
парами, если в обоих звеньях эти пары поступа-
тельные;
если в принудительной кинематической цепи
вращательные пары заменяются на поступатель-
ные, то в каждом шарнирном многоугольнике
после замены должны сохраняться, по крайней
мере, две вращательные пары (см. кат. 4.5.2, № 1-7,
в некотором смысле № 10 и 14, не удовлетворяет
этому условию № 15).
Перед тем, как остановиться на определенном
варианте механизма, следует рассмотреть все в
принципе подходящие механизмы [36] из кат. 4.5.2.
На рис. 4.51 демонстрируется уже знакомый
метод выбора альтернативного механизма, облада-
ющего тем же числом степеней свободы, что и
исходный. Задачей является разработка механиз-
ма умножения силы. Как и полагается, в начале
мы проводим анализ известного механизма (кли-
новой мультипликатор, строка 1 кат. 4.4.2, соответ-
ствующий механизм - 15, кат. 4.5.2). Выбирая раз-
личные входные и выходные движения (вращение,
поступательное движение), мы находим другие
механизмы, обладающие парами нужного вида.
Для поступательного движения _ пчель-
ная или вращательно-поступательная пары, для
вращения - вращательная или вращательно-посту-
пательная пары.
На рис. 4.51, столбец 5, показаны выбранные из
кат. 4.5.2 схемы механизмов 12, 11, 9 и 2. В столбце
7 из них составляются новые комбинации, а в
столбце 8 приведены варианты реализации.
Один из способов образования комбинаций -
это параллельное соединение в единый механизм
двух механизмов, приведенных в строках 1-14 кат.
4.5.2, так, чтобы в результате число степеней
свободы оставалось f = 1. Для этого можно, напри-
мер, объединить в одно звено стойки механизмов,
а также два следующих звена и удалить одну
одноподвижную пару. Как будет сейчас показано,
эта процедура всегда снова приводит к механиз-
мам с одной степенью свободы. Таким образом,
после соединения двух пар соответствующих
звеньев двух принудительных механизмов в два
звена и удаления одной одноподвижной пары из
комбинированного механизма, получается опять
цепь с одной степенью свободы.
Доказательство. Для соединяемых четырех-
звенных принудительных цепей Zn = 4 + 4-2=6; Zg=4+
+ 4-1 = 7, а потому, как следует из рис. 6.14,
/=1.
При таком же соединении трехзвенных цепей
Zn = 3 + 3- 2 = 4; Ев; = 2 + 2-1 = 3; Z еп = 2, поэтому
по рис. 6.14 f = 1.
При соединении одной трех- и одной четырех-
звенной цепей получаем: Zn = 3 + 4- 2 = 5; Zej=2 +
+ 4-1 = 5; Zen = 1 и тоже /= 1.
Во всех случаях вычисление числа степеней
свободы может производиться с помощью таблицы
на рис. 6.14. При этом следует принимать во внима-
ние идентичные степени свободы звеньев или
групп звеньев. Идентичные степени свободы
появляются в тех случаях, когда некоторые звенья
или группы могут перемещаться независимо от
всей цепи. Следует также обращать внимание на
особые случаи (см. рис. 6.13).
1. Список принципов к конструкторскому каталогу 4.5.2
1. Цель создания конст- рукторского катало- га 2. Момент применения 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация 6. Ссылки на варианты 7. Примеры Дать обзор простых вариантов двух-, трех- и четырехзвенных механизмов при различных комбинациях враща- тельных, поступательных и враща- тельно-поступательных пар. Показать функции, для выполнения которых пригодны эти механизмы Выбор подходящего механизма (на уровне кинематической цепи) в нача- ле геометрически материальной реа- лизации изделия или при варьирова- нии имеющегося механизма При разработке плоских приводных механизмов, у которых сумма чисел степеней свободы пар равна четырем (кроме примера 15), например, при варьировании умножителей силы, стопоров обратного хода и аналогич- ных устройств Принудительные замкнутые (двух-, трех- и четырехзвенные). механизмы [13] — это цепи звеньев, у которых чис- ло степеней цепи в целом. /=1 По числу, виду и расположению пар и звеньев 32, 106,41, 26 Рис. 4.51, 3.21,3.22
4.5. Цепи звеньев, механизмы и машины
147
Анализ Синтез Дополнение
Исходный механизм из кат. 4.4.2 Соответствующий исходный механизм из кат. 4.5.2 Шаги варьирования Другие возмо- жности без двух- подви- жных пар,№ в кат. 4.5.2 Назва- ния меха- низмов
Выбор Изменение положения и комбинирова- ние новых механизмов Получаемые варианты механизмов
Пример № в кат. 4.4.2 Схема №в кат. 4.5.2 Новый исход - ный механизм, кинематичес - кая схема № в кат. 1.5.2
№ 1 2 3 4 5 6 7 е 9 10
1 и 5 F, V 1 1.3 15 1.5 9 1.7 { 1.8 с / 4 7 1.10 Кулач- ковый меха- низм (пово- ротный клин)
2 г.5 11 г.г < ) ’• yf, F' \ 2 3 г. ю Шарни- рный рычаг
3 3.5 12 3.7 3.8 Г*-*Г** 1F, 5 7 3,10 Клино- вой ме- ханизм
4 4.1 Т F3 2 4.з G Е> Т-<3 D 9*9 -ci LQ- 9*9 4.1 ✓ “ IFi 9*9 Ж ь 4 7 4.10 Одно- плечий рычаг
5 5.5 ffij 11 11 11*11 5. ( < НН F и ) 5.8 Рг. < ii*ii < i 1 2 3 5.10 Дву- плечий рычаг (вари - анты)
6 W" Ih 3 6.3 1 Н ii^’ — । j 2*9 0.5 . 2*11 ¥ М 2*11 * О i, 2 3 8.10
7 7.1 (ej 4 7.3 9—Г—/Г / № j? «1_. JL J i L- 9*12 12 L.T-.J 11 11*12 7.1 С ®—т—А Л ‘ЛГ 7.8 11*12 * fT/ F2 0 If fF, С 2 3 - 5 7 7.10
. враща-
5— тельная
пара
поступа-
тельная
пара
вращательно-посту -
пательная пара
Рис. 431. Варьирование механизмов умножения силы
148
4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.5.2:
ПРИНУДИТЕЛЬНЫЕ МЕХАНИЗМЫ С ЧИСЛОМ ЗВЕНЬЕВ ОТ 2 ДО 4 С ВРАЩАТЕЛЬНЫМИ,
ПОСТУПАТЕЛЬНЫМИ И ПЛОСКИМИ ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНЫМИ ПАРАМИ
Классификационная часть Главная часть Специальная часть
Число пар Число и располо- ЛГРМИР ИПЯ- Пары, смеж- ные со Схема механизма Смежные со стойкой звенья пригодны для Реализа- ция задан- ной траек- тории или закона движения путь—вре- мя Число звеньев Конструк- тивные затраты на пары
преооразования и передачи движений умножения силы
r i щательных стой- Враще- ние/пост движе- ние т. 1 гг - Принцип рычага Принцип шарнир- ного ры- чага Принцип клина
праще - иие/вра- щение тельное/ пост, дви- жение
пар кой
1 2 3 1 № 1 2 3 4 5 6 7 8 9
4 4 Рядом и напротив Враща- тельная и вра- шат. па- ры 1 — • — • • — Возможно приближение по точкам (не более 9) 4 Малые
3 Враща- тельная и посту пат. па- ры 2 • — — • • • Умерен- ные
Враща- тельная и вра- щат. nai ры 3 — • — • • •
2 Рядом Враща- тельная и посту пат.па- ры 4 • — — • • • Большие
Поступ и посту пат. пары 5 — — • — • •
Враща- тельная и вра. шаг па- ры 6 — • — Условно • Условно
1 Напро-1 1ТИВ Враща- тельная и посту пат. па- ры 7 • — — • Условно •
3 2 Враща- тельная и вра- шат, па- ры 8 — • — • • Условно Обычно точно 3 Умерен- ные
1 Враща • тельная и посту, пат. па- ры ^х^ 9 • — — • • • Большие
0 Поступ и посту пат. па- ры ^^Х^ 10 — — • — — •
2 Вращ.и вращат- поступ. пары 11 Только в отдель- ных точ- ках Только в отдели иых точ- ках • • • Умерен- ные
1 Поступ. и вращ- поступ. пары 12 Только в отдель иых точ- ках — Только в отдель- ных точ- ках • Условно • Большие
Вращат и враш. поступ. пары 13 Только в отдель иых точ- ках Только в отдель- ных точ- ках — • Условно •
0 Поступ. и вращ- поступ. пары 14 — — • • — •
Поступ. и пос- тулат . пары 15 — — • — —• • Возможно только в особых случаях Большие (в особ, случаях малые)
2 0 Враш- поступ. пары 16 — — • — — • Возможно 2 Малые
Обозначения — нет . • да
О— вращательная
' пара ej
поступательная
пара сj;
вращательно-поступательная
пара <>ц:
4.5. Цепи звеньев, механизмы и машины
149
4.5.3. Разработка различных устройств на основе
данной схемы механизма
Применяя операции варьирования, можно си-
стематическим образом получать новые техниче-
ские устройства из имеющихся. При этом должны
сохраняться существенные признаки модели из-
делия, а изменяться - сопоставимые с ними конк-
ретизирующие признаки. Именно такая процедура
заложена в рабочий план (см. рис. 2.10). В этом
случае для модели „Физическая функциональная
структура” постоянными являются функции, а
варьируются реализующие их эффекты. Для моде-
ли „Геометрическая функциональная структура”
остаются неизменными эффекты, а меняются
геометрические характеристики. Наконец, здесь
мы рассматриваем модель „Принудительный трех-
звенный механизм”. Постоянными для этой моде-
ли являются число звеньев и сумма чисел степе-
ней свободы пар, а варьируются расположение и
геометрия пар.
На рис. 4.48 представлен переход от схемы
замкнутой цепи звеньев (с числом звеньев до
четырех) к кинематической схеме механизма и к
его реализации (соединению). Следует отметить,
что многие кинематические схемы сводятся к
одинаковым замкнутым цепям, а многие устрой-
ства (машины) сводятся к механизмам с одной и
той же кинематической схемой. Реализуя схему
цепи на уровне схемы механизма, мы определяем,
какое звено является стойкой, а также конкрет-
ный вид пар (сочленений), при реализации же
механизма добавляются еще другие параметры:
какое из звеньев является ведущим, а какое ведо-
мым, а также геометрические характеристики
(углы) сочленений.
Рассмотрим подробнее механизмы 8, 9 и 10 из
кат.4.5.2 (принудительные механизмы). В эти меха-
низмы входит одна плоская вращательно-посту-
пательная пара, которая не соединена со стойкой.
Если варьировать геометрическую форму враща-
тельно-поступательной пары (две рабочие опорные
кромки, одна рабочая опорная кромка, угол между
касательной в точке соприкосновения и касатель-
ной к окружности с центром в центре вращения) и
направление движения в поступательной паре, то
получатся различные механизмы. Эти механизмы,
очень похожие друг на друга по структуре, приве-
дены в систему в кат. 4.5.3. Здесь мы найдем наибо-
лее часто используемые кулачковые механизмы и
фрикционные передачи. Конструктивная близость
этих механизмов, в первую очередь тех, которые
представлены в одной строке, дает возможность
при необходимости составить один механизм из
нескольких, отождествляя звенья 2 и 1 в них. Как
пример функциональной интеграции на рис. 5.44
(поле 2.2) представлен механизм, являющийся
объединением механизмов из полей 1.1 и 1.2
кат. 4.5.3. Стойка (звено 1) в них одна и та же, раз-
личными деталями должны оставаться только
звенья под номером 3.
Если использовать две опорные кромки враща-
тельно-поступательной пары (см., например,
столбцы 3 и 4), то достаточно одной геометриче-
ской связи. Если же использовать только одну
кромку, то должна действовать также силовая
связь. Так, механизмы в столбце 5 каталога долж-
ны реализовываться на основе силовых связей.
Если расположить в них шарнир (31) с той же сто-
роны, что и шарнир (12), то получится механизм с
внутренним зацеплением фрикционных колес.
Еще один способ варьирования, не вошедший в
кат. 4.5.3, состоит в повороте относительно друг
друга одноподвижных пар. При этом возникают
пространственные механизмы, не рассматрива-
емые в данной книге. Для них сумма степеней
свободы пар должна быть равна семи (см. также
кат. 4.3.6, примеры 5-13, специальную часть, стол-
бец 3, для примера 5, например 4- eB 4- eIV= eVII, и
рис. 4.55, столбцы 2,3, 5, 6).
1. Список принципов к конструкторскому каталогу 4.5.3
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Дать обзор наиболее употребитель- ных трехзвенных механизмов, пока- зать их общие свойства, возмож- ность свести к одной и той же схеме из кат. 4.5.2 В предметной фазе, например, на этапе определения контура, а также при функциональной интеграции (см. рис. 5.42 и 5.43 и разд. 5.4) При разработке механизмов, типы которых представлены в каталоге Операция варьирования — это выпол- няемое по предписанным правилам изменение модели изделия (см. гл. 5). Изменение не касается суще- ственных признаков, а касается только сопоставленных с ними конк- ретизирующих признаков. Примеры: модель: „Физическая функци- ональная структура”, сохраняются — функции, Изменяются — эффекты; модель: Геометрическая структу- ра”, сохраняются — эффекты, изменя- ются — геометрические характери- стики; модель: „Принудительный трех- звенный механизм”, сохраняются — схема механизма, изменяются — расположение и геометрия пар По виду механизма (примеры 8, 9 и 10 из кат. 4.5.2) и по устройству вра- щательно-поступательной пары Кат. 4.5.4 (Варианты фрикционных систем) Рис. 5.44 (Функциональная интегра- ция)
150
4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.5.3:
РАЗРАБОТКА РАЗЛИЧНЫХ УСТРОЙСТВ НА ОСНОВЕ ДАННОЙ СХЕМЫ МЕХАНИЗМА
Классификационные части Варыфовямие механизмов из кат. 4.5.2 2 , X) ЗА к 12 3 \31 8 С<-' 777 з __ 2 3 з — 9огУЦ1- 12 8 tZ ->> ' эх?- 2 Q. хЭ А Специ- альная часть II Меха- низм из кат. 4.5.2
?. х* ' 3 А , г. a l'- А
А & v .„А U
юу w ,7 ' 10V w' 7 1°V 7 10 u J
Варьир ванне в 12 о-\ Вид ар \ме^‘ \ииз- 31 Зубчатая передача 50o>a>-50.p-*0<’bis50’ Храповый останов а*90’;-90’* р*90’ Кулачковый механизм a>p;p+o° Фрикционная система a + 0°; р = эи Фрикционная передача а*0°;р = 90°
1 2 № 1 2 3 4 5 6
Вращательная Вращательная 1 и г N 3 / ч 31 А / N 1.2 / т 1.3 b^, ' >- \\ )j3 7 1 2 ’ 1.4 b^_^ i 2 1.5 f 2 1 3 /l2Y 31 \ ! ' 8
Поступательная 2 I 12 р Г Ъ 2.2 2 \ 31^L 12 > 2,3 2.4 \ x/^xz/~ь 'x^TS>i \ из ЬХЧУЧ У iWl 1 9
Поступательная 3 ±2 12 Ж I Т Ж 31 g рз 3.2 jfe. 12 Ж 31*Л* 3.3 W ь „Л /XV 31 3,4 b J—1 Tvf31 1 Jxv2 Q" 3.5 1 3 2- — Fi"* ”1 Fl?-3 е±1 1 $= 10
Специальная часть I 4 Поле 1.1. Пара внешнего зацепле- ния: шарниры (12), (31) по разные сто- роны от JVW. Пара внутреннего зацепления *. шарни- ры (12), (31) по одну сторону от NN — Жесткий останов, храповый останов, зубчатый фиксатор в зависимости от величины углов аи0 ... . „ - Рабочая кромка a: кулачок с силовой связью и внешним контактом, кромка Ь: кулачок с силовой связью и внутренним кон- тактом, кромки а и Ь: кулачок с гео- метрической связь» Поля 1.4 и 2.4. Кромка a : фрик- ционные системы с внешним контак- том, кромка Ь *. с внутренним контактом । Поле 1.5. Пара внешнего зацепле- ния: шарниры (12|(31) по разные стороны от ТТ. Пара внутреннего зацепления: шарни- ры (12), (31) по одну сторону от ГТ Специ- альные части
4.5. Цепи звеньев, механизмы и машины 151
4.5.4. Варианты одноступенчатых фрикционных
систем
Фрикционные системы, помещенные в обзор-
ном кат. 4.2.4, можно изменять применением
операций варьирования „заменить вращение на
поступательное движение - и наоборот” и „перене-
сти некоторые вращательные и поступательные
движения в другую плоскость”. Возникающие в ре-
зультате варианты собраны в детальном кат. 4.5.4.
Дополнительная возможность варьирования за-
заключается в расположении сочленений (шарни-
ров) с одной степенью свободы по одну или по раз-
ные стороны от фрикционной поверхности.
Системы с эффектом клина можно получать,
например, на основе механизмов из кат. 4.5.2
(Принудительные механизмы), поля 8, 9, 10, конк-
ретизируя их методами кат. 4.5.3. Решения, возни-
кающие в результате этого процесса, чрезвычайно
похожи на решения в кат. 4.5.4 (ср. поля 1.4, 2.4, 3.4
кат. 4.5.3 с полями 5.2, 4.2, 1.2 кат. 4.5.4). Замена
вращательной пары на поступательную, очевидно,
как раз и означает замену вращательного движе-
ния на поступательное. Тем не менее сохраняют-
ся некоторые различия между прямыми методиче-
скими указаниями кат. 4.5.4 и методами получе-
ния фрикционных систем из схем механизмов в
кат. 4.5.3:
прямой метод варьирования не требует абст-
рагирования устройства до схемы механизма и
варьирования последней. При этом можно учесть
многие детали, исчезающие при абстрагировании,
например тип фрикционной системы (линейный,
дегрессивный, прогрессивный). Прямым методом
проще пользоваться, но различных вариантов
получается меньше:
непрямой метод (через схемы механизмов)
более сложен, поскольку предполагает более
высокую степень абстракции, но при этом получа-
ется больше различных вариантов (поскольку в
рассмотрение вводится большее число механиз-
мов). Этот метод представляется более перспек-
тивным, если ставится задача получить побольше
решений для последующего анализа. (В кат. 4.5.3,
в частности, нет операции „смена стойки” и не
рассматриваются пространственные механизмы).
Не каждая операция варьирования применима
ко всем фрикционным системам с различными
основными эффектами, поэтому число вариантов
различно в трех детальных каталогах 4.5.4 (1, 2 и 3).
Дополнительная возможность варьирования для
кат. 4.5.4 (1) состоит в изменении расположения
шарнира по отношению к фрикционной поверхно-
сти (см. рис. 4.9). То же для вариантов детального
каталога 2 (см. рис. 4.10).
1. Список принципов к конструкторскому каталогу 4.5.4
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование каталога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Дать обзор вариантов, полученных с помощью простых операций варь- ирования из фрикционных систем (кат. 4.2.4) В предметной фазе для изменения геометрической структуры при со- хранении функции и эффекта При разработке фрикционных муфт, тормозов, стопоров обратного хода, соединений и т. д. Фрикционные системы (см. разд. 7.4 и кат. 4.2.4), операции варьиро- вания механизмов (см. кат. 4.5.3) По типу фрикционных систем (линей- ный, дегрессивный, прогрессивный), по виду движений (поступательное, вращательное), по положению оси вращения ведущего звена Рис. 4.44 и 4.47 (нелинейные фрикци- онные системы), рис. 3.17 (Линейные фрикционные системы), рис. 4.6 — 4.10, а также рис. 4.11 (Практиче- ское использование фрикционных систем)
152
4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.5.4:
ВАРИАНТЫ ОДНОСТУПЕНЧАТЫХ ФРИКЦИОННЫХ СИСТЕМ НА ОСНОВЕ ТРЕХЗВЕННЫХ
МЕХАНИЗМОВ ИЗ КАТ. 4.2.4 И 4.5.2 (лист 1)
ДЕТАЛЬНЫЙ КАТАЛОГ 1: КЛИНОВЫЕ СИСТЕМЫ
Классификационно- специальная часть Тип фрик- циоиной системы Линейная Дегрессивная Прогрессивная
Операции варьирования
Нажимная часть |<-'ко^?Д,1чая'\ Положение Вид движения
1 2 з 4 № 1 2 3
1 Внешнее Поступательное движение Поступательное движение 1 * 1.2 1.3 . $
Вращение Радиальное 2 “ +1' "О 2.2 V. iF X ' Ф ’ ил/—^Х. ' Ф »
Осевое 3-1 1 |F Спереди ж » (Ьш ” V Спереди ’X» 1 3.3 . ^7^ Спереди
Вращение Поступательное движение 4 л 4.2 F / V ‘3 Ъ) \ F ту
Вращение Радиальное 5 5.1 u>/< X w» ' Ф ’ 5.2 еЛ ' ф ' 5-3 ’ ф '
Осевое 6 6.1 f Спереди -г к фш 62 /ф фш 63 к фш
Внутреннее Поступательное движение Поступательное движение 7 7.1 V —Л’А’ 7.2 V & ZW 7.3 V —ZW —
Вращение Радиальное 1 8 8.1 ч>// Ж ( tF А 1 в В. 2 1 ф ' 8.3 I ф '
Осевое 1 9 9.1 Ж ^Спереди “Ж tr 9.2 41 Спереди 1 9.3 Спереди Лл 1
Вращение Поступательное движение 10 10.1 V If —WS 10.2 V “7Г W/' 10.3 к яг
Вращение 1 Радиальное 11 u>yZ F \ 1 ф ' 11.2 и ' F \ X 1 9 J” 1 11.3 у/ / F \ ' Ф •
Осевое 12 12.1 Ж 'F Спереди 12.2 1Р\СпеРеДИ шф \ 1 лйг 12.3 Спереди/fX Vй
4.5. Цепи звеньев, механизмы и машины
153
КОНСТРУКТОРСКИЙ КАТАЛОГ 4.5.4 (лист 2)
ДЕТАЛЬНЫЙ КАТАЛОГ 2: РЫЧАЖНЫЕ СИСТЕМЫ
ДЕТАЛЬНЫЙ КАТАЛОГ 3: ТОРМОЗНЫЕ ЛЕНТОЧНЫЕ СИСТЕМЫ
Классификационно специальная часть Операции варьирования Тип фрик- ционной Линейная Дегрессивная Прогрессивная
Вид движе- ний сколь- зящей части Поло-\Ли'-,е“ жение на-\мы жим. части\
1 2 № 1 2 3
Вращение радиальное Внешнее 1 — 1. 2 X 1 ® ш) \F 1.3
Внутреннее 2 — 2 . 2 ( ® 1 \^F 0'
154
4. Собрание конструкторских каталогов
4.6. Варьирование структуры
4.6.1. Операции варьирования структуры
Предположим, что на основе различных сооб-
ражений или с использованием каталогов мы раз-
работали предварительный проект технического
устройства (в виде схемы, учитывающей геометри-
ческие характеристики). Тогда, скорее всего, ока-
жется, что поверхности деталей, объемы деталей
(„соединяющие” их поверхности), а также кинема-
тические пары не вполне удовлетворяют име-
ющимся ограничениям, - как в отношении взаим-
ного расположения, так и в отношении размеров.
Поэтому, прежде чем делать проект на уровне
чертежей (кат. 4.10.1) и определять размеры, следу-
ет еще на стадии геометрической (принципиаль-
ной) схемы произвести операции варьирования
согласно кат. 4.6.1.
Здесь уже недостаточно говорить о „геометри-
ческих схемах” вообще, а должны быть определе-
ны и названы применяемые в настоящей книге
конкретные способы изображения конструкций
(см. рис. 4.52). В теории механизмов применяется
представление конструкций, называемое нами
геометрической линейной структурой (см. также
рис. 5.2, модель 11). В ней отображается геометрия
кинематических пар, поверхностей элементов и
соединяющих их рабочих объемов элементов,
„заполненных веществом”. Объемы элементов
(называемые звеньями) часто изображаются
только линиями. Можно также рассматривать
поверхности и объемы элементов совместно и
называть в этом случае „структурными элемента-
ми”, а несколько структурных элементов, соеди-
ненных через кинематические пары, называть
Название
Символическое
изображение
сэ
Структурный
элемент
РП Пара
рабочих
поверхностей
гс,
Геометрическая
структура
СФЭ
Ро (рабочий объем)
Рабочий объем
2
№ 1
Дополнение
Способ
рассмотрения Модель
3 4
1
>> К
S 8®
бочая поверхность)
2
3
Поверхности и
соединяющие
их 1
рабочие объемы
(заполненные
веществом),
через которые
в дальнейшем
может быть
передано воздей
ствие. Все они
зассматриваются
чисто геометри- (
- чески
1||з
4
Структурно- F, -*L
функциональный /
S
*2
элемент
z
5
6
РПФ Функция
рабочих поверх-
ностей (поверх-
ностная функ-
ция)
ГФС
Геометрическая
функциональная
структура
Поверхности и
соединяющие их
тела рассматри-
ваются в связи
' с их функциями
( относящимися
к силе, скорост! i
и т. д.)
Рабочая поверхность
F, F,
v2 v3
1Н
н»
8 5 Й
- ф
5
s
S
е-
ф
S
S
Рис. 432. Структурные представления технических устройств
без стечений об их функциях и с таковыми (см. также рис. 4.63,
5.43 и 6.10-2)
„геометрической структурой” (см. рис. 4.52, строки
1-3). Аналогичное представление конструкций
применяется в модели „геометрическая цепная
структура” (рис. 5.2, модель 10) [46].
Расширяется спектр отображаемых свойств в
модели „геометрическая функциональная струк-
тура” (рис. 5.2, модель 9). Элементы в этой модели,
наряду с геометрическими (поверхности и объ-
емы), отображают также функциональные харак-
теристики (действующие силы, моменты и скоро-
сти). Эти „действующие величины” и поверхности,
через которые они „действуют” на тела, называют-
ся соответственно функциональными величина-
ми и рабочими поверхностями. Наполненные ве-
ществом объемы, лежащие между рабочими по-
верхностями и передающие функциональные вели-
чины, называются рабочими объемами [55,56,68,17].
Таким образом, мы ввели понятия структур-
но-функциональных элементов, рабочих поверхно-
стей, а для изображения устройства в целом - по-
нятие „геометрической функциональной структу-
ры” (см. рис. 4.52, строки 4-6; а также разд. 6.4).
Далее мы рассмотрим наиболее часто приме-
няемые пары, обычно называемые „шарнирами”
или „сочленениями” [90]. Характерным свойством
„сочленения” в обычном понимании этого слова
является подвижность двух деталей или двух
жестких участков одной детали (пружинные,
ленточные сочленения и т. п.) в соединении, рабо-
тающем как единое целое. На рис. 4.53 показаны
сочленения, в основе которых лежат важнейшие
кинематические пары. Их самопроизвольная
разборка предотвращается специальными упо-
рами. Поскольку еще не существует общеприня-
того определения понятия „сочленение”, мы бу-
дем использовать его для обозначения техниче-
ского устройства, которое обладает как свойства-
ми кинематической пары, так и свойством сохра-
нять целостность (не распадаться), и при этом за-
нимает относительно небольшой объем.
Наконец, заметим, что кинематическая пара с
несколькими степенями свободы вырождается в
одноподвижную (с одной степенью свободы), если
наложить условия полной взаимной зависимости
на возможные движения в направлениях свободы.
Примером сказанного может служить взаимозави-
симость поступательного и вращательного движе-
ний для винтовой пары.
Указанную зависимость мы будем также
отмечать специальным образом в матрице связей:
если одно направление зависит от другого, то мы
будем помещать обозначение второго направле-
ния в позицию, соответствующую первому направ-
лению (см. рис. 4.53). На этом рисунке показано,
как двухподвижную пару (строки 5 и 6) превратить
в одноподвижную (строки 3 и 4).
Ясно, что таким способом можно превратить и
многие другие пары с несколькими степенями
свободы в одноподвижные. Их полезность в техни-
ке, однако, во многом зависит от того, окажутся ли
они столь же простыми и технологичными, как
винтовые и зубчатые пары.
Рис. 4.53 можно также считать описанием
условных обозначений для одно- и двухподвиж-
ных пар.
В кат. 4.6.1 поверхности и объемы элементов, а
также пары варьируются по четырем основным
параметрам. Два из них качественные, а именно -
топология (дискретный) и форма (непрерывный)
4.6. Варьирование структуры
155
Примеры
Дополнение
Классификация Общий случай
Вид пар Зависи- мость Название В кине- мати- ческих цепях
№ 1
Частный случай: неразъемные
пары звеньев (сочленения)
В подвижных
соединениях
из структур-
ных элемен-
тов
2
В подвижных
соединениях
из контурных
элементов
(деталей)
3
Матрица
связей S12
Число
сте-
пеней
сво-
боды
4 5
Одно- под- вижные Незави- симые свободы Вращатель- ная пара (плоская) 1 1 2
Поступа- тельная пара (плоская) 2
Зависи- мые свободы Пара качения (плоская) 3
Правовин- товая пара (простран- ственная) 4
Двух- под- вижные Незави- симые свободы Вращатель- но-поступа- тельная пара (плоская) 5
Вращатель- но-поступат. (цилиндри- ческая) пара (простран- ственная) 6
Рис. 4.53. Представление одно-и двух-
подвижных пар звеньев в виде структур-
ной схемы, чертежа и матрицы связей
элементов, а другие два - количественные: их
число (дискретный) и размеры (непрерывный). При
применении этих операций варьирования следует
учитывать, что они не всегда независимы друг от
друга: изменение числа поверхностей элемента
приводит к изменению числа ветвей его объема
(поля 1.1 и 2.1), а изменение формы или топологии
поверхностей элемента влечет за собой изменение
вида соответствующей пары (поля 1.2, 1.3, 3.2, 3.3).
В то же время изменения элементов могут (но не
обязаны) вызывать изменения функций механизма.
С другой стороны, если принимать за исходный
для вариации весь механизм в целом (кат. 4.5.1,
4.5.2), то можно, например, варьировать число
элементов, а не их индивидуальные характеристи-
ки, такие как число ветвей, кинематических пар,
отдельных поверхностей и т. п.
На рис. 4.54 приведены некоторые примеры
операций варьирования структуры, которые изме-
няют отдельные элементы исходного механизма.
Очевидно, что при неизменности положения и
формы рабочих поверхностей функция механиз-
ма не меняется (на указанном рисунке см. поля
1.1, 1.4, 2.1-2.4, 3.1, 3.4). В поле 3.1 двухподвижная
пара заменяется двумя одноподвижными и допол-
нительным звеном.
Напротив, неизменность функций в случае
шарнира (поле 3.3) является исключением: не-
смотря на инверсию в паре, звено а совершает преж-
нее движение. Такая ситуация имеет место, когда
центры кривизны поверхностей в паре совпадают.
Наконец, в примере 3.4 функция механизма
тоже не меняется, на этот раз потому, что измене-
ние положения звена а (см. эскиз вверху) обеспе-
чивается эксцентриситетом расширенной цапфы
(эскиз внизу). К таким решениям (расширение
цапфы) нужно обращаться, если звено а очень ко-
роткое, и возникают трудности с размещением
подшипников.
156
4. Собрание конструкторских каталогов
Рис. 4.54. Применение операций варьирования структуры из кат.
4.6.1 к трех- и четырехзвеннику
1. Список принципов к конструкторскому каталогу 4.6.1
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определение основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Дать систематический обзор опера- ций для изменения геометрических структур, например в принципиаль- ных схемах В начале предметной фазы Для варьирования имеющейся гео- метрической структуры путем изме- нения структурных элементов и стро- ения пар Геометрическая структура —это пред- ставление механических конструк- ций с помощью структурных элемен- тов (рис. 4.52) и их соединений через пары По применению операций к поверх- ностям, объемам или парам Рис. 4.54 Рис. 4.51, 4.54, 6.42 — 6.45; каталоги 4.5.3, 4.5.4
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.6.1: ОПЕРАЦИИ ВАРЬИРОВАНИЯ СТРУКТУРЫ
Класс ифика- ционно- специальная часть CTnVKTVnHW Варьиру- емый параметр И Увеличить (уменьшить) количество Изменить форму Изменить топологию Увеличить (уменьшить) размеры
уровни № 1 2 3 4
СЭ Структурные элементы 1 L J Рп Рабочие поверхности 1 1.1 ।—। 1—Ц Бинарное (тернарное) звено 1.2 | 1 £ ? Прямая (кривая) линия сечения 1.3 ( ) о о Внешние (внутренние) ’’поверхности” 1.4 | j Радиус 1 ) Ч ) Угол
Ро Рабочие объемы 2 2.1 I I I 2.2 2.3 2.4 t" " 1 Длина
' 1 1 S Одна Две ветвь ветви 1 1 Г" ' 1 Прямой (непрямой) ’’рабочий объем” 1 1 1 > 1 Сплошной (полый) 1 1 J р. / Угол
РП Пары рабочих поверхностей 3 3.1 Одна Две пара нары 3.2 НН —и— Например, изменение вида сочленения 3.3 я _ Например, инверсия в паре 3.4 Например, расшире- ние цапфы
4.7. Передаточные механизмы равномерного хода
157
4.7. Передаточные механизмы равномерного хода
Передаточные механизмы равномерного хода
имеют важное значение для создания машин всех
видов, поскольку для передачи вращения в боль-
шинстве случаев применяют именно их. Особенно
обширная литература посвящена зубчатым коле-
сам и зубчатым передачам [48, 15, 81], и ее полез-
ность не подвергается никакому сомнению. Поэто-
му основная цель каталога в данном случае сво-
дится к обзору и напоминанию уже известных
вариантов. Обойтись без каталога можно и при
выборе типа передач (с геометрической или с фрик-
ционной связью), который легко осуществляется
исходя из постановки задачи, с учетом допустимо-
сти проскальзывания, величины осевых нагрузок,
а также мощности, приходящейся на единицу
объема механизма.
Однако как раз в случае таких давно известных
деталей машин, как зубчатые колеса, существует
вредная тенденция применять традиционные
решения, особо не задумываясь об альтернатив-
ных возможностях. Эти решения имеют хорошо
отработанную технологию и оптимальны в некото-
рых отношениях. Однако наличие принципиально
новых технологий, таких как литье под давлением
(экструзия), или радикальное усовершенствова-
ние известных методов безотходной обработки,
таких как горячая и холодная прессовка, с одной
стороны, и наличие новых требований и областей
применения, с другой, создают предпосылки для
появления нестандартных решений. Кроме того,
необходимо помнить, что существует целый ряд
давно известных конструкций зубчатых передач,
которые волею случая оказались в стороне от
основного потока инженерной мысли.
Итак, внедрение методического конструирова-
ния целесообразно и здесь! Его систематические
процедуры, не признающие известности или неиз-
вестности, господствующего мнения и ..конструк-
торских штампов”, отнюдь не пренебрегают накоп-
ленным опытом. Однако при поиске новых воз-
можностей к этому опыту следует обращаться не в
начале, а в конце работы, как к источнику инфор-
мации о возможных ограничениях.
4.7.1. Основные передаточные механизмы
равномерного хода. Особые виды зубчатых
зацеплений
Прежде всего попытаемся выяснить, возможны
ли новые виды зубчатых пар для трехзвенных
плоских и пространственных механизмов, содер-
жащих две вращательные пары (рис. 4.55). При
этом мы исключаем из рассмотрения реечные
передачи (см. о них, например, в кат. 4.5.3). Так, все
передачи, приведенные на рис. 4.55, за исключени-
ем поля 2.3, хорошо известны и широко применя-
ются. Зацепление в поле 2.3 используется в по-
следние годы при изготовлении способом обкатки
зубчатых колес с внутренним зацеплением на
зубофрезерных станках.
Новые способы изготовления дают возмож-
ность разработать серию различных конструкций
зубчатых колес, совместимых друг с другом. На рис.
4.56 в полях 1.1 - 1.3 изображены три типа зубча-
тых колес, которые при одинаковом модуле и
соответствующих профилях зубьев обладают
взаимной совместимостью. В полях 2.1 и 2.2 изобра-
жены зубчатые колеса с внутренним зацеплением,
совместимые с зубчатыми колесами в полях 1.1 и
1.2. Все они имеют (при одинаковом числе зубьев и
одинаковом модуле) одинаковый делительный
(или начальный) цилиндр.
Что касается зубьев, не параллельных оси
колеса, то они могут быть получены, например,
непрерывным сдвигом профиля. Цилиндриче-
ские колеса в полях 1.1 и 1.2 всем хорошо знакомы.
Закреплено
на стойке
Перемычка
Зубчатое колесо
вращательная
пара
вращательная пара
на стойке
I плоская вращательно-поступательная
__НА пара, пространственная пятнподвиж-
' ная пара
S — в случае перпендикулярных осей только косые зубья: ЛГ — только конические зубчатые колеса из рнс. 4.56, столбец 2
Рис. 4.55. Разработка разнотипных зубчатых зацеплений на основе трехзвенных механизмов
158
4. Собрание конструкторских каталогов
Рис. 436. Зубчатые зацепления с различным углом наклона
зубьев У
Производящая рейка
Рис. 437. Зубчатое колесо с клиновидными косыми зубьями и с
наклоном боковых сторон профиля зуба в разные стороны
В то же время гораздо менее известны особого
рода конические колеса внешнего и внутреннего
зацепления полей 1.2 и 2.2 [64], равно как и колеса
с клиновидными косыми зубьями [64, 80] (поле 1.3
[66]), которые при соответствующем расположении
правильно входят в зацепление при параллельных
и пересекающихся осях.
Существенное различие имеется между кони-
ческими зубчатыми колесами столбцов 2 и 4. В
первом случае для обкатки эвольвентного профи-
ля был применен производящий цилиндр, во
втором - производящий конус. На рис. 4.57 показа-
но, каким образом следует представлять себе
колеса с клиновидными косыми зубьями и их
зацепление с зубчатой рейкой. Цилиндрические
зубчатые колеса имеют дополнительный параметр -
угол наклона зубьев на делительном цилиндре 3
Мы различаем прямые зубья { р= 0), косые зубья
(₽ > 0) и клиновидные косые зубья (наклон левой
и правой сторон зуба в разные стороны, рис. 4.58).
Зубчатое колесо на рис. 4.57 имеет клиновидные
косые зубья, что позволяет путем осевого смеще-
ния изменять зазор между зубьями в паре, вплоть
до полного его устранения.
На рис. 4.59 представлены теперь многочислен-
ные способы образования зубчатых пар из зубча-
тых колес с полей 1.1-1.3 и 2.1, 2.2 на рис. 4.56. В
настоящее время применяются только пары из
полей 1.1 и 1.4 на рис. 4.59, остальные же практи-
IIIIIIIII
Прямые зубья
р «О*
Косые зубья
Р *0*
IHHI
Клиновидные
косые зубья
М О
Рг+ О
V/////////I
Рис. 438. Угол наклона зубьев на делительном цилиндре для
цилиндрических зубчатых колес
чески не известны. Следует особо отметить, что те
зубчатые колеса, которые образуют зацепление с
параллельными осями (см. поле 3.3.1 на рис. 4.59),
при условии правильного исполнения могут обра-
зовывать также зацепление с пересекающимися
осями (поле 3.3.2). То же самое справедливо и для
пар зубчатых колес в полях 2.2.1 и 2.2.2, и в этом
проявляется отличие данного случая от обычного
конического зацепления. Все пары имеют пра-
вильное зацепление, обеспечивают равномерную
передачу вращения при эвольвентном профиле
зубьев и допускают неточный монтаж при условии,
что сохраняется боковой зазор между зубьями и не
меняется угол между осями. В парах с параллель-
ными осями соприкосновение происходит по
линии, в других парах - в точке. Этих новых видов
зубчатых колес не было до сих пор еще и потому,
что обкатка традиционными способами в данном
случае неприменима - скорее всего, требуются
такие способы изготовления, как литье под давле-
нием [80, 32.1,83] и т. п.
На рис. 4.60 изображены три пары цилиндриче-
ских зубчатых колес с числом зубьев малого коле-
са z — 1, 2 и 3. Все они имеют эвольвентный про-
филь, правильно зацепляются, соприкасаются по
линии и имеют постоянное передаточное отноше-
ние. Их называют „зубчатыми колесами с эволоид-
ным зацеплением” [62,63, 49]. Все перечисленные
свойства сохраняются и при незначительном уве-
личении расстояния между осями. Исходный
контур этих зубчатых колес может быть обычным,
например согласно стандартам ДИН 867 или ДИН
58400. Такие зубчатые пары можно применять там,
где требуются большие передаточные отношения
при малом числе ступеней, в частности для заме-
ны червячных передач, - при этом КПД передачи
превысит 90% [80.1].
Эволоидное зацепление было найдено только
тогда, когда удалось преодолеть последний барь-
ер - положение стандарта, согласно которому ми-
нимально возможное число зубьев zmin = 7. Дело в
том, что это положение справедливо только в отно-
шении стандартных зубчатых колес. В правильное
4.7. Передаточные механизмы равномерного хода
159
Вид
зацепления
Дважды внешнее кшепление
Внешнее и внутреннее зацепление
\Сопряжен-
\ ное зуб -
\ чатое
Зуб-\коле-
чатое \со
Цилиндричес-
кое колесо
внешнего
зацепления
Коническое
колесо
внешнею
зацепления
Колесо с
клиновидными
косыми зубья -
ми внешнего
зацепления
3
Цилиндричос - Коническое
колесо
внутреннего
зацепления
Цилин-
дрическое
колесо
внешнего
зацепле- 1
ния
Лин. кон гак 1
внутреннего
зацепления
Колесо с кли-
новидными
косыми зубья-
ми внутренне -
го зацепления
Коничес-
кое ко-
лесо вне-
шнего
зацепле-
ния
Как 1.2
Колесо с
клино-
видными
косыми
зубьями
внешнего
зацепле -
ния 3
1.4 при сопряженном (возможно, симметричном) профиле
2.5.1 > зубьев, одинаковом модуле и одинаковом числе зубьев
3 5 _J “ могут быть использованы в качестве зубчатых муфт
Соприкосновение по линии
Рис. 4.59. Возможности образования зубчатых пар для зубчатых колес, отличных от обычных конических
160
4. Собрание конструкторских каталогов
i » 1:37
Рис. 4.60. Зубчатые зацепления цилиндрических колес с числом
зубьев шестерни (малого колеса) от xj = 1 до *> = 3. Справа вни-
зу: однозубая шестерня, у которой половина угла профиля
а = 20*, и угол наклона зубьев на делительном цилиндре Р = 20*
зацепление с зубчатым колесом со стандартным
профилем могут входить различные зубчатые
колеса с другим профилем зубьев, для которых
минимальное число зубьев zmin< 7. При этом дол-
жен быть изменен только профиль зубьев малого
колеса.
Аналогично можно рассмотреть возможности
изменения всех существующих типов зубчатых
передач. Систематическое применение операций
варьирования породит множество бесполезных
решений, однако есть много шансов и на то, что
будут найдены решения, открывающие новые
возможности. При этом, правда, может понадо-
биться отбросить некоторые действующие, но не
необходимые ограничения.
4.7. Передаточные механизмы равномерного хода
161
1. Список принципов к конструкторскому каталогу 4.7.1
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ка- талога 4. Определения основ- ных понятий 5. Классификация в каталоге 6. Ссылки на варианты 7. Примеры Дать обзор форм передач равномер- ного хода и их свойств В предметной фазе конструирова- ния Для предметной реализации преоб- разователей момента и угловой ско- рости, приводов (трансмиссий, сило- вых передач), а также преобразова- телей сила—момент силы и скорость— угловая скорость Мгновенное передаточное отноше- ние должно быть постоянным. Оно определяется как отношение мгновенных угловых скоростей ве- дущего и ведомого звена i'u = 6) i/W?= = const По числу звеньев механизма, по типу связи, используемой для пе- редачи силы (геометрическая или фрикционная) Рис. 4.59 [49, 65, 70, 37]
Классификационная часть Главная часть Специальная часть
Числе! Тип | ашьигк- /»ха<гаы Физичес- кий эЛ- Передачи Эскиз Положе-) ния осей Направ- ления вращения ведущего и ведомо- го валов Обычное переда- точное отношение "вых кпд Г) % Обыч- ное сколь- жение % Необ- ходи- мость пред- варит, напря- жения Распо- ложение колес опреде- ляется их диа- метром Произ- водст- венные затраты Необхо- димая точность установ- ки Шум при работе Изнаши-| ваемость Конструктив- ные варианты Типичные об- ласти приме- нения
ев
фект
1 2 3 1 2 № 1 2 3 к 5 6 7 8 9 10 11 12 13
Трех- звен- ные Гео- мет- риям кая СВЯ31 Закон рычага ж) Зубчатые с цилинд- рически- ми коле- сами M9I рыт 1 Парал- лельные Противо- положны (при вну- треннем зацепл., совпал-) А *. а’ А S 2 96-99 0 Нет Да Средние Средняя 1) Сред- ний до больш. 2) Сред- ний Низкая 1) Прямозубые колеса 2) Косозубые колеса (эво- лоидные зацеп л} Силовые передачи любой мощности, логические механизмы
Зубчатые с кониче- скими колесами 4Ф 2 Пересе- кающие ся или скрещи- вающие- ся 92...96 0 Нет Да Больш. Больш. Средний до боль- шого Низкая Прямозубые, косозубые, с круговыми зубьями колеса Передачи с пересекаю- щимися осями
Винтовые зубчатые t 5 3 Скрещи- вающие- ся — т*'*5 50...92 0 Нет Да Средние >> Низкий ДО средн. Низкая До средн. Приводы приборов
Червяч- ные 4 м — 3* i*100 30...98 0 Нет Да 1) Сред- ние 2) Боль- шие ff Низкий Низкая 1) Цилиндричес- кие червячные передачи 2) Глобоидные передачи Механизмы на- стройки, позицио- нирован ия,станки механизмы с са- моторможением
Фрик цион* ная СВЯЗЬ .Закон рычага и кулонов- ское трен. Ff^ppdА Фрикци- онные с фрик- ционны- ми катками 5 ^Парал- лельные 2) или скрещи- вающие ся Противо- положны (при вну- треннем зацепле- нии сов- падают) i*100 95 ...98 0.5...5 Да 1) Да 2) Нет Низкие Низкая W Больш. 1) Цилиндричес- кие катки 2) Конические катки Приводы при- боров, прессов ступенчато пе- рестраиваемые передачи
Четы- рех* звен- ные Г ео- мет- рич ес кая связь Закон рычага Плане- тарные 6 Коакси- альные Противо- положны или сов- падают 30 ...98 0 Нет — Средние Больш. Средний Низкая — Механизмы сум- мирования, пере- ключения, транс- миссии. подъеми о- транспортные устр,
Волновые зубчатые 1) 7 »> То же для дис- кового генера- тора .волн 1)78* i« 320 2)280*i*1000 3)9«i«85 D65...92 0 Нет — Средние ДО больших Средние Средние 1) Кулачковый 2) дисковый 3) Роликовый генератор волн Механизмы позицио- нирования
И
Пластин- чатые зубчатые ▼ ч я ш В Парал- лельные Совпа- дают 95...Э9 0 Нет Нет Средние » Больш. Роликовые втулочные и зубчатые цепи Механизмы уп- равления, автомо- били, подъемно- транспортные устройства
Зубчато- ременные $ 9 >• » IT*1*12 95... 99 0 Нет Нет » ОчвНЬ низкий » — Счетные машины, механизмы управления
Цепные с кругло- звенными цепями *00 10 Парал- лельные или скрещ. <90 0 Нет Нет 99 Низкая Больш. Больш. Круглозвенные цепи, звеньевые цепи - Механизмы настройки
Классификационная часть Главная часть Специальная часть
Число звеньев Тип связи Физичес- кий эф- фект Передачи Эскиз Положе- ния осей Нахф яв- лен ия вращения ведущего и ведомо- го валов Обычное передаточ- ное отно- шение ,=Пвь_ ПВЫХ кпд и,% Обыч- ное сколь- жение, % Необ- ходи- мость пред- варит, напря- жения Распо- ложение колес опреде- ляется их диа- метром Произ- водст- венные затраты Необхо- димая точность установ- ки Шум при работе Изнаши- ваемость Конструк- тивные варианты Типичные области применения
1 2 3 1 2 № 1 2 3 4 5 6 7 8 9 10 11 12 13
Четырехзвенные Фрикционная связь Закон ры- чага и куло- новское тре ние(линей- 1ые снстемь Фрикци- онные планетар ^ные / 11 Коакси- альные Совпа- дают iH*’" — 0.5... 5 Да — Средние Боль- шая Низкий Боль- шая — Механизмы на- стройки, сту- пенчато пере- страиваемые передачи
Закон ры- чага и куло- новское трение (нелиней- ные систе- мы) Клино- ременные 12 Парал- лельные То же jL-i-w 94...Э7 1...3 Да Нет Низкие Низкая Очень низкий Средняя — Автомобили, стан - ки, силовая пере- дача в рабочих ма- шинах , бесступен-. чатые передачи
Плоско- ременные f я 13 Парал- лельные илискре щипаю- щиеся Совпадаю! (для скре- щивающие ся ремией противо- положны) 91...99 0.1... 1 Да Нет >• То же — Станки
Тросовые 14 То же Совпада- ют или противо- положны То*'*20 94...9Б 1...3 Да Нет То же — Приводы приборов
4.7. Передаточные механизмы равномерного хода
164
4. Собрание конструкторских каталогов
4.8. Неподвижные соединения
4.8.1. Общие положения
Для достижения определенного относительно-
го положения деталей или частей одной детали в
техническом устройстве применяются соедине-
ния.
Определения. Соединениями называются кон-
струкции, создающие связи между двумя или не-
сколькими твердыми телами (или частями одного
тела), то есть не позволяющие им разделяться в
месте соединения при рабочих условиях. Техноло-
гия изготовления соединений (сборки) описана в
стандарте ДИН 8583 [12].
Различают неподвижные и подвижные соеди-
нения. Неподвижные соединения при рабочих на-
грузках не допускают относительного перемеще-
ния рабочих поверхностей в месте соединения.
Подвижные соединения допускают такого рода
перемещения хотя бы в одном направлении. Все
неподвижные соединения, за исключением соеди-
нений вещественной связью (сплошных), могут
быть названы креплениями.
Далее, различают разъемные и неразъемные
соединения. Разъемные соединения могут быть
разобраны при помощи определенных усилий и
монтажных операций и Ли удалением запирающих
элементов [73] без разрушения деталей; напротив,
при разборке неразъемных соединений неизбеж-
ны необратимые деформации деталей или проме-
жуточного слоя.
К разъемным соединениям относятся, в част-
ности, различные запоры [73]. В таком соединении
запирающий элемент является неотъемлемой
частью всего механизма и снабжен выступающей
частью, которая позволяет отпереть его без помо-
щи инструментов (рукой или ногой).
Как в отношении сил, так и в отношении пере-
мещений, следует различать монтажное, демон-
тажное, основное и дополнительное направления
нагрузки. В соответствии с этим в названии непо-
движного соединения часто указывают тип свя-
зи, удерживающей детали в направлении основ-
ной нагрузки - характеристической связи (кат.
4.2.1): соединения с вещественной, геометриче-
ской и силовой связью или,кратко, - вещественные
(сплошные) и силовые соединения и т. п.
На рис. 4.61 предлагается классификация не-
подвижных и подвижных соединений. Неподвиж-
ные соединения подразделяются по типу характе-
ристической связи. Вещественные соединения
подразделяются далее по способу их реализации,
геометрические соединения - по форме их рабочих
объемов.
Наконец, силовые соединения могут быть
реализованы при помощи статических сил (упру-
гая, полевая или фрикционная связь) или динами-
ческих сил (инерционная или электродинамиче-
ская связь). Важную роль играют „квазигеометри-
ческие” и заклинивающие соединения, сохраня-
ющие многие преимущества соединений с „чисто
геометрическими” связями, но не имеющие зазо-
ров. Классификация подвижных соединений
обсуждается в разд. 4.9.
4.8.2. Соединения и типы связей
Фиксацию деталей в соединении обеспечива-
ют связи. Когда говорят о типах связей, то подра-
зумевают и определенные свойства соединения,
например зазор при „чисто геометрической связи”
или отсутствие зазора при силовой связи. Анализ
связей семи изображенных на рис. 4.62 соединений
показывает, однако, что лишь в редких случаях
тип связи одинаков для всех 12 направлений.
В левом столбце рисунка приведены типы
характеристических связей соединений: вещест-
венного, пластического, защелкивающегося [5],
винтового, заклепочного и прессового, а также их
обозначения, в столбце 1 - характерные примеры,
и в столбце 2 - относящиеся к ним матрицы типов
связей деталей а и Ъ. Эти матрицы [74] устроены
аналогично матрице связей на рис. 4.12. Они со-
держат на месте каждого направления букву,
обозначающую соответствующую связь, например,
г - для геометрической связи, У - для упругой
силовой связи, т - для фрикционной связи (связи
трением) и т. д.
Таким образом, например, вторая строка матри-
цы в поле 3.2 означает: связь Sa> ь деталей а и b (ин-
декс после запятой соответствует телу отсчета -
закрепленной детали) в направлении dy - квазиге-
ометрическая (Уг), в направлении dy - геометриче-
ская (г), в направлении вращения dzx и dzx -фрик-
ционная (т).
В этих матрицах связь, характеризующая со-
единение в целом (характеристическая связь),
отмечена кружком.
Из таблицы сразу видно, что характеристиче-
ская связь часто действует лишь в отдельных
направлениях. Исключением является веществен-
ная связь [95, 96, 94]. Тем не менее, мы считаем
оправданным характеризовать соединение только
одним типом связи. Причины этого были указаны
в комментариях рис. 4.3 и более подробно разъяс-
нены на рис. 4.63.
Посмотрим, отвечает ли пример 6 на рис. 4.62
данному определению соединений. Ответ зависит
от величины рабочих усилий. Если масса - тяже-
лая станина или тяжелая стена, которая не может
быть сдвинута рабочим усилием, несомненно,
имеем дело с неподвижным, в данном случае -
разъемным соединением.
Ясно, кроме того, что упругие связи вследствие
больщого предварительного напряжения (приме-
ры 4 и 5) ведут себя в работе, как геометрические
без зазора. В этом случае в матрице стоит обозна-
чение Уг „квазигеометрическая связь”.
Наконец, заметим, что описанные соединения
часто служат в качестве запирающих элементов
[73], см. п. 3.6.2 и пример на рис. 3.26. Монтаж и
демонтаж запирающего элемента производится,
как правило, в направлении силовой связи, а рабо-
чая нагрузка воспринимается в направлении гео-
метрической связи.
4.8.3. Роль типов связи при изготовлении
соединений
При рассмотрении различных типов связи
часто говорят о геометрических и силовых свя-
зях - как будто речь идет о двух взаимно исключа-
ющих свойствах. Такое противопоставление,
однако, едва ли оправданно, потому что силовую
связь, например, невозможно реализовать без гео-
метрической. Подобным же образом „чисто гео-
метрическая” связь реализуется, по существу, за
счет больших внутренних сил упругости деталей.
Сказанное поясняет рис. 4.63.
Соединения
I-----------------
Неподвижные соединения (крепления)
-----------------!
Подвижные соединения (направляющие)
Прямолинейные
направляющие
Формы профиля
(напр. по рис. 4.72)
Г
с
Пары
скольжения
Число степеней свободы > О
Вращательные
направляющие
Винтовые на-
правляющие
Прочие на-
правляю-
щие
Рис. 4.61. Классификация соединении
Формы
профиля
СКПКм
Формы
профиля
СКПКм
Формы
профиля
СКПКм
К
П
Км
Пары
качения
Одно-
кратные
Ц Б Ш СТ
Цилиндр I ш I
(конус) 1 1
Бочка Седловидное
тело
Пары
с подвесом
в поле
Много-
кратные
Ц Б Ш
Комбинирован-
ные пары
Скольжение-
качение _
Скольжение-
подвес
Качение-
подвес
Гравитационное
поле
Магнитное Электрическое
поле поле
Непосредствен- Твердое промежу- Жидкое
| ное соприкос- точное тело трение
1 новение
4.8. Неподвижные соединения
166
4. Собрание конструкторских каталогов
Соединение и
типы связей
Тип
связи в
демонтаж -
ном направле-
нии
Вещественная
связь (в)
Геометрическая
связь (г)
Упругая
связь (У)
Неподвижное
| Матрица типов
связей Sa ь для
деталей а и b
s
§
Полевая
связь (п)
соединение
Система координат
dy
dz
dxy
5
6
Фрикцион-
ная связь
(т)
dzx
'нт mm
Соответствие позиций
направлениям
dyz dyz\
dzx
dxy dxy
rf rf Ef ЕД в матрице
Eft г г /dx dx
rf rf Е( Е,/ dy dy
\dz dz
4.1 a
Пра4 1ЫЙ винт
5.1 b
И
'Ef Ef Ei E|
£?,f г E(
Ef' Ef Er E,
Масса
5.2
/ rf rf Ef E
taf г г
\rf rf Ef E
6.2
/г Г 9f 9
г г
\r r g( g(
^E( E( Ef E(
! г'»г г г
\Et E( Ef E(
Обозначения: пг — полевая связь, действующая как геометрическая (квазигеометрическая связь)
тг —фрикционная связь с геометрическим упором; Уг упругая связь с геометрическим упором,
Уг — упругая связь, действующая как геометрическая (квазигеометр ическая связь)
Рис. 4.62. Типы связей в различных типич-
ных соединениях, соответствующие мат-
рицы типов связей (обозначения в матри-
це типов связей как на рис. 4 J-l—4J.-3)
Объемная связь а
Объемная связь Ь
Поверхностная
связь а/Ь (внешняя)
Рис. 4.63. Строение цепи соединения как последовательности
объемных и поверхностных связей (см. также рис. 4.52, 5.43 и
6 Л. 0-2)
4.8. Неподвижные соединения
167
Если, отвлекаясь от других свойств, вместо
каждого из соединяемых элементов рассматривать
только его рабочий объем (на рис. 4.63 - длинные
горизонтальные линии) и его рабочие поверхности
(на рис 4.63 - перпендикулярные к ним короткие
отрезки), то в цепи связей сразу же обнаруживает-
ся чередование объемных и поверхностных связей.
Таким образом, каждое соединение представляет
собой последовательность связей, среди которых
различаются объемные и поверхностные. Так,
например, упругая силовая связь на рис. 4.2-1 явля-
ется типичной объемной связью. С другой сторо-
ны, геометрическая связь на рис. 4.2-2 является
типичной поверхностной связью. Совокупные
свойства цепи связей одного соединения легко
определить с помощью соотношений табл. 4.1 (см.
п. 4.2.1).
На рис. 4.64 приведены несколько типичных
последовательностей связей для самых разных
соединений.
Классификация соединений на группы I-IV
(левый столбец заголовка) проведена по тому
признаку, являются ли объемные и поверхностные
связи односторонними или двусторонними.
Далее, соединения подразделяются (столбец 4)
на группы по наличию и типу накопителей энер-
Действие
связи в ра-
бочем объе-
ме, на рабо-
чие поверх -
и ости
1
Рабочий
объем:
двусторон -
нее
Комбинации
элементарных
связей
Поле
на
рис.
4.2-3
Эскиз
Цепь связей
2
Вид цепи
Наличие
накопителей
энергии
Рабочие
поверхнос -
тк двусто-
роннее
Рабочий
объем;
двусторон-
нее
Рабочие
поверх-
ности одно-
стороннее
Жесткая
объемная
связь,
вещественная
связь
Жесткая
объемная
связь,
фрикционная
связь
Жесткая
объемная
связь
геометр ичес -
кая связь
Жесткая
объемная
связь, поле-
вая связь
Упругая
объемная
связь, геоме-
трическая
связь
1.1
1.4
1.2
с b
Откры-
тая
Нет (группа D)
Откры -
тая в
х-напр яв-
лении
х-иапр явление
нет (группа D),
у -направление:
да, Pq — нако-
питель
(группа В)
Нет (группа D)
Ш
Рабочий
объем: одно-
стороннее
Рабочие
поверхнос -
ти:двусто-
роннее
Вязкая
объемная
связь,
фрикционная
связь
IV
Рабочий
объем:
односто-
роннее
Динамическая
связь, геоме-
трическая
связь
Рабочие
поверхнос-
ти: одно-
стороннее
Динамическая
связь,
полевая связь
Замкну-
тая в
х-направ-
лении
8.3
Откры -
тая
х-напр явлен не:
да. Ро—нако-
питель
(группа В),
у-направление:
нет (группа/))
14
х-направление:
нет (группа/)),
у-направление:
да, Р о, Р п-
накопители
(группа А)
Рис. 4.64. Цепи связей и накопители энергии в соединениях с обозначением групп:
А — имеются объемные и поверхностные накопители; В — имеются только объемные накопители; С — имеются только поверхностные
накопители; D — нет никаких накопителей
168
4. Собрание конструкторских каталогов
гии: имеется как объемный, так и межповерхност-
ный накопитель энергии (группа Л); имеется толь-
ко объемный накопитель энергии (группа В); име-
ется только межповерхностный накопитель энер-
гии (группа С); накопители энергии отсутствуют
(группа D).
Согласно рис. 4.64, двусторонние связи элемен-
тов делают возможными открытые цепи, как пока-
зывают примеры 1 и 2 в направлении х. При одно-
направленных связях, напротив, как показывают
остальные примеры, требуются замкнутые цепи.
Все цепи с накопителями энергии образуются
силовыми связями и не имеют зазоров; пример 2 в
направлении у, а также примеры 4-6. Цепи без на-
копителей и с односторонними связями имеют
зазор, см. пример 3. С точки зрения нашей класси-
фикации особенно интересен пример 8: на рабочих
поверхностях между частями констру кции а и b уси-
лие сжатия обеспечивается непосредственным
соприкосновением, а усилие растяжения - силой
тяготения. Таким образом, две односторонние
поверхностные связи с противоположными направ-
лениями действия, дополняя друг друга, образуют
одну двустороннюю связь - и цепь оказывается
открытой! Определенное сходство с описанной
ситуацией наблюдается в примере 6 на рис. 4.62.
4.8.4. Проектирование соединений
При проектировании соединения следует
учитывать не только его рабочее состояние, в
котором движение по всем 12 направлениям
невозможно, но также и способ монтажа, возмож-
ность зарядки накопителя энергии и создания
силы, препятствующей разъединению деталей.
Монтажное и запирающее движения [73] для
замков изображены на рис. 1.8, возможности заряд-
ки накопителя энергии для создания удержива-
ющих сил показаны на рис. 1.9, а тип связи, выдер-
живающей рабочую нагрузку, указан на рис. 1.10,
4.2-1,4.2-2 [73].
4.8.5. Повышение прочности силовых соединений
Полезный прием, часто используемый для
сильно нагруженных соединений и позволяющий
объединить преимущества геометрических связей
(передача больших усилий) с преимуществами
силовых связей (отсутствие зазора, простота монта-
жа), состоит в том, чтобы создать в цепи связей
соединения состояние „квазигеометрической”
связи. Соединение такого рода состоит из после-
довательности геометрических и упругих элемен-
тарных связей, причем в замкнутой цепи должен
Название №
Эскиз
Цепная структура Матрица типов связей Умножители силы
2 3 4
Головка Стена
Отверстие
1.3 До монтажа 1Л
-^a(c.d), b =
I Of Or 0 о\
Of Of f f
\Of Of f f/
После
монтажа
^a(c.d).l) ~
/f Г Г Г \
rfrf EtEt
\rfrf EfJ
2.3 До монтажа
Sa ь1
/rr rr\
(EE
\EE rr/
После
монтажа
So.b -
/ff f f\
ff ff
\ff ff/
Рычаг: r„/rc
Клин: ctga
Двойной
клин:
I Ctg(3
Двойной
клин.
| ctga
3.3 До монтажа
S0.b=
/г r EtEt\
EtEt E(E,
\EtEt EtEf/
После
_ монтажа
Sob =
/fr Е-ЕЛ
EtEf Mt
\EfEf EtEt/
Отсутствуют
Of — свобода с ограничением геометрической связью;
Qr — свобода с ограничением фрикционной связью.
Рис. 4.65. Встроенные умножители силы в со-
единениях с различными связями и структу-
рой цепи (обозначения как на рис. 4.62)
4.8. Неподвижные соединения
169
быть хотя бы один1 потенциальный накопитель
энергии, обычно упругий. В этом случае, в отличие
от других силовых цепей, сила для зарядки нако-
пителя энергии, например при монтаже, значи-
тельно больше, чем силы, действующие на накопи-
тель при работе. Предварительное напряжение
всего соединения (выгодное также е отношении
усталостной прочности) исключает зазоры, а при
работе соединение ведет себя так же, как и в
случае геометрической связи. Примеры соедине-
ний с квазигеометрической связью были показаны
на рис. 4.62 (примеры 3-7).
Большое монтажное усилие может быть полу-
чено не только в результате применения соот-
ветствующих инструментов и приспособлений,
как, например, для заклепочного и прессового
соединений, но часто также за счет внутренних
умножителей силы (кат. 4.4.2), как, например, в
случае винтовых и клиновых соединений.
Применение фрикционных соединений часто
еще более выгодно, чем упругих силовых, посколь-
ку в первом случае не требуется ничего, кроме
двух противолежащих рабочих поверхностей,
служащих для восприятия нормальных усилий, и
материала, который выдерживает также усилие
сдвига.
При этом, однако, следует учитывать, что нор-
мальные силы, порождаемые накопителем энер-
гии, должны не просто иметь некоторый неболь-
шой запас по сравнению с рабочими нагрузками в
направлении трения, но превосходить их в 1/р раз
(ц - коэффициент трения). Если эту проблему уда-
1 Ниже будет показано, что в каждой замкнутой силовой
цепи должны присутствовать хотя бы два противодействующих
накопителя энергии. Часто, однако, один из этих накопителей
характеризуется столь большим значением производной силы
по перемещению dF/ds (например, коэффициент жесткости
пружины), что его можно считать абсолютно жестким и не рас-
сматривать в качестве накопителя энергии. — Прим. авт.
ется решить, как, например, в случае дюбеля, то
соединение может быть легко смонтировано
обычными средствами (например, при строитель-
стве) и способно выдерживать значительную на-
грузку. Большие монтажные усилия в случае дюбе-
ля (рис. 4.65, строка 1) обеспечивают три последо-
вательных умножителя силы, а именно: рычажный
умножитель, определяемый отношением диамет-
ров рукоятки отвертки и шурупа; клиновый умно-
житель резьбы шурупа и клиновый умножитель,
определяемый конической формой шурупа и от-
верстия в дюбеле.
Аналогичного эффекта умножения силы для
более сложных или больших по размерах соедине-
ний можно достичь с помощью инструментов с гид-
равлическими усилителями.
Заметим, что в левом нижнем квадрате матри-
цы типов связей соединения (рис. 4.65, поле 1.3)
для случая большого монтажного усилия стоит
Ог (свобода с ограничением геометрической свя-
зью), а для случая малого рабочего усилия - тг
(фрикционная связь с ограничением геометриче-
ской связью).
На рис. 4.65 показано штекерное соединение с
чисто геометрической связью - крючок-защелка
([5, 35], 5.5 [14]) с клиновым умножителем при мон-
таже (пример 2), а также штекерное соединение с
фрикционной связью без умножителя (пример 3).
Монтаж последнего значительно более трудоемок.
Схемы замкнутых цепей соединений (стол-
бец 2) позволяют понять, какие именно пары рабо-
чих поверхностей имеют фрикционную связь и
требуют вследствие этого особенно мощных уси-
лий при сборке.
Умножитель силы присутствует также и в гео-
метрических соединениях, у которых сопротивле-
ние разъему возникает вследствие изменения
фермы при монтаже. Так, у шплинта (см. пример 2,
рис. 4.62) изменение исходной формы препятствует
вытаскиванию его за ушко, поскольку плечо
Рис. 4.66. Относительная частота использования
соединений с упругой и пластической связью в
области машиностроения и точного приборострое-
ния
170
4. Собрание конструкторских каталогов
рычага от центра отверстия до его края, которое
при этом действовало бы, гораздо меньше, чем
плечо от загибаемого конца шплинта до границы
отверстия, которое служило для изменения формы
концов при сборке.
Важное значение для соединений имеет фрик-
циональная интеграция (см. разд. 5.4).
4.8.6. Возможности применения различных типов
соединений
Число и разнообразие соединений чрезвычайно
велико. Об этом свидетельствуют подборки в [92,
93, 12, 50], составленные с целью получить доста-
точно полный обзор и способствовать распростра-
нению неизвестных форм. В основе всех соедине-
ний лежат известные элементарные связи. В то
время как простые комбинации этих связей хоро-
шо обозримы, о чем свидетельствует рис. 4.2-3,
число комбинаций резко возрастает, если в соеди-
нение входят не два, а три и белее элементов, а
типы связей в различных направлениях подверга-
ются варьированию. Кроме того, возможны различ-
ные варианты запирающего движения, различные
виды накопителя энергии, разные углы между
направлениями запирающего движения и нагруз-
ки, несимметричные, симметричные и поворотно-
симметричные формы, различные конструктивные
варианты и материалы (см. обзор в [80.2]).
Для того чтобы, тем не менее, осуществить
обзор наиболее часто применяемых соединений,
Гиснером [29] была составлена таблица относи-
тельной частоты их применения в типичных кон-
струкциях автомобилестроения и точного прибо-
ростроения. На рис. 4.66 показана для сравнения
классификация отдельных соединений, применя-
емых в автомобилестроении и при производстве
некоторых точных приборов (телевизор, радио-
приемник, реле, счетчик тока, телефон, штекер и
др.). Поразителен тот факт, что в машиностроении
две трети всех соединений - резьбовые, а 95 % всех
соединений относятся к одному из трех видов:
резьбовые, заклепочные и прессовые. Доля этих
трех видов соединений еще более возрастает с уве-
личением размеров машин и аппаратов.
В области точного приборостроения распреде-
ление применяемых соединений по видам более
равномерно. Здесь уже шесть видов соединений
составляют 95% от общего числа применяемых.
Сложившееся положение объясняется различ-
ными причинами. Винтовые соединения позволя-
ют осуществлять взаимно согласованные враща-
тельное и перпендикулярное ему поступательное
х. Характери тики связ Частота х. применений \ с- ей Эскиз
№ 1
МС687. 1.1 П
а
МС 95 7. тпс 70.97. ПКЧ!.^ 1 1
МС16.5У. ТПС26.17. 2 2.1 п
мсЮ.57. тпс 2.97. 3 3.1 Ь-сЖ i за! п трессован
МС тпс 24,77. ГПС14.67. 4 а—w/7/Л 7 <А>
тпс 8.3 7. 5 5.1 о п
ТПС1.87. 6 6.1 а л
ь
Матрица типов связей
После монтажа При монтаже Snlnl.b Дополнение
2 3 4
1.2 /rf rf Ef Ем I Ef f г г 1 Irf rf Ef Ef 1.. ' f f E E \ E f r E f f E E 1 1.4 Поля 1.2, 3.2 напряженное соединение (силами упру- гости) (квази- геометр ичес-
2.3 1 f f E E \ I E f r r 1 1 f f E E I кие связи). Поля 1.3—3.3 упругая дефор мация в соеди- иеиии, обеспе- чиваемая умно- жителями си - лы (квазигео- метрические связи)
3.2 I Ef Ef Et Ef \ r f r r 1 Ef Ef Ef Ef J 3.3 E E E E 1 EE EE ]
4.2 I f f f f 1 1 f 0 f f 1 f f f f 1 4.3 ] f f f f 1 f f f f 1 f f f f ] 4.4 Поле 4.2 зазоры, жест- кость (геомет- рические свя- зи с зазорами)
Q 1 r r E E ' E f r r у r r E E 5.3 / f f 0 0 \ E 0 f f Iff 00 ] Поля 5.2,6.2 отсутствие зазоров,упру- гая деформа- ция возможна без умножите -
6.2 / r r E E \ IE f r r I r r EE] 6.3 ] r r E E I E f r r ] 1 r r EE] лей силы (квазигеомет - рические связи)
Рис. 4.67. Специфические свойства наиболее упо-
требительных неподвижных соединений (обозначе-
ния как на рис. 4.2-1 -4.2-3 и 4.62)
4.8. Неподвижные соединения
171
движение (см. также „зависимые связи” на рис. 4.53).
Угол подъема резьбы можно считать нуле-
вым (редуцированный аред= 0) при рассмотрении
рабочих нагрузок, если только его действительное
значение достаточно для самоторможения (р 2» а). Все
действующие связи в этом случае можно считать
геометрическими. Однако есть возможность
использовать все свойства соединения как силово-
го, если подействовать на вход вращательным
усилием (особенно с помощью мультипликаторов).
И тогда, например, накопитель энергии можно по
желанию заряжать или разряжать, т. е. изменять
действующие силы уже после сборки.
Наиболее выгодна нарезка резьбы на цилиндре
в отношении как эксплуатационных, так и техно-
логических свойств соединения. В шурупах по
дереву, правда, угол подъема резьбы должен быть
не меньше 1°. Такая резьба создает удобства при
заделке отверстий, сборке и разборке, имеет
хорошие свойства направляющей вращательного
движения, а также простую форму поверхности,
что означает простоту изготовления. В частности,
допустима частая разборка без ухудшения качест-
ва соединения и без повреждения ответной части.
Три вида соединений, наиболее употребитель-
ных в машиностроении, и шесть видов, наиболее
употребительных в приборостроении, более под-
робно представлены на рис. 4.67. Для удобства
сравнения все они исполнены как трехэлементные
соединения. „Квазигеометрические” соединения,
полученные с помощью болта, заклепки и штифта
(см. поля 1.2, 3.2 и 1.3-3.3) пригодны для работы в
условиях больших нагрузок. Матрицы типов свя-
зей для болта и заклепки почти одинаковы, так
как различие предварительного натяга, способов
сборки и разборки в них не отражаются. В собран-
ном соединении резьба выполняет в какой-то
степени те же функции, что и головка заклепки. В
строке 4 на рис. 4.67 показано „чисто геометриче-
ское” соединение. Оно непригодно для работы при
больших нагрузках, так как имеет люфт, а фикси-
рующие лапки легко деформируются. И наконец,
силовые соединения в строках 5 и 6 могут воспри-
нимать лишь небольшие нагрузки. Они применя-
ются главным образом в малонагруженных соеди-
нениях точных приборов [1].
4.8.7. Заклепочные соединения
Заклепочные соединения, как и винтовые,
относятся к числу наиболее употребительных в
машиностроении и точном приборостроении [93]. В
кат. 4.8.1-4.8.3 они представлены с наибольшей
возможной полнотой по причине важности и раз-
нообразия исполнений.
Согласно работе [8], „Заклепочное соединение -
это неразъемное, подвижное или неподвижное
соединение двух частей, принадлежащих одной
или нескольким деталям, с помощью специальной
соединительной детали (заклепки) или конструк-
тивного элемента одной из соединяемых деталей
(цапфы). При сборке соединения происходит
деформация стержня соединительной детали (или
конструктивного элемента) под действием силы,
Вид за- клепки Приспо- собление для под- держки \Процесс Хклепки Ко\ нец\ стер-\ жня эаХ Заклепка Заклепочное соединение Обознач- ен -—под- держки. сила, V— деформ, сила) Способ соединения, сила реакции Стержень зак- лепки, дос - туп ность отверстия
клепки № 1 2 3 4 5
Закле- почные отвер- стия дву- сторон- него до- ступа (’’несле- пые”) Тре- буется Спло- шной 1 и 1 U | Н 1.3 Н V 1.4 Опосредо- ванный Со стороны головки при поддержке 1.5 Сплошной стержень Двусторон- няя
Пусто- телый 2 2.1 2-2 |Н 2.3 н V 2.4 Непосред- ственный Со стороны стержня при поддержке 2.5 Сплошной стержень, отверстие на конце Двусторон- няя
Закле- почные отвер- стия од- носто- роннего доступа ("сле- пые”) Не гре- буется Спло- шной 3 3.1 Й 3.2 3.3 V 3.4 Опосредо- ванный (нажатием) Со стороны головки без поддержки 3.5 Пустотелый стержень, отверстие со стороны _головки_* Двусторон- няя
|а|
Пусто- телый 4 4.1 1 4.2 Х2 i 4.3 V 4.4 Опосредо- ванный (вытягива- нием) Со стороны головки без поддержки 4.5 Пустотелый стержень, отверстие сквозное Односторон- няя
Тре- буется Пусто- телый 5 5.1 5.2 Н 1 V 5.3 Н V 5.4 Опосредо- ванный Со стороны головки при поддержке 5.5 Пустотелый стержень, отверстие сквозное Односторон - няя
Рис. 4.68. Важнейшие свойства заклепок,
существенные при изготовлении заклепоч-
ного соединения. Анализ в целях опреде-
ления классификационных признаков для
кат. 4.8.1—4.8.3
172
4. Собрание конструкторских каталогов
направленной вдоль оси стержня. В результате
соединительная деталь (или конструктивный
элемент) и соединяемые детали оказываются
соединенными друг с другом геометрической или
квазигеометрической связью”.
1. К обзорному каталогу: Заклепочные соединения
Подробное исследование всех существующих
форм заклепок с учетом различных способов
соединения [8, 34] позволяют сформулировать
следующие (необходимые и достаточные) класси-
фикационные принципы для обзорного и деталь-
ного каталога:
Установочное отверстие в заклепочном соеди-
нении доступно с обеих сторон или только с одной
стороны;
образование заклепочного соединения с по-
мощью специальной соединительной детали
(опосредованно) или с помощью конструктивного
элемента одной из деталей (непосредственно);
принцип клепки: поддерживающая сила (Н) и
деформирующая сила (V) действуют с одной или с
разных сторон заклепки;
стержень заклепочного соединения сплошной
или пустотелый, в последнем случае открыт или
закрыт с одной-двух сторон, с прорезью/без про-
рези.
Важнейшие из классификационных признаков
разъясняются на пяти примерах на рис. 4.68. Дву-
сторонней доступности установочного отверстия
требуют исполнений 1 и 2. Специальная соедини-
тельная деталь имеется в исполнениях 1, 3 и 5.
Распределение по сторонам соединения поддер-
живающей и деформирующей силы в каждом
случае различно (кроме 1 и 2). Стержень заклепки
сплошной в случаях 1 и 2, а устройство для поддер-
жки требуется для заклепок 1, 2 и 5.
Специальные признаки были получены с
помощью списков на рис. 3.30. В результате первого
просмотра списка появились 99 понятий, имеющих
отношение к пространственному расположению,
геометрической форме, а также к принципам
монтажа и изготовления заклепок [8]. Специаль-
ные признаки, включенные в каталог, были ото-
браны в результате второго просмотра на основе
более жестких критериев.
Из-за обилия рассматриваемых объектов вна-
чале был составлен обзорный каталог (кат. 4.8.1,
Заклепочные соединения). Классификация в нем
осуществляется по доступности отверстия (с
одной, двух сторон), по способу соединения (опо-
средованный, непосредственный) и по принципу
клепки.
2. К детальным каталогам: Заклепочные соединения
двустороннего и одностороннего доступа
Заклепочные соединения, в которых устано-
вочное отверстие доступно только с одной стороны
(„слепые”), описываются в кат. 4.8.3. Такая систе-
матическая подборка материала по заклепочным
соединениям может оказаться очень полезной для
конструктора и способствовать возникновению
новых идей, особенно если учесть, что подборка
составлена на основе номенклатуры продукции 30
известнейших фирм. Заклепочные соединения
часто применяются вместо винтовых, особенно в
случае, когда нет особых ограничений на силу
предварительного напряжения или не требуется
(даже нежелательна) возможность разборки.
Наконец, заклепки предпочтительны, если тол-
щина головки винта и гайки слишком велика
(например, при соединении тканей и кожи) или
винтовое соединение слишком дорого (например,
при креплении обшивки).
3. Список принципов к конструкторским каталогам - 4.8.1-4.8.3
1. Цель соединения кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ка- талога 4. Определение основ- ных понятий 5. Классификация в каталоге 6. Ссылки на варианты 7. Примеры Обзор основных видов заклепочных соединений, их классификация, поиск новых вариантов исполнения В предметной фазе конструирования При выборе возможного соединения нескольких деталей или частей одной детали Заклепочное соединение - это неразъ- емное неподвижное или подвижное соединение одной или нескольких деталей с помощью вспомогательной соединительной детали (заклепки) или конструктивного элемента одной из соединяемых деталей (цапфы), ко- торые при сборке подвергаются пла- стической деформации Заклепочное соединение (вообще): доступность, опосредованное/непо- средственное соединение, принцип клепки. Заклепочное соединение двустороннего доступа: то же и тип стержня заклепки, отверстие в заклад- ной головке заклепки или в стержне. Заклепочное соединение односторон- него доступа: то же и число деталей соединения 8 Рис. 4.68
4.8. Неподвижные соединения
173
4. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.8.1: ЗАКЛЕПОЧНЫЕ СОЕДИНЕНИЯ (ОБЗОРНЫЙ КАТАЛОГ)
Классификационная часть Главная часть Специальная часть Дополнение
Дос- туп- ность уста- новоч отвер стия | Способ образо - вания соеди- нения Принцип клепки; Н -поддерж сила; К-де - формирую- щая сила Наиме- нова- ние Эскиз Прочность Номи- нальный диаметр заклепки (НДЗ), ММ Сам О- про- бой- ность Инстру- мент для клепки Допо дли- тель- ные функ цин Об- ласть закли нива- ния Примечания/вари - анты
на срез на раз- рыв
1 2 3 1 2 № 1 2 3 4 5 6 7 1
Дву- сто- рон- няя Опосре- дован- ный !» Заклеп ка 1 Очень низкая ... очень высокая 0,7 40,0 Неко- торая часть Клепаль- ные ма- шина (ва- рианты), молоток, поддерж ка,об - жнмка Неко торая часть деко- ратив ные кол- пачки 0.8 136,0 Варианты: заклепка сплошная, расщеп - ленная двухлепест - ковая, трубчатая/пу - стотелая, полупусто- телая, полупустоте - лая с колпачком; в основном стандарти- зованы, поставляют- ся особой формы
Заклеп- ка со । стяги - ваю - щим коль- цом 2 Средняя ... высокая 5,0 10,0 Нет Ручные и пневма- тические клепаль - иые ус - тройства — 0,8 44,5 —
Ж Заклеп- ка с бол товым сердеч - ником 3 Высо- кая Сред- няя 10,0 Нет Клепаль - ный гид - ро- и пне- вмоин- струмен - ты — 14,3 33,4 —
Непо- средст- венный t V Закле - почная цапфа L2, J Г i V'/A 4 См. строку 1 Область как в строке 1 Воз- мож- на в отде- льных случа- ях См. строку 1 — Об- ласть, как в стро- ке 1 Варианты: заклепоч - ная цапфа сплошная, трубчатая, пустоте- лая, полупустотелая особые формы, зави- сящие от конструк - ции
Одио- сто- рон- няя Опосре- дован- ный Ж Заклеп- ка с сер- дечни - ком 5 Низкая ... средняя 2.4 6.4 Нет Ручные и пневма - тические клепаль - ные ус - тройства Нело- маю- щиеся стерж нн:ус танов ка ра- злич- ных наса- док : о.з 75,0 Варианты: заклепка с протягиванием оправ- ки, вытяжная, кубко- образная, с винтовым сердечником, запатен- товано: самопробой- ная заклепка со свер- ловым концом
Ж Заклеп - ка с рас- порным сердеч - ником 6 Низкая 3,0 6,4 Нет Молоток — 1,9 26,0 Вместо штифта возможен винт
t, Взрыв- ная за- клепка 7 — — 2.6 10,0 Нет Инстру - мент с электро- нагре - вом — — Выпуск прекращен
Непо- средст - венный Ж Заклеп- ка с ре- зьбой I й т ( 8 Средняя 3,0 16.1 Нет Ручные, пневма - тические н пневмо гидравли ческие клепаль - ные ус - тройства Фун- кции винта нли гайки 0,25 7,5 Варианты: вклепывае- мая гайка,заклепка с резьбой н сердечнн - ком; запатентовано самопробойная за- клепка со сверловым концом
174 4. Собрание конструкторских каталогов
5. КОНСТРУКТОРСКИЙ КАТАЛОГ 4Л.2 : ЗАКЛЕПОЧНЫЕ СОЕДИНЕНИЯ ДВУСТОРОННЕГО ДОСТУПА ("НЕСЛЕПЫЕ”)
Классификационная часть Главная часть Специальная часть
Способ обраэо вания соеди- нения Принцип клепки Стер- жень заклеп- ки Отверстие в головке заклепки/ на конце стержня Наиме- нование Эскиз Прочность иа срез (односрез- иая наг- рузка), Н Проч- ность иа раз- рыв, Н Мате- риал Защитное покрытие НДЗ, мм Толщ, соеди- няемо- го па- кета, мм
1 2 3 4 1 2 № 1 2 3 4 5 6
Опое - редо- ван - ный 2£_ Сплош - ной ч - X * £ 5 Е 3 S § Сплош- 3 ная за- S клепка I| 1 до 200000 ДО 80000 Сталь, медь, алюми- ний и его сплавы, латунь н,м, М-Ц, о,ц 0:7 36,0 до 136,0
я S £ « S о ф « X
* 3 Двух- s. х лепест- ф ф g § ковая Яф заклеп- ан ка 2 — — Сталь н,м, М-Ц 1.6 6.0 4.0 30.0
( W
Я 0 ЬСС 1 X
Пусто - телый 1 Трубча- тая/пус- тотелая заклеп - ка 3 ДО 95 000 до 80 000 Сталь, спец, сталь, медь и ее спла- вы, алю- миний и его сп ла' вы, ла- тунь, ПВХ Н,М, м-ц, о, ц, Кд, Х,Ср 0.8 40,0 0,8- 56,0 больш. значеи. ДЛЯ отде- льных длин
Заклеп - ка с от- версти- ем на конце стержня/ иаполо- вину пу- стоте - лая 4 Каталог следует дополнить соот- ветствующимн значениями Сталь, лег. сталь, алюми- ний и его сплавы, медь, латунь Ц.х 2.0 10,0 4.3 45,0
“Г Пусто - телая за- клепка 5 Сталь, латунь н,м-ц 2.0 5.9 1.0 17,0
Пусто - телая за- клепка с кол - лачком я \ \ 6
MI Заклеп- ка с бол- товым сердеч - ником 7 23 000 7 500 Сталь ц 10,0 14,3 33,4
MI Сплош- ной 1 Заклеп - ка со стягива- ющим коль- цом 8 до 33 000 до 29 000 Сталь, спец, сталь, алюми- ниевые сплавы н,м, м-ц, Кд, 0, Ц,ср, X, Хим. Пос, фос 5.0 10,0 0,8 44,5
4.8. Неподвижные соединения
175
(ДЕТАЛЬНЫЙ КАТАЛОГ, лист 1)
Дополнение
Длина стержня заклеп - ки, мм Диам. голов- ки за- клеп- ки, мм Толщ, голов - ки за- клепки, мм Форма заклад- ной го - ловки Диаметр отверстия (ном. диам заклепки — НДЗ), мм Само- пробой- вость Инстру- мент для клепки Примечания Основные области примене- иия ДИН, источник (изготови - тели)
1 8 9 10 11 12 13 1 2 3
до 190,0 1.8 64.0 0.5 25,0 Полукрч потайн., полупо- тайная, низкая полу- кругл., ремеи - иая за- клепка НДЗ+0,1 1.0 нет Клепаль- ные моло- ток, под - держка. обжимка Возможно соедине - ние с шайбами под - закладной и замы - кающей головками Особые формы: на - садочная заклепка Котло-. ре - зервуаро- строение, конструк - ции из лег- ких метал- лов и стали, обработка кожи, кар- тона ДИН: 123, 124,302, 660,661, 662,674, 675(7338). Хонзель
4,5 35,0 3,1 14,0 (Различ- ные) — да Клепаль- ные маши- на, моло- ток, под- держка, обжимка Возможен колпачок. на замыкающей головке Пластмас - совые/кар- тонные ко-? робки, ко- жаные из- делия Таппе и Ко- зак, вюль- фельский завод за- клепок, Шеффер- Хомберг
L3 60.0 также отдель- ные длины 1,3 52.0 Для круглой головки с бурти* ками 025-3,5 иначе соотве- тствует толщине стенки Плос - кая, круг- лая с бурти- ками ндз+од 1.0 Возмож- на (зави- сит от ма- териала) Штамп для оса- живания стержня, клепаль - ные моло- ток, под- держка Заклепки с надсвер- ленными концами без головки (ДИН 7341) и с разл. головками; гильзы для прово- локи (ДИН 46288); пустотелые заклеп- ки; из материалов для глубокой вытяжки Накладки в тормозах и муфтах ДИН: 7333, Шольтен, Робберт, Массен, Остеррат, Пфайфер, Фребель и Обстфельд
5.0 50,0 5.2 12.0 0.8 3.6 Полу- круглая, низкая полу - круг- лая, плоская, потай- ная, ова- льная нет Штамп для оса - живания стержня, клепаль- ные моло- ток, под- держка Возможно соединение с шайбами Накладки в тормозах и муфтах (с плоской головкой) ДИН: 660, 661,7338. Хоизель, Шеффер- Хомберг, Вебер и Ок- сеифельд
3.8 12.0 См. строку 3 —‘ Диаметр стержня + 0,3 да Клепаль- ные маши- на, моло- ток, под- держка, обжимка Поставляются за - клепки из двух час - тей (с головной час- тью, ДИН 7331), поставляются от- крытые/за крытые тарельчатые колпачки Текстиль - ная про * мышлеи - ность ДИН 7331. Беринг и сыновья
Верхняя часть: 4,0-22,0 нижняя часть: 2.1 - 5,0 1.2 2.5 (Колпа- чок за- клепки)
24.2 41.3 26.9 30.1 1.5 2.4 Плоская НДЗ+0,3 1.0 нет Клепаль- ные гид - ро- и пне- вм ©инст- рументы Болты (стержни) с уплотнительной шайбой Деревян- ные щиты на опор - ных рамах Титге - манер
1,5 38,0 8.4 28,7 2,2 6.3 Низкая, полу- круглая потай - ная НДЗ+0,1 0.2 Ручные и пневма - тические клепаль - ные ус - тройства Достижимо высокое предварительное напряжение, вибро - устойчивы Контейне- р о-, авто - мобиле - строение, транспор - тиое при- борострое- ние Ав дель, Титге- майер
176
4. Собрание конструкторских каталогов
КОНСТРУКТОРСКИЙ КАТАЛОГ 432 (лист 2)
Классификационная часть Главная часть Специальная часть
Способ образо- вания сведи - нения Принцип клепки Стер - жень за- клепки Отверстие в головке заклепки/ иа конце стержня Наиме- нование Эскиз Прочность на срез (односрез- ная нагру- зка), Н Проч- ность на раз- рыв, Н Мате- риал Защитное покры - тие ндз, мм Толщ, соеди- няемо- го па- кета, мм
1 2 3 4 1 2 № 1 2 3 4 5 6
Непо- сред- ствен- ный Н| V t Сплош- ной I 4“ Сплош- ная за- клепоч- ная цапфа ^^2 9 См. строку 1 Зависит от детали Зависит от мате - риала, см. стро- ки 1—8 Области как в строке 1
Пусто - телын i Труб- чатая закле- почная цапфа 10 См. строку 3 Области как в строке 3
i Закле - печная цапфа с отвер- стием на кон- це/по - тайная f /л 11 См. строку 4 Области как в строке 4
। Пусто- телая закле- почная цапфа 12 См. строку 5 Области как в строке 5
4.8. Неподвижные соединения
177
Дополнение
Длина стержня заклеп- ки, мм Диам- голов- ки за- клепки мм Толщи- на голо- вки за- клепки, мм Форма заклад- ной ГО- ЛОВКИ Диаметр установоч- ного отве- рстия (НДЗ),мм Само - пробой- ность Инстру- мент для клепки Примечания Основные области примеие- НИЯ дин, источники (нзготови - те ли)
7 8 9 10 11 12 13 1 2 3
Зависит от тол- щины соеди- няемого пакета Контур детали заменя- ет закладную головку Области как в строке 1 нет (в отдель- ных слу - чаях воз- можно) См. строку 1 Привести в специаль- ной части количест - венные данные невоз- можно, так как они зависят от свойств конструкции Заклепочные цапфы или насадки могут быть выточены, отлиты или выпрес - сованы Заклепоч- ные соеди- нения стол- биков с пластиной, осей с ос- нованием, втулок с зубчатыми колесами нт.д. Литература по деталям машин
Области как в строке 3 См. строку 3
См. строку 4
Области как в строке 5 См. строку 5
12 — 2317
178 4. Собрание конструкторских каталогов
6. КОНСТРУКТОРСКИЙ КАТАЛОГ 4В.З: ЗАКЛЕПОЧНЫЕ СОЕДИНЕНИЯ ОДНОСТОРОННЕГО ДОСТУПА (’’СЛЕПЫЕ”)
Классификационная часть Главная часть Специальная часть
Способ образо вания соеди- нения Принцип клепки Конец стержня пустоте- лой за- клепки Дополнит, элемент соедине- ния, получ. при образ- зам, голов. Наиме- нова- ние Эскиз Прочность на срез (односрез- ная нагру- зка) , Н Проч- ность на ра- зрыв, Н Мате- риал втул- ки Мате- риал сердеч- ника Защитное покрытие (втулка/ сердеч- ник) Номина- льный диаметр заклеп - ки(НДЗ) мм Толщ соеди няемо го па* кета, мм
1 2 3 4 1 2 № 1 2 3 4 5 6 7
Опо- средо- ван - ный М Открыт Отсут- ствует Заклеп- ка с про* тягива- нием оправки wri к 1 До 10 000 До 3700 Алюм. сплавы латунь, мягкая сталь, монель- металл (Cu-Ni) (Оправ- ка яв- ляется частью инстру- мента для клеп- ки) Ц, без покрытия 2,4 6,4 0,5 17,4
г/хд
Як < <i
Е
Y /5j
Алюм. сплавы спец, сталь, медь и ее спла вы мо- нель- металл мягкая сталь, полиа- мид
Сердеч - ник за- клепки Заклеп- ка с вы- тяжным сердеч- ником а . 2 до 12 250 До 7100 Алюм», алюми- ниевые сплавы стань, специа- льная сталь, бронза, полиа- мид Ц.М.Кд, фос, лак, Ан 2,4 6,4 о.з 75,0
ГУ 2$
к \
Закрыт Кубко- образ- ная за - клепка 3 ДО 4000 До 4500 Алю- миний, медь Алю- миний, сталь, специ- альная сталь Ц, /лано- лизация / фос 3.2 6,4 0.8 17,0
Кч к 1
Открыт Заклеп- ка с рас- порным сердеч - ником 4 400 200 Алю - миний и его сплавы сталь Спе- циаль- ная сталь Ц, фос 3,0 6,4 1.9 26,0
vf Отсут- ствует Взрыв- ная за- клепка 5 — — Алю- миние- вые сплавы сталь — Ан 2,6 10,0 —
Непо- сред- ствен- ный м Вклепы- ваемая гайка 6 до 5600 До 9400 Алюми ниевые сплавы сталь, латунь — Кд, Ц, без покрытия 4,6 16.1 0,25 7.5
1^
а
V / /Н
Сердеч - ник за - клепки Заклеп- ка с резь- бой и сердеч - ником 7 ДО 3200 — Сталь, латунь Сталь Кд 3,0 4.0 0.5 6,0
Закрыт Отсут- ствует Вкле- пывае- мый винт 8 Способ крепле- ния,срав- нимый с винтом 4.6 (ДИН- 267) — Сталь — Ц 5,4 9.8 0.5 5.0
ЕЯ
4.8. Неподвижные соединения
179
(ДЕТАЛЬНЫЙ КАТАЛОГ)
Дополнение
Длина стер- жня закле- пки, мм Диа- метр голо- вки закл> мм Толщ голо- вки зак- лепке мм Диам. уста- новочн. от- верстия, мм Диа- метр резь- бы/ мм Длина резьбы, мм Форма заклад- ной го- ловки Самопро- бойность Инстру- мент для клепки Примечания Основные области примене- ния дин, источ- ники (изго- тови- тели)
8 9 10 11 12 13 14 15 16 1 2 3
3,2 19,8 4,0 10,4 0,76 2.6 НДЗ+0,05 0.7 — — Низкая полу- круглая, потайная Нет Ручная клепка, пневма - тические клепаль- ные уст- ройства Возможна последую- щая запрессовка сте- ржня. Возможен риф- леный стержень Автомоби- лестроение, бытовые устройства, различные материалы (металлы н неметаллы' Авдель
3,5 80,0 4,5 16,0 0.5 1,8 НДЗ+0,05 0.8 — — То же Патент; вершина сверла на конце се- рдечника, в других случаях: нет Ручная клепка, пневма - тические устройст- ва, руч- ная дрель с насадкой Возможна раздача ко- нца стержня клином сердечника, формир. закладной головки на рифленом сердечни- ке. Поставляются зак- лепки с разрывом го- ловки/стержня. Воз- можно нинтовое дви- жение сердечника Автомоби- льные при- боры, фаса- ды, изоля- ция/венти - ляция,при- борострое- ние, окна/ двери Нитек, Рив- так, Гезипа, Тук- кер, Хон- зель, VVG
5,9 22,0 6,0 12,7 0,8 2,3 НДЗ+0,1 — — м Нет Ручная клепка, пневма - тические клепа- льные устрой- ства Возможны исполне- ния с коротким/ длинным стержнем Потолоч- ные/стен- ные обли- цовки, профили Нитек, Тук- кер, Титге- майер
5.0 30,0 5,2 15,7 1.5 3,6 НДЗ+0,1 — Низкая полу- круглая, плоская, потайная Нет Молоток Вместо штифта возможен винт Авто-, кон- тейнере-, приборо- строение; фасады, крыши, за- боры; креп ление плен- ки/фольги Авдель, Кер- пин, Рив - так
3.0 34,0 — — НДЗ+0,1 0.5 — — Низкая полу- круглая, потайная Нет Клепаль- ный инст- румент с электро - нагревом (130°... 300° С) Выпуск прекращен Строитель- ство из об- легченных элементов, самолето- строение Фин- дай зен, Бут- лер
7.5 29,0 8.0 18,0 0,5 2.5 ндз+од М3 М12 4Д... 11,5; не менее шести витков резьбы Плоская, потайная (также особые испол- нения) Нет Ручная клепка, пневмо- гидравли- ческие пистоле- ты, пнев- матичес - кие уст- ройства Поставляются с за- крытым концом стержня; при клеп- ке также отрезание резьбовой части и втягивание во втул- ку заклепки Тонкостен- ные профи- ли н листы, компыоте - ры, комму- тационные устройства Авдель । Нитек, Гезнпа, Титге- майер
5,0 9,0 — — НДЗ+0Д М5 Мб 10,0 15.0 — Патент: вершина сверла на конце се - рдечника, в других случаях: нет Обычные устройст- ва для ’слепых ” заклепок Может быть исполь- зован как специаль - ный соединительный элемент с дополни- тельной функцией винта Авто- и аппарато- строение, электрообо рудование, сантехника, строитель- ство из облегчен, элементов Гезипа
8,0 15,2 8.0 12,0 0.5 1.5 НДЗ+0,1 М4 М8 8.0 20,0 Плоская, потай- ная Нет Ручные клепальн. устройст. (М4-М8) пневмоги- дравли- ческие пи- столеты (М5-М8) Может быть исполь - зован как специаль - ный соединительный элемент с дополни- тельной функцией винта Тонко- стенные профили и листы Титге- майер
180
4. Собрание конструкторских каталогов
4.8.8. Соединения вал-ступица
При конструировании значительная часть
работы связана с выбором таких деталей, как под-
шипники, пружины, рычаги, зубчатые колеса,
ремни и валы [48, 34, 40]. Предлагаемые каталоги*
„Соединения вал - ступица” позволяют легко
выбрать один вариант из многих видов таких
соединений. Для наглядности представления
всего многообразия конструктивных решений
сначала был составлен обзорный каталог.
1. Общие положения
Соединения вал - ступица (обзорный каталог).
Обзорный каталог 4.8.4 разъемных механических
соединений вала со ступицей содержит следую-
щие пять базовых конструктивных форм [7]:
профильный вал;
соединение с помощью профильного элемента;
соединение на основе зажима;
соединение с помощью натяжного элемента;
напряженное шпоночное соединение.
Этот каталог прежде всего дает пользователю
достаточно общую информацию об интересующей
его конструкции. Пять базовых конструктивных
форм описываются исключительно с помощью
качественных признаков. Ниже приведены некото-
рые из этих специальных признаков с указанием
области значений:
передаваемый крутящий момент (большой,
средний, малый);
восприятие осевых нагрузок (есть, нет, возмож-
но);
соединение центрируемо (да, нет, возможно);
осевая подвижность ступицы (возможна, нет,
есть, только если осевая сила больше силы тре-
ния);
перестановка ступицы (возможна, бесступенча-
тая, ступенчатая).
Перечисленные признаки используются при
предварительном выборе одного или нескольких
типов соединений вал-ступица на достаточно
абстрактном уровне. Указывать уже на этой стадии
количественные признаки было бы нерационально
во многих отношениях. В первую очередь это
связано с тем, что на этой стадии выбора конструк-
тор еще не должен выбирать конкретное соедине-
ние, а гораздо больше интересуется дополнитель-
ными возможностями решения стоящей перед
ним задачи. Детальные сведения, например, о
возможных диаметрах валов, о применяемых
материалах и т. д. должны были бы рассматривать-
ся в этом обзоре в настолько общем виде, что их
влияние на выбор конструктивного типа было бы
незначительным. Поясним сказанное на примере.
Диаметр вала для соединения с помощью профиль-
ного элемента может лежать в пределах от 0,5
до 1000 мм. Эта столь общая информация мало
полезна конструктору на данной стадии, посколь-
ку он обычно располагает гораздо более точными
данными о диаметре вала и хотел бы осущест-
влять выбор на этой основе.
Задачей обзорного каталога является сокраще-
ние затрат времени на выбор решения. Если при-
нять решение о выборе одного из типов соедине-
* Эти каталоги являются каталогами особого рода, посколь-
ку их содержанием является функция, связанная с двумя объ-
ектами. Их можно было бы выделить в отдельную группу ката-
логов отношений”. - Прим. авт.
Операция
варьирования
конструкции
№
Отсутствует
(исходная
конструкция)
2.2
Изменить
относительное
2 положение
деталей
Вариант конструкции
Кат. 4.10.1
2.3
Поле ЗА
3.1
Изменить
3 форму
детали
4.1
Изменить
размеры
детали
5.1
Изменить
число
деталей
Попе-
речный
штифт
з.З
Поле 2.2
Сегмен-
тная
шпонка
4.3
Поле 2.4
5.3
Поле 3.1
Рис. 4.69. Получение вариантов соединения вал—ступица приме-
нением операций варьирования конструкции
ний, приведенных в этом абстрактном обзорном
каталоге, то на следующем шаге придется иссле-
довать на возможность применения варианты
только одной базовой конструктивной формы.
Таким образом будет достигнута существенная
экономия времени.
Соединения вал-ступица (детальный каталог).
Вообще говоря, можно представить себе, что для
каждой базовой конструктивной формы обзорного
каталога составляется свой объектный детальный
каталог. Детальные каталоги в этом случае полу-
чаются в результате варьирования элементов
обзорного каталога. Однако если число вариан-
тов, как в нашем случае, вполне обозримо, то
более целесообразно собрать все варианты в один
каталог. Приведенный здесь детальный каталог
4.8.5 возник в результате применения операций
варьирования конструкции: изменить положение,
форму, размер(ы) и число деталей или узлов. Опе-
рации применяются к базовым формам кат. 4.8.4.
Все названные операции варьирования на-
глядно представлены в каталоге операций 4.10.1
(Операции варьирования конструкции). На сле-
дующем примере кратко поясняется принцип
систематического варьирования:
На основе базового элемента „призматическая
шпонка” получаются варианты, показанные на
рис. 4.69. В столбце 1 содержатся наименования
операции, применяемой к базовой форме, в столб-
це 2 показан возникающий при этом вариант.
Эти операции были применены ко всем базо-
вым конструктивным формам, в результате чего
получился детальный каталог 4.8.5, содержащий
30 наиболее известных вариантов соединений вала
4.8. Неподвижные соединения
181
со ступицей. Существенно более подробное пред-
ставление соединений вал-ступица и новейшие
методы расчетов можно найти в работе Коллмана
[37.1].
2. Список принципов к конструкторскому каталогу 4.8.4
1. Цель создания кон- структорского ката- лога 2. Момент примене- ния при методичес- ком конструирова- нии 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Дать обзор разъемных механических соединений вал — ступица путем вы- деления пяти базовых конструктив- ных форм: профильный вал, соедине- ние с помощью профильного элемен- та, соединение на основе зажима, со- единение с помощью натяжного эле- мента (втулки), напряженное шпо- ночное соединение Предметная фаза конструирования При разработке всех видов соедине- ний валов, цапф и осей со ступицами, например для зубчатых колес, роли- ков, рычагов, шкивов и т. д. Каталог дает возможность осущест- вить предварительный выбор базовой конструктивной формы соединения и этим сокращает затраты труда при выборе подходящего вида соединения между валом и ступицей. Окончатель- ный выбор производится с помощью детального кат. 4.8.5 (Соединения вал — ступица), в котором для каждой, из базовых конструктивных форм приведены различные варианты 1 Соединение вал — ступица — это сое- динение между валом и ступицей (ответной частью в форме втулки), которое неподвижно в радиальном направлении и подвижно или непод- вижно в осевом По типу поверхностной связи (поверх- ностная нормальная, т. е. геометри- ческая, связь, поверхностная танген- циальная, т. е. фрикционная, связь и комбинированная поверхностная нормально-тангенциальная связь) между валом и ступицей и по ono-j средованному / непосредственнее характеру передачи силы Кат. 4.8.5 содержит в общей сложности 24 варианта базовых конструктивных форм, представленных в настоящем обзорном каталоге Рис. 4.69
182 4. Собрание конструкторских каталогов
3. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.8.4: СОЕДИНЕНИЯ ВАЛ-СТУПИЦА (ОБЗОРНЫЙ КАТАЛОГ 2)
Классифика- ционная часть Главная часть Специальная часть Дополнение
поверх- гной свя Способ пе- редачи сил Уравнение 1 S. Эскиз редавае- । момент На передачу момента влияют приятие :евых грузок кцияна егрузки цииение трируе- hi he 1 Примечания
l!s Сое) Пе] мый Peai пер< Осе дви ’ СТ] е а
1 2 1 2 3 № 1 2 3 4 5 6 7 8
ная (гео- ая связь) Непосред- ственный Мтг&В-Ат тдоп 2 ₽доп Шлицевое 1 (Ц}) \|Л 1 Большой ент формы Нет а JB Да ! Возможна ступенча- тая —
Нормаль: яетричесв льный переда ваемый момент ^ср - средний эффективный 3 'оэффици о И а
*посред занный а g d."? ^срР 2 Малый Возмож S Возмож) Простой монтаж
диаметр 3
нальная ная связь) Непосред- ственный >Мп ,МГ F^I2 =КиЯ^д>/2 а — угол клина Мт — момент трения По прессо- вой посад-. ке FKtx Т©7~ 3 Малый... большой 1 Да а & Да о при пенчатая —
5 о О S 1 3 ф з! а* Тольк Лисс ' в Малы
s! «8 FT сила трения </щт —диаметр С натяго через втулку F 1 i§*
II ti V 4 «а М на изготовле-
3 с а О а штифта б емпература ocei ние и монтаж
нгенцн- ьная и рмаль- ная Опосредо- ванный — ф о S о X а 5 Малый rt X а а а § § Нет Нет 1 о а ——
£5® в £ с
4.8. Неподвижные соединения
183
4. Список принципов к конструкторскому каталогу 4.8.5
1. Цель создания кон- структорского ката- лога 2. Момент примене- ния при методическом конструировании 3. Использование ката- лога 4. Определение основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Показать важнейшие (наиболее из- вестные) варианты базовых конструк- тивных форм соединений вал — ступи- ца, приведенных в кат. 4.8.4 Предметная фаза конструирования При разработке всех видов соедине- ний валов, цапф и осей со ступицами, например для зубчатых колес, роли- ков, рычагов, шкивов и т. д. Расширенный спектр решений полу- чен применением операций варьиро- вания конструкции (положения, формы, размеров и числа деталей или узлов см. кат. 4.10.1) к базовым фор- мам, приведенным в кат. 4.8.4. С по- мощью этого и благодаря расширен- ному списку специальных признаков делается возможно более целена- правленный выбор подходящего решения Те же, что и в списке принципов к кат. 4.8.4 По типу поверхностной связи (поверх- ностная нормальная, т. е. геометри- ческая, связь, поверхностная танген- циальная, т. е. фрикционная, связь, и комбинированная поверхностная нормально-тангенциальная связь) между валом и ступицей и по опосре- дованному / непосредственному хара- ктеру передачи силы [37.1]
184 4. Собрание конструкторских каталогов
5. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.8.5: СОЕДИНЕНИЯ
Примечания Г- Центрирова- ние по на- ружному и внутреннему диаметрам и по боко- вым граням. Возможна короткая ступица Для корот- ких и тон- костенных ступиц. Возможен конический конец вала ф о £ 2 з pl phi * х 8,3 s
НИН -эиэмийп NdawHdn ю сьвгэЛэн •hgXg Baiattado этпискшэшнй ‘имнвлэ ‘aojBhiqd aHHauuadx
ДИН, источ- ники (изготс (вители 1Г> 5461/63 5471/72 5480. 5482 5481 1 1 1.7 1470-77 1481. 6 324. 7346 9889 8889
ЖВ1НОМ ВН 141BdU£ Малы* Сред- ние Малые
ЭИНЭ1ГЯОХ -олеи ен iqiediBg ГО Высо- кие 4 хвнишвм хтчнФгвиПапэ вн он ‘этпгвк Сред- ние
Мате- риал гч •• s sggo ® м 5 S . *0* - ^2 сь о ® я ю оо Ю1Г*ЬЭ :«1ииЛхэ / ,1гвя „ (®ПИ 009 = "Л) 091S вяноцщ
WW *В1ГВН dxamrttf S= 10-150 1 150-500 ю-юо 004-04 09-90 1 1 5-500 |
НЭПГВ1ГВНПО11 чхэон -жомгсод я 5 S вэАнох Birjf вхфихгп олоиээьинои mrtf -ви S X
Пере- ста- новка сту- пицы! о* 5 S S
Осевая под- виж- ность сту- пицы CD При посадк! с I заэоро! KxcXdiBH tag и WodOEBC э эхЕВэои Hdji 1 1 ITOdOCBE э эиквэои ндц
чхэон -нвяодиэ -ншпдээн е*. & X s s 1 5
Соедн нение цент- риру- емо <о 5 Само центрь pye- мость 5
HxcXdjedau ей иипхвэд 1Г> По- ломка
1 Воз- мож- ности И СП ОЛЬ вания | вхсАблвн ввннэкэбэп ввнМвИх вхсЛйген BBHHawadau HBHdBktx 1 1 1 1 1
аинэжшЬпн эошээн ГО эошчнод aaHHado эотчхгод ээнКэбз эопгагод
Ч1ГИЭ Э1ЧНЭЭ( 1 1 l BOtoiBraiHHduaog 1 1 1
На пере- дачу момен- та влияют ивидэхвм ‘иионэооэ ‘хчмбоф хнэиПнффсоя *bitbs diawBHtf
хГ.- — ф" — — § о о J - .с — X»
Пере- давае мый мо- мент - Боль- шой Ма- лый
Классифика- ционная часть нН HiTHHasiatradaoiraH и1чннвно1Гэ4эоио
Тип поверх ност- ной связи - (ЧЕваэ ивхэаьидхэиоал) ввнчивмМоц
Тангенциальная (фрикционная связь)
Непосредственный
Опосредованный
тг
о
v
Клеммовое
Прессовая посадка
с про-
резью
со сма-
зкой
ради-
альи.
про-
дольн.
Я В Й
Малый ... большой
Малый Малый ... большой
Натяг
Натяг
Диаметр вала, коэффициент трения,температура, вращательные и дополнительные осевые силы, материал
Боль-
шой
Давление ’
(напр.,
масла/
U * I и
Л г
Т f f 31 л * i
е us и i sIs
к 4
18 л -
л *
Q S
О Я g
m
Его
Ш X X
g В £
Т ч» С
X М £
м т “
двухэле-
ментное
Малый ... средний
981
Малое [
8 5
Воспринимаются
Среднее
Малое
Ударная, переменная нагрузка
Прокрутка
Возможна
При ^аксиальная > ^удержания
(I хэии ‘ JOLTV1VX иННЧ1ГУХЭ1Г) УПИПЛЮ - LTV8
кинэнипэоэ эннжияНоиэн "g’V
Классифика- ционная часть Главная часть Специальная часть Дополнение
тип поверх ност- ной связи Способ пере- дачи сил Уравнение Наиме- нование Эскиз Пере- давае- мый мо- мент На пер» g дачу g X 8S Воз- мож- ности т Реакция на перегрузки Соединение цент- I рируемо Несба ланси- рован Осевая ганов пицы Возмож- ность подняладга Диа- метр вала [ мм] - ° А За- траты на ж дин, источники (изгото- вители) Приме ры приме- нения Примечания
мента 3 и ф Мест напря: lb Sus
ность а* риал &38
ВЛИЯЮТ £ ность ступицы Ё £ « х монтал
1 2 1 2 3 № 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
Тангенциальная (фрикционная связь) Опосредованный См. строки 12-22 Н Втулка Шиита 23 F 1 См. строки 11—21 | । Восприятие; зависит от предвар. напряж] Воспринимаются 1 Малое Ударная, переменная нагрузка Прокрутка Да Возможна При Fgjtc < Fудерж См. строк 12-22 и Да Да i См. строки 19—22 См. строки 15—22 Мальк
Шайба Ринг- стер на 24 F (Большое Среднее 3-100 Небольшая долго- вечность
ЦИЛИНД' эическо натяж- ное кольцо ц шЬ 25 НИЙ F Напря- женные соеди- нения I
атяжная втулка Тапер— Локка 26 F Да Да С 10-100 (Аврора) J Зубча тые колеса муфты
! Нормальная н тангенциальная Опосредованный М < Мт Клиновая п шпонка врезная J yggxLr^ssL 27 Малый F а Поломка Нет Нет — St60, шпоне ная сталь 1 Средние Малы* 6886. 6887
к М„ < Мг, О-^Рдоп линовал шпонка на лыск 28 F а — 5-500 6883, 68 84
Фрикци- онная шпонка 29 р (Среднее | Про- ® крутка См. строк 19 6881. 6889
См. строки 1-10 Танген- циальна шпонка • 30 Сред- ний h 1 b большое Ударн пере- менна 1агруз1 X 0 » § <а Е Прн тосадке зазоро Нет и 50-100 Вал, СЧ, ЛСт, Ст Сред- ние I 271 .реплен >ычаго! нт. п. «е
4.9. Подвижные соединения
187
4.9. Подвижные соединения
При обсуждении неподвижных соединений
уже было дано определение подвижного соедине-
ния. Оно является частным случаем соединения
вообще при условии, что имеется возможность
свободного движения соединяемых деталей, по
крайней мере, в одном направлении.
Для конструкций, образованных из двух сопри-
касающихся и допускающих относительное движе-
ние элементов, имеется целый ряд понятий и
условных обозначений, а на рис. 4.70 приведена их
сводка. Отметим, что различие между этими
понятиями (например, направляющая, сочлене-
ние, пара) являются довольно тонкими. Рис. 4.70
представляет собой попытку сделать эти различия
более отчетливыми, дав соответствующие опреде-
ления.
Если мы рассматриваем какую-либо составную
часть узла как сочленение, то имеет значение
только взаимная подвижность двух деталей. Если
мы рассматриваем часть узла как пару рабочих
поверхностей, то становится существенным распо-
ложение точек соприкосновения рабочих объемов,
взаимозависимости и действия различных сил.
Когда же мы занимаемся направляющими, следу-
ет принимать в расчет также различные конструк-
тивные свойства. К ним относятся и наличие
комбинаций идентичных пар, и необходимость
зазоров или упругости деталей, а также размеры,
нагрузки и форма поверхностей соприкосновения.
Выше (см. рис. 4.61) подвижные соединения
рассматривались главным образом как направля-
ющие. При этом типична триада решаемых задач
(см. пример на рис. 4.71):
оставить определенные направления свобод-
ными, а другие запереть;
обеспечить восприятие нагрузок;
не допустить больших потерь энергии.
Наиболее важны направляющие поступатель-
ного и вращательного движения, последние назы-
ваются также „подшипниками”. Обе группы
направляющих содержатся в кат. 4.9.1 - 4.9.5.
Опишем устройство этих каталогов.
№
Понятие
Обозначение
2
Пример реализации
3
о
2
3
4
5
6
7
Пара
с точкой
опоры
(кони-
ческая)
Сочленение
(шарнир)
Пара
элементов
(звеньев)
Пара
рабочих
поверхно-
стей
□
См. рис. 4.61
а
-F.
*1
Направляю
щая посту-
пательного
движения
И Направ-
ляющая
вращатель-
ного дви-
жения
(подшипник)
Определения понятия
4
'•4 Соприкосновение двух 1
подвижных относительно друг
друга звеньев в единственной
точке. (Пара элементов с
одноточечным соприкосно-
вением)
Ы Соприкосновение двух
подвижных относительно друг
друга звеньев по двум им
принадлежащим непрерыв-
ным поверхностям или в точ-
ках, лежащих на этих поверх
ностях. (Пара элементов с со
прикосновением по точкам,
лежащим на двух поверхно-
стях)
Дополнение (цель)
5
Сведение всех спо-
собов образования пар
к соприкосновению в
точке опоры
I 5 Сведение всех
способов образования
пар к соприкосновению
или действию точек
двух технических по-
верхностей. Указание
на действие (работу)
функ ционал ьных
величин
Направля-
ющая
L 1 L
/ > Г
гг>
5Л
Подвижное соединение
жестких частей одного, двух
или большего числа очень
близко друг к другу распо-
ложенных звеньев
It Соприкосновение двух
’’элементов”. Под ’’элемен-
тами” здесь понимаются
части тел, которыми эти
тела соприкасаются
те
3.5 Определение свобод
и несвобод, относитель-
ных движений двух
(жестких) звеньев, их
’’элементов”. См. также
нормативы VDI -2127
Подвижное соединение,
которое может восприми -
мать силы или моменты в на-
правлении, перпендикуляр -
иом направлениям относи-
тельных движений
*э Реализация заданных
относительных движе-
ний или ограничений с
помощью постоянно
применяемых коиструю
гивных единиц или
гибких участков.
Прерывание потока
(прекращение передачи)
силы или момента
5.5
Создание опор для
подвижных звеньев с
возможно меньшими
потерями энергии.
Обеспечение опре-
Направляющая для чисто
поступательного (прямоли— целенной траектории
нейного) движения
Направляющая для чисто
вращательного движения
движения
Рис. 4.70. Понятия, относящиеся к парам звеньев и направляющим (.см. также разд. 7.4)
188
4. Собрание конструкторских каталогов
1. Оставит* и запереть свободы перемещения,
/11 О 0\
например, Sa (m), b =111 11/
\ 1 1 11/
2. Воспринимать нагрузки и силы (моменты)
реакции, например, F = Fm + Fr +....
3. Обеспечивать малость потерь энергии,
например,* ЛГ2; ы, = ы2
Рис. 4.71. Задачи направляющей
4.9.1. Направляющие поступательного движения
Направляющие являются подвижными сое ди*
нениями. С их помощью решаются задачи, во-пер-
вых, обеспечить возможность заданного относи-
тельного движения двух тел и, во-вторых, воспри-
нимать большие нагрузки в определенных запер-
тых направлениях. При этом (третья задача) силы
сопротивления движению в разрешенных направ-
лениях должны быть невелики.
В зависимости от вида допускаемых относи-
тельных движений различают поступательные,
вращательные, винтовые, поступательно-враща-
тельные и другие направляющие. Поступательные
и вращательные направляющие называются также
соответственно прямолинейными направляющи-
ми и подшипниками. Столь различные названия
конструкций, выполняющих близкие функции,
видимо, связаны с тем, что для прямолинейных
направляющих характерно изменение местополо-
жения деталей, в то время как местоположение
подшипников фиксировано. Важнейшие функции,
выполняемые этими направляющими, одинаковы:
делать возможными определенные движения и
восприятие нагрузок (см. рис. 4.71), однако в пер-
вом случае больше бросается в глаза первая из
этих задач, а во втором - вторая. Если вращатель-
ным направляющим (подшипникам) посвящена
обширная литература, содержащая самые разно-
образные сведения, то поступательные направля-
ющие все еще находятся на заднем плане.
Конструктивные варианты прямолинейных
направляющих, содержащиеся в каталогах, взяты
в основном из работы Фелькерса [104], в ней же
следует искать интересующие читателя подроб-
ности. Обзорная классификация направляющих
дана на рис. 4.61. Она проводится по виду относи-
тельного движения (поступательное, вращатель-
ное и т. д.) между направляющим и направляемым
звеном, по форме профиля поверхности, по виду
пары (скольжения, качения, подвес в силовом
поле) и по промежуточным элементам (или по-
лям), расположенным между элементами пары.
Обычно предпочтительны направляющие,
профиль которых, т. е. форма поперечного сече-
ния, состоит из отрезков прямых. Для таких направ-
ляющих на рис. 4.72 приведена классификация, в
основу которой положено число прямолинейных
элементов, составляющих сечение, их взаимное
расположение и тип связи.
Попытка систематического представления
видов пар сделана на рис. 4.73. За основу здесь
взято устройство важнейших видов пар рабочих
поверхностей. В первой группе верхней части
рисунка (поля 1.1-1.3) показаны пары с соприкос-
\ Тип \ связи Число \ элементов профиля \ Геометрически и квазигеометрически действующие профили направляющих Геометрически действующие по всем направлениям плоскости профили направляющих
Центральные Нецентральные Центральные Нецентральные
Замкну* тые Незам- кнутые
1 № 1 2 3 4 5
1 и — — — —
2 2 21 — — —
3 3 4 3 •’ . t Ч К 1 7 £ Л—£ | 4.1 3.2 “у \ 3.3 \ зл 4.4^^ —
4 5 Б —- 5.2 ГГХ’к ’"^53 6.2 6.3 Ь.с 5.5^
6.4
7 8 9 71 91 X J !Л г ,!v V 7.3 9.3^^ 7.4 7.5 9.5
Сопряженные формы не представлены
Рис. 4.72. Формы профиля направляющих с прямо-
линейными контурами сечения
4.9. Подвижные соединения
189
новением по линии (в плоскости сечения). Во
вторую группу входят пары качения (2 Л-2.3), если
только качение возможно; поля 2.1-2.3 соответ-
ствуют парам скольжения из тех же элементов, в
которых качение сделано невозможным. Наконец,
в третью группу входят пары с подвесом в силовом
поле.
