



































































Автор: Павленко Г.П. Половников В.С. Лопатин А.П.
Теги: дорожный (безрельсовый) транспорт городской транспорт машиностроение
Год: 1979




Текст
Г.П.ПАВЛЕНКО • В.С.ПОЛОВНИКОВ- А.П.ЛОПАТИН
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ ДИСПЕТЧЕРСКОГО
УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ГОРОДСКОГО
ТРАНСПОРТА
Г. П. ПАВЛЕНКО, В. С. ПОЛОВНИКОВ, А. П, ЛОПАТИН
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ГОРОДСКОГО ТРАНСПОРТА
МОСКВА «ТРАНСПОРТ» 1979
39.8
Л 12
УДК 656.13.022 : 658.514 : 62—506 : 681.9
Павленко Г. П. и др.
П12 Автоматизированные системы диспетчерского управления движением пассажирского городского транспорта/Павленко Г. П., Половников В. С., Лопатин А. П.— М.: Транспорт, 1979, 207 с., ил., табл.
В пер.: 1 руб.
В книге описан опыт создания и внедрения автоматизированных систем диспетчерского управления движением городского пассажирского транспорта (АСДУ-ГПТ). Рассмотрены основные цели и задачи автоматизированного управления движением городского пассажирского транспорта (ГПТ), приведены статистический анализ показателей его работы, результаты исследования планового и оперативного управления ГПТ, раскрыта структура АСДУ ГПТ и описаны технические и программные средства функционирования систем, технические и программные средства функционирования систем, охарактеризовано методическое обеспечение АСДУ-ГПТ, показана тенденция развития методов и средств автоматизированного управления движением ГПТ.
Книга рассчитана на научных и инженерно-технических работников, занятых решенном задач автоматизированного управления городским пассажирским транспортом.
31803-043 П ------------ 43-79 3603040000
049(01)-79
ББК 39.8 6Т.З
(g) Издательство «Транспорт», 1979.
ПРЕДИСЛОВИЕ
Основной задачей транспорта, как отмечено в решениях XXV съезда КПСС, является полное и своевременное удовлетворение потребности народного хозяйства в перевозках на основе существенного повышения мощности и качества всей транспортной системы страны. Для выполнения дайной задачи «Основными направлениями развития народного хозяйства СССР на 1976— 1980 гг.» предусмотрено: «...расширить внедрение на транспорте средств автоматики, телемеханики и автоматизированных систем управления перевозками и технологическими процессами».
Непосредственно из общей задачи транспорта вытекает и частная задача городского пассажирского транспорта — обеспечение повышения качества удовлетворения потребности городского населения в поездках и эффективности использования его ресурсов. Одно из важных направлений решения этой задачи — разработка методов и средств автоматизированного управления городским пассажирским транспортом.
^Материал данной книги базируется в основном на результатах исследования, разработки и внедрения автоматизированных систем диспетчерского управления движением городского пассажирского транспорта (АСДУ-ГПТ), осуществляемых впервые в нашей стране.
В гл. 1 на основе обзора и анализа современных методов и средств управления определены цели и задачи автоматизированного управления движением городского пассажирского транспорта (ГПТ) на современном этапе. Для получения необходимых исходных данных по исследованию управления движением ГПТ в условиях функционирования АСДУ-ГПТ, определению структуры систем и обоснованию целесообразности их создания в гл. 1 и 2 приведен статистический анализ объекта управления. В гл. 3 и 4 изложены результаты исследования управления маршрутизированным и таксомоторным транспортом в условиях функционирования автоматизированных систем. Описание структуры автоматизированных систем и режимов функционирования технических средств дано в гл. 5, а программного обеспечения — в гл. 6. Методическое обеспечение внедрения АСДУ-ГПТ представлено в гл. 7. Тенденции развития методов и средств автоматизированного управления движением ГПТ охарактеризованы в гл. 8.
ГЛАВА 1
Ц£ЛИ И ЗАДАЧИ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГОРОДСКОГО ПАССАЖИРСКОГО ТРАНСПОРТА
Рост современных больших городов характеризуется значительным увеличением численности их населения и размеров территорий. При этом наблюдается все большее удаление мест жительства от мест приложения труда, снижается численность жителей центральной части городов и увеличивается численность жителей пригородной зоны, возрастает число людей, пользующихся транспортом, а также дальность их поездок, наблюдается насыщение городов транспортными единицами.
Увеличение подвижного состава города ведет к уменьшению эффективности его использования: рост численности транспортных средств снижает скорость их движения, увеличивает транспортные задержки, повышает аварийность.
Общая тенденция развития городского пассажирского транспорта за рубежом проявляется в росте численности легковых автомобилей. Большое количество легковых автомобилей на магистраля.х привело к тому, что, например, в Нью-Йорке средняя скорость движения всех наземных транспортных средств составляет всего 13,6 км/ч, а в часы пик часто снижается до 5 км/ч [2]. Из-за перегруженности городских улиц транспортными средствами дополнительные транспортные расходы в Англии составили в 1971 г. 500 млн. фунтов стерлингов и ежегодно возрастают на 14% [13].
Острый характер приобретает проблема безопасности дорожного движения. Гигантские темпы автомобилизации порождают также проблему защиты окружающей среды, поскольку именно автомобиль вызывает наибольшее загрязнение атмосферы.
В СССР в условиях планового ведения народного хозяйства нет опасности стихийного роста численности легковых автомобилей, однако транспортная проблема больших городов становится все острее и требует радикальных мер для ее решения. Развитие транспорта в городах СССР, осуществляемое с целью улучшения удовлетворения потребности населения в поездках, имеет большое социально-экономическое значение, так как влияет на величину свободного времени трудящихся.
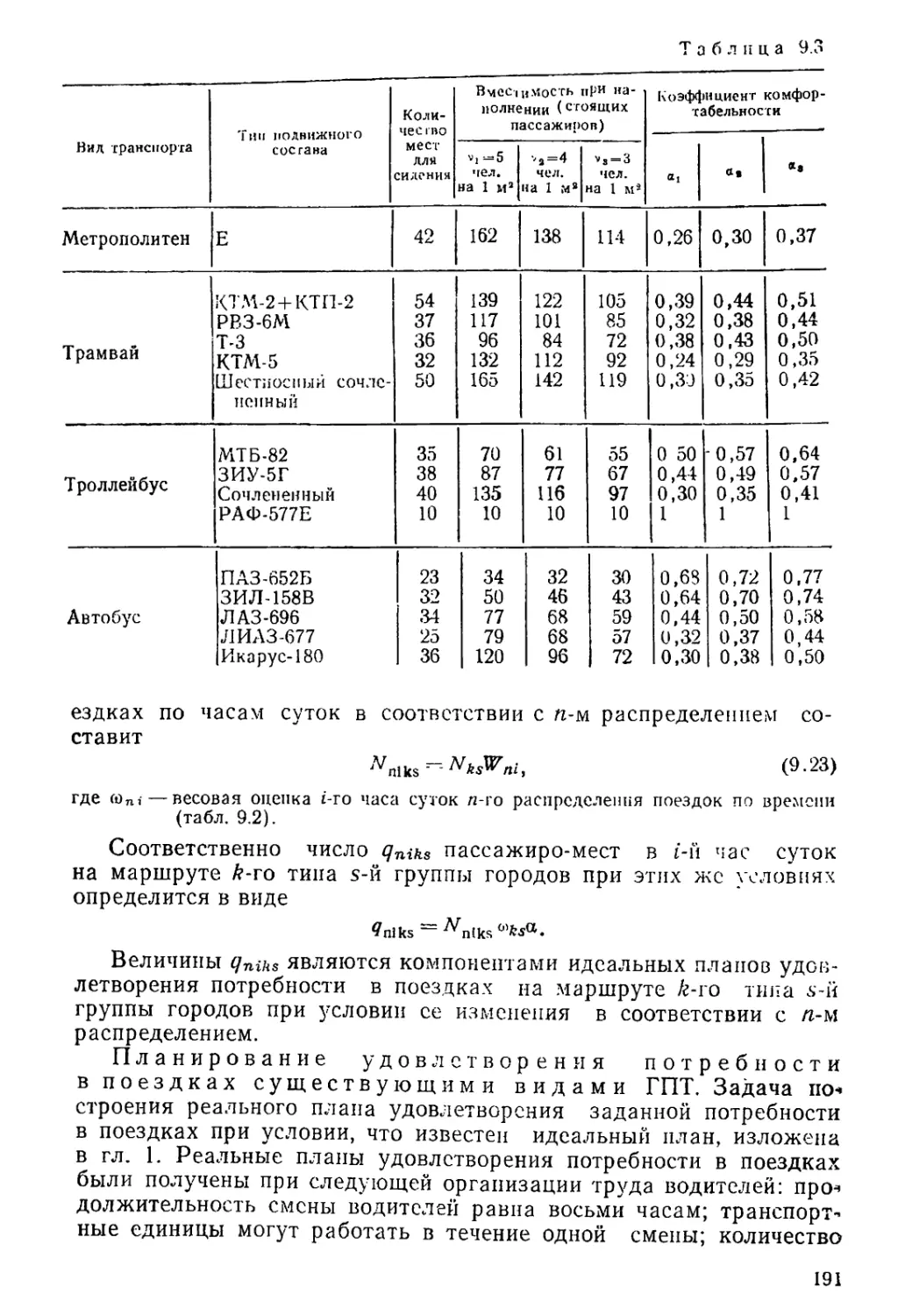
Для обеспечения элементарной комфортабельности поездок наполнение подвижного состава нс должно превышать 4—5 чел/м2 пола салона транспортной единицы. Но эти нормы не выдерживаются. Кроме того, велико время поездок пассажиров.
По данным [24] средние затраты времени на поездку трудящихся составляют: в городах с населением более 1 млн. чел. — 47,6 мин; с населением от 500 тыс. до 1 млн. чел. — 44,6 мин; с населением от 250 тыс. до 500 тыс. чел. — 41,4 мин. При этом непосредственно на передвижение затрачивается 35—40% времени, на ожидание транспортных средств—15—25% и на подход к остановочным пунктам и от них к месту назначения поездки — 35—50 % Кроме того, наблюдается переполнение подвижного состава: в часы пик на 1 м2 свободной площади пола приходится 8—10 чел.
Помимо потери времени, длительные поездки к месту работы в существующих условиях вызывают транспортную усталость и снижают производительность труда.
Многие исследователи транспортных проблем больших городов и практики видят выход из данного положения в повышении эффективности работы транспортных единиц за счет применения более совершенных методов и средств управления ими, модернизации подвижного состава и создания принципиально новых транспортных систем.
Одним из важных направлений работ в СССР по разрешению транспортной проблемы городов является внедрение новых методов и средств управления транспортом.
1.1. Обзор и анализ современных методов и средств управления городскими пассажирскими перевозками
Внутренняя структура каждого города может быть представлена в виде объектов трудовой, культурно-бытовой и жилой организации. Трудовая организация содержит объекты приложения труда населения города, культурно-бытовая — объекты удовлетворения культурно-бытовых потребностей, а жилая охватывает места жительства.
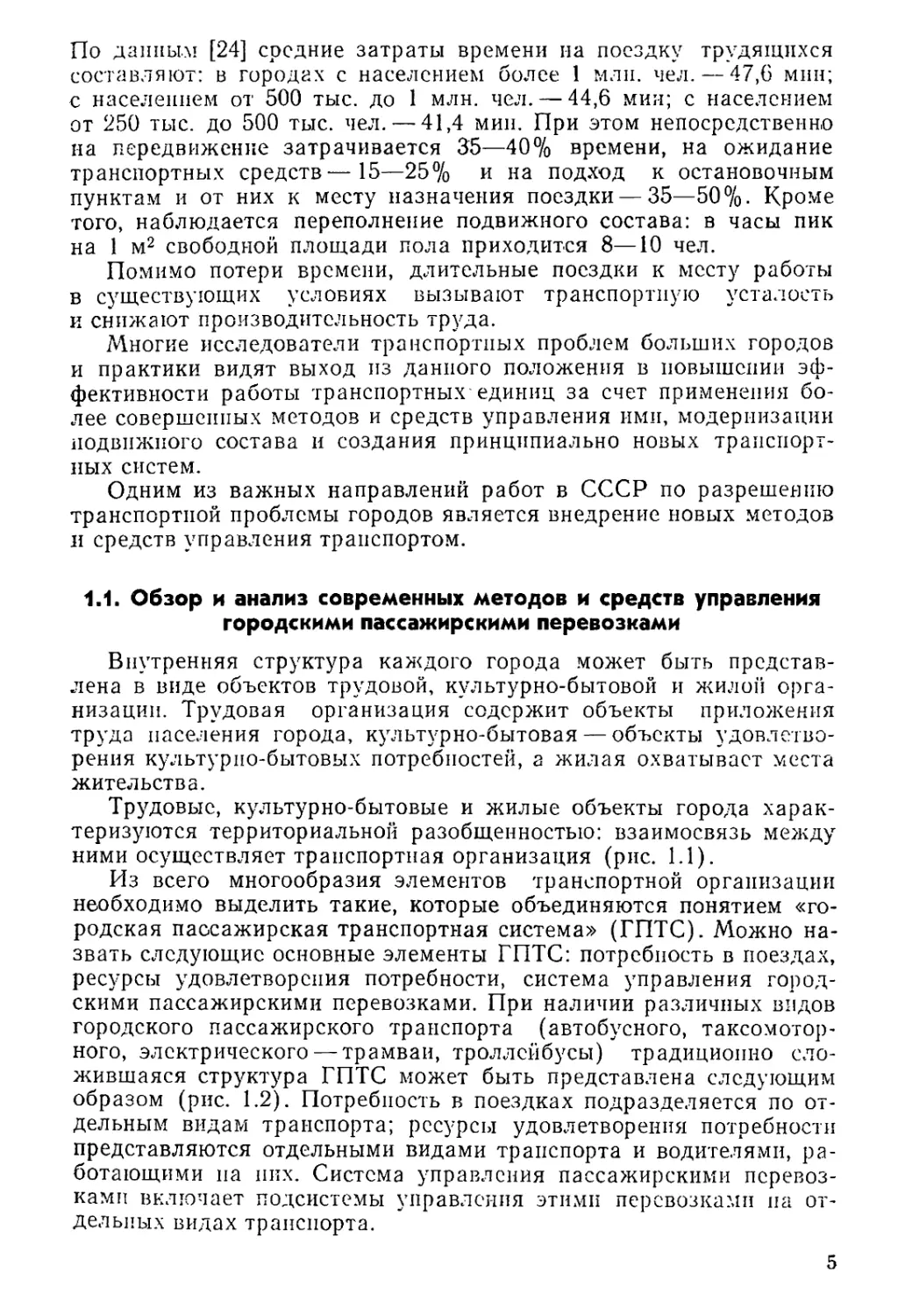
Трудовые, культурно-бытовые и жилые объекты города характеризуются территориальной разобщенностью: взаимосвязь между ними осуществляет транспортная организация (рис. 1.1).
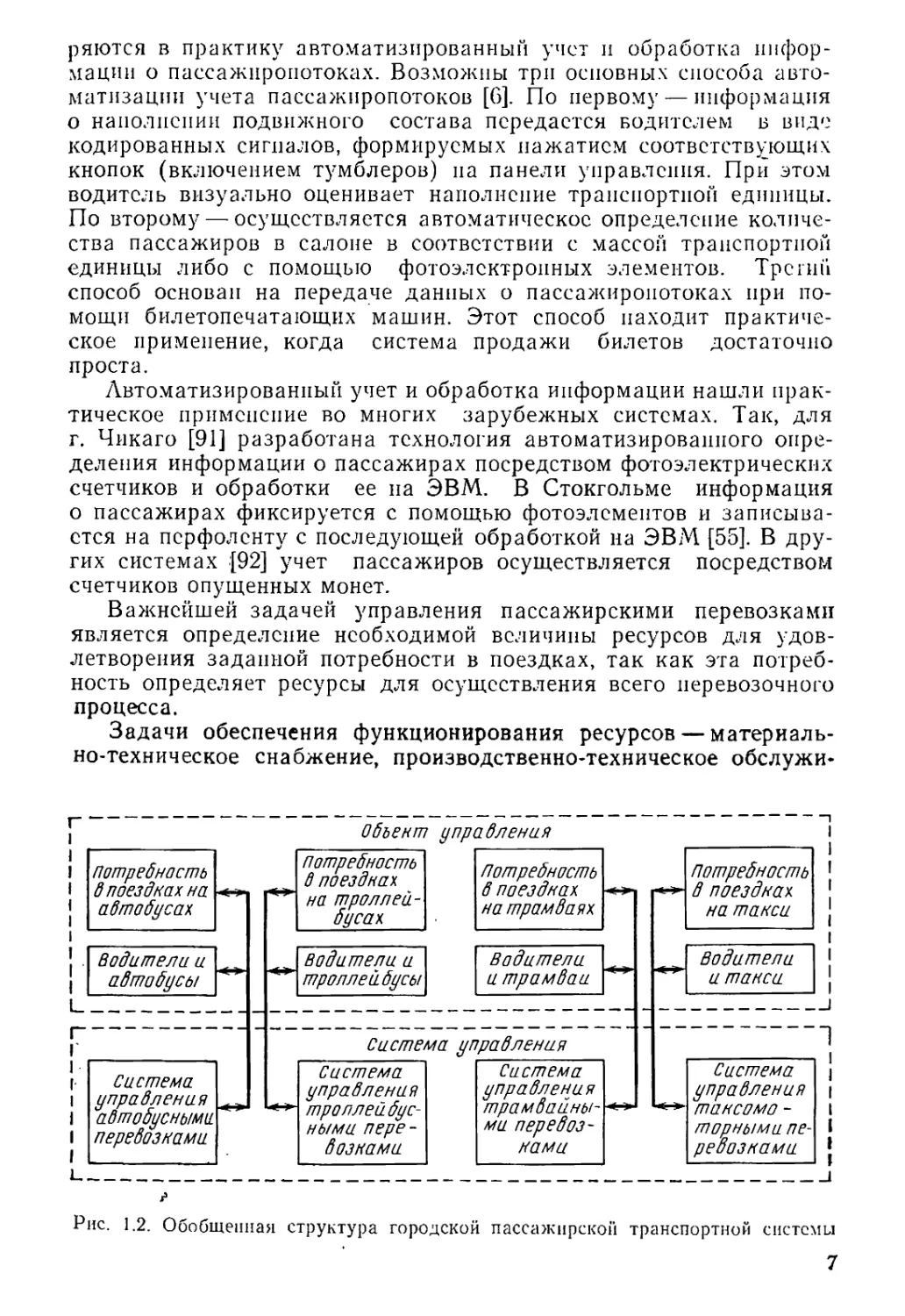
Из всего многообразия элементов транспортной организации необходимо выделить такие, которые объединяются понятием «городская пассажирская транспортная система» (ГПТС). Можно назвать следующие основные элементы ГПТС: потребность в поездах, ресурсы удовлетворения потребности, система управления городскими пассажирскими перевозками. При наличии различных видов городского пассажирского транспорта (автобусного, таксомоторного, электрического — трамваи, троллейбусы) традиционно сложившаяся структура ГПТС может быть представлена следующим образом (рис. 1.2). Потребность в поездках подразделяется по отдельным видам транспорта; ресурсы удовлетворения потребности представляются отдельными видами транспорта и водителями, работающими па них. Система управления пассажирскими перевозками включает подсистемы управления этими перевозками па отдельных видах транспорта.
Можно назвать три основных комплекса задач, которые должны решаться в рамках ГПТС: определение потребности в поездках, формирование ресурсов и управление процессом удовлетворения потребности в поездках.
Формирование информации о потребности в поездках осуществляется в основном по результатам статистических об-
I
Жилая организация
Рис. 1.1. Обобщенная структура города
обследований. Из многочисленных работ, посвященных различным методам обследования, а также отдельным вопросам методики проведения обследований можно отмстить работу [29], в которой дан анализ различных способов сбора и обработки информации о потребности городского населения в поездках и проведена классификация по критерию функционального использования их результатов. Па основе такого анализа предложена постоянно действующая система сбора информации, предполагающая координированное проведение комплекса транспортных обследований и совместное использование получаемых данных.
Любые статистические обследования потребности в поездках можно назвать плановыми, так как они осуществляются в определенные (плановые) отрезки времени. Кроме того, внедряются оперативные методы формирования информации о потребности в поездках, при которых пассажиры формируют информацию о потребности в поездках с помощью городских телефонов или специальных устройств вызова транспорта (УВТ). Наибольшее распространение данный способ формирования информации получил на таксомоторном транспорте [30, 71]. В последнее время за рубежом формирование информации о потребности в поездках с помощью УВТ осуществляется также и на автобусном транспорте. Так, в 1968— 1969 гг. Массачусетским технологическим институтом предложена новая форма транспортного обслуживания Dial-A-Ride [93], суть которой сводится к отказу от фиксированных маршрутов движения автобусов и составлению маршрутов движения в соответствии с заявками пассажиров, формируемыми с помощью городских телефонов либо УВТ и поступающими па диспетчерский пункт. В диспетчерском пункте на основе заявок, поступивших за некоторый отрезок времени, составляется график движения транспортной единицы. По данному методу различаются четыре вида обслуживания: с отклонением от маршрутов; от многих точек к одной; от многих точек к немногим; от многих точек ко многим. В зависимости от «плотности» и интенсивности заявок, поступающих с обслуживаемого района города, используются автобусы с числом мест для сидения от 10 до 40.
Кроме названных способов формирования информации о потребности в поездках, в настоящее время разрабатываются и внед-6
ряются в практику автоматизированный учет и обработка информации о пассажиропотоках. Возможны три основных способа автоматизации учета пассажиропотоков [6]. По первому — информация о наполнении подвижного состава передастся водителем в виде кодированных сигналов, формируемых нажатием соответствующих кнопок (включением тумблеров) па панели управления. При этом водитель визуально оценивает наполнение транспортной единицы. По второму — осуществляется автоматическое определение количества пассажиров в салоне в соответствии с массой транспортной единицы либо с помощью фотоэлектронных элементов. Третий способ основан на передаче данных о пассажиропотоках при помощи билетопечатающих машин. Этот способ находит практическое применение, когда система продажи билетов достаточно проста.
Автоматизированный учет и обработка информации нашли практическое применение во многих зарубежных системах. Так, для г. Чикаго [91] разработана технология автоматизированного определения информации о пассажирах посредством фотоэлектрических счетчиков и обработки ее па ЭВМ. В Стокгольме информация о пассажирах фиксируется с помощью фотоэлементов и записывается на перфоленту с последующей обработкой на ЭВМ [55]. В других системах [92] учет пассажиров осуществляется посредством счетчиков опущенных монет.
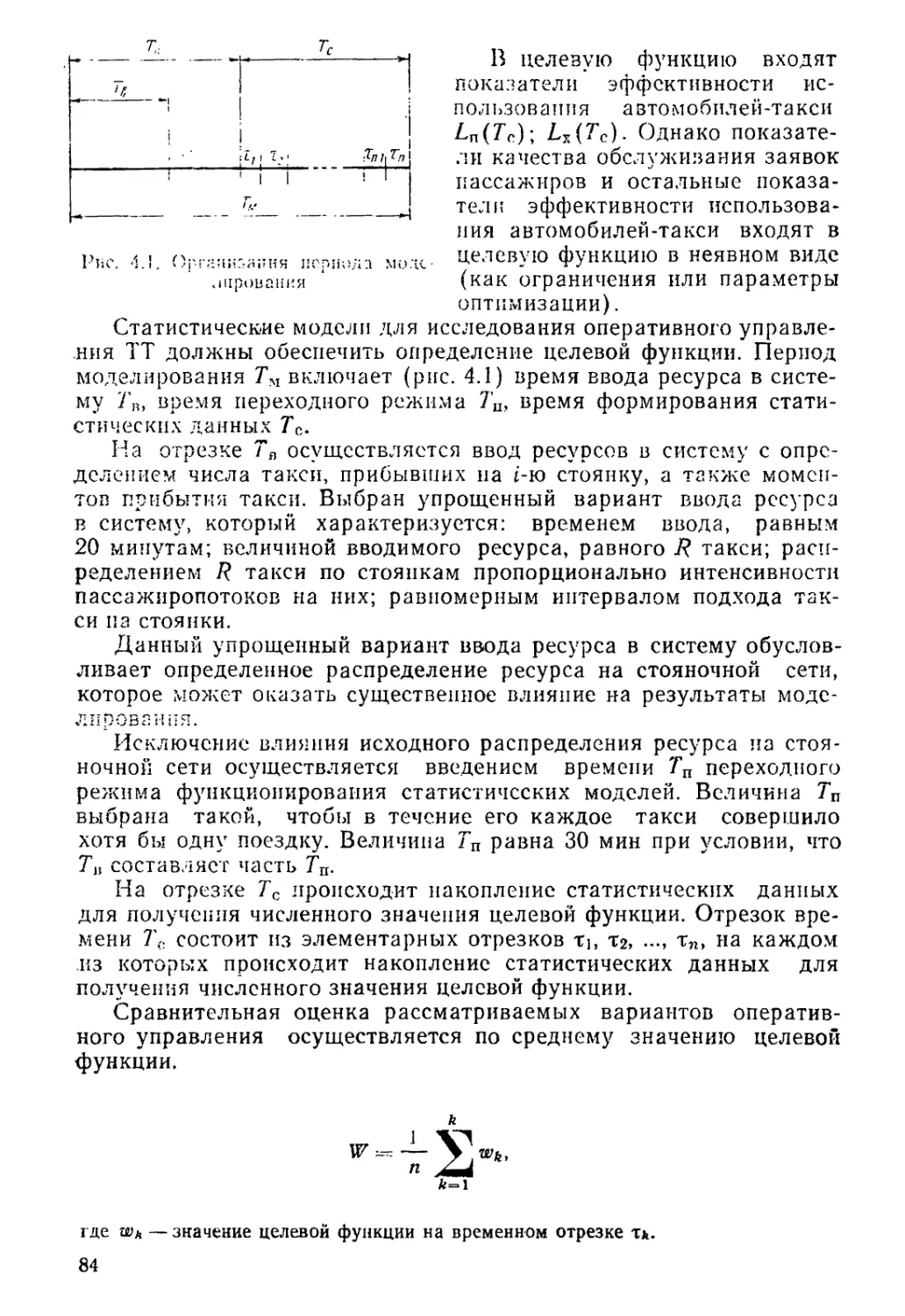
Важнейшей задачей управления пассажирскими перевозками является определение необходимой величины ресурсов для удовлетворения заданной потребности в поездках, так как эта потребность определяет ресурсы для осуществления всего перевозочного процесса.
Задачи обеспечения функционирования ресурсов — материально-техническое снабжение, производственно-техническое обслужи-
Рис. 1.2. Обобщенная структура городской пассажирской транспортной системы
ванне и др.—являются вспомогательными и выходят за рамки дан* ной работы.
Методы определения необходимого количества маршрутизированного (автобусного, электрического) и немаршрутизированною (таксомоторного) транспорта различны. При определении количества маршрутизированного транспорта (МТ) решаются следующие задачи: формируется транспортная сеть для различных видов МТ; выбирается маршрутная сеть различных видов МТ; рассчитывается количественный состав и уточняется типаж МТ.
Первая из названных задач решается при разработке генеральных планов развития городов. Методология решения данной задачи, а также практические рекомендации представлены исследованиями ЦНИ и ПИ градостроительства. Для определения транспортной сети различных видом МТ используются методы прогнозирования численности населения, его подвижности и внутригородских коррепонденций. Из многочисленных работ по данным вопросам можно назвать работы [42, 56, 57], содержащие обзорный материал и методические указания практического характера.
Задачи формирования маршрутных сетей, определения типажа и количества различных видов МТ могут быть условно разделены на три группы. Методы решения задач первой группы [50, 80, 86] базируются на основе опыта разработки и анализа существующих сетей МТ. При этом для заданной транспортной сети города определяется объем работы пассажирского транспорта, строятся картограммы пассажиропотоков и выбирается рациональный вид МТ для освоения пассажиропотоков. Далее рассчитывается потребность в подвижном составе. Например, в работе [4] по результатам изучения статистических и отчетных данных по МТ представлены закономерности распределения поездок пассажиров по маршрутам, на основе использования которых получены рекомендации по рациональному типажу и количественному составу МТ. Для каждой из рассматриваемых групп городов, отличающихся численностью населения, получены типы маршрутов, определены рациональная вместимость транспортных единиц и необходимое количество их на маршрутах каждого типа. Одпако принимаемое в расчет количество типов маршрутов слишком укрупненно представляет маршрутную сеть.
Решение задач второй группы базируется на использовании экономико-математических методов и средств вычислительной техники. Так, в работе ;[3] изложен метод формирования рациональной сети автобусных маршрутов. Обобщенным критерием качества маршрутной сети приняты затраты времени пассажиров на ожидание транспортной единицы (ТЕ), проезд и пересадки. Экспертно формируются несколько вариантов сети маршрутов, после чего улучшаются исходные варианты по эвристическому алгоритму добавления и исключения маршрутов.
Наиболее полное решение задач проектирования маршрутных сетей городского пассажирского транспорта с использованием формальных методов представлено в работах [41, 87]. Исследование 8
задачи формирования маршрутной сети ГПТ осуществлено методами системного анализа: даны формализованное описание п постановка задач анализа структуры пассажиропотоков на транспортной сети и возможных вариантов организации перевозок; формирования подмножеств транспортных районов города прохождения отдельного маршрута; определения последовательности прохождения транспортных районов в маршруте, а также анализа избыточной совокупности маршрутов. Результатом работы является общая методика проектирования маршрутной сети ГПТ.
Задачи третьей группы охватывают в основном вопросы моделирования пассажиропотоков на заданных маршрутных сетях с целью определения количества ТЕ и показателей транспортного обслуживания. Например, в работах {84, 85] функционирование маршрута представляется системой массового обслуживания. Отметим, что использование точных моделей для анализа работы даже изолированного маршрута практически неосуществимо ввиду их сложности. В целях упрощения моделей принимают различного рода ограничения, позволяющие получить относительно простые расчетные соотношения.
Задача определения необходимого количества подвижного состава и рационального его типажа является комплексной. Цель ее решения — обеспечение заданного качества транспортного обслуживания городского населения при минимальных затратах (комплексный характер цели). В виде исходных данных должны быть использованы разнообразные физические характеристики маршрутов, а также закономерности изменения потребности в поездках по часам суток (комплексное представление объекта управления). Кроме того, необходимо учесть ограничения па использование ресурсов в виде конкретной организации труда водителей. В такой постановке указанная задача еще не решалась, однако проработка отдельных направлений ее решения осуществляется. Так, в работе [4] предложена экономико-математическая модель оптимизации количества и вместимости автобусов па городском маршруте. Критерием оптимизации в этом случае является минимум народнохозяйственных затрат, складывающихся из оценок времени пассажиров на ожидание транспортных средств и затрат транспортных предприятий на эксплуатацию маршрута. В работе [3] предложен графоаналитический способ определения количества часов работы автобусов на каждом маршруте, режимов работы смен водителей и автобусов, а также зависимости качества обслуживания пассажиров от средней продолжительности работы автобусов.
Работы [3, 4] направлены на решение последней из названных задач — выбора подвижного состава, рациональной вместимости и распределения его по маршрутам. Решению задачи распределения заданного количества подвижного состава по маршрутам посвящена работа {69]. Исходными данными для решения задачи являются допустимые затраты времени пассажиров на ожидание, текущие затраты транспортного предприятия, характеристики маршрутов (пассажиропотоки, время кругорейса, показатели регу
лярности движения и др.), а оптимизации подлежат тип и количество автобусов на каждом из маршрутов.
Вопросы определения количества автомобилей-такси для различных городов нашли отражение во многих работах. Необходимое количество автомобилей-такси зависит не только от потребности в поездках на таксомоторном транспорте [44, 75], но и от заданного качества удовлетворения потребности, а также от эффективности управления таксомоторным транспортом. Кроме того, определяемое количество автомобилей-такси зависит и от организации труда водителей. Результатом определения необходимого количества автомобилей-такси должен быть график их выпуска из автотранспортных предприятий.
Управление процессом удовлетворения потребности в поездках является основной задачей АСДУ, так как решение ее обеспечивает выполнение назначения городского-пассажирского транспорта. Существует тесная взаимосвязь между методами управления процессом удовлетворения потребности в поездках и средствами управления. Разработка методов управления перевозочным процессом ориентируется па соответствующие средства реализации. В свою очередь, средства реализации оказывают существенное влияние на методы управления. Можно выделить три класса средств реализации управления ГПТ: диспетчерской связи; диспетчерской связи и отображения информации; диспетчерской связи, сбора, хранения, обработки и отображения информации. Каждому из классов средств управления соответствуют конкретные задачи управления перевозочным процессом, реализуемые этими средствами.
Средства диспетчерской связи обеспечивают возможность установления речевой связи между диспетчерами центральной диспетчерской станции (ЦДС) и водителями транспортных единиц (ТЕ). В настоящее время накоплен большой опыт использования средств диспетчерской связи на ГПТ. Внедрению средств диспетчерской связи и методов управления в рамках названных средств посвящены многие работы. Так, в работах [8—10] определены необходимость внедрения на ГПТ центральных диспетчерских станций, описаны варианты их технического оснащения и опыт работы. В работе [79] раскрыты технические аспекты внедрения диспетчерской связи на ГПТ. В частности, охарактеризована система индуктивной связи, разработанная в Министерстве автомобильного транспорта РСФСР, которая обеспечивает двустороннюю симплексную связь водителей городских автобусов с диспетчерами ЦДС по шести каналам. В большинстве зарубежных систем диспетчерской связи обмен информацией диспетчеров с водителями производится по радиоканалу. Например, в городах Гамбурге, Чикаго, Цюрихе [6] устройства радиосвязи работают в дуплексном режиме. Следует отмстить, что средства диспетчерской связи в зарубежных системах управления транспортом, обеспечивающие только речевой обмен информацией между водителями и диспетчерами, носят второстепенный характер. Им присущи следующие недостатки: большое количество диспетчеров, их ограниченные возможности по перера-
боткс информации и формированию управляющих воздействии. Основной вид связи диспетчера с водителями — обмен информацией в форме кодированных сообщений с использованием каналов передачи данных, т. е. с помощью средств диспетчерской связи и отображения информации.
В СССР и за рубежом нашли некоторое применение средства диспетчерской связи и отображения информации, обеспечивающие возможность автоматизированного формирования информации о ГПТ и его местоположении на территории города с помощью устройств транспортных единиц и оборудования контрольных пунктов. Например, в работах [81, 82] изложены результаты исследования управления таксомоторным транспортом при использовании средств диспетчерской связи и отображения информации, а также описана практическая реализация их в виде первой очереди автоматизированной системы диспетчерского управления движением таксомоторного транспорта Москвы. Аппаратура диспетчерского пункта данной системы предназначена для сбора информации о наличии автомобилей-такси на стоянках (отображение номеров автомобилей-такси) и осуществления двусторонней телефонной связи диспетчеров с водителями и пассажирами, формирующими заявки на поездки с помощью городских телефонов. Автомобили-такси оборудованы устройствами подвижной единицы (УПЕ), которые позволяют автоматически формировать номер автомобиля-такси и признак вызова диспетчера на речевую связь. Аппаратура стоянки обеспечивает передачу информационного блока с устройства подвижной единицы (при наезде автомобиля-такси на индуктивный контур, уложенный под дорожное покрытие) в телефонную линию связи с аппаратурой диспетчерского пункта. Примером использования средств диспетчерской связи и отображения информации на автобусном транспорте может служить телемеханическая система, разработанная в Кабардино-Балкарском транспортном управлении [1]. Система, состоящая из устройства приемо-переда-чи данных, аппаратуры контрольных пунктов, ретрансляторов, каналов связи, устройства обработки данных и мнемощита, выполняет следующие функции: преобразование полученной с автобусов информации для подготовки воспроизведения се на мнемощите и ввода в цифропечатающее устройство, а также в устройство обработки данных; обеспечение двусторонней связи между устройствами приемо-передачи и контролируемыми автобусами по составному каналу связи (радиоканал — выделенная телефонная линия); коммутацию информации от телесигнализации.
Средства диспетчерской связи и отображения информации не нашли широкого применения как в отечественой практике, так и за рубежом. Хотя технические средства данного класса обеспечивают снижение численности диспетчерского персонала за счет автоматизации получения информации о перевозочном процессе, они дают незначительное повышение эффективности управления ГПТ, так как имеются ограниченные возможности диспетчерского персонала по переработке информации и формированию управля
ющих воздействий, которые могут быть существенно расширены только при использовании технических средств управления ГПТ третьего класса.
Рассмотрим зарубежный опыт автоматизированного управления движением городского пассажирского транспорта с помощью средств диспетчерской связи, сбора, хранения, обработки и отображения информации. В иностранной научно-технической литературе автоматизированные системы диспетчерского управления движением ГПТ объединяются общим понятием «электронные системы контроля» (Electronic Control systems). Системы различаются принципами их построения и задачами, решаемыми ими. В общем случае они обеспечивают: двустороннюю речевую связь между водителями и диспечерами; обмен кодированной информацией между диспетчерами и водителями; автоматическое получение информации о местоположении транспортных единиц па дорожной сети и ввод ее в ЭВМ; автоматизацию контроля движения транспортных единиц и выработки управляющих воздействий; автоматизированное отображение информации о ходе перевозочного процесса и рекомендациях по управлению перевозочным процессом на пультах диспетчеров; передачу оперативной информации пассажирам с отображением ее па специальных устройствах, устанавливаемых в местах наиболее интенсивного движения ГПТ; автоматизацию определения и обработки информации о пассажиропотоках; автоматизацию составления расписаний движения маршрутизированного транспорта; накопление и обработку отчетной и статистической информации о работе ГПТ.
В электронных системах контроля радиотелефон является основным средством диспетчерской связи, ЭВМ — устройством обработки и хранения информации, а устройствами отображения информации— специальные табло, мнемосхемы и дисплеи.
В таких городах, как Гамбург, Лондон, Париж, Цюрих, Чикаго, Нью-Йорк, Ротердам, накоплен значительный опыт автоматизированного управления ГПТ [6]. В частности, в Гамбурге электронная система контроля осуществляет контроль движения 165 автобусов и управление ими на 12 маршрутах. В Лондоне для автоматизации определения местоположения 40 автобусов на маршруте используется система Marconi, в Париже для аналогичных целей на одном из маршрутов используется система Secama, в Цюрихе управление движением автобусов на двух маршрутах осуществляет система Ham-Proicctron. В Чикаго с 1970 г. осуществляется контроль движения 500 автобусов системой Motorola. Аналогичные по выполняемым функциям системы разработаны фирмами «Siemens» [88, 89] и «Bosch» [96] в ФРГ. Находятся в разработке системы автоматизированного управления ГПТ в Токио и Осаке [95], а также в Бристоле [90].
В системах Motorola и Hani-Prolectron фирмы «Siemens» местоположение транспортных средств на маршрутах отождествляется с расположением боллардов. Болларды представляют собой радиопередатчики малой мощности, непрерывно изучающие свой
собственный кодированный сигнал (максимальное расстояние восприятия сигнала—100 м). Данный сигнал воспринимается приемником, установленным на транспортной единице, а затем при циклическом опросе приемников информация в виде номера болларда и номера транспортной единицы поступает в ЭВМ. На основе данной информация ЭВМ осуществляет контроль расписания движения транспортных единиц.
В системе Motorola для определения местоположения автобусов па маршруте между двумя боллардамп используются счетчики времени, которые фиксируют время, прошедшее с момента проследования автобусом последнего болларда. Болларды размещаются на конечных и промежуточных контрольных пунктах маршрутов на расстоянии 1,6—2,4 км. ЭВМ определяет местоположение автобуса относительно последнего пройденного болларда с учетом показаний счетчика времени. Центральная ЭВМ обеспечивает вызов на связь до 3300 автобусов при цикле опроса их, равном 2 мин. В условиях Чикаго максимальное время следования автобуса между двумя боллардамп составляет 12 мин. В нормальных условиях за это время автобус будет вызван на связь 6 раз. Ошибка определения местоположения автобусов данной системой возникает при пересчете времени, прошедшего с момента проследования последнего болларда, в расстояние, которое прошел автобус от этого болларда. С целью устранения ошибок пересчета вместо счетчиков времени используются счетчики оборотов колоса (циклометры) .
В настоящее время введена первая очередь системы в Цюрихе (Limited System), обеспечивающая контроль движения автобусов на маршрутах посредством радиотелефонной связи и канала передачи кодированных сообщений. ЭВМ циклически с периодом в 10 с опрашивает транспортные единицы, что обеспечивает контроль движения 500 транспортных единиц по одному каналу, а при увеличении цикла опроса до 14 с число контролируемых транспортных единиц увеличивается до 700. Фирма «Hani-Prolectron>> планирует выпускать две типовые системы — Prolectron-200 и Proiectron-1000. Последняя рекомендуется для использования в больших городах, так как обеспечивает управление 1000 транспортных единиц. В настоящее время система функционирует в Цюрихе па двух автобусных маршрутах и проходит испытания на трамвайном и троллейбусном маршрутах. Вторая очередь системы Complete System будет осуществлять автоматическое определение местоположения маршрутизированного транспорта и контроль движения. Местоположение подвижного состава будет определяться местоположением последнего пройденного болларда с учетом расстояния от него, измеряемого циклометром. При расстоянии 1—2 км между боллар-дами система обеспечит определение местоположения транспортной единицы с точностью до 20 м. Отклонения от расписаний будут отображаться на информационном табло диспетчерского пункта и на панели управления транспортной единицы. Управляющие воздействия на транспортные единицы могут формироваться автома-
тичсски либо диспетчерами. Диспетчеры могут наблюдать па экране дисплея точное положение машины на одном либо двух маршрутах в любой момент времени.
Экспериментальная система Secama предназначена для автоматического контроля движения автобусов и управления ими. Местоположение автобуса характеризуется расстоянием, пройденным от конечной станции, которое определяется циклометром. Контрольный цикл движения 35 автобусов составляет 35 с.
Ошибки в измерении расстояния корректируются на остановках сравнением пройденного расстояния между остановками с теоретическим.
Местоположение автобусов в системе Marconi также определяется расстоянием, пройденным от конечной станции. Движение автобусов отображается на экране дисплея. Система может управлять 1000—1500 автобусами с циклом проверки 100—150 с. Связь между автобусами и диспетчерским пунктом обеспечивается на двух частотах: 140 мГц для вызова, 107 мГц для ответа [91].
В системе RVL фирмы «Bosch» для определения местоположения подвижного состава и переговоров с водителями применяется радиосвязь.
Транспортные единицы оборудованы вычислительными устройствами для предварительной обработки и анализа информации.
Центральный диспетчерский пункт оборудован ЭВМ Mluby 3/30, обеспечивающей решение задач управления подвижным составом и обработки отчетных и статистических данных.
В экспериментальной системе, введенной в эксплуатацию в 1973 г. в Токио [95], информационная связь с автобусами осуществляется циклически по радиоканалам.
В системе Eyssa, спроектированной для г. Барселоны, местоположение 1000 транспортных единиц будет определяться каждые 100 с в зависимости от расстояния, пройденного от последнего бол-ларда. Передача информации в виде кодированных сообщений будет осуществляться по радиоканалам {91].
Вводится в эксплуатацию электронная система контроля в Дублине [94], рассчитанная на управление 900 автобусами. В системе используется радиотелефонная связь, обработка информации и управление осуществляется ЭВМ.
За рубежом ведутся работы по автоматизированному управлению таксомоторным транспортом [12]. Так, во Франкфурте-на-Майне заявки на автомобили-такси передаются с помощью телефонов. Диспетчер вводит заявки в вычислительную систему, которая определяет количество автомобилей-такси для удовлетворения заявок. Водитель выбранного автомобиля-такси подтверждает получение заявки нажатием кнопки на панели передатчика, а при выполнении заявки вводит в вычислительный комплекс соответствующую информацию. Датской фирмой «Storno» разработана система центрального диспетчерского управления работой автомобилей-такси с помощью средств радиосвязи и вычислительной техники. Система
работает следующим образом. Пассажир вызывает по телефону диспетчерский пункт, где вызов принимается автоматическим телс-фоноответчиком, переключающим линию связи па пульт свободного диспетчера по приему заявок. Диспетчер вводит заявку в ЭВМ. Информация о свободных автомобилях-такси поступает в ЭВМ по радиоканалу. Водителю выбранного автомобиля-такси автоматически диктуется адрес заказчика, записанный на магнитном барабане. В системе управления движением автомобилей-такси, разработанной для Монреаля, все автомобили-такси оборудованы устройствами радиосвязи с диспетчерским пунктом, па котором установлена ЭВМ. ЭВМ обеспечивает автоматизацию установления связи между диспетчерским пунктом и любым автомобилем-такси, находящимся на линии, по запросам как диспетчера, так и водителей.
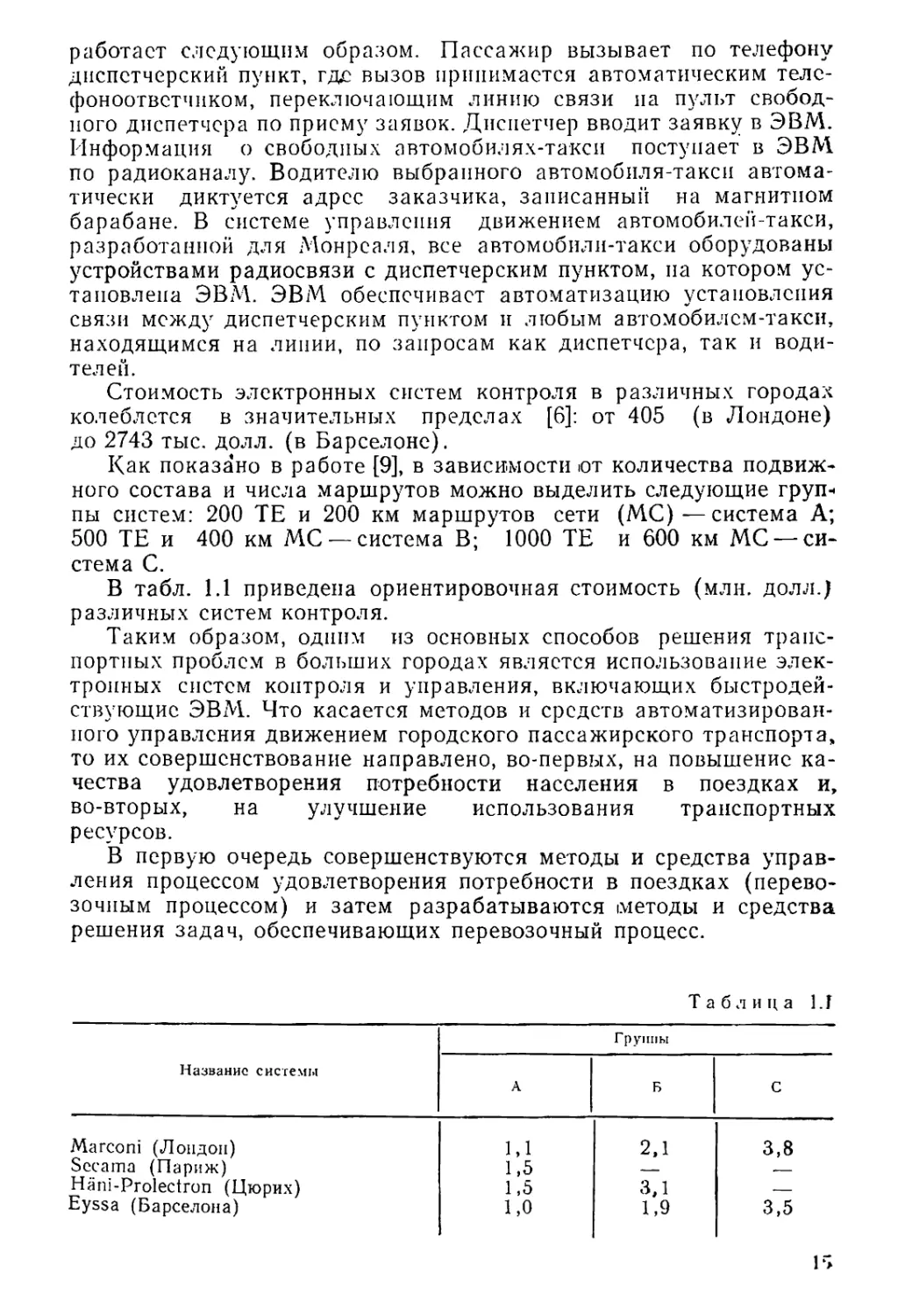
Стоимость электронных систем контроля в различных городах колеблется в значительных пределах [6]: от 405 (в Лондоне) до 2743 тыс. долл, (в Барселоне).
Как показано в работе [9], в зависимости ют количества подвижного состава и числа маршрутов можно выделить следующие группы систем: 200 ТЕ и 200 км маршрутов сети (МС)—система А; 500 ТЕ и 400 км МС — система В; 1000 ТЕ и 600 км МС — система С.
В табл. 1.1 приведена ориентировочная стоимость (млн. долл.) различных систем контроля.
Таким образом, одним из основных способов решения транспортных проблем в больших городах является использование электродных систем контроля и управления, включающих быстродействующие ЭВМ. Что касается методов и средств автоматизированного управления движением городского пассажирского транспорта, то их совершенствование направлено, во-первых, на повышение качества удовлетворения потребности населения в поездках и, во-вторых, на улучшение использования транспортных ресурсов.
В первую очередь совершенствуются методы и средства управления процессом удовлетворения потребности в поездках (перевозочным процессом) и затем разрабатываются (.методы и средства решения задач, обеспечивающих перевозочный процесс.
Таблица 1.1
Название системы Группы
А Б с
Marconi (Лондон) 1,1 2,1 3,8
Sccama (Париж) 1,5 — —
Hani-Prolectron (Цюрих) 1,5 3,1
Eyssa (Барселона) 1,0 1,9 3,5
1.2. Показатели качества удовлетворения потребности городского населения в поездках. Основные задачи автоматизированного управления движением городского пассажирского транспорта
Главной целью автоматизированного управления движением городского пассажирского транспорта является максимальное удовлетворение потребности населения в поездках при эффективном использовании ресурсов.
Показателями качества удовлетворения потребности городского населения в поездках может быть принято среднее время: t\ — подхода пассажира к остановочному пункту (ОП); /2 — ожидания транспортной единицы (ТЕ) иа ОП; /3— передвижения в ТЕ; /4 — подхода к месту назначения поездки от ОП.
Важнейшим показателем качества работы ГПТ является комфортабельность поездки, определяемая средним значением коэффициента комфортабельности:
где аг—значение коэффициента комфортабельности /-й поездки (со=1, если пассажиру предоставлено место для сидения, и а;-=0 — в противном случае);
А — общее число поездок.
Значения /4 зависят от размещения ОП на территории города, t2— от обеспеченности транспортной системы ресурсами и от управления ими, — от средней длины поездок пассажиров, временных затрат на пересадки, обеспеченности транспортной системы ресурсами, управления ресурсами и технических характеристик ТЕ.
Таким образом, управление городскими пассажирскими перевозками требует решения задач: оптимального размещения ОП на территории города (управления потребностью в поездках); машрутизации движения городского пассажирского транспорта; установления соответствия между потребностью в поездках и ресурсами удовлетворения потребности; определения рациональных методов и средств управления процессом удовлетворения потребности.
Рассмотрим основные задачи управления городскими пассажирскими перевозками.
Постановка задачи оптимального р а з м е щ е и и я остановочных пунктов на территории города. Пусть задано разбиение территории города на зоны с указанием суммарной интенсивности поездок 7^ из f-й зоны (f=l, Л\). Вводятся переменные
{1, если в /-й зоне есть ОП,
(1.1)
О, в противном случае,
на которые накладываются ограничения
(1.2)
/=1
Известна матрица сц временных затрат пассажиров в стоимостной оценке, связанных с переходом пассажиров из зоны i в зону /. Средние за отрезок времени Т затраты пассажиров на подход к ОП и на установку и эксплуатацию оборудования ОП составят
F (х) = cixi + 2 Л/Г +
/«1
где Cj — затраты на оборудование ОП в зоне /;
С — константа, удовлетворяющая условию C>max Cij.
Пусть ^2шах, ^тах —соответственно максимально допустимое время, затрачиваемое пассажиром па подход к ОП, и максимально допустимое время следования пассажира от ОП прибытия до зоны назначения. Тогда ограничения па качество обслуживания пассажиров по показателям t4 могут быть записаны в виде
min [СЦХ] + С (1 — X/)] < niin(p/2max» ?*4inax), (1 -4)
где [3 — коэффициент, приводящий временные затраты пассажиров к стоимостному выражению.
Таким образом, задача размещения ОП заключается в определении такого вектора Х = хь х2, ..., xKi, удовлетворяющего условиям (1.1), (1.2), (1.4), при котором значение суммарных затрат (1.3) минимально.
Для решения поставленной задачи могут быть использованы эвристические и точные алгоритмы дискретного программирования, изложенные в работах [47—49].
Постановка задачи построения маршрутной сети движения городского пассажирского транспорта. Данная задача рассматривалась во многих работах. Можно выделить два направления ее решения — градостроительное и транспортное. При проектировании городов, а также разработке генеральных планов их развития необходимой составной частью решений являются предложения ио выбору рационального варианта транспортной системы. В частности, при разработке генеральных планов городов стремятся решать задачи [77]: снижения затрат времени на поездки путем увеличения плотности сети городского транспорта; упорядочения транспортного и пешеходного движения в центрах городов путем создания достаточно плотной сети впеуличиого общественного транспорта, пешеходной зоны, удобно связанной с остановочными пунктами; совершенствования организации движения в направлении город — пригород путем электрификации пригородных железнодорожных путей; развития сети ско
ростных городских дорог и магистральных улиц непрерывного движения с устройством пересечений на разных уровнях.
Можно сказать, что обобщенным результатом транспортных исследований градостроительного направления является улично-дорожная сеть городского пассажирского транспорта. Основной задачей транспортного направления исследований является определение па заданной транспортной сети города маршрутной сети движения единиц ГПТ.
Как указывалось, постановки задач проектирования маршрутной сети, методы их решения и практическое использование результатов в виде законченной методики представлены в работах [41, 88]. Рассмотрим постановку основных задач проектирования маршрутной сети ГПТ в рамках указанных работ, расширяя или детализируя их отдельные положения по мере необходимости.
Проектирование маршрутной сети ГПТ возможно осуществить в два этапа: на первом — сформировать избыточную совокупность маршрутов, а па втором — произвести окончательный их выбор путем анализа полученной избыточной совокупности. На первом этапе решаются задачи анализа структуры пассажиропотоков в городе, их распределения па транспортной сети, определения подмножеств транспортных районов, соединяемых одним маршрутом, и последовательности прохождения транспортных районов в маршруте. На втором этапе осуществляется анализ перевозочного процесса на отдельном маршруте, выбор рационального числа ТЕ на маршрутах избыточной совокупности, распределение заданного числа ТЕ по маршрутам избыточной совокупности.
Предположим, что задача оптимального размещения ОП на территории города решена, т. е. определено Кг остановочных пунктов и известна матрица корреспонденций:
л-ПМЬ i^j,
а также граф транспортной сети
S — {Z,U},
где X,j — число пассажиров, начинающих маршрут в зоне i и закапчивающих в зоне j:
Z=(1.2, ..., К2)— множество ОП на территории города (множество вершин графа);
U — множество кратчайших путей между ближайшими по транспортной сети остановочными пунктами (ребер графа).
Идеальной маршрутной сетью с позиций пассажира является такая, па которой поездки осуществляются по кратчайшим путям и без пересадок. Такая маршрутная сеть может быть образована множеством невложенных кратчайших путей, т. е. нс составляющих часть любого другого кратчайшего пути на транспортной сети между двумя остановочными пунктами. Очевидно, что при прохождении маршрутов по всем невложенным кратчайшим путям будут обеспечены поездки пассажиров между любыми остановочными пунктами с наименьшими временными затратами. Для обеспечения перевозок на такой маршрутной сети потребуется большое количе
ство ТЕ, провозная способность которых будет использоваться крайне низко. Уменьшение количества ТЕ с одновременным повышением использования их провозной способности может быть достигнуто за счет объединения в маршруты нескольких невложенных кратчайших путей или их частей. Однако в этом случае часть пассажиров будет осуществлять поездки с пересадками и не кратчайшим путем, т. с. для них понизится качество удовлетворения потребности в поездках.
Формирование множества невложенных кратчайших путей можно произвести в следующей последовательности. Вначале на графе транспортной сети определяются кратчайшие расстояния между всеми парами вершин с помощью известных алгоритмов поиска кратчайших путей, например, изложенных в ‘[78], т. е. формируется матрица
Л— ||//;||, Z=l, K2i 7 —1, К2, где la — кратчайшее расстояние по транспортной сети между остановочными пунктами к j.
Далее следует выбрать максимальный элемент из матрицы L и сформировать кратчайший путь между и, Данный путь является невложенным, так как имеет максимальную длину. Кратчайшие пути между всеми парами остановочных пунктов прохождения данного пути, за исключением й, /ь будут вложенными, поэтому помечаются все эти пары и соответствующие им элементы матрицы L. Вновь выбирается максимальный элемент матрицы L, но среди непомеченных элементов производится построение кратчайшего пути между ОП i2 и /2, отмечаются все пары ОП прохождения данного пути. Описанный процесс повторяется до тех пор, пока не будут отмечены все элементы матрицы L. При этом будут сформированы все невложенные кратчайшие пути.
Будем характеризовать потребность в поездках на маршруте средним попарным пассажирообменом между ОП, через которые он проходит. Предположим, $=1, 2, ...— текущий индекс формируемых подмножеств Bs остановочных пунктов прохождения s-ro маршрута. Введем переменные:
{1, если i е Bs\
О в противном случае.
Тогда средний попарный пассажирообмсн между ОП подмножества Bs определится в виде
*2 Я2
‘ Ж.-о S X 1>" +
7-1
где d* — число ОП в подмножестве Вя.
Установим для r-го вида ГПТ диапазон изменения потребности в поездках на маршруте:
/7(г) — , Z)(r) 1,
lamin’ inaxJ’
где £>min > ^max — минимальный, максимальный средний попарный между ОП маршрута пассажирообмен, который может быть освоен г-м видом ГПТ.
В общем случае диапазоны £)(•’), г=1, К могут перекрываться. Для областей перекрытий D(r'> необходимо установить рациональный вид ГПТ, т. с. состыковать границы диапазонов D(rX В результате может быть получен следующий ряд:
Г) п(2) рл’, \
такой, что nd) nd) D(K)
где —минимальный средний попарный между ОП маршрута пассажиро-обмеп, который рационально удовлетворять r-м видом ГПТ.
Таким образом, средний попарный между ОП маршрута пасса-жирообмен, который рационально удовлетворять r-м видом ГПТ, лежит в пределах
n(r) < < D^r+^
^mtn u min *
Назовем величину P^O порогом провозной способности r-го вида ГПТ.
