



















































































































































Автор: Агунов М.В. Вербова Н.М. Агунов А.В.
Теги: электротехника водный транспорт учебник судовая автоматика
ISBN: 978-5-88303-463-2
Год: 2009




Текст
Министерство образования и науки Российской Федерации Государственное образовательное учреждение высшего профессионального образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
М.В. ЛГУНОВ, Л.В. ЛГУНОВ, Н.М. ВЕРБОВЛ
СИСТЕМЫ И УСТРОЙСТВА
к-#
судовой автоматики
чебник
I
• I
Санкт-Петербург
2009
Министерство образования и науки Российской Федерации Государственное образовательное учреждение высшего профессионального образования «САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
М.В. ЛГУНОВ, А.В. ЛГУНОВ, НМ. ВЕРБОВА
СИСТЕМЫ И УСТРОЙСТВА СУДОВОЙ АВТОМАТИКИ
Допущено УМО по образованию в области кораблестроения и океанотехники в качестве учебника для студентов высших учебных заведений, обучающихся по специальности «Системы электроэнергетики и автоматизации судов» направления подготовки дипломированных специалистов «Системы объектов морской инфраструктуры»
Санкт-Петербург
2009
УДК 621.372
ББК 39.42-05
А27
Рецензенты:
кафедра автоматики и электроники ВКА им. А.Ф. Можайского (начальник кафедры д-р. техн, наук, проф. В.Н. Арсеньев);
кафедра автоматики СПбГУВК (заведующий кафедрой д-р. техн, наук, проф. Р.Э. Францев)
Агунов М.В., Агунов А.В., Вербова Н.М.
А27 Системы и устройства судовой автоматики: учебник / М.В. Агунов, А.В. Агунов, Н.М. Вербова; СПбГМТУ. - СПб., 2009. - 339 с.
ISBN 978-5-88303-463-2
В учебнике рассмотрены системы, устройства, функциональные узлы и элементы судовой автоматики, описаны принципы их построения и функционирования. Приведено решение примеров, способствующих лучшему усвоению и закреплению материала.
Учебник предназначен для студентов вузов специальности 180201 - «Системы электроэнергетики и автоматизации судов».
Научный редактор заведующий кафедрой САиИ СПбГМТУ проф. В. В. Кузнецов
УДК 621.372
ББК 39.42-05
ISBN 978-5-88303-463-2
© М.В. Агунов, 2009
© А.В. Агунов, 2009
© Н.М. Вербова, 2009
© СПбГМТУ, 2009
ОГЛАВЛЕНИЕ
Предисловие научного редактора.........................5
Введение...............................................8
Глава 1. Электромеханические элементы автоматических систем...............................................12
1.1. Аппаратура управления. Электромагнитные реле...12
1.2. Дистанционные передачи.........................13
1.3. Исполнительные устройства......................26
1.4. Усилители исполнительных устройств.............37
1.5. Электромеханические датчики скоростей и ускорений.49
1.6. Гироскопические устройства.....................55
Глава 2. Электронные аналоговые элементы автоматических систем...............................7...............66
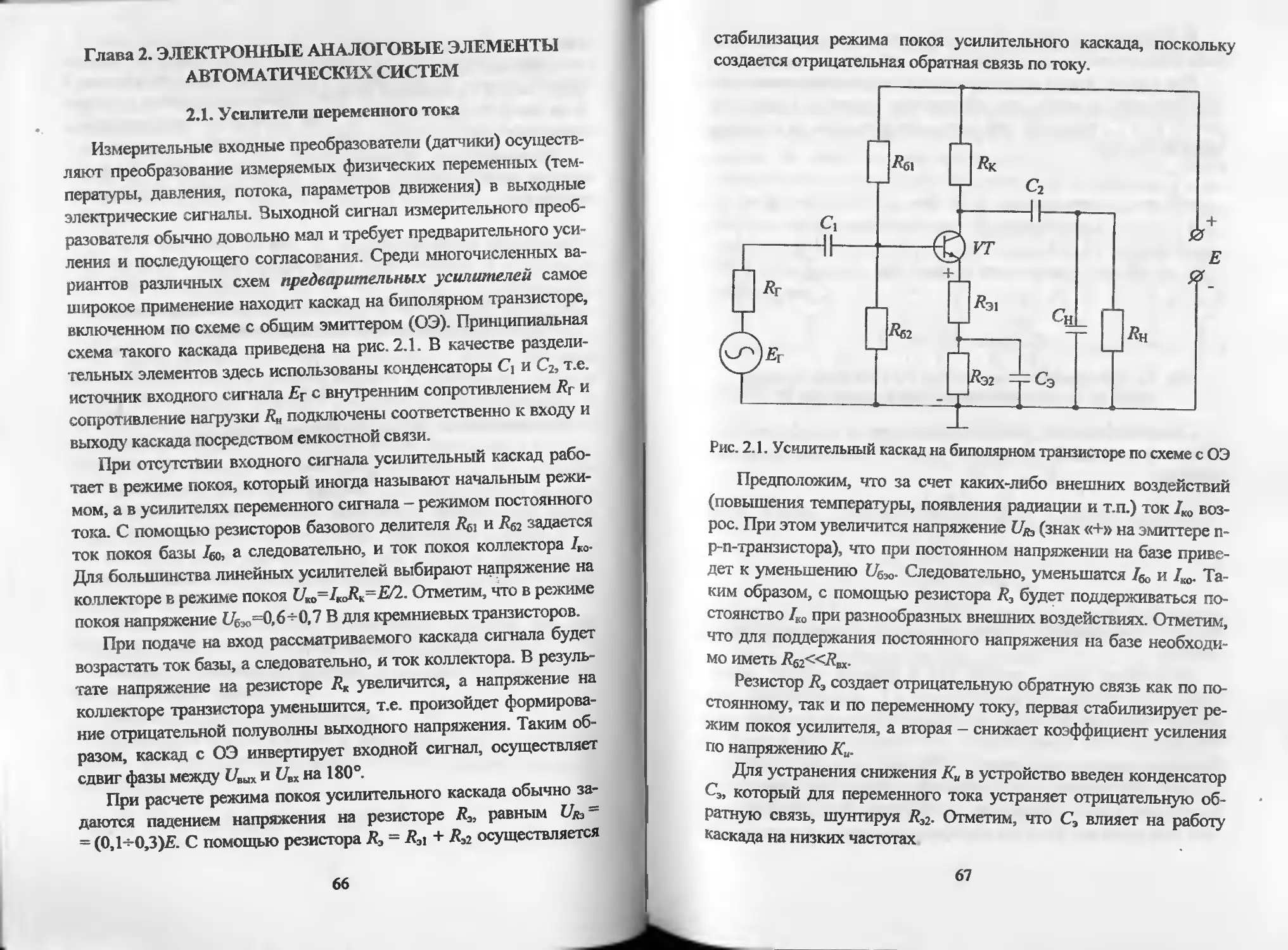
2.1. Усилители переменного тока.....................66
2.2. Усилители постоянного тока.....................75
2.3. Схемы аналоговых вычислений на ОУ..............87
2.4. Функциональные устройства......................93
2.5. Генераторы линеаризующих колебаний и фильтры... 99
Глава 3. Электронные цифровые элементы автоматических систем..............................................114
3.1. Общие сведения о цифровых автоматических системах...........................................114
3.2. Цифровые устройства...........................116
3.3. Микропроцессоры и узлы микропроцессорных устройств..........................................162
3.4. Цифро-аналоговые и аналого-цифровые преобразователи....................................198
3.5. Проектирование автоматических систем на базе микропроцессоров...................................214
Глава 4. Автоматические системы......................218
4.1. Автоматический контроль.......................218
4.2. Автоматическая защита.........................218
4.3. Автоматическое управление.....................219
3
4.4. Автоматическое регулирование....221
4.5. Анализ и синтез линейных стационарных автоматических систем методом пространства состояний..........224
4.6. Экспериментальное исследование факторов, ограничивающих работоспособность системы...................241
Глава 5. Автоматическая система управления гребной пропульсивной установкой ледокола.......................247
5.1. Гребная электрическая установка.................247
5.2. Система управления гребной пропульсивной установкой..........................:....................263
5.3. Характеристики системы управления гребной пропульсивной энергетической установкой.................275
5.4. Проверка настроек контуров пропульсивного управления................................................289
Глава 6. Судовая автоматическая рулевая система......291
6.1. Рулевой электропривод переменного тока..........291
6.2. Система управления рулевой установкой...........296
Глава 7. Электропитание автоматических систем........299
7.1. Общие сведения об источниках электропитания систем автоматики................................... 299
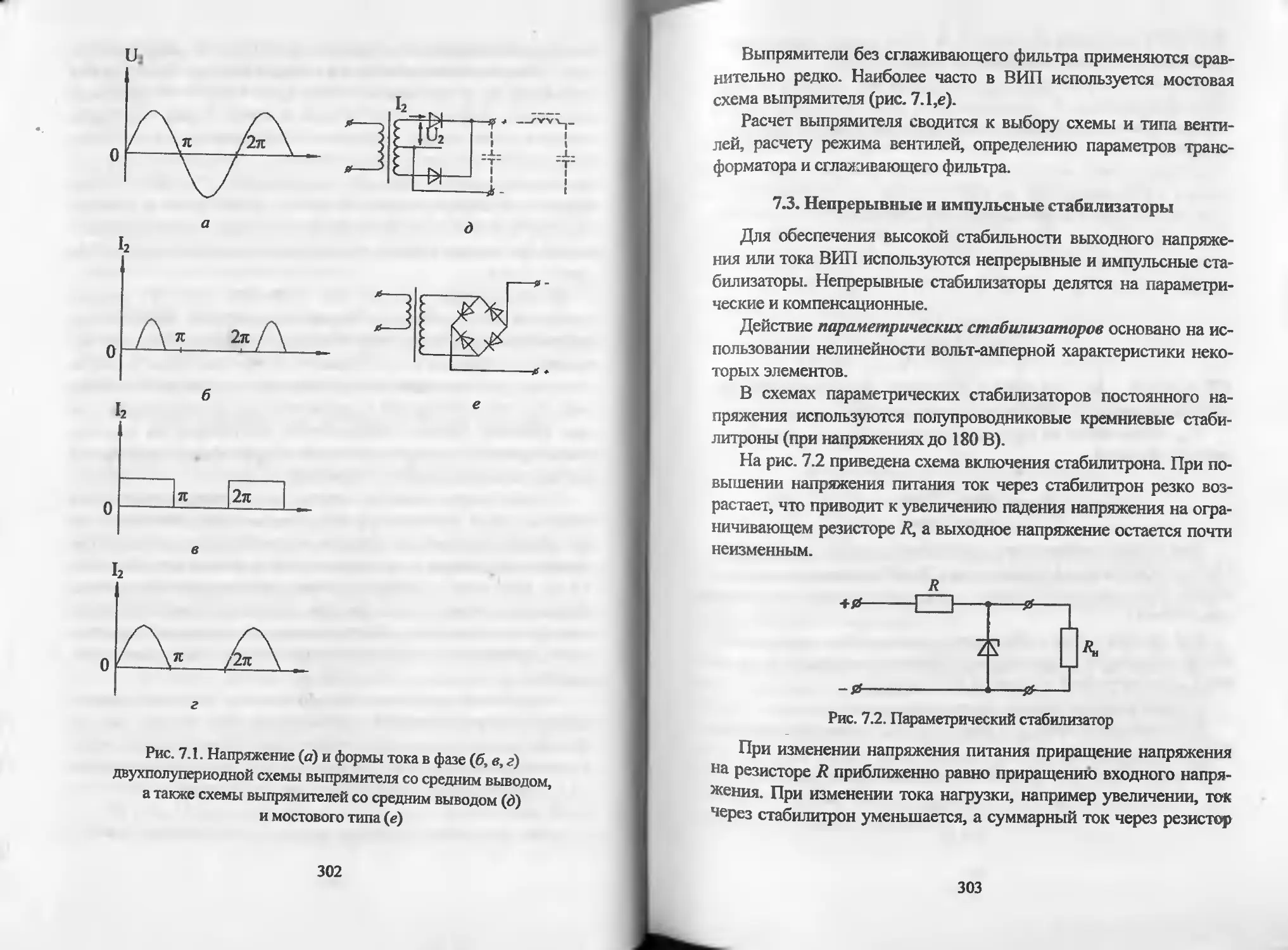
7.2. Выпрямительные устройства. Общие сведения......300
7.3. Непрерывные и импульсные стабилизаторы.........303
7.4. Источники бесперебойного питания............. 311
Литература...........................................314
Приложение 1. Лабораторный практикум: Автоматическое управление судовой электроэнергетической установкой...........................................316
Приложение 2. Курсовое проектирование: Разработка следящей системы с двигателем.........................324
Приложение 3. Характеристики электромеханических элементов автоматических систем.......................335
ПРЕДИСЛОВИЕ НАУЧНОГО РЕДАКТОРА
В образовательной программе подготовки инженеров по специальности «Системы электроэнергетики и автоматизации судов» существенную роль играет знание физических основ и функционального назначения широкого класса элементов и устройств, предназначенных для синтеза систем автоматизации судов и других технических объектов морской инфраструктуры, а также методологии их применения при создании этих систем.
Уже с 1946 года в учебные планы энергетических специальностей машиностроительного факультета (ныне ФКЭиА ГМТУ) была включена учебная дисциплина «Теория автоматического регулирования». Тогда же в институте был организован семинар, руководил которым член-корресповдент АН СССР Иван Николаевич Вознесенский, крупный ученый, автор теории автономного регулирования.
Бурное развитие автоматики потребовало улучшения качества подготовки молодых специалистов. В связи с этим с 1950 года на кафедре судовых силовых установок начинается широкая подготовка инженеров-механиков по специальности «Автоматическое управление и регулирование судовых силовых установок».
Первая группа новой специальности была сформирована из студентов V курса. Целевое обучение с продлением срока подготовки на полгода позволило обеспечить первый выпуск по новой специальности в том же 1950 году (среди выпускников того времени был и Б.В. Ракицкий, в настоящее время д-р техн, наук, проф., в течение 15 лет возглавлявший факультет Корабельной энергетики и автоматики). В последующие годы срок обучения новой специальности становится обычным (5 лет и 10 месяцев).
Уже в тот период к чтению курсов по автоматике привлекаются:
- известный специалист в области автоматизации судовых котельных установок М.Ш. Шифрин, впоследствии лауреат Ленинской премии, д-р техн, наук, профессор, по праву причисляемый нынче к патриархам отечественной судовой автоматики;
5
- один из крупнейших специалистов в области автоматизации дизелей и судовых дизельных установок М.М. Левин, впоследствии д-р техн, наук, профессор;
- автор капитальных трудов в области как регулирования, так и теории и расчета паровых турбин С.А. Кантор, лауреат Государственной премии, д-р техн, наук, профессор.
Следует отметить, что все они были неразрывно связаны с промышленностью и в своих лекционных курсах отражали последние достижения науки и техники в области автоматизации. Будучи прекрасными специалистами, они вместе с тем обладали блестящим педагогическим талантом и умели просто и доходчиво излагать самые сложные вопросы, вскрывая при этом физику рассматриваемых явлений. Педагогическим мастерством, увлеченностью своим делом, большой эрудицией и глубокими энциклопедическими знаниями они буквально завораживали своих слушателей и тем самым предопределяли их дальнейшую судьбу: большинство обучавшихся в 50-х годах, став «автоматчиками» на студенческой скамье, всю свою жизнь посвятили развитию теории и практики автоматизации судовых технических средств.
В дальнейшем они составили основное ядро специалистов по автоматизации в НПО, в проектных организациях и в вузах (генеральный директор НПО «Аврора» лауреат Ленинской премии В.В. Войтецкий, заместители директора А.И. Мильский и В.Н. Юнг, начальники отделений А.В. Игнатьев, Ю.И. Колкунов, Ю.Т. Никиток, Ю.Н. Уваров, главные конструкторы В.В. Филиппов, д-р техн, наук профессор Л.В. Арсеньев, Д.В. Бушенин, В.И. Гольтраф и многие другие).
Бурное развитие автоматики продолжалось, и это требовало не только увеличения выпуска специалистов, но и качественного изменения уровня их подготовки. Появилась необходимость в разработке и постановке целого ряда новых дисциплин (таких, например, как «Проектирование автоматических систем управления судовых энергетических установок»), а также в создании новой лабораторной базы. Все это и послужило причиной создания в декабре 1957 года самостоятельной кафедры автоматического регу
6
лирования и теплотехнических измерений, которая впоследствии была переименована в кафедру судовой автоматики и измерений.
За прошедшее время подготовка специалистов по автоматизации проводилась в рамках специальностей:
- 0525 - «Судовые системы установки» (со специализацией по автоматизации) 1950-1960 гг.;
- 0606 - «Автоматика и телемеханика» 1961-1968 гг.;
- 0525-со специализацией «Автоматическое управление СЭУ» 1965-1974 гг.;
- 0649 - «Автоматизация теплоэнергетических процессов» 1971-1987 гг.
- 1809-«Электрооборудование и автоматика судов» с присвоением квалификации инженера-системотехника 1988-1994 гг.
С 1995 г. ведется подготовка по специальности
180201-«Системы электроэнергетики и автоматизации судов».
Темпы развития техники и, как следствие, элементной базы систем автоматизации постоянно нарастают, что требует соответствующего обновления обучающих курсов. К сожалению, последний учебник «Функциональные устройства судовых автоматизированных систем» вышел из печати в 1991 году. Мы надеемся, что предлагаемый труд восполнит образовавшийся пробел.
Профессор
В.В. Кузнецов
ВВЕДЕНИЕ
Автоматическая система предназначена для управления каким-либо объектом или устройством без активного вмешательства оператора (человека). Под управлением здесь понимается совокупность целенаправленных воздействий для достижения определенных результатов.
Совокупность устройств, обеспечивающих автоматический процесс управления, называют автоматической системой. Автоматическая система может осуществлять автоматический контроль, автоматическую защиту, автоматическое управление и автоматическое регулирование и состоит из следующих основных элементов: датчиков, дистанционных передач, устройств обработки сигналов, исполнительных устройств.
На вход системы управления поступает сигнал, содержащий сведения об управлении (о необходимом поведении объекта), называемый задающим (управляющим) воздействием. Вместе с сигналом, содержащим задающее воздействие, на вход системы могут поступать различные возмущения (помехи), которые мешают процессу управления. Источниками помех могут быть, например, изменения внешних условий работы системы (температуры, давления, влажности, качки и т.д.), которые действуют как на устройство управления, так и на объект управления, или изменения внутреннего состояния системы (нестабильность источников питания, внутренний шум и т.п.). Задающее воздействие x,(f) (рис. В.1) сравнивается с поступающим по цепи обратной связи значением y(t) регулируемой величины, т.е. вырабатывается сигнал рассогласования Х0=*з(0-Х0- На рис. В.1 операция сравнения обозначена символом окружности с закрашенным сектором Закрашенный сектор соответствует при этом замене у на -у. Здесь же показаны промежуточные элементы (ПЭ), осуществляющие соответствующую обработку сигнала, и исполнительное устройство (ИУ) совместно с объектом управления (ОУ).
Система функционирует так, что поддерживает величину z(t) близкой к нулю (для случая статической системы, в которой в установившемся режиме присутствует остаточное рассогласование);
8
именно в этом случае у(0 близко к х3(Г), т.е. система выполняет функции слежения за х3(/).
Рис. В.1. Функциональная схема следящей системы
Всякий элемент, входящий в автоматическую систему, является по существу преобразователем, на вход которого поступает входная величина хвх, а на выходе образуется выходная величина увых. В одних элементах выходная величина получается путем непосредственного преобразования входной. В других же элементах имеется вспомогательный источник энергии и входная величина Хю при этом управляет передачей энергии от вспомогательного источника на выход элемента. Наличие вспомогательного источника позволяет обеспечить усиление входной величины.
Природа входных и выходных величин элементов автоматики может быть самой различной. Причем в элементе обязательно происходит преобразование входной величины в выходную. Связь между выходной и входной величинами определяется зависимостью увых=/(хвх).
Свойства элементов определяются следующими основными параметрами: коэффициентом преобразования, порогом чувствительности, вносимой в преобразование погрешностью, коэффициентом полезного действия. При преобразовании быстроизменяю-шихся во времени величин большое значение имеют инерционные (динамические) свойства элемента, ограничивающие его быстродействие. Инерционные свойства элементов оцениваются по динамическим характеристикам.
Коэффициент преобразования представляет собой отношение выходной величины элемента к входной А"=УвьоАвх- Часто величину К называют статическим коэффициентом преобразования в отличие от динамического коэффициента преобразования АГд, кото
9
рый определяется как отношение приращения выходной величины /}увих к приращению входной JxBX:
(ВЛ)
Значения коэффициентов К и Кд зависят от характера функции, связывающей входную и выходную величины. Если эта функция линейна, то
К = КД- const.
Размерность коэффициентов К и Кд определяется размерностью входной и выходной величин.
Порог чувствительности определяется тем минимальным изменением входной величины, при котором это изменение может быть зафиксировано на выходе элемента. Возникновение порога чувствительности обусловливается двумя причинами Одна из них - это наличие трения, люфтов и гистерезиса, а вторая - действие на преобразователь дестабилизирующих факторов и различного рода помех.
На рис. В.2 приведены зависимости у =/(х), поясняющие понятие порога чувствительности.
Рис. В.2. К пояснению порога чувствительности
10
В первом случае (см. рис. В.2,а) показано, что выходной сигнал появится после того, как входной достигнет некоторого значения Xi, определяемого, например, силой трения при преобразовании электрической величины в механическое перемещение. Значения X] и Х2 называются порогами чувствительности, а интервал между порогами чувствительности - зоной нечувствительности. Во втором случае (см. рис. В.2,б) выходной сигнал можно обнаружить только после того, как его величина превысит некоторый уровень yi собственных выходных шумов преобразующего элемента. Величина Xi в этом случае, соответствующая ylt называется порогом чувствительности.
11
Глава 1. ЭЛЕКТРОМЕХАНИЧЕСКИЕ ЭЛЕМЕНТЫ АВТОМАТИЧЕСКИХ СИСТЕМ
1.1. Аппаратура управления. Электромагнитные реле
Одним из наиболее распространенных элементов автоматических систем, предназначенных для прерывистого, дискретного управления токами и напряжениями посредством электрических сигналов малой мощности, являются электромагнитные реле.
Управляемая цепь включается на выходе реле (рис. 1.1,а). Изменение параметров этой цепи производится путем замыкания или размыкания контактов реле в результате притяжения якоря реле электромагнитом, по обмотке которого пропускается ток управляющего сигнала.
Рис. 1.1. Электромеханическое реле
На рис. 1.1, б приведена статическая характеристика реле. При непрерывном изменении тока в управляющей цепи в пределах от 7=0 до 1=1ср контакты реле не срабатывают. При достижении управляющим сигналом значения 7=7ср происходит замыкание контактов реле и параметр у управляемой цепи изменяется скачкообразно от у =уЫШ{ до у =укахе. Дальнейшее увеличение управляющего сигнала от 7=7ср до 1=1,^ не вызывает изменений параметра у. Уменьшение сигнала от 7=7макг до 7ср, а во многих случаях
и до 1<1ср не вызывает размыкания контактов. Когда управляющий сигнал достигнет значения !=!„, контакты реле разомкнутся и параметр у управляемой цепи примет значение у =унин. Значения сигнала Лф и 1т называются соответственно сигналами срабатывания и отпускания.
Электромагнитные реле подразделяются на реле постоянного и переменного тока, поляризованные, магнитоэлектрические и резонансные реле. Реле в зависимости от назначения может иметь различное число контактных пар - от одной до 20-30.
Контакты реле делятся на две группы: нормально разомкнутые и нормально замкнутые. Нормально разомкнутыми называются контакты, разомкнутые при отсутствии тока в обмотке и замыкающиеся при срабатывании реле. Нормально замкнутыми называются контакты, замкнутые при отсутствии тока в обмотке и размыкающиеся при срабатывании реле.
На основе использования электромагнитных реле работают многочисленные устройства систем автоматики. К ним можно отнести реле времени, релейные генераторы, релейные усилители и другие устройства.
1.2. Дистанционные передачи
В системах автоматического управления широко используются устройства дистанционной передачи параметров различных физических процессов, устанавливающие необходимую зависимость между выходной и входной величинами. Для передачи на расстояние угловых и линейных механических перемещений используются электромеханические дистанционные передачи аналогового и цифрового типа.
Типичным представителем дистанционных передач аналогового типа являются потенциометрические дистанционные передачи. Потенциометрические дистанционные передачи применяются в ряде устройств, где необходимо передать по электрической линии связи механическое угловое смещение одного элемента относительно другого. В потенциометрической дистанционной передаче (рис. 1.2) обеспечивается передача угла поворота оси скользящих контактов кольцевого потенциометра. Потенциометр имеет
12
13
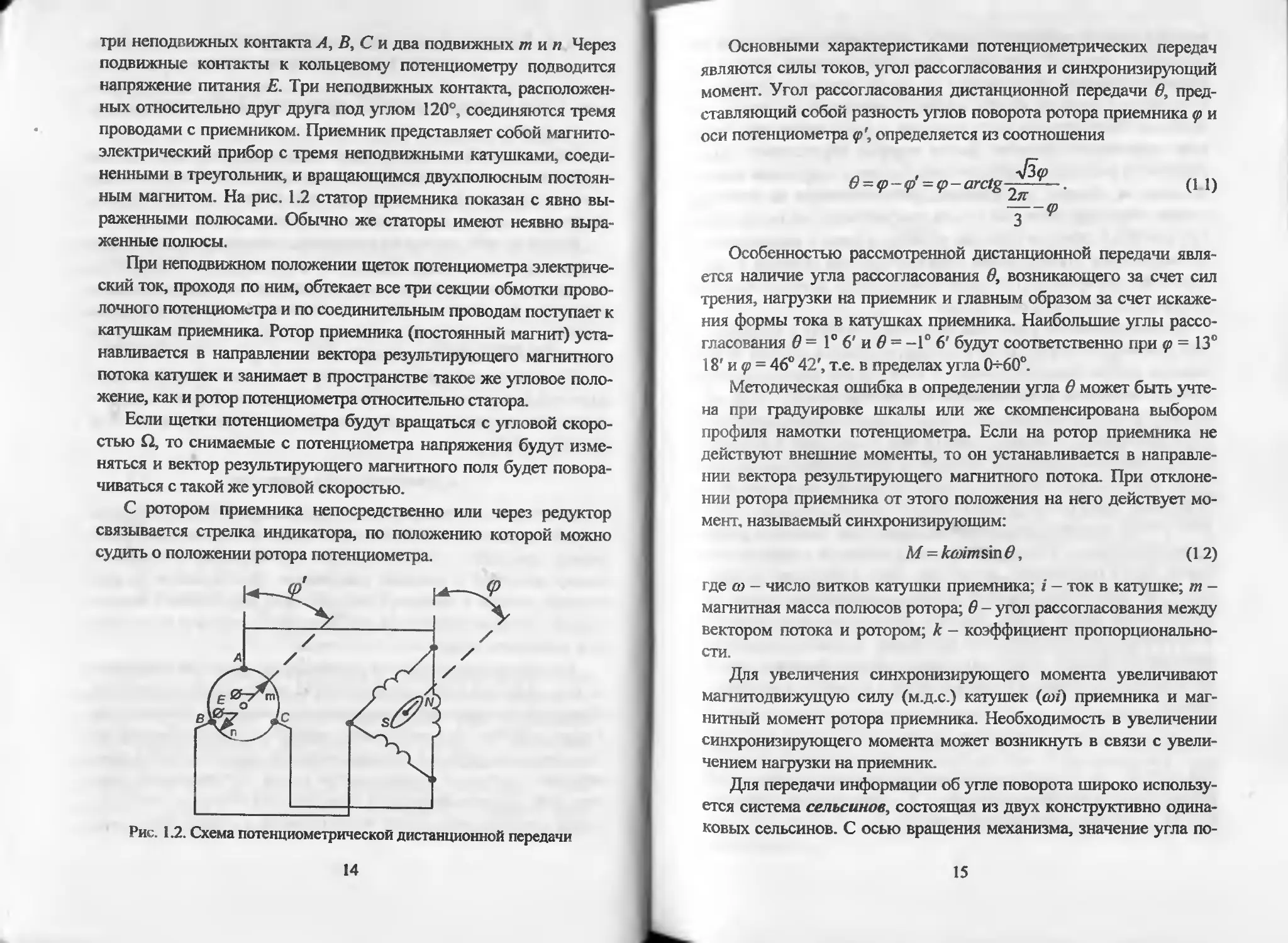
три неподвижных контакта А, В, С и два подвижных т и п Через подвижные контакты к кольцевому потенциометру подводится напряжение питания Е. Три неподвижных контакта, расположенных относительно друг друга под углом 120°, соединяются тремя проводами с приемником. Приемник представляет собой магнитоэлектрический прибор с тремя неподвижными катушками, соединенными в треугольник, и вращающимся двухполюсным постоянным магнитом. На рис. 1.2 статор приемника показан с явно выраженными полюсами. Обычно же статоры имеют неявно выраженные полюсы.
При неподвижном положении щеток потенциометра электрический ток, проходя по ним, обтекает все три секции обмотки проволочного потенциометра и по соединительным проводам поступает к катушкам приемника. Ротор приемника (постоянный магнит) устанавливается в направлении вектора результирующего магнитного потока катушек и занимает в пространстве такое же угловое положение, как и ротор потенциометра относительно статора.
Если щетки потенциометра будут вращаться с угловой скоростью Q, то снимаемые с потенциометра напряжения будут изменяться и вектор результирующего магнитного поля будет поворачиваться с такой же угловой скоростью.
С ротором приемника непосредственно или через редуктор связывается стрелка индикатора, по положению которой можно судить о положении ротора потенциометра.
Рис. 1.2. Схема потенциометрической дистанционной передачи
Основными характеристиками потенциометрических передач являются силы токов, угол рассогласования и синхронизирующий момент. Угол рассогласования дистанционной передачи в, представляющий собой разность углов поворота ротора приемника <р и оси потенциометра <р’, определяется из соотношения
J3tp 0 = <p-<p = tp-arctg—-.
у-₽
(11)
Особенностью рассмотренной дистанционной передачи является наличие угла рассогласования в, возникающего за счет сил трения, нагрузки на приемник и главным образом за счет искажения формы тока в катушках приемника. Наибольшие углы рассогласования в = Г 6' и в - -Г 6' будут соответственно при <р = 13° 18' и <р = 46° 42', т.е. в пределах угла 0^60°.
Методическая ошибка в определении угла 6 может быть учтена при градуировке шкалы или же скомпенсирована выбором профиля намотки потенциометра. Если на ротор приемника не действуют внешние моменты, то он устанавливается в направлении вектора результирующего магнитного потока. При отклонении ротора приемника от этого положения на него действует момент, называемый синхронизирующим:
М = kaimsm0, (12)
где со - число витков катушки приемника; г - ток в катушке; т -магнитная масса полюсов ротора; 6 - угол рассогласования между вектором потока и ротором; к - коэффициент пропорциональности.
Для увеличения синхронизирующего момента увеличивают магнитодвижущую силу (м.д.с.) катушек (<yi) приемника и магнитный момент ротора приемника. Необходимость в увеличении синхронизирующего момента может возникнуть в связи с увеличением нагрузки на приемник.
Для передачи информации об угле поворота широко используется система сельсинов, состоящая из двух конструктивно одинаковых сельсинов. С осью вращения механизма, значение угла по-
14
15
ворота которого требуется передать, механически связан один из сельсинов, который называют сельсином-датчиком (рис. 1.3). Сельсин-приемник располагается на месте приема информации. Конструкция сельсина сходна с конструкцией электрического генератора. Вращающаяся часть сельсина - ротор имеет одну пару явно выраженных полюсов, форма которых обеспечивает синусоидальное распределение магнитного потока в воздушном зазоре. Питание на обмотку возбуждения, расположенную на полюсах ротора, поступает через два кольца, закрепленных на оси ротора. Три статорные обмотки сельсина уложены в пазах и распределены по окружности статора таким образом, что оси обмоток в пространстве сдвинуты на 120° одна относительно другой. Обмотки статора соединены по схеме звезды.
В дистанционных передачах сельсины работают в индикаторном режиме, в котором ротор сельсина-приемника следует за поворотом ротора сельсина-датчика. В этом режиме работы обмотки роторов сельсинов подключаются к сети переменного тока, обмотки статоров сельсинов соединяются между собой. Магнитные поля, создаваемые роторными обмотками, индуцируют в обмотках статора сельсИНа-приемника и обмотках статора сельсина-датчика э.д.с., амплитудные значения которых в каждой фазе зависят от угла между осью ротора и осью обмотки статора. Если угол поворота ротора сельсина-приемника не равен углу поворота ротора сельсина-датчика, то э.д.с., наводимые в обмотках статоров сельсинов, будут различными, вследствие чего в обмотках статоров будут протекать токи значения которых определяются углом рассогласования между углом поворота ротора сельсина-датчика и углом поворота ротора сельсина-приемника. В результате взаимодействия магнитного потока, созданного обмоткой ротора сельсина-приемника, с токами в обмотках статора создается вращающий момент
М =кМт sm Да, (1.3)
где Да = а] - а2 - рассогласование углов поворота роторов сельсина-датчика и сельсина-приемника; к - постоянный коэффициент; Мт - амплитудное значение момента.
16
Рис. 1.3. Индикаторный режим работы сельсинов
Под действием вращающего момента ротор сельсина-приемника устанавливается в синфазное положение, в котором угол рассогласования с точностью до ошибки равен нулю. Сельсинная дистанционная передача позволяет передавать угол поворота ротора сельсина-датчика на несколько параллельно включенных сельсинов-приемников, установленных в различных местах.
Многие системы управления содержат вычислительные устройства, которые выполняют тригонометрические операции, связанные с преобразованием сигналов из одной системы координат в другую. Для решения таких задач часто используются вычислительные устройства с вращающимися трансформаторами (ВТ)
Вращающиеся трансформаторы представляют собой электрическую машину, на статоре и роторе которой размещено по две взаимно перпендикулярных обмотки. Ротор ВТ механически соединяется с устройством, тригонометрическая зависимость от угла поворота которого должна быть получена. Угол поворота ротора ВТ является входным сигналом, а напряжение с ВТ - выходным сигналом. В общем случае ротор ВТ может совершать круговое вращение, поэтому рассматриваемый трансформатор и называют вращающимся.
17
Одна из обмоток статора или ротора питается от сети переменного тока, за счет чего в магнитопроводе ВТ создается пульсирующее магнитное поле. В зависимости от угла поворота относительно положения, принятого за нулевое, изменяется э.д.с. на выходных обмотках трансформатора. Если питающее напряжение подается на обмотку ротора, то выходными обмотками считаются обмотки статора, и наоборот. Обмотки ВТ могут быть соединены или по схеме синусно-косинусного вращающегося трансформатора (СКВТ), или по схеме линейного вращающегося трансформатора (ЛВТ). На рис. 1.4,а показано соединение обмоток ВТ по схеме СКВТ. Обмотка, на которую подается напряжение питания, называется обмоткой возбуждения, а обмотка, перпендикулярная к ней, называется квадратурной обмоткой. С выходных обмоток СКВТ в режиме холостого хода снимаются напряжения, пропорциональные синусу и косинусу угла поворота ротора ВТ:
X.n
Aos=£mCOS«>
(14)
где Ет - максимальное значение э.д.с. на выходных обмотках, равное Uon; Uo - амплитудное значение напряжения питания, п -коэффициент трансформации.
Уравнения 1.4 справедливы только для режима холостого хода. Если выходные обмотки СКВТ нагружены, то в синусной и косинусной обмотках протекают различные токи isi„ и icos, которые создают магнитные потоки и Фс<№. Магнитные потоки направлены вдоль осей выходных обмоток СКВТ и могут быть разложены на продольные (действующие по направлению потока возбуждения) и поперечные (перпендикулярные потоку возбуждения) составляющие (рис. 1.4,6). Продольные составляющие магнитных потоков Ф„Р,„, и ФпрСОТ направлены навстречу магнитному потоку возбуждения и практически не влияют на зависимость выходного напряжения от угла поворота ротора ВТ. Продольные составляющие приводят к увеличению тока возбуждения, в результате чего компенсируется влияние продольных составляющих магнитных потоков, возникающих из-затоков нагрузки.
18
Рис. 1.4. СКВТ с вторичным симметрированием
Поперечные составляющие магнитных потоков Фп sin и Ф„ cos создают искажения в выходных напряжениях. Паразитная э.д.с., возникающая в синусной обмотке из-за тока нагрузки, оказывается пропорциональной isin cos2 а, а возникающая в косинусной обмотке - пропорциональной icos sin2 а. Для уничтожения паразитных составляющих э.д.с. в выходных напряжениях СКВТ необходимо, чтобы при любом угле поворота ротора поперечные составляющие магнитных потоков, возникающих из-за токов нагрузки, были скомпенсированы.
Для ликвидации искажений выходного напряжения применяются два метода симметрирования СКВТ: вторичное и первичное. При вторичном симметрировании выходные обмотки СКВТ должны быть нагружены на одинаковые сопротивления zsin = = 2cos=z. В этом случае по поперечной оси СКВТ суммарный магнитный поток будет равен нулю. При вторичном симметрирова
19
нии СКВТ его входное сопротивление не зависит от угла поворота ротора вращающегося трансформатора и является постоянным.
В тех случаях, когда выходные обмотки СКВТ не могут быть нагружены на одинаковые сопротивления, применяется схема первичного симметрирования.
В схеме первичного симметрирования квадратурная обмотка нагружается на сопротивление, равное сопротивлению источника питания обмотки возбуждения. При таком включении обмотка возбуждения и квадратурная обмотка выполняют роль вторичного симметрирования относительно обмоток ротора, поэтому выходное напряжение СКВТ не будет зависеть от токов нагрузки, т.е. паразитные составляющие э.д.с. будут равны нулю.
Выходное сопротивление СКВТ с первичным симметрированием является постоянным и не зависит от угла поворота ротора трансформатора, входное же сопротивление зависит от угла поворота ротора. Так как внутреннее сопротивление источника питания обмотки возбуждения обычно очень мало, то для осуществления первичного симметрирования достаточно замкнуть квадратурную обмотку накоротко.
На рис. 1.5 показано включение обмоток ВТ со вторичным симметрированием по схеме линейно-вращающегося трансформатора, напряжение на синусной обмотке которого определяется выражением
"sin = Uo
а>2 sing
0)1 1+—cosa
(1.5)
где соь <о2 - число витков в обмотке возбуждения и синусной обмотке.
При правильном выборе отношения т = а)2 I а>\ зависимость (1.5) соответствует линейной зависимости от угла поворота ротора ВТ. Выбор значения т определяется диапазоном изменения угла поворота ротора ВТ. Для угла поворота ротора а = 60° коэффициент т = 0,54.
Так как частота изменения угла поворота ротора ВТ всегда значительно меньше частоты питающего напряжения, то вращающиеся трансформаторы можно считать безынерционными звеньями.
20
Рис. 1.5. Схема включения линейного ВТ с вторичным симметрированием
Отличительной особенностью передач цифрового типа является то, что значения передаваемых перемещений преобразуются в дискретные уровни электрического сигнала и каждый такой уровень передается по линии связи от передающей к приемной части системы в ваде кода, представляемого в двоичной системе счисления.
Основным элементом электромеханических цифровых дистанционных передач является преобразователь перемещений в цифровой код. По принципу действия преобразователи линейных и угловых перемещений в цифровой и двоичный код разделяют на преобразователи считывания и последовательного счета.
В преобразователях считывания угловое или линейное перемещение контролируемого органа преобразуется непосредственно в цифровой код. Главным элементом такого преобразователя является кодирующее устройство, состоящее из задающего и считывающего элементов. Задающий элемент непосредственно (механически) связан с контролируемым органом и имеет опреде-
21
ленный кодовый рисунок. Кодовый рисунок перемещается вместе с контролируемым органом.
При преобразовании угловых перемещений кодовый рисунок выполняется на диске в виде концентрических окружностей. В преобразователях линейных перемещений кодовый рисунок может быть нанесен на пластинку, перемещаемую вместе с объектом.
Кодовый рисунок может быть выполнен, например, в виде прозрачных элементов на непрозрачном материале, при этом в качестве чувствительных элементов могут использоваться фотодиоды. В этом случае с одной стороны кодового рисунка устанавливается источник света, а с другой - фотодиоды, число которых соответствует числу разрядов используемого двоичного кода Перемещение кодового рисунка приводит к освещению в определенной последовательности разрядных фотодиодов и формированию кодовых чисел.
Вследствие ошибок, допускаемых при изготовлении кодирующего устройства, на границах изменения разрядов возникает неоднозначность считывания и как следствие большие ошибки. Например, в обычном двоичном представлении при переходе от кода числа 3 к коду числа 4 значения двух младших разрядов изменяются от 1 к 0, а в следующем разряде от 0 к 1:
00011—>3
00100 ^>4.
Нет гарантии, что эти разряды изменят свои значения точно в один и тот же момент времени. Поэтому при переходе от числа 3 к коду числа 4 может реализоваться любая трехразрядная комбинация битов, соответствующая возможным изменениям значений этих трех разрядов.
Ошибки, связанные с неоднозначностью считывания, могут быть снижены до величины разрешающей способности за счет использования методов, основанных на представлении чисел в специальных условных кодах, в которых изменению числа на единицу младшего разряда соответствует изменение значения на единицу лишь одного какого-либо разряда, а не одновременное изменение всех разрядов, что может иметь место при обычном коде. Такие коды называют рефлексными кодами.
Применение рефлексного кода, кроме того, позволяет повысить вдвое разрешающую способность преобразователя по сравнению с обычным двоичным кодом. В качестве примера рефлексного кода рассмотрим код Грея. Этот код образуется из обычного двоичного кода путем суммирования по модулю два данной двоичной комбинации с такой же, но сдвинутой вправо на один разряд. Например, преобразование двоичных чисел 1101 и 1010 в код Грея производится следующим образом:
110ll 101 o’l
110р ф 101*0
1011J 1111!
При сложении единица в младшем разряде первой суммы и нуль также в младшем разряде второй суммы отбрасываются.
Преобразование двоичного числа в код Грея можно осуществить и методом замены в нем каждой цифры, стоящей правее единицы в соседнем разряде, на обратную (табл. 1.1).
На рис. 1.6 показан диск, на котором кодовый рисунок выполнен в соответствии с кодом Грея.
Как видно из табл. 1.1 и рис. 1.6, в любом случае два соседних числа, следующие непосредственно друг за другом, отличаются значением только одного разряда, т.е. только один фотодиод будет переходить границу переключения. Вследствие этого ошибка за счет неоднозначности отсчета не может превысить единицы младшего разряда. Для того чтобы использовать результаты, полученные с преобразователя, построенного на основании кода Грея, необходимо перевести их в позиционный двоичный код.
Для получения цифры Хк двоичного позиционного кода из кода Грея нужно произвести сложение по модулю 2 цифр кода Грея от и-го разряда до Л-го включительно. При этом если общая сумма -четное число, то результат суммирования записывается символом 0, при нечетном значении общей суммы в результат суммирования записывается символ 1. Таким образом:
Ar4 = fxf(mod2). (1.6)
1=Л
23
22
Таблица 1.1
Десятичное число Двоичное код Код Грея
0 00000 00000
1 00001 00001
2 00010 00011
3 00011 00010
4 00100 00110
5 00101 00111
б 00110 00101
7 00111 00100
8 01000 01100
9 01001 01101
10 01010 01111
11 01011 01110
12 01100 01010
13 01101 01011
14 01110 01001
15 они 01000
16 10000 11000
17 10001 11001
18 10010 11011
19 10011 11010
20 10100 11110
21 10101 11111
22 10110 11101
23 10111 11100
24
Рис. 1.6. Диск с кодом Грея
Пример Необходимо перевести число х=11101, представленное двоичным кодом Грея, в обычный двоичный код.
Дано: х=х4хзХ2Х1Х0=11101.
Определить: Х=Х^Х-^Х^Х\Х^.
В соответствии с выражением (1.6) имеем:
Aro=(x4+jc3+jC2+xi+xo) (mod 2)=(1+1+1 +0+1) (mod 2)=0;
Лг1=(х4+х3+х2+х|) (mod 2)=(1+1+1+0) (mod 2)=1;
(mod 2)=(1+1+1) (mod 2)=1;
%з=(х4+х3) (mod 2)=(1+1) (mod 2)=0;
JV4=(x4) (mod 2)=(1) (mod 2)=1.
Таким образом, числу х=11101, представленному кодом Грея, соответствует число позиционного двоичного кода АМ0110. Недостатком кода Грея и всех других рефлексных кодов является необходимость перевода их в обычный двоичный код.
В преобразователях последовательного счета механическое перемещение предварительно преобразуется во временной интер-ва, а затем определяется число импульсов эталонной частоты,
25
прошедших за этот временной интервал. Число прошедших импульсов фиксируется в двоичной системе счисления и характеризует значение преобразуемого механического перемещения.
Преобразователи этого типа могут быть выполнены циклическими и накапливающими. В циклических преобразователях при каждом измерении преобразуется вся измеряемая аналоговая величина. В накапливающих (интегрирующих) преобразователях в каждом цикле измерения фиксируется лишь приращение аналоговой величины.
Накапливающие преобразователи последовательного счета, как правило, содержат задающий и чувствительный элементы, счетное устройство (микропроцессор) и устройство, определяющее знак изменения определяемого приращения.
В настоящее время выпускаются накапливающие преобразователи с погрешностью 0,001% и меньше.
Индикаторы счетных устройств могут устанавливаться на приемной стороне и отображать значение контролируемого перемещения. Для удобства восприятия информации числа двоичного кода могут быть преобразованы в числа десятичной системы счисления.
13. Исполнительные устройства
Исполнительные устройства предназначены для создания регулирующего воздействия на объект управления. В тех случаях, когда исполнительные устройства производят механическое перемещение регулирующего органа, их называют исполнительными двигателями. В качестве исполнительных двигателей в автоматических системах применяются гидравлические, пневматические двигатели, различные электромагнитные механизмы, электрические двигатели постоянного и переменного тока.
Качество работы систем автоматики (точность, быстродействие и другие параметры переходного процесса), надежность работы и эксплуатационные свойства в значительной степени определяются характеристиками исполнительных устройств. К числу основных характеристик исполнительных устройств относятся следующие: кратность регулирования скорости, под которой по
26
нимают отношение максимальной скорости к значению минимальной устойчивой скорости, инерционность, линейность регулировочных характеристик, стабильность работы при изменении условий окружающей среды, масса и габариты на единицу мощности, надежность.
В системах автоматики наибольшее распространение получили электрические двигатели постоянного и переменного тока, а также привод на электромагнитных порошковых муфтах.
Двигатели постоянного тока с независимым возбуждением нашли широкое применение в системах, в которых исполнительное устройство должно обеспечивать высокую кратность регулирования частоты вращения. Схема включения двигателя показана на рис. 1.7.
Регулирование частоты вращения вала двигателя может осуществляться путем изменения напряжения, приложенного к якорю при постоянном напряжении на обмотке возбуждения, или изменением напряжения на обмотке возбуждения при неизменном напряжении якоря, или одновременно и тем и другим. При регулировании частоты изменением напряжения на якоре поведение двигателя описывается следующими уравнениями равновесия:
- уравнением моментов
,, _ . , </£ 2
Мд =см Ф-1Я =J—+MC; (1,7)
at
-уравнением электрического равновесия
(7 =се-Ф-О+Лч,+А, (1.8)
dt
где см, се - коэффициенты пропорциональности, зависящие от геометрических размеров двигателя, материала магнитопровода, схемы якоря и т.д.; Ф - магнитный поток возбуждения; J- момент инерции вращающихся частей, приведенный к валу двигателя; М - момент сопротивления; Q - частота вращения вала двигателя; R,L~ сопротивление и индуктивность обмотки якоря; Uy — управляющее напряжение, приложенное к якорю двигателя; 4 - ток в обмотке якоря.
27
Если за выходную величину двигателя принять частоту вращения якоря, а за входную - напряжение на якоре, то из (1.7), (1.8) следует, что передаточная функция двигателя при Л£=0 определяется выражением
JTn(s) =---Д-------, (1.9)
nV ' тм7>2+т>+1 '
где Ад= 1/(сеФ) - коэффициент передачи двигателя; Т^ЛЩс^Ф1) -электромеханическая постоянная времени; Т3 = L/R - электромагнитная постоянная времени.
Рис. 1.7. Схема включения двигателя с независимым возбуждением
Если за выходную величину принять угол поворота вала двигателя, то передаточная функция будет иметь вид
W(s)=--------Г-------V
v s(TvT3s2 +TMs + l)
(1.Ю)
Обычно Тэ« Ты, поэтому электромагнитной постоянной времени пренебрегают. В этом случае
^’=^71)' (1П)
28
Переходный процесс в двигателе при скачкообразном изменении напряжения на якоре определяется выражением
(1.12)
где Оу - установившееся значение частоты вращения якоря двигателя.
Зависимость частоты вращения якоря двигателя от управляющего напряжения в установившемся режиме называют регулировочной характеристикой. Типичный вид этой характеристики дан на рис. 1.8.
При Мс = 0 и малых значениях Uy характеристика линейна и определяется выражением
«=W-
При больших значениях Uy регулировочная характеристика ограничена из-за насыщения магнитопровода двигателя.
При МСФ 0 регулировочная характеристика имеет зону нечувствительности, значение которой
Рис. 1.8. Регулировочные характеристики
29
Инерционность двигателя, как это следует из выражения (1.9), определяется электромеханической постоянной времени Г„, величина которой пропорциональна моменту инерции, приведенному к валу двигателя. Наименьшее значение постоянной времени Тк достигается за счет рационального выбора коэффициентов редукции между отдельными парами зубчатых шестерен, включенных между валом двигателя и регулируемым органом. Передаточные числа между отдельными парами шестерен необходимо выбирать из условия минимума суммарного момента инерции, приведенного к валу двигателя. В этом случае (см. (1.9)) электромеханическая постоянная времени будет иметь наименьшее значение. Для нена-груженных двигателей малой мощности (до 20-30 Вт) электромеханическая постоянная времени измеряется сотыми долями секунды. С увеличением мощности двигателей значение Ти увеличивается.
Управление частотой вращения двигателя может производиться и путем изменения напряжения на обмотке возбуждения при постоянном напряжении на якоре двигателя. Обычно таким способом осуществляется регулирование частоты вращения в нешироких пределах без изменения направления вращения якоря двигателя. В таком режиме работы двигателя входным сигналом является напряжение на обмотке возбуждения, а выходным - частота вращения якоря двигателя. Передаточная функция двигателя в этом режиме работы определяется выражением
WB (s ) =--------------V----• (1.15)
BV ’ TtTMs2+{TH+Tt)s + \
где к = — _ коэффициент передачи двигателя; iM, Фо - ток
в якоре и магнитный поток возбуждения; Te=LJR& - постоянная времени обмотки возбуждения.
Знак минус в правой части (1.15) указывает, что увеличению напряжения на обмотке возбуждения соответствует уменьшение частоты вращение двигдтрдя.
В системах управления широко используются двухфазные двигатели переменного тока. Простота и надежность конструкции, отсутствие скользящих контактов определяют широкое применение этого типа двигателей в маломощных системах управления (системах стабилизации частоты, приборных следящих системах и т.п.).
На статоре двигателя расположены две обмотки (рис. 1.9): возбуждения <ов и управления e>y. Оси обмоток образуют угол 90°. Обмотка возбуждения подключается к сети переменного тока, обмотка управления питается от усилителя системы управления. Необходимый для создания вращающего момента фазовый сдвиг между напряжением на обмотке возбуждения UB и управляющим напряжением Uy, равный примерно 90°, достигается за счет включения в цепь обмотки возбуждения (или в цепь обмотки управления) конденсатора емкостью С.
С целью получения малого момента инерции ротора двигателя, а следовательно, и малого значения электромеханической постоянной времени ротор двигателя выполняется в виде полого тонкостенного цилиндра из немагнитных сплавов меди или алюминия.
Рис. 1.9. Схема двухфазного короткозамкнутого двигателя
Пусковой момент пропорционален напряжению на обмотке управления:
Л/п =сА>
31
30
где си - постоянный коэффициент.
При вращении ротора в нем наводится э.д.с., пропорциональная частоте вращения ротора. В результате взаимодействия наведенных в роторе токов с вращающимся магнитным потоком, созданным обмотками статора, возникает тормозящий момент
Л/т=спП.
где са - постоянный коэффициент; Q - частота вращения ротора.
Вращающий момент, развиваемый двигателем,
Л/д = Л/п-Л/т.
Постоянные коэффициенты cq и си определяются из механических характеристик двигателя, типичный вид которых приведен на рис. 1.10:
Рис. 1.10. Механические характеристики двигателя переменного тока
В переходном режиме для ненагруженного двигателя (М=0) уравнение равновесия моментов определяется выражением
1 У Т Г УЧ Т d^ii
Мд = cU - cnQ = J-----,
dt
где J-момент инерции ротора двигателя
32
Из последнего выражения следует, что передаточная функция двигателя, равная отношению преобразования Лапласа для частоты вращения к преобразованию Лапласа для управляющего напряжения, приложенного к обмотке управления, определяется выражением
°16’
Если в качестве выходной величины двигателя принять угол поворота ротора, то передаточная функция принимает следующий вид:
--------------------- (1 и) { ' Uy(s) s(l+sTM)
где *д=си/сц - коэффициент передачи; Tu=J/cq - электромеханическая постоянная времени.
В установившемся режиме
С1 = кд(иу-и0), (118)
где Uo = Мс !си - величина зоны нечувствительности, обусловленная моментом сопротивления.
Значение постоянной времени Ти увеличивается с ростом частоты питающего напряжения. Так, например, если для двигателя с частотой питающего напряжения 50 Гц Ты = 0,05 + 0,08 сек., то для двигателя с частотой 400 Гц Т„ = 0,2 0,4 сек.
По сравнению с двигателем постоянного тока для управления двигателем переменного тока требуется усилитель меньшей мощности, так как большая часть потребляемой мощности поступает непосредственно от сети через обмотку возбуждения.
Масса и габариты двухфазных двигателей переменного тока больше массы и габаритов двигателей постоянного тока той же мощности.
Двигатель в исполнительном устройстве выполняет роль преобразователя электрической энергии в механическую, а порошковые муфты являются устройствами, которые управляют переда-
33
чей этой механической энергии на выходной вал исполнительного устройства
Схема исполнительного устройства на порошковых муфтах приведена на рис. 1.11,а.
Рис. 1.11. Исполнительное устройство на электромагнитных порошковых муфтах
Принцип работы электромагнитных порошковых муфт основан на эффекте сцепления, возникающем между двумя поверхностями, разделенными зазором с ферромагнитным порошком. Если через зазор проходит магнитный поток, то частицы порошка, связываясь одна с другой и намагниченными поверхностями ведущих и ведомых частей муфт, образуют сцепляющий слой. В результате ведо
34
мая и ведущая части муфт оказываются связанными одна с другой, при этом сила сцепления будет тем больше, чем больший магнитный поток пронизывает зазоры муфт. С увеличением магнитного потока в зазорах муфт увеличивается механическая энергия, передаваемая на выходной вал исполнительного устройства. Магнитный поток в зазорах муфт создается обмотками управления, на которые подается напряжение постоянного тока. Это напряжение является входным сигналом исполнительного устройства.
Порошок, заполняющий зазоры муфт, состоит из ферромагнитного материала (карбонильного железа) и смазывающих веществ, в качестве которых используются графит, тальк, окись цинка в муфтах с твердым наполнителем и керосин, минеральные масла в муфтах с жидким наполнителем. Средние размеры частиц порошка не превышают 0,002-0,03 мм. В настоящее время в основном применяются муфты с твердым наполнителем.
В зависимости от способа подвода энергии к обмоткам управления различают контактные и бесконтактные муфты. В контактных муфтах обмотки управления расположены на вращающихся с постоянной частотой частях муфт, поэтому управляющее напряжение на обмотку управления поступает через контактные кольца, которые расположены на оси вращения муфт. В бесконтактных муфтах обмотка управления располагается на неподвижной части. При равных моментах, передаваемых муфтами, масса и габариты бесконтактных муфт несколько больше, чем контактных муфт из-за усложнения конструкции, связанного с расположением обмотки управления на неподвижной части.