В трех других частях рис. 4.73 показаны комби-
нации, состоящие из двух пар рабочих поверхнос-
тей, причем каждая из пар относится к одному из
исходных видов. Поля, представляющие наиболь-
ший интерес, обведены жирной рамкой. В части
1/1 - это пары скольжения с обычными исполне-
ниями промежуточных тел или сред, причем в
полях 1.1/1.1 - для поступательного, а в полях
1.2/1.3 и 1.3/1.2 - для вращательного движения.
Аналогичные утверждения справедливы и для
части 2/2, поля 2.1/2.1, а также 2.2/2.3 и 2.3/2.2 - все
эти пары основаны на принципе качения (реализо-
ванном, например, в подшипниках качения).
В части 1/2 приведены смешанные пары сколь-
жения - качения. В полях 1.2/2.1 - 1.2/2.3 изобра-
1 Пара скольжения (соприкосновение по линии) 2 Пара качения, 2 Пара скольжения (соприкосновение по точке) 3 Подвесная пара
11 1.2 1.3 2.1 2.1 2.2 2.2 2.3 2.3 3.1 11111 г 77^0^77 3.2 3.3
2/2 Пары качения—качения
Другие комбинации пар:
Две элементарные пары
1/1 Пары скольжения—скольжения
Рис. 4.73. Систематика пар скольжения, качения и подвесных пар. Элементы сечений: прямые, дуги окружностей. Наиболее важные
пары обведены жирной рамкой
1/3 Пары скольжения—подвесная.
2/3 Пары качения—подвесная.
3/3 Пары подвесная—подвесная
3. Список принципов к конструкторским каталогам 4.9.1 и 4.9.2
190 4. Собрание конструкторских каталогов
жено условное колесо, в котором пара рабочих
поверхностей с меньшим радиусом (внутренняя)
является фрикционной (скольжения), а с большим
радиусом (внешняя) - парой качения. В полях
1.3/2.1 - 1.3/2.3 изображен условный тормоз, в
котором у фрикционной пары и у качения радиус
одинаков.
1. Прямолинейные направляющне с одинаковой формой профиля
В кат. 4.8.1 содержатся направляющие, про-
филь которых взят из поля 3.2 рис. 4.72, вид пары
варьируется (например, по рис. 4.73). В специаль-
ной части каталога можно выяснить, для решения
каких задач пригодны содержащиеся в нем комби-
нации.
2. Прямолинейные направляющие с различными формами
профиля
В кат. 4.9.2 варьируется (по рис. 4.72) профиль
направляющих 1, 4, 5, 8 из кат. 4.9. 1. Многочислен-
ные новые варианты можно получить, используя
рациональные комбинации рис. 4.73, а также ком-
бинации из трех пар рабочих поверхностей.
1. Цель создания кон- структорского ката- лога 2. Момент применения при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Показать пары звеньев, которые при- меняются (или могут быть примене- ны) в направляющих В предметной фазе конструирования (на этапе геометрически материаль- ной реализации изделия) При разработке направляющих посту- пательного движения, станин, воспри- нимающих большие нормальные силы Прямолинейная направляющая (на- зываемая также направляющей поступательного движения) - это такая направляющая, которая делает возможным только поступательное относительное движение между двумя определенными элементами подвижного соединения По форме профиля направляющей, по виду пары и по характеру передачи сил Кат. 4.9.2, рис. 4.72, 4.73; 104 104
4.9. Подвижные соединения
191
4. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.9.1:
ПРЯМОЛИНЕЙНЫЕ НАПРАВЛЯЮЩИЕ С ОДИНАКОВЫМИ ФОРМАМИ ПРОФИЛЯ
Классификационная часть Главная часть Специальная часть
Форма профиля направ- ляющей из рнс. 4.72 Вид пар Способ передачи сил Пример Трение Обеспечи ваемая точность движе- ния 'Допу- скаемая нагрузкг Чув- ствитель- ность к ударам Демпфи- рование в иормалк ном направ- лении ' Износ Комби- нация пар по рис. 4.73
1 2 3 1 № 1 2 3 4 5 6 7
Поле 3.2 Сколь- жения Непосред- ственное соприко- сновение 1 2 1 Большое Очень высокая Очень высокая (больше* трение) Очень низкая Очень боль- шое (без смазки) Очень высокий 1.1
Твердые проме- жуточные тела 1 2 Среднее Высокая Очень высокая (малое треиие) Умерен- ное Умерен- ный ... высокий
Сколь- жения — сколь- жения Жидкость (статически, динами- чески) 1 '77%^^777777777^ 3 Очень малое Умерен- ная Низкая, зависит от давлен ш Низкая Малое Крайне низкий 1.1 /1.1
Качения — качения Шарики 1 2 4 Малое Низкая Высокая Умеренный 2.1/2.1
Различные тела •' качения (например, цилиндры) 5 Высокая Зависит от формы тела качения
Качения — качения -- качения Два после- довательно соединенны тела качения 1 6 » Низкая Высокая 2.3/2.2/ 2.1
к
х । 1?
Г [олный п в строк* рофи/п/как
Подвесная Магнитное, электриче- ское и др., а также комбиниро ванные поля 5 7 Отсут- ствует Низкая Низкая, зависит от рассто- яния Низкая (в по- кое) , высокая (в дви- жении) Среднее Отсут- ствует 3.1
Сколь- жения — качения Тороидаль- ное колесо 1 2 8 Малое Низкая Высокая Малое Умеренный 1.2/2.1
Колеса различной формы (например, цилиндры) zxxxxxxxxxxx 1 <ЖЖ1z 7777//ЛУ7^777777^ 9 Зависит от формы тела качения
Подвесная - сколь- жения Тела скольжения и силовое поле Z1 10 Большое Низкая Низкая (в по- кое) , высокая (в дви- жении) Большое Высокий 3.1 /1-1
3 2
О
f/' ' * < ' * / * / Z / / / / Полный профиль К< К
Подвесная - качения Тела качения и силовое поле в строке 9 г1 2 £ К 11 Очень малое Низкий 3.2/2.1
п 7 d тгг> роф1 ш
<4- гг> ол МЫЙ П] О. гУт7 <ль ка
в строке 9
192
4. Собрание конструкторских каталогов
5. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.9.2;
ПРЯМОЛИНЕЙНЫЕ НАПРАВЛЯЮЩИЕ С РАЗЛИЧНЫМИ ФОРМАМИ ПРОФИЛЯ
Классификацией-
ио-специальная
часть
Скольжение
Виды пар в прямолинейных направляющих
4.9. Подвижные соединения
193
4.9.2. Направляющие вращательного движения
(подшипники)
Эти направляющие подразделяются (см.
рис. 4.61) в зависимости от видов пар: скольжения,
качения, подвесные и комбинированные. Мы
будем в дальнейшем изложении использовать
название „подшипник” для двух важнейших
видов пар - качения и скольжения.
Подшипники необходимы во всех тех случаях,
когда требуется удерживать на определенных
траекториях подвижные детали по отношению к
покоящимся. При этом подшипники должны
выдерживать действующие нагрузки, а трение и
износ должны оставаться в установленных допу-
стимых пределах (см. также рис. 4.71).
Предлагаемая система каталогов заимствова-
на из диссертации Дикхенера [6]. Ее основная
задача - помочь конструктору подобрать подшип-
ники для машины по возможности быстро и прос-
то. Набор из трех конструкторских каталогов
(4.9.3, 4.9.4, 4.9.5) делает возможным целенаправ-
ленный поиск среди множества различных кон-
структивных форм подшипников.
Необходимо отметить, что упомянутые катало-
ги не освобождают конструктора от решения задач
определения размеров. В связи с этим сохраняет-
ся необходимость использования давно известных
каталогов подшипников качения или руководств
по расчету подшипников скольжения. Наиболее
естественным представляется такой порядок
работы, когда вначале по конструкторскому ката-
логу выбирается тип подшипника, а затем по
обычным (фирменным) каталогам подшипников
качения определяются конкретные конструктив-
ные формы, размеры и т. д.
1. К обзорному каталогу: Подшипники
Представление всего спектра конструкций,
объединяемых названием „подшипники”, осуще-
ствляется на двух уровнях. На первом представле-
ны все мыслимые базовые формы подшипников.
На втором уровне - детального каталога - помеща-
ются варианты базовых форм порознь - для под-
шипников скольжения (кат. 4.9.4) и подшипников
качения (кат. 4.9.5) [97,103,99].
Обзорный каталог 4.9.3 разделяет всю совокуп-
ность „подшипников” на два множества, опреде-
ляемых характером относительного движения
(скольжение или качение) вкладыша подшипника
и цапфы (или промежуточного слоя). Более мел-
кое подразделение проводится d зависимости от
агрегатного состояния промежуточного слоя. Он
может быть твердым или текучим (жидким, газо-
образным), а может и вовсе отсутствовать.
Третий уровень подразделения для подшипни-
ков качения связан с геометрической формой
твердого промежуточного слоя - тела качения.
При этом геометрия тела качения может быть
определена (следуя классификации Куна [38, 105])
по рис. 4.74 и 4.75. Для тела качения в поле 4.1 рис 4.75
[22, 23] известен в настоящее время лишь один
вариант применения - в качательном плавающем
подшипнике. Применение тел качения из полей
3.2 и 4.2 вообще неизвестны (по крайней мере, в
подшипниках качения), они представляют собой
только теоретически возможный вариант.
Для подшипников скольжения с текучим
промежуточным слоем третий столбец классифи-
кационной части содержит их подразделение в
Рис. 4.74. Аналитическая фигура, используемая при классифи-
кации тел качения согласно Куну. Штрихпунктирное изображе-
ние относится к случаю та < 0:
i — постоянная длина
Конические
ролики |
(КР) ।
УГОЛ Е
Радиусу
ролики
(ССР)
Шарики ।
(с < 1/2)|
5-1 Цилин- '
дрические I
ролики I
(какв1Л.)|
<.1 Симме- I
гричные сед;
ловидные । Г
’’Цилин- I
дрические ।
ролики ।______
(ЦР) (в том । ~[_
числе иголь-
чатые) |
Симметрич-
ные бочко-!
образные 1 (
ролики |
(СБР) ।
№
2
2.2 Несим-1
метричные I
бочкообраз-
ные ролики
НРБ ।
3-2 Несим- |
^•2 Несим- I
метричные |
седловид- ।
ные ролики
5 2 Кони- *
ческиеро- I
лики |
(как в 1.2)|
Рис. 4.75. Классификация тел качения согласно Куну [38] (обо-
значения, как на рис. 4.74)
зависимости от вида промежуточного элемента
(газ или жидкость). Для всех видов твердого про-
межуточного слоя используется общее наименова-
ние „твердый смазочный материал”.
В главной части каталога приведены 13 типов
подшипников - результат трехуровневой класси-
фикации. Здесь содержатся общепринятые наиме-
нования подшипников и примеры конструктивных
реализаций (в виде эскизов).
Специальная часть содержит семь признаков.
Первые пять из них делают возможным предвари-
тельный сравнительный анализ:
допустимая нагрузка;
коэффициент трения;
допустимая окружная скорость;
13 — 2317
194
4. Собрание конструкторских каталогов
максимальная рабочая температура;
восприятие кратковременных ударных нагру-
зок.
Все они даны как качественные признаки
(кроме признака 4, рабочая температура), что
позволяет проводить сравнительную оценку типов
подшипников. Завершают специальную часть
признаки в столбцах 6 и 7, содержащие указания
на важнейшие стандарты и нормативы.
2. Список принципов к конструкторскому каталогу 4.9.3
1. Цель создания кон- структорского ката- лога 2. Момент примене- ния при методичес- ком конструирова- нии 3. Использование ката- лога 4. Определения ос- новных понятий 5. Классификация в ка- талоге 6. Ссылки на t 'ианты 7. Примеры Дать обзорную классификацию типов подшипников путем введения пяти базовых . >нструктивных форм под- шипников скольжения и восьми базовых конструктивных форм под- шипников качения В предметной фазе конструирования С помощью каталога осуществляется первоначальный обзор всей совокуп- ности (теоретически) возможных кон- структивных форм подшипников с целью предварительного выбора одной или нескольких базовых форм. На следующей стадии производится конкретизация выбранного типа подшипника с помощью детальных каталогов .Додшипники скольжения” (кат. 4.9.4) и .Додшипники качения” (кат. 4.9.5) Подшипники — это такие детали машин, которые обеспечивают воз- можность вращательного относитель- ного движения деталей по опреде- ленным траекториям. Подшипником должны выдерживаться действующие нагрузки так, чтобы трение и износ оставались в установленных допусти- мых пределах Подшипники (называемые также направляющими вращательного дви- жения) классифицируются (первый признак) по характеру относительного движения между вкладышем подшип- ника и цапфой (скольжение и каче- ние), затем (второй признак) — по агрегатному состоянию промежуточ- ного слоя. Третий классификацион- ный признак детализирует вид или форму промежуточного слоя. Для подшипников скольжения он может быть газообразным, жидким, твердым смазочным материалом, вовсе отсут- ствовать; кроме того, функцию проме- жуточного слоя может выполнять магнитное поле. Для подшипников качения приведены теоретически возможные формы тел качения (см. рис. 4.75), на основе которых образует- ся соответствующий тип подшипника Кат. 4.9.4 содержит 14 вариантов под- шипников скольжения. Кат. 4.9.5 со- держит 23 варианта подшипников ка- чения
4.9. Подвижные соединения
195
3. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.9.3:
НАПРАВЛЯЮЩИЕ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ, ПОДШИПНИКИ (ОБЗОРНЫЙ КАТАЛОГ)
Классификационная
часть;
Главная часть
Употре- |
Относи- Несущая
тельное промежуточная
Дщ1е'е~ сРеда________бительное
поверх-
ностеи состоя-
ние
Форма,
вид
наиме-
нование
Эскиз
Допусти-
мая
нагрузка
Коэффициент
трения
Ц
Специальная часть
Допусти-
мая
окружная
скорость
2
Газ
Газовый
тодшипник
Низ- Bbicot
кая кая
bit
Очень
низ-1 ж ,
кий ний кий
3
Макси-
мальная
рабочая
темпера
тура,
_[°С1
4
Сред-co-t Ниэ- ВЫС°‘
нии кая кая
1
Текучее
Сколь-
жение
Жид-
кость
Жидкост-
ной
подшип-
ник
Твердый
смазоч-
Гвердое ный
материал
(ТСМ)
Подшип-
ник
с ТСМ
Отсутствует
Подшип-
ник
без
смазки
Магнит-
ное
поле
Магнит-
ный
подшип-
ник
х
и
S
ч
о
Очень Очень Нуле- ВысЛОчень Очень
--------------низкая высо—
_________________________Сре/ькая_
няя
Воспри-
ятие
кратко-
времен-
ных
ударных
нагрузок
Стан-
дарты,
норма-
тивы
Хорошее
6
Область
Применения
(примеры)
7
Космическая
техника,
приборы,
зысокооборотные
шлифовальные
шпиндели,
реакторы
Шарики
Иглы
(ИР)
Качение
Твердое
РПсКР
СБР
НБР
ССР
НСР
Шарико-
подшип
ник
(ШП)
Рол и к сь-
под шип
ник
(РП) с ЦР
Игольча-
тый
подшип-
ник
(ИП)
РП с БР
Уп.сфер.
РП
(РП с СР)
(Отсут
ствует)
низкая высо- вой
_4_СредЛа«_____Низ-22111
кий
Данные отсутствуют
Неизвестен
Z77/Z.
zvjrtv/
ж——ж
JL—dr
1
няя
- 22
Г -
1
s |.
D
&
. • йй й
г
‘1
1
100
(250)
170
(800)
280
(690)
450
120
(270)
150
(300)
120
120
200
(300)
120
Очень
хорошее
Среднее
и
Хорошее
ДИН: Станки, машины
тетрадь автотракторные
126 ДВС, турбины,
2201. 2202. тяжелые машины
Землеройно- транспортные
2203, машины.
2204, эксцентрики,
2252, радары
2541, Ножовочные стан ки, автомобили,
2543 роликовые цепи,
рельсовый |
транспорт I
Навигационные и
измерительные
приборы,
прецизионные
инструменты
Среднее..
плохое
Среднее
ДИН 615.
625.626.
628, 630.
711, 715.
42966
722,
5412.
43200.
43283
Хорошее
и
С/Х машины,
станки, электро-
инструмент,
аьтомобили
617.
618.
5405.
5429
720
Электродвига-
тели, рельсовый
транспорт,
машины
"Опоры шеек
коленчатого вал;
порши, пальцев,
передачи, опор-
ные и контакт
ные ролики,
толкатели
Автомобили.
клети прокатные
станов,
рельсовый
транспорт,
шпиндели
станков
635
Тяжелые опорные
и направляющие
ролики,суда,
прокатные
станы,
виброгрохоты
728 Подъемные краны, суда, червячные передачи, тяжелые машины
Качательные подшипники
— Неизвестны
196 4. Собрание конструкторских каталогов
4. Подшипники скольжения
Степень абстракции детального каталога
подшипников скольжения довольно высока. В
связи с этим при проведении классификации мы
сознательно отказались от учета направления
вектора нагрузки. Все конструктивные формы,
содержащиеся в главной части каталога, могут
быть использованы и как радиальные, и как упор-
ные, и как комбинированные (радиально-упорные)
подшипники (см. классификационный признак 1).
Зато совершенно необходимым оказался учет
различий между статическими и динамическими
подшипниками скольжения. Статические под-
шипники работают при условии создания давле-
ния внешним воздействием, т. е. необходимый
слой смазки создается действием извне. В проти-
воположность этому, при динамическом, или
внутреннем создании давления, несущий слой
смазки образуется только во время относительно-
го движения вкладыша подшипника и цапфы.
Разделение подшипников по принципу внешнего
или внутреннего создания давления (классифика-
ционный признак 2) образует первый уровень клас-
сификации (сюда не входит единственный вид
подшипника, не имеющий промежуточного слоя -
подшипник, работающий без смазки).
Следует добавить, что возможны также комби-
нации внешнего и внутреннего способов создания
рабочего давления. Эти так называемые гибрид-
ные подшипники с успехом применяются уже
многие годы. Они могут снабжаться, например,
гидростатическим устройством для запуска. Тре-
тий и четвертый классификационные признаки
характеризуют несущий промежуточный слой. В
первую очередь указано его агрегатное состояние
(третий признак), а затем - более мелкие разно-
видности (четвертый признак). Среди последних
находятся газы, вода, жидкие масла, ферромагнит-
ная суспензия, электропроводная жидкость,
консистентные масла, твердые смазочные мате-
риалы (графит, MoS2 и т. д.) и магнитное поле. В
число этих разновидностей входят также консис-
тентные масла и электропроводная жидкость в
статических подшипниках. Практическое исполь-
зование этих возможностей до настоящего момен-
та неизвестно, но в разработанной системе класси-
фикации они появляются вполне закономерно (в
первую очередь это относится к консистентным
маслам).
В главной части детального каталога „Под-
шипники скольжения” для типов подшипников,
найденных на основе описанной классификации,
приведено употребительное (торговое) наименова-
ние и эскиз, поясняющий принцип устройства под-
шипника.
В связи с тем, что подробное обсуждение
восьми специальных признаков потребовало бы
слишком много места, мы остановимся лишь на
некоторых из них. Описание всех признаков,
имеющих отношение к каталогам подшипников,
можно найти в [6].
Удельная нагрузка является одним из важней-
ших признаков при оценке подшипника скольже-
ния. Она, по определению, равна нагрузке, прихо-
дящейся на единицу площади поверхности
подшипника (например, см2). Предельные допусти-
мые значения зависят как от свойств материала
подшипника, так и от вязкости применяемого
смазочного материала. Для газовых подшипников
основные сведения по грузоподъемности и жест-
кости можно найти в [87-89]. В каталоге исполь-
зован масштаб, с помощью которого диапазон
нагрузок на подшипник подразделен на 6 уровней.
Допустимая температура. Диапазон допусти-
мых температур всегда необходимо учитывать при
выборе подходящего подшипника. Область рабо-
чих значений дополнена предельными значени-
ями (в скобках), которые в отдельных случаях
являются допустимыми для данного типа под-
шипников (см. данные в приведенной литературе).
Показатель стоимости. При окончательном
выборе подшипника из нескольких вариантов
принимается в расчет также их стоимость. Дать
абсолютные цифры стоимости для приведенных в
каталоге типов подшипников невозможно по
причине высокой степени абстракции представле-
ния материала. Указанный в каталоге показатель
стоимости может быть использован при сравни-
тельных оценках. В качестве исходного для срав-
нения взят соответствующий показатель простей-
шего легкодоступного подшипника (гидродинами-
ческий подшипник, кат. 4.9.4, строка 3).
Указанный в каталоге интервал значений учиты-
вает различные, возможно, более дорогие кон-
структивные разновидности соответствующего
типа подшипников.
Заметим здесь же, что большую пользу при
оценке стоимости отдельных функциональных
единиц или проектов в целом могут принести ка-
талоги относительных стоимостей, в особенности
предлагаемые Эрленшпилем и его коллегами [1.1,
4.1,16.1,16.2, 83.1].
Литература, использованная для составления
специальной части кат. 4.9.4 и 4.9.5, приведена в
п. 4.9.3. Источники LI - L9 относятся к подшипни-
кам скольжения, остальные - к подшипникам ка-
чения.
4.9. Подвижные соединения
197
5. Список принципов к конструкторскому каталогу 4.9.4
1. Цель создания кон- структорского ката- лога 2. Момент примене- ния при методичес- ком конструирова- нии 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Детализация базовых конструктивных' форм подшипников скольжения, при- веденных в кат. 4.9.3, ориентирован- ная на возможности применения В предметной фазе конструирования При выборе подшипников скольже- ния. Каталог упрощает и ускоряет этот выбор, так как включает в себя важнейшие как практически реализо- ванные, так и теоретически возмож- ные конструктивные разновидности подшипников. Делается возможным совместное рассмотрение всех различ- ных исполнений подшипников сколь- жения Подшипники скольжения — это такие подшипники (см. кат. 4.9.3), в которых относительное движение между вкла- дышем подшипника и цапфой (или промежуточным слоем) является скольжением Классификация проводится сначала по способу создания несущей силы (давления): динамически или стати- чески, особый случай — подшипники без смазки (строка 7). Затем подшип- ники подразделяются по агрегатному состоянию промежуточного слоя (газо- образный, жидкий, твердый, отсут- ствующий) и по его конкретному виду (газ, вода, жидкое масло, ферромагнит- ная суспензия, электропроводная жид- кость, твердый смазочный материал и магнитное поле). Воспринимаемая на- грузка для всех вариантов может быть радиальной, осевой или комбинирован- ной. На основе приведенной класси-. фикации получаются две дополни- тельные разновидности подшипников (гидростатический с консистентным маслом, строка 12, и магнитогидроди-, намический, строка 13), которые на данный момент отсутствуют на рынке подшипников [L1-L9]
198
4. Собрание конструкторских каталогов
6. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.9.4 _
ПОДШИПНИКИ СКОЛЬЖЕНИЯ (ДЕТАЛЬНЫЙ КАТАЛОГ)
Классификационная часть
Главная часть
Специальная часть
2
Несущая
промежуточ-
среда
1
Агре-
гатное
состо-
яние
3
Вид
4
Эскиз
Коэф
тре-
ния
110*’]
Окружная
скорость
(диапазон
возможн.
значений]
Iм/с [
Удельная
нагрузка
сила
площадь
1
№
1
3
Г азо-
образ-
ное
Газ
Вода
Частое
ревер-
сирова-
ние
4
Внут-
реннее
(динами
чески)
Жид-
кое
Масло
Пла-
стичная
смазка
Ради-
альное,
осевое,
комби-
Твер-
ниро-
ванное
дое
Допуск,
т-ра
окруж.
среды,
°C
5
Пока-
затель
стои-
мо-
сти
6
Примеры
применения.
Примечания
7
^>ёрро- '
магнит-
ная
суспен-
зия
Аэро-
динами-
ческий
подшип-
ник
Гидро ди-
намиче-
ский
водяной
подтип-
ник
Гидроди-
намиче-
ский
подшип-
ник
Гидро-
данам,
подшип.
с пласт,
смазкой
Магнито-
вязкост-
ный
подшип-
ник
1...5
Высокая
О 110 1»
Низкая
-100... 200
ю’...ю:
Фарм. и пищ.
промышлен.,
реакторы,
космическая
техни ка,
турбо машины
тем
Подшип-
ник
с ТСМ
Отсутствует
Внут-
реннее
(динами -
чески)
.Маг-
нитное
поле
Газо-
образ-
ное
Газ
Вода
2
0,8-10
(100)
5...10’
119)
1L9)
5...1Q
(12)
1...10
1L2)
Высокая
0...80
° 1 10 1®^9)^ИЗКаЯ
19)
Высокая
О I 10 100 Низкая
[L9j
Ч19)
Нет
Высокая
0^ Г 10 А^Низкдя
Высокая
° 1 10 ?12)Низхая(12)
-201-50)...
100(250)
-20... 100
1...Ю2
Ю2..1О3
Подводные
насосы
и турбины
Прок, станы,
пар. турбины,
электродви-
гатели, суд.
подшипники,
гидрогене-
раторы
♦Только при
использовании
синтетических
масел
Внешнее
(стати-
чески)
Жид-
кое
Подшип-
ник
без
смазки
Маг нити. “
подшип-
ник с пос
тоянными
магии- /
тами
Аэроста-
тический
подшип-
ник
I идро-
статиче-
ский
водяной
подшип-
ник
50...300
IL4)
114)
5 И m|s N S s и
ids sh s к и s
1 — ВХОДНОЙ'
дроссель,
2 — камера
высокого
давления,
3 — насосы
9
10
(15)
0.5...1.5
(19)
20-200
Высокая
° 1 10 W?. .Низкая
-100...150
1800)
1...101
Высокая
0 1 i и!о „
________113г*ИЗКаЯ( L 3)
-250—150
(690)
На вязкость
влияет
внешнее
магнитное
поле_______
Печные ма-
нипуляторы,
дорожные
реактивные
н землеройно-
транспортные
машины, неф-
те и газопров
двигатели,
конвертеры
ГГНГ
(151,
(L21|
° 1
Высокая
Низкая...
il5I
-200...450
Высокая
ir13*3^)
Высокая
Да
-100... 200
0...80
Гидроста-
тический
подшип-
ник
Гидрост.
Пластин- подшип-
ннк с
Масло
11
(151
ная
смазка
Элект-
ропро-
водная
жид-
кость
смазкой
Высокая
0.5...1.5
(0,004)
0 I ю юо
!191»и3кая119!
-201-50).-.
100(250)
[15)
Магнито-
гидр о-
динами-
ческий
подтип-
ник
Данные отсутствуют
Магнит
ное
поле
Высокая
Электро
магнит-
ный
подшип-
ник
Да
Низкая
IL81
^Работа в усло-
виях гранично*
„1 умения-----------
[Аэронавигаци-
онные приборы
и гироскопы
Действие поля,
не зависит от
агрегатного
состояния
пром, среды
10...ТО
Фармацевтич.
и пищ. пром.,
реакторы,
турбо машины
Подводные на-
сосы, турбины
Станки^,
антенны,
телескопы
♦Только при
использовании
синтетических
масел
Пока не нашли
практического
применения
Давление от
внешнего
магнитного
поля
-200... 450
Точные
машины
4.9. Подвижные"соединения
199
7. Подшипники качения
В качестве первого классификационного
признака выбрано преимущественное направле-
ние восприятия нагрузок (радиальное, осевое, или
радиальное и осевое) [6].
Второй классификационный признак связан с
формой тела качения. Следует, правда, признать-
ся, что для простоты картины приведены только те
геометрические формы, для которых в главной
части каталога можно было поместить существу-
ющие в настоящее время реализации.
Третий классификационный признак подраз-
деляет подшипники по числу рядов тел качения.
Поскольку многорядные подшипники во многих
отношениях ведут себя так же как однорядные,
этот признак соответствует более тонкой класси-
фикации.
На основе трехуровневой классификации полу-
чаются 23 конструктивные разновидности. При
этом комбинации отдельных разновидностей
(например, упорного и радиального роликовых
подшипников двустороннего действия) не включе-
ны в каталог в качестве самостоятельной разно-
видности (осевого поворотного подшипника).
В главной части для каждого из подшипников
приведено легко понятное наименование и эскиз,
поясняющий принцип его устройства, а кроме то-
го, порядковые номера разновидностей.
В специальную часть входят 12 существенных
признаков, связанных с различными свойствами
подшипников. Здесь мы остановимся лишь на
некоторых из этих признаков.
Частота вращения и окружная скорость. Макси-
мальная или минимальная частота вращения,
реализуемые определенным типом подшипника,
являются одним из важнейших критериев при
выборе подходящего подшипника. То же самое
справедливо и для грузоподъемности.
Грузоподъемность. Приведенные цифры часто-
ты вращения и грузоподъемности находятся, как
правило, в зависимости друг от друга: минималь-
ной частоте вращения соответствует максималь-
ная грузоподъемность, и наоборот. В отдельных
случаях эта зависимость может нарушаться, напри-
мер вследствие изменения размеров подшипника,
и тогда приводимые значения величин отмечают-
ся в каталоге звездочкой (*).
Необходимо добавить также, что приведенные
значения частоты вращения и грузоподъемности
имеют силу только для „нормальных” подшипни-
ков. В различных конструктивных исполнениях
одного и того же типа подшипников эти значения
могут изменяться, умножаясь на коэффициент от
0,5 до 2,0.
Коэффициент и момент трения. Эти понятия
используются здесь для обозначения сопротивле-
ния движению подшипников в целом. Оно скла-
дывается из трения смазочнс о материала и тре-
ния скольжения или качения. Коэффициент
трения наиболее наглядно характеризует общее
сопротивление движению, будучи коэффициентом
пропорциональности в выражении для силы тре-
ния. Приведенные значения имеют силу для
надлежащим образом смазанных подшипников
при средних значениях нагрузки и частоты враще-
ния.
Показатель стоимости. Данные по стоимости,
справедливые во всех случаях, привести в катало-
ге оказалось невозможным. В связи с этим была
выбрана графическая форма представления,
показывающая зависимость относительного пока-
зателя стоимости от диаметра подшипника. За
единицу принимается стоимость радиального
шарикового подшипника одностороннего дей-
ствия без канавки для комплектования шариками
(примерно того же типоразмера). На рис. 4.76-4.79
по оси ординат отложен относительный показа-
тель стоимости, а по оси абсцисс - внутренний
диаметр подшипника.
Литература по подшипникам качения приведе-
на в п. 4.9.3 под номерами [L10-L31].
8. Список принципов к конструкторскому каталогу 4.9.5
1,Цель создания кон- структорского ката- лога 2. Момент примене- ния при методичес- ком конструирова- нии 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры - - Детализация базовых конструктивных форм подшипников качения, приве- денных в кат. 4.9.3, ориентированная на возможности применения В предметной фазе конструирования Настоящий каталог, расширенный по сравнению с кат. 4.9.3, содержит все разновидности подшипников каче- ния, производимые в настоящее время. Две разновидности (строки 1 и 2) с необходимостью появляются в каталоге, исходя из имеющейся клас- сификации, но не содержатся на данный момент в каталогах фирм-из- 1 'товителей. Приведенные 14 специальных призна- ков делают возможным быстрый и целенаправленный выбор одной или нескольких разновидностей подшипнйков из всех имеющихся Подшипники качения — это такие подшипники (см. кат. 4.9.3), з которых относительное движение между наружным (а также внутренним) кольцом и промежуточным слоем (телом качения) является качением По направлению воспринимаемых нагрузок (преимущественно радиаль- ное, преимущественно осевое, ради- альное и осевое), и по форме тела качения (шарики, цилиндрические ролики, игольчатые ролики, коничес- кие ролики, симметричные и несим- метричные бочкообразные ролики). Вошедшие в обзорный каталог допол- нительные формы тел качения (сим- метричные и несимметричные седло- видные ролики) не были введены в классификационную часть настояще- го каталога. Указания по примене- нию подобных подшипников могли бы бьг ’аны только на основе теоре- тических соображений, поскольку на данный момент неизвестны их кон- структивные реализации или вариан- ты применения [L10-L31]
13’
200
4. Собрание конструкторских каталогов
9. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.9.5! ПОДШИПНИКИ КАЧЕНИЯ
Классификационная часть
Главная часть
Специальная часть
Направление восприятия нагрузки Форма тела качения Число рядов тел качения Наименование Эскиз Внутренний диаметр <2, мм Наружный диаметр D, мм Ширина В (Высота Я), мм — Динамичес- кая грузо- подъем- ность С, кН
1 2 3 1 2 № 1 2 3 4
Преимуще- ственно радиальное Шарики 1 Рад. ШП, одноряд- ные с канавками для комплекто- вания шариками 1 По запросу!
2 Рад. ШП, двухряд- ные с канавками для комплекто- вания шариками 2 10 1113.261 100 [1231 30 [113.261 180 [1231 14 [L11261 46 (L23) 6550 [H3ij 132 [L231I
Роли- ки цр 1 Рад. РП с ЦР, однорядные 3 4 1124) 600 ню) 12 (L24) 890 [ио] 4 IL24 ] 184 [L101 1,250 [L241 4031 [Lioii
> 2 Рад. РП с ЦР, > 2-рядные 5 4 20 [ив] 630 (из) 42 [не] 850 [из] 30 [L16 1 218 [из) 35.5 [L161 3800 [mil
ИР 1 Рад. ИП, однорядные яшл Z//ZZ 5 5 1113.15) 380 15 [L13.15 1 480 12 1113,15) 100 3,4 [L151| 880 ,
I
>2 Рад. ИП, > 2-рядные 6 12 (из) 95 iu3.i5] 24 [L151 130 [113.151 20 [И5 1 63 1113,151 11,2 ' [L151I 154
—.J
Преимуще- ственно осевое Шарики 1 Уп. ШП односто- роннего действия Я*—=! 1 7 3 [L281 530 [113,26] 8 [128] 640 [из. 261 3.5 [L281 85 [L13.261 0,780 [128]| 500 !L26)|
1 Уп.-рад. ШП одно- стороннего дейст- вия л/я 8 100 ! L131 500 135 [ИЗ] 600 25 1113) 80 64 I 1И311
530 1
2 Уп. ШП двусто- роннего действия 9 10 IL13.261 220 (1221 32 [L13.261 300 U221 22 (из. 261 110 (1221 12.7 uni 26,0 [122)1
( J1
С я
2 Уп.-рад. ШП дву- стороннего дейст- вия 10 30 1113.27) 260 IL221 55 и 13,27) 400 [L22] 32 [113.271 164 [122] ш 1 320, [из]|
Роли- ки ЦР 1 Уп. цилиндричес- кие РП с ЦР одно- стороннего действ. 11 10 IL201 600 (115) 22 [ио] 800 (us) 6,5 (1201 160 [И5 1 7,110 [L201| 4850 [И51|
ои СИ т
ИР 1 Уп.ИП 12 5 (120) 240 13 [L201 300 3.1 IL20J 24 2.420 I IL20j| 232 ।
МО 7//ZZ//I
КР 1 Уп. РП с КР 13 16,129 ИЗО) 1219,2 41,275 ИЗО] 1524 12,7 , , (130) 136,525 42.040 1 I L301I 1652,080 1
Радиальное и осевое Шарики 1 Рад.-уп. ШП, одно- рядные неразъем- ные 14 1 (L 21.24,28) 600 1113.26) 3 [L21,24,28) 730 [ИЗ. 26) 1,5 1124.281 60 1113,261 0,030 [L24]| 280 И2611
1 Рад.-уп. ШП, одно- рядные разъемные [0 1 15 1.5 (128) 170 5 [L281 360 (126) 2 [1281 72 (126) 0,100 [L28]| 275 [L26)|
1 Радгуп. ШП, одно- рядные неразъем- ные со скосом на наружном кольце |«| 16 1 IL241 30 1113.22.23) 4.25 1124) 62 [L13.22.23] 22 (1241 16 1113) 0,032 [L24)| 5,6 [из)|
L-. . j
2 Рад.-уп. ШП двухрядные 17 10 (1221 110 [ИЗ. 261 30 IL22J 240 (ИХ 261 14 (122) 92,1 (Н31 7,35 I [ПЭР 255 |
2 Сферические ШП /ZZZ// •те WM 18 3 (L28) 150 1113) 10 (128) 270 нт 4 (1281 54 [из] 0,450 [L28]|
Л- .X 140 lii3)|
Роли- ки КР 1 Рад.-уп. РП с КР, однорядные 19 9,525 ИЗО) 1701.8 31,991 It 301 2070.099 10,008 (1301 139,7 7.565 IL3Sl| 5790 j
2 Рад.-уп. РП с КР, двухрядные 20 По запросу
НБР 1 Уп.-рад. сфери- ческие РП 1 "j 21 60 (126) 900 130 (1261 1520 42 11261 372 280 1ИЗ)1 19300 (U611
СВР 1 РПсБР J-—L 22 20 [ИЗ] 280 47 [ИЗ] 500 14 IL131 80 17,3 (L131 1080
2 Сферические РП •А—L. сл 23 20 [И3.261 1180 [из] 52 [L13.26] 1580 [из! 15 [1261 462 (И31 26,5 [1261 17600 (U31
ИП — игольчатый, РП — роликовый, ШП — шариковый подшипники
4.9. Подвижные соединения
201
(ДЕТАЛЬНЫЙ КАТАЛОГ)
1 Статическая 1 грузоподъ- I емность С, 1 кН Частота вращения nf мин" 1 Максима- льный до- пустимый угол перекоса Угол контакта Коэф- фици- ент тре- ния ц , 10"1 Отсут- ствие потре- бности в уходе Пока- затель стой* мости Стандар- ты, нор- мативы Эксплуа- тационные ограниче- ния Примеры применения. Примечания **
1 4 5 6 7 8 9 10 11 12 13
По запросу! Убывающее значение, заменяются на № 14
1 5,6 п.13) [ 173 25000 (ИЗ) • 3600 0 (ИЗ) 0 (1131 1.5 (126) Нет См. ди- аграм- мы: Отно- ситель- ный пока- затель стои- мости в зави- снмос- ги от внут- ренне- го диа- метра подши- пника ДИН 625 лист 3 ' Fa- 0.3Fr (125) Убывающее значение. Такие же по- дшипники, но без канавок для ком плектования в разработке f L13]
J 0,76 (124] । 4848 [по] «24000 (из) 270 (по) 7' (L131 0 (1131 1,1 (1261 ДИН 5412, ли- сты 1,2,3 F.-0 Передачи, электродвигатели, коле- сные подшипники рельсового под- вижного состава, шпиндели стан- ков, опорные и рабочие валки
। 28 (U61 | 6000 (из! 15000 (ИЗ) 700 6' (1161 0 (ИЗ) 1.1 (1261 (иб.Ш Да (П51 ДИН 5412,ли- сты 4. 9 Fa-0
! 2,38 (115) 1 1510 32000 1115) 950 6' (1201 0 (1131 2,0 (1261 ДИН 617 Fe-0 Типографские машины, подъемно- транспортная техника. станки .ле- тательные аппараты деревообраба- тывающие машины, сельскохозяй- ственные машины, текстильные машины, судостроение, автомоби- лестроение
1 10,04 (115) 1 233 • 23000 (L15] 3600 0 (ПЗ) 0 (115) 2.5 (126) Нет Fa=0
| 11,2 Н13) 1 3250 (126) . 9500 (126) 530 0 1113.25] 90* (112.26) 1.3 (126) ДИН 711 листы 1,3 £-0 Подъемные краны, станки
143 | [ИЗ) 2200 3800 (ИЗ) 800 0 (1251 60’ (113.261 2.0 (1121 Fr-0 Высокооборотные шпиндели станков Необходимо предвар. напряжение
j 19,6 (из) | 1и20 11221 6700 (из) 800 IL 22) 0 1125.26) 90* (112.26) 1,3 (1261 ДИН 715 Fr=0 Станкостроение Особые подшипники: самоустана- вливающиеся, с шаровидными корпусами
| 21,6 (из) I 1510 [1221 9500 (из) 1300 (1221 0 (113,251 60’ (112,13.27) 2.4 (1121 Fr =0 Высокооборотные шпиндели стан- ков, точные подшипники, стод сверлильного станка: Необходимо предварительное напряжение
| 7,55 11201 110800 (П5) 15500 иго) 330 (1151 0 (1251 90’ (1201 4.0 (1201 ДИН 722 ^0 Эксцентриковые прессы, станки для глубокого сверления, сушиль- ные барабаны, шпиндели станков
! 2,17 1 (1201 j 974 25000 (1 20) 900 0 (113.251 90* (L201 4,0 (1201 ДИН 5405, лист 2 Fr=0 Сельхозмашины, автомобилестро- ение, подъемно-транспортная тех- ника
18500 (1301 580 4' ИЗО) Fr-0 Автомобилестроение, опорные ва- лки прокатной клети, станки для глубокого сверления,экструдеры
I 0,01 (L241 530 (126) 54 000 (1221 » 900 (113,261 16' (112 1 5’-15’ (112) 1.5 [1261 Да 1113.26) ДИН 625 листы 1, 2 Отсутст- вует Все области техники
1 2,12 (ИЗ) I 375 (1261 « 90000 (из) 1900 (126! ю' (125) 15*-40’ (112.13) 2.0 [1261 Нет ДИН 628 листы 1, 2 Только одностор» осевые силы Оптические приборы, летательные аппараты, станки
| 0,012 (124) | 2,24 (из) «40000 игп 13000 (из) ю' (1131 60’ (112.241 1.5 (1261 ДИН 615 Только одностор. осевые силы Небольшие электрические прибо- ры , компасы, электрогенераторы
| 5,3 1 (ИЗ) | 335 24000 (ИЗ) 2600 0 (113.25) 25’-45’ (ИЗ. 221 2.4 (126) ДИН 628 лист 1 Отсутст- вует Сельхозмашины, клетн прокат- ных станов
1 0.52 1 (НЗ) | 114 • 36000 , , (1131 2600 4* (ИЗ) 5*-20’ (112) 1.0 (126) Да (L 17,261 ДИН 630 листы 1, 2 Отсутст- вует Текстильные машины, транспорт- ные приспособления, простые де- ревообрабатывающие машины, сельхозмашины .—
1 1 (ИЗ) I 900 « 21000 (1301 . 400 4' (1121 10’-30’ (112.131 1,8 (126) Нет ДИН 720 Только одностор» осевые силы Наземный транспорт, судострое- ние, сельхозмашины, прокатные станы, газовые турбины, станки
По запросу! Отсутст- вует Колесные подшипники рельсового подвижного состава, шпинделей станков
1 490 (122) 155000 (126) 2700 - (1221 160 11261 0,5’(3*) (112.131 50’ (112) 1.8 [126] Нет ДИН 728, «сты 1, 2 Fr<0,55Fa (1251 Подъемные краны, судостроения, мощные червячные редукторы
1 11,6 I 1П31 1080 7500 (ИЗ) 670 4* (113.25) 0 (1121 1.1 (L261 ДИН 635. лист 1 Отсутст- вует Вагонетки, направляющие ролики Для мощных ударных нагрузок
1 19,3 1 (113) 128500 10000 (ИЗ) 180 0.5’(3’1 [112.13] 4’- 18* (1121 1,8 (1261 ДИН 635 лист 2 Отсутст- вует Гребные валы, вибрационный гро- хот, вибраторы, опорные и направ- ляющие ролики камнедробилки
/'о-осевая сила; F'r радиальная сила
Имеют силу не для приведенных значений грузоподъемности.
Примечания к №№ каталога см. на следующей странице.
202
4. Собрание конструкторских каталогов
Примечания к конструкторскому каталогу 4.9.5.
К №№ 3 и 4. Миниатюрные подшипники: d - 4... 10 мм; нормальные подшипники: d > 10 мм; особые подшипники, допускающие
осевую нагрузку (Fa < 0,35 Fr), [ ,г. 13]; цилиндрические РП с ненулевым углом контакта (замена для № 15) (L13].
К №№ 5 и 6. Все значения относятся к комплектным подшипникам.
К № 7. Миниатюрные подшипники: d — 3.. .9 мм; нормальные подшипники: d > 9 мм; особые подшипники: самоустанавливающиеся.
К № 11. При большой ширине сечения вместо одного длинного несколько коротких роликов.
К № 12. Малая высота, все значения относятся к комплектным подшипникам с противоположным диском.
К № 14. Миниатюрные подшипники: d - 1.. .10 мм; нормальные подшипники: d > 10 мм поставляются также с пластмассовыми сепа-
раторами (стеклянными шариками) [L 29].
К № 15. Миниатюрные подшипники: d = 1,5.. .12 мм; нормальные подшипники: d > 10 мм; особые формы: четырехточечный подшип-
ник. При больших частотах вращения может быть необходимо предварительное напряжение.
К № 16. Миниатюрные подшипники: 1.. .3 мм; нормальные подшипники: d > 3 мм, поставляются также с пластмассовыми сепа-
раторами LL131.
К tr 17. Особые формы: для больших переменных осевых сил (составное внутреннее кольцо), комбинированный радиально-упорный
подшипник как точечный подшипник.
К № 18. Миниатюрные подшипники: d = 3.. .9 мм; нормальные подшипники; d ? 10 мм.
К № 19. Особая форма: перекрестно-роликовый подшипник.
К № 21. Необходима определенная минимальная осевая нагрузка. В нормальном случае смазка жидким маслом (исключение [Ь13]).
Рис. 4.76. Относительный показатель стоимости упорно-радиаль-
ных роликовых подшипников:
а — подшипники с коническими роликами (№ 19 в кат. 4.95); b -
упорно-радиальные роликовые сферические подшипники
(№ 21); с — подшипники с бочкообразными роликами (№ 22); d -
сферические роликовые подшипники (№ 23)
Рис. 4.77. Относительный показатель стоимости радиально-упор-
ных шариковых подшипников:
е — радиально-упорные подшипники, однорядные разъемные
(№ 15); f — радиально-упорные подшипники, однорядные неразъ-
емные со скосом на наружном кольце; g — радиально-упорные
подшипники, двухрядные (№ 17); h — сферические подшипники
(№ 18)
4.9. Подвижные соединения
203
Рис. 4.78. Относительный показатель стоимости упорных под-
шипников качения:
1 - упорные шариковые подшипники одностороннего действия
(№ 7); к — упорные шариковые подшипники двустороннего дей-
ствия (№ 9); т — упорные подшипники одностороннего действия
с цилиндрическими роликами (№ И); л — упорные игольчатые
подшипники (№ 1); о — упорные подшипники с коническими ро-
ликами (№ 13)
Рис. 4.79. Относительный показатель стоимости радиальных
подшипников качения:
р - радиальные шариковые подшипники, двухрядные с канав-
ками для комплектования шариками (№ 2); q — радиальные под-
шипники, однорядные с цилиндрическими роликами (№ 3);
г - радиальные подшипники, двухрядные с цилиндрическими
роликами (№ 4); s — радиальные игольчатые подшипники, одно-
рядные (№ 5); t — радиальные игольчатые подшипники, двух-
рядные (№ 6)
4.9.3. Список литературы к каталогам
подшипников
L1. Brown Boveri: Gasdynamische Lager. BBC-Mittei-
lungen 51 (1964) 12, 821-832.
L2. Noack, G.: Reibungstechnik I, II. Vorlesung TU Claus-
thal 1974.
L3. Hentschel, G.: Entwicklungstendenzen bei wartungs-
freien Trockengleitlagem. Maschinenmarkt 81 (1975;
433-435.
L4. Jayaram, V.D.; Predki, W.: Kunststofflager vereinfa-
chen die Konstruktion. Konstruktion 29 (1977) 318.
L5. Lang, O.R.; Steinhilper, W.: Gleitlager. Berlin, Heidel-
berg, New York: Springer 1978.
L6. NN.: Festschmierstofflager aus metallischem Grund-
werkstoff mit eingelagertem Trockenschmierstoff. Die
Maschine 2 (1970) 35-37.
L7. RuB, A.: Gleitlager ohne Fremdschmierung: Was lei-
sten sie heute? Maschinenmarkt 82 (1976) 1397-1400.
L8. SKF Kugellagerfabriken GmbH: Aktive Magnetlager.
Technische Information 1977.
L9. Vogelpohl, G.: Betriebssichere Gleitlager. Bd. 1, 2. Aufl.
Berlin, Heidelberg, New York: Springer 1967.
L 10. Cooper Roller Bearings Co Ltd., King's Lynn: Geteilte
Rollenlager. Katalog G.G. 12, London 1977.
Lil. DIN-Taschenbuch 24: Normen uber Walzlager. Berlin,
Koln: Beuth-Verlag 1978.
LI2. Eschmann, P.; Hasbergen, L.; Weigand, K.: Die Walz-
lagerpraxis, 2. Aufl. Munchen, Wien: Oldenbourg 1978.
L13. FAG Kugelfischer Georg Schafer & Co: FAG Stan-
dardprogramm. Schweinfurt 1978.
L14. GRW Gebriider Reinfurt: Klein-, Miniatur- und Instru-
menten-Kugellager. Wurzburg 1979.
L15. INA Industriewerk Schaeffler: MaBkatalog D 303. Her-
zogenaurach 1974.
L16.-: INA-Zylinderrollenlager MaBkatalog D201. Herzo-
genaurach 1972.
L17. Koyo: Walzlagervorratsliste Nr. 2. Hamburg 1978.
L18. Kuhn, P.R.: Einige anwendungstechnische Eigenschaf-
ten vollrolliger Zylinderrollenlager. Schweiz. Technische
Zeitschrift (1976) Nr. 23/24.
L19. Kollmann, F.G.: Maschinenelemente - Vorlesungsum-
druck 1978. TU Braunschweig.
L20. Nadella Walzlager GmbH: Katalog. Stuttgart 1973.
L21. Nippon Miniature Bearing Co Ltd.: Miniatur-Kqgella-
ger Tokyo.
L22. NSK Kugellager GmbH: Hauptkatalog 7810. Rating
1978.
L23. NWG Neuweg Fertigung GmbH: Walzlager-Hand-
buch. Munderkingen 1974.
L24. RM В Miniaturwalzlager AG: Handbuch und Katalog
G/D. Biel/Schweiz 1974.
L 25. RuB, A.: Auswahlkriterien fur Walzlager zum metho-
dischen Konstruieren. Maschinenmarkt 80 (1974) 1113-
1115.
L26. SKF Kugellagerfabriken GmbH: Hauptkatalog 3000 Т/
Dd 6500. Schweinfurt 1975.
L27. -: Genauigkeitslager 3055 T/Dd 6690. Schweinfurt 1978.
L28.-: Miniatur- und Instrumentenlager Dd 6131a.
Schweinfurt 1973.
L29. STAR Deutsche Kugelhalter GmbH: Allgemeine Pro-
duktinformation. Schweinfurt 1978.
L30. Timken Rollenlager: Technisches Handbuch Nr. 1.
Dusseldorf 1972.
L31. ?rafl, P.: Ein Programmsystem zur Auswahl geeigneter
Walzlager aus rechnerintem gespeicherten Lagerkatalo-
gen. Konstruktion 25 (1973) 259-263.
204 4. Собрание конструкторских каталогов
4.10. Варьирование контура и структуры
Пусть мы уже разработали геометрическую
структуру детали или узла и представили ее в
форме геометрической схемы, состоящей из рабо-
чих объемов и рабочих поверхностей (см. рис. 2.14,
строки 3 и 4). Теперь встает задача перейти от
геометрической схемы к схематическому чертежу
(эскизу) детали, называемому также контурным
представлением (см. рис. 2.14, строка 5). Такой чер-
теж является плоским изображением пространст-
венной детали и получается в результате парал-
лельной проекции или сечения детали плоскос-
тью. После этого становится возможным говорить о
расположении и форме линий, имея в виду поверх-
ности, на которых эти линии лежат и которые они
определяют.
Наиболее простым является случай, когда
контур детали одинаков в любом сечении, парал-
лельном плоскости чертежа (см. рис. 2.14, строки 5
и 6), т. е. если поверхности детали не имеют кри-
визны в направлении, перпендикулярном плоскос-
ти чертежа. Такие простые формы деталей харак-
терны для наглядных стадий конструирования.
Прежние изображения рабочих поверхностей
переходят на чертеж, хотя часто при этом сильно
усложняются. Прежние изображения рабочих
объемов заменяются теперь на изображения с
помощью линий контура. Рабочие поверхности ста-
новятся не более, чем элементами контура, равно-
правными с остальными контурными поверхностя-
ми. Последнее обстоятельство, очевидно, упрощает
представление деталей на чертеже, но в то же
время, как правило, затрудняет для „непосвя-
щенного” понимание того, какие из элементов
контура относятся к выполнению („передаче”)
функций, а какие являются „остальными” и
служат лишь для определения границ детали.
На рис. 4.80 на примере пиноли приведено раз-
деление конструктивной структуры устройства на
различные элементы [68, 53, 20]. Они сильно отли-
чаются от элементов функциональной структуры.
„Техническое устройство” выполняет общую
функцию „служить допускающей вращение одно-
сторонней опорой для детали вращения”. Техни-
ческое устройство разбивается на „узлы” и „дета-
ли”. Узлы состоят из деталей и выполняют
частные функции, например „разместить центр
а и подшипник с” (столбец 2). В соответствии с
принципом агрегатирования (взаимозаменяемос-
ти) из узлов может быть собрано техническое
устройство и в заданное время может быть произ-
ведена их замена.
Наименьший, далее неделимый элемент
называется „деталью” (столбец 3). Деталь состоит
из „контурных поверхностей”, образующих границу
тела (заполненного веществом объема). Контур-
ные поверхности подразделяются на „рабочие
поверхности”, имеющие функциональное значе-
ние, и „остальные поверхности” [20] (столбец 3).
Передача функций от одной детали к другой
происходит через „пары рабочих поверхностей”
(столбец 4). Последнее понятие находится в опре-
деленном родстве с понятием пары элементов
(звеньев) в теории механизмов (см. рис. 4.70).
Описанное подразделение, сводящее, в конеч-
ном счете, тела к их поверхностям, представляет-
ся более оправданным, чем подразделение на
элементарные тела и элементарные поверхности.
При конструировании (предметной реализа-
ции [86, 40] первые варианты, обычно произволь-
ные и случайные, впоследствии изменяются. В
связи со сказанным, в качестве объектов этого
изменения предлагается принять контурные
поверхности, детали, узлы и материалы.
4.10.1. Операции варьирования конструкции
Изменение контура может означать изменение
числа, формы, топологии и размеров, а изменение
материала - изменение числа, вида, качества и
количества. Соответствующие правила (операции)
в наглядной форме представлены в кат. 4.10.1.
Примерами могут служить рисунки в каталоге, а
также процедура разразботки шатуна на рис. 4.81.
На рис. 4.81 представлены промежуточные
фазы, соответствующие переходу от строки 7 к
строке 8 общего плана (рис. 2.14). В столбце 1 на
рис. 4.81 в форме конкретного требования содер-
жится желаемое свойство - цель варьирования. В
столбце 2 указана операция варьирования из
кат. 4.10.1, а в столбце 3 приведен результат приме-
нения этой операции.
Заметим, что „остальные поверхности” допу-
скают различные изменения в широких пределах.
Рабочие же поверхности (установочные отверстия
для поршневого пальца и коленчатого вала),
напротив, определяются довольно рано и практи-
чески не могут быть позже изменены. Если такая
задача все-таки ставится, то зачастую ее можно
решить, только разработав новый вариант констру-
кции всей детали или узла. В некоторых случаях
отдельные размеры рабочих поверхностей (напри-
мер, диаметр цилиндров двигателя) имеют на-
столько важное значение, что их изменение требу-
ет коренной переработки всего технического
Деталь
Пара деталей
Техническое
устройство
Детали a- d соединены
через пары рабочих
поверхностей (РП)
— пара рабочих по-
верхностей, наиболее
частый случай реали-
зации пары звеньев
п —рабочая по-
I верхность
Л'п — остальные кон-
турные поверхности
LPO — рабочий объем
Узлы 1, 2
и детали 3, 4
звеньев
соединены через пары
Рис. 4.80. Структура технического устройства. Свой-
ства узлов, комбинаций деталей и отдельных де-
талей
4.10. Варьирование контура и структуры
205
Целевое свойство
Изменение по ка-
талогу: ’’Опера-
ции варьирования
конструкций”
2
№
Предыдущий шаг :
уменьшение мас-
сы при оптималь-
ных сечениях
Исходный контур:
рис. 2.14, строка 7
Сборка с колен-
чатым валом
2
Изменить число
деталей (3.1) и по-
верхностей (2.1)
3.2
Крепежные поверх- Изменить форму
3 ности неподвижно-поверхностей (1.2)
го соединения и деталей (2.2)
4.1 4.2
Отверстия для
I соединительных Изменить тополо-
деталей и подвода гию Деталей (2.3)
масла
5.2
Уменьшить сече-
ния (силовой
поток)
Изменить размеры
деталей (2.4).Ре-
зультат : рис. 2.14,
строка 8
Результат
Рис. 4.81. Варьирование конструкции по кат. 4.10.1 (операции
варьирования конструкции) при конструировании шатуна (но-
вая разработка)
устройства. Поэтому параметры рабочих поверх-
ностей следует тщательно определять на возмож-
но более ранней стадии конструирования.
Различные возможности применения операций
кат. 4.10.1 показаны на рис. 4.82. Здесь ставится
задача улучшить приемное приспособление в
машине для крепления кнопок на ткани. Задача
устройства - привести кнопку в правильное исход-
ное положение перед тем, как обжимка захватит
ее, протолкнет между плоскими пружинами и,
расклепав, скрепит с тканью на основании (на
рисунке не изображенном).
В столбце 1 содержится желаемое свойство
(постановка задачи), в столбце 2 - операции варь-
ирования, приводящие к цели, в столбце 3 - ре-
зультат выполнения операции, а в столбце 4 - в
дополнение к предыдущему - недостатки данного
варианта.
Мы вовсе не утверждаем, что без каталога
использовать различные приемы для улучшения
конструкции невозможно. Однако при этом мно-
гие возможности часто оказываются забытыми.
При работе с каталогом следует помнить и о
том, что различные операции не являются незави-
симыми друг от друга. Так, изменение поверхнос-
ти детали всегда приводит к изменению детали, и
наоборот. Не принимать в расчет эти взаимозави-
симости нельзя, но основным критерием различия
операций может служить их цель. Если мы хотим
изменить поверхность, то выполняются операции
из строки 1 каталога. Если же такой целью являет-
ся изменение числа поверхностей, взаимного их
Целевое свойство (постановка задачи) Изменение по каталогу : ’’Операции варьирования конструкции” Результат Имеющиеся слабые места (анализ)
№ 1 2 3 4
1 1.1 Придать кнопке перед расклепы- ванием правиль- ное исходное по- ложение 1.2 Отсутствуют предварительный проект до улуч - шения Пру- 'у. жина \\д J +[ 'А II °6' Ц жнм- JJ ка Кнопка 1.4 Точечное соприкоснове ине кнопки с пружинами в процессе клепки
2 2.1 ~ Реализация соприкосновения по линиям или поверхностям 2.2 Изменить контурную по- верх ность А пружин (1.2) 2.3 Сталь 2.4 Следы износа обжимки от трения о пру- жины
3 3.1 Подобрать подходящие парь материалов 3.2 Изменить материал пружин (4-2) 3.3 , 1~|~ Бронза 3.4 „ Недоста- точная сила давления пружин
4 4.1 Увеличить силу пружин при за- данной деформа- ции 4.2 Изменить число пружин (3.1) 4.3 г 4.4 Непригод- ность для приема малых кнопок
5 5.1 Обеспечить возможность при- ема малых кнопок 5.2 Изменить размеры (1.4) и расстояния (2.4) поверхностей А 5.3 J L 5.4 Опасность вы- скальзывания кнопки
6 6.1 Охватить кнопку со всех сторон 67 Изменить взаим- ное расположе - ние пружин (3.4) 6.3 6.4 Улучшенный предваритель- ный проект
Рис. 4.82. Варьирование конструкции по каталогу 4.10.1 (опера-
ции варьирования конструкции) с целью устранения недостат-
ков заклепочной машины
расположения или изменение рабочего объема, то
применяются операции строки 2 кат. 4.10.1.
1. Список принципов к конструкторскому каталогу 4.10.1
1. Цель создания кон- структорского ката- лога 2. Момент примене- ния при методическом конструировании 3. Использование ката- лога 4. Определения основ- ных понятий 5. Классификация в ка- талоге 6. Ссылки на варианты 7. Примеры Дать систематический обзор опера- ций для изменения контурных по- верхностей, деталей, узлов и материа- ла деталей В предметной фазе конструирования, в основном на этапе геометрически материальной реализации Для варьирования контура и материа- ла деталей, изменения узлов, напри- мер с целью избавиться от слабых мест Контур детали — это линии, возника- ющие при сечении поверхностей де- тали плоскостью изображения или при параллельной проекции этих поверхностей на Плоскость изображе- ния. Линии контура всегда образуют замкнутые фигуры По объекту изменения — поверхности, детали, узлы или материал (см. рис. 4.63) 20,3 Рис. 3.28, 4.81, 4.82
206
4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.10.1:
ОПЕРАЦИИ ВАРЬИРОВАНИЯ КОНСТРУКЦИИ
Классификаци— Варьиру-
онноспециальная
часть
Уровни
конструирования
емыи
параметр
№
Увеличить
(уменьшить) число
.
1
Линии контура
Изменить форму
Изменить топологию
3
Увеличить
(уменьшить) размеры
4
Контурные
поверхности
1.4
Малый
Деталь
2.1 Контурные
Узел
Материал
_________2
'2 Циклоидные,
эвольвентные
поверхности
1.3 Внутренние
поверхности
Наружные
Большой
2.2 Компоновка
Полая
деталь
2.4 Расстояния н углы
на поверхностях
Компоновка
деталей
3.3 Топология узла
(например,
q инверсия в паре)
Размеры
и взаимное
4 Увеличить (уменьшить) число Изменить вид Изменить качество Изменить количество
4.1 Один или несколько материалов на деталь, на узел 4.2 Изменить материал, ншфимер, чугун на сталь, сталь на пластмассу 4.3 Например, изменения структуры 4.4 Увеличить (уменьшить) массу, объем, вес
4.11. Способы обработки давлением
Возможность выбора наиболее подходящего
способа изготовления изделия [18, 22] требует от
конструктора уже на стадии разработки списка
требований знания многочисленных данных и
ограничений. К ним относится планируемая
производительность, необходимые усилия при
обработке, используемые материалы и т. д. На
основе этих сведений становится возможным
сделать правильный выбор способа изготовления
конструируемого изделия с учетом технологичес-
ких возможностей предприятия.
Предлагаемые каталоги предназначены для
упрощения процесса выбора в области способов
обработки под давлением. Все известные способы
разделены на группы, а каждая из групп представ-
лена в форме объектного каталога. Каждый из 127
способов обработки давлением, перечисленных в
ДИН 8582 [11], можно отнести, в соответствии с
рис. 4.83, к одной из следующих групп:
обработка давлением с преобладанием напря-
жений сжатия;
обработка давлением с преобладанием напря-
жений сжатия и растяжения;
обработка давлением с преобладанием напря-
жений растяжения;
гибка;
обработка давлением с преобладанием каса-
тельных напряжений.
Если пользователь остановился на одном из
этих способов (например, исходя из технологи-
ческих возможностей родной фирмы), то на сле-
дующем шаге становится возможным этот выбор
детализировать. А для этого можно уже использо-
вать обзорный каталог, посвященный выбранному
основному способу.
4.11.1. К обзорному каталогу: Обработка давле-
нием сжатия
После того, как на первом шаге был выбран
способ „обработка давлением сжатия” [11.1], кон-
структору предстоит сделать выбор среди 7 различ-
ных способов обработки давлением сжатия, содер-
жащихся в кат. 4.11.1. А затем уже можно будет
получать более детальную информацию, например
о продавливании, объемной штамповке или сво-
бодной ковке.
Классификация в обзорном каталоге учиты-
вает, являются ли движения штампа поступа-
тельными или вращательными, и оказывается ли
после обработки поковка полностью внутри штам-
па или только частично, или извлечена из него
(точнее, содержит ли штамп поверхности, форма
которых совпадает с формой готовой детали и
определяет ее, см. примеры в кат. 4.11.1).
В главной части каталога приведены важные
критерии, облегчающие и направляющие выбор.
Прежде всего, это следующие количественные
признаки:
минимальный (максимальный) номинальный
размер;
минимальная (максимальная) масса детали;
достижимые допуски (высота неровностей);
экономически оправданный объем производ-
ства.
Способствуют упрощению выбора также и
качественные признаки:
4.11. Способы обработки давлением
207
Рис. 4.83. Выбор способа обработки давлением за три последовательных конкретизирующих шага
ожидаемые отходы или потери материала;
величина затрат на зарплату и материал.
Еще один признак характеризует вид и свой-
ства обрабатываемого материала.- Наконец, в
число специальных признаков входят также
основные формы заготовок и готовых деталей
(поковок).
Специальные признаки из кат. 4.11.1 должны
сравниваться с требованиями, содержащимися в
списке требований, и различными другими ограни-
чениями на готовое изделие. На этой основе
делается выбор одного или нескольких способов
из приведенных в каталоге.
На третьем шаге выбранный способ обработки
еще раз детализируется (см. рис. 4.83). Для этого
используются детальные каталоги, подразделя-
ющие выбранный способ на разновидности. Так,
если из кат. 4.11.1 был выбран способ „объемная
штамповка, при которой поковка находится цели-
ком в полости штампа”, то на основе кат. 4.11.2
можно рассмотреть шесть его разновидностей
(см. п. 4.11.2).
1. Список принципов к конструкторскому каталогу 4.11.1
1. Цель создания конструкторского каталога 2. Момент примене- ния при методи- ческом констру- ировании 3. Использование каталога 4. Определения ос- новных понятий 5. Классификация в каталоге 6. Ссылки на вари- анты 7. Примеры Дать наглядное представление о всех известных способах обработки давле- нием сжатия (согласно стандарту ДИН 8582) [11]. Критерии выбора, ориентированные на практическое использование, -облегчают целенап- равленный поиск решения Предметная фаза конструирования (этап технологической реализации из- делия) Для выбора подходящего способа из- готовления, исходя из технологиче- ских возможностей предприятия Обработка давлением сжатия — это такой способ пластического формооб- разования (обработки давлением) твердого тела, при котором пластиче- ское его состояние достигается в основном путем приложения усилий сжатия по одному или нескольким направлениям Способы обработки давлением под- разделяются по характеру движения штампа (поступательное/вращатель- ное), по наличию/отсутствию в штам- пе отверстия, определяющего форму готовой детали, и по тому, содержит ли штамп форму готовой детали (полностью, частично, содержит пол- ностью форму отверстия в детали, не содержит) Кат. 4.11.2 содержит варианты для спо- соба объемной штамповки, при кото- ром поковка находится целиком в по- лости штампа
208 4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.11.1 ОБРАБОТКА ДАВЛЕНИЕМ (ОБЗОРНЫЙ КАТАЛОГ)
4.11. Способы обработки давлением
209
4.11.2. К детальному каталогу: Объемная
штамповка
В целях наглядности классификация в катало-
ге проводится по величине деформируемого
объема (большой/малый), по образованию облоя
(заусенца) (да/нет) и по области применения
(предварительная, основная, дополнительная
обработка).
В главной части каталога приведены общеиз-
вестные наименования и определения согласно
стандарту ДИН 8583. Эскизы, помещенные в столб-
це 3, иллюстрируют определения.
В специальной части приводятся вначале
сведения о форме заготовок (проволока, пруток,
слиток и т. д.). Затем - о формах деталей (поко-
вок), получаемых этим способом (тела вращения,
компактные или плоские формы и т. п.). Другие
полезные признаки специальной части: обрабаты-
ваемые материалы, качественные характеристики
массы детали (малая, средняя, большая), экономи-
чески оправданный объем производства, допус-
ки, необходимая предварительная и последующая
дополнительная обработка, а также рабочие
температуры.
В форме относительных показателей в спе-
циальной части каталога приведены данные о
расходе материала и о требующемся усилии штам-
повки, поскольку абсолютные цифры названных
показателей практически не встречаются в специ-
альной литературе. За единицу приняты соответ-
ствующие показатели для способа „высадка в
штамп”. И если для способа „штамповка в откры-
том штампе” требуется усилие, большее на
34... 100 %, то в каталог помещается значение 1,34-
2,00.
Описанный выше трехступенчатый процесс
выбора с использованием описаний взаимозависи-
мых групп способов существенно сокращает и облегча-
ет работу конструктора. Достаточно сравнить с ним
обычный порядок действий, когда приходится
производить сквозной просмотр всех способов и
выбор из них подходящего, имея дело с общим
числом 127 способов стандарта ДИН 8582 [И]. В то
же время набор обзорных каталогов настолько не-
велик, что на этом уровне становится возможным
принять решение о выборе одного из основных спо-
собов обработки давлением. Для принятия реше-
ния обычно достаточно имеющихся знаний и све-
дений о возможностях предприятия.
После этого, на втором шаге, конструктору
также приходится выбирать из совсем небольшого
числа способов обработки. Обзорные каталоги
упрощают процедуру выбора и опять-таки сберега-
ют рабочее время.
На третьем шаге, наконец, появляются кон-
кретные разновидности способов изготовления.
Выбор наиболее подходящего из них осуществля-
ется по специальным признакам детального
каталога.
1. Список принципов к конструкторскому каталогу 4.11.2
1. Цель создания конструкторского каталога 2. Момент приме- нения при мето- дическом конст- руировании 3. Использование каталога 4. Определения ос- новных понятий 5. Классификация в каталоге б. Ссылки на варианты 7. Примеры Детализация содержащегося в кат. 4.11.1 (Обработка давлением сжатия) способа „Объемная штамповка, при которой поковка находится целиком в полости штампа”. Показаны наиболее известные варианты этой технологии Предметная фаза конструирования (этап технологической реализации изделия) Для выбора подходящего способа изго- товления среди различных способов объемной штамповки, исходя из под- робных данных о требуемых свойст- вах (экономически оправданный объем производства, материалы, до- пуски, температура и т. д.). Ступенча- тый процесс выбора (например, с ис- пользованием обзорного каталога 4.11.1) сберегает силы и экономит вре- мя Объемная штамповка, при которой поковка находится целиком в поло- сти штампа - это способ обработки давлением с преобладанием напряже- ний сжатия с помощью движущихся навстречу друг другу половинок штампа, полностью охватывающих об- рабатываемую деталь и придающих ей свою форму (ЙИН 8583, лист 4) Способы объемной штамповки под- разделяются по деформируемому объ- ему (большой/малый), образованнию облоя (заусенца) (да/нет) и по области применения (предварительная, основ- ная, дополнительная обработка)
14-2317
210
4. Собрание конструкторских каталогов
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.11.2:
ОБЪЕМНАЯ ШТАМПОВКА, ПРИ КОТОРОЙ ПОКОВКА НАХОДИТСЯ ЦЕЛИКОМ В ПОЛОСТИ ШТАМПА
Классификационная часть Главная часть
Величина деформи- руемого объема Образова- ние облоя Область применения . Наименова- ние Определение (ДИН 8583, лист 4) Эскиз Основные формы заготовок
1 2 3 1 2 3 № 1 -
Боль- шая Нет Предвари- тельная И главная обработка Высадка в штампе Высадка в штампе — это объемная штамповка, при которой происходит ло- кальное увеличение площа- ди сечения детали без об- разования облоя чг й 1 Заготовки из проволо- ки, прутка, слитка — го- рячекатаные или — тя- нутые, торцы; парал- лельны, перпендикуляр- ны к продольной оси
Да Главная обработка Штампов- ка в открытом штампе Штамповка в открытом штампе — это объемная штамповка, при которой поковка находится цели- ком в полости штампа, причем излишек материа- ла вытекает в облойное пространство 2 Заготовки из прутка, мерные заготовки, прутки,слитки
Малая Нет Предвари- тельная обработ- ка Осадка Осадка — это объемная штамповка нарезанных первичных заготовок, как предварительная операция перед штамповкой выдав- ливанием . Ж-, 1 KS31I L \ 3 Осаживаемые прутки, слитки
Последую- щая обра- ботка Правка в штампе Правка в штампе — это объемная безоблойная штамповка с целью прав- ки поковок с удаленным облоем 4 Очищенные от облоя, улучшенные поковки, дырчатые, кованые или изменившие свою форму
Главная обработ- ка Двусто- ронняя чеканка Двусторонняя чеканка — это объемная безоблойная штамповка с малым обжа- тием по высоте или толщи- не между профильными матрицами, в полости ко- торых помещается деталь целиком или же подлежа- щая чеканке область 1 5 Осаживаемые прутки, слитки -
Главная и последую- щая обра- ботка Калибров- ка в штам- пе Калибровка в штампе — это объемная штамповка, при которой поковка на- ходится целиком в полости штампа, причем прилегаю- щей к штампу детали вы- давливанием придается окончательная форма 6
4.11. Способы обработки давлением
211
(ДЕТАЛЬНЫЙ КАТАЛОГ)
Специальная часть
Основные формы готовых деталей Материалы Масса детали Экономически оправданный объем производства Допуски Расход материала Усилие штам повки Темпера- тура штам- повки, К Предварительная обработка Последующая обработка Примеры применения
2 3 4 5 6 7 8
Тела вращения 1. Штамповка без нагрева: ДИН 17 111, ДИН 17 006, ДИН 17 440, ДИН 16 54, Евроиорм 83, 84,96,107,119. 2. Штамповка с нагревом: Общие конструк- ционные стали, улучшаемые стали: нелеги- рованные, легированные; цементуемые стали: нелеги- рованные, легированные; специальные стали; алюминий, магний, медь, титан; жаростойкие сплавы на основе: железа, никеля, кобальта; молибденовые и вольфра- мовые сплавы Малая... средняя Малый ... большой Диаметр IT 8—9 1 1 1. Холод- ная 2. Горячая. 500-1900 Средняя Средняя Болты, вииты, заклепки, шарики, ролики, конуса, гвозди,гайки
1. Компактные формы (шарики, кубики). 2. Плоские формы с дополнительными элементами с одной или двух сторон. 3. Длинные формы с прямой или искривлен ной в плоскости осью (Малая) средняя... большая Малый ... средний (большой) Диаметр IT 8—9 При массе детали: < 1кг= 1,11—1,43 > 1кг= 1,11-1,25 1,34 2,00 500 — 1900 Малая Большая (обрезание облоя, калибровка, термообработка, удаление окалины) Детали машин: диски, коленчатые валы и т.д. Стандартные детали: винты, болты и Т.Д. Инструменты: клещи, ножницы и т.д. Листовые детали
Компактные и плоские формы Малая Большой Диаметр IT8—9 1 1 500 — 1900 Большая (малые допуски заготовки, необходимость центрирования) Средняя Заготовки зубчатых колес, подшипников качения; малые колеса турбин, ступицы, фланцы, крестообразные детали, корпуса; рычаги, кривошипы, шипы
Диаметр IT 8—9 1 1 Без проме- жуточного подогрева Малая Улучшаемые стали: дополниетльиое улучшение; отжигаемые или норма- лизуемые поковки: после термообработки
Компактные и плоские формы Малая Большой Диаметр IT 8—9 1 1 500- 1900 Большая (обрезание облоя, калибровка, термообработка, удаление окалины) Средняя Монеты, медали
Диаметр IT 8—9 1 1
212
4. Собрание конструкторских каталогов
4.12. Размеры с допусками
Изготовление и замена деталей, а также опре-
деление посадок, зазоров, различных расстояний
между деталями, например при сборке, связано с
необходимостью использования размеров с до-
пусками и проведения расчетов с ними.
При таких расчетах, результат которых являет-
ся только более или менее вероятным предложе-
нием, в сущности, используются два основных
метода:
расчет предельных размеров;
расчет наиболее вероятных размеров (факти-
ческие размеры).
Первый метод позволяет найти границы, в ко-
торых находится результирующий (замыкающий)
размер, если все исходные составляющие размеры
находились в своих заранее заданных границах.
Предположение здесь включает в себя все, в том
числе маловероятные, случаи: оно оправдывается
стопроцентно.
Второй метод предполагает знание закона рас-
пределения допусков на составляющие размеры
(например, нормальное распределение), и резуль-
татом его применения является допуск, который
тем точнее соответствует реальному, чем больше
число составляющих допусков. Здесь результат
оправдывается не стопроцентно и не учитывает
крайних случаев.
В конструировании обычно пользуются первым
методом. Это объясняется тем, что, во-первых,
число входящих в одно вычисление допусков
относительно невелико (в среднем 5-10), во-вто-
рых, тем, что часто требуется абсолютная уверен-
ность в результате, и, в-третьих, тем, что в процессе
изготовления изделий часто встречаются система-
тические ошибки (или из-за того, что размеры
заготовок находятся на границе допустимых, или
из-за того, что применяемые инструменты совер-
шенно изменяют закон распределения допусков).
В связи с этим мы рассмотрим далее только метод
расчета предельных размеров.
4.12.1. Предельные размеры, допуски и их
расчет
При изготовлении деталей принципиально
невозможно выдерживать размеры с любой жела-
емой точностью. В то же время произвольные и
случайные ограничения оказываются совершенно
неприемлемыми. Все это привело к тому, что
различными национальными и международными
профессиональными организациями были выра-
ботаны общеобязательные нормы, устанавлива-
ющие величину допустимых отклонений в зависи-
мости от конструктивных параметров и требуемого
качества изделий (см. стандарты DIN (ДИН) в ФРГ,
AGMA (А ГМ А) в США, ISO (ИСО) - международ-
ный).
Размеры, колеблющиеся в относительно узких
пределах, по целому ряду причин целесообразно
представлять в виде суммы двух величин. Одна из
них постоянна и приблизительно совпадает с
размером. Другая же характеризует случайные
отклонения размера, и для нее указываются
только предельные значения. При расчетах с
такими величинами, кроме известных, следует
применять также дополнительные алгебраичес-
кие правила. Ниже будет показано, как с помощью
Пример Обозна- чение Определение
№ 1 2 3
1 1.1 । G 1 : 1 1.2 G 1.3 Наибольший (верх- ний )предельный раз- мер является боль- шим из двух пре- дельных размеров Предельные размеры — это два раз- мера, меж- ду которы- ми должен лежать фа- ктический размер
2 । 1-^—। ! 1 1 1 1 1 1 2.2 К 2.3 Наименьший (ниж- ний) предельный раз- мер является мень- шим из двух пре- дельных размеров
3 J1 1 1 L-—-Ц-1 i । । 1 । । 3.2 т Т = G-К 3. 3 Допуск Т (допуск на размер) — это разность между наибольшим и наименьшим предельными размерами. Допуск не снабжен знаком плюс или минус и всегда больше нуля
4 4 1 । 1 । । । ! Ц 1 : । । । । । 4.2 I 4.3 Фактический размер / — это раз- мер, полученный измерением детали. Он отличается от номи- нального вследствие погреш- ностей изготовления и измерение
5 5.’ ' 1 1 Ь—, 1 и! 1 11 ' 5.2 N 5.3 Отклонение А — это вектор, па- раллельный прямой, проходя- щей через номинальный н преде- льный размеры, модуль которо- го равен разности этих размеров При расчетах с номинальными размерами отклонения рассмат. рнваются как векторные вели- чины
6 : 1 1 !а 1 1 II 1 1 1 Aul 1 1 1 6.2 А A0 = G-N Ди = К - N I = Ао ~ Ац Aj = I-N 6.3 Номинальный размер N — это размер, который служит для указания величин и к которому относятся отклонения. Он явля- ется произвольным размером, по порядку величины сравни- мым с предельными размерами, и может быть больше или мень- ше предельных размеров Верхнее отклонение -4В — это отклонение наибольшего разме- ра от ном., ннжнее отклонение Ан — это отклонение наимень- шего размера от ном. Направления отклонений ука- зываются знаком (плюс или минус) передними. Фактическое отклонение A t — это разность между фактичес- ким и номинальным размером
7 7.1 L— м ► 7.2 м M=>N д° 7.3 Обобщенный размер (размер с допусками) М — это номина- льный размер, заданный вместе с отклонениями. Справедливы равенства: Мщах = G Mmin = К. Нанесение размеров на чертежи осуществляется с помощью обобщенных размеров
8 — 8. 2 м М=>Мд° ^0 8.3 . _ , Сопряженный обобщенный раз- мер М представляет собой ус- ловную величину,введенную для удобства вычислений, ко- торая позволяет преобразовы - вать уравнения с обобщенными разм , выделяя нужное слагаем.
9 — 9.2 9.3 Знак равенства, показывающий что прн переносе слагаемых ИЗ одной части уравнения в другую кроме изменения знака требу- ется также ’’изменение сопря — женности”
Строки 7—9 взяты не нз листа ДИН
Рис. 4.84. Определения величин, относящихся к размерам с до-
пусками [10]
простых средств производить сложные алгебраи-
ческие операции над размерами с допусками и
получать численные результаты.
На рис. 4.84 приведены определения важней-
ших понятий, имеющих отношение к размерам.
Строки 1-6 соответствуют стандарту ДИН 7182
[10], строки 7-9 добавлены автором. Следует обра-
4.12. Размеры с допусками
213
тить внимание на то, что номинальный размер N
является только базовым размером. Он может
быть как меньше нижнего, так и больше верхнего
предельного размера, а может и лежать между
этими двумя границами. Не менее важно и то, что
отклонения всюду понимаются как предельные
отклонения, и во все выражения для предельных
размеров входят именно предельные отклонения.
Новым на рис. 4.84 является понятие обобщен-
ного размера М (строка 7). Обобщенный размер
состоит из трех „размеров”: номинального размера,
верхнего и нижнего отклонений размера. Отклоне-
ния записываются при номинальном размере на
местах индексов. Для того чтобы с обобщенным
размером можно было обращаться как с самосто-
ятельной алгебраической величиной, введена
также новая операция „сопряжение”, а вместо
знака равенства используется заменяющий его
знак „стрелка” (строка 9).
4.12.2. Векторный характер величин
На рабочих чертежах номинальные размеры
всегда проставляются без знака, а отклонения раз-
меров - со знаком (плюс или минус) перед ними.
Знак указывает на векторный характер отклоне-
ний, направление которых тем не менее совпадает
(без учета знака) с направлением номинального
размера. При образовании размерной цепи номи-
Получаемый
в результа-
те размер
Графическое представление
-
Пояснение
2
Наиболь-
ший резуль-
тирующий 1
предельный
размер
Сложе-
Наимень -
ший резуль-
тирующий 2
предельный
размер
mm ^2min
Мрез. min
Наиболь-
ший резуль-
тирующий
предельный
размер
Вычита-______________
ние
Наимень-
ший резуль-
тирующий
предельный
размер 4
Номиналь-
ный размер,
отклонения
размера
Измене-
ние 5
знака
Результирующий наибольший раз-
мер, обозначаемый Gpe3 или
^рез. max > представляет собой сум
му составляющих наибольших раз-
меров для нескольких обобщен-
ных размеров__________________
г.1
Результирующий наименьший раз-
мер, обозначаемый А рез или
рез. min. представляет собой сум-
му составляющих наименьших раз-
меров для нескольких обобщен -
иых размеров
Результирующий наибольший раз-
мер, Л/рез тах, представляет собой
разность между наибольшим разме
ром уменьшаемого и наименьшим
размером вычитаемого составляю-
щего размера. Если первый из ука-
занных предельных размеров боль-
ше второго, то результирующий
размер положителен
4.?
Результирующий наименьший раз-
мер, Л/рет min, представляет собой
разность между наименьшим раз-
мером уменьшаемого и наиболь-
шим размером вычитаемого состав
ляющего размера. Если первый из
указанных предельных размеров
больше второго, то результирую-
щий размер положителен
5 1
Знак перед обобщенным размером
показывает его направление, т. е.
векторный характер.
н Знак’’минус” (например,—М) из
меняет все прежние направления
на противоположные, причем не
только номинального размера, но
также и отклонений. Поскольку
однако —Ан > —А в, то (—4Н) ста-
новится верхним, а (—Ад) НИЖНИМ
{отклонением в положительном на-
правлении (кат. 4.12.1, строка 2)
Рис. 4.85. Сложение и вычитание составляющих предельных раз-
меров для получения результирующих предельных размеров,
изменения знака обобщ енного размера. Образование размерных
цепей
нальные размеры тоже приобретают векторные
свойства, но допуск и в этом случае остается
абсолютной величиной без знака. Верхний (наи-
больший) предельный размер G и нижний (наи-
меньший) размер К, обозначаемые также Мтах и
Mmin, характеризуются следующими равенствами:
°'sM^sN + Ae-, (4.63)
K^MmmsN + AH. (4.64)
При сложении предельных размеров верхний и
нижний предельные размеры получаются путем
сложения соответственно верхних и нижних соста-
вляющих размеров (строки 1 и 2 рис. 4.85), а при
вычитании - наоборот. Чтобы получить верхний
результирующий размер, нужно из первого верхне-
го предельного размера вычесть-второй нижний
предельный размер. Нижний результирующий
размер получается вычитанием из первого нижне-
го предельного размера второго верхнего.
Результат операции характеризуется не только
абсолютной величиной размера, но также связан с
его расположением относительно начальной
точки (нулевой точки числовой прямой). Справед-
ливы неравенства
М > М : (4.65а)
рез max рез. тт> ' 7
- т.п- (4.656)
рез. max рез. min 4 >
Как показано на рис. 4.91, отрицательный
результирующий размер может означать наложе-
ние двух частей детали или исчезновение какой-
либо ее части, определяемой некоторыми граница-
ми, и т. д. В любом случае отрицательный резуль-
тат имеет совершенно не тот смысл, что положи-
тельный.
4.12.3. Расчеты с обобщенными размерами
При изменении знака роль верхнего и нижнего
отклонений меняется согласно следующим нера-
венствам (см. также рис. 4.85, строка 5):
АВ>АН; (4.66а)
-Ав<-Ан. (4.666)
Появление знака „минус” перед обобщенным
размером затрагивает все три его размера-компо-
ненты, т. е. номинальный размер и оба отклоне-
ния. Отклонения при этом меняются местами.
Справедливы следующие соотношения (правило 2
в кат. 4.12.1):
- М => - j =* - • (4.67)
Для получения правильного результата вычи-
сления с составляющими размерами должны
производиться с учетом их векторного характера.
Проще всего это сделать, образовав размерную
цепь, из которой можно найти результирующий
(замыкающий) размер. Вее составляющие размеры,
с которыми мы имеем дело, колеблются в опреде-
ленных границах, к которым и нужно применять
различные алгебраические операции в зависимос-
ти от вида размерной цепи. В связи с этим при
составлении размерной цепи следует придержи-
ваться определенных правил.
На рис. 4.86 приведены некоторые примеры
214
4. Собрание конструкторских каталогов
Размер-
ная цепь ____
________ № _
1.1
Пример
Допуски
Дополнение
Замкну-
тая
1
1.2
Заданный Рассчитан- ный
т. 0,150 Тр«з.1 0,390
Тг 0,180 ^рез. II 0,360
Тз 0,210 ТреэШ 0,330
3_________
' 1.3
Определение раз-
меров неоднознач-
но.
При расчетах с до-
пусками других
составляющих раз-
меров допуск для
суммы получается
большим, чем за-
данный на чертеже.
\Строка за- _ Ч. голов- СтолЧ^ ка Графическое представление Правила заданий на чертеже и расчета размеров
головка № 1 2
*=^рез.
Одно-
крат-
но от-
кры-
12 ♦ 0.090
Ti 0,150 Задан- ный
Т2 0,180
ТрезШ 0,330 Рассчи- танный
3.2
т. 0,150 Задан- ный
Трез. П 0,360 Рассчи- танный
ь 0,210 Задан- ный
2.3
Определение раз-
меров однозначно.
Для каждого раз-
мера имеется толь-
ко один допуск.
Результирующий
допуск всегда
больше, чем со-
ответствующий
составляющий до-
пуск при непосред-
ственном определе
нии размеров и
том же квалитете.
>s
3
1Г
Мрез.Ш Мрез. IV
М5
Ml
Определение размеров.
Обобщенные размеры М, —М4
заданы на чертеже (внизу)
Подлежащие расчету результи-
рующиеразмеры Мрез i-Afpe3. iv
^вверху)
Однозначное определение раз-
меров : Необходимо задавать
обобщенные размеры (Л/(---Л1^)
таким образом,чтобы в одном)
из координатных направлений
(здесь — х—направление) от од-
ной точки с размером до дру-
гой вела единственная одно-
кратно открытая размерная
цепь
Трез. I 0,390 Рассчи- танный
т? 0,180 Задан- НЫЙ
h 0,210
Осьх--
Расчет
^рез I "* -М2~М3-М^М^
Положительное направление
оси должно быть выбрано оди
лаковым для результирующе-
го размера и для всей размер-
ной цепи, например слева на-
право
5.2
Трез.1 ? Неопре- делимый
Тг 0,180 Задан- ный
Трез.Ш ? Неопре- делимый
5.3
Определение раз-
меров выполнимо
не полностью.
Не заданные номи-
нальные размеры
и допуски не мо-
гут быть найдены
й
>>
S а
CL ®
п
Ось.г —
ГрезЛГ
М4 М,м
Л/рез П **М 5 + ^4 + *3 +^2
Одинаковые размеры в раз-
личные раз мерные цепи (ср. с
полем 2.2) могут входить с
различными знаками
1
3
Й4 I ,Мз М?
Рис. 4.86. Замкнутые и открытые размерные цепи. Многознач-
ное, однозначное и неполное определение размеров
определения размеров для пластины с двумя
отмеченными центрами отверстий. Допуски взяты
из стандарта ДИН 7160 [9] и соответствуют одному
и тому же квалитету (х = 12).
В поле 1.1 проставлены 3 размера, в полях 2.1 -
4.1 - по 2, а в поле 5.1 - один размер. Размерная
цепь в поле 1.1 замкнута, поэтому от одной ее
точки до другой ведут различные пути. Размерные
цепи в полях 2.1 - 4.1 однократно открыты, так
что от одной их точки до другой ведет единствен-
ный путь. Наконец, размерная цепь в поле 5.1
двукратно открыта, и некоторых точек этой цепи,
например левого края пластины, вообще нельзя
достичь (т. е. определить) на основе единственного
проставленного размера.
4.12.4. Расчеты допусков
Для номинальных размеров не имеет особого
значения, проставлен ли в размерной цепи какой-
либо из вычисляемых другим способом размер,
т. е. является ли цепь замкнутой или однократно
открытой. Для допусков все обстоит совершенно
иначе. На рис. 4.86, поле 1.2 в табличке приведены
вместе допуски, проставленные на чертеже и
получаемые из вычислений. Как мы видим, значе-
ния противоречат друг другу, и возникает неод-
нозначность допусков. Причины этого следующие:
и
я
§
м m Ось х —
'"рез. Ш
М3М2
Ось.г —
м5
рез. IV
М4 Мз
Мрез IV =* -‘МS +
5
Рис. 4.87. Составление размерных цепей и расчет результиру-
ющих размеров при определении предельных допусков
номинальные размеры в замкнутой цепи
зависимы друг от друга, а допуски независимы;
допуски связаны с номинальными размерами
не линейной зависимостью, а примерно пропор-
циональны кубическому корню из номинальных
размеров;
при вычитании размеров номинальные разме-
ры вычитаются, а допуски складываются.
Только однократно открытая размерная цепь
позволяет получить однозначные соотношения и
для номинальных размеров, и для допусков.
Двухкратно и более открытая цепь не позволяет
определить все размеры, а в (однократно и более)
замкнутой цепи возникает неоднозначность
результирующих допусков. В связи с этим все
4.12. Размеры с допусками
215
размерные цепи, используемые в расчетах, дол-
жны быть однократно открытыми. В этом случае от
одной точки цепи (размера) до другой ведет един-
ственный путь. Чем меньше на этом пути промежу-
точных размеров, тем меньше допуск результи-
рующего размера при условии одинакового квали-
тета допусков.
4.12.5, Размерные цепи
Размерные цепи позволяют путем вычисления
быстро определить так называемый результирую-
щий (замыкающий) обобщенный размер Мрез, непо-
средственно на чертеже не указанный. Рассмотрим
пример (см. рис. 4.87). В поле 1.1 на пластине про-
ставлены размеры по х-направлению. Отмечены
пять точек, расстояние между которыми на черте-
же непосредственно не указаны. Для расчета этих
расстояний (размеров Мрез1 -Mpe3iv) в полях 2.1 - 5.1
приведены размерные цепи.
Опишем удобный способ составления размер-
ных цепей. Продолжим вспомогательные линии,
представляющие две точки, расстояние между
которыми не указано и должно быть рассчитано,
снабдим их штриховкой и будем рассматривать,
как два берега одной реки. Вычисляемый резуль-
тирующий размер Мрез - это расстояние между бе-
регами. Будем считать теперь направление слева
направо (поле 2.1) или снизу вверх положитель-
ным. Наша задача сводится к тому, чтобы добрать-
ся с левого берега реки на правый (или с нижнего
на верхний) по проставленным (известным) разме-
рам. То, в каком направлении мы при этом идем,
определяет знак, с которым входит в сумму состав-
ляющий проставленный обобщенный размер. Для
размерных цепей столбца 1 соответствующие
выражения приведены в столбце 2. Сразу же стано-
вится очевидным, что одни и те же размеры могут
входить в выражение для результирующего
размера с разными знаками в зависимости от
строения цепи, что не в любую размерную цепь
непременно входят все проставленные на чертеже
размеры и что (с целью подчеркнуть специфику
обобщенного размера) в выражениях используется
специальный знак равенства „стрелка”. Теперь
становится возможным номинальные размеры и
отклонения проставленных обобщенных размеров
(кратко - составляющих размеров) соединить в
номинальном размере и отклонении результиру-
ющего (замыкающего) размера. На рис. 4.87 приве-
дены размерные цепи и соответствующие фор-
мульные выражения, используемые для определе-
ния четырех результирующих размеров - MIV
(см. [58]).
Опираясь на равенства (4.63) и (4.64), от геомет-
рического выполнения операций на рис. 4.85 легко
перейти к правилам кат. 4.12.1. Сложение в полях
1.1 и 2.1 рис. 4.85 соответствует строке 1 кат. 4.85,
вычитание в полях 3.1 и 4.1 - строке 3, а изменение
знака в поле 5.1 - строке 2.
Численные примеры практического использо-
вания правил кат. 4.12.1 показаны на рис. 4.88.
Наиболее целесообразно выписать числовые значе-
ния размеров, проставленные на чертеже (поле
1.1), и составить размерную цепь по аналогии с
рис. 4.87. После этого собственно вычисление состо-
ит из трех сложений и одного раскрытия скобок
(поля 3.1, 3.2 и 4.1, 4.2 на рис. 4.88) или из двух
сложений и одного вычитания (поля 3.1, 3.2 и 5.1).
Описанные способы расчета применимы и в том
Действия Составляющие размеры Результирующие размеры Дополнение: правила из кат. 4.12.1
№ 1 2 3
Размеры и размерные цепи по рис. 437 1 1.1 Численные значения Mi => 155.*S М —по-0.045 М2 “-0.067 и . 1 -1 * 0 093 М3 =* 11.0.050 1.2 Уравнения: Мр«1=>М, - м? - Мз - Мд* м5 М] + М5 - (М2 ♦ Мз + Мд) Трет I = Ав.рет- Ан. рез 1.3 Правило 8
2 JE ЗЕ 11 4 t + <♦ ° S OD в> 2.2 Результат: М * 01* 9.220 Мреэ -о здо Треэ I = 0. 560
Отдельные шаги Численные выкладки для М рез i
Сложение положи- тельных и отрицате- льных раз- меров 3 СТ> СП (Л CD СЛ "V 1 ♦ • ♦ < + i * ~г .=» F> 0 •=» еэ =><==> *— = 5 ° ° S 3 S S <® Т ? во а> о ° 3.2 (-) -Мг ^-(23Х6) -мз ^-(1i;o.D5o) -мд =» -op ig;;s5) -(124 " 0.046-0.093-0.175 \ ' - 0.067*0.050-0.175/ 3.3 Правила 1,7
Раскрытие скобок, сложение промежу- 4 4.1 1<Э 4.2 Mi*M5 => 215*“^’ -(Мг*Мз*Мд) =>-124^ 4.3 Поле 4.1: правило 2
точных ре- зультатов q .* 0 029*0,19 2 -0,118-0 222 qi*O.22O 31 - 0340 Поле 4.2 : правила 1, 7
Вычитание промежу- точных ре- зультатов 5 5.1 Вариант вместо строки 4 Mi + M5 => 215t°°?’ -(М2* М3*М4) =>-(1241® q.*o огв-t-o 19?) . q.*o 2 20 -0,’19-(*0,2 22) ’’ -0 340 5.3 Правило 3 (перекрест- ное прави- ло)
Рис. 4.88. Расчет результирующего обобщенного размера
tiprf заданных составляющих размерах (численные примеры)
случае, когда составляющие размеры относятся не
к одной, а к нескольким соединенным между
собой деталям.
4.12.6. Расчет составляющих размеров при
заданном результирующем размере
Довольно часто возникает вопрос не о резуль-
тирующем размере в размерной цепи, а об одном из
входящих в нее составляющих размеров. Напри-
мер, может быть поставлено условие, чтобы ре-
зультирующий размер не превосходил определен-
ного заданного значения, причем в результате
расчетов с использованием составляющих разме-
ров и их допусков именно это значение должно
получаться как максимально возможное. Само
собой это может получиться только случайно.
Кроме того, часто нельзя изменять допуски на
некоторые составляющие размеры, если эти до-
пуски обеспечивают требуемую посадку или
относятся к необрабатываемым размерам заготов-
ки. В этом случае обычно выбирается подходящий
составляющий размер, и его допуск изменяется до
тех пор, пока не получится требуемое согласова-
ние с результирующим размером. При этом, как
216
4. Собрание конструкторских каталогов
Размерная цепь
Дополнение:
правила
из кат. 4.12.1
2 3
Мрез=»М1-М2*Мз‘И4-^
Уравнение для М 2
и результат расчета
м
Уравнение из поля 1.2 преобразовать
по правилу 5
М2 =» Mj ♦ Mj ♦ Й4 - (МрезЛ
=>Mi*M3*Mt-(M2‘?)
Результат
u I Q ~ 0.002
п2 - * а-0.067
Правила 5,6
Значения составляющих размеров Оценка 2 Т 3 3.1 ц —- L п* 0.060 •=* *‘'♦0.030 М3 => 15.0ZJJ” М4 => 31.0^0.080 и *7 7*0,000 м5 ^'-0,030 N2 = 48.0 (по пред- Допуски Tf = 0,030 Т3 . 0,040 Т4 . 0,160 Ь- * 0,015 2 Квалитет Т2 « 0,062 хя 9 3.2 Оценка до ДЛЯ Л/рез • 1. Допуск 2. Границь положе» пустимых значений величин TlfS рез > 2Г= 0,307 I исходя из крайних ий (минимальный зазор) 3.3
П — м5
4-
^рез> -^в. рез- рет положению) Л/рез. =>0.15 Д ВЫб ZT « 0,307 ST,.5рез рано 0< Л/^ < Л/1 min “ Л Л/, 5П
«— Л/рез. max доп эез. max доп = ^1,5 рез = 1И = 4,03-3,70 = 0,330
Отдельные шаги Численные выкладки
Решение уравне- ния из Сложение положи- тельных и отрица- тельных размеров (правила 1,6) Различные знаки 4 М (+) м у /-0.030 М1 =* 4 *0.060 М => 14-°092 “з 13-0.052 й -j*-0.080 n4 J 1.0.080 гП *0.030 -0,092 -0,080 Эи *0,060 -0.052*0.080 =ф сп-0.’« зи* 0.088 (-) -Л/рез =*'^'^.о.цо) f? ПП*"0.015 \ U’UU-0,K0 *0.000/ -*-<z.oolS) z.oo:J“ 4.3 Правила 1,7 Правило 2
поля 2.1 Сложение промежу- точных ре- зультатов 5 5.1 50 ’0,142 зи* 0,088 7 * 0.140 " L- 0,155 u =*, /0-0.142*0.140 /0-0.002 М2 *°* 0,088 - 0.155 -0.067 5 3 Правила 1,7
Проверка по уравнению из поля 12 Б 6.1 М, *М3*М4 => 50.00:}н5 -М2-}М5 =>Ч9,85:Ж Л^реэ. » 0.15ГЙ «'•SIC" OkD rsi f>| ГМ ГМ СЗЧЭ СЭ «- CD СЮ OB О CD CD <3 CD CD CD CD О о o o' as d d d d СЭ rn CD OO CD ‘ cn CD ft t t ЗЕ I* 6.3 Правила 1,7 Правило 2
Рис. 4.89. Расчет составляющего обобщенного размера М при заданном результирующем размере Постановка задачи в примере: на-
значить допуски на размер Mj таким образом, чтобы штифт всегда находился внутри канавки
4.12. Размеры с допусками
217
Численные выкладки
Дополнение
(правила из
кат. 4.12.1)
3
1.3
Результирующий
размер задает
положительное
направление
размерной цепи
без посадки 2.1 Случай а : посадка
(F9I...M, =♦ 12.0*™*’
Расчет зазоров и экс- 2 (h9)... Мг=> 12.0.'°™ Случай />: без посадки
центрич- ности М 17 ч*0.№3 Mi '♦0.050 М2=> 12.0:°°°°
2.2 2.3
-Мрез. I л => fl? «э I»0 059’1'0 0431 =ьП,0,°2 1 12-12). 0 016 -(*0.0002 и.0016 Правило 3
-Мрел. ПаФ п*0051 X ч 1 , U*OODB 2 * 7Рез 1а Отрицательные
результирую-
Мрел. 1Ь (17 1 17 1*0 0930 0431 ~ 14 050 - (+0 000) щие отклонения у зазоров в по-
=♦ or0136 и- '.0 050 садке при расче- те положить —
•М рез. 11 о.о5;°°о6г’ * -L.Mpe3.lb равными нулю
Состав-
ление
размер-
ной цепи
и резу -
льтат
3.2 «5. М 3.3 Направление таких размеров, как .1/ 4 , с V = 0 и .-1 в — — 1 н безразлично. Для прессовой
Ь u 1 *2 посадки в раз -
М3 J ” _ мерной цепи нет
Я ' размеров М, и 1/ 2. Размерная
Мрез.Шф. М3 - у - М4- цепь проходит через среднюю линию .1/1 и .1/ 1
=> м3.%-()
2.2 4.3
Результат: Шайба в неко—
Мрез JDu = ОД 1().27Ь торых случаях вылезает за
(случай и с поездкой)
Размер-
ная цепь,
содержа- щая посадку Значе - ния сос- Численные выкладки
тавляю - тих раз- меров. Сложе - ние по- ложите- 5 5.1 М| =1 ► 12 О*0059 F II1U*OO16 «2 n*cooc * z- -QD43 у л* 0.100 M4 =» u-0100 у c 4*0 000 => Ы-0.0П 5.2 ~LJ 1* »T 3o.6!°0;n с л ♦ 0.000 du*0.0?15 5.3 Правила 1, 7, 4 При делении от- клонений их сле- дует округлять до тысячных только в окон- чательном резул.
льных разме - ров м3 => 30.6:°’“ зб.б:“;”5
Сложе- ние от - рицате- льных разме- ров и • пцоме - жуточ - 6 ед ft ft ft 1 ¥ r!~ (-) -<s.o:!Ss) -(305* ° °00) lJU-3- 0.037/ 6.2 •Mpe,. Ша=» -Mpe (. Ill a min = зб.б:°;”5 nc c *0.145 -0.1Z95 0 .. 0.270 U' "0.276 - 0,176Л/резДПатох=*0.370 6.3 Результирующие отклонения округлить до тысячных Правила 1,2,4,7
ных ре— зульта - тов _ nc r*0.l295\ -(□6.5_0U5y TA ' JD-3-0.1295
Рис. 4.90. Размерные цепи, содержащие посадки. Постановка задачи в примере: расчет зазора в посадке (Mp^)» эксцентриситета (Мр^п)
илерекрытия шайбы и пластины (Мр^щ)
218
4. Собрание конструкторских каталогов
правило, изменяют не только сам допуск, но и его
поля. Поэтому, как и раньше, целесообразно
составить размерную цепь с желаемым результи-
рующим размером и проводить расчеты с ее по-
мощью. Но тут-то и возникают принципиальные
сложности, отсутствующие в элементарной алгеб-
ре. Дело в том, что для обобщенного размера
имеет силу неравенство
М-М*0. (4.68)
В этом легко убедиться, воспользовавшись
правилом 3 из кат. 4.12.1. Проделаем соответст-
вующие выкладки: по определению
Т = Ав-Ан>0, (4.69)
деталь не может быть изготовлена с абсолютной
точностью. Тогда
(4-70)
То₽3 = Лв вез - Лн вез = Ав ~ Ан ~ (Лн “ AJ =
рез в.рез н.рез в м 4 м
= 2(АВ-АИ) = 2Т.
(4.71)
Из-за этого свойства обобщенного размера мы
не можем обычным образом переносить слагаемые
в уравнении из левой части в правую и наоборот.
Правило переноса, которое здесь используется,
основано на том, что если из обеих частей равен-
ства вычесть одну из стоящих там величин, то из
одной части равенства эта величина исчезнет, а в
другой появится с противоположным знаком.
Чтобы все-таки с уравнениями размерных цепей
можно было обращаться, как с обычными, Выров-
ски [108] предложил ввести так называемый сопря-
женный обобщенный размер М. Он представляет
собой число - условную величину - и определяет-
ся равенством
М =» (4.72а)
Повторное сопряжение, как и повторное отри-
цание, возвращает нас к исходной величине
М =» => М (4.726)
н
(см. правило 5 кат. 4.12.1).
Если теперь по правилу 3 найти разность
М-М=> (N-N)ab~ab =”0, (4.73)
Лн zih
то получим в результате чистый нуль.
Для целей преобразования равенств с обобщен-
ными размерами это означает, что при переносе
размера из одной части равенства в другую он не
только изменяет знак, но еще и сопрягается (пра-
вило 6). Равенство с обобщенными размерами
сохраняется, если у всех слагаемых в алгебраичес-
кой сумме одновременно изменить знак (как и в
обычной алгебре), а также если заменить все
слагаемые на сопряженные или одновременно
изменить знак и заменить слагаемые на сопряжен-
ные.
На рис. 4.89 приведен численный пример. В
поле 1.1 показана втулка, удерживаемая на валу
штифтом. Результиру1ощий допуск, характеризу-
ющий относительное положение штифта и канав-
ки, не должен превосходить имеющегося зазора.
Предельные значения размеров должны гаранти-
ровать отсутствие соприкосновения штифта и бо-
ковых поверхностей канавки, т. е.
0 < М . (4.74)
w рез реэ.тах >
Вычисление результирующего размера произ-
ведено в поле 3.2, п. 2 (рис. 4.89). После этого обыч-
ным образом составляется размерная цепь для
Мрез (поле 1.2). Соответствующие уравнения для
М2 приведены в поле 2.1.
В поле 3.1 собраны все составляющие размеры
и определен результирующий размер. После этого
произведена оценка ожидаемой суммы составля-
ющих допусков - одна должна быть меньше ре-
зультирующего допуска Трез.
В строках 4-6 приведены численные расчеты.
Вначале складываются между собой по отдельнос-
ти положительные и отрицательные размеры, а
затем - полученные при этом промежуточные
результаты разного знака (строки 4 и 5). В строке 6
произведена проверка.
Здесь нам впервые встретились операции
умножения и деления обобщенных- размеров. По
правилу 4 из кат. 4.12.1 в случае независимых друг
от друга размеров эти операции выполняются
путем умножения номинального размера на соот-
ветствующий множитель (который может быть
меньше единицы) и умножения отклонений на
кубический корень1 * из этого множителя (всегда по-
ложительного).
При расчете зависимых размеров, например
радиуса исходя из диаметра, более осмысленно
умножать отклонения на тот же коэффициент, как
это и было сделано в настоящем примере.
4.12.7. Размерные цепи, включающие
цилиндрические посадки
Если размерная цепь проходит через детали,
для которых указаны посадки, то описанный
способ расчета не меняется. Если посадка с зазо-
ром, то этот зазор следует взять за результирую-
щий размер (как на рис. 4.90, поле 1.1) и составить
размерную цепь для А4рез1 (поле 1.2, вверху). Другой
способ - расчет отклонения средней линии Мрез1]
(поле 1.2, внизу).
Если посадка без зазора, то размерная цепь
проходит через средние линии, проведенные без
учета допусков. При переходных посадках отрица-
тельные результирующие отклонения считаются
нулевыми и все вычисления проводятся с положи-
тельными отклонениями.
В следующем примере (рис. 4.90, поле 3.1)
показана посадка шайбы на ось. По размеру М ш
следует определить,~не вылезет ли шайба за край
пластины при неблагоприятном распределении
отклонений. На эскизе МрезШ положителен, т. е.
предполагается, что шайба помещается на пласти-
не. Если, однако, возможны отрицательные значе-
ния, то это следует учесть при расчете. В поле 3.2
показана размерная цепь и приведено уравнение.
В поле 2.2 ранее был вычислен зазор в посадке
Мрез1а как разность Мх и М2. Эксцентричное поло-
жение отверстия в шайбе по отношению к ее
наружному краю характеризуется размером М4.
Для этого размера, а также для аналогичных
случаев, когда номинальный размер нулевой, а
1 В области номинальных размеров, превышающих 500 мм
(N*> 500) отклонения должны умножаться на тот же множитель,
что и номинальные размеры. Это связано с определением еди-
ницы допуска i = (0,45 ^N* + 0,001 N*)10~3, см. стандарт ДИН 7160
[9]. — Прим. авт.
4.12. Размеры с допусками
219
отклонения симметричны, направление стрелки в
размерной цепи безразлично. Дальнейшие вычи-
сления в полях 5.1 - 5.2 проводятся так жц,как и в
предыдущих примерах.
4.12.8. Смысл различных значений
результирующего размера
Значения результирующего размера соответ-
ствуют3 некоторой ограниченной области, и всегда
следует проверять, является ли эта область допу-
стимой или даже в принципе возможной, и если
да, то насколько хорошо она согласуется с поста-
вленной целью. На рис. 4.91 приведены разные
возможные значения результирующего размера и
отдельных его компонент. Их влияние на констру-
ктивные характеристики показано в столбцах 1-4.
Например, на основании строки 2 можно понять,
что отрицательность результирующего размера
означает, что исходное предположение о распре-
делении допусков ошибочно или же была допуще-
на ошибка в вычислениях или записи.
4.12.9. Расчеты допусков в двух измерениях
До сих пор мы рассматривали допуски, относя-
щиеся только к одному направлению. В то же
время положение точки на плоскости характери-
зуется двумя координатами, а в наших рассмотре-
ниях - двумя размерами (см., например, поле 1.1
на рис. 4.92). Соответственно и допуски следует
рассматривать для двух направлений. И если эти
направления являются зависимыми друг от друга
через некоторое третье направление (например,
через направление линии центров отверстий как в
поле 2.1 на рис. 4.92), то допуск в этом третьем
направлении превышает больший из двух допус-
ков по координатам (поле 2.2).
Для задания размеров, определяющих положе-
ние точек на плоскости, можно использовать
признаки равенства треугольников, в первую
очередь их частные случаи, относящиеся к прямо-
угольным треугольникам. При этом всегда тре-
буются два исходных размера. Во всех расчетах с
прямоугольным треугольником прямой угол
считают в точности прямым и пренебрегают его
допусками, поскольку они относятся не к самому
углу, а к его реализации или измерению в машине
или приспособлении.
В примере строки 2 (см. рис. 4.92) считаются
известными две стороны и заключенный между
ними (прямой) угол, в примере 3 - одна сторона и
два прилежащих к ней угла, в примерах 4 и 5 - две
стороны и (прямой) угол, лежащий против боль-
шей из них. Самыми неблагоприятными оказы-
ваются допуски в том случае, когда размеры
гипотенузы и катета близки друг к другу (при-
х\Краяс размерами Смысл значений результирующего размера Дополнение
Компоненты*''^ результирующего^^ Внешние края Внутренние края О дностор онние края Центры
размера № 1 2 3 4 5
Результн рующие предель- ные раз- меры ^рез. min > 0 1 1.1 1.2 -• 1.3 О ' 1.4 ~| 1- 1.5 Расположе- ние краев с размерами соответству. ет предпо - латаемому, если ^рез 0
1 ] т + 4- А В
Перемычка сохраняется Отверстие сохраняется Контур сохраняется Центры распо- ложены. как предполагало»
^рез. max 0 2 2.1 2 1 "Т 2.3 Кон измс 2 4 2.5 Расположе- ние краев с размерами не соответ- ствует пред- полагав мо- му, если Мрез < 0
di ] _ J I - 1 В А
Перемычка исчезает Отверстие исчезает ГУР княется Центры пере- ставлены мес- тами
х зе х х хэ -О ХЭ ТЗ □ 8 2 8 э а эв = S э S и и A V 3 4 3.1 Поскольку результирующие предельные размеры и больше, и меньше нуля, то в зависимости от значений фактических допу, сков может встретиться случай строки 1 или случай строки 2 4.1 Ошибка в вычислениях, так как должно быть ^рез. max ^рез. min “ > й 3.5 4.5
Результи- рующий номи- нальный размер ^реэ > 0 5 5.1 Результирующий номинальный размер расположен, как и предполагалось 5.5
Лрез <0 6 6.1 Предположение о расположении определяющих краев номи- нального размера оказалось неверным и должно быть измене- но 6.5 Имеем ли мы здесь случай строки 2, зависит от отклонений
/Урез = 0 7 7.1 Этот случай встречается довольно часто, особенно для посадок
Результи рующие откло- нения Л в. рез > ^н. рез 8 8.1 Неравенство верно и выполняется для любых отклонений 8.5
^в, рез < ^н. рез 9 9.1 Неравенство допустимо только формально при вычислениях с сопряженными размерами. Для несопряженных размеров и в качестве результата неверно 9.5 См. ката- лог 4.12.1. строка 5
^в.рез ~ ^н. рез 10 10.1 Неверно ни в реальности, ни формально, так крк должно быть Трез = Ло рет Лн рез > 0 10.5
Рис. 4.91. Смысл различных значений резуль-
тирующего обобщенного размера и его от-
дельных компонентов
220
4. Собрание конструкторских каталогов
Результирующий
допуск
___________3____________
1.3
Наименьшие возмож-
ные допуски вг-,
х- и у -направлении
2.3
Наименьшие возмож-
ные допуски в х- и
у -направлении.
В /^направлении допуск
больше в соответствии
с длиной диаго нали в
двумерном поле допу-
ска____________________
3.3
Наименьшие возмож-
ные допуски в г- и
о-направлении.
В х - и у -направлении
допуски больше в со-
ответствии с длиной
диагонали в двумерном
поле допуска
43 -
Наименьшие возмож-
ные допуски в г- и
х -направлении.
В у - и ^направлении
из-за близости длин
гипотенузы и большого
катета очень большие
допуски
5.3
Наименьшие возмож —
ные допуски в г и
у -направлении.
В хи о-направлении
допуск больше, в не-
благоприятных случаях
очень большой
Рис. 4.92. Результирующий допуск при задании двумерных по-
лей допуска
мер 4) и, в несколько меньшей степени, когда
направление допуска является диагональным для
направлений полей исходных допусков (пример. 2).
Если размеры, определяющие относительное
положение двух точек, заданы на приблизительно
перпендикулярных направлениях, то допуск для
диагонали оказывается наименьшим.
Составление размерных цепей производится,
как и раньше, для каждого координатного напра-
вления порознь. Если составляющие размеры
заданы непосредственно, то все сводится к
рис. 4.92. Результирующие размеры по координат-
ным направлениям могут объединяться в один
общий размер с двумерными полями допуска1.
Расчет размера, существенного для функции
устройства, например Мг, может проводиться
путем определения номинального размера Мг и
отклонений (допусков) для предельного положе-
ния номинального размера. Направление номи-
нального размера, как правило, не совпадает с
диагональным направлением полей допусков
(см. рис. 4.92, поле 2.2).
Если захотеть составить двумерную размерную
цепь [16], то все размеры следует представлять в
векторной форме [57]. Однозначно размеры опре-
деляются тогда, когда исходные длины и углы
соответствуют одному из признаков равенства
треугольников.
4.12.10. Правила расчета допусков
В одноименном каталоге 4.12.1 собраны все
правила по расчетам допусков с помощью предель-
ных размеров. В столбце 1 приведены названия
операций, в столбце 2 - уравнения, в столбце 3 -
формулировки правил. Сложение (строка 1) осно-
вано на сложении номинальных размеров и откло-
нений по отдельности. Изменение знака (строка 2)
означает одновременное изменение знака компо-
нент и перестановку позиций отклонений. Так
называемое „перекрестное правило” (строка 3)
является следствием правила изменения знака
из строки 2. Умножение и деление обобщенных
размеров (строка 4) выполняется, согласно „мо-
дельным законам для допусков” [61, 67], путем
умножения и деления номинального размера на
соответствующий множ;итель, а отклонений - на
кубический корень из этого множителя (случай
зависимых допусков является исключением из
этого правила!).
В строке 5 приведена новая операция - сопря-
жение, которая необходима для преобразования
уравнений с обобщенными размерами. Ее исполь-
зование показано в строке 6. Переход от уравнений
с обобщенными размерами к обычным показан в
строке 7, а из строки 8 видно, что предельные допу-
ски (но не фактические, наиболее вероятные до-
пуски) всегда складываются.
Конструктор сможет быстро овладеть правила-
ми расчета предельных допусков после разбора
небольшого числа примеров. В связи с этим основ-
ная задача кат. 4.12.1 - каталога операций - пред-
ставить в удобной и наглядной форме все упомя-
нутые правила и, в какой-то степени, служить
сборником формул этого, достаточно необычного,
вида расчетов.
1. Список принципов к конструкторскому каталогу 4.12.1
1. Цель создания кон- структорского ка- талога 2. Момент примене- ния при методи- ческом констру- ировании 3. Использование каталога 4. Определения ос- новных понятий 5. Классификация в каталоге 6. Ссылки на варианты 7. Примеры Наглядно представить алгебраические правила для расчетов с обобщенными размерами, номинальными размерами, (предельными) отклонениями и допу- сками В предметной фазе конструирования в основном на этапе технологической реализации изделия При расчетах результирующего (замы- кающего) размера или составляющих размеров с помощью размерной цепи, а также при расчетах результирующих (предельных) отклонений и результи- рующих (предельных) допусков Допуск на размер. Обобщенный размер, состоящий из номинального размера, верхнего и нижнего отклонений. Определение см. на рис. 4.84 По тому, относятся ли правила к обоб- щенным размерам или к номинальным размерам, допускам и отклонениям Рис. 4.85-4.92
1 Двумерность означает не расширение поля допуска, а
только то, что допуски указываются для двух измерений. —
Прим. ает.
4.12. Размеры с допусками
221
2. КОНСТРУКТОРСКИЙ КАТАЛОГ 4.12.1: ПРАВИЛА РАСЧЕТА
ПРЕДЕЛЬНЫХ ДОПУСКОВ
Классифи- кациоинал Главная часть
Операция Уравнение Правило
часть № 1 2 3
1 1.1 Сложе- ние 2 Общий случай : Ll" Е Авк 2_Мк => [Г N1 ’ . к=1 Е Анк 1 Другие способы Ml * м2 *.... *мп =* <11 . .। . ц 1 Ав1 ♦ Ав2 + ...+ Авп (Ni + N; +....+ Nn). . _ А Ahi ♦Ан2+...+А1,п 1.3 Сложение обобщенных раз- меров выполняется путем сложения номинальных раз меров, причем верхних и нижних отклонения по от- дельности. Отклонение, стоящее на месте верхнего индекса, должно быть всегда боль- ше отклонения, стоящего на месте нижнего индекса: Лв > 4Н; — Ан х* —Ар
2- 2.1 Изме- нение знака 2.2 -М => \ Ан/ => - N’JH ~Ав 2.3 Изменение знака обобщен- ного размера вызывает из- менение знака номинально- го размера и обоих откло- нений. Отклонения при этом меняются местами
Обобщен- ный размер М 3 3.1 Вычи - тание 3.2 Ав1 “Ац2 =>(Ю2)*В’’^ Ан1 -Ав2 3.3 Вычитание может быть све- дено к сложению (поле 12) если изменить знак (поле 22) у вычитаемого. Другой способ — "перекрестное правило”: АВ1 * Abz II Abi - ABz Ahi * Ан2 || Ан1 " Ав2 Сложение Вычитание
4 4.1 Умно- жение 4.2 VToF а 1а|М => |o|N3/—, Viol Ан 4.3 При умножении обобщен- ного размера на положите- льный множитель а номи- нальный размер умножает- ся на а, верхнее и нижнее отклонения умножаются на tfa
5 5.1 Сопря- жение 5.2 М => N,H ; Ав м => /в=> м Ан 5.3 Сопряжение означает толь- ко перестановку отклоне - ний. Эта операция введена- только для удооства расче- тов и не имеет геометричес- кого смысла. При ее выпол нении вторым правилом в поле 1.3 пренебрегают
6 6.1 Преоб- разо- вание урав- нений 6.2 Общий случай: Мрез^ £мк ; Мк =*МП к--1 к--1 Пример: Мрез'М^ =* М| - М2 - М з Мрез - М! + М 2 + М з => М 6.3 Если алгебраическое слагае- мое переносится из одной части в другую, то прн этом производится как измене- ние его знака, так и сопряжение. Равенство остается справед- ливым, если заменить все слагаемые на сопряженные или если умножить их все на одинаковый коэффи- циент
Номиналь- ный размер N 7 7.1 Сложе- 7.2 Пример: И рез М, -Mz + Mj-Ml; Npea = Ni -N2+N3-N4 Ав рез " Abi-Ahz+Ab3-Ah4 Анрез = АН1-AbZ+A,,]-А^ 7.3 После раскрытия скобок (как показано в поле 2 2) результирующий размер может быть получен обыч- ным сложением номиналь- ных размеров, верхних и нижних отклонений
Отклоне - ние размера^ Допуск на размер Т 8 ние 8-г Для примера нз поля 7.2: 7.2 Трез= Ь + Tz + Общий случай; Т = Ав- Ан Трез= Аврез- Анрез е.з Результирующий (предель- ный) допуск Гре, всегда яв- ляется суммой составляю- щих допусков и никогда не оказывается их разностью. В отличие от допусков, но- минальные размеры, верх- ние и нижние отклонения могут совершенно свобод- но как складываться, так и вычитаться
Специальный знак равенства, указывающий, что следует пользоваться правилами
из поля 6 Л
222 4. Собрание конструкторских каталогов
4.13. Список литературы
I. Andresen, U.: Die Rationalisierung der Montage be-
ginnt im Konstruktionsbiiro. Konstruktion 27 (1975)
478 484.