Формирование маршрута можно начать с пары ОП, имеющей максимальный средний пассажирообмен (предположим, это пара н, ц). Вначале определяется, каким невложенным кратчайшим путям принадлежит пара и, и. Например,
fz, v ^(/<1, /<2, ... , Ki)t
где /G, /<2, Ki— невложенные кратчайшие пути, проходящие через пару и, Затем устанавливаются номера зон, принадлежащие объединению
i
[J Ks = (u, v, i, ... , /). 5 = 1
Из ОП с номерами i, ..., I выбирается такой, который имеет максимальный средний попарный с uv пассажирообмен (например, ОП с номером I) и по которому проверяют выполнение неравен-ства Di > DKm{
где Di — средний попарный между золами иу v, i пассажирообмен.
Если неравенство ие выполняется, то сформирован маршрут, проходящий через ОП с номерами uv. В противном случае к ОП с номерами и, v присоединяется ОП с номером i и определяется, каким путям из числа /<ь ^2, ... , Ki не принадлежит ОП с номером I. Предположим, ОП с пОхМером i не принадлежит Ль Находится объединение
i
U = (a, v, i, s, ... , k)
s = 2
и вновь из ОП с номерами $, ..., k устанавливается такой, который имеет максимальный средний попарный с и, v, i пассажирообмен и т. д. Процесс закапчивается формированием маршрута для исходной пары ОП. Помечаются все корреспонденции, удовлетворяемые сформированным маршрутом, и выбирается из числа оставшихся очередная максимальная корреспонденция.
Данная процедура закапчивается формированием множества маршрутов для r-го вида ГПТ. Все корреспонденции, удовлетворяемые на маршрутах r-го вида ГПТ, в дальнейшем не принимаются в расчет.
Аналогичный описанному процесс повторяется для каждого вида ГПТ (для каждого значения порота провозной способности). В результате будут сформированы множества маршрутов для каждого вида ГПТ.
Полученная таким образом маршрутная сеть ГПТ может сказаться избыточной при определении необходимого числа ТЕ па каждом из маршрутов. Избыточными можно считать такие маршруты, необходимое число ТЕ на которых меньше некоторой заданной величины, а также те из ни?;, которые нецелесообразно иметь по другим причинам, например — по мнению экспертов.
Надо полагать, что данный подход к построению маршрутной сети ГПТ наиболее применим при проектировании маршрутной сети новых городов, так как сложившаяся маршрутная сеть не может быть подвержена глобальным изменениям. Однако применение данного подхода при модернизации маршрутных сетей отдельных видов ГПТ, необходимость в которой возникает вследствие развития города, также вполне целесообразна.
Следующий этап решения задачи построения маршрутной сети ГПТ — определение необходимого количества и типа транспортных единиц на каждом из маршрутов — является этапом планирования работы ГПТ на маршрутной сети. Задачи данного этапа тесно соприкасаются с задачей установления соответствия между потребностью в поездках и ресурсами удовлетворения потребности.
Постановка задачи установления соответствия между потребностью в поездках и ресурсами удовлетворения потребности. Определим потребность в поездках на городском пассажирском транспорте величинами суммарного количества пассажиров, которых необходимо перевезти в f-й час суток — ас 1=1,24. Ресурсами удовлетворения являются водители и транспортные единицы (ТЕ).
Пусть на основании определено необходимое количество пас-сажиро-мсст qi для удовлетворения с некоторым заданным качеством. Совокупность qi по всем часам суток назовем идеальным планом удовлетворения потребности в поездках:
Q = (^1, qi, , ?24).
Имеются ограничения на использование ресурсов в виде конкретной организации труда водителей и фиксированной продолжительности использования ТЕ в суточном цикле работы. Будем ха-
растеризовать организацию труда водителей часом начала работы /=1,и и продолжительностью работы водителей h (часов). Работу ТЕ определим в течение, одной смены водителя (полученная r результате величина ресурсов ТЕ может быть скорректирована с учетом возможности использования части ТЕ в течение двух смен работы водителей).
Фактически с учетом ограничений на использование ресурсов в f-й час может работать г, пассажиро-мсст. Совокупность по всем часам суток назовем реальным планом удовлетворения потребности в поездках:
r2t ... , Г24).
Пусть Nj — число пассажиро-мсст, которое необходимо выпустить в j-й час выпуска. Тогда
г/ / = 1,24,
где h — целые числа интервала [max(i — /1, 1); iTiin(w, 1)].
Или, введя параметр y/j,
| 1, если
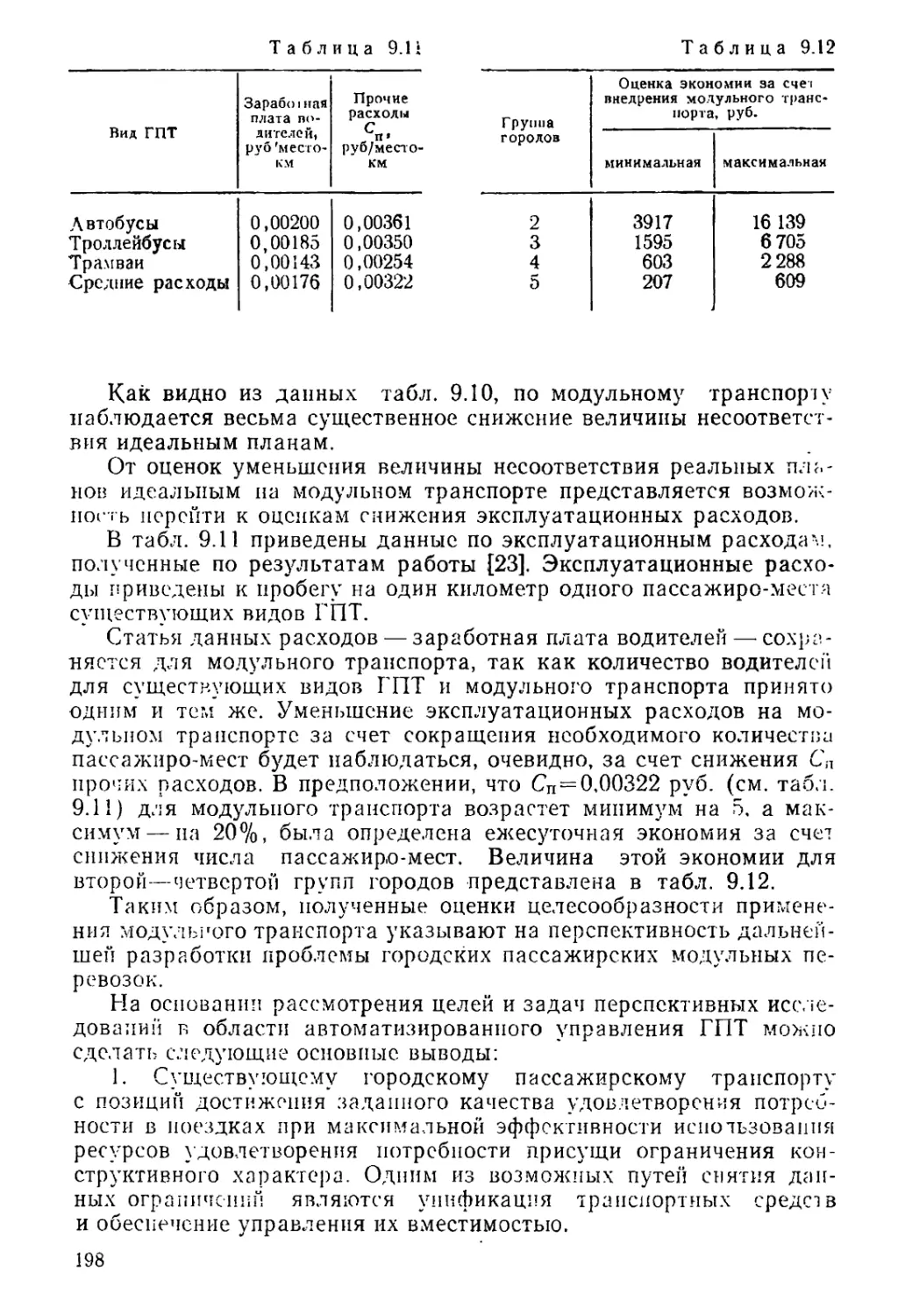
( 0, если получим
и г,=2 j-l
Несоответствие реального плана идеальному в i-il час суток \i = ri—qi ведет к потерям, связанным либо с недостатком пасса-жиро-мест и равным еАг (Аг в данном случае отрицательно), где 8 — стоимостная оценка того, что одному пассажиру нс предоставлено место в ТЕ либо с избытком пассажиро-мсст, равным iqA^ (Аг в данном случае положительно), где г]—эксплуатационные затраты на одно пассажиро-мссто.
Суммарные потери А за счет несоответствия реального плана идеальному определятся в виде
24
Д — (т) max (О, Д/) — е min (О, А,)). (1*7)
L =1
Задача определения плана выпуска пассажиро-мест для удовлетворения заданной потребности в поездках может быть сформулирована следующим образом: требуется определить значения переменных Л/j, /=1, и, которые удовлетворяют ограничениям Af^O, Nj — целые числа, и минимизируют целевую функцию (1.7).
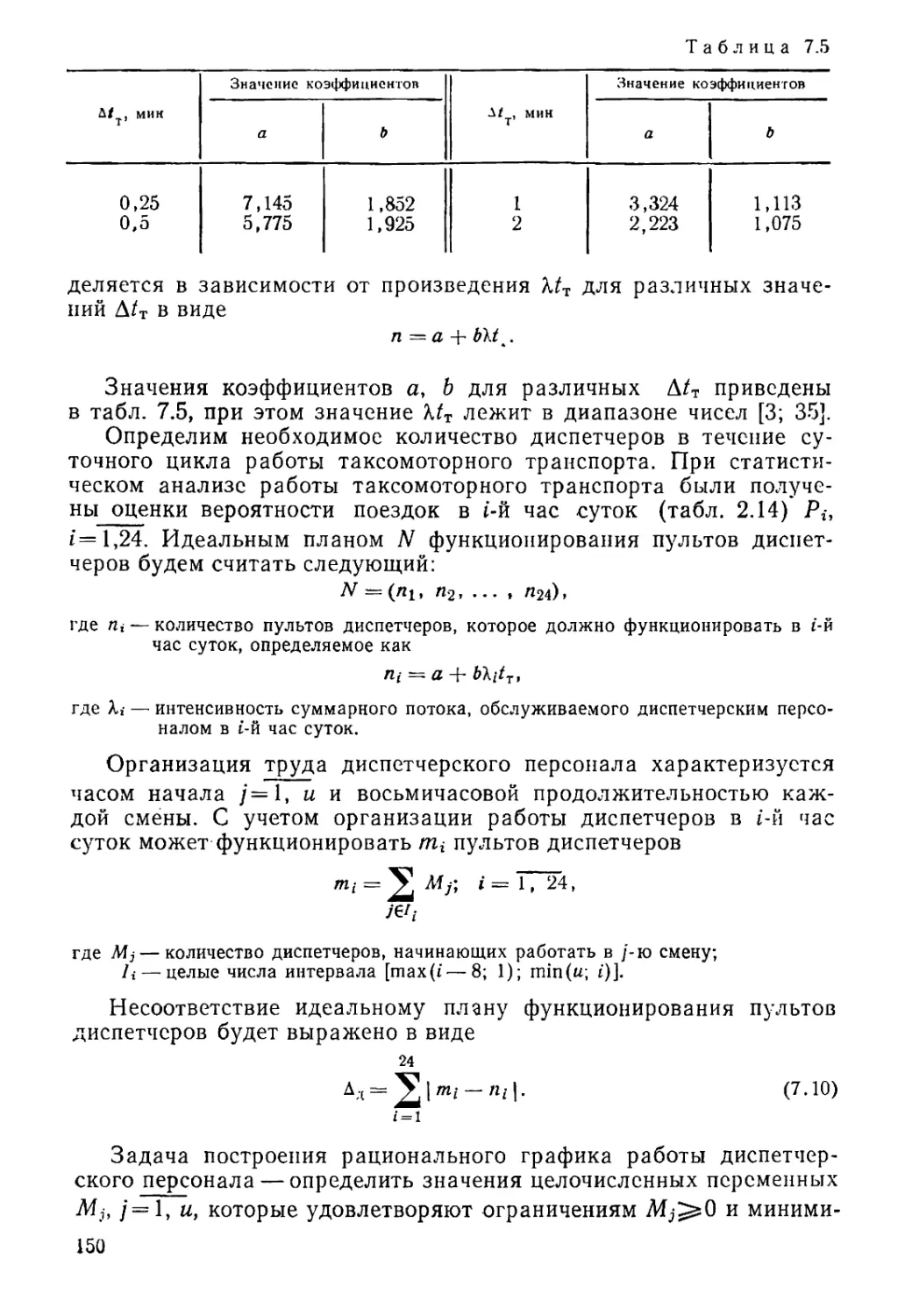
Поставленная задача относится к классу нелинейных задач целочисленного программирования. Принципиальная сложность решения определяет необходимость замены се более простой.
Рассмотрим приближение 7? к Q только «сверху». Тогда целевая функция (1.7) преобразуется к виду
24 и 24
А qit (1'8)
М /=1 /=1
где 24
77 =- 2
/-1
Если продолжительность работы транспортных единиц одинакова и равна h, то yi = h. Определение плана выпуска пассажиро-мсст в этом случае сводится к нахождению
и
min (2М
7=1
при ограничениях
и
2 7<>ЛГj > Qi, 1^24, /-1
(1.9)
(l.W)
Nj > 0, j — 1, и, Nj — целые.
Можно показать, что матрица ||yij||, £=1,24, / = 1, и является упимодулярной, т. е. любой минор данной матрицы равен либо О, либо ±1. Тогда, согласно [32], многогранное множество
и
N / > 0, j - 1 з и
где qt — является целочисленным, т. с. все его вершины (опорные планы задачи линейного программирования) целочпелены. Следовательно, задачи (1.9) и (1.10) могут быть решены как пецелочисленная задача линейного программирования. Получаемое при этом оптимальное решение будет удовлетворять условию целочисленности.
Компоненты Q могут быть рассчитаны как произведение числа М{ ТЕ, необходимых в i-ii час суток, на число мест со для сидения в ТЕ:
qi — Af/oj.
Для задания Mi необходимо установить зависимость данных величин от значений потребности сц и показателей качества удовлетворения потребности.
При фиксированной маршрутной сети, сети остановочных пунктов и стоянок такси показателями качества обслуживания, которые зависят от Mi, являются время ожидания начала обслуживания и комфортабельность поездок. При нахождении необходимого ко
личества ТЕ для формирования идеального плана требуется определить минимальное количество ТЕ в каждый час суток, обеспечив вающее заданное качество удовлетворения потребности в поездках. ТакихМ образом, величины Mi и t2 должны удовлетворять следующим ограничениям:
i=1
где / — средняя маршрутная дальность поездки пассажира;
х— коэффициент недоиспользования вместимости ТЕ из-за неравномерности пассажиропотока по перегонам маршрута;
v — эксплуатационная скорость ТЕ;
L—длина маршрута;
бтах — максимальное время ожидания ТЕ пассажиром.
Ограничения (1.11) означают, что число ТЕ в любой час суток должно быть таково, чтобы, во-первых, сц поездок были обеспечены с коэффициентом комфортабельности а (первое ограничение), во-вторых, время ожидания в любой час суток не должно быть больше максимального (второе ограничение) и, в-третьих, среднее время ожидания во все часы суток не должно быть больше заданного (третье ограничение). При этом предполагается, что время ожидания пассажира равно половине интервала движения ТЕ на маршруте.
Потребность в поездках сц необходимо определить для каждого маршрута, каждого вида ГПТ. Организация труда водителей каждого вида ГПТ может быть детализирована по продолжительности их работы, в том числе и по наличию смен различной продолжительности. В результате определится необходимое число ТЕ на маршрутах каждого вида ГПТ.
Нахождение необходимого количества автомобилей-такси в каждый час суток значительно сложнее, так как время ожидания пассажирами автомобилей-такси определяется не только количеством автомобилей-такси, но и сетью стоянок, а также структурой управления таксомоторным транспортом.
Задачи управления процессе м удов л створе н и я потребности в поездках представляются наиболее важными и составляют основу автоматизированного управления движением ГПТ.
В самой общей постановке задача определения рациональных методов и средств управления процессом удовлетворения потребности в поездках заключается в следующем. Предположим известными: множество У возможных вариантов управления движением городского пассажирского транспорта; затраты на организацию управляющей системы (УС), функционирующей в соответствии с s-м вариантом управления Z6; экономия от функционирования УС
в соответствии с s-м вариантом управления Es. Тогда задача выбора рационального варианта функционирования УС и средств его реализации заключается в определении
max (Es — Zs)
при ограничениях на качество удовлетворения потребности в поездках.
Рассмотрим основные задачи управления процессом удовлетворения потребности в поездках. Будем при этом различать маршрутизированный (МТ) и немаршрутизированный транспорт (ИТ). Движение МТ осуществляется на маршрутной сети постоянной конфигурации. Движение НТ осуществляется на улично-дорожной сети. Управление движением МТ У1 можно рассматривать в виде планового Уп и оперативного У12. Управление движением НТ целесообразно рассматривать в виде оперативного У2. Кратко охарактеризуем варианты управления Уц, У12, Уг-
Уц осуществляется посредством маршрутных расписаний движения МТ. Каждый маршрут движения определяется последовательностью прохождения остановочных пунктов транспортными единицами, распределенными на данный маршрут. Расписание движения на маршруте определяет для каждой ТЕ плановые моменты прибытия на каждый ОН в течение суточного цикла работы;
У12 осуществляется при различного рода нарушениях расписаний движения маршрутизированных ТЕ (техническая неисправность ТЕ, прибытие на ОП позже или раньше планового момента). Если для i-й ТЕ определен плановый /-й момент прибытия на /е-й ОП т0 нарушение планового движения данной ТЕ будет в случае, если фактический момент j прибытия i-й ТЕ на /г-й ОП tty больше tty > + 6 или меньше tty<xty — 3, где б — допусти-
мая величина времени отклонения движения ТЕ от расписания. Цель контроля движения МТ — получение информации о нарушениях расписаний движения, т. е. исходной информации для yi2;
У 2 обеспечивается формированием оперативных управляющих воздействий на немаршрутизированные ТЕ. При этом предполагается, что в управляющую систему поступают заявки пассажиров на поездки, формируемые на ОП посредством устройств вызова транспорта (УВТ) и с квартирных (служебных) телефонов. УС определяет моменты прибытия ТЕ на ОП (при формировании заявок на поездки с телефонов), т. е. в некоторые точки на уличнодорожной сети.
Цель контроля движения НТ — получение информации о нарушениях движения транспортными единицами (при их технической неисправности, прибытии в заданную точку раньше или позже предписанного момента), т. е. неисполнении управляющих воздействий системы.
Таким образом, целью контроля при автоматизированном управлении процессом удовлетворения потребности городского населения в поездках является получение информации о технической
неисправности ТЕ (нарушение /Д), о прибытии ТЕ в заданную точ-ку раньше (Н2), позже (Яз) предписанного момента прибытия.
На основе информации о событиях /Д, Н2 и Я3 система управления должна сформировать управляющие воздействия для восстановления нарушенного движения. В связи с этим в дальнейшем будем полагать, что У2 обеспечивается не только формированием управляющих воздействий, определяющих движение НТ, но и управляющих воздействий для восстановления нарушенного движения.
Техническая неисправность ТЕ может возникнуть в любой точке се движения на улично-дорожной сети. Если система управления обеспечивает «непрерывную» информационную связь с ТЕ, то получение информации Я1 возможно в момент ее возникновения. Обозначим экономию в стоимостном выражении от восстановления нарушенного движения за счет Н\ в виде £(Я1), а затраты на получение информации Н\ в момент возникновения Н\ — в виде Z(/fi). Тогда получение информации Н\ в произвольной точке улично-дорожной сети в момент возникновения Н\ будет целесообразно, если Z(//i) ^£(/Д). В противном случае получение информации Н\ может быть обеспечено с некоторым запаздыванием, определяемым затратами времени водителями либо па подход к ближайшему телефону-автомату или УВТ при неисправной ТЕ, либо на проезд исправной ТЕ от точки возникновения до ближайшего ОП. В этом случае водитель исправной ТЕ формирует информацию В настоящее время и для ближайшей перспективы второй способ получения информации Нх можно считать наиболее приемлемым.
Рассмотрим последовательно получение информации Н2 и //3 для МТ и НТ. На МТ информация Н2, Н3 может быть получена при сравнении — в, tty > vty -и в, осуществляемом двумя спо-
собами: Si{l) и S2(2).
1. Операции f.. < — &, tty > tW — в осуществляются цент-
рализованно вычислительным комплексом (ВК) системы управления, для чего необходимо поступление в ВК информации 1*.^
2. Эти операции осуществляются децентрализованно с помощью специального оборудования ОП.
Для определения нарушений Н2, Н3 z-й ТЕ при прибытии на £-й ОП необходимо, чтобы оборудование ОП обеспечивало хранение (способ S2i) или формирование (способ S22) величин тг-/г.
На НТ следует различать прибытие ТЕ по адресу для удовлетворения заявок, сформированных с квартирных (служебных) телефонов, и на ОП для удовлетворения заявок, сформированных с помощью УВТ. При этом нет необходимости получать информацию Н2, т. е. при прибытии ТЕ в заданную точку раньше планового момента водитель будет ожидать пассажира, сформировавшего заявку. Информация Н3 при удовлетворении заявок, сформированных по адресу, может быть передана только пассажирами, так как исключена возможность установки оборудования получения информации /Уз по всем адресам. При удовлетворении заявок, сформированных па ОП, возможными способами получения информа
ции Из являются Si, 52ь Применение S22 в данном случае невозможно из-за стохастического характера управляющих воздействий, определяющих моменты прибытия пемаршрутпзированных ТЕ в заданные точки. Что касается способа S2i, то осуществление его базируется на аппаратурной реализации получения величин
Рассмотрим территориальные аспекты получения информации о нарушениях движения транспортных единиц. Как следует из вышеизложенного, движение МТ и НТ определяется заданными моментами прибытия ТЕ в некоторые точки дорожно-уличной сети. Исходное управление потребностью в поездках проявляется при размещении ОП на этой сети. Предположим, что определено множество ОП формирования потребности в поездках. При этом каждый ОП характеризуется местоположением на дорожно-уличной сети. Кроме того, выделено подмножество Gi остановочных пунктов движения МТ и подмножество G2 остановочных пунктов движения НТ. Тогда движение НТ будут определять т;д — моменты прибытия i-й ТЕ (1= 1, 2, ...) на ОП g<=Gz. Так как моменты прибытия НТ могут быть заданы для любого ОП из G2 и, следовательно, нарушения движения НТ возможны на любом ОП из G2, то необходимо обеспечить получение информации о нарушениях движения НТ на всех ОП множества G2. Таким образом, при управлении НТ функции контроля и управления движением должны быть совмещены территориально, т. е. осуществляться на каждом остановочном пункте НТ.
Пусть известна маршрутная сеть, охватывающая ОП множества Gi. При этом каждый маршрут определяется последовательностью ОП МТ. Прежде чем составлять расписания движения ТЕ на маршрутах, требуется определить, для каких ОП маршрутов целесообразно задавать плановые моменты прибытия ТЕ. Если определено, па каких ОП маршрута целесообразно осуществлять плановое управление движением ТЕ, то при этом находятся и ОП контроля их движения. Таким образом, для МТ целесообразно территориальное совмещение функций планового управления Ун и контроля. Возникает вопрос, на всех ли ОП маршрута должно осуществляться управление Ун- Можно полагать, что если пассажирам необходимо знать моменты прибытия ТЕ на ОП, то управление Ун целесообразно вводить на всех ОП маршрута. На таких маршрутах пассажиры «группируются» к известным моментам прибытий ТЕ. Данные маршруты характеризуются относительно малой потребностью в поездках, и ТЕ движутся на них с большим интервалом. На маршрутах с относительно большой потребностью в поездках, где ТЕ движутся с небольшим интервалом, пассажиры не ориентируются на плановые моменты прибытия транспортных средств, т. е. можно считать поток пассажиров ОП таких маршрутов случайным, в связи с чем нет необходимости осуществлять управление Уп па каждом ОП. Для данных маршрутов необходимо решить задачи определения рациональных точек планового управления (осуществления контроля) на маршрутах со случайным потоком пассажиров на ОП.
Рассмотрим теперь задачи управления на основе информации о результатах контроля движения транспортных единиц. Управление па основе информации о нарушении /71 заключается в формировании управляющего воздействия (ввод резервной ТЕ).
Формирование щ сопряжено с решением задач по определению величины резерва парка ТЕ, территориальному размещению резервных ТЕ, организации работы водителей резервных ТЕ.
Управление НТ на основе‘информации о нарушениях //2, Н3 состоит в формировании соответствующих управляющих воздействий w2 (отстой) и и3 (оповещение пассажиров).
Кроме того, управление МТ на основе информации о нарушениях Н2, Нз проявляется в виде воздействий и4 (замедление движения) и zz5 (нагон).
Таким образом, определены управляющие воздействия, которые следует формировать па основе информации контроля движения транспортных единиц:
U[ — ввод резервной ТЕ. Воздействие формируется при технической неисправности транспортных единиц;
U2 — «отстой» ТЕ в течение времени отклонения фактического момента прибытия ТЕ от планового. На НТ и МТ (маршруты со случайным потоком пассажиров) исполнение данного управляющего воздействия строго обязательно, на маршрутах со случайным потоком пассажиров исполнение и2 может оказаться неосуществимым из-за ограниченного числа «мест отстоя ТЕ» на ОП;
из — оповещение пассажиров об опоздании ТЕ на НТ и па маршрутах МТ с неслучайным потоком пассажиров (формирование «з на маршрутах со случайным потоком пассажиров нецелесообразно) ;
и4 — уменьшение скорости движения ТЕ на последующем перегоне маршрута со случайным потоком пассажиров (в случае раннего прибытия на ОП предшествующего перегона);
^5 — увеличение скорости движения ТЕ на последующем перегоне маршрута со случайным потоком пассажиров (в случае опоздания прибытия на ОП предшествующего перегона).
Остановимся теперь на некоторых технических аспектах управления на основе информации контроля движения транспортных единиц. Прежде всего отметим, что формирование щ—и$ целесообразно только в момент получения информации о нарушениях П2 и Нз, так как состояние объекта управления при задержке в формировании информации может смениться. Поэтому требуется обеспечить «территориальное совмещение контроля и управления на основе информации контроля». Иными словами, на ОП, имеющих оборудование контроля, необходимо иметь и оборудование управления на основе информации контроля.
Как было отмечено выше, формирование информации Н\ может быть осуществлено посредством телефонной связи. Формирование воздействия щ также может быть осуществлено посредством телефонной связи (диспетчеры УС имеют телефонную связь с местами нахождения резервных ТЕ).
Если обеспечить отображение информации //2 и /73 на информационном табло в виде значений величины отклонений фактических моментов прибытия ТЕ на ОП от плановых (получение информации //2, Н3 по S2i, S22) с указанием признака опоздания пли опережения, то этим будут сформированы управляющие воздействия п2, ^4, ^5’ Остановимся на этом подробнее. Предположим, немарш-рутизированная Ля ТЕ прибыла на /г-й ОП в момент с нарушением /У2. В результате контроля определилась величина
— tW> 0) и отобразилась на информационном табло. Водитель ТЕ воспринимает величину > о как время отстоя, т. е. исполняет и2. На МТ при нарушениях Н2 величины > 0 водители могут воспринимать как и4. При нарушениях Я3 на МТ для водителей будут отображаться величины < о, которые следует воспринимать как и5.
Формирование и3 на (/г + 1)-м ОП маршрута возможно по результатам контроля прибытия НТ на k-и ОП, когда УС определяет, что восстановить нарушенное движение к моменту прибытия ТЕ на (/г+ 1)-й ОП невозможно. Отмстим принципиальную сложность формирования и3 на МТ, так как оно основывается па прогнозе ситуации. Формирование и3 на НТ невозможно, так как нельзя воспользоваться информацией о «предыстории движения НТ» при прогнозировании опоздания ТЕ. Однозначно об опоздании ТЕ на НТ и МТ можно говорить только при получении информации Н\. Учитывая сложность формирования управляющего воздействия и3 на МТ и невозможность его формирования на НТ, следует несколько изменить условия формирования воздействий. Л именно, оповещение пассажиров об опоздании ТЕ надо осуществлять в случае технической неисправности ТЕ.
Рассмотрев технические аспекты формирования управляющих воздействий по результатам контроля движения ТЕ, можно сделать вывод о целесообразности конструктивного совмещения контроля и управления на основе информации контроля, т, е. говорить о единой конструкции оборудования контроля и управления но результатам контроля.
Рассмотрение принципов управления маршрутизированным и ^маршрутизированным транспортом, целей и задач контроля движения транспортных единиц, типов нарушений движения транспортных единиц и способов получения информации о нарушениях, технических и территориальных аспектов контроля и управления позволяет сделать следующие выводы:
плановое управление маршрутизированным транспортом и оперативное немаршрутизированным сводится к заданию моментов прибытия транспортных единиц на остановочные пункты или по адресам;
нарушения заданного движения транспортных единиц проявляются при технической неисправности ТЕ и превышении допустимой величины отклонения фактических моментов прибытия ТЕ от заданных;
применение специального оборудования для получения информации о технической неисправности ТЕ нецелесообразно ввиду его сложности и относительно малой интенсивности потока отказов ТЕ;
выбор способа получения информации о превышении допусти-* мой величины отклонений фактических моментов прибытия ТЕ от заданных возможен при углубленной проработке конструкции устройств получения информации и анализе затрат вычислительных ресурсов системы управления;
территориальное и конструктивное совмещение функций контроля и управления необходимо для немаршрутизированного транспорта и >маршрутов с неслучайным потоком пассажиров. Каждый остановочный пункт должен быть оборудован устройством контроля и управления. ОП маршрутов со случайным потоком пассажиров, на которых целесообразно осуществлять контроль и управление, необходимо определять при решении задачи размещения ОП контроля и управления на маршруте. Решение данной задачи должно предшествовать составлению расписаний движения ТЕ на таких маршрутах.
Классификация задач автоматизированного управления городским пассажирским транспортом и выделение автоматизированных систем диспетчерского управления. Основные задачи автоматизированного управления городским пассажирским транспортом, решение которых непосредственно обеспечивает перевозочный процесс, можно разбить на следующие классы задач: оптимального размещения остановочных пунктов на территории города (класс 1); оптимального построения маршрутной сети (класс 2); установления соответствия между потребностью в поездках и ресурсами удовлетворения потребности (класс 3); планового управления городским пассажирским транспортом (класс 4); оперативного управления городским пассажирским транспортом (класс 5); определения показателей качества удовлетворения потребности в поездках (класс 6); формирования статистических данных о работе городского пассажирского транспорта (класс 7).
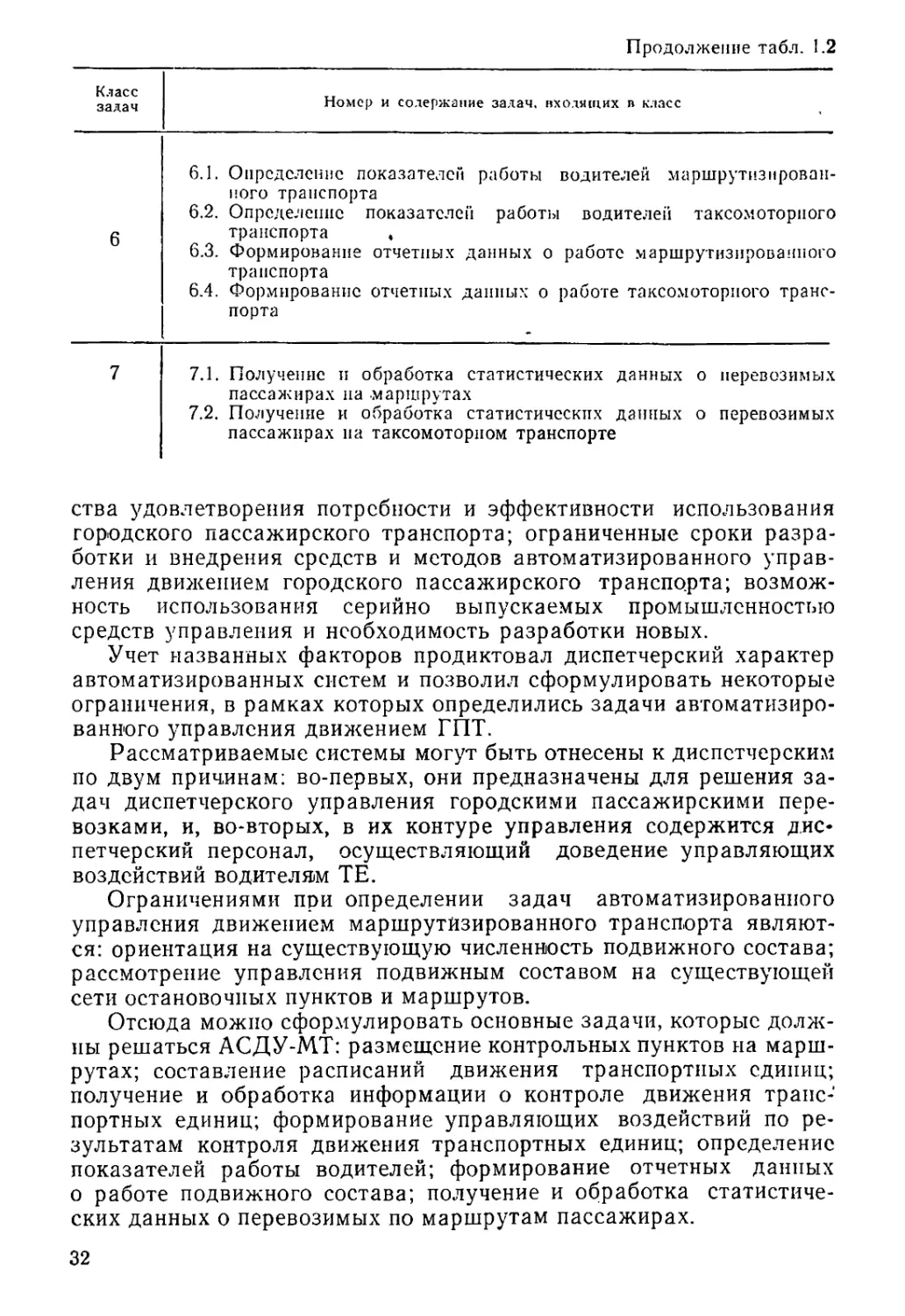
Класс задач по обеспечению работоспособного состояния ресурсов (техническая подготовка, материально-техническое снабжение н т. д.) и планированию их развития выходит за рамки данного рассмотрения. В табл. 1.2 раскрыты названные классы задач.
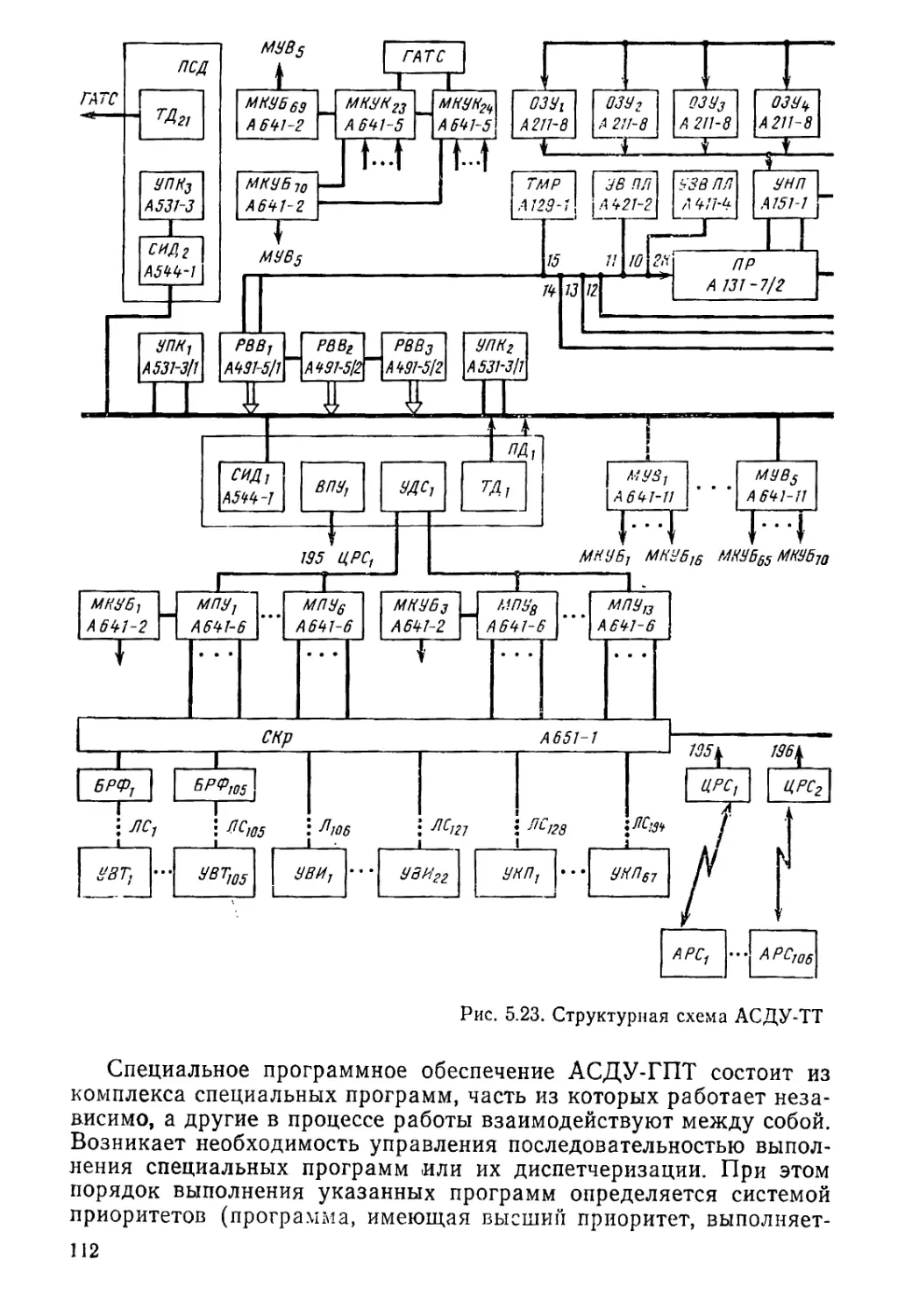
В соответствии с разделением ГПТ на маршрутизированный и нсмаршрутизированный транспорт рассмотрим автоматизированные системы диспетчерского управления движением маршрутизированного (АСДУ-МТ) и таксомоторного (АСДУ-ТТ) транспорта. Учитывая деление маршрутизированного транспорта на автобусный и электрический, будем различать автоматизированные системы диспетчерского управления движением автобусов (АСДУ-А) и электротранспортом (АСДУ-Э). При определении задач, которые должны решать системы, необходимо учитывать следующие факторы: целесообразность включения в первую очередь задач управления движением ГПТ, решение которых обеспечит повышение каче-
Т а б л и ц а 1J.
Класс задач Помер и содержание задач, входящих в класс
1 1.1. Зонирование территории города и определение матрицы корреспонденции между зонами 1.2. Оптимальное размещение остановочных пунктов маршрутизированного транспорта 1.3. Оптимальное размещение остановочных пунктов таксомоторного транспорта
2 2.1. Формирование множества невложенных кратчайших путей 2.2. Определение минимальной провозной способности различных видов ГИТ 2.3. Выделение остановочных пунктов прохождения различных видов ГПТ 2.4. Определение избыточной совокупности маршрутов 2.5. Выбор рациональной сети маршрутов
зг 3.1. Определение изменения потребности в поездках по часам суток на маршрутах 3.2. Определение изменения потребности в поездках на таксомоторном транспорте по часам суток 3.3. Построение идеальных планов удовлетворения потребности в поездках на маршрутах. 3.4. Построение идеального плана удовлетворения суточной потребности в поездках па таксомоторном транспорте 3.5. Построение реальных планов удовлетворения суточной потребности в поездках па маршрутах 3.6. Построение реальных планов удовлетворения суточной потребности в поездках на таксомоторном транспорте
4 4.1. Выделение маршрутов с неслучайным потоком пассажиров 4.2. Размещение контрольных пунктов на маршрутах со случайным потоком пассажиров 4.3. Составление расписаний движения транспортных единиц на маршрутах 4.4. Составление плана выпуска таксомоторного транспорта из транспортных предприятий
5 5.1. Получение и обработка информации о контроле движения транспортных единиц на маршрутах 5.2. Формирование управляющих воздействий по результатам контроля движения транспортных единиц па маршрутах 5.3. Получение и обработка информации о заявках пассажиров на автомобили-такси 5.4. Получение информации о распределении свободных автомобилей-такси на территории города 5.5. Управление движением таксомоторного транспорта для удовлетворения заявок пассажиров 5.6. Контроль движения транспортных единиц на маршрутах 5.7. Контроль исполнения управляющих воздействий водителями автом обилей-такси
Класс задач
Номер и содержание задач, входящих в класс
6.1. Определение показателей работы водителей маршрутизированного транспорта
6.2. Определение показателей работы водителей таксомоторного транспорта ,
6.3. Формирование отчетных данных о работе маршрутизированного транспорта
6.4. Формирование отчетных данных о работе таксомоторного транспорта
7.1. Получение и обработка статистических данных о перевозимых пассажирах на маршрутах
7.2. Получение и обработка статистических данных о перевозимых пассажирах па таксомоторном транспорте
ства удовлетворения потребности и эффективности использования городского пассажирского транспорта; ограниченные сроки разработки и внедрения средств и методов автоматизированного управления движением городского пассажирского транспорта; возможность использования серийно выпускаемых промышленностью средств управления и необходимость разработки новых.
Учет названных факторов продиктовал диспетчерский характер автоматизированных систем и позволил сформулировать некоторые ограничения, в рамках которых определились задачи автоматизированного управления движением ГПТ.
Рассматриваемые системы могут быть отнесены к диспетчерским по двум причинам: во-первых, они предназначены для решения задач диспетчерского управления городскими пассажирскими перевозками, и, во-вторых, в их контуре управления содержится диспетчерский персонал, осуществляющий доведение управляющих воздействий водителям ТЕ.
Ограничениями при определении задач автоматизированного управления движением маршрутизированного транспорта являются: ориентация на существующую численность подвижного состава; рассмотрение управления подвижным составом на существующей сети остановочных пунктов и маршрутов.
Отсюда можно сформулировать основные задачи, которые должны решаться АСДУ-MT: размещение контрольных пунктов на маршрутах; составление расписаний движения транспортных единиц; получение и обработка информации о контроле движения транс-’ портных единиц; формирование управляющих воздействий по результатам контроля движения транспортных единиц; определение показателей работы водителей; формирование отчетных данных о работе подвижного состава; получение и обработка статистических данных о перевозимых по маршрутам пассажирах.
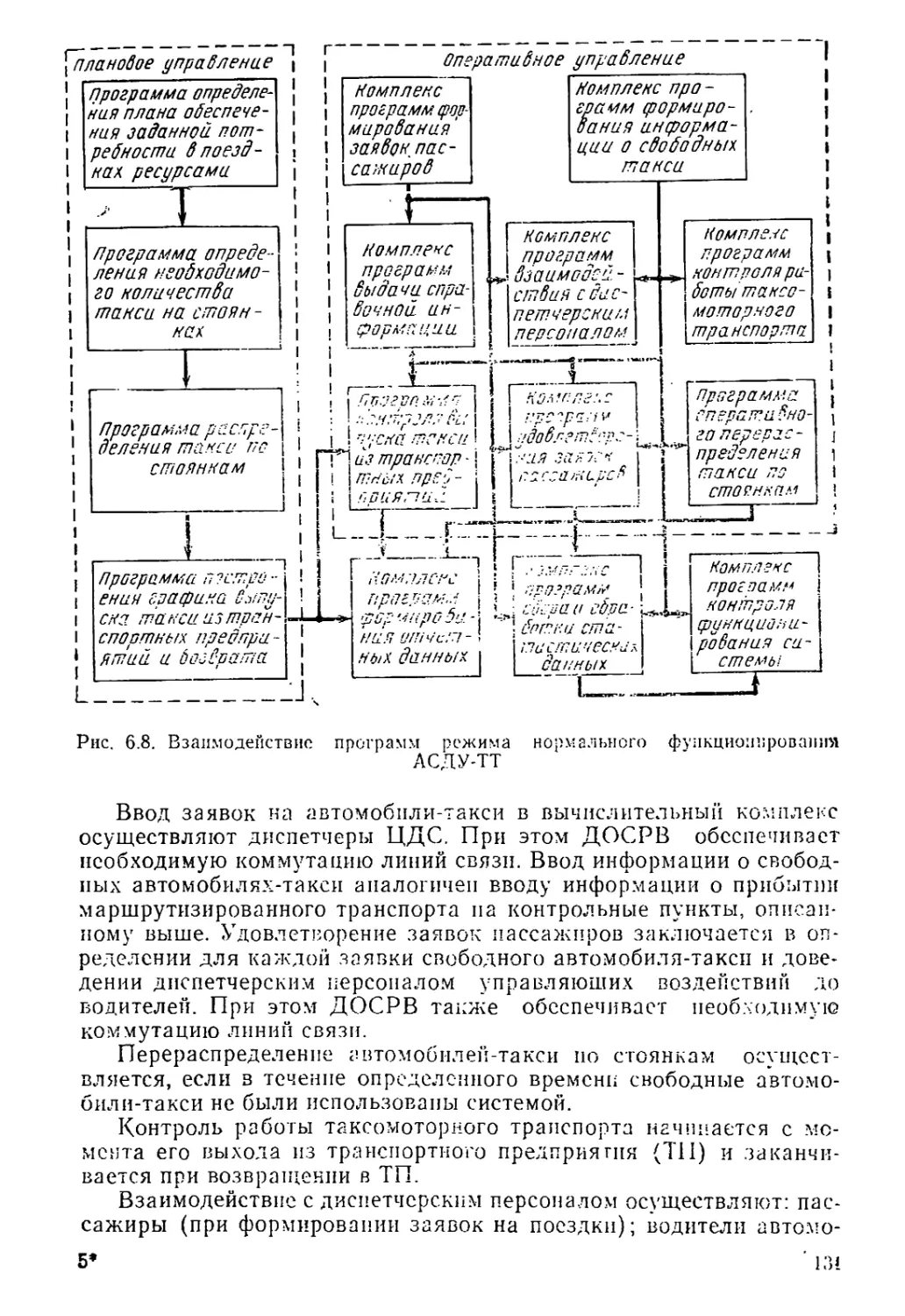
Так как обеспеченность таксомоторным транспортом в городах, где экспериментально внедряются АСДУ-ТТ, оказалась близкой к достаточной, а дополнительное комплектование таксомоторным транспортом не сопряжено с большими трудностями, ограничения по численности таксомоторного транспорта не накладывались. Исходная ориентация на стояночный принцип управления таксомоторным транспортом потребовала оптимального размещения стоянок автомобилей-такси на территории города, так как существующая стояночная сеть развита недостаточно. Поэтому функции АСДУ-ТТ оказались шире, и при разработке системы были решены следующие задачи: зонирование территории города и определение матрицы корреспонденций между зонами; оптимальное размещение стоянок автомобилей-такси; определение изменения потребности в поездках по часам суток; построение идеального плана удовлетворения суточной потребности в поездках на таксомоторном транспорте; построение реальных планов удовлетворения суточной потребности в поездках на таксомоторном транспорте; составление плана выпуска автомобилей-такси из транспортных предприятий; получение и обработка информации о заявках пассажиров на автомобили-такси; получение информации о распределении свободных автомобилей-такси на территории города; управление движением таксомоторного транспорта для удовлетворения заявок пассажиров; контроль исполнения управляющих воздействий водителями автомобилей-такси; определение показателей работы водителей автомобилей-такси; формирование отчетных данных о работе таксомоторного транспорта; получение и обработка статистических данных о количестве перевозимых пассажиров.
ГЛАВА 2
СТАТИСТИЧЕСКИЙ АНАЛИЗ ОБЪЕКТА УПРАВЛЕНИЯ
Объектом управления автоматизированных систем диспетчерского управления движением городского пассажирского транспорта (АСДУ-ГПТ) является городской пассажирский транспорт и потребность в поездках па нем. Статистический анализ объекта управления производится с целью получения необходимых данных для исследования методов управления городским пассажирским транспортом в условиях функционирования АСДУ-ГПТ, определения структуры и технико-экономического обоснования целесообразности создания этих систем.
Существующие методы обследования работы городского пассажирского транспорта [29] не позволяют получить все необходимые исходные данные для создания АСДУ-ГПТ. Поэтому требуется разработка новых методов проведения статистического анализа объекта управления. Специфика функционирования маршрутизированного и таксомоторного транспорта предопределяет различие в методах обследования работы данных видов ГПТ.
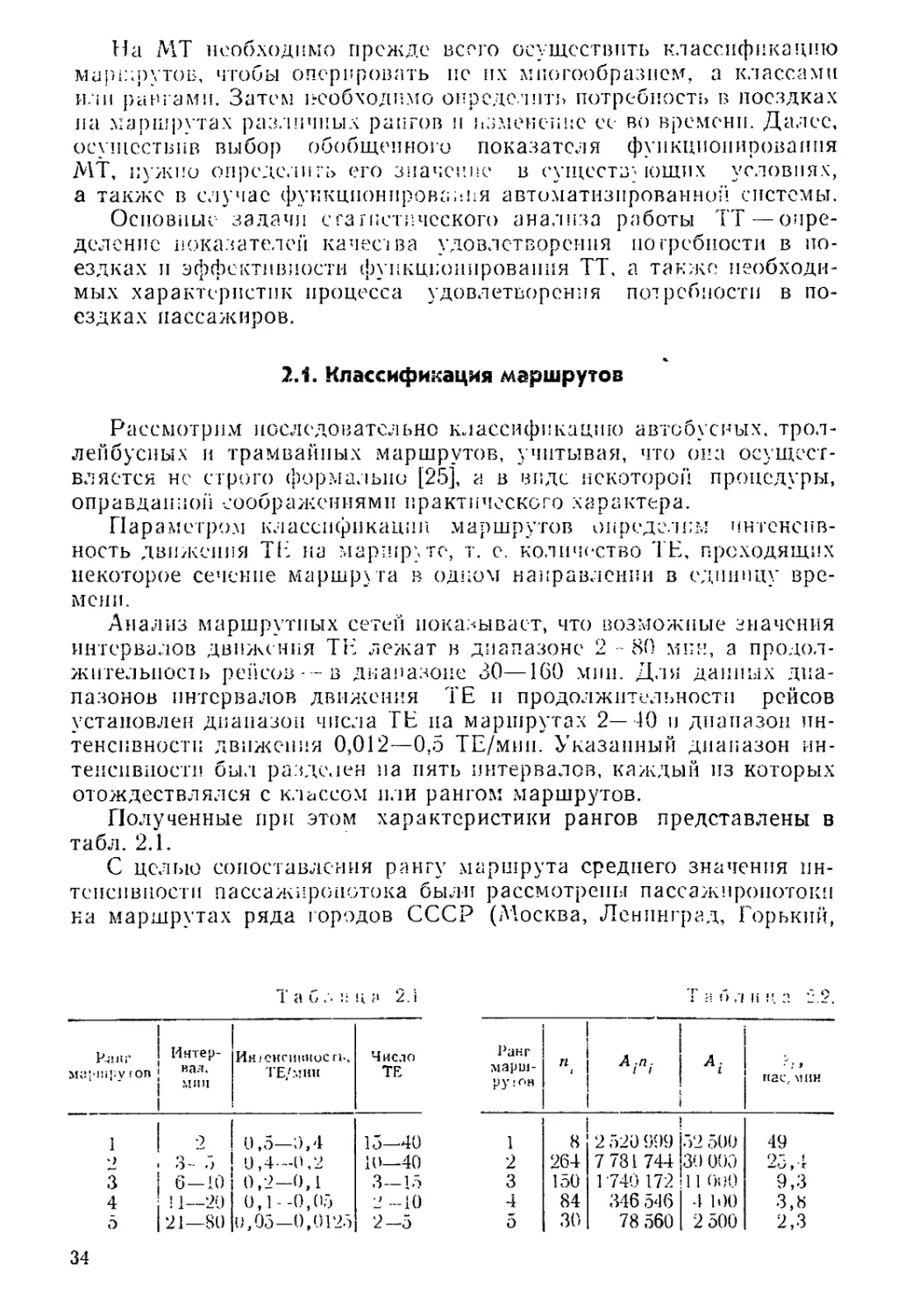
На МТ необходимо прежде всего осуществить классификацию маршрутов, чтобы оперировать не их многообразием, а классами или рангами. Затем необходимо определить потребность в поездках на маршрутах различных рангов и изменение ее во времени. Далее, осуществив выбор обобщенного показателя функционирования МТ, нужно определить его значение в существующих условиях, а также в случае функционирования автоматизированно!’ системы.
Основные задачи сгагнстичсского анализа работы ТТ —определение показателей качества удовлетворения потребности в поездках и эффективности функционирования ТТ, а также необходимых характеристик процесса удовлетворения потребности в поездках пассажиров.
2.1. Классификация маршрутов
Рассмотрим последовательно классификацию автобусных, троллейбусных и трамвайных маршрутов, учитывая, что ока осуществляется нс строго формально [25], а в виде некоторой процедуры, оправданной соображениями практического характера.
Параметром классификации маршрутов определим интенсивность движения ТЕ на маршруте, т. е. количество ТЕ, преходящих некоторое сечение маршрута в одном направлении в единицу времени.
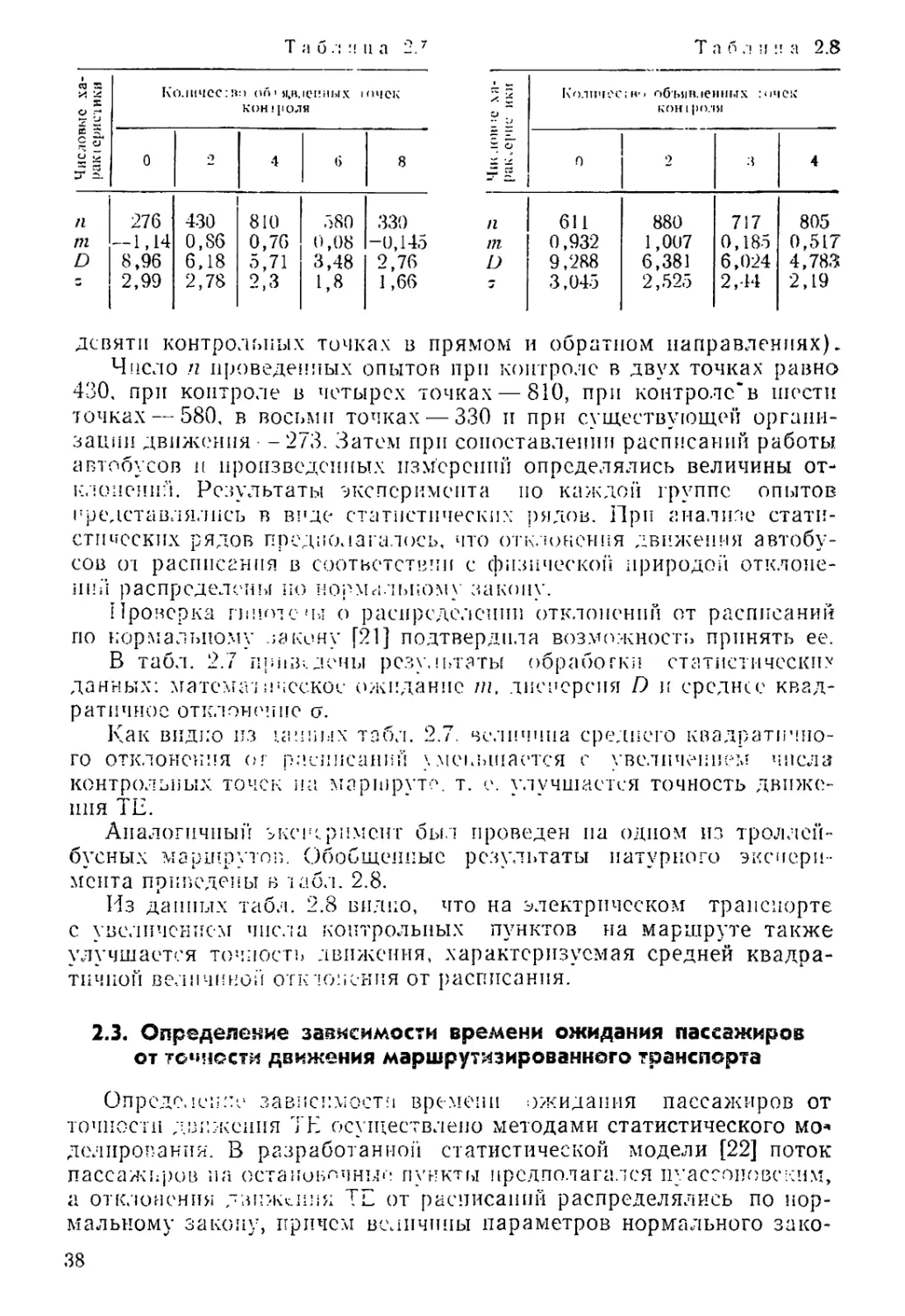
Анализ маршрутных сетей показывает, что возможные значения интервалов движения ТЕ лежат в диапазоне 2 - 80 мин, а продолжительность рейсов--в диапазоне 30—160 мин. Для данных диапазонов интервалов движения ТЕ и продолжительности рейсов установлен диапазон числа ТЕ на маршрутах 2—10 и диапазон интенсивности движения 0,012—0,5 ТЕ/мии. Указанный диапазон интенсивности был разделен па пять интервалов, каждый из которых отождествлялся с классом пли рангом маршрутов.
Полученные при этом характеристики рангов представлены в табл. 2.1.
С целью сопоставления рангу маршрута среднего значения интенсивности пассажиропотока были рассмотрены пассажиропотоки на маршрутах ряда городов СССР (ЛАосква, Ленинград, Горький,
Иан г маршру f ов Интервал, мин Ин.'СИСИВНОС гъ. ТЕ/мни Число ТЕ
1 2 0,5—;),4 15—40
> , । 3-5 0,4—0.2 10—40
3 i i 6—ю 0,2—0,1 3-15
4 ; ! 1—20 0,1—0,05 2 -10
а | 21—80 0,05—0,0125 2-5
Т н 6.1 и ? 2.2.
Ранг марш-РУ ! ОН п Aini Ai пас, мин
1 8 2 520 999 52 500 49
2 264 7 781 744 30 000 25,4
3 150 1740 172 11 ОНО 9,3
4 84 346 546 4 100 3,8
5 30 78 560 2 500 2,3
Куйбышев, Уфа, Омск). Среднее число At перевозимых пассажиров на маршруте Его ранга за сутки определено как
где A ij —- количество пассажиров, перевозимых на /-м маршруте z-ro ранга;
п, — количество маршрутов z-ro раша.
Средняя интенсивность рг- пассажиропотока на Ем ранге марш-* рутов
_ _di-
где 7'1 — среднее время работы автобусов в сутки.
Величины Л,-, рг- приведены в табл. 2.2.
В соответствии с. характеристиками рангов маршрутов были проанализированы данные по маршрутам ряда городов с числом жителей от 850 тыс. до 1500 тыс. населения, в результате чего получены средне': ’вешенные значения интервала, интенсивности движения ТЕ, интенсивности пассажиропотока, числа ТЕ. Эти значения определяли .характеристики типового средневзвешенного представителя ранга маршрутов (табл, 2.3).
