







































































































































































































































































































































































































































































































































































































































































































































































































































































































































Текст
П. С. АЛЕКСАНДРОВ
ЛЕКЦИИ
ПО АНАЛИТИЧЕСКОЙ
ГЕОМЕТРИИ,
ПОПОЛНЕННЫЕ НЕОБХОДИМЫМИ
СВЕДЕНИЯМИ ИЗ АЛГЕБРЫ
с приложением
собрания задач, снабженных решениями,
составленного А. С. Пархоменко
Допущено М ииистерстпом
высшего и средне.1» специального образования СССР
в качестве учебника для студентов университетов
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
МОСКВА 1968
A 46
617.3
УДК 516, О
ОГЛАВЛЕНИЕ
Предисловие 13
Глава I Координаты на прямой 17
§ 1 Отношение отрезков 17
§ 2 Напрашенные отрезки (векторы), их отношение 18
§ 3 Ось Алгебраическое значение (координата) вектора па оси 20
§ 4 Сложение векторов на прямой .21
§ 5 Система координат на прямой 22
§ 6 Деление отрезка в данном отношении 23
§ 7 Пропорциональность пар чисел 25
§ 8. Бесконечно удаленная точка прямой 28
§ 9 Пропорциональность двух последовательностей, состоящих из п
чисел 29
Глава II Векторы 32
§ 1 Равенство векторов Свсбодный вектор ... 32
§ 2 Линейные операции над векторами (сложение и умножение на
число) . . ... . . 34
1 Сложение векторов C4) 2 Умножение вектора иа чи-
число C8)
§ 3 Проекции . . . 39
§ 4 Коллииеарные и компланарные векторы, координаты вектора
относительно данного базиса .... 44
§ 5. Линейная зависимость и независимость векторов .... 49
<f 6. Геометрический смысл линейной зависимости векторов ... 50
§ 7. Векторные многообоазия ... ... 52
Глава III Аффинная система координат на плоскости и в пространстве 55
§ 1 Определение аффинной системы координат 55
1 Аффинная система координат на плоскости E5) 2 Аф
фипная система координат в пространстве E8)
§ 2 Перенос начала координат . ... 61
§ 3 Деление отрезка в данном отношении 62
Г лапа IV Прямоугольная система координат. Полярные координаты 66
§ 1 Прямоугольная система координат на плоскости и и простраи
стве Расстояние между двумя точками Сравнения окружно
стп и сферы . . . . . .66
1 Прямоугольная система координат на плоскости и в простран-
пространстве F6) 2 Форму та для длины вектора (для рассто-
расстояния между двумя точками) в прямоуголыюн системе
4 ОГЛАВЛЕНИЕ
координат F6). 3. Уравнение окружности: замечание об
уравнении линии вообще F7). 4. Уравнение сферы F8).