1.1. Albien, E., u. W. Heller: Aufbau von Relativkosten-
Katalogen fiir Norm- und Kaufteile, Werkstoffe und
Halbzeuge. DiN-Mitt. 59 (1980) 229-240.
2. Bacher, K.: Beit rage zum methodischen Vorgehen in
der Baukonstruktion. Befestigung zwischen leichten
AuBenwanden und dem Gebaudetragwerk. VDl-Fort-
schritt-Berichte, Reihe4, Nr. 51. Dusseldorf: VDI-Ver-
lag 1979.
3. Birkhofer, H.: Analyse und Synthese der Funktionen
technischer Produkte. Diss. TU Braunschweig 1980.
4. Birkhofer, H.; Franke, H.-J.: Funktion und Gestalt.
Konstruktion Elemente Methoden (1977) H. 10.
4.1. Busch, W.: Relativkosten-kataloge als Hilfsmittel zur
Kostenfriiherkennung. VDl-Bericht Nr. 347. Dfissel-
dorf: VDI-Verlag 1979.
5. Delpy, U.: Zylindrische Schnappverbindungen aus
KunststofF. Berechnungsgrundlagen und Versuchsergeb-
nisse. Konstruktion 30 (1978) 179-184.
6. Diekhoner, G.: Erstellen und Anwenden von Konstruk-
tionskatalogen im Rahmen des methodischen Konstruie-
rens. Diss. TU Braunschweig 1980. Erschienen in Fort-
schrittberichte der VD1-Z, Reihe I, Nr. 75: Dusseldorf
1981.
7. Diekhoner, G.; Lohkamp, F.: Objektkataloge - Hilfs-
mittel beim methodischen Konstruieren. Konstruktion
28 (1976) 359-364.
8. Diekhoner, G.; Kopowski, E.: Konstruktionskataloge
uber Nietverbindungen - ein weiterer Schritt zur Syste-
matisierung der Verbindungstechnik. VD1-Z 123 (1981)
570-578.
8.1. DIN 3960: Begriffe und BestimmungsgroBen ffir Stirn-
rader (Zylinderrader) und Stimradpaare (Zylinderrad-
paare) mit Evolventenverzahnung. Berlin, Koln: Beuth-
Vertrieb 1976.
8.2. DIN 5479: Obersetzung bei physikalischen GroBen,
Begriffe, Formelzeichen. Berlin, Koln: Beuth-Vertrieb
1978.
9. DIN 7160: ISO - AbmaBe fiir AuBenmaBe (Wellen).
Berlin, Koln: Beuth-Vertrieb 1965.
10. DIN 7182: Toleranzen und Passungen. Grundbegriffe.
Berlin, Koln: Beuth-Vertrieb 1971.
11. DIN 8582: Fertigungsverfahren Umformen. Einord-
nung, Unterteilung, Alphabetische Obersicht. Berlin,
Koln: Beuth-Vertrieb 1971.
11.1. DIN 8583: Fertigungsverfahren Druckumformen. Ber-
lin, Koln: Beuth-Vertrieb 1969/1970.
12. DIN 8593: Fertigungsverfahren Fiigen. Berlin, Koln:
Beuth-Vertrieb 1967.
13. Dizioglu, B.: Lehrbuch der Getriebelehre, Bd. I (1965)
und Bd. 2 (1967) Braunschweig: Vieweg.
14. Dizioglu, B.: Kinematische und statische Grundlagen
des Spannens und Positionierens im Maschinenbau, ins-
besondere bei Werkzeugmaschinen. VDI-Berichte
Nr. 281, S. 25-35. Diisseldorf: VDI-Verlag 1977.
15. Dudley, D.W.; Winter, H.: Zahnrader. Berlin, Gottin-
gen, Heidelberg: Springer 1961.
16. Eder, H.: MaBeintragrng und Toleranzauswirkung.
Feinwerktechnik 66 (1962) H. 9.
Г6.1. Ehrlenspiel, K.: Genauigkeit, Giiltigkeitsgrenzen, Ak-
tualisierung der Erkenntnisse und Hilfsmittel zum ko-
stengiinstigen Konstruieren. Konstruktion 32 (1980)
487 492.
16.2. Ehrlenspiel, K., Kiewert, A., u. U. Lindemann: Erar-
beitung von Hilfsmitteln zum kostengiinstigen Kon-
struieren - eine Aufgabe fiir die Konstruktionslehre.
VDLZ 122 (1980)681-687.
17. Ersoy, M.: Wirkflache und Wirkraum. Ausgangsele-
mentezum Ermitteln der Gestalt beim rechnerunterstiitz-
ten Konstruieren. Diss. TU Braunschweig 1975.
18. Ersoy, M.: Konstruktionskataloge fiir Fertigungsverfah-
ren. wt-Z. ind. Fertig. 66 (1976) 211-217.
19. Ersoy, M.: Systematik und Katalog fiir raumliche Ele-
mentenpaare. Mechanism and Machine Theory (1976)
331-342.
20. Ersoy, M.; Franke, H.-J.: Systematik der Elemente und
Operationen bei der konstruktiven Gestaltung. VDI-Z
118 (1976) 1183 1187.
21. Ewald, O.: Losungssammlungen fiir das methodische
Konstruieren. Diisseldorf: VDI-Verlag 1975.
22. Foley, J.W.: Patentschrift 2, 255, 035 USA, 9.9.1941.
23. Foley, J.W.: Patentschrift 2, 565, 070 USA, 21.8.1951.
24. Follinger, O.; Weber, W.: Methoden der Schaltalgebra.
Miinchen: Oldenbourg 1967.
25. Franke, H.-J.: Untersuchungen zur Algorithmisierbar-
keit des Konstruktionsprozesses. Diss. TU Braunschweig
1976.
26. Franke, R.: Vom Aufbau der Getriebe. Diisseldorf:
VDI-Verlag 1958.
27. Gerber, H.: Bauweisen mechanischer Flipflops, fein-
werktechnik + micronic 76 (1972) 58-62.
28. Gerber. H.: Ein Konstruktionsverfahren fur Gerate mit
logischer Funktionsweise. Konstruktion 25(1973) 13 )7.
29. GieBner, F.: GesetzmaBigkeiten und Konstruktionskata-
loge elastischer Verbindungen. Diss. TU Braunschweig
1975.
30. Griibler, M.: Allgemeine Eigenschaften der zwanglaufi-
gen ebenen kinematischen Ketten. Civilingenieur. 1880,
168.
31. Hain, K.: Angewandte Getriebelehre, 2. Aufl. Diissel-
dorf: VDI-Verlag 1961.
32. Hain, K.: Getriebelehre, Grundlagen und Anwendun-
gen. Miinchen: Hanser 1963.
32.1. Haupt, U.: Keilschragverzahnung fiir Getriebe mit ein-
stellbarem Verdrehflankenspiel. Diss. TU Braunschweig
1981.
33. Heesch H.; Kienzle, O.: FlachenschluB. Buchreihe Wis-
senschaftliche Normung. Berlin, Gottingen, Heidelberg:
Springer 1963.
34. Hildebrand, S.: Feinmechanische Bauelemente, 3. Aufl.
Miinchen: VEB-Verlag Technik/Hanser 1978.
35. Hoechst AG: Berechnung von Schnappverbindungen
mit Kunststoffteilen. КЕМ 16(1979)69-76.
36. Kiper, G.: Die Wahl des Mechanismus als konstruktive
Teilentscheidung. VDI-Berichte Nr. 195(1973) 253 264.
37. Kollenrott, F.; Mende, H.: Evoloid-Verzahnungen fiir
Leistungsgetriebe mit groBen Obersetzungsverhaltnissen.
VDI-Berichte Nr. 332. Diisseldorf . VDI-Verlag 1979.
37.1. Kollmann, F.G.: Welle-N^be-Verbindungen. Berlin,
Heidelberg, New York: Springer (voraussichtlich 1982).
38. Kuhn. P.: Zur systematischen Behandlung von Walzla-
gern in der Lehre. Nicht veroffentlichter Vortrag anlaB-
Ikh der Maschinenelementetagung Karlsruhe 1979.
39. Leyen, D. van: Ober die Verwendung des Logikbegriffs
in technisch-wissenschaftlichen Veroffentlichungen, ins-
besondere solchen der Informationsverarbeitung und der
Konstruktionswissenschaft. feinwerktechnik + micronic
76 (1972) 73-77.
40. Leyer, A.: Maschinenkonstruktionslehre. Hefte 1-6 tech-
nica-Reihe. Basel, Stuttgart: Birkhauser 1963-1971.
41. Lichtenheldt, W.: Konstruktionslehre der Getriebe. Ber-
lin: Akademie-Verlag 1970.
42. Lorenz, D.: Das elastische Gelenk als statisch bestimm-
tes Modell. Diss. TU Braunschweig 1972.
43. Merhar, G.: Getriebetechnische Losungskataloge. Ma-
schinenbautechnik 27 (1978) 15-18.
44. Mette, M.: EinfluB der Reibung auf die An.derung der
Zahnkraft iiber dem Eingriff bei geradverzahnten Stirn-
radern unter Beriicksichtigung der Massenverhaknisse.
Diss. TU Braunschweig 1975.
45. Mette, M.: Reibung in Gleit-Walzpaarungen bei.Trok-
kenlauf oder Grenzschmierung, Konstruktion 30 (1978)
259-266.
46. Miiller, E.: Modellentwicklung fiir die Synthese mecha-
nischer Konstruktionen. Diss. TU Braunschweig 1978.
47. Neudorfer, A.: Systematischer Katalog fiir Bedienteile.
Werkstatt und Betrieb 110 (1977) 225 236.
48. Niemann, G.: Maschinenelemente Bd. 1, 2. Aufl. 1975,
Bd. 2 1965. Berlin, Heidelberg, New York^Springer (.2.
neubearb. Auflage von Bd. 2 in Vorbereitung, 2 Bande
1981).
49. Niemann, G.; Rotlr, K.: Zahnformen und Getriebe-
eigenschaften bei Verzahnungen der Feinwerktechnik.
Feinwerktechnik 68 (1964) 344-357, 409-423, 538.
50. NN: Fastening & Joining Issue. Machine Design 41
(1969) Nr. 22.
51. Oberdorfer, G.: Das System Internationaler Einheiten
SI, Standort der GroBenlehre. Wien, New York: Sprin-
ger 1977.
52. Pahl, G.: Wegezur Losungsfindung. Industrielle Organi-
sation 39(1970) 156-157.
4.13. Список литературы
223
S3. Pahl, G.; Beitz, W.: Konstruktionslehre. Berlin, Heidel-
berg, New York: Springer 1977.
54. Reuleaux, F.; Moll, C.: Konstruktionslehre fur den Ma-
schinenbau. Braunschweig: Vieweg 1854.
54.1. Richter, W.: Getriebe fur Fernsteuerungen. VDI-Be-
richte Nr. 374 Dusseldorf: VDI-Verlag 1980.
55. Rodenacker, W.G.: Physikalisch orientierte Konstruk-
tionsweise. Konstruktion 18 (1966) 263 269.
56. Rodenacker, W.G.: Festlegung der Funktionsstruktur
von Maschinen, Apparaten und Geraten. Konstruktion
24 (1972 ) 335-340.
57. Roth, K.; Roth, K.: Einfiihrung in die Vektorlehre.
Munchen: Hanser 1972.
58. Roth, K.: Berechnung der Toleranzsummierung von
GrenzmaBen in der Ebene. Unverdflentlichte Arbeit
(Siemens AG) 1956.
59. Roth, K.: Die Kennlinie von einfachen und zusammen-
gesetzten Reibsystemen. Feinwerktechnik 64(1960) 135
60. Roth. K.: Reibkupplungen in der Feinwerktechnik,
Feinwerktechnik 65 (1961) 285 296.
61. Roth, K.: Kennzeichnende Merkmale feinwerktech-
nischer Konstruktionen. VDI-Z 105 (1963) 1017 1025,
1125 1129.
62. Roth, K.: Evolventenzahnradpaarung mit Schragverzah-
nung zur Ubersetzung ins Langsame. Deutsche. Patent-
schrift 1.210.644 Miinchen 1963.
63. Roth, K.: Evolventenverzahnungen fiir parallele Achsen
mit Ritzelzahnezahlen von 1 bis 7. VDJ-Z 107 (1965)
275 284.
64. Roth, K.: Evolventenverzahnung und Raderpaarung
unter Verwendung einer Verzahnung mit verschiedener
Zahnkopf- und Grundkreismantelflache. Osterreich: Pa-
tentanmeldung 1967.
65. Roth, K.: Zum Wirkungsgrad von schragverzahnten
Stirnradgetrieben mit Ritzelzahnezahlen von I bis 5.
VDI-Z 109 (1967) 242-252.
66. Roth, K. : Planrad mit Evolventenverzahnung. Deutsche
Patentschrift 1.775.345. Miinchen 31.7.1968.
67. Roth, K.: Die Feinwerktechnik im Blickpunkt ihrer
Nachbargebiete. Industrielle Organisation Zurich (1968)
H.4.
68. Roth, K.: Systematik der Maschinen und ihrer mecha-
nischen elementaren Funktionen. Feinwerktechnik 74
(1970) 453 460.
69. Roth, K.: Systematik mechanischer Flipflops und ihre
Bedeutung fiir die Konstruktion von Schaltelementen.
Feinwerktechnik und MeBtechnik 82 (1974) 384-392.
70 Roth, K.: Stirnradpaarungen mit I- bis 5-zahnigen Rit-
zeln im Maschinenbau. Konstruktion 26 (1974) 425-
429.
71. Roth, K.: Die logische SchluBmatrix, ein Algorithmus
zur Analyse und Synthese von Verbindungen und Fiih-
rungen in der Konstruktion. VDI-Fortschritt-Berichte,
Reihe I, Nr. 35. Dusseldorf: VDI-Verlag 1974.
72. Roth, K.: Aufbau und Handhabung von Konstruktions-
katalogen. VDI-Berichte Nr. 219. Dusseldorf: VDI-Ver-
lag 1974.
73. Roth, K.: VerschluBglieder und Verschliisse aus Kunst-
stoffteilen mit Vielfachfunktionen. Konstruktion 28
(1976) 249 258.
74. Roth, K.: Systematik fester Verbindungen als Grundlage
fur ihre sinnvolle Anwendung und Weiterentwicklung.
VDI-Berichte Nr. 360. Dusseldorf: VDI-Verlag 1980 und
VDI-Z 122 (1980) 381 389.
75. Roth, K.; Gerber. H.: Logische Funktionsplane mecha-
nischer Nachrichtengerate und ihre Bedeutung fiir die
Konstruktion. Feinwerktechnik 73 (1969) 369 376.
76. Roth, K.; Franke, H.-J.; Simonek, R.: Algorithmisches
Auswahlverfahren zur Konstruktion mit Katalogen.
Feinwerktechnik 75 (1971) 337 345.
77. Roth, K.; Simonek, R.: Mechanische Verstarker. Kon-
struktion 23 (1971) 90-98.
78. Roth, K.; Franke, H.-J.; Simonek, R.: Aufbau und Ver-
wendung von Katalogen fiir das methodische Konstruie-
ren. Konstruktion 24 (1972) 449-458.
79. Roth, K.; Birkhofer, H.; Ersoy, M.: Methodisches Kon-
struieren neuer Sicherheitsgurtschldsser. VDI-Z 117
(1975) 613-618.
80. Roth, K.; Haupt, U.: Stirnrader mit keilformigen Evol-
ventenzahnen fiir spielfreie Getriebe. VDI-Berichte Nr.
374. Dusseldorf: VDI-Verlag 1980.
80.1. Roth. K.; Kollenrott, F.: Zahnradpaarungen mit Kom-
plementprofilen zur Erweiterung der Eingriffsverhalt-
nisse und Erhohung der FuB- und Flankentragfahigkeit.
Konstruktion 34 (1982) Heft 3
80.2. Roth, K.; Kopowski, E.: Konstruktionskataloge fiir
feste Verbindungen. VDI-Z 124 (1982) Heft 7
81. Ruge, J.: Handbuch der SchweiBtechnik. Berlin, Heidel-
berg, New York: Springer 1974 (2. neubearb. A ullage
in 2 Banden 1980).
82. Salje, E.: Elemente der spanenden Werkzeugmaschinen.
Miinchen: Hanser 1968.
83. Scholz, G.: VerschleiBuntersuchungen an thermopla-
stischen Kunststoflzahnradern der Feinwerktechnik in
der Paarung Stahl - KunststofT- Diss. TU Braunschweig
1980.
83.1. Schuppar, H.: Rechnerunterstiitzte Erstellung und Ak-
tualisierung von Relativkosten-Katalogen. Diss. TH
Aachen 1977.
84. Sieker, К.-H.: Sperrgetriebe. AWF-VDMA-VDI-Getrie-
behefte 3, 4 und 5. Berlin : AusschuB fiir wirtschaftliche
Fertigung.
85. Steinbuch, K.: Taschenbuch der Nachrichtenverarbei-
tung. Berlin, Gottingen, Heidelberg: Springer 1962; (2.
Aufl. 1967. 3. neubearb. Aufl. in 3 Banden unter dem
Titel „Taschenbuch der Informatik" 1974).
86. Tjalve, E.: Die Gestaltungsstadien im Konstruktionspro-
zeB. Konstruktion 27 (1975) 492-498.
87. Unterberger, R.: Die Steifigkeit der Luftlager. Feinwerk-
technik 65 (1961) 17-24.
88. Unterberger, R.: Gaslager mit hoher Tragfahigkeit.
Feinwerktechnik 69 (1965) 154-156.
89. Unterberger, R.: Berechnung und Anwendung des
druckgesteuerten Luftlagers. TZ fiir praktische Metall-
bearbeitung 62 (1968) 149-153.
90. VDI-Richtlinie 2127: Getriebetechnische Gundlagen,
Begriflsbestimmungen der Getriebe. Diisseldorf: VDI-
Verlag 1962.
91. VDI-Richtlinie 2222, Bl. 2: Erstellung und Anwendung
von Konstruktionskatalogen. Diisseldorf: VDI-Verlag
1982.
92. VDl/VDE-Richtlinie 2251. Feinwerkelemente Verbin-
dungen, Ubersicht (Griindruck). Diisseldorf: VDI-Ver-
lag 1972.
93. VDI/VDE-Richtlinie 2251, Bl. 2: Feinwerkelemente
Stauch- und Biegeverbindungen. Diisseldorf: VDI-Ver-
lag 1979.
94. VDI/VDE-Richtlinie 2251, Bl. 3: Feinwerkelemente Lot-
verbindungen. Diisseldorf: VDI-Verlag 1971.
95. VDI/VDE-Richtlinie 2251, Bl. 4: Feinwerkelemente
SchweiBverbindungen. Diisseldorf: VDI-Verlag 1965.
96. VDI/VDE-Richtlinie 2251, B1. 5: Feinwerkelemente Kle-
beverbindungen. Diisseldorf: VDI-Verlag 1970.
97. VDI/VDE-Richtlinie 2252, Bl. 3: Feinwerkelemente
Fiihrungen, Gleitgelenke-, Sinterlager. Diisseldorf: VDI
Verlag 1970.
98. VDI/VDE-Richtlinie 2252, Bl. 8: Feinwerkelemente
Fiihrungen, Walzlager und andere Walzfiihrungen. Diis-
seldorf: VDI-Verlag 1976.
99. VDI/VDE-Richtlinie 2253: Feinwerkelemente Sperrun-
gen, Ubersicht. Diisseldorf: VDI-Verlag 1971.
100. VDI/VDE-Richtlinie 2253, Bl. 2: Feinwerkelemente
Sperrungen, Setzanschlage. Diisseldorf: VDI-Verlag
1972.
101. VDI/VDE-Richtlinie 2253, Bl. 3: Feinwerkelemente
Sperrungen, Festanschlage. Diisseldorf: VDI-Verlag 1971.
102. VDl/VDE-Richtlinie 2254, Bl. 2: Feinwerkelemente
Drehkupplungen, Schaltkupplungen. Diisseldorf: VDI-
Verlag 1978.
103. VDI/Richtlinie 2541: Gleitlager aus thermoplastischen
Kunststoffen. Diisseldorf; VDI-Verlag 1975.
104. Volckers, U.: Wiederverwenden konstruktiver Los ungen
durch Aufbau firmenspezifischer Konstruktionskata-
loge. Diss. TU Braunschweig 1977.
105. Vigh, Z.: Patentschrift 3, 337, 278 USA 22.8.1967.
106. Volmer, J.: Getriebetechnik. Berlin: VEB-Verlag Tech-
nik 1972.
107. Whitesitt, J.E.: Boolesche Algebra und ihre Anwendun-
gen. Braunschweig: Vieweg 1968.
108. Wyrowski, G.: Das Rechnen mit tolerierten MaBen.
Konstruktion 13 (1961) 289-306.
109. Zasada, H.U.: Stoffschliissiges Verbinden thermopla-
stischer Kunststofle mittels ReibschweiBens. Konstruk-
tion 29 (1977) 397 403.
224
5. МОДЕЛИ И ВСПОМОГАТЕЛЬНЫЕ СРЕДСТВА ДЛЯ КОНСТРУИРОВАНИЯ В ОТДЕЛЬНЫХ ФАЗАХ
В гл. 2 был описан процесс конструйрования на
основе рабочего плана (см. рис. 2.10), а также
отмечено, что почти во всех применяемых методах
так или иначе используется рабочий план. Подоб-
ные рабочие планы очень важны для соблюдения
наиболее выгодной и, тем самым, правильной
последовательности шагов при конструировании.
Однако они имеют лишь теоретическое значение,
если для отдельных фаз или этапов не предлага-
ются затем совершенно конкретные вспомогатель-
ные средства. Такими средствами могут служить
модели изделия, каждая из которых соответствует
определенному этапу конструирования. Модель
такого рода состоит из обозримого числа элемен-
тов, возможно более полно отражающих сущест-
венные для данной фазы конструирования свой-
ства технического устройства.
Определенные правила должны позволять
соединять эти элементы в структуры („сети”) и
обеспечивать возможность применения операций
варьирования, с помощью которых может быть
получено большое число различных решений.
Конструкторские каталоги и подборки решений
также облегчают процесс конструирования, но в
отличие от моделей изделия не содержат ника-
ких указаний о представлении решений в форме
сетевых моделей.
В дополнение к гл. 2 в настоящей главе дано
описание вспомогательных средств, предназначен-
ных для разработки изделия на том или ином
этапе конструирования, т. е. на определенном
уровне абстракции. На рис. 5.1 приведен рабочий
план и показано его разделение на этапы.
Этапы конструирования (отрезки фаз) соответ-
ствуют различным уровня абстракции, для кото-
рых существуют различные возможности представ-
ления изделия, например схема абстрактных
функций в форме абстрактной функциональной
структуры (модель 4), принципиальная схема
(модель 11) или контурное представление в форме
чертежа в ортогональных проекциях (модель 13) и
т. д.
На каждом таком этапе конструирования
разработка, варьирование и оптимизация изделия
может производиться по весьма формализован-
ным, часто даже алгоритмизируемым, шагам. Так,
на этапе конструирования 7 (см. рис. 5.1) следует
варьировать и оптимизировать физическую фун-
кциональную структуру, на этапе 11 - разрабаты-
вать на ее основе кинематическую схему, состоя-
щую из пар (шарниров) и звеньев, а на этапе 13 -
определять размеры и материалы и т. д. Результат
каждого этапа является исходным для формули-
ровки конкретной задачи следующего этапа
(см. пример на рис. 2.14). Чем больше дополнитель-
ных этапов конструирования удается ввести, тем
более простой и формальной становится работа на
каждом этапе. Например, на рис. 4.81 в строках 2, 3
и 4 показаны три дополнительных этапа конструи-
рования по сравнению с рис. 2.14. Увеличение
числа этапов конструирования облегчает и пере-
ход от одного этапа к другому.
Процедуру конструирования на одном этапе,
т. е. с помощью одной модели изделия, следует на-
зывать „горизонтальной” процедурой, так как
она производится на одном уровне абстракции, а
процедуру перехода от одного этапа к другому -
„вертикальной”.
Таким образом, мы приходим к тому, что для
различных задач в рабочий план необходимо
вводить соответствующие модели изделия, удо-
влетворяющие целому ряду требований содержа-
тельного и методического характера. Эти модели
могут и должны быть неодинаковыми, но наибо-
лее подходящими для каждой конкретной кате-
гории задач. Такие модели и работа с ними явля-
ются предметом дальнейшего изложения.
5.1. Модели изделия для этапов рабочего плана
Занимаясь конструированием, мы всегда
стараемся представить конструируемое изделие в
такой форме, в которой рассматриваемые свойства
были бы ясно выражены и легко могли варьиро-
ваться. Так, дизайнер охотно делает модели из
картона, пенопласта, легко обрабатываемой пласт-
массы перед тем, как окончательно определить
очертания изделия. Конструктор обычно предпо-
читает изображение в плоской, неискаженной
проекции перспективному, „искаженному” чтобы
иметь возможность изображать в масштабе длины,
углы, проводить сечения и более точно опреде-
лять фактические геометрические соотношения.
Такой чертеж также является моделью изделия,
которая строится из ограниченного числа (стан-
дартных) элементов, соединяемых по определен-
ным правилам, отражающим вполне определен-
ные свойства изделия. Подобные модели всегда
использовались в конструировании, но их совокуп-
ность никогда не ограничивалась каким-либо
определенным набором, они обычно не формали-
зовались и могли плавно переходить одна в дру-
гую. Франке [8] первым обратил серьезное внима-
ние на это обстоятельство и дал следующее опре-
деление.
Модель, представляющая изделие (кратко
Рп-модель) - это модель конструируемого техни-
ческого устройства, позволяющая получить доста-
точное и подходящее для выполнения операций
отображение, по крайней мере, тех (системных)
свойств устройства, которые относятся к соответ-
ствующему этапу конструирования и.
При попытке разработать „сквозные” методы
конструирования, т. е. такие, которые от постанов-
ки задачи ведут к рабочим чертежам, возникает
необходимость, в дополнение к имеющимся,
использовать специальные новые модели.
Ханзен [12] предлагает следующие семь уров-
ней моделей: „Уточненная задача”, „Техническая
функция”, „Топология”, „Технический принцип”,
„Конкретизированный принцип”, „Технический
проект” и „Полное описание системы”. Для четы-
5.1. Модели изделия для этапов рабочего плана
225
Рис. 5.1. Использование различных медалей изделия из рис. 5 J в рабочем плане из рис. 2.10. Числа указывают номера моделей на рис. 5 Д,
штриховыми линиями показаны плоскости переходов
рех из этих групп моделей он дает прямые опреде-
ления.
У Роденаккера [27] модели изделия явным
образом не определяются. Тем не менее, можно
выделить уровни „требуемой взаимосвязи воздей-
ствий”, „логической взаимосвязи воздействий”,
„физической взаимосвязи воздействий”, „кинема-
тической, конструктивной и технологической
взаимосвязи воздействий”.
Коллер [15] предлагает 16 моделей изделия:
„Постановка задачи”, „Общая функция”, „Струк-
тура частных функций”, „Структура основных
операций”, „Варианты эффектов”, „Варианты
носителей эффектов”, „Структура функций эле-
ментов”, „Варианты принципа”, „Варианты кон-
структивных элементов”, „Варианты сборочных
единиц (узлов)”, „Варианты системы”, „Технико-
экономическая оценка”, „Масштабный проект”,
„Окончательный проект”, „Чертежная документа-
ция”, „Технологическая документация” (см. так-
же рис. 2.17).
У Поля и Байтца [24] выделено семь моделей:
„Постановка задачи”, „Функциональная структу-
ра”, „Принципы решения”, „Технико-экономи-
15 — 2317
226
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Фаза коист- руиро- вания \ Модели и их \ свойства Модель изделия I Степень стандарта- | зованности 1 Основные способы представ- TTAUua Свойства, отражаемые в модели
Пример представления (фрагмент) Элементы, ус - ловия и спосо- бы соедине- ния в модель Словесный ; Формульный > Графический Действие Топология Прин- цип дей ствия Геомет рическ структ Материал Сведения об | изготовлении
Наиме - \ нование \ модели ' Физичес-1 кий Логичесн кий Качест- венные I КоличесН твенные
№ 1 2 3 ' 4 5 6 7 8 9 10 11 12 13 14
Фаза форму- лиров- ки задачи Постановка задачи 1 Предложения: например, сконструировать техничес- кое устройство для подъема автомобиля Слова; синтаксис о О о о о О о о о
Функцио- нальное положение 2 Объектно-предикатные выра- жения: например,поднять автомобиль; удерживать автомобиль вверху; опустить автомобиль Понятия для выражения объекта и пре- диката; син- таксис о о о о о о о о о о
Функ- циона- льная фаза Модель общей функции 3 в <3 э — с — Перемещать авто- моб- (вещество) путем подвода энергии при упра- вляющем воздей- ствии (сообщение) =>В -*э -►С Вещество, энер- гия, сообщение; черный ящик о о о О о о о о о
Абстрактная функцио- нальная стру- ктура (АФС) 4 (в> (э> © □ Абстрактные функции; на- правление пото- ка, одноимен- ные величины о о о о О о о о о о о о о О О о о
—(э)
Абстрактная диаграмма потоков 5 Э| —• Стандартные величины и нестандартные операции о о о о о о о о о о о о
Высвоб)-^ ЭчерезС* Прео-|^ браз-Э* Привести В в движ|
с
Логическая функцио- нальная стру- ктура (ЛФС) 6 X X X] . К' — у Бинарные сос - тояния; логи- ческие операции (комбинации) о о о о о о о о о о о о о о о о о
Специальная функцио- нальная стру- ктура (СФС) 7 Интенсивност - ные, количеств, величины; фи- зич.уравнения о о о о о о о о о о о о о о о
2 S; ’ 3 F;
Векторная, функцио- нальная стру- ктура (ВФС) 8 ,-F F, tvz -F, Механические интенсивностньк и количествен - ные величины; уравнения сил и скоростей о о о о о о о о о о о о о о о о о о о о О
F? t vT
Геометричес- кая функцио- иальиая стру- ктура (ГФС) 9 Геометрические элементы, по - верхностные па- ры; принудите- льное движение о о о о о о о О о о о О о о о о о о о о о о О
U '-1
Пред- метная фаза
Геометричес- кая цепная структура 10 г } Структурно- фу нкциоиальн. элементы; уравн сил и скоростей о о о о о о о о о О о о о о о о
4 я 74 Ж
Геометричес- кая линей- ная струк- тура 11 Звенья, пары; число степеней свободы о о о о о о о о о о о О о о о о о о о о о
Z Z Z 'XJL
Логическая матрица связей 12 П Г. /И b§VSalblq д" Я) Бинарные вза- имные р асполо- жения; логичес- кие операции о о о о о о о о о о о о о о о о о о о о
Геометричес- ки материаль ная реализа- ция 13 'Гела, ограничен- правильн. повер - хностями; сопри- косн.без взаимо- проникновения о о о о о о о о о о о о о о о о о о о о о о GL
— гч
Масштабный проект (чер- теж) с техно- логическими указаниями 14 __JIl Детали машин; совместимость о о о о о о о о о о о о о о о о о о о о о о О о о О
Рабочие чертежи для отдельных деталей 15 Контурные эле- менты; требова- ния к чертежам о о о /о| о о |о/ о о О о о Q о о о о о о о о о о о о о о о о о О
1
1
ч.
_ Низко, мало, незначительно, о Высоко, велико, много, значительно
ничтожно
Рис. 5 J. Модели изделия для использования в рамках алгоритмического метода выбора при конструировании с каталогами (АМВК)
5.2. Вспомогательные средства для фазы формулировки задачи
227
ческая оценка”, „Грубая и тонкая конструктивные
структуры”, „Окончательная конструктивная
структура” и „Технологическая документация”.
В алгоритмическом методе выбора по катало-
гам (АМВК) используются 16 моделей изделия
(рис. 5.2), при этом возможны различные варианты.
Модель 16 (технико-экономическая оценка [47]) не
приведена на рис. 5.2, однако она всегда входит в
рабочие планы и служит для анализа недостатков
и стоимости изделия.
Обзор моделей и характеристика их свойств
приведены в табличной форме на рис. 5.2. В заголо-
вочном столбце приведен рабочий план и дано
наименование моделей, в столбце 1 представлены
типичные примеры элементов модели, а в столбце
2 - понятия, относящиеся к элементам и их
объединению в модели. Столбцы 3-14 содержат, в
каком-то смысле, обзор способов представления в
модели и свойств изделия, отражаемых моделью.
На рисунке хорошо видно, что в моделях отражает-
ся весь процесс конструирования от абстрактных
этапов со словесными формулировками до кон-
кретных, на которых появляются чертежи кон-
струкций. Число маленьких кружков в столбцах
3-14 показывает, в какой степени названное
свойство присуще данной модели. Если в соответ-
ствующем поле нет ни одного кружка, то данное
свойство у модели вообще отсутствует, если один
кружок, то оно занимает подчиненное положение,
а если четыре кружка, то это свойство существенно
для модели.
Чтобы со всеми этими моделями изделия
можно было работать на самом деле, недостаточно
поместить их названия в рабочий план, т. е. необ-
ходимо предоставить пользователю замкнутые
системы со строго определенными элементами,
хорошо продуманными операциями и четкими
указаниями по применению. Благодаря этим
моделям должно возникать достаточно большое
множество разнообразных вариантов решения на
уровне соответствующей фазы конструирования.
Многие конструкторы внутренне противятся
ужасающему ущемлению их свободной фантазии,
якобы связанному с появлением подобных
средств. На самом же деле модели изделия как раз
и способствуют тому, чтобы не было ущемления
фантазии, не было шор, мешающих разглядеть
смежные области техники.
Вопрос о количестве различных моделей
изделия, используемых в процессе конструирова-
ния, является вопросом практической целесо-
образности. Теоретически можно себе предста-
вить, что для каждого класса изделий существует
своя особая модель. Однако предложенная Хуб-
кой [13] классификация свойств технических
систем ясно показывает, что до подобного много-
образия моделей еще очень далеко, к тому же
возможность использования столь большого числа
моделей представляется весьма проблематичной.
Как уже не раз отмечалось, число свойств (а вмес-
те с ними и число необходимых классов изделий)
скачкообразно возрастает с повышением уровня
конкретизации. Впоследствии оказывается также,
что эти свойства начинают сложным образом
зависеть друг от друга, - в то время как желатель-
но, чтобы они были независимы.
Следующее обстоятельство, о котором здесь
уже много говорилось, - это совместимость, преем-
ственность моделей, сменяющих друг друга в
рабочем плане. Автор придерживается той точки
зрения, что полностью достигнуть этого невозмож-
но^ в частности,потому, что модели и связанные с
ними операции относятся, как правило, к разным
разделам науки: математике, физике, кибернети-
ке, системотехнике, теории прочности, теории
механизмов и машин, а также деталей машин. В
каждом таком разделе внешне подобные величи-
ны снабжаются дополнительной информацией,
выбор и использование которой в конструировании
достаточно произволен. Часто отсутствует и одно-
значная взаимосвязь между величинами двух
различных моделей, например передачи силы и
формы подходящего для этого стержня. Возмож-
ность выбора формы становится независимым
параметром, с помощью которого обеспечивается
выполнение дополнительных требований, напри-
мер удобства изготовления или определенных
способов формообразования и т. д. При таких
переходах между моделями изделия конструкто-
ры пользуются различными индивидуальными
способами установления соответствия. В этом
кроется одна из причин того, что сегодня в облас-
ти хорошо формализуемых моделей использова-
ние вычислительной техники распространено уже
достаточно широко, например при расчете и опти-
мизации имеющихся структур, определении разме-
ров деталей и изготовлении чертежей. В то же
время вне этой области, при переходе между
различными моделями изделия, все же невозмож-
но отказаться от использования способности чело-
века к целостному восприятию, его опыта и зна-
ния последующего использования изделия.
В дальнейшем модели изделия, представлен-
ные на рис. 5.2, будут обсуждаться по отдельности
и иллюстрироваться примерами. Хотя первона-
чально они создавались для АМВК, их можно при-
менять и вне рамок этого метода - порознь или в
определенных комбинациях. В то время как в гл. 2
была рассмотрена „вертикальная” процедура
конструирования по рабочему плану, в данной
главе изложение ограничивается „горизонталь-
ной” процедурой в рамках определенных моделей
изделия.
5.2. Вспомогательные средства для фазы
формулировки задачи
Затраты в фазе формулировки задачи сравни-
мы с затратами в функциональной и предметной
фазах конструирования, и это вполне оправданно,
поскольку формулировка задачи существенно
влияет на свойства изделия. Любая постановка
задачи, какую бы степень абстракции она ни
имела, и к какой бы фазе конструирования она ни
относилась, должна прямо или косвенно отвечать
на три основных вопроса.
Какой цели должно служить техническое
изделие (например, путем реализации определен-
ных предусмотренных функций)? Содержание при
этом представляется в функциональной фазе - в
так называемом „функциональном положении”, и
в предметной фазе - в так называемом „техноло-
гическом положении”.
Какие обстоятельства, требования или ограни-
чения должны дополнительно учитываться (на-
пример, на основе уже известных данных для
списка требований)? Результат формулируется в
виде так называемых „положений - требований”,
собираемых в списки требований.
228
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Какова инструкция, описывающая последо-
вательность действий, приводящих к выполнению
этих требований (например, „сконструировать”,
„изготовить” и т. д.)? Эта инструкция записывает-
ся в виде так называемого „инструктивного поло-
жения”.
Таким образом, только формулировка требу-
емого процесса функционирования или только
составление списка требований не является
полноценной постановкой задачи, поскольку
отсутствуют еще два необходимых компонента. На
нескольких примерах будет показано, как неполно
поставленная задача дополняется до полной, и
осуществляется формулировка требуемых поло-
жений. По поводу рассматриваемых положений
можно отметить, что обычно инструктивные поло-
жения относятся к субъекту - подлежащему,
функциональные положения - к объекту - прямо-
му дополнению глагола, и, наконец, положения -
требования - к различным обстоятельствам и
дополнениям. К субъекту относится глагол дей-
ствия, к объекту - глагол цели.
5.2.1. Постановка задачи
До начала конструирования словесная форму-
лировка, содержащая описание задачи, как прави-
ло, часто очень неточна по причине чрезмерной
краткости, но также из-за более наглядной, образ-
ной формы выражения. И подобно тому, как произ-
водится разработка конструкции, вначале должна
производиться разработка формулировки. Такая
ситуация соответствует тому этапу конструирова-
ния, который в рабочем плане обозначен только
словом „задача”. Ничему пока не мешает то, что
задача сформулирована обычным, разговорным
языком, без претензий на безупречность формули-
ровок. Важнее убедиться в том, что существенные
обстоятельства не оказались замаскированными
из-за неудачного выбора слов. Кроме того, из ярких
образных понятий можно извлечь много ценного
для последующей формулировки требований.
Подобная первоначальная формулировка задачи
может звучать примерно так:
„... сконструировать автомобильный домкрат”.
Для большинства читателей это требование совер-
шенно точно указывает направление дальнейшей
конструкторской деятельности, поскольку едва ли
не каждому из нас хорошо знакома ситуация,
когда стоя на улице, быть может, под дождем или
в темноте, с черными от грязи руками приходится
менять колесо на автомобиле с помощью домкра-
та. Многие полагают, что подобного описания
задачи уже достаточно, чтобы начать конструи-
ровать. Но здесь довольно велика опасность, что
будет разрабатываться устройство, близкое к
хорошо знакомому, пример которого заслонит все
другие представления и возможности. Конструк-
тор начинает двигаться по определенному пути, с
которого вряд ли сможет сойти, ступив на него
однажды, так как путь этот шаг за шагом ведет его
к цели, а именно: к известному примеру!
Паль [22] предостерегал от этой опасности на
следующем выразительном примере: следует
ставить перед собой задачу „не сконструировать
гаражные ворота”, но „сконструировать устройство,
защищающее открытый гараж от непогоды, всеоб-
щего обзора, доступа и взлома”. Тогда решение
задачи в такой постановке не обязательно должно
привести к обычным воротам.
Постановка задачи
Пример: (Г-н X должен ...) сконструировать переносное устройство для подъема автомобиля
Разработанное функциональное положение Выделенные положения- требования Данное инструктив- ное положение
Поднять автомобиль Допускать использование на улице, в гараже, в поле, при любой погоде. Преду- смотреть ножной или руч- ной привод,допускать перенос человеком. Раз- меры и т. д. (Г-н X должен) выполнить новую разработку вплоть до изготовления технологической документации
Рис. 53. Пример разбиения постановки задачи на положения
трех типов: функциональные, положения-требования и инст-
руктивные
Описанной опасности можно избежать в нача-
ле работы, если первый вариант формулировки
задачи преобразовать так, чтобы в нем не содержа-
лось возможное решение, а только была бы указа-
на цель, которая должна быть достигнута с помо-
щью технического устройства как результата
конструирования. Новый вариант формулировки
задачи, в котором часть первоначальных сведений
может оказаться потерянной, должен, однако, уже
содержать все три типа положений формулировки
задачи хотя бы и в неразвернутом виде. Именно
для этого варианта мы будем использовать обо-
значение „постановка задачи”. В нашем примере
он может быть выражен следующим образом:
„... г-н X должен сконструировать техническое
устройство для подъема автомобиля”.
На следующем шаге мы должны разделить три
„компонента” постановки задачи и зафиксировать
их в функциональном положении, положениях-
требованиях и инструктивном положении (см.
пример на рис. 5.3).
Абстрагирование, произведенное при формули-
ровке постановки задачи исходя из задачи, про-
должается, как правило, и при переходе к функци-
ональному положению, при этом все ранее поте-
рянные сведения собираются, и в нашем случае
приобретают максимально конкретную формули-
ровку, становясь положениями-требованиями.
Содержание инструктивного положения оста-
ется примерно тем же, но, как правило, дробится
на большее число организационных детальных
инструкций.
Процесс абстрагирования, про который здесь
всюду говорится, хотя и расширяет область воз-
можных решений, но не искажает содержания
задачи. Поэтому то, что о содержании задачи стало
известно, в дальнейшем не будет потеряно.
Описанная здесь постановка задачи была
представлена на рис. 5.2 как модель изделия 1. В
результате анализа постановки задачи должен
получиться первый вариант формулировки функ-
ционального положения и множество подробно-
стей для дополнения списка требований.
5.2.2. Функциональное положение
Теперь должна быть продолжена разработка
функционального положения. Опыт конструктор-
ской деятельности нам доказывает, что справить-
ся с задачей легче, если она разбита на более
мелкие, обозримые части, например общая задача
на частные. Это разбиение всегда выгодно произ-
5.2. Вспомогательные средства для фазы формулировки задачи
229
Из общей по- становки зада- чи: функцио- нальное поло- жение Из частной постановки задачи:
Глави. функ- циональное положение Главное и дополнительное функциональное положения, дополнительные условия
1 2 3 №
Поднять автомобиль 2.1 Поднять автомобиль вверх 3.1 Автомобиль должен быть поднят вверх 1
3.2 Работа должна быть совер- шена человеком 2
3.3 При воздействии человека должна начаться работа по подъему; подъем должен быть прекращен по достиже- нии определенной высоты 3
2.4 Удерживать автомобиль вверху 3.4 По окончании подъема автомобиль должен оста - ваться вверху, даже если человек больше ни к чему не притронется* 4
2.5 Опустить автомобиль 3.5 При воздействии челове - ка автомобиль должен быть опущен посредством специальных операций* 5
* В поля 3.4 и 3.5 помещены только добавленные новые
функциональные положения
Рис. 5.4. Разбиение функционального положения общей поста-
новки задачи на функциональные положения частных постано-
вок задач
Уровень абстрак- ции Объект Предикат Теряемая дополни- тельная ин* формация Цель абстра- гирования
№ 1 2 3 4
Низ- кий Высо- кий 1 1.1 Автомобиль 1.2 Поднять — —
2 2.1 Твердое тело 2.2 Поднять 2.3 Автомобиль поднять от земли 2.4 Обобщение процесса
3 3.1 Твердое вещество 3.2 Перемещать 3.3 Соединен- ные тела перемещать против на- правления силы тяжести 3.4 Возможность перехода к идеальным функциям физической функцио- нальной структуры
4 4.1 Вещество 4.2 Передавать 4.3 Вид вещес- тва, способ передачи возможность перехода к идеальным функциям абстрактной функцио- нальной структуры
Рис. 5.5. Пример последовательно выполняемого абстрагирова-
ния функционального положения и увеличивающаяся при этом
потеря дополнительных сведений
водить довольно рано, т. е. тогда, когда хорошо
видны все следствия этой процедуры. Это справед-
ливо также для функционального положения. В
этом случае нам хорошо видно, что общая поста-
новка задачи составлена из нескольких следу-
ющих во времени друг за другом частных постано-
вок задач, в которых тоже содержатся определен-
ные функциональные положения.
Для примера „автомобильный домкрат” это
проделано на рис. 5.4, как раз следуя течению
процесса во времени (столбцы 1 и 2). Общий про-
цесс „подъема автомобиля” разлагается в после-
довательность „поднять автомобиль”, „удержи-
вать автомобиль вверху”, „опустить автомобиль”.
При этом вначале рассматриваются главные функ-
ции (например, перенос тела), и только на следу-
ющем шаге - необходимые дополнительные функ-
ции, такие как передача энергии и комбинирова-
ние сообщений.
Теперь, чтобы определить сведения, положе-
ния-требования, которые необходимо включить в
список требований, а также, чтобы установить,
должна ли главная функция непременно допол-
няться целым рядом побочных, нужно сделать, в
каком-то смысле, шаг назад и описать, например,
ближайшую окрестность „подъема автомобиля,
удержания автомобиля вверху и опускания авто-
мобиля” несколько подробнее (столбец 3). В ре-
зультате можно будет сформулировать функци-
ональные положения, относящиеся не только к
вещественным, но и к энергетическим и информа-
ционным процессам.
Теперь снова начинается процесс обобщения
(абстрагирования) для функциональных положе-
ний из частных постановок задач. При этом пропа-
дают многие дополнительные сведения, которые
позже могли бы быть использованы при составле-
нии списка требований. Пример абстрагирования
функционального положения из поля 3.1 рис. 5.4
показан на рис. 5.5. Подобным же образом можно
абстрагировать все функциональные положения
полей 3.1-3.5 рис. 5.4. Результат показан на
рис. 5.6-1, а-г, где а - исходные формулировки
функциональных положений из столбца 3 рис. 5.4;
б - результат абстрагирования, соответствующий
уровню абстрактной диаграммы потоков; в -тоже,
уровню абстрактной функциональной структуры;
г - то же, уровню физической функциональной
структуры.
Большую помощь при формулировке функци-
ональных положений может оказать список подхо-
дящих для этого глаголов, выражающих техниче-
ские понятия (рис. 5.6-2 из Биркхофера [4]). Они бы-
ли выбраны из общего списка примерно в 1000
слов, содержащихся в одном из технических слова-
рей, и в результате выбора их осталось около 200. В
список попали в основном переходные глаголы,
выражающие воздействие на стоящий в винитель-
ном падеже объект (прямое дополнение), напри-
мер: поднять (переходный глагол) автомобиль
(объект). Переходные глаголы главным образом
пригодны для описания функций технических
изделий. Они могут быть разделены на объектно-
независимые: изменять, создавать и т. д. и на объ-
ектно-зависимые: поднять, открыть и т. д., которые
в отдельных случаях содержат указание на конк-
ретный вид действия: стержень - отрезать, махо-
вое колесо - сваривать и т. д.
Дальнейшее важное подразделение состоит в
классификации на глаголы действия и глаголы
цели. Так, например, цель формоизменение может
быть достигнута с помощью различных действий:
пластического формообразования (обработки
давлением), обработки резанием, разделения,
соединения и т. д. Определяющим.фактором везде
все же является цепь, а в меньшей степени - дей-
ствие, с помощью которого в разных случаях
по-разному реализуется цель. Поэтому и в рабочих
планах составителем всегда указывалась цель,
например разработать функциональную структу-
ру, но не вид деятельности, который при этом про-
исходит, например проектировать на уровне пред-
230
5. Модели и вспомогательные средства для конструирования в отдельных фазах
По- ле на рис: 5.4 Функциональные положе- ния частных задач
3.1 Поднять автомобиль
3.2 Совершать работу человеком
3.3 Начинать и прекращать работу по управляющему воздействию человека
3.4 Удерживать автомобиль вверху без воздействия человека
3.5 Опустить автомобиль по управляющему воз- действию человека
№ Функциональные положения для абстрактной функциональной структуры Примечания
1 Передавать вещество Передавать вещество в комбинации с энергией Передача вещества функцио- нально связана с передачей энергии, причем накопитель вещества становится на- копителем энергии
2 Забирать энергию иэ накопителя и передавать Человек является накопителем энергии
3 Управлять потоком энергии по- средством комбинирования с сообщениями Человек является также нако - пителем сообщений н управля - ет процессом по определенной программе
4 Удерживать энергию в веществе Автомобиль является накопи - телем вещества и энергии
5 Расходовать энергию посредством комбинирования с сообщениями Накопитель энергии "автомо - биль” разряжается
в)
№ Функциональные положения для абстрактной диаграммы потоков
1 Перемещать вещество вверх путем подвода энергии
2 Использовать энергию чело- века. Передавать энергию через вещество
3 Вызывать начало и прекращение потока энергии воздействием человека (сообщением)
4 Удерживать вещество вверху, препятствуя отводу энергии
5 Управляющим воздействием (сообщением) разрешить отвод энергии и в результате этого опустить вещество
б)
№ Функциональные положения для специальной функциональной структуры (I-Q—диаграммы по- тока) Примечания
1 'Перемещать твердое вещество (массу) Вызывать перемещение массы пу- тем приложения силы и соверше- ния работы Масса может быть приведена в дви жение действием опреде - ленной силы. Приведение мас- сы в движение определяется силовым воздействием
2 Использовать н передавать силу (мощность) человека Так как сила должна быть больше веса автомобиля, то необходимо предусмот - реть умножение силы
3 Управлять началом и прекраще- нием силового воздействия с помощью сообщений Реализуется только косвенно через носители сообщений, например (энергетические)’ сигналы
4 Препятствовать обратному движе- нию массы в отсутствие подъем- ной силы Например, используя стопоры обратного хода
5 Разрешить посредством сообще - ний обратное движение массы Как в строке 3
г)
Рис. 5.6. Формулировка функциональных положений:
Рис. 5.6-1. Абстрагирование функциональных положений до уровня различных функциональных структур:
а — исходные функциональные положения из столбца 3 на рис. 5,4 ; б — уровень абстрактной диаграммы потоков; в — уровень абстракт-
ной функциональной структуры; г — уровень специальной функциональной структуры
верительного проекта. В постановке задачи долж-
ны присутствовать оба вида глаголов - и действия,
и цели. Например, в случае ... сконструировать уст-
ройство и поднять автомобиль... глагол действия -
сконструировать, глагол цели - поднять. В функ-
циональное положение переходит только глагол
цели. В чертежах по возможности тоже придержи-
ваются этого разделения глаголов. В них, напри-
мер, указывается диаметр (цель), но, как правило,
не указывается вид обработки - сверление или
фрезерование (действие).
Выводы. Предложены следующие отдельные
шаги для разработки функционального положе-
ния.
1. Положить в оснойу формулировку задачи на
обычном разговорном языке.
2. Формулировку задачи абстрагировать и
заново сформулировать так, чтобы в ней содержа-
лась цель создания технического устройства, но не
результат конструирования. Составлять список те-
ряющихся при этом сведений.
3. Разделить постановку задачи на функци-
ональное положение, положения-требования и
инструктивное положение. Собирать теряющиеся
при этом сведения и дополнительно конкретизи-
ровать положения-требования.
4. Разделять „общефункциональные положе-
ния” на „частнофункциональные положения”
(например, по временной последовательности, по
рабочим циклам и т. д.).
5. Разбить частнофункциональные положения
на главные и дополнительные. Наглядное пред-
ставление, дающее дополнительные сведения.
6. Главные и дополнительные функциональ-
ные положения абстрагировать так, чтобы стало
возможным начинать констурирование с уровня
абстрактной или физической функциональной
структуры.
Для новых разработок характерен подход, при
котором функциональное положение формулиру-
ется сразу в терминах соответствующих физиче-
ских величин. Так поступают повсеместно, и часто
5.2. Вспомогательные средства для фазы формулировки задачи
231
Абсорбировать Информир овал Писать Сажать
Адсорбировать Испарять Питать Сваривать
Анализировать Испытывать Плавить Сверлить
Блокировать Калибровать Поверять Светить
Вводить Кантовать1 Повреждать Связывать
Вести Качаться Подготавливать Сдвигать
Висеть Классифицировать Поворачивать Сжимать
Включать Клеить Поднимать Складировать
Возбуждать Клепать Подтягивать Скользить
Волочить Ковать Позиционировать Сливать
Воспринимать К онденсировать Показывать Служить
Восстанавливать Контролировать Покрывать Смазывать
Впитывать Копировать Поляризовать Смывать
Вращаться Лакировать Потреблять Снимать
Всасывать Лить Править Соединять
Входить Маркировать Предохранять Сортировать
Выверять Менять Прерывать Спускал
Выгружать Модулировать Прессовать Сравнивать
Выключать Монтировать Приводить в действие Срывать
Выпускать Нагревать Прилегать С таб ил нзир овать
Гасить Нагружать Принимать Стирать
Генерировать Накапливать Приспосабливать Стопорить
Гнуть Наклонять Проводить Строгать
Гореть Намагничивать Производить Сушить
Давать Наносить. Прокатывать Сцеплять
Давить Наполнять Промывать Считать
Двигать Напылять Пропитывать Твердеть
Делить Настраивать Просеивать Течь
Демонтировать Обжимать Пускать Толкать
Держать Обкатывать Работать Тормозить
Добавлять Обогащать Разб>фать Травить
Доводить Обрабатывать Разделять Транспортировал
Дозировать Образовывать Разрезать Трансформир ова л
Дробить Опиливать Разъедать Тянул
Заглушать Опрыскивать Разъединять Убирал
Загораживать Ориентировать Распределять Управлял
Загружать Осаждать Растворять Уравновешивал
Зажигать Ответвлять Растягивать Ускорял
Зажимать Отводить Растягиваться Устанавливал
Закреплять Отделять Расцеплять Фиксировал
Закрывать Отжимать Расщеплять Фильтровал
Замедлять Отклоняться Рафин ир овать Формовал
Записывать Охлаждать Реагировал Фрезеровал
Защищать Оценивать Регистрировать Хватал
Идти Падать Регулировать Цен трир овать
Изгибать Паять Редуцировать Чеканил
Изготавливать Передавать Резать Читал
Изменять Передвигаться Ремонтировать Шлифовал
Изнашиваться Переключал Решать Штамповал
Изолировать Пилить Ровнять Экранировать
Рис. 5.6-2. Список глаголов для описания функциональных положений
232
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Модификация: вход в отдельные фазы Структуры методического конструирования Новая разработка: прохождение всех фаз
Фазы Рабочий план, этапы констр у ирован ия Модель на рис. 5.2 Пример Вид деятельности
^Задача — Сконструировать автомо- бильный домкрат Грубо очертить зада- чу обиходным тех - ническим языком
Функциональное
конструирование
(абстрактное)
Определено
функциональ-
ное положение
разработать
Функциональное
конструирование
(физическое)
Определены
идеальные
функции для
В,Э, С
разработать
Функциональ- i Список
ное положение !
| требований
-----------Г
Абстрактная фун кциональная структура . 1 1
Физическая функ-
циональная
структура (здесь-
специальная)
। Логическая
। функциональная ।
Разработать устройство для
подъема автомобиля
Поднять автомобиль
Автомобиль поднять.
Автомобиль удерживать
вверху.
Автомобиль опустить
_ (_к Перемещать авто -
° г мобиль (вещество)
Э
путем подвода g
энергии при управ-
ляющем воздейст- -» С
вии (сообщение)
Выявить цель задачи,
но не возможное
решение
Разработать функ-
циональное положе -
ние для общей
задачи
Разбить на функцио-
нальные положения
для частных функ-
ций, например в со -
ответствии с рабо-
чими циклами
Выразить функциона-
льное положение час-
тной задачи через
идеальные функции
для потоков вещее -
тва, энергии и сооб -
щений
4
ИЛИ
5
Ввести стандартные
идеальные функции
для потоков вещест-
ва, энергии и сообще-
ний, затерт их подраз-
делять, комбиниро-
вать и оптимизиро-
вать
Использовать нестан-
дартные идеальные
функции, их подраз-
делять, комбиниро-
вать и оптимизиро-
вать
Представить отдель-
ные идеальные функ-
ции для вещества,
энергии и информа -
ции в виде соотно-
шений между физи-
ческими величинами
Отдельные идеаль-
ные функции по
возможности даль -
ше подразделять,
комбинировать,
оптимизировать
Сопоставлять
с ними эффекты
(например, эффект
рычага и клина), по-
следние по возмож-
ности фор му лир о -
вать количественно
(закон, закономер -
ность)
2
3
7
7
7
С
Рис. 5.7. Введение моделей изделия в рабочий план конструирования. Ход конструирования при новой разработке и модификации
имеющейся конструкции
5.2. Вспомогательные средства для фазы формулировки задачи
233
это, действительно, очень удобно. Однако при
этом отсутствует целостный комплекс, связанный
с комбинированием и накоплением сообщений, и
поэтому во многих случаях логические схемы и
схемы управления приходится составлять раздель-
но. Для этого, чтобы учесть в этой области все, что
требуется конструктору для работы, ему достаточ-
но иметь у себя „информационный комплекс” в
том виде, как он представлен в абстрактной функ-
циональной структуре. Тогда появится возмож-
ность держать перед глазами и эту часть конструк-
ции и обратить внимание, по крайней мере, на ее
важнейшие элементы. Таким образом, если в
работе появляются информационные моменты, не
следует перескакивать через абстрактную функци-
ональную структуру. Следует указать также на
возможность расширения спектра решений, кото-
рая, в частности, основана на том, что абстрактный
энергетический поток рассматривается еще до
определения конкретного вида энергии и только
потом - все характеризующие его физические
свойства сил, моментов, скоростей.
Функциональное положение представлено на
рис. 5.2 как модель изделия 2.
Соответствие обсуждавшихся моделей изде-
лия этапам рабочего плана воспроизведено на
рис. 5.7. В середине рисунка изображен рабочий план,
его фазы и этапы конструирования, и рядом с ним -
номера моделей изделия, которые могут быть
использованы на этом этапе или фазе. В правой
части рисунка эти модели проиллюстрированы на
примере автомобильного домкрата, а также сдела-
ны важные замечания о соответствующих видах
деятельности конструктора. В левой части рисунка
представлены возможности прямого входа в раз-
личные фазы конструирования (подобно рис. 2.15).
Эти возможности должны использоваться во всех
тех случаях, когда речь идет не о новой разработ-
ке, а об улучшении или модификации имеющейся
конструкции.
По окончании разработки функционального
положения (модель изделия 2) заканчивается
важнейшая часть фазы формулировки задачи.
Разработка списка требований производится в
этой фазе в тех пределах, в каких это возможно,
однако в основе своей она распределена по всем
фазам конструирования. Более подробно мы
остановимся на этом ниже.
Наконец, нелишне подчеркнуть, что все разби-
ения и действия в процессе конструирования по
описанным правилам не являются обязательны-
ми. Здесь речь идет вовсе не об инструкциях,
каждой буквы которых необходимо строго при-
держиваться, а только о направлениях, програм-
мах, которые дают хорошие результаты, даже если
им следовать лишь в общих чертах. Вдобавок с
ростом опыта работы по подобным методикам
следование им становится постепенно вполне
автоматическим.
5.23. Список требований
Первые призывы и предложения по поводу
формализации обычных форм технического зада-
ния в виде списка требований исходят от Паля
[22]. В этой работе требования разделяются на три
категории: требования, пожелания и цели. Паль
включает функциональное положение в требова-
ния. В других работах [21, 23, 24] упоминаются
только требования и пожелания. Идея списка
требований была принята многими авторами и
разработана автором этой книги и его коллегами
следующим образом.
Собрание всех требований к изделию, начиная
с технического задания (в обычной форме) вместе
с пожеланиями заказчика, и кончая внутренними,
частично даже несущественными конструктивны-
ми, технологическими и стоимостными требовани-
ями, - называется списком требований. ' Требова-
ния часто представляют собой исходный пункт
для последующего членения постановки задачи и
лежат в основе критериев, по которым оценивают-
ся варианты решений или производится оптимиза-
ция. Поскольку невыполнение определенных
требований (например, жестких требований)
приводит к исключению, а лучшее выполнение
целевых требований (в данном случае - требова-
ний-пожеланий) ведет к предпочтению решений,,
представляется целесообразным сразу распреде-
лять их по группам кат. 4.1.1.
Отсюда следует, что применение требований
не ограничивается определенной фазой, а распро-
страняется на весь процесс конструирования.
Кроме того, требования не только формулируются
вначале, но дополняются и конкретизируются на
каждом шаге конструирования.
Растущий при этом список требований, наряду
с выполнением своей непосредственной задачи,
служит также полезным протоколом разработки
изделия. Затраты на его составление оправдыва-
ются во многих отношениях.
Так, если по недосмотру какое-то требование
окажется забытым или, наоборот, появится лиш-
нее требование, то возможность создания изделия
становится сомнительной.
Составление списка требований, в особенности
с применением методических приемов (вспомога-
тельных средств), приводит разработчика к систе-
матическому рассмотрению окрестности изделия и
тем самым к созданию заведомо полного набора
1. В каких отношениях (связях) находится изделие с людьми, системами, вещами,
веществами, обстоятельствами и природными условиями?
2. Какова природа этих отношений?
3. Каковы продолжительность, момент появления, частота этих отношений
4. Появляются ли эти отношения закономерно, вынужденно или случайно?
5. Появляются ли эти отношения преднамеренно и кем или чем они вызываются?
6. Эти отношения желательны или нежелательны?
7. Как сказываются эти отношения на свойствах изделия?
8. Как могут или должны быть организованы поставки изделия с учетом этих отношений?
Рис. 5.8. Анкета изделия для быстрого анализа
задачи и для формулировки предварительной
постановки задачи
234
5. Модели и вспомогательные средства для конструирования в отдельны., фазах
Регистрационный номер: Изделие: переносное устройство для подъема автомобиля человеком Разработчик: Дата: Лист 1
СПИСОК ТРЕБОВАНИЙ I Метод: анкета изделия
Классификационная часть Требовательная часть Специальная часть Дополнение
Получение информа- ции № в анкете изделия Описательные данные (качественные) Числовые данные (количественные) Тип требо- ваний Источник Весовые коэффи- циенты
Доку- менты Люди
№ 1 2 3 4 5 6
С помощью анкеты изделия 1 1 Должно обслуживаться че- ловеком (рукой, ногой) Прикладываемые при об - служивании силы > 10 Н Ц Справсч. по эрго- номике 3
2 Развиваемая при поднятии сила > 5000 Н Ц Статис - тика Г-н Майер 3
3 При любых погодных усло- виях,кроме экстремальных Ж 2
4 Желательна возможность использования иа песча- ной и травянистой почве П 1
5 Вес < 10 Н Ц Кон- структор (Ко) 2
2 6 Источник энергии — человек Сила воздействия < 100 Н Ц С прав оч. по эрго- номике 3
7 Расстояние между упорной и подъемной площадками уменьшить до 100 мм Ц Статис - тика 2
8 Для транспортировки помещаться в багажнике Наибольший размер в сло- женном состоянии 500 мм Ц Ко 4
Из техни- ческого задания заказчика 22 Производство 10 000 шт. в год Ж Фирма Г-н Шим- мель- пфенниг 3
23 Цена иа 10% ниже прежней Ц 2
24 Желателен нержавеющий материал П Фирма Г-и Убер- клюг 2
Из дополнительных источников инфор- мации 25 Избегать повреждения шас- си и защитного покрытия Ж Заинте- ресован, участник 3
26 —
27 —
Ж, Ц, П —см. кат. 4.1.1
Весовые коэффициенты требований пропорциональны приведенным значениям
Рис. 5.9. Форма списка требований L Метод: анкета изделия по рис. 5.8. Пример: автомобильный домкрат (извлечение)
требований. Организация требований в удобные
для чтения списки чрезвычайно полезна для
быстрого ознакомления с ними постороннего лица,
а также при последующей значимости требований.
Форма списка требований и его объем для
одинаковых изделий могут быть совершенно
различными. Далее будут обсуждаться три воз-
можности определения требований, полностью
независимые друг от друга и значительно различа-
ющиеся между собой числом вопросов и полнотой.
С помощью простой анкеты изделия (рис. 5.8)
можно реализовать первую из них (рис. 5.9), вторую
(см. рис. 5.13) найти по методу „Анализ окрестно-
сти изделия” и, наконец, третью (см. рис. 5.17) уста-
новить с помощью метода „Анализ жизненного
цикла изделия”. Выбор метода зависит от плани-
руемых затрат, а также от того, какое значение
придается формулировке задачи. Простой список
требований, изображенный на рис. 5.9, соответству-
ет минимальным затратам на формулировку кон-
структорской задачи. Список требований из рис. 5.13
рекомендуется, если рассмотрению подлежит
только поведение изделия в производстве, в то
время как изготовление, распределение, повтор-
ное использование, возобновление и т. д. не вызы-
вают никаких трудностей. В противном случае
придется потрудиться и разработать список требо-
ваний согласно рис. 5.17. Затраты всегда оценива-
ются исходя из числа вопросов. Соответственно
для каждого из описанных методов оно составляет
примерно 10,100,250 (или 1000 вопросов для анали-
тического списка). Число ответов в большинстве
случаев различно: так на десять вопросов часто
можно дать от 20 до 30 ответов, а на 100 вопросов,
вероятно, только 200. Каждый список требований
содержит классификационную часть, в которой тре-
бования упорядочивают по способу их создания - с
помощью вопросов, на основе технического зада-
ния заказчика (в обычной форме), или каким-либо
другим способом, а также требовательную часть с
порядковой нумерацией требований, и специаль-
ную часть, позволяющую отыскивать требования
по их типу, источнику или по соответствующему
шагу конструирования.
Процедура разработки списка требований
всегда одинакова. Наряду с уже известными тре-
бованиями, при помощи определенных вопросов
формируются опорные положения и вспомогатель-
ные ассоциативные средства, которые напоминают
конструктору обо всем необходимом. Во всех
случаях следует прежде всего провести основа-
тельный анализ предшествующих и конкуриру-
5.2. Вспомогательные средства для фазы формулировки задачи
235
ющих изделий, выполняющих аналогичные функ-
ции - простейший способ получить дополнитель-
ную информацию для списка требований. При этом
выясняются слабые места собственного и преиму-
щества конкурирующего изделия [22]. Наконец,
следует использовать все требования и сведения,
которые выявились при разработке постановки
задачи и функционального положения, а также
полученные из других источников (например, из
технического задания заказчика или возникшие в
результате обсуждений).
На втором шаге следует целенаправленно
расширить эти сведения и, поскольку это целесо-
образно, сформулировать их в виде требований.
Следующие три метода облегчают этот шаг, а иной
раз только благодаря им этот шаг становится
возможным. Они служат также для дальнейшего
уяснения постановки задачи, так как иногда из
вопроса о свойствах изделия можно вывести важ-
ное функциональное положение для одной из
частных задач.
5.2.4. Методы составления списка требований
1. Анкета изделия (список требований 1)
Ограниченный список вопросов, например
подобный данному на рис. 5.8, предназначен для
того, чтобы выяснить важнейшие отношения и
связи изделия со всем тем, с чем оно так или
иначе сталкивается. Одна часть этих отношений
определяется природными условиями или други-
ми внешними обстоятельствами. Про другую часть
надлежит выяснить, какими должны быть эти
отношения для того, чтобы изделие обладало
желаемыми свойствами, или какими они могли бы
быть, если бы были выполнены все требования-по-
желания. На основе полученных таким образом
сведений следует сформулировать положения-тре-
бования, выражающие количественные и качест-
венные требования к изделию, и, кроме того,
необязательные требования (пожелания). Если
вместе с другими (ранее известными) требовани-
ями их внести в список, то получится список
требований 1 - простейшая форма списка требова-
ний (см. рис. 5.9).
В процессе конструирования этот список по-
полняется описанным ранее образом, поскольку
становящиеся все более конкретными представле-
ния об изделии и различные уточняющиеся дан-
ные позволяют получать новые целесообразные
требования. Может даже оказаться так, что мно-
гие требования будут в корне изменены в ходе
конструирования, так как первоначально изделие
представлялось совсем другим.
При оценке решения обязательно учитывается
вид требований: относится ли требование к жест-
ким (Ж), целевым с границами (Ц) или пожелани-
ям (П). Жесткие требования, для которых характе-
рен запрет перехода границы (см. кат. 4.1.1), в
случае их невыполнения заставляют отвергнуть
решение. С другой стороны, чем ближе к заданным
границам или целевой точке между ними мы
находимся (если требования целевые) или чем
больше выполнено пожеланий, тем более хорошим
признается решение. И, так как только две послед-
ние группы требований могут использоваться при
оптимизации решения, всегда должен указывать-
ся вид требований.
В простейшей форме списка требований (спи-
4 5 6
Рис. 5.10. Системы окрестности изделия. Метод: анализ окрест-
ности изделия
Рис. 5.11. Системы окрестности изделия по рис. 5.10 для устрой-
ства подъема автомобиля, которое перевозится в багажнике и
приводится в действие человеком
сок требований I) по образцу рис. 5.9 в двух столб-
цах классификационной части содержится способ
получения информации (с помощью анкеты изде-
лия, из технического задания заказчика или
другими способами), а также указаны номера
вопросов из анкеты, данных из технического зада-
ния и т. д. В требовательной части в столбце 1
приведены данные в описательной форме, в столб-
це 2 - в форме количественных требований. В
столбце 3 (входящем в специальную часть) указан
вид требований, в столбцах 4 и 5 - источники
сведений, которые могут нести за них ответствен-
ность. Для того чтобы облегчить заполнение
списка требований, на рис. 5.9 показан пример
заполнения всех вышеуказанных полей для слу-
чая „автомобильный домкрат”. В столбце 6 при-
ведены весовые коэффициенты требований, кото-
рые тем больше, чем более важными являются
требования.
2. Анализ окрестности изделия (список требований П)
Важное значение для получения данных, на
основе которых формулируются требования, имеет
анализ систем из (функциональной) окрестности
изделия (рис. 5.10). В середине рисунка находится
изделие, которое воздействует на окрестность и
само подвергается воздействию со стороны окрест-
ности. В наших рассмотрениях фигурируют следу
236
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Смеж- ная система Главный вопрос Под-’ вопрос Частные вопросы Пример: ’’автомобильный домкрат”
Ответ Формулировка для списка требований
1 Пас- сив- ная 1.1 Кто1? Описание системы 1.1.1 О какой системе идет речь? Автомобиль
1.1.2 Исходное состояние: Качественно Автомобиль на нормальной высоте
1.1.3 Количественно Начальная высота приложения силы ho » 200 мм Точка приложения силы для устройства на высоте 200 мм от основания
1.1.4 Целевое состояние: Качественно Поднять автомобиль
1.1.5 Количественно Точки приложения силы на высоте 200 мм< h <400 мм Ход 180 мм, Лн = =220 мм,/)в =400 мм, высота подъема варьируется
1.1.6 Окрестность системы В открытом месте, на обочине Использование при различи, видах осно- вания (грунта) и раз- личных погод пых
1.2 Что? Воздейст- вия на изделие 1.2.1 Чем осуществляется воздействие: Качественно Силами условиях
1.2.2 Количественно F ъ 5000 Н Для подъема можно использовать силу 5000 Н
1.2.3 Допустимое отклонение от целевого состояния Качественно
1.2.4 Количественно ± 2% Сила подъема Г = 4000 ± 80 Н
1.2.5 Возможные против о- действия на изделие Благоприятные —
1.2.6 Неблаго- приятные Обратное движение при силе, вызывающ, обратное движение, Сила, вызывающ.об- ратное движен .дол- жна быть меньше, чем сила подъема
1.3 Когда? Времен- ные отно* шения 1.3.1 Момент времени воздействия Л -= 4000 Н Произвольный
1.3.2 Продолжительность воздействия Произвольная, как правило, 15 мин Сохранять состояние ’’поднято” произ- вольно долго
1.3.3 Воздействие: Как часто 4 раза в год Использование в среднем 4 раза в год
1.3.4 Достижение целевого состояния Как быстро ~ 1 мин Силу и ход при подъе- ме согласовать так, чтобы время подъема = 1 мин
Где? Простран- ствениые отноше- ния 1.4.1 Приложение воздействия Какие места Боковые стороны автомобиля, линия равновесия Предусмотреть эле- менты для передачи силы
1.4.2 Пространственные отношения изделия Подъемное устрой- ство имеет опору под автомобилем
2 Актив- ная 2.1 Кто? Описание системы 2.1.1 Кто или что является источником энергии? Человек Имеется в распоря- жении механический источник энергии
2.1.2 Свойства источника энергии : качественные Должен работать с перерывами Требуется стопор обратного хода
2.1.3 количествен- ные Мощность 0,1 кВт, г < 1 м/с Подобрать передато- чное отношение в со- ответствии с силой и мощи, при подъеме
2.1.4 В какой'среде работает источник энергии? В закрытых помеще- ниях и на открытом воздухе
2.1.5 Кто или что является источником энергии? И т. д. И т. д.
2.1.6 2.1.7 Какие свойства источника вещества известны (количественные, качественные), в какой среде он работает?
2.2 Что? 2.2.1... 2.2.6- Какие воздействия производятся источниками вещества и энергии на изделие и каковы противодействия?
2.3 Когда? 2.3.1 2.3.4 Когда, к какому моменту времени, как долго, как часто, как быстро может быть получена энергия и вещество из соответствующего источника и каковы пространственные соотношения?
2.4 Где? 2.4.1 2.4.2 Где находится источник энергии и вещества, какие пространственные соотношения существуют между этим источником и изделием?
Рис. 5.12. Список вопросов метода: анализ окрестности изделия. Формулировка точной постановки Пример: автомобильный дом-
крат, пассивная система из окрестности * А
5.2. Вспомогательные средства для фазы формулировки задачи
237
Смежная система Главный вопрос Под- вопрос Частные вогфосы Пример: ’’автомобильный домкрат”
Ответ Формулировка для списка требований
3 Систе- ма уп- равле- ния 3.1 Кто? 3.1.1... 3.1.6 Кто является управляющей системой? Качественные и количественные данные по этому поводу; в какой среде Человек Источник информац. (сообщений), управл., регулирован, имеется
3.2 Что? 3.2.1... 3.2.6 Какие имеются воздействия убавляющей системы на изделие и обратные воздействия (благоприятные, неблагоприятные) И т. д. И т.д.
3.3 Когда? 3.3.1 3.3.4 Когда, как часто, как долго должны даваться коман- ды (управляющие воздействия). Какие существуют временные соотношения между подачей команды и ее исполнением
3.4 Где? 3.4.1 3.4.2 Где находится управляющая система, ее пространственные соотношения с изделием
4 Место дейст- вия 4.1 Кто? 4.1.1... 4.1.6 Кто или что является местом действия, качественные, количественные данные, среда, соотношения места Гараж, улица, земля (поле) Учесть состояние грунта, погодные условия
4.2 Что? 4.2.1 4.2.6 Какие воздействия могут производиться местом действия на изделие и обратно, благоприятные, неблагоприятные И т. д. и т. д.
4.3 Когда? 4.3.1... 4.3.4 Когда, как долго, как часто, как быст- ро может использоваться место действия
Где? 4,4.1 4.4.2 Где находится место действия, какие гфеДъявляют- ся требования к его положению и свойствам
Рис. 5.12 (продолжение)
ющие системы из окрестности изделия (смежные
системы):
1. Пассивная система, на которую направлено
воздействие.
2. Активная система, которая воздействует на
изделие.
3. Управляющая система, которая управляет
изделием.
4. Место хранения и система транспортировки с
разовыми и ежедневными воздействиями.
5. Система обслуживания.
На рис. 5.11 приведен пример - обычный авто-
мобильный домкрат и системы в его окрестности.
Для каждой системы из окрестности теперь
необходимо получить ответы на множество общих
вопросов, чтобы продолжить анализ изделия.
Этими вопросами могут быть, например:
1. Описание системы (кто?).
2. Воздействие на изделие (что?).
3. Отношения времени (когда?).
4. Отношения места (где?).
Каждый из этих общих вопросов разбивается
далее на 4-6 частных вопросов, так что в случае
шести систем окрестности изделия из четырех
общих вопросов и 4-6 частных вопросов получается
в общей сложности около 100 вопросов. Если во-
прос является существенным для изделия, то
вместе с определенными способами представле-
ния он дает информацию для списка требований.
На рис. 5.12 приведены вопросы, относящиеся к
пассивной системе из окрестности изделия „авто-
мобильный домкрат”.
Общие вопросы, относящиеся к взаимодейст-
вию устройства для подъема автомобиля с каждой
смежной системой, приводят к ответам, оценива-
емым по их значимости. Оценка этих ответов или
мысленных связей (ассоциаций), дающих требу-
емый результат, содержится в последнем столбце,
и на ее основе формулируются требования, кото-
рые заносятся в список требований II (рис. 5.13).
Частные вопросы из рис. 5.12 были составлены
в полном объеме только для пассивной смежной
системы. Для других смежных систем они соответ-
ственно повторяются. Список требований П
(рис. 5.13) учитывает в классификационной и тре-
бовательной частях те же принципы классифика-
ции, что и список требований I, однако в специаль-
ной части в столбце 4 тип требований детализи-
руется согласно нумерации кат. 4.1.1, а в столбце 5
приводятся шаги рабочего плана конструирова-
ния. Столбцы 3 и 7 помогают находить или упоря-
дочивать требования по их типу, по шагам конст-
руирования и по источнику их появления.
Этот метод позволяет конструктору, ограничи-
ваясь примерно 100 вопросами, определить важ-
нейшие ограничения для изделия. Он относитель-
но прост и нагляден, однако имеет, по меньшей
мере, следующие два недостатка:
общие вопросы носят слишком обобщенный и
абстрактный характер, так что некоторые частно-
сти, которые могли бы входить в ответ, ускользают
из поля зрения;
не учитывается жизненный цикл изделия.
Третий метод, описываемый ниже, хотя и
требует значительных затрат, зато позволяет
избежать этих недостатков и обеспечивает практи-
чески полный комплект сведений для списка
требований.
3. Анализ фаз жизненного цикла изделия
(список требований!!!)
В этом методе, предложенном Франке [7],
окрестность изделия, „... состоящая из всех систем,
которые вступают во взаимодействие с изделием
или его частями в какой-либо фазе его жизненно-
го цикла...”, рассматривается с помощью обширно-
го набора практически независимых друг от друга
понятий в различные моменты времени. Полный
жизненный цикл изделия (рис. 5.14, заголовоч-
ные столбцы 1 и 2) и системы „Технико-физиче-
ская окрестность” и т. п. (заголовочные строки 1 и
2) дают в итоге матрицу поиска с 90 полями, со-
держащими 250 вопросов. Они очень конкретны:
например, вопросы о применимых средствах произ-
водства, о потребном пространстве, о массе, долго-
вечности, коэффициенте полезного действия, о
возможности повторного применения и т. д. Дета-
лизация вопросов в отдельных полях матрицы
поиска производится в так называемых аналити-
ческих списках. Примером расширения столбцов
238
Свойства ^***>(^ и условия Фазы жизненного цикла а Технико-физические Человеческие
б Технологические и функциональные Физические и природные Физические Психические
1 2 № 1 2 3 4
Производство Планирование изделия, проектирование, конструирование 1 1.1 Уровень развития техники, технология конструирования 1.2 Известные законы природы, эффекты и вещества 1.3 Уровень развития эргономики, возмож- ность производить исследования опытных вариантов изделия с целью анализа их эр- гономических свойств 1.4 Уровень мотивации и образования разработчиков, методика конструирования
Подготовка пр оизвод ства и изготовление деталей 2 2.1 „ Доступные средства производства н оборудование. технология изготовления 2.2 Т ехнол огические свойства материалов, нагрузки в процессе изготовления 2.3 Обращение с деталями, опасность пораниться острыми заусенцами, стыкуем ость деталей (фаски) 2.4 Квалификация изготовителей, технологическая об осн ованность размеров
Сборка 3 3.1 Доступные монтажные инструменты и вспом огательиые приспособления 3-2 Нагрузки в процессе сборки, климатические условия при монтаже иа строи- тельных площадках Обращение с деталями: масса, размеры 3.4 Распознаваем ость деталей, опасность их перепутать
Распределение Транспортировка 4 4.1 Доступные средства транспортировки (габариты грузов), погрузочные приспособления 4.2 Особые климатические условия (например, транспортировка морем) 4.3 Масса, ручки и другие элементы для транспортировки, центр тяжести, безопасность и сохранность при погрузке и выгрузке 4.4 Обозначение чувствительных деталей и мест захвата для транспортировки
Хранение 5 5.1 Занимаемая площадь, масса, упаковка 5.2 Старение и порча при хранении 5.3 Обращение с изделием на складе, штабелирование, устойчивость 5.4 Учет низкой квалификации складских работников
Сбыт 6 6.1 Рекламирующие изделие технические принципы 6.2 Стойкость к коррозии, независимость от кл иматич еских условий (также и как коммерческое свойство) 6.3 Эргономические преимущества перед конкурирующими фирмами 6.4 Репутация фирмы, пригодность к демонстрации, сведения о происхождении
Применение Рабочее состояние и состояние покоя 7 7.1 Функция, надежность, долговечность, КПД, складываем ость, взаимоотношения со смежными системами 7.2 Нагрузки и движения в процессе эксплуатации, климатические условия окружающей среды, наличие источников воды и воздуха 7.3 Эргономические условия, безопасность, отсутствие утомляющих факторов (например, жара, или шума), гигиена 7.4 Простота и удобство в эксплуатации, инструкции по эксплуатации, внешний вид при работе и в покое
Техобслуживание 8 8.1 Число точек обслуживания, применяемые инструменты 8Д Нагрузки и движения при техобслуживании 8.3 Возможность доступа к точкам обслуживания и их осмотра 8’4 Маркировка точек обслуживания, карты техобслуживания
Ремонт 9 9.1 Взаимозамеия ем ость изнашивающихся деталей 9.2 Нагрузки и движения при ремонте 9.3 Пространство для ремонтных операций, усилия и обзор при ремонте 9.4 _ Методика поиска неисправностей, показатели износа
Возобновление Замыкание жизненного цикла, рециклинг 10 10.1 „ Повторное использование, утилизация, переработка 10.2 Уровень нагрузки на окружающую среду, экологичность 10.3 Угроза отравления, облучения 10.4 „ Последствия от причинения вреда окружающей среде для репутации фирмы
Рис. 5.14. Матрица поиска для уяснения задачи, анализа фаз жизненного цикла изделия и поиска информации с целью формулировки
точной постановки задачи и составления списка требований
239
Экономические Нормативные Прочие
Стоимостные Планово- организационные Правовые Стандарты и промышленные нормативы Прочие
5 6 7 8 9
1.5 Стоимость разработки 1.6 Продолжительность разработки, учет важнейших целей предприятия 1.7 Законы по охране - авторского права для принципов решений 1.8 Нормативы Союза немецких инженеров 1.9 Учет тенденций развития, моды, политической ситуации
2.5 Плата рабочим- изготовителям, стоимость материала, стоимость оборудования 2.6 Поставщики, планирование производства деталей, капиталовложения 2.7 Законы по охране авторского права для технологии изготовления 2.8 Стандарты на средства изготовления (ДИН, ИСО), стандарты на материалы 2.9 Рынок сырья, рынок рабочей силы, автоматизация
3.5 Плата рабочим- изготовителям, стоимость инструментов 3.6 Объемы производства, хранение материалов, полуфабрикатов и пр. 3.7 Законы по охране авторского права для технологии сборки 3.8 Стандарты на инструменты, стандарты на применяемые соединения 3.9 Рынок сырья, рынок рабочей силы, автоматизация
4.5 Транспортные расходы, пошлины 4.6 Выбор транспортного средства или обращение к услугам агентов 4.7 Ответственность за повреждения при транспортировке, таможенные правила 4.8 Стандарты на транспортные средства, погрузочные механизмы, на упаковку 4.9 Долговременные изменения транспортных средств или складской техники
5.5 Расходы иа помещения, капитальные затраты 5.6 Средняя пр од олжительность хранения, организация хранения 5.7 Положения о допустимом сроке хранения 5.8 Стандарты на стеллажи, двери, ворота 5.9 Долговременные изменения транспортных средств или складской техники
6.5 Достижимая прибыль от продажи, допустимые расходы на рекламу 6.6 Пути сбыта, организация сбыта 6.7 Законы по охране потребителей, гарантийное обслуживание, штрафы, обусловленные договором 6.8 Внутризаводские нормативы по вопросам сбыта 6.9 „ Исследование рынков сбыта, размещение рынков сбыта (внутри страны, за границей)
7.5 Плата обслуживающему персоналу, капитальные затраты, расходы на помещения, стоимость энергетических и эксплуатационных материалов 7.6 Срок ввода в эксплуатацию, срок службы, длительность перерывов в работе 7.7 Законы по охране труда, инструкции и правила по технике безопасности 7.8 Нормативы Союзов технического надзора, немецких электро- техников и немецких инженеров, стандарты ДИН, ИСО на конструк- тивные исполнения, качество продукции, типоразмеры, методы испытаний и безопас- ность 7.9. Лучшие изделия конкурирующих фирм, , впечатления от ярмарок и выставок, литература, собственные более старые изделия
8.5 Расходы на техобслуживание 8.6 Интервалы между профилактическими осмотрами 8.7 Договоры на техническое обслуживание 8.8 Нормативы на техническое обслуживание, стандарты на оборудование 8.9 Тенденция к избавлению от необходимости техобслуживания
9.5 Н епоср едственная стоимость ремонта при неисправностях 9.6 Организация ремонтного обслуживания покупателей, ремонт на заводе или в гарантийной мастерской 9.7 Договоры с отдельными торговцами и мастерскими 9.8 Стандарты на инструменты 9.9 Тенденция к"замене узлов вместо ремонта
10.5 Затраты или прибыль от рециклинга 10.6 Публикация материалов по защите окружающей среды 10.7 Законы по охране окружающей среды 10.8 Внутризаводские нормативы 10.9 Возросший уровень понимания экологических проблем (охраны окружающей среды)
240
Регистрационный номер : Изделие: Переносное устройство для подъема автомобиля человеком Разработчик: Дата: Лист: 1
СПИСОК ТРЕБОВАНИЙ II Метод: окрестность изделия
Классификационная часть Требовательная часть Специальная часть
Получение ин форма- ции Номер Описательные данные (качественные) Числовые данные (количественные) Тип требова- ний по кат. 4.1.1 Этап KOHCT- руиро- в ан ия по рис. 2.10 Источник
главного вопроса под- воп- роса Группа № Доку- менты Люди
№ 1 2 3 4 5 6 7
1 Пассивная смежная система 1.1 Описание системы (кто?) 1.1.1 1 Автомобиль
1.1.2 2
1.1.3 3 Точка приложения силы • для подъема около 200 мм от основания ж — 2.1 2.2 Статис- тика Г-н Майер
1.2 Воздейст- вия на изделия (что?) 1.2.1 7
1.2.2 8 Развиваемая при подъеме сила около 5000 Н ц 7 1.2 2.1 Статис- тика Г-н Майер
1.2.3 9
1.2.4 10 Допуск иа развиваемую при подъеме силу ± 80 Н Ж 5 2.1 2.2 Из ста- тисти- ки Конст- руктор
1.2.5 11
1.3 Временные отношения (когда?) 1.3.1 13
1.3.2 14 Сколь угодно долго нахо- диться в поднятом вверх состоянии Ж — 1.1 Ко
1.3.3 15 Использование в среднем 4 раза в год Ж — 2.1 2.2 Ко
1.4 Простран - ствениые отноше- ния (где?) 1.4.1 17 Должны быть в наличии элементы, позволяющие передавать силы ж — 2.1 2.2 Заказ- чик Г-н Фер- ласс
1.4.2 18
2 Активная смежная система 2.1 Описание системы (кто?) 2.1.1 19 Человек в качестве источника механической энергии ж — 1.1... 2.1 Ко
2.1.2 20 Предусмотреть стопор обратного хода ж — 1.1 2.1 Ко
2.1.3 21 Согласование передаточ- ного отношения W < 0,1 кВт, ход = 180 мм v < 1 м/с, Г < 100 Н ’ ц 14 1.2 2.1 Справ. по эрго номике
Из техничес- кого зада- ния, заказчика Раздел № 1 111 Производство 100 000 шт. в год ж 7 2.2 Зада- ние
7 112 Использование в условиях пустыни П — 2.1 2.2 Г-н Вунш
9 113 Цена не выше марок за штуку ц 12 2.1 2.2 Зада- ние
114
Из дополнительных источников информации 120 Работоспособность без смазки, в пыли, в песке П — 2.1 2.2 Ко
121
122
Рис. 5.13. Форма для списка требований П. Метод: анализ окрестности изделия по рис. 5.10. Пример: автомобильный домкрат (извле-
чение)
241
Фазы жизненного цикла Технико-физические свойства и условия
функциональные и технологические физические и природные
Производство Планирование изделия, проектирование, конструирование i Уровень развития техники, известные пионер- ; ские достижения в конструировании, оригиналь- ные принципы решений, экстремальные парамет- ры мощности и конструктивные величины, миниа- тюризация; предполагаемые к использованию в производстве и другие доступные опытные дан- ные, аналогичные изделия конкурирующих фирм; доступные лабораторные методы (испытательные стенды, измерительные приборы и пр.); вычисли- тельная техника (аппаратное и программное обе- спечение), аналоговые ЭВМ, устройства представ- ления информации; смежные изделия, размерные ряды Известные законы природы (начала термодина- мики, законы подобия и т. д.) и эффекты (эффект теплового расширения и т. д.), известные матери- алы и вещества и их физические, химические и физиологические свойства, в особенности пре- дельные значения; фундаментальные исследова- ния в области физики и химии; открытия
Подготовка производства и изготовление деталей Доступные станки, приспособления и прочие средства производства в зависимости от их вида, размеров и производительности (например, рас- стояние между центрами и высота центров то- карного станка, реализуемая средняя скорость, усилие прессования, достижимые допуски и ше- роховатости); степень автоматизации изготовле- ния, доступные устройства управления и регу- лирования (станки с ЧПУ); доступные готовые детали, полуфабрикаты и заготовки, материалы; существующие группы типовых деталей, детали массового использования, групповое изготовле- ние, объемы производства, размеры партий; учет технологических условий отдельных способов из- готовления (перерабатываемые материалы; усло- вия, относящиеся к форме и структуре: возможно- сти извлечения из формы и согласованная с возможностями методов обработки давлением конструкция литых и кованых деталей, соответст- вующая заборная часть инструмента при сверле- нии, прошивании, протягивании, фрезеровании и т. д., допустимый радиус изгиба, положение плоскости разъема литейной формы или штампа, учет текстуры при прокате и пр.); съем металла при резании, отходы металла, число креплений, число технологических переходов на деталь, глубина обработки изделия; контроль качества, измерительные приспособления и приборы, испытательные инструменты Нагрузки при изготовлении в зависимости от их вида (механические, тепловые, электрические и т. д.), величины, изменений во времени и часто- ты — см. также под рубрикой „Рабочее состояние и состояние покоя” — примеры: усилие на срез, сила натяжения, рабочие частоты станков (на- пример, при фрезеровании) по отношению к соб- ственным частотам сборочных единиц (рябь на поверхности), коррозия от охлаждающей жидко- сти, закалочные ванны, физико-химическая обра- ботка и т. д.; движения инструмента и заготовки при обработке, кинематика станков (движения резания, продольной и поперечной подачи), воз- можность доступа (при необходимости одновре- менного) всех инструментов ко всем точкам обра- ботки, выход инструмента из изделия (например, при ударах, уменьшении размеров шлифуемой детали); возможность доступа (при необходимо- сти в процессе обработки) измерительных и конт- рольных инструментов; технологические свойства обрабатываемого материала (способность к запол- нению формы, вытяжке и гибке и т. д.)
Сборка Доступные монтажные инструменты и вспомога- тельные средства (например, пневматический гайковерт, сборочные прессы, устройства для пайки и сварки); сборочные автоматы, промыш- ленные роботы, методы управления, число и вид монтируемых деталей и сборочных единиц, рас- членение на монтажные группы, сборка в завод- ских условиях или на стройплощадке, центриро- вание, соединение и уплотнение; юстировка, методы измерений Движения и нагрузки при сборке; примеры: прес- совые посадки (подшипников качения и др.), горячие прессовые посадки (втулок и др.), отсут- ствие коллизий при сборке; климатические и фи- зические условия окружающей среды (монтаж на стройплощадках или в цехах завода, сварка в атмосфере защитного газа и т. д.); возможность пайки и сварки
Распределение Транспортировка, хранение Доступные транспортные средства в зависимости от их вида (грузовые автомобили, суда, самолеты и т. д.), вместимость и размеры (габариты и массы грузов), узкие места (например, двери, ворота, мосты); штабелирование и устойчивость (нерас- сыпучесть), складываемость, погрузочные прис- пособления (ремни, цепи), рамы, крановые крючья; упаковка (пленка, картон, ящик, короб- ка), контейнеры; площади и объемы складов, допустимые нагрузки на полки и перекрытия Движения и нагрузки, связанные с транспорти- ровкой (нагрузки за счет собственной массы, на- грузки в отдельных точках при подъеме, коррозия от морской воды, толчки и тряска в наземном транспорте и т. д.); климатические условия (по- грузка под дождем, снегом, при предельных тем- пературах); старение и коррозия при хранении
Рис. 5.15. Специальный аналитический список технико-физических свойств и условий для детальной разработки списка требований [7].
Лист1
16 — 2317
242
Фазы жизненного цикла Технико-физические свойства и условия
функциональные и технологические физические и природные
Распределение Сбыт Учет предубеждений потребителей изделия про- тив новых принципов функционирования, рекла- мирующие изделие принципы функционирова- ния: учет моды и имеющихся тенденций (напри- мер, „электронное”, „сенсорное”, „автоматиче- ское”, экологически чистое”, „с малым потребле- нием энергии”); учет интересов потребителей с точки зрения вторичной переработки Учет принятых в отрасли физических свойств определенных изделий (например, часы - анти- магнитные); необычные или наиболее благопри- ятные физические свойства или применение особых материалов — как коммерческие свойства (например, золотые контакты)
Применение Рабочее состояние и состояние покоя Функции, работа, входные, выходные и рабочие параметры, сложность, мощность, производитель- ность, КПД, точность, прецизионность; возмож- ность функциональной и геометрической адап- тации, жесткость конструкции, независимость, аккумулирующая способность; превращения и пе- реработка вещества, выход продукции, потери от утечек, герметичность, требуемые эксплуатаци- онные материалы (например, смазочные матери- алы, вода, воздух); энергообмен, потребность в энергии (вид и количество энергии), необходимые преобразования энергии, потоки информации, регулирование, управление, чувствительность, номинальные значения, число и вид каналов связи, кодирование, уровень искажений, вспомо- гательные функции (например, охлаждение, смазка), вредные функции (трение, перегрев, вибрация, раскачка и т. д.); функциональное раз- деление или функциональная интеграция; общая надежность, надежность в работе, надежность при перебоях в подаче энергии (например, агре- гат аварийного питания для медицинской аппара- туры), долговечность, минимизация вреда при ло- кальных неисправностях (например, блокировки, проскальзывание муфты), защита от неправиль- ного использования („от дурака”) (например, бло- кировки), защита от пыли, влаги и посторонних веществ; граничные условия смежных техниче- ских систем (тактовое время, присоединительные размеры, общая потребляемая электрическая мощность и т. д.), сеть сжатого воздуха, оборудова- ние для подвода или отвода воды, воздуха, разно- го рода отходов, выхлопов; пусковая характеристи- ка, перерывы в работе, занимаемый оборудовани- ем объем и площадь, компактность, масса, допу- стимая нагрузка на перекрытия, фундамент (удар- ная и вибрационная изоляция); занимаемая пло- щадь в нерабочем состоянии (складываемость) Нагрузки и движения в процессе эксплуатации в зависимости от их вида (механические, тепло- вые, электрические, магнитные, химические, радиационные и т. д.), продолжительности, часто- ты и изменений во времени (постоянная, пульси- рующая или переменная нагрузка и т. д.), от рас- пределения и комбинации (например, множест- венные нагрузки) и от их величины, примеры: массовые силы (функционально обусловленные или связанные, например, с нежелательным дис- балансом), рабочее давление в трубах и котлах, высокие температуры и, возможно, давление в камерах сгорания, образование электрической дуги в силовых выключателях, проникновение корродирующих сред (например, щелочей, кис- лот), трение, скорости скольжения и т. д.; функци- онально обусловленная кинематика, примеры: вращательные, поступательные ( непрерывные или осциллирующие) или связанные движения, отсутствие внутренних или внешних столкнове- ний, климатические условия в процессе эксплу- атации (величина и колебания давления и влаж- ности воздуха, а также его температуры); пыль, грязь, грибковые поражения и т. д.; физические свойства материала (твердость, электропровод- ность и емкость); проявляющиеся при работе фи- зические законы (законы сохранения энергии, импульса, массы и т. д.), логические законы (коммутативность, ассоциативность и т. д.); основ- ной принцип функционирования изделия (меха- нический, электронный, тепловой и т. д.)
Техобслуживание и ремонт Доступные инструменты, вспомогательные сред- ства и материалы для техобслуживания и ремонта, принадлежности, число точек обслуживания, возможность демонтажа критических деталей (разъемные соединения), взаимозаменяемость изнашивающихся деталей, ремонт и техобслужи- вание у потребителей или изготовителей Нагрузки и движения при ремонте и техобслужи- вании (смятие резьбы, разрушение условно раз- борных соединений и т. д.), отсутствие коллизий при разборке на детали; климатические условия при ремонте и техобслуживании
Возобновление Замыкание жизненного цикла, рециклинг Повторное использование, утилизация, перера- ботка, моделирование замкнутого жизненного цикла: первичный цикл, вторичный цикл, тре- тичный цикл, возможность извлечения из изде- лия содержащихся в нем ценных материалов (проблема разделения) Нагрузка на окружающую среду вследствие образо- вания брака и лома и ненадлежащего его хране- ния (горы отходов, металлома, остатки эксплу- атационных материалов и других вредных ве- ществ, например загрязнение водоемов нефтью)
Рис. 5.15. Продолжение. Лист 2
243
Фазы жизненного цикла Человеческие свойства и условия
физические психические
Производство Планирование изделия, проектирование, конструктирование Уровень развития эргономики, ее достижения (известные, всеобщие решения, законы, правила), доступные источники информации (книги, жур- налы, личные контакты), эргономическое иссле- дование производства (собственные исследования, эргономические центры); физические нагрузки на человека при специальных способах разработки (лекальщики в судостроении) и при лаборатор- ных исследованиях Уровень мотивации и образования разработчи- ков, возможности коллективной работы, методы интенсификации групповой работы (мозговой штурм, синектика), процедуры методического конструирования (функциональные структуры, морфологический ящик и т. д.), опасность ошиб- ки при недостатке времени в стрессовой ситуации
Подготовка производ- ства и изготовление деталей Опасность пораниться об острые края деталей, заусенцы; опасные для здоровья материалы, тех- нологические процессы (газ, пыль; защитные при- способления); масса деталей при ручном изготов- лении, других ручных операциях (см. также эрго- номические условия под рубрикой „Рабочее состо- яние и состояние покоя”) Уровень мотивации и квалификации изготовите- лей (рабочие высокой и средней квалификации, опыт и ответственность, система оплаты, стимули- рование, вероятность брака), возможность пере- хода на новую технологию; легкопонятные рабо- чие чертежи, согласованность размеров с возмож- ностями изготовления
Сборка Вспомогательные элементы для сборки (фаски, острия); высота и расположение точек монтажа, обеспечивающие возможность доступа и согласо- ванные с размерами человека (по возможности без дополнительных приспособлений), устойчи- вость и сохранность деталей при сборке; неэффек- тивные способы монтажа (ручная склейка) (см. также условия под рубриками „Изготовление деталей ...” и „Рабочее состояние...” Квалификация и опыт рабочих-монтажников; рас- познаваемость деталей, опасность перепутать детали или способ их установки (выявление сим- метрии или асимметрии, предусмотрение марки- ровки); использование соответствующих монтаж- ных схем
Распределение Транспортировка, хранение Обращение с изделием при различных операциях (масса, ручки и другие элементы для транспор- тировки); возможные опасности при погрузке или соскальзывании груза с места (устойчивость, за- цепление опорных элементов, упорные выступы для штабелирования), возможные опасности от просачивающихся газов или жидкостей (электри- ческие батареи), размещение и продолжитель- ность Ручки, центры масс, отчетливая разметка точек для приложения силы, хброшо заметное обозна- чение чувствительных деталей или машин („Осто- рожно, стекло!”) или необходимого при транспор- тировке положения (например, „Верх!”)
Сбыт Необычные или наиболее благоприятные эргоно- мические свойства (например, автомобильные сиденья многократно переустанавливаемые или с гидравлической системой амортизации), эргоно- мические свойства, пригодные для рекламы и влияющие на продажу, эргономические свойства изделий конкурирующих фирм Квалификация торгового персонала (сбыт через специализированную торговую сеть, универсаль- ные магазины, представителей); репутация фир- мы, сведения о происхождении (фирменный знак, фирменное оформление); сведения о качестве, функциональность, покрытие в отношении внеш- него вида и качества (отсутствие излишнего хро- ма); пригодность к демонстрации, представитель- ность, броскость; реальная полезность, престиж- ность
244
Фазы жизненного цикла Человеческие свойства и условия
физические психические
Применение Рабочее состояние и состояние покоя Эргономические условия: размеры тела среднего мужчины и средней женщины, границы 5%-, 95-ой группы мужчин и женщин, группировка пользователей, отклонение от нормальных про- порций тела (одежда на великанов и карликов), рабочая высота, устройство сидений, рабочее про- странство для рук, пальцев рук и для ног, область захвата, угол зрения, расстояние от глаз; масса тела, масса частей тела (положение покоя на пе- дали); физическая сила человека, возможные нагрузки, направления сил, расстояние до точки приложения силы, возраст, здоровье, группировка по физическим возможностям; подвижность конечностей в суставах: плечевом, локтевом, лу- чезапястном, тазобедренном, коленном и т. д.; характеристики движений и их изменение во времени (небольшая величина усилий, утомле- ние); способность выдерживать нагрузки: силовые, давления (контактное напряжение), ускорение (например, опасность ранения при столкновении автомобилей), вибрация, излучения (тепловое, УФ, гамма-, рентгеновское), электрический ток, напряжение; физиологические функции: дыха- ние, потоотделение, терморегуляция (в нужной мере теплая, не мешающая дыханию одежда); климатические воздействия: жара, холод, влаж- ность воздуха (учет тепловых характеристик окру- жающей среды и устройства, возможностей ис- пользования вне помещения, например дождеза- щита транспортных средств), акустические воз- действия: шум, средний уровень шума окружа- ющей среды, средний уровень шума устройства (пишущая машинка в помещениях конторы), пики шума (учет шумовых характеристик устрой- ства, например пылесоса, клепального молотка, затруднение обслуживания, управления: преду- преждающие сигналы); световые воздействия: ос- вещенность, цвет, яркость, контрасты, ослепле- ние, блики, тени; выбор оттенка цвета: интенсив- ность, насыщенность (чистота), легкость чтения показаний, контроль цветов, красное освещение в целях светотеневой адаптации; воздействие Механических колебаний: частота, амплитуда, резонанс, восприятие (гидравлические амортиза- торы сидений грузового автомобиля); химические и физические воздействия: газы, пары, пыль, запах, раздражающие вещества, яды, вред для здоровья (аппараты для переработки синтетиче- ских материалов); электрические воздействия (изоляция электрических устройств, электроста- тические эффекты при соприкосновении с синте- тическими материалами); возможное усиление воздействий при их комбинации (вибрация и хо- лод при работе вне помещений); биологические воздействия: гигиенические требования, грязь, сырость, микроорганизмы, грибки (гладкость наружных поверхностей, простота их очистки) Информирование обслуживающего персонала о состоянии машины, каналы информации в зави- симости от их типа, числа и воспринимающей способности (глаз, ухо, осязание, чувство равнове- сия и т. д.), зависимость восприятия зрительной информации от направления (поэтому: акустиче- ский предупреждающий сигнал, оптическая де- тальная информация), распознаваемость функ- ции, обозримое и рациональное расположение элементов сигнализации и обслуживания (напри- мер, учет следования в обратном порядке при движении назад, функциональных взаимосвязей различных переключательных кнопок при их размещении), четкое описание наиболее важных функций, хорошо заметные краски, формы и сим- волы для обозначения опасных мест (например, большие, красные выключатели защиты, желто- коричневые полосы на выступающих частях), простые и понятные символы; индикаторы, шка- лы и экраны, их расположение и оформление; образование формы, восприятие образа, символи- ка, желательные или нежелательные ассоциации (например, швейная машина в форме бараньей головы); раскраска, контрасты, психологическое влияние цвета (тепловые и холодные цвета, вли- яние окраски на оценку размера, скрытие с по- мощью окраски, например, черные основания бытовых приборов), модные краски; хороший ди- зайн как дополнительное достоинство (для вла- дельца, покупателя), улучшения настроя на ра- боту; психологическое влияние окружающих условий (см. соседний столбец), психологические нагрузки (стресс под воздействием шума, быстрых рабочих тактов, мигающее освещение (не вклю- чать все газоразрядные лампы в одну фазу), нежела- тельная концентрация внимания при неудовлет- ворительной форме органов управления или плохо считываемые показания приборов, опас- ность перепутать, психологическое утомление, монотонность, длительность, стресс, ослабление восприятия и концентрации, возможные ошибки управления следует учитывать или избегать их (например, выключатели зашиты или автомати- зация); квалификация пользователя, образован- ность, опыт, обучение трудовым навыкам, специ- альность (например, инженер, квалифицирован- ный рабочий, ученик, домашняя хозяйка, ребе- нок); ясные, обозримые, полные инструкции по использованию (как минимум необходимы опи- сание функций и соответствие функций органам управления, указания на источники неисправно- стей и ошибок, ремонт, техобслуживание и места обслуживания клиентов)
Техобслуживание и ремонт Удобный и надежный доступ к точкам обслужива- ния и изнашивающимся деталям (непосредствен- ный прямолинейный доступ извне, места смазки и заправки не возле горячих деталей и т. д.), при- нимать во внимание эргономические условия (см. также „Рабочее состояние ...” и „Сборка”), в особенности учитывать зону досягаемости, пространство для рабочих операций, требуемые усилия и обзор Квалификация обслуживающего и ремонтного персонала, по возможности проектировать изде- лие, не требующее техобслуживания; изнашива- ющиеся детали, различимость величины износа непосредственно или через индикатор; обозначе- ние, маркировка точек обслуживания, регулиро- вочных элементов; однозначность типа, положе- ния, величины сменных деталей (избегать опас- ности перепутывания похожих деталей), облегче- ние проверки и поиска неисправностей с помощью карт технического обслуживания и поиска неис- правностей; мотивация через порядок, чистоту
Возоб- новление Замыкание жизненного цикла, рециклинг Угроза образования ядов, излучения, взрыва, биологических воздействий, опасность ранения Учитывать возможные последствия для репута- ции фирмы
Рис. 5.15. Продолжение. Лист 4
5.2. Вспомогательные средства для фазы формулировки задачи
245
X. Свойства, X. условия Фазы жизнен - Технико-физические Человеческие
ного цикла № 1 2 3 4 5
Произ- водство 1 1.1 Выполненное современ- ными методами планиро- вание изделия, проектиро- вание и конструирование 1.2 Специализированные ру- ководства, содержащие конструкторские катало- ги и сведения о материа- лах 1.3 Возможность изготовле- ния опытных образцов и исследования их эргоно- мических свойств 1.4 Частичное использование процедур методического конструирования, опыт имеется 1.5
2 2.1 Машины для массового производства, горячей и холоди обработки давлен вытяжки, штамповки, об- работки резанием 2.2 Подходящий к имеющей- ся технологии материал, отсутствие особых нагрузок 2.3 Избегать придания дета- лям формы, вредящей удобству использования 2.4 Учет возможностей спе- циальных технологий (для придания деталям заданной формы) 2.5
3 3.1 Приспособление для облегчения сборки на конвейере 12 Отсутствие чрезмерных нагрузок при сборке 33 Масса и форма деталей, допускающие ручную сборку 3.4 Предусмотреть отсут - ствие затрудне- ний при сборке 3.5
Распреде- ление 4 4.1 Габаритные размеры изде- лия заданы заранее 4.2 Выполнение условий тран- спортировки должно обес- печиваться упаковкой 4.3 Специальные элементы для транспортировки не нужны 4.4 Маркировка о необходи- мости бережного обращ- ения при транспортиров- ке 4.5
— 5 5.1 5.2 5.3 5.4 5.5
Применение 7 7.1 (См. функциональное по- ложение ) Долговечность: 10 лет, частота использования: 100 раз. возможность ук- ладки в багажник, высо - та до днища легкового автомобиля: 0,2 м, ход подвески: 0,15 м 7.2 Нагрузка: ~ 5000 Н, поступательное дви- жение, использование вне помещений 7.3 Надежно удерживать вес автомобиля, отсутствие повреждений во время обратного хода, легкость опускания 7.4 Ручное, возможно нож- ное воздей ствие, пока- затели удобства: сила рук< 100 Н; сила ног < 200 Н. Предпочтительно воз- вратно-пос тупательное движение 7.5
8 8.1 Не требует техобслу - живания 8.2 Не заполняется 8.3 Не заполняется 8.4 Не заполняется 8.5
9 S.1 Проектировать изнаши- вающиеся детали взаи - мозаменяемыми 9.2 Не заполняется 9.3 Доступность точек воз - действия, пространство для ремонтных операций 9.4 Не заполняется 9.5
Возобнов- ление 10 10.1 Обеспечить повторное ис- пользование материалов деталей за счет легкости разборки 10.2 Отсутствие нагрузки на окружающую среду Ю.З Не заполняется 10.4 Не заполняется 10.5
Рис. 5.16. Заполненная матрица поиска для примера .Автомобильный домкрат” (извлечение)
1-4 матрицы поиска является аналитический
список (рис. 5.15). Этот список может периодиче-
ски пополняться посредством добавления новых
понятий и разделов для типичных в производстве,
постоянно повторяющихся затрат, и сокращаться
посредством вычеркивания ненужных. Построение
соответствующего списка требований (см. рис. 5.17)
производится так же, как и списка на рис. 5.13.
Порядок работы: после разработки и вычерчи-
вания матрицы поиска с пустыми полями в эти
поля заносят относящиеся к изделию ответы на
вопросы (рис. 5.16) или же составляют список, в
котором после обозначения поля (1.1 ... 10.9) стоят
ответы. При этом целесообразно заранее оценить
важность отдельных сведений и заполнять поля
матрицы поиска в соответствующем порядке.
Далее, ответы должны описывать в первую оче-
редь желаемую цель и ограничения на изделие, но
не средства, которыми это достигается, например
вес 30 Н, и ни в коем случае ответ: для достижения
малого веса применить алюминиевый сплав.
После оценки вопросы переносят в список требо-
ваний Ш (рис. 5.17).
Поясним описанный выше порядок работы на
примере автомобильного домкрата с помощью
заполненной матрицы поиска (см. рис. 5.16). Рас-
сматривая вопросы в отдельных полях (обознача-
емых номерами соответствующей строки и столбца)
в отношении к устройству для подъема автомоби-
ля, мы принимаем во внимание их положение в
матрице и сразу же выясняем, может ли содержа-
ние этих полей (с учетом заголовков строки и
столбца) быть взято в качестве требований к изде-
лию (подобно методике на рис. 5.12).
Принципиальная трудность, о которой не раз
уже говорилось, состоит в том, что список требова-
ний с повышением уровня конкретизации изделия
может шаг за шагом пополняться, и многие поля
матрицы поиска могут осмысленно использовать-
ся лишь в более-поздних фазах конструирования.
Список требований может быть полным только
для очередного этапа конструирования. Выход из
положения состоит в том, чтобы определять толь-
ко те требования, которые необходимы для следу-
ющего этапа конструирования и не зависят от
возможных решений. Использование в дополнение
к матрице поиска аналитического списка (см. рис.
5.15), отражающего особенности производства и
эксплуатации, будет здесь хорошим подспорьем.
Следующие замечания также могут оказаться
полезными в работе. При первом проходе рабочего
плана используются только те требования, кото-
рые получаются из полей 7.1 и 7.2 матрицы поиска
(рис. 5.14), а также ограничения из технического
задания. При втором проходе можно использовать
требования, связанные со строками 7,1, 4, и только
после этого учесть требования в остальных полях.
При этом достигается то, что с самого начала не
246
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Регистрационный номер; Изделие : Переносное устройство для подъема автомобиля человеком Разработчик: Дата- Чист: 1
Список требований III Метод : анализ фаз жизненного цикла
Классификационная часть Требовательная часть Специальная часть
Получение ннфор - мацин Номер поля в матрице поиска Описательные данные (качественные) Числовые данные (количественные) Тип требова- ний по кат. 4.1.1 Этап конст- руиро- вания цо рис. 2.10 Источник
Группа Доку- менты Люди
№ 1 2 3 4 5 6 7
С помощью матрицы поиска и аналити- ческого списка Произ- водство 1.1 1 Предусмотреть использо- вание холодного прессования П — 2.1 2.2 Стан - дарты на ма- териа- лы Г-н Хубер
2 Предусмотреть использо- вание штамповки П —
1.2 3 Использов.при разработке методического конструи- рования. новое решение Ж — 0... 2.2 Г-н Брем
4 Учитывать возможности оптимизации материала 2.2 Г-н Хубер
3.9 48 Обеспечить высокую степень автоматизации производства ж — 2.2 Г-н Ляйт- нер
Рас пр еде - ление 4.1 не заполняется
6.9 Легкая разборка
Приме - нение 7.1 Срок службы : 10 лет ц 7 2.1 Заказ- чик Г-н Шуль- це
складной п —
7.2 Нагрузка: 5000 ... 8000 Н Ц 13
8.1
9.9 Отсутствие специальных требований Ж — . 2.1 Сове- щание от ... Г-н Майер
Возобнов- ление (рецик- лннг) 10.1 Допускать ремонт путем замены деталей п —
10.9 Возможность последую- щего использования деталей п — 2.1 Конст- рук- тор
Из техни- ческого задания заказчика Раздел № 2 Производство 100 000 шт. в год ж Зада- ние
5 Цена не выше . . . марок за штуку Ц 12 №
Из дополнительных источников информации Ежегодный рост производства на 10% п — Заинт. участ- ник Г-н Ляйз - нер
Рис. 5.17. Форма для списка требований Ш. Метод: анализ фаз жизненного цикла изделий по рис. 5.14 и 5.15. Пример: автомобильный
домкрат (извлечение)
появляется пессимизм по отношению к новым
решениям, не возникают трудности из-за огромно-
го числа требований, и, наконец, требования
наиболее конкретного вида формулируются лишь
тогда, когда уже видны контуры вполне опреде-
ленных решений.
Для точной формулировки требования очень
важно установить их тип по кат. 4.1.1. При этом
сразу становится очевидно, что такая формулиров-
ка, как „нагрузочная способность 5000 Н” может
означать все, что угодно, например „максималь-
ная нагрузка” (тогда имеют силу случаи 10-12
каталога) или „минимальная нагрузка” (тогда
имеют силу случаи 7-9). Кроме того, в случае
„минимальная нагрузка”, как, вероятно, подразу-
мевалось в исходном положении-требовании,
необходимо знать, должен ли оптимум быть как
можно больше (случай 7), иметь определенное
значение (случай 8) или быть как можно меньше
(случай 9).
Чтобы облегчить повторное использование
изделия, следовало бы подумать, что разделение
на однородные по материалу группы дорогосто-
ящими способами (например, на „демонтажном
конвейере” [3], с использованием взрыва) следует
учитывать уже при конструировании. Также следо-
вало бы подумать, не могут ли демонтируемые
детали позже применяться в качестве инструмен-
тов (например, в качестве торцовых, рожковых или
трубных ключей); подобный метод применяется
5.3. функциональные структуры
247
при изготовлении банок для горчицы, например в
форме кубков или пивных кружек. Тогда нет
нужды их выбрасывать, а можно использовать
дальше, по-новому.
5.3. Функциональные структуры
За фазой формулировки задачи в рабочем
плане (см. рис. 2.10) следует функциональная
фаза. Для входящих в нее двух этапов конструиро-
вания имеются следующие возможности работы:
абстрактная функциональная структура (этап
конструирования 1.1);
физические функциональные структуры (этап
конструирования 1.2);
логическая функциональная структура (этап
конструирования 1.2);
геометрическая функциональная структура
(переход от этапа конструирования 1.2 к 2.1).
Для этих структур разработаны модели изде-
лия 3-9 (см. рис. 5.2). В каждую из этих моделей
входит набор элементов (операндов), набор правил
соединения элементов (операций) и предложения
по целесообразному использованию моделей.
Очень ценны при этом указания по формальному
варьированию операций. Среди моделей особое
положение занимает модель 3, состоящая из
единственного „элемента”, которым является
черный ящик. При представлении общей функции
используется только одно символическое изобра-
жение (см. рис. 5.38), при представлении частных
функций может появиться сеть из одинаковых
изображений, каждое из которых выполняет свою
функцию.
5.3.1. Функциональные структуры с абстрактными
величинами
1. Абстрактная функциональная структура (АФС)
Эта структура приведена на рис. 5.2 как модель
изделия 4. Ее возникновение отвечает имеющейся
потребности что-либо сказать о функциях будуще-
го изделия на возможно более высоком уровне
абстракции, а также о переходе от общей задачи к
общей функции, от частных задач к частным
функциям, о направлении потоков величин в
изделии и о возможной схеме соединений [37,38].
Основное отличие этой модели от модели 5
состоит в том, что все важнейшие технические
взаимосвязи представляются с помощью 30 стан-
дартных функций, для которых оказывается уже
целесообразным разработать каталоги. В качестве
элементов модели используются три абстрактных
величины теории конструирования: вещество,
энергия, сообщения, а их состояние или измене-
ние состояния описываются с помощью операций:
накопление, передача, преобразование вида и
комбинирование. Определения этих операций и
условные обозначения для них приведены на
рис. 5.18. Они во многом согласуются с принятыми
в системодинамике.
Операция „накопление” объединяет как
накопление и расход чего-либо, так и его хране-
ние. Операция „передача” объединяет как пере-
мещение чего-либо по линии передачи (проводу) в
одном или двух направлениях, т. е. „проведение”,
так и изменение формы представления абстракт-
ной величины, обычно связанное с изменением ее
местоположения, т. е. „преобразование формы”.
„Преобразование вида” указывает на изменение
Проведение
Определение
2 I 3
1.2 Запасение н хранение определенных коли-
честв вещества, энергии и информации на
ограниченном месте так,чтобы впоследст-
вии доставленное вещество, совершенная
работа или введенная информация могли
быть извлечены для использования. Одно-
временно обозначение для источника и по-
глотителя
Перемещение щфеделеиного количества ве-
щества, энергии и информации в другое мес-
то без его преобразования или накопления
Преобразование
формы
32
Изменение фор-
мы представле-
ния абстрактной
величины, обыч-
но связанное с
изменением ее
местоположения
Преобразование
вида
4.2
Изменения вида
абстрактной
величины
Объе*
д мни-
тель-
5.2
Объединение
двух потоков
в один поток
(смешивание)
ное
оди-
нако-
вые
раз-
ные
7.2
Распределение
одного потока
по двум пото -
кам
3
3.3 Для вещества — внеш-
ней формы деталей, для
энергии — величин, от-
носящихся к работе или
мощности, для сообще-
ния — форма представ-
ления кода (но не сам
код)_____________________
4^ Для вещества — вида
материала, для энер-
гии — вида энергии,
для сообщения — ко-
да
5.3 Объединяются две оди-
наковые нз трех абст-
рактных величин — ве-
щества, энергии н со-
общений__________________
6.3 Одна нз трех абстрак-
тных величин управ-
ляется другой
Одна нз трех абстракт-
ных величин одного по-
тока разделяется на
два потока
8.3 От одной из трех аб-
страктных величин
отводится другая
Рис. 5.18. Операции, порождающие абстрактные функции, их
обозначения и определения
вида абстрактной величины. „Комбинирование”
существует в четырех разновидностях, зависящих
от направления потока и комбинации величин. В
предшествующих публикациях различие между
преобразованиями формы и вида проводилось
только для этапа геометрически материальной
реализации (2.1 на рис. 2.10). Если же операции над
различными видами вещества, энергии и кодов
различать уже на уровне абстрактной функци-
ональной структуры, то целесообразно проводить
это различие и здесь [18].
Если теперь одну из четырех операций (в
какой-либо ее разновидности) применить к одной
из трех абстрактных величин, то получится одна
из абстрактных функций. На рис. 5.19 приведены
все 30 получающихся при этом функций, а на
рис. 5.20 - наглядные примеры возможной их реализа-
ции в технике. Абстрактные функции на рис. 5.19 и
5.20 как раз и Образуют функциональные элемен-
ты, своего рода „стандартные блоки”, с которыми
ведется работа в данной методике. (Дальнейшие
примеры в области информационных механизмов
показаны на рис. 6.41).
Эти элементы отображают на очень высоком
уровне абстракции технические устройства, реали-
зующие все возможные функции, связанные с
веществом, энергией и сообщениями. Так, напри-
мер, символ в поле 2.3 на рис. 5.19 может обозна-
чать клиновой, рычажный или зубчатый меха-
низм, а также трансформатор. Он же может обозна-
чать любое „прямое преобразование” в матрице
Юсти (см. рис. 2.12), стоящее там на диагонали
(поля от 1.1 до 5.5). С другой стороны, символ в
поле 2.4 на рис. 5.19 может обозначать все „прямые
превращения” матрицы Юсти, которые расположе-
ны там вне главной диагонали.
248
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Направление потока для операции ’’Проведение” может быть с помощью стрелки ограничено одним
направлением, например, —1Э -» i— .. .
Необратимые (ирреверсивные) преобразователи вида могут быть отмечены буквой, напримергь^-н
названы также потребителями.
Соединительная линия у накопителя может быть как входом, так и выходом, для других условных
обозначений по одну сторону все соединительные линии должны быть входами, а по другую — вых о-
дами. Обозначение накопителя может относиться к источнику, если оно снабжено индексом, напри мер
По всем не подписанным входам и выходам проходят основные величины обозначения.