В системах автоматики электромагнитные порошковые муфты используются для включения и отключения механических цепей, а также в исполнительных устройствах регулирования частоты вращения различных объектов, в системах регулирования углового положения объектов, в системах регулирования момента, передаваемого к регулируемому органу. По сравнению с электродвигателями постоянного и переменного тока исполнительное устройство на порошковых муфтах имеет ряд преимуществ, основными из которых являются малая инерционность, небольшая мощность, потребная для управления, большая кратность регули-
35
рования частоты вращения, линейная зависимость передаваемого момента от тока управления. К числу недостатков исполнительного устройства на порошковых муфтах относятся ухудшение динамических свойств при больших моментах инерции нагрузки, непостоянство характеристик вследствие износа рабочего порошка, тяжелый тепловой режим работы, относительная сложность механического узла.
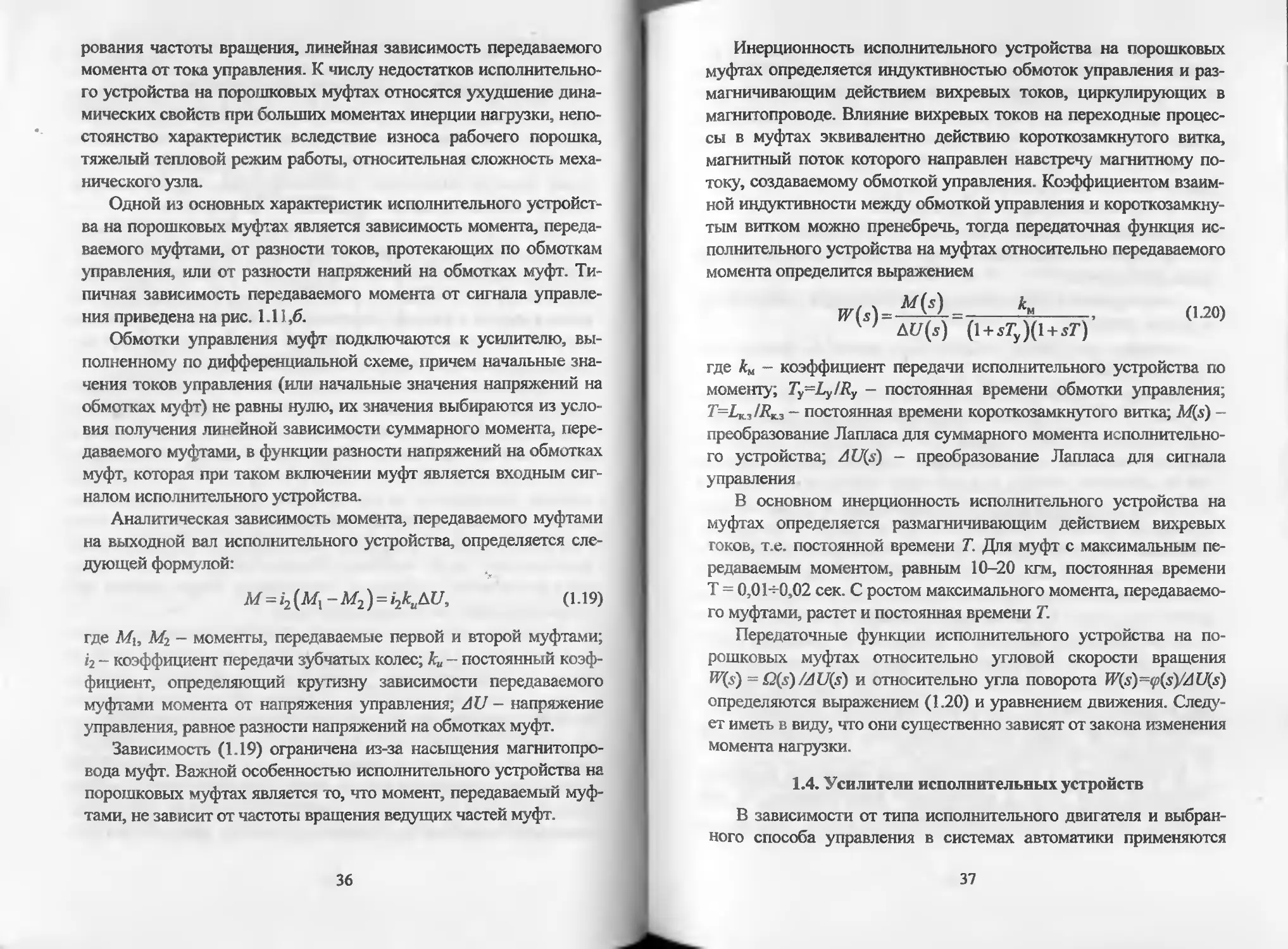
Одной из основных характеристик исполнительного устройства на порошковых муфтах является зависимость момента, передаваемого муфтами, от разности токов, протекающих по обмоткам управления, или от разности напряжений на обмотках муфт. Типичная зависимость передаваемого момента от сигнала управления приведена на рис. 1.11,6.
Обмотки управления муфт подключаются к усилителю, выполненному по дифференциальной схеме, причем начальные значения токов управления (или начальные значения напряжений на обмотках муфт) не равны нулю, их значения выбираются из условия получения линейной зависимости суммарного момента, передаваемого муфтами, в функции разности напряжений на обмотках муфт, которая при таком включении муфт является входным сигналом исполнительного устройства.
Аналитическая зависимость момента, передаваемого муфтами на выходной вал исполнительного устройства, определяется следующей формулой:
М = /2(М1-М2) = 12Л„ДГ7, (1.19)
где Mi, М2 - моменты, передаваемые первой и второй муфтами; i2 - коэффициент передачи зубчатых колес; ки — постоянный коэффициент, определяющий крутизну зависимости передаваемого муфтами момента от напряжения управления; AU - напряжение управления, равное разности напряжений на обмотках муфт.
Зависимость (1.19) ограничена из-за насыщения магнитопровода муфт. Важной особенностью исполнительного устройства на порошковых муфтах является то, что момент, передаваемый муфтами, не зависит от частоты вращения ведущих частей муфт.
36
Инерционность исполнительного устройства на порошковых муфтах определяется индуктивностью обмоток управления и размагничивающим действием вихревых токов, циркулирующих в магнитопроводе. Влияние вихревых токов на переходные процессы в муфтах эквивалентно действию короткозамкнутого витка, магнитный поток которого направлен навстречу магнитному потоку, создаваемому обмоткой управления. Коэффициентом взаимной индуктивности между обмоткой управления и короткозамкнутым витком можно пренебречь, тогда передаточная функция исполнительного устройства на муфтах относительно передаваемого момента определится выражением
= ------к------ (1.20)
V 7 A<7(s) (l + sTyXl + sT)
где ku - коэффициент передачи исполнительного устройства по моменту; Ty=Ly/Ry - постоянная времени обмотки управления;
- постоянная времени короткозамкнутого витка; M(s) -преобразование Лапласа для суммарного момента исполнительного устройства; AU(s) - преобразование Лапласа для сигнала управления
В основном инерционность исполнительного устройства на муфтах определяется размагничивающим действием вихревых гоков, т.е. постоянной времени Т. Для муфт с максимальным передаваемым моментом, равным 10-20 кгм, постоянная времени Т = 0,01-^0,02 сек. С ростом максимального момента, передаваемого муфтами, растет и постоянная времени Т.
Передаточные функции исполнительного устройства на порошковых муфтах относительно угловой скорости вращения W(s) = Q(s)/AU(s) и относительно угла поворота W(s)=q>(s)/4U(s) определяются выражением (1.20) и уравнением движения. Следует иметь в виду, что они существенно зависят от закона изменения момента нагрузки.
1.4. Усилители исполнительных устройств
В зависимости от типа исполнительного двигателя и выбранного способа управления в системах автоматики применяются
37
следующие типы усилителей: электромашинные, магнитные, релейные и полупроводниковые. Каждый из этих усилителей может иметь различное конструктивное исполнение, однако с точки зрения их работы в системах автоматики качество работы усилителей определяется следующими характеристиками:
- передаточной функцией, дающей коэффициент усиления и инерционность усилителя;
- коэффициентом усиления по мощности;
- входным и выходным сопротивлениями усилителя;
- дрейфом выходного сигнала при нулевом значении сигнала на входе усилителя;
- амплитудной характеристикой, определяющей диапазон линейности усилителя;
-надежностью работы, габаритами и массой на единицу вы ходной мощности.
Электромашинные усилители (ЭМУ) применяются обычно в системах, в которых исполнительным двигателем служит двигатель постоянного тока с независимым возбуждением. Электромашинные усилители, осуществляющие усиление сигнала управления по мощности, состоят из приводного двигателя и генератора постоянного тока, конструктивно выполненных в одном корпусе. Приводной двигатель предназначен для вращения с постоянной скоростью генератора ЭМУ; в качестве приводных двигателей в ЭМУ используются как двигатели постоянного тока, так и двигатели переменного тока. Входным сигналом ЭМУ является напряжение постоянного тока, подаваемое на обмотку возбуждения генератора; выходным сигналом - напряжение с генератора ЭМУ; нагрузкой на ЭМУ служит двигатель постоянного тока с независимым возбуждением. Для возбуждения ЭМУ требуется небольшая мощность, обычно это единицы или десятки ватт. Коэффициент усиления по мощности в современных ЭМУ достигает нескольких тысяч или даже десятков тысяч.
В зависимости от способа возбуждения генератора различают следующие типы ЭМУ: с независимым возбуждением; со смешанным возбуждением; с поперечным полем.
38
На рис. 1.12 приведена схема ЭМУ с независимым возбуждением. В переходном режиме напряжения соответственно на входе и выходе генератора ЭМУ определяются следующими уравнениями:
di
Uy=r/y + L^ G-21)
U^=E = C£M>y=Ciiy,
(1-22)
где гу, Ly - сопротивление и индуктивность обмотки управления (возбуждения) ЭМУ; Q - угловая скорость вращения якоря ЭМУ; <?ф, Cj - постоянные коэффициенты; Фу - магнитный поток, создаваемый обмоткой управления; /у - ток в обмотке управления
Рис. 1.12. Схема ЭМУ с независимым возбуждением
Из (1.21) и (1.22) следует, что передаточная функция ЭМУ с независимым возбуждением имеет вид
°-2з)
где ky^Citry - коэффициент усиления ЭМУ; Ty=Lylry - постоянная времени обмотки управления.
Коэффициент усиления ЭМУ в различных усилителях имеет различное значение, но в среднем можно считать, что 1< Л,.<10.
Значение постоянной времени Ту зависит от внутреннего сопротивления усилителя, напряжение с которого подается на обмотку управления ЭМУ. При использовании полупроводниковых усилителей, для которых обмотка управления является нагрузкой,
39
постоянные времени ЭМУ мощностью 0,1-0,5 кВт не превышают нескольких миллисекунд.
Для получения больших коэффициентов усилений используются ЭМУ со смешанным возбуждением, схема генератора которого приведена на рис. 1.13.
Большие значения коэффициента усиления ЭМУ достигаются за счет положительной обратной связи, в результате чего суммарный магнитный поток управления Ф=Фу+Фо создается в основном за счет энергии, поступающей с выхода ЭМУ. В установившемся режиме напряжение на выходе ЭМУ выражается через напряжение на обмотке управления зависимостью
(124)
1 Ку2
где ку1=С}у/Гу, ку2=ст/(го+гу) - постоянные коэффициенты.
Наибольшее значение коэффициента усиления зависит от стабильности коэффициента ку.2, который в основном определяется изменением сопротивления г0 цепи обмотки обратной связи.
Рис. 1.13. Схема ЭМУ со смешанным возбуждением
Передаточная функция ЭМУ со смешанным возбуждением определяется выражением (1.23), в котором коэффициент усиления вычисляется по формуле (1.24).
Наиболее широко в автоматических системах применяется ЭМУ с поперечным полем, схема генератора которого приведена
40
на рис. 1.14. ЭМУ с поперечным полем представляет собой двухполюсную машину постоянного тока с двумя парами щеток. Одна пара щеток (1-1) расположена по оси, совпадающей с направлением магнитного потока управления. Эту ось называют продольной осью ЭМУ. Вторая пара щеток (2-2), замкнутая накоротко, расположена по оси, которая перпендикулярна продольной оси. Эту ось называют поперечной осью ЭМУ. При включении управляющего напряжения на обмотке возбуждения в магнитопроводе ЭМУ возникает магнитное поле, направленное по продольной оси. При вращении якоря в этом магнитном поле в поперечной цепи индуцируется Э.Д.С.
где Фу - магнитный поток, создаваемый обмоткой возбуждения; се - постоянный коэффициент.
Рис. 1.14. Схема ЭМУ с поперечным полем
Так как сопротивление короткозамкнутой цепи мало, то уже при незначительном магнитном потоке возбуждения в поперечной цепи протекает значительный ток. Ток в поперечной цепи создает магнитный поток
41
который направлен по поперечной оси ЭМУ. Поперечный магнитный поток индуцирует в обмотке якоря по продольной оси Э.Д.С.
£вых=САз>
которая является выходным напряжением ненагруженного ЭМУ
Если к продольной оси подключить нагрузку, то вследствие появления нагрузочного тока по продольной оси возникает магнитный поток Фпр, который направлен по продольной оси навстречу магнитному потоку управления Фу. Для компенсации влияния магнитного потока, созданного током нагрузки, применяется компенсационная обмотка, магнитный поток которой Фко направлен навстречу магнитному потоку нагрузки. Для изменения степени компенсации служит шунтирующее обмотку компенсации сопротивление /?ш.
Передаточная функция ЭМУ определяется из следующей системы уравнений:
-уравнение цепи возбуждения
Л Uy=ryly + Ly~^;
-уравнение короткозамкнутой цепи
- уравнение продольной оси для ненагруженного ЭМУ
А>ых “ ^4ых = СЛл ’
из которой следует, что передаточная функция ЭМУ определяется выражением
>T(s)=iMv=7----------Д------г. (1-2S)
42
где к =
- коэффициент усиления ЭМУ; ГЮ5 =
постоянная времени короткозамкнутой цепи; Гу = у - постоянная времени обмотки управления; гу, Ау - сопротивление и индуктивность обмотки управления; rK3, L^3 - сопротивление и индуктивность короткозамкнутой цепи; с,- - постоянный коэффициент.
Электромашинные усилители выпускаются мощностью от нескольких десятков ватт до десятков киловатт. В маломощных ЭМУ постоянная времени ТКЗ исчисляется сотыми долями секунды. С ростом мощности ЭМУ постоянная времени увеличивается. Значение постоянной времени Ту зависит от внутреннего сопротивления усилителя, используемого в системе управления. Обычно постоянная времени короткозамкнутой цепи намного больше постоянной времени обмотки управления, а коэффициент усиления ЭМУ имеет значения 1 < к < 10.
Магнитные усилители {МУ) применяются в системах управления как усилители мощности для питания маломощных двухфазных двигателей переменного тока. Принцип работы МУ основан на изменении индуктивного сопротивления катушки с ферромагнитным сердечником при дополнительном подмагничивании ее постоянным током.
На рис. 1.15,а приведена схема дроссельного МУ. Источником энергии служит сеть переменного тока с напряжением LL, к которой подключаются рабочие обмотки МУ и нагрузка. На среднем стержне расположена обмотка управления (подмагничивания), на которую подается управляющее напряжение постоянного тока Uy. На рис. 1.15,6 приведена кривая намагничивания ферромагнитного материала сердечника МУ, из которой следует, что с увеличением управляющего напряжения, т.е. с увеличением постоянной составляющей напряженности магнитного поля Я=, увеличивается ток в рабочих обмотках МУ (уменьшается индуктивное сопротивление рабочих обмоток), что приводит и к увеличению тока в нагрузке. На рис. 1.15,в приведена типичная зависи-
43
мость тока, протекающего в нагрузке, от тока подмагничивания. Так как мощность, выделяемая в нагрузке, во много раз больше мощности, расходуемой в обмотке управления, то МУ обладает усилительными свойствами по мощности
Рис. 1.15. Схема дроссельного магнитного усилителя
Приведенная схема МУ позволяет получить усиление по мощности в несколько десятков раз. Значительно более высокий коэффициент усиления по мощности (104 и более) имеют усилители с положительной обратной связью, одна из распространенных схем которого приведена на рис. 1.16. Выходной ток МУ выпрямляется и подается на обмотку обратной связи оо с, расположенную на одном сердечнике с обмоткой управления, поэтому подмагничивающее поле создается не только током управления, но и вы
прямленным током нагрузки. Направление тока в обмотке обратной связи определяется схемой выпрямителя, поэтому обратная связь является положительной только при одном знаке напряжения Uy, при котором магнитные потоки обмотки управления и обмотки обратной связи складываются и коэффициент усиления увеличивается. При другом знаке Uy магнитные потоки вычитаются и коэффициент усиления МУ уменьшается.
Рис. 1.16. Дроссельный магнитный усилитель с обратной связью
Дроссельные магнитные усилители не позволяют менять фазу выходного тока в соответствии с изменением полярности управляющего напряжения. В тех случаях, когда требуется обеспечить изменение фазы выходного напряжения, применяется двухтактное включение дроссельных усилителей. На рис. 1.17 представлена схема дифференциального МУ, которая состоит из двух дроссельных МУ с обмотками смещения. Обмотки смещения подключены к источнику постоянного напряжения 17см и соединены таким образом, что если в одной паре сердечников магнитные потоки управления и смещения складываются, то во второй паре эти по
45
токи вычитаются. Рабочие обмотки МУ включены встречно, поэтому при напряжении управления, равном нулю, напряжение на нагрузке также равно нулю. Фаза выходного напряжения изменяется в зависимости от изменения знака напряжения управления.
Рис. 1.17. Схема дифференциального магнитного усилителя
Инерционность МУ определяется в основном индуктивностью обмоток управления и обмоток положительной обратной связи. Передаточная функция МУ представляется выражением
<|26>
где к - коэффициент усиления по напряжению; Т - постоянная времени.
Постоянная времени и коэффициент усиления МУ по мощности кр связаны зависимостью
к
Т=-*г, (127)
где /-частота источника питания.
Коэффициент усиления по мощности МУ без обратных связей пропорционален второй степени линейных размеров сердечника магнитопровода. Введение в магнитный усилитель обратных связей приводит к увеличению коэффициента усиления по мощности, но вместе с этим увеличивается инерционность МУ. Из (1.27) следует, что инерционность МУ может быть снижена повышением частоты питающего напряжения, в результате чего уменьшаются также габариты МУ, а коэффициент усиления по мощности остается неизменным.
Больших значений коэффициента усиления по мощности - порядка 105-106 - позволяют достигать релейные усилители. Работа релейных усилителей основана на использовании электромеханических реле. Мощность, коммутируемая контактами реле, может значительно превосходить мощность, потребляемую обмоткой реле при срабатывании. В релейных усилителях для получения линейной зависимости среднего значения напряжения на выходе усилителя от напряжения управления используется вибрационная линеаризация характеристик усилителя. При линеаризации с помощью внешних колебаний на входную обмотку поляризованного реле (или на дополнительную обмотку реле) помимо управляющего напряжения подается линеаризующее напряжение переменного тока с амплитудой U„ и частотой / Частота линеаризующего напряжения должна быть существенно (в 5-10 раз) больше максимальной возможной частоты напряжения управления. Помимо этого частота линеаризующего напряжения должна быть такой, чтобы длительность полупериода колебаний была в 3-5 раз больше времени срабатывания реле.
На рис. 1.18 приведены схема релейного усилителя и временная диаграмма напряжений, поясняющие принцип работы усили-
47
46
теля, для линеаризации которого используется напряжение треугольной формы.
Рис. 1.18. Релейный усилитель с внешней линеаризацией
Если сигнал управления С7У равен нулю, то длительность замыкания контактов поляризованного реле при положительном и от
48
рицательном значениях линеаризующего напряжения будет одинаковой, поэтому среднее за период значение напряжения на выходе усилителя будет равно нулю. Если сигнал управления не равен нулю и за время, равное периоду изменения напряжения линеаризации, может быть принят постоянным, то длительность замыкания контактов реле оказывается неодинаковой в различные полупериоды линеаризующего напряжения. В результате в выходном напряжении усилителя появляется постоянная составляющая С7ВЫХ. величина и знак которой определяются управляющим напряжением. При пилообразном напряжении линеаризации эта зависимость является линейной и определяется формулой
<128)
где Um - максимальное напряжение на контактах реле; Ua - максимальное значение напряжения линеаризации.
Формула (1.28) справедлива только в том случае, если максимальное значение напряжения линеаризации выбрано из условия
и^и^+и^,
где £7С(, - напряжение срабатывания реле; Uym - максимальное значение управляющего напряжения.
Если пренебречь временем срабатывания реле, то релейный усилитель можно считать безынерционным звеном. Если временем срабатывания реле пренебречь нельзя, то передаточная функция релейного усилителя выражается передаточной функцией звена с постоянным запаздыванием:
W(s)=ke~IT, (1.29)
где т - время срабатывания реле.
1-5. Электромеханические датчики скоростей и ускорений
Датчики скоростей и ускорений применяются для формирова-Ния сигналов, пропорциональных скоростям или ускорениям перемещений. Измерение скорости перемещения (углового или ли
49
немного) возможно методом дифференцирования сигнала перемещения или путем использования специальных генераторных датчиков. Измерение ускорения также возможно методом дифференцирования скорости, двукратным дифференцированием перемещения или инерционным методом. Датчики ускорений, построенные на инерционном принципе, называются акселерометрами.
Наибольшее распространение среди электромеханических датчиков угловой скорости получили тахогенераторы. Они представляют собой миниатюрные генераторы постоянного или переменного тока. На рис. 1.19 показана схема тахогенератора постоянного тока, в котором возбуждение осуществляется постоянными магнитами. Магнитный поток, создаваемый магнитами, является постоянной величиной, поэтому напряжение, снимаемое со щеток тахогенератора, пропорционально частоте вращения якоря тахогенератора. При изменении направления вращения якоря изменяется полярносгь выходного напряжения. Входной величиной тахогенератора является угол поворота якоря <р, выходной - напряжение на щетках U. Передаточная функция тахогенератора определяется выражением
(,зо)
где к - коэффициент передачи, В-с/град; Т=1я/(Кя+Ки) - постоянная времени; Ru L, - сопротивление и индуктивность якоря тахогенератора; R„ - сопротивление нагрузки.
Рис. 1.19. Схема тахогенератора постоянного тока
50
Обычно тахогенераторы рассчитаны на нагрузку с большим сопротивлением (Д, равно нескольким килоомам), поэтому постоянной времени Т можно пренебречь; тогда выражение (1.30) принимает вид
W(s)=ks.
(1-31)
Тахогенераторы постоянного тока имеют значительные погрешности, обусловленные температурными нестабильностями (изменением сопротивления обмотки якоря, магнитной проницаемости магнитопровода) и нестабильностью щеточного контакта. Меньшие погрешности имеет тахогенератор переменного тока, схема которого приведена на рис. 1.20.
Рис. 1.20. Схема тахогенератора переменного тока
Тахогенератор переменного тока не имеет щеточных контактов. На статоре тахогенератора расположены под углом 90° две обмотки. Одна из обмоток - обмотка возбуждения - подключается к сети переменного тока, вторая обмотка является выходной обмоткой, с которой снимается выходное напряжение. Ротор тахогенератора выполнен в виде тонкостенного алюминиевого стакана, вращающегося в зазоре между статором и неподвижным цилиндрическим стаканом. При неподвижном роторе напряжение на выходе тахогенератора равно нулю, так как оси обмоток статора взаимно перпендикулярны. При вращении ротора в магнитном поле обмотки возбуждения в роторе индуктируются вихревые токи, магнитный поток которых наводит в выходной обмотке статора переменную э.д.с., пропорциональную частоте вращения ротора.
51
При изменении направления вращения изменяется фаза наводимой э.д.с. Передаточная функция тахогенератора переменного тока определяется выражением (1.31).
На рис. 1.21 приведена схема пружинного акселерометра, измеряющего линейное ускорение в направлении х. Чувствительным элементом прибора является масса 1, которая может перемещаться только в направлении х. При отсутствии ускорения на массу не действуют никакие силы и под действием пружины 2 масса удерживается в среднем нейтральном положении. Если датчик перемещается с ускорением х", то на массу действует инерционная сила РИ, в результате чего масса перемещается вдоль оси х на некоторую величину I. Величина перемещения определяется из условия равенства инерционной силы Р„ и сил уравновешивающих пружин Ль
Ри=Рп,
или
-тх'=с1, , (1.32)
где т - инерционная масса; с — жесткость пружины; I - перемещение массы
Рис. 1.21. Схема пружинного акселерометра
Из (1.32) следует, что перемещение массы пропорционально измеряемому ускорению:
/ = -—х’ = -Л„х', (1.33)
С
где Лд - коэффициент передачи датчика.
Величина / с помощью потенциометра 3 (или датчика другого типа) преобразуется в электрический сигнал. Для успокоения колебаний инерционной массы предназначен демпфер 4.
Погрешности акселерометров обусловлены силами трения и люфтами в опорах и направляющих подвески инерционной массы, непостоянством упругости пружины, влиянием боковых ускорений и т.д. Конструктивное разнообразие акселерометров объясняется разнообразием способов, используемых д ля повышения точности работы приборов. Распространенным вариантом конструкции является датчик с маятниковым подвесом инерционной массы. В поплавковых акселерометрах маятниковый подвес помещается внутри пустотелого поплавка, погруженного в жидкость. Поплавковые акселерометры обеспечивают высокую точность измерения линейных ускорений.
В акселерометрах, измеряющих угловые ускорения, инерционная масса (рис. 1.22) перемещается из-за действия инерционного вращающего момента, который через угловое ускорение определяется выражением
Угол поворота массы уравновешивается моментом пружины:
Л/П=с<р.
В результате получается, что угол поворота инерционной массы пропорционален измеряемому ускорению:
(р = -—= (134)
с
52
53
где <p - угол поворота инерционной массы; ф - измеряемое угловое ускорение; J - момент инерции массы; с - жесткость пружины
Рис. 1.22. Схема датчика угловых ускорений
Точность работы акселерометров, измеряющих угловые ускорения, определяется теми же факторами, что и акселерометров, предназначенных для измерения линейных ускорений.
Передаточная функция акселерометров, измеряющих линейные ускорения, определяется выражением
W(s\ = U™-Q = ' к-------------, (1.35)
1 ’ s2X(s) T2s2+2gTs+l
где - преобразование Лапласа для напряжения на выходе акселерометра; s2^) - преобразование Лапласа для величины ус-
корения, действующего на акселерометр; к ~ ~—кп - коэффици-
ент передачи, В-с/мм; Т = Jm/ - постоянная времени; £ = —т=-Ч/с 2л! тс
коэффициент относительного затухания; а - коэффициент демпфирования.
54
Передаточная функция акселерометров, измеряющих угловые ускорения, определяется выражением (1.35), в котором коэффициент передачи, постоянная времени и относительный коэффициент
затухания вычисляются по формулам к = ; Т = ;
1.6. Гироскопические устройства
Приборы и устройства, действие которых основано на использовании свойств гироскопа, называются гироскопическими. Современные гироскопические устройства - это сложные электромеханические устройства, в состав которых входят высокооборотные асинхронные двигатели, безмоментные индуктивные чувствительные элементы, дистанционные передачи, электромагнитные моментные датчики и другие электромеханические элементы.
Во многих системах автоматики гироскопические устройства, выполняющие роль стабилизаторов движения, одновременно служат исполнительными устройствами, обеспечивающими отработку поступающих команд.
В ряде случаев на подвижном объекте необходимо по командам изменять в пространстве положение отдельной его части независимо от положения самого объекта. При этом к динамическим свойствам исполнительного устройства, обеспечивающего перемещение управляемой части объекта относительно самого объекта, предъявляются высокие требования. Наиболее важные из них следующие: угловые движения объекта и его управляемой части должны быть между собой хорошо «развязаны», т.е. угловые движения объекта не должны передаваться его управляемой части и, наоборот, ошибки в отработке поступающих команд должны быть минимальными при достаточно высокой скорости изменения значений команд; в отсутствие команд управления часть объекта Должна сохранять неизменным некоторое заданное угловое положение в пространстве. Наилучшим образом этим требованиям Удовлетворяют гироскопические исполнительные устройства, вы
55
полняющие одновременно роль гиростабилизаторов. Гироскопические устройства, установленные на подвижном объекте, реагируют лишь на его угловые перемещения. Поэтому с помощью гироскопических устройств при соответствующей их установке могут быть измерены угловые положения объекта, его угловые скорости и ускорения. Наиболее сложные системы (инерциальные) содержат помимо прецизионных гироскопических стабилизаторов прецизионные акселерометрические головки с интеграторами (для измерения скорости движения путем однократного интегрирования измеренного ускорения и измерения пройденного пути с помощью двукратного интегрирования сигнала ускорения). Инерциальные системы обеспечивают измерение линейных и угловых перемещений, скоростей и ускорений, что позволяет определять координаты объекта, направление меридиана и местной вертикали. Основой всякого гироскопического устройства является гироскоп.
Гироскоп в карданном подвесе представляет собой электромеханическую систему, состоящую из ротора 1 (рис. 1.23), вращающегося с угловой скоростью Qz около своей оси симметрии OZ, внутренней 2 и наружной 3 рамок карданного подвеса и корпуса 4. Быстровращающийся ротор обладает большой инерцией и оказывает противодействие попыткам изменить положение оси его вращения. Наличие карданного подвеса обеспечивает сохранение заданного положения оси вращения OZ при вращении корпуса гироскопа (объекта, на котором установлен корпус гироскопа) вокруг любой из трех осей: OX, OY, OZ.
В принципе и негироскопическое тело, например тот же ротор гироскопа, при £?=0 (ротор не вращается) способен сохранять неизменным направление в пространстве. Однако практически не представляется возможным создать идеальную опору (карданный подвес) без трения и устранить причины, вызывающие появление внешних моментов, отклоняющих ось OZ ротора от заданного направления в пространстве.
56
Рис. 1.23. К определению гироскопического момента
У ротора, быстро вращающегося в карданном подвесе, отклонение его оси от первоначального направления за время действия внешнего момента оказывается в десятки тысяч раз меньше, чем отклонение такого же, но невращающегося ротора при действии равного внешнего момента в течение такого же времени. Этим и характеризуется способность быстровращающегося ротора сохранять неизменным положение своей оси в пространстве.
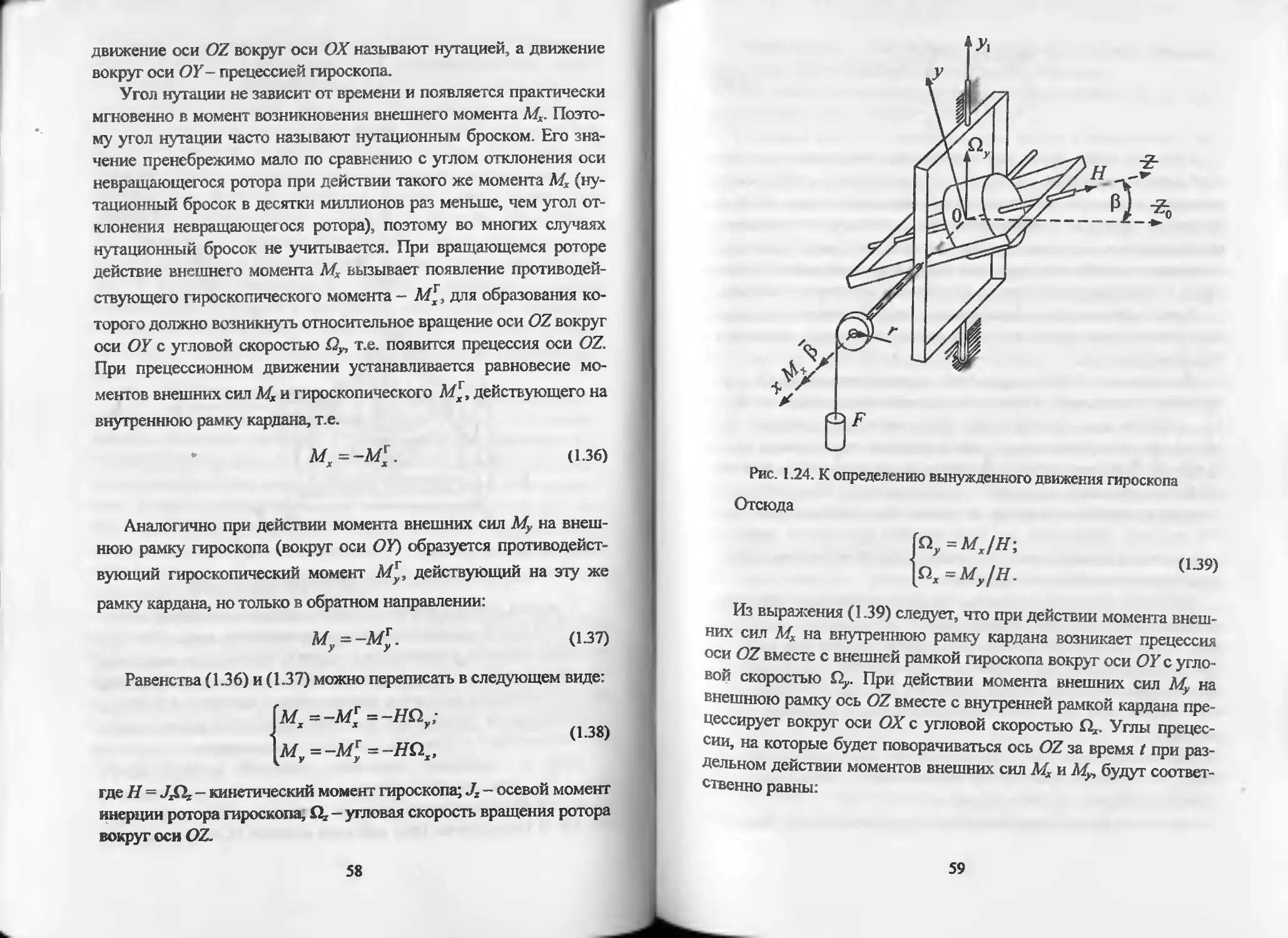
Если к гироскопу приложить внешний момент Mx-Fr (рис. 1.24), стремящийся повернуть внутреннюю рамку кардана, то ось OZ будет поворачиваться как вокруг оси ОХ, так и вокруг оси OY. В таком случае (при действии момента Мх вокруг оси ОХ)
57
движение оси OZ вокруг оси ОХ называют нутацией, а движение вокруг оси ОУ- прецессией гироскопа.
Угол нутации не зависит от времени и появляется практически мгновенно в момент возникновения внешнего момента Мх. Поэтому угол нутации часто называют нутационным броском. Его значение пренебрежимо мало по сравнению с углом отклонения оси невращающегося ротора при действии такого же момента Мх (нутационный бросок в десятки миллионов раз меньше, чем угол отклонения невращающегося ротора), поэтому во многих случаях нутационный бросок не учитывается. При вращающемся роторе действие внешнего момента Мх вызывает появление противодействующего гироскопического момента - Мх, для образования которого должно возникнуть относительное вращение оси OZ вокруг оси OY с угловой скоростью Qy, т.е. появится прецессия оси OZ. При прецессионном движении устанавливается равновесие моментов внешних сил Мх и гироскопического Мх, действующего на внутреннюю рамку кардана, т.е.
ч=-чг-
(1.36)
Аналогично при действии момента внешних сил Му на внешнюю рамку гироскопа (вокруг оси OY) образуется противодействующий гироскопический момент М'у, действующий на эту же рамку кардана, но только в обратном направлении:
M=-Mrv.
(1-37)
Равенства (1.36) и (1.37) можно переписать в следующем виде:
\МХ = -Мх =-HQy; \м=-мг=-нпх,
(138)
где Н = - кинетический момент гироскопа; Jx - осевой момент
инерции ротора гироскопа, £2г—угловая скорость вращения ротора вокруг оси OZ.
58
Рис. 1.24. К определению вынужденного движения гироскопа Отсюда
|'О_>,=Л/Х/Я;
\Ох=Му/Н.
(139)
Из выражения (1.39) следует, что при действии момента внешних сил Мх на внутреннюю рамку кардана возникает прецессия оси OZ вместе с внешней рамкой гироскопа вокруг оси OY с угловой скоростью Оу. При действии момента внешних сил Му на внешнюю рамку ось OZ вместе с внутренней рамкой кардана прецессирует вокруг оси ОХ с угловой скоростью Ол. Углы прецессии, на которые будет поворачиваться ось OZ за время t при раздельном действии моментов внешних сил Мх и Му, будут соответственно равны:
59
Mv ах = £17= — Iх х Н
(140)
Скорость и угол прецессии тем меньше, чем больше кинетический момент гироскопа Я (больше угловая скорость собственного вращения ротора £22 и больше осевой момент инерции J,). Угол прецессии примерно в сотни тысяч раз меньше угла отклонения невращающегося ротора, поэтому по величине угла прецессии оценивают способность гироскопа сохранять неизменным направление оси вращающегося ротора по сравнению с невращающимся.
Таким образом, быстрое вращение ротора значительно повышает способность сохранять неизменным положение его оси в пространстве.
Из уравнений (1.39) следует, что скорости прецессии Ц, и £2Х гироскопа определяются значениями моментов внешних сил Мх и Му, действующих на гироскоп. Если моменты внешних сил Мх=Му=0, то скорость прецессии гироскопа также равна нулю Ц,=Ог=0. При прекращении действия момента внешних сил ось OZ ротора гироскопа мгновенно останавливается. Следовательно, прецессия гироскопа является движением без инерции. Это важное свойство гироскопов, по этой причине они нашли широкое применение в качестве исполнительных устройств различных систем гироскопической стабилизации.
Основная задача, возлагаемая на трехстепенной гироскоп, выполняющий роль гироскопического стабилизатора, состоит в том, чтобы удержать заданное направление оси OZ его ротора в пространстве (например, в гирокомпасе). Качество такой стабилизации определяется скоростью прецессии оси ротора OZ от заданного направления под действием возмущающих моментов внешних сил.
Гиростабилизатор, установленный на подвижном объекте, подвержен действию различных возмущающих моментов, основными из которых являются следующие:
--моменты трения, возникающие в опорах карданного подвеса;
60
-инерционные моменты рамок карданного подвеса, появляющиеся при качке, колебаниях и вибрациях объекта;
-моменты, образуемые за счет несбалансированности ротора и рамок карданного подвеса.
Среднюю скорость отклонения оси ротора OZ гироскопа, стабилизирующего какое-либо устройство, от заданного направления в пространстве, возникающую под действием возмущающих моментов внешних сил, называют собственной скоростью прецессии гироскопа. В целях уменьшения собственной скорости прецессии гироскопы выполняют с большим кинематическим моментом (£4 до 60 000 оборотов в минуту), а также используют гироскопы специальной конструкции, обеспечивающей минимальные возмущающие моменты. К таким гироскопам относятся гироскопы без карданного подвеса, например гироскоп, ротор которого вращается в жидкой среде (поплавковый гироскоп); в сферическом гироскопе ротор выполнен в виде сферы, вращающейся во взвешенном состоянии в газовой или воздушной среде (гироскопы с газовым или воздушным подвесом). Центрирование ротора такого гироскопа осуществляется посредством специальных центрирующих магнитных (магнитный гироскоп) или электростатических (электростатический гироскоп) полей. Сферические гироскопы обладают малой собственной скоростью прецессии и большим сроком службы.
Для уменьшения собственной скорости прецессии, вызываемой моментами сил трения в подшипниках карданного подвеса, в гироскопах используется разгрузочное устройство, состоящее из двух замкнутых систем регулирования. Каждая из этих систем следит за величиной и направлением моментов, вызывающих прецессию, и создает противодействующие гироскопические моменты, которые уменьшают прецессию, т.е. происходит как бы разгрузка гироскопа от внешних моментов.
Свойство прецессии гироскопа используется при построении гироскопических исполнительных устройств. В этом случае внешние моменты, прикладываемые к рамкам карданного подвеса, по величине и направлению определяются командами, подаваемыми на исполнительное устройство. Рамки карданного подвеса
61
гироскопа механическим или другим способом связываются с объектом, положением которого в пространстве нужно управлять. Передаточная функция гироскопического исполнительного устройства для одной плоскости управления может быть получена из выражения (1.40). Продифференцировав это выражение, получим:
day _ Мх dt ~ Н '
или
а =— Мх=^-Мх, (1.41)
Hs s
vjxe s=d/dt - символ дифференцирования; Л?г=1//7 - коэффициент передачи гироскопа.
Из выражения (1.41) следует, что передаточная функция гироскопа, определяющая зависимость его выходной величины Оу от входной Му, представляется соотношением
W{s) =—, (1.42)
т.е. является передаточной функцией интегрирующего звена с коэффициентом передачи К.
Однако выражение (1.42) не учитывает того, что внешний момент действует на одну из рамок кардана и стремится повернуть ее в одной плоскости, а поворачивается другая рамка кардана в плоскости, перпендикулярной первой рамке. С учетом этого обстоятельства передаточная функция гироскопа для обеих плоскостей управления имеет вид
И*)- 7? • V <из)
где i = - множитель, учитывающий перекрестную (ком-
плексную) связь между управляющими моментами внешних сил и выходными отклонениями рамок карданного подвеса; a=JJH\ J3 -экваториальный момент инерции ротора.
62
Для измерения углов поворота объекта относительно неизменного направления, задаваемого ротором гироскопа, на корпусе гироскопа устанавливаются датчики, преобразующие углы поворота рамок карданного подвеса в электрические сигналы (например, напряжение).
С помощью гироскопа может быть измерена угловая скорость вращения объекта, на котором установлен гироскоп.
Простейшим гироскопическим датчиком угловой скорости является гироскоп с двумя степенями свободы (рис. 1.25), у которого в карданном подвесе имеется одна рамка, а не две, как в гироскопе с тремя степенями свободы для измерений углов поворота.
Рис. 1.25. Двухстепенной (скоростной) гироскоп
Принцип действия датчиков угловой скорости основан на измерении гироскопического момента, возникающего в гироскопе при развороте его корпуса. Ротор 1 гироскопа (см. рис. 1.25) с большой угловой скоростью вращается вокруг оси z в подшипниках рамки 2. Рамка может поворачиваться вокруг оси у в подшипниках 3 корпуса гироскопа. Рамка 2 центрируется пружинами 4 и связана с воздушным (жидкостным) демпфером 5. Кроме того, ось рамки соединена с подвижным контактом потенциометра. Корпус потенциометра скреплен с корпусом объекта. Если требуется измерить частоту вращения вокруг оси X, то гироскоп располагается так, как показано на рис. 1.25. Если же нужно измерить угловую скорость объекта вокруг некоторого другого направления, то ги
63
роскоп нужно установить на этом объекте так, чтобы ось х гироскопа, перпендикулярная к плоскости zy, включающей в себя оси z ротора и у рамки, совпадала с направлением, вокруг которого происходит измеряемое вращение. Свойство двухстепенного гироскопа таково, что при вращении его корпуса вокруг оси х возникает противодействующий этому вращению гироскопический момент Му, пропорциональный скорости поворота. Вектор момента Му направлен вдоль оси у и стремится повернуть рамку вокруг этой оси.
Гироскопический момент Му уравновешивается пружинами 4, причем угол отклонения рамки 2, а следовательно, и подвижного контакта потенциометра зависит от назначения и направления скорости поворота корпуса. С выхода потенциометра, таким образом, снимается напряжение, знак и величина которого будут соответствовать направлению и частоте вращения объекта. Наличие инерционной массы и упругих пружин в измерителе скорости приводит к тому, что переход от одного состояния измерителя к другому при изменении скорости происходит с наличием колебательного процесса, увеличивающего время установления и вызывающего значительные динамические погрешности. Для устранения колебаний в переходном режиме в гироскопическом измерителе скорости имеется демпфер, значительно уменьшающий время переходного процесса и динамические погрешности измерения.
Движение рамки измерителя угловой скорости определяется уравнением моментов, действующих на рамку гироскопа. Такими моментами являются:
—гироскопический момент, вызываемый поворотом корпуса гироскопа около оси ОХ под действием внешнего момента;
-момент, создаваемый пружинами, противодействующий гироскопическому моменту;
-момент, создаваемый демпфером
Считая угол поворота рамки Оу измерителя угловой скорости малым, для его определения можно пользоваться приближенным уравнением
Да; + £>Z22a; + Ktfa=-Н£1Ж,
64
где А\ - момент инерции ротора 1 и рамки 2 относительно оси у; D- удельная сила демпфирования, развиваемая демпфером 5 (рис. 1.25); 1\ - расстояние от точки крепления пружины 4 к рамке 2 до оси у; 1г - расстояние от точки соединения тяги демпфера с рамкой до оси у; Kt - результирующая жесткость двух пружин 4.
Из приведенного выражения следует, что передаточная функция гироскопического измерителя угловой скорости представляется в виде
W(S}=— =--
что соответствует передаточной функции колебательного звена Частота собственных колебаний рамки гироскопа
Е V А
=/,
Чувствительность измерителя угловой скорости
к
65
Глава 2. ЭЛЕКТРОННЫЕ АНАЛОГОВЫЕ ЭЛЕМЕНТЫ АВТОМАТИЧЕСКИХ СИСТЕМ
2.1. Усилители переменного тока
Измерительные входные преобразователи (датчики) осуществляют преобразование измеряемых физических переменных (температуры, давления, потока, параметров движения) в выходные электрические сигналы. Выходной сигнал измерительного преобразователя обычно довольно мал и требует предварительного усиления и последующего согласования. Среди многочисленных вариантов различных схем предварительных усилителей самое широкое применение находит каскад на биполярном транзисторе, включенном по схеме с общим эмиттером (ОЭ). Принципиальная схема такого каскада приведена на рис. 2.1. В качестве разделительных элементов здесь использованы конденсаторы G и С2, т.е. источник входного сигнала Ег с внутренним сопротивлением /?г и сопротивление нагрузки R„ подключены соответственно к входу и выходу каскада посредством емкостной связи.
При отсутствии входного сигнала усилительный каскад работает в режиме покоя, который иногда называют начальным режимом, а в усилителях переменного сигнала - режимом постоянного тока. С помощью резисторов базового делителя /?6i и Лб2 задается ток покоя базы Тео, а следовательно, и ток покоя коллектора 1КО. Для большинства линейных усилителей выбирают напряжение на коллекторе в режиме покоя Um=IKORK=E/2. Отметим, что в режиме покоя напряжение 176эо=0,6^0,7 В для кремниевых транзисторов.
При подаче на вход рассматриваемого каскада сигнала будет возрастать ток базы, а следовательно, и ток коллектора. В результате напряжение на резисторе Лк увеличится, а напряжение на коллекторе транзистора уменьшится, т.е. произойдет формирование отрицательной полуволны выходного напряжения. Таким образом, каскад с ОЭ инвертирует входной сигнал, осуществляет сдвиг фазы между 14ых и UBX на 180°.
При расчете режима покоя усилительного каскада обычно задаются падением напряжения на резисторе Л3, равным = = (0,3)Е. С помощью резистора Л3 = Лл + Лз2 осуществляется
66
стабилизация режима покоя усилительного каскада, поскольку создается отрицательная обратная связь по току.
Рис. 2.1. Усилительный каскад на биполярном транзисторе по схеме с ОЭ
Предположим, что за счет каких-либо внешних воздействий (повышения температуры, появления радиации и т.п.) ток 1К0 возрос. При этом увеличится напряжение (знак «+» на эмиттере п-р-п-транзистора), что при постоянном напряжении на базе приведет к уменьшению U5m. Следовательно, уменьшатся и ZK0. Таким образом, с помощью резистора R3 будет поддерживаться постоянство /ко при разнообразных внешних воздействиях. Отметим, что для поддержания постоянного напряжения на базе необходимо иметь R62«Rm-
Резистор R3 создает отрицательную обратную связь как по постоянному, так и по переменному току, первая стабилизирует режим покоя усилителя, а вторая - снижает коэффициент усиления по напряжению Ки.
Для устранения снижения Ки в устройство введен конденсатор Сэ, который для переменного тока устраняет отрицательную обратную связь, шунтируя R32. Отметим, что С, влияет на работу каскада на низких частотах
67
В некоторых случаях к выходу усилительного каскада может быть подключена емкость нагрузки Ст изображенная на рис. 2.1.
При работе каскада в области низких частот наблюдается спад коэффициента усиления, что обусловлено влиянием конденсаторов Сь С2 и С„ поскольку при уменьшении частоты их сопротивление возрастает.
а б
Рис. 2.2. Эквивалентная схема каскада с ОЭ для области низких
частот (а) и эквивалентная схема его входной цепи (б)
Спад коэффициента усиления характеризуют коэффициентами частотных искажений М„ и Мв на нижней и верхней граничных частотах:
^ио
kJ
мв =
где Км - коэффициент усиления на частоте с нулевым фазовым сдвигом.
Рассмотрим работу каскада ОЭ в области низких частот. Влияние разделительных конденсаторов и Сэ на коэффициент частотных искажений М„ можно определить отдельно, используя метод суперпозиции. Сразу отметим, что больший вклад в значение Мк вносит цепь конденсатора Сэ. Поэтому, если предположить, что Ма = 3 дБ, то Л/НС| = Л/нс2 = 0,5 дБ, а МяС, = 2 дБ. Полный Мя будет равен сумме коэффициентов частотных искажений за счет этих трех емкостей. Если эти коэффициенты представлены в отно
68
сительных единицах, то для определения общего А/н следует взять их произведение.
Эквивалентная схема каскада в области нижних частот показана на рис. 2.2,о. Здесь Р - дифференциальный коэффициент усиления по току для схемы с ОЭ, a Rs = Яб1||Яб2. Сначала рассмотрим влияние на работу каскада конденсатора Сь Для этого случая входную цепь усилительного каскада можно преобразовать к виду, представленному на рис. 2.2,6, где многоэлементная схема действует своим сопротивлением RBX, включенным в цепь Cj. Учитывая, что при отсутствии в схеме конденсатора Сэ коэффициент усиления каскада по напряжению относительно генератора определяется как
К -и™
~/ЧН
(2.1)
для низшей частоты сон можно записать:
(2-2)
где Rm = Тогда, используя (2.1) и (2.2), нетрудно получить:
^2- = 1 + —1-----, (2.3)
У^н^нс!
где тНС| = С,(Яг+Лх) — постоянная времени входной цепи усилительного каскада
Теперь найдем модуль отношения (2.3):
Таким образом, коэффициент частотных искажений на низшей частоте А/нс1 однозначно определяется постоянной времени Для уменьшения А/ис1 при прочих равных условиях нужно увеличить С].
69
Выражение (2.4) может быть использовано для определения коэффициента частотных искажений на низшей частоте практически для любой цепи любого усилительного устройства. Так, для выходной цепи Мпс2 в (2.4) следует лишь заменить zllci на тнс2. В этом нетрудно убедиться, проделав выкладки для выходной цепи рассматриваемого усилителя. В результате получим, что
^=C2(R^ + R,) = C2(Rk + Rr).
Таким образом, для определения Ми следует найти постоянные времени всех цепей, влияющих на низкой частоте на Ки, затем подставить каждую из них в (2.4), а полученные значения коэффициентов частотных искажений сложить.
Для эмитгерной цепи усилительного каскада можно записать.
где JUm — выходное сопротивление каскада со стороны эмиттера транзистора. Здесь же отметим, что его значение обычно не превышает десятков ом, поэтому и получается весьма малая величина для тнсэ. Это обстоятельство определяет максимальные искажения в цепи конденсатора С3. Таким образом, для уменьшения Ми в рассматриваемом каскаде требуется увеличить емкости Ci и С2, но в первую очередь в большей степени Сэ.
Рассмотрим теперь частотные искажения в области высоких частот. Для области высоких частот эквивалентную схему каскада с ОЭ можно преобразовать к виду, приведенному на рис. 2.3. Здесь не использованы некоторые элементы, которые не оказывают практического влияния на работу усилителя в области высоких частот. Прежде всего отметим, что спад Ки в области высоких частот в основном будет обусловлен влиянием Ск* и Сн, а также падением коэффициента Д который является комплексной величиной и поэтому на схеме обозначен как Д.
Эквивалентный коэффициент Де, который учитывает шунтирующее влияние Ск‘ генератора тока на высоких частотах, можно представить в следующем виде: P^PAy+j0^ где гв=т^+Ск*Лкн+Сн7?кн - эквивалентная постоянная времени каскада с ОЭ в области высоких частот. Тогда для высшей рабочей частоты а)в получим
70
Ч=|^|=>/1+7ч^Л
(2.5)
Выражение (2.5) справедливо для любого усилительного устройства. Оно указывает на то, что уменьшения искажений в области высоких частот можно достичь снижением тв, величина которой во многом определяется используемым в усилителе транзистором. Для низкочастотных транзисторов тв = т^ = тв(Д+1), поскольку их частотные свойства в основном определяются временем пролета неосновных носителей заряда через базу. Для ВЧ транзисторов (при Сн=0) тв ~CK*Rm, т.е. зависит не только от параметров транзистора, но и от Rm.
Рис. 2.3. Эквивалентная схема каскада с ОЭ для области высоких частот
Необходимо отметить, что в области высоких частот с ростом частоты не только возрастает Л/в, что соответствует уменьшению коэффициентов усиления в каскаде, но и увеличивается фазовый сдвиг 17вых относительно Um. При этом угол фазового сдвига для каскада с ОЭ с ростом <ов стремится от 180 к 360°.
Одним из основных параметров усилительного каскада является стабильность его работы. Прежде всего важно, чтобы в усилителе обеспечивался стабильный режим покоя. Существуют три причины, влияющие на изменение тока 40 под воздействием температуры (или другого вида внешнего воздействия). Так, при возрастании температуры, во-первых, увеличивается обратный ток коллек
71
торного перехода, во-вторых, уменьшается напряжение Cfe» и, в-третьих, возрастает коэффициент передачи постоянного тока В.
Для большинства усилителей, выполненных на кремниевых транзисторах, основной фактор влияния на А/к0 определяется приращением Д(76х)=е,ДУСЕ,-температурный коэффициент напряжения (ТКН) (3 мВ/град), АТ- рабочий температурный диапазон). В этом случае нестабильность тока коллектора можно представить в следующем виде:
. г е, £АТ
A/KO=SHC—------, (2.6)
где S -——-----------коэффициент нестабильности усилитель-
1+-^-
+
ного каскада, который показывает, во сколько раз в усилительном каскаде изменения тока покоя больше, чем в идеально стабилизированном устройстве. Чем меньше SBC, тем стабильней усилитель.
При повышении R3 и уменьшении Rs коэффициент 5НС уменьшается, стремясь в пределе к величине а. При этом усилитель будет иметь наилучшую стабильность. Однако необходимо отметить, что уменьшение приводит к снижению коэффициента усиления. Если, наоборот, увеличивать Rs и уменьшать R3, то <$нс будет стремиться к своей максимальной величине В. На практике обычно 5нс = 2-г-5.
Для повышения стабильности работы усилительного каскада иногда используют термокомпенсацию, заключающуюся во включении последовательно с резистором Re2 прямо смещенного диода, ТКН которого равен ТКН эмиттерного перехода транзистора. При изменении температуры напряжение ибзо и напряжение на диоде будут меняться одинаково, в результате чего ток /&> останется постоянным. Применение этого метода эффективно в каскадах на кремниевых транзисторах, где, как указывалось выше, основную нестабильность порождает
При создании усилительных устройств для реализации двухтактного каскада усилителя мощности требуется иметь два сигнала (напряжения), равных по величине относительно общей шины,
72
но противоположных по фазе. На практике для получения таких сигналов используют фазоинверснъш (парафазный) усилитель, принципиальная схема которого приведена на рис. 2.4.
Основой рассматриваемого фазоинверсного усилителя являются три элемента: п-p-n транзистор и два резистора RK и R3. Выходной сигнал UBmh снимаемый с коллектора транзистора, имеет противоположную полярность относительно входного сигнала UBX, а выходной сигнал t/Bbra2, снимаемый с эмиттера транзистора, совпадает по фазе с Um.
Так как коэффициент усиления по напряжению для сигнала, снимаемого с эмиттера, всегда несколько меньше единицы и по условию работы фазоинверсного усилителя КЯ^КЛ, то в устройстве отсутствует усиление по напряжению. Для выполнения равенства K„i=K,a необходимо, чтобы jW?K=(^+l)J?3. При больших р достаточно, чтобы RK=R.3.