§2. Скалярное произведение векторов; угол между днумя векторами 69
1. Угол между двумя векторами F9). 2. Направляющие ко-
косинусы G1). 3. Скалярное произведение двух векторов
G2). 4. Выражение скалярного произведения и угла между
двумя векторами через координаты этих векторов G3).
§ 3. Угол от одного вектора до другого на плоскости 75
§ 4. Полярная система координат на плоскости 77
1. Определение полярных координат G7). 2. Связь прямо-
прямоугольных координат с полярными G9). 3. Примеры (81).
§ 5. Полярная система координат в пространстве 84
Глава V. Прямая линия 87
§ 1. Направляющий вектор и угловой коэффициент прямой (в про-
произвольной аффинной системе координат). Уравнение прямой . 87
§ 2. Расположение двух прямых на плоскости 91
§ 3. Частные случаи общего уравнения прямой 93
§ 4. Векторная и параметрическая форма уравнения прямой. Урав-
Уравнение прямой, проходящей через две заданные точки .... 94
§ 5. Задача: когда прямая Ах-\-Ву-\-С = 0 на плоскости проходит
через точку пересечения двух заданных прямых Агх-\- Вху +
+ С1==0 и Л2х-|-?.,,//-ЬС2 = 0? 97
§6. Две полуплоскости, определяемые данной прямой па плоскости 101
§ 7. Прямая иа плоскости в прямоугольной системе координат.
Нормальное уравнение прямой на плоскости 105
§ 8. Расстояние от точки до прямой (иа плоскости) 107
§ 9. Углы, образуемые двумя прямыми на плоскости 108
1. Угол между двумя прямыми A08). 2. Угол от первой пря-
прямой до второй (ПО).
§ 10. Прямая в пространстве, снабженном прямоугольной системой
координат 112
Глава VI. Парабола. Эллипс. Гипербола 114
§ 1. Парабола 114
§ 2. Определение и каноническое уравнение эллипса 119
§ 3. Параметрическая запись уравнения эллипса; построение эллип-
эллипса по точкам. Эллипс как результат сжатия окружности к од-
одному из ее диаметров 124
§ 4. Эллипс как проекция окружности и как сечение круглого ци-
цилиндра 126
§ 5. Определение гиперболы. Каноническое уравнение гиперболы 129
§ 6. Основной прямоугольник и асимптоты гиперболы 134
§ 7. Директрисы эллипса и гиперболы 137
§ 8. Фокальный параметр эллипса и гиперболы. Уравнение при
вершине 142
1. Фокальный параметр A42). 2. Уравнение при вершине.
Объяснение названий «парабола», «эллине», «гипербола» A43).
§ 9. Уравнение эллипса, гиперболы и параболы в полярных коор-
координатах 147
ОГЛАВЛЕНИЕ 5
Глава VII. Детерминанты . 150
§ 1. Площадь ориентированного параллелограмма и треугольника 150
§ 2. Детерминант второго порядка. Матрицы 152
§ 3. Детерминанты третьего порядка 154
§ 4. Разложение детерминанта третьего порядка по элементам ка-
какой-либо строки. Приложение к системе трех уравнений
с тремя неизвестными (правило Крамера) 15Э
§ 5. Системы трех урапнений с тремя неизвестными с детерминан-
детерминантом системы, равным нулю 152
§ 6. Арифметическое я-мерное векторное многообразие (простран-
(пространство). Общее определение матрицы. Детерминанты любого
порядка ' . . . . 167
1. Арифметическое n-мерпое векторное пространство A67).
2. Общее определение матрицы. Детерминанты гс-го порядка.
Невырождающиеся матрицы A68). 3. Основные свойства
детерминантов A70).