Рис. 5.19. Абстрактные функций и их условные обозначения
Передача
Прове -
денне
Преобра-
зование
формы
Преобра-
зование
вида
Комбинирование
Объединительное
Одинако-
вые вели-
чины
Различные величины
Распределительное
Одинако-
вые вели-
чины
2 3________ 4 5 6 7 8
Различные
величины
Обозна-
чения
Пример
Обозна-
* чения
!
Пример
О
Перфолента
Рис. 5.20. Примеры аппаратов, машин и приборов или элементов аппаратов, машин и приборов, реализующих абстрактные функции
5.3. Функциональные структуры
249
Рис. 5.6-1, в По функциональному положению из рис. 5.6-1, в Абстрактная функциональная структура Дополнение
N* 1 2 3
Поло- жение 1 1 1.1 Проводить вещество 1.2 1.3
2 2.1 Проводить вещест- во от одного нако- пителя вещества к другому 2.2 (в)—| в |—(в) 2.3 В начале н в конце должен быть предусмот- рен накопитель
3 3.1 Проводить вещест- во в комбинации с энергией 3.2 3.3
Поло- жение 2 4 4.1 Забирать энергию из накопителя, проводить (с по- терями) 4.2 4.3 При проведении взятой из нако- пителя энергии происходят ее потери из-за преобразования ее вида (прев- ращения в теп ло)
5 5'1 Чтобы обеспечить нужное направление потока энер- гии, на преобразователе формы эн ер гни должен быть установлен правиль- ный энергетический потен- циал (см. также рис. 4.26) 5.2 5.3 Функцию ’’прове- дение” можно за- менить соедини- тельной линией, если к ней не предъявляется особых требова- ний
Поло- жение 3 6 6.1 Управлять пото- ком энергии пу- тем его комби- рования с сооб- щениями -о ' № чЗ Ч-У (си) J Т I \Ч/ 1 BS Ум\ |_1 GO 6.3
Поло- жение 4 7 7.1 Удерживать энер- гию, накоплен- ную в веществе 7.2 (в)—К , |в>—1 в |-(в) (э)—К К. И—* |э)—Э>—<э| /\ i Х-s ©_гИ IZ Х^э)-\э) 7.3 Пр епятствовать высвобождению энергии с помо- щью выпрямите- ля (стопор об- ратного хода)
Поло- жение 5 8 8.1 Расходовать энер- гию путем ком- бинирования с сообщениями 832 , । с 1 1 1 Сто- пор Гёь !(э)-Г 1 Челове | В Г 11 /Н"э ДЧ <э 'Y;ZT НЩт /-J ДДо„ к Преобразова фермы энерг Hl) J /к .1 /X ь крат гель ни Автомобиль 1 г И 11 ! 11 1 Я-Н э) 1 11 1 1 1 1 1 1 1 '! 1 1 1 Д®! J 1л. 1 Окрестность 8.3 С помощью пере- ключаемого сто- пора обратного хода для расхо- дования энергия из правого нако- пителя вещества, одновременно на- копителя энергии, открывается об- ходной путь для энергии в окрест - ность
Рис. 5.21. Разработка абстрактной функциональной структуры на основе функциональных положений рис. 5.6-1, в. Пример: автомобиль
ный домкрат
250
5. Модели и вспомогательные средства для конструирования в отдельных фазах
При соединении функциональных элементов
следует придерживаться правила, что соединяться
всегда должны два „проводника”, по которым
проходит одна и та же абстрактная величина,
причем направление потока в месте соединения
должно оставаться тем же.
Для более подробного представления функци-
ональных взаимосвязей технического устройства
обычно требуется сетевая структура соединений,
которую можно разработать последовательно по
шагам, как это показано на рис. 5.21.
Справедливы следующие положения:
для любой полноценной системы в начале и в
конце ее структуры находятся накопители для
одинаковых абстрактных величин, а между ними,
обычно, - соответствующий передатчик (см. рис.
5.21, поле 2.2);
ввиду того, что накопитель вещества может
быть одновременно накопителем энергии или со-
общений, а накопитель энергии - накопителем
сообщений, не всегда будет наблюдаться симмет-
рия накопителей (поле 6.2), при этом необратимое
(ирреверсивное) преобразование вида можно
обозначать индексом i;
если к функции „проведение” не предъявляет-
ся особых требований, то ее можно заменить
соединительной линией (рис. 5.21, поля 4.2 и 5.2);
направление потока .обычно выбирается от
левого или верхнего накопителя к правому или
нижнему. Противоположное направление также
не исключается, если только между ними нет
„проводников” со стрелкой (выпрямителей) (поля
7.2 и 8.2 на рис. 5.21).
Порядок работы можно показать на примере
„автомобильный домкрат”. На рис. 5.6-1, а приведе-
ны функциональные положения, описывающие
некоторую цель на обычном языке. На рис. 5.6-1, б они
абстрагированы до абстрактных функций, т. е.
цель действия в предложении (объект) была
заменена абстрактными величинами, а относяще-
еся к ней высказывание выражено с помощью слов
для обозначения действия (глаголов) из списка
„накапливать, передавать, преобразовывать (вид)
и комбинировать”. Теперь уже легко заменить эти
функциональные положения на соответствующие
абстрактные функции, поскольку они строятся из
одних и тех же понятий, например „преобразовать
форму вещества”, „преобразовать вид энергии” и
т. д. При переходе к абстрактным функциям возни-
кает необходимость дополнительно выяснить ряд
обстоятельств: что будет входом и выходом, како-
вы направления потоков, которые могут разли-
чаться в разные моменты времени, каковы усло-
вия соединения потоков. Таким образом, при пере-
ходе от функционального положения к абстракт-
ным функциям осуществляется первый Шаг конк-
ретизации, связанный с включением в модель
новых сведений.
С другой стороны, в этих функциях так же, как и в
постановке задачи, содержится некая цель. Они
описывают, каким изделие должно быть в идеале,
как оно должно в идеале функционировать, и
„размечают поле”, которое позднее будет запол-
няться. В связи с этим они называются идеальными
функциями в противоположность реальным функ-
циям, которые описывают, например, существу-
ющие в реальности взаимосвязи между элемента-
ми двух множеств на основе соответствующего
уравнения. Необходимо четко различать идеаль-
ные функции, т. е. то, чего хочется достичь, и
реальные функции, т. е. то, чего удалось достичь в
действительности.
На рис. 5.21, поля 1.1 и 1.2 абстрактные функ-
ции сопоставлены с первым функциональным
положением „проводить вещество”. Поскольку в
начале и в конце должны находиться накопители
энергии, мы добавляем их в поле 2.2. Следующее
функциональное положение (поле 3.1) требует
согласования между веществом и энергией, -
соответствующий комбинирующий элемент добав-
лен в поле 3.2. Отбор энергии (поля 4.1 и 4.2) связан
с ее проведением, распределением и неизбежны-
ми потерями из-за необратимого преобразования
вида (превращения). Правильное направление
потока (здесь - слева направо) обеспечивается
всего одним преобразователем формы энергии,
добавленным в поле 5.2 (см. также рис. 4.26). Функ-
циональное положение в поле 6.1 требует, чтобы
все процессы происходили по соответствующей
команде, и в поле 6.2 введена функция комбини-
рования потока энергии и информации, поступа-
ющей с информационного входа (накопителя). В
результате поток энергии - а вместе с ним и поток
вещества - начинает переносить сообщения,
которые накапливаются в итоге в накопителе
веществ. В поле 7.2 в схему добавляется выпрями-
тель, а в поле 8.2 показано его развитие до управ-
ляемого стопора обратного хода.
Абстрактные функции выбираются при помо-
щи функциональных положений. Затем произво-
дится их соединение в абстрактную функциональ-
ную структуру на основе требований и различных
закономерностей для потоков вещества, энергии и
сообщений, а также на основе данных, содержа-
щихся в функциональных положениях. Созданная
таким образом функциональная схема обладает
тем преимуществом, что не содержит еще ограни-
чивающих указаний на конкретный вид энергии
(например, механическую энергию) - в ней сохра-
няются многие возможности дальнейшего варь-
ирования и комбинирования.
Для реализации преобразователей энергии и
стопоров обратного хода могут быть использованы
кат. 4.4.2 и 4.4.3, для преобразователей всех видов -
матрица Юсти (рис. 2.12), а для механических
накопителей сообщений - кат. 4.3.6 и рис. 3.21,3.22
и 6.41. Прямолинейные направляющие, требующи-
еся для передачи вещества, содержатся в кат. 4.9.1
и 4.9.2. Множество вариантов, возникающих при
изменении одних только преобразователей формы
энергии (по своему действию часто эквивалентных
умножителям силы), содержатся в работе [36],
посвященной механическим усилителям.
Не всегда легко свести все идеальные функ-
ции к 30 стандартным абстрактным функциям.
Наибольшие трудности представляет тот случай,
когда функциональное положение связано более
чем с одной из трех абстрактных величин. Если,
например, нечто говорится о какой-либо силе или
о каком-либо движении, то следует выяснить,
какие изменения состояния энергии оказывают
требуемые воздействия. Использование преобразо-
вателя формы энергии (рис. 5.21, поле 5.2) там, где
позже появится его механическая реализация в
виде умножителя силы из класса систем передачи
энергии, доставляет пример сведения силовых
воздействий к энергетическим состояниям.
Абстрактная функциональная структура не
5.3. Функциональные структуры
251
Правило варьирования Пример: автомобильный домкрат Дополнение
№ 1 2 3
0 0.1 Исходная структура из рис. 5.21, поле 8.2 0.2 Человек |@- 1 ©- dt Преобразователь формы энергии Я- J 0.3 Человек должен вво- дить в преобразователь как энергию, так и информацию
1 1.1 Смещение границ систем и Человек /_ Домкрат Г К К 1(с)н V V LSr _l 1.3. Человек должен вво- дить только сообщения. Энергию предоставляет домкрат
2 2.1 Изменение последова- тельности абстрактных функций 2.2 Человек Пре __ фо{ образователь |мы энергии Домкрат 2.3 Управление потоком энергии происходит со стороны выхода преобразователя, а не со стороны входа (вторичная сторона)
3 3.1 Разложение некоторых абстрактных функций иа несколько 3.2 Человек Домкрат 3.3 Вид энергии преоб- разуется, проводится и преобразуется обрат- но
4 4.1 Объединение несколь- ких абстрактных функ- ций в одну 4.2 Человек Домкрат Автомобиль 1 (э)—Н э -Нэ) 1 1 О ! ! | । L L J 4.3 Изменение по сравне- нию с нолем 4.2 рис. 5.21, если рассматри- вать только энергети- ческие аспекты накопи- телей и проводников энергии
5 5.1 Добавление преобразо- вателей вида и провод- ников Человек Домкрат LSs L J 5.3 Два последовательно включенные проводника для различных видов энергии, с целью дис- танционного управ- ления
6 6.1 Перестановка информа- ционного входа (другой вид энергии для ком- бинирования с сообще- ниями) u Человек Домкрат lS'_l i 6.3 Управление подводом энергий производится только после преобра- зования ее вида
7 7.1 Увеличение числа ветвей (параллельное соедине- ние) 7.2 u Человек F=n (aj—к । л э 3>J-G3 7\ - ‘ (cj—V । | э Домкрат 7.3 Конструкция с резер- вированием за счет двух проводников для различных видов энергии
Рис. 5.22. Правила варьирования для изменения функциональной структуры. Пример: автомобильный домкрат
обладает „строгостью” принципиальной электри-
ческой схемы, которая должна удовлетворять
количественным закономерностям. Зато мы полу-
чаем наглядное представление последователь-
ностей стандартных частных функций, способных
выполнить общую функцию, а вместе с ней и
общую задачу. Если теперь в каждый блок поме-
стить выполняющее идеальную функцию техниче-
ское устройство (в электронике аналогичную роль
играют стандартные платы), то у нас появятся
проблемы совместимости в зонах пересечения,
балансировки, поиска оптимальных рабочих
скоростей, шарниров, свободного пространства для
обеспечения движений и т. д. В связи с этим не
следует чрезмерно осторожничать при составле-
нии таких функциональных структур - возможные
252
5. Модели и вспомогательные средства для конструирования в отдельных фазах
ошибки очень быстро обнаружатся при геометри-
ческой реализации. Вначале эти структуры следу-
ет рассматривать как возможные варианты соеди-
нения определенных „функциональных единиц”.
Уже на этом этапе конструирования (после
разработки абстрактной функциональной структу-
ры) легко находить варианты будущих техниче-
ских устройств, как показано на рис. 5.22. Здесь в
столбце 1 приведены правила варьирования, в
столбце 2 - соответствующие функциональные
структуры, и в столбце 3 - некоторые следствия
для конструкции. Во многих случаях принципи-
альные решения можно принять уже на ранних
этапах конструирования - например, производить
ли управление потоком энергии до преобразовате-
ля (умножителя силы), как в поле 0.2 рис. 5.22, или
после него, как в поле 2.2. В первом случае сила,
„включающая” или „выключающая” поток энер-
гии, проходит через преобразователь, а во втором
случае - нет. Для варианта в поле 1.2 возникает
вопрос, каким образом использовать вспомогатель-
ный источник энергии с целью обеспечения легко-
сти воздействия.
Надежное определение наилучшего варианта
на уровне абстрактной функциональной структуры
невозможно - слишком мало критериев для выбо-
ра имеется на этом (очень абстрактном) уровне.
Тем не менее, уже на этом этапе конструирования
можно и нужно отбрасывать варианты, противоре-
чащие определенным требованиям. Так, варианта
поле 1.2, в котором используется источник энер-
гии, входящий в систему домкрата, противоречит
первоначальной постановке задачи.
Для исследований принципиального характера
рис По функциональному положе-
_ ' нию из рис. 5.6-1, б
5.0-1, о ________________
№ 1
Абстрактная
диаграмма потоков
__
Дополнение
Поло-
жение
1
1.1
Вещество двигать вверх
за счет подвода энергии
Вещество
(автомобиль)
_____________3________
' 1.3
Вещество может
быть приведено в
движение за счет
подвода энергии
Поло - Использовать энергию
жение человека. Проводить
2 2 энергию дальше через
вещество
2.2
Источник
энергии
(человек)
2.3
В
Чтобы поток энергии
направить в сторону
вещества, сделать
передатчик энергии
проводником и пре-
образователем
формы
3.1
Начало н прекращение
потока энергии должны
вызываться человеком
1°~ (через сообщения)
3 3
4.1
Удерживать вещество
вверху, препятствуя
отводу энергии
Поло -
жение
4 4
3.2 3.3
Поток энергии
должен быть
управляемым
Потенциальная энер-
гия сохраняется в
накопителе вещес-
тва и при прекраще-
нии потока энергии
(благодаря стопору
обратного хода)
5.1
Управляющим воздей-
ствием человека (сооб-
щеиием) разрешить
отвод энергии и эа счет
этого опустить
Поло- вещество
жение
5 5
Отвод энергии из
вещества вызы-
вается вторым
источником
сообщений
Рис. 5.23. Разработка абстрактной диаграммы потоков на основе функциональных положений рис. 5.6-1, б
5.3. Функциональные структуры
253
Варианты про-
^Х.цесса коне-
^чтруэфо-
Рабочий
план
Отсутствие
стандартизо-
вали ости
1
Величины стандартизо-
ваны, операции ие стан-
дартизованы
-
В.личинЬг стандартизованы,
операции стандартизованы
3
О
о
Задача и поста-
новки задачи 1
1.1
Абстрактные ве-
личины, диаг-
раммы потоков
и функциональ-
ные структуры
Физтес-
кие ве-
личины,
диаграм-
мы пото
ков в
функци-
ональ-
ные
струк-
туры
Физичес-
кие
функ-
ции
1.2.2
Эффек-
ты, но-
сители
эффек-
тов
2.1
Геометрически
материальная
реализация
изделия
d Задача
Обращение к
каталогам,
4
Задача
п
С
Каталог
Эскиз,
схема
Ь
А
Постановка задачи
Задача
9
и
Функция с (•]}
нами
Диаграмма no-
il токов с I-, Q •
величинами
Принципи-(П)
альная схема
Векторная функция
(многополюсник)
V
Функци- Список
ональное требо -
положен.
ваний
I
Каталог
Векторная фун- /*д\
кциональиая
структура
w ,, О
У _______________
Геометрическая/Th
линейная к-/
структура
Е
Геометрическая (ТО)
цепная структура
К
Каталог
Эскиз,
схема
(4) ... Номер модели изделия на рис. 5.2.
Рис. 5J4. Руководство по использованию отдельных моделей изделия. „Маршрутная карта’* различных вариантов процесса конструиро-
вания по рабочему плану до начала геометрически материальной реализации изделия
(например, того, какие имеются возможности
решений, какими они могли бы быть) абстрактная
функциональная структура тоже оказывается
очень полезной. В этом позволяет убедиться
работа Гисснера [11], посвященная исследованию
немеханйческих устройств печати.
В заключение еще раз опишем целесообразную
последовательность действий при разработке
абстрактной функциональной структуры:
1. Абстрагировать функциональные положения
до абстрактных функций (см. рис. 5.6-1, в).
2. Сопоставить с абстрактными функциями их
обозначения (см. рис. 5.19 и 5.20).
3. Разработать абстрактную функциональную
структуру (см. рис. 5.21).
4. Разложить на частные функции.
5. Образовать варианты (см. рис. 5.22).
6. Оптимизировать, руководствуясь требовани-
ями.
2. Абстрактная диаграмма потоков вещества, энергии и
сообщений
В абстрактной функциональной структуре абст-
рактные величины в качестве элементов (операн-
дов) и их функции (операции) - стандартны. Веще
'‘то, энергия и сообщения могут накапливаться,
проводиться, преобразовываться и т. д., но вещест-
во не может „подниматься”, энергия подключать-
ся или сообщение „перерабатываться”. Напротив,
функции абстрактной диаграммы потоков могут
быть образованы из произвольных высказываний о
веществе, энергии и сообщениях, подобно тому,
как это сделано у Паля и Байтца [24] или в норма-
тивах Общества немецких инженеров VD1 (ФРГ)[46].
Таким образом, абстрактная диаграмма пото-
ков является альтернативной возможностью к
абстрактной функции, представляется менее
ограничительной и потому проще в составлении.
При этом, правда, более трудным становится
непосредственно следующий за этим этапом
254
5. Модели и вспомогательные средства для конструирования в отдельных фазах
переход к физической функциональной структуре.
Все блоки могут быть соединены друг с другом,
независимо от того, одинаковые величины в них
содержатся или различные. Это связано с тем, что
поток вещества или сообщений может быть одно-
временно потоком энергии, а в блоке с выходом
для вещества вполне может накапливаться энер-
гия. На рис. 5.2 абстрактная диаграмма потоков
представлена как модель изделия 5. В качестве
модели общей функции при этом обычно выбира-
ется модель 3, а в фазе формулировки задачи -
модели 1 и 2.
Полученные известным образом функциональ-
ные положения рис. 5.6-1, а сформулированы на
рис. 5.6-1, б для абстрактной диаграммы потоков и
преобразованы по шагам в соответствующую
структуру на рис. 5.23. Результат довольно прост и
нагляден. Этим объясняется пристрастие многих
пользователей к данному спросу, хотя высказыва-
ния в „элементарных блоках” в одних случаях
могут указывать на какое-либо решение чересчур
определенно, а в других - оказаться, напротив,
слишком общими. В первом случае сужается
спектр решений, а во втором - затраты по конкрет-
ной формулировке высказываний переносятся в
следующую фазу.
5.3.2. Функциональные структуры с физическими
величинами
Результатом этапа конструирования 1.1 в рабо-
чем плане на рис. 2.10 является абстрактная
функциональная структура (рис. 5.21) или абст-
рактная диаграмма потоков (см. рис. 5.23). Частные
функции этих структур, а также требования дан-
ной фазы являются исходными для разработки
более конкретных частных функций, которые
связаны с элементами векторной или I - Q-диаграм-
мы потоков (см. также рис. 2.18). А затем начина-
ются поиски реализации этих частных функций,
описанных с помощью физических величин и их
соотношений, путем перехода к эффектам.
На рис. 5.24 дан обзор возможных вариантов
процесса конструирования, связанных с использо-
ванием соответствующих элементов отдельных
моделей изделия. В заголовочном столбце нахо-
дится рабочий план по рис. 2.10, в столбце 1 пред-
ставлено обычное, интуитивное конструирование,
в столбце 2 - конструирование с подходами к
частичной алгоритмизации, в столбце 3 - констру-
ирование с рядом полностью алгоритмизованных
шагов, а в столбце 4 - конструирование с помощью
каталогов.
Имеется еще ряд комбинаций для процесса кон-
струирования, которые описаны на рис. 5.25, где содер-
жатся их свойства, относящиеся к ним модели и
таблицы, а также их достоинства и недостатки.
Конструирование по столбцу 3, шаги р - t и по столб-
цу 2, шаги d -f (рис. 5.24) было подробно представ-
лено в разделе 5.3.1. Шаги и - у, А - Е столбца 3 опи-
саны в гл. 6. Конструирование с каталогами (стол-
бец 4) было содержанием раздела 3.6. В дальней-
шем изложении мы займемся шагами g - h - i - к,
поскольку эта последовательность содержится в
процессах конструирования (маршрутах) 2 и 6,
равно как и в обычно предпочитаемом процессе 8
(рис. 5.25). Рис. 5.24 можно рассматривать как
Мар- шрут Последова- тельность шагов кон- струирования Свойства выбранного варианта пути процесса конструирования Примечания
№ 1 2 3
1 а -Ь Интуитивный процесс на ос- нове опыта Необходима конструкторская н изобретательская одаренность
2 d -m Процесс с инструкциями, диаграммами потоков и матрицами поиска. Элементы зафиксированы, операции выбираются произвольно Малое время обучения, высокая гибкость, высказывания часто неформальны, доля интуиции велика
3 P-У Многие шаги алгоритмизируемы. Для этого зафиксированы и элементы, и операции. Стандартные величины, s-t очень абстракт- но, w-y только для механических величин, главным образом ДЛЯ САПР Большее время обучения. Широкий спектр. Высказывания формальны. Доля интуиции меньше
4 GL. HL. IL. KL Перескакивание возможно большего числа шагов рабочего плана за счет обращения к каталогам Малое время обучения, большое разнообразие вариантов
5 a - c - b Интуитивный процесс с использованием случайно оказавшего- ся под рукой каталога Легкость подобного использова- ния, пополнение запаса знаний
6 n-g -c-b Применение конструкторских каталогов только после раз- работки функциональной структуры с физическими величинами Малое время обучения, подходы к систематизации процесса
7 n-g -h-m Вход в (физическую) специальную структуру. Прочее как в маршруте 2 Понятность, наглядность, гибкость, часто неформальность
8 p-u-g-m Первая часть как маршрут 3, вторая — как маршрут 2. Вначале очень абстрактен со стандартными величинами и операциями, потом стандартны только величины Время обучения среднее, обычно выбираемый путь, большое многообразие решений без применения ЭВМ
9 p-u-g-k-u Петлеобразный процесс с целью использования функциональной матрицы и поиска эффектов для некоторых функций Время обучения среднее
10 A-B-u-y Вход в векторную функциональную структуру после разработки постановки задачи применительно к механическим функциям Большее время обучения, для работы с основательным анали- зом и применением ЭВМ
11 d- f- 1 - u - у Нестандартизованные операции в абстрактной диаграмме пото - ков, стандартизованные операции в физических функциональных структурах Большее время обучения. Первая часть гибкая, вторая как маршрут 10
12 A-E Метод: геометрическая цепная структура для кинематических функций Большее время обучения, исключительно для работы с применением ЭВМ
Рис. 5.25. Различные варианты методического и неметодического процесса конструирования на основе „маршрутной карты” из рис. 5.24
5.3. Функциональные структуры
255
X. Система Величины Х\ Механическая Аэрогндро- динамическая Электрическая Термо- динамическая (твердые тела) теплота и работа Псевдотермо- динамнческая (твердые тела) теплопроводность без потерь
Поступательное движение Вращательное движение
р Т р т Р т Р т Р т Р т
& 4? Л .•V 1 2 5 6 9 10 13 14 17 18 21 22
Сила F Переме- щение S Момент силы м Угол поворота Р Поток объема U Импульс давле- ния JT Сила тока I Магнит- ный поток Ф Поток энтро- пии dS/dt — Тепловой поток daw/dt —
3 4 7 8 11 12 15 16 19 20 23 24
/ / %. Чч А Импульс Pi Скорость V Момент импульса L Угловая ско- рость и Объем V Давле- ние Pd Заряд а Напряже- ние и Энтро- пия S Темпера- тура т Коли- чество теплоты Qw Темпера- тура т
Рис. 5.26. Интенсивностные и количественные величины различных физических систем:
Р - per или одноточечные величины;
Т - trans или двухточечные величины
своего рода „маршрутную карту” для конструиро-
вания с различными моделями изделия, а рис. 5.25 -
как список наилучших „маршрутов”, содержащий
описание их достоинств и недостатков. В основу
каждого из вариантов процесса конструиро-
вания положены определенные стратегии [45].
Теперь опишем для каждого этапа конструиро-
вания относящуюся к нему модель и покажем на
примере, как соединяются ее элементы. Вслед за
этим обсудим проблему перехода от одной модели
к другой.
Принцип работы домкрата был представлен на
рис. 5.21 с помощью абстрактных функций, а на
рис. 5.23 - с помощью функций абстрактной диаг-
раммы потоков. Используемые в этих представле-
ниях величины, как например энергия, при даль-
нейшей конкретизации должны быть в большинст-
ве случаев заменены на такие величины, как сила,
скорость, перемещение или сила тока, напряже-
ние, поток магнитной индукции. Если поместить
эти величины на входы и выходы черного ящика,
то можно будет хорошо представить себе жела-
емые физические функции (идеальные функции).
Очень удобными для изображения абстрактной
величины „энергия” оказались интенсивностные и
количественные величины (/-Q-величины) (рис. 5.26),
используемые в системодинамике [20, 41, 25, 1, 6].
Это объясняется тем, что с их помощью можно
очень хорошо описать интенсивность потока энер-
гии и количество накопленной энергии в техниче-
ской системе. Они встречаются в области механи-
ки, гидравлики, электричества и термодинамики
и связаны друг с другом прямыми соотношениями.
Различные функции, связывающие одни величи-
ны с другими, должны быть сведены к функциям с
I-Q-величинами. Можно ожидать, что это всегда
окажется возможным, так как трудно представить
себе технический процесс, в котором энергия не
играла бы никакой роли. Однако поскольку в
„физических функциональных структурах” дела-
ются утверждения только об энергетических
состояниях, то состояния вещества и информации
можно описать только косвенно.
На рис. 5.27 еще раз показаны интенсивностные
и количественные величины механической систе-
мы, а также их взаимосвязи. Их группировка в
одноточечные или P-величины (левая сторона) и
двухточечные или Т-величины (правая сторона)
несет информацию о том, что „... для задания ве-
личин в одной определенной точке пространства
требуется только эта точка пространства ...” [20]
или, что „... для их определения или идеального
измерения требуются две точки пространства ...”
Нульточечные величины, такие как время, прост-
ранственно независимы. На рисунках на убыва-
ющей диагонали находятся интенсивностные, на
возрастающей - количественные величины. Опе-
рация дифференцирования по времени переводит
одно- или двухточечные количественные величи-
ны в соответственно одно- или двухточечные
интенсивностные величины. Определенные конст-
руктивные величины (см. рис. 5.28), такие как же-
сткость (коэффициент упругости), масса и т. д.,
переводят одноточечные величины в соответ-
ствующие двухточечные. Наконец, произведе-
нием соответствующих интенсивностных величин
оказывается мощность (например, Р = Fv), а одно-
и двухточечной величин - работа, например,
dW = Fds или dW= vdpf Все упомянутые взаимо-
связи не включали в себя каких-либо промежуточ-
ных величин, относящихся к материалу и его свой-
ствам.
К достоинствам абстрактной функциональной
структуры относилось то, что, поскольку мы зани-
мались только работой и мощностью, не было
необходимости при описании потоков энергии
задумываться о жесткости, массе и затухании
(поглощении). Но как раз это достоинство оказа-
лось бы недостатком на следующем этапе констру-
ирования. Дело в том, что такие величины, как
жесткость, масса, затухание содержат дополни-
тельные указания* для дальнейшей конкретиза-
ции энергетических функций, как это сейчас будет
показано. Следуя Симонеку [42, 43], величины, вы-
ражающие прямую зависимость между интен-
сивностными и количественными величинами,
можно назвать конструктивными величинами (или
конструктивными параметрами). В основном здесь
идет речь о соотношениях между одно-и двухточеч-
ными величинами, в которые входят свойства
вещества, выводимые (см. пример на рис. 5.28) из
констант материала (например, модуля упругости
Е или плотности р) и геометрических величин.
Конструктор может таким образом выбирать,
изменять или фиксировать эти величины, чтобы
интенсивностные и количественные величины,
кратко называемые здесь функциональными ве-
личинами, имели желаемые значения, направле-
ния или динамику. Может возникнуть впечатле-
ние, что величина „время” оказывается в двойст-
256
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Нульточечная величина: время t
Одноточечные или Двухточечные или Поступательная
рег-величины trans-величины система
Вращательная
система
Рис. 5J27. Интенсивностные и количественные величины в ме-
ханических поступательных и вращательных системах. Непо-
средственные соотношения для величин [20]
венном положении. С одной стороны, как нульто-
чечная величина, она является функциональной
величиной, т. е. не может изменяться непосредст-
венно. С другой стороны, она порождает связь
между соответствующими количественными и
качественными величинами. В реальной деятель-
ности мы часто сводим ее к отрезку (например,
между начальной и конечной точкой временного
промежутка) и используем затем наравне с конст-
руктивными величинами. В других случаях, когда
она не играет никакой роли, мы поступаем пример-
но так, как если бы перемещение полностью
описывалось пройденным отрезком. В заключение
подчеркнем, что функциональные величины
можно изменять только путем изменения конст-
руктивных величин, а также подставлять в задан-
ные известные соотношения.
Описываемая ниже процедура действий конст-
руктора основана на том, чтобы по заданным соот-
ношениям на функциональные величины (идеаль-
Идеальная функция Функциональ- ные вели - чины Функцио- нальное уравнение Конструк- тивные величины Реализация
№ 1 2 3 4
F = f (S) 1 и—□ dF = с ds h3bE С' 41s
Pi= f (v) 2 Щ— Pi- m v m przl
Рис. 5.28. Разделение величин в физических функциях на функ-
циональные” и „конструктивные”
ные функции) отыскать уравнения или эффекты с
конструктивными величинами, а затем попытать-
ся реализовать уравнения или эффекты с помо-
щью деталей.
1. Диаграмма потоков с интенсивностными и количественными
величинами (специальная функциональная структура)
Диаграмма потоков этого типа, представля-
ющая собой одну из важнейших физических функ-
циональных структур, приведена на рис. 5.2 как
модель 7 и предназначена для преодоления участ-
ка g - т на „маршрутной карте” (см. рис. 5.24).
Выберем из рис. 5.23 (например, поля 3.2) те
блоки абстрактной диаграммы потоков, в которых
присутствует энергетическая функция. Поскольку
о человеке как источнике энергии вряд ли нам
удастся сказать что-либо новое, сконцентрируем
наше внимание на блоке „передатчик энергии”,
который является, очевидно, отправной точкой
для будущего автомобильного домкрата. На входе
и выходе находится механическая энергия. В
нашем распоряжении величины из •рис. 5.27. Оче-
видно также, что мы находимся в области статики,
причем на входе (человек) и выходе (автомобиль)
должна быть сила. Поэтому мы пренебрежем
другой интенсивной величиной, т. е. скоростью, и
изобразим желаемую идеальную функцию в виде
черного ящика с силой на входе и выходе. Анало-
гично можно поступить и с другими элементами
абстрактной диаграммы потоков, что показано на
рис. 5.29.
После этого возникает задача отыскать для
найденных идеальных функций физические
соотношения, законь^ или эффекты. Для этого
предназначена матрица на рис. 5.30. В ней все ин-
тенсивностные и количественные величины из
рис. 5.26 содержатся по одному разу в столбце
(вход) и в строке (выход). На пересечении строки и
столбца находится номер физического соотноше-
ния, связывающего две соответствующие величи-
ны.
Идеальная функция
Абстрактная
диаграмма потоков
Диаграмма потока
с 1 - или (. -величи-
ной на входе и
выходе
F2 = f (F,)
S = f(F2)
Рис. 529. Переход от функ-
ции абстрактной диаграм-
мы потоков к функциям с
интенсивностными и ко-
личественными величи-
нами (рис. 524, marf-g)
5.3. Функциональные структуры
257
Так, например, у функции
* (5.1)
сила F на входе - независимая переменная, а пе-
ремещение s на выходе - зависимая переменная.
Поэтому ее номер в матрице - 2.1, в противополож-
\Вход ВыХ f, Si P, vi
ход № 1 2 3 4
fl 1 1.1 1.2 1.3 1.4
*1 2 2.1 2.2 2.3 2.4
Pl 3 3.1 3.2 3.3 3.4
Vl 4 4.1 4.2 4.3 4.4
П ример
Идеальная
функция
Подстановка эф -
фекта или уравне-
ния из матрицы
Рис. 530. Матрица функциональных величин (фрагмент). С 5-
хенное индексами собрание физических зависимостей (эф к-
тов, законов, положений) для соотношении между входными и
выходными величинами
ность функции F=f(s) с номером 1.2. Так как не
для любых двух величин существует прямое1 коли-
чественное соотношение или имеется физический
эффект, связывающий их, то на рис. 5.31, устроен-
ному аналогично рис. 5.30, те поля, которые со-
держат известные соотношения, заштрихованы.
Эти соотношения приведены по отдельности на
рис. 5.32 под номерами соответствующих полей.
Источники, из которых были взяты уравнения,
приведены ниже в списке литературы в п. 2. По
форме рис. 5.31 и 5.32 подобны двумерному обзор-
ному каталогу и соответствующему ему одномер-
ному детальному.
В нашем примере в соответствии с рис. 5.29
должно быть найдено соотношение между двумя
Прямые соотношения следует предпочитать, чтобы избе-
жать побочных (дополнительных) эффектов. Мы имеем прямое
соотношение для двух функциональных величин, если для
выражения их взаимосвязи не требуется никакая третья функ-
циональная величина и может требоваться только какая-либо
конструктивная величина (включая время). - Прим. авт.
ведено одно или несколько (по возможности прямых) соотношений (возможно, законов или эффектов)
17-2317
258
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис 5.31 Уравнение Примечание Литература
1.1 F2=f(F1) /’’-сила
tg tg (a2±p2) 1 Эффект клина с трением ое-угол наклона p-угол трения Рис. 5.33
(2)F2=^ ctg(a±p) д = tgp, коэффициент трения + клин забивается - клин выбивается р > а самоторможение
(3)F2=F1ctg(a±p) Наклонная плоскость с трением F ^горизонтальная сила F г-вес -(-движение вверх —движение вниз
(4) F2 1 F, tg 04 + tg a2 Шарнирный рычаг Рис. 5.33
(5) Fl=TT~F' + v v c2 Поперечное сжатие пружины с-константа жесткости пружины p-отношение деформации F17.S.453 Рис. 4.28
(6) F> 1 ±A* ctg a Нелинейная фрикционная система Рис. 4.9 Кат. 4.2.4
(7) F2=—^~~j~Fi 1±2^ ‘2 Нелинейная фрикционная система Рис. 4.10
(8) F2 = eWF,; FR=(e«’-l)F (9) F,=MF Ленточный тормоз; фрикционная система Линейная фрикционная система F18.S.237 Кат. 4.2.4
Рис. 532. Уравнения и эффекты полей матрицы из рис. 531 (Лист1)
5.3. Функциональные структуры
259
Поле на рис. 5.31 Уравнение Примечание Литература
1.1 (10) f2=—f, Г2 (11) f2=f,+f0 U2) F2 = ^F, (13) F2 = ^Ft Ai Эффект рычага Блок ’’Эффект молотка” Выравнивание давления F17.5.453 Рис. 4.26 Рис. 4.31 F17, 5.453 F17,5.453
1.2 (1) dF = cds (2) F = cs (3) F=maj2s (4) F = p^As (5) F = EAS- (6) F = c(/7) —1(J(1|) ,7. _ 4h3bE (7) F—s /3 (8) F = csAs s-перемещение, путь Сила упругости пружины Сила упругости при с — const Центробежная сила Подъемная (архимедова) сила р^плотность жидкости Закон Гука Тепловое расширение 1 {т —длина при темпера- туре Т Свободно лежащий изгибае- мый брус, нагруженный в середине s-прогиб в середине /i-высота бруса 6-ширина бруса Деформация сдвига Fl,5.16 F21,5.76 F6,5.145 F21,5.130 F 21,5.219 F9,5.874 F 21,5.130 F 6,5.145
1.3 F=№) dp (1) F=^ р -импульс сила и импульс сила и импульс (см. поле 3.1, № 1) F21.5.37
Рис. 5.32. (Лист 2)
260
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис 5.31 Уравнение Примечание Литература
1.4 v — скорость
(1) F—pv Фрикционное демпфирование p-константа трения F21,5.171
(2) F ~2nr2 p(ovb Эффект Магнуса р- скорость набегающего потока t-ширина цилиндра р-плотность среды F6,5.147
(3) dr F = m—- dr Второй закон Ньютона F21.5.37
(4) F-2m<iwr Сила Кориолиса ^-относительная скорость F6,5.147
(5) (6) F = ca^v2 A 2 F = pvcA Динамическая подъемная сила св — коэффициент подъемной силы р — плотность Звуковое давление p-скорость частиц р-ПЛОТНОСТЬ c-скорость звука F17,5.455 Кат. 4.4.1 F17,5.455 Кат. 4.4.1
(7) F = 6nrfrv Сопротивление в ламинар- ном потоке p-динамическая вязкость г-радиус шара F17,5.455 Кат. 4.4.1
(8) F = l-?-v2A a 2 Сопротивление в турбулен- тном потоке л-коэффициент сопротив- ления F17,5.455 Кат. 4.4.1
(9) Fm^ = Vc/mmv Упругий удар с-коэффициент жесткости упругого тела F17.5.445 Кат. 4.4.1
Рис. 532. (Лист 3)
5.3. Функциональные структуры
261
Поле на рис. 5.31 Уравнение Примечание Литература
1.4 (Ю) F~-cB21'к Вихревые токи А-электрическая прово- димость Л-магнитная индукция c-константа, зависящая от конструкции £6,5.146
(И) (12) F = mv(l — cos a) F=mvf Реактивная сила a-угол отклонения Принцип отдачи ^-относительная скорость £17,5.454 Кат. 4.4.1 F17,5.454 Кат. 4.4.1
(13) F = Конвективное ускорение А -сечение потока р-плотность F17. S.454 Кат. 4.4.1
(14) F = QvB Сила Лоренца £21,5.376 £17,5.454
(15) Fr= = sign(v)/iFN Трение скольжения £17,5.455 Кат. 4.4.1
1.5 F=/(M) М крутящий момент (силы)
(1) M F=— r Определение момента силы (см. поле 5.1, № 1) F21,5.63
1.6 F=fM <^-угол поворота
(1) F = — mg sin (p Маятник £18,5.263
(2) F2 = Fle^ Трение троса на цилиндре £18,5.237
(3) 1 F=- C(p r Пружина скручивания £13,5.62
1.7 F-f(L) /. — момент импульса
(1) „ 1 dL F = r^ Изменение момента импуль- са £1,5.47
Рис. 532. (Лист 4)
262
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5.31 Уравнение Примечание Литература
1.8 F=f(co) (1) F = mra>2 (2) F = 2wtrw: (3) F = 2npr2 covb aj-угловая скорость Центробежная сила Сила Кориолиса Эффект Магнуса (см. поле 1.4. №2) £17,5.454 Кат. 4.4.1 Кат. 4.4.1 F17.S.455 Кат. 4.4.1
1.9 F=f(u) (1) F = puvsina (2) AF = pl^ at и-поток объема Силовое действие при истечении массы Поток вещества в трубе /-длина трубы £18,5.297 £7,5.52
1.11 (1) F = Г-объем Подъемная (архимедова) сила рж~ плотность жидкости £21,5.136
1.12 F=f(pd) (1) F=pdA Pj — давление Сила через давление £21,5.30
1.13 F~f(l) (i) f~^a (2) F = /t/2 (3) F = IIB /-сила тока Электромагнит / -расстояние до магната А - площадь магнита и -число витков ро-магнитная проницае- мость вакуума Эффект Элию—Томсона Закон Био—Савара £17,5.454 Кат. 4.4.1 Кат. 4.4.1 /19,5.900
Рис. 532. (Лист 5)
5.3. Функциональные структуры
263
Поле на рис, 5.31 Уравнение Примечание Литература
1.13 (4) 2пг Проводники с током ро-магнитная проницае- мость вакуума г-расстояние между проводни ками /-длина проводников F22.5.498
1.14 F=f№ НФ (D Г=— А 1 ^1^2 (2) ' = 4^. / Ф-магнитный поток Проводник с током в поле Закон Кулона II /^-относительная маг- нитная проницаемость F 8,5.131 F6, 5.145
1.15 F-f(Q) (1) F=BvQ 1 С1С2 <2) f = 4„£o£r (3) Л I Р-электрический заряд Сила Лоренца (см. также 1.4 № 14) Закон Кулона I е-диэлектрическая про- ницаемость Пьезоэлектрический эффект К-константа, зависящая от материала ^/-толщина пластины /-длина металлической накладки F17, 5.454 Кат. 4.4.1 F6, 5.145 F1, 5.196
1.16 и 1 -Q 1 § ь — |ГЧ и 1^3 II II II Ц, о S /-электрическое напря- жение Притяжение двух пластин конденсатора друг другу Пьезоэлектрический ис- точник силы d/ С-крутизна преобразователя (см. поле 16.1 № 2) F8.5.157 F2.5.307
Рис. 532. (Лист 6)
264
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис 5.31 Уравнение Примечание Литература
2.1 S=/(F) F-сила
(1) ds=-dF с Сила упругости пружины (см. также 1.2, № 1) F1.5.16
(2) II Г» 1 и- Сила упругости при с = const
(3) F Подъемная (архимедова) сила/ (см. также 1.2, № 4)
F6,5.140
(4) /F Закон Гука (см. 1.2, № 5) F21,5.130
(5) /3F Прогиб бруса F21,5.130 F9, 5.874
4h5bE (см. 1.2, № 7)
(6) I / F \2 s = — I 1 2\GA/ Сдвиг, кручение F 6,5.140
(7) , F s — lu. EA Поперечное сжатие М-коэффициент поперечного сжатия F 6, 5. 140 F21,5.130
2.2 s=f(s) «-перемещение, путь
(1) S2 = Sit^ Ck Клин F6,5.174
(2) s2=—«1 rl Рычаг F6,5.174
(3) S2~a2s' Постоянство объема несжима- емых жидкостей F6,5.174
(4) -i Ъ 21 Деформация сдвига F6,5.174
(5) S2 = MpSl *0 Поперечное сжатие “F6,5.174
2.4 s=f(v) у-скорость
(1) ds = vdt Определение скорости (см. поле 4.2, № 1) F13,5.15 F21,5.9
Рис. 5 Л2. (Лист 7)
5.3. Функциональные структуры
265
Поле на рис. 5.31 Уравнение Примечание Литература
2.5 s=/(JW) (1) 2EI М — момент силы Свободно лежащий стер- жень, нагруженный момен- том на свободном конце F9,S.872
2.6 s =f(<p) (1) ds=rd<p ^2) s=r(l —cos (p) 4-/(1 —cos ф) »r(l-cos <p)4-^ ysin2<p <р -угол поворота Длина дуги и угол К ривош ипно-шатунный механизм -угол кривошипа Ц/ -угол шатуна 1 г - — ход 1 -длина шатуна при F21.S.4 F18, S.796
2.8 s=/(w) (1) S=ra)t (2) s =/(<») СО -угловая скорость Круговая траектория Эффект Вайссенберга F21,S.17 F6, S.140
212 S=/(Pd) (1) pg р d -давление Гидростатическое давление в жидкости F21,S.134
2.14 5=/(Ф) ,/ 1 01*2 (1) S-/, • p V 4n/x0Pr F Ф — магнитный поток Закон Кулона II (см. 1.14, № 2) F6,S.140
2.15 s=/(6) -1 / 1 Q1Q2 (1) s=z\ л F ' ' У 4яе0£г г Q — электрический заряд Закон Кулона 1 диэлектрическая прони- цаемость (см. поле 1.15, № 2) F 6, S.140
Рис. 532. (Лист 8)
266
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5.31 Уравнение Примечание Литература
2.16 s=f(U) е <7 (г-г,)2 (,) 5~т d 2 (-электрическое напряжение Путь электрона при дви- жении к аноду е -заряд электрона (/-напряжение между плас- тинами (/-расстояние между плас- тинами t j-время начала /-время наблюдения F8, 5.168-169
3.1 P^f(F) (1) dp^.fdt. F-сила Закон Ньютона для импульса (см. поле 1.3, №1) F13, S.50 F21, S.37
3.4 А =/(">) (1) dp^mdv у—скорость Импульс (количество движения) (см. поле 4.3, JNsl) F21, S.37
3.7 P,=f(L) (1) Pt=~L- L-момент импульса Импульс г -расстояние от базовой точки до прямой вектора F 22,5.118
3.8 (1) Pi = mrw w — угловая скорость Долбежный маятник (составной) F13,5.54
4.1 v=/(F) F л (1) dv=—dt m F-сила Второй закон Ньютона F13.5.50 F21,5.36
Рис. 532. (Лист 9)
5.3. Функциональные структуры
267
Поле на рис. 5.31 Уравнение Примечание Литература
4.1 (2) Г==А~ Fh (3) Закон Стокса нединамическая вязкость Вязкая жидкость между пластинами •Вихревые токи (см. поле 1.4, № 10) к электрическая прово- димость В магнитная индукция с константа, зависящая от конструкции F17,5.455 Кат. 4.4.1 F6, S.143 F6,5.143
4.2 ds (D at s-перемещение, путь Определение скорости (см. поле 2.4, № 1) F13,5.10 F21,5.8
4.3 v = f(p) (1) dv=^ m. Ру-импульс Количество движения (см. поле 3.4, №1) F21, S.37
4.4 (1) v2 = vi a (2) v2=— П r2=jlri Л2 у-скорость Клин Рычаг Уравнение неразрывности F6,5.175 F6,5.175 F 6,5.142
4.6 (1) at ip — угол поворота Окружная скорость F13,5.15
4.8 v=/(w) (1) v — ru) w — угловая скорость Окружная скорость (см. поле 8.4, № 1) F13, 5.16
Рис. 532. (Лист 10)
268
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5.31 Уравнение Примечание Литература
4.9 v=/(«) F (1) v = ~ pu u-поток ооъема Скорость истечения из труоы F18, 5.297
4.12 V=f(pd) ,n 1 /2Apd (1) v — / V P (2) г=Ц^(г2-х2) 4»// Pj-давление Вытекание из резервуара Закон Хагена—Пуазейля г-радиус трубы л-радиус струйки тока //-динамическая вязкость /-длина струйки тока F21. S.166 F21,5.171
4.16 U (1) v=Hi (2) el7 (3) v=-—(t-t J md [/-электрическое напря- жение Закон электромагнитной индукции Электрокинетический эф- фект е-диэлектрическая прони- цаемость f—электро кинетический потенциал //-динамическая вязкость Скорость электронов при движении к аиоду (см. поле 2.16, № 1) Г 8, 5.120 F 6,5. 143 F8, 5.168
5.1 M=j\F) (1) M = rF /-сила Определение момента силы (см. поле 1.5) F21, 5.63
5.2 M=/(s) (1) M = mgs s-перемещение, путь Изгибающий момент П8. S.378
Рис. 532. (Лист 11)
5.3. функциональные структуры
269
Поле на рис. 5.31 Уравнение Примечание Литература
5.4 М=/(г) rjb (1) М=—2nrv Ф v -скорость Момент трения цапфы ?? динамическая вязкость ф относительный зазор в подшипнике г радиус цапфы b ширина подшипника F 20,5.82
5.6 GIT (1) dAf=— (2) М = см(р см = const. ^-угол поворота Торсионный вал /у момент инерции круче- ния G модуль сдвига (см. поле 6.5, № 1; 2) F2,5.314
5.7 M=/(L) dL (П М=— at L -момент импульса Момент силы и момент импульса (см. поле 7.5, № 1) F1.5.47 F13,5.75
5.8 (1) M = ^>) (2) M = /pco<op rf r? (3) M-4n/ij<»r2_r? Сс>-угловая скорость Момент силы и количество движения /p-полярный момент инер- ции Момент прецессии сор -угловая скорость пре- цессии /p-момент инерции Уравнение Маргулиса /-длина цилиндра F13, 5.64 + 75 F13, 5.76 F4,5.179
Рис. 532. (Лист 12)
270
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5.31 Уравнение Примечание Литература
5.13 м=/(П (1) М = АпВ1 /-сила тока Крутящий момент катушки //-число витков 1-площадь сечения катушки £5,5.29
5.14 М=/(Ф) рф2п (1) m=cJ~— р (2) М = С&1аФ Фчмагнитный поток Вихреточный тахометр p-число пар полюсов //частота вращения р удельное сопротивление С/-константа Крутящий момент электро- двигателя /а-ток якоря С ^константа, зависящая от конструкции £2, 5.348 £19,5.954
6.1 . F (1) = arc sin — G Fr (2) Ф = — с /сила Маятник (см. поле 1.6, № 1) Пружина скручивания (см. поле 1.6, № 3) £18,5.263 £13,5.62
6.2 <р =f{s) 1 (1) d<p = -ds г _ s (2) (р = ~ при г = const t Г s-перемещение, путь Угол и длина дуги (см. поле 2.6, № 1) £21,5.4
6.5 <р=/(М) (1) d<p=-J-dM С/1 у М-^момент силы Торсионный вал (см. поле 5.6, N-' 1; 2) £2,5.314
Рис. 5.32. (Лист 13)
5.3. Функциональные структуры
271
Поле на рис. 5.31 Уравнение Примечание Литература
6.5 (2) <р = — М см= const см G/T CM M /
6.6 ф2=/(ф1) (1) <р2=—<Р1 ip — угол поворота Передачи с зубчатыми и фрикционными колесами F18, 5.751 Кат. 4.7.1
6.8 ф =/(«) (1) d<p = codt ш — угловая скорость Определение угловой ско- рости (см. поле 8.6, № 1) F 18,5.243
7.3 Ь=/(р,) (1) ' L = rpt Pj-импульс Момент импульса (см. поле 3.7, № 1) F22, 5.118
7.5 L=f(M) (1) dL = Mdt Л/момент силы Момент импульса и момент силы (см. поле 5.7, № 1) F18, 5.265
7.8 L=/(co) (1) dL = /pdo? о>-угловая скорость Момент импульса и угло- вая скорость (см. поле 8.7, № 1) F18, S.266
8.2 w=/(s) s (1) o>=- s-перемещение, путь Круговая траектория (см. поле 2.8, № 1) F21.5.17
8.4 OJ=f(v) 1 (1) w = - V r v-скорость Угловая скорость тела вращения (см. поле 4.8, № 1) F18, 5.245
Рис. 532. (Лист 14)
272
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5-31 Уравнение Примечание Литература
8.5 CD=f(M) М J (1) da) = ~— dr р M — момент Круговая частота (см. поле 5.8, № 1) F13 S .64+75
8.6 О) =f(<p) (1) а) = —~ dt угол поворота Определение угловой ско- рости (см. поле 7.8, № 1) F18, S.245
8.7 co=f(L) (1) dw-pdt p L-момент импульса Угловая скорость и момент импульса (см. поле 7.8, № 1) F18, S.266
8.8 ^2=№1) (1) ct>2= — a)2 Г2 со — угловая скорость Угловые скорости в меха- нических передачах F18, S.751
8.16 oi=f(V) (1) <»=~u h U — электрическое напря- жение Эффект Джозефсона, экви- потенциальность, высокие частоты при низких темпе- ратурах F6, S.151
9.4 u=f(v) (1) du = d(r>l) v-скорость Уравнение неразрывности F12, S.200
9.11 u=f(V) dV (!) u = — V — объем Приток в резервуар И—объем резервуара вы- сокого давления и участка трубопровода .(см. поле 11.9, №1) F7.5.53
Рис. 532. (Лист 15)
5.3. Функциональные структуры
273
Поле на рис. 5.31 Уравнение Примечание Литература
9.12 М =f(Pd) m я г4 Др (I) и = 8 Irj <2> “4 "г В dl pd — давление Закон Хагена—Пуазейля А/. — разность давлений Приток в резервуар г гидравлическая емкость В В — обратное значение величины, обозначаемой как сжимаемость F 22,5.243 F7, 5.53
11.9 Г=/(и) (1) dH=udf u-поток объема Приток в резервуар (см. поле 9.11, № 1) F7.5.53
11.12 y=f(Pd) I (1) V— — mRT Pd pd — давление Закон Гей-Люссака для сжимаемых газов т масса R удельная газовая постоянная Т абсолютная температура F22, 5.314
12.1 Pt = f(F) (1) P^~ A F — сила Определение давления (см. поле 1.12, № 1) F12. 5.163
12.2 Pd=f(s) (1) Pd = P8s 5 — перемещение, путь Гидростатическое давление на глубине $ р-плотность ^-ускорение свободного падения (см. поле 2.12, № 1) F12, 5.164
Рис. 532, (Лист 16)
18—2317
274 5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5.31 Уравнение Примечание Литература
12.4 о 1 а — |ПЗ В.|еч II II II Ч T9 Ч В. В. В. <1 О v — скорость Скоростной напор (см. поле 4.12, № 1) Падение давления в тру бе 7-диаметр трубы /-длина трубы . - 64 X — — для ламинарного Re течения F4, 5.196 /18.5.309
12.9 Pd=/(u) Ра 1 (1) p-^d7 u-поток объема Разность давлений на концах трубы ро-средняя плотность ве- щества потока /Л, 5.52
12.11 Ра=ЯИ (1) Pd=ymRT (2) Pd = y«R*T Г-объем Закон Гей-Люссака для сжимаемых газов (см. поле 11.12, № 1) Осмотическое давление /? ^-универсальная газовая постоянная F22, 5.314 F22, 5.253
13.2 /=/(s) (1) /=<4 s д перемещение, путь Электронно-вакуумный датчик s-расстояние между элект- родами F14, 5.235
13.4 (1) I2 = Al/v+B у-скорость Термоанемо метр А и //-константы, определя- емые свойствами нагревае- мой нити F2, 5.345
Рис. 532. (Лист 17)
5.3. Функциональные структуры
275
Поле на рис. 5.31 Уравнение Примечание Литература
13.13 (» /2=?ч (2) 7=/ke’d /-сила тока Трансфор матор Mi, н2-числа витков Ударная ионизация a-число ионизации d -расстояние между анодом и катодом I к -электронный ток /21,5.434 /6,5.159
13.15 dQ (1) at 0-электрический заряд Сила электрического тока в проводнике F8, S.6 /1,5.197 /7,5.45
13.16 /=/([/) (1) к р 1 dU (2> /=саГ линейные 1 системы (3) d/ = -l7dt JU (4) I^KUlL2 //-электрическое напря- жение Закон Ома, падение напря- жения в проводнике /гудельное сопротивление Сила тока и напряжение С-ем.кость конденсатора /.-индуктивность катушки Электронная лампа /^-анодный ток 14напряжение между элект- родами К-константа /1, 5.199 F 7, 5. 50 /8,5.175
14.13 S c=l 5 и и e 6- Лейла тока Ток намагничивания в трансформаторе /,71ток намагничивания /^сопротивление намагничиванию П-ЧИСЛО SIHTKOB /21,5.433
Рис. 5J2. (Лист 18)
18*
276
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5.31 Уравнение Примечание Литература
14.13 (2) <ЬФА 7 2л г Магнитное поле прямого провода до-магиитная проницаемость вакуума /-расстояние до провода Л-площадь поперечного сечения F 8,5.92
14.16 Ф=Ди) (1) 6Ф = ибг [/-электрическое напря- жение Закон Фарадея F 7,5.45
15.1 Q-f(F) (1) QK=d F ‘i г F-сила Пьезоэлектричество (зави- сящее от направления) d-пьезомодуль F2, 5.306
15.2 (1) Q=^tz0-U sd ^-перемещение, путь Плоский конденсатор s ^-расстояние между плас- тинами F 1,5.283 F 8,5.159
15.13 (1) dQ = /dt Асила тока Заряд и сила тока (см. поле 13.15, № 1) F21,5.294 F8.5.6 F7, 5.45
15.16 Q=f(U) (1) Q = CV (/-электрическое напря- жение Емкость F8,5.145
16.1 U=f(F) Fd (П F-сила Конденсатор F6,5.160'
Рис. 532. (Лист 19)
5.3. Функциональные структуры
277
Поле на рис. 5.31 Уравнение Примечание Литература
16.1 (2) Пьезоэлектрический источ- ник силы d —-крутизна преобразова- теля (см. поле 1.16, № 2) F 2,5.307
16.2 1— ' S S —• о. с: с | с || и и л to Ю| <~* | Czj Сл s-перемещение, путь Напряжение индукции и на- пряженность электростати- ческого поля Конденсатор ЭД С индукции в проводнике, прошедшем путь S в магнит- ном поле В-магнитная индукция Fl, 5.226 F6, S.160 F8, S.H7
16.4 U=f(v) (1) U=Blv v-скорость ЭДС индукции В-магнитная индукция (см. поле 4.16, № 1) F8, 5.117
16.6 V=f(<P> (1) v=kb^~ dt ^_угол поворота Генератор постоянного тока В-магнитная индукция К-константа, зависящая от конструкции F14, 5.239
16.13 U=f(I) (1) U = IR (2)dl/=i/df d/ (3) U = L- . линейные системы /-сила тока Закон Ома Напряжение и сила тока С-емкость L индуктивность (см. поле 13.16, № 2 и 3) F11,5.34 F7.S.50
Рис. 5.32. (Лист 20)
278
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле на рис. 5.31 Уравнение Примечание Литература
16.13 яв/ (4) а Ipl (5) U=-^- А Эффект Холла В- магнитная индукция Я „-константа Холла Падение напряжения в про- воднике Л-сечение проводника р удельное сопротивление Z-длина проводника F 1,5.231 F21,5.296
16.14 и=ДФ) 4Ф "инг-^ Ф-магнитный поток ЭДС ни лук нии Fl. S.226
16.15 о < о»|и Il II (^-электрический заряд С — емкость конденсатора £21,5.282
16.16 U=f(U) (!) "1 U-электрическое напря- жение Трансформатор £1,5.259
Рис. 5.32. (Лист 21)
силами. Искомое соотношение определяется
полем 1.1 на рис. 5.31 и соответствующими уравне-
ниями на рис. 5.32, например, можно взять те два
уравнения, которые выражают функцию клина и
шарнирного рычага. Другой путь ведет от входа,
столбца 1, к полю 5.1, оттуда - к полю 1.5 и, нако-
нец, к выходу, строке 1. В этом случае дважды
появится основное соотношение между поступа-
тельной и вращательной системами, например:
Поле 1.5: Г2 = /(М) = -i М; (5,2 а)
г2
Поле 5.1: М= ДГХ) = , (5.2 б)
так что
F2—2-F*. (5-3)
т. е. выражение для закона рычага.
Исключенный при переходе к уравнению (5.3)
вращательный момент сохраняется в дальнейшем
как внутренний действующий момент в рычаге.
Если для некоторых величин поле пересече-
ния строки и столбца не заштриховано, то для этих
величин прямое соотношение не приведено, и его
следует получить через подходящие промежуточ-
ные величины. Исключаемые при этом величины
отсутствуют на входах и выходах, но остаются
действующими в системе как „внутренние вели-
чины”. Например, рычаг, в котором нет передачи
внутреннего момента, - неработоспособен.
Подобные соотношения, например, между
двумя силами, вообще между двумя одинаковыми
величинами ми^ио получить, если скомбиниро-
вать между собой уравнения с „симметричной”
нумерацией из матрицы на рис. 5.30 или 5.31. Так,
например, комбинация уравнений (1.3 + 3.1 & 1.1)
или (1,5 + 5.1 6 1.1), см. также иллюстрацию этого
способа на рис. 5.33.
Второй пример призван осветить способ работы
при появлении производных величин. Исходя из
задачи, которая допускает прямой вход на уровень
диаграммы потоков с I - Q-величинами (блок п на
рис. 5.24), для приведения в действие автоматики
ремня безопасности [39] в уравнение было введено
изменение скорости dv в единицу времени как не-
зависимая переменная и перемещение 5 как зави-
симая:
fl dv
Прямое соотношение в поле 2.4 матрицы на
рис. 5.32 нам не подходит, так как оно содержит
только двухточечные величины, для измерения
которых необходима внешняя опорная точка.
Поэтому мы будем искать в первую очередь соотно-
шения для изменения скорости, в которые входи-
ла бы легко измеримая одноточечная величина,
например сила, и найдем их в полях. 1.3 и 3.4.
Объединяя их, получаем:
_ dv
F = m-----•
dt (5-5)
После этого останется найти только соотношение
между силой и путем, например из поля 2.1, или
какое-нибудь комбинированное.
(5.4)
5.3. Функциональные структуры
279
Поле мат- рицы из рис. 5.31 Уравнения отдельных функций F4ZZP- 4ZD- Ис- клю- чаем, вели- чина X Уравнение для составной функции F2 = f(F,) Реализация конструктивных величин Приме - чания
Ж 1 2 3 4 5 6
1 и 1.1 1.2 F - F1 — 1.4 Как в столбце 2 при а2 = 0 ; р2 = р, F2=ctg(a-2p)F1 15 ,Л к 1.6 Клин Ц = tgp
2 tg (a^p^tg (a2*p2)
2 2.2 F - F> 2 a, * tg a2 — 2.4 Как в столбце 2 при а, = а2 F2 ’ -|-ctga F, Ж lx F’ “X a2 V 2.6 Шарнир- ный рычаг без тре- ния в шар- нирах
3 3.1 1.Ы.1 ell 3.2 F„-ctgfa, ♦ 2p,) F, F2»ctg(a2-7p2)Fx 3.3 Fx 3.4 при а, = а2 Pl =Р2 F2=»ctg2(a*2p)F1 Tt r II iK 3.6 Два кли- на, соеди- ненных последо- вательно
r2 -]rw> у 'И2 Fl -4— ^~P2 -Pi
4 4.2 F = 1 F ‘ tg a, ♦ tg a2 1 F2=ctg(a3*2p)Fx 4.3 F. 4Л при а, =а2 F2«yctgai ctg (а3 * 2р) Fn T F’ JV a2 4.6 Шарнир - ный рычаг и клин, соединен- ные после- дователь- но
5 5.1 13*3.1 ©1.1 5.2 dp, = F, dt, (3.1) F2 = (1.3) dt2 5.3 Pi- 5.4 F -^-F F? ' dt2 F’ 5.5 1 *t, TH 56 Эффект молотка
6 6.1 1.5 *5.1 ©1.1 6.2 M = F,r, (5.1) F2=4-M (1.5) r2 6.3 M 6.4 F = — F 2 r2 F' 6.5 f'l 4 r’ A r? 6.6 Эффект рычага
Рис. 533. Разработка решений для функции Fj =/(Г1) с помощью матрицы функциональных величин (см. рис. 5.31) и собрания уравне-
ний (см. рис. 5.32). Перед р ставится знак „минус”, если точка приложения силы Fj движется справа налево
Первая замена зафиксировала для всех после-
дующих решений, что соотношение между скоро-
стью и путем будет реализовываться через массу.
Для реализации соотношения между силой и пу-
тем матрица функциональных величин на рис. 5.32
предоставляет не только уравнения поля 2.1,
но и уравнения комбинации полей (2.6 + 6.1 = 2.1)
или (2.12 + 12.1 £ 2.1). Вместе с соответствующими
принципиальными схемами они приведены
на рис. 5.34. Иногда имеет смысл получать возмож-
ные комбинации функций с помощью небольшой
программы для ЭВМ.
Переход от диаграммы потоков с функциональ-
ными величинами (силой, скоростью, импульсом и
т. д.) к диаграмме потоков с конструктивными
величинами (массой, жесткостью, длиной, углом,
плотностью - в том виде, в каком они приводятся
на чертежах) является одной из важнейших со-
ставляющих этого способа конструирования, что
подчеркивает название „специальная функци-
ональная структура” [44, 43, 42].
Представленное на рис. 5.28 разделение вели-
чин на функциональные и конструктивные обла-
дает еще и тем достоинством, ранее не упоминав-
шимся, что показывает разделение физических
величин на такие, которые изменяются во время
функционирования устройства, т. е. функци-
ональные, и на такие, которые определены конст-
рукцией, т. е. конструктивные. Функциональные
величины описывают идеальные функции (входы
и выходы на диаграмме потоков), а конструктив-
ные величины обеспечивают их реализацию. Как
показано на рис. 5.28, интенсивностные и количе-
ственные величины являются функциональными
(столбец 1), а такие включаемые в соотношения
величины, как жесткость и масса - конструктив-
280 5. Модели и вспомогательные средства для конструирования в отдельных фазах
Поле мат- рицы из рис. 5. 31 Уравнения отдельных функций Иск- люча- емая вели- чина X Уравнение для составной функции s = HF) Реализация конструктивных величин Приме - чания
N* 1 2 3 4 5 6
1 1.1 2.1 1.2 ds = — 0F с — 1.4 Как столбец 2 1.5 F s r c ! v 1.6 Упругость
2 2.1 2.6 * 6.1 2.2 ф = arctg ;6 Л F-^p/л Г^Ф 1 .... 2.3 Ф 2.4 s»r arctg -f- b 2.5 X П \r,lr Л \IG A4 F А§^ф А F!" j 1Ь Роликовая опора Маятник
3 3.1 2.12*12.1 3.2 Р.-Ч S=—Pd pg р'"' PdE // /// s «—F // Pd 3.3 Pd 3.4 s = -L- F pgA 3.5 F s i-ШЛ । . 19 3.6 Сообщаю - щиеся сосуды
Рис. 534. Разработка решений для функции s = f(F) с помощью матрицы функциональных величин (см. рис. 531) и собрания уравнений
(см. рис. 532)
ними (столбец 3). К конструктивным величинам в
первую очередь относятся геометрические пара-
метры (длины, площади, объемы) и характеристи-
ки материалов (модуль упругости, плотность,
магнитная проницаемость и т. д.).
Только с помощью конструктивных величин
мы можем обеспечивать нужное нам соотношение
между двумя функциональными величинами.
Так, на рис. 5.28 определенное соотношение между
перемещением и силой обеспечивается посредст-
вом жесткости или посредством изменяемых
конструктором величин, определяющих величину
жесткости. Точно так же соотношение между
скоростью и импульсом обеспечивается посредст-
вом массы, или же величин, массу определяющих.
Все эти зависимости используются при реали-
зации 1-Q - диаграммы потоков. С помощью мат-
рицы функциональных величин (см. рис. 5.30)
находятся прямые или непрямые соотношения
между идеальными функциями, которые содер-
жатся в соответствующих полях в форме уравне-
ний и/или физических эффектов. В каждое урав-
нение входят конструктивные величины, дающие
указания на возможные реализации; то же спра-
ведливо и для названий эффектов.
На рис. 5.33 показаны некоторые примеры
разработки решений на основе конструктивных
величин, входящих в уравнения, а также на основе
комбинаций двух уравнений, в одно из которых
входит входная, а в другое - выходная функция.
Поставленная задача - реализовать соотношение
^2=/(Л )> причем должно быть F2 > Fi. В матрице
функциональных величин на рис. 5.31 поле пересе-
чения строки и столбца для сил Fi и F2 (т. е. поле
1.1) заштриховано, что означает существование
соотношения для этих величин в форме уравнения
или эффекта. Поскольку название эффекта (на-
пример, эффект клина, шарнирного рычага) еще не
указывает на определенную геометрическую
структуру, следует исходить из конструктивной
величины - угла (примеры 1 и 2 на рис. 5.33). После-
довательное использование двух эффектов из
одного и того же поля 1.1 матрицы на рис. 5.31
осуществлено в примерах 3 и 4 на рис. 5.33. В при-
мере 5 показано комбинированное соотношение
для двух сил с промежуточной величиной импуль-
сом, а в примере 6 - с промежуточной величиной
моментом силы. Мы видим, что вновь появляется
значительная часть решений из кат. 4.4.2 „Умно-
жители силы”. Все решения связаны одноточечны-
ми величинами, которые при их последовательном
соединении образуют требуемую последователь-
ную цепь.
На рис. 5.34 приведены примеры решений для
функции s =/(F). Простейшее из них, основанное
на законе Гука для пружины, содержится в поле
2.1 рис. 531 и, скорее всего, первым придет в голову
любому конструктору. Решение 2 на рис. 5.34 более
5.3. Функциональные структуры
281
изощренное, так как в нем соотношение порожда-
ется с помощью угла ф, растущего с ростом силы.
Уравнения в поле 6.1 рис. 5.31 указывают на про-
грессивно растущий угол или на маятник.
В решении 2 на рис. 5.34 этот эффект комбини-
руется с эффектом из поля 2.6 матрицы - для того,
чтобы от угла перейти к перемещению. Исключа-
емая величина - угол поворота ф.
В последнем решении 3 на рис. 5.34 для реали-
зации зависимости перемещения от силы исполь-
зуется промежуточная величина давления pd . На
входе и выходе давление отсутствует, но в системе
оно сохраняется.
Различные особенности, проявляющиеся при
выборе исключаемых промежуточных величин,
показаны на следующем примере.
Пусть соотношение
Ф =/(Г) (5.6)
должно быть реализовано через различные проме-
жуточные величины. Если использовать уравне-
ния полей (6.2 + 2.1 = 6.1) из рис. 5.31 и 5.32, выбрав
$
ф = —;
г
F
5 =--,
С
то в первом случае получаем:
гс
(5.7)
(5.8)
(5.9)
Если ж,е использовать уравнения полей (6.5 + 5.1 =
= 6.1), выбрав уравнения (5.10) и (5.2-2), т. е.
(P=_JLm, (5.10)
см
то во втором случае получаем:
Ф=_£_Л/. (5.11)
см
Решения реализованы геометрически на рис. 5.35.
В первом случае промежуточная величина (пе-
ремещение s) - двухточечная, во втором (вра-
щательный момент М) - одноточечная. Двухто-
чечная величина „перемещение” приводит при
геометрической реализации к параллельной кон-
фигурации конструктивных величин г и с; одното-
чечная величина „момент” - к последовательной
конфигурации величин г и см. В то время как в
случае параллельного соединения (рис. 5.35, а) уве-
личение радиуса г требует уменьшения жестко-
сти пружины, в случае последовательного соеди-
нения (б) жесткость пружины должна изменяться
пропорционально радиусу. Следует подчеркнуть,
что и в конструкции проявляются различия в
зависимости от того, исключается из уравнений
двух- или одноточечная величина.
2. Список литературы к физическим уравнениям на рис. 5.32
Fl. Gerthsen, Chr.: Physik, 9. Aufl. Berlin, Heidelberg,
New York: Springer 1966.
F2. Grave, H.F.: Elektrische Messung nichtelektrischer
GroBen, 2. Aufl. Frankfurt/M.: Akad. Verlagsges. 1965.
F3. Hund, F.: Theoretische Physik, Bd. 1. Stuttgart: Teub-
ner 1962.
F4. Kohlrausch, F.: Praktische Physik, Bd. 1. Stuttgart:
Teubner 1960..
F5. Kohlrausch, F.: Praktische Physik, Bd. 2. Stuttgart:
Teubner 1968.
F6. Koller, R.: Konstruktionsmethode fiir den Maschinen-,
Gerate- und Apparatebau. Berlin, Heidelberg, New
York: Springer 1976.
F7. Macfarlane, A.G.J.: Analyse technischer Systeme.
Mannheim: Hochschultaschenbiicher-Verlag 1967.
F8. Moeller, F.: Grundlagen der Elektrotechnik, 12. Aufl.
Stuttgart: Teubner 1963.
F9. NN.: Hiitte 1, Theoretische Grundlagen, 28. Aufl. Ber-
lin: Ernst & Sohn 1955.
F10. NN.: Physik-Hiitte, Mechanik, Bd. 1, 29. Aufl. Berlin,
Munchen, Dusseldorf: Ernst & Sohn 1971.
Fl 1. NN.: Technisches Tabellenheft. Berlin, Munchen: Sie-
mens 1977.
F12. Orear, J.: Grundlagen der modernen Physik. Munchen:
Hanser 1973.
FI3. Pohl, R.W.: Mechanik, Akustik und Warmelehre, 16.
Aufl. Berlin, Heidelberg, New York: Springer 1964.
F14. Rohrbach, Chr.: Handbuch fiir elektrisches Messen.
Diisseldorf: VDI-Verlag 1967.
F15. Roth, K.; Simonek, R.: Mechanische Verstarker. Kon-
struktion 23 (1971) 90-98.
F16. Roth, K.; Franke, H.-J.; Simonek, R.: Algorithmisches
Auswahlverfahren zur Konstruktion mit Katalogen.
Feinwerktechnik 75 (1971) 337-364.
F17. Roth, K.; Franke, H.-J.; Simonek, R.: Aufbau und
Verwendung von Katalogen fiir das methodische Kon-
struieren. Konstruktion 24 (1972) 449-458.
F18. Sass, F.; Bouche, Ch.; Leitner, A. (Hrsg.): Dubbell,
13. Aufl. Berlin, Heidelberg, New York: Springer 1970
(Ber. Neudruck 1974).
F19. Sass, F.; Bouche, Ch.; Leitner, A. (Hrsg.): Dubbel II,
13. Aufl. Berlin, Heidelberg, New York: Springer 1970
(Ber. Neudruck 1974).
F20. Vogelpohl, G.: Betriebssichere Gleitlager, 2. Aufl. Ber-
lin, Heidelberg, New York: Springer 1967.
F21. Westphal, W.H.: Physik, 22. bis 24. Aufl. Berlin, Got-
tingen, Heidelberg: Springer 1963.
F22. Zeller, W.; Franke, A.: Das physikalische Riistzeug des
Ingenieurs. Darmstadt: Fikentscher 1963.
Рис. 535. Конструктивное значение комбинации двух уравне-
ний для функции ф = f(F) по рис. 531 и 532. Решение а для па-
раллельной, а решение б для последовательной конфигурации
конструктивных величин г и с
282
5. Модели и вспомогательные средства для конструирования в отдельных фазах
3. Промежуточные шаги для комбинированных способов
конструирования
Прямой вход в физическую функциональную
структуру (см. рис. 5.24, шаг n-g). Если уже поста-
новка задачи формулируется в терминах непосред-
ственно физических величин, а потоки вещества,
энергии и сообщений в их общем виде не играют
никакой роли, то можно входить прямо на уровень
физической функциональной структуры, как
показано на рис. 2.15. Если дальнейший путь
должен проходить через шаги g-m на рис. 5.24, то
в качестве входных и выходных величин должны
быть использованы обсуждавшиеся интенсивност-
ные и количественные величины. Производимые
над ними операции можно выразить с помощью
глаголов функциональных положений. На рис. 5.36
показан переход от функциональных положений
(см.-рис. 5.6-1, г) к l-Q-диаграмме потоков. Вход
на этот уровень открывает нам теперь все возмож-
ности дальнейшей конкретизации изделия с
помощью матрицы функциональных величин и
содержащихся в ней уравнений и эффектов.
Вход в каталоги из физической функциональ-
ной структуры (см. рис. 5.24, шаг g-c). Отдельные
блоки функциональной структуры (см., например,
рис. 5.36) описывают идеальную функцию через
входные и выходные величины. Если случайно
окажется, что у нас есть каталог решений этой или
похожей функции, то можно сократить путь, ранее
проходивший через матрицу функциональных
величин, и брать прямо из каталога решения, в
которых уже осуществлен выбор эффектов и их
носителей. Идеальная функция в среднем блоке
на рис. 5.36 могла бы, например, быть выполнена
решением из кат. 4.4.2 „Умножить силу”.
Редукция входных и выходных величин (см.
рис. 5.24, шаг u-g). Для описания потоков энергии,
например, в электрических цепях, всегда необхо-
димы одноточечные величины и связанные с ними
двухточечные. Если твердо установить идеальную
функцию для пары величин одного вида на входе
и выходе, то, как правило, окажется определенной
и функция для другой пары величин (другого
вида). Если эта другая пара величин для нас не
важна, то достаточно рассматривать только первую
пару.
Рис. 536. Разработка диаграммы потока с интенсивностными и
количественными величинами (специальная функциональная
структура) на основе функциональных положений из рис. 5.6-1, г
для шага п - g по рис. 5.24
Для блоков и и v (см. рис. 5.24) предназначена
модель изделия 8 из рис. 5.2, т. е. векторная функ-
циональная структура с направленными величи-
нами на входах и выходах в количестве в общей
сложности от двух до шести. При переходе к специ-
альной функциональной структуре число величин
можно уменьшить уже упомянутым способом.
Тогда останутся только существенные для изде-
лия величины, например только сила или только
скорость, но не обе. На рис. 5.37 это продемонстри-
ровано на нескольких примерах.
Теперь появляется возможность на дальней-
шем пути поиска решения вместо шагов v-y (см.
рис. 5.24) выполнить шаги g- т, которые были описаны
в п. 5.3.2. Необходимой предпосылкой этого явля-
ется описанная здесь редукция входных и выход-
ных величин. Этот переход нередко используется,
в особенности тогда, когда возникает необходи-
мость совместить достоинства абстрактной функ-
циональной структуры и матрицы функциональ-
ных величин или когда имеются многополюсники
с немеханическими величинами.
Пример с порождением вариантов для процесса
конструирования по рабочему плану. Для наибо-
лее часто применяемого пути из рис. 5.24 с после-
довательностью шагов p-u-g-m на рис. 5.38 при-
веден пример его прохождения. Процесс констру-
ирования следует рабочему плану алгоритмиче-
ского метода выбора по рис. 2.10 и учитывает при
этом образование вариантов в соответствии с
рис. 2.18. Этот пример заимствован у Биркхофера
[4] и посвящен разработке машины для крепления
кнопок на материи [5].
Постановка задачи: разработать приводимое в
действие и управляемое человеком техническое
устройство, приклепывающее кнопки или их
ответные части к текстильным материалам (см.
рис. 5.38, строка 1). Постановка задачи ведет к
общей функции. Для наглядности она тоже изоб-
ражена на рисунке, в строке 2; на входе этой функ-
ции - составные части кнопок и материя, на выхо-
де - прикрепленные кнопки. Поток вещества
является главным потоком. Дополнительными
Рис. 5.37. Примеры перехода от абстрактных функций к вектор-
ным (рис. 63 и 6.3) и к специальным функциям. Шаги t - и и u-g
по рис. 534
Шаги конструи- ,
рования "
Структура изделия
Форму -
лиров- /Функциональна
ка к положение J
задачи
X
се
х
i
X
о
§
X
X
(Общая фуикц^
Разложение л
на частные
функции j
Приклепать кнопки к текстильным материалам
Требования
Работа с участием человека, различные размеры кнопок,
применимость в быту и на производстве, и т. д-/'
е
к
х
В
X
о
§
X
X
9
5
X Л
о. х
к
«5
« S 5
^Представление^
в виде возмож-1
ных фуикционгн
(льных структур!
;..Z-.1____'
Выбор одиойЛ
функциональ-
ной структуры/
г Превратить
абстрактные
функции в
« о ” к векторные у
aSg? ' L- <
as г? l________
о <Выбор
ft — г». I векторной
функции
Эффекты для'
функций из
каталогов
Выбор одного
эффекта
Выбор
5
« I \( Контурный \
* S к проект J
1' ! Г-., 1... .
| Выбор )
6
х х f Улучшенный
Й5Д проект
— С-*
Вариант 3
Вариант 1
Черный
ящик
--Э
Передача
импульса
Разложение
силы
Передача Разложение
импульса силы
Передача
импульса
Распространение
/X.РаспространениеI ,z\. Распростр;
/ X, давления / / X. давл<
пересекаю- ’ . I пересекаю- i
щееся параллельное | / щееся параллельное
Разрядка
источника
Разрядка кинетической
Разложение Передача разложение
силы импульса силы
/X. Распространение
/ X, давления i
пересекаю - X
щееся параллельное
“I Вариант 2
Четырех -
звенный
механизм
Передача
Гидравли-
ческий
цилиндр
Ударный
механизм
Четырех -
звенник,ги-
дроцилиндр
Четырех-
звенник,
винт
/ычаг, винт
Передача,
винт
Маховик,
четырех-
звенник
Маховик,
винт
Маховик,
передача
Шарнирно-рыча-
жнып вариант
Ударный вариант Гидравличес- кий вариант
Вариант с ходовым
винтом с резьоой
большого шага
Кривошипный
пресс
Рис. 538. Процесс конструирования при разработке ручной машины для крепления кнопок с помощью алгоритмического метода выбора при конструиро-
вании с каталогами (АМВК)
283
284
5. Модели и вспомогательные средства для конструирования в отдельных фазах
потоками являются потоки энергии и сообщений,
причем источником энергии и устройством обра-
ботки данных является человек.
На следующем шаге производится разложение
общей функции на частные, их соединение в
абстрактные функциональные структуры, приве-
денные в трех вариантах, и, наконец, выбор най-
лучших вариантов.
Дальнейший ход процесса показан на двух
функциях: „преобразовать” и „накопить энергию”.
Так как здесь всюду идет речь только о механиче-
ской энергии, в строке 3 с абстрактными функци-
ями могут быть теперь сопоставлены векторные.
Следующим шагом можно было бы варьировать
векторные функции (например, изменением
направления входной силы для изменения ее
величины и т. д.). В данном примере это не делает-
ся, и (без порождения вариантов и выбора вариан-
та функции) в строке 4 производится переход к
физическому эффекту. Процесс выбора эффектов
не представлен в строке 4, а даны только названия
выбранных в итоге эффектов.
В строке 5 с эффектами сопоставлены произ-
вольные структурные изображения механизмов, их
реализующих. Как было показано в гл. 4, эти
механизмы можно очень разнообразно варьиро-
вать. Затем следует выбор подходящего структур-
ного проекта. Оставшиеся после этого проекты
должны разрабатываться далее на уровне контур-
ных представлений - чертежей (в которых пред-
ставляются детали, имеющие плоские и простран-
ственные измерения). Выбор наиболее подходя-
щих проектов и устранение слабых мест ведет к
небольшому числу улучшенных проектов, для
одного из них затем производится технологиче-
ская разработка и деталировка.
Представление входных и выходных величин
векторными функциями (см. рис. 5.24, шаг /с-и). Не-
обходимость в этом шаге возникает в том случае,
когда конструирование начинается с шага d или и
и должно продолжиться шагами и-у, в первую оче-
редь при применении ЭВМ и дисплеев. Так как на
шаге к имеются уравнения, реализующие идеаль-
ную функцию, конструктивные величины или эф-
фекты, а также возможные носители эффекта, то
не представляет трудностей определить функци-
ональные величины, а также их направление и
знак и составить из всего этого векторную функ-
цию (см. также гл. 6).
Переход от абстрактной диаграммы потоков
к абстрактной функциональной структуре (см.
рис. 5.24, шаг f-f). Во многих случаях проще начать
решение конструкторской задачи с моделей из
столбца 2 на рис. 5.24, чем с моделей из столбца 3.
При этом формализованными понятиями, которые
необходимо использовать, будут только три абст-
рактные величины - вещество, энергия и сообще-
ния, а их соотношения можно выражать понятны-
ми терминами обычного технического языка.
Чтобы несмотря на это продолжить потом движе-
ние путем столбца 3, лучше алгоритмизируемым,
следует в заключение шага f все выражения для
отношений между абстрактными величинами
заменить на стандартные термины: накапливать,
проводить, преобразовывать форму и вид и комби-
нировать. Таким образом, абстрактная диаграмма
потоков превратится в абстрактную функциональ-
ную структуру.
Описанные переходные шаги очень существен-
но расширяют возможности конструирования в
функциональной фазе, делают его более гибким и
позволяют приспособиться к особенностям каждо-
го конкретного случая. У нас есть возможность
выбора не только между четырьмя вариантами
пути в столбцах 1-4 на рис. 5.24, но и между 12 ва-
риантами на рис. 5.25, при этом шаги t-u (как на
рис. 5.37), А - В, В-и и В - Е более подробно опи-
сываются в гл. 6.
5.3.3. Функциональные структуры с логическими
величинами
Информация играет важную роль в абстракт-
ных функциональных структурах. Абстрактная
величина „сообщения” появляется уже в абстракт-
ной диаграмме потоков на рис. 3.14, а позже в
функциональных структурах на рис. 5.21-5.23.
Смысл таких выражений для абстрактных функ-
ций, как накапливать, проводить, преобразовы-
вать форму и вид и комбинировать сообщения, был
раскрыт на рис. 4.17. В данном случае, подобно
тому, как это делается для энергетических функ-
ций, на втором этапе функциональной фазы долж-
на производиться дальнейшая конкретизация
функций информационных. При этом совершенно
недостаточно, например, говорить только о комби-
нировании двух потоков сообщений, а должен
быть указан конкретный вид комбинирования,
т. е. логической операции, которая при этом вы-
полняется (конъюнкция, дизъюнкция и т. д.).
Испытанным инструментом здесь является аппа-
рат (элементы и операции) булевой алгебры,
например в форме алгебры релейных схем (см.
рис. 4.18 и 4.22).
Составление логической функциональной
структуры показано на примерах на рис. 4.20-4.22
для управления штамповочной машиной. Сущест-
венно более развернутые логические схемы меха-
нических устройств можно найти в [35, 39], а об-
зор логических механизмов как функциональных
единиц на рис. 6.41. У Роденаккера под функцио-
нальными структурами понимаются главным об-
разом логические функциональные структуры
[26,28].
Для всех видов машинных систем естественно
накапливать и передавать сообщения в форме би-
нарных (двоичных) элементов и состояний. Для
механических элементов это особенно удобно
ввиду хороших возможностей реализации двух
дискретных состояний (например, упор слева/упор
справа или возможность взаимного движения име-
ется/отсутствует). Если при описании механизмов
логические высказывания свести к бинарным со-
стояниям (например, путем соответствующей ко-
дировки), то появится возможность использовать
для механизмов весь мощный аппарат алгебры
логики.
Механической логике во многих случаях при-
писывается небольшое значение в связи с быст-
рым распространением микропроцессоров. Это,
конечно, оправданно, особенно при решении проб-
лем переработки информации, однако несправед-
ливо в отношении многочисленных устройств
ввода и вывода информации; очень простых опера-
ций, когда переход от механики к электронике и
обратно требует не меньших издержек, чем меха-
ническая логика; особых требований к надежно-
сти (например, механическое запирание неразре-
шенных вариантов расположения).
По названным причинам мы отказались от
5.4. Функциональные интеграция и разделение при переходе в предметную фазу
285
сложных логических схем. Примеры ограничива-
ются простыми обстоятельствами, важными для
механических элементов. Обзор важнейших логи-
ческих механизмов для всех элементарных логи-
ческих операций можно найти на рис. 6.41.
Еще одно обстоятельство, значение которого,
видимо, возрастает - это применение логических
операций для построения узлов из деталей, а так-
же шарнирных комбинаций, как это показано на
рис. 4.13-4.16.
Возможный порядок действий при составлении
логической функциональной структуры уже был
описан в п. 4.3.2. Место стыка электронного выхода
системы переработки информации и входа меха-
нической системы приобретает все более важное
значение. Здесь должен стоять электромеханиче-
ский преобразователь. Поскольку перемещение
механических деталей обычно требует довольно
больших сил, в механической части устройства
должен быть предусмотрен умножитель силы или
же в электронной части - электронный усилитель.
5.4. Функциональные интеграция и разделение
при переходе в предметную фазу
Процесс конструирования был показан на
рис. 1.6, 2.10 и 5.1 как спуск от способов представ-
ления высокого уровня абстракции к способам
низкого уровня. С каждым из уровней, называ-
емых здесь этапами конструирования, сопостав-
лены одна или более моделей изделия из рис. 5.2.
Продвижение вперед в процессе конструирования
в пределах одного „уровня моделей”, т. е. в рамках
одного этапа конструирования, было названо „го-
ризонтальной” процедурой, а переход от уровня к
уровню, от ступени к ступени - „вертикальной”.
Двигаясь „по вертикали” мы обычно сталкиваемся
с наибольшими трудностями. Ряд мест в рабочем
плане (например, плоскостей переходов, обозна-
ченных штриховыми линиями на рис. 2.10, 2.17,
2.18,5.38) невозможно в большинстве случаев прой-
ти с помощью единого алгоритма, несмотря на все
усилия в этом направлении и попытки ограни-
читься только простыми случаями. Дело в том,
что, пересекая плоскости переходов, мы вступаем
в новую, отличную от прежней, область представ-
лений. У новых понятий общими с прежними яв-
ляется только часть свойств, но далеко не все
свойства. Это несколько похоже на пересечение
границы между странами с родственными, но не
очень близкими языками. Вдобавок может ока-
заться, что слово одного языка можно передать на
другом только целым предложением, потому что в
другом оно не встречается, и наоборот. Но даже это
целое предложение в большинстве случаев не
вполне удовлетворительно описывает первона-
чальное слово.
Пересечение такой плоскости перехода симво-
лически изображено на рис. 5.39 на уже известном
примере замка из рис. 1.5. В то время как расчле-
нить общую функцию на частные удается еще до-
вольно просто, сопоставление с частными функци-
ями отдельных деталей зависит от конкретной
конструктивной реализации и, например для
функционально-интегрированного замка из
рис. 1.17, выглядит совсем по-другому. Для пока-
занного перехода характерно, что многие частные
функции реализуются несколькими деталями, а
многие детали при этом участвуют в реализации
нескольких частных функций. В то время как для
общих и частных функций классификация строит-
ся иерархически, на плоскости переходов возника-
ет полииерархическая классификация [29,30,32].
Так, например, к реализации частной функции
„...вдвигать одну деталь в другую...” относится как
Рис. 539. Иерархические отношения между общей и частной функциями, полииерархическое сопоставление с частными функциями
деталей на примере замка из рис. 13
286
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Идеальные функции
Реальные функции
Пример: прямоугольный параллелепипед в качестве маятника
Обозна- Свойства реальных
чение функций
Положение оси
а вращения
Р Масса
у Длина
§ Тепловое
расширение
е Жесткость
Прямоугольная
£ форма
х Вращательный
подвес
Значение для
идеальных
•функций
Необходимо
Иногда
необходимо
Не имеет
значения
Нежелательна
Недостает
Рис. 5.40. Теоретико-множественное представление детали, ре-
альной и идеальной функций
направляющая а, так и направляющая Ь, но в то же
время каждая из этих направляющих участвует в
реализации еще и частных функций „...создать
силу...”, „...умножить силу...” и т. д. Поэтому каж-
дая деталь оказывается в результате потенциаль-
ным носителем многих частных функций или их
компонент, и в зависимости от того, насколько
удачно и с каким „коэффициентом использова-
ния” конструктор составит из этих деталей функ-
ционально работоспособное техническое устрой-
ство, появятся хорошие или плохие конструкции,
т. е. в нашем случае - конструкции из малого чис-
ла деталей или же из неоправданно большого.
На плоскостях переходов встречаются наиболь-
шие трудности в разработке конструкций, но и
здесь почти всегда оказывается возможным вне-
сти в конструкцию улучшения. Уже при количест-
ве деталей порядка 10 представляется абсолютно
невероятным, чтобы конструктор мог проанализи-
ровать все рациональные решения. Можно даже
предположить, что его решение является локаль-
ным, но не абсолютным оптимумом. Располагая,
например, десять деталей друг за другом, мы уже
получаем 10! = 3 628 800 вариантов расположения.
Итак, никогда не следует падать духом при по-
иске новых решений - ведь среди всего множества
потенциальных вариантов, даже среди простран-
ственных комбинаций, найдется много еще неиз-
вестных. Другие варианты можно получить, если
сопоставить:
функциональное положение - с другими функ-
циями;
функции - с другими эффектами;
функции и соответствующие эффекты - с
другими деталями;
детали - с другими способами изготовления.
Интересный и поучительный способ изобразить
существующее положение дел предложил Биргхо-
фер [4], дав теоретико-множественную интерпре-
тацию, идеальных и реальных функций (рис. 5.40).
Пусть у детали есть свойства от а до £, с по-
мощью которых она может выполнять одноимен-
ные функции. Идеальная функция, однако, требует
Функциональная интеграция--►
функциональное разделение
Рис. 5.41. Тенденции изменения технической и экономической
ценности решения при функциональной интеграции и функ-
циональном разделении
свойств а, 3, у, Л, причем свойства А. у детали нет.
Свойство 6 еще могло бы, на худой конец, иметь
некоторое значение для особо точных маятников,
но свойство е для обычных конструкций маятни-
ков абсолютно безразлично. Свойство %, прямо-
угольная форма, может даже оказаться вредным,
так как в этом случае центр тяжести располагает-
ся довольно близко к оси вращения, и поэтому
силы тяжести оказывают относительно большее
действие на величину силы трения в подшипни-
ках, повышая ее, чем на колебательное движение
маятника.
Как правило, отдельные детали обладают как
теми свойствами, которые необходимы для выпол-
нения идеальной функции, так и теми, которые не
имеют значения для этого или оказываются вред-
ными. Чем больше различных свойств у одной де-
тали или чем больше деталей удается объединить
в одну, тем больше функций она оказывается спо-
собной выполнять и тем более экономичным, как
правило, становится решение, но, в то же время и
тем больше привносится вредных свойств, что сни-
жает техническую ценность решения.
Мы встречаемся с обратной тенденцией, когда
детали с многочисленными свойствами изменяют-
ся или подразделяются таким образом, чтобы не-
которые из прежних свойств исчезли. Если при
этом изменении была проявлена должная лов-
кость, то исчезнут в итоге как раз те свойства, ко-
торые были нежелательны. Эта процедура обычно
влечет за собой повышение технической ценности
решения и снижение его экономичности.
Увеличение числа свойств одной детали с
целью заставить ее выполнять несколько функций
[16] называется функциональной интеграцией, а
сокращение числа свойств с целью устранения не-
желательных функций называется функциональ-
ным разделением.
Тенденции к изменению технической и эконо-
мической ценности при функциональной интегра-
ции и функциональном разделении показаны на
рис. 5.41. Графики могут служить предупреждени-
ем об опасности переусердствовать, стремясь к
функциональной интеграции по экономическим
соображениям и к функциональному разделе-
нию - по техническим. За определенным порогом
и техническая, и экономическая эффективность
начинают уменьшаться.
На рис. 5.42 с помощью теоретико-множествен-
ных диаграмм показано, что при объединении де-
талей от а до / (функциональная интеграция) с ро-
стом числа деталей обязательно возрастает также
число нежелательных так называемых паразитных
5.4. Функциональные интеграция и разделение при переходе в предметную фазу
287
Рис. 5.42. Возрастание числа дополнительных (так назы-
ваемых паразитных) функций при объединении деталей
а, Ь; а, Ь, е и a, b,e, f:
(+) — обозначение для „объединения” (например, в рабо-
чих объемах) как на рис. 5.44 и 6.28
функций. При функциональном разделении число
паразитных функций уменьшается или даже они
вовсе исчезают. Так, деталь в поле 2.9, составлен-
ная из деталей а, Ь, ей/, наряду с требующимися
свойствами а, р, у обладает еще семью совершенно
не требующимися, а деталь ат в поле 2.5 обладает
только нужными свойствами. При функциональ-
ном разделении может, конечно, случиться и так
(деталь а2)> что вместо нежелательных исчезнут
нужные свойства. С другой стороны, функциональ-
ную интеграцию можно выполнить настолько
удачно, что дополнительные свойства окажутся
безвредными.
К свойствам отдельных деталей могут быть
причислены не только внутренние свойства их ра-
бочего объема, но и те свойства, которые возника-
ют при образовании пары из рабочей поверхности
данной детали и смежных поверхностей (рис. 5.43).
В соответствии с этим различают функции рабоче-
го объема, или объемные функции (сокращенно
Р0Ф), и функции рабочих поверхностей, или по-
верхностные функции (РПФ), как это показано на
рис. 5.43. Объемными функциями называются та-
кие функции, которые являются следствием отно-
шений между двумя рабочими поверхностями од-
ного рабочего объема, а поверхностными - такие,
которые появились в результате образования пары
двух рабочих поверхностей.
При анализе технического устройства обнару-
живается, что его механическая общая функция
составляется из цепей, звеньями которых являют-
ся поочередно объемные и поверхностные функ-
ции (см. рис. 5.43, а, 6), на что было указано уже в
работе [30]. Ветвление функций, например для
петлевых структур, может быть произведено по ра-
бочему объему или по рабочей поверхности (см.
рис.5.43, в. 1 ив. 2). Здесь также видны причины
возникновения структуры полииерархической
сети между частными функциями и деталями на
рис. 5.39. Так, деталь а на рис. 5.43, в. 1 участвует в
выполнении двух функций, в то же время, с другой
стороны, для одной только поверхностной функ-
ции обычно необходимы две детали, например
а и Ь.
Возможности синтеза путем построения функ-
циональных цепей будут освещены в гл. 6.
5.4.1. Различные виды функциональной
интеграции
Если изображать детали в виде геометриче-
ских структур (содержащих только рабочие объ-
емы и рабочие поверхности, см. рис. 4.52, 6.10-2), то
можно наглядно изобразить и различные возмож-
ные виды функциональной интеграции, что сде-
лано на рис. 5.44. В соответствии с этим рисунком
функции, действующие на несколько деталей или
в нескольких местах, можно объединять двумя
способами, т. е. осуществлять функциональную
интеграцию следующими двумя способами:
объединением рабочих объемов;
объединением по рабочим поверхностям.
Объединение (рис. 6.27 и п. 6.4.3) двух рабочих
объемов можно производить параллельно, как при
функциональной интеграции вида 1-3 (рис. 5.44,
строки 1-3), или последовательно, виды четвертый
и пятый (строки 4 и 5). Объединение рабочих
поверхностей также может быть параллельным,
как для функциональной интеграции шестого
вида (рис. 5.44, строка 6), или последовательным,
седьмой вид (строка 7). Каждый из этих видов
функциональной интеграции возможен при впол-
не определенных предположениях и приводит к
характерным для него структурам, а значит - и к
типичным для него свойствам. Для видов с перво-
го по третий рабочие объемы должны объединить-
ся или полностью, или в конце одного из отрезков,
или же по некоторому отрезку в их середине.
Рабочие поверхности при этом на одном или обоих
концах отрезка отождествляются или остаются в
том же общем числе.
Четвертый и пятый виды функциональной ин-
теграции состоят в объединении рабочих объемов
по их концам, т. е. по общей паре рабочих поверх-
ностей. Это объединение в случае четвертого вида
может производиться с помощью пленочного (п
кого) шарнира (см. также рис. 5.49), который допу-
скает относительные движения жестких деталей в
определенных границах. Пятый вид объединения
может реализовываться через вещественную
связь, которая не допускает никаких относитель-
ных движений на месте бывшей пары рабочих
поверхностей.
В связи с тем, что функциональная интегра-
ция может означать не только уменьшение числа
288
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Ветвление функций:
в)
по рабочим объемам
в!)
Рис. 5.43. Функции (а), функциональные цепи (б) и ветвления
функции (в, в. 1, в 2) твердых тел (см. также рис. 4.52, 4.63 и
6.10*2)
рабочих объемов, но также и уменьшение числа
рабочих поверхностей, выделяются еще шестой и
седьмой виды функциональной интеграции. При
интеграции шестого вида происходит, например,
объединение двух выходных рабочих поверхностей
одного рабочего объема в одну („параллельное”
расположение по отношению к функции). При
интеграции седьмого вида входная и выходная ра-
бочие поверхности рабочего объема превращаются
в одну общую („последовательное” расположение
по отношению к функции).
Всегда следует стремиться реализовать функ-
циональную интеграцию первого вида, так как
часто одна деталь через одни и те же рабочие по-
верхности может выполнять различные функции
без вредного побочного действия. На рис. 5.44,
поле 1.2, например, одна деталь используется для
передачи и поступательного, и вращательного дви-
жения.
Второй вид функциональной интеграции типи-
чен для литых и штампованных деталей. Все дета-
ли, движения которых совместимы, можно объеди-
нить по некоторой области, при этом обычно полу-
чается общая входная рабочая поверхность и раз-
личные выходные рабочие поверхности. Примером
может служить корпус устройства, соединяющий
многочисленные рабочие поверхности с основани-
ем или комбинированное зубчатое и храповое ко-
лесо, как на рис. 5.44, поле 2.2.
При функциональной интеграции третьего
вида предполагается, что рабочий объем имеет в
различных направлениях различные, друг от друга
независящие свойства, это могут быть две степени
свободы или очень большая и очень низкая жест-
кость пружины, как в поле 3.2.
Другой характер носит функциональная инте-
грация четвертого и пятого вида. При четвертом
виде кинематическая пара заменяется соединени-
ем с помощью вещественной связи, разрешающей
те же движения, что и пара, и в то же время позво-
ляющей передавать необходимые усилия. Особен-
но хорошо все это реализуется с помощью синтети-
ческих материалов [48,19], если только при охлаж-
дении удается избежать кристаллизации и связан-
ной с ней потери гибкости в узкой части шарнира.
Пятый вид функциональной интеграции озна-
чает просто объединение двух деталей, у которых
между рабочими поверхностями не должно проис-
ходить никакого относительного движения, а под-
вижность нужна только в процессе монтажа
(рис. 5.44, поле 5.2). Здесь возникает важный во-
прос: подходит ли один материал в равной степени
для выполнения прежних функций и найдется ли
для новой формы хороший способ изготовления.
Дело в том, что, согласно работе [10], наиболее ча-
стой причиной разделения деталей на части явля-
ется вовсе не требуемое разделение функций, а
допустимые возможности монтажа и необходи-
мость использования различных материалов.
Объединение рабочих поверхностей по шесто-
му виду функциональной интеграции (рис. 5.44,
строка 6) имеет важное значение для упрощения
деталей и их обработки. Следует использовать лю-
бую возможность осуществить этот вид интегра-
ции путем изменения формы деталей.
Несколько отличается от предыдущей (впро-
чем не теряя с ней родства) функциональная инте-
грация седьмого вида (рис. 5.44, строка 7). В этом
случае одна и та же поверхность должна быть при-
годной для использования и в качестве входной, и
в качестве выходной. В первую очередь это отно-
сится к деталям в форме тел вращения. Для них в
любом угловом положении вход и выход должен
быть расположен на одной и той же поверхности, а
элементы поверхности, образующие пары, часто
изменяют свое положение даже в процессе функ-
ционирования.
5.4. Функциональнее интеграция и разделение при переходе в предметную фазу
289
Лист 1
Классифика • дня Структурные контурные примеры Признаки
Интеграция рабочих объемов Вид Исходные детали Интегри рован ные детали Предположения Применимость
№ 1 2 3 4
Объе- дине- ние в рабо- чих объе- мах (парал- лель- ное): полное 1 “ 2 3 /,А Ь / 1.2 1 , ,и Л 0(+)Ь 1.3 Рабочий объем а (+)Ь должен обладать как тре- буемыми свойст- вами детали а , так и b 1.4 Рабочие объемы должны иметь в объединяемых местах совмести- мые свойства. Две рабочие по- верхности
а П Ь П ^4
/1 4 к (-»-) — - - - - - - - —
1 ' 1 2 3 /и и\ 4 а(+)Ь □ Н
раз- ветв- ленное 2 2.1 1 23 4 V-5—Г/(+)\—к 3уФх''4 -КЛ" J’(+) 2.2 1ха(+)ЬхГ^3 Q (+)Ь -МьЬДлЬ- 1,з 2.3 До места развет- вления как 1.3. После этого мес- та рабочие объе- мы могут быть различными 2.4 Как в поле 1.4. Три рабочие по- верхности. Приме- няется в основном для литых и фор- муемых деталей
пере - крест- ное 3 31 —/+) р К* Jjb 3.2 4 1 ''"'i [ а (+) b 3А_^4 п""2 1—/ ЦТ (+) b 3.3 Различные свой - ства деталей а и Ь сохраняются в а (+Х> за счет использова имя различных напра- влений 3.4 Как в поле 1.4. Для конструкций, не лежащих на од- ной прямой, учи- тывать моменты. 4 рабочих поверх- ности
Объеди- нение по рабо чим по- верхм о- стям (после- довате- льное) Гибкая вещест- венная связь 4 4.1 273 ki ° Il b К4 4.2 2/3 к. / > 4.3 Требуемые отно- сительные движе- ния деталей а н Ъ сохраняются в а + Ь. Свойства пленочных н пру- жинных шарни- ров 4.4 Пара рабочих по- верхностей 2/3 исчезает. Замена шарнира функци- о нально-интегри- рованной поли- мерной деталью
I- и г J/3 /4 1 ! Т а+Ь 1 2/3 4
г Г
а b а+Ь
Жест- кая вещест- венная связь 5 5.1 2/3 V ' b / 5.2 1 4 \ °*ь _|/ 5.3 Различные свойст- ва деталей а и b сохраняются в а + b за счет испо- льзования соотве- тствующей фор- мы. Предположе- -ние: отсутствие относительных движений в 2/3 5.4 Пара рабочих по- верхностей 2/3 ис- чезает. Уменьше- ние числа деталей при одинаковых материалах
I II г , Ч3 К
а Ь а + Ь
Рис. 5.44. Основные принципиальные
возможности функциональной интегра-
ции двух рабочих объемов или двух ра-
бочих поверхностей. (Лист 1. Рабочие
объемы):
(+) - объединение в рабочих объемах;
+ — объединение по рабочим поверх-
ностям (см. также рис. 6.27)
Лист 2
Классифи- кация Структурные н контурные примеры Признаки
Интеграция рабочих по- верхностен | Вид | Исходные детали Интегрированные детали Предположения Применимость
№ 1 2 3 4
Объедине- ние выход- ных и вход- ных рабо- чих поверх- ностей (па- раллельное) 6 б-1 2/5 1 л— 4/7 /б h 4/7 1 Q —e 2/5 ^8 6.2 2/5 ч Lt-r-s in .6 k 0УЬ 2/5 1 а / LJ-L р 2/7 6.3 Свойства общей поверхности дол- жны быть подхо- дящими для обеих пар рабочих пове - рхностей 6.4 Поверхности 2 н 4 должны лежать на общей поверхности Важный вид функ- циональной интег- рации при перехо- де от структурных элементов к телам
Объедине- ние выход- ных и вход- ных рабо - чих поверх- ностей (пос- ледователь- ное) 7 7,1 2/3 4/5 11/6 \i ° и b » e У 7.2 2/3*4 3*4/5 k y-v / \ //И г 7.3 Свойства общей поверхности дол- жны быть допус- тимыми для входа н выхода. Возмож- ность непрерыв- ного изменения положения 7.4 Как в поле 6.4. Важный внд функ- циональной интег- рации для переста- новки входной и выходной поверх- ности, например при вращении
Т « W 1 b 2/3^ ^4/5 1 а \ у е ' 2/3*4 b 1 I ..LI о
3*4/5
Рис. 5.44. Продолжение. (Лист 2. Рабо-
чие поверхности)
19 — 2317
290
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Классифи- кация Примеры Признаки
Варианты вида 4 Функциональная интеграция с использованием гибкой ве- щественной связи Свойства Применимость
№ 1 2 3
4.1 Кабельный шарнир 1 11 2/3 0-Ь 1.2 При ограниченном расстоянии произво- льное взаимное по- ложение рабочих по- верхностей 1 и 4 1.3 Совместное удержа - ние литых пластмас - совых деталей перед их монтажом
4.2 Ленточный шарнир 2 2.1 | 1/4 | 1/4 Q*b\p?71 I \^°*b b'OlH—Л'3!.! Лента 1 Лента 2.2 -Относительная под- вижность в той сте- пени, какая требует- ся для монтажа 2.3 Совместное удержа- ние сопряженных элементов до образо- вания из них пары. Обработка давлением для одной детали
4.3 Пленочный шарнир 3 3.1 2/3 к Xх o-b 4 3.2 Колебательное движе- ние в плоскости на угол свыше 90° без противодействия в шарнире. Круговое движение невозможнс 3.3 Замена для обычных (вращательных) шар- ниров при относите - льно больших колеба- тельных движениях и использовании поли- мерных материалов
4.4 Пружинный шарнир 4 4.1 П '717 2/3 A"'"' T-b 4.2 Небольшие колеба- тельные движения. Коленчатая форма шарнира обеспечива- ет переменный мо- мент упругости 4.3 Замена шарниров для небольших колебаний с пружинными свой- ствами
Рис. 5.45. Варианты функциональной интеграции с
гибкой (шарнирной) вещественной связью по
рис. 5.44, строка 4
Клас- сифика- ция Примеры
Нагруз- ка Формы полимерных пружин
№ 1
1.1
Признаки
Свойства
Применимость
3
Относительно
малые переме-
щения, боль-
шие силы, пе-
ременный про-
филь, хорошее
использование
материала, ма-
лый занимае-
мый объем
2.2
Как в поле 1.2
3.2
Относительно
большие пере-
мещения,
малые силы
Замена для
листовых
пружин
2.3
Замена для
жестких
винтовых
пружин
3.3
Замена для
мягких
пружин
сжатия
4.2 4.3 Замена для мягких пру-
Как в поле 3.2 жин растяже- ния. В качест-
ве коленча- тых пру- жин — см. также
рис. 5.45, поле 4.1
Рис. 5.46. Полимерные пружины с особенными упругими свойст-
вами
Некоторые варианты функциональной инте-
грации четвертого вида, главным образом в обла-
сти полимерных конструкций, имеют особенное
значение. „Кабельный шарнир” (функциональная
интеграция вида 4.1) в поле 1.1 на рис. 5.45 пред-
назначен для временного соединения двух дета-
лей с рабочими поверхностями 1 и 4 исключитель-
но с целью формования, хранения и монтажа. При
этом полностью сохраняется подвижность деталей
во всех направлениях для коротких расстояний и
малых углов.
Ленточный шарнир (функциональная интегра-
ция вида 4.2) в поле 2.1 рис. 5.45 также предназна-
чен для соединения нескольких деталей перед
монтажом или формованием. Он гораздо более ог-
раничен в отношении свободных движений, чем
кабельный шарнир и, как можно видеть в правой
части поля 2.1, допустимая подвижность для него
часто порядка нескольких миллиметров, что
можно использовать при монтаже соединений-за-
щелок. -
Большое разнообразие возможностей функцио-
нальной интеграции (вида 4.3 на рис. 5.45) связано
с использованием пленочного шарнира. В нем раз-
решается кажущееся противоречие между отно-
сительными движениями „жестких” концов дета-
ли и их соединением с помощью вещественной
связи. Как будет показано ниже на различных при-
мерах, с помощью пленочного шарнира можно реа-
лизовать полные четырехзвенники из одной дета-
ли, а также выштамповать их в одной детали. Не
следует недооценивать возможностей устранения
необходимости хранения деталей и последующей
их сборки в массовом производстве. Прочность
подобных шарниров гораздо больше, чем это обыч-
но кажется на первый взгляд. Достаточно вспом-
нить, насколько трудно разорвать пленки из неко-
торых полимеров. По мере дальнейшего развития
5.4. Функциональные интеграция и разделение при переходе в предметную фазу
291
технологии пленочные шарниры найдут примене-
ние также в среднем машиностроении. Здесь, прав-
да, необходимы испытания при низких темпера-
турах сухости, так как в этих условиях полимеры
становятся очень хрупкими.
Если требуется сочетание подвижности соеди-
нения на основе гибких вещественных связей с
упругими свойствами, то естественно применять
функциональную интеграцию вида 4.4 (см. поле 4.1
на рис. 5.45) [33]. Здесь также чрезвычайно выгодно
использовать определенные полимерные материа-
лы, тем более что они сохраняют упругие свойства
долгое время. При этом всегда оказывается более
благоприятным, а часто даже необходимым, что-
бы длительные нагрузки были как можно меньши-
ми, а лучше даже вовсе отсутствовали.
Относительная подвижность двух частей дета-
ли может быть достигнута не только с помощью
шарниров, что является поверхностной функ-
цией, но и на основе упругих свойств всей детали,
что окажется объемной функцией. Если при этом
используются обычные силы упругости, то мы име-
ем дело с хорошо знакомыми пружинами. Во мно-
гих случаях функциональная интеграция не обхо-
дится без пружин. Полимерные пружины, однако,
могут иметь только вполне определенные формы
[14, 2], важнейшие из которых приведены на
рис. 5.46. Необычность этих форм объясняется тем,
что в поперечном сечении должны действовать
нагрузки в основном на сжатие и растяжение, и го-
раздо меньшие - на сдвиг. Для примеров в полях
3.1 и 4.1 малые угловые отклонения в пружинном
шарнире увеличиваются с помощью рычага, а вра-
щательное движение переводится в поступатель-
ное с помощью шарниров. Таким образом, пружина
сама по себе уже является высокоинтегрирован-
ной деталью.
5.4.2. Примеры различных видов функциональной
интеграции
На нижеследующих рисунках показаны случаи
применения [33, 34] отдельных видов функцио-
нальной интеграции. В пластмассовой шариковой
ручке на рис. 5.47 применена среди прочего функ-
циональная интеграция вида 4.1. В правой части
рисунка изображено соединение деталей а й b с по-
мощью „кабельного шарнира”, так чтобы эти дета-
ли были подвижны относительно друг друга как
кулиса и собачка. Крючок с рабочей поверхностью
7 является пружиной изгиба, которая действует не
только в плоскости изображения, но и в перпенди-
кулярном направлении. Не из пластмассы сделаны
только стержень/и пружина g. Шариковая авторуч-
ка функционирует по принципу Т-переключателя,
подобно примеру 2 в кат. 4.3.6, а также примерам
1-4 в кат. 4.3.7 с рабочей поверхностью 1 в роли
Т-входа, и стержнем /в роли Q-выхода.
Использование ленточного шарнира Ьб/5 в за-
мочной вставке на рис. 5.48 (пример интеграции ви-
да 4.2) показывает, насколько оказывается удоб-
ным, если подлежащие монтажу детали держать
все время вместе. В этом случае оказываются ис-
ключенными всякие нежелательные замены при
монтаже.
Подробности исполнения пленочных шарниров
показаны на рис. 5.49. На изображении по Коллеру
и Лаушнеру [17] сравниваются правильные и не-
правильные исполнения, приводятся размеры и
наглядно показываются решающие критерии для
Рис. 5.47. Шариковая авторучка из двух пластмассовых деталей
а + Ь и в, стержня f и стальной пружины;. Несмотря на различия
в отношении сортировки и сборки, детали а и Ь соединены ка-
бельным шарниром 4/5. Функциональная интеграция деталей
а и b вида 4.1 и 4.4 по рис. 5.45. Материал: полиацетат; принцип
работы см. кат. 43.7
Рис. 5.48. Замочная вставка из пластмассы с ленточным шарни-
ром Ье/s, функциональная интеграция вида 4.2 по рис. 5.45. Эле-
менты а и Ь объединяются в одну деталь с помощью деформи-
руемой ленты bfi/5 для последующего формирования, хранения
и монтажа
выбора формы пленочного шарнира. Наилучшим
материалом для них считается полипропилен (РР).
Особенно впечатляет применение интеграции
вида 4.3 с использованием пленочного шарнира к
карданному шарниру (рис. 5.50). Сравнение конст-
рукций на рисунке показывает, насколько дорого-
стоящим является изготовление шарнира обычной
обработкой резанием и насколько просто с исполь-
зованием техники литья под давлением, экстру-
зии. Для пластмассовых деталей в процессе экс-
плуатации не возникает проблем смазки и корро-
зии. Вместо трех деталей, которые порознь изго-
тавливались, а затем подлежали сборке, теперь у
нас появляется только одна деталь, которая пред-
ставляет собой целый функциональный элемент и
в качестве такового (в ассортименте) может хра-
ниться на складе и предлагаться покупателю.
Оглядываясь на трудности, которые возникают
во время поисков способа сборки из. деталей рабо-
тоспособного технического устройства, мы привет-
ствуем любую возможность использования уже
имеющейся, испытанной и смонтированной функ-
циональной единицы. Ведь тогда нам не нужно ни
разрабатывать что-либо заново, ни искать способы
правильного соединения отдельных сборочных
единиц друг с другом. В электронике уже давно
292
5. Модели и вспомогательные средства для конструирования в отдельных фазах
Правильно
Неправильно
Рис. 5.50. Карданные шарниры, изготовленные из трех металли-
ческих деталей (слева) и из полимерного материала — полиаце-
тата (справа). Обычные шарниры в полимерном исполнении за*
меняются на пленочные
Рис. 5.51. Хирургический зажим с четырмя пленочными шар-
нирами вместо одного центрального шарнира. На концах ручек
а и b предусмотрен замок из крючков
Рис. 5.49. Формы пленочных шарниров преимущественно из по-
липропилена (РР)
стало привычным применение готовых деталей
(компонентов) и модулей. В заключение отметим,
что и для подобных пластмассовых изделий все же
следует избегать высоких нагрузок и слишком
больших передаваемых моментов.
Другой прекрасный пример использования пле-
ночных шарниров (интеграция вида 4.3) - хирур-
гический зажим, показанный на рис. 5.51. Четыре
п пеночных шарнира, соединенные в один четырех-
шарнирник, обеспечивают вместе с удлиненными
звеньями выполнение функции, аналогичной
функции ножниц. Поскольку крайне трудно, ис-
пользуя технологию литья под давлением, реали-
зовать пленочный шарнир в пересечении звеньев
(как было бы, если бы мы в точности подражали
обычным ножницам), то взамен него работают две
последовательно включенные рычажные системы.
Сверх того, достоинством этих систем является
также дополнительное умножение силы (анало-
гично рис. 4.33). Необходимый дополнительно за-
мок из крючков на концах деталей а и b при исполь-
зовании пластмасс получается почти даром.
Совсем для другого предназначен четырехшар-
нирник на рис. 5.52 (функциональная интеграция
видов 4.3 и 4.4). Используя напряжения в пружин-
ном шарнире 8/9, он обеспечивает откидывание и
захлопывание крышки, закрывающей сосуды с
жидкостью, ящики, футляры любого рода и тому
подобные вместилища [33,32,48]. Пружинный шар-
нир приводит здесь к тому, что крышка b оказыва-
ется слева или справа от положения опрокидыва-
Рис. 5.52. Функционально-интегрированная затычка для бутыл-
ки с бистабильным положением опрокидывания крышки
Ь, состоящая из одной пластмассовой детали — пружинного че-
тырехзвенника (защелкивающегося шарнира). Пленочные шар-
ниры 2/3, 4/5 и 6/7 получены функциональной интеграцией
вида 4.3, а шарнир 8/9 — вида 4.4 по рис. 5.45
ния. В первом случае, например, жидкость можно
вылить, а во втором - поверхность 10 выступа кры-
шки прилегает к поверхности 11 отверстия и слу-
жит некоторым уплотнением этого отверстия, так
что при переворачивании бутылки из нее практи-
чески ничего не выливается. Гораздо лучшее
уплотнение обеспечит в данном случае выступ
на крышке, если с помощью дополнительного дав-
ления заткнуть им отверстие 13, как пробкой в обыч-
ной бутылке. Совмещение столь большого числа
различных функций в одной-единственной пласт-
массовой детали представляет собой пример за-
5.4. Функциональные интеграция и разделение при переходе в предметную фазу
293
Рис. 5.53. Функционально-интегрированная бельевая прищепка
(а) из одной и пряжка ремня (б) из двух пластмассовых деталей.
В позициях 6/7,10/11 и е на прищепке зажимы вида 4.4 по
рис. 5.45, а в позиции 2/3 — встроенный защелкивающийся шар-
нир. У пряжки в позиции 8/9 пружинный шарнир
мечательного успеха в использовании функцио-
нальной интеграции.-
На рис. 5.53, а изображена бельевая прищепка,
а на рис. 5.53, б - пряжка ремня, обе пластмассовые.
Шарниры 6/7,10/11 и е - примеры функциональной
интеграции вида 4.4 (подвижность у шарнира не-
большая, но одновременно он является пружиной
и создает нужное силовое воздействие). Посколь-
ку прищепка не может быть отлита сразу в собран-
ном состоянии, в ней предусмотрен защелкива-
ющийся шарнир 2/3, приводимый в рабочее состоя-
ние впоследствии. Шарнир 8/9 в пряжке оказывает-
ся под нагрузкой только при воздействии на него,
и поэтому не теряет своей силы с течением вре-
мени.
5.43. Систематический порядок действий
при функциональной интеграции
Возможности упростить имеющуюся конструк-
цию путем функциональной интеграции должны
быть выяснены с помощью определенных вопро-
сов, а порядок действий описан с помощью соот-
ветствующего структурного представления. Вопро-
сы по выяснению возможностей функциональной
интеграции следующие.
Предусмотрено: обработка резанием
Исчерпаны ли возможности функциональной
интеграции первого вида?
Есть ли возможность интеграции второго и
третьего вида без появления новых значительных
недостатков?
Можно ли удачным объединением деталей и
соответствующим выбором материала заменить
некоторые сочленения (шарниры) с помощью инте-
грации пятого вида и упростить детали с помощью
интеграции шестого и седьмого вида?
Предусмотрено: обработка давлением и первона-
чальное формообразование (литье)
Учтены ли уже полностью возможности функ-
циональной интеграции второго и третьего вида с
целью упрощения дополнительной обработки?
Предполагается: переход на детали из полимер-
ных материалов, в особенности получаемые лить-
ем под давлением (экструзией)
Тщательно ли и во всей ли полноте продуманы
возможности функциональной интеграции перво-
го, второго и третьего видов, в особенности второго
и третьего?
Выяснены ли все последствия замены обычных
шарниров на гибкую вещественную связь (вид 4.1 -
4.4)? Здесь содержатся убедительнейшие нововве-
дения (не следует, однако, забывать об ограниче-
ниях, свойственных пленочному шарниру!). '
Учтены ли возможности комбинации пленоч-
ного и пружинного шарнира (интеграция вида 4.3
и 4.4)?
Может ли быть применен кабельный или лен-
точный шарнир (интеграция вида 4.1 и 4.2) в целях
сортировки, хранения и монтажа, а также для
обеспечения обработки давлением простой де-
тали?
Нельзя ли передать упругие свойства звену со-
ответствующей формы (интеграция вида 5)?
Интеграция путем редукции деталей в геомет-
рической структуре. Необходимые шаги можно ус-
мотреть из рис. 5.54 на примере бельевой прищеп-
ки и из рис. 5.55 на примере замка.