В табл. 2.4 в качестве примера приведено распределение маршрутов по рангам ряда городов СССР, где обозначает число маршрутов Его ранга (i=l, 5).
Таблиц;; 2.3
Типовом ма рш-эу г Число ТЕ Интервал, м ин Ишенсив-Hocih движения ТЕ, ТЕ/мин Ишсисив-пость пассажиропотока, нас '*.41 я Типовой маршрут Число ТЕ Интерна.;, M1U1 Интенсивность движения ТЕ. Т!’; мин Интенсивность пас-сажиропо-юка. пас мин
Я1 30 о 0,5 45 *4 । 7 15 0,066 3,8
Л2 27 4 0,25 25,4 i *5 30 0,0335 2,3
Ъ 14 7 0,143 9,3 li j 3
Т а б л и ц а 2.4
Город Количсс1 во маршрутов j Распределение маршрутов ио рангам Расче-.пое число НЕ
тг т 2 ГПз т г
Ташкент 85 0 29 30 25 10 1200
I о: :>кий 66 0 18 *Д*> 16 7 070
*1 'а.шеи 72 в । 9 39 30 12 810
Челябинск 79 0 з 29 30 12 720
1 1срм ь 74 0 18 23 22 И 870
Минск 69 0 20 28 14 7 1100
Ранг маршрутов Характеристики рангов маршрутов
троллейбусных трамвайных Интервал, мин Ин (ОНСИШЮСТЬ движения ТЕ, ТЕ/мин Число ТЕ
1 2—3 0,46—0,35 20—34
1 3—4 0,29—0,19 10—28
2 3—4 0,35-0,24 10—34
2 5-8 0,19—0,11 6—25
3 5—8 0,24—0,13 7—25
3 9—45 0,11—0,023 3—13
4 9—15 0,13—0,07 2—13
Таблица 26
Типовой маршрут ранга Характеристика типового маршрута
Троллейбусны х Трамвайных Число ТЕ Ин гервал, мин Интенсивное (ь движения ТЕ, ТЕ/мин Интенсивность пассажиропотока, вас/мин
Ли 21 2 0,44 45,5
Л21 16 5 0,233 41,7
Л12 20 3 0,308 36,0
Л22 12 7 0,150 28,2
Л1з 12 6 0,154 18,5
Л2з 6 13 0,076 16,0
Ли 7 10 0,106 9,0
Аналогичный анализ маршрутных сетей электротранспорта позволил получить следующие диапазоны изменения интенсивности движения электротранспорта: 0,07—0,459 ТЕ/мин— для троллейбусов; 0,023 —0,290 ТЕ/мин — для трамваев.
Таким образом, диапазоны изменения параметра классификации по рангам маршрутов электротранспорта перекрываются диапазоном изменения параметра классификации по рангам автобусных маршрутов.
Учитывая диапазон изменения параметра классификации по рангам маршрутов электротранспорта и базируясь на классификации автобусных маршрутов, получены для трамвайных маршрутов 3 ранга, а для троллейбусных 4 ранга (табл. 2.5).
Анализ маршрутных сетей электротранспорта городов Ташкента, Свердловска, Челябинска, Баку, Омска и других, заключающийся в разнесении маршрутных сетей по рангам и в определении средневзвешенных значений интервала, интенсивности движения ТЕ, интенсивности пассажиропотока, числа ТЕ, позволил определить следующие характеристики типовых маршрутов рангов (табл. 2.6).
2.2. Определение зависимости времени ожидания пассажиров от точности движения транспортных единиц на маршруте
Автоматизированные системы диспетчерского управления движением маршрутизированного транспорта (ЛСДУ-А и ЛСДУ-Э) осуществляют контроль и управление движением МТ в определенных точках маршрутной сети — контрольных пунктах (КП). При этом местоположение контрольных пунктов на маршрутной сети определяет местоположение «точек» получения информации с объекта управления для осуществления контроля и управления. Данный подход определяется спецификой объекта управления.
Так как автоматизированное управление движением МТ рассматривается на заданной маршрутной сети, то улучшение качества удовлетворения потребности в поездках на МТ будет наблюдаться в основном по показателю /2— среднему времени ожидания пассажира на остановочном пункте. Поэтому t2 может быть принят в качестве обобщенного показателя функционирования АСДУ-МТ.
Оценка указанного показателя была получена исходя из следующих предположений: функционирование АСДУ-МТ направлено на то, чтобы маршрутизированный транспорт точно исполнял расписания движения; так как точкой контроля движения и управления МТ являются КП, то водители МТ при функционировании системы будут стремиться прибыть на КП в установленные расписаниями моменты времени.
Функционирование АСДУ-МТ при данных предположениях анализировалось в следующем натурном эксперименте. По длине одного из маршрутов г. Омска равномерно были распределены девять групп наблюдателей. Расписания движения автобусов на данном маршруте определяли моменты их прибытия па остановочные пункты— места нахождения наблюдателей. В первой группе опытов наблюдатели скрыто от водителя фиксировали отклонения от расписания. Первая группа опытов исследовала существующее положение: водитель выполняет расписание движения в условиях отсутствия объективного контроля. Во второй и последующих группах опытов водителям сообщалось, в каких точках маршрута будет осуществляться контроль движения и передаваться информация об отклонениях от расписания (наблюдатели выполняли функции устройства контрольного пункта системы). Одновременно скрыто от водителей осуществлялся контроль движения во всех других точках и водителям поочередно сообщалось о контроле движения в двух, четырех, восьми точках маршрута.
Движение каждой ТЕ на маршруте можно полагать независимым от движения других ТЕ, так как оно определяется индивидуальным расписанием. Поэтому опытом считалась регистрация отклонения (в минутах) от расписания движения ТЕ на контрольном пункте. Если действительное время прибытия ТЕ на КП больше указанного в расписании, то отклонение считалось отрицательным, если меньше — положительным. При выполнении ТЕ одного рейса проводилось 18 опытов (регистрации отклонений от расписания в
Числовые ха-ракюрисчики Количсс: вп осн ячменных ючек ^2 кон* роля о = Ко.1пчес:и’> объявленных :очск КОН 1 роля
0 о 4 (> 00 Чп< .юн рак ,с|и 0 о 3 4
/1 т D 276 — 1,14 8,96 2,99 430 0,86 6,18 2,78 810 0,76 5,71 2,3 .580 0,08 3,48 1,8 330 п —0,145 т 2,76 D 1,66 Z 611 0,932 9,288 3,045 880 1,007 6,381 2,52.5 717 0,185 6,024 2,44 805 0,517 4,783 2,19
девяти контрольных точках в прямом и обратном направлениях).
Число п проведенных опытов при контроле в двух точках равно 430, при контроле в четырех точках — 810, при контроле*в шести точках — 580, в восьми точках — 330 и при существующей организации движения - 273. Затем при сопоставлении расписаний работы автобусов и произведенных измерений определялись величины отклонений. Результаты эксперимента по каждой группе опытов представлялись в виде статистических рядов. При анализе статистических рядов предполагалось, что отклонения движения автобусов от расписания в соответствии с физической природой отклонений распределены но нормальному закону.
Проверка гшипеч-л о распределении отклонений от расписаний по нормальному закину [21] подтвердила возможность принять ее.
В табл. 2.7 приведены результаты обработки статистических данных: математическое ожидание т, дисперсия D и среднее квадратичное отклонение о.
Как видно из ’.а иных табл. 2.7. величина среднего квадратичного отклонения ог расписаний уменьшается с увеличением числа контрольных точек на маршрута, т. е. улучшается точность движения ТЕ.
Аналогичный эксперимент был проведен па одном из троллей-бусны.х маршрутов. Обобщенные результаты натурного эксперимента приведены в табл. 2.8.
Из данных табл. 2.8 видно, что на электрическом транспорте с увеличением числа контрольных пунктов на маршруте также улучшается точность движения, характеризуемая средней квадратичной величиной отклонения от расписания.
2.3. Определение зависимости времени ожидания пассажиров от точности движения маршрутизированного транспорта
Определение зависимости времени ожидания пассажиров от точности движения ТЕ осуществлено методами статистического мен дслирования. В разработанной статистической модели [22] поток пассажиров на остановочные пункты предполагался пуассоновским, а отклонения дзпжшшя ТЕ от расписаний распределялись по нормальному закону, причем величины параметров нормального зако-38
j;: m и о были взяты из табл. 2.7 и 2.8. По хмодели опредсля-. в:ь зависимость времени ожидания пассажиров от числа конт-•и.шны?; пунктов на маршруте. Моделирование движения ТЕ про-. годилось для типовых маршрутов различных рангов.
Основные моменты функционирования статистической модели .и я определения зависимости времени ожидания пассажиров от ь чности движения ТЕ па маршруте заключались в следующем:
с учеюм планового интервала х прибытия ТЕ на остановочный ;\ккт формировались фактические интервалы т^т + бг, 2, ..., • ди б; — величина отклонения от планового момента прибытия г-й ГЕ, вырабатываемая по нормальному закону с помощью генератора случайных чисел [19];
среднее время ожидания пассажира полагалось равным половине фактического интервала прибытий ТЕ па остановочный пункт;
количество пассажиров, подходящих к остановочному пункту зи z-й фактический интервал, определялось как произведение т,р, где р -- интенсивность пассажиропотока на маршруте;
определялось среднее врстмя ожидания любого пассажира на маршруте в виде частного от деления суммарного времени ожидания всех пассажиров па количество пассажиров, подошедших на остановочный пункт за фактические интервалы движения ТЕ.
Результаты определения среднего времени ожидания пассажиров в зависимости от числа контрольных пунктов на типовых ав-'обуспых маршрутах каждого ранга представлены в табл. 2.9.
3 табл. 2.10 приведены аналогичные данные для троллейбусных маршрутов. В табл. 2.9 и 2.10 ноль точек контроля соответствует моделированию существующего положения.
Если конкретную маршрутную сеть представить числом маршрутов каждого ранга, то, используя результаты табл. 2.9 и 2.10, можно дать оценку среднего времени ожидания пассажиров на маршрутной сети в зависимости от числа контрольных пунктов на ней.
Представляет практический интерес получение стоимостной .щепки времени ожидания пассажиров. По данным работы [43], стоимость одного часа времени ожидания пассажира может быть принята ванной 0,4 руб. Тогда годовая экономия от снижения вре-
Т а б л и ц а 2.9
! - 1 Ч.Г UlpV! i ранга I Интенсивное-.’ь движения ТЕ, ТН .«лк 5.'л •Brhi ;r-: r ..•ни-,; ТЕ. -лнн • . .чек ком i роля
° i 1 1 1 1 4 G 8
Я1 0,5 2 i ,72 1,67 1,66 1,56 1,52
Я> 0,25 3,1'2 2, <37 2,83 2,7 2,56
0,145 7 4.58 4,3 4,14 3,91 3,84
*4 0,07 15 8,17 7,92 7,89 7,76 7,67
0,033 30 15.3 15,18 15,16 15,09 15,04
Типовой маршрут ранга Ин I СПСПНПОС : I, движения ТЕ, ТЕ/мин Плановый ин । ер вал, мин Количсшво ючек киш роля
0 2 3 4
Ец 0,44 2 2,643 2,314 2 Д 45 2,051
0,398 3 3,071 2,774 2,585 2,459
#13 0,154 6 4,292 3,927 3,796 3,699
#14 0,106 10 5,886 5,583 5,492 5,477
мепп ожидания пассажиров на маршруте Его ранга при контроле движения на нем в / = 2, 4, 6, 8 контрольных точек определится как
0,1 (/ (ij) Цц-=-----60----Л365’
где toi~— среднее время ожидания пассажира иа маршруте Лго ранга при отсутствии контроля и управления движением автобусов (ноль контрольных точек в табл. 2.9);
ttj — среднее время ожидания пассажира па маршруте Г-го ранга при контроле и управлении движением автобусов в / контрольных точках;
41 — среднее количество перевозимых пассажиров на маршруте Ьго ранга за сутки.
Величины E1?j приведены в табл. 2.11.
Моделирование функционирования ЛСДУ-МТ на маршрутах различных рангов позволило оценить экономию от автоматизированного контроля и управления движением МТ.
Полученные стоимостные оценки снижения времени ожидания указывают на целесообразность разработки и внедрения ЛСДУ-МТ.
ветствуют утренним и вечерним периоду. Натурный эксперимент
2.4. Определение потребности в поездках на маршрутах с учетом ее изменения по часам суток
Суточный цикл работы транспортных единиц на каждом маршруте можно разбить на пять временных отрезков: два из них соот-часам пик и три — межпиковому по определению потребности в поездках на маршрутах необходимо проводить в течение всего суточного цикла работы транспорта иа маршрутной сети. Затем статистические данные следует группировать но выделенным временным отрезкам относительно постоянной интенсивности пассажиропотока.
Натурный эксперимент заключается в следующем.. На каждом остановочном пункте маршрута
фиксируется количество в,ходящих пассажиров в момент прибытия очередной ТЕ. Пусть за некоторый отрезок времени число прибывших на данный ОП транспортных единиц, работающих иа маршруте, составило /г. Тогда, если а* — число пассажиров, вошедших в х-ю ТЕ, то суммарное число пассажиров, уехавших с данного ОП за этот отрезок времени, составит
k
4k = as* & — 1 » 2, ... .
Аналогичные величины определяются по количеству выходящих пассажиров иа каждом остановочном пункте каждого маршрута, т. е. величины ф&; k = 1, 2, ....
Величины и ф/{ характеризуют потребность в поездках на маршрутах и изменение потребности во времени и используются в качестве исходных данных для составления расписаний движения ТЕ.
2.5. Статистический анализ работы таксомоторного транспорта
Статистический анализ работы таксомоторного транспорта производится с целью определения основных существующих закономерностей формирования потребности в поездках на таксомоторном транспорте (ТТ), показателей качества удовлетворения потребности и эффективности работы ТТ, а также получения характеристик, необходимых для определения структуры ЛСДУ-ТТ.
Потребность в поездках па ТТ характеризуется следующими статистическими параметрами: интенсивностью прибытия пассажиров в зоны и отправления из них; матрицей корреспонденций из зоны в зону; интенсивностью суммарного пассажиропотока по часам суток.
Статистически определяемыми показателями качества удовлетворения потребности в поездках па ТТ являются: среднее по всей стояночной сети время ожидания пассажира; среднее максимальное время ожидания пассажира; вероятность отказа пассажиру в обслуживании.
Эффективность работы ТТ характеризует: коэффициент платного пробега; среднее время простоя автомобиля-такси на стоянке; максимальное время простоя автомобиля-такси на стоянке.
Кроме того, в результате статистического анализа требуется установить: суммарное число пассажиров, перевезенных на ТТ за период обследования со стоянок, с линии и по заказу, а также подошедших на стоянки; суммарное число пассажиров, получивших отказ в обслуживании по каждой стоянке; коэффициент непрямо-лиисйиостп поездок; значение коэффициента наполнения автомобиля-такси в одной поездке; суммарное число автомобилей-такси, прибывших за период обследования иа каждую стоянку и убывших с них без пассажиров; законы распределения поездок пассажиров ио дальности и времени; законы распределения холостых передвижений автомобилей-такси.
Методика проведения натурного эксперимента включает разработку: перечня необходимых организационных мер (расчет количества бланков учетной документации и их подготовку; определение количества люден и организации, из которых будут привлекаться люди для проведения эксперимента; подробный инструктаж водительского состава и учетчиков по правилам заполнения учетных форм); форм заполнения первичным статистическим материалом и указаний по обработке форм.
Первичный статистический материал фор?лпрустся учетчиками на обследуемых стоянках и водительским составом в течение всего времени работы. Водители заполняют форму Ф1, учетчики — формы Ф2 и Ф3; которые включают следующие реквизиты для заноч-пення:
Ф1—номер поездки, помер зоны, адрес, время начала поездки, показания спидометра в этот момент времени, количество пассажиров, севших на стоянке и вне стоянки, номер зоны окончания поездки, адрес, время окончания поездки и показания спидометра в .тот момент времени;
Ф2 номер стоянки, номер автомобиля-такси, время прибытия автомобнля-таксн на стоянку и \ бытия с нее (с пассажиром, без пассажира), время ожидания;
ФЗ — номер стоянки, время прихода пассажира на ст ряпку, гремя его посадки в автомобиль-такси, вр^мя ухода со стоянки в случае отсутствия обслуживания, время ожидания.
По окончании проведения эксперимента у чеп чики брошюру ют формы Ф2 и ФЗ по стоянкам и часам суток и передают их на обработку.
Реквизиты «адрес начала поездки» и «адрес конца поездки» формил Ф1 заполняются водителем в процессе поездки. Реквизит.’/ «номер зоны начала поездки» и «номер зоны конца поездки» заполняются после проведения эксперимента. Для злого каждый адрес начала н конца поездки относится к соответствующей зоне. При этом используют карту-схему города с нанесенными на ней зонами. Таким образом заполняются реквизиты «соны отправления» и «зоны прибытия» дополнительной формы «результаты первичной обработки формы Ф! >>. Реквизиты «количество пассажиров», «час суток» переносятся из формы Ф1 в дополнительную форму, а реквизиты «дальность поездки» и «время поездки» заполняются при вычислении соответствующих данных формы Ф1. Показание таксометра прп прибытии вычисляется из его показаний при отправления и таким образом рассчитывается дальность поездки; время отправления вычитается из времени прибытия, в результате чего познается время поездки. Реквизиты «неоплаченный пробег» и «неоплаченное время» в дополнительной форме заполняются при вычитании соответствующих данных Ф1 предыдущей и последующей поездок (разносы? ?лсжду показаниями таксометра по скончании предыдущей поездки и начале последующей поездки дает неоплаченный пробег, соответствующая разность между временами’—неоплаченное время).
Данные, полученные в результате проведения натурного эксперимента. и статистическая обработка форм Ф1, Ф2 и ФЗ позволяют .определить все необходимые статистические характеристики объекта \правления. Статистические данные форм Ф2, ФЗ обычно обрабатывают вручную. Обработке на ЭВМ подложат лишь данные (нормы «результаты первичной обработки формы Ф1», которые • •рсдваригсльно переносятся на машинный носитель информации — 15-колончатые перфокарты в виде двух макетов. Для удобства машинной обработки в ЭВМ с перфокарт статистические данные переписываются па магнитную лепту. Комплекс программ, разработанных для ЭВМ Минск-22, позволяет получить все необходимые параметры, показатели и характеристики перевозочного процесса на таксомоторном транспорте.
Рассмотрим основные результаты обработки статистических данных работы таксомоторного транспорта городов Москвы, Алма-Аты и Ростова-на-Дону. Прежде всего остановимся на характере оясирсделсипя временных интервалов между пассажирами, последовательно подходящими к стоянке такси. Обследуемые стоячки в jtom случае можно разделить на две группы. К первой относятся с!ОЯ!.к1’, поток пассажиров на которые обладает свойствами ординарности, отсутствия последействия и стационарности [67] в тече,-:’нс определенного отрезка времени. Стоянки в горой группы хар.чк-герпзуются зависимыми моментами подхода .пассажиров к ним (подход «пачками»), чго обусловливается расположенном вблизи стоянок культурно-бытовых учреждений. Выдвинутая гипотеза о показательном законе распределения временных интервалов между последовательным подходом пассажиров на стоянки подтвердилась только для стоянок первой группы.
Далее остановимся на характере распределения поездок пассажиров.по дальности.
При анализе распределения длины поездок пассажиров иа автомобилях-такси в городе Москве [27] оказалось, что эмпирическое распределение весьма близко к логарифмически нормальному:
(Zg.r-wJ?
•J 1 2а ”
Р (х) —----Tzzr • — е х ,
с? V । 2л х
где тх — математическое ожидание .v: х— дальность поездки, км:
Ох — среднее квадратическое отклонение or /их; v = 0,4343 при 0<х<12 и с =-0,4534 при 12<z<27.
Однако эмпирическое распределение поездок пассажиров по дальности в г. Алма-Ате и Ростове-на-Дону не оказалось близким к логарифмически нормальному закону распределения. В табл. 2.12 приведено статистическое распределение поездок пассажиров по дальности г. Ростова-на-Дону.
Общее число обследованных поездок — 4764, среднее значение дальности поездки — 8,406 км, а времени — 16,74 мин.
В табл. 2.13 приведено распределение .длины холостого передвижения автомобилей-такси в г. Ростове-на-Дону (длина холосто* го передвижения — расстояние по сети от точки освобождения автомобиля-такси до точки очередной посадки пассажиров). Средняя длина холостого передвижения составила 2,016 км.
Суточная неравномерность поездок пассажиров г. Алма-Аты и г. Ростова-на-Дону представлена в табл. 2.14.
Табл и ц а 2.12
Ин 1 с рва л дальнее!и поездки, км Часто га попадания и интервал Ин! ер вал дальние 1<и поездки, км Час ю га попадания в iihi ервал И hiервал дальнее1и поездки, 1 кч Час-j оз а иона гания в ин 1срвал Ию ервал дальности поездки, км Часioia попадания в ин(ервал
0—1 0,004 8—9 0,078 15—16 0,022 22—23 0,0048
1—2 0,027 9—10 0,082 16—17 0,015 23—24 0,6019
2—3 0,058 10—11 0,056 17—18 0,013 24—25 0,0019
3-4 0,082 11 — 12 0,054 18-19 0,010 25—26 0,0015
4—5 0,088 12—13 0,038 19—20 0,011 26—27 0,0019
5—6 0,093 13—14 0,027 20—21 0,0057 27—28 0,00066
6—7 0,094 14—15 0,030 21—22 0,0048 28-29 0,00042
7—8 0,089 29-30 0,00042
Таблица 2.13
Ин I ервал далыюс i и холостого передвижения, км Частота попаданий в интервал И нтервал дал ьно ст и холостого передвижения, км Частота помазаний в ин 1ервал
0—1 0,42 5-6 0,34
1—2 0,23 6—7 0,023
2—3 0,12 7—8 0,012
3—4 0,065 8-9 0,008 ,
4-5 0,071 9—10 0,013
Табл и ц а 2.14
Час сугок Частота поездок в городах Час суюк Частота поездок в городах
Алма-Ата Ростов-па-Дону Алма-Aia Росчов-на-Дону
5—6 0,0057 0,02 17—18 0,0802 0,064
6—7 0,0027 0,028 18—19 0,0832 0,056
7—8 0,0008 0,026 19—20 0,0842 0,054
8—9 0,0009 0,034 20—21 0,0883 0,047
9—10 0,0024 0,045 21—22 0,0752 0,037
10—11 0,0027 0,058 22-23 0,0659 0,022
11—12 0,0052 0,073 23—24 0,0732 0,0058
12-13 0,0256 0,076 24-1 0,0477 0,017
13—14 0,0478 0,078 1^2 0,0419 0,0095
14—15 0,0552 0,08 2-3 0,0252 0,0067
15—16 0,0667 0,079 3-4 0,0171 0,0086
16—17 0,0862 0,069 4—5 0,0151 0,0084
Количество пассажиров, перевезенных за сутки обследования работы ТТ г. Алма-Аты, составило 41364, при этом 62% пассажиров было перевезено со стоянок, 32% —с линии и 6% — по заказам.
Таксомоторным транспортом г. Ростова-на-Допу ежесуточно перевозится 4()—45 тыс. пассажиров.
В табл. 2.15 приведены основные показатели качества удовлетворения потребности в поездках на ТТ и эффективности его работы в городах Алма-Ате и Ростове-на-Дону, полученные при обработке ст а тист и ч-ес к и х д ai нi ы х. i
Как видно из данных табл. 2.15, качество удовлетворения потребности в поездках на ТТ низкое как по временным затратам пассажиров на ожидание, так и по вероятности отказа в обслуживании. Эффективность использования ТТ в г. Росговс-на-Дону достаточно высока. Об этом свидетельствуют среднее значение коэффициента платного пробега (0,81) и среднее по всем стоянкам время простоя автомобилей-такси — 4,68 мин, рассчитанное па основании табл. 2.15. Высокая эффективность использования ТТ при низком качестве удовлетворения потребности в поездках указывает, во-первых, иа необходимость существенного увеличения численности таксомоторного парка г. Ростова-на-Дону, во-вторых, — на необходимость автоматизированного управления таксомоторным транспортом.
Численность таксомоторного парка г. Алма-Аты избыточна. На это указывают как значение коэффициента платного пробега, так и временные затраты ТТ на ожидание пассажиров.
Таким образом, для данных городов необходимо обеспечить соответствие между потребностью в поездках на ТТ и ресурсами удовлетворения потребности. Автоматизированное управление процессом удовлетворения потребности в поездках па ТТ должно соответственно обеспечить улучшение качества обслуживания населения таксомоторными перевозками и повышение эффективности использования таксомоторного транспорта.
Таблица 2.15
Города
Показа i ели качесша удов.1е1норения потребное i и в поездках на TT и эффекгивносги работы ТТ Алма-Ата Рос i ов-на-Дону
Среднее врсхмя ожидания пассажира па стоянках, мин Максимальное время ожидания пассажира на стоянках, мин Вероятность отказа в обслуживании пассажира на стоянках Среднее значение коэффициента платного пробега Среднее время простоя автомобиля-такси па стоянках, МИИ Максимальное время простоя автомобиля-такси па стоянках, мин Среднее наполнение автомобиля-такси за одну поездку 2-12 30—60 0—0,588 0,7392 2—10 20—50 2,042 3,2—12,63 12-69 0,03—0,48 0,81 2-8 10—40 1,96
ГЛАВА 3
ИССЛЕДОВАНИЕ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МАРШРУТИЗИРОВАННОГО ТРАНСПОРТА В УСЛОВИЯХ ФУНКЦИОНИРОВАНИЯ АВТОМАТИЗИРОВАННОЙ
СИСТЕМЫ
Управление движением маршрутизированною транспорта (МТ) в условиях функционирования АСДУ-МТ может рассматриваться в виде планового и оперативного.
Как показывают результаты обследования работы МТ, фактический выпуск транспортных единиц отличается от планового на 20- 30%, а на нскоторы?; маршрутах составляет менее 50% планового. Столь значительное отклонение фактического ресурса от планового вызывает в отдельных случая?; нарушение управления движением МТ, и в качестве моры по частичному устранению последствий такого нарушения нужна оперативная корректировка раепп-сзи: и движения. Возможны два подхода к корректировке расписаний: но первому из них осуществляется корректировка исходных расписаний движения с гнетом фактического состояния ресурсов; ио второму -выбор расписаний из заранее сформированной библиотеки расписаний, наиболее соответствующих изменившемуся состоянию ресурсов. В любом случае стоит .задача применения формальной процедуры, реализуемой iia ЭВМ для расчета расписаний движения МТ.
Анализ многочисленны?; методов ir алгоритмов составления расписаний, описанных, в частности, в работах [11, 15, 33], показал невозможность их применения для целей корректировки планового управления движением МТ в условиях функционирования АСДУ-МТ. Поэтому возникла необходимость разработки формальной процедуры, реализуемой на ЭВМ с относительно небольшими затратами машинною времени для оперативной корректировки или формирования библиотеки расписаний.
Таким образом, основными задачами управления в условиях функционирования АСДУ-МТ являются: составление или выбор оперативных расписаний движения; контроль исполнения оперативных расписаний; диспетчерское управление движением МТ при нарушения?; расписания.
3.1. Составление расписаний движения маршрутизированного транспорта
Первым этапом составления расписаний движения МТ является распределение фактически сложившегося накануне очередного суточного цикла числа ТЕ по маршрутам.
Распределение заданного числа транспортных единиц по маршрутам. Известные методы рационального распределения ТЕ ио маршрутам [5, 84] требуют при реализации их на ЭВМ большн?; затрат машинного времени и ие могут быть использованы для целей формирования библиотеки или оперативной корректировки расписаний.
При распредслсинн ТЕ но маршрхтам необходимо соблюдать как интересы транспортных предприятий, так и пассажиров. Компромиссным является распределение ТЕ по k маршрутам, обеспечивающее максимальное значение целевой функции
F У и-со- moi.
где s, — число ТУ. распределяемое на i-i'i маршрут;
—доход транспортного предприятия от перевозок пассажиров на Ум маршруте;
Zi(Si)—cy.MMapiibie потерн от ожидания пассажиров па Ум маршруте в стоимостном выражении.
При этом должно выполняться условие
лгкН i -= 1
где S — оГл'.ее количество ТГ. рис продляемых по маршрутам па данном оч резке времени.
Введем обозначение
//(s/)---сх-(5Z) — z>(S-).
Функция fi(s7-) возрастает с увеличением числа s, ТЕ, распре* деленных на данный маршрут I, так как при этом увеличивается объем перевозок и уменьшается время ожидания пассажиров. Однако можно показать, что вследствие постоянства интенсивности пассажиропотока на рассматриваемом отрезке времени возрастание fi(si) замедляется с ростом st. Полагаем, что
ЛИ/ !- 1)- Л(ъ) i-1).
Таким образом, fi(st) — вогнутая функция.
Математическая постановка задачи распределения заданного числа ТЕ но маршрутам в этом случае состоит в следующем. Требуется наихп вектор
5 = ($1, 52, ... , ск) , максимизирующий функцию
f (5) -= У fi
(3.1)
(3.2)
при ограничениях:
(3.3)
si У $?, Si — целые.
Величины определяют минимальное количество ТЕ, необхо-« днмос для удовлетворения потребности пассажиров в поездках на маршрутах:
?о _ Pjx* ’
ш----
ZZ
где р, — интенсивность пассажиропотока на i-м маршруте в течение рассматриваемого отрезка времени;
х< — время кругорейса на l-m маршруте.
Л,—длина i-ro маршрута;
li —средняя дальность поездки иа i-м маршруте;
и) — усредненная по типам вместимость ПЕ.
Очевидно, что для решения задачи необходимо потребовать выполнение условия k 7-1
В работе [51] показана возможность точного решения задачи (3.1)—(3.3) с помощью следующего алгоритма. Представим величины Хг° в виде вектора
50^(5°, 4, , ?к’).
Па первом шаге определяется индекс То, которому соответствует наибольшая из величин
Д/z (s°) = ft (з° 4-1) - fi (ty. i -V*.
Если максимум достигается при нескольких значениях i, то выбирается любое из них. Строится вектор Si, отличающийся от вектора 5° компонентой с номером iQ:
••• > »*к)-
Предположим, что на /г-м шаге (н>1) получен вектор
5я 4, ... , я").
Тогда на (/г+ 1)-м шаге также находится индекс i0, которому соответствует наибольшая из величин
A// (s?) - fi (s? + 1) - fi (*я), и полагается
5Л+1^5?, ... , s" s? Tl, s? , v ... , s*
1 *0—'I7 Iq /от! 7 к
Процесс продолжается до тех пор, пока не будет получен вектор с суммой компонент, равной S. Для этого необходимо сделать
k
п* s<i шагов.
В результате обработки статистических данных [65] показано, что зависимость с приемлемой точностью может быть аппроксимирована функцией вида
<?.•($/) <0; 0 - ea2z‘$x),
где «1/, «2, — положительные посгопнлыс.
Суммарные потери от ожидания ТЕ на i-м маршруте могут быть оценены в виде
zi (si) - Рр/Т
где р — стоимостная оценка единицы времени ожидания пассажиров;
Т — отрезок времени, на котором рассматривается распределение ТЕ по маршрутам.
Отметим, что данный подход к распределению ТЕ по маршрутам применим, если единицы подвижного состава относительно мало различаются по вместимости. В противном случае необходимо решать задачу рационального распределения заданного количества различных типов ТЕ по маршрутам [64].
Количество рейсов О?, которые совершат Si подвижных единиц на ьм маршруте, определяется как
О/ •-= —.
где T2i — время работы ТЕ на i-м маршруте.
Величины Oi рассчитываются для каждого из выделенных отрезков времени.
На следующем этапе составления расписаний движения МТ определяются моменты времеди начала каждого из Oi рейсов.
Определение моментов времени отправления транспортных единиц в очередной рейс. Постановка данной задачи состоит в следующем. Необходимо определить моменты времени отправления ТЕ с начального контрольного пункта в каждый из Oi рейсов так, чтобы при этом было обеспечено минимальное время ожидания пассажиров.
Пусть за некоторый отрезок времени на i-i\ ОП данного маршрута было k прибытий ТЕ.
Предположим, что —число пассажиров, вошедших в s-ю ТЕ. Тогда суммарное число пассажиров, уехавших с i-ro ОП за данный отрезок времени, составит
1г
= k - 1,2, ... .
5-1
Предположим, что осуществлено аппроксимирование величин и получены зависимости фД/) на отрезке времени формирования потребности в поездках на f-м остановочном пункте. Пусть остановочному пункту начала движения ТЕ на маршруте присвоен первый номер f=l. Обозначим момент начала и окончания форми-
Pirc. 3.1. Суммг.ровшше потри»’ сгч в поездках на ос:;сх пунктах маршрута
роваиня потребности на i-'л остановочном пункте как ри и р2* соответственно. Тогда потребность в поездках будет описываться функцией
/Срп» Ы-
На рис. 3.1 показаны данные функции для произвольного маршрута, имеющего п остановочных пунктов. Момент отправления с Лго остановочного пункта первой ТЕ (первого рейса) обозначен в виде а время проезда между псовым остановочным пунктом и z-м -в виде 6/(Si = 0).
При использовании зависимостей ср,(/) предполагз. . с я, что все пассажиры, подошедшие на осганозочный пункт за время между /-м и р е й са м и, обе л у ж ива юте я. В этом случае заштрихованные площади численно характеризуют суммарное время ожидания пассажиров, обслуженных первым рейсом.
Г! росу м м п р у с м и от р еб и., с т ь
в поездках на всех осин опорных пунктах маршрута с учетом норм времени из пробег ТЕ между первым остановочным пунктом и последующими:
8,).
Если ко времени / = с первого остановочного пункта ТЕ не отправлена в рейс, то время ожидания пассажиров
С
Если за отрезок времени [рц, р2шах], где р2тах — тпахрзг» лродче-___________________________________________________ L
довало пг рейсов в моменты времени ts $=1, т с первого остановочного пункта, то суммарное но всем остановочным пунктам время ожидания пассажиров
l'max т
т Т О(‘^ Гт (/$) т (\у— i) I (Ззшах As)*
Р11
Х-'
Рис. 3.2. Су.млириванне потребности в писст.оьх на отрезке времени относительно :Ь.етоя11нон потребности в поездках
отоезке восмени с постоянной нн-
Аналитическое выражение функции (p(f) довольно сложно. Поэтому па каждой in выраженных диапазонов относительно постоянной пот робности г» поездках (как отменялось ранее, суточный никл работы ТЕ па маршрутах разбивается на пять отрезков) ф(/) полагается кусочно-линейной. Таким образом, потребность в поездках па маршруте за суточный никл работы подвижного состава представляется кусочно-линейной функцией.
В работе Г52] показано, что тиа
1 -ьнвностbio пассажиропотока требованию минимума суммарного времени ожидания пассажиров соответствует совокупность рей-свив выполненная с равными интервалами. Это положение является исходным при решении задачи определения количества рейсов.
На рис. 3.2 показана функция д(/) на выделенном участке относительно постоянной потребности в поездка.-:. -Моменты отправления в очередной рейс обозначены как ... , б., а заштрихованные площади треугольников численно характеризуют суммарное время ожидания пассажиров Д начала очередного s-го рейса:
^5 ^5—1 ----
Введем ограничение, по которому рейс назначается в точках п.-ло.ма кусочно-линейной функции ф(/); количество точек излома полагаем равным q. Тогда задача определения количества рейсов g; на Z-M отрезке относительно постоянной потребности в поездках может быть сформулирована следующим образом. Требуется опре-дслтпь количество рейсов gi i=l, qy чтобы суммарное время ожидания пассажиров но всем рейсам было минимальным. Математическая постановка задачи может быть представлена в виде
-> min
(3.4)
при ограничения?;
(3.5)
где — количество назначенных рейсов на t-м отрезке времени относительно по-(‘-.-янной потребности в поездках.
Так как at-6j/2 = const, то задачу (3.4) с ограничениями (3.5) можно свести к следующей:
<7 а:ь,- g;
—— • max (3.6)
JU - gi + *
1 = 1
при ограничениях:
a 1
gi >0; Z=l, q,}
где gi — целые числа.
Задача (3.6) с ограничениями (3.7) является целочисленной задачей нелинейного программирования. Точный метод ее решения предложен в работе [17]. Однако жесткие временные ограничения на решение (оперативное составление расписаний движения AVI') вызвали необходимость разработки приближенных методов.
Если снять ограничения £г<>0, то для решения задачи (3«6)] можно применить метод неопределенных множителей Лагранжа. При этом вводится вспомогательная функция:
_q -7
+’(°га- Х4 i-1 z-1
где ci — aibij2\ v— множитель Лагранжа; q(2) „f/1)_q
Необходимые условия максимума функции F} дают систему (<7+1) уравнений с неизвестными g\, g2l ..., gq. Результатом ее решения [17] являются величины
__ q
]77O<2) -I- q )zc7—
q
2^
В случае gi<0 используется метод «замораживания» отрицательных компонент, состоящий в многократном применении метода множителей Лагранжа. Таким образом определяется количество рейсов на каждом из участков относительно постоянной потребности в поездках.
С учетом исходного положения о целесообразности равномерного интервала движения ТЕ на маршруте интервал движения ТЕ на l-m участке относительно постоянной потребности в поездках
Л/
*1/ - —•
Затем осуществляется «привязка» первой ТЕ к моменту отправления с начального контрольного пункта (момент (Зи) и формируется последовательность моментов отправления ТЕ в рейс с учетом величин gi, а также норм времени па пробег между остановочными пунктами. В результате определяется множество моментов времени отправления транспортных единиц в рейсы от начального контрольного пункта Go= (gd, ..., gOh) и множество моментов их прибытия на начальный контрольный пункт (окончания рейсов) Gp = = (£рЬ ••• > gph) •
Далее требуется для каждой транспортной единицы, например /-й, определить множество моментов отправления с начального контрольного пункта в рейсы Go1czG0 и множество моментов окончания рейсов GpjczzGp, т. е. «закрепить» рейсы за ТЕ.
Закрепление рейсов за транспортными единицам и. Предположим, что для некоторого маршрута выделено два временных отрезка относительно постоянной потребности в поездках Ti, Т2, на которых целесообразно назначить gi и g2 моментов начала рейсов с остановочного пункта, например g'1=g-2 = 4. Таким образом, для данного маршрута назначено восемь рейсов, т. е» Go= (goi, ..., gos), Gp= (gp}, ..., gP8). На рис. 3.3 отражена времен-
пая связь между элементами данных множеств и показан пример закрепления рейсов. За нервен* 'i рансиортиой единицей закреплен первый, четвертый, седьмой рейсы. Как видно из рис. 3.3, второй рейс з?1 данной '1 Е не мог быть : якреплеи, так как он начинается раньше, чем оканчивается первый рейс (д01>Лр?). Все другие рейсы (третий, четвертый и т. д.) начинаются позже окончания первого и в принципе могли быть закреплены за данной ТЕ в качестве второго репса. Однако при закреплении рейсов за 'ГЕ требуется, чтобы время отстоя ТЕ между рейсами не превышало заданного (полагаемся, что величины Го1, То2 удовлетворяют -.тому условию). Другие немодные условия закрепления рейсов за ТЕ таковы: начало первого рейса утренней смены должно быть в момент е(,ь окончание последнего рейса вечерней смены должно 6ыте> в момент ц ?; время до обеденного перерыва утренней п вечерней смен не должно превышать заданного; продолжительность рабочего времени смен ие должна превышать заданной; должна быть обеспечена заданная продолжительность пересмен и обеденных перерывов.
Результатом решения задачи закрепления О; рейсов за подвижными единицами, распределенными на Ей маршрут (i—1, 2, является определение для каждой из хд ТЕ моментов отправления в очередной рейс, а также моментов начала отстоя во время обеденного перерыва водителей и пересмены [6с]. Тальпы обра юм, задача закрепления даст возможность получить все необходимые данные для составления расписаний движения ТЕ. Далее исходные расписания могут быть детализированы и па их основе осуществляется построение расписаний, в которых определяются и моменты проследования промежуточных остановочных пунктов маршрута.
3.2. Контроль исполнения расписаний маршрутизированным транспортом
В автоматизированных системах диспетчерского управления движением маршрутизированного транспорта получение информации о нарушениях расписаний движения транспортных единиц осуществляется следующим ибразом. На каждом остановочном пункте кон кроля движения МТ устанавливаются устройства контрольного пункта (УКН). С прибытием Ей ТЕ на /с-й контрольный пункт информационный блок, формируемый устройством подвижной единицы (УПЕ), ретранслируется УКП в телефонный канал связи и поступает в вычислительный комплекс системы, который формирует фактический момент прибытия Ей ТЕ в /-м рейсе на k-ii остановочный пункт и осуществляет операции сравнения
/<*)<?*)-б, <<*)>?*>-у с, IJ М/ U’ 1LJ ' 1 ’
r-er-.^—н.кпювый момент прибытия »-й ТЕ в /-л рейсе па k-i\ остановочный пункт;
д — допустимая величия;] о ; избиения от риски.пниi л.льке-ыя на ж..ом маршруте.
Возникает задача определения остановочных пунктов па маршруте, в которых целесообразно осуществлять контроль движения ТЕ, т. с. пунктов, 1де необходимо установить УКП. Предположим, что маршрут проходит через / = 0, /V остановочных пунктов, интенсивность пассажиропотока на которых 7^. Движение ТЕ на маршруте осуществляется с интервалом т. Плановый момент прибытия /г-й ТЕ па Ей остановочный пункт равен
т(/г) . _ т(0) — 1)Тв
Фактический момент прибытия /г-н ТЕ на Ей остановочный пункт равен //Ч При опоздании ТЕ пассажиры дополнитель-
но ожидают прибытия ТЕ в течение времени ^.'И —т**). Если ТЕ прибыла на остановочный пункт раньше планового момента то водитель переводит ее в режим ожидания до момента времени т/Ч При этом дополнительное время ожидания пассажиров считается равным нулю. Тогда суммарное время ожидания пассажиров при нарушениях расписаний движения составит
п^к) — шах (0, 1{к) — х{к}),
где п\к число пассажиров, подходящих к i'-му остановочному пункту (ОП) к моменту времени
Здесь предполагается, что при ТЕ стоит на данном
011 до момента и ожидание пассажиров в этом случае считается равным пулю. Введем переменные:
| 1, если на Z-мОП осуществляется контроль,
I 0 в иротигном случае.
Если на Ем ОП осуществляется контроль движения ТЕ (есть контрольный пункт, оборудованный УКП), то при опоздании ТЕ управляющая система реагирует так, чтобы к (/-1-1)-му ОП опоздание было ликвидировано, т. е. t(.k\ x\k\ для всех i таких, что
При этом суммарные затраты, обусловленные временем ожидания пассажиров н необходимостью установки УКП на контрольных пунктах, составят
/V-I4 К N
Z (Г) 3 V V лр> шах (.), /<Л > - тр>) (1 - у^) + с0 У У1, Juai аал
где Р=1/'о, 4'1, . . . , .'/Л');
р — стоимость единицы времени ожидания пассажиров;
со — затраты на оборудование КП.
В этой формуле величины — являются случайны-
ми. При статистическом анализе работы маршрутизированного транспорта было установлено, что отклонения от расписания распределяются по нормальному закону. Можно предположить, что и
величины также распределены по нормальному закону, при-» чем математическое ожидание nii и среднее квадратичное отклонение Oi нс зависят от k, т. е. зависят только от номера ОП.
Найдем математическое ожидание величины max (О, ^.й)) =
оо
= j xdF {Ь}(х), -----«О ‘ L
где^,<*/х)
•х
— функция распределения случайной величины
Легко показать, что
1 /
О, при х < О,
F (к) (х) при х > й>
где —функция распределения случайной величины
Тогда
(Х-И7.)»
°° 1 °° 9
Г 1 С 2з"
м (») = I xrfFt(ft) w = —Vе ‘ dx-
J Ч <т/у 2л J
Произведя замену х — nii /
<Ч } 2л получим
л (А) =-----\ (mi ч- /а; )/2)е-'2 а/ V^dt -
az j/2n J mi
ГТ
С учетом последнего выражения математическое ожидание суммарных затрат Z(Y) может быть выражено как
АЧ-1 /V Аг
MZ (Г) = Е (Г) - 0 2 2 n‘?> ri (1 “ У!-'} + с° 2
1-1 ft=l х=0
Учитывая, что
к V = kr\i — Тк(, fe=i
математическое ожидание суммарных затрат записывается в виде
Л'4-1 Л’
£ (Г) = $Т V z;r,- (1 - </,._!) Со У Hi -
*-1 М
N N
=?т 2 х«’+1 г-’+1 с1 - +со 2 у‘=
/-0 х-=0
w л-
— (<0 ~ 4-1 г/-ы) У1 “Ь ?Т ^/4-1 rZ4-1 •
М z=0
Тогда задача определения контрольных пунктов на маршруте будет формулироваться следующим образом: требуется найти минимум £(У) при У=(Уо» Уъ • • > Ук\ _
Очевидно, что этот минимум достигается на векторе У=(//о, z/i, ..., yN) таким, что
। 1, при Со — ?ГХ/4-1Г/4-1 < 0;
I О, при Со — ?ГХ/+1г.ч ! >0,
Таким образом, осуществлять контроль на i-м остановочном пункте целесообразно только в том случае если затраты
па дополнительное время ожидания пассажиров pTXi4-iG+i превышают затраты на оборудование данного остановочного пункта с0. Параметры гь ^2, •••, Лу-i характеризуют степень нарушения движения. Чем больше величина r7, t=l, W—1, тем более целесообразен контроль движения ТЕ на Лм остановочном пункте. Отрицательные значения параметров п характеризуют движения ТЕ с опережением расписания. Данные нарушения не вызывают дополнительного времени ожидания пассажиров в случае, если при преждевременном прибытии ТЕ на остановочный пункт водитель останавливает движение ТЕ до наступления планового момента без управления со стороны системы. Организация контроля движения на таких остановочных пунктах нецелесообразна.
3.3. Диспетчерское управление движением маршрутизированного транспорта при нарушениях расписаний
Расписания движения МТ определяют моменты прибытия на контрольные пункты. Диспетчерское управление осуществляется на КП н направлено на частичную либо полную ликвидацию опозданий, ранних прибытий, сходов с липни транспортных единиц, а также внеплановых изменений пассажиропотоков и ухудшения уело-
Bufi движения. Используются следующие диспетчерские управляю-щи.. воздсйс1вкя: нагон в пути, увеличение нормы времени па проезд, сокращение времени отстоя па конечном контрольном пункте (ККП), увеличение времени отстоя па ККП, уменьшение времени крхгорейса, раздвижка интервала, переход па равномерный интервал, укороченный рейс, удлиненный рейс, переключение с маршрута на маршрут, ввод резервной ТЕ,
В табл. 3.1 установлено взаимное соответствие между видами нарушений движения и управляющими воздействиями, которые могут быть направлены на восстановление движения.
Т а б л и ца 3.1
Ви 1ы диспетчерских уирак 1яюишх воздействий Вилы нарушений движения
Опоздание Раннее прибытие Сход линии Увеличение кассажпро-HOIOKGB Ухудшение условий движения
Н;ч 0.1 в пути X — — /— —
Увеличение врем<.•; п приезда — у — — —
Сокращение ьремеии отстоя у — — — —
Увеличение времени огстоя X — — —-
Р а з дв ижк а i и 1 т с рва ли — — X -— —•
Переход на рш ш-’.:грный икюр- — у —
Укороченны!. репс — — — । —
Удлиненный — — — —
Переключение 'i Г. с маршрута — ✓‘ч. у —
на маршрут
Ввод резервной ТЕ — — X —
Как видно из данных табл. 3.1, один и те же нарушения могут устраняться различными управляющими воздействиями. Поэтому необходимо определить условия формирования того или иного управляющего воздействия при различного рода «нарушениях движения-.
А и а л и з у с л о в и й ф о р м и р о в а н и я управ л я то щ и х воздействий с прибытием транспортной е ди и и цы на КП позже ил а нового момента. Предположим, что ТЕ прибыла па /г-й КП в момент времени ifl с опозданием на время Если величина времени опоздания удовлетворяет условию <% = = Y/,;T/i, где \nj—допустимая величина уменьшения планового времени т/17- проезда на участке /г—/ маршрута, то можно формировать \ нравляющее воздействие «нагон на участке k—j маршрута» (j = k±\y k + 2, , N—1, где /V —номер конечного КП). При этом
необходимо осуществлять корректировку плановых моментов про* следования контрольных пунктов:
T-_f + — Vkpkh еслп —Yfe/Тл/) > О,
7 1 в противном случае,
где Xj — плановый момент прибытия на /-й КП.
Если величина времени опоздания такова, что за счет увеличения скорости движения ТЕ обеспечить прибытие ее на конечный КП в плановый момент времени нс представляется возможным, можно осуществлять сокращение времени отстоя ТЕ на конечном КП. При этом необходимым условием формирования данного управляющего воздействия является
У kN <?kN Т- Y^O,
где Yft.v — допустимая величина уменьшения планового времени проезда на участке k — N маршрута (времени ть,у);
у — допустимая величина уменьшения времени /0 отстоя на конечном КП.
Если величина опоздания такова, что за счет увеличения скорости движения и уменьшения времени отстоя ТЕ на конечном КП обеспечить отправление в очередной рейс в плановый момент времени не представляется возможным, допустимо формировать управляющие воздействия типа: «увеличение времени отстоя на КП» (так, чтобы ТЕ была отправлена в очередной рейс в плановый момент); «укороченный рейс» (такой, чтобы ТЕ закончила его к плановому моменту начала очередного рейса); «удлиненный рейс» (такой, чтобы ТЕ, пропустив один обычный рейс, вернулась из удлиненного к плановому моменту начала следующего рейса).
А н а л п з у с л о в и й ф о р м п р о в а и и я у п р а в л я ю ш и х воздействий при раннем прибытии ТЕ на контрольный пункт. Предположим, что ТЕ прибыла на k-i\ КП в момент времени с опережением планового момента прибытия та на величину б/;. Если величина где — допустимая
величина увеличения планового времени т/н- проезда на участке /V—/, то следует формировать управляющее воздействие «увеличение времени проезда». При этом необходимо осуществить корректировку плановых моментов проследования контрольных пунктов.
__ [ Ту (о^ > если (о# - > U,
] I ту в противном случае.
Если величина времени опережения такова, что за счет уменьшения скорости движения ТЕ обеспечить ее прибытие'на конечный КП в плановое время невозможно, то требуется увеличить время отстоя ТЕ па конечном КП. При этом необходимым условием формирования данного управляющего воздействия является
г k rov ~
где — допустимое увеличение I времени т\ Л;
с— тI Имес увеличение
планового времени проезда на \чистке
HI A; OiCAH И:« •.ОВСЧ-ОА! KIT.
Анализ у с л о в и й ф о р .м и р о в а н и я у и р а в л я-ющид воздействий при сходе ТЕ с линии. В данном случае (при управлении движением автобусов -и троллейбусов) можно формировать следующие управляющие воздействия: «уменьшение времени кругорейса», «раздвижка интервала», «переход на
Рис. 3.4. Иллюстрация ввода резервной подвижной единицы при сходе подвижной единицы с маршрута
равномерный интервал», «переключение с маршрута на маршрут» и «ввод резервной ТЕ». Так как последствия схода ТЕ с линии наиболее значимы (увеличиваются временные затраты пассажиров на поездку и уменьшается эффективность использования ресурсов), необходимо получить опенки целесообразности формирования того или иного управляющего воздействия. Показателем эффективности формирования управляющих воздействий при сходе ТЕ с линии можно при
нять суммарное время ожидания пассажиров.
Вначале оценим эффективность применения управляющих воздействий «ввод резервной ТЕ», «раздвижка интервала » и «переход на равномерный интервал». Предположим, что на маршруте выделено пять временных отрезков относительно постоянной интенсивности пассажиропотока (два «пиковых» и три «межпиковых»): to—t], t\—/4—h (рис. 3.4). В момент времени tG зафиксирован сход ТЕ с линии. Работоспособное состояние ТЕ будет восстановлено через время тв, т. е. в момент времени /в. Через время тр в момент времени /р может быть осуществлен ввод резервной ТЕ.
Суммарное время ожидания пассажиров па маршруте за время тв при сходе ТЕ с линии составит
5 J с. — (</сУсУ),
/-1
где — интенсивность пассажиропотока па /-м временном отрезке:
т;(/с)—часть /-го временного отрезка, перекрываемая временем схода ТЕ;
tCj — среднее время ожидания пассажиров на /-м временном отрезке при сходе ТЕ па нем.
Суммарное время ожидания пассажиров на маршруте за время тв при вводе резерва составит
5 5
Л; ~ (М tpj + (тр)
/=1 ;=1
где Tj (/с) —часть /-го временного отрезка, на который работает резервная ТЕ;
— среднее время ожидания пассажира при вводе резервной ТЕ на /-м временном отрезке;
тД/р)—часть /-го временного отрезка, заключенная между моментами схода ТЕ с линии и ввода резервной ТЕ.
Тогда снижение Л7Р суммарного времени ожидания пассажиров за счет ввода резерва при сходе ТЕ с линии определится в виде
Д/р = J с - J р*
Учитывая, что V (Q — (г, т; (Л;) (см. рис. 3.4), получим
следующее выражение для A/p: •
5 5 5
~ АЛ/ (^>) ^с/ — f Gp) А/т/ (^,) (А; — i р;).
j-i /-1 /=1
Проведя аналогичный анализ, можно показать, что снижение Д/п суммарного времени ожидания пассажиров за счет раздвижки интервала при сходе ТЕ с линии определится как
5
АЛ/ (ги) (А/ — ^и?)>
J-1
где Т}(ти) —часть j-ro временного отрезка, на которой интервал движения ТЕ увеличен на отрезок тн;
Ли — среднее время ожидания пассажира на /-м временном отрезке при увеличении интервала движения ТЕ на нем на величину Тп.
Аналогично можно показать, что снижение Д/о суммарного времени ожидания пассажиров за счет перехода на равномерный или оперативный интервал определяется в виде
~ Ъ’Ъ (То) <Jcj toj) > j = l
где tj(to)—часть /-го временного отрезка, на которой движение ТЕ осуществ
ляется с оперативным интервалом т0; жира на /-м временном отрезке при движении ТЕ на нем с оперативным интервалом т0.
Перейдем теперь к оценке эффективности применения управляющего воздействия «переключение ТЕ с маршрута на маршрут». Предположим, что анализируется возможность переключения ТЕ с одного маршрута, интенсивность пассажиропотока на котором ?ч, на другой, где интенсивность пассажиропотока 12 (рис. 3.5) в случае схода ТЕ с первого маршрута в момент времени на время тв. Начало переключения ТЕ со второго маршрута на первый осуществляется в момент времени tn. При этом переключаемая ТЕ прибывает на первый маршрут в момент /п.
Переключение ТЕ с одного маршрута на другой можно
toj — среднее время ожидания пасса-
Рис. 3.5. Иллюстрация переключения подвижной единицы с маршрута на маршрут
отождествлять с вводом резервной ТЕ па первый маршрут. Поэтому снижение Л7П суммарного времени ожидания пассажиров на первом маршруте за счет переключения ТЕ с маршрута на маршрут определится по аналогии с
А^П ~ ЛЛ/ (Л.) (fcj
/“1
где т,(/п) — часть /-го временного отрезка, на котором работает «персключеп-ная» ТЕ;
/Cj — среднее время ожидания пассажира на /-м временном отрезке при сходе на нем ТЕ;
tnj — среднее время ожидания пассажира на /-м временном отрезке при работе «переключенной» на нем ТЕ.
Переключение ТЕ со второго маршрута равносильно сходу с него ТЕ, что вызывает увеличение времени AJi ожидания пассажиров:
5 5
АЛ = ^2jxj ЛЛ/Л/,
у=1 i=l
где Tj(/H)—часть /-го временного отрезка, перекрываемая временем перекзлиония ТЕ (временем т:1);
tn. — среднее время ожидания пассажира па j-v временном отрезке при переключении ТЕ в;: другой маршрут:
тд — продолжительность /-го отрезка времени;
Е. --среднее время ожидания пассажир;: на /-и временном отрезке без переключения ТЕ на другой маршрут.
Перевод ТЕ с маршрута на маршрут будет оправдан только в том случае, если снижение времени ожидания пассажиров на новом маршруте будет больше увеличения времени ожидания пассажиров на прежнем маршруте (в рассматриваемом случае при.Д/п> АЛ). Общее снижение Д7 времени ожидания пассажиров
А' - АЛ-АЛ.
При формировании управляющего воздействия «переключение ТЕ с маршрут^! па маршрут» в случае схода ТЕ с линии необходимо определить такую пару маршрутов, для которой обеспечивается максимум общего снижения времени ожидания пассажирок ---max А/. Выбор наиболее эффективного управляющего воздействия при сходе ТЕ с линии может быть осуществлен при определении максимального снижения Д/с суммарного времени ожидания пас* сажиров:
Д/с — п’.ах (Ал . А'и, Д.' о, max AJ).
Таких? обрезом, п/т: .жж ;ом сходе ТЕ с линии целесообразно формировать такое угщ^.-яющее воздействие, которое обеспечивает максимальное с-ижсняе времени ожидания пассажиров (по сравнению со случаем отсутствия управляющих воздействии).
Л и а л и з у слов и й ф о р м и р о в а и и я у п р а в л я то ш и х в о з д е н ст в п н при у в е л п ч е и и и пасс а ж и р о и о т о-ков. Внеплановое увеличение пассажиропотоков ведет к перенол-
нению ТЕ, к снижению комфортабельности поездок и увеличению временны?; затрат пассажиров. Основными управляющими воздействиями при этом являются «переключение ТЕ с маршрута на маршрут» и «ввод резервной ТЕ». Целесообразно формировать такое управляющее воздействие, которое обеспечит максимальное снижение времени ожидания пассажиров (ио сравнению со случаем отсутствия \ правляющнх воздействий).
Предположим, на части /-го временного отрезка т,(/у) в момент /у произошло внеплановое увеличение интенсивности пассажиропотока на величину AZ,. Тогда увеличение суммарного времени ожидания пассажиров на данном маршруте
5
д;у ” д';т/(7у)7уЛ
/=1
где tyj — среднее время ожидания пассажира на /-м временном отрезке при увеличении на нем пассажиропотока.
Если на данный маршрут переключить ТЕ, то AJy уменьшится на Д7П, т. е. на величину снижения суммарного времени ожидания пассажиров за счет переключения ТЕ с маршрута на маршрут. Если ввести резервную ТЕ, то величина А/у уменьшится на AJP, т. е. на величину снижения суммарного времени ожидания пассажиров за счет ввода резервной ТЕ.
Выбор чина управляющего воздействия при внеплановом увеличении пассажиропотока на маршруте может быть осуществлен при определении максимального уменьшения величины Д/у:
Jv -- ir.a:< {(Д/у — А/ц), (А/у — Л/р);.
В заключение остановимся па выборе управляющего воздействия: при ухудшении условий движения на отдельных маршрутах или маршрутной сети в целом; из-за изменения погодных условий, увеличения интенсивности движения транспорта, ремонтно-строительных работ, заторов и других причин, резко снижающие; скорость маршрутизированного транспорта. В качестве основного управляющего воздействия з этом случае рекомендуется управление «переход на равномерный интервал». С учетом возможной скорости движения ТЕ рассчитывается интервал, соблюдая который ТЕ отправляются с конечных КП.