§ 7. Разложение детерминанта /1-го порядка по элементам данной
строки (данного столбца) 174
§ 8. Правило Крамера для решения систем я уравнений с я не-
неизвестными 177
§ 9. Общее определение миноров матрицы. Теорема Лапласа . . 178
§ 10. Умножение детерминантов 183
§ 11. Детерминант я-ro порядка как линейная нечетная нормиро-
нормированная функция от п векторов 1?5
Глава VIII. Преобразование координат. Матрицы , 188
§ 1. Переход от одной аффинной системы координат к другой . . 1ЬА
1. Переход от одной аффинной системы координат к другой
с тем же началом. Переход от одного базиса к другому.
Матрица, обратная к данной A88). 2. Переход от одной
аффинной системы координат к другой с изменением начала
координат A91). 3. Уравнение гиперболы относительно ее
асимптот A91).
§ 2. Перемножение матриц. Новое определение обратной матрицы 103
1. Произведение двух матриц A93). 2. Новое определение об-
обратной матрицы A95).
§ 3. Переход от одной прямоугольной системы координат к другой 19С
1. Случаи прямоугольного репера на плоскости A96). 2. Ор-
Ортогональные матрицы. Прямоугольные (ортогональные) ре-
реперы в пространстве A99).
§ 4. Действия над матрица-ми в общем случае 202
Глава IX. Преобразование координат (продолжение): ориентация пло-
плоскости и пространства; углы Эйлера; объем ориентированного
параллелепипеда; векторное произведение двух векторов 207
§ 1. Ориентация пространства (плоскости) 207
§ 2. Углы Эйлера 218
§ 3. Объем ориентированного параллелепипеда 221
о оглавлшие
1. Некоторые частные случаи определения ориентации прост-
пространства B21). 2. Объем ориентированного параллелепипеда
B22).
§ 4. Векторное произведение двух векторов 225
1. Бивектор B25). 2. Векторное произведение B26)
Глава X. Плоскость и прямая в пространстве 230
§ 1. Уравнения плоскости 230
1. Параметрическое и общее уравнения плоскости B30).
2. Уравнение двумерного векторного многообразия B32).
3. Первая основная теорема о плоскости B34). 4. Условие
компланарности пектора плоскости B35). 5. Частные слу-
случаи уравнения плоскости B36).
§ 2. Множество решений системы двух однородных линейных урав-
уравнений с тремя неизвестными 238
§ 3. Взаимное расположение двух плоскостей 240
§ 4. Прямая как пересечение двух плоскостей 241
§ 5. Пучок плоскостей 244
§ 6. Взаимное расположение двух прямых в пространстве . . . 246
§ 7. О двух полупространствах, определяемых данной плоскостью 247
§ 8. Плоскость в прямоугольной системе координат; нормальное
уравнение плоскости; расстояние от точки до плоскости . . 249
§ 9. Угол между прямой и плоскостью; угол между двумя пло-
плоскостями 252
§ 10. Две задачи 254
Глава XI. Движения и аффинные преобразования 259
§ 1. Определение движений и аффинных преобразований .... 259
§ 2. Преобразование векторов при аффинном преобразовании пло-
плоскости и пространства. Основные свойства аффинных преобра-
преобразований 264
§ 3. Аналитическое выражение аффинных преобразований .... 271
§ 4. Сохранение отношений площадей и объемов при аффинных
преобразованиях 274
§ 5. Получение собственных аффинных преобразований посред-
посредством деформации тождественного преобразования. Следствия 276
§ 6. Движения как изометрические преобразования 278
§ 7. Преобразования подобия 280
1. Определение преобразования подобия B80). 2. Равномерное
растяжение (гомотетия) B80). 3. Представление преобразо-
преобразования подобия в виде произведения растяжения и движе-
движения B82).
§ 8. Классификация движений прямой и плоскости 283
1. Движения прямой B83). 2. Движения плоскости B84).
Глава XII. Векторные пространства (многообразия) любого конечного
числа измерений. Системы линейных однородных уравнений . . . 288
§ 1. Определение векторного пространства 288
§ 2. Размерность. Базис. Координаты 292
1. Базис B92), 2. Переход от одного базиса к другому B94).
§ 3. Теорема об изоморфизме между любыми двумя векторными
пространствами одной и той же конечной размерности п . . 295
ОГЛАВЛЕНИЕ 7
§ 4. Подпространства векторного пространства. Дальнейшие теоре-
теоремы о линейной зависимости векторов и о базисе векторного
пространства 297
1. Определение подпространства векторного пространства B97)
2. Теорема Штейннца «о замене» B98).