Бельевая прищепка: исходя из обычного ис-
Рис. 534. Функциональная интеграция на основе структурного анализа (6) бельевой прищепки (а), последующая интеграция структур-
ных элементов (в, г) и разработка контура по структуре (д)
294
5. Модели и вспомогательные средства для конструирования в отдельных фазах
9)
Рис. 5.55. Функциональная интеграция на основе структурного анализа (б) замка (а) из рис. 1.14, № 5, последующая интеграция структур-
ных элементов (в, г) и разработка контура по структуре (д)
Рис. 536. Функциональная
интеграция замка из рис.
1.14, № 6. На том же рисунке
можно усмотреть его бли-
зость к замку № 5. Разработ-
ка интегрированного замка
возможна на основе соответ-
ствующего структурного ана-
лиза первоначального замка
аналогично рис. 535
полнения, рис. 534, а, разработана геометрическая
структурная схема (6), содержащая только функ-
ционально существенные рабочие объемы и рабо-
чие поверхности. Варьируя расположение деталей,
мы изменяем структуру (см. кат. 4.6.1), например, в
соответствии со следующим принципом: взять
детали в точках пересечения, совершить инверсию
в парах 2/3, 6/1,10/11, добиться более благоприят-
ного их положения, например пружины е на схеме
Ь. Затем (структурная схема г) придать пружине
сжатия более выгодную форму по рис. 5.46, осу-
ществить функциональную интеграцию четвертого
вида на поверхностях 6/7, 10/11, конкретизируя
вид интеграции (4.4) превратить структурную схе-
му в контурное изображение. Результат показан на
рис. 5.54, д (или на рис. 5.53, а).
Замок: исходя из обычного исполнения,
рис. 5.55, а, разработана сначала геометрическая
структурная схема (б). С помощью функциональ-
ной интеграции пятого вида объединяем детали е
и Ь. Шарнир 10/11 становится лишним (в). С целью
устранения ненужных разветвлений и пересече-
ний в конечном варианте, расположить поверх-
ность 4 по-другому. Вслед за этим разработать кон-
турное изображение (чертеж). Мы получаем в ре-
зультате замок, показанный на рис. 5.55, д (или
5.53, б).
Аналогичным образом можно было бы прове-
сти структурный анализ потефонного замка 6 из
рис. 1.14, затем интеграцию структуры и получить
контурное изображение замка на рис. 5.56, состоя-
щего всего лишь из двух деталей. Примечательно
в этом замке использование двух пленочных шар-
ниров при а/b и b/с, устроенных в соответствии с
возможностями полимерных материалов, а также
снятие с них нагрузки при закрытой крышке бла-
годаря выступам сь входящим в углубления аР
5.5. Список литературы
1. Aschoff. H.-J.: Ober die Bedeutung der Systemdynamik
fiir die Konstruktion signalverarbeitender Gerate. Diss.
TU Braunschweig 1974.
2. Beitz, W.: Verwenden und Gestalten von Kunststoffteilen
- Leitlinie im Rahrnen des methodischen Konstruierens.
Konstruktion 29 (1977) 381-387.
3. Beitz, W.; Meyer, H.: Zwischenbericht zum Forschungs-
vorhaben: Recyclingfreundliche Gestaltung von Ge-
brauchsgiitern. Berlin: Umweltbundesamt 1980.
4. Birkhofer. H.: Analyse und Synthese der Funktionen
technischer Produkte. Diss. TU Braunschweig 1980.
5. Birkhofer. H.; Franke. H.-J.: Funktion und Gestalt. Fall-
beispiel: Konstruktion ei’nes Druckknopfansetzautoma-
ten. Konstruktion Elemente Methoden (1977) H. 10.
6. Finkelstein, L.: A systematic scheme of dynamic physical
system description for instrument models. International
Measurement Confederation 1977, 97-133.
7. Franke. H.-J.: Methodische Schritte beim Klaren kon-
struktiver Aufgabenstellungen. Konstruktion 27 (1975)
395-402.
8. Franke. H.-J.: Untersuchungen zur Algorithmisierbarkeit
des Konstruktionsprozesses. Diss. TU Braunschweig
1976.
9. Gerber, H.: Ein Konstruktionsverfahren fur Gerate mit
logischer Funktionsweise. Konstruktion 25 (1973) 13-
17.
10. GieBner, F. : GesetzmaBigkeiten und Konstruktionskata-
loge elastischer Verbindungen. Diss. TU Braunschweig
1975. .
11. GieBner. F.: Methodischer Aufbau eines Losungsfeldes
fiir nichtmechanische Drucker. VDI-Berichte Nr. 347.
Dusseldorf: VDI-Verlag 1979.
12. Hansen, F.: Konstruktionswissenschaft - Grundlagen
und Methoden. Miinchen, Wien: Hanser 1974.
13. Hubka. V.: Theorie der Maschinensysteme. Berlin, Hei-
delberg. New York: Springer 1973.
14. Kaufer, H.; Jitschin. M.: Katalog schnappbarer Form-
gchluBverbind ungen an Kunststoffteilen und beispielhafte
Konstruktion linienformiger KraftschluBverbindungen.
Konstruktion 29 (1977) 387-397.
15. Koller. R.: Konstruktionsmethode fur den Maschinen-,
Gerate- und Apparatebau. Berlin. Heidelberg. New York:
Springer 1976 (Ber. Neudruck 1979).
16. Koller. R.: Methodisches Konstruieren: Integralbau-
weise. Konstruieren und GieBen (1978) H. 1. 12-26.
17. Koller. R.; Lauschner. H.-J.: Methodisches Konstruieren
mit Kunststoffen. Konstruktion 28 (1976) 219-226. 259-
266.
5.5. Список литературы
295
18. Krumhaucr. Р.: Rechnerunterstiitzung fiir die Konzept-
phase der Konstruktion. Diss. TU Berlin 1974.
19. Lauschner, H.-J.: Methodisches Konstruieren mit Kunst-
stoffen. Diss. TU Aachen 1977.
20. Macfarlane. A.GJ.: Analyse technischer Systeme. Mann-
heim, Bibliographisches Institut 1967.
21. Pahl. G.: Entwurfsingenieur und Konstruktionslehre
unterstutzen die modeme Konstruktionsarbeit. Konstruk-
tion 19 (1967) 337-344.
22. Pahl. G.: Wege zur Losungsfindung. industrielie Organi-
sation 39(1970) 156-157.
23. Pahl. G.: Klaren der Aufgabenstellung und Erarbeitung
der Anforderungsliste. Konstruktion 24(1972) 195-199.
24. Pahl. G.; Beitz. W.: Konstruktionslehre. Berlin. Heidel-
berg. New York: Springer 1977.
25. Richter. A.; Aschoff. H.-J.: Problemstellungen bei der
funktionsorientierten Konstruktionssynthese signalverar-
beitender Gerate aus der Sicht der Systemdynamik. Fein-
werktechnik 75 (1971) 374-379.
26. Rodenacker. W.G.: Festlegen der Funktionsstruktur von
Maschinen. Apparaten und GerSten. Konstruktion 24
(1972) 335-340.
27. Rodenacker. W.G.: Methodisches Konstruieren. Kon-
struktionsbflcher Bd. 27. Berlin, Heidelberg. New York:
Springer 1970. 2. Auflage 1976.
28. Rodenacker, W.G.; Baumgarte. R.: Die Vereinfachung
der Gerate beginnt mit der Funktionsstruktur. Konstruk-
tion 28 (1976) 479-482.
29. Roth. K.: Kennzeichnende Merkmale feinwerktech-
nischer Konstruktionen. VDI-Z 105 (1963) 1017-1025;
1125-1129.
30. Roth. K.: Systematik der Maschinen und ihrer mecha-
nischen elementaren Funktionen. Feinwerktechnik 74
(1970) 453-460.
31. Roth. K.: Methodisches Ermittdn von Funktionsstruktur
und Gestalt. VDI-Berichte Nr. 219. Diisseldorf: VDI-Ver-
lag 1974.
32. Roth. K.: VerschluBglieder und Verschlusse aus Kunst-
stoftteilen mit Vielfachfunktionen. Konstruktion 28
(1976) 249-258.
33. Roth. K.: KunststofTteile mit Vielfachfunktionen. Kunst-
stoffe 66 (1976) 265-271.
34. Roth. K.: Anregungen zum Einsatz unkonventioneller
Gestaltungsmoglichkeiten bei Kunststoftkonstruktionen.
In Reihe: Ingenieurwissen. Konstruktion, Fertigung und
Anwendung feinwerktechnischer KunststofTteile. Diissel-
dorf: VDI-Verlag 1976. S. 199-217.
35. Roth. K.; Gerber, H.: Logische Funktionsplane mecha-
nischer Nachrichtengerate und ihre Bedeutung fiir die
Konstruktion. Feinwerktechnik 73 (1969) 369-376.
36. Roth, K.; Simonek, R.: Mechanische Verstarker. Kon-
struktion 23 (1971) 90-98.
37. Roth. K.; Franke. H.-J.; Simonek, R.: Algorithmisches
Auswahlverfahren zur Konstruktion mit Katalogen. Fein-
werktechnik 75 (1971) 337-345.
38, Roth, K.; Franke, H.-J.; Simonek, R.: Die Allgemeine
Funktionsstruktur, ein wesentiiches Hilfsmittel zum me-
thodischen Konstruieren. Konstruktion 24 (1972) 277-
282.
39. Roth, K.; Birkhofer. H.; Ersoy, M.: Methodisches Kon-
struieren neuer Sicherheitsgurtschldsser. VDI-Z 117
(1975)613-618.
40. Roth, K.; Birkhofer, H.; Ersoy, M. ; u.a.: Beschreibung
und Anwendung des Algorithmischen Auswahlverfahren;
zur Konstruktion mit Katalogen (AAK). Konstruktion
27 (1975) 213-222.
41. Seely, S.: Dynamic systems analysis. London : Chapman
Hall 1964.
42. Simonek, R.: Die konstruktive Funktion und ihre Formu-
lierung fiir das rechnerunterstiitzte Konstruieren. Fein-
werktechnik 75 (1971) 145-149.
43. Simonek, R.: Ein Beitrag zur Ermittlung der Speziellen
Funktions-Struktur in der Konstruktion. Diss. TU Braun-
schweig 1973.
44. Simonek. R.: Em Verfahren zur Ermittlung der Speziellen
Funktionsstruktur mit Hilfe der EDV. feinwerktechnik
& micronic 78 (1974) 10-17.
45. Steinwachs, H.O: Strategien fiir den Einsatz von Kon-
struktionsmethoden. VDI-Z 119(1977) 1093-1097.
46. VDI-Richtlinie 2222 Blatt I: Konzipieren technischer
Produkte. Diisseldorf: VDI-Verlag 1973.
47. VDI-Richtlinie 2225: Technisch-wirtschaftliches Kon-
struieren. Diisseldorf: VDI-Verlag 1969.
48. Wiesinger, W.; Wolf, Th.: Schnappscharniere aus Kunst-
stoff, neue Moglichkeiten fiir Thermoplaste. Technische
Rundschau (1970) Nr. 12.
296
6. НОВЫЕ МОДЕЛИ ДЛЯ МЕТОДИЧЕСКОГО КОНСТРУИРОВАНИЯ И КОНСТРУИРОВАНИЯ
С ПОМОЩЬЮ ЭВМ
Необходимые для обычного методического
конструирования модели изделия 1-5 и 7 на
рис. 5.2 уже были подробно рассмотрены. Модели
8-10 особенно удобно использовать при работе с
ЭВМ. Первая из них (модель 8) векторная функци-
ональная структура была упомянута при описа-
нии рис. 5.24 и служит для перехода от абстракт-
ной к геометрической функциональной структуре.
Модель 6 - логическая функциональная структу-
ра _ уже давно известна как логическая схема уст-
ройств, и при работе с ней с успехом применяются
ЭВМ. На рис. 4.20 - 4.22 и в п. 5.3.3 приведены при-
меры использования этой модели для некоторых
технических задач. Здесь мы подробно опишем мо-
дели 8-10, специально созданные для работы
конструктора с активным дисплеем - устройством,
позволяющим с помощью светового карандаша
вмешиваться в процесс работы программы.
Все эти модели имеют общее свойство: при
комбинировании элементов может применяться
строгий алгоритм, и весь'процесс конструирования
проводится по определенной стратегии. Упомяну-
тые модели имеют различные области и условия
применения. Модель 6 предназначена для логиче-
ских функций, в особенности для комбинирования
и накопления бинарных величин. Эта модель по-
зволяет описывать все, что может быть представ-
лено с помощью двоичного кодирования и логиче-
ских операций, в том числе обработку сообщений,
логику соединений твердых тел [40] и т. д. Модели
9 и 10 - геометрические функциональная и цепная
структуры - разработаны исключительно для меха-
нических энергетических функций, в особенности
для твердых тел. При этом модель 9 предназначе-
на в основном для статических задач, а модель 10-
для кинематических. Рассмотренная выше модель
7, а также модель 8 открывают возможность пере-
хода к немеханическим физическим системам,
что уже было отмечено в гл. 5.
6.1. Сравнительный анализ элементов
функциональных структур
Для прохождения функциональной фазы рабо-
чего плана можно выбирать различные модели из-
делия из рис. 5.24. Различия между моделями луч-
ше всего видны по их элементам, функциональ-
ным величинам и операциям. Для правильного
выбора момента применения важно также учиты-
вать степень абстракции.
На рис. 6.1 приведены элементы описанных
функциональных структур и их характеристиче-
ские свойства.
Об элементах абстрактной функциональной
структуры в строке 1 уже было подробно рассказа-
но. Можно только еще раз напомнить, что для сое-
динения двух элементов необходимо совпадение
абстрактных величин на выходе одного и входе
другого при заданном направлении потока.
В случае логических функций (строка 2) доста- •
точным условием возможности соединения любых
двух элементов является согласованность направ-
лений потоков, поскольку на всех входах и выхо-
дах - бинарные величины 0 и 1 (или ДА и НЕТ,
и т. п.). К тому же, нет нужды вводить все возмож-
ные логические комбинаторные элементы, такие
как эквивалентность, импликация и т. д. - доста-
точно трех элементов, приведенных в кат. 4.3.2 и
4.3.4 (отрицание, конъюнкция и дизъюнкция). Что-
бы использовать известные механизмы в качестве
логических элементов, необходимо прежде всего
закодировать их физические состояния. Так, на-
пример, „левое положение” или „неподвижность
вала”, или „отсутствие силового воздействия”
можно обозначить через 0, а „правое положение”,
„движение вала”, „наличие силового воздейст-
вия” - через 1.
В то время как величины, связанные с элемен-
тами абстрактной и логической функциональных
структур носят совершенно различный характер,
для элементов трех следующих функциональных
структур они, в сущности, одинаковы. Речь идет иб
интенсивностных I- или о количественных Q- вели-
чинах различных физических систем (см. рис. 5.26),
преимущественно механических (рис. 5.27). В от-
личие от I - Q-элементов (специальная функция,
строка 3 на рис. 6.1), векторный элемент (строка 4)
характеризуется более точным и конкретным опи-
санием правил соединения, а для структурно-функ-
ционального элемента (строка 5) указаны также
свойства, относящиеся к его рабочему объему.
Для I - Q-элементов в строке 3 требуется лишь
информация типа „на входе сила F, на выходе - уг-
ловое перемещение ф” аналогично сигнальной це-
пи по Куленкампу [31]. То, что происходит в про-
цессе передачи мощности или накопления энер-
гии со второй величиной, например скоростью или
моментом силы, здесь неважно. Как и для абст-
рактных функциональных элементов, соединение
элементов допустимо, если согласованы выходная
и входная величины и направления потоков. Раз-
нообразные возможности соединения I-Q-элемен-
тов позволяют вначале с небольшими затратами
создать многочисленные диаграммы потоков и
варианты структуры, после чего можно решать
вопросы совместимости.
Векторный функциональный элемент (стро-
ка 4) всегда задает направления пары интенсив-
ностных величин, необходимых для описания по-
тока мощности. Если одна из величин не задана,
то она считается заведомо равной нулю. Специфи-
ка этих функциональных структур состоит в том,
что соединение двух элементов может произво-
диться только в том случае, если абсолютные зна-
чения механических интенсивностных одноточеч-
ных величин (силы и момента) этих элементов рав-
ны, а направления противоположны, тогда как
скорости одинаковы по величине и направлению.
Эти условия равновесия, относящиеся прежде все-
го к местам соединения, приводят к тому, что то-
пология структурной схемы аналогична топологии
будущего изделия. Точно так же и для двухточеч-
ных механических интенсивных величин (скорость
и угловая скорость) должно быть установлено зна-
6.2. Векторная функциональная структура
297
Фаза кон- струиро - вания Назбание Условное обозна- чение типичного элемента (для операции) Функциональ - ные величины (операнды) Условия соединимости элементов Необходимые понятия Модель на рис. 5.2 Обозначе- ние этапа на рис. 5.24
№ 1 2 3 4 5 6 7
Функцио- нальная фаза 1 1.1 АФЭ абстракт- ный функцио- нальный элемент 1.2 1.3 Абстрактные величины: ве- щество, энер - гия, информа - ция(сообщения) 1.4 Одноименные абстрактные величины 1.5 Направление потока, различные виды элементов 1.6 4 1.7 S
2 2.1 ЛФЭ логичес- кий функцио- нальный элемент 2.2 Х2_гх х,Хн 2.3 Бинарные логические величины 2.4 Бинарные вели - чины, направле - ние потока 2.5 Бинарное кодирова- ние входных и выход- ных величин, выбор необходимых логи- ческих элементов 2.6 6 —
3 Физические функции 1 3.1 1 Q 3 фун- кциональ- ный/-G-эле- мент (спе- циальная функция) 3.2 3.3 Интенсивност - ные и количест- венные величи- ны системоди- намики 3.4 Одноименные величины, направление потока 3.5 Разделение на функ- циональные и конст - руктивные величины, элементы матрицы функциональных величин 3.6 7 3.7 g
М —*
4 4.1 ВФЭ некто - рный функ- циональный элемент 4.2 4.3 Интенсивност - ные и количе - ственные вели - чины механики (хотя бы на одном входе или выходе) 4.4 Условия равно- весия и согласо - ванности скоро - стей в местах соприкоснове - ния механичес - ких элементов 4.5 Направления величин, точки воздействия 4.6 8 4.7 и
М1У
СМ1 frj
Плоскость перехода 5 5-1 СФЭ струк - турно-фун- кциональ - ’* ный эле- мент 5.2 f2 4- г 5.3 Интенсивност - ные и количе- ственные вели - чины механики 5.4. Условия равно - весия и согласо- ванности скоро- стей в местах соприкоснове - ния элементов и внутри эле - ментов 5-5 Свойства элементов, связанные с упруго - стью, массой и погло- щением энергии, вза- имное расположение рабочих поверхно - стей, структуриро- ванные элементы 5.6 9 ".7 W
Предмет- ная фаза 6 6.1 ГЛЭ геометри- чески линей- ный структур- ный элемент 6.2 о 6.3 Нет непосред- ственной связи с определенны- ми функцио- нальными ве- личинами 6.4. Совместимые пары рабочих поверхностей, отсутствие вза- имопроникно - вения раоочих объемов 6.5 Положение рабочих поверхностей, их связь через рабочий объем 6.6 11 6.7 b.rn.y
7 7.1 ГКЭ геометри - чески матери- альный контур- ный элемент 7.2 7.5 Контур детали 7.6 13 —
Рис. 6.1. Функции различных моделей изделия, их величины и способы соединения элементов
чение их направления и положения в местах со-
единения. Как для векторных, так и для геометри-
ческих функциональных элементов верно, что оди-
наковое направление интенсивностных величин,
описывающих поток энергии, означает прием, а
противоположное - отдачу энергии.
В поле 5.2 на рис. 6.1 изображен элемент геомет-
рической функциональной структуры, или структурно-
функциональный элемент. Рассмотренные выше
элементы полей 1.2-4.2 символизируют реализа-
цию функционального положения в форме идеаль-
ной функции. При этом что-либо говорится только
о входе и выходе, но не о внутренности элемента.
В то же время структурно-функциональный эле-
мент с его рабочими поверхностями, рабочим
объемом, линейным размером г и, в ряде случаев,
его упругостью, массой и энергопоглощением
(с, т, d) задает существенные свойства рабочего
объема. Здесь вход и выход уже связаны с физиче-
скими эффектами и их носителями. Элемент на-
ходится в равновесии, распределение скоростей со-
ответствует свойствам рабочего объема (жесткий,
упругий, пластичный), рабочие поверхности и
функциональные величины имеют правильное по-
ложение и направление. Условия соединения эле-
ментов этой функциональной структуры учитыва-
ют существенные свойства, которые впоследствии
потребуются для реализации функций с помощью
деталей и узлов.
Ниже будут описаны обе последние разновид-
ности функциональных элементов и составля-
емые из них функциональные структуры.
Ради полноты рис. 6.1 содержит также геомет-
рически линейный структурный элемент и геомет-
рически материальный контурный элемент, кото-
рые хорошо нам знакомы из повседневной конст-
рукторской практики.
6.2. Векторная функциональная структура
Рассмотрение механических функциональных
систем по аналогии с немеханическими, например
электрическими системами [33,34,39,1] и т. п., как
правило, не позволяет учесть трехмерность меха-
нических систем, и заставляет работать с элемен-
тами, которые необходимо представлять себе со-
средоточенными в одной точке. Из-за этого многие
типичные свойства механических систем теряются
298
6. Новые модели для методического конструирования с помощью ЭВМ
при составлении функциональной структуры, от-
сутствуют при последующем синтезе и не могут
быть использованы при переходе от функциональ-
ной к предметной фазе конструирования. В то же
время с помощью векторных функций [41] можно
представлять элементы в виде многополюсников,
что дает возможность отчасти учитывать также
пространственные параметры функциональных
величин.
Векторная функциональная структура состоит
из элементов, аналогичных многополюсникам в
электрических системах, и воспроизводит на вхо-
дах и выходах этих элементов „входо-выходную
характеристику” требуемой идеальной функции.
Этим входам и выходам, как правило, соответст-
вуют интенсивностные одноточечные величины,
определяющие мощность механических систем,
или хотя бы некоторые из этих величин.
В отличие от обычного представления механи-
ческих величин с помощью системы электриче-
ских многополюсников, входные и выходные вели-
чины представляются в виде векторов, соединен-
ных с векторами сопряженных элементов в соот-
ветствии с их положением и направлением. След-
ствием этого является то, что относительное поло-
жение блоков, как уже было упомянуто, отражает
топологию будущего технического изделия. В со-
ответствии с этим функциональная структура
должна отражать, наряду с поведением системы в
целом, также и важнейшие условия пространст-
венного расположения механических элементов;
тем самым она выходит далеко за рамки обычного
многополюсного представления.
Еще одна важная особенность векторной функ-
циональной структуры состоит в том, что всегда
учитываются также те силы реакции, которые яв-
ляются следствием одних только условий равно-
весия, а не свойств потока энергии (они часто
являются также следствием объемной деформации).
Непосредственно из структурной схемы видны так-
же соотношения между силами и моментами, ско-
ростями и угловыми скоростями.
6.2.1. Свойства векторных функциональных
элементов
1. Векторные функциональные элементы явля-
ются „черными ящиками” с качественно заданны-
ми размерами, входы и выходы которых для меха-
нических величин определяются положением и
точками приложения действующих на них одно-
точечных величин (например, сила и момент,
рис. 6.2).
2. Двухточечные величины связываются с тем
же входом или выходом, т. е. с точкой приложения
соответствующей одноточечной величины, и, воз-
можно, также с базовой точкой (например, основа-
нием) или с другим входом или выходом черного
ящика.
3. Векторы интенсивностных величин должны
быть изображены при элементах в правильных
положении и направлении. В особенности должно
быть ясно, являются ли линии их действия совпа-
дающими, пересекающимися или параллель-
ными.
4. Силы и моменты, действующие на элемент,
обязаны находиться в равновесии; это относится и к
тем силам и моментам, которые действуют между
двумя элементами при их соединении, если они,
Соглашение
1.1
Они всегда
находятся в
равновесии
2.1
Абсолютные
скорости отно-
сятся к стойке,
относительные
скорости — к
другим точкам
ЗА
Вход или вы -
ход является
точкой прило-
жения силы
или момента
4.1
На входе для
мощности: оди-
наковые напра-
вления, на вы-
ходе для мощ-
ности: различ-
ные направле-
ния интенсив-
ностных вели-
чин
Пример
5.1 5.2
Обозначения
входов снабже-
5 ны нечетными
индексами, обо-
значения выхо-
дов — четными
См. поле 4.2
— в.-наведенные силы инерции; О-точка приложения сил или моментов.
Рис. 6Л. Условные соглашения об элементарных векторных
функциях (векторных функциональных элементах)
становясь внутренними силами или моментами,
исчезают.
5. Если в месте соединения силы и моменты
находятся в равновесии, а поступательные скоро-
сти и, возможно, тангенциальные и угловые скоро-
сти равны, то рассматриваемые смежные элементы
могут быть объединены по рабочим поверхностям,
т. е. соединены в новый черный ящик без промежу-
точных поверхностей (можно считать, что с помо-
щью вещественной связи). Примеры см. на рис. 6.4,
строки 2,4, 6,8, верхние изображения.
6. Если у двух соединяемых элементов скоро-
сти не согласованы в смысле правила 5, а силы и
моменты находятся в равновесии, то эти элемен-
ты, тем не менее, можно соединить, если их по-
верхности соприкосновения допускают взаимное
скольжение (такие поверхности скольжения
изображаются в черном ящике двумя параллель-
ными штрихпунктирными линиями). Мгновенный
наклон этих поверхностей скольжения (плоскость
скольжения) получают путем переноса в одну
точку векторов мгновенных скоростей в месте
соединения и проведения прямой через их концы.
Относительная скорость элемента определяется
через разложение абсолютной скорости в соответ-
ствии с рис. 6.7, поле 1.2.
7. Если тангенциальные скорости двух элемен-
тов имеют одинаковое направление и абсолютное
значение, а угловые скорости различны, то между
этими элементами можно реализовать пару каче-
ния. Направление тангенциальной скорости
должно совпадать с направлением касательной в
точке качения (например, рис. 6.5, строка 6).
8. Если на входах и выходах двух элементов
6.2. Векторная функциональная структура 299
\ Функции ме-
Хханическнх
\интенсив-
МехаХ ност-
ничес- \ ньи
кие энерХ?с^™'
готические4
функции
№
Переместить ве-1 Переместить
личины в напрачлнчины в нал
в пении дейст-
вия (поступате-
льное движе-
ние)
> ве
_______напра-
влении, перпен-
дикулярном к
оси (вращатель
ное движение)
Переместить ве-
личины перпен-
дикулярно к на
правлению дей-
ствия (поступа-
тельное движе-
ние)__________
4
Преобразовать
вращательные
величины в по-
ступательные
(нормальные
силы)
6
гю энергию • ►сти с) * й .. h- 1 и 6^ vi — 3 1.3 M, У У Ц 1.4 Ml У F 1 ft u M, Й у—1 X wi Tf3
1ть потенциально >фициент упругс им* г 2 2.1 L — J 2.3 2.4 Mi > 1 Ft 2.6 Как в поле 2.4
S о g раз- Я ряжать 3 и F- — J *2 3.3 M, У < U>2 14 4 16 Как в поле 3.4
Переместить поступательные величины пер- пендик.к нап- равл. действия (тангенциаль- Преобразовать вращательные величины в поступательные
Тангенциаль- ная сила: вход Тангенциаль- ная сила: выход
ные силы)
8 12 13
1Л 1.12 1.13
М iF2.2 Mi ta
У г У У
h ’ У Si •йу В,
ft wi Ц
2.8 2.12 2.13
М TF2.2 м £
} Как в у
F, „ Е, поле 2.8 Fh В,
ц u 4.2
18 Ли 112 3.13
м, F2.2»l MJ F< 1ft
У Как в /
F, и- поле 3.8 E. E.
iFu
Is 8 2 заря- 31 жать 4 43 F. 4.3 5 У 4.4 Mi t 4 4.6 M t 4 4.8 M *v21 4.12 M, ♦V2.2 4.13 M f 4
rf < У- y 7 F1 > X
< i 1 3 s L *1 V2 w. w2 t\ *777. W,F 777» 777, Wl Wf* ! *12 777.
3 f удер- । живать заря- жен- ным 5 5.1 5l3 5.4 Lv‘ 5.6 f* — — —
У у
vi 4 0) fv3 777, Uh 777.
L- ! ряжать i j 6 6.1 л 61 M2 6.4 Mi f4t 6.6 4t 4 6.8 Ml ^.2 14 M.2 F2.1 777. 6.12 633 wlf 1 F‘tt 4
> У > c у X F2.l 777.
4 4 Wl w2 777. 4 777, w, w. 4 7777. Fu
c 2 s s прово- i лить 2 9 8.1 s л 9.3 Ml M2 9.4 M, F4f 4 — 9Л Mi Fi? — —
У У к > Г F2.1
4 U>1 ш2 F3 777. F !tv v3
[ 7 npeob- 3 разо- вывать форму 10 — — — 10.6 M, 6lf 4 — 10.12 ^.2^X22 10.13
У у 4 J2J
^F f 7777. Wl 4 7777. 1.2 777»
Величины, тангенциальные к их ’’поверхности приложения"; строки 1—3 — свойства упругости,
строки 4—6 — свойства инерции (силы реакции)
Комбинирован- ные энергети- ческие функц. Тепловая Механическая— электрическая Электричес- кая—механи- ческая Опорные функции Нормальная сила Нормальная— тангенциаль- ная сила^ Момент
Преобразо- вание вида (превраще- ние) энер- гии № 11 -* *1 1- FjL-tp V1 Г-О > Создавать опору для сил и мо- ментов № 0 Ъ М> (<
Рис. 6 J. Элементарные векторные функции, непосредственно реализуемые с помощью известных физических эффектов — извлечение
(см. также рис. 6.22-1)
300
6. Новые модели для методического конструирования с помощью ЭВМ
действуют одинаковые силы или моменты и оди-
наковые скорости, то эти элементы можно соеди-
нить в один объединением их рабочих объемов.
При этом одноточечные величины на каждом
входе или выходе суммируются (например, рис. 6.4,
строки 1,3,5, 7).
6.2.2. Соединение векторных функциональных
элементов
На рис. 6.3 изображен набор векторных функци-
ональных элементов, исходя из которых можно
вывести все остальные. Они обладают всеми свой-
ствами 1-4. Другие элементы можно вывести из
рис. 6.22-1 (каталога структурно-функциональных
элементов), поля которого с теми же номерами,
что и на рис. 6.3, содержат элементы с теми же
входными и выходными величинами. В строке 11
на рис. 6.3 приведены элементы для комбиниро-
ванных энергетических, функций, в строке 0 -
элементы для функций создания опоры (опорных
функций). С учетом соглашений 1-4 можно, разу-
меется, составить еще много вариантов векторных
функций, не приведенных здесь. Элементы в
строках 0-10 рис. 6.3 имеют, однако, то преимуще-
ство, что могут в дальнейшем реализовываться
одной деталью так, что эффект и его носитель
обеспечены. Кроме того, соединяя эти элементы
между собой, можно описывать сложные механи-
ческие функции. Все Механические функции
технических устройств могут быть сведены к опи-
санным векторным функциям. Соответствие абст-
рактным функциям дается классификацией в
заголовочном столбце, а соответствие 2-Q-функци-
ям - в заголовочной строке; см. также описание
рис. 6.22-1.
1. Соединение сил и моментов
Соединение векторных функциональных эле-
ментов для случаев, в которых может иметь место
объединение по рабочим поверхностям или в рабо-
чих объемах (см. свойства 5 и 8), показано на рис. 6.4
на девяти типичных примерах. При соответству-
ющем положении поверхностей в парах элементы
могут быть скомпонованы, но не объединены, что
обозначено на эскизах двумя штрихпунктирными
линиями. С помощью примеров строк 5 и 6 можно
создавать не только цепные, но и разветвленные
структуры. Определяющими здесь являются
одноточечные величины. Векторы сил (и момен-
тов) должны пересекаться, а их векторная сумма
должна быть равна нулю (равновесие). Важен
также случай 5 (строка 9, внизу), включающий в
рассмотрение тангенциальные силы (например,
трения). Как уже было упомянуто, силы (кроме
полевых) могут передаваться только нормально к
поверхностям пары или тангенциально- к ним
(силы трения).
2. Соединение скоростей
Возможность соединения двух элементов зави-
сит не только от сил и моментов, но также и от
скоростей, что отмечено в свойствах 5-8. Различ-
ные типичные случаи систематизированы на рис. 6.5.
Здесь мы не стали изображать примеры объеди-
нения в рабочих объемах, как на рис. 6.3, так
как для них единственным требованием являет-
ся равенство скоростей на рабочих поверхностях
объединяемых элементов. Зато жесткие соедине-
ния, а также подвижные (т. е. пары поверхностей)
представлены многочисленными вариантами.
Если элемент а соединяется с элементом Ь путем
объединения по рабочим поверхностям (можно
считать „связывается вещественной связью”), то
применяется обозначение а+b, если же соедине-
ние производится с образованием (кинематиче-
ской) пары, т. е. оно подвижное, то используется
обозначение а/b, и в черном ящике элемента воз-
никают упомянутые выше двойные штрихпунктир-
ные линии, показывающие требуемую конфигура-
цию поверхностей (см. также рис. 6.4).
При соединении вращающихся деталей следу-
ет учитывать, что и тангенциальные скорости
должны быть согласованы. Поэтому центр враще-
ния, который в таких случаях иногда приходится
указывать, должен располагаться так, чтобы это
было принципиально возможно (рис. 6.5, случай 4).
Наконец, на рис. 6.5 отражена важная возможность
изменения направления скорости (случай 3, см.
также рис. 6.7), пары скольжения и качения. Пары
скольжения (случай 5.1) возникают при неравенст-
ве тангенциальных скоростей, а пары качения
(случай 5.2) - при их равенстве.
Как следует из примеров на рис. 6.4 и 6.5, век-
торная функциональная структура открывает
также возможность выбирать пару исходя из
функции, минуя трудоемкий анализ свойств
различных пар, более или менее подходящих для
реализации требуемых функций.
6.2.3. Соединение комбинированных одно-и двух-
точечных величин
На рис. 6.6 показаны различные возможности
соединения отдельных элементов, в которых
действующими являются две интенсивностные
величины. Если равновесие в месте соединения
достигается без использования одной из одното-
чечных величин, то эта исходная одноточечная
величина и после соединения элементов остается
внешней. В обозначении нового составного черно-
го ящика на место нижнего индекса помещаются
или все старые элементы (например, Fal, Fb2), или,
если, например, h = a( + )b, то вместо этого вводим
Fhl, ^h2- Но этот вектор (см., например, рис. 6.4,
строка 1) равен сумме первоначально приложен-
ных к а и b сил, так что Fhl = Fal + Fbl. При соеди-
нениях, подобных изображенным на рис. 6.6, силы,
приложенные извне, остаются на изображении
элемента и не изменяются.
Почти все примеры приведены для жестких
деталей, у которых скорости поступательного
движения и угловые скорости вращательного
движения одинаковы в любом месте. Но следует
учитывать, что так дело обстоит далеко не всегда.
Объединение векторных функциональных элемен-
тов, приводящее в результате к реализации функ-
ций простых элементов механизмов, показывает
возможности синтеза в рамках данного метода
(столбец 2).
На рис. 6.7 представлен особенно важный
случай, а именно, изменение направления векто-
ров сил с помощью функционального элемента и
векторов скоростей - с помощью наклонного
расположения функциональных пар поверхностей
в месте соединения. Важность этого случая связа-
на с тем, что мы можем изменять абсолютные
значения величин сил, моментов и скоростей
путем изменения их направления, напрямую или
через преобразование поступательного движения
6.2. Векторная функциональная структура
301
Случаи
Силы и моменты
в месте соедине -
ния
Вид
соединения
Исходные элементы
Элементы-результаты соединения
Векторные функцио-
нальные элементы
Детали машин
№
I
2
3
4
5
Fhi ~ F<ii Fbi
FhZ = FoZ^ FbZ
1.5
h = а(*)Ь
Объединение
в рабочих
объемах
1.2 2 Z.1 FaZ"Fb1 "О Fh1=Fa1 FhZ= FbZ z.z Объединение или компо- новка по ра- бочим пове - рхностям Z.3 Fa1 a FaZ Fb1 + b FbZ Z.4 Fa1 ,.FbZ ~~^h = a + b p Falr| „ .Jb? h=a/b
2.1 3 3.1 Mhl = M01HMbl Mhz=MozHMb2 3.Z Объединение в рабочих объемах 3.3 Mai a Maz Мы b Mbz 3.4 Mhi h=0(*)b Миг
el — eZ*-
5 £F(*)£F = O
al aZ
3.2 6 Fa2^rFel=0
41 7 Мм = М01(*)Мы
Mh2 =MQ2(-)Mb2
Mq2Ai = 0
4.2 8 Mh1=MQ1
Mh2=Mb2
Faz *Fb1 =0
FaTZ "Ли = 0
Объединение
или компо -
новка по ра-
бочим пове-
рхностям
43
Mai
Mq? Мы
Мьг
Объединение
по рабочим
поверхнос-
тям (развет-
вление)
Объединение
в рабочих
объемах
Объединение
или компо -
новка по ра -
бочим повер
хностям
4.4
Mai
Mbz
Me)
Mbz
h^a/b
м h=a*b м
“al МЬ2
(+) — объединение в рабочих объемах; + — объединение по рабочим поверхностям или компоновка
Рис. 6.4. Силы и моменты при соединении векторных функциональных элементов
302 6. Новые модели для методического конструирования с помощью ЭВМ
Скорости в месте Вид соединения Исходные элементы Элементы — результаты соединения
Векторные функцио- нальные элементы Детали машин
№ 1 2 3 4 5
и 1.2 1.3 и 1.5
Объединение
или компоно-
вка по рабо-
чим поверхно
стям
1 1 to 'to*0 = шь = 0 to1 уьт= 0
2.1
2 2 tosto =0 uto'“to*0 to'to =0
3.1
3 3 to *to u)0 *wb*0 voi *to
4J
4 4 v0 =vb =0 Ч2 '“to “to ’“to=% voI2 ’toi
5.1
5.1 5 v0 =vb a>0%a>b 4>rz*toi
5.2 6 6.1 V0 'Vb МШЬ to?' toi
6.2
to
h=a/b
to
Компоновка,
пара качения
(одинаковые
танген циаль -
ные скорости)
Компоновка,
пара сколь-
жения (пово-
рот вектора
скорости)
5.2
Компоновка,
пара скольже -
ния (различ-
ные тангенци-
альные ско -
роста)
Объединение
по рабочим
поверхностям
“»01
“>b2
Q/b
“to
“to
“>b
VflI2 ' -
toi «0
“to
“>02 “»Ы
“to
h*O/b
o/b
o*b*g
5.3
o*b=g
o*b=g
Рис. 6.5. Скорости при соединении векторных функциональных элементов
во вращательное (рычаг и т. п.). А это является
основой умножителей скорости и силы, относя-
щихся к системам передачи энергии.
Имея исходные вектора скоростей (рис. 6.7,
поле 1.2), мы определяем угол наклона поверхно-
стей пары, соединяя концы этих векторов, а тан-
генциальную скорость - проектируя их на эту
поверхность, т. е. ее касательную плоскость. В
поле 2.1 к элементам а и b пришлось добавить до-
полнительные элементы ей/, чтобы достичь рав-
новесия сил в местах соединения и равенства со-
ответствующих скоростей (va2 = vel и vbl= v^4). По
этим скоростям вместе со скоростью скольжения
находят скорости смежных элементов:
v.yi = ve2-var2; (6.1)
Ve2= VZi-Vbri. (6.2)
После этого необходимые для создания равнове-
сия „внешние” силы определяют, какое направле-
ние должны иметь направляющие для деталей
скольжения и какая нагрузка приходится на места
восприятия сил. Силы трения здесь в расчет не
принимаются.
Комбинированные способы изменения направ-
ления движений (например, получение винтового
движения) осуществляются путем наложения
элементарных случаев - для данного примера
случаев 5.1 (вверху) и 3 (внизу) из рис. 6.5.
6.2. Векторная функциональная структура
303
№
Примеры
Компоновка по рабочим поверхностям
Объединение по рабочим
поверхностям
2
Допол-
нение
_____3
и
h=o/b
□/b/e/f
o/b
4Г42
6.2
M02
42
o/b
42*4l
7.1
7
^2
h = a*b
V----------
(например, подпружинивание)
(например, управление)
Ш
1Vb2
h=(Hb
гоГ2 ГЬП
(например, двуплечий рычаг)
Ma2*Mb2
h=(Hb
42*42 dk
(например, двойной кривошип)
Moi
Ш
h±o*b
4l ШЬ2
(например, балансирный грузик)
7.2
o/b
Мй Мо2 мы МЬ2 ж MqI Лх Mb2 Moi Mb2
а Ь ’ !' ** ii h=a*b
4l 42 <*»ы 42 4i 41 4l WU
7777, (например, вал] 7777
Рнс.6.4,
стро-
ка 2,
рис.6.5,
стро -
ка 1
С
См.
также
рис.
6.3,
поле
10.6
5.3
Ско-
рость,
см.
также
рис.
6.5,
стро-
ка 4
См.
также
рис.
6.3,
поля
9.3,
4.3
7.3 _
См.
также
рис.
6.4,
стро-
ка 4,
рис.
6.5,
стро-
ка 2
Рис. 6.6. Примеры соединения векторных функциональных элементов путем объединения или компоновки по рабочим поверхностям
в соответствии со свойством 5 и правилами из рис. 6.4 и 6Л
304
б. Новые модели для методического конструирования с помощью ЭВМ
Пример
Конструкция
Допол-
нение
3
и
11
Определение требуемого угла наклона пары поверхностей
1.2
Разложение скорости
Наклон пары
поверхностей
Рис. 6.5,
строка 3
2.2
Разложение силы
2.3
Исполь-
зование
двух
промежу-
точных
взаимо-
допол-
няющих
элемен-
тов е н f
с развет-
вления -
ми
Рис. 6.7. Определение требуемого угла наклона пары поверхностей при заданных непараллельных силах и скоростях двух соединяемых
(компоновкой) векторных функциональных элементов а и b
Практический пример разработки векторной
функциональной структуры показан на рис. 6.8. Из
функциональных положений рис. 5.6.-1, г непосред-
ственно получаются векторные функциональные
элементы. Чтобы привести массу в движение,
должна быть накоплена энергия, т. е. выбирается
элемент 4.1 на рис. 6.3. Требуемая энергия может
быть получена путем разрядки накопителя - для
этого подходит элемент 3.1 или 6.1 на том же
рисунке. Элемент 6.1 соответствовал бы движу-
щейся массе (молоток), а элемент 3.1 - распрямля-
ющейся пружине. Выбирается последняя возмож-
ность.
Чтобы умножить силу, должна быть выбрана
комбинация элементов, изменяющая направле-
ние входов и выходов мощности. Выбирается
комбинация из поля 2.1 на рис. 6.7, соответству-
ющая клину. Однако она могла быть взята и из
поля 4.2 рис. 6.6 (рычаг), выбрана какая-нибудь
другая подобная комбинация или же, наконец,
составлена из обеих возможностей. При этом
важно (для работы с ЭВМ), что не используя све-
дений о клине, рычаге, винте и т. д. и исходя из
общих положений типа „... умножить силу статиче-
ски можно, только если изменить ее направление
или добавить к ней другие силы, имеющие компо-
ненты с тем же (и того же знака) направлением...”,
можно прийти или к уже известным, или, в каких-
то случаях, к новым элементам механизмов.
В функциональную структуру на рис. 6.8 не
было включено трение и связанное с этим необра-
тимое превращение энергии. С этим явлением мы
столкнемся позже, при обсуждении стопоров
обратного хода. Для полноты функциональной
структуры в нее следует также включить переход
от сообщений к кодирующим их сигналам и пере-
дачу последних через энергетические элементы.
Для этого пригодны структуры, аналогичные сиг-
нальным цепям в работах [39,1, 38], которые могут
легко включаться в векторные функциональные
структуры. Описанная процедура разработки
конструкции в настоящее время широко применя-
ется и усовершенствуется.
Сравнительный “обзор различных представле-
ний идеальных функций показан на рис. 6.9. Для
каждой абстрактной функции в столбце 1 приве-
дены соответствующие векторные функции. Для
наглядности в столбцах 3 и 4 показаны также
реализующие их элементы механизмов, в столбце
5 - обычное и, в принципе, возможное число опор-
ных точек (точек приложения сил и т. п.). В столб-
це 6 содержатся многополюсники, сопоставленные
в работах [39, 33, 17] с механическими функци-
ональными элементами при сравнении способов
представления, в столбце 7 дано число полюсов.
Следует обратить внимание на то, что опорные
точки для сил реакции, с которыми не связаны
скорости, не содержатся в обычных представлени-
ях многополюсников и, тем самым, оказывается
невозможным отобразить существенный аспект
механических функциональных элементов. Без
этих сил реакции было бы совершенно невозмож-
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями 30 5
\Функ- 2\ния По\ Функциональ- ное положение из рис. 5.6-1, г Физическая функцио нальная структура Дополнение
же- нив № 1 2 3
1 1 1.1 Перемещать твердое вещест- во (массу) 1.2 Ve2 777'7, 1.3 Для пере* мещения массы е против си* лы тяжес- ти необхо- дима пере- дача мощ- ности
е
F.1 t Vel
2 2.1 Вызывать пере- мещение массы путем приложе- ния силы и со- вершения ра- боты 12 Foi Ju tV e2 13 Необходим источник энергии a
0 4— e
va2 iit b '77/7. el
2 3 3.1 Использовать и передавать силу (мощность) че- ловека 3.2 f- 2 3.3 Выходную силу Fа г от источни- ка энергии а (человек) требуется умножить с помощью мультипли- катора Ь/ с так, чтобы FC1 была больше входной СИЛЫ Fe !
e
Б 12 F,i! h e1
a N* ^4 fv
X 1 «*1 q
3 4 4.1 Управлять на- чалом и прекра- щением сило- вого воздейст- вия с помощью сообщений 4.2 Сигнальная цепь 4.3 Представи- ма в ВФС как ото- бражение потока со- общений в поток энер- гии
4 5 5.1 Препятствовать обратному дви- жению массы в отсутствие подъ- емной силы 5.2 5.3 При изме- нении зна- ка Vb I сто- пор обрат- ного хода d переносит силовую связь пол- ностью на основание q. Компо- нента Fb 1 исчезает
e
Fel ^2
d
Fd,‘ Fez
a b/c\.
'7777^
5 6 6.1 Разрешить по- средством со- общений об- ратное движе- ние массы 6.2 Сигнальная цепь Как в стро- ке 4
Рис. 6.8. Разработка векторной функциональной структуры, ис-
ходя из функциональных положений рис. 5.6-1, г. Пример: авто-
мобильный домкрат (см. также рис. 639)
но, например, изменить направление потока
мощности на рис. 6.7, 6.8. Действие направляющих
(рис. 4.71 и рис. 6.6, поле 3.2) тоже невозможно
объяснить, не вводя в рассмотрение силы реакции,
обеспечивающие перпендикулярность скорости к
направлению действия силы. В этом случае в
направлении передачи мощности
FoX vai = Fai vaicosafl>vi = Faival; (6.3)
Fe2Ve2 = Fe2ve2cosaF2>V2= -Fe2ve2,
(6.4)
тогда как вдоль направляющей
(6.5)
A4Vb4=0-
(6.6)
Таким образом, направляющие являются как бы
„плотинами” на пути потока мощности.
6.3. Создание напряженных циклов, напряженных
сегментов и конструкций с силовыми полями
6.3.1. Создание и поддержание силовых
воздействий
Одна из важнейших задач, стоящих перед кон-
структором в предметной фазе конструирования,
заключается в поиске способов создания сил,
которые обеспечили бы для отдельных деталей
или целых групп деталей их ускорение, торможе-
ние, сохранение стационарного скоростного режи-
ма несмотря на другие силовые воздействия - или
же просто удержание в собранном состоянии. С
физической точки зрения мы встречаемся здесь с
ситуациями, которые связаны с зарядкой, удержа-
нием в заряженном состоянии или разрядкой
накопителя энергии.
Как видно из рисунков 6.3 и 6.22-1, ускорение
(торможение) массы является зарядкой (соответ-
ственно, разрядкой) накопителя кинетической
энергии (строки 4 и 6). Поскольку в этих процессах
всегда происходит отчасти необратимое превраще-
ние энергии, то для понимания истинного положе-
ния дел следует, строго говоря, каждый накопи-
тель энергии считать соединенным с демпфиру-
ющим (поглотительным) элементом. Например,
при ускорении должны быть соединены два соот-
ветствующих элемента строк 4 и 7 на рис. 6.224,
при торможении - элементы строк 6 и 8. Способ
учесть вязко-упругие свойства реальных веществ
на основе идеализированных связей элементов
показан на рис. 6.22-2. При этом оказывается, что
реальные вещества можно описать только комбина-
цией идеализированных состояний.
В дальнейшем изложении мы будем в целях
наглядности рассматривать только идеализиро-
ванные состояния веществ, характеризующиеся
чисто упругими, массозависимыми или энергопо-
глотительными свойствами.
В поведении материалов конструктора в пер-
вую очередь интересует их способность поддержи-
вать силу путем удержания накопителя потенци-
альной энергии (строка 2 на рис. 6.3, 6.22-1) в заря-
женном состоянии. Во всех остальных случаях
„создания” сил поддержание силы осуществляет-
ся благодаря относительному движению двух
элементов. При этом вследствие неизбежного
трения (не составляют исключение даже спутники
планет) происходит непрерывная разрядка нако-
пителя энергии, и от этого - уменьшение силы с
течением времени^ Нередко (постоянная) разряд-
ка оказывается даже фактором создания силы.
При удержании накопителя потенциальной энер-
гии в заряженном состоянии никаких потерь не
происходит благодаря отсутствию относительных
движений. Потери энергии следует в любом случае
принимать в расчет при явлениях релаксации [37].
Для того чтобы воспрепятствовать разрядке
накопителя потенциальной энергии, его выходы
соединяются со вторым накопителем потенциаль-
ной энергии, силы и направления разрядки для
которого противоположны таковым для первого.
Накопители разряжаются1 и заряжаются друг от
1 Строго говоря, два обратимых (идеальных) накопителя по-
тенциальной энергии не могут заряжаться или разряжаться
описанным образом. Между ними всегда должен быть включен
кинетический или же необратимый накопитель, благодаря
которому процесс зарядки протекает в конечное время и благо-
получно заканчивается. Но в состоянии покоя потребность з до
бавочном накопителе отпадает. — Прим. авт.
20 — 2317
306
6. Новые модели для методического конструирования с помощью ЭВМ
Рис. 6.9. Сопоставление с абстрактными и векторными функциями, относящимися к механической энергии, других функциональных
представлений
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
307
Рис. 6.10. Напряженные циклы и их представление в виде цепных структур;
Способ измене
ння направле -
ния силы
5
1.5
Дополнитель-
ные моменты
<изгиб)
12 Эквивалентная
Полевые
силы; уп -
ругне силы
(напряжен-
ный сег - 3
мент)
схема
~С-0
’’Цикл”
вырож-
дается
Полевые
силы; по-
левые си -
лы (напря-
женный
сегмент)
*2 Эквивалентная
схема __
вырож- I
дается 777
Дополнитель-
ные моменты
(изгиб, кру-
чение)
14 Эквивалентная 15
вырождается
Отсутствует,
силовое поле
проникает
сквозь тела
Эквивалентная
схема
4.5
Отсутствует,
силовые поля
проникают
сквозь тела
Рис. 6.10-1. Примеры статических напряженных циклов и напряженных сегментов, содержащих и не содержащих силовые поля
РП (пара рабочих поверхностей)
Деталь Рп (рабочий объем)
\
Обозначение Рп (рабочая поверхность)
Цепь сжатия
Цепь растяжения
Рис. 6.10-2. Условные обозначения в структурных схемах для ра-
бочих объемов и рабочих поверхностей. Строение цепей сжатия
и растяжения
друга до тех пор, пока не будет достигнуто равно-
весие сил и в месте соприкосновения не установит-
ся покой. С их поверхностей соприкосновения
(рабочих поверхностей) можно „снимать” силу
практически неограниченное время и использо-
вать ее для различных конструктивных надобно-
стей, например образовывать неподвижные соеди-
нения. Поскольку соответствующая конструкция
из твердых тел предполагает кольцеобразное
(циклическое) устройство, в котором все элементы
находятся в напряженном состоянии, ее следует
назвать напряженным циклом. Если считать, что
энергия задана, а сила - производная от нее вели-
чина, то можно сформулировать (также и для
конструкций, отличных от напряженного цикла)
следующее положение.
Сила может возникнуть только тогда, когда
имеются, по меньшей мере, два накопителя энер-
гии. Она появляется, если два накопителя потен-
циальной энергии препятствуют разрядке одного
другим или если накопители потенциальной и
кинетической энергии или только кинетической
энергии заряжаются и разряжаются навстречу друг
другу, или если накопитель потенциальной или
кинетической энергии разряжается в необратимый
накопитель. Любой процесс зарядки и разрядки
связан с необратимым превращением энергии.
Описанный способ рассмотрения имеет фунда-
ментальное значение для конструирования. Ни
одно винтовое или клеммовое соединение не
работало бы, не будь оно снабжено накопителем
потенциальной энергии, например специальным
конструктивным элементом. При этом, как уже
указывалось, следует пренебречь релаксационными
308
6. Новые модели для методического конструирования с помощью ЭВМ
явлениями [37]. Предпосылкой существования
любых соединений с силовыми связями (см. гл. 4)
являются все те же накопители потенциальной
энергии.
6.3.2. Напряженный цикл и его конструктивные
свойства
Кутцбах [32] уже давно обратил внимание на
значение напряженных циклов для определенных
конструкций. Он называет соединения, возника-
ющие на основе напряженных циклов, „парными
соединениями”.
Подобным же образом Хайн [20, 21] подробно
рассматривает кинематические цепи с числом
степеней свободы -1, особенно хорошо подхо-
дящие для напряженных циклов и тем самым для
зажимных или натяжных механизмов. Поскольку
принцип соединения двух деталей или узлов при
помощи натяжения применяется в большинстве
конструкций [47], становится особенно важным
подвергнуть напряженные циклы более тщатель-
ному рассмотрению. Во всех деталях, напряжен-
ных за счет внутренних сил упругости, проявляет-
ся типичная конфигурация так называемого ста-
тического напряженного цикла.
Статический напряженный цикл представляет
собой обычную замкнутую цепь звеньев с числом
степеней свободы/=-1(рис. 6.10-1, строки 1 и 2).
При появлении сил инерции, зависящих от скоро-
сти, или полевых сил конструкции перестает быть
циклом, и тогда говорят о напряженном сегменте
или силовом поле (см. рис. 6.10-1, строки 3 и 4 и
рис. 6.12, поля 3.1-5.1). В подобную конструкцию вхо-
дят, по меньшей мере, два накопителя энергии,
которые на основе имеющихся на их выходе сил
или взаимно препятствуют разрядке друг друга,
или попеременно заряжаются и разряжаются, или
обратимый из этих накопителей за определенный
промежуток времени заряжает необратимый.
Справедливо следующее положение.
В замкнутой цепи звеньев число взаимно неза-
висимых напряженных циклов не превосходит
числа отрицательных степеней свободы.
Напряженные сегменты содержат открытую
цепь звеньев, силовые поля могут действовать
также между несоприкасающимися телами.
6.3.3. Напряженные циклы и напряженные
сегменты
1. Устройство напряженных циклов и напряженных сегментов
Поскольку для образования статических
покоящихся напряженных циклов необходима
замкнутая цепь звеньев с числом степеней свобо-
ды/^-1, а для каждого напряженного цикла -
два накопителя энергии, то их можно классифици-
ровать по числу степеней свободы и по виду нако-
пителя энергии. Мы будем говорить о простом на-
пряженном цикле, если число степеней свободы
цепи f- -1, о двукратном -при f - -2 и т. д. Бо-
лее тонкая классификация может учитывать
число звеньев и пар, число замкнутых областей
кинематической схемы, одно- и многоподвижные
пары и тому подобные моменты (см. рис. 6.10-1,
6.16-6.18). Можно также разделять напряженные
циклы на плоские и пространственные цепи.
На рис. 6.10-1 приведены различные конструк-
ции, содержащие статически покоящиеся напря-
женные циклы, напряженные сегменты и силовые
поля. Их структурное представление (цепь звень-
ев) показано в столбцах 2 и 4, а способ изменения
направления силы - в столбце 5. Каждая комбина-
ция силовых связей образует базовый тип, вариан-
ты которого, получающиеся при изменении знака
сил и точек их приложения в паре, представлены в
столбцах 3 и 4. В то время как для первого типа -
упругого напряженного цикла - действительно
имеется плоский или пространственный „цикл”
(кольцо) (см. рис. 6.10-1, строки 1 и 2), при появле-
нии в нем полевых сил он часто вырождается в
напряженный сегмент или в конструкцию с сило-
выми полями.
Силовое воздействие осуществляется часто не
только через рабочие поверхности, но и через
рабочие объемы. Силовые поля являются до
некоторой степени взаимопроникающими (см.
рис. 6.10-1, строки 3 и 4). Напряженные сегменты, в
которые входят силы инерции, характеризуются не
только тем, что они являются частями хотя бы и
вырожденного напряженного цикла, но также и
тем, что они всегда открыты (см. рис. 6.12-2, по-
ля 3.1 и 4.1).
От упругих накопителей1 силовое действие мо-
жет передаваться, по существу, только через пары
рабочих поверхностей (пары элементов), на кото-
рые действует нагрузка сжатия. При этом возника-
ют циклы, содержащие участки звеньев, подобные
цепям сжатия и растяжения на рис. 6.10-2. На осно-
ве представленных базовых типов можно разрабо-
тать многочисленные другие напряженные циклы
путем их объединения или последовательного
соединения, как это будет сейчас продемонстриро-
вано.
Подобно тому, как принудительные механиз-
мы изображаются замкнутыми кинематическими
цепями с числом степеней свободы f = +1, стати-
чески покоящиеся напряженные циклы можно
представлять в виде замкнутых цепей звеньев с
числом степеней свободы f- -1. Как уже упоми-
налось, число напряженных циклов, содержаще-
еся в произвольной замкнутой цепи, не совпадает
с числом областей, на которые эта цепь разбивает
плоскость, а равно числу отрицательных свобод,
точнее, числу переопределенностей.
Если цепь имеет две отрицательные степени
свободы, то она может содержать, независимо от
числа звеньев и пар элементов, максимум два
независимых напряженных цикла. Как правило,
число напряженных циклов в таких цепях равно
максимально возможному, поскольку в силу
неизбежных допусков" на размеры монтаж цепи
при отсутствующем зазоре возможен только благо-
даря минимальной упругой деформации. При этом
все потенциальные накопители, необходимые для
напряженных циклов, подвергаются зарядке.
Только если разрядить все эти накопители, не
разбирая соединения, например путем отжига,
напряженные циклы перестанут действовать, но
снова проявятся при последующем одностороннем
нагреве.
Если монтаж должен быть выполнен без ма-
1 В предельном случае один из накопителей может обла-
дать крайне малой упругостью или податливостью — так что на
практике мы считаем его жестким (неупругим или неподатли-
вым). Тем не менее силовые действия все равно имеются, по-
скольку не существует абсолютно ,.неподатливых” материалов.
Достаточно вспомнить об автономном строении вещества. -
Прим. авт.
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
309
лейших зазоров в сочленениях, то число степеней
свободы цепи должно быть /= 0 (см. рис. 6.14).
Такие цепи являются также основой конструкций
с узловой точкой. Одно из звеньев такой конст-
рукции фиксируется в определенном месте (в
узловой точке), а остальные могут расширяться
или удлиняться, при этом конструкция не теряет
жесткости. Примерами таких конструкций явля-
ются несущие конструкции на основе трехзвен-
ных цепей, вал на двух подшипниках, один из
которых зафиксирован, а другой может переме-
щаться, турбины или мосты с температурными
расширениями (кат. 4.5.1, столбец 2).
Разработка переопределенных [14, 12], т. е. с
необходимостью „напряженных” цепей, исходя из
цепей с одной степенью свободы, является часто
встречающейся задачей (многочисленные приме-
ры приведены на рис. 6.11-1). Эту задачу всегда
Рис. 6.11. Однократно переопределенные цепи с числом звеньев 2—10:
(ДДя-
одно-
крат-
ных на-
пряжен-
ных
циклов)
Одно-
кратно
пере-
опреде-
ленные
цепи
Ал = 4
п=6; ер8
Как в поле
5.2
п =10,-ер 14
6 ф ф о ,
; । Т Т j Выводятся
Например, с i i I ф из поля 1.3
<5 4> Ф 6 1
Дер 7
П=8; ер 11
Как в поле 5.3
Переходы при
разработке
новых цепей
Переход от
строки 1
К стро- ке 3 5 6
Ап 0 2 4
Дб) 1 4 7
Переход от строки 3 к строке 5,
от строки 5 к строке 6 и т. д.
Наименьший многоугольник
(кроме полей 2.1 и 3.1): Зе(
Ал* 2
Де* 3
—О— одноподвижная вращательная пара, е t
Рис. 6.11-1. Разработка однократно переопределенных цепей с числом степеней свободы/=—1, исходя из цепей с числом степеней сво-
боды /= 1. (Поле 5.2, № 1,2,3,4,6 —по Хайну [19], № 5 —по Роту и Килеру)
310
6. Новые модели для методического конструирования с помощью ЭВМ
Хх Измене- Исходи, цепь Изменение числа звеньев п Число звень- ев Число пар Изменение числа сочленений с
пени сво- боды S. ння е.г0:6^0 6ц=1 еп-2 еп=3 ef-l е'.2 е2 = 3 е^-е^.е3-!
л е^-е3
е,*2е„ № 1 2 3 4 5 6 7 8
f=-1 5 1 и п-4 ^з_-р СГ 1 по 1. п = 3 - 3 - г 1 1.3 , п = 2 1 — 4 5 15 е-4 © /К 1 16 е-3 Айк * (J3 \ 21 d |4 \ \ / Ngr — -—
8 2 2.1 с П-6 2Пк_ЗГу ° 1 ° 2.2 с П-5 ЗЛЬ^б 2?Ф\Ф^6 1 2.3 , п-4 - 5 '^уг&'у'уК ГУ//] 'У/ 6 ’ 1 2.4 т П-3 * 1 6 8 2.5 , е = 7 ©г VzJR 2/V_J« г О' , о 2.6 е ©— 2/V -6 — 27 е = 5 1 28 е = 4 ©Л-ттЯ \з^§О/ ©
f=0 6 3 11 л-5 3 -q 2Г°зГ V ст , х> 32 л-4 3 -А 2l 14 Ст t ПЭ 3.3 н 1 П = J - х 3 - г 1 ~ зл п = 2 1 5 6 3-5 „ с е = 5 3^_-© 1 3'6 е з/ X (с = 4 5 / /\ У) —- —
9 4 41 п-7 2/V яг ° 1 42 42 п-6 ЪлД. S6y7\y^A AxJ V Y <Т , 10 4.3 - г П-Э __^,5 (fXSSxl/7 1 4.4 „ / Л - 4 у\7 1 7 9 45 е = 8 л X_fli5 (or kTOr 2/У LEXX А ° 1 ° 46 е=7 2/\з у у 1 е = Ь ©-^-^ ТхЗ 5/\6 / г 1 48 е = 5 лХ/\Б / \ / У
f=1 7 5 5.1 к П-6 З^ДХ4 1 5.2 с п-5 З^СХх 1 • 5.3 . п-4 з ~ УУУ//%Ь 1 5.4 0 П-3 3 I4 1 6 7 5.5 „ к е = 6 3^©^4 Y А у 2| Ж. I 1 56 е-5 с<\/б Ъ © — —
10 6 67 п-8 ЗЛД 2, У J р [Жж/6 1 б'2 п = 7 з^^4 2/W J7 Ь 1 6.3 г, с П-0 Зл4 2/V и Г 1 6.4 „ г п = 5 Lax 2/Жж\5 1 8 10 65 е=9 j О У jLxWvaw6 1 ° 6.6 п е = 8 Ш} 1 1'7 е = 7 . Ел 68 с е = 6 ♦ Г / 7\ Ъ Г
Операции 7 7.1 Замена бинарного звена подходящей двух- подвнжиой парой (например, вращательно- поступательной парой или кулачком). В цепи не должно быть идентичных степеней свободы — 7.5 Замена двух одноподвижных пар (шарниров), принадлежащих тернарным (3) и более подвиж- ным звеньям на одноподвижные двух- и более кратные сочленения. В полях, обозначенных звездочкой (*), выполнение операции привело к тому, что первоначальное число степеней свободы осталось таким только для части цепи
одноподвижная
Сг вращательная пара, ;
двойная вращательная ?
пара дважды одноподвижная, е( ;
плоская
двухподвижная пара, Ец ;
тройная вращательная
пара, трижды одноподвижная,
Рис. 6.11*2. Варьирование цепей изменением числа звеньев при использовании двухподвижных пар элементов (например, вращательно-
поступательной плоской пары), изменением числа сочленений при использовании комбинированных сочленений. (Базовые цепи взяты
из рис. 6.11-3)
приходится решать, когда механизмы с одной
степенью свободы должны быть напряженными и
подвижными, а иногда даже передавать мощность.
В строке 1 на рис. 6.11-1 изображены возможные
кинематические цепи с одной степенью свободы,
имеющие два, четыре и шесть звеньев. Теперь
задача звучит так: сколько звеньев или (и) пар
элементов нужно добавить к цепям с одной степе-
нью свободы из строки 1, чтобы сделать из них
однократно переопределенные цепи?
Решение этой задачи представлено в заголо-
вочном столбце „Дополнительные элементы” как
числовыми значениями, так и графически. В каче-
стве базы для рассмотрения этого вопроса на рис. 6.14
на основании уравнения Дизиоглу [11] (суще-
ственно более общего, чем соотношения Грюблера
[18] и Чебышева [46] для замкнутых цепей с чис-
лом звеньев 1—10 приведены в табличном виде
числа одно-, двухподвижных и идентичных пар и
соответствующие числа степеней свободы (от
f = -2 до f = +2). В заголовочной строке приведены
числа степеней свободы цепей и сумма числа
двухподвижных пар элементов еп, числа идентич-
ных степеней свободы eid, а также число пассив-
ных связей $[11]. В заголовочных столбцах содер-
жится число звеньев и, а в полях таблицы - число
одноподвижных пар элементов в!. Числа, заклю-
ченные в скобки, формально являются решениями
уравнений, но не соответствуют никаким реаль-
ным цепям. Во второй снизу строке даны уравне-
ния для числа (для каждого значения f - отдель-
но), а в нижней строке - общее уравнение Дизи-
оглу.
Рис. 6.14 очень удобен для быстрого нахожде-
ния числа степеней свободы плоской замкнутой
цепи, а также для простого определения числа
звеньев (элементов) и пар элементов, которые
должны быть использованы, чтобы, например,
уменьшить число степеней свободы от /= + 1до
f = - 1. Так, для числа звеньев и = 4 и числа степе-
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
311
Ч Число
\ степей
п'.свобо
слоХ^
звенД—-
2 1
t=2
Допол-
нение
1.5
Унарные
и другие
звенья
(откры-
тые цепи)
3.5
Бинарные
звенья
(замкну-
тые цепи)
Бинарные
и тернар -
ные
звенья
(замкну-
тые цепи)
7.5
Бинарные,
тернарные
и кватер -
парные
звенья
(замкну-
тые цепи)
—О-—" вращательная пара одноподвижная, е >
/
Рис. 6.11-3. Базовые цепи с числом степеней свободы от/= —1 до/ = 2 и различным числом звеньев. (Поля 73 и 8.4 по Хайну [19; 19.1], см.
также кат. 4.5.1)
6. Новые модели для методического конструирования с помощью ЭВМ
312
ней свободы f = -1 мы находим или в] = 5 однопо-
движных, или ej= 4 одноподвижных и еп = 2 двух-
подвижных пар элементов и идентичных степеней
свободы. Важнейшие особые случаи, которые
следует постоянно иметь в виду (с примерами их
редукции к неособым по [11], приведены на
рис. 6.13.
Если (как показано на рис. 6.11-1) изменить
число одноподвижных пар на Д в] = 1 (строка 2) или
число звеньев на Д п = 2 и одновременно число
одноподвижных пар на Д в] = 4 (строка 4), то число
степеней свободы замкнутой цепи уменьшится на
2 и она из цепи с одной степенью свободы сможет
превратиться в однократно переопределенную
цепь. Переход от принудительной цепи к одно-
кратно переопределенной может производиться
также путем добавления двух бинарных звеньев.
Впоследствии реализуемых „пружинами” (строка 4
на рис. 6.11-1). И тогда, если внешние силы меньше
сил предварительного напряжения, то добавлен-
ные звенья ведут себя как жесткие, и число степе-
ней свободы цепи / = -1; а если внешние силы пре-
вышают силы предварительного напряжения, то
эти звенья ведут себя как упругие, податливые, и
число степеней свободы цепи / = + 1 (принудитель-
ная цепь).
С помощью этой процедуры (различным обра-
зом выбирая дополнительные звенья) получают
известные переопределенные цепи (например, в
поле 5.2, заимствованные у Хайна [22]). В поле 3.3
должны появиться такие же цепи, как и в поле 5.2.
Можно проверить, что цепи поля 5.2 идентичны
цепям поля 3.3. Набор цепей в полях 3.2 и 5.2
полный, а в остальных полях - неполный.
Примеры упорядочены по числу кватернарных,
тернарных и бинарных звеньев. Возможности обра-
зования вариантов при изменении числа звеньев и
сочленений без изменения числа степеней свобо-
ды (f= -1) показаны на рис. 6.11-2. Базовые цепи,
из которых выводятся все остальные, приведены
на рис. 6.11-3, причем неполные наборы цепей
заканчиваются обозначением „и т. д.”. Поля, рас-
положенные по диагонали и заключенные в жир-
ную общую рамку, содержат звенья одной и той
же” ... арности” (бинарные, тернарные и т. п.).
2. Виды напряженных циклов и напряженных сегментов
На рис. 6.12-1 представлена матрица всевоз-
можных видов напряженных циклов и напряжен-
ных сегментов, образованных из накопителей
энергии двух определенных видов: потенциаль-
ный упругий и кинетический. Эта матрица содер-
жит все допустимые комбинации накопителей,
изображенные с помощью структурно-функци-
ональных элементов (см. рис. 6.22-1, а расшифровку
условных обозначений см. на рис. 6.21). Комбина-
Рис. 6.12. Систематизация напряженных циклов и напряженных сегментов между двумя элементами, а также примеры реализации си-
ловых воздействий:
Накопитель 'К энергии 2 Накопитель X с? с2 т2 -ч ч пч ч у ПЧ ч ‘ ч-
Г q или -Ч Н или Н Ь 4- -1 или Н у-
1 "1 I I 1 1
1 г Г с2 ' с2 ' 1 г 1 с2
энергии 1 № 1 2 3 4 5 6
1.1 1.2 13 с2 1.4 1.5 1.6
С] 1—м- 1 — — С1 — — т2 С]
2.1 С2 2.3 2.4 25 2.6
2 — Ц—I--J Cl — — — —
31 с2 3.2 3.3 3.4 35 36
1-М- 3 L-|—Е—Г J С1 — — Cl П12 V-T1—4 — —
ГО, V-Ч 4 4.1 4.2 4.3 т’ ч 4.4 -.5 46 шр т, 1—TV—-4
т, 5 5.1 5.2 5.3 5.4 55 5.6
ш. 1—Ч 6 6.1 С2 6.2 6.3 6.4 т? ЪЧ-1—4 65 66
Значения скоростей обеспечивают постоянное соприкосновение в парах рабочих поверхностей.
Рис. 6.12-1. Теоретически возможные напряженные циклы и напряженные сегменты при комбинации накопителей потенциальной
(упругости) и кинетической энергии. Смысл условных обозначений сил и скоростей разъясняется на рис. 6.21
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
313
Дей>»
ству-
ющие
силы
Поясне-
к. ння
сн
№
Напряженный цикл,
напряженный сегмент,
силовое поле
Возникновение сило-
вого воздействия
-
1.2
Напряженный цикл
(всегда замкнут). Си-
ла передается через
тела, которые не про-
никают друг в друга.
Из них должен быть
составлен цикл, что-
бы возникла сила ре-
акции, нужная для
равновесия
Дей-
ству-
ющие
силы
3
§
Поясие-
. ния
СН
№
Напряженный цикл,
напряженный сегмент,
силовое поле
.
Возникновение сило-
вого воздействия
2
3.2
Напряженный сегмент
(всегда открыт). Си-
ла реакции образует-
ся, например при ус-
корении массы. Для
создания равновесия
выходная сила не тре-
бует противодействия
с другой стороны.
При бесконечно боль-
шой массе (земля)
изменения скорости
не происходит
[дГ
С|’
2
11.2
Силовые поля (зам-
кнутые) . Два проти-
воположно действ, си-
лов поля приложены
к одним н тем же де-
талям. Поскольку
оин могут быть про-
никают, во^шкает
вырожденный напря-
женный цикл (т. е. на
пряженный сегмент).
В зависим, от величи-
ны и характера изме-
нений сил возникает
или устойчивое поло-
жение равновесия
(поле 1.1), нли заряд-
ка и разрядка с соот-
ветствующим движе-
нием (поле 12.1)
(см. также кат. 4.2.3)
н
X
13
§
Б
S
Ф
X
с
5.2
Напряженный сегмент
и силовое поле соеди-
няются в полный на-
пряженный цикл.
Напряжен, цикл мо -
жет быть составлен из
силов. поля и напряж.
сегмента(поля 5.1;7.1)
__ __
Напряжен цикл воз-
никает здесь путем до
полнения напряжен -
ного сегмента сило-
вым полем до цикла
В предельном случае
силовое поле может
пронизывать напряж.
сегмент (напр. сое дин.
через земн. прнтяжен.!
7.2
Напряженный цикл
(замыкаемый напря-
женным сегментом
"cj”) и движение —
предпосылки переда-
чи энергии (поля 2.1;
7.1)
Я
Ф
Е?
О
С
X
X
о
С
Е?
X
Е
х
Е?
X
X
X
I
CU
ф
X
X
5
8.1
i. О.
0) Ф
X X
X X
Е Е
8.2
Напряженный сегмент
из частей m ] и m 2
X
X
X
ф
3
X
ё
о
с
9.2
Силовое поле (откры-
тое) . За счет силов. по-
ля, которое может
действ, иа кажд. части-
цу вещества, две мас-
сы отталкиваются или
притягиваются (нап-
рим., случай снл тяже-
сти) . Силовое действ,
может сильно изменя-
ться на протяжении те-
ла (магнит, поле), так
что возникают разли-
чные, пространствен-
но-зависимые напря-
жения
К
8.
X
S
3
§
О
ф
§
е
п Л
*
к
а
8
Е
13.1 Вторичный
13.2
Первичный цикл:как
в поле 1.1.
Вторичный цикл: при
тренин покоя (у, =0)
как в поле 1.1. Прн
тренин скольжения
сила действует толь-
ко пока », > 0. Сила
трения зависит от но-
рмальной силы, энер-
гия превращается
необратимо_________
14.2
Напряженный цикл
возникает через осно-
вание, если цилиндр
замкнут, жидкость
вязкая, а поршень -
подвижный. Напря-
женный сегмент воз-
никает, если цилиндр
открыт, а жидкость
движется поршнем.
Сила трення зависит
от скорости, энергия
превращ, необратимо
F
Обозначения: СП “ состояние накопителя, ”с , ” — сжатие; с3 — растяжение.
15.2
Первичный напряжен-
ный цикл возникав!
через люльку, штанги
и тормозную доску
до тех пор, пока дей-
ствует F v, а вторич-
ный напряженный
сегмент между люль-
кой и тормозной дос-
кой — пока v =# 0 н
действует F,y
16.2
Возникает первич-
ный напряженный
сегмент, как в слу-
чае 4, пока d >• < 0, и
вторичный — пока
Ф 0
17.2
Первичный цикл как
в поле 1.1 является
предпосылкой обра-
зования напряженно-
го сегмента из сво-
бодно висящего ка-
ната. Он существует
как в покое (трение
покоя), так и при
торможении в движе-
нии (трение скольже-
ния) ______________
18.2
При движении в вяз-
кой жидкости в каж-
дой частице вещества
(массы) возникает
напряженный сегмент
Рис. 6.12-2. Перелаза сил в напряженных циклах и напряженных сегментах, содержащих силовые поля и не содержащих их
314
6. Новые модели для методического конструирования с помощью ЭВМ
Цепи и
степени
свободы
Вид напря-
женного цикла
Пример зубчатой передачи
Схема механизма для принудитель -
ного и напряженного состояния
Число степеней
свободы до и
после прило-
жения силы
№
1
Напряженный
цикл статичес -
кий (накопи - 1
тель потенциа-
льной энергии)
1.3 йена-jнал^я-
пряжей, подвиж непод- вижное
П =4 п =6
е, =3 7
ец=2 еп= 2
f =1 f =-1
напряженное,
подвижное
п =8 еи= О
G] =9 f =1
е„ = 2
Напряженный
сегмент кине -
тический (на-
копитель кине-
тической и по-
тенциальной 2
энергии)
Напря- Трение,
женный завися-
цикл,
напря-
женный
сегмент
стацио-
нарный
(нако-
питель
потен-
циаль-
ной и
тепло-
вой
энер-
гии)
щее от
силы
(напря-
женный
цикл)
3.1 13.2 3.3 иена-,напря-
Трение,
завися-
щее от
скорос-
ти (на-
пря-
женный
сег-
мент)
п — число звеньев; еь еп, еи — число одно-, двухподвижных и идентичных пар; f — число степеней свободы цепи звеньев
Рис. 6.12-3. Примеры напряженных циклов и напряженных сегментов. Цепи звеньев для подвижного напряженного и ненапряженного
состояния и неподвижного напряженного состояния
ции, которые могли бы появиться в поле 4.5 на
рис. 6.12-1, оказываются недопустимыми, посколь-
ку в месте соединения не действуют силы и по-
этому не возникают напряжения. Таким образом,
теоретически возможны всего девять комбина-
ций.
Если вычеркнуть повторы, например, в полях
1.6, 3.4 и 4.6, то останется шесть комбинаций. Из
этих оставшихся использовать комбинацию из
поля 6 можно только при особых условиях, по-
скольку здесь накопитель кинетической энергии
заряжается и разряжается, только если скорости
неравномерны. Для абсолютно жестких тел это
потребовало бы бесконечно больших сил. Такая
комбинация будет работоспособна, только если
для масс будет допустима некоторая минималь-
ная деформация. Похожая ситуация наблюдается
в полях 1.3 и 3.1. Если масса элементов нулевая, то
для зарядки и разрядки элементов требуются
бесконечные скорости. Поскольку мы не знаем тел
с нулевой массой, то и эти конструкции должны
обладать некоторым минимумом инерционных и
поглотительных свойств. Таким же образом следу-
ет рассматривать и комбинации в полях 4.3 и 6.1. В
итоге (с учетом сделанных оговорок) у нас остает-
ся шесть принципиальных случаев, при этом
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
315
соответствующие поля обведены на рис. 6.12-1
жирной рамкой.
Если исследовать (аналогично способу на
рис. 6.12-1) передачу сил с учетом силовых полей, то
при этом получатся возможности, представленные
на рис. 6.12-2. Примеры на этом рисунке раскрыва-
ют возможности использования в конструкции
требующихся сил при помощи напряженных цик-
лов, напряженных сегментов и силовых полей.
Тривиальные варианты, например изменение
знака скорости в конструкции примера 2, на рисун-
ке не приводятся.
Важный случай статического напряженного
цикла - пример 1. Здесь определенная сила под-
держивается без подвода или отвода энергии, что
может быть использовано, например, в соединени-
ях. В других примерах такого эффекта не возника-
ет, хотя он может быть достигнут в результате
комбинации напряженного сегмента и силового
поля, как в примерах 5 и 6. К примеру 6 относится
и то очевидное явление, что твердые тела на пло-
ской поверхности прочно связаны с землей. Приме-
ры 11 и 12 дают наглядное представление о том,
каким образом с помощью двух противоположно
действующих полей можно удерживать или пере-
мещать массу (плазму, магнитную деталь) без
соприкосновения с ней. Примеры 3 и 4 относятся к
напряженным сегментам с соприкосновением
элементов на основе сил инерции и упругих сил. В
близких к ним примерах 9 и 10 использованы силы
инерции и полевые силы, а соприкосновение эле-
ментов отсутствует. Комбинацию полевых и упру-
гих сил при наличии движения доставляет пример
7, а комбинацию с двумя кинетическими накопи-
телями - пример 8.
В примерах 13-18 представлены напряженные
циклы и напряженные сегменты с фрикционными
парами. Трение покоя (примеры 13, 17) не состав-
ляет принципиально нового случая. В каждом из
этих двух примеров оно может быть использовано в
неподвижных соединениях двух деталей, но для
этого типа соединения требуется дополнительный
первичный цикл или первичный сегмент для
создания нормальных сил.
В случае трения скольжения (примеры 13-18)
один из накопителей энергии, заряжаемый при
работе, всегда необратим. Новое по сравнению с
предыдущими примерами здесь то, что второй
накопитель энергии по существу является тепло-
вым: он принимает тепловую энергию, но не произ-
водит никакой полезной механической работы. В
связи с этим для существования напряженного
цикла или сегмента здесь необходим постоянный
подвод энергии.
В примере 13 показан напряженный цикл, в
котором энергия от упругого накопителя Ci через
фрикционную пару передается на опоры (тепловой
накопитель). Возникает сила, которая сохраняется
до тех пор, пока продолжает течь поток энергии.
Нормальная сила создается первичным циклом с
пружиной Сз. Этот случай имеет важное значение,
поскольку тепловой накопитель легко разряжать
(охлаждать) и, получая как следствие стационар-
ный поток энергии, поддерживать тем самым
существование стационарного напряженного
цикла. Изменяя нормальную силу (пружина с3),
можно изменять величину силы трения.
Похожие отношения наблюдаются в примере
14, с той только разницей, что там сила трения
зависит в основном от скорости v движения порш-
ня и существует только при относительном движе-
нии. Можно представить себе два варианта этой
конструкции. В одном из них цилиндр замкнут и
имеет узкий просвет по площади поршня; во
втором - цилиндр открыт (например, для турбули-
зации воздуха). Тогда в первом случае возникает
напряженный цикл (через основание), поскольку
силы передаются через переднюю стенку цилинд-
ра. Во втором же случае возникает напряженный
сегмент, поскольку здесь в основном приводятся в
движение молекулы воздуха. Отметим, что в
обоих последних примерах (13 и 14) путем соответ-
ствующего подвода энергии можно добиться
стационарного состояния, стационарного напря-
женного цикла и вместе с этим постоянного под-
держания силы.
Похожий способ создания напряженных цик-
лов и сегментов состоит в использовании вместо
сил упругости комбинаций сил инерции или поле-
вых сил с силами трения (примеры 15-18) (см.
также кат. 4.2.1: Типы связей).
Четыре важных примера использования напря-
женных циклов и сегментов в приводах представ-
лены на рис. 6.12-3. Эти примеры соответствуют
случаям 1, 9, 17, 18 на рис. 6.12-2. Рис. 6.12-3 являет-
ся попыткой показать на типичных примерах
реализацию напряженных циклов и сегментов в
задачах натяжения и привода. Одновременно
должны быть определены степени свободы соот-
ветствующих цепей звеньев для трех или двух
постоянно сменяющих друг друга рабочих состо-
яний: ненапряженное, но"подвижное; напряжен-
ное неподвижное и напряженное подрижное. Эти
рабочие состояния соответствуют трем основным
состояниям накопителей энергии: удержание в
заряженном состоянии накопителя кинетической
энергии, удержание в заряженном состоянии
накопителя потенциальной энергии и зарядка или
разрядка одного из этих двух накопителей.
3. Три рабочих состояния цепей звеньев в передачах
Подобно соединениям (см. рис. 4.67, строка 4)
передачи также могут находиться в состоянии
„ненапряженное”, с чисто геометрическими связя-
ми в подшипниках и зазорами в направлениях
передачи движения. При этом передается движе-
ние, но практически не передается усилие. Соот-
ветствующая кинематическая цепь в этом состо-
янии имеет число степеней свободы f = + 1. Все звенья
рассматриваются как жесткие. На рис. 6.12-3 это
рабочее состояние обозначено „ненапряжен-
ное, подвижное”. Приблизительно такое состо-
яние наступает, когда передачу смонтировали, но
еще никуда не подсоединили и легко производят
холостую прокрутку. При идеализированном
рассмотрении чисто кинематических процессов
можно представить себе, что нет никакого напря-
женного цикла или сегмента. Передается только
скорость.
Второе состояние „напряженное неподвижное”
наступает, как и у соединений, тогда, когда непо-
движная передача подвергается напряжению,
например при наложении пружин, на ее вход и
выход (см. поле 1.1 рис. 6.12-3). При этом передают-
ся усилия, но не передается никакого движения.
Соответствующая кинематическая цепь имеет
число степеней свободы/= -1. Имеет место ста-
тический напряженный цикл, который может
появляться только в примерах данной строки, а
также строки 3 при трении покоя. Так же, как и у
316
6. Новые модели для методического конструирования с помощью ЭВМ
соединений, сила предварительного напряжения
больше, чем возможная сила, приводящая в дви-
жение весь механизм. В направлениях вращения
подшипников действует силовая связь, поскольку
пары элементов находятся в области действия
напряжений. Упруго деформируемые звенья в
цепи рассматриваются как жесткие. Передается
только сила.
Третье рабочее состояние, которое также могут
принять все примеры рис. 6.12-3, - это движение с
напряжением, например когда в строке 1 увеличи-
вается сила пружины, что приводит механизм в
движение, когда в строке 2 маховик разгоняется
двигателем, в строке 3 - проскальзывает фрикци-
онный тормоз и в строке 4 крыльчатка гонит воз-
дух. При этом передается сила и скорость, и, следо-
вательно, мощность. Число степеней свободы
цепи снова равно / = +1, поскольку под действием
внешней силы, во всех перечисленных случаях
большей, чем сила предварительного напряжения,
происходит деформация упругих звеньев, и цепь
рассматривается так, как если бы она содержала
соответствующие дополнительные звенья и сочле-
нения. Снова можно провести параллель с силовы-
ми соединениями, а именно: с ситуацией при их
монтаже, когда внешние силы больше, чем силы
предварительного напряжения. В направлениях
вращения подшипников в передачах действует
силовая связь, поскольку соответствующие пары
элементов входят в некоторый напряженный
цикл, напряженный сегмент или силовое поле.
Рассмотрев второе и третье из описанных
рабочих состояний, можно установить, что в напря-
женных циклах с соответствующими упругими
звеньями при изменении силы статически одно-
кратно переопределенная цепь превращается в
принудительную.
4. Практические примеры конструкций передач
По отдельным примерам, приведенным на
рис. 6.12-3, можно сделать следующие замечания: в
поле 1.1 воспроизведена обычная двухступенчатая
зубчатая передача. Если вначале не обращать
внимания на пружины, то она в точности соответ-
ствует схеме механизма в поле 1.2. С помощью рис. 6.14
мы устанавливаем, что ее число степеней сво-
боды f= 1, т. е. цепь принудительная (поле 1.3,
слева). Прикрепление пружин с и h (поле 1.1)
означает добавление двух звеньев с четырьмя до-
полнительными одноподвижными парами (полу-
чаем в общей сложности п = 6 и в] = 7), что превра-
щает принудительный механизм в переопределен-
ный. Дополнительные элементы обозначены
штриховыми линиями с и h в поле 1.2. Число сте-
пеней свободы f = -1 (поле 1.3, справа, вверху).
Наши рассуждения сохраняют силу только до
тех пор, пока мы рассматриваем дополнительные
звенья с и h как жесткие, т. е. пока действующие
на них силы меньше, чем силы предварительного
напряжения. Поскольку эти звенья приобретают
все же растяжимость под действием сил, больших
силы предварительного напряжения, то их кине-
матическое поведение становится таким же, как и
при замене каждого из них на два жестких звена
(ci, с2 и hls h2 соответственно, штрихпунктир-
ная линия вне цепи в поле 1.2), соединенных
между собой одноподвижными парами. С этими
комбинациями вместо звеньев с и h мы снова при-
ходим к принудительной цепи, что показано в
поле 1.3 внизу.
Таким образом, мы расширяем механизм из
звеньев, которые можно считать жесткими, столь-
кими звеньями и парами, чтобы он стал переопре-
деленным (см. рис. 6.11-1). Эти звенья делаются,
однако, упругими или податливыми при действии
силы, что позволяет достичь двух целей: подвиж-
ности и напряжения. Такие механизмы, как уже
упоминалось, наиболее пригодны для передачи
мощности.
Возникновение напряженного цикла предпо-
лагает, что в замкнутой системе зарядка или
разрядка обоих действующих накопителей энер-
гии вызывает противоположно направленные
движения. Для напряженного цикла в поле 1.1 на
рис. 6.12-3 это два упругих накопителя, движения
при разрядке которых приводят к двум противо-
положно направленным вращательным движени-
ям. Зубчатые колеса будут прокручиваться до тех
пор, пока не установится равновесие (точка с
минимумом потенциальной энергии, см. также
рис. 4.5, а). Уравнительное движение под действи-
ем обусловленных трением демпфирующих вли-
яний очень быстро прекращается, напряжение и
связанное с ним силовое действие на соответству-
ющих поверхностях соприкосновения сохраняет-
ся. Тем самым у нас появляется неподвижный,
статический, напряженный цикл. Для того чтобы
иметь дело только с однозначными взаимозави-
симостями, принудительный механизм (здесь:
зубчатые колеса и корпус), как правило, делают
как можно более жестким, а дополнительные
растяжимые звенья - упругими, по возможности с
единственным направлением деформации.
Действующие силы и накопители энергии в
конструкции передачи в поле 2.1 на рис. 6.12-3
другого рода, чем в напряженном цикле. В привод-
ном двигателе вместо упругих сил действуют
электромагнитные полевые силы, а'в маховике на
выходе - силы инерции, вызываемые ускорением
или замедлением. Пока действуют электромагнит-
ные полевые силы - в условиях отсутствия тре-
ния - система должна ускоряться или замедлять-
ся, в зависимости от направления действия сил по
сравнению с направлением вращения маховика.
Силы инерции в накопителе кинетической энер-
гии всегда противодействуют таким изменениям,
подобно тому как в напряженном цикле силы
упругости противодействуют другим силам упруго-
сти. В нашем случае мы имеем дело не с замкну-
тым напряженным циклом, а с открытым напря-
женным сегментом. Схема напряженной переда-
чи представлена в поле 2.2 (частично), а ее степе-
ни свободы указаны в поле 2.3 слева. Поскольку
силы появляются только при неравномерном дви-
жении (предполагается отсутствие трения), то
такой характер движения является необходимой
предпосылкой напряжений. Число степеней
свободы цепи и в напряженном состоянии должно
оставаться f = 1 (поле 2.3 справа). В этом механиз-
ме мы встречаемся с кинетическим напряженным
сегментом.
Если на выходном колесе нет возникающих
при ускорении или замедлении массовых сил, а
есть, например, сила трения, порождаемая упругой
нормальной силой, картина в корне изменяется.
Движение равномерно только при постоянном
моменте от двигателя на входе, и цепь является
напряженной, как и в первом случае. Однако в
отличие от него электромагнитный накопитель в
двигателе может пазояжаться во время движения
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
317
без того, чтобы второй обратимый механический
накопитель заряжался или разряжался. При рав-
номерном движении здесь возникает статический
подвижный (стационарный) напряженный цикл. У
механизма, фрагмент схемы которого показан в
поле 3.2, число степеней свободы/= 1, а на вход-
ной и выходной стороне, расширенной звеньями
h, с, число степеней свободы /=-1, как и в случае
статического неподвижного напряженного цикла.
Последний случай возникает, если усилие, разви-
ваемое двигателем, недостаточно для приведения
механизма в движение. Фрикционная пара между
звеньями g и h действует при этом как однопо-
движная пара элементов, так же как и листовая
прижина h при движении в горизонтальном на-
правлении. Если же усилие от двигателя способно
привести систему в движение, причем через корот-
кое время устанавливается постоянная скорость
вращения, то мы получаем статический, равномер-
но подвижный, стационарный напряженный цикл.
Звенья с и h в цепи (поле 3.2) должны быть заме-
нены звеньями ci, с2, hi и поступательной парой,
а также одноподвижной парой при звене hi и двух-
подвижной парой между звеньями hi и g.
Если фрикционная поверхность тормоза распо-
ложена перпендикулярно оси вращения, как это
обычно и бывает, то возникает дополнительная
идентичная степень свободы и звенья ci, с2, a, b,g
остаются взаимно подвижными даже если звено
hi неподвижно, и общее число степеней свободы
механизма f = 0.
В четвертом случае кинематическая схема до
места приложения силового воздействия (фраг-
мент схемы см. в поле 4.2) совпадает со всеми
остальными. Механизм является принудительным
(f= 1, поле 4.3, слева). Однако поскольку здесь
силы возникают только тогда, когда на крыльча-
тке действует трение, т. е. когда она крутится, то и
в этом случае, несмотря на напряжение, цепь
звеньев остается принудительной (поле 4.3, спра-
ва). В отличие от случая 2, напряжение здесь
имеет место и при равномерном движении. В итоге
мы сталкиваемся здесь со статическим подвиж-
ным - стационарным напряженным сегментом.
Сила трения на выходе зависит от скорости.
При использовании накопителей энергии в
качестве конструктивных элементов, с помощью
которых посредством нужных сил что-либо должно
изменяться или сохраняться неизменным, анализ
возникающих напряженных циклов, напряженных
сегментов или силовых полей оказывается чрезвы-
чайно полезным вспомогательным средством. По
существу, в наших целях мыможемрасполагать не
силами, но накопителями энергии, которые можно
Х^Редукция Исходная цепь Число звень- ев, пар,сте- пеней сво- боды Редукция к базо - вой цепи или к случаю общего положения или общих размеров Число звеньев, пар,сте- пеней свободы Дополнение
№ 1 2 3 4 5
Одно- и двухпод- вижные пары 1 1.1 п 1.2 п = 3 ei-2 еп= 1 f =1 1.3 1.4 п = 4 еГ 4 f = 1 1.5 Двухподвнж - ную пару можно заменить двумя одноподвижны - ми и одним про- межуточным звеном
Идентичные, одно- и двухпод- вижные пары 2 2.1 2.2 П = 4 6] = 3 еп = 1 ^id~ 1 eireid 'S = 2 f =1 2.3 2.4 п = 4 ег4 f --1 25 Идентичные свободы дела- ют отдельные звенья незави - симо подвиж - ными, но умень- шают число степеней сво - боды цепи
Одно- н мно- гократные (например, двукратные) однопод- вижные па - ры (двой- ной шарнир) 3 3,1 з Na—3 2/ \ | / \ 4 / \ 5 A j er 6 —** 1 <"D 33 .UJ и ♦ 2L и it —* rDI ||> on CT> It 13 ~ 3 Cw гАХ/уАз 6 о 3.4 п = 6 е, = 7 f =1 3.5 Редукция пары X - ё = (i -1) е, ё = (4-1)е1=3е1
Особое положение пар 4 4J ^Р 47 n =5 e, = 6 f =0 но не вполне жесткая 4.3 общее положение н размеры 4.4 п -- 5 е, = 6 f =0 4.5 Таблица на рис. 6.14 не учитывает осо- бых случаев положения и сочетаний размеров
Избыточные условия же- сткости (на- пример, зве- но 2) и осо- бые раз - меры 5 5.1 \ ' \ \2 \ A у особые размеры 5.2 n =5-1 = 4 er 6-2 = 4 f =1 звено 2 избыточно (пассивная связь)
Обозна- вращатель- —| поступатель
чения: ная пара ej | ная пара
-~©~ двойная вращательная пара
а 0 х_ поступательио-вра -
щательная пара еп
Рис. 6.13. Примеры определения числа степе-
ней свободы цепи звеньев с помощью табли-
цы из рис. 6.14 по [11]. Трактовка особых слу-
чаев
Пригодность цепи Двукратные напряжен- ные циклы Однократные напряжен- ные циклы Ненапряженные соединения Принудительные механизмы Дифференциалы —
Число степе - ней свободы цепи f=-2 f=-1 f=0 f = 1 f = 2 —
\Md Число^Х^ звеньев п 0 1 2 3 4 5 6 7 8 0- 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 7 8 0 1 2 3 4 5 6 7 8 en+eid^^ / Число звеньев п
1 1 0 (0) 1
2 2 1 0 2 1 0 1 0 1 0 0 2
3 4 3 2 1 0 3 2 1 0 3 2 1, 0 2 1 0 2 1 0 3
4 5 4 3 2 5 4 3 2 1 4 3 2 1 4 3 2 1 0 3 2 1 0 4
5 7 6 5 4 3 6 5 4 3 6 5 4 3 2 5 4 3 2 5 4 3 2 1 5
6 8 7 6 5 8 7 6 5 4 7 6 5 4 7 6 5 4 3 6 5 4 3 6
7 10 9 8 7 6 9 8 7 6 9 8 7 6 5 8 7 5 5 8 7 6 5 4 7
8 11 10 9 8 11 10 9 8 7 10 9 8 7 10 9 8 7 6 9 8 7 6 8
9 13 12 11 10 9 12 11 10 9 12 11 10 9 8 11 10 9 8 11 10 9 8 7 9
10 14 13 12" 11 14 13 12 11 10 13 12 11 10 13 12 11 10 9 12 11 10 9 10
Уравнение для значений параметров е1 3n-en-eM.s-1 6! 3n-en-eid.s-2 ег 3П" en"eid+S"3 ег 3n-en-ea.s-4 ег 3n-e„-ea>s-5 Число: < од- ноподвижных, €*]] —даухпод- вижных, е id — идентич- ных пар
2 2 2 2 2
Уравнение Дизиоглу для общего случая j _ число степеней свободы । _ число степеней свободы в одной механизма i точке соприкосновения t V/h f ) 'C-f с h_ для плоских механизмов Ь = 3 L. — число идентичных степеней свободы 1 = ЩП ~ 1) " 2- ' " - 1: J - zL'ir) + Обозначения: u для пространственных 0=6 1 u S — число пассивных связей П — число звеньев (например: f = 3(п - 1) - 26j - 6П - 6;d+ S для плоскости) - - - — - . —. - _ -- -- -- - _ . _ _
6. Новые модели для методического конструирования с помощью ЭВМ
Значения числа звеньев п н двухподвижных пар < и используются также (в качестве порядковой нумерации) для обозначения полей
Внимание: ограничения из-за подцепей, число степеней свободы которых меньше общего числа степеней свободы цепи
Рис. 6.14. Число пар элементов ер e„ и е^ в зависимости от числа звеньев в замкнутых, плоских цепях с числом степеней свободы от/——2 до/= 2 в соот-
ветствии с уравнением Дизиоглу [11]
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
319
по потребности заряжать, разряжать или удержи-
вать в заряженном состоянии. В дальнейшем
изложении мы, как правило, будем более подроб-
но рассматривать только плоские статические,
неподвижные напряженные циклы с упругими
накопителями энергии.
6.3.4. Статические упругие напряженные циклы
Устройство этих напряженных циклов лучше
всего выясняется при рассмотрении их цепей
звеньев. Заодно можно установить различия в
числе образующихся на плоскости (многоуголь-
ных) областей при одном и том же числе напря-
женных циклов.
Нередко возникает задача увеличения числа
областей при том ж© числе напряженных циклов.
Это можно проделать двумя способами:
расширением одного из звеньев без добавле-
ния новых сочленений и без объединения этого
звена с другими звеньями;
добавлением в каждом случае такого числа
новых звеньев и пар, чтобы при нем число степе-
ней свободы цепи оставалось f = -1 (см. рис. 6.14,
столбец f = -1).
При определении числа степеней свободы
механизма легко могут быть допущены ошибки,
если не обратить особого внимания на различия
видов пар, избыточные условия жесткости, особен-
ности расположения й сочетания размеров.
На рис. 6.13 приведены примеры цепей из
работы [11], определение числа степеней свободы
которых часто наталкивается на трудности. Как
показано на рисунке, их можно свести к соответст-
вующим базовым цепям. Если проделать эту про-
цедуру, то потом можно будет определить число
степеней свободы, используя только число звень-
ев п и число одноподвижных пар ej, например по
рис. 6.14. Значения числа звеньев помещены в
левом и правом заголовочном столбце рис. 6.14, а
число одноподвижных пар - в полях соответству-
ющих строк.
Можно обойтись без редукции случаев 1 и 2 на
рис. 6.13, если найти сумму двухподвижных и иден-
тичных пар и вычесть из нее число избыточных
условий жесткости (eu+ eid - s). Это значение по-
мещено в третью строку головки таблицы на рис. 6.14.
На пересечении строки числа звеньев п и ^столб-
ца суммы еп + eid - s находится число одноподвиж-
ных пар. Но это поле пересечения всегда находит-
ся в определенной зоне, для которой соответству-
ющее число степеней свободы указано в заголов-
ке. Если сумма ец + eid - s отрицательна или боль-
ше 8, то таблицу можно продолжить для каждой
зоны, экстраполируя приведенные числовые ряды.
Если заданы значения и, en, eid и s, то с помощью
уравнений в предпоследней строке можно вычи-
слить ei. В любом случае, в том числе и для прост-
ранственных цепей звеньев, можно найти число
степеней свободы с помощью уравнения Дизиоглу.
В строке 3, поле 3.1, на рис. 6.13 встречается
краткая пара ё" (образована более чем двумя
звеньями). В рассматриваемом случае она являет-
ся двойной одноподвижной парой. Согласно
Дизиоглу можно произвести редукцию посредст-
вом умножения числа степеней свободы соответ-
ствующей кратной пары на число ее звеньев
i, уменьшенное на единицу (см. поле 3.5). Одно-
подвижная пара, например, с i = 3 звеньями (по^
ле 3.2), будет тогда рассматриваться как
Пример
конструкции
Представление1сила трения
в виде цепи
звеньев
/^тангеи- |
ци ал. си ла
Дополнение
Силы тре -
ния боль*
ше внеш "
иих тан -
генциаль-
иых сил:
Fr fta
' 1.4
’’Точечное со-
прикоснове-
ние”, острие
проникает
сквозь наруж-
ную поверх *
ность
__
’’Двухточечное
соприкосновен
ние”, острия
проникают
сквозь наруж-
ную поверх-
ность
3.2 Трение ско-
„ . льжения
м м
Эквива-а и
лентная схема
Трение покоя
(^>-1
о Ь
3
Силы трения’’Точечное со-
могут быть
больше и
меньше
внешних
тангенциа-
льных сил:
прикоснове-
ние”, геомет-
рия наружных
поверхностей
не изменяется
ТА
Эквивалент-
ная схема
внешних
тангенциа-
льных сил:
Fr ft а *
ио меньше
тангенциа-
льных сил,
возникаю-
щих при
’’растяже -
нии” дета-
ли:
Fr < FTS
R
Силы тре -
ния больше
4.4
В зоне центра
наибольшего
трения проис-
ходит относи-
тельное таи -
геициальиое
движение.
Совокупное
действие со -
ответствует
трению покоя
Представление'
для плоскости
(нагрузка рас-
тяжения)
-_F2
T’T'VV’T
а b с f g
как в
примере
6 4
Свободы в па-
рах ограничив,
особым поло-
жением и тре-
1 нием. Пример
имеет силу
также для не-
упругих тро-
сов, канатов,
веревок, про-
волок
Обозначейия:-О— вращатель-—^ постулательно-враща-
ная пара, е, тельная пара, е(1
Рис. 6.15. Представление конструкций, имеющих слоистую струк-
туру в виде пар или цепей звеньев
е = (3 - l)ez = 2е15
т. е. как две одноподвижные пары в расчетах и
таблице (см. рис. 6.14).
Редукция принудительной цепи с двойным
сочленением до цепи с однократными сочленени-
ями окажется правильной, то есть сохраняющей
принудительность,"если при этом не произойдет
противоположного процесса - объединения двух
смежных в четырехзвеннике сочленений в двой-
ное сочленение. Уменьшение числа простых
сочленений за счет образования кратных в одно-
кратно переопределенных цепях уже было показа-
но на рис. 6.11-2 на многочисленных примерах.
В случаях 4 и 5 на рис. 6.13 обычный расчет дает
неверные результаты. Чтобы этого не случалось,
следует избегать особых расположений и особых
сочетаний размеров [11,13].
Нахождение напряженных циклов в готовых
технических изделиях часто не может быть произ-
ведено однозначно в связи с тем, что пара для
двух технических поверхностей, в зависимости от
их формы и структуры, может интерпретироваться
по-разному. Если форма двух поверхностей такова,
что фактически между ними имеется одноточеч-
ное соприкосновение, не допускающее боковые
320
6. Новые модели для методического конструирования с помощью ЭВМ
ХПриводи-
\мая ин-
Чис форма
ло напз< ция
ряжен- X,
них цик-
лов_____
№
2
3
Название
Зажимная
скобка с од-
ной зажимав -
мой деталью
Щипцы
XI
Пила
Эскиз
Цепь звеньев
Число звеньев, пар,
степеней свободы
(напряженное
состояние)
Дополнение
Один
напряжен-
ный цикл
4
Дырокол до
и во время
нажатия
5
Зажимная
скобка с нес-
колькими за-
жимаемыми
деталями
б
Секатор
71
7
Дырокол
в момент
пробития
8.1
Два на-
пряжен-
ных
цикла
8
Запор для
резервуара
9
911
Ножницы в
фиксирован-
ном поло -
женин
Обозначения: -О'" вращатель -
ная пара,
4.5
f=-1
с h
7.5
Пробойник к
нагружается
Имеется ’’пяточный'
шарнир или сила
трения
Энергия накапли-
вается при посред-
стве барашка К
Необходима рука:
она действует как
пружина
Рука действует
как пружина,
кат. 4.5.1
п =3
е, >3
ens2
f=-2
п = 3
е, =4
еи = 0
f ж-2
•4 без h
п =3
81 = 3
е,,= 1
поступатель - —вращательно-поступательная пара, е,,
ная пара, ej
d
Q —-ь d к
ZZZZZZJ
\\W\W
5
П = 2
е, = 2
= 4
= 5
ь ' tv М
п =4
е,=5
п =5
е,=5
бц=3
5.5
На переходах с-а
и с-к ’’пяточный”
шарнир или трение
покоя (см. также
рис. 6.15, строки
4 и 5)
«э A S 'р ° J "* 'xiXZx' ° / 1> 6.4 Напря- жение п =7 ej = 9 ец=1 f=-1 Резание п =9 е) = 11 ен=! f= 1
7.3 _ Q 7.4 Напряжение п = 5 ei -1 бц = 0 f=-2
I — Т 1к Iе Z 1 т У J h
А 1 - а., Я, / . >г< _-Ь
6.5
Усилие руки мало
благодаря комби-
нации продольного
и поперечного дви-
жений между
звеньями а и/
8.5
Рассматривается в
плоскости сечения.
Накопление энергии
при посредстве
колеса к
9.5
Между разрезав -
мым материалом
и рукой необходи-
мо неподвижное
соединение.
Требуются две руки
Рис. 6.16. Статические напряженные циклы в технических изделиях повседневного обихода
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями
321
смещения (конические опоры), то этот случай
можно представлять как одноподвижную пару
(рис. 6.15, поле 1.2). В этом и многих последующих
рисунках необходимо учитывать, что на пару могут
быть наложены ограничения в виде дополнитель-
ных сил сжатия или растяжения, превращающие
ее, например, в одно- или двухподвижную. Если у нас
два или более острия воткнуты в деформируемый
материал (поле 2.1), то пару можно интерпретиро-
вать, как показано в поле 2.2. Места соприкоснове-
ния вместе с соединяющими их звеньями образуют
свой собственный напряженный цикл. Выпук-
лость, приложенная к гладкой поверхности (поле
3.1), представляет собой двухподвижную пару,
результат редукции [11], которой к одноподвиж-
ной паре или сочленению воспроизведен на экви-
валентной схеме в поле 3.2. Отметим, что пара
элементов при трении скольжения двухподвиж-
ная (это соответствует ее геометрической форме),
а при трении покоя она только одноподвижная.
В большинстве случаев техническая пара
рабочих поверхностей в том виде, как она пред-
ставлена на рис. 5.43 и рис. 6.10-2, например, двумя
параллельными линиями, должна интерпретиро-
ваться иначе, чем кажется вначале. Не всегда
правильно представление о деталях скольжения.
При этом также можно предположить, что сопри-
косновение происходит по выпуклостям в различ-
ных точках, с максимальным трением в их центре.
При действии нормальных сил эти выпуклости
могут смещаться в тангенциальном направлении;
примерно то же самое происходит, когда не слиш-
ком сильно изогнутый гвоздь выпрямляют на
твердом основании (рис. 6.15, поле 4.1). Силы
трения не являются здесь препятствием для
движения точек соприкосновения в тангенциаль-
ном направлении. Поэтому в качестве пар элемен-
тов мы берем одну двухподвижную и одну одно-
подвижную пары (поле 4.2), а в эквивалентную
схему входят три одноподвижные пары и одно
дополнительное звено.
Описанная пара элементов имеет важное
значение при расширении напряженных циклов,
так как, например, в их зоны давления можно
поместить сколь угодно много промежуточных
слоев. Силами давления эти слои сжимаются, но
при этом число степеней свободы всей цепи не
изменяется (см. рис. 6.15, строка 5). Конструкция
такого рода лежит в основе многочисленных
неподвижных соединений.
Представление симметричной тяговой цепи с
нагрузкой на растяжение с помощью одноподвиж-
ных пар дано в строке 6 рис. 6.15. Звенья цепи
ограничены в движении дополнительной фрикци-
онной связью таким образом, как если бы они
были связаны в одноподвижные пары в плоскости
чертежа.
Ряд практических примеров статических
упругих напряженных циклов в употребительных
технических устройствах представлен на рис. 6.16-6.19.
Они должны побуждать конструктора к целе-
направленному созданию напряженных меха-
нических устройств и схем их механизмов, которые
показывают необходимые напряженные циклы,
накопители энергии и стопоры обратного хода в
этих накопителях. На рис. 6.16 в строке 2 показано
изображение рассматриваемых устройств [19], а в
строке 3 - соответствующие им цепи. Используя
число звеньев и число пар (столбец 4), можно
21 — 2317
установить (см. рис. 6.14), что в примерах 1-6 содер-
жится один напряженный цикл, а в примерах 7-9
два напряженных цикла. Число замкнутых обла-
стей кинематической цепи различно. Накопление
энергии производится воздействием руки через
промежуточное звено к (примеры 3 и 8) и воздей-
ствием руки напрямую в остальных примерах.
Особого внимания заслуживает секатор (пример
6). Путем обеспечения движения режущих кромок
через пятизвенную цепь удалось достичь совмеще-
ния продольного (пилящего) и поперечного (раз-
резающего) движений. В результате становится
возможным, используя небольшую силу руки,
перерезать довольно толстые ветви, при этом
острым является только верхний нож (звено /), а
нижний служит только в качестве широкого про*
тивоупора, как доска при резке колбасы.
Стопоры* всех типов и быстродействующие
затворы служат прекрасными примерами использо-
вания неподвижных напряженных циклов, в
особенности - с упругими накопителями энергии.
Кроме того, эти механические устройства годятся
для демонстрации перехода принудительной цепи
в однократно переопределенную, как изображено
на рис. 6.12-3 в поле 1.2.
На рис. 6.17 в столбце 2 приведены обычные
схематические эскизы стопоров и быстродейству-
ющих затворов [45], в столбце 3 - принципиальные
схемы соответствующих механизмов, в столбце
4 - структурные схемы цепей, и, наконец, в столб-
це 6 - числа звеньев и пар, а также степеней
свободы. При переходе из состояния создания
напряжения (столбцы 4 и 5, нижние схемы; стол-
бец 6, данные справа) в напряженное состояние
(столбцы 4 и 5, верхние схемы; столбец 6, данные
слева) в большинстве случаев подвижность како-
го-то элемента ограничивается упором или изме-
нением некоторой пары элементов, и число степе-
ней свободы цепи изменяется с/=1на/=-1.
В процессе движения внешняя сила больше
силы внутреннего напряжения, и пружины можно
заменить двумя упорами. В напряженном состо-
янии, напротив, внешняя сила меньше силы внут-
реннего напряжения, поэтому пружины должны
быть изображены как самостоятельные (жесткие)
звенья (см. также рис. 6.12-3).
В строке 1 идентичная степень свободы звена
а вследствие закругления опорной поверхности
означает фактически, что здесь постоянно имеет
место состояние „мертвой точки”, а в строке 2
подвижность детали а обеспечивается благодаря
идентичной степени свободы сочленения.
Особые формы напряженных циклов, которые
возникают в результате звездообразного расшире-
ния одного из звеньев, приведены на рис. 6.18.
Примеры в столбцах 1-4 с расширенным основани-
ем типичны для мачт и палаток, примеры в столб-
цах 5 и 6 - для напряженных циклов с полностью
симметричным устройством и симметричным
распределением напряжений. В частности, цикл в
поле 3.5 является основой всех мячеподобных
конструкций, шин, надувных матрацев, а цикл в
поле 1.5 - для теннисных ракеток, рыболовных
сетей и т. д. Конструкции с единственным напря-
женным циклом (строка 1) теряют полностью
напряжение, если удалить из них даже одно звенп,
в других конструкциях (строки 2 и 3) остается, по
меньшей мере, еще один второй напряженный
цикл.
322
6. Новые модели дЛя методического конструирования с помощью ЭВМ
Наимено-
вание
Эскиз конструкции
Схема механизма
Цепь звеньев
Специальная
Общая
Число звеньев,
пар,степеней
свободы
3.1
Фиксатор
с криво-
линейным
звеном
(пово-
ротный)
4.1
Фиксатор
с криво-
линейным
звеном
(поступа-
тельный)
5.1
Шарнир-
но-рычаж-
нын быс -
тродейст-
вующий
затвор
(двупле-
чий)
Шарнир -
но-рычаж -
ный быс -
тродейст-
вующий
затвор
(одно-
плечий)
напряжения Q?
напря-S4ZZ/
жен- ь Jeu'S ।
ное Q
создание Q
на--------
пря- q;
жения
6.6
п =3
е, =3
еп = 1
= О
f =-1
n =4
ei =4
еп = 0
eid = 0
t =1
7.1
Шарнир-
но-рычажн
быстро - •
действ.за-
твор (дву-
плечий, с
изогну-
тым зве.-
ном)
созда-
ние
напря-
жения
соз да- а_____-о
ние о——"'
на-с/ \
пря-<$----------Ь
жения Ч
7.6
п = 4
е1 = 4
еп = 2
eid = D
f ---1
n =4
е, = 4
е„=0
f =1
Рис. 6.17. Анализ механических фиксаторов и быстродействующих затворов для определения их напряженного состояния при числе сте-
пеней свободы/= —1 и/= +1. Возрастание абстрактности их представления от столбца 2 к столбцу 6. В столбце 6 параметры слева отно-
сятся к напряженному состоянию, параметры справа — к состоянию создания напряжения
6.3. Создание напряженных циклов, напряженных сегментов и конструкций с силовыми полями 32 3
Обозначения; —О— вращательная пара е.
Рис. 6.18. Важнейшие звездчатые, статические напряженные циклы с различным числом степеней свободы и областей на схеме, разрабо-
танные на основе базовых форм
6.3.5. Зарядка, удержание в заряженном состоянии
и разрядка накопителей энергии
напряженных циклов
Технические устройства, представляющие со-
бой напряженные циклы, требуют однократного
или (при стационарной работе) постоянного подво-
да энергии. Подвод может осуществляться посред-
ством непрерывной разрядки кинетического
накопителя (двигателя), как это происходит для
стационарного и кинетического напряженных
циклов в примере на рис. 6.12-3. Другая возмож-
ность - однократная зарядка одного из двух нако-
пителей потенциальной энергии для неподвижно-
го напряженного цикла, например зарядка пружи-
ны с в устройстве на рис. 6.12-3, строка 1. Вполне
достаточно, чтобы заряжался только один накопи-
тель (в рассматриваемом случае только с). Если на^
пряженный цикл замкнут, то первый накопитель (в
примере пружина h) автоматически заряжает вто-
рой накопитель. Для неподвижных напряженных
циклов всегда представляет технические труд-
ности задача не допустить разрядки накопителя в том
месте, где подводилась энергия в процессе заряд-
ки, после ее окончания. Для решения этой задачи
предусматриваются „места зарядки” со стопорами
обратного хода, такими как, например, вентиль
(рис. 6.19, поле 1.1). Для стационарных напряжен-
ных циклов, для напряженных сегментов и сило-
вых полей, вызывающих движение, стопор на
входе не требуется, поскольку поток энергии
поддерживается постоянно. Напротив, стопор
обратного хода должен быть предусмотрен для
всех статических неподвижных устройств.
Способ зарядки энергией, связанный с подхо-
дящим стопором обратного хода, часто решающим
образом определяет конструктивное исполнение
напряженных циклов, например для жестких
соединений.
На рис. 6.19 приведены многочисленные приме-
ры технических устройств и соединений с различ-
ными принципами стопорения обратного хода. В
строке 1 показаны устройства для зарядки со сто-
порением обратного хода в одном направлении -
посредством геометрической связи, в другом -
посредством силовой связи; строка 2 иллюстрирует
принцип Г-образного запирающего движения,
стопорения обратного хода посредством „накиды-
вания”, строка 3 - посредством приспособлений с
точкой опрокидывания, строка 4 - посредством
зажимных приспособлений, и, наконец, строка 5 -
посредством пластической деформации [28, 29].
Накопители энергии в столбце 1 заряжаются
благодаря упругой деформации, в столбце 2 - теп-
ловой и в столбце 3 - в результате движения
против силы тяжести. Для каждого примера ука-
зан заряжаемый накопитель, вид стопора обратно-
го хода и название устройства.
На основе таких же принципов, что присущи
устройствам на рис. 6.19, действуют также запира-
ющие элементы на рис. 3.26. Во всех примерах с
силовой связью создаваемый напряженный цикл
должен сохраняться все время, пока он выполняет
свою функцию.
Примеры на рис. 6.12 и 6.16-6.19 показывают
конструктору, насколько разнообразными способа-
ми можно создавать и поддерживать силы для
самых разных задач. При этом может варьировать-
ся число звеньев и пар в цепях, вид накопителя
энергии, возможность его зарядки и разрядки,
равно как и поддержание заряженного состояния с
помощью различных стопоров обратного хода.
324
б. Новые модели для методического конструирования с помощью ЭВМ
Способ
предотвращения
разрядки
Зарядка потен -
циального на -
копителя
энергии
Упругая деформация
Примеры
Тепловая деформация
Подъем
Встроенный сто -
пор обратного
хода с геометри -
ческой связью
Зацепление за
край (крюк)
№
2.2
Бандаж нагрет
ЕЬ
Секатор
Ходовое колесо
Шпилька
нагрета
Пружина
напряжена
Автомобильное
колесо
п j ы==1
*—* Посажен на край
Шина
накачана
Вентиль
закрыт
Увели-
Рука препятствует
разрядке
Гайка
затяну-
та, са-
мотор
мо же-
ние
Резьбовое соединение
Газовый котел (газгольдер)
Груз поднят,
повешен
на крюк
Пружинные весы
Запирающий
элемент
свободен
Прн повороте
проходит через
точку опроки-
дывания
Патефонный замок
Защемление
Подъем
песка
Деталь_
растянута
Биметал-
лическая
пластина
Перемещение
за вершину
Преодоление
точки опрокиды-
вания (переход
через вершину)
Дополнительная
пластическая
деформация
Самотормо-
/ жение
З-2 При деформации
проходит '/ / /. Кнопка воз-
через точку! ЛК I врата в исход-
опрокидыва-// ное положение
ния —
Пружина
контакта
реле
Ленточный транспортер
КЗ
Соединение вал-ступица
5
Пустотелая заклепка
Элемент облицовки
Груз
поднят
Нагрета
н дефор -
миро-
вана
Сплошная заклепка
Предварительно напряжена
и деформирована
Устройство пожарной
сигнализации
Конический венец нагрет
Автомобиль
поднят
Самоторможе-
ние в действии
Само-
тормо
жение
Автомо-
бильный
домкрат
Заклепка
деформи-
_. рована
Рис. 6.19. Примеры способов зарядки потенциальных накопителей энергии в статических напряженных циклах и предотвращения их
разрядки. Заряженные накопители энергии служат для создания и поддержания статической силы
6.4. Геометрическая функциональная структура
325
6.4. Геометрическая функциональная структура
6.4.1. Особенности и назначение
В то время как векторная функциональная
структура по существу охватывает только функци-
ональные величины, их направление и относи-
тельное положение, учитывает их влияние на
„черные ящики”, о внутренности которых ничего
не известно, - геометрическая функциональная
структура [41, 43, 42] характеризует содержание
очередного „ящика” некоторыми существенными
свойствами. Он может быть снабжен упругими,
массозависимыми или (и) поглотительными (демп-
фирующими) свойствами (задаваемыми буквами
с, т, d) и называется рабочим объемом (рис. 4.52,
4.63,5.43,6.10-2).
Рабочий объем соединяет рабочие поверхности
и изображается при этом в виде линии, показыва-
ющей также его характерный размер (длину).
Рабочие поверхности, в свою очередь, представля-
ются линиями их проекций или сечений, касатель-
ные к которым могут пересекать рабочий объем
под различными углами. Дополнительное задание
функциональных величин через вектора (причем
вход и выход, как правило, предполагается распо-
ложенным в точке пересечения рабочей поверхно-
сти и линии рабочего объема, и как исключение -
там, где воздействует одноточечная величина)
расширяет векторный функциональный элемент
до так называемого структурно-функционального
элемента. На рис. 6.1 уже были представлены и
описаны различные элементы. В частности, струк-
турно-функциональный элемент содержит следу-
ющие данные*, характерное направление и размер
элемента, данные о его упругих (с), массозависи-
мых и жестких (т) или чисто поглотительных
(d) свойствах, об угловом положении, структурной
форме, точках воздействия сил, направлениях, а
также обозначение функциональных величин.
Если не рассматривать функциональные вели-
чины, то элемент становится символом, изобража-
ющим звенья и сочленения, например, как в
схемах теории механизмов и машин (см. рис. 6.1,
поле 6.2 - в этом случае мы называем его здесь
геометрическим структурным элементом). Если
же не рассматривать рабочий объем структурно-
функционального элемента, то останутся сущест-
венные величины векторного функционального
элемента (поле 4.2).
Таким образом, показано назначение структур-
но-функционального элемента и тем самым ге-
ометрической функциональной структуры. Она
должна служить соединительным звеном между
блок-схемой векторной функциональной структу-
ры (которая в основном отображает функциониро-
вание изделия подобно электрической схеме) и
конкретными, представимыми в виде отдельных
деталей элементами машин. Она объединяет в
себе как функциональную структуру, так и конст-
руктивную структуру. Между этими двумя структу-
рами в большинстве случаев зияет пропасть, что
легко понять из рис. 1.3,1.7,2.18,5.38.