3.4. Оперативное формирование расписаний движения
Отработка большинства оперативных управляющих воздействий сопряжена с изменением расписаний движения маршрутизированного транспорта, что пппвотит к необходимости оперативно ст роить и корректировать расписания. С згой целью разработаны устройства построения расписания.
Одно из них [53] содержит диски в количестве, соответствующем числу контрольны?; пунктов, на образующей поверхности которых нанесены отметки от 1 до 60 мин. Диски посажены на конические
Рис. 3.G. Внешний вид устройства построения расписаний
втулки, расположенные на оси вместе с пружиной, обеспечивающей сцепление втулок и дисков.
Устройство другой конструкции разработано для АСДУ-А. Внешний вид показан на рис. 3.6. Устройство содержит диск 1, на лицевой поверхности которого нанесены деления от 1 до 60 мин. Диск вращается в круговом вырезе основания 2, по краю которого расположены риски 3, являющиеся продолжением делений, нанесенных на лицевой поверхности диска. На каждой риске имеются гнезда 4, образующие концентрические относительно диска ряды и предназначенные для установки в них фишек 5 с номером КП (фишки с круглой головкой). Риска «Начало репса» 6 является началом отсчета, а расположенные на ней гнезда служат для установки фишек 7 с часом начала рейса (фишки с квадратной головкой). В углах основания имеется ряд гнезд 8 для хранения свободных фишек.
Устройство построения расписания работает следующим образом. Перед отправлением ТЕ в очередной рейс в гнездах 4 с помощью фишек 5 водитель выставляет нормы времени на пробег между соединениями КП. Затем поворотом диска 1 против риски 6 «Начало рейса» устанавливается время выхода в рейс в минутах, 64
а в гнездо на риске 6 вставляется фишка 7 со значением часа выхода в рейс. Против рисок 3, в гнездах которых установлены фишки с номерами КП, устанавливаются деления диска с временем проследования данных КП в минутах. Если рейс не заканчивается в о.чение текущего часа, то фишка 5 с номерами КП, которые ТЕ про ледует в течение следующего часа, вставляются во второй конце:! грический ряд гнезд и т. д. Таким образом, по ряду, в гнезде ко-гор»-<«> стоит фишка 5 с номером КП, определяется час проследования данного КП.
Бодигсль каждой ТЕ с помощью описанного устройства можс: ошржгнвно построить любое расписание, располагая исходной пиф рмацией в виде норм времени на пробег между КП и времени наг '<1 рейса.
ГЛАВА 4
ИССЛЕДОВАНИЕ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТАКСОМОТОРНОГО ТРАНСПОРТА а УСЛОВИЯХ ФУНКЦИОНИРОВАНИЯ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ
В настоящее время таксомоторный транспорт (ТТ) многих го-ро.щв СССР используется весьма эффективно. Однако качество об-сл\ -.иванпя пассажиров таксомоторным транспортом остается еще ид г.дм. Как показывают результаты статистического анализа ра-бок ТТ ряда городов СССР, причиной такого положения является иск -лвстсгвие между потребностью в поездках па ТТ и ресурсами со удовлетворения, а также несовершенство методов и средств уп-рз • :ння таксомоторным транспортом.
: юъектнвпая тенденция к стояночному принципу обслуживания по; ч-бностц в поездках на ТТ создает предпосылки для постановки 11 решения задачи определения рациональной стояночной сети 'ГТ. Другими задачами, котовые должны быть решены в процессе исследования управления ТТ в условиях функционирования ав-.визированной системы, являются определение необходимого кг. юства такси и решение конкретных вопросов планового и опера шного управления ТТ.
4.1. Управление потребностью в поездках на таксомоторном транспорте
Управление потребностью в поездках на ТТ проявляется при рь мешении устройств вызова такси (УВТ) на территории города. Задача размещения УВТ на территории города аналогична задаче р?-мешения остановочных пунктов, описанной при рассмотрении пр У»тем автоматизированного управления городским пассажирским I рвнепорюм.
Предположим, что осуществлено зонирование территории города. известна суммарная интенсивность поездок на такси из Ей зоны ц(. . = 1, Л': и матрица Z\; временных затрат пассажиров в стоимост
ной оценке, связанных с их переходом из зоны i зону /. Введем переменные:
[ 1, если в j-й зоне есть У ВТ;
1 I 0 в противном случае, такие, что
/-1
Тогда средние за отрезок времени Т затраты W(Z) пассажиров на подход к УВТ и па установку и эксплуатацию УВТ составят:
К, АД
W (Z) = c'dzi + min (D'dzi + D (1 —
;=i i=i
где c7j — затраты на установку и эксплуатацию УВТ в J-й зоне;
D — константа, удовлетворяющая условию Z)Д>тах/)г;.
При решении задачи размещения УВТ необходимо учесть такой показатель качества удовлетворения потребности в поездках на ТТ, как максимально допустимое время /i max, затрачиваемое пассажиром на подход к устройству вызова такси. Тогда ограничение на ка* чество обслуживания пассажиров таксомоторным транспортом запишется:
min (PijZj -h D (1 — Zj) <
где P — коэффициент, приводящий временные затраты пассажиров к стоимостному выражению.
Задача размещения УВТ заключается в определении вектора 7=(2Ь ..., 2к,), удовлетворяющего ограничению на качество
обслуживания пассажиров и минимизирующего целевую функцию №(Z). Методы решения задачи изложены в работах [47—49].
4.2. Определение рациональной стояночной сети таксомоторного транспорта
Стояночная сеть таксомоторного транспорта, определяемая общим количеством стоянок ТТ и их размещением па территории города, влияет на качество удовлетворения потребности в поездках и эффективность использования автомобилей-такси. Проанализируем основные компоненты затрат по организации стояночной сети в условиях функционирования автоматизированной системы.
Во-первых, каждая стоянка должна быть оборудована устройствами информационной связи системы с водителями такси и пассажирами. Следовательно, необходимо учесть стоимость устройств, затраты на их монтаж, наладку и эксплуатацию. Обозначим данную компоненту затрат U70. Во-вторых, необходимо учесть затраты, определяемые непроизводительным использованием ТТ, и временные затраты пассажиров. Непроизводительное использование ТТ
характеризуется: холостым пробегом такси от пунктов освобождения до стоянок прибытия (затраты U^i); простоем такси на стоянках в ожидании управляющего воздействия системы, если в момент прибытия ТЕ на стоянку отсутствует потребность в поездках (затраты Ц/2); холостым пробегом такси от стоянки до начального пункта очередной поездки (затраты №3); холостым пробегом такси на стоянку с большей интенсивностью пассажиропотока (затраты №4). Временные затраты пассажиров на ожидание обслуживания обозначим в виде W5.
Затраты Wi зависят от управления движением ТТ после освобождения от очередной поездки, W2— от распределения потребности в поездках и ресурсов удовлетворения потребности на территории города и во времени, И73 и W4— от управления ТТ при превышении максимально допустимого времени простоя на стоянках, IF5 — от обеспеченности таксомоторным транспортом и управления им.
Управление таксомоторным транспортом с позиций размещения стоянок такси характеризуется следующим. Такси, освободившееся в зоне /, прибывает на стоянку в зоне /г, предписанную управляющей системой, и может находиться на ней в ожидании управляющего воздействия в течение времени TQ. Если за время То в одной из зон, находящейся на расстоянии ие больше /о от стоянки в зоне /г, возникает заявка пассажира, то такси направляется для ее удовлетворения. При отсутствии заявок в предписаннор! зоне такси переезжает на более интенсивную стоянку.
Предположим, что территория города разбита на зоны. Обозначим: Мъ — множество номеров всех зон, находящихся па расстоянии, не превосходящем /0, от зоны k\ Vi— средняя скорость движения такси; т—времянахождения системой свободного такси и передачи управляющего воздействия водителю; ср — стоимость километра холостого пробега; гр — стоимость простоя такси в течение единицы времени; р — стоимость единицы времени ожидания пассажира. Среднее значение затрат 1Г2, W3, при организации в k-й зоне стоянки выражаются в виде:
Ск = (1 — е~'1*Т'и) ₽Т + “--- ] (V +
Н* \ V1 ) т)
m^Mk
Рк
где р-'т — интенсивность поездок пассажиров из зоны пи=Мк;
k ^2 Pw Lkm‘—длина холостого пробега пз зоны k в зону т.
При этом, если г?а время TQ в зоны M]t заявки ие поступают, то с вероятностью совершается холостой пробег на сто-
янку с большей интенсивностью пассажиропотока. Тогда среднее 3* 67
значение затрат типа W2— Wk связанных с оборудованием в k-й зоне стоянки,
Чтобы учесть затраты введем переменные величины
I 1, если в Z-й зоне имеется стоянка; ,.
sz - . (4-Ь-
(О в противном случае, такие, что
V / I
5/ > 1. к ‘ • Д
1-1
Тогда расстояние от /-й зоны до ближайшей стоянки составит rnin (Ljjsi - /Д (1 — s/)),
где Lij — расстояние от центра /-й зоны до /-й стоянки (мссгопо.южсние освобождения такси в зоне отождествляемся с центром зоны);
Д1— произвольная константа, удовлегтряющая условию
/И > max Л//;
Lij — расстояние между центрами зон Z, J (Z- 1, А’ьZ =?=/)•
Будем полагать, что для каждого центра зон существует единственная ближайшая стоянка. Введем орункшио
S (£/.;, min(L/;S/ ---41(1—5/)),
которая равна единице тогда, когда ближайшей к зоне / является стоянка в зоне k \Lhj — расстояние между центром j-й зоны и &-й стоянкой). Тогда среднее значение затрат /(.?) типа —W5 за период Т может быть выражено в виде:
Ki кх , 10
V’H V-iIP':i VI „ -а, 7.
. , V---------- Л (и* , сЛ-.< е * -
j-\ /Л /г = 1
-г ^Ljij S (Lkj, min (Л/;5/~ .И (1 — s/))), (4.3}
где ст — стоимость единицы непроизводительного пробега такси;
ц/ — интенсивность поездок пассажиров из / й зоны;
Рц — вероятность поездки пассажира из i-n зоны в /но;
0)т — среднее наполнение такси в поездке.
Исходя из изложенного, задача определения рационально!' стояночной сети таксомоторного транспорта сводится к отысканию вектора
5= ($!, So, .... 5К1).
удовлетворяющего условиям (4.1), (4.2), на котором целевая функция (4.3) принимает минимальное значение. Данная задача -шляется задачей нелинейного программирования с булевыми переменными. Отсутствие эффективных общих методов решения подобные 68
задач обусловило необходимость разработки и исследования специальных алгоритмов. В результате была создана методика опрете-ченпя рациональной стояночной сети в условиях функционирования автоматизированной системы диспетчерского управления движением таксомоторного транспорта.
4.3. Определение необходимого количества такси для удовлетворения потребности в поездках
Потребность в поселках на ТТ определяется суммарным количеством пассажиров, которое необходимо перевезти таксомоторным транспортом в каждый час суток, или интенсивностью пассажиропотока в f-ii час суток i—1.24.
Качество удовлетворения потребности в поездках па ТТ при нахождении необходимой величины ресурсов достаточно характеризовать средним временем ожидания пассажира /2 при ограничениях на максимальное время ожидания бта- п i-eponiиостгю отказа в обслуживании за это время.
Показателями эффективности использован ня таксомоторного транспорта приняты: коэффициент платного пробега, равный отношению платного пробега к полному (платному и холостому); среднее /т и максимальное /т тах время простоя такси на стоянке в ожидании пассажира. Будем считать элементарным циклом работы автомобиля-такси сумму следующих временных отрезков: времени ti платной поездки одного пассажира; времени т2 следования такси па стоянку после освобождения от очередной поездки; времени т3 простоя такси на стоянке в ожидании пассажира; времени т4 перегона такси на другую стоянку, если на данной стоянке время простоя такси превышает максимально допустимое.
Суточный цикл работы автомобиля-такси складывается из элементарных циклов, каждый из которых может содержать и нулевые компоненты. Пусть, например, длительность элементарного цикла равна тц. По окончании очередной поездки вторая поездка может либо продолжаться (посадка второго пассажира на пути следования первого), либо начаться в момент окончания первой. В общем случае элементарный цикл может быть представлен в виде ть либо Т1+Т2, либо тч+тг+тз, либо Т1+т2+гз+т4 и его можно считать случайной величиной.
В результате статистического анализа работы ТТ конкретного города можно получить эмпирическую функцию F(ti) распределения поездок пассажиров по продолжительности времени тц
^(П) - P(t < ?i).
Компонента т3 является случайной величиной, и ее математическое ожидание zn-3 и среднее квадратичное отклонение определяются исходно задаваемыми показателями эффективности работы ТТ:
~ ат3 ^гтах*
Компоненты т2, т4 также являются случайными величинами, значения которых зависят от характеристик стояночной сети и управления ТТ.
Оценим математическое ожидание величины т2. Пусть задано разбиение территории города на зоны с указанием интенсивности прибытий такси в каждую зону Vi, i=l,Ki. Работа ТТ рассматривается в течение некоторого отрезка времени Т. Известна матрица расстояний между центрами зон L = HM; i, /=1, К; lij = 0 при f=/< Точка прибытия такси в зону отождествляется с центром зоны. Оценкой вероятности прибытия такси в Z-ю зону является величина
Стояночная сеть задается величинами ski А=1, К\ :
| 1, если в £-й зоне имеется стоянка; (О в противном случае.
Местоположение стоянки в зоне отождествляется с центром зоны. Тогда расстояние от i-й зоны до ближайшей стоянки составит
Ц = min(Z^A ч- М (1 — $Л)), k
где thi — расстояние от k-й зоны до г-й;
М — произвольная константа, удовлетворяющая условию
М > max Lij.
Оценка математического ожидания случайной величины т2 представляется как
где сч — скорость движения ТТ.
Величина пгХ2 получена в предположении, что такси после освобождения от очередной поездки следует на ближайшую стоянку. Возможны другие варианты управления движением такси после освобождения от очередной поездки, о которых пойдет речь при рассмотрении оперативного управления ТТ. При этом могут быть получены соответствующие оценки математического ожидания случайной величины т2. Оценка математического ожидания случайной величины т4 может быть дана только в результате исследования оперативного управления ТТ. На данном этапе будем полагать, что такая оцека подучена и равна тХе
Таким образом, представляется возможным задать изменение случайной величины т — длительности элементарного цикла работы автомобиля-такси в виде случайной функции
А (т) = Л(/ < т), которая может быть выражена через F^), znTp
Постановка задачи определения необходимого количества такси для удовлетворения заданной потребности в поездках в терминах теории массового обслуживания [45] может быть следующей. На вход Мканальной системы массового обслуживания (СМО) поступает простейший поток заявок с интенсивностью л. Время обслуживания каждым из А каналов распределяется в соответствии с Fi(t). Если вновь поступившая заявка застает свободным хотя бы один канал, она принимается па обслуживание и обслуживается до конца. Если все каналы заняты, заявка в порядке очереди ожидает обслуживания в течение времени /2тах и получает отказ, если в течение /2 max ни один из каналов не освобождается. При данных X, Л(т) ^2 max требуется определить такое количество каналов обслуживания, чтобы вероятность отказа пассажиру в обслуживании, среднее время ожидания пассажира и среднее время простоя такси не превышали заданных значений.
В соответствии с описанной СМО разработана статистическая модель [38] и осуществлены численные эксперименты на ЦВМ. Для условий городов Алма-Аты и Ростова-на-Дону при различных значениях Z было определено необходимое количество автомобилей-такси. Сглаживание экспериментальных данных осуществлено с помощью линейной функции методом наименьших квадратов [34]. Полученная зависимость для г. Алма-Аты имеет вид
Mi =24,96X 4-2,766; Хе[0,3;43], (4.4)
а для г. Ростова-на-Дону
ЛГ2^И,75Х +8,065 Ze [2; 32], (4.5)
где Л имеет размерность
поездок
мин
В табл. 4.1 и 4.2 приведены данные о необходимом количестве такси в каждый час суток для городов Алма-Аты и Ростова-на-Дону, рассчитанные по фрмулам (4.4) и (4.5).
Таблица 4.1
Час суток Номер часа 1 иоездок/мин N. Час суток Номер часа i иоездок/мин Л
5-6 1 1,296 35 17—18 13 31,632 792
6—7 2 2,496 65 18-.19 14 35,136 880
7—8 3 12,288 309 19—20 15 22,896 559
8-9 4 22,944 575 20—21 16 20,112 505
9—10 5 26,496 661 21—22 17 12,096 305
10—11 6 32,016 802 22—23 18 8,208 208
11—12 7 41,370 1036 23-24 19 7,242 184
12—13 8 38,496 964 24-1 20 2,736 71
13—14 9 39,936 1000 1—2 21 1,296 35
14—15 10 40,416 1012 2-3 22 0,384 12
15—16 11 42,384 1061 3—4 23 0,432 14
16—17 12 36,096 904 4-5 24 1,152 32
Табл и ц а 4.2
Ча/ I i«»е]1 МНИ Час-су 1 ок ] I <»MC!> 'i > исез u'мин N .•
5—() 1 8.4 206 17 -18 i 13 26 ,58 633
6—7 2 И.<88 288 18-19 i 14 23,569 562
7-8 3 И), 92 26л i 19 -20 ! i 5 22,go; 5111
8—9 4 I ! 1-1.37 346 1 29-2: : 16 19,5 166
9—1П . 1 18,76 • 19 i 2i— 22 ' 17 15,46 37 i
10-Н () 24,008 - yj I 22- 23 ; 18 9,31. 227
Ы - 12 > 3'4,42 723 ' 23-24 ! 2,13 65
12-13 3!.562 75-) 21 i 2'i 4,8b 122
13- •; 1 1 I 32.528 773 i I -2 ; ' : 3,982 iO 1
14 — 15 33.729 880 1 2 - -.3 : 22 2,781 74
15 -Ш 32,997 7>'4 ! 3 -! ! 2'^ 3 .572 92
16-17 12 | 28.868 687 1 <-•> ; 21 3,48 90
В таГмнна.х в виде /., обозначена интенсивность поездок пассажиров, а в виде Л’; — необходимое количество автомобилей-такси в г-н час суток. Количество ATi перевозимы?; пассажиров в г-н час суток ТТ
_4 -- / : 6'0 о., ,
где (ч7 - ijkjiicc ’..Miu/iiiciific такси б поездке.
Величины .V--(.VpA, Д/Т.) будем в дальнейшем называть идеальным планом удовлетворения потребности в поездках таксомоторным транспортом.
4.4. Исследование планового управления движением таксомоторного транспорта в условиях функционирования автоматизированной системы
.Диализ работы ТТ городов Ллма-Азы, Москвы, Ленинграда, Омска определяет наличие следующих установочных элементов планового управления в существующей технологии его работы: планирование выпуска ТТ из транспортных предприятии (ТП) по часам суток; указание па дорожной сети преимущественных мест прибытия ТТ после выпуска из 111; планирование продолжительности работы ТТ на линии.
Выпуск ТТ и ТП по часам суток основывается на эпизодическом изучении изменения потребности в поездках по часам суток. Как показывает практика, планы выпуска ТТ различных ТП не всегда скоординированы но количеству такси, выпускаемых в различные часы суток’. Координация же данных планов по точкам прибытия такси на дорожной сети практически отсутствует. Кроме того, предписание точек прибытия ТТ носит субъективный характер и не охватывает транспортной сети в целом. Отсутствие объективного контроля исполнения планов выпуска водительским составом фактически исключает плановое управление ТТ.
При определении целен и задач автоматизированного управления движением городского пассажирского транспорта была, осуществлена постановка задачи планирования обеспечения ресурсами городской пассажирской транспортной системы и предложен метод решения ее. Рассмотрим эту задачу для условий работы ТТ.
Предположим, ччо определен идеальный план удовлетворения потребности в поездка?; таксомоторным транспортом
до, , х_ч),
где Л\ — необходимое количество автомобилей-такси в ьп час суток.
С учетом ограничений на использование* ресурсов, которые проявляются в виде конкретной организации труда водителей и фиксированной продолжительности использования автомобилей-такси в суточном цикле работы ГТ, может быть определен реальный план удовлетворения потребности в поездках таксомоторным транспортом:
Я^2, , ^24).
Так, построение плана /? для условий г. Алма-Аты проведено в работах [36, 39]. При этом организация труда водителей ТТ .характеризовалась: началом работы первого выпуска такси из ТП в первый час суток (f=l), (с 6 до 7 ч) и последнего выпуска в восьмой час суток (z = 8), (с 13 до 14 ч); продолжительностью работы на линии в течение 8 ч; одночасовой продолжительностью обеденного перерыва. Автомобили-такси при этом могли использоваться в течение одной смены (односменные) и двух смен (двухсменные). Использование односменных такси в основном предполагалось в дневное время, а двухсменных — в ночное.
В настоящее время в стадии завершения разработка методов решения более общей задачи планирования обеспечения ресурсами городской пассажирской транспортной системы, в которой ограничения на использование ресурсов могут быть самого общего характера (произвольная продолжительность работы водителей и время ее начала, а также любая продолжительность использования средств транспортировки).
Количество такси, которое должно работать в Рй час суток в соответствии с реальным планом, определяется планом выпуска такси ио часам суток:
i ~ Г24, (4.6)
где R/ — количество .такси, которое необходимо выпустить в /-й час выпуска (/= 1, «т);
h —целые числа интервала [гпах(/ — Лт,1); miil(ZZT, i )]
Ьт — количество часов работы водителя в течение суточного цикла.
Выражение (4.6) определяет суммирование на i-м часе суток тех такси, время работы которых в данный час суток еще не окончено. Работа автомобилей-такси предполагается в течение одной
смены водителей. Возможность использования части автомобилей-такси в течение двух смен может быть учтена с помощью коэффициента ej, определяющего уменьшение величин 7?' с учетом работы части автомобилей-такси /-го выпуска в течение двух смен водителей:
= ZjRj.
Следующий этап исследования планового управления ТТ — определение стоянок прибытия автомобилей-такси каждого выпуска, т. е. рациональное распределение между стоянками Rj такси в /-и час выпуска.
Предположим, что на s-io стоянку в /-й час выпуска послано nSj автомобилей-такси. Очередь автомобилей-такси на данной стоянке при этом будет равна
где mSj — длина очереди автомобилей-такси на /-й стоянке до момента прибытия nSj такси.
Среднее время простоя Лго автомобиля-такси в очереди равно
1
*sj
где (От — среднее значение наполнения автомобилей-такси за одну поездку; j — интенсивность пассажиропотока па s-й стоянке в j-й час выпуска.
Как показывают результаты статистического анализа работы таксомоторного транспорта ряда городов, можно принять сот^2. Тогда суммарное среднее время простоя такси на всех стоянках составит
2 + + 2(772^ -1-/?^) \ _
lsj Ksj 'sj /
S=1
П
__ VI (m,,j —j— nsj) (msj + Iisj -г- 1)
n
Задача состоит в определении таких nSj, чтобы ’У’ nSj =- Rj, nsj >0,
S=1
nSj — целые и величина Jj принимала минимальное значение. Поскольку данная задача характерна для любого /, в дальнейшем данный индекс можно опустить. Простыми вычислениями можно преобразовать целевую функцию J к виду п:
п
Так как 1/4Х^ = const, то минимизация J сводится к минимиза-5=1 ции функции п
J' = ^(*s — “J2.
5=1
1 (1т 9 + 1
где xs = —-^2" ns\ us — —----— •
Г ) 7к5
Формулировка задачи определения потребного ресурса на стоянках такси заключается в следующем.
Требуется найти п переменных х2, ..., хп, которые удовлетворяют ограничениям п
2^05*$ = /?» *$>0, 05*5 — целое, (4.7)
5=1
где 05 — У^5» и минимизируют функцию
Поставленная задача является дискретной задачей квадратичного программирования.
Для ее решения предлагается алгоритм, легко реализуемый на ЭВМ и требующий малых затрат машинного времени. При этом используется метод множителей Лагранжа.
Введем функцию Лагранжа п п
L = 2 (Xs — “s)2 — 1
S-l S~1
где л — неизвестный параметр.
Из условия
Э1
—— = 2 (х5 — us) + 5 = 0
dxs
находят относительный экстремум, т. е.
xs = —— +us.
Так как
V ?sxs = R,
ТО 11 п
Из последнего выражения находят
2(Д- V и5з.с)
11
Окончательно оптимальное решение имеет вид
Я - У “sts
(4.8)
Если всех^Д^С, то получено решение исходной задачи без учета ее целочисленности. Если рассматривать ограничения (4.7) и условие х° ^0, то областью допустимых решений является симплекс, задаваемый ограничениями (4.7), (4.8).
Можно показать [14], что каждой точке х на симплексе ставится в соответствие точка х с лучшими значениями целевой функции и Ихмсющая первые I координат нулевые. Тогда исходная задача сводился к аналогичной, но меньшей размерности. Требуется найти такие Хп^0, ЧТОбЫ ФУНКЦИЯ
п
приняла свое наименьшее значение. Для решения этой задачи следует вновь применить метод Лагранжа и проверить, все ли найденные xs, s = l-\-l, ...» п неотрицательны. В противном случае вновь заменяются отрицательные компоненты нулями и осуществляется переход к задаче еще меньшей размерности до тех пор, пока все xs не будут положительными. Очевидно, данный процесс конечен. Что касается целочисленности переменных, то используется обычное округление, не выводящее решение за рамки симплекса.
Для получения nSj в выражение (4.8) введем исходные обозначения. Тогда величины и5)- определятся как
Rj -h V (2/W -и 1)/2
" 4msj ч- 1
2
nsj — ^sj
(4.9)
п
Расчет начинается для / = 1. В соответствии с (4.9) вычисляются значения пл1 (первый шаг). Проверяется, имеются ли отрицательные значения пя1 на первом шаге. Если имеются, осуществляется выделение данных значений и переход ко второму шагу счета. Если nsl^0, осуществляется округление до целых. На втором и по-76
следующих шагах счета отрицательные значения ns\ заменяются нулевыми и для оставшихся положительных значений производится расчет /?Л1 в соответствии с (4.9). Процесс вычислений закапчивается при получении всех Изложенная последовательность
счета повторяется для ; = 2, 3, ..., ит часов выпуска такси из транспортных предприятий.
Далее требуется определить, из каких ТП целесообразно осуществить выпуск такси на стоянки. Пусть для каждого часа выпуска автомобилей-такси из ТП необходимо рассчитать nSjk — количества автомобилей-такси для выпуска на s-ю стоянку в j-n час выпуска из /с-го ТП, которые удовлетворяют ограничениям:
р 1
Х’’ — ----
lisjk -- ы 'Ь
й-i
/ц _ ____ !.
П sjk Kj?;', j — 1 , U Ц k —- 1 , р\
6-1
Целые
и минимизируют целевую функцию « р Г i — LsiSisik*
S-lA’-l
где R\k — ресурс А’-го ТП в /-и час выпуска;
Аял — расстояние от 5-й стоянки до /г-го ТП.
(4.10)
(4.11)
Как следует из вида ограничений (3.10) и целевой функции (4.11;, задача распределения ресурса транспортных предприятий по стоянкам в каждый час выпуска сведена к транспортной задаче открытого типа, для решения которой могут быть использованы известные алгоритмы [20] .
Таким образом, результатом исследования планового управле-
ния таксомоторным транспортом является формальная процедура
для расчета количества такси, которое каждое транспортное предприятие должно выпустить в каждый час на каждую стоянку.
4.5. Исследование оперативного управления движением таксомоторного транспорта в условиях функционирования автоматизированной системы
Исследование оперативного управления движением таксомоторного транспорта осуществлено методом статистического моделирования [16] на примере конкретного объекта управления — таксомоторного транспорта г. Алма-Аты. Все характеристики работы ТТ Алма-Аты, необходимые при исследовании оперативного управления, получены при обработке данных натурного эксперимента по методике, описанной выше. Численные значения показателей и параметров, а также виды характеристик будут раскрываться в дальнейшем по мере необходимости.
Исследование оперативного управления движением таксомотор* ного транспорта состоит в определении множества управляющих воздействий, множества способов их формирования, множества вариантов оперативного управления и вида функции сравнительной оценки вариантов управления.
Анализ существующих методов управления движением ТТ и тенденции их развития позволяет определить следующее множество В оперативных управляющих воздействий
= (61, 62, , в5),
где в1 — формирование ресурса;
в2—поиск ресурса;
вз — перегон автомобиля-такси;
в4 — ожидание автомобиля-такси;
в5 — ожидание пассажира.
Рассматриваются следующие способы формирования управляющих воздействий: 8ц — формирование ресурса на ближайшей стоянке от точки освобождения такси; #i2 — формирование ресурса на предписанной стоянке прибытия такси после освобождения; — формирование ресурса в точке освобождения такси от очередной поездки; e2i — поиск ресурса в момент поступления очередной заявки пассажира в систему; в22— поиск ресурса в течение времени для заявки пассажира, поступившей в систему; в2з — поиск ресурса для т заявок пассажиров, поступивших в систему за время Д/; #31 — осуществление перегона при наличии свободного такси на i-ii стоянке (в гй зоне) и заявки пассажира на j-й стоянке (в j-й зоне), если длина перегона 1ц не превышает допустимой /д; в32— при наличии заявки пассажира на j-й стоянке в момент tnj, если за максимально допустимое время ожидания пассажира /2щах не подойдет очередное такси на j-ю стоянку, следует осуществить перегон такси, находящегося от j-й стоянки на минимальном расстоянии, из числа тех, для которых выполняется неравенство Gnj+^г max) + где tn — момент начала перегона такси с i-й стоянки, а Лд — время перегона автомобиля-такси с t-й стоянки на j-ю; в.^-осуществление группового перегона такси для обслуживания т заявок пассажиров, поступивших в систему за время Д/, по критерию минимального суммарного холостого пробега такси; в34— формирование перегона такси в условиях е31 с подсадкой; в35 — формирование перегона такси в условиях п32 с подсадкой; в36— форми-* роваиие перегона такси в условиях в33 с подсадкой; e4i— перераспределение между ближайшими стоянками тех такси, время ожидания которых превышает максимально допустимое; в42 — ожидание такси до момента получения управляющего воздействия; в43 — перераспределение между предписанными стоянками такси, время ожидания которых превышает максимально допустимое; #51—ожидание обслуживания пассажиром, если в момент поступления заявки пассажира в системе отсутствует ресурс для ее удовлетворения; #52 — ожидание обслуживания группой пассажиров на отрезке времени ДЛ
Элементы вп, в12, 01з определяют формирование ресурса в системе. Стоянка прибытия такси после освобождения может быть выбрана в соответствии с минимальным значением функционала
/ mL + 1 \
min cslQi -г ?---- ,
i \ Л/ )
где сТ — стоимость единицы длины холостого пробега;
(3 — стоимость единицы времени ожидания такси;
/Hi — очередь такси на i-й стоянке;
Л/ — интенсивность пассажиропотока на i-й стоянке;
— расстояние от точки освобождения до i-й стоянки.
Элементы оперативного управления 0ц, 012 характеризуют «стояночный принцип управления» ТТ (ввод информации в систему об освобождении такси возможен только со стоянок, имеющих специальное оборудование). Воздействия 0ц, 0i2 требуют затрат на формирование ресурса (величины cT-lOi). Элемент 013 исключает данные затраты и определяет непрерывный принцип управления (ввод информации в систему об освобождении такси возможен в любой точке дорожной сети посредством специального оборудования). Результаты исследования эффективности воздействия 0ц, 012, 613 лежат в основе выбора принципа управления ТТ.
Элементы 62Ь в22 требуют одиночного обслуживания заявок пассажиров (ресурс находится только для одной заявки), причем в случае 022 обслуживание осуществляется с ожиданием. Элемент 02з введен для группового обслуживания заявок пассажиров. Предполагается, что затраты на перегон такси при одиночном и групповом обслуживании заявок пассажиров не равноценны, и поэтому целесообразно исследование данных элементов.
Элемент 031 характеризует перегон такси при условии анализа ситуации по распределению ресурса в момент поступления заявки пассажира. Элемент 632 предполагает анализ для выяснения, во-первых, не подается ли очередное такси на /-ю стоянку за рекомендуемое время ожидания пассажира, во-вторых, для выбора ближайшего такси из числа тех, которые прибудут на стоянки (в зоны) и могут обслужить данную заявку. Предполагается, что при 032 будут меньшими затратами на перегон.
Элемент 033 рассчитан на групповой перегон такси. Элементы ^34—0зб определяют подсадку в такси на перегоне, которая возможна при следующих условиях. При следовании такси из пункта N в пункт S подсадка происходит в пункте L, если L лежит на пути N—S; пассажир пункта L следует в S; наполнение такси позволяет осуществить подсадку, и время ожидания пассажира в пункте L не превысит допустимого.
Как показывают результаты статистического анализа работы ТТ, наполнение такси в одной поездке примерно равно двум пассажирам, т. е. по наполнению такси используется примерно на 50%. Подсадка за счет увеличения наполнения такси обеспечит уменьшение необходимого ресурса для удовлетворения данной потребности на величину АТ?. С другой стороны, за счет наличия общего участка
проезда двух пассажиров (двух групп пассажиров) подсадка ?бу-слепливает уменьшение платного ппобега на величину АЛ. Т<дда эффективность подсадки за время Т
/ДДУ)- С(Г) AR-cAL(T), (4.12)
'.io С (Г) —затра 1ы на содержание одного такси в течение времени Т.
Элементы t?4b 643 введены для оценки целесообразности поиска», элемент щ?-- «ожидания» водителем такси пассажира. • (пи <*4i такси, прождав в течение 7гшах и не получив управляющего воздействия системы для удовлетворения заявки пассажира, перегоняется на ближайшую стоянку, а при вчз—на стоянку, где время простоя будет минимальным:
min (mi — 1)) а, .
i
При б’42 такси ожидает получения управляющего воздействия.
Элементы 651, б52 введены для рассмотрения соответственно одиночного и группового обслуживания заявок пассажиров.
Варианты оперативного управления движением ГТ зависят от выбранных воздействий У и способов их формирования:
У:_У(в,У1, ... , (1.13)
где /ь z2, /4= 1,3; 0=1,6; 15= 1,2.
Конкретный вариант оперативного управления движением ТТ определяется конкретным набором элементов в^.
В дальнейшем будут рассматриваться нс все возможные варианты оперативного управления, определяемые выражением (4.13), а только некоторые из них, выделяемые процедурой исследования оперативного управления.
Исследование оперативного управления движением ТТ осуществляется в виде целенаправленной процедуры. На первом ее шаге выделяются такие элементы из вщ, которые могут
быть изучены локально, т. е. вне связи с другими элементами. Локализация относится к исследованию эффективности управления движением ТТ с подсадкой и без подсадки при одиночном п i руп-повом обслуживании заявок пассажиров. Таким образом, выделяется следующая совокупность элементов:
в = («23» *33» • * • > *36, *уЭ •
На втором шаге осуществляется выбор исходного варианта оперативного управления движением ТТ, в качестве которого принят У1 как наиболее просто реализуемый системой:
J’i -У(0Ц, в>1, «31, *41)-
Вариант У\ управления является усеченным, так как не содержит элемента типа Яз/,.
В результате исследования Ад можно определить заведомо неэффективные элементы оперативного управления, входящие в него. Выбор очередного варианта оперативного управления на последу-80
нщп.ч шагах процедуры производится исключением неэффективных элементов варианта управления предыдущего шага и введением в него других элементов из совокупности
в-,; , в : . ... , вг: . - •' 1 -1 2 01 Г,
11 с с л е до в а н и е э ф ф е к т и в и о с т и п о д с а д к и. Использование подсадки как элемента оперативного управления таксомоторным транспортом целесообразно, если эффект превысил программные затраты системы по обеспечению управления.
Прежде всего следует определить вероятность Рп возникновения условий подсадки. Опенка PlL в г. Алма-Ате осуществлена с помощью статистического моделирования [37], которое проведено при различных интенсивностях формирования заявок пассажиров 7 на различных отрезках времени г. В результате получена зависимость
- 0,0457 -j- 0,00223277, U ее [10,84].
Если обозначить интенсивность поездок пассажиров в виде А, то интенсивность подсадок определится как
лн ЛРН.
В соответствии с (4.12) для-оценки эффективности подсадки требуется определить лР и Л£. Величину А/? можно найти, используя выражение (4.4):
А?? — (24,96Л — 2,766) • - (21,96 (Л — А„) — 2,766 - : 24,96АИ.
Снижение платного пробега за счет одной подсадки определяется следующим образом:
ДЛ -Z
где I — средняя дальность поездки пассажира;
In — расстояние от точки формирования поездки до пункта подсадки.
В условиях Алма-Аты установлено., что подсадка эффективна только при Д£^2,5 км. Однако сравнительная опенка величины эффекта от подсадки, полученной при этом, и прогнозируемых программных затрат системы по ее обеспечению показала нецелесообразность подсадки при существующей организации работы ТТ. Поэтому элемент оперативного управления движением ТТ «подсадка» и соответственно способы формирования управляющих воздействий Я34, ^35, взб из дальнейшего рассмотрения исключаются.
Исследование эффективности группового и одиночного обслуживания заявок пассажиров. Как указывалось выше, при исследовании оперативного управления таксомоторным транспортом рассматривается одиночное и групповое обслуживание заявок пассажиров. Последовательность их удовлетворения при одиночном обслуживании заключается в следующем: в момент поступления в систему ьй заявки пассажира для нее формируется область поиска ресурса в Di определяется ресурс для удовлетворения f-й заявки пассажира.
Процедура удовлетворения заявок пассажиров при их групповом обслуживании значительно сложнее: рассматривается поступление т заявок в систему за время Л/; определяется ресурс для удовлетворения т заявок пассажиров (/и такси); каждая из т заявок пассажиров и каждое из т такси характеризуется местоположением на территории города (Q точек местоположения заявок пассажиров и точек местоположения такси); взаимное расположение т заявок пассажиров и т такси определяется матрицей расстояний А=||/о11, i = 1,Q, / = 1»ЛА, i=/=jf где t^j — расстояние от f-й точки формирования потребности до j-й точки местонахождения ресурса; перегон т такси для удовлетворения заявок пассажиров определяется решением транспортной задачи, т. с. минимизацией суммарного холостого пробега V V nijlij, где — количество такси, перегоняем
<-1
мых от /-Й до l-Й точки.
Сравнение одиночного и группового обслуживания заявок пассажиров можно осуществить с помощью оценок математического ожидания и дисперсии длины перегона, полученных методом статистического моделирования. Статистические модели должны обеспечить в этом случае: формирование области поиска ресурса Di для удовлетворения f-й заявки пассажира; определение такси в Di для удовлетворения i-й заявки пассажира при одиночном обслуживании; формирование группы заявок пассажиров и такси для удовлетворения их; решение транспортной задачи; определение математического ожидания и дисперсии холостого пробега такси при одиночном m0, Do и групповом mr, Dr обслуживании заявок пассажиров. Результаты моделирования приведены в табл. 4.3
Величины /п0, Do и mr, Dr получены для двух принципов управления ТТ — стояночного (элемент оперативного управления яп) и непрерывного (элемент оперативного управления в13). Количество опытов для опенки эффективности одиночного обслуживания равно 1000 (опытом полагалось обслуживание одной заявки). Эффективность группового обслуживания исследовалась при различных значениях произведения 7Л, где Z — интенсивность заявок пассажиров па ТТ определяется возможными значениями t — затрат времени пассажиров на ожидание ответа по удовлетворению их заявок (t = 0,5; 1,0; 1,5 мин).
Таблица 4.3
Принцип управления Показатели эффективности одиночного и группового удовлетворения заявок пассажиров
mQ, км тг, км
Х/ = 10 X/ = 20 X/=30 м=ю Х/=20 Х/~30
Стояночный 4,362 0,187 3,416 2,754 2,2 0,147 0,071 0,52
Непрерывный 4,482 0,173 3,252 2,871 2,1 0,121 0,092 0,55
Как видно из табл. 4.3, групповое обслуживание эффективнее одиночного как при стояночном, так и при непрерывном принципах управления. При этом групповое обслуживание тем эффективнее, чем больше величина 7Л. Сравнительная численная оценка эффективности одиночного и группового обслуживания по величине затрат на перегон такси (т0, тг) проведена для /=1 мин, л=20 за-явок/мин. При стояночном принципе управления групповое обслуживание обеспечивает снижение затрат на перегон такси на 36,9%, а при непрерывном — на 36%.
Таким образом, одиночное обслуживание заявок пассажиров целесообразно было бы исключить из дальнейшего рассмотрения. Однако групповое обслуживание заявок пассажиров обеспечивает только снижение холостого пробега такси. Оно практически не влияет на другие показатели эффективности использования ТТ и не ухудшает показатели качества удовлетворения потребности в поездках на ТТ, а исследование оперативного управления движением ТТ при групповом обслуживании весьма сложно. В связи с этим рассматриваемые в дальнейшем варианты оперативного управления включают одиночное обслуживание заявок пассажиров. При этом эффективность любого варианта оперативного управления может быть откорректирована с учетом группового обслуживания пересчетом затрат на перегон такси.
Определение целевой функции для сравнительной оценки вариантов оперативного управления движением таксомоторного транспорта. Эта целевая функция ТГ(ТС) имеет следующий вид:
IT(7’c)^D(7’c)-Z(rc),
где D(TC) —значение дохода от удовлетворения данной потребности в передвижениях за Те,
Z(TC) —приведенные эксплуатационные затраты по обеспечению удовлетворения данной потребности в передвижениях;
Тс —время моделирования работы ТТ.
Значение D(TC) определяется в виде
£>(ГС) = £П(ТС) cTi+N(Tc)c^
где Лп(Тс) —суммарная длина платного пробега за Те, г-н — стоимость единицы длины платного пробега;
N(TC) —число посадок в R такси за Те, ст2 — стоимость посадки.
В Z(T'c) включены затраты, зависящие от многих показателей: ст5 Г2.Ц (Тс) ~Т (Тс)!
Z (Тс) ст3Дп (Гс) + ст4 (£„ (Тс) + £х (Гс)) -F аг ~ >
где Стз — заработная плата водителя, приведенная к одному платному
километру;
Ст\ — переменные эксплуатационные расходы, приходящиеся на 1 км пробега;
ат — норма амортизационных отчислений для капитального ремонта на 1000 км пробега;
Ст5 — стоимость одного такси;
^х(Гс) —суммарная длина холостого пробега R такси за Тс.
В целевую функцию входят показатели эффективности использования автомобилей-такси Ап(Гс); АХ(7С). Однако показатели качества обслуживания заявок пассажиров и остальные показатели эффективности использования автомобилей-такси входят в целевую функцию в неявном виде (как ограничения или параметры оптимизации).
Статистические модели для исследования оперативного управления ТТ должны обеспечить определение целевой функции. Период моделирования включает (рис. 4.1) время ввода ресурса в систему 7В, время переходного режима 7’ц, время формирования статистических данных Тс.
На отрезке осуществляется ввод ресурсов в систему с определение?/! числа такси, прибывших на i-ю стоянку, а также моментов прибытия такси. Выбран упрощенный вариант ввода ресурса в систему, который характеризуется: временем ввода, равным 20 минутам; величиной вводимого ресурса, равного 7? такси; распределением R такси по стоянкам пропорционально интенсивности пассажиропотоков на них; равномерным интервалом подхода такси па стоянки.
Данный упрощенный вариант ввода ресурса в систему обусловливает определенное распределение ресурса на стояночной сети, которое может оказать существенное влияние на результаты моделирования.
Исключение влияния исходного распределения ресурса на стояночной сети осуществляется введением времени Тп переходного режима функционирования статистических моделей. Величина Тп выбрана такой, чтобы в течение его каждое такси совершило хотя бы одну поездку. Величина Тп равна 30 мин при условии, что Тп составляет часть Ти.
На отрезке Тс происходит накопление статистических данных для получения численного значения целевой функции. Отрезок времени Тс состоит из элементарных отрезков tj, Тг, ...» тп, на каждом .из которых происходит накопление статистических данных для получения численного значения целевой функции.
Сравнительная оценка рассматриваемых вариантов оперативного управления осуществляется по среднему значению целевой функции.
k w 1 W ------ Wk,
n £=1
где Wk —значение целевой функции на временном отрезке тд. 84
Исследование исходного .варианта оперативного управления движением таксомоторного транспорта. Исходным вариантом У1 оперативного управления движением таксомоторного транспорта является
3 1 — (6 ] 1 » «21 , «'J , <?41) »
который характеризуется: 0ц— формированием ресурса на ближайшей стоянке от точки освобождения; 02i— поиском ресурса в момент поступления очередной заявки пассажира в систему; 03] — формированием перегона при наличии свободного такси на i-ii стоянке и заявки пассажира на /-й стоянке, если длина перегона не превышает допустимой; 041 — перераспределением между ближайшими стоянками тех такси, время ожидания которых превышает максимально допустимое.
Цель исследования У1 — определение целесообразности включения в оперативное управление элементов в21, ^41-
Результаты исследования У1 представлены в табл. 4.4.
В табл. 4.4 в виде t2, /2тах обозначены: среднее и максимальное время ожидания пассажира; Ро— вероятность отказа в обслуживании пассажиру; tT -и tr max— среднее и максимальное время простоя такси на стоянке; Ли— среднее значение коэффициента платного пробега.
Как видно из данных табл. 4.4, среднее значение целевой функции отрицательно, т. е. данный вариант оперативного управления неэффективен. Низкое значение показателя /<п указывает на то, что У] обеспечивает значительные затраты па холостой пробег такси. Можно предположить, что данные затраты определяет элемент 041. Частичное подтверждение этому — увеличение /Сп при возрастании /Ттах До 10 мин. С целью проверки данного предположения элемент в4! заменяется на 042 в очередном варианте оперативного управления.
Поиск ресурса в момент поступления заявки на обслуживание #21 обусловливает высокую вероятность отказа. Увеличение времени ожидания такси незначительно сказывается на величине PG. С целью уменьшения величины PQ элемент в2\ исключается из дальнейшего рассмотрения, а вместо него вводится элемент в22. Элемент 022 указывает на необходимость введения
Таблица 4.1.
Исходные параметры Значение нелевой функции W, руб. Показатели качества обслуживания заявок пассажиров Показа iели эффективности использования ТТ
Тд. мин л мин *2 max । мин Ро t.f, мин шах ♦ мин «и
5 19 -30,0 6,76 10 0,376 3,97 5 0,2711
5 36 — 18,7 6,95 10 0,277 6,78 10 0,3284
Таким образом, очередной вариант У2 оперативного управления определяется заменой e4j на и в21 на в22*
У2=-У(вц, в2<2, в.и, в io, в51).
Сравнительная оценка эффективности варнак тов оперативного управления движением таксомоторного транспорта. Целью исследования варианта оперативного управления У2 является определение целесообразности включения в оперативное управление элементов в22, в42. Результаты исследования У2 представлены в табл. 4.5.
Как видно из данных табл. 4.5, введение в оперативное управление элемента в22 обеспечивает Ро = О. При этом среднее время поиска ресурса /р равно 1,73 мин. Введение в оперативное управление элемента в42 значительно увеличивает эффективность работы ТТ. Кроме того, введение элементов в22, в42 обеспечивает следующие показатели удовлетворения потребности в поездках на ТТ: среднее время с момента прихода на стоянку /п До момента вызова такси /Р+/П) равное 5,22 мин; максимальное время ожидания пассажира, равное 15 мин; безотказное обслуживание заявок пассажиров при достаточной величине ресурсов удовлетворения потребности в поездках на ТТ. При этом эффективность использования ТТ характеризуется коэффициентом платного пробега, равным 0,642, и средним временем простоя такси на стоянке, равным 1,79 мин. Таким образом, включение в оперативное управление элементов в22, ^42 целесообразно.
Дальнейшему анализу подлежит вариант оперативного управления Уз, основанный на непрерывном принципе управления ТТ:
Уз~-У(б13» ^22» *42> «51).
Исследование У3 осуществляется с целью получения сравнительной оценки стояночного и непрерывного принципов управления таксомоторным транспортом. В табл. 4.6 приведены результаты моделирования оперативного управления движением ТТ в соответствии с вариантом У3.
Так как при непрерывном принципе управления движением таксомоторного транспорта отсутствуют затраты на следование такси в точку формирования заявок, то эффективность У3 выше, чем У2. Однако окончательное решение по выбору принципа управления можно принять только при учете затрат на реализацию управления
Таблица 4.5
Исходные параметры Значение целевой функции U7, руб. Показатели качества обслуживания заявок пассажиров Показатели эффективности использования ТТ
МИИ /р, мин п /о, МИИ ^2 тах> мин Ро t , мин
5 1,73 13 22,89 3,49 15 0 1,79 0,612
Т а б л и ц а 4.6
Исходные параметры Значение целевой функции W, руб. Показатели качества обслуживания заявок пассажиров Показатели эффективности использования ТТ
мин t , мин Р п /8) мин *2 max, мин Ро t , мин А’ и
5 2,79 13 24,73 1,601 15 0 0,178 0,665
в соответствии со стояночным и непрерывным принципами. Поэтому в дальнейшем рассматриваются варианты оперативного управления для стояночного и непрерывного принципов.
При моделировании вариантов оперативного управления У2 и У3 показатель использования автомобилей-такси /ттах не определялся. Чтобы обеспечить /Ттах^15 мин, необходимо включить элемент оперативного управления в43, т. е. рассмотреть следующие варианты У4 и У5 оперативного управления:
У4 = У(бц, 622, 031, 043» 051),
У5 = ^(013> 022» 0.31» 043, 051)-
При моделировании вариантов оперативного управления У4 и У5 получены результаты, аналогичные результатам моделирования вариантов У2 и У3 соответственно, так как при trmax=15 мин не наблюдались ситуации по перераспределению такси. Учитывая, что в реальных условиях управления движением таксомоторного транспорта возможны значительные колебания как потребности в поездках, так и ресурсов ее удовлетворения, которые могут привести к превышению допустимой величины /ттах (скоплению такси на отдельных стоянках), элемент в43 необходимо ввести в оперативное управление.
Очередные варианты Уб и У7 оперативного управления определяются исходя из замены элемента в31 на в32, т. е. при изменении условий формирования перегона.
Результаты моделирования управления движением таксомоторного транспорта в соответствии с вариантами Уб, У7 представлены в табл. 4.7.
Таблица 4.7
Вариант оперативного управления Исходные параметры Показатели качества обслуживания заявок пассажиров Показатели эффективности использования ТТ
х*> мин мин л Wf руб. мин *2 птах, мин *т шах, мин t?, мин
5 0 13 31,79 5,39 15 15 4,16 0,805
У7 5 0 13 31,8 6,88 15 15 5,8 0,805
Как видно из данных табл. 4.7, введение в оперативное уире.пенис элемента 6’32 существенно повышает эффективность работы ТТ: Полученные значения целевой функции при У(3 и У; примерно равны вследствие того, что при У7 наблюдалось больше ситуаций ио перераспределению такси, время ожидания которых превышает 15 мин. Этим же объясняется увеличение /т при У? до 5.8 дин. Среднее время ожидания пассажира при У7 возросло за счет то/о, что удовлетворение заявок пассажиров происходило в основ длм без перегона такси из других зон.
Очередной вариант оперативного управления определяется при замене на в12 и рассматривается в виде модификации У6':
(«12, «22» «32» «43» «51)-
Результаты моделирования управления движением ТТ в соответствии с вариантом У^ приведены в табл. 4.8.
Как видно из данных табл. 4.7, 4.8, эффективность У1 ниже, чем Уб. Следовательно, формирование ресурса в соответствии с в12 нецелесообразно.
Другие варианты оперативного управления движением ТТ принимаются при рассмотрении группового обслуживания заявок пассажиров для стояночного и непрерывного принципов. Как было показано выше, групповое обслуживание заявок пассажиров уменьшает холостой пробег такси для стояночного принципа примерно на 30,9% и для непрерывного — на 36%. Уменьшение холостого пробега на 36,9% для стояночного принципа управления обеспечивает увеличение значения целевой функции варианта У6 до 34,2,3 и коэффициента платного пробега до 0,87. Аналогично уменьшение холостого пробега на 36% для непрерывного принципа увеличивает значение целевой функции варианта У7 до 31.21 и коэффициента платного пробега до 0,869.
Использование результатов исследования управления движением таксомоторного транспорта д л я определения структуры авто м а т и з и р о в а и и о й системы. Любой из рассмотренных вариантов оперативного управления ТТ (за исключением Уь который неэффективен) может определить технологию функционирования автоматизированной системы диспетчерского управления движением таксомоторного транспорта (АСДУ-ТТ).
Таблица 4.8
Исходные параметры Показа (ели камее та о б с. f v ж ।! па н пя пая ко к лас с аж а гов Показа: ели .эффективное г к использования ТТ
> мин /р, мин W, руб. /2, .мин i'2 max» мин мин /*т, мнн Л‘П
5 0 13 29,42 5,39 15 15 4,162 0,756
При разработке ЛСДУ-ТТ для любого конкретного города необходимо выбрать вариант оперативного управления. Количественные соотношения между оценками эффективности вариантов оперативного управления могут и нс сохраниться, поэтому выбору варианта оперативного управления должен предшествовать статистический анализ конкретного обт>екта с целью получения необходимых исходных данных. Затем, используя комплекс программ исследования, необходимо получить оценки эффективности вариантов оперативного управления для условий конкретного города.
Прежде чем осуществить выбор варианта оперативного управления для конкретного города, предстоит решить, в соответствии со стояночным пли непрерывным принципом будет функционировать ТТ.
Выбор принципа управления движением ТТ в одном случае может быть однозначным (например, значительное количество радиофицированных такси обусловливает непрерывный принцип управления), в другом (более общем) определяется вариантом оперативного управления. Окончательный же выбор варианта оперативного управления возможен при учете затрат на реализацию системы.
Исходя из изложенного предлагается следующая последовательность определения структуры ЛСДУ-ТТ с использованием результатов исследования оперативного управления. Вначале необходимо найти рациональные варианты оперативного управления для стояночного и непрерывного принципов, затем — возможные варианты структуры системы и затрат па их рсализапшо. После этого требуется осуществить корректировку значений целевой функции для выбранных вариантов с учетом затрат па реализацию рассматриваемых структур системы.
Максимальному значению целевой функции будет соответствовать как принцип управления таксомоторным транспортом, так и рациональный вариант структуры системы.
В соответствии с данной последовательностью выбраны рациональные варианты структуры АСДУ-ТТ городов Алма-Аты и Ростова-на-Допу.
ГЛАВА 5
СТРУКТУРА АВТОМАТИЗИРОВАННЫХ СИСТЕМ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГОРОДСКОГО ПАССАЖИРСКОГО ТРАНСПОРТА
Под структурой автоматизированных систем диспетчерского управления движением городского пассажирского транспорта (АСДУ-ГПТ) понимается совокупность функциональных устройств систем и информационные связи между ними.
При рассмотрении структуры АСДУ-ГПТ следует различать как функционирование системы в целом, так и работу комплекса ее технических средств (КТС). Функционирование АСДУ-ГПТ осуще-
Рис. 5.1. Укрупненная структурная схема ЛСДУ-МТ
ствляется в соответствии с технологическими алгоритмами системы и направлено на решение задач диспетчерского управления движением городского пассажирского транспорта. КТС можно характеризовать режимами его работы, обеспечивающими функционирование системы.
Данное разделение условно, так как АСДУ-ГПТ представляют в виде КТС и системы программного обеспечения, и принято для простоты изложения материала.
Вначале рассмотрим в общем виде структуру автоматизированных систем диспетчерского управления движением маршрутизированного транспорта (АСДУ-MT) и таксомоторного транспорта (АСДУ-ТТ).
Более подробно будут рассмотрены примеры автоматизированных систем конкретных городов.
На рис. 5.1 представлена укрупненная структура АСДУ-MT, содержащая устройства подвижных единиц (УПЕ), контрольных пунктов (УКП), связи с периферийным оборудованием (УСПО), а также коммутационное оборудование (КО), оборудование пультов диспетчеров (ПД) в составе установки диспетчерской связи (УДС) и дисплея (Д), вычислительный комплекс (ВК), оборудование транспортных предприятий (ОТП).
УКП, УПЕ, ОТП рассматривается как периферийное, а УСПО, КО, ПД, ВК — как центральное оборудование, которое располагается в здании центральной диспетчерской станции (ЦДС).
Рис. 5.2. Внешний вид конструкции устройства подвижной единицы
УПЕ размещается на панели управления в кабине водителя и обеспечивает обмен речевой информацией между водителем и диспетчером, а также формирование кодированной информации для ввода ее в ВК- Внешний вид конструкции УПЕ показан на рис. 5.2. УКП размещаются на контрольных пунктах маршрутов, передают речевую и кодированную информацию в телефонные линии связи (ЛС) и имеют внешний вид конструкции, показанный па рис. 5.3.
Рис. 5.3. Внешний вид конструкции устройства контрольного пункта
Рис. 5.4. Внешний вид конструкции устройс 5 =>;• <’ периферийным
оГн.г.удоз.-.нием
УСПО (рис. 5.4) осуществляет прием информации с ЛС и передачу речевой информации на ПД, а кодированной — в В К- Кроме того, УСПО формирует сигналы, управляющие работой УКП, и передает их в Л С.
КО обеспечивает подключение с помощью В К любой линии связи с УКП на вход УДС любого ПД.
Д позволяет осуществить обмен кодированной информацией между диспетчером и ВК, OTII (рис. 5.5)—обмен кодированной информацией между диспетчерами транспортных предприятий и В К-
ВК обеспечивает управление работой всех других устройств системы и определяет функционирование системы в соответствии с ее назначением.
Пример размещения центрального оборудования АСДУ-А г. Омска показан на рис. 5.6.
Укрупненная структура АСДУ-ТТ (рис. 5.7), кроме названных выше устройств, содержит устройства вызова такси (УВТ), коммутационное оборудование двух типов (KOi и КО2), устройства ввода информации (УВИ). Кроме того, пульты диспетчеров АСДУ-ТТ оборудованы телефонными аппаратами (ТД) для связи диспетчеров системы с пассажирами, формирующими заявки на поездки с помощью телефонных аппаратов городской автоматической телефонной станции (ГАТС). Дополнительно в структуру АСДУ-ТТ включается существующее оборудование управления ТТ по радиоканалу (автомобильные радиостанции — АРС, центральные радиостанции — ЦРС), которое на схеме укрупненной структуры АСДУ-ТТ не показано.
УВТ устанавливаются на стоянках и в других местах интенсивного спроса такси и представляют собой телефон-автомат с унифицированной оплатой вызова такси.
KOj обеспечивает подключение городского телефона пассажира, формирующего заявку на поездку, к телефону свободного в данный момент диспетчера по управлению ВК, КО2—подключение линии связи с любым УВТ на вход УДС любого ПД по управлению В К.
Оборудование ПД (рис. 5.8) осуществляет ввод заявок пассажиров в В К, сформированных посредством УВТ и квартирных (служебных) телефонов, получение рекомендаций ВК по управле-
Рис. 5.5. Оборудование пульта диспетчера автотранспортного предприятр.т
Рис. 5.7. Укрупненная структурная схема ЛСДУ-ТТ
нию такси и доведение управляющих воздействий В К водителям.
Устройства ввода информации предназначены для ввода кодированной информации в ВК с помощью жетона водителя и телефонной связи водителей с диспетчерами.
В составе центрального оборудования АСДУ-ТТ необходимо иметь также учрежденческую автоматическую телефонную станцию (УАТС), предназначенную для внутренней связи на ЦДС с возможностью выхода на ГАТС для доведения информации по удовлетворению заявок, сформированных с городских телефонов пассажирами.