§ 5. Алгебраическая (в частности, прямая) сумма подпространств 302
§ 6. Линейные отображения векторных пространств 304
1. Определение и простейшие свойства линейных преобразо-
преобразований C04). 2. Матрица линейного преобразования. Умно-
Умножение преобразований и умножение матриц C06).
§ 7. Теорема о ранге матрицы 310
§ 8. Системы линейных однородных уравнений 313
Глава XIII. Линейные, билинейные и квадратичные функции на век-
векторных пространствах 321
§ 1. Линейные функции 321
§ 2. Билинейные функции и билинейные формы 323
§ 3. Матрица билинейной и квадратичной формы и ее преобразо-
преобразование при переходе к новому базису (при преобразовании пе-
переменных) 327
§ 4 Ранг билинейной и квадратичной формы (билинейной и квад-
квадратичной функции) 330
§ 5 Существование канонического базиса для всякой квадратичной
и всякой билинейной функции («приведение квадратичных
форм к каноническому виду») 332
Глава XIV. Точечно-векторное аффинное га-мерное пространство R" . 343
§ 1. Определение я-мерного аффинного пространства 343
§2. Системы координат. Арифметическое пространство R". Изомор-
Изоморфизм всех л-мериых пространств между собою 345
§ 3. А-мерные плоскости я-мерного аффинного пространства; г-мер-
ные параллелепипеды 348
1. Прямая в л-мерном пространстве C48). 2. Общее опреде-
определение r-мерной плоскости я-мерного аффинного простран-
пространства R" C49).
§ 4. Геометрически независимые системы точек. Барицентрические
координаты. Симплексы 352
§ 5. Системы линейных уравнений 357
§ 6. Аффинные преобразования л-мерного аффинного простран-
пространства R" • 363
Глава XV. Алгебраические линии и поверхности. Комплексная пло-
плоскость и комплексное пространство 364
§ 1. Определение алгебраических линий и поверхностей 364
§ 2. Преобразование многочлена втором степени при преобразовании
координат 368
§ 3. Аффинная эквивалентность линий и поверхностей 371
§ 4. Комплексная плоскость 373
§ 5. Прямая линия на комплексной плоскости 377
§ 6. Замечание о действительных и мнимых линиях 380
§ 7. Комплексное пространство 382
8 ОГЛАВЛЕНИЕ
§ 8. Распадающиеся линии и поверхности. Цилиндрические и ко-
конические поверхности. Поверхности вращения 384
1. Распадающиеся линии и поверхности C84). 2. Цилиндри-
Цилиндрические поверхности C85). 3. Конические поверхности C86).
4. Поверхности вращения (ЗЭО).
§ 9. Несколько заключительных замечаний о линиях и поверхно-
поверхностях 393
Глава XVI. Различные виды кривых второго порядка 398
§ 1. О линиях, определяемых уравнениями второй степени с двумя
неизвестными 399
1. Приведение квадратичной формы от двух переменных к ка-
• ионическому виду при помощи преобразований прямоуголь-
прямоугольных координат C99). 2. Первый основной случай: Xt ф О,
Хг ф 0 D00). 3. Второй основной случай: Х1Х2 = 0 D02).
§ 2. Инварианты многочлена второй степени 403
§ 3. Центральный случай 408
§ 4. Параболический случай: 6 = 0 413
§ 5, Аффинная классификация кривых второго порядка 416
§ 6. Несколько заключительных замечаний 420
Глава XVII. Общая теория кривых второго порядка 425
§ 1. Пересечение алгебраической кривой с прямой. Асимптотиче-
Асимптотические направления и асимптоты алгебраической кривой . . . 425
§ 2. Теорема единственности для кривых второго порядка. Пучок
кривых второго порядка 429
1. Теорема единственности D29). 2. Пучок кривых второго
порядка D32).
§ 3. Асимптотические направления кривых второго порядка . . . 434
§ 4. Пересечение кривой второго порядка с прямой неасимптотиче-
неасимптотического направления. Касательные 440
§ 5. Пересечение кривой второго порядка с прямой асимптотиче-
асимптотического направления. Геометрическая характеристика асимпто-
асимптотических и неасимптотических направлений 442
§ 6. Центр кривой второго порядка 445
§ 7. Диаметры кривой второго порядка 448
§ 8. Взаимно сопряженные векторы (направления). Диаметры и
касательные 450
1. Взаимно сопряженные векторы. Особое направление D50).