73
К выходу фазоинвертирующей ступени может быть подключена, например, распространенная бестрансформаторная схема двухтактного каскада усилителя мощности на одинаковых транзисторах, приведенная на рис. 2.5. В этой схеме сопротивление нагрузки подключено к общей точке транзисторов через конденсатор большой емкости.
Интересные схемы двухтактных каскадов получаются при четании транзисторов р-п-р и п-р-п. Они не требуют подачи вход каскада двух противофазных напряжений, т.е. работают фазоинвертора
При построении схемы усилителя с бестрансформаторным оконечным каскадом необходимо правильно решать вопрос о питании этого каскада вместе с предыдущими ступенями от одного общего источника. Следует также отметить, что транзисторы р-п-р и п-р-п, применяемые в двухтактном каскаде, должны быть одинаковы по своим параметрам и характеристикам.
?
Рис. 2.5. Выходной каскад усилителя мощности
74
При необходимости получать большие мощности можно использовать более сложные схемы, в которых применяются комплементарные транзисторы. Для снижения нелинейных искажений рекомендуется выходной и предварительный усилительные каскады охватывать общей глубокой отрицательной обратной связью.
2.2. Усилители постоянного тока
Если выходной сигнал измерительного преобразователя изменяется очень медленно вплоть до нулевой частоты, то для его усиления используются усилители постоянного тока. Отличительной особенностью усилителя постоянного тока является отсутствие разделительных элементов, предназначенных для отделения усилительных каскадов друг от друга, а также от источника сигнала и нагрузки по постоянному току. При разработке усилителя постоянного тока приходится решать две основные проблемы: согласование потенциальных уровней в соседних каскадах и уменьшение дрейфа (нестабильности) выходного уровня напряжения или тока. Дрейфом нуля называется самопроизвольное отклонение напряжения или тока на выходе усилителя от начального значения. Этот эффект проявляется и при отсутствии сигнала на входе. Поскольку дрейф нуля проявляется таким образом, как будто он вызван входным сигналом усилителя постоянного тока, то его невозможно отличить от истинного сигнала. Существует много причин, обусловливающих наличие дрейфа нуля в усилителях постоянного тока. К ним относятся нестабильности источников питания, температурная и временная нестабильности параметров транзисторов и резисторов, низкочастотные шумы, помехи и наводки.
В усилителях переменного тока, естественно, тоже имеет место дрейф нуля, но поскольку их каскады отделены друг от друга разделительными элементами (например, конденсаторами), то этот низкочастотный дрейф не передается из предыдущего каскада в последующий и не усиливается им. Поэтому в таких усилителях (рассмотренных в предыдущем параграфе) дрейф нуля минимален и его обычно не учитывают. В усилителях постоянного тока для уменьшения дрейфа нуля прежде всего необходимо заботиться о его снижении в первом каскаде. Следует также подчеркнуть,
75
что работа усилителя постоянного тока может быть удовлетворительной только при превышении минимальным входным сигналом величины дрейфа нуля, приведенной к входу усилителя.
Среди усилителей постоянного тока в настоящее время наибольшее распространение в устройствах автоматики получили дифференциальные (параллельно-балансные, или разностные) усилители. Такие усилители относительно просто реализуются в виде монолитных интегральных микросхем и широко выпускаются отечественной и зарубежной промышленностью. Их отличает высокая стабильность работы, малый дрейф нуля, большой коэффициент усиления дифференциального сигнала и большой коэффициент подавления синфазных помех.
На рис. 2.6 приведена принципиальная схема простейшего варианта дифференциального усилителя. Любой дифференциальный усилитель выполняется по принципу сбалансированного моста, два плеча которого образованы резисторами RK\ и а два других -транзисторами VTi и VT2. Сопротивление нагрузки R„ включается между коллекторами транзисторов, т.е. в диагональ моста. Сразу отметим, что резисторы R3i и Ra2 имеют небольшие значения, а часто и вообще отсутствуют. Можно считать, что резистор /?э подключен к эмиттерам транзисторов. Отметим, что питание дифференциального усилителя осуществляется от двуполярного источника напряжения.
При анализе работы дифференциального усилителя принято выделять в нем два смежных плеча, первое из которых состоит из транзистора VT. и резистора /?К1 (и J?3i), а второе - из транзистора VT2 и резистора R^. (и /?Э2). Каждое смежное плечо дифференциального усилителя является каскадом с ОЭ, т.е. дифференциальный усилитель состоит из двух каскадов с ОЭ. В общую цепь эмиттеров транзисторов включен резистор R^ которым задается их общий ток.
Для того чтобы дифференциальный усилитель качественно и надежно выполнял свои функции, а также мог в процессе длительной работы сохранить свои параметры и свойства, в реальных усилителях требуется выполнить два основных требования.
76
Первое требование состоит в симметрии обоих плеч дифференциального усилителя. Необходимо обеспечить идентичность параметров каскадов с ОЭ, образующих дифференциальный усилитель. При этом должны быть одинаковы параметры транзисторов VTt и КГ2, а также RK\=Ra. (и /?э1=Яэ2)- Если это требование выполнено полностью, то больше ничего и не требуется для получения идеального дифференциального усилителя. Действительно, при UBX\=UBx2= 0 достигается полный баланс моста, т.е. потенциалы коллекторов транзисторов одинаковы, следовательно, напряжение на нагрузке равно нулю. При одинаковом дрейфе нуля в обоих каскадах с ОЭ (плечах дифференциального усилителя) потенциалы коллекторов будут изменяться всегда одинаково, поэтому на выходе дифференциального усилителя (ДУ) дрейф нуля будет отсутствовать. За счет симметрии плеч дифференциального усилителя обеспечивается его высокая стабильность при изменении напряжения питания, температуры, радиационного воздействия и т.д.
77
Симметрию смежных плеч дифференциального усилителя могут обеспечить лишь идентичные элементы, в которых все одинаково и которые были изготовлены в абсолютно одинаковых условиях. Так, в монолитной интегральной микросхеме близко расположенные элементы действительно имеют почти одинаковые параметры. Следовательно, в монолитных интегральных микросхемах первое требование для дифференциального усилителя почти выполнено. Это позволяет реализовать дифференциальный усилитель пусть не с идеальными, но все же с хорошими параметрами, но при непременном выполнении второго основного требования к дифференциальным усилителям.
Второе основное требование состоит в обеспечении глубокой отрицательной обратной связи для синфазного сигнала. Синфазными называются одинаковые сигналы, т.е. сигналы, имеющие равные амплитуды, фазы и формы. Если на входах дифференциального усилителя (см. рис. 2.6) присутствуют C7Bxi = t4x2, причем с совпадающими фазами, то можно говорить о поступлении на вход дифференциального усилителя синфазного сигнала. Синфазные сигналы обычно обусловлены наличием помех, наводок и т.д. Часто они имеют большие амплитуды (значительно превышающие полезный сигнал) и являются крайне нежелательными для работы любого усилителя.
Выполнить второе основное требование позволяет введение в дифференциальный усилитель резистора /?э (или его электронного эквивалента). Если на вход дифференциального усилителя поступает синфазная помеха, например, положительной полярности, то транзисторы VT\ и VT2 приоткроются и токи их эмиттеров возрастут В результате по резистору R3 будет протекать суммарное приращение этих токов, образующее на нем сигнал отрицательной обратной связи. Нетрудно показать, что /?э образует в дифференциальном усилителе последовательную отрицательную обратную связь по току. При этом будет наблюдаться уменьшение коэффициента усиления по напряжению для синфазного сигнала каскадов с ОЭ, образующих смежные плечи дифференциального усилителя, который можно рассчитать с помощью
78
КИ(2)-
R31(2)
Учитывая, что в сбалансированном усилителе через каждый из коллекторных резисторов протекает ток /э/2, коэффициент усиления синфазного сигнала будет
исф 2R, 2R3 2Я,
(2.7)
Чем лучше симметрия плеч дифференциального усилителя, тем меньше Д/?к. Поскольку идеальная симметрия невозможна даже в монолитной интегральной микросхеме, то всегда АДКД 0. При заданном RK уменьшить А"ИСф можно за счет увеличения глубины отрицательной обратной связи, т.е. увеличения R3 В результате удается значительно подавить синфазную помеху
Теперь рассмотрим работу дифференциального усилителя для основного рабочего входного сигнала - дифференциального. Дифференциальными (противофазными) сигналами принято называть сигналы, имеющие равные амплитуды, но противоположные фазы. Будем считать, что входное напряжение подано между входами дифференциального усилителя, т.е. на каждый вход поступает половина амплитудного значения входного сигнала, причем в противоположных фазах. Если t7Bjd в рассматриваемый момент времени представляется положительной полуволной, то [7вх2 - отрицательной.
За счет действия I7Bxi транзистор VTt приоткрывается и ток его эмиттера получает положительное приращение £J3t, а за счет действия UB,a транзистор VT2 призакрывается и ток его эмиттера получает отрицательное приращение - АДг- В результате приращение тока в цепи резистора R3 будет АД^АДг-АДг. Если смежные плечи дифференциального усилителя идеально симметричны, то АД?Э=О и, следовательно, отрицательная обратная связь для дифференциального сигнала отсутствует. Это обстоятельство позволяет получать от каждого каскада с ОЭ в рассматриваемом усилителе, а следовательно, и от всего дифференциального усилителя большое усиление. Так как ди» дифференциального входного сиг
79
нала в любой момент времени напряжения на коллекторах транзисторов РТ1 и РТ2 будут находиться в противофазе, то на нагрузке происходит выделение удвоенного выходного сигнала. Итак, резистор /?э образует отрицательную обратную связь только для синфазного сигнала. На практике можно использовать четыре схемы включения дифференциального усилителя: симметричные вход и выход, симметричный вход и несимметричный выход, несимметричный вход и симметричный выход, несимметричные вход и выход. При симметричном входе источник входного сигнала подключается между входами дифференциального усилителя (между базами транзисторов). При симметричном выходе сопротивление нагрузки подключается между выходами дифференциального усилителя (между коллекторами транзисторов) Такое включение дифференциального усилителя и было рассмотрено выше (см. рис. 2.6).
При несимметричном входе источник входного сигнала подключается между одним входом дифференциального усилителя и общей шиной. Коэффициент усиления дифференциального усилителя не зависит от способа подачи входного сигнала, т.е. от того, симметричный или несимметричный вход.
При несимметричном выходе сопротивление нагрузки подключается одним концом к коллектору одного транзистора, а другим - к общей шине. В этом случае Ки оказывается в 2 раза меньше, чем при симметричном выходе.
Если при несимметричных входе и выходе входной сигнал подан на вход того же плеча, с выхода которого и снимается выходной сигнал дифференциального усилителя, то на усиление работает лишь одно плечо. Здесь на выходе получаем инвертированный сигнал. Когда входной сигнал подан на вход одного плеча дифференциального усилителя, а выходной сигнал снимается с выхода другого плеча, то на выходе получаем неинвертированный сигнал с тем же Ки, что и в первом случае. Если снимать выходной сигнал всегда с одного заданного выхода, то входам дифференциального усилителя можно присвоить названия «инвертирующий» и «неинвертирующий».
80
Одним из основных параметров дифференциального усилителя является коэффициент ослабления (подавления) синфазного сигнала (КОСС). Обычно КОСС представляется как отношение Яндиф кЯнсф, Т.е. КОСС=201g
Используя (2.7), можно записать:
^идиф 1 2Л, ^исф 5 Г> ’
(2.8)
где &=&R,/RK - коэффициент асимметрии дифференциального усилителя. При необходимости коэффициент асимметрии можно дополнить слагаемыми, представляющими разброс других параметров элементов устройства. Напомним, что разброс номиналов резисторов в монолитных интегральных микросхемах не превышает 3%.
В дифференциальных усилителях всегда стремятся сделать КОСС как можно больше. Для этого следует увеличивать /?э. Однако существует несколько причин, ограничивающих эту возможность, самая главная из них - это большие трудности при реализации резисторов значительных номиналов в монолитных интегральных микросхемах.
Решить эту проблему позволяет использование электронного эквивалента резистора большого номинала, которым является источник стабильного тока.
Дифференциальные усилители являются основой для построения операционных усилителей Операционным усилителем называют высококачественный интегральный усилитель постоянно^ го тока с дифференциальным входом и двухтактным выходом, предназначенный для работы в схемах с цепями обратных связей. Название усилителя обусловлено первоначальной областью его применения - выполнением различных операций над аналоговыми сигналами (сложение, вычитание, интегрирование и др.). В настоящее время операционные усилители (ОУ) выполняют роль многофункциональных узлов при реализации разнообразных устройств автоматики различного назначения. ОУ не только реализуют свою основную функцию усиления сигнала, но могут также
81
обеспечивать его фильтрацию, математическую обработку или коррекцию нелинейностей.
На рис. 2.7 показана упрощенная эквивалентная схема ОУ. В представленной модели ОУ имеет входное сопротивление Ra, включенное между двумя его входами Vi и v2 (так же обозначаются напряжения, подаваемые на эти входы). Выходная цепь состоит из управляемого источника (генератора) напряжения и включенного последовательно с ним выходного сопротивления Л» связанного с выходом ОУ. Разность напряжений между входами ОУ вызывает протекание тока через сопротивление Rj. Дифференциальное напряжение умножается на величину К — коэффициента усиления ОУ, в результате получается значение выходного напряжения.
При разработке схемы наилучшим подходом является использование на первом этапе предположения об идеальности ОУ, что существенно упрощает расчет передаточной функции
Kv=^.
vi
Затем провёряется степень неидеальности характеристик используемого ОУ для выяснения влияния данного фактора на параметры схемы. Если это влияние незначительно, то разработку схемы можно считать завершенной, в противном случае нужны дополнительные расчеты.
Рис. 2.7. Эквивалентная схема ОУ
Для упрощения конструкторских расчетов предполагается, что идеальный ОУ имеет следующие характеристики:
82
1) коэффициент усиления при разомкнутой петле обратной связи равен бесконечности;
2) входное сопротивление Rd равно бесконечности;
3) выходное сопротивление Ло=0;
4) ширина полосы пропускания равна бесконечности (бесконечно протяженная амплитудно-частотная характеристика);
5) v0= 0 при Vi= v2 (отсутствует напряжение смещения нуля).
Последняя характеристика очень важна. В соответствии с рис. 2.7 v2 -V| = v0 IK. Если v0 имеет конечное значение, а коэффициент усиления К бесконечно велик (типичное значение 100000), то v2-v, =0 и V] =v2. Поскольку входное сопротивление Rd для дифференциального сигнала (v2 -vj также очень велико и Vj = v2, то можно, как это обычно делается, пренебречь током через Rd. Эти два допущения существенно упрощают разработку схем на ОУ. Сформулируем их окончательно следующим образом.
Правило 1. При работе ОУ в линейной области на двух его входах действуют одинаковые напряжения.
Правило 2. Входные токи для обоих входов ОУ равны нулю.
На принципиальных схемах ОУ обозначается треугольным символом, как на рис. 2.7, но без указания его внутренней структуры.
ОУ является унифицированным элементом, позволяющим осуществлять синтез схем электронной техники различных сфер, причем одновременно упрощаются проектирование, изготовление и настройка электронного устройства, повышаются его эксплуатационные, а в ряде случаев и технические характеристики. В большинстве этих схем ОУ используется в конфигурации с замкнутой петлей обратной связи. Цепи обратной связи, охватывающие ОУ, снижают его коэффициент усиления и обеспечивают реализацию других желательных характеристик.
На рис. 2.8 представлена принципиальная схема инвертирующего усилителя. Диапазон применений этого усилителя исключительно широк и включает, в частности, измерительную технику. Многие особенности инвертирующего усилителя, например расширенная полоса пропускания и пониженное выходное сопро
83
тивление, обусловлены сопротивлением цепи обратной связи, в данном случае Rf.
Выражение для коэффициента усиления (передаточная функция) инвертирующего усилителя может быть получено следующим образом. Поскольку неинвертирующий вход заземлен, его потенциал равен О В. Согласно правилу 1 потенциал инвертирующего входа также равен О В (так называемая виртуальная земля). Таким образом, инвертирующий вход ОУ в схеме на рис. 2.8 во всех практических случаях также можно считать заземленным.
Рис. 2.8. Инвертирующий усилитель
В соответствии с первым законом Кирхгофа алгебраическая сумма всех токов, входящих в узел и исходящих из узла, должна быть равна нулю. В то же время в силу правила 2 равен нулю и входной ток ОУ. Отсюда следует, что it + if = 0 и
(2.9)
Поскольку правый вывод резистора R, находится под потенциалом земли (О В), а на левом выводе действует входное напряжение vh то, согласно закону Ома, if =vlIRi. Аналогично получаем if =v0/Rf. Подстановка этих соотношений в уравнение (2.9) дает
84
Rj
Rj
или
-Rf
~W'
(2.Ю)
Таким образом, данная схема инвертирует входной сигнал и коэффициент усиления инвертирующего усилителя равен К= Rf/Rj.
Входное сопротивление инвертирующего усилителя обычно довольно мало. Поскольку инвертирующий вход по существу заземлен, входным сопротивлением для входного сигнала является сопротивление R,.
На рис. 2.9 представлена схема неинвертируюшего усилителя. Согласно правилу 1 на инвертирующем входе ОУ также действует входное напряжение v,. В силу правила 2 ток if должен течь через резистор Я, на землю, не ответвляясь в ОУ. Делитель напряжения задает следующую взаимосвязь между входным и выход-
ным напряжениями:
v, = R‘V° или К Rt+Rf
lii+Rf _^+Rf r, "1+v
Коэффициент усиления неинвертирующего усилителя положителен и по абсолютной величине всегда больше или равен 1, а входное сопротивление очень велико (близко к бесконечности).
Рис. 2.9. Неинвертирующий усилитель
Если в неинвертирующем усилителе положить R, равным бесконечности, a Rf равным нулю, то получится схема повторителя напряжения, изображенная на рис. 2.10. Согласно правилу 1 на
85
инвертирующем входе ОУ тоже действует входное напряжение v,-, которое непосредственно передается на выход схемы. Следовательно, vo=v/, и выходное напряжение отслеживает (повторяет) входное напряжение.
Повторитель напряжения эффективно используется в качестве буферного усилителя или преобразователя сопротивлений (импе-дансов). При использовании в качестве буферного усилителя повторитель напряжения обеспечивает развязку одной из схем от нагрузочного влияния следующих за ней каскадов.
Рис. 2.10. Повторитель напряжения
Очень важной схемной конфигурацией на ОУ является дифференциальный усилитель, который представляет собой комбинацию инвертирующей и неинвертирующей схем на ОУ.
На рис. 2.П показана принципиальная схема простого дифференциального усилителя на ОУ. Согласно правшу 2 входные токи для обоих входов ОУ равны нулю, поэтому ток, определяемый напряжением v2, протекает через резисторы R\ и R2 на землю. Делитель напряжения на этих резисторах определяет величину напряжения на неинвертирующем входе ОУ:
Ri+R2
(211)
Согласно правилу 1 напряжение на инвертирующем входе ОУ должно быть равно напряжению на его неинвертирующем входе. Следовательно, верхняя половина схемы действует как инвертирующий усилитель Рассчитывая ток в этой половине схемы так, как это делалось для инвертирующего усилителя, получаем
R2
(2.12)
86
Рис. 2.11. Дифференциальный усилитель на ОУ
Подстановка (2.11) в уравнение (2.12) дает
^1
Полученное соотношение определяет коэффициент усиления дифференциального усилителя. Как видно из этого соотношения, если на входах дифференциального усилителя будет действовать синфазное напряжение V]=v2, то v4=0. То есть коэффициент усиления синфазного напряжения для дифференциального усилителя равен 0.
Если vt ф Уг, то коэффициент усиления дифференциального напряжения (или просто коэффициент усиления) равен R2/R{. Отметим, что реальный дифференциальный усилитель не может обеспечить полного подавления синфазного напряжения.
2.3. Схемы аналоговых вычислений на ОУ
Несмотря на то что при математической обработке сигналов все большее предпочтение отдается цифровым методам в силу их большей гибкости и упрощения аппаратных средств для их реализации, аналоговая обработка сигналов может иметь преимущество в тех случаях, когда цифровая обработка занимает слишком много времени. Схемы на ОУ идеально подходят для выполнения различных аналоговых вычислений.
87
Так, суммирование нескольких входных напряжений можно осуществить при помощи инвертирующего усилителя Каждый вход сумматора соединяется с инвертирующим входом ОУ через взвешивающий резистор. Инвертирующий вход называется суммирующим узлом, поскольку здесь суммируются все входные токи и ток обратной связи.
Принципиальная схема суммирующего усилителя представлена на рис. 2.12. Как и в обычном инвертирующем усилителе, напряжение на инвертирующем входе должно быть равно нулю, следовательно, равен нулю и ток, втекающий в ОУ. Таким образом:
V =/1+4+-+^ и
Так как на инвертирующем входе действует нулевое напряже-
S8
Резистор ^-определяет общее усиление схемы. Сопротивления Ri, R2, R„ задают значения весовых коэффициентов и входных сопротивлений соответствующих каналов
На рис. 2.13 показана принципиальная схема простейшего аналогового интегратора. Эта электронная схема вырабатывает выходной сигнал, пропорциональный интегралу (по времени) от входного сигнала. Один вывод конденсатора присоединен к суммирующему узлу, а другой - к выходу интегратора. Следовательно, напряжение на конденсаторе одновременно является выходным напряжением. Выходной сигнал интегратора не удается описать простой алгебраической зависимостью, поскольку при фиксированном входном напряжении выходное напряжение изменяется со скоростью, определяемой параметрами vh R и С. Таким образом, для того чтобы найти выходное напряжение, нужно знать длительность действия входного сигнала. Напряжение на первоначально разряженном конденсаторе
где if - ток через конденсатор. С другой стороны, для v, имеем ii=Vi/Rj. Поскольку if= ih то с учетом инверсии сигнала получаем
Из этого соотношения следует, что v0 определяется интегралом (с обратным знаком) от входного напряжения, умноженным на масштабный коэффициент 1/RjC. Напряжение vfc - это напряжение на конденсаторе в начальный момент времени (г = 0).
Идеализированный интегратор (рис. 2.13) имеет серьезный недостаток: если напряжение v„ на входе не изменяется неопределенно долгое время, то выходное напряжение v0 будет уменьшаться до тех пор, пока не достигнет величины напряжения насыщения ОУ. Это происходит потому, что по постоянному току интегратор работает как усилитель с разомкнутой петлей обратной связи.
89
Рис. 2.13. Простейший интегратор на ОУ
На рис. 2Л4,а показана практическая принципиальная схема интегратора, где приняты меры для предотвращения насыщения ОУ В цикле установки в начальное (исходное) состояние ключ Si замкнут, а ключ S2 разомкнут4. Схема работает как инвертирующий усилитель, который заряжает конденсатор С до напряжения -vic, равного взятому с обратным знаком опорному напряжению vr. Поскольку входное сопротивление и сопротивление цепи обратной связи одинаковы, то коэффициент усиления инвертирующего усилителя равен -1, v0 равно v, и в начальном состоянии конденсатор заряжен до напряжения vr. В цикле интегрирования ключ Si разомкнут, а ключ S2 замкнут В цикле хранения оба ключа разомкнуты и выходное напряжение v0 поддерживается на постоянном уровне для считывания или последующей обработки.
Ключи Si и S2 могут быть контактами реле или аналоговыми ключами (например, на полевых транзисторах). Работой ключей управляют внешние логические устройства. Это упрощает установку начальных условий и запуск интегрирования в тех случаях, когда для решения дифференциального уравнения используются несколько интеграторов. На рис. 2.14,6 иллюстрируется последовательность рабочих циклов интегратора.
90
Рис. 2.14. Интегратор на ОУ (а) и его рабочие циклы (б)
к
На рис. 2.15 показана принципиальная схема простейшего дифференциатора. Дифференциатор вырабатывает выходной сигнал, пропорциональный скорости изменения во времени входного сигнала. Ток, протекающий через конденсатор, определяется как
Если производная dv./dt положительна, ток z, течет в таком направлении, что формируется отрицательное выходное напряжение v0. Таким образом:
Рис. 2.15. Простейший дифференциатор на ОУ
91
На первый взгляд, данный метод дифференцирования сигнала кажется довольно простым, но при его практической реализации возникают проблемы с обеспечением устойчивости схемы на высоких частотах. В данном случае неустойчивость схемы связана с тем, что амплитудно-частотная характеристика идеальной дифференцирующей цепи пересекается с амплитудно-частотной характеристикой ОУ при разомкнутой петле обратной связи (рис. 2.16,6). В модифицированной схеме на рис. 2.16,а дополнительно введен резистор обеспечивающий излом амплитудно-частотной характеристики дифференцирующей цепи вблизи точки пересечения характеристик с частотой излома / = l/(2nRtC). Резистор Ri уменьшает добротность дифференцирующей цепи на высоких частотах. Можно показать, что точка пересечения характеристик соответствует частоте <o*=Aoa)0/fyC. Отсюда с учетом соотношения со, = 1ZR, С находим условие устойчивости схемы:
где Ло<оо - произведение коэффициента усиления на ширину полосы для используемого ОУ.
Частота
б
Рис. 2.16. Дифференциатор на ОУ (а) и его АЧХ (б)
92
Для использования в дифференциаторе пригоден не всякий ОУ. Критерием выбора является быстродействие ОУ: нужно выбирать ОУ с высокой максимальной скоростью нарастания выходного напряжения и высоким значением произведения коэффициента усиления на ширину полосы. Хорошо работают в дифференциаторах быстродействующие ОУ.
2.4. Функциональные устройства
Функциональные устройства - устройства, в которых управление формируется в зависимости от параметров протекающих процессов, - находят широкое применение в автоматических системах. Одним из таких устройств является компаратор - электронная схема, которая сравнивает два входных напряжения и вырабатывает выходной сигнал, зависящий от состояния входов. Принципиальная схема компаратора показана на рис. 2.17,а Здесь ОУ работает с разомкнутой петлей обратной связи. На один из его входов подается опорное напряжение, на другой — неизвестное (сравниваемое) напряжение. Выходной сигнал компаратора указывает, выше или ниже уровня опорного напряжения находится уровень неизвестного входного сигнала. В схеме на рис. 2.17,а опорное напряжение vr подается на неинвертирующий вход, а на инвертирующий вход поступает неизвестный входной сигнал v,. При vt>vr на выходе компаратора устанавливается напряжение v0=-v, (отрицательное напряжение насыщения). В противоположном случае (v(<vr) получаем vo=+v,. Можно поменять местами входы - это приведет к инверсии выходного сигнала. На рис. 2.17,6 представлена передаточная характеристика рассмотренного компаратора.
Компаратор должен переключаться из одного состояния в другое с максимально возможной скоростью. Данный компаратор работает с разомкнутой петлей обратной связи, поэтому отпадает необходимость в стабилизации петли обратной связи и его частотной коррекции. Частотная коррекция приводит к снижению быстродействия и скорости нарастания выходного напряжения и увеличивает время срабатывания. Время срабатывания - это время, необходимое для переключения выхода компаратора из одного
93
состояния в другое, отсчитываемое с момента поступления входного запускающего сигнала. Максимальная скорость нарастания выходного напряжения показывает, насколько быстро может изменяться выходной сигнал усилителя во время такого переключения
Рис. 2.17. Компаратор (а) и его передаточная характеристика (б)
Если напряжение г,, поступающее на вход компаратора (рис. 2.17), содержит шумовую составляющую, то выходное напряжение vo будет очень быстро флуктуировать между уровнями +уй и -vs. Исключить такие флуктуации можно путем создания в компараторе цепи положительной обратной связи, при которой часть выходного напряжения подается на неинвертирующий вход.
Принципиальная схема такого устройства, называемого триггером Шмитта, показана на рис. 2.18,а. Триггер Шмитта представляет собой устройство, в котором переход из одного устойчивого состояния в другое осуществляется только при определенных уровнях входного напряжения vr-Avr и vr+4vr, называемых пороговыми уровнями. При введении в схему резистора R2 на резисторе /?1 появляется напряжение положительной обратной связи. При высоком уровне выходного напряжения резистор R2 передает с выхода на вход напряжение, которое суммируется с опорным. В этом случае опорное напряжение возрастает на величину
^+Л2
94
Рис. 2.18. Триггер Шмитта (а) и его передаточная характеристика (б)
Таким образом, получаем новое (большее) значение опорного напряжения:
ДГг+=Кг+ДКГ.
В результате компаратор будет переключаться (из состояния с высоким уровнем выходного напряжения) при новом значении vh превышающем vr на величину положительного напряжения обратной связи, поступающего с выхода компаратора. Как только входное напряжение v, превысит новое опорное напряжение vr+Av„ выходное напряжение компаратора начнет уменьшаться. Это уменьшение через резистор R2 передается на неинвертирующий вход, и напряжение на нем также уменьшается, стимулируя дальнейшее падение выходного напряжения. За счет положительной обратной связи этот процесс происходит лавинообразно и компаратор быстро переключается в противоположное состояние. Поскольку на выходе компаратора действует теперь напряжение vo=-vs, то на его вход по цепи обратной связи передается напряжение
r r}+r2
В этом случае устанавливается новое опорное напряжение для состояния с низким выходным уровнем:
ДГ,_=Гг-ДГ,.
Передаточная характеристика, изображенная на рис. 2.18,6, иллюстрирует эффект петли гистерезиса. При введении положительной обратной связи составляющие шума во входном напряже
95
нии V, уже не могут вызвать перебросов выходного сигнала vo от +v, к -г, и обратно. Например, если г,- превысит уровень vr +Avr и v0 сразу же примет значение -v„ то для переключения компаратора обратно в исходное состояние необходимо, чтобы v, снизилось до значения, меньшего чем vr-Avr. Ширину петли гистерезиса можно изменять, используя вместо постоянного резистора /? потенциометр.
Для зашиты устройств автоматики от возможных перегрузок используют ограничители. Ограничитель - нелинейный четырехполюсник (рис. 2.19,а), статическая характеристика которого имеет один из трех видов ограничений: снизу, сверху и двустороннее. На рис. 2.19,6 приведена несколько идеализированная статическая характеристика двустороннего ограничителя.
Рис. 2.19. Ограничитель (а) и его статическая характеристика (б)
96
Статическая характеристика аппроксимируется кусочнолинейными функциями:
С7.ых=‘ ^Ахр. НИЖН ’ ПРИ ^ВХ — ^А10р. нижн ’ кит, при <им <Unopwpaf- Um при U„ > огр. верхи ’г вх пор. верхи 5
где £7пор. н„жн, С/пор. верхи - пороги ограничения по входу; и<хран. верхи - уровни ограничения по выходу; к - угловой коэффициент статической характеристики; t/K - напряжение на входе ограничителя; t/вых - напряжение на выходе ограничителя.
Показанная на рис. 2.19,6 характеристика справедлива при сравнительно медленных изменениях входного сигнала, когда можно пренебречь влиянием инерционности элементов ограничителя.
На рис. 2.20 показана принципиальная схема двустороннего амплитудного ограничителя с обратной связью, представляющего собой инвертирующий усилитель, в цепь обратной связи которого включены стабилитроны.
При 0<ыВЫх< Uc^i+Uja стабилитрон VD2 включен в прямом направлении и работает как обычный открытый полупроводниковый диод, внутреннее сопротивление которого гпр мало. Падение напряжения на нем составляет примерно 0,7 В. Стабилитрон VD\ включен в обратном направлении и при обратном напряжении на нем мд1обр = «вых - U/a < t4ra6i имеет большое внутреннее сопротивление Гобр, соответствующее г^р закрытого полупроводникового диода. При -((/д1+14таб2)<^4ых<0 стабилитроны меняются ролями: VD\ работает как открытый диод, на котором падает прямое напряжение С7дЬ VD2 - как закрытый диод, к которому приложено обратное напряжение = пвьа- UR\ ~ и^ < UmS2.
Таким образом, в диапазоне + С/д) < ивых < + U# со-
противление цепи, состоящей из VDi и ED2, велико, и ограничитель работает в режиме передачи сигнала как обычный инвертирующий усилитель с коэффициентом усиления КИОС =-Rf/Rt.
Выходное напряжение ограничивается сверху на уровне ^вых. огр ~ + Цц ’ когда стабилитрон EDi переходит в режим
97
стабилизации напряжения, и снизу на уровне ^^ых оф =|^стаб2+Цц|> когда в режим стабилизации напряжения переходит стабилитрон VD2.
Рис. 2.20. Двусторонний амплитудный ограничитель на ОУ
В системах автоматики широко применяются и диодные ограничители. В параллельных диодных ограничителях нагрузка и источник входного сигнала включены параллельно (рис. 2.21).
Рис. 2.21. Диодный ограничитель
Режим передачи получается здесь при запертых диодах (ею<£в при ограничении сверху и ею>£н при ограничении снизу), а режим ограничения - при отпертых диодах. Существенное повышение
98
эффективности работы ограничителя повышается с усилением неравенств:
ГД •S> > Догр ГД ’
где Гд - сопротивление запертого диода; Гд - сопротивление отпертого диода.
2.5. Генераторы линеаризующих колебаний и фильтры
В нелинейных автоматических системах на нелинейный элемент обычно действуют одновременно медленно меняющееся напряжение (напряжение управления) и переменное линеаризующее напряжение (см. рис. 1.18). Напряжение на выходе нелинейного элемента не повторяет формы медленно меняющегося напряжения, однако его спектр содержит гармоники спектра данного управляющего напряжения. Для выделения этих полезных гармоник применяют избирательную по частоте цепь (фильтр), подключаемую к выходу нелинейного элемента. Это позволяет рассматривать нелинейный элемент совместно с избирательной по частоте цепью как упрощенную цепь с линейными свойствами.
Выбор характеристик переменного линеаризующего напряжения является задачей, которая не имеет однозначного решения. Это объясняется тем, что, с одной стороны, получение строгих аналитических выражений характеристик нелинейных элементов из их физических свойств по ряду причин затруднительно. Поэтому чаще пользуются экспериментально снятыми и усредненными (с учетом разброса параметров) характеристиками, которые обычно задаются графически. С другой стороны, охватывая часть характеристики нелинейного элемента, переменное линеаризующее напряжение формирует его рабочую область и определяет, таким образом, погрешность ее аппроксимации.
Учитывая, что погрешность аппроксимации в рабочей области характеристики обычно допускается одного порядка с величиной
99
разброса параметров, в качестве линеаризующего напряжения чаще всего используют линейно изменяющиеся и синусоидальные напряжения
Линейно изменяющееся напряжение (рис. 2.22) характеризуется двумя промежутками времени: рабочего хода Zpa6, в течение которого напряжение изменяется по линейному закону, и обратного хода /обр, в течение которого напряжение возвращается к исходному значению. В некоторых приложениях закон изменения напряжения за время обратного хода может быть несуществен.
Различают положительное (рис. 2.22,а,б) и отрицательное (рис. 2.22,в,г), а также линейно нарастающее (рис. 2.22,а,г) и линейно падающее (рис. 2.22,б,в) напряжения.
Для получения линейно изменяющегося напряжения в схеме генератора необходимо обеспечить в течение времени заряд или разряд некоторого конденсатора большой емкости постоянным током. Действительно, если 7c=const, то напряжение на конденсаторе
= = (2.13)
т.е. для получения идеальной линейности напряжения на конденсаторе ис ток заряда его должен быть постоянным. Напряжение ис для большинства генераторов является выходным или передается на выход через повторитель.
100
Рис. 2.22. Виды линейно изменяющегося напряжения
101
Простейшим пассивным генератором линейно изменяющегося напряжения (ГЛИН) может служить ЕС-цепь (рис. 2.23,а), на вход которой подается прямоугольный импульс напряжения с амплитудой Евх (рис. 2.23,6), а выходное напряжение снимается с конденсатора большой емкости. Такая ЕС-цепь называется интегрирующей, так как ее выходное напряжение пропорционально интегралу входного. Действительно:
—0
С ивых
--0
Рис, 2.23. Простейший ГЛИН (а) и временные диаграммы его работы (б)
102
Учитывая, что iK = ic-ur/R= (um-uBU^)/R, можно записать
= -u«^dt = -^\undt--^\uKmdt. (2.14)
Первый член в (2.14) характеризует полезный результат операции интегрирования, а второй определяет ошибку. Ошибка интегрирования уменьшается с увеличением постоянной времени t=RC, однако при этом уменьшается и первый член выражения (2.14), определяющий ивьк.
Таким образом, 7?С-цепь (см. рис. 2.23,а) может обеспечить достаточную точность операции интегрирования, а следовательно, приемлемую линейность выходного напряжения лишь при выполнении условия WBX>>WBUx-
Интегрирующая пассивная цепь - составная часть активных генераторов линейно изменяющегося напряжения, обеспечивающих приемлемую линейность выходного напряжения при им>Ет (см. рис. 2.23,6). Другой составной частью ГЛИН является генератор прямоугольных импульсов.
Принципиальная схема генератора прямоугольных импульсов на операционном усилителе приведена на рис. 2.24,а. На рис. 2.24,6 приведены временные диаграммы ее работы. Генератор прямоугольных импульсов представляет собой автоколебательный мультивибратор на операционном усилителе.
При включении питания дифференциальное напряжение смещения, возникающее на входе ОУ за счет действия положительной обратной связи, образованной резисторами и R2, скачком переводит операционный усилитель в режим ограничения выходного сигнала.
Пусть в момент времени t0 на выходе ОУ устанавливается положительное максимальное напряжение UBiama=E^orp. Вход 1 в момент времени t0 оказывается заземленным по переменному току, так как напряжение на конденсаторе С при включении питания скачком измениться не может, т.е. Щ1о) = Г7С(ГО) = 0. Напряжение на входе 2 определяется сопротивлениями резисторов и R2 и равно
103
Рис. 2.24. Генератор прямоугольных импульсов на ОУ (а) и временные диаграммы его работы (б)
После момента t0 конденсатор заряжается с постоянной времени t=RC и напряжение на нем, а следовательно, на входе 1 ОУ изменяется, стремясь от нуля к значению Е+огр. Напряжение на входе 2 остается неизменным. В момент времени напряжение wc(r) достигает значения (Л2, т.е. t/c(?i)=L?+2, изменяется знак дифференциального входного напряжения ОУ, а выходное напряжение его скачком достигает своего отрицательного предела -С/вых (Ивх=^огР-
Напряжение U2 становится отрицательным и удерживает схему в состоянии ограничения, когда UBm=E~orp. Конденсатор С перезаряжается, а напряжение на нем стремится к Е~огр. При |(/с|=СГ2=£"огр/ происходит скачок выходного напряжения к положительному пределу.
Длительности квазиустойчивых состояний схемы определяются из формул:
Тх = = RCln[ 1+^-1;
104
Т2 = = RC/n( 1+^-'1 = Т,.
I Я. J
Таким образом, схема генерирует импульсы длительностью, равной половине периода, другими словами, импульсы со скважностью, равной двум, где скважность определяется как отношение периода следования импульсов к их длительности. Для изменения частоты и скважности выходных импульсов можно: подать в точку а напряжение зашунтировать резистор R цепью, состоящей из последовательно соединенных резистора R' и диода VD (на рис. 2.24,а показана пунктиром).
Для получения синусоидального линеаризующего напряжения чаще всего используются RC-генераторы. В ЯС-генераторах в качестве частотно-избирательных цепей применяются цепи обратной связи, состоящие из конденсаторов и резисторов. В генераторах мщуг использоваться усилительные каскады, инвертирующие и не инвертирующие сигнал. В первом случае ЯС-цепь обратной связи должна обеспечивать дополнительный фазовый сдвиг на 180°, а во втором - ее фазовый сдвиг должен быть равен нулю. Значительное количество возможных ЯС-генераторов определяется большими схемотехническими возможностями ЯС-цепей.
На рис. 2.25 приведена принципиальная схема ЯС-генератора на инвертирующем усилительном каскаде. В цепи отрицательной обратной связи здесь использована трехзвенная ЯС-цепь, сдвигающая фазу на 180°. Поскольку максимальный фазовый сдвиг, вносимый одним ЯС-звеном, на частоте, близкой к нулю, стремится к 90°, для получения сдвига в 180° ЯС-цепь должна содержать не менее трех последовательно включенных звеньев. В этом случае каждое звено на частоте генерации fo обеспечивает сдвиг в 60°, при этом еще сохраняется приемлемый коэффициент передачи всей ЯС-цепи. Для четырехзвенного фильтра (который тоже иногда используется в ЯС-генераторах) фазовый сдвиг на частоте fo для одного звена составляет 45°. Четырехзвенные ЯС-цепи обладают меньшим затуханием сигнала на частоте генерации и для выполнения генератора требуют использования усилителя с меньшим коэффициентом усиления.
105
Обычно в /?С-генераторах Ri=R2 = R, и С| = С2 = С3. При этом частота, на которой для трехзвенной ЛС-цепи сдвиг фазы напряжения достигает 180°, может быть определена как
а частота, на которой сдвиг фазы напряжения достигает 180° для четырехзвенной ЛС-цепи, находится как
На частоте То коэффициент обратной связи % Для трехзвенной 7?С-цепи равен 1/29, а для четырехзвенной - 1/18,4 Следовательно, возбуждение генератора будет происходить, если в устройстве К„ >29 в случае трехзвенной и А"и>18,4 в случае четырехзвенной ЛС-цепи.
Рис 2.25. Генератор синусоидального напряжения на фазосдвигающих ЯС-цепях
Регулировка Ки в усилителе на ОУ осуществляется за счет изменения глубины отрицательной обратной связи (обычно с помощью RJ). Кроме того, глубокая отрицательная обратная связь в рассматриваемом ЯС-генераторе применяется для улучшения формы синусоидальных колебаний и снижения влияния элементов схемы на работу устройства.
Снижения затухания в цепях отрицательной обратной связи и улучшения других параметров генераторов можно достичь за счет использования так называемых прогрессивных цепочек. В таких
106
цепочках применяются резисторы, номиналы которых для каждого последующего звена берутся в п раз больше, чем в предыдущем звене, и конденсаторы, номиналы которых, наоборот, уменьшаются для каждого последующего звена в п раз. Так, при п = 5 в трехзвенной цепи ^«i/l 1.
Если неинвертирующий усилитель охватить положительной обратной связью, то он будет генерировать колебания и без использования фазовращающих ЛС-цепей. Однако условия возбуждения в таком генераторе будут выполняться для целого спектра частот, что приведет к появлению колебаний несинусоидальной формы. Для осуществления генерации только синусоидальных электрических колебаний в устройстве должна быть использована цепь положительной обратной связи, обеспечивающая условие баланса фаз только для одной частоты Уо. В такой /?С-цепи на частоте Уо фазовый сдвиг должен быть равен нулю. Этим свойством обладает мост Вина, который широко применяется в /?С-генерато-рах.
На рис. 2.26 приведена принципиальная схема /?С-генератора на неинвертирующем усилительном каскаде с мостом Вина в цепи положительной обратной связи. Поскольку на частоте f0 коэффициент передачи моста Вина равен 1/3, то и ^=1/3, и возбуждение генератора имеет место при Кн >3. Это соответствует jfy/R,- >3.
Рис. 2.26. Генератор синусоидального напряжения с мостом Вина
107
В общем случае частота генерации будет зависеть и от параметров усилителя. Однако применение ОУ с глубокой положительной обратной связью практически устраняет этот фактор. В результате температурная нестабильность частоты ЛС-генерато-ра на ОУ определяется только температурной нестабильностью ЯС-цепей и имеет весьма малые значения.
Для выделения напряжения управления из спектра напряжения на выходе нелинейного элемента в современных автоматических системах используются активные фильтры.
Активные фильтры содержат не только пассивные элементы -резисторы, конденсаторы и катушки индуктивности (катушки индуктивности в активных фильтрах имитируются операционным усилителем с подключенным к его выходу конденсатором), но и активные элементы - операционные усилители. Порядок фильтра (число полюсов) определяется числом входящих в него элементов, способных запасать энергию, т.е. конденсаторов и катушек индуктивности. Чем больше число полюсов в фильтре, тем лучше его
характеристики.
Обычно используется три типа активных фильтров: Чебышева, Баттерворта и Бесселя (называемого также фильтром Томпсона). Каждый из них предназначен для оптимизации различных рабочих параметров.
108
На рис. 2.27 показана принципиальная схема активного фильтра нижних частот (ФНЧ) второго порядка, называемая схемой Саплена-Ки. Схема названа по имени авторов, предложивших данную технику в 1950-х годах. Приведенная схема является двухполюсным фильтром низких частот, который может иметь конфигурацию любого из трех перечисленных выше основных типов. В табл. 2.1 приведена необходимая информация для выбора соответствующих значений резисторов и конденсаторов. Например, при разработке двухполюсного фильтра Баттерворта с желаемой частотой среза/. = 1 кГц из табл. 2.1 выбирают следующие параметры: к\ =0,1592 и к2 = 0,586. Произвольно задаваясь значениями /<=10 кОм и С=0,01 мкФ (типичные значения для схем на операционных усилителях), R и R/ можно вычислить как:
Л = — = 15,95 кОм;
Ос
Rj = Rik2 = 5,86 кОм.
Таблица 2 1
Число полюсов Филыр Бесселя Фш Ба-rrej ibip эворта Филыр Ч {6 %-ная г [ебышева гульсация)
*L кг кг кг к. 1 кг
2 Блок 1 0,1251 0,268 0,1592 0,586 0,1293 0,842
4 Блок 1 01111 0,084 0,1592 0,152 0,2666 0,582
Блок 2 0,0991 0,759 0,1592 1,235 0,1544 1,660
6 Блок 1 0,0990 0,040 0,1592 0,068 0,4019 0,537
Блок 2 0,0941 0,364 0.1592 0 586 0,2072 (448
БлокЗ 0,0834 1,023 0,1592 1,483 0,1574 1,846
8 Блок 1 0,0894 0,024 0,1592 0,038 0,5359 0,522
Блок 2 0,0867 0,213 0,1592 0,337 0,2657 1,379
БлокЗ 0,0814 0,593 0,1592 0,889 0,1848 1,711
Блок 4 0,0726 1,184 0,1592 1,610 0,1582 1,913
Округление этих двух значений до ближайших стандартных значений резисторов с 1%-ным допуском в результате даст
109
/?=15,8 кОм и 7?/=5,90 кОм. Все компоненты обязательно должны иметь 1%-ную точность и выше.
Использование конкретного типа операционного усилителя не является критическим до тех пор, пока частота его общего усиления более чем от 30 до 100 раз превышает частоту среза фильтра. Это легко выполнимое требование до тех пор, пока частота среза фильтра лежит ниже приблизительно 100 кГц.
Четырех-, шести- и восьмиполюсные фильтры формируются последовательным соединением 2, 3, и 4 таких блоков соответственно. Для примера на рис. 2.28 приведена схема шестиполюсного фильтра Бесселя с частотой среза 1 кГц, полученная последовательным соединением трех блоков. Каждый блок, как предусмотрено табл. 2.1, имеет разные коэффициенты к} и к2, дающие в итоге разные величины используемых резисторов и конденсаторов.
Рис. 2.28. Шестиполюсный ФНЧ Бесселя
Для получения фильтра высоких частот необходимо поменять в схеме местами компоненты R и С (компоненты R/и % остаются на своих прежних местах).
Для идеального низкочастотного фильтра частотная характеристика должна быть плоской на всей полосе пропускания и резко обрываться на частоте среза фильтра. Амплитудно-частотная характеристика (АЧХ) идеального и реальных фильтров каждого из трех типов приведена на рис. 2.29.
У фильтра Чебышева в полосе пропускания отмечается рябь (волнистые изменения по амплитуде в полосе пропускаемых частот). Чем больше допускается количество пульсаций в полосе пропускания фильтра, тем более быстрое затухание может быть достигнуто. У всех фильтров Чебышева, рассчитанных с исполь-
110
зованием коэффициентов, приведенных в табл. 2.1. пульсация амплитудно-частотной характеристики в полосе пропускания достигает 6% (0,5 dB), это типичный выбор.
Частота (герц)
Частота (герц)
Частота (герц)
Рис. 2.29. АЧХ идеального и реальных фильтров
Фильтры Баттерворта оптимизированы для обеспечения, насколько это возможно, наиболее крутого спада амплитудно-частотной характеристики при отсутствии пульсаций в полосе
111
пропускания. Они обычно называются максимально плоскими фильтрами и идентичны фильтрам Чебышева, сконструированным при условии нулевых пульсаций в полосе пропускания.
Фильтры Бесселя не имеют пульсаций в полосе пропускания, но крутизна спада амплитудно-частотной характеристики у них хуже, чем у фильтров Баттерворта.
На рис. 2.30 показаны переходные характеристики каждого из трех фильтров (реакция фильтра на скачкообразное изменение значения на его входе от одного уровня до другого). Значения по горизонтальной оси показаны для фильтра с частотой среза 1 Гц, однако их можно смасштабировать (обратно пропорционально) для более высоких частот среза. Например, для частоты среза 1000 Герц вместо секунд переходная характеристика будет показана в миллисекундах. Фильтры Баттерворта и Чебышева перерегулированы (имеют выбросы) и демонстрируют звон (колебания с
Рис. 2.30. Переходные характеристики фильтров
112
На рис. 2.31,а показан импульс, форма которого может рассматриваться как резкий скачок вверх, за которым следует резкий скачок вниз. На рис. 2.31,6 и 2.31,в показано, как импульс такой формы будет выглядеть после прохождения его через фильтры соответственно Бесселя и Чебышева. Как видно, фильтр Чебышева вносит в форму импульса разрушительные искажения. Если бы это был, например, видеоимпульс, то перерегулирование изменило бы яркость краев изображения объектов по сравнению с их центрами. Еще хуже: левая сторона объектов выглядела бы светлой, в то время как правая сторона объектов выглядела бы темной. Большое количество приложений никоим образом не допускают наличия плохого вида переходной характеристики. Именно здесь и находят свое применение фильтры Бесселя: отсутствие перерегулирования и симметричные фронты импульса.
Рис. 2.31. Изменение формы прямоугольного импульса фильтрами
113
Глава 3. ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ЭЛЕМЕНТЫ АВТОМАТИЧЕСКИХ СИСТЕМ
3.1. Общие сведения о цифровых автоматических системах
Многие автоматические системы действуют при прерывистом поступлении информации о задающем воздействии. Причиной этого обычно является импульсный режим работы устройства. Так, если в состав импульсной гидролокационной станции входит автоматическое дальномерное устройство, то сигналы о текущем значении дальности поступают на следящие системы только во время приема отраженных импульсов. В импульсном режиме осуществляется многоканальная гидроакустическая связь при временном разделении каналов. Некоторые гидронавигационные устройства работают в импульсном режиме и т.д.
Прерывистость может возникать и в случае непрерывного поступления входных сигналов за счет прерывания, например сигнала рассогласования или других сигналов внутри следящей системы. Это имеет место, когда в состав системы входит микропроцессор (цифровой процессор обработки сигнала), выходные данные которого выдаются дискретно, с тактом, характерным для каждого цифрового процессора обработки сигналов.
Точность, которая может быть достигнута в прерывистой системе, из-за прерывистости поступления информации всегда хуже той, которую можно получить от аналогичной непрерывной системы.
Чтобы «заполнить» перерывы, внутри системы устанавливают различные запоминающие (фиксирующие или экстраполирующие) устройства. Их назначение состоит в том, чтобы на основе предшествующих данных о процессе регулирования «предсказать» ход процесса на время перерыва сигнала в точке установки устройства. Для запоминания в системах автоматики применяют пиковые детекторы, амплитудные детекторы со сбросом, расширители импульсов, запоминающие (интегрирующие) конденсаторы (устройства выборки хранения) и т д.
Отличие цифровых систем от прерывистых или, как чаще их называют, дискретных состоит в том, что данные, выдаваемые
114
микропроцессором, квантованы по уровню. Однако это отличие во многих практических случаях не является существенным, поскольку число градаций, выдаваемых микропроцессором, может быть достаточно большим. По этой причине иногда не делают различий между дискретными и цифровыми системами.
Отметим, что при анализе дискретных систем используется математический аппарат уравнений в конечных разностях и z-преобразование.
Рис. 3.1. Функциональная схема цифровой автоматической системы
Функциональная схема цифровой автоматической системы показана на рис. 3.1. Цифровая автоматическая система включает аналоговый коммутатор (мультиплексор) (АК), аналого-цифровой преобразователь (АЦП) и цифро-аналоговый преобразователь (ЦДЛ), между которыми включен цифровой процессор обработки сигналов (ЦПОС). ЦПОС осуществляет сравнение задающего воздействия x3(t) с поступающим по цепи обратной связи значением регулируемой величины у(0 (задающее воздействие x3(f) и значение регулируемой величины y(t) могут быть представлены не только в аналоговой, но и в цифровой форме) и дальнейшую цифровую обработку сигнала (ЦОС) рассогласования z(t). Отметим, что в большинстве ЦПОС аналоговый мультиплексор, аналого-цифровой и цифро-аналоговый преобразователи входят в состав микропроцессора в виде устройств ввода и вывода данных. Прерывистость в такой системе обусловлена прерыванием информации внутри системы, поскольку микропроцессор выдает результаты вычислений в виде отсчетов (дискрет) в определенные тактовые моменты времени.
115
3.2. Цифровые устройства
В цифровых автоматических системах принят алфавитный способ задания информации. Символы, из которых состоит алфавит, называют буквами. Конечные последовательности букв алфавита называют словами. Число букв в слове называется длиной слова. В алфавите из т букв можно получить гп различных слов длиной к.
Любой дискретный преобразователь информации можно представить в виде устройства, на вход которого поступают слова из букв входного алфавита, а на выходе образуются слова из букв выходного алфавита. Процесс преобразования информации в таком устройстве сводится к установлению соответствия между входными и выходными словами. Такое определенным образом заданное соответствие называется алфавитным оператором. Алфавитные операторы, задаваемые на основе конечной системы правил, принято называть алгоритмом.
Отличительная особенность функционирования цифрового автомата определяется двумя его свойствами:
1) автомат имеет конечное множество внутренних состояний-,
2) переход автомата из одного состояния в другое происходит скачкообразно, что позволяет рассматривать его как мгновенный. Такая абстракция хорошо описывает основные свойства реальных автоматов и поэтому принята при построении их теории. Для учета же присущей реальным устройствам инерционности вводится ограничение в условие работы цифровых автоматов: после изменения состояния автомата переход его в следующее состояние возможен не ранее, чем через фиксированный для данного автомата промежуток времени, называемый интервалом дискретности (такт). Это обстоятельство позволяет рассматривать функционирование автомата в так называемом дискретном автоматном времени, принимающем целые значения / = 0,1,2,..., п ... .
Изменения состояний автомата вызываются входными сигналами, а результат работы автомата фиксируется формированием выходного сигнала.
116
При описании алгоритма функционирования автомата задаются:
1) множество букв входного алфавита автомата
= {щ,и2,
2) множество букв выходного алфавита автомата:
F=fy/ = fvbv2, ...,v^;
3) множество букв алфавита его внутренних состояний:
W={w} = {wu w2,wj.
Одно из состояний Wo выделяется в качестве начального; в момент t = 0 автомат всегда находится в начальном состоянии.
На перечисленных множествах необходимо задать функции переходов и выходов.
Функция переходов определяет состояние автомата w(/+l) в момент /+1 в зависимости от его состояния w(/) и входного сигнала ы(/+1):
w(/+l) = y4w(0, ц(0].
Функция выходов определяет выходной сигнал v(0- ®на может быть задана несколькими способами. Если выходной сигнал в момент / определяется только состоянием автомата в этот момент,
v(0 = ^w(r)), (3.1)
то такой автомат называют автоматом Мура. Если же выходной сигнал зависит не только от состояния автомата, но и от входного сигнала, то есть
v(0 = ?>(w(0, «(0). (3 2)
то такой автомат называют автоматом Мили
Два цифровых автомата называются эквивалентными, если совпадают их входные и выходные алфавиты и для любого входного слова совпадают их выходные слова. В теории цифровых автоматов доказывается, что для всякого автомата Мили существует
117
эквивалентный ему автомат Мура. Это обстоятельство позволяет рассматривать только автоматы одного вида - автоматы Мура; законы их функционирования выражаются в более компактной форме.
Частным случаем дискретных автоматов, находящих широкое применение, является автомат без памяти, называемый комбинационной схемой. Сигнал на выходе комбинационной схемы в момент t согласно (3.2) однозначно определяется значением входного сигнала в тот же момент времени
v(r) = ^(u(O).