Вычислительный комплекс, коммутационное оборудование, дисплеи, оборудование транспортных предприятий АСДУ-ГПТ являются агрегатными средствами вычислительной техники [31], а УПЕ, УКП, УСПО, УДС, УВИ, УВТ — средствами целевой разработки.
Кроме основного, в состав АСДУ-ГПТ входит вспомогательное оборудование: передвижная лаборатория внедрения и эксплуатации устройств подвижной единицы и периферийных устройств — УКП, УВИ, УВТ; контрольно-проверочная аппаратура оборудования автотранспортных предприятий (рис. 5.9). Внешний вид УВИ показан на рис. 5.10.
Рис. 5.8. Оборудование пультов диспетчеров
Рис. 5.9. Контрольно-проверочная аппаратура оборудования автотранспортных предприятии
5.1. краткая характеристика агрегатных средств вычислительной техники
Агрегатные средства вычислительной техники (АСВТ-М) разделяются на следующие группы: агрегатные модули для компоновки центрального вычислительного комплекса; устройства ввода-вывода и внешней памяти; агрегатные модули для связи с объек-т о ?» 1; с о г л а со в а те л и.
•Агрегатные модули для компоновки центрального вычислительного комплекса АСДУ-ГПТ включают: процессор модели М-6000, оперативное запоминающее устройство; расширите, чь ввода-вывода; устройство наращивания памяти; капал нпямого доступа в нам ять.
Процессор (ПР) предназначен для логической и математической обработки информации, хранящейся в запоминающем устройстве, а также для управления устройствами ввода-вывода и устройствами связи с объектом.
Оперативное за изминающее устройство (ОЗУ) обеспечивает запись, хранение н выдачу информации. Расширитель ввода-выво
да (Р13В) увеличивает число иодк. ввода-вывода и устройств связи с кия памяти (УНП) осуществляет к процессор} оперативны?; заном
Рис. 5.10. Внешний вид конструккш устройства ввода информации
9G
почаемых к процессору устройств объектом. Устройство паращпва-у вс л и ч е н и е ч i с л a 11 од к л ю ч а е ?; ы .х И Н сНОШИХ устройств (ДО ВОСЬМИ;. Кана.* прямого доступа в память (КПДП) предназначен для вы-по шения операций обмена информацией между быстродействующими устройствами ввода-выцод; и оперативкой памятью параллельно с работой процессора по программе.
В состав устройства ввода-вывода и внешней памяти АСДУ-ГПТ входят: вводно-выводное устройство; устройство ввода с перфоленты; устройство вывода ча перфоленту; устройство иеча-т а 1 о щ е е пара л л ел ь ное; с т а н ц и я и и д и к а ц и и д,' н и ы х, у с г р о й с т в о * внешней памяти на магнитных лисках; устройство внешней памяти на магнитной лепте; таймер; устройство печати с клавиатурой.
Вводно-выводное устройство ВВУ предназначено для ввода в вычислительный комплекс и вывода из него алфавитно-цифровой { информации, а вводно-выводное устройство ВВУ-2 — для связи
оператора с вычислительным комплексом, организации ввода-вывода алфавитно-цифровой и специальной информации.
Устройство ввода с перфоленты (УВвПЛ) осуществляет ввод двоичной и символьной информации с перфоленты; устройство вывода на перфоленту (УВПЛ)—вывод кодированной алфавитно-цифровой информации на перфоленту.
Устройство печатающее параллельное (УПчП) обеспечивает быстрый вывод из вычислительной машины алфавитно-цифровых и специальных символов.
Дисплей (станция индикации данных — СИД) предназначен для оперативного обмена символьной информацией человека с вычислительным комплексом.
Устройства внешней памяти на магнитных дисках (УВПМД) и ленте (УВПМЛ) предназначены для расширения памяти, быстрого ввода-вывода, накопления, сортировки, изменения и компоновки информации, создания информационного архива системы.
Таймер (ТМР) осуществляет выдачу в процессор временных меток.
Устройство печати с клавиатурой (УПК) предназначено для вывода на печать символьной информации, получаемой со станции индикации данных.
В состав агрегатных модулей для связи с объектом АСДУ-ГПТ входят: модуль группового управления вводом дискретной информации; модуль ввода инициативных сигналов; модуль группового управления выводом дискретной информации; модуль кодового управления бесконтактный; модуль позиционного управления; модуль кодового управления контактный.
Модуль группового управления вводом дискретной информации (МГУ) осуществляет управление модулями ввода инициативных сигналов и позволяет наращивать по емкости данные средства ввода.
Модуль ввода инициативных сигналов (МВвИС) предназначен для ввода в вычислительную систему инициативных сигналов от устройств вызова такси.
Модуль группового управления выводом дискретной информации (МУВ) обеспечивает управление бесконтактными модулями кодового управления и наращивание по емкости данных средств вывода.
Модуль кодового управления бесконтактный (МКУБ) предназначен для приема, запоминания информации, поступающей от процессора, и выдачи управляющих воздействий на модули позиционного управления и модули кодового управления контактные, модуль позиционного управления (МПУ) —для коммутации линий связи диспетчерского персонала с водителями подвижных единиц и пассажирами, формирующими заявки на поездки с помощью устройств вызова такси; модуль кодового управления контактный (МКУК)—для управления кассированием монеты в УВТ и переключения режимов работы устройств вызова такси, а также коммутации телефонов диспетчерского персонала.
4—861 п7
В состав согласователей АСДУ-ГПТ входят: дуплексный регистр; модуль быстрой передачи данных; разветвитель сопряжения; модуль сопряжения с телеграфными линиями связи.
Дуплексный регистр (ДР) предназначен для подключения к вычислительному комплексу устройств связи с периферийным оборудованием, модуль быстрой передачи данных (МБПД) —для осуществления информационного обмена между станцией индикации данных и вычислительным комплексом и удаления станции индикации данных от ВК, разветвитель сопряжения 2К (PC) —для наращивания числа подключаемых устройств ввода-вывода к вычислительному комплексу, модуль сопряжения с телеграфными линиями связи (МСТЛ) —для установления связи и обмена информацией между ВК и вводно-выводными устройствами и удаления вводно-выводных устройств от вычислительного комплекса.
5.2. Функционирование комплекса технических средств автоматизированных систем диспетчерского управления движением маршрутизированного транспорта
Функционирование КТС АСДУ-MT рассматривается в следующих режимах: передача кодированной информации с УПЕ в ВК; вызов диспетчера на телефонную связь водителем; вызов водителя на телефонную связь диспетчером; информационная связь диспетчеров автотранспортных предприятий с ВК.
Передача кодированной информации с УПЕ в ВК. Структурная схема передачи кодированной информации с УПЕ в ВК представлена на рис. 5.11. Носителем кодированной информации УПЕ является жетон. Кроме того, имеются два органа управления УПЕ: кнопки заполнения салона и тумблер телефонной связи. Когда водитель вставляет жетон в УПЕ, на выходе УПЕ появляется кодированная информация, которая включает: гаражный номер транспортной единицы; признак смены водителя; коэффициент заполнения салона; вид транспорта (автобус); вызов на телефонную связь.
Рис. 5.11. Структурная схема передачи кодированной информации с УПЕ в ВК 98
Эта информация считывается при поступлении на УПЕ сигнала «запрос». УПЕ в исходном состоянии готово к приему сигнала «запрос» и телефонных сообщений с диспетчерского пульта. УКП в исходном состоянии находится в режиме ретрансляции телефонных сообщений. УСПО постоянно работает в режиме циклического опроса УКП. Связь между УСПО и УКП осуществляется по выделенной нскоммутируемой линии связи городской телефонной сети; связь между УПЕ и УКП — индуктивная, осуществляется при помощи контура связи УКП, уложенного под дорожное полотно, и петлевой антенны УПЕ, крепящейся под днищем автобуса.
УСПО посылает сигнал «запрос» на УКП, которое, получив сигнал, переводится в режим ретрансляции дискретной информации и посылает сигнал «запрос» на контур связи прямого направления. Если на каком-либо контуре связи стоит транспортная единица, то ее УПЕ принимает сигнал «запрос» и переводится в режим передачи дискретной информации.
УКП последовательно опрашивает каждый контур связи прямого направления, и при наличии ТЕ дискретная информация ретранслируется в УСПО. Принятая информация в УСПО проверяется на достоверность: если есть искажение, то формируется сигнал «неверно» и происходит повторный опрос УПЕ; если произошел трехкратный опрос, а информация не достоверна, УСПО формирует фиктивный сигнал «верно» для перехода на другой контур связи, а по данному каналу выдается в ВК информация о неисправности канала; если дискретная информация достоверна, УСПО формирует сигнал «верно» и переходит к опросу следующего контура связи. После опроса контуров связи прямого направления формируется сигнал «отбой 1», по которому определяется направление следования транспортной единицы, и УКП переходит к опросу контуров связи обратного направления, после чего формируется сигнал «отбой 2», по которому УКП переводится в исходное состояние, а УСПО переходит к опросу следующего УКП. УСПО приформировывает к дискретной информации, полученной от УПЕ, дополнительную (направление движения и номер УКП) и прерывает работу процессора по программе для ввода дискретной информации.
Вызов диспетчера на телефонную связь водителем транспортной единицы. При вызове диспетчера водителем па телефонную связь необходимо в дискретную информацию УПЕ ввести признак вызова на телефонную связь. Для этого водитель переводит тумблер на УПЕ в положение «телефон». После опроса УПЕ и введения дискретной информации в ВК производится обработка поступившей информации. ВК, определив наличие признака вызова на телефонную связь, управляет коммутацией в УСПО канала связи на телефонную связь и одновременно при помощи модуля кодового управления бесконтактного — модулем позиционного управления, который обеспечивает подключение телефонной линии связи УСПО на вход устройства диспетчерской связи свободного диспетчера. Пульт диспетчера оборудован устройством оперативной связи с ВК —дисплеем. ВК выводит необходи-
Рис. 5.12. Структурная схема работы устройств при вызове водителя диспетчером на телефонную связь
мый формат данных на экран дисплея и формирует признак занятости этого диспетчера на время телефонной связи. Связь осуществляется по методу временного разделения каналов. Приоритетом речи является начало разговора. Во время телефонной связи УСПО продолжается опрос контуров связи УКП, и при опросе контуров связи УКП, которые на УСПО закоммутированы в режим телефонной связи, происходит прерывание телефонной связи на время опроса контуров и переключение на прием кодированной информации. После приехма кодированной информации телефонная связь восстанавливается.
По окончании телефонного разговора диспетчер набирает на клавиатуре дисплея формат данных и признак освобождения и вводит в ВК. Последний анализирует полученную информацию и коммутирует линию связи в исходное состояние, т. е. УСПО переключается с телефонного канала на канал приема кодированной информации, а УДС отключается от телефонной линии связи.
Вызов водителя транспортной единицы диспетчером на телефонную связь осуществляется по инициативе диспетчера, а также при доведении управляющего воздействия по инициативе вычислительного комплекса. Структурная схема данного режима изображена на рис. 5.12.
Вызов водителя транспортной единицы на телефонную связь при доведении управляющего воздействия по инициативе вычислительного комплекса осуществляется следующим образом. Вычислительный комплекс, определив транспортную единицу, водителю которой надо довести управляющее воздействие, выводит требуемый формат данных на экран дисплея свободного диспетчера и формирует признак занятости. Одновременно определяется местонахождение транспортной единицы и производится коммутация линии связи на телефонную связь посредством УСПО, МУВ, МКУБ, МПУ на УДС пульта этого диспетчера. Диспетчер доводит управляющее воздействие водителю транспортной единицы. Перевод системы в исходное состояние производится ВК по команде диспетчера.
При вызове водителя транспортной единицы на телефонную связь по инициативе диспетчера последний набирает необходимый 100
формат данных на клавиатуре дисплея с указанием конкретного водителя и вводит его в вычислительный комплекс. ВК анализирует полученную информацию и определяет ближайшее УКП, с которого можно осуществить телефонную связь. В момент прибытия данной транспортной единицы к этому УКП ВК коммутирует с помощью УСПО, МУВ, МКУБ и МПУ телефонную линию связи на УДС пульта диспетчера и выводит на экран СИДа информацию о том, что водитель требуемой ТЕ вызван на телефонную связь. Диспетчер осуществляет речевой обмен информацией с водителем. Переход в исходное состояние системы осуществляется ВК по команде диспетчера, который формирует на экране СИДа требуемый формат данных и признак освобождения и вводит его в В К.
Информационная связь диспетчеров автотранспортных предприятий с вычислительным комплексом. На каждом автотранспортном предприятии для обеспечения информационной связи с вычислительным комплексом установлено следующее оборудование: пульт диспетчера; устройство контрольного пункта.
Пульт диспетчера автотранспортного предприятия (рис. 5.13) оборудован дисплеем (СИД) для оперативной связи с ВК, устройством печати для вывода информации на печать (УПК) и аппаратурой передачи данных (МППД). Диспетчер автотранспортного предприятия набирает на клавиатуре дисплея информацию, редактирует ее и вводит в ВК- Ввод и вывод информации осуществляется по инициативе ВК*
Устройство контрольного пункта автотранспортного предприятия предназначено для выполнения следующих функций: регистрации начала и конца работы водителей транспортных единиц; доведения рекомендаций водителем транспортных единиц, выпуск кото-
Рис. 5.13. Структурная схема функционирования оборудования автотранспортного предприятия
рых производится вне планового графика; проверки работоспособности УПЕ.
Структурная схема автоматизированной системы диспетчерского управления движением автобусов г. Омска представлена на рис. 5.14.
На данной схеме однотипные устройства имеют свою нумерацию, а агрегатные средства вычислительной техники дополнительно имеют промышленный шифр устройства (процессор А131-7).
В АСДУ-А г. Омска входит: 36 устройств контрольного пункта (УКП1—УКПзб); 3 устройства связи с периферийным оборудованием (УСПО1—УСПОз); к каждому УСПО подключается 16 линий связи с УКП; 3 дуплексных регистра (ДР1— ДР3) для обмена информационными словами между УСПО и ВК; 5 пультов диспетчеров (ПД!—ПД5), оборудованных станциями индикации данных (СИД1—СИД5), устройствами печати с клавиатурой (УПК1— УПК5), установками диспетчерской связи (УДС1—УДС5); 4 комплекта оборудования автотранспортных предприятий, содержащих
СИД1—СИД4, имеющих возможность работать с аппаратурой передачи данных — МППД]—МППД4, УПКб—УПКо; коммутационное оборудование в составе МПУ2—МПУ15, МКУБ1—МКУБ5, МУВ; вычислительный комплекс в составе ПР, УВвПЛ, УВПЛ, ОЗУ1— ОЗУ8, УНП, ТМР, РВВ, ВВУ, ВВУ-2, КПДП, УВПМД, УВМЛ, ДР.
5.3. Функционирование комплекса технических средств автоматизированной системы диспетчерского управления движением таксомоторного транспорта
Функционирование КТС АСДУ-ТТ рассматривается в следующих режимах: передача кодированной информации с УПЕ в ВК (данный режим работы КТС АСДУ-ТТ аналогичен режиму работы КТС АСДУ-А); вызов водителем диспетчера на телефонную связь с помощью УПЕ (данный режим аналогичен описанному выше); вызов водителей такси, оборудованных УПЕ, на телефонную связь с диспетчерами (данный режим аналогичен описанному выше); передача кодированной информации с помощью УВИ; вызов водителей такси на телефонную связь с диспетчерами посредством УВИ; формирование заявок пассажирами с помощью УВТ; доведе-
Рис. 5.14. Структурная схема АСДУ-А в г. Омске
ние информации по удовлетворению заявок пассажиров с помощью УВТ; формирование заявок пассажирами с помощью городского телефона; доведение информации по удовлетворению заявок пассажирам с помощью городского телефона; формирование заявок пассажиров с диспетчерского пункта и доведение информации пассажирам по удовлетворению данных заявок; формирование повторного запроса пассажиром; работа системы при отказе вычислительного комплекса; информационная связь диспетчеров автотранспортных предприятий с ВК (данный режим аналогичен описанному выше, но оборудование транспортных предприятий содержит вводно-выводное устройство (ВВУ) и модуль согласования с телеграфными линиями (МСТЛ), обеспечивающий удаление ВВУ от ВК).
Передача кодированной информации с помощью УВИ. Структурная схема передачи кодированной информации с помощью УВИ представлена на рис. 5.15.
Формирование кодированной информации с помощью УВИ осуществляется в двух режимах без признака вызова на телефонную связь и с признаком вызова.
Формирование информации по первому режиму осуществляется водителем при освобождении такси. Носителем кодированной информации, которая вводится в ВК с помощью УВИ водителем, является его личный жетон. При вставленном жетоне на выходе УВИ формируется кодированная информация, которая считывается при поступлении на УВИ сигнала «запрос», формируемого в УСПО. В исходном состоянии УВИ находится в режиме ретрансляции кодированной информации и готово к приему телефонных сообщений. УСПО постоянно работает в режиме циклического опроса УВИ. Связь между УВИ и УСПО осуществляется по выделенной некоммутируемой линии связи городской телефонной сети. Принятая в УСПО информация проверяется на достоверность. Если информация искажена, то формируется сигнал «неверно» и производится повторный опрос УВИ, причем после трехкратного опроса при недостоверной информации УСПО формирует фиктивный сигнал «верно» для перехода к следующему УВИ, а по данному каналу выдается в ВК информация о неисправности канала. Если дис-
Рис. 5.15. Структурная схема передачи информации с помощью УВИ
L--------------------
Рис. 5.16. Структурная схема работы устройств при вызове водителя на телефонную связь с диспетчером
кретная информация достоверна, УСПО формирует сигнал «верно», переходит к опросу следующего УВИ и вводит кодированную информацию в ВК-
Формирование кодированной информации по второму режиму — с признаком вызова на телефонную связь — производится для получения водителями разрешения на посадку пассажиров, не формировавших заявку на поездку, т. е. в момент прихода пассажира на стоянку, или для сообщения информации водителем диспетчеру по инициативе водителя.
Для вызова диспетчера на телефонную связь водителем ТЕ необходимо в информационной посылке УВИ дополнительно сформировать признак вызова на телефонную связь. Для этого водитель вставляет жетон в УВИ, снимает телефонную трубку и нажимает кнопку телефонной связи. Этим вводится сигнал вызова на телефонную связь в информационную посылку УВИ. После опроса УВИ и введения кодированной информации в ВК производится обработка поступившей информации. ВК, определив наличие признака вызова на телефонную связь в информационной посылке УВИ, управляет коммутацией в УСПО канала связи на телефонную связь и одновременно при помощи модуля группового управления выводом дискретной информации, модуля кодового управления бесконтактного, а также модуля позиционного управления обеспечивает подключение телефонной линии связи УСПО на вход УДС свободного пульта диспетчера. ВК выводит необходимый формат данных на экран дисплея и формирует признак занятости этого диспетчера на время телефонной связи. При этом УСПО продолжает опрос УВИ. При опросе УВИ, которое закоммутировано в режим телефонной связи, происходит прерывание телефонной связи на время опроса и переключение на прием дискретной информации. По окончании телефонного разговора диспетчер набирает на клавиатуре дисплея необходимый формат данных, признак освобождения и вводит его в ВК. По команде ВК схема возвращается в исходное состояние.
Вызов водителей такси на телефонную связь с диспетчерами посредством УВИ. Структурная схема данного режима работы КТС АСДУ-ТТ представлена на рис. 5.16.
Управляющие воздействия по удовлетворению заявок пассажиров водителями такси формирует вычислительный комплекс, определив такси для удовлетворения данной заявки пассажира, выводит требуемый формат данных на экран дисплея свободного диспетчера и формирует признак занятости этого диспетчера. Одновременно производится коммутация линии связи УВИ па телефонную связь посредством УСПО, МУВ, МКУБ и МПУ па УДС пульта этого диспетчера и посылается сигнал вызова на телефонную связь с водителем на устройство индикации УВИ. Диспетчер производит доведение управляющего воздействия ВК водителю такси. По окончании доведения управляющего воздействия ВК диспетчер формирует признак освобождения и вводит его в ВК, который переводит схему в исходное состояние.
Формирование заявок пассажирами с помощью УВ. Структурная схема работы устройств формирования заявок пассажиров с помощью УВТ представлена на рис. 5.17.
При формировании заявок пассажирами с помощью УВТ вызов диспетчера на телефонную связь производится по инициативе пассажира. В исходном состоянии УВТ отключено от линии связи. Связь между УВТ и блоком разделительных фильтров (БРФ) осуществляется по выделенной некоммутируемой линии связи городской телефонной сети.
Для формирования заявки пассажир опускает монету в монетоприемник и снимает телефонную трубку УВТ; в этот момент УВТ подключается к линии связи, т. е. подсоединяется блок питания (БП). При замыкании цепи питания в БРФ формируется инициативный сигнал, который передается на МВвИС и через МГУ вводится в ВК. Вычислительный комплекс, анализируя информационную посылку от МВвИС, определяет номер УВТ, по которому формируется заявка пассажиром, и определяет свободного диспетчера
Рис. 5.17. Структурная схема работы устройств при формировании заявок пассажирами с помощью УВТ
Рис. 5.18. Структурная схема работы устройств при доведении информации по удовлетворению заявок пассажиров
для приема заявки от пассажира. Далее, при помощи МУВ, МКУБ управляет МПУ, который обеспечивает подключение линии связи УВТ на вход УДС этого диспетчера. Одновременно ВК формирует признак занятости диспетчера па время приема заявки. Диспетчер осуществляет прием заявки пассажира и одновременно формирует формат данных, определяющий заявку, на клавиатуре дисплея. По окончании приема заявки диспетчер вводит ее в ВК и формирует признак освобождения. ВК принимает заявку от диспетчера и отключает линию связи УВТ от УДС. Таким образом, диспетчер освобождается для приема следующей заявки или доведения управляющих воздействий ВК водителям такси. На время поиска ресурса в системе для удовлетворения заявки пассажира ВК переключает линию связи с УВТ при помощи МУВ, МКУБ и МКУК2 в режим «ожидание», и пассажир слышит в телефонной трубке сигналы режима ожидания обслуживания.
Доведение информации по удовлетворению заявок пассажиров с помощью УВТ. Структурная схема данного режима работы КТС АСДУ-ТТ приведена на рис. 5.18.
Вычислительный комплекс, приняв заявку, осуществляет поиск ресурса в системе для ее удовлетворения. Определив свободное такси для удовлетворения данной заявки, ВК выводит требуемый формат данных на экран дисплея свободного диспетчера и формирует признак его занятости. Одновременно ВК переключает линию связи УВТ при помощи МУВ, МКУБ, МКУК и МПУ на УДС пульта этого диспетчера и коммутирует ее с УВИ или УКП, где находится данная ТЕ, при помощи МУВ, МКУБ, МПУ и УСПО на вход УДС пульта диспетчера. После этого диспетчер осуществляет доведение рекомендаций ВК пассажиру и водителю ТЕ. По доведении управляющих воздействий ВК диспетчер формирует признак освобождения п вводит его в ВК, по которому ВК переводит схему в исходное состояние.
Формирование заявок пассажирами с помощью городского телефона. Структурная схема формирования
Рис. 5.19. Структурная схема работы устройств при формировании заявок пассажирами с помощью городского телефона
заявок этого типа приведена на рис. 5.19, причем вызов диспетчера на телефонную связь происходит по инициативе пассажира.
Телефон абонента (ТА) — это телефон городской сети. В исходном состоянии он отключен от линии связи. Связь между ТА и телефоном диспет
чера (ТД) осуществляется по коммутируемой телефонной линии связи городской телефонной сети. Для формирования заявки с помощью ТА пасса
жир набирает специальный номер ГТС и попадает на ТД пульта свободного диспетчера, т. е. того, который в исходном состоянии закоммутирован на линию связи ГАТС. Занятость ТД определяется подключением линии связи к УАТС. Диспетчер формирует при-
знак занятости, осуществляет прием заявки пассажира и одновременно формирует формат данных, определяющий заявку пассажира. По окончании приема заявки диспетчер вводит ее в ВК и формирует признак освобождения. ВК принимает заявку, и диспетчер освобождается для выполнения других работ.
Доведение информации по удовлетворению
заявок пассажиров с помощью городского телефона. Структурная схема данного режима работы КТС АСДУ-ТТ представлена на рис. 5.20.
Приняв заявку, ВК осуществляет поиск ресурса в системе для ее удовлетворения. Определив свободное такси, ВК выводит требуемый формат данных на экран дисплея свободного диспетчера и формирует признак его занятости. Одновременно он переключает
Рис. 5.20. Структурная схема работы устройств при доведении информации по удовлетворению заявок пассажиров с помощью городского телефона
Рис. 5.21. Структурная схема работы устройств при формировании информации о заявках пассажиров с диспетчерского пункта
линию связи ТД при помощи МУВ, МКУБ и МКУК с ГАТС на У АТС и коммутирует линию связи с УВИ или УКП, где находится свободная ТЕ, при помощи МУВ, МКУБ, МПУ и УСПО на УДС пульта этого диспетчера. Диспетчер набирает номер телефона абонента и доводит рекомендации ВК пассажиру и водителю такси, после чего форхмирует признак освобождения и вводит его в ВК. ВК возвращает схему в исходное состояние.
Формировние заявок пассажиров с диспет
черского пункта и доведение информации пассажирами по удовлетворению заявок. Структурная схема данного режима работы КТС АСДУ-ТТ представлена на рис. 5.21.
Диспетчерский пункт (ДП) удален от ВК и оборудован ТД и дисплеем. Связь между ВК и дисплеем осуществляется при помощи МППД.
Оформление заявки на поездку пассажира с ДП производится диспетчером, который формирует требуемый формат данных и вводит в ВК. ВК принимает заявку и на время поиска ресурса в системе освобождает диспетчера для приема следующих заявок. Определив свободную ТЕ, ВК выводит требуемый формат данных на экран дисплея, и диспетчер доводит рекомендаций ВК пассажиру. ТД на диспетчером пункте служит для приема заявок пассажиров с помощью ТА.
Формирование повторного запроса пассажирами осуществляется набором специального телефонного номера с любого телефона ГТС или с помощью УВТ. Необходимость повторного запроса возникает в том случае, когда такси для удовлетворения заявки пассажиров не подошли за рекомендуемое время ожидания.
Работа АСДУ-ТТ при отказе вычислительного комплекса. При отказе ВК старший диспетчер переводит систему в режим «отказ ВК». Структурная схема информационного обмена старшего диспетчера с водителями для этого случая приведена на рис. 5.22.
Для перевода в режим «отказ ВК» устройств вызова такси старший диспетчер отключает блок питания от цепей питания УВТ. При этом все УВТ, с помощью которых пассажирами формируются заявки на передвижение, переводятся из режима нормального функционирования в режим «отказ ВК». При отсутствии сигналов в трубке УВТ пассажиру, согласно инструкции на лицевой панели
Рис. 5.22. Структурная схема работы устройств при отказе ВК
УВТ, возвращается монета. В течение времени восстановления работоспособного состояния системы для пассажиров исключается возможность формирования заявок на поездки с помощью УВТ. При работе системы в режиме «отказ ВК» старший диспетчер переводит такси в свободный режим в течение определенного времени. С этой целью все линии связи с УВИ и УКП выведены на пульт старшего диспетчера, который коммутирует их с УВТ и УКП на УДС и доводит водителям такси распоряжения о свободном режиме работы.
Для выполнения предварительных заявок, момент исполнения которых приходится на время восстановления системы, используются радиофицированные такси. Доведение заявок осуществляется с пультов диспетчеров, оборудованных выносными пультами управления центральных радиостанций. Предварительные заявки выводятся на печать на пульте старшего диспетчера при помощи УПК.
По истечении указанного времени свободного режима работы водители обязаны с ближайшей стоянки выдать кодированную информацию об освобождении такси.
Структурная схема АСДУ-ТТ г. Ростова-на-Дону представлена на рис. 5.23. Система содержит: 67 устройств контрольного пункта (УКП1—УКПб?), устанавливаемых на стоянках такси, где средняя длина очереди свободных такси не превышает восьми — максимального числа мест ожидания такси, определяемого максимальным числом контуров связи одного УКП; 22 устройства ввода информации (УВИ1—УВИ22), устанавливаемых на стоянках, где средняя длина очереди такси превышает 8; 105 устройств вызова такси (УВТ1—УВТ105); секцию кроссовую из конструктивов АСВТ-М (СКр), к которой подходят линии связи ЛС1— ЛС]94; блоки разделительных фильтров (БРФ1—БРФюб); 106 автомобильных радиостанций (APCj—АРСюе); 2 центральные радиостанции (ЦРС1, ЦРС2) с выносными пультами управления (ВПУЬ ВПУ2), установленным на ПДь ПД2о; 20 пультов диспетчеров, оборудованных СИД1—СИД2о, УДС1—УДС2о, ТД!—ТД2о; 3 устройства связи с периферийным оборудованием (УСПО1—УСПО3) в варианте конструкции, обеспечивающехМ подключение 32 УКП к каждому; 12 дуплексных регистров (ДР1—ДР12) для обмена информационными словами между УСПО и ВК; коммутационное оборудование в
ПО
составе МКУБ1—МКУБ6о, МПУ]—МПУ2бо, обеспечивающее подключение линий связи с любым УКП и УВТ па вход УДС любого ПД; оборудование управления подключением блока питания (БП) при формировании заявок пассажиров с помощью УВТ в составе МКУБ!— МКУБб4, МКУК1—МКУКи, МВВИС]—МВВИСм, МГУ; оборудование управления переключением УВТ в режим ожидания в составе МКУБ66—МКУБбд, МКУК12—МКУК22 и генератора режима ожидания (ГРО), обеспечивающего соответствующие звуковые сигналы в трубке УВТ при ожидании пассажиром ответа системы по удовлетворению его заявки; МУВ1—МУВ5 для управления МКУБ1—МКУБ7о; пульт старшего диспетчера в составе СИД2ь УПКз, ТД21; оборудование транспортных предприятий в составе ВВУ1—ВВУз И МСТЛ; оборудование для переключения телефонов диспетчеров и линий ГАТС на вход УАТС и, наоборот, в составе МКУБ69, МКУБ7о, МКУК23, МКУК24; оборудование вычислительного комплекса в составе ОЗУ]—ОЗУ8, УНП, УВПЛ, УВвПЛ, ТМР, Пр, КПДП, УВПМД, УПчП, УВПМЛ, РВВ1—РВВ3, УПК, PC (расширитель ввода-вывода).
Компоновка агрегатных средств вычислительной техники осуществлена в данном случае в соответствии с методикой [35].
ГЛАВА 6
ХАРАКТЕРИСТИКА ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ
ДВИЖЕНИЕМ ГОРОДСКОГО ПАССАЖИРСКОГО ТРАНСПОРТА
Автоматизированные системы диспетчерского управления движением городского пассажирского транспорта наряду с комплексом технических средств включают в себя также и систему программного обеспечения, состоящую из специального программного обеспечения и операционной системы.
Специальное программное обеспечение (СПО) представляет собой комплекс специальных программ, осуществляющих выполнение всех технологических задач, для решения которььх предназначены АСДУ-ГПТ.
Операционная система (ОС) обеспечивает необходимую последовательность выполнения технологических программ и определяет функционирование комплекса технических средств в различных режимах функционирования систем.
Суточный цикл функционирования АСДУ-ГПТ включает начальный запуск, дневную работу и вечернее окончание. В течение суточного цикла функционирования АСДУ-ГПТ возможна аварийная ситуация (сбои в работе технических либо программных средств) и, как следствие этого, — послеаварийное восстановление. В соответствии с этим СПО содержит комплексы специальных программ начального запуска, нормального функционирования, послеаварийного восстановления и вечернего окончания работы системы диспетчерского управления.
МУВ5
03yt А211-8
£_
ТМР |
ОЗУ 2 A 211-8 zxz
у в пл А 421-2
PBBj
PBBt
PBB3
УПКг
УПК, . _
A531-3/1 A431-5/1" A491-512 ~ A491-5/2 A531-3/1
УДС.
/J
озу3 А 211-8
^влл
0ЗУ4 A 211-8
"T~
УНП
A151-1
ПР
A 131-7/2
Bnyj
^4/ A544~l
195 l/PC^
МКУБз _ М.ПУ8 A 641-2 I A 641-6
4
/7Д/
Рис. 5.23. Структурная схема АСДУ-ТТ
J
Специальное программное обеспечение АСДУ-ГПТ состоит из комплекса специальных программ, часть из которых работает независимо, а другие в процессе работы взаимодействуют между собой. Возникает необходимость управления последовательностью выполнения специальных программ или их диспетчеризации. При этом порядок выполнения указанных программ определяется системой приоритетов (программа, имеющая высший приоритет, выполняет-112
в г. Ростове-на-Дону
ся первой). Диспетчеризация специальных программ полностью возлагается на ОС. Для выполнения любой специальной программы требуется выделение ресурсов вычислительного комплекса (ВК) в виде конкретных устройств ввода-вывода, объема оперативной памяти и т. д..
Функции распределения ресурсов ВК при выполнении специальных программ осуществляются также ОС.
Рис. 6.1. Укрупненная структура операционной системы АСДУ-ГПТ
Одно из основных требований к АСДУ-ГПТ — обеспечение их надежного функционирования. В определенной степени это возлагается на ОС. В процессе функционирования АСДУ-ГПТ операционная система обнаруживает ошибки в передаваемой информации, отказы устройств ввода-вывода, сбои и отказы процессора, нарушения программой границ оперативной памяти, зацикливание программ и т. д. Если при этом неисправность не может быть устранена средствами операционной системы, то
ОС выдает соответствующее сообщение оператору об обнаружен-
ной неисправности.
Функции, выполняемые ОС, а также унифицированный комплекс технических средств АСДУ-ГПТ определили универсальный характер операционной системы; ОС конкретных систем отличаются не качественно (по структуре), а количественно (по числу элементов структуры). Специфика же конкретных систем отражается в их специальном программном обеспечении. Таким образом, представляется возможным рассмотреть вначале структуру ОС без детализации ее для конкретной системы, а затем — программное обе
спечение автоматизированных систем диспетчерского управления маршрутизированным и таксомоторным транспортом.
Операционная система АСДУ-ГПТ состоит из двух взаимодействующих подсистем: операционной системы, построенной на базе основной управляющей системы (ОУС), входящей в состав программного обеспечения модели М-6000 АСВТ-М [60]; операционной системы, работающей в реальном масштабе времени на базе дисковой операционной системы (ДОС) реального времени (РВ), также входящей в состав программного обеспечения модели М-6000 АСВТ-М [59].
Структура ОС и использование ее в различных режимах работы АСДУ-ГПТ показаны на рис. 6.1. Рассмотрим структуру ОС, вопросы ее генерации и взаимодействия с оператором для различных режимов функционирования АСДУ-ГПТ.
6.1. Характеристика операционной системы в режиме начального запуска и вечернего окончания
Операционная система в режимах начального запуска (ИЗ) и вечернего окончания (ВО) предназначена для работы в однозадачном режиме перемещаемых программ, формируемых трансляторами с МНЕМОКОДА, АЛГОЛА и ФОРТРАНА модели М-6000
Рис. 6.2. Формирование ОС в режиме НЗ в ВО
АСВТ-М [58, 61, 62], и состоит из следующих частей: системы ввода-вывода; перемещающего загрузчика; генератора управляющей системы.
Система ввода-вывода включает программы управления вводом-выводом, обработки прерываний и драйверы (программы, обеспечивающие функционирование периферийных устройств системы).
Перемещающий загрузчик представляет собой программу, обеспечивающую: загрузку в доступную область оперативной памяти рабочих программ, полученных трансляторами; связь рабочих программ между собой; формирование косвенной адресации; компоновку рабочих программ необходимыми библиотечными программами.
Генератор управляющей системы обеспечивает генерацию ОС необходимой конфигурации. Генерация ОС—это процесс формирования абсолютного варианта операционной системы, предназначенного для работы с конкретным набором технических средств. Абсолютный вариант ОС получается при записи всех программных модулей ОС в системе команд ЭВМ.
Генерация ОС включает четыре фазы. На начальной фазе генератор управляющей системы запрашивает информацию об ОС, т. е. об устройствах ввода-вывода, размерах доступной памяти и т. д. Затем на фазе загрузки модулей ОС генератор загружает программы управления вводом-выводом, обработки прерываний и драйверы, а также перемещающий загрузчик. На следующей фазе ввода параметров генератор управляющей системы формирует таблицу оборудования, в которой записывается: во-первых, постоянная информация обо всех устройствах, необходимых для работы ОС (номера устройств и каналов ввода-вывода, код типа устройств, абсолютные адреса секции запуска драйверов устройств); во-вторых, оперативная информация, поступающая от драйверов устройств (состояние операции — завершена или в стадии выполнения, состояние устройства — количество передаваемых слов или символов). И, наконец, на фазе завершения генерации генератор управляющей системы заканчивает формирование и выводит абсолютный вариант
ОС на перфоленту, называемую в этом случае абсолютной двоичной лентой.
Загрузка ОС в режимах НЗ и ВО в ОЗУ осуществляется вводом информации с абсолютной двоичной ленты. При этом очищается вся область ОЗУ, не занимаемая операционной системой.
Изложенная последовательность формирования ОС в режиме НЗ и ВО приведена на рис. 6.2.
Необходимым оборудованием для работы ОС в режиме НЗ и ВО является: процессор; оперативное запоминающее устройство емкостью 32К, где К-1024 16 разрядных машинных слов; устройства печати с клавиатурой и параллельное; устройство ввода с перфоленты и вывода на перфоленту; устройства внешней памяти на магнитных лентах и дисках; станции индикации данных пультов диспетчеров.
6.2. Характеристика операционной системы в режиме нормального функционирования
Вариантом ОС в режиме нормального функционирования является дисковая операционная система реального времени (ДОСРВ).
Основные программные модули ДОСРВ: модуль диспетчеризации, модуль управления вводом-выводом и прерываниями и модуль центрального управления.
В качестве вспомогательных средств распределения функций оперативной системой служат библиотека системных подпрограмм, таблицы оборудования и драйверы ввода-вывода.
Модуль диспетчеризации (рис. 6.3) состоит из секций: временных программ; запуска специальных программ и обработки очередей; обработки запросов оператора; вспомогательных программ; обработки программных запросов.
Секция временных программ производит все работы, связанные с организацией системного времени. По сигналу от таймера через каждые 10 мс осуществляется наращивание системного времени. Далее просматривается список времени запуска программ. Программы, время запуска которых совпадает с текущим временем, переводятся в список готовых к использованию. Просматривается также таблица оборудования системы и выявляются устройства, время ответа на запрос которых превысило допустимые пределы. По окончании работы секция временных программ передает управление секции запуска специальных программ.
Секция запуска специальных программ оперирует с очередью готовых программ, упорядоченных по приоритетам. Если в очереди отсутствуют программы, то управление передается на холостой цикл для ожидания поступления готовой к выполнению программы. В противном случае выбирается первая программа из очереди готовых и сравнивается ее приоритет с приоритетом выполняемой! программы. Если приоритет выполняемой программы выше, то продолжается ее выполнение, в противном случае она возвращается в очередь готовых, а управление передается программе из очереди.
Модуль модуль центрального
диспетчеризации (мд) управления (МЦУ)
МДУ мдч\
мяв ♦
мд!
МУВВ1, МУВВ2, МУВВ5 секция обработки программных запросов
Модуль управления вводом -выводом (МУВВ) мдч мцуз мцуз\
МУВВ1
МД2 МДУ
МЦУ1 МЦУ5 1 1 1 1 1 1 1 1 1 1 1 1 1 1 i 1; МУВВ2 МУВ85 МУВВЗ
секция ан али -за прерываний Секция исключения J Секция выполнения системных запросов на ввод-вывод Секция одра -бот к и запросов оператора Секция обработки программных запросов на бвод-бывод
МУВВк
МЦУЗ\
МД 2
Секция обработка запросов оператора
мдз
С екай я вспомогательных программ
МЦУ2
Секция работы с библиотекой программ
МЦУЗ
Секция выполнения программных запросов
МУВВУ
МУВВ2 МУ385
МД]
МУВВ6
Секция проверка За* просов
МЦУ1
МДУ
Секция запуска
МД5
Секция временных программ
библиотека системных подпрограмм^
МЦУЧ
Секция распределения дисковой, памяти
Секция управления драйверами
УВПМД
МУВВ1
Секция обработки прерывании
П2
МЦУ5
мдг
МУввя _____
УВПМД
Драйвер Драйвер "'Драйвер
УВВ1
УВВ2 -
УВВп2
Т
1
2
Рис. 6.3. Структура ДОСРВ
Секция обработки запросов оператора оформлена как подпрограмма, а запросы содержат код и запрашиваемые параметры. При поступлении запроса анализируется код и управление передается на ветвь программы, обрабатывающей запросы соответствующего типа.
Секция вспомогательных программ содержит подпрограммы, используемые во всех других секциях диспетчеризации. В частности, подпрограмма загрузки параметров осуществляет очистку временной области памяти, преобразование параметров в форму с фиксированной запятой и занесение их во временную область. В этой же
секции находятся подпрограммы преобразования чисел из символьного кода в форму с фиксированной запятой и наоборот. К вспомогательным программам также можно отнести программы запуска системы и управления с пульта оператора. Программа запуска устанавливает все устройства системы в исходное состояние, выдает оператору сообщение о вводе системного времени, устанавливает интервал работы таймера, передает управление секции запуска специальных программ. Данная программа выполняется один раз, после чего оперативная память, занимаемая ею, считается свободной. Обращение к программе управления с пульта оператора системы осуществляется при нажатии любой клавиши на этом пульте.
Секция обработки программных запросов оперирует с запросами на: завершение программ; вмешательство оператора; запуск программ с ожиданием и без ожидания; системное время; задание временных параметров программ.
Модуль управления вводом-выводом и прерываниями в ДОСРВ состоит из секций: выполнения системных запросов на ввод-вывод; обработки запросов оператора; обработки программных запросов на ввод-вывод; проверки запросов; обработки прерываний; управления драйверами.
Данный модуль обеспечивает выполнение операции ввода-вывода: контролирует обработку системных прерываний от всех устройств ввода-вывода и схем контроля процессора; производит анализ источников прерываний и передачу управления соответствующей программе обработки прерываний; обрабатывает запросы на ввод-вывод и команды оператора по вводу-выводу; выявляет ошибки ввода-вывода; выдает диагностические сообщения об ошибках на печать.
Модуль центрального управления состоит из секций: анализа прерываний; проверки корректности программных запросов (секция исключения); работы с библиотекой программ; выполнения программных запросов; распределения дисковой памяти.
Данный модуль обеспечивает определение адреса поступившего запроса и управление его обработкой, обработку входов и выходов библиотечных подпрограмм, выделения и освобождения дорожек диска, резервирование и освобождение рабочих блоков памяти, подготовку диагностических сообщений, исключение специальных программ из системы.
Что касается вспомогательных средств распределения функций ДОСРВ, то они содержат: математические подпрограммы, которые включают в себя подпрограммы вычисления элементарных функций и преобразования форм представления данных; подпрограммы реализации команд расширенной арифметики и арифметики с плавающей запятой, обеспечивающих их выполнение при минимально необходимой конфигурации оборудования вычислительного комплекса; группу подпрограмм обслуживания ввода-вывода, обеспечивающих согласование работы основной программы ввода-вывода с работой устройств ввода-вывода; служебные, подпрограммы, ис-118
пользуемые в основном непосредственно библиотекой стандартных программ.
Таблица оборудования имеет столько элементов, сколько устройств включено в систему. Информация в таблицу оборудования записывается во время генерации системы.
Драйверы ввода-вывода управляют передачей данных между процессором и внешними устройствами. Перед началом передачи ДОСРВ помещает адреса элементов таблицы оборудования в специально отведенную область оперативной памяти и передаст управление драйверу.
Кроме названных трех основных модулей, ДОСРВ включает генератор системы и модуль редукции. Генератор ДОСРВ является абсолютной программой. Генерация ДОСРВ включает следующие фазы: начальной загрузки программ, ввода параметров, загрузки диска.
В начальной фазе генератор получает информацию о системе в виде: кода выборки управляющего канала устройства внешней памяти на магнитных дисках (УВПМД), адреса подключения канала УВПМД к каналу прямого доступа в память, размера основного (системного) диска, номера начального трека системного диска, числа программно защищенных треков, номера системного диска, размера вспомогательного диска, кода обращения к таймеру, интервалов прерываний от таймера, адреса последней ячейки доступной памяти, номера устройства ввода программ, библиотечных программ и некоторых других параметров.
В фазе загрузки программ оператор вводит в систему модули ДОСРВ, драйверы, вспомогательные программы.
В фазе ввода параметров оператор вводит для каждой программы параметры, описывающие тип, приоритет и временные характеристики каждой программы.
В фазе загрузки диска формируются все необходимые таблицы и преобразуются перемещаемые программы в абсолютные двоичные коды.
На рис. 6.3 показано взаимодействие модулей ДОСРВ между собой и внешними объектами, под которыми понимаются программы пользователей (Pi—Pni) —специальные программы, программы взаимодействия с диспетчерским персоналом и оператором системы, устройства ввода-вывода (УВВ1- УВВ??2) и УВПМД. Любая программа пользователя запускается модулем диспетчеризации (МД). Запуск программы может производиться по запросу оператора, при наступлении времени запуска и по вызову от другой программы. Получив управление, Д^Д либо передает его программе пользователя, либо, если нет программы на выполнение, переходит на холостой цикл, ожидая готовности программы пользователя. От программы пользователя управление всегда передается модулю управления вводом-выводом по прерыванию от защиты памяти. МД выполняет все основные функции по управлению программами пользователя: изменяет и анализирует их состояние; если необходимо, исключает их из системы; выбирает очередную программу и осу
ществляет запуск ее на выполнение; выполняет некоторые типы программных запросов; производит обслуживание системных часов; осуществляет запуск временных программ; управляет их подготовкой к загрузке.
Модуль управления вводом-выводом МУВВ, получив управление по прерыванию, анализирует источник прерывания и передает управление соответствующему драйверу или другой программе ДОСРВ, Для обработки запросов оператора МУВВ передает управление секции обработки запросов оператора МД, а для определения типа программного запроса — модулю центрального управления МЦУ. Если МУВВ обнаружил отказ УВПМД, то управление передается модулю редукции MP. МР осуществляет редукцию состояния системы при отказе УВПМД и восстановление его при устранении отказа.
МЦУ анализирует тип программного запроса пользователя и передает управление МД для его исполнения. Кроме того, МЦУ обеспечивает управление использованием библиотечных программ, распределение и освобождение дисковой памяти, исключение программ пользователя. Секция обработки запросов оператора декодирует его запрос, анализирует на корректность и определяет тип запроса. Часть запросов выполняется в данном модуле, остальные передаются для выполнения другим секциям МД и МУВВ. Кроме того, в данную секцию входит программа, управляющая системным телетайпом, на котором работает оператор.
6.3. Взаимодействие основных комплексов программ специального программного обеспечения АСДУ-ГПТ
Как было отмечено выше, система программного обеспечения АСДУ-ГПТ представляется комплексами специальных программ начального запуска, нормального функционирования, послеаварий-ного восстановления и вечернего окончания работы. Структура названных комплексов программ специфична для каждого типа систем, но логика взаимодействия между ними носит общий характер. Поэтому можно рассмотреть взаимодействие основных комплексов СПО без учета особенностей конкретных систем (рис. 6.4).
Вначале рассмотрим взаимодействие комплексов программ начального запуска (КПНЗ) и нормального функционирования (КПНФ). Прежде всего осуществляется генерация основной управляющей системы с КПНЗ. Результатом является перфолента, содержащая абсолютный вариант всех программ начального запуска и части программ ОУС и стандартной библиотеки. Затем генерируется ДОСРВ, включающая в качестве программ пользователя КПНФ и комплекс программ послеаварийного восстановления (КПАВ). При этом распределение оперативной памяти производится только для программ ДОСРВ. В результате генерации копия КПНФ записывается на накопители на магнитных дисках (НМД) и магнитных лентах (НМЛ).
г* 4 тп
Варианты расписании, . графиков выпуска
Информация о фактическом
изменениях потребности в перевозках_______'
варианты расписаний, графи -ков выпуска
Информация об
Планы выпуска
ция об
управления
Комплекс программ подготовки плановых массивов информации
Комплекс z-x программ "* у J
"Г __ послеава-ЦДС ~~ ри иного.
------ восстановления
состоянии пепла нова я сур со 6
информация
Плановая информация
Информация о текущем со-
стоянии пере-
*— -^возочного про -цес.са.
Информация, 6осста-_
надпиваемая в ОЗУ
Статистическая информация долговременного хранения
Комплекс программ нормаль -ного функ ци о народа ни я
~Г~ ~v
АТП
Корректировки плановой информации
Информация обилие-нении ресурсов
Рекомендации i по восстанов- ------
лению ресурсов
Отчетность
Комплексурограмм о работе АТПГ"^
вечернего окончания работы системы
| Отчетность о работе । с
диспетчеров
I
*
о
I
Рис. 6.4. Взаимодействие основных комплексов программ СПО АСДУ-ГПТ
Переход из режима НЗ в режим НФ производится следующим образом. Оператор системы вводит в оперативную память КПНЗ, устанавливает на внешних накопителях носители с исходными массивами информации и передает управление программе диспетчеризации программ начального запуска. На основании данных о фактическом состоянии ресурсов автотранспортных предприятий (АТП) КПНЗ обеспечивает получение расписаний движения маршрутизированного транспорта и графиков выпуска автомобилей-такси на
текущий день, а также вывод данной информации на НМЛ. Кроме того, КПНЗ осуществляет корректировку массивов плановой информации, необходимой для контроля и управления транспортными единицами, с учетом фактического состояния ресурсов накануне очередного суточного цикла работы городского пассажирского транспорта. В результате выполнения указанных действий на пульт оператора выводится сообщение: «Система готова к утреннему запуску». Затем оператор вводит в оперативную память КПНФ, запускает таймер для отсчета системного времени, вводит откорректированные массивы плановой информации и вызывает программу диспетчеризации временных программ.
Взаимодействие КПНФ и комплекса программ вечернего окончания (КПВО) осуществляется следующим образом. В виде самостоятельных частей генерируется ОУС с каждой из программ вечернего окончания в отдельности. В результате генерации перфоленты содержат абсолютный вариант одной из программ вечернего окончания и необходимые программы ОУС и стандартной библиотеки. Информационная связь между КПНФ и каждой из полученных программ вечернего окончания осуществляется через общую область памяти на НМД и на НМЛ, поэтому КПВО с перфолент переписывается на магнитную ленту. Взаимодействия между КПНФ и КПВО в процессе нормального функционирования систем нет (между ними отсутствуют связи по управлению).
Переход от режима нормального функционирования к режиму вечернего окончания заключается в следующем. Оператор вводит в систему запрос на завершение режима НФ и получает сообщение: «Режим НФ окончен, выключите СИДы и УСПО». Выполнив данные указания, оператор вводит в оперативную память КПВО, устанавливает на внешних накопителях носители с накопленными массивами информации о завершенном суточном перевозочном процессе и запускает программу обработки отчетных данных. В результате выполнения этой программы отчетность о работе водителей, АТП и диспетчеров ЦДС выдается в виде соответствующих форм. Затем оператору выдается сообщение: «Обработка отчетных данных окончена». Получив это сообщение, он вводит в оперативную память программы обработки статистических данных и устанавливает на внешних накопителях носители с накопленными статистическими данными о ходе перевозочного процесса.
В результате выполнения данных программ обработанные статистические данные выводятся на печать в виде соответствующих форм и оператор получает от системы соответствующее сообщение. Аналогично осуществляется обработка статистической информации о работе программных и технических средств системы.
После выполнения всех указаннььх действий режим вечернего окончания завершается и оператору системы выдается сообщение: «Режим вечернего окончания закончен, выключите все устройства».
Взаимодействие КПНФ и КПАВ осуществляется следующим образом. В режиме НФ соответствующими программами накапливается информация о текущем состоянии перевозочного процесса, и 122
эта информация через определенные интервалы времени выводится на НМЛ. При обнаружении отказов технических либо программных средств — таких, которые вызывают прекращение режима нормального функционирования, — осуществляется переход на режим послеаварийного восстановления. После восстановления работоспособности средств управления оператор вводит с НМЛ информацию о состоянии перевозочного процесса, которому соответствовал сбой, и запускает КПАВ.
Данные программы восстанавливают информационное состояние системы и обеспечивают возможность продолжения ее нормального функционирования.
6.4. Режим нормального функционирования автоматизированных систем диспетчерского управления движением маршрутизированного транспорта
В режиме нормального функционирования АСДУ-MT решаются следующие задачи: контроль исполнения расписаний движения ТЕ на маршрутах; управление движением ТЕ при нарушениях расписаний; обнаружение схода ТЕ с линии ^формирование необходимых управляющих воздействий; обнаружение переполнения ТЕ и формирование необходимых управляющих воздействий; накопление статистических и отчетных данных; формирование информации о текущем состоянии перевозочного процесса для осуществления послеаварийного восстановления работоспособности системы; управление коммутацией линии связи; обеспечение необходимой информацией для выборочного слежения за работой транспортной единицы или ТЕ маршрута в целом; контроль правильности работы устройств системы УПЕ, УКП, УСПО, ВК и основных программ.
В комплексе программ нормального функционирования выделяются следующие группы программ: приема и обработки информации (заявок) от ТЕ; приема и обработки запросов диспетчеров; контроля функционирования системы; вспомогательные.
Прием заявок от ТЕ сопровождается прерыванием решения текущей задачи. При этом осуществляется проверка правильности информационного блока, определяющего заявку, занесение признаков неисправности УПЕ и УКП в соответствующие области оперативной памяти (шкалы) и постановка заявки в очередь на обслуживание. Обработка заявок осуществляется в порядке поступления их в систему.
В процессе обработки заявок осуществляется коммутация линий связи, анализируется наполнение ТЕ на маршруте, выдается справочная информация диспетчеру НДС, выявляются отклонения от расписания и другие нарушения (непроследование контрольных пунктов, невыполнение рекомендаций), определяется необходимость формирования управляющего воздействия по восстановлению нарушенного движения, завершается обработка заявок формированием управляющего воздействия.
Рис. 6.5. Взаимодействие программ режима нормального
В группу приема и обработки заявок от ТЕ входят следующие программы: ввода — Пп, приема — 77^, предварительной обработки заявок ТЕ — 7713, контроля исполнения расписаний транспортными единицами — Л14, выбора способа «ввода ТЕ в расписание» — П^> формирования и выдачи рекомендаций по «вводу ТЕ в расписания»— 7716, формирования управляющих воздействий при сходе ТЕ
Ввод инфор-\ маиди с [ системной I ленты
идс
л;з лгч л15
Л?9
Контроль
HULL
Выбор способа ввода ТЕ в распи-
п г_____1_____
75 Рекоменда -
-j, ции подводу ТЕ в расписание
П16
ком мути -идя линий, связи
Л!8
Л^5 ПЛ
Управление при сходе ТЕ и переполнении
/7/7
НДС
ЛЧ6
— Запуск П13
ГЫ
П23 —**
Вывод информации для' послеаварии-ного восстановления
I
I \ Лц
П1Ц. П31
ПЧ5
Подготовка справочной информации
Вывод отчетных — да иных
/7.7
Выдача справок
Контроль -времени ответа диспетчера
НДС
вправление при переполнении ТЕ
лгч
Запуск временных программ
ТДл2Й
Раздвижка интервала
г.29
—Оператав- I ныи ин- | । тервал |
Ввод масса-да исход'
П26 ных данных
вправление при сходе ТЕ
НПА в
Вычисли -тельный центр
Выпуск резерва
Л25
ЦДС
W
П^1
^функционирования АСДУ-МТ
с линии и переполнения транспортных единиц на маршруте — Я17, коммутации линий связи — П^.
Прием запросов диспетчеров также сопровождается прерыванием решения текущей задачи, проверкой принятого запроса и постановкой его в очередь на обслуживание. При обработке запроса .вначале устанавливается код формата запроса, по которому назна
чается тот или иной вид обработки. Если запрос-сообщение диспетчера указывает на то, что водителям или диспетчерам АТП доведены управляющие воздействия системы, корректирующие расписания, то в массив информации для послеаварийного восстановления заносятся данные об изменении расписаний.
В систему вводятся сообщения диспетчера: о сходе ТЕ с линии или об увеличении пассажиропотока (рассчитываются необходимые параметры для формирования соответствующих управляющих воздействий); об ухудшении условий движения (прекращается контроль исполнения расписаний); о необходимости телефонной связи с водителем ТЕ (фиксируются параметры запроса в оперативной памяти и проверяется возможность удовлетворения запроса); о справке (выдается диспетчеру соответствующая справка).
В группу программ обработки запросов диспетчеров входят программы: ввода информации — Л2ь контроля и постановки запросов в очередь—П2ъ, анализа запросов — Л23, формирования управляющего воздействия при переполнении ТЕ на маршруте — /724, формирования текста рекомендации «выпуск резерва из АТП» — /725л формирования управляющих воздействий при сходе ТЕ с маршрута—/72б, выдачи справочной информации — /727, запуска временных программ — /728л расчета параметров для формирования управляющих воздействий «раздвижка интервала» — /72э и «оперативный интервал» — 772ю.
Группа программ контроля функционирования системы включает программы: анализа работоспособности УКП — П31 и УПЕ — /7з2, накопления и анализа информации о систематических сбоях — 7733 п контроля информации в массивах — Л34.
В группу вспомогательных программ входят программы: ввода информации с системной ленты — Л41, контроля за временем ответа диспетчеров на запрос водителей — /742, запуска программы предварительной обработки заявок ТЕ — Л43, отмены справки — Л44> вывода отчетных данных—П45, вывода информации для послеаварийного восстановления — П4&, вывода статистической информации на НМД — Л47, подготовки справочной информации — Л48, ввода массивов исходных данных для обеспечения режима нормального функционирования — Л49.
На рис. 6.5 показано взаимодействие между программами режима нормального функционирования. Считается, что между двумя программами существует взаимодействие по управлению, если хотя бы в одной из программ есть запрос на диспетчеризацию другой программы. Кроме того, может быть взаимодействие между двумя программами по информации, если таковая передается от одной программы к другой, а также по управлению и по информации.
Взаимодействие КПНФ по управлению или диспетчеризация программ режима нормального функционирования осуществляется ДОСРВ по программным запросам или по информации, вводимой во время генерации КПНФ. С позиций диспетчеризации КПНФ можно выделить программы, запускаемые при поступлении в ВК заявки, запроса (сообщения) диспетчера и по времени.
6.5. Режим начального запуска автоматизированных систем диспетчерского управления движением маршрутизированного транспорта
Режим начального запуска ЛСДУ-МТ обеспечивает подготовку системы к работе и включает два этапа: подготовку к следующему суточному циклу функционирования и запуск системы.
Подготовка к суточному циклу работы заключается в корректировке плановой информации в соответствии с фактическим состоянием ресурсов накануне очередного суточного цикла работы. При этом осуществляется прием и проверка информации от диспетчеров АТП, ввод откорректированных массивов технологической информации, расчет, проверка и выдача на внешний носитель исходных данных для запуска системы.
Подготовка к следующему суточному циклу начинается после режима вечернего окончания работы системы, и поэтому на данном этапе представляется возможным использовать информацию о результатах работы системы за прошедший день, т. е. проанализировать причины отклонений от расписаний, сделать заключение о соответствии действующих расписаний потребности в поездках, ресурсам и условиям движения, изучить накопленные данные по результатам контроля функционирования системы.