2. Диаметры и касательные D57).
§ 9. Вид уравнения кривой, если оси координат имеют сопряжен-
сопряженные направления 458
§ 10. Второе доказательство теоремы единственности. О полноте
системы ортогональных инвариантов 462
1. Второе доказательство теоремы единственности D62). 2.0 пол-
ноге системы ортогональных инвариантов D65).
§11. Оси симметрии и главные направления кривой второго по-
порядка 466
§12. Основная теорема об аффинных преобразованиях 473
ОГЛАВЛЕНИЕ 9
Глава XVIII. Краткое описание различных видов поверхностей вто-
второго порядка • 476
§ 1. Распадающиеся поверхности 476
§ 2. Цилиндрические поверхности 478
§ 3. Конусы второго порядка 479
§ 4. Эллипсоиды и гиперболоиды 482
§ 5. Параболоиды . 492
§ 6. Прямолинейные образующие 4У/
1. Прямолинейные образующие однополостного гиперболоида
D97). 2. Прямолинейные образующие гиперболического
параболоида E01).
Глава XIX. Общая теория поверхностей второго порядка. 1 (пересе-
(пересечение с плоскостью и с прямой; асимптотические направления; ка-
касательная плоскость; центр) 504
§ 1. Ранг и детерминант малой и большой матрицы многочлена
второй степени 504
§ 2. Пересечение поверхности второго порядка с плоскостью . . . 506
§ 3. Пересечение поверхности второго порядка с прямой. Асимпто-
Асимптотические направления. Касательные прямые и касательная
плоскость. Особые точки поверхности второго порядка . . . 509
§ 4. Асимптотические направления, конус асимптотических направ-
направлений, прямолинейные образующие поверхностей второго по-
порядка ....... 513
§ 5. Центр поверхности второго порядка 522
Глава XX. Общая теория поверхностей второго порядка. II (диаме-
(диаметральные плоскости; особые и главные направления; аффинная
классификация) 528
§ 1. Диаметральные плоскости. Особые направления 528
1. Плоскость, сопряженная данному неасимптогическому на-
направлению E28). 2. Плоскость, сопряженная асимптотиче-
асимптотическому направлению; общее определение диаметральной пло- ¦
скости E29). 3. Простейшие свойства диаметральных пло-
плоскостей E30), 4. Особые направления E31).
§ 2. Диаметральные плоскости поверхностей различных видов . . 536
1. Центральные поверхности (поверхности с единственным
центром) E36). 2. Поверхности с прямой центров н с пло-
плоскостью центров E36). 3. Поверхности без центров E37).
§ 3. Сопряженные направления 539
§ 4. Уравнение поверхности второго порядка относительно коор-
координатной системы с сопряженными направлениями осей . . . 542
§ 5. Теорема единственности 543
§ 6. Главные направления 546
§ 7. Приведение к каноническому виду уравнения поверхности
второго порядка 553
§ 8. Аффинная классификация поверхностей второго порядка . . . 564
10 ОГЛАВЛЕНИЕ
Глава XXI. Проективная плоскость 570
§ 1. Перспективное соответствие между плоскостью и связкой . . 570
§ 2. Однородные координаты точек на плоскости и лучей в связке 573
1. Определение однородных координат E73). 2. Уравнение
прямой на плоскости в однородных координатах E77).
§ 3. Координаты прямой; арифметическая проективная плоскость;
общее определение проективной плоскости 579
1. Координаты прямой E79). 2. Арифметическая проектив-
проективная плоскость E80). 3. Общее определение проективной плос-
плоскости E81). 4. Комплексная проективная плоскость E82).
§ 4. Принцип двойственности для проективной плоскости .... 583
§ 5. Проектнвпая система координат в связке и на проективной
плоскости 590
§ 6. Проективные преобразования и отображения проективной пло-
плоскости 599
1. Определение и аналитическая запись проективных преобра-
преобразований E99). 2. Основная теорема о проективных преоб-
преобразованиях плоскости F02). 3. Задание проективных пре-
преобразований проективной плоскости аффинными преобразо-
преобразованиями трехмерного пространства F04). 4. Подгруппа
проективно-аффинных преобразований F05). 5. Проектив-
Проективные отображения одной плоскости на другую. Перспектив-
Перспективные отображения F10).
