

























































































































































































































































































Текст
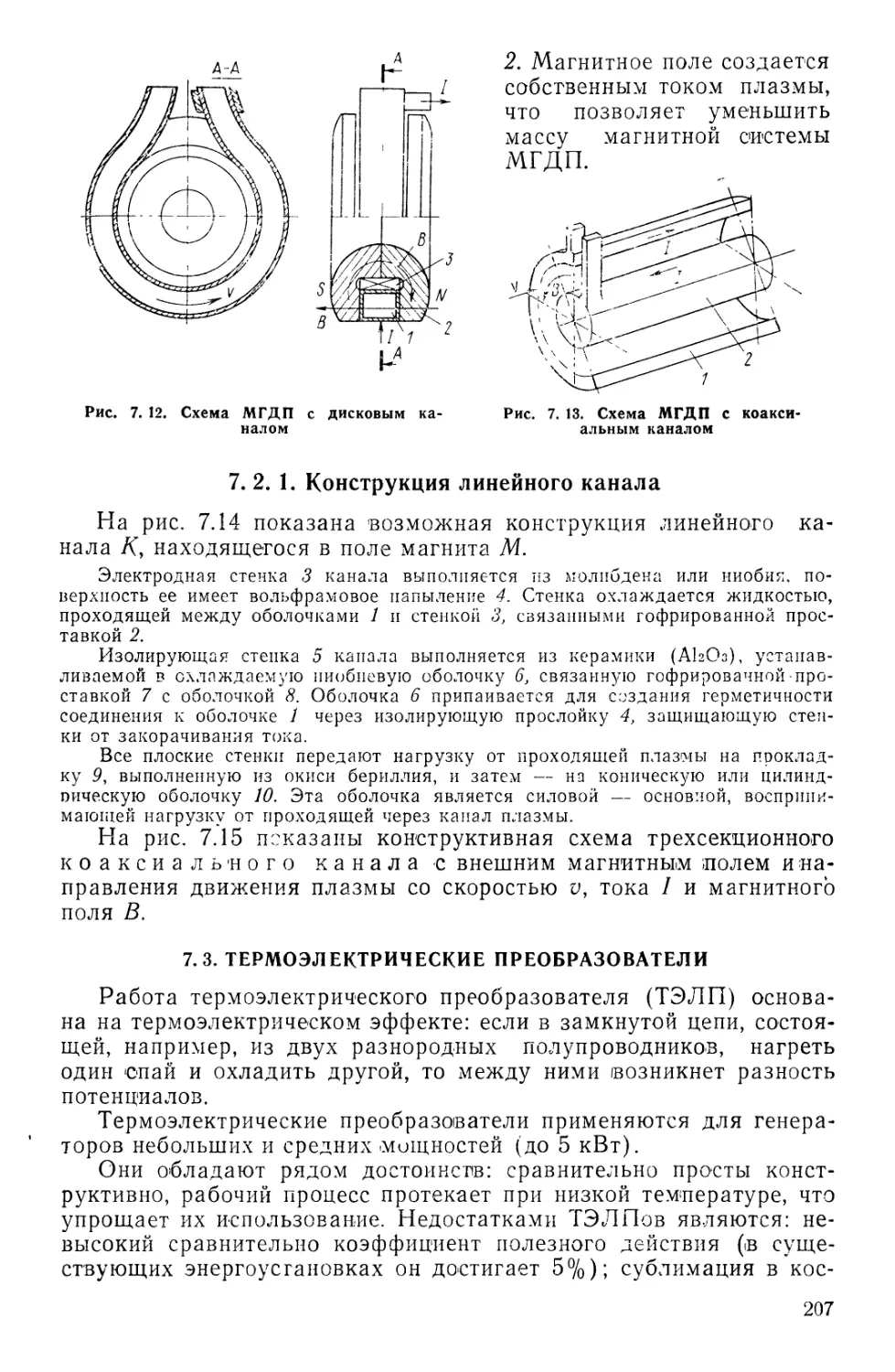
А.ф.ГУРОВ
Д.Д.СЕВРУК
Д.Н.СУРНОВ
конструкция
И ПРОЕКТИРОВАНИЕ
ДВИГАТЕЛЬНЫХ
УСТАНОВОК
Допущено Министерством высшего и среднего
специального образования СССР
в качестве учебника для студентов
авиационных специальностей
высших учебных заведений
Под ред. д-ра техн. наук
проф. А. Ф. ГУРОВА
ВТОРОЕ ИЗДАНИЕ,
ПЕРЕРАБОТАННОЕ И ДОПОЛНЕННОЕ
МОСКВА «МАШИНОСТРОЕНИЕ» 1980
ББК 39.62
Г95
УДК 629.78.036.7 (075.8)
Гуров А. Ф. и др.
Г95 Конструкция и проектирование двигательных
установок: Учебник для авиационных высших учебных
заведений/А. Ф. Гуров, Д. Д. Севрук, Д. Н. Сурков; Под
ред. А. Ф. Гурова — 2-е изд. перераб. и доп. — М.,
Машиностроение, 1980.— 320 с, ил.
В пер.: 1 р.
Г 318°8-215 215-80 3607000000 ББК 39"62
038(01 )-80 6Т6
ИБ № 1993
Алексей Федорович Гуров
Доминик Доминикович Севрук
Дмитрий Николаевич Сурнов
КОНСТРУКЦИЯ И ПРОЕКТИРОВАНИЕ
ДВИГАТЕЛЬНЫХ УСТАНОВОК
Редактор М. А. Колосов Корректор В. Е. Блохина
Технический редактор Т. С. Старых Переплет художника Е. В. Бекетова
Сдано в набор 19.П.79 Подписано в печать 29.02.80 Т-00783
Формат 60X907ie Бумага типографская № 2 Гарнитура литературная
Печать высокая Усл. печ. л. 20,0 Уч.-изд. л. 21,8
Тираж 2300 экз. Заказ 3050 Цена 1 р.
Издательство «Машиностроение» 107885, Москеэ, ГСП-6 1-й Басманный пер., 3.
Московская типография № 8 Союзполиграфпрома при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли.
Хохловский пер., 7.
©Издательство «Машиностроение», 1980 г.
ПРЕДИСЛОВИЕ КО ВТОРОМУ ИЗДАНИЮ
Первое издание настоящего учебника вышло в 1970 г. под
названием «Конструкция и расчет на прочность космических
электроракетных двигателей».
За время, прошедшее после выхода первого издания,
космическая техника сделала грандиозный шаг вперед. На Луне
побывали люди, советские автоматические станции исследовали Луну,
космические двигатели длительно работают в космическом
пространстве, обеспечив, в частности, рекордную длительность пребывания
в космосе героев Советского Союза, летчиков-космонавтов В. А.
Ляхова и В. В. Рюмина. Опубликованы обширные материалы по
конструкции и расчетам деталей 'космических двигательных установок,
класс которых значительно расширился. Все это обусловило
необходимость внесения в учебник существенных дополнений и изменения
его названия.
Настоящее издание сохраняет принятое в первом издании
методическое построение учебника.
В учебнике описаны конструкции и дан расчет на прочность,
устойчивость и колебания основных деталей космических
двигательных установок, включающих энергетические установки и
электроракетные двигатели (плазменные, электростатические, электро-
нагревные). Большое внимание уделено источникам энергии
космических двигательных установок (ядерные реакторы, изотопные
источники питания, солнечные батареи и концентраторы,
химические топливные элементы); описаны конструкции преобразователей
энергии, методики их проектирования и расчета. При этом в
учебник внесен раздел магнитогидродинамических преобразователей,
рассмотрены конструкции омических и коллоидных двигателей,
введены разделы, посвященные расчетам деталей в стадии
ползучести, изложены вопросы прочностной надежности и
малоцикловой прочности. Одновременно некоторые материалы первого
издания несколько сокращены и частично перегруппированы.
3050 3
Примеры конструкций носят учебный характер и не связаны с
какими-либо конкретными двигателями и установками.
Физические величины даны в единицах международной системы
(СИ), за «исключением температуры, которую авторы по ряду
соображений сочли целесообразным оставить в градусах Цельсия.
Раздел 1.5.6, посвященный проблеме надежности космических
двигательных установок, написал д-р техн. наук, проф. Д. Д. Сев-
рук, гл. VI — доц. Д. Н. Сур'нов, остальной материал — д-р техн.
яаук, проф. А. Ф. Гуров.
Авторы выражают искреннюю признательность д-ру техн. наук
Д. И. Белоусову, сделавшему ряд ценных замечаний при
просмотре рукописи, и доц. Ю. А. Бровальскому.
Все замечания и пожелания по книге следует направлять по
адресу; издательство «Машиностроение», 107885, Москва, ГСП-6,
1-й Басманный пер., 3.
ЧАСТЬ ПЕРВАЯ
ОБЩИЕ СВЕДЕНИЯ О КОСМИЧЕСКИХ
ДВИГАТЕЛЬНЫХ УСТАНОВКАХ
Целью курса «Конструкция и расчет на прочность космических
электроракетных двигателей и энергетических установок» является
изучение конструкций двигательных установок (КДУ), их узлов и
деталей, расчет на прочность ;и колебания, развитие навыков про-
ектирозания и конструирования узлов и деталей, изучение
динамических явлений, сопровождающих работу двигателя.
В космическом пространстве могут использоваться различные
двигательные установки (ДУ). В настоящее время широко
применяются двигательные установки с химическими ракетными
двигателями — жидкостными ракетными двигателями (ЖРД) и
ракетными двигателями твердого топлива (РДТТ).
В настоящем учебнике изучаются космические двигательные
установки (КДУ) с электроракетными двигателями, тяга у которых
создается в результате взаимодействия электромагнитных,
электростатических полей с ионизированным рабочим телом. Такая
установка состоит из двух основ'ных частей: бортовой энергетической
установки (КЭУ) и собственно электроракетного двигателя
(КЭРД).
Глава I
СХЕМЫ КДУ. ПРОЧНОСТЬ
1.1. КЛАССИФИКАЦИЯ КДУ
Все космические двигательные установки по типу
энергопитания можно разделить на КДУ:
с ядерным реактором (или реакторами);
с использованием энергии радиоактивных изотопов;
с использованием солнечной энергии;
с использованием химической энергии.
По способу преобразования энергии в электрическую — на
двигатели:
с машинным преобразованием энергии;
с термоэмиссионным преобразованием энергии;
с термоэлектрическим и фотоэлектрическим преобразованием
энергии;
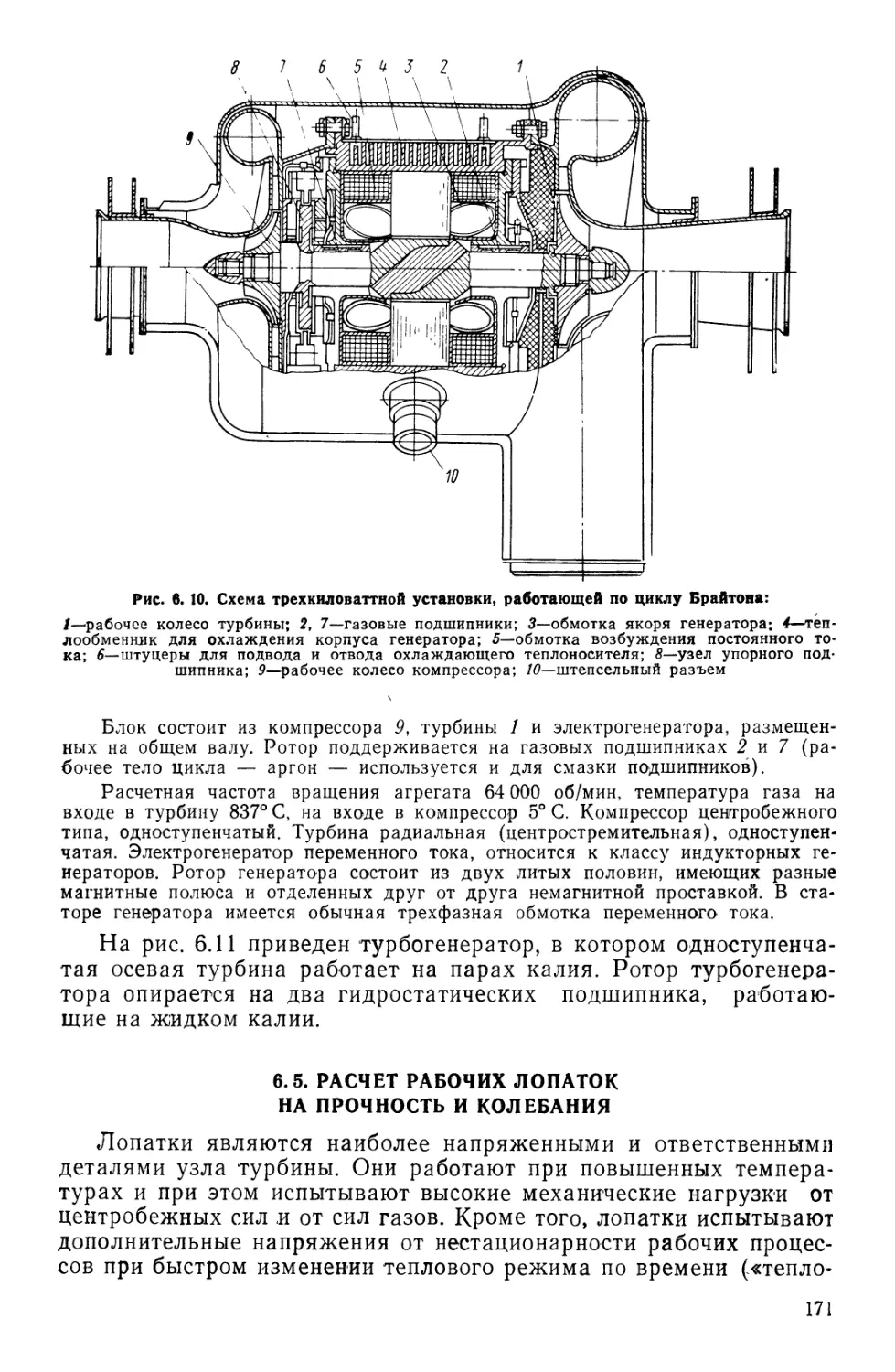
Рис. 1.1. Общая схема состава космических двигательных установок (КДУ):
КЭУ — космическая энергетическая установка; КЭРД — космический электроракетный
двигатель;
ИЭ — источники энергии: ЯР — ядерный реактор, ИГ — изотопный генератор, С —
солнечный источник; X—химический источник;
ПЭ — преобразователи энергии: МП — машинный. ТЭП — термоэмиссионный, ТЭЛП —
термоэлектрический, ФЭП—фотоэлектрический, МГДП—магнитогидродинамический;
ТОА — теплообменны-е аппараты. И — излучатели, ТО — теплообменники, ТТ — тепловые
трубы-
А — агрегаты: Н — насосы, ФЛ — фильтры-ловушки, КЕ — компенсационные емкости, К —
клапаны;
Д—двигатели; ПД—плазменные, ЭСД—электростатические, ЭНД—электронагревные;
СП—система питания; СО—система охлаждения;
Т — тепловые, П — на промежуточных нейтронах, Б — на быстрых нейтронах. ГФ —
газофазные, СК — солнечные концентраторы, СБ — солнечные батареи, АБ — аккумуляторные
батареи, ТЭ — топливные элементы, ЖМ — жидкометаллические, Г — газовые, РК —
редукционные клапаны, ОК — обратные клапаны, ЗК — заправочные клапаны, В — вентили, ДК —
дренажные клапаны; ПТ — постоянного тока, ИД — импульсные двигатели, ЭТД —
электротермические двигатели; ИД — ионные двигатели, КД — коллоидные двигатели, АДЭ —
двигатели с азимутальным дрейфом электронов
с термохимическим преобразованием энергии (топливные
элементы) ;
с магнитогидродинамическим преобразованием энергии.
По типу двигателя:
на ионные (электростатические);
плазменные;
электротермические.
По целевому назначению:
на маршевые;
коррекции;
краткоресурсные одноразового применения.
Двигатели делятся также на много режимные и одно-
режим н ы е.
Рассмотрим сначала классификацию их по целевому
назначению.
Маршевые двигатели предназначаются для обеспечения
межпланетного полета летательного аппарата. Эти двигатели могут
быть как однорежимными, так и многорежимными. В последнем
случае они могут изменять величину и направление вектора тяги.
Ступенчатое изменение величины тяги может быть осуществлено
включением и выключением двигателей, входящих в силовую
двигательную установку, или плавной регулировкой. Маршевые
двигатели могут быть спроектированы для полета на аппарате с
человеком и без человека. Пилотируемый космический корабль требует
специальной биологической защиты экипажа корабля от
космических излучений и от радиации, если источником энергии являются
ядерный реактор или радиоизотопы. Для некоторых космических
программ длительность непрерывной работы маршевых двигателей
может достигать 10 000 ч и более.
Двигатели коррекции предназначены для коррекции траектории
(орбиты) космического летательного аппарата. Суммарное время
работы такого двигателя может составлять 100 ч.
Краткоресурсные двигатели — это однорежимные двигатели
одноразового применения для беспилотных летательных аппаратов и
для искусственных спутников различного назначения. Длительность
их непрерывной работы не превышает 5 ч. Общая схема состава
космических двигательных установок показана на рис. 1.1.
1.2. ТРЕБОВАНИЯ К КОСМИЧЕСКИМ
ДВИГАТЕЛЬНЫМ УСТАНОВКАМ
Требования к КДУ складываются из требований к
энергетической установке и к собственно двигателю.
1.2. 1. Удельная масса КДУ
Энергетическая установка и двигатель должны иметь
наименьшую удельную массу.
Удельной массой КЭУ уэу называется отношение пол-
лой ее массы Мэу в кг к электрической мощности N9 в Вт:
Уэу^Мэу/N,. (1.1)
Удельной массой двигателя удв называется отношение
массы Мдв «сухого» двигателя (без расходуемого рабочего тела)
в кг к его тяге R в Н:
V»=MJR. (1.2)
По параметрам уэу и 7дв оценивается степень массового
совершенства энергетической установки и двигателя.
При проектировании КДУ исходят из задания, в котором
указаны величина тяги, а также габаритные и массовые (весовые)
характеристики. При этом целесообразно, чтобы КДУ заданной тяги
имела минимальные габариты и массу.
Иногда в задании на проектирование даются габариты и масса
КДУ и требуется получить ее с максимально возможной тягой.
Такая форма задания на проектирование возникает часто как
результат модернизации уже выполненной конструкции.
Параметры КДУ, ее характеристики — тяга или мощность —
связаны с ее габаритами и массой.
">//, кг/пВт
500
Рис. 1. 2. Зависимость удельной массы энергетических установок от электрической
мощности:
1—термоэлектрическая система на радиоизотопах; 2—солнечная фотоэлектрическая батарея;
3—термоэмиссионная система на солнечной энергии; 4—термоэлектрическая система с
ядерным реактором; 5—термоэлектрическая система с ядерным реактором с защитой;
6—турбогенераторная система на солнечной энергии; 7—термоэмиссионная система с ядерным
реактором; 8—термоэмиссионная система с ядерным реактором с защитой; 9—турбогенераторная
система с ядерным реактором; 10—турбогенераторная система с ядерным реактором с
защитой
Космические двигательные установки не выпускаются серийно,
их конструкции еще не приобрели законченных форм, вот почему
удельная масса их колеблется в больших пределах и зависит от
типа конструкции, схемы, назначения и мощности системы.
В табл. 1. 1 показаны удельные массы различных
существующих энергетических установок, а на рис. 1.2—зависимости ^эу от
мощности для различного типа установок.
Система
Турбогенераторная с ядерным реактором
То же
Термоэмиссионная с ядерным реактором
То же
Термоэлектрическая с ядерным реактором
То же
Термоэмиссионная с солнечным концентратором
энергии
То же -
Термоэлектрическая на радиоактивных изотопах
То же
Т
"э«
кВг
10 000
5
2 500
8
о
0,3
3
0,1
1
0,1
а б л и ц а 1.1
Ъу
кг/кВт
3
100
4
20
100
400
30
45
100
300
Как видно из табл. 1. 1 и рис. 1.2, удельная масса
энергетических установок зависит от величины электрической мощности.
Особенно заметно снижается удельная масса у энергоустановок с
ядерными реакторами. Это объясняется тем, что масса ядерного
реактора и масса узла защиты, составляющие основную часть массы
ядерной энергоустановки, мало изменяются с увеличением ее
мощности. Поэтому при больших уровнях мощности удельная масса
установок с ядерными реакторами является наименьшей, и именно
эти установки предпочтительнее применять в космических
летательных аппаратах.
Турбогенераторные и термоэмиссионные установки имеют
меньшую удельную массу по сравнению с другими, начиная с
мощности приблизительно 50 кВт.
Таблица 1.2
Тип установки;
преобразователь
Радиоизотопная;
термоэлектрический
Ядерная;
термоэлектрический
Солнечная;
термоэмиссионный
Ядерная;
термоэмиссионный
Ядерная с МГД-
преобразователем
Ядерная;
турбогенераторный
N3y кВг
Ы0~3
1-100
(1—5>-10—3
10—1000
200000
500-20000
If
60—20
60-20
15-1
2—0,1
10-1
*], %
3—10
3-10
10-30
10-30
5-25
Т реактора,
кг/кВг
(тепловая)
5-2
0,6-0,2
0,02
0,15-0,04
Т
излучателя, кг/кВг
0,5-0,1
0,3—0,05
0,02
0,1—0,03
60—20
10—1
0,2
2—1
Энергоемкость,
кВт/кг
4,1—160
26-5700
125000
1950—38000
Тип двигателя
Магнитоплазменный дуговой
То же
Импульсный плазменный
То же
Цезиевый с поверхностной
ионизацией, электростатический
То же
Цезиевый с объемной ионизацией
Ртутный с объемной ионизацией
Коллоидный
То же
R,
мН
4
14
0,017.
6,6
0,022
0,089
4,53
1,64
0,039
4,45
А>э,
Вт
224
727
2,5
364
27
32,4
141
64
5
68
Т
м,
кг
2,2
—
1,3
—
—
2,7
11,5
2,3
3
9,1
а б л и ц а 1.3
7„ -10-3,
Дв
кг/Н
0,2
—
100
—
—
20
0,5
2
100
2
Космические энергетические установки мощностью от 1 до
50 кВт перспективны с термоэмиссионным и термоэлектрическим
преобразованием энергии при любом неядерном источнике тепла.
Радиоизотопные источники энергии эффективны для систем с
термоэлектрическими преобразователями энергии для двигательных
установок малой мощности (от 30 Вт до 5 кВт).
В табл. 1.2 приведены удельные массы и другие параметры
КЗУ, использующие различные типы преобразователей.
Космические электроракетные двигатели так же, как и КЭУ,.
не выпускаются серийно, и поэтому значения их удельных масс
колеблются в широких пределах. В табл. 1.3 приведены значения
удельных масс для различных типов КЭРД.
1. 2. 2. Экономичность КДУ
Вторым важным требованием к КДУ является требование
минимального расхода рабочего тела при ее эксплуатации, т. е.
наилучшая экономичность.
Экономичность КДУ определяется экономичностью КЭУ и:
КЭРД.
ЭконОхМ'ичность КЭУ определяется удельным расходом рабочего
тела (РТ).
Удельным расходом космической энергетической установки
называется отношение секундного расхода РТ к ее электрической
мощности:
Csv=mpJN9 (1.3)
и имеет размерность кг/(Вт-с).
Величина Сэу , где источником энергии является ядерный
реактор, невелика; она несколько больше в ЭУ с радиоактивными"
изотопными источниками тепла, равна нулю в ЭУ с солнечным
источником энергии и существенна в ЭУ с химическим источником
энергии. Экономичность КЭРД также определяется удельным
расходом рабочего тела.
Удельным расходом двигателя называется
отношение секундного расхода рабочего тела к тяге двигателя:
Cm = mpJR, (1.4)
его размерность кг/(Н-с).
В электрических КДУ весь запас рабочего тела находится на
борту корабля, поэтому принято определять экономичность
двигателя по удельному импульсу.
Удельным импульсом двигателя называется
отношение его тяги к секундному расходу рабочего тела:
/ = /?//нр.т. (1.5)
Эта величина обратна удельному расходу рабочего тела; ее
размерность Н • с/кг или м/с.
10
Ниже дано сравнение удельных импульсов плазменных
космических двигателей (ПД), ионных космических двигателей (ИД) и
жидкостных ракетных двигателей (ЖРД):
/, м/с
ЖРД
(2,2—3,5) • 103
пд
(50—100) • 103
ид
до 600 103
Как видно, космические электроракетные двигатели (ПД и ИД)
имеют удельный импульс существенно выше, чем ЖРД. Этим и
объясняется преимущественное применение электроракетных
двигателей для космических полетов.
1. 2. 3. Надежность и долговечность КДУ
Под надежностью обычно понимается свойство изделия
выполнять заданные функции, сохраняя свои эксплуатационные
показатели в заданных пределах в течение требуемого промежутка
времени или требуемой наработки.
Надежность изделия обусловливается его «безотказностью»,
«ремонтопригодностью», «сохраняемостью», а также
«долговечностью» его частей.
Здесь рассмотрены только вопросы, относящиеся к
долговечности (более подробно см. подразд. 1. 5. 6).
Долговечностью называют свойство изделия сохранять
работоспособность до предельного состояния при установленной
системе технического обслуживания и ремонтов.
Показателями долговечности являются ресурс, срок службы.
Ресурс характеризует продолжительность работы изделия
(наработку) до предельного состояния и обычно оговаривается в
технической документации. Срок службы — календарная
продолжительность эксплуатации изделия до наступления предельного
состояния или до списания.
Несколько одинаковых двигателей при их эксплуатации будут
иметь юазличную долговечность, так как разрушения и аварии
возможны в различных элементах двигателя и в различное время и
происходят в результате малозаметных различий в материале,
технологии изготовления двигателей и других причин.
Ресурс (срок службы) устанавливается заводом-поставщиком
как время гарантированной безаварийной работы двигателя.
Долговечность двигателей различного назначения различна.
Например, долговечность ракетных двигателей жидкого и
твердого топлива (ЖРД,*РДТТ), как правило, не превышает 5 ч;
космических электроракетных (КДУ) — от 5 до 10 000 ч.
Ресурс ЖРД и РДТТ одноразового применения складывается
из времени полезной работы, времени заводских контрольных и
сдаточных испытаний.
11
Ресурс двигателей многократного применения целесообразно
устанавливать по времени безаварийной работы наиболее
напряженной ответственной детали двигателя. У таких двигателей
существует понятие полного, или амортизационного, ресурса,
который устанавливается из нескольких промежуточных ресурсов.
После наработки времени, соответствующего промежуточному
ресурсу, двигатель подвергается полной разборке, замене
напряженных, опасных в аварийном смысле деталей, и поступает в
повторную эксплуатацию на протяжении следующего ресурса. Таких
ресурсов может быть несколько. Амортизационный, или полный,
ресурс двигателя может состоять из двух-трех промежуточных
ресурсов после переборок. После выработки амортизационного ресурс?
двигатель снимается с эксплуатации.
Долговечность КДУ может быть различной в зависимости от ее
целевого назначения.
1. 2. 4. Радиационная безопасность КДУ
Радиационная безопасность особенно важна для систем,
источником энергии которых является ядерный реактор или
радиоактивные изотопы.
Требования техники безопасности для аварийных состояний
КДУ различны в зависимости от времени и места предполагаемых
аварий. Если авария происходит на старте в непосредственной
близости от поверхности земли (не выше 50 км), то, так как
энергоустановка может не успеть сгореть, она должна не разрушиться
при падении. Если авария происходит на старте в значительном
удалелии от земли, то КДУ должна быть отстрелена в сторону
орбит, превышающих 400 км (орбиты высвечивания), где ее радиация
не опасна и где она может находиться длительное время. Если это
по какой-либо причине не произойдет, то следует предусмотреть
разрушение установки на такие мелкие частицы, чтобы обеспечить
сгорание .их при падении на значительном расстоянии от земли.
1.3. КОНСТРУКТИВНЫЕ СХЕМЫ КДУ
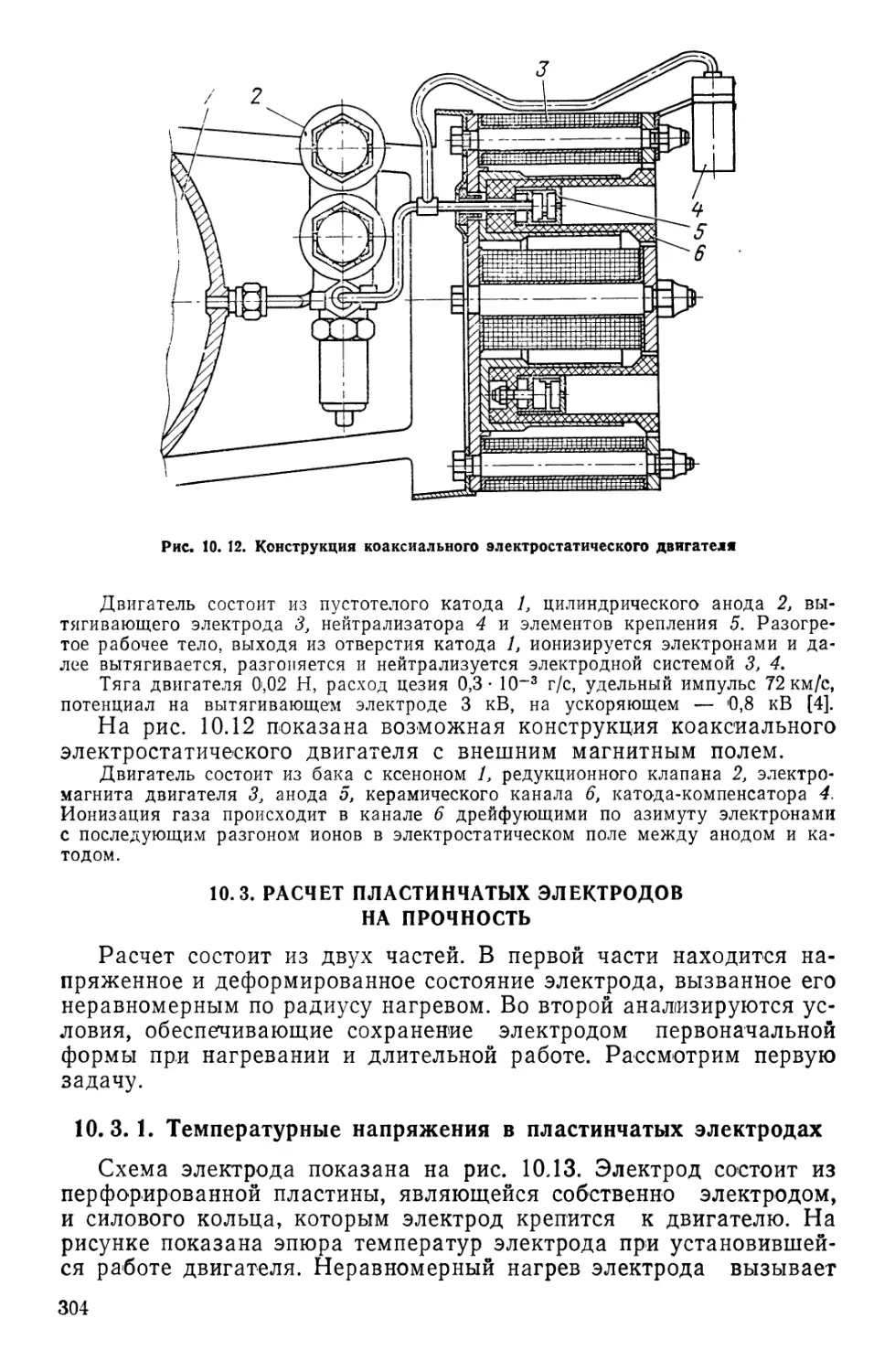
Конструктивная схема КДУ с ионным двигателем (ИД) и
машинным преобразователем энергии (МП) показана на рис. 1.3.
КДУ состоит кз двух основных частей — энергетической
установки, включающей элементы /—6 и 8—16, и ионного двигателя 7.
Энергетическая установка трехконтурная. Каждый контур
представляет собой герметичную независимую систему, где
циркулирует жидкий металл.
Первый контур установки (7) состоит из реактора 1 с защитой,
парогенератора 2 и агрегатов — насоса 11, фильтра-ловушки окислов 12 и
компенсационной емкости 13.
Второй конгур (//) установки включает парогенератор 2, турбину 3
турбогенератора 9, регулятор оборотов турбины 16, теплообменник-регенератор 15у
теплообменник-конденсатор 14 и агрегаты 11, 12 и 13.
Третий контур (///) установки состоит из теплообменника-конденсатора
14, холодильников-излучателей 6 и 10, теплообменников 8, центробежного
насоса 5, агрегатов 11, 12, 13 и подшипников 4 турбогенератора 9.
12
i
Рис. 1. 3. Схема КДУ с ионным двигателем и машинным преобразованием энергии
Несмотря на кажущуюся сложность трехконтур'ная схема
предпочтительнее одноконтурной и двухконтурной.
Одно из существенных достоинств трехконтурной установки
заключается в том, что в реакторе и холодильнике-излучателе
рабочее тело находится в однофазном рабочем состоянии.
В одноконтурной установке реактор должен быть кипящим,
В двухконтурной установке не удается избежать двухфазного
состояния рабочего тела в излучателе.
Рассмотрим взаимодействие элементов установки.
Эвтектика натрий — калий, натрий или литий из реактора /
поступает в парогенератор 2, способствуя парообразованию рабочего
тела второго контура установки в парогенераторе 2.
Образовавшийся пар, проходя через турбину 3, вращает ротор
турбогенератора 9, установленный, как правило, на гидростатических
подшипниках 4, а затем поступает в регенератор 15, где отдает часть тепла
рабочему телу второго контура, и далее — в конденсатор 14, где
пар полностью конденсируется.
При этом тепло от рабочего тела второго контура отбирается
холодным жидким металлом третьего контура, протекающим через
конденсатор 14. Он обычно выбирается таким же, как и металл
первого контура. Сброс тепла в третьем контуре осуществляется
холодильником-излучателем 10.
Перекачка металла в каждом контуре производится насосом 11>
очистка — фильтром 12, компенсация расширения металла при
разогреве — емкостью 13.
Часть жидкого металла в третьем контуре поступает в
подшипники 4 турбогенератора. Обычно температура жидкого металла,
выходящего из излучателя, выше оптимальной температуры
подшипника. Ее следует снизить до £=150 ... 200° С. Давление же в
13
контуре, определяемое только сопротивлением в контуре и кави-
тационными характеристиками насоса 11, обычно не
превышающее 0,1—0,2 МПа, недостаточно для работоспособности
подшипников. Поэтому в параллельной цепи третьего контура
устанавливается кроме дополнительного холодильника 6 центробежный
насос 5, который повышает давление металла в подшипнике до 0,4—
.0,6 МПа.
В рассматриваемой КДУ есть еще один, четвертый контур —
'контур охлаждения обмоток турбогенератора (на рис. 1.3 не
показан).
Достоинство рассматриваемой установки заключается в том, что
во всех ее частях используются элементы известных технических
решений, что упрощает ее реализацию. Известно также, что при
^.большой мощности КДУ удельная масса такой установки наи-
гменьшая. Недостаток установки — сложность и громоздкость.
Приведем один из возможных вариантов запуска такой
установки.
Установка вакуумируется и заправляется рабочим телом. При
заполнении контуров рабочее тело подвергается очистке, проходя
через стендовые фильтры. После заправки установка в разогретом
состоянии поступает на ракету-носитель и в этом состоянии
выводится на орбиту. На орбите после сброса аэродинамического и
теплового экранов включается реактор. Температура рабочего
тела повышается; излучатель, развернутый в рабочее положение,
обеспечивает охлаждение рабочего тела. Турбина турбогенератора
делает первые обороты, и через некоторое время КДУ выходит
на рабочий режим.
КЭУ с машинным преобразователем энергии и газообразным
рабочим телом показана на рис. 1. 4.
Установка состоит из турбогенератора, куда входят компрессор 1,
генератор 2 и турбина 3, нагревателя 4, теплообменника 5 и
холодильника-излучателя 6. Рабочее тело — газ (аргон) — сжимается в центробежном компрессоре
1 и с параметрами £=150° С, р=73 кПа поступает в теплообменник 5, а
затем — в нагреватель 4 с радиоактивным изотопным источником тепла, где
параметры рабочего тела доводятся до /=840° С и р=70 кПа. В этом состоянии
газ поступает на лопатки центростремительной турбины 3, установленной на
одном валу с генераторОхМ 2 и компрессором 1. Выходя из турбины с
параметрами £=547° С и р = 34,3 кПа, аргон отдает избыточное тепло в регенераторе
Ь, после чего поступает в холодильник-излучатель 6, а затем — снова в
компрессор 1. Такую маломощную энергетическую установку с электрической
мощностью до 5 кВт целесообразно применять в космических энергетических
системах.
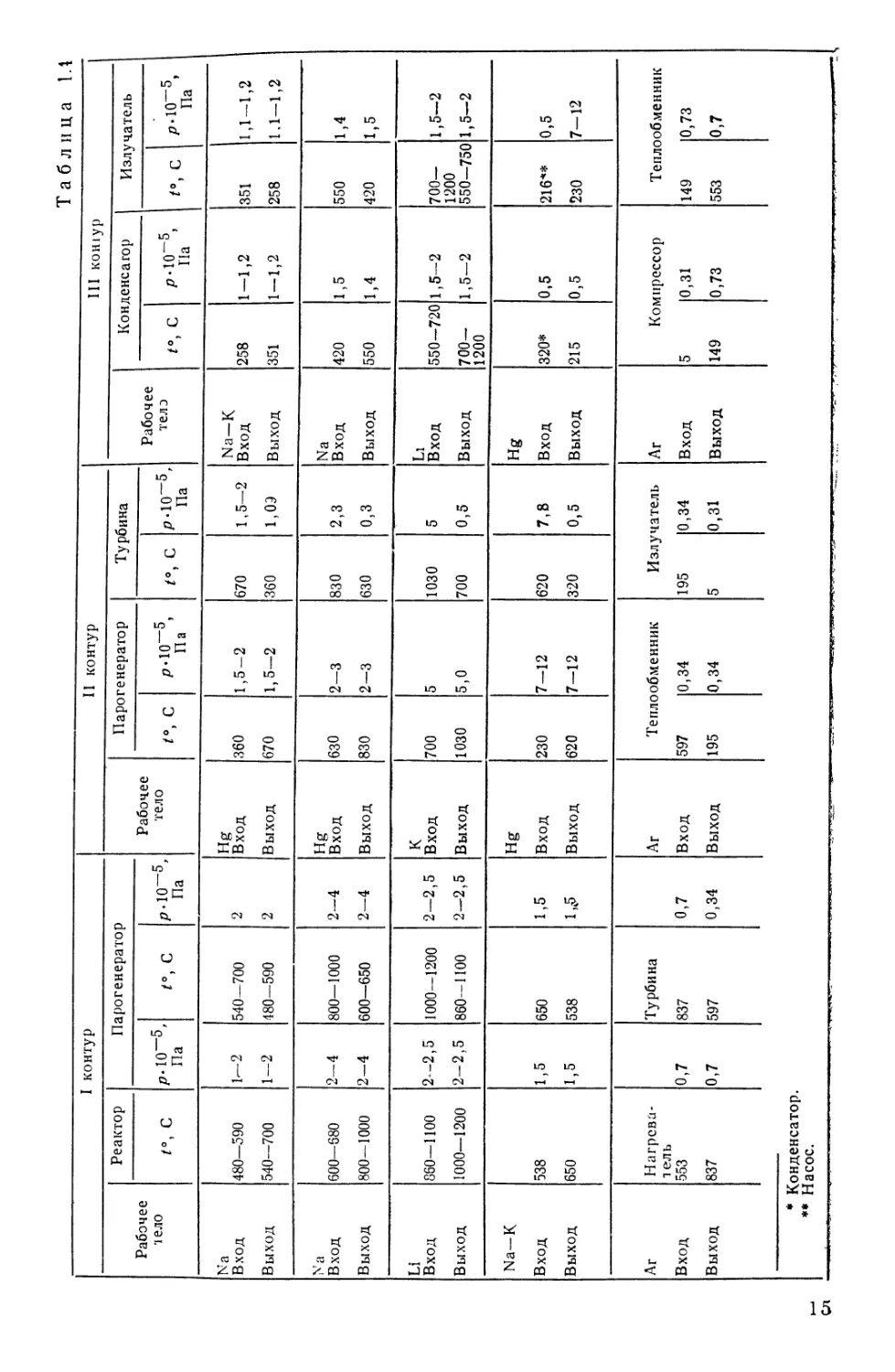
В табл. 1.4 указаны рабочие тела, температуры и давления,
с которыми можно встретиться при -праектированил такой
установки. Как видно, эвтектика натрия и калия, а также ртуть позволяют
спроектировать сравнительно низкотемпературную
энергоустановку. Достоинство ее — в возможном применении простых
нержавеющих сталей типа Х18Н9Т. Низкий уровень температур
теплоносителя упрощает доводку и эксплуатацию этой установки.
Недостаток этих рабочих тел — низкая температура излучателя. Цикл с
14
- '
сз
-г
\о
-<
о.
я
о
Пм1
О*
>>
я
о
>—1
а.
>->
я
о
1—1
.0
тел
3
Излу
гор
га
Я
О)
Кон;
га
я
я
а.
о
га
Сц
Я
См
Паро
10.1
2.
о»
Я
а>
См
о
га
С
а,
g
Pea
ю
I «
ft.
о
о
Ю
1 га
и
о
<и
Рабоче
телэ
ю
! га
ft.
и
о"
ю~
1 Я
ft.
и
о"
О)
% о
£s
га н
Он
LO
! га
2^
ft.
CJ
ю
О р<
ft,
и
о g
о 2:
а,
(Г»
1
ю
со
СМ
|
258
t|
Zffl
I
Ю
'Ч
о
С
U
,_,
360
сС
о
ХШ
см
540
СМ
—<
S
1Т
о
00
■^f
е(
О
га х
2.CQ
с*
1
-
CN
(М
1
351
I
3
CQ
гт>
О
*-•
сэ
%
<м
ю
г-Г
670
t<
о
X
3
CQ
сч
-590
480
см
т-Н
о
ю
Ч
ЫХО
са
о
ю
ю
ю
420
о
га х
2CQ
со
<м
о
СО
оо
со
|
ем
630
с*
о
ECQ
4f
1
CN
-1000
I
1
CM
о
X
s
<
о
га х
2-CQ
ю
550
ыход
CQ
со
о
o
CO
1
см
830
Ef
0X14
CQ
t»<
j
CM
-650
I
|
CM
000
1
oo
et
ЫХ0
CQ
CM
Ю
о с
t>.»
CM
I
-720
550-
Vox
JCQ
ю
о
CO
о
to
700
ход
*CQ
Ю
°\
CM
7
s
LO
CM
<M
100
1
CO
ход
JCQ
CM
Ю
50-750
-<ю
CM
III
t
700-
1200
ыход
CQ
Ю
о
о
о
cz>
Ю
1030
<
о
X
3
CQ
ю
CM
-1100
860
LO
<M
|
CM
1200
о
сч
ЫХО
CQ
ttfl
X
ьл
X
1
га
ю
о
*
*
со
Ю
О
320*
ход
CQ
0Q
t«.
О
@
<м
7
230
Vox
CQ
ю
650
_
оо
Vox
CQ
|
о
<м
ю
о
215
ыход
CQ
ю
о
о
СМ
СО
-12
t^
620
fct
0X14
CQ
*ъ
538
^н
Ю
о
X
3
CQ
ii
я
а>
сор
рее
я
о
<
тел
Э*
s
я
а>
"о
§
CU
с_
t_
<
рбина
j_?
ева-
&^
X р.
<
СО
t^.
о
а>
■-J
31
о
ю
Vox
CQ
"^f
со
о
ю
34
о
597
ход
CQ
t>.
о
837
о
ю
Vox
CQ
to
о
s
со
1^
о
149
ЫХОД
CQ
со
о
Ю
О
195
X
3
CQ
с^
О
597
1^.
о
оо
et
ЫХО
CQ
с
сато
S8
* *
*
15
Рис. 1. 4. Схема КЭУ с машинным преобразователем энергии
более высокой температурой излучателя при разных условиях дает
?более легкую установку.
Установки, в которых рабочими телами являются литий и
калий, при прочих равных условиях имеют меньшую массу из-за
уменьшения размеров излучателя. Однако в контурах с литием
следует считаться с необходимостью применения более дорогих
материалов — «ниобия и молибдена.
Установки с натрием и калием по своим достоинствам
занимают промежуточное положение. Установки с газообразным РТ —
аргоном — позволяют избежать трудностей, связанных с
агрессивностью жидких металлов.
Ядерная термоэмиссионная КДУ с плазменным двигателем,
показанная на рис. 1.5, одноконтурного типа и состоит из
энергетической установки 1—)/ и собственно двигателя 12.
Она включает узел реактора 1, в котором тепловыделяющий элемент
(ТВЭЛ) совмещен с катодом 2 и анодом 3, и узлы: компенсационной
емкости 4, бака с инертным газом 5, насоса 6, защиты 9, пускового насоса 10,
излучателя 11.
На рисунке показано также условное размещение емкости 8 с цезием и
-жиклера 7 для сброса цезия и продуктов шлакования.
При пуске реактора и его разогреве происходит эмиссия электронов от
нагретого катода 2 к сравнительно холодному аноду 3. Тепло с анода снимается
жидким металлом, циркулирующим в контуре и излучателе //. Получающийся
электрический ток используется для питания двигателя, насосов и агрегатов.
Достоинство такой установки — простота (нет вращающихся
частей), компактность, возможность непосредственного получения
большой силы тока, что упрощает питание плазменного
двигателя. Недостаток установки — сложность доводки узла реактора с
преобразователем, трудности изучения и отработки этих двух
основных элементов.
16
^11______| ! \ \
Рис. 1. 5. Схема КДУ с термоэмиссионным преобразователем энергии
Узел преобразователя 2—3 работает в условиях высоких
температур, при наличии больших нейтронных потоков и длительное
время, что усложняет подбор подходящих работоспособных
материалов.
Запуск установки аналогичен запуску установки в предыдущем
примере. После заполнения, разогрева, очистки контура установка
готова к пуску. Циркуляция жидкого металла обеспечивается
пусковым насосом 10, который после пуска реактора отключается.
КЭУ с термоэлектрическим преобразованием энергии, двухкон-
турная, показана на рис. 1.6.
Первый контур состоит из реактора /, насоса 3 и узла термоэлектрического
преобразователя 4. Второй контур включает насос 3, преобразователь 4 и
излучатель 5. Каждый контур имеет компенсационную емкость 6 (она показана
здесь только в контуре излучателя). Установка может иметь один насос 3 на
оба контура. Охлаждение такого насоса может потребовать дополнительного
холодильни::а-нзлучателя 2.
При пуске реактора происходит разогрев горячего спая
термоэлектрического (полупроводникового) преобразователя установки.
Охлаждается преобразователь жидким металлом второго контура.
Получающийся в результате разогрева спая электрический ток
используется для питания системы космического двигателя.
Рис. 1.6. Схема КЭУ с термоэлектрическим преобразователем энергии
17
8' 8
Рис. 1. 7. Схема солнечной КЭУ с топливными элементами
Достоинство установки — простота и легкость при ограниченных
уровнях мощности; недостаток — меньший к. п. д., чем в двух
других рассмотренных установках.
Полупроводники имеют низкие температуры холодного спая,
что утяжеляет излучатель.
Запуск аналогичен запускам установок, рассмотренных выше.
Солнечная КЭУ с топливными элементами, схематично
показанная на рис. 1. 7, состоит из трех контуров.
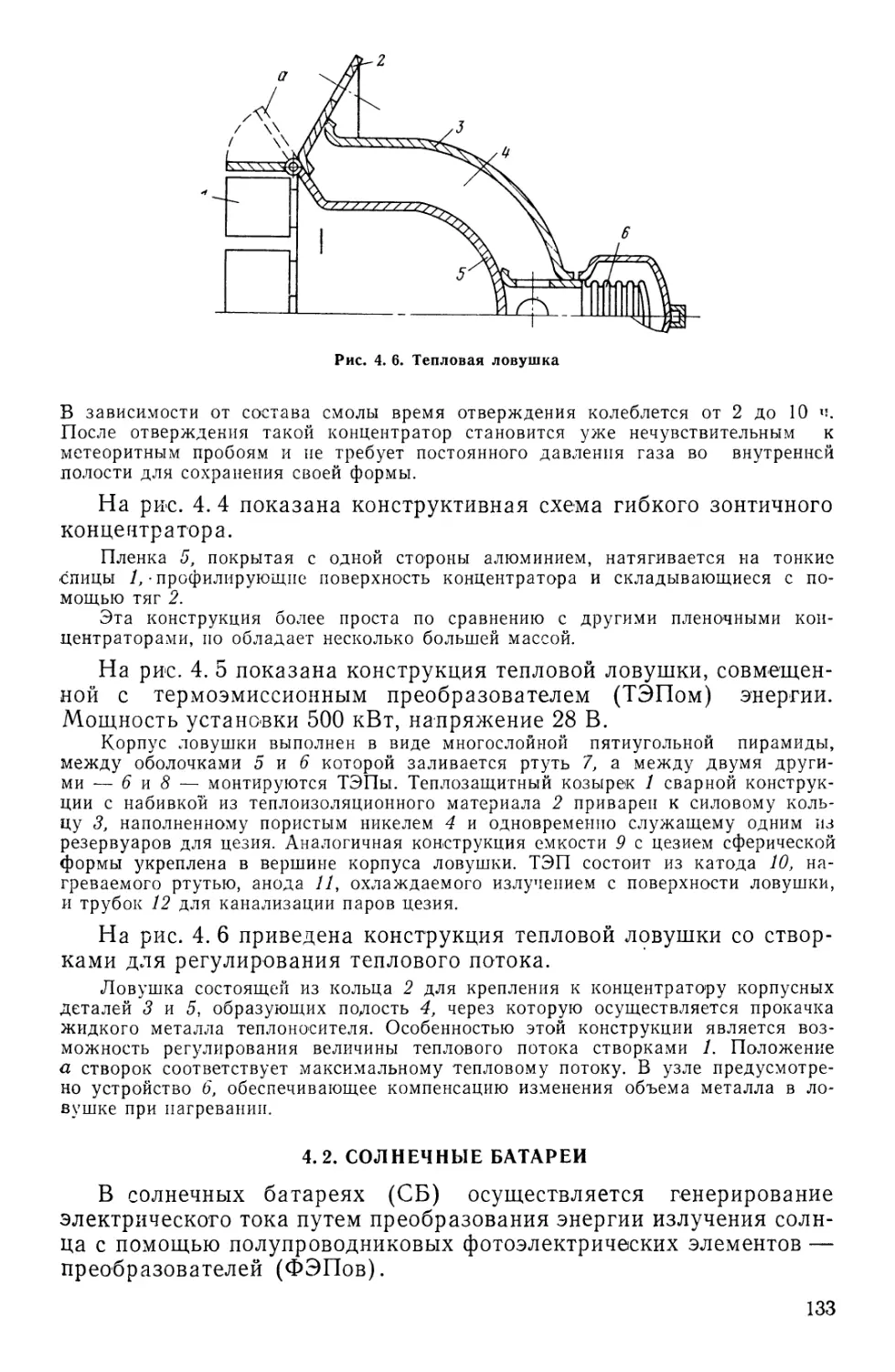
Первый контур включает солнечный концентратор / с тепловой ловушкой 2,
теплообменник 4 и агрегаты — насос Л фильтр 8 и компенсатор 9.
Второй контур включает генератор тока — собственно топливный элемент
3 испаритель и фазоразделк гель-регенератор 4 и конденсатор 5.
' Третий контур состоит из конденсатора 5, холодильника-излучателя 6 и
агрегатов 7, 8, 9.
При выводе установки на орбиту система ориентации
обеспечивает концентрирование потока солнечного излучения в ловушке «.
Теплом ловушки разогревается жидкий металл в первом контуре,
например литий, который поступает в регенератор 4 для
разделения продуктов реакции топливного элемента на основные состав
ляющие.
В топливном элементе ионизирующееся раоочее тело второго
контура, например натрий, поступает к ионообменной мембране
(на схеме не показано), ионизируется, отдавая электроны
электроду проникает через мембрану в контур второго рабочего тела,
например олова. Электроны, совершив работу во внешней цепи,
участвуют в образовании продукта реакции (в нашем примере —
сплава Na — St). .
В дальнейшем продукт реакции поступает в регенератор 4, где
сплав разделяется на исходные компоненты. Если регенератор, как
указано на рис. 1.7, тепловой, то из сплава выпаривается
компонент имеющий более низкую температуру кипения (в нашем
примере -Na). Обедненный этим компонентом более тугоплавкий
спчав поступает вновь в топливный элемент. Пары же натрия
конденсируются в теплообменнике 5, после чего конденсат поступает
18
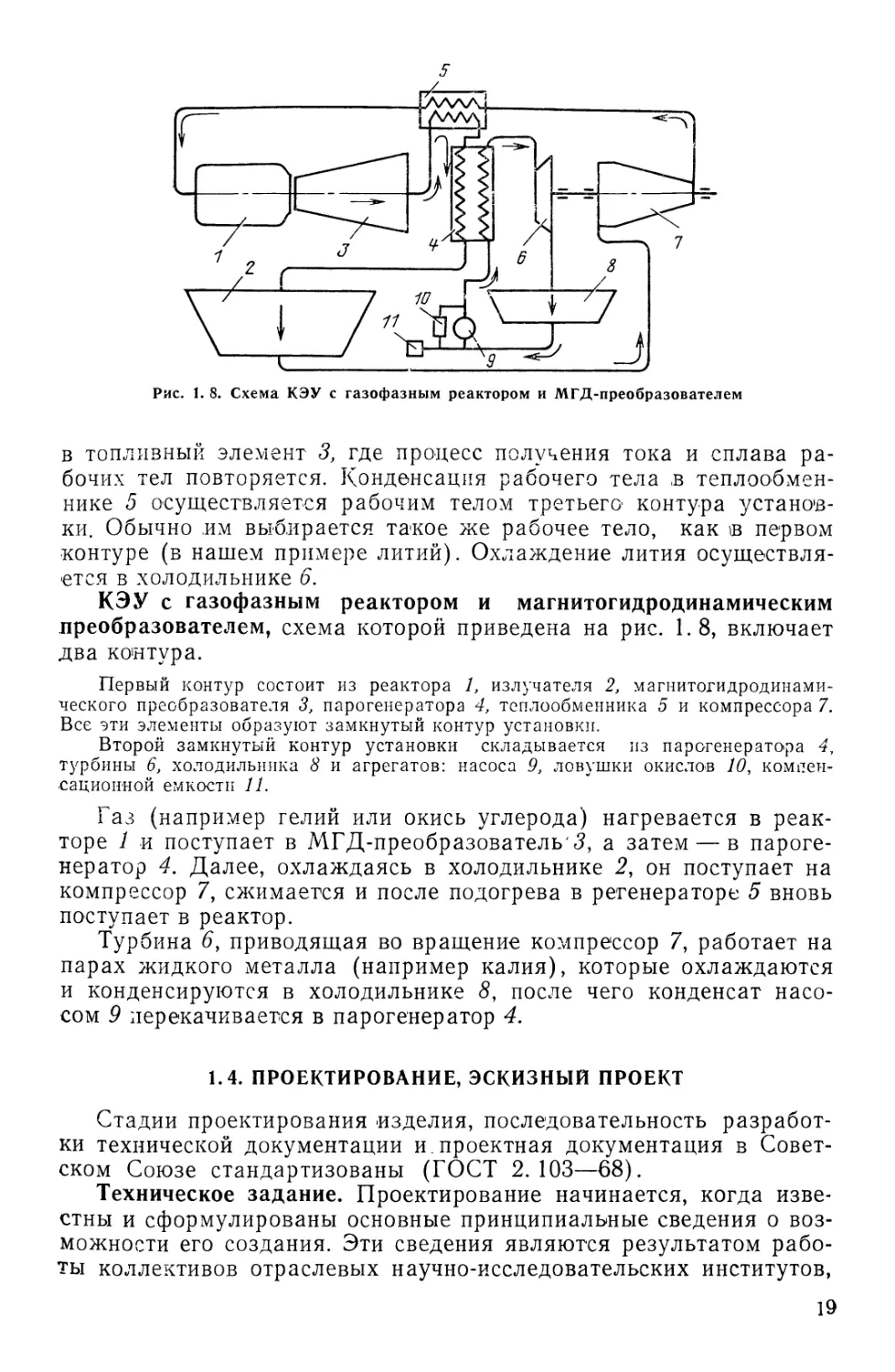
Рис. 1. 8. Схема КЭУ с газофазным реактором и МГД-преобразователем
в топливный элемент 3, где процесс получения тока и сплава
рабочих тел повторяется. Конденсация рабочего тела ,в
теплообменнике 5 осуществляется рабочим телом третьего контура устано'в-
ки. Обычно :им выбирается такое же рабочее тело, как \в первом
контуре (в нашем примере литий). Охлаждение лития
осуществляется в холодильнике 6.
КЭУ с газофазным реактором и магнитогидродинамическим
преобразователем, схема которой приведена на рис. 1.8, включает
два коитура.
Первый контур состоит из реактора 1, излучателя 2, магнитогидродинами-
ческого преобразователя 3, парогенератора 4, теплообменника 5 и компрессора 7.
Все эти элементы образуют замкнутый контур установки.
Второй замкнутый контур установки складывается из парогенератора 4,
турбины 6, холодильника 8 и агрегатов: насоса 9, ловушки окислов 10,
компенсационной емкости 11.
Газ (например гелий или окись углерода) нагревается в
реакторе 1 и поступает в МГД-преобразователь'З, а затем — в
парогенератор 4. Далее, охлаждаясь в холодильнике 2, он поступает на
компрессор 7, сжимается и после подогрева в регенераторе 5 вновь
поступает в реактор.
Турбина 6У приводящая во вращение компрессор 7, работает на
парах жидкого металла (например калия), которые охлаждаются
и конденсируются в холодильнике 8, после чего конденсат
насосом 9 перекачивается в парогенератор 4.
1.4. ПРОЕКТИРОВАНИЕ, ЭСКИЗНЫЙ ПРОЕКТ
Стадии проектирования изделия, последовательность
разработки технической документации и.проектная документация в
Советском Союзе стандартизованы (ГОСТ 2.103—68).
Техническое задание. Проектирование начинается, когда
известны и сформулированы основные принципиальные сведения о
возможности его создания. Эти сведения являются результатом
работы коллективов отраслевых научно-исследовательских институтов,
19
Эскизный, проект
\Г.
Графические документы^ Тек cm одыд документы ^Макеты сборочных единиц^
I Черте* о&ицего Вида Л Ведомость 3 П
[Пояснительная записка
Г~ Схемы U
I 1 I
Технические данные
Расчеты на прочность
уад~аритные чертежи j-| Описание конструкции II Экономические расчеты
теоретические черт emu LJ
Теоретические расчеты}
Рис. 1. 9. Состав эскизного проекта
учебных институтов и других организаций.
Научно-исследовательская работа заканчивается отчетом, патентной заявкой,
лабораторным образцом, макетом.
Результаты научно-исследовательской работы позволяют
сформулировать задание на проектирование изделия и общие
требования к его облику, размерам и массе. Техническое задание после
согласования к утверждения служит основой для выполнения
первого этапа проектирования — формулирования технического
предложения.
Техническое предложение. В результате изучения и проработки
технического задания конструктор формирует облик изделия в
первом приближении.
Техническое предложение состоит из ряда конструкторских
документов. Обязательными являются текстовые документы:
ведомость технического предложения, пояснительная чзаписка, где
кратко приводятся предполагаемые технические данные изделия,
основные расчеты, подкрепляющие необходимость и возможность
создания предлагаемого изделия.
Эскизный проект (ЭП). После утверждения технического
предложения начинается разработка эскизного проекта.
Эскизным проектом называется совокупность конструкторских
документов, содержащих принципиальные конструктивные
решения, обеспечивающие работоспособность изделия, а также данные,
обосновывающие возможность и целесообразность его создания.
Эскизный проект (рис. 1.9) состоит из графических и
текстовых документов и макетов сборочных единиц. В число графических
документов входят чертеж общего вида изделия (сборочной
единицы) с необходимыми разрезами, выносами и пояснениями,
принципиальные схемы, габаритные чертежи, теоретический чертеж.
В некоторых случаях, когда конструкция ясна и повторяет
определенный тип изделия, представление графических документов
не обязательно.
20
Текстовые документы для всех случаев проектирования
являются обязательными. Они включают: ведомость ЭП, где дается
перечень всех его составных частей; пояснительную за'писку,
содержащую технические данные изделия, описание конструкции, расчеты
рабочего процесса, расчеты на прочность основных деталей
изделия; сведения по материальному обеспечению и экономическое
обоснование:
Основой для создания ЭП являются техническое предложение,
а также результаты научно-исследовательской проработки
проблемы, выполненной в соответствующих научно-исследовательских
учреждениях, патентная литература, публикации.
Выполненный эскизный проект защищается на
научно-техническом совете проектной организации, где принимается решение о
дальнейшей работе над проектом или его отклонении.
Вероятность отклонения эскизного проекта делает
нецелесообразным подробную конструкторскую проработку всех деталей
изделия, выполнение рабочих чертежей, подробные расчеты рабочего
процесса и на прочность всех деталей изделия. Все эти расчеты
выполняются приближенно и называются «расчетами в эскизном
проектировании».
Технический проект (ТП). Техническим проектом называется
комплекс конструкторских документов, обеспечивающих создание,
испытание и сдачу опытного образца изделия заказчику.
Изделие, представленное в ЭП на чертеже общего вида,
разбивается на сборочные единицы, которые детально прорабатываются
в специализированных конструкторских группах, выпускающих
рабочие и сборочные чертежи. Одновременно производятся
подробный расчет рабочего процесса и расчет на прочность деталей,
проводится технологическая проработка деталей узла и уточняется
спецификация используемых материалов.
По чертежам сборочных единиц выполняется общий сборочный
чертеж изделия.
Таким образом, графическая документация ТП состоит из
чертежей общего вида и рабочих чертежей деталей, сборочных
единиц, схем, габаритного и теоретического чертежей.
Текстовая документация состоит из ведомости технического
проекта и пояснительной записки.
Технический проект может быть дополнен созданием макетов
отдельных сборочных единиц и изделия в целом.
Работа конструкторского бюро заканчиваете^, когда
изготовленное в соответствии с проектом изделие проходит
государственные испытания и подтверждает заявленные характеристики.
Комплекс инженерно-технической документации, называемой
рабочей документацией, передается предприятию для
производства изделия.
1.5. ВОПРОСЫ РАСЧЕТА НА ПРОЧНОСТЬ КДУ
Вопросы прочности КДУ в настоящем курсе рассматриваются
применительно к эскизному проектированию первого поколения
21.
деталей и узлов конструкции. На этом этапе проектирования
предполагается, что узел в первом приближении скомпонован и
основные размеры его выбраны. Предполагается также, что
конструктором выбраны основные толщины стенок деталей, несущих
нагрузку, для ответственных деталей определены основные нагрузки,
а для леталей, работающих при высоких температурах, тепловые
потоки и температуры стенок.
Проверка правильности выбранных конструктивных размеров в
первом приближении, проверка прочности ответственных деталей
узла в эскизном проектировании и являются основными задачами
излагаемого расчета -на прочность.
Расчет, таким образом, является поверочным. Для него
характерна проверка выбранных размеров, а не их определение.
Критерием правильности выбранных размеров будет являться
величина полученного запаса прочности или длительной прочности,
запаса пластичности или ползучести детали.
Таким образом, расчет ведется по запасам прочности, а не по
допускаемым напряжениям; последнее типично при расчете
деталей в серийных конструкциях.
На рассматриваемом этапе проектирования расчет напряжений
ведется в основном в границах упругой задачи, что позволяет
получить сравнительно простые и удобные для использования
соотношения. Такой расчет не исключает, а в некоторых случаях даже
требуе^ более подробного расчета с применением специальных
методов.
Расчет деталей на прочность состоит из трех основных этапов.
Первый этап — определение сил и моментов, действующих
на деталь, и ее опасного сечения. Ему предшествует анализ
режимов работы конструкции и выбор расчетной схемы.
Второй этап — расчет напряжений или деформаций,
которые возникают в детали от действия сил и моментов.
Третий этап — сравнение полученных напряжений с
предельными напряжениями диаграммы деформирования образца
материала, из которого выполнена рассчитываемая деталь. Из этого
сравнения определяются запас прочности и пластичности для крат-
коресурсных деталей и запас длительной прочности и ползучести
для деталей, работающих длительное время. Расчет заканчивается
сравнением полученного запаса прочности с нормами прочности,
принятыми для изделия данного типа, и заключением о
работоспособности детали/
Напомним основную терминологию, с которой нам придется встречаться с
дальнейшем.
Прочностью детали называют сопротивляемость детали действующим на нее
нагрузкам. Прочность детали является функцией большого числа факторов:
характера изменения напряжений, температуры и длительности работы,
конфигурации детали, ее размеров, состояния поверхности, конструкции переходов и
сопряжений, ориентации волокон металла и его структуры и т. д. Правильная
оценка влияния каждого из этих факторов на прочность детали язляется одной
из задач расчета.
Напряжением называется интенсивность внутренних сил, действующих на
данную элементарную площадку в сечении детали. Напряжение вычисляется для
22
-той площадки как отношение абсолютной величины силы к величине площади,.
на которую она действует, т. е. как сила, приходящаяся на единицу площади
сечения.
Нормальным напряжением ok называется составляющая напряжения,
действующая перпендикулярно &-ой площадке.
Под влиянием внешних сил и возникающих напряжений размеры детали
несколько изменяются — она деформируется.
Деформацией называется изменение линейных или угловых размеров
детали; обычно эти изменения весьма незначительны по сравнению с размерами
детали.
Абсолютное удлинение, т. е. изменение линейного размера /, обозначаются
Д/. Оно положительно при растяжении и отрицательно при сжатии.
Относительное удлинение е = Д///.
Запасом прочности п называется отношение предела прочности материала
On к максимальному напряжению атах, возникающему в материале детали при
ее работе:
л =" <*в/*тах- (1.6)-
При расчете детали на прочность после нахождения атах
находят п и сравнивают полученный результат с заданным предельным
значением запаса прочности япр. Если я<япр или п<\, то вносят
изменения в размеры детали для ее упрочнения.
Как видно из формулы (1.6), существенным фактором,
определяющим запас прочности, является качество материала.
Очевидно, чем выше ав материала, тем 'выше будет запас прочности
и тем легче, при прочих равных условиях, изготовить из него
деталь или элемент конструкции с требуемыми свойствами.
К конструкционным хматериалам, применяемым в космических
электроракетных двигателях и, в частности, — в узле реактора,,
предъявляются следующие требования:
высокая прочность—предел прочности должен быть по
возможности максимальным;
жаропрочность — высокая прочность при высоких
температурах;
жаростойкость — повышенное сопротивление длительному
взаимодействию с воздухом и другими газами при высоких
температурах;
хорошая свариваемость;
малое поперечное сечение захвата нейтронов;
способность противостоять нейтронным потокам без
существенного изменения диаграммы деформирования;
совместимость с агрессивными рабочими телами;
низкая скорость испарения в условиях космического вакуума.
Предел прочности обычных конструкционных материалов
существенно падает с увеличением температуры t и длительности т
работы деталей (рис. 1. 10, а) и мало зависит от интенсивности
облучения нейтронными потоками (рис. 1.10,6). В последнем случае
существенно снижается вязкость материала и повышается порог
холодноломко'сти (рис. 1. 10,6). Поэтому расчет запаса прочности
конструкционных материалов, находящихся в нейтронных потоках,
мало отличается от обычного расчета; определение же запаса пла-
23
f(t)
t;r
a)
6 '
/
f/
y/
/
/
Y
7/
r^
т
Рис.
I. 10. Зависимости предела прочности материала от времени и температуры (а);
диаграммы деформирования материала, облученного и необлученного нейтронами (б)
стичности следует вести с учетом искажения диаграммы
деформирования материала.
Выбор конструкционных материалов для КДУ зависит от
рабочего тела и его совместимости с теми или иными материалами.
Иззестно, что жидкие металлы, широко применяемые в
космических энергоустановках, являются агрессивными средами. Они
активно воздействуют на конструкционные материалы, разрушая их.
Нержавеющие хромо-никелевые сплавы по условиям совместимости
со всеми жидкими металлами, кроме лития, можно применять при
температурах до 800° С. При более высоких температурах жидких
металлов, включая литий, требуется применение ниобия и
молибдена.
Все конструкционные материалы сублимируют, т. е. испаряются
б космосе, и тем интенсивнее, чем выше температура их
поверхности. При температурах выше 1000° С скорость утонения стенок из
углеродистых и хромо«икелевых сплавов из-за сублимации
достигает нескольких миллиметров в год. При оценке прочности
тонкостенных конструкций необходимо иметь это в виду.
1.5. 1. Запас прочности краткоресурсных деталей
Рассмотрим расчет запаса прочности деталей, долговечность
которых не превышает пяти часов. Такой расчет приходится
делать также и для деталей большого ресурса, если они работают
в условиях релаксации напряжений.
Исходные данные для этого расчета берутся из стандартной
диаграмхмы деформирования материала детали (рис. 1. 11),
которая представляет собой зависимость между условными
нормальными напряжениями о и относительными удлинениями е и таким
образом характеризует механические свойства материала при
статической нагрузке.
Условность нормальных напряжений и соответствующих им относительных
удлинений заключается в том, что напряжения о относятся к первоначальной
площадке сечения образца, а удлинение — к первоначальной его длине.
В диапазоне малых упругих и упруго-пластических деформаций условные
напряжения и удлинения мало отличаются от истинных, подсчитанных с учетом
:24
*
о,оог\
ол
\
1 ^
/
■^о
_ii
л«*
f \ ,
I
<^у> 1
<
£г
>0
рис 1. П. Диаграмма деформирования
материала
сужения поперечного сечения образца wпри
его испытании, и для .инженерного расчета
являются исходными.
Одной из особенностей рассматриваемой
диаграммы деформирования является
стандартный способ ее получения. Диаграмма
определяется экспериментально (на
стандартных машинах в сравнительно короткий
отрезок времени (до двух минут) на
стандартных образцах. Стандартность способа
нахождения диаграммы деформирования —
обязательное условие определения свойств
материала, иначе пользоваться этими
результатами было бы невозможно.
На диаграмме деформирования определяют характерные точки
у, т и в, каждой из которых соответствует определенное предельное
напряжение: упругости (сгу), текучести (ат) и разрыва {бв).
Пределом упругости ау=ао,оо2 называют напряжение, при
котором возникают первые признаки пластической деформации. Оно
определяется как напряжение, отвечающее заданной небольшой
остаточной деформации. Обычно остаточное относительное
удлинение 8=0,002... 0,005%. Предел упругости является критерием
прочности только в тех случаях, когда недопустимы даже
небольшие остаточные деформации при работе детали.
Модуль упругости Е является коэффициентом
пропорциональности напряжений и деформаций в пределах упругости:
о = Ег, (1.7)
где Е=\ga^=-
Предел текучести ат = 1(То,2 является напряжением,
соответствующим возникновению остаточных деформаций определенной
величины. Обычно пределом текучести называют напряжение, при
котором возникает остаточное относительное удлинение 8=0,2%.
Предел текучести широко применяется в расчетах как характеристика
сопротивляемости материала статическим нагрузкам, когда
работоспособность детали или элемента конструкции определяется их
деформированием, например: деформированием рабочих лопаток
турбин, вытяжкой каналов с жидким рабочим телом, опасной
деформацией оболочек под нагрузкой.
Модуль упрочнения Ет характеризует сопротивление материала
малым упруго-пластическим деформациям:
* = £>, (1.8)
где ET=tgfi = dcl'ds.
Существенным различием между Ет и Е является то, что величин i
Ет переменная. В приближенных расчетах ее часто полагает посг>
янной. Модуль упрочнения Ет с увеличением напряжений от ау до
стт может уменьшаться в 100 раз и более.
25
В расчетах применяют секущий модуль £*, определяемый
по формуле
E* = tga*,
где а* — переменный угол, образованный прямой, соединяющей
начало координат с любой точкой на кривой деформирования.
Иногда модуль £* называют обобщенным модулем упругости.
Предел прочности, или временное сопротивление материала
разрыву, (7в является условным напряжением, соответствующим
максимальной нагрузке при испытании образца на растяжение или
сжатие.
Для большинства конструкционных материалов временное
сопротивление является основной характеристикой прочности
металла при статических нагрузках, величиной, определяющей запас
прочности конструкции.
Формула запаса прочности для краткоресурсных деталей будет
иметь вид
* = °./<W = °i%me, (1.9)
где t — температура.
Время работы детали, как и длительность нагружения образцов
при получении диаграммы деформирования на испытательных
машинах, мало.
В тех случаях, когда работоспособность детали определяется
ее деформацией, критерием ее годности является запас
пластичности, определяемый по формуле
где а$— предел текучести материала.
Как видно, запас пластичности также не зависит от
продолжительности нагружения.
Интенсивность напряжений и деформаций
В тех случаях, когда деталь находится в одноосном
напряженном состоянии и Отах^сГт, в знаменатель формулы запаса
прочности (1.9) подставляется расчетное максимальное значение
напряжения, и численное значение п, если известно ав, получаем сразу,
так как диаграммы деформирования материала получены на
образцах, подвергавшихся одноосному нагружению.
Рассмотрим расчет аШах и я, если деталь находится в сложно-
напряженном состоянии. Известно, что напряжение в направлении
какой-либо оси в сложно-напряженном состоянии еще не
характеризует прочности детали.
Это очевидно из рис. 1. 12, а, где для одноосного состояния
Ох = Егх или ех = Ох1Е, а в двухосном состоянии (рис. 1. 12,6)
где [i — коэффициент Пуассона.
26
б)
Рис. 1. 12. Схемы
напряженного состояния образца:
а—однооснре; б—плоское
Очевидно, можно построить диаграмму
деформирования, растягивая образец по
двум взаимно перпендикулярным
направлениям. Однако это не просто, так как
соотношение напряжений вх и gy может быть
самым различным и, в принципе,
бесконечно большим.
Однако диаграмму деформирования
образца в одноосном напряженном состоянии
по закону g=Es можно использовать и для
определения несущей способности элемента,
находящегося в плоском или объемном
напряженном состоянии, если вместо gx и гх
или Gy и гу сравнивать обобщенное, или
эквивалентное, напряжение сгг-, которое
называется интенсивностью напряжений, и обобщенные,
или эквивалентные, деформации е*, называемые
интенсивностью деформаций, 'полученные в соответствии с одной из
теорий прочности материала.