Запуск системы включает в себя генерацию операционной системы и КПНФ, а также подключение периферийных устройств системы. Па рис. 6.6 показано взаимодействие комплекса программ запуска системы. Запуск системы начинается с ввода плановых массивов информации, информации от диспетчеров АТП о фактическом состоянии ресурсов и работоспособности УПЕ, устанавливаемой контрольно-проверочной аппаратурой ЛТП. Из наборов заранее рассчитанных расписаний выбирается такой, который в большей степени соответствует фактической величине ресурсов, и вводится в ВК с внешнего носителя информации.
После ввода расписаний и формирования необходимых массивов информации в оперативной памяти составляются планы выпуска ТЕ и передаются на АТП. Затем осуществляется ввод и корректировка массивов для режимов нормального функционирования и послеаварийного восстановления.
КПНЗ включает программы: диспетчеризации начального запуска, связи с диспетчерами АТП и оператором системы, распределения типов ТЕ по маршрутам, составления плана выпуска ТЕ из АТП и формирования массива расписаний, подготовки необходимой информации. Программа-диспетчер начального запуска осуществляет контроль работы и выполнения установленной последовательности взаимодействия программных модулей режима начального запуска, формирует и выводит планы выпуска ТЕ из АТП.
Программы связи с диспетчерами АТП и оператором системы обеспечивают ввод информации диспетчеров АТП и ее логический анализ, а также корректируют массив состояния ресурсов с учетом их фактического наличия.
Рис. 6.6. Взаимодействие программ режима начального запуска АСДУ-МТ
Программа распределения типов ТЕ по маршрутам осуществляет для каждого АТП распределение ТЕ по маршрутам. Программа подготовки информации обеспечивает формирование, ввод, корректировку и вывод массивов технологической информации и расписаний на внешний носитель.
6.6. Режим послеаварийного восстановления автоматизированных систем диспетчерского управления движением маршрутизированного транспорта
При возникновении аварийной ситуации (прерывание режима нормального функционирования системы из-за отказов программных и технических средств) необходимо оперативно локализовать неисправности, устранить их и обеспечить перезапуск системы. Комплекс программ послеаварийного запуска предназначен для восстановления состояния системы, предшествовавшего аварийной ситуации. В режиме послеаварийного восстановления предусматривается прием информации от старшего диспетчера ЦДС об изменениях на маршрутах за время аварии. КПАВ включает программы: вывода запросов, ввода информации, корректировок массивов, ввода и распаковки информации с системной ленты, формирования очереди для программы таймера.
Взаимодействие КПАВ показано на рис. 6.7.
Послеаварийное восстановление осуществляется в такой последовательности: происходит подготовка информации для работы КЛАВ; корректируются массивы вводимой информации с магнитных накопителей для послеаварийного восстановления, с расписаниями и массивы информации по сообщениям старшего диспетчера; диспетчеризуются программы нормального функционирования по времени; производятся операции окончания режима послеаварийного восстановления.
6.7. Режим вечернего окончания работы систем диспетчерского управления движением МТ
Режим вечернего окончания Рис. 67. Взаимодействие программ работы АСДУ-MT предназна- Рсжима послеаварийнот восстанов.чс-г г ния АСДУ-МТ
чен для обработки статистической информации и отчетных данных о функционировании систем за суточный цикл. В нем предусматривается: ввод массивов информации, подготовленных на относительно длительный отрезок времени (месяц, сезон и т. д.); ввод массивов информации, полученной при начальном запуске системы; ввод накопленных отчетных данных с НМД или НМЛ; обработка статистической информации; вывод обработанных отчетных данных на печать; ввод накопленной статистической информации; вывод обработанной статистической информации на НМД и
на печать.
Режим вечернего окончания работы начинается после завершения очередного суточного цикла функционирования маршрутизированного транспорта и включает в себя ввод программ вечернего окончания работ, ввод и обработку массивов информации.
Полученные в результате обработки отчетные данные печатаются в виде соответствующих форм и содержат: ежесуточные сведения по объемам перевозок; ежемесячные данные распределения пассажиропотоков по часам суток на каждом маршруте и показатели качества удовлетворения потребности в поездках; ежесуточные показатели работы водителей, АТП и диспетчеров; ежесуточные показатели надежности функционирования системы.
Обработанные статистические данные за суточный цикл функционирования системы выводятся на НМД и сохраняются в течение месяца.
6.8. Режим нормалЬИогв функционирования автоматизированной системы диспетчерского управления движением таксомоторного транспорта
Для АСДУ-ТТ исключается возможность четкого выделения режимов начального запуска и вечернего окончания, так как таксомоторный транспорт осуществляет перевозки пассажиров круглосуточно. Поэтому названные режимы объединены в режим нормального функционирования АСДУ-ТТ.
Следует отметить также, что задачи режима послеаварийного» восстановления АСДУ-ТТ аналогичны задачам послеаварийного восстановления АСДУ-МТ и отличаются только в технологическом, аспекте. Очевидно, что после устранения аварийной ситуации для. дальнейшего нормального функционирования АСДУ-ТТ необходимо восстановить информацию о предварительных заявках на такси. Для этого указанная информация периодически выводится на внешний носитель. Все остальные необходимые корректировки информационных массивов, а также ввод информации о предварительных заявках пассажиров с внешнего носителя в вычислительный комплекс осуществляется после восстановления работоспособности системы, т. е. в режиме ее нормального функционирования.
В режиме нормального функционирования АСДУ-ТТ решаются следующие основные задачи: плановое управление; оперативное управление; формирование отчетных данных о работе водителей, транспортных предприятий и диспетчерского персонала; сбор и обработка статистических данных; контроль функционирования системы.
Взаимодействие комплекса программ режима нормального функционирования АСДУ-ТТ представлено на рис. 6.8.
Плановое управление движением таксомоторного транспорта определяется программами: определения плана обеспечения заданной потребности в поездках ресурсами (построения реального плана удовлетворения заданной потребности в поездках); определения необходимого количества автомобилей-такси на стоянках при выпуске автомобилей-такси из автотранспортных предприятий; распределения автомобилей-такси каждого выпуска каждого автотранспортного предприятия по стоянкам; построения графика выпуска автомобилей-такси и их возврата в автотранспортные предприятия.
Данный комплекс программ выполняется при изменении величины ресурсов и колебаниях потребности в поездках.
Комплекс программ оперативного управления движением таксомоторного транспорта содержит программы: формирования заявок пассажиров; формирования информации о свободных автомобилях-такси; удовлетворения заявок пассажиров; перераспределения автомобилей-такси по стоянкам; контроля выпуска автомобилей-такси из автотранспортных предприятий и работы автомобилей-такси; взаимодействия с диспетчерским персоналом; выдачи справочной информации.
Рис. 6.8. Взаимодействие программ режима нормального функционирования АСДУ-ТТ
Ввод заявок на автомобили-такси в вычислительный комплекс осуществляют диспетчеры ЦДС. При этом ДОСРВ обеспечивает необходимую коммутацию линий связи. Ввод информации о свободных автомобилях-такси аналогичен вводу информации о прибытии маршрутизированного транспорта па контрольные пункты, описанному выше. Удовлетворение заявок пассажиров заключается в определении для каждой заявки свободного автомобиля-такси и доведении диспетчерским персоналом управляющих воздействий до водителей. При этом ДОСРВ также обеспечивает необходимую коммутацию линий связи.
Перераспределение автомобилей-такси по стоянкам осуществляется, если в течение определенного времени свободные автомобили-такси не были использованы системой.
Контроль работы таксомоторного транспорта начинается с момента его выхода из транспортного предприятия (ТП) и заканчивается при возвращении в ТП.
Взаимодействие с диспетчерским персоналом осуществляют: пассажиры (при формировании заявок на поездки); водители автомо-
Зилей-такси (при обмене речевой информацией с диспетчерами); вычислительный комплекс (при формировании управляющих воздействий по удовлетворению заявок пассажиров, управлении движением автомобилей-такси и выдаче справочной информации).
Комплекс программ формирования отчетных данных, а также сбора и обработки статистических данных АСДУ-ТТ выполняет те же функции, что и в АСДУ-МТ, но с учетом особенностей технологии функционирования таксомоторного транспорта.
ГЛАВА 7
МЕТОДИЧЕСКОЕ ОБЕСПЕЧЕНИЕ АВТОМАТИЗИРОВАННЫХ СИСТЕМ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГОРОДСКОГО ПАССАЖИРСКОГО ТРАНСПОРТА
Методическое обеспечение автоматизированных систем диспетчерского управления движением городского пассажирского транспорта представляет собой комплекс математических моделей, расчетных соотношений и методических указаний, предназначенных для определения количественных и пространственных характеристик структуры систем и экономических показателей их функционирования в условиях конкретного города.
Количественные характеристики АСДУ-ГПТ определяются числом: устройств контрольного пункта; вызова автомобилей-такси, звода информации; связи с периферийным оборудованием; пультов диспетчеров. Данные характеристики АСДУ-ГПТ определяют, э свою очередь, и количественный состав коммутационного оборудования. Что касается количественного состава устройств вычислительного комплекса, то он достаточно стабилен, т. е. несущественно зависит от конкретного объекта управления, так как определяется функциями, выполняемыми системой, не меняющимися при изменении характеристик объекта управления.
Пространственные характеристики структуры АСДУ-ГПТ определяются размещением устройств контрольного пункта, вызова автомобилей-такси и ввода информации на территории города.
Определение экономических показателей функционирования АСДУ-ГПТ осуществляется с целью оценки эффективности внедрения системы в конкретном городе.
В качестве целевых функций рассматриваемых ниже математических моделей выступает, как правило, прибыль, что объясняется экономическим характером решаемых задач.
7.1. Определение оптимального количественного состава и размещения оборудования автоматизированных систел диспетчерского управления движением маршрутизированного транспорта
Определение оптимального количественного состава оборудования АСДУ-МТ рассмотрим на примере автоматизированной системы диспетчерского управления движением автобусов (АСДУ-А).
Основные исходные данные для решения этой задачи получены при классификации маршрутных сетей городов: тг— число маршрутов ьго ранга; р< — среднее значение интенсивности пассажиров потока на маршруте Аго ранга; Кг — среднее значение интенсивно сти движения ТЕ на маршруте Аго ранга.
Последовательно определим оптимальное число УКП, УСП(Х ПД рассматриваемой системы.
Определение оптимального числа устройств контрольного пункта для АСДУ-МТ. При статистическом анализе работы автобусного транспорта определена годовая экономия от снижения времени ожидания пассажиров на маршруте Аго ранга при контроле движения на нем в /=2, 4, 6, 8 контрольных пунктах (см. табл. 2.11):
0,4 (//0-//7)
Eli=—ёб—л'-360’
где — среднее время ожидания пассажира на маршруте z-го ранга при отсутствии контроля и управления движением ТЕ;
tij — среднее время ожидания пассажира на маршруте i-го ранга при контроле движения и оперативном управлении автобусами в / контрольных точках;
Аг — среднее количество перевозимых пассажиров па маршруте Тго ранг? за сутки;
0,4 — стоимостная оценка часа времени ожидания пассажира (руб.).
Введем переменные niy £=1,5, равные числу контрольных пунктов на маршруте Аго ранга, причем иг-е(2, 4, 6, 8). Тогда доход £ от контроля движения ТЕ на маршрутной сети будет равен
5
«2.....п5) = (7.1$
а суммарное число N контрольных пунктов маршрутной сети определится как
5
1 V1
Лг(/г1» п2, ••• > ЩМ;,
Ан
t=i
где Ан — коэффициент наложения маршрутов, который может быть определен в виде
где L — длина маршрутной сети города;
Ik —длина 6-го маршрута;
М — число маршрутов.
К затратам С на установку устройства контрольного пункть можно отнести: стоимость оборудования, затраты на строительные, монтажные, пуско-наладочные работы, аренду линий связи.
Затраты на оборудование устройствами контрольного пункта всей маршрутной сети можно определить как
5
п2, ... , n5) = C nimi. (7.2)
“ 7=1
Введем целевую функцию W прибыли:
wп2..........п5) = Е(п1, п2.....л5) —Z(/ii, п2, , zi5).
С учетом (7.1), (7.2) целевая функция преобразуется к виду 5 5
W (nlt п2, ... , л5) - V (Ein т,- — №/(«/). (7.3)
\ 1 Кн J лшшк
i=l / = 1
Выражение (7.3) показывает, что целевая функция является сепарабельной [76], поэтому для отыскания ее максимума достаточно найти максимум ^г(мг-) для всех i и полученные максимальные значения сложить.
Анализ маршрутных сетей ряда городов СССР показал, что:
1 < с 5; 1 < т2 < 20; 1 < /п3/л4; т5 С 30; <= [2, 5; 6].
Для получения практических рекомендаций по определению числа КП в условиях конкретного города при указанных возможных mi и Кн определены (табл. 7.1) только максимальные значения Wi(rii) в виде
/ / С \\
wi (/7/) = max ^in. ~~ ~~t7~ ni I Г \ \ 1 Ли //
Так, на маршрутах первого и второго рангов оптимальное число КП для всех Кн=2,5, 3,0, ..., 6,0 равно 8(ni*=n2* = 8). На маршрутах третьего ранга я3* = 6 для Кн=2,5; 3,5; ... ; 5,0 и п3* = 8 для Кп = 5,5; 6,0. На маршрутах четвертого ранга п4*=2 для Ки=2,5; 3,5, ..., 5,0 и п4* = 8 для Кн=5,5; 6,0. На маршрутах пятого ранга для всех Пг=2,4, 6,8 и при всех значениях Кн=2,5; 3,0, ..., 6,0 значения целевой функции отрицательны.
В качестве примера определим оптимальное число УКП для АСДУ-А Омска. Маршрутная сеть Омска характеризуется числами:
/И1=--0, 7779 =12, /?г3 = 26, 7774 = 24, т3 = 8, Дн=5.
Из табл. 7.1 следует, что при Кн = 5,0, п2* = 8, п3* = 6, н4*=2. Необходимое количество УКП при этом, будет равно
4
N* = — V, n,mi = — (12-8 + 26-6 i- 24-2) = 60.
/<н 5
1=2
Таким образом, по данным табл. 7.1 можно оценить необходимое число УКП для АСДУ-А конкретного города, маршрутная сеть которого представлена определенным числом маршрутов каждого ранга.
T a б jt и u . <1 7. г
Значения ml s
"z 2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0 * ni
8 ГП\ 1 2 3 4 5 18 254 36 508 54 762 73 016 91270 19 470 38 940 58 410 77 880 97 350 20 338 40 677 61015 81354 101 692 20 990 41 980 62 970 83 950 104 950 21 496 42 993 64490 85 986 107 483 21902 43 804 55 706 87 608 109 510 22233 44467 66 700 88 934 111 168 22 510 45 020 67 530 90 040 112 550 Tfl\ 8
8 П12 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 26 277 52 554 78 831 105 108 131 385 157 662 183939 210216 236493 262 770 289 047 315324 341 601 367 818 394 155 420 432 446 709 472986 499 263 525 540 27493 54986 82 479 109 972 137 455 164958 192451 219 944 247 437 274930 302423 29916 57 409 384902 412395 439 888 467381 494 874 522 367 549 860 28 361 56 723 85 084 113 446 141 807 170 169 198531 226 892 255 254 283 615 311977 340 338 368 700 397 062 425 423 453 785 482 146 510 508 538 869 567 231 29 013 58 026 87 039 116 052 145 065 174078 203 091 232 104 261 117 290 130 319 143 348 156 377 169 406 182 435 195 464 208 493 221 522 234 551 247 580 260 29 519 59 039 88 559 118 078 147 598 177 118 206 637 236 157 265 677 295 196 324 716 354236 383 755 413 275 442 792 472 314 501 834 531354 560 873 590 393 29 925 59 850 89 775 119 700 149 625 179 550 209 475 239 400 269 325 299 250 329 175 359 100 389 025 418950 448 575 . 478800 508725 538 650 568 575 598500 30256 60 513 90 769 121 026 151 283 181 539 211796 242 053 272 309 302 5G6 332823 363079 393336 423592 453 849 484 106 514 362 544619 574 876 605 132 30 533 61066 91599 122 132 152 655 183 198 213 731 244264 274 797 305 330 330 863 366 395 396 929 427 462 457 995 488 528 519 061 549 524 580 127 610 660 ТП2 8
Продолжение табл. 7.1
/К; Значения т. *н
2,5 3,0 3,5 4,0 4,5 5,0 5,5 6,0
1 2 12 459 24 918 13371 26 742 14 022 28 044 14511 29 022 14891 29 782 15 195 30 390 15489 30 979 15 766 31532
3 4 37 377 49 836 40 113 53 484 42 067 56 089 43 533 58044 44 673 59 564 45 585 60 780 46 468 61 958 47 298 63 064
’ 5 6 62 295 74754 66 855 80 116 70 112 84 134 72 555 81 066 74455 89346 75 975 91 170 77 448 92 987 78 830 94596
7 8 81213 99 672 93 597 106 968 98 157 112 179 101 577 116 088 104 237 119 128 106 365 121 560 108 427 123 917 110 362 126 128
9 10 112131 124590 120 339 133 710 126 201 140 224 130599 145 110 134 019 148 910 136 755 151 950 139 406 154 896 141 894 157 660
11 12 131 049 149 508 147 081 160 452 154 246 158 269 159 621 174 132 153 801 178 692 167 145 182 340 170 386 185 875 173 426 189 192
6 7П3 13 14 161 967 174 426 173 823 187 194 182 291 196 314 188 643 203 154 193 583 208 474 197 535 212 730 201 365 216854 204 958 220 724 /п3 8
15 16 186 885 199 344 200 565 213 936 210 336 224 358 217 665 232 176 223 365 238 256 227 925 243 120 232344 247 834 236 490 252 256
17 18 211 803 224 262 227 307 240678 238 321 252 403 246 687 261 198 253 147 268 038 259 315 273 510 263 323 278 813 268 022 283 788
19 20 236 721 249 180 254 049 267 420 266 426 280 448 275 709 290 220 282 929 297 820 288 705 339 000 , 294303 309 792 299 554 315320
21 22 261539 274098 280 791 294 162 294 471 308 493 304731 319 242 312711 327 602 319 095 334290 325 282 340 772 331 086 346 852
23 24 286 557 299 016 307 533 320 904 322 515 336 538 333 753 348 264 342 495 357 384 349 485 364 680 356 261 371 751 362 618 378 384
25 26 27 311475 323 934 336 393 334 275 347 646 361017 350 516 364 583 378 605 362 775 377 286 391 797 372 275 387 166 402 057 379 ВД5 395 070 410 765 387 240 402 730 418 220 394 150 409 916 425 682
28 29 30 348 852 361311 373 770 374388 387 759 401 130 392 628 406 650 420 672 406 308 420 819 435 330 416 948 431 839 446 730 425 460 440 655 455 850 433 709 449 199 464689 441448 457 214 472 980
1 669 973 1 190 1352 .1479 1 511 1671 1948
2 1338 1946 2 380 2 706 2 959 3 162 3 343 3 896
3 2 007 2 919 3 570 4059 4439 4 743 5014 5 844
4 2 676 3 892 4 760 5 412 5918 6324 6686 7 792
5 3 345 4 865 5 950 6 765 7 398 7 905 8 358 9 740
6 4014 5 838 7 140 8 118 8 878 9 486 10 029 11688
7 4 683 6811 8 331 9 471 10 357 11067 11701 13636
8 5 352 7 784 9 521 10 824 11837 12648 13 373 15 584
9 6 021 8 757 10711 12 177 13 317 14229 15 044 17 532
9 10 6 690 9 730 11901 13 530 14 796 15 810 16 710 19 480 Q
11 7 359 10 703 13 091 14 883 16 276 17 391 18 388 21 428 0
12 8 028 11676 14 281 16 236 17 756 18 972 20 059 23 376
13 8 697 12 649 15 471 17 589 19 235 20 553 21 731 25 324
14 9 366 13 622 16 662 18 942 20 715 22 134 23 402 27 272
15 10 035 14 595 17 852 20 295 22 195 23 715 25 074 29220
16 10 704 15568 19 042 21 648 23 674 25 296 26 746 31 168
17 11 373 16 541 20 232 23 001 25154 26 877 28 417 33 116
18 12 042 17 514 21 422 24 354 28 634 28 458 30 089 35 054
19 12711 18 487 22 812 25 707 28 113 30 039 31 761 37 012
• 20 13 380 19 460 23 802 27 060 29 593 31620 33462 38960
21 14 049 20 433 24 993 28 413 31073 33 201 35 104 40 908
22 14718 21406 26 183 29 766 32 352 34 782 36 776 42 856
23 15 387 22 379 27 373 31 113 34 032 36 663 38 447 44 804
24 15 056 23 352 28 563 32 472 35 512 37 944 40 119 46 752
25 16 725 24 325 29 753 33 825 36 991 39 525 41 790 48 700
26 17 394 25 298 30 943 35 178 38 471 41 106 43 462 50 648
27 18 063 26 271 32 133 36 531 39 951 42 697 45 134 53 596
28 18 732 27 244 33 324 37 884 41430 44 268 46 805 54 544
29 19 401 28 217 34 514 39 237 42910 45849 48 477 56 492
w 30 20 070 29 190 35 704 40 590 44390 47 430 50 149 58 440
Подобные оценки необходимо проводить на предпроектной стадии, когда решается вопрос о целесообразности внедрения системы в конкретном городе. Уточнение количественного состава УКП осуществляется на стадии проектирования системы, при этом вместо среднего значения коэффициента наложения маршрутной сети должно учитываться количество маршрутов, проходящих у каждого контрольного пункта. При такой детализации характеристик маршрутной сети конкретного города решается задача не только определения количества УКП, но и размещения их на территории города.
Размещение устройств контрольного пункта на маршрутной сети. Предположим, что определено множество Р=(1, 2, ..., п) точек маршрутной сети, в которых потенциально воз;уюжна установка УКП. Множество Р определяется исходя из возможности пространственного размещения устройств контрольного пункта, прокладки контуров связи, обеспечения подсоединения УКП к электрической сети, а также подвода к этой точке телефонной линии ГТС.
Маршрутная сеть представляется множеством маршрутов М= (1, 2, ..., т).
Определим матрицу А = ||ars|| таким образом, что
( 1, если через г-ю точку проходит s-й маршрут; ars — । м
( 0 в противном случае.
Введем переменные
( 1, если в r-й точке есть УКП;
( 0 в противном случае.
При этом общее число устройств контрольных пунктов на маршрутной сети W составит
п
Г —1
а число К* устройств контрольных пунктов на s-м маршруте будет равно:
п
arsXr .
г = 1
Обозначим в виде EisKs значение годовой экономии от снижения времени ожидания пассажиров на маршруте zs-ro ранга при контроле движения на нем в Ks контрольных пунктах. В табл. 2.19 приведены значения Ец при i=is=l, 2, ..., 5 и Ks=0, 2, 4, 6, 8. Определим значения при / = 1, 3, 5, 7 по известным EiQl Е^, Ец, Е^ Е^ в соответствии с выражением
£ш+1= Z=0, 1,2,3,
Допустим, что при числе контрольных пунктов па маршруте свыше восьми значение годовой экономии от снижения времени ожидания пассажиров равно полученной при 8 КП.
Определим значение целевой функции вида (7.3) в r-й точке как
ТП f С \
Wr = 2Д - 5 ЯГ5-С j хг. (7.4)
5=1 4 7
Таким образом, задача определения рационального числа и местоположения контрольных пунктов на маршрутной сети заключается в нахождении максимального значения функции
л m £
W(xlt х2, ... , (7.5)
де \дев J
г = 1 5=1
при условии, что %г = 0,1 для г— 1, 2, ..., и.
Преобразуем (7.5) следующим образом:
л т_ е
ПЮ= У] Щ ars - с) Хг =
r=1 S=1 5 а'*Хг
Г-1
Тогда задача будет заключаться в максимизации целевой функции
т п
5=1 Г=1
яри ограничении хг=0,1, г=1, 2, и.
Данная задача является нелинейной задачей дискретного программирования. Анализ возможности ее решения точным методом показал, что для этого потребуются весьма большие затраты машинного времени. Так, в соответствии с предложенным по методу ветвей и границ алгоритмом задача размерности п = 44 и т = 15 решалась около трех часов на ЦВМ производительностью порядка 200 тыс. элементарных операций в секунду. С учетом того, что реальные задачи содержат до 100 маршрутов и нескольких сот точек потенциального размещения УКП, определилась необходимость разработки приближенны?; эвристических алгоритмов. В результате их сравнительной оценки была определена целесообразность следующего приближенного алгоритма решения исходной задачи.
Алгоритм представляется в виде многошаговой процедуры. На Лм шаге /=1,2, ... п вычисляется и—t значений целевой функции (7.4). Пусть на Z-м шаге получен вектор
= ... ,
Если на каждом шаге исключается установка УКП в одной из точек множества Р, то вектор Х^) содержит t нулей и (п—t) единиц. Выделим компоненты вектора X{t\ равные единице:
... , х^ =1. r2 rtl—t
Последовательно исключим каждую из компонент х,к, /?=1, 2, ...» п—t, т. е. получим п—t векторов, k-й из которых равен:
= x^(k), ... , 2м.., п-/.
При этом Ля компонента равна:
x(O(fe) = f если
( 0, если i —
Далее определяем значения целевой функции (7.5) для каждого из полученных векторов и находим минимальное из них:
min (Г (.¥</)) = Г А
Вектор х«) определяет исключение УКП в соответствующей точке. На ^+1-м шаге полагается
Х^ = Х<£>.
Таким образом, за максимальное число шагов, равное п, исходная задача будет решена.
Рассмотренный эвристический алгоритм определения рационального количественного состава и территориального размещения устройств контрольного пункта легко реализуется на ЭВМ.
Определение рационального количества устройств связи с периферийным оборудованием АСДУ-МТ. Конструктивно УСПО может включать один или два полукомплекта, к каждому из которых можно подключать до шестнадцати УКП. Однако, чтобы определить фактически подключаемое число УКП к данному УСПО, необходимо убедиться, не превышает ли суммарная интенсивность поступления информации с УКП допустимой загрузки УСПО.
В данном случае УСПО можно рассматривать как систему массового обслуживания (СМО), которая характеризуется: числом обслуживающих аппаратов, равным и; поступлением заявок на обслуживание по т каналам; показательным распределением интервалов между последовательными заявками каждого из т ка-налов; показательным распределением времени обслуживания заявок каждым обслуживающим аппаратом и времени ожидания обслуживания 140
входными заявками в случае занятости всех обслуживающих аппаратов. Искомый параметр в дайной модели — вероятность Рп отказа в обслуживании входной заявки при п обслуживающих аппаратах системы массового обслуживания.
Характеристики вышеописанной конструкции УСПО приняты на основе количественных оценок, полученных с помощью разработанной математической модели данной СМО [26]. Показано, что максимальная интенсивность потока заявок по всем т=16 каналам на одно УСПО не должна превышать 0,282 заявок в секунду. При этом вероятность отказа в обслуживании составит Р —10~6.
Число УСПО для АСДУ-А конкретного города может быть определено в соответствии с соотношением _ л 0,282 ’
где Л —суммарная интенсивность заявок ТЕ со всех УКП.
Рациональное число УСПО (А*) равно:
ф _ Л(Пр п2.......гф
L ~ 0,282
где Л(лр, н2-• • ,/25 = ) “ суммарная интенсивность потока заявок от УКП при условии, что число У1\П на каждом маршруте Его ранга равно , Z = 1 ,5
В табл. 7.2 приведены величины
Д/ = iiiinp.i,
полученные при: п^ = 2, 4, 6, 8 для т = 1, 2, 5; mi = lt 2, 5;
/п2 = /пз=/‘Ч= 1, 2, ..., 30; т5=1, 2, 10 и интенсивности движения
ТЕ на типовом маршруте ранга (см. табл. 2.4), равной Xi =0,5, Z2 = — 0,25, 7.3 = 0,143, 7^4=0,066, 2-s = 0,0335 заявок/мин.
В качестве примера определим рациональное число УСПО для АСДУ-А г. Омска. Так, для данной маршрутной сети получено:
при т-2 =12, л2 = 8; при т3 — 26, — 6; при — 24, п\ = 2 и при т5 = 8,
=
На пересечении соответствующих строк и столбцов табл. 7.2 определяются следующие интенсивности:
А 2 _ /П2П*2 Х2 = 24,0,
Л3 = т3п* Х3 = 22,282,
Д4 = /724/14X4= 3,192.
Рациональное число УСПО составит
Л2 + Д-з -г а4 п 60-0,282
Число т- п1 от • Число от. П1
2 4 6 8 2 4 б 8
1 1,000 2,000 3,000 4,000 23 6,578 13,133 19,711 26,289
2 2,000 4,000 6,000 8,000 24 6,874 13,704 20,568 27,432
т\ 3 3,000 6,000 9,000 12,000 25 7,150 14,275 21,425 28,575
4 4.000 8,000 12,000 16,000 26 7,436 14,846 22,282 29,718
э 5,000 10,000 12,000 20,000 27 7,772 15,417 23,139 30,861
28 8,008 15,988 23,996 32,004
29 8,294 16,559 24,85.3 33,147
1 2 3 0,500 1,000 1,500 1,000 2,000 3,000 1,500 3,000 4,500 2,000 4,000 6,000 30 8,t83 17,130 25,710 34,290
0,133 0,267 0,400
4 2,000 4,000 6,000 8,000 1 0,533
5 2,500 5,000 7,500 10,000 2 0,266 0,534 0,800 1,060
6 3,000 6,000 9,000 12,000 3 0,399 0,801 1,200 1,590
7 3,500 7,000 10,500 14,000 4 0,532 1,068 1,600 2,132
8 4,000 8,000 12,'000 16,000 5 0,665 1,335 2,000 2,665
9 4,500 9,000 13,500 18,000 6 0,798 1,602 2,400 з,ша
10 5,030 10,000 15,000 20,000 7 0,931 1,869 2,800 3,731
11 5,500 И ,000 16,500 22,000 8 1,064 2,136' 3,200 4,264
12 6,000 12,000 18,000 24,000 9 1,197 2,403 3,600 4,797
13 6,500 13,000 19,500 26,000 10 1,330 2,670 4,000 5,330
14 7,000 14,000 21,000 28,000 11 1,463 2,937 4,400 5,863
15 7,500 15,000 22,500 30,000 12 1,596 3,204 4,800 6,395
16 8,000 16,000 24,000 32,000 13 1,729 3,471 5,200 6,929
17 8,500 17,000 25,500 34,000 14 1,862 3,738 5,600 7,462
18 19 20 9,000 9,500 10,000 18,000 19,000 20,000 27,000 28,500 30,000 36,000 38,000 40,000 /п4 15 16 17 18 19 1,995 2,128 2,261 2,394 2,527 4,005 4,272 4,539 4,806 5,073 6,000 6,400 6,800 7,200 7,600 7,995 8,529 9,061 9,594 10,127
20 2,669 5,349 8,000 10,660
1 0,286 0,571 0,857 1,143 21 2,793 5,607 8,400 11,193-
2 0,572 1,142 1,714 2,286 22 2,926 5,874 8,8'30 11,726г
3 0,858 1,713 2,571 3,429 23 3,058 6,141 9,210 12,259
4 1,144 2,281 3,428 4,572 24 3,192 6,408 9,600 12,792
о 1,430 2,8о>.) 4 ,285 5,715 25 3,325 6,67,о 10,000 13,325
6 1,716 3,426 5,142 6,858 23 3,458 6,942 10,400 13,85^
7 2,002 3,997 5,999 8,001 27 3,591 7,209 10,800 14,391
8 2,288 4,568 6,856 9,114 28 3,724 7,476 11,200 14,921
9 2,514 5,139 7,713 10,2'57 29 3,857 7,743 11,600 15,45/
10 2,860 5,710 8,570 11,430 3.) 3,990 8,010 12,000 15,993
тл 11 3,146 6,281 9,427 12,573
12 3,436 6,852 10,284 13,716
13 3,718 7,423 11,141 14,839 1 0,067 0,133 0,200 0,267
14 4,004 7,994 I1,998 16,032 2 0,134 0,266 0,490 0,534
15 4,290 8,565 12,855 17,145 3 0,201 0,399 0,690 0,80!
16 4,576 9,136 13,712 18,288 4 0,268 0,532 0,800 1,068
17 4,862 9,707 14.569 19,431 5 0,335 0,665 1,000 1.335
18 5,148 10,278 15,426 20,574 6 0,492 0,798 1,200 1,6,12
19 5,434 10,849 16,283 21,717 7 0,469 0,931 1,400 1,869
20 5,720 11,480 17,140 22,869 8 0,536 1,064 1,690 2,136
21 6,006 11,991 17,297 24,003 9 0,693 1,197 1,800 2, 4(:3
22 6,292 12,562 18,854 25,1-16 10 0,670 1,330 2,000 2,670
Определение рационального количества пультов диспетчеров для АС ДУ-MT. В АСДУ-МТ диспетчерский персонал доводит управляющие воздействия ВК водителям., а также принимает от них информацию.
Диспетчерский персонал можно рассматривать как систему массового обслуживания, содержащую пд обслуживающих аппаратов (диспетчеров), на вход которой поступает пуассоновский поток заявок с интенсивностью Лд. Время обслуживания каждой заявки постоянно и равно t0. Система равнодоступна (требования обслуживаются любым свободным аппаратом). В случае если в течение времени все аппараты заняты, то требование покидает систему не-обслужснным.
Представление работы диспетчерского персонала в виде системы массового обслуживания позволяет получить ориентировочные оценки по количественному составу диспетчеров. Эргономическпе-факторы при этом не рассматриваются.
Интенсивность поступления заявок в систему лд определяется в виде суммы интенсивности управляющих воздействий лд: и интенсивности вызова диспетчеров на телефонную связь Лд2 водителями ТЕ.
Интенсивность диспетчерских воздействий определяется в основном отклонениями движения ТЕ от расписания и их сходами с. линии.
Определим теперь вероятность превышения допустимой величины отклонения движения ТЕ от расписания. Документы по организации работы автобусного транспорта [66] регламентируют допустимую величину отклонения, равную ±2 мин. Как показано при статистического анализе работы маршрутизированного транспорта, величина среднего квадратичного отклонения в зависимости от числа контрольных пунктов на маршруте равна 1,66—2,48 мин. Данный диапазон изменения величины среднего квадратичного отклонения можно принять для оценки вероятности превышения допустимой величины отклонения движения ТЕ от расписания. По результатам указанного анализа можно также принять распределение отклонений от расписания по нормальному закону. С учетом этого вероятность превышения допустимой величины отклонения принимается PQ = 0,3173.
Предположим, что А4 — число конечных УКП, a N— общее число УКП. Тогда интенсивность потока заявок ТЕ с конечных УКП определится в виде
.VI *
А’-—А(«Р л2, ... , л5). (7.6)
Полагая, что на каждом маршруте имеются два конечных УКП, получим
5
i = l
Выражение (7.6) можно записать как
5
2 2 mi
Л1 -----Л (д’, «2> : • • • п5>-
2 т1п1 i=\
Интенсивность управляющих воздействий составит
лд=Л1Ро.
Вызов диспетчеров на телефонную связь водителями осуществляется при каждом сходе ТЕ с линии. Можно полагать, что так как Хд2СлД1.
В результате статистического моделирования описанной системы массового обслуживания получена зависимость числа пультов (пд) от интенсивности формирования управляющих воздействий
/2л ~ 10 (1 — е“0,5оХл), Лд Е [2,5] заявок/мин. (7.7)
В соответствии с (7.7) можно определить необходимое количество пультов диспетчеров для автоматизированной системы, внедряемой в конкретном городе.
7.2. Определение оптимального количественного состава и размещения оборудования автоматизированных систем диспетчерского управления движением таксомоторного транспорта
Задача определения оптимальной стояночной сети таксомоторного транспорта в условиях функционирования автоматизированной системы была поставлена при исследовании управления таксомоторным транспортом. При этом учитывались затраты на оборудование стоянок автомобилей-такси, где должны быть установлены устройства контрольного пункта и ввода информации, которые назовем устройствами стоянок (УС).
Решение задачи определения оптимальной стояночной сети или оптимального размещения УС осуществляется специально разработанными методами [47—49]. В результате ее решения находится вектор
5"-- ($1 , 52, , 5К1),
определяющий размещение УС: в /-и зоне устанавлива-
ется УС, если компонента Sj вектора 5 равна 1. Далее требуется определить, оборудование какого типа целесообразно установить в зонах размещения УС (УКП или УВИ).
УКП обеспечивает автоматический ввод кодированной информации с устройства транспортной единицы в вычислительный комплекс при наезде ТЕ на индуктивный контур, уложенный под дорожное 144
покрытие. Конструкция УКП допускает подключение до восьми контуров связи (одновременно на стоянке, оборудованной одним УКП, не может находиться больше восьми автомобилей-такси). Если интенсивность потока свободных автомобилей-такси на стоянку такова, что средняя длина очереди такси превышает восемь, требуется либо увеличить число УКП (представить стоянку такси в виде нескольких стоянок), либо установить на данной стоянке УВИ, которое обеспечивает ввод кодированной информации с индивидуального жетона водителя автомобиля-такси.
Таким образом, возникает задача определения необходимого числа контуров связи на каждой стоянке автомобилей-такси.
Устройства вызова такси могут быть установлены как непосредственно на стоянках, так и в местах интенсивного спроса автомобиля-такси.
Размещение УВТ на территории города необходимо производить до решения задачи размещения УС, поскольку расположение УВТ определяет формирование потоков заявок пассажиров на поездки. Постановка задачи оптимального размещения УВТ, а также указания по ее решению были даны при исследовании управления таксомоторным транспортом.
Вопросы определения оптимального размещения, а следовательно, и количественного состава периферийного оборудования (УС, УВТ) АСДУ-ТТ в разделе исследования управления движением ТТ определены тем, что размещение УВТ является задачей управления потребностью в поездках, а размещение УС — задачей формирования ресурсов. Поэтому в данном разделе целесообразно определить рациональное количество контуров связи для каждого УКП, устройств связи с периферийным оборудованием и пультов диспетчеров.
Определение рационального числа контуров связи устройств контрольных пунктов. Эта задача является общей для маршрутизированного и таксомоторного транспорта, поэтому в дальнейшем под остановочным пунктом (ОП) будем понимать контрольный пункт и стоянку такси.
Предположим, что на J-м ОП установлено УКП с контурами связи. Временем обслуживания ТЕ на ОП является время занятости ею контура связи. Время обслуживания распределено по показательному закону с параметром ц0- Интервалы между последовательными прибытиями ТЕ на J-й ОП распределены по показательному закону с параметром v>.
Тогда, как показано в работе [45], можно определить вероятности Рпи) (0, (^=0, 1, 2 ...) событий, состоящих в том, что в момент t на J-м ОП число обслуживаемых и ожидающих обслуживания ТЕ равно п (считаем, что все прибывающие ТЕ становятся в очередь);
где Ptf* определяется из условия
2^1
и равно fl" “ —------------------------!----------
-L (Г^Г}
л! + rjl (1- Ру)
гг=О
При этом считается, что загрузка УКП
P'Orj меньше единицы.
Найдем среднее число L(J)(ri) ТЕ в очереди на j-й стоянке:
<Sj) = У] пР<Дг. = п -уу р"+г/ (rj)Ti = и=1 7
РйП{?)г!)Г} VI п роЧ?Зг^Г} Pj —------------- > , пи. ----------------.
О» ЛА 3 Г/Ц1-Р;)2
л = 1
Тогда среднее время(rj) ожидания заявки на у-м ОП составит
Ио
Количество контуров связи на у-м ОП г$ должно удовлетворять такому условию, чтобы время /д ожидания и обслуживания ТЕ на ОП не превышало допустимого
/О>(гу)</Л. (7.9)
В качестве г,, например, можно взять наименьшее г/°), удовлетворяющее (7.9), т. е.
rW ~ min г7-.
Таким образом, для определения рационального количества контуров связи необходимо звдть интенсивность pj потока ТЕ на ОП (/=1, 2, ...), интенсивность обслуживания (рю), допустимое время Уд ожидания и обслуживания ТЕ на ОП.
Рассчитаем указанные параметры для маршрутизированного и таксомоторного транспорта.
Интенсивность потока ТЕ на j-й контрольный пункт зависит от числа маршрутов, проходящих через него, и их рангов:
5
1-1
где Xi — интенсивность движения ТЕ на маршруте ьго ранга;
tn j — число маршрутов i-ro ранга, проходящих через /-й контрольный пункт.
Определим теперь интенсивность потока такси на J-ю стоянку в случае, если после освобождения они следуют на ближайшую стоянку. Интенсивность потока освобождающихся автомобилей-такси в зоне может быть определена в виде
где у.г — интенсивность пассажиропотока из i-й зоны;
Рц — вероятность поездок пассажиров из зоны i в зону /; от— коэффициент наполнения автомобиля-такси;
Ki — общее число зон.
Интенсивность обслуживания ТЕ на контрольном пункте р,мо можно оценить через среднее время нахождения ТЕ на остановках. С этой целью определена статистическая функция распределения времени нахождения автобусов на остановке H(t) (рис. 7.1). При этом получено среднее время нахождения ТЕ на остановке
Дмо = 14,9 с. Таким образом, 1
Р-МО — ,
См о
Интенсивность обслуживания автомобилей-такси на стоянке цто зависит от местоположения последней и принятого в системе варианта оперативного управления таксомоторным транспортом. Определение Цто с учетом указанных факторов весьма сложно, поэтому ограничимся лишь некоторой оценкой этой величины, полученной при исследовании управления таксомоторным транспортом. Так, получено время занятости контура связи одной ТЕ, равное промежутку времени с момента передачи кодированной информации в вычислительный комплекс до момента получения управля-6*
Рис. 7.1. Статистическая функция рас пределения времени нахождения автобусов на остановке
ющего воздействия; в большинстве случаев оно не превосходит 5 мин. С учетом сказанного величина /т0=5 мин может быть принята в качестве верхней оценки для среднего времени обслуживания одной ТЕ на стоянке, а интенсивность обслуживания цТо может быть принята равной
1 Нго = —--•
*то
При выборе допустимого времени ожидания и обслуживания ТЕ на ОП необходимо исходить из того, чтобы очереди ТЕ, ожидающих освобождения контуров связи, были минимальными (практически при каждом прибытии ТЕ на ОП должен быть свободный контур связи). В связи с этим в конкретных расчетах значения величины /мд (допустимое время ожидания и обслуживания маршрутизированного транспорта), £тд (допустимое время ожидания и обслуживания таксомоторного транспорта) должны незначительно превышать величины /мо, ^то соответственно. В результате расчетов числа контуров связи для стоянок с различными значениями интенсивности прибытия автомобиля-такси были получены данные, приведенные в табл. 7.3.
Таблиц а 7.3
Число контуров связи УКП Интервал значений интенсивности потока прибывающих такси на стоянку, автомобиле й-и акси/мин Число контуров связи УКП Интервал значений интенсивности потока прибывающих такси на стоянку, автомсбилей-такси/мин
1 0—0,075 5 0,415—0,525
2 0,075—0,175 6 0,525—0,665
3 0,175—0,285 7 0,665—0,825
4 0,285—0,415 8 0,825—0,975
В табл. 7.3 для каждого заданного числа контуров связи указан соответствующий интервал интенсивности прибытия автомобилей-такси на стоянку. С помощью данной таблицы нетрудно определить число контуров связи для конкретной стоянки автомобилей-такси. Для этого достаточно найти интервал интенсивности, в который попадает значение интенсивности прибытия автомобилей-такси на данную стоянку.
Из табл. 7.3 видно, что при значении интенсивности прибытия автомобилей-такси на стоянку больше 0,975 автомобилей-такси/мин требуется либо увеличить число УКП на данной стоянке, либо вместо УКП установить УВИ.
В АСДУ-ТТ г. Ростова-на-Дону на подобных стоянках предполагается установка УВИ.
Определение рационального числа устройств связи с периферийным оборудованием АСДУ-ТТ. Конструкция УСПО унифицирована для автоматизированных систем диспетчерского управления городским транспортом. Поэтому 148
определение рационального числа УСПО для АСДУ-ТТ осуществляется так же, как и для АСДУ-МТ:
► *___Ат
т~ 0,282 ’
где LT* — рациональное число УСПО для АСДУ-ТТ;
Д т — суммарный поток заявок автомобилей-такси со стоянок.
Величина Ат может быть выражена через интенсивность прибытия автомобилей-такси на стоянки в виде
7=1
Определение рационального числа пультов диспетчеров АСДУ-ТТ. Диспетчерский персонал АСДУ-ТТ может быть рассмотрен в виде системы массового обслуживания (СМО), описанной при определении рационального числа пультов диспетчеров для АСДУ-МТ.
Суммарный поток заявок в такой системе на таксомоторном транспорте складывается из потоков: заявок пассажиров на поездки, формируемых с помощью устройств вызова автомобиля-такси и городских телефонов; управляющих воздействий вычислительного комплекса, которые диспетчерский персонал должен передать водителям и пассажирам; вызовов диспетчеров водителями на речевую связь.
Время обслуживания заявок данной СМО определяется временными затратами диспетчеров на их прием от пассажиров и ввод в вычислительный комплекс, на доведение управляющих воздействий ВК пассажирам и водителям и речевой обмен информацией с водителями.
Предположим, интенсивность суммарного потока заявок на диспетчерский персонал равна X, а среднее время обслуживания одной заявки равно tT. Заявки могул' ожидать обслуживания в течение времени А/т. Результаты статистического моделирования функционирования такой модели при различных значениях и А7Т приведены в табл. 7.4.
Сглаживание экспериментальных данных табл. 7.4 произведено методом наименьших квадратов. Число пультов диспетчеров опре-
Таблица 7.4
Д/т, мин Значение коэффициентов А/ , МИН Значение коэффициентов
а ь а ь
0,25 7,145 1,852 1 3,324 1,113
0,5 5,775 1,925 2 2,223 1,075
деляется в зависимости от произведения для различных значений Д/т в виде
п = а + b\t^
Значения коэффициентов а, b для различных Д/т приведены в табл. 7.5, при этом значение Мт лежит в диапазоне чисел [3; 35].
Определим необходимое количество диспетчеров в течение суточного цикла работы таксомоторного транспорта. При статистическом анализе работы таксомоторного транспорта были получе-ны оценки вероятности поездок в i-й час суток (табл. 2.14) Рг-, 1= 1,24. Идеальным планом N функционирования пультов диспетчеров будем считать следующий:
W » Л24),
где Пг — количество пультов диспетчеров, которое должно функционировать в г-й час суток, определяемое как
rii = а +
где Лг — интенсивность суммарного потока, обслуживаемого диспетчерским персоналом в t-й час суток.
Организация труда диспетчерского персонала характеризуется часом начала /=1, и и восьмичасовой продолжительностью каждой смены. С учетом организации работы диспетчеров в i-й час суток может функционировать т,г пультов диспетчеров
mi = i = 1, 24,
;ezz
где — количество диспетчеров, начинающих работать в j-ю смену;
h — целые числа интервала [тах(: — 8; 1); min(u; /)].
Несоответствие идеальному плану функционирования пультов диспетчеров будет выражено в виде
24
Д.ч= 2 I «<•-«<!• (7.10)
1=1
Задача построения рационального графика работы диспетчерского персонала— определить значения целочисленных переменных Mj, /=1, и, которые удовлетворяют ограничениям и миними-150
зируют целевую функцию (7.10). Эта задача аналогична задаче планирования обеспечения ГПТ ресурсами заданной потребности в поездках, рассмотренной при исследовании автоматизированного управления городским пассажирским транспортом. Как и ранее, данную задачу целесообразно замелить другой, получаемой при приближении к идеальному плану только «сверху». Полученная при этом задача будет целочисленной задачей линейного программирования, для решения которой допустимо применение одного из методов решения нецелочисленных задач линейного программирования.
В результате необходимое количество диспетчеров в течение суточного цикла работы таксомоторного транспорта составит
и
N, =2^--
J-1
С учетом того, что каждый пульт диспетчеров может функционировать в течение S смен их работы, общее число пультов в системе будет равно
В заключение отметим, что подобный подход к определению числа пультов диспетчеров для АСДУ-МТ практически не осуществлялся, так как реальный поток заявок на диспетчерский персонал в АСДУ-МТ оказывается существенно меньше, чем в АСДУ-ТТ. Поэтому в АСДУ-МТ необходимо значительно меньшее число пультов диспетчеров и составление графика работы диспетчерского персонала может быть достигнуто более простыми методами.
7.3. Определение экономической эффективности автоматизированных систем диспетчерского управления движением городского пассажирского транспорта
Внедрение автоматизированных систем диспетчерского управления движением городского пассажирского транспорта сопряжено с трудоемкими строительно-монтажными и пуско-наладочными работами и требует привлечения значительных капитальных вложений. Поэтому наряду с социальными аспектами целесообразности внедрения АСДУ-ГПТ Важное значение приобретают и экономические факторы.
За количественное выражение экономической эффективности внедрения АСДУ-ГПТ принимается годовой экономический эффект Эг:
Эг — э ~ ЕпК t
где Э — суммарная экономия от внедрения системы;
Еп — нормативный коэффициент эффективности;
К— общая сумма капитальных затрат.
Определим составляющие экономического эффекта для АСДУ-МТ и АСДУ-ТТ. Если характер капитальных и эксплуатационных затрат для двух классов систем в основном сохраняется, то экономия от внедрения данных систем имеет характерные для каждого вида транспорта составляющие.
Определение капитальных затрат. Капитальные затраты, связанные с внедрением АСДУ-ГПТ, включают в себя стоимость предпроизводственных затрат на научно-исследовательские и опытно-конструкторские работы, оборудование системы, строительно-монтажные и пуско-наладочные работы. Отметим, что пред-производственные затраты включаются в капитальные затраты на создание и внедрение только первых (головных) автоматизированных систем. Так, предпроизводственные затраты по созданию АСДУ-А Омска составили 1181,1 тыс. руб., а АСДУ-ТТ г. Ростова-на-Дону— 500 тыс. руб.
Затраты на систему состоят из стоимости аппаратуры центра, периферийного и сервисного оборудования. Величина затрат на оборудование определяется количественными характеристиками структуры АСДУ-ГПТ. В табл. 7.6 приведена стоимость агрегатных средств вычислительной техники, используемых в АСДУ-ГПГ, ио ценам па 1976 г. В табл. 7.7 приведена стоимость оборудования целевой разработки.
К сервисному оборудованию относятся передвижные лаборатории внедрения и эксплуатации устройств подвижных единиц и периферийного оборудования, контрольно-проверочная аппаратура оборудования автотранспортных предприятий, устройство построения расписания.
Стоимость строительно-монтажных и пуско-наладочных работ может быть определена только при выполнении проектных работ. Ориентировочной оценкой затрат данного вида с учетом транспортно-заготовительных расходов могут быть данные табл, 7.8, полученные в результате внедрения АСДУ-А в Омске.
Так, стоимость строительно-монтажных и пуско-наладочных работ одного УКП составила около 7700 руб., а одного УПЕ — около 120 руб. Стоимость строительно-монтажных и пуско-наладочных работ по УВИ будет близкой и аналогичной стоимости УКП, а по УВТ — стоимости установки телефона-автомата.
Определение эксплуатационных затрат. С эксплуатацией АСДУ-ГПТ связаны затраты на обслуживание системы, па заработную плату диспетчерского персонала, амортизационные отчисления на электроэнергию, потребляемую системой, на выполнение профилактических и текущих ремонтов, аренду выделенных телефонных линий связи и накладные расходы.
Затраты на обслуживание системы и содержание диспетчерского персонала состоят из фонда основной и дополнительной заработной платы с отчислением на социальное страхование.
Количество обслуживающего и диспетчерского персонала зависит от организации труда и структуры системы. Определение количества диспетчеров для конкретных систем показано в гл. 7, 152
Наименование аппаратуры Условные обозначения Шифр Стоимость, руб.
Процессор М-6000 Оперативное запоминающее устройство Устройство наращивания памяти Канал прямого доступа в память Расширитель ввода-вывода Устройство ввода с перфоленты » вывода на перфоленту Вводно-выводное устройство Станция индикации данных Расширитель ввода-вывода Таймер Модуль управления выводом дискретной информации Устройство внешней памяти па магнитных дисках Устройство внешней памяти на магнитной ленте Устройство печатающее параллельное Модуль кодового управления бесконтактный Модуль позиционного управления Дуплексный регистр Модуль кодового управления контактный Модуль быстрой передачи данных » группового управления Модуль ввода инициативных сигналов Устройство печати с клавиатурой Разветвитель сопряжения Модуль сопряжения с телеграфной линией связи Модуль параллельной передачи данных Шкаф кроссовый ПР ОЗУ УНП кпдп РВВ УВвПЛ УВПЛ ВВУ сид РВВ ТМР МУВ УВПМД УВПМД УПчП МКУВ МПУ др МКУК МБПД МГУ МВвИС УПК PC МСТА мппд А-131-8 А-211-8 А-151-1 А-152-1/1 А-491-5/1 А-411-4 . А-421-2 А-531-2 А-541-1 А-541-2 А-491-5/2 А-129-1 А-641-11 ЕС 5052 А-311-3/6 А-522-1 А-641-2 А-641-6 А-491-3 А-641-5 А-723-1 А-622-Г/7 А-622-4 А-531-3 А-151-2 А-722-2 А-721-2 А-651-1 12 250 10 000 1 303 5 500 4 210 4 700 2 150 1 200 5 000 12 440 4210 16) 1 ЗОЭ 34 000 69 550 55 000 75 120 200 295 550 2518 260 4 550 10 890 2 500 1350 680
численность обслуживающего персонала устанавливается в соответствии с нормами на эксплуатацию агрегатных средств вычислительной техники. В частности, для АСДУ-А Омска количестве- обслуживающего и диспетчерского персонала с учетом двухсменной работы системы составляет 32 чел. с годовым фондом зарабои-юй платы 60,0 тыс. руб.,—около 6% от затрат на оборудование. Для АСДУ-ТТ г. Ростова-на-Дону количество диспетчерского и обслуживающего персонала составляет 110 чел. с годовым фондом заработной платы 190,4 тыс. руб.,— около 9% от затрат на оборудование. Амортизационные отчисления включают расходы на полное восстановление, капитальный ремонт и определяются исходя из балансовой стоимости оборудования и действующих норм амортизации [46].
Затраты на текущий ремонт могут быть приняты в размере 5% от общей стоимости оборудования системы [18].
Наименование аииараiуры Условные обозначения Стоим ость, руб. Примечание
Устройство подвижной единицы УПЕ 410 По данным завода-изготовителя на 1976 г.
» контрольного пунк- та УКП 2427 В условиях изготовления опытным производ- ством организации-разработчика на 1976 г.
Установка диспетчерской связи УДС 362 В условиях изготовления опытным производ- ством организации-разработчика на 1976 г.
Устройство ввода информации УВИ 1100 То же
» связи с периферий- ным оборудованием УСПО 16441 »
Передвижная лаборатория внедрения и эксплуатации устройств подвижной единицы ПЛВЭ-УПЕ 36300 »
Передвижная лаборатория внедрения и эксплуатации периферийных устройств плвэ-п 50820 »
Контрольно-проверочная аппаратура оборудования автотранспортных предприятий КПА-АТП 4997 »
Устройство построения расписания УПР 18 »
Устройство вызова такси УВТ 50 Стоимость телефона-автомата АТМ-69/15
Стоимость электроэнергии, потребляемой оборудованием систе-мы, рассчитывается суммированием энергии, потребляемой каждым устройством. Так, для АСДУ-А Омска затраты на электроэнергию составили около 0,63% затрат на оборудование, а для АСДУ-ТТ г. Ростова-на-Дону — около 0,4%.
Затраты на эксплуатацию выделенных телефонных линий связи определяются из расчета арендной платы: 60 руб. в год за каждую линию связи [54].
В накладные расходы входят затраты на освещение, отопление помещений, приобретение машинных носителей информации, служебные командировки и др. Согласно работе [18], эти расходы составляют около 60% от фонда заработной платы обслуживающего персонала.
Определение экономического эффекта от внедрения АСДУ-МТ. Внедрение АСДУ-МТ обеспечивает повышение качества удовлетворения потребности населения в поездках и эффективности использования маршрутизированного транспорта.
Повышение качества удовлетворения потребности в поездках осуществляется показателями среднего времени ожидания пассажира и комфортабельности поездок.
Оценка снижения времени ожидания пассажиров за счет функ-» ционирования АСДУ-МТ дана в гл. 2.
Наименование затрат Стоимость, руб. Примечание
Строительно-монтажные работы по установке центрального оборудования 67 650 12,6% от стоимости центрального оборудования
Пуско-наладочные работы по центральному оборудованию 24 790 4,65% от стоимости центрального оборудования
Строительные работы по размещению устройств контрольного пункта 162 310 Около 5000 руб. на одно УКП
Монтажные работы по установке устройств контрольного пункта 41440 Около 1300 руб. на одно УКП
Монтажные работы по установке устройств подвижных единиц 36 900 Около 60 руб. па одно УПЕ
Пуско-наладочные работы по устройствам контрольного пункта 43 633 Около 1400 руб. на одно УКП
Пуско-наладочные работы по устройствам подвижной единицы 36 900 Около 60 руб. на одно УПЕ
Регулярное движение маршрутизированного транспорта в условиях функционирования АСДУ-МТ обеспечивает равномерное наполнение салона подвижных единиц, за счет чего повышается комфортабельность поездок, а это, в свою очередь, увеличивает число оплачиваемых поездок за счет проезда пассажиров па короткие расстояния и уменьшения неоплачиваемых поездок.
Обеспечение снижения затрат времени городского населения на поездки, т. е. увеличение его свободного времени,— важная народнохозяйственная задача. Стоимостная оценка снижения времени ожидания пассажиров за счет внедрения АСДУ-А может быть получена на основе данных табл. 2.11—экономии Ец от снижения времени ожидания на маршруте i-ro ранга при наличии на нем контроля и управления движением ТЕ в j = 2, 4, 6, 8 контрольным пунктам.
Если маршрутная сеть характеризуется тг- маршрутами l-го ранга, а рациональное число контрольных пунктов на маршрутах i-ro ранга определяется как то экономия 3(t2) от снижения времени ожидания пассажиров составит
5
3 (й) — Е * mif i — 1 in'L
где Ein i—годовая экономия от снижения времени ожидания пассажиров на маршруте i-ro ранга при контроле и управлении движением ТЕ па нем в /г;* контрольных пунктах.
Экономия от снижения себестоимости перевозки одного пассажира
Э = (#о-с1)770(1 +Л-у),
где Со, ci — себестоимость перевозки одного пассажира соответственно до внедрения и после внедрения системы;
Ло— годовой объем городских пассажирских перевозок до внедрения системы;
Л'у — коэффициент увеличения количества перевозимых пассажиров.
Исследования, проведенные кафедрой экономики ЛЪосковского автомобильно-дорожного института, определили, что внедрение АСДУ-А в Омске обеспечивает увеличение объема перевозок в среднем на 8—10%. Таким образом, ориентировочно можно полагать, что Лу= (0,08—0,1). Для Омска принято увеличение количества перевозимых пассажиров на 8% (Ху = 0,08) при внедрении АСДУ-А, что обеспечило экономию от снижения себестоимости перевозки в 940 тыс. руб. Годовой экономический эффект от внедрения системы, выраженный только через экономию от снижения себестоимости перевозки, составил 525 тыс. руб., а срок окупаемости — около 3 лет.