§ 7. Проективные координаты на прямой. Проективные отображения
прямой • 612
§ 8. Двойное отношение 620
1. Определение двойного отношения четырех точек на прямой
F20). 2. Гармонические четверки точек F23). 3. Двойное
отношение и проективные отображения F24). 4. Двойное
отношение в пучке прямых F25). 5. Выражение двойного
отношения четырех точек на прямой, заданных своими коор-
координатами относительно системы проективных координат на
плоскости F26). 6. Двойное отношение четырех точек па пря-
прямой, заданной параметрическими уравнениями F28).
Глава ХХ11. Кривые второго порядка па проективной плоскости . . 630
§ 1. Определение. Теорема единственности 630
§ 2. Пересечение кривой второго порядка с прямой. Касательные;
асимптоты 634
§ 3. Пучок кривых второго порядка. Второе доказательство тео-
теоремы единственности. Теорема Паскаля. Теорема Штейнера 640
§ 4. Поляры и полюсы 649
§ 5. Коррелятишюе, в частности полярное, соответствие. Танген-
Тангенциальное ургвненне кривой 655
§ 6 Диаметры как поляры несобственных точек 659
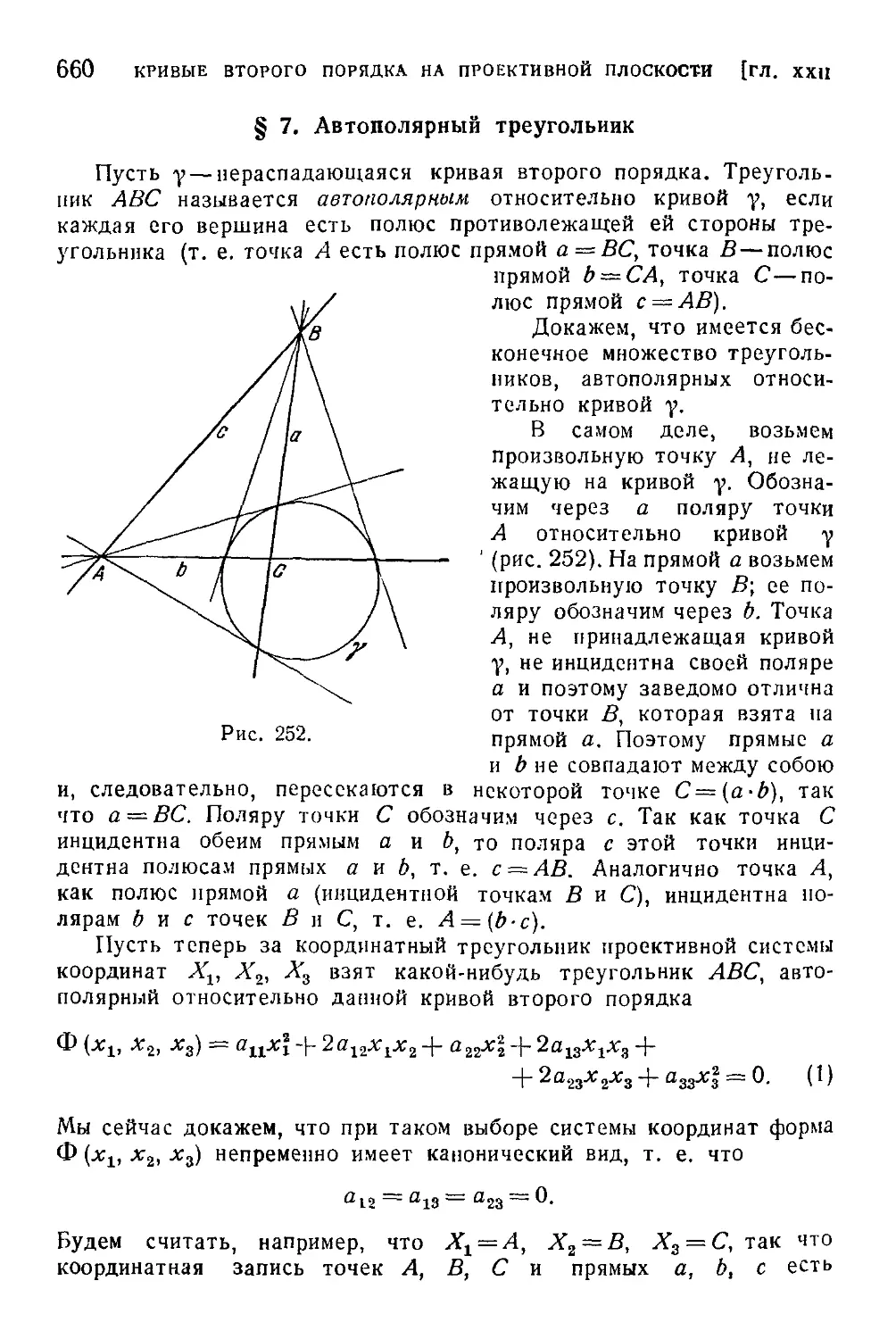
§ 7. Антополярный треугольник 660
§ 8. Проективная классификация кривых второго порядка .... 662
ОГЛАВЛЕНИЕ 1 ]
Глава XXIII. Начальные сведения из аналитической геометрии про-
проективного пространства 6G3
§ 1. Проективное пространство; его плоскости и прямые 668
§ 2. Проективные координаты. Проективные преобразования . . . 673
1. Проективные координаты F73). 2. Проектинно-аффинное
пространство F75). 3. Проективные преобразования F77).