Под интенсивностью напряжений О{ понимают такое напряжение при
одноосном напряженном состоянии, которое эквивалентно комплексу напряжений в
детали при сложно-напряженном состоянии.
Под интенсивностью деформаций Ег понимают такую относительную
деформацию при одноосном напряженном состоянии, которая эквивалентна комплексу
деформаций в детали, находящейся в сложно-напряженном состоянии.
Эквивалентные напряжения а* и деформации ег находятся чаще всего в
соответствии с одной из двух теорий прочности — теории, основывающейся на
равенстве наибольших касательных напряжений, и теории равенства энергии
формоизменения. Первая широко применяется в задачах, где предельное состояние
характеризуется переходом упругого состояния в пластическое, т. е. если ао,оог<
<сУтах<о*0,2. Она же применяется, если в расчете встречается
сложно-напряженное состояние элементов конструкции, когда наибольшее и наименьшее из
главных напряжений имеют разные знаки. Вторая применяется в задачах, где
предельное состояние характеризуется началом разрушения детали, т. е. если go,2<
Формула для определения эквивалентного напряжения в соответствии с
первой теорией
а/ — аг —
(1.11)
где o"i, о*2, о>з — главные напряжения; k = oT p/o~T Сж — отношение предела
текучести материала при растяжении к пределу текучести при сжатии; k =
=-сГвр/(Тв.сж для хрупких материалов; для большинства конструкционных
материалов k=\.
Формулы для определения эквивалентного напряженного состояния в
соответствии со второй теорией будут различны в зависимости от того, находится
ли элемент в упругом или пластическом (ji = 0,5) состоянии.
Приведем формулы, связывающие напряжения и деформации детали,
находящейся в сложно-напряженном состоянии.
Если напряжения не превышают предела упругости (ji = 0,3) и если
они нормальные и главные (ах, cry, o~z), то
(1.12)
27
Эти соотношения преобразуются, если неизвестными являются напряжения
(1ЛЗ)
Обобщенные напряжения и деформации
<Ч = 1/0,5 Цах - сгг)2 +
/2 ^
4^'')2
Если рассматривается частный случай, а именно — плоско-напряженное
состояние, то формулы (1.12), (1.13) и (1.14) приобретают вид
1 1
(1. 16)
Если напряжения превышают предел упругости (^1=0,5), то главные
напряжения (ох, oY, Oz) и главные деформации ((ox, oY, oz) связаны
следующими' формулами:
Эти соотношения в преобразованном виде
28
где °о = "5" («jc + *r + »г):
/ (1.19)
Уравнения (1.18) могу! быть получены в другой форме из уравнений (1.17):
V = 4-—(°k-'o)+^ (1-20)
Z (Г/
3 е/
Интенсивность напряжений и деформаций
1=^ -^-^-f^ (L21)
В частном случае, когда напряженное состояние будет плоским, то формулы
(1.18), (1.20), (1.21) упрощаются:
гх^~(ах — °'5аг)>
(1.22)
6/ , Л г- х
Зх = -
±Jl £ о5£ _ о-»)
3 с/ ^
а- = 1/с2 а а + а2 *
х хк к. (L24)
^=TV4+Vr+4-
Пример 1.1. Найти интенсивность напряжений для трех показанных на
рис. 1.13 напряженных состояний образцов (напряжения заданы в МПа;
коэффициент k== 1).
Величины эквивалентных напряжений по формуле (1.11) Oi = Oi—(Тз:
а) ai = 80 — 10 = 70; (ах = 80, а2 = 30, а3 = 10);
б) q-l = 60 — ( — 10) = 70; <>! = 60; <j2 = 0; а3 = — 10);
в) а/ = 75 — 0 = 75; (вх = 75; а2 = 10; а3 = 0).
Величины эквивалентных напряжений по формуле (1.21)
а/ = /0,5 [(aj — а2)2 + (а2 — а3)2 + (а3 — ох)2;
а) а/ = /0,5 [(80 — 30)2 + (30 — 10)2 +(10 — 80)2 = 62,3;
б) tsi =- /0,5 [(60 — 0)2 + (0 — 10)2 + ( — 10 — 60)2] = 65,4;
в) Qi = /0,5 [(75 — 0)2 -{- (Ю — 0)2 + (0 — 75)2] = 80,5.
29
Рис. 1. 13. Схема нахождения
эквивалентных напряжений:
а, б, в—виды нагружений
б)
В)
Как видно из примера, значения эквивалентных напряжений, подсчитанные
по различным теориям прочности, не одинаковы.
Особенности расчета напряжений и деформаций
Как было сказано, исходным материалом для расчета является
диаграмма деформирования образца, полученная на стандартной
испытательной машине.
На рис. 1. 14 показана упрощенная диаграмма деформирования
в виде диаграммы идеально упруго-пластического тела, что
типично для материалов и условий работы большинства деталей в КДУ.
Диаграмму деформирования можно разбить на три участка,
в границах которых расчет будет иметь свои особенности.
Первый участок характерен тем, что напряжения в детали не
превышают предела упругости материала, т. е. аг^сГу, и
принимается ц—0,3.
Для этого участка расчет ведется <тю классической формуле
закона Гука:
= Ег ИЛИ ai =
где E =
Второй участок характерен тем, что ау<(Тг<с>т; рачет ведется
по формулам упруго-пластического состояния (1.17) — (1.20),
причем коэффициент Пуассона \х принимается равным 0,5.
Такой расчет позволяет получить напряжения и деформации,
которые устанавливаются в детали, если какие-либо напряжения
превосходят предел упругости. Очевидно, эти напряжения могут
существенно отличаться от напряжений, получаемых в границах
упругой задачи.
Третий участок соответствует работе материала за пределом
текучести, т. е. при Oi>aT. Коэффициент
Пуассона ji принимается равным 0,5.
В этом случае для задач, которые
будут рассмотрены ниже, удобно
применить расчет деформированного состояния
по методу «переменных параметров
упругости».
Напряжения и деформации
описываются формулой, близкой к формуле
закона Гука:
Рис. 1. 14. Типичная
условная диаграмма
деформирования (см. рис. 1. 11)
= E*S ИЛИ Ji^^
30
где Ek = tga* — секущий модуль упругости; о<н является перемен-
ной величиной и определяется из диаграммы деформирования для
различных значений а*, соответствующих различным величинам
деформаций е, так что £=tga на первом участке деформирования
является частным случаем секущего модуля Е*.
В расчетах очень важно определить переход из упругого
состояния в пластическое, что для одноосного напряженного состояния
соответствует точке т на диаграмме деформирования (см. рис.
1. 14) и напряжению ат, а для сложно-напряженного состояния —
равенству Oi = aT.
1. 5. 2. Запас прочности деталей,
работающих длительное время
Теория упругости рассматривает напряженное и
деформированное состояния детали в границах линейной зависимости между
напряжением и деформацией. При небольшой длительности
испытаний, низких уровнях температур и напряжений приложение формул
теории упругости и термоупругости к расчетам реальных
конструкций не ведет к сколь-нибудь значительным погрешностям, что
подтверждено многочисленными экспериментами. Такой расчет
целесообразно проводить на стадии эскизного проектирования для
первичной оценки напряженного состояния детали и ее деформации <и
правильности выбора основных ее размеров. Однако при
увеличении длительности работы конструкции и повышении уровня
температуры и напряжений различие в поведении идеально упругого и
реального тел становится все больше и в расчет приходится
вводить более или менее значительные коррективы, учитывающие
особенности поведения реальных материалов в рабочих условиях.
Как известно, существуют два представления о неупругом поведении
материалов: пластичность и ползучесть. Внешнее различие этих двух близких
понятий заключается в том, что пластические деформации слабо или почти не
зависят от времени, тогда как деформации ползучести развиваются во времени.
Таким образом, ползучесть можно определить'как состояние материала, при
котором при неизменных напряжениях в детали развивается пластическая
деформация, зависящая от времени ее работы. Время служит одной из основных
характеристик ползучести. При наличии ползучести происходит меняющееся во
времени перераспределение напряжений.
Расчет деталей на ползучесть необходим:
1) для деталей, работающих длительное время при высоких
температурах и изменение размеров которых существенно влияет
на рабочий процесс двигателя, его работоспособность или
параметры;
2) для деталей, работающих длительное время при высоких
температурах с значительными напряжениями; при этом следует
учитывать, что пластические деформации могут существенно сгладить
неравномерности напряжений в детали и тем самым позволить
облегчить конструкцию.
Стандартная диаграмма деформирования материала
экспериментально определяется на стандартных машинах в сравнительно
короткий отрезок времени — до 2 мин (кривая 0 на рис. 1.15).
31
Рис. I. 15. Влияние продолжительности
испытаний на диаграмму деформирования
материала
Рис. 1. 16. Типичная диаграмма
ползучести материала при различных
нагрузках (Pi<P2<-P3=const)
Однако давно замечено, что диаграмма деформирования
существенно изменяется, если изменять врехмя испытаний. Если время
испытаний сократить, то линия о=}~(г) перемещается на более
высокие уровни и предельные значения напряжений 00,002; сго,2; <?в
повышаются (кривая 1) по сравнению со стандартной кривой
деформирования.
Если Бремя испытания увеличивается (кривая 2), то
уменьшаются предельные напряжения 00,002*, 00,2*, сгв и увеличиваются
участки диаграммы от предела пластичности ао,2 до разрыва образца
(участки т — в кривых 2 и 5), чему еще более способствует нагрев
образца.
Пластические деформации деталей в случае работы в условиях
нагрев! могут достичь таких значений, что не считаться с ними
там, где важно сохранение геометрических размеров, нельзя.
Несущую способность материала детали, работающей
длительное время при повышенных температурах, наиболее правильным
было бы оценивать по кривой ползучести, снятой в действительных
условиях работы. Такую кривую с достаточной для практических
целей точностью получают, прикладывая к подвешенному образцу
растягивающую силу Р (силу тяжести) с замером удлинения и
напряжения в зависимости от времени и температуры (рис. 1. 16).
В начальный момент времени после приложения нагрузки
относительное удлинение стержня будет определяться по формуле
Согласно этой формуле при постоянном напряжении удлинение сохраняет
постоянное значение и не зависит от времени, т. е. изменение е за весьма малое
время т будет столь медленным и малым, что им можно пренебречь. На рис. 1.16
это напряжение соответствует точке ео или точке еу на стандартной диаграмме
деформирования (см. рис. 1.11).
В дальнейшем, в особенности при высоких температурах и напряжениях,
нарастание е после точки ео будет значительным; оно существенно зависит от
времени. На этой кривой можно выделить три этапа ползучести. Этап /
характеризуется переменной скоростью нарастания деформации ползучести г = йг1йх.
В начале этого этапа скорость нарастания наибольшая, затем она убывает до
мнннмапьного. значения, остающегося приблизительно постоянным на II этапе.
32
Область ползучести / с убывающей скоростью называется неуста нови в-
uj e й с я ползучестью. Продолжительность этого этапа обычно мала: от
нескольких минут до 5 ч, хотя в некоторых случаях она может достигать
нескольких десятков часов. Эта область ползучести учитывается в расчетах
деталей краткоресурсных ракетных двигателей. В расчетах деталей РД
длительного ресурса ею можно пренебречь, но она является также расчетной, если
напряжениям сопутствует явление релаксации.
Область ползучести //, характеризующаяся постоянной скоростью
деформации, называется установившейся ползучестью. В зависимости от
температуры и уровня напряжений она 'может продолжаться от десятков минут
до многих сотен часов. В материалах космических электроракетных двигателей
эта зона может достигать 10 000 ч. Она является основной в расчетах деталей
на ползучесть.
Третий, кратковременный этап ползучести характеризуется образованием
шейки в образце и разрушением. Резкое увеличение е в конце этапа ///
объясняется возрастанием напряжения в образце. Сохранить напряжение постоянным
на обычной экспериментальной машине трудно, но, если создать условия а=
= const, то этап /// ползучести станет менее выразительным, хотя и закончится
разрушением образца в точке р. Время тр характеризует полное время работы
материала образца до его разрушения.
Полученные из эксперимента кривые ползучести вида,
показанного на рис. 1.16, непосредственно для расчетов неудобны и
перестраиваются на два семейства кривых: а=/(е) и сх=/(т),
которые рассмотрим ниже.
Основные соотношения ползучести
Всякий материал, обладающий свойством упругости и
ползучести, можно в первом приближении представить в виде
элементарной модели (рис. 1. 17), состоящей из двух последовательно
соединенных разнородных частей: упругого элемента, имеющего
жесткость С, и вязкого элемента-цилиндра, наполненного вязкой
жидкостью, которая может перетекать через небольшие отверстия в
поршне. Сила сопротивления перемещению поршня
пропорциональна скорости перемещения и коэффициенту вязкого трения
а жидкости.
Перемещение точки А элемента будет складываться из
перемещения упругой (пружины) и вязкой (поршня) частей элемента.
Для упругой части элемента
Р=Схпр; лгпр = Р/С,
что соответствует
ey = aJE и гу--=а/Е;
Для вязкой части элемента
Р = ахП; хп = Р/а или еп=а/Х, (1.25)
гдеа — коэффициент вязкого трения материала; X —
относительный коэффициент вязкого сопротивления материала.
Для металлов лучшее совпадение с экспериментом для вязкой
составляющей скорости деформации дает несколько другая
зависимость:
3050 33
где 1/кт=В, если учесть, что для
установившейся ползучести по условиям опыта cr^const,
B
Рис. 1. 17. Модель
упруго-вязкого тела
Таким образом, окончательно получаем
суммарное относительное перемещение точки
А и скорость деформации образца:
г = а/Е + Взтх; е=а/Е-\-Ват, (1.26)
где относительная деформация и скорость
ползучести
гп = В*™%' (1.27)
*п = Ват. (1.28)
Легко показать, что формулы (1. 26) качественно достаточно
хорошо описывают поведение упруго-пластического тела.
Действительно, если время т мало, т. е. т—^0, то деформация элемента
определяется только первым членом правой части первого
равенства в выражении (1.26). При больших значениях т пластическая
деформация растет при неизменных упругой деформации, и
скорость ее, т. е. скорость перемещения точки Л, определяется
только вязкостью тела, так как при постоянном значении усилия
производная от о/Е равна нулю.
Формулы (1.26) и (1.27) являются основными в теории и
расчете деталей на ползучесть.
Диаграмма скорости ползучести
Эта диаграхмма строится при обработке экспериментальных
кривых ползучести. Например, на рис. 1. 18, а показаны зависимости
деформации ползучести 8 от времени и напряжения для стали.
Участком неустановившейся ползучести пренебрегаем.
Из этих кривых определяем скорости, соответствующие
установившейся ползучести г=етт (индекс min в дальнейшем будем
отбрасывать). Вносим значение скорости ползучести в табл. 1.5.
Напряжение сг, МПа
Скорость ползучести
8'
108, 1/ч
89,9
0,77
117
1,
,2
26
Таб.
144,9
2,35
тица
172
3,
1.5
,5
17
Наносим эти точки на логарифмическую сетку (рис. 1. 18,6) и
проводим прямую так, чтобы она занимала по возможности «среднее»
положение между нихми.
Кривые скорости ползучести, полученные экспериментально в
форме рис. 1.18, б, позволяют найти коэффициенты m и В, необ-
34
6-10~2 мпа.
0,5
/
5
*
2д
0,5
1 г з
j) г-10* Ф
Рис. 1. 18. Диаграмма скорости ползучести:
а-Е-/(т); 6-o=f(e)
ходимые для расчетов. Для этого прологарифмируем выражение
(1. 28) к получим
lg£ = lg£ + /rclgc (1.29)
Считая, что экспериментальная диаграмма нам известна, найдем
т и В следующим образом.
Обозначим 'В точках 1 и 2 рис. 1.18,6 значения напряжений и
скоростей деформаций через ai, ei и сгг, ег; тогда
Вычитая из первого выражения второе, получим
lgei —lg e^/rallga! —lgo2)
и окончательно: t ^ = lg(£i/£2)/lg(ai/a2)- (1.30)
Затем значение В найдем по известному т:
lgiJ^lge! — m\gov (1-31)
Очевидно, безразмерная величина т есть тангенс угла наклона
прямой ]ge=lg 23 + mlga; размерность величины В—1/(Пат-ч).
Значения т и В даже для однотипных металлов изменяются в
широких пределах. В табл. 1.6 приведены некоторые значения этих
величин для различных сталей.
Таблица 1.6
Марка стали
СТ-20
Ст-25
12Г2А
12ХМФ
Х18Ы9Т
Температура,
°С
500
400
454
620
650
т
6,1
6,9
4,4
12,7
5,9
В, \/{иат-ч)
7,27-10-54
5,0-10-58
4,6-10-45
1,04-10-107
4,24-10-52
Марка стали
Х13Н16Б
ХНВМ12
»
»
Спл. W
Температура,
°С
700
500
600
700
1800
т
5,0
7,76
10,3
5,21
2,74
В, 1/(Пат-ч)
6,9-10-45
2,36-10-71
5,28-10-90
1,35-10-46
2,44-10-21
2*
Диаграмма пределов длительной прочности
Как указывалось, предел прочности материала существенно
зависит от времени работы и температуры.
Если продолжать испытание образца, как указано на рис. 1.18,
то /// этап ползучести заканчивается разрушением материала.
Напряжение, при котором произойдет разрушение образца, будет
зависеть от материала, длительности нагружения и температуры
образца. Предельное значение напряжения, при котором возникает
разрушение нагретого до температуры t образца за установленный
промежуток времени т, называется пределом длительной
прочности материала и обозначается а^}х, причем обычно т=
= 100, 1000, 5000, 10000 ч и определяется как временем
эксплуатации конструкции, так и возможностями испытательной машины,
на которой получают эти значения. Температура нагрева образца
является вторым фактором, определяющим значение предела
прочности данного материала.
Во многих случаях расчета на прочность, так же как и предел
прочности Ов} стандартной диаграммы деформирования, предел
длительной прочности а£\ является критерием работоспособности
конструкции. Принципиальное отличие предела длительной
прочности о^1 от предела прочности а(в'} заключается в зависимости его
от времени работы материала.
Из формулы (1.27) гП = Вотх получим
ат = г/(Вх) = А/Х,
где А = е/В9 и после логарифмирования
mlg* = lgA-lgx. (1.32;
Эта формула связывает напряжение, относительную деформацию и
время работы детали. Коэффициент А считается известным, так как
предполагается что относительная деформация образца е при
испытании известна. Действительно, если е=ер, т. е. соответствует
удлинению образца при разрушении, то
А = ер/В, т-=Гр, a <s = ai%
где Ов(т обозначает напряжение, при котором произошло
разрушение образца за время испытания т при температуре t, т. е. это
предел длительной прочности материала. Тогда формула (1.32)
будет иметь вид
mlgoHH = lgA-lgXr (1.33)
На рис. 1.19, а, показаны типичные логарифмические кривые
длительной прочности материала.
Во многих случаях известна только экспериментальная кривая
длительной прочности, показанная на рис. 1. 19, а. По этой кривой
легко можно найти параметры т и А данного материала.
Очевидно, если известны для точек ) и 2 en, оъ, ti, Т2, и так как
mlge1 = lgi4--lgr1; m\go2 = \gA-- lgt2,
36
t, ч
4) f)
Рис. 1. 19. Диаграмма предела длительной прочности и предела ползучести:
то, вычитая из первого выражения второе, получим
^=lg(t2/t1)/lg(a1/
а по известному значению т находим А:
(1.34)
Запас длительной прочности определяется аналогично запасу
при кратковременном нагружении:
п=о$/оша, (1.35)
т. е. запас длительной прочности детали является отношением
предела длительной прочности материала к максимальному
напряжению (к интенсивности напряжений) в детали, выполненной из этого
материала.
Диаграмма пределов ползучести
Для сравнительной оценки сопротивления материала
ползучести вводят так называемый предел по л зучести, т. е.
предельное напряжение, при котором за данный отрезок времени т
достигается заданная деформация ползучести е. (Для космических
электроракетных двигателей это время достигает 5000—10 000 ч;
относительное удлинение е= 1 ... 2%.)
Величина предела ползучести определяется по формуле (1.32):
mlgo = lgA — lgt.
В общем виде предел ползучести записывается в виде ai% и при
е=2%, Л = 0,02/В предельное напряжение, вызвавшее
относительное удлинение в 2% образца, нагретого до температуры / и
проработавшего под нагрузкой время т, запишется как <4'т*
Типичные кривые изменения пределов ползучести е[\1 со
временем показаны на рис. 1. 19, б.
37
Запасом ползучести детали называется отношение предела
ползучести материала к максимальному напряжению (интенсивности
напряжений) в детали, выполненной из этого материала, т. е.
*. = °£/<w- П. 36)
Наряду с запасом прочности и запасом ползучести в расчетах
применяется з а п а с по времени работы детали до
разрушения, определяющийся по формуле
/Цв = <£/*, (1.37)
где TBJJ— длительность нагружения образца до разрушения при
данных температуре и напряжении (берется из диаграммы
пределов длительной прочности); т—время службы детали
(наработка).
Запас по времени работы детали до
предельной деформации ползучести определяется по формуле
л*,. = 1Г#/т, (1.38)
де t/,4— время достижения образцом деформации ползучести е
при данных значениях температуры и напряжении. Эти запасы
определяют резервы времени работы детали.
Интерполяция диаграмм длительной прочности
Степенная зависимость (1. 33) предела длительной прочности от
времени работы материала позволяет осуществить оценку предела
прочности в широком диапазоне времени работы материала.
Однако часто данных по длительной прочности материалов не хватает.
Ниже рассматривается способ интерполяции характеристик
длительной прочности материалов по ограниченным данным и
диаграмме деформирования материала.
Рассмотренный ниже интерполяционный прием следует
применять осмотрительно, только для первой грубой оценки предела
прочности при отсутствии других более надежных данных.
Полагаем, что имеются диаграмма деформирования материала при
кратковременных испытаниях и различных температурах (рис. 1.20, а) и кривая дли-
6, МП а,
? МП а
800
600
ш
\200
1
Л
W
I
/
t=20°C I
700 \
6=000°С
/ /£
1000
5
го г, %
10 15
а)
Рис. 1. 20. К методу интерполяции кривых длительной прочности:
а—исходные кривые; б—полученные характеристики
38
тельной прочности для одного из режимов испытаний, например для /=700°С
/рис. 1.20, б). Для этих условий линия / = 700°С удлиняется до т= 10000 ч; лк-
^я / = 900° С наносится параллельно ей по одной точке А, взятой из рис. 1.20, а.
Такое построение несложно, так как кривая ав = /(т) в логарифмической сетке
изображается прямой.
Расчет деформаций ползучести
Если нагретая деталь находится в одноосном напряженном
состоянии, то согласно теории упругости ее деформация будет
определяться по формуле
где еп — деформация ползучести; ег = аД/ — температурная
деформация.
Здесь M=t —10 — разность температур тела в конце (t) и в
начале (to) нагревания; а — коэффициент линейного расширения.
Таким образом, z=o/E + aAt+Bem%. Все величины здесь
известны.
Если деталь находится в сложно-напряженном состоянии, то
деформация и напряжения в стадии ползучести определяются по
формулам пластического состояния (1. 18) и (1. 19).
Если материал не нагревается, то ео=О в формуле (1. 18), что
является условием несжимаемости материала. Действительно,
подставив в формулу (1. 19) для е0 значения sx, еу, ez из уравнений
(1. 12), получим
е0=П-2!*)оо/Я. (1.39)
По этой формуле величина ео очень мала и в приближенных
расчетах ею можно пренебречь, т. е. положить ео=О. Окончательно
формулы (1. 13) будут иметь вид
2а/ 2а/ 2а;
аХ"~"°0 — ——£Х' aY~aQ==1i—гУ> aZ""a0 = "5— SZ-
os. i 3s/ o£;
Исходными в расчетах на ползучесть при сложном
напряженном состоянии принимаются уравнения напряженного и
деформированного состояний в стадии пластичности (1.20):
3s/ / \ г Зе/ ,
и интенсивности напряжений и деформаций (1. 21):
о, =
Так как обычно пластическое деформирование сопровождается
нагревом тела, то в соотношение (1.39), определяющее среднюю
39
деформацию, добавляется слагаемое е*:
Принимая условие несжимаемости материала, получим eo=e*.
Отсюда зависимости (1.20) принимают вид
2а i
er = ^(ar~ao) + s,; (1.40)
2а i
3е/ / \ |
известно, при равномерном нагреве тела, не стесненного
внешними связями, температурные напряжения не возникают.
В этом случае при определении напряжений температурная
деформация Et в выражении (1.40) может быть опущена.
Окончательно деформация детали в стадии ползучести в общей
форме будет равна
или
0-41)
о ое.
= -^" (az~ao) + e/ + T-L(ez — °o)»
а деформация ползучести — гш=Вогтх=вгтп, где п = Вх.
Рассмотрим частный случай ползучести в плоско-напряженном
состоянии:
Компоненты деформации ползучести в зависимости от
компонентов напряжений будут
1 2 2 —
и окончательно: еХп= — (<з| —cjxoF-)-ar) 2 (2gx-—gy)Bx;
2 t (1.42)
ey,,= —(Л —Зх°к + о?0 2 (2ог — ax) 5тг.
40
Полная деформация будет
(1.43)
1. 5. 3. Релаксация напряжений
Все случаи нагружения деталей можно свести к двум,
существенно отличающимся друг от друга — это напряжение активными
силами и нагружение силами упругости материала.
Примеры первого типа нагружения показаны на рис. 1.21, а.
Нагрузка действует на образец в виде силы тяжести груза Р\ на
лопатку турбины действуют центробежные силы Рц\ на стенку
сферического бака действуют силы давления газа р, заключенного в
баке. Все эти случаи нагружения обладают той основной
особенностью, что напряжения в деталях мало или почти не меняются
с течением времени, несмотря на наличие деформаций.
Примеры второго типа нагружений показаны на рис. 1.21,6.
Напряжения растяжения в болте и сжатия в деталях фланца
создаются силами упругости материала болта; напряжения сжатия в
сечении образца создаются силами упругости в результате
нагревания; напряжения в анодном пакете создаются силами упругости
сопряженных деталей при их температурной деформации. Эти
нагружения характерны тем, что.они создаются силами упругости
материала, которые всегда зависят от времени работы и никогда
не остаются постоянными при любом уровне нагружения детали,
что является следствием необратимых пластических деформаций,
возникающих при нагружений деталей. Это явление называется
релаксацией.
5)
Рис. 1. 21. Схема нагружения деталей:
а—внешние нагрузки; б—тепловые нагрузки
>
jb d
V»
Рис. 1.22. Схема
определения релаксации напряжений
41
1,0
0,5
V
Я
\ ^
^^
"- -
10 %ч
Рис. 1.23. Параметры
релаксации напряжений
Релаксацией напряжений
называется ослабление напряженного
состояния деталей с течением времени при
неизменной нагрузке, а напряжения —
релаксирующими
напряжениями.
Причины появления релаксации легко
выявить при анализе протекания кривой
ползучести на первом участке диаграммы
ползучести (рис. 1.22). Первичное нагру-
жение детали создает напряжение и
упругую деформацию, характеризующуюся
точкой во. Далее в очень короткое время
(тл) происходит быстрое изменение
напряженного состояния.
При нагружении деталей активными силами значения
напряжений и деформаций, развивающихся на этом участке, в
особенности в деталях, работающих длительное время, всегда невелико.
Поэтому обычно сложную кривую деформирования «а» заменяют
прямой «Ь». Однако если эти напряжения релаксирующие, то
изменение напряженного состояния будет всегда существенным.
Для расчета релаксации необходимо найти зависимость между
деформацией ползучести и временем на нервом участке диаграммы
ползучести материала. Используем приближенную зависимость,
удобную для практических расчетов. Исходным является второе
уравнение (1.26), которое мы перепишем в несколько измененном
виде:
г=о/Е + В(х)ат. (1.44)
Значение константы В представлено здесь в виде переменной
величины, зависящей от времени. Уравнение (1.44) позволяет
рассчитать релаксацию напряжений.
Полагаем, что элемент находится в напряженном состоянии и
так зафиксирован, что дальнейшая его деформация ограничена.
Тогда из уравнения (1.44), полагая e = const и, следовательно,
е=0, получаем da/om=—EB(x)dr. Интегрируя это выражение и
имея в виду, что при т=0, а=ао, найдем
1 / г_т \—т\ Z7Q
где
Обозначив Q=a/(To, получим
где q — убывающая функция (рис. 1. 23).
График функций В(х) и Q можно найти из основных
зависимостей пластической деформации. Значение показателя степени т
42
<6; п
П=1
1
h^
s;
<°t /пах
«^ Е. ^
Рис. 1. 24. График запаса прочности деталей с релаксирующими напряжениями
известно из экспериментальных кривых ползучести; функцию Q
находим по известным е, а и т\ функцию В(т) находим после
определения функции Q графически или численным
дифференцированием.
Как видно из рис. 1.23, функция В(т) переменна на первом
участке, что соответствует участку неустановившейся ползучести,
и постоянна на участке установившейся ползучести; функция Q
после некоторого значения монотонно увеличивается; функция q
уменьшается резко при значении т, близком к нулю, а далее —
монотонно.
Итак, изменение релаксирующих напряжений по времени
определяется формулой cr = Q0o; при т = 0 о= 1; при т>0 q< 1.
Запас прочности деталей с активными напряжениями при т=0
имеет максимальное значение (рис. 1.24, а). При увеличении
времени работы он монотонно уменьшается до значения, допустимого
в конце ресурса. В эскизном проекте в конце ресурса его можно
принимать равным единице.
Запас прочности деталей с релаксирующими напряжениями вы-
бираегся по диаграмме длительной прочности для момента
времени, КОГДа Т = 0, П = 0(вП А?тах-
Величина п должна существенно превышать единицу, так как
режим т=0 является самым напряженным и определяющим
работоспособность детали. Как видно из рис. 1.24,6, при t>0
условия работы таких деталей улучшаются, так как запас прочности
в дальнейшем растет до некоторой максимальной величины и
затем только монотонно убывает.
1. 5. 4. Долговечность деталей, работающих
при нестационарных режимах
Особенностью такого нагружения является сравнительно
медленное изменение напряженного состояния по времени работы
детали. Если нагружение периодическое, то оно называется мало-
Цикловым.
На рис 1.25 показаны типичные нестационарные режимы: / —
изменение напряжений при двухрежимной работе (турбогенерато-
43
Рис. 1.25. Примеры
нестационарных режимов работы
Рис. 1.26. Оценка длительной
прочности при двухрежимной
работе:
а—виды напряжений;
б—зависимость долговечности от
напряжений
t,
{
t2
к
1
6
6г
0
*г
' *Рг
-С,
а)
р\
■с
6)
ры, реакторы); 2 — изхменение напряжений в оболочках ТВЭЛов,
ампул радиоизотопных источников энергии; 5 — нагружение,
соответствующее пуску и останову агрегатов; 4 — нагружение деталей,
работающих в околоземном пространстве. Если разрушение детали
происходит за время тр, то запасом долговечности при
нестационарном нагружении будет величина пх =тр/ттах-
Расчет прочности деталей, работающих в таких условиях, целе-
ссюбразно проводить методом суммирования повреждаемостей.
Повреждаемостью П называется совокупность несплош-
ностей, обрывов, дефектов, возникающих в нагруженной детали с
течением времени, сопровождающих работу детали и
уменьшающих таким образом эффективное сечение, сопротивляющееся
нагрузке.
Механизм повреждаемости сложен. В результате нагружения в
металле возникают различного рода дефекты (несплошности,
трещины, поры), снижающие работоспособность детали. Этому
процессу противодействует при некоторых условиях процесс
«залечивания» этих несплошностей, что особенно заметно на пластичных
материалах при высоких температурах.
В настоящее время имеется несколько способов численного
описания повреждаемости. Наибольшее распространение получили
способы временной оценки повреждаемости, опирающиеся на из-
44
вестную диаграмму пределов длительной прочности материала,
порученную в условиях стационарного нагружения (рис. 1.26,6).
ь ' Действительно, если провести на этой диаграмме линию
напряжения детали аь то на ней легко находится время
действительной работы детали %\ и время разрушения tpi под этим
напряжением.
В этом случае количественная оценка повреждаемости может
быть выражена через относительную долговечность
детали ть т- е- через отношение времени работы детали при дан-
пом напряжении к предельному времени ее работы при этом
напряжении:
n=-t = T/tp.
Понятие относительной долговечности имеет простой
физический смысл: эта мера исчерпания работоспособности материала до
его полного разрушения.
Закон изменения повреждаемости П по времени выражается
сложной нелинейной зависимостью. Однако для. многих
инженерных расчетов кривую повреждаемости строят в виде прямой,
заменяя сложный закон изменения линейным. Вначале, при т=0,
повреждаемость детали 11 = 0; в момент разрушения при т=тр
повреждаемость достигает критической величины П = ПКр=1.
Оценка долговечности по методу линейного суммирования
повреждаемостей при ступенчатом изменении напряжений
Рассмотрим оценку длительной прочности детали, работающей
в двухрежимных условиях (рис. 1.26, а). Для упрощения будем
считать, что температура детали — величина постоянная.
Дано: п, т2, аь ст2, трЬ тр2.
Требуется найти тр и /2t=tp/(ti+t2).
Кривая длительной прочности материала детали ав показана на
рис. 1.26,6; на ней отмечены времена разрушения,
соответствующие каждому из заданных режимов работы детали.
Как видно из рис. 1. 26, а, деталь проработала в течение
времени Ti при напряжении а\, затем в течение времени т2 при
напряжении CF2, при котором она и разрушилась. Обозначим тр2—время
до разрушения при напряжении а2 после работы детали в течение
времени ti при напряжении G\ (рис. 1.26, а). Следует подсчитать
суммарное время до разрушения. Очевидно, что, если деталь
работала при напряжении а2, то время до разрушения т*2 было бы
минимальным, но и это не соответствует действительности, так как
некоторое время деталь работает при более низких
напряжениях (7,1.
Построим диаграмму повреждаемости для каждого из этих
напряжений по времени (рис. 1.27, а). Отметим время работы на
каждом напряжении. Найдем повреждаемость материала при
каждом напряжении.
45
а.) Ю
Рис. I. 27. График повреждаемости:
а—исходные данные; б—суммарная повреждаемость
На каждой ступени напряжений количественные значения
повреждаемости не достигают критической величины и соответственно
Если разрушение детали произошло на втором участке в
результате достижения суммарной повреждаемостью критической
величины, то тогда (рис. 1.27,6)
ИЛИ tl/% + Х*2/Х№ = 1' "
где тР2=тР2 (1 — х 1 /tpl)
— время работы детали на втором участке до разрушения с
учетом наработки на первом, а суммарное время работы детали до
разрушения —
Отсюда находится запас долговечности детали
(1.46)
п __ _
tp TX +Tp2(l —
Итак, метод линейного суммирования повреждаемости позволяет
по кривым длительной прочности, полученным при стационарных
испытаниях, рассчитывать долговечность конструкции, работающей
при нестационарном нагружении.
Формула (1.45), обобщенная для случая i участков нагруже-
ния, имеет вид
*р/=*р/ [1 -(*ifai+*2/Xp2+- • • +Xi-i/xP(i-i))], (1.47)
и тогда время работы детали до разрушения будет
tp^, (1.48)
где
46
Из формулы (1.48) легко получить выражение суммы
относительных долговечностей или повреждаемостей.
Положив k=i, получим
•'хпъ=\ или VlTb=l.
Эта формула для случая непрерывного изменения напряжений,
приобретает вид
[ rfttn^L
Циклическое изменение напряжений
Циклическое изменение напряжений показано на рис. 1.28.
Такой характер работы детали может сопутствовать периодическому
включению и выключению энергоузла, например реактора, если их
в блоке установлено несколько и они работают попеременно. Это
нагружение внешне похоже на циклическое нагружение, которое
возникает при вынужденных колебаниях и приводит к усталости
материала деталей. Однако от вибропрочности и усталостного
характера нагружения этот случай отличается принципиально.
Время изменения напряжений в цикле тц=Т1+Т2 в
рассматриваемом случае превышает длительность цикла при вынужденных
колебаниях на несколько порядков; поэтому число циклов
изменения напряжений очень невелико и на несколько порядков
отличается от числа циклов нагружения при вибрациях.
Такое нагружение называют малоцикловым.
Очевидно, повреждаемость на первом и втором участках
нагружения будет
ni=ti/Tpl; П2=т2/Гр2.
Повреждаемость за один цикл нагружения Пц:
Если обозначить Nv. ц — число циклов, после которого наступает
разрушение, то время работы до разрушения при циклическом на-
гружении Тр. ц будет равно
Кроме того, Nv. ц(тц/тр1 + ,Т2/тр2) = 1,0 или—— (гi /гр1 + т2/тр2)=1, от-
Tl+T-2
1. 5. 5. Температурные напряжения
Температурные напряжения возникают в детали при
прохождении через нее тепловых потоков.
47
Lp.u.
Рис. 1. 28.
Циклическое
напряжений
изменение
При изучении температурных
напряжений встречаются с двумя
различными случаями. Первый — когда
температурные напряжения
появляются в результате быстрого нагре-
в а или остывания изделия
(детали). Этому режиму, хотя и
кратковременному, соответствуют максимальные
температурные градиенты, а
следовательно, и напряжения. Уменьшения
этих напряжений можно достичь
увеличением времени разогрева изделия,
времени пуска. Для установок, где
время пуска должно быть минимальным, температурные напряжения
должны рассчитываться.
Второй случай — когда напряжения возникают в деталях в
результате воздействия установившихся тепловых потоков и
соответствующих им установившихся градиентов температур.
Для очень многих элементов конструкции расчет
температурных напряжений является основным, если деформации,
соответствующие этим напряжениям, не выходят за пределы упругих. Этот
расчет может быть исходным для расчета на прочность, если
температурные напряжения превосходят предел упругости материала,
когда пластическими деформациями, сопутствующими этим
напряжениям, пренебрегать нельзя. Расчет прочности деталей в этом
случае следует вести с учетом релаксационных явлений.
Если нагреть элемент объема упругого тела до температуры t
и при этом ничто не будет препятствовать его свободному
расширению, то элемент расширится во всех направлениях (рис. 1.29, а),
причем относительные тепловые деформации его описываются
следующими формулами:
ext = eYt = ezt = aAt; yxYt = yYzt = yzxt=O, (1.49)
где At=t — t0 (t0 — начальная температура тела); а —
коэффициент линейного расширения (относительное удлинение материала
детали при нагревании на ГС).
Обращение в нуль сдвиговых компонентов тепловой деформации у
вытекает из отсутствия искажений углов при этой деформации. Отметим, что эти
деформации никаких напряжений в детали не вызывают и, таким образом, закол
Гука, связывающий деформацию и напряжение, здесь не применим.
Заделна,
Рис. I. 29. Деформация элемента при нагревании
48
Если при нагревании тела его деформация будет стеснена, что
может произойти из-за неравномерного нагрева отдельных его
участков или вследствие связанности каких-либо участков его
поверхности с другими телами, и элементы тела не смогут свободно
расширяться, то в нем возникнут (рис. 1.29,6) температурные
напряжения. В этом случае деформация каждого элемента тела
складывается из тепловой деформации свободного элемента и упругой
деформации, вызванной температурными напряжениями. Если эти
напряжения обозначить, как обычно, через ox, cry, crz, т^у, %yz>
%zx> то деформации
ех=~1ах
^ 0-50)
zz=—
Выразим напряжения через деформации. Складывая первые три
уравнения, получим
где в — относительное объемное расширение элемента.
Первое уравнение системы (1.50) преобразуется затем так:
2G 1 —2{х 1
Отсюда определяем вх> oy и gz:
зх= [е~-| ^—s
х ^х ' 2 2
х ' 1_2(х 1 — 2(1 )
t^tfi^ (1. 51)
s
az|sz |sаДЛ ; XzxGyzx.
z l 4-fx V ^ ' 1 — 2fx 1—2fx ) zx xzx
Полученные общие выражения деформаций и напряжений
упрощаются для случаев плоского и одноосного напряженного состояния.
Для плоского напряженного состояния
49
Е
а) Ю
Рис. 1. 30. Температурные деформации:
a—в свободной детали; б—при ее жестком закреплении
а соотношения (1.51) принимают вид
%XY=GyXY.
Для одноосного напряженного состояния
z4aM; з^=Е(г — alt).
Е v
Полученные результаты имеют простой физический смысл. В
обобщенном виде их можно представить как
где е* — температурная деформация свободной от связей детали;
8У — упругая деформация детали, возникающая вследствие
стесненности температурного деформирования.
Итак, суммарная деформация нагретой детали складывается
из свободного ее температурного расширения и упругой
деформации, появляющейся вследствие стесненности этой деформации.
Температурные напряжения определяются только упругой
составляющей деформации. Ее нахождение составляет основную
трудность в расчете.
Температурная деформация е* всегда известна; она равна
Это упрощает получение численного результата.
Закономерности напряженного состояния нагретой детали показывают
существенное отличие его от напряженного состояния ненагретой детали,
находящейся под нагрузкой, где, как известно, всякой
относительной деформации соответствует определенное напряжение.
Рассмотрим, например, напряжение и деформации детали, свободной от
закрепления (рис. 1.30, а).
При заданных значениях а и At деформация
так как s =0, s — st=a\t; а = Ег -==0.
50
Обратим внимание, что гфО, сг=О, т. е. полная деформация
детали ке характеризует ее напряженности.
Рассмотрим напряжение и деформации в детали, имеющей
жесткое закрепление (рис. 1.30,6). При заданных значениях а и
Д£ деформации
а = Ег — — ЕаМ.
И здесь при е=0 афО, т. е., как и в предыдущем случае, полная
деформация не характеризует напряженности детали.
Напряженное состояние детали, имеющей жесткую заделку,
обладает еще одним важным качеством: жесткая заделка —
единственная, при которой температурная деформация детали точно
равна ее упругой деформации с обоатным знаком.
В деталях, подвергающихся нагреву, как бы создают условия
жесткой заделки для оценки предельных температурных
напряжений, которые могут возникнуть.
Пример 1.2. Найти температурные напряжения в детали, выполненной из
стали и установленной жестко, как указано на рис. 1.30, б, если известны ос =
= 10- 10—6 1/град; Е=2 • 1011 Па; Д*=100°С.
Напряжение
_2- 10П• 10-6. ЮО -= —200 МПа.
Как видно из примера, даже не очень большой подогрев жестко
закрепленной детали вызывает большие напряжения. Появлению напряжений в случае
нагрева детали, имеющей заделку, иногда дают такую физическую
интерпретацию: если бы не было ограничивающей заделки, то деталь расширилась бы
при нагревании на относительную величину е* = аА£, вследствие же жесткого
закрепления детали такого удлинения не происходит. Это можно представить
как обратное деформирование свободной детали в результате воздействия
усилия Р, возникающего з месте жесткого закрепления детали.
Возникновение сил реакции в местах заделки, точное равенство
при этом температурной деформации детали ее упругой
деформации позволяют с помощью простого приема находить
температурные напряжения в самых разнообразных случаях.
Рассмотрим этот прием.
Общий способ нахождения температурных напряжений
Имеем свободную неоднородную по а деталь (рис. 1. 31, а).
Даны а, А/, Е, следует найти еу и о. Если бы эта деталь
деформировалась свободно, то ее относительная температурная деформация
была бы Et=aAL Так как деформирование детали вследствие
неоднородности свойств стеснено, то ее деформация е=е* — sy (рис.
1.31, а). Находим величину относительной упругой деформации еу
следующим образом.
До нагревания деталь мысленно устанавливаем в жесткий
корпус, который не позволяет расшириться ей при нагревании (рис.
1.31, б), отчего возникает сила реакции Р. Так как в
рассматриваемом (при жесткой заделке) случае температурная деформация,
которая известна, равна упругой, т. е. е* = —аД£=еу*, то Р=
= еу*£77=—EFaAt, где F — расчетное сечение детали.
51
fc=±
■?■<
/; в)
Рис. 1. 31. Схема определения температурных напряжений:
а—свободная деформация, б, в—стесненная деформация
Полученные в этом состоянии напряжения и деформации
отличаются от действительных, так как двухсторонней жесткой
заделки детали нет. Для получения истинной температурной деформации
следует приложить к детали нагрузку Р, возникающую в
предполагаемой заделке детали, но направленную в противоположную
сторону (рис. 1. 31, в).
Деформация детали в этом случае может быть подсчитана.
Обозначим ее относительную деформацию е=е(—Р). Сумма
относительных деформаций детали, упругой при ее жесткой заделке (см.
рис. 1.31,6) и от силы реакции —Р, дает истинную упругую
относительную деформацию
у (-Я). (1-52)
Этот прием определения упругой температурной деформации
применяется и в более сложных задачах. В общей форме
относительная деформация детали
1. 5. 6. Запас прочности и критерии надежности
Надежность — свойство изделия выполнять заданные функции,
сохраняя свои эксплуатационные показатели в заданных пределах
в течение требуемого промежутка времени или требуемой
наработки.
Надежность изделия слагается из большого числа
составляющих; здесь рассматривается только физическая, или прочностная,
надежность, т. е. безотказность в течение заданного времени,
обеспечиваемая выбранным запасом прочности деталей изделия.
Математически надежность выражается через вероятность безотказной
работы конструкции и записывается !в;виде Р = вер{£/>0},
где U—oB — ам — функция неразрушения.
Обычная формула запаса прочности п=ов/оЛ1 предполагает,
что ав и ом — детерминированные величины.
В действительности <тв — предел прочности, о.,
—максимальное напряжение зависят от большого числа случайных факторов,
вследствие чего случайной величиной будет и запас прочности я.
Принимаем нормальный закон распределения для случайных
величин ав и аи. Плотность распределения их будет
52
'^^
'53)
где ом, ав— математические ожидания величин ам и ав;
dl и rf2B —дисперсии величин ам и ав.
Графически функции (1.53) и (1.54) показаны на рис. 1.32.
Очевидно деталь будет работать не разрушаясь, если выполняется
условие ол/^ав, и разрушится, если ав<Сюм. В этом случае f/<0.
Функция плотности распределения для величины U будет
нормальной и запишется так:
1
где Z7=7B-a^; £/бг = ^в + ^Л-
Вероятность разрушения равна
2 4
а вероятность неразрушения, как противоположное отказу
событие, равна
Заменим переменные в последнем выражении на
x = {U — U)ldv\ dU=dudx.
Тогда
|/2л
- х
—F i'1-
"и I
Функция Ф(х) (интеграл Таусса) табулирована. Разделим
числитель и знаменатель аргумента функции Ф выражения (1. 55) на ом:
Р=1-ф(,/4—^-„V 11-56)
53
Область
отказов
О 6М 66 6
Рис. 1. 32. Законы распределения действующего напряжения и несущей способности
где п=ов/ом — средний запас прочности; <1°м^=с^ам/ам:> vb=
= doB/oh — коэффициенты вариации.
Полученное выражение (1.56) связывает запас прочности п и
вероятность неразрушения. Обычно коэффициенты вариации
изменяются в пределах: vM =0,05 ... 0,10; ив = 0,02 ... 0,10.
Методика расчета прочностной надежности
Оценка надежности конструкции является последним этапом ее
расчета. На первых этапах выбирается расчетная схема,
определяются основные нагрузки, действующие на систему, выбирается
вид отказа системы, исходя из ее условий работы. Далее
рассчитываются основные факторы, влияющие на отказ конструкции.
Обычно техническими условиями задается вероятность
неразрушения системы в целом, и при расчетах коэффициенты запаса
прочности выбираются с учетом этой вероятности.
Оценка надежности конструкции производится в следующем
порядке.
1. Выбирается структурная схема всей конструкции в целом.
Так, структурную схему из пяти, например, звеньев можно
представить в виде их последовательного соединения. При таком
соединении отказ любого звена приводит к отказу всей конструкции.
Следовательно, вероятность безотказной работы всего изделия
равна произведению вероятностей неразрушения каждого звена, т. е.
где /= 1, 2,..., k — число входящих в конструкцию звеньев.
При параллельном соединении вероятность неразрушения
определяется по формуле
2. Исходя из принципа равнонадежности всех звеньев структур-
ной схемы, находим вероятность неразрушения каждого звена на
основе выражения
р.=-^р^, (1.57)
где Рпр — заданная на всю конструкцию предельная вероятность
неразрушения; k — число звеньев в конструкции. Приведем
выражение (1.56) к виду
р<='-ф(-. „,_,
Здесь fi.i — средний запас прочности /-го звена или
где
vm = V J&&+*£//(л1 - 1). (1. 58)
— коэффициент вариации функции U.
Находим из равенства (1. 58) запас прочности
3. По полученным в п. 2 вероятностям неразрушения Р<
определяем по таблицам для Ф(<г) вариации функции неразрушения vn,
4. Из справочника по статистическим свойствам материалов [8]
находим величины vBt, из прочностных расчетов определяем vMi.
5. По формуле (1.59) определяем коэффициент запаса
прочности га для некоторого /-го элемента.
Аналогично определяем значения п для других узлов системы.
ЧАСТЬ ВТОРАЯ
ИСТОЧНИКИ ЭНЕРГИИ КДУ
Глава II
ЯДЕРНЫЙ РЕАКТОР
Ядерный реактор — наиболее перспективный источник энергии
для КДУ. Он обладает высокими энергетическими возможностями,
позволяет получить достаточно высокие температуры рабочего
тела, и его массовая характеристика остается неизменной в течение
всего времени эксплуатации. К недостаткам реактора относятся
большие трудности создания надежной конструкции и защиты
от ядерного излучения при эксплуатации, ограничения при
ремонте, опасность при авариях, высокая стоимость. Проблема
получения наилучших конструкционных материалов для активной зоны
реактора находится еще <в стадии разрешения. Рассмотрим
классификацию ядерных реакторов.
По энергии нейтронов, которые определяют ядерное деление,
реакторы подразделяются на работающие на быстрых,
промежуточных и тепловых нейтронах.
Тепловые и промежуточные реакторы по принципу компоновки
активной зоны делятся на гомогенные и гетерогенные.
Гомогенные реакторы имеют замедлитель, равномерно смешанный
с делящимся веществом; в гетерогенных реакторах замедлитель и
делящееся вещество могут размещаться в активной зоне
раздельно, могут находиться в разных фазах.
По физическому состоянию теплоносителя реакторы делятся на
реакторы с ж ид к и м и газообразным теплоносителем.
Реакторы, в которых теплоноситель переходит из жидкой фазы в
паровую, фазу, называются кипящими.
Реакторы с жидким и газообразным теплоносителем по
направленности движения рабочего тела делятся на реакторы
прямоточной и противоточной схемы. В реакторах
прямоточной схемы теплоноситель во всех частях реактора перемещается в
одном направлении. В реакторах противоточной схемы
теплоноситель используется сначала для охлаждения корпуса реактора, а
потом поступает в активную зону. Петлевая схема направления
движения теплоносителя определяется иногда местом расположения
реактора в энергетической установке.
По времени действия реакторы делятся на реакторы
длительного действия и реакторы с относительно малым временем
использования.
56
По характеру контакта рабочего тела с поверхностью
тепловыделяющих элементов (ТВЭЛов) реакторы делятся на
реакторы с твердой, жидкой и газообразной
поверхностью ТВЭЛов. Два последних типа реактора позволяют поднять
температуру рабочего тела значительно выше температуры
плавления, однако они не вышли из стадии экспериментальных и научно-
исследовательских разработок. Пока в космических
электроракетных двигателях используются реакторы с твердой стенкой.
2. 1. КОНСТРУКТИВНЫЕ И СИЛОВЫЕ СХЕМЫ
ЯДЕРНЫХ РЕАКТОРОВ
Прямоточный ядерный реактор на быстрых нейтронах по одной
из возможных схем (рис. 2.1, а) состоит из корпуса, включающего
собственно корпус 1, силовую плиту 2 и диафрагму 4\ ТВЭЛов <?;
радиального отражателя 9\ регулирующих барабанов 7 и 8\
защиты 6.
Корпус / — основная силовая часть реактора. Он скрепляет активную
зону и систему регулирования, воспринимает и передает нагрузки, возникающие при
старте двигателя и его нормальной работе, через плиту 2, которую также
называют трубной доской или перфорированной пластиной. Она скрепляет ТВЭЛы
3 и воспринимает нагрузки от них во время старта и работы КДУ.
ТВЭЛы также опираются на тонкую легкую диафрагму 4, назначение
которой — фиксация и поддержка ТВЭЛов и дефлектирование теплоносителя при
работе реактора. ТВЭЛ 3 состоит из оболочки, при помощи которой через
хвостовик он крепится к силовой плите 2 реактора, активного делящегося вещества
и двух торцовых отражателей. Радиальный отражатель 9 в данном примере
состоит из двух частей — неподвижной, примыкающей в виде тонкого слоя к
внутренней поверхности корпуса 1, и внешней, откидывающейся для останова
реактора в аварийной ситуации.
2 3
Рис. 2. 1. Силовые схемы ядерных реакторов:
прямоточного на быстрых нейтронах; б—гомогенного противоточного на тепловых
нейтронах
57
Регулирование реактора осуществляется барабаном 8, приводящимся в
движение механизмом 7, а аварийное выключение — перемещением
отражателей 9.
Жидкий металл, как указано стрелкой, поступает в реактор из
трубопровода в передней части реактора, проходит через отверстия а в силовой
плите 2, между ТВЭЛами и выходит из сборника 5 на задней стенке реактора.
Реакторы на быстрых нейтронах конструктивно просты,
сравнительно малы по габаритным размерам и невелики по массе. Они
просты и технологически, имеют небольшое количество деталей,
нечувствительны к применению в активной зоне конструктивных
материалов, поглощающих нейтроны. Недостатки их сводятся в
основном к тому, что они имеют большую загрузку делящегося
вещества и поэтому в ряде случаев дороже других конструкций
реакторов.
Гомогенный реактор на тепловых нейтронах с противоточным
движением рабочего тела (рис. 2. 1,6) состоит из корпуса 1 с
силовой плитой 2 и ТВЭЛов 3; радиального отражателя 6;
регулирующих ч аварийных стержней 7, §; защиты 5. Общая схема
крепления ТВЭЛов, состоящих из оболочки, торцового отражателя и
делящегося материала, смешанного с замедлителем, аналогична
описанной выше.
Теплоноситель, поступающий в реактор, проходит между внешней оболочкой
корпуса и тонкой стенкой, соединенными друг с другом гофрированной простав-
кой 9. Далее, как это указано стрелкой, теплоноситель поступает через отвео-
стия в силовой плите 2 в активную зону и .затем — к патрубку вывода
теплоносителя из реактора. Укладка ТВЭЛов в активной зоне осуществляется с
небольшими тепловыми зазорами. Для уменьшения поглощения нейтронов
стальные оболочки применяются только для аварийных и регулирующих стержней
7 и 8, размещенных в активной зоне.
Реакторы на тепловых нейтронах конструктивно сложнее
прямоточных, имеют при одинаковой мощности большие массу и
габариты, более чувствительны к применению обычных
конструкционных материалов в активной зоне. Однако эти реакторы
обладают рядом существенных достоинств, в частности, они обычно
дешевле, так как при равных условиях требуют меньшей загрузки
делящегося вещества. Для замедления нейтронов применяется
замедляющий материал. Им может быть, например, материал,
содержащий 'водород. Замедлитель равномерно перемешан по активной
зоне.
Схема реактора на промежуточных нейтронах (рис. 2.2, а)
близка к двум схемам, рассмотренным ранее.
Корпус /, в который входят также его передняя 2 и задняя 4 торцовые
стенки, в данной конструкции выполнен так же, как и в реакторе на тепловых
нейтронах. Установка ТВЭЛов 3 в оболочке из конструкционного материала,
радиальный отражатель 6 и регулирование^ с помощью барабанов 5,
размещенных в отражателе 6, аналогичны выполненным в реакторе на быстрых
нейтронах. В отражателе размещаются и барабаны аварийного выключения
реактора.
На рис. 2. 2, б показана силовая схема гетерогенного реактора
на тепловых нейтронах с газовым рабочим телом.
Корпус / реактора, торцовые стенки 2 и трубы 3 для размещения ТВЭЛов
и прохода теплоносителя — газа — представляют собой жесткую цельносварную
конструкцию типа прямоточного котла. ТВЭЛы 4 в виде пластин (см. сечение
58
6 5
Рис. 2. 2. Силовые схемы ядерных реакторов:
а—на промежуточных нейтронах; б—гетерогенного на тепловых нейтронах
А—А) устанавливаются секциями в трубах 3. Регулирующие и аварийные
стержни 5 и 6 выполняются аналогично схеме теплового реактора.
В качестве отражателя и замедлителя в этом реакторе как один
из возможных вариантов применяется вода, которая поступает ч
правый верхний патрубок корпуса и занимает все свободное
пространство между ТВЭЛами и корпусом. Для обеспечения
равномерного перемешивания воды при работе реактора в корпусе
установлены диафрагмы с отверстиями. Для обеспечения надежного
охлаждения конструктивных элементов реактора имеется
специальный подвод воды в кожух, охватывающий оболочку крепления
ТВЭЛов.
Газ, например гелий, проходя по внутреннему каналу,
нагревается от пластинок, которые могут быть выполнены из сплава
урана Форма канала может быть различной в зависимости от
давления теплоносителя.
Схема газофазного реактора показана на рис. 2.3.
Реактор состоит из корпуса 3 с патрубками подвода 2 и отвода / рабочего
тела (водорода) являющегося теплоносителем и замедлителем активной зоны;
наружного отражателя 4, имеющего каналы для прохода рабочего тела; силовой
стенки 5; внутреннего отражателя 10; выполненного из окиси бериллия и
имеющего отверстия для прохода рабочего тела в центральную полость;
вольфрамовой сетки 9. Реактор имеет патрубки ввода рабочего тела в реактор //,
ввода порошкообразного урана 6 и ввода водорода 7 для охлаждения
центрального тела 8. Центральное тело 8 состоит из внешней охлаждаемой оболочки,
вольфрамовой сетки, обращенной к центральной полости реактора, отражателя
и канала для прохода порошкообразного урана в центральную полость.
Рабочее тело — водород из входного патрубка реактора 2 проходит по
каналам двухслойной оболочки корпуса 3, каналам наружного отражателя 4 и
поступает в выходной патрубок 1. В нагретом состоянии водород поступает нч
турбину, приводящую в движение насос системы питания, а затем вновь в ро-
59
2 J
11
Рис. 2.3. Схема газофазного реактора
актор через патрубок //, отверстия во внутреннем отражателе 10 и через
отверстия в вольфрамовой сетке 9 в центральную полость реактора.
Ядерная реакция происходит в ТВЭЛе, представляющем
газообразный стержень, содержащий порошок урана, окруженный
газообразным замедлителем и твердыми отражателями. Плазма,
состоящая из смеси водорода и урана, через кольцевую щель
выходит из реактора.
2.2. КОНСТРУКЦИЯ ЭЛЕМЕНТОВ РЕАКТОРА
Большое число конструкционных деталей реактора и элементов
выполняется из листового материала и соединяется сваркой. Ар-
гоно-дуговая электросварка — основной вид сварки конструкций
реактора—обеспечивает получение прочного герметичного шва и
допускает полную автоматизацию технологического процесса.
Электронно-лучевая сварка обеспечивает прочный герметичный
шов наивысшего качества и позволяет сваривать разнородные
материалы, например сталь и цветные металлы, вольфрам и др., т. е.
такие материалы, которые не поддаются другим видам сварки.
Следует отметить, что электронно-лучевая сварка не всегда
применима, она дорога и требует специального оборудования.
Кроме этих способов в отдельных случаях применяются более
редкие способы сварки, имеющие большие перспективы. Это
сварка трением, термодиффузионная, ультразвуковая, сварка
лазерным лучом, взрывом.
Пайка также широко применяется в конструкциях элементов
реактора. Во многих элементах, например в соединениях
многослойных оболочек, при креплении силовых узлов и др., пайка
успешно применяется наряду со сваркой. В некоторых случаях,
например в соединениях конструкционных материалов с керамикой,
60
Ю
Рис. 2. 4. Конструкция ТВЭЛов реакторов:
а—на быстрых нейтронах; б—на тепловых нейтронах
она незаменима и является единственным способом соединения
таких элементов.
Конструкция ТВЭЛа реактора. Одна из возможных
конструкций ТВЭЛа реактора на быстрых нейтронах показана на
рис. 2. 4, а.
ТВЭЛ представляет собой замкнутую герметичную тонкостенную
конструкцию, состоящую из оболочки 2, закрытой с двух сторон наконечниками 1 и 5.
Внутрь оболочки с небольшим зазором укладывается часть торцового
отражателя 3 и таблетки делящегося вещества 4. В зависимости от вида
теплоносителя, его температуры и от материала делящегося вещества оболочку 2 и
наконечники 1 п 5 делаю г из нержавеющей стали, например Х18Н9Т, ЖСК,
молибденового и ниобиевс^о сплавов. Делящееся вещество получают из сплавов
урана, окислов урана, карбидов урана. Отражатель изготовляется из бериллия,
окиси бериллия. Наконечник 1 ТВЭЛа свободно входит в отверстие трубной
(силовой) доски 7 и прямоугольный вырез фиксирующей пластины 8. Дальнейший
поворот ТВЭЛа на 90° приводит к осевой фиксации его пластиной 8 и
выступом наконечника / Затем наконечник контрится от возможного поворота при
транспортировке и работе пластиной 9, в которой имеются прямоугольные
вырезы для наконечника и отверстия для прохода теплоносителя. Пластина 9
крепится к трубной доске 7 винтами. На рис. 2.4, а сечение Б—Б дано без
пластины 9, а вид А — когда эта пластина установлена. Вторым наконечником 5
ТВЭЛ фиксируется в легкой диафрагме 6 реактора.
Оболочка ТВЭЛа — наиболее натруженный элемент в реакторе.
Она подвергается воздействию газовых сил, возникающих в
результате деления урана. Газовые осколки деления могут скапливаться
под оболочкой. Если реактор имеет различные переменные режимы
работы, то это приводит к циклической нагрузке оболочки.
В узел ТВЭЛа теплового реактора (рис. 2. 4, б) входят
наконечник 3, часть торцового отражателя 4, делящееся
вещество 5.
61
А-А
S 6
Рис. 2. 5. Конструкция ТВЭЛа реакторов:
а—на промежуточных нейтронах; б, б—гетерогенного на тепловых нейтронах
В зависимости от вида теплоносителя и температуры ТВЭЛа наконечники
выполняются из нержавеющей стали, например Х18Н9Т, молибдена, ниобия.
Отражатели могут быть из окиси бериллия и бериллия; топливом в гомогенном
реакторе — смеси урана с графитом, окисью бериллия, гидридами.
ТВЭЛ, таким образом, представляет разнородную по материалу
конструкцию, собранную в один узел. Связь между отдельными элементами, стальным
наконечником и внешней оболочкой, если она есть, осуществляется сваркой
или пайкой. Наконечник ТВЭЛа 3 трубчатой формы в дальнейшем переходит в
шестигранник, что обеспечивает плотную кладку активной зоны. Теплоноситель
проходит через отверстия внутри ТВЭЛа или между блоками. ТВЭЛ
приваривается к силовой плите 2 через кольцо /. Вторым концом ТВЭЛ опирается на
поддерживающую диафрагму 6.
Представленный на рис. 2. 5, а ТВЭЛ реактора на
промежуточных нейтронах выполняется, как и в реакторе на быстрых
нейтронах, в виде замкнутой тонкостенной сварной конструкции,
состоящей из наконечника 8, корпуса 7 и торцовых стенок3. Внутри
оболочки 7 размещается часть торцевого отражателя 5, делящееся
вещество 6, смешанное, как в тепловом реакторе, с замедлителем,
и трубки 4 для .прохода теплоносителя.
Элементы 3, 4, 7, 8 изготовляются из нержавеющей стали, молибдена,
ниобия; отражатель — из окиси бериллия; делящееся вещество — из смеси урана с
окисью бериллия, гидридов. Поперечное сечение ТВЭЛа в активной зоне может
быть круглым или шестигранным. Теплоноситель может проходить по каналам
4 внутри ТВЭЛа или омывать его поверхность снаружи. Наконечник ТВЭЛа 8
крепится к силовой плите 2 в данном примере посредством тонкой
штампованной пластины /, приваренной к плите 2 точечной сваркой.
На рис. 2.5,6, в показана конструкция ТВЭЛа
гетерогенного реактора."
ТВЭЛ состоит из двух концентричных оболочек /
и 3, разделенных проставкой 2, внутри которых
размещаются блоки активной зоны. Каждый блок состоит из
графитового основания 4 и пластинки делящегося
вещества 5, изготовленной из сплава урана. Внешняя
оболочка 1 приваривается к силовой плите 6. Материал
элементов 1, 2 и 3 — нержавеющая сталь.
Y Конструкции сердечников ТВЭЛов,
показанные на рис. 2. 6, выполнены в виде таблеток
или стержней из спеченных шариков. Их
достоинство — существенно более надежное со-
рис. 2.6. конструкция противление температурным нагрузкам, умень-
серде^ншсов^твэлов га- шение шлакообразования. Просты, технологич-
62
f- 5
Рис. 2. 7. Конструкция
регулирующих устройств
реакторов:
а—на быстрых к
промежуточных нейтронах; б—на
тепловых нейтронах
ны ТВЭЛы, выполненные в виде закрученных круглых и
профилированных прутков.
Конструкции регулирующих барабанов реакторов на быстрых
и промежуточных нейтронах показаны на рис. 2. 7, а.
Узел регулирующего барабана состоит из корпуса /, который фланцем 2
крепится к выступу фланца корпуса реактора. В корпусе 1 размещается на
подшипниках 3 и 7 регулирующий барабан, представляющий собой
герметичную оболочку 4, куда закладывается материал отражателя 5 (бериллий, окись
бериллия). В профилированные приливы к внутренней поверхности оболочки 4,
занимающие около 180°, устанавливается сегмент из бористой стали 6,
обладающей сильной способностью поглощать нейтроны. Регулирующий барабан
приводится во вращение через рессору 8. Подшипники, шариковый опорно-упорный
3 и опорный роликовый 7, работают без смазки или смазываются охлаждающей
жидкостью, если барабан охлаждаемой конструкции. Крепление корпуса
регулирующего барабана 1 на подшипниках 3 и 7 обеспечивает свободную
температурную деформацию корпуса реактора.
Конструкция регулирующего стержня реактора на тепловых
нейтронах в одном из возможных вариантов показана на
рис. 2. 7, б.
Она состоит из управляющего цилиндра 1, корпуса 2, опорных устройств 7 и
собственно стержня 6. Элементы 1, 2 и 7 стержня изготовляются из
нержавеющей стали, элемент 6 — из бористой стали.
Регулирование осуществляется перемещением стержня в активной зоне
реактора при помощи поршня, находящегося под давлением рабочей жидкости;
стержень в работе охлаждается жидкостью, подводимой к коллекторам 3.
Рабочая жидкость, управляющая стержнем, в данном случае выбирается
такой же, как и охлаждающая жидкость. Корпус регулирующего стержня /
приваривается к силовой плите реактора 4 и опорной диафрагме 5. Недостаток
конструкции — рыхлость, т. е. большое количество незаполненных объемов.
Узел защиты (рис. 2. 8) от излучений реактора имеет'массу,
которая превышает иногда массу самого реактора.
63
Он состоит из фермы крепления /,
связывающей защиту с реактором и
другими элементами установки, силовых
колец 2, диафрагмы 3, оболочек 4, трубок 5
для выведения к реактору регулирующих
стержней. Защитным материалом от
Y-излучения реактора является
вольфрамовый лист 8; от нейтронного излучения
реактора отсек защиты 6 заполняют
материалом, содержащим водород,
например гидридом какого-либо металла.
Дополнительно для усиления поглоща-
тельной способности защиты
устанавливают прослойки из бористой стали 7.
Весь узел представляет собой
сварную герметичную
конструкцию. Герметичность необходима
для сохранения водорода,
выделяющегося с течением времени из
защитного материала.
Выделение водорода при работе энергоустановки требует
расчета оболочек защиты на прочность и устойчивость. Уменьшить
давление водорода можно путем создания пустот при заполнении
оболочек гидридом металла. При расчете оболочек следует иметь
ввиду также нагрев узла защиты при работе реактора.
На рис. 2.9 приведена конструкция реактора тепловой мощностью 600 кВг.
Теплоноситель — эвтектика Na—К с температурой /Вх = 593°С и *Вых = 705°С.
Давление теплоносителя 2,81 • 10~5 Па, расход теплоносителя 6,04 кг/с,
количество ТВЭЛов 211. Внешний диаметр ТВЭЛа равен 14,2 мм [8]. Таблетки
топлива / выполнены из гомогенной смеси урана и гидрида циркония; внутренний
Рис. 2. 8. Узел защиты реактора
Рис. 2. 9. Конструкция гомогенного реактора на тепловых нейтронах
64
Рис. 2. 10. Конструкция гетерогенного реактора на промежуточных нейтронах
радиальный отражатель 2 — из окиси бериллия, покрытой оболочкой из не^
ржавеющей стали. Внешний отражатель 3 выполнен из бериллия разъемным;:
на нем размещаются шесть барабанов-сегментов 4, обеспечивающих регулировку
работы реактора. Аварийный останов реактора осуществляется отбрасыванием!
внешнего отражателя 3. Защита реактора выполнена из гидрида лития.
На рис. 2.10 показана конструкция гетерогенного.реактора на
промежуточных нейтронах.
Реактор состоит из корпуса 4 с патрубками 8' и 10\ активной зоны,
включающей трубные доски 2 и 6 и диски 3; регулирующих устройств (барабана 5\,
отражателя 7 и механизма перемещения отражателей) и защиты 9.
Жидкий металл поступает в корпус реактора по патрубку 10, проходит
активную зону и по патрубку 8 выходит из реактора. Активная зона собирается*
из дисков 3 с отверстиями, через которые проходят трубки, связывающие ее в
одно целое с трубными досками 2 и 6.
Регулирование реактора осуществляется барабанами 5, аварийное
регулирование — отражателями 7, откидывающимися механизмом /. Защита 9 реактора
выполнена в виде многослойной конструкции. Защита реактора теневая, поэтому
габариты установки должны вписываться в эту тень. ' ■
На рис. 2.11 представлена конструкция реактора по типу
^Ромашка», в котором отвод тепла от активной зоны реактора осу-г
Ществляется без помощи теплоносителя. '
Реактор имеет цилиндрическую форму. Тепловыделяющие элементы /
выполнены в виде пластин из дикарбида урана с ЭО^'/о-ным обогащением изотопов»
Урана. Активную зону, состоящую из ТВЭЛов и графитовых пластин 2 с макси*
мальной температурой в центре 1770°С, со всех сторон окружает отражатель^
из бериллия, в боковых частях которого находятся четыре регулирующих с:
Ня о. ■ - -
3 3050
Рис. 2. 11. Реактор с твердой активной зоной
Термоэлектрический преобразователь 5 из германиево-кремниевого сплава
расположен непосредственно на поверхности радиального отражателя, имеющего
температуру 1000е С. Ребра 6 на поверхности преобразователя служат для его
охлаждения. Электрическая мощность преобразователя 5 рав!на 500 Вт.
2.3. РАСЧЕТ ДЕТАЛЕЙ РЕАКТОРА НА ПРОЧНОСТЬ
В реакторе следует рассчитывать на прочность следующие
основные элементы: сердечники и оболочки тепловыделяющих
элементов, корпусные и другие оболочки, силовую плиту.
Тепловыделяющие элементы в виде сплошных круглых
стержней или пластин испытывают температурные напряжения
вследствие неравномерного нагрева материала. Наибольшая
неравномерность нагрева, а следовательно, и наибольший градиент
температур имеет место в поперечном сечении ТВЭЛа, тогда как вдоль его
оси температура изменяется более или менее платно.
•В эскизном проекте в расчете на прочность принимаем, что
температурное поле симметрично относительно оси сердечника
ТВЭЛа и что градиент температур является функцией радиуса
круглого ТВЭЛа или расстояния от оси симметрии плоского
ТВЭЛа. В этом случае для первичной оценки прочности пренебре-
таем влиянием концевых условий сердечника на напряженность и
находим напряжения в ТВЭЛе в любой его точке, удаленной от
;К0НЦ03.
Наличие градиента температур в сердечнике вызывает
радиальные, окружные и осевые напряжения, соответствующие его темле-
(66
ратурным деформациям, т. е. сердечник находится в объемном
напряженном состоянии, что и следует учитывать при оценке егс^
прочности.
Для уменьшения температурных напряжений сердечник часто
делают в виде таблеток делящегося вещества, помещенных в
цилиндрическую оболочку. Растрескивание и разрушение таблетки'
при работе нежелательно, поэтому следует проверять ее
температурные напряжения. Если таблетка тонкостенная, то она будет
находиться в плоском напряженном состоянии и испытывать
существенные нагрузки в окружном и радиальном направлениях;
напряжения же в направлении оси ТВЭЛа будут малы и в расчете не
учитываются.
Оболочка, охватывающая таблетки ТВЭЛов, будет нагружаться
давлением газов, выделяющихся при делении урана. Проверка
прочности оболочки входит в число необходимых расчетов
прочности узла реактора.
Далее в число минимальных расчетов реактора входит расчет
корпуса реактора и опорной плиты.
При определении температурных напряжений будем считать,
что закон изменения температуры по элементу детали известен и
задан. Известны также основные характеристики материалов
реактора ((см. Приложение). , ,
2. 3. 1. Температурные напряжения в ТВЭЛах
и отражателях
Тонкие цилиндрические таблетки
Рассмотрим стержни ТВЭЛа, выполненные в виде плоских тонг-
ких таблеток — дисков (рис. 2.12). Диск находится в
плоско-напряженном состоянии; напряжение в направлении оси ТВЭЛа
будет разно нулю.
Даны Е, a, At=f(r), o^l(t); следует найти ог — радиальные иг
0f — окружные напряжения, U — деформацию диска, At —
перепад температур; ранее он определялся по формуле
где tQ — температура сборки или изготовления детали, обычно
равная 20° С; t — температура, которая устанавливается в детали
в результате нагрева.
Для рассматриваемой задачи это равенство целесообразно
представить в виде
Т- е. в виде постоянной составляющей перепада Д/mm и переменной
его составляющей, зависящей от радиуса, Atof(r).
Так как равномерный нагрев детали не вызывает
температурных напряжений, то, исключив из рассмотрения A/mm, внесем в рае-
3* 6?
ЗРис. 2. 12. Температурное нагружение тонких
таблеток
и + du,
Рис. 2. 13. Схема сил, действующих
на элемент, и его деформация
чет перепад Atof(r), чем существенно его упростим. (Часто перепад
Atofi(r) записывают в виде At.)
Уравнение равновесия сил упругости диска при неравномерном
яагреве решается следующим образом. Вырежем из тонкого диска
толщиной h элемент, ограниченный дугой dq> и толщиной dr (рис.
2. 13), приложим к его граням силы взаимодействия с отсеченной
частью диска. На него будут действовать силы Tr\ Tr+dTr\ T9.
Полагаем, что величина h мала; градиент температур
симметричен относительно оси; деформацию диска ничто не стесняет, т. е.
элемент диска находится в плоско-напряженном состоянии.
Эти силы выразим через напряжения:
Тг + dTr = ar
Так как элемент находится в равновесии, то сумма проекций сил
на ось г должна равняться нулю, т. е.
—arhrd<?-{-3rhrdy-\-d(Grhrd<?) — 23?/idr sin (tf<p/2) = 0.
Сокращая на hdy и раскрывая дифференциал, получаем искомое
уравнение равновесия сил упругости диска:
rdor/dr + ar — 0^ = 0. (2.1)
Найдем относительные деформации элемента. Обозначим
деформацию элемента в радиальном направлении через и. По рис.