Если в общем случае при N значениях входного сигнала и L внутренних состояниях автомата максимальное число возможных выходных сигналов Mmax=NL, то в автоматах без памяти Мтш=М. В этом смысле можно считать, что комбинационные схемы имеют только одно внутреннее состояние (Z=l), являющееся неизменным.
При практическом применении цифровых автоматов важное место занимает простейшее (побуквенное) преобразование, заключающееся в замене каждой буквы исходного алфавита определенной комбинацией букв нового алфавита, имеющей одинаковую для всех букв длину. С помощью простейших взаимно однозначных преобразований информацию, заданную в любом конечном алфавите, можно записать в алфавите, содержащем только две буквы. Такой алфавит называется стандартным двухбуквенным или двоичным, а две его буквы обозначаются нулем и единицей.
Двоичная переменная у, значения которой зависят от значений других двоичных переменных хь х2,..., хр, именуемых аргументами, называется переключательной (двоичной, булевой) функцией.
у=у(хих2, ...,хр).
Задание двоичной функции означает, что каждому из возможных сочетаний (наборов) ее аргументов xt,x2, -.,хр поставлено в соответствие определенное значение у. Функции считаются различными, если значения у отличаются по крайней мере для одного набора аргументов. При р аргументах полное число Р их различных наборов Р=2Р. Поскольку каждому из наборов может соответ
118
ствовать два значения у (0 или 1), то общее число F различных функций р аргументов
F = 22P. (3.3)
Наборы аргументов принято нумеровать: при этом условливаются, что номера наборов совпадают со значениями двоичных чисел, разрядами которых являются аргументы (хь х2, хр). Очевидно, что номера наборов меняются в таком случае от 0 до 2₽-1.
Алгебра логики предполагает (допускает) возможность образования сложных функций, то есть функций, аргументы которых являются функциями других двоичных аргументов. Например, если y=ji(zi, z2), a zt =zj(xb х2) и z2=z2(x3, х4), очевидно, что У ~У1 (*ь х2, хз, *<)• Операция замены аргументов одной функции другими функциями называется суперпозицией функций. Эта операция дает возможность с помощью функций меньшего числа аргументов получать функцию большего их числа. Многократное применение этих операций позволяет получать функции любого требуемого числа аргументов. В частности, такую возможность обеспечивает суперпозиция функций двух аргументов.
В соответствии с (3.3) существует 16 различных функций двух аргументов. Перечень этих функций у0, ...,yi5 с указанием наборов аргументов х2 представлен в табл. 3.1 (там же указаны наименования логических элементов, реализующих соответствующие функции).
В алгебре логики справедливы следующие законы:
1) переместительный закон, или закон коммутативности
AvB = Bx/A; АлВ=ВлА;
2) сочетательный закон, или закон ассоциативности ^vB)vC = /1v(BvC); (ЛлВ)лС = Лл(ВлС);
3) распределительный закон, или закон дистрибутивности
119
(Xvb)aC = (AaC)v(BaC); (AaB)vC = (AvC)a(BvC);
4) законы инверсии (законы де Моргана) АлВ = ~Ах/В; Ах/В = АлВ,
где а - знак дизъюнкции; v - знак конъюнкции.
Таблица 3.1
Значения аргументов х2 и функций у<тУм Функции Элементы
Х| 0 0 1 1
*2 0 1 0 1
Уо 0 0 0 0 Константа «нуля» Генератор «нуля»
У1 0 0 0 I Конъюнкция (лог. умн.) Конъюнктор (И)
У2 0 0 1 0 Запрет по х2 Схема запрета (НЕТ) по х2
Уз 0 0 1 1 Переменная (тавтология) Х| Повторитель Х|
Л 0 1 0 0 Запрет по X] Схема запрета (НЕТ) по х(
Уз 0 1 0 1 Переменная (тавтология) х2 Повторитель х2
Уб 0 1 1 0 Логическая неравнозначность Исключающее ИЛИ
Уз 0 1 1 1 Дизъюнкция (лог. слож.) Дизъюнктор (ИЛИ)
Уз 1 0 0 0 Стрелка Пирса Элемент Пирса (ИЛИ-НЕ)
Уз 1 0 0 1 Логическая равнозначность Эквивалентность
По 1 0 1 0 Инверсиях! Инвертор х2
Ун 1 0 1 1 Импликация отх2 КХ) Импликаторизх2
Уп 1 1 0 0 Инверсиях) Инвертор X)
Из 1 1 0 1 Импликация отХ| кх2 Импликатор изх|
Ид 1 1 I 0 Штрих Шеффера Элемент Шеффера (И-НЕ)
Из 1 1 1 1 Константа «единицы» Генератор «единицы»
В выражениях алгебры логики может возникнуть неоднозначность, если не условиться о порядке выполнения операций. Так, в
120
выражении /JvBaC имеется двоякий смысл: (ачВ)лС или Л v (в а с); эти выражения не тождественны. В алгебре логики, как и в обычной алгебре, условились вначале выполнять операции умножения, а затем сложения. Если же раньше нужно выполнить сложение, то используются скобки.
Любое выражение алгебры логики представляет собой суперпозицию функций отрицания, дизъюнкции и конъюнкции. Возникает вопрос, достаточно ли такого набора функций для выражения с их помощью произвольной переключательной функции.
Система функций алгебры логики называется функционально полной (базисом), если любую переключательную функцию /(x„_i, х„-2, ..., хо) можно представить как результат суперпозиции х»_ь х„_2,..., хь и функций системы, взятых в любом конечном числе.
В алгебре логики показывается, что функционально полными являются, например, системы функций состоящие из двух функций: отрицания и дизъюнкции или же отрицания и конъюнкции. Пользуясь только любой парой этих функций, можно выразить любую переключательную функцию. На практике при построении логических схем широко используется система из трех функций: отрицания, дизъюнкции и конъюнкции. Добавление к функционально полной системе еще одной функции, не нарушая ее полноты, упрощает построение логических схем. Интересно, что можно построить функционально полную систему, состоящую из одной функции. Таковыми являются функции Шеффера и Пирса. Недостаток такой системы заключается в том, что для реализации даже такой простой операции, как дизъюнкция, требуется выполнить три операции Шеффера.
Логические схемы, входящие в состав любого цифрового устройства, строятся из логических элементов. Одним из основных требований к набору логических элементов является требование функциональной полноты. Набор логических элементов является функционально полным, если реализуемые им переключательные функции составляют функционально полную систему.
Предположим теперь, что зафиксирован какой-либо набор логических элементов. Задача построения из такого набора комбинационной схемы, реализующей некоторую переключательную
121
функцию, сводится прежде всего к ее представлению в виде выражения алгебры логики. При составлении выражений, описывающих произвольную переключательную функцию, важное значение имеют две простейшие переключательные функции: кон-ституенты единицы и нуля.
Конституентой единицы (минитермом) называется переключательная функция п переменных К(х^, хп_2, х0) = К(х), равная
единице только на одном наборе значений аргументов. Из этого определения следует, что число различных конституент единицы равно числу наборов. Удобно каждую конституенту пронумеровать, присвоив ей номер набора, на котором эта конституента равна единице. Набор Х„ и конституента Kj при a-j называются соответствующими друг другу. При этом оказывается справедливым соотношение
{1 при j=a;
. °4)
О при
Конституента единицы представляет собой конъюнкцию всех переменных, входящих в это произведение с отрицанием или без него. Рассмотрим например, конъюнкцию хя_1лхп_2л...лх0 всех аргументов с инверсией. Эта конъюнкция равна единице, если все ее аргументы равны единице. Для этого необходимо, чтобы х,=0 для всех г. Следовательно, рассматриваемая конъюнкция - конституента единицы, соответствующая нулевому набору, т.е.
х^2,Хо)=Хл_} лхп_2 л...л^.
В общем случае чтобы получить конституенту единицы, соответствующую набору Ха=а„.х, а„.2, ..., во с номером «, следует образовать конъюнкцию всех аргументов, причем аргумент х, входит в конъюнкцию без инверсии, если а,=1, и с инверсией, если а,=0. Например, для переменных Х| = 1; х2 - 0; х3 = 0 конституента единицы будет получена, если образовать следующую конъюнкцию:
К(хх, Хг, Хз) = Х] ax2ax3.
Конституентой нуля (макситермом) называется переключательная функция п переменных М(х„„ъ х„_2, ..., х0), равная нулю
122
только на одном наборе значений переменных. Конституента нуля Ма на наборе с номером а представляет собой дизъюнкцию всех аргументов, причем аргумент xt входит в дизъюнкцию без инверсии, если в наборе Ха=а^.1, «„_2, ао - а,=0, и с инверсией, если а,=1. Например для функции четырех аргументов х0=1, Xi =0, х2=1, х3=0
Л/(хо,х. ,Х2,Х3) = ХО VXj VX2 AXj.
Рассмотрим способ выражения переключательной функции в аналитической форме.
Пусть имеется переключательная функция f(X), заданная своими значениями /(х7) для всех наборов (табл. 3.2). Образуем следующую функцию п ар1ументов:
/-0
(/(Л) =1-вд 4-0-ад +0-+1ед +1-ВД +1ед +0-ВД +1- W)
В соответствии с (3.4) Kj(X^\ приу=а, откуда f*(Xa)=f(Xa). Поскольку мы взяли произвольный набор, то можно утверждать, что f*(X)=f(X). Следовательно:
123
и мы получили разложение функции f(X) по конституентам единицы. Последнее выражение можно упростить, так как члены, для которых f(Xj)=0, можно исключить, а в оставшихся конъюнкциях /(А)=1 можно не писать. Поэтому в правой части последнего выражения останутся лишь те конституенты Kj, для которых f(X;)=l:
f(X)=(3.5)
(/(.¥) = xjXjjtj + XjXjXj + X^jXj + x,x2x3 + X,X2X3 ),
где <Ti представляет собой совокупность номеров наборов, на которых функция f(X) равна единице.
Представление переключательной функции в соответствии с (3.5) называется совершенной дизъюнктивной нормальной формой (СДНФ) этой функции. Изложим правило такого представления:
1) записывается дизъюнкция произведений всех аргументов, причем число таких произведений равно числу наборов, на которых данная функция равна единице;
2) под каждым произведением записывается набор, обращающий заданную функцию в единицу;
3) над аргументами, под которыми записаны нули, ставятся знаки отрицания.
Переключательную функцию можно представить также в совершенной конъюнктивной нормальной форме (СКНФ}.
где Оо - совокупность номеров наборов, на которых функция равна нулю. Такое представление целесообразно применять, если число наборов, на которых функция равна нулю, меньше числа наборов, на которых функция равна единице.
Полученные выше аналитические выражения служат основой для построения логических схем, реализующих заданные переключательные функции.
Прежде чем строить логическую схему, реализующую требуемую переключательную функцию, целесообразно упростить выражение этой функции, что может быть выполнено различными методами. В частности, можно использовать метод тождест
124
венных преобразований, вытекающих из законов алгебры логики. Ниже приводится ряд возможных приемов упрощения.
Прием, основанный на применении формулы
Ах у/ Ах = А, называется склеиванием (склеиванием по х)
Прием, называемый поглощением, основан на использовании тождества
АхуА = А .
Эти же приемы применены к операции умножения: (A vx)(A vx) = j4;
(Avx)A = A.
Иногда целесообразно вынесение за скобки и их раскрытие: А ЛХ| v А лх2 = А а(Х] v х2);
(Avx,)a(Avx2) = Av(x, лх2).
Следующие приемы также иногда приводят к упрощениям: х v хА = х v А;
x(xvA)=Ax.
Для иллюстрации метода тождественных преобразований упростим выражение
f(x2,XltX0) = Х^ V V X2XiX0 = Х2Х, V Х^Хд = Х2 (Xj V XjXj =
= Х2(х, VX0).
Для минимизации переключательных функций с числом переменных до 6 удобен метод диаграмм Вейча (карт Карно). Метод основан на представлении переключательных функций в виде прямоугольных таблиц с числом клеток, равным числу всевозможных наборов, то есть 2". Каждая клетка диаграммы Вейча соответствует определенному набору переменных, и в нее вписывается значение функции (0 или 1), которое она принимает на данном наборе. В то же время каждой клетке диаграммы соответствует конституента единицы с номером, совпадающим с номером набора Специальная разметка столбцов и строк диаграммы и, следовательно, нумерация клеток производятся таким образом, что конституенты, соответствующие двум соседним клеткам, обяза
125
тельно склеиваются по одной из переменных. Для переключательных функций двух, трех и четырех переменных разметка диаграмм и нумерация клеток показаны на рис. 3.2. Важно отметить, что в диаграмме для функции от трех переменных соседними следует считать также крайние клетки каждой строки, а в диаграмме для функции от четырех переменных соседними являются крайние клетки каждой строки и столбца При большем числе переменных
Рис. 3.2. Диаграмма Вейча для функций двух, трех и четырех переменных
Минимизация переключательных функций начинается с заполнения диаграммы Вейча. Если на данном наборе функция равна единице, то в клетке с номером, равным номеру набора, ставится единица; остальные клетки отмечаются нулями (что необязательно)
Диаграмма Вейча позволяет получить выражение переключательной функции в дизъюнктивной нормальной форме (ДНФ), представляющей собой дизъюнкцию произведений аргументов. В отличие от СДНФ входящие в ДНФ произведения не обязательно содержат все переменные. Для получения ДНФ в заполненной диаграмме обводят прямоугольными контурами все единицы. При этом каждый контур должен быть обязательно прямоугольным и
126
состоять из одних единиц. Число клеток в контуре должно равняться целой степени числа 2. Говорят, что контур покрывает 1,2, 4, 8 и т.д. клеток. Указанными контурами необходимо покрыть все единицы диаграммы', некоторые контуры могут содержать только одну клетку.
Каждому контуру соответствует логическое произведение, входящее в ДНФ. Изолированной единице (контуру, состоящему из одной клетки) соответствует произведение п переменных, а именно конституента единицы, номер которой совпадает с номером клетки. Контуру из двух клеток соответствует произведение п-1 переменных, причем исключается та переменная, которая входит в данный контур как с инверсией, так и без нее. Если контур состоит из четырех единиц, то в ДНФ ему будет соответствовать произведение п-2 переменных. В общем случае наличие единиц в 2" соседних клетках позволяет исключить из соответствующего произведения т переменных. Следовательно, при образовании контуров надо стремиться к тому, чтобы количество контуров было возможно меньшим. При этом одни и те же клетки, заполненные единицами, могут входить в несколько контуров.
Применение метода плоскостных диаграмм рассмотрим на примере минимизации логической функции
F(x0,x1,x2,x3) = x0x1x2x3 +Х0Х,Х2Х3 +Х0Х]Х2Х3 +X0X!X2X3 +
+ Xq^Xj + ^jXjXjXj.
Для минимизации данной функции строим шестнадцатиквадратную диаграмму (рис. 3.3). Квадраты, отвечающие членам исходной формулы, отмечаем единицами (например, набор хох1х2х3 соответствует квадрату 7). Обводим прямоугольными контурами все единицы. Для каждого обведенного контура записываем соответствующие им конъюнкции, в которые входят все переменные, за исключением тех, по которым происходит склеивание (переменные, входящие в контур в прямом и инверсном видах). Для контура 1 запишем хрс2, для контура 2 запишем х^х3.
Таким образом, минимальная дизъюнктивная нормальная форма заданной логической функции представляется как F = XjX2 +X]j^x3.
127
Рис. 3.3. Диаграмма для заданной функции
Метод диаграммы Вейча удобно применять при минимизации не полностью определенных функций. Так называются функции, значения которых определены не на всех наборах. Не полностью определенные переключательные функции описывают условия функционирования схем, на вход которых некоторые комбинации сигналов вообще не подаются. При минимизации не полностью определенных функций их удобно рассматривать как всюду определенные функции, некоторые значения которых могут выбираться произвольно Доопределение следует производить так, чтобы получились группы с максимальным числом единиц, а число таких групп было минимальным
В качестве примера рассмотрим синтез логической схемы, предназначенной для выделения пяти старших цифр десятичной системы, представленных в четырехразрядном двоичном коде, когда номер набора совпадает со значением цифры. Так как всего имеется 16 четырехразрядных наборов, а цифр только 10, в наборах с номерами от 10 до 15 переключательная функция, описывающая данную схему, оказывается неопределенной. На наборах с номерами от 0 до 4 она равна нулю, а на наборах от 5 до 9 - единице (табл. 3.3). На рис. 3.4,а приведена диаграмма рассматриваемой переключательной функции, а на рис. 3.4,6 - способ ее доопределения, приводящий к минимальной форме:
F(x3,x2,X|,xj)) = х3 v х2х0 V Х2Х].
128
Рис. 3.4. Диаграмма Вейча для не полностью определенной функции
Таблица 33
Номер набора Значение переменных *0* 1*2*3 Значение функции
0 0000 0
1 1000 0
2 0100 0
3 1100 0
4 0010 0
5 1010 1
6 ОНО 1
7 1110 1
8 0001 1
9 1001 1
10 0101 ♦ (не определена)
11 1101 ♦ (не определена)
12 ООП * (не определена)
13 1011 * (не определена)
14 0111 * (не определена)
15 1111 ♦ (не определена)
Без доопределения функция оказалась бы значительно более сложной:
F(x3,x2txl,x0) = x3x2Xj vx3x2x0 vx3x2xj.
129
С помощью диаграммы Вейча можно находить также минимальные конъюнктивные нормальные формы (КНФ). При этом в группы следует объединить не единицы, а нули. Кроме того, раз-метка диаграммы изменяется таким образом, что на место переменных с инверсией ставятся переменные без инверсии, и наоборот.
Выше было показано, что любую переключательную функцию можно представить в виде выражения алгебры логики, содержащего операции конъюнкции, дизъюнкции и инверсии. Для решения задачи синтеза логической схемы необходимо определять схемы реализации таких функций при помощи любой функционально полной системы элементов. Элементы, выполняющие непосредственно операции конъюнкции, дизъюнкции и инверсии, называются соответственно элементами И, ИЛИ и НЕ. На рис. 3.5 показаны обозначения этих элементов.
или
*о |&
х2 &
j = x1xovx3x2
и-или
Рис. 3.5. Изображение одноступенчатых (я) и двухступенчатых (6) логических элементов
При помощи функционально полной системы из элементов И. ИЛИ и НЕ функции, представленные в ДНФ, реализуются особенно просто. Для этого в начале образуются нужные конъюнкции. Перед образованием конъюнкций для некоторых пере
130
менных, возможно, придется выполнить операции инверсии. Для образования конъюнкции от многих переменных применяются многовходовые элементы И. Если число переменных в конъюнкции превышает число входов элемента И, то конъюнкция формируется поэтапно. Дизъюнкция полученных произведений реализуется путем подачи сигналов с выхода элементов И на входы элементов ИЛИ. Элементы ИЛИ также могут быть многовходовыми.
Широко применяются Элементы, реализующие комбинации операций И, ИЛИ, НЕ. Так, элемент И - ИЛИ позволяет непосредственно реализовать некоторые несложные функции заданные в ДНФ-
Наибольшее распространение получили логические элементы И - НЕ и ИЛИ - НЕ (рис. 3.6).
Рис. 3.6. Изображение логических элементов И - НЕ и ИЛИ - НЕ
На рис. 3.7 в виде примера приведена логическая схема из элементов И - НЕ, реализующая функцию F = ABD v ABD v В D
Последовательностные устройства обладают свойством запоминания информации, поскольку строятся на элементарных автоматах с памятью. Количество элементарных автоматов т с памятью, необходимое для кодирования всех состояний М последовательностного автомата, определяется соотношением
m>|log2Af|.
Значение т называют объемом памяти последовательностного автомата
131
Рис. 3.7 Реализация функции F = ABD v ABD \/ ВD
Основная модель последовательностного устройства включает комбинационную часть, которая формирует выходные сигналы устройства, и сигналы обратной связи исходя из значений входных сигналов и значений внутренних переменных (рис. 3.8). В зависимости от свойств цепей обратной связи различают два вида автоматов - асинхронные и синхронные.
В синхронных автоматах цепи обратной связи содержат элементы задержки (ЭЗ, рис. 3.8,а). Они управляются внешними тактовыми импульсами и выполняют функцию запоминания сигналов внутренних переменных на один такт. Благодаря этому при отсутствии тактовых импульсов передача сигналов по цепям обратной связи не осуществляется.
В асинхронных автоматах (рис. 3.8,6) задержка сигналов внутренних переменных обусловлена инерционностью логических элементов и конечной скоростью распространения электрических сигналов по цепям (главным образом первым фактором). Различие сигналов внутренних переменных на входе и выходе комбинаци
132
онных частей имеет место при этом только в течение динамической части такта; в статической части значения совпадают, и именно эта часть соответствует устойчивому состоянию автомата.
Рис. 3.8. Структурная схема автомата с памятью
133
В комбинационной части последовательностного автомата могут иметь место состязания (гонки). При применении синхронных элементов задержки временные (преходящие) ошибки не оказывают влияния на работу устройства, поскольку тактовые импульсы, разрешающие передачу сигналов внутренних переменных с выхода на вход, подаются по истечении динамической части тактов. В асинхронных устройствах явление состязаний имеет первостепенное значение, так как именно динамическая часть такта определяет смену состояний автомата.
Асинхронные последовательностные устройства включают лишь комбинационные элементы. Синхронные устройства предполагают применение тактируемых запоминающих элементов (элементарных автоматов памяти) Меньшая стоимость комбинационных элементов по сравнению с запоминающими на начальном этапе внедрения цифровых устройств определяла преимущества асинхронных автоматов (несмотря на присущую последним опасность состязаний) перед синхронными. Внедрение микроэлектронной элементной базы привело к тому, что стоимости комбинационных элементов и тактируемых элементов задержки стали близкими. Соответственно, в настоящее время применяют главным образом синхронные последовательностные устройства. Далее задача логического проектирования рассматривается применительно к устройствам этого типа.
Элементарными автоматами с памятью, или триггерами, принято называть автоматы, которые характеризуются следующими свойствами:
1) число входных переменных не более трех (входные переменные принято обозначать специальными символами в соответствии с функциями, выполняемыми триггерами); в это число не входит тактовый вход, на который подаются синхронизирующие импульсы, фиксирующие смену тактов работы устройства;
134
2) число внутренних состояний равно двум, чему соответствует одна внутренняя переменная (последнюю принято обозначать символом 0;
3) число выходных переменных - одна (у), причем значение у совпадает со значением Q (функция выхода y = Q)', обычно в триггерах имеется возможность наряду со значением Q получать инверсную переменную Q ;
4) функции переходов, называемые характеристическими уравнениями = Q(x‘, Q’), являются полными.
Разновидности триггеров отличаются числом входов, а при их одинаковом числе - функциями переходов. Общее число W различных триггеров с р входами определяется соотношением W = 52*; число практически применяемых разновидностей существенно меньше. Далее рассматриваются наиболее употребимые из них.
Триггер R-S-muna представляет собой элементарный последовательностный автомат с двумя входами R и S, функционирующий в соответствии с табл. 3.4. В триггерах Л-5-типа одновременная подача единичных значений входных переменных R и S недопустима (ведет к появлению критических состязаний). В строчках таблицы переходов триггеров, соответствующих R' = S' = 1, содержится знак неопределенности значения £/+1. Такая комбинация входных переменных недопустима (считается запрещенной), что алгебраически выражается требованием R‘S‘ = 0. Доопределяя значения 0,+|, соответствующие запрещенным комбинациям R' и S*, единицами и упрощая СДНФ, можно представить характеристическое уравнение R-S триггера в следующей минимальной форме: Q'+l = S' +R'Q‘, или с учетом закона инверсии (де
Моргана) QM = S‘ R'Q'
135
Таблица 3.4
Такт t 6м
R' S' С'
0 0 0 0
0 1 0 1
1 0 0 0
1 1 0 X
0 0 1 1
0 1 1 1
1 0 1 0
1 1 1 X
В соответствии с характеристическими уравнениями такой триггер можно построить на логических элементах И - НЕ и ИЛИ-НЕ.
На рис. 3.9 приведены две схемы Л-S-триггера, на элементах И - НЕ и ИЛИ - НЕ соответственно и их графическое обозначение согласно ЕСКД. Такой триггер называют асинхронным.
В отличие от асинхронного тактируемый Л-S-триггер на каждом входе имеет дополнительные схемы совпадения, первые входы которых объединены и на них подаются тактирующие сигналы С (рис. 3.10). Тактируемый Л-S-триггер описывается уравнениями Q‘+l = S'C‘ +Q\R‘ + С') или 0,+I =57СГ2'Л1С7.
В большинстве случаев на практике требуется определить комбинацию входных сигналов при заданном переходе триггера из одного состояния в другое. Такая задача возникает, например, при синтезе счетчиков, регистров и т.п.
136
Рис. 3.9. Схемы асинхронных R-S триггеров и их обозначение в соответствии с ЕСКД
Решить эту задачу можно с помощью характеристической таблицы (табл. 3.5), для построения которой рассматривают характеристическое уравнение триггера для всех возможных переходов Ql —>£/+1: 0-»0, 0-М, 1—>0, 1-М. После подстановки в характеристическое уравнение значений Q' и QM получают равенства, определяющие значения переменных R! и S1 для соответствующего перехода. Если переход происходит при любом значении переменной, ее значение считают безразличным и в таблице отмечают (*).
____________________________________ Таблица 3.5
R1 S1
00 0
01 0 1
10 1 0
11 0 •
137
Рис. ЗЛО. Схема тактируемого (синхронного) Л-S триггера и его обозначение по ЕСКД
Характеристические таблицы триггеров используют при синтезе сложных последовательностных схем.
Триггер D-типа относится к одновходовым триггерам. Характеристическое уравнение триггера согласно таблице переходов (табл. 3.6) определяется соотношением
Q,+' = D'Q' +D‘Q' =D'.
Таблица 3.6
Такт / Q,+l
D' С
0 0 0
1 0 1
0 1 0
1 1 1
Из уравнения следует, что триггер в момент времени t + Принимает состояние, соответствующее значению переменной на D -входе в момент времени I, т.е. с помощью D -триггера осуще
138
ствляется задержка входного сигнала. Табл. 3.7 является характеристической таблицей для D -триггера.
Тактируемый D -триггер функционирует в соответствии с таблицей переходов 3.8. Характеристическое уравнение D -триггера, составленное в соответствии с этой таблицей, записывается в виде (7+| = CQ' + . Из уравнения следует, что
при наличии тактирующего сигнала (С = 1) триггер переходит в состояние Q,+i = D', а при отсутствии тактирующего сигнала ( С = 0) триггер сохраняет предыдущее состояние.
Таблица 3.7
Q-+Q,+x D1
00 0
01 I
10 0
11 1
вав левую и правую части уравнения) тактируемый D -триггер может быть построен, например, так, как показано на рис. 3.11,а, здесь же приведено его обозначение в соответствии с ЕСКД.
Среди триггеров типа D большое распространение получили триггеры, тактируемые фронтом. Такие триггеры строятся по Двухступенчатой схеме. Двухступенчатые триггеры состоят из двух тактируемых импульсом триггеров (основного - master и до
139
полнительного - slave), которые синхронизируются взаимно инверсными тактовыми сигналами. На рис. 3.11,6 приведена логическая структура двухступенчатого триггера. При воздействии тактового импульса информация со входа ведущего триггера Т} пе
реписывается на его выход. Ведомый триггер Т2 в это время не меняет своего состояния, поскольку на его тактовом входе действует нулевой сигнал. После окончания тактового импульса ведомый триггер перейдет в то состояние, в котором находится ведущий триггер. Так как выходной сигнал снимается с ведомого триггера, то внешне это проявляется таким образом, как если бы перепись сигнала со входа производилась в момент воздействия на тактовый вход перепада 1/0. Такой тактовый вход обозначают треугольником, повернутым вершиной в обратную сторону от триггера. Если активным является перепад 0/1, треугольник повернут вершиной внутрь триггера.
Рис. 3.11. Схема тактируемого (а) и двухступенчатого (б) D -триггера
140
Триггер Т-типа является одновходовым устройством с двумя устойчивыми состояниями, изменяющим свое состояние на противоположное всякий раз, когда на его вход Т поступает управляющий сигнал. Триггер Т -типа функционирует в соответствии с таблицей переходов 3.9 и описывается характеристическим уравнением Q" = QTl + QT.
Функция перехода Т -триггера по виду совпадает с функцией логической неравнозначности двух переменных х, и х2 (если значения Т и Q поставить в соответствие со значениями хг и х2). Это означает, что счетный триггер выполняет операцию суммирования входной переменной по модулю 2.
Характерной особенностью Т -триггера является то, что частота изменения потенциала на его выходе в два раза меньше частоты сигнала на входе Т. Это свойство триггера используется при построении счетчиков.
Триггер Т -типа можно построить на логических элементах. Однако в настоящее время в составе серий, как правило, имеются либо триггеры Т-типа, либо триггеры D-типа и J-X-типа в интегральном исполнении, которые можно перевести в режим Т -триггера коммутацией некоторых выводов микросхемы. Так, например, если в тактируемом D-триггере вход D соединить с инверсным выходом Q, то D-триггер превращается в Т -триггер, поскольку при условии D* = £/ уравнение тактируемого D-триггера 2'+,=C'0'+C,D’ приобретает вид б,+|=С,б,+С'б', при этом на вход С подаются счетные импульсы. На рис. 3.12 приведено условное обозначение асинхронного и тактируемого Т-триггеров.
При синтезе многоразрядных счетчиков и последовательных регистров на Т -триггерах используется характеристическая табл. 3.10.
141
Таблица 3.9
Такт / Qt+X
Г Q
0 0 0
1 0 1
0 1 1
1 1 0
Таблица 3.10
Г
00 0
01 1
10 1
11 0
Таблица 3.11
Такт/ с-
j к1 0
0 0 0 0
0 1 0 0
1 0 0 1
1 1 0 1
0 0 1 1
0 1 1 0
1 0 1 1
1 1 1 0
Триггер J-K-muna относится к двухвходовым устройствам, функционирующим в соответствии с табл. 3.11.
Таблица 3.12
j К‘
00 0 *
01 1
10 ♦ 1
11 ♦ 0
142
Из табл. 3.11 следует, что при комбинации сигналов J и К, соответствующей конъюнкции J-K = l, триггер инвертирует предыдущее состояние (т.е. при J• К = 1, Q,+x =Q‘). В остальных случаях J-К триггер функционирует как R-S -триггер. При этом вход J эквивалентен входу S, а вход К - входу R. Функ-
Рис. 3.11. Условное обозначение асинхронного и тактируемого Т -триггеров
В схемотехнике наибольшее распространение получили тактируемые J-К -триггеры. Эти триггеры являются универсальными, поскольку коммутацией внешних выводов J-К -триггер можно превратить в триггер, выполняющий функции R-S, D и Т -триг-ера. Так например, если в характеристическом уравнении для J-К -триггера принять J' =D' и Kt=Dt, то в результате получим 2'+1 = D'. Это выражение полностью совпадает с характеристическим уравнением для D-тршгера. Для получения Т -триггера достаточно объединить входы J и К. В этом случае характеристическое уравнение J-К -триггера приобретает ввд характеристического уравнения Т -триггера.
Условное обозначение тактируемого J-К -триггера, а также организация D и Т -триггеров на основе J-К -триггера приведены на рис. 3.13. Характеристическая таблица для J-К. -триггера имеет вид табл. 3.12.
143
а б в
Рис. 3.13. Условное обозначение тактируемого /-^-триггера (а) и организация на его основе D-триггера (б) и /’-триггера (в)
В настоящее время существует ряд разновидностей триггеров с дополнительными входами. Введение этих входов придает триггеру дополнительные свойства, характерные для нескольких типов триггеров. Примером может служить триггер К155ТМ2, который обладает свойствами тактируемого D -триггера и асинхронного RS -триггера (рис. 3.14).
Рис. 3.14. Условное обозначение триггера К155ТМ2
Синтез синхронных последовательностных устройств выполняется исходя из заданной (таблично или алгебраически) системы функций выходов и переходов в предположении, что элементная база определена (заданы разновидности применяемых триггеров и комбинационных элементов; считается, что по способу синхронизации триггеры относятся к двухступенчатым). Составление уравнений выходов и переходов предполагает предварительное установление (на основании содержательного описания автомата) числа его внутренних состояний и кодирования последних наборами внутренних переменных. Сложность структуры автомата зависит от выбора объема его памяти (он может превышать минимально необходимый), способа кодирования возможных внутренних состояний и разновидности применяемых триггеров. По этой причине рациональное решение упомянутых вопросов
144
должно составлять неотъемлемую часть синтеза автомата. Однако в общей постановке эта задача относится к числу проблемных в современной теории конечных автоматов, и даже ее ограниченное решение связано со значительными трудностями. Б практике логического проектирования типовых узлов цифровых устройств число устойчивых состояний, их кодирование и тип применяемых триггеров определяют, как правило, эвристически на основании известных сведений по опыту разработки аналогичных узлов. Методы структурного синтеза гарантируют при этом определение работоспособной структуры автомата.
При синтезе последовательностных автоматов принципиально новой задачей по сравнению с синтезом комбинационных схем является обеспечение требуемого вида функции переходов автомата. Каждое уравнение системы переходов определяет переходы одного из триггеров синтезируемого автомата (для произвольной /-Й переменной №/=&,). Анализ показывает, что любому из уравнений переходов (далее r-му) может быть придана форма ^7+I = Ci+1 - SuQ'i + g'uQi > гда g‘u и g2i - функции множества внутренних состояний W‘ и множества входных переменных и‘. Уравнения данного вида определяют переходы каждого триггера в соответствии с выполняемыми ими функциями в автомате, поэтому они получили наименование прикладных уравнений триггеров.
С другой стороны, переходы каждого триггера определяются его характеристическим уравнением; для триггера любой разновидности это уравнение можно представить в виде Cf+I =ciiQt +c2iQi » где си и c2i - функции входных перемен-ных триггера в течение такта t (R и S в триггерах R-S-типа, J и К в триггерах J-K -типа и т.п.).
Для определения структуры комбинационных ветвей автомата необходимо установить связь входных переменных каждого триггера Uq с множеством входных U1 и внутренних W переменных автомата
143
Уравнения этого вида получили наименование уравнений входов триггеров Знание этих уравнений позволяет определить структурные схемы комбинационных ветвей в соответствии с методами синтеза комбинационных схем. В целом структурный синтез автомата сводится, таким образом, к определению прикладных уравнений и совместному решению их с характеристическими уравнениями применяемых триггеров с целью получения уравнений входов последних
Совместное решение прикладных и характеристических уравнений можно осуществлять алгебраически или с помощью таблиц переходов и соответствующих им карт Карно.
Рассмотрим последовательность синтеза автомата с помощью карт Карно на следующем примере.
Пусть требуется построить автомат, управляющий полумостовым инвертором напряжения (рис. 3.15), который должен сформировать импульсы управления силовыми (ИТ, и VT2) и коммутирующими (РТ3 и ИТ4) тиристорами (рис. 3.16).
Рис. 3.15. Принципиальная схема однофазного инвертора
Полумостовой инвертор напряжения работает следующим образом. Пусть в некоторый момент времени на управляющие электроды тиристоров VTi и VT4 поданы отпирающие импульсы Тиристоры VTj и VT4 отпираются, и через нагрузку Z» начинает протекать ток по цепи: положительная клемма источника питания Е, открытый тиристор VTi, нагрузка Z„, конденсатор С2, отрицательная клемма источника питания. Одновременно происходит заряд коммутирующего конденсатора С3 по цепи: положительная клемма источника питания Е, открытый тиристор VT,, коммути
146
рующий дроссель Lb коммутирующий конденсатор С3, открытый тиристор VT4, отрицательная клемма источника питания. По окончании заряда конденсатора С3 тиристор VT4 запирается, при этом левая обкладка конденсатора (см. рис. 3.15) оказывается заряженной до положительного потенциала. По окончании формирования полуволны напряжения, питающего нагрузку, управляющий импульс подается на тиристор VT3, при этом начинается перезаряд конденсатора С3 по цепи: левая обкладка конденсатора, дроссель Lb диод VDb открытый тиристор VT3, правая обкладка конденсатора С3. Тиристор VTt оказывается под действием приложенного к нему обратного напряжения, падающего на диоде VDi, и запирается. Затем управляющие импульсы подаются на тиристоры VT2 и VT3, начинается дозаряд конденсатора С3 и фор-
Рис. 3.16 Временные диаграммы работы системы управления автономным инвертором
На основании словесного описания работы полумостового инвертора напряжения строятся временные диаграммы работы его системы управления. Временные диаграммы входных и выходных сигналов являются одним из способов задания автомата. Они описывают все возможные комбинации сигналов. Анализ временных диаграмм (см. рис. 3.16) позволяет выделить шесть состояний автомата. Таким образом, для его реализации потребуется три триг
147
гера Выберем в качестве элементной базы триггеры типа J-K (К155ТВ1). Составим в соответствии с временными диаграммами таблицу переходов (табл. 3.13), причем для устранения гонок кодирование состояний автомата проведем в соответствии с кодом Грея переход автомата из одного состояния в другое будем осуществлять по переднему фронту сигнала С, а формирование импульсов управления - в соответствии с тактовыми импульсами С.
В табл. 3.13 функционирования автомата приведены двоичные коды всех предыдущих и последующих его состояний, выраженных через состояния триггеров в моменты времени прихода очередного входного стробирующего (тактирующего) сигнала С, а также значения импульсов управления силовыми (FT,, VT2) и коммутирующими (FT3, FT4) тиристорами в эти же моменты времени.
Таблица 3.13
Номер состояния С Й й Й Й*1 ег1 ег1 FT, VT2 FT3 VT4
1 1 0 0 1 0 0 1 0 0 i
2 1 1 0 0 1 1 0 0 0 0 0
3 1 1 1 0 0 1 0 0 0 1 0
4 1 0 1 0 0 1 1 0 1 1 0
5 1 0 1 1 0 0 1 0 0 0 0
6 1 0 0 1 0 0 0 0 0 0 1
На основе табл. 3.13 для каждого триггера составим карты Карно, отражающие переход данного триггера из предыдущего состояния Q' в последующее Q”1 (рис. 3.17). Для этого в клетки карты, соответствующие номерам предыдущих состояний автомата, вписываются 2-разрядные двоичные числа, выражающие переход триггера Q' —> Q'+1 при изменении состояния автомата. Полученные таблицы называют прикладными. В этих таблицах прочерк соответствует исключенному состоянию автомата, например состоянию Q0QxQ2
148
Рис. 3.17. Прикладные таблицы автомата
На основании полученных прикладных таблиц и характеристической таблицы J-К -триггера (табл. 3.12) составляем карты Карно соответственно для J (рис. 3.18) и К (рис. 3.19) входов каждого триггера. Для этого 2-разрадные двоичные числа в прикладных таблицах заменяют соответствующими обобщенными значениями из клеток характеристической таблицы для каждого входа триггера. В результате получается набор карт Карно, отражающих значения логических функций на всех входах каждого триггера в зависимости от состояний автомата.
Рис. 3.18. Карты Карно для J входов
Используя методы минимизации логических функций, из полученного набора карт Карно составляем минимизированные логические уравнения, которые связывают между собой входы и выходы всех триггеров автомата.
Учитывая, что в прочеркнутых клетках, как и в клетках со звездочками, функция не определена, при проведении контуров в картах Карно включаем в контуры указанные клетки.
149
После минимизации получаем логические уравнения входов J и К триггеров автомата
4=й'Й;«»=Й;
Л=Й;^1=Й;
/2=а'й;^=й'-
Эти уравнения полностью определяют структуру синтезируемого автомата Логические выражения, описывающие работу выходной комбинационной схемы, получим из табл. 3.13:
VTt=CQiQ[Qi,
=cesaa'+cge;g=с(йе;й' +а'йй)=сйй;
vr. = cQiQtQ'+cgfl'a=Qa'Q'ffi+йм=СШ.
Принципиальная схема синтезированного автомата приведена на рис. 3.20 (без выходной комбинационной схемы).
При составлении логических схем узлов цифровых устройств необходимо выполнить два условия:
- не подсоединять к одному и тому же входу логического элемента несколько выходов;
150
- не образовывать замкнутых цепей, по которым сигнал с выхода какого-либо элемента мог бы снова попасть (пройдя, возможно, другие элементы) на один из входов того же самого элемента.
Как было показано, при наличии замкнутых цепей устройство на логических элементах может иметь несколько внутренних состояний, что используется для построения триггерных струк-
Рис. 3.20. Синтезированный автомат без выходной комбинационной схемы
Дешифраторы. Дешифратор - устройство, которое служит для дешифрования любого «-буквенного слова. Он представляет собой комбинационную схему с п входами и т выходами. На каждом из выходов сигнал, равный единице, возникает только при вполне определенной для каждого из выходов комбинации входных сигналов. Если пронумеровать наборы входных сигналов, а также выходы дешифратора целыми числами начиная с нуля, то
151
его работу можно описать так: при подаче на вход j-ro набора входных сигналов ху сигнал уу = 1 появляется только на выходе с номером J.
Максимальное количество выходов дешифратора равно числу «-разрядных двоичных чисел, т.е. т = 2п. Такие дешифраторы называются полными. Иногда возникает необходимость дешифровать только одно или несколько входных слов (чисел). В этом случае имеют дело с неполными дешифраторами. Иное название дешифраторов - декодеры. На рис. 3.21 приведены условное обозначение дешифратора и его структура.
Для примера приведем таблицу истинности дешифратора 3-разрядного числа (табл. 3.14).
Таблица 3.14
Номер слова Х3 х2 X! Yi у2 Y3 y4 y5 Y6 y7 y8
1 0 0 0 1
2 0 0 1 1
3 0 1 0 1
4 0 1 1 1
5 1 0 0 1
6 1 0 1 1
7 1 1 0 1
8 1 1 1 1
152
Рис. 3.21. Дешифратор: условное обозначение (о), внутренняя структура (6)
Для решения некоторых конкретных задач выпускаются интегральные схемы (ИС), которые служат преобразователями кодов. В отличие от дешифратора преобразователь кодов может формировать произвольное число нулевых и единичных сигналов на выходах. Каждому входному набору (слову) ставится в однозначное соответствие выходной набор (слово). Примером преобразователя кодов служит микросхема, преобразующая двоичный код в сигналы управления семисегментным индикатором (рис. 3.22). Здесь, например, двоичному набору 0000 должно соответствовать формирование логической единицы на всех выходах, кроме G.
Обратную функцию выполняют шифраторы. У шифратора 2я входов, на один из них подается логическая 1, а на остальные - О,
153
на п выходах формируются слова, соответствующие двоичному
Рис. 3.22. Преобразователь кода для управления семисегментным индикатором
Мультиплексор. Мультиплексор осуществляет подключение одного выхода к любому из имеющихся входов. Логический сигнал на выходе F (рис. 3.23) принимает значение сигнала на входе Dj в зависимости от управляющих сигналов Ло, Аь А2, ...» А,. Обычно вход Do подключается к выходу при наборе управляющих сигналов ООО .. О, Z>i - при ООО ... 1 и т.д.
Функциональный узел, который выполняет функции, противоположные мультиплексору (сигналы, поступающие на вход, распределяются по нескольким каналам), называется демультиплексором. Существуют мультиплексоры и демультиплексоры для коммутации аналоговых сигналов.
Рис. 3.23. Мультиплексор
154
Сумматоры. Сумматор - схема, осуществляющая получение арифметической суммы двух одноразрядных двоичных чисел. Числа в двоичной системе складываются по тем же правилам, что и в десятичной системе счисления. Например: 21+22=43, 1011+1001=10100. Основу сумматоров составляют либо элементарные одноразрядные комбинационные сумматоры, либо элементарные автоматы с памятью. Соответственно, принято делить сумматоры на комбинационные \\ накапливающие.
Одноразрядные комбинационные сумматоры осуществляют сложение двух двоичных разрядов х, у и значения переноса z из младшего разряда, а также выработку значения суммы 5 и переноса р в старший разряд.
Одноразрядный сумматор (рис. 3.24,6) с тремя входами строится в соответствии с табл. 3.15 двоичного сложения, из которой вытекают минимальные дизъюнктивные формы для функций S' ир:
S = х yz v xyz v xyz v xyz;l
Jp = xyvyzvxz. J
На основе одноразрядного сумматора могут быть построены схемы сравнения, выявляющие совпадения (равенство) кодов.
Для совпадения цифр в Ам разряде необходимо, чтобы обе цифры были равны нулю или единице. Отсюда получаем функцию эквивалентности одноразрядных двоичных чисел 2?f. - xtyt v xtу,.
Соответственно функция неравнозначности, или сумма по модулю два (исключающее ИЛИ) определяется выражением Я, =ХМ = х©у, которое реализуется в полусумматоре (см. рис. 3.24,а) для получения суммы S. На рис. 3.25,а приведено условное обозначение сумматора по модулю 2. Кроме рассмотренных схем в цифровых устройствах применяются также логические схемы, выявляющие большее или меньшее из двух сравниваемых двоичных чисел (см. рис. 3.25,6) (К555СП1)
155
Рис. 3.24. Комбинационные полусумматор (а) и полный сумматор (6)
ческих триггерах со счетными входами и рассчитываются на последовательный ввод разрядов слагаемых.
156
Рис. 3.25. Схемы сравнения чисел
Двоичные накапливающие сумматоры строятся на базе триггеров со счетными входами. Одноразрядный сумматор имеет один вход, на который последовательно подаются разряды слагаемых и цифра переноса в данный разряд, и два выхода S и р. на одном выходе формируется сумма S по модулю два, а на другом - сигнал переносар в старший разряд (рис. 3.26,а).
Рис. 3.26. Накапливающие сумматоры
157
За время суммирования в одном разряде триггер может переключаться до трех раз. Четвертое переключение необходимо при установке нуля. С этим связан основной недостаток накапливающего сумматора - низкое быстродействие. Однако если далее к сумме первых двух чисел нужно добавить третье, четвертое число и т.д., то добавление каждого нового числа потребует максимум двух переключений триггера, потому что к началу сложения цифры одно из слагаемых уже находится в счетчике. В связи с этим проигрыш в скорости при выполнении многократных суммирований по сравнению с комбинационным сумматором получается не слишком большим. В то же время экономия в количестве оборудования получается заметной.
На рис. 3.26,6 показан принцип соединения одноразрядных накапливающих сумматоров. Имеющиеся между одноразрядными сумматорами Линии задержки исключают возможность наложения во времени сигналов переноса и второго слагаемого.
Регистры. Регистром называют совокупность триггеров, объединенных общими схемами управления, предназначенных для хранения одного двоичного слова (кода). Регистры используются также для выполнения некоторых операций над кодами: сдвиг кода вправо или влево, образование обратного кода и др.
В зависимости от способа ввода и съема информации различают параллельные ^последовательные регистры.
В регистрах параллельного действия все разряды кода вводятся и выводятся одновременно. Помимо триггеров в состав регистров входит еще и ряд схем И для управления приемом и выдачей кода (рис. 3.27). Каждый триггер предназначен для запоминания одного разряда кода. Перед записью кода на шину установки нуля подается сигнал, переводящий все триггеры в нулевое состояние. Для Записи кода в регистр на схемы И, соединенные с единичными входами, подаются цифры а, разрядов кода и сигнал записи Информации. Возникающие на выходах схем И сигналы воздействуют на входы установки единицы триггеров; при ai = 1 соответствующие триггеры переводятся в единичное состояние. Для считывания кода, записанного в регистре, на схемы И, подключенные к выходам Q триггеров, подается сигнал считывания.
158
При этом сигналы, соответствующие единице, появляются на выходе только тех схем И, для которых Q-1-
Параллельные регистры могут быть образованы из триггеров любого типа. От типа применяемых триггеров будет зависеть лишь способ управления вводом информации.
Последовательные регистры воспринимают информацию через один разряд - входной - и выдают ее также через один разряд, называемый выходным. Последовательные регистры состоят из триггеров, соединенных последовательно таким образом, что выходной сигнал предыдущего триггера поступает на вход последующего. Все триггеры управляются общими синхронизирующими импульсами, причем появление импульса на тактовом входе вызывает сдвиг записанной в нем информации на один разряд вправо или влево. Поэтому такие регистры называются регист-
На рис. 3.28 показана схема регистра, позволяющего производить сдвиг кода как в сторону младших разрядов, так и в сторону старших разрядов. Здесь выход Q каждого триггера может быть соединен как со входом D последующего триггера, так и со входом D предыдущего, в зависимости от состояния управляющего сигнала у. При наличии сигнала у = 1 включается прямая связь
159
между разрядами, а при у = 0 - обратная. Таким образом, при у = 0 происходит сдвиг в сторону старших разрядов а при у = 1 -в сторону младших разрядов. Подобные регистры называются реверсивными регистрами сдвига. Сдвиг информации осуществляется под воздействием тактового импульса.
Рис. 3.28. Реверсивный регистр сдвига
При построении регистров сдвига применяются триггеры типа R-S, D или J-K.
Сдвигающие регистры применяются также для преобразования параллельного кода в последовательный и наоборот. Для этого каждый разряд регистра должен иметь дополнительный вход для параллельного приема кода. Преобразование последовательного кода в параллельный осуществляется путем одновременного опроса состояний всех триггеров регистра (см. рис. 3.27).
Импульсные счетчики. Импульсный счетчик можно определить как автомат Мура с N состояниями, имеющий один элементарный входной канал. При подаче на вход счетчика сигнала он переходит в состояние, номер которого на единицу больше номера предыдущего состояния; если же номер состояния является максимальным, то счетчик переходит в нулевое состояние.
При кодировании состояния счетчика обычными двоичными кодами последовательных целых неотрицательных чисел начиная с нуля, т.е. числами вида 00 ... 00,00 ... 01,00 ... 10,00 ... 11 и т.д., импульсный счетчик называется двоичным. Двоичный «-разрядный счетчик имеет N = 2” различных состояний, каждому из которых соответствует двоичное число в пределах от 0 до 2п -1
160
При построении двоичных счетчиков в качестве элементарных автоматов обычно используют двухступенчатые счетные триггеры с дополнительным входом установки нуля.
Двоичный счетчик можно получить, если последовательно соединить выход /-го триггера с Г-входом (/+1)-го триггера (рис. 3.29). Если сигнал на вход Т-триггера последующего разряда подавать с инверсного выхода триггера предыдущего разряда (рис. 3.30), то получим вычитающий счетчик.
Рис. 3.29. Двоичный счетчик
При исключении некоторых устойчивых состояний двоичного счетчика можно построить счетчик с коэффициентом пересчета, не равным 2" Такие счетчики называют недвоичными.
Рис. 3.30. Вычитающий двоичный счетчик
На рис. 3.31 иллюстрируется пример построения счетчика с коэффициентом пересчета, равным трем.
Счетчики являются одними из наиболее распространенных узлов цифровых устройств. Существует большое многообразие счетчиков: это и так называемые реверсивные счетчики способные работать как в режиме сложения, так и в режиме вычитания, и кольцевые, в которых происходит сдвиг единицы из разряда в разряд под действием поступающих на вход импульсов, и т.д. Способы построения таких счетчиков основаны на введении в них дополнительных элементов и связей.
161
Рис. 3.31. Недвоичный счетчик
3.3. Микропроцессоры и узлы микропроцессорных устройств
Микропроцессор (МП) - это программно управляемое устройство, осуществляющее процесс обработки цифровой информации и управление им, построенное на основе одной или нескольких больших (сверхбольших) интегральных схем.
Этот микроэлектронный прибор стал в последние годы ядром многих электронных систем автоматического регулирования и управления аппаратурой и технологическими процессами, измерительных устройств и устройств отображения и обработки информации.
Такое широкое внедрение микропроцессора в обширный класс устройств обусловлено в первую очередь тем, что МП в отличие от традиционных интегральных схем выполняет не одну какую-либо функцию, а набор арифметических и логических функций и, кроме того, экономичен в изготовлении как стандартное изделие в условиях серийного производства.
Первый МП был разработан фирмой Intel тс. в 1973 г. Это был МП с фиксированной длиной слова и системой команд, физически оформленный в виде 4-разрядной p-МОП большой интегральной схемы с названием 14004.
Первым, действительно универсальным в рамках широкого круга решаемых задач стал разработанный этой же фирмой МП 18080. Этот МП имеет довольно большое (64К слов) адресное пространство и универсальную мощную (78 комавд) систему команд.
162
Существует большое количество разновидностей МП, выпускаемых различными фирмами, как отечественными, так и зарубежными, отличающихся друг от друга как по архитектуре, так и по другим различным признакам. Рассмотрим некоторые особенности их построения и функционирования на примере отечественного аналога однокристальной ЭВМ 18051 - однокристального микроконтроллера КМ 1816ВЕ51.
Микроконтроллер (МК) /ГИ1816ЯЕ51 выполнен на основе высокоуровневой n-МОП-технологии и выпускается в корпусе, имеющем 40 выводов.
Отечественные и зарубежные фирмы предлагают полный аналог этого МК, выполненный по другим технологиям, например МК КМ1830ВЕ51 (I 87С51) реализован по К-МОП-технологии На рис. 3.32 показана цоколевка корпуса МК51 и имена выводов.
Для работы МК51 требуется один источник электропитания +5В. Через четыре программируемых порта ввода/вывода МК51 взаимодействует с внешними устройствами в стандарте ТТЛ-схем с тремя состояниями выхода.
KM18I6BE51
Р1,0 «и 1
Р1,1 «н 2
Р1,2 <- 3
Р1,3 -н 4
Р1,4 5
Р1,5 -м 6
Pl,6 7
Р1,7 - 1
RST/UPD ->! (RXD)P3,0 -(ТХР)Р3.1 -(INTO)P3.2 -> (INT1)P3,3 -
(ТО) Р3,4 -
(ТЦРЗ,5 -(WR1P3.6 «-(RD)P3,7 -
XTAL2 <-
XTAL1 -
GND
8
9
10
11
12
13
14
15
16
17
18
19
20
40
39
38
37
36
35
34
33
32
31
30
29
+5В Р0,0 Р0,1 Р0.2 Р0,3 РОД Р0,5 Р0,6 PQ.7
F.A/UPP
ALE/PROG
29 -> PSEN
28 -> Р2,7
27
26
25
24 ->
23 -
22 ->
21 -
Р2,6 Р2.5
Р2,4
Р2,3
Р2.2
Р2,1
Р2,0
2
3
5
6
Рис. 3.32. Цоколевка корпуса МК 51 и имена выводов
163
В состав МК51 входят: 8-битное арифметическо-логическое устройство (АЛУ); постоянное запоминающее устройство (ПЗУ) емкостью 4 Кбайт; оперативное запоминающее устройство (ОЗУ) емкостью 128 байт два 16-битаых таймера/счетчика; последовательный порт с максимальной скоростью приемопередачи в асинхронном режиме 375 Кбит/с; двухуровневая система прерываний от 5 источников; 32 двунаправленные программируемые линии ввода/вывода. Имеется возможность расширения памяти программ и внешней памяти данных. Отличительной особенностью системы команд МК51 является наличие быстрых команд деления и умножения, возможность логической обработки отдельно адресуемых бит, развитая система условных ветвлений. При тактовой частоте 12 МГц большинство команд выполняется за 1-2 мкс.
Приведем краткое описание выводов МК51:
- ЕАШРР - отключение резидентной памяти программ / дополнительное питание +21В в режиме программирования резидентной ПЗУ;
- GND - общая точка, земля;
- +5В - основное напряжение питания +5В;
- RST/UPD - системный сброс / аварийное питание +5В в режиме пониженного энергопотребления;
- ALE I PROG - строб адреса внешней памяти (используется для фиксации на внешнем регистре младшей половины адреса внешней памяти) / строб программирования резидентной памяти программ;
- PSEN - разрешение внешней памяти программ; является стробом чтения;
- XTAL1, XTAL2 - вход и выход внутреннего синхрогенератора; служат для подключения кварцевого резонатора, допускается также подача внешнего синхросигнала на вывод XTAL2 при заземлении XTAL1;
- (РО.О ... Р0.7), (Р1.0 ... Pl.7), (Р2.0 ... Р2.7), (РЗ.О ... Р3.7) - 32 индивидуально программируемые двунаправленные линии ввода/вывода портов 0,1,2,3; линии порта 0 и 2 используются также при обращении к внешней памяти, линии порта 3 могут использоваться как линии специального назначения.
164
Основу структурной схемы МК51 (рис. 3.33) образует внутренняя двунаправленная 8-битная шина, которая связывает между собой все основные узлы и устройства: резидентную память, АЛУ, блок регистров специальных функций (РСФ), устройство управления и порты ввода/вывода.
Рис. 3.33. Структурная схема МК 5!