Сопоставление этих структур проведено также
на рис. 6.39. Если там, например, в поле 2.3 устра-
нить стрелки векторов, то получится уже что-то
вроде чертежа или схемы позднейшего проекта
(поле 2.4). Во всех случаях на этом шаге констру-
ирования уже определяется топология изделия,
часто даже общие черты геометрической структу-
ры. В частности, пары рабочих поверхностей долж-
ны уже быть точно определены и заменены обозна-
чениями конструкций сочленений (см. рис. 4.70)
или требуемыми парами элементов (например,
кат. 4.3.1).
Геометрическая функциональная структура
открывает возможности, исходя из топологически
расширенной функциональной схемы (например,
векторной функциональной структуры), в опреде-
ленных случаях по четким правилам прийти к
геометрической структуре будущей конструкции,
так называемой принципиальной схемы. Наличие
определенных правил, позволяющих преодолеть
именно эту столь трудно проходимую плоскость
перехода, делает конструирование и в этой фазе
более доступным для ЭВМ. Это значит, что вычис-
лительная машина должна на основе чисто функ-
циональных данных и алгоритмов соединения
функций отыскивать из стандартного запаса (см.
рис. 6.22-1) геометрические структуры с рабочими
поверхностями и рабочими объемами и создавать
общую структуру, которая бы наилучшим образом
соответствовала поставленным целям.
Ключ к решению этой задачи дают элементар-
ные функции рабочих поверхностей и рабочих
объемов (объемные и поверхностные функции).
Это принципиально возможные энергетические
функции накопления, передачи, преобразования
формы и вида и комбинирования, представленные
на простейших геометрических структурах, напри-
мер на имеющих форму стержня механических
деталях и их рабочих поверхностях. Оказывается,
что структурно-функциональные элементы, приве-
денные на следующих рисунках, не только необхо-
димы, но и достаточны для описания всех процес-
сов, встречающихся в механических конструкциях.
Вне зависимости от применения ЭВМ в констру-
ировании, отраженный в таблицах анализ механи-
ческих конструкций имеет всеобщее значение и
способствует лучшему пониманию элементов
механизмов.
Сформулируем еще раз целиком назначение
геометрических функциональных структур: фор-
мальный переход от функциональной к предмет-
ной фазе в определенных пределах, сведение всех
простых технических устройств (например, элемен-
тов механизмов в энергетической области) к
одинаковым базовым структурам, синтез техниче-
ских устройств из этих базовых структур, например
при систематической функциональной интегра-
ции, представление формальных соотношений
между механическими интенсивнос'тными вели-
чинами и структурными формами, разработка
вариантов конструкций с использованием ЭВМ
и т. д. В отличие от элементов векторной структуры,
элементы геометрической функциональной струк-
туры рассматриваются так же, как и детали ма-
шин, которые являются упругими или жесткими,
обладают массой или энергопоглотительными
свойствами.
6.4.2. Элементы геометрической функциональной
структуры
На рис. 5.43 (представления функциональной
цепи) можно увидеть, что такая цепь всегда ока-
зывается последовательностью объемных и по-
верхностных функций. В начале и конце цепи
другая функция должна обеспечить соединение
детали со смежной или же опорная функция -
326
6. Новые модели для методического конструирования с помощью ЭВМ
Структурный элемент Элемент- стержень H-i—« Элемент-вал I Элемент- балка ; । / Элемент-рычаг Нормальные силы Тангенциальные и нормал. силы
К Функции ме- \ ханнческих \ ннтенснв- Меха\ностных ц ичес -\ве jim чин кие знерХк гетические\ Переместить поступательные величины в на- правлении ден - ст.вня Переместить вращательные величины в на- правлении вращения Переместить вращательные величины пер - пендикулярно к направлению вращения Преобразовать вращательные величины в по- ступательные, переместить силу Преобразовать поступательные величины во вращательные, переместить силу Преобразовать вращательные величины в по- ступательные, переместить силу
функции № 1 2 3 6 7 12
Накопить потенциальную энергию Заря- дить 1 1.1 г F2 1.2 м^ с м2 ^7 1.3 у, с 5 СО 1.7 Л f2 Ч ^м 1.12 f’/P F,
Удер- живать в заря- женном состоя - НИИ 2 2.1 F, г F2 h—2—г 2.2 Mi м2 23 м, м? 2.6 М—> F2 F1 2.7 Как в поле 2.6 2.12 . м—х И Л с -I- •F/цТ F/m
Разря - ДИТЬ 3 3.1 С рЗ Ё V2 3.2 Мц~ с М2 ш2 3.3 М) с ш2 м2 3.6 F1 3.7 Л ?- F; 3.12 г 2 и2 -F/цТ F/M Fi
Прово- Q
ДИТЬ У
Преоб-
разовать
форму
Рис. 6.20. Структурно-функциональные элементы для механических энергетических функциональных величин в векторном представ*
лении (фрагмент)
осуществить соединение с основанием. В этой
связи мы будем различать прежде всего три вида
функций: объемные, поверхностные и опорные,
рассматриваемые вместе с относящимися к ним
элементами.
1. Объемные функции
На рис. 6.20 воспроизведен небольшой фрагмент
из собрания элементарных объемных функций (см.
рис. 6.22-1). В головке таблицы на рис. 6.20 помеще-
ны пять структурных элементов, все в форме
стержня, но с различными комбинациями входов и
выходов. Для'всех элементов характерно наличие
одного измерения (длины) и рабочих поверхностей
на входах и выходах. Рабочие поверхности, обозна-
ченные точками, должны быть соединены с помо-
щью вещественной связи, снабженные поперечны-
ми черточками - с помощью вещественной или
другой связи, а те, у которых на рабочих поверхно-
стях действуют силы трения (столбец 12, правая
или левая вертикальная поперечная черточка), не
должны соединяться вещественной связью. Во
второй строке головки под каждым элементом
указаны выполняемые им функции. В боковик
внесены хорошо нам знакомые энергетические
функции абстрактной функциональной структуры.
В полях рисунка размещены функциональные
элементы, каждый из которых выполняет задан-
ную в боковике функцию, но либо с другими ин-
тенсивностными величинами, либо с другим
направлением действия этих величин. У каждого
структурно-функционального элемента есть иде-
альное свойство рабочего объема. Элемент явля-
ется или упругим (с), или массивным и жестким
(гл), или обладает поглотительными свойствами
(d), как на рис. 6.22-1. Если при элементе не стоит
такое обозначение, то т»н обладает всеми тремя
свойствами.
Так, например, элемент в поле 2.1 на рис. 6.20
может изображать нагруженный на сжатие стер-
жень (условно силы действуют центрально); эле-
мент в поле 9.2 - статически вращаемый, переда-
ющий энергию вал; в поле 1.3 - закрепленный
справа, подвижный слева прогибаемый брус; в по-
ле 2.6 - закрепленный слева, нагруженный справа
конец рычага; в поле 10.12 - вращающийся, справа
работающий во фрикционной паре конец рычага и
т. д.
В связи с тем, что представление элементов с
использованием векторов, обозначений величин и
индексов сильно затрудняет построение структур-
ной схемы, для изображения схем на экране дисп-
лея были разработаны удобные и легко читаемые
условные обозначения. Они приведены на рис. 6.21
наряду с векторными. Одноточечные величины
представляются гладкими линиями, двухточеч-
6.4. Геометрическая функциональная структура 32 7
\ Функцио- \ нальные \ величины Сила, момент Скорость, угловая скорость Мощность
Струк-\ турнын \ Векторное представление Экранное представление Векторное представление Экранное представление Векторное представление Экранное представление
элемент № 1 2 3 4 5 6
Элемент- стержень 1 1.1 F —J F —। 1.2 1.3 V -J V —1 1.4 1.5 F —। V —н F —4 V —М т т*
Элемент* вал 2 2.1 М М 22 2.3 ‘ 0) — (1) « • 2.4 2.5 М СО -•*’ м — Ц) —•* 2.6
Элемент- балка 3 3.1 м м 1 г III III n 3.3 11 Г" 1 III III м 1 3.5 Mz Ц) «V- к лк in № «= л]
Элемент- рычаг (нор- мальные величины) 4 4.1 |F J L 4.3 V 4.4 4.5 F ;Цу F Цу 4.6
Элемент- рычаг (тан- генциаль - ные вели- чины) 8 F f F/ц —j 8.2 —— -|l 8.3 ’ и V j 8.4 It 8.5 F*IV F/Ц Я F/ц nd Fit у 8.6 -jl.
Следует учитывать: векторы сил и скоростей должны — даже если их изображения и смешены — лежать на оси стержня
(строки 1 и 5); они относятся к конечной точке рычага (строка 4).
Ось вращения совпадает с осью вала (строка 2), проходит через центр круговых изображений
(строка 3) или при специальном задании через точку на продолжении балки.
Направление всегда указывает на точку пересечения с элементом, обозначения скоростей имеют
Г-образную форму.
Несоприкасающнеся обозначения изображают возникающие вследствие трения тангенциальные
силы и связанные с ними относительные скорости
Рис. 6.21. Экранное представление функциональных величин, относящихся к структурно-функциональным элементам, показанное на
примерах на рис. 6.22-1
ные величины приобретают крючки. Знак (направ-
ление) величины задается в точке пересечения с
обозначением элемента, где получается своего
рода стрелка. Таким образом немедленно опреде-
ляется. например, направление вращения в стро-
ках 2 и 3.
Условные обозначения фрикционных величин
не соприкасаются с изображением элемента, а их
направление определяется по положению возмож-
ной точки пересечения. Существенное достоинст-
во этого способа представления заключается
также в том, что одно- и двухточечные величины
изображаются одним символом, составленным из.
обоих отдельных символов (см. примеры в столб-
це 6).
На рис. 6.22-1 воспроизведена полная таблица
элементарных объемных функций в виде дисплей-
ных (экранных) обозначений. Она является осно-
вой последующих рассмотрений, а, кроме того, уже
была использована при разработке элементарных
векторных функций на рис. 6.3.
На рис. 6.22-2 показано, каким образом из
свойств упругости и поглощения идеализирован-
ных рабочих объемов можно скомбинировать
свойства реальных веществ, следуя предложению
Като, Кудо и Ихимару [26].
Не изменяя объемные функции, можно варь-
ировать положение точек приложения функци-
ональных величин путем отрицания, отражения и
отрицания отражения, что показано на рис. 6.23
для всех пяти структурных элементов. Для синте-
за составных структур часто необходимы, напри-
мер, подвергнутые отрицанию или отражению
элементы с теми же функциями.
Нумерация полей на рис. 6.22-1 и 6.23 дает
одновременно четкую классификацию содержа-
щихся в них объемных функций, которая исполь-
зована и в других рисунках. Если, например, требу-
ется задать элементарную объемную функцию для
передачи мощности в направлении действия силы,
то применяется обозначение Ро Ф 9.1. Если при этом
нужно также отличать стержень сжатия от стерж-
ня растяжения, то можно, подобно рис. 6.23, задать
для первого случая Р0Ф 9.1-1, а'для второго -
РОФ 9.1-2.
На рис. 6.24 содержатся элементарные опорные
функции, включая их отрицания и отражения, как
в векторном, так и в дисплейном представлении.
328
Рис. 6.22. Структурно-функциональные элементы и идеализированные связи внутри их рабочих объемов:
Структурный элемент Элемент- стержень »-1—1 Элемент-вал * 1 ’ Элемент-балка Z L 1 Элемент-рычаг для нормальных сил т г
Me Функции механнчесп Хкнх инте- Переместить поступатель - Переместить вращательные Переместить вращательные величины пер - Переместить поступательные величины перпендикулярно к направлению действия Преобразовать вращательные величины в по- Преобразовать поступатель - ные величины
хани-X ней вн. ческие X. вели- энергети-\чин в иаправ ленни действия направлении вращения пендикулярно к направлению вращения Постулат -вра- щат. величины в поступатель- ные величины Поступательн- величины в по- стулат .-враща- тельн. Велич. сту нательные величины во вращатель - ные величины
функции № 1 2 3 4 5 6 7
»энергию I зарядить 1 1.1 с 1 г 1.2 1.3 с 1.4 С У 15 16 1.7 Как в поле 1.5
X X 5 § $ 5 X удержи - вать в заряжен- ном со- стоянии 2 2.1 1—с—г 2.2 к 2..^ 2.3 С 2.4 С 1 и 25 Как в поле 2.4 2.6 Как в поле 2.4 2.7 Как в поле 2.4
X с 0 * С9 я раз- рядить 3 3.1 1— 12 3.3 3.4 3.5 ^-4 3.6 Как в поле 3.4 3.7 С Т ?
2 S а ф X зарядить 4 4.1 m Ч 4 *777 4.2 у "и.. 4.3 m J" 1 4.4 m У -J Wz 4.5 m 1- 4.6 m 4.7 m к 'J
кинетическую з удержи- вать в заряжен- ном со- стоянии 5 5.1 ГО 1 Ч 5.2 nt S 5.3 m Г <! 5.4 ГО т Т 55 Как в поле 5.4 5.6 ГО 7 J 57 m L
| Накопить раз- рядить 6 6J '1—-ч 6.2 6.3 6.4 m 5/ - J 77% 6.5 7^4 6.6 7 J 6.7
в X 0 л С9 Л к© 8 сх потен - циаль- ную 7 7.1 . cd 1 Г 7.2 cd 7.3 cd 7.4 Cli 1 75 са и 1- 75 7.7 Как в поле 7.5
1 Необратимо п 1 вид энергии кинети - ческую 8 8.1 rod 1 г 8.2 md <. .... 8.3 md А г 8.4 md 85 md х- L (Л 8.6 md I? 1 8.7 Как в поле 8.5
энергию прово- ЛИТЬ 9 11 1 г 12 13 14 D ± 15 7 4Г — —
Передать преоб- разовать форму 10 — — — — — 10.6 7 10.7 ^-7
1. Строки 1, 3, 7: элемент деформируется; строки 4, 6, 8: элемент ускоряется нли тормозится.
2. Столбец 2: ось вращения совпадает с осью элемента; столбцы 3—15: центры вращения в центрах
внутренних круговых функциональных значков.
Рис. 6.22-1. Структурно-функциональные элементы в экранном представлении. Базовые элементы геометрической функциональной
структуры для элементарных функций рабочего объема
329
Элемент-рычаг для тангенциальных сил - — 1 Г
Переместить постулат, велит. перпендик. к направл. действия Преобразовать вращательные величины в поступательные величины, тангенциальная сила Преобразовать поступатель - ные величины во вращатель - ные величины, такгенциаль - ная сила
Поступательно-вращательные величины в поступательные в< личины, тангенциальная сила Поступательные величины в ' поступательно-вращательные величины, тангенциальн. сила
Выход Вход Выход Вход Выход Вход Выход Вход
8 9 10 11 12 13 14 15
1.8 V-M- 1.9 а2—г 1Ю Тг-^А L11 1г-М- 1.12 hr—А 1.13 frA 1.14 Как в поле 1.10 1.15 Как в поле 1.11
2.9 2.9 2.10 -h—<4- 2.11 С х' -h—А 2.12 Как в поле 2.8 2.G Как в поле 29 2.М Как в поле 2.10 2.15 Как в поле 2.11
з.в Тр-Чг 3.9 ЗЮ Тт-Чг 111 Аа 3.12 Как в поле 3.8 3.13 Как в поле 3.9 3.14 -h-Мг 3.15 Тг-Ч^
4.9 1Л Ь 4- 4.9 m Тр—< 777 4.10 m fr— ’777; 4.11 m s- fr—fr *777. 4.12 m fr- fr ’777. 4J3 m Тп—»Г 434 m . Тт—гГ 4.15 Тт—А
— — — — — — — —
6.8 J m । —fr 6.9 П) . —fr 6.И тА-А- 777 6.11 m s- fr—fr 6J2 . m । frr- -fr 6.13 m Т,7 ' 1г 6.14 -frA 6.15 -v4r
29 тН—v 7.9 cd . А—г 7.Ю cd fr—fr 211 cd If fr 7.12 cd . -fc— 7.13 cd . ъ—fr 7.14 Как в поле 7.10 7.15 Как в поле 7.11
8.8 . md I Ту—А- wr, 8.9 md 8.10 -|ЛА- 777. 8.П . 7- It— 8.12 /nd । , Tn—4- 8.13 md , Tn—‘Г 8.14 Как в поле 8.10 8.15 Как в поле 8.11
9.9 Ъ—Jr 9J9 —4“ 9.Ю fr—fr 9.11 1?—A — — — —
— — — — 0.12 t—Jr 10.13 “b—й- 577 10.14 Tf—?г 777 10.15 т?—А
3. Не соприкасающиеся с изображением элемента функциональные значки задают силы трения и скорости трения,
относящиеся к рабочим поверхностям.
330
6. Новые модели для методического конструирования с помощью ЭВМ
Модель Обозначение Дифференциальное уравнение
—АМг* Упругое тело = q0-£
• 1 |— • Вязкая жидкость tf = qre
ЧНАААг Жидкость Максвелла xq,-€
_-АААг Твердое тело Кельвина = q0-E ♦ qVE
м/\л {н 3-параметри - ческое твер - дое тело елр,- cf =q0 -E ♦ q, -Ё
•—1 1— АААл ~п~~ -• 3-параметри- ческая жидкость 6*p,-& =q, -Ё *q2-E
О — напряжение, Е — удлинение; р,, Qq, qb q2 — константы,
получаемые нз вязкоупругих констант, например
q0 *Е — модуль упругости.
V. Операция X. варьиро- вания ОпорнаяХ^ Исходная форма Отрицание Отражение относитель но продо- льной оси Отрицание отражения
функция № 1 2 3 4
Нормальная сила Вектор- ное пре- дстав- ление Экран- ное пре- дстав- ление 51 S1-1 S1-2 wi si-з как 51-1 S1-4 как 51-2
Осевой момент Вектор- ное пре- дстав - ление Экран- ное пре- дстав- ление 82 S2-1 Д S2-2 S2-3 как 52-1 S2-4 как 52-2
Радиальный момент Вектор- ное пре- дстав- ление Экран- ное пре- дстав- ление S3 S3-1 S3-2 S3-3 как ' 53-2 S3-4 как 53-1
Поперечная сила Вектор- ное пре- дстав- ление _ Экран- ное пре- дстав- ление 54 S4-1 р “~2 _|F S4-3 JLjil . S4-4
Рис. 6.24. Таблица элементарных опорных функций в векторном
и экранном представлении
Рис. 6.22-2. Вязкоупругое поведение реальных материалов, изоб-
ражаемое соединением идеализированных связей по Като, Кудо
и Ихимару [26]
\Операция
X. варьи-
„ \ рова-
СтруК ния
ктур-X
ный
элемент
Исходная
форма
Отрицание
Отражение
относитель-
но продоль-
ной оси
Отрицание
отражения
№
4
9.1-4
9.1
L
9.1-
Элемент-
стержеиь
Элемент-
балка
как
93-1
как
10.6-1
как
9.1-2
как
9.2-2
"1
9.3-4
13
10.6-4
10.6-2
10.12-2
10.12-3
Ю.12
как
93-2
как
10.6-2
Рис. 6.23. Отрицание и отражение структурно-функциональных
элементов из рис. 6.22-L Функция рабочего объема при этом
остается неизменной
Элемент-
вал
Элемент-
рычаг
(нормаль
иая сила)
Элемент-
рычаг
(танген-
циальная
• сила)
10.6
как
9.1-1
как
92-1
10.12-4
Сложные опоры получаются объединением в
рабочих объемах элементарных опор, что показано
на рис. 6.39. Для обозначения опорных функций
перед номером поля из рис. 6.24 ставится буква S.
2. Поверхностные функции
Для соединения рабочих объемов в цепную
конфигурацию важное значение имеют функции
рабочих поверхностей, или поверхностные функ-
ции (рис. 6.25). В них не участвуют никакие момен-
ты, а существенными являются общие скорости в
нормальном направлении и часто относительные
скорости в тангенциальном направлении. Следует
обратить внимание на следующую особенность
функций в столбце 5: здесь механическая энергия
отбирается от одной из поверхностей, но другой
при этом не принимается, а, как мы уже знаем,
необратимо превращается в тепловую. При каче-
нии, столбец 6, центр вращения всегда лежит в
точке соприкосновения рабочих поверхностей и
приобретает скорость только тогда, когда переста-
ет быть центром качения. Тем самым скольжение
здесь отсутствует. Движение в тангенциальном
направлении происходит здесь оттого, что сближе-
ние при качении точек катящихся поверхностей
вызывает, из-за изменения положения радиуса,
движение в тангенциальном направлении. Тело
вращения действует как двуплечий изогнутый
рычаг с центром качения в рели центра враще-
ния.
При обозначении символы функций относятся
к точке соприкосновения рабочих поверхностей.
Обозначение функций осуществляется постанов-
кой букв РпП перед соответствующим номером
поля, например РпП 3/1 или РпП 3/1-3. для отра-
женной функции. В качестве операции варьирова-
ния допускается только отражение, если между
рабочими поверхностями действуют силы сжатия.
Если же рабочие поверхности сжимаются силами
растяжения (отталкивания), например разнопо-
люсными магнитами, мы имеем дело всюду только
с поверхностными функциями, подвергнутыми
отрицанию.
6.4. Геометрическая функциональная структура 331
\Тангенциальная Отсутствует Сцепление через трение Скольжение с трением Качение
X функция Нормальная Передать тайге нциалЬ' ную силу Передать тангенциаль- ную скорость Передать энер - гию в танген- циальном направлении Передать тан- генциальную силу, преобра- зование вида энергии Относительное движение с пре- небрежимо малым трением
функция № 1 2 3 4 5 6
Передать нормальную силу 1 1.1 12 V- -| 1 —Р 1 1.3 л j—|г 1.4 Y~ — Р 1 1.5 “Р 1 1.6
Передать нормальную скорость 2 2.1 777 — — — — —
Передать энергию в нормальном направлении 4 3.1 7777 3.2 Ц- -41 ~Р 1 3.3 1 1^ 1| г 3.4 2_Ц— -чь Т/ 1 3.5 24- -HJ T~f 1 777. 3.6 "НМ— 777
Рис. 6.25. Элементарные функции рабочих поверхностей в экранном представлении
Варианты
отческие
энергетические
функции
Накопить
механи -
ческую
(потенци-
альную)
энергию
Преобра-
зовать
форму
механи-
ческой
энергии
Варианты
Исходная форма
зарядить
G2
G3
разрядить
G4
потенци-
альную в
кинети-
ческую
кинети-
ческую в
потейци-
альную
удержать
в заряжен-
ном состо-
янии
Массозависимая сила
Рис. 6J6. Структурно-функциональные элементы в качестве по-
левых (гравитационных) элементов для поступательных направ-
лений действия
3. Элементы-источники
Мы имеем дело с элементами-источниками
[34], если при элементах рабочего объема на рис.
6.22-1, строки 3 и 6, помещена дополнительно
буква Q. Интенсивностные P-источники возника-
ют из элементов строки 3, если положить, что
интенсивностная P-величина (здесь - сила или мо-
мент силы) имеет вполне определенное значение
в каждый момент времени, независимо от значе-
ний интенсивностной Т-величины (здесь Т- ско-
рость или угловая скорость) в источнике. Интен-
сивностные Т-источники возникают из элементов
строки 6, если положить, что интенсивностная
Т-величина имеет вполне определенное значение
в каждый момент времени, независимо от значе-
ний интенсивностной P-величины в источнике.
4. Полевые элементы
В заключение должны быть упомянуты еще и
(гравитационные) полевые элементы, представ-
ленные на рис. 6.26. Они действуют отчасти как
потенциальные элементы рис. 6.22-1, отчасти как
кинетические. На рис. 6.26 действие силы поля
всегда направлено вниз, так что при операции
отрицания должен быть предусмотрен поворот на
180°. Отражение относительно продольной (верти-
кальной) оси ничего в этих примерах не меняет,
так как величины направлены параллельно про-
дольной оси.
6.4.3. Операции со структурно-функциональными
элементами
Ниже будут описаны элементарные операции,
из которых образуются все более сложные состав-
ные. Обзор этих операций приведен на рис. 6.27, а
операции по отдельности и относящиеся к ним
правила и примеры - на рис. 6.23, 6.28-1 и 6.28-2.
1. Варьирование
Реализуется путем отрицания, отражения или
отрицания отражения, осуществляется путем из-
менения знаков функциональных величин, без из-
менения при этом абстрактной функции элемента
или ее структуры. Варьирование включено в сбзор
на рис. 6.27 (см. подробности на рис. 6.23 и 6.28-1,
строки 1 и 2). Длины и свойства рабочих объемов
остаются без изменений.
332
6. Новые модели для методического конструирования с помощью ЭВМ
''-^Процедура Наименование Пример Допол- нение
Операция № 1 2 3
Варьирова- ние 1 и Отрицание 1.2 1й—|Г Ч и Рис. 6.23, 6.28-1
2 11 Отражение 2.2 -р—|Г —Ц-
3 11 Отрицание отражения ~Р— Р—
Соединение 4 4.1 Компоновка (последовательная) h—h—И I*-1! Ч н 11*>2 Ч 1 Г ♦ ~1 Г - “1 II г 4.3 Рис. 6.28-1, рнс. 6.29
5 Ы Объединение по рабо- чим поверхностям (последовательное) “ 1— 4- •У ч -ч т 1 5.3 Рис. 6.28-1, рнс. 5.44
Г— *1—*
6 6.1 Объединение в рабочих объемах (параллельное) 6-2 —1 г—1—И 1*—1—Ч Г (♦) с - -Р—Р-
Разделение 7 7.1 Разъединение 7.2 г“Г~ —
Яг
8 11 Поперечное разделение 12 ^-1Г12 Н г-1, -чм Ч У— в -Ч 4— 4 1*-'2—Ч У— 8.3 Рис. 6.28-2, рис. 5.44
Г 1*1 1 1 1
9 11 Продольное разделение 9.2 Г»—1—И Л - ’ (+) ^±2
1
Объединяю- щая пере- стройка 10 10.1 Объединение входных или выходных рабо - чих поверхностей 10.2 ч 103 Рис. 5.44
1 ч. 1
11 П.1 Объединение входных рабочих поверхностей с выходными 11.2 -Ч ч г
1 \L
Разъели- няющая перестрой - ка 12 12.1 Разделение входных или выходных рабочих поверхностей 12.2 -Ч -ч
1 г
13 111 Отделение входных рабочих поверхностей от выходных 112 W
Рис. 6.27. Обзор операций для структурно-функциональных элементов (СФЭ). Варьирование, соединение, разделение, объединяющая и
разъединяющая перестройка
2. Соединение
Эта операция может реализоваться путем объ-
единения по рабочим поверхностям или объедине-
ния в рабочих объемах. При этом из отдельных
структурно-функпиональных элементов (или
меньших групп) составляются (большие) группы.
Если возникает новый рабочий объем, то он содер-
жит сумму свойств старых рабочих объемов, при-
чем они получаются в первых двух случаях после-
довательным, а в последнем случае - параллель-
ным соединением функциональных величин.
Компоновка получается при соединении эле-
ментов с образованием между их рабочими поверх-
ностями связи, отличной от вещественной (см.
рис.6.27, строка 4, и рис. 6.29). Длина получающего-
ся узла равна сумме длин составляющих его
элементов в соответствующих проекциях.
Объединение по рабочим поверхностям получа-
ется при соединении двух структурно-функцио-
нальных элементов с образованием вещественной
связи между их рабочими поверхностями (см.
рис. 6.27, строка 5; рис. 6.28-1, строки 3, 4, 5). Длина
объединенного элемента равна сумме длин состав-
ляющих его элементов в соответствующих про-
екциях.
Объединение в рабочих объемах получается
при соединении рабочих объемов структурно-функ-
циональных элементов вещественной связью. Тре-
буемые движения элемента должны быть все
одновременно выполнимы также и в объединен-
ном состоянии, в каждой точке рабочего объема и
6.4. Геометрическая функциональная структура
333
Рис. 6.28.Операции варьирования, соединения и разделения структурно-фузжпиональных элементов:
Примеры на элементах рис. 6.22-1
Правило
Дополнение
1
Варьиро- вание знака функци- ональ- ных ве- личин - 1 Исходная форма 2 Отрицание 3 Отражение 4 Отрицание отражения 1.2 Отрицание: изменяют- ся знаки всех величин Отражение: изменяют- ся знаки только вели- чин, не параллельных продольной осн (оси симметрии) 1.3 Нагрузка на сжатие: поля 2.1-1,2.1-3 Нагрузка на растяже- ние: поля 2.1-2,2.1-4 см. также рис. 6.23, рис. 6.25
Объем- ная фун- кция 1 1.1 -1 Iй—гГ 1.1-2 1.1-3 “Ь—4" 1.1-4
Поверх- ностная функ- ция 2 2.1-1 -г y -чь ~П 1 2.1-2 l-у Н- -Г7 Гй~ 2.1-3 I -ч П- 2.1-4
Соеди-
нить два
элемен-
та путем
объеди-
нения
по рабо-
чим по-
верхно-
стям
Соеди-
нение
струк-
турно-
функци-
ональ-
ных эле-
ментов
вещест-
венной
связью
Соеди-
нить три
элемен-
та путем
объеди-
нения по
рабочим
поверх-
ностям
5
7
(см. также тождества
иа рис. 6.21, строка 3)
Все силы и моменты
на соединяемых рабо-
чих поверхностях дол-
жны быть в равнове-
сии
Все скорости на соеди-
няемых рабочих по-
верхностях должны
быть равны (одинако-
вый знак, направле-
ние н абсолютная
величина)
(Замечание: разложе-
ние силы происходит
в рабочем объеме)
F! И7!
о
о
О
^F2ttV2
О)
4.3
Изменение направле-
ния силы
3
м
Рис. 6.28-1. Операции для структурно-функциональных элементов (СФЭ): варьирование и соединение
334
6. Новые модели для методического конструирования с помощью ЭВМ
Примеры на элементах рнс. 6.22-1
Правило
Дополнение
Операция
Процедура
Соедине-
ние стру-
ктурно-
функци-
ональ-
ных
элемен-
тов
Соеди-
нить не-
прямоу-
гольные
элемен-
ты путем
объеди-
нения по
рабочим
поверх-
ностям
(после-
дова-
тельно)
Соедине-
ние стру-
ктурно-
функци-
ональ-
ных эле -
ментов
по рабо-
чим по-
верхно-
стям не-
вещест-
венной
связью
Пара
рабочих
поверх-
ностей
Соеди-
нить (ко-
мпонов-
кой) три
пары ра-
бочих
поверх-
ностей
(РПП)
Соедине- Соеди-
ние стру- нить два
ктурно- элемен-
функци- та путем
ональ- объеди-
ных эле- нения их
ментов рабочих
вещест- объемов
венной (парал-
связью лельно)
3
№
62
случай 3,
5
6
Эскиз реализации
примера поля 5.1
Правило как
в поле 3.2
Звездчатые элементы
могут редуцировать -
ся в точку
случаи 4
4
«з
Пример для случая 1
Свойства рабочего
объема по одинако-
вым направлениям не
должны противоре-
чить друг другу
См. рис.
6.25
Функции объединенно-
го элемента являются
суммой функций от-
дельных элементов н
их комбинаций
Должна воспринимать
ся как нагрузка сжа-
тия, так и изгиба
Случай 1,
Суммы сил и моментов
на каждой паре рабо-
чих поверхностей и в
каждой точке контакта
равны нулю. Нормаль -
ные скорости на повер-
хностях пар равны. Раз-
личия в абсолютных ве-
личинах скоростей ком
пенсируются тангенци-
альными скоростями.
(Замечание: разложение
скорости происходит в
парах рабочих поверх-
ностей)
Все силы н моменты
должны находиться в
равновесии. Скорость,
отсутствующая в
объединенном элемен-
те, не должна приво-
дить к противоречиям
Разложение скорости
Изменение направле-
ния скорости
6.4. Геометрическая функциональная структура
335
.Процедура
Примеры
Правило
Дополнение
Операция
Поперечное
разделение
Разделить
структур -
но-фуикци-
ональный
элемент пу-
тем попе -
речного
разреза
Продольное
разделение
Расщепить
структур-
но-функци-
ональные
элементы
путем про-
дольного
разреза
12
13
2
(+)
2
Особые ел? чаи:
(+1
14
(+)
Скорости на местах
разделения должны
быть равны между
собой и старым ско-
ростям в этих местах
Сконцентрировать
массу
Все силы и моменты
новых структурно-фу-
нкциональных элемен-
тов должны находить-
ся в равновесии
Сконцентрировать
упругость
(+)
[-(+)
(+)
(+)
1~1+)
Г
3
Все силы и моменты
обеих поверхностей
разреза, а также но -
вых элементов, долж-
ны быть в равновесии.
Все скорости на повер-
хностях разреза долж-
ны быть равны. Силы,
моменты и скорости
на поверхностях, от-
личных от возникших
в результате разделе -
ния, не меняются
Случай 1 в поле 1.1
Для всех других сил,
кроме сил давления и
трения, для передачи
сил и моментов долж-
ны быть предусмотре-
ны особые пары по-
верхностей, например,
случай 4
Пример для случая 2
в поле 2.1
Функциональные ве-
личины на разделен-
ных рабочих поверх-
ностях,ранее состав-
лявших одну поверх-
ность, должны в сум-
ме составлять исход-
ные функциональные
величины
Разделение функцио-
нальных величин
требует большего ко-
личества деталей и
дополнительных соч -
ле не ний для их раз-
вязки
поляризация
тлвоепие
частичная поляри-
зация
Рис. 6.28-2. Операции для структурно-функциональных элементов (СФЭ): поперечное и продольное разделение
336
6. Новые модели для методического конструирования с помощью ЭВМ
на всех рабочих поверхностях, даже если при этом
происходят наложения. Эта операция для отли-
чия ее от других разновидностей соединения
обозначается „плюсом” в скобках (+) (см.
рис. 6.27, строка 6; рис. 6.28-1, строка 8 варианты на
рис. 5.44, строки 1,2 и 3). Длина объединенного эле-
мента равна длине каждого из составляющих его
элементов в соответствующих проекциях. Этот
способ соединения имеет особое значение для
функциональной интеграции (см. рис. 5.44).
3. Разделение
Эта операция может производиться путем
разъединения (разборки) ранее скомпонованного
узла, путем разделения соответствующего струк-
турно-функционального элемента по поперечному
или продольному сечению. Разложение узла или
элемента (детали) на меньшие элементы может
быть целесообразно из соображений монтажа, из-
готовления или согласования различных свойств
(материалов). Исходные свойства рабочего объема
сохраняются.
Разъединение - это отделение некоторых
или всех элементов из скомпонованного узла (со-
единения), например с целью функционального
разделения или соединения с другими элемента-
ми (см. рис. 6.27, строка 7). Сумма длин отделен-
ных элементов равна длине исходного соединения
в соответствующих проекциях.
Поперечное разделение - это расщепление „ма-
теринского” структурного элемента на два „дочер-
них” структурных элемента путем разреза рабочего
объема, не параллельного оси элемента, а в боль-
шинстве случаев - перпендикулярного ей (см.
рис. 6.27, строка 8; рис. 6.28-2, строка 1). На месте
разреза возникают две новые, параллельные
рабочие поверхности, одноточечные величины ко-
торых находятся в равновесии и двухточечные ве-
личины которых равны. Исходные рабочие поверх-
ности материнского структурного элемента и их
функциональные величины не изменяются. Сум-
ма длин полученных элементов равна длине
исходного элемента.
Продольное разделение - это расщепление
структурно-функционального элемента вдоль его
рабочего объема (см. рис. 6.27, строка 9; рис. 6.28-2,
строка 2). Новые элементы имеют на соответствую-
щих рабочих поверхностях те же скорости (двухто-
чечные величины), что и раньше. Их одноточечные
величины должны находиться в равновесии, и
если их просуммировать на ранее совпадающих
поверхностях, то снова получатся исходные одно-
точечные величины. Длины полученных элемен-
тов одинаковы и равны длине исходного элемента.
Эта операция может использоваться с целью функ-
ционального разделения.
4. Объединяющая перестройка
Эта операция состоит в объединении отдель-
ных рабочих поверхностей в одну, связную рабочую
поверхность. Тем самым осуществляется переход
от структурного представления к контурному,
поскольку изображение рабочих объемов непре-
рывно расширяется до тех пор, пока не будет полу-
чено целостное двумерное сечение. Их свойства
остаются неизменными. Можно различать две раз-
новидности этой операции:
Объединение входных или выходных рабочих
поверхностей. Из отдельных рабочих поверхностей
составляется одна новая, при этом ни сами функ-
циональные величины, ни их положения не меня-
ются (см. рис. 6.27, строка 10).
Объединение входных рабочих поверхностей с
выходными. Как описано выше, рабочие поверхно-
сти объединяются в одну новую рабочую поверх-
ность (см. рис. 6.27, строка 11).
Объединяющая перестройка имеет особое зна-
чение для функциональной интеграции (см.
рис. 5.44), позволяя достичь существенных упроще-
ний.
5. Разъединяющая перестройка
Эта операция является обратной по отноше-
нию к объединяющей перестройке. Соответствен-
но различают:
разделение входных или выходных рабочих
поверхностей (см. рис. 6.27, строка 12);
отделение входных рабочих поверхностей от
выходных (см. рис. 6.27, строка 13).
6. Примеры операций
На рис. 6.28-1 приведены отдельно операции
варьирования и соединения, в столбце 1 они пояс-
няются различными примерами со структурно-
Функциональными элементами, в столбце 2 опре-
деляются через правила, и, наконец, в столбце 3
наглядно иллюстрируются эскизами устройств.
Операция соединения обозначается знаком плюс,
который заключается в скобки, в случае объедине-
ния в рабочих объемах.
Для синтеза умножителей силы или скорости
особое значение приобретают разложение силы,
реализуемое рабочими объемами (см. рис. 6.28-1,
поле 4.1), и разложение скорости, обеспечиваемое
парами рабочих поверхностей (поле 7.1).
На рис. 6.28-2 представлены многочисленные
примеры и комментарии по операциям разделе-
ния. Потребность в разделении структурно-функ-
ционального элемента появляется очень часто,
например когда по условиям монтажа [5, 16] или
изготовления элемент должен быть разрезан в
определенном месте поперек с разделением его
входной и выходной рабочих поверхностей (после-
довательное, или поперечное, разделение). Разде-
ление целесообразно также тогда, когда из-за
вредного взаимного влияния функций проводится
расцепление элемента вдоль его рабочего объема,
так что у каждого из образовавшихся элементов
остается еще не менее двух рабочих поверхностей,
хотя бы одна из которых принадлежала исходному
выходу или входу (параллельное, или продольное,
разделение).
Обе разновидности разделения показаны на
нескольких типичных примерах на рис. 6.28-2. В
поле 1.1 приведены десять случаев последователь-
ного, а в поле 2.1 - 15 случаев параллельного раз-
деления. Правила соответствующих операций (при-
веденные в полях 1.2 и 2.2) соотносятся с соответ-
ствующими правилами рис. 6.28-1. Столбец 3
показывает возможности применения правил при
создании деталей.
Чтобы последовательно разделенные структур-
но-функциональные элементы сохранили способ-
ность выполнять исходную функцию, они должны
быть жестко соединены. Параллельно разделен-
ные элементы могут быть соединены неподвижно
или подвижно - следовательно, также и шарнира-
ми. Из десяти случаев поперечного разделения на
рис. 6.28-2 первый случай имеет особое значение,
так как он показывает возможность расширить
6.4. Геометрическая функциональная структура
337
цепь в области чистого сжатия, не сталкиваясь с
необходимостью принимать дополнительные меры
для удержания. Разделенные детали соединяются
и удерживаются в области сжатия, как будто они
вовсе не разделялись (столбец 3). Эту возможность
часто используют, когда нужно в область чистого
сжатия напряженного цикла включить дополни-
тельные детали, например в креплениях и (под-
вижных) соединениях (см. рис. 6.16, поле 5.2,
рис, 4.67 и 4,68), Матрица типов связей для случая в
поле 54 КД рис. 646 показывает, что пара деталей
а и Ь на самом ЛОДе ведет себя как неподвижное
соединение. Эта матрица связей выглядит следу-
ющим образом:
I тт сс \
Sa,b- СГ тт • (6.7)
\ тт сс/
Буквы г, с, т показывают, связь какого типа (гео-
метрическая, силовая или фрикционная) препят-
ствует движению в соответствующем направлении
(см. также рис. 4.62 и 4.65). Простота сборки и воз-
можность передавать силы без изменения их на-
правлений обусловливает применение этого
„соединения” во многих случаях.
Если разделение производится в области дей-
ствия других видов нагрузки (сдвиг, растяжение,
сжатие, кручение), как в случае 4 (см. рис. 6.28-2,
поле 1.1), то последующее соединение значитель-
но более накладно, что показано в поле 1.3 внизу.
При разделении с наклонно направленными
силами (случай 8) производятся те же действия,
как и при перпендикулярных силах (случай 5).
Новым в случаях 9 и 10 является то, что путем кон-
центрации массы (упругости) в одном из двух
элементов ее можно локализовать в некоторой
области, так как при последовательном соедине-
нии поведение цепи в целом зависит от опреде-
ленных свойств отдельных элементов (см. табл. 4.1
к рис. 4.2-3).
Примеры продольного разделения 1-15 распо-
ложены в поле 2.1. Полученные при разделении
элементы (или их проекции) имеют ту же длину,
что и исходные. Разделение (например, в случае 2)
может служить также для „развязки” различных
функциональных величин (здесь - силы и момен-
та, см. поле 2.3). В случаях 6 и 8 продольное разде-
ление сочетается с поперечным, а в случаях 7 и 9 -
нет. Появление различных возможностей связано
с тем, что рабочие объемы в точке разделения
пересекаются. Отметим своеобразие случаев
10-15. Случаи 10 и 11 показывают, что из одного
(нейтрального) структурного элемента можно сде-
лать два (полярных) структурно-функциональных
элемента; случаи 12 и 13 показывают, что элемен-
ты можно структурно удваивать, причем в этих
случаях интенсивностные величины становятся
соответственно меньше, в противоположность
случаю 1 поля 1.1, где уменьшаются размеры, а
функциональные величины остаются неизменны-
ми. При поляризации деталей в случаях 14 и 15
поля 2.1 из исходного элемента создаются, в конце
концов, несколько элементов совершенно другого
вида, причем таких элементов должно быть как
минимум два.
7. Компоновка с использованием пар элементов (сочленении)
Соединение двух деталей (элементов) вещест-
венной связью, за исключением особых случаев
22 — 2317
типа пленочных шарниров (см. рис. 5.49), приводит
к возникновению неподвижных соединений.
Везде, где детали машины должны обладать отно-
сительной подвижностью, оставаясь при этом
прочно связанными, используются подвижные со-
единения (см. разд. 4.8, рис. 4.61), возникающие
при соединении элементов с помощью сочленений
(шарниров). В противоположность жесткому ве-
щественному соединению сочленение имеет хотя
бы одно направление, в котором возможно относи-
тельное движение соединенных звеньев. В этом
направлении абсолютные скорости соприкаса-
ющихся поверхностей могут не совпадать, и ника-
кая соответствующая одноточечная величина
(сила или момент) передаваться не может (трени-
ем пренебрегаем). Тем самым сочленение не толь-
ко служит для обеспечения относительного дви-
жения двух элементов, но - что обеспечивается
тем же эффектом - является также барьером
(фильтром) для определенных функциональных
величин.
Для создания неподвижных соединений без
помощи вещественной связи применяются также
сочленения, состоящие как минимум из двух пар,
которые можно смонтировать, но которые затем
действуют друг на друга таким образом, что свобо-
ды одной пары уничтожаются другой парой. Если
каждая наша пара требует для монтажа одной
поступательной степени свободы, и соответствую-
щие пары должны соединяться параллельно, то
такого рода соединения можно получить с по-
мощью матрицы связей по процедуре рис. 4.14.
На рис. 6.29 приведены важнейшие разновид-
ности пар (сочленений). В столбце 2 даны соответ-
ствующие матрицы связей, содержащие символи-
ческое представление свобод и ограничений. Они
могут применяться для алгоритмической генера-
ции комбинаций пар. Передаваемые парами эле-
ментов величины приведены в столбце 3, а непе-
редаваемые (отфильтрованные) - в столбце 4.
Последние величины (например, момент в поле
2.4) не могут удерживаться в равновесии элемен-
том Ь, поскольку они действуют в элементе а. Рав-
новесие может поддерживаться третьим элемен-
том или ускоряемой массой. Если матрица связей
содержит в рассматриваемом направлении 1, то
силы, моменты и скорости могут передаваться с
элемента а на элемент Ь, если же стоит 0, то это не-
возможно. О каких силах, моментах и скоростях
идет здесь речь, разъясняется на рис. 6.30 для при-
мера 4 из рис. 6.29.-
Матрицы связей [40]. которые обсуждались в
п. 4.3.1 для случая ортогональных, взаимно незави-
симых перемещений, представлены на рис. 6.31
также и для зависимых перемещений. При состав-
лении матрицы используется тот факт, что зави-
симость перемещений приводит к зависимости
ограничений. Поэтому применяется следующее
соглашение: если обозначение перемещения в
данном направлении стоит в матрице в поле дру-
гого направления, то соответствующее ограниче-
ние действует не только в данном, но и в этом
другом направлении.
Фиксированное и не приводимое здесь распре-
.эние полей матрицы, а также обозначения
направлений представлены на рис. 4.12. На рис.
6.31 в матрице связей поля 1.2 на месте dx написано
dy, т. е. для нарисованного в поле 1.1 клинового ме-
ханизма имеет место зависимость dx =/(dy), но не
338
6. Новые модели для методического конструирования с помощью ЭВМ
Свойства, правила Пример Матрица связей Величины на поверхностях nap Не передавав* мая парой
соединения Соединение по паре рабочих в равновесии между а и равны для а и b (отфильтро- вываемая) величина
поверхностей № 1 2 3 4
Плос- кая пара Вещественная связь (жесткая) 1 1.1 о । Ь 1.2 /11 11 - \ - 11/ 1.3 Как рис. 6.28-1, случай 3.1 1.4 Отсутствует
Плос- кая пара с геомет* ричес - КОЙ связью Вращательная пара 2 2.1 2.2 /11 - \ 11 “ \- 0 °/ 2.3 F, Fy V, Vy 2.4 М Ш
Посту- патель- ная пара С парал- лельны - ми ося - ми 3 3.1 о । 1 3.2 /о о 11 \ - 11/ 3.3 Fy М Vy ш 3.4 F, V.
С нак- лонны- ми ося- ми 4 4.1 0 ь 4.2 /dy dy - \ dx dx - \ - 11/ 4.3 Fit М vx w 4.4 F,=f(Fy) vMH(vy)
С пер- пенди- куляр- ными осями 5 5.1 о ГГ1_L 5.2 . /1 1 0 0 - \ - 1 U 5.3 М V, ш 5.4 Fy vy
Плоская двух- подвиж- иая пара С парал- лельны- ми ося- ми 6 6.1 •S—Ф-Л. 6.2 z /о ° - \ 11 \ - 0 0/ 6J Fy vy 6.4 F«*v, M ;Ш
С нак- лонны- ми ося- ми 7 7.1 -°—^2—L 7.2 /dy dy - \ Idxdx \ - 0 0/ 7.3 FK vx 7.4 F, = f(Fy) v,*f(vy) M;W
С пер- пенди- куляр- нымк осями 8 в.1 -9—Q—L 8.2 , /1 1 - \ о о - \ - 0 0/ аз F, 8.4 Fy; vy M ; Ш
Прост- ранст- венная пара Вещественная связь (жесткая) 9 9.1 0 | Ь 9.2 . /11 1 1\ 11 11 \1 1 1' 1/ 9.3 Как рис. 6.28*1, случай 3.1 9.4 Отсутствует
Прост- ранст- венная пара с геомет- ричес- кой связью Винто- вая пара (за иск- лючени- ем обла- сти зак- лини- вания) С парал- лельны- ми ося- ми 10 10.1 а ✓ m ь 10.2 Idyz dyz dx dx \ 11 11 \1 1 11/ №3 Все, кроме F, м,*му2 Все, кроме V» to, = шу2 10.4 FM = f (MJ vx = t (шх)
С нак- лонны- ми ося- ми С пер- пенди- куляр- ными осями 11 пл о Г| Ь 11.2 /1 1 1 1\ dzx dzx dy dy \1 1 11/ 11.3 Все, кроме Fy Му -= Мг, Все, кроме vy Шу 5 Ц)г, 11.4 Fy =t(My) vy = t (шу)
12 12.1 12.2 / 1 1 1 1 \ 11 11 ydxy dxy dz dz/ 12.3 Все, кроме 5 Мг = Мху Все, кроме Vz Ш2 = Шху 12.4 FZ=f(M; ) vz= f (ш2)
Враща- тельио- поступа- тельная (цилии- дричес- кая) пара С парал- лельны- ми ося- ми 13 131 а ГТ) b 13.2 /00 0 o\ 11 11 \1 1 1 1 / Все, кроме F, М, 5 Му2 Все, кроме V, Ш, £ Шу; 13.4 F>:VX Мх;шх
С нак- лонны- ми ося- ми С пер- пеиди- куляр- иымй осями 14 14.2 /1 1 1 и 0 0 0 0 \1 1 ' 4 14.3 Все, кроме 5 Му = Мг, Все, кроме s CUу - СО?х 14.4 Fy; Vy My: шу
1Ь 15.1 15.2 /1 1 i 1| 11 11 \0 0 0 0/ 15.3 Все, кроме F, мг -= М,у Все, кроме V; Шг = Шму 15.4 F2: Vz M2: Ш2
Рис. 6.29. Операции для соединения (компоновки) структурно-функциональных элементов с помощью пар элементов (сочленений),
фильтрующих определенные ограничения
6.4. Геометрическая функциональная структура
339
Пример
реализации,
фильтрация
Силы, скорости,
перемещения
Харак-
тер дей- J
ствия
Ограни-
чения,
свобо-
ды, за-
виси-
мые,
незави-
симые
2.1
So.b *
(dy dy - \
dx dx -
- 1 1/
2.2
Независимо
ограниченные:
Fn ; Уи; М; W
Независимо
свободные (от-
фильтрован-
ные): Fl0; Vjo
зависимо
ограниченные
(свободные):
х: Fy ; V,: Vy
2.3
Зависимые переме-
щения, обращение
зависимостей при
помощи двусторон-
них направляющих:
dx от пу
dx от dy
dy от dx
dy от dx
Рис. 630. Разъяснение передачи и фильтрации механических
величин с помощью пар (сочленений). Пример 4 из рис. 6.29
dx, dy и т. д. — логические величины, которые в случае зависи-
мости направления могут быть поставлены также и на другие
поля. S —• логическая матрица связей. См. также рис. 4.12 •
Рис. 631. Матрица связей для зависимых ограничений
наоборот. Если теперь, как в поле 1.3, перемеще-
ние в направлении dy ограничено (dy = 1), то это ог-
раничение (как следует из матрицы в поле 1.2)
действует также на месте dx, и цифру 1 устанавли-
вают не только в поле dy, но также и в поле dx (мат-
рица в поле 1.4). Теперь из матрицы поля 1.4 сле-
дует, что элемент а в поле 1.3 имеет только незави-
симую свободу в dx-направлении и зависимую сво-
боду в dy-направлении. В строке 2 даны примеры
зависимостей для случая двусторонних направля-
ющих (поля 2.1 и 2.2), а также ограничений в dx-на-
правлении в полях 2.3 и 2.4. Аналогичным образом
обстоит дело также для правого винта (поля 3.1 и
3.2). Если движение винта ограничивается, когда
он упирается в заштрихованную стенку, то dx = 1,
это направление тем самым заперто (ограничено)
и зависимо по той причине, что dyz = 1, обозначение
другого направления, стояло в поле dx. В этом слу-
чае имеет силу не только dyz =/(dx), но и dx=/(dyz),
поскольку эти оба направления стоят в полях друг
друга. Если плоскость в строках 1 и 2 наклонена
вниз или винт в строке 3 - левый, то первые два
столбца матриц меняются местами.
6.4.4. Компоновка технического устройства
из элементов
На многочисленных примерах рис. 6.32 и 6.33
показано, как из структурно-функциональных эле-
ментов можно составить энергетические элементы
для технических устройств. На рис. 6.32 представ-
лены статические „элементы механизмов” [36, 44].
Примеры 1-4 являются соединениями открытых
цепей посредством объединения по их рабочим
поверхностям, примеры 5-10 - соединения откры-
тых цепей по рабочим поверхностям и в рабочих
объемах и, наконец, пример 11 - соединение в
замкнутую цепь. Элементы, не параллельные
плоскости изображения, показаны штриховыми
линиями. Для тел вращения (типа заклепки в по-
ле 8 на рис. 6.32) только одна из плоскостей сече-
ния отображена в виде структурно-функциональ-
ного элемента.
Следует обратить внимание на то, что при объ-
единении элементов на соединяемых рабочих
поверхностях обычно действует одна пара величин,
которая обеспечивает выполнение условий равно-
весия (как момент в примере 2, поле 2.1), в то
время как другая пара величин (здесь, например,
сила бывшего динамического винта) остается в ка-
честве характеристики узла (например, сила в
центре структуры, поле 2.2). В предельном случае
интенсивностные величины остаются внешними, и
для равновесия достаточным оказывается одно
лишь равенство скоростей. Если в месте соедине-
ния все же не должно оставаться никакой внеш-
ней силы (как в примере 5, поле 5.1), то выбирают-
ся два или более структурно-функциональных эле-
мента, которые в совокупности обеспечивают
выполнение необходимых условий равновесия.
При переходе к полю 5.2 в этом случае производит-
ся объединение в рабочем объеме и по рабочим
поверхностям. Аналогично обстоит дело и в по-
следующих случаях.
Другие важные элементы механизмов состав-
лены на рис. 6.33 из „кинетических” структурно-
функциональных элементов. В примере 1 (по-
ле 1.1) внутренними величинами становятся толь-
ко моменты, в то же время различным образом
направленные силы суммируются и остаются внеш-
ними величинами; то же имеет место и для угло-
вой скорости (поле 1.2).
В примере 2 все обстоит аналогичным образом,
а в примере 3 мы видим мгновенное состояние зуб-
чатого зацепления. Здесь вещественной связи не
может быть в принципе из-за постоянно происхо-
дящего разделения мест соприкосновения. В при-
мере 3 дано представление ролика в виде трех
первоначально отдельных, а позднее интегриро-
ванных элементов с объединенными рабочими
поверхностями.
В примерах 5 и 6 показан составленный из
элементов вал при нагрузке моментами сил на его
входе и выходе или на соответствующих опорах.
Составленное из элементов колесо представлено
340
6. Новые модели для методического конструирования с помощью ЭВМ
Рис. 632. Разработка элементов механизмов, исходя из статических структурно-функциональных элементов (см. также рис 6 27 6 28-1 и
6.28-2) ’
6.4. Геометрическая функциональная структура
341
\ Реали- Синтез из структурно-функциональных элементов путем объединения по рабо - чим поверхностям и в рабочих объемах Эскиз Наименование
хзаад Вели А ИЯ Структурно-фун - кциональная схема Контурное представление
чины № 1 3 4
1 и 1.2 13 /7*2 1.4 Изогнутый рычаг
2.1 и 2.3 , 2Л
2 к < Стержень с рычагом для его вращения
Л— - —
Силы, ио- молы, скоро- сти 3 11 3.2 3.3 Ф^2^.ф. ' Ш1 \K\ 'ш2 ЗЛ Зубчатая пара (начало зацепления)
4 4J U X /><\ Fr 1 ш I и» 4.4 Ролик
5 11 4J U 12 Ч г- i 1 » 1 1 + 1 13 14 Вал, нагруженный на кручение (например, через шпоночный паз и зубчатое колесо)
•• —
6 11 д— ч 6.2 xV---- 63 -М м/гпЬ -и-" jrr 1Г LJ'w’ 6Л Вал на плавающем подшипнике
7 F 7.2 .. 7.3 7.4 Колесо
в Ы . I--' /' 1. j -F-чГ f ] 1.-м- 8.2 —V 8.3 /VX L-Xy^VjT И ¥ фрикционная поверхность 8.4 Фрикционный диск
9 9.1 1 > и т. д. \\ ь-'t 9.2 9.3 iA\\\FlvC N 9.4 Коленчатый вал
Штриховые линии ие лежат в плоскости изображения или в какой-либо параллельной ей плоскости
Рис. 6.33. Разработка элементов механизмов, исходя из кинетических структурно-функциональных элементов (см. также рис. 6J7,6.28-1 и
6.28-2)
342
6. Новые модели для методического конструирования с помощью ЭВМ
Формы структур
цепей звеньев пос-
ле объединения
Как в поле 1.3
f = - 1
Варьирование пар,
число степеней
своооды /
Контурное пред-
ставление струк-
тур из столбца 3
Штриховые линии в столбце 1 не лежат ни в плоскости рисунка, ни в параллельной ей плоскости
Рис. 6.34. Создание простых статических напряженных циклов из структурно-функциональных элементов (СФЭ). Использование пар
(сочленений), которые не отфильтровывают (а пропускают) необходимые для создания напряжения силы и моменты
6.4. Геометрическая функциональная структура
343
Рис. 635-1. Замкнутые плоские цепи звеньев по рис. 6.14 с числом степеней свободы f=—1> подходящие для простых напряженных
циклов
344
6. Новые модели для методического конструирования с помощью ЭВМ
в примере 7, причем структура здесь сильно отли-
чается от структуры ролика. Функция шины соот-
ветствует функции ролика (качение), функция
внутренней части со спицами и отверстием для
цапфы ролику не соответствует (скольжение).
Фрикционный диск в примере 8 должен компоно-
ваться из рычажных элементов с нормальными и
тангенциальными силами, коленчатый вал в при-
мере 9 - из элементов-балок и элементов-валов.
В соответствии с изложенным в разд. 6.3, опре-
деленные конструктивные задачи можно удовле-
творительно разрешить созданием напряженного
цикла. На рис. 6.34 показано, как можно разрабо-
тать однократный статический напряженный
цикл, исходя из структурно-функциональных эле-
ментов. Прежде всего элементы должны быть цик-
лически соединены, что происходит в столбце 1.
После этого следует установить, какие пары эле-
ментов (соответственно, рабочих поверхностей)
должны быть соединены вещественной связью, а
какие, напротив, геометрической, полевой илр
фрикционной.
Если ограничиться вещественной и геометри-
ческой связью, то возникают цепи звеньев, подоб-
ные приведенным в столбце 2 на рис. 6.34. При
этом, конечно, для любого напряженного цикла
число звеньев, одно-, двухподвижных, идентичных
и т. д. пар следует выбирать таким, чтобы число
степеней свободы было/ < 0. Для плоских однократ-
ных напряженных циклов такие цепи звеньев
можно взять из рис. 6.35-1. В столбце 4 рис. 6.34 вос-
произведены эскизы законченных технических
устройств, соответствующих этим цепям. Цепи, ко-
торые содержат хотя бы одно пространственное со-
членение, например, винтовое, должны рассматри-
ваться как пространственные в целом и рассчиты-
ваться по уравнению Дизиоглу (см. рис. 6.14).
На рис. 6.35-1 приведены возможные плоские
однократные переопределенные цепи с двухпо-
движными и идентичными парами в количестве до
еп + eid = 4, соответствующие данным столбцов 0-4
и строк 1-5 на рис. 6.14. Примеры на рис. 6.35-1 варь-
ировались, насколько это позволяла геометрия:
производилась замена одноподвижных пар на
двухподвижные и на идентичные. При этом воз-
никли примеры с независимо подвижными звень-
ями: 3, 5, 6, 8 и др., важные для многих техниче-
ских задач, например фрикционных тормозов и
муфт, фиксируемых с помощью трения перевод-
ных рычагов, подшипников и пр. При разработке
варианта конструкции, включающей напряженные
циклы, эти и другие примеры должны рассматри-
ваться совместно с их геометрическим обращени-
ем (инверсией, переменой пар). То же относится и
к варьированию патентованных предложений с
аналогичными структурами.
Пример 5 на рис. 6.35-1 кажется противореча-
щим основам теории механизмов и машин, по-
скольку ему приписывается число степеней свобо-
ды/ = -1 и в то же время он выглядит как прототип
конструкции вращательно-поступательной пары,
для которой/ = 2. Противоречие разрешается и
здесь, если различать между тремя рабочими со-
стояниями. Если в цепи примера 5 имеются зазоры
(чисто геометрическая связь),то ее число степеней
свободы/ = 2. Если определяющей становится си-
ловая связь и движение в парах вследствие трения
сводится к вращению, то цепь становится напря-
женной (/= -1), как в случае 1. Если же действует
Обозначения;-О- HO- поступательная пара е.,
пап Пара , J 1
плоская двухподвижная пара еп .
Рис. 6.35-2. Возможности интерпретации числа степеней свободы
при силовой и при чисто геометрической связях ПО рис. 6.14
силовая связь, а силы трения преодолеваются пре-
вышающими их внешними силами, то у нас снова
появляется первоначальное число степеней сво-
боды для круглого звена (/=*2), несмотря на напря-
жение (подобно случаю 3). Поскольку в большинст-
ве случаев силы трения на порядок меньше нор-
мальных сил, ими, как правило, пренебрегают, и
тогда получается число степеней свободы, как при
чисто геометрической связи. На рис. 635-2 приве-
дены некоторые примеры, показываютЦИе, что при
трактовке пар как цепей необходимо учитывать
различия между тремя возможными рабочими со-
стояниями.
Однозначные результаты можно получить,
конечно же, только тогда, когда будет точно опре-
делено направление „податливости” При больших
внешних силах. Примеры на рис. 6.12-3 проявляют
свойство податливости перпендикулярно к нор-
мальным поверхностям, примеры же на рис. 6.35-2,
наоборот, тангенциально к ним (трбние сколь-
жения).
Процесс, подобный представленному на рис. 6.34,
происходит также на рис. 6.36. В столбце 1 приведе-
на постановка задачи, выраженная в форме
функционального положения с указанием запрет-
ных зон как условия из списка требований. Этим
требованиям удовлетворяют также структурно-
функциональные элементы на входе и выходе и
само их расположение. Теперь в пространстве меж-
6.4. Геометрическая функциональная структура
345
После-
дова-
тель -
ные
этапы
Число
Соединяемые совместимые структур- Соединение вещественной связью, обла-
но-функциональные элементы анализ функций сочленений стей
схе-
мы
Допустимые напря-
женные циклы по Выбор и реализация
рис. 6.35-1
1.1
Постановка задачи (функциональное
положение)
Переместить силу в сторону
(параллельное соединение)
________3
"и
Ограничение
Не передавать моменты ни на
основание, ни на вход, ии на
выход.
Отсюда следующее соединение;
I Определение некоторых
свойств сочленений,кри -
терни выбора для
рис. 6.29, поле 2.2 или 6.2
1.4
1.5
Постановка задачи (функциональное
положение)
Переместить в сторону, силу, противо-
действующую силу и скорость (диаго -
нальное расположение)
Ограничение
Не передавать моменты ни на
вход, ни на выход.
Следствие: определение свойств
сочленений
Статический под-
вижный напря-
женный цикл
(упругая, пластн -
ческая деформа -
Вариант
ция), выбрано:
поле 8.4
Обозначения: Х>— вращательная
пара 6|;
поступательная
пара б|
плоская двухподвнжная пара Рц .
Рис. 6.36. Последовательность действии при синтезе статических механизмов из структурно-функциональных элементов. Вход: сила,
поток энергии; вспомогательные средства: простые статические неподвижные и подвижные напряженные циклы. Обозначения см. на
рис. 6 Л и 6.35-1
346
6. Новые модели для методического конструирования с помощью ЭВМ
^..Реализация Поддержание сил и скоростей с использованием накопите- лей энергии Соответствующий элемент-стержень из рис. 6.22-1 Подвод энергии, отвод энергии Потери энергии Пример
задача № 1 2 3 4 5
Поддержи- вать силу F*0 Av=0 1 1.1 Удерживать заряженным потенциальный накопитель энергии (статическая неподвижная сила) 1.2 Г -н-£—г F* 0 Fj + F2 = O v =0 1.3 Нет при отсутствии релаксации 1.4 Нет при отсутствии релаксации 1.5 Винтовые соеди - нения (напря- женный цикл, статический)
2 2.1 Зарядить или разрядить кинетический накопитель энергии (сила инерции) 2.2 *7777 Зарядка F,* 0 W у ♦ 0 VV2 Разрядка f2*o F, = 0 v *0 v1=v2 2.3 Постоянно Необходим под- вод или отвод энергии 2.4 Имеются из-за превраще- ния энергии 2.5 Приводы (напря- женный сегмент, кинетический)
3 3.1 Поддерживать равенство энергии зарядки н разрядки накопителя (статическая, равномерно движущаяся сила) 3.2 1 Г F *0 F1 + F2 = O v *0 Vj = V2 3.3 Постоянно Необходим под- вод или отвод энергии 3.4 Нет в стационарном режиме Имеются в нестационарном режиме нэ-за пре - вращения энергии 3.4 Валы машин в стационарном режиме (напря- женный цикл, стационарный)
Поддержи- вать ско - рость v*0 4 4.1 Удерживать заряженным кинетический накопитель энергии 4.2 F = 0 V 4 0 VV2 4.3 Нет при отсутствии трения (напри- мер, гравитация в вакууме) 4.4 Нет при отсутствии трения 4.5 Спутник (маховик)
5 5.1 Зарядить или разрядить потенциальный накопитель энергии 5.2 Зарядка F*0 f,*f2=o v,* 0 v2=0 1-^- Разрядка F*0 f,-f2=o v2*0 v, = 0 5.3 Постоянно Необходим под- вод или отвод энергии 5.4 Имеются из-за превраще - ния энергии 5.5 Работающий подъемник
6 6.1 Поддерживать равенство энергии зарядки и разрядки накопителя 6.2 Как 3.2 6.3 Как 3.3 6.4 Как 3.4 65 Валы машин в стационарном режиме
j I- _j d I I г_
С у * входные Г у - выходные Обозначения: "1--------= > - . Т------ - • I----=___
' величины; ’* ‘ величины ' у V
Рис. 6.37. Накопители энергии как средство для синтеза конструкций, в особенности для поддержания силы или скорости
ду входом и выходом можно разместить, например,
приведенные на рисунке структурно-функциональ-
ные элементы. На первом шаге определяется спо-
соб соединения элементов на основе ограничи-
тельных условий и возможного здесь же задания
некоторых пар, в которых вещественная связь
должна соединить элементы, предназначенные
для передачи момента (столбец 2). Число замкну-
тых областей схемы выводится часто исходя из
возможностей обхода запретных зон (столбец 3).
При этом из всех мыслимых вариантов можно вы-
брать небольшое число реализуемых цепей звень-
ев (см. рис. 6.14 и 6.35) или механизмов, которые
представлены в столбце 4 (все они с двумя обла-
стями). В качестве окончательного варианта
может быть выбрано, например, решение, показан-
ное в столбце 5. Задача в поле 1.1 на рис. 6.36
требует статического неподвижного, а в поле
6.1- статического подвижного напряженного
цикла.
Если при поиске решения исходить из наличия
накопителя энергии, который конструктор должен
реализовать в первую очередь, чтобы этим создать
силы и скорости, то ценную информацию для этого
поиска могут дать взаимосвязи, приведенные на
рис. 6.37. Наиболее интересны случаи 1 и 4. Слу-
чай 1 находит широкое применение в технических
устройствах со статическими напряженными цик-
лами; случай 4 встречается гораздо реже, напри-
мер в спутниках связи и релейных станциях в поле
тяжести небесного тела. Все чаще используется
возможность накапливать кинетическую энергию
в маховых колесах из высокопрочных пластмасс
[9.1], вращающихся в вакууме, когда постоянство
угловой скорости сохраняется наиболее хорошо. В
столбце 2 на рис. 6.37 содержатся также сведения о
6.4. Геометрическая функциональная структура
347
Соединяемые совместимые структур-
но-функциональные элементы
Соединение вещественной связью,
анализ функций сочленения
Требования
к сочленени
ям, матри-
ца связей
Возможный вид цепи для
напряженного сегмента и
напряженного цикла
Постановка задачи (функциональное
положение)
Передать энергию от звена с через
вращательный элемент к звену т
------£
Вход
С — например,, пружина, цилиндр
с поршнем, магнитный якорь
и т. д.
щ — ускоряемая масса
(центробежные силы не
учитываются)
Постановка задачи (функциональное
положение)
Передать энергию от звена с через вра -
щательное звено к паре рабочих повер -
хностей a/q 5 и преобразовать ее вид
при равномерном движении
Обозначения: 1-=FT-;
Ограничение
Не передавать моменты ни на основание,
ни на вход, ни на выход. Отсюда следую -
щее соединение:
z \ Определение некоторых
1 I свойств сочленений и кри-
териев выбора по рис. 6.29
Ограничение
Как в поле 1.2
Штриховые линии не лежат в плоскости чертежа или в параллельной ей плоскости.
Напряженный сегмент
(кинетический)
^q
(как плоская цепь)
Цепь звеньев в плоскости
вращения
ненапряжен- ное, непод- вижное сос - тояние напряженное подвижное состояние
п « 3 п «4
ei ’3- ei
eD -0 е„-0
eid-0 eid«0
f -0 f -1
Напряженный цикл
(стационарный)
Цепь звеньев в плоскости
вращения
Ненапряжен-
ное, непод-
вижное сос-
тояние
п » 3
е,=3
еп - о
Cid = О
f -О
Напряженное,
подвижное,
трение сколь
жения
п -5
е,-5
е„-1
gjd= О
f «1
Рис. 6.38. Последовательность действий при синтезе кинетических механизмов из структурно-функциональных элементов. Вход: поток
энергии; вспомогательные средства: простые напряженные сегменты и напряженные циклы
том, когда для создания напряженного цикла не-
обходимо отсутствие, равномерное или неравно-
мерное движение. Выбор определяется тем, кото-
рая из сил - или F2 - не равна 0, а также наличи-
ем/отсутствием скорости. Если скорость нулевая,
мы берем цепь с числом степеней свободы f < -1, а
если же ненулевая, то мы должны положить в ос-
нову конструкции цепь cf = 1 (см. рис. 6.12-3).
Задачи, подобные поставленным на рис. 6.36 в
поле 6.1, решаются также на рис. 6.38 с помощью
структурно-функциональных элементов, включаю-
щих напряженные сегменты. В поле 1.1 стоит зада-
ча передать энергию из потенциального накопите-
ля с (например, через вращающееся звено) и напра-
вить ее на ускорение массы m (накопитель кинети-
ческой энергии). Такая задача решается, напри-
мер, в поршневых двигателях. Процедура констру-
ирования в столбцах 1 и 2 совпадает с представлен-
ной на рис. 6.36, в столбце 3 - отличается использо-
ванием матрицы связей при поиске сочленений.
Требования запереть или оставить свободными дви-
жения, которые должны выполняться или по ка-
ким-либо причинам уже определены, заносятся в
эту матрицу. Теперь, обращаясь к рис. 6.29, опреде-
ляем, какими должны быть еще не описанные,
т. е. свободно выбираемые направления свобод,
348
6. Новые модели для методического конструирования с помощью ЭВМ
чтобы при этом получилось подходящее техниче-
ское сочленение. В зависимости от того, рассмат-
ривается ли звено с как жесткое или податливое в
продольном направлении, число степеней свободы
механизма f=Q или / = 1 (рис. 6.38, поле 1.4). Полу-
чается напряженный сегмент.
В случае 2 на рис. 6.38 возникновение напря-
женного цикла трактуется примерно так же как на
рис. 6.12-3, строка 3 (особый случай: фрикционное
колесо расположено концентрично оси вращения).
На рис. 6.38 в поле 2.4 приведено, правда, только
состояние до приложения силы (т. е. до появле-
ния трения) и состояние после приложения силы,
когда уже действует трение скольжения. Здесь
также при приложении силы и наличии трения
возникает напряженный цикл.
Итак, мы рассмотрели модель „геометрическая
функциональная структура”, которая была разра-
ботана аналитически. Она должна была показать,
что все энергетические элементы механизмов сво-
дятся к описанным элементам с рабочими объема-
ми и рабочими поверхностями (см. рис. 6.22-1 и по-
следующие) как к исходным.
Обычные детали машин можно с полным осно-
ванием уподобить химическим соединениям, ко-
торые строятся иногда из малого, а иногда из боль-
шого числа химических элементов. Тогда химиче-
ские элементы следует уподобить исходным
элементам геометрической функциональной
структуры. Точно так же как в химии для образова-
ния новых соединений часто целесообразно ис-
пользовать не только элементы, но также и опре-
АФС (описывает поток энергии)
Синтез
Анализ
2
1
Выявление и абстрагирование
функциональной структуры
ГФС (определяет топологию)
VI
q
Рис. 6.39. Разработка новой конструк-
ции, исходя из известной. Пример ис-
пользования абстрактной, векторной и
геометрической функциональной струк-
тур в рабочем плане
Привести
массу в
движение
Умножить
силу
(v>0)
Проводить
силу
(v>0)
*2
Разработанная
конструкция
6.4. Геометрическая функциональная структура
349
деленные, по самым различным причинам наибо-
лее подходящие соединения, - конструирование
не потребуется начинать каждый раз с исходных
элементов геометрической функциональной струк-
туры, а в большинстве случаев будут использовать-
ся их испытанные комбинации (часто совпадаю-
щие с обычными деталями машин), к которым при
необходимости будут добавляться отдельные эле-
менты.
Но при всем том, для того чтобы стало возмож-
ным переложить описанные процедуры конструи-
рования на вычислительную технику, а также
целесообразно пользоваться функциональными
интеграцией, разделением и перемещением, не-
обходимо знать, какие простейшие структурные
элементы выполняют исходные функции и каким
образом можно на их основе получать известные,
более сложные структуры (детали машин). Конст-
руктору, работающему в традиционной манере,
также будет весьма полезно познакомиться с вза-
имно независимыми исходными элементами меха-
нических конструкций.
6.4.5. Конструирование с помощью векторной
и геометрической функциональной
структуры
На рис. 5.24 была дана своего рода „маршрут-
ная карта” для правильного использования раз-
личных моделей изделия. Кроме того, в гл. 5 были
описаны некоторые из возможных маршрутов -
вариантов процесса конструирования. Теперь у нас
имеются все предпосылки для более подробного
обсуждения векторной и геометрической функ-
циональной структуры в качестве средства перехо-
да от абстрактной функциональной структуры к
предметной фазе. Следующий пример соответст-
вует маршруту между блоками s-y на рис. 5.24 или
p-у на рис. 5.25. Чтобы скорейшим образом прийти
к функциональной структуре, часто выбирается
маршрут, описанный в гл. 1 (рис. 1.3), а именно:
анализ известной конструкции, выполняющей тре-
буемую функцию.
Пусть нашей задачей будет, например, „боль-
шую массу, находящуюся под предварительным
напряжением от силы F2, привести в движение ма-
лой силой F/’. Анализ частных функций представ-
лен в левом столбце на рис. 6.39. В качестве извест-
ного изделия на этом рисунке изображен двухка-
мерный гидравлический цилиндр с двумя соответ-
ствующими поршнями (поле 1.3). От силы Fr пор-
шень а приходит в движение, при этом сила умно-
жается вследствие распространения давления и
различной площади сечения цилиндров, что при-
водит в движение большой поршень и массу е. Час-
тные функции, которые здесь возникают, это „пере-
давать силу”, „умножить силу при наличии движе-
ния (v > 0)” и „перемещать массу”.
На основе этого анализа теперь не представля-
ет трудностей так абстрагировать функциональ-
ную структуру из поля 1.2, чтобы она описывала
поток энергии, явно необходимый для перемеще-
ния массы. Имеет смысл сразу абстрагировать част-
ные функции до уровня абстрактных (поле 2.1),
т.е. „передавать силу” в „передавать энергию”,
„умножить силу” в „преобразовать форму энергии”,
а „привести массу в движение” в „накопить энер-
гию”.
Из заголовочных строк и столбцов рис. 6.3 и
6.22-1 можно взять подходящие термины для двух
уровней абстракции векторной и геометрической
функциональной структуры, причем целесообраз-
нее пока не рассматривать их реализацию в полях
на пересечении соответствующих строк и столбцов
на этих рисунках.
Проделанные операции позволили разработать
абстрактную функциональную структуру без пред-
варительного анализа и точной формулировки
постановки задачи. При этом следует сознавать,
что решения получатся в определенной степени
родственными, если только не варьировать функ-
циональную структуру радикальным образом. В
нашем случае, правда, абстрагирование до возмож-
но более высокого уровня препятствует слишком
сильной близости решений и чрезмерному суже-
нию пространства решений (см. также рис. 2.16).
Теперь в поле 2.2 на рис. 6.39 производится
синтез. Прежде всего определяется, что поиск
ограничивается механическими решениями. Но
тогда далее можно работать с векторной функцио-
нальной структурой (модель 8 на рис. 5.2) анало-
гично рис. 6.8. Элементы можно взять из рис. 6.3.
Для функций „проводить энергию” в нашем рас-
поряжении элементы строки 9. Так как на входе
стоят две поступательные величины (сила и ско-
рость), то подходит столбец 1, а в итоге элемент в
поле 9.1. Для функции „преобразовать форму энер-
гии” в строке 10 найдется немало решений, но
только таких, в которых поступательное движение
преобразуется во вращательное, и наоборот. У
нас же, следуя первоначальному образцу - исход-
ной конструкции, должно сохраниться поступа-
тельное движение. Как было показано выше (см.
рис. 6.28-1), силы изменяют направление в рабочем
объеме (поле 4.1), скорости - на рабочих поверхно-
стях (поле 7.1). Поэтому кажется целесообразным
выбрать решение, аналогичное приведенному на
рис. 6.7 в поле 2.1. Оно представляет собой брусок,
который благодаря подходящему расположению
рабочих поверхностей создает возможности изме-
нить направление силы и скорости.
Функция „накопить энергию” (здесь - в массе,
которая приводится в движение) связана с заряд-
кой накопителя кинетической энергии и представ-
лена для поступательных движений в поле 4.1 на
рис. 6.3 и 6.22-1. Если поставить задачу накопления
потенциальной энергии в процессе равномерного
движения против направления полевой силы (на-
пример, подъем автомобиля с помощью домкрата),
то следует выбрать векторную функцию, соответст-
вующую структурно-функциональному элементу в
поле G1-1 на рис. 6.26.
Тот факт, что в векторной функциональной
структуре отдельные элементы-блоки располага-
ются под вполне определенным углом друг к дру-
гу, позволяет наметить уже на этом этапе рабочего
плана позднейшие топологические свойства рас-
положения деталей.
Выполнить переход к геометрической функ-
циональной структуре (поле 2.3 на рис. 6.39) теперь
нетрудно, так как элементы этих структур доволь-
но точно соответствуют друг другу (см. рис. 6.3 и
6.22-1). Такие геометрические величины, как дли-
на или радиус уже возникают в явном виде, но
только качественно. Однако их отношения, а тем
самым и углы, должны быть возможно ближе к
окончательному состоянию. Полученная таким
образом структурная схема, если убрать из нее
стрелки - концы векторов, становится очень похо-
350
6. Новые модели для методического конструирования с помощью ЭВМ
Рис. 6.40. Элементы для функции ,.проводить энергию” в моде-
лях изделия различных уровней абстракции
жа на окончательный вариант конструкции и в
сильной степени определяет ее топологию (см.
рис. 6.39, поле 2.3). На этом этапе должны быть
приняты решения, будут ли определенные элемен-
ты соединяться посредством вещественной связи
(функциональная интеграция) или же для выпол-
нения своих функций они должны соприкасаться
только по рабочим поверхностям.
Переход от структурных элементов к деталям с
заданными контурами (поле 2.4) можно упростить,
если соединить замкнутой линией все рабочие по-
верхности, относящиеся к одному рабочему объ-
ему, а „линии рабочих объемов” стереть. Контур-
ное представление оказывается наиболее простым
и обычно предпочитаемым в силу того, что рабо-
чий объем в этом представлении изображается
только его поверхностями, которые мы только и
можем воспринимать в действительности.
Полученный результат - умножитель силы по
клиновому принципу - не кажется особенно ориги-
нальным: он известен достаточно хорошо. Однако
нашей целью здесь было лишь раскрыть шаги про-
цесса конструирования и найти не обязательно но-
вые, но какие-либо альтернативные, равноценные
решения. Менее известные, возможно даже новые,
решения могли бы быть найдены, если бы варьиру-
емый элемент b (поле 2.1) был бы представлен как
преобразователь вида энергии с возможностью об-
ратного преобразования в механическую энергию
или если бы блок b/d (поле 2.2) был заменен на блок
из поля 4.2 на рис. 6.6.
На рис. 6.40 представлена на элементах различ-
ных моделей изделия пошаговая конкретизация
частной функции а из рис. 6.39 („проводить меха-
ническую энергию”). Здесь ясно видны отличия
элементов на различных фазах с разным уровнем
абстракции. Наблюдается возрастание информа-
тивности представления и одновременно рост
трудностей при переходе. Элементы для реализа-
ции были взяты из моделей 4,8,9 и 15 на рис. 5.2.
6.5. Механизмы для логических функций
Выше уже были подробно обсуждены механиз-
мы для накопления, передачи и комбинирования
энергии. Образование их из структурно-функцио-
нальных элементов в разд. 6.4 показало, что все
они находятся в определенном родстве. На рис. 6.40
для одной из функций („проводить энергию”) при-
ведены различные модельные представления.
Такие же или похожие механизмы могут быть ис-
пользованы также для накопления (запомина-
ния), проведения, преобразования формы и вида и
комбинирования сообщений [10; 10.1]. Примерные
варианты наиболее часто встречающихся механизм
мов собраны на рис. 6.41. Информационный аспект
конструкций раскрывается только после того, как
будет задана кодировка сообщений, как это дела-
лось для логических механизмов на рис. 4.18, стро-
ка 4, и в следующих за ним рисунках.
В частности, собачка в поле 1.1 на рис. 6.41, ко-
торая нам уже встречалась в умножителях силы,
представляет собой .RS-переключатель. Ее большое
преимущество заключается в том, что при S=1 вход-
ная сила может быть гораздо меньшей, чем дейст-
вующая выходная сила при Q = 1. Движок для пе-
реключения сцепной муфты в поле 2.1 и его функ-
ция как механического RS-переключателя с поло-
жением опрокидывания уже приводились на
рис. 4.23, поле 3. Мы ежедневно сталкиваемся с
электромеханическим RS-переключателем с биста-
бильным положением опрокидывания - обыкно-
венным перекидным рычажным выключателем из
поля 3.1 на рис. 6.41. Перекидной рычаг исполняет-
ся обычно в виде расположенной наклонно пла-
стины, причем воздействие осуществляется нажа-
тием на ее выступающий край.
Механизмы, работающие по принципу Т-пере-
ключателя, все чаще начинают использоваться в
„неэлектрических” областях. Следует упомянуть
защелку для шкафа в кат. 4.3.6, строка 9, и шари-
ковую авторучку. На рис. 6.41, поле 4.1, такая
функция запоминания (накопления) представле-
на на примере клавишного выключателя с крюч-
ком из кат. 4.3.6.
Проведение сообщений предполагает проведе-
ние энергии. Реализуется оно путем кодирования.
Как следует из полей 5.1 и 6.1 на рис. 6.41, кодиро-
вание может основываться на положении (т. е. на
перемещении), на изменении движения и т. д. В
конце концов, любое изменение какой-либо физи-
ческой величины, создаваемое на входе и согла-
сованно отображающееся на выходе, может ис-
пользоваться для кодирования.
Отрицание логической величины механически
реализуется легче всего обращением направления
движения. Кодировка положений 0 и 1 задает тог-
да одно и то же направление, если на входе и
выходе одинаковые логические величины распо-
ложены с одной и той же стороны (см. рис. 6.41,
поле 8.1). Тот же эффект отрицания мсжет быть
достигнут и путем обращения кодирования, как
это показано в кат. 4.3.2, строка 3, а также на
рис. 6.41, поле 9.1.
Пока еще ничего не говорилось о механизмах,
предназначенных для „преобразования вида или
формы” сообщений. Здесь имеется в виду не се-
мантический или прагматический, но только син-
таксический аспект. Речь идет о преобразовании
знаков, в частности о преобразовании кода. В
смысле определений, относящихся к абстрактным
функциям, мы говорили всегда о преобразовании
вида, когда какая-либо величина превращалась в
величину другого вида (рода), и о преобразовании
6.5. Механизмы для логических функций
351
Абст-
ракт-
ная
функ-
ция
Логическая функция
Обозначение,
уравнение
Наиме-
нова-
ние
Деталь
или
узел
Пример
Кодировка
Дополнение
№
Собач -
ка 1
Нако-
пление
(запо -
мина-
ние)
S Q
ап*’ »
(SvRAQ)n
R5-пере
ключе -
тель
Дви-
жок
сцеп-
ион
муф-
ты
2
2
Кодировка
положением
Кодировка
положением
3
Рычаг R (он же Q ) при
любом воздействии
через неизображенный
элемент вернется в ис -
ходкое положение
Механизм воздействия
на сцепиую муфту
см. на рис. 4.23
Пере-
кид-
ной
рычаж-
ный
выклю-
чатель
3
S: R-кодиро-
вка поло-
жением; ток
есть » Q = 1,
тока нет &
Q = О
Для S и R разнонаправ-
ленная кодировка поло-
жением (как в поле 2.1)
1.2
Прове-
дение
С
Qn” =
(QaIvOlaT )
Т-пере-
ключа-
тель
Кнопо-
чный
выклю-
чатель
F>HT = 1
F<FoM = O
Q
кодировка
положением
см. кат. 4.3.6 и 4.3.7,
рис. 4.23 и 4.24
Под-
вижный
элемент
Вал
Движ-
ковый
меха-
низм
Элемент
отри-
цания
Дву-
плечий
рычаг
Посту-
патель-
ный
стер-
жень
6
8
Посту-
патель-
ный g
стер-
жень
5.1
0 1 0 1 1 1 tz/zjJ 1 X P/ZI у 5.2 Кодировка положением (одиоиа1 правленная) 5.3 Переменные хи у совпадают
LZZZJ “г х У х=’ у=1 6.2 У=0
0 _ _ _ 0 7^ г" ( б? О> ) 7.2 Кодировка положением 7.3 См. кат. 4.3.2 и 4.3.3
°— X у 8.2 Кодировка положением 8.3
0 1 10 х ' ' 1 1 у 9.2 Кодировка положением (разнона- правленная) 9.3 Отрицание за счет изменения кодировки
Рис. 6.41. Механизмы для накопления, проведения, преобразования формы и вида и комбинирования сообщений (см. также рис. 4.17)
(Лист 1)
352
6. Новые модели для методического конструирования с помощью ЭВМ
Абст-
ракт-
ная
функ-
ция
Логическая функция
Обозначе -
ние, урав-
нение
Наиме-
нова-
ние
Деталь
или
узел
Пример
Кодировка
Дополнение
Преоб-
разова-
ние
вида
Преоб-
разо-
ватель
кода
(преоб-
разо -
ватель
вида)
10.1
в
Преоб-
разова-
ние
формы
— После - дова- тельио- парал- лель - ный преоб- разов - (преоб- разов. фор- мы) 11
Клави- шный
пере- клю- чатель 12
Элемент коньюн-
кции (И) Сцеп- ная муфта 13
Дверная
Двер-
ной
замок
14
У=*2УХ1
Рис. 6.41 (Лист 2)
Элемент
дизъюн-
кции
(ИЛИ)
Авто-
моби-
льный
тормоз
15
I
1 — 0 — Вход
о—I Л -1 — 0 — 1
Выход
Вход 7
(тактовый
импульс)
ранство)
12.1
0 1 U Напряжение
—---------------------1 >ерек лючате льный
131 Rpnv.iiHH --------------——1 рычаг
15.1
Тормозная
колодка
У
Тормозной
барабан
Педаль Р,
тормоза X,
Тормозной
цилиндр
колеса
Ручной
тормоз
*2
2
10.2
Декодирова- Расстояния между конеч-
ние по спосо-
бу сложения
(кодировка
положением)
Вид кода из
меняется
10.3
11.2
Код преоб -
разуется из
временной в
простраист-
венную пос-
ледователь-
ность.
Сам код не
меняется
12.2
U*UD^x2 = l
и=ио = х2 = О
1* ID = У =1
1 = 10 = У =°
13.2
ш, *0 SX, = 1
w^OSx^O
w2 *0 = у=1
ц)2 = 0^у =0
14.2
Кодировка
положением,
X,-дверная
ручка,
Х2~ ключ,
у — собачка
р»0= х = 1
р-*0 = х = 0
Fy>0Sy = l
Fy-*O = y = O
3
иым и начальным поло -
жениями роликов
I, II и III должны нахо-
дится в отношении
2°: 2’ : 2г
11.3
При параллельно-после-
довательном преобра-
зовании код преобразу-
ется из пространствен-
ной во временную по-
следовательность (пре-
образование формы)
12.3
Ток протекает (у =1)
только если клавиша
нажата (х j =1) и прило-
жено напряжение
(х2 =1)
13.3
Ведомый вал вращается
(у = 1), только если вра-
щается ведущий вал
(xj =1) и переключатель-
ный рычаг вдвинут
(х2 =1)
14.3
Собачка открыта (у = 1),
если имеется воздейст-
вие или на ручку (х! = 1),
или иа ключ (х2 = 1),
или на них обоих
15.3
Воздействие на тормоз-
ные колодки произво-
дится (у = 1), если име-
ется воздействие или на
педаль тормоза (xi = 1),
или на ручной тормоз
(х2 = 1), или нд обоих
6.6. Геометрическая цепная структура
353
формы, когда она оставалась той же и менялись
только ее характеристики. Преобразование вида
сообщений в синтаксическом смысле сводится к
изменению кода. Если код переводится в другой,
например код Морзе в бинарный пятиразрядный,
то говорится о преобразователях кода (в построен-
ной здесь системе понятий - также с „преобразова-
телях вида кода”)- Если же он только переводится
из пространственной во временную форму пред-
ставления, то можно говорить о параллельно-по-
следовательных или, наоборот, о последовательно-
параллельных преобразователях (в построенной
системе понятий - последовательно-параллель-
ный преобразователь формы и т. д.).
В поле 10.1 на рис. 6.41 представлен механиче-
ский дешифратор, основанный на сложении [3, 4,
23]. Это механизм, преобразующий, например, би-
нарный код (здесь трехразрядный) в обычные литер-
ные знаки. Описание работы: бинарными элемен-
тами 0 и 1 служат конечные положения роликов
I, II и III, которые могут быть перемещены или нет
по отрезкам, длина которых соответствует степе-
ням двойки. Сумма вариантов их перемещений,
образующаяся на тросе, для любой комбинации
имеет свою, отличную от других1 длину, благодаря
чему прокручивает каждый раз литерное колесо
на соответствующий угол. Суммарная длина пути
обеспечивает выбор как раз требуемой литеры,
которая оказывается над ударным молоточком и
при его ударе отпечатывается на бумаге. В послед-
нее время в информационных устройствах исполь-
зуются почти исключительно электронные преоб-
разователи кода. Но, тем не менее, вполне может
оказаться, что для силового управления в экстре-
мальных условиях окажется более предпочтитель-
ным преобразователь кода в гидравлическом или
механическом исполнении.
П осле довате льно-параллельный преобразова-
тель, как он показан в поле 11.1 на рис. 6.41, часто
находит применение в быстропечатающих устрой-
ствах для оперативной печати, например в качест-
ве периферийного устройства ЭВМ. Кода, т. е. ком-
бинации его элементов, такое устройство не изме-
няет, а преобразует его форму представления из
временнбй в пространственную. Функция: молото-
чек на входе должен приводиться в действие
тогда, когда выбранная литера (здесь цифра 2) ока-
жется в позиции для печати. Для быстропечатаю-
щего устройства действие молоточка должно
продолжаться несколько микросекунд, чтобы по-
лучился чистый оттиск и была обеспечена быстрая
смена литер при печати.
Логические операции над сообщениями могут
быть весьма разнообразными. Здесь выбрана конъ-
юнкция (и) и дизъюнкция (ИЛИ), поскольку эти
операции наиболее просто реализуются механиче-
ски, как это показано на рис. 4.18. Операция конъ-
юнкции часто встречается в технике (см. примеры
в полях 12.1 и 13.1 на рис. 6.41.). Ток / течет в провод-
1 То свойство, что сложение значений степеней по основа-
нию 2 (2 , 21. 2 ,.... 2П) во всех возможных комбинациях (без по-
вторений, 2° = 1, 21 = 2, 2° + 2 - 3, 2 - 4 и т. д.) дает в итоге все
натурные числа, можно использовать для обозначения класси-
фицируемых объектов, например фортепиано = 1, скрипка = 2,
альт = 4, виолончель = 8. Тогда каждое натурное число соответ-
ствует своей комбинации инструментов, например 3: фортепиа-
но + скрипка, 14: струнное трио, 15: фортепианный квартет, 14.2:
струнный квартет. Повторяющиеся инструменты (здесь вторая
скрипка) приводятся после точки. — Прим. авт.
23 — 2317
нике только тогда, когда приложено напряжение
и одновременно нажата клавиша. Точно так же
для муфты в поле 13.1, где ведомый вал только
тогда будет приведен в движение, когда ведущий
вал*1 вращается, а переключательный рычаг х2
находится в положении 1.
Операция дизъюнкции тоже часто встречается
в технических устройствах. На эскизе в поле 14.1
изображен дверной замок с собачкой и ключом.
Собачка может быть открыта или с помощью двер-
ной ручки, или ключом. В автомобильном тормозе,
поле 15.1, тормозные колодки могут быть приведе-
ны в действие или через привод р1 от тормозной пе-
дали, или через привод р2 от ручного тормоза. В тех-
нике безопасности подобные конструкции называ-
ются также конструкциями с резервированием
[24].
Без информационных функциональных эле-
ментов [38] машинные системы немыслимы. Для
тех простых функций, которые могут или должны
быть реализованы механически, описанные при-
меры могут сослужить конструктору хорошую
службу.
6.6. Геометрическая цепная структура
Имеется немалое число попыток использовать
возможности мощной вычислительной техники
для нужд методического конструирования [7, 8,
30]. Это относится как к синтезу механизмов [27],
так и к выбору из определенных функциональных
единиц [9] или к работе с дисплеем вообще [6].
Модель, специально предназначенная для ра-
боты с активным дисплеем (со световым каранда-
шом), - геометрическая цепная структура [35, 43,
42] - приведена на рис. 5.2 под номером 10. Ее осо-
бенности состоят, с одной стороны, в том, что она
приспособлена к требованиям со стороны вычисли-
тельных машин в отношении способа представле-
ния, объема памяти, кодирования, техники меню
и т. д., а, с другой стороны, в том, что здесь функ-
ция сопоставляется с отдельными геометрически-
ми элементами или цепями, в то время как в гео-
метрической функциональной структуре элемен-
ты и функции образуют целостную общность.
Кроме того, при разработке данной модели была
поставлена цель: получить единую систему эле-
ментов, строящихся из отдельных геометрических
элементов (рис. 6.42).
Геометрические элементы составляются из
структурных и шарнирных (соединительных) ча-
стей. Они могут быть первого-третьего порядка.
Элементы третьего порядка состоят из одной
структурной компоненты (рабочего объема) и од-
ного шарнира (пары рабочих поверхностей). Они
представлены на рис. 6.42, а. Поскольку имеются
лишь три плоских сочленения, или шарнира (ку-
лачковая, или вращательно-поступательная пара,
вращательная и поступательная пары), которые
допускают геометрическую связь с одной или с
двух сторон, то возникает всего шесть вариантов:
от 001 до 006. Те же варианты, но по одной из по-
верхностей сочленения связанные с основанием,
получают кодовые номера от 0100 до 0600. Кроме
того, есть еще один элемент второго порядка с ко-
довым номером 7000 и два элемента первого по-
рядка с кодовыми номерами 0000 и 0007.
354
б. Новые модели для методического конструирования с помощью ЭВМ
Геометрические элементы складываются, как
правило, из Т-образных структурных частей
(рис. 6.42,6). При этом нижний конец непосредст-
венно примыкает к структурному шарниру, пра-
вый - к „свободному” шарниру, а левый - к смеж-
ному. Если складывать элементы третьего, второго
и первого порядков в осмысленных сочетаниях, то
получится, как показано на рис. 6.42, в, всего около
40 возможных геометрических элементов.
б) Вход
Выход
Рис, 6.42. Элементы геометрической цепной структуры, их сос-
тавные части и составление цепей из них:
а — представление в ЭВМ частей геометрических элементов и их
кодировка; б — структура геометрических элементов; в — состав-
ление геометрического элемента из элементов 1-го и 3-го поряд-
ков; г — геометрическая цепная структура, полученная на ЭВМ
Для соединения геометрических элементов в
цепные используются данные о числе элементов,
наличии определенных элементов, определенных
сочленений и, наконец, требования принудитель-
ности (числа степеней свободы): Таким способом
получены, например, цепи на рис. 6.42, г, причем ис-
пользовался машинный алгоритм и вывод резуль-
тата на экран.
Связи между геометрическими элементами и
функциями устанавливаются некоторым разум-
ным соответствием, как это, например, сделано на
рис. 6.43.
Поскольку это соответствие не является вза-
имно-однозначным из-за того, что элементы в силь-
ной степени уже функционально интегрированы,
для. цепей обнаруживается некоторая многознач-
ность, с которой, однако, удается хорошо справ-
ляться, пользуясь возможностями вмешательства
в работу программы на интерактивном дисплее.
Пусть мы произвели анализ имеющейся конст-
рукции, в качестве примера возьмем стопор обрат-
ного хода - заклинивающий останов (см. рис. 5.21,
поле 8.2; кат. 4.43 и рис. 4.40-4.47). В результате бы-
ла выяснена схема механизма и определено,
какие функции должны быть сопоставлены раз-
личным звеньям, после чего мы можем задать не-
обходимые сведения по соединению элементов. С
помощью ЭВМ по этим данным о соединении
могут быть образованы различные варианты и вы-
ведены на экран дисплея, графопостроитель или, в
каком-либо коде, на устройство печати.
На рис. 6.44 воспроизведены 20 из 216 выданных
примеров с трех- и четырехзвенными цепями [35].
Машинные результаты еще не содержат данных о
геометрических величинах, типах углов и разме-
рах, так что посторонний наблюдатель еще не стал
бы интерпретировать цепи в левом столбце как за-
клинивающий останов (или стопор обратного
хода). Эти машинные результаты являются отобра-
жением стопора только на уровне функционально-
зависимой модели. Их преобразование в модель,
зависимую от изделия и приведенную в правом
столбце, остается в данном случае задачей конст-
руктора.
На рис. 6.45 приведен пример конструирования
с помощью ЭВМ, представлены этапы этого процес-
са. Здесь производится дальнейшая разработка
варианта из рис. 6.44.
Шаг 1 (рис. 6.45, в) представляет собой геометри-
ческую цепную структуру в том виде, как она со-
держалась в таблице, включающей 216 возможных
вариантов. Так как элементы модели „геометри-
ческая цепная структура” уже несут в себе гео-
метрические сведения, например о форме подшип-
ников и сочленений, то имеющаяся структура
приводит к первым предметным изображениям
при переходе от функциональной фазы к пред-
метной.
Рис. 6.43. Сопоставление функций простых
элементов механизмов с частями геометриче-
ской цепной структуры
6.6. Геометрическая цепная структура
355
Заклинивающий останов
Заклинивающий останов
1.1. Разложение силы с тангенциальной силой между
структурными элементами
1.1. Разложение силы с тангенциальной силой между
структурными элементами
Число элементов: 2 + 1
Число элементов :3 + 1
Число комбинаций: 24
Число комбинаций: 48
Заклинивающий останов
2.1. Разложение силы с изгибающими моментами
между структурными элементами
Число элементов : 3 + 1
Число комбинаций: 32
Заклинивающий останов
3. Изменение направления силы
Число элементов: 3 + 1
Число комбинаций : 48
№
113
Изображение на дисплее
Рис. 6.44. Примеры из каталога с 216 стопорами обратного хода (заклинивающими остановами), полученные на ЭВМ с активным диспле-
ем [36]
356
6. Новые модели для методического конструирования с помощью ЭВМ
ВЫБОР И РАСЧЕТ ЗАКЛИНИВАЮЩЕГО ОСТАНОВА
С силовыми связями
ИМЯ: К. РОТ ДАТА: 2. 9. 80
ИСХОДНЫЕ ДАННЫЕ
ВХОДНОЕ ДВИЖЕНИЕ
ПОСТУПАТЕЛЬНОЕ: НЕТ
ВРАЩАТЕЛЬНОЕ : ДА
ВХОДНАЯ СИЛА
ВХОДНОЙ МОМЕНТ
ДИАМЕТР
ШИРИНА (ВХОДНОЙ ЭЛЕМЕНТ)
РАССТОЯНИЕ МЕЖДУ ОПОРАМИ
ТОЛЩИНА МЕТАЛЛА
ДОП. ДАВЛЕНИЕ НА ВХ. ЭЛЕМЕНТЕ
КОЭФФИЦИЕНТ ТРЕНИЯ
ТВЕРДОСТЬ ПО БРИНЕЛЮ
ОБЩАЯ ДЛИНА
УГОЛ ОХВАТА
ПРИМ-: РИС. 6.46
(ДА/НЕТ)
(ДА/НЕТ)
EK = Н.Т. [КН]
ЕМ =250. [ КНММ]
DU = 100. [ММ]
ВЕ=0. [ММ]
LA = Н.Т. [ММ]
BS =н.т. [ММ]
PZE = 50. [Н/КВ.ММ]
PMY = .25 [-1
НВ = Н.Т. [ Н/КВ.ММ]
GL= 300 [ММ]
GAMMA = 45. [ГРД]
Рис. 6.45. Разработка стопора от абстрактной модели, получен-
ной иа ЭВМ, до трехмерного представления:
а — геометрическая цепная структура; б — геометрическая ли-
нейная структура; в — чертеж в проекциях; г — трехмерное изоб-
ражение
ВХОДНОЙ МОМЕНТ [ КНММ | ЕМ = 250.09
ДЛИНА ФРИКЦИОННОГО ЭЛЕМЕНТА [ ММ] AR = 50.45
ДЛИНА ВЫХОДНОГО ЭЛЕМЕНТА [ ММ ] В = 151.36
ШИРИНА [ ММ ] BE = 16.97
УГОЛ ОХВАТА [ ГРД] GM = 45.00
УГОЛ ТРЕНИЯ [ ГРД] ALFA - 14.04
Рис. 6.46. Разработка стопора обратного хода с помощью вычис-
лительной машины. Вверху — исходные данные, внизу — геомет-
рическая линейная структура
Для дальнейшей разработке первого предмет-
ного изображения требуется указание количест-
венных значений функциональных величин с уче-
том конструктивных ограничений. На активном
дисплее появляется формуляр (рис. 6.46, вверху),
зависящий от выбранной геометрической цепной
структуры, который обеспечивает наглядный ввод
требуемых для дальнейшей разработки данных.
Сокращением Н. Т. (не требуется) обозначаются
величины, задание которых ведет к переопреде-
ленности исходных данных. Путем выбора опреде-
ленной цепной структуры и последующей обработ-
ки формуляра ЭВМ на втором шаге генерирует
геометрическую линейную структуру, представ-
ленную на рис. 6.45, б и рис. 6.26, внизу. При зада-
нии на втором шаге определенных размеров с по-
мощью системы изготовления чертежей конструк-
тор может получить на дисплее соответствующий
чертеж.
Третий шаг (рис. 6.45, в) - разработка контура за-
клинивающего элемента для стопора - показан на
рис. 6.47, а. Для разработки чертежа детали с вер-
тикальной и горизонтальной проекциями и зада-
нием размеров вычислительной машине требуется
около 4 минут.
Очень полезными при новых разработках ока-
жутся программно реализованные алгоритмы, ре-
конструирующие трехмерное изображение детали,
исходя из размеров, заданных в чертеже на дисп-
лее [25]. Пример на рис. 6.47, в был создан на основе
двух проекций (рис. 6.47, а и б) за несколько минут,
в результате получилось трехмерное изображение
готовой детали. В целях лучшего зрительного вос-
приятия из этого изображения было получено изо-
бражение на дисплее, не содержащее невидимых
линий (рис. 6.47, г).
Программная реконструкция трехмерного вида
детали позволяет конструктору во всех фазах изго-
товления чертежей держать под контролем как
конструкцию, так и чертеж. Это обеспечивается
тем, что параллельно двумерному проекту строит-
ся трехмерное представление на основе проекций
чертежа, а на трехмерном изображении ошибки в
конструкции и размерах можно обнаружить очень
быстро.
Создаваемое программой трехмерное описание
детали является основой дальнейших операций
разработки, в число которых входят:
расчет произвольного сечения на чертеже;
построение точных проекций для целей конт-
роля;
замена перспективных вспомогательных изо-
бражений при конструировании станков;
выяснение возможностей расположения и мон-
тажа в заданном объеме;
контроль возможных пересечений сборочных
единиц;
моделирование стадий движения;
использование алгоритмов визуализации для
получения торговых и ремонтных изображений [15];
6.6. Геометрическая цепная структура
357
Рис. 6.47. Полученное программными
средствами трехмерное представление
заклинивающего элемента (а, г) из рис.
6.46 и на основе дисплейного изображе-
ния, содержащего чертеж с видом спе-
реди и сверху (б, в):
а — вид спереди; б — вид сверху; в — соз-
данное с помощью ЭВМ трехмерное
Представление; г — трехмерное пред-
ставление элемента после стирания не-
видимых линий
изготовление взрывных чертежей сборочных
единиц; подготовка данных для изготовления на
станках с ЧПУ;
оценка данных с целью планирования работы;
выдача данных для программирования обра-
батывающих автоматов.
Оказывается, что с помощью активного дисп-
лея и возможностей ЭВМ создаются условия для
быстрого и гораздо более полного охвата констру-
ктивных решений, чем это было прежде. Если был
проделан тщательный анализ постоянно встреча-
ющихся частных функций, как это было показано
на примере стопоров обратного хода, то примерный
вид основных деталей может быть получен из кон-
структорских каталогов с помощью ЭВМ. Эти ка-
талоги, основанные на положениях методического
конструирования, оказываются гораздо более пол-
ными, чем известные подборки решений, напри-
мер нормативы AWF (комитета по промышленной
продукции, ФРГ) по заклинивающим остановам
(2,48].
Для описанных задач в настоящее время не
имеется особых трудностей, обусловленных прин-
ципиальными ограничениями современной вычис-
лительной техники. Гораздо больше проблем свя-
зано с разработкой алгоритмов конструирования,
которые позволили бы вести работу в интерактив-
ном режиме, т. е. самим конструктором при помо-
щи и поддержке вычислительной машины. Боль-
шая часть данной книги предназначена в первую
очередь для того, чтобы продемонстрировать ос-
новные идеи и принципы таких алгоритмов.
Но и рассматривая задачи в более далекой пер-
спективе, мы не избежим при конструировании с
помощью ЭВМ необходимости очень точного пред-
варительного анализа „распределения ролей”.
Этот анализ должен определить, какие шаги и
операции при данном состоянии техники и при ис-
пользовании имеющихся программ и машин долж-
ны выполняться автоматически, по внутренним
алгоритмам, а какие - путем строго определенного
вмешательства конструктора в протекающий внут-
ри машины процесс конструирования.
Число перекладываемых на ЭВМ этапов конст-
руирования окажется тем большим, чем более
систематизированы конструкторские знания и
конструкторские операции в процессе конструиро-
вания. Единое освещение всех вариантов процесса
конструирования и анализ элементов, использу-
емых конструктором, имеет своей целью, в числе
всего прочего, более полную алгоритмизацию про-
цесса конструирования с тем, чтобы все больше
этапов этого процесса оказалось возможным воз-
ложить на вычислительные машины [43.1].
358
б. Новые модели для методического конструирования с помощью ЭВМ
6.7. Список литературы
1. Aschoff, H.-J.: Ober die Bedeutung der Systemdynamik
Tur die Konstruktion signalverarbeitender Gerate. Diss.
TU Braunschweig 1974.
2. AWF-VDMA-VDI: Getriebehefte, Sperrgetriebe. Heft 1-
6. Berlin, K61n: Beuth Vertrieb, 1952... 1957
3. Bauder, J.; Roth, K.; Uhden, 1.: Darstellung, Umwand-
lung und Umsetzung von Codes in der Feinwerktechnik.
Feinwerktechnik 68 (1964) 169-179.
4. Bauder, J.; Roth, K.; Uhden, I.: Die mechanischen Deco-
dierer in der Femschreibtechnik. Feinwerktechnik 68
(1964) 248-261.
5. Beitz, W.: Fertigungs- und montagegerecht. Konstruktion
25 (1973) 489-497.
6. Beitz, W.: Konstruieren im bildschirmunterstutzten Dia-
log mit dem Rechner. VDI-Berichte Nr. 219. Diisseldorf:
VDI-Verlag 1974.
7. Beitz, W.: Obersicht uber Moglichkeiten der Rechnerun-
terstdtzung beim Konstruieren. Konstruktion 26 (1974)
193-199.
8. Brader, C.; Hohl, G.: Rechnereinsatz in der Konzept-
phase des Konstruktionsprozesses. VDI-Berichte Nr. 219.
Diisseldorf: VDI-Verlag 1974.
8.1. Brockhaus: Enzyklopadie, 17. Auflage. Wiesbaden:
Brockhaus 1974
9. Buschhaus, D.: Rechnerunterstutzte Auswahl und Be-
rechnung von Schaltkupplungen. Diss. TU Berlin 1976.
9.1. Canders, W.-R.; Heldt, J.; Weh, H.: Berechnung und
Dimensionierung von Faserverbund-Schwungradern zur
Energiespeicherung. Konstruktion 33 (1981) 183-191
10. DIN 44300: Informationsverarbeitung, Begrifle. Berlin,
Koln: Beuth Vertrieb 1972.
10.1. DIN44301: Informationstheorie, Begrifle. Berlin, Koln:
Beuth Vertrieb 1977.
11. Dizioglu, B.: Lehrbuch der Getriebelehre, Bd. 1 (1965),
Bd. 2 (1967) Braunschweig: Vieweg.
12. Dizioglu, B.: Zur Konstruktionslehre der mechanischen
Bewegungsubertragung. Melliand Textilberichte Interna-
tional 52(1971) Nr. 8 und 9, 911-917, 1036-1041.
13. Dizioglu, B.: Designing without the risk of locking. Me-
chanism and Machine Theory 8 (1973) 55-69.
14. Dizioglu, B.: Kinematische und statische Grundlagen des
Spannens und Positionierens im Maschinenbau, insbeson-
dere bei Werkzeugmaschinen. VDI-Berichte Nr. 281
S. 25-35. Diisseldorf: VDI-Verlag 1977.
15. Fritsche, B.; htytsche, M.: Automatische Visibilitatser-
mittlung von dreidimensional erfaBten Maschinenbautei-
len. Angewandte Informatik (1978) 544-547.
16. GieBner, F.: GesetzmaBigkeiten und Konstruktionskata-
loge elastischer Verbindungen. Diss. TU Braunschweig
1975.
17. GraBer, A.: Ober die Bedeutung von Strukturplanen fur
die Konzeptphase. feinwerktechnischer Entwicklungen.
Diss. TU Berlin 1979.
18. Grubier, M.: Allgemeine Eigenschaften der zwanglaufigen
ebenen kinematischen Ketten. Civilingenieur (1880) 168.
19. Hain, K.: Die Entwicklung von Spannvorrichtungen mit
mehreren Spannstellen aus kinematischen Ketten. Indu-
strieblatt 59 (1959) 559-564.
19.1. Hain, K.: Selbsteinstellende Getriebe. Grundlagen der
Landtechnik (1956) 55-71
20. Hain, K.: Beispiele zur Systematik von Spannvorrichtun-
gen aus 6-gliedrigen kinematischen Ketten mit Freiheits-
grad F= — 1. Das Industrieblatt 61 (1961) 779-786.
21. Hain, K.: Entwurf viergliedriger, kraftverstarkender Zan-
gen fur gegebene Krafteverhaltnisse. Industrieblatt 62
(1962) 70-73.
22. Hain, K.: Getriebelehre, Grundlagen und Anwendungen.
Miinchen: Hanser 1963.
23. Heinzl, J.: Methodisches Konstruieren und Entwickeln
decodierender Getriebe. VDI-Berichte Nr. 195 (1973)
215-222.
24. Hoiecek, K.; Zemanek, H.: Redundanz in der Feinwerk-
technik. Feinwerktechnik 69 (1965) 441-453.
25. Jakobs, G.: Rechnerunterstfltzung bei der Geometrisch-
Stofflichen Produktgestaltung. Diss. TU Braunschweig
1981.
26. Kato, I.; Kudo, J.; Ichimaru, K.: Artificial softness sen-
sing - an automatic apparatus for measuring viscoelasti-
city. Mechanism & Machine Theory 12 (1977) 11-26. Per-
gamon Press 1975.
27. Kiper, G.: Rechnerunterstutzte Synthese von Getriebe-
bauformen. VDI-Berichte Nr. 281 (1977) 85-94.
27.1. Kiper, G.: Ebene kinematische Ketten mit ein und
zwei Laufgraden sowie bis zu sechs Gliedem und nicht
zwanglaufigen Kurvengelenken. Konstruktion 31 (1979)
111-115
27.2. Kiper, G.; Schian, D.: Sammlung der Grublerschen
kinematischen Ketten mit bis zu zwolf Gliedem. VDI-
Fortschritt-Berichte, Reihe 1, Nr. 44, Dusseldorf: VDI-
. Verlag 1976
28. Kollmann, F.G.: Die Auslegung elastisch-plastisch be-
anspruchter QuerpreBverbinde. Forsch. Ing. Wes. 44
(1978) 1-12.
29. Kollmann, F.G.: Neues Berechnungsverfahren fur ela-
stisch-plastisch beanspruchte QuerpreBverbande. Kon-
struktion 30 (1978) 271-275 und 299-306.
30. Krumhauer, P.: Rechnerunterstutzung fur die Konzept-
phase der Konstruktion. Diss. TU Berlin 1974. D 83.
31. Kuhlenkamp, A.: Konstruktionslehre der Feinwerktech-
nik. Munchen: Hanser 1971.
32. Kutzbach, K.: Grundlagen der festen Paarverbindungen.
VDI-Z 74 (1930) Nr. 45, 1541-1545.
33. Lenk, A.: Elektromechanische Systeme. Berlin:.VEB-Ver-
lag Technik 1973.
34. Macfarlane, A.G.J.: Analyse technischer Systeme. Mann-
heim: Bibliographisches Institut 1967.
35. Miiller, E.: Modellentwicklung fur die Synthese mecha-
nischer Konstruktionen. Diss. TU Braunschweig 1978.
36. Niemann, G.: Maschinenelemente, Bd. 1. Berlin, Gottin-
gen, Heidelberg: Springer 6. Ber. Neudruck 1963; 2. Aufl.
1975 (Unter Mitwirkung von M. Hirt).
37. Pahl, G.; Beitz, W.: Konstruktionslehre. Berlin, Heidel-
berg, New York: Springer 1977.
38. Reder, H.-J.: Ein Beitrag zur rechnergestutzten Synthese
signalverarbeitender Gerate. Diss. TU Braunschweig
1979.
39. Richter, A.; Aschoff, H.-J.: Problemstellung bei der funk-
tionsorientierten Konstruktionssynthese signalverarbei-
tender Gerate aus der Sicht der Feinwerktechnik. Fein-
werktechnik 75 (1971) 374-379.
40. Roth, K.: Die logische SchluBmatrix, ein Algorithmus
zur Analyse und Synthese von Verbindungen und Fiihrun-
gen in der Konstruktion. VDI-Fortschritt-Berichte,
Reihe 1, Nr. 35. Dusseldorf: VDI-Verlag 1974.
41. Roth, K.: Methodisches Ermitteln von Funktionsstruktur
und Gestalt. VDI-Berichte Nr. 219. Diisseldorf: VDI-Ver-
lag 1974.
42. Roth, K.: Modellentwicklung zur rechnerunterstiitzten
Synthese mechanischer Konstruktionen. Wissenschaft-
liche Mitteilungen der Universitat Rostock, Schiffstechni-
sche Sektion (1978).
43. Roth, K.: Neue Modelie zur rechnerunterstiitzten Syn-
these mechanischer Konstruktionen. Konstruktion 31
(1979) 286-289.
43.1. Roth, K.; Bohle, D.: Rechnerunterstutzte Konstruktion
von Hydraulik-Steuerplatten. Konstruktion 34 (1982)
Heft 4
44. Schlottmann, D.: Konstruktionslehre. Berlin: VEB-Ver-
lag Technik 1977.
45. Serm-Sermax: Serages rapides (Firmenprospekt).
46. Tschebyschew, P.L.: Oeuvres II, 285-297.
47. VDI/VDE-Richtlinie 2251, Blatt 1: Spannverbindungen.
Dusseldorf: VDI-Verlag 1972.
48: VDI/VDE-Richtlinie 2253: Feinwerkelemente Sperrungen
(Obersicht). Dusseldorf: VDI-Verlag 1971.
359
7. ОБЗОР И ОПРЕДЕЛЕНИЯ ОСНОВНЫХ ПОНЯТИЙ
7.1. Список конструкторских каталогов
См. также
Стр.
Рис. 3.29. Специальные и классификационные признаки для конструкторских каталогов (обзор-
ный каталог)............................................................................ 65
Рис. 3.30. Список специальных и классификационных признаков для конструкторских каталогов
(детальный каталог).................................................................. 66-72
„ Название каталога Стр.
лога н
4.1.1. Типы требований................................................................. 76
Связи и движения
4.2.1. Типы связей..................................................................... 82
4.2.2, Ограничить движение в одном направлении (односторонние упоры)................... 85
4.23. Ограничить движение в двух направлениях (двусторонние упоры).................... 89
4.2.4. Фрикционные системы с различными характеристиками............................... 94
4.2.5. Операции варьирования для функционального изменения фрикционных систем. . . 96
Пары элементов, логические механизмы
4.3.1, Важнейшие кинематические и статические пары.................................... 100
4.3.2. Механизмы отрицания............................................................ 104
4.3.3. Варианты механизмов отрицания ................................................. 104
4.3.4. Механизмы конъюнкции и дизъюнкции.............................................. 105
4.3.5- Варианты механизмов конъюнкции и дизъюнкции.................................... 106
4.3.6. Механические Т-переключатели (клавишные переключатели)..................... 112-114
43.7. Варианты механических Т-переключателей (варианты клавишных переключателей). 115,116
Силы и механизмы
4.4.1. Создать силу при помощи других величин.................................. 118-121
4.4.2. Одноступенчатое умножение силы................................................. 130
4.43. Механическое стопорение обратного хода......................................... 139
4.5.1- Замкнутые однозвенные пары, пары звеньев и цепи с числом звеньев не более четы-
рех ................................................................................... 144
4.5.2 - Принудительные механизмы с числом звеньев от 2 до 4 с вращательными, поступа-
тельными и плоскими вращательно-поступатёльными парами................................. 148
4.53. Разработка различных устройств на основе данной схемы механизма.................... 150
4.5.4, Варианты одноступенчатых фрикционных систем, разработанных на основе трехзвен-
ного механизма в соответствии с кат. 4.2.4 и 4.53................................ 152,153
4.6.1. Операции варьирования структуры................................................ 156
4.7.1. Основные передаточные механизмы равномерного хода ... .7................... 162,163
Неподвижные соединения
4.8.1. Заклепочные соединения (обзорный каталог)...................................... 173
4.8.2. Заклепочные соединения двустороннего доступа (детальный каталог) .......... 174-177
4.83. Заклепочные соединения одностороннего доступа (детальный каталог).......... 178,179
4.8.4. Соединения вал - ступица (обзорный каталог).................................... 182
4.8.5. Соединения вал - ступица (детальный каталог)............................ 184-186
Подвижные соединения
4.9.1. Прямолинейные направляющие с одинаковой формой профиля......................... 191
4.9.2. Прямолинейные направляющие с различными формами профиля........................ 192
4.93. Направляющие вращательного движения, подшипники (обзорный каталог). ...... 195
4.9.4. Подшипники скольжения (детальный каталог)...................................... 198
4.9.5. Подшипники качения (детальный каталог)..................................... 200,201
4.10.1. Операции варьирования конструкции............................................ 206
Способы обработки давлением
411.1. Обработка давлением сжатия (обзорный каталог)................................. 208
4.11.2 * Объемная штамповка (детальный каталог) ..................................... 210211
360 7. Обзор и определения основных понятий
лога Название каталога Стр.
Допуски
4.12.1- Правила расчета предельных допусков.......................................... 221
7.2.Список подборок решений и таблиц
Абстрактные функции Стр.