2. 13 получим
dr + du — dr da
d^ dr
a'b' —ab (r-\-u)dy —rdy и
(2.2)
ab
rdy
Для плоско-напряженного состояния имеем следующие выражения
для напряжений и деформации:
68
Е , , N EaAt
з.
1 — и.2
i—(i.
9(р + ^,).
9 1 — И-2 1 — fx
Из уравнений (2. 1) — (2.3) получаем дифференциальное
уравнение для радиального перемещения:
^+_L^_JL = (l+[JL)(aA/y. (2.4)
Для удобства интегрирования уравнение (2.4) представим в
виде
^му. (2.5)
Первое интегрирование дает
а второе —
г
!±MLCr_|_£L. (2.6)
Г
a
Здесь Ci и Со — постоянные.
Подставляя уравнение (2.6) в (2.3), находим напряжения (см.
рис. 2. 12)
г
2(1—f») (1
(2. 7)
2(1 —р.) (1 +[л) г2
Найдем постоянные Cj и С2. Известно, что при
г=а агв = 0, а при г = & ^^О- (2-8)
Подставляя эти условия в уравнения (2. 7), получим
Г» ±kl^LeL\ гпМНг- С у -гу-)и* v гпа/г/г (о q\
^2 — #2 J ^2 — ^2 J
а а
Окончательно получим
6 г
аг = \ aktrdr \ ccA^rrfr; (2. 10)
Т 1)2 а2 Г2 J A"2 J
a
Яг £ i г-, п 1П
\ aktrdrA \ aktrdr — EaM; (2. И)
Г2 J /"2 J
69
r
J
Для диска без отверстия в этих формулах следует положить а=0
либо находить Сь С2 из граничных условий для диска без
отверстия: при г=Ь Огь = 0\ при г=0 вг = о? , что следует из осевой
симметрии напряжений.
Закон изменения градиента температур по радиусу может
быть представлен во многих случаях в виде степенной
зависимости
где /г=1, 2, 3,.. ., п.
Подстявив выражение (2. 13) в (2. 10), получим расчетные
формулы для определения напряжений:
1
J
[ /г + 1 /2+2
)п+2 (b—a)n+2 b(b—r)n+1 , b(b—a)n+l
1 Ub—r)n+z (b—a)n+z b(b—r)n+i , b(b—a)n+iT\ .
r2(b — a)n L л+2 /2+2 /2 + 1 /2 + 1 J/ '
(2. 14)
1 \Ь(Ъ—а)п+1 (b-a)n+2]
/г + 1 п + 2
^(6 —д)я+11 /^— г\/О
л + 1 J U—а) ) #
Г2 (^_ Д)л [л+2 п+2 /2 +
Закон изменения А/ по радиусу диска может быть сложным.
Если при этом существенно переменной величиной будет
коэффициент а, то интеграл в формулах напряжений и прогибов (2. 10)
следует брать численно. Наиболее целесообразно применить
интегрирование по формуле трапеций.
b b
Если обозначить Г aMrdr= f tyir, то
а а
Ъ
\ ^/-=-igL(to + 2<h + 2<fe+ ...2фя_1+^), (2. 15)
где lab — промежуток интегрирования; k — число участков, на
которое разбивается промежуток; г|э0, г|)Ь ..., tyh — численное значение
функции г|) = аЛ/г на границах участков.
Запас прочности п=.ов,х /oimSiXy где ot = y a2. — orav-\-a*.
Определение запаса прочности следует проводить на двух режимах
работы реактора: на режиме пуска и на режиме конца ресурса.
Пример 2.1. Найти температурные напряжения в диске, если известно
70
л=1.
V \
i ГА а=11,9-ю'6
Г\
rk а=11,9-Г0~6мм
I
и
1
/
A
У
1
г, мм
\
'6* \
\
\
J
у^
\
\
1200 /1300-60 -30 0 30 6,МПа ПОО t,°C -100 -50 0 506,МПа
а=12,д-10~6 ff)
Рис. 2. 14. Температурные напряжения:
а—охлаждение внешнее; б—охлаждение центральное
В результате расчета получим:
приг = <2аг—0, а =—О,55£аА^о; при г = b ar = 0, с — 0,
Пример 2.2.
Найти температурные напряжения в таблетках ТВЭЛа, если дано: £=1,5Х
XIО5 МПа; размеры — по рис. 2.14. Здесь же приведены эпюры напряжений
при внешнем и центральном охлаждении.
Толстостенные цилиндрические ТВЭЛы. Отражатели
Дано (рис. 2. 15): £, а, А/, ав,т (t); требуется найти сгг, а?, а^-
Считаем, что распределение нагрева А/ симметрично
относительно оси ТВЭЛа и не изменяется в направлении его оси.
Таблетки толстостенны, если h^b.
Полагаем, что на достаточном расстоянии от концов его
поперечные сечения остаются плоскими. Напряжения, которые
возникают в поперечном сечении, определяются по следующим
формулам:
J
а
-^2-^2 Г2
Г2
; (2.16)
Если в цилиндре отверстия нет, то в формулах (2. 16) следует
положить а=0.
71
Ato
At
Рис. 2. 15. Толстостенная таблетка
ТВЭЛа
Постоянная осевая
относительная деформация гх в каждом
частном случае должна быть подобрана
так, чтобы равнодействующая
усилий, распределенных по
поперечному сечению цилиндра, обращалась в
•нуль, т. е.
ь
2л (axrdr = 0. (2. 17)
а
Совместное решение уравнений
(2. 16) и (2. 17) дает
Sx^a^mm + AV2)' (2- 18)
где Ato=ta—tb — максимальное значение перепада температур по
сечению ТВЭЛа.
Если ta — температура на 'внутренней поверхности таблетки, а
температура его на внешней поверхности равна нулю, то
температура на каком-либо расстоянии г от центра
• M=taln(b/r)/ln{b/a).
Подставив это значение в формулы (2. 16), найдем следующие
выражения для температурных напряжений:
*«<- —\-]п± а—
/a) L r b2-at
Eatа
2(1-
- ц) In (b/a)
Eatn
1 1 Ь
1 — In
г
l+i-ln-2- ; (2.19)
2(1— p.)
1 — 2 1П г : 1П
L г Ь9—а2 a J
Если ta положительно, то радиальное напряжение для всех
точек сжимающее и обращается в нуль на внутренней и внешней
поверхностях цилиндра. Составляющие напряжения о9 и gx
достигают своих наибольших по абсолютной величине значений на
внутренней и внешней поверхностях цилиндра. Приняв г=а, найдем
Eatn
2(1
1 —-
262
In —
; а
(2. 20)
При
Eata
2(1 —f*)ln(ft/,
— (\ —In—). (2.21)
■а) { W-o2 а)
Если толщина стенки h мала по сравнению с внешним радиусом
цилиндра Ь, то формулы (2.20) и (2.21) можно упростить, приняв
Ь[а = \-\-т\ \п{Ь1а) = т——-\-— ...
2. о
и считая т малой величиной. Тогда при г=а
72 ■
з , - (2-22)
а при г = Ъ ао = ах= Eata (\~—) . (2.23)
к ' х 2(1-fi) V 3 ' V ;
Если стенки цилиндра очень тонки, т. е. ra<Cl, пренебрежем
членом га/3 в выражениях (2. 22) и (2. 23). Тогда для поверхностей
г=а и г=& получим соответственно
(2.24)
Эти температурные напряжения по толщине будут
распределяться так же, как в плоской пластинке или тонкой оболочке при
линейном законе распределения температуры.
Температурные напряжения — главный фактор, который
следует иметь в виду при проектировании ТВЭЛа реактора. Это легко
показать, если выразить температуру ТВЭЛа через функцию
тепловыделения qVy называемую объемной теплонапряжен-
н о с т ью:
где ^ = ^-=qvd2/lSk. (2.25)
41
Здесь А,— коэффициент теплопроводности в Вт/(м-град); qv —
объемная теплонапряженность в Вт/м3; Д£ — разность температур
на оси и на поверхности таблетки в °С; d — диаметр
сердечника в м.
Если а = 0, то температурные напряжения
В интервале температур 50—6003С величина Еа/(\—[i) для урана,
например, практически имеет постоянное значение и приблизительно равна 3,5 МПа/
град.
Заменив At в формуле (2.26) выражением (2.25), получим для
уранового ТВЭЛа
0lM0
Из этой формулы видно, что уменьшение диаметра сердечника
является эффективным способом снижения максимальных
температурных напряжений.
Эта формула полезна для оценки правильности выбора
размеров таблеток ТВЭЛов.
73
1,0
0,8
0,6
0,4
0,2
/
1
А
1/
1
/\
г,
<
/
мм
у^у
\
6х
&у
°5'0, 75
О, 75 7,25
(о.МЛа,
На рис. 2. 16 показано распределение
напряжений в сердечнике уранового
тепловыделяющего элемента при перепаде
тем'ператур Д/=>1. Наибольшую величину
имеют окружные и осевые напряжения.
На поверхности сердечника о1ба эти
напряжения максимальны и равны между
собой.
Пример 2. 3. Найти максимальное
температурное напряжение в ТВЭЛе реактора, если
известны: диаметр сердечника d —5 • 1Ю~3 м; К =
= 30 Вт/(м-град); ^у = 0,435 109 Вт/м3.
Очевидно,
Рис. 2.16. Температурные
напряжения в сердечнике ТВЭЛа
х-
0,435-109-25.10-6
30
•= 11-103 X
= 40 МПа.
Этот пример показывает, что даже при сравнительно небольших размерах
стержня ТВЭЛа в нем возникают значительные температурные напряжения.
Оценку прочности сердечника ТВЭЛов после нахождения ог, о^, ох
следует вести по формуле
где °/ = l 0,5[(^-^)2+(^-ax)2 + ((ix—ог)2].
Необходимо, чтобы п> 1,2.
Для снижения температурных напряжений в ТВЭЛах,
отражателях, тонкостенных дисках целесообразно уменьшать внешний
диаметр ТВЭЛа. Таблетки горючего по торцам покрывают металлом,
например молибденом, что улучшает теплопроводность таблетки и
уменьшает перепад температур А/о (рис. 2. 17, а). Уменьшения Д/о
можно добиться увеличением времени выхода реактора на
рабочий режим. Толстостенные радиальные отражатели целесообразно
выполнять разрезными (рис. 2.17,6); также разрезными делают
таблетки горючего (рис. 2. 17, в), если по условиям компоновки
активной зоны они должны иметь большой диаметр.
Пластинчатые ТВЭЛы
Пластинчатый ТВЭЛ, схема которого показана на рис. 2. 18,
устанавливается свободно в корпусе. Дано: Еу a, At=t — to\
требуется найти ох-
Покрытие Мо
*) Ю 8)
Рис. 2. 17. Способы снижения температурных напряжений
74
/Как видно из рисунка, ' '
градиент температур
симметричен относительно оси
ТВЭЛа. В соответствии с
общим приемом нахождения
температурных напряжений
зафиксируем ТВЭЛ жестко в
осевом направлении и
найдем напряжение (Xi от сил
реакций, возникающих от такого закрепления:
1
л/г
/ \
л/г
V
/
/
Рис. 2. 18. Температурное нагружение
пластинчатого ТВЭЛа
1 —
-Eatd.
(2.27)
Множитель 1/(1—fi) введен из-за плоско-напряженного
состояния пластины.
Наложение связи приводит к нарушению граничных условий
свободно установленной пластины. Восстановим эти условия
приложением силы, равной и противоположной силе реакции в заделке:
Л/2
Я = [ Eattbdy.
-Л/2
Напряжение от этой силы
Л/2
\ Eatdbdy.
1
а2 —~~ 7Т~ —
1
1—u.bh (\—\L)bh
(2. 28)
Л/2
Окончательно напряжения в свободной пластине
Л/2
I' Eatdbdy. (2.29)
Л/2
2. 3. 2. Расчет оболочек реактора на прочность
Укажем несколько общих понятий, относящихся к оболочкам.
Под оболочкой понимается тело, у которого одно из трех
измерений значительно меньше двух других. Виды оболочек
приведены на рис. 2. 19. Две поверхности оболочки I, имеющие
наибольшие размеры, называются основными.
Геометрическое место точек 2, равноотстоящих от основных
поверхностей оболочки, называется срединной поверхностью.
Геометрические формы оболочки полностью определяются формой
срединной поверхности и законом изменения толщины оболочки.
Обычно эта толщина постоянна.
Наибольшее распространение имеют оболочки вращения, т. е.
такие оболочки, у которых срединная поверхность образована
вращением какой-либо плоской кривой вокруг оси, лежащей в
плоскости этой кривой, называемой образующей 3.
75
Рис. 2. 19. Геометрические характеристики однослойной оболочки
Если срединная поверхность представляет собой плоскость, то
такую оболочку называют пластиной.
След сечения оболочки плоскостью, проходящей через ось,
называется меридианом, а секущая плоскость называется
меридиональной. Радиус кривизны меридиана на каком-либо его
участке называется первым главным радиусом кривизны
i?n поверхности на данном участке; радиус кривизны следа от
пересечения поверхности оболочки плоскостью, перпендикулярной к
меридиану, называется вторым главным радиусом кривизны
R2 поверхности на данном участке. Иногда слово «главный»
опускают.
Радиусы Rw и R2 являются переменными величинами,
характеризующими геометрию оболочки вращения. Полностью
геометрические формы оболочки вращения характеризуются этими двумя
радиусами, углом 9, образованным нормалью к срединной
поверхности и осью симметрии, и углом ф, определяющим размер оболочки
в плоскости радиуса кривизны R2.
Во многих случаях напряжения, возникающие в оболочке,
равномерно распределены по толщине. Такое состояние называется
безмоментным.
Уравнение равновесия сил упругости
осесимметричной оболочки
Рассмотрим равновесие элемента осесимметричной оболочки
(рис. 2.20). Примем, что ось X направлена по касательной к дуге
меридиана, описанной радиусом Ru соответственно ось У — по
касательной к дуге, описанной радиусом R2y а ось Z — ло нормали.
Приложим к граням выделенного элемента внутренние
растягивающие силы Те и Гер, а к точке А — внешние Р. Обозначим S\> s2 —
длина дуг выделенного элемента.
Известны величины RlU R2, P — сила давления р рабочего
тела, h — толщина элемента. Найти вэ , а9 . Очевидно, что
76
Рис. 2.20. Схема равновесия
элемента оболочки
Рис. 2. 21. Схема равновесия элемента
оболочки
Спроектируем эти силы на ось Z; сумма их проекций должна
равняться нулю:
'Bz=—2TBs\n(d9/2) = -
Аналогично для сил Tv получим 2Г92=—
проекций на ось Z
- Сумма этих
= 0.
Отсюда, поделив все уравнение на sis^ft, получим
^/Ri+o9/R2 = P/h (2.30)
— основное уравнение безмоментного напряженного состояния осе-
симметричной оболочки.
Здесь два неизвестных — ае и о?. Второе уравнение
равновесия системы составим для части оболочки (рис. 2.21), отсеченной
нормальным коническим сечением.
Сумма проекций всех сил на ось X должна равняться нулю.
Проекции этих сил на ось X
= <*в/1-2пг0 sin б0; dPx= — p-2nrdsx cos 6;
ds1=dr/cos6.
После интегрирования получим
Рх=— \
Условие равновесия запишется так:
или
яг0 sin eo= f 2nprdr
о
е
\prdr.
sin eo=
(-2.31)
It
Рис. 2. 22. Элемент сферической оболочки
"Если давление р приложено ко всей внутренней поверхности
юболочки, то после интегрирования ов =pnro2/sin 0. Таким образом,
уравнения (2.30) и (2.31) позволяют получить неизвестные
напряжения се и Gcp в осесимметричной оболочке.
Несущая способность однослойной
сферической оболочки
Сферические оболочки встречаются в конструкциях корпуса ре-
гактора, в баках системы подачи рабочего тела и вспомогательных
устройствах узла реактора. Схема сил и напряжений,
действующих в сферической оболочке, показана на рис. 2. 22. Напряжение
:в однослойной сферической оболочке, заполненной газом или
жидкостью с давление р, определяется из уравнения (2.30). Для
сферы Rl = R2=R, сто =сг<р ='(Х и тогда
a = pR/(2h). (2.32)
Стенки сферы находятся в плоско-напряженном состоянии, но
эхо не сказывается на ее несущей способности, так как
ai = V ое-
ш запас прочности
Сферическая оболочка единственная, где обобщенное
напряжение Ot полностью совпадает с любым другим напряжением
плосконапряженного состояния. Как мы увидим ниже, в стенках
сферической оболочки возникают при равных условиях наименьшие
возможные напряжения. Вот почему сферическая оболочка является
наиболее рациональной конструкцией для емкостей, находящихся
под высоким давлением. Во встречающихся конструкциях следует
принимать п=1,1 . .. 1,2. На рис. 2.22 показано конструктивное
оформление сварочного шва сферической оболочки.
78
Рис. 2. 23. Схема нагружения
цилиндрической однослойной
оболочки
бхтах
a) 6l>
Рис. 2. 24. Напряжения в торцовой стенкег
а—сферической; б—плоской
Несущая способность однослойной
цилиндрической оболочки
Цилиндрические однослойные оболочки часто встречаются в
различных элементах конструкции. Корпусы реакторов, баки,
теплообменники часто выполняются цилиндрической формы.
Схема сил и напряжений, действующих на замкнутую
цилиндрическую оболочку, показана на рис. 2. 23. По известным величинам
р, R, h найдем ов , о9 и п.
Первое уравнение равновесия элемента, вырезанного из
цилиндрической стенки, получим из выражения (2.30) подстановкой
Rl = oo и R2 = R:
(2.33)
Напряжение ов = ох найдем делением усилия Рх,
действующего на днище, на поперечное сечение оболочки. Усилие,
растягивающее оболочку в направлении оси X:
а напряжение
рпф
2nRh
PR
2h
(2.34)
Таким образом, окружное напряжение cfy в стенках
цилиндрической оболочки вдвое больше осевого напряжения ах. Важен и тот
факт, что это окружное напряжение почти равно эквивалентному
напряжению, определяющему прочность и несущую способность-
оболочки. Действительно, эквивалентное напряжение
ог = У ох — Зха? + °9 ~ 0,876ср,
так как вх = 0,5о<р .
Запас прочности оболочки находится обычным способом:
В зависимости от назначения элемента п='1,2 ... 1,5.
Торцовое днище цилиндрической оболочки
Часто однослойные цилиндрические оболочки имеют замкнутую
форму. Одна из возможных форм ее торцовой части — сфера
радиусом, равным радиусу цилиндра, т. е. r=R (рис. 2. 24, а).
Напряжение стенок сферы определяется по формуле (2.32):
<5сф=0,5/?Г/'Й.
Напряжение стенки цилиндра ey = pr/h. Сферическое днище
цилиндрической оболочки с радиусом сферы, равным радиусу
цилиндра, не является рациональной конструкцией ни по массе, ни по
габаритам. Как видно из рис. 2. 24, а, если толщины материала
.цилиндра и днища одинаковы, то напряжения <л в них будут
различны ((Тгсф = 0,5рг//г=0,5аср ; ai = 0187pr/h) и конструкция будет
перетяжелена. Уменьшение толщины днища вдвое не приводит к
равнопрочной конструкции. Появляется новый недостаток
—сварочный шов располагается в месте перехода цилиндра в сферу, т. е.
в месте резкого изменения толщины стенки.
Не рациональна и конструкция днища, представленная на рис.
2. 24, б, так как в ней следует считаться с изгибающим моментом
Мх, нагружающим переходную часть оболочки.
Значительно рациональнее днище эллиптической формы.
Расчет прочности эллиптического днища
Эллиптическая форма применяется для днищ корпусов
реакторов и различных емкостей. Известно, что для эллипса с полуосями
а и Ъ главные радиусы кривизны (рис. 2. 25, а) будут выражаться
формулами
(a2 sin2 а -f- #2 cos2 а)3/2 ' (a2 sin2 а -Ь #2 cos2 а)1//2
Эти формулы сразу позволяют построить эллиптическую
поверхность. Задаваясь углом а наклона радиуса вектора (этот угол
совпадает с углом Э), находим радиусы кривизны R\ и /?2, после
даго строим эллипс. Например:
а = 0, R1=R2—a2/b; а = я/2, R1 = b2/a, R2—a.
Найдем напряжения gq , действующие на элемент в
меридиональном направлении, и силы, действующие на элемент оболочки,
а затем спроектируем их на О'сь X. Получим (рис. 2. 25, б)
Тв=авЬ-2лг; Р = рлг2.
Учтем, что sma=r/R2f тогда
Tq sin а — Р=0 или osh-2nr—-ряг2 = 0
и aB = 0,5pR2/h. (2.35)
Подставляя равенство (2.35) в основное уравнение (2.30),
найдем напряжение а9 , действующее в окружном направлении:
m
Рис. 2. 25. Эллиптическое днище:
а—построение; б—эпюры напряжений
Формулы (2. 35) и (2. 36) позволяют подсчитать напряжение в
эллиптическом днище или эллиптическом сосуде.
Пример 2.4. Найти напряжения в эллиптическом днище в точках О и А,
если a — R\ 6 = 0,5^ (см. рис. 2.25, а). Напряжения в днище зависят от радиусов
кривизны Ri и R2, которые, в свою очередь, зависят от размеров а и b
эллипса.
Напряжение в точке О (лежащей на оси симметрии):
__ а2 R2
а = 0, i= 2 = — = Q5R = ,
ае = с^ = pR2/(2h) = pR/h.
Таким образом, напряжение в точке О эллиптического днища равно
окружному напряжению цилиндрической оболочки.
Напряжение на экваторе в точке А:
а = я/2; /?! = ЬУа = (0,5/?)2//? = 0,25/?; R2 = a = R)
_ pR2_ _ pR_ # _2_в(л -В2Л _ _^?_
°Q ~ 2h ~~ 2h ' С<{>~ h 2[ ~ 2Ri)~~ ~~ h '
Меридиональные напряжения а9 в точке А получились равными осевым в
цилиндрической оболочке. Окружные же напряжения на экваторе достигли
отрицательных значений (эпюра напряжений показана на рис. 2.25, б\ здесь же
нанесена эпюра обобщенных напряжений). Максимальные обобщенные
напряжения в сечении, проходящем через точку А:
) — аваю + аш-
Подставив сюда ае=—0,5а9, получим в точке А напряжение
Итак, в центральной части днища обобщенные напряжения
почти эквивалентны напряжениям в цилиндрической оболочке.
Следовательно, эллиптическое днище можно выполнить почти равно-
81
3? 0.2SR
а) °>
Рис. 2. 26. Конструкция днища:
а—цростого; б—упрочненного
прочным с цилиндрической оболочкой, варьируя размеры а и Ь
эллипса.
Недостаток эллиптического днища—переменное значение
радиуса кривизны по углу а. Иногда днище образуют подобно
эллиптическому, но радиусами двух окружностей (рис. 2.26).
Максимальным напряжение будет в точке А в результате
появления изгибающего момента Мх\ оно равно axmax=l(^/6,6Q)acp.
Бели q —0,25/?, как это часто имеет место, то ax max— 1,25а9 , т. е.
очень близко к максимальному напряжению цилиндрической
оболочки.
В ответственных конструкциях величину максимального
напряжения б точке А иногда снижают конструктивными приемами:
сварочный шов днища стараются не размещать на оси эллипса (см.
рис. 2. 26, а); иногда в месте минимального радиуса вваривают
упрочняющее кольцо 1 (рис. 2. 26, б).
Такие конструктивные приемы обеспечивают равнопрочную
конструкцию днища. Запас прочности следует оценивать по обычной
формуле
причем п=\\,2 ... 1,5 в зависимости от конкретных условий.
Мембранные напряжения в конической оболочке
Рассмотрим замкнутую коническую оболочку, показанную на
рис. 2. 27, а. Она нагружена внутренним давлением р и силой NXt
приложенной к основанию оболочки через жесткую диафрагму 1,
закрывающую оболочку, но не мешающую ей деформироваться.
Найдем мембранные напряжения ог и с^ и деформацию
оболочки w. Величины й, 0, р, Nx известны.
Напряжения в направлении оси г от силы Nx находятся по
формуле Or(Nx) =Tr/F, где
Tr=Nx/
nrh sin 28
Рис. 2. 27. Коническая оболочка:
а—схема действующих сил; б—напряжения
Как видно, напряжение аг увеличивается с приближением
рассматриваемого сечения к вершине конуса. Напряжение аф(Л^х) от
нагрузки Nx равно нулю, нулю равна деформация w.
Найдем напряжения ог в направлении оси г от внутреннего
давления р. Если предположить, что внутреннее давление р
постоянно и действует на всю внутреннюю поверхность конической
оболочки и диафрагмы, то
= рлг2 sin26; F =2nrh sin 8,
n —1l. t - рх .
г F ' г cos 8 '
откуда ar = prtgd/(2h)~pR/iK2h), (2.37)
где R = r tgQ — радиус кривизны оболо-чки.
Найдем окружные напряжения а9 . Рассмотрим равновесие
элемента оболочки (рис. 2.27,6), выделенного сферическими или
коническими сечениями.
Проектируя внешние и внутренние силы на нормаль к
поверхности оболочки, получим pRdq)dr=o9 hdrdy, откуда
a? = prtgd/h=pR/h. (2.38)
Мембранные напряжения стер являются причиной возникновения
деформации оболочки в радиальном направлении:
Eh
Eh
Расчет горообразной оболочки
Торообразные оболочки применяются в системах питания и
регулирования движителей. Особенностью такой оболочки является
переменная величина второго главного радиуса кривизны R2 (рис.
2. 28). Дано /i, R, а, р. Найдем аб , о? .
Очевидно Ri=R; R2=a/sina+R. Изменение R2 проследим по
изменению угла а:
а = 0; /?2=со; а = л/2, R2 = a~\-R;
а= —я/2; R2 = a — R.
Составив уравнение равновесия элемента, вырезанного двумя
плоскостями, нормальными к поверхности.
83
4-
Рис. 2. 28. Торообразная оболочка
Рис. 2.29. Схема элемента двухслойной
цилиндрической оболочки
Очевидно r==R2sma=a + Rsm а. Проектируя все силы на ось
Z, получим
Tq sin а-2тсг — /?jr(r2 —<22) = 0,
где Ге — погонная сила.
Подставляя значение г, получим
Гб sin а2я (a -f- /? sin a) = pn [{a + R sin a)2 — a2]
~ /?/? (2a-f/? sin a) /?/? 2a+/?sina
И 1 0 = j oq= .
2 (a +# sin a) 2A a + /? sin a
Из основного уравнения (2. 30), получаем
Как видно из этих выражений, наибольшее напряжение ов
возникает во внутренних точках торообразной оболочки при ф = —я/2;
в частном случае, когда a = R, напряжение ае = оо.
Расчет двухслойных цилиндрических оболочек
Оболочки в реакторах, которые мы. будем рассматривать ниже,
испытывают силовое и температурное воздействия. Температура
теплоносителя в реакторе может быть весьма высокой.
Температура стенки оболочки, соприкасающейся с горячим рабочим телом,
будет существенно ниже вследствие охлаждения, однако она
остается все-таки настолько высокой, что это заметно сказывается на
механических и прочностных свойствах материала оболочки.
Рассмотрим типичную двухслойную оболочку, элемент которой
показан на рис. 2. 29. Наиболее сильно нагрета стенка,
соприкасающаяся с горячим рабочим телом. Она может иметь температуру 800—
1000° С, а в некоторых случаях — и более высокую.
Температура стенки сильно зависит от ее толщины. Чем
толще стенка, тем выше ее тепловое сопротивление и тем выше,
следовательно, ее температура и тем ниже прочностные показатели
материала.
84
При высоких температурах, которые имеет рабочее тело,
оказывается невозможным повышать прочность горячей оболочки
путем увеличения ее толщины. Это привело бы к ее перегреву,
местному оплавлению и вымыванию металла.
Таким образом, оболочка, соприкасающаяся с горячим рабочим
телом, должна быть достаточно тонкой, чтобы обеспечивать
необходимую передачу тепла и сохранять низкую температуру. С
другой стороны, она должна быть достаточно прочной, чтобы
выдержать перепад давлений между межрубашечным и рабочими
пространствами.
Основным силовым элементом, воспринимающим как полный
перепад давлений рабочего тела и окружающей среды, так и
нагрузки узла в целом, является вторая оболочка. Температура этой
оболочки значительно меньше первой и не превышает температуры
охлаждающей жидкости. Ее толщина определяется не из условий
теплопередачи, а диктуется целиком соображениями прочности.
Расчет несущей способности двухслойной цилиндрической
оболочки, элемент которой показан на рис. 2.29, проводим по безмо-
ментной теории без учета осев'ой нагрузки.
Будем рассматривать совместное деформирование неодинаково
нагретых оболочек, соединенных жесткими продольными связями.
На общей несущей способности вид связей не скажется. Обычно
жесткость -связей сравнительно велика, хотя конструктивно они
могут быть выполнены самым различным образом.
В этом расчете рассматривают только окружные напряжения в
оболочке, предполагая, что другие, например осевые напряжения,
малы. Те погрешности, которые вызываются этим допущением,
незначительны и целиком оправдываются его простотой.
Одной из особенностей расчета является также то, что обычно
он ведется по запасу пластичности, так как двухслойные оболочки
в большинстве случаев используются как трубопроводы для
транспортировки рабочей жидкости, где проходные сечения должны
сохранять свюи основные размеры на всем протяжении работы
конструкции.
Нам известны: р — давление газа или жидкости в рабочей
полости узла, в Па; р0 — давление в пространстве между
оболочками, в Па; размеры оболочек и узла Л, R; коэффициенты линейного
расширения материала оболочек а и их средняя температура t;
время работы т и диаграмма'деформирования оболочек o=f(e).
Необходимо найти окружные напряжения внутренней сг<р и
внешней (Тер оболочек и запас пластичности по,2. Полагаем, что
радиусы оболочек близки друг к другу, т. е. R'^R" zzR. Будем также-
иметь в виду, что связи оболочек недеформируемы в радиальном
направлении и податливы в окружном.
Рассмотрим равновесие выделенного из оболочки элемента с
центральным углом dy. В пределах этого элемента отделим
внешнюю оболочку от внутренней. На внутреннюю оболочку действует
85
р;б*
Рис. 2. 30. Деформация
оболочки
Рис. 2. 31. Диаграмма
деформирования
Рис. 2. 32. Напряжения и
запас прочности в
двухслойных оболочках
кроме давлений р и р0 еще и контактное давление рКу которое
является осредненным давлением сил связи между 'оболочками.
На внешнюю оболочку действуют давления р0 и рк; наружным
давлением на наружную поверхность пренебрегаем (однако, если
оно существенно, то его следует учесть). Приложив окружные
напряжения а? и Сер, напишем условие равновесия элементов
оболочки, показанных на рис. 2. 29, по формуле (2. 33):
где р — текущее значение давления газа или жидкости.
Исключая из этих уравнений рОу получим
ti^-Vtir^ = pR. (2.39)
В этом уравнении два неизвестных: стер и а9. Дополним уравнение
(2. 39) уравнением совместности деформаций.
Особенностью деформаций осесимметричного (в данном случае
цилиндрического) элемента является взаимосвязь деформаций в
радиальном и окружном направлениях. Рассмотрим удлинение
элемента одной из оболочек аЬ (рис. 2.30) до размеров а\Ь\\ в силу
осевой симметрии точки а и аь Ъ и Ь\ остаются на радиусах этого
элемента.
Полная относительная деформация элемента в окружном
направлении вер легко определяется:
s9 = (a1bi~ab)q,b= kR/R.
Эта полная относительная окружная деформация каждой
оболочки будет складываться из упругой и температурной
деформаций, и если учесть, что мы положили R'=R"=R , то
окончательно второе недостающее уравнение будет иметь следующий вид:
£<р=в^у-4-Вср/; £ср/ = (Ш^а^ и окончательно
с ' \пиг ." \п'Ч" \Р!Р (9 4ГП
£(р *¥>У ~Т~ тУ ~Г" i-*-*\/*V« V. /
86
Здесь £<рУ и £^у только упругие деформации внутренней и внешней
оболочек в окружном направлении соответственно, a o!tr и a!'t"—
их температурные деформации.
Укажем порядок численного расчета напряжений по формулам
(2.39) и (2.40).
Задаемся величиной e9 = s9=s9 = AR/R. По этой величине
и иавестным o!t' и a!ft" находим
Scpy =zz s<p ex t \ ^<py — ^f — ^ ^ •
Далее, по диаграмме а=/(е) определяем о9 и а? (рис. 2.31).
Теперь по известным а? и а? находим
/; = (!/#) (*'<4 + *4) (2.41)
и строим зависимость р = /(Д7?) (рис. 2.32). На кривой находим
точку 5 заданного рабочего давления р и определяем запас общей
несущей способности оболочек — отношение предельного давления
рабочего газа или жидкости рПр к их рабочему давлению р.
Величина /?Пр определяется по графику зависимости p = f\(&R)y
на котором отмечаем точку 4, где прямая, проведенная из начала
координат, касательна к кривой p=f(AR). Эта точка определяет
начало опасно больших изменений размеров оболочек. Давление,
соответствующее точке 4, называем предельным давлен и-
е м рПр. Если на этой диаграмме нанести расчетное рабочее
давление газа или жидкости р, то отношение рпр к р и будет запасом
пластичности или несущей способности по,2 оболочки:
^0,2 = Рир/Р-
Величина яо,2 должна находиться в границах 1,1 —1,3.
На эту же диаграмму нанесем кривые напряжений Оср и о9 по
AR. Отметим характерные точки на кривой р по AR.
Точка 1 соответствует такому положению, когда внешняя
оболочка растягивается вследствие разогрева внутренней; внешнее
давление р на оболочке равно нулю.
Точка 2 иллюстрирует растяжение внешней оболочки давлением
р и внутренней оболочкой вследствие ее температурного удлинения.
Сжимающее напряжение внутренней оболочки при температурном
расширении полностью уравновешивается ее растяжением в
результате приложения давления р.
Точка 3 соответствует напряженному состоянию оболочек в
рабочем режиме. Нагружение их рабочим давлением р таково, что
обе оболочки растянуты и обе участвуют в работе.
Точка 4 — точка предельного давления, соответствующего
пределу пластичности оболочек. Дальнейшее нагружение может
привести к недопустимым изменениям геометрии охлаждающего-
тракта.
Точка 5 соответствует разрушающему давлению или пределу
прочности конструкции.
Пример 2.5. Пусть дана двухслойная оболочка следующих размеров: R =
=-9,2 Ю-2 м, Л/=-Л//=1,5- 1С-3 м.
87
Средние температуры внутренней и наружной стенок: f = 575°C; /" =
= 100° С; материал оболочек — сталь Х18Н9Т.
Температурные удлинения определяются по графику, приведенному на
рис. П.4 (см. Приложение), из которого видно, что a'f = 0,0104; a"t" = 0,0016.
Диаграммы растяжения стали Х18Н9Т при температурах 575 и 100° С
приведены на рис. П.5. Примем, что при отрицательных значениях е^ диаграмма
о? имеет тот же вид, что и при положительных, но знак а? меняется на
обратный. Рабочее давление /? = 4 МПа. Задаемся значением А/? = 0,25 10~3 м.
Далее ищем, чему будет равно давление газов, обеспечивающее эту
радиальную деформацию. Для этого находим по формуле (2.40) e^ = AR/R=--
= 0,25/92 = 2,72- 10~3. Затем находим £^у и е^у:
% = е9— а*' = 2,72-10-3 _ ю,4. Ю~з = —7,68-10-3;
\у = \— at" = 2J2-Ю-з _ 1,66-10-3 = 1,06-10-3.
По известным значениям относительных деформаций е^у и е по графику
а=/(е ), приведенному на рис. П.5, находим значения напряжений:
<^ = —214 МПа и <rj = 194 МПа.
Причем, как уже говорилось выше, полагаем, что при отрицательных
значениях е<ру диаграмма сг=/(е) имеет тот же вид, что и при положительных,
только знак о?у меняется на обратный.
При малых значениях е9у напряжение af может быть непосредственно
подсчитано по формуле о —Ее^у, где модуль упругости для каждой температуры
берется из графика, приведенного на рис. П.5.
В нашем случае
Е' = 1,6-105 МПа; Е" .-= 2-105 МПа.
Наконец, по формуле (2.38) определяем
Полученное значение /7 = 0,33 МПа показывает, что AR выбрано неудачно, так
как давление внутри оболочек р = 4 МПа. Продолжаем расчет до получения
полной кривой p=f(AR), задаваясь другими значениями AR. Результаты расчета
представлены в виде кривой (рис. 2.33). На ней же показано изменение о и а^
в зависимости от AR. Отметим на этих кривых точку а, соответствующую
рабочему давлению р = 4 МПа.
Как видно из рис. 2.33, увеличение радиуса оболочек при рабочем
давлении А# = 0,9- К)-3 м, напряжение во внешней оболочке (точка b) a^ = 300 МПа,
а во внутренней (точка с) а^=—60 МПа; последнее напряжение является
сжимающим, что объясняется большим температурным удлинением внутренней
оболочки. Если бы рабочее давление было большим, то напряжение во
внутренней оболочке стало бы растягивающим.
Кривые, приведенные на рис. 2.33, показывают, что при р = 0 появляется
некоторое деформированное состояние, обусловленное температурным
расширением внутренней оболочки.
Существенно отметить, что на кривой изменения давления наблюдаются два
участка резкого роста. Первый участок при малых AR и второй — при AR^
■5=^0,9 10~3 м. Падение интенсивности нарастания давления р на первом участке
малых значений AR объясняется падением сопротивляемости внутренней
оболочки, которая сжата и сильно нагрета.
Падение интенсивности на втором участке объясняется пластическими
деформациями внешней оболочки. Как видно из рис. 2.33, она нагружена давлением
/?>7,5 МПа и в ней происходит резкий рост пластических деформаций.
Запас несущей способности внешней оболочки пОг2 = 7,5/4 =1,87.
р: б-/o~z, мпа
р
4
/
°'l
/1
/
У
/
/1
la
h
/1
1
1/
/,
a/\
y**
f
— —
25 0,50 0,75 Я WO 1,25 АЯ-Ю/м
Рис. 2. 33. Напряженность оболочек в
зависимости от радиальной деформации
а)
Рис. 2. 34. Двухслойная оболочка:
а-схема элемента; б-реакции опор
89
Расчет двухслойной оболочки с учетом осевой нагрузки
Вырежем элемент оболочки и приложим к нему все известные
нагрузки (рис. 2. 34). Как и в предыдущем случае, известны
давления р, /?о, размеры оболочек /г, /?, коэффициент линейного
расширения материала а и средняя температура его нагрева t, время
работы оболочки т и диаграмма деформирования материала а=
= /(е). Требуется найти ох, в<? и /го,2.
Будем считать, как и прежде, что оболочка не испытывает мо-
ментной нагрузки. Основная трудность расчета заключается в том,
что определяется несущая способность оболочки, находящейся в
двухосном напряженном состоянии.
Осевая нагрузка, которая условно на рис. 2. 34, б изображена
вектором Тх> может иметь различное происхождение. Обычно она
пропорциональна давлению рабочей среды и может быть
определена но формуле
(2.42)
где К — коэффициент пропорциональности, зависящий от
конструкции узла и способа его крепления. Например, для схемы,
показанной на рис. 2. 34, б,
откуда K = nR2.
Рассмотрим условия равновесия выделенного элемента.
Поступая как и в предыдущем случае, получим условие равновесия в
окружном направлении и условие совместности деформаций:
г,? = е'9у + a't' = г'п + аТ = &R/R,
аналогичные условиям (2.39) и (2.40).
Для решения задачи необходимо иметь четыре уравнения, так
как неизвестных четыре. Из условия совместности деформаций в
направлении оси X получим
Tx = jKp = 2nR (a'xh'-\-Qxh") • (2. 43)
Уравнение (2. 43) для удобства расчета преобразуем, из него
найдем, чему равняется р, подставим в уравнение (2.39) и получим
окончательно
'xh' + oxh"). (2.44)
К
Составим разность
д = (й'а -\- ь"а ) [pxh + oxh ). (2. 45)
К
Условием правильности подбора гх и е<р будет
Д = 0.
90
Из условия равенства относительных деформаций оболочек в
направлении оси X получим последнее необходимое уравнение
£х = £*у + аГ = г"Ху + а'Г. (2. 46)
Схема расчета аналогична схеме, принятой в примере 2.4.
Следует только учесть, что обе оболочки находятся в двухосном
напряженном состоянии и работают в стадии пластических
деформаций. Поэтому в диаграмме деформирования материала оболочек
нужно заменить откладываемые по осям напряжения а и
относительные деформации е величинами сгг и ег-, определяя последние по
формулам (1. 24).
Укажем последовательность расчета.
Задаемся величиной гФ =hR/R и определяем упругие
деформации £(р'у И е'п:
ФУ ' ф ~~~ ^* * ? ФУ ^ср \£ Г •
Задаемся значениями гХ1 и еХ2. Находим для этих двух значений
упругие деформации г'Ху и е^у:
Далее, по первой формуле системы (1.24) подсчитываем
обобщенные деформации г/ и £/ для двух значений гх' и ex-
£/1 = —7|- ^ (£Х1у) +£Х1у£сру + (£<ру) I
(вфу)2; (2.47)
Д-
у)2. (2.47)
у о
По этим величинам обобщенных деформаций из диаграммы
деформирования материала а=/ (е) находим о/ь <з/2, а/ь о,-2 (см. рис.
2. 35), а затем из выражений (1.24) определяем
' 4a/i/' '\ r 4а>2
3 £П У 3 е'.2
п 4 a'i / " "\ " 4 ^ "9
з е^ Х1у ' ' wcp' а%2 з £;2
У _ 4 a/i / ' , лг' \ ' 4 ^2 /
9l = -Г" "4- (s?y + 0,5sX ly) ; o"92 = —~ 4^-
^ e ^
4 (s + 05s ) ; o" 4^
e/2
91
Рис. 2. 35. Обобщенные
жения
напряРис. 2. 36. Относительные
деформации гх
Рис. 2. 37. Зависимость
напряжений от радиальной
деформации (см. рис. 2. 34)
Теперь подставляем полученные значения напряжений в
уравнение (2. 45) и устанавливаем, удовлетворяют ли они этому
уравнению. Так как значения е<р и гх выбраны произвольно, то
уравнение (2.45), как правило, не будет удовлетворяться. Тогда строим
график приближенной зависимости Д=/((8^) по двум точкам
(рис. 2.36):
к
На этом графике ищем значение ех, при котором Д = 0. По за-
даному значению вер и по полученному значению гх находим
искомое р по формуле (2.38). ПовторяехМ расчет для новых значений
8<р и гх-
Далее строим искомую кривую p=f\(AR) и, как в предыдущем
случае, ищем запас несущей способности оболочки п=рп$/р. На
рис. 2.37 показаны кривая p=f(AR) и кривые напряжений в
обеих оболочках.
Обычно запас пластичности для элементов реактора следует
выбирать в пределах %>2=lyl ... 1,3.
2. 3. 3. Расчет на прочность
силовой пластины реактора
В конструкции реактора часто встречаются однослойные и
многослойные пластины, а также диски, работающие на изгиб от сил
давления рабочей среды и сосредоточенных нагрузок.
Опорные плиты и днища встречаются обычно постоянной
толщины осесимметричной формы с осесимметричным размещением
отверстий и подкрепляющих стержней. Они могут быть сильно или
умеренно нагреты, в некоторых случаях может существовать
градиент температур вдоль радиуса диска и некоторое изменение ее
по толщине. К последнему случаю можно отнести двухслойные пла-
92
z,
l\
v
с
r
1_
L_P
dr
(W
^t.i
л/ *
^ v
Л
Рис. 2. 38. Расчетная система
координат
Рис. 2.39. Деформация элемента
пластины
г
zt
а
а
—.
в
Т
г^^—^Гг^
dr
а ь
я В
<?,
/
xj
С4<9
Ч
)
А-
стины, защищенные от горячих газов или жидкостей тонкой
стенкой. Опорная пластина имеет отверстия для прохода жидкости или
газов: отверстия используются для крепления труб, которыми обе
пластины связываются вместе.
В периферийной части пластину в первом приближении
можно считать жестко заделанной при работе на изгиб и нежесткой
при работе на радиальные деформации, так как обычно
радиальные деформации почти не стеснены вследствие тонкостенности
конструкции цилиндрической оболочки.
В некоторых случаях пластину рассматривают как свободно
опертую по периферийному контуру и тем самым определяют
напряженное состояние в самом неблагоприятном случае. В
действительности опорная пластина укреплена упруго. Упругость
заделки следует учитывать при более подробном расчете.
Напряжения и изгибающие моменты
Предполагая, что изгибная деформация сечения пластины
следует гипотезе о неизменности нормали, и приняв систему
координат, показанную на рис. 2. 38, найдем напряжения аг, а?,
возникающие в пластине, ее деформацию w и запас прочности п.
Рассмотрим пластину постоянной толщины Л, нагруженную
силами, симметрично расположенными относительно оси Z.
Известны a, i, диаграмма a=/(ie). Деформация, перемещения и
напряжения, возникающие в пластине, будут также симметричны
относительно оси Z.
Прогиб пластины w и угол поворота нормали 0 являются
функциями только радиуса г и связаны между собой соотношением
b=_dw_=_w^ (2<48)
dr
Знак отрицательный потому, что с увеличением прогиба угол
наклона уменьшается.
93
Элемент пластины dr, удаленный от нейтральной оси О — г на
расстояние г, находится в условиях плоско-напряженного
состояния. Напряжения этого элемента (рис. 2. 39)
* * ). (2.49)
Эти напряжения определяют несущую способность пластины.
Найдем ег и 8ср . Рассмотрим деформацию элемента пластины.
На рис. 2. 39 показан элемент пластины dr до и после деформации.
Нормаль, занимавшая до изгиба пластины положение Аа,
повернется на угол В и займет согласно гипотезе о неизменности
нормали положение А'а'. Нормаль ЪЪ повернется на угол 0 + rf9.
Отрезок ab, расположенный на расстоянии z от срединной поверхности
в радиальном направлении, получает удлинение
Размер элемента ab до деформации равен dr. Таким образом,
относительное удлинение пластины в радиальном направлении
= zb'. (2.50)
Найдем относительную деформацию элемента в окружном
направлении. До изгиба пластины длина окружности, проходящей
через точку а, была равна 2яг, а после изгиба — 2я(г + г0).
Следовательно, относительное удлинение в окружном направлении
Подставляя выражения (2.50) и (2.51) в (2.49),
окончательно получим напряжения в пластине:
Таким образом, радиальные и окружные напряжения,
возникающие в пластине, пропорциональны расстоянию z от нейтральной
плоскости. Очевидно, максимальные напряжения будут на
поверхности пластины, т. е. при z=±h/2:
, 0 \ Eh I 6
'^г/' 9 ~ 2(1-(х2)\ г
На рис. 2. 40 показаны напряжения аг, приложенные к полоскег
выделенной из элементарной призмы. По известным напряжениям
Or и вер найдем изгибающие моменты, приложенные к граням. Как
видно из рис. 2. 40, при положительной деформации w возникает
отрицательный изгибающий момент — Мг.
Обозначим относительные изгибающие моменты, возникающие
на гранях элементов (моменты, приходящиеся на единицу длины
сечения), соответственно Мг и М9 , где
Mr=Mr/{2nr).
94
Рис. 2. 40. Изгибающий момент
Рис. 2. 41. Элемент пластины
Очевидно, dMr = —<OrZdz; тогда
_ Л/2
УИГ = — \ arzdz.
-Л/2
Иопсльзуя выражения (2.52), получим
Г
-Л/2
Г z2dz — h3/l2, следовательно,
Л/2
где
D =
(2. 53)
(2. 54)
Здесь D — жесткость пластины на изгиб в Н-м, называемая
цилиндрической жесткостью.
Аналогично получаем изгибающий момент:
(2. 55)
(Иногда черту над обозначением моментов опускают. Следует
только не забывать, что в этих выражениях моменты отнесены к
единице длины сечения пластины.)
Сравнивая выражения (2.52), (2.53) и (2.55), получаем
простые формулы, связывающие изгибающие моменты и напряжения:
(2-56)
Уравнения равновесия сил упругости элемента пластины и ее
прогиб. Рассмотрим, наконец, равновесие выделенного элемента.
Приложим к граням все равнодействующие усилия и моменты.
На рис. 2.41 показаны положительные силы и моменты. При
обходе пластины в направлении оси г положительный момент Мт
направлен по часовой стрелке, а перерезывающая сила Q — по
положительному направлению оси Z.
На грани ab (рис. 2. 41, а) касательные напряжения дают
равнодействующую поперечную силу Q, направленную по оси Z. Ин-
тенсивность_ее, т. е. силу, приходящуюся на единицу дуги i
обозначим Q. Поперечная сила Q на грани ab будет равна
а на грани ей равна Qrdq-\-d(Qrdq>).
Поскольку рассматривается жесткая пластина, напряжения в
слоях справа и слева от нейтральной плоскости элемента
одинаковы, но различны по знаку; нормальные силы на гранях
элемента отсутствуют.
Итак, моменты и силы, выраженные через соответствующие
интенсивности, будут
= Qrd<tdr + d(Qrdi) dr.
Проектируя все силы, действующие на элемент, на ось Z,
получим
Qrd<? - Qrd<? — d (§rd<?) -f- prdydr = 0,
откуда - . {QrY^pr. . (2.57)
Составим сумму моментов сил, приложенных к элементу,
относительно оси У, касательной к дуге круга радиуса г в срединной
плоскости (см. рис. 2. 41, б):
Mrrdy — Mrrd<? — d (MTrdy) + — prdrdy — +
или, пренебрегая малыми величинами высшего порядка, получим
7Wcp-(Afrr)' = Qr. (2.58)
Если подставить Мг и М9 из выражений (2. 53) в (2. 58) и
считать, что жесткость пластины D постоянна, получим . "
или [(Vr)(9ry]' = -Q/D, (2.59)
что можно проверить простым дифференцированием.
96
Если учесть зависимость (2.48) 6=—а/, то уравнение (2.57)
можно представить в виде
[{\lr)(rw')'\=Q'ID. (2.60)
Наконец, если в правую часть уравнения (2. 60) подставить Q
из уравнения (2.57), то после некоторых преобразований найдем
окончательно
{\jr){r[{\;r){rw')'\'Y=PlD (2-61)
или в сокращенной записи V2V2w—p/Dy где оператор Лапласа
V2w = wrrJr(l/r)wr = (l/r)(rwfy.
Часто применяют интегральную форму записи уравнения (2.61).
Проинтегрируем уравнение (2.61) четыре раза.
Первый интеграл
Ш (rw')' =
о о
Интегрируя еще раз, получим
' = |г
0 0
Г Г Г Г
и окончательно w=[ — \г\ — \ ~^~ ^г4 + ~" Cxr2{\v,r— \)-\-
0 0 0 0
_|~ _L с2г2 + С3 In г + С4. . (2. '62)
4
Изгиб сплошной пластины постоянного сечения
Выражение (2.62), справедливое для любой пластины
постоянного поперечного сечения с любой нагрузкой, упрощается для
пластины без отверстия (рис. 2.42). Из условия, что при г=0
величина w должна оставаться конечной, получаем С! = С3=0.
Таким образом, для пластины, не имеющей центрального
отверстия,
0 0 0 0
В частном случае, когда р=const,
да ^1 + С
(2. 64}
64D 4 2 ' 4
4 305 0 97
Рис. 2.42. Пластина с
заделанными краями
Рис. 2. 43. Пластина с свободно
опертыми краями
Рассмотрим два основных частных случая расчета сплошных
пластин.
Случай 1. Пластина жестко заделана по внешнему контуру и
загружена равномерно распределенной нагрузкой.
В этом случае постоянная С2 в формуле (2. 64) должна быть
«определена из условия ш'=0 при r=b. Продифференцировав
уравнение (2. 64) один раз и приравняв результат нулю, получим
W ==-
юткуда С2=—pb2f(8D), и окончательно
>2-г2). (2.65)
Постоянную С4 в выражении (2.64) находим из условия ш = 0 при
г=Ъ\
64D 32D
откуда С4=рЬ4/64; окончательно
64Z)
(2. 66)
Наибольший прогиб пластины будет в ее центре:
wmax
Изгибающие моменты
(2. 67)
В_центре пластины мг=М9 =\(pb2/l6) (l + |i); на опорном контуре
jfr=—рЬ2/8; Мер =—pb2\i/8. Найдем напряжения в пластине. Как
;уже указывалось,
Подставляя максимальные значения моментов в эти форхмулы,
получим
.98
Изменение напряжения по радиусу пластины показано на
рис. 2. 42.
Рассмотрим значения прогибов пластины в случае нагружения
ее сосредоточенной концентрической нагрузкой Р.
Решая исходное уравнение (2. 64), получим «прогиб пластины
9 I 9м Л , (62 4- Г2) (£2 _ а2)
2+r2)ln+i
b, (2-68)
6 2£2 J У v 7
где единичные функции
( 1, r<a\ f 1, г>а;
( 0, г>а; \0,
Значение относительного изгибающего момента на контуре ллаг
стинки
(
4 л V №
(2.69)
Если внешняя сила сосредоточена в центре, то прогиб пла-*
стины
In-!■-}- '2~ГМ- <2.70)
6 ' 2 /
(2.71)
и максимальный момент получается в месте заделки пластины:
Текущее значение относительных изгибающих моментов
Я~Г(1+1»)1п —-ll;
В этом случае обычно считают, что нагрузка Р приложена не
по окружности, а к некоторой кольцевой площади, ширина
которой не меньше толщины пластины.
Случай 2. Пластина свободно оперта по внешнему контуру и
загружена равномерно распределенной нагрузкой (рис. 2.43).
В этом случае постоянная С2 в равенстве (2. 64) должна быть он-»
ределена из условия Мг = 0 при г = Ь. Опуская промежуточные
преобразования, получим
_г2\
7
64£>
4* 99
Относительные изгибающие моменты
г2);
(2.73)
Изгибающие моменты достигают максимальных значений в центре
пластины (г=0):
О .
Подставим значения моментов по (2.73) в формулы (2.56),
тогда:
3 (3 + fx) рЬ2
в центре пластины бгтах = о(?тах = -^——- ;
о№
на внешнем контуре (& = г)зг=0; в?=—(1 — p)pb2.
Очевидно, что этот тип крепления пластины менее выгоден, чем
предыдущий.
. Изменение напряжений для рассматриваемого случая показано
на рис. 2. 43.
Рассмотрим нагружение пластины концентрично расположен-
*н6й силовой нагрузкой (см. рис. 2.43). Решая уравнения (2.63),
лолучим
^le1
2(1 +р)Ь2 J l
L ^ ~V ; 2(1+^)^ J 2'
Г 1, г<а;
где б! =: ^ е2 = |
10, г>а; 10,
Прогиб в центре будет максимальным:
\
12(1
В этих формулах предполагалось, что концентричная нагрузка
приложена на радиусе а, несколько удаленном от центра. Если
.^радиус а етяшвается в точку или в окружность, диаметр которой
./ра'вен дли близок jc толщине пластины, то изгибающие моменты
_ (2.74)
ж?=£г[(1+!1)1пт+(1~(1)]'
а прогиб пластины
[2r2ln —+!±^(62_Г2)1 (2.75)
« ' 1 +;xv J
ioo
В центре пластины w = P(3 + \x)b2/[l6KD(l +41)].
Находим запас прочности пластины
Следует выбирать п= 1,3 ... 1,5.
Особенности расчета подкрепленной силовой пластины
В некоторых случаях сразу видно, что пластина, если ее не
подкрепить, будет или очень тяжела, или иметь чрезмерно
большие прогибы под нагрузкой. Прогиб называется большим, когда
он превышает толщину пластины. Чтобы избежать этого, силовая
пластина жестко связывается стержнями 1 и 2 с днищем, имеющим
большую жесткость вследствие своей формы и меньшей
температуры нагрева (рис. 2. 44).
Расчетная схема двух таким образом связанных днищ
принимается следующей. Эллиптическое днище, к которому
привариваются стержни, считаем абсолютно жестким, так что в работе
деформируются только пластина и подкрепляющие стержни.
Полагаем также, что стержни размещаются осе'симметрично, образуя
непрерывное силовое кольцо крепления пластины.
Задача статически неопределима. Решаем ее методом сил
строительной механики. Рассекаем систему по месту присоединения
стержней к пластине; компенсируем действие стержней силой R.
Очевидно, прогиб пластины и стержней в первой точке
где б,ю — податливость пластины в первой точке от внешней
нагрузки, в данном случае от давления р в м/(Н/м2). Податливостью
называется отношение прогиба элемента в какой-либо точке к
нагрузке, вызвавшей этот прогиб; физический смысл податливости —
это прогиб системы в какой-либо точке в результате приложения
единичной нагрузки; бц — податливость пластины в первой точке
от €иловой нагрузки © м/Н; 6i — податливость стержня в первой
точке в м/Н.
Рис. 2. 44. Расчетная схема подкрепленной пластины
101
Приравнивая эти уравнения, получим
&io/>-W?i=ai/?i
и окончательно /?i~6iop/(6n+8i).
Таким образом, в результате подкрепления силовой пластины
стержнем ее изгибающий момент, напряжения и прогиб будут
уменьшены силой Яи которую мы может увеличить или уменьшить
подбором податливости 6i или места размещения.
Пластину можно эффективно подкрепить подбором
податливости 8ц стержня. Если эта податливость будет велика (6i = oo), то
/?i = 0 и никакого поддерживающего эффекта не получается.
Если 6i = 0, т. е. если устанавливаем жесткую опору в первой
точке пластины, то значение реакции Ri будет максимальным и
эффект разгрузки — наибольшим. После подбора стержня 6i и
определения /?i производится расчет пластины с учетом действия силы
Ru Значения изгибающих моментов, напряжений и прогибов будут
равны сумме этих величин от внешней нагрузки и силы R\:
Если получаем, что a>max< h и напряжения удовлетворяют
условиям прочности, то задача решена. Иногда для этого следует
устанавливать два-три ряда подкрепляющих стержней.
В некоторых случаях подкрепление нельзя осуществить. При
нормальных напряжениях будем получать большие прогибы,
сдвигающие всю активную зону по оси. В этих случаях следует
уточнить расчет, применяя аппарат, учитывающий гибкость пластины.
Пример 2.6. Найти напряжение и прогибы круглой жестко заделанной
пластины, подкрепленной осесимметричными стержнями (см. рис. 2.44), если дано!
#1=0,45 м; 02 = 0,8 м; £ = 1,7 м;
А = 1,5-10-2 М; /! = 0,28м; /2 = 0,22м;
Рг = 70-10-4 м2; F2 = 44-10~4 М2;
/? = 0,42МПа: £ = 2,2-105 МПа.
Считаем, что эллиптическое днище, к которому крепятся стержни, жесткое.
Если бы пластина была неподкрепленной, то напряжение в ее опасном
сечении r — b определялось бы по формуле (2.68) и было бы равно
0,75/762 _ 0,75-4,2-105-72
«max — ~ h2 —— lf 52.10-4 ~~
Это напряжение чрезмерно велико. Напряжение в пластине после учета.'
разгружающего действия стержней будет равно — 700 МПа.
Сравнивая эти напряжения, видим, что подкрепление пластины снизило
уровень напряжений более чем в пять раз.
Расчет гибких пластин
Под гибкими понимают такие пластины, которые способны под
действием внешних сил заметно менять свою форму без
нарушения упругих свойств материала. Обычно у таких пластин значение
параметров wo/h>'\ ... 10, где w0 — прогиб пластины в центре.
102
Рис. 2. 45. Элемент гибкой пластины
Рис. 2. 46 Деформация пластины
Отличие таких пластин от рассмотренных ранее заключается
в том, что к напряжениям изгиба от моментов М9 и Мг
добавляются напряжения растяжения или сжатия срединной поверхности
от сил ±ТГ и Г<р , появляющиеся вследствие больших прогибов
(рис. 2. 45).
Уравнения равновесия сил упругости гибкой пластины. При
выводе рассматриваемых ниже основных уравнений сохраняется
гипотеза неизменности нормали к срединной поверхности и задача
решается в пределах упругости.
Составим уравнения равновесия элемента пластины, который
выделим двумя меридиональными и двумя коническими сечениями,
размером г, dr. Приложим к элементу внешнюю нагрузку и силы
и моменты, действующие по его граням (>см. рис. 2.45). Схема
действия сил аналогична приведенной на рис. 2.41, только добавятся
распределенные нормальные усилия Тг и Т9 . Элементы пластины
представлены на рис. 2. 46 в деформированном состоянии.
Значения силовых факторов следующие:
r + dTr=Trrd<? + d (?rrd<t)\
1 cp^^ ydr\
= — prd<fdrdr;
= Qrd<?dr.
Спроектируем все силы на ось Z:
— Q/v/cp — d (Qr^cp) -\-prd<?dr + T rrd<?Q —
Здесь вместо синусов и косинусов малых углов подставлены углы
или единицы соответственно. После преобразования этого уравне-
103
ния, пренебрегая малыми величинами второго порядка, имеем
{r(TrO + Q)Y = pr, (2.76)
или r(TrB + Q)=F(r), где F(r) = § prdr + C.
Проектируем все моменты на ось У (см. рис. 2.45):
— Mrrd<? — d (M
После упрощений, аналогичных упрощениям первого уравнения,
получим
Др - (Мгг)г = ~Qr. (2. 77)
Полученные уравнения не позволяют определить усилие Г,
поэтому составим еще одно уравнение, проектируя все силы на нормаль
к срединной поверхности пластины:
Qrrfcp — Qrdy — d (Qrrfcp) -\-Prd<?dr — Trrdb — T^drd^d,
откуда pr - ?rrd' - {QrY - Тф = О. (2. 78)
Исключаем из уравнений (2.76) — (2.78) Q.. Для этого подставим
выражение Qr = F(r)—TrrQ, полученное из уравнения (2.76), в
уравнение (2.78). Поскольку
F'{r) = pr\ T9 = (Trr)\ , (2.79)
уравнение (2. 77) принимает вид
(MrrY — M9=F(r) — Trr6. (2.80)
Мы получили два уравнения (2.79) и (2.80) равновесия сил,
действующих на элемент, тогда как неизвестных величин пять: Мт>
Мер, Тг, Т\ , 0. Для нахождения недостающих уравнений
рассмотрим деформацию пластины.
На рис. 2. 47 показан элемент дуги меридиана до и после
деформации. Полное перемещение любой точки дуги меридиана
можно разложить на две составляющие — w по направлению оси
симметрии Z и и — по радиусу г. Третья составляющая вследствие
симметрии равна нулю.
Длина дуги после деформации
w A/B/=dr(\ + 8гг), где &гТ —
относительное удлинение срединной
поверхности по направлению дуги меридиана.
Проектируем замкнутый
шестиугольник ВВ"В'А'А"АВ на
направление радиуса г и на ось симметрии:
# + rf/-(l-fsrr)cos6 — (u-\-du) — dr = 0;
подставляя cos9=l—Э2/2 и
пренебрегая величинами малого порядка, по-
Рис. 2. 47. Деформация элемента ЛуЧИМ jj
104
IL+ (LlL
2. (2.81)
Проекция шестиугольника на ось симметрии дает
e = —w'. (2.82)
Вычисление относительного удлинения в окружном направлении
приводит к результатам
г9т = и!г (2.83)
и srr-(s,7r)/ = 62/2. (2.84)
Находим теперь относительные удлинения ггг и e<pZ в точках
пластины, удаленных на расстояние z от срединной поверхности в
результате ее деформации относительно нейтральной плоскости.
Ранее (см. разд. 2. 1) эти деформации определялись. Они равны:
(2.85)
(2.86)
Отсюда суммарные относительные деформации
ег = егГ + г6'; sv = s9t + z (в/г),
и, таким образом, суммарные напряжения
_ Бел и выразить, как это_ делалось ранее, относительные усилия
Тт и Т9 и моменты Мг и М9 через напряжения аг и о? , то
/г/2
dz = {ггТ 4- [X£?r);
1 2
= \ °
J
-Л/2
/г/2
1 — f
Eh
-/г/2
откуда
srr=:-L-(rr — jaZ1^); 6(p7. = —_(f9 —ji,rr);
£^Л с/г
V2
Mr = —
Л/2
(2.87)
\ (2.88)
-Л/2
Полагая толщину h постоянной, заменим в выражении (2. 84)
и етг зависимостями (2. 87). Тогда
Тг - цГ,-
' = Eh (62
(62/2).
105
Подставим сюда Т9 из уравнения (2. 79):
Т, - ц (7>)' [(7>)' г]' + Ц (7>)' -£
отсюда -r(7>)"-(7>)' + -^ = £7z(62/2). (2.89)
Вернемся к уравнению (2. 80) и исключим из него Мг и Мер ,
взятые из формул (2. 88). Тогда
и по'сле преобразований
r6" + 6' L = i>_e-^- . (2.90)
1 г D D V '
Таким образом, получены окончательно два уравнения (2. 89) и
(2. 90) с двумя неизвестными Тг и 9. Эти уравнения нелинейные,
так как в первое уравнение входит квадрат неизвестной функции
8. а во второе — произведение неизвестных Г0.
Функция F(r) может быть найдена из условия равновесия
центральной части оболочки. Так, например (рис. 2.48), при нагруже-
нии ее давлением р из условия равновесия центральной части
следует
При нагружении пластины сосредоточенной нагрузкой получим
—Q-2nr—Tr-2nrQ + P = 0; 2лг(Q + TrQ) = P.
Уравнение (2.60), если на пластину действует давление р>
будет иметь вид
5 ±! Л! (2.91)
г D 2D
Окончательно в сокращенной записи полученная система
уравнений примет вид
где Г =
г [(1/г) (гв)']'=кТе ~ vr2,
7г? и 12(1 — fx2) 62 рЬЪ ~ Г
; k ; v ; r
Eh Л2 2D b
Уравнения (2. 92) являются уравнениями пластины в больших
перемещениях. Они — нелинейные, так как в первое из них входит
квадрат функции 0, а во второе — произведение функций Гиб.
Прогибы и напряжения гибкой пластины. Один из
распространенных способов нахождения прогибов гибкой пластины
заключается в следующем. Полагают, что форма поверхности пластины при
Юб
больших изгибах подобна форме
поверхности жесткой пластины и характер прогибов
такой же, но зависимость от внешнего
давления р более сложная, чем для жестких
пластин, где прогиб пропорционален
давлению. Такой прием обеспечивает
удовлетворительную точность, если шо/А^4, где w0 —
прогиб в центре пластины.
Находим прогиб пластины, считая ее
жесткой. Тогда Т = 0 и первое уравнение си-
Ч
1200
1000 —
Рис. 2. 48. Нахождение
силы Р
200
0-2 4 6
Рис. 2. 49. Жесткость гибкой пластины
стемы (2. 92) отпадает, а второе будет иметь вид
Интегрируем это уравнение дважды. Две постоянные
интегрирования будем искать из условий: при г=0 0^оо; при г=Ь 6 = 0,
т. е. будем рассматривать такой случай, когда края пластины
имеют жесткую заделку. Получим
—г).
Это значение угла 6 наклона касательной к упругой
поверхности пластины можно получить и непосредственно по формулам
(2. 61). Положим теперь для гибкой пластины
7); (2.93)
величина С не зависит от г и является искомой функцией
давления р. Подставляя выражение (2. 93) в первое уравнение системы
(2. 92), получим
Интегрируем это уравнение дважды. Значение двух произвольных
постоянных интегрирования получим из граничных условий,
соответствующих жесткой глухой заделке пластины по внешнему
контуру: при г=\ имеем 8 = 0, и = 0, еф = 0. Далее, подставляя
результат во второе уравнение системы (2.92), получим C = 4wo/bf где
w0 — прогиб пластины в центре, и окончательную зависимость
прогиба пластины от ее параметров:
h V 21
l-ku
(2. 94)
107
или при |и —0,3
pb*/(Eh4) = 5,92 (wo;h) + 2,76 (wo;hf.
Зависимость (2.94) приведена на рис. 2.49. Там же приведены
результат расчета пластины, которая может перемещаться в
заделке в радиальном направлении (без 'поворота), и результат
расчета по формулам для жесткой пластины.
Таким образом, максимальный прогиб гибкой пластины и
давление р связаны кубической зависимостью. При малых прогибах
членом, содержащим третью степень отношения wo/h, можно
пренебречь, при этом формула (2. 94) переходит в ранее приведенные
зависимости для жесткой пластины.
Кривые на рис. 2. 49 показывают, что с возрастанием прогибов
жесткость гибкой пластины увеличивается. Уже при прогибах
ш/А>1 пластину следует считать гибкой.
Однако рассмотренная методика расчета прогибов гибкой
пластины не является универсальной. Она дает хорошее совпадение с
точным расчетом и практикой при wQ/h^4.
Методика требует уточнения, если прогибы превышают это
значение. Действительно, при рассмотрении упругой поверхности
пластины по мере роста прогибов можно заметить Схмещение точки
•перегиба к контуру и в пределе — совпадение ее с заделкой, что
противоречит основному допущению о подобии больших прогибов
прогибам жесткой пластины. Можно задаваться формой упругой
поверхности в виде
d-=—C(rz — r). (2.95)
Это выражение отличается от равенства (2. 93) тем, что здесь
вместо показателя степени 3 введен неопределенный показатель
z, определяемый каждый раз в зависимости от конкретных
соотношений нагрузки и толщины пластины. Опуская преобразования,
получим
Eh.4 1 — fx2 V h
Здесь Ах = — (г 4-1) (z + 3).
3z
Для жесткой заделки
A =2 * + l [_J , 2*3+39*2+ i67,g+ 174 I
3 г+3[1-1аГ6(2г + 1)(г+2)(г+5)]' К'
Для решения уравнения (2. 96) следует определить величину
wo/h из выражения
(WA)3==£/(l-ti2), (2.98)
где В зависит от г:
,_ 16,гб -, 296*5 + 217г4 + 7899^3 + 14533^2 + 12726,г + 4011
~* 2(г + 1)2 (-г +2)2 (z +5)2
108
■]. (2.99)
Таким образом, задача нахождения больших прогибов пластинкиг
сводится к следующему. Задаваясь параметром г, находим по
формуле (2. 99) величину £, а потом и отношение W0/h из выражения
(2.98). Затем при известных z и wofh из формулы (2.96)
определяем жесткость pb4f(Eh4) или давление р.
Расчеты можно сократить, воспользовавшись табл. 2. 1 и
кривыми рис. 2.49, составленными при jut=0,3 для пластины, имею--
щей жесткую заделку. На графике приведены результаты для жест-
кой А и свободной Б заделки.
г, мм
3
5
7
9
11
13
15
17
wQ/h
1,029
1,488
2,224
2,384
3,514
4,134
4,758
5,351
pb*j{Eh>>)
8,569
19,91
с 0,88
99,56
169,8
266,4
395,8
552,5
г, мм
19
21
23
25
27
29
31
33
Т
wo/h
5,953
6,554
7,151
7,648
8,346
8,942
9,534
10,13 .
аблица 2.1
pb*/(Eh*)
749,9
989,3
1273
1607
1995
2442
2944
3518
Опыт показывает, что полученная таким образом расчетная
характеристика дает хорошее совпадение с экспериментом при
прогибах порядка 15—20 толщин.
Напряжение в гибкой пластине. Максимальные напряжения
возникают на контуре защемления:
7>
= -f-
h -
6МГ
(2. 100J
Знак плюс или минус берется в зависимости от того, для
какой поверхности пластины определяется напряжение.
При жестком креплении пластины на ее контуре
е«р = —(аср—|лаг) = 0, откуда а<р = |длг.
Найдем оГтах='О{ по формуле Феодосьева:
-SL)] . (2. 101)
а2тах — ■
Порядок расчета напряжений заключается в том, что по
заданному давлению р вычисляем величину pb4/(Eh4), затем находим
из таблицы z и wo/h и, наконец, по формуле (2. 101)
—напряжение.
109
M
W 1 W
"^-c—ii—з
if:
ъ
Рис. 2. 50. Жесткость гибкой пластины
Напряжение в пластине от сосредоточенных нагрузок. Удобные
выражения для расчета напряжений в пластине при
сосредоточенных нагрузках приведены в работе [7].
Схема нагружения пластины показана на рис. 2. 50.
Толщина пластины h принимается постоянной. Угол поворота
пластины на внешнем и внутреннем контурах равен нулю. Прогиб
пластины считаем малым, так как прогиб каждой пластины не
превышает ее толщины h.
Ищем напряжения и деформацию кольцевой пластины с
защемленными контурами при нагружении осевой силой Р.
Используя уравнения равновесия сил упругости жесткой пластины,
получим формулу для расчета кольцевой пластины
w0
0
n2k\
J
(2. 102)
Л J
AnD L 4 &2 -- 1
где wa — прогиб пластины на радиусе a; k=b/a.
Наибольший изгибающий момент возникает в пластине вблизи
внутреннего контура:
Р
~Р (2
~4^Г
\
(2. 103)
Исключив из уравнения (2. 103) силу Р, можно установить
зависимость изгибающего момента в функции осевого смещения
лластины:
М,а =
2 In £—
12 (1 —
— 1)2 —
Напряжение изгиба
2Eh
(1-
ИЛИ
(£2—1)2.
2Eh
(2. 104)
где W— последний множитель в уравнении (2. 104).
Коэффициент Wy подсчитанный для различных значений k,
приведен в табл. 2.2. Здесь ;и далее полученные напряжения
вычисляются по абсолютной величине без уточнения их знаков.
ПО
Таблица 2.2!
k
w
X
Y
z
1,10
155
145
165
150
1,15
70,0
63,7
76,7
66,6
1,20
39,9
35,4
45,2
37,7
1,25
25,9
22,3
30,2
24,1
1,30
18,3
15,33
21,9
16,8
1,35
13,6
11,16
16,8
12,4
1,40
10,57
8,45
13,3
9,50
Приведем формулу напряжений у внешнего контура:
2Eh £2_-i_2 1n£
(2. 105Х
или
2Eh
X.
Коэффициент X также дается в табл. 2. 2. Приведем формулы
для расчета пластины при ее угловых деформациях.
Угол поворота пластины вокруг центра при неподвижном
внешнем контуре
М
^ип^ + 1 ; (2. 106)
относительный изгибающий момент в радиальном направлении на
радиусе а
£2—1
напряжения изгиба
0,5 (£2_
(1 —|
1) 1П^ — £2 -
(2. 107)
ИЛИ
где У — последний множитель в уравнении (2. 107).
Аналогично напряжения у внешнего контура Ъ
(2. 108}
или
Значения У^ Z приведены в табл. 2.2.
Особенности расчета перфорированных силовых пластин
Силовая плита реактора представляет собой перфорированную-
пластину постоянной толщины, в значительной части ослабленную
ill
Рис. 2. 51. Элементы перфорированной силовой плиты реактора
отверстиями для крепления ТВЭЛов, и отверстиями для прохода
теплоносителя или охлаждающей жидкости. Это сказывается как
на величине полной нагрузки, действующей на пластину, так и на
ее жесткости и несущей способности, что должно учитываться е
расчете.
Найдем нагрузку на пластину на рабочем режиме.
Если известен перепад давлений на пластине р и ее размеры
к, d, b (рис. 2.51,а), то усилие, действующее на сплошную
пластину, было бы
Усилие, фактически действующее на пластину с учетом
.уменьшения ее поверхности вследствие перфорации,
где т — число каналов радиусом с в ТВЭЛах для прохода
теплоносителя.
Эквивалентное этому усилию условное давление, которое
действует на перфорированную часть пластины, найдем из
выражения
t
(2.109)
Эпюра давлений на силовую плиту реактора, таким образом,
носит ступенчатый характер, и мы будем иметь дело с расчетом
пластины при переменной нагрузке.