165
Рассмотрим основные элементы структуры и особенности организации вычислительного процесса в МК51
АЛУ. 8-битное АЛУ может выполнять арифметические операции сложения, вычитания, умножения, деления, логические операции И, ИЛИ, исключающее ИЛИ, а также операции циклического сдвига, сброса, инвертирования и т.п. В АЛУ имеются регистры временного хранения операндов Г1 и Т2, схемы десятичной коррекции, формирования признаков результата операции. Важной особенностью АЛУ является его способность оперировать с битами. Отдельные программно-доступные биты (флаги) могут быть установлены, сброшены, инвертированы, переданы и проверены в логических операциях. Эта способность АЛУ оперировать с битами столь важна, что можно говорить о наличии в нем булевского процессора.
Таким образом, АЛУ может оперировать с четырьмя типами информационных объектов: булевскими (1 бит), цифровыми (4 бита), байтными (8 бит) и адресными (16 бит).
При выполнении многих команд в АЛУ формируется ряд признаков операции (флагов), которые фиксируются в регистре слова состояния процессора PSW.
На рис. 3.34 показан формат PSW.
Функции аккумулятора булевского процессора выполняет флаг переноса (С). АЛУ не управляет флагами селекции банка регистров (RSI, RS0). Их состояние полностью определяется прикладной программой, у которой имеется возможность выбора одного из четырех регистровых банков. Хотя процессор в МК51 и имеет в своей основе аккумулятор, он может выполнять множество команд и без его участия.
Например, данные могут быть переданы из любой ячейки резидентной памяти данных в любой регистр или любой регистр может быть загружен непосредственным операндом и т.д. Многие логические операции также могут быть выполнены без участия аккумулятора.
8-битный регистр-указатель стека SP может адресовать любую область резидентной памяти данных. Его содержимое инкрементируется, прежде чем данные будут запомнены в стеке, и декре
166
ментируется после извлечения данных из стека Подобный способ адресации элементов стека называют прединкрементным-постдекрементаым.
7 6 5 4 3 2 1 0
1с |АС| ы RS1 RSO И н и
Рис. 3.34. Формат PSW: С - флаг переноса / заема, устанавливается и сбрасывается при выполнении арифметических, логических и некоторых команд пересылки; АС - флаг вспомогательного переноса, формируется при выполнении команд сложения и вычитания и сигнализирует о переносе / заеме в бите 3; F0 - программный флаг общего назначения; OV - флаг переполнения, формируется при выполнении арифметических команд, принимает единичное значение при возникновении переполнения, т.е. при выходе результата за диапазон -128 ... +127; Р - флаг паритета, формируется в каждом цикле любой команды и постоянно фиксирует нечетное (1) / четное (0) значение числа единиц в аккумуляторе;
RSI, RS0 - программно-управляемые флаги выбора рабочего банка регистров 00 - банк 0 (00Н+07Н); 01 - банк 1 (08H+0FH);
10 - банк 2 (10Н+17Н); 11 - банк 3 (18H+1FH)
Двухбайтный регистр-указатель данных DPTR обычно используется как источник 16-битного адреса при обращении к внешней памяти. Командами МК51 этот регистр может быть использован или как 16-битный регистр, или как два независимых 8-битных регистра (DPH и DPL).
Устройство управления и синхронизации. Кварцевый резонатор, подключаемый к выводам XTAL1 и XTAL2, управляет работой внутреннего генератора, который в свою очередь формирует системные сигналы синхронизации.
Устройство управления МК51 на основе сигналов синхронизации формирует машинный цикл, равный 12 периодам синхросигнала или 6 состояниям первичного управляющего автомата (S1-S6). Каждое состояние управляющего автомата содержит 2 фазы (Pl, Р2). В фазе Р1, как правило, выполняется операция в АЛУ, а в фазе Р2 осуществляется межрегистровая передача. Весь машинный цикл состоит из 12 фаз, начиная с фазы S1P1 и заканчивая
167
фазой S6P2. Внешним наблюдаемым сигналом кроме сигнала генератора является сигнал строба адреса внешней памяти (ALE), который формируется дважды за один машинный цикл (S1P2-5-S2P1 и S4P2^S5P1) и используется для управления процессом обращения к внешней памяти (рис. 3.35).
Большинство команд МК51 выполняется за один или два машинных цикла. Только команды деления и умножения требуют четырех машинных циклов. При частоте резонатора 12 МГц время машинного цикла составляет одну микросекунду.
Резидентная память МК5\. ОЗУ и ПЗУ, размещенные на кристалле МК51 (резидентная память), физически и логически разделены, имеют различные механизмы адресации, работают под управлением различных сигналов и выполняют разные функции. Резидентное ПЗУ имеет емкость 4 Кбайт и предназначено для хранения команд, констант, таблиц перекодировки и т.п. МК51 имеет 16-битную шину адреса, на которую имеют выход счетчик команд PC и регистр-указатель данных DPTR. Последний выполняет функции базового регистра при косвенных переходах по программе и используется при чтении констант из памяти программ.
Резидентная память данных предназначена для хранения переменных прикладной программы, адресуется одним байтом и имеет емкость 128 байт.
В начале адресного пространства (OOH^IFH) резидентной памяти данных располагаются 4 регистровых банка по 8 регистров в каждом. Далее (20H-J-2FH) размещается область программных флагов (до 128), которые могут быть использованы по усмотрению разработчика. Начиная с адреса ЗОН и до конца адресного пространства (7FH) размещается свободная зона, используемая для хранения данных и/или в качестве стека. Приведенное распределение не является обязательным. Например, с целью расширения свободной зоны разработчик может отказаться от использования двух старших регистровых банков и области программных флагов. В этом случае свободная область резидентной памяти данных расширяется с 80 до 112 байт
168
I SI I S2 I S3 | S4 | SS | S6 | SI I S2
I Pl |P2 | Pl |P2 I Pl IК I Pl |P2 I Pl IК |P1 |P2 I Pl |K I Pl |P2
X1M.2 [JTJnJT-JnjnJTJT-JT PUrdT-JT-FL П_П_TL-
Рис. 3.35. Временные диаграммы доступа к внешним: а - ПЗУ; б - ОЗУ
К адресному пространству резидентной памяти данных примыкает пространство регистров специальных функций, перечисленных в табл. 3.16.
169
Таблица 3.16
Регистры специальных функций
Имя Наименование Адрес
АСС* Аккумулятор ОЕОН
В* Регистр-расширитель аккумулятора 0F0H
PSW* Слово состояния программы 0D0H
SP Регистр-указатель стека 81Н
DPTR Регистр-указатель данных (DPH) 83Н
(DPL) 82Н
Р0* ПортО 80Н
Р1* Порт 1 90Н
Р2* Порт 2 0A0H
РЗ* ПортЗ ОВОН
1Р» Регистр приоритетов 0В8Н
IE* Регистр разрешения прерываний 0А8Н
TMOD Регистр режима таймера/счетчика 89Н
TCON* Регистр управления / состояния таймера 88Н
ТНО Таймер 0 (старший байт) 8СН
TL0 Таймер 0 (младший байт) 8АН
ТН1 Таймер 1 (старший байт) 8DH
TL1 Таймер 1 (младший байт) 8ВН
SCON* Регистр управления / состояния УАПП 98Н
SBUF Буфер приемопередатчика 99Н
PCON Регистр управления мощностью 87Н
Примечание: регистры, имена которых отмечены звездочкой (*), допускают адресацию отдельных бит.
170
Хотя резидентная память данных и регистры специальных функций имеют единое адресное пространство, однако механизмы их адресации различаются.
Резидентная память данных допускает прямую и косвенную, а регистры специальных функций - только прямую адресацию.
Внешняя память МП-системы. ОЗУ, так же как и ПЗУ. может быть расширено до 64 Кбайт путем подключения внешних больших интегральных схем (БИС) памяти. Доступ к внешнему ПЗУ осуществляется при помощи управляющего сигнала PSEN, который выполняет функцию строб-сигнала чтения. Доступ к внешнему ОЗУ обеспечивается управляющими сигналами RD и WR.
При обращении к внешнему ПЗУ всегда используется 16-битный адрес. Доступ к внешнему ОЗУ возможен с использованием 16-битного или 8-битного адреса. В случае использования 16-битного адреса старший байт адреса появляется (и сохраняется неизменным в течение одного цикла записи или чтения) на выводах порта 2.
Если очередной цикл внешней памяти следует не сразу же за предыдущим циклом внешней памяти, то неизменное содержимое регистра-защелки порта 2 восстанавливается в следующем цикле. Если используется 8-битный адрес, то состояние порта 2 остается неизменным.
Через порт 0 в режиме временного мультиплексирования осуществляется выдача младшего байта адреса и передача байта данных. Сигнал ALE стробирует запись младшего байта адреса во внешний регистр. Затем в цикле записи выводимый байт данных появляется на внешних выводах порта 0 перед появлением сигнала WR. В цикле чтения вводимый байт данных принимается в порт 0 по фронту сигнала RD. При любом обращении к внешней памяти устройство управления МК51 загружает в регистр-защелку порта 0 константу 0FFH, стирая прежнюю информацию.
Временные диаграммы на рис. 3.35 иллюстрируют процесс генерации управляющих сигналов при обращении к внешней памяти.
171
Необходимо отметить, что цикл обращения к внешнему ПЗУ занимает половину машинного цикла (0,5 мкс), а цикл доступа ОЗУ - полный машинный цикл (1,0 мкс).
Порты ввода/вывода МК5\
Микроконтроллер имеет 4 восьмибитных порта ввода/вывода Р0, Pl, Р2 и РЗ. Каждый разряд любого порта может быть индивидуально настроен на ввод или вывод. Для настройки разряда на ввод необходимо в соответствующий бит порта записать 1. Каждый разряд порта содержит D-триггер, буфер чтения состояния триггера и состояния линии ввода/вывода, а также выходной каскад (рис. 3.36).
В тех случаях, когда порт является одновременно операндом и местом назначения результата, устройство управления автоматически реализует специальный режим, который называется «чтение-модификация-запись». Этот режим обращения предполагает ввод сигналов не с внешних выводов порта, а из его буферного регистра (из D-триггеров), что исключает влияние нагрузки, подключенной к выводу, на правильность считывания ранее выведенной информации.
Выходы портов 1, 2, 3 имеют схему внутренней «подпитки» через транзистор 73. Эти порты часто называют квазидвунаправ-ленными в отличие от двунаправленного порта 0, который такой схемы «подпитки» не имеет.
Выходной транзистор Т2 открыт во время, пока D-триггер данного разряда порта находится в состоянии 0. В отличие от Т2 транзистор 71 открывается на короткое время (S1P1 и S1P2) только при переключении разряда из состояния 0 в состояние 1. Тем самым достигается быстрый заряд паразитной выходной емкости. В дальнейшем 71 закрыт, и уровень 1 поддерживается через 73, включенный как сопротивление. Ток короткого замыкания выхода на землю в этом состоянии равен 0,25 мА, тогда как при открытии 71 ток достигает величины 30 мА.
Порт 0 имеет ту особенность, что в нормальных операциях ввода/вывода его выходной транзистор 71 остается всегда закрытым (71 открывается только в случае передачи через порт 0 единичного уровня при обращении к внешней памяти). Таким обра
172
зом, выходы порта 0 являются выходами типа «открытый коллектор». Кроме обычного ввода/вывода порты 0 и 2 используются в циклах обращения к внешней памяти. По завершении такого цикла порт 2 восстанавливает свое состояние, а в порт 0 записывается KOflOFFH.
Рис. 3.36. Схемотехника портов ввода/вывода: а - схема одного разряда буферного регистра порта; б - схема выходного каскада порта
173
Каждая линия порта 3 имеет свою альтернативную функцию (см. рис. 3.32). Отметим, что для нормальной работы альтернативной функции в соответствующий разряд порта 3 должна быть записана 1.
Выходы портов 1, 2 и 3 могут нагружаться на 4-ТТЛ входа микросхем серии К555, а порта 0 - на 8 входов. Кроме того, линии порта 0 могут использоваться как входы с очень высоким входным сопротивлением (входные токи линий портов 1, 2 и 3 составляют около 0,25 мА при нулевом входном сигнале).
Таймер/счетчик. Два программируемых 16-битных тайме-ра/счетчика (Т/СО и Т/Cl) могут быть использованы в качестве таймеров или счетчиков внешних событий. При работе в качестве таймера, содержимое Т/С инкрементируется в каждом машинном цикле (МЦ). т.е. каждые 12 периодов синхросигнала.
7 6 5 4 3 2 1 0
GATE 1 С/Т М1 МО GATE С/Т Ml | МО
Т/Cl Т/СО
Рис. 3.37. Регистр режима таймера/счетчика: GATE - управление внешней блокировкой Т/С, при установке разрешает внешнему входу INTx блокировать счет Т/С, при этом единичное значение входа INT* разрешает счет, нулевое - запрещает; с/т - выбор режима работы Т/С: 0 - таймер; 1 - счетчик; Ml, МО - выбор одного из четырёх режимов работы: 00 - режим 0,01 - режим 1,10 - режим 2,11 - режим 3
При работе в качестве счетчика содержимое Т/С инкрементируется под воздействием перехода из 1 в 0 внешнего сигнала, подаваемого на соответствующий (ТО, Т1) вывод МК51. Так как на распознавание перехода требуется два МЦ, то максимальная частота переключения входных сигналов равна 1/24 тактовой частоты МК51 при длительности единичного импульса не менее одного МЦ.
Для управления режимами работы Т/С и для организации взаимодействия таймеров с системой прерывания используются 2 регистра специальных функций (TMOD и TCON), описание кото
174
рых приводится на рис. 3.37 и 3.38 соответственно. Как следует из описания управляющих бит TMOD, для обоих Т/С режимы работы О 1 и 2 одинаковы. Режимы 3 для Т/СО и Т/Cl различны. Рассмотрим кратко работу Т/С во всех четырех режимах.
7 6 5 4 3 2 1 0
TCON | TF1 | TR1 | TFO | TRO | IE1 | IT1 | IE0 | ITO~j
Рис. 3.38. Регистр управления/состояния таймера/счетчика-TF1, TF0 - флаги переполнения Т/Cl и Т/СО, устанавливаются при переполнении Т/С, сбрасываются при входе в подпрограммы обслуживания прерывания;
TRI, TR0- управление пуском/остановомТ/Cl иТ/СО, 1-счет, 0 - останов; IE1, IE0 - флаг внешнего прерывания устанавливается при переходе сигнала из 1 в 0 на выходах / входах INTI и INTO, сбрасывается при выходе из подпрограммы обслуживания прерывания;
IT1, IT0 - управление типом прерывания; прерывание фиксируется:
1 - по спаду, 0 - по нулю на входах INTI и INTO
Режим 0. Перевод любого Т/С в режим 0 делает его похожим на 8-битный счетчик, на входе которого подключен 5-битный предделитель. Работу Т/Cl в режиме 0 иллюстрирует рис. 3.39,а. В этом режиме таймерный регистр имеет разрядность 13 бит. При переходе из состояния «все единицы» в состояние «все нули» устанавливается флаг прерывания от таймера (TF1). Синхросигнал поступает на вход Т/С, когда управляющий бит TR1 установлен и либо управляющий бит GATE (управление блокировкой) равен 0, либо на внешнем выводе запроса прерывания INT1 присутствует уровень 1.
Режим 1. Работа любого Т/С в режиме 1 такая же, как и в режиме 0, за исключением того, что таймерный регистр имеет разрядность 16 бит.
Режим 2. В режиме 2 работа организована таким образом, что переполнение (переход из состояния «все единицы» в состояние «все нули») 8-битного счетчика TL1 приводит не только к уста
175
новке флага TF1 (рис. 3.39,6), но и автоматически перезагружает в ТЫ содержимое старшего байта (ТН1) таймерного регистра, которое предварительно было задано программным путем. Перезагрузка оставляет содержимое THI неизменным.
Режим 3. В режиме 3 Т/Cl и Т/СО работают по-разному. В режиме 3 Т/Cl останавливается и сохраняет неизменным свое текущее содержимое. Иными словами, эффект такой же, как и при сбросе управляющего бита TR1.
Работу Т/СО в режиме 3 иллюстрирует рис. 3.39,в. В режиме 3 TL0 и ТНО функционируют как 2 независимых 8-битных Т/С. Работу TL0 определяют управляющие биты Т/СО. Работу ТНО, который может выполнять только функции таймера, определяет управляющий бит TR1. При этом ТНО использует флаг переполнения TF1.
Режим 3 используется в тех случаях, когда требуется наличие дополнительного 8-битного Т/С. Можно считать, что в режиме 3 MK5I имеет в своем составе 3 таймера/счетчика. Работа Т/СО в режиме 3 ограничивает функциональные возможности Т/Cl, который при этом, однако, может использоваться, например, для задания скорости приемопередачи последовательного порта или для других целей, не требующих прерываний от таймера.
Последовательный интерфейс. Через универсальный асинхронный приемопередатчик (УАПП) осуществляется прием и передача информации, представленной последовательным кодом (младшими битами вперед), в полном дуплексном режиме обмена. В состав УАПП, называемого часто последовательным портом, входят принимающий и передающий сдвигающие регистры, а также специальный буферный регистр (SBUF) приемопередатчика.
Последовательный порт МК51 может работать в 4 различных режимах. Выбор режима осуществляется через регистр управления / состояния (SCON) УАПП (рис. 3.40).
Режим 0 В этом режиме информация (8 бит) и передается, и принимается через вход приемника (RXD). Через выход передат
176
чика (TXD) выдаются импульсы сдвига, которые сопровождают каждый бит Частота приемопередачи равна 1/12 тактовой частоты.
а
б
Рис. 3.39. Режимы работы таймера/счетчика: а- Т/Cl в режимах 0 и 1; б - Т/Cl в режиме 2; в - Т/СО в режиме 3
177
Режим 1 В этом режиме передаются через TXD или принимаются из RXD 10 бит информации: старт-бит (0), 8 бит данных и стоп-бит (1). Скорость приемопередачи задается Т/С1.
Режим 2. В этом режиме через TXD передаются или из RXD принимаются 11 бит информации: старт-бит, 8 бит данных, программируемый 9-й бит и стоп-бит. Например, для повышения достоверности передачи путем контроля по четности в 9-й бит может быть программно помещено значение флага паритета из PSW
SCON SMO SMI SM2 REN ТВ8 RB8 TI RI
Рис. 3.40. Регистр управления / состояния УАПП: SMO, SM1 -управление режимом работы: 00 - режим 0,01 - режим 1,10- режим 2, 11 - режим 3; SM2 - если 1, то флаг RI не будет устанавливаться при приеме тех символов, у которых 9-й бит данных (для режимов 2 и 3) или стоп-бит (режим 1) равен 0; REN - разрешение приема: 1 - разрешение, 0 - запрет; ТВ8 - 9-й передаваемый бит данных; RB8 - 9-й принятый бит данных; TI, R1 - флаги прерывания передатчика и приемника
Режим 3. Режим 3 совпадает с режимом 2 во всех деталях, за исключением частоты приемопередачи, которая задается Т/С1.
В режимах 1, 2 и 3 скорость приемопередачи зависит от бита SMOD регистра управления мощностью PCON (рис. 3.41) и определяется выражениями:
2$mod
2$mod
/1,3 ~ 22 /переполнения T/CI -
Прерывание от таймера 1 в этом случае должно быть заблокировано. Сам Т/Cl может работать и как таймер, и как счетчик событий в любом из трех режимов.
Однако наиболее удобно использовать режим таймера с автоперезагрузкой. В этом случае
fosc
'переполнения Т/С1
178
Во всех четырех режимах работы передача из УАПП инициируется любой командой, в которой буферный регистр SBUF указан как получатель байта. Прием в УАПП в режиме 0 осуществляется при условии, что RI=0 и REN= 1. В режимах 1, 2, 3 прием начинается с приходом старт-бита в том случае, если REN=1.
7 6 5 4 3 2 1 0
PCON SMOD — -- --- GF1 GFO PD IDL
Рис. 3.41. Регистр управления мощностью: SMOD - управление скоростью приемопередачи УАПП; GF1, GF0 - программные флаги общего назначения; PD - управление энергопотреблением:
1 - пониженное, 0 - нормальное энергопотребление; IDL - бит холостого хода, при IDL=1 МК переходит в режим холостого хода
В бите ТВ8 программно формируется значение 9-го передаваемого бита данных в режимах 2 и 3. В бите RB8 фиксируется (в режимах 2 и 3) 9-й принимаемый бит данных. В режиме 1, если SM2=0, в бит RB8 заносится стоп-бит. В режиме 0 бит RB8 не используется.
Флаг прерывания передатчика TI (приемника RI) устанавливается аппаратно в конце периода передачи (приема) 8-го бита данных в режиме 0 и в начале (середине) периода передачи (приема) стоп-бита в режимах 1,2 и 3. Соответствующая подпрограмма обслуживания прерывания должна сбрасывать бит TI (RI).
В режимах 1, 2 и 3 прием начинается при обнаружении перехода сигнала на входе RXD из состояния 1 в состояние 0. Для этого под управлением внутреннего счетчика вход RXD опрашивается 16 раз за период следования бита. Как только переход из 1 в 0 при входе RXD обнаружен, так внутренний счетчик по модулю 16 сбрасывается и перезапускается для выравнивания его переходов с границами периодов представления принимаемых бит. Таким образом, каждый период представления бита делится на 16 интервалов с помощью внутреннего счетчика. В состояниях 7, 8 и 9 счетчика производится опрос сигнала на входе RXD. Считанное значение принимаемого бита - это то значение, которое было получено по меньшей мере дважды из трех замеров (мажоритарное голосо
179
вание «два из трех»). Если значение, принятое в первом такте (предполагаемый старт-бит), не равно 0, то блок управления приемом вновь возвращается к поиску перехода из 1 в 0. Этот механизм обеспечивает подавление ложных (сбойных) старт-бит.
Система прерываний. Упрощенная структура системы прерываний показана на рис. 3.42. Маскирование и присвоение приоритетов осуществляется программно через специальные регистры разрешения прерываний (IE) и управления приоритетами (IP). Форматы этих регистров приведены на рис. 3.43 и 3.44. Всего существует 5 источников прерываний и два уровня приоритетов (высший и низший). Флаги внешних прерываний (IE0, IE1) и биты выбора типа внешних прерываний располагаются в регистре TCON (см. рис. 3.38).
TF0------------------------------------------ 000BH
001ВН
Рис. 3.42. Структура системы прерываний
180
Сброс флагов IE1 и IE0 выполняется в том случае, если прерывание было вызвано по переходу (заднему фронту сигнала запроса).
Если же прерывание вызвано нулевым уровнем входного сигнала, то сбросить флаг IE должна соответствующая подпрограмма обслуживания прерывания путем воздействия на источник прерывания.
Флаги запросов прерывания от таймеров TF0 и TF1 сбрасываются автоматически при передаче управления подпрограмме обслуживания. Флаги запросов прерываний от УАПП (RI и TI) должны сбрасываться соответствующими подпрограммами. Система прерываний сформирует аппаратно вызов соответствующей подпрограммы обслуживания, если она не заблокирована одним из следующих условий:
1) в данный момент обслуживается запрос прерывания равного или более высокого уровня приоритета;
2) текущий машинный цикл не последний в цикле выполняемой команды;
3) выполняется команда RETI или команда, связанная с обращением к регистрам IE и IP.
При этом в стек загружается адрес точки возврата в основную программу. Подпрограмма обслуживания прерывания должна обязательно заканчиваться командой возврата RETI, которая сообщает системе прерываний, что обслуживание данного прерывания закончено.
7 6 5 4 3 2 1 0
-I - 1ю ЕЛ № ЕТО | ЕХО |
Рис. 3.43. Регистр разрешения прерываний: ЕА - бит общего разрешения: 0 - все прерывания замаскированы, 1 - каждый источник разрешается своим собственным битом IE.X; ES - разрешение прерываний от УАПП;
ЕТ1, ЕТО - разрешение прерывания от Т/Cl, Т/СО; ЕХ1, ЕХО - разрешение прерывания от INTI, INTO
Сброс, режим холостого хода и режим пониженного энергопотребления. Сброс. Сброс МК51 осуществляется путем пода
181
чи на вход RST сигнала 1. Для уверенного сброса МК51 этот сигнал должен быть удержан на входе RST по меньшей мере в течение двух машинных циклов (24 периода синхросигнала). Квази-двунаправленные буферные схемы внешних выводов ALE и PSEN находятся при этом в режиме ввода. Под воздействием сигнала RST сбрасывается содержимое регистров PC, ACC, В, PSW, DPTR, TMOD, TCON, Т/СО, Т/Cl, IE, IP и SCON, в регистре PCON сбрасывается только старший бит, в регистр - указатель стека загружается код 07 Н, а в порты РО-РЗ - коды 0FFH. Состояние регистра SBUF - неопределенное. Сигнал RST не воздействует на содержимое ячеек ОЗУ. Когда включается электропитание, содержимое ОЗУ неопределенно, за исключением операции возврата из режима пониженного энергопотребления.
7 6 5 4 3 2 1 0
IP
PS РТ1 РХ1 РТО РХО
Рис. 3.44. Регистр управления приоритетами: PS - бит приоритета УАПП; РТ1, РТО - биты приоритетов Т/Cl и Т/СО; РХ1, РХО - биты приоритетов INTI и INTO; бит = 1 - высший приоритет, 0 - низший
Для автоматического формирования сигнала RST при включении электропитания необходимо между входом RST и +5В включить конденсатор емкостью 10 мкФ, а между RST и GND - резистор сопротивлением 8,2 кОм.
Режим холостого хода. Любая команда, по которой установится управляющий бит IDL (PCON.O) в регистре управления мощностью (см. рис. 3.41), переведет МК51 в режим холостого хода. При этом продолжает работу внутренний генератор синхросигналов. Все регистры сохраняют свое значение. На выводах всех портов удерживается то логическое состояние, которое на них было в момент перехода в режим холостого хода. На выводах ALE и PSEN формируется уровень 1.
Выйти из режима холостого хода можно по прерыванию. Любой из разрешенных сигналов прерывания приведет к аппаратному сбросу бита IDL и прекратит тем самым режим холостого хода.
182
После исполнения команды RETI (выход из подпрограммы обслуживания прерывания) будет исполнена команда, которая следует в программе за командой, переведшей МК51 в режим холостого хода.
Режим пониженного энергопотребления. Перевод МК51 в этот режим возможен по команде, которая установит бит PD в регистре управления мощностью. В этом режиме блокируется генератор синхросигналов, содержимое ОЗУ и регистров специальных функций сохраняется, а на выходных контактах портов удерживаются значения, соответствующие содержимому их регистров. Выходы сигналов ALE и PSEN сбрасываются. Аварийное питание МК будет осуществляться по входу RST/UPD, при этом основное напряжение электропитания (+5В) может быть снято. После восстановления уровня основного питания (+5В) аварийное питание должно быть удержано еще на два машинных цикла для отработки МК функций системного сброса.
Режим загрузки и верификации прикладных программ. Под воздействием внешних электрических сигналов МК51 может быть электрически запрограммирован или, иными словами, в ПЗУ МК могут быть загружены объектные коды прикладной программы. Содержимое ПЗУ МК может быть уничтожено выдержкой под ультрафиолетовым источником света (стирание) для последующего перепрограммирования. МК имеет средство защиты, обеспечивающее невозможность прочтения содержимого ПЗУ в конечном изделии и, следовательно, сохранение профессиональных секретов разработчика прикладного программного обеспечения.
Загрузка программы в ПЗУ. В режиме программирования МК51 должен работать на пониженной частоте (с резонатором 4+6 МГц). Адрес ячейки ПЗУ, в которую должен быть загружен байт прикладной программы, подается на выводы порта 1 и выводы Р2.0+Р2.3 порта 2. При этом загружаемый байт поступает в МК через порт 0. Выводы Р2.4+Р2.6 и PSEN должны быть заземлены, а на выводы Р2.7 и RST необходимо подать уровень логической 1. На входе EAIUPP поддерживается уровень +5 В, но перед моментом загрузки байта он должен быть повышен до 21 В. В это
183
время уровень на входе ALE / PROG должен быть не менее чем на 50 мс сброшен в 0. После этого напряжение на входе EAIUPP возвращается к уровню +5 В. Источник напряжения +21 В (UPP) должен быть стабилизирован, так как превышение предельного значения +21,5 В приводит к необратимым повреждениям ПЗУ.
Запись бита защиты. Бит защиты ПЗУ, будучи установлен, запрещает доступ к ПЗУ любыми внешними средствами. Процедура записи бита защиты такая же, как и при загрузке программ в ПЗУ, но на вывод Р2.6 должен подаваться уровень 1. Сигналы на выводах портов Р0, Р1 и Р2.0-Р2.3 могут быть в любом состоянии. Однажды установленный бит защиты можно сбросить только путем полного стирания ПЗУ.
Верификация программ. Если бит защиты не запрограммирован, то содержимое ПЗУ может быть прочитано с целью проверки правильности загрузки прикладной программы либо по ходу программирования, либо после окончания программирования МК51. Доступ к ячейкам ПЗУ осуществляется так же, как и при программировании ПЗУ, за исключением того, что на вывод Р2.7 подается сигнал 0, используемый в качестве строб-сигнала чтения.
Стирание ПЗУ. Для стирания содержимого ПЗУ МК следует поместить под источник ультрафиолетового излучения с длиной волны менее 4000 ангстрем. После стирания в матрице ПЗУ содержатся все единицы.
Система команд МК51 состоит из 111 базовых команд. Большинство команд (94) имеют формат 1 или 2 байта и выполняются за 1 или 2 машинных цикла (99 команд) МК обрабатывает операнды четырех типов: биты, 4-битаые цифры, байты и 16-битные слова. Для доступа к данным используется 4 способа адресации: прямая, непосредственная, косвенная и неявная.
Ассемблер ASM51 допускает использование символических имен регистров специальных функций и портов, приведенных в табл. 3.16, а также их отдельных бит.
Символическое имя бита имеет следующую структуру:
<имя регистра специальных функций или порта>.<номер бита>
Например, имя АСС.5 определяет 5-й бит аккумулятора.
184
Команды, модифицирующие флаги результата в PSW, приведены в табл. 3.17, значение флага паритета Р напрямую зависит от содержимого аккумулятора. Кроме того, флаги могут изменяться при выполнении команд, в которых местом назначения определено PSW
Таблица 3 17
Команды, модифицирующие флаги в PSW
Команды Флаги
ADD C, OK, AC
ADDC C. OK AC
SUBB C, OK AC
MUL c=o,ov
DIV C=0, OK
DA c
RRC c
RLC c
SETBC C=1
CLR C 0=0
CPL C c=c
ANL C,b c
ANL C,/b c
ORL C,b c
ORL С,Л c
MOVC,b c
CJNE c
При описании отдельных команд МК51 приняты следующие сокращения:
А - аккумулятор (неявная адресация);
ad - прямой 8-битный адрес байта ОЗУ (0-127), порта или регистра специальных функций (конкретные значения адресов регистров специальных функций приведены в табл. 3.16);
add - прямой 8-битный адрес назначения;
ads - прямой 8-битный адрес источника;
ad 11 - прямой 11-битный адрес передачи управления;
ad 16 - прямой 16-битный адрес передачи управления;
ad 16h - старший байт прямого 16-битного адреса;
ad 161 - младший байт прямого 16-битного адреса;
bit - прямой 8-битный адрес бита или флага, адреса конкретных бит и флагов приведены на рис. 3.45;
#d - 8-битный непосредственный операнд (константа);
#dl6- 16-битный непосредственный операнд (константа);
185
#dl6h - старший байт 16-битного непосредственного операнда;
#dl61 — младший байт 16-битного непосредственного операнда;
i - бит в коде операции (КОП), определяющий регистр косвенного адреса: i=0,1 (RO, Rl);
PC - программный счетчик или счетчик команд;
ге1 — 8-битный относительный адрес передачи управления в пределах -128...+127 байт относительно адреса команды, следующей за командой перехода, ASM 51 позволяет вместо rel указывать метку перехода;
R - обобщенное имя регистра косвенного адреса (R0 или R1);
R^ - обобщенное имя рабочего регистра (п = 0-н 7);
пт - 3-битное поле в коде операции, определяющее регистр общего назначения (RO-s- R7);
SP - указатель стека;
< — оператор присваивания (замещения);
< -> - оператор взаимного обмена;
V , л, V- операторы логических операций: И (конъюнкция), ИЛИ (дизъюнкция), исключающее ИЛИ;
(а) - префикс косвенной адресации;
# - префикс непосредственного операнда;
(Y) - содержимое регистра или ячейки памяти с именем Y (прямая адресация);
((Y)) - содержимое ячейки памяти, адресуемой содержимым Y (косвенная адресация).
Кроме этого, при написании исходного текста программ для МК51 удобно пользоваться следующими обозначениями, принятыми в ассемблере ASM51:
п - текущее содержимое счетчика команд МК;
В - суффикс двоичного кода;
Н - суффикс шестнадцатеричного кода;
HIGH - логическая операция выделения старшего байта из d 16 при ассемблировании;
LOW - логическая операция выделения младшего байта из d 16 при ассемблировании;
AND - логическая операция «конъюнкция» при ассемблировании;
NOT - логическая операция «инверсия» при ассемблировании;
186
OR - логическая операция «дизъюнкция» при ассемблировании.
Прямой адрес
™ С-----□
2FH ЕЗВЭЕИЕ30ЭВЯЕЯК
2ЕН
2DH
2СН гаигяииЕптг?
2ВН БЗВЗЕЯ35ЭЙЗЕ1Е
2 АН гаигарпгагптр
29Н ПГмИГЯТИГППГП
28Н ЕЛПЗЕЯПДЕИЕЯП1ЕП
27Н ЕЭЕЯЕЯгзгЯВЛгЭЕЗ
26Н
25Н
24Н
23Н шеняйееипие
22Н гптгиггпигягпгя
21Н ЕЗЗЙЕПЗЭиЛЕПРЭЕЭ
20Н ПЯЕЗЕЭИЕЗЕЗИИ
1FH 18Н 1 БанкЗ
17Н ЮН Банк2
0FH 08Н Банк1
07Н ООН ' БанкО
бита
0FFH ОГОН
ОЕ2Н
DD0H
0В8Н ОВОН
0А8Н ОАОН
98Н
90Н
88Н ВОН
Г71Г71Гх1Г71ГДГ71Ь|Г7П I
а>сг)
п
Е7 |Еб|Е5
D7 |Рб|Р5|Р4 |РЗ; D2 |Р1 |Р0
АГ t —j —[АС |АВ| АА |А9|А8
Е31ЕЗЕ9ЕЕ1Е11ЭЕЯЕ]
SE'
9F |9Е|9Р|9С[9В
97|96|95|94|93|92|91|9о1
тгтч]
Имя регистра
В
А
PSW
IP
РЗ
Е
Р2
SCON
И
icon
И)
К
Рис. 3.45. Карта адресуемых бит а - в ОЗУ; б - в регистрах специальных функций
Все команды МК51 по формату, типу операндов, способу адресации и передачи управления можно разделить на 13 типов, представленных на рис. 3.46.
Далее в табличной форме приводится описание системы команд, разбитой на 5 групп: передачи данных (табл. 3.18), арифметических операций (табл. 3.19), логических операций (табл. 3.20), операций с битами (табл. 3.21) и передачи управления (табл. 3.22).
Для каждой команды приводится мнемокод, код операции, тип (Т) команды согласно рис. 3.46, формат (Б) в байтах, время выполнения в машинных циклах (Ц) и выполняемая операция. Смысловое содержание мнемокодов команд раскрывается в табл. 3.23.
187
Таблица 3.18
Группа команд передачи данных
Мнемокод КОП T Б Ц Операция
MOV A,Rn 11101m 1 1 1 (A)<HRn)
MOV A,ad 11100101 3 2 1 (A)<-(ad)
MOV A,(a)Rj 111001 li 1 1 1 (A)<—((RJ)
MOV A, #d 01110100 2 2 1 (A)<-#d
MOV К., A lllllrrr 1 1 1 (Rn)<-(A)
MOV Ra, ad lOIOlrrr 3 2 2 (Rn)<-(ad)
MOVRn, #d Ollllrrr 2 2 1 (RnWd
MOV ad, A 11110101 3 2 1 (ad)<-(A)
MOV ad, R„ 10001пт 3 2 2 (adXRJ
MOV add, ads 10000101 9 3 2 (add)<-(ads)
MOV ad, (a)Rj 100001 li 3 2 2 (ad)<-((R,))
MOV ad, #d 01110101 7 3 2 (ad)<-#d
MOV(a)R,,A llllOlli 1 1 1 ((Ri))<-(A)
MOV (a)R„ ad 011001 li 3 2 2 ((ROX-Cad)
MOV(a)R„#d OlllOlli 2 2 1 ((Ri))<-#d
MOV DPTR, #d!6 10010000 13 3 2 (DPTR)<-#dl6
MOVC A, (a)A+DPTR 10010011 1 1 2 (A)<—((A)+(DPTR))
MOVC A, (a)A + PC 10000011 1 1 2 (PC)<-(PC)+1
(AH-((A)+(PC))
MOVX A, (a)Ri HlOOOli 1 1 2 (AW(R,))
MOVX A, (a)DPTR 11100000 1 1 2 (A)<-((DPTR))
MOVX (a)Rj, A llllOOli 1 1 2 ((Ri))<-(A)
MOVX (a)DPTR,A 11110000 1 1 2 ((DPTR))<-(A)
PUSH ad 11000000 3 2 2 (SP)<-(SP)+1
((SP))<-(ad)
POP ad 11010000 3 2 2 (adX(SP))
(SP)<-(SP)-1
XCH A, Rn llOOlrrr 1 1 1 (A)^R„)
XCH A, ad 11000101 3 2 1 (A>>(ad)
XCH A, (a)Rj 110001li 1 1 1 (AX+ORj))
XCHD A,(a)R, HOlOlli 1 1 1 (Ао+зХ^((^1)<из)
188
Таблица 3.19
Группа команд арифметических операций
Мнемокод КОП T Б Ц Операция
ADDA,R„ OOlOlrrr 1 1 1 (A) <—(A) + (Rn)
ADD A, ad 00100101 3 2 1 (A) <-(A) + (ad)
ADD A, (a)Rj 001001h 1 1 1 (A) <—(A) + ((R,))
ADD A, #d 00100100 2 2 1 (A)<-(A) + #d
ADDC A, Rn 001 Пит 1 1 1 (A) <- (A) + (RJ + (Q
ADDC A, ad 00110101 3 2 1 (A) <-(A) + (ad) + (C)
ADDC A, (a)Rj 001101 li 1 1 1 (A)4-(A) + ((Ri)) + (C)
ADDC A, #d 00110100 2 2 1 (A) «-(A) + #d + (C)
DA A 11010100 1 1 1 если [(Ao+J)>9] v [(AC) = 1], to (Ao + 3) *- (Ao » 3) + 6, затем если [(A4+7)>9]v [(C) =1], to(A4+7)<-(A4.7) + 6
SUBB A. R„ lOOllrrr 1 1 1 (A) <-(A)-(C)-(IQ
SUBB A, ad 10010101 3 2 1 (A) <- (A) -(C) -(ad)
SUBB A, (a) R, 100101 li 1 1 1 (A) <- (A) - (C) - ((Ri))
SUBBA, #d 10010100 2 2 1 (A) <-(A) - (C) - #d
INCA 00000100 1 1 1 (A)<-(A)+1
INCRn OOOOlrrr 1 1 1 (Rn)<-(Rn)+l
INC ad 00000101 3 2 I (ad)«-(ad)+l
INC (a)Rj 000001 li 1 1 1 ((Ri))<-((Ri))+l
INCDPTR 10100011 1 1 2 (DPTR) <-(DPTR) + 1
DECA 00010100 1 1 1 (A)<-(A)-1
DECRn 0001 Irrr 1 1 1 (Rn)<-(Rn)-l
DEC ad 00010101 3 2 1 (ad) <—(ad) -1
DEC(a)R, OOOlOlli 1 1 1 ((Ri))<-((Ri))-l
MUL AB 10100100 1 1 4 (В) (A) <-(A) x (B)
DIV AB 10000100 1 1 4 (А) (В) <- (A) / (B)
189
Таблица 3.20
Группа команд логических операций
Мнемокод КОП T Б Ц Операция
ANLA, R„ OlOllrrr 1 1 1 (A) 4-(A) a IL,
ANLA, ad 01010101 3 2 1 (A) 4-(A) a (ad)
ANL A, (a)R, OlOlOlli 1 1 1 (A)<-(A)a((R.))
ANLA, #d 01010100 2 2 1 (A)<-(A)A#d
ANL ad, A 01010010 3 2 1 (ad) <—(ad) a (A)
ANL ad, #d 01010011 7 3 2 (ad) <-(ad) a #d
orla.il, OlOOlrrr 1 1 1 (A) 4-(A) v(Rn)
ORL A, ad 01000101 3 2 1 (A) 4-(A) v (ad)
ORL A, (a)Rj 010001 li 1 1 1 (A) 4-(A) v ((IL))
ORL A, #d 01000100 2 2 1 (A)4-(A)v#d
ORL ad, A 01000010 3 2 1 (ad) 4-(ad) v (A)
ORLad,#d 01000011 7 3 2 (ad) 4-(ad) v #d
XRLA. R„ OllOlrrr 1 1 1 (A)4-(A)VRn
XRL A, ad 01100101 3 2 1 (A) 4-(A) V (ad)
XRLA, (a)R, OHOOlli 1 1 1 (A)4-(A)V((R,))
XRLA, #d 01100100 2 2 1 (A)4-(A)V#d
XRL ad, A 01100010 3 2 1 (ad) 4-(ad) V (A)
XRL ad, #d 01100011 7 3 2 (ad)4-(ad)V#d
CRLA 11100100 1 1 1 (A) 4-0
CPLA 11110100 1 1 1 (A) 4- A
RL A 00100011 1 1 1 (An+I)4-(An), п=0-нб
(Ao)4-(A7)
RLC A 00110011 1 1 1 (An+I)4- (АД n=0 : 6
(Ao>(C),(C)4-(A7)
RR A 00000011 1 1 I (Ад)4-(Ад+i), n=0 4 6
(A7)4-(Ao)
RRC A 00010011 1 1 1 (A„)4-(An+l), n=0 4-6
(A7)4-(C),(C)4-(Ao)
SWAP A 11000100 1 1 1 (Aim) 4-> (A7+4)
190
Программа на ассемблере состоит из строк, каждая из которых может содержать:
- метку, символически указывающую адрес команды, которой передается управление, метка отделяется от команды символом «:»;
- команду, мнемоническое обозначение операции;
- операнд или операнды, указывающие регистр, пару регистров, один или два непосредственных байта данных или адреса; операнды разделяются запятыми;
- комментарии, поясняющие содержание операций в программе; комментарии отделяются от команды символом «;».
1 коп ।
2 | КОП |
3 | КОП | EZ
4 I КОП | [2
5 | КОП | d
6 |А,р.„ | КОП| [/Г
7 | КОП | d
8 I КОП | Q2
9 I КОП I CZ
ю I КОП I fZ
11 I КОП I 02
12 I КОП I 02
13 I КОП I 02
#d ad
bi
re
ad
ad ads
#d
bit
ad!6
#d!6h
P7________
| #d
| add
| re
| re
| ad 161
| # d!61
Рис. 3.46. Типы команд MK51
Ниже приводится пример записи программы на ассемблере и в машинных кодах, которая после выполнения системного сброса осуществляет переход к выполнению команд, расположенных чиная с ячейки ПЗУ с адресом 0030Н, извлекающих число из гистра R7, инвертирующих его и записывающих результат в гистр R6, после чего переводит МК51 в режим холостого хода.
191
Программа на ассемблере обычно записывается в следующей форме:
Me ?ка
BEGIN:
END-
Мнемокод
UMP BEGIN
MOV A, R7
CPLA
MOV R6, A
MOV PCON, #01
; Перейти к началу
; Получить число из R7
; Инвертировать число
; Записать результат в R6
; Перейти в режим
; холостого хода
Таблица 3 21
Группа команд операций с битами
Мнемокод КОП T Б Ц Операция
CLR С 11000011 1 1 1 (C)<-0
CLR bit 11000010 4 2 1 (b)<-0
SETB С 11010011 1 1 1 (C)<-1
SETB bit 11010010 4 2 1 (b)<-l
CPL С 10110011 1 1 1 (C)<- (C)
CPL bit 10110010 4 2 1 (b)<-(b)
ANL С, bit 10000010 4 2 2 (C)<-(C)A(b)
ANL С, /bit 10110000 4 2 2 (C)^(C) Л (b)
ORL C, bit 01110010 4 2 2 (C)<-(C)v(b)
ORL C, /bit 10100000 4 2 2 (C)<-(C) v (b)
MOV C, bit 10100010 4 2 1 (C)<-(b)
MOV bit, C 10010010 4 2 2 (b)<-(C)
При занесении программы в ПЗУ мнемокоды команд переводят в машинные коды, при этом понимается, что в зависимости от длины (одно-, двух- или трехбайтная) команды в памяти будут занимать от одной до трех последовательных ячеек. Программу в таком виде удобно записывать следующим образом. В левом столбце - адреса команд в программе, далее следует машинный код команды и комментарий к команде.
192
Адрес Машинный код
0000Н 00000010
000IH 00000000
0002Н 00110000
ООЗОН 11101111 0031Н 11110100
0032Н 11111110
ООЗЗН 01110101
0034Н 10000111
0035Н 00000001
Комментарий
код команды LJMP adl6 ; старший байт адреса ООН ; младший байт адреса ЗОН ; код команды MOV A, Re ; код команды CPL А ; код команды MOV Rn, А ; код команды MOV ad, #d ; адрес PCON-87 Н ; данные, заносимые в ;PCON-01H
Группа команд передачи управления
Таблица 3.22
Мнемокод КОП T b U Операция
1 2 3 4 5 6
LJMP ad 16 00000010 12 3 2 (PC) «-ad 16
AJMP ad 11 aI0a9a800001 6 2 2 (PC) <- (PC)+2, (PC0 + l0) <- ad 11
SJMP rel 10000000 5 2 2 (PC) «- (PC) + 2, (PC)«-(PC)+rel
JMP (a)A+DPTR 01110011 1 1 2 (PC) <—(A) + (DPTR)
JZ rel 01100000 5 2 2 (PC) (PC) + 2, если (А)=0,то (PC) <-(PC) + rel
JNZ rel 01110000 5 2 2 (PC) <- (PC) + 2, если (A) * 0, to (PC) <-(PC) + rel
JC rel 01000000 5 2 2 (PC) <- (PC) + 2, если (C) = 1, to (PC) <-(PC) + rel
JNC rel 01010000 5 2 2 (PC) «—(PC) + 2, если (С) = 0,то (PC) <-(PC) + rel
JB bit rel 00100000 11 3 2 (PC)«- (PC) + 3, если (b) = 1, те (PC) «-(PC) + rel
JNB bit rel 00110000 11 3 2 (PC)«— (PC) + 3, если (b)~0, to (PC) <-(PC) + rel
JBCbit rel 00010000 11 3 2 (PC) «- (PC) + 3, если (b) = 1, to (b) <-0 и (PC) <-(PC) + rel
DJNZ Rn, rel 11011ПТ 5 2 2 (PC)<—(PC)+ 2, (Rn)<-(RJ-1, если (RJ * 0, to (PC) <- (PC)+rel
DJNZ ad, rel H010101 8 3 2 (PC) <—(PC) + 2, (ad) <-(ad) - 1, если (ad) * 0, to (PC)(PC)+rel
193
Окончание табл. 3.22
1 2 3 4 5 6
CJNE A, ad, rd 10110101 8 3 2 (PC)«-(PC)+3, если (A) * (ad), to (PC)<-(PC) + rd, если (A) < (ad), то (C) <- 1, иначе (C) <- 0
CJNE A, #d, rd 10110100 10 3 2 (PC)<-(PC) + 3, если (A)*#d to (PC) <- (PC) + rel, если (A) < #d, то (С) «- 1, иначе (C) <- 0
CJNE R„ , #d, rd lOlllrrr 10 3 2 (PC)<-(PC) + 3 если (R„) # #d, to (PC) <- (PC) + rel, если (RJ < #d, то (C) <-1, иначе (C) <- 0
CJNE (a)R, #d, rel lOHOlli 10 3 2 (PC)<(PC)+3, если ((RO) * #d, to (PC)<-(PC) + rel, если ((Rd) < #d, то (C)<-1, иначе (C)«-0
LCALL adl6 00010010 12 3 2 (PC)<- (PC) + 3. (SP) <- (SP) +1, ((SP))<-(PC0+7), (SP) <- (SP) +1, ((SP))<-(PC8+Is), (PC)<-ad 16
ACALL adll a^ag10001 6 2 2 (PC) <- (PC) + 2. (SP) <- (SP) +1, ((SP)WPC0,7),(SP)<-(SP)+l, ((SP))<-(PCg.15),(PC0+10)<-adll
RET 00100010 1 1 2 (PCS+ 15)<-((SP)), (SP) <- (SP) -1, (PCO.7)<-((SP)),(SP)<-(SP)-1
RET1 00110010 1 1 2 (PCg+15)<-((SP)),(SP)«-(SP)-l, (PC0+7)<-((SP)),(SP)<-(SP)-l
NOP 00000000 1 1 1 (PC)«-(PC)+1
Необходимо отметить, что ассемблер ASM51 допускает использование обобщенных команд перехода JMP и вызова CALL. В процессе трансляции, исходя из реального расстояния перехода, ASM51 заменит обобщенные команды оптимальными (по формату) командами перехода (SJMP, AJMP, LJMP) и вызова (ACALL, LCALL).
Для автоматического выполнения сложных операций управления требуются не только отдельные микропроцессоры, но и комплекс вспомогательных устройств, позволяющих следить за состоянием процесса управления и осуществлять его необходимую коррекцию.
В небольших микропроцессорных системах управления в качестве устройств, позволяющих осуществлять индикацию и изме-
194
нение режимов работы автоматической системы, наибольшее распространение получили схемы индикации и клавиатуры, работающие в динамическом режиме, где дешифрирование и сканирование клавиатуры и дисплея осуществляется программно.
Мнемокоды команд МК
Таблица 3.23
Мнемокод ADD ANL CALL CINE CLR
CPL DA
DEC DIV
DJNZ INC IMP MOV
MUL NOP
ORL POP PUSH
RET RL(RLC) RR(RRC) SETB SUBB SWAP XCH XRL
Jxx
Выполняемая операция или действие
Сложение
Конъюнкция
Вызов подпрограммы
Сравнение и переход, если не равно
Сброс (обнуление)
Инвертирование
Десятичная коррекция
Декремент
Деление
Декремент и переход, если не нуль
Инкремент
Безусловный переход
Пересылка данных
Умножение
Холостая команда
Дизъюнкция
Извлечение из стека
Загрузка в стек
Возврат в основную программу
Сдвиг влево (циклический)
Сдвиг вправо (циклический)
Установка бита в единичное значение
Вычитание
Обмен тетрад в байте
Обмен
Исключающее ИЛИ
Условный переход (хх - код условия)
195
Пример такого блока индикации и клавиатуры приведен на рис. 3.47.
В данной схеме в каждый момент времени работает только один из двух семисегментных индикаторов светодиодной матрицы АЛС 318А, а управляющие порты запрограммированы следующим образом: порты А, В и порт С - биты DC4, DC7 работают только на вывод информации; порт С - биты DCO. DC1 работают только на ввод информации.
Эффект непрерывного свечения индикаторов обеспечивается многократным повторением вывода символа и световой инерцией глаза наблюдателя (приблизительно 0,018 сек.).
Организация цикла периодического высвечивания символа производится следующим образом
1. В порт В записывается код в соответствии с требуемым изображением символа, например для вывода буквы «г» необходимо зажечь сегменты Е и G, следовательно, единицы должны быть записаны в разрядах DB4 и DB6, остальные разряды должны быть в состоянии нуля.
2 В порт А записывается код в соответствии с требуемым номером семисегйентного индикатора, который должен высветить символ «г», например если необходимо высветить «г» во второй позиции индикатора, то в разряд DA1 должна быть записана единица, а в остальные разряды - нули. Единица с выхода DA1 инвертируется микросхемой 555ЛН1, выполняющей роль буфера, в результате чего на вторую позицию индикатора АЛС318А подается потенциал, близкий к нулю, что вызывает свечение сегментов в данной позиции
3. Производится чтение битов DCO, DC1 порта С. Если в этот момент нажата клавиша «1» или «7», то разряды DC0 и DC1 будут восприняты как 01 или как 10, что является сканирующим кодом этих клавиш при опросе второй позиции индикатора. Эти же коды при опросе, например, четвертой позиции индикатора будут восприняты как сканирующие коды соответственно «3» и «9» и т.д. Нажатие других клавиш не приведет ни к каким изменениям потенциалов на входах DC0 и DC1 и будет воспринято как код 11, т.е. клавиша не нажата. При нажатии двух клавиш одновременно
196
например «1» и «7», «4» и «*» со входов DC0 и DC1 будет считана комбинация 00. Эта комбинация может восприниматься как ошибочная и игнорироваться или по усмотрению разработчика использоваться для переключения каких-либо режимов работы микропроцессорной системы управления.
Рис. 3.47. Блок индикации и клавиатуры микропроцессорной системы управлений
4. Запись нулей в порт А, В и С - бит DC4 производит гашение индикатора, после чего весь процесс повторяется для следующей позиции индикатора и для следующей пары клавиш.
С выхода DC7 порта С на схему звуковой сигнализации, собранную на транзисторе ИЛ и пьезокерамическом звонке BQ\, подается звуковой или речевой широтно-импульсно-модулированн-ный (ШИМ) сигналы
197
3.4. Цифроаналоговые и аналого-цифровые преобразователи
Сопряжение микропроцессора с объектом управления реализуется посредством преобразования непрерывных сигналов в двоичный код - аналого-цифровое преобразование и обратного преобразования кода в непрерывные сигналы - цифроаналоговое преобразование.
Существует два широко распространенных способа цифро-аналогового преобразования-, с использованием резистивной матрицы с весовыми двоично-взвешенными сопротивлениями и с аттенюатором сопротивлений лестничного типа R-2R.
На рис. 3.48 показана принципиальная схема 4-разрядного цифроаналогового преобразователя (ЦАП) с весовыми двоичновзвешенными сопротивлениями Четыре бита, фиксируемые в регистре, управляют состояниями четырех ключей и обеспечивают 16 различных комбинаций. Операционный усилитель включен по схеме сумматора. При замыкании одного из ключей выходное напряжение ЦАП определяется произведением опорного напряжения на отношение сопротивлений резистора обратной связи и резистора, находящегося в цепи данного ключа. Если, например, замкнут ключ, соответствующий старшему значащему разряду (СЗР) регистра (при установке в этом разряде логической «1»), то
с весовыми двоично-взвешенными сопротивлениями
198
e -—Е
“ 2R * 2 2’’
При установке логической единицы в разряде В1
R Е, Е,1
е =—F - - 4
та 8Л 8 2 22
При замыкании нескольких ключей результирующее выходное напряжение определяется суммой вкладов от каждого замкнутого ключа. Например, при установке логической единицы в разрядах ВЗ и выходное напряжение будет
Eref [ Erej _ Еref Г_1_+ О
2 8 2 U0 22/
Таким образом, можно получить 16 различных дискретных уровней выходного напряжения, соответствующих 16 различным двоичным комбинациям на выходе ЦАП. Соотношения сопротивлений весовых резисторов должны быть выдержаны с высокой точностью для обеспечения необходимой линейности преобразования входного кода в выходное напряжение.
Конструирование такого ЦАП на одном кристалле вызывает определенные трудности. Это объясняется слишком большим диапазоном сопротивлений входящих в него резисторов.
Реальное значение R, которое можно получить для резистора, формируемого как часть интегральной микросхемы, составляет 5 кОм. Таким образом, в 8-разрядном ЦАП требуется 9 резисторов с сопротивлениями от 5 кОм до 1,28 МОм (256^5 кОм), а в 12-разрядном - 13 резисторов с совершенно нереальным диапазоном сопротивлений вплоть до 20,48 МОм.
Такие значения сопротивлений недостижимы в интегральной технологии из-за ограниченности свободного пространства (т.е. полезной площади) на кристалле (типичный кристалл ИС имеет площадь 0,25 дюйма2 —161 мм2). Поэтому рассмотренный тип ре
199
зисторной схемы не находит практического применения в однокристальных ЦАП.
Возможности интегральной технологии реализуются наилучшим образом при повторении на одном кристалле одной и той же структуры. При этом получаются функциональные элементы с очень близкими (согласованными) характеристиками.