§ 3. Понятие об я-мерном проективном пространстве 679
§ 4. Поверхности второго порядка в проективном пространстве.
Теорема единственности 680
§ 5. Пересечение поверхности второго порядка с плоскостью и
с прямой. Касательные прямые. Касательная плоскость. Пря-
Прямолинейные образующие 684
§ 6. Полюсы и полярные плоскости 690
§ 7. Проективная классификация поверхностей второго порядка 693
§ 8. Распределение по проективным классам поверхностей различ-
различных аффинных классов. Проективно-аффинная классификация
поверхностен второго порядка 700
Глава XXIV. Евклидово я-мерное пространство 710
§ 1. Введение. Ортогональные матрицы 710
§ 2. Положительно определенные симметричные билинейные функ-
функции в векторном пространстве 712
§ 3. Определение евклидовых пространств и простейших относящих-
относящихся к ним понятий 716
§ 4. Неравенство Коши — Буняковского и его следствия. Углы . . . 719
§ 5. Подпространства евклидовых пространств. Ортогональное до-
дополнение к данному подпространству 721
Глава XXV. Линейные операторы, билинейные и квадратичные функ-
функции в евклидовых пространствах. Поверхности второго порядка 724
§ 1. Инвариантные подпространства и собственные векторы линей-
линейного оператора в любом векторном пространстве 724
§ 2. Ортогональные преобразования п-мерногоевклидова простран-
пространства 730
§ 3. Движения трехмерного евклидова пространства 736
§ 4. Преобразования подобия. Дальнейшие проблемы 741
§ 5. Самосопряженные операторы 743
§ 6. Теорема о структуре произвольного линейного преобразования
евклидова пространства 749
§ 7. Билинейные и квадратичные формы в евклидовых пространст-
пространствах 752
§8. (п — 1)-мерные многообразия (поверхности) второго порядка
в п-мерпом аффинном и евклидовом пространствах 754
Прибавление. Перестановки, множества и их отображения; группы 767
§ 1. Перестановки 767
§ 2. Множества 777
§ 3. Отображения или функции 779
§ 4. Разбиение множества на подмножества. Отношение эквивалент-
эквивалентности 783
1. Множества множеств G83). 2. Разбиение на классы G84).
3. Отношение эквивалентности G85).
12 ОГЛАВЛЕНИЕ
§ 5. Определение группы 787
§ 6. Простейшие теоремы о группах 794
1. Аксиома ассоциативности G94). 2. Нейтральный эле-
элемент G94). 3. Обратный элемент G95). 4. Замечания об аксиомах
понятия группы G96). 5. Понятие подгруппы G97). 6. Усло-
Условие, чтобы подмножество группы было подгруппой G97).
§ 7. Эквивалентность подмножеств данного множества по отноше-
отношению к данной группе его преобразований 797
Задачи 800
К главам I, II, III (800). К главе IV (803). К главе V (807).
К главе VI (817). К главе VIII (823). К главе IX (826).
К главе X (830). К главе XI (833). К главе XII (841). К гла-
главе XIII (844). К главе XIV (850). К главе XV (857). К гла-
главам XVI и XVII (863). К главе XVIII (870). К главам XIX и XX
(878). К главе XXI (882). К главе XXII (886). К главе XXV (888).