Величина условного давления рп будет существенно меньше
имеющегося перепада р и зависит от количества и размеров
отверстий в плите.
Вторым расчетным режимом является режим старта ДУ.
Удельные и переменные нагрузки на пластину при старте
определяются по формуле
где 10£—перегрузка при старте; Мй.3 — масса активной зоны.
112
Стартовая удельная нагрузка всегда
превышает давление на пластину при рабочем
режиме. Однако она действует кратковременно
и при умеренных температурах. Часто bnzzb,
тогда считают давление, р постоянным.
Оценим снижение жесткости. Основой для
оценки снижения жесткости 'перфорированной
плиты является особенность ее
деформирования под нагрузкой, установленная мшгократ- Рис 2 52 Схема раз_
НЫМИ Экспериментами раЗЛИЧНЫХ ИОСЛеДОВате- мещения'отверстий в
Лей. Эта ОСОбеННОСТЬ ЗаКЛЮЧаеТСЯ В ТОМ, ЧТО силовой ^плите реак-
форма прогиба нагруженной перфорированной
плиты подобна форме изгиба 'сплошной плиты.
На рис. 2.51,6 построены кривые прогибов w и wn сплошной
и перфорированной пластин соответственно при одинаковом на-
гружении.
Величина прогиба перфорированной пластины существенно
зависит от размеров s, d, h (рис. 2.52). Перфорированная пластина,
как и сплошная, находится в плоско-напряженном состоянии, ее из-,
гиб подобен изгибу сплошной пластины, ее несущая способность
определяется главными напряжениями аги а? , достигающими
наибольшего значения на ее поверхности.
Около отверстий всегда имеется некоторая концентрация
напряжений, что весьма существенно для плит, выполненных из хрупких
материалов. Для материалов плит, применяемых в реакторах,
концентрацией напряжений можно пренебрегать.
Исходя из подобия кривых прогибов пла'стин можно записать
= y, (2. 100)
где у — коэффициент пропорциональности, учитывающий снижение
жесткости пластины D вследствие ее перфорации.
Найдем значение у из сравнения прогибов перфорированной и
сплошной пластин. Для пластины, показанной на рис. 2.51,6,
прогибы на радиус г
р Ш — Г2)? р (Ь2 — г2)2
w = — — ; wn = — — ,
64D 64Z)n
откуда w/wn = DJD = y и Dn = yD.
Итак, цилиндрическая жесткость перфорированной пластины
Dn равна жесткости неперфорированной пластины, умноженной на
коэффициент перфораций у. Это позволяет в первом приближении
находить напряжения перфорированной пластины по формулам для
сплошной пластины, внося поправку ла снижение ее жесткости
вследствие перфорации.
Цилиндрические жесткости
12(1 —fx2) 12 (1—fx2)
В некоторых случаях считают, что поправку на снижение
жесткости перфорированной пластины можно внести изменением Е и
ИЗ
\х пластины, считая ее оплошной и сохраняя
неизменным ее толщину. Для задач,
которые мы рассматриваем, целесообразно
уменьшение жесткости получить, введя в
расчет условно уменьшенную толщину
пластины, которую обозначим 1гп и найдем из
соотношения
0,2 0,4- 0,6 0,8 d!°
Рис. 2. 53. Изменение
коэффициента v
r (2. Ш)
Как уже указывалось, величина у
зависит от размеров перфорированной плиты и
отверстий в ней и определяется по формуле
Y = 0,25(3 +с) (l-|i2)(l-rf/s), (2. 112)
где d — диаметр отверстия; s — шаг
отверстий; с — коэффициент жесткости плиты;
(2.113)
Изменение коэффициента у в зависимости от отношения
диаметров отверстий перфорации к их шагу показано на рис. 2. 53.
Обычно значения у находятся в пределах от 0,1 до 0,5, что
соответствует отношению (d/s) =0,2 .. . 0,9.
Ит1к, зная значения у, получим окончательные уравнения для
pa-счета круглых перфорированных пластин:
I
Mrn = Dy(w" + p—-
(2. 114)
В тех случаях, когда подсчитаны изгибающие моменты непер-
форированной пластины и требуется определить напряжения в ней
после перфорации, в формуле напряжений следует принимать
условную толщину пластины, учитывающую перфорацию А„ = А
а напряжения подсчитывать по формулам
Например, в перфорированной плите, схема заделки которой
аналогична схеме, приведенной на рис. 2.51, напряжения в точке,
находящейся на расстоянии г от центра, будут
_ 6/7^2
Wyr ■
2v2/3
114
Запас прочности перфорированной плиты определяем по
обычной формуле
3;
,. = J/ 4и — Зг п3?п + V-
Значение п следует выбирать в пределах /г= 1,1 ... 1,3.
Глава III
РАДИОАКТИВНЫЕ ИЗОТОПНЫЕ
ИСТОЧНИКИ ЭНЕРГИИ
Известно, что при распаде радиоактивных материалов
выделяется большое количество тепла. Это тепло может быть с успехом
использовано в космической энергетической установке.
Большинство из применяемых радиоактивных изотопов
получают искусственно в результате нейтронного облучения металлов
в обычных энергетических реакторах. В результате распада
изотопа происходит монотонное уменьшение тепловой потенциальной
энергия источника -по экспоненциальному закону. Достоинством
источников энергии с использованием радиоактивных изотопов
является простота и надежность эксплуатации. Большое различие
изотопов по темпу распада позволяет спроектировать источник
энергии для самых разнообразных целей и назначений.
Энергоустановки на радиоактивных изотопах имеют и
некоторые недостатки:
— они сравнительно дороги, так как на получение изотопа
приходится расходовать уран: выделение изотопа к тому же является
сложным и дорогостоящим процессом.
Энергия, выделяемая изотопом, пропорциональна его массе,
поэтому радиоизотопные энергоустановки целесообразны только при
небольших мощностях (менее киловатта);
— использование изотопных элементов требует выполнения
ряда мер техники безопасности.
Если излучение а-частиц (протоны) сравнительно безопасно
для человека, так как гасится в материалах самого изотопа и
конструкции ампулы, то Y-излучение (электромагнитное) и р-излуче-
ние (электроны), а также нейтронное излучение требуют защиты.
Ампула с изотопом должна быть герметичной, не разрушаемой
при аварийном падении на землю, так как продукты распада
радиоактивны.
Все радиоактивные изотопы в числе продуктов распада
содержат газообразный гелий, давление которого в замкнутом объеме
в конце срока службы может достигать огромных значений, что
усложняет конструкцию источника, и поэтому при проектировании
источника необходимо снижать это давление до допустимых
величин. Продукты распада агрессивны и вызывают сильную коррозию
115
большинства конструкционных материалов. Следует
предусматривать их антикоррозионное покрытие.
Часто изотоп приходится сплавлять с другими металлами для
улучшения его теплопроводности и упрочнения.
Типичным примером изотопного материала является кюрий-242, период
полураспада которого равен 162 суткам.
Кюрий-242 получается искусственно в результате бомбардировки
нейтронами америция-241; его удельная тепловая мощность равна 122 Вт/г. Он может
быть использован в генераторах со сроком службы от 3 до б месяцев.
Проблемы защиты при использовании этого изотопа связаны с гашением попутных а-
распаду нейтронного п- и уизлучений.
При распаде кюрий-242 переходит в плутоний-238, который возбуждает
сильную коррозию обычных нержавеющих сталей; с ним не корродирует только
тантал. Кюрий-242 используется в виде сплава с америцием-241 (45% Cm и 55%
Am) и дополнительно сплавляется с стабилизирующим металлом, например с
золотом (1 часть Cm+Am-t-5 частей Аи), который улучшает передачу тепла в
сплаве.
В результате распада кюрия-242 выделяется гелий. Если поместить изотоп
в герметичную ампулу без избыточного объема, то к концу срока службы
источника (спустя 240 суток после заключения изотопа в ампулу) давление
накапливающегося в ампуле гелия возрастет до 55 МПа.
Приведем данные по основным изотопам, применяемым в
космических энергоустановках, в табл. 3. 1.
Таблица 3.1
Наименование
Плутоний
Цезий
Стронций
Кюрий
Кобальт
Прометий
Церий
Кюрий
Полоний
Формула
ри238
Cs137
Sr90
Cm244
Co60
?Ш|2Оз
Се144
Cm242
Po210
Способ
распада
a
9 у а
P, y
a, n
Э, у
3, Y
P. У
a, n
a
Период
полураспада (лет,
суток)
86,4 л
33 *
28 „
18 ,
5,3 ,
2,6 „
285 сут
162 „
138 *
Топливное
соединение
PuC; Pud
CsCl
SrTiO3
Cm2O3
Co
PmO3
CeO2
Cm2O3
. Полониды
Плотность,
г/см3
12,5
3,9
4,8
11,8
9
6,6
6,4
11,75
9,3
Тепловая
мощность,
Вт/г
0,55
0,325
0,112
2,8
9
0,167
21,9
110—122
140—170
Как видно из табл. 3. 1, можно спроектировать источник,
работающий различное время.
Рассмотрим силовые схемы и конструкцию изотопных
источников энергии.
3.1. КОНСТРУКТИВНЫЕ СХЕМЫ ИЗОТОПНЫХ ГЕНЕРАТОРОВ
Изотопный генератор нерегулируемой схемы с твердой тешюпе-
редающей средой показан на рис. 3.1, а. Он представляет собой
ампулу, состоящую из изотопного источника тепла 1, технологической
оболочки 2 и антикоррозионной оболочки из тантала <?, вставлен-
116
Рис. 3. 1. Изотопные
генераторы:
а—нерегулируемой схемы;
б, в—регулируемой схемы
12 J 4
ную в капсулу 4. Капсула 4 устанавливается в корпусе 5 изотопной
станции. Тепло из изотопа в силу теплопроводности поступает к
термоэлектрическим преобразователям 7 (ТЭЛПам). Утечка тепла
ограничивается теплоизоляцией 6. Корпус 8 является
одновременно излучателем. Для обеспечения быстрого разрушения и сгорания
станции при аварии предусмотрено быстрое отсоединение крышки
корпуса по шву 3, выполненному низкотемпературной пайкой.
Изотопный генератор регулируемой схемы с жидким
теплоносителем показан на рис. 3.1,6. Передача тепла от изотопа к
ТЭЛПам осуществляется жидким металлом 10. Расширение его
при нагревании обеспечивает перемещение заслонки 11,
регулирующей тепловую мощность источника. Капсула 3 имеет мощную
защиту от излучения 4 и форму, обеспечивающую
стабилизированное падение при аварии.
Изотопный генератор с передачей тепла излучением показан на
рис. 3. 1,в. В отличие от рассмотренных схем между капсулой 3 и
ТЭЛПами 7 имеется полость, заполненная газом. Уменьшение
давления газа в этой полости вследствие утечки газа через фильтр 12
обеспечивает регулирование мощности генератора по времени
работы.
Газ
Рис. 3. 2. Схема изотопного нагревателя
117
На рис. 3. 2 показана схема нагревателя, источником тепла в
котором служит радиоактивный материал. Ампула 1
устанавливается в корпус 2 нагревателя и омывается газом.
Охлаждающая рубашка 3 необходима для регулирования
мощности нагревателя и охлаждения корпуса после сборки.
3. 1. 1. Конструкция изотопного источника тепла
Типичная конструкция изотопного генератора показана на рис.
3. 3. Изотопный источник 1 помещается в оболочку 2 из стали,
молибдена или тантала. Эта оболочка может изнутри покрываться
защитным материалом 3 — например карбидом тантала,
вольфрама. Все это в сборе называется ампулой.
Особенность изотопов такова, что сразу же после его получения в
воспроизводящем канале реактора он непрерывно излучает частицы и тепло. Поэтому
после заключения изотопа в оболочку и сварки, что делается автоматически с
помощью манипулятора, ампула должна помещаться в cpev,y с интенсивным
отбором тепла, например в контейнер с водой, сухим льдом и т. д. Если этого
не сделать, то температура изотопа может достичь таких значений, что
транспортировка ампулы будет затруднена. Оболочка может потерять твердость или
полностью расплавиться.
В контейнере изотоп поступает на сборку, где закладывается в
корпус капсулы 4, который завинчивается пробкой 5 и
заваривается, что обеспечивает прочность и герметичность капсулы.
Толстостенный корпус капсулы 4 выполняется из жаропрочного
материала. Внешняя поверхность ее коническая, что обеспечивает
простоту ее установки в корпус станции 6.
Толстостенная конструкция капсулы определяется
требованиями к ое прочности. Капсула не должна разрушиться при падении
и ударе о землю.
Существуют и другие конструкции капсул, различающиеся
только формой корпуса. На рис. 3. 4 показана конструкция
ампулы, способной удовлетворять требованиям неразрушаемости без
капсулы.
Изотопный материал 1 помещается в тонкостенную оболочку 3
покрытую изнутри антикоррозионным материалом 2. Оболочка 3
укладывается в корпус 4, имеющим развитый наконечник 5,
обеспечивающий восприятие ударной нагрузки при падении.
J
I \ \
12 3 «5
Рис. 3. 3. Конструкция капсулы
Рис. 3. 4. Конструкция ампулы
118
Вид А
Рис. 3. 5. Конструкция изотопной станции
На рис. 3. 5 показана конструкция изотопной станции, имеющей
электрическую мощность 210 Вт. Рабочее тело — изотоп строи-
ций-90, температура горячего спая преобразователя 530° С,
температура холодного спая 380° С. Станция состоит из источника
энергии термоэлектрических преобразователей и системы
регулирования тепловой мощности.
Изотопный источник /, уложенный в толстостенный корпус 2,
нагревает жидкий металл, помещенный в пространство между двумя
оболочками 4 и 5 корпуса станции, и горячий спай
термоэлектрического преобразователя 3. В начальной стадии работы станции
избыточная тепловая мощность сбрасывается в космическое
пространство, для чего спроектирована система регулирования. Она
состоит из подвижного экрана-излучателя 6, стоек 7, створок,
поворачивающихся относительно неподвижных осей 8, Открываются створ-
Рис. 3. 6. Конструкция изотопной станции малой мощности
119
ки стойками 7 при перемещении экрана-излучателя 6 в результате
теплового расширения жидкого металла и деформирования силь-
фона 9.
На рис. 3. 6 приведена одна из возможных конструкций
изотопной станции небольшой мощности. Конструкция выполнена по
схеме, указанной на рис. 3. 1, б. Источником тепла служит изотопный
материал У, размещенный в капсуле 3, имеющей антикоррозионное
покрытие 2 и защиту 6. Регулирование мощности осуществляется
устройством 5, генерирование тока — преобразователями 4.
3.2. РАСЧЕТЫ НА ПРОЧНОСТЬ
3. 2. 1. Расчет толстостенной капсулы на прочность
Расчетными режимами корпуса капсулы являются:
рабочий режим, когда основное нагружение капсулы
осуществляется давлением гелия в конце работы;
технологический режим; при этом рассматриваются
температурные напряжения, возникающие в стенках капсулы при ее
охлаждении во время транспортировки на сборку;
аварийный режим, когда рассматривается прочность капсулы
при падении.
При расчете прочности капсулы на рабочем режиме считаем ее
равномерно нагретой, т. е. градиентом температур по корпусу
капсулы пренебрегаем. За расчетную толщину стенки принимаем не
только толщину собственно корпуса капсулы (она обозначена
линией с на рис. 3. 7, а), но и толщину корпуса станции, соединенных
между собой диффузионной сваркой.
Расчетное давление р гелия в капсуле определяется из
диаграммы зависимости его от времени излучения источника т. Как видно
из рис. 3. 7, б, давление гелия зависит от свободного объема v,
остающегося в капсуле или ампуле после установки изотопа. Если
этот объем мал (v = V\) и определяется только тем зазором, с ко-
Рис. 3. 7. Элементы капсулы:
«а—распределение напряжений; б—изменение давления гелия по времени; в—силы, действую
щие на элемент стенки капсулы
120
торым изотоп устанавливается в капсуле, то давление может быть
чрезмерно большим и капсула получится тяжелой. Если объем
велик (v = v3), то капсула может оказаться также тяжелой ввиду
увеличения ее размеров. Возможен выбор оптимального объема i>2.
Иногда решают задачу по-другому. Можно, задаваясь давлением
в капсуле или ампуле в конце ресурса (не более 10,0—12,0 МПа),
определить потребный свободный объем и таким образом
спроектировать источник.
Уравнения равновесия сил упругости капсулы
На рис. 3. 7, а показана капсула изотопного источника и
элемент, вырезанный из нее, <с приложенными к нему векторами сил
Тг, Гф, Tz.
Размеры капсулы а, Ъ, I, параметры р} t, x и диаграммы а =
=f\(e) известны. Требуется найти crr, o9 , az и п.
Расчет ведем, учитывая следующие особенности: давление в
капсуле выбираем в конце ресурса; считаем, что стенки капсулы
нагреты равномерно и что они находятся в упругом состоянии; хотя
стенка капсулы находится в объемном напряженном состоянии,
полагаем, что осевое напряжение az постоянно и мало влияет на
напряжения аг, а? .
Исходные уравнения напряжений будут иметь согласно
формулам (2. 3) следующий вид:
( + У Л + У P*2l{b1a?). (3.1)
Относительные деформации ег и 1вф определяются по формуле (2.2)
Вырежем элемент из стенки капсулы и приложим к его граням
векторы сил упругости (см. рис. 3. 7, в).
Спроектируя эти силы на вертикальную ось г, после некоторых
преобразований получим уравнение равновесия, подобное
уравнению (2. 1):
a;r+v__a?=o, (3.2)
связывающее два неизвестных напряжения.
% Заменяя в этом уравнении напряжения равновесия их
выражениями через перемещения, получим дифференциальное уравнение
радиальных деформаций
й" + — и'—- = 0,
Г Г2
или [{\lr){ru)r\ = 0.
Это линейное однородное уравнение второго порядка. Его интеграл
содержит две произвольные постоянные:
1/г); (3.3)
121
Рис. 3. 8. Эпюры напряжений в
стенках капсулы
постоянные Сь С2 определяются из
граничных условий
г = а, ог=—р; г = Ь, а, = 0.(3.4)
Знак минус при р принимается потому,
что стенки капсулы этим давлением
сжаты.
Подставляя выражение (3. 3) в формулы для напряжений (3. 1),
получим
где постоянные А = С,; В= С2.
1-м- 1 + р.
После подстановки граничных условий (3. 4)
A=pa2/{b2~a2); B=pa2b2\(b2-a2).
Пользуясь этими значениями постоянных, получаем
окончательно формулы ДЛЯ Ог, (Тер И Oz-
°г == I 1 I» аср J== I 1 ~\ I '•>
1)2 —_ #2 V г2 / Ь% а% \ г% I
-а2). (3.5)
На рис. 3. 8 показаны эпюры напряжений в стенках капсулы.
Как видно, максимальные напряжения развиваются на внутренней
поверхности капсулы. Следует отметить, что радиальные
напряжения Or отрицательны.
3ainac прочности капсулы
Обобщенное напряжение Oi находим по формуле объемного
напряженного состояния:
а, = ^0,5 [(а, - а,)2 + (а, - azf + (az+ar)2].
Запас прочности следует выбирать /г=1,1 ... 1,2.
Упруго-пластическое и пластическое состояния капсулы
Общий характер напряжений, полученный в предыдущем
расчете и показанный на рис. 3. 8, существенно изменится, если
отдельные напряжения, например окружные напряжения о9 на
внутренней стенке капсулы, превзойдут предел текучести материала ат.
Это может произойти либо при увеличении внутреннего давления
р, либо вследствие падения ат материала капсулы с течением вре-
хмени ее работы. Появляющиеся при этом пластические деформации
приведут к перестройке эпюры напряжений ог и Gz. Рассмотрим
как изменятся эти напряжения, учитывая объемный характер
напряженного состояния стенки капсулы.
122
Основные уравнения, связывающие напряжения и деформации
детали, находящейся в упругом состоянии, будут
\
°;
/
Е (
^1 S
1 — {х V
К+79
1 — [л V 1 — 2[х
az = -£— Uz + -^— £0V (3. 6)
£z = y ^z ~~^^r + ««p)]i (3. 7)
где eo=i(8r+^ + 8z)/3.
Определяющим напряженное состояние является интенсивность
напряжений Oi и интенсивность деформаций ег-:
^)+Kz+(zr)]
(3.8)
£| = 0,5 V2 У{гг - в,)2 + (s, - szf + (ez - еГ)2.
Зависимости напряжений и деформаций при
упруго-пластическом и пластическом состояниях тела должны быть такими, чтобы
предусматривалась возможность перехода одной из слагающих
напряжений iorr, o> » <?z B пластическое состояние, т. е. равенство ее
ат- Дальнейшее нагружение не должно приводить к изменению это-
го напряжения, так как пластические деформации не позволяют
этого сделать.
Момент перехода упругого состояния в пластическое
определяется из соотношения
а[=ат. (3.9)
Упруго-пластическое состояние есть частный случай
пластического состояния, поэтому математическое описание этих состояний
должно быть идентичным.
Формулы, связывающие главные напряжения и деформации в
стадии пластичности, имеют вид
s9 = (s//a/)K-0,5(ar + az)]; (3.10)
Sz = №)[*z-0,5(ar+a,)],
или, будучи выражены через напряжения, для несжимаемого
материала (ео=О)
2a/ 2a i
аг-а0 = —sr; a,-ao = —e,;
(3.11)
2а/
az-*o^—£z>
ое/
где во— (oj + Otp +<Tz)/3 — среднее значение напряжения.
123
Итак, при некоторых условиях окружные напряжения капсулы
<Тср могут превзойти предел текучести материала. Образуется
некоторая зона, где в первой возникают пластические деформации.
Эта зона в поперечном сечении ам-пулы будет представлять собой
кольцо. Обозначим радиус границы, разделяющей упругую и
пластическую область, через гт. Очевидно, эта величина характеризует
степень распространения пластических деформаций в сечении
капсулы. Вследствие осевой симметрии нагружения в
упруго-пластическом состоянии напряжения деформации и перемещения являются
функциями двух величин г и гт.
Для упрощения выкладок будем считать, что осевая
деформация стенок не изменяется по радиусу и длине: er=const, sz = const.
Положим для начала, что она равна нулю, т. е. er=ez=0.
Дифференциальное уравнение равновесия элемента капсулы
(3. 2) имеет вид
Окружная 8Ф и радиальная ег относительные деформации
связанны с радиальным перемещением точки и и радиусом г
следующими соотношениями:
er = du/dr и е«р =
Из второго соотношения имеем и=щ и, следовательно,
da dz<? ,
— -=r -- + 8?-
dr dr ' f
Сопоставляя .полученный результат и первое соотношение,
выводим условие совместности деформаций:
г (ds?/dr) -)- Scp — sr = 0.
Радиальные и окружные напряжения в упругой области
представим в виде
(^Ь(Н <зл2)
Коэффициент 2aT/j/3 в формулах (3. Г2) введен для удобства
последующих выкладок. Он влияет только на величины постоянных
интегрирования.
В пределах упругости осевая деформация гг связана с
напряжениями в стенках капсулы соотношением
Поэтому на основании принятого условия ez = 0 получаем
az = p(ar+a9). (3.13)
Зависимости компонентов напряжений от компонентов
деформаций по теории упругонпластических деформаций известны (3. 11).
Примем для упрощения решения задачи, что материал стенок не-
124
сжимаем (ео=О). При условии ez = 0 из соотношения (3. 11) имеем
Oz = oo. Следовательно, из выражения (3. 10) имеем
azn=0,5(az-[-Scp).
Подставляя эту величину в выражение для интенсивности
напряжений (3.8), получаем
а1 = УЗ(ъ-*)12. (3. 14)
При отсутствии упрочнения, что соответствует нашей задаче,
напряжения должны удовлетворять условию пластичности (3. 9) и,
следовательно, согласно формуле (3. 14)
a9-ar=2oT/^3. (3. 15)
Поэтому дифференциальное уравнение равновесия (3. 2) принимает
вид
da г 2 от
dr ~ /3 г
Интегрируя это уравнение, получим
/j (3.16)
где гт — радиус границы между упругой и пластической
областями; С\ — функция гт.
Согласно формулам (3. 13), (3. 15) и (3. 16)
(3. 17)
2 Л г , п , 1 \
z /з ч /-Т 2;
В упругой области напряжения о9 и о»г определяют по
формулам (3. 12). Величину осевого напряжения для несжимаемого
материала получаем по формуле (3. 13), полагая в ней ^=0,5.
Подставляя в нее выражения (3. 12), находим
az=---^a7A. (3. 18)
z /3 т У }
Перейдя к рассмотрению радиальных перемещений как в
упругой, так и в пластической областях, из условия несжимаемости
(ео,= О) и соотношения (2.2) находим, что
sr-[-£(pz=0 и dti/dr-\-u/r=0.
Интегрируя последнее уравнение, устанавливаем, что
и = С2/г, (3. 19)
где С2 —функция гт.
Для того чтобы связать величины С2, А я В, заметим, что в
упругой области из первой формулы (2. 2) и формулы (3. 6) для
несжимаемого материала (|ш=0,5)
125
Подставив в это соотношение выражения (3. 12) и (3. 18),
получим
п=\ 3(от/Е)(В/г). (3.20)
Сопоставляя величины (3. 19) и (3.20), заключаем, что
C2=V3(oT/E)B. (3.21)
Для определения постоянных Л, £, Сь С2 и неизвестного
радиуса гт используем краевые условия:
при
где an, ОрТ и аГу, 0<ру — напряжения в пластической и упругой
областях соответственно.
Из первого краевого условия, используя выражение (3. 16),
имеем
+ х—&JL. (3.22)
Из второго краевого условия с помощью соотношений (3. 12)
устанавливаем, ЧТО'
Л-£/г2-0. (3.23)
Третье и четвертое краевые условия при помощи соотношений
(3. 12), (3. 16) и (3. 17) дают
Cl = A-Bjr2y\ (3.24)
С2+1=Л + Я/г?. (3.25)
Решая уравнения (3. 24) — (3. 25) относительно Л, В и Сх и
используя выражение (3.21), получим
±^ -^3 А=±.А; *=j£. (3.26)
1 262 2 2 Е 2 № 2 V ]
Подставляя величину С\ в соотношение (3.22), получим
уравнение для нахождения гт:
р = ^ 12 ln-^- - —+ 1) ; (3. 27)
это уравнение решается численно или графически. Для этого
целесообразно представить его в виде
/М2 + 21п^—
\ Ь I гт
126
Подставляя величины постоянных (3.26) в соотношения
(3. 16) — (3. 18), получим формулы для напряжений в
пластической области:
7l[77(t)] <3'28»
"- п^КЦФ
в упругой области:
Согласно формулам (3.19) и (3.21) радиальное перемещение
как в упругой, так и в пластической областях определяются по
формуле
2 Е г
Найдем величину предельного давления рпр, при котором
пластическая область распространится на все сечение стенки капсулы
(гт = о). Полагая в формуле (3.27) гт = Ь, получим
2 , Ь
Лр=7з°т1пТ-
Напряжения в этом состоянии получим по формулам (3.28), по-
лагая*в них гт = 6:
2 1 г 2 л г , л
аг = —^<зт1п—; оф = —-=-зт In hi ;
г уъ * ь 9 /3 4 ь { )
( ) (3.30)
На рис. 3. 9 представлены эпюры напряжений, построенные по
формулам (3.29) (кривая У), (3.28) (кривая 2) и (3.30) (кривая
3) для капсулы с отношением Ь/'а=2 при различных
отношениях гт/а.
Если в упругом состоянии опасной точкой являлась точка А, то
в пластическом опасная точка перемещается в точку Б.
Долговечность оболочки ампулы
Оболочки ампулы изотопных источников энергии испытывают
монотонно возрастающее напряжение. Рассмотрим как оценивается
127
&Z 6(/7
Рис. 3. 9. Упруго-пластическое состояние капсулы
/7
J7
6
0
Рис
/
/
3.
>
N
1 x т
fp ТР(<#сопЛ)
10. Долговечность
ампулы
долговечность (ресурс) такой оболочки. Да-ны р, ^,\ = /(х),г и А
(рис. 3. 10). Следует найти время до разрушения тр.
Принимаем, что аг- = Сер ; имеем также соотношение хр = Аа^т.
Рассмотрим случай, когда скорость нарастания напряжений
постоянна: о'=do/dx=\consL Тогда а=а'т. Формула линейного
суммирования повреждаемости
Из основного уравнения ползучести найдем
Хр = Аа~т ИЛИ fp = (£/a)m,
где с = А1/т; подставляя в тр значение а и интегрируя, получим
ТР ТР т+1
Г dx i rft ( о' \т хр -,
J (c/a)m "~ J (с/оЧГ ~\~/ w + 1 "~ '
о о
1
и окончательно тр=[(/гг+ l)(c/a')m]m+1.
Если подсчитать по этой формуле тр, то оно будет существенно
большим, чем при стационарном нагружении оболочки.
Глава IV
СОЛНЕЧНЫЕ ИСТОЧНИКИ ЭНЕРГИИ.
СОЛНЕЧНЫЕ БАТАРЕИ
Известно, что солнце излучает огромную энергию. Плотность
потока солнечной энергии за пределами земной атмосферы у земли
(называемая солнечной постоянной) составляет S=
= 1,4 кВт/м2, а вблизи земной поверхности на экваторе
достигает 1 кВт/м2.
128
Простейшим приемником солнечной энергии является плоская
поверхность. Большую плотность солнечной энергии, и в частности,
тепловой солнечной энергии, дают концентраторы — зеркала.
Эффективность концентратора определяется
коэффициентом концентрации солнечных лучей /г, равным отношению1
плотности теплового потока, полученной на ловушке-коллекторе,,
к плотности солнечного потока S, падающего из пространства».
У'существующих концентраторов п=80 ... 2000.
Качество концентратора определяют величиной его
коэффициента полезного действия
где r\3 = SJSa — к. п. д. зеркала; ч\л=£л'/8л — к. п. д. ло!вушки:.
Здесь 5Л — энергия, падающая на ловушку; S3 — энергия,
падающая на зеркало; S/ — энергия, отводимая от ловушки. Для
различных конструкций и условий т]к=0,2 ... 0,8.
Значения удельных масс солнечных концентраторов, где
зеркалами служат полированные металлические поверхности: у=
=0,9 ... 4,6 кг/м2.
Удельная мощность таких конструкций концентраторов при
температуре стенок ловушки 800—2000° С, Л^уд = 0,1 ... 0,4 кВт/кг.
Достоинством солнечных концентраторов по сравнению с
другими источниками энергии является их конструктивная простота..
Недостатки: постепенное ослабление -в процессе эксплуатации
отражательной способности зеркала вследствие неизбежных
повреждений поверхности; невозможность работы концентратора в
условиях затенения; нецелесообразность применения такой конструкции
для мощностей свыше 20 кВт из-за -ее большой массы и
громоздкости.
По конструктивному оформлению все солнечные концентраторы
можно разбить на жесткие (нескладывающиеся и
складывающиеся) и на концентраторы гибкие — пленочные. По форме
зеркальной поверхности концентраторы разделяются на параболические*,
конические (зеркало Френеля) и сферические.
4.1. СИЛОВЫЕ СХЕМЫ И КОНСТРУКЦИИ
СОЛНЕЧНЫХ КОНЦЕНТРАТОРОВ
На рис. 4.1, а показана схема жесткого нескладывающегося
солнечного концентратора с конической зеркальной поверхностью.
Концентратор состоит из зеркала 1, которое образовано кольцевыми
коническими поверхностями; подзеркальника 2, являющегося силовым
конструктивным элементом, крепящим зеркало с остальной энергоустановкой; силового
кольца 3; трех тяг 4 и тепловой ловушки 5. Такая конструкция наиболее проста л
может служить вспомогательным источником энергии небольшой мощности.
На рис. АЛ, б дана схема жесткого складывающегося
параболического зеркала солнечного концентратора большой мощности.
Концентратор состоит из зеркальных поверхностей / и 2, подзеркальника1 с
силовым кольцом 3, трех тяг 4 и тепловой ловушки 5.
Для уменьшения габаритов зеркала на старте верхняя его часть /
выполнена в виде лепестков, поворачиваемых на шарнире 6 гидроцилиндрами 7; кро-
5 3050 129
Рис. 4. 1. Схемы жестких солнечных концентраторов:
а—нескладывающиеся; б—складывающиеся
ме того, после поворота лепестков в рабочее положение на шарнире 6 с
помощью гидроцилиндров 9 лепестки могут разворачиваться в 'рабочее положение
.относительно осей 8 (см. вид А).
Размеры концентраторов могут достигать 25—30 м в диаметре и создавать
мощность энергоустановки до 30 кВт.
Элемент зеркала Френеля показан на рис. 4.2, а. Оно представляет собой
многослойную жесткую конструкцию, в которой на основное силовое кольцо 2,
спаянное с подзеркальником 1, устанавливается профилированная поверхность
3 из нержавеющей стали.
Для улучшения отражательной способности поверхности 3 на нее
наносится слой алюминия 4 толщиной 0,О5—0,01 мм и упрочняющий оптически
прозрачный слой 5, близкий по составу к стеклу (SiCte), толщиной до 0,2 мм.
С нерабочей стороны к поверхности 3 припаивается сотовая конструкция 6
из алюминиевой фольги (толщина до 0,1 м;м). Соты заполняются
стекловолокном 7. Вся конструкция соединена.пайкой, что облегчает получение точного
профиля зеркальной .поверхности, обеспечивающего высокий коэффициент полезного
действия установки.
На рис. 4.2, б показана конструкция шарниров для развертывающегося
зеркала. Лепесток зеркала / присоединен к кронштейну 2, имеющему цапфу,
входящую в гнездо в жесткой раме 3, поворачивающуюся на оси 4. Опора 5 с
осью 4 укреплена на жестком силовом кольце 6 зеркала, который с
подзеркальником 7 составляет основную силовую систему солнечного концентратора.
На рис. 4. 3 показана конструктивная схема и элементы
конструкции гибкого надувного пленочного солнечного концентратора.
Надувные концентраторы выполняются двух типов: просто
гибкие надувные концентраторы и такие же концентраторы, но с
последующим отверждением пленки. Внешнее оформление этих
концентраторов сходно.
Зеркало концентратора состоит из двух одинаковых по толщине и
материалу пленок 1, 2, из которых пленка / с внутренней стороны имеет алюминиевое
130
5-5
Рис. 4. 2. Конструкция зеркал:
а—жесткое коническое; б—конструкция шарниров
напыление, а пленка 2 этого напыления не имеет и прозрачна. Известно; что
если полихлорвиниловую пленку, укрепленную по периферии, нагрузить
перепадом давлений, то в зависимости от его величины поверхность пленки будет*
приобретать форму параболы, сферического сегмента или промежуточные между
ними формы. Такие поверхности являются оптимальными для концентрирования)
солнечного теплового потока.
В рассматриваемой конструкции перепад давлений создается инертньш
газом, которым наполняют внутреннюю полость двух склеенных по периферий?
плоских пленок. Опорной поверхностью для пленок является надувной торооб-
разный обод 3, так же выполненный из тонкостенной пленки и тоже
наполняемый инертным газом.
В такой конструкции солнечные лучи свободно проникают через прозрачную»
пленку 2, отражаются от металлизированной поверхности пленки 1 и
концентрируются в ловушке 6".
На рис. 4.3 показана конструкция узла крепления пленок 1, 2 к ободу 3 к
способ подвода инертного газа в полость тора 3, Силовым элементом,
связывающим пленочную конструкцию концентратора с остальной частью
энергоустановки, является силовое кольцо 4, к которому на тягах 5 крепится ловушка (к
Внутренняя полость кольца 4 используется как резервуар нейтрального газзз
Рис, 4. 3. Схема гибкого пленочного концентратора
131
Рис. 4. 4. Схема зонтичного
концентратора:
/—спица; 2—тяга; 3—шток; 4—
ловушка; 5—пленка
Рис. 4. 5. Конструкция тепловой
ловушки
для наполнения концентратора и торовой полости; она разделена мембраной 7,
так как давление газа в полости между пленками 1, 2 и торовом ободе 3 не
одинаково. Подача газа в концентратор обеспечивается пневмоэлектрическими
клапанами 8 после соответствующей команды.
Размер концентратора рассматриваемой конструкции практически не
ограничен и диаметр его может достигать 60 м. Давление инертного газа 135 -
270 Па.
Достоинство конструкции заключается в ее простоте и легкости;
недостатком является постепенная потеря формы пленки вследствие деформации, что
приводит к некоторому снижению характеристики концентратора. Недостатком
является также уязвимость установки со стороны метеоритных частиц. Такая
конструкция применяется для краткоресурсных энергетических установок.
Гибкие надувные концентраторы с последующим отверждением пленки
отличаются от рассмотренной схемы материалом применяемой пленки.
Полихлорвиниловая пленка, например, покрытая специальным смолообразным
составом, обладает свойстзом отвердевания под действием ультрафиолетовых лучей.
Рис. 4. 6. Тепловая ловушка
В зависимости от состава смолы время отверждения колеблется от 2 до 10 ч.
После отверждения такой концентратор становится уже нечувствительным к
метеоритным пробоям и не требует постоянного давления газа во внутренней
лолости для сохранения своей формы.
На рис. 4.4 показана конструктивная схема гибкого зонтичного
концентратора.
Пленка 5, покрытая с одной стороны алюминием, натягивается на тонкие
спицы 1, • профилирующие поверхность концентратора и складывающиеся с
помощью тяг 2.
Эта конструкция более проста по сравнению с другими пленочными
концентраторами, но обладает несколько большей массой.
На рис. 4. 5 показана конструкция тепловой ловушки,
совмещенной с термоэмиссионным преобразователем (ТЭПом) энергии.
Мощность установки 500 кВт, напряжение 28 В.
Корпус ловушки выполнен в виде многослойной пятиугольной пирамиды,
между оболочками 5 и 6 которой заливается ртуть 7, а между двумя
другими — 6 и 8 — монтируются ТЭПы. Теплозащитный козырек 1 сварной
конструкции с набивкой из теплоизоляционного материала 2 приварен к силовому
кольцу S, наполненному пористым никелем 4 и одновременно служащему одним из
резервуаров для цезия. Аналогичная конструкция емкости 9 с цезием сферической
формы укреплена в вершине корпуса ловушки. ТЭП состоит из катода 10,
нагреваемого ртутью, анода //, охлаждаемого излучением с поверхности ловушки,
и трубок 12 для канализации паров цезия.
На рис. 4. 6 приведена конструкция тепловой ловушки со
створками для регулирования теплового потока.
Ловушка состоящей из кольца 2 для крепления к концентратору корпусных
деталей 3 и 5, образующих полость 4, через которую осуществляется прокачка
жидкого металла теплоносителя. Особенностью этой конструкции является
возможность регулирования величины теплового потока створками 1. Положение
а створок соответствует максимальному тепловому потоку. В узле
предусмотрено устройство 6, обеспечивающее компенсацию изменения объема металла в
ловушке при нагревании.
4.2. СОЛНЕЧНЫЕ БАТАРЕИ
В солнечных батареях (СБ) осуществляется генерирование
электрического тока путем преобразования энергии излучения
солнца с помощью полупроводниковых фотоэлектрических элементов —
преобразователей (ФЭПов).
133
■В фотоэлектрическом преобразователе под воздействием
квантов света возникает разность потенциалов между позитивной и
негативной частями полупроводника, что обусловлено выбиванием
фотонами некоторого количества свободных электронов. Панели СБ
с ФЭПами представляют собой весьма распространенный тип
электрических установок. Они широко применяются на различных
космических летательных аппаратах. Их достоинства следующие: они
просты по конструкции и в эксплуатации, эффективно реализуют
«даровую» солнечную энергию, имеют хорошие массовые
характеристики и поэтому в некоторых случаях незаменимы.
Недостатками ФЭПов являются постепенное падение к. п. д.
ФЭПоз в результате облучения их в космосе потоками
заряженных частиц и изменения состава и свойств полупроводника, а
также ухудшение фотоэлектрических свойств элементов при
увеличении их температуры. Известно, что нагрев элемента на 80° С
приводит к трехкратному падению его мощности.
Фотоэлектрический преобразователь выполняется из
кремниевых, селеновых, полупроводниковых элементов. Некоторые
сведения по применяемым материалам, удельной массе q и предельным
температурам /тах, ФЭПов и СБ приведены в табл. 4. 1.
Таблица 4.1
Материал
Кремний
Сульфид кадмия
(пленочный)
Фосфид индия
Арсенид галлия
Теллурид кадмия
Фосфид галлия
Арсенид сурьмы
V %
15
6
2
13
4
0,5
—
'max' °C
100—150
500—650
250—300
300—400
300
500—650
350—450
N, кВт
5—45
2,5
Чб' %
9—7,8
3,6
д, кг/кВт
434—35
18,2
Наибольшее распространение получили кремниевые элементы
из-за их хорошей спектральной чувствительности к солнечному
излучению и наибольшей удельной мощности.
КПД фотоэлектрических элементов, под которым понимается
отношение полезной мощности к мощности падающего' света,
определяется рядом факторов: спектром падающего света, оптическими
свойствами поверхности, на которую падает солнечный свет,
технологическими факторами и качеством полупроводников.
КПД фотоэлементов т]э составляет 7—15%, а к.п.д. солнечных
■батарей на фотоэлементах щ достигает 9%. Напряжение в этих
элементах £/ = 0,4 В; плотность тока /= (1,8 ... 5) • 10~2 А/см2;
удельная мощность #уд= (0,72 . . . 2,0) -10~2 Вт/см2.
На рис. 4. 7 показано устройство единичного
фотоэлектрического элемента.
134
Рис. 4. 7. Конструкция ФЭПа
ФЭП представляет собой многослойную керамическую пластинку, покрытую
с рабочей стороны прочным стеклообразным оптически прозрачным составом
/, защищающим элемент от воздействия космических частиц. Под ним
размещаются: интерференционный фильтр 2, припой 3, полупроводник 4 р-типа,
полупроводник 5 /2-го типа, коммутационные пластины 6 и 7.
Основа элемента — полупроводники: кремниевая пластинка 5 с большим
количеством примесей л-типа, на которую нанесен тонкий слой 4 материала
р-типа. Далее припаиваются электроды: снизу — пластинка 6 на всю
ширину а элемента, сверху — только полоска 7 к р-элементу. Припайка
осуществляется после нанесения никелевого покрытия для связи керамики с металлом.
К этим электродам подсоединяется внешняя нагрузка. При освещении
ФЭПа положительный ток идет от контакта 7 через нагрузку к нижнему кок-
такту б.
Достоинством ФЭПа являются его сравнительно небольшие размеры: а =
= 8 ... 10; Ь=Ю ... 30; с = 2 ... 3 мм. Толщина слоев 1, 2, 3, 4: 0,2^0,5; 0,02—
0,2; 0,002—0,02; 0,002—0,005 мм соответственно.
Подобные единичные фотоэлементы, встречаются в отдельных
конструкциях СБ.
На рис. 4. 8 показаны формы панелей солнечных батарей,
применяемых в различных космических летательных аппаратах.
Батарея фотоэлементов площадью 1 м2 при полезной площади 0,7 м2,
помещенная в поток солнечного излучения с плотностью 5=1000 Вт/м2,
позволяет получить электрическую мощность 40 Вт с учетом всех потерь. Масса
батареи составляет 10 кг; время работы — до года.
На рис. 4.9 приведен возможный вариант конструкции такой батареи.
В нем ФЭПы 1 укладываются в корпус 3, изготовляемый из легкого сплава, с
изолирующими прослойками 2, 5 и прослойкой 4 из гофрированной фольги,
обеспечивающей должную жесткость панели.
JUULJUI-
HDDDDIZ
ппаппс
1ППППГ
-я-
-
-
-
-п-
_
"Т
1
птпгтти
Рис. 4. 8 Формы панелей солнечных батарей
135
Рис. 4. 9. Конструкция батареи ФЭПов
Известны [4] параметры солнечных батарей, разрабатываемых или
применяемых на различных спутниках Земли. Батарея для космического аппарата
имеет следующие данные: площадь — 2,76—21 м2, электрическую мощность —
150—1000 Вт, массу — 34—130 кг. Другая СБ имеет площадь 21 м2,
электрическую мощность до 1 кВт, массу 130 кг.
4. 2. 1. Пленочные солнечные батареи
Фотоэлектрические преобразователи могут быть выполнены в
виде тонких пленочных элементов. Для этого пригодны
полупроводниковые фотоэлектрические элементы на основе сульфида кадмия,
теллурида кадмия, селенида кадмия.
При изготовлении такого единичного преобразователя
площадью 10 до 100 см2 можно получить к. п. д. элемента в пределах 5—
6% и удельную мощность 22—100 Вт/кг (сульфид кадмия), 65—
154 Вт/кг (теллурид кадмия).
На рис. 4. 10, а, показана конструкция элемента, выполненного
на прозрачной стеклянной основе.
На стеклянную пленку 1 толщиной 0,05—0,1 мм наносится тонкий слой
припоя, состоящего из подложки 2 (Я = 0,001 ... 0,005 мм) и окиси олова 3 (h=
= 0,05 ... 0,01). Далее путем напыления наносятся тонкие пленки сульфида
кадмия'4 (/г = 0,002 ... 0,05 мм) и сульфида меди 5 (Л = 0,00015 ... 0,0005 мм). Эти
две пленки и образуют фотоэлемент. Для снятия тока применяется
мелкоячеистая сетка или контакты из серебряной пасты.
Такой фотоэлемент прозрачен. Свет может падать прямо на слой 5 или с
обратной стороны через стекло 1 и освещать полупроводниковый барьер —
спай 2—3. Есть разработки конструкции поликристаллического ФЭПа из
теллурида кадмия. Пленки из этого материала толщиной от 5 до 10 мкм осаждаются
в вакууме на стеклянную подложку с помощью специального испарителя. Далее
слой теллурида кадмия обрабатывается присадками для получения материала
проводимостью р-типа, а затем — в ионном растворе меди для образования тон-
136
Рис. 4. 10. Конструкция пленочного ФЭПа:
а—прозрачный; б—непрозрачный
кого 'Слоя теллурида меди. Полученный таким способом фотоэлемент при
освещении с плотностью 80 мВт/см2 обеспечивает к.п.д., равный 6%, и напряжение
0;55 В.
На рис. 4.10, б показана конструкция элемента, выполненного на
непрозрачной металлической основе. Достоинством такого элемента является
повышенная гибкость и хорошие массовые характеристики. Он получается путем
вакуумного осаждения пленки сульфида кадмия 2, толщиной 0,05 мм, на
молибденовую фольгу / (/г —0,05 мм). Барьер (слой) образуется окислением слоя
меди 3, осаждаемой гальваническим методом на пленку сульфида кадмия 2.
В качестве контакта р-слоя служит золотая или серебряная сетка 4, которая
прикрепляется к пластине прессованием. Освещение такого ФЭПа должно быть
односторонним, так как фольга непрозрачна. Размер элемента (70—150) X (70—
150), к.п.д.^3,8%.
Прозрачные пленочные элементы устанавливаются на
прозрачную пластмассовую пленку, которая может быть собрана в панель,
ориентируемую и не ориентируемую относительно Солнца. Неори-
■ентируемые панели требуют в 4—6 раз большую площадь при
равных условиях, но установка в целом упрощается, так как
отсутствует механизм ориентации.
Наиболее выгодны складные или надувные пластмассовые
конструкции ТЭПов. Так, например, надувная сфера, изготовленная из
прозрачной пленки, может служить основой для размещения на ее
поверхности прозрачных пленочных ФЭПов, обеспечивая
компактную укладку и простой метод развертывания. Известно, что
освещаемая солнцем сфера, покрытая пленочными элементами,
эквивалентна плоской панели с площадью, равной площади проекции
сферы на плоскость, перпендикулярную Солнцу. Достоинством такой
конструкции является постоянная величина получаемой энергии
независимо от ориентации установки относительно Солнца.
При диаметре сферы до 30,5 м такая установка может дать
несколько киловатт электроэнергии с к. п. д. равным 3...5%. На
рис. 4. 11, а представлена конструкция пленочной СБ такого типа.
Установка состоит из легкой прозрачной надувной сферы 1, с внутренней
стороны которой прикреплены ФЭПы; узлы крепления сферы — бака 2, штанги
3 и полезного груза — приборного стыка 4. Сфера 1 надувается азотом под
давлением 68 Па. На рис. 4.11, б показано крепление ФЭПа. Предварительная
оценка массы сферы с ФЭПами показывает, что на долю пленочных элементов
приходится 95% ее массы. Средняя удельная мощность КЭУ составляет 4,J—
21 Вт/кг, при к.п.д. батареи, равном 1—5% соответственно. В табл. 4.2 даются
оценочные характеристики сферической СБ.
137
Рис. 4. 11. Конструкция пленочной СБ:
а—конструктивная схема; б—крепление фЭПа (см. рис. 4. 10)
Таблица 4.2
Диаметр сферы,
м
30,5
18,4
6,1
КПД элемента,
0/
1—5
1—5
1—5
Электрическая
мощность С Б,
кВт
10—51
4—18
0,5—2,3
Масса
элементов,
кг
2430
875
96,5
Масса пленки,
кг
55,5
20
2,2
Удельная
мощность,
Вт/кг
4,02—20,25
4,47—20,05
5,07—23,15
Другим вариантом конструкции солнечных батарей с
применением пленочных элементов является гибкая металлическая панель.
Элементы крепятся к панели, затем она сворачивается в
компактную форму, удобную для запуска. На орбите панель
разворачивается путем заполнения ее газом или благодаря остаточным в'нут-
ренним напряжениям в конструкции. Этот вариант конструкции
проще предыдущего1, обладает малой массой, более простой
технологией изготовления, чем надувные конструкции. Однако для
обеспечения оптимальной характеристики панелей необходима система
ориентации, что увеличивает их массу.
Пленочные элементы позволяют существенно уменьшить массу
солнечных батарей. Увеличение площади единичного ФЭПа до 50—
225 см2 дает еще больший выигрыш. Оценки показывают, что КДУ
с такими элементами могут обеспечить удельную мощность
порядка 65—110 Вт/кг.
4.3. РАСЧЕТ ПЛЕНОЧНЫХ КОНЦЕНТРАТОРОВ И СБ
НА ПРОЧНОСТЬ
Пленочные конструкции целесообразно рассматривать как
абсолютно гибкие пластины (АГП) или мембраны. Мембраной или
АГП называется пластина, имеющая исчезающе малую жесткость
на изгиб. Из формулы цилиндрической жесткости D =
= £А3[12(1 — \i2)] видно, что это возможно при А«0. Иногда
мембраной называют пластину, работающую только на растяжение,
138
т. е. когда изгибающий момент МжО.
Практически мембрана—это
пластина, у которой прогибы велики (wo/h=
= 20, где w0— 'перемещение центра
мембраны).
Уравнение равновесия сил
упругости АГП. Рассмотрим мембрану (рис.
4. 12), имеющую жесткую заделку по
внутреннему контуру (по радиусу а) и
по внешнему (по радиусу Ь) и
нагруженную давлением р.
Даны величины A, a, b,.p, E.
Следует иайти вг, w.
Особенности такой мембраны
заключаются в том, что следует искать
напряжения, направленные только ра-
диально аг, хотя она находится в
плоско-напряженном состоянии. Это
объясняется незначительностью
напряжений а9 . Этим объясняется также
необходимость жесткого закрепления внешней и внутренней контурных
поверхностей.
Дифференциальное уравнение равновесия элемента мембраны
получаем из системы (2. 92) гибкой пластины:
Рис. 4. 12. Схема нагружения
мембраны
Это уравнение при D«0 имеет вид
г[(1/г)(гП']'=-е2/2; fo=
где
_ Trr я j _ Тг , —_ г . v_ pr2b
Eh ' r~ 2nr ' b ' ' 2Eh
Отсюда находятся следующие важные соотношения:
fr у Ттах
аг = —— = L —=- ; огтах--п. = ;
h r a
fr
(4.1)
(4.2)
(4.3)
Ф 1 г max
шах ~ Eh
гтах~2яа ; п~ Ь '
Найдем функцию Т.
Угол наклона элемента нагруженной мембраны можно представить
в виде
д = С?. (4.4)
Подставляем это значение в первое уравнение системы (4. 1) и
интегрируем его дважды. Получаем
Щ (4.5)
139
где постоянные Сх и С2 определяются из граничных условий.
Для мембраны, жестко закрепленной по контуру и имеющей
жесткий фланец по центральному отверстию, эти условия будут
следующими: при г=ау 8г=0 при г='1, 8г = 0, т. е. радиальные
перемещения мембраны на радиусах г=а и r=b должны быть равны
нулю. Тогда для этих двух радиусов справедливо соотношение
где следует иметь в виду, что производная Т берется по г. Таким
образом, получаем
огкуда Сг= -l=li(l +a2); С2=-^-~а\ (4.6)
1 —р. 1 4-р.
Подставим теперь функции Т и 0 по зависимостям (4. 4) и (4. 5) во
второе уравнение (4. 1) и умножим полученное произведение на г.
Интеграл от полученного произведения, взятый в пределах от
а до единицы, в соответствии с методом Галеркина приравняем
нулю:
4^fi + + )
j L 16 V г,
а
Далее, так как w'=—9, то согласно выражению (4.4)
w
где постоянная С выбирается из условия равенства нулю прогиба
w на внешнем контуре.
Таким образом, w =—Cb(r2— l)/2.
Отсюда находим перемещение центра мембраны
и значение постоянной
с%1&5— Т^- (4'8>
Подставив теперь эти значения С и v в уравнение (4 7), получим
зависимость между нагрузкой и прогибом в центре мембраны:
140
Г I
500
Рис. 4. 14. Элемент пленочного СК
Рис. 4. 13. Зависимость прогиба
мембраны от нагрузки
Здесь
Если а=0, то при
3 — p. -2 -2
1 + [A
,0,3 Л3=-4+-3->
(4. 10)
(4.11)
3 ' 1 — {X
)^3,19(<sy0M)3, wo=O,68bprpb/(Eh).
Этот результат почти не отличается от точного:
pb4/(Eh*) = 3A5(w0/h)3; w0=Ofi62bVpb/(Eh).
Зависимости прогиба мембран от действующего давления
показаны на рис. 4. 13.
Порядок численного расчета напряжений мембраны следующий.
Находим Аъ и wo = -^=- \/ ~§^> а затем — постоянные Сь С2, С3.
Определяем Т и Гтах:
, то, изменяя Wo/h, добиваемся
где а=а/Ь.
Находим аг, аГтахИ п. Бели
его увеличения до единицы.
Пример 4.1. Рассчитать прочность пленочного солнечного концентратора
dprac. 4. 14), если 6=1/1,16 м; /? = 32,15 м; Л=0,015 мм; о;0=1,86 м, £=3300 МПа;
[х = 0,435, т-9000 ч; ^=55° С.
Находим по формуле (4. 10) значение А5 и оцениваем величину
необходимого давления наддува пленки по формуле (4.9). Получаем Л3 = 3,87; р = 79,5 МПа;
Находим напряжение в пленке.
141!
Получаем С = 0,333; Ci = —4,54. Тоща
ЕС2
(Jr = ■
16
(?+d)= --2,29 (72-4,54),
ОГКуда СГгтах=Ю4 МПа.
У1з диаграммы длительной прочности находим
тгткуда запас прочности пленки
Глава V
ТОПЛИВНЫЕ ЭЛЕМЕНТЫ.
ТОПЛИВНЫЕ АККУМУЛЯТОРЫ
В космических энергетических установках применяются
различные химические источники тока — электрохимические генераторы
<ЭХГ).
На схеме рис. 5.1 показаны основные типы ЭХГ, отличающиеся
конструктивными параметрами и применяющиеся в КЭУ.
Электрохимические элементы (ЭХЭ) — это такие
гальванические элементы, где токообразующий процесс происходит в основном
за счет химической энергии электродов.
Если происходящие при разряде изменения веществ при
электрохимической реакции необратимы, то они называются
одноразовыми или простыми гальваническими
элементами. Если израсходованные при разряде активные вещества
могут быть восстановлены (регенерированы), то такие ЭХЭ
называются аккумуляторами. Регенерация в рассматриваемых ЭХЭ
достигается пропусканием тока © обратном направлении, т. е.
регенерация активных веществ — электрическая.
Оба этих типа электрохимических элементов применяются в
КЭУ, обладают высокой надежностью, хорошими
эксплуатационными характеристиками: их рабочее напряжение 1,5—2 В;
максимальная удельная энергия £уд=30 ... 100 Вт-ч/кг; число рабочих
циклов аккумуляторов 100 ... 400.
Топливным элементом (ТЭ) называется гальванический
элемент, в котором, как и в ЭХЭ, химическая энергия топлива
непосредственно преобразуется электрохимическим путем в
электрическую. В отличие от ЭХЭ электроды не принимают прямого
участия в процессе.
Топливные элементы относятся к прямым преобразователям
химической энергии топлива в электрическую. Возможность такого
превращения вытекает из того, что химическая энергия имеет
электрическую природу. Обычно химическая реакция между горючим
и окислителем заключается в отдаче или приобретении их
атомами определенного количества электронов. Эта реакция сопровож-
142
Одноразодые
с расходобониеп
\ рабочего тело
Шупуляторы
с электрической]
регенерацией
срасходоп
РТ
Аккупуляторы
с электрической
регенерацией
Регенеративные
агрегатной
схепы
Регенеративные
собпещенной
схепы
N1 - кодпип
Ад - кодпии
Ад - цинк [
ЛУ - цинк
РЬ - кислота
РЬ - кодпип
РЬ — цинк
_Г
U-селитра
А1 - кислород
Zn-нислоро'б
Ве-
перекись
z - кислород
с циркуляцией
электролита
КОН
JL
JL
LL - сера
NG-сбинец
No - сера
Na - олодо
Na-теллур
Na- ртуть
Li -селен Li -олобо
LL - водород
непбранные
КОН
менбронные
Рис. 5. 1. Классификация электрохимических генераторов
Ш-теллур
Ш- хлор
Ll - иод
LL - хлор
Li - олобо
дается соответствующим тепловым эффектом. Поскольку в
химической реакции участвует огромное число атомов и молекул,
передвижение электронов в этих реакциях хаотично. В итоге
неупорядоченных пермещений электронов выделяется тепловая энергиям
Преобразование этой тепловой энергии в электрическую наиболее
эффективным машинным способом дает к.п.д., равный 30—40%.
Для непосредственного превращения химической энергии з
электрическую необходимо обеспечить перемещение электронов с
определенными скоростями и в наперед заданных направлениях.
Это упорядоченное движение электронов при химических
реакциях происходит во всех гальванических элементах. Такое
получение электроэнергии более эффективно. Коэффициент полезного
действия практически удваивается.
Достоинствами ТЭ являются: относительно небольшие удельные
массы, отсутствие движущихся частей, бесшумность, высокий
коэффициент полезного действия. Теоретически к.п.д. топливных эле-
ментов существенно превышает к.п.д. других 'Преобразователей и
может достигать 85%. Конструктивные формы ТЭ сравнительно
несложны.
Однако многие стороны работы ТЭ еще не изучены и, в
частности, не найдены материалы для них, сохраняющие
работоспособность в течение длительного времени,.
Топливные элементы даже с катализаторами, ускоряющими
реакции, теряют к.п.д. в процессе эксплуатации вследствие
необратимых процессов, возникающих при их работе.
143
Рассмотрим классификацию топливных элементов,
применяемых в КЭУ, по параметрам, влияющим на конструкцию.
По способу использования рабочего тела ТЭ можно разделить
на две группы: простые топливные элементы, или элементы прямой
реакции, и регенеративные элементы.
В ТЭ первой группы в результате химической реакции
получаются электроэнергия, тепловая энергия и продукты реакции.
Продукты реакции не используются повторно в топливном элементе и
шштому такие элементы должны иметь баки с рабочим телом и
*батеи для приема продуктов реакции. Типичным примером могут
{быть водородно-кислородные ТЭ, продуктом реакции в которых
"Является вода.
В регенеративных топливных элементах продукты реакции
после восстановления возвращаются в ТЭ для повторного
использования. Регенеративные ТЭ по способу регенерации могут быть
разделены на три группы:
аккумуляторы с электрической регенерацией, в которых рабочие
тела в процессе разряда образуют химическое соединение,
разлагающееся на основные компоненты при обратном движении
электрического тока (Li — сера, Na — сера, Na — теллур, Li — селей
■и др.);
регенеративные элементы с тепловой регенерацией и агрегат-
Бой схемой, в которых восстановление осуществляется в
результате многоступенчатого процесса разделения продуктов
реакции, отвода тепла от полученных компонентов, перегона
компонентов в исходный топливный элемент (примерами таких ТЭ
являются Na—свинец, Na—олово, Na—ртуть, Li—олово, Li—водород
31 др.);
регенеративные элементы с тепловой регенерацией
совмещенной схемы, в которых путем подбора рабочих тел и
температур возможно осуществить процесс регенерации в границах
одного конструктивного узла, что придает ТЭ исключительную
компактность и простоту в эксплуатации. Часто применяются
отдельные элементы в виде тепловой трубки. (Примерами таких
ТЭ могут служить Na—теллур, Na—хлор, Li—иод, Li—хлор,
Li—олово и др.).
По роду рабочего тела ТЭ можно разделить на водо-
,родно-кислородные и жидкометаллические. В водородно-кислород-
!лых ТЭ процесс основан на реакции окисления горючего —
водорода. Достоинством этих элементов являются сравнительно
невысокие температуры рабочего процесса.
В жидкометаллических ТЭ реакция идет в сплавах металлов;
она сопровождается часто сравнительно высокими температурами.
Они имеют значительно более высокие удельные показатели, чем
водородно-кислородные. Однако более высокие температуры, а
иногда и давления несколько усложняют их конструкцию.
Большие различия вносит в конструкцию топливного элемента
физическое состояние рабочего тела, поступающего
в топливный элемент. По этому признаку топливные элементы
можно разбить на элементы: газ — газ (например, водородно-кис-
лородный ТЭ), газ — жидкость (литиево-водородный ТЭ);
жидкость — жидкость (элемент на сплавах металлов).
Все топливные элементы имеют среду, разделяющую
электроды и способствующую свободному переходу ионов от одного
электрода к другому, но препятствующую переходу нейтральных
атомов. Этой средой является электролит, имеющий в своем составе
атомы рабочего тела топливного элемента, но не растворяющий
электроды и рабочее тело.
По типу электролита водородно-кислородные ТЭ
делятся на кислотные и щелочные! Электролитом в жидкометалли-
ческих ТЭ являются расплавы солей. Электролиты могут быть
применены в жидком, твердом или квазитвердом состоянии. В
последних двух случаях гогорят, что топливный элемент имеет
ионообменную мембрану.
В топливном элементе топливо и окислитель подводятся к
соответствующим электродам. Благодаря электрохимической
активности реагентов на них устанавливается определенный потенциал:
топливный электрод становится отрицательным, а окислительный—
положительным полюсом элемента. При соединении обоих
полюсов через нагрузочное сопротивление реагенты электрохимически
преобразуются, причем освобождающиеся на топливном электроде
электроны перемещаются через внешнюю цепь к
противоположному электроду.
5.1. КОНСТРУКТИВНЫЕ СХЕМЫ И КОНСТРУКЦИЯ
ТОПЛИВНЫХ ЭЛЕМЕНТОВ
5. 1. 1. Водородно-кислородные топливные элементы
Выполненные конструкции водородно-кислородных ТЭ можно
разбить на три группы: топливные элементы с жидким
циркулирующим щелочным электролитом, мембранные ТЭ с кислотным
электролитом и мембранные ТЭ с щелочным электролитом.
Принципиальная схема конструкции ячейки первой группы ТЭ
показана на рис. 5.2. Я'чейка состоит из камеры горючего 1,
камеры окислителя 3, пористых электродов 2 и 4, электролита 5. Это
элемент прямой реакции. Он имеет низкую и среднюю рабочую
температуру реакции; электролит является раствором или
расплавом солей, например калия (КОН), горючее — водород и
окислитель — кислород. На примере этого ТЭ, работающего с
рабочими телами, находящимися в различных фазовых состояниях (газ —
жидкость — газ), установим основные трудности в создании
топливного элемента.
Для прямой реакции преобразования химической энергии в
электрическую, так же как и в гальваническом элементе, в топливном
элементе требуется осуществить непосредственный контакт трех
обязательных частей: рабочего тела (например водорода),
электрода и электролита (например раствора солей КОН). Очевидно, кон-
145
Рис. 5. 2. Схема ячейки водородно-кислородного ТЭ
такт таких разнородных тел без разделительных устройств
невозможен. В топливных элементах с рабочими телами газ —
жидкость — газ разделение осуществляется электродами, которые
выполняются в виде пористого тела. Эскиз такого электрода (узел!)
показан на рис. 5.2.
Одна из важных проблем при конструировании
электрода—выбор размеров пор, которые должны быть такими, чтобы на рабочем
режиме топливного элемента в них сохранялось равновесие сил
давления газообразного рабочего тела и капиллярного давления
жидкости, т. е. давления, создаваемого поверхностным
натяжением пленки жидкости.
В поры чрезмерно большого размера (пора «а») электролит не
проникает из-за низкого капиллярного давления. Газ, в этом
случае, например Н2 или О2, может проникнуть через поры в
электролит и образовать взрывоопасную смесь.
Через чрезмерно мелкие поры (пора «в»), газ не поступает к
электроду из-за большого капиллярного давления. Электролит
«зыпотевает» в газовую полость рабочего тела, что нарушает
стабильную работу топливного элемента. Только нужный размер пор
(пора «б») обеспечивает стабильный контакт газа-реагента,
электролита и электрода.
Водородно-кислородные ТЭ
с жидким циркулирующим электролитом
На рис. 5.3 показана конструктивная схема такого элемента с
обслуживающими его агрегатами.
Вся энергоустановка состоит из блока топливных элементов (на рисунке
он представлен в виде двух ячеек); баков для питания 9, 11; бака с
нейтральным газом 10; вентиля 12, теплообменника 13, холодильника-излучателя 14;
насоса 15; сепаратора 16, бака для продуктов сгорания 17.
Ячейка топливного элемента состоит из топливной, водородной, полости /г
отрицательно заряженного электрода — «анода» 2, полости с электролитом 3, по-
ложительного окислительного электрода — «катода» 4, поддерживаемого никэ-
левой перфорированной пластиной 5, и изоляторов 6. (Название «анод» и
«катод» условны и относятся к внутренней цепи ТЭ.) Электроды 2, 4 выполнены
двухслойными. Температурная компенсация изменения объема электролита ocv-
146
Рис. 5. 3. Схема водородно-кислородного ТЭ
ществляется сильфонной коробкой 7. Блок топливных элементов, состоящий из
30 ячеек, помещается в цилиндрический корпус 8. К блоку подводятся водород
и кислород из баков 9, 11 соответственно. В корпусе сделаны выводы для
электрического тока и воды с водородом.
Образование воды в элементе происходит на водородном электроде 2. Ее
лары удаляются из элемента в смеси с циркулирующим водородом и поступают
через вентиль 12 и теплообменник 13 в холодильник 14. Из холодильника вода
откачивается насосом 15 в сепаратор 16 и бак 17. Водород с небольшим
количеством остаточных паров воды после подогревания в регенераторе вновь
поступает в топливный элемент.
Рабочая температура реакции в элементе 260° С, давление
газов 0,4 МПа. При пуске и при работе на малой мощности элемент
разогревается специальным нагревателем. При работе элемента на
электродах интенсивно выделяется тепло. Оно удаляется
излучением из корпуса и циркулирующим водородом. Температура водо-
родио-паровой смеси в топливной полости элемента выше
необходимой для конденсации воды, поэтому смесь поступает в
регенератор, где часть тепла отдается поступающей после сепарации па-
ро-водородной смеси, а затем окончательно—.в
конденсаторе-излучателе. Возможен такой режим работы ТЭ, когда паро-водородная
смесь, минуя регенератор 13, поступает в конденсатор-излучатель.
Работу топливного элемента можно представить в виде
нескольких этапов.
Первый этап состоит в обеспечении ионизации молекул или
атомов горючего, т. е. в образовании положительных ионов и
свободных электронов. Второй — в присоединении электронов
нейтральными атомами окислителя с образованием отрицательных ионов.
Этот этап происходит на положительном электроде. И, наконец,
третий этап состоит в соединении ионов горючего и окислителя в
межэлектродной среде с образованием продукта реакции. Роль
межэлектродной среды выполняет электролит. Если он кислотный,
то он является проводником положительного иона водорода к
положительному электроду. Реакция и выделение воды происходит
на положительном электроде в кислородной полости элемента. Ес-
147
ли электролит щелочной, то отрицательный ион окислителя —
кислорода (или его соединения) — перемещается к отрицательному
водородному электроду, где он, соединяясь с ионом водорода, дает
воду. Реакция и выделение воды в этом случае происходит на
отрицательном, водородном, электроде.
В рассматриваемой схеме топливного элемента, выполненного
с щелочным (КОН) электролитом, под действием каталитических
свойств топливного электрода «анода» молекула водорода
распадается на два атома, которые, в свою очередь, подвергаются
ионизации с образованием соответствующего количества протонов и
электронов:
Электроны по внешней цепи поступают к окислительному
электроду «катоду», где происходит реакция:
Так как ион кислорода в водной среде неустойчив, он
переходит в ион гидроксила:
Ионы гидроксила с помощью электролита перемещаются к
«аноду», где происходит заключительная реакция:
Образовавшаяся вода разбавляет электролит и, если не
принять мер по ее удалению, концентрация электролита снизится
ниже допустимой нормы.
Удачная конструкция позволяет обеспечить выделение воды
на поверхности водородного электрода со стороны газовой
полости и тем самым сохранять концентрацию электролита более или
менее стабильной по времени работы ТЭ.
Водородно-кислородный ТЭ с ионообменной мембраной
Жидкий электролит в топливном элементе создает ряд
специфических трудностей при размещении его в конструкции.
Необходимость обеспечения герметичности соединений элемента,
применение уплотнений, разделяющих электролит и рабочее тело?
усложняет конструкцию, утяжеляет ее, снижает надежность. Вот почему
существенными достоинствами обладают ТЭ с твердым
электролитом в виде ионообменной мембраны.
Одна из конструкций представляет собой кислотный
электролит, находящийся в квазитвердом состоянии. Мембрана состоит из
пористой керамики смешанной с полимером, в который введена
серная кислота. Каждая сторона'мембраны покрывается слоем
платины в виде сетки, которая является электродом ТЭ и его
катализатором.
Электроды выполнены либо в виде сплошной фольги из
платины толщиной до h-=0,2 мм, либо, для улучшения диффузии газа
148
через фольгу, в виде сетки из никелевой проволоки диаметром
d-=76 мкм (60 отверстий на 1 см2), покрытой платиной. Этим
обеспечивается условие одновременного контакта электролита,
электрода и газа.
Толщина мембраны может достигать 0,8 мм, включая
электроды. Ионообменная мембрана состоит из никелевого пористого
водородного электрода, капиллярного пористого асбеста,
пропитанного раствором КОН, и пористого платинового'кислородного
электрода.
5. 1.2. Регенеративные топливные элементы
Весьма целесообразной представляется такая компоновка ТЭ,
когда продукты химической реакции регенерируются для
повторного использования.
Согласно приведенной на рис. 5.4 схеме, топливный элемент
можно объединить с регенератором, в котором образующиеся в
элементе продукты реакции восстанавливаются в исходные
реагенты, которые вновь подаются в элемент.
Очевидно, в регенератор подводится такое же количество
энергии, которое вырабатывается в топливном элементе. Обычно
регенеративные устройства выполняются тепловыми и поэтому
регенераторы называются термическими. Возможны, однако, и
другие типы регенераторов, например химические,
электрохимические.
Термическая регенерация заключается в нагревании
образовавшегося при получении энергии сплава до такой температуры^
при которой из сплава испаряется компонент, обладающий
меньшей температурой кипения. Затем пар конденсируется чв
конденсаторе, собирается так же, как и обедненный этим компонентом
сплав, и по отдельным магистралям возвращается в топливный
элемент. Предполагается, что компоненты обладают такими тепло-
физическими свойствами, что разделение их технически возможно.
ТЭ с термической регенерацией
На рис. 5.5 показана схема одного из простых элементов с
термической регенерацией (литий — водород). Система состоит из
работающего при 450° С топливного элемента 1, 2, 3, 4 (в котором
происходит гидрирование лития) и регенератора 5, работающего
при температуре выше 850° С, в котором гидрид лития LiH
диссоциирует на составные части: Li и Н2. Электролитом является
расплавленная эвтектическая смесь LiF—Li. Отрицательные заряды
ионизированного лития собираются на корпусе /, гидрид лития —
на поверхности электрода 3.
Это пример топливного элемента, где рабочие тела находятся
в различном агрегатном состоянии — жидкость и газ.
149
I
L^
Hi
-о— ■<->
тэ
Реагент 1
Реагеигп2
Продукт
i
Регенератор
t
реакции
Рис. 5. 4. Схема регенеративного ТЭ
Рис. 5. 5. Жидкометаллический ТЭ
литий — водород
Жидко металлические ТЭ
ТЭ ртуть — амальгама ртути. В показанном на рис. 5.6 ртутном
жидхометаллическом ТЭ натриевая амальгама и ртуть вступают
в электрохимическую реакцию. Продукты реакции далее
термически разделяются на первоначальные реагенты посредством
дистилляции в регенераторе 2; тепло для разделения получают из
источника тепла /.
Основу топливного элемента 5 составляет пористая керамическая ионная
мембрана, пропитанная электролитом из расплавленной натриевой соли.
Расплав удерживается в порах мембраны благодаря капиллярным силам.
Нейтральные молекулы (частицы) натрия на поверхности мембраны ионизируются и
отдают отрицательный заряд электроду Л.
Одновременно ионы натрия превращаются в атомы у поверхности второго
электрода К, где, реагируя с ртутью, образуют интерметаллическое соединение
типа NaxHg. В результате перетока ионов натрия к электроду К концентрация
его у электрода А уменьшается. Оставшаяся, неиспользованная его часть
сливается, как указано на рис. 5.6.
В результате процесса из элемента выходят обедненный натрий и
амальгама ртути. Далее оба этих потока объединяются и с помощью
электромагнитного насоса перекачиваются в регенератор 2. В сепараторе регенератора 2,
нагреваясь от постороннего источника тепла 1, амальгама обогащается
натрием. Более легко испаряющаяся ртуть переходит в конденсатор 3, откуда
поступает в топливный элемент 5. Обогащенный натрием сплав натрия с ртутью
поступает в холодильник-излучатель 4, а оттуда, достигнув температуры 475° С, — в
топливный элемент.
Так как сброс тепла целесообразно провести при максимально
возможной температуре реагентов, то температура нагрева
излучателя устанавливается на уровне 475° С. Эта температура
определяется наилучшей работоспособностью электролита. Оптимальной
температурой электролита является температура его плавления.
В этом примере она равна 460° С.
Давление паров ртути, выходящей из сепаратора, равно
0,7 МПа.
150
Узел!
Щ(0,7МП(Г*75оС)
Hal
Рис. 5. 6. Ртутный ТЭ
С таким же давлением в топливный элемент поступает
обогащенный сплав амальгамы ртути. Таким образом, мембрана в
элементе не несет нагрузок от давления реагентов.
Жидкометаллические ТЭ являются перспективными. Их
достоинства обусловлены весьма большими скоростями электродных
реакций в результате контакта жидких металлов с расплавом
солей и существенно большей проводимостью расплагвов солей
электролитов по сравнению с лучшими водными растворами обычных
гальванических элементов, что в результате дает малые омические
потери, сопровождающие реакцию, и высокие к.п.д. топливного
элемента.