На рис. 3.49 показана принципиальная схема ЦАП, по своим функциональным характеристикам эквивалентная ранее рассмотренной (см. рис. 3.48), но в которой используются резисторы только двух номиналов - R и 2R. Это так называемый ЦАП с аттенюатором сопротивлений лестничного типа R-2R. Структура резисторной матрицы такова, что ток, втекающий в нее через какую-либо ветвь, на своем пути к концу «лестницы» в каждом узле делится на два равных тока, уходящих от узла по двум ветвям.
Рис. 3.49. ЦАП с аттенюатором сопротивлений лестничного типа
Рассмотрим эквивалентные схемы для отдельных разрядов преобразователя. Эквивалентная схема, соответствующая введенному в регистр коду 1000, т.е. когда ключ старшего разряда под-
200
ключей к источнику опорного напряжения, а ключи остальных разрядов подключены к общему проводу, приведена на рис. 3.50.
Из эквивалентной схемы вытекает, что значение напряжения е определяется из рассмотрения простейшего делителя
^O’-
Напряжение е, отвечающее коду 0100, будет
e=—I2R = —IR.
4 2
Так как
Рис. 3.50. Эквивалентная схема при включении третьего разряда: а - полная; б - свернутая
201
При преобразовании любого кода .¥= хз-х2-хгх0
З23 '
В случае и - разрядного преобразователя
Резисторная матрица в рассмотренном ЦАП содержит почти в два раза больше резисторов, чем просил резисторная матрица, но сопротивления этих резисторов малы - обычно 5-10 кОм; они требуют относительно небольшого участка полезной площади кристалла и, кроме того, могут быть изготовлены с хорошо согласованными значениями сопротивлений (в выпускаемых фирмами ИС ЦАП используется лазерная подгонка сопротивлений).
Для устройств, реализующих как аналоговые, так и цифровые функции, характерно наличие двух общих (земляных) выводов. Эти выводы предназначены для минимизации резистивной связи и шума в цепях прохождения аналогового сигнала. Для уменьшения помех в системе, содержащей как аналоговые, так и цифровые компоненты, хорошие практические результаты дает использование всюду внутри системы раздельных общих проводов для аналоговых и цифровых схем и соединение этих общих проводов друг с другом только в одной точке.
Аналого-цифровое преобразование является операцией, устанавливающей отношение двух величин - входной аналоговой V, и эталонной Vr. Цифровой сигнал преобразователя есть кодовое представление этого отношения. Это отношение иллюстрируется на рис. 3.51,а.
Если выходной код преобразователя является «-разрядным, то число дискретных выходных уровней равно 2". Таким образом, процесс аналого-цифрового преобразования состоит из квантования по уровню и кодирования.
202
На рис. 3.51,6 приведена передаточная характеристика АЦП (ломаная линия) и линия абсолютной точности (линия проведена через нуль и точку максимального значения выходного сигнала).
Рис. 3.51. Взаимосвязь сигналов (а), передаточная характеристика идеального АЦП (6)
Из рисунка видно, что шаг квантования по уровню в сущности определяет разрешающую способность преобразователя. Для квантового сигнала характерно наличие скачков на величину шага квантования в моменты времени, когда непрерывный (аналоговый) входной сигнал проходит средние между двумя уровнями значения. Между этими моментами времени значение выходного сигнала не изменяется.
При таком способе построения квантованного сигнала максимальная ошибка квантования, определяемая разностью входного и выходного сигналов, нигде не будет превышать ±1/2 шага квантования. Поскольку шаг квантования представляет собой значение аналоговой величины, на которую отличаются уровни входного сигнала, представляемые двумя соседними выходными кодовыми комбинациями, т.е. равен весу младшего значащего разряда, принято говорить, что погрешность не превышает ±1/2 МЗР. Величину погрешности квантования по уровню можно уменьшить, увеличивая число разрядов в выходном коде преобразователя.
203
Характеристики реальных преобразователей по ряду Параметров могут отличаться от идеальных характеристик (аналогичных идеальной характеристике на рис. 3.51,6). Передаточная характеристика преобразователя может быть сдвинута относительно идеальной характеристики (рис. 3.52,а). Эта погрешность смещения, или установки нуля, определяется как значение аналоговой величины, при которой характеристика пересекает ось входных напряжений. Наклон передаточной характеристики может отличаться от своего идеального значения, что приводит к погрешности наклона, или усиления (рис. 3.52,6). Для большинства серийно выпускаемых АЦП погрешности смещения и усиления или очень малы, или могут быть практически полностью устранены с помощью предварительных регулировок. Труднее устранить погрешности, связанные с нелинейностью передаточной характеристики, которые невозможно уменьшить с помощью регулировки.
Рис. 3.52. Погрешности преобразователя
204
В АЦП проявляются два типа нелинейности: интегральная и дифференциальная. Интегральная нелинейность (рис. 3.52,в) определяется максимальным отклонением передаточной характеристики от идеальной прямолинейной характеристики при нулевых значениях погрешностей смещения и усиления. Дифференциальная нелинейность (рис. 3.52,г) - это отклонение величины одного из уровней квантования от его идеального аналогового значения. Если дифференциальная нелинейность превышает один МЗР, то в выходном сигнале может исчезнуть одна из кодовых комбинаций (выпадающий код).
Для выполнения преобразования АЦП требуется некоторое конечное время, называемое временем преобразования tc.
Изменение входного напряжения во время процесса преобразования вносит нежелательную неопределенность в генерируемый выходной сигнал. Полная точность преобразования реализуется только в том случае, если изменение входного напряжения за время измерения не превышает шаг квантования, т.е.
бЯ^ЦДИС с dt~ 2я ’
где ПДИС - полный диапазон изменения входного аналогового сигнала; V, - входной аналоговый сигнал; п - разрядность преобразователя.
Например, если преобразование осуществляется с помощью 8-разрядного АЦП со временем преобразования 4=100 мкс, при полном диапазоне изменения входного аналогового сигнала 2U, то для синусоидального входного сигнала
V, =t/sin(27t/z),
а скорость изменения входного сигнала
dV
-^ = 2iifUcos(2nft),
ее максимальное значение будет
205
¥1 =2^-
Другими словами:
гс2яД7<^,
откуда
/<12,4 Гц.
' Таким образом, даже в случае относительно пологого синусоидального сигнала его частота ограничена 12,4 Гц. При столь жестком ограничении диапазон применения АЦП был бы исключительно узок. Эта трудность преодолевается путем использования на входе АИЦ устройства выборки-хранения (УВХ). УВХ -аналоговая схема, которая по команде осуществляет отсчет значений входного сигнала и затем сохраняет это значение, пока АЦП выполняет преобразование (рис. 3.53).
к АЦП
Рис. 3.53. Устройство выборки-хранения
Временным интервалом, определяющим допустимую скорость изменения входного напряжения, является задержка между моментом получения команды и моментом перехода схемы в режим хранения, называемая апертурным временем ta. Типичное значение апертурного времени - несколько десятков наносекунд. Если использовать УВХ с апертурным временем 20 нс, то максимальная
206
допустимая частота входного сигнала в рассматриваемом примере составит
/_< 62,17 кГц.
Это вполне приемлемое значение для преобразователя с Zc=100 мкс.
Следует обращать внимание на выбор типа конденсатора, поскольку диэлектрическая абсорбция (диэлектрические потери) в запоминающем конденсаторе является одним из источников погрешностей. Лучше всего здесь работают конденсаторы с диэлектриком из полипропилена, полистирола и тефлона. Слюдяные и поликарбонатные конденсаторы имеют уже посредственные характеристики. И совсем не следует использовать керамические конденсаторы.
Как отмечалось выше, действие аналого-цифровых преобразователей в принципе достаточно просто: в них происходит преобразование дискретизованных аналоговых сигналов в соответствующую последовательность двоичных чисел. Однако сделать это можно несколькими способами.
Наиболее распространенный способ реализации функции аналого-цифрового преобразования в преобразователях со средним и высоким быстродействием - АЦП последовательного приближения (поразрядного уравновешивания). В структуру АЦП последовательного приближения входит ЦАП (рис. 3.54).
Данный метод основан на аппроксимации входного сигнала двоичным кодом и последующей проверке правильности этой аппроксимации для каждого разряда кода, пока не достигается наилучшее приближение к величине входного сигнала. На каждом этапе этого процесса двоичное представление текущего приближения хранится в так называемом регистре последовательного приближения. Преобразование всегда начинается с установки единичного значения старшего значащего разряда в регистре последовательного приближения. Это соответствует первоначальной оценке величины входного сигнала половиной величины полного диапазона (полной шкалы). Компаратор сравнивает выходной сигнал ЦАП с входным напряжением и выдает контроллеру команду на сброс СЗР, если эта первоначальная оценка превышает
207
величину входного сигнала; в противном случае остается установленное значение СЗР. В следующем такте контроллер устанавливает в единичное значение следующий (но старшинству) разряд и снова, исходя из уровня входного сигнала, компаратор «решает», сбрасывать или оставлять установленным этот разряд. Преобразование продолжается аналогичным образом, пока не будет проверен последний, МЗР. В этот момент содержимое регистра последовательных приближений является наилучшим приближением входного сигнала - это и есть выходной цифровой сигнал (слово) АЦП.
Рис. 3.54. АЦП последовательного приближения: а-структурная схема; б - временная диаграмма сигналов; в - логическая схема работы АЦП
Таким образом, в АЦП последовательного приближения выходной сигнал для «-разрядного преобразователя получается точно за и тактов.
208
На рис. 3.55 иллюстрируется метод двухтактного (или двойного) интегрирования.
Входное напряжение интегрируется в течение фиксированного интервала времени Гь соответствующего полному заполнению счетчика. В конце этого интервала вход интегратора переключается на источник опорного сигнала. Выходное напряжение интегратора теперь уменьшается по линейному закону, а счетчик ведет подсчет импульсов до тех пор, пока входное напряжение не достигнет нулевого значения, после чего счетчик прекращает работу, а интегратор устанавливается в исходное состояние. Заряд, накопленный интегрирующим конденсатором в течение первого интервала, равен заряду, потерянному им в течение второго интервала. Следовательно.
T\Vt =t2Vr.
Рис. 3.55. Двухтактный интегрирующий АЦП: а - структурная схема; б - временная диаграмма сигналов
Отсюда следует
Заметим, что отношение временных интервалов является одновременно отношением содержимого счетчика. Другими словами, состояние счетчика в конце интервала t2 представляет собой выходное слово АЦП.
209
Метод двухтактного интегрирования обеспечивает отличные шумовые характеристики. Поскольку входное напряжение интегрируется в течение некоторого промежутка времени, любые высокочастотные шумы, накладывающиеся на входной сигнал, при интегрировании компенсируются. Кроме того, фиксированный временной интервал 1\ можно выбрать таким, чтобы почти полностью исключить помехи с частотами, кратными 1/Ть Для этой цели обычно выбирается временной интервал, определяемый частотой промышленной сети.
Главный недостаток двухтактного интегрирующего АЦП -низкое быстродействие.
Метод мгновенного, или параллельного преобразования иллюстрируется на рис. 3.56. Он используется в тех случаях, когда требуется очень высокая скорость преобразования, например в видеотехнике, радиолокации, гидролокации, в цифровых осциллографах.
Рис. 3.56. АЦП параллельного преобразования
210
В этом методе входной сигнал сравнивается одновременно со всеми пороговыми уровнями с помощью компараторов, смещенных по уровню опорного сигнала на один младший значащий разряд относительно друг друга. Смещение обеспечивается за счет использования прецизионного резистивного делителя. При подаче аналогового сигнала на вход АЦП компараторы, смещенные выше уровня входного сигнала, имеют на выходе логический ноль, а смещенные ниже этого уровня - логическую единицу. Сигналы с выходов компараторов подаются на комбинационную схему, на выходе которой получается цифровой код входного напряжения Скорость преобразования таких АЦП достигает 100 мГц при 8-разрядном разрешении.
Одним из широко распространенных способов является однобитовое аналого-цифровое преобразование, базирующееся на использовании дельта-модуляции. Популярность использования дельта-модуляции объясняется простотой схемотехнической реализации дельта-модулятора, а также тем, что единицы и нули, произведенные дельта-модулятором, очень легко преобразовать обратно в аналоговый сигнал. Для этого необходим всего лишь простой аналоговый низкочастотный фильтр.
При дельта-модуляции (ДМ) в цифровом виде представляется разность величин последовательных отсчетов сигналов. Простота конструкции дельта-модулятора объясняется тем, что здесь в отличие от других способов аналого-цифрового преобразования не требуются нормирующие усилители, устройства выборки-хранения, фильтры антисовмещения (фильтры, устраняющие наложения спектров) и детали с повышенной (обычно не менее 1%) точностью номиналов. Тем не менее в такой системе можно получить высокие значения отношения сигнал-шум, например около 65 дБ. Недостатком дельта-модуляции является то, что для достижения заданного качества сигнала обычно необходима гораздо большая скорость передачи информации, чем при использовании других способов АЦП. Поэтому ДМ лучше подходит для тех систем, где недопустимы большие затраты на хранение или обработку отсчетов. Кроме того, в каналах с шумами погрешности в оценке координат на приемной стороне накапливаются. Поэтому для
211
уменьшения влияния эффекта накопления погрешностей длительность интервала представления сообщения должна быть не очень большой.
Одноразрядный дельта-модулятор, изображенный на рис. 3.57, образует простейший АЦП. На каждом тактовом интервале принимается двоичное решение путем сравнения уровня входного сигнала с величиной аппроксимированного предыдущего отсчета, сохраняемого в модуляторе. Если сигнал больше аппроксимируемого значения, то к последнему добавляется фиксированное приращение, и наоборот, если сигнал меньше предыдущего отсчета, приращение вычитается. Процесс повторяется для каждого отсчета, и аппроксимированное значение сигнала все время удерживается вблизи истинного значения входного сигнала (рис. 3.58). Точность аппроксимации прямо связана с величиной приращения. Одноразрядные числа, на основании которых в модуляторе строится аппроксимированное значение входного сигнала, можно передать в другое место и там восстановить по ним ту же самую величину сигнала. Обычно это делается с помощью цифровой низкочастотной фильтрации с последующей дискретизацией на другой, более низкой частоте. Полученные таким образом отсчеты эквивалентны отсчетам на выходе обычного АЦП.
212
Входной сигнал
Напряжение на интегрирующем /конденсаторе
Передаваемый поток
—. двоичных чисел
Рис. 3.58. Сигналы в системе дельта-модуляции
При дельта-представлении возникают ошибки двух видов: квантования и перегрузки. Максимальная ошибка квантования не превышает шага квантования, если перегрузки по крутизне отсутствуют. Ошибки перегрузки возникают, если крутизна сообщения (скорость изменения сигнала) превышает максимально допустимую при дельта-представлениях. Крутизна сообщения определяется произведением величины шага квантования dK на частоту дискретизации (опроса) fs. Поэтому, для того чтобы система не перегружалась, должно удовлетворяться следующее условие:
fs dK^\x'(tV
где । (г) - модуль первой производной сообщения по времени.
Качество работы одноразрядного преобразователя полностью определяется частотой дискретизации (опроса) и, следовательно, скоростью создания информации. При заданной величине шага квантования создается шум квантования определенного уровня, а максимальное значение сигнала определяется допустимой скоростью изменения сигнала и его частотой. Удваивая частоту дискретизации, можно в два раза повысить допустимую скорость изменения и тем самым при неизменной частоте удвоить максимальную амплитуду сигнала Если же сохранить скорость изменения сигнала и в два раза уменьшить шаг квантования, то шум квантования понизится вдвое. Можно найти оптимальную величину шага квантования, определяемую статистическими свойствами входного сигнала, при котором отношение сигнал-шум становится максимальным. Отношение сигнал-шум чаще всего измеряется на
213
частоте 1 кГц и для простого одноразрядного дельта-модулятора определяется как:
S 0,2//
/F05
где / - частота дискретизации (опроса), / — частота синусоидального сигнала, на которой определяется отношение сигнал-шум, а F - ширина полосы, в которой измеряется мощность шума. Например, при дискретизации с частотой 500 кГц, когда скорость создания информации равна 500 Кбит/с, для синусоидального сигнала с частотой 1 кГц можно достичь S/N ~ 55 дБ, если допустимая ширина полосы кодируемого сигнала равна 14 кГц.
Для дальнейшего улучшения характеристик системы следует применять более сложные адаптивные дельта-модуляторы.
3.5. Проектирование автоматических систем на базе микропроцессоров
Использование микропроцессоров или цифровых процессоров обработки сигнала при проектировании различных автоматических систем позволяет создавать устройства, особенностью которых является то, что аппаратные средства и программное обеспечение существуют здесь в форме неделимого аппаратно-программного комплекса Процесс разработки такого аппаратно-программного комплекса удобно представить в виде последовательности трех фаз проектирования:
1) разработка (и/или выбор типовых) аппаратных средств;
2) разработка прикладного программного обеспечения;
3) комплексирование аппаратных средств и программного обеспечения и отладка прототипа системы.
При использовании микропроцессора в качестве комплектующего элемента разработчик системы избавлен от необходимости проектировать и сопровождать технической документацией самую сложную центральную часть изделия. Проектная документация на аппаратные средства изделия содержит только документацию на аппаратуру сопряжения микропроцессора с датчиками и исполнительными механизмами объекта управления. С появлением аналоговых (сигнальных) микропроцессоров, интегральных ЦАП и
214
АЦП, разнообразных БИС специализированных контроллеров все более сложные функциональные части автоматической системы переходят из разряда подсистем в разряд комплектующих элементов. Так как эти комплектующие элементы являются сложно организованными приборами, функционирующими под управлением программы, то удельный вес прикладного программного обеспечения в микропроцессорных системах имеет устойчивую тенденцию к увеличению, а удельный вес аппаратных средств - к снижению.
Если задача уже поставлена, то наиболее трудоемким и сложным (из-за тесной связи с областью приложения будущей программы) этапом работы является этап формирования алгоритма решения поставленной задачи. Связано это с тем, что этот этап практически не поддается формализации и, следовательно, не может быть автоматизирован обычными средствами. Проектная работа здесь носит глубоко творческий характер и сильно зависит от опыта и квалификации разработчика.
Проиллюстрируем вышесказанное одним из возможных подходов к созданию систем с использованием микропроцессора на примере проектирования цифрового фильтра.
Пусть требуется создать ФНЧ первого порядка.
На рис. 3.59,а показана принципиальная схема такого фильтра. Порядок фильтра, как отмечалось ранее, определяется числом входящих в него реактивных элементов, т.е. конденсаторов и катушек индуктивности. Сигналы низких частот проходят через фильтр низкой частоты на его выход. Высокочастотные сигналы замыкаются через конденсатор на землю и не появляются на выходе фильтра. На рис. 3.59,6 приведена АЧХ этого фильтра. Граничная частота фильтра (частота излома, перегиба) логарифмической АЧХ а)с=1/г (рад/с), где r=RC - постоянная времени. Для представления частоты в герцах используется соотношение СОс=2т&.
Запишем дифференциальное уравнение, описывающее процессы, происходящие в ФНЧ, показанном на рис. 3.59, с учетом того, что
Uвт + Ri = U
215
ai = C dUum/dt, тогда уравнение будет иметь вид и-“+йс^г=и- (3'6)
| 11вых|
I Ubx I R
а б
Рис. 3.59. Фильтр нижних частот: а - принципиальная схема; б - АЧХ
Рассмотрим значения входного и выходного сигналов в дискретные моменты времени иД/, где п = 0,1,2,... и заменим производную конечной разностью
<#7ВЫХ ~ ^ВЬ1Х^ ~^ВЬ1Х(.-1)Дг
dt Ы
тогда выражение (3.6) примет вид
Проделаем с (3.7) следующие преобразования.
А/С7ВЫХ + RCUEhK -RCU =&tU3x . (3.8)
ВЫХяд, ВЫХлД/ ВЫХ(п-|)Д/ ВХлА» '
Объединим первые два члена в (3.8) и вынесем за скобки
^t + RC)U,^ ~RCUB^ = (3.9)
Перенесем второй член (3.9) в правую часть равенства и разделим левую и правую части полученного равенства на (Ar+7?Q. Тогда
216
и - , RCU^
вых^ Д/+ЯС Д/ + ЯС
(3.10)
Разделим числитель и знаменатель членов в правой части
(3.10) на Де
^вых-* l + RC/ *\+RC/ (3 ll)
1+ /Л/ 1+ At
RC/ как kt, —ZAr, как k2 i^A.
Наконец, обозначив РЛ,У
Z+J%
получаем
^быхлД, - + ^2^вых(я_1)й1 •
(3 12)
Реализовав (3.12) в виде программы для микропроцессора и использовав схему на рис. 3.60 при Д/ « RC, получим цифровой фильтр нижних частот
Рис. 3.60. Схема цифрового фильтра
Цифровые устройства, созданные на базе микропроцессоров, имеют ряд преимуществ перед аналоговыми. Приведем некоторые из них на примере рассмотренного выше цифрового фильтра.
1. Нечувствительность характеристик фильтра к разбросу параметров, входящих в него элементов, их временному и температурному дрейфам.
2. Малые размеры и высокая надежность работы фильтра, связанные с использованием БИС.
3. Легкость изменения параметров и характеристик цифрового фильтра, что при использовании микропроцессора осуществляется модификацией программного обеспечения или таблиц коэффициентов.
4. Возможность реализации адаптивных фильтров, т.е. фильтров с изменяющимися в процессе работы параметрами.
217
Глава 4. АВТОМАТИЧЕСКИЕ СИСТЕМЫ
4.1. Автоматический контроль
Системы автоматического контроля без непосредственного участия человека осуществляют наблюдение за работой машин и механизмов, контролируют ход технологических процессов, ведут количественный учет технических характеристик движения.
Автоматический контроль освобождает человека от ряда утомительных операций, позволяет производить измерения различных величин в условиях, малодоступных или опасных для непосредственного труда человека, повышает точность и увеличивает быстроту выполнения контрольно-измерительных операций.
Системы автоматического контроля основаны на применении методов и средств измерения неэлектрических величин электрическими методами.
Рис. 4.1.“Блок-схема системы автоматического контроля
Устройства автоматического контроля (рис. 4.1) представляют собой разомкнутые автоматические системы. Контролируемый объект воздействует на датчик. Электрический сигнал датчика передается промежуточному элементу, в котором происходит соответствующая обработка сигнала. В зависимости от назначения устройства автоматического контроля сигнал от промежуточного элемента может передаваться исполнительным устройствам, которые приводят в действие сигнализатор (сирену, вентилятор и т.п.). Системы автоматического контроля применяются в качестве измерительных, сигнализирующих, счетных, сортировочных устройств, а также выполняют роль анализаторов, дефектоскопов, дозаторов.
4.2. Автоматическая защита
Системы автоматической защиты служат для ограничения времени действия перегрузок на защищаемую установку, т.е. для
218
предотвращения опасных последствий этих явлений. Системы автоматической защиты осуществляют автоматическое отключение защищаемых установок при возникновении в них перегрузок, при исчезновении или снижении питающих установку напряжений ниже нормы, а также нечастую коммутацию в нормальных режимах.
В системах автоматической защиты осуществляется непрерывное измерение контролируемого параметра защищаемой установки, и при превышении его значения свыше определенного уровня установка либо полностью отключается, либо на некоторое время переводится в специальный режим с ограниченными характеристиками, после чего осуществляется попытка повторного вывода установки на номинальный режим.
Устройства автоматической защиты представляют собой разомкнутые автоматические системы и по своей структуре аналогичны устройствам автоматического контроля (см. рис. 4.1).
43. Автоматическое управление
Системы автоматического управления осуществляют пуск или остановку машин и агрегатов без непосредственного участия человека. Человек производит лишь первоначальное включение, а дальнейшие функции по управлению объектом берут на себя автоматические устройства.
Главным элементом систем автоматического управления являются электронные ключи. Электронный ключ (аналог электромеханического контакта) - активный элемент (транзистор или тиристор), включенный в цепь нагрузки и осуществляющий ее коммутацию, т.е. замыкание или размыкание при воздействии внешнего управляющего сигнала. Ключ может находиться в двух стационарных состояниях: замкнутом и разомкнутом. Время перехода ключа из одного состояния в другое определяется инерционностью переходных процессов, протекающих в ключе при изменении его состояния. Переход ключа из разомкнутого состояния в замкнутое характеризуется его временем включения, а из замкнутого в разомкнутое - временем выключения.
219
На рис. 4.2 представлена схема ключа на биполярном транзисторе. В данной схеме запертое состояние транзистора обеспечивается резистором R& а отпирание транзистора вызывается положительным входным сигналом £*.
Рис. 4.2. Электронный ключ
Основными требованиями к электронному ключу являются стабильность состояний электронного ключа при действии дестабилизирующих факторов и высокое быстродействие, определяемое временем перехода из одного состояния в другое.
Для обеспечения стабильного запертого состояния транзистора должно выполняться условие, которое для наиболее неблагоприятного случая (/°=/ма|Сс) принимает вид:
Лбо-^6 <^бэг»
где 7кбо - обратный ток коллектора; U63r - граничное напряжение база-эмитгер.
Для обеспечения стабильного замкнутого состояния транзисторного ключа (т.е. насыщения транзистора) необходимо выполнение условия
220
4^21эппп ~ Кн ПРИ »ибзюс, где (76энас - напряжение насыщения база-эмиттер; h2\3-B - коэффициент усиления тока базы при большом сигнале (см. параграф 2.1) при
Дискретность выходного сигнала ключа позволяет использовать ключ не только как коммутатор цепи нагрузки, но и в качестве регулирующего элемента, например в импульсных источниках электропитания. А также в качестве основного элемента логических схем, реализующих функции булевой алгебры.
4.4. Автоматическое регулирование
Системы автоматического регулирования без непосредственного участия человека поддерживают требуемый режим работы судовых объектов или технологических процессов, например заданную скорость, температуру, уровень жидкости, напряжения и т.д.
Регулируемым объектом (машина, аппарат или процесс, который подвергается регулированию) может быть, например, электрический двигатель, а регулируемым параметром (физическая величина, которую требуется поддерживать постоянной или изменять по определенному закону) - скорость вращения его вала, если величину ее требуется поддерживать постоянной.
Вследствие возмущающего воздействия (внешнее воздействие, под влиянием которого изменяется регулируемый параметр), например изменения нагрузки на валу электродвигателя, регулируемый параметр отклоняется от заданной величины. Сигнал об этом отклонении от регулируемого объекта передается на элемент сравнения (см. рис. В.1), который сравнивает полученный сигнал с заданным параметром (уставкой) и посылает сигнал рассогласования в промежуточный элемент. Промежуточный элемент в случае необходимости усиливает полученный сигнал, осуществляет его соответствующее преобразование и посылает к исполнительному устройству. Исполнительное устройство приводит в действие регулирующий элемент, который, воздействуя на регулируемый объект, приводит регулируемый параметр в соответствие с заданным. Таким образом, устройство автоматического регулирования представляет собой замкнутую автоматическую систему.
221
Рассмотрим в качестве примера следящую систему, предназначенную для дистанционного управления поворотом выходного вала (движок потенциометра редуктора) пропорционально входному напряжению, снимаемому с потенциометра ручки управления, показанную на рис. 4.3.
+Un (220 В. 400 Гц)
(12 В. 400 Гц)
Рис. 4.3. Простейшая следящая система с двигателем
Напряжение уставки ит с потенциометра ручки управления (джойстика) поступает на один из входов схемы сравнения, где из него вычитается напряжение обратной связи иж, пропорциональное углу поворота объекта регулирования. Полученный таким образом сигнал рассогласования и с выхода схемы сравнения поступает на вход полупроводникового усилителя мощности с трансформаторным выходным каскадом, который питает управляющую обмотку двухфазного асинхронного исполнительного (управляющего) электродвигателя. С валом двигателя через редуктор соединены потенциометрический датчик углового перемещения и объект регулирования.
При наличии напряжения на входе усилителя мощности якорь двигателя начинает вращаться, перемещая связанный с ним через редуктор движок потенциометра обратной связи R^. Возникающее напряжение иж, пропорциональное смещению движка а и углу поворота якоря двигателя адв, синфазно входному напряжению. Последнее достигается соответствующим выбором направления смещения движка.
22?
Напряжение на входе усилителя мощности и = ит - ик. Напряжение на управляющей обмотке ыу = К\и, где коэффициентом Кх учитывается усиление усилителя мощности и наличие трансформатора Тр.
Двигатель вращается до тех пор, пока рассогласование (разность между имеющимся и требуемым значением угла поворота) не станет равным нулю. Угловая скорость вращения якоря двигателя пропорциональна напряжению иу: со =КДВ иу. Соответственно, передаточная функция двигателя ~am! иу = Кт1 р, гдеp=jсо.
Благодаря наличию двигателя система является астатической. Это означает, что в установившемся режиме остаточное рассогласование отсутствует, если не учитывать сухого трения в двигателе (застоя).
Для уменьшения погрешности от застоя необходимо использовать двигатели с малым напряжением трогания При заданном Щр ошибка застоя равна: / К, где К - коэффициент усиле-
ния, характеризующий зависимость напряжения на обмотке управления двигателя при единичном рассогласовании (в разомкнутой системе).
Угол поворота движка потенциометра равен а = К.^ адв, а напряжение, снимаемое с движка потенциометра, ик= ft а. Соответственно структурная схема (рис. 4.4,а) будет состоять из интегрирующего звена, усилительных (пропорциональных) звеньев и цепи обратной связи Д Вся система эквивалентна одному инерционному звену с коэффициентом передачи К3 - 1 / р и постоянной времени Тэ = 1 / Р К (см. рис. 4.4,6). Коэффициент К3 (град/В) характеризует угол поворота движка потенциометра на единицу входного напряжения.
Рис. 4.4. Структурная (а) и эквивалентная (б) схемы простейшей следящей системы с двигателем
223
В режиме изменения угла поворота с постоянной скоростью в системе имеется постоянное рассогласование (скоростная ошибка), величина которого равна Да^ = vc / К„ где vc - скорость изменения угла поворота, a Kv = Р К - коэффициент передачи по скорости (1/с).
Недостатком системы является ее значительная инерционность, обусловленная (при наличии понижающего редуктора) главным образом механической инерцией якоря двигателя. Инерционность системы характеризуется величиной Т, и зависит от р и К. увеличения быстродействия увеличивают коэффициент К и вводят различные корректирующие цепи.
4.5. Анализ и синтез линейных стационарных автоматических систем методом пространства состояний
Удобным математическим методом, позволяющим выполнять описание систем автоматического управления (объектов управления), формулировать и решать важные задачи теории управления (в том числе оптимального), является метод пространства состояний. Этот метод находит весьма широкие приложения и хорошо подходит для реализации средствами микропроцессорной техники.
Предположим, что есть детерминированный объект управления, который можно описать совокупностью параметров Х)(/), x2(z),..., меняющихся во времени. На объект поступают (по к его входам) некоторые управляющие воздействия wi(Z), u2(l), ..., «*(/). Зададим значения х,(/0) переменных х, (/=1,2,..., и) в начальный момент /0- Совокупность значений х,(Г) называют переменными состояния, если они вместе с управляющим воздействием «,(/) (/=1, 2, ..., к) однозначно определяют поведение объекта в любой момент времени t>t0. Переменные состояния при заданных начальном состоянии и управлении однозначно определяют состояние в любой момент времени, независимо от того, как достигнуто начальное состояние.
Состояние системы удобно описывать вектором x(t) в п-мерном пространстве, которое называют пространством состояний. Компонентами вектора х(0 являются переменные со
224
стояния Xi, которые записываются с помощью матрицы-столбца •*0)=1Л1(0» х2<1), ...» хя(0]т, где «Т» - операция транспонирования матрицы.
Обычно в качестве выходных (требуемых) переменных системы используют не все переменные состояния, а лишь часть из них. Иногда в качестве выходных переменных yi(/), y2(t), при-
нимаются не сами переменные, а известные функции gb g2, •••» gm от них (а может быть, и управления «(/)).
Уравнения состояния и выхода записываются в стандартной векторной форме:
где f - л-мерная, g - «-мерная векторные функции; «(Z)=[«i(0, 1/2(0, «Д0]Т; Х0=[У1(0, J2W, ...» Ы0]Т - к- и «-мерные векто-
ры-столбцы. Если интерес представляют сами переменные состояния, то у (0 совпадает с х(Г).
Для линейной системы (объекта) функции f и g, являются линейными комбинациями переменных состояния и управления «1,..., и*. В этом случае
Л=Yau ('К (О+(')«/ (') • 1 =ь2..........«;
7=1 1=1
п к
»= 1.2- --т>
j=l 7=1
где ау, Ьи, Су, du - функции времени. Запись уравнений состояния и выхода сильно упрощается при использовании матриц:
х(/)=Л(г)х(/)+*(/)«(/);
j(/)=c(/)x(/)+d(z)-K(/)
Здесь введены матрицы ап • - "ь
*и • • \к
Ь =
"л1 • • "лл.
225
С11 • с1л
_Cml • • Стп.
А.
• d\k
dmk.
В случае линейной стационарной системы матрицы A, b,c,d-
постоянны.
Если объект (или система) описывается одним дифференциальным уравнением л-го порядка, то последнее легко преобразовать к системе п уравнений первого порядка, т.е. привести к системе уравнений в пространстве состояний.
Так, если задано уравнение
[а„ (t)pn (z)p"-1 +...+«0(/)]y(f)=M(r)
(p=d/dt - оператор дифференцирования), т.е. в правой части не содержится производных функций n(f), то в качестве переменных состояния принимаются величины j(z); jfa); y(t); ...,т.е:
x1(/)=y(z);
^(0=р"_,Я/)=А1(0-
И из заданного уравнения находим: ап ап ап ап ап
Все это можно записать в компактной матричной форме: x(/)=Hx(f)+A-«(/),
где
О 1 О
226
ж
Уравнение выхода принимает вид y(t)=c-x(t) с соответствующей матрицей с или превращается в тождество y(0=JCW> если требуется наблюдать величину х(/).
Проверка наблюдаемости и управляемости посредством диагонализации. Рассмотрим линейную стационарную динамическую систему с одним входом и одним выходом, описываемую следующими уравнениями состояния и выхода:
x(z)=А • x(r)+b •«(/);
(4.1)
y(z)=c-x(z),
(4-2)
где х - и-мерный вектор состояния; и - входная переменная управления; у - выходная переменная; Л, b и с - постоянные матрицы.
Операции, описываемые линейными уравнениями, удобно представить в виде структурной схемы на рис. 4.5, где двойные линии обозначают векторные связи. Для получения вектора х(1) нужно осуществить интегрирование вектора х(г). Вектор х(г) в свою очередь образуется путем суммирования вектора x(Z), подвергнутого преобразованию А, и переменной управления и(г), подвергнутой преобразованию Ь. Аналогично получается выходная переменная у(0: вектор х(0 подвергается преобразованию с.
227
Рис. 4.5. Графическое представление операций, описываемых линейными уравнениями состояния
Определим x(t) как
(4-3)
где М - матрица собственных векторов матрицы А (ненулевых решений линейной однородной системы (А - Х,Е)х = 0, где Е -единичная матрица), называемая модальной матрицей преобразования. Если матрица А имеет различающиеся собственные значения, то подстановка (4.3) в (4.1) и (4.2) дает:
z(/)=Jz(r)+y •«(/); (4.4)
y(/) = az(/), (4.5)
где
Л = М-А-М = \ Л
L 4
у=М'-Ь',
(4-6)
а=с-М.
Диагональные элементы матрицы А, т.е. Л2 и А3, представляют собой различающиеся собственные значения матрицы А (решения характеристического уравнения матрицы det(A -IE) = 0).
Проверка управляемости. Считается, что система, представленная уравнениями (4.1) и (4.2), является полностью управляемой
228
тогда и только тогда, когда все строки вектора управления у конечны. Если в i-й строке появляется нулевое значение, то соответствующая мода (собственное колебание) является неуправляемой.
Проверка наблюдаемости. Считается, что система, представленная уравнениями (4.1) и (4.2), является полностью наблюдаемой тогда и только тогда, когда все столбцы выходного вектора « конечны. Если в i-м столбце появляется нулевое значение, то соответствующая мода (собственное колебание) является ненаблюдаемой
Управление состоянием обратной связи. Пусть в системе, описываемой уравнением (4.1), будет использован следующий закон управления состоянием обратной связи:
"(')=F x(/)+r(/)=[F/ F2 ... F„]- ’ +/(/), (4.7)
где r (t) - задающее воздействие (уставка).
Подстановка (4.7) в (4.1) дает следующее уравнение системы с замкнутой обратной связью:
х(/)=[л + Л^]-4)+д-г(/). (4 8)
Задача создания устройства управления состоит в том, чтобы найти вектор управления обратной связью F так, чтобы матрица замкнутой обратной связи [A*=A+6'F] былаустойчивой (т.е. все различающиеся собственные значения X матрицы А* должны иметь отрицательную действительную часть), а система обладала удовлетворительной переходной характеристикой.
Если система описывается одним дифференциальным уравнением л-го порядка, то матрица замкнутой обратной связи А* определяется как
229
О 1 о
А =
О 6 1
«и «я «и
Последнее означает что при подходящем выборе вектора обратной связи F полюса системы с замкнутой обратной связью могут быть размещены на s-плоскости в желаемых местах.
Элементы вектора F определяются по следующим соотношениям:
где fo,f, ...tfn-i - коэффициенты характеристического уравнения
Р* +fn-\PnX +-+/1Р+/0
замкнутой системы с желаемыми корнями Л2,Л„.
Подбор корней для придания системе необходимых динамических свойств требует некоторого опыта и определенных навыков и производится путем нескольких проб. Нужно стремиться, чтобы верхняя половина s-плоскости являлась зеркальным отображением нижней. Необходимо также иметь в виду следующее правило: для интервала частот, в котором справедливо неравенство
230
логарифмическая амплитудная характеристика (ЛАХ) Wt участка системы, охватываемого обратной связью, равна взятой с обратным знаком логарифмической амплитудной характеристике параллельного корректирующего контура W2 в цепи обратной связи. Полезным при подборе корней может оказаться и метод корневых годографов, связывающий вад переходной характеристики с распределением нулей и полюсов передаточной функции замкнутой системы.
При известных корнях характеристическое уравнение можно получить из следующего соотношения:
ПО-М=о, i=l
которое в развернутом ваде даст искомый характеристический полином.
Наблюдение состояния. Реализация закона управления в соответствии с уравнением (4.7) требует, чтобы все переменные состояния были измерены и возвращены для выработки входной переменной управления «(/). В некоторых случаях это либо нереализуемо, либо экономически нецелесообразно по причинам физической недоступности состояния, а также неприемлемой стоимости измерительных и телеметрических сетей.
Однако теория наблюдения состояния позволяет восстановить весь вектор состояния из минимального количества измерений, для которых система полностью наблюдаема. Наблюдатель состояния представляет собой модель реальной системы {объекта) плюс корректирующий член, представляющий собой ошибку между выходом модели и выходом реальной системы. Это приводит к следующей структуре для наблюдателя состояния:
x(t) = А • x(t)+b • u(t)+К [у (/) - с х(г)], (4.9)
где х и К - векторы соответственно наблюдения (или оценки) состояния и усиления.
231
Последний член в уравнении наблюдения (4.9) представляет собой выходную ошибку модели и корректирует несоответствие между реальным и оцененным состояниями системы.
Вычитание уравнения наблюдения (4.9) из уравнения системы (4.1) с учетом (4.2) дает следующее динамическое уравнение оценки ошибки состояния:
£(г) = х(<)-*(г)=(Л-К-с) х(г), (4.10)
где х(/) = х(/) - x(z) - вектор ошибки восстановления.
Уравнение означает, что если матрица ошибки (А-К-с) устойчива, то ошибка будет стремиться к нулю.
Скорость уменьшения погрешности оценки зависит от динамики матрицы ошибки. Таким образом, задача создания наблюдателя может быть сформулирована следующим образом: найти такой вектор усиления К наблюдателя, чтобы матрица оценки ошибки (А-К-с) была устойчивой с достаточно более быстрой динамикой, чем у матрицы А системы. Это подразумевает, что собственные значения для (А-К-с) должны быть расположены глубже в левой половине s-плоскости, чем таковые для матрицы А системы.
Элементы вектора К определяются как:
^1=^0-—;
ап
ап
оп
где ко, к\,..., кп\ - коэффициенты характеристического уравнения
р" + ViP""1 +...+ *iP + *b =0.
После задания желаемых корней в левой половине s-плоскости точно таким же образом, как и в случае управления состоянием
232
обратной связи, определяются коэффициенты характеристического уравнения
Синтез линейной стационарной автоматической системы завершается использованием переменных состояния наблюдателя для замыкания петли обратной связи с тем же самым вектором управления обратной связи F.
Отметим, что при построении микропроцессорных систем с обратной связью следует проявлять осторожность при выборе частоты дискретизации- При использовании хранения нулевого порядка частота дискретизации сигнала /л определяется в соответствии с теоремой ВЛ. Котельникова:
где- верхняя граничная частота спектра обрабатываемого сигнала.
На практике частоту дискретизации выбирают в 5-6 раз больше верхней граничной частоты спектра сигнала, что позволяет отказаться от фильтра антисовмещения (противоподменного), предотвращающего эффект наложения спектров. Отметим, что применение теоремы В.А. Котельникова для определения необходимой частоты дискретизации приводит к очень высоким требованиям, которые порой трудно реализуются.
Менее жесткие требования к частоте дискретизации получаются при использовании хранения первого, второго и более высокого порядка, однако это несколько усложняет систему.
После того как подходящий период дискретизации выбран, динамические уравнения наблюдателя преобразуются из непрерывных в дискретно-временные (уравнения в конечных разностях), которые затем реализуются в виде компьютерной программы.
Рассмотрим несколько примеров, иллюстрирующих метод пространства состояний.
Пример 1. На вход системы, состоящий из интегратора и инерционного звена (рис. 4.6), поступает задающее воздействие xft) = u(t). Составим уравнения состояния выхода системы.
233
Рис. 4.6. Структурная схема следящей системы с единичной обратной связью
Передаточные функции разомкнутой и замкнутой систем имеют вид:
Ф(^)=-Г3- -------= —2---------2.
V ' т2/?2+2£ср + 1 р2 +2^®0p + <0q
Е=—L--
2^ГК„'
“о 4
причем выход
у(г)=Ф(р)«(г)
Соответствующее дифференциальное уравнение записывается как
^^+2^0^l+<ogy(r) = ®gw(/). (4.11)
at at
Введем переменные состояния:
234
*i(O=HO;
(4.12)
*2(0=^=*i(0-
Тогда из (4.11) получаем:
*2 (0 = “®о*1 (0 ~ 2^“о*2 (0+<°о«(0 • (4.13)
Запишем систему уравнений состояния (4.12) и (4.13) в матричной форме:
dt
Введем векторы и матрицы:
х=[х1(0,х2(0]г; и=[о,и(0]г;
-ЧЛ -У- -[: а-
Уравнение выхода:
Но если, например, требуется наблюдать неу(0. a j(0’ то в качестве выхода должна быть принята переменная х2(/), а уравнение выхода будет:
Так как общий вид уравнения выхода (наблюдения)
у(0 = сх(0
то при наблюдении xi(/)
235
=[• »]
а при наблюдении х2(/)
с=[0 1]
В общем случае могут наблюдаться х,(Т) и х2(Г) или их линейная комбинация
Из матричного уравнения
у(г)=с-ж(г)
получаем:
ГЛW]=h сг1.Г*1 (/)!=Гс«х1(/)+с2^2W1
W')JЪ CJW')J
Следовательно:
Jl(0 = CA(0 + C2*2(0’
y2(t)=c3Xl(t)+cAx2(t).
Таким образом, в случае раздельного наблюдения Х](/) и х2(/) матрица с примет вид
С=[о °]’
т.е. У1(/) = Xi(/), y2(f) = х2(/). В случае наблюдения линейной комбинации Xi(r) и х2(/), когда у(0 = «i*i(0 +
4? *]•
т.е. Ci = аь с2 = а2, с3 = с4 = 0.
На рис. 4.7 изображена схема получения переменных состояния. Для определения x2(z) необходимо w(T) умножить на и из полученного произведения вычесть величины х2(/) и х((Т), измененные в 2^®о и ©о Р33 соответственно
236
Схему на рис. 4.7 можно рассматривать как модель получения переменных состояния ХО или формирующий фильтр.
Рис. 4.7. Схема получения вектора состояния ХО для системы (объекта), описываемой уравнением второго порядка
Пример 2. Рассмотрим линейный стационарный объект управления 3-го порядка с одним входом и одним выходом, заданный передаточной функцией вида
13 - I625
(р + 1)(2р+1)(4р +1) / + 1,75/ + 0,875р +0,125 '
Знаменатель передаточной функции представляет собой характеристическое уравнение заданного объекта управления с коэффициентами:
а0 =0,125; q =0,875; а2=1,75; о3=1.
Запишем модель объекта управления в пространстве состояний, полагая ХО =*1(0:
= -0,125X1 (0 - 0.875х2 (г) -1,75х3 (г) + 1,625м (?).
237
Матрицы и векторы объекта управления будут иметь следующий вид:
0 1 О' 0
А = 0 0 1 0
-0,125 -0,875 -1,75 1,625
Уравнение выхода ХО = *i(0, и, следовательно:
с = [1 0 0].
Проверка устойчивости. Модальная матрица преобразования М и матрица собственных значений Л для этого объекта управления следующие:
0,968
М= -0,242
0,061
0,873 0,577'
-0,436 -0,577 0,218 0,577
Все различающиеся собственные значения матрицы А имеют отрицательную действительную часть, следовательно, объект управления устойчив
Проверка управляемости. Вектор управления объекта
8,95 у = -14,893 .
7,506
Все строки вектора управления конечны, следовательно, объект полностью управляем.
Проверка наблюдаемости. Выходной вектор объекта
а = [0,968 0,873 0,577].
238
Все столбцы выходного вектора конечны, следовательно, объект полностью наблюдаем.
Определение коэффициентов характеристического уравнения устройства управления (контроллера) по заданным корням. Пусть желаемыми корнями матрицы замкнутой обратной связи Л системы управления будут:
А., =-2,5; A2=-3 + 1j; X4=-3-lj,
где j - мнимая единица. Тогда в соответствии с
П(₽-М=о
1=1 получим
(p + 2,5)(p + 3-U)(p + 3 + l/) = 0, или
р3 + 8,5р2 + 25р + 25 = 0.
Теперь можно определить элементы вектора F-
Ъ =—-/q- = 0,125 - 25 = -24,875;
«з
F2 = - /1 = 0,875 - 25 = -24,125;
«з
F3 = - /2 = 1,75 - 8,5 = -6,75,
°з
или
/' = [-24,875 -24,125 -6,75]
Определение коэффициентов характеристического уравнения наблюдателя (предиктора) по заданным корням. Пусть же
239
лаемыми корнями матрицы оценки ошибки (А-К-с) системы управления будут:
X, =-3,5; Х2=-4 + 2у; X3=-4-2J.
Тогда
(p + 3,5)(p + 4-2i)(p + 4 + 2i) = 0,
или
р3 + 11,5р2+48р + 70 = 0.
Элементы вектора К определятся как:
Кх = ^-— = 70 - 0,125 = 69,875;
"з
Кг = jt, -^- = 48 - 0,875 = 47.125;
«з
Kj=*2-^-=11,5-1,75=9,75
аз
или
К= [69,875 47,125 9,75].
Дифференциальные уравнения в матричном виде, описывающие структуру системы управления с замкнутой обратной связью и наблюдателем состояний, записываются как:
^-A-x+b-r^+b-F-x;
^ = Ax(t)+br(t)+K[c-x(t)-cx(t)'].
На рис. 4.8 изображена структурная схема системы, реализованная в соответствии с этими уравнениями.
240
4.6. Экспериментальное исследование факторов, ограничивающих работоспособность системы
Исследование факторов, ограничивающих работоспособность системы в низкочастотной и высокочастотной областях, сводится к нахождению доминирующих низкочастотного и высокочастотного полюсов логарифмической амплитудно-частотной характеристики (ЛАХ). В большинстве случаев низкочастотный и высокочастотный полюса отстоят друг от друга на несколько декад и обусловливают отклик системы в частотной и временной областях.
Установлено, что благоприятное протекание переходного процесса имеет место только в том случае, если переходные полосы ЛАХ имеют наклон 20 дБ на декаду, причем длина такого участка должна быть порядка одной декады. Полосы пропускания определяют поведение системы в установившемся режиме. В астатической системе наклон ЛАХ на этих участках -20£ (к - порядок ас-гатизма); в статической к = 0 и наклон 0 дБ на декаду. Полосы задерживания существенного влияния на переходную характеристику не оказывают
В s-области отклик системы определяется как:
Отклик (s) = Передаточная характеристика (s)x воздействие (s).
Если сделать допущение, что затухание равно нулю и, следовательно, s=jd), установившийся отклик в частотной области будет характеризоваться модулем и фазой, которые являются функциями частоты. Граничные частоты функции могут быть определены при помощи теста в частотной области с использованием источника синусоидального сигнала с изменяемой частотой. Такой тест может быть выполнен, например, следующим образом:
а) установите на входе подходящий синусоидальный сигнал такой, чтобы на выходе форма сигнала не была искажена;
б) изменяя с некоторым шагом частоту сигнала на входе, измерьте требуемое количество значений амплитуды и фазы сигнала на выходе (следите за тем, чтобы требования п. а) не нарушались);
в) разделите значения амплитуд выходного сигнала на соответствующие значения амплитуд входного сигнала и постройте график зависимости десятичного логарифма этого отношения от частоты, а также график зависимости фазы от частоты (диаграммы Боде).
241
Рис. 4.8. Структурная схема системы управления к примеру 2
242
Доминирующие низкочастотный и высокочастотный полюсы расположены там, где построенная нормированная амплитудно-частотная кривая пересекает уровень -3 dB (0,707 по линейной шкале). Отметим, что ту же самую информацию можно получить и из графика зависимости фазы от частоты
Во временной области полюсы передаточной характеристики определяют форму отклика, рельеф которого может быть использован для нахождения доминирующих полюсов. При тестировании во временной области теоретически полезной в качестве возбуждающей функции является дельта-функция S(t), поскольку ее изображение по Лапласу определяется как:
Однако с практической точки зрения (с точки зрения генерирования возбуждающей функции) наиболее приемлемой оказывается единичная функция 1(1), чье изображение по Лапласу задается как
<•«]=;
При проведении измерений в качестве возбуждающего воздействия вместо единичной функции удобнее использовать прямоугольный периодический сигнал типа «меандр» (прямоугольные импульсы со скважностью, равной двум). Это позволяет получить устойчивую картинку реакции системы на экране осциллографа.
На рис. 4.9 показан отклик на такое воздействие однополюсной низкочастотной системы с высокочастотным полюсом. Решение отклика системы первого порядка во временной области описывается в нормированном виде как
r(/)=l-e'*k<
Для r(t), равного 10 и 90% от максимального значения, можно записать:
0,1=1-е~^-~>\ (4.14)
0,9 = (4.15)
243
Перенеся I в обоих выражениях в левую часть и разделив (4.14) на (4.15), получим:
или
ln9=(r2-/1)-j®|(_3<ffi).
Таким образом:
. 2,2
Следовательно, для системы с одним доминирующим высокочастотным полюсом справедливо:
2’2 - °-35
А-з«)-2я(,
Рис. 4.9. Отклик однополюсной низкочастотной системы с одним высокочастотным полюсом на единичное воздействие
244
На рис. 4.10 показан отклик на ступенчатое воздействие, инверсное единичной функции (перевернутая сверху вниз единичная функция), однополюсной высокочастотной системы с низкочастотным полюсом. Решение отклика такой системы первого порядка во временной области описывается в нормализованном виде как
Как и в предыдущем случае для r(t), равного 90 и 10% от максимального значения, можно записать:
0,9=е'У^“ч‘', (4.16)
Рис. 4.10. Отклик однополюсной высокочастотной системы с одним низкочастотным полюсом
на ступенчатое воздействие, инверсное единичной функции Разделив (4.16) на (4.17) получим
или
245
Таким образом:
1 _ 2,2
7Ч-з^)
Следовательно, для системы с одним доминирующим низкочастотным полюсом также справедливо:
. 2,2 _ 0,35
А-«.) = 2я(,
Если система содержит несколько звеньев, каждое из которых имеет свой доминирующий полюс, причем взаимное влияние между полюсами очень мало, она, как правило, обладает общим доминирующим полюсом. Если полюсы расположены не слишком далеко друг от друга, а интервал (fr-б) для каждого звена задается как tri, tn, —, tm то их общий интервал tr в пределах 10% погрешности определяется как
Таким образом, высокочастотный доминирующий полюс находится путем измерения времени нарастания фронта отклика на возбуждающий прямоугольный импульс, тогда как низкочастотный доминирующий полюс находится путем измерения времени спада фронта отклика на возбуждающий прямоугольный импульс. Наиболее быстрый способ выполнить такое измерение заключается в следующем. Отрегулируйте чувствительность осциллографа так, чтобы амплитуда выводимого на экран отклика системы занимала на экране, скажем, пять делений. Тогда 10%-ное время нарастания будет соответствовать 0,5 деления по вертикальной шкале, а 90%-ное время нарастания будет соответствовать 4,5 деления по вертикальной шкале. Аналогично 10%-ное время спада будет соответствовать 4,5 деления по вертикальной шкале, а 90%-ное время спада - 0,5 деления по вертикальной шкале.
Отметим, что точное значение частоты используемого для тестирования прямоугольного сигнала большого значения не имеет. Частота должна быть выбрана так, чтобы на осциллографе было удобно измерять нарастающий и падающий фронты отклика.
246
Глава 5. АВТОМАТИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ГРЕБНОЙ ПРОПУЛЬСИВНОЙ УСТАНОВКОЙ ЛЕДОКОЛА
5.1. Гребная электрическая установка
В последние годы для ледоколов становится обычным явлением применение гребной электрической пропульсивной установки, позволяющей осуществлять при плавании режимы маневрирования с типичной для них дизельной главной энергетической установкой (ДГУ). В таких установках гребные движители (винты) вращаются электродвигателями, получающими питание от источников электроэнергии, в качестве которых используют электро-машинные генераторы.
Многие разновидности структурных схем гребных электрических установок различаются типом первичных двигателей (турбины и дизели), родом тока, числом генераторов и гребных электродвигателей, вариантами схем их соединений, принципами управления и т.д. Но для всех разновидностей установок электродвижения судов характерным является генерирование электрической энергии и последующее ее преобразование в гребном электродвигателе в энергию вращения гребного вала.
В генераторных агрегатах происходит преобразование тепловой энергии в механическую и далее в электрическую, которая передается гребным электродвигателям, преобразующим ее в механическую энергию вращения гребных винтов. Таким образом, мощность первичных тепловых двигателей в гребной электрической установке определяется мощностью на винтах и КПД линии гребного вала, гребных электродвигателей и генераторов. Обычные же неэлектрические гребные установки осуществляют непосредственное преобразование тепловой энергии в механическую энергию гребных винтов.
В связи с двумя дополнительными преобразованиями энергии - механической в электрическую в генераторе (КПД генераторов переменного тока 95-97,5% в зависимости от их мощности) и электрической в механическую в гребном двигателе (КПД двигателей переменного тока 95-97%) - КПД пропульсивной установки
247
при использовании принципа электродвижения в режимах, близких к номинальным, снижается
Кроме того, энергетическая схема и структура гребной электрической установки сложнее, чем у неэлектрических пропульсивных установок с тепловыми двигателями. Требуется более квалифицированный персонал для обслуживания гребной электрической установки. Однако гребные электрические установки имеют по сравнению с неэлектрическими установками ряд достоинств, которые определили их широкое распространение на морских и речных судах всех типов и в особенности на судах ледокольного типа В настоящее время число судов-электроходов исчисляется тысячами. Мощности гребных электрических установок отдельных судов-электроходов превысили 100 МВт, разрабатываются гребные электрические установки мощностью более 200 МВт.
Основными достоинствами гребной электрической установки по сравнению с неэлектрическими гребными установками являются следующие Преобразование энергии в тандеме генератор-гребной двигатель допускает различное в широком диапазоне сочетание частот вращения первичных тепловых двигателей и винтов, что обеспечивает при отсутствии их жесткой связи возможность выбора значений этих частот оптимальными одновременно как для первичных тепловых двигателей, так и для гребных винтов. как правило, для тепловых двигателей выгодны частоты вращения, повышенные по сравнению с частотами вращения гребных винтов, оптимальными по их гидродинамическим показателям.