Отметим, что данные экономические показатели определяют целесообразность внедрения АСДУ-А для автотранспортных предприятий. Однако при этом нс учитывается экономия за счет снижения времени ожидания пассажиров. Учет экономии от снижения времени ожидания пассажиров, обеспечиваемого автоматизированными системами диспетчерского управления городским пассажирским транспортом, определяет целесообразность внедрения данных систем для народного хозяйства в целом.
Определение экономии и экономического эффекта от внедрения АСДУ-ТТ. Повышение качества удовлетворения потребности в поездках на таксомоторном транспорте при внедрении АСДУ-ТТ обеспечивается показателями среднего времени ожидания пассажиров и вероятности отказа в обслуживании. Значение данных показателей до внедрения системы (обозначим их в виде tc, Рс соответственно) могут быть получены в результате статистического анализа объекта управления, а их значения после внедрения системы (ZB, Рв) могут быть определены при исследовании управления таксомоторным транспортом в условиях конкретного города. Экономия Э\ за счет снижения времени ожидания пассажиров определяется в виде
где Л7с — суммарное количество перевозимых пассажиров на ТТ за год до внедрения системы;
Л?в — суммарное количество пассажиров, перевозимых за год после внедрения системы;
р — стоимостная оценка единицы времени ожидания пассажиров.
Уменьшение вероятности отказа в обслуживании на ТТ при функционировании АСДУ-ТТ приводит к увеличению количества перевозимых пассажиров, поэтому величина NB определяется как
Например, по результатам исследования управления ТТ г. Ростова-на-Дону в условиях функционирования АСДУ-ТТ количество перевозимых пассажиров за сутки увеличивается на 5250 и составит 50250 чел.
При рациональном размещении устройств вызова такси на территории города, как показывают результаты исследования управления ТТ, средняя длина перегона ТЕ для удовлетворения заявок пассажиров, сформированных с помощью УВТ, не превысит 0,75 км. Поэтому стоимость вызова автомобиля-такси с помощью УВТ определена в размере 15 коп., что и определяет дополнительную денежную выручку.
За счет более эффективного управления ТТ в условиях функционирования АСДУ-ТТ возрастает коэффициент платного пробега, что также определяет дополнительную денежную выручку.
Суммарная экономия Э от внедрения АСДУ-ТТ (без учета экономии от снижения времени ожидания пассажиров) составит
Э = Д1 4- Д2 4“ Дз»
где Д1 — дополнительный доход за счет увеличения платного пробега;
Д2 — дополнительный доход за счет вызова автомобиля-такси с помощью УВТ;
Дз — дополнительный доход за счет оплаты дополнительных посадок.
Величина Д\ определяется увеличением количества перевозимых пассажиров и коэффициента платного пробега. Суммарный платный пробег всех автомобилей-такси за год до внедрения системы вычисляется:
Лгс
Gx 4“ ^п) ТСпС»
где Zx — средняя длина одного непроизводительного (холостого) пробега автомобилей-такси;
/п — средняя длина одной платной поездки;
Кпс — среднее значение коэффициента платного пробега до внедрения системы;
сот — среднее наполнение автомобиля-такси в одной поездке.
Аналогично суммарный платный пробег ТТ после внедрения системы определится как
— (/х4-/п)А’пв,
<°т
где Кп.ъ- — среднее значение коэффициента платного пробега после внедрения системы. Тогда Д\ определится в виде
Д1 = —-+Zn- - NcKnc) <хт,
где ат — стоимость одного платного километра пробега такси.
В частности, рассчитано, что при внедрении АСДУ-ТТ в г. Рос-тове-на-Дону дополнительный доход за счет увеличения платного пробега составит около 1110 тыс. руб.
Величина дополнительного дохода за счет оплаты вызова такси с помощью УВТ зависит от количества пассажиров, использующих УВТ для формирования заявок:
ФЛИО,15 /42 — ; 9
IS
где фт— коэффициент, определяющий процент пассажиров, формирующих заявки с помощью УВТ;
0,15 — стоимость оплаты вызова автомобиля-такси с помощью УВТ, руб.
Исследование управления в условиях функционирования АСДУ-ТТ в г. Ростове-на-Дону показало, что около 60% пассажиров будут пользоваться УВТ для формирования заявок на поездки. При этом получено, что Д2 = 840 тыс. руб. Дополнительный доход за счет увеличения количества оплачиваемых посадок составит
77
Дз - - >
WT
где Оп — стоимость оплаты посадки в автомобиль-такси, руб.
Для условий г. Ростова-на-Дону Д3 = 98 тыс. руб.
В связи с увеличением платного пробега ТЕ при внедрении АСДУ-ТТ эксплуатационные расходы возрастут пропорционально увеличению платного пробега:
AZ - Yt \ + Z" (ВД» -
Л
где \т — стоимостное выражение эксплуатационных расходов, приходящихся на один платный километр пробега.
Экономический эффект от внедрения АСДУ-ТТ в г. Ростовс-па-Дону, по данным расчетов, составляет около 400 тыс. руб., при сроке окупаемости 2,5 года.
Приведенные экономические оценки указывают па целесообразность внедрения автоматизированных систем диспетчерского управления городским пассажирским транспортом.
ГЛАВА 8
ОПЫТ ВНЕДРЕНИЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГОРОДСКОГО ПАССАЖИРСКОГО ТРАНСПОРТА
В течение 1977—1978 гг. сданы в промышленную эксплуатацию АСДУ-А в Омске и Алма-Ате и первая очередь АСДУ-ТТ в Ростове-па-Дону. В последующем намечается внедрить автоматизированные системы диспетчерского управления отдельными видами ГПТ во многих городах СССР. Опыт внедрения и эксплуатации головных образцов АСДУ-ГПТ показывает, что широкое тиражирование систем требует проведения мероприятий промышленного, технического и организационного характера.
8.1. Промышленное обеспечение внедрения АСДУ-ГПТ
Промышленное обеспечение внедрения АСДУ-ГПТ требует решения вопросов серийного выпуска разработанных средств автоматизированного управления ГПТ и комплектации систем агрегати-руемыми средствами вычислительной техники. В настоящее время закончено освоение промышленного выпуска ряда разработанных средств автоматизированного управления ГПТ на предприятиях Минприбора СССР.
К ним относятся устройства контрольного пункта, связи с периферийным оборудованием, ввода информации, диспетчерской связи АСДУ-ГПТ.
Комплектование автоматизированных систем диспетчерского управления городским пассажирским транспортом агрегатируемыми средствами вычислительной техники осуществляется в соответствии с действующим положением по поставке АСВТ-М, по которому поставка осуществляется в виде типовых и специфицированных комплексов.
Анализ структуры типовых комплексов показал, что требованиям АСДУ-ГПТ не отвечает ни один из них. Поэтому поставка АСВТ-М для АСДУ-ГПТ осуществляется в виде специфицированных комплексов.
На разработку и изготовление специфицированного комплекса составляется техническое задание, согласовывается с организацией-разработчиком АСВТ-М и представляется в трест «Союзсистем-комплект» Минприбора СССР.
Поставка специфицированных комплексов осуществляется, как правило, в виде одного из типовых комплексов и дополнительных модулей, определяемых спецификацией к договору поставки.
Следует остановиться па вопросах пуска и наладки специфицированных вычислительных комплексов АСВТ-М (СВ К) для АСДУ-ГПТ. Практика показывает, что заказчик АСДУ-ГПТ — транспортное управление — на этапе разработки системы не может квалифицированно осуществить приемку СВК. Поэтому целесообразно наладку и пуск СВК осуществлять с привлечением организации, разработавшей АСДУ-ГПТ. Кроме того, существующая практика проверки работоспособности технических и программных средств СВК недостаточно эффективна, что приводит к необходимости разработки комплекса тестов, учитывающего специфику АСДУ-ГПТ. Полученный организацией-заказчиком СВК может быть использован в качестве технологического стенда для проверки режимов функционирования периферийного и коммутационного оборудования, устройств связи с периферийным оборудованием и пультов диспетчеров на этапе проведения строительно-монтажных работ.
Технологический стенд используется также для отладки специального программного обеспечения и операционной системы.
8.2. Техническое обеспечение внедрения АСДУ-ГПТ
Техническое обеспечение внедрения и эксплуатации АСДУ-ГПТ / необходимо на стадиях проектирования, проведения строительных, монтажных и пуско-наладочных работ. Создание АСДУ-ГПТ предполагает различные разработки непосредственно системы и выпол* нение проектов привязки комплекса технических средств (КТС) АСДУ-ГПТ для условий конкретного города. Для этой цели выполняются проекты привязки.
Требования на размещение центрального оборудования в здании ЦДС совпадают с общими требованиями к размещению и эксплуатации средств вычислительной техники. Сложнее выполнение проектов привязки периферийного оборудования, так как разработанные проекты необходимо согласовать с соответствующими организациями для проведения работ по вскрытию дорожного полотна (при укладке индуктивных контуров связи и недостающих линий связи), по выделению телефонных линий связи в сети ГТС, по установке УКП, УВТ, УВИ без нарушения общего архитектурного облика города.
Особого внимания требует оборудование остановочных пунктов. Конфигурация индуктивных контуров должна быть отображена на поверхности дорожного покрытия, а наезд транспорта на контуры должен регулироваться указателями. Остановочные пункты автобусного транспорта должны иметь «карманы», длина которых позволяет одновременно «накапливать» достаточно большое число транспортных единиц.
Площадь каждой стоянки должна позволять одновременно размещать максимальное для нее число такси. На остановочных пунктах надо обеспечить удобство посадки и высадки пассажиров.
Проведение строительных и монтажных работ по установке периферийного оборудования требует привлечения соответствующих организаций. Однако характер строительных работ не позволяет любой строительной организации выполнить их. Так, строительные работы для внедрения головных образцов АСДУ-ГПТ выполнялись специализированными бригадами, созданными у заказчика системы и обеспеченными соответствующей техникой. Как показывает опыт, монтажные работы могут быть выполнены практически любой организацией по монтажу электронного оборудования.
Пуско-наладочные работы по установке УПЕ и размещению периферийного оборудования производятся монтажной организацией совместно с организацией-разработчиком. На данном этапе весьма эффективно использование передвижных лабораторий внедрения и эксплуатации устройств подвижной единицы и периферийных устройств. Оборудование подвижных лабораторий, смонтированное в автобусах ПАЗ-652Б, позволяет осуществить настройку устройств по всем режимам работы, обнаружить неисправности и устранить их. Мобильность лаборатории позволяет существенно снизить временные и материальные затраты на наладку и эксплуатацию периферийного оборудования АСДУ-ГПТ.
Внедрение АСДУ-ГПТ сопряжено с большой организационной работой, проводимой в рамках города, транспортного управления и транспортного предприятия. Так как АСДУ-ГПТ направлены прежде всего на улучшение транспортного обслуживания городского населения, то руководство работой по внедрению систем целесообразно возложить на городские органы власти.
На этапе внедрения головных образцов АСДУ-ГПТ создавались постоянно действующие штабы по внедрению системы при Горисполкомах, в которые входили руководители всех организаций, участвующих в разработке и внедрении систем. Составлялся и утверждался план-график проведения работ по созданию систем, за выполнением которого следил штаб. Кроме того, штаб решал все оперативные вопросы, связанные с координацией проводимых работ. Положительный практический опыт указывает на целесообразность подобного подхода и при тиражировании систем.
Организационные мероприятия, проводимые в рамках транспортных управлений и предприятий, направлены на подготовку объекта управления к внедрению систем. В рамках транспортных управлений требуется осуществить следующие мероприятия: создать отдел АСУ, в состав которого следует включить информационно-вычислительный центр транспортного управления и службу эксплуатации автоматизированной системы диспетчерского управления; решить вопросы выделения трудовых ресурсов для службы эксплуатации автоматизированной системы; осуществить перестройку организационной структуры и штатного расписания ЦДС в соответствии с требованиями АСДУ-ГПТ; внести необходимые изменения в систему оплаты труда водителей и диспетчеров в условиях функционирования АСДУ-ГПТ; укомплектовать штат диспетчерского и обслуживающего персонала, а также осуществить его обучение; заменить существующую диспетчерскую отчетность на формируемую АСДУ-ГПТ; разработать должностные и операционные инструкции для персонала.
В рамках транспортных предприятий (ТП) необходимо: определить должностных лиц, ответственных за проведение внедрения системы в рамках ТП; осуществить перестройку организационной структуры и штатного расписания ТП в соответствии с требованиями АСДУ-ГПТ; обучить водительский состав работе в условиях функционирования АСДУ-ГПТ и разработать для них должностные инструкции; обучить*диспетчеров ТП работе в условиях функционирования АСДУ-ГПТ и разработать для них должностные инет-» рукции; обучить средний руководящий состав работе в усло^ виях функционирования АСДУ-ГПТ и разработать для него должностные инструкции; изменить гаражные номера подвижного состава в соответствии с требованиями функционирования АСДУ-ГПТ.
Выполнение указанных мероприятий промышленного, технического и организационного характера обеспечивает успешное внедрение и эксплуатацию АСДУ-ГПТ.
ГЛАВА 9
ТЕНДЕНЦИИ РАЗВИТИЯ МЕТОДОВ И СРЕДСТВ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГОРОДСКОГО ПАССАЖИРСКОГО ТРАНСПОРТА
Задача автоматизированного управления движением городского пассажирского транспорта в традиционной постановке может быть сформулирована следующим образом. При заданных видах ГПТ требуется выявить такие методы и средства управления отдельными видами ГПТ или всем транспортом в целом, которые обеспечили бы повышение качества удовлетворения потребности городского населения в поездках и эффективности использования ресурсов удовлетворения потребности. Были выделены три этапа решения задачи автоматизированного управления ГПТ: внедрение средств диспетчерской связи на ГПТ; внедрение средств диспетчерской связи и отображения информации; внедрение средств диспетчерской связи, сбора, хранения, отображения и обработки информации. На каждом этапе разрабатывались соответствующие методы управления, которые могли быть реализованы с помощью технических средств данных этапов. Переход от этапа к этапу определялся требованиями дальнейшего повышения качества удовлетворения потребности городского населения в поездках и эффективности использования ресурсов удовлетворения потребности.
На третьем этапе были созданы автоматизированные системы диспетчерского управления отдельными видами ГПТ. Четвертым этапом развития автоматизированного управления движением ГПТ можно считать дальнейшее совершенствование комплекса технических средств АСДУ-ГПТ и методов управления движением.
Следует отметить, что относительный эффект автоматизированного управления движением ГПТ при переходе от этапа к этапу имеет тенденцию к снижению. Существует некоторый предел, при достижении которого дальнейшее повышение качества удовлетворения потребности в поездках и эффективности использования ресурсов только за счет совершенствования средств и методов управления невозможно. Поэтому объективной необходимостью в перспективе является принципиально более общая постановка задачи автоматизированного управления ГПТ. Следует определить, какую конструкцию должен иметь подвижной состав и какие должны быть методы и средства управления его движением, чтобы стало возможным достигнуть заданного качества удовлетворения потребности городского населения в поездках при максимальной эффективности использования ресурсов.
Отнесем данную постановку задачи автоматизированного управления ГПТ к пятому этапу и охарактеризуем далее четвертый и пятый этапы прогнозируемого развития управления ГПТ. Прогноз развития управления ГПТ в данном случае строится па основе опыта разработки АСДУ-ГПТ, а также проведения научно-исследовательских работ по развитию управления ГПТ в перспективе.
9.1. Анализ тенденций развития средств управления движением городского пассажирского транспорта
Существующий комплекс технических средств (КТС) для автоматизированного управления ГПТ не лишен недостатков в части информационной связи с ТЕ, доведения управляющих воздействий ио восстановлению нарушенного движения и построения структуры систем.
Организация информационной связи в АСДУ-ГПТ осуществляется по индуктивному каналу на участке «транспортная единица — контрольный пункт» и по проводному каналу — на участке «контрольный пункт —ЦДС». При внедрении АСДУ-ГПТ выявились трудности, связанные со вскрытием дорожного полотна при укладке индуктивных контуров и недостаточным количеством свободных телефонных пар в кабельных телефонных сетях. Применение радиоканалов для информационной связи с ТЕ вместо индуктивно-проводных каналов может облегчить тиражирование систем и снизить как стоимость оборудования, так и объем строительно-монтажных работ.
Следует отметить, что прямая замена индуктивно-проводных каналов па радиоканалы нецелесообразна, так как при этом потребуется большое количество разрешенных для использования частот (или пар частот при организации дуплексных радиоканалов), равное числу контрольных пунктов. Очевидно, обеспечить в большом количестве радиочастоты не представится возможным. Предварительное изучение данного вопроса показывает, что реально можно рассчитывать на число радиочастот в пределах десятка па одну систему. Только одна эта причина определяет необходимость разработки сети радиоканалов, принципиально отличающейся от сети индуктивно-проводных каналов.
Структура сети радиоканалов во многом зависит от принципа контроля движения ТЕ и управления им. Различается контроль и управление в любой точке транспортной сети (непрерывный) и в некоторых выделенных точках (дискретный). Принцип непрерывного контроля и управления частично осуществлен в описанных выше зарубежных системах, и использование его вызывает необходимость разработки и оценки новой технологии управления движением ГПТ. В разработанных АСДУ-ГПТ принят принцип дискретного контроля и управления, который отвечает существующей технологии управления движением ГПТ. Таким образом, выбор принципов контроля it управления движением ГПТ в перспективе сопряжен с разработкой новых методов управления и оценкой их целесообразности.
Если ориентироваться иа существующую технологию управления движением ГПТ, то можно принять за основу структуру радиоканалов, предназначенных для обмена дискретной и речевой информацией между ТЕ и НДС.
Радиоканал дискретной информации (РДИ) работает в дуплексном режиме. Обмен информацией между ТЕ и ЦДС производится
через ретрансляторы, расположенные на остановочных пунктах, где осуществляется контроль и управление движением ТЕ. Местоположение ТЕ определяется местоположением ретранслятора, через который передана информация от ТЕ в ЦДС. При этом осуществляется наложение кода ретранслятора на информационный сигнал от ТЕ (маркирование сигнала). РДИ между контрольным пунктом (КП) и ЦДС может быть образован при помощи радиостанций низовой УКВ-радиосвязи (диапазон 150 мГц), расположенных на ЦДС и всех КП, РДИ между ТЕ и КП может быть образован при помощи радиостанций, работающих в диапазоне 425— 440 мГц. Радиус действия этого канала должен быть не более 100 м, чтобы исключить взаимное влияние соседних КП, работающих на одинаковых несущих частотах. Требуется наличие несущих частот для передачи информации от ЦДС к КП, от КП к ТЕ, от ТЕ к КП и ЦДС. Получение дискретной информации от ТЕ осуществимо в данном случае при циклическом опросе ретрансляторов. При этом распределение информационных сигналов, поступающих от ТЕ, производится при помощи распределителей, находящихся на ЦДС и ТЕ.
Характеристики радиоканалов для передачи речевой информации зависят от доведения до водителей ТЕ управляющих воздействий по восстановлению нарушенного движения. В разработанны.х АСДУ-ГПТ доведение управляющих воздействий, сформированных вычислительным комплексом (ВК), осуществляется диспетчерским персоналом. Если в АСДУ-МТ требуется относительно небольшое количество диспетчеров, то в АСДУ-ТТ потребность возрастает до 20—30 чел., что является недостаткОхМ систем. Возникает необходимость замыкания обратной связи в контуре управления ТЕ-ВК, минуя диспетчерский персонал. Однако это сопряжено с разработкой специальных дисплейных устройств для размещения их либо на КП (при дискретном принципе контроля и управления), либо на ТЕ (при непрерывном контроле и управлении). При наличии таких средств доведения управляющих воздействий количество радиоканалов для передачи речевой информации может предельно сократиться, а их роль будет только вспомогательной (например, для получения водителями различного рода справок).
В настоящее время в СССР интенсивно ведутся работы по созданию разнообразных устройств отображения информации для оснащения ими различных отраслей народного хозяйства и, в частности, технологических процессов. Поэтому не исключено в перспективе появление дисплейных устройств и для ГПТ.
Структура сети радиоканалов для организации информационной связи с ТЕ при непрерывном принципе контроля и управления характеризуется: наличием маркеров на направлениях движения ТЕ, номер которых считывается оборудованием ТЕ при проследовании их через зону действия маркера (в радиусе 20—50 м); нали-личем радиооборудования на ТЕ, дисплейного устройства, устройства определения наполнения и пройденного расстояния от маркера до точки очередного опроса ТЕ; организацией радиоканала 164
обмена дискретной информацией между ТЕ и ЦДС; циклическим опросом радиоканалов для получения дискретной информации о движении ТЕ и для формирования управляющих воздействий; наличием речевого радиоканала для экстренной связи между диспетчерами и водителями ТЕ.
Остановимся далее на возможных направлениях совершенствования структуры автоматизированных систем. Структура разработанных АСДУ-ГПТ является централизованной, т. е. средства сбора, хранения, обработки и отображения информации, объединенные понятием В К, сосредоточены в НДС. Периферийное оборудование при этом обеспечивает только формирование исходной информации для управления. В централизованной структуре должна быть обеспечена высокая надежность функционирования технических и программных средств ВК, так как сбои в его работе исключают управление практически всеми ТЕ. Учитывая, что надежность функционирования В К пропорциональна количеству его оборудования, которое, в свою очередь, пропорционально числу управляемых ТЕ, можно сказать, что существует некоторый предел числа управляемых ТЕ, превышение которого характеризуется неудовлетворительной надежностью. В таком случае необходим переход к децентрализованным структурам АСДУ-ГПТ.
Возможность построения децентрализованной структуры систем управления ГПТ зависит от общего развития средств вычислительной техники. В настоящее время заканчиваются работы по созданию системы малых электронных вычислительных машин (СМ ЭВМ). Комплексы СМ ЭВМ предназначены для: использования на нижнем уровне сложных иерархических систем управления, компоновки простых одноуровневых АСУ технологическими процессами, применения в качестве устройств управления в серийно выпускаемых контрольно-измерительных системах, выполнения инженерных и других расчетов и т. д. СМ ЭВ?4 строится на современной конструктивно-элементной базе с широким применением микросхем повышенного уровня интеграции, что обеспечивает их высокую надежность, производительность и малые габариты. Кроме того, комплексы СМ ЭВМ совместимы с комплексами М-6000, М-7000 АСВТ-М, а также с машинами ЕС ЭВМ.
Применение СМ ЭВМ для управления движением ГПТ можно прогнозировать следующим образом. На маршрутизированном транспорте относительно самостоятельным элементом перевозочного процесса является маршрут. Существует набор управляющих воздействий по регулированию движения ТЕ только на маршруте. Можно говорить об использовании комплексов СМ ЭВМ для управления движением ТЕ на каждом из маршрутов либо на их группе. При этом децентрализованная структура управления ГПТ будет содержать два уровня. На первом уровне будет осуществляться управление движением ТЕ на отдельных маршрутах (группе маршрутов), а па втором — на маршрутной сети в целом.
Для таксомоторного транспорта можно осуществить децентрализацию управления по районам движения автомобилей-такси, обе
спечив одновременно управление обслуживанием заявок пассажи-ров в отдельных районах комплексами СМ ЭВМ, а движением автомобилей-такси в целом по городу — вычислительным комплексом более высокого уровня.
Следующий уровень децентрализации управления движением ТЕ может быть обеспечен при размещении средств управления на остановочных пунктах (ОП) и непосредственно на ТЕ. Необходимая предпосылка этого — промышленный выпуск микропроцессоров и имеющийся опыт их использования [73]. Микропроцессор расположен [28], как правило, на одном кристалле большой интегральной микросхемы (БИС) и состоит из арифметико-логического устройства, устройства управления и связывающих их информационных шин. Микропроцессор выполняет некоторый набор команд по обработке информации и инициирует обращение к запоминающему устройству, внешним устройствам и другихМ блокам микро-ЭВМ, т. с. представляет собой универсальное вычислительное устройство.
В связи с тем, что функция контроля и управления ГПТ на ОП могут быть формализованы, имеется возможность определить для каждого ОП программу контроля и управления движением ТЕ. На основе микропроцессоров могут быть разработаны программные автоматы контроля и управления движением ГПТ. Оборудовав такими автоматами ОП и обеспечив координацию их работы по группам или всех в целом, можно обеспечить более падежное и эффективное функционирование ГПТ.
При наличии достаточно дешевых микропроцессоров может быть представлена возможность оборудования ими каждой ТЕ. Для каждой маршрутизированной ТЕ микропроцессор может осуществлять сравнение плановых моментов прибытия ТЕ на каждый из ОП маршрута с фактическими и вырабатывать управляющие воздействия но восстановлению нарушенного движения данной ТЕ. Координацию работы всех ТЕ отдельного маршрута может осуществлять программный автомат контроля и управления одного из ОП, а координацию движения ТЕ на маршрутной сети в целом — центральный вычислительный комплекс. Микропроцессор, установленный па автомобиле-такси, может, например, обеспечить контроль прибытия ТЕ в заданную точку, в заданный момент времени.
Развитие КТС автоматизированного управления движением ГПТ находится во взаимной связи с развитием методов управления, технологии функционирования и программного обеспечения этих систем.
9.2. Анализ тенденций развития методов управления движением городского пассажирского транспорта
Как было показано выше, город можно представить в виде взаимодействия объектов трудовой, культурно-бытовой, жилой и транспортной организаций. Будем различать множество объектов жилой А, трудовой В и культурно-бытовой С организаций. Обозпа-
чим потребность в поездках между элементами Л, В, С в виде пар элементов ab; ас\ аа\ ba; bb\ bc\ са\ cb\ сс. Направление движения при этом полагаем от первого ко второму элементу пары. Потребность в трудовых поездках Т определим множеством пар типа ab, Ьа, а потребность в культурно-бытовых поездках К — множеством пар вида ас, са, be, cb, аа, bb, сс.
В настоящее время потребность в трудовых и культурно-бытовых поездках удовлетворяется ГПТ, методы и средства управления которым едины. Однако в зависимости от характера Т и К они могут быть весьма различны. Можно назвать следующие особенности удовлетворения потребности в трудовых поездках: Т носит обязательный характер и даже частичное неудовлетворение ее ведет к уменьшению производимого общественного продукта; Т требует повышенного качества удовлетворения, связанного [74J с уровнем производительности труда в обществе; исходная информация для управления процессом удовлетворения Т может быть получена с относительно малыми затратами в местах приложения труда (предприятиях, организациях, учреждениях, учебных заведениях) с учетом мест жительства трудящихся; Т имеет устойчивый характер, так как относительно мало меняется по величине, обладает относительно постоянным временем возникновения и периодом повторения, имеет относительно постоянное распределение по направлениям.
Можно считать, что трудовые поездки являются не столько потребностью трудящихся, сколько потребностью предприятий, организаций, учреждений, учебных заведений в обеспечении наилучших условий труда членов коллективов. В этом смысле можно сказать, что рабочий день трудящихся начинается с их появления на остановочном пункте для трудовой поездки, куда они обязаны подойти к определенному времени.
Потребность в культурно-бытовых поездках является личной потребностью трудящихся для удовлетворения их собственных запросов, что составляет их главное отличие от Т.
Другими особенностями удовлетворения К являются: К требует больших затрат на получение исходной информации для управления, так как число точек формирования потребности весьма велико; К не имеет устойчивого характера, так как меняется по величине, характеризуется случайным моментом возникновения, случайным периодом повторения и случайным распределением по направлениям.
Указанные особенности потребности в трудовых и культурно-бытовых поездках определяют соответствующие требования к организации их удовлетворения.
При общем назначении ГПТ должно быть обеспечено единое управление им. Единому управлению движением препятствует принадлежность отдельных видов ГПТ различным ведомствах^. В настоящее время ставится задача координированного управления ГПТ. При этом полагается, что ГПТ будет находиться в ведении либо одного ведомства, либо координирующего органа.
г
Объект у пр а блен и я
Управляющая система
1
_______I
Рис. 9.1. Перспективное представление городской пассажирской транспортной системы
Основная идея координированного управления ГПТ — в использовании более мобильных видов транспорта — автобусного и таксомоторного— при нарушениях работы электротранспорта [9].
Целесообразно в дальнейшем ставить задач)7 нс координированного, а комплексного управления ГПТ, которое должно проявиться при управлении потребностью в поездках, определении ресурсов удовлетворения потребности и управлении процессом удовлетворения потребности. В соответствии с этим основным направлением совершенствования технологии автоматизированного управления движением ГПТ будет комплексное использование ресурсов при раздельном удовлетворении потребности в трудовых и культурно-бытовых поездках.
На начальной стадии проработки названного направления совершенствования технологии автоматизированного управления движением ГПТ городская пассажирская транспортная система представляется в следующем виде (рис. 9.1). Объектом управления является потребность в трудовых и культурно-бытовых поездках, а также ресурсы ее удовлетворения. Управляющая система содержит подсистемы управления процессом удовлетворения Т, К, Т и К.
Подсистема управления процессом удовлетворения Т должна обеспечивать управление перевозками от некоторых ОП у мест жительства трудящихся до ОП у мест приложения труда и в обратных направлениях. Определим линией экспрессного движения ЭЛ линию безостановочного движения ТЕ между парой остановочных пунктов, один из которых принадлежит множеству ОП у мест жительства, а другой — множеству ОП у мест приложения труда. В рамках рассматриваемой подсистемы в первую очередь должны быть решены задачи экспрессной маршрутизации (ЭМ), т. е. задачи выделения ЭЛ и объединения их в маршруты. Плановое управление движением ТЕ, осуществляемое данной подсистемой, должно задаваться расписаниями движения ТЕ на каждом из выделенных, экспрессных маршрутов. Оперативное управление движением ТЕ.
будет вводиться при различного рода нарушениях расписаний дви-» жения.
Удовлетворение части Т посредством ЭМ может обеспечить снижение временных затрат пассажиров на передвижение и более эффективное использование ресурсов за счет безостановочного движения ТЕ на экспрессных линиях. Другая часть Т может быть удовлетворена на обычных маршрутах движения ТЕ (со всеми остановками). По аналогии с ЭМ будем говорить в этом случае о постоянной маршрутизации (ПМ).
Подсистема управления процессом удовлетворения К должна обеспечить оперативное управление частью культурно-бытовых перевозок. Для любого города характерно наличие направлений с относительно небольшой потребностью в культурно-бытовых поездках, имеющей явно выраженный случайный характер. Организация постоянных маршрутов движения на таких направлениях экономически невыгодна, так как вместимость маршрутизированного транспорта, обладающего большой провозной способностью, будет использоваться нерационально. На таких направлениях следует организовать работу транспорта малой провозной способности, например микроавтобусов, при этом для пассажиров необходимо сформировать сеть остановочных пунктов и обеспечить их возможностью формирования заявок на поездки, в которых должен быть указан помер ОП назначения поездки. На основе данных заявок можно управлять посадкой пассажиров, т. е. разрешать посадку в данную транспортную единицу только тем пассажирам, которые следуют в направлении с пассажирами, уже находящимися в ней. Попутное направление определяется допустимой величиной отклонения от кратчайшего пути между ОП формирования и удовлетворения заявок пассажиров. На основе информации, содержащейся в заявках пассажиров на поездки, управляющая система может формировать для каждой ТЕ очередной ОП прибытия, т. е. оперативный маршрут движения. В этом суть оперативной маршрутизации (ОМ) движения ТЕ. ОМ движения ТЕ позволит более эффективно использовать транспорт малой провозной способности.
Несмотря па случайный характер Л”, можно выделить направления относительно постоянной потребности и охватить их постоянными маршрутами.
Подсистема управления процессом удовлетворения Т (за исключением части, удовлетворяемой посредством ЭМ) и К (за исключением части, удовлетворяемой посредством ОМ) предназначена обеспечить плановое и оперативное управление движением ТЕ на постоянных маршрутах. При этом плановое управление будет осуществляться введением расписаний, а оперативное — при их нарушениях.
Таким образом, перспективная технология автоматизированного управления движением ГПТ должна решать следующие задачи: выделение части потребности в трудовых поездках для удовлетворения их экспрессными и постоянными маршрутами, а также час
тей потребности в культурно-бытовых поездках для удовлетворения их оперативными маршрутами; объединение части потребностей в трудовых и культурно-бытовых поездках для удовлетворения их постоянными маршрутами; введение постоянной, экспрессной и оперативной маршрутизации; комплексное использование ресурсов для удовлетворения потребности в трудовых и культурно-бытовых поездках.
Рассмотрим постановку данных задач, предварительно охарактеризовав задание потребности в поездках и распределение ее па территории города. Величина потребности городского населения в поездках, характер ее распределения во времени и на территории города полностью определяется матрицами корреспонденций, изменяющихся во времени. Будем различать матрицы трудовых (Л4Т) и культурно-бытовых (Л4К) корреспонденций в А-й час суток:
м к = II МКк = Це!)) ||; // = 1, л; а^’=0, eW = 0 при i = j,
где , e^j—соответственно число трудовых и культурно-бытовых поездок из зоны i в зону / за £-й час суток.
Для учета распределения потребности в поездках по направлениям на территории города необходимо задать граф транспортной сети и определить множество невложенных кратчайших путей, например, способом, описанным в гл. 1. Возможны различные способы распределения потребности в поездках по невложенным кратчайшим путям, например равномерное распределение, распределение с учетом некоторых характеристик путей, последовательное распределение и т. д. В дальнейшем будем полагать, что тем или иным способом имеется возможность распределения трудовых и культурно-бытовых корреспонденций по невложенным кратчайшим путям.
Выделение потребности в поездках для удовлетворения ее экспрессными маршрутами. Выделим линии экспрессного движения ЭЛ на невложенных кратчайших путях для объединения их в экспрессные маршруты, па которых предполагается удовлетворение части потребности в трудовых поездках. Линией экспрессного движения на s-м пути является линия безостановочного движения между парой остановочных пунктов данного пути. Выделение ЭЛ основывается на следующих предпосылках. Остановка ТЕ в каком-либо пункте вызывает увеличение времени проезда каждого из пассажиров, следующих далее данного пункта (транзитных пассажиров) на величину ть Безостано-’ вочное движение через какой-либо пункт некоторых ТЕ из их последовательности вызывает увеличение среднего времени ожидания пассажира па данном пункте па величину Т2. ЭЛ целесообразно назначать в том случае, если дополнительные временные затраты на проезд пассажиров превышают дополнительные временные затраты на ожидание. При этом увеличится средняя скорость движения ТЕ, т. е. транспорт будет использоваться более эффективно.
Предположим, что: ЭЛ начинается в пункте iSt заканчивается в пункте /s; между пунктами isjs находится Kisjs пунктов; величина корреспонденции между isj$ равна a^sjs. Тогда дополнительные затраты T^tsjs времени a^sjs пассажиров выразятся как
Т? • i Tiai i •
1 s^s s s s s
Вследствие безостановочного движения части ТЕ на участке isjs временные затраты T°is/s на ожидание всех пассажиров, кроме следующих из is в Д, возрастут на величину 1:2'-
Tls+ljs = r^(aisis + l+ ••• + + (%+b j+2+••• +
+ 4- ... + -2/ -i + а} 2/ ) 4- -у )•
Если < risJ's' то ВЬ1Деленис ЭЛ isjs целесообразно.
Постановка задачи построения экспрессных маршрутов заключается в следующем. Пусть имеется /и оста-новочных пунктов окончания ЭЛ и известны моменты /);, /= 1, m, к которым следует перевезти пассажиров f-го к /-му ОП на экспрессной линии (t, /).
Если рассматриваются перевозки трудящихся к трудовым учреждениям (ТУ), то введенные характеристики имеют следующую трактовку: m— число ТУ, Dj — момент начала работы /-го ТУ, ац— количество трудящихся, которых необходимо перевезти от f-ro ОП к /-му'ТУ до начала его работы.
Предположим, что подача ТЕ к f-му ОП для подвоза трудящихся к /-му ТУ должна производиться нс ранее заданных моментов времени dij (в течение отрезка времени [d^, Dj]). Тогда, обозначив экспрессную линию (г, /) в виде Л, будем в дальнейшем говорить об объеме перевозок на линии А, равном аь = а<].
Под экспрессным маршрутом будем понимать произвольную упорядоченную совокупность, состоящую из линий перевозок:
Н = (М2. ...» hk).
Маршрут Н= (Аь ..., hk) технологически допустим, если для каждого I— 1, ..., А выполнено условие
‘I- + ^Л9 “f" т • * • "Г thi—xht )
~~ Whi ihth2 "b ifiah3 ’Г ••• (9*1)
где ht - (ii, Л); = d^ , Z)^ = Z^;
6is —время выполнения перевозки по линии hs\
thdisvx — время следования ТЕ от ТУ с номером jR до ОП с номером ie+b
Неравенство (9.1) соответствует требованию, чтобы перевозка по линии hi осуществлялась на временном интервале \dhl> D^].
Обозначим L — совокупность всех технологически допустимых маршрутов. Каждому маршруту H<=L поставим в соответствие суммарную вместимость (количество мест для пассажиров) транспортных единиц Хц, выделенных для работы на этом маршруте. Естественное требование, которому должны удовлетворять величины Хн, состоит в том, чтобы суммарная вместимость ТЕ, проходящих по каждой линии h, соответствовала объему перевозок на этой линии:
АбЛ <9-2)
HQL
где I — множество всех линий перевозок;
алн — кратность линии h в маршруте Н.
Другое требование вытекает из ограниченности ресурсов транспортной системы:
^ХН<М, (9.3)
H£L
где М — суммарная вместимость всех ТЕ, используемых для трудовых перевозок.
В качестве критерия оценки различных вариантов назначения ТЕ на маршруты может быть выбран суммарный непроизводительный пробег ТЕ на маршруте
2 C^H’ М
к—1
где Сн = ^Сл^+1,Ск^+1- расстояние от hs до hs+l.
Таким образом, задача построения экспрессных маршрутов для удовлетворения части трудовой потребности в поездках сводится к определению таких значений вместимостей Хн>0, H<^L, при которых выполняются условия (9.2), (9.3), а значение критерия (9.4) минимально. Использованию подлежат те из маршрутов которым в оптимальном решении сформированной задачи соответствуют /л>0. Одновременно в этом случае определяется и величина транспортных ресурсов, назначаемых на каждый маршрут. Поставленная задача может быть решена методами линейного программирования.
Выделение потребности в поездках для удовлетворения ее оперативными маршрутами. Выделение части К для удовлетворения ее оперативными маршрутами обеспечивается на основе следующих предпосылок: осуществление ОМ целесообразно микроавтобусами и таксомоторным транспортом; потребность в К на пути прохождения ОМ должна соответствовать провозной способности микроавтобусов и таксомоторного транспорта; оперативные маршруты движения микроавтобусов проходят по сети остановочных пунктов постоянной конфигурации, на которых формируются пассажирами заявки на поездки; опера
тивные маршруты движения таксомоторного транспорта проходят через точки формирования пассажирами заявок на поездки, местоположение которых определяется адресом (местожительства, работы и т. д.).
Из множества невложенных кратчайших путей выделим некоторое подмножество, потребность в поездках на каждом элементе которого соответствует провозной способности микроавтобусов и таксомоторного транспорта. Для этого определим некоторую граничную величину потребности 77s° в поездках па s-м невложенном кратчайшем пути:
97 Т
= (9.5)
is ^inin
где La — длина s-ro пути;
Is — средняя дальность поездки на s-м пути;
<0м — вместимость микроавтобуса;
ys — коэффициент неравномерности потребности в поездках на s-м пути;
Т — среднее время работы ТЕ за сутки;
Tmin — минимальный интервал движения ТЕ.
Выражение (9.5) определяет максимальное количество пассажиров, которых можно перевезти за сутки на s-м пути микроавтобусами. Оно получено следующим образом. Количество ТЕ (М) для осуществления перевозок на пути длиной L со скоростью V в зависимости от интервала движения лежит в пределах
2£ „ 2L
--------< М <--------.
У*®тах ^^mln
С другой стороны, необходимое количество ТЕ (М) для перевозки П пассажиров за время работы Т со скоростью V составит
где (о — вместимость ТЕ;
у — коэффициент неравномерности потребности в поездках (у^1);
I — средняя дальность поездки пассажира.
Из выражения (9.6) следует, что
П = М—^-------. (9.7)
Подставляя в (9.7) выражение для максимального количества ТЕ, т. е. величину
„ 21
^Jmax — „ >
‘'Tmin
получим выражение, аналогичное (9.5):
2L Т
—
* ^min
Значение тпцп связано со средним временем ожидания пассажира t2 и условием
4- ^mln
Определим величину полагая, что s-й путь проходит через зоны Si, 52,Sn^ Для этого вначале рассчитаем суммарный объем работы As на s-м пути.
Sns Sns
2 2 при Zi==A>
[s=S1 Л = 5»
где eisis’ eJs'ls — количество пассажиров, которых необходимо перевезти на участке isjR в прямом и обратном направлениях;
tisjs — расстояние между зонами isjs.
Затем определим -суммарное количество Bs поездок на s-м пути:
Sns Sns
2 2 <dy,+4'.’-
*\у —Si jg—Sz
Тогда величина ls может быть получена в виде
Определим коэффициент у« неравномерности потребности в поездках
Y^ — где — коэффициент, учитывающий неравномерность потребности в поездках на участках s-ro пути;
б6- — коэффициент, учитывающий неравномерность потребности в поездках по часам суток на s-м пути.
Определим коэффициенты неравномерности потребности в поездках по участкам невложенных кратчайших путей. Будем рассматривать движение ТЕ на участке Si52, 5253, ..., (прямое направление) и на участках .... S2Si (обратное
направление). Номера участков полагаем совпадающими с номером зоны начала движения (например, номером участка 5i52 является 51). Тогда количество <iIs перевозимых пассажиров на участке is (в прямом направлении) определится как
где nisjs — величина корреспонденции из зоны is в зону /«.
Количество dis пассажиров, перевозимых на участке js в обратном направлении, определится как
Л Si ______
ч= 2 2 s2-
i s=^nsL S
Загрузкой disjs участка isjs в прямом и обратном направлениях является величина
Определим максимальную величину из величин dlsjs и обо-значим ее maxrfZj;5. Тогда коэффициент 0S неравномерности потребности в поездках по участкам 5-го пути будет иметь вид
+ 'М. + • +
Постановка задачи оперативной маршрутизации. Суть оперативной маршрутизации заключается в следующем: движение ТЕ рассматривается на фиксированной сети остановочных пунктов; на каждом ОП осуществляется формирование и удовлетворение потребности в поездках; формирование потребности в поездках осуществляется в виде заявок, определяющих номера остановочных пунктов; с прибытием ТЕ на очередной остановочный пункт осуществляется посадка только тех пассажиров, которым был указан номер' данной ТЕ для удовлетворения их заявки, и предписывается последующий ОП прибытия.
Предположим, что управляющая система па основе информации о заявках пассажиров и о распределении ТЕ на территории города формирует в некоторые фиксированные моменты времени воздействия, которые управляют посадкой пассажиров в ТЕ и их движением до следующего управляющего воздействия. Последовательность ОП, предписанных ТЕ для прохождения между двумя очередными управляющими воздействиями, назовем оперативным планом g движения транспортной единицы, а наполнение ТЕ па каждом ОП данной последовательности будем считать оперативным планом наполнения q транспортной единицы. Тогда оперативное управление процессом удовлетворения потребности в культурно-бытовых поездках на фиксированной сети ОП будет определяться последовательностью формирования оперативных планов (7; движения и оперативных планов Q2- наполнения ТЕ:
о,...............ri”).
где i—номер ТЕ;
tii — максимальное число управляющих воздействий на i-io ТЕ за суточный цикл работы.
Отметим, что УС доводит информацию в соответствии с G2-водителю i-й ТЕ, а в соответствии с Qi—пассажирам этой ТЕ. Последовательность Gi определяет оперативный маршрут движения i-й ТЕ, a Qi — ее оперативное наполнение за суточный цикл работы. Таким образом, оперативное управление У в этом случае представляется множеством пар Gi, Qc
y=(Gi Qi; G2, Q-2; ...; GNQN)t
где N — суммарное число ТЕ, обеспечивающих удовлетворение заданной потребности в культурно-бытовых поездках.
Конкретный вариант У представляется способом задания последовательности моментов формирования управляющих воздействии, а также оперативных планов движения и наполнения ТЕ.
Будем различать два способа формирования последовательности управляющих воздействий УС. По первому способу управляющее воздействие формируется в момент поступления очередной’ заявки на поездку в УС (функционирование УС в режиме одиночного обслуживания заявок). По второму способу заявки на поездки накапливаются в течение времени между двумя последовательными моментами формирования управляющих воздействий (функционирование УС в режиме «группового обслуживания заявок пассажиров»).
В самом общем виде целевая функция 1^(У) для выбора рационального варианта У может быть записана как
1Г(У)-П(У) —И(У), (9.8)
где £>(У) —доход от управления;
2(У) —затраты на обеспечение функционирования УС в соответствии с управлением У.
Качество удовлетворения потребности в культурно-бытовых поездках на фиксированной сети ОП зададим в виде следующих ограничений:
Р (/ < t2) > 1 — PQ ; (9 9)
LiJ
Hj
где t2 — среднее время ожидания пассажиром ТЕ;
/2* — допустимое среднее время ожидания пассажиром ТЕ;
./ — время ожидания ТЕ некоторым пассажиром;
Ро — вероятность отказа в обслуживании пассажиру за /2*;
Кц — коэффициент непрямолинейпости поездки пассажира от t-ro к /-му ОП;
— фактическое и кратчайшее расстояние между остановочными пунктами i и /;
К— допустимый коэффициент непрямолинейности поездок пассажиров.
Дополнительно введем еще одно ограничение на качество удовлетворения заявок, запрещающее пересадку пассажиров из одной ТЕ в другую в процессе удовлетворения заявок.
Характер целевой функции (9.8) в большой степени зависит от типа оплаты за проезд, которая может осуществляться: 1) пропорционально фактическому расстоянию проезда пассажира, 2) пропорционально кратчайшему расстоянию между ОП формирования и ОП удовлетворения заявки пассажира и 3) в виде постоянной оплаты за проезд. Первый тип аналогичен оплате поездок пассажиров на таксомоторном, а последний — на маршрутизированном транспорте. Видимо, оправдано исключение первого типа оплаты за проезд, так как отклонения от кратчайшего пути поездки пассажира противоречат его интересам. Поэтому уточним целевую функцию (9.8) только для двух оставшихся типов оплаты за проезд:
1 (У) - ЧМ (У) - v2 (Ц (У) К (У) ч- L2 (У)), (9.10)
^2 (У) - М (У) - (У) К (У) + L2 (У)), (9.11)
где vt — оплата за проезд единицы расстояния А^У);
Ь1(У) — суммарная длина по кратчайшему расстоянию между ОП движения всех ТЕ с пассажирами за суточный цикл работы в соответствии с управлением У;
Ь2(У) —суммарная длина между ОП при движении ТЕ без пассажиров за суточный цикл работы в соответствии с управлением У;
и2 — стоимостная оценка расходов, приходящихся на единицу пробега ТЕ; Уз — фиксированная плата за проезд;
Л (У) —количество перевозимых пассажиров всеми ТЕ за суточный цикл работы в соответствии с управлением У;
2((У)—среднее значение коэффициента непрямолинсйности поездок в соответствии с управлением У.
Общность целевых функций (9.10), (9.11) состоит в том, что их значение зависит в основном от наполнения транспортных единиц при s-м варианте управления. С увеличением наполнения ТЕ растут компоненты целевых функций Ц(У) и Д(У) и общий пробег транспортных единиц.
Поскольку функционалы (9.10), (9.11) дают различные варианты управления, постольку необходимо рассмотреть оба варианта. Это целесообразно еще и потому, что характер оплаты за проезд при введении нового вида транспортного обслуживания должен быть аргументирован. Нс нарушая общности рассуждений, будем в дальнейшем обозначать целевую функцию как Ц/(У), подразумевая при этом, что опа имеет формы (9.10) или (9.11).
Предположим, что управляющая система в течение суточного цикла функционирования формирует В управляющих воздействий, так что
в—2^ /•=1
Отметим, что в режиме одиночного обслуживания пассажиров величина В совпадает с суммарным числом заявок, поступивших в УС за суточный цикл ее функционирования. При групповом об-7—861 177
служпваыии количество управляющих воздействий определяется в виде
где Т - время функционирования УС в течение суточного цикли;
А/— временной интервал между двумя управляющими воздействиями.
Полагая, что УС формирует управляющие воздействия в моменты Z= 1, 2, В, обозначим состояние УС в момент f в виде и будем характеризовать его тремя векторами, которые определяю г:
очереди пассажиров па 3 остановочных пунктах
n{t > — ( /2(9; Z 1, S; J =- TTS; I у);
где Л j— номера ОП формирования и удовлетворения заявок;
положение транспортных единиц па улично-дорожной сети у«\ * = тт^);
где y{ki} —координаты местоположения Ze-н ТЕ в момент времени /;
наполнение транспортных единиц
z</) = №• 4/У • • • • - ‘ - ТГТ; j =ТГ$; i =/-- г, k -77TF), где ... —информация о первом, втором и т. д. пассажирах, находя-
щихся в k-\\ ТЕ в момент времени Л которые совершили посадку па /-м ОП и следуют к /-му ОП.
Таким образом, состояние системы x(t) в момент времени t может быть представлено в виде
Оперативное управление У(/) в момент времени 9 как было сказано выше, сводится к выбору пары
У<'> = (4°. ^\k=\7N),
где gk^— оперативный план движения £-й ТЕ, сформированный в момент t\ — оперативный план наполнения k-й ТЕ, сформированный в момент t.
Предположим, что моменты прибытия пассажиров на ОП независимы и поток обладает марковскими свойствами [63]. В этом случае процесс образования очередей заявок па ОП также будет марковским.
Переход системы из состояния в состояние а<'+,) определяется управлением У(*+Ч. Обозначим условную вероятность события xU+О ПрН условии выполнения событий х^\ У(^+1) в Виде
Р + , У(/+1)) (9.12)
Вероятности (9.12) определяют переход системы из одного состояния в другое под действием управления. С другой стороны, уп-178
равленпс в (/+ 1)-н момент зависит от состояния системы в предшествующий и от управления до него:
x(t)f yU)f x(0))_
1}(x(/) , S(/)), /-0, 1,..., В—1,
где S<0 — управление, действовавшее до момента /+1.
Задача синтеза оптимального управления процессом удовлетворения потребности в культурно-бытовых поездках на факсирован-ной сети остановочных пунктов заключается в определении такого управления, которое обеспечивает
в
М (У Г'’) + Г(ЛВ)) „ „ „ ->тах ____
4 J у(^-И)=®(^? J)(X(O, $(О),/=0, В— 1
при условии, что переход системы из состояния в состояние определяют вероятности (9.12),
где AU7г (х/_,У<0 — приращение целевой функции на /-м также управления при выборе управления +
lV'(xB)—значение целевой функции при переходе системы в конечное состояние, AI — знак математического ожидания.
Сложность данной задачи определяет необходимость разработки эвристических приближенных методов решения, которые могут быть реализованы управляющей системой с допустимыми затратами.
Выделение потребности в поездках для удовлетворения ее посредством постоянной маршрутизации. При помощи постоянной маршрутизации предполагается целесообразным удовлетворение части К, не отнесенной к ОМ, и части Т, не отнесенной к ЭМ.
В результате решения задачи выделения ЭЛ можно сформировать матрицу
<7<м — || Zij l|: j -= 1, п; Azi/=--0 при l — j,
элементы которой
I 0, если /, j соединяются ЭЛ, fx- i --
I 1, иначе.
Назовем матрицу матрицей пометок экспрессных линий. Обозначим множество невложенных кратчайших путей, на которых часть К целесообразно удовлетворять в виде ПМ, как Ц/'11М, а множество всех невложенных кратчайших путей как W. Полагаем, что известна процедура формирования элементов матриц трудовых и культурно-бытовых корреспонденций и отнесения их к невложенным кратчайшим путям. Процедура формирования корреспонденций, которые необходимо удовлетворять посредством ПМ, может быть описана следующим образом.
Выбирается первый элемент W7 (первый невложенный кратчайший путь) и проверяется принадлежность его №пм. Если первый элемент W принадлежит то необходимо суммировать отнесенные к данному пути трудовые и культурно-бытовые корреспонденции. При этом требуется учесть, что часть трудовых корреспонденций должна удовлетворяться на ЭЛ, т. с. необходимо проверить, равен нулю или единице соответствующий элемент бэл- Если элемент бэл, соответствующий рассматриваемой корреспонденции, равен нулю, то формируется только культурно-бытовая поездка. Если первый элемент W не принадлежит W'nM, то формируются только трудовые корреспонденции. При этом корреспонденции, помеченные в бэл нулем, также полагают нулевыми.
Формируется матрица QK пометок корреспонденций, отнесенных к первому невложенному пути:
= ^'/ = 0 при i — j,
В QK на данном шаге помечаются пулями элементы, отнесенные к первому пути, а остальные элементы полагаются равными единице. Далее выбирается второй элемент W, и для него описанная процедура повторяется. Кроме того, проверяется, помечена ли каждая корреспонденция второго элемента в Qk- Если корреспонденция в QK помечена нулем (отнесена к первому пути), то се величина принимается нулевой. В противном случае формируется либо суммарная трудовая и культурно-бытовая корреспонденция (второй элемент W принадлежит №Пм), либо только трудовая (второй элемент W не принадлежит U/nM). Описанная процедура повторяется для всех элементов W, Таким образом производится формирование корреспонденции на невложенных кратчайших путях, удовлетворять которые целесообразно посредством ПМ.
Постановка задачи построения постоянных маршрутов. Рассмотрим более подробно, чем в гл. 1, задачу построения постоянных маршрутов движения различных типов ТЕ. Предположим, что для каждого типа подвижного состава определен рациональный объем перевозок /7, т. е. построен ряд
//-('А, Я2, ... , /7К), (9.13)
такой, что
ГЦ < 7/2 < ... < /А,
где Hi — минимальный пассажиропоток на маршруте, который рационально удовлетворять i-м типом ТЕ (под пассажиропотоком понимается количество пассажиров, проследовавших в единицу времени сечение маршрута).
Рассмотрим предварительно соотношение между пассажиропотоком, объемами перевозок и работы. Объем перевозок Ф равен
Ф = /7Г——, (9.14)
7 и
где Т — отрезок времени, за который определяется объем перевозок;
L — длина маршрута;
1М — средняя маршрутная дальность поездки пассажира.
Объем работы Л выражается как
Л = Ф/М. (9.15)
Из выражений (9.14), (9.15) следует, что количество N перевозимых пассажиров за время Т в сечение маршрута имеет вид
у!
N — ПТ =. (9.16)
С учетом (9.16) преобразуем ряд (9.13) к виду
N = (Nlt N-2, ... t NK), (9.17)
где Ni — минимальное количество пассажиров, которое рационально перевезти i-м типом ТЕ за время Т в сечении маршрута.
Поставим задачу формирования маршрутных сетей (МС) для различных типов ТЕ, учитывая, что на МС £-го типа рационально перевозить нс меньше пассажиров; на МС (k—1)-го типа рационально перевозить от /VK-i до AfK пассажиров и т. д.; на МС первого типа — от АД до АД пассажиров.
Из соображений практического характера следует ввести ограничение на минимальную длину маршрута при формировании АТС. Так как формирование МС рассматривается на множестве невложенных кратчайших путей, то от ограничений на их длину можно перейти к ограничениям па число зон прохождения маршрута. Будем полагать, что минимальное число зон прохождения маршрута равно х.
В общем виде задача формирования маршрутных сетей различных видов ТЕ заключается в следующем. Требуется выделить для k типов ТЕ на множестве невложенных кратчайших путей такие пути или участки путей, охватывающие нс менее х зон, на которых необходимо перевезти соответственно не менее АД пассажиров; от Nk-1 до АД пассажиров и т. д.; от Mi до АД пассажиров.
Рассмотрим s-й невложенный кратчайший путь, проходящий через зоны Si, S2, ..., Sns. Путь из is в Д (js, S2, ... , 5лр)
будем обозначать
__ (Д, Г2, , Гр),
где гi{i= 1, р) —промежуточные точки кратчайшего пути (g, Д);
р — количество промежуточных точек пути (is, Д).
Выделим на s-м пути всевозможные пути (Д, Д), для которых р^х. Данные пути определят варианты маршрутов на s-м невложенном кратчайшем пути.
Для каждого из введенных таким образом маршрутов определим величины и Lisjs (объем работы и длину пути):
= 2 lrirj(d'irj^d'jr^ i=l j=i+l
р-1
= lriri+l’
/ = 1
где — расстояние между зонами О» rj(lr-rj ПРП ri ~~ ГА* — величина корреспонденции от
г/ к гj (dr_ ~ dr^r^ при г/-г7).
По величинам Aisjs> Lisjs можно определить количества перевозимых пассажиров на маршруте (is, js) за время Т:
Далее следует определить маршрут:
max?/,- t ~N *
i'i' SJS
4 = (Si. S2, ... , Srt -x + 1), + ... , S„ ),
S S
т. e. маршрут, на котором необходимо перевезти максимальное ко-
личество пассажиров. Полученные таким образом величины
••• , ... , N*
ЧЛ *2^2 ЧЛ ^т^тп
необходимо сравнить с компонентами ряда (9.17) и выбрать из них тс, которые не меньше Nn и т. д. до интервала (Лгь N2).
-г TV.*,* N •
Те из величин чЛ ’ ’ Cmjrn которые не попали ни в один
из рассматриваемых интервалов, исключаются, поскольку маршруты, определяемые ими, организовывать экономически невыгодно. Однако не исключено, что сформированная таким образом маршрутная сеть по показателям маршрутной дальности поездки, коэффициента перссадочности и временных затрат пассажиров па пересадки будет хуже существующих. В этом случае полученную маршрутную сеть следует дополнить за счет введения части отбракованных маршрутов.
Планирование ресурсов для осуществления постоянной, экспрессной и оперативной маршрутизации. В результате анализа постоянной, экспрессной и оперативной маршрутизации можно сделать вывод о том, что ПМ целесообразно организовать для электрического и частично автобусного транспорта, ЭМ — для автобусного транспорта, ОМ — для микроавтобусов (при удовлетворении части К, формируемой на фиксированной сети ОП) и таксомоторного транспорта (при удовлетворении части К, формируемой по «адресам»).
Предположим, что при решении задач построения постоянных, экспрессных и оперативных маршрутов было установлено необходимое число пассажиро-мест в i-й час суток (i=l, 2, 24) для
удовлетворения части Т посредством ЭМ (^н). для удовлетворения части Т и части К посредством ПМ для осуществления ОМ посредством микроавтобусов (?3i) и таксомоторного транспорта
(#4i)- Таким образом определены следующие идеальные планы Qr удовлетворения потребности в поездках:
Qr Яг2у • • • , </г24)>
где г~1,4 — тип транспортных единиц для удовлетворения потребности в поездках соответствующего вида.
Б настоящее время для каждого вида ГПТ сложилась определенная организация труда водительского состава, которая характеризуется типами смен (продолжительностью работы водителей и временем начала каждой смены).
Возможны два направления решения задачи планирования использования ресурсов. В первом варианте сохраняется существующая организация труда водителей, во втором — предлагается более рациональная организация их труда. Естественно, что второй вариант более предпочтителен.