Предметный указатель 901
Посвящается
Алексею Серапионовичу ПАРХОМЕНКО
в знак благодарности,
уважения, дружбы
ПРЕДИСЛОВИЕ
Эта книга представляет собой учебник аналитической геометрии
в ее традиционном понимании, написанный на основании лекций,
которые я в течение многих лет читал в Московском университете
и которые пополнены, как это и сказано в заглавии, необходимыми
сведениями из алгебры. Книгу эту, предназначенную для универси-
университетских студентов-первокурсников, я старался писать так, чтобы
она была доступна каждому студенту — при единственном условии,
что он вообще склонен к математике и желает серьезно зани-
заниматься ею.
Из вещей, не входящих в программу средних классов общеобра-
общеобразовательной школы, эти «Лекции» предполагают лишь знание комп-
комплексных чисел, так что книга может служить и целям самообразо-
самообразования; я думаю, что она доступна всем тем учащимся старших
классов средней школы, которые любят математику, интересуются
ею и готовы шаг за шагом ее изучать, не стремясь во что бы то
ни стало начинать это изучение с постижения так называемых «по-
«последних слов науки».
На русском языке написано немало хороших учебников аналити-
аналитической геометрии. Мы с благодарностью помним классические курсы
К. А. Андреева и Б. К. Млодзеевского, относящиеся к началу теку-
текущего столетня. Превосходный для своего времени курс С. С. Бюш-
генса примыкает к курсу Б. К. Млодзеевского, оставаясь в том же
кругу идей и в некотором роде развивая их.
Новым словом в учебной литературе по аналитической геометрии
явились курсы Н. И. Мусхелишвили и Б. Н. Делоне (последний
в соавторстве с Д. А. Райковым). Все первые годы своего препода-
преподавания аналитической геометрии в Московском университете я в основ-
основном опирался именно на курс Н. И. Мусхелишвили, и влияние его
на мой учебник, несомненно, значительно. Можно только радоваться
предстоящему выходу в свет нового, четвертого издания этой,
уже ставшей классической книги. Что касается Б. Н. Делоне, то
14 ПРЕДИСЛОВИЕ
богатство его геометрических идей делает его книгу (совместную с
Д. А. Райковым) образцом геометрического мышления и изложения,
который сохраняет и на многие годы сохранит свое значение.
Упомянутые мною книги непохожи друг на друга. Я думаю, что
и книга, предлагаемая сейчас вниманию читателя, не очень похожа
на своих предшественниц (названных выше), хотя и несет на себе
печать влияния каждой из них. В то же время я не стремился
к оригинальности, а оставался — более или менее — в традиционных
пределах. Никакого «нового слова» в моих «Лекциях» читатель не
найдет. Однако если два разных человека пишут об одном и том
же, то обычно получаются разные вещи, и это давно известно. Можно
не перечислять, чем именно отличается мой учебник от предшествую-
предшествующих ему: когда дело касается такого элементарного предмета, как
аналитическая геометрия, то всякий, кому до этого есть дело, сам
заметит, если есть что-нибудь новое в изложении. Впрочем, сделаю
все же одно замечание. Элементарные сведения по проективной гео-
геометрии даются лишь в главах XXI—XXIII, так что весь обычный
материал аналитической геометрии излагается с аффинной и метри-
метрической точек зрения. Однако мне представляется наиболее интерес-
интересным рассматривать, например, аффинные свойства невырождающихся
кривых второго порядка как относящиеся к геометрии проективной
плоскости с выделенной на ней несобственной прямой — для того
хотя бы, чтобы у всех этих кривых был центр и чтобы диаметры
были просто прямыми, проходящими через этот центр. С другой
стороны, изучая кривые на вещественной плоскости, я предпочитаю
ее рассматривать как вещественную плоскость, погруженную в ком-
комплексную плоскость (со всеми ее четырьмя «вещественными» изме-
измерениями). Другими словами, я считаю законным и интересным среди
всех преобразований координат (на комплексной плоскости) выделить
особо преобразования с вещественными коэффициентами, так что вся
комплексная плоскость мыслится мною (как во времена Понселе!)
в виде вещественной плоскости, «пополненной мнимыми (т. е. не
вещественными) точками». Это для того, чтобы у каждой веществен-
вещественной невырождающейся кривой второго порядка были две асимптоты —
вещественные (быть может, совпадающие) или мнимые (