Рис. 5.19. Абстрактные функции и их обозначения ..................................... 248
Векторные функции
Рис. 6.3. Элементы векторных функций................................................. 299
6.4, 6.5. Соединения векторных функций....................................... 301,302
Вопросники (матрица поиска, аналитический список)
Рис. 5.8. Анкета изделия (для списка требований I)................................... 233
5.12. Список вопросов для окрестности изделия (для списка требований II)..... 236,237
5.14. Матрица поиска (для списка требований III) ................................ 238
5.15. Аналитический список (для списка требований III) ...................... 241-244
Вспомогательные средства
Рис. 3.2. Список важнейших конструкторских каталогов и обзорных таблиц для методического
конструирования по АМВК............................................................ 46,47
Допуски
Рис. 4.84. Определения величин, относящихся к размерам с допусками................... 212
4.85. Расчет предельных размеров................................................. 213
4.92. Результирующий допуск при задании двумерных полей допуска.................. 220
Замки, запоры
Рис. 1.8. Запирающее движение замков.................................................. 19
1.9. Зарядка накопителей энергии замков........................................... 19
1.10. Создать силу реакции в замках............................................... 20
1.11. Точка опрокидывания в устойчивые конечные положения......................... 20
1.13. Уплотнительные поверхности запоров для жидкостей.....................-. 21
1.14. Примеры замков ............................................................. 22
Зубчатые колеса
Рис. 4.55 - 4.60. Различные зубчатые колеса и пары (зубчатые зацепления)......... 157-160
Интенсивностные величины
Рис. 5.26. Интенсивностные и количественные величины................................. 255
Информационные механизмы
Рис. 6.41. Механизмы для реализации информационных функций........................... 351
Конструирование, варианты процесса
Рис. 5.25. Список вариантов процесса конструирования................................. 254
5.24. „Маршрутная карта” вариантов процесса конструирования...................... 253
Модели изделия
Рис. 5.2. Модели изделия для АМВК.................................................... 226
Направляющие
Рис. 4.72. Формы профилей направляющих с прямолинейными контурами сечения............ 188
Напряженные циклы
Рис. 6.104. Статические напряженные циклы ........................................... 307
6.11-1. Однократно переопределенные цепи для напряженных циклов (f = -1)......... 309
6.11-2. Варьирование изменением числа звеньев и сочленений (f = -1).............. 310
6.11-3. Цепи с f = -1... +2 и различным числом звеньев........................... 311
6.12-1. Возможные напряженные циклы, напряженные сегменты........................ 312
6.12-2. Передача сил в напряженных циклах........................................ 313
6.12-3. Примеры напряженных циклов............................................... 314
6.16-6.19. Примеры статических напряженных циклов, необходимые для их действия
стопоры обратного хода и накопители энергии............................. 320-324
6.34. Создание напряженных циклов из структорно-функциональных элементов......... 342
„ Опрокидывание”
Рис. 3.20. Механические устройства с положением „опрокидывания”....................... 57
3.21,3.22. Варианты механических положений „опрокидывания”........................ 58
7.2. Список подборок решений и таблиц
361
Передача сил
Рис. 3.23. Механизмы для передачи усилий от руки........................................ 59
Подшипники качения
Рис. 4.75. Профили тел качения......................................................... 193
Превращение (преобразование вида) энергии
Рис. 2.12. Матрица прямого превращения энергии по Юсти.................................. 34
Связи
Рис. 4.2-1 - 4.3. Элементарные связи в рабочих объемах и по рабочим поверхностям,.... 78-80
Соединения
Рис. 4.62. Связи в соединениях......................................................... 166
4.64. Цепи связей и накопители энергии............................................. 167
4.67. Свойства важнейших соединений.......................................• • • 170
4.68. Основные типы заклепочных соединений......................................... 171
Соединения вал - ступица
Рис. 4.69. Варианты соединений вал - ступица........................................... 180
Степени свободы
Рис. 6.14. Число степеней свободы в замкнутых цепях................................... 318
6.35- 1. Цепи с различными парами элементов и числом степеней свободы / = -1....... 343
Стопоры обратного хода
Рис. 6.44. Примеры из составленного на ЭВМ каталога стопоров обратного хода............ 355
Стопоры обратного хода (заклинивающие остановы)
Рис. 4.40,4.41. Создание стопоров обратного хода .................................. 132,133
4.43 - 4.45. Варианты стопоров обратного хода.................................. 134-136
Структурно-функциональные элементы
Рис. 6.20 - 6.26. Структурно-функциональные элементы............................... 326-331
6.27, 6.28-1,6.28-2. Операции со структурно-функциональными элементами......... 332-335
6.29. Соединение структурно-функциональных элементов с помощью сочленений.......... 338
6.32, 6.33. Элементы механизмов, составленные из структурно-функциональных элементов 340,341
Транспортирующие устройства
Рис. 2.16. Устройства для продвижения перфоленты........................................ 39
Умножители сил
Рис. 4.30 - 4.32. Последовательное соединение умножителей силы..................... 123-125
4.51. Варианты механизмов умножения силы................................... . 147
Упоры
Рис. 4.4. Односторонние и двусторонние упоры (геометрическая и силовая связь)........... 86
Фиксация соединений
Рис. 3.25 - 3.27. Конструкции запирающих элементов................................... 60,61
3.26. Накопители энергии запирающих элементов....................................... 61
Функциональная интеграция
Рис. 5.44. Основные возможности функциональной интеграции.............................. 289
5.45. Функционально интегрированные сочленения................................. 290
5.46. Функционально интегрированные пружины........................................ 290
5.49. Возможные конструкции сочленений из синтетических материалов (пленочные шар-
НИРЫ).................................................л........................ 292
Функциональные величины
Рис. 5.31. Матрица функциональных величин.............................................. 257
5.32. Управления и эффекты полей матрицы из рис. 5.31................... . 258-278
Функциональные положения
Рис. 5.6-2. Список технических глаголов для функциональных положений................... 231
Функциональные связи
Рис. 4.19. Соединения логических механизмов............................................ 102
Цепи звеньев
Рис. 4.48,4.49. Разработка механических конструкций на основе цепей с числом элементов-от 1
до 4............................................................................... 140,141
362
7. Обзор и определения основных понятий
7.3. Список рисунков и каталогов по ключевым словам, соответствующим важнейшим классам задач
(См. также рис. 3.2 и разд. 7.2). Рисунки, номера которых выделены курсивом, имеют наиболее важное
значение.
Ключевое слово Рисунок Каталог
Абстрактные операции Абстрактные функции Анкета изделия Аппараты, машины, приборы Варианты (порождение) 4.17,5.15 5.19, 5.20 (-> Вопросники) 2.9,5.20 2.16,3.23,3.25,3.27,3.28, 4.30 - 4.32,6.11-1, 4.2.5,43.7,45.4,
Варьирование конструкции 6.11-2 3.28, 4.69, 4.82 4.6.1,4.10.1 4.10.1
Варьирование структуры 4.51, 4.54 4.6.1
Векторные функции (элементы) Вопросники, матрица поиска Летали машин (синтез) Допуски (расчет) 6.2, 6.3 -6.7 5.8,5.12,5.14, 5.15 6.27, 6.28, 6.32,6.33, 6.36,6.38 4.84-4.86, 4.87-4.92 4.12.1
Задача Запирающий элемент Зубчатые колеса 1.1,1.6,5.3, 5.8, 5.12,5.14, 5.15 1.5,1.8 - 1.10,3.24, 3.25-3.27 4.55, 4.56, 4.57 - 4.60 4.7.1, 4.8.4,
Изделие (окрестность, жизненный цикл) Информация (механические элементы) 5.10,5.11,5.14, 5.15 4.17, 5.20,6.41 4.8.5, 4.5.3 4.3.2-4.3.7
Каталоги, структура и создание Качения подшипники Качения тела (пары) 3.3-3.9,3.11 -3.13,3.29,3.30 (♦ Подшипники) 4.73, 4.74, 4.75 4.9.5
Кодирование 4.18,4.20-4.23,6.41 4.3.2 - 4.3.7
Конструирование Контурные элементы Логические (булевы) операции (-* Предметная реализация) 4.80 4.18, 4.22 4.3.2, 4.3.4
Логические механизмы 4.17, 4.18 - 4.22, 4.23, 4.24, 6.41 4.3.2 - 4.3.7
Матрица поиска Модели (изделия) Морфологический ящик Мультипликаторы (силы) Муфты спепные (переключаемые) (-* Вопросники) 4.52,5.2, 6.22-2 1.13, 1.19 (-* Умножители силы) 3.17,3.18, 4.11,4.23 4.2.4
Направляющие 4.61,4.70,4.77, 4.72 4.9.1, 4.9.2
Напряженные циклы, напряженные сег- 6.10-1, 6.11, 6.12-1 - 6.12-3, 6.16 - 6.18,6.34 - 4.5.1
менты Операции 6.36, 6.38 5.18, 5.33, 5.34, 6.4 - 6.7, 6.23, 6.27-6.29 4.6.1,4.10.1
Опрокидывания механизмы (см. также -* Пе- реключатель двухпозиционный) Пары элементов 1.11,3.19 -3.22, 4.4, 4.5, 4.22, 4.23,6.41 4.53, 4.70,6.11-2, 6.13 4.3.1
Переключатель двухпозиционный (механи- 4.22-4.24, 6.41 4.3.6, 4.3.7
ческий), флипфлоп Перестройка объединяющая рабочих по- верхностей Перестройка разъединяющая рабочих по- верхностей Переходы (сопоставления) в процессе конст- руирования Переходы, сопоставления (реализация) Подшипники 5.44, 6.27 6.27 1.1,1.3,1.6,1.7, 2.11, 2.13,2.18, 5.21,5.29-5.31, 5.36-5.39,6.9,6.21 5.24 („Маршрутная карта”), 5.39 4.61,4.73, 4.75 4.9.3-4.9.5
Потоков диаграмма (абстрактная, специаль- ная) Предметная реализация, конструирование 3.14,3.18, 5.23,5.29, 5.36 2.14, 3.28,4.81 4.10.1
Просеивание 3.15 4.4.1
Рабочие поверхности, пары рабочих поверх- ностей, рабочие объемы Разветвления Разделение и соединение (СФЭ) Свобода, степени свободы 4.52, 4.63,4.70, 4.80, 5.43, 6.10-2, 6.25 5.43, 6.7,6.28-1 6.27, 6.28-1, 6.28-2 6.13,6.14, 6.15, 6.35-2 4.3.1
Связей матрицы 4.12, 4.16,4.53, 6.29, 6.31,6.38 4.2.1
Связи, матрицы типов 4.62, 4.65, 4.67 4.2.1
Связи (передача сил) 3.20, 4.1 - 4.2-3, 4.13 - 4.16, 5.43 4.2.1
Связи поверхностные, объемные 4.1, 4.2-1, 4.2-2, 4.2-3, 4.3 4.2.1
Связей цепи 4.3, 4.63, 4.64, 4.65,6.10-2 4.2.1
7.4. Определения новых понятий
363
Ключевое слово Рисунок Каталог
Скольжения, подшипники Слоистая структура Соединения (неподвижные) (-> Подшипники) 6.15 4.2-3, 4.3, 4.61, 4.62 - 4.64, 4.66 - 4.69 4.8.1 -4.8.5
Соединение СФЭ Сопоставления Сочленения, шарниры (-* Разделение) (-* Переходы) 4.70,6.29 4.3.1
Способы изготовления 4.8.3 4.11.1,4.11.2
Стоимости показатель (подшипники каче- ния) Стопорение обратного хода 4.76 - 4.79 4.40-4.47,6.19,6.44 4.4.5
Структурно-функциональные элементы 4.52,6.1, 6.20 - 6.24,6.27 - 6.29, 6.33, 6.34,6.36, 4.6.1
(синтез) 6.37
Структурные представления Требований списки 3.14, 4.52, 4.53, 4.63,5.43, 6.10-2 5.9,5.13, 5.17 4.1.1
Трехмерное (изображение) Умножители силы, мультипликаторы 6.45 - 6.47 4.27-4.37, 4.51,4.65 4.4.2
Упоры 3.20, 4.4 4.2.2, 4.2.3
Усилитель (мощности) Функции (функциональные элементы) Функциональная интеграция Функциональная структура Функциональное положение Функциональные величины (матрица) Функциональные положения, абстрагиро- вание Фрикционные системы 4.38, 4.39 1.3,1.6,1.7, 5.40, 6.1, 6.3, 6.22-1 5.41, 5.42, 5.44-5.55, 6.27 1.13,3.14,5.21, 5.22,5.23, 5.29, 5.36, 6.8, 6.39 5.3-5.6 5.21, 5.28, 5.30, 5.31, 5.55 5.4, 5.5, 5.6-1, 5.6-2, 5.21,5.23, 5.36, 6.8 4.6-4.11 4.2.4, 4.2.5,
Фрикционные системы с заклиниванием 4.8-4.10,4.41-4.47,6.44 4.5.4 4.2.1, 4.2.4,
11епи с/= -1...+2 Цепи звеньев Пепи, особые случаи 11епи, схемы механизмов 6.11-3 (-> Цепи) 6.15, 6.15, 6.35-1,6.35-2 4.48,4.49, 4.51, 4.54, 4.55, 4.63, 4.64, 6.10-2, 4.5.4 4.5.1, 4.5.2
11епи, переопределенные 6.11-3, 6.13, 6.14, 6.15 6.11-1, 6.11-2,6.18,6.35-1 4.5.1
Шарниры Элементы моделей изделия Энергия, вещество, сообщения Энергии накопитель Энергии поток Этапы конструирования Эффекты (-> Сочленения) 5.19, 5.31, 6.2, 6.3, 6.22-1,6.24, 6.26, 6.40, 6.42 2.1 - 2.7,2.8, 2.9,3.14, 5.19 - 5.21 4.64, 6.19, 6.57 5.17,3.18, 4.26 2.10,2.14, 2.15,4.81,5.38 1.3,1.6, 2.11,2.12, 2.18, 3.16,5.31, 5.32 4.4.1
7.4. Определения основных понятий
Приведенные ниже определения призваны
способствовать правильному употреблению слов и
выражений, содержащихся в этой книге. Для за-
имствованных определений даны ссылки на ис-
точники. Каждая ссылка состоит из номера разде-
ла с соответствующим списком литературы и (в
квадратных скобках) номера источника в этом
списке. Если ссылка стоит при заглавном слове, то
определение заимствовано целиком, если она сто-
ит в тексте, то заимствована только предшествую-
щая ей часть. Многоточия в заимствованных опре-
делениях указывают на сделанные в них пропу-
ски.
Абстрактная диаграмма потоков (Allgemeines FluB-
bild)
* Функциональная структура, в которой *
функциональные элементы стандартизованы толь-
ко в отношении операндов (вещества, энергии и со-
общений), но не в отношении операций. Функцио-
нальных элементов произвольно много, примеры:
собирать, передвигать, размельчать, сваривать ве-
щество или потреблять, уничтожать, изолировать
энергию и т. д. Абстрактная диаграмма потоков яв-
ляется альтернативным вариантом к абстракт-
ной функциональной структуре. Составлять ее лег-
че, но пути дальнейшей реализации оказываются
менее однозначными и алгоритмичными.
Абстрактная функциональная структура (Allgemei-
ne Funktions struktur)
-* Функциональная структура, элементами ко-
торой являются абстрактные функции. Она со-
ставляется главным образом для -* новых разрабо-
ток в начале -* функциональной фазы. Она отно-
сится к кибернетическим моделям, так как поми-
мо потоков вещества и энергии в рассмотрение
вводится также поток сообщений. Это же назва-
ние применяется также к одному из * этапов кон-
струирования в функциональной фазе.
364 7. Обзор и определения основных понятий
Абстрактные величины (теории конструирования)
(Allgemeine GroBen der Konstuktionslehre)
Следующие величины: -> вещество, -* энергия
и -* сообщения (она же -* информация). Фон Вайц-
заккер (2.3 (71 ]) указывает на основополагающий
характер этих величин в кибернетике и называет
их — материей, энергией и информацией. По его
представлениям материя есть также возможность
движения материи (т. е. энергия), а информация
может служить мерой количества формы (мате-
рии). Тем самым обнаруживается внутренняя взаи-
мосвязь всех трех названных величин.
Абстрактные операции (Allgemeine Operationen)
Прийципиальные изменения или состояния,
которые можно приписать -* абстрактным величи-
нам. Примеры: -* накопление как обратимое изме-
нение количества во времени в одном и том же
месте; -> передача как изменение места или (и) из-
менение описывающих (физических) величин при
одном и том же содержании; преобразование ви-
да (превращение) как изменение вида абстракт-
ной величины и комбинирование как возмож-
ные сопоставления друг с другом двух одинаковых
или различных абстрактных величин (см. рис. 5.19).
Операцию „передача” можно подразделить на
операции -* проведение для чистого изменения
местоположения и -* преобразование формы для
изменения описывающих величин (при одном и
том же содержании).
Абстрактные функции (Allgemeine Funktionen)
-* Функции, возникающие от применения -*
абстрактных операций к -> абстрактным величи-
нам. К ним относятся — накопление, -> проведе-
ние, — преобразование формы, -* преобразование
вида и-» комбинирование вещества, -> энергии и
-> сообщений. Абстрактные функции являются
элементами -> модели изделия под названием
абстрактная функциональная структура.
Абстракции степень (уровень) (Abstraktionsstufe,
Abstraktionsgrad)
Это степень изолирующей -* абстракции,
модели изделия. Чем выше уровень абстракции,
тем более обобщенной, но и тем менее наглядной
становится модель изделия.
Абстракция (Abstraktion) (1.5 [11])
Обозначает процесс получения понятий, иде-
альных объектов (абстрагирование), а также ре-
зультат этого процесса (понятия, идеальные объ-
екты). Известны следующие классические формы
абстрагирования.
Обобщающая (генерализующая) абстракция от-
влекается от несущественных свойств вещей, -* от-
ношений и т. д. и выделяет их существенные свой-
ства. Понятие „существенные свойства” относи-
тельно, хотя и не субъективно. Оно всегда связано
с определенной научной системой. По современ-
ным представлениям задачей обобщающей абст-
ракции считается поиск инвариантов.
Изолирующая абстракция выделяет определен-
ные свойства, -> отношения и т. д. классов объек-
тов из их взаимосвязи и придает им до некоторой
степени самостоятельное существование. В этом -
источник объективного идеализма.
Идеализирующая абстракция создает идеаль-
ные объекты (например, -> модели изделия), т. е.
построенные из понятий модели реальных предме-
тов, свойств, отношений.
Агрегатирования ( блочности, модульности) ме-
тод (Baukasten technik) (2.3 [51])
-> Метод конструирования, при котором -* функ-
циональные элементы строятся из повторяющихся
одинаковых -> конструктивных элементов. Конст-
руктивные элементы взаимозаменяемы, их соеди-
нения и места подключения (например, штекер-
ные разъемы) всегда одинаковы и позволяют про-
изводить полную разборку устройства. Метод агре-
гатирования приводит к неоптимальному исполь-
зованию пространства, но зато он хорошо подходит
для создания взаимозаменяемых агрегатов (моду-
лей) и предоставляет большие возможности варь-
ирования -* общей функции технического устрой-
ства (см. также -> „органоподобная техника прост-
ранственной компоновки”, -* метод конструктив-
ных элементов).
Активный элемент (Aktives Element) (1.5 [11])
* Элемент Е динамической системы такой,
что:
воздействия окружающей среды на Е приводят
его к некоторым состояниям вполне определенно-
го вида (например, определенная температура, за-
ряд и т. д.). Каждый отдельный вид таких состоя-
ний называется -* вводом (в)Е,-
Е воздействует на окружающую среду тем, что
переходит в некоторые состояния вполне опреде-
ленного вида. Каждый вид таких состояний назы-
вается * выводом (из) Е;
в Е есть, по меньшей мере, один ввод и один
вывод;
состояния - вводы и состояния - выводы одно-
значно определены.
Алгебра логики -* Булева алгебра (Algebra der
Logik)
Алгебра релейных схем (Schaltalgebra) (1.5 [11])
Называемая также алгеброй релейных сетей,
своим предметом имеет проблемы электрических
(релейных) сетей, к которым применяются методы
-* булевой алгебры.
Алгоритм (Algorithmus) (1.5 [11])
Однозначно определенный способ решения по
схеме некоторого класса задач (например, извле-
чение квадратного корня из натурального числа с
точностью до заданного числа знаков).
Алгоритмический метод выбора при конструирова-
нии с каталогами (АМВК) (Algorithmisches Auswahl-
verfahrenzur Konstruktion mit Katalogen, AAK)
Предлагающийся в данной книге способ -* кон-
струирования методического. В его основе лежит
определенный -* рабочий план для -* фаз конструи-
рования, определенные -* модели изделия и •*
каталоги для -* этапов конструирования м предло-
жения по выполнению определенных -* шагов кон-
струирования.
Алгоритмо-физически ориентированная методика
конструирования (Algorithmisch-Physikalisch orien-
tierte Konstruktions methodik)
Методика конструирования по Коллеру (1.5
1Л. Определения основных понятий
365
Алфавит (Alphabet) (6.7 [10])
Последовательно упорядоченный -> набор зна-
ков. (Замечание. Частный случай: обычный, состо-
ящий из букв алфавит).
Алфавитно-цифровой (Alphanumerisch, alphanume-
ric) (6.7 [10])
Имеющий какое-либо отношение к -* набору
знаков, состоящему, по меньшей мере, из десятич-
ных -* цифр и букв обычного -* алфавита.
АМВК (ААК)
** Алгоритмический метод выбора при конст-
руировании с каталогами
Аппарат (в теории конструирования) (Apparat, der
Konstruktionslehre)
-* Сложное, обычно -* комплексное техниче-
ское устройство, которое выполняет -* главную
функцию, описываемую через -* вещественные
функциональные элементы. В этом заключается
существенное отличие аппарата от -* машины или
- прибора.
Бинарный (binar, binaty)
Принимающий в точности два значения; обо-
значение для свойства, состоящего в возможности
иметь значением один из двух бинарных знаков.
(Замечание: „бинарный" неравнозначно с „двоич-
ный", -*• цифра.)
Бит (Bit) (6.7 [10])
1. Краткая форма для — бинарного, а также
для двоичного знака (-* цифра), если различие
между ними не имеет значения.
2. Единица измерения количества бинарных
решений (по выбору одного из двух вариантов).
(Замечание: все логарифмически опреде-
ленные величины теории информации, такие как
•* количество решений, количество информации,
•* избыточность и т. д. выражаются в битах, если
логарифм берется по основанию 2.)
Блок-схема (функциональная или структурная
схема) (Blockschaltbild, Funktionsdiagramm, Block-
schema)
Графическое представление -* структуры (бо-
лее или менее -* комплексной или -* сложной) -*
системы, в котором абстрагируются от структуры
подсистем или элементов. Обычно блок-схема
строится из плоских геометрических фигур, таких
как прямоугольники, круги и т. п. (так называ-
емые блоки), которые соединяются линиями со
стрелками. В то время как отдельные блоки рас-
сматриваются как -* черные яшики, изображаю-
щие определенные подсистемы или функциональ-
ные единицы, соединительные линии ‘ задают
функциональные взаимосвязи между ними и со-
ответствующее направление действия. (По (6.7
[39]) они описывают, в частности, следующие свой-
ства систем: статическое поведение линейных сис-
тем, а также динамическое поведение; см. также
•* сети.
Булев (булевский) (Boolesch, boolean) (6.7 [10])
Бинарный, кроме того указывает на примене-
ние бинарных -* конечнозначных переменных в ка-
честве аргументов -* конечнозначных функций бу-
левой алгебры.
(Замечание: в связи со сказанным употреб-
ляются названия „булева переменная” и „булев-
ские операции”, а также „булевский механизм”
вместо „логического механизма”.)
Булева алгебра (алгебра логики) (Boolesche Algeb-
ra, Algebra der Logik)
Абстрактная алгебра, в которой переменные
могут принимать только два значения, например I
и О или 1 и 0 и т. д.
...Если дано множество элементов х, у, z, то на
них может быть введена операция, так чтобы с произ-
вольными двумя элементами х, у из множества
был однозначно сопоставлен определенный эле-
мент того же множества. Эти операции могут быть
названы, например, дизъюнкцией и конъюнкцией
(или сложением и умножением), а сопоставлен-
ный элемент обозначен хУ у и х Л у. В частности, в
основе булевой алгебры по Хантингтону лежат
следующие основные законы - „аксиомы” этой ал-
гебры.
1. х У у — у V х:
х А у = У А х
(коммутативный закон).
2. (х У у) Л z = (х Л z) V (у Л z);
(х Л у) V z = (х V z) Л (у V z)
(два дистрибутивных закона).
3. Найдутся элементы О и I такие, что
х V О = х; х Л I = х.
4. Для каждого элемента х найдется элемент х та-
кой, что
хУх =1; хЛ х = О
(х и х в роли взаимоисключающих дополнений).
Для обозначения элементов О и I можно ис-
пользовать цифры 0 и 1 (4.13/24)...
От обычной арифметики булева алгебра отли-
чается еще и тем, что переменные в ней могут при-
нимать только два значения, иначе не будет вы-
полняться второй закон дистрибутивности (1.5
[11])... и что есть взаимодополнительные (компле-
ментарные) величины, находящиеся во взаимоис-
ключающей противоположности, т. е. если одна из
них отрицается, то вторая соответствует истине...
Булеву алгебру можно интерпретировать раз-
личными способами: как логику высказываний,
как -* алгебру релейных схем, как теорию мно-
жеств и т. д.
Булевский механизм(Boolesche Getriebe)
(—) Логический механизм
Варьирование структурно-функциональных эле-
ментов (Variiren von Strukturfunktions-Elementen)
Представляет собой обращение (-* отрицание)
направлений всех сЬункииональных величин или
(и) -* отражение этих функциональных величин от-
носительно продольной оси. -* Абстрактная функ-
ция, выполняемая структурно-функциональным
элементом, остается неизменной. Сохраняется
также -* геометрическая структура элемента и со-
стояние равновесия (см. также рис. 6.23 ).
Варьирования операции (Variationsoperation)
Выполняемое по определенным правилам це-
ленаправленное частичное изменение изделия,
представленного той или иной -* моделью изде-
лия. относящееся только к неосновным признакам
соответствующего -* этапа конструирования. Ос-
366
7. Обзор и определения основных понятий
новные существенные признаки остаются неиз-
менными.
Ввод (Input, Eingabe) (1.5 [111)
Воздействие окружающей среды на элемент
или на систему. При этом под вводом элемента
системы понимается воздействие окружающей
среды или других элементов той же системы на
данный элемент...
Величины двухточечные (Zweipunkt-GroBen) (5.5
Г201)
Называются также Trans или кратко Т-величина-
ми. Они представляют собой пространственно экс-
тенсивные величины. К двухточечным величинам
относятся такие из основных физических величин,
как путь, скорость, магнитный поток, электриче-
ское напряжение и температура. Они называются
пространственно экстенсивными по той причине,
что для их определения (или идеального измере-
ния) необходимы две точки пространства. В боль-
шинстве случаев одной из двух точек служит ис-
ходная (начальная) точка. Измерение этих вели-
чин по отношению к двум данным точкам можно
представлять себе таким образом, что эти две точ-
ки в пространстве соединяет некоторый идеаль-
ный инструмент (мост). Примерами служат изме-
рение электрического потенциала (напряжения),
измерение скорости (начальная точка), измерение
температуры (эталонные точки шкалы) и т. д.
... (См. также — нульточечные и одноточечные
величины, а также рис. 5.26,5.27.)
Величины интенсивностные (IntensitatsgroBen)
(5.5 [20])
Такие величины, как сила и скорость (прямо-
линейное движение), момент силы и угловая ско-
рость (вращательное движение), а также сила тока
и электрическое напряжение и пр. Произведение
величин в паре является мерой интенсивности, с
которой совершает работу какой-либо динамиче-
ский объект. Интенсивностные величины связаны
с соответствующими •* количественными величи-
нами следующей зависимостью:
d ,
—-----(количественная величина) = интенсив-
ен
ностная величина.
Величины количественные (QuantitatsgroBen)
(5.5 [20])
Такие величины, как путь и импульс (прямо-
линейное движение), угол поворота и момент им-
пульса (вращательное движение), а также магнит-
ный поток и электрический заряд. Количествен-
ные величины являются мерой накопленной в сис-
теме энергии и находятся в тесной связи с -* ин-
тенсивностными величинами.
Величины конструктивные (KonstruktionsgroBen)
Величины, организующие непосредственную
связь между -* интенсивностными, между -> коли-
чественными или между обоими видами величин.
Конструктивные величины описывают конструк-
тивную реализацию -* Функций, а также создают
ее (примерами служат жесткость пружины, масса,
коэффициент поглощения, длина, плотность, в ка-
кой-то степени также время). Они определяют
конкретный вид соотношений взаимосвязанных -*
функциональных величин.
Величины нульточечные
(Nullpunkt-GroBen) (5.5 [20])
Это пространственно-независимые величины.
При анализе динамических систем время оказы-
вается единственной пространственно-независи-
мой величиной. Поэтому время может пониматься
как нульточечная величина, ее измерение не свя-
зано с какой-либо определенной точкой простран-
ства. (См. также одноточечные и •* двухточеч-
ные величины.)
Величины одноточечные (Einpunkt-GroBen) (5.5 [20])
Называются также Рет-или кратко Р-величина-
ми. Они представляют собой пространственно-ин-
тенсивностные величины. К одноточечным вели-
чинам относятся такие из основных физических
величин, как сила, импульс, сила тока, заряд и •*
энтропия. Они называются пространственно-ин-
тенсивностными по той причине, что для их зада-
ния в определенной точке пространства необходи-
ма лишь одна эта точка. Пространственно-интен-
сивностные величины называются также проход-
ными величинами, поскольку многие из таких ве-
личин проходят сквозь измерительные инструмен-
ты, обычно используемые для их измерения. Так,
например, ток проходит через амперметр, а сила
передается через пружину (проходит сквозь нее)...
(См. также -*• нульточечные и -* двухточечные ве-
личины, а также рис. 5.26,5.27)
Величины функциональные (FunktionsgroBen)
* Интенсивностные и -»• количественные ве-
личины различных физических систем (сила, мо-
мент силы, скорость и, соответственно, путь, угол
поворота, импульс, а также в определенном смыс-
ле время и т. д.). Через функциональные величи-
ны описывается физическое содержание -> функ-
ционального положения, -* идеальных функций, а
также и всех остальных функций. Однако создать
искомую картину физического процесса можно
только при помощи * конструктивных величин.
Величин функциональных, прямые соотношения
(FunktionsgroBen, direkte Beziehungen von)
Мы имеем прямое соотношение двух -> функ-
циональных величин, если в соответствующее вы-
ражение не входит никакая третья функциональ-
ная величина, допускаются лишь -* конструктив-
ные величины (включая время). Такие соотноше-
ния приведены, например, в матрице функцио-
нальных величин (рис. 5.31, 5.32).
Вещество (Stoff)
- * Материя, которая для выполнения опреде-
ленных функций •* накапливается, •* проводится
(перемещается в пространстве), подвергается *
преобразованию формы, -> преобразованию вида
или -> комбинированию. Вещество является одной
из трех -> абстрактных величин (субстанций) -*
теории конструирования.
Визуальный индикатор (Sichtgerat), дисплей (disp-
lay device) (6.7 [10])
Выходное устройство, представляющее пользо-
вателю данные в доступной для восприятия гла-
зом Форме (например, телевизионные экраны,
цифровые индикаторы).
Вывод (Output, Ausgabe) (1.5 [11])
Воздействие элемента какой-либо системы на
7.4. Определения основных понятий
367
другие элементы той же системы или на окружаю-
щую среду, или воздействие всей системы на окру-
жающую среду. Вывод может состоять из одного
потока материи, энергии или информации (потока
сообщений) или из нескольких таких потоков...
Геометрическая структура -* Структура геометри-
ческая
Гвоздь крепежный винтовой (Befestiguns -
Schraubnagel)
Особая разновидность крепежного винта, в ко-
торой угол подъема резьбы настолько велик, что
самоторможение возникает не при поступатель-
ном, а при вращательном движении. Поэтому кре-
пежный винтовой гвоздь должен монтироваться
не вращением, а поступательным движением
(забиваться). Он препятствует вращению, но сам
должен быть предохранен от поступательного дви-
жения (в продольном направлении) (см. также
рис. 4.46).
Гибка (Biegeumformen) (4.13 [11])
— Пластическое формообразование (обработка
давлением) твердого тела, при котором пластич-
ное состояние достигается в основном за счет на-
пряжений изгиба.
Главная часть (Hauptteil)
Часть -* конструкторского каталога, которая
содержит собственно содержание каталога, т. е. •*
объекты, -* решения или -* операции. Это содержа-
ние представляется в форме понятий, формулиро-
вок, условных знаков, формул, схем, эскизов, чер-
тежей и т. п. Информация, доступная в настоящее
время, заполняет подчас не все поля, предусмот-
ренные в главной части. Заполнение пустых полей
может быть произведено впоследствии, при появ-
лении новой информации.
Данные (Daten, data) (6.7 (10])
- * Знаки или непрерывные функции, которые
на основе известных или специальных соглашений
представляют •* информацию с целью ее дальней-
шей обработки.
Данные аналоговые (Analoge Daten, analog
data) (6.7 (10])
— Данные, состоящие только из непрерывных
функций.
Данные цифровые (Digital Daten, digital data) (6.7(10])
- * Данные, состоящие только из * знаков.
Данных носитель (Datentrager, data medium) (6.7(10])
Средство, позволяющее сохранять данные (пер-
фокарты, магнитные ленты, бумага для печати
ит. д.).
Дедукция (Dedaktion) (1.5 [11])
Логический вывод высказываний из других вы-
сказываний на основе логических правил вывода
(при этом в общем случае приходится привлекать
еще и другие, ранее выведенные или заранее пред-
полагаемые справедливыми высказывания, на-
пример аксиомы из системы аксиом).
Дешифратор (декодер) (Decodierer, decoder) (6.7(10])
- * Преобразователь кода с несколькими входа-
ми и выходами, в котором для каждой комбина-
ции входных сигналов выходной -* сигнал подает-
ся на один вполне определенный выход.
Деталь (машины) (Einzelteil)
Конструкция, изготовленная на основе вещест-
венных связей. Ее внешние поверхности называют-
ся в данном случае * контурными поверхностями.
Они ограничивают объем, в котором деталь обра-
зует •* рабочий объем. При изображении детали в
проекции появляется замкнутая линия, -* контур
детали. Рабочие чертежи, как правило, полностью
определяют деталь. Из деталей составлены -*
узлы.
Де Моргана законы (De Morgansches Theorem)
Следующие правила преобразований в •* буле-
вой алгебре:
х V у = х Л у :
хКу =х Vу .
Диалоговый режим (Dialogbetrieb, conversational
mode) (6.7 (10])
Режим работы вычислительной системы, при
котором в процессе решения задачи происходит
попеременно постановка частных задач (вопросов)
и ответ на них.
Каталог конструкторский Конструкторский
каталог.
Дизъюнкция (логическое сложение, операция
ИЛИ) (Disjunktion, ODER - Verknupfung, OR operation)
Двухместная -* булева операция, определя-
емая таблицей значений одной зависимой вели-
чины от значений двух независимых величин, ко-
торая приведена на рис. 4.18, поле 3.3.
Допуск на размер (MaBtoleranz) (4.13 [10])
Разность длин между наибольшим и наимень-
шим размерами. Перед этой величиной не ставит-
ся знак и она всегда больше нуля (см. также
рис. 4.84 и следующие, кроме того кат. 4.12.1).
Допуск результирующий (Resultierende Toleranz)
Сумма всех — составляющих допусков на раз-
меры в однократно открытой размерной цепи, сов-
падающая с разностью между верхним и нижним -*
результирующими отклонениями (кат. 4.12.1, по-
ле 8.2).
Жизненного цикла изделия анализ (Analyse des
Produktlebenslaufs)
Способ получения сведений и представлений,
способствующих формулировке •* требований пу-
тем исследования жизненного цикла изделия от
момента возникновения изделия до переработки
его в качестве вторичного сырья, включая возмож-
ности повторного использования входящих в изде-
лие материалов (рециклинг) (см. также рис. 5.14).
Задача (Aufgabe)
Высказывание, выраженное обычным языком
без какой-либо формализации, из которого можно
составить хотя бы примерное представление о под-
лежащем конструированию техническом устройст-
ве (например, новые автомобильные тормоза; см.
также -* постановка задачи).
Задача общая (Gesamtaufgabe)
Совокупность всех -* задач, которые должна
выполнять достаточно -* комплексная, обычно
также достаточно * сложная, состоящая из многих
отдельных единиц общая система. Общая задача
368 7. Обзор и определения основных понятий
может реализовываться * общей функцией, а мо-
жет подразделяться на -* частные задачи, в свою
очередь реализуемые * частными функциями.
Задача частная (Teilaufgabe)
-* Задача, являющаяся частью общей задачи
системы. Все частные задачи, образуя определен-
ную иерархию, в совокупности составляют * об-
щую задачу.
Заклинивания возможность (Klemmfahig) — Фрик-
ционная система прогрессивная.
Заклинивающая система (Klemmsystem)
-* Фрикционная система, в которой -* коэффи-
циент трения больше или равен -* коэффициенту
трения заклинивания. В заклинивающей системе
господствует самоторможение. Приложением -*
разъединяющей силы заклинивание можно убрать.
Закон (физический) (Gesetz. physikalisches)
Количественно выраженное соотношение меж-
ду физическими величинами, возможно включа-
ющее константы, характеризующие свойства ма-
териала.
Закономерность (GesetzmaBigkeit)
Аналогична закону, но при этом часто выра-
жается некоторое сомнение в ее общезначимости.
Замок (запор, затвор, затычка и т. п.) (VerschluB)
Устройство, которое позволяет соединять запи-
рающим движением и разъединять отпирающим
движением два подвижных (соединенных) узла
или две части одной цепи звеньев (или деталей)
или, наконец, одной деформируемой детали. В
замке всегда присутствует такое звено (элемент),
которое выполняет функцию запирающего эле-
мента.
Запирающий элемент (VerschluBglied)
„Последний” препятствующий самопроизволь-
ной разборке элемент (деталь) в собранном узле,
после удаления которого возможна разборка узла.
Звенья (Glieder) * Цепь звеньев
Знак (Zeichen, character) (6.7 [10])
Элемент конечного множества различных эле-
ментов, предназначенного для представления ин-
формации. Множество называется набором знаков.
(Замечание: „Знак” неравнозначно с „сим-
вол”, * условное обозначение.)
Знаков набор (Zeichen vorrat) знак
Знак бинарный (Binarzeichen, binary element, binary
digit) (6.7 [10])
Каждый * знак, входящий в набор знаков из
двух знаков.
(В качестве бинарных знаков могут использо-
ваться произвольные знаки, например, О и L; если
не бояться смешения с цифрами, то также 0 и 1.
Другие примеры пар бинарных знаков: ДА и НЕТ,
ИСТИНА и ЛОЖЬ, 12 В и 3 В.)
Зубчатое зацепление эволоидное (Evoloid-Verzah-
nung)(4.13 [63; 37])
Такое эвольвентное зубчатое зацепление, пре-
имущественно косозубое, в котором число зубьев
малого колеса в парах с параллельными осями
имеет величину zj = 1...6. Благодаря малому числу
зубьев малого колеса, при одном и том же * пере-
даточном отношении либо общее число зубьев и
размер всей передачи соответственно меньше,
либо при одном и том же расстоянии между осями
модуль соответственно больше. Изменения меж-
осевого расстояния не оказывают, как и в обычных
эвольвентных зацеплениях, никакого влияния на
величину передаточного отношения. Зубья боль-
шого колеса могут при этом иметь в своей основе
стандартный профиль, но в целях достижения
наибольшей грузоподъемности лучше снабжать их
* сопряженным (комплементарным) профилем.
Избыточность (Redundanz, redundancy) (6.7 [10.1])
Разность между количеством решений и-»
энтропией:
R = HQ-H.
Избыточность относительная (Relative Redundanz,
relative redundancy) (6.7 [10.1])
Представляет собой отношение * количества
решений к -* избыточности:
_ R _Н0-Н
Г на Но •
Изделие (Produkt)
Техническое, овеществленное образование
(устройство), полученное в результате конструи-
рования в ходе реализации * рабочего плана с
целью выполнения * постановки задачи.
Инструкция (оператор) (Anweisung, statemeht)
(6.7[10])
Выраженные на произвольном языке указания
по выполнению каких-либо действий, замкнутые
как в отношении заданных взаимосвязей, так и в
смысле использованного языка. Инструкция назы-
вается условной, если она указывает на необходи-
мость проверки какого-либо условия.
Интуитивного поиска идей методы (Methoden zur
intuitiven Ideenfindung)
* Мозговой штурм, * Синектика, * Метод 6-3-5.
Информации источник (Nachrichtenguelle, informati-
on source) (6.7 [10.1])
Часть информационной системы, которой при-
писывается возникновение в ней информации (со-
общений).
Замечание: дискретный стационарный ис-
точник информации располагает некоторым на-
бором знаков с конечным числом типов знаков
(типов букв), из которых источник непрерывно
выбирает бесконечную последовательность -*
знаков с повторениями, так что при этом возника-
ет стационарный * случайный процесс. Тогда с
каждой конечной последовательностью знаков
(букв) связывается определенная вероятность.
Информации количество (Informationsgehalt, infor-
mation content) (6.7 (10.1])
Количество информации Ij некоторого события
х, (например, появления некоторого знака) есть
логарифм обратной величины вероятности р(х:) на-
ступления этого события, т. е.
L - l°g ~ — или Л = log2 —7—г— [бит/знак].
’ P(Xi) 1 2 p(xj
7.4. Определения основных понятий
369
Информации количество среднее (Informationsge-
halt, mittlerer) (6.7 [10.1])
Среднее количество информации Н, называе-
мое также “* энтропией, множества из и событий
х1... хп с вероятностями р(х{) равно математическо-
му ожиданию (среднему значению) -* Количества
информации отдельных событий:
П П 1
« = =.Zp^log2^-7
[бит/знак].
Информация (Information) (2.3 [71])
Количество совершенно не разрешенных про-
стых альтернатив (двоичных выборов), которые
разрешаются при наступлении события. Совершен-
но не разрешенными считаются такие простые аль-
тернативы, в которых ни один из их двух возмож-
ных вариантов не является более вероятным, чем
другой.
Теперь можно принять за меру „количества
формы” какого-либо предмета количество простых
альтернатив (см. также -» количество информа-
ции), которые нужно разрешить для того, чтобы
описать его форму. В этом смысле информация,
содержащаяся в каком-либо предмете, как раз и
является мерой его формы. При этом под инфор-
мацией, содержащейся в предмете, понимается
информация, приобретаемая наблюдателем при
наступлении события, заключающегося в появле-
нии в его поле зрения распознаваемого и иденти-
фицируемого предмета.
Использование в качестве вторичного сырья (Wie-
derverwertung) (2.3 [70.1])
Использование веществ (отходов) или -»
изделий в повторяющихся процессах (производст-
вах), которые ими уже были однажды пройдены.
Изменения в изделиях при этом происходят очень
существенные, и их совпадение с конечным про-
дуктом (изделием) обычно отсутствует (пример:
использование металлолома в промышленности).
См. также -> рециклинг.
Использование повторное (без существенной пере-
работки) (Wiederverwendung) (2.3 [70.1])
Многократное использование -* изделия без
изменений или с крайне незначительным его из-
менением (пример: многократное использование
упаковки). См. также -* рециклинг.
Использование после переработки (Weiterverarbei-
tung) (2.3 [70.1])
Преобразование какого-либо -> вещества или -»
изделия в другой конечный продукт - вещество
или изделие. Часто с этим процессом связаны из-
менения как вещества (материала), так и изделия
(пример: использование химической основы ста-
рых шин (резина) для изготовления беговых доро-
жек и игровых площадок на стадионах и спортза-
лах или в шумозащитных стенах). См. также -*
рециклинг.
Каталог детальный (Deteilkatalog)
* Конструкторский каталог, охватывающий
только фрагмент, отдельную деталь -* обзорного
каталога и снабжающий ее своими признаками.
Вместе с обзорным каталогом и, возможно, други-
ми деталями каталогами он входит в иерархиче-
скую систему каталогов.
24 — 2317
Каталог обзорный (Ubersichtskatalog)
* Конструкторский каталог, который может по
своему содержанию охватывать широкую область,
поскольку в его классификации используются
только признаки больших групп. Для точного охва-
та отдельных групп, а также для подробного опи-
сания условно представленных вариантов, приме-
няют -> детальные каталоги, которые иерархиче-
ски сопоставляются с обзорными каталогами.
Каталог операций (Operationskatalog)
- » Конструкторский каталог, содержащий шаги
процедур, процедуры или правила, которые пред-
ставляют интерес, например, в рамках -* методиче-
ского конструирования, - а также их условия и
критерии применения. В каталогах операций
отсутствует -» специальная часть. Примером ката-
лога операций служит кат. 4.10.1 (Операции варьи-
рования конструкции).
Каталог объектов (Objektkatalog)
- * Конструкторский каталог, содержащий не
связанные с конкретной задачей („задачно-неза-
висимые”) сведения, необходимые при -> конст-
руировании, в первую очередь сведения об объек-
тах физической, геометрической, технологиче-
ской и материаловедческой природы. В качестве
принципов классификации для каталога объектов
выбираются классы способов установления раз-
личных соответствий между объектами. Примером
каталога объектов служит кат. 4.9.5 (Подшипники
качения).
Каталог (Katalog) -* Конструкторский каталог
Каталог конструкторский -* Конструкторский ка-
талог
Каталог отношений (Beziehungskatalog, Relations-
katalog)
* Конструкторский каталог, содержанием ко-
торого является -* функция, -» отношение, т. е. не-
которая взаимосвязь между двумя объектами.
Каталог решений (Losungskatalog)
-* Конструкторский каталог, содержащий мак-
симально полный спектр решений для какой-ли-
бо -* постановки задачи. Решения могут соответст-
вовать различным -* этапам конструирования и от-
носящимся к ним -* моделям изделия. Так, -* с
функциональнымц.положениями в качестве реше-
ний могут быть сопоставлены функции, -* с функ-
циями - относящиеся к ним -* эффекты, с эффек-
тами - подходящие -» носители эффектов, с носи-
телями эффектов •* подходящие -* структурные и
контурные элементы, а с последними при воз-
можности - подходящие способы изготовления. В
каталоге могут содержаться решения, способству-
ющие продвижению от одного этапа конструирова-
ния к другому, в частности решения, обеспечива-
ющие перескакивание нескольких этапов или
фаз конструирования. Примером каталога реше-
ний служит кат. 4.4.2 (Умножение силы).
Классификационные признаки (Gliederungsmerk-
male)
Заглавные понятия, подразделяющие содержа-
ние -» главной части -* конструкторского каталога
однозначно, максимально полно и непротиворечи-
во. Используемые в данном конструкторском ката-
370
7. Обзор и определения основных понятий
логе классификационные признаки в совокупно-
сти образуют его -* классификационную часть.
Классификационная часть (Gliederungsteil)
Часть -* конструкторского каталога, которая
определяет систему в представлении содержания
и полноту каталога. Свой окончательный вид она
должна получить при составлении каталога, при
этом должны иметься возможности включения в
каталог предметов и явлений, существующих
в теории, но к настоящему времени еще не реали-
зованных на практике (белые клетки в -* главной
части). Классификационная часть содержит одни
только -* классификационные признаки.
- * Требование с верхней границей, -* Требова-
ние с нижней границей
Код (Code) (6.7 [10])
Правило однозначного сопоставления (кодиро-
вания) -* знаков из одного -* набора знаков - со
знаками из другого набора (представляющего мно-
жества).
(Замечание: сопоставление не обязано
быть взаимнооднозначным.)
В тех частых случаях, когда название „код”
применяется только ко второму набору знаков
(представляющему множеству), то его можно
интерпретировать как „результат сопоставления
набора знаков А с набором знаков В”.
Знаки представляющего множества сами мо-
гут быть -* словами из элементов некоторого дру-
гого набора знаков.
Код бинарный (Binarkode) (6.7 [10])
- * Код, в котором каждый -* знак выражения
является -* словом, состоящим из бинарных зна-
ков (бинарным словом).
Знак, состоящий из п бинарных знаков, называ-
ется также n-битным знаком.
Кодирование (Codierung)
Процесс, при котором происходит -* преобразо-
вание кода
Команда (Befehl, instruction) (6.7 [10])
- * Инструкция, которую в использованном язы-
ке более нельзя разложить на части, которые бы
сами были инструкциями.
Комбинирование (Verknupfen)
- » Абстрактных величин (одна из -* абстракт-
ных операций) - это объединение нескольких по-
токов в один поток (смешение) или разделение од-
ного потока на несколько потоков (распределе-
ние) одинаковых или различных величин (см. так-
же рис. 5.18).
Комплексность (Komplexitat)(1.5 [11])
Комплексность какой-либо конструкции ха-
рактеризует число существующих между элемен-
тами -► отношений.
Компоновка структурно-функциональных элемен-
тов (Zusammensetzen von Strukturfunktions-Elemente)
Не вещественное * соединение -* структур-
но-функциональных элементов по их -* рабочим
поверхностям.
Конечнозначная переменная (Schaltvariable, swit-
ching variable)
Переменная, которая может принимать только
конечное число значений. (Замечание: мно-
жество этих значений образует -* набор знаков.
Чаще всего встречаются -* бинарные переменные).
Конечнозначная функция (Schaltfunktion, switching
function) (6.7 [10])
Функция, у которой каждый аргумент - пере-
менная и сама функция может принимать только
конечное число значений. Если функция пред-
ставляется посредством некоторого оператора, то
говорят об операции. (Замечание: см. булевы
операции на рис. 4.18 и 4.22).
Конструирование (Konstruieren)
Каждый из различных видов работы, которая
должна быть выполнена для достижения резуль-
татов, обозначенных в -* рабочем плане. В частно-
сти, сюда относятся -* формулировка задачи, со-
ставление -* функциональной структуры, -* пред-
метная реализация (конструирование в более уз-
ком смысле) технического устройства и докумен-
тирование результатов так, чтобы на следующей
стадии - изготовления технического устройства -
можно было получить все необходимые для этого
сведения.
Конструирование адаптационное (Anpassungskonst-
ruktion)
По Палю и Байтцу (1.5 [20]) - конструирование,
при котором производится приспособление (адап-
тация) имеющегося принципа решения с целью
преодоления явно выраженных ограничений в из-
мененной постановке задачи (в поздних фазах
конструирования). При этом часто возникает необ-
ходимость новой разработки для отдельных сбо-
рочных единиц (-> узлов) или -* деталей. (Адапта-
ционное конструирование соответствует поэтому
функциональному или -* предметному конст-
руированию. См. также -* конструирование вариа-
ционное -* новая разработка.)
Конструирование варьирующее (Variantenkonstruk-
tion)
По Палю и Байтцу (1.5 [20]) - конструирование,
которое осуществляется путем варьирования па-
раметров и/или структуры разрабатываемого изде-
лия. При этом не решаются никакие новые вопро-
сы, связанные с материалом, нагрузками и техно-
логией и т. п. См. также -* адаптационное конст-
руирование и -* новая разработка.
Конструирование изменяющее (модификацион-
ное) (Anderungskonstruktion)
Название всех -* разновидностей конструирова-
ния кроме -* новой разработки, т. е. таких, при ко-
торых производятся конструктивные изменения
имеющегося технического устройства. Примеры
изменяющего конструирования - -* конструирова-
ние функциональное, * конструирование предмет-
ное и т. п.
Конструирование методическое (Methodisches
Konstruieren)
Такой образ действий при конструировании,
который следует некоторой разработанной методи-
ке и предполагает наличие -* рабочего плана с -*
моделями изделия для отдельных •* фаз конст-
руирования или отдельных -* этапов конструирова-
ния. Появляются возможности алгоритмизировать
ТА. Определения основных понятий
371
некоторые шаги процесса, если относящиеся к
ним операции точно определены и формализо-
ваны.
Конструирование оригинальное (новая разработка)
(Neukonstruktion)
- » Разновидность конструирования, в основе ко-
торой еще не лежит абстрактная формулировка
-> постановки задачи, еще не требуется принимать
во внимание никаких заранее заданных -* функ-
циональных структур и при которой все существен-
ные возможности -> предметной реализации еще
остаются открытыми. Вход в -> рабочий план осу-
ществляется на -»• этапе конструирования „Поста-
новка задачи”.
Конструирование предметное (Gestaitungs konst-
ruktion)
- ► Разновидность конструирования, в которой
формулировка -»• постановки задачи производится
применительно к реализации имеющихся или за-
данных физических функций. Вход в -»• рабочий
план осуществляется на -*• этапе конструирования
-♦ „геометрически материальная реализация из-
делия”.
Конструирование технологическое (разработка
технологии) (Herstellungskonstruktion)
- » Разновидность конструирования, в которой
формулировка -► постановки задачи исходит из
имеющегося или заданного предметного образа
(конструкции) и производится применительно к
изготовлению изделия. Вход в -* рабочий план осу-
ществляется на -> этапе конструирования -► „тех-
нологическая реализация”.
Конструирование функциональное (общее) (Funk-
tionskonstruktion, allgemeine)
- * Разновидность конструирования, в которой
-> постановка задачи сформулирована примени-
тельно к -> абстрактным величинам (-» веществу,
-> энергии и -> сообщениям). Вход в -* рабочий
план осуществляется на -» этапе конструирования
-> абстрактной функциональной структуры. (См.
также соответствующее место на рис. 2.15.)
Конструирование функциональное (специальное)
(Funktionskonstruktion, spezielle)
- > Разновидность конструирования, в которой
формулировка -> постановки задачи исходит из
имеющейся или заданной -> абстрактной функцио-
нальной структуры или из -* абстрактной диаграм-
мы потоков и производится в терминах -> физиче-
ских или -> логических функций. При этом остаются
открытым^ все существенные возможности -> пред-
метной реализации. Вход в -* рабочий план осу-
ществляется на -» этапе конструирования -> физи-
ческой или -> /. гической функциональной струк-
туры. (См. также соответствующее место на
рис. 2.15.)
Конструкторский каталог (Konstruktionskatalog)
Полезный при -> конструировании, хранящийся
не в человеческой памяти, а организованный чаще
всего в табличной форме источник знаний, пост-
роенный с учетом требований методичности и
снабженный системой классификации его содержа-
ния, которая является максимально полной в за-
данных границах. Каталог предоставляет возмож-
ности проводить в нем целенаправленный поиск
и выборку информации, он состоит из -> классифи-
кационной, -> главной и -» специальной частей, а
также может содержать дополнение. В -» катало-
гах операций специальная часть отсутствует.
Конструкторский каталог двумерный (Zweidimen-
sionaler Konstruktionskatalog)
-»• Конструкторский каталог, в котором -> клас-
сификационная часть занимает как заголовочный
столбец, так и заголовочную строку в табличной
форме каталога. -»• Главная часть размещается в
полях пересечения строк и столбцов, а классифи-
кационная часть может одновременно служить ->
специальной частью. Однако отдельная специаль-
ная часть также может присутствовать и разме-
щаться на противоположных с главной частью сто-
ронах таблицы.
Конструкторский каталог одномерный (Eindimen-
sionales Konstruktionskatalog)
-> Конструкторский каталог, в котором ->• клас-
сификационная часть простирается только в од-
ном направлении в табличной форме каталога,
т. е. образует только заголовочный столбец или
только заголовочную строку. -» Главная и специ-
альная части образуют также только столбцы или
только строки таблицы.
Конструктивных элементов метод (Bauteiletechnik)
(2.3 [51])
Метод конструирования, в котором исполь-
зуется небольшое число всегда одних и тех же
-> конструктивных элементов, но возможности их
соединения можно многообразно варьировать (на-
пример, печатные платы). Метод конструктивных
элементов приводит к неоптимальному использо-
ванию пространства, но зато позволяет получить
большое число -> общих функций, используя весь-
ма небольшое число элементов.
Конструкция с резервированием (с избыточностью)
(Reduntante Konstruktion)
-»Конструкция, в которой -* реальная функция
между -> вводом и -> выводом реализована двумя
или более независимыми друг от друга и не влия-
ющими друг на друга путями. (Пример: ручной и
ножной тормоз на автомобиле. См. также (->) из-
быточность и 6.7 [24]).
Конструкция (Konstruktion)
В узком смысле слова - придуманное челове-
ком, в процессе -» конструирования определенное
во всех подробностях, описанное в документации
искусственное техническое устройство, предназна-
ченное на основе своей -> идеальной функции к
выполнению определенных задач. В широком
смысле слова наряду с искусственными рассмат-
ривают также естественные (природные) конструк-
ции. К ним причисляются все те природные обра-
зования, возникшие не в результате целенаправ-
ленных человеческих действий, а от атомов до
кристаллов, простейших организмов, растений,
животных, людей и небесных тел, которые на ос-
нове изменения состояния -> абстрактных величин
(-* вещества, -> энергии и ->• сообщений) выполняют
некоторую -> функцию.
Контур детали (Teilekontur)
Линия, образующаяся при сечении поверхно-
сти детали плоскостью ичобпажрниа. и пи ппи
372 7. Обзор и определения основных понятий
параллельной проекции детали на эту плоскость.
Контур детали всегда замкнут.
Контур (Kontur) -* Контурное представление, ->
контур детали
Контурные поверхности (Konturflache)
Поверхности твердого тела, определяющие его
контур на проекционных чертежах. На этих черте-
жах контурные поверхности изображаются замкну-
тыми линиями. Если тело выполняет определен-
ную функцию в некоторой технической системе, то
контурные поверхности подразделяются на -* рабо-
чие поверхности и -* нерабочие контурные поверх-
ности.
Контурные поверхности нерабочие (Restkonturfla-
che)
Часть -* контурной поверхности твердого тела,
которая остается после отделения от последней
-*• рабочих поверхностей. Все изменения поверх-
ностей тела, которые не должны затрагивать его
техническую -* функцию (дизайн и т. п.), могут
предприниматься только на нерабочих поверх-
ностях.
Контурное представление (чертеж) (Konturbild)
Графическое представление тел, при котором
очертания (контуры) предмета изображаются ли-
ниями, являющимися результатом сечения или
проекции. Для рабочих чертежей деталей приме-
няются ортогональные проекции, являющиеся
контурным представлением, из которого на основе
общепринятых условных соглашений можно вос-
становить наружные поверхности тела и этим - его
трехмерный образ.
Конъюнкция (логическое умножение, операция И)
(Konjunktion, UND-Verkntlpfung, AND operation)
Двухместная -> булева операция, определя-
емая таблицей значений одной зависимой величи-
ны от значений двух независимых величин, кото-
рая приведена на рис. 4.13, поле 3.2.
Коэффициент передачи Л (передаточный коэффи-
циент) (Ubertragungsfaktor X)
Отношение -*• силы трения к -* силе, порождаю-
щей трение, во -* фрикционных системах из твер-
дых тел. Он зависит от -*• коэффициента трения ц и
от конструктивных свойств фрикционной системы.
(См. также кат. 4.2.4)
Коэффициент трения ц (Reibwert, Reibungskoeffi-
zient)
Отношение -> силы трения к нормальной силе,
наблюдаемое в -* паре рабочих поверхностей из
двух фрикционных партнеров, приводимых тан-
генциально в движение. Коэффициент трения ха-
рактеризует отношение сил в связи со свойствами
поверхностей тел, материалов пары и, возможно,
относительной скорости; в противоположность -*
передаточному коэффициенту он не учитывает
свойств механической конструкции. Различают ко-
эффициенты трения скольжения и трения покоя в
зависимости от того, находятся ли партнеры в паре
в относительном движении или же из состояния
покоя приводятся в движение („отрываются” друг
от друга).
Коэффициент трения заклинивания (Klemmreib-
wert)
-* Коэффициент трения Ц, при котором переда-
точный коэффициент стремится к бесконечности
(Х-* <»). При этом значении коэффициента трения
и всех его превосходящих во -* фрикционной сис-
теме возникает самоторможение.
Коэффициент умножения (Multiplikationsfaktor) -*
Умножитель силы, -> Умножитель скорости
Коэффициент умножения силы к (Kraft-Multiplika-
tions-faktor-k)
Отношение выходной силы в входной в * умно-
жителе силы или в усилителе силы. Если не-
сколько умножителей или усилителей включают-
ся вместе, то отношение величины силы на выходе
последнего и входе первого характеризует резуль-
тирующий коэффициент умножения силы.
Крепление (Halterung) -»• Соединение неподвиж-
ное (жесткое)
Материя (Materie) (2.3 [71])
Заполняющие пространство более неделимые
мельчайшие тела, атомы.
Матрица связей логическая (SchluBmatrix, logische)
Представляет -> ограничения и свободы в
паре элементов или -> паре рабочих поверхностей
по всем 12 возможным направлениям свобод с по-
мощью -*• булевских (логических) величин в мат-
ричной форме. С матрицами могут производиться
операции по правилам -> булевой алгебры.
Матрица типов связей (SchluBartenmatrix)
Матрица, в которую помещены типы -> связей
для -> соединения двух твердых тел по всем 12
(односторонним обобщенным) направлениям.
Машина (в теории конструирования) (Maschine, der
Konstruktionslehre)
Сложное, обычно -> комплексное техниче-
ское устройство, которое выполняет -> главную
функцию, описываемую через -*• энергетические
функциональные элементы. В этом заключается
существенное отличие машины от -* аппарата или
-* прибора.
(Это определение машины исходит из измене-
ний энергетических состояний, т. е. из функции, а
не из описания объекта, т. е. механизма .)
Машина (в теории механизмов) (Maschine, der Get-
riebelehre) (6.7 [11])
-> Машина (для механической энергии)- это ме-
ханизм, целью которого является реализация
определенных силовых воздействий, движений
или/и совершение работы. (Это определение исхо-
дит из механизма, т. е. объекта, а не из изменения
энергетических состояний, т. е. функции.)
Метод 6-3-5 (Methode 635)
Методика поиска идей путем целенаправлен-
ного использования интуитивного мышления и
возникающих ассоциаций, разработанная на осно-
ве мозгового штурма для группы из шести чело-
век, которые дополняют набор решений по три
идеи решения 5 раз. В основе метода лежит попыт-
ка, предлагая некоторые решения, побудить участ-
ников выдвинуть новые решения.
Описание происходящего: после обсуж-
дения и анализа проблемы каждый из участников
записывает по три предложения решений в форму-
7.4. Определения основных понятий
373
ляр, который через 5 минут передается дальше.
Предложения принимаются к сведению следую-
щим участником и дополняются тремя новыми
решениями, пока каждый не обработает каждый
формуляр.
Область применения: проблемы поиска,
анализа и выяснения взаимосвязей.
Правила: такие же, как и при -* мозговом
штурме.
Оценка: экспертами
Характеристика метода: „отстраняю-
щий” и „вдохновляющий” эффекты выражены
меньше, чем при мозговом штурме и синекти-
ке, более предпочтительны „письменные” участ-
ники, чем „устные”. (См. также 2.3 [42], 2.3 [50.1].)
Методы конструирования (Konstruktionstechniken)
Различные методы реализации -* функцио-
нальной структуры в -* конструктивной структуре.
Для вещественной, энергетической и информаци-
онной техники известны следующие важнейшие
методы конструирования, применяемые во всех
этих трех областях: -* „органоподобная” техника
пространственной компоновки, -* агрегатирования
методп "* конструктивных элементов метод.
Механизм (как схема) (Mechanismus) (6.7 [11])
Механизм - это принудительная замкнутая -*
кинематическая цепь, в которой одно из звеньев
закреплено, т. е. находится в покое. Сколько
звеньев содержится в цепи, столько же различных
механизмов можно, вообще говоря, получить из
этой цепи.
Механизм логический (булевский) (Logisches Get-
riebe, Boolesches Getriebe)
* Механизм, который при соответствующем
кодировании выполняет -* логическую функцию.
Мозговой штурм (Brainstorming)
Методика поиска идей путем целенаправлен-
ного использования интуитивного мышления в
группе из 5-15 человек. В обстановке одобрения,
свободы и раскованности участники группы гене-
рируют большое количество идей, которые в те-
зисном черновом виде записываются, подхватыва-
ются другими участниками, варьируются и обнов-
ляются благодаря возникающим ассоциациям, что
приводит к существенно лучшим предложениям.
Область применения: решение постав-
ленных проблем, которые являются не слишком
комплексными и могут быть очень четко опреде-
лены.
Правила: отсутствие критики (например,
никаких пораженческих реплик, вроде: все это уже
давно было, этого нам никогда не сделать, все
равно ничего не выйдет и т. п.), количество главен-
ствует над качеством, фантазия не стесняется ни-
какими рамками, отказ от авторского права.
Состав участников: междисциплинар-
ный круг участников, находящихся на одном уров-
не служебной иерархии.
Оценка: результат рассматривается специа-
листами, систематически упорядочивается, иссле-
дуется на возможность применения и реализации.
(См. также "* синектика, -* „метод 6-3-5” и 2.3 [37.1],
2.3 [42]).
Модель (Modell) (1.5 [11])
...В естественных науках появляется понятие
модели в тех ситуациях, которые в наиболее
общем виде можно описать примерно следующим
образом: объект (предмет, материальная или иде-
альная система, процесс) М является в этом смыс-
ле моделью, если существуют аналоги между М и
другим объектом О, которые на основании свойств
М позволяют сделать определенные выводы о
свойствах О...
Модель изделия (Produktdarstellendes Modell)
Кратко называемая Рп-моделью (от Produkt-
изделие. - Прим, пер.) - это модель будущего
технического устройства, содержащая достаточ-
ное и подходящее для выполнения -* операций
отображение, по крайней мере, тех (системных)
свойств устройства, которые рассматриваются в со-
ответствующей -* фазе или -* этапе конструирова-
ния с номером п (см. рис. 2.10).
Монтажный элемент (Bauelement) -* Конструктив-
ный элемент
Муфта сцепная (Schaltkupplung)
Относится к -* элементам механизмов, своей
-★главной функцией имеет включение, -* проведе-
ние и прерывание потока механической энергии
(реализуемого вращающими деталями). Поэтому в
процессе переключения муфта является в основ-
ном “* функциональной единицей с "* информаци-
онной функцией, во включенном состоянии -
функциональной единицей с "* энергетической
функцией.
Накопитель энергии (Speicher fur Energie, Energie-
speicher) (5.5 [20])
Объект накапливает энергию, если совершен-
ная над ним работа может быть получена обратно
в той же форме. Если эта работа определяется па-
рой измерений по отношению к паре точек в про-
странстве, то соотношение между измеренными
величинами определяет абстрактный объект,
который мы называем накопителем энергии, на-
пример: масса, пружина, конденсатор, индуктив-
ность и т. п.
Накопление (Speichern)
Обратимое изменение во времени количества
некоторой “* абстрактной величины (как * абст-
рактная операция) в некотором, ограниченном ме-
сте, т. е. внутри заданных границ системы (см. так-
же рис. 5.18).
Направляющая X^tihrung)
“* Подвижное соединение, обеспечивающее за-
данное относительное движение двух твердых тел.
Тела соприкасаются или непосредственно через их
* пары рабочих поверхностей, или опосредованно,
через промежуточные тела или наполняющие про-
межутки жидкости, или же вообще не соприкаса-
ются и соединение образуется за счет полевых
связей. В опорном направлении направляющие
должны воспринимать большие силы, в определен-
ных случаях - также моменты, и при этом обеспе-
чивать легкость движений в направлении их "*
свободы. При уменьшении расстояния между эле-
ментами соединения они должны обнаруживать
непрерывное возрастание жесткости с тем, чтобы
обеспечивалась устойчивость положения при из-
менении нагрузки. Важнейшие классы направля-
ющих —* направляющие поступательного и “* на-
правляющие вращательного движения.
7. Обзор и определения основных понятий
374
Направляющая вращательного движения (враща-
тельная направляющая) (Rotationsfuhrung)
- * Направляющая, допускающая исключитель-
но круговые относительные движения деталей
(примеры: -* подшипник скольжения, подшип-
ник качения, -* подшипник подвесной и пр.). Не-
которые вращательные направляющие удовлетво-
ряют условию о том, что они должны быть ** соеди-
нениями, только в смонтированном состоянии (на-
пример, плавающий подшипник).
Направляющая поступательного движения (Trans-
lationsftihrung)
Направляющая с прямолинейным относи-
тельным движением деталей (например, прямоли-
нейная направляющая).
Напряженные сегменты кинетические (Kinetische
Spann ungssegm еп te)
- * Напряженные сегменты, в которых обеспе-
чивающие наличие * связей -* пары рабочих по-
верхностей, а вместе с ними - обладающие массой
-* рабочие объемы совершают неравномерные от-
носительные движения.
Напряженные циклы кинетические (Kinetische
Spannungsringe)
- » Напряженные циклы, в которых обеспечива-
ющие наличие -» связей пары рабочих поверхно-
стей, а вместе с ними - обладающие массой рабо-
чие объемы совершают неравномерные относи-
тельные движения.
Напряженные циклы статические (Statische Span-
nungsringe)
Напряженные циклы, в которых передающие
связь -> пары рабочих поверхностей не соверша-
ют ни относительных, ни абсолютных движений.
Напряженные циклы стационарные (Stationare
Spannungsringe)
(-*•) Напряженные циклы, в которых переда-
ющие связь -> пары рабочих поверхностей не со-
вершают движений относительно друг друга, а
участвуют в общем (абсолютном) движении. Если
циклы содержат рабочие объемы, масса которых
существенна для абсолютного движения, то это
движение должно быть равномерным.
Напряженный сегмент (Spannugssegment)
Вырожденный до „линейной” открытой цепи
связей -* напряженный цикл. Поля противона-
правленно действующих сил взаимно проника-
ющи, при этом хотя бы часть связей должна быть
полевой. Напряженные сегменты всегда находят-
ся в равновесии. Различают статические, ста-
ционарные и -* кинематические напряженные
сегменты.
Напряженный сегмент статический (Statisches
Spannungssegment)
Напряженный сегмент, в котором переда-
ющие -* связь пары рабочих поверхностей не со-
вершают ни относительных, ни абсолютных дви-
жений.
Напряженный сегмент стационарный (Stationares
Spannungssegment)
Напряженный сегмент, в котором переда-
ющие -* связь -* пары рабочих поверхностей не со-
вершают движений относительно друг друга, а
участвуют в общем (абсолютном) движении. Если
сегменты содержат рабочие объемы, масса кото-
рых существенна для абсолютного движения, то
это движение должно быть равномерным.
Напряженный цикл (Spannungsring)
Является замкнутой через -»• объемные и (или)
поверхностные связи цепью связей. Эта цепь
может представлять собой обычную цепь звень-
ев, если все пары рабочих поверхностей касают-
ся, при этом -* число степеней свободы f = -1; она
может быть открытой цепью звеньев, в которой
несоприкасающиеся пары рабочих поверхностей
связаны полевой связью, или - в вырожденной
форме ("* напряженный сегмент) - состоять из
двух или нескольких отдельных масс, связанных
между собой только полевыми силами, как, на-
пример, планеты и Солнце. Можно различать -»
статические, -* стационарные и кинетические
напряженные циклы в зависимости от относи-
тельного и абсолютного движения рабочих объ-
емов или -> рабочих поверхностей. Если напряжен-
ный цикл вырождается в незамкнутую (нециклич-
ную) - открытую конструкцию, то он называется -*
напряженным сегментом.
Напряженный цикл и напряженный сегмент
лежат в основе всех силовых „парных соединений”
(6.7 [32]), -> соединений и силовых передач. Замк-
нутые цепи имеют столько же независимых напря-
женных циклов, сколько и отрицательных степе-
ней свободы. Напряженный цикл всегда находит-
ся в равновесии.
Обработка давлением -*• Пластическое формообра-
зование.
Обработка давлением с преобладанием касатель-
ных напряжений (Schubumformen) (4.13 [11])
Пластическое формообразование (обработка
давлением) твердого тела, при котором пласти-
ческое состояние достигается в основном за счет
касательных напряжений (напряжений сдвига).
Обработка давлением с преобладанием напряже-
ний растяжения (Zugumformen) (4.13 [11])
Пластическое формообразование (обработка
давлением) твердого тела, при котором пластиче-
ское состояние достигается в основном за счет
напряжений растяжения в одном или нескольких
направлениях.
Обработка давлением с преобладанием напряже-
ний растяжения и сжатия (Zug-Druckumformen)
(4-13 [11])
- * Пластическое формообразование (обработка
давлением) твердого тела, при котором пластиче-
ское состояние достигается в основном за счет
комбинированных напряжений растяжения -
сжатия.
Обработка давлением с преобладанием напряже-
ний сжатия (Druckumformen) (4.13 [11])
Пластическое формообразование (обработка
давлением) твердого тела, при котором пластиче-
ское состояние достигается в основном за счет на-
пряжений сжатия в одном или нескольких направ-
лениях.
Объединение входных и/или выходных рабочих
поверхностей (Vereimgen der Eingangs - oder/und
Ausgangswirkflacher)
7.4. Определения основных понятий
375
* Объединяющая перестройка соответственно
входных и/или выходных -»• рабочих поверхностей,
причем те и другие объединяются порознь. В том,
что относится к функциональным величинам и их
расположению, изменений не происходит (рис. 6.27,
5.44)
Объединение входных рабочих поверхностей с вы-
ходными (Vereinigen der Eingangs - mit Ausgangswirk-
flachen)
* Объединяющая перестройка входных и вы-
ходных -> рабочих поверхностей в одну единую ра-
бочую поверхность (см. рис. 6.27, 5.44)
Объединение структурно-функциональных эле-
ментов (СФЭ) в их рабочих объемах (Vereinigen von
Strukturfunktions - Elementen (SFE) in ihren Wirkfla-
chen)
- > Вещественное соединение -> рабочих объ-
емов двух -* структурно-функциональных элемен-
тов в один. Такой вид объединения элементов
означает параллельное соединение их -»• функцио-
нальных величин. Такое объединение допустимо
только в том случае, когда оказываются возмож-
ными движения, которые требуются функцио-
нальными величинами во всех местах нового ра-
бочего объема и на всех новых -»• рабочих поверх-
ностях.
Объединение структурно-функциональных эле-
ментов (СФЭ) по рабочим поверхностям (Vereini-
gen von Strukturfunktions - Elementen (SFE) an den
Wirkflachen)
* Вещественное соединение двух -* структур-
но-функциональных элементов по двум смежным
-* рабочим поверхностям. Такой вид объединения
элементов означает последовательное соединение
их функциональных величин. Новый -> рабочий
объем составляется (например, по длине) из
прежних.
Объединяющая перестройка рабочих поверхно-
стей (Zusammenfassen von Wirkflachen)
Объединение отдельных •* рабочих поверхно-
стей в одну связную рабочую поверхность. Разли-
чают объединение (соответственно) входных
или/и выходных рабочих поверхностей и * объеди-
нение входных рабочих поверхностей с выходны-
ми. Путем объединяющей перестройки можно реа-
лизовать переход от -*• структурных к -* контурным
элементам. Объединяющая перестройка часто
также производится при -* функциональной ин-
теграции.
Объемная штамповка, при которой поковка на-
ходится целиком в полости штампа (Gesenkumfor-
men mit ganz umschlossenem Werkstiick) (4.13 [11.1])
* Обработка давлением сжатия, при которой
половинки штампа движутся навстречу друг дру-
гу, полностью охватывают штампуемую деталь и
определяют этим форму поковки.
Ограничение движения двустороннее (Bewegung
gegensinnig begrenzen)
Ограничение движения одного тела посредст-
вом двух действующих навстречу друг другу “*
упоров, в том числе таким образом, что тело вооб-
ще теряет всякую возможность движения (отсут-
ствие зазоров). Комбинируя определенные харак-
теристики „сила - путь” для отдельных •* сил свя-
зей, можно целенаправленно получать заданные
положения равновесия (устойчивое, безразличное
и неустойчивое, см. кат. 4.2.3)
Ограничение (запрет) (Sperrung)
Ограничение движения твердого тела по от-
ношению к другим телам в соединении возника-
ет в направлении -* степени свободы, в котором
относительное движение невозможно. Ограниче-
ние есть отрицание -*• свободы (см. также -* мат-
рица связей).
Окрестности изделия анализ (Analyse der Produk-
tumgebung)
Способ получения сведений и представлений,
способствующих формулировке -* требований пу-
тем исследования смежных систем изделия (см.
также рис. 5.10).
Окрестность изделия (Produktumgebung) (3.10 [7])
Если рассматривать * изделие как замкнутую
систему, то окрестность изделия состоит из всех
систем, которые вступают в отношения с издели-
ем или частями изделия в каких-либо фазах его
жизненного цикла (смежные системы).
Операция ИЛИ (ODER-VerknUpfung) -* Дизъюнкция.
„Органоподобная” техника пространственной ком-
поновки („Organische” Techmk) (2.3 [51])
* Метод конструирования, наиболее часто ис-
пользуемый в машиностроении. Достаточно про-
извольное разграничение соседних функцио-
нальных единиц обычно таково, что конец одной
единицы образует одновременно начало следую-
щей, и так же располагаются органы в живом ор-
ганизме. Эти единицы являются -> функциональ-
но-интегрированными в отношении входящих в
них деталей, аналогично электронным интеграль-
ным схемам. „Органоподобная” техника нуждает-
ся в наименьшем пространстве для конструкции,
но при любом изменении требует проведения кон-
струирования заново (см. также -*• агрегатирования
метод, * конструктивных элементов метод).
Останов заклинивающий (KlemmschluB- Gesperre)
-> Останов, в котором в одном или обоих проти-
воположных направлениях движения ведомой
детали возникает -> заклинивающая связь.
Остановы (Gesperre) (4.13 [99])
Механические _ приспособления, прекращаю-
щие взаимное движение ведомых деталей в одном
или двух противоположных направлениях. Стопо-
рение достигается за счет -> силовых связей, дей-
ствие может иметь характер -> геометрического
или -► силового и во многих остановах выключать-
ся и опять включаться (см. также -» стопоры об-
ратного хода).
Отклонение размера (предельное) (AbmaB)
Вектор, параллельный вектору -* номинально-
го размера и соединяющий его конец с -*• предель-
ным размером. Длина вектора отклонения равна
абсолютной величине разности предельного и но-
минального размеров, а его направление указыва-
ется знаком перед этой величиной. Если отклоне-
ние уменьшает номинальный размер, то его знак
„минус”, если увеличивает - то „плюс” (см. также
рис. 4.84, 4.85 и последующие, а также кат. 4.12.1).
376
7. Обзор и определения основных понятий
Отклонения размера результирующие (Resultieren-
de AbmaBe)
Полученная на основе определенных правил
расчета алгебраическая сумма всех отклонений
-> составляющих размеров в однократно открытой
-> размерной цепи. Как и для составляющих раз-
меров, здесь различают верхнее и нижнее резуль-
тирующее отклонение * результирующего номи-
нального размера, которые вычисляются в зависи-
мости от того, как проходит размерная цепь, из верх-
них или/и нижних составляющих отклонений
(см. кат. 4.12.1, поле 7.2).
Отношение (Relation) (1.5 [11])
Логическая взаимосвязь, взаимозависимость
между двумя или несколькими предметами, про-
цессами и т. д. ...Теория отношений представляет
собой хорошо развитую область математической
логики...
Отражение (структурно-функциональныхэлемен-
тов) (Spiegelung, bei Strukturiunktioris-Elementen)
Симметричное переключение векторных функ-
циональных величин -* структурно-функцио-
нальных элементов относительно их продоль-
ной оси.
Отрицание (операция НЕ) (Negation, NICHT - Verk-
ntipfung, NOT operation)
Одноместная булева операция, определя-
емая таблицей значений одной зависимой величи-
ны от значений одной независимой, которая при-
ведена на рис. 4.18, поле 3.1. В соответствии с этим
значение на выходе всегда противоположно зна-
чению на входе (см. также систему аксиом Хан-
тингтона для булевых алгебр).
Пара винтовая (Schraubenpaar)
Пространственная * пара элементов с чис-
лом степеней свободы f = 1, элементы которой мо-
гут совершать относительное вращательное дви-
жение вокруг заданной оси и относительное по-
ступательное движение вдоль этой оси, но в про-
тивоположность -* цилиндрической паре, оба эти
движения связаны, т. е. зависимы друг от друга. В
технических реализациях винтов и ходовых вин-
тов расстояние вдоль оси между винтовыми по-
верхностями в любом месте одинаково (постоянст-
во шага).
Пара вращательная (Drehpaar)
Плоская -»• пара элементов с -* числом степе-
ней свободы f = 1 (одноподвижная), элементы ко-
торой (в одной плоскости) относительно друг
друга могут иметь только вращательное дви-
жение. (См. также -> пара поступательная, -* па-
ра вращательно-поступательная плоская, пара
вращательно-поступательная пространствен-
ная).
Пара вращательно-поступательная пространствен-
ная (цилиндрическая) (Drehschiebepaar)
Пространственная -* пара элементов с чис-
лом степеней свободы f = 2 (двухподвижная), эле-
менты которой могут совершать вокруг заданной
оси относительное вращательное движение, а
вдоль этой оси - поступательное движение. В про-
тивоположность -> винтовой паре, оба движения
независимы друг от друга. (См. также -* пара вра-
щательно-поступательная плоская.)
Пара вращательно-поступательная плоская (ку-
лачковое сочленение) (Zweigelenkpaar, Kurvenge-
lenk)
Плоская -* пара элементов с -> числом степе-
ней свободы f = 2 (двухподвижная), элементы ко-
торой могут совершать (в одной плоскости) как от-
носительное вращательное движение, так и отно-
сительное поступательное. Оба движения незави-
симы друг от друга. (См. также -> пространствен-
ная вращательно-поступательная пара.)
Пара однозвенная (в теории механизмов) (Einele-
mentenpaar, getriebetechmsch)
Пара элементов, в которой места соприкосно-
вения („элементы”) принадлежат не двум, а одно-
му звену. Под „элементами” здесь понимаются со-
прикасающиеся части тела (например, определен-
ные плоские участки).
Пара поступательная (Schiebepaar)
Плоская -»• пара элементов с -> числом степе-
ней свободы f = 1 (одноподвижная), элементы ко-
торой могут иметь друг относительно друга только
поступательное движение (в одной плоскости).
(См. также -* пара вращательная, -* пара враща-
тельно-поступательная плоская, -* пара враща-
тельно-поступательная пространственная.)
Пара рабочих поверхностей (Wirkflachenpaar)
Пара, образованная двумя, первоначально под-
вижными относительно друг друга (хотя бы в од-
ном -► направлении свободы) звеньями ( или час-
тями одного упругого звена) по двум им принад-
лежащим -* рабочим поверхностям. В этом месте
через соприкосновение обычно возникает взаимо-
действие (работа). В отличие от пар элементов,
данный случай предполагает также наличие дей-
ствия -* функциональных величин и рассматрива-
ет все области соприкосновения, не принадлежа-
щие одной непрерывной поверхности, как различ-
ные пары рабочих поверхностей.
Пара фрикционная (Reibpaarung)
Пара рабочих поверхностей, в которой за счет
трения возникают тангенциальные силы. В парах
твердых тел с жидкостями достаточно рабочей по-
верхности твердого тела. Особым случаем являет-
ся фрикционная пара с заклинивающей связью.
Пара цилиндрическая Пара вращательно-посту-
пательная пространственная
Пара элементов двухподвижная (Zweiwertiges Е1е-
mentenpaar)
Пара элементов, в которой -*• число степеней
свободы относительных движений ее элементов
f = 2. Такими парами являются плоская враща-
тельно-поступательная пара, -» пространственная
вращательно-поступательная (цилиндрическая)
пара.
Пара (элементов) (в теории механизмов) (Elemen-
tenpaar, getriebetechnisch)
Два соприкасающиеся „элемента” образуют
пару (элементов). Под „элементами” здесь пони-
маются те части тела, в которых эти тела соприка-
саются (6.7 [11]).
Как правило, в пару входят все точки сопри-
косновения двух тел (или -* звеньев). Часто, тем
не менее, целесообразно рассматривать отдельные
ТА. Определения основных понятий
377
точки соприкосновения как различные пары, а об-
щую пару для двух звеньев - как -* цепь звеньев
(см. также -*• пара рабочих поверхностей).
Пара элементов одноподвижная (Einwertiges Ele-
mentenpaar)
-* Пара элементов, в которой число степеней
свободы относительных движений ее элементов
/= 1. Такими парами являются вращательная и
поступательная пара среди плоских и винтовая
пара среди пространственных пар и т. п.
Передаточное отношение (Ubersetzung)
Отношение угловых скоростей двух -* звеньев
-> принудительной цепи. Угловые скорости изме-
ряются относительно соответствующих центров
вращения, принадлежащих третьему звену, обыч-
но - стойке. Различают -> номинальное, -> среднее
и -> мгновенное передаточные отношения (См.
4.13(8.2]).
Передаточное отношение мгновенное (Momentane
Ubersetzung)
Отношение мгновенных угловых скоростей ве-
дущего (toj и ведомого (w2) звеньев, = со х /со 2. В
зубчатых передачах это отношение тоже непосто-
янно из-за неизбежных отклонений формы зубьев
от идеальной. В любых исполнениях зубчатых пе-
редач оно подвержено постоянным колебаниям и
может только случайно оказаться равным -* но-
минальному передаточному отношению.
Передаточное отношение номинальное (Nennuber-
setzung)
Теоретическое передаточное отношение, опре-
деляемое значениями решающих -* номинальных
размеров без -* допусков или цифровыми характе-
ристиками соответствующих деталей. Для зубча-
тых пар - это отношение числа зубьев ведомого
колеса к ведущему, для фрикционных передач -
отношение соответствующих номинальных диа-
метров окружностей качения колес.
Если теоретическое -* мгновенное передаточ-
ное отношение остается постоянным на всем про-
тяжении периода и равно тем самым номинально-
му передаточному отношению, то говорят о пере-
дачах „равномерного хода”. Это же понятие рас-
пространяется и на те реальные случаи, когда при
работе мгновенное передаточное отношение
вследствие допусков на размеры и меняющихся
сил трения испытывает небольшие периодические
колебания. Постоянное передаточное отношение
во фрикционных и эвольвентных зубчатых зацеп-
лениях достигается благодаря постоянству отно-
шения радиусов окружностей качения, которое
для случая эвольвентных зубчатых зацеплений
обеспечивается постоянством отношения диамет-
ров основных окружностей.
Передаточное отношение среднее (Mittlere Uber-
setzung)
Усредненное за время одного периода отноше-
ние угловых скоростей ведущего и ведомого зве-
на -* принудительной передачи. Для фрикционных
и гидростатических передач оно получается из от-
ношения чисел оборотов ведущего и ведомого
звеньев, для зубчатых передач -> номинальное пе-
редаточное отношение равно среднему.
Передаточный коэффициент (-*) Коэффициент пе-
редачи
Передатчик энергии (Uber tr age г von Energie)
(5-5 L20j)
Определенные „физические устройства” (вклю-
чая -* узлы и -* детали - Автор) могут рассматри-
ваться как идеальные в том смысле, что они пе-
редают мощность без -* превращения или -* накоп-
ления энергии. Если этот перенос мощности опре-
деляется двумя парами измерений мощности в
двух точках пространства, то соотношение между
этими величинами определяет абстрактный объ-
ект, который мы называем передатчиком энергии.
Примерами могут служить идеальные рычаги,
идеальные механические передачи, идеальные
трансформаторы и т. п.
Передача (Ubertragen)
Изменение формы представления -* абстракт-
ной величины (-* абстрактная операция), чаще все-
го связанное с изменением ее места положения.
Различают проведение и -* преобразование фор-
мы (см. также рис. 5.18).
Передача (передаточный механизм) (Getriebe)
(6.7(11])
Передача по Дизиоглу - это -* механизм, в ко-
тором одно определенное звено приводит в движе-
ние остальные. Это звено называется приводным.
Из одного механизма (характеризующегося своей
кинематической схемой) можно, вообще говоря,
получить различные передачи. (Состояния меха-
низма при передаче сил и мощности см. -* напря-
женный цикл.)
Переключатель двухпозиционный (флипфлоп)
(FlipflopH1.5 (11])
-* Схема бистабильного типа (-* бистабильный
элемент), основывающаяся на принципе -> триг-
гера.
(Конструктивный элемент, реализующий
„флипфлопную” функцию, также часто называет-
ся флипфлопом или триггером.)
Переключатель двухпозиционный (флипфлоп)
механический (Flipflop, mechanisches)
Механическая функциональная единица, реа-
лизующая в качестве * главной функции принцип
двухпозиционного (триггерного) переключения.
Указанная трактовка устройства предполагает ло-
гическую кодировку входов и выходов. (При-
меры: электромеханический выключатель осве-
щения, различные замки-защелки и т. д.)
Пластическое формообразование (обработка дав-
лением) (Umformen, als Fertigungsverfahren) (4.13(11])
Способ изготовления путем пластического из-
менения формы твердого тела. При этом как мас-
са, так и целостность тела сохраняются. (См. так-
же -* обработка давлением с преобладанием на-
пряжений сжатия, -> растяжения и сжатия, сдви-
гай гибка.)
Плоскость перехода (Zuordnungsebene)
Граница между двумя соседними - фазами
конструирования или -* этапами конструирования
в -* рабочем плане. Поскольку по разные стороны
от плоскости перехода изделие представляется с
помощью различных -* моделей изделия, то при
378 7. Обзор и определения основных понятий
пересечении этой плоскости должны быть уста-
новлены достаточно произвольные -* отношения
между соответствующими -* элементами моделей
изделия (например, между схемными элемента-
ми — функциональной структуры и деталями
конструктивной структуры).
Подборка решений (неформальная) (Losungssam-
lung)
Необязательно полная, не полностью структу-
рированная подборка -* решений, -* объектов и
(или) -* операций. -* Классификационная часть не
обязана быть полной, а -* специальная часть мо-
жет отсутствовать. Подборки решений появляют-
ся, как правило, на подготовительной стадии при
составлении -* конструкторского каталога.
Подшипник (Lager) -* Направляющая вращатель-
ного движения.
Подшипник качения (Walzlager)
-* Направляющая вращательного движения
(подшипник), в которой соединение между двумя
взаимно подвижными частями (как правило, меж-
ду внешним и внутренним кольцом) осуществля-
ется через — тела качения, так что в местах сопри-
косновения преобладает качение, а скольжение
минимально (при минимальном радиусе трения).
Подшипник плавающий (в-осевом направлении)
(Loslager)
Для того чтобы удовлетворить требованиям в
отношении -* соединений с узловой точкой и обес-
печить в цепи звеньев, соответствующей валу +
корпус, возможность числа степеней свободы f = О
в каждой плоскости, проходящей через ось враще-
ния, должно выполняться следующее условие: в
каждой осевой плоскости одна из -* направляю-
щих вращательного движения должна иметь чис-
ло степеней свободы f = 1 (вращение в осевой пло-
скости, вращение вокруг оси не в счет, см. -* фик-
сированный подшипник), а другая - число /= 2
(вращение и смещение в осевой плоскости). Вра-
щение в осевой плоскости, наряду с другими спо-
собами, может обеспечиваться зазорами в подшип-
никах.
И теперь, плавающий подшипник - это такая
направляющая вращательного движения, которая
кроме вращательной, имеет еще и поступательную
степень свободы, а-* фиксированный подшипник -
это направляющая вращательного движения, не
имеющая поступательных свобод.
Подшипник подвесной (Schwebelager)
* Направляющая вращательного движения
(подшипник), в которой опорные силы и, возможно,
силы реакции направляющей возникают благода-
ря силовому полю. При этом движущиеся относи-
тельно друг друга детали (например, вал и вкла-
дыш подшипника) не соприкасаются.
Подшипник скольжения (Gleitlager)
- * Направляющая вращательного движения
(подшипник), в которой относительное движение
между вкладышем подшипника и цапфой (или
промежуточной средой) является скольжением.
Подшипник фиксированный (в осевом направле-
нии) (Festlager)
- * Направляющая вращательного движения с
осевой связью, которая в смонтированном состоя-
нии кроме вращения вокруг оси имеет добавоч-
ную вращательную свободу в любой осевой плоско-
сти с * числом степеней свободы f = 1 (например,
вращение за счет зазоров в подшипнике). Для вос-
приятия моментов, действующих перпендикуляр-
но оси вращения, фиксированный подшипник
обычно соединяется параллельно с -* плавающим
подшипником (см. -* соединение параллельное).
Позиция (Stelle, position) (6.7 [10])
Положение некоторого (-*) знака в последова-
тельности знаков.
Положение (в физике) (satz, physikalisch)
„Положение” представляет собой некоторое
физическое высказывание, которое по сути своей
должно быть -* законом, в справедливости которо-
го исследователь убежден, но которое при этом во
многих случаях не может быть доказано пол-
ностью поставленными экспериментами или же
такого доказательства может не быть в принципе.
Положение инструктивное (Anweisungssatz)
Содержит совокупность всех -* инструкций
(видов деятельности, операций, распоряжений и
т. п.) по составлению требуемой конструкторской
документации. В -* постановке задачи инструк-
тивное положение обычно выражено через подле-
жащее и сказуемое (субъект и предикат) главного
предложения.
Положение-требование (F orderungssatz)
Положение, содержащее формулировку
требований к разрабатываемому устройству. Все
положения-требования объединяются в -* список
требований. Положения-требования выводятся из
— постановки задачи, из -* анализа окрестности
изделия или из -* анализа жизненного цикла из-
делия.
Положение функциональное (Funktionssatz)
Выражает совокупность воздействий, зависи-
мостей и технических, физических, химических и
других процессов, обеспечивающих выполнение
-* главной функции. В -* постановку задачи оно
обычно входит в виде относительного предложе-
ния с объектом в винительном падеже.
Положения nocTaHOBO4Hbie(Aufgabensatze)
Три типа положений, получаемых исходя из
-* постановки задачи: -* инструктивные, -^-функцио-
нальные и-+положения-требования.
Постановка 3afla4H(Aufgabenstellung)
- > Инструкция по разработке технического уст-
ройства, т. е. о том, как его -* проектировать и
-* конструировать с учетом как наиболее технически
целесообразную форму элементов, так и возможно-
сти их изготовления и монтажа. Наряду с инструк-
цией по выполнению конструкторской деятельно-
сти (-* положение инструктивное) в постановке за-
дачи содержится в форме -* положения функцио-
нального подлежащая выполнению -* главная
функция, а также в форме -> списка требований -
предъявляемые к изделию требования.
Постановка общей задачи (Gesamt - Aufgabenstel-
lung)
- * Постановка задачи, разработанная примени-
тельно к -* общей задаче и содержащая для нее,
по крайней мере, неявно, -* функциональное по-
7.4. Определения основных понятий
379
поженив, -* положение-требование и инструк-
тивное положение.
Поток главный (HauptfluB)
Поток вещества, энергии или сообщений, от-
носящийся к выполнению-* главной функции.
Поток дополнительный побочный (NebenfluB)
Поток вещества, энергии или сообщений, от-
носящийся к-* дополнительной функции.
Потребитель (Verbraucher) (5.5 [20])
- * Преобразователь вида, в котором происходит
необратимое превращение энергии из какой-либо
ее формы в тепловую.
Правило физическое (Regel, physikalische)
Наряду с правилами, понимаемые как -»• закон
или -* эффект, это также обозначение для
совокупности эмпирических данных, в большинст-
ве случаев допускающих исключения.
Превращение-* Преобразование вида.
Предварительное проектирование (черновая при-
кидка) (Konzipieren) (1.5[20])
По Палю и Байтцу - часть конструирования, в
которой, вслед за выяснением постановки задачи,
происходит определение принципиальных момен-
тов в решении и путях его реализации в процессе
абстрагирования, составления -* функциональных
структур и поиска подходящих принципов реше-
ний и их комбинаций, на основе предварительного
проекта (чернового наброска) решения.
(Примерно соответствует конструкторской дея-
тельности, названной в данной книге -* функцио-
нальной реализацией, или проектированием.)
Преобразование вида (превращение) (Wandeln)
- > Абстрактной величины (одна из -* абстракт-
ных операции) - это изменение вида (рода) этой ве-
личины. Для -* вещества - это изменение (вида)
материала, для -* энергии - вида энергии, для
* сообщений - их -* кода (см. также рис. 5.18).
Преобразование формы (Umformen, als Operation)
Для -* абстрактной величины (как -* абстракт-
ная операция) представляет собой количествен-
ное изменение описывающих ее величин без из-
менения их типа, в большинстве случаев связан-
ное также с изменением их положения, например
для вещества - изменение его -»• контура, для
•* энергии - величин, описывающих мощность, для
•* сообщений - формы представления кода (но не
самого кода) (см. также рис. 5.18).
Преобразователь вида кода (Code - Wandler) -* Пре-
образователь кода
Преобразователь вида энергии (Wandler fiir Ener-
gie) (5.5 [20])
Если связанные друг с другом изменения со-
стояний физических объектов относятся к различ-
ным формам энергии, называемых также различ-
ными видами энергии, то говорят о преобразова-
нии вида (превращении) энергии. Если связанное с
этим преобразование мощности определяется
через две пары измерений мощности в двух парах
точек пространства, то соотношение между этими
величинами определяет абстрактный объект, ко-
торый мы называем преобразователем вида (энер-
гии).
Преобразователь данных (Umsetzer converter)
- * Функциональная единица, служащая для из-
менения представления -»• данных (6.7 [10]).
(Замечание: изменение может относиться
как к -* кодированию, так и к -»• носителю данных
или к физической величине, используемой для
представления данных. В терминологии книги
учтено указанное различие: мы говорим о -* пре-
образовании (вида) кода, когда имеется в виду
* кодирование и~> декодирование, ио-* преобразо-
вании формы кода, когда имеется в виду -* парал-
лельно-последовательное или -* последовательно-
параллельное преобразование.)
Преобразователь кода (Code - Umsetzer, code trans-
lator) (6.7 [10])
- * Преобразователь, который -* знаки одного
-* кода А сопоставляет со знаками другого кода В.
(Замечание: в терминологии данной книги
обозначается так же как „преобразователь вида
кода”.)
Преобразователь параллельно-последовательный
(Parallel-Serien-Umsetzer, parallel-serial converter)
(6.7 [10])
- * Преобразователь данных, преобразующий
цифровые -* данные, представленные в параллель-
ном коде, в данные, представленные в последова-
тельном (во времени) коде. (В книге используется
также обозначение „параллельно-последователь-
ный преобразователь формы” - „Parallel-Serien-Um-
former”.)
Преобразователь последовательно-параллельный
(Serien-Parallel Umsetzer-serial - parallel converter)
(6.7 [10])
- * Преобразователь данных, преобразующий
цифровые -* данные из последовательной (во вре-
мени) формы представления в параллельную (од-
новременную). (В книге используется также обо-
значение „последовательно-параллельный преоб-
разователь формы”.)
Преобразователь формы кода (Code-Umformer)
- * Параллельно-последовательный преобразо-
ватель, -* Последовательно-параллельный преоб-
разователь.
Преобразователь формы энергии (Umformer fiir
Energie) (5.5 [20])
Идеальный преобразователь формы энергии
является -* передатчиком энергии, в котором от-
дельные величины обеих пар измерений мощности
в двух парах точек пространства в процессе переда-
чи подвергаются обратимому изменению, приме-
ром служат идеальные умножители сил, относя-
щиеся к системам передачи энергии, идеальные
передачи с передаточным числом i = 1 (с -* переда-
точным отношением i = 1:1), идеальные трансфор-
маторы и т. п.
Прибор (в теории конструирования) (Gerat, der Коп
struktionslehre)
- * Сложное, обычно -* комплексное, техниче-
ское устройство, которое выполняет -* главную
функцию, описываемую через -* информационные
функциональные элементы. В этом заключается
380 7. Обзор и определения основных понятий
существенное отличие прибора от -*• аппарата или
-* машины.
Принудительный многозвенник (цепь) (Zwanglan-
figes Vielgelen К (Kette))
- * Цепь звеньев не менее чем из трех звеньев и
-* числом степеней свободы/ = 1
Принудительное движение (принудительность)
(Zwanglauf) (4.13 [90])
Свойство -* пары элементов или -* кинемати-
ческой цепи, если ее -* число степеней свободы
/=1-
Проб и ошибок метод (Trial-and-error-Methode)
(1.5 [И])
Метод сознательного и систематического при-
менения проб и ошибок - это метод последова-
тельного приближения, Все целенаправленные,
самоорганизующиеся кибернетические системы,
которые должны управлять элементами окружа-
ющей среды, имеющими характер -* черного ящи-
ка, действуют методом проб и ошибок.
Проведение (Zeiten)
Проведение -* абстрактной величины (как *
абстрактная операция) - это перемещение некото-
рого количества вещества, энергии или сообщений
в другое место, так чтобы ему не сопутствовало -*
комбинирование, -* преобразование вида,-* преоб-
разование формы или -* накопление (см. также
рис. 5.18).
Проводник энергии (Zeiter ftir Energie)
Идеальный проводник энергии - это -* передат-
чик энергии, в которых каждая из величин в обеих
парах мощностных показателей не изменяется при
передаче из одной точки пространства в другую.
Примеры: валы в идеальных подшипниках, иде-
альные передачи с передаточным числом i = 1,
идеальные электрические проводники и т. д.
Программа (Programm) (6.7 [10])
Полностью достаточная для решения задачи
инструкция вместе со всеми необходимыми согла-
шениями.
Проектирование (Entwerfen) (1.5 [20])
По Палю и Байтцу - часть конструирования, во
время которой, исходя из предварительного проек-
та (см. -* проектирование предварительное), про-
изводится дальнейшее конструирование техниче-
ского устройства на основе технических и эконо-
мических соображений и других данных, так что-
бы стала однозначно определенной последующая
-* разработка, в результате которой уже появляет-
ся документация, позволяющая изделие изгото-
вить.
(Соответствует деятельности, названной в дан-
ной книге -* разработкой формы.)
Промышленный дизайн (Industrial Design) (2.3[26.1])
Конструирование и оптимизация изделия, ка-
сающиеся его связанных с человеком функций.
Наиболее важны следующие три направления дея-
тельности: согласование определяемых изделием
зрительных факторов, т. е. разработка внешнего
вида; определение изделия в отношении его чело-
веко-приборных функций (эргономика); также в от-
ношении его информационных функций.
Просеивание в методическом конструировании
(Siebverfahren, konstruktionssystematisch)
Метод выбора подходящего решения из-* конст-
рукторского каталога со -* специальными призна-
ками. Метод состоит в том, что в -* специальной
части каталога заштриховываются все поля от-
дельных решений или объектов, для которых не
выполняются заданные в заголовочной строке
свойства. Те решения или объекты, у которых не
оказалось заштрихованным ни одно поле (про-
скочившие в дырку), оказываются выбранными,
„просеянными” (см. рис. 3.15).
Процедура „вертикальная” (в конструировании)
(„Vertikales” Vorgehen, beim Konstruieren)
Сквозной проход отдельных -* фаз конструиро-
вания, например с целью проверки влияния опре-
деленных конструктивных решений на изделие,
на разных уровнях, вплоть до последнего. Такая
проверка оказывается быстрой, но при этом только
прикидочной и часто поверхностной; отдельные
-* этапы конструирования рассматриваются без
подробностей и нерасчлененно (см. также -* проце-
дура „ горизонтальная”).
Процедура „горизонтальная” (в конструировании)
(„Horizontales” Vorgehen, beim Konstruieren)
Работа в рамках одного -* этапа конструирова-
ния, с одной определенной -* моделью изделия,
когда производится рассмотрение и реализация
всех конкретных деталей этой модели. Переход к
следующему этапу конструирования совершается
только после того, как будут полностью исчерпаны
все возможности работы на предыдущем этапе (см.
также -* процедура „вертикальная”).
Прямолинейная направляющая (GeradfUhrung)
-* Направляющая поступательного движения.
Рабочая поверхность (Wirkflache)
Рабочие поверхности представляют собой те
части -* контурных поверхностей твердого тела, ко-
торые имеют определяющее значение для дейст-
вия -* функциональных величин, например точки
приложения сил, базовые поверхности скоростей
и т. д. Рабочие поверхности являются непрерывны-
ми поверхностями, в двумерном представлении
вырождающиеся в линии. Для условного изобра-
жения, например, -* структурных элементов, в ка-
честве представителей рабочих поверхностей бе-
рутся линии, образующиеся при сечении реальных
рабочих поверхностей плоскостью изображения.
Разъединение (разборка) (Vereinzeln) -* Разделе-
ние структурно-функциональных элементов.
Рабочая деличина -* Конструктивная величина
(BaugroBe)
Рабочий объем (Wirkraum)
Соединяющее рабочие поверхности, заполнен-
ное веществом пространство (объем) твердого
тела. Для условного изображения, например, *
структурных элементов в качестве изображения
рабочих объемов используют просто линии, соеди-
няющие -* рабочие поверхности.
Рабочий план (Ablaufplan)
Испытанная на практике и подтвержденная
теорией целесообразная последовательность трех
-* фаз конструирования, подразделенных на -* эта-
7.4. Определения основных понятий
381
пы конструирования. Рабочий план построен с уче-
том итеративности процесса -* конструирования, в
нем предусмотрены возможности возврата после
каждого этапа конструирования, использование
критерием выбора вариантов, а также использо-
вание и уточнение дополнительных сведений из
* Списка требований.
Рабочих поверхностей пара -* Пара рабочих поверх-
ностей.
Разделение поперечное (структурно-функциональ-
ных элементов) (Querschnittstrennen von Strukturfunk-
tions-Elementen)
— Разделение — структурно-функционального
элемента по его рабочему объему непараллель-
но направлению линии, изображающей этот рабо-
чий объем. В местах разделения в каждом из
вновь созданных элементов возникает по новой -*
рабочей поверхности, касательной в точке разреза
к линии разреза. Скорости на новых рабочих по-
верхностях соответствуют скоростям бывшего ра-
бочего объема в месте разреза, а силы и моменты
должны быть выбраны таким образом, чтобы как
силы и моменты в сечении, так и новые и старые
элементы находились в равновесии. Сумма длин
отдельных рабочих объемов дает в итоге длину
первоначального рабочего объема.
Разделение продольное (структурно-функциональ-
ных элементов) (Langsschnittstrennen)
-* Разделение структурно-функционального
элемента по его "* рабочему объему вдоль линии,
изображающей этот рабочий объем. У новых эле-
ментов, при тех же -* рабочих поверхностях, что и у
старых, оказываются те же скорости. Силы и мо-
менты сил должны для каждого элемента нахо-
диться в равновесии и после сложения на -* рабо-
чих поверхностях, ранее совпадавших, совпадать с
первоначальными значениями (по величине и на-
правлению).
Разделение структурно-функциональных элемен-
тов (СФЭ) (Trennen von Strukturfunktions-Elementen
(SFE))
Разделение на части -* структурно-функцио-
нальных элементов или соответствующих им -►
соединений. Различают разъединение (разборку)
(соединения на детали), — поперечное разделение
и -* продольное разделение. Разъединение пред-
ставляет собой разделение двух структурно-функ-
циональных элементов, связанных не * вещест-
венной связью, по их -* рабочим поверхностям; при
поперечном и продольном разделении производит-
ся разделение рабочего объема, при этом из одно-
го элемента образуются два, одинакового типа.
Полученные в результате разделения СФЭ имеют
в местах раздела одинаковые скорости, и каждый
из них находится в равновесии (см. также -* функ-
циональное разделение).
Разделение функциональное -* Функциональное
разделение
Размер номинальный (NennmaB)
Размер, который служит для задания величин
и к которому относятся -* отклонения размера
(4.13 [10]). Значение номинального размера произ-
вольно, оно соответствует по порядку величины
* предельным размерам, но может быть и меньше
нижнего, и больше верхнего предельного размеров
(см. также рис. 4.84, 4.85 и следующие с дальнейши-
ми определениями, а также кат. 4.12.1).
Размер номинальный результирующий (Resul tie -
rendes NennmaB)
Полученная на основе определенных правил
расчета алгебраическая сумма всех -* составля-
ющих номинальных размеров в однократно откры-
той — размерной цепи. Он задает номинальное рас-
стояние между начальной и конечной точкой раз-
мерной цепи (см. кат. 4.12.1).
Размер обобщенный (Allgemeines МаВ)
Совокупность из -* номинального размера и
связанных с ним — отклонений размера. При рас-
четах с обобщенными размерами используются
особые правила вычислений (см. также рис. 4.84,
4.85 и последующие, а также кат. 4.12.1).
Размер обобщенный результирующий (Resulieren-
des Allgemeines МаВ)
-* Обобщенный размер, состоящий из -* резуль-
тирующего номинального размера и -> результиру-
ющих (верхнего и нижнего) отклонений в одно-
кратно открытой -* размерной цепи (кат. 4.12.1).
Размер составляющий (отдельный) (EinzelmaB)
— Обобщенный или -* номинальный размер, ко-
торый непосредственно указан на чертеже, а не со-
ставляется из других указанных на чертеже раз-
меров.
Размерная цепь (MaBkette)
Ряд, построенный из — обобщенных размеров -*
деталей, узлов и т. д., который позволяет опре-
делить -* результирующий номинальный размер,
-* результирующие отклонения, короче - -* резуль-
тирующий обобщенный размер в том случае, когда
соответствующие данные на чертеже не приводят-
ся. При корректном задании размеров на чертеже
размерная цепь, составленная из приведенных раз-
меров не должна оказаться замкнутой, иначе опре-
деление размеров сделалось бы неоднозначным.
Не должен также отсутствовать более чем один
размер, иначе она окажется неполной. Условие
полноты и однозначности определения размеров
означает, что для любых двух „размерных точек”
— контура может быть составлена одна, и только
одна, однократно открытая размерная цепь, в ко-
торую входят проставленные на чертеже размеры
(см. рис. 4.85-4.87).
Разновидность конструирования (Konstruktionsart)
Используется для. обозначения конструктор-
ской работы и получающихся при этом * конструк-
ций в зависимости от места входа в -* рабочий
план и обусловленной этим степенью абстракции
* формулировки задачи. В соответствии с этим
различают: -* оригинальное конструирование (но-
вую разработку), — функциональное конструирова-
ние, -* предметное конструирование и -* техноло-
гическое конструирование (разработку техноло-
гии). Паль и Байтц (1.5 [20]) выделяют, наряду с
оригинальным конструированием, также — адапта-
ционное и -* вариативное конструирование.
Разработка (Ausarbeiten)(1.5 [20])
По Палю и Байтцу, часть -* конструирования,
в которой проект технического устройства допол-
няется окончательными указаниями по конструк-
382 7. Обзор и определения основных понятий
ции, форме, размерам и свойствам поверхностей
изделия, а также его стоимости, в результате чего
создается документация на изделие в виде черте-
жей и другого рода документов, необходимая для
его реализации в материале. (Примерно соответст-
вует деятельности, названной в данной книге
* разработкой технологии.)
Разработка (конструирование) структуры (Struktur-
gestaltung)
Определение пространственного или плоского
„функционального скелета” в форме схем, состоя-
щих, например, из -*• структурных элементов или
-+ структурно-функциональных элементов.
Разработка (конструирование) технологии (Herstel-
lungsgestalten) реализация предметная.
Разработка формы (Formgestalten) -* Реализация
предметная (конструирование).
Разъединяющая перестройка рабочих поверхно-
стей (Unterteilen von Wirkflachen)
Обратная операция по отношению к -* объеди-
няющей перестройке. Различают разделение толь-
ко входных и (или) выходных рабочих поверхно-
стей, а также и отделение входных рабочих поверх-
ностей от выходных. В отношении функциональ-
ных величин и их положения ничего не меняется
(см. рис. 6.27).
Разъединяющая сила (Losekraft)
Минимальная сила (по направлению и величи-
не), которая, будучи приложенной к той же точке,
что и "*• сила, приводящая к возникновению тре-
ния, уничтожает эффект заклинивания. По этой
причине разъединяющая сила оказывается парал-
лельной и противоположно направленной к силе,
приводящей к возникновению трения.
Реализация геометрически материальная (Geomet-
risch-Stoffliche Produktgestaltung)
-* Этап конструирования в -► предметной фазе,
на котором осуществляется определение -* гео-
метрической структуры, -» контура, материала, оп-
ределение размеров в основном завершается, про-
веряется возможность монтажа и в результате по-
является первый конструктивный проект. Для до-
стижения наилучших экономических показателей
изделия следует как можно раньше произвести
его “»• технико-экономическую оценку. Деятель-
ность конструктора на этом этапе можно назвать
•* разработкой (конструированием) формы.
Реализация предметная (конструирование) (Ges-
talten)
Действия, определяющие геометрическую фор-
му -* структур (-* рабочих объемов, рабочих по-
верхностей), геометрическую форму -* контуров,
наружные поверхности, строение и материал -*
деталей и -► узлов, а также позволяющие предпо-
ложительно оценить последующие затраты. Если
эти действия касаются только геометрии техниче-
ского устройства, его материала, размеров и воз-
можностей монтажа, то можно говорить о „разра-
ботке (конструировании) формы”, если же эти ме-
роприятия касаются изготовления деталей и опре-
деления их всевозможных мелких подробностей,
то речь идет о „разработке (конструировании) тех-
нологии”, если, наконец, эти мероприятия каса-
ются повторного использования материала, то
речь идет о „разработке (конструировании) утили-
зации (рециклинга)”. Предметная реализация или
конструирование означает всевозможные виды
деятельности конструктора в -»• предметной фазе.
Важной составной частью процесса разработки
формы является задание формы в смысле “»• про-
мышленного дизайна.
У Паля и Байтца и в нормативах VDI-2222/1
(ФРГ) предметная фаза подразделяется на про-
ектирование (Entwerfen) и -► разработку (Ausarbei-
ten)
Реализация технологическая (Herstellungstechni-
sche Produktgestaltung)
-* Этап конструирования в предметной фазе,
на котором осуществляется его предметная реа-
лизация (конструирование) в отношении наилуч-
ших: изготовления составных частей, монтажа,
транспортировки, способа хранения на складах;
возможностей ремонта, взаимозаменяемости изна-
шивающихся деталей; повторного использования
(~* рециклинг (замыкание жизненного цикла)) и
т. д. С целью достижения наилучших экономиче-
ских показателей изделия и его качества в про-
цессе технологической реализации так же следует
как можно раньше произвести -► технико-экономи-
ческую оценку. Деятельность конструктора на
этом этапе можно обозначить как „конструирова-
ние изготовления, монтажа, ремонта, рециклинга
и т. д.”
Реализация функциональная (проектирование,
развитие) (Entwickeln)
Получение -* идеальных функций и функ-
циональных структур технического изделия, исхо-
дя из •* функционального положения и требова-
ний. Сюда же относится сопоставление идеаль-
ным функциям -* эффектов, но не сопоставление
•* предметных элементов с эффектами. Проектиро-
вание обозначает деятельность конструктора в
функциональной фазе.
В других рабочих планах, например, по Палю и
Байтцу, по нормативам VD1-2222/1 (ФРГ) эта же
деятельность называется ** проектированием пред-
варительным. Последнее понятие, в отличие от
проектирования (развития) включает в себя также
схематическое представление предметных эле-
ментов.
Рециклинг (замыкание жизненного цикла) (Recyc-
ling) (2.3 [70.1])
Возвращение материалов (или обратный поток
материалов) в искусственном круговороте, кото-
рый стремится уподобиться круговороту веществ в
природе. Под материалом в этой связи понимается
как материя, так и -*• энергия. Можно указать
следующие три основные формы рециклинга: ->
повторное использование (без существенной пе-
реработки), -► использование в качестве вторсырья,
-* использование после переработки. (Связи с про-
цессом конструирования см. на рис. 2.17.)
Рециклинга модельные системы (Recycling-Modell-
systeme)
Определяют возможный круговорот (циркуля-
цию) материалов в процессе -* рециклинга. Приме-
няется обозначение первичный круг, если отходы
продукции снова превращаются в продукцию (ре-
циклинг отходов в прямой форме или в непрямой
форме - при предварительной обработке и подго-
7.4. Определения основных понятий
383
товке, обогащении); вторичный круг, если отходы
продукции сразу или после подготовки снова
включаются в использование (рециклинг вторич-
ного сырья) и третичный круг, если продукция или
ее отходы прямо (регенерация) или непрямо (пос-
ле обработки и подготовки) снова превращаются в
продукцию (рециклинг вторичного сырья). См. так-
же 2.3 [70.1].
Решение (Ldsung)
Выполнение -> постановки задачи и требований в
рамках одной или нескольких “* моделей изделия,
в течение одной или нескольких “* фаз конструи-
рования в -* рабочем плане. Реализация решений
определенных постановок задач на различных
уровнях абстракции включается, с максимальной
полнотой и наглядностью, в “* каталоги решений.
Решений количество (Entscheidungsgehalt, decision
content) (6.7 [10.1])
Количество решений Но множества из п взаим-
но исключающих событий (например, “* набора зна-
ков из и знаков) определяется по формуле Но =
= logn. (При основании логарифма, равном 2, зна-
чение получается в битах Но = log2n [бит/знак].)
Решения элементарные (Elementarlosungen)
Постоянно повторяющиеся базовые решения,
из которых составляются обычные решения.
Элементарные решения нельзя свести к другим
решениям, а их возможное общее число уменьша-
ется по мере уменьшения -* сложности.
Ряд размерный (типовой) (Baureihen) (1.5[20])
Ряд технических устройств, -* узлов или де-
талей, выполняющих одинаковую функцию одина-
ковым образом, размеры которых принимают зна-
чения из заданного набора, а изготовление макси-
мально унифицировано. Устройства, из которых
образован размерный ряд, широко применяются в
различных областях.
Сборка (процесс соединения) (Filgen) (4.13[12])
Образование целостного предмета из двух или
большего числа деталей, имеющих геометрически
определенную твердую форму, или же из таких де-
талей с добавлением бесформенного материала.
При этом в необходимых случаях обеспечивается
создание пространственного единства и неразде-
лимости и увеличение его в целом. К сборке при-
числяются также совместная укладка и наполне-
ние, а также перекомпоновка и объединение, в со-
ответствии с данным определением, частей одного
и того же тела, например кольца.
Сборочная единица (блок, модуль, монтажная
группа) (Baugruppe)
Совокупность узлов, выполняющая задан-
ную частную функцию. Сборочная едини-
ца является “* функциональной единицей, разра-
ботанной с учетом возможностей сборки.
Свобода (степень свободы, направление свободы)
(Freiheit, Freiheitssinn)
Свобода одного твердого тела по отношению к
другим телам в “* соединении - это направление
(в ряде случаев - одностороннее), учитываемое
при подсчете числа степеней свободы, т. е. в ко-
тором возможно относительное движение. Свобо-
да является отрицанием "* ограничения (за-
прета).
Свободы идентичные (стеГгени свободы идентич-
ные) (Identische Freiheiten)
В отдельных звеньях или группах звеньев
замкнутой цепи появляются идентичные свободы
в парах элементов в том случае, когда лежащие
между ними звенья или группы звеньев могут дви-
гаться независимо от всей цепи. Каждая незави-
симая возможность движения звена или группы
звеньев входит тогда в „число идентичных степе-
ней свободы”, при этом, как следует из рис. 6.14,
число степеней свободы всей цепи уменьшается.
Конструктивные реализации идентичных свобод
используются очень часто, в колодочных тормозах,
например, должно создаваться напряжение между
тормозной колодкой и барабаном, но барабан при
этом, как единственное звено цепи, должен еще и
вращаться.
Свободы число степеней (геометрических) (Frei-
heitsgrad, geometrischer) (6.7 [И])
Число независимых параметров, от которых за-
висят возможные положения механической сис-
темы.
Связь объемная (WirkraumschluB)
Связь, существующая между материальны-
ми частицами внутри рабочего объема, в особен-
ности между двумя его “* рабочими поверхностя-
ми. Объемная связь относится к элементарным
связям.
Связь поверхностная (WirkflachenschluB)
Связь, существующая между -* рабочими по-
верхностями одного или двух разных “* рабочих
объемов. Рабочие поверхности могут, но не обя-
заны соприкасаться. Поверхностная связь отно-
сится к элементарным связям.
Связей цепь (SchluBkette)
Последовательное расположение “* рабочих
объемов, сохраняющееся в целостном виде благо-
даря “* связям по их общим парам рабочих по-
верхностей. Если на всех парах рабочих поверхно-
стей связи действуют двусторонне, то цепь может
быть открытой ("* напряженный сегмент), если хо-
тя бы одна связь в цепи односторонняя, то цепь
должна быть замкнутой (-* напряженный цикл).
Сила, нужная для поддержания связей, создается,
по меньшей мере, двумя заряженными “* накопи-
телями энергии. Эти накопители в случае полевых
сил могут находиться вне цепи связей, но обычно
все же внутри цепи, и чаще всего локализованы в
одном из рабочих объемов.
Связи пассивные (Passive Bindungen) -* Цепи сверх-
замкнутые.
Связывающая сила (SchluBkraft)
Та “* сила (механическая, магнитного поля и
т. п.), благодаря которой возникает -* элементар-
ная связь.
Связь (замыкание) (SchluB)
Существующее в течение определенного вре-
мени силовое взаимодействие между двумя мате-
риальными частицами. Эти материальные части-
цы могут быть атомами, молекулами, твердыми
телами, жидкостями или газами. Мы называем
связь внутренней, или -* объемной (а также связью
рабочего объема), если силовое взаимодействие
384 7. Обзор и определения основных понятий
заключено внутри некоторого * рабочего объема,
и называем связь внешней, или -* поверхностной
(а также связью рабочей поверхности), если взаи-
модействие происходит между -* рабочими поверх-
ностями. В зависимости от того, соприкасаются ра-
бочие поверхности или нет, говорят о контактной
или бесконтактной связи, а от того, относится ли
связь только к одной "* паре рабочих поверхностей,
соответственно только к одному рабочему объему
или же к нескольким, говорят об "* элементарной
или об "* обшей связи. (В атомной и субатомной об-
ласти говорят об обменных взаимодействиях меж-
ду элементарными частицами.)
Связь вещественная (StoffschluB)
Возникающая благодаря электромагнитным
(молекулярным) силам связь между молекулами
ограниченного рабочего объема, удерживающая их
вместе таким образом, что они образуют единое
твердое тело.
Связь вторичная (Sekundarer SchluB)
-* Связь, которая может возникнуть только
благодаря первичной связи, а при ее исчезнове-
нии так же исчезает, как, например, -* фрикцион-
ная связь трения покоя и скольжения.
Самоторможение (Selbsthemmung) -* Связь закли-
нивающая.
Связь геометрическая (FormschluB)
1. Как элементарная связь
* Связь, действующая между двумя соприка-
сающимися "* рабочими поверхностями твердых
тел перпендикулярно поверхностям соприкоснове-
ния. Дополнительное сближение тел привело бы к
разрушению их поверхностей и их взаимопроник-
новению.
2. Как общая связь
* Связь, в состав которой входит, по меньшей
мере, один -* рабочий объем в * цепи звеньев, та-
кой что вследствие его свойств и положения в
цепи (например, высокая жесткость) общая связь
действует как геометрическая (-*) элементарная
связь. Различают "* квазигеометрическую и *
чисто геометрическую связь. В первом случае не-
обходимы два "* накопителя энергии, во втором не
нужен ни один.
Связь динамическая (за счет изменения импуль-
са) (ImpulsanderungsschluB)
- * Силовая связь, действующая как -> поверх-
ностная связь, при которой силовое воздействие
возникает за счет изменения импульса рабочего
объема при изменении его скорости или массы.
Связь действует только в те моменты времени,
когда происходит изменение импульса.
Связь заклинивающая (KlemmschluB)
- * Фрикционная связь, при которой -> сила тре-
ния может быть сколь угодно большой. -* Переда-
точный коэффициент в начале области заклинива-
ния А. , а при дальнейшем возрастании коэф-
фициента трения - °° < А. < 0. Если к паре прило-
жить нагрузку против -* силы трения заклинива-
ния, то заклинивающая связь все равно сохранит-
ся, даже если обратится в нуль сила, приводящая
к возникновению -* трения. Поэтому такая связь,
однажды возникнув, оказывается -> первичной
связью, порождаемой непосредственно нормаль-
ной связью. Заклинивающая связь может возник-
нуть только в -* прогрессивных фрикционных сис-
темах с заклиниванием. Ее действие часто назы-
вают самоторможением, она всегда односторон-
няя. Ее возможности применения такие же, как и
для -* квазигеометрической связи в тангенциаль-
ном направлении с произвольно большими рабочи-
ми нагрузками. Заклинивающая связь может быть
разрушена приложением -* разъединяющей силы.
Связь квазигеометрическая (Quasi FormschluB)
- * Силовая связь (в качестве -* общей связи)
действующая как -* геометрическая связь по той
причине, что рабочие усилия меньше, чем силы
предварительного натяжения, существующие в ->
связях, порожденных силами упругости, магнитно-
го поля или гравитационными и т. д. В цепь связей
должны входить, по меньшей мере, два -> накопи-
теля энергии.