Реверс гребных винтов гребной электрической установки реализуется благодаря реверсивности электродвигателей достаточно просто при помощи управляемых полупроводниковых преобразователей. В турбинных гребных установках для этой цели необходимо дополнительно предусматривать турбины заднего хода. Для дизельных установок существуют ограничения в темпе реверса.
Система управления гребной электрической установкой позволяет обеспечивать автоматическое регулирование мощности и работу гребного электродвигателя при изменении режимов работы судна от хода в свободной воде до швартового режима; кроме того, гребная электрическая установка обеспечивает ограничение
248
момента на гребном валу при заклинивании гребного винта во льду.
Достоинством гребных электрических установок является отсутствие обязательной пространственной связи элементов благодаря кабельным линиям, что облегчает компоновку пропульсивной установки и, в частности, заметно сокращает (на 15-30%) длину гребных валов. Поэтому гребная электрическая установка дает общее увеличение грузоподъемности судна при данных его обводах.
Использование гребных электрических установок дает широкие возможности совершенствования энергетической системы судов.
На рис. 5.1 представлена упрощенная схема дизель-электрической гребной пропульсивной установки, включающей дизель, трехфазный синхронный генератор, трехфазный синхронный электродвигатель, трехфазный непосредственный преобразователь частоты, датчик скорости синхронного электродвигателя, датчик скорости дизеля, датчик мощности синхронного генератора и схемы управления.
Рис. 5.1. Дизель-электрическая гребная пропульсивная установка
Дизель-электрическая гребная пропульсивная установка работает следующим образом. Капитан судна поворотом рукоятки ма
249
шинного телеграфа устанавливает скорость вращения винтов судна, что в первом приближении устанавливает нужную скорость движения. Управление скоростью вращения винтами судна определяет его ледокольные способности в большей степени, чем устанавливаемая фиксированная мощность. Сигнал задающего воздействия с машинного телеграфа поступает на схему пропульсивного управления, сюда же поступают сигналы от датчика скорости дизеля и от датчика мощности синхронного генератора. Здесь после обработки этих сигналов вырабатывается сигнал уставки, который с выхода схемы пропульсивного управления поступает на положительный вход элемента сравнения. На отрицательный вход элемента сравнения поступает сигнал с датчика скорости синхронного электромотора. Сигнал уставки сравнивается с поступившим по цепи обратной связи сигналом датчика скорости синхронного электромотора, т.е. вырабатывается сигнал рассогласования, который с выхода элемента сравнения поступает на схему управления скоростью. Схема управления скоростью управляет работой непосредственного преобразователя частоты с естественной коммутацией (НПЧЕ). НПЧЕ вырабатывает переменное напряжение с регулируемыми амплитудой и частотой, питающее синхронный электромотор. Частота вращения электромотора, а следовательно и винта, определяется частотой этого напряжения. Управление амплитудой напряжения позволяет в нешироких пределах осуществлять регулирование вращающего момента электромотора.
Для поддержания постоянной скорости при увеличивающемся сопротивлении винтам со стороны льда система управления скоростью, снимая показания с датчика скорости синхронного электромотора, увеличивает вращающий момент, вырабатываемый синхронными электромоторами, а также мощность, вырабатываемую судовыми генераторами. Это действие увеличивает толкающую способность судовых винтов и сводит до минимума падение скорости судна при пересечении ледяных полей.
Несмотря на то что капитан по желанию может изменять скорость гребного вала, система управления пропульсивной энергетической установкой на основе получаемой информации с датчика
250
скорости дизеля и датчика мощности синхронного генератора ограничивает мощность, используемую синхронными электромоторами, предотвращая перегрузку генераторов и удерживая дизельные двигатели от потери оборотов.
На рис. 5.2 показана энергетическая схема подключения судовой гребной пропульсивной установки, которая обеспечивается энергией, поступающей от трех морских дизельных двигателей. Схема содержит три синхронных генератора, два трансформатора, два непосредственных преобразователя частоты с естественной коммутацией, два синхронных электродвигателя и коммутационную аппаратуру.
НПЧЕ 1200В. 0-18 Гц 3x1875 А
Рис. 5.2. Энергетическая схема подключения судовой гребной пропульсивной установки
Синхронные генераторы мощностью по 6,25 MBA каждый приводятся во вращение тремя морскими дизелями. В зависимости от величины нагрузки к шине главного распределительного Щита (ГРЩ) с напряжением 4,2 кВ частотой 50 Гц, питающей два трансформатора непосредственных преобразователей частоты
251
мощностью 8 MBA каждый, подключаются один, два или три синхронных генератора. На вход непосредственных преобразователей частоты поступает напряжение 1,2 кВ с частотой 50 Гц, которое преобразуется в выходное напряжение с регулируемой частотой от 0 до 18 Гц. Каждый из двух непосредственных преобразователей частоты питает соответствующие синхронные электромоторы и состоит из трех встречно-параллельных шестипульсных тиристорных мостов, работающих без уравнительных токов, рассчитанных на ток величиной до 1,9 кА. Судно приводится в движение двумя синхронными электромоторами мощностью по 6 МВт каждый, с частотой вращения 145/180 об/мин при частоте питающего напряжения 14,5-18 Гц. Особенностью синхронных электродвигателей является их бесщеточное возбуждение.
Основным источником энергии на судне является приводной двигатель генераторного агрегата. В приводном двигателе происходит преобразование энергии сжигаемого топлива (нефть, мазут, соляровое масло, и др.) в механическую энергию. В дизельном двигателе это происходит следующим образом. Основной частью морского дизельного двигателя являются двенадцать цилиндров, внутри которых производится 11-12-кратное сжатие чистого воздуха, при этом воздух нагревается до 500-600 °C. Когда поршень внутри цилиндра достигает верхнего положения (рис. 5.3), в цилиндр вбрызгивается жидкое топливо, например нефть. Делается это при помощи особой форсунки, работающей от сжатого воздуха, нагнетаемого компрессором. Зажигание разбрызганной и испарившейся нефти происходит вследствие высокой температуры, получившейся в цилиндре при сжатии, и не требует никаких вспомогательных поджигающих устройств. Во время горения нефти поршень движется вниз и производит работу. Затем происходит выбрасывание отработанных газов.
Использование дизеля в качестве приводного двигателя обусловлено его сравнительно высоким КПД (порядка 38%), постоянной готовностью к быстрому запуску (в течение » 30 с), автономностью в работе, простоте в эксплуатации.
Вместе с тем дизели имеют сравнительно малый срок службы (моторесурс быстроходных дизелей, применяемых в качестве при
252
водных двигателей, около 10 тыс. ч), неравномерный вращающий момент, низкую перегрузочную способность (10-15%) и высокий уровень шума. Низкая перегрузочная способность отрицательно сказывается на динамических характеристиках в переходных режимах при внезапных кратковременных набросах нагрузки. Неравномерность (пульсации) вращающего момента дизеля снижает стабильность напряжения и частоты генераторов и возбуждает колебательные процессы (качания) при параллельной работе ДГ, сопровождающиеся вредными обменными колебаниями мощности между агрегатами.
Преобразование механической энергии приводного двигателя в электрическую энергию осуществляется с помощью синхронного генератора. Дизель через специальный редуктор вращает ротор синхронной машины, на котором расположена ее бесщеточная система независимого возбуждения. Схематическое устройство синхронной машины показано на рис. 5.4.
Ротор (индуктор) представляет собой конструкцию в виде цилиндра с выступами из специальной электротехнической стали, на которые надеты катушки. Обмотки на этих катушках, по которым проходит постоянный ток возбуждения, создающий магнитное поле, соединены так, что на отдельных выступах имеются поочередно северные и южные полюсы электромагнитов. Число пар этих полюсов определяется частотой вращения ротора и обычно
253
составляет четыре, шесть или восемь полюсов. Так, например, для получения переменного тока с частотой 50 Гц при скорости вращения ротора 500 об/мин требуется шесть пар полюсов. Статор генератора (якорь) представляет собой кольцо из специальной электротехнической стали, в пазах которого уложены обмотки. Для уменьшения потерь на вихревые токи Фуко это кольцо выполняется не сплошным, а состоящим из отдельных тонких листов, изолированных друг от друга. При вращении ротора в обмотках статора возникает переменная ЭДС синусоидальной формы с частотой а. Как показано на рис. 5.5, эту ЭДС можно представить в виде вектора Ео, вращающегося с частотой <о. При подключении обмоток якоря (статора) к нагрузке в них под действием ЭДС Ео возникает переменный ток якоря 1а. Магнитное поле реакции якоря накладывается на магнитное поле возбуждения, искажая его и таким образом изменяя вектор Ео как по величине, так и по направлению. В нагруженной синхронной машине возникает сложная картина вращающегося магнитного поля.
Рис. 5.4. Ротор (индуктор) синхронного генератора с вспомогательной машиной постоянного тока питания индуктора {слева) и схематическое изображение якоря (статора) S с индуктором генератора /, вращающегося со скоростью V {справа)
Для ненасыщенной машины справедливы линейные зависимости между магнитодвижущей силой, магнитным потоком и ЭДС. Поэтому вследствие возможности применения принципа суперпозиции можно рассматривать отдельно поле возбуждения и возникающую при этом ЭДС и поле реакции якоря и ЭДС, возникающую от его вращения, а затем производить векторное сложение
254
ЭДС. При условии, что генератор нагружен на активноиндуктивную нагрузку, ток якоря 1а будет отставать по фазе от основной ЭДС Ео на угол у/, как показано на рис. 5.5. Этот ток создает в магнитной системе машины магнитодвижущую силу реакции якоря, которую можно разложить на две составляющие, направленные вдоль продольной и поперечной осей пары полюсов ротора. Этим составляющим магнитодвижущей силы соответствуют токи Id и 1Ч, для которых справедливо:
7rf=/esink|/; /g=/0cosvp.
Рис. 5.5 Векторная диаграмма якорной цепи синхронной машины
Эти токи создают ЭДС продольной и поперечной реакции якоря, которые отстают от своих магнитодвижущих сил на угол 90° и, таким образом, ЭДС продольной реакции якоря направлена вдоль поперечной оси, а ЭДС поперечной реакции, наоборот, вдоль продольной оси ротора. Эти составляющие ЭДС реакции якоря можно выразить через ток якоря 1а:
Ed = hxd = 4\/sinV,' Еч = Iqxq = /flxgcos\|/, (5.1)
255
где xd и xq - синхронные индуктивные сопротивления машины соответственно по продольной и поперечной осям
Электромагнитная мощность синхронной машины определяет-
ся как
Рэм =mUIcos(<p),
где Uni- напряжение и ток фазы, т- число фаз. Учитывая, что в первом приближении <р=\|/-0, электромаг-
нитную мощность синхронной машины можно записать как
Рэм = mUlcosf v -&) = (5-2)
= jnl/7cos\|/cos0 + mt/ZsimysinO.
С учетом (5.1) можно записать:
UcosQ = E0-Ed=E0-Iaxdsin\i/;
CZsinO = Eq = Iaxqcos\y.
Откуда следует:
r. E0-(7cos©
Zsim|/=—-------;
xd
_ IZsin© Zcosvp =---.
xd
Подставляя эти выражения в (5.2), получим:
[OsinOcos© En-(7cos0 . ----------+----------sm0 =
хя xd J
(5-3)
=^stae+"if±_±L(2e).
xd Xd J
256
Таким образом, электромагнитная энергия синхронной машины содержит две составляющие: первая является энергией вращающегося магнитного поля, создаваемого обмоткой возбуждения с учетом его искажения реакцией якоря, а вторая - энергия несимметрии вращающихся полей продольной и поперечной реакции якоря.
Непосредственный преобразователь частоты с естественной коммутацией (НПЧЕ) осуществляет преобразование энергии переменного тока частотой 50 Гц, поступающего от синхронного генератора, в энергию переменного тока с регулируемой частотой 0-18 Гц. Каждый из двух трехфазных НПЧЕ состоит из трех однофазных НПЧЕ. Структура силовой цепи однофазного НПЧЕ показана на рис. 5.6.
Рис. 5.6. Силовая схема НПЧЕ с однофазным выходом
Силовая цепь НПЧЕ состоит из двенадцати управляемых вентилей 1-12, включенных по мостовой схеме. Вентильные группы НПЧЕ работают поочередно (раздельное управление). Положи
257
тельный полупериод выходного напряжения формируется при поочередной подаче отпирающих импульсов на вентили 1-6; отрицательный - при подаче отпирающих импульсов на вентили 7-12.
Для предотвращения внутреннего короткого замыкания управляющие импульсы при раздельном управлении в любой момент времени должны подаваться только на тиристоры одной из вентильных групп в соответствии с направлением тока в нагрузке.
На рис. 5.7 иллюстрируется формирование кривой выходного напряжения НПЧЕ при синусоидальной форме задающего напряжения l/зад. Форма тока нагрузки преобразователя i„ принята синусоидальной.
Формирование алгоритма переключения силовых вентилей происходит при сравнении напряжения управления и опорных напряжений 17оп соответствующих фаз, синхронизированных частотой питающей НПЧЕ сети и опережающих последние соответственно на 30° (С7ОП A-В опережает UmA-B на 30° и т.д.).
Моменты отпирания тиристоров вентильной группы 7-12 определяются как точки пересечения кривой напряжения управления I/зад с восходящими участками косинусных кривых опорного напряжения.
Например, при в момент пересечения кривых Uon С-В и t/зад включаются тиристоры 12 и 9, обеспечивая подключение питающихся фаз С и В к выходу НПЧЕ, т.е. обеспечивая подачу входного напряжения Um С-В на выход НПЧЕ, при t = t2 включа-егся тиристор 8, тиристор 12 выключается, так как оказывается под действием обратного напряжения, приложенного к нему и равного С-В - UBX А-В.
Переключение групп вентилей производится непосредственно после перехода кривой выходного тока НПЧЕ через нуль. При этом управляющие импульсы с вентильной группы 7-12 снимаются, и через выдержку времени, достаточную для восстановления запирающих свойств тиристоров, включаются импульсы вентильной группы 1-6. Моменты включения тиристоров вентильной группы 1-6 определяются абсциссами пересечения кривой с ниспадающими участками кривых Uom как это показано на рис. 5.7.
258
Рис. 5.7 Формирование кривой выходного напряжения НПЧЕ
Далее формирование кривой выходного напряжения протекает аналогично описанному. Углы регулирования тиристоров первой и второй групп при этом будут изменяться в выпрямительном (cq) инверторном (а2) режимах по закону
«1 = arccos(rsinco2z),
а2 = arccos( - rsmo)2f),
где г - относительное выходное напряжение. При таком методе формирования кривой выходного напряжения преобразователя частоты синусоидальная задающая кривая точно представляет желаемую составляющую выходного напряжения как по амплитуде, так и по фазе. Таким образом, синхронизация косинусными кривыми сводит НПЧЕ с синхронизирующими схемами управления к линейному усилителю напряжения, не имеющему сдвига по фазе между входным задающим сигналом и желаемой составляющей выходного напряжения.
259
Иными словами, изменение амплитуды и фазы входного задающего сигнала приводит к соответствующему изменению амплитуды и фазы выходного напряжения НПЧЕ, что позволяет синтезировать кривую выходного напряжения с желаемой фазой и желаемой амплитудой. Указанное свойство и отводит НПЧЕ роль силового регулирующего элемента в гребной электрической установке.
Для получения инверторного режима работы НПЧЕ необходимо сдвинуть задающую кривую на 180 эл. град. (рис. 5.8). При этом тиристоры первой и второй групп автоматически переводятся в инверторный режим, поскольку угол регулирования а увеличивается до значений больших 90 эл. град. Инверторный режим работы позволяет уменьшить время переходного процесса, а также осуществлять рекуперацию (возврат) энергии вращающихся по инерции винтов в моменты их реверса.
Рис. 5.8. Кривые напряжения и тока НПЧЕ в инверторном режиме
260
Как отмечалось выше, трехфазный выход НПЧЕ получают путем повторения основной конфигурации цепи для гребуемого числа выходных фаз, причем выходы однофазных НПЧЕ подключают к соответствующим электрически не связанным обмоткам синхронного двигателя. Обмотки синхронного двигателя выполнены несвязанными с целью предотвращения внутренних коротких замыканий в трехфазном НПЧЕ.
Для максимально возможного подавления гармоник входного тока на шинах ГРЩ от обоих трехфазных НПЧЕ их питание осуществляется от двух трансформаторов, первичные обмотки которых соединены в треугольник, а каждая из трех групп вторичных обмоток одного из них соединена в звезду, а другого - в треугольник.
Синхронный двигатель осуществляет преобразование энергии переменного тока с регулируемой частотой 0-18 Гц, поступающей от соответствующего НПЧЕ, в механическую энергию гребного винта.
По сравнению с другими электродвигателями синхронный двигатель может работать с cos <р = 1, улучшая КПД всей гребной пропульсивной установки.
Частота вращения (синхронная скорость) синхронного двигателя зависит от частоты тока, питающего двигатель, и числа пар полюсов ротора и определяется как
n = 60flp,
где п - частота вращения ротора синхронного двигателя; р - число пар полюсов; /-частотатока, питающего статор.
Конструкция синхронного двигателя аналогична конструкции синхронного генератора. Различие между ними заключается в том, что в генераторе сдвиг между ЭДС обмотки якоря и ее током меньше 90°, а в двигателе тот же сдвиг больше 90°. Вследствие этого электромагнитный момент, действующий на ротор в генераторе, направлен против вращения, а в двигателе - в сторону вращения Векторные диаграммы двигателя аналогичны векторным Диаграммам генератора.
261
Вращающееся поле статора передает электромагнитную мощность ротору, где она преобразуется в механическую мощность, т.е.
Лм — ?м ~ ^эм^с ’
откуда с учетом (53) может быть получено выражение для электромагнитного момента:
, . mUEn . _ Мэм =-----sin©+
sin (20).
Первая составляющая момента - это магнитоэлектрический момент, вызванный взаимодействием поля возбуждения с вращающимся магнитным полем, вторая составляющая - так называемый реактивный момент, который создается за счет изменения индуктивности системы при повороте ротора, т.е. неравенства магнитных сопротивлений по осям dviq.
Вторая составляющая используется только в реактивных машинах (синхронных компенсаторах). Первая же составляющая используется в магнитоэлектрических машинах (синхронных генераторах и синхронных двигателях). Таким образом, электромагнитный момент синхронного двигателя определяется следующим выражением:
Л/ = mUE° sm0
(5-4)
Мерой способности двигателя сохранять синхронизм при изменяющейся нагрузке служит синхронизирующая мощность Рс, определяемая как первая производная от электромагнитной мощности по углу 0.
На рис. 5.9 представлены зависимости электромагнитного момента Мэм=Рэм4вс и удельного синхронизирующего момента Мс=Рс/а>с от угла 0.
Жирно начерченная часть кривой M3U=f(Q) соответствует области устойчивой работы синхронной машины при малых возмущениях, так как при изменении угла 0 от -90° до +90° удельный
262
синхронизирующий момент Мс сохраняет положительное значение.
Рис. 5.9. Зависимости Л/эм и Мс от угла 0 Максимальный электромагнитный момент
Мэмм
Ер
Ч Ч xd
определяет предел статической устойчивости синхронного двигателя, т.е. его способности держаться в синхронизме при малых возмущениях режима работы. При определении Л/эм.м по выше приведенной формуле ЭДС Ео следует брать по спрямленной характеристике холостого хода для данного тока возбуждения.
5.2. Система управления гребной пропульсивной установкой
Целевым назначением системы управления гребной пропульсивной энергетической установкой является поддержание баланса между мощностью, генерируемой дизель-генераторной установкой, и мощностью, потребляемой гребной пропульсивной энергетической установкой и другими нагрузками.
263
Установленная на машинном телеграфе уставка скорости судна в виде напряжения постоянного тока поступает с потенциометра машинного телеграфа на АЦП.
С АЦП в цифровом виде уставка поступает в микропроцессорную систему управления гребной энергетической установкой. Микропроцессорная система управления гребной пропульсивной энергетической установкой на основе полученной от АЦП информации вырабатывает уставку скорости и сигналы ограничения вращающего момента синхронных электромоторов, которые посылаются на судовую двигательную установку. Система управления гребной пропульсивной установкой непрерывно отслеживает состояние судовой системы генерирования переменного тока, а именно величину генерируемой в системе мощности. Микропроцессорная система управления приводом при помощи НПЧЕ отслеживает скорость, установленную на машинном телеграфе. Одновременно микропроцессорная система управления гребной пропульсивной энергетической установкой отслеживает баланс между генерируемыми и потребляемыми мощностями и при возникновении небаланса осуществляет защиту дизелей и соединенных с ним синхронных генераторов от перегрузки.
Кроме того, микропроцессорная система управления гребной пропульсивной энергетической установкой осуществляет защиту синхронных генераторов и электродвигателей от перегрузок по току, выдерживаемых статором. Защита от перегрузок по току осуществляется при помощи обратной функции задержки. Эта функция используется в системе управления постольку, поскольку микропроцессорная система управления является дискретной системой.
Математически обратная функция задержки - это экспоненциальный сигнал. Он может быть представлен одним из следующих двух способов:
у[л]=е~°" или у[л]=г”".
Как показано на рис. 5.10, оба уравнения дают экспоненциальную кривую.
264
Рис. 5.10. Обратная функция задержки
Первое выражение через параметр о управляет затуханием сигнала. Если а положительно, то с увеличением номера отсчета п, форма волны будет уменьшаться по величине. Подобным же образом, если о отрицательно, кривая будет постоянно увеличиваться Если о точно равно нулю, сигнал будет иметь постоянную величину, равную единице. Второе выражение для управления затуханием формы волны использует параметр г. Форма волны будет уменьшаться, если г > 1, и увеличиваться, если г < 1. Сигнал будет
265
иметь постоянную величину, когда г = 1. Эти два уравнения являются просто двумя разными способами выражения одного и того же. Один способ может быть заменен другим с помощью использования соотношения
r~n=J-"=_ е-™ ,
где а = /п(г).
Таким образом, при достижении заранее установленного значения ограничения по мощности микропроцессорная система управления гребной пропульсивной установкой судна постепенно снижает уставку максимального вращающего момента в соответствии с обратной функцией задержки, а следовательно, и ток статора от 165 до 100%. Применение стратегии разомкнутого контура Ограничения потребности в мощности устраняет необходимость анализа системы управления этого контура. Это связано с тем, что система управления в данном случае строится из элементов с положительными параметрами и не имеет обратных связей, а следовательно, устойчива и обладает достаточной стабильностью внешних показателей.
На рис. 5.11 показана топология системы управления гребной пропульсивной установкой, соответствующая приведенному описанию. Заметим, что контур защиты от перегрузок по току со стороны синхронных электродвигателей на данном рисунке не показан
Рис. 5.11. Система управления судовой гребной пропульсивной установкой
266
На рис. 5.12 показана функциональная модель гребной пропульсивной установки судна. Для упрощения функциональной модели гребной пропульсивной установки игнорируется динамика судна, а вращающийся винт рассматривается как помповая нагрузка. Модель точно описывает крутящий момент нагрузки гребного винта, имеющий место во время испытаний судна в доке. При таких испытаниях судно привязывается к доку канатами, а затем винты судна приводятся во вращение. Это позволяет испытать оборудование судна при имитации швартовых условий. Во время таких испытаний настраивается мощность генератора, а также регуляторы ограничения минимальной частоты бортовой сети переменного тока. Как правило, необходимости менять после этого настройки микропроцессорных контроллеров системы управления гребной пропульсивной установкой во время ходовых испытаний судна в море не возникает Это объясняется тем, что во время испытания в доке при снижении частоты бортовой сети переменного тока до ее нижнего предела нагрузка на гребную электрическую установку ледокола адекватна нагрузке в условиях арктических льдов
Входными сигналами для функциональной модели пропульсивного управления судном являются сигналы уставок мощности генератора Р/, скорости на машинном телеграфе №, минимальной скорости генератора N^, скорости генератора Ng.
I--------[ЕЛ Р' ---------------------------------
Рис. 5.12 Функциональная модель пропульсивного управления судном
267
Сигнал уставки мощности генератора Pg поступает на элемент сравнения контура ограничения мощности электромотора, где сравнивается с сигналом мощности генератора Pg, поступающим через интегратор по цепи обратной связи. В свою очередь сигнал уставки минимальной скорости генератора поступает на элемент сравнения контура ограничения частоты генератора, где сравнивается с поступающим по цепи обратной связи сигналом скорости генератора Ng. С выходов элементов сравнения сигналы рассогласования поступают каждый на свой соответствующий автоматический регулятор. Сигнал рассогласования с элемента сравнения контура ограничения мощности поступает соответственно на автоматический регулятор мощности, а сигнал рассогласования с элемента сравнения контура ограничения частоты - на автоматический регулятор частоты. С выходов автоматических регуляторов результирующие сигналы поступают каждый на свой соответствующий блок умножения.
Сигнал с выхода автоматического регулятора мощности перемножается с предварительно прошедшим через усилитель-ограничитель сигналом уставки скорости на машинном телеграфе. В свою очередь с результатом этого произведения перемножается сигнал с выхода автоматического регулятора частоты. Полученный таким образом сигнал является уставкой скорости электромотора Nm*, поступающей на первый элемент сравнения контура автоматической регулировки скорости и вращающего момента электромотора. В этом месте он сравнивается с сигналом скорости электромотора Nmt поступающим по цепи обратной связи. Полученный в результате сравнения сигнал рассогласования, пройдя через преобразующие элементы автоматического регулятора скорости и автоматического регулятора вращающего момента, перемножается с сигналом контура защиты синхронного генератора и электродвигателя от перегрузок по току. В итоге получается сигнал вращающего момента электромотора Тт который поступает на второй элемент сравнения контура автоматической регулировки скорости и вращающего момента электромотора. Здесь он сравнивается с постоянной времени крутящего момента нагрузки Th при помощи которой учитывается действие последней.
268
Сигнал о текущем значении мощности электромотора Рт получается как результат перемножения вращающего момента электромотора Тт с сигналом скорости электромотора Nm. Суммарное значение мощности электромотора и мощности других потребителей дает сигнал мощности общей электрической потребности судна Pg.
Сигнал уставки скорости генератора Ng поступает на первый элемент сравнения контура регулятора скорости дизельного двигателя, где сравнивается с сигналом скорости генератора Ng, поступающим по цепи обратной связи. С выхода первого элемента сравнения сигнал рассогласования через преобразующие элементы автоматического регулятора скорости генератора попадает на второй элемент сравнения, где сравнивается с сигналом мощности общей электрической потребности судна Pg.
Действие поводка регулятора частоты дизельного двигателя учтено в контуре регулятора скорости при помощи постоянной времени поводка регулятора частоты Td. Постоянная времени поводка регулятора частоты сравнивается на третьем элементе сравнения с сигналом крутящего момента генератора Tg, полученного как результат деления мощности общей электрической потребности судна Pg на скорость генератора Ng.
Таким образом, система управления пропульсивной энергетической установкой имеет два собственных контура управления: контур, ограничивающий мощность, подводимую к пропульсивным электромоторам, и контур, предотвращающий в моменты мгновенных или непрерывных перегрузок остановку дизелей, осуществляющих привод генераторов.
Блок-схема системы управления для контура ограничения мощности, показанная на рис. 5.13, получена из модели системы управления гребной пропульсивной энергетической установкой, приведенной иа рис. 5.12.
269
Рис. 5.13. Блок-схема управления ограничением мощности
При возникновении превышения общей потребности в мощности над мощностью, которая может быть выработана соединенными с шиной генераторами, скорость вращения винтов судна падает. В свою очередь крутящий момент нагрузки на винт изменяется как функция квадрата скорости вала. При работе в окрестности точки максимальной мощности генератора соотношение между требуемым вращающим моментом электромотора и скоростью может быть линеаризовано до выражения
Ги=^(7+^)^, (5.5)
где
Tt
(5-6)
Поскольку ограничение мощности имеет место вблизи номинальной скорости электромотора, контур ограничения мощности может быть линеаризован путем подстановки номинальной скорости электромотора (Мо=1 отн. ед.) в два блока умножения. Тогда с учетом выражения (5.4) окончательная схема контура ограничения мощности примет вид блок-схемы, показанной на рис. 5.14.
270
Рис. 5.14. Блок-схема линеаризованного управления ограничением мощности
Контур ограничения мощности является системой типа I, имеющей только один интегратор в прямой ветви. Это означает, что система будет регулировать скачкообразное изменение уставки ограничения мощности с нулевой установившейся ошибкой и может быть стабилизирована, если все постоянные времени опережения и запаздывания могут быть сделаны приблизительно компенсирующими друг друга. Коэффициент усиления разомкнутого линеаризованного контура ограничения мощности, как видно из рис. 5.14, определяется как
Gh
= KpNlKt
(n-srp)(i+rf;)
(5.7)
Если постоянная опережения регулятора ограничения мощности Тр становится равной постоянной времени обратной связи сигнала мощности Та, а две другие постоянные времени друг друга компенсируют, то выражение (5.7) принимает вид передаточной функции интегрирующего звена:
(5.8)
Приравнивая (5.7) к (5.8) и решая относительно интегрального коэффициента усиления Кр, получим:
КР =
Шер
(5 9)
271
При движении судна ограничение мощности имеет место вблизи номинальной скорости электромотора. Следовательно, Nso равна одной относительной единице и (5.9) может быть упрощено:
Кр=-^-- (5.10)
Как и в предыдущем случае, блок-схема системы управления для контура ограничения частоты, показанная на рис. 5.15, получена из модели системы управления гребной пропульсивной энергетической установкой, приведенной на рис. 5.12.
В нормальных условиях в судовой электроэнергетической системе (СЭЭС) работа генераторных агрегатов происходит при практически непрерывных изменениях нагрузки. Изменения состава или мощности потребителей соответствуют изменению режима работы генераторных агрегатов с другой величиной угловой скорости вращения £?в и, соответственно, иной частотой напряжения:
©В=р-£2В,
где р - число пар полюсов генератора.
Согласно требованиям Правил Российского морского регистра, правил Международной электротехнической комиссии и ГОСТ 13109-97 к качеству электроэнергии частота напряжения со в бортовой сети должна поддерживаться постоянной В СЭЭС точность поддержания (стабилизации) частоты генераторов в статическом режиме при изменении нагрузки генераторных агрегатов от номинальной в пределах от 25 до 100% находится в пределах ±1,0% от номинальной частоты (Аео = <° СС>ИОМ 100% или ®ном
f~f
bf=-—^2^100%), а в динамическом режиме при включении /ном
или выключении полной нагрузки точность поддержания частоты генераторов находится в пределах ±5,0 -10,0%.
Стабилизация частоты осуществляется с помощью собственных автоматических регуляторов частоты вращения приводного
272
двигателя генератора - устройства, изменяющего подачу топлива в приводной двигатель генератора (дизель) таким образом, чтобы при любых нагрузках поддерживать частоту вращения генераторного агрегата неизменной.
Условие пониженной частоты имеет место тогда, когда обороты дизельных двигателей падают и они уже не реагируют на действия их собственных регуляторов скорости по поддержанию постоянной частоты генераторов 50 Гц.
Это происходит следующим образом. При повороте вала винта мощность Рт, потребляемая электромотором, требует небольшого увеличения величины генерируемой мощности Pg. В результате возникает крутящий момент генератора Т& который действует на дизельный двигатель как нагрузка. Собственный регулятор обнаруживает падение оборотов дизельного двигателя и увеличивает подачу топлива в двигатель. Это обычно увеличивает вращающий момент Та двигателя до величины, соответствующей крутящему моменту нагрузки генератора Tg, и восстанавливает обороты дизельного двигателя до их номинальной величины.
Если же дизельный двигатель не разовьет требуемый нагрузке вращающий момент Tg, обороты дизеля будут падать до тех пор, пока не достигнут ограничения минимальной частоты генератора и разъединители генератора не разомкнутся, отключив генератор от шины.
Для предотвращения отключения генератора при минимальной частоте контур управления частотой генератора снижает вращающий момент электромотора, дабы отрегулировать обороты дизельного двигателя так, чтобы частота синхронного генератора оставалась выше ограничения минимальной частоты в 45 Гц.
Всякий раз, когда частота на шинах генератора падает ниже 48,5 Гц, часть системы управления ограничением частоты, которая описана в модели управления гребной пропульсивной энергетической установкой судна (см. рис. 5.12), автоматически снижает скорость вращения винтов судна. Эта особенность позволяет капитану получать максимально доступную мощность от находящихся в данный момент в работе генераторов переменного тока,
273
не опасаясь потери генераторов переменного тока из-за пониженной частоты.
Важно помнить, что контур управления минимальной частотой начинает действовать только тогда, когда вращающий момент дизельного двигателя ограничен либо недостаточной подачей топлива, либо установленным ограничением на сжигание топлива. Это позволяет игнорировать собственный контур регулятора дизельного двигателя при анализе контура управления частотой генератора и приводит к упрощенной блок-схеме, показанной на рис. 5.15.
Рис. 5.15. Блок-схема линеаризованного управления частотой генератора
Отметим, что при анализе регулятора управления частотой генератора используется га же линеаризованная модель крутящего момента нагрузки винта, что и в анализе контроллера ограничения мощности.
Коэффициент усиления GH разомкнутого регулятора, показанного на рис. 5.15, определяется как
(5.11)
Поскольку это система типа II с двойным интегрированием, то так же, как и в случае с (5.7) и (5.8), коэффициент усиления с разомкнутым контуром GH будет связан с желаемой переходной частотой обследующим уравнением:
_4(i+»rd) G" V
(5.12)
274
где
и Г/=7„. (5.13)
Если приравнять два последних выражения для коэффициента усиления с разомкнутым контуром, т.е. выражения (5.11) и (5.12), то мы можем решить это уравнение относительно интегрального коэффициента усиления Ка контроллера управления частотой генератора и получить:
К -
d k^nIk,)
(5.14)
Поскольку при анализе системы управления используются переменные в относительных единицах, скорости генератора Ndg и электромотора Nso приблизительно равны единице. Это позволяет упростить уравнение для интегрального коэффициента усиления до выражения
4 л
К, *4
(5 15)
5.3. Характеристики системы управления гребной пропульсивной энергетической установкой
При анализе характеристик устойчивости систем автоматического регулирования в случаях, когда степень полинома знаменателя передаточной функции замкнутой системы невелика (до 4-5), удобно использовать алгебраический критерий, который позволяет найти соотношения между параметрами системы, необходимые и достаточные для обеспечения устойчивости.
Передаточной функцией замкнутой системы называют соотношение Ф($)=1ф)/[1+Wz(s) FF0C(s)], где W(s) - передаточная Функция разомкнутой системы; ^«(s) - передаточная функция Цепи обратной связи. Оно характеризует связь между выходом замкнутой системы и задающим воздействием (при отсутствии Других воздействий). Если 1Гос(5)=1, формула передаточной функции имеет вид: 0(s)=FT(s)/[l + W(s)].
275
Для определения с помощью алгебраического критерия (Рау-са-Гурвицг), является ли система устойчивой, составляется передаточная функция замкнутой системы W(s)=A(s)/B(s) и рассматриваются соотношения между коэффициентами fc, полинома знаменателя (характеристического полинома):
B(s)=b„ sn+b„_l sn } +....+^-5+^
Система будет устойчивой, если все коэффициенты bt (I = 0, 2, .... и) положительны (необходимое условие) и удовлетворяют (при п > 3) неравенствам b\br-bJbj>Q (л = 3), ^(^з-^д)-W>3> О (л = 4), (Ь4Ь3-Ь5Ъ2)(ЬхЬг-ЬоЬз)-(bfo-bob5)2 > 0 (л = 5), и т.д.
Для систем первого и второго порядков (л=1, 2) положительность коэффициентов является условием не только необходимым, но и достаточным.
Иногда вместо приведенных соотношений записывают определитель Гурвица, в результате раскрытия которого получают необходимые соотношения для коэффициентов (в том числе упомянутые выше неравенства).
Для анализа характеристик устойчивости контура ограничения мощности запишем передаточную функцию замкнутой системы контура, учитывая, что передаточная функция разомкнутой системы определяется в соответствии с (5.8):
Тогда полином знаменателя определяется как
B(5) = S + COcp.
Поскольку этот полином является полиномом первого порядка, причем коэффициент hi=l, а коэффициент £0=®сР, необходимым и достаточным условием устойчивости контура регулирования мощности будет выполнение следующего неравенства:
<Вср>0-
276
Учитывая, что
<Оср=^Х^/’
условие устойчивости можно записать как
KpN20Kt>V.
Поскольку Nso равна одной относительной единице вышеприведенное выражение упрощается:
КрК,>0.
Таким образом, необходимым и достаточным условием устойчивости контура регулирования мощности является положительное значение произведения интегрального коэффициента усиления регулятора мощности Кр на постоянную вращающего момента нагрузки винта К).
Для анализа устойчивости контура ограничения частоты запишем передаточную функцию замкнутой системы, учитывая, что передаточная функция разомкнутой системы определяется в соответствии с (5.12):
Тогда полином знаменателя определяется как
B(s) = Ks • s2 + оф • Td • s+(i)2f
Поскольку этот полином является полиномом второго порядка, необходимое и достаточное условие устойчивости контура регулирования частоты - выполнение неравенств:
Ks>0, G^Td>0, ©^->0.
Учитывая (5.13), а также то, что квадрат любого числа положителен, приведенные неравенства упрощаются до следующего Условия устойчивости:
277
Td>0, G)c/>0
Таким образом, необходимым и достаточным условием устойчивости контура регулирования частоты являются положительное значение постоянной времени поводка регулятора частоты Td и положительное значение желаемой переходной частоты а>^.
Традиционно характеристики качества систем автоматического управления оцениваются переходным процессом в системе.
Характер переходных процессов существенно зависит от начальных условий в системе. Примем в качестве начальных условий нулевые значения всех переменных в системе. Причем интерес здесь будет представлять поведение выходной величины при резком изменении входной величины.
Вычисление переходных характеристик нелинейных систем традиционными методами, например с помощью обратного преобразования Фурье или приближенными графоаналитическими методами, связано с определенными грудностями. Поэтому определение поведения системы целесообразнее проводить с помощью компьютерного моделирования.
Одной из наиболее популярных достаточно мощных и универсальных систем моделирования является система моделирования электронных схем Electronics Workbench 5.12 канадской фирмы Interactive Image Technologies Ltd.
В системе используется многооконный интерфейс с ниспадающими и разворачивающимися меню. Функции и назначения отдельных элементов, окон и опций аналогичны их назначению в Windows.
Формирование и проверка схем осуществляются при помощи «мыши». С ее помощью можно перетащить компоненты или приборы из библиотеки на экран. Для этого необходимо поставить указатель «мыши» на выбранный компонент и, нажав и не опуская левую кнопку «мыши», перетащить его на нужное место рабочего поля.
Использование клавиатуры необходимо только для текстового ввода информации (определение меток, значений или моделей
278
компонента, описание схемы, ввод значений в используемом приборе) или при использовании горячих клавиш. Допускается вставка текста, набранного в другом приложении Windows, и наоборот.
Инструментальные средства Electronics Workbench очень похожи на реальные инструментальные средства электроники. Все, что необходимо для формирования и проверки схем, располагается на экране.
Рабочее поле, в котором формируется и проверяется схема, занимает большую центральную область экрана.
Система схемотехнического проектирования и анализа электронных схем и устройств Electronics Workbench позволяет выполнять графический ввод проектируемой схемы и анализ характеристик аналоговых, цифровых и аналого-цифровых устройств. В отличие от других программ схемотехнического моделирования в системе Electronics Workbench на экране изображаются измерительные приборы с органами управления, максимально приближенными к реальности. Пользователь освобождается от изучения довольно абстрактных правил составления заданий на моделирование исследуемой схемы на PSpice.
В схеме достаточно подключить двухканальный осциллограф и генератор сигналов, и программа сама определит, какие процессы надо подвергнуть анализу. Чтобы начать процесс моделирования, достаточно нажать выключатель, и на устройствах индикации будут зафиксированы исследуемые режимы.
После того как схема электрической цепи создана и на нее щелчком «мыши» по кнопке запуска моделирования подано питание, симулятор приступает к нахождению решения для этой цепи и генерированию данных, которые можно наблюдать на экранах инструментов типа осциллографа. Симулятор - это часть Electronics Workbench, которая производит численное решение математического представления созданной электрической цепи.
Для того чтобы такие вычисления стали возможны, каждый компонент в цепи представляется математической моделью. Математические модели связывают введенную схему с математическим представлением, необходимым для моделирования. Точность
279
составляющих моделей определяет степень соответствия результатов моделирования реальной электрической цепи.
Математическое представление цепи - это система нелинейных дифференциальных уравнений. Главная задача симулятора состоит в том, чтобы получить численное решение этих уравнений. Симулятор, построенный на основе SPICE, преобразует нелинейные дифференциальные уравнения в набор нелинейных алгебраических уравнений. С помощью метода Ньютона-Рафсона эти уравнения затем линеаризуются. Полученная таким образом система линейных алгебраических уравнений решается методом LU-факторизации редких матриц.
Симулятор в Electronics Workbench имеет четыре основные стадии работы: вход, установка, анализ и выпуск.
На входной стадии, после того как схема электрической цепи введена, заданы значения всех ее величин и выбран вид анализа, симулятор считывает информацию о введенной цепи.
В стадии установки симулятор создает и проверяет структуру данных, которая содержит полное описание введенной цепи.
В стадии анализа выполняется схемотехнический анализ, вид которого был указан на входной стадии. Эта стадия занимает самое большое время работы центрального процессора и фактически является ядром схемотехнического моделирования. Здесь формируются и решаются уравнения цепи для указанных видов анализа и получаются все данные для непосредственного вывода или для последующей обработки.
На выходной стадии просматриваются результаты моделирования, которые можно наблюдать либо при помощи инструментов типа осциллографа, либо в виде графиков.
В схеме электрической цепи каждая общая точка соединения элементов цепи называется узлом. По каждой ветви, соединяющей два узла, протекает ток. Задача симулятора вычислить напряжения в каждом узле и токи во всех ветвях.
Чтобы получить такое решение для введенной цепи, цепь представляется как система уравнений вида
А*Х=В,
280
где А - модифицированная узловая матрица полной проводимости размерностью п х rr, X - вектор неизвестных величин размерностью и; В — вектор констант, также размерностью п; п - количество неизвестных величин.
Система уравнений формируется с помощью общего метода схемотехнического анализа, называемого модифицированным узловым подходом (MNA).
Неизвестные величины (вектор X размерностью п) включают каждое напряжение узла (исключая землю), а также токи источников напряжения. Вектор В содержит константы напряжений и токов источников. Члены, входящие в матрицу полной проводимости А, определяются в соответствии с первым и вторым законами Кирхгофа и законом Ома.
Модифицированную узловую матрицу полной проводимости называют редкой, поскольку она содержит большее количество нулей, чем величин отличных от нуля. Применяя связанный список, решение уравнений цепи можно получить с использованием только одних ненулевых величин узловой матрицы. Этот метод называется редкой матричной техникой. Он сокращает время моделирования и требует меньшего объема используемой оперативной памяти компьютера.
Electronics Workbench решает уравнения цепи, используя унифицированный алгоритм как для линейных, так и для нелинейных цепей. Решение уравнений линейной цепи постоянного тока рассматривается как частный случай решения уравнений нелинейных цепей постоянного тока.
Чтобы решить систему предварительно сформированных уравнений редких модифицированных узловых матриц (система однородных линейных уравнений), используется LU-факториза-Ция. Она позволяет разложить матрицу А на две треугольные матрицы (нижнюю треугольную матрицу L и верхнюю треугольную матрицу Ц) и решить два матричных уравнения, используя прямую и обратную подстановки.
Для предотвращения некоторых вычислительных проблем, связанных с изменением описания узлов, а также для улучшения
281
точности вычислений и максимизации эффективности решения, используется несколько эффективных алгоритмов. Они включают:
- алгоритм частичного поворота, который снижает ошибку округления, вносимую методом LU-факторизации;
- алгоритм предопределения порядка, который улучшает состояние матриц;
-алгоритм переопределения порядка, который минимизирует ненулевые члены для обеспечения возможности решения уравнения.
Решение уравнений для нелинейной цепи находится путем преобразования цепи на каждой итерации в линеаризованную схему замещения, решение уравнений которой на каждой итерации осуществляется вышеописанным методом. Нелинейные цепи преобразуются в линейные единожды линеаризацией всех нелинейных компонентов схемы с помощью модифицированного метода Ньютона-Рафсона.
Решение уравнений для динамической нелинейной цепи находится за счет преобразования цепи в дискретизированную эквивалентную нелинейную цепь в каждой точке дискретизации и последующего применения метода для нелинейной цепи постоянного тока, описанного выше.
Использование динамических цепей, преобразованных в цепи постоянного тока дискретизацией всех динамических компонент в цепи, подчиняется соответствующим правилам численного интегрирования.
Для вычисления значения интеграла дифференциальных уравнений, используемых при решении во временной области, Electronics Workbench по выбору использует два численных метода интегрирования:
- трапецеидальный (по умолчанию);
- Гира (от 1-го до 6-го порядка).
Когда для дискретизации дифференциального уравнения применяется трапецеидальный метод, используется следующее приближение:
282
V h[dV^
" 2V dt dt J'
где F„+i - неизвестное значение напряжения; V„ - значение напряжения из решения в предыдущий момент времени; h - величина шага времени; п - интервал времени.
Интегрирование первого порядка методом Гира - это хорошо известный обратный метод Эйлера. Формула интегрирования второго порядка методом Гира с переменным шагом следующая:
^П+1 _ fyl-l у | ^И-1 у _____________у
л h,-h^ " hn.t(h^h^)
Ki+i - текущее неизвестное решение; V„ - решение в первый предыдущий момент времени; V„_t - решение во второй предыдущий момент времени; - величина текущего шага времени; h„t -величина шага времени в предыдущий момент.
Максимальный порядок метода интегрирования можно изменять. При использовании более высокого порядка (от 3 до 6) метод Гира теоретически приводит к более точным результатам, но увеличивает время моделирования. Максимальный порядок метода интегрирования - это максимальный порядок, который может использоваться в Electronics Workbench. В соответствии со схемой симулятор выбирает наиболее подходящий порядок метода интегрирования.
Из-за свойств нелинейных компонентов для каждого дискретного момента времени, прежде чем будет получен результат, решение матрицы полной проводимости может осуществляться несколько раз. Точка получения решения достигается тогда, когда рассчитанная в виде абсолютного и относительного допуска разница между последовательными значениями напряжения становится меньше, чем величина заданного желаемого допуска.
Во время вычисления рабочей точки основных нелинейных компонент цепи по постоянному току для облегчения нахождения решения Electronics Workbench использует два модифицированных алгоритма продолжения Ньютона-Рафсона: с шагом проводимости и с шагом источника.
283
Алгоритм с шагом проводимости - это многошаговый итеративный алгоритм. Согласно алгоритму к диагональным элементам модифицированной узловой матрицы полной проводимости прибавляется проводимость (?т/я так, чтобы решение сходилось более быстро. Основной замысел здесь - условно сохранять матрицу.
Первоначально применяется большое значение Gmin и быстро находится приблизительное решение. Затем проводимость снижается в десять раз и решение ищется снова, при этом результаты предыдущего решения используются как начальные условия для следующей итерации. Когда Ога;л уменьшается до нуля, выполняется заключительное решение и находится точный ответ.
Фактически одношаговое решение простой нелинейной итерации разбивается здесь на многошаговое, которое использует тот же самый алгоритм, но имеет много малых шагов.
В алгоритме с шагом источника, для того чтобы получить сходимость решения по постоянному току, приращение исходного вектора источника рассматривается как переменный параметр. Подобно методу с шагом проводимости метод с шагом источника преобразует одношаговое решение в многошаговое. Начиная с нулевого вектора, вектор источника медленно ползет вверх до его полного значения по постоянному току. На каждом шаге источника ищется решение простой нелинейной итерации. Величина подъема задается количеством желаемых шагов.
Именно по перечисленным выше причинам, а также из-за простоты работы Electronics Workbench удобен для проведения компьютерного моделирования переходных процессов в системе.
На рис. 5.16 приведена схема модели, при помощи которой получена переходная характеристика контура ограничения мощности. На схеме представлены блок передаточной функции, генератор, генерирующий единичную функцию, и осциллограф для наблюдения происходящих в схеме процессов.
Контур ограничения мощности моделируется блоком передаточной функции. Этот компонент моделирует передаточные характеристики систем в «-области. Блок передаточной функции определяется как дробь с полиномами, находящимися в числителе и знаменателе. При помощи этого блока может быть непосредст
284
венно смоделирована передаточная функция вплоть до третьего порядка. Данный компонент может быть использован при анализе по постоянному и переменному току и при анализе переходных процессов. Модель передаточной характеристики в блоке определяется в форме следующей рациональной функции:
г ч A(s) = к.Дз-^ + Лг-^+д-я + Оо U B(s) ’h3 s3+Z>2 s2+V-s + A> ’
Power
-|pc51-
Рис. 5.16. Компьютерная модель
для получения переходных характеристик контуров ограничения
В соответствии с уравнением (5.16) коэффициенты для блока передаточной функции будут следующими:
а3=0, а2=0, fli=0, <?о= (Bq, и 63=0, b2=0, bi=l, bn= <£>,?.
Первое значение для <вср выбирается произвольно. Затем на вход системы подается единичная функция, а поведение выходной величины наблюдается на выходе блока передаточной функции.
Во время моделирования было установлено, что с целью ограничения перерегулирования на уровне не более 20% в ответ на ступенчатый входной сигнал (Bq, должна быть не более 4,5 рад/с.
На рис. 5.17 показаны результаты работы модели для ®ср = 4,5 рад/с.
285
Анализ результатов моделирования показывает что через 0,333 с, когда сигнал на входе системы (кривая 1 на рис. 5.17) изменил свое состояние с нулевого на единичное, точно так же изменился и сигнал выходной величины (кривая 2). Далее система начинает отрабатывать сигнал выходной величины, который увеличивается по линейному закону. Через 1,3059 с система заканчивает отработку сигнала выходной величины
Рис. 5.17. Отклик контура ограничения мощности на единичное воздействие
Теперь по виду переходной характеристики можно оценить показатели качества системы:
- /уст - время установления (время от момента поступления воздействия до момента, начиная с которого переходная характеристика отличается от своего ус-
тановившегося значения не больше, чем на ±5%)----0,9729 с
- число отдельных выбросов......................1
- величина перерегулирования.....................20%
- время до первого выброса (время от момента поступления воздействия до максимума)...............0,273 с
Схема модели для получения переходной характеристики контура ограничения частоты такая же, как и для контура ограничения мощности (см. рис. 5.16). Однако коэффициенты для блока
286
передаточной функции берутся в соответствии с уравнением (5.17) будут следующими:
«з=0, а2=0, 01=7^ а0=а)2^ и />3=0, b2=Ks, b}=(o2cfTd, Ь0=а>2^.
С целью ограничения перерегулирования на уровне менее 20% в ответ на ступенчатый входной сигнал постоянная времени опережения Td контура управления «минимальной» частоты выбирается так, чтобы:
а
^=<0^=2.
Первое значение для юсу принимается равным соср, при необходимости в дальнейшем оно может быть скорректировано.
Затем так же, как было описано выше, осуществляется процедура моделирования.
В процессе моделирования было установлено, что принятое первоначально значение сос/ = 4,5 рад/с является удовлетворительным для предотвращения пересечения уровня «минимальной» частоты, что имеет место тогда, когда обороты дизельного двигателя падают более чем на 92% от его номинальной скорости.
На рис. 5.18 показан отклик модели для со</ = 4,5 рад/с, а на рис. 5.19 показан этот же отклик контура ограничения частоты на единичное воздействие при увеличенном масштабе по оси ординат.
Анализ результатов моделирования показывает, что через 0,333 с, когда сигнал на входе системы (кривая 1 на рис. 5.18) изменил свое состояние с нулевого на единичное, точно так же изменился и сигнал выходной величины (кривая 2). Далее система начинает отрабатывать сигнал выходной величины и он начинает Увеличиваться. Через 1,8118 с система заканчивает отработку сигнала выходной величины.
287
Рис. 5.18. Отклик контура ограничения частоты на единичное воздействие
Рис. 5.19. Отклик контура отраничения частоты на единичное воздействие при увеличении масштаба по оси ординат
288
По виду переходной характеристики оцениваются показатели качества системы:
-/уст - время установления (время от момента
поступления воздействия до момента, начиная с которого переходная характеристика отличается от своего установившегося значения не больше, чем на ±5%)____________________________________1,4788 с
- число отдельных выбросов...................2
- величина перерегулирования_________________..... 3,55%
-время до первого выброса (время от момента поступления воздействия до максимума)...........1,334 с
5.4. Проверка настроек контуров пропульсивного управления
С целью обеспечения правильности функционирования микропроцессорного контроллера системы управления гребной пропульсивной энергетической установкой следует осуществить проверку настроек контуров пропульсивного управления во время морских ходовых испытаний. Здесь целесообразно подавать сигналы обратной связи системы на цифровые осциллографы с памятью или на самописцы с цифроаналоговыми преобразователями. Для того чтобы проконтролировать работу гребной пропульсивной системы в условиях Арктики, ходовые испытания необходимо проводить не только на открытой воде, но и во льдах
Для проверки настроек контура ограничения мощности эффективным может быть анализ переменных гребной пропульсивной системы во время аварийного заднего хода, который является маневром, при котором капитан осуществляет реверс вращения валов. Запись переменных для этого режима должна осуществляться тогда, когда все три генератора находятся в работе. Это позволит использовать всю мощность во время обратного хода вала. Следует обратить внимание на то, что кавитация, имеющая место во время обратного хода вала, во время периода, когда винты вращаются в обратном направлении, а судно все еще движется вперед, будет снижать величину потребляемой судовыми винтами мощности.
289
В этом режиме целесообразно фиксировать мощность генератора и его магнитный поток, скорость электромотора и его магнитный поток, уставку вращающего момента электромотора.
Для того чтобы испытать работу регулятора ограничения частоты генератора, целесообразно осуществить разгон судна от нулевой до максимальной скорости хода при отключенном ограничителе мощное ги генератора. Здесь следует фиксировать отклик регулятора частоты и понижение уставки скорости, вызванное регулятором в моменты падения частоты дизель-генератора ниже 48,5 Гц. Следует также фиксировать ток генератора и его мощность, уставку скорости и уставку скорости на машинном телеграфе.
В условиях преодоления льда интересующими параметрами являются мощность генератора, магнитный поток электромотора, вращающий момент электромотора, скорость электромотора. Следует заметить, что на графике мощности могут появляться пики возникающие из-за перемалываемых судовыми винтами попавших под них кусков льда.
290
Глава 6. СУДОВАЯ АВТОМАТИЧЕСКАЯ РУЛЕВАЯ СИСТЕМА
6.1. Рулевой электропривод переменного тока
В настоящее время рулевой электропривод переменного тока для судов становится обычным явлением. Рулевой электропривод по массе, габаритам, высокой точности судовождения, простоте обслуживания опередил все известные конструкции рулевых машин
В рулевом электроприводе поворот пера руля судна осуществляется через редуктор асинхронным трехфазным электродвигателем, в цепи питания которого находятся управляемые дроссели насыщения.
Отличительной особенностью асинхронного электродвигателя является то, что его ротор имеет частоту вращения, отличающуюся от частоты вращения магнитного поля статора.
Основными конструктивными элементами асинхронного двигателя (АД) являются неподвижный статор и подвижный ротор (рис. 6.1). Статор и ротор разделены воздушным зазором от 0,1 до 1,5 мм. Пакет статора с целью уменьшения потерь на вихревые токи набирают из штампованных листов электротехнической стали. На внутренней полости статора имеются пазы, в которые укладываются провода обмотки. Листы статора перед сборкой в пакет изолируют слоем лака или окалины, полученной при их отжиге.
В пазы статора укладывают обмотку, которая в простейшем случае состоит из трех катушек - фаз, сдвинутых в пространстве на 120°. Ротор асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали. На поверхности ротора имеются продольные пазы для обмотки. Листы сердечника ротора специально не изолируют, так как в большинстве случаев достаточно изоляции от окалины.
291
Рис. 6.1. Конструкция асинхронного двигателя
Обмотка короткозамкнутого ротора представляет собой медные стержни, забитые в пазы. С двух сторон эти стержни замыкаются кольцами. Соединение стержней с кольцами осуществляется пайкой или сваркой (рис. 6.2).
Чаще всего короткозамкнутую обмотку выполняют расплавленным алюминием и литьем под давлением. При этом вместе со стержнями и кольцами отливаются и лопатки вентилятора обдува двигателя.