ТЭ натрий — олово. Известно, что для термической регенерации
металлы должны обладать существенной разницей между точками
кипения или давлениями пара для того, чтобы исключить взаимное
проникновение при их разделении. Такими свойствами обладают
натрий и олово.
Давление пара натрия зависит от концентрации его в сплаве
Na—Sn и существенно превышает давление пара олова при
температуре кипения сплава Na—Sn. Это обусловливает легкое
выкипание натрия при нагревании и конденсацию при охлаждении.
Экспериментально полученные данные показывают, что
топливный элемент, имеющий натриевый анод и катод из сплава
натрий — олово (15—30% Na), развивает ЭДС, равную 0,42—0,36 В
при температуре 500—700° С.
Разделение натрия и олова происходит тем эффективнее, чем
выше температура. При температуре ^1000° С в испарителе
остается сплав, содержащий три массовых процента натрия, который
и поступает в ТЭ.
Конструктивная схема этого ТЭ показана на рис 5.7; его топливная батарея
состоит из нагревателя /, регенератора 2, конденсатора 3 и собственно
топливного элемента, включающего корпус — «катод» — 4, выполненный из
нержавеющей стали и являющийся сборником сплава натрий — олово; сетку — «анод» —
5 и ионообменную мембрану 6, выполненную в ^иде чаши из пористой окиси
151
Рис. 5. 7. Жидкометаллический ТЭ натрий — олово
алюминия. Мембрана пропитана эвтектической смесью NaCl и Na, имеющей
температуру плавления 575° С. Рабочая температура элемента равна 625—650° С,
регенератора — 1000° С. В этих условиях при содержании 13,6—26,3% натрия в
сплаве при давлении паров натрия в «анодной» полости элемента, равном 73,5—
88,4 Па (0,54—0,65 мм рт. ст.), получают ЭДС, равную 0,3 В, и ток, равный
0,1 А.
Сплав натрия и олова из «катодной» полости 4 перекачивается в
регенератор 2. Дистилляция в нем натрия возможна, если давление паров его над
сплавом будет превышать давление пара чистого натрия. Известно, что
давление паров чистого натрия при 650°С равно 72 кПа (53 м;м рт. ст.). Известно
также, что давление паров натрия при нагревании сплава (13,6 и 26,3ID/o Na) при
900°С равно 1,3—4,3 кПа (9,5—31,68 мм рт. ст.), а при *=1100°С 9,5—
33,9 кПа (70,2—249,6 мм рт. ст.) соответственно. Отсюда видно, что
температура дистилляции в регенераторе, равная 1000° С, полностью обеспечив-ает
разделение сплава на исходные компоненты.
Экспериментальное исследование работоспособности ячейки
такого ТЭ показало, что полный к.п.д. процесса равен 16%, плот-
но'сть — 0,32 Вт/см2, удельная мощность — 140 Вт/кг.
ТЭ литий — селитра. Литий (^Пл= 186° С) и эвтектический сплав
нитратов солей LiNO3 и KNO3 (селитра £ПЛ=133°С), который
является сильным окислителем и одновременно электролитом,
образуют ячейку топливного элемента.
Топливная батарея (рис. 5.8) такого ТЭ состоит из нескольких собственно
топливных элементов, насоса перекачки электролита 6, сепаратора 7, бака с
отработанными газообразными продуктами 8 и компенсационной емкости 9.
«Анод» 1 топливного элемента — литий — находится в твердом состоянии;
расплав солей — эвтектика нитратов 55t0/o LiNO3 и 45% KNO3 — в жидком
состоянии. «Катод» 2 представляет собой пластину из никеля или меди.
Номинальный рабочий режим ТЭ соответствует температуре
150° С. Эвтектика — электролит — легко ионизируется в
расплавленном состоянии. На «аноде» происходит ионизация лития с
выходом положительного иона в расплав солей и концентрацией
отрицательного заряда на отрицательном электроде — литии.
На «катоде» происходит абсорбция кислорода О2, который
берется из расплава электролита при его термическом разложении.
При замыкании внешней цепи происходит диффузия
положительных ионов лития к «катоду» и образование окиси лития и
окислов азота.
152
1 1 Ъ 4 6 7
Рис. 5. 8. Схема литий-селитрового ТЭ
На литиевом электроде пленка окислов рыхлая и не мешает
прохождению реакции.
В процессе эксплуатации ТЭ окислы азота, окислы лития
насыщают электролит и должны быть сепарированы; одновременно
происходит выгорание лития. Для сохранения зазора между
электродами в ячейке имеется подающая пружина 3 и
дистанционные упоры 4. Блок ячеек устанавливается в корпусе 5.
Регенеративный ТЭ, совмещенный с тепловой трубкой
Процессы испарения 1И конденсации, происходящие в тепловой
трубке, совмещенные с образованием и разделением сплава,
позволяют спроектировать компактную замкнутую энергетическую
установку в одном агрегате (рис. 5.9).
На рис. 5.9, а показана принципиальная схема элемента.
Рабочим телом ТЭ является сплав лития и олова. Топливный
элемент состоит из участка подвода тепла А, промежуточного
участка Б, по которому в одном направлении проходит сплав, а в
другом олово, и участка В, в .котором происходят конденсация лития,,
образование сплава и выделение электрической энергии.
Перекачка сплава осуществляется насосом кондукционного типа при
прохождении вырабатываемого тока в его рабочем канале.
На участке А происходит разделение сплава на две части:
жидкую — олово и газообразную — литий. Литий и олово, минуя
тепловой регенератор 5, поступают в собственно топливный элемент
В. Здесь происходит конденсация и ионизация лития, который,
пройдя через пастообразный электролит, соединяется с оловом,
образуя сплав лития с оловом. Этот сплав перегоняется насосом Г в
холодильник излучатель Д, а затем — в сепаратор А.
Как видно из конструктивной схемы, представленной на рис. 5.9, б, ТЭ
состоит из цилиндрического корпуса 4 и двух соосмых оболочек 2 и 3, образующих
каналы для сплава литий — олово и олово.
Разделению лития и олова способствуют лопатки 1, создающие вихревое
Движение олова в канале между оболочками 2 и 3. Оболочка 3 переходит п
сетку — электрод, которая вместе с сеткой — электродом — 5 образует
полость для размещения пастообразного электролита 6, являющегося смесью солей
лития.
153
—*-*- Сплпд Ll-Sn
*- Жидкий Sn
— Паоы LI
Рис. 5. 9. Регенеративный ТЭ, совмещенный с тепловой трубкой:
а—^схема прохождения рабочего тела; б—конструкция ТЭ
Рис. 5. 10. Конструкция литий-серного аккумулятора
Электроды отделены друг от друга изолятором 7. Токосъемник 8 является
одновременно частью кондукционного насоса для прокачки сплава по зазору
между корпусом 4 и оболочкой 2. Для уменьшения размера регенератора часть
корпуса 4 покрыта экранами.
На рис. 5.10 показана конструкция литий-серного
аккумулятора, состоящего из блока однотипных герметичных ячеек /.
Ячейка состоит из матрицы серы 3, выполненной из пористого рифленого
графита; матрицы лития 6, выполненной из пористого хрома; изолятора 2 и
корпусных деталей — электродов — / и 5, 7, герметично закрывающих ячейку
с электролитом 4, содержащим бромистый литий.
На границе лития с электролитом на «аноде» происходит ионизация лития
с отдачей электронов электроду 7 и диффузия ионов лития в электролите к
матрице 3 и электроду L
ЧАСТЬ ТРЕТЬЯ
ПРЕОБРАЗОВАТЕЛИ
Глава VI
МАШИННЫЕ ПРЕОБРАЗОВАТЕЛИ
6.1. ОБЩИЕ СВЕДЕНИЯ
Среди известных способов преобразования тепловой энергии в
электрическую машинный способ занимает особое место. Тепловая
энергия, полученная, например, при сгорании каких-либо горючих
веществ или в результате ядерной реакции, идет на нагрев
рабочего тела и /Преобразуется в тепловой машине в механическую
энергию. Один из способов использования полученной таким образом
механической энергии — вращение электрогенератора,
вырабатывающего постоянный или переменный ток различной частоты.
В этой области техники накоплен большой опыт конструирования
и эксплуатации. Однако космические энергетические установки с
машинными преобразователями тепла в электричество имеют ряд
особенностей, ограничивающих выбор параметров рабочего
процесса и конструктивные .схемы самих устано;вок. К ним относятся
ограничения в снижении нижней температуры цикла по условиям
отвода тепла в космос; затруднения в осуществлении ряда
процессов (парогенерации, конденсации), протекающих в условиях
невесомости, при наличии двухфазных рабочих тел; требования,
подчас противоречивые, обеспечения минимальной массы и
габаритов, простоты и высокой надежности конструкции, удобства и
безопасности эксплуатации. Необходимо при этом учитывать
большую сложность, а в ряде случаев невозможность пополнения
рабочего тела без (вмешательства со стороны человека в сочетании с
длительным ресурсом работы.
В настоящее время этим требованиям лучше всего
удовлетворяют тепловые установки, работающие по замкнутому газовому
циклу Брайтона или паровому циклу Ренкина.
Источниками тепла могут быть либо реакторы деления
ядерного горючего (в установках с большой электрической мощностью —
100 ... 1000 кВт), либо установки -с радиоактивными изотопами
(электрическая мощность порядка 1,5 кВт), либо, наконец,
концентраторы солнечной энергии (электрическая мощность 2—
15кВт).
В качестве тепловой машины, преобразующей тепловую
энергию в механическую, может быть использована паровая или
газовая турбина, являющиеся наиболее легкими и компактными из
всех известных машин для преобразования тепла б механическую
155
энергию. Поэтому в дальнейшем мы ограничимся, в основном,
вопросами, связанными с проектированием турбин.
Представляет также интерес использование в качестве
преобразователя тепла поршневого двигателя Стирлинга, работающего
на основе газового цикла. В двигателе Стирлинга процессы
сжатия и расширения происходят при движении рабочего поршня
(практически при постоянной температуре), а регенерация — при
движении вытеснительного поршня (при постоянном
объеме). Хотя в двигателе Стирлинга имеются большие механические
потери из-за трения поршней о стенки цилиндра, его эффективный
к.п.д. выше, чем в газо- и паротурбинных установках, приближаясь
к к.п.д. идеального цикла Карно.
Важным вопросом при проектировании установок с машинным
преобразователем тепловой энергии в электрическую является
выбор рабочего тела теплоносителя. Так, для ядерных источников
тепла в турбинном контуре обычно используются щелочные металлы
(температура пара перед турбиной /г = 800—1000° С) или ртуть
(/г = 500 ... 600° С) с реализацией парового цикла на насыщенном
и на влажном паре (получение сухого пара требует
дополнительного нагрева в несколько сот градусов, что не всегда приемлемо).
Жидкометаллические теплоносители имеют относительно высокие
температуры (4 = 500 ... 600° С) кипения при сравнительно низких
давлениях, что позволяет поддерживать в контурах установки
низкие давления. Это особенно важно для космических
энергетических установок, где отвод тепла цикла осуществляется только
излучением, а этот процесс эффективен при высоких
температурах.
Присущие процессам кипения и конденсации таких
теплоносителей высокие коэффициенты теплоотдачи позволяют передавать
значительные количества тепла в малых по размеру и массе теп-
лообменных устройствах. Жидкие металлы, будучи простыми
веществами, не подвержены разложению и с этой точки зрения
допускают практически неограниченное повышение температуры и
интенсивности ядерного облучения в установках. Вместе с тем
жидкометаллические теплоносители являются весьма
агрессивными. Поэтому применение таких рабочих тел ставит задачу о
подборе конструкционных материалов, сохраняющих достаточно
высокую прочность и коррозионную стойкость в среде жидких
металлов и их паров при высоких температурах. Кроме того, жидкие
металлы требуют больших затрат мощности на их прокачку.
Для солнечных и изотопных источников тепла при
ограниченной максимальной температуре цикла (/г^500 ... 600° С)
характерно применение в турбинном контуре органических
теплоносителей (дефинил, даутерм, толуол), интерес к которым
в последние годы резко возрос. Это связано с тем, что
органические теплоносители имеют низкое давление насыщенных паров при
сравнительно высокой температуре кипения, требуют небольших
затрат мощности на прокачку и обладают малой коррозионной
активностью. К недостаткам органических теплоносителей можно
156
отнести низкую термодинамическую эффективность, малые
значения коэффициента теплоотдачи и склонность .к термическому
разложению при высоких температурах.
В машинных преобразователях с газовым циклом
(газотурбинные установки и двигатели Стирлинга) используются инертные
газы (гелий, неон, аргон, криптон, ксенон, рубидий) и их смеси. При
малых мощностях предпочтительнее газы с малой теплоемкостью
(при этом снижается число ступеней компрессора газотурбинной
установки), при больших мощностях большую часть смеси должен
составлять гелий с его более высоким значением теплоемкости.
Инертные газы допускают ]высокие температуры цикла и коррози-
онно не активны. Однако удельная площадь
холодильника-излучателя газотурбинных установок (Sx-и/Мэл) намного больше, чем
паротурбинных. Это связано с тем, что перепад температур в таком
излучателе выше, а температура стенок трубок и ребер
соответственно ниже, чем, например, в установках с жидкометаллическими
теплоносителями. В газотурбинных установках могут
использоваться в качестве теплоносителей диссоциирующие газы, например
фосфор (Р4^2Р2).
G, 1. 1. Влияние перенасыщенного пара
и его конденсации на работу паровой турбины
Наряду с трудностями решения чисто конструктивных iBonpo-
сов при проектировании паровых турбин для космических
энергетических установок представляет трудность решение таких
вопросов, как перенасыщение расширяющегося на лопатках турбины
пара и его конденсация внутри турбины.
Сущность перенасыщения сводится к тому, что при быстром
расширении рабочее тело не успевает конденсироваться и может
сохраняться в виде пара, хотя по условию термодинамического
равновесия должна происходить частичная конденсация. Это
приводит к снижению к.п.д. турбины.
Радиальная протяженность лопаток турбины для
перенасыщенного состояния пара должна быть меньше, чем для рав'новесного.
Поэтому турбинная решетка, рассчитанная с учетом частичной
конденсации, пропускает больший расход рабочего тела.
Переход от перенасыщенного состояния рабочего тела к
равновесному сопровождается снижением к.п.д. турбины.
Посторонние частицы в рабочем теле являются центрами
конденсации. Поэтому рабочие тела, которые используются в
энергетических установках, должны характеризоваться высокой чистотой,
т. е. малым количеством посторонних частиц.
Конденсация является следствием равновесного расширения
любого насыщенного пара. Она приводит к снижению к.п.д.
турбины и вызывает эрозию лопаток и других элементов конструкции.
Эта эрозия вызывается соударением медленно движущейся
пленки конденсата и отдельных капель с быстро движущимися
деталями ротора. Опыт показывает, что для того, чтобы не было эро-
157
зии, количество рабочего тела в жидкой фазе в турбине не должно
превышать 10—12%, а окружная скорость лопаток не должна
превосходить 275 м/с. Более высокие скорости допустимы лишь в
турбинах с дополнительным промежуточным подогревом пара между
ступенями турбины. В этом случае пар остается сухим. Однако
промежуточный подогрев пара вызывает необходимость
увеличения размеров и массы парогенератора и радиатора (поверхность
теплоотдачи из-за необходимости осуществления перегрева пара
должна быть увеличена на несколько порядков). Применение
даже одной или двух ступеней промежуточного перегрева пара
усложняет конструкцию и увеличивает массу турбины. Поэтому
перегрев пара может быть рекомендован лишь как крайнее
средство.
6.2. ВЫБОР ОСНОВНЫХ РАЗМЕРОВ ТУРБИН
Турбина должна иметь высокий к.п.д., быть надежной в
работе, компактной и иметь малую массу. Этим требованиям
подчиняется выбор параметров рабочего тела и основных размеров
турбин.
Турбины для космических энергетических установок обычно
делаются осевыми (одно- и многоступенчатыми), так как такие
турбины практически не ограничивают мощности, имеют высокий
к.п.д. и значительно меньшую массу.
К основным размерам турбины относятся диаметр рабочего
колеса по среднему сечению лопаток 1)ср и длина лопаток.
Диаметр рабочего колеса по среднему сечению лопаток
определяется по формуле
Ос? = 60иср/(лп), (6. 1)
где п — частота вращения в об/мин (выбирается при
газодинамическом расчете турбины по величине напряжений в корневом
сечении лопатки); ucv> — окружная скорость на среднем диаметре
турбины в м/с.
Если для газовых турбин значение иср = 350 ... 450 м/с
(при Dcp// = 5 ... 6) и лимитируется лишь условиями прочности
деталей ротора (лопаток, дисков), то для паровых турбин окружную
скорость приходится ограничивать величиной не более 275 м/с (при
£>ср/'<5) из-за эрозии лопаток и других деталей ротора
вследствие конденсации пара при его расширении в турбине и соударении
быстро движущихся деталей с конденсатом.
Длина лопаток определяется по массовому секундному
расходу G рабочего тела:
/(6.2)
где q — плотность рабочего тела на выходе из соплового
аппарата в кг/м3; са — осевая скорость рабочего тела в м/с (можно
принимать са^ 140 ... 170 м/с).
158
Рабочая часть лопаток (перо) профилируется по треугольникам
скоростей, 'Известным из газодинамического расчета.
При коротких лопатках (/=10 ... 20 мм) целесообразнее
применять активные турбины. При более длинных лопатках выгоднее
профилировать лопатки по принципу реактивных турбин, так как
при этом можно получить более высокий к.п.д.
С длиной лопатки согласовывается хорда лопатки Ъ и шаг
лопаток t. С ростом удлинения лопаток l/b уменьшаются осевые
размеры ступени турбины, однако при этом возрастают напряжения
от изгиба к вибраций. Работающие в более тяжелых условиях
лопатки первых ступеней турбины обычно выполняют с меньшим
удлинением (//6 = 1,5 ... 2,5), чем лопатки последних ступеней.
Для снижения массы конструкции и ее диаметральных
размеров стремятся увеличить густоту решетки, или отношение b/t,
путем уменьшения шага; так, минимальный шаг лопаток обычно
определяется условиями размещения хвостовиков лопаток на ободе
диска. Максимальное значение b/t в корневом сечении лежит в
пределах 2—2,2.
По длине лопатки в турбинах КЭУ хорда чаще всего
выполняется постоянной. Увеличение хорды b к периферии повышает к.п.д.
турбины, но при этом снижается вибрационная надежность пера
лопатки. Уменьшение толщины профильных сечений пера лопатки
улучшает газодинамические качества и снижает массу рабочего
колеса, но при этом напряжения в лопатках возрастают.
Лопатки могут выполняться с постоянной площадью сечения
(короткие лопатки активных турбин) и с переменной, причем для
длинных и высоконагруженных лопаток отношение площади
корневого сечения FFo к площади .концевого сечения FR выбирают
равным 4—6, а для более коротких и менее нагруженных лопаток
FrJF*=2.. .3.
При этом площади промежуточных сечений изменяются по
степенному закону (см. разд. 6.5).
6.3. КОНСТРУКТИВНЫЕ СХЕМЫ И КОНСТРУКЦИЯ
ДЕТАЛЕЙ ТУРБИНЫ
6. 3. 1. Крепление рабочих лопаток к диску
Узел крепления рабочих лопаток к диску ротора испытывает
значительные нагрузки главным образом от центробежных сил
лопаток.
К узлам крепления предъявляется ряд требований, основными
из которых являются следующие: обеспечение размещения
заданного числа лопаток при достаточной прочности крепления,
точность установки лопаток, идентичность заделки лопаток
(обеспечивающая малый разброс частот свободных колебаний лопаток),
наименьшее ослабление обода диска креплением, наименьшая
нагрузка дисков от крепления и легкость монтажа (для разборных
соединений).
159
б)
Рис. 6. 1. Некоторые способы крепления рабочих лопаток к дискам турбин:
а—при помощи «елочного» замка; б—(при помощи цилиндрического замка; в—при помощи
сварки
На рис. 6.1 показаны различные способы крепления рабочих
лопаток турбины к диску.
Из разборных креплений лопаток к дискам наибольшее
распространение получило крепление с помощью «елочного» замка (рис.
6.1, а); малые размеры замка по окружности диска позволяют
разместить на ободе большое число лопаток. Благодаря свободной
посадке хвостовика лопатки в паз диска уменьшается возможность
возникновения добавочных, температурных, напряжений в диске
(вследствие свободы термических деформаций), а под действием
раззиваемой при работе центробежной силы лопатка
самоустанавливается и достигается высокая степень равномерности
распределения нагрузок по зубьям елочного замка. Свободная посадка
лопаток облегчает их монтаж.
Из других видов разборных креплений рабочих лопаток к
дискам можно назвать цилиндрический замок (рис. 6.1, б). Однако
это крепление не получило широкого распространения.
В ряде случаев применяется неразъемное крепление лопаток
к диску посредством сварки (рис. 6.1, в). Такое крепление имеет
высокие прочностные характеристики, однако материалы лопаток
и дисков должны обладать хорошей свариваемостью, а качество
сварки -и точность установки лопаток перед сваркой требуют
тщательного контроля.
Лопатки можно крепить к диску при помощи пайки
высокотемпературными припоями.
При небольших размерах турбин лопатки можно отливать
заодно с дисками по выплавляемым моделям.
Для уменьшения перетекания газа через радиальный зазор
между ротором <и корпусом и увеличения к.п.д. турбины
применяют лопатки с бандажными полками (рис. 6.2). Кроме того,
бандажные полки снижают вибрационные нагрузки на лопатки, но
увеличивают в пере лопатки напряжения от центробежных сил.
Иногда при длинных лопатках перетекание может быть уменьшено
постановкой металлокерамических вставок на корпусе турбины
(рис. 6.3), который позволяют на рабочих режимах свести к мини-
160
Рис. в. 2. Рабочие лопатки
турбины с бандажными полками
Рис. в. 3. Металлокерамические
вставки в корпусе турбины,
позволяющие уменьшить радиальный
зазор б -*•
муму радиальный зазор б между корпусом турбины и концами
лопаток. <
6. 3. 2. Диски турбины и их соединение
между собой и с валом
Роторы турбин работают при высоких окружных скоростях и
рабочих температурах. Для этих условий работы обычно
применяют роторы дискового типа с одним венцом лопаток (двухвенечные
диски применяют иногда в тихоходных турбинах или в турбинах с
очень короткими лопатками в целях снижения массы).
В многоступенчатых турбинах применяют роторы барабанно-
дисковой конструкции, так как в таких турбинах имеет большое
значение поперечная жесткость ротора.
По соображениям прочности диски стремятся выполнять без
центральных отверстий.
В тех случаях, когда центрального отверстия избежать не
удается, диски усиливают путем соответствующего утолщения его у
отверстия.
Узел соединения дисков между собой (в многоступенчатых
турбинах) и диска с валом должен иметь высокую механическую
прочность, надежно передавать крутящий момент и осевые усилия,
обеспечивать надежную установку сопрягаемых деталей при всех
условиях работы, достаточную изгибную жесткость ротора.
Рис 6.4. Соединение диска с
валом:
а—при помощи центрирующего
бурта (втулки) и радиальных
фиксирующих штифтов;
б—сваркой
Прессобая
посадка
6 3050
161
Соединения дисков между собой и с валом могут быть
разборными. Однако для простоты <и надежности эти соединения лучше
выполнять неразъемными, например напрессовкой диска на
центрирующий бурт вала (рис. 6.4, а) или другого диска с
постановкой радиальных фиксирующих штифтов так же на прессовой
посадке.
Наиболее простым является соединение диска с валом при
помощи сварки (рис. 6.4, б) или отковка диска с валом за одно
целое (при небольших размерах ротора).
6. 3. 3. Сопловые аппараты
Сопловые аппараты (СА) состоят из лопаток постоянного
профиля, расположенных в виде круговой решетки, и бандажей в виде
сплошных колец или полуколец, образующих наружную и
внутреннюю стенки кольцевого тракта для рабочего тела.
Геометрия сопловых лопаток определяется на основании
газодинамического расчета и из условия обеспечения прохода
расчетного количества газа (пара). Желательно, чтобы число сопловых
лопаток было простым числом. В тех случаях, когда резонансные
колебания рабочих лопаток возбуждаются сопловыми лопатками
(число сопловых лопаток равно или кратно числу рабочих
лопаток), то одним из способов отстройки от резонанса является
изменение числа сопловых лопаток.
Сопловые аппараты должны иметь достаточную жесткость,
чтобы при работе турбины не изменялся угол выхода потока
рабочего тела (от этого зависит к.п.д. турбины, ее мощность и расход
рабочего тела через сопловой аппарат); крепление их должно
обеспечивать свободу температурных деформаций во избежание
появления температурных напряжений и коробления конструкции.
Поэтому СА не включаются в силовую схему корпусов турбины.
Закрепление сопловых лопаток может быть двухопорным,
консольным или свободным. При двухопорном закреплении лопатки
жестко закрепляются в обоих бандажах (в этом случае на одном
из бандажей выполняют температурные разрезы через каждые 4—
6 лопаток); при консольном креплении лопатки жестко
заделываются в один из бандажей, а в другом свободны; и, наконец,
лопатки могут быть свободно вставлены в обоих бандажах.
Обычно СА турбин КЭУ изготовлены методом прецизионного
литья секций по 2—4 лопатки или в виде общей отливки; в сварных
конструкциях СА лопатки привариваются к бандажам.
6.3.4. Корпусы турбин
Корпусы турбин (внутренний и наружный) воспринимают
нагрузки от ротора (через подшипники) и сопловых аппаратов и
передают эти усилия на соседние корпусы, входящие в систему КЭУ.
Корпусы турбины должны обладать высокой изгибной
жесткостью, гарантирующей отсутствие существенных деформаций. Их
132
конструктивные формы зависят от расположения опор ротора,
способа крепления СА и принятого способа изготовления корпусов.
Силовые элементы корпусов необходимо защищать от воздействия
агрессивных паров рабочего тела путем постановки одиночных или
двойных экранов, устройством каналов, по которым должен
прокачиваться охладитель. Сопрягающиеся с корпусом элементы
тщательно центрируются преимущественно на буртах. Чтобы
избежать дополнительных температурных напряжений и короблений
материалы сочленяемых корпусов должны иметь близкие значения
коэффициентов линейного расширения, а сами корпусы
охлаждаться. В целях герметизации стыки сопряженных корпусов обычно
заваривают.
6.4. ОПОРЫ ТУРБОГЕНЕРАТОРОВ
Надежность и долговечность турбомашин в значительной
степени определяются работоспособностью подшипников.
При небольших мощностях турбогенератора его ротор обычно
выполняется неразборным, т. е. ротор генератора и турбины
жестко связаны друг с другом. В этом случае ротор делается двух-
опорным.
При больших мощностях приходится ставить турбину и
генератор на самостоятельные опоры, а момент от турбины к
генератору передавать при помощи муфты.
В условиях космического полета отсутствуют силы гравитации.
В этом случае на подшипники действуют переменные по величине
и направлению силы, возникающие вследствие дисбаланса ротора
(который всегда имеет место несмотря на тщательное
изготовление деталей), силы от газового потока, изменяющихся при
изменении параметров газа или пара в проточной части турбины и,
наконец, магнитные силы, возникающие при наличии
эксцентриситета у ротора генератора относительно статора. Непостоянные по
времени нагрузки на подшипники могут вызвать явления
усталости.
Гравитационные силы можно создать, придав космическому
кораблю вращение вокруг некоторых осей для получения
постоянной центробежной силы. Если эта сила будет достаточно велика по
сравнению с силами дисбаланса и другими переменными силами,
то условия работы подшипников будут приближены к обычным,
когда подшипники воспринимают статическую нагрузку.
Особенно большие усилия на подшипники возникают при
выводе космического корабля на орбиту, когда наблюдаются
ускорения, превышающие земное ускорение свободного падения в
несколько раз. При этом могут также возникнуть большие
вибрационные ускорения.
Если система преобразователя в период вывода космического
корабля на орбиту не работает, то проблема подшипников
сводится к решению обычных вопросов, связанных с деформацией и
усталостью.
8* 163
Рис. в. 5. Подшипники сухого трения:
а—с графитовыми вкладышами; б—с вкладышами из карбидов титана и вольфрама
При высоких температурах в среде жидкометаллических
теплоносителей обычные подшипники качения не могут быть
использованы. Даже если эти подшипники прецизионные и изготовлены из
специальных жаропрочных сплавов, то и тогда срок их работы
невелик.
Подшипники сухого и полужидкостного трения (с графитовыми
вкладышами, рис. 6.5, а) не могут быть также использованы из-за
их быстрого износа.
Несколько больше срок работы у подшипников с вкладышами,
выполненными из карбидов титана и вольфрама (рис. 6.5, б), но
они очень хрупкие и быстро изнашиваются и изменяют свои
размеры. Для того чтобы подшипники не перегревались, их
необходимо охлаждать, для чего можно использовать хорошие
охлаждающие свойства жидких металлов. ^
Более перспективными для использования в турбогенераторах
космических энергетических установок являются подшипники
скольжения, в которых трущиеся поверхности разделены слоем
жидкости.
В настоящее время в технике применяются два типа
подшипников скольжения, отличающихся способом получения несущей
силы в слое жидкости.
Наиболее известен из них гидродинамический подшипник, у
которого подъемная сила в несущем слое жидкости создается
вращением шейки вала, захватывающей (вследствие вязкости)
смазывающую жидкость и загоняющей ее в клиновидный зазор между
шейкой вала и вкладышем подшипника (корпусом).
При вращении вала под действием разности
гидродинамического давления смазывающей жидкости в зазоре вал всплывает и
линия центров шейки вала и вкладыша поворачивается на угол <р
в направлении вращения (рис. 6.6). При этом обеспечивается
чисто жидкостное трение. На рис. 6.6 показано типичное
распределение избыточного гидродинамического давления жидкости в зазоре
подшипника. Равнодействующая сил давления при чисто
жидкостном трении равна по величине, но обратна по направлению
подъемной силе подшипника.
Следует отметить, что необходимая грузоподъемность такого
подшипника достигается при вполне определенной частоте
вращения вала (которая должна быть ниже рабочей частоты вращения)
164
Избыточное
оадление в
слое смазки
рис. 6.6. Типичное распределение
давления в слое смазки
гидродинамического подшипника при
вращении вала
Рис 6.7. Гидродинамический подшипник
при определенном зазоре, а также при определенной вязкости
смазывающей жидкости.
При малой частоте вращения вал касается подшипника и
возникает сухое трение. Для устранения перекосов и несоосностей
(которые также ведут к контакту металлических поверхностей и
сухому трению) целесообразно использовать
самоустанавливающиеся вкладыши, свободно проворачивающиеся в своих гнездах.
В качестве смазывающей жидкости в подшипниках
турбогенераторов космических энергетических установок используется
рабочее тело, т. е. те же теплоносители, что и в контуре турбины. При
применении обычных масел возник бы ряд трудностей и в первую
очередь — в создании уплотнений, способных в течение
длительного времени предотвращать прорыв паров рабочего тела в полости
подшипников и, наоборот, протекание смазки в полости с рабочим
телом, а также просто утечку смазки.
Как известно, вязкость жидких металлов очень низкая
(вязкость жидкометаллических теплоносителей примерно в 10—100 раз
меньше, чем вязкость обычных смазочных масел). Поэтому рабочие
зазоры в подшипниках жидкостного трения должны составлять
примерно 10% от величины зазора обычного масляного
подшипника. Для предотвращения разрушительного для подшипника
контакта металлических поверхностей, эрозии и явлений усталости
надо строго выдерживать этот зазор во время работы
турбогенератора.
На рис. 6.7 показана конструкция гидродинамического
подшипника турбогенератора КЭУ, работающего на жидкометалли-
ческой смазке.
Подшипник представляет собой вкладыш 2 с кольцевой канавкой А,
установленный в сферическом гнезде корпуса 1. От проворота сферический вкладыш
165
А-А
5 Камеры Камеры
В/ сообщающей- раздельные
У i еся К j a
9С b \
подшипника
В)
Рис. 6.8. Конструктивные схемы гидростатических опорных подшипников:
я—с капиллярной компенсацией (/кД?к>10); б—с диафрагменной компенсацией (£д/
в—с щелевой компенсацией (с взаимно-обратным щелевым дросселированием)
2 удерживается штифтом 5. Возможен подшипник и без штифта (плавающий
тип). Зазоры между валом 3 и вкладышем 2, а также по сфере между
вкладышем 2 и корпусом 1, устанавливаются подбором.
Подшипник 2 и корпус / изготавливаются из сплава молибдена с
вольфрамом и титаном. Поверхность шейки вала покрыта карбидом вольфрама.
Смазка подается по отверстию 7 в корпусе /, попадает в
кольцевую канавку 4У откуда через наклонное отверстие 6 в
подшипнике поступает в кольцевую проточку 8 на внутренней стороне
подшипника. Из проточки смазка поступает в рабочий зазор между
шейкой вала и подшипником. Такой подшипник может работать
при температуре примерно до 900° С. При снижении температуры
увеличивается вязкость рабочей жидкости и грузоподъемность
подшипника возрастает.
Большие достоинства имеет гидростатический
подшипник. Внешняя нагрузка в таком подшипнике при любой частоте
вращения (даже при п = 0) уравновешивается, в основном,
гидростатическим давлением в несущем слое жидкости, которое
обеспечивается внешним (относительно подшипника) источником
давления (насосом). В гидростатических подшипниках могут быть
использованы любые жидкости, в том числе жидкие металлы и газы.
Внешняя нагрузка при нормальной работе гидростатического
подшипника воспринимается неразрывным слоем жидкости, что
исключает возможность сухого контакта.
Способность гидростатических подшипников воспринимать
нагрузки в широком диапазоне весьма благоприятно сочетается с их
чрезвычайно низким коэффициентом трения порядка 4-10~6 —
7-Ю-6.
Для пояснения принципа работы гидростатического
подшипника рассмотрим рис. 6.8, а, б. Шейка вала / вращается в
неподвижной втулке 2, имеющей со стороны, обращенной к шейке вала,
несколько изолированных камер. В эти камеры извне через дози-
166
рующие отверстия (капилляры 3 или жиклеры 4) подается рабочая
жидкость под начальным давлением рн.
Когда эксцентриситет равен нулю (е = 0), зазоры на выходе из
всех камер одинаковые. При этом давление жидкости во всех
камерах будет одинаковым и несущая способность подшипника
равна нулю.
При смещении вала от оси на некоторую величину давление в
камерах изменяется. В камерах, к которым шейка вала
приблизилась, гидродинамическое сопротивление при истечении жидкости
из этих камер возрастает и давление также возрастает. В
противоположных камерах давление, наоборот, уменьшается вследствие
снижения гидродинамического сопротивления на выходе из этих
камер. Вместе с 'изменением гидродинамического сопротивления
при истечении жидкости из камер меняется расход жидкости через
камеры и через жиклеры на входе в каждую камеру. Так, в
камерах, где зазор на выходе уменьшается, уменьшается и расход, а
вместе с этим снижается сопротивление при течении смазки через
жиклер, и наоборот. Все это вызывает увеличение давления в
одних камерах и снижение давления в других, что и приводит к
созданию подъемной силы, уравновешивающей внешнюю нагрузку.
На рис. 6.8 показаны некоторые конструктивные схемы
радиальных гидростатических подшипников: с капиллярной
компенсацией (рис. 6.8, а), с диафрагменной (жиклерной) компенсацией
(рис. 6.8, б) и щелевой регулируемой компенсацией (рис. 6.8, в).
Работа подшипников с капиллярной и диафрагменной
компенсацией ясна из вышеизложенного. Рассмотрим работу подшипника
с щелевой регулируемой компенсацией. Рабочая жидкость в таком
подшипнике сначала поступает в камеры А, откуда по радиальным
сверлениям и спиральным канавкам на внешнем диаметре
корпуса подшипника поступает в диаметрально противоположные
рабочие камеры Б. Кольцевая проточка В служит для-дополнительной
подпитки камер А. Кольцевая проточка Г сообщается со сливной
полостью.
При смещении вала вниз (по рис. 6.8) верхний зазор между
валом / и корпусом 5 подшипника увеличится, а нижний —
уменьшится. При этом облегчается заполнение жидкостью верхних
камер А и, соответственно, увеличивается сопротивление на входе в
нижние камеры А.
Одновременно сопротивление на выходе из верхних рабочих
камер В уменьшается, а на выходе из нижних рабочих камер В —
увеличивается. Все это приводит к появлению большей разности
давлений в рабочих камерах В и созданию подъемной силы.
Описанный гидростатический подшипник с взаимно-обратным
дросселированием более эффективен, чем подшипники с
капиллярной или диафрагменной компенсацией.
Необходимо отметить, что при перекосах такого подшипника
его грузоподъемность будет падать, так как при этом существенно
нарушается взаимосвязь между дросселированием жидкости на
входе и выходе.
167
A~A
Рис. 6.9. Схема гидростатического упорного
подшипника
По аналогичному принципу
работает гидростатический
подпятник (рис. 6. 9). В случае
перекоса подшипника зазор в
зоне камеры / уменьшится и
соответственно увеличится
зазор в зоне камеры 3.
Произойдет изменение
гидродинамических сопротивлений на входе и
выходе, давление в камере 1
pi увеличится, а в камере 3
Рг — уменьшится. Возникаю*
щий момент сил будет
выравнивать положение ротора. Бели упорный торец подшипника под
влиянием осевой силы перемещается строго вдоль оси, то давление
будет повышаться одновременно во всех камерах и возникнет
уравновешивающая сила в подпятнике.
Работа подшипников жидкостного трения связана с прокачкой
определенного количества рабочей жидкости (смазки). Трение и
износ в таком подшипнике очень малы. Однако затрата мощности
на прокачку смазки довольно велика (нужны специальные
насосы). Подача жидкости в подшипник должна начинаться до начала
вращения ротора турбогенератора.
Применение жидкометаллической смазки может вызвать
разрушение материала вала и подшипников. Эрозия может явиться
результатом как химической несовместимости конструкционных
материалов с жидкометаллической смазкой, так и размыва
поверхности деталей потоком смазывающей жидкости большой
плотности, например ртути. Это связано с низкой вязкостью
жидкометаллической смазки, вследствие чего поток ее может быть
турбулентным, несмотря на малый зазор. Турбулентное течение приводит к
возникновению большого динамического давления смазки на
поверхность детали и к вымыванию материала потоком жидкости.
Для уменьшения влияния турбулентности необходимо увеличивать
чистоту рабочих поверхностей деталей подшипника (полировка).
Для уменьшения износа, по-видимому, будут полезны специальные
покрытия.
Подшипники жидкостного трения кроме грузоподъемности и
расхода рабочей жидкости характеризуются еще жесткостью,
вибрационной устойчивостью и чувствительностью к направлению
внешней нагрузки. Под жесткостью подшипника здесь понимается
отношение изменения величины внешней нагрузки к изменению
эксцентриситета. Исследования показали, что жесткость
гидростатических подшипников выше, чем гидродинамических.
Вибрационная устойчивость определяется той частотой
вращения ротора, при которой вследствие вибраций нарушается
целостность жидкостной пленки в подшипнике и возникает контакт
между валом и подшипником. Более высокая жесткость
гидростатических подшипников определяет и более высокую их вибростойкость.
168
При большой частоте вращения ротора, установленного на
гидростатических подшипниках (порядка 10 000—30000 об/мин),
следует учитывать влияние динамического эффекта
гидростатического подшипника (грузоподъемность такого подшипника с учетом
вращения несколько выше, чем без него) и более строго определять
зону равновесного положения ротора с учетом вибрационной
неустойчивости.
Чувствительность гидростатических подшипников к
направлению внешней нагрузки, как оказалось, существенно меньше, чем
гидродинамических, у которых она зависит как от места подвода
смазывающей жидкости, так и от относительного движения
поверхностей трения, образующих жидкостной клин.
В турбомашинах, работающих на газообразном рабочем теле,
целесообразно применять подшипники с газовой смазкой. По
принципу действия такие подшипники аналогичны подшипникам с
жидкой смазкой. Однако газообразное рабочее тело (смазка)
накладывает на конструкцию таких подшипников ряд специфических
особенностей. Газовые подшипники способны работать при высоких
скоростях и в широком диапазоне температур, они
невосприимчивы к радиации и химически активной среде, надежны и
долговечны.
Подшипники с газовой смазкой разделяются на два основных"
типа: подшипники с внешним наддувом (газостатические
подшипники) и самоподдерживающиеся
(газодинамические) подшипники. В подшипниках с внешним наддувом
подача сжатого газа осуществляется от внешнего источника через
отдельные гладкие отверстия наддува, равномерно распределенные по
окружности, через отверстия наддува с круговыми внутренними
канавками и через отверстия наддува, объединенные круговой
микроканавкой. Газ, поступая под давлением в смазочный зазор,
движется только к наружному краю подшипника. Такой подшипник
обладает несущей способностью при любой относительной
скорости поверхностей шипа и подшипника. В
самоподдерживающемся подшипнике газовая пленка, разделяющая трущиеся
поверхности, возникает вследствие движения окружающего
подшипник газа, затягиваясь в зазор между шипом и подшипником в
результате относительного движения их поверхностей. Подобный
подшипник по конструкции проще подшипника с внешним
наддувом, поскольку он не нуждается в специальной системе подачи
газа, но он не обладает несущей способностью при отсутствии
вращения шипа. В некоторых подшипниках газовая пленка и
избыточное давление создаются одновременно и внешним наддувом, и
высокой частотой вращения шипа. Такие подшипники называются
гибридными, они обладают некоторой начальной несущей
способностью при нулевой частоте -вращения шипа, а с ее
увеличением их несущая способность повышается. Гибридные подшипники
устойчивы при работе в широком интервале частот вращения.
Характерным недостатком подшипников с внешним наддувом
является необходимость установки отдельного насоса и организа-
169
ция отвода отработанных газов, что существенно ограничивает
область применения таких подшипников. Однако они требуют менее
высокой точности изготовления, исключают возможность сухого
трения при малых скоростях и выдерживают как постоянные, так
и пульсирующие нагрузки. Удельная нагрузка может достигать
значения 7 МПа. Самоподдерживающиеся подшипники могут
воспринимать лишь очень небольшие нагрузки (несколько десятков
кПа), причем их несущая способность пропорциональна частоте
вращения шипа, а точность изготовления и сборки должна быть
высокой; использовать их можно лишь для тех опор, поверхности
которых под нагрузкой всегда находятся в относительном движении
(во время пуска и останова турбогенератора в таких подшипниках
имеет место сухое трение). Общим недостатком подшипников с
газовой смазкой следует считать то, что вследствие малой вязкости
газов такие опоры способны воспринимать значительно меньшие
нагрузки, чем соответствующие опоры с жидкой смазкой.
Для изготовления газовых подшипников в зависимости от
типа подшипника могут применяться различные металлы, керамика
и керметы, пластмассы. При этом необходимо учитывать, что
материалы трущихся пар в таких подшипниках должны обладать
хорошими характеристиками трения и износа при отсутствии смазки.
Кроме того, должна обеспечиваться точная геометрия и хорошая
чистота их поверхностей. Искажения поверхностей во время
работы не допускаются.
Детали газовых подшипников обрабатываются с большей
точностью, чем подшипников с жидкой смазкой. В некоторых
случаях допуски на обработку рабочих поверхностей составляют
несколько десятых долей микрона. С точки зрения получения и
сохранения таких допусков более пригодны твердые металлы,
которые лучше подаются такой окончательной механической
обработке, как точное шлифование, притирка алмазными пастами,
хонингование и даже суперфиниш.
Некоторые особенности электрогенераторов КЭУ. Принцип действия ич
теория электрогенераторов известны из курса электрических машин. Здесь мы
отметим лишь некоторые особенности электрогенераторов для космических
энергетических установок.
Электрогенераторы, как правило, смонтированы на ондом валу с турбиной
(т. е. без редуктора) и имеют большую частоту вращения (20 000 об/мин и
выше}, ограничиваемую максимально допустимой с точки зрения прочности
окружной скоростью рабочих лопаток турбины.
Примерно от 5 до 20% мощности, подведенной к генератору, идет на нагрев
деталей генератора (обмотки ротора и статора и др.). Для отвода тепла от
генератора приходится делать специальный контур, причем теплоноситель
пропускается по каналам непосредственно в статоре генератора. При этом должна быть
обеспечена надежная изоляция обмоток от теплоносителя.
Необходимо учитывать, что материал обмоток (медь, серебро) может
нагреваться до 700° С, и так как обмотки ротора находятся в поле действия
центробежных сил, они будут работать в области пластических деформаций.
На рис. 6.10 показан комбинированный вращающийся блок КЭУ
мощностью 3 кВт, работающий по циклу Брайтона.
170
Рис. в. 10. Схема трехкиловаттной установки, работающей по циклу Брайтона:
/—оабочее колесо турбины: 2, 7—газовые подшипники; 3—обмотка якоря генератора:
4—теплообменник для охлаждения корпуса генератора; 5-обмотка возбуждения постоянного
тока- 5—штуцеры для подвода и отвода охлаждающего теплоносителя; S-узел упорного
подшипника; 9—рабочее колесо компрессора; 10—штепсельный разъем
Блок состоит из компрессора 9, турбины / и электрогенератора,
размещенных на общем валу. Ротор поддерживается на газовых подшипниках 2 и 7
(рабочее тело цикла — аргон — используется и для смазки подшипников).
Расчетная частота вращения агрегата 64 000 об/мин, температура газа на
входе в турбину 837° С, на входе в компрессор 5° С. Компрессор центробежного
типа, одноступенчатый. Турбина радиальная (центростремительная),
одноступенчатая. Электрогенератор переменного тока, относится к классу индукторных
генераторов. Ротор генератора состоит из двух литых половин, имеющих разные
магнитные полюса и отделенных друг от друга немагнитной проставкой. В
статоре генератора имеется обычная трехфазная обмотка переменного тока.
На рис. 6.11 приведен турбогенератор, в котором
одноступенчатая осевая турбина работает на парах калия. Ротор
турбогенератора опирается на два гидростатических подшипника,
работающие на жидком калии.
6.5. РАСЧЕТ РАБОЧИХ ЛОПАТОК
НА ПРОЧНОСТЬ И КОЛЕБАНИЯ
Лопатки являются наиболее напряженными и ответственными
деталями узла турбины. Они работают при повышенных
температурах и при этом испытывают высокие механические нагрузки от
центробежных сил и от сил газов. Кроме того, лопатки испытывают
дополнительные напряжения от нестационарности рабочих
процессов при быстром изменении теплового режима по времени («тепло-
171
Рис в. 11. Конструкция турбогенератора
вой удар»), а также от механических колебаний пера лопатки
(особенно при резонансе).
6. 5.1. Растяжение лопатки центробежными силами
Под действием центробежных сил в пере лопатки возникают
напряжения растяжения, изгиба и кручения, из которых основными
являются напряжения растяжения.
Напряжения изгиба от центробежных сил используются для
компенсации напряжений изгиба от действия газодинамических сил
(см. ниже). Напряжения кручения бывают обычно малы и при
ориентировочных расчетах ими можно пренебречь.
При расчетах на прочность пера лопатки принята следующая
система координат (рис. 6.12).
Ось ОХ совпадает с осью вращения ротора и направлена по
потоку газов; ось Or (или OZ) перпендикулярна к оси вращения
ОХ и проходит через центр корневого сечения лопатки.
Ось OY перпендикулярна осям ОХ и Or и направлена так, что
ее кратчайший угловой путь до совмещения с осью Or
осуществляется поворотом в направлении угловой скорости со вращения
ротора.
Рассмотрим методику определения напряжений в пере лопатки
от центробежных сил. Для общности возьмем лопатку с
бандажной полкой (рис. 6.13).
Для удобства при определении растягивающих напряжений сгр
в произвольном сечении (на радиусе г) лопатки разделим полную
центробежную силу С, действующую в этом сечении, на
центробежную силу собственно пера лопатки Сп и центробежную силу
бавдажной полки Сб.
Очевидно, можно записать
Найдем эти силы. Выделим элемент лопатки на радиусе г тол-
172
Рис. 6.12. Система
координат для построения лопаток
Рис. в. 13. Схема рабочей
лопатки (к расчету на проч-
ность) ->
щиной dr. Тогда центробежная сила, создаваемая выделенным
элементом лопатки:
где q — плотность материала лопатки в кг/м3; со — угловая
скорость вращения диска в рад/с; F=F(r) —площадь поперечного
сечения лопатки на текущем радиусе г в м2.
Полная центробежная сила в сечении г от массы собственно
пера лопатки
R
Центробежная сила бандажной полки
где V— объем бандажной полки в м3.
Суммарная центробежная сила, действующая в сечении г:
Напряжение растяжения в сечении на радиусе г
R
a p =
(6.3)
Формула (6.3) является основной расчетной формулой для
определения напряжений растяжения на произвольном радиусе лопатки с
любым законом изменения площади сечения.
Характер изменения напряжений растяжения от центробежных
сил по радиусу лопатки показан на рис. 6.14. Здесь кривая а
относится к лопатке без бандажной полки, а кривая б — к лопатке
173
6р.
Рис. 6. 14. Напряжения от центро- Рис. 6. 15. Газовые силы, действу-
бежных сил в пере лопатки пере- ющие на перо лопатки
менного сечения
с бандажной полкой. Площадь поперечного сечения лопаток
турбины обычно изменяется по степенному закону:
Значение показателя степени п = 0 соответствует лопатке
постоянного сечения; п=\ — лопатке с линейным законом изменения
площади сечения пера.
Для лопаток турбин обычно принимают п = 2 ... 4, причем при-
п^З (для обычных значений FR/Fro=0,2 ... 0,4) максимальные
напряжения будут находиться не в корневом сечении (кривая в).
Если /^const, то формула (6.3) примет вид
— ги»*2
F I
Максимальное напряжение от центробежных сил для такой
лопатки будет в корневом сеченаи:
6. 5. 2. Изгиб лопатки газодинамическими силами
Напряжение изгиба от газодинамических сил по величине
занимает второе место после напряжений растяжения от
центробежных сил. Для определения газодинамических сил, действующих на
лопатку, рассмотрим работу решетки рабочего колеса турбины
(рис. 6.15).
Из газодинамического расчета турбины известны следующие
параметры газа (пара): проекции осевой и окружной скоростей газа
на оси, совпадающую с осью вращения вала и перпендикулярную
174
ей: С\а\ с\и\ С2а\ с2и', окружная скорость на данном радиусе — и;
плотность газа (пара) на входе в ступень qi и на выходе из
ступени Q2] давление газа (пара) соответственно pi и р2.
Известно, что сумма внешних сил, действующих на некоторый
объем газа, равна векторной разности между количествами
движения втекающего и вытекающего газа через ограничивающую
этот объем контрольную поверхность (на рис. 6.15 обозначена
пунктиром).
Полагая, что частицы газа, обтекающего лопатки, движутся по
цилиндрическим поверхностям, рассмотрим цилиндрический слой
на радиусе г толщиной dr. (Это предположение равносильно тому,
что кольцевые площади на входе в рабочее колесо и на выходе из
него равны.) Выделим струю газа, обтекающую одну лопатку, и
приложим к поверхностям раздела силы взаимодействия.
Элемент лопатки действует на газ с силой dN. Сила давления
газа на элемент лопатки будет равна dP = —dN.
Составляющие этой силы газов равны соответственно dPa (в
плоскости, 'проходящей через ось вращения) и dPu (в плоскости
вращения).
Очевидно, dPa = —dNa; dPu = —dNu.
Усилия на единицу длины пера лопатки (интенсивности
погонных нагрузок) в соответствующих плоскостях
qx=dPJdr\ qY=dPJdr.
Найдем значения интенсивности нагрузки.
Масса газа, протекающего через элементарную площадку в
единицу времени (отнесенная к одной лопатке):
2nrdr 2nrdr
где z — число рабочих лопаток.
Рассматривая изменение количества движения в осевом
направлении, получим
dm (с2а - с1а) = (р2 - А) ^j-+dNa,
огкуда ^
2nrdr t ч
— Qlcla {°2а — C\ah
и окончательно:
2лг , ч 2яг , ч
Ях = -J— (Л - А) - — QiCia (с2а - с1а).
Положительное направление qx соответствует направлению
интенсивности нагрузки вдоль потока (по направлению оси ОХ).
Найдем теперь интенсивность распределения нагрузки в плоскости
вращения.
175
Изменение количества движения в плоскости
вращения равно
dm(cu-cu)=dNu>
огкуда dPu= -dNu= -
и интенсивность погонной нагрузки в плоскости вращения
Я У = -J- QlCla \PU — С\и).
Положительное напряжение qY, определяемое по этой формуле,
соответствует положительному направлению векторов скоростей с2и
и ciu.
Необходимо отметить, что в осевых компрессорах (насосах)
вектор qY направлен против вращения, а в осевых турбинах — по
вращению.
Зная интенсивности погонной нагрузки qx и qY, найдем теперь
изгибающие моменты. Изгибающие моменты, создаваемые силами,
действующими на элемент dr на радиусе г, будем искать в
некотором фиксированном сечении г* (см. рис. 6.13) относительно осей
ОХ (в плоскости ROY) — Мх и OY (в плоскости ROX) — MY:
dMx =qYdr (r — г*);
dMv=qxdr (r — г*).
Интегрируя эти выражения по длине лопатки от г* до R, получим
изгибающие моменты в сечении г*:
M
Y=\qx{r-r*)dr.
В корневом сечении лопатки изгибающие моменты будут
максимальными и определяться выражениями
R R
Напряжения изгиба определяются раздельно, относительно
главных осей инерции ^ит)* для отдельных точек сечения,
наиболее удаленных от осей (рис. 6.16).
* Главные оси инерции проходят через центр тяжести сечения, причем для
приближенных расчетов можно считать, что ось £ параллельна хорде АС,
соединяющей переднюю кромку профиля с задней кромкой. Ось ц перпендикулярна
к оси |.
Ось | направлена от передней кромки профиля сечения к задней кромке;
ось т] направлена от корытца к спинке профиля сечения лопатки.
176
Такими точками в сечении
лопатки являются: Л(£А, Ца)\ В(%Ву цв) и
С& )
& Л)
Находим моменты от сил газа
относительно главных осей
инерции *:
cos
= Мх sin р —
Напряжения ИЗГИба В ЛЮбоЙ ТОЧ- Рис# 6. 16. изгибающие моменты отно-
Ке СечеНИЯ ОПредеЛЯЮТСЯ СООТНОШе- сительно главных осей лопатки
нием
М. 8 Мъ
-^-1 (6.4)
где /$ и /т) — главные моменты инерции поперечного сечения
лопатки в м4.
Знаки изгибающих моментов в этом уравнении надо считать
положительными, если они вызывают деформацию изгиба
выпуклостью в сторону положительного направления соответствующей
оси.
Знаки координат g и ц берутся в соответствии с направлением
осей.
При выводе формулы (6.4) учтено правило знаков для
изгибающих моментов и для направлений: напряжение растяжения
считается положительным, напряжение сжатия — отрицательным.
Обычно в турбомашинах главные моменты инерции сечений ло-
латок связаны примерным соотношением
в то время как изгибающие моменты имеют один и тот же
порядок величин. Поэтому напряжения изгиба, например в точке Л,
можно приближенно определять по формуле
л. (6.5)
6. 5. 3. Изгиб лопатки центробежными силами
Изгиб лопатки под действием центробежных сил возникает в
том случае, когда центры тяжести отдельных сечений по длине
лопатки не совпадают с осью Or, проходящей через центр тяжести
корневого сечения.
Рассмотрим изгиб лопатки под действием погонной еагрузки
от газовых сил qx и qY в поле центробежных сил С (рис. 6.17).
Допустим, что ось центров тяжести неизогнутой лопатки
совпадает с осью Or. Под действием сил qx и qY лопатка будет изгибать-
* Векторы моментов Мх и Му направлены так, что с их концов
вращение, вызываемое этими моментами, против часовой стрелки.
видим
177
Рис. в. 17. Компенсация газодинамических
изгибающих моментов моментами от
центробежных сил
ся. На изогнутую лопатку будет
действовать центробежная сила
С, создающая моменты Мхе и
MYc> стремящиеся вернуть ось
лопатки в нейтральное
положение.
Таким образом, действие
центробежных сил приводит к тому,
что суммарный прогиб лопатки
будет меньшим, чем прогиб,
подсчитанный от действия только сил
газов (линии прогиба а).
Меньшими будут и напряжения изгиба
лопатки. Этим пользуются для
разгрузки лопаток от чрезмерно
больших напряжений изгиба
лопаток газодинамическими силами.
Можно так спроектировать
лопатку, что в заделке или вблизи нее будет возникать достаточно
малый или даже равный нулю изгибающий момент.
Существует два конструктивных способа уменьшения
напряжений изгиба в лопатке или, 1как говорят, два способа разгрузки
лопатки с помощью «выноса».
В первом случае лопатка с прямолинейной осью, проходящей
через центры тяжести сечений, устанавливается в заделке с
наклоном в сторону действия изгибающих газодинамических сил
(относительно оси, проходящей через центр тяжести корневого
сечения лопатки). Такой способ технологически удобен и часто
применяется для разгрузки коротких лопаток турбин.
Другой способ разгрузки заключается в том, что линия
центров тяжести сечений лопатки представляет собой специально
подобранную кривую. Посадка лопатки в замке выполняется для
этого случая радиально, без наклона.
Недостатком рассмотренных способов компенсации
изгибающих моментов является их однорежимность. Действительно,
изгибающие моменты от центробежных сил зависят от угловой
скорости вращения ротора, а моменты — от сил газов, от плотности газа
и от других параметров потока, различных для различных условий
работы турбины.
Обычно турбину проектируют так, чтобы изгибающий момент
от центробежных сил составлял определенную долю от
газодинамического момента, т. е.
где у — коэффициент компенсации.
Значение у выбирается с учетом работы лопаток на различных
режимах и обычно составляет 7 = 0,3 ... 0,6. Лопатка с линейными
выносами позволяет осуществить заданную компенсацию только в
одном сечении, в качестве которого естественно принять сечение с
17$
наибольшими напряжениями изгиба. Таким сечением обычно
является корневое сечение.
Имеется более эффективный способ разгрузки лопатки
центробежными силами — закрепление лопатки в шарнирном замке. При
таком способе закрепления лопатки суммарный изгибающий
момент в заделке будет равен нулю на любом режиме работы ротора
турбины. Лопатка в этом случае может быть выполненной более
легкой, чем при жесткой заделке. Однако из-за конструктивной
сложности это удалось сделать лишь для холодных лопаток
(длинные лопатки компрессоров), и то лишь для компенсации
изгибающих моментов в плоскости вращения диска.
6. 5. 4. Суммарное напряжение и запасы
прочности лопатки
В каждом сечении лопатки суммарное напряжение
определяется как сумма напряжений растяжения и изгиба:
Запас прочности определяется из выражения
3/
(6.6)
где Зв,т— предел длительной прочности материала лопаток с
учетом температуры и времени.
Очевидно величина запаса прочности лопатки вдоль радиуса
не будет оставаться постоянной — она будет меняться в зависи-
(/)
мости от изменения напряжении cs по радиусу и от величины Ов,т,
изменяющейся вследствие переменной температуры лопатки (рис.
6.18). Обычно минимальный запас прочности принимается по
опасному «сечению лопатки в пределах я=1,2 ... 1,5. Для лопаток
турбин опасное сечение лежит примерно на расстоянии, равном
20—30% длины лопатки, считая от корневого сечения.
В коротких лопатках, где изгиб несущественней, расчет лопатки
на прочность ограничивается определением напряжений только от
Опасное
сечение \
лопатки
ё\х 0 п
Рис. 6. 18. Эпюры напряжений в рабочей лопатке турбины
179
центробежных сил. В этом случае запас прочности в лопатке
определяется равенством
Обычно величина запаса прочности nv берется несколько больше,
чем с учетом напряжений изгиба, а именно:
лр=1,5...2Д
6. 5. 5. Расчет лопаток на колебания
Весьма частым дефектом является возникновение значительных
колебаний лопаток в работающей турбине и связанная с этим их
поломка.
Непосредственной причиной вибрационных поломок лопаток
является усталость материала при действии знакопеременных
нагрузок, вызывающих напряжения выше предела усталости.
Механизм разрушения можно представить себе так.
При наличии колебаний сначала появляются небольшие
трещины у края лопатки. В процессе колебаний эти трещины все время
растут и когда рабочее сечение лопатки уменьшится из-за
трещины до определенной величины, наступает обрыв лопатки. Место
излома, где лопатка получила первоначальную усталостную
трещину, очень характерно: его поверхность гладкая, как бы
отполированная. В месте сечения, где лопатка оборвалась и где трещина
еще не успела развиться, поверхность излома кристаллическая.
Поломка одной лопатки обычно приводит к разрушению
остальных лопаток и турбины .в целом.
Для предупреждения вибрационных поломок лопаток и
успешной борьбы с ними в случае их появления необходимо правильно
оценить возможные источники возникновения дефекта. С этой
целью необходимо определить собственные частоты колебаний
лопаток, возмущающие силы и произвести их гармонический анализ;
построить частотную диаграмму и выявить возможные
резонансные частоты в диапазоне рабочих частот вращения ротора и
выявить наиболее опасные из них .Различают следующие виды
колебания лопаток: изгибные, крутильные, изгибно-крутильные и
кромочные, или пластиночные, колебания (когда почти вся
поверхность лопатки неподвижна, а колеблются лишь отдельные места
кромок, а иногда и замкнутые области лопатки). Колебания
последнего из указанных видов высокочастотные, возникающие в
тонких лопатках.
Наиболее опасными являются изгибные колебания, так как па
своей частоте они всегда могут находиться в диапазоне рабочих
частот вращения.
Крутильные и другие формы колебаний лопаток турбин имеют
большую частоту и не всегда попадают в зону рабочих частот
вращения турбомашины.
Кромочные колебания имеют частоту порядка десятков тысяч
колебаний в секунду и могут возбуждаться при наличии опреде-
18©
Рис. 6.19. Вид и обычные места
расположения вибрационных
трещин на лопатках турбины
Рис. 6.20. Расчетная схема лопатки
(к расчету на колебания)
ленного сочетания числа сопловых и рабочих лопатак, при наличии
вибрационного сгорания в камерах сгорания. Эти колебания пока
не поддаются расчету.
На рис. 6.19 показан вид и обычные места расположения
вибрационных трещин на лопатках турбины.
Мы рассмотрим лишь изгибные колебания лопаток.
Собственные частоты свободных колебаний лопаток
При расчете лопатки на колебания примем следующие
допущения.
1. Лопатка представляет собой стержень, жестко заделанный на
одном конце и со свободным другим концом. Ось неизогнутой
лопатки (в нейтральном положении) принимается прямолинейной и
направленной строго по оси OZ (рис. 6.20).
2. Колебания лопатки будем рассматривать только в плоскости
наименьшей жесткости, т. е. относительно главной оси g.
3. Считаем лопатку не закрученной, но повернутой на
некоторый угол р=^const (нет инерции поворота сечения).
4. Отсутствует вращение, т. е. нет продольных сил, вызываемых
центробежными силами. (Влияние центробежных сил на частоту
колебаний лопатки мы рассмотрим позднее.)
Частоты собственных колебаний лопатки будем определять
методом непосредственного составления уравнения частот, пользуясь
известным принципом Д'Аламбера.
Внешней нагрузкой при колебании лопатки являются силы
инерции. Погонная нагрузка от сил инерции выражается
равенством
q = -QF (д^/дх2) = -Q/Ч (6. 7)
где qF — погонная масса лопатки (масса единицы длины
лопатки) в кг/м; q — плотность материала лопатки в кг/м3; F — площадь
текущего поперечного сечения лопатки в м2; ц = г\(г, т) —функция
прогиба (уравнение упругой линии) лопатки.
181
Внешняя сила инерции уравновешивается внутренними силами
упругости.
Как известно, изгибающий момент при изгибе балки равен
Mli = EIi{d2y\/dz2) = E/^\ (6.8)
где Е — модуль упругости 1-го рода в Н/м2; Д — момент инерции
площади поперечного сечения лопатки относительно оси | в м4.
Дифференцируя это уравнение, найдем выражение для
поперечной силы:
dMJdz = Q = {EItf'Y. (6.9)
Продифференцировав уравнение (6.9), получим выражение для
погонной нагрузки от внутренних сил упругости:
d2MJdz2 = -^-=q = (E/ir\rrr. (6. 10)
Приравнивая внешнюю погонную нагрузку пюгонной нагрузке
от внутренних сил [уравнения (6.5) и (6.8)], получим общее
дифференциальное уравнение для колеблющейся лопатки:
(Е/мУ'+qF^O. (6.11)
Для решения дифференциального уравнения (6.11)
воспользуемся методом Фурье разделения переменных z и т.
Введем обозначения:
Л (г; x) = u(z)g(x) = ug, (6.12)
где и(г) — функция прогиба, зависящая только от координаты z\
g{%) — функция прогиба, зависящая только от времени. '
Продифференцировав выражение (6.12) четыре раза по z и два
раза по т и подставив эти производные в уравнение (6.11),
получим
откуда —*•— = —=а>с=const. (6. 13)
qFu g
В левой части полученного равенства находится функция
{EIiu")"I(qFu), зависящая только от координаты г, а в правой —
функция (—gig), зависящая только от времени т. Обе эти
функции равны друг другу при любых значениях гит, а это возможно
только тогда, когда каждая из этих функций равна одной и той же
постоянной положительной величине, которую обозначим
через О)с2.
Из уравнения (6.13) получаем два дифференциальных
уравнения:
£ + «&=0; (6.14)
(£/&")"-<*>IqFu=0. (6.15)
Уравнение (6.14) представляет собой уравнение гармонических
колебаний лопатки. Период гармонических колебаний
182
а частота колебаний /= 1/Т = озс/(2я), где сос — круговая частота
собственных колебаний лопатки [это и есть физический смысл
постоянной сое в уравнении (6.13)].
Решение уравнения (6.14) запишется в виде
g=A cos «vt-f В sin coct.
Уравнение (6.15) представляет собой дифференциальное урав^
нение формы упругой линии колеблющейся лопатки, так как
содержит в себе только геометрические и массовые характеристики
лопатки и частоту ее собственных колебаний. В общем виде это
уравнение не решается. Можно лишь получить решение равномерно
нагретой (или холодной) лопатки постоянного поперечного сечения.
Рассмотрим этот случай, для которого
Г=const; £Д = const.
Введем относительную переменную z=z/L Заметим, что
Тогда уравнение (6.15) примет вид
или ulY — a*u = Qt (6.16)
где а4 = o)2/4q^/(£/e) (6.17)
— параметр дифференциального уравнения (6.16).
Из равенства (6.17) можно определить собственную круговую частоту
колебаний лопатки:
Hfh
2_ f El.
V ^' <6Л8>
рде а пока неизвестно.
Уравнение (6.16) — линейное дифференциальное уравнение четвертого
порядка. Полное решение этого уравнения запишется в виде
a(z) = A cos az + В sin az + С ch az + D sh ai*. (6.19)
Вместо частных решений cos az; sin az; ch az и sh az A. H. Крылов ввел
линейные комбинации круговых и гиперболических функций, получивших
название функций Крылова.
Тогда уравнение (6.19) примет вид
и (5) = AS (az) + ВТ (a7) + CU(а!) + DV (aF), (6.20)
* Напомним, что гиперболические синус и косинус определяются
выражениями
X —X X —X
и ft — е е +е
sh* ; h*
sh* ; ch* =,
а их производные будут: (shjc)/=ch*; (ch#)'=sh;c.
1»
где 5 (az) = — (ch az -Ь cos az); T (az) = — (sh az 4- sin az);
U (az) = —(ch az— cos az); V(az) = — (sha5 — sin a7). (6.21)
Функции S, T, U и V при дифференцировании обладают свойством круговой
замены, т. е.
5 (az); S' (az) = aV (az); S" (az) = aW (al); Sm (az) = аЗГ (ai);
7 (ai): 7" (az) = aS (ai); Г'' (ai") = aW(az); Г"(az) = a*U(ai); (6.22)
U (az); U' (az) = aT (az); Un (az) = a^S (az); W" (a'z) = aW (az);
V (az); V (az) = aU(az); V" (az) = a*T (a~z); V" (az) = a35 (az).
Применение этих функций позволяет сразу написать решение уравнения
(6.16), удовлетворяющее граничным условиям.
__ Для нашей задачи имеем следующие граничные условия:
£=0; м(0)= 0 (прогиб в заделке равен нулю);-
£=0; м'(0)=0(угол поворота сечения в заделке равен нулю);
г=1; u"(a) = 0 (изгибающий момент на свободном конце лопатки равен ну-
_ лю);
2=1; tt"'(a)=0 (перерезывающая сила на свободном конце лопатки равна
нулю)'.
Использовав первые два граничные условия, получаем
Тогда решение (6.20) примет вид
и (z) = CU(az) -Ь DV(az). (6.23)
Применим третье и четвертое граничные условия (при 2=1).
Из формул (6.22) имеем
U* (а) = a2S (a); V" (а) = а*Т(а),
л также U'"(a) = aW(a); V" (а) = a3S(a).
Подставляя эти выражения в равенство (6.23) соответственно для третьего и
четвертого граничных условий, получим
Ca2S (a) + Da2T (a) = 0; CaW (a) + £>a3S (а) = 0.
Решение этой системы однородных алгебраических уравнений относительно
С и D будет иметь не нулевое значение при условии, если определитель ее будет
равен нулю, т. е. если
S(a) Г (a)
V (a) S(a)
= 0
или
Отсюда, используя равенства (6.21), получим
chacosa = — 1. (6.24)
Уравнение (6.24) имеет бесконечное количество корней. Однако для нас
практически имеют значение лишь первые из них:
ai= 1,875; a2 = 4,694; a3 = 7,855; a4= 10,996; a5= 14,137; a6= 17,279 и т. д.
Каждому значению а соответствует своя форма упругой линии (рис. 6.21) (по
числу узловых точек) и своя собственная круговая частота колебаний,
определяемая равенством (6.18).
184
Ряс. в. 21. Формы изгибных колебаний
лопатки постоянного сечения
Например, для 1-й формы колебаний
собственная круговая частота колебамий
будет (в рад/с)
(ос1
/1,875\2 /
[ I ) У
Соответственно частота
этого случая (в Гц)
qF
колебаний для
^ U(Z)
/
0,8
0,6
0,4
0,2
0~
***
/
/
/
^0,6 j
ц
//
//
1-я форма
1-я форма
3-я форпа
Интегральный метод определения собственных частот
колебаний лопатки
Изложенный способ определения собственных частот колебаний
лопатки, как указывалось, годится лишь для простейшего случая,
когда лопатка имеет постоянную температуру по длине и
постоянное сечение. Однако для абсолютного большинства задач это
решение не подходит.
Поэтому рассмотрим более общий случай колеблющейся
лопатки, у которой ?Ф const; £Д Ф const.
Исходное дифференциальное уравнение свободных колебаний
лопатки получено выше [см. уравнение (6.15)]:
Напомним, что левая часть этого уравнения представляет собой
погонную нагрузку от внутренних сил упругости. Проинтегрируем
это уравнение. Получим выражение для перерезывающей силы:
Постоянную интегрирования С\ найдем из граничного условия:
при z=l перерезывающая сила равна нулю, т. е.
откуда
х=—<й2с \qFucIz.
о
Подставляя значение С\ в выражение для перерезывающей
силы, получим
QFudz- f qFtidz ] = -о)2 f QFadz.
i ) i
185
Интегрируем полученное выражение еще раз. Получим
выражение для изгибающего момента:
Z I
Eftti"= —о)2 Г f QFudz2-\-C2.
Рш
Постоянную интегрирования С2 найдем из граничного условия: при
z~l изгибающий момент равен нулю, т. е. (EIzu")z=i = O,
11
откуда С2 = со? Г f QFudz2.
Тогда выражение для изгибающего момента примет вид
/ z I II \ II
Е1ги"= —а>с| f f QFudz2— f f QFudz2 I=«>c f f QFudz2.
' \0 г 0 z ) zz
I I
Обозначим f f QFudz2 = Mn. Это интегральный оператор, про-
z г
порциональный изгибающему моменту. Тогда получим EI^uf/ =
= (Oc27Wh, ИЛИ йУ = (0с р,И .
Проинтегрировав это уравнение, найдем выражение для угла
поворота упругой линии:
z
й =о)с \ —— а,г-[~Сз.
о е
Постоянная интегрирования С3 = 0, так как при 2 = 0; w/(0)=0.
Интегрируем последний раз. Получим уравнение прогибов
колеблющейся лопатки:
оо *•
Постоянная интегрирования С4 = 0, таю как при z=0 w(0)=0.
Окончательно линейное интегральное уравнение упругой линии
для колеблющейся лопатки запишется в виде
Z Z II
и = <оН Г -^- ^ ^ QFudz2. (6.26)
0
zz I I
~^ ff dz2
Обозначим \ \ -^r
«J •) ^' С
0 0 k zz
Тогда уравнение (6,26) можно записать в виде
«=«2*.. (6.27)
186
Полученное линейное интегральное уравнение (6.26) имеет
следующие свойства:
уравнение имеет бесконечное количество собственных чисел—•
®lv (Ос2; а)й'-*-» т- е- колеблющаяся лопатка имеет
бесконечное число частот собственных колебаний;
каждому значению собственного числа соответствует строго
определенная собственная функция щ; и2\ иг ..., т. е. своя форма
упругой линии;
все собственные функции образуют ортогональную систему
функций:
(0 при / ф j
(6.28)
11 при г=у.
Последнее свойство используется при определении частот
собственных колебаний и функций формы порядков выше* первого
(т.е. ^с* и ик, где £ = 2, 3, 4,...).
Интегральное уравнение (6.27) обычно решается методом
последовательных приближений (простая итерация). Достоинством
этого метода является то, что с его помощью возможно рассчитать
систему, когда все параметры заданы численно (таблично). В
результате расчета наряду с частотами получаются формы
колебаний, что придает решению задачи конкретный физический смысл.
Если некоторая функция задана численно, то необходимо
произвести нормирование этой функции.
Процесс последовательных приближений будет состоять в
определении собственной функции щ+i и собственного числа ^(/+1), если
имеется исходное приближение функции пи по формуле простой
итерации
В этой формуле два неизвестных: щ+i и<*>2(/+1). Метод
последовательных приближений обеспечивает их нахождение. Для этого
определяем интегральный оператор KUi как функцию исходного
приближения щ. Первое приближение находим нормированием
результата:
2 ^ 1
п
Так как неизвестное число ^(z+i) входит и в функцию, и в
норму как множитель, то оно сокращается, что позволяет вести
дальнейший расчет без определения этого числа на промежуточных этапах.
После определения щ+i операцию повторяем и находим
следующее приближение:
«|+2=«>2</+2)/Гв(/+1), (6.29)
и так до тех пор, пока два смежных приближения не дадут
достаточно близкого совпадения собственных функций.
187
и
1,0
0,9
0,6
0,1
0,6
0,5
0,4
0,Ъ
0,1
0,1
шшШЛ
'У
у
uto
J
'/'
/
///
/У
А
'/
А
7/
///
jj
t
0,1 0,2 0,3 0,U 0,5 0,6 0,7 0,8 0,9 z
Рис. 6.22. Исходное и два
последующих приближения 1-й формы упругой
линии колеблющейся лопатки (к
примеру расчета)
Неизвестный параметр юс2 на*
ходим ш формулы (6.29) при
условии равенства значений
функций двух последних
приближений:
(6. 30)
Тогда, с учетом равенства (6.30)
уравнение (6. 29) примет вид
- 31)
Поскольку последнее
равенство должно быть справедливо во
всем интервале изменения
функции, то оно будет справедливо ч
для их максимальных значений,
т. е. для их норм. Поэтому
можем равенство записать так:
= 1 ==<°
с(/+2)
откуда
(6. 32)
Последнее выражение является расчетным для определения
квадрата круговой частоты собственных колебаний лопатки. Расчет
сводится в таблицу. Точность совпадения двух последовательных
приближений удобно (для наглядности) проверять графически, для
чего строится зависимость и = п(г) для исходного и последующих
приближений.
Метод последовательных приближений приводит всегда к
отысканию наименьшего значения собственного числа интегрального
уравнения (т. е. низшей частоты свободных колебаний) и
соответствующей формы упругой линии независимо от вида
первоначально заданной функции формы упругой линии.
Для построения сходящегося процесса последовательных
приближений при отыскании высших значений собственных частот и
соответствующих им форм упругой линии используется условие
ортогональности (6.28).
Подробнее об определении собственных частот и функций формы для более
высоких порядков см. в книге [4]. Там же можно познакомиться с методикой
расчета лопатки на колебания с учетом бандажной полки. Заметим лишь, что
всякое прибавление массы к колеблющейся системе (к лопатке или какой-либо
другой упругой системе) снижает собственную частоту колебаний этой системы.
Пример 6.1. Найти низшую частоту свободных колебаний лопатки турбины.
Высота лопатки h=0,142 м; материал лопатки сплав ХН70ВНТЮ (ЭИ-617);
р=8,4 • 103 кг/м8. При расчете учтено изменение модуля упругости вследствие
неравномерного нагрева лопатки по ее высоте.
Значения F и /^ получаются из газодинамического расчета.
188
Для расчета лопатка обычно делится на 10 равных частей. В качестве
нулевого приближения можно принимать нормированную функцию упругой линии
консольной балки постоянного сечения (функция Ию), которая удовлетворяет
граничным условиям задачи.
Расчет ведется по формуле (6.26). Интегрирование производим по способу
трапеций.
Как нулевое, так и последующие приближения функции и наносим на
график (рис. 6.22).
Круговую частоту свободных колебаний лопатки определим по формуле
(6 32):
"*= Q(//20)4.10-7(/Cei)me ^8,4.103(0,142/20)4.10-7.57134 =8'19-10"6'
откуда coci=286O рад/с.
Соответственно, собственная частота колебаний лопатки будет равна
/с1 = о>с1/2я = 456 Гц.
Влияние вращения на собственную частоту
колебаний лопатки
В инженерной практике собственную частоту колебаний
вращающейся лопатки определяют по частоте невращающейся
лопатки с поправкой этой частоты на вращение.
Как уже упоминалось, во вращающейся лопатке под
действием центробежных сил возникает момент, стремящийся распрямить
изогнутую лопатку при ее колебаниях (см. рис. 6.17).-Это
равносильно ужесточению лопатки. Как следствие этого ужесточения,
собственная частота колебаний вращающейся лопатки возрастает.
Особенно большое влияние центробежные силы оказывают на
низшую собственную частоту колебаний (соответствующую первой
изгибной форме). Влияние на остальные частоты менее
существенно. Поэтому представляет интерес вычисление именно низшей
собственной частоты колебаний с учетом влияния центробежных
сил.
Круговая собственная частота (динамическая) колебаний сод с
учетом вращения определяется по формуле
0)2=0)2 + 5(02, (6.33
где сое — круговая собственная, частота колебаний невращающейся
лопатки; со — угловая скорость ротора; В — коэффициент,
учитывающий влияние центробежных сил на собственную частоту
колебаний лопатки. ,, „пЯ,г
Коэффициент В зависит от
размеров лопатки и может быть
определен по формуле
/ г
F (r0 + z)dz\ (dufdz)* dz
о
- 9
.,„-„<. Рис* в. 23. Зависимость собственной
j частоты колебаний лопатки от угловой
и скорости ротора
189
где и — прогиб в текущем сечении лопатки; F — текущая площадь
поперечного сечения лопатки.
На рис. 6.23 показан характер изменения сод в зависимости от
угловой скорости ротора.
Влияние нагрева лопатки
на ее собственную частоту колебаний
От момента пуска до выхода на стационарный режим
температура газов и температура л остаток возрастают.
Вследствие увеличения температуры лопатки с ростом со
снижается модуль упругости материала, что ведет к снижению
собственной частоты колебаний лопатки (кривая а).
Если известна температура лопатки на каждом режиме, то
учесть влияние разогрева можно по формуле
где Et — значение модуля упругости при заданной температуре;
сое и Е — собственная частота колебаний и модуль упругости
холодной лопатки соответственно.
Вынужденные колебания лопатки.
Резонансные режимы
При работе турбины поток газов движется по проточной части
неравномерно. Эта неравномерность вызывается изменением
направления газа в непрямолинейной проточной части, а также
влиянием различных стоек, выступов, лопаток сопловых аппаратов и
других элементов конструкции, обтекаемых газами.
Неравномерность потока, воздействующего на лопатки, вызывается и
парциальным подводом газа в турбинах со ступенями скорости.
Неравномерность потока создает периодическое изменение газовых
сил, нагружающих лопатки в процессе работы. Вследствие этого
и возникают вынужденные колебания лопаток.
За время одного оборота ротора турбины сила, действующая
на лопатку, будет изменяться по определенному закону, причем ее
можно представить как сумму гармонических компонентов (рис.
6.24):
где Ро\ Pi', •••; Ри — амплитудные значения каждой из
гармонических составляющих; ei; 82; ...; еь — углы сдвига фаз для
соответствующих гармоник. ф
Каждая из гармоник круговой частоты вынужденных
колебаний ось кратна угловой скорости со вращения ротора, причем
порядок гармоники k определяет эту кратность:
<оЛ=*<о=Л.2ш1, (6.34)
190
где k — номер гармоники
(6=1, 2, 3,...; п — частота
вращения ротора в об/с).
Вынужденные колебания
Время одного оборота
Первая гармоника
Sl Четвертая гармо
. ника
Шестая гармоника
Двенадцатая гармо-
//J/A-tf
Рис. 6.24. Разложение
возмущающей газовой силы на
гармоники
in Зона рабочей и max
. частоты оращения,
' теп итах
Угловая скорость си, рад/с
Рис. 6.25. Резонансная диаграмма и
резонансные режимы
сами по себе будут опасны, если будет велика величина
возбуждающей силы, способная вызвать значительные амплитуды
колебаний. Однако на практике опасными являются так называемые
резонансные режимы.
Как известно, условием резонанса является равенство частот
вынужденных сов = со^ и частот свободных колебаний сос, т. е.
В этом случае даже малые силы способны вызвать
значительные амплитуды колебаний и привести к поломке лопаток.
В турбине может быть множество различных гармоник
возбуждения, однако не все они будут опасны с точки зрения резонанса.
Для выявления степени опасности той или иной гармоники
строят частотную (резонансную) диаграмму (рис. 6.25) для каждой
ступени турбины. Эта диаграмма представляет собой график
зависимости частот свободных [определяемых уравнением (6.33)] и
вынужденных [см. уравнение (6.34)] колебаний лопатки в
зависимости от угловой скорости (или частоты) вращения.
Ввиду трудности получения кривых Р = Р(т) при построении
частотной диаграммы и предварительной оценке опасности того
191
или иного резонанса надо учитывать, что амплитуда силы Р и ее
гармонических составляющих быстро убывают с уменьшением
частоты вращения. Поэтому практический интерес представляет
рассмотрение вынужденных колебаний в диапазоне лг== (0,8 ... 1,05) X
X #inax-
Наиболее опасными являются гармоники с наименьшими
порядком кратности к числу стоек, направляющих лопаток и других
возбудителей колебаний. При действии гармоник одной силы более
опасными будут гармоники низших порядков.
Для наглядности вместе с частотной диаграммой построим
график зависимости напряжений от угловой скорости со при
вынужденных колебаниях лопатки.
В каждой из точек пересечения лучей возбуждающих сил с
графиком частот собственных колебаний будут иметь место резонан-
сы. На этих режимах наблюдаются «всплески», т. е. резкое
увеличение амплитуд, и, соответственно, увеличение напряжений.
Анализ частотной характеристики показывает, какие гармоники
вынужденных колебаний будут опасны, и дает возможность
обоснованно воздействовать на конструкцию узла турбины с целью
избежания опасных резонансных режимов.
Существуют следующие практические способы борьбы с
резонансными режимами лопаток.
1. Устранение опасной гармоники возбудителя. Этого можно
иногда достигнуть путем небольшой конструктивной переделки
узла турбины. Допустим, что опасная гармоника соответствует k = 4
(по числу стоек). Если изменить число стоек, например на 5, то
опасная гармоника пропадает.
2. Отстройка лопатки от резонансной частоты, т. е. изменение
собственной круговой частоты сос. Этого можно добиться путем
некоторого изменения размеров лопатки, не нарушая, однако,
газодинамических характеристик турбины, и без коренной переделки
ступени турбины. Можно, к примеру, применить пустотелые
лопатки, срезать угол пера лопатки на периферии вблизи задней
кромки, применить лопатки с бандажными полками, объединить
лопатки в группы путем связки нескольких лопаток перемычками или
групповой отливки лопаток с бандажными полками и т. д.
Все перечисленные мероприятия позволяют перераспределить
массы и изменить жесткость пера лопатки, а следовательно,
изменить сос.
3. Демпфирование колебаний лопаток. Существует несколько
способов демпфирования колебаний упругих систем, основанных на
рассеивании энергии колеблющейся лопатки. Это прежде всего
демпфирование в материале лопатки (внутренним трением);
механическое демпфирование в замках лопатки. Можно демпфировать
лопатки путем постановки двух соседних лопаток в один паз на
диске. В этом случае демпфирование создается трением
поверхностей стыка двух смежных колеблющихся лопаток. Можно
демпфировать колебания лопаток путем пропускания проволоки (для
длинных лопаток) сквозь отверстия в лопатках на свободной по-
192
садке. При вращении пакета лопаток с проволочным бандажом в
местах контакта будет возникать трение, демпфирующее
колебания. Такой способ соединения лопаток проволокой будет к тому же
увеличивать жесткость лопаток и увеличивать сос.
Существует еще так называемое аэродинамическое
демпфирование, основанное на изменении аэродинамической силы при
изменении угла атаки и относительной скорости потока.
Аэродинамическое демпфирование более эффективно при
длинных лопатках и малых углах атаки.
Сравнение частот, определенных расчетом и экспериментально
Экспериментальная проверка собственных частот колебаний
лопаток показала, что действительные частоты значительно ниже
полученных расчетом. Одна из причин этого несовпадения
заключается в том, что расчетное определение собственных частот
колебаний лопатки производилось без учета прогиба, вызванного
действием касательных напряжений от перерезывающих сил, а также
без учета инерции поворота сечений пера при колебаниях [см.
формулу (6.25)] лопаток постоянного поперечного сечения.
Другой практически важной причиной, вызывающей снижение
собственных частот колебаний лопатки, является влияние заделки.
При расчете лопатки считали заделку абсолютно жесткой, на
самом же деле при колебаниях лопатки деформируется не только
само перо лопатки, но и ножка, закрепленная в диске. Особенно
сильно это влияние у коротких лопаток (короткими считаются
лопатки, у которых //7<30, где / — длина лопатки; / — радиус
инерции корневого сечения лопатки).
Действительная собственная частота изгибных колебаний
первой гармоники для лопаток постоянного поперечного сечения
может быть определена по следующей формуле:
7l? /2 V QF '
где г|)=/эксп//расч; /эксп — собственная частота колебаний,
найденная экспериментально; /расч —• собственная частота колебаний,
найденная расчетным путем (без учета влияния касательных
напряжений, инерции поворота сечений и влияния заделки).
Глава VII
ПРЯМЫЕ ПРЕОБРАЗОВАТЕЛИ
7.1. ТЕРМОЭМИССИОННЫЕ ПРЕОБРАЗОВАТЕЛИ
ЭНЕРГИИ
Преобразователи, в которых электрический ток получается в
результате эмиссии электронов от нагретого катода к аноду,
называются термоэмиссионными (ТЭП). Если промежуток
между анодом и катодом вакуумирован и не содержит паров ,ка-
7 3050 193
ких-либо элементов, то такие преобразователи называются
термоэлектронными.
Промежуток между электродами у термоэмиссионного
преобразователя заполнен какими-либо парами, например парами цезия.
Термоэмиссионный преобразователь образуется горячим
катодом и холодным анодом, расположенными друг против друга с
небольшим зазором. При повышении температуры катода растет
кинетическая энергия электронов. Они преодолевают силы
притяжения ядрами атомов, вылетают с поверхности и образуют вокруг
катода электронное облако. Этот процесс называется
термоэмиссией.
Пролетев межэлектродный зазор и попав на холодный анод,
электроны создают на нем отрицательный потенциал, в то же
время катод заряжается положительно. Замыкая цепь, получают элек-
трпческий ток. Термоэмиссионные преобразователи обладают
достоинствами, которые сводятся к следующему.
Они имеют сравнительно высокий к.п.д., в пределах 10—15%,
который, в принципе, может быть доведен до более высокого
значения; конструктивно они во многих случаях проще, чем, например,
машинные, менее громоздки и обладают меньшей удельной и
абсолютной массой.
Однако применение термоэмиссиониых преобразователей еще
связано со многими трудностями, так как
некоторые вопросы рабочего процесса преобразователей плохо
изучены;
катоды ТЭП работают при температурах, достигающих 1400—
2000е С, в контакте с агрессивными, например, парами цезия, что
затрудняет подбор материала для работы в течение длительного
времени;
аноды ТЭП, работая при темпэратурах 600—800° С, должны
иметь изоляцию, которая бы не разрушалась при высоких
температурах, обладала хорошей теплопроводностью для эффективности
охлаждения и была бы совместима с другими конструкционными
материалами;
температурные деформации преобразователя соизмеримы с
межэлектррдиым зазором, (0,01—0,5 мм), тогда как
преобразователь тем эффективнее, чем меньше зазор.
В существующих конструкциях межэлектродный зазор
достигает 0,01—0,9 мм.
И наконец, при изготовлении ТЭПов возникает много
технологических проблем, определяющих работоспособность конструкции.
Все термоэмиссионные преобразователи по конструктивному
оформлению можно разбить на три группы:
преобразователи, совмещенные с ТВЭЛом реактора,
совмещенные с излучателем и совмещенные с теплообменником.
7.1.1. Конструктивные схемы и конструкция ТЭПов
Схема ТЭПа> совмещенного с ТВЭЛом реактора, показана на
рис. 7.1, а.
194
Рис. 7. 1. Схемы ТЭПов, совмещенных:
а—с ТВЭЛом реактора; б—с теплообменником; в—с излучателем
Преобразователь состоит из катода 1, изолированного от оболочки ТВЭЛа
3 изолятором 2\ анода 4, устанавливаемого в трубе 6. так же на изоляторе 5.
Катод / нагревается теплом, поступающим от ядерного горючего через оболочку
ТВЭЛа 3 и изолятор 2. Отвод тепла осуществляется с внешней поверхности
оболочки ТВЭЛа в охлаждающей жидкостью, протекающей через реактор.
На рис. 7.1, в показана схема ТЭПа, совмещенного с теплообменником.
В нем катод 1 нагревается металлом, поступающим из реактора 3. Тепло из
анода 2 отводится излучателем 4. В зазор между катодом и анодом поступают
пары цезия из ампулы 5.
Схема ТЭПа, совмещенного с излучателем, показана на рис.
7.1, в. Здесь катод / нагревается металлом, поступающим из
реактора 3. Тепло от анода 2 отводится излучением с внешней
оболочки 4, к которой крепится анод. Цезий размещен в ампуле 5.
Термоэмиссионный преобразователь,
совмещенный с ТВЭЛом реактора
На рис. 7.2 показана конструкция такого преобразователя.
ТВЭЛ, совмещенный с термоэмиссионным преобразователем,
называется электрогенерирующим элементом (ЭГЭ). Как
видно из рисунка, ЭГЭ состоит из элементов собственно ТВЭЛа и
элементов преобразователя.
ТВЭЛ состоит из таблеток горючего (например UC) 3, оболочки горючего 4,
замедлителя нейтронов 9, помещенного в герметичную полость между двумя
оболочками 10 и 11, и торцового отражателя 12. Радиальный отражатель здесь не
показан, он выполняется, как и обычный отражатель реактора. Между
оболочками 4 горючего и замедлителя 11 размещается преобразователь, состоящий из
катода 6 и его изоляции 5, анода 7 и его изоляции 8. Тепловой поток от
делящегося вещества 3 нагревает катод 6.
7* 195
Рис. 7. 2. Схема ТЭПа, совмещенного с ТВЭЛом реактора
Возможна такая конструкция, где газообразные продукты деления горючего
при работе реактора по отверстиям в таблетках 3, оболочке 4 и
коммутационном стержне / выводятся через жиклер 17 наружу. Жидкий металл (натрий,
литий), омывающий оболочку 10 ТВЭЛа, поглощает тепло, идущее от катода и
поддерживает температуру анода в заданных границах.
Анод и катод соединены последовательно перемычкой, имеющей отверстия
для прохода паров цезия, обеспечивающего нейтрализацию объемного заряда.
Отработанный цезий через канал 13 в отражателе 12 и жиклер 14 выводится
из корпуса.
Ток от крайнего анода коммутационной шиной 2 и стержнем 1 поступает на
коммутационную плиту 15, установленную в корпусе реактора на изоляторе 16.
Анод может выполняться из нержавеющей стали, ниобия;
катод — из молибдена, ниобия; коммутационные элементы — из бе-
риллиевой бронзы; замедлитель — из гидрида металлов,
отражатель — из окиси бериллия.
Совмещение термоэмиссионного преобразователя с ТВЭЛом
реактора имеет неоспоримые достоинства. Это наиболее легкая
конструкция преобразователя; передача тепла к нагретому катоду
осуществляется наикратчайшим путем; при высокой, температуре
катода конструкция имеет сравнительно умеренные температуры
других деталей (анода, замедлителя, жидкого металла).
Совмещенная конструкция позволяет использовать реакторы
различных типов — быстрые, тепловые. Возможна разработка
системы с большим диапазоном мощностей.
Конструкция ТЭПа, совмещенного с ТВЭЛом, имеет
недостатки: ТВЭЛ реактора и преобразователь представляют собой
неразъемную цельносварную конструкцию, органически входящую в
общую конструкцию реактора, а это усложняет ее доводку, испыта-
тание.
При создании конструкции возникают серьезные
технологические трудности, так как приходится соединять большое число раз-
196
нородных материалов, к которым предъявляются высокие
требования по прочности и герметичности соединений. Таким, например,
сложным элементом конструкции является анодно-катодный узел.
Термоэмиссионный преобразователь,
совмещенный с излучателем
На рис. 7.3 показана схема термоэмиссионного
преобразователя, совмещенного с излучателем.
Преобразователь состоит из катода 9, установленного посредством
прослойки из окиси бериллия 10 на наружной стенке 11 тепловой ловушки солнечного
концентратора. Для равномерного нагрева всех анодов преобразователя стенка
И нагревается расплавленным металлом 12, например алюминием, натрием и др.
Анод 3—4, являющийся одновременно излучателем установки, своей центральной
частью 4 установлен на три сферических изолятора 6 из окиси алюминия
(АЬОз). Эти изоляторы обеспечивают расчетный зазор между анодом и
катодом.
^ Конструкция анода выполнена разъемной для того, чтобы обеспечить
припайку гофрированной мембраны 5 к изолятору 1, который служит
одновременно местом для крепления анода 3 к корпусу тепловой ловушки.
Мембрана о изолирует межэлектродный промежуток 13 от космического
пространства. Промежуток 13 заполняется парами цезия, поступающими при
прогреве катода из аккумулятора 8. Аккумулятор представляет собой пористый
металл 7, например никель, пропитанный жидким цезием и уложенный в
герметичную ампулу 8, приваренную к аноду. Это обеспечивает точную дозировку
цезия в зазоре и удобную сборку.
К корпусу тепловой ловушки анод 3-4 крепится через упругий элемент 2,
представляющий собой тонкостенную герметичную коробку, заполненную
аргоном.
Анод выполняется из молибдена, катод — из вольфрама; оболочки тепловой
ловушки — из молибдена, остальные детали — из нержавеющей стали,
изоляторы — из окиси аюминия и окиси бериллия.
Рис. 7. 3. Схема ТЭПа, совмещенного с излучателем
197
Такая конструкция термоэмиссионного преобразователя имеет
определенные достоинства. Она проста, позволяет вести доводку
собственно преобразователя независимо от энергетического
источника.
Недостатком конструкции является трудность получения
оптимальных размеров преобразователя. Размеры анода и
излучающей поверхности близки. Известно, что максимальная мощность,
которую можно снять с излучающей поверхности при рабочих
температурах, не превышает 3 Вт/см2. Таким образом, малая
излучающая способность поверхности анода будет ограничивать
параметры конструкции.
Термоэмиссионный преобразователь,
совмещенный с теплообменником
Такой прео!бразо1ватель показан на рис. 7.4.
Он включает корпус, две трубные доски и набор электрогенерирующих
элементов (ЭГЭ).
ЭГЭ состоит из внутренней горячей оболочки 1, изолятора 2. катода 3У
анода 4, изолятора 5 и внешней цилиндрической оболочки 6.
Крепится ЭГЭ к двухслойной трубной доске 8, 9; в промежутке между
слоями проходят пары цезия.
Преобразователь разогревается литием, который, протекая по внутренней
полости оболочки /, отдает тепло катоду 3 преобразователя. Охлаждение
анода 4 может обеспечиваться натрием, поступающим в два коллектора // корпуса
теплообменника. Так как ниобий и нержавеющая сталь плохо свариваются, в
конструкции предусмотрено промежуточное технологическое кольцо 10.
Электрический ток от всех катодов собирается на коммутационную плиту /.
Достоинства рассматриваемой схемы заключаются в легкости
доводки и эксплуатации конструкции. Размеры преобразователя
Рис. 7. 4. Схема ТЭПа, совмещенного с теплообменником
198
могут быть -выбраны оптимальными и по аноду и по катоду, так
как излучатель не ограничивает количества сбрасываемого тепла;
тепловая мощность реактора не связана с габаритами анодного
узла.
Недостатки—повышенный температурный режим реактора я
большая масса всей конструкции по сравнению со всеми ранее
рассмотренными схемами.
Одна из описанных установок [3], мощностью 27 кВт, имеет катоды из
специального вольфрама, алоды — из вольфрама. Нейтрализация
пространственного заряда осуществляется введением в зазоры ТЭПа цезиевой плазмы.
Диаметр ТВЭЛов, выполненных из карбида урана, d = 2,5 см; общая площадь
электродов 5 = 2000 см2. Температура катода /К=1727ОС, температура анода
/а = 727°С, удельная мощность А^уд=10 Вт/см2, к.п.д. установки г| = 9,7%;
масса установки G = 640 кг.
Другая установка имеет мощность N=300 кВт. Размер активной зоны
£>Х£ —32x28 см, число ГВЭЛов 546, масса реактора 264 кг. Общий к.п.д.
установки 12°/о, к.п.д. термоэмиссионных элементов 14%. Удельная мощность
Л7уд = 11 ... 12 Вт/см2 при плотности тока /=8 А/см2; температура катода £к==
= 1815° С, его материал UC—ZrC; температура анода /а = 982 ••• 1094° С;
удельная масса установки у= 1,91 кг/кВт.
Имеются сведения о гермоэмиссионной установке, где источником энергии
является радиоизотоп кюрий Cm242 с периодом полураспада 162 дня и удельным
тепловыделением (7=115 Вт/г. Эта установка при мощности Л/"= 100 Вт имеет
площадь катода 5=80 см2; температура катода /К = 927°С, анода — /а = 427°С;
масса установки (?=10 кг, ресурс работы — один год.
В литературе [6] описывается установка без теплоносителя мощностью
40 кВт, с размерами активной зоны Dy(L — 49,5x120 см.
Тепло к катоду поступает через стенки, а с анода отводится в космос
излучением. Температуры электродов: /K = 2027°C, /a=1427°C; *Нал = 1227°С.
Напряжение установки £/=-24 ... 28 В.
Термоэмиссионный преобразователь, совмещенный с тепловой ловушкой,
конструктивная схема которого показана на рис. 7.3, имеет основные размеры:
диаметр катода а'=3,8 см, поверхность излучения элемента 10,2 см2, tK--
= 1827° С, мощность одного элемента JV=85 Вт; сила тока /=64 А при
напряжении U= 1,3 В; к.п.д. г] = 15%, удельная масса у=3,4 кг/кВт.
Межэлектродный зазор равен 0,13 мм, анод — никелевый, удельная мощность элемента
ЛГУД = 8 Вт/см2.
На рис. 7.5 показана схема ТЭПа, совмещенного с реактором.
Реактор состоит из электрогенерирующих каналов (ЭГК) 1, установленных
в блоки с замедлителем 2, торцовых отражателей 3, бустерных ТВЭЛов 4,
радиального отражателя 5 и регулирующих барабанов 6. ЭГК включает катод 7,
в сверлениях которого устанавливается горючее 8, и анод 9. Канал 10
обеспечивает отвод продуктов деления горючего.
На рис. 7.6 показана конструкция электрогенерирующего
элемента (ЭГЭ) реактора.
Таблетки горючего 1 из карбида урана UC установлены в оболочку катода
преобразователя 2, выполненного за одно целое с анодом из вольфрама.
Тепловое разделение катода и анода обеспечивается большим числом отверстий, о,
служащих также для подачи в зазор преобразователя паров цезия. Взаимная
центровка преобразователей осуществляется шайбами 4 и кольцами 5 и 12 из
окиси алюминия А12О3. Эти элементы являются хорошими тепловыми и
электрическими изоляторами.
Аноды установлены в цилиндрической оболочке 11 на изоляторах 10 и;-?
ВеО. Коммутация тока обеспечивается стержнями 8 и плитами 7, сделанными
из бронзы. Материалом торцовых отражателей 9 является окись бериллия ВеО.
Крепление ЭГЭ к силовой плите 15 осуществляется сваркой, диафрагма 6
служит опорой конца ЭГЭ, подача и отбор натрия происходят через отверстия 14;
199
Рис. 7. 5. Общий вид реактора-преобразователя
Рис. 7. 6. Конструктивная схема электрогенерирующего элемента
Рис. 7. 7. Конструктивная схема электрогенерирующего элемента
200
подача и отбор паров цезия — через отверстия 13. Сечение А—А показывает
канал в торцовом отражателе для прохода паров цезия.
На рис. 7,7 представлена другая конструкция электрогенери-
рующего элемента реактора.
В ней таблетки горючего 2 установлены в оболочку катода 3, выполненного
за одно целое с анодом 5. Оболочка катода с одного конца опирается на шай~
бу-изолятор 4, а аноды 5 посредством изолятора 6 размещены в трубках 7 и
9, ограничивающих замедлитель 8. В трубке 9 по краям размещаются также
торцовые отражатели /.
Одним концом ЭГЭ крепится к силовой плите 14 сваркой, другим —
свободно опирается на диафрагму 12. Коммутации тока осуществляются
стержнями 13 и плитами 11, изолированными от реактора шайбами 10.
7.1.2. Расчет деталей преобразователя на прочность
Многие детали преобразователя аналогичны деталям реактора,
поэтому их следует рассчитывать по методике, изложенной в гл. П.
Новым элементом является анодный пакет, который испытывает
температурные напряжения.
Расчет температурных напряжений анодного пакета
Анодный пакет представляет собой многослойную
цилиндрическую оболочку, испытывающую температурные напряжения при
разогреве и работе.
Рассмотрим расчет температурных напряжений трехслойной
оболочки (рис. 7.8, а). Исходные данные — геометрические
размеры, материал, градиент температуры по толщине пакета заданы.
Следует найти напряжения 0Фь о^, ^3. Расчет ведем в
предположении, что оболочки плотно припаяны друг к другу.
Напряжениями, возникающими в осевом направлении, пренебрегаем, т. е.
считаем (Та'~"0. Это предположение допустимо в первичном, грубом,
расчете, рассмотрением которого »и ограничимся. Также
пренебрегаем различиями в радиусах оболочек, полагая Rx^R^^R^^R-
Условно зафиксируем одно из сечений оболочки а—а (см.
рис. 7.8, б) и рассмотрим деформацию пакета относительно этого
сечения. Очевидно, принятое для упрощения совместное
деформирование оболочек можно представить так, как это показано на
RHR
а)
Рис. 7. 8. Схема анодного пакета:
а—напряжения; б—деформация
201
рис. 7.8, б, откуда видно, что температурная деформация пакета
приводит к увеличению радиуса R. С другой стороны, совместная
деформация приводит к появлению различных по значениям сил
реакции Р слоев. Известно, что при температурном деформирова-
.Ш1и полная деформация
Так как e((y=oJE, то
Условия совместности деформаций и равновесия в окружном
направлении
п
£cpi == S(p2 =ц ^срз ==z • • • ^^ *ср/г> ^ * i —= \J (' • Л)
или
*/ = ^» если учесть, что
где / — любой из п слоев, т. е. /=1, 2, 3, ... Очевидно, эти два
условия позволят решить поставленную задачу. Подставив
уравнение (7.1) в (7.2), получим
(7.3)
= 0.
Представим эту систему в ваде
. 4)
зА3 = 0.
Решая систему относительно неизвестных напряжений
получим
где
Д =
Е2 — Ех О
я о ~ь
Д3 = ЕХЕ2 [Exhx [ахМх — а3Д/3)
202
Отсюда
+
Напряжение в /е-м слое я-слойной оболочки
c9k=Ek — , (7. 5)
2 Bib
£«1
что и является решением задачи.
Первичной оценкой прочности оболочки может быть общая
формула запаса прочности
где
Мероприятия по упрочнению анодного пакета
Рассмотрим напряжения, возникающие в анодном пакете при
его нагреве. Если анодный пакет представляет собой трехслойную
оболочку (рис. 7.9, а), выполненную из молибдена, окиси бериллия
и нержавеющей стали Х18Н9Т. то при нагревании через некоторое
время т возникнут температурные напряжения. Оболочка 2 из
окиси бериллия будет растянута, оболочка / из молибдена и
оболочка 3 из нержавеющей стали будут сжаты. Это является
следствием перепада температур At и различием в коэффициентах
линейного расширения этих материалов, которые соответственно равны:
а! = 12-Ю-6; а2 = 7.10-6; а3=16.1()-6.
Известно, что окись бериллия плохо воспринимает
растягивающие напряжения. Можно изменить знаки напряжений в пакете на
противоположные путем технологической операции, представлен- ,
ной на рис. 7.9, б.
Пакет устанавливается без зазоров в корпусе, имеющем низкий
коэффициент линейного расширения, и нагревается до рабочей
температуры. После нагрева и выдержки в течение некоторого
времени, обеспечивающей релаксацию напряжений, корпус и
пакет охлаждаются до исходной температуры. В результате в
пакете устанавливаются напряжения, указанные на рис. 7.9, в.
Повторный (рабочий) нагрев так обработанного пакета приводит к
распределению напряжений, более работоспособному, чем это
представлено в первом, исходном случае.
203
/f z
Рис. 7. 9. Напряжения в анодном пакете:
у—молибден; 2—окись бериллия; 3—нержавеющая
сталь
Рис. 7. 10. Деформация ползучести
катода
Расчет деформации ползучести оболочки катода
Высокие температуры оболочки ТВЭЛа, на которые
устанавливается катод, непрерывное воздействие газообразных продуктов
распада горючего при эксплуатации генератора требуют расчета и
проверки изменения рабочего зазора между катодом и анодом.
Расчетная схема показана на рис. 7.10. Даны значения р, R, h, At,
В, m, x, Д. Требуется найти изменение радиуса оболочки катода
AR вследствие деформации ползучести.
Считаем, что рабочий зазор выбран с учетом свободной
температурной деформации катода и анода. Тогда, например, изменения
радиусов катода ARK и анода А/?а при нагреве будут равны
соответственно:
где принято RK=R3i = R.
Исходные уравнения относительных деформаций, если считать, что
оболочка катода находится в плоско-напряженном состоянии,
будут
£9 — — ^ [а? — о0), sz_ ^ — (az — аг , ( . J
Где ао = — (a9 + az) И e/ = -i/raJ — a(paz + az. (7.7)
Подставим равенства (7.7) и известное уравнение ползучести
г1 = Во?Х
в уравнения (7.6):
з ВаТх г 1 / ,
204
M
3 5 £; Г 1 .1 1 E;
2 o/ L о J 2 a/
так как az = 0,5сгф.
Окончательно деформация оболочки
Равенство нулю sz показывает, что в цилиндрической оболочке,
нагруженной внутренним давлением, деформация ползучести
развивается только в окружном направлении. В осевом направлении она
равна нулю.
Пример 7.1.
Найти деформацию ползучести оболочки катода за 100 ч работы
преобразователя, если дано /? = 5 10~3 м и /г = 5 • Ю-6 м, /7 = 0,3 МПа, /=1800°С,
а = 6,73-10-6 1/град, материал оболочки — вольфрам, m — 2J4, J3 = 2,44 • 10~21
(м2/Н)т ч, х=100 ч.
Находим напряжения в оболочке катода:
z
=
* h 5-10-4 z
Находим деформацию ползучести
=0,5 (32 — 3-1,5 + 1,52)(2'74-1) °>5(2-3—1,5) 2,44-10-21. юо =
= 0,06; А/? =- ^ = 5-10-3.0,06 = 0,3-10-3 м.
7.2. МАГНИТНЫЕ ГИДРОДИНАМИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Принципиальная схема магнитогидродинамического
преобразователя (МГДП) показана на рис. 7.11. По каналу / между
полюсами магнита 2 со скоростью v пропускают поток горячей
плазмы, имеющей достаточно высокую электропроводность.
Воздействие поперечного магнитного поля плотностью В на заряженные
частицы плазмы приводит к переносу их к боковым стенкам канала,
и тем самым на стенках, играющих роль электродов, создается
разность потенциалов. В такой установке осуществляется прямое
преобразование энергии потока в электрическую. Точнее, в
электрическую энергию преобразуется кинетическая энергия струи,
которая в свою очередь получается при предварительном расширении
плазмы в сопле.
Особенностью условий работы преобразователя является
высокое давление плазмы в канале, высокая температура,
агрессивность рабочей жидкости.
В схемах с МГДП возможны три режима: с сохранением
статической температуры и уменьшением кинетической энергии
плазмы; с сохранением кинетической энергии плазмы и уменьшением
температуры; со снижением того и другого.
205
Рис. 7. И. Схема МГДП с
линейным каналом
/—канал; 2—магнит
В зависимости от режима форма канала
МГДП будет различной.
По способу организации отвода энергии
от потока намагниченной плазмы МГДП
делятся на кондукционные и индукционные.
Кондукционный МГДП
характеризуется тем, что поток электропроводной
плазмы, протекающей через поперечное
магнитное поле, вызывает ток / внутри канала
МГДП, замыкающийся затем по внешней
цепи R (см. рис. 7. 11), т. е. в генераторе
обязателен электрический контакт рабочего
тела со стенками—электродами.
Недостатками такого преобразователя являются
требование высокой температуры стенок, иначе, т. е. при холодной
стенке, электропроводность в пристеночном пограничном слое
будет очень низкой и высоки потери на джоулево тепло; возможный
коррозионный и эрозионный износ стенок — электродов. Такой
преобразователь может быть как постоянного, так и переменного или
прерывистого тока, в зависимости от характера изменения
магнитного поля или скорости потока плазмы во времени.
Индукционный МГДП характеризуется тем, что
электрическая мощность создается в нем за счет э.д.с. индукции в
катушке магнитной системы, охватывающей поток
электропроводной плазмы, текущей по электрически изолированному" каналу.
Такие преобразователи могут производить только переменный ток,
а создание прикладываемого, бегущего вдоль канала магнитного
поля в них требует реактивной мощности, которая может быть
подведена от специального синхронного генератора либо от
батареи конденсаторов.
Наибольшее распространение получила кондукционная схема
преобразователя в силу ее большей простоты, больших
перспектив на получение значительных к.п.д., а также из-за сравнительно
пониженных требований к проводимости плазмы.
Кондукционные преобразователи различаются по форме
канала, которые делятся на линейные, дисковые, коаксиальные и
радиальные.
В МГДП на рис. 7.11 линейный канал имеет
прямоугольное поперечное сечение, изменяющееся по длине, в соответствии с
изменением параметров проходящей через него плазмы. Такая
схема позволяет получить большие мощности в одном агрегате
при сравнительно простом конструктивном исполнении.
В МГДП с дисковым каналом (оис. 7.12) канал /
выполнен в виде полого диска. Магнитное поле В создается
электромагнитом 2 с намоткой 3. Такая схема позволяет получить МГДП
небольшой мощности (50—100 кВт).
В МГДП с коаксиальным каналом (рис. 7.13) канал
преобразователя образуется внешней оболочкой 1 и сердечником
,206
А-А
2. Магнитное поле создается
собственным током плазмы,
что позволяет уменьшить
массу магнитной системы
мгдп.
Рис. 7. 12. Схема МГДП с дисковым
каналом
Рис. 7. 13. Схема МГДП с
коаксиальным каналом
7. 2. 1. Конструкция линейного канала
На рис. 7.14 показана возможная конструкция линейного
канала К, находящегося в поле магнита М.
Электродная стенка 3 канала выполняется из молибдена или ниобия,
поверхность ее имеет вольфрамовое напыление 4. Стенка охлаждается жидкостью,
проходящей между оболочками 1 и стенкой 3, связанными гофрированной прос-
тавкой 2.
Изолирующая стенка 5 капала выполняется из керамики (АЬОо),
устанавливаемой в охлаждаемую пиобиевую оболочку 6, связанную гофрированной-про-
ставкой 7 с оболочкой 8. Оболочка 6 припаивается для создания герметичности
соединения к оболочке 1 через изолирующую прослойку 4, защищающую
стенки от закорачивания тока.
Все плоские стенки передают нагрузку от проходящей плазмы на
прокладку 9, выполненную из окиси бериллия, и затем — на коническую или цилинд-
оическую оболочку 10. Эта оболочка является силовой — основной,
воспринимающей нагрузку от проходящей через канал плазмы.
На рис. 7.15 показаны конструктивная схема трехсекционного
коаксиального канала с внешним магнитным ;полем и
направления движения плазмы со скоростью vy тока / и магнитного
поля В.
7.3. ТЕРМОЭЛЕКТРИЧЕСКИЕ ПРЕОБРАЗОВАТЕЛИ
Работа термоэлектрического преобразователя (ТЭЛП)
основана на термоэлектрическом эффекте: если в замкнутой цепи,
состоящей, например, из двух разнородных полупроводников, нагреть
один спай и охладить другой, то между ними /возникнет разность
потенциалов.
Термоэлектрические преобразователи применяются для
генераторов небольших и средних -мощностей (до 5 кВт).
Они обладают рядом достоинств: сравнительно просты
конструктивно, рабочий процесс протекает при низкой температуре, что
упрощает их использование. Недостатками ТЭЛПов являются:
невысокий сравнительно коэффициент полезного действия (iB
существующих энергоустановках он достигает 5%); сублимация в кос-
207
10
9 'б
Рис. 7.14. Конструкция линейного канала
Рис. 7.15. Конструктивная схема
трехсекционного коаксиального
канала МГДП с внешним магнитным
полем:
/—внешняя оболочка; 2—сердечник;
3—электромагнит
мическом пространстве этих полупроводниковых материалов
преобразователей, требующих поэтому защиты.
В табл. 7.1 приведены характеристика основных
полупроводников, применяющихся в КДУ, а также произведения эффективности
Z на температуру горячего спая, характеризующие к.п.д. элемента.
Таблица 7.1
Полупроводник
Германиево-кремниевый
Свинцово-теллуровый
Германиево-кремниевый —
свинцово-теллуровый
Свинцово-олово-теллуровый
Формула
GeSi
РЬТе
GeSiPbTe
PbSnTe
Температура, °С
холодного
спая
260
175
247
200
горячего
спая
850
800
530
400
820
800
650
650
Эффективность zt
0,6
0,4
1,0
1,0
0,8
0,8
1,0
0,9
208
Как видно, германиево-кремниевый элемент работает при
сравнительно высоких температурах холодного и горячего спая,
наиболее стоек из всех других \в вакууме, но имеет наихудший к.п.д.
Овинцово-теллуровый элемент имеет высокий к.п.д., но
неустойчив в вакууме; его температура холодного спая низкая, что
утяжеляет излучатель установки. Два последних элемента обладают
средними свойствами по сравнению с двумя первыми.
Рассмотрим классификацию термоэлектрических
преобразователей. По конструктивной схеме они делятся на преобразователи,
совмещенные с ядерным реактором или изотопным источником
тепла; совмещенные с излучателем и совмещенные с
теплообменником.
7. 3.1. Схема термоэлектрических преобразователей
В энергоустановках малой мощности встречается схема,
показанная на рис. 7.16, а. Источником тепловой энергии является
радиоактивный изотопный материал или ядерное горючее /. Оброс
тепла, проходящего через преобразователь 2, осуществляется
излучением. Схема одноконтурной ЭУ с ТЭЛПом показана на рис.
7.16, б. Горячий спай преобразователя 1 нагревается жидким
металлом, поступающим из реактора. Холодный спай совмещен с
излучателем. Двухконтурная ЭУ показана на схеме 7.16, в.
Необходимые температуры горячего и холодного спаев преобразователя
У обеспечиваются прокачкой жидкого металла «горячего» и
«холодного» контуров.
Конструктивная схема модуля ТЭЛПа показана на рис. 7.17, а.
Модуль состоит из нескольких столбиков п- и р-типа 1, коммутационной
шины 2, припаянной к столбикам припоем 3, изоляции (ВеО) 4, корпуса
модуля 5. Размер Л составляет обычно 5—15 мм.
На рис. 7.17, б показан модуль ТЭЛПа, выполненный в виде
цилиндрического столбика — блока.
Столбики п- и р-типа 1 спаяны в одно целое с изолятором 2 и
наконечником горячего спая 3. Напыление изоляции 4 защищает преобразователь от
металлической стенки источника тепла. На рисунке показана также
коммутационная шина 5, опорная шайба 6 и стакан 7 холодного спая преобразователя
пружиной 8.
ТЭЛП, совмещенный с изотопным источником
и излучателем
Как видно из рис. 7.18, источником тепла в этой конструкции является
радиоактивный изотоп 1Х помещенный в ампулу 2 и передающий тепло горячему
спаю преобразователя через теплопроводную набивку 3 и теплопроводную
оболочку 4. Полупроводниковые элементы 5 установлены на изоляторы 6 и
заключены в герметичную оболочку 7, являющуюся одновременно излучателем и
корпусом установки.
Материалы элементов такой конструкции следующие:
оболочек — нержавеющая сталь или молибден, изоляторо>в — окись
бериллия; теплопроводный материал — бериллий. Герметичность
корпуса 7 позволяет применить высокоэффективный свинцово-
теллуровый элемент.
209
Рис. 7. 16. Схемы преобразователей:
а—в радиоизотопном генераторе; б— в одноконтурной ЭУ, в—в двухконтурной ЭУ
2 3 4 5
I III
щт
ТТ
см.
а)
Рис. 7. 17. Схемы модулей преобразователей:
а—модуль преобразователей* б—блок преобразователя
Рис. 7. 18. Схема ТЭЛПа, совмещенного
с источником энергии и излучателем
Рис. 7. 19. Схема ТЭЛПа,
совмещенного с теплообменником
210
Достоинства такой конструктивной схемы — простота и
легкость; недостаток — в том, что трудно получить в одной
конструкции оптимальную температуру холодного спая, определяемую
размером излучающей поверхности, и оптимальную температуру
горячего спая, определяемую мощностью источника и
теплопроводностью многих материалов. Следует иметь в виду, что излучающая
способность поверхности преобразователя невелика.
Так как представленная конструкция плохо расчленяется на
отдельные элементы, ее трудно довести до нужных параметров.
ТЭЛП, совмещенный с теплообменником
Термоэлектрический преобразователь (рис. 7.19) состоит из
оболочек 1 и 3, связанных гофрированной проставкой 2, изолятора 4
и блока р и п столбиков-полупроводников, связанных внутренней
коммутацией 5. Пластинки 5 выполняются из молибдена, блок р—п
элементов обладает свойствами керамических материалов,
соединение этих разнородных материалов обеспечивает прослойка 6\
пространство между столбиками заполнено теплоизоляционным
материалом 7.
Материал оболочек — нержавеющая сталь или «ниобий, в
зависимости от рабочего тела. Изолятор выполнен из окиси
бериллия, внутренняя коммутация — из молибдена, внешняя — из бе-
риллиевой бронзы, теплоизоляционный материал — стекловата.
Достоинства такой конструкции: оптимальные температуры
холодного и горячего спаев; возможность быстрой отладки
преобразователя; [Возможность придать узлу преобразователя любую
приемлемую конструктивную форму — плоскую, осесимметричную
и т. д.
7. 3. 2. Конструкция ТЭЛ Пов
Известна конструкция термоэлектрического генератора (ТЭГа)
с термоэлектрическим преобразователем, смонтированным на
реакторе без жидкого теплоносителя. Реактор имеет активную зону
цилиндрической формы, составленную из тепловыделяющих
элементов в виде пластин из дикарбида урана UC2 с 90%-ным
обогащением U235 и графитовых конструкций. Загрузка U235 равна 49 кг.
Активную зону с максимальной температурой в центре 1770° С со
всех сторон окружает радиальный отражатель из бериллия; в
отражателе размещены четыре управляющих стержня.
Термоэлектрический преобразователь состоит из нескольких
тысяч полупроводниковых элементов, выполненных из германиево-
кремниевого сплава и расположен на внешней поверхности корпуса
реактора, имеющего температуру 1000° С. ТЭГ имеет четыре
группы термоэлементов, каждая из которых включает четыре
параллельные цепи. Суммарная мощность преобразователя N = 500 Вт
при силе тока / = 88 А. Тепло сбрасывается через охлаждающие
ребра. Долговечность установки 4000 ч. Конструкция отдельных
элементов установки показана на рис. 7.20.
211
Рис. 7.20. Конструкция
элементов ТЭЛПа
Рис. 7.21. Конструкция разъемного
ТЭЛПа
Возможным способом соединения полупроводниковых элементов 2 с
горячими 1 и холодными 3 узлами установки является пайка по поверхностям Г, X.
Назначение сильфона 4 в этой конструкции — герметизация полости
полупроводниковых элементов. Основной недостаток такого узла — технологические
трудности пайки большого числа разнородных элементов.
На рисунке 7.21 показана *более технологичная разъемная
конструкция узла соединения преобразователей с корпусными
деталями.
Горячая поверхность преобразователя 2 и горячая поверхность корпуса
установки 1 стыкуются, но не пропаиваются. Технологический разъем
конструкции по горячему спаю, упрощая конструкцию, приводит, однако к сравнительно
большим потерям тепла, чем это было в предыдущем случае. Конструкция
сдвоенного сильфона 4 холодильника 3 обеспечивает герметизацию полости
полупроводниковых элементов и достаточное усилие прижатия узла преобразователя при
разогреве конструкции.
На рис. 7.22 показан другой способ соединения преобразователя
с корпусными деталями [4].
Здесь полупроводники 2 жестко припаиваются к горячей 3 и холодной У
оболочкам корпуса.
Оболочка 3 нагревается жидким натрием, размещенным в полости Б.
Температурные деформации узла компенсируются гофрированным элементом 4, а
изменение объема натрия при разогреве — гофрированным элементом 5. Этот
же элемент, перемещая при разогреве стенку 6, створками 8 обеспечивает
тепловое регулирование мощности. Обратное движение стенки 6 осуществляется
пневмопружиной 7.
Данные таких ТЭЛПов: рабочие температуры /г = 582 ... 593° С; /х = 177...
209° С; полезная мощность N = 3 ... 5 Вт; мощность источника тепла Мт = 96Вт;
к.п.д. т] = 4 ... 5%. Батарея включает 27 термоэлементов из селенида свинца и
обеспечивает напряжение £7 — 2,5 ... 2,8 В.
Установка с термоэлектрическими элементами из РЬТе (л-тип) и GeBiTi (р-
тип) имеет полезную мощность 7V = 250 Вт. Элементы установлены на внешней
поверхности корпуса реактора (32 группы элементов по 24 шт. в каждой
группе). Все 768 элементов обеспечивают напряжение 28 В; tr = 6l4°C, *Х = 344°С.
Данные ТЭЛПа, совмещенного с излучателем (рис. 7.23), следующие:
тепловая мощность реактора 35 кВт, электрическая мощность 500 Вт при
напряжении 28,5 В. Преобразователи выполнены из CeSi; перепад температур мел.-
212
Рис. 7. 22. Конструкция регулируемого ТЭЛПа
Рис. 7.23. Конструкция ТЭЛПа, совмещенного с излучателем
213
ду спаями — от 468 до 310° С. Генератотг*состоит из 14 400 элементов,
мощностью 0,37 Вт при напряжении 0,1 В каждый. Долговечность установки — 1 год.
Узел каждого генерирующего элемента состоит из собственно
преобразователя 1, трубопровода с жидким горячим металлом 2, излучателя 3. Форма
трубопровода 2 цилиндрическая, что снижает потери тепла и уменьшает испарение;
к излучателю 3 приварен компенсатор 4 температурных деформаций в виде
гофра.
Глава VIII
ТЕПЛООБМЕННЫЕ АППАРАТЫ
В космических энергетических установках теплообменных
устройств очень много. Теплообменником является собственно
ядерный реактор, где имеются все необходимые для теплообмена
элементы: теплоноситель, «горячие» и «холодные» детали, источник
тепла. Такими же устройствами являются изотопный источник
тепла, тепловая ловушка солнечного концентратора,
термоэмиссионный и термоэлектрический преобразователи тепловой энергии.
Однако в этих агрегатах теплообмен сопутствует другим основным
процессам, которые определяют основное назначение изделия, как,
например, генерирование энергии, преобразование энергии и т. д.
Под теплообменным аппаратом (ТОА) понимается устройство,
основным назначением которого является передача тепла от
одного рабочего тела к другому или его рассеивание. В космических
электроракетных двигателях ТОА делятся на две группы —"это
холодильники-излучатели и собственно теплообменники.
Все теплообменные аппараты можно разделить на теплообмен-
ные аппараты, где при работе не происходит изменения
агрегатного состояния рабочего тела — они называются
регенераторами, или рекуператорами, — и теплообменные
аппараты, где происходит изменение агрегатного состояния — они
называются парогенераторами и конденсаторами.
Кроме этого, конструктивно ТОА сильно отличаются друг от
друга соответственно тому, в каком виде — жидком, газообразном
или твердом — находится теплоноситель.
Рассмотрим подробнее конструктивные особенности первой
группы ТОА — излучателей.
8.1. ХОЛОДИЛЬНИКИ-ИЗЛУЧАТЕЛИ
Назначение холодильника-излучателя — отвод тепла в
космическое пространство.
Излучатель — неотъемлемая часть КЭУ, так как излучение
тепла — это единственный способ теплообмена в космическом
пространстве.
Излучатель по габаритам и массе занимает существенное место
в энергоустановке, а его конструктивные формы во многом
определяют эффективность энергоустановки в целом.
214
При проектировании излучателя следует исходить из
следующих соображений.
Размеры излучателя обратно пропорциональны четвертой
степени температуры его поверхности. Поэтому температура
излучателя должна быть максимально возможной, чтобы у?1енынить его
массу и габариты. В стартовых условиях излучатель также должен
иметь минимальные габариты, удобные для установки его в
ракету-носитель. Он должен удовлетворять условиям виброустойчивости
и герметичность'.
В космическом пространстве излучатель должен занимать
положение, затененное защитой реактора. В конструкции излучателя
следует предусматривать устройства, позволяющие отключать
некоторую часть холодильника, в которой нарушилась герметичность
вследствие метеорных пробоев или других причин.
По конструктивной схеме холодильники-излучатели разделяют
на несколько групп. По физическому состоянию
теплоносителя холодильники подразделяются на холодильники с жидким
и парогазообразным теплоносителем. Наибольшее место в КДУ
занимают холодильники жидкометаллические, где теплоносителем
являются металлы. Имеются холодильники, в которых тепло
передается твердыми стенками, а жидкий теплоноситель в системе
отсутствует.
По компоновочной схеме все холодильники можно
разделить на неразвертывающиеся и развертывающиеся.
Каждая из этих конструкций может быть выполнена
независимо от других элементов конструкций, но может быть совмещенной
с различными устройствами энергетической установки или с
преобразователями энергии.
Наконец, жидкометаллические излучатели могут быть с
однофазным или многофазным рабочим телом, например двухфазным,
когда холодильник-излучатель совмещается с конденсатором и
жидкий металл находится в жидком и парообразном состоянии.
Рассмотрим некоторые типичные конструктивные схемы
холодильников-излучателей.
8. 1. 1. Конструктивные схемы
холодильников-излучателей
Конический жесткий неразвертывающийся излучатель
На рис. 8.1 показана схема такого излучателя.
Ом состоит из двух коллекторов 1, к которым подводится и отводится
жидкий металл — теплоноситель, растекающийся по трубкам 2. Трубки 2 спаяны
излучающей перепонкой 3 и для жесткости зафиксированы шпангоутом 4. С
внутренней стороны излучателя для защиты размещенных в нем элементов
установлен экран 5.
Достоинства такого излучателя — простота конструкции,
возможность применения автоматической сварки узлов и элементов.
Недостатки — сравнительная громоздкость; неэффективное
использование поверхности излучения, так как теплообмен осущест-
215
Рис. 8.1. Схема конического жесткого неразвертывающегося излучателя
вляется с одной стороны; большое пространство внутри излучателя
практически не используется. Хотя иногда в этом пространстве
устанавливаются пусковые насосы и емкости тепловой компенсации
контура, однако полностью свободный объем они не используют.
Такая конструкция .применима для КДУ малой мощности.
Размеры излучателя вписываются в обтекатель стартовой
ракеты-носителя.
На рабочем режиме в излучателе возникают значительные
температурные перепады, а следовательно, и напряжения. На эту
особенность следует обращать внимание в тех случаях, когда
излучатель включен в силовую схему энергоблока; расчет должен вестись
и на стартовые условия, если излучатель воспринимает стартовые
нагрузки.
Конический гибкий неразвертывающийся излучатель
В этой схеме (рис. 8.2) трубки 2, несущие теплоноситель, и коллекторы /
сварены в один узел, который при старте никаких нагрузок, кроме нагрузок от
собственной массы, не несет. В рабочем состоянии трубки испытывают
температурные напряжения, на которые конструкцию необходимо рассчитывать.
Силовым каркасом, связывающим излучатель с другими элементами
установки, является замкнутая тонкостенная гибкая коническая оболочка 3, которая
для увеличения жесткости находится под давлением нейтрального газа.
Оболочка имеет жесткие фланцы 4\ ее боковая поверхность является дополнительной к
трубкам излучающей поверхностью. Оболочка соединяется с одним из
коллекторов сваркой.
Достоинства этой схемы — легкость излучателя; недостаток —
одностороннее использование поверхности излучения. Схема, как
и предыдущая, находит применение в КДУ малой мощности.
Схема неразвертывающегося излучателя показана на рис. 8.3. Излучающие
тепло и связывающие коллекторы 1 трубки 2 с экраном 3 здесь, как и в
предыдущей конструкции, не включены в силовую схему космической двигательной
установки. Для этого имеется жесткий цельносварной каркас 4.
216
А-А
Рис. 8. 2. Схема конического гибкого неразвертывающегося излучателя
Рис. 8. 3. Схема гибкого неразвер- Рис. 8.4. Схема плоского развертывающегося иэ-
гывающегося излучателя с жестким лучателя
силовым каркасом
Вид А
Рис. 8. 5. Схема развертывающегося конического излучателя
217
Плоский развертывающийся излучатель
Развертывающийся излучатель показан на рис. 8.4.
Он состоит из двух коллекторов 1, к которым подводится и отводится
жидкий металл — теплоноситель, трубок охлаждения 2, на которые
напаиваются поверхности излучения 3. Конструктивно каждая плоскость излучателя
состоит из нескольких (на схеме — из четырех) секций — панелей, связанных шар-
пиром 4.
Узел шарнира 4 обеспечивают герметичность излучателя в ctqdto?.oai
состоянии ,развертывание, герметичность и фиксацию секций в рабочем развернутом
состоянии. На каждой панели предусмотрены отсечные клапаны 5, запирающие
выход жидкого металла при пробое какой-либо трубки панели.
Две плоскости излучателя в стартовом положении свертываются
относительно оси симметрии и удерживаются от развертывания легкой,
сбрасывающейся в космосе оболочкой.
Достоинство такой конструкции — возможность получения
эффективного излучателя практически любого размера. Плоская
форма излучателя удобна для наилучшего использования
поверхностей.
Недостаток конструкции — большая сложность по сравнению с
предыдущими конструкциями. Неизбежны потери металла в момент
развертывания излучателя в космосе.
Конический развертывающийся излучатель
Как видно из рис. 8.5, излучатель состоит из торообразной рамы,
совмещенной с коллекторами жидкого металла 1 и 2, панелей излучателя 5, шарнира
развертывания 4> гибких элементов 3.
В стартовом состоянии панели излучателя 5 повторяют контуры обтекателя
ракеты-носителя. В рабочем состоянии панели разворачиваются около шарнира
4 «сухой» конструкции, не омываемого жидким металлом, что исключает потери
теплоносителя при развертывании. Герметизация панелей и коллекторов 1 и 2
осуществляется с помощью гофрированных элементов 3. Трубки и переборки в
панели 5 выполнены из штампованных тонких листов.
Излучатель, совмещенный с ТЭЛПом
На схеме (рис. 8.6) показан такой излучатель. Сброс тепла осуществляется
ребром 1У выполненным из алюминия и защищенным от сублимации в вакууме
специальным ^покрытием. Тепло к излучателю поступает по латунному штырю 2.
припаянному к холодному торцу термоэлектрического генератора 3.
Такая конструкция применима для радиоактивных изотопных
источников. Типичным излучателем в изотопных генераторах явля-
етря внешний корпус 1 станции (рис. 8.7). Тепло к нему от
капсулы 3 передается гибким теплопроводом, выполненным в виде
медного, жгута 2.
Излучатель с использованием тепловых трубок
Излучатель (рис. 8.8) состоит из поперечных 1 и продольных 2 коллекторов,
по которым жидкий металл, перетекая, отдает тепло в тепловые трубки 3,
которые, в свою очередь, вместе с экраном 4 сбрасывают это тепло в космическое
пространство.
Тепловое излучение тепловой трубкой основано на
использовании явления переноса тепла при парообразовании и конденсации.
218
Вид А
Рис. 8. 6. Схема излучателя,
совмещенного с ТЭЛПом
А-А
Рис. 8.7. Схема излучателя
с гибким теплопроводом
Известно, что процесс парообразования сопровождается
поглощением тепла, определяемым скрытой теплотой парообразования и
выделяемым при конденсации. Такой способ охлаждения весьма
эффективен, так как «тепловодность» тепловой трубки может
превышать теплопроводность, например, серебра в десятки тысяч раз.
Схема тепловой трубки показана на рис. 8.9, а. Она состоит из трех
частей — части ai для подвода тепла, части а2, где теплообмен не производится и
последней части а3, представляющей сббой излучатель тепла. Часть а2
изолируется, размер ее определяется конструкцией; в этом месте трубка крепится к
коллектору излучателя.
Принципиально конструкция трубки сравнительно проста. Если
герметичную трубку, имеющую по внутренней стенки пористое
тело, наполнить частично жидким металлом, дапример натрием, то
при нагревании горячего конца (часть а,\) натрий будет испаряться
и заполнять всю свободную внутреннюю полость.
Этот процесс сопровождается интенсивным отбором тепла,
количество которого определяется скрытым теплом парообразования
рабочего тела (в данном случае — натрия).
JLL.
Рис. 8. 8. Схема излучателя
на тепловых трубках
Рис. 8. 9. Тепловая трубка:
а—схема; б—конструкция
219
Пары натрия, распространяясь по трубке и соприкасаясь с
холодными стенками ее охлаждаемой части, отдают тепло
охладителю (часть а3) и конденсируются. Жидкий натрий капиллярными
силами возвращается в горячую часть трубки, и процесс
повторяется.
Так как в основе теплообмена лежит процесс испарения и
конденсации, то трубка нагрета почти равномерно и градиент
температуры вдоль оси трубки не велик.
Наиболее важными элементами трубки являются поверхность
теплоподвода и размеры капилляра — фитиля, обеспечивающего
транспортировку конденсата к горячему концу трубки.
Очевидно, что в правильно спроектированной трубке процесс
перекачки металла будет установившимся и непрерывным.
Капиллярные силы должны справляться с отсосом жидкого металла в
горячую полость трубки, иначе возможен ее перегрев и прогар.
При несоразмерно больших количествах подводимого тепла
возможно пузырьковое кипение металла в порах и капиллярах фитиля,
что также ухудшает теплообмен и может привести к срывному
режиму работы трубки и ее прогару. Очень важно, чтобы
материалы трубки и рабочего тела были совместимы и была обеспечена
должная коррозионная стойкость конструкции. Рабочее тело
должно быть предельно чистым, иначе поры фитиля будут закупорены и
перекачка металла нарушится. Такая чистота может быть
достигнута вакуумным переплавом рабочего металла.
Давление в трубке определяется давлением насыщенных паров.
Оно может быть очень большим, и прочность трубки должна
поэтому проверяться соответствующим расчетом.
Конструкция (см. рис. 8.9, б) трубки состоит из корпуса 1, пористого
тела — фитиля 2 и элементов крепления. Форма торцовой стенки корпуса,
испытывающего внутреннее давление, выполняется овальной как наиболее прочной
при минимальной массе.
Таблица 8.1
*, °с
150
340
400
650
715
1100
1500
1600
1900
2000
Рабочее тело
НгО
Hg
Cs
К
Na
Na
Zi
Pb
Ag
Ag
Материал трубки
Медь
Нержавеющая сталь
Титан
] Ni-сплав
| Ni-сплав
Ниобий
1 Мо-сплав
1 Nb-сплав
W-сплав
W-сплав
Re-сплав
220
Форма фитиля может 'быть самая различная. Капиллярные
каналы могут быть сделаны за одно целое с внешней оболочкой и
представлять собой продольные пазы. Они же могут быть
выполнены в виде отдельной детали, в виде различных сеток и сеток с
продольными каналами для транспортировки жидкости. Схема
заделки горячего конца трубки показана на рис. 8.10.
В табл. 8.1 показаны температуры горячего конца трубки t °C,
рабочие тела и материалы тепловых труб, используемые в
различных конструкциях ТОА.
8. 1.2. Конструкция деталей излучателя
На рис. 8.11, а показана типичная конструкция сборных
коллекторов излучателя. Форма коллекторов определяется способом
их сборки и контроля.
Очевидно, надежно* сварить и проверить сварной шов можно тогда, когда
конструкция позволяет осмотреть его с двух сторон. Это особенно важно для
шва крепления труб 1. Вот почему сначала осуществляется приварка труб к
половине коллектора 2, а затем сварка коллекторов 2 я 3. Для этого обе
половины коллекторов имеют специальные отбортовки.
Форма излучающей поверхности показана на рис. 8.11, б. Тонкая
алюминиевая или стальная оболочка приваривается или припаивается к трубкам из
нержавеющей стали, ниобия или молибдена.
Ответственным элементом излучателя является шарнирное соединение,
обеспечивающее разворот секций излучателя в пространстве.
На рис. 8.11, в это соединение показано в стадии старта энергоустановки.
Вакуумирование излучателя и герметичность узла обеспечиваются тонкой
мембраной 2, приваренной к двум его секциям 1 и 7. Эта мембрана не мешает
развернуться излучателю после старта. Усилием пружины 3 осуществляется
разворот секций в космосе. Для облегчения обрыва мембраны она надрезана.
Герметизация зазоров в шарнире после развертывания секций
осуществляется манжетным уплотнением 4. Это уплотнение полностью не герметично. Оно
рассчитано на работу только на время разогрева космической установки и ее
пуска в космосе. Герметичность узла шарнира в рабочем положении
обеспечивается жидкометаллическпм уплотнением 5 и 6. Уплотнение состоит из тонкой
оболочки 5 и легкоплавкого металла 6. Оболочка 5 после приварки к цапфе 7
секции чисто и точно обрабатывается. Металл 6' выбирается таким, чтобы его
температура плавления превышала температуру теплоносителя в стартовых
условиях. Если эта температура равна 150—250° С, то металлом уплотнения
может быть свинец (температура плавления около 300° С).
При разогреве излучателя в космосе свинец плавится. Увеличение его
объема при плавлении и разогревании приводит к плотному прижатию и к
последующему привариванию оболочки 5 к цапфе 1. Таким образом, узел шарнира
при эксплуатации установки становится полностью герметичным.
На рис. 8.12 показана схема крепления панелей излучателя,
позволяющая отключать отдельные секции при их разрушении или
метеорном пробое, а на рис. 8.13 — размещение нагревателей в
трубках излучателя.
8.2. ТЕПЛООБМЕННИКИ
Теплообменники (ТО) занимают существенное место в
космических двигательных установках. Они применяются для получения,
конденсации и регенерации пара в установках 'С машинным
преобразованием энергии; как устройство, позволяющее утилизировать
221
/ 2
2 7 3
2 7
Рис. 8. 10. Схема крепления тепловой
трубки (ТТ):
/—коллектор; 2—тепловая трубка
Рис. 8.11. Конструкция деталей
излучателя:
а—коллектор; б—излучатели; в—шарнир
5)
Зи.д А
А-А
Рис. 8. 12. Схема панелей с аварийным устройством:
/, 2—коллекторы; 3—излучатель; 4—клапан
5-5
Рис, 8. 13. Схема трубки излучателя с нагревателем
222
тепло в различных звеньях энергоустановки и, тем самым,
повысить ее коэффициент полезного действия. Теплообменники —
необходимый элемент в энергоустановках с регенеративными
топливными элементами, в установках с МГДП и в установках,
использующих ядерный реактор как источник тепловой энергии.
Все теплообменники в зависимости от того, происходит в них
изменение агрегатного состояния теплоносителя или не происходит,
делятся на две группы. Теплообменники, где происходит
изменение агрегатного состояния, называются парогенераторами
и конденсаторами. Теплообменники, где изменение
агрегатного состояния не происходит, называются
регенераторами и рекуператорами.
Конструкция теплообменника 'существенно зависит от того, в
газообразном или жидком состоянии находится теплоноситель.
Конструкция теплообменника также существенно зависит от
формы поверхности, разделяющей теплоносители: они могут быть
трубчатые или пластинчатые. В теплообменниках поверхности
разделения теплоносителей нагреты по-разному; это приводит к
возникновению в них температурных деформаций и напряжений.
По способу восприятия температурных деформаций все
теплообменники делятся на три группы: жесткие без компенсации
температурных деформаций; жесткие, разгруженные от напряжений,
и гибкие теплообменники.
Гибкие — это такие теплообменники, у которых в силовую
схему включены специально спроектированные гибкие элементы,
воспринимающие температурные деформации его деталей и
снижающие температурные напряжения до сколь угодно малой величины.
Такие ТО встречаются трех видов: с гибкими трубками; с сильфон-
ными компенсаторами; с линзовыми компенсаторами.
8. 2. 1. Конструктивные схемы теплообменников
Жесткий трубчатый ТО
Теплообменник (рис. 8.14, а) состоит из корпуса 2, двух
одинаковых трубчатых досок 1 и трубного пакета 3. Все элементы
теплообменника собираются в узел сваркой. Иа рис. 8.14, б показана
такая же конфигурация для теплообменников с небольшим
расходом рабочего тела; иногда они называются «труба в трубе».
Достоинством рассматриваемой схемы теплообменника
является его простота; это самое простое из возможных конструктивных
решений. Недостатком такой конструкции является наличие
температурных напряжений, которые возникают вследствие различных
температур и связанных с ними температурных деформаций
корпуса ) и трубного пакета 3. Температурные напряжения в этой
конструкции опасны, так как они распространяются на места
сварки, к которым предъявляются повышенные требования прочности
и герметичности.
223
л
тг
Рис. 8. 14. Схемы жесткого трубчатого теплообменника
Такие теплообменники встречаются в тех случаях, когда
градиенты температур этих деталей невелики.
Жесткие ТО, разгруженные от температурных напряжений
В этих теплообменниках нестесненность температурных
деформаций достигается специальной компоновкой и выбором силовой
схемы. Поэтому температурные напряжения в деталях таких
теплообменников не возникают.
На рис. 8.15, а показан теплообменник такого типа. В нем имеется корпус
/, две трубные доски 2 и трубный пакет 3, состоящий из двух концентрично
установленных пучков труб, жестко закрепленных в своих трубных досках.
Охватывающие, внешние, трубы имеют герметично заделанные концы. Оба
пучка труб образуют независимые системы, отдельные части которых
деформируются независимо друг от друга.
Недостаток такой конструкции, как и других, рассматриваемых
ниже,— несколько большая сложность по сравнению с первой
схемой.
В теплообменнике, показанном на рис. 8.15, б, разгрузка от
температурных напряжений достигается плавающей, незакрепленной
на корпусе, подвеской второй трубной доски, причем коллекторы
подвода обеих систем, как и коллекторы отвода теплоносителя,
объединены в одну общую деталь.
На рис. 8.15, в конструктивная схема теплообменника
аналогична предыдущей. Однако она технологически проще, так как
5-6
Рис. 8. 15. Схема жесткого теплообменника с температурной компенсацией:
а—с раздельными трубными пакетами; б—с плавающей трубной доской; в, г—с U-образны-
ми трубками
224
Рис. S. 16. Схема гибкого теплообменника:
а—с гибкими трубками; б—с компенсаторами
трубные диски входа и выхода металла выполнены независимо
друг от друга. Разгрузка от возникших температурных
напряжений достигается свободным, независимо от корпуса,
деформированием трубного пакета. Это достигается приданием трубкам U-об-
разной формы.
Достоинством конструкции является также более компактная
комподовка всего узла.
На рис. 8.15, г, такая же конструкция выполнена для
одиночной трубы по типу труба в трубе.
Гибкие ТО
Гибкие теплообменники с гибкими трубками показаны на
рис. 8.16, а. К этому типу ТО относятся такие, где температурные
деформации воспринимаются трубками или трубным пакетом,
работающим на «изгиб». Такая деформация трубок, имея в виду их
повышенную гибкость, не вызывает сколько-нибудь заметных
напряжений в сопряженных деталях.
Как видно из рис. 8.16, а, трубкам придана не стесняющая
деформации форма.
Гибкие теплообменники с сильфонными и линзовыми
компенсаторами показаны на рис. 8.16, б. Если в обычный жесткий
теплообменник и трубный пакет ввести гибкие элементы, то его корпус
будет разгружен от температурных напряжений. В зависимости ог
места введения гибкого элемента последний будет приобретать ту
или другую конструктивную форму.
Возможны три варианта установки гибких элементов.
Гибкий элемент / вводится в местах присоединения трубных досок к
корпусу на входе или выходе рабочего тела из теплообменника. Конструктивно
гибкий элемент может представлять собой сильфонную конструкцию или
мембрану. В любом случае этот элемент воспринимает относительные температурные
перемещения корпуса и трубного пакета и тем самым создает условие «несте^-
Ненности» их деформации.
8 3050 225
г)
Рис. 8.17. Конструкция гибких деталей
теплообменников:
а, б—сильфоны; в—гибкая трубка; г—линзовые
компенсаторы
Рис. 8.18. Конструкция крепления трубки
теплообменника
Гибкий элемент 2 вносится во внешний корпус теплообменника и
называется линзовым компенсатором; гибкие элементы 3 сильфонного типа
устанавливаются на каждую трубку трубного пакета. Эта конструкция применяется для
теплообменников с большими расходами рабочего тела.
8.2.2. Конструкция деталей теплообменников
Конструкция сильфонного компенсатора, устанавливаемого
между трубной доской 2 и торцом корпуса 1, показана на рис. 8.17,
а. Если перепад давлений на компенсаторе велик, то он делается
многослойным (см. рис. 8.17, б). Компенсатор, выполненный в
виде изогнутой гибкой трубки и соединяющий корпус 1 и трубную
доску 2, показан на рис. 8.17, в. Он применяется в
теплообменниках, где расход теплоносителя, проходящего через трубную доску,
невелик. Конструкция различных линзовых компенсаторов
показана на рис. 8.17, г.
На рис. 8.18 показаны конструкции крепления трубок 1 к
трубной доске 2 и завихрителя 3 теплоносителя, придающего ему
«закрутку» и прилегание к стенкам трубки при течении.
226
Рис. 8. 19. Расчетная схема излучателя
8.3. РАСЧЕТ ДЕТАЛЕЙ ТЕПЛООБМЕННЫХ АППАРАТОВ
НА ПРОЧНОСТЬ
8. 3. 1. Расчет трубок
Как указывалось, в теплообменных аппаратах основными
являются переменные во времени тепловые нагрузки. Однако при
расчетах температурных напряжений будем, как и ранее, считать, что
через деталь проходит установишийся поток тепла и что
установившимися будут и градиенты температур по сечению детали.
Будем предполагать далее, что элементы теплообменных аппаратов
работают в упругой стадии, т. е. пластические деформации
рассматривать не будем.
Трубки и стенки ТОА нагреты неравномерно, что является
причиной возникновения напряжений. Для первой, приближенной, их
оценки схему ТОА можно представить, как показано на рис. 8.19.
Некоторое количество трубок, имеющих различные температуры,
объединено коллекторами. Полагаем, что поперечные сечения
трубок Fr их коэффициенты линейного расширения а неодинаковы.
При работе энергоустановки средние температуры трубок
различны, что вызывает осевые нагрузки на отдельные трубки и может
привести к потере устойчивости сжатых трубок. Имеется
существенная неравномерность температуры вдоль оси отдельно взятой
трубки, неравномерность распределения температур по сечению,
что приводит к дополнительным напряжениям.
Для первичной оценки прочности трубок следует провести
следующие расчеты: оценить напряжения растяжения и сжатия
наиболее нагруженных трубок, появляющиеся в результате
неодинаковых средних температур, и по усилиям сжатия определить их
устойчивость; оценить напряжения, появляющиеся в результате
наличия градиентов температур вдоль оси трубки и в ее сечении;
оценить напряжения, возникающие в трубке в месте ее крепления
в коллекторе. (Подобные расчеты рассмотрены в гл. IX).
В теплообменниках жесткого типа следует проводить расчет на
прочность трубной доски (эта задача рассмотрена в гл. II). И,
наконец, следует оценить напряжения в гибких элементах гибких
теплообменников (см. гл. IX).
8* 227
Температурные напряжения в трубках ТО А
при переменном по длине нагреве
Даны п трубок, связанных двумя коллекторами (см. рис. 8.19)
и их параметры Е, F, а, At. Как и ранее, At=t—10. Если
температура At вдоль трубки переменная, то
1
Т)
о
= —\Шх.
'(В дальнейшем индекс «ср» при t будем опускать). Следует найти
Ри Р2, -Рз, • ••> Рп\ 04, сг2, а3, ..., ап, где i = 1, 2, 3, ..., k, ..., п.
Полагаем, что коллекторы обладают большой жесткостью и при
нагревании не деформируются. Если бы трубки были свободны,
то они деформировались по рис. 8.20 на величины Д/ь А/2. В
действительности их деформация ограничена, что вызывает появление
усилий Ри Р2у ..., Рп.
Известно, что относительная деформация каждой трубки равна
8<=Д/г// и 8г=18Уг + 8й-, где 8у и е* — упругая и температурная
деформация нагретой трубки.
Известно, что
еу = P/(EF) = PjA, в, = аА/, (8. 1)
где A=EF.
Основное исходное условие для составления системы уравнений
сводится к двум уравнениям:
(8.2)
т. е. суммарные деформации трубок равны друг другу, и сумма сил
реакций равна нулю, так как система находится в равновесии.
В соответствии с формулами (8.1) и условиями (8.2) составим
систему уравнений (примем, для упрощения г = 3)
Pi/At + а, А/,=Р2/А2+а2дг2;
(8.3)
дьг Или более подробно
Pj PlA2-P2A1=.
~AL2
Отсюда Pi=Ai/A; Р2=Д2/Д; Р3 =
Л2 —Аг О
где Д=
Рнс 8.20. Элемент излучателя
228
1 1 1
Ах = A\ [A2
L2 = AXA2 [Ax {axMx — а2Д/2) +Л3 (a3A^3— a2A/2)];
A3=AXA2 [Ax (axktx — a3A/3) + A2 (c^ — a3A/3)].
Отсюда усилие в каждой трубке
р —А Л*(а2^2 — ахА^х) + A3
1 * А
(о. 4J
-Ai + ^2 + Лз
р _д Ах (aiA^ — а3А;3) + А2(а2А^2 — а3А*3)
3 3 Ax + A2 + A3
Усилие в k-и трубке при наличии п трубок
п
^Aifai&tt — abtJd
Р* = Ак^ , (8.5)
2^
(=1
гдег=1, 2, 3, ..., k,..., п.
Величина и знак напряжений находятся так:
«1 = Л/Л. «2 = ^2/^2. -.., Ч = Р«1?п- (8-6)
Для растянутых труб запас прочности определяется по
формуле
л=<£>А>тах; «> 1Д..л,2.
Пример 8.1.
Найти напряжения в двух трубках, связанных, как указано на рис. 8.20,
отличающихся температурой нагрева, если даны температуры нагрева £i=20°C;
4=120° С; £i=£2=2-105 МПа; а! =а2=10 • 10~e 1/град; Ft=F2. Для
системы, имеющей две трубки, формулы (8.4) и (8.6) имеют вид
g __
f (-L-+-L-) Р
1 \ ВР "*" £^ I 2
Так как El=E2', ai==—a2; Fi=Fi, то получаем
^ = 0,5£а (/, -12).
Если бы концы трубок были заделаны жестко, то напряжения в них были
бы равны Oi = o2=o=Ea&t, Таким образом, свободное крепление двух трубок
уменьшает напряжение в них по сравнению с жесткой заделкой вдвое.
Пример 8.2. Найти запас прочности трубной доски 1 с учетом вероятности
неразрушения конструкции теплообменника (рис. 8.21).
Исходные данные: радиус трубной доски (ТД) #=115 мм; материал ТД —
Х18Н9Т; толщина ТД п=3 мм; перепад давлений p=pi—Рг=О,1 МПа;ов^10ооо =
= 180 МПа. Температура доски £=650° С. Заданная предельная вероятность
неразрушения теплообменника РПр = 0,977; число деталей теплообменника 5 (две
трубные доски, корпус, торцовая стенка, трубка).
229
Рг
R=115
ч
1ЛЛА1'*,
У/ ',.
Рис 8. 21. Схема теплообменника
1. Выбираем последовательную структурную схему ТО (см. подразд. 1.5.6).
2. По формуле (1.57) определяем вероятность неразрушения трубной доски
РТфД = ^"Р^ = ^977 = 0,9954.
3. По формуле (1.58) определяем выражение функции vu
Ф (\/Vu) = 1 — Рт.д = 1 — 0,9954 = 0,0046.
Учитывая соотношение [14]
где Ф1 (лг) = 1/]/^2я | e~t2/2dx — табулированная функция Лапласа, получаем
6
Ф (l/Vy) = 0,5 - Ф1 (1/t;^) = 0,4954.
По таблицам для функции Лапласа находим (табл. 8.2) [14]
1/1^=2,6; ^ = 0,36.
4. Ввиду сложности расчета коэффициентов вариации действующего
напряжения vM задаемся значениями
^ = 3,45-10-2; vB = 7,77-10-2.
5. Определяем запас прочности трубной доски
п =-
- 362 ± у362.7,772 — 3,452 (7,772 — 362)
7,772 — 362
откуда л =1,3.
Таблица 8.2
X
0
0,0000
0,5
0,1915
1,0
0,3413
2,0
0,4772
2,5
0,4938
3,0
0,4987
Расчет сжатых трубок на устойчивость
Форму равновесия статически нагруженной конструкции
называют устойчивой, если малым возмущающим воздействиям
соответствуют малые отклонения от этой формы. В соответствии с этим
230
VY
Рис. 8. 22. Формы потери
устойчивости:
а—трубка; б—мембрана; в—бак
потерей устойчивости называется такое состояние, когда малые
возмущения ее приводят к (переходу от одной равновесной формы к
другой. Для большого числа конструкций такой переход системы
приводит к ее разрушению. Вот почему нагрузки, при которых
происходит потеря устойчивости, называют критическими, а
соответствующие состояния — критическими состояниями.
Явление потери устойчивости разнообразно. Наиболее часто
встречаются следующие случаи:
появление качественно новых смежных форм равновесия;
появление несмежных форм равновесия;
достижение недопустимо больших скоростей деформации в
конструкциях, материал которых обладает свойством ползучести.
Примером появления качественно новых смежных форм равновесия может
служить процесс деформирования центрально сжатой первоначально прямой
упругой трубки (рис. 8.22).
Проследим изменение прогибов трубки при изменении точно по оси
приложенной силы Р.
При умеренных значениях сжимающей силы (например, значение,
соответствующее точке А рис. 8.22, а), прямолинейная форма равновесия является
единственной и притом устойчивой, сохраняющейся даже при воздействии на трубку
небольшими возмущающими поперечными нагрузками q. При увеличении этой
силы до значения Рк прямолинейная форма становится неустойчивой.
В точке К диаграммы деформирования возможны две формы равновесия
трубки: прямолинейная и изогнутая. Эта криволинейная форма равновесия при
нагружении силой Рк является более устойчивой, чем прямолинейная. Поэтому,
если нагружение трубки силой Рк сопровождается небольшими возмущающими
поперечными нагрузками q, то трубка приобретает именно эту форму. Такое же
явление наблюдается, если сжимающие силы превышают значение Рк
(например, сила, соответствующая точке В).
Смысл понятия потери устойчивости в рассматриваемом случае относится к
такому факту, когда при одной нагрузке имеют мето две смежные качествен-
231
но разные формы равновесия. Происходит как бы разветвление формы
равновесия, или их бифуркация, а точка К — это точка бифуркации.
Потеря устойчивости трубки носит бифуркационный характер.
Итак, при повышении нагрузки до значения Рк происходит переход одной
устойчивой формы равновесия трубки в другую. Этот процесс перехода
осуществляется скачкообразно.
Для одиночных деталей, например колонн в строительных сооружениях,
такой процесс в ряде случаев приводит к большим изгибным деформациям, к
перераспределению вследствие этого нагрузок на деталь и ее неизбежному
разрушению. В других случаях, когда разрушение не происходит, деформация
деталей, а следовательно, и дополнительные напряжения изгиба в них достигают
весьма больших значений, что непосредственно угрожает прочности
конструкции. Поэтому состояние системы при нагружении силой Рк называют
критическим, нагрузки и напряжения — критическими. Естественно, критическое
состояние, как непосредственно предшествующее возможному разрушению,
считается недопустимым.
Кривая / таким образом характеризует, как указывалось, потерю
устойчивости трубки при точном осевом приложении силы Р. Однако в реальных
конструкциях такого точного приложения нагрузки трудно достигнуть, и всегда
имеется некоторый эксцентриситет е приложения нагрузки, т. е. смещение
сжимающей силы от точного осевого; кроме того, ось трубки также может иметь
отклонение от прямолинейной формы вследствие технологических неточностей,
неточной сборкой конструкции и других причин.
Изменение прогибов трубки с изменением нагрузки для подобного реального
случая показано кривой 2. Как видно, общий характер протекания кривой
деформации близок к ранее рассмотренному случаю, и если сила Р близка к
критическому значению Рк, то напряжения в трубке достигают значительной
величины. Таким образом, для реального случая следует найти значение Рк, которое
считают обычно предельным.
Примером появления несмежных форм равновесия может служить
«хлопающая мембрана» (см. рис. 8.22, б). В начале нагружения при монотонном
росте давления р происходит монотонное увеличение деформации. Однако на
определенном уровне нагружения (точка К) происходит «хлопок», мгновенное
увеличение деформации на величину г, и система скачком приобретает новую
форму, соответствующую точке В. Таким образом, точке К диаграммы
деформирования соответствует критическое состояние, так как при небольшом росте
нагрузки система может иметь новую форму равновесия. Эта новая форма
равновесия (точка В) не является смежной форме равновесия системы в точке /С,
так как при уменьшении нагрузки система из точки В не попадает в исходную
К, а перемещается в состояние К' и затем уже в точку А" диаграммы
деформирования.
Неустойчивой формой равновесия, таким образом, кроме точек К и К'
является ветвь деформирования КК''. Эти состояния не реализуются ни при
монотонном нагружении, ни при обратной монотонной разгрузке. Если систему
установить в состояние, соответствующее какой-либо точке этого участка КК', то
после любого сколь угодно малого возмущения на диаграмме деформирования
это выражается как скачок на какой-либо из устойчивых участков ОК или ВК'
в зависимости от величины и направления приложенного возмущения.
Примером потери устойчивости при ползучести материала может служить
сферическая оболочка, наполненная сжатым газом (см. рис. 8.22, в). Как видно
из диаграммы деформирования, обычной при ползучести материала, на участке
деформирования ОК оболочки устойчива. После точки /Сив особенности точки
К' деформации W начинают существенно расти, и в точке В скорость
деформации достигает недопустимо больших значений, после чего оболочка
разрушается. Состояние системы в точке К' является критическим.
Устойчивость трубки ТО
Рассмотрим трубку теплообменника, сжатую силой 5 (рис.
8.23). Будем считать, что концы трубок опираются на шарниры, что
232
S 2
Рис. 8. 23. Потеря устойчивости трубки излучателя
наиболее близко к реальным условиям. Даны значения Е, J, F,
требуется найти SK.
Допустим, что стержень под действием 'постороннего
незначительного возмущения слегка изогнулся. Полагая, что прогибы
малы, можем воспользоваться основным уравнением изгиба стержня:
EJ(d2y/dx2) = M. (8.7)
Изгибающий момент М в сечении х равен —Sy. (Знак минус
поставлен потому, что в выбранной нами системе координат
изгибающий момент отрицателен.) Подставляя это значение М в исходную
формулу, получим
Это линейное, однородное дифференциальное уравнение
второго порядка. Рассмотрим случай, когда параметры трубки
постоянные величины. Тогда
tf+k2y=0, где k2=S/EJ. (8. 8)
Решением этого уравнения будет
у—A sin kx-\-A cosx.
Оно должно удовлетворять граничным условиям #=0, # = 0; х=1,
// = 0, откуда постоянные интегрирования В = 0, Asmkl=0. Таким
образом, трубка может находиться в равновесии в изогнутом
состоянии, если sin&/ = 0, что возможно при
&/ = 0, я, 2я,...э пл,
где п — любое целое число (1, 2, 3, ..., п).
Подставив в эту формулу значение k из (8.8), получим
Наименьшее значение критической силы соответствует я=1.
Подставляя это значение, получим известную формулу Эйлера:
Sn = n*EJ/P. (8.9)
Критическую силу для стержней, имеющих другие граничные
условия, можно вычислить по аналогичной формуле, введя понятие
приведенной длины /np = v/:
SKV = n>EJi{vlf (8. 10)
где v — коэффициент, учитывающий вид опор стержня.
233
Значение коэффициента v можно найти в справочной литературе.
Например, для консольного стержня v=2; для стержня, имеющего жесткую заделку
двух концов, v=0,5.
Потеря устойчивости трубок при эксцентричном сжатии
Реальные конструкции нельзя выполнить так, чтобы сжатие их
было точно осевым. Всегда существуют какие-то погрешности,
технологические неточности, которые приведут к эксцентричному
сжатию.
В большинстве случаев всякие технологические и производственные
неточности можно свести к основной схеме (рис. 8.24), где сжимающая сила S
приложена с эксцентриситетом е.
Величина эксцентриситета
е=(М0-4 ... Ю-2)/ мм.
Практически для трубок ТО А
е = 0,01 ... 0,5 мм.
Рассмотрим, как будет изменяться прогиб трубки в зависимости
от нагрузки S, приложенной « ней с эксцентриситетом е. Итак, даны
Е, J, F, e, S. Найти прогиб y=f(S).
Дифференциальное уравнение, описывающее состояние
равновесия, получим из уравнения изгиба (8.7) EJy"=M. Так как
изгибающий момент М = —S(y + e), получим следующее линейное
неоднородное дифференциальное уравнение:
EJy"+Sy=-Se. .(8.11)
Для случая, когда параметры системы постоянны, оно принимает
вид
y»-\-k2y=-ke, (8. 12)
(
Решение этого уравнения можно представить в виде
у = А sin kz-\-B cos kz—e,
что можно проверить непосредственной подстановкой. Оно должно
удовлетворять граничным условиям:
2=0, у = 0; *=/, у=0у
D , e(l-coskl)
отсюда В=е\ А= . и1— .
sin kl
4а
И окончательно:
1 — cos kl
Рис. 8. 24. Потеря устойчивости трубки при
эксцентричном сжатии
sin kl
xsin kz + co&kz— ll. (8.13)
Максимальный прогиб будет
ymax=^(l-cos —j^ cos — .
Если построить зависимость (8.13) как функцию нагрузки 5, то
получим кривые, представленные на рис. 8.22, а. Как видно,
прогибы трубки возрастают при увеличении силы S. Характер
протекания кривой сохраняет лавинный характер при приближении 5 к
51ф. Вот почему в этом случае не теряет актуальности
необходимость определения SKp. Деформация трубки в рассматриваемом
случае начинается сразу после приложения нагрузки. Таким
образом, форма упругой линии соответствует второй устойчивой форме
равновесия, и явления бифуркации не существует.
Напряжения, запасы прочности одиночных труб, стоек
В случае нагружения одиночных деталей при потере
устойчивости происходит лавинный процесс деформирования системы.
Как было сказано, критическое состояние детали недопустимо,
так как такая деформация приводит к перераспределению
нагрузки, к неучтенному догружению и возможному разрушению. В
некоторых конструкциях такая деформация вредна, так как она
является подобием лишней степени свободы в системе.
Зная критическую силу 5кр, найдем критическое напряжение,
например, трубки с шарнирными концами:
* (8.14)
кр F ЕР X? *
где Х = 1/] — параметр гибкости (гибкость) стержня.
Радиус инерции поперечного сечения / определяется его
моментом инерции и площадью по формуле
j=/7/?.
Так, для круглого сплошного стержня и для трубки
соответственно
X—1ДО?.
Как видно из формулы (8.14), критическое напряжение в
трубке, соответствующее точке бифуркации, зависит только от модуля
упругости материала и ее параметра гибкости. Однако это
справедливо, пока напряжения не превышают предела
пропорциональности материала, так как вывод выражений для критической силы
Эйлера основывается на использовании дифференциального
уравнения изогнутой балки (8.7). А оно предполагает, что материал
следует закону Гука.
Совершенно естественно, что, если критическое напряжение
будет превышать предел пропорциональности материала, то
формулой (8.14) пользоваться нельзя. Многочисленные эксперименты
показывают, что стержни, выполненные из материала с резко
выраженной точкой предела текучести ат, теряют устойчивость и
изгибаются, как только сжимающее напряжение становится равным
пределу текучести. Вот почему запас устойчивости для одиночных
235
6, мпа
wo
200
100
бт
^>ч
\
4/7 80
Б
к1
Л
\
N
110 160 А
А
деталей будет определяться
по-разному, В ЗаВИСИМОСТИ ОТ ТОГО (Ткр>СГт ИЛИ
На рис. 8.25 показана кривая /
критических напряжений для стали с £=2,1 -105 МПа,
ат = 250 МПа, откуда видно, что после
гибкости >w^80 (участок Л) критические напряжения
определяются формулой Эйлера. При меньшей
гибкости аКр = сгт. На этом же рисунке кривая
2 показывает критические напряжения для
материала, не имеющего резко выраженного
предела текучести.
Таким образом, диаграмма критических
напряжений имеет два участка: участок А, где
устойчивость трубки определяется формулой
Эйлера, или, как говорят, участок
длинных стоек, и участок £, устойчивость
которого определяется уровнем напряжений <Го,2*
или, как говорят, участок коротких стоек.
Запасом устойчивости называется отношение критического
сжимающего напряжения к максимальному напряжению,
действующему в детали.
ДЛЯ Трубок боЛЬШОЙ ДЛИНЫ При
Рис. 8.25. Диаграмма критических
напряжений
р
для коротких трубок или, что одно и то же, при сгк
где GmsLx = Sm8iX/F — наибольшее напряжение трубки от усилия
сжатия. Запас устойчивости следует выбирать в диапазоне п^
> 1,5... 2,5.
Напряжения, запасы прочности неодиночных сжатых трубок
Если нагрузка на узел распределена между несколькими
деталями, то потеря устойчивости одной из них не обязательно
заканчивается ее разрушением, хотя повышенные ее деформации
вызывают временное перераспределение нагрузок и напряжений между
деталями данного узла. Запас прочности детали оценивается по
величине сжимающей силы и по изгибающему моменту,
возникающему в сечении как от первоначальной неточности приложения
нагрузки, так и в результате деформации детали.
Очевидно, изгиб трубки происходит более или менее монотонно
в зависимости от степени поддержки ее смежными элементами.
На рис. 8.26, показан случай, когда одна трубка излучателя
ввиду его неравномерного, нагрева сильно сдеформировалась. Это
возможно при «холодном» запуске ЭУ и нагрузка на такую трубку
может достигать критических значений. Однако разрушения этой
трубки может и не быть, так как поддержка коллекторов
осуществляется большим числом трубок, которые и препятствуют
разрушению узла. Расчетные напряжения в такой трубке будут
*^кр ■ *->кр (i/ma
ainax — "у Л ^
236
У тал i
г
Рис 8.26. Потеря устойчивости неодиночных деталей
где №=0,25(./?3—г3); R, г — внешний и внутренний радиус трубок.
Запас прочности л=Ов'т/втах; его величина должна быть
равна я>1,2.
Если е = 0, то прогиб z/max находим по удлинению Al=aAtl, как
указано на рис. 8.26. Форму упругой линии при деформации
принимаем синусоидальной.
Напряжения в свободных трубках излучателя
при наличии перепада температур в поперечном сечении
В поперечном сечении трубок и других элементов излучателя
после их нагрева устанавливается определенный перепад
температуры At, который приводит к появлению в них температурных
напряжений, даже в тех случаях, когда элемент свободен от
закреплений.
Подход к решению задачи заключается в следующем.
Жестко фиксируем элемент в осевом направлении. Тогда
упругие и температурные деформации равны друг другу. Находим
напряжения в элементе в этом положении.
Наложение связи приведет к нарушению граничных условий
свободной системы. Восстановим граничные условия приложением
к системе силы, равной реакции, возникающей в заделке, но
противоположной по направлению. Находим напряжения от этой силы —
они будут только упругими.
Совершенно очевидно, что сумма напряжений в
зафиксированном и в свободном элементе даст истинные температурные
напряжения в нем.
Распределение перепадов может быть самым различным.
Рассмотрим первый случай, когда градиент температуры в
поперечном сечении трубки симметричен (рис. 8.27) относительно оси.
Представим себе, что принятый закон изменения температуры по
сечению сохраняется в любом сечении трубки.
Известны Е, а, А^ требуется найти напряжение а. .
Таким образом под перепадом температуры Д^ в поперечном
сечении элемента понимается (рис. 8.28):
где t0 = 20° С является температурой деталей при сборке изделия.
Представим эту зависимость по-другому.
237
I
1
1
i
;
^}
i
\ f
(y)
^4
/
/
/
t
Рис. 8.27. Напряжения при симметричном
температурном перепаде
Рис. 8.28. Перепад температур в
поперечном сечении
Разобьем температуру t(y) любой нагретой точки поперечного
сечения на некоторую минимальную tm\n, общую для всех точек
сечения величину, и дополнительную At*(у):
Напряжения от одинакового для всего сечения разогрева
~4nm—20° возникать не будут. Целесообразно поэтому
рассматривать только перепад At* (у), который будет создавать напряжения,
или, для простоты, At.
Если представить такой элемент в свободном состоянии, то
удлинение его в результате нагрева будет пропорционально
перепаду температур: e = aAt. Если осуществить заделку такого
элемента, то возникнут силы реакции PR и сжимающие напряжения
Gi = —EaAt (см. рис. 8.27).
Эпюра сжимающих напряжений будет точно следовать закону
изменения температур и будет идентичной в любом сечении
зафиксированного элемента.
Найдем напряжения, возникающие в элементе, если освободить
его от заделки. Для этого к концам стержня приложим
растягивающие напряжения, обеспечивающие нулевые напряжения на
концах.
Эти напряжения можно создать силой
Л/2
Р= I EaMbdy,
Л/2
которая на достаточно удаленном от конца расстоянии вызовет
равномерно распределенные напряжения
Л/2
o2=^- = j- ^ EaMbdy.
-Л/2
Как уже говорилось, сумма напряжений а и а2 дает истинное
значение напряжений в поперечном сечении детали.
Таким образом, неравномерный
симметричный нагрев свободного
элемента по его сечению приводит к
появлению напряжений, которые
определяются по формуле
(8. 15)
м
h/2
— Г Eabibdy.
h/2
-Л/2
Деформация элемента
Л/2
=-Т- = */+«у. £v = 4- f vMbdy.
-h/2
Рис. 8.29. Эпюры напряжений прв
несимметирчном температурном
поле
На рис. 8. 27 показана
результирующая эпюра напряжений
элемента по сечению и вдоль его оси.
Если распределение температуры по сечению не симметрично, то
поступим вначале так же, как и ранее: осуществив жесткую
заделку элемента (рис. 8.29), получим, как и раньше, реакции в заделкг
PR и напряжения в сечении о\ = —Eakt.
Освободим элемент от заделки и для сохранения граничных
условий приложим к его концам растягивающую силу Р.
h/2
Р 1с
Получим а2 = —=— \ EaMbdy.
-h/2
Изгибающий момент М, возникающий вследствие осенесиммет-
ричного приложения сил реакции на концах
Л/2
М= f EaLtbydy,
Л/2
и напряжения изгиба в результате действия этого момента
Л/2
Мц и (* —, . .1 ,
а3 = —£ = -z- \ EaMoydy.
-А/2
Таким образом, полное напряжение в сечении
Л/2 Л/2
<з= —
—
t
-Л/2 -Л/2
Эпюры напряжения представлены на рис. 8.29.
-£- V EaMbydy. (8. 16)
239
\Рис. 8.30. Схема нагружения
плоской панели
кг
**3
1
/ /
/
/
у/
9
/ '
и
-Ь-
/
/
7
/
ом
г
х
(1
Рис. 8. 31. Элемент плоской панели
8. 3. 2. Расчет плоской панели излучателя
Выведем уравнения сил упругости прямоугольной свободной
пластины, когда по ее краям приложены распределенные
изгибающие моменты.
Изгиб пластины в двух взаимно перпендикулярных
направлениях будет «чистым», подобно тому, как изгибается призматический
стержень в соответствии с гипотезой сохранения плоской формы
поперечных сечений, их поворота относительно нейтральной оси и
нормальности к упругой кривой при изгибе.
Пусть плоскость XY будет совмещена со срединной плоскостью
пластинки до ее деформации. Оси координат X и Y направим, как
показано на рис. 8.30, вдоль ее краев. Положительным
направлением оси Z условимся считать направление вверх. Через Мх
обозначим отнесенный к единице длины изгибающий момент,
действующий по краям, параллельным оси Y. Аналогично по краям,
параллельным оси X, действует погонный момент MY- Моменты будут
положительными, если они направлены так, как показано на
рис. 8.30, т. е. производят сжатие на верхней поверхности
пластинки и растяжение на нижней. Толщину пластинки h будем считать
малой в сравнении с другими размерами.
Рассмотрим элемент, выделенный из пластинки, как показано
на рис. 8.31, двумя парами плоскостей, параллельных плоскостям
XZ и YZ. Так как на контуре пластинки (см. рис. 8.30) действуют
распределенные моменты, то в любой ее точке будут действовать
только эти моменты.
Допустим, что при изгибе пластинки боковые грани элемента
остаются плоскими и поворачиваются относительно нейтральных
осей таким образом, что остаются нормальными к изогнутой
срединной поверхности пластинки. Это означает, что срединная
поверхность пластинки не будет подвергаться во время изгиба
растяжению и что, следовательно, срединная поверхность будет вместе
с тем и нейтральной поверхностью пластинки.
Воспользуемся законом Гука для плоского напряженного
состояния:
240
или ax = ^z~2^x^r^Y^ °у = ——2{у\^х
Пусть \jrx и 1/гу обозначают кривизну нейтральной
поверхности в сечениях, параллельных соответственно плоскостям XZ и YZ
(см. рис. 8.31).
Найдем относительные удлинения в направлениях X и Y
элементарного слоя abed, отстоящего от нейтрального слоя на
расстоянии г:
аЧ>'— lib{r
Х ab
аналогично 8у = г/гу.
Получим напряжения в слое
Ez ( 1 , 1 \ Ez I 1 , 1 \ /о iTN
[tu; а к (А — . (8. 17)
Таким образом, напряжения вх и oy про-порциональны
расстоянию z слоя abed от нейтральной поверхности и зависят от
кривизны изогнутой пластинки. Напряжения (8.17) вызываются
изгибающими моментами Мх и MY, которые приложены к пластинке
(см. рис. 8.30):
Л/2 Л/2
Л/1Х= f oxzHydz\ MY= f а
-Л/2 -Л/2
Подставим значения ох и gy и учтем, что
Тогда
Л/2
Жу = ^а — | \ z2dz = г-а.— ; (8.18)
х i-v*\rx гг> * 12(1 — ^) Vrx гк У V
-Л/2
Аналогично Му = DI \- jx ) = —
\ ГУ ГХ I
где D=— —цилиндрическая жесткость; w — прогибы
пластинки в направлении оси Z;
w"x= — l/rx; Wy= — l/rY.
Полученные выражения показывают, что максимальные
напряжения получаются на поверхности пластинки и при
подстановке z = Л/2 в уравнение (8.17) будут
241
Если Мх=Му = М, то
; M
(8.49)
т. е. пластинка изгибается по сферической поверхности, радиусы
кривизны которой определяются величиной 1/г^= 1//"у= 1//".
Напряжение ох = ог = о 6/12
Температурные напряжения в плоской панели излучателя
Рассмотрим деформирование пластины при тепловом нагруже-
нии.
Если отсчет температуры вести от срединной поверхности
пластины, полагая, что с одной стороны она нагрета,- а с другой —
охлаждена, то естественно заключить, что температурные
деформации расширения и сжатия будут пропорциональны расстояниям
от срединной поверхности. Следовательно, приходим к такому же
закону деформации, как и в чистом изгибе пластинки
изгибающими моментами.
Если к пластине, равномерно нагретой до средней температуры
/Ср, подвести и отвести тепло так, как это показано на рис. 8.32, а,
то можно себе представить, что при установившемся тепловом
режиме изменение температуры пластины по толщине h будет
линейным, и симметричным относительно нейтральной плоскости.
Такое изменение температуры в сечении вызовет
температурные деформации. Эти деформации в незакрепленной пластине
будут складываться из двух частей: из деформаций, одинаковых для
всех сечений пластинки и определяемых равномерным нагревом
ее до температуры /Ср, и дополнительной деформации,
определяемой перепадом температур в поперечном сечении h—4=Л/=2Д^Ср-
Деформация панели от нагрева до температуры AfCp не вызывает
напряжений. Найдем деформацию от перепада температур в
поперечном сечении. Очевидно, деформации будут пропорциональны
расстояниям от нейтральной поверхности, т. е. закон изменения
Ч
6
242
а
>СР
а)
йТср
-t(Z)
~^Т PR
йТ
,С1 С)
*
5)
Рис. 8.32. Температурные напряжения в элементе плоской панели:
а—температура; б—деформация
'а ^
А
V
Y\l°
7У
/
Jo_
/
1
-Г
тх
W
V
ЛТ(г)
а) 5)
Рис. 8. 33. Напряжения в равномерно нагретой свободной пластине:
а—температура; б—нагрузки
температурных деформаций полностью идентичен закону
деформаций пластины при чистом изгибе ее изгибающими моментами.
В расчетах будет встречаться перепад температур Д£Ср, который
определяется по формуле:
(8. 20)
опор,
1
Деформированное состояние панели, освобожденной от
легко находим.
Текущее значение температурного перепада Д£Ср в поперечном
сечении панели на расстоянии z от нейтральной плоскости, которое
обозначим A^Cp(z), равно
/ \ — ^L 1 _ Ate .
ср \z) — у z -jj^ — п '
температурная деформация —
гг = а А4Р {z) = aMz/fi. (8.21)
Напряжения в такой панели будут равны нулю, так как стеснения
этим деформациям нет (рис. 8.32, б). Очевидно, температурные
напряжения возникнут тогда, когда температурные деформации будут
стеснены. Рассмотрим крайний случай, когда панель жестко
закреплена по периметру. Тогда в заделке возникнет реактивный
момент. Очевидно,
где упругая деформация панели от изгибающего момента еу = <г/г
(8.19). Приравнивая известные значения е и е*, получаем
z aMz 1
— = — , откуда —=
г h r
откуда
ЕаМ
2(1—р.
12(1 — I
EaAtc
1—И-
(8.22)
243
Полученные выражения позволяют найти температурные
напряжения в свободной панели при нелинейном законе изменения
градиента температур в поперечном сечении. Как видно по формуле,
напряжения идентичны напряжениям, возникающим в стержневых
элементах. Множитель 1/(1—\х) показывает, что наш элемент —
пластина.
Рассмотрим напряжения в свободной пластине при
произвольном законе изменения температуры сечения (рис. 8.33, а).
Деформированное состояние пластины зависит от градиента температур
на ее поверхности и по сечению. При нелинейном законе изменения
температур в сечении температурные напряжения в свободной
пластине не будут равны нулю. Дан температурный градиент в сечении
At, E, а и геометрические размеры. Чтобы найти напряжения,
поступаем в соответствии с общими правилами, которые мы
рассматривали ранее.
Закрепив холодную пластину жестко по краям (рис. 8.33, б)>
нагреем ее. В ней возникнут напряжения сжатия
& xi ==(Зух ==&1==1 — *^ с&Дгд 1 — р»),
а в заделке — силы и моменты реакции Рх, PY, Mx, MY. Для
обеспечения граничных условий свободной пластины приложим усилия
Рх и PY к ее краям; получим вблизи ее заделки напряжение
растяжения
Л/2
ах2= — = \ EaLtbdz,
F (1— \^)F J
-Л/2
где F = bh.
Формула для gy2 будет аналогичной.
Заметим, что для прямоугольной пластины оХ2 может быть не
равно gy2- Приложив изгибающие моменты Мх и My,
компенсирующие несимметричность температурного поля, получим
напряжение
Л/2
охг=^= {_z \ EaMbzdz.
-Л/2
Значение gy3 запишется аналогично. Таким образом,
окончательно
Л/2 Л/2
\ EaMbdz-\ \ Evbdbdz. (8.23)
(1 +p)F J (1 — д.) / J
-Л/2 -Л/2
Запас прочности пластины
п= —^-, где <*i=
°/max
Необходимо, чтобы
ЧАСТЬ ЧЕТВЕРТАЯ
ДВИГАТЕЛИ
Глава IX
ПЛАЗМЕННЫЕ И ЭЛЕКТРОНАГРЕВНЫЕ ДВИГАТЕЛИ
В плазменном двигателе (ПД) тяга создается в результате
истечения плазмы рабочего тела. Ускорение плазма получает при
взаимодействии с собственным или внешним магнитным полем.
Плазменные двигатели обладают высоким удельным импульсом
/уд = 20 ... 100 км/с, далеко превосходящим удельный импульс
ракетных двигателей жидкого и твердого топлива.
В создании плазменных двигателей имеются существенные
трудности: не решены проблемы обеспечения длительной работы
отдельных теплонапряженных элементов, предотвращения эрозии
электродов и т. д. Отстает разработка материалов, которые могли
бы противостоять высоким тепловым нагрузкам длительное время.
Плазменные двигатели можно разделить на три группы:
двигатели импульсные, двигатели постоянного тока и двигатели
переменного тока.
В импульсных двигателях генерирование и ускорение плазмы
осуществляется энергией периодических разрядов конденсатора.
Достоинством таких двигателей является возможность получения
сравнительно менее напряженного в тепловом и энергетическом
отношении анодно-катодного узла. В импульсных двигателях легче
обеспечить защиту анодно-катодной системы от перегрева, проще
решаются проблемы охлаждения, многократного включения и
выключения двигателя, многоразовое™ применения. Недостаток —
сравнительно большая масса конденсаторов.
Эти двигатели применяются в основном для коррекции
траектории КЛА. Они могут использоваться космонавтом как двигатели
индивидуального пользования.
В двигателях постоянного тока генерирование и разгон
плазмы осуществляется постоянным током. Двигатели могут быть
электромагнитными и электротермическими. Они проектируются как
маршевые для межорбитальных полетов и как двигатели
коррекции. Особенность их — сравнительно высокотемпературный
режим работы анодно-катодной системы.
Двигатели переменного тока — это электромагнитные
двигатели, в которых генерирование и разгон плазмы осуществляется
переменным током. К ним относятся двигатели с бегущим
магнитным полем, высокочастотные, сверхвысокочастотные и электротер-
245-
мические двигатели. Они могут иметь самое различное целевое
назначение.
Высокие температуры плазмы в ПД требуют особого внимания
к проектированию системы охлаждения, выбору материалов,
требуют решения большого числа сложных конструктивных и
технологических задач.
Агрегатное состояние рабочего тела (твердое, жидкое или
газообразное) определяет конструктивные формы системы питания и
генератора плазмы.
По способу компоновки катодно-анодной системы двигатели
делятся на пинчевые, коаксиальные, торцовые, рельсовые,
электротермические, омические.
9.1. КОНСТРУКТИВНЫЕ СХЕМЫ ДВИГАТЕЛЕЙ И ЭЛЕКТРОДОВ
На рис. 9.1 показаны схемы электродов различных плазменных
двигателей.
Электроды плазменных двигателей постоянного тока с
внешним магнитным полем показаны на рис. 9.1, а.
Электродная система в них состоит (из катода 1, анода 2 и внешнего
магнита 3. Как видно из рисунка, электроды осесимметричны, причем
анод может иметь различные формы.
Схемы /, //, /// электродов, показанные на рис. 9.1, б, относятся
и плазменным двигателям постоянного тока с собственным
магнитным полем. Такие электродные системы встречаются
в двигателях больших и средних тяг, а также в электротермических
двигателях. Схема /// отличается не только цилиндрической
формой анода 2, но и размещением изолятора 3 в сравнительно
«холодной» части двигателя.
Электродные системы /—IV импульсных двигателей показаны
на рис. 9.1, в. Они выполняются осесимметричной пинчевой,
рельсовой формы. На схеме IV электродная система двухкаскадная.
Схема плазменного омического двигателя показана на рис. 9.1, г.
Импульсный пинчевый ПД (рис. 9.2) состоит из узла
генератора плазмы, ускорителя и систем питания, охлаждения и
электропитания.
Узел генератора плазмы — пинчевого типа, состоит из катода 7,
изолирующей проставки 6, анода 15 и элементов для подвода охлаждающей жидкости и
тока.
Катод 7 и анод 15 выполнены в виде связанных двухслойных оболочек с
тороидальной поверхностью. Эта поверхность у анода постепенно переходит в
цилиндрическое сопло.
Ускоритель — рельсового типа, состоит из изолирующей прокладки 14,
анода 13 и катода 12. Электроды, как и в генераторе плазмы, двухслойные для
прохождения охлаждающей жидкости. v
Узел системы питания состоит из баллона с управляющим газом 2,
редуктора давления 3, емкости 4 с рабочим телом (аргоном), снабженной
разделительной мембраной, и дозатора 5.
Систему охлаждения составляет насос 10 с электроприводом 9, дозатор // и
холодильник 8.
Система электропитания состоит из источника тока /, конденсаторов 18,
разрядника-модулятора 17 и устройства для зажигания 16.
246
12 3 12 3 12
1 2
1 2
Рис. 9. 1. Схемы электродов:
а—с внешним магнитным полем; б—с собственным магнитным полем; в—импульсного ПД;
г—омического ПД
247
Рис 9.2. Схема импульсного ПД
К клеммам анода и катода и к разряднику-модулятору 17 подводится
напряжение. Далее открывается редукционный клапан 3 баллона 2
управляющего газа; рабочий газ из емкости 4 через дозатор 5 поступает в разрядный
промежуток генератора.
Зажигание дуги осуществляется устройством 16. Назначение разрядника-
модулятора 17 — обеспечить определенную цикличность разряда конденсатора;
таким образом в широких пределах регулируется режим работы дйигателя и
его тяга.
Ионизация газа в разрядном промежутке с помощью
устройств 16 и 17 приводит к разряду конденсатора генератора
плазмы по всему промежутку между анодом и катодом и перемещению
сгустка плазмы — плазмоида по каналу генератора; при
перемещении плазмовда происходит его линчевание, т. е. формирование
9 в
248
Рис. 9. 3. Схема коаксиального ПД
в виде тора или кольца, и выброс из
сопловой части анода 15 в ускоряющую
систему двигателя. В ускоряющей системе
происходит синхронный разряд
конденсатора ускорителя, что приводит к
образованию магнитного поля в ускорителе,
разгону и выбросу плазмы в
пространство. На рис. 9. 2 показано взаимодействие
магнитного В и электрического / полей на
частицу плазмы, создающих усилие F, Рис* 9*4* Упрощенная схема сил
выбрасывающее ее в пространство.
Коаксиальный ПД постоянного тока состоит (рис. 9.3) из узла
генератора плазмы, узла ускорителя, систем питания рабочим
телом, охлаждения и электропитания.
В узле генератора плазмы испаритель 1 приварен к катоду 6 и составляет
с ним основную силовую деталь; собственно генератором плазмы являются анод
2 с катодом 6 и сопло 3, являющееся также изоляционной прокладкой между
генератором плазмы и ее ускорителем.
Ускоритель состоит из анода 4, катода 6 и обмотки электромагнита 5.
Катод 6 является общим для генератора плазмы и ускорителя. Он представляет
собой многослойную цельносварную оболочку из жаростойкого материала и
имеет вольфрамовый подогреватель 7. В систему питания входят емкость 15 для
жидкого металла, электромагнитный насос 14 и дозатор 13.
Система охлаждения включает емкость 9, электромагнитный насос 10,
распределитель охладителя (жидкий металл) И и холодильник-излучатель 12, 8.
Систему электропитания составляют источник постоянного тока 16,
системы регулирования, распределения и коммутации тока.
Рабочее тело электромагнитным насосом 14 подается в распределитель 13,
откуда поступает в коллектор корпуса испарителя двигателя и в охлаждающую
систему. Парообразное рабочее тело через форсунки поступает в генератор
плазмы, где ионизируется в межэлектродном пространстве. Из генератора плазмы
оно поступает в тепловое сопло 3, а оттуда — в коаксиальный ускоритель
4, 5, 6.
Охлаждение электродной системы осуществляется рабочим телом в
изолированных друг от друга излучателях. Для изоляции узла катода и анода
используются прокладки из окиси тория или алюминия.
На аноде 4 размещен спрофилированный по длине соленоид, изолированный
от него напыленным слоем окиси алюминия. Назначение соленоида — создание
дополнительного внешнего магнитного поля. Это повышает коэффициент
полезного действия двигателя, улучшает температурный режим электродов.
При изучении коаксиальных ускорителей было замечено, что
увеличение длины электродов мало влияет на эффективность
работы двигателя. Наибольший прирост тяги получается в торцовой
части электродов.
На рис. 9.4 упрощенно показаны направление движения тока,
силы, действующие на частичку плазмы F, эквипотенциальные
поверхности плазмы на торце коаксиального двигателя. Если
внешнего магнитного поля нет, плазма разогревается джоулевым
теплом, увеличивающимся у стенок катода. Собственное магнитное
поле В прижимает плазму к поверхности катода и перед катодом.
У торца «катода тепловое воздействие плазмы на торец катода
наибольшее.
249
Рис 9. 5. Схема торцового ПД с жидким рабочим телом
Если имеется внешнее магнитное поле (см. рис. 9.3), то оно
помимо ускорения плазмы способствует стабилизации процессов
нагрева и перемещения плазмы. Появляющееся осевое соленоидное
магнитное поле приводит к возникновению окружной
составляющей усилия, действующего на элемент плазмы, к более
равномерному распределению тепловых потоков и температуры плазмы по
межэлектродному промежутку, существенно улучшает работу
двигателя.
Торцовый ПД постоянного тока (рис. 9.5) представляет
собой плазменный двигатель с торцовой компоновкой анодно-катод-
ной системы и жидким рабочим телом. Основное
достоинство такой конструкции — рациональная форма катода,
исключающая контакт конструктивных материалов с центральной
частью плазменного жгута, имеющего наивысшие температуры.
Двигатель состоит из генератора-ускорителя и систем питания рабочим
телом, охлаждения и электропитания.
Генератор-ускоритель включает молибденовый катод 11 кольцевой формы,
охлаждаемый кремниеорганической жидкостью; жаропрочный изолятор 10 и
вольфрамовый анод 9. Система питания рабочим телом состоит из бака / со
сжатым газом, бака 2 с рабочим телом и нагревателем, дозатора 3 и форсунки 4
В узел охлаждения входят электронасос 5, холодильник-излучатель 6 и
распределитель 7. Узел электропитания составляет источник тока 8 и проводки о г
него к анодно-катодной системе и нагревателю 2. После подачи напряжения на
клеммы анода и катода и на пусковой разрядник (на схеме не показан) под
давлением управляющего газа на мембрану бака 2 рабочее тело, через дозатор
3, поступает через форсунки 4 в разрядный промежуток двигателя.
Непосредственно около форсунки происходит ионизация паров рабочего тела и
дальнейший разгон плазмы.
Сброс тепла со стенок анода 3 осуществляется излучением, охлаждение
стенок катода — кремнеорганической жидкостью.
250
/-К
SYT
/ ^
Рис. 9. 6.
^Г^Ч
\С^/
J
Схема
Я-
0-
5Ч
F
1
Нзнр
\
импулы
рабочим
ГП-
IJj
,v
П
лл/jwl
1/1ЧЛЛ.Л
Ч/З/ ,
н[
X)
х/
'ц.
;
V''.'
У.
у< ,-
шого ПД
телом
С
|L
ч
/7 /Г
-/ ■///
''' /'И<*
, v\^
твердым
Импульсный ПД с торцовой
компоновкой анодной-катодной
системы с твердым
рабочим телом (рис. 9. 6)
состоит из генератора-ускорителя и
систем питания и
электропитания.
В узел генератора-ускорителя
плазмы входят катод 5,
изолирующий элемент 7 и анод 10. Узел
питания включает баллон 1 с
управляющим газом, редукционный клапан 2,
емкость с управляющей жидкостью 3,
дозатор 4, привод — камера 6 для
перемещения рабочего тела и рабочее
тело 11 (фторопласт). Система
электропитания включает конденсатор 8 и
источник питания 9.
Включение двигателя
осуществляется податей напряжения на
катод и анод. На поверхности торца фторопласта 11 возникает поверхностный
разряд, происходит испарение и ионизация продуктов испарения фторопласта.
Силы возникшего электромагнитного поля действуют на образующуюся плазму,
разгоняют ее, в результате чего создается тяга двигателя.
Для компенсации расхода фторопласта имеется система подачи рабочего
тела: сжатый газ из баллона через редукционный клапан 2 выдавливает
рабочую жидкость — силикон — из бака 3 в герметичную, свободно расширяющуюся
камеру 6, обеспечивая тем самым перемещение шашки твердого топлива в
разрядном промежутке.
9.2. КОНСТРУКЦИЯ ДВИГАТЕЛЕЙ
Рассмотрим один из вопросов конструкции — центрирование
нагретых деталей.
В плазменных двигателях приходится встречаться с
требованием: крепление двух осесимметричных деталей, должно сохранять
точную исходную ориентацию друг относительно друга при их
нагреве. Исходную ориентацию детали получают при сборке.
Примером может служить центрирование детали А
относительно детали Б (рис. 9.7, а).
Наиболее простой и надежный способ взаимного
центрирования ненагретых деталей А я Б заключается в сопряжении их по
цилиндрическим поверхностям прямоугольных шлицев, причем
центрирующие поверхности С могут быть выполнены с
необходимой точностью простыми средствами: на детали А она получается
протяжкой, на детали Б — шлифовкой.
Однако этот способ центрирования совершенно неприемлем,
если детали А я Б после сборки нагреваются и при том не одинаково.
Если считать, что деталь А нагревается больше чем Б, то, как это
видно из рис. 9.7, зазор по б центрирующей поверхности С
увеличивается, что является следствием радиальной направленности
деформирования w осесиммегричных деталей при нагревании.
На рис. 9.7, б показана конструкция шлицев, использующая эту
особенность деформирования осесимметричных деталей при нагре-
251
г)
Рис 9.7. Центрирование нагретых деталей:
а—прямоугольные шлицы; б—конические шлицы; в, г—цилиндрические штифты
вании. Здесь шлицы выполнены с боковыми поверхностями С,
ориентированными в радиальном направлении, так что посадка
деталей по этим поверхностям обеспечивает сохранение центровки и
при разогревании. Однако такой способ центрирования деталей не
получил широкого распространения ввиду его технологической
сложности.
На принципе, близком к рассмотренному, основывается способ
центрирования двух деталей цилиндрическими штифтами. Как
видно из рисунка 9.7, б при нагревании деталей зазор по
поверхности С штифта изменяется незначительно по сравнению с
радиальным зазором. Таким образом, температурная деформация
детали не изменяет условия центрирования. Следует заметить, точность
центрирования будет тем выше, чем меньше угол а в выполненной
конструкции.
Применение цилиндрических штифтов для крепления анода
двигателя показано на рис. 9.7, в. Ориентация штифтов может быть
по нормали к образующей или по нормали к оси симметрии анода.
Пунктиром показано положение анода после тепловой
деформации. Такое соединение обеспечивает фиксацию и центрирование
анода при разогреве двигателя.
На рис. 9.8 показана возможная конструкция торцового
плазменного двигателя, предназначенного для межорбитального я
межпланетного полета летательного аппарата.
Двигатель состоит из бака 1, наполненного азотом под высоким давлением;
редукционного клапана 2, бака 3 с рабочим телом — литием; магнитогидроди-
намического дозатора 4 расхода рабочего тела, катода 5 и анода 6. Двигатель
может потреблять ток 10 кА напряжением 40 В; расходовать 135 г/с рабочего
тела, развивать тягу 40 Н.
252
На рис. 9.9 дана иная конструкция дугового плазменного двигателя. Он
состоит из бака, наполненного аргоном под давлением 5 МПа; редукционного
клапана, снижающего давление аргона до 0,15 МПа (на рис. 9.9 не показано);
бака 1 с жидким аммиаком; регулирововочного клапана 2, обеспечивающего
постоянное давление перед дозатором 3, и собственно двигателя.
Двигатель имеет расширяющееся сопло-анод 5 с магнитной системой 4,
катод 6. Его возможные данные: тяга — 15 Н, расход рабочего тела — 0,05 г/с,
потребляемый ток — 800 А напряжением 70 В, ресурс Ш0 ч.
Конструкция плазменного двигателя малой тяги,
предназначенного для ориентации искусственного спутника в космическом
пространстве, дана на рис. 9.10 [4].
Двигатель развивает тягу ОД Н, удельный импульс его 50 км/с, частота
импульсов 10 Гц, расход рабочего тела 0,002 г/с. Рабочее тело двигателя —
фторопласт, ресурс 100 ч, емкость конденсаторной батареи 0,0О5 Ф.
Двигатель состоит из узла генератора-ускорителя плазмы, системы подачи
рабочего тела и системы электропитания.
Генератор-ускоритель включает два медных электрода 3, 4, в которых
размещена шашка твердого рабочего тела 5; на одном из электродов имеется
устройство поджига 6.
Шашка рабочего тела перемещается штоком 2 пневмогидроцилиндра
системы подачи. Панель 7 крепления электродов является стенкой корпуса
двигателя, в котором размещены конденсаторы 8 и блок 1 инициатора разряда.
Корпус двигателя заполнен аргоном для улучшения работы конденсаторов.
На рис. 9.11 показана конструкция плазменного импульсного
двигателя, работающего на жидком рабочем теле.
Он состоит из катода 1, анода 2, на котором размещен инициатор 3, бака
4 с рабочим телом и пористым стержнем 5 и конденсаторов 6. Рабочее тело,
подогретое в баке 4, через пористый стержень 5 проникает в межэлектродное
пространство двигателя. Высоковольтный разряд между катодом и инициатором
3 генерирует плазменный сгусток, который в дальнейшем разгоняется в
межэлектродном промежутке двигателя.
На рис. 9.12 приведена конструкция блока импульсных
плазменных двигателей ориентации.
Двигатель состоит из катода 2, анода /, дозатора 3, бака с рабочим
телом — оловом 4, конденсатора 5. Мощность двигателя 500 Вт, удельный
импульс 93 км/с.
Мощность омического двигателя, показанного на рис. 9.13, равна 1,8 кВт,
удельный импульс 3,8 км/с. Рабочее тело — аммиак — подается в трубопровод
1, затем нагреватель 2 и далее — в сопло 3.
9.3. РАСЧЕТ НА ПРОЧНОСТЬ ЭЛЕМЕНТОВ ДВИГАТЕЛЯ
Основное содержание расчета на прочность двигателя сводится
к нахождению запасов прочности деталей, работающих длительное
время в условиях высоких температур и значительных
температурных градиентов; особенностью его является расчет на прочность
деталей из тугоплавких материалов — вольфрама, молибдена,
керамики и др.
Основными расчетами в плазменном двигателе являются:
расчет на прочность анода, расчет баков системы подачи, расчет
мембран баков системы подачи, расчет колебаний анодов импульсных
двигателей.
Одной из наиболее напряженных деталей плазменного
двигателя является его анод. Расчет анода следует вести для двух слу-
253
Рис 9.8. Конструкция торцового ПД
Рис 9.9. Конструкция дугового ПД
254
2 4 5
Рис. 9. iO. Конструкция ПД с твердым рабочим телом
Рис 9.11, Конструкция импульсного ПД с жидким рабочим телом
255
Рис. 9.12. Конструкция блока импульсных ПД
Рис. 0.13. Конструкция омического двигателя
256
чаев. Первый расчетный случай — это длительная работа анода наг
маршевом режиме двигателя, когда расчетной нагрузкой на анод
является давление плазмы или рабочего тела и характерными
условиями являются высокие температуры оболочки анода и
длительное время работы. На этом режиме в силу релаксационных
явлений температурные напряжения будут незначительны. Второй
расчетный случай — это режим запуска двигателя, когда
расчетными условиями нагрузки на анод будут тепловые нагрузки,
создающие большие температурные перепады как по длине анода, так
и по толщине его стенки, при сравнительно небольшой
длительности действия, равной времени пуска двигателя. Таким образом, в
этом случае следует определять температурные напряжения в
аноде двигателя.
Аноды плазменных двигателей имеют (цилиндрическую, кониче4-
скую и более сложные формы. Рассмотрим расчет
цилиндрического анода. Будем рассматривать его как оболочку, нагруженную^
внутренним давлением, а затем и перепадом температур.
9. 3. 1. Расчет цилиндрических анодов,
нагруженных давлением
Уравнения равновесия сил упругости
цилиндрической оболочки
Даны геометрические размеры оболочки Y, h, модуль упругости
Е. Требуется найти напряжения ах, аФ и прогиб в направлении
оси 2.
Считаем, что на элемент оболочки действуют силы внутреннего
давления р. Приложим к нему силы, компенсирующие силы
взаимодействия элемента (рис. 9.14). По граням элемента будут
действовать в окружном направлении силы Гф и моменты <МФ. Они
равны друг другу по обеим граням благодаря осевой симметрии
оболочки.
В осевом направлении силы Тх, Q <и момент Мх будут
изменяться вдоль выделенного элемента, так как в этом направлении;
симметрии нагружения может и не быть. Обычно силы и моменты,
приложенные к граням, рассматривают как распределенные по
длине нагрузки. Будем их обозначать f, Q и М. Очевидно,
= Qrdr, +
P=prd<?dr.
Проектируем все силы на оси X и Z и находим сумму
моментов относительно оси, параллельной оси У и совпадающей с правой
гранью элемента. Получим
9 3050 257
■мх+&мх
d(Trd<?)=0;
-\-prdydx==O; (9. 1)
(Рис. 9.14.
Элемент цилиндрической
л очки
Первое уравнение системы
(9. 1) указывает, что силы Тх
постоянны. Напряжение ох =
=Txfh также величина посто-
обо. яиная. Это выражение говорит
о том, что в цилиндрической
оболочке напряжения в
направлении оси X не зависят от напряжений в окружном
направлении. Если они будут отличаться от нуля, то могут быть
просуммированы с теми, которые получаются в результате решения
остальных двух уравнений:
Q' + — T =p\ Mx = Qy. (9.2)
2 9 ' А*
Эти два уравнения содержат три неизвестные величины: Гф, Q и
Ых- Рассмотрим деформацию срединной поверхности оболочки под
действием_сил Гф.
Силы Тц>, действуя нормально к сечению оболочки в окружном
направлении, создают окружные «мембранные» (безмоментные)
напряжения o<P = T(?/h.
Вычислим относительную деформацию элемента (рис. 9.15) под
действием силы Гф:
а' Ь' —аЬ (г -f w)dy — rdy w
Отсюда o9=E\s9=Ew/r; из 0<р =Гф/й получаем
(9.3)
Очевидно, нагрузка Гф не влияет на деформацию iex, поскольку
ех = 0.
Рассмотрим оболочку под действием изгибающего момента Мх.
Найдем относительную деформацию элемента гх(М), еф(М). Край
оболочки можно представить как элемент пластины.
Относительная деформация £х(М) будет равна
аЬ
Известно, что кривизна К:
258
Рис. 9.15. Деформация элемента оболочки
и окончательно е(Щ
Моментная нагрузка не вызывает окружных деформаций егф(М),,
поэтому приходим к выводу
Напряжения от моментной нагрузки будут определяться из
следующих известных соотношений Гука для пластины:
Найдем изгибающий момент Мх:
dMx = ox(M)zdz,
Л/2 Л/2
отсюда Мх= [ ax(M)zdz=—-— [ z2dz=-
J 1 — [Я J
-Л/2
12(1-^x2)
(9.4)
где D=Ehy[l2(l—t*.2)].
Возвращаемся к первому уравнению системы (9.2). Подставляя в
него Mx'^Q, получаем
Тр
откуда с помощью уравнений (9.3) и (9.4) найдем
]~\Л-^- = Р' (9.5)
dr2 I r*
Это основное уравнение изгиба цилиндрической оболочки. Она
позволяет найти ее деформированное состояние под действием раз-
9* 250
личных нагрузок. Уравнение (9.5) относится к классу линейных
неоднородных дифференциальных уравнений четвертого порядка. При
выводе его мы не накладывали ограничений на характер измене-
яия параметров оболочки и они могут быть существенно
переменными величинами.
Расчет цилиндрической оболочки с постоянными параметрами,
нагруженной давлением
В большом числе случаев толщина оболочки h, цилиндрическая
жесткость D и модуль упругости Е являются или могут быть при-
^ближенно представлены постоянными величинами. Переменным
остается только давление р. Уравнение (9.5) будет иметь вид
г-> *
(9.6)
гЮ
Eh 3(1 —
зиш, если обозначить З4— =
4гЮ
wiv ~{-4$4w = p/D. (9.7)
Это также линейное неоднородное дифференциальное уравнение
четвертого порядка. Его интеграл содержит сумму решений
уравнения без правой части и частного решения:
w=.e~Qx (Сг sin $x-{-C2cos Рлг) + ердг(С3 sin p;c-f-C4cos $x)-\-w4 =
■=wo-\-w4, (9.8)
тле wo — общее решение уравнения (9.7) без правой части; w4 —
^частное решение уравнения (9.7); С\, Съ Съ, С4 — постоянные
интегрирования, которые определяются по условиям на концах
оболочки.
Рассмотрим частные случаи решения этого уравнения.
Случай 1. Напряжения и деформация свободной оболочки,
нагруженной давлением.
Рассмотрим оболочку без опор (рис. 9.16). Известны р, h, r, E.
Требуется найти аф, w, п.
Деформации и напряжения в оболочке от поверхностной нагруз-
жи определяются частным решением уравнения (9.7). Это легко
доказать из следующего. Для практически встречающихся видов
поверхностной нагрузки w14 =0, что справедливо для нагрузки,
действие которой выражается законом
р=Вхп, где В—-константа, а /г=0, 1.
Этому условию удовлетворяет
равномерно распределенная нагрузка,
например давление газа,
гидростатическое давление жидкости.
Будем жжать прогиб w как сумму
решений 1£>О'И w4. Общее решение
уравнения (9. 6) без правой части находим
из уравнения
Фис. 9. 16. Оболочка,
нагруженная давлением
260
Полагая wo = Ap = ABxn, получаем после подстановки
wlov = 0 и wo = 0.
Частное решение уравнения (9.6) находим из уравнения
TV I Eh p
w\? A w4= — .
' rW ч D
Полагая w4=Ap = ABxn, получаем после подстановки
ту n Eh P f"2P
wl=0; w^ HW=w=i
Напряжения, возникающие от этого давления:
ocp = Ew/lr=pr/h. (9.9)
Эта формула была нами получена ранее ш более простых
предположений.
А. Оболочка нагружена постоянным давлением
pi = £ = const.
Если давление р = const, то прогиб, угол наклона и вторая
производная будут:
также равны нулю производные более высоких порядков: w"r =
= wlY = 0. Полученное выражение показывает, что радиальная
деформация оболочки будет постоянной для всех ее сечений.
Перекоса или изгиба ее не будет, что следует также из равенства нулю
угла наклона касательной к упругой линии деформированной
оболочки (на рис. 9.16, W\' = 0). Напряжения аф в соответствии с
формулой (9.9) также будут постоянны вдоль образующей оболочки.
Оболочка под действием рассматриваемой нагрузки будет
находиться в безмоментном, мембранном состоянии.
Б. Оболочка нагружена гидростатическим дав лен, и-
е м
Находим /прогиб оболочки
w w
{B0 + Blx); w' = r-^; w" = w'" = wlY =0.
Eh Eh
Вид деформированной оболочки показан на рис. 9.16. Как видно из
рисунка, деформация оболочки будет линейно зависеть от х. В
этом случае нагружение также не создает моментных нагрузок на
оболочку, что легко установить из равенства нулю второй
производной прогиба (w" = 0), т. е. напряжения будут только
мембранные. Они определяются по формуле
Случай 2. Оболочка нагружена на одном крае распределенным
моментом и перерезывающей силой.
261
Рис. 9. 17. Оболочка с нагрузкой
по краям
Известны Е, h, г, Qo, Mo. Требуется
определить аф, Ох, "&> п.
Рассмотрим цилиндрическую
оболочку (рис. 9. 17), 'К краю которой
приложены изгибающие моменты Мо и
перерезывающие силы QOy причем и те и другие
равномерно распределены по окружности
по кромке оболочки, т. е. при лг=О.
В дальнейшем для упрощения обозначим
их Мо и Qo.
Давление р=0, поэтому в решении
(9. 8) следует положить w4=0 и искать
общий интеграл однородного
дифференциального уравнения (9.7) без правой части.
Известно, что в этом случае интеграл (9.7) выражает краевой
эффект, т. е. влияние радиальных распределенных сил и моментов,
действующих по краю оболочки. Так как приложенные нагрузки
производят местный изгиб, быстро уменьшающийся по мере
увеличения расстояния от торца, то заключаем, что второй член
правой части уравнения (9.8) должен равняться нулю. Поэтому С3 =
= С4 = 0 и
w = e~P-r(C1sinp;c + C2cosp;t). (9. 10)
Постоянные С\ и С2 определим из граничных условий: при х = 0
Продифференцировав уравнение (9.10) три раза, получим
— C2 (cos
sin
'■*[Сг (cos pjc+ sin pxj + G'2(cos pjc— sin f
Подставим в эти уравнения граничные условия:
С __ мо . с= ^
Окончательно
— sin
(9.11)
Максимальный прогиб на загруженном конце
f-Q0). (9. 12)
Угол наклона касательной к упругой линии оболочки найдем
путем дифференцирования выражения (9.11):
w = —
и при х = 0
262
Нам известны прогиб w и вторая
производная от прогиба w".
Напряжения найдем по формулам
Очевидно, крайнее сечение будет
самым напряженным:
_6М0 .
Отсюда обобщенное напряжение
Рис. 9. 18. Эпюра напряжений
оболочки
запас прочности
, 2.
Как видно из рис. 9.17 и 9.18, наиболее напряженное сечение
оболочки проходит через точку Л; напряжения быстро убывают по
мере удаления от плоскости приложения нагрузки.
Расчет напряжений удобно (проводить, используя таблицы
следующих функций, подсчитанных заранее.
Если ввести обозначения функций
P*(p + ip) | 3*( §x— sin §х)\
= е~^ sin
то выражения для прогиба и его производных могут быть
представлены в следующей форме:
Численные значения функций ф, гр, в и g приводятся в табл. 9.1.
Функции ф и г|) представлены на рис. 9.19, функция £ — на
рис. 9.20.
Понятие о длинной и короткой оболочках
Из кривых рис. 9.20 вышеприведенных формул видно, что прогиб w и его
производные w', w", w"' с возрастанием х уменьшаются. Следовательно, прогиб
и изгиб оболочки носит местный характер, как это и предполагалось вначале,
при вычислении постоянных интегрирования.
263
0,8
0,6
0,2
X
У
\
1
-9
Г^
\
\
ч.
-^
Г—Т fix
I I
Рис. 9. 19. График функций
ф И1|)
Рис. 9. 20. График функций
0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
1
1,
2,
Здг
0
,1
,2
,3
,4
,5
,6
,7
,8
,9
,0
,1
,2
,3
Л
5
6
7
8
9
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
о
0
0
о,
о,
о,
о,
,0000
,9907
,9651
,9267
,8184
,8231
,7628
,6997
,6354
,5712
,5083
,4476
,3899
3355
2849
2384
1959
1576
1234
0932
0667
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0,
0,
0,
0,
0,
0,
ф
,0000
,8100
,6398
,4888
,3564
,2415
,1431
,0599
,0093
,0657
,1108
1457
1716
1897
2011
2068
2077
2047
1985
1899
1794
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
о,
о,
о,
о,
о,
6
,0000
,9003
,8024
,7077
,6174
,5323
,4530
,3798
,3131
,2527
,1988
,1510
,1091
0729
0419
0158
0059
0235
0376
0484
0563
0
0
0
0
0
0
0
0
0
0
0
0
0
0,
0,
0,
о,
о,
о,
о,
с
0
,0903
,1627
,2189
,2610
,2908
,3099
,3199
,3223
,3185
,3096
2967
2807
2626
2430
2226
2018
1812
1610
1415
1230
(
2
2
2
^
2
2
2
2
2
3
3
3
3
3,
3,
з,
з,
з,
з,
4,
и
,1
,2
,3
,4
,5
,6
,7
,8
,9
,0
1
2
3
4
5
6
7
8
9
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
о,
о,
о,
о,
о,
<р
,0439
,0244
,0080
,0056
,0166
,0254
,0320
,0369
,0403
,0423
,0431
,0431
0422
0408
0389
0366
0341
0314
0286
0258
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0,
0,
0,
о,
о,
о,
ф
,1675
,1548
,1416
,1282
,1190
,1019
,0895
,0777
,0666
,0563
0469
0383
0306
0237
0177
0124
0079
0040
0008
0019
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0,
о,
о,
о,
о,
о,
Габл
0
,0618
,0652
,0668
,0669
,0658
,0636
,0608
,0573
,0534
,0493
,0450
0407
0364
0323
0283
0245
0210
0177
014?
0120
и
0
0
0
0
0
0
0
0
0
0
0
0
0
0
о,
о,
о,
о,
о,
о,
ца 9.1
С
,1057
,0895
,0748
,0613
,0493
,0383
,0287
,0204
,0132
,0071
0019
0024
0058
0085
0106
0121
0131
0137
0140
0139
Характер изменения затухающих кривых проследим по функции
С = е~^х sin j3jc,
показанной на рис. 9.20. С каждой полуволной амплитуда функции меняет знак
и уменьшается по абсолютной величине в 23,14 раза. Таким образом максималь-
264
Ю1
2 J
1
1д ^
Р\
\0 1 2
J
4
Рис. 9. 21. Расчетная схема оболочек
Рис. 9.22. Напряжения в оболочке
с шарнирной опорой
ные значения напряжений, возникающих от нагрузок Qo, Mo, располагаются в
первой полуволне гармонической функции, длину которой будем обозначать /д =
= /п/2 (см. рис. 9.20).
Итак, промежутком, оценивающим прочностные характеристики оболочки,
является ее длина от места приложения нагрузки в границах первой полуволны.
Эту длину называют параметром длины оболочки и обозначают /д. Найдем ее
величину.
Длина волны /п на протяжении полного периода изменения гармонической
функции 2л; будет равна
3(1—to.2) __ 1,29
rW
/rh
отсюда /Л = (л/1,29) |/гЙ = 2,
Эту величину округляют до величины
/7
Д 1
Если длина оболочки />/д, то она называется длинной, если /</д, то
короткой. В длинной оболочке деформации и напряжения в ней от
нагрузок, приложенных на ее краях можно находить независимо друг относительно
друга, т. к. погрешность от такого рассмотрения будет невелика, а упрощения
в расчете существенны.
Понятие параметра длины оболочки позволяет упростить расчет оболочек,
указанных на рис. 9.21.
Так как рассматривают обычно напряженное место в оболочке, то
ограничивают поиск напряжений только в границах параметра длины /д,
указанного на рис. 9.21.
Случай 3. Напряжения в опертой оболочке, нагруженной
давлением.
А. Край оболочки имеет шарнирную опору (рис. 9.22).
Известны г, h, E, р. Требуется найти <тф, ах, сгф(М), w. Исходное
уравнение
wlYJrEh/{r2k) = p/D; известно, что
w = wo-\-w4.
Находим частное решение w4. Так как p=f(xn), где я = 0,1,
примем w4=Ap. Тогда ^У=0 и w4 = r2p/(Eh). Обозначим для
сокращения записи w4 = 8. Находим общее решение исходного уравнения
без правой части w0:
wo=^x(Cx sin p
265
Постоянные интегрирования Сь С2 находим из граничных условий:
х = 0\ w{0) = wo{0) + w4{0\ откуда адо(О) = -8(О);
ад''(0)==адо(0) + адч(0), откуда Wo(0) = 0,
так как адч(0)=0.
Подставив эти значения в выражения для w0 и ад0, получим Ci =
= 0; С2 = —6(0).
Из выражения (9.12), связывающего деформацию и нагрузки
на краю оболочки, имеем
= -8(0) и отсюда Q^ = -
Далее находим
233Z)
1 Q^ sin ?jc= — 2p2e-^8 (0) sin
ад
так как для рассматриваемого случая 6" = 0.
После этого находим напряжения
с w 6Dw
acp = f—; ax = ——
Прогибы до, шч и напряжения показаны на рис. 9.22.
Особенностью распределения напряжений в этом случае
является наличие максимальных напряжений не на краю оболочки, а
вблизи от него (точка А).
Б. Край оболочки .имеет жесткую заделку (рис. 9.23).
Известны г, h, E, р. Требуется найти аФ, ах, о*(М), т.
Исходное уравнение
1\г 1 Eh Р
wiy/ -) ■ ад = — ; известно, что w = wo-\-w4.
Находим тч. Так как р = В(хп), где п = 0,1, примем w4=Ap. Тогда
<v =0 и
4
Находим wo\
wo = e~^x(C1 sin
Из условий х = 0; w(0) =wo(0) +w4(0) =0; шо(0)=— 6(0);
-^о/(0)+^ч/(0)=0; доо/(0)=— бг(0).
Подставляя эти значения wo(0) и шо7(0) в уравнения
та,о==е-Р'(С1 sin Bjc + C2cos?;c);
адо = pe~3jr [Q (cos Ъх — sin ?jc) — C2 (cos ?jc + sin £
266
w«=$
Рис. 9.23. Напряжения в оболочке
с жесткой заделкой
и^положив в них л: = 0, получим
Рис. 9. 24. Напряжения в
оболочке при тепловом нагру-
жении
Из выражений w" и wr" и условий
х=0; Mx = Dw"(0)=A4R; Qx =
получим
MR = 2^2D\^-^Jrb(0)]; QR = —
I. P J
и окончательно
е-рг
(cos $x— sin $x) -\-QR cos f
(cospA:+sin !
w" =-
sin
После этого находим напряжения
Эпюры прогибов и;, t^4 и напряжений показаны на рис. 9.23.
9. 3. 2. Расчет цилиндрических анодов
при тепловом нагружении
Уравнение деформации цилиндрической оболочки
при тепловом нагружении
В результате нагрева вдоль оси оболочки устанавливается
определенный градиент температур (рис. 9.24). Найдем
зависимость деформации оболочки w от этого градиента. По толщине
стенки температуру считаем одинаковой (постоянной).
267
Известны h, г, Е, a, At. Требуется майти аф, Ох, о? (М), w.
Полагаем, что оболочка имеет постоянные параметры h, r, E;
модуль упругости Е полагаем равным среднему его значению.
Перепад температур At — величина переменная и зависящая от
координаты х оболочки. В общем виде
где В — коэффициент; п — показатель степени, равный 0, 1, 2 иЗ
при равно!мерном, линейном и нелинейном нагреве 'соответственно.
Как указывалось, относительная деформация элемента при
нагревании определяется формулой
где (8у — упругая деформация элемента, появляющаяся
вследствие стесненности его деформирования; et — температурная
деформация свободного элемента.
Для цилиндрической оболочки существенны относительные
деформации в окружном направлении еф=18срУ+89ь которые легко
пересчитываются в радиальные деформации w по формуле ш = геф.
Окончательно
w = wy-\-wt.
Свободная температурная деформация wt известна (рис. 9.24):
wt = rtyt — га At.
Известно, что напряжение в оболочке создает упругая
составляющая суммарной температурной деформации элемента. Ее
нахождение и вызывает наибольшие трудности.
Упругую составляющую деформации оболочки находим
общими для температурной задачи приемами.
Первый шаг. Условно накладываем на холодную оболочку
жесткие связи в виде жесткого корпуса и затем нагреваем ее до
температуры t. Температурного расширения оболочки не произойдет;
в ней возникнут сжимающие напряжения, а на поверхности —
реакция жестких стенок в виде распределенного давления р*.
Совершенно .аналогичный эффект можно получить, если расширившуюся
до Wt = raAt оболочку сжать внешним давлением до исходного
размера.
Известно, что такая жесткая заделка оболочки соответствует
условиям, когда упругая и температурная деформации равны и
противоположны по знаку:
w* = w*y + w*t = 0; 13^
w*y = — w* = — ra A/f.
Найдем, чему равна реакция стенок р*, удерживающая оболочку
в сжатое недеформированном состоянии. Упругая деформация
оболочки и давление, вызывающее ее, связаны уравнением
у ^
гЮ D
268
Находим из uerowy — Wy.0-\-wy4. Так как по условию wy.o=^
= 0, то Wy = Wy4. Примем wy*=AAt=ABxn. Подставим это*
*IV п
выражение в исходное уравнение; учитывая, что wy =U, получиьи
Ehw* p* Eh *
L=_£__ и it?* = Wy.
гЮ D r2
Величина wy* является упругим прогибом оболочки в
результанте действия на нее давления р*. Этот прогиб из соотношения (9.13)
известен: wY* = —raAt. Подставляя это значение wy* в выражение
для р*, получим давление, которое удерживает оболочку в сжатом
состоянии в результате наложения жесткой связи:
Полученные значения упругой деформации оболочки wy*=^
= —raAt и реакции р* отличаются от действительных, так как
жесткой заделки оболочки в действительности нет. Оболочка
свободна.
Второй шаг. Чтобы получить истинную деформацию оболочки,
следует приложить к ней нагрузку, возникающую пр,и ее
фиксации, но с противоположным знаком, и найти прогиб.
Прогиб оболочки от давления р = —p*=EhaAt/r обозначим шр;
будем исходить из обычного уравнения
IV i Eh EhaAt /Гк 1 Ах
р ~гЮ р rD K 7
Третий шаг. Сумма двух деформаций, полученных из
уравнений (9.13) и (9.14), даст нам упругую составляющую суммарной
деформации оболочки при ее тепловом нагружении:
wY = wy -f- wp = — га М + wp.
Окончательное численное значение деформации разогретой
свободной оболочки находится из соотношения
y — raM ~\-w = wp.
Таким образом, упругая составляющая прогиба wY и полный
прогиб нагретой оболочки w содержит составляющую wv, которую1
получают из уравнения (9.14).
Уравнение 9.14 есть основное уравнение деформации оболочки
при тепловом нагружении. Часто индекс р опускают.
Случай 4. Температурные напряжения и деформация свободной
оболочки.
Известны г, h, E, a, At. Требуется <найти аиш.
Исходное уравнение
iv , thwP EhaAt
wD ч = ;
р ' гЮ rD
решение этого уравнения будет wp = w0 + w4. Найдем частное реше-
269
ние w4. Обычно для рассматриваемых нами задач M=f(xn)t где
л = 0, 1,2, 3. Очевидно, w4^f(xn) и w[v = 0. Тогда
Ehw4 EhaM
; W
; W4
Этот важный результат имеет место при более сложном законе
изменения градиента температуры по длине оболочки, при условии
*e>iv = 0.
Найдем общее решение w0:
^wo=e~^(C1 sin $x-\-C2cas$x)+eV*(CBsin P*+C4cospjc),
постоянные Сь С2, С3, С4 находим из граничных условий:
4{Q)=0,
после чего все необходимые данные для расчета имеются.
Находим
Рассмотрим конкретные случаи.
А. Температура постоянна по длине
или меняется по ли-нейномузакону.
На рис. 9.25 оболочка нагрета равномерно по длине или имеет
постоянный градиент температур.
Если градиент температур — постоянная величина, т. е. At=
='const, то из уравнения (9.14) wp = wo + w4 = w4y так как ^о = 0.
Далее EhwJ(r2D)=Ea&t/(rD) и
wp=w4=rakt; w'=w"=w'" = wiv = 0;
o(p=Ewy/r=0.
Итак, равномерный разогрев свободной оболочки не вызывает
в ней температурных напряжений; деформация оболочки равна
нестесненной температурной деформации.
Если температура изменяется /по линейному закону, например
At = B0-\-Blxi то
270
w =^woJriw4=w4; ^0 = 0;
=^w4 = rakt = ra (BQ -\- Bxx)\
wy=0; о?=0.
Таким образам, линейный закон изменения
температуры по оси «свободной оболочки также
не вызывает в ней температурных напряжений.
Ее деформация ратана нестесненной температур-
ной деформации.
рис g 2g дефОрма-
Wоболочки при ли-
В. Температура изменяется по нелинейному закону.
Известно, что температурные напряжения в свободной оболочке'
возникают, если закон изменения температуры по длине
нелинейный, т. е. если At = Bxn при п^2. Примем At=E
Из основного уравнения (9.14)
IV , Eh Ehatt
rD
имеем wp=w0 + w4.
Находим w4:
C3 sin %x + C4 cos $x).
C4 определим для гранич-
где Л0=
Находим w0:
wo=e-*x (Сг sin §x -}- C2 cos
Постоянные интегрирования Cu C&
нмх условий:
при х=0, w°4(0) = wm4(0) = 0;
при x=l, Wp{l)=w'"p(l) = 0.
Продифференцировав выражение для wv три раза, получим:
w'p=— е~^ 3 [(Сг-\-С2) sin Pjc+ (Сг - С2) cos $x] + e**$x
X [(С3 - С4) sin Рх + (С3 - С4j cos px] + 2Агх;
wp=2 е-Р* р2 [С2 sin рл: - Q cos Щ —
~-2e^?2[C4sin рх-СзСозр^+гЛ; (9. 16)
^; = 2 е-?' Р3 \{Сг - С2) sin Pjc + (Сх + С2) cos Щ -
-2 е^ Зз[(С3 + С4) sin Pjc~(C3~C4)cos Щ.
Подставив граничные условия в эти уравнения, получим
постоянные интегрирования С.
Укажем на упрощения в расчете, которые можно получить,
используя параметр длины оболочки /д.
271
Гп
u
At
-ттГ
L
[Л
Рис. 9. 26. Элемент оболочки
Если рассчитываемая оболочка длинная, т. е. ее длина больше
/д (рис. 9.26), то постоянные интегрирования можно определить,
используя граничные условия (9.15) для х = 0 .и х=1 независимо
друг от друга.
При х = 0 определим Сь Съ .положив С3 = С4 = 0. Тогда
<wp (0) = 2 е-?* (З2 [С2 sin Рх - Сх cos fU] + 2Ах = О
При х = 1 ищем Cz, С\, положив С\ = С2 = 0:
w'p{l) = 2 еР' р3 [(С3 + С4) sin Щ - (С3 - С4) cos Щ = 0.
Во многих случаях задача еще более упрощается, как это
показано на рис. 9.26. Опасной и наиболее напряженной частью
анода является, например, его правый конец. В этом случае ищем
постоянные С3 и С4, положив Ci = C2 = 0. Таким образом,
постоянные интегрирования Сь С2, С3, С4 определены. Из уравнений (9.16)
•находим значения wp .и wp", а затем упругую деформацию и на-
лряжения в оболочке:
wy=w0; w = Wp,
Построим кривую запаса прочности оболочки п=сЦ1/а1.
Величина <*Ц\ будет «переменной, так как температура вдоль
оси оболочки переменная. Переменной величиной будет также
обобщенное напряжение
Построив обе эти кривые и их отношение, получим кривую
запаса прочности n — f(x).
272
h = 10
Рис. 9. 27. Напряжения в оболочке
Пример 9.1. Найти температурные напряжения в свободной
цилиндрической оболочке (рис. 9.27), если дано:
а = 6,5-10-6 c°-i; £ = 2,83-105 МПа; ^ = 0,3; & = 2160 4-1,73*2.
Находим деформацию wp из уравнения (9.14):
wp = e~®x (Ci sin $x 4- С2 cos $х) 4 еРх (Сз sin р* + С4 cos $x) 4 ^ч-
Частное решение
w4 = rakt = 126-6,5.10-6 (2160 4 1,73*2) = 1770-10-4 +
4- 1Д17-10-4*2 =, Ао + Агх2.
Находим общее решение уравнения (9.14) без правой части.
Находим величины р, Д /д: |3 = 323; D = 22; /д = 16 • 10—3. Найдем
коэффициенты Сь Съ Съ, С4 из граничных условий: при
На левом конце, при х = 0, находим Си С2, приняв С3 = С4 = 0. На
правом конце, при х = 1, находим Сг, С4, приняв Ci = C2 = 0.
Итак, при х = 0 2р2С!—28,34-10~5 = 0; Ci + C2 = 0; отсюда С{ =
= 10,8 • Ю-3 мм; С2 = —10,8-10~3 мм.
При х = 1
2(32 (3,12С4 — 25,8С3) 4 28,34-10-5 == 0;
— 3,12 ( — Сз — С4) — 25,8 (Сз — С4) = 0,
откуда Сз = 0,46- 10~3 мм; С4=0,33 • Ю"3 мм и прогиб
w0 = e~pjf • 10-3 (Ю,8 sin $x — 10,8 cos $x) 4-
+ ep<r-10-3 (0,46 sin Pjc 4 0,33 cos $x).
После вычисления w0 и w4 находим суммарную деформацию оболочки по
формуле
w = Wf -\- Wy = гаА^ 4* Wo-
Например, для х=1 получим w0 — —9,59 • 10~3 мм; ауч=1885 • 10~3 мм;
w = wp= 1875 • 10~3 мм и напряжение растяжения в окружном направлении по
формуле
_ р Wo_ 2,83-106
0(р~~ г = 12%6 W°'
Определим wp по формулам (9.16):
wp = 2 е~рл: ^2 [С2 sin рл: — Сх cos
— 2 epj: (32 [С4 sin Эа: — С3 cos pjc] -f-
273
+ 2Л •-= — е~$х [28,3-10-4 sin ?x + 28,3-10-4 cos рл:]
— е?х-10-4 [0,865 sin рд: — 1,2 cos ?x] + 2-14,17-10—4.
Находим напряжения ал-, о*9(Л1), подсчитанные по формулам
2, где М v =
.Л
у" = 2,59-105-
Например, для jc = / получим а =—216; для л; = 60 мм.
а^ = 763, ах = 246, а9 (ЛГ) - 74 МПа.
Обобщенное напряжение в оболочке
а запас прочности п = о^/<хтах.
На рис. 9.27 показаны полученные эпюры прогибов, напряжений и запасы
прочности.
Случай 5. Температурные напряжения в оболочке, имеющей
опоры.
А. Край оболочки имеет шарнирную опору (рис. 9.28).
Известны г, h, E, a, At. Требуется найти а<р, Ох, о9(М)л w. Дана
At=Bxn, где л = 0, 1, 2.
Исходное уравнение
IV i Eh EhaAt
•wn= .
Решение .ищем по формуле
sin
Известно, что w4 = raAt = 6 и что при x = 0 w4(0) =гаДЙ(О) =6(0).
Здесь 6(0) — значение частного интеграла шч на крае оболочки;
А/(0) — перепад температуры на крае оболочки.
Найдем w0. Постоянные интегрирования С! ,и С2 и неизвестную
реакцию опоры QR найдем из граничных условий:
Рис. 9.28. Напряжения и прогибы оболочки с Рис. 9.29. Напряжения и прогибы
шарнирной опорой оболочки с жесткой заделкой
274
Обычно-6" (0) и бл//(0) равны нулю.
Рассмотрим этот случай. Подставив значения wp(0),
в соответствующие выражения wp, wp и wp, получим
а из равенства wo(0) =QR/(2fi3D) находим QR =—2p3Z>6(0) ииско-
мую деформацию w0:
^ /?cos ^х = ~ е~?* 8 (°) cos ?x'
^; =_- _ 2 е-^ ?2S (0) sin Зх.
Напряжения найдем по обычным формулам:
a(p=Ewo/r; Gx — 6Dwp/ti2; й9(М)
Эпюры напряжений и деформации показаны на рис. 9.28.
Как видно, любой закон изменения температур по оси оболочки
вызывает в опорном сечении значительные напряжения. Вот
почему жесткую фиксацию нагретых оболочек следует избегать.
Б. Край оболочки имеет жесткую заделку (рис. 9.29).
Известны г, h, E, a, At. Требуется найти аф, Ох, в<?(М), w. Дано
At=f(xn), где п = 0, 1, 2, 3. Исходное уравнение
IV
известны
wo = e-?x{C1 sin $x-\-C2 co-s §x).
Неизвестные величины Сь С2, MR, QR найдем из условия:
при х = 0
w"p (0) = Wo (0) + w\ (0) = MR/D; w"p (0) = w"0 (0) + wl (0) - QR/D.
и w4 два раза
; C2=-8f0);
Дифференцируя выражения для w0 и w4 два раза и подставляя в
них указанные условия, получаем
(cos рл: — sin $x) + Q# cos
275
15 20 25 30 Х.мм
Рис. 9. 30. К расчету цилиндрического анода
sin
w" =
= 2 е-
cos §x + sin $x) + QR sin $x] + 8" =
-^ + й (0)1 cos Bjc- 8 (0) sin
Таким образом, все необходимые величины определены. Прогиб
оболочки будет равен: wp = w, wY = w0. Напряжения в оболочке
Эпюры напряжений и прогибы представлены на рис. 9.29.
Как видно, жесткая заделка конца оболочки приводит к
большим напряжениям в месте крепления, что требует проверки ее
прочности.
Пример 9.2. Найти напряжение и запас прочности цилиндрического анода,
размеры которого указаны на рис. 9.30, если известны: материал — сталь
Х18Н9Т; £=1,45-105 МПа; а=(21,2 ... 22,2) ■ 10"6 1/град. Левый конец анода
закреплен жестко. Температура по длине анода нарастает линейно.
1. Закон изменения температуры по длине анода At = B0-{-Bix.
Из условий при х = 0 А/ —430° С; при х — 1 А^ = 580°С, получаем Во~
= 430 град; £i = 4,3 град/мм.
2. Найдем параметры оболочки. Параметр длины
/д = 2,5 Y~rh = 2,5 /50-0,5= 12,5 мм,
т. е. рассчитываемая оболочка относится к классу данных. Определим
1 2Q 1 29
?^W
12(l-fx2)
12(1 — 0,32)
276
Рис. 9. 31. Напряжения в цилиндрическом аноде
Найдем погонные реакции QR и MR:
Ъ (0) = гадго = 50-21,2-10-6-430 = 0,435 мм;
Ъ' (0) = аДг0 = 21,2-10-6.430 = 9,1 • 10—3; у (0) = 0;
MR =
)1
» (0)1 + Db" (0) =
[Q 1 . 1П—3 I
-^——- + 0,455 = 100,2 H;
0,275 J
QR = _ 2рзо f^-J^- + 2b (0) j + Db" (0) =
= -2-0,2573.166,3f^4-^- +2-0,455] s-51,4 Н/мм.
|_ 0,27o> J
4. Находим
(cos fix— sin fix) -f Q# cos fix] -f-
a = Ewjr.
Определяем коэффициенты:
: 2-0,2573.166,3 = 56,5 Н/мм;
, = 0,257.10,02 = 25,8 Н/мм;
£ 1,45-104
г ~ 50
= 2900 Н/ммЗ.
277
Х~б(Р АА*/
в- *(!
+<5Х
м,
Рис. 9. 32. К определению напряжений на кромках свободной оболочки
Прогиб w0, определяющий напряжение в цилиндрической оболочке, равен
0,455 мм.
На рис. 9.30 построены кривые w0, wn и суммарный прогиб анода wp в
результате его нагрева.
5. Находим
w =
p
sin
sin
Определяем коэффициенты:
PD = 0,257-166,3 = 426 Н/мм;
6D 6-166,3
0,52
■ = 3980 кН/мм2.
Распределение напряжений по аноду показано на рис. 9.31.
Напряжение в оболочке при наличии перепада
температуры по толщине
В свободной, не закрепленной, цилиндрической оболочке,
имеющей перепад температуры по толщине, возникнут температурные
напряжения.
Полагаем, что температура «по толщине оболочки изменяется по
линейному закону (рис. 9.32) и одинакова на всем ее протяжении.
В точках, находящихся на значительном расстоянии от концов
оболочки, изгиба не будет. Напряженное состояние элемента
оболочки будет подобно состоянию пластины при неравномерлом
нагреве, рассмотренном ранее.
Упругую деформацию элемента чгр;и тепловом нагружении
найдем метод ом, рассмотренном в гл. 1. Для этого условно
фиксируем оболочку жестко по обоим концам, находим значения
реактив* * б
и напряжений
аф* в местах фиксации
обоного момента
лочки, возникающих в результате ее нагрева.
Далее приложим к краям оболочки изгибающие моменты Мо=*
— MR и найдем деформацию и напряжения от этих моментов.
Известно, что упругая деформация элемента при тепловом
нагружении, а следовательно, и напряжения будут равны сумме
деформации зафиксированного состояния и деформации от
момента Mq.
Итак, дано: г, h, At Требуется найти аг(0), аф(0).
278
1. Находим упругую
деформацию оболочки и изгибающий момент
в заделке:
Изменение температуры At(z) по
толщине оболочки будет равно (см. под-
раз д. 9. 3. 2)
*-ср
л/2
Напряжения в оболочке в результате
фиксации будут
Рис. 9.33. Напряжения в
оболочке при неравномерном
нагреве по ее толщине
"XV
EaAt
EaAt
" 1-jx 1 —fx '
Изгибающий момент в заделке —
(9. 17)
EaAtht
12(1 —ka) '
2. Находим деформацию оболочки и напряжения
под действием изгибающего момента Мо=—MR*:
Wo). (9. 18)
232£) Y ' л v и/ /?2
3. Находим искомые напряжения, для чего сложим
напряжения <7ф* (9.17) с напряжениями о?, вызванными моментами
MQ (9.18); получим
EaAt
(9. 19)
V г,шал 2(1 —[X
Эта формула показывает, что на свободном торце
максимальное температурное напряжение действует в окружном направлении.
При jli = 0,3 это напряжение на 25% больше напряжения,
вычисленного по формуле (9.17) для точек, находящихся на большом
расстоянии от торцов.
В хрупком материале следует, таким образом, опасаться
трещин с торцов оболочки, а не в середине.
На рис. 9.32, в и 9.33 показаны эпюры напряжений на концах
и в средней части оболочии, имеющей перепад температуры по
толщине.
9. 3. 3. Расчет цилиндрических анодов
с переменными параметрами
Рассмотрим цилиндрическую оболочку, нагруженную осесим-
метрично. Нагрузки складываются' из нормально приложенного
давления и из тепловых напряжений в виде осесимметричного
лоля температур, неравномерного вдоль оси и по ее толщине. Счи-
279
таем основные параметры оболочки — толщину h, модуль
упругости Е, (коэффициент линейного расширения а — веллчинами
переменными, а коэффициент Пуассона \х — величиной постоянной.
Это условие в практических задачах не вносит заметной
погрешности в расчет, если учесть, что диапазон изменения \х вообще не
велик (ji = 0,3 ... 0,5) и в расчетах может быть осреднен. Считаем,
что основная поверхность оболочки после нагружен.ия остается
основной; считаем также, что она после деформации мало
отличается от цилиндрической.'Оба эти условия можно представить в виде
h/2
/= *
J
d 0.
-Л/2
Элемент рассматриваемой оболочки с нагрузками,
приложенными к нему, показан на рис. 9.14.
Уравнения равновесия имеют следующий вид (см. подразд.
9.3.1):
^ *+Ь> = р, ^-Q = 0 ; d-^f+l*-=P. (9.20)
dx ' dx r y' dx ^ ' dx% ' r ^ v }
(Здесь и в дальнейшем векторные знаки в обозначениях 7\ Q, М
опущены).
Уравнения деформаций. В рассматриваемом случае основная
поверхность оболочки совпадает с серединной поверхностью.
Обозначим перемещение точек основной поверхности вдоль радиуса
через w, вдоль образующей — и. Положительное направление этих
деформаций показано на рис. 9.14.
Деформация основной поверхности (z = 0) определяется
равенствами
sxo=du/dx; £qo = w/r.
Деформация в слое, отстоящем на расстоянии z от основной
поверхности, в соответствии с гипотезой «жесткой нормали» будет
равна
du , d^w w /n oi\
eY = \-z ; e9=—. (9.21)
x dx ' dxi 9 r V
Уравнения упругости с учетом неравномерного нагрева
оболочки будут иметь вид
*х = ^г(^-Ы + а'; 4~(°9~V<°x) + <*t> (9-22)
где аи — температурная деформация при нагреве до f. (Здесь и
далее вместо величины нагрева Д£ принимаем температуру нагрева
оболочки t, т. е. t—t>o=t=At. Из выражений (9.22) следует
ж
Учитывая равенство (9.21), получим
Е I da г w . <flw \ Е (1 + р.)
hu h<z — at,
1 —p.2 U^: r r ^2; 1 —fi.2 (9.23)
а- Е U^L+JL + ZI,J^)- Д^^,
1 — [х2 \ tf x г ^х2 / 1 — fx2
Усилия и моменты, действующие на единицу длины в
поперечном и продольном сечениях основной поверхности, будут равны
Л/2 Л/2
1 xz=z \ ®х '"* "р^1*7 \ Gydz\
-Л/2 -Л/2
Л/2 Л/2
Му=— Г ovzdz; Мф= \ GyZdz.
х j х «р j «р
—Л/2 —Л/2
Внося в эти равенства выражения (9.23) и пренебрегая малыми
величинами, получим
гр du j. , w г т . т du r , w r ™ %
г (9.24)
Л/2 Л/2
/1 = Т1^
-Л/2 -Л/2
Л/2 Л/2
7-^-7 \
1 — fJi.2 J
Л/
1 — fJ-2 f
—/z/2 —Л/2
Функции Tt, Mt зависят от распределения температурной
деформации at и определяются равенствами:
Л/2 Л/2
Tt = l-±^ \ Eatdz; Mt^1-^- \ Eatzdz.
1 —и- J 1—н-2 J
—Л/2 —Л/2
Исключаем из уравнений (9.20), (9.23), (9.24) все неизвестные,
кроме w. Для этого из уравнения (9.24) находим
du 1
dx fi
Далее из выражений для Гф и Мх в уравнении (9.24) находим
/ /2
г \ /i " V
Внося эти выражения в последнее уравнение системы (9.20),
имеем
28 [
(9.25)
ах<- / г* г г ах*
Л/2 Л /2
1
/'2 г
Л/2 Л/2
где
1 — № J J
-Л/2 _Л/2
Это и есть окончательное дифференциальное уравнение осесим-
метричной деформации оболочки переменной толщины «с
переменным модулем упругости и постоянным коэффициентом
Пуассона JLI.
Если расчет оболочки ведется в границах упругих напряжений,
то модуль упругости Е полагают величиной постоянной ,и
уравнение (9.25) упрощается:
* Т 4-
Г X^
A/2 A/2
ёЛ(
+ — \ atdz ё—Л-( \ afzdz), (9.26)
r J 1-pi rfi2 I J У
—Л/2 —Л/2
где D
И наконец, если толщина оболочки величина постоянная, то
приходим к .известному уравнению деформации цилиндрической
оболочки:
А/2 А/2
—Л/2 —А/2
Часто принимают, что температура по толщине стенки изменяется
по линейному закону:
где 1с$(х) — температура срединной поверхности; At(x) —
разность между температурами наружной и внутренней поверхности.
Уравнение (9.27) в этом случае будет таким:
Ehw ix rr, . Eh .
pTx+ atep + D{l+v)
где A = At(x); tCp=tcv(x), или в сокращенной записи
При ji = 0,3 имеем
-i^
1,285
Л2/-2
282
Расчет цилиндрической оболочки
с жесткой фиксацией краев
Трудоемкость расчета оболочки по
уравнению (9. 26) в значительной
степени зависит от характера граничных
условий. Рассмотрим случай, когда
один конец оболочки имеет жесткую
заделку, а другой свободен (рис. 9.34).
Известны £, Л, a, t\ все эти
величины могут быть переменными.
Требуется найти о?, Ox* o<p(M), w.
Можно прямым интегрированием
ДИффереНЦИаЛЬ'НОГО уравнения (9. 2Ь)
с учетом граничных условий получить
неоднородное линейное интегральное уравнение и решать его
методом последовательных приближений.
Уравнение (9.26) относится к классу дифференциальных
уравнений, у которых процесс последовательных приближений
медленно сходящийся, что неудобно в приближенных расчетах, когда
расчет ведется на обычных цифровых машинах.
Целесообразно обратиться к способу расчета, который уже
применялся: представить напряженное состояние оболочки как
сумму безмоментного напряженного состояния и моментного
напряженного состояния, быстро затухающего по мере удаления от
зоны нагрузок. Таким образом, решение уравнения (9.26) будет
складываться из частного его решения и общего решения без
правой части:
Рис 9 34. оболочка с переме„ны-
ми параметрами
Исходное дифференциальное уравнение (9.26) для случая
температурного нагружения примет вид
^ (9.28)
где t = t(x) — текущее значение температуры оболочки вдоль ее
образующей.
Освобождаем оболочку от закрепления, находим ее деформацию от
нагрева до температуры t, т. е. находим частное решение.
Полагаем, что t=f(xn), где я^З, т. е. полагаем, что KDw'p)" = 0; тогда
(Eh/r2)w4=hEai/r9
откуда w4 = rat.
Находим общее решение уравнения (9.28) без правой части:
(Dw*o)" + EhwJr2 = 0. (9.29)
Обозначим Eh/r2=A.
Интегрируем уравнение (9.29) четыре раза.
283
Первый интеграл
о
Из условия, что при х = 0 (Owl)' ==Q0 находим C\ = Q0; из
условия при x=l(Dwo)' = 0 получаем
Qo=|* Awodx,
6
и окончательно
х I
(Dw'o)'= — f Awodx-\- Г Awodx= — Qx.
6 6
Второй интеграл
х
Dwo= — \
о
Из условия, что при х = 0 DwnQ = M0 находим C2=Af0. Из
условия, что при x = l Dw"o = 0 получаем
i
и окончательно
X I
Dw"= — ГQxdx-{- ?Qxdx= —Mx.
о о
Интегрируем это уравнение еще раз:
х М,
Для длинных оболочек, если нужно найти прогиб оболочки w и
напряжения аф, целесообразно использовать условие, что при х=1
1 М
wo'(l) = 0; получим С3= \ —— dx и окончательно
о
d\
[ Мх
o= — \ —±
J /у
о
J
о о
Последующее (последнее) интегрирование приводит к результату
284
Для длинных оболочек целесообразно С4 находить !из условия, что
при x = l w(l)=0. Тогда CA= ^w'xdx и
о
х I
w0 = — f w'xdx-\- f w'xdx. (9. 30)
6 о
Решать уравнение (9.30) следует методом последовательных
приближений. За исходную можно принять любую функцию,
удовлетворяющую граничным условиям — при х = 0 wo = —б; -при х=1
wo = 0. Обычно принимают прямолинейную функцию. После двух-
трех приближений обычно получается достаточно точное значение
прогибов
Неполный прогиб оболочки wv = w0Jrw4. Напряжения в оболочке
определяются упругой составляющей прогиба
wy = wp — rat = wo-\-w4—rat.
Так как w4 = rat, то упругим прогибом будет функция w0.
Обычный вид эпюр прогибов и (Напряжений показан на рис. 9.34.
Пример 9.3. Найти окружные напряжения цилиндрического анода
интегральным способом. Условия задачи по примеру 9.2.
Полученные прогибы w показаны на рис. 9.30 кривыми а.
Температурные напряжения и деформации свободной оболочки
Дано At(x)=tf где t — температура срединной поверхности;
параметры а, Е, h — переменные величины.
Исходное уравнение
w^ (9. 31)
.
Обозначив Eh/r2 = A; Eha/r = B и имея в виду, что А, В —
функции х, проинтегрируем уравнение (9.31) четыре раза, учитывая
следующие граничные условия:
х = 0; Dw"(0)=0- [D<w"(0)]'=0;
x=l\ Dw"{l) = 0\ [Dwrr{l)}f=0. [ '
X X XX XX
(Dw")'=- f Awdx-\- f Btdx; Dw"=- f f Awdx2-\- f Г Btdx2;
0 0 0 0 00
(9. 33)
XX XX
"= \ \ Awdx2+ —{[ Btdx2.
0 0
+ w'°m (9< 34)
w' = -
X X
= -]]-£■
0 0
X
\ъ
0
X X
\\
0 0
0 0
X X
Л\Aw
6 0
Awdx4 -
X
■dx*+^
0
X X
0 0
1
X X
\\
0 0
0 0
X X
w
0 0
Bid
285
Представим решение в виде
w=F + Flw'o + F0w0. (9.36)
Здесь Fo, F\, F — функции, определяемые с помощью
последовательных приближений:
где fo=h fi=x\
0000 0000
х х I* л* х х х х
о 0 о о оооо
Неизвестные w0, w0' определяем из граничных условий на
конце, т. е. при х = 1:
Подставляя их в уравнения (9.32), (9.33) при *==/, будем иметь
систему уравнений
I / 1х 1х
Г Awdx — Г Btdx = 0; Г Г Awdx2 — Г Г Btdx2 = 0.
»/ •/ *) *) t) .у
О 0 0 0 0 0
Подставив вместо w его значение по формуле (9.36), будем иметь
/ i
w^
о • о
I х I х
0 f AFodx-]-w'o ^ AF1dxJrФ1=0;
(9.37)
0 0 0 0
I
где Фг = Г AFdx - f Btdx;
6 6
I x I x
Ф2=^ AFdx2-^\ Btdx2.
6 6 6 6
Прогиб и угол наклона оболочки на конце при х = 0 определим,
решив систему (9.37):
I X I I
Фг \ [ AFxdx2 — Ф2 f AFX dx Фх + wo f AF0 dx
-J; *H
rr.
\ AFl dx\\ AF0 dx2 — f AF0 dx f f AFX dx* f AFX dx
boo ooo о
(9. 38)
286
После подстановки этих значений г?сг-
w0 и w0' в общее решение по
формуле (9. 36) получим
окончательное выражение для прогиба.
Зная прогиб, находим вторую
производную w" из уравнения
(9. 33), а затем и изгибающие
моменты, действующие в сечении
оболочки.
Функции Fo, Fu F — есть
сходящиеся ряды Неймана, скорость
сходимости которых зависит от
длины О!болочки. Сходимость
рядов существенно ухудшается,
если длина оболочки больше пара-
б>МПа
метра длины /д = 2,
Пример 9.4.
Найдем деформации и напряжения
в цилиндрическом аноде, если
температурное ноле его определяется следующей
формулой:
Рис. 9.35. Напряжения в цилиндрической
оболочке
t (x) = [б27е-
-0,0182л-
— llle"
Известны: £ = 2,2 • 105 МПа; а = 5,9- 10~6 1/град.
Перепад по толщине стенки не учитываем. Другие параметры оболочки
показаны на рис. 9.35.
Находим параметры w0 и w0' по формуле (9.38). Для этого находим
значение интегралов (расчетные таблицы не приводятся)
[AFQdx= —A (//10). 18,09= — Л-90,45;
о
1х
\\AF0dx2= —A (//10)2 11,08-= —А -277;
об
i
\AFdx= —A (//10) 55,43= — .4-277,15;
0
1х
\J AFdx* = А (//10)2 269,3 = Л-6733;
f Btdx = В (//10).3907 = В-19535;
б
1х
\\Btdx2 = В (//10)2.21826 = В- 545650;
00
\ AFdx = А (//10).633,2 = Л.3166;
1х
= А (//10)2.1397,6 = Л. 34940.
287
Отсюда
(Оо = 0,255 мм; о)о' = — 0,0027 мм;
i4/D = 6,66- Ю-5; £/£ = 0,315- 10~7.
Упругий прогиб будет равен еу = —at-\-w/r и напряжение о(? = Егу. Эпюра
напряжений показана на рис. 9.35.
9. 3. 4. Расчет конических анодов
Конические аноды часто встречаются в конструкциях
плазменных движителей. Анод в общем случае представляет собой
коническую оболочку с переменными параметрами: толщиной, модулем
упругости, коэффициентом линейного расширения; на ее
внутреннюю поверхность действует давление проходящей плазмы или
газа. Стенки анода испытывают большие тепловые нагрузки.
В большом числе случаев задачу можно свести к расчету
конической оболочки с постоянными параметрами и осесимметричному
нагружению, где искомые напряжения и деформации элементов
являются функцией только координаты г (расстояние вдоль
образующих оболочки от вершины конуса до рассматриваемого
сечения).
Уравнение равновесия сил упругости конической оболочки
На рис. 9.36 показаны положительные силы и моменты,
приложенные к элементу, вырезанному из конической оболочки.
Известны h, # = rtg0, p. Требуется найти деформацию
оболочки w.
Радиальные перемещения в сторону увеличения радиуса
кривизны оболочки R принимаются положительными. Также
положительным принимается давление р, действующее на внутреннюю
поверхность оболочки от центра к периферии.
Как и в цилиндрической оболочке, выразим все деформации и
внутренние усилия через полные радиальные перемещения w.
Рис. 9. 36. Нагрузки, действующие на элемент конической оболочки
Так, относительная деформация з окружном направлении
Изменение кривизны вдоль образующих:
Kr=—d2wjdr2.
Изменение кривизны в окружном направлении, связанное с
изменением радиуса кривизны оболочки R, из-за поворота элементов
на угол dw/dr:
K9=-(l/r)(dw/dr).
Последнее выражение получено следующим образом.
Первоначальная кривизна оболочки в кольцевом направлении l/R =
= l/(rtg8). Вследствие поворота образующей на угол dw/dr радиус
кривизны приобретает новое значение:
Р г sin 0 t , г sin 0
нов cos (0 + dw/dr) cos 0 — (dw/dR) siri 0
откуда изменение кривизны
I* 1 1 1 dw
9 ~~ Янов R ~ Г dr
Изменением кривизны из-за перемещения w пренебрегаем.
Полные окружные нормальные напряжения
a? = E£<p = Ew/(rtg б).
Погонные изгибающие моменты
Mr=—D{Кг + рК9) = D (w" + -£- w'\
Погонные поперечные силы получаются из условия равенства
нулю моментов, действующих на элемент оболочки:
^ dr ' г г г dr V r/ r 9
Окончательно разрешающее дифференциальное уравнение будет
иметь'вид
^/2 \ d^w I , d \ dD dwl , Eh /Л ОГкЧ
— \rD 4-«, — N w=pr. (9.39)
df2\ dr^j dr L dr dr J ' r tg2 0 y v y
Это линейное дифференциальное уравнение четвертого порядка
с переменными коэффициентами. Рассмотрим, как его можно
упростить.
30 3050 289
Если толщина оболочки по длине постоянна, т. е. h = const и
) = const, то уравнение (9.39) примет вид
(9. 40)
Ehw
= — Р
D
или в преобразованной форме
(9.41)
где 3 = ]
Пь /?о — начальные радиусы усеченной оболочки.
При 6 = я/2 уравнения (9.39) и (9.41) превращаются в
дифференциальные уравнения упругой поверхности круглой пластины,
нагруженной осесимметричной нагрузкой.
Полученные уравнения (9.40) и (9.41) являются основными
для расчета оболочки на прочность под действием приложенного к
ней давления.
Уравнение деформации конической оболочки
при тепловом нагружении
Рассмотрим случай теплового нагружения конической оболочки,
если будет действовать переменное по длине осесимметричное
температурное поле с постоянной температурой по толщине стенки
(рис. 9.37).
Напряженное состояние конических оболочек можно
определять по той же схеме, что приводилась при расчетах
цилиндрических оболочек. Считаем систему осесимметричной, так что искомые
напряжения и деформации являются функцией лишь одной
координаты.
Известны h, r, E, a, t. Требуется найти w.
Известна зависимость температуры по длине оболочки. Для
задач, которые мы рассматриваем, можно положить t=f(xn), где я =
= 0, 1, 2.
Суммарная деформация оболочки при тепловом нагружении
Рис 9.37. К определению темпера-
турных напряжений
290
y
где w=wY+wt — температурная
деформация нестесненной оболочки;
wy — упругая деформация оболочки
вследствие стесненности ее
деформирования.
Упругую деформацию, как и ранее,
находим как сумму упругой
деформации жестко зафиксированной
оболочки шу* и ее упругой деформации wp в
результате приложения к ней сил
реакций, возникающих при жесткой
заделке w7=wY* + Wp. Для этого делаем
два
А. Фиксируем оболочку в жестком корпусе, нагреваем ее,
находим wy* и /?*, возникающие при такой фиксации:
Отсюда wY* = —wt* = —Rat.
Этой деформации соответствует давление р*, фиксирующее
оболочку. Определим его из уравнения
Ehw* r
Dr tg2 8 D
Очевидно, что % =
Так как wy.o = 0 по условию фиксации оболочки в жестком
прямолинейном корпусе, то Шу* = ДОу<ч. Положив wy*=At, получим
Ehw*
r2 tg28 R
Б. Так как жесткой фиксации оболочки в действительности нет,
снимаем ее, прикладывая давление р, равное и противоположное
давлению р*, т. е. р = —р*, и находим деформацию, которую мы
обозначим wv, являющуюся вторым слагаемым упругой
деформации:
_L I^L (9>42)
D R V '
или в форме ' ' 1 /—•'*'' ' ' лал ш г ЕШ
* х II ^- л *"11"' #*^««
гог
Это и есть основное разрешающее уравнение деформаций при
тепловом нагружении? так как все остальные параметры легко
находятся.
Упругая деформация оболочки, вызывающая напряжения,
будет равна
а суммарная деформация оболочки
10* 291
Таким образом, задача сводится к решению уравнения (9.42).
Это линейное неоднородное уравнение четвертого порядка с
переменными коэффициентами.
Глава X
ЭЛЕКТРОСТАТИЧЕСКИЕ ДВИГАТЕЛИ
В ионных двигателях тяга создается в результате выброса в
пространство положительно заряженных частиц рабочего тела с
последующей нейтрализацией их электронами. Такие двигатели
называют электростатическими (ЭСД), так как ускорение частиц
в них происходит в электростатическом поле.
Ионные двигатели имеют максимальный удельный импульс
50—250 км/с и обладают высоким коэффициентом полезного
действия, однако имеют сравнительно низкую лобовую тягу.
Рассмотрим кратко классификацию ионных двигателей.
По способу ионизации рабочего тела двигатели делятся на две
группы: двигатели с поверхностной ионизацией и
двигатели с объемной ионизацией рабочего тела. Первая
группа подразделяется на две подгруппы: двигатели с ионизацией
на пористом вольфраме и с ионизацией на гладком
вольфраме. Вторая группа подразделяется на двигатели, в
которых ионизация рабочего тела осуществляется
осциллирующим разрядом, ионизацией в дуговом разряде
токами сверхвысокой частоты и с ионизацией электронами при их
азимутальном дрейфе.
По конструкции ионно-оптической системы двигатели делятся
на сеточные, пластинчатые, кольцевые.
По способу питания рабочим телом ионные двигатели можно
разделить на несколько групп: с вытеснительной
подачей рабочего тела инертным газом; с фитильной
системой питания; с дозированием рабочего тела на основе
электролитического принципа; с подачей рабочего тела
собственным давлением насыщенных паров.
Ввиду малых расходов рабочего тела система питания
предусматривает тонкую регулировку расхода, которая осуществляется
различными способами — капиллярным, клапанным, пористыми
перегородками.
Ионные двигатели предназначены для маршевого и
межорбитального полета в космическом пространстве. Эти двигатели
незаменимы как двигатели коррекции орбит спутников.
Коллоидные двигатели — это такие двигатели, тяга в которых
создается пучком заряженных частиц, образованными
комбинациями молекул.
По главному показателю ракетных двигателей — удельному
импульсу — эти двигатели занимают промежуточное место меж-
292
ду ЖРД и плазменными двигателями. Удельный импульс
коллоидных двигателей равен 8—15 км/с.
По конструктивным узлам и способу ускорения частиц
коллоидные двигатели близки к ионным .Однако размер частиц в
коллоидных двигателях на два порядка больше чем в ионных (в
коллоидных — 10~5 мм, в ионных — 10~7 мм). Для ускорения таких
частиц требуется существенно большие потенциалы электродной
системы (до 6—8 кВ).
Выходящий с большой скоростью пучок положительно
заряженных частиц нейтрализуется электронами, вводимыми в поток
эмиттером электронов. Тяга регулируется изменением тока
заряженных частиц, давления и температуры рабочего тела в системе
подачи. Рабочим телом служит ионопроводящая жидкость: аммиак,
парафин, глицерин с различными присадками, усиливающими их
способность приобретать заряд.
Зарядка частиц осуществляется электростатическим полем,
создаваемым капиллярной трубкой, входящей в отверстие
вытягивающего электрода.
Коллоидные двигатели целесообразно использовать для
ориентации и удержания на орбите спутников с источником энергии
малой мощности. Это двигатели малой тяги. Их достоинства:
большая продолжительность работы, малое количество потребляемой
энергии, простота конструкции и эксплуатации, низкая удельная
масса, отсутствие ограничений в размерах, высокий к.п.д.,
минимальное взаимодействие с летательным аппаратом, сравнительно
низкие температуры нагретых деталей.
Недостатком коллоидных двигателей является сравнительно
высокие значения потенциалов электродной системы, а отсюда —
повышенные требования к защите ее от пробоев и замыканий.
10.1. КОНСТРУКТИВНЫЕ СХЕМЫ ЭСД
10. 1.1. Схемы электродных систем
Электродная система в значительной мере определяет
конструкцию ЭСД.
На рис. 10.1, а, б, в показаны схемы расположения электродов
в двигателях с поверхностной ионизацией (рабочего тела.
Корпус /, нагреватель 2 и вольфрамовая пористая пластина 3 составляют
генератор ионов; сетки 4, 5 вытягивают и профилируют ионы и ускоряют их
движение; устройство 6 нейтрализует ионы.
На рис. 10.1,г показана схема расположения электродов в ЭСД
с объемной ионизацией.
Ионизация рабочего тела в корпусе 1 в результате эмиссии и осциллирова-
ния электронов между нагретой танталовой пластинкой катода 2 и
антикатодом 3, чему способствует магнитное поле, создаваемое электромагнитом 4 около
анода 5. Положительно заряженные ионы рабочего тела вытягиваются и
ускоряются сеткой 6 и нейтрализуются устройством 7.
В двигателе, указанном на схеме 10.1, д, ионизация рабочего
тела осуществляется вследствие столкновения частиц рабочего те-
293
Рис. 10.1. Схемы электродных систем электростатических двигателей:
а, б, в—с поверхностной ионизацией; г—с объемной ионизацией; д—с ионизацией
дрейфующими электронами; е—коллоидный двигатель
ла, выходящего из отверстий в аноде 2, с электронами,
поступающими из катода и дрейфующими в азимутальном направлении в
магнитном поле, создаваемом магнитом — корпусом 1 и обмоткой
электромагнита 3.
На рис. 10.1, е показана электродная система коллоидного
двигателя. В нем, в корпусе 1 устанавливаются капилляры 2, на
концах которых происходит ионизация рабочего тела в результате
воздействия на него электростатического поля, создаваемого
сетками 3 и 4\ устройство 5 служит нейтрализатором частиц.
10. 1.2. Конструктивные схемы ионных двигателей
Сеточный двигатель с поверхностной ионизацией
и вытеснителъной подачей рабочего тела
Двигатель (рис. 10.2) состоит из узла ионизатора-эмиттера
ионов, узла ионнооптической системы, систем питания
электропитания.
Узел ионизатора состоит из герметичной ниобиевой камеры 1, нагревателя
2, ионизатора 3, представляющего собой пластину из пористого вольфрама,
спрофилированную в виде полос цилиндрических сегментов, между которыми
напаиваются пластинки 5 для защиты вытягивающей сетки от бомбардировки ионами.
В узел ионизатора входят также экраны 4, уменьшающие потери тепла.
Ионнооптическая система состоит из ускоряющей (вытягивающей) сетки 6\
замедляющей (профилирующей) сетки 7 и сетки 8 нейтрализации пучка. Каж-
294
12
5 6 7
Рис. 10. 2. Схема сеточного двигателя
дая сетка представляет собой вольфрамовую нить, натянутую на раму 9
посредством гофрированного переходника //. Рамы 9 крепятся друг к другу и к
корпусу двигателя через изолирующие прокладки 10.
Узел подачи рабочего тела спроектирован по принципу вытеснения рабочего
тела давлением инертного газа. Он состоит из бака 12 со сжатым до высокого
давления нейтральным газом, редукционного клапана 13, емкости с рабочим
телом 14, дозатора 15, испарителя 17.
В систему электропитания входят источники тока 16, 18 для обеспечения
энергией электродов ионно-оптической системы и разогрева двигателя.
После подачи напряжения к клеммам ионно-оптической системы двигатель
готов к работе. Далее открывается редукционный клапан 13 баллона 12
управляющего газа. Давлением газа на мембрану бака 14 жидкий цезий через
дозирующий клапан 15 вытесняется в испаритель 17 и камеру / ионизатора
двигателя. Вольфрамовая пористая пластина ионизатора 3, нагретая до 1200 К,
излучением нагревателя 2 ионизирует пары цезия, положительные частички Которого
вытягиваются через поры пористой пластины вольфрама в ионно-оптическую
систему, где и разгоняются до нужной скорости.
Пучок положительных частиц нейтрализуется электронами, эмитируемыми
нагретой вольфрамовой сеткой 8.
Достоинство описанной схемы — ее простота. Недостаток
двигателя — эрозия сеток, а также большие потери тепла через
пористую вольфрамовую пластину.
Двигатель с пластинчатой ионно-оптической системой
и поверхностной ионизацией рабочего тела
Двигатель (рис. 10.3) состоит из узла ионизатора, узла ионно-
оптической системы и систем питания, включения питания,
электропитания.
Узел ионизатора состоит из корпуса ионизатора 1, нагревателя
ионизатора 4, эмиттера ионов 5, пластинки 6, которая напаивается на эмиттер ионов для
защиты вытягивающей пластины от эрозии. В корпусе ионизатора установлены
экраны 2 для уменьшения тепловых потерь корпуса.
295
J, Ч 5 6
21
го
17 13
Рис. 10. 3. Схема двигателя с поверхностной ионизацией
В узел ионно-оптической системы входят ускоряющий электрод 7,
профилирующий электрод 8, нейтрализующий электрод 9. Каждый электрод
представляет собой пластину с отверстиями, присоединенную к корпусу ионизатора через
изоляторы 3.
Рабочее тело (цезий) заключено в керамическую капсулу 19 с
нагревателем 21, защищенным экранов 20. При нагревании капсулы 19 до 450° С,
керамика приобретает свойства эмиттера ионов. При создании разности
потенциалов между рабочим телом и капсулой электродами 18 расход цезия можно
регулировать очень точно.
Включение и останов двигателя осуществляется отсечным клапаном 16,
управляемым инертным газом, размещенном з бортовом баллоне 13, снабженном
редуктором давления 14 и краном 15. Электропитание обеспечивается
источниками 10, 11, 12, 17.
Работает двигатель по схеме, аналогичной предыдущей.
Основной недостаток этих двух двигателей — высокая средняя
температура, что приводит к большим потерям тепла и усложнению
конструкции для обеспечения длительной работы. Температуры
эмиттера ионов, нагревателя и корпуса могут достигать следующих
величин: 4=1200 ... 1250° С; /п=1700 ... 1750°С; *„=1000°.С
соответственно.
Двигатель с объемной ионизацией рабочего тела
осциллирующим разрядом
Двигатель (рис. 10.4) состоит из узла ионизатора, узла
электродов ионно-оптической системы, системы подачи рабочего тела и
системы электропитания.
Узел ионизатора включает корпус 10, выполненный в виде цилиндрической
камеры с отверстиями на торцовой стенке, катод И из танталовой пластинки,
нагреватель катода 12, анод 13, обмотку стабилизации 14. В ионно-оптическую
систему входят и электроды: ускоряющий 9, профилирующий 8 и
нейтрализующий 7.
Система питания вытеснит.ельная — давлением насыщенных паров цезия.
Емкость с цезием 2 имеет нагреватель 1, обеспечивающий испарение цезия. Тонкая
296
Рис. 10. 4. Схема двигателя с объемной ионизацией
дозировка подачи осуществляется нагреванием капилляра 3. Система
электропитания состоит из источников электроэнергии 4, обеспечивающих питанием
нагреватели расходного бака 2, источников 5, 6 питания основных электродов 11,
13, 9 и нагревателей 15 катода, нейтрализатора и стабилизирующего
соленоида 14.
При разогревании танталовой пластинки катода двигателя
возникает электронное облако, которое осциллирует в камере между
катодом и антикатодом (стенкой камеры), ионизируя
поступающее в камеру рабочее тело (пары цезия или ртути, газы — аргон
и др.).
Положительные .ионы вытягиваются через отверстия ионно-оп-
тической системой, как и в других, рассмотренных ранее ионных
двигателях.
Двигатель имеет два( существенных достоинства. Во-первых, он
низкотемпературный. Самый горячий элемент ионизатора —
катод — нагрет до 700 ... 750° С, если рабочее тело цезий или ртуть,
и до 550 ... 560° С, если рабочее тело аргон. Ориентировочная
температура корпуса двигателя не превышает 250° С в первом случае
и 100° С во втором. Таким образом, тепловые потери в этом
двигателе минимальны.
Во-вторых, двигатель обладает свойством авторегулирования.
При увеличении температуры катода ионизация уменьшается, а
при уменьшении температуры — возрастает (катод работает на
спадающей ветви характеристики в соответствии с кривой Ленгмю-
ра). Достоинством двигателя является также возможность более
широкого выбора рабочих тел.
Недостаток двигателя — его несколько большие размеры по
сравнению с аналогичными ЭСД, основанными на принципе
поверхностной ионизации.
297
10.1. 3. Конструктивная схема коллоидного двигателя
Коллоидный двигатель (рис. 10.5) состоит из узла генератора
заряженных частиц, узла системы электродов с их креплением и
изоляцией и узла питания (рис. 10.5 не показан).
Генератор заряженных частиц состоит из камеры, образованной плитой 6 и
оболочкой 8, капилляров 7, укрепленных в плите 6, и нагревателя 9 с
изолирующим экраном 10. Камера является емкостью для размещения паров
рабочего тела — нафталина.
Ионно-оптическая система включает два электрода. Вытягивающий, первый,
электрод 11 выполнен в виде перфорированною диска, укрепленного в кольце
5, который в свою очередь приливами крепится через регулирующую шайбу 4 к
трем болтам 3 и затем через изоляторы 2 к силовому кольцу / двигателя.
Второй, ускоряющий, электрод 12 конструктивно выполнен подобно вытягивающему
электроду и крепится посредством регулирующих шайб 4 к болтам,
приваренным к силовому кольцу 1 двигателя.
10.2. КОНСТРУКЦИЯ ЭСД И ЕГО ЭЛЕМЕНТОВ
10. 2.1. Узел ионизатора и эмиттера ионов
Крепление и форма пористой пластинки из вольфрама,
служащей эмиттером ионов, показаны на рис. 10.6.
Для вариантов рис. 10.6, а, б, в характерно, что собственно ионизатор
выполняется из одного куска пористого вольфрама 2, имеющего прямоугольную,
квадратную, шестигранную или круглую форму. По периметру ионизатор
соединяется сваркой или пайкой со стальной, молибденовой или ниобиевой оболочкой
/. Для формирования пучка ионов на внешнюю профилированную поверхность
пористого вольфрама напаиваются молибденовые или ниобиевые пластинки 3.
Достоинство такой конструкции соединения корпуса ионизатора и пористой
пластинки заключается в том, что длина шва наименьшая.
Как известно, пористый вольфрам хрупок, а стальная, -молибденовая или
ниобиевая оболочка пластична и податлива. Сварка такой пары сложна. Даже
электронно-лучевая сварка не всегда обеспечивает отсутствие трещин и пережога
материала по шву. Электронно-лучевая сварка проводится автоматически с
сохранением постоянной скорости образования шва, в том числе и на угловых
участках. Вот почему углы в пористой пластинке делаются с достаточно
большими закруглениями.
Спаивание пористой пластинки с корпусом более желательно, так как в этом
случае растрескивание эмиттера менее вероятно.
Эмиттеры, показанные на рис. 10.6, а, б, в плохи тем, что
практически не удается обеспечить их равномерный разогрев.
Пластинки-накладки 3, устанавливаемые для профилирования пучка,
имеют температуры, отличные от температуры пористого вольфрама,
что способствует появлению трещин.
Более совершенная конструкция представлена на рис. 10.6, г.
Основное ее достоинство — поверхность излучения доведена до
минимума. Некоторое увеличение длины сварного ,или паяного шва
по сравнению с предыдущими конструкциями компенсируется
более совершенной круглой формой эмиттеров, более удобной для
электронно-лучевой сварки.
Пример конструкции пластинчатого электрода показан на
рис 10.7.
Пластина с отверстиями / крепится к корпусу двигателя 4 посредством
тонкой жесткой штампованной оболочки 2 и трех корундовых изоляторов 3. Для
надежной центровки и крепления изолятора к нему припаяны металлические
элементы 5.
298
Рис. 10. 5. Схема коллоидного двигателя
/ 2
Рис 10. 6. Конструкция эмиттера ионов:
а, б, в—ионизатор в форме стенки; г—осесимметричный ионизатор
299
Рис. 10. 7. Конструкция пластинчатого электрода
10. 2. 2. Узел нагревателя
Наиболее простая возможная конструкция нагревателя
показана на рис. 10.8, а.
На керамической плите 1 устанавливаются вольфрамовые нити 2,
фиксируемые в гнездах ажурной пластиной 3 из окиси бериллия. Недостаток такого
нагревателя — большие потери тепла.
Нагреватель, изображенный на рис. 10.8, б, выполняется
непосредственно на корпусе ионизатора 2. Вольфрамовая проволока 1
изолирована от корпуса керамическими втулками 3.
На рис. 10.8, в показана конструкция пластинчатого
нагревателя, выполненного из молибденового сплава.
Нагреватель надежно может работать в агрессивной среде.
Особенности соединения керамики и металла
Обычно керамика имеет в среднем коэффициент линейного расширения а==
=-8 Ю-6 1/град.
При соединении ее с металлом различие в значениях коэффициента
линейного расширения а не должно превосходить 10%. Хорошо соединяются
керамикой металлы: никель, ковар (кобальтово-никелево-железистый сплав), медь,
титан.
Геометрические формы металлических и керамических поверхностей и самих
деталей имеют большое значение для надежности соединений. Место спая
должно быть у металла тонкостенным (см. рис. 11.9, а, б). На рис. 10.9, в
показаны поверхности керамики и металла, соединенные пайкой. Металлические
детали 6 по поверхности спая подвергаются обезжириванию, травлению и обжигу
при / = 400° С. Далее они покрываются тонким слоем никеля (толщиной около
15 ... 20 мкм, слой 5 на рис. 11.9, в); цилиндрические поверхности в месте
припоя выдерживаются с точностью, соответствующей посадке скольжения или
ходовой посадке третьего класса.
Керамическую деталь 1 в месте припоя покрывают слоем металла способом
спекания или плазменным напылением (слой 2). Эти покрытия в зависимости
от назначения детали выполняются молибденом с добавкой железа (молибдэ-
300
вид А
А-Л
Рис. 10. 8.
Конструкция
телей:
нагреваа_ПрОВолочный керамический; б—
проволочный с керамическими
изоляторами; в—пластинчатый
Рис. 10. 9. Соединение керамики и металла:
а, б—проставки и трубки; в—фланцы
301
Рис. 10. 10. Конструкция ионного двигателя
новая технология), молибденом с добавкой марганца (молибдено-марганцевая
технология), карбидами вольфрама, молибдена и титана (карбидная
технология). Далее на этот слой наносится напылением или гальванически слой никеля
(слой 3). После этого металлическая и керамическая детали покрываются по
месту спая припоем (слой 4), собираются и помещаются в электрическую печь,
где пайка производится в условиях вакуума или в среде инертного газа.
В деталях системы питания ионных двигателей широко применяется пайка
металла с металлом.
Пайка применяется вместо сварки при соединении тонкостенных элементов
конструкции с толстостенными во избежание их коробления, в соединениях
элементов, подвергающихся во время эксплуатации вибрационным нагрузкам (так
как паяные соединения обладают более высокой усталостной прочностью, чем
сварные); при изготовлении тонкостенных конструкций с большим числом мест
соединений, так как общий нагрев в этом случае не приведет к какому-нибудь
значительному местному короблению; в соединениях материалов, обладающих
плохой свариваемостью (медь — молибден, никель и ковар с керамикой).
На рис. 10.10 изображен ионный двигатель, предназначенный
для ориентации искусственных спутников Земли.
Пары цезия ионизируются в корпусе 1 с нагревателем 2 и экранами 3 на
поверхности эмиттера ионов 4 из пористого вольфрама, нагретого до 1230° С, с
козырьками 5 и вытягиваются ускоряющим электродом 8, нагретым до 1130° С.
Профилирование пучка осуществляется тормозящим электродом 7 и напайками
6 для нейтрализации ионов. Корпус 1 устанавливается на изоляторах 9.
Цезий подается из бака 10 под давлением насыщенных паров, для чего он
нагревается печкой 11 до 100 ... 150° С. Расход дозируется пористой
керамической перегородкой 12 с использованием электролитического эффекта перегородки,
на внешнюю стенку которой напыливается тонкий слой меди. Изменением
напряжения «слой меди — керамика» достигается тонкая регулировка расхода
рабочего тела.
Тяга двигателя 0,11 Н, расход цезия 1,66 Ю"3 г/с, удельный импульс
70 км/с, полная сила тока 1,22 А [4].
На рис. 10.11 показана конструкция ионного двигателя с
объемной ионизацией.
302 '
303
Рис 10. 12. Конструкция коаксиального электростатического двигателя
Двигатель состоит из пустотелого катода /, цилиндрического анода 2,
вытягивающего электрода 3, нейтрализатора 4 и элементов крепления 5.
Разогретое рабочее тело, выходя из отверстия катода 1, ионизируется электронами и
далее вытягивается, разгоняется и нейтрализуется электродной системой 3, 4.
Тяга двигателя 0,02 Н, расход цезия 0,3- 10~3 г/с, удельный импульс 72 км/с,
потенциал на вытягивающем электроде 3 кВ, на ускоряющем — '0,8 кВ [4].
На рис. 10.12 показана возможная конструкция коаксиального
электростатического двигателя с внешним магнитным полем.
Двигатель состоит из бака с ксеноном /, редукционного клапана 2,
электромагнита двигателя 3, анода 5, керамического канала 6, катода-компенсатора 4.
Ионизация газа происходит в канале 6 дрейфующими по азимуту электронами
с последующим разгоном ионов в электростатическом поле между анодом и
катодом.
10.3. РАСЧЕТ ПЛАСТИНЧАТЫХ ЭЛЕКТРОДОВ
НА ПРОЧНОСТЬ
Расчет состоит из двух частей. В первой части находится
напряженное и деформированное состояние электрода, вызванное его
неравномерным по радиусу нагревом. Во второй анализируются
условия, обеспечивающие сохранение электродом первоначальной
формы при нагревании и длительной работе. Рассмотрим первую
задачу.
10.3.1. Температурные напряжения в пластинчатых электродах
Схема электрода показана на рис. 10.13. Электрод состоит из
перфорированной пластины, являющейся собственно электродом,
и силового кольца, которым электрод крепится к двигателю. На
рисунке показана эпюра температур электрода при
установившейся работе двигателя. Неравномерный нагрев электрода вызывает
304
Рис. 10.13. Схема электрода
температурные напряжения. Как видно из
рисунка, температура средней части электрода
выше чем периферийной, что может привести
к выпучиванию электрода.
Итак, известны A, hK, At, Ey а. Требуется
найти аг, аф, и. Величина нагрева &t = t — 20.
Иногда расчет ведется не по величине нагрева,
а по значению температуры электрода f С.
Коэффициент а считаем величиной
переменной, модуль Е — величина постоянная, равная
среднему значению модуля для данного
уровня температур. Основным осложнением при
определении напряженного состояния
электрода является существенное различие в
толщинах собственно электрода и его силового кольца. На стыке этих
двух элементов возникнут силы реакции R, которые следует
определить. Необходимо также при определении напряжений в
электроде учитывать ослабление его отверстиями.
Определение силы реакции R
Находим значение реакции R с помощью метода сил. Для
этого рассекаем электрод и кольцо по радиусу с, затем
прикладываем неизвестную-силу взаимодействия jR (рис. 10.14).
Находим значение этой силы из условия равенства радиальных
деформаций кольца икс и электрода ис на радиусе с:
ис=есоро-еЛ> tiKC=eKc0PKO+eKCR, (10.1)
где ес, Скс — податливость электрода и кольца в точке С от
распределенной контурной нагрузки; ес0, екс0 — податливость
электрода и кольца от внешней нагрузки; Ро, Рко — внешняя нагрузка на
электрод и кольцо.
В рассматриваемом случае внешней нагрузкой является нагрев
до температуры t, а произведение есОРо — температурная
деформация электрода в точке С; аналогично, е^оРко — температурная
деформация кольца в точке С. Учтем, что R = R/(2nc). Из условия
равенства ис = икс получим
Ъ = есЪРЪ — 1
(10.2)
Все величины, входящие в числитель формулы (10.2),
известны:
_ (t) 2_ г
ъ
о=икс (t)= Ъ2С__с2 J
(10.3)
305
Рис. 10. 14. Схема нагружения
электрода
Рис. 10. 15. Модель электрода
/ г
Rl
С
'С
- ««-
г
h
-^
f
с
к
—*-
R
b
Податливости ес и екс> входящие в знаменатель формулы (10.3),
найдем из рис. 10.15.
Если приложить распределенное усилие Л к радиусу с
электрода, то податливостью последнего будет называться отношение
ec = u{c)[R.
Удлинение электрода на радиусе с от нагрузки R
откуда ес = с (1 — y.)j(Eh)\
аналогично, податливость кольца
__ ик(с)
кс~~ R
пк{с) =
и окончательно
кс EhK (62 —с2
где h и hK — толщины электрода и кольца.
(10.4)
(Ю.5)
Податливость перфорированной пластины при растяжении
Рассмотрим деформацию двух круглых пластин под действием
распределенной нагрузки R (рис. 10.16). Вторая пластина
отличается от первой только тем, что она перфорирована, т. е. h = hn.
Эпюры радиальных деформаций, как показывают многочисленные
исследования ,и как видно из рисунка, подобны, т. е.
(10.6)
где у — коэффициент перфорации пластины.
Подробные исследования показывают также, что обе пластины
имеют однотипное плосконапряженное и деформированное
состояние и поэтому в первом приближении их прочность может
оцениваться по одним и тем же формулам.
306
Рис. 10. 16. Модель перфорированной пла- Рис. 10.17. Напряжения в электроде и кольце
стины
Вот почему толщину Лп перфорированной пластины можно
заменить приведенной толщиной йпр сплошной пластины, подбирая
АПр так, чтобы прогибы обеих пластин были одинаковыми, т. е.
Итак, для первой и второй пластины действительны
соотношения h = hm ифии; для второй и третьей пластины Лп¥=Апр, ип=итф.
Прогибы пластин будут
г(1
Jo.fl
-г (1-
и окончательно
а (г) = и (г) =hw
«п (г) ипр (г) h
Апр = уЛ=УАп. (10.7)
Значение коэффициента перфорации у определяется в
зависимости от геометрических размеров s, d и hn пластины. В тех случаях,
когда отверстия в электроде имеют более сложную форму, размеры
s и d подсчитываются из условия эквивалентной пористости.
Значение коэффициента у подсчитывается по формуле
(10.8)
Обычно y = 0,3 ... 0,6.
Напряжения в электроде определяются по формулам
аг=—\ attrdr-— \ a\trdr-arc;
с* J /-2 J
о о
(10.9)
307
г
Е
з? = -М altrdr-]- -=j\
о о"
или сокращенно с>г = ст,.(£)—orrc;^ = аф(Т)—агс> где аг(0 и а? (t) —
температурные составляющие напряжений в формуле (10.9), а
Напряжения в кольце
1 _ £); (10. 10)
6 Г
_£_U aMrdr-\ \aMrdr —
г2/ J ' Г2 J
2— c2 V /*2
или сокращенно аКг = акг(0 -\-окгс{г); аКЧ) = акф(0 +ак<рс(^), где
аКг(0 и аКф(0 — температурные составляющие напряжений;
Типичная диаграмма напряженного состояния электрода и
кольца показана на рис. 10.17. Расчет заканчивается проверкой
запаса прочности по формуле
Где
ot = \/о2г — ora<p
10. 3. 2. Приближенная оценка устойчивости электрода
при сжатии
Известна формула критических напряжений, которые
вызывают потерю устойчивости пластины. Напряжения вызываются
нагрузкой, приложенной к внешнему контуру пластины, свободному
от опор:
-^-f.
с )
(10.11)
Так как •orcz=RlhnV> то, очевидно, электрод будет устойчив, если
Огс^Откр. Это соотношение дает оценку устойчивости в самом
неблагоприятном случае.
Очевидно, условием, обеспечивающим устойчивость электрода
при работе двигателя, будет уменьшение напряжения сжатия на
всей длине электрода и, в частности, напряжения а7С, или равен-
308
и-ст
ство его нулю. Это условие можно создать
приложением к внешнему контуру
дополнительного растягивающего напряжения 0ГТ,
называемого технологическим.
Рассмотрим способы создания в электроде
растягивающих напряжений.
Технологический способ
Известные из расчета напряжения агс
можно приложить к электроду со стороны кольца
на радиусе с (рис. 10.18) путем создания
предварительного натяга электрода при
сварке его с внешним кольцом.
Бели до сварки электрода с кольцом
равномерным нагревом электрода деформировать
его на величину ит, то это обеспечивает приложение при
остывании .положительных напряжений агт, как это указано на рис. 10. 18.
Суммарные напряжения ars в электроде будут меньше опаодых,
вызывающих потерю устойчивости электрода.
Потребную технологическую деформацию электрода на
радиусе с
Рис. 10. 18.
Технологический способ повышения
устойчивости электрода
можно получить, если равномерно нагреть электрод на величину
At. Тогда
где At = t—20 — величина нагрева электрода при его сборке с
кольцом. Приравнивая выражения для аст, получаем потребную
величину нагрева электрода
(10.12)
Еа
Рассматриваемый прием целесообразно применять для
двигателей одноразового применения.
Конструктивные способы
Путем равномерного размещения по окружности упругих
элементов в кольце электрода (рис. 10.19) можно обеспечить
растяжение электрода дополнительным напряжением агт, полученным, как
и в предыдущем случае, из расчета температурных напряжений.
Упругим элементом может 'быть герметичная сильфонная
коробка, наполненная нейтральным газом. Особенность такой
конструкции заключается в том, что дополнительные напряжения агт не
релаксируют.
Для применения этого мероприятия в конструкции двигателей
длительного ресурса необходимо провести контрольный расчет
деформации ползучести электрода.
309
250,8
Рис. 10. 19. Конструктивный
способ повышения устойчивости
электрода
Рис. 10.20. Напряжения в
электроде ЭСД
Кроме этого способа дополнительное растягивающее
напряжение при нагревании можно получить в такой конструкции, где
кольцо выполняется из материала, имеющего существенно более
высокое значение коэффициента линейного расширения а, чем
собственно электрод. Например, кольцо выполнять из стали Х18Н9Т,
а электрод — из молибденового или вольфрамового сплава.
Проведем примерный расчет перфорированного электрода
ионного двигателя.
Найти температурные напряжения в перфорированном электроде ионного
двигателя с размерами перфорации: d==4 мм; 5 = 7,1 мм. Размеры, параметры
и результаты расчета представлены на рис. 10.20 и в табл.Л 0.1. __
Находим прогибы электрода в точке С, податливости и реакцию R, по
формулам 10.2 и 10.3. Прогиб электрода в точке С при нагревании (см. табл. ЮЛ)
\
= j~^.10-2.189,7 = 0,38 мм.
Расчет кольца проводится по таблице, аналогичной табл. 10.1. Так, например»
прогиб кольца в точке С при нагревании
310
Приведенная толщина электрода hllv = yh
у = 0,25 (3 + Л) (l — —) (1 - м-2) = 0,25 (3 +0,995) (1 — -^-) (1-0,32) = 0,397;
\ s / \ 7,1/
* ~ 1 + wl- О? " 1 + (2^1 - 4)2 - °'"5: *"> - °-397'2 - °'794 ММ-
Податливость электрода в точке С
Податливость кольца в точке С
сЗ 1
1703
3,21 -104-5 (2102 — 1702-
Значение реакции R
у? асо — иксо
Г
) L
2102
' + 1702 (
0,38 — 0,26
1 +0
и
,3)] =
-0
-1
,0535
1,45
•10-2
Н/мм.
ес + екс 0,0468 • 10-2 + 0,0535-10-2
Находим напряжение о> в электроде по формуле (10.9): о*г= сгг(/)—сггс, где
с г
Е у ЕС*
ar (t) = — \ aAtrdr — — \ aAtrdr.
^2 J /-2 J
0 0
г
Е
Е с
Величину — \ aktrdr для г=0 определяем так:
г
Е 1
— \ raMrdr = — ЕаМ
о
;42,3,
г=0
что приведено в 8-й строке табл. 10.1, а для г=170
с
что приведено там же.
Находим ar = i7o, так как
напряжения а? показаны в табл. 10.1 (12-я строка). Аналогично находятся
напряжения Ghr и Ok<p в кольце.
Эпюры напряжений в электроде и кольце показаны на рис. 10.20.
Определяем температуру равномерного разогрева электрода до сварки его
с кольцом (10.12):
=74С.
3,2.104.5,83.10-6
311
Таблица 10.1
пп
1
2
3
4
5
6
7
8
9
10
11
12
Функция
д*
а
гаД/
J(3)tfr
ЕаМ
£(4)
(1/^2)
(6) (7)
сг(О
*г=(9)—сгс
^O=(8)+35f7-(5)
о, = (И)-«гс
Множитель
1
10-6
10-2
1
104
10-4
1
1
1
1
1
0
460
5,850
0
0
846
0
423
—66
-2105
-66
-210,5
34
445
5,845
8,83
8,83
820
475
8,6
408
—51
—196
—55
-199
г,
68
422
4,838
16,72
34,38
782
185
2,15
400
—43
—188,5
-25
-169
мм
102
398
5,830
23,65
74,75
740
404
0,96
389
-32
—176,5
+0,6
-138,5
136
365
5,822
29,10
127,5
680
693
0,54
374
—17
—161,5
45
—99,5
170
335
5,813
33,1
189,7
627
1030
0,346
357
0
—144,5
87
—57,5
ПРИЛОЖЕНИЕ
ПРОЧНОСТНЫЕ ХАРАКТЕРИСТИКИ МАТЕРИАЛОВ,
ПРИМЕНЯЕМЫХ В КДУ
]м па
400
!Ши
3
,исг
и с '
X
\
щ ч:
..
N.
200 I Y\\ -^J- 1 1700
VA IIP PV
50
30
О 400 800 12001 °C 10
6-
—-—.
■"-"—
t=1600°C
^^-^
г, ч
104
ос-10, 1/град
го
15
10
5
^^JJCz^
^Ч
t°c
Е- ю f мпа
2,5
и
1 Л.
"^-
■ .
'
' .
■
~ .
400
1,5
800 0 400 800 1200 t °C
и
U0z
UC
UCz ,
tn/C
1133
2880
2350
2470
рг/см3
18,9
10,97
13,6
11,7
Р-
0,2-0,24
Рис. П. 1. Прочностные характеристики урана и его соединений
0 400 600 1200 1600 2000 24001,°С
6в,МПа
40
30
20
10
V/,
/y/
r =
У/л
5ч
100
50
30
t = 1500...7600°C
1—^
400 800 1200 t,°C 10 w 10
Рис П. 2. Прочностные характеристики графита
7,2
J
ос
3
2
7
jLLl
222
iyyai
7 —
777"
7=7=;
Н^
E"-/fi
Ш7
500
400
300
200
100
\
Т = 1...5ч
ч
•Ча
Га
J
2
7
10001, С
, M Па
/^
50
30
t
—'—
= 1000
"—о.
°с
'— ,
—-*-.
Т, ч
О 200 600 WOO t°C 10 W*
Рис П. 3. Прочностные характеристики бериллия
'О3
314
(t)
6
г, мпа
1000 г~
300
200 ЦОО 600 t,°C
40
*- .
t = 600 °С
I
—-—J
!
i
22
ос-10* 1/град
20
19
18
17
16
У^
У
/
^^
E-wf мпа
2,4
2,2
2,0
1,8
1,6
0 2СШ 400 600t,°C
Рис. П. 4. Прочностные характеристики стали Х18Н9Т
315
0,005 0,010 0,015 0,020
Рис. П. 5. Диаграмма деформирования стали Х18Н9Т
316
600
400
200
t
■* А/в-
= 1200 °С
t-28W+7TL
Т, ч
600 BOO 1000 1200 t,°C
10
102
10J
E-w'fMPa
200 400 600 800 WOO 1200 t,°С
500
300
100
70
50
30
10
^ТУуу^^ Сллавы
t =1000° С
t = 1100 °C
j
10
10*
10'
Z,4
Рис. П. 6. Кривые прочности ниобиевых сп-тавов
317
4 >мпа
300
\ МПа
600
ЧОО
200
к
Мо^
i
Mo-сплав
\
Ч:
-, 70
SO
10
20
■
I ! '
—Г"—-Li_
• \ i
! i 1
!
1 Mo - сплав
н
t_
ц*
=11 CO °C
" ■ н
= /J00 °C
30
600 900 1200 1500 t,C 10
ос ■ 10? 1/град
102
Е-Ю*МПа
3
200 600 WOO 1400 1800 Z200t,°C
Рис. П. 7. Прочностные характеристики молибденовых сплавов
300
200
100
\
^N
^v
W+2ThO2
2*2*^
I
200
100
70
SO
30
1100 1500 1800 2100 t,°C ю
<x-70? 1/град
-
^fl
i
1 "
1
Oz; t=lSOO°C
*——-
Wj t=1700°C
200 600 1000 1400 1800 2200 t,°C
Рис. П. 8. Прочность вольфрамовых сплавов
СПИСОК ЛИТЕРАТУРЫ
1. Агрусс В. Термически регенерируемый элемент с жидким металлом
«Прямое преобразование тепловой энергии в электрическую и топливные элементы».
М., АН СССР, ВИНИТИ, 1964, вып. 11. с. 141—152.
2. Болотин В. В. Статистические методы в строительной механике. М., Строй-
издат, 1965. 279 с.
3. Голкомб. Экспериментальное исследование МПД — двигателя с катодом,
расположенным на выходе из двигателя. — ВРТ, 1972, № 10, с. 34—39.
4. Гуров А. Фм Севрук Д. Д., Сурнов Д. Н. Конструкция и расчет на
прочность космических электроракетных двигателей. М., Машиностроение, 1970. 491 с.
5. Гуров А. Ф. Расчеты на прочность и колебания в ракетных двигателях.
М.; Машиностроение, 1966. 455 с.
6. Дроздович В. Н. Газодинамические подшипники. Л., Машиностроение,
1976. 207 с.
7. Королев В. И. Расчет сильфонов. — Вестник МГУ, 1954, № 9, с. 15—28.
8. Куландин А. А., Тимашев С. В., Иванов В. П. Энергетические системы
космических аппаратов. М., Машиностроение, 1972. 426 с.
9. Кулешов В. В. О связи критериев прочности и надежности
применительно к силовым элементам авиационного двигателя. — Авиационная техника, 1965,
№ 3, с. 89—97.
10. Кузнецов А. А., Алифанов О. М., Ветров В. И. Вероятностные
характеристики прочности авиационных материалов и размеров сортамента. М.,
Машиностроение, 1970. 566 с.
11. Кузнецов В. А. Ядерные реакторы космических энергетических
установок. М., Атомиздат, 1977. 240 с.
12. Масси Л. Д. Пленочные фотоэлементы для преобразования солнечной
энергии. М., АН СССР, ВИНИТИ, 1964, вып. 11, с. 123—130.
13. Прочность тугоплавких металлов/Писаренко Г. С. и др. М.,
Металлургия, 1970. 365 с.
14. Справочник по вероятностным расчетам./Абезгауз Г. Г. и др. М., Во-
ениздат, 1960. 407 с.
15. Сурнов Д. Н. Исследование критических чисел оборотов системы с
двумя дисками, вращающимися с различными угловыми скоростями. — Сб.
трудов МАИ. М., Оборонгиз, 1956, вып. 74, с. 39—62.
16. Тепловые трубы. Сб. статей. Пер. с англ. и нем. под ред. Э. Э. Шпиль-
райна. М., Мир, 1972. 419 с.
17. Тугоплавкие металлические материалы для космической техники. Сб.
статей. М., Мир, 1966, 420 с.
18. Умаров Г. Я., Жадраев У. Ж. Предельное давление воздуха в надувных
концентраторах. — Гелиотехника, № 3, 1966, с. 12—24.
19. Ушаков Б. А., Никитин В. Д., Емельянов И. Я. Основы
термоэмиссионного преобразования энергии. М., Атомиздат, 1974. 287 с.
20. Фугуровский В. И. Расчет на прочность беспилотных летательных
аппаратов. М., Машиностроение, 1973. 355 с.
21. Черепанов А. М., Тресвятский С. Г. Высокоогнеупорные материалы и
изделия из окислов. М., Металлургия, 1964. 400 с.
22. Энергетические установки для космических аппаратов. Сб. статей. Пер.
с англ. под ред. Д. Д. Невяровского. М., Мир, 1964. 393 с.
ОГЛАВЛЕНИЕ
Стр.
Предисловие ко второму изданию 3
Часть первая. Общие сведения о космических двигательных
установках 5
Глава I. Схемы КДУ. Прочность 5
1.1. Классификация КДУ 5
1.2. Требования к космическим двигательным установкам ... 7
1.3. Конструктивные схемы КДУ . . 12
1.4. Проектирование, эскизный проект . . 19
1.5. Вопросы расчета на прочность КДУ . 21
Часть вторая. Источники энергии КДУ 56
Глава II. Ядерный реактор 56
2.1. Конструктивные и силовые схемы ядерных реакторов ... 57
2.2. Конструкция элементов реактора . 60
2.3. Расчет деталей реактора на прочность 66
Глава III. Радиоактивные изотопные источники энергии П5
3.1. Конструктивные схемы изотопных генераторов 116
3.2. Расчеты на прочность 120
Глава IV. Солнечные источники энергии. Солнечные батареи . . . . 128
4.1. Силовые схемы и конструкции солнечных концентраторов . . 129
4.2. Солнечные батареи 133
4.3. Расчет пленочных концентраторов и СБ на прочность . . . 138
Глава V. Топливные элементы. Топливные аккумуляторы . . . . 142
5.1. Конструктивные схемы и< конструкция топливных элементов . , 145
Часть третья. Преобразователи 155
Глава VI. Машинные преобразователи 155
6.1. Общие сведения . . . . . ...;.... 155
6.2. Выбор основных размеров турбин . 158
6.3. Конструктивные схемы и конструкция деталей турбины . . . 159
6.4. Опоры турбогенераторов . . 163
6.5. Расчет рабочих лопаток на прочность и колебания . . . . 171
Глава VII. Прямые преобразователи 193
7.1. Термоэмиссионные преобразователи энергии 193
7.2. Магнитные гидродинамические преобразователи 205
7.3. Термоэлектрические преобразователи 207
Глава VIII. Теплообменные аппараты , . . 214
8.1. Холодильники-излучатели • . . . 214
8.2. Теплообменники . . 221
8.3. Расчет деталей теплообменных аппаратов на прочность . . . 227
Часть четвертая. Двигатели 245
Глава IX. Плазменные и электронагревные двигатели . . ... 245
9.J. Конструктивные схемы двигателей и электродов ., ... 246
9.2. Конструкция двигателей 251
9.3. Расчет на прочность элементов двигателя . . . . ., ■ . 253
Глава X. Электростатические двигатели 292
10.1. Конструктивные схемы ЭСД . . 293
10.2. Конструкция ЭСД и его элементов 298
10.3. Расчет пластинчатых электродов на прочность ... . , . 304
Приложение 313
Список литературы 319