Связь общая (GesamtschluB)
Результирующая -* связь -* цепи звеньев в оп-
ределенном месте. Она образуется из совокупно-
сти -* элементарных связей этой цепи.
Связь первичная (Primarer SchluB)
- * Связь, которая может создаваться или уст-
раняться независимо от других связей (пример:
-* силовая связь в нормальном направлении). В
этом заключается ее отличие от -* вторичной
связи.
Связь силовая (KraftschluB)
1. Как -* элементарная связь в нормальном на-
правлении (к рабочим поверхностям):
-* объемная связь, действующая между двумя
несоприкасающимися -* рабочими поверхностями,
находящимися под постоянным силовым воздей-
ствием и могущими изменять расстояние друг меж-
ду другом без взаимопроникновения -> рабочих
объемов. Рабочие поверхности принадлежат одно-
му и тому же -* рабочему объему, они также огра-
ничивают -* накопитель энергии, необходимый
для создания силовой связи. Силовые связи под-
разделяются на -* упругие, -» полевые и -* динами-
ческие связи.
2. Как -* общая связь в нормальном направле-
нии (к рабочим поверхностям):
-* Связь в -* цепи звеньев, в которой поддержи-
вается постоянное силовое воздействие и допу-
скается изменение расстояния между определен-
ными -* рабочими поверхностями без взаимопро-
никновения -* рабочих объемов. В цепи звеньев
должны быть, по меньшей мере, два -* накопителя
энергии, которые в случае статических сил взаим-
но препятствуют разрядке друг друга, а в случае
динамических сил, наоборот, должны постоянно
заряжаться или разряжаться. Рабочие усилия в
цепи больше, чем силы, созданные предваритель-
ным напряжением, в противоположность -* квази-
геометрической связи. Силовые связи в нормаль-
ном направлении являются -* первичными свя-
зями.
3. Как -* общая связь в тангенциальном направ-
лении: -* связь фрикционная
Связь фрикционная (ReibschluB)
- * Связь в тангенциальном направлении в -*
паре рабочих поверхностей, возникающая вследст-
вие -* силовой связи в нормальном направлении и
7.4. Определения основных понятий
385
обусловленного этим тесного соприкосновения ра-
бочих поверхностей. Фрикционная связь предпо-
лагает ненулевой -* коэффициент трения ц > 0.
Если действует -* сила трения без того, чтобы ра-
бочие поверхности перемещались относительно
друг друга, то это связь трения покоя (наивысшёе
значение силы трения достигается в этом случае
незадолго до начала скольжения). При наличии
скольжения мы имеем связь трения скольжения.
Оба вида фрикционных связей относятся к -^вто-
ричным силовым связям, так как в них всегда
предполагается наличие -* первичной силовой
связи. В противоположность этому заклинива-
ющая связь относится к первичным связям. Сило-
вые связи действуют одинаково в обоих направле-
ниях, параллельных фрикционным поверхностям,
только в -* линейных фрикционных системах.
Связь чисто геометрическая (Reiner FormschluB)
- * Геометрическая связь как -* общая связь *
цепи звеньев, у которой в направлении возможной
передачи сил наличествуют зазоры, по крайней
мере, в одном из двух противоположных соответ-
ствующих направлений. В такой ** цепи звеньев в
направлении чисто геометрической связи нет дей-
ствующих “* накопителей энергии.
Связь элементарная (ElementschluB)
• * Связь, действующая внутри одного рабо-
чего объема или одной пары рабочих поверхно-
стей. В соответствии с этим есть два вида элемен-
тарных связей: -*• поверхностная и объемная.
Связь силовая гравитационная (Schwere-Kraft-
schluB)
Силовая связь, порождаемая силами тяже-
сти (гравитационными).
Связей типов матрица Матрица типов связей.
Связей матрица логическая “* Матрица связей ло-
гическая.
Связь силовая магнитная (Magnetischer Kraft-
schluB)
* Силовая связь, причиной которой является
наличие магнитного поля, по меньшей мере, меж-
ду двумя рассматриваемыми телами.
Связь силовая полевая (FeldkraftschluB)
“* Силовая связь, действующая как "* поверх-
ностная связь, при которой силовое воздействие
передается через силовое поле между двумя "* ра-
бочими поверхностями двух различных “* рабочих
объемов или одного и того же рабочего объема.
Как правило, рабочие поверхности не соприкаса-
ются.
Связь упругая силовая (Elastischer KraftschluB)
Силовая связь, действующая как “* объем-
ная связь, при которой силовое воздействие воз-
никает вследствие упругой деформации рабочего
объема.
Сеть (Netzwerk) (6.7 [8.1])
Соединение некоторого количества схемных
элементов (резисторов, реактивных элементов, ис-
точников напряжения) в „сеть”, которая, как пра-
вило, состоит из некоторого количества петель
(ячеек). Особым видом сетей являются •* четырех-
полюсники, к ним относятся в числе прочих раз-
личные электрические фильтры. Если цепь содер-
жит главным образом „переключательные” (релей-
ные) элементы (реле, диоды, переключательные
транзисторы), то говорят о релейной сети. (См. так-
же “* алгебра релейных схем.)
Сигнал (Signal) (6.7 [10])
Физическое представление сообщений.
(Замечание: при абстрактных рассмотрениях
может отсутствовать ссылка на какую-либо опре-
деленную физическую величину, если физическая
реализация не интересна или не определена. В
этом случае сигналом может быть названа мате-
матическая величина, лежащая в основе абстракт-
ного рассмотрения.) - Именно с таким значением в
книге используется термин „сообщение”.)
Сила (Kraft) (4.13 [51])
Одна из величин, производных от конструк-
тивных величин массы, длинц и времени, ее раз-
мерность - <F> = <rn> <L> <t 2 > . Единицей силы
является ньютон (Н), [F] = 1 Н, связанный с ос-
новными единицами соотношением кг-м«с .
Сила, порождающая трение (Reibung einleitende
Kraft)
- * Сила, которая во -* фрикционных системах
вызывает соприкосновение рабочих поверхностей.
В -* линейных фрикционных системах она совпа-
дает с действующей во -* фрикционной паре нор-
мальной силой, в •* нелинейных фрикционных сис-
темах она может быть больше или меньше нор-
мальной силы и обычно имеет другое направ-
ление.
Сила трения (Reibkraft)
- * Сила, возникающая вследствие трения как
сила реакции в тангенциальном (касательном) на-
правлении, если двигать относительно друг друга
поверхности двух твердых тел или твердого тела и
жидкости, между которыми действует нормальная
сила, или (в случае твердых тел и пр.) только пы-
таться двигать. По силе трения можно определить
коэффициент трения.
Сила трения заклинивания (Klemmreibkraft)
* Сила трения, возникающая в -* заклинива-
ющей связи. Она всегда такой же величины, как и
сила, проводимая фрикционной системой в на-
правлении фрикционной пары, и ограничена
только прочностью материала.
Синектика (Synek-tik)
Методика поиска идей путем целенаправлен-
ного использования интуитивного мышления в
группе из 4-7 участников. В отличие от “* мозгово-
го штурма, здесь делается попытка с помощью
аналогий из нетехнических или полутехнических
областей, побудить участников взглянуть на вещи
с совершенно непривычной точки зрения, а затем,
возвращаясь к исходной задаче, прийти к новым
идеям ее решения.
Описание происходящего: определе-
ние, анализ, новая формулировка задачи, посте-
пенный отход от известного, исследование проб-
лемы с новых точек зрения. При этом почти всегда
начинают появляться новые идеи.
Область применения: анализ ситуации и
проблемы производства.
Правила: никакой критики, предложения
25 — 2317
386 7. Обзор и определения основных понятий
в форме тезисов, участников не перебивать, избе-
гать проблем, связанных с различием статуса
участников, ознакомить всех с „правилами игры”,
поощрять участников, берущих на себя роль по-
средника и примирителя.
Состав участников: междисциплинар-
ный круг участников, находящихся на одном уров-
не служебной иерархии.
Оценка: идеи оцениваются экспертами, ре-
зультаты оценки сообщаются участникам. (См.
также -* мозговой штурм, -* метод 6-3-5, 2.3 [15],
2.3 [42].)
Структуры разработка Разработка (конструиро-
вание) структуры.
Система (System) (1.5 [11])
Множество элементов и множество отноше-
ний между этими элементами....
Слово (Wort, word) (6.7 [10])
Последовательность знаков, в определенной
связи рассматриваемая как целостная единица.
Сложность (Kompliziertheit) (1.5 [11])
Сложность какой-либо конструкции является
мерой разнородности входящих в нее элементов.
Случайный процесс (Stochastischer ProzeB, Zufall-
sprozeB)(1.5 [11])
Процесс, который можно описать через случай-
ную переменную x(t, v), причем t чаще всего обо-
значает время. При фиксированном t получается
(одномерное) распределение вероятностей. Поэто-
му случайный процесс можно представлять себе
как систему изменяющихся с течением времени
случайных переменных....
Соединение (Verbindung)
Соединение двух или нескольких твердых тел
(или двух частей одного тела), препятствующее их
разъединению при рабочих нагрузках. Различают
соединения -* неподвижные и -* подвижные,
разъемные и неразъемные, на основе •* вещест-
венной связи (вещественные, сплошные) и неве-
щественные. Процесс создания соединения, назы-
вается “* сборкой (См. также объединение струк-
турно-функциональных элементов....)
Соединение вал - ступица (Welle-Nabe-Verbindung)
В радиальном направлении неподвижное
(жесткое), а в осевом направлении - подвижное
или неподвижное соединение вала и ответной
части в форме втулки.
Соединение вещественной связью (вещественное)
(Stoff schltiBige Verbindung)
Соединение двух твердых тел, в котором
сила, препятствующая разъединению этих тел в
направлении главной нагрузки, передается по-
средством вещественной связи. Это соединение
является неразъемным (примеры: сварное,
паяное соединение)
Соединение (включение) параллельное (Parallel-
schaltung, Nebeneinanderschaltung) (1.5 [11])
* Функциональная связь (соединение) не-
скольких (по меньшей мере, трех) -* схемных эле-
ментов таким образом, что вывод одного из них
является одновременно вводом всех остальных
элементов или таким образом, что ввод одного из них
одновременно является выводом всех остальных...
(В * алгебре релейных схем, например параллель-
ное соединение контактов...)
Соединение (включение) последовательно-парал-
лельное (Reihenparallelschaltung)(1.5 [11])
- * Функциональная связь (соединение), по
меньшей мере, трех схемных элементов таким
образом, что в нем встречается и -* последователь-
ное и параллельное соединение. В алгебре ре-
лейных схем под последовательно-параллельным
соединением понимают схему, в которой встреча-
ются последовательные и параллельные соедине-
ния контактов....
Соединение (включение) последовательное (Rei-
henschaltung, Serienschaltung, Hintereinanderschal-
tung)(1.5[ll])
- * Функциональная связь (соединение) * схем-
ных элементов Elf E2t...fEm причем для каждого
элемента Ej его вывод является одновременно
-* вводом элемента Е, + i... (в -* алгебре релейных
схем под этим понимается последовательное сое-
динение контактов)....
Соединение геометрической связью (геометриче-
ской) (FormschltiBige Verbindung)
- * Соединение двух твердых тел, в котором по-
тенциальная сила передается в главном направ-
лении нагрузки через смежные рабочие поверхно-
сти за счет соприкосновения соответствующих гео-
метрических поверхностей перпендикулярно к
ним. Соединение может быть разъемным или •*
неразъемным.
Соединение заклепочное (Nietverbindung)
-'Неразъемное, неподвижное или ->подвиж-
ное соединение одной или нескольких деталей с
помощью вспомогательной соединительной дета-
ли (заклепки) или специального конструктивного
элемента на одной из соединяемых деталей (за-
клепочная цапфа), так что при монтаже эта деталь
или этот элемент пластически деформируется.
Соединение на основе фрикционной связи (фрик-
ционное) (ReibschluBige Verbindung)
Соединение двух твердых тел, в котором ра-
бочие усилия в направлении главной нагрузки пе-
редаются через фрикционную связь.
Соединение неразъемное(№сЫ losbare Verbindung)
- * Соединение, для которого любое разделение
входящих в него деталей возможно только за счет
их повреждения или необратимой деформации.
Соединение неподвижное (жесткое) (Feste Verbin-
dung)
- * Соединение, которое не допускает относи-
тельных движений в месте соединения (в том чис-
ле и при рабочих нагрузках) ни в одном из 12 воз-
можных направлений. Все неподвижные соедине-
ния, кроме основанных на -* вещественной связи,
можно также назвать креплениями.
Соединение не на основе вещественной связи (не-
вещественное) (Nicht s tof f schltiBige Verbindung)
Соединение, в котором удержание деталей в
собранном состоянии в направлении главной на-
грузки осуществляется не посредством -* вещест-
венной связи.
7.4. Определения основных понятий
387
Соединение на основе заклинивающей связи (за-
клинивающее соединение) (KlemschluBige Verbin-
dung)
- * Неподвижное или односторонне -* подвиж-
ное соединение, в котором связь, обеспечиваю-
щая совместное удержание решающих звеньев яв-
ляется -* заклинивающей связью. Заклинивающая
связь поддерживается до тех пор, пока действует
или приводящая к возникновению -* трения сила
F, или сила, действующая против силы трения.
Соединение подвижное (Bewegliche Verbindung)
- » Соединение, в котором относительное дви-
жение соединяемых частей возможно хотя бы в од-
ном направлении без их разделения при рабочих
нагрузках и в рабочих условиях.
Специальные признаки (Zugriffsmerkmale)
Заглавные понятия, обозначающие существен-
ные свойства содержания -► конструкторского
каталога и помогающие конструктору выбрать
нужные данные. Используемые специальные при-
знаки в совокупности образуют -* специальную
часть конструкторского каталога и упорядочены
таким образом, что позволяют легко находить в
каталоге объекты и решения, опираясь на обозна-
ченные ими свойства.
Специальная часть (Zugriffsteil)
Часть “* конструкторского каталога, в которой
можно проводить поиск элементов содержания
конструкторского каталога с помощью особых •*
специальных признаков, обычно не содержащихся
в классификационной части. Специальная
часть, максимально удовлетворяя требованиям
пользователя, может сколь угодно расширяться
без одновременного изменения классификацион-
ной и главной части. (См. также -* конструктор-
ский каталог одномерный.)
Список принципов (Prinzipblatt)
Своего рода введение к конструкторскому
каталогу, в котором приводятся смысл, общие
принципы и взаимосвязи, положенные в основу
его устройства. В любом случае список принципов
должен содержать определение основного поня-
тия (или понятий) каталога. Кроме того, целесо-
образно в этом же списке принципов указывать
цель создания, момент использования, примене-
ние каталога, а также принципы классификации,
варианты и примеры.
Список требований "* Требований список.
Соединение разъемное (Losbare Verbindung)
Соединение, которое допускает (частое) раз-
деление входящих в него деталей без их повреж-
дения или изменения. Такое разделение произво-
дится путем приложения определенных сил в
определенной последовательности и/или путем
удаления запирающего элемента. Противопо-
ложным свойством обладают •* неразъемные сое-
динения.
Соединение силовой связью (силовое) (Kraftschlu-
Bige Verbindung)
Соединение двух твердых тел, в котором ра-
бочие усилия передаются в направлении главной
нагрузки через напряженный цикл или * напря-
женный сегмент. Цикл или сегмент содержат два
-► накопителя потенциальной энергии, разрядка
которых происходит в противоположных направ-
лениях и это создает препятствие к разрядке для
них обоих. Если рабочие усилия в направлении
главной нагрузки меньше, чем силы, созданные
предварительным напряжением, то действие сое-
динения оказывается квазигеометрическим
(примеры: заклепочные и винтовые соедине-
ния).
Соединение с узловой точкой (Fixpunktlagerung)
•* Неподвижное соединение, образующее вме-
сте с ответной частью соединения -* цепь звеньев с
числом степеней свободы f - 0. Оно обладает
тем достоинством, что внешние воздействия не
вызывают относительных движений отдельных
звеньев, но концы этих звеньев допускают отно-
сительные смещения (вследствие теплового рас-
ширения и наличия допусков) без возникновения
напряжений. Во многих случаях одна достаточно
маленькая деталь, „точка”, неподвижно соединя-
ется с основанием (узловая точка в турбине, фик-
сированный в осевом направлении подшипник на
валу и т. д.), - так что все звенья цепи как бы вы-
растают из нее.
Сообщение (Nachricht, message)
•* Знаки или непрерывные функции, представ-
ляющие информацию с целью ее дальнейшей пе-
редачи на основе общеизвестных или принятых на
данный случай соглашений (6.7 [10]). Сообщения
можно накапливать (запоминать), -* проводить
(передавать), -* преобразовывать форму (парал-
лельно-последовательно-параллельное преобразо-
вание), “* преобразовывать вид (кодировать, деко-
дировать) и -* комбинировать. Сообщение являет-
ся одной из * абстрактных величин.
Сочленение пружинное (Federgelenk)
-* Сочленение, образующееся за счет упругого
элемента одного из звеньев или за счет непод-
вижного соединения двух жестких звеньев с по-
мощью упругого элемента. Как правило, пружин-
ные сочленения допускают лишь небольшие отно-
сительные движения. По этой причине они или
совсем не способны к круговым движениям, или
только в пределах небольших углов отклонения,
но зато в них отсутствует внешнее трение, так что
при чисто упругих деформациях не возникает ни-
каких остаточных отклонений.
Сочленение кулачковое (Kurvengelenk) Пара вра-
щательно-поступательная плоская.
Сопряженные профили (Komplementprofile)
Исходные профили зубчатых колес, в которых
высота головки зуба, по крайней мере, одного из
профилей совпадает с высотой ножки зуба ответ-
ного профиля, но не совпадает с его собственной
высотой ножки зуба. При односторонних компле-
ментарных профилях это справедливо по отноше-
нию к высоте головки зуба только одного исходно-
го профиля, при двусторонних - для обоих профи-
лей (исходного и ответного исходного). Сопряжен-
ные профили часто применяются в эволоидных
зубчатых зацеплениях, поскольку они позволяют
значительно усилить большое или малое зубчатое
колесо (разумеется, одно за счет другого) или при
больших смещениях исходных контуров сделать
колеса с малой головкой зуба, не слишком умень-
388 7. Обзор и определения основных понятий
шая степень перекрытия профилей против нор-
мальной. С помощью комплементарных профилей
можно улучшить распределение нагрузок в зубча-
том зацеплении между входящими в зацепление
колесами (4.13 [80.1]).
Сочленение двойное (двойной шарнир) (Doppelge-
lenk)
* Сочленение, в которое входят три элемента,
в минимальном пространстве образующие две -*
пары элементов. Число его -* степеней свободы
(подвижность) является суммой подвижностей от-
дельных пар. Для -* вращательных пар, образую-
щих двойной шарнир, оси вращения обеих пар сов-
падают (см. рис. 6.11-2; 6.13).
Сочленение (шарнир) (Gelenk)
"* Подвижное соединение жестких деталей,
принадлежащих одному звену или нескольким,
тесно прилегающим друг к другу. Сочленение мо-
жет состоять из одной или нескольких, различным
образом взаимосвязанных -* пар элементов. К по-
следнего рода сочленениям относятся также -*
пружинные и -* пленочные сочленения.
Сочленение пленочное (Filmgelenk)
"* Сочленение, образующееся за счет гибкого
(сделанного из полимерной пленки, ткани или
кожи) элемента одного из звеньев или за счет не-
подвижного соединения двух жестких звеньев с
помощью такого элемента. Некоторые пленочные
сочленения допускают значительные относитель-
ные движения, они не способны к круговым дви-
жениям или способны только в пределах неболь-
ших углов и, как правило, могут воспринимать
лишь небольшие нагрузки. Часто их называют так-
же „шарнирными сочленениями” (Scharnierge-
lenke).
Стопор обратного хода (Rticklaufsperre)
Механический -* останов, препятствующий от-
носительному движению ведомой детали только в
одном направлении (в одну сторону) (-* направля-
ющая).
Структура (Struktur Organisation) (1.5 [11])
Множество (-*) отношений, связывающих друг с
другом элементы некоторой -* системы, и всех изо-
морфных им совокупностей отношений.
Структура геометрическая (Geometrische Struktur)
Представление механических устройств с по-
мощью * геометрических структурных элементов
и их соединений посредством * пар элементов или
"* пар рабочих поверхностей.
Структура конструктивная (монтажная) (Baustruk-
tur)
"* Структура, образующаяся при соединении -♦
деталей в -* узлы и (или) в -* изделие в целом. Для
механических конструкций конструктивная струк-
тура, как правило, сильно отличается от — функ-
циональной структуры. Конструктивная и функ-
циональная структуры совпадают или очень похо-
жи только тогда, когда все — функциональные
элементы как целостные единицы реализованы в
виде -♦ конструктивных элементов. К таким эле-
ментам относятся механические конструкции
типа шарикоподшипников и электротехнические
(электронные) типа транзисторов, резисторов, кон-
денсаторов и т. п.
Структура функциональная (Funktionsstruktur)
Различного рода соединение — функциональ-
ных элементов для выполнения -* частной или -
общей функции. Для механических конструкций
функциональная и -* конструктивная (монтажная)
структура, как правило, сильно различны. (В про-
тивоположность сказанному эти -♦ структуры ока-
зываются близки при использовании -* метода аг-
регатирования.)
Структура функциональная информационная
(Funktionsstruktur fiir Nachricht)
- * Функциональная структура, выполняющая
различные действия с сообщениями и составлен-
ная из таких только -* абстрактных функций,
которые относятся к -* абстрактной величине -* со-
общения. Из них же строится — логическая функ-
циональная структура.
Структура функциональная векторная (Vektorielle
Funktionsstruktur)
- *• Функциональная структура, -*• функциональ-
ные элементы которой являются -* векторными
функциями. Она обычно разрабатывается на осно-
ве — абстрактной или -* специальной функцио-
нальной структуры. Соединенные в „сеть” блоки
этой структуры описывают -* частную или -* общую
функцию будущего -* изделия, а также отражают
его топологию. По своим свойствам она похожа на
электрическую — сеть.
Структура функциональная геометрическая
(Geometrische Funktionsstruktur)
- * Функциональная структура, -* функциональ-
ными элементами которой являются структурно-
функциональные элементы (СФЭ). Она может раз-
рабатываться, исходя из “* векторной или же
* абстрактной функциональной структуры. Геомет-
рическая функциональная структура описывает,
после * объединения вещественной связью со-
ответствующих рабочих объемов и -* соединения
соприкасающихся -* рабочих поверхностей, изде-
лие в форме схемы - -* структурно-функционально-
го узла. Внешние -* функциональные величины,
действующие, например, на присоединительных
рабочих поверхностях, сохраняются, - другие же
при этом действуют как внутренние; они учитыва-
ются при определении размеров, но на схеме не
изображаются. Геометрическая функциональная
структура служит для одновременной разработки
функциональной и ”* конструктивной структуры
и тем самым наводит мосты через -* плоскость пе-
рехода между соответствующими фазами конст-
руирования.
Структура функциональная логическая (Logische
Funktionsstruktur)
- * Функциональная структура, получающаяся
соединением конечного числа логических эле-
ментов и, в определенных случаях, * элементов
задержки. Она является логической сетью, состоя-
щей из цифровых элементарных конечных авто-
матов.
Структура функциональная специальная (Spezielle
F unktionsstr uktur)
- * Функциональная структура, элементами ко-
торой являются -* специальные функции. Она мо-
жет разрабатываться, исходя из абстрактной
функциональной структуры или -* абстрактной ди-
7.4. Определения основных понятий
389
аграммы потоков и может применяться для всех
физических систем (механических, термических и
т. п.), для которых определены * интенсивностные
и * количественные величины.
Структура функциональная физическая (Physika-
lische Funktionsstruktur)
-* Функциональная структура, в которой^ вводом
и выводом * функциональных элементов являют-
ся физические величины, например “* интенсив-
ностные и •* количественные величины физиче-
ских систем. Одним из примеров служит * специ-
альная функциональная структура. „Физическая
функциональная структура” - также название
одного из “* этапов конструирования в “* функцио-
нальной фазе.
Структурно-функциональных элементов (СФЭ) со-
единение (Verbinden von Strukturfunktions-Elemen-
ten)
Соединение двух структурно-функциональ-
ных элементов путем “* компоновки, * объедине-
ния по рабочим поверхностям или в рабочих объ-
емах. Возникающий при этом рабочий объем ока-
зывается объединением рабочих объемов исход-
ных элементов (см. также “* функциональная ин-
теграция). Соединение предполагает состояние
равновесия и одинаковые скорости в месте соеди-
нения.
Схема линейно-структурная (Linienstrukturbild)
Схема технического устройства, в которой вхо-
дящие в него детали изображаются следующим об-
разом: объемные тела - линиями, а важнейшие
функциональные поверхности - их линиями се-
чения (следовыми линиями). Примерами линейно-
структурных схем являются "* цепи звеньев по
Грюблеру и структурно-функциональные узлы.
Схема (соединений) (Schaltung)(1.5 [11])
Любое соединение “* схемных элементов.
Схемный (релейный) элемент (Schaltelement)
(1.5 [И])
-♦ Активный элемент некоторой системы, кото-
рый высвобождает, запирает или изменяет поток
воздействий (или информации) в этой системе.
Тела качения (Walzkorper)
Промежуточные тела, находящиеся между взаим-
но подвижными беговыми дорожками в -* подшипни-
ках (и других опорах) качения. Тела качения
должны обладать поворотной симметрией (быть
телами вращения), по крайней мере, для одной
оси и выполнять функцию силовой опоры, в кото-
рой движение качения преобладает, а движение
скольжения пренебрежимо мало.
Теория конструирования (Konstruktionslehre)
Теория (раздел науки) о “* методическом кон-
струировании, проводимом на основе организо-
ванных в систему источников информации и вспо-
могательных средств.
Технико-экономическая оценка (Technisch-wirt-
schaftliches Bewerten)
Способ поиска у изделия слабых мест (в техни-
ческом и экономическом отношении) на возможно
более ранней стадии конструирования, например,
в начале “* предметной фазы. Оценка считается
удовлетворительной и свидетельствует о высоких
качествах изделия, если полученные оценки (от О
до 4) максимально высоки; о сбалансированности
качеств изделия, если показатели технической и
экономической ценности максимально близки; и,
наконец, о совершенстве изделия, если имеет ме-
сто и то и другое; (см. также 2.3 [64])
Требование граничное нецелевое (Grenzforderung,
ungezielte)
Нецелевое граничное требование (Г) и нецеле-
вое "* диапазонное требование (Д) относятся к
"* жестким требованиям. Нецелевое граничное
требование представляет собой “* требование, ко-
торое считается невыполненным только тогда,
когда произошел переход за границы, установлен-
ные в "* положении-требовании. Насколько близко
или далеко от этой границы мы находимся при вы-
полненном требовании, не играет никакой роли.
Переход же за эту границу сразу влечет за собой от-
брасывание рассматриваемого варианта конструк-
ции. В граничном требовании присутствует или
только верхняя, или только нижняя граница, в
диапазонном - как верхняя, так и нижняя гра-
ницы.
Требование граничное целевое (Grenzforderung,
gezielte) -* Требование с верхней границей, * Тре-
бование с нижней границей
Требование диапазонное нецелевое (Bereichsfor-
derung, ungezielte)
"* Жесткое требование к * изделию, которое
выполнено только тогда, когда указанные в
положении-требовании характеристики изделия
лежат в заданной области (диапазоне) (см. также
-* требования граничные).
Требование диапазонное целевое (Bereichsforde-
rung, gezielte)
* Целевое требование к -> изделию, которое
выполнено оптимально тогда, когда указанные в
положении-требовании характеристики изделия
лежат в заданном диапазоне, как можно ближе к
целевой точке.
Требование жесткое (Ж) (Festforderung F)
“* Требование к изделию и рассматриваемым
конструктивным вариантам, которое всегда долж-
но выполняться в точности. Невыполнение жест-
кого требования влечет за собой отбрасывание рас-
сматриваемого варианта. Жесткие требования
можно подразделить на "* точечные, -* граничные
и "* диапазонные требования, - ср. "* целевые тре-
бования (см. кат. 4.1.1).
Требование необязательное (пожелание, П)
(Wunschforderung, W)
“* Требование, которое в каких-то случаях мо-
жет не выполняться или выполняться только час-
тично. Если оно, тем не менее, выполнено, то это
повышает ценность “* конструкции, соответствен-
но "* изделия. Все типы требований могут быть вы-
ражены в форме необязательных требований (см.
кат. 4.1.1)
Требование с верхней границей (Hochstforderung)
* Целевое требование с верхней границей це-
лей, причем или эта верхняя граничная цель, или
нижележащая точечная цель, или даже неограни-
390
7. Обзор и определения основных понятий
ченная минимальная цель считается оптималь-
ным выполнением требования. (См. также "* тре-
бование с нижней границей.)
Требование с нижней границей (Mindestforderung)
Целевое требование с нижней границей целей,
причем или эта нижняя граничная цель, или
вышележащая точечная цель, или даже неогра-
ниченная максимальная цель считается опти-
мальным выполнением требования (см. также
требование с верхней границей).
Требование точечное (Т) (Punktforderung, Р)
• * Жесткое требование к изделию, которое
выполнено только тогда, когда определенное в
нем точечное значение выдерживается изделием.
Требование целевое (Ц) (Zielforderung, allgemein Z)
Переменное "♦ требование, оптимальное вы-
полнение которого в представлении с помощью
числовой прямой выражается или ограниченной
областью с предпочтительной границей, или пред-
почтительной целевой конечной точкой при нали-
чии или отсутствии границ (или ограниченной об-
ласти), или, наконец, определенной тенденцией
(целевая точка в бесконечности). Чем лучше вы-
полнено целевое требование, тем более удачным
считается вариант конструкции (см. кат. 4.1.1).
Требование целевое без границ (Zielforderung, nicht
begrenzt)
* Целевое требование, в представлении кото-
рого с помощью числовой прямой отсутствуют гра-
ницы или ограниченные области (диапазоны).
Требований список (Anforderungsliste)
Собрание всех -* требований к изделию (нося-
щих или не носящих целевого характера), а также
всех пожеланий в отношении свойств изделия.
Список требований пополняется в течение процес-
са конструирования. Содержащиеся в нем •* целе-
вые и * необязательные требования служат одно-
временно критериями при оптимизации и выборе
наилучшего варианта.
Требования (Anforderungen)
Требования к изделию содержат описания тре-
буемых свойств изделия, дополнительных и гра-
ничных условий и, в отличие от функционально-
го положения, могут выражать их в количествен-
ном виде. Если некоторая возможность варьирова-
ния параметров допустима или даже необходима,
то в требованиях указывается направление и целе-
вая точка оптимизации. Можно выделить * тре-
бования жесткие, •* требования целевые и * тре-
бования необязательные (или требования-пожела-
ния). В то время как жесткие требования всегда
должны выполняться в точности, целевые требова-
ния (в определенных границах) могут выполнять-
ся более или менее полно, а необязательными тре-
бованиями можно в каких-то случаях и пренебре-
гать. Оценка, в частности при сравнении вариан-
тов конструкции, производится по степени выпол-
нения целевых и необязательных требований (см.
также кат. 4.1.1).
Триггер (Trigger) (1.5 [11])
- * Схемный элемент, создающий импульсы
(триггерные импульсы), управляющие некоторым
процессом переключения (коммутации).
Узел (Teileverband)
Единая совокупность -* деталей, удержива-
емых вместе -* соединениями.
Узел структурно-функциональный (Strukturfunkti-
ons-Verband)
- * Соединение нескольких -♦ структурно-функ-
циональных элементов, которое при дальнейших
операциях может рассматриваться как единое це-
лое. Соединение производится посредством
-*• компоновки объединения по-* рабочим поверх-
ностям или в -* рабочих объемах. Структурно-функ-
циональный узел всегда находится в равнове-
сии.
Умножитель (мультипликатор) силы (механиче-
ский) (Kraftmultiplikator, mechanischer)
Механическое устройство, осуществляющее из-
менение, большей частью увеличение (умноже-
ние) силы от его входа к выходу. Для умножения
силы не требуется никакой дополнительный ис-
точник энергии (вспомогательная энергия) в про-
тивоположность усилителям силы или * усили-
телям мощности. Умножение силы в системах пе-
редачи энергии сопряжено с уменьшением скоро-
сти, и наоборот: типичный пример - рычаг (см. так-
же * умножитель скорости).
Умножитель силы (мультипликатор) с собачкой
(Klinkermultiplikator)
- * Умножитель силы, в котором входной силой
является сила трения FT (до тех пор, пока она по
модулю меньше нормальной силы: |FT|<|FH|, а вы-
ходной - сила, действие которой направлено про-
тив нормальной силы FH. Достоинством этого типа
мультипликаторов является постоянство величи-
ны выходной силы, которая не зависит от входной
силы и от коэффициента трения. К недостаткам
можно отнести то, что после каждого воздействия
на мультипликатор необходимо заново заряжать
накопитель энергии, создающий нормальную силу.
Подобные устройства можно использовать для
передачи ограниченной мощности (рис. 4.29, б).
Умножитель (мультипликатор) силы фрикцион-
ный (Reibmultiplikator)
* Умножитель силы, реализованный с по-
мощью фрикционных систем, подобный -» умно-
жителю силы с собачкой. Если -♦ сила трения
F? меньше, чем сила, порождающая трение (F), то
последняя становится выходом мультипликатора,
а коэффициент умножения х - обратно пропор-
циональным -* передаточному коэффициенту
X: и = i/Х, Если сила трения больше силы, порож-
дающей трение, то на выходе сила трения и коэф-
фициент умножения равен передаточному: х = X
(см. рис. 4.42).
Умножитель (мультипликатор) скорости (механи-
ческий) (Geschwindigkeitsmultiplikator, mechani-
scher)
Механическое устройство, в котором происхо-
дит увеличение или уменьшение скорости на его
выходе по сравнению со входом. Для умножителей
скорости не требуется подвода дополнительной
(вспомогательной) энергии. Для систем передачи
энергии при уменьшении скорости, как правило,
происходит увеличение силы (“* умножитель си-
лы), и наоборот: примером служит рычаг.
7.4. Определения основных понятий
391
Упор (Anschlag)
Одностороннее ограничение движения твердым
телом, которое прекращает движение другого
твердого тела в одном направлении благодаря од-
носторонне действующей связи в определенном ме-
сте. Высвобождающаяся при торможении второго
тела энергия “* преобразуется в другие виды (на-
пример, за счет трения). Если тело, служащее упо-
ром, само не совершает заметных перемещений, то
речь идет об упоре „в узком смысле слова”. Если
такие перемещения упора происходят или если пе-
ремещения точки соприкосновения сравнимы с
размерами тел, - то речь идет об упоре „в широком
смысле”.
Если ограничение движения происходит толь-
ко в одном направлении, то можно говорить об од-
нонаправленном, или одностороннем упоре, если
оно происходит в двух противоположных направ-
лениях, - о двунаправленном, или двустороннем
упоре (кат. 4.2.2; 4.2.3).
Усилитель (механический) (Verstarker, mechanisch)
Механический усилитель (мощности) представ-
ляет собой механическую конструкцию, обладаю-
щую двумя входами и одним выходом для мощно-
сти в форме кинетической энергии. Один из вхо-
дов является управляющим (информационным),
он задает изменения выходной мощности в соот-
ветствии со значениями своих “* интенсивностных
величин, определенным образом изменяя выход-
ные интенсивностные величины. В зависимости от
того, основан усилитель мощности на умножении
силы или скорости, его можно использовать также
в качестве умножителя силы или -*• умножителя
скорости усилитель силы).
(Замечание. Как и в электротехнике, здесь
также об „усилителе” говорится только тогда,
когда речь идет об увеличении мощности, а не об
умножении (увеличении) только скорости или
только силы, т. е. интенсивностных величин, - без
одновременного увеличения мощности.)
Усилитель силы (Kraftversthrker)
Механическое, возможно - электромеханиче-
ское, устройство, осуществляющее увеличение
(умножение) силы от входа усилителя к его вы-
ходу. Для умножения силы в данном случае тре-
буется дополнительный источник энергии (вспо-
могательная энергия).
Условное обозначение, символ (Symbol) (6.7 [10])
"* Знак или ** слово, которому придается опре-
деленное значение.
Утилизация (RUckgewinnung) •* Рециклинг.
Фаза конструирования (Konstruktionsphase)
Фаза в "* рабочем плане, соответствующая од-
ной из принципиально различных категорий “*
конструирования, занимающих свое место в про-
цессе конструирования. Переход от одной фазы
конструирования к другой, как правило, не может
быть осуществлен по какому-либо “* алгоритму.
Этот переход, обозначаемый как "* плоскость пе-
рехода, преодолевается с помощью более или ме-
нее произвольных операций. Рабочий план “* ал-
горитмического метода выбора при конструирова-
нии с каталогами (АМВК), положенный в основу
данной книги, предусматривает следующие фазы
конструирования: * фазу формулировки задачи,
“* функциональную и “* предметную фазы.
Фаза предметная (предметной реализации) (Gesch-
taltende Phase)
Третья "* фаза конструирования в рабочем
плане. В этой фазе принимаются все решения,
определяющие конечный образ будущего изде-
лия - материального предмета, и способ его изго-
товления - технологию. “* Список требований в
последний раз пополняется и приобретает закон-
ченность. Предметная фаза, хотя и не столь опре-
деляющая, как первая, и не столь решающая, как
вторая, но она все же очень важна для качества
будущего изделия. Деятельность конструктора в
этой фазе можно назвать -*• предметной реализа-
цией, или конструированием.
Фаза формулировки задачи (Aufgabenformulierungs-
Phase)
Первая * фаза конструирования в •* рабочем
плане. В этой фазе определяется -* постановка за-
дачи, а из нее выводится начало -*• списка требова-
ний и -*• инструктивное положение. Фаза формули-
ровки задачи имеет определяющее значение для
качества будущего изделия. Деятельность конст-
руктора в этой фазе можно назвать -*• формулиро-
ванием.
Фаза функциональная (фаза функциональной реа-
лизации) (Funktionelle Phase)
Вторая -*• фаза конструирования в -*• рабочем
плане. В этой фазе определяются -* главная и -*• до-
полнительные функции изделия, представляются
в форме -* идеальных функций для материально-
го, энергетического и информационного процессов
и соединяются в -*• функциональную структуру. По-
полняется список требований. Эта фаза хотя и ме-
нее важна для качества будущего изделия, чем
-* фаза формулировки задачи, но остается все же
решающей. -* Функциональная структура может
быть разработана в форме -*• абстрактной диаграм-
мы потоков, -* абстрактной, специальной или -* ло-
гической функциональной структуры. Отдельным
* функциональным элементам сопоставляются
подходящие эффекты. Деятельность конструктора
в этой фазе можно назвать -* функциональной реа-
лизацией, или проектированием.
Формулирование (Formulieren)
Создание точного словесного выражения
* постановки задачи, -* функционального, -* инст-
руктивного положения и -* положений-требова-
ний, то есть деятельность конструктора в -* фазе
формулировки задачи.
Фрикционная система (Reibsystem)
Конструкция из механических твердых дета-
лей, по крайней мере, с одной * фрикционной па-
рой, в которой тангенциальное относительное пе-
ремещение поверхностей вызывает противодейст-
вующую силу трения. Различают простые и -* со-
ставные, а также -* линейные и -* нелинейные
фрикционные системы.
Фрикционная система дегрессивная (Degressives
Reibsystem)
Нелинейная -* фрикционная система, X - Ц -ха-
рактеристики которой с ростом коэффициента тре-
ния становится все более плоской:
392
7. Обзор и определения основных понятий
d2X
dp2
Изменения -> коэффициента трения по мере его
увеличения вызывают все меньшие изменения
силы трения. (См. также -> прогрессивная фрикци-
онная система.)
Фрикционная система линейная (Lineares Reibsys-
tem)
- > Фрикционная система, в которой * переда-
точный коэффициент является линейной функ-
цией -> коэффициента трения. В линейных фрик-
ционных системах сила трения пропорциональна
силе, приводящей к возникновению трения в пред-
положении, что коэффициент трения ц не меняет-
ся с изменением сил.
Фрикционная система нелинейная (Nichtlineares
Reibsystem)
* Фрикционная система, в которой переда-
точный коэффициент X является нелинейной
функцией * коэффициента трения. Вследствие
этого в нелинейных фрикционных системах * сила
трения при постоянной * силе, приводящей к воз-
никновению трения, возрастает с ростом коэффи-
циента трения в меньшей степени, чем пропорци-
онально (дегрессивная система) или в большей
степени (прогрессивная .система). При этом только
„прогрессивные” фрикционные системы - и то не
все - могут стать •* заклинивающими системами.
(См. также * прогрессивная, * дегрессивная фрик-
ционная система.)
Фрикционная система прогрессивная (Progressives
Reibsystem)
* Нелинейная фрикционная система, X - Ц-ха-
рактеристика которой (в ее части, находящейся
над абсциссой) с ростом коэффициента трения ста-
новится все более крутой:
dp2
Если при конечном коэффициенте трения
ц передаточный коэффициент X стремится к беско-
нечности, то возникает * заклинивающая связь.
Такое может произойти только в прогрессивных
фрикционных системах с возможностью заклини-
вания.
Изменения * коэффициента трения в прогрес-
сивной системе по мере его увеличения вызывают
все большие изменения * силы трения. (См. так-
же * дегрессивная фрикционная система.)
Фрикционная система простая (Einfaches Reibsys-
tem) (4.13 [59])
* Фрикционная система, в которой силы трения
присутствуют только в одной * паре рабочих по-
верхностей, то есть в которой * передаточный ко-
эффициент зависит только от одного * коэффици-
ента трения (см. также фрикционная система со-
ставная).
Фрикционная система составная (Zusammenge-
setztes Reibsystem) (4.13 [59])
* Фрикционная система, в которой силы тре-
ния присутствуют более чем в одной * паре рабо-
чих поверхностей. Пары рабочих поверхностей па-
раллельно, последовательно или иным образом
соединены между собой через рабочие объемы,
так что общую силу трения можно определить,
зная отдельные силы трения в парах. Результиру-
ющий * передаточный коэффициент X зависит
тогда от некоторого числа независимых •* коэффи-
циентов трения. В специальных случаях можно
даже получить горизонтальную характеристику
(т. е. силу трения, не зависящую от коэффициента
трения) или убывающую характеристику (сила тре-
ния убывает). В простых случаях (многодисковые
тормоза) составную систему можно свести к * про-
стой фрикционной системе.
Функции информационные (Nachrichtenfunktionen)
Здесь - * функции, производные от * абстракт-
ных функций для * абстрактной величины * „со-
общение^. Они принципиально отличаются от * ве-
щественных и •* энергетических функций. Все
функции, которые * кодируются с целью * накоп-
ления, * передачи, преобразования вида и-* ком-
бинирования сообщений, по этому определе-
нию относятся к информационным функциям.
Функциональная структура Структура функцио-
нальная.
Функция логическая (Logische Funktion)
-* Функция, определяющая в зависимости от
значений одной или двух независимых перемен-
ных значения зависимой переменной, причем до-
пустимыми являются только два значения, напри-
мер 0 и 1.
Логическая функция описывает * функцию
логического элемента, которая заключается в
сопоставлении по определенным правилам с каж-
дым набором из нулей и единиц, общим числом п
знаков на входе - одного из значений 0 или 1 на
выходе.
Функции носитель (Funktionstrager)'
По Палю и Байтцу (1.5 [20]) - -*• детали, а также
их -* рабочие поверхности или же -* узлы, в кото-
рых реализуется физическое событие и которые
уже содержат необходимые для этого конструктив-
ные признаки. При этом происходит перескакива-
ние через определение * эффекта или -» носителя
эффекта, в котором во многих случаях нет безус-
ловной необходимости.
Функции энергетические (Energiefunktionen)
Здесь - * функции, производные от •* абстракт-
ных функций для- -* абстрактной величины
-* „энергия”. Они принципиально отличаются от
вещественных и -* информационных функций. Все
функции, главной целью которых является изме-
нение состояния абстрактной величины „энергия”
или описывающих ее величин (например, -* интен-
сивностных и -* количественных величин), по это-
му определению относятся к энергетическим
функциям.
Функциональная единица (Funktionseinheit)
Механический, механико-электрический, элек-
тронный, оптический и т. д. * узел, отделимый
от системы более высокого уровня иерархии и
выполняющий * частную или -* общую функцию.
К функциональным единицам относятся, напри-
мер, •* конструктивные (монтажные) элементы, но
также и •* подшипники качения или * сцепные
муфты. Используемая в качестве единицы, из ко-
7.4. Определения основных понятий
393
торых в процессе сборки строится система, она мо-
жет быть также названа сборочной единицей.
Функциональная интеграция (Funktionsintegration)
Объединение различных "* носителей функ-
ций в одном * рабочем объеме с целью удешевле-
ния производства, так что исходные их “* функции
сохраняются, а возможно появляющиеся при этом
вредные функции остаются в приемлемых грани-
цах. Носители функций могут быть как рабочи-
ми объемами, так и “* рабочими поверхностями.
Можно указать семь видов функциональной инте-
грации. Наибольшая функциональная интеграция
производится главным образом для небольших
деталей (см. также "* функциональное разделе-
ние).
Функциональная связь (соединение) (Kopplung)
(1.5 [П])
Мы имеем связь между элементами (или сис-
темами), если определенные * выводы одного эле-
мента (системы) являются одновременно ввода-
ми другого элемента (системы)....
Функциональное разделение (Funktionstrennung)
Дополнительное разделение ** рабочего объ-
ема, “* рабочей поверхности или нескольких "* пар
рабочих поверхностей, производимое с целью избе-
жать взаимного влияния носителей функций
из-за вредных функций. Наибольшее функцио-
нальное разделение производится главным обра-
зом для больших деталей (см. также -* функцио-
нальная интеграция).
Функциональное условное обозначение (функцио-
нальный символ) (Funktionssymbol)
* Условное обозначение, служащее, например,
для изображения функционального элемента на
схемах.
Функциональные элементы энергетические (Ener-
gie - Funktionselemente)
-* Функциональные элементы, описывающие *
накопление, “> проведение, преобразование фор-
мы (также передачу), преобразование вида и
комбинирование энергии подобно абстрактным
функциям. (См. также вещественные и "♦ инфор-
мационные функциональные элементы.)
Функция (Funktion)
Однозначное сопоставление с элементами
множества А (например, с величинами на входе
-* функционального условного обозначения) элемен-
тов множества В (например, величины на выходе
функционального обозначения). Элементы перво-
го множества (например, входные величины) мож-
но рассматривать как независимые, а второго
(например, выходные величины) - как зависимые
•переменные. В теории конструирования всегда
необходимо четко различать "* идеальные и “*
реальные функции.
Функция векторная (Vektorielle Funktion)
Определенная для механической системы твер-
дыми телами -* функция между -* интенсивност-
ными или (и) -* количественными величинами, от-
ражающая не только их величину, но также и точ-
ки приложения к пространственно-протяженному
„черному ящику”. Векторная функция служит для
составления -*• векторной функциональной струк-
туры и во многом аналогична.представлению изде-
лия в виде -* четырех- и многополюсников.
Функции вещественные (Stoffunktionen)
Здесь - -* функции, производные от -* абстракт-
ных функций для -* абстрактной величины ->
„вещество”. Они принципиально отличаются от
-* энергетических и -> информационных функций.
Так, например, химические формулы описывают
определенные вещественные функции.
Функция главная (Hauptfunktion)
-♦ Функция, описывающая как раз ту цель, ра-
ди достижения которой проводилось конструиро-
вание технического устройства. Она может быть
вещественной природы (для -* аппаратов), энерге-
тической (для -* машин) и информационной (для
-► приборов). Как правило, у технического устрой-
ства только одна главная функция.
Функция (в кибернетике) (Funktion, kybernetisch)
(1-5 [И])
Функция динамической, в частности киберне-
тической системы, - это абстрактный класс воз-
можных способов поведения этой системы ... . Из
знания функции •* элементов системы и природы
-* функциональных связей элементов, зафиксиро-
ванных в матрице структуры системы (или, напри-
мер, в -* функциональной структуре), можно прий-
ти к знанию (или способу) сконструировать функ-
цию системы. Взаимоотношения между функцией
элементов, связями элементов и функцией систе-
мы можно наглядно представить с помощью
-* блок-схемы.
В случае динамической, в частности киберне-
тической, системы функция элемента системы
состоит в преобразовании определенного -* ввода в
определенный -* вывод....
Функция дополнительная (побочная) (Nebenfunkti-
оп)
Все функции, не являющиеся * главными
функциями, являются дополнительными. Допол-
нительная функция для -* общей функции при ее
разложении на -» частные функции может стать
там главной. (Пример: „автомобиль”. Главная
функция: транспортировать людей и грузы. До-
полнительная функция: превращать химическую
или электрическую энергию в кинетическую. Но
эта дополнительная функция для „водителя” ста-
новится главной). -
Функция идеальная (заданная) (Soil-Funk tion)
Идеальная функция описывает желаемую
-* функцию изделия,, какой она должна быть в идеа-
ле (физическую, химическую и т. п.), в то время
как реальная функция описывает фактически реа-
лизуемую изделием функцию. •* Постановка зада-
чи для идеальной функции формулируется в -* функ-
циональном положении. Функции -♦ рабочего пла-
на являются идеальными функциями, а соот-
ветствующие функции изделия, напротив, являют-
ся реальными функциями.
Функция общая (Gesamtfunktion)
Совокупность всех -*• функций, которые реали-
зуют или должны реализовывать достаточно
-* комплексное, часто также достаточно * сложное,
26 — 2317
394 7- Обзор и определения основных понятий
техническое устройство. Общая функция выпол-
няет •* общую задачу (соответственно •* постанов-
ку общей задачи) и может подразделяться на -♦
частные функции. И общая, и частные функции
всегда понимаются в смысле -♦ идеальных функ-
ций, если только иное прямо не оговорено.
Функция объемная (рабочего объема) (Wirkraum-
Funktion) 1
- * Функция, являющаяся следствием отноше-
ний между двумя -♦ рабочими поверхностями од-
ного -* рабочего объема.
Функция поверхностная (пары рабочих поверхно-
стей) (Wirkflachenpaar-Funktion)
- ♦ Функция, возникающая в -* паре рабочих по-
верхностей.
Функция реальная (фактическая) (Ist-Funktion)
-* Функция идеальная (заданная).
Функция специальная (Spezielle Funktion)
Определенная для различных физических сис-
тем (механических, электрических и т. п.) функ-
ция между -♦ интенсивностными или (и) количест-
венными величинами этих систем. Соотношение
реализуется через одну или несколько -♦ конструк-
тивных величин. Специальные функции символи-
чески изображаются блоками, соединяемыми в
-* блок-схемы.
Функция частная (Teilfunktion)
Функция, которая должна выполнять или вы-
полняет часть задач технического изделия. -♦ Об-
щая функция и частная функция, если не сде-
лано специальной оговорки, понимаются как
-* идеальные функции. Совокупность частных функ-
ций, соединенных в •* функциональную структуру,
образует общую функцию.
Цепь звеньев (Gliederkette)
Выполненное посредством -* пар элементов
-* соединение твердых тел (в предельном случае -
частей одного тела), которые этим соединением
ограничиваются в своей подвижности. Тела при
этом называются звеньями. Понятие цепи звеньев
служит в этой связи объединяющим понятием для
-* кинематической цепи, статической цепи, пар
элементов вместе с их звеньями и -♦ одноэлемент-
ных пар вместе с их звеном.
Цепь кинематическая (Kinematische Kette)(6.7 [11])
Образованное посредством -* пар элементов
-* подвижное соединение устойчивых прочных тел,
взаимная подвижность которых ограничивается
этим соединением. Подвижно соединенные тела
называются также „звеньями цепи”. Число степе-
ней свободы цепи/> 1 (см. также -* статическая
цепь, -»• цепь звеньев).
Цепь переопределенная (Uberbestimmte Kette)
- ♦ Цепь звеньев, -* число степеней свободы ко-
торой/ < - 1. Она однократно переопределена и со-
держит один напряженный цикл, если/ = -1, дву-
кратно переопределена с двумя независимыми на-
пряженными циклами, если/= -2 и т. д.
Цепь сверхзамкнутая (Ubergeschlossene Kette)
(6.7 [11])
Цепь звеньев, содержащая больше звеньев,
чем нужно для достижения •* принудительного
движения (или другого заданного -* числа степе-
ней свободы). В большинстве случаев такие цепи
получаются при особом соотношении размеров
звеньев. Эти звенья образуют пассивные связи и в
уравнениях обозначаются буквой s (см. рис. 6.13 и
6.14).
Цепь статическая (Statische Kette)
- * Цепь звеньев, в которой в результате образо-
вания -* пар возникают неподвижные соединения
твердых тел. Тела, соединенные друг с другом па-
рами, называются „звеньями цепи”. -* Число
степеней свободы цепи / < 0 (см. также -* цепь ки-
нематическая).
Цифра (Ziffer, digit) (6.7 [10])
- * Знак, принадлежащий -* набору знаков из N
знаков, для которых определено их числовое зна-
чение - задано взаимнооднозначное соответствие
с целыми числами 0,1,2,..., N - 1.
В зависимости от числа цифры, лежащие в ос-
нове системы счисления, называют двоичными (bi-
nary digits, N = 2), восьмеричными (N = 8), десятич-
ными/decimal digits, N= 10) и т. д.
(Замечание: „двоичный” неравнозначно с
-♦ бинарный.)
Цифровой (Numerisch, numeric) (6.7 [10])
Связанный с некоторым -♦ набором знаков, ко-
торый состоит из -* цифр или из цифр и особых зна-
ков для представления чисел.
Черный ящик (Schwarzer Kasten, black-box) (1.5 [11])
Система, структура которой или (по крайней
мере, отчасти) неизвестна, или от структуры кото-
рой абстрагируются по той причине, что в данном
исследовании определенные взаимосвязи несу-
щественны. При этом известным или доступным
для определения считается поведение этой сис-
темы, то есть -♦ вводы (входы) и -* выводы (выхо-
ды) системы и -* отношения между ними.
Четырехполюсник (Vierpol) (6.7 [8.1])
Абстрактный способ изображения электриче-
ской схемы, служащей для передачи переменных
напряжений или токов с одним входом и одним
выходом, каждый из которых состоит из двух кон-
тактов (или полюсов) - так что всего получается
четыре полюса. Четырехполюсником является
трансформатор и передатчик, им может быть сис-
тема проводников и -*“сеть; таким же образом мо-
гут быть представлены схемы из радиоламп, тран-
зисторов и других элементов....
Шаг конструирования (Konstruktionsschritt)
Процесс перехода от одного -♦ этапа конструи-
рования к следующему или от одной •* фазы кон-
струирования к другой. В любом случае при
этом пересекается (перешагивается) -► плоскость
перехода.
Шифратор (кодер) (Codierer, coder) (6.7 [10])
Преобразователь кода с несколькими входами
и выходами, в котором сигнал всегда поступает
только на один из входов, и каждому такому вход-
ному сигналу соответствует своя особая комбина-
ция выходных сигналов.
ЧА. Определения основных понятий
395
Эвристика (Heuristik) (1.5 [11])
Наука о методах и правилах открытий и изо-
бретений. Эвристические методы представляют
собой частный случай •* метода проб и ошибок.
Одно из отличий эвристики от дедуктивных мето-
дов (•* дедукция) заключается в том, что она рабо-
тает с предположениями, аналогиями, рабочими
гипотезами, временными -* моделями и т. д. Эври-
стические методы не являются строгими метода-
ми доказательства, а лишь оказывают помощь в
поиске доказательств... . Эвристические методы
можно моделировать на вычислительных маши-
нах, например используя набор универсальных
стратегических принципов... . Если с помощью эв-
ристических методов найдено доказательство,
решена задача, то, вообще говоря, доказательство
можно представить в строго логическом виде, и
тогда первоначальные эвристические соображе-
ния становятся излишними.
Элемент (Element)
Составная часть некоторой совокупности (сис-
темы) объектов, которую в рамках данной совокуп-
ности нельзя разложить далее на части (1.5 [11]).
Сказанное означает, что в элементе не могут со-
держаться другие элементы. Элементы независи-
мы друг от друга.
Элемент задержки (Verzogerungselement) (1.5 [11])
Цифровым образом действующий автомат с од-
ним -* вводом, состоящим ровно из одного входа и
обладающий ровно двумя состояниями. Его "*
выводом в такте t + 1 является значение сигнала,
бывшее на входе элемента в такте t.... Тем самым
элемент задержки не производит переработки сиг-
налов, а служит элементом памяти (-* накопи-
телем).
Элемент конструктивный (монтажный) (Bauteil,
Bauelement)
* Схемный элемент технической системы,
строящийся, как правило, из базовых унифициро-
ванных элементов (например, из пневмо- или
электронных логических унифицированных эле-
ментов). Он представляет собой -* функциональ-
ную единицу, которая одновременно является
замкнутым в себе, компактным, пригодным для
конструирования по методу -* агрегатирования
элементом (примеры: резистор, транзистор, мик-
росхема и т. д.). Его соединение с другими элемен-
тами и подключение к ним производится через
специальные соединительные элементы или
вводы.
Элемент логический (Logisches Element)
Цифровой автомат, обладающий единствен-
ным состоянием. В результате значение сигнала
на выходе для произвольного такта t зависит толь-
ко от значения сигнала на входе в том же такте t.
Элемент предметный (Gestaltelement)
Элемент -* линейной структуры или -> контур-
ного представления (чертежа). Предметными эле-
ментами являются -* звенья и * пары элементов, а
также •* рабочие объемы и -* рабочие поверхности,
применяемые в структурном или контурном пред-
ставлении.
Элемент структурно-функциональный (СФЭ)
(Strukturfunktions-Element, SFE)
* Элемент для изображения твердых тел. Он
представляет собой объединение * геометриче-
ского структурного элемента и * векторного функ-
ционального элемента. Соответствующий геомет-
рический структурный элемент состоит из -* рабо-
чего объема и, по меньшей мере, двух -* рабочих
поверхностей (без опорных элементов). К рабочим
поверхностям приложены * функциональные ве-
личины (-* интенсивностные и (или) * количест-
венные величины), изображенные векторами, точ-
ки приложения и направления действия которых
приблизительно совпадают с истинными. Направ-
ление векторов постоянно по отношению к рабо-
чим поверхностям или рабочему объему. Все эле-
менты находятся в равновесии. Идеальные свойст-
ва рабочего объема задаются обозначениями с (ко-
эффициент жесткости), m (масса), d (коэффициент
поглощения), а качественное представление ли-
нейных размеров - условным изображением. Эле-
мент служит для составления -* геометрической
функциональной структуры. При соединении
структурно-функциональных элементов (СФЭ)
должны выполняться определенные условия, на-
пример сохранение равновесия, одинаковость ско-
ростей и т. д. Каждый СФЭ является одновремен-
но носителем некоторого -* физического эффекта.
Элемент структурный геометрический (Geometri-
sches Strukturelement)
Элемент геометрической структуры, состоя-
щий из линий, изображающих будущий * рабочий
объем и, возможно, будущие -♦ рабочие поверхно-
сти (в теории механизмов первые называются
-* звеньями, а вторые - элементами). Изображения
рабочих поверхностей позволяют строить из них
пары.
Элементы контурные (Konturelemente).
Элементы -* модели изделия, которые точно
определяют геометрические контуры деталей, яв-
ляющиеся линиями сечений или проекций в дву-
мерном представлении и плоскостями в трехмер-
ном. Такое представление тел позволяет их рас-
познавать и различать на основе анализа замкну-
тых линий контура или замкнутых конфигураций
поверхностей.
Элементы механизмов (Maschinenelemente)
То, что здесь названо этим словом, не является
-* элементами в собственном смысле слова, но кон-
структивными единицами, используемыми на
практике от минимальной до средней -* комплекс-
ности. Оказалось, что такие единицы наиболее це-
лесообразно применять при построении -* аппара-
тов, -* машин и -* приборов.
Элементы структурные (Strukturelemente)
- * Элементы, из которых строятся геометриче-
ские линейные структуры, позволяющие, напри-
мер, изобразить структуру, „скелет” технического
устройства.
Элементы функциональные (Funktidnselemente)
- * Схемные элементы, из которых можно пост-
роить -* функциональную структуру, у всех эле-
ментов, по меньшей мере, один -* ввод и один
-* вывод, на схемах они изображаются типичными
-* функциональными обозначениями.
396 7. Обзор и определения основных понятий
Элементы функциональные вещественные (Stoff-
Funktionselemente)
Функциональные элементы, описывающие •*
накопление, -♦ проведение, -* преобразование фор-
мы, -* преобразование вида и -* комбинирование
веществ (материалов), подобно -* абстрактным
функциям. (См. также -* энергетические и -* ин-
формационные функциональные элементы.)
Элементы функциональные информационные
(Nachrichten-Funktionselemente)
- * Функциональные элементы, описывающие
* накопление, -* проведение, -* преобразование фор-
мы, преобразование вида и -> комбинирование
-* сообщений, подобно -* абстрактным функциям.
(См. также -♦ вещественные и -* энергетические
функциональные элементы.)
Энергетический накопитель (Energiespeicher)
- * Накопитель энергии
Энергия (Energie)
Способность совершать работу (5.5 [20]), или
способность перемещать материю (2.3 [71]). С
целью выполнения какой-либо функции она мо-
жет -* накапливаться, проводиться (пространствен-
но перемещаться), -* преобразовываться по форме
(или -* передаваться), -* преобразовываться по виду
или -^комбинироваться. Энергия - одна из трех
-* абстрактных величин.
Энтропия (по Больцману) (Entropie nach Boltzmann)
S = klnp [Дж/К],
где k - постоянная Больцмана; р - вероятность ста-
тистического распределения энергии по молеку-
лам.
Энтропия (по Шеннону) (Entropie nach Jhannon)
И
Н = - S p(xf)log2 р(хг) [бит/знак],
i = 1
p(Xi) -вероятность появления -* знака х( (см. также
-* количество информации среднее).
Этап конструирования (отрезок фазы конструиро-
вания) (Konstruktionsabschnitt, Phasenabschnitt)
Осуществляемое на основе выбора определен-
ной * модели изделия подразделение •* фазы кон-
струирования. Граница данного этапа с соседним
(очередная плоскость перехода) пролегает там,
где представление изделия с помощью данной мо-
дели становится уже недостаточным.
Эффект физический (Effekt, physikalischer)
Физическое явление или физический процесс
(словоупотребление исторически обусловлено, по-
этому нет единого и строгого определения).
Эффекта носитель (Effekttrager)
Реализующий -* эффект -* структурный или
контурный элемент или система из нескольких
таких элементов (см. также 1.5 [13]).
7.5. Свободный список существующих конструкторских каталогов и других подборок решений
397
7.5. Сводный список существующих конструкторских каталогов и других подборок решений
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
Bacher, К.: Beitrage zum methodischen Vorgehen in der Baukonstruktion: Befesti- gung zwischen leichten AuBenwanden und dem Gebaudetragwerk. VDI-Fort- schritt-Berichte, Reihe 4, Nr. 51 Diisseldorf: VDIVerlag 1979. Birkhofer, H., u. H.-J. Franke: Funktion und Gestalt.'Fall bei- spiel: Konstruktion eines Druckknopfansetzautomaten. КЕМ, Bd. 14 (1977) Nr. 10, 118-129. Chironis, N.: Mechanisms, Linkages and Mechanical Controls. McGraw-Hill-Book- Company: New York 1966. Chironis, N.: Gear design and application. McGraw-Hill- Book-Company: New York 1967. DFQ. AbschluBbericht den Forschungsvorhaben Ro 222/7, Ro 222/9, Ro 222/13, Ro 222/17. Diekhoner, G.: Systematische Lbsungsfindung mit Konstruk- tionskatalogen. VDI-Z 120 (1978) Nr. 8, S. 351-357. Diekhbner, G., u. F. Lohkamp: Objektkataloge - Hilfsmittel beim methodischen Konstruie- ren. Konstruktion 28 (1976) H. 9, S. 359-364. Diekhoner, G., u. E. Kopowski: Konstruktionskataloge Uber Nietverbindungen - ein weit- rer Schritt zur Systematisie- rung in der Verbindungstechnik, VDI-Z 123 (1981) Nr. 8, S. S70-S78. Системы крепления на- ружных стен к несущим конструкциям Пары рабочих поверхностей для выверки, передачи сил, передачи моментов в узлах крепления Рабочие объемы для про- ведения сил и моментов в узлах крепления Принудительные кинема - тические механизмы с чис- лом звеньев не более четырех Устройства ориентации Элементы механизмов, приводы передачи, муфты Зубчатые зацепления и передачи Операции варьирования функциональных структур Соединения вал - ступица Умножение сил Кинематические меха- низмы с числом звеньев не более четырех Механические одноступен- чатые передачи с постоян- ным передаточным отно- шением Соединения вал - ступица Заклепочные соединения X X X X X X XX XX XX X XX XX XX X X X X • • • • • О О • • • • • • • • • • • • • • • • • • • н н д д н н н д д д д д д Д •
398
7. Обзор и определения основных понятий
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
DiekhOner, G.: Erstellen und Специальные и классифи - X X X X • • д
Anwenden von Konstruktions- кационные признаки для
katalogen im Rahrnen des me* конструкторских каталогов
thodischen Konstruierens. Diss. TU Braunschweig 1980. Fortschrittberichte der VDI- Подшипники скольжения X X • • д
Zeitschriften, Reihe 1, Nr. 75. Dusseldorf: VDI-Verlag 1981.
Dittrich, G., u. R. Braune: Methodische Verwendung von RUdergetrieben in unglei- Зубчатые передачи 1 1 X • • н
chfOrmig Ubersetzenden Getrieben. VDI-Z 115 (1973) Nr. 7, S. 569-576. 1 1 ! i 1 1 !
Dreibholz, D.: Ordnungssche- mata bei der Suche von Наложение двух движений X • О н
LOsungen. Konstruktion 27 (1975) Nr. 6, S. 233-239.
Ersoy, M.: Wirkflache und Wirkraum - Ausgangseleme- Технология литья X X • • н
nte zum Ermitteln der Gestalt Пространственные пары X X • ' • н
beim RechnergestUtzten Konstruieren. Diss. TU Braunschweig 1975. элементов
Ersoy, M.: Konstruktionskata- log fUr Fertigungsverfahren. wt - Z. ind. Fertigung 66 (1976) Nr. 4, S. 211-217. Технология литья X X • • н
Ersoy, M.: Systematik und Пространственные пары X X • • н
Katalog fUr rMunliche Ele- mentenpaare. Mechanism and Machine Theory (1976) Vol. 11, S. 331-342. элементов -
Ersoy, M.: Werkzeug-Schnell- Механические и гидравли- X • • н
spann Einrichtungen. Blech ческие зажимные и натяж-
Rohre Profile 22 (1981) 3. ные приспособления и их свойства
Ewald, 0.: Losungssammlun- Создание сил X • • (П)
gen fUr. das methodische Механический преобразо- X X • • н
Konstruieren. Dusseldorf: ватель перемещения с
VDI-Verl. 1975. большим передаточным отношением Соединения X • н
Подшипники и направ- ляющие X • — н
Муфты X X • • н
Пружины X • — н
7.5. Свободный список существующих конструкторских каталогов и других подборок решений
399
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование ) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
Устранение зазора в вин- товых парах Устранение зазора в цилиндрических зубчатых передачах X X X • • • • н н
Franke, H.-J.: Methodische Schritte beim Klaren konstru- ktiver Aufgabenstellungen. Konstruktion 27 (1975) H. 10, S. 395-402. Аналитический список для уяснения постановки задачи X • О д
Friebel, H., Hielscher, G., Kwanka, H., u. Rohrs: Infor- mationsspeicher ftir -physi- kalische Effekte zum Konstruie- ren in der Prinzipfindungsphase. Maschinenbautechnik 24 (1975) Nr. 11, S. 512-514 und Nr. 12, S. 539-542. Физические эффекты X • н
Gerhard, E., u. D. Heil: Analo- ges elektrisches Messen von Wegen und Bewegungen. und- oder-nor + steuerungstechnik 8(1978) Nr. 1/2, S. 18-19. Аналоговое электрическое измерение перемещений и углов X • • н
GieBner, F.: GesetzmaBigkei- ten und Konstruktionskata- loge elastischer Verbindungen. Diss. TU Braunschweig 1974. Упругие крепления и сое- динения X • • н
Habiger, E.: Elektrische An- triebsmittel, eine Ubersicht ftir den Anwender. Maschi- nenbautechn. 22 (1973), H. 4. S. 179-183. Электрические приводы (вращательные) X X • • н
Habiger, E., u. M. Kunze: Elektrische Antriebe in der Feingeratetechnik. Feingera- tetechnik 26 (1977) Nr. 6, S. 271-276. Приводы с непрерывным вращательным движе- нием Приводы с непрерывным и прерывистым поступатель- ным движением X X X X • • • н н
Hain, K.: Ge triebe-Atlas ftir verstellbare Schwing-Dreh- Bewegungen. Braunschweig: 1967. Систематика кривошипно- коромысловых механизмов X X • • н
Hain, K.: Getriebelehre. Mun- chen: Hanser, 1963 (В книге приведены различные классификации передач) Принудительные шести- звенные шарнирные меха- низмы Принудительные восьми- звенные кинематические цепи ' X X X X • • - н н
400
7. Обзор и определения основных понятий
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулир ование) функциональной (проектир ование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
Heimann, A.: Konstruktionska- talog fiir Gestellbauteile. Werkstatt und Betrieb 110 (1977) Nr. 4, S. 225-236. Каркасные элементы станин X - О н
Henry, D.: Checklist for designing molded plastic parts. Machine Design (1978) Nr. 18, S. 114-118. Правила конструирования деталей из синтетических материалов X О н
HOffler, H.-О.: Methodische Hilfsmittel zum Konstruie- ren. Diss. TU Braunschweig 1981. Операции варьирования конструкции Правила конструирования деталей, получаемых литьем X X X • • О О н н
Правила конструирования деталей из синтетических материалов X • О н
Правила конструирования профилированных дета- лей X • О н
Justi, E.: Leitungsmechanis- mus und Energieumwandlung in Festkorpern. Gottingen: Vandenhoeck & Ruprecht 1965. Таблица прямого преобра- зования энергии (матрица Юсти) X • л
Khufer, H., u. M. Jitschin: Katalog schnappbarer Formsch- luBverbindungen an Kunsts- toffteilen und beispielhafte Konstruktion linienfbrmiger •Kraftformschlufiverbindungen. Konstruktion 29 (1977) H. 10, S. 387-397. Геометрические соедине- ния-защелки X X • • н
Koller, R.: Ein Weg zur Kon- struktionsmethodik. Kon- struktion 23 (1971), H. 20, S. 388-400. Физические эффекты X • — (Л)
Koller, R.: Konstruktionsme- thode fiir den Maschinen-, Ge- rate- und Apparatebau. Berlin, Heindelberg, New York: Springer 1976. Физические эффекты Преобразование вида энергии и сигналов Увеличение, уменьшение физических величин X X X • • • - (Л) н н
Kracke, J.: MaBbestimmung ebener viergliedriger Kirbelge- triebe von vier Ubereinstimmun- gen. Diss. TU Braunschweig 1972. Особые положения в четы- рехзвенных механизмах^ X X • н
7.5. Свободный список существующих конструкторских каталогов и других подборок решений
401
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части - - - - * Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
Kracke, J.: Beitrag zur Synthese ebener viergliedri- ger Funktionsgetriebe in Steg-, Tot- und Parallellagen. Mechanism and Machine Theory, Vol. 9 (1974) Nr. 2, S. 255-272. Особые положения в четы- рехзвенных механизмах X X • - н
Lauschner, H.-J.: Sustema- tische Anwendung von Kunst- stoffen bei der Realisierung technischer Funktionsele- mente und -gruppen. Kon- struktion 29 (1977). H. 10, S. 408-415. Синтетические мате- риалы как носители функций X X • • н
Merhar, G.: Getriebetech- nische Lbsungskataloge. Maschinenbautechnik 27 (1978) Nr. 5, S. 215-220. Механизмы X X • • н
Muller, H.W.: Stufenlos einstellbare Getriebe. VDL Bericht Nr. 195. Diisseldorf: VDI-Verlag 1973. Бесступенчато регулируе- мые передачи X X - • н
MUller, H.W.: Stufenlose Ge- triebe. Ingenieur digest 14 (1975) H. 10, S. 71-76. Механические бесступен- чатые передачи X X - • н
Muller, S.: Untersuchungen zur Anwendung von B-Strah- len fUr die Anwesenheits- kontrolle im Maschinenbau. Der Maschinenbau 19 (1970) H. 6, S. 260-265. Контроль (конструктивных элементов) в рабочем состоянии X • О н
Neudbrfer, A.: Systematischer Katalog fUr Bedienteile. Werkstatt u. Betrieb 110 (1977), Nr. 4, S. 225-236. Органы управления X • • н
Neuddrfer, A., u. W. Voss: Pa- tentanalyse systematisch durchgefUhrt am Beispiel von Skisicherheitsbindungen. Feinwerktechnik und MeB- technik 85 (1977) Nr. 8, S. 385-392. Основные кинематические типы механизмов безопас- ных (лыжных) креплений X X • н
NN: Fastening and Joining Reference Issue. Machine Design 13 (1980) Vol. 52, No. 26. Соединения и их эле- менты X X О О н
402
7. Обзор и определения основных понятий
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование) функциональной (пр оектир ование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная 1 специальная
Pestel, Е., G. Schumpich, и. S. Spierig: Katalog von Ubertragungsmatrizen zur Berechnung techn. Schwin- gungsprobleme. VDI-Bericht Nr. 35. Dusseldorf. VDI- Verlag 1959. Presse, G.: Aufbau und Anwendung eines Kataloges physikalischer Effekte. Maschi- nenbautechnik 26 (1977) Nr. 7, S. 330- Roth, K.: Konstruieren mit Konstruktionskatalogen. Berlin, Heidelberg, New York: Springer 1982. (Настоящий перевод: Рот К. Алгоритмизация кон- струирования с помощью каталогов) Матрицы коэффициентов передачи Физические эффекты Модели изделия Типы требований Прямое превращение энергии (матрица Юсти) Создание силы Одноступенчатое умноже- ние силы Механические стопоры обратного хода Функциональные вели- чины (физические эф- фекты) Логические механизмы отрицания Логические механизмы конъюнкции и дизъюнк- ции Механические RS-пере- ключатели Механические Т-переклю- чатели Типы связи Ограничение движений Однократно переопреде- ленные цепи с вращатель- ными парами Однократно переопреде- ленные цепи с вращатель- ными и плоскими враща- тельно-поступательными парами, а также с одно- кратными и двукратными вращательными парами Основные цепи с числом степеней свободы f = -1... +2 X X X X X X X X X X X X X X X X X X X X X X X X X X X • • • • • • • • • • • • • • • • • • • • • • • • • • • • • О О • н н д д д д д д д д д д д д д д д д
7.5. Свободный список существующих конструкторских каталогов и"других подборок решений
403
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
Roth, К.: Untersuchungen Uber die Eignung der Evolven- ten-Zahnform fUr eine allgemein verwendbare feinwerktechnische Norm- verzahnung. Diss. TH Mun- chen 1963. Пары элементов и цепи с числом звеньев 1...4 и чис- лом степеней свободы f = -l...+2 Принудительные меха- низмы с числом звеньев 2...4 Фрикционные системы Варианты фрикционных систем Основные (кинематичес- кие) пары Пары элементов и замкну- тые цепи Операции варьирования структуры Передачи равномерного хода Цепи связей неподвижных соединений Заклепочные соединения^ Соединения вал-ступица Задачи, профили и испол- нения направляющих Прямолинейные направ- ляющие Форма и классификации тел качения (подшип- ники) Направляющие враща- тельного движения Операции варьирования конструкции Обработка давлением сжатия Объемная штамповка Правила расчета предель- ных допусков Исходные профили при- борных зубчатых зацеп- лений, минимальные числа звеньев X X X X X X X X X X X X X X X X X X X X X X X • • • • • • • • • • • • • • • • • • • О 1 • • •••• | ••••!• •• | • • | о । д д л д д л д д л л д л л л д д л д д н ;
404
7. Обзор и определения основных понятий
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части ——- " ... * - — Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) 1 предметной (разра- ботка технологии) классификационная специальная
Roth, К.: Aufbau und Handha- Умножение силы X X • • д
bung von Konstruktions- katalogen. VDI-Berichte Nr. 219. Dusseldorf: VDI-Verlag Создание силы X • • д
1974.
Roth, K.: Systematik mecha- Механические Т-переклю- X X • О д
nischer Flipflops und ihre Bedeutung fur die Konstruk- tion von Schaltelementen. чатели
Feinwerktechnik und Meflte- chnik 82 (1974) H. 8, S. 384-392.
Roth, K.: Foundation of Примеры каталогов реше- X X • • д
methodical procedures in design. Design, Vol. 2 (1981) no 2, p. 107-115. ний, объектов и операций
Roth, K.: Konstruktionskata- Устройство и примеры X X • • д
loge und ihr Einsatz beim конструкторских катало-
methodischen Konstruieren. VDI-Z, 123 (1981) S. 413-418 гов
Roth, K., Franke, H.-J., u. R. Simonek: Algorithmisches Абстрактные функции X • О д
Auswahlverfahren zur Усиление силы X X • — д
Konstruktion mit Katalogen. Feinwerktechnik 75 (1971) Nr. Стопорение движения X X • — д
8, S. 337-345.
Roth, K., Franke, H.-J., u R. Simonek. Aufbau und Ver- Умножение силы X X • • д
wendung von Katalogen fur Создание силы X • • д
das methodische Konstruie- ren. Konstruktion 24 (1972) Стопорение обратного X X • • (Д)
Nr. 11, S. 449-458. хода
Roth, K., Birkhofer, H., Измерительные и запи- X X • • н
Franke, H.-J., Simonek, R., u.a.: Beschreibung und рающие системы
Anwendung des Algorithmis- chen Auswahlverfahrens zur Konstruktion mit Katalogen (AAK). Konstruktion 27 (1975) Nr. 6, S. 13-22. Измерение ускорения X X • • н
RuB, A.: Auswahlkriterien fur Walzlager zum methodischen Konstruieren. Maschinenmarkt 80 (1974), S. 1113-1115. Подшипники качения X О • н
RuB, A.: Auch „Konstante” Аксиально-поршневые X О • н
haben ihren Markt, MarktUber- sicht, Konstant-Axialkolben- pumpen und Motore. fluid (1973) Febr.,S. 36-39. насосы и гидромоторы
7.5. Свободный список существующих конструкторских каталогов и других подборок решений
405
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная | 1 1
Schuppar, Н.: Rechnerunter- stUtzte Erstellung und Aktuali- sierung von Relativkosten- Katalogen. Diss. TH Aachen 1977. VDI-Richtlinie 2222, Bl. 2: Konstruktionsmethodik. Erstellung und Anwendung von Konstruktionskatalogen (Entwurf). Dusseldorf: VDI- Verlag 1977. VDI-Richtlinie 2225, Bl. 2: Konstruktionsmethodik, Technischwirtschaftliches Konstruieren, Tabellenwerk. Dusseldorf: VDI-Verlag 1977. VDI-Richtlinie 2229: Metallkle- ben. Hinweise fur Konstruk- tion und Fertigung. Dussel- dorf: VDI-Verlag 1977. VDI/VDE-Richtlinie 2251, Bl. 1: Feinwerkelemente. Span- nverbindungen. Dusseldorf: VDI-Verlag 1972. VDI/VDE-Richtlinie 2251, Bl. 2: Feinwerkelemente. Stauch- und Biegeverbindungen. DUsseldorf: VDI-Verlag 1979. Каталог относительных стоимостей Операции варьирования конструкции Принудительные кинема- тические механизмы с числом звеньев не более четырех Создание силы Одноступенчатое умноже- ние силы Механическое стопорение обратного хода Устранение зазора в вин- товых парах Устранение зазора в цилиндрических зубчатых передачах Механические односту- пенчатые передачи с пос- тоянным передаточным отношением Технико-экономические показатели (относитель- ные стоимости) материа- лов Клеющие вещества для соединения металлов Напряженные соединения Высадочные и гибочные соединения X X X X X X X X' X X X X X X X X X X X X О • • • • • • • • О О О • • • • • • • • • • О О н д д л л д н н л н н н н
406
7. Обзор и определения основных понятий
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
VDI/VDE-Richtline 2251, Bl. 3: Feinwerkelemente. Lbtver- bindungen. Diisseldorf: VDI- Verlag 1965. VDI/VDE-Richtlinie 2251, Bl. 4: Feinwerkelemente. SchweiBverbindungen. Diis- seldorf: VDI-Verlag 1965. VDI/VDE-Richtlinie 2253: Feinwerkelemente. Sperrun- gen, Ubersicht. Diisseldorf: VDI-Verlag 1953. VDI/VDE-Richtlinie 2253, Bl. 1: Gesperre. Tafel 1: Grundformen von Gesper- ren mit ihren funktionellen Eigenschaften. Diisseldorf: VDI-Verlag 1967. VDI/VDE-Richtlinie 2258: Be- dienelemente, Ubersicht. Diisseldorf: VDI-Verlag 1963, neuer Entwurf 1976. VDI-Richtlinie 3821: Kunst- stoffkleben. Diisseldorf: VDI-Verlag 1978. Volkers, U.: Wiederverwen- dung konstruktiver Lbsungen durch Aufbau firmenspezi- fischer Konstruktionskataloge. Diss. TU Braunschweig 1978. Wankel, F.: Einteilung der Ro- tationskolbenmaschinen. Stuttgart: Deutsche Verlag- sanstalt, Fachverlag 1963. Wilhelms, W.: Untersuchung von ebenen, viergliedrigen Gelenkgetrieben mit Feder- verspannung zur Erzielung vorgebbarer Gleichgewichts- lagen. Diss. TU Braunsch- weig 1974. Пайка Пайка стекла и керамики Сварка Стопоры Остановы Органы управления Клеющие вещества для соединения синтетиче- ских материалов Прямолинейные направ- ляющие (основополагаю- щие) Прямолинейные направ- ляющие (специальные) Роторно-поршневые ма- шины Напряженные с помощью дополнительных упругих элементов четырехзвен- ные механизмы X X X X X X X X X X X X X X X X X • О • • • • О • • • • О • О • • • о • н н н н н н н д н н н
7.5. Свободный список существующих конструкторских каталогов и других подборок решений
407
Продолжение табл. 7.5
Литература Содержание (ключевые слова) каталога Используется на фазе Структурные части Описано в этой книге
формулировки задачи (формулирование) функциональной (проектирование) предметной (разработка формы) предметной (разра- ботка технологии) классификационная специальная
Willenegger, Н.: Technisch- wirtschaftlicher Vergleich von SchweiBverfahren £tir Anwendungen in der Fein- werktechnik. Feinwerktechnik + + micronic 77 (1973) H. 7, S. 299-303. Сварка X X О • Н
Willenegger, H.: Konstruie- ren mit GuBwerkstoffen. Diisseldorf: GieBerei-Verlag 1966, S. 21-25. Литье X X О • н
Wolf, H., u. D. Heil: Analo- ges elektrisches Messen von Kraften, Driicken und Besch- leunigen. und-oder-nor + + steuerungstechnik 8 (1978) Nr. 5, S. 9-11. Измерение механических упругих деформаций X X • • н
х - предназначен для фазы; • - есть; О - отчасти есть; - отсутствует; Д - да; Н - нет.
1См. также разд. 6.7 [27.1,27.2].
2См. также разд. 4.13 [80.2].
408
8. ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Номера страниц, где даны определения понятий, набраны полужирным
шрифтом. Буква (Р) после номера страницы указывает, что ссылка
дается на рисунок, а буква (К) - на каталог.
А
Абстрагирование 17
- частных функций до уровня абс-
трактных 349
- функциональных структур 349
Абстрактная диаграмма потоков 363
см.также Диаграмма потоков
- функциональная структура 363
Абстрактные величины (теории конс-
труирования) 364 см.также Величины
абстракные
- операции 364
- функции 364
Абстракции степень (уровень) 364
- технические устройства 247
Абстракция 31, 364
Агрегатирования(блочности, модуль-
ности) метод 364
- принцип 204
Активный элемент 364
Алгебра логики см. Булева алгебра
- релейных схем 364
Алгоритм 364
Алгоритмический метод выбора при
конструировании с каталогами (АМВК)
34,364
Алгоритмо-физически ориентированная
методика конструирования 364
Алгоритмы конструирования 357
- машинные 354
- програмнореализованные 356
Алфавит 365
Алфавитно-цифровой 365
АМВК(ААК) см.Алгоритмический метод
выбора при конструировании с ката-
логами
Анализ функциональный окрестности
изделия 32
- жизненного цикла изделия 234,367
см.также Изделие
- фаз жизненного цикла изделия 237
- окрестности изделия 38,234-236(Р)
237
- предварительный общих свойств 62
- сравнительный биологических конс-
трукций 45
- сравнительный элементов функцио-
нальных структур 296
Аналогии в области техники 45
Анкета изделия 32,233(Р),234,235
Аппарат 28
- в теории конструирования 365
Аппараты (машины для работы с ве-
ществом) 31
Аспект информационный конструкций
350
Б
Бинарный 365
Бит 107,365
Блок скольжения как умножитель силы
122,124
Блок-схема(функциональная или стру-
ктурная схема) 365
Блоки стандартные 247 см.Элементы
функциональные
Булев(булевский) 365
Булева алгебра 365
Булевский механизм слг.Механизм ло-
гический
В
Вал на двух подшипниках 309
- профильный 180
Варианты решений 43
- технических устройств 252
Вариации элементарных конструкций 24
- фрикционных систем 137
Варьирование конструкций 205
- операции 365
- систематическое - Принцип 180
- структурно-функциональных элемен-
тов 365
Ввод 366
Векторы сил - Изменение направления
300
- сил и моментов 300
- скоростей - Изменение направления
300
Величины абстрактные 33
- абстрактные теории конструирова-
ния 28,31
- бинарные логические 97
- входные и выходные 18 - Представле-
ние векторными функциями 284
- двухточечные 366
- интенсивные 255,366
- количественные 255,366
- конструктивные 92,366
- нульточечные 366
- одноточечные 366
- одно- и двуточечные комбинирован-
ные - Соединение 300
- функциональные 154,255,366
Величин функциональных прямые соот-
ношения 366
Весы десятичные 125
Вещество 31,247,366
Взаимодействия силовые 77
Взаимозаменяемость 204 см.также Аг-
регатирования принцип
Взаимосвязь обзорного и детального
Предметный указатель 409
каталогов в списке признаков 73(Р)
Визуальный индикатор 366
Винт ходовой 127
Воздействия силовые - Создание и под-
держание 305
Вставка замочная 291
Втулка Шпита 125
Вход в различные фазы конструирова-
ния - Примеры решений 40
- прямой в физическую функциональ-
ную структуру 282
Выбор вариантов 43
Вывод 366
Выпрямители сил - Кинематическое при-
менение стопоров обратного хода 134
Вязкость 77
Г
Гравитационные элементы см. Элемен-
ты полевые
Главная часть 367
Гибка 367
Гвоздь крепежный винтовой 367
Геометрическая структура см.Струк-
тура геометрическая
Глаголы действия 228
- цели 228,229
Грузоподъемность подшипников каче-
ния 199
Д
Данные 367
- цифровые 367
Данных носитель 367
Двигатель поршневой 347
Движение уравнительное 316
Дедукция 367
Дерево решений 24,26
Дешифратор(декодер) 367
- механический 353
Деталь 204,367 - Операции разработки;
Описание трехмерное, создаваемое
программой 356
Детали машин как химические соеди-
нения 348
Де Моргана законы 367
Де моргана правило 103
Домкрат автомобильный 127
Диалоговый режим 367
Диаграмма потоков 34
- - абстрактная 55,253,254
--переход к абстрактной функци-
ональной структуре 284
- - с интенсивными и количественны-
ми величинами 256
Дизъюнкция(логическое сложение,
операция ИЛИ) 102,353,367
Дисплей активный 296 см.также Перо
световое
27 — 2317
- интерактивный 354
Документация рабочая 43
Допуск на размер 367
- результирующий 367
Допуски 212 Расчет 214,Правила рас-
чета 220,221(К), Расчеты в двух из-
мерениях 219
Дюбель 165
3
Задача 367
- общая 16,367
- разбиение на частные задачи 229
-частная 16,24,368
Задвижка-штеккер 19
Зажим 180
- хирургический 292
Зазоры 212
Заклепка 171
Заклинивания возможность слсФрикци-
онная система прогрессивная
Заклинивающая система 368
Закон 16,368
- дистрибутивный 101
- коммутативный 104
- модельный для допусков 220
- распределения допусков на состав-
ляющие размеры 212
Закономерность 368
Замок(запор,затвор,затычка и т.п.)368
см.также под их названиями
- дверной с собачкой и ключом 353
- для шкафа 121
- интеграция функциональная 294
- с защелкой 17
- штекерный 23
Замки - Исполнение детальное 22
Запоры 164
Запрет 79
Затвор быстродействующий 321,322(Р)
- для жидкостей 22(Р)
Зацепление с параллельными осями 158
- с пересекающимися осями 158
Зацепления зубчатые - Особые виды 157
- как фрикционные системы 92
Защелка-штекер 23
Запирающий элемент 368
Звено ведомое - Возможности стопоре-
ния 132
Звенья 142,368 см,также Цепь звеньев
- начальные в цепи обработки инфор-
мации 101
- начальное положение 142
Знак 368
- бинарный 368
Зубчатое зацепление эволоидное 158,
368
Зубья косые клиновидные 158
- прямые 158
- стопорные 134
410 Предметный указатель
И
Избыточность 368
Избыточность относительная 368
Изделие 368 - Жизненный цикл 32; Эта-
пы геометрически материальной тех-
нологической реализации 34
Изображение предметное 356
- трехмерное готовой детали 356
- детали на дисплее без невидимых
линий 356
Инструкция(оператор) 368
- по синтезу цепей связей 80
Интеграция путем редукции деталей в
геометрической структуре 293
- функциональная 285,286,350 - Систе-
матический порядок действий 293,
Виды 287 - Примеры применения раз-
личных видов 149,291
- результатов 43
Интуитивного поиска идей методы 368
см.также Метод 6-3-5; Мозговой
штурм; Синектика
Информации источник 368
- количество 368
- количество среднее 369
Информация 28,30,31,369
- носитель 101
- общетехническая - Хранение в ката-
логах 59
Использование в качестве вторичного
сырья 369
- повторное(без существенной пере-
работки) 369
- после переработки 369
Исследование фаз жизненного цикла
изделия 32
К
Карандаш световой слсПеро световое
Карта маршрутная 253
Каталог 369
- детальный 51,369
-конструкторский - Классификация
по способу организации 47, содержа-
нию 52;Использование 51,54;Принципы
наполнения 24; Принципы при выборе
типа 62;Составление 62; Сравнение
типов 52; Структура 47; Требования 46
Каталоги для алгоритмического мето-
да 46
- для методического конструирования
24
- для фазы формулирования задачи 74
- двумерные 47
- обзорные 49,369
- объектов 52,58,59,369
- одномерные 47
- операций 52,61,369
- отношений 369
- признаков 63
- решений 52,58,369
- решений двумерные 34
- с двумерной классификационной
частью 49
- с трехмерной классификационной
частью 49
Классификационные признаки 369
Классификационная часть 370
Классы каталогов 52
- понятий 63
Клин как умножитель силы 122
- поворотный 134
Код 350,370
- бинарный 370
Кодирование 370
Кодирование двоичное 296
- сообщений 350
- физических состояний механизма 226
Колеса зубчатые 157
- - конические 158
- - с эвалоидным зацеплением 158
- - с клиновидными косыми зубьями
158
- маховые из высокопрочных пласт-
масс 346
Колесо литерное 353
- ударное как механический источник
энергии 129
Команда 370
Комбинация идеализированных состоя-
ний, см- состояния идеализированные
- цепочек, эффектов 24
- силовой и геометрической связи 132
Компановка 332
- структурно-функциональных элемен-
тов 370
Комбинации накопителей 314
Комбинирование 370
Комплекс информационный 233
Комплектность 53,370
Конкретизации этап 23
Конкретизация 18
Конечнозначная переменная 370
- функция 370
Конструирование 370 - Методический
принцип 43; Перескакивание(пропуск)
фаз 37; Разделение на фазы 32; Эта-
пы 224
- адапционное 38,370
- варьирующее 38,370
- изменяющее(модифткационное) 38,370
-методическое 157,370 - Использо-
вание ЭВМ 353,354,357; Подборки ре-
шений,конструкторские каталоги 24;
Рабочий план 31
- оригинальное(новая разработка)
35,371
- по рабочему плану - Пример с по-
рождением вариантов 282
- предметное 3S,371
- технологическое(разработка техно-
логии) 38,371
- функциональное общее 38,371
- - специальное 38,371
Предметный указатель 411
Конструктивных элементов метод 371
Конструкторский каталог 371, см так-
же Каталоги
Конструкции мячеподобные 321
- однородные 90
- с силовыми полями 305
- с одной узловой точкой крепления
142
- с резервированием 353
- с узловой точкой 309 см.Вал на
двух подшипниках
Конструкция 371
- с резервированием^ избыточностью)
371
Координаты каталога 53
Конус производящий 158
Контур 372
- детали 371
Контурное представление 204,372
см,Чертеж
Контурные поверхности 372
- - нерабочие 372
Конъюнкция(логическое умножение,
операция И) 102,353,372
Коэффициент передачи 372
- передаточный 90
- - и конструктивные величины 92
Коэффициент трения 90,372
- - заклинивания 91,372
- - подшипников качения 199
Коэффициент умножения 124,132,372
- - силы 48,122,372
Крепления 164 см. Соединения неподвиж-
ные
Критерии оценки главной функции 31
Критерий выбора 26
Кусачки 126
М
Маршрутная карта процесса конструи-
рования 253,255,349
Маршруты процесса конструирования
255
Материя 372
Матрица видов напряженных циклов и
сегментов 312
- прямого превращения энергии по
Юсти 34
- связей 97,154,347
- - для зависимых ограничений 339
- - логическая 97,137,372
Матрица поисков 237,238(Р)
- типов связей 164,372
- функциональных величин 49,257(Р),
258(Р),278
- Юсти 49,247(Р)
Машина(в теории конструирования)
29,140,372
- (в теории механизмов) 372
Метод 6-3-5 372
- вариации эффектов 15,23,24
- варьирования прямой 151
27*
- варьирования непрямой(через схемы
механизмов) 151
- кинематических цепей 140
- морфологического ящика см.Морфо-
логический ящик
Методы конструирования 373
Методика конструирования 24,31,33
- составление каталогов решений 53
Механизм(как схема) 373
- логический(булевский) 101,373
Механизмы 140
- комбинаторные логические 102
- базовые 102
- отрицания логические - Базовые
формы, Варианты 104
- конъюнции и дизъюнции - Базовые
формы 105, Варианты 106
- последовательные логические 107
- умножения сил 122
- с резервированием 125
- свободного хода - Кинематическое
применение стопоров обратного хода
134,135
- принудительные 142,146,317
- - с числом звеньев от 2 до 4 148
- - трехзвенные 149
- кулачковые 149
- с внутренним зацеплением фрикци-
онных колес 149
- передаточные равномерного хода
157,162 см.также Передачи зубчатые
- натяжные 308
- зажимные 308
- для накопления, проведения, пре-
образования формы и вида и комбини-
рования сообщений 350,351
Методы расчета размеров с допусками
212
Мозговой штурм 373
Модель 373
Модель для конструирования в от-
дельных фазах 224
- для работы с активным дисплеем
353 см. Структура цепная геометри-
ческая
- изделия 224,226,373 - Обзор и ха-
рактеристики 227; Соответствие эта-
пам рабочего плйна 233; Уровни
224,225
- специальная 224
Монтажный элемент см.Элемент конс-
труктивный
Момент трения подшипников качения
199
Морфологический ящик 18,21 - Общий
принцип работы 24; Условия коррект-
ной применимости 23;
Мультипликаторы 122 см.также Умно-
жители сил
-комбинированные 125
-шарнирнорычажные 126
Муфта сцепная 56,137,373
412 Предметный указатель
Н
Набор минимальный субстанций 28
Наборы частных решений 24
Нагрузка удельная для подшипников
скольжения 196
Наклонная плоскость 17
Накопители эпергии - Состояния ос-
новные 315
- - как средство для синтеза конс-
трукций 346(Р)
- - напряженных циклов - Зарядка,
Разрядка 323; Удержание в заряжен-
ном состоянии 323
Накопитель кинетической энергии
305,347
- механический потенциальной энер-
гии 117,122,305
- энергии 77,305,373
- - в качестве конструктивного эле-
мента 317
- - тепловой 315
Направление нагрузки монтажное, де-
монтажное, основное, дополнительное
164
Накопление 247,373
Направляющая 62,373
- вращательного движения 187,193,
195,374 см.также Подшипники
Направляющие - см. Соединения под-
вижные
- винтовые 188
- поступательного движения 187,188,374
-поступательно-вращательные 188
- прямолинейные с одинаковой формой
профиля 190,191(К)
- прямолинейные с различными форма-
ми профиля 190,192(К)
Напряженные сегменты кинетические 374
Напряженный сегмент 374
- - статический 374
- - стационарный 374
Напряженные циклы кинетические 374
- - статические 374
- - стационарные 374
Напряженный цикл 374
Новая разработка см. Конструирова-
ние оригинальное
Номера кодовые 353
Носители эффектов 19
Ножницы 126
О
Область заклинивания 90
- обеспечения информацией 43
- оценки 43
- поиска решений 43
Обозначения условные для изображе-
ния схем на экране дисплея 326
Обработка давлением 374 - Группы
206, Признаки 206,207, Способы 206
- - с преобладанием касательных
напряжений 374
- - с преобладанием напряжений рас-
тяжения 374
- - с преобладанием напряжений рас-
тяжения и сжатия 374
- - с преобладанием напряжений сжа-
тия 374
Объединение входных и/или выходных
рабочих поверхностей 336,374
- входных рабочих поверхностей с вы-
ходными 336,375
- в рабочих объемах 332
- по рабочим поверхностям 332
- структурно-функциональных элемен-
тов(СФЭ) в их рабочих объемах 375
- структурно-функциональных элемен-
тов(СФЭ) по рабочим поверхностям 375
Объединяющая перестройка рабочих
поверхностей 375
Объемы рабочие 77,154,325
- - элементов 154, см. также Звенья
Объемная штамповка, при которой по-
ковка находится целиком в полости
штампа 375
Ограничение(запрет) 15,375
Ограничение движения 77
- - двустороннее 375
Ограничитель движения см.Упоры
Окрестность изделия 15,375
- - анализ 375 см.также Аналаз ок-
рестности изделий
Операции варьирования - Применение
151; Примеры 109
- - для функционального изменения
фрикционных систем 95,96(К)
- - конструкции 204,206(К)
- структуры 154,155
Операции логические 296
- со структурно-функциональными
элементами - Примеры 336,337
Операция ИЛИ "Оргаподобная" техни-
ка пространственной компановки 375
Опоры сложные 330
Оптимизация - Возможность 103
Останов заклинивающий 137,375
- направленного действия 132,135
- фрикционный 137
-храповый137
Остановы 375
-заклинивающие 133 см,также Сто-
поры обратного хода
- с заклинивающей связью - Примеры
137
Ответственность экономическая в фа-
зах конструирования 37
Отделение входных рабочих поверх-
ностей от выходных 336
Отклонение размера 213
- - предельное 213,375
- - результирующее 376
Отношение 376
- конъюнктивное 98
Отношения человеко-машинные 35
Предметный указатель 413
Отражение(структурно-функциональ-
ных элементов) 375
Отрезки фаз 224 см. Этапы конструи-
рования
Отрицание(операция НЕ) 102,376
П
Палиспаст 125
Пара винтовая 376
-вращательная 189,376
- вращательно-поступательная прост-
ранственная(цилиндрическая) 376
- однозвенная(в теории механизмов) 376
- однозвенная замкнутая 140,144
- поступательная 376
- рабочих поверхностей 204,376
- фрикционная 376
- цилиндрическая 376
- элементов двухподвижная 376
- элементов(в теории механизмов) 376
- элементов одноподвижная 377
Пары важнейшие кинематические,
статические 97,100
- одноподвижные 312
- одноподвижные - Поворот относи-
тельно друг друга 149
- с двумя степенями свободы 140
- с одной степенью свободы 140
- с подвесом в силовом поле 189
- с соприкосновением по линии 188
Параметры варьирования элементов -
Качественные, количественные 154
- конструктивные 255
- - фрикционных систем 95
Передаточное отношение 377
- - мгновенное 377
- - среднее 377
- - номинальное 377
Передаточный коэффициент 377 см.
Коэффициент передаточный
Передатчик энергии 377
Передача 247,377
Передача(передаточный механизм) 377
Передачи - Примеры конструкций
316,Состояния рабочие 315
- зубчатые 152
- фрикционные 149
Переключатели клавишные 109,
112-114(К), 115,116
- двухпозиционные - Обеспечение
повторных переключений 109
- двухпозиционные - Специальные
признаки 109
- - механические - Классификация
механизмов 110
Переключатель двухпозиционный(флип-
флоп) 107, И 1,377
- - (флипфлоп) механический 108,377
Переключения повторные 109
Перестройка объединяющая структур-
но-функциональных элементов 336
разъединяющая структурно-функцио-
нальных элементов 336
Пистолет строительно-монтажный 54
Переход 17,19
- к деталям и узлам 23
- к эффектам и механизмам 35
- от частных функций к эффектам 33
Переходы при конструировании изде-
лий 45
Перо световое 15
Перфокарты 28
Плазма - Перемещение с помощью двух
противоположно действующих полей 315
План задач для соединения частных
конструктивных задач в систему 31
План рабочий 15,31,224,380 - Вход в
различные фазы 38; Модели изделия
для различных этапов конструирова-
ния 224; Фазы 43; Области 43
- - для алгоритмического метода вы-
бора при конструировании с катало-
гами 32
- - для кинетического синтеза машин
31
- - переменный 37,38
- - по Коллеру 41
- - по Палю и Байтцу 40
- - по Роде Наккеру 41
Планы рабочие - Сравнение 40
Пластичность 77
Пластическое формообразование 377
см.также Обработка давлением
Платы стандартные 251
Плоскость перехода 42, 286, 377
Плоскости горизонтальные (фазы) в
рабочем плане 43
- вертикальные(области) в рабочем
плане 43
"Плотина" на пути потока мощности
305
Поверхности контурные деталей 204
- рабочие 77,154,204
- уплотнительные затворов для жид-
костей 20
Поверхностные функции см. Функции
рабочих поверхностей
Податливость 344
Подборка решений(неформальная) 45,
378
Подборки решений для методического
конструирования 24
Подразделение процесса конструиро-
вания на фазы и этапы - Последствия
38
Показатель стоимости для подшипни-
ков скольжения 196
- - для подшипников качения
199,202,203(Р)
Последствия верных и неверных реше-
ний 35
- - принятых в различных фазах
конструирования 37
Подшипник 188,378 см.Направляющая
вращательного движения
414 Предметный указатель
- качения 378
- плавающий(в осевом направлении)378
- подвесной 378
- фиксированный^ осевом направле-
нии) 378
11одшипники - Признаки,Типы,Уровни
подразделения 193
- качения - Признаки классификаци-
онные 199
- скольжения 196,198(К)
Позиция 378
Положение(в физике) 15,378
- инструктивное 32,378
- равновесия 87,88
- устойчивое 88
Положение - Требование 32,378
- функциональное 32,228,250,378 -
Список глаголов для формулировки
229,231(Р); Шаги для разработки 230
Положения постановочные 378
Понятия обобщенные 63
Посадки 212
Постановка задачи 228,378
- общей задачи 378
Поток главный 379
- дополнительный побочный 379
- сообщений 101 см. Информация
Потребитель 379
Правила в каталогах операций 52
Правило 16
- синтеза 132
- физическое 379
Превращение 379
Предварительное проектирование
(черновая прикидка) 379
Предметная реализация см. Конструи-
рование
Представление абстрактное 53
- конкретное 53
- контурное(чертеж, эскиз) 35
- логическое пары твердых тел 97
- решений в каталогах 53
- содержания каталогов 53
Преобразование вида(превращение)
247,379
- формы 379
Преобразователь вида кода 353,379
- вида энергии 379
- данных 379
- кода 379
- параллельно-последовательный 379
- последовательно-параллельный 353,379
- формы кода 379
- формы энергии 379
- электромеханический 285
Прибор 28
- в теории конструирования 379
Приведение в движемие 77
Признаки классификационные - Разра-
ботка 62
- - для конструкторских каталогов -
Список 63
- модели изделия 149
- равенства треугольников - Исполь-
зование для задания размеров 219
- специальные 48
- специальные и классификационные
для конструкторских каталогов 65
- конкретизирующие 63
Принудительный многозвенник(цепь)
380
Принудительное движение(принуди-
тельность) 380
Принцип исходного решения 23
- методический конструирования 43
Принципы классификационные 63
Приспособления для создания уплот-
нительной силы 23
- зажимные 124
Прищепка бельевая 293
Проб и ошибок метод 380
Пробки для бутылок 23 с.м.Затворы
для жидкостей
Проведение 380
Проводник энергии 380
Программа 380
Проектирование 34,380
Промышленный дизайн 35,380
Пропуск фазы конструирования 35
Просеивание в методическом констру-
ировании 48,380
Процедура "вертикальная"(в констру-
ировании) 224,380
- "горизонтальная"(в конструирова-
нии) 224,380
Пряжка ремня 293
Прямолинейная направляющая 380 см.
Направляющая поступательного движе-
ния
Р
Рабочая поверхность 380 см. Поверх-
ности рабочие
Разъединение(разборка) 380
Рабочая величина 380 см. Величина
конструктивная
Рабочий объем 380 см.Объем рабочий
Рабочий план 380 см.План рабочий
Равновесие безразличное 87
Разделение входных или выходных ра-
бочих поверхностей 336
- поперечное(структурно-функцио-
нальных элементов) 336,381
- продольное(структурно-функцио-
нальных элементов) 336,381
- структурно-функциональных элемен-
тов(СФЭ) 381
- функциональное 285,286,381 см.так-
же Функциональное разделение
Разветвление 99 см.Цепь параллельная
Размер номинальный 213,381
- номинальный результирующий 381
- обобщенный 213,218,381
- обобщенный результирующий 381
- сопряженный 218
Предметный указатель 415
- результирующий(замыкающий)212,213,
220 - Вычисление 218; Смысл различ-
ных значений 219; Способы расчета 215
- составляющий(отдельный) 212,215,
216(Р),381
Размеры с допусками - Векторный ха-
рактер величин 213, Методы расчета
212, Определение понятий 212(Р)
- предельные 212
Размерная цепь 381 с.м.Цепь размерная
Разновидность конструирования 38,381
Разработка 381
- новая 38, см.также Конструирова-
ние оригинальное
- (конструирование) структуры 382
- технологии 38,382
- формулировки 228
- формы см. Реализация предметная
Разрядка накопителя энергии 305
Разъединяющая перестройка рабочих
поверхностей 382 см.также Перест-
ройка разъединяющая
- сила 382
Ракетки теннисные 321
Расчет предельных размеров 212
- фактических размеров 212
Реализация геометрически материаль-
ная 382
- предметная(конструирование) 35,382
- технологическая 382
- функциональная(проектирование,раз-
витие) 34,382
Редукция входных и выходных величин
282
- принудительной цепи 319
Революция техническая 28
Результаты машинные 354
Реконструкция программная трехмер-
ного вида детали 356
Рентабельность технических решений
и предложений 35
Рециклинг(замыкание жизненного цик-
ла) 382
Рециклинга модельные системы 382
Решение 383
-альтернативное 18,19
- задач в пределах одного этапа
конструирования 52
Решения механические 349
- элементарные 45,383
Решений количество 383
Ручка шариковая пластмассовая 291
Р ычаг - Длина 95
- как идеальный входной элемент 125
- как умножитель силы 122,124(Р)
Ряд размерный (типовой) 383
С
Самоторможение см. Связь заклинива-
ющая
Сборка 383
Сборочная единица(блок, модуль, мон-
тажная группа) 383
Свобода(степень свободы,направление
свободы) 383
Свободный ход 132
Свободы идентичные(степени свободы
идентичные) 383
- число степеней(геометрических) 383
Свойства топологические расположе-
ния деталей 349
Связей типов матрица 385 см. Матри-
ца связей
- матрица логическая 385 см. Матри-
ца связей
- цепь 383
Связи в соединениях - Типы 77,164,
166; Распределение по классам 80
- зависимые 171
- комбинированные -Свойства 79
- между геометрическими элементами
и функциями 354
- пассивные 383
Связывающая сила 383
Связь(замыкание) 383
- вещественная 77,164,300,384
- вторичная 384
- геометрическая 132,164,384
- динамическая(за счет изменения
импульса) 384
- заклинивающая 80,132,384
- квазигеометрическая 80,164,384
- обратная положительная 133
- общая 384
- объемная 167,383
- поверхностная 77,167,383
- первичная 384
- силовая 77,164,384
- - гравитационная 385
- - магнитная 385
- - полевая 80,385
- упругая силовая 80,134,164,385
- фрикционная 164,384
- функциональная условная 102
- характеристическая 164
- чисто геометрическая 80,385
- цепи общая 81
- элементарная 79,385; Классифика-
ция 78; Объединение в общую связь
цепи 80
Сегменты напряженные 305,308,312,
316 см. Напряженные сегменты
Секатор 321
Сеть 385
Сети см. Структуры
Сигнал 385
Сила 385
- включить, выключить, создать, ум-
ножить 117
- возникновение при преобразовании
вида или формы энергии 117, возмож-
ность возникновения 307, Природа
физическая 117, Создание и поддер-
жание 118-121(К), 305, Способы пере-
дачи при различных типах связей 77,
416 Предметный указатель
Умножение одноступенчатое 129(К)
- моментов соединения 300
- порождающая трение 385
- полевая 78
- противодействующая 122
- разъединяющая 80,91
- реакции 305
-трения 78,90,91,385
- трения заклинивания 385
Синектика 385
Синтез конструкций 45
- логический новых подвижных сое-
динений с помощью матрицы связей 97
- составных структур 327
- цепей связей 80
Система 386
- активная 237
- единая элементов 353
- замкнутая 227
- изготовления чертежей 356
- каталогов 24,62
- обслуживания 237
- транспортировки 237
- управления 237
Системы передачи энергии 17,122,302
- клиновые 92,151,152
- ленточные тормозные 92,153
- рычажные 153(К)
- фрикционные 90 - Использование в
качестве усилителей мощности 128
- - без возможности заклинивания 90
- - дегрессивные 90,91
- - линейные 90
- - нелинейные - Операции для функ-
ционального изменения 95
- - одноступенчатые - Варианты 151
- - прогрессивные 90
- - рычажные 92
- - с возможностью заклинивания 91
- - с заклиниванием в стопорах об-
ратного хода 132
- - с различными характеристиками 94
Скоростей соединение 310
Слово 386
Сложность 386
- конструкции 53
- содержания каталогов 53
Случайный процесс 386
Состояния дестабильные 87
События физические 31
Совместимость попарная 26
Соединение 164,332,386 - Возможности
применения 170; Классификация 164,
165(Р), 167; Функциональная интег-
рация 170; Проектирование 168; Роль
типов связей при изготовлении 164
- вал-ступица 180,182(К), 186,386
- вещественной связью 164,386
- в качестве запирающих элементов
164
- (включение) параллельное 386
- (включение) последовательно-па-
раллельное 386
- (включение) последовательное 386
-заклепочное 171,173(К),386
- - двустороннего доступа 172,174(К)
- - одностороннего доступа!72,178(К)
- - принципы классификационные 172
- квазигеометрическое 134,171
- на основе фрикционной связи(фрик-
ционное)386
- неподвижное(жесткое) 86,135,164,
386
- неподвижное с переопределенностью
во вращательном направлении 98
- неразъемное 134,164,386
- не на основе вещественной связи
(невещественное) 386
- на основе заклинивающей связи
(заклинивающее соединение) 387
- парное 308
- подвижное 164,187,387
- поступательно подвижное 86
- разъемное 134,164,387
- силовой связью 164,168,387
- с упругой и пластической связью -
Частота использования в машино-
строении 169
- с узловой точкой 387
- шпоночное напряженное 180
Сообщение 247,387
Соотношения логические 18
- физические 18
Сопряжение 213
Сопряженные профили 387
Составление конструкторских катало-
гов - Выбор темы 62; РекомендациибЗ
Состояния идеализированные - Комби-
нация 305
Сочленение 149,154,388 см.также
Шарнир
- двойное(двойной шарнир) 388
- пленочное 388
- пружинное 387
Специальные признаки 387
Специальная часть 387
Список аналитический 237,241-244(Р)
- ключевых слов для выражения тех-
нических понятий 74
- принципов 74,75(К),385
- специальных и классификационных
признаков для конструкторских ката-
логов 66-72
- требований 60,233-235,387
Способы изображения конструкций 154
- комбинированные изменения
направления движения 302
- комбинированные конструирования-
Промежуточные шаги 282
- организации обзорного и детально-
го каталогов 51
Средства вспомогательные для разра-
Предметный указатель 417
ботки изделий 224
Степени свободы идентичные 98,99,146
Стопорение обратного хода см. Сто-
пор обратного хода
- механическое обратного хода 139(К)
Стопор обратного хода 109,132,134,
135,137,388
--переключаемый 137
- - с геометрической связью 134
- - с фрикционной заклинивающей
связью 132
- - фрикционный элементарный 133
Структура 388
-геометрическая 154,388
--линейная 154,256
- - цепная 154,353
Структура конструкта вная(монтажная)
204,388
- соединений сетевая 250,251(Р)
- терминологическая классификацион-
ных принципов в каталогах 46
- функциональная 23,247,309,388
- - абстрактная 29,33,224,247,250,
253,349
- - векторная 296,297,388
- - геометрическая 149,154,247
325,388
- - информационная 388
- - логическая 34,247,296,388
- - новая 38
- - специальная 256,388
- с абстрактными величинами 247
- - с логическими величинами 284
- - с физическими величинами 254
- - физическая 34,38,149,247,282,389
Структурно-функциональных элемен-
тов(СФЭ) соединение 389
Субстанции 28
Суждения оценочные общие 48
Схема абстрактных функций 224
- линейно-структурная 35,389
- принципиальная 224,325
- соединений 389
Схемный(релейный) элемент 389
Т
Твердый смазочный материал 193
Тела качения 193(Р) 389
- - в подшипниках 193
Тема конструкторского каталога 62
Температура допустимая для подшип-
ников скольжения 196
Теория конструирования 389 - Общие
принципы 28; Разработка способа
синтеза 142
Термины бинарных состояний 101
Техника пространственной компановки
органоподобная 43
Технико-экономическая оценка 389
Типы связей см. Связь требований 76(К)
Топология 154
- конструкции 350
Точки соприкосновения 97
Траектория замкнутая в одном нап-
равлении 109
- кардиоидная 111
- незамкнутая в обоих направлениях
109
Требование - Категории 75
- граничное нецелевое 389
- - целевое 389
- диапазонное нецелевое 389
- - целевое 389
- жесткое 74,389
- к конструкторским каталогам 46
- необязательное 74,389
- с верхней границей 389
- с нижней границей 390
- точечное(Т) 390
- целевое без границ 390
Требований список 390 см. Список
требований
Требования 390
Триггер 390
У
Угол клина 95
- наклона зубьев 158
- охвата ленты 95
Узел структурно-функциональный 204,390
Умножитель(мультипликатор) силы(ме-
ханический) 122,302,390 см.также
Мультипликаторы
- силы - Варианты соединения 124;
Особые свойства 128(Р); Соединение
123(Р), 125; Функции дополнительные
126
- - внутренний 169
- - клиновой 169,350
- - рычажный 169
- - с собачкой 390
- - фрикционный 390
- скорости(механический) 128,302,390
Уплотнение запираемого объема 23
Уплотняющая сила 23
Уровень решений в каталогах 53
Упор 84,391
- двусторонний 89(К)
- - с различными тинами равновесия 88
- односторонний 84,85
Упругость 77
Уравнение логическое 101
- полей матрицы функциональных ве-
личин 258-278(Р)
Усилитель механический 391
-аналоговый 128
- дискретный 129
- мощности как умножитель скорости
и силы 128
- силы 391
Условное обозначение - Символ 391
Утилизация см. Рециклинг
418 Предметный указатель
Устройства быстропечатающие 353
- логические управляющие 28
- логические - Порядок конструиро-
вания 101
Устройство переферийное ЭВМ 353
-техническое 28,204 - Варианты
252; Компановка элементов 339; Раз-
работка на основе данной схемы ме-
ханизма 149,150(К); Структурные
представления 154
- - новое - Получение из имеющихся
149
- - со статически напряженными цик-
лами 346
Ф
Фаза конструирования 391
- предметная(предметной реализации)
32,34,349,391
- формулировки задачи 32,227,391
- функциональная(фаза функциональ-
ной реализации) 32,33,34,354,391
- функциональная в рабочем плане 247
Фиксатор механический 322(Р)
Флипфлоп см. Переключатель двухпо-
зиционный
Форма каталога комбинированная 49
Формулирование 33,391
- первоначальное 228
Формуляр на активном дисплее 356
Фрикционная система 391
- - дегрессивная 391
- - линейная 392
- - нелинейная 392
- - прогрессивная 392
- - составная 392
Функциональная структура см. Струк-
тура функциональная
Функции абстрактные 247,248,250
- векторные и абстрактные - Состав-
ление 306(Р)
- вещественные 393
- информационные 284,392
- комбинаторные логические 101,102
- объемные элементарные - Обозначе-
ния дисплейные 327,328
- опорные элементарные 327
- последовательные логические 102,
107
- рабочих поверхностей 287,330
-частные 17,24,34,254,350
- энергетические 392
Функции носитель 392
Функция 393
- в кибернетике 393
- векторная 393
- главная 3 1,393
- дополнительная!!юбочная) 393
- идеальная(заданная) 32,33,286,393
- логическая 392
-общая 17,247,393
- объемная(рабочего объема)287,32б,
394
- поверхностная(пары рабочих по-
верхностей) 394
- реальная(фактическая) см. Функция
идеальная(заданная)
- специальная 394
- частная 394
Функциональная единица 392
- интеграция 393
- связь(соединение) 393
Функциональное разделение 393 см.
Разделение функциональное
- условное обозначение(функциональ-
ный символ) 393
Функциональные элементы энергети-
ческие 393
ц
Цапфа 171
Цилиндр гидравлический двухкамерный
349
- делительный 157
-производящий 158
Цепь 23 см.также Структура функцио-
нальная
- базовая 311 (Р) 312
- замкнутая плоская 168,310
- звеньев 77,140,394
- кинематическая 140,142,146,394
-открытая 168
- переопределенная 309(Р), 310,316,
344,394
- принудительная 312
- размерная 213-215,218,220
- сверхзамкнутая 394
- сигнальная 304
-статическая 140,142,394
- тяговая симметричная 321
- функциональная 288(Р)
Цепи - Классификация по числу сте-
пеней свободы 142
- звеньев в передачах - Рабочие
состояния 315
- исходные - Ограничения при варь-
ировании 146
- с числом звеньев не более четырех
140,144(К)~
Цифра 394
Цифровой 394
Цикл напряженный 80,142,305,307,308,
312
- - простой 308
- - статический 308,316,319,344
- - стационарный 315,317
Циклы и сегменты напряженные - При-
меры использования в приводах
314(Р),315
Ч
Частота вращения для подшипников
качения 199
Предметный указатель 419
Часть каталога главная, классифика-
ционная, специальная 47
Черный ящик 394
Чертеж - Получение на дисплее 356
- в ортогональных проекциях 224
- схематический см. Эскиз
Чис ло звеньев как классификационный
и специальный признак 142
Число степеней свободы - Определе-
ние 319
--плоской замкнутой цепи 310
Четырехполюсник 394
Ш
Шаг конструирования 394
Шаги алгоритмизируемые 224
- формализованные 224
Шарнир кабельный 290
- карданный 291
- ленточный 290
- пленочный 290
Шарниры 154
Шнуровки 125
Шифратор(кодер) 394
Штамповка объемная - Классификация
209,210(К)
Э
Эвристика 395
Элемент 395
- демпфирующий 305
- задержки 395
- конструктивный (монтажный) 395
- логический 395
- натяжной 180
- предметный 395
- профильный 180
- структурно-функциональный(СФЭ)
325,395
- структурный геометрический 325,395
Элементы - Параметры варьирования
поверхностей и объемов элементов 154
- геометрические 353
- геометрической функциональной
структуры 325 - Как элементы хими-
ческие^ подобие) 348
Элементы-источники 331
- контурные 395
- механизмов 395
- статические 339,341
- модели 247
-структурные 154,350,395
- структурно-функциональные 154,326,
331
- структурно-функциональные - Варь-
ирование 331; Компановка 337; Объ-
единение по рабочим поверхностям, в
рабочих объемах 331,332(Р); Разде-
ление 335,336
- памяти 107
- полевые 331
Элементы функциональные 247,250,395
- - векторные 296,298,300,304
- - вещественные 396
- - информационные 396
Элементы энергетические для техни-
ческих устройств 339
Энергия 31,247,396
Энтропия по Больцману 30,396
- по Шеннону 396
Эскиз 204
Этап конструирования(отрезок, фазы)
224,396
- геометрически материальной реали-
зации 35
- предметной фазы конструирования 36
- технологической реализации 35
Эффект физический 16,396
- умножения 125
Эффекта носитель 396
Эффективность решения техническая 40
- решений экономическая! стоимость)
40
СПРАВОЧНОЕ ИЗДАНИЕ
Карлхайнц Рот
КОНСТРУИРОВАНИЕ
С ПОМОЩЬЮ КАТАЛОГОВ
Редактор Д.П. Бут
Художественный редактор С.И. Голубев
Технический редактор Р.Д Гольдштейн
Корректоры Л.Е. Сонюшкина и Л.А. Ягупьева
ИБ № 5292
ЛР-080003 от 15.08.91 г.
Сдано в набор 22.10.1991 г. Подписано в печать 14-02.95.
Формат 60х90 1/8. Бумага офсетная. Гарнитура Тиде.
Печать офсетная. Усл. печ. л. 53 Усл.кр.-отт 52,5. Уч.-изд. л. 52,98.
Тираж 5 000 экз. Заказ 2317
Ордена Трудового Красного Знамени издательство "Машиностроение”,
107076, Москва, Стромынский пер., 4
Отпечатано в Московской типографии № 2 РАН,
121099, Москва, Шубинский пер., 6,
с оригинал-макета, изготовленного в Барановичской укрупненной типографии.
225320, г. Барановичи, Советская, 80.