В результате прохождения трехфазного электрического тока в простейшем случае по трем неподвижным фазам статора, расположенным под углом 120° по отношению друг к другу, в асинхронном двигателе возникает вращающееся магнитное поле, которое создает в короткозамкнутом роторе индукционный ток. Магнитные поля индукционного тока ротора и тока статора взаимодействуют между собой, в результате чего на ротор действуют силы, благодаря которым ротор начинает вращаться в направлении вращения магнитного поля статора. Скорость вращения ротора меньше скорости вращения магнитного поля статора, поэтому вращение ротора относительно магнитного поля статора является асинхронным.
Скорость вращения магнитного поля статора - синхронная скорость - определяется следующим образом:
292
60/
где «1 - синхронная скорость, об/мин; / - частота тока в обмотке статора, Гц;/? - число пар полюсов статора.
Рис. 6.2. Короткозамкнутый ротор
Скорость вращения ротора пг (асинхронная скорость) нормально нагруженного двигателя на 3-5% меньше синхронной скорости. Разница между синхронной и асинхронной скоростями п' = П1 - л2 представляет собой скорость скольжения, а величина
"1~”2 «1
скольжение.
С изменением скорости вращения ротора изменяется скольжение и соответственно частота э.д.с. и тока в короткозамкнутом роторе:
«2
Магнитное поле статора перемещается относительно ротора со скоростью скольжения п' и наводит в короткозамкнутом роторе э-Д-с., частота которой/ ==/ s.
293
Приложенное к фазе обмотки статора напряжение U] уравновешивается основной э-Д-с. Е\, э.д.с. рассеяния и падением напряжения на активном сопротивлении обмотки статора:
Параметры ротора через отношение чисел эффективных витков обмоток wb w2 соответственно статора и ротора (коэффициент трансформации) приводятся к статору. Уравнение для роторной обмотки будет иметь вид:
Е2-/2х2+4~> s
а для токов асинхронного двигателя справедливо соотношение:
где - ток, обусловленный магнитными потерями.
Схема замещения, отражающая реальные физические процессы в асинхронном двигателе, приведена на рис. 6.3. Здесь: гь г2 -активные сопротивления соответственно обмоток статора и ротора; Xi=coi£i; х2 =<H\L2, xp=o>iZ12 - индуктивные сопротивления рассеяния статора, ротора и намагничивания; 5 - скольжение; СО] -угловая скорость поля статора.
Электромагнитный момент АД через параметры схемы замещения определяется выражением
А, ^2
М = т.... ,
©1
где U2 - индуцированное напряжение ротора; 12 - ток ротора; т -число фаз.
Рис. 6.3. Эквивалентная схема замещения асинхронного двигателя
х2
294
Учитывая, что
электромагнитный момент АД можно выразить как
М = т-----*---(6 1)
со,
Для установления связи фазного напряжения обмотки статора Ui с моментообразующими током /2 роторной цепи в соответствии с эквивалентной схемой замещения без учета магнитных потерь можно записать:
/(Г,+Ух) +(^+хг)
Подставляя (6.2) в (6.1) и с учетом того, что ®i = 2jr/i /р, для электромагнитного момента АД получим:
—1—
2,^i(ri + X) +(х1+хг)
На рис. 6.4 представлены зависимости относительного электромагнитного момента и тока статора асинхронного двигателя от относительной частоты скольжения и величины питающего напряжения.
Таким образом, регулирование угловой скорости ротора можно осуществлять за счет изменения величины питающего напряжения, при этом для достижения приемлемого диапазона регулирования исполнение двигателя должно обеспечивать большое критическое скольжение Этим требованиям отвечают двигатели с большим сопротивлением роторной цепи.
Изменение величины питающего напряжения на зажимах статора осуществляется при помощи дросселей насыщения, индук
295
тивность которых изменяется в результате подмагничивания постоянным током.
Рис. 6.4. Зависимости относительного электромагнитного момента и тока статора АД от относительной частоты скольжения и величины питающего напряжения
Дроссель насыщения имеет три стержневых или тороидальных сердечника, на каждом из которых намотано по одной рабочей обмотке переменного тока, включенной в цепь соответствующей обмотки статора. Обмотка управления, питаемая постоянным током, охватывает все три стержня. Напряжение на зажимах статора плавно регулируется изменением намагничивания сердечников дросселя за счет изменения тока обмотки управления.
6.2. Система управления рулевой установкой
Целевым назначением системы управления рулевой установкой является обеспечение перекладки полностью погруженного пера руля с 35° одного борта на 30° другого борта на полном ходу судна за 28 с. Погрешность регулирования не должна превышать ±1°.
296
г
Рис. 6.5. Система управления рулевой установкой
На рис. 6.5 (см. вклейку) представлена схема систеМы УпРав’ ления рулевой установкой, состоящей из редуктора, аси^Ронного двигателя АД, в цепи которого находятся управляемые ДР°ссе-™ насыщения ДН, промежуточных магнитных усилителей пРе" образователен напряжения в ток подмагничивания, бала1’сных Фа' зовых детекторов и дистанционной передачи, состоящей из лйУ* конструктивно одинаковых сельсинов.
Установленная при помощи штурвала уставка курса на сель~ сине-датчике приводит к появлению на ссльсине-приемн1’ке Э-Д-С-, фаза которой зависит от направления поворота и при аг0 смене изменяется на 180°, а амплитуда пропорциональна углу Рассогла-сования между углом поворота ротора сельсина-датчика и Углом поворота ротора сельсина-приемника, жестко соединений0 с ®ал" лером руля. С сельсина-приемника э.д.с. рассогласован^ поступает на входы балансных фазовых детекторов.
Балансный фазовый детектор состоит из двух тра'1СФ°Рма" торов и двух амплитудных детекторов, выполненных нй ДисДах-Фазовый детектор преобразует э.д.с. рассогласования и 0П0Рный синусоидальный сигнал w_ в постоянное напряжение, 0еличина которого зависит от разности фаз этих колебаний. Действие Ф330-вого детектора основано на преобразовании векторн(лх СУММ входного и опорного сигналов амплитудными детекторам*1-
В одном из балансных фазовых детекторов диоды вк1*ючены в прямом направлении, а в другом - в обратном. Такое В1<Лючение диодов приводит к тому, что при соответствующей фазе э-Д-с- Рас‘ согласования работает только соответствующий фазовь*^ Детектор. Постоянное напряжение, пропорциональное амплитУДе э д-с-рассогласования, с выхода одного из балансных фазовых Детекторов поступает на вход соответствующего преобразовате/*я напряжения в ток.
Основным элементом преобразователя напряжений в ток служит неинвертирующий усилительный каскад на операДиоином усилителе. Преобразование напряжения в ток происходи благодаря действию обратной связи. Входное напряжение и паДение напряжения на входном сопротивлении усилителя от протекаю' Щего по нему тока нагрузки равны. Поэтому /вых = Um / Rf и ток в нагрузке не зависит от сопротивления нагрузки ZH.
297
Питание нагрузки осуществляется от отдельного изолированного источника. Это предотвращает протекание тока нагрузки через другие цепи системы и позволяет устранить помехи, появляющиеся при протекании тока нагрузки по земляным шинам. Для уменьшения протекающего через транзисторы тока и рассеиваемой на них мощности силовые транзисторы включены параллельно. Для выравнивания коллекторных токов транзисторов в цепи их эмиттеров включены выравнивающие резисторы На случай возникновения короткого замыкания в цепи нагрузки коллекторы силовых транзисторов защищены плавким предохранителем. Для защиты силовых транзисторов от противо-э.д.с. индуктивной нагрузки параллельно ей подключен фиксирующий диод в обратном включении.
С выхода преобразователя напряжения в ток ток подмагничивания поступает на обмотку управления соответствующего магнитного усилителя, нагрузкой которого, в свою очередь, является соответствующий дроссель насыщения.
По мере насыщения магнитных сердечников дросселя сопротивление его рабочих обмоток уменьшается, а напряжение на статоре электродвигателя увеличивается, и ротор двигателя начинает вращаться, перемещая связанные с ним через редуктор баллер руля и ротор сельсина-приемника. Двигатель вращается до тех пор, пока э.д.с. рассогласования не станет равной нулю.
Один из дросселей насыщения соединяет обмотки асинхронного двигателя с питающими фазами в порядке АВС, другой дроссель - в порядке С В А. Это позволяет при смене фазы э.д.с. рассогласования на 180° осуществлять изменение порядка чередования фаз обмотки статора. Последнее приводит к реверсированию двигателя, т.е. к изменению направления вращения вала электродвигателя на обратное.
Фазы питающего напряжения защищены от коротких замыканий и возможных перегрузок плавкими предохранителями.
Отметим, что судовая промышленность выпускает рулевые машины с номинальным крутящим моментом на баллере руля от 0,4 до 2500 кНм и с наибольшим рабочим углом поворота руля от среднего положения на каждый борт от ±35° до ±70°.
298
Глава 7. ЭЛЕКТРОПИТАНИЕ АВТОМАТИЧЕСКИХ СИСТЕМ
7.1. Общие сведения об источниках электропитания систем автоматики
Для питания устройств систем управления постоянными и переменными напряжениями в большинстве случаев используются вторичные источники питания, объем которых составляет от 20 до 40% всего объема современной автоматической системы.
Вторичными источниками питания (ВИП) называют источники напряжения (или тока), для которых первичными источниками энергии служат централизованные сети переменного или постоянного напряжения, а также автономные первичные источники энергии в виде аккумуляторных, гальванических, солнечных и других типов батарей.
Вращающиеся преобразователи (мотор-генераторы) и статические преобразователи (на транзисторах или тиристорах) можно рассматривать в качестве первичных источников питания по отношению к устройствам, для которых они служат источниками энергии, и в качестве вторичных источников питания по отношению к сетям, питающим эти преобразователи.
ВИП подразделяются на источники постоянного и переменного напряжения, которые, в свою очередь, делятся на нестабилизи-рованные и стабилизированные.
Задачей стабилизированных ВИП является поддержание выходного напряжения (или тока) неизменным (в заданных пределах) при колебаниях напряжения первичной сети, сопротивления нагрузки, а также при колебаниях окружающей температуры.
Нестабилизированные (неуправляемые) источники постоянного напряжения содержат трансформаторы, вентили и сглаживающие фильтры, а стабилизированные, кроме того - стабилизаторы напряжения параметрического или компенсационного типа.
Уменьшение объема и массы ВИП достигается повышением частоты преобразовательных устройств до десятков и сотен кило-ГеРЧ, применением высокочастотных полупроводниковых прибо-
299
ров (диодов, транзисторов), применением интегральных схем и функциональных узлов общего и специального назначения
ВИП изготавливается на выходные мощности от долей ватта до нескольких киловатт и на напряжения от долей вольт до нескольких десятков киловольт.
Основными параметрами нестабилизированных ВИП являются напряжение питающей сети и его отклонения от номинала; полная мощность, потребляемая от питающей сети; номинальное выходное напряжение; номинальный ток нагрузки и его возможные отклонения; коэффициент пульсации выходного напряжения (только для ВИП постоянного напряжения).
Основными параметрами стабилизированных ВИП кроме пе речисленных являются следующие: нестабильность выходного напряжения (тока) при заданных изменениях тока (сопротивления) нагрузки; нестабильность выходного напряжения (тока) при заданных колебаниях окружающей температуры.
7.2. Выпрямительные устройства. Общие сведения
Выпрямительное устройство используется для преобразования переменного напряжения питающей сети в постоянное напряжение требуемой величины.
Выпрямительное устройство в большинстве случаев состоит из силового трансформатора, преобразующего напряжение питающей сети, вентилей, осуществляющих выпрямление переменного напряжения, и сглаживающего фильтра.
Основным элементом выпрямительного устройства является вентиль. Вентиль - нелинейный элемент, сопротивление которого в прямом направлении в сотни и тысячи раз меньше, чем в обратном. В качестве вентилей применяются в основном полупроводниковые вентили (кремниевые, германиевые диоды).
Для режима работы выпрямителей принципиальное значение имеет характер нагрузки, включенной на выходе, т.е. схема сглаживающего фильтра. Питание выпрямителей производится от переменного напряжения синусоидальной формы (рис. 7.1,а).
На рис. 7.1 показаны форма тока в фазе двухполупериодной схемы выпрямителя со средним выводом обмотки при работе на
300
фильтр, начинающийся с емкости (рис. 7.1,6), с индуктивности (рис. 7.1,в), на активную нагрузку без фильтра (рис. 7.1,г) и схемы выпрямителя со средним выводом (рис. 7.1,6) и выпрямителя мостового типа (рис. 7.1,е). В первом случае форма тока представляет собой отрезок синусоиды с продолжительностью менее полупериода; во втором случае ток имеет прямоугольную форму с продолжительностью, равной полупериоду; в третьем случае форма тока синусоидальная. Различные формы токов и длительность работы фазы приводят к тому, что методы расчета выпрямителей с различным характером нагрузки существенно отличаются друг от друга.
В устройствах малой (до 100-300 Вт) и средней (до 300-1000 Вт) мощности широко используются выпрямители, работающие на фильтр, начинающийся с емкости. Хотя эти выпрямители обладают более низким к.п.д. по сравнению с выпрямителями, работающими на индуктивность, они позволяют получить хорошее сглаживание выпрямительного напряжения при малых размерах фильтра. Выпрямители, работающие на емкость, используются в широком диапазоне выпрямленных напряжений (от единиц вольт до десятков киловольт).
В устройствах средней и частично малой мощности при токах нагрузки выше 1 А используются выпрямители, работающие на фильтр, начинающийся с индуктивности. Эти выпрямители обладают более высоким к.п.д. и меньшим внутренним сопротивлением по сравнению с выпрямителями, работающими на емкость. Применение индуктивного фильтра позволяет также ограничить амплитуду тока вентиля. Выпрямители, работающие на индуктивность, применяются в широком диапазоне выпрямленных напряжений.
Недостатком выпрямителей, работающих на индуктивность, являются перенапряжения, возникающие на выходе емкости фильтра при включении выпрямителя или сбросе тока нагрузки. Перенапряжения могут привести к повреждениям в цепях нагрузки и особенно опасны для полупроводниковых схем.
301
Рис. 7.1. Напряжение (а) и формы тока в фазе (б, в, г) двухполупериодной схемы выпрямителя со средним выводом, а также схемы выпрямителей со средним выводом (д) и мостового типа (е)
302
Выпрямители без сглаживающего фильтра применяются сравнительно редко. Наиболее часто в ВИП используется мостовая схема выпрямителя (рис. 7.1,е).
Расчет выпрямителя сводится к выбору схемы и типа вентилей, расчету режима вентилей, определению параметров трансформатора и сглаживающего фильтра.
73. Непрерывные и импульсные стабилизаторы
Для обеспечения высокой стабильности выходного напряжения или тока ВИП используются непрерывные и импульсные стабилизаторы. Непрерывные стабилизаторы делятся на параметрические и компенсационные.
Действие параметрических стабилизаторов основано на использовании нелинейности вольт-амперной характеристики некоторых элементов.
В схемах параметрических стабилизаторов постоянного напряжения используются полупроводниковые кремниевые стабилитроны (при напряжениях до 180 В).
На рис. 7.2 приведена схема включения стабилитрона. При повышении напряжения питания ток через стабилитрон резко возрастает, что приводит к увеличению падения напряжения на ограничивающем резисторе R, а выходное напряжение остается почти неизменным.
R
Рис. 7.2. Параметрический стабилизатор
При изменении напряжения питания приращение напряжения на резисторе R приближенно равно приращению входного напряжения. При изменении тока нагрузки, например увеличении, ток через стабилитрон уменьшается, а суммарный ток через резистор
303
R остается величиной неизменной. В обоих случаях выходное напряжение стабилитрона изменяется незначительно.
Основным параметром всех стабилитронов является коэффициент стабилизации К, представляющий собой отношение относительных изменений входного и выходного напряжений стабилизатора:
К = =Г-^ст~+11— .
[(/ет+А.Кии к
или
где па = Еа1Е„; /ст - ток через стабилитрон; R - ограничивающее сопротивление; Ratm - динамическое сопротивление стабилитрона.
Ядин определяется из вольт-амперной характеристики стабилитрона по формуле
д — ^ст-макс ^'ст.мин у _у 'ст.макс '*ст.мик
При выборе стабилитрона рекомендуется, чтобы ток нагрузки схемы стабилизатора /н не превышал 70-80% максимально допустимого тока через стабилитрон, указанного в соответствующих справочниках.
Для расчета схемы стабилизатора должны быть заданы входное напряжение Ео и пределы его изменения, выходное напряжение Е„, ток нагрузки /„ и пределы его изменения.
Порядок расчета стабилизаторов следующий.
Выбирают отношение па в пределах 1,4-2 и задаются значением тока через стабилитрон 1„.
Ограничивающее сопротивление определяют по формуле
д ^'ст(ист~и
304
Мощность, выделяемая на резисторе Л:
Р=(1.1£0-£ст)(/ст + /„).
На рис. 7.3 приведена схема параметрического стабилизатора напряжения с повышенной стабильностью. Эта схема отличается от обычных параметрических схем наличием компенсационного стабилизатора тока, выполненного на транзисторе VTI и стабилитроне VD\. Стабилизатор тока поддерживает неизменным ток через стабилитрон PD2 при постоянном токе нагрузки. Стабилизация тока через стабилитрон FD2 повышает стабильность выходного напряжения при колебаниях входного напряжения стабилизатора.
R3
VD1
Рис. 7.3. Параметрический стабилизатор напряжения с повышенной стабильностью
Основными недостатками параметрических стабилизаторов напряжения являются невысокий коэффициент стабилизации низкий к.п.д., малая выходная мощность, невозможность регулировки выходного напряжения.
В стабилизаторах компенсационного типа (с отрицательной обратной связью), представляющих собой систему автоматического регулирования, поддержание постоянства выходного напряжения обеспечивается за счет автоматического изменения сопротивления регулирующего элемента, на который с выхода стабилизатора подается сигнал рассогласования, пропорциональный изменению выходного напряжения. Наибольшее распространение получили стабилизаторы напряжения с последовательно включенным регулирующим элементом.
305
Структурная схема типового стабилизатора представлена на рис. 7.4. Входное напряжение t7Bxi поступает на регулирующий элемент (РЭ), представляющий собой регулируемое сопротивление, на котором падает часть напряжения и с выхода которого снимается выходное напряжение UBm. Выходное напряжение поступает на вход схемы сравнения (СС), где сравнивается с опорным напряжением £70П- Разность выходного (или части выходного) и опорного напряжения поступает на вход усилителя постоянного тока (УПТ), который усиливает этот сигнал и подает его на вход регулирующего элемента в необходимой фазе. При изменении входного напряжения или тока нагрузки выходное напряжение несколько изменяется. Это вызывает такое изменение напряжения на регулирующем элементе, при котором значение выходного напряжения восстанавливается с заданной степенью точности
Рис. 7.4. Структурная схема компенсационного стабилизатора
В отдельных стабилизаторах УПТ могут отсутствовать, УПТ и схемы сравнения могут быть объединены.
Компенсационные стабилизаторы могут быть разбиты на две группы.
1 Стабилизаторы с непрерывным (линейным) регулированием, у которых транзисторный регулирующий элемент работает в линейном режиме. Регулирующий элемент обычно включается в цепь постоянного тока, но может быть включен и в цепь переменного тока.
2 . Стабилизаторы с импульсным регулированием (импульсные (ключевые) стабилизаторы), у которых регулирующий элемент работает в ключевом режиме с переменной скважностью. Регули
306
рующий элемент обычно включается в цепь постоянного тока, но может включаться и в цепь переменного тока.
Существует большое разнообразие схем непрерывных стабилизаторов.
Рассмотрим одну из наиболее часто встречающихся схем (рис. 7.5).
Питание линейной коллекторной нагрузки транзистора схемы сравнения (УПТ) осуществляется от дополнительного источника Л7вх2, минус которого соединяется с плюсом выходного напряжения. В общем случае для питания коллекторной нагрузки может быть использовано основное напряжение питания стабилизатора Umi, но это при использовании линейной нагрузки существенно ухудшает стабильность. Напряжение С/вх2 обычно дополнительно стабилизируют при помощи кремниевых стабилитронов.
В схеме сравнения в базовую цепь транзистора Р72 подается разность выходного и опорного напряжений. Опорный стабилитрон питается с выхода стабилизатора, в связи с чем эта схема обладает повышенной стабильностью.
Рис. 7.5. Схема непрерывного стабилизатора
Рассмотрим взаимодействие схемы сравнения с регулирующим транзистором. Если при изменении входных напряжений или
307
тока нагрузки Цых увеличится, то напряжение на базе VT2 получит положительное приращение и увеличится ток коллектора транзистора VT1. Это приведет к увеличению падения напряжения на коллекторной нагрузке Ry, в результате чего уменьшатся напряжение и ток базы регулирующего транзистора. Уменьшение тока базы вызывает увеличение напряжения на регулирующем транзисторе и восстановление значения выходного напряжения с заданной степенью точности.
Связь между выходным и опорным напряжением с учетом параметров транзистора VT2 может быть выражена следующей формулой:
где n = Ra2/Ra; RB = RBt + Rb2; U62 - напряжение между эмиттером и базой VT2.
Величина резистора Ry выбирается из условия
^нмакс _ ^вх2 ~(^вых ^61)
Ая.минИП ^у
Если при регулировке движок потенциометра схемы двигать вверх (в сторону увеличения R&), то напряжение падает.
В стабилизаторах с непрерывным регулированием на регулирующем элементе выделяется значительная мощность, тем большая, чем больше разность между входным и выходным напряжением. Поэтому непрерывные стабилизаторы на большие выходные мощности 50-500 Вт и на низкие выходные напряжения имеют низкий к.п.д. и неудовлетворительные массогабаритные показатели.
В импульсных спийилизаторах регулирующий элемент работает в ключевом режиме. При этом, когда регулирующий транзистор открыт, на нем падает малое напряжение при заданном токе, а когда транзистор закрыт, на нем падает большое напряжение, но ток транзистора близок к нулю. В обоих случаях выделяемая на транзисторе мощность мала. По сравнению с непрерывными стабилизаторами импульсные имеют более высокий к п.д., меньшие
габаритные размеры и массу. Однако при этом увеличивается напряжение пульсации, ухудшаются параметры переходного процесса, возрастают помехи, генерируемые стабилизатором.
Импульсные стабилизаторы целесообразно использовать в мощных источниках питания на низкие и средние напряжения при больших колебаниях входного напряжения и регулировке выходного напряжения в больших пределах, когда требования к стабильности, пульсациям, помехам невысокие.
Схемы импульсных стабилизаторов представляют собой импульсные системы автоматического регулирования, в которых поддерживается неизменным среднее значение выходного напряжения за счет изменения времени закрытого и открытого состояния регулирующего транзистора. Изменение времени открытого и закрытого состояния регулирующего транзистора осуществляется модулятором длительности (МД), который управляет сигналом отрицательной обратной связи, поступающей с выхода усилителя постоянного тока.
Рассмотрим принцип работы импульсного стабилизатора на примере схемы на рис. 7.6.
Рис. 7.6. Схема импульсного стабилизатора с ШИМ
Схема включает в себя регулирующий элемент Р71, накопительный дроссель Др, конденсатор С, коммутирующий диод VD и
308
309
модулятор длительности, выполняющий одновременно функции схемы сравнения. Модулятор представляет собой управляемый мультивибратор на транзисторах VT3 и Г73', конденсаторах Ci и С/, коллекторных сопротивлениях R^, RK}', у которого вместо обычных базовых сопротивлений используются транзисторы VT2 и ГГ2', играющие роль управляемых сопротивлений. Эти транзисторы совместно с эмиттерным сопротивлением R3 образуют дифференциальную схему сравнения.
В обычных транзисторных мультивибраторах, в которых конденсаторы Cj и С/ заряжаются через коллекторные сопротивления, не обеспечиваются крутые фронты импульсов на коллекторе при запирании транзисторов. Поэтому, чтобы обеспечить крутые фронты, использованы зарядные сопротивления Rk2 и R&, отделенные при помощи диодов VD1 и VD1' от коллекторных сопротивлений RKi и Rk!
В номинальном режиме, когда сигнал ошибки близок к нулю (С4ых П ~ Ц>п), напряжение на базах и токи коллекторов VT2 и VT2* одинаковы. При этом разрядные токи конденсаторов Ci и С]' равны между собой и при симметрии схемы мультивибратор генерирует импульсы прямоугольной формы со скважностью, равной двум (рис. 7.7).
стора Р72 уменьшается, а коллекторный ток транзистора VT2' возрастает приблизительно на столько же. Соответственно конденсатор С будет разряжаться медленней, чем конденсатор С/, и транзистор VT3 будет находиться в закрытом состоянии большее время, чем в открытом, а регулирующий транзистор будет находиться в открытом состоянии больше времени, чем в закрытом. Если C/BXi повышается, то процесс повторяется в обратной фазе.
7.4. Источники бесперебойного питания
Источник бесперебойной подачи электропитания предназначен для того, чтобы не доггустить прекращения подачи электроэнергии, падений напряжения или резких перепадов напряжения на питаемое оборудование в случае возникновения крупных повреждений на линии. Бесперебойная подача электроэнергии обеспечивается за счет отключения оборудования от электросети и подачи электропитания с внутренних батарей до тех пор, пока не будет исправлена сеть или не будут выполнены операции по нормальному завершению работы оборудования.
На рис. 7.8 приведена блок-схема источника бесперебойного питания.
°£ГЦ~1 ^вых-ЖС/оп
Рис. 7.7. Временные диаграммы работы импульсного стабилизатора
Если, например, входное напряжение U„i понижается, то выходное напряжение падает. При этом коллекторный ток транзи-
310
Рис. 7.8. Блок-схема источника бесперебойного питания
Схема содержит: сетевой фильтр 1, сетевой разъединитель 2, схему контроля сетевого напряжения 3, преобразователь 4, аккумуляторную батарею 5
Схема работает следующим образом. При пропадании сетевого напряжения схема контроля вырабатывает управляющий сигнал, по которому происходит отключение источника бесперебойного питания от сети с помощью разъединителя и запускается преобразователь, осуществляющий преобразование напряжения аккумуляторной батареи в переменное напряжение, требуемое для питания оборудования.
Форма напряжения, близкая к синусоидальной, достигается за счет включения трех усилителей мощности, как показано на рис. 7.9. При этом усилители должны управляться в соответствии с временными диаграммами, показанными на рис. 7.10.
Рис. 7.9. Схема включения усилителей мощности
312
Рис. 7.10. Временные диаграммы работы источника бесперебойного питания
313
ЛИТЕРАТУРА
1. Агунов А.В. Схемотехника систем автоматизации. СПб., СПбГМТУ, 2005.104 с.
2. Агунов МВ. Микропроцессоры в вопросах и ответах Тольятти: ТолПИ, 2000. 82 с.
3. Архангельский Е.Н., Богач В.Г.. Вилесов Д.В., Сеньков А.П. Судовая электротехника и электроника. Л., Судостроение, 1985. 312 с.
4. Белопольский ИИ. и др. Проектирование источников электропитания радиоустройств. М.: Энергия, 1967. 302с.
5. Бруслиновский Б.В., Катханов М.Н., Константинов С.Д. и др Функциональные устройства судовых автоматизированных систем. Л.: Судостроение, 1991.336 с.
6 Гинзбург С.А., Лехтман И.Я., Малов В.С. Основы автоматики и телемеханики. М.: Энергия, 1970.110 с.
7. Деруссо И, Рой Р., Клоуз Ч. Пространство состояний в теории управления. М.: Наука, 1970.620 с.
8. Додик С.Д. Полупроводниковые стабилизаторы постоянного напряжения и тока. М.: Сов. радио, 1962.352 с.
9. Источники электропитания на полупроводниковых приборах. Проектирование и расчет И Под ред. СД. Додика и Е.И. Гальперина. М.: Сов. радио, 1969.448 с.
10. Каларащук В.И. Электронная лаборатория на IBM PC. Программа Electronics Workbench и ее применение. М.: Слон-Р, 1999. 506 с.
11. Калман Р., Фалб И, Арбиб М. Очерки по математической теории систем. М.: Едиториал УРСС, 2004,400 с.
12. Колосов С.А., Калмыков ИВ., Нефедова В.И. Элементы автоматики. М.: Машиностроение^ 1970.392 с.
13. Красовский А.А., Поспелов ГС. Основы автоматики и технической кибернетики. М.: Энергия, 1962.600 с.
14. Наумов Б.Н. Теория нелинейных автоматических систем. М.: Наука, 1972. 544 с.
15. Потемкин ИС. Функциональные узлы автоматики. М.: Энергоатомиздат, 1988.320 с.
16. Применение цифровой обработки сигналов / Пер. с англ. И Под ред. Э. Оппенгейма. М.: Мир, 1980. 552 с.
17. Справочник по радиоэлектронным системам: В 2 томах. Tl, М.: Энергия, 1979.352 с.
18. Справочник по радиоэлектронным устройствам: В 2 томах. Т.1. М.: Энергия, 1978.440 с.
19. Тараторкин Б.С. Электронные устройства судовой автоматики. Л.: Судостроение, 1981.248 с.
20. Ту Ю.Т. Цифровые и импульсные системы автоматического управления. М.: Машиностроение, 1964.472 с.
21. Turner J.K., Polar 8 icebreaker propulsion system simulation study, Gastops Ltd., Tech. Rep. GTL-56-1-TR.3, May, 1989.
22. Sherlock J. and Borman J.B., Warship electrical propulsion: The way ahead, Trans. IMarE(C), Vol. 97, Conf. 3, Paper 3.
314
315
ПРИЛОЖЕНИЯ
П 1. Лабораторный практикум: Автоматическое управление судовой электроэнергетической установкой
1. Цель работы
Исследование ключевых аспектов динамики поведения и изучение переходных процессов электроэнергетической установки.
2 Программа работы
2.1. Найти передаточные функции системы регулирования возбуждения и системы регулирования скорости турбины, определить тип звеньев, составляющих эти системы, и составить их схемы
2.2. Ввести схему системы регулирования возбуждения и проверить ее работу.
2.3. Исследовать работу схемы системы регулирования возбуждения.
2.4. Ввести схему системы регулирования скорости турбины и проверить ее работу.
2.5. Исследовать работу схемы системы регулирования скорости турбины
3. Краткие теоретические сведения
Принятые сокращения: vr — напряжение уставки, выставляющее рабочую точку регулятора возбуждения синхронной машины; Nr - сигнал уставки, выставляющий рабочую точку регулятора скорости турбины; г - внутреннее сопротивление синхронного генератора.
Схема исследуемой электроэнергетической установки показана на рис. П 1.1 Электроэнергетическая установка подключена к шинам главного распределительного щита через генераторный автоматический выключатель. Электроэнергетическая установка содержит синхронную машину, упрощенные системы регулирования возбуждения и скорости турбины.
Рис. П1.1. Упрощенная схема судовой электроэнергетической установки
сис-
В нормальных условиях в судовой электроэнерГетическо^
теме (СЭЭС) работа генераторных агрегатов происходит практически непрерывных изменениях нагрузки. Изменениям става или мощности потребителей соответствуют изменения жима работы генераторных агрегатов с другой величиной угле ~ скорости вращения ротора NB и, соответственно, иЯ°й частотой ©
напряжения на клеммах генератора:
316
со =pNB,
где р - число пар полюсов синхронного генератора.
317
На рис. П1.2 показана схема синхронной машины. Ротор синхронной машины содержит основную обмотку возбуждения vfi одну демпферную обмотку kd по оси d и две демпферные обмотки
кдг по оси q. Демпферные обмотки поддерживают синхронную работу машины в те первоначальные моменты, когда она начинает терять синхронизм.
Электромеханические переходные процессы характеризуются здесь зависимостью угла выбега ротора синхронного генератора 8 относительно оси вращающегося поля статора во времени и без учета демпферного момента определяются решением дифференциального уравнения вида
где Tj - постоянная инерции; Pin - механическая мощность, подводимая к синхронной машине (относится к турбине); Pt - электромагнитная мощность генератора (мощность, потребляемая электрической нагрузкой).
Э.д.с. синхронной машины описывается следующим математическим выражением:
E = kItN„
где к - коэффициент передачи синхронной машины (зависит от конструкции машины); 1е - ток обмотки возбуждения.
Система возбуждения относится к стабилизированным системам типа ST1 с регулированием напряжения при помощи управляемого выпрямителя. При изменении напряжения на обмотке возбуждения изменяется сила тока возбуждения электрической машины и, как следствие, основной магнитный поток и э.д.с. в обмотках якоря. При таком возбуждении э.д.с. синхронной машины определяется как
E = k^f,
ке - коэффициент передачи синхронной машины со стабилизированной системой возбуждения; Ef- напряжение, подаваемое на обмотку возбуждения синхронной машины (относится к ротору).
318
Рис. П1.2. Упрощенная схема синхронной машины
Система возбуждения содержит простое инерционное звено с ограничениями выходного сигнала, соответствующими предельно допустимым значениям обмотки возбуждения, представляющее управляемый выпрямитель.
Турбина и соответствующая система регулирования скорости, реагирующая на изменение скольжения (скорость скольжения) 8’ = ®мом -<£> = « = db/dt, где з - переменная Лапласа, представлена Двумя инерционными звеньями. Первое инерционное звено с постоянной времени представляет задержку управляющего сервомотора, а второе инерционное звено, с постоянной времени Тс1п представляет турбину с неперегретым паром.
Данные и начальные эксплуатационные режимы электроэнергетической установки приведены в табл. П1.1.
319
Таблица П 1.1
Синхронная машина
т 0,7 с
ке 200 отн. ед.
R 0,003
Р, 1 отн. ед.
Система возбуждения
Л 1 | 0,05 с
Граничные значения
Ef upper 1 0,025 отн. ед.
Eflover | -0,025 отн. ед.
Система регулирования скорости
Tsm 0,15 с
Tch 0,5 с
Граничные значения
Pinmox 1
Pinn.in ~0
р 1 &max 1
Pgymin 0
Начальные рабочие условия
vr 1 отн. ед.
Jk 1 1 отн. ед.
4. Методические указания по выполнению работы
4.1. Из уравнений, описывающих работу синхронной машины, пользуясь преобразованием Лапласа, следует найти ее передаточные функции и определить тип звеньев, которые они описывают Математические выкладки по определению передаточных функций и описываемый ими тип звеньев привести в отчете.
4.2. Воспользоваться пакетом прикладных программ схемотехнического моделирования Electronics Workbench и с учетом найденных передаточных звеньев синхронной машины ввести схемы системы возбуждения и регулирования скорости.
На примере системы возбуждения рассмотрим подробнее, как это можно сделать при помощи указанного пакета.
1. Приступая к построению характеристик, необходимо сначала запустить программу Electronics Workbench. После запуска она будет выглядеть следующим образом:
320
2. Ввести схему исследования, имеющую следующий вид:
3. Дважды щелкнув левой кнопкой мыши по изображению соответствующего элемента, установить его требуемые параметры
4. Чтобы схема начала функционировать, необходимо нажать I о ] ГД]
кнопку в верхнем правом углу.
321
4.3. Исследовать поведение электроэнергетической установки при различных рабочих режимах, подавая при этом на электроэнергетическую установку следующие типы возмущений:
а) ступенчато изменить напряжение уставки, выставляющее рабочую точку регулятора возбуждения синхронной машины, на величину Av, = +0,05 отн. ед.;
б) электроэнергетическая установка работает в установившемся режиме от момента I - 0 до момента ton - 1 с на нагрузку с сопротивлением 0,005 Ом. Затем в момент времени ton происходит внезапное короткое замыкание на шинах ГРЩ. В момент времени tclear = 1,1 с автоматический выключатель отключает синхронный генератор от закороченной шины ГРЩ и подключает к нему балластный резистор с сопротивлением 0,1 Ом. В момент времени ireciosure = 1,6 с происходит автоматическое повторное включение (АПВ) генератора на шины ГРЩ и отключение балластного резистора. Считается, что к моменту АПВ происходит полное самоустранение короткого замыкания;
в) ступенчато изменить сигнал уставки, выставляющий рабочую точку регулятора скорости турбины, на величину ДЛ'Г = +0,05 отн. ед.;
г) электроэнергетическая установка работает в установившемся режиме от момента t = 0 до момента ton = 8 с на нагрузку мощностью 0,5 отн. ед. В момент времени t0„ происходит внезапный наброс нагрузки на шинах ГРЩ до мощности в 1 отн. ед. Затем через 0,1 с происходит резкий сброс нагрузки до мощности 0,04 отн. ед. И наконец, в момент времени, равный 8,6 с, нагрузка возвращается к уровню мощности 0,5 отн. ед.
Для каждого из этих возмущений следует получить графики переходных процессов изменения выходного напряжения на генераторе и изменения скорости 5’. Отметьте на графиках момент, когда электроэнергетическая установка вернется к установившемуся режиму работы, и определите максимальное отклонение скорости для каждого случая. Проанализируйте, достигали ли рабочие характеристики выходных сигналов систем возбуждения и регулирования скорости граничных значений.
322
Примечание: В Меню Analysis / Analysis Options закладка Transient увеличьте число точек итерации переходного процесса (Transient time point iterations (ITL 4)) до 100.
4.4. Продемонстрировать работоспособность схем систем преподавателю.
5. Содержание отчета
5.1. Описание назначения и функционирования схем управления системы возбуждения и системы регулирования скорости, а также их поведения и динамики электроэнергетической установки при различных возмущениях.
5.2. Все схемы и графики, необходимые для анализа и сравнительной оценки.
5.3. Выводы.
6. Контрольные вопросы
6.1. Объясните назначение и принцип действия демпферных обмоток, расположенных на осях d и q, при совместной работе нескольких генераторов, особенно в момент короткого замыкания у шин одного из них.
6.2. Объясните устройство и принцип работы функциональных элементов систем: управляемого выпрямителя, сервомотора, тахогенератора, автоматического выключателя, реле времени.
323
П 2. Курсовое проектирование Разработка следящей системы с двигателем
1. Общие положения
1.1. Задание. Разработать простейшую следящую систему с двигателем:
вариант 1 - для отработки угловых перемещений;
вариант 2 - для регулирования скорости вращения.
1.2. Исходные данные
Момент инерции объекта регулирования относительно оси его вращения Jo [кг-м2] 9,7
Момент статических сопротивлений Мето [Нм] 10,5
Внешний воз'1ущающий момент Мю [Н-м] 4,9
Скорость системы (требуемая для нормальной работы) а' [гоад/с] 18
Ускорение системы (в моменты пуска) а" [град/с2] Х.Х
Диапазон отработки угла а [град] ±30
Установившаяся скооостная ошибка 0уст [ХЮ-3 рад] ±ЗЛ
Вариант 2
Момент инерции объекта регулирования относительно оси его вращения [кг-м! 10
Момент статических сошотивлений М™ [Н-м] 11,7
Внешний возмущающий момент Мм [Н м] 5,1
Скорость системы (требуемая для нормальной работы) а' [град/с] 600
Ускорение системы (в моменты пуска) а” [град/с2] 4ХХ
Диапазон регулирования скорости и [об/мин] ±100
Установившаяся ошибка ©уст [x10“J рад/с] ±9Х
X - последняя значащая цифра номера зачетной книжки;
XJC- две последние значащие цифры номера зачетной книжки.
13. Задание на специальную проработку
Вариант 1. Используя пакет прикладных программ для схемотехнического моделирования Electronics Workbench, построить переходную характеристику проектируемой системы.
324
Вариант 2. Используя пакет прикладных программ для схемотехнического моделирования Electronics Workbench, построить ЛАХ и логарифмическую фазо-частотную характеристику (ЛФХ) разомкнутой проектируемой системы.
1.4. Содержание расчетно-пояснительной записи подлежащих разработке вопросов
Введение.
Составление функциональной схемы системы.
Построение структурной схемы системы.
Определение параметров и выбор узлов системы.
Определение передаточной функции системы.
Выполнение задания на специальную проработку.
Выводы.
Литература.
1.5. Перечень обязательного графического материала
Функциональная схема системы.
Структурная схема системы.
Структурная схема эквивалентной системы простейшего вида. Графики, поясняющие задание на специальную проработку.
2. Указания к выполнению курсового проектирования
2.1. Общие вопросы проектирования автоматических систем
Задача проектирования автоматической системы заключается в выборе по заданным требованиям (быстродействию, точности работы и т.д.) структуры и параметров системы.
Таким образом, данная задача сводится к структурному синтезу автоматической системы, т.е. к нахождению вида оператора преобразования системы и ее элементов. Задача структурного синтеза автоматической системы в общем случае пока не решена, процедура синтеза выполняется по тем или иным полуэвристиче-ским - полуформальным правилам или просто на основе интуиции и опыта предварительного исследования типовых систем различных классов путем создания нового оператора преобразования,
325
новой схемы, реализующей отдельные операции, нового Принципа регулирования.
Конструктивным шагом здесь может явиться рассмотрение задачи структурного синтеза как задачи кусочной аппроксимации, для чего на основе целевого назначения системы и ее содержательного описания определяется набор ее операций, а затем с каждой элементарной операцией сопоставляется элементарная структура, в которой эта операция может быть реализована.
Обычно этот процесс распадается на несколько этапов и производится примерно в следующем порядке.
1. В соответствии с содержательным описанием автоматической системы составляется ее функциональная схема в виде соединения отдельных элементов, выполняющих определенные функциональные преобразования.
На основе функциональной схемы выделяются типовые динамические звенья, которые описываются определенными передаточными функциями.
2. Автоматическая система изображается в виде структурной схемы, представляющей собой соединенные в общую замкнутую цепь простейшие динамические звенья
Такое представление позволяет установить общие свойства системы автоматического регулирования и определить пути их улучшения.
Структурные схемы составляются путем выделения в функциональной схеме динамических звеньев, обладающих свойствами однонаправленности и независимости. В тех случаях, когда это сделать затруднительно, записываются уравнения (в символическом виде), описывающие процессы в отдельных частях системы, по которым затем строится структурная схема.
Если в системе содержатся нелинейные звенья, то следует предварительно произвести (где это возможно) их линеаризацию путем замены нелинейной характеристики отрезком прямой, касательной к нелинейной характеристике в выбранной рабочей точке.
3. Определяются параметры динамических звеньев. В соответствии с найденными параметрами, в предположении, что элементная база определена (заданы разновидности применяемых узлов,
326
функциональных устройств и элементов), осуществляется выбор узлов, функциональных устройств и элементов, реализующих динамические звенья.
4. Путем использования теорем о преобразовании звеньев структурная схема приводится к эквивалентной системе простейшего вида (динамическому звену с жесткой обратной связью) и находится передаточная функция последней.
5. Проводится анализ передаточной функции разомкнутой и замкнутой системы: исследуются условия устойчивости системы, а также качество процесса регулирования при различных воздействиях на систему.
2.2. Общее описание следящих систем с двигателем
Следящие системы - это такие системы, которые с той или иной степенью точности воспроизводят изменения входных величин, происходящие по произвольному закону. По назначению следящие системы делятся на следящие электроприводы, системы дистанционного управления, измерительные системы.
Основным звеном современных автоматизированных систем управления машинами и механизмами является электропривод.
Электроприводом называется электромеханическое устройство, предназначенное для преобразования электрической энергии в механическую энергию вращательного либо поступательного движения и включающее электромеханический преобразователь (двигатель) и устройство управления двигателем.
Современные автоматизированные электроприводы представляют собой сложные динамические системы, включающие в себя линейные и нелинейные элементы, обеспечивающие в своем взаимодействии разнообразные статические и динамические характеристики. Механическая энергия, необходимая для создания относительного перемещения механизмов, в основном поступает от электрического двигателя - силовой части электропривода. Задающее воздействие и измеренное значение регулируемой величины проходят через информационную часть системы управления электроприводом
Свойства автоматизированного электропривода определяют важнейшие показатели машин и механизмов, а также качество и
эффективность технологических процессов, в которых они задействованы.
2.2.1. Следящая система для отработки угловых перемещений
Следящая система предназначена для дистанционного управления поворотом объекта регулирования (например, авторулевые).
Напряжение уставки ит с ручки управления (джойстика или штурвала) поступает на один из входов схемы сравнения, где из него вычитается напряжение обратной связи 1/^, пропорциональное углу поворота объекта регулирования. Полученный таким образом сигнал рассогласования и с выхода схемы сравнения поступает на вход усилителя мощности, который питает управляющую обмотку двухфазного асинхронного исполнительного (управляющего) электродвигателя. С валом двигателя через редуктор соединены датчик углового перемещения и объект регулирования.
2.2.2. Следящая система для регулирования скорости вращения
Следящая система предназначена для дистанционного регулирования скорости вращения вала объекта регулирования (например, электрические трансмиссии).
Напряжение уставки с ручки управления (машинного телеграфа) поступает на один из входов схемы сравнения, где из него вычитается напряжение обратной связи «ос, пропорциональное угловой скорости вала объекта регулирования. Полученный таким образом сигнал рассогласования и с выхода схемы сравнения поступает на вход усилителя мощности, который питает управляющую обмотку двухфазного асинхронного исполнительного (регулирующего) электродвигателя. С валом двигателя через редуктор соединены тахогенератор и вал объекта регулирования.
2.3. Определение основных параметров следящего привода
2.3.1. Расчет параметров следящего привода
1. Определение максимального момента сопротивления, приведенного к валу исполнительного двигателя:
1/ _^сто+Л^во , Wo Я «
ДОпкх —" ---- ~1-----ОС .
328
где ijo - КПД силового редуктора (?;0 = 0,8); кд - коэффициент учета момента инерции двигателя и элементов механической передачи (Ад = 1,2); г’о - редукционное число силового редуктора (io= 100=1000)
Редукционное число силового редуктора определяется как:
/о=^6Лдн’
где у - коэффициент форсирования, для двигателей с электроприводом у=1,1; «дн - номинальное число оборотов в минуту приводного двигателя.
Коэффициент передачи силового редуктора находится как
К?С =~-
<о
2. Определение предварительного номинального момента исполнительного двигателя:
где Кп - коэффициент кратковременных перегрузок двигателя по моменту при случайных перегрузках исполнительного механизма, в электроприводе с асинхронным двигателем Кп = 1,7=2,5, для двигателей постоянного тока Кп = 2,5=3.
3. Определение предварительной номинальной мощности исполнительного двигателя:
Р№1 =л(цн эдлдн (Вт).
4. Выбор исполнительного двигателя по мощности из каталога. При выборе двигателя следует учитывать, что в астатических системах в установившемся режиме остаточное рассогласование отсутствует, если не учитывать сухое трение в двигателе (застоя). Для уменьшения погрешности от застоя необходимо ис-
329
пользовать двигатели с малым напряжением трогания и^. При заданном «гр ошибка застоя равна Да3 = и^К, где К- коэффициент усиления, характеризующий зависимость напряжения на обмотке управления двигателя при единичном рассогласовании (в разомкнутой системе).
2.3.2. Проверка правильности выбора исполнительного двигателя
1. Определение максимального момента на валу выбранного двигателя:
2. Определение номинального момента выбранного двигателя:
м -р 30 1
МДН 1
71 лдн
где Рдн - номинальная мощность выбранного двигателя, Вт; идн -номинальное число оборотов в минуту выбранного двигателя.
3. Определение коэффициента фактической перегрузки выбранного двигателя:
*п
Л/дн
Считается, что двигатель выбран правильно,’ если величина фактической перегрузки не превышает допустимой.
2.4. Определение передаточной функции двигателя
Коэффициент усиления двигателя по скорости вращения относительно напряжения управления (без учета инерционности ротора) определяется выражением
^уд
1 п
Uymax3Q‘
7ДН-
Передаточная функция двигателя по углу поворота соответственно находится как
330
гдер =J®.
2.5. Выбор чувствительного элемента
При выборе чувствительного элемента из каталога следует руководствоваться тем, что предельная ошибка чувствительного элемента не должна превышать 30-5-50% от допустимой установившейся ошибки всего привода: Очэп <(0,3...0,5)0уст.
При этом необходимо помнить, что показатель класса точности характеризует наибольшую допустимую погрешность измерения и выражает эту погрешность в процентах от наибольшего показания чувствительного элемента. Погрешность может быть положительной или отрицательной, т.е. чувствительный элемент может давать как преувеличенные, так и преуменьшенные значения.
Например, чувствительный элемент класса 0,2 с наибольшим показанием 300 единиц может давать в любом месте рабочего диапазона измерений погрешность до ±0,2% от 300, т.е. ±0,6 единиц.
Если указанное выше требование обеспечить не удается, ротор чувствительного элемента соединяют с осью вращения объекта регулирования через повышающий редуктор с редукционным числом i‘i (ii<l). Коэффициент передачи повышающего редуктора определяется как
^рп — h
Применение редуктора позволяет уменьшить ошибку измерения в ХрП раз.
После того как чувствительный элемент выбран, определяется его коэффициент передачи Кчэ.
Для линейного вращающегося трансформатора Кчэ = тУпКт, где Г7П - напряжение питания, В, zn=co2/coi, а <вь ©2 - число витков в обмотке возбуждения и синусной обмотке; К? - угловой коэффициент, рад-1, прямой линии, аппроксимирующей функцию
331
, since f( а) =--------,
l+mcosfa>
связывающую напряжение на синусной обмотке линейно вращающегося трансформатора с углом поворота ротора. Угловой коэффициент находится из построенного для заданного диапазона отработки угловых перемещений графика функции /(а) как тангенс угла наклона линейной части графика, т.е. Ку=к/(аУ&а.
Если за выходную величину тахогенератора принята частота вращения ротора, то тахогенератор представляет собой безынерционное звено с Кчэ = Ктг, где К-ц- - крутизна изменения выходного напряжения, В/(рад/с).
2.6. Определение коэффициента усиления усилителя мощности Коэффициент усиления по напряжению усилителя мощности находится следующим образом:
— Uушах
^УМ д ]/ у °УСТЛРПАЧЭ
2.7. Построение ЛАХ, ЛФХ и переходной характеристики
Определение поведения системы целесообразно проводить путем компьютерного моделирования с помощью системы моделирования электронных схем Electronics Workbench.
Рис. П2.1. Компьютерная модель для получения ЛАХ и ЛФХ
332
На рис. П2.1 приведена схема модели, при помощи которой могут быть получены ЛАХ и ЛФХ следящей системы, на рис. П2.2 - схема модели для получения ее переходной характеристики. В модели на рис. П2.1 представлены блок передаточной функции, генератор синусоидального переменного напряжения, характериограф для построения ЛАХ и ЛФХ системы. В модели на рис. П2.2 показаны блок передаточной функции, генератор, генерирующий единичную функцию 1(0, и осциллограф для наблюдения происходящих в системе процессов.
Рис. П2.2. Компьютерная модель для получения переходных характеристик
Следящая система моделируется блоком передаточной функции. Этот компонент моделирует передаточные характеристики систем в s-области. Блок передаточной функции определяется как дробь с полиномами, находящимися в числителе и знаменателе. При помощи одного такого блока может быть непосредственно смоделирована передаточная функция вплоть до третьего порядка. Данный компонент может быть использован при анализе по постоянному и переменному току и анализе переходных процессов. Модель передаточной характеристики в блоке определяется в форме следующей рациональной функции:
333
»T(s)=
P(s) ^a3-s3 +a2-s2 + a}-s + Qq Q(s) fy-s3 +b2s2 +bl-s+b0
При построении ЛАХ и ЛФХ для решения задачи аппроксимации частотных характеристик к входу и выходу системы подключается характериограф.
При построении переходной характеристики на вход системы подается единичная функция, а поведение выходной величины наблюдается на выходе блока передаточной функции.
2.8. Заключительный этап
Работа над проектом завершается составлением таблицы характеристик спроектированной системы
2.9. Вопросы по защите курсового проекта
1. Дайте определение статической и астатической системы управления.
2. Какой системе присуща скоростная ошибка - статической или астатической?
3. Объясните принцип работы разработанной системы и ее основных узлов.
4. Объясните, чем обусловлена инерционность разработанной системы.
5. Что можно сделать для увеличения быстродействия разработанной системы?
6. В чем состоит суть определения устойчивости по ЛАХ и ЛФХ?
7. Какой участок ЛАХ влияет на работу системы в установившемся режиме? Каков наклон ЛАХ на этом участке для астатической системы с астатизмом к-го порядка? А для статической системы (к = 0)?
8. При каком наклоне среднечастотного участка ЛАХ (вблизи частоты среза <вс) переходный процесс протекает благоприятно? Какова должна быть длина этого участка?
9. Оказывает ли существенное влияние на переходную характеристику высокочастотный участок (при со » сос) ЛАХ?
334
П 3. Характеристики электромеханических элементов автоматических систем
§ g
1
5
Jh 5 S S- 5 2 2 X- 5
1 Is 1 а а а й к a a § §
Hi ! Ш h hl Ш hl 10
!₽< 5 «-8 -8 -8 . 8 S’- Ss R- 8
н- 1 = 1 a • •°
]н I Й |f и st !t is !! II Й
. & R8 R а 55 R «8 R R R
II 1 * 1 1 1 B § i
J j 1 1 1 1 1 S' 1 i j H i
g* я i 1 й i 4 s i a i X i § 2 Й i ! i
р i 5 1 i 1 1 1 ! 1 Ct I I
335
Электродвигатели переменного тока
Обозначение изделия ОСТ ТУ вращения питания В Частота, Номинальный момент. Н*м (ГС’СМ).. трогания. В Потребляемый тол, А вращения, об/мин мощность. Вт Вес.
ДКИ-Ы2ТВ 16.0.513.003-72 П 115(0.) послед/парал 36/18 (оу) 400 Нам, пуск, не 0/Ю27 (29) 2 Нал. пуск, оу не более 0,26 Сннхр. 12000 1 0,1
ДКИ-2.5-12ТВ 16.0.513.003-72 п 115(о.) послед/парал 36/18 (оу) 400 0,0064 («3) 2 0,39 12000 2,5 0,18
ДКИ-6-12ТВ 16.0.513.003-72 п 115(0.) 36/18 (оу) 400 0,012 (130) 2 0,78 12000 6 0,35
ДКИ-16-12ТВ 16.0.513.003-72 п 115(0.) послед, ларал 80/40 (оу) 400 0,029 (300) 2 0,89 12000 16 0,75
ДКИ-40* 2ТВ 16.0.513.003-72 п 115(0.) послед/парал 80/40(ov) 400 0,054 (550) 2 2,12 12000 40 2.36
ДКИ-1,6-3 АТ ВБО.312.111 л/п 220 (он) 127/63,5 (оу) 50 0,00853 4 0,08 ов 0,1 ру 1800 1,6 0.55
АДП-124Б ВБЗ. 18X042 п ПО 1000 0,01225 2 0,5 ов 6,45 оу 12000 не менее 15 0,55
ДКМР-1-20 BH.3t2.105 л/п 36(о.) 48/24 (оу) 400 0,378 (3860) 3 0,5 ов 0,35 оу 176 не менее — 0,37
ДКМР-1-50 ВБ31Х1О5 Л/П 36 (ов) 48/24 (оу) 400 0,152 (1550) 3 0.5 ов 0,35 оу 44 — 0,37
(2000)
ДВА-У4 — - послед 220 50 (1100) — 0,17 610 6 4.2
ДПА-У2 — — 220 (0.) 140/80 (оу) 50 (2000) — 0,28 0/1300 — 3
ДЛГ-1 - - .127 220 50 (70) - 0.06 1200 2 1.4
ДПА-010/5-4 — — 220 (ов) 140/80 (оу) 50 (3000) — 0,45 0/1430 — 3,8
ДВД-1Р - - "мо” 50 (1500) - 0,41 1500/750 15/7,5 7
Вращающиеся трансформаторы
Тахогенераторы
Обозначение изделия Номиналы.^ напряжение ветС,жле“и«, В Номинальная изменения выходного напряжения, мВ/(об/мин) Класс точности сопротивление нагрузки. Ом вращения, об/мнн Вес, КГ
1.6ТГП-2 ОТ постоянного 2.5 0.5 10000 3000 0,025
2.5ТГП-1 от постоянного 4,0 1.0 6000 3000 0,09
ТГП-5 ' от постоянного 4,0 0,2 10000 6000 0,09
ТП2О^О,5 от постоянного 6.0 0.S 10000 3000 0,05
ТП20-4-0.2 от постоянного 4.0 0.2 10000 6000 0,05 0,065
ТП20-4-1 от постоянного 4,0 1,0 6000 3000 0,05 0,065
ТП75(8О) - 20 погрешность не более 0,2% 10000 3000 0,5
ТМГ-ЗОТЗ 2.5
СИСТЕМЫ И УСТРОЙСТВА