В основу решения задачи планирования ресурсов для удовлетворения потребности в трудовых и культурно-бытовых поездках может быть положен метод установления соответствия между потребностью в поездках и ресурсами удовлетворения потребности, описанный в гл. 1.
Удовлетворение части Т посредством Э1М необходимо осуществить в относительно короткие временные отрезки начала и окончания работы трудовых учреждений. Как следствие, возникает проблема использования ресурсов вне данных временных отрезков. Возможное решение этой проблемы — комплексное использование ресурсов для осуществления экспрессной и постоянной маршрутизации. Таким образом, требуется осуществить комплексное обеспечение ресурсами идеальных планов Qi, Q2, в то время как планы (?з, Q4 могут быть обеспечены ресурсами раздельно.
Вначале рассмотрим обеспечение ресурсами идеальных планов Qs, Q4 на примере плана Q3. Реальные планы удовлетворения потребности в культурно-бытовых поездках на фиксированной сети ОП и по «адресам» определяются с учетом ограничений на организацию труда водительского состава. Возможные способы организации труда водителей микроавтобусов будем характеризовать m типами смен (тп=1, 2, ..., т3), имеющих соответственно продолжительность /7П, и временем начала работы каждой смены в /=1, 2, ... • 24 — tm часы суток. С учетом различных вариантов организации труда водителей может быть обеспечено в i-й час суток г™{ пассажиро-мест:
'£• = 2 NU’ <9Л8>
ie/f
.где N™j — число пассажиро-мест, обеспечиваемое микроавтобусами, которое необходимо обеспечить в /-й час выпуска при т-м типе организации труда водителей;
/(/”) — целые числа интервала [max (i — tm\ 1); min (24—/)]
Несоответствие реальных планов идеальным в f-й час суток определится как
д('«) — Г(гп) _ — r3i
Рассматривая приближение реальных планов к идеальному «сверху» плану, приходим к задаче установления соответствия между потребностью в поездках и ресурсами ее удовлетворения, изложенной в гл. 1. В результате решения этой задачи могут быть определены величины затем, в соответствии с (9.18), — величины rffl и, наконец,— величины ^з?0-
Далее следует осуществить рациональную организацию труда водителей, т. е. установить
24 д("г*) min 'V 3 s' _ J OL
т /=1
Рациональной организацией труда будет такая, которая имеет тип смены т*, а продолжительность ее— Число ТЕ, выпускаемых в j-й час, определится как
AA<f>
где (Оз — число мест для сидения в транспортных единицах третьего типа;
фз3- — коэффициент уменьшения количества ТЕ третьего типа /-го выпуска, учитывающий работу части этих ТЕ в течение нескольких смен работы водителей.
При определении n{3jn^ полученные дробные величины округляются до ближайших целых (например, в сторону увеличения). Аналогично решается и задача обеспечения ресурсами идеального плана Q4.
Остановимся теперь на решении задачи комплексного обеспечения ресурсами идеальных планов Qb Q2, приняв следующую последовательность решения. Вначале решим задачу обеспечения ресурсами идеального плана Qi по аналогии с решением предыдущих задач обеспечения ресурсами планов Q3, Q4. В результате определим: рациональную организацию труда водителей (например, в виде типа смены /с* и ее продолжительности число ТЕ первого типа, выпускаемое в j-й час п**, а также число Sb ТЕ, работающее в i-й час суток:
С К* )
где /(к ) — целые числа интервал') [max (Z 1); min (24 /)].
Далее полагаем, что излишнее по сравнению с идеальным планом число пассажиро-мсст будет использоваться для осуществления ПМ. Для этого надо скорректировать идеальный план Q2, за-184
меняв его компоненты на Я1и~ и решить задачу обеспечения ресурсами полученного таким образом идеального плана. Таким образом, ресурсы первого типа будут использоваться комплексно: для осуществления ЭМ в те часы суток, когда имеется потребность в них, и для осуществления ПМ в тс часы суток, на которые имеются в избытке ресурсы удовлетворения Т посредством ЭМ. Затем решим задачу обеспечения ресурсами идеального плана, содержащего компоненты qn — , т. е. построим модифицированный
план Q2.
9.3. Цели и задачи перспективных исследований в области автоматизированного управления движением городского пассажирского транспорта
С точки зрения возможности повышения качества удовлетворения потребности городского населения в поездках и эффективности использования ресурсов, существующие виды ГПТ имеют следующие ограничения: OY — использование данного типа ТЕ для определенного вида перевозок; О2— каждая ТЕ имеет фиксированное число мест; О3 — необходимость водителя для каждой ТЕ; О4 — продолжительность использования ТЕ для перевозок в суточном цикле ограничена регламентированным временем работы водителей, а также необходимость профилактических и ремонтных работ; О5 — количественный состав ТЕ зависит от пропускной способности дорожно-транспортной сети.
Единому управлению ГПТ препятствует как принадлежность отдельных видов ГПТ различным ведомствам, так и ограничение О\. Причем если ведомственные противоречия могут быть преодолены организационными мероприятиями, то снятие Oi сопряжено с модернизацией ГПТ.
Потребность городского населения в поездках меняется по величине, времени и направлениям движения ТЕ. Ограничение О2 приводит в отдельные часы суток и па отдельных направлениях либо к переполнению салона ТЕ, либо к недогрузке его; переполнение ухудшает качество поездок пассажиров, а недогрузка понижает эффективность использования подвижного состава. Возникает проблема соизмерения качества обслуживания пассажиров и эффективности использования подвижного состава, кардинальное решение которой возможно при управлении вместимостью транспортных средств (ТС). В настоящее время элементы управления вместимостью уже внедряются в практику пассажирских перевозок, правда, в локальных масштабах. Изменение вместимости предусматривается, как правило, только в парках за счет сцепки двух или трех ТЕ. Можно говорить об управлении вместимостью в более широком смысле, если обеспечена возможность оперативного сочленения (расчленения) транспортных единиц для перевозки пассажиров (модулей перевозок) различной вместимости в особых точках улично-дорожной сети — пунктах управления (ПУ). Подобный под-
ход к управлению вместимостью, позволяющий устранить О2, сопряжен с необходимостью модернизации городского пассажирского транспорта.
Ограничения Оз, О4 также могут быть сняты при обеспечении оперативного сочленения (расчленения) модулей перевозок (МП), т« е. при возможности компоновки МП в блоки и при условии, чго для управления движением каждого модуля перевозок lie требуются водители. Пропускная способность дорожно-транспортной сети может быть увеличена при компоновке МП в блоки (при эюм возрастает плотность движения).
Рассмотрим суть требований к ГПТ, выполнение которых позволит частично либо полностью снять указанные ограничения, присущие существующим видам ГПТ и повысить качество удовлетворения потребности населения в поездках при максимальной эффективности использования ресурсов транспортной системы. Существующие транспортные средства (автобусы, автомобили-такси, трамваи, троллейбусы) можно рассматривать в виде средств транспортировки (СТ) и модулей перевозок (МП), жестко сочлененных между собой. СТ являются силовыми установками, МП — емкостями для перевозок. Предположим, что транспортные средства расчленены на СТ и МП. СТ обеспечивают движение, имеют органы управления и силовую установку, управляются водителями. СТ имеют возможность сочленяться (расчленяться) с МП. В свою очередь МП могут сочленяться (расчленяться) между собой, образуя блоки модулей. Предполагается развитый унифицированный типаж средств транспортировки и модулей перевозок. СТ отличаются мощностью силовой установки и скоростью движения, МП — вместимостью. СТ осуществляют перемещение МП одного пли разных типов, скомпонованных при необходимости в блоки. Сочленение (расчленение) СТ с МП или МП между собой производится оперативно в процессе осуществления перевозок. Для построенного по такому способу модульного транспорта частично либо полностью снимаются ограничения на осуществление перевозок.
Главный вопрос, на который следует ответить уже па первом этапе исследования этой проблемы,— какова должна быть база построения модульного транспорта? Выбор базы во многом предопределяет направление исследований по формированию основных конструктивных характеристик модульного транспорта, а также методов и средств управления им. Основными конструктивными характеристиками, которые должны быть определены с позиций управления, являются: типаж модулей перевозок по емкости и средств транспортировки по мощности; нормы времени па сочленение (расчленение) модулей перевозок; максимальная длина блока модулей перевозок, сочленяемого с данным типОлМ средства транспортировки.
Программа разработки принципов и методов управления городскими модульными перевозками представлена в работе [40].
Для обоснования целесообразности модульного транспорта с позиции обеспечения ресурсами городской пассажирской транс-186
портной системы необходимо: задать потребность в поездках с учетом наиболее общих закономерностей ее формирования; разработать формальный метод планирования обеспечения ресурсами процесса удовлетворения потребности городского населения в поездках; осуществить планирование обеспечения заданной потребности в поездках существующими видами ГПТ и модульным транспортом; провести сравнительную оценку затрат на удовлетворение заданной потребности в поездках существующими видами ГПТ и модульным транспортом.
Формальный метод планирования обеспечения ресурсами процесса удовлетворения потребности городского населения в поездках изложен в гл. 1 (задача установления соответствия между потребностью в поездках и ресурсами удовлетворения потребности). В данной главе мы опишем модель объекта управления, на котором осуществлялась сравнительная оценка существующих видов ГПТ и модульного транспорта, и приведем результаты сравнительной оценки.
Модель объекта управления с позиций планирования ресурсов удовлетворения потребности в поездках должна включать в себя: задание объема работы транспорта в зависимости от численности населения и структуры города; распределение поездок по транспортной сети; изменение потребности в поездках но часам •суток.
В настоящее время считается общепринятой следующая классификация городов СССР по численности населения: первая группа— 1000—2000 тыс. чел., вторая — 500—1000; третья — 250—500; четвертая— 100—250; пятая — 50—100 тыс. чел.
В результате анализа отчетно-статистических данных по тпанс-портной подвижности всех городов СССР с населением более 100 тыс. чел. в [86] был определен средний прогнозируемый на 1980 г. объем ФЬз перевозок. ГПТ (за исключением автомобилей-такси) за сутки по s-й группе городов:
Ф1= 1580 тыс. пас.; Ф2 = 860; Ф3 = 380; Ф4=145; Ф5 —54 тыс. пас.
Объем работы ГПТ определяется количеством переводимых пассажиров и дальностью их поездок. Прогнозируемый объем работы ГПТ по s-й группе городов (Л5) составляет [86]:
Л1 = 6400; Л2 = 2970; А3= 1190; А^.412; Л5= 130 (тыс. пасс-км за сутки).
Распределение поездок по маршрутной сети города может характеризоваться величиной работы ГПТ на 1 км маршрутной сети, или пассажиронапряженностью. В работе [86] определены типы маршрутов (табл. 9.1) в зависимости от пассажиронапряжепности для каждой группы городов. При этом для каждого тина маршрутов приведена рекомендуе?у!ая рациональная вместимость транспортных единиц. В табл. 9.1 приняты следующие обозначения (для маршрута /г-го типа s-й группы городов): Hks — работа, приходящаяся на единицу длины; Ф^Л — объем перевозок; ДЛя — объем работы; — рациональная вместимость; LliS — суммарная длина маршрутов /г-го типа (Lks = Aks/Hks).
Группа городов Харак 1 ерис гики маршругов
Тип маршрутов k "kS, тыс. пасс-км тыс. нас. тыс. пас. пас. 4.S, км
км
1 2,5 126,7 509,392 35 204
1 2 7,8 1011,2 4075,136 90 522
3 17,0 442,4 1782,872 230 105
1 2,35 129 445,05 35 189
2 2 6,65 559 1928,55 90 290
3 14,85 172 593,4 160 40
1 2,07 57 178,41 35 86
3 2 3,8 182,4 570,912 65 150
3 11,5 140,6 440,078 110 38
1 1,98 43,5 123,975 35 63
4 2 4,24 72,5 206,625 65 49
3 8,85 29 82,65 110 9
1 2,32 35,64 85,536 35 37
5 2 6,2 18,36 44,064 65 7
Натурные обследования показывают, что характер изменения потребности в поездках по часам суток определяется в основном категориями поездок. Так, трудовые поездки характеризуются утренними и вечерними часами пик, а культурно-бытовые распределены более равномерно по часам суток.
За основу задания изменения потребности в поездках приняты приведенные в работе [70] закономерности распределения: трудовых поездок основной части трудящихся градообразующей группы при трехсменной работе (распределение 1); трудовых поездок трудящихся обслуживающей группы при двух- и трехсменной работе (распределение 2); культурно-бытовых поездок (распределение 3). По данным распределениям получены (табл. 9.2) пять типов «весовых» оценок потребности в поездках по часам суток wni таких, что:
20
wni = 1, п -- 1, 2,..., 5.
/=1
Первый тип весовых оценок повторяет распределение 3, второй— получен сложением распределений 1 и 2, третий — сложением распределений 1 и 3, четвертый — сложением распределений 2 и 3 и пятый — сложением всех распределений.
Задание качества удовлетворения потребности в поездках на городском пассажирском транспорте. При планировании обеспечения ресурсами процесса удовлетворения потребности в поездках необходимо задать показатели качества удовлетворения этой потребности: среднее время ожидания /2 пассажиром транспортной единицы на остансь вочном пункте; среднее время поездки пассажира; среднее значение коэффициента а комфортабельности поездок.
Часы суток Весовые опенки потребности в поездках но часам суток Часы суток Весовые опенки потребности и поездках но часам суюк
wl/ ^2/ W3/ W5Z W1Z “’21 W3i w4i u'5i
5-6 0 0,01 0 0,006 0,004 15—16 0,04 0,13 0,08 0,057 0,084
6—7 0,01 0,17 0,095 0,021 0,087 16—17 0,02 0,12 0,048 0,056 0,069
7—8 0,02 0,11 0,05 0,05 0,065 17—18 0,01 0,04 0,006 0,035 0,025
8—9 0,03 0,04 0,02 0,05 0,035 18—19 0,05 0,02 0,032 0,05 0,036
9—10 0,06 0,02 0,04 0,057 0,041 19—20 0,1 0,02 0,064 0,086 0,06
10—11 0,1 0 0,064 0,072 0,051 20—21 0,08 0 0,051 0,058 0,041
11—12 0,09 0 0,06 0,065 0,046 21—22 0,08 8 0,051 0,058 0,041
12—13 0,07 0 0,045 0,05 0,036 22—23 0,04 0,06 0,061 0,029 0,05
13—14 0,08 0 0,051 0,058 0,041 23—24 0,05 0,13 0,085 0,064 0,089
14—15 0,06 0,11 0,091 0,057 0,084 24—1 0,01 0,02 0,006 0,021 0,015
Значение показателя времени ожидания /2Ку Й-го типа s-й группы городов зависит от среднего вала движения ТЕ на данном маршруте:
^ks
Nksvks
для маршрутов значения интер-
где — количество ТЕ, необходимое на маршрутах А>го типа .s-n группы городов;
vhs — эксплуатационная скорость на маршрутах k-ro типа 5-й группы городов.
Полагая, что > получим соотношение:
, _ '_____^ks
2 *' NksV/ts
Из выражения (9.19) следует, что
^ks
t‘2ftsvks
(9.19)
(9.20)
Выражение (9.20) определяет зависимость величины ресурсов (числа ТЕ) от показателя качества удовлетворения потребности — среднего времени ожидания пассажира. С другой стороны, величина ресурсов зависит от потребности в поездках и распределения ее по направлениям движения, т. с. от показателей качества удовлетворения потребности /3 и а. С учетом данных показателей количество Nks ТЕ по маршрутам fe-ro типа s-й группы городов определится в виде
(9.21)
где число пассажиро-мсст в ТЕ маршрута /г-го типа s-й группы юродов;
ф,— маршрутный коэффициент использования вместимости ТЕ;
ф2— коэффициент суточной неравномерности пассажиропотока;
tht — время работы ТЕ па маршрутах k-io типа s-й группы городов;
— коэффициент комфортабельности поездок на маршрутах /г-го типа s-й группы городов.
В настоящее время при планировании использования ресурсов ориентируются на «пиковые» часы потребности в поездках [24], полагая при этом, что ‘Ф1Ф2— 0,3. Принимая ф1 = 0,5 [13], получим ф2 = 0,6.
Показатель /3 неявно входит в выражение для определения объема Aks работы ГПТ на маршруте /г-го типа s-й группы городов (см. табл. 9.1):
где фь< - объем перевозок на маршруте /г-го типа s-п группы городов;
- маршрутная средняя дальность поездки.
Тогда значение показателя /3 для маршрутов £-го типа х-й группы городов будет равно
Взаимосвязь коэффициента комфортабельности (число пассажиров на единицу площади пола салона) с вместимостью ТЕ приведена в табл. 9.3 и определяется в соответствии с выражением <4
= —• (9.22)
(0 ks
Качество удовлетворения потребности в поездках будем задавать, руководствуясь нормами для перспективных расчетов. Так, значение показателя t2 установим исходя из рекомендуемых интервалов движения ГПТ в городах различных категорий [86]: Т]^Т2^ = 4 мин; тз:=4,2 мин; т4 = 4,5 мин; ts=5 мин.
Рациональная вместимость ТЕ па маршрутах k-ro типа s-й группы городов приведена в табл. 9.1 и определена при перспективных нормах 3 чел. на квадратный метр площади пола салона.
В соответствии с табл. 9.3 коэффициент комфортабельности поездок при принятой вместимости находится в диапазоне 0,37—0,77 в зависимости от типов ТЕ, а его среднее значение для существующих видов ГПТ равняется 0,57. В связи с этим в дальнейшем полагаем, что a/i.s = a=0,57. С учетом (9.22) выражение (9.21) приводится к виду _________________________________________
* “ks'WlVfistks
Необходимое число NnikS ТЕ в i-й час суток па маршруте /г-го типа s-й группы городов при условии изменения потребности в по-190
Вил транспорта Тип подвижного состава Коли-чес гво мест для сидения Вмсс-щ^ость при наполнении (стоящих пассажиров) Коэффициент комфортабельности
V, —5 чел. на 1 м2 । >а=4 чел. на 1 м8 1 >з = 3 чел. на 1 мз ai •• 1
Метрополитен Е 42 162 138 114 0,26 0,30 0,37
КТМ-2+КТП-2 54 139 122 105 0,39 0,44 0,51
РВЗ-6М 37 117 101 85 0,32 0,38 0,44
Т-3 36 96 84 72 0,38 0,43 0,50
Трамвай КТМ-5 32 132 112 92 0,24 0,29 0,35
Шестиоспый сочлененный 50 165 142 119 0,30 0,35 0,42
МТБ-82 35 70 61 55 0 50 -0,57 0,64
Троллейбус ЗИУ-5Г 38 87 77 67 0,44 0,49 0,57
Сочлененный 40 135 116 97 0,30 0,35 0,41
РАФ-577Е 10 10 10 10 1 1 1
ПАЗ-652Б 23 34 32 30 0,68 0,72 0,77
ЗИЛ-158В 32 50 46 43 0,64 0,70 0,74
Автобус Л АЗ-696 34 77 68 59 0,44 0,50 0,58
ЛИАЗ-677 25 79 68 57 0,32 0,37 0,44
Икарус-180 36 120 96 72 0,30 0,38 0,50
ездках ставит
по
часам cvtok
соответствии
с п-м
распределением со-
в
jVniks ' ' ^ks^niy
(9.23)
где (Ont — весовая оценка i-ro часа суток л-го распределения поездок по времени (табл. 9.2).
Соответственно число qnths пассажиро-мест в г-й час суток на маршруте #-го тина s-й группы городов при этих же условиях определится в виде
tfniks ~ ^n(ks
Величины q^ihs являются компонентами идеальных планов удовлетворения потребности в поездках на маршруте /г-го типа s-й группы городов при условии се изменения в соответствии с /г-м распределением.
Планирование удовлетворения потребности в поездках существующими видами ГПТ. Задача по-» строения реального плана удовлетворения заданной потребности в поездках при условии, что известен идеальный план, изложена в гл. 1. Реальные планы удовлетворения потребности в поездках были получены при следующей организации труда водителей: про^ должительность смены водителей равна восьми часам; транспортные единицы могут работать в течение одной смены; количество
смен работы водителей равно 12; начало работы первой смены в первый час суток (с 5 до 6 ч), второй — во второй час суток (с 6 до 7 ч) и т. д., двенадцатой — в двенадцатый час суток (с 6 до 17 ч).
Количество ТЕ, полученное в соответствии с рассчитанными реальными планами удовлетворения потребности в поездках на маршрутах /г-го типа 5-й группы городов при условии изменения потребности в поездках приведено в табл. 9.4.
Таблица 94
Величины несоответствия реальных
планов идеальным, полу-
ченные в виде
20
k/lks {Qniks Гtilks)->
приведены в табл. 9.5.
В рамках рассматриваемой модели объекта управления вариант задания потребности в поездках для города 5-й группы определяется видом распределения потребности в поездках по часам суток на маршрутах каждого типа. Так, при пяти видах распределений потребности в поездках по часам суток, каждое из которых может быть принято для любого из трех типов маршрутов города первой группы, общее число вариантов задания потребности в поездках будет равно 15. Аналогичное число вариантов задания потребности в поездках будет и для городов других групп, за исключением пятой, для которой число вариантов равно 10, так как город характеризуется двумя типами маршрутов.
Чтобы упростить последующий сравнительный анализ существующих видов ГПТ и модульного транспорта, из всех вариантов задания потребности в поездках по каждой группе городов были выбраны такие, для которых получены минимальные (Asmm) и максимальные (A.smax) величины несоответствия реальных планов идеальным (табл. 9.6).
Данные минимаксные оценки получены при использовании метода построения оптимальных реальных планов, обеспечивающих
Группа городов Тин маршрута k Вариант п раенре геления потребности по часам суток
1 2 3 4 5
1 28 705 66 589 22420 15060 23858
1 2 225 281 528 147 177 256 119 559 189 737
3 102 737 232 523 77 956 54 365 87 402
1 24 787 57464 19 579 13 296 20 837
2 2 106 324 248 062 83697 56 465 89 707
3 34 246 76 926 26 858 19 473 28 502
1 10 780 24426 8 266 5 933 9165
3 2 33 257 77 271 26 586 18 253 28 256
3 27 261 60 553 20 488 14 847 22 747
1 8 182 18 775 6 386 4 771 7 105
4 2 14 056 31 395 11 054 7 721 11 722
3 8 156 14 363 5 899 4 206 5 899
1 6 010 13 012 4 573 3 317 4 932
□ 2 3 197 7 199 3 197 2 531 2 864
минимальную величину несоответствия идеальным планам. Любые эвристические методы построения реальных планов, очевидно, дадут заведомо худший результат.
Болес того, величина несоответствия идеальным планам будет еще больше при существующих способах планирования обеспечения ресурсами, когда в расчет принимается только потребность в поездках в часы пик.
Планирование удовлетворения потребности в поездках модульным транспортом. Модульный транспорт обеспечивает использование модулей перевозок в течение времени, меньшего продолжительности работы водителей, а также изменение вместимости за счет компоновки МП в блоки.
Табл и ц a 9.G
Группа городов 5 Величина несоответствия реальных планов идеальным, пассажиро-мес г 1 рунпа городов 5 Величина несоответствия реальных планов идеальным, пассажиров мест
д " . 5 лип Д’’ S них niin д s шах
1 188 990 827 260 4 16 698 64533
2 89 234 382460 5 5 848 20 211
3 39 033 162 250
/77 L6b?; ?/?? Lm,M Q-n
/ 10 18 3,66 О 7 25,6 126
2 15 26 6,33 ЕГШТЕП 6 26,28 155
3 20 35 5,82 AWto RRRHnsI 1 4 23,28 160
* i 1 i 1 66 •7 "5 i ^FLnJEFFJI i, J 2178 p 132
1 А 1 1 i ! I -г Г - i -7 i 1 i ттанвшп ; zLl« я A A Fl H □ jd 153
26,10 186
; 6 ! 3S ! 62 1 i U—- q d о H id d id H iJ ci j i’Lsjc н,БИн.£!.с-2и
1 г 1 , J ’ ! = 75 I ! 1 !ТШГ0Т;н A g» П R п в Я R d 2 23,28 160
ь 45 i 2 23,18 158
i i 79 i I >7.98 ТБВЪНЕНВЪ'ЪНН Hl-il -i Es-fcn HR R nsn ELS n ssl
1 i f 1 _
—-— J —1 1 j 2 2‘r,60 176
1 — i i«5 i rj ТЗП н 0*3" H Ь u id Ь Ь H H H | ri SELO. R FLAjBsa RR A H_F! aJ
Снятие данных ограничений па использование ресурсов уменьшает величины несоответствия между идеальными и реальными планами.
Построим реальные планы удовлетворения потребности в поездках на £-м маршруте .s-й группы городов при условии ее изменения по часам суток в соответствии с л-м распределением. При этом будем также решать задачу приближения реальных планов к идеальным «сверху». Компоненты этих планов определяет выражение (9.23). Предварительно определим основные характеристики модульного транспорта, в качестве которых принимаем: типы МП,, отличающиеся числом пассажиро-мест Qm=(10, 15, ..., 45, 50),
т= 1, 2, ..., 9; длину каждого типа МП 1т = (/ь /2» •••> максимальную длину блока модулей.
В целях определения 1т осуществлена компоновка мест для сидения пассажиров в модулях с учетом следующих требований: шаг h сиденья равен 720 мм; ширина сиденья — 460 мм; ширина двери— 750 и 1500 мм ,[7]. В табл. 9.7 приведены принятые варианты компоновки. С учетом этого длину МП можно определить как
- rmh Г 2£,
где — число рядов для сидения в модуле /n-го типа;
6 = 750 мм — принятый размер устройства сочленения модулей в блоки.
Максимальную длину блока модулей выберем исходя из условия возможности ko?yIiioiiobkh в блок двух модулей максимальной длины L = 26 м.
По характеристикам оь, /пь L определены (см. табл. 9.7): максимальное число МП m-го типа в блоке qm, максимальная длина блока с МП m-го типа (Lm), вместимость МП m-го типа (со,?/), максимальная вместимость блока модулей m-го типа (СМ.
Для модульного транспорта, базирующегося на существующих видах ГПТ, можно предполагать уменьшение эксплуатационной скорости за счет необходимости операций сцепок и расцепок, снижающих «оборачиваемость» МП. Будем полагать, что эксплуатационная скорость МП первого типа снизится минимум на 5 и максимум на 10%. Так как в блоке максимальной длины может быть наибольшее число МП первого тина (компоновка МП первого типа в блоки сопровождается максимальным числом операций сценки и расцепки), то понижение эксплуатационных скоростей для МП других типов будет меньше, чем для первого типа, и будет пропорционально числу операций сценки-расцепки. Полученные с учетом этих предположений величины снижения эксплуатационной скорости для МП различных типов представлены в табл. 9.8.
С целью обеспечения одного и того же качества удовлетворения потребности в поездках по показателю среднего времени ожидания пассажира существующими видами ГПТ и модульным транспортом
Таблица 9.8
Тип мп т Снижение эксплуатационных скоростей Тип МП т Снижение эксплуатационных скоростей
Максимальное снижение эксплуатационной скоро-сти 6тах> км/4 Минимальное снижение эксплуатационной скорости Максимальное снижение эксплуатационной скоро-с,и £гпах' км/4 Минимальное снижение эксплуатационной скорости Сп> км/4
1 10 5 6 3,1 1,5
2 7 3,5 7 2,8 1,3
3 5,4 2,6 8 2,5 1,2
4 4,4 2,1 9 2,2 1,0
5 3,5 1,7
полагаем, что количество ГПТ, определяемое в соответствии с (9.23), равно числу средств транспортировки:
niks ~ 2V nibs*
— число СТ для транспортировки МП /zz-го типа в i-й час суток на маршрутах fc-ro типа s-й группы городов при условии изменения потребности в поездках по часам суток в соответствии с n-м распределением.
Общее количество МП m-го типа, необходимое в i-й час суток на маршрутах k-vo типа s-й группы городов, при указанных условиях выбирается таким образом, чтобы минимальным
количеством МП данного типа освоить потребность в поездках в данный час суток:
лл('л) niks
[ Nnmiks< есл" ((“
I
| Г — 1
I . Wz7z''t?1VZ-7) Wks
&kswni — 1 \ \
-Ь 1, в противном случае,
где квадратные скобки означают, что берется целая часть;
Фья — пассажиропоток на k-м маршруте s-й группы городов (см. табл. 9.1);
ыш — «вес» потребности в поездках i-ro часа при n-м распределении сс но часам суток (см. табл. 9.2);
со,?/— вместимость МП m-го типа (см. табл. 9.7);
i|?i — коэффициент неравномерности пассажиропотока ио участкам маршрута;
lh»— дальность поездки па маршрутах /е-го типа s-й группы городов.;
vks^ — эксплуатационная скорость МП гп-го тина па маршруте /г-го типа $-й группы городов, которая принимает два значения
иллп1Н1 ' I* 1 100 ' lkst U,Fj,nax \ 100 / ks’
где &rnax и ^пйп —максимальное и минимальное снижение эксплуатационной скорости на маршруте &-го типа s-й группы городов (ц/<а) для МП т-го типа (см. табл. 9.8).
Так как на маршрутах третьего типа первой группы городов рекомендуется использование рациональной вместимости в 230 пасса-жиро-мсст (см. табл. 9.1), а максимальная вместимость блока модулей определена в 186 пассажиро-мест (см. табл. 9.7), то потребность в поездках на данных маршрутах не может быть освоена модульным транспортом. Поэтому величины мпТз1 пе определялись.
Количество пассажиро-мест, обеспечиваемое модулями перевозки m-го типа,
г
(т) _ niks '
^niks
Группа городов 5 Величина несоответствия реальных планов идеальным, иассажиро-мест
\т* s min д(от*> max
2 43 851 1 107 901 9
3 8 895 1 37 650 9
4 9 135 1 20 913 9
5 2 031 1 8 561 9
Группа городов 5 Уменьшение величины несоответствия реальных планов идеальным
b s инп ь з шах
2 2,035 3,54
3 4,39 4,31
4 1,83 3,09
5 2,88 2,36
Величина несоответствия в случае модульного транспорта составит
20
1=1
Значения определяются для минимального и максимального снижения эксплуатационных скоростей МП.
Для модульного транспорта по аналогии с существующими видами ГПТ из всех вариантов задания потребности в поездках по каждой группе городов были выбраны такие, при которых получены минимальные и максимальные величины несоответствия реальных планов идеальным. При этом минимальными величинами приняты величины, полученные при минимальном, а максимальными— при максимальном снижении эксплуатационной скорости. Затем из и д<™>х выбирались величины:
д('") д(^) та д(т)
dmin minasnnn> “\sniax n,dxasmax*
тп тп
Таким образом определялся тип модулей перевозок, обеспечивающий минимальное и максимальное несоответствия реальных планов идеальным.
В табл. 9.9 приведены значения Л1ппп» Aimax для всех групп городов, кроме первой. Данные величины не определялись для первой группы городов, так как освоение потребности в поездках на маршрутах третьего типа этих городов модульным транспортом рассматриваемого вида не представляется возможным.
Сравнительная оценка существующих видов ГПТ и модульного транспорта. Сравнительную оценку существующих видов ГПТ и модульного транспорта, построение которого основывается на базе существующих видов ГПТ, произведем по величине несоответствия реальных планов идеальным в виде
r_ , A^niax
^min- } , *sniax- (z7r?)
UAinin a^niax
Вид ГПТ Заработай плата водителей, руб 'место-ix м Прочие расходы сп. руб/место-км
Автобусы 0,00200 0,00361
Троллейбусы 0,00185 0,00350
Трамваи 0,00143 0,00254
Средние расходы 0,00176 0,00322
Группа городов Оценка экономии за счет внедрения модульного транспорта, руб.
минимальная максимальная
2 3917 16 139
3 1595 6 705
4 603 2 288
5 207 609
Как видно из данных табл. 9.10, по модульному транспорту наблюдается весьма существенное снижение величины несоответствия идеальным планам.
От оценок уменьшения величины несоответствия реальных планов идеальным на модульном транспорте представляется возможность перейти к оценкам снижения эксплуатационных расходов.
В табл. 9.11 приведены данные по эксплуатационным расходам, полученные по результатам работы [23]. Эксплуатационные расходы приведены к пробегу на один километр одного пассажиро-места существующих видов ГПТ.
Статья данных расходов — заработная плата водителей — сохраняется для модульного транспорта, так как количество водителей для существующих видов ГПТ и модульного транспорта принято одним и тем же. Уменьшение эксплуатационных расходов на модульном транспорте за счет сокращения необходимого количества пассажиро-мест будет наблюдаться, очевидно, за счет снижения Сп прочих расходов. В предположении, что Сп = 0,00322 руб. (см. табл. 9.11) для модульного транспорта возрастет минимум на 5, а максимум— па 20%, была определена ежесуточная экономия за счет снижения числа пассажиро-мест. Величина этой экономии для второй—четвертой групп городов представлена в табл. 9.12.
Таким образом, полученные оценки целесообразности применения модульного транспорта указывают на перспективность дальнейшей разработки проблемы городских пассажирских модульных перевозок.
На основании рассмотрения целей и задач перспективных исследований в области автоматизированного управления ГПТ можно сделать следующие основные выводы:
1. Существующему городскому пассажирскому транспорту с позиций достижения заданного качества удовлетворения потребности в поездках при максимальной эффективности использования ресурсов удовлетворения потребности присущи ограничения конструктивного характера. Одним из возможных путей снятия данных ограничений являются унификация транспортных средств и обеспечение управления их вместимостью.
2. Необходимость управления вместимостью транспортных средств определяется изменением потребности в поездках во времени и по направлениям движения городского пассажирского-транспорта, а целесообразность управления вместимостью подтверждается внедрением элементов такого управления в практику пассажирских перевозок.
3. Обеспечение управления вместимостью транспортных средств приводит к идее модульного транспорта.
4. Основными конструктивными характеристиками модульного транспорта, которые должны быть определены с позиций обеспечения заданного качества удовлетворения потребности в поездках при максимальной эффективности использования ресурсов удовлетворения потребности, являются: типаж модулей перевозок и средств транспортировки; нормы времени на сочленение (расчленение) моду .чей перевозок между собой и со средствами транспортировки, организация сочленения (расчленения); максимальная длина блока модулей перевозок, сочленяемого с данным типом средства транспортировки.
5. Конструктивные характеристики модульного транспорта зависят от базы его построения.
6. Можно выделить следующие относительно самостоятельные, но взаимосвязанные направления проведения научно-исследовательских, опытно-конструкторских и проектных работ по внедрению модульных перевозок: общесистемное, конструктивное и экономическое. Общесистемное направление работ должно обеспечить разработку принципов, методов и средств управления модульным транспортом, конструктивное — разработку конструкции средств транспортировки и модулой перевозок, экономическое — определение рациональной сферы применения модульного транспорта.
СПИСОК ЛИТЕРАТУРЫ
1. Автоматизированная система контроля за движением городских автобусов. Межотраслевой информационный листок № 51. 16Б. 12. М., ЦБНТИ Мин-автотранса РСФСР, 1975.
2. Аксенов И. Я. Наука и транспорт. М.» «Знание», 1974. 49 с.
3. Антошвили М. Е., В а ре л о пул о Г. А., Хрущев М. В. Организация городских автобусных перевозок с применением математических методов и ЭВМ. М., «Транспорт», 1974. 102 с.
4. Антошвили М. Е., Сппрпп И. В. Определение потребного количества подвижного состава для работы на городских автобусных маршрутах. — Реф. сборник, сер. «Пассажирские перевозки», № 10. М„ ЦБНТИ Мипавтотранса РСФСР, 1975. 44 с.
5. А н т о ш в и л и М. Е., Федоровский В. С. Методика распределения автобусов по маршрутам и определения их потребного количества в городах.— «Автомобильный транспорт», 1972, Nb 6, с. 23—25.
6. А р т ы н о в А. П. Автоматизация управления уличным пассажирским транспортом в больших городах за рубежом. — Обзоры по проблемам больших городов, № 13—75, М., ГОСИНТИ, 1975. 40 с.
7. А ф а и а с ь е в А. А., Цукерберг С. М. Автомобильные перевозки. М., «Транспорт», 1973. 320 с.
8. Б л а т н о в М. Д. Пассажирские автомобильные перевозки. М., «Транспорт», 1973. 304 с.
9. Блатнов М. Д. Пути совершенствования организации пассажирских перевозок на автомобильном транспорте. — Обзорная информация. М., ЦБНТИ Мипавтотранса РСФСР, 1973. G4 с.
10. Блатнов М. Д. Управление пассажирским автомобильным транспортом. М„ «Транспорт», 1970. 32 с.
11. Б лих И. М., Лознер Л. Г., Тарасов Б. В. Опыт внедрения ЭВМ для планирования и учета перевозочного процесса на автомобильном транспорте. Л., ЛДНТП, 1971. 28 с.
12. Б о л о н е н к о в Г. В. Пути совершенствования работы легкового таксомоторного транспорта в городах. — Обзоры по проблемам больших городов, А» 2—7(5, М., ГОСИНТИ, 197(5. 31 с.
13. 15 о л о и е п к о в Г. В. Скоростной общественный транспорт крупного города. — Обзорная информация. М., ЦНТИ по гражданскому строительству и архитектуре, 1972, с. 3.
14. Бра новинка я С. В., Лопатин А. П., Н удел ь май Г. А., П о-л о в и и к о в В. С. Определение необходимого количества автомобилей-такси на стоянках при выпуске такси из транспортных предприятий. — В кп.: Применение математических методов в экономических исследованиях и планировании. Киев, «Будивельник», 1973, с. 29—35.
15. Б у р т и н Ю. Д., Варслопуло Г. Е. Математическая модель оптимального выбора режимов работы транспортных единиц па маршрутах городского пассажирского транспорта. — В кн.: Современное состояние и перспективы 200
развития транспортных систем крупного города. Вып. 2. Свердловск, 1974» с. 70—76. (Тезисы конференции).
16. Б у с л е п к о Н. II. Метод статистического моделирования. ЛЕ, «Статистика», 1970. 112 с.
17. Власенко В. II., Половников В. С., Солодухина Н. Н. Составление списка рейсов подвижных единиц. — В кп.: Вопросы проектирования автоматизированных систем управления транспортом. Вып. 2. Омск, Зап.-Сиб. кн. изд-во, Омское отд., 1976, с. 111 —120.
18. Временная методика определения экономической эффективности автоматизированных систем управления предприятиями. М., «Экономика», 1973. 28 с.
19. Голенко Д. И. Моделирование и статистический анализ псевдослучайных чисел на электронных вычислительных машинах. М., «Паука», 1965. 227 с.
20. Гольштейн Е. Г., Юдин Д. В. Задачи линейного программирования транспортного типа. М., «Наука», 1969. 382 с.
21. Грачев В. А., Половников В. С.. Лопатин А. П., Б р а нови цк а я С. В. Выбор оптимального числа контрольных пунктов на маршруте.— В кн.: Применение математических методов в экономических исследованиях и планировании. Вып. 3. Киев, 1969, с. 72—79.
22. Грачев В. А., Половников В. С., Лопатин А. П., Дворникова Е. Г., Б р а н о в и ц к а я С. В. Моделирование автоматизированной системы диспетчерского управления движением автобусов с целью нахождения обобщенного показателя качества функционирования системы. — В кн.: Применение математических методов в экономических исследованиях и планировании. Вып. 3. Киев, 1969, с. 10—21.
23. Д о б р о с е л ь с к а я Т. М. Методы технико-экономических расчетов по выбору оптимального варианта пассажирской транспортной системы в крупных городах. Труды ИКТП, 1973, вып. 41, с. 34—102.
24. Добросельская Т. ЛА., Пырялина Г. В. О затратах времени на транспорт и оценке пассажиро-часа в пригородно-городском сообщении. В кп.* Вопросы организации и развития городского пассажирского транспорта. Труды ИКТП, 1973, вып. 41, с. 119—131.
25. Д о р о ф е ю к А. А. Алгоритмы автоматической классификации. — «Автоматика и телемеханика», 1971, № 12, с. 78—114.
26. Др ома ш к о В. Б., Лопатин А. П., Новошинская С. И., Половников В. С. Математическая модель устройства связи с периферией для автоматизированной системы диспетчерского управления движением автобусов. В кп.: — Автоматизированные системы управления и технические средства. Вып. 1. Омск, Зап. Сиб. кн. изд-во. Омское отд. 1973, с. 68—74.
27. Д ромашко В. Б., Лопатин А. П., Половников 'В. С., Ша м р а й В. И. Статистический анализ системы обслуживания таксомоторным транспортом. — В кп.: Автоматизированные системы управления и технические средства. Вып. 1. Омск, Зап.-Сиб. кп. изд-во, Омское отд. 1973. с. 98—115.
28. Зарубежная электронная техника. № 9 (155), ЛЕ, ГОСИНТИ, 1977. 47 с.
29. Зепгбуш ЛА. В., Белинский A. Ю., Д ы п к и и А. Г. Пассажиропотоки в городах. ЛЕ, «Транспорт», 1974, 135 с.
30. 3 л а т о в О. ЛЕ, Бнкяшева Р. Я. Организация работы радиофицированных легковых таксомоторов в Ленинграде. В кн. — Пассажирские перевозки автомобильным транспортом. ЛА., ЦБНТИ Мнпавтотранса РСФСР, 1974, 18 с.
31. Комплекс технических средств М-6000 АСВТ-ЛА. Каталог, Ч. 1, 2. Северодонецк, НИИУВЛА, 1973. 362 с.
32. Корбут А. А., Финкельштейн IO. IO. Дискретное программирование. ЛЕ, «Наука», 1969. 368 с.
33. Крупник В. ЛЕ Динамический подход к составлению маршрутных расписаний городского пассажирского транспорта. — В кн.: Некоторые вопросы исследования транспортных потоков. Выл. 4, ЛЕ, ЦЭМИ, 1973, с. 73—82.
34. Ленник Ю. В. Метод наименьших квадратов и основы математико-статистической теории обработки наблюдений. ЛЕ, «Физматгнз», 1962. 349 с.
35. Логическая компоновка систем на базе процессора ЛА-6000. АСВТ-М. Руководящий технический материал. Северодонецк, НИИУВМ, 1973. 180 с.
36. Лопатин А. П., Кронберг А. А., Мальгинов Л. А. Алгоритм корректировки реального плана выпуска такси из транспортных предприятий.—
В кн.: Вопросы проектирования автоматизированных систем управления транспортом. Вып. 2. Омск, Зап.-Сиб. кн. изд-во. Омское отд. 1976, с. 58—68.
37. Лопатин /X. П., Половников В. С„ ДА альгинов Л. Л. Определение вероятности подсадки в такси. — В кн. Строительство в Западной Сибири. Труды СибАДИ, 1975, вып. 45, с. 37—42.
38. Лопатин А. П.» Мальгпнов Л. А. Определение необходимого ресурса автомобилей-такси для удовлетворения заданной потребности в передвижении.— В кн.: Вопросы проектирования автоматизированных систем управления транспортом. Вып. 2. Омск. Зап.-Сиб. кн. изд-во. Омское отд., 1976, с. 35—38.
39. Лопатин А. П., Нудельмап Г. А. Расчет графиков выпуска авто-мобплеч-такси из транспортных предприятий. — В кн.: Вопросы проектирования автоматизированных систем управления транспортом. Вып. 2. Омск, Зап.-Снб. кн. изд-во, Омское отд. 1976, с. 38—44.
40. Лопатин А. Г!.. Павленко Г. П„ Половников В. С. Цели и задачи исследования и разработки принципов и методов управления городскими модульными перевозками. В кн.: Вопросы проектирования автоматизированных систем управления транегюотом. Вып. 2. Омск, Зап.-Сиб. кн. изд-во. Омское отд., 1976, с. 153- 168.
41. Макаров И. II., Яворский В. В. Модели проектирования сети маршрутов городского пассажирского транспорта. В кн.: Моделирование процессов управления транспортными системами. Владивосток, 1977, с. 92—95. (Тезисы докладов Всесоюзной конференции).
42. Математические модели внутригородского расселения. М., «Стройиздат», 1974.155 с.
43. Методические указания по определению экономической эффективности применения средств технологической связи в системе Министерства автомобильного транспорта РСФСР. М., ЦБНТИ Минавтотранса РСФСР, 1972. 36 с.
44. Мун Э. Е. Определение потребностей населения в таксомоторных перевозках. М., ЦБНТИ Минавтотранса РСФСР, 1974. 28 с.
45. Новиков О. А., Петухов С. М. Прикладные вопросы теории массового обслуживания. М., «Советское радио», 1969. 339 с.
46. Нормы амортизационных отчислений но основным фондам народного хозяйства СССР. М., «Экономика», 1974. 144 с.
47. Нудельмап Г. А.. Бра новицкая С. В. Метод рационального размещения периферийного оборудования автоматизированной системы диспетчерского управления таксомоторным транспортом при групповом обслуживании пассажиров. — В кн.: Использование экономико-математических методов в планировании отраслей народного хозяйства. Киез, «Будивельник», 1975, с. 11—25.
48. Нудельмап Г. А. Оптимизация стояночной сети такси в системах с одиночным обслуживанием пассажиров. Б кн.: Вопросы проектирования автоматизированных систем управления транспортом. Вып. 2. Омск, Зап.-Сиб. кн. изд-во. Омское отд. 1976, с. 50—58.
49. Нудельмап Г. А., Павленко Г. П. Оптимизация стояночной сети таксомоторного транспорта в условиях автоматизированной системы диспетчерского управления. — В кн.: Вопросы проектирования автоматизированных систем управления транспортом. Вып. 2. Омск, Зап.-Сиб. кп. изд-во, Омское отд., 1976, с. 44—50.
50. О :: ч и н к и.к о в Е. В.. Фишсльсои М. С. Городской транспорт. М., «Высша г школа», 1976. с. 228—347.
5i. Павленко Г. П., Раскин Е. ДЕ, Хейфец Г1. Б. Метод рационального распределения подвижных единиц маршрутизированного транспорта. В кн.: В*шр;,еы проектирования автоматизированных систем управления транспортом. Вып. 2. Омег'. Зап.-Сиб. кн. изд-во, Омское отд., 1976, с. 97—102.
52. Половников В. С.. Солодухина Н. II. Составление раскисания движения маршрутизированного общественного транспорта. — В кн.: Современное состояние и перспективы развития транспортных систем крупного городя. Вып. 2. Свердловск, 1974. с. 79- 75 (материалы конференции).
53. II о л о в и к к о в В. С., Л о и а т и н А. П. Устройство построения расписания движения маршрутизированного транспорта. Авторское свидетельство № 3895л4 кл. С 09629/02.2'с.
54. Правила пользования городскими телефонными сетями. М., Связьиздат, 1952. 15 с.
55. Проблемы развития городского общественного транспорта. — «Автомобильный транспорт», 1975, .№ 1, с. 22—24.
56. Программное обеспечение технического расчета системы городских путей сообщения, представленной в сетевой форме (ЭВМ «Мннск-22»). В кн.: Автоматизация проектирования городских транспортных систем. Вып. 1. М., «Стропиздат» 1976. 134 с.
57. Программное обеспечение технического расчета системы городских путей сообщения, представленной в маршрутной форме (ЭВМ «Минск-22»), В кн.: Автоматизация проектирования городских транспортных систем. Вып. 2. М., «Стропиздат», 1976, 134 с.
58. Программное обеспечение М-6000 АСВТ-М. АЛГОЛ. Руководство по программированию. Северодонецк, НИИУВМ, 1974. 117 с.
59. Программное обеспечение М-6000 АСВТ-М. Дисковая операционная система реального времени. Краткое описание и руководство по пользованию. Ч. 1—2. Северодонецк, НИИУВМ, 1975. 311 с.
60. Программное обеспечение М-6000 АСВТ-М. Основная управляющая система. Краткое описание и руководство по пользованию, 2-я редакция. Северодонецк, НИИУВМ, 1975. 124 с.
61. Программное обеспеченно М-6000 АСВТ-М. МНЕМОКОД. Руководство по программированию. Северодонецк, НИИУВМ, 1974. 152 с.
62. Программное обеспечение М-6000 АСВТ-М. ФОРТРАН. Руководство по программированию. Северодонецк, НИИУВМ, 1974. 148 с.
63. Пугачев В. С. Статистические методы в технической кибернетике. М„ «Советское радио», 1971. 192 с.
64. Раски н Е. М., X е и ф с ц П. Б. Метод распределения тиков подвижных единиц по маршрутам. — В кн.: «Вопросы проектирования автоматизированных систем управления транспортом». Вып. 2. Омск, Зап.-Сиб. кн. изд-во, Омское отд., 1976, с. 102—111.
65. Р а с к и н Е. М. Применение экономико-математических методов при координации оперативною управления городским пассажирским транспортом.— В кп.: Вопросы совершенствования управления городским пассажирским транспортом. М.. МДНТП, 1975, с. 53—63.
66. Руководство по организации пассажирских перевозок на автомобильном транспорте. М., Мннавтотранс РСФСР, 1970. 191 с.
67. Саати Т. Л. Элементы теории массового обслуживания и се приложения. М., «Советское радио», 1971. 519 с.
68. Солоду х и и а Н. Н. Оперативная opi анизация оптимального расписания движения подвижных единиц. Материал конференции «Пути улучшения планирования и организации движения городского электротранспорта». Одесса. 1975, с. 26-29.
69. Спирин И. В. Распределение подвижного состава по городским автобусным маршрутам. — В кн.: Пассажирские перевозки автомобильным транспортом. М., ЦБНТИ Мипавтотранса РСФСР, 1976. 38 с.
70. С т р а м е и т о в А. Е., Сосянц В. Г., Фишельсон М. С. Городской транспорт. М., Изд-во литературы по строительству, 1969, с. 87—105.
71. Суурсо Ю. Система диспетчерского управления таксомоторами.— «Автотранспорт и дороги Латвии», 1975, № 1, с. 38—40.
72. Т а р а н о в А. Т. Перевозки пассажиров автомобильным транспортом М., «Транспорт», 1972. 215 с.
73. Техника и применение микропроцессов. Т. 64. 1976, 220 с.
74. Томсен А. А. Экономическая оценка транспортной усталости. — Обзоры по проблемам больших городов. № 74—71. 10 с. ГОСИНТИ.
75. Федоровский В. С., Абоян П. П. Методика определения потребностей в таксомоторных перевозках.— Труды МАДИ, 1973, вып. 66.
76. Хедли Дж. Нелинейное и динамическое программирование. М., «Мир», 1967. 506 с.
77, Хр и стю к Н. М., Черепанов В. В. Проблемы транспорта в генеральных планах крупных городов.-—В кн.: Транспорт в планировочной структуре городов и агломераций. Киев, КиевНИИградостроительства, 1974, с. 3 — 13.
78. Ху Т. Целочисленное программирование и потоки в сетях. М., «Мир», 1974, с. 191—212.
79. Ча ликов Л. А., Воропаев Е. И. Технологическая связь на автомобильном транспорте. М., «Транспорт», 1976, 96 с.
80. Черепанов В. А. Транспорт в планировке городов. М., Изд-во литературы но строительству, 1970, с. 212—252.
81. Шам рай В. И. Автоматизированная система диспетчерского управления таксомоторным транспортом в г. Москве. — В кн.: Развитие и применение АСУ на автотранспорте. М., МДНТП, 1972, с. 14—16.
82. Шам ран В. И. Некоторые вопросы проектирования автоматизированной системы диспетчерского управления таксомоторным транспортом. — В кн.: Резервы повышения производительности труда на предприятиях таксомоторного транспорта. М., МДНТП, 1972, с. 27—30.
83. Шульга Ю. Н. К вопросу оптимизации обслуживания в системах с ожиданием. — «Экономика и математические методы», 1970, Т. 6. Вып. 1, с. 136—139.
84. Ш у л ь г а 10. Н., Овчаренко В. В. Определение количества подвижного состава для маршрутов городского пассажирского транспорта. — «Экономика и математические методы», 1971, т. 7, вып. 3, с. 397—410.
85. Шульга К). Н. Определение процесса обслуживания в сетевых системах. М., «Наука», 1974.
86. Юдин В. А., Самойлов Д. С. Городской транспорт. М., Строй-издат, 1975, с. 158—251.
87. Я в о р с к и й В. В. Модели и алгоритмы проектирования сети городского пассажирского транспорта. В кн.: Проблемы построения автоматизированных систем управления на транспорте. Киев, «Будивельпик», с. 93—103.
88. Buhn und Bus noch attraktiver rnit Computerhilfe. Rechnergcstenertes Leitsystem fiir offentlichen Nahverkehr. «Stadtvcrkehr», 1974, 19, No 4, s. 122.
89. Bertschmann H. Modernes Leitsystem fiir den Nahverkehr. «Vcrkehr und Techn.», 1973, 26, No 2, s. 51—56.
90. Bristol's bus locator for show for Minister. «Commerc. Mot.», 1971, 134, No 3433, p. 24.
91. Cobera Conde II. The use of electronic systems with a view to improving the operation of surface public transport. 40 th International Congress (International Union of Public Transport), the Hague, 1973.
92. Janies Alec Patrick, Improvement relating to apparatus for use on passenger transport vehicles.
93. Mason F. I., iMumford I. R., Computer models for designing Dial — A — Ride sistern. Automotive Engineering Congress, Detroit, Mich., January 10—14, 1972.
94. Monitoring buses in Dublin. «Data Process», 1974, 16, No 3, p. 174—175.
95. NTS under development in Japan. «Lock Jup.», 1974, 19, No 217, p. 10—13.
96. Rcchncrgcstcuertes Verkehrsleitsystcm Bosch — RVL. «Nahverkehrs —* Prax.», 1974, 22, No 7, s. 285—287.
ОГЛАВЛЕНИЕ
Предисловие........................................................... 3
Глава 1. Цели и задачи автоматизированного управления движением городского пассажирского транспорта...................................... 4
1.1. Обзор и анализ современных методов и средств управления городскими пассажирскими перевозками......................... 5
1.2. Показатели качества удовлетворения потребности городского населения в поездках. Основные задачи автоматизированного управления движением городского пассажирского транспорта.................................................. 16
Г л а в а 2. Статистический анализ объекта управления................. 33
2.1. Классификация маршрутов................................ 34
2.2. Определение зависимости времени ожидания пассажиров от точности движения транспортных единиц па маршруте ... 36
2.3. Определение зависимости времени ожидания пассажиров от точности движения маршрутизированного транспорта .... 38
2.4. Определение потребности в поездках на маршрутах с учетом ее изменения по часам суток............................. 40
2.5. Статистический анализ работы таксомоторного транспорта ...................................................... 41
Г л а в а 3. Исследование управления движением маршрутизированного транспорта в условиях функционирования автоматизированной системы............................................................. 46
3.1 Составление расписаний движения маршрутизированного транспорта.................................................. 46
3.2. Контроль исполнения расписаний маршрутизированным транспортом................................................. 54
3.3. Диспетчерское управление движением маршрутизированного транспорта при нарушениях расписаний..................... 57
3.4. Оперативное формирование расписаний движения .... 63
Г л а в а 4. Исследование управления движением таксомоторного транспорта в условиях функционирования автоматизированной системы 65
4.1. Управление потребностью в поездках на таксомоторном транспорте................................................. 65
4.2. Определение рациональной стояночной сети таксомоторного транспорта.............................................. 66
4.3. Определение необходимого количества такси для удовлетворения потребности в поездках . . . ..... „ , 69
4.4. Исследование планового управления движением таксомоторного транспорта в условиях функционирования автоматизированной системы............................................ 72
4.5. Исследование оперативного управления движением таксомоторного транспорта в условиях функционирования автоматизированной системы . . ............................... 77
Главао. Структура автоматизированных систем диспетчерского управления движением городского пассажирского транспорта.................. 89
5.1. Краткая характеристика агрегатных средств вычислительной техники................................................. 96
5.2. Функционирование комплекса технических средств автоматизированных систем диспетчерского управления движением маршрутизированного транспорта.............................. 98
5.3. Функционирование комплекса технических средств, автоматизированной системы диспетчерского управления движения таксомоторного транспорта ................................. 103
Глава 6. Характеристика программного обеспечения автоматизированных 111
систем диспетчерского управления движением городского пассажирского транспорта .....................................
6.Р. Характеристика операционной системы в режиме начального запуска и вечернего окончания........................... 114
6.2. Характеристика операционной системы в режиме нормального функционирования ..........................'............ 116
6.3. Взаимодействие основных комплексов программ специального программного обеспечения АСДУ-ГПТ....................... 120
6.4. Режим нормального функционирования автоматизированных систем диспетчерского управления движением маршрутизированного транспорта............................................ 123
6.5. Режим начального запуска автоматизированных систем диспетчерского управления движением маршрутизированного транспорта................................................. 127
6.6. Режим послеаварийного восстановления автоматизированных систем диспетчерского управления движением маршрутизированного транспорта..................................... 128
6.7. Режим вечернего окончания работы автоматизированных систем диспетчерского управления движением маршрутизированного транспорта ........................................ 129
6.8. Режим нормального функционирования автоматизированной системы диспетчерского управления движением таксомоторного транспорта......................................... 130
Глава 7. Методическое обеспечение автоматизированных систем диспетчерского управления движением городского пассажирского транспорта.......................................................... 132
7.1. Определение оптимального количественного состава п размещения оборудования автоматизированных систем диспетчерского управления движением маршрутзкрованпого транспорта 132
7.2. Определение оптимального количественного состава п размещения оборудования автоматизированных систем диспетчерского управления движением таксомоторного транспорта ... 144
7.3. Определенно экономической эффективности автоматизированных систем диспетчерского управления движением городского пассажирского транспорта............................. 151
Г л а в а 8. Опыт внедрения автоматизированных систем диспетчерского управления движением городского пассажирского транспорта 158
8.1. Промышленное обеспечение внедрения АСДУ-ГПТ .... 159
8.2. Техническое обеспечение внедрения АСДУ-ГПТ............ 159
8.3. Организационное обеспечение внедрения АСДУ-ГПТ ... 161
Глава 9. Тенденции развития методов и средств автоматизированного управления движением городского пассажирского транспорта 162 9.1. Анализ тенденций развития средств управления движением городского пассажирского транспорта.................................. 163
9.2. Анализ тенденций развития методов управления движением городского пассажирского транспорта.................. . . 166
9.3. Цели и задачи перспективных исследований в области автоматизированного управления движением городского пассажирского транспорта.............. , . _ .................. 185
Список литературы.......................... . 200
Г ри горни Павлович Павле н к о Виктор Степанович По л о в н и к о в
А и а т о л и и Петрович Л о п а т и и
АВТОМАТИЗИРОВАННЫЕ СИСТЕМЫ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ
ДВИЖЕНИЕМ ПАССАЖИРСКОГО ГОРОДСКОГО ТРАНСПОРТА
Рецензенты В. С. Федоровский, М. Д. Блатной, М. П. Печерский Редактор II. О. Бра ii л о иски й Обложка художника В. А. Шехтера Технический редактор Л. Е. Ill мелева Корректоры С. М. Лобова, Т. С. Ященко
II Г» М 1253
Сдано в набор 07.07.78 Подгысано в нечагь 2>.г2 78
Т—22G27 Формат бум.-.ю. тип. № 2
Гари, литературная Псч. пысокгя Псч. л. 13
Уч.-изд. л. 14,43 Тираж 8500 эк к Заказ № 861
Цена 1 руб. II <д. № 1—4—1/14 № 9141
11здаюл!>С18о «Транспорт», ^Москва, Басманный туп., ба
Московская типография № 8 «Союзполпграфпрома» при Государственном комитете СССР по делам издательств, полиграфии и книжной торговли, Хохловский пер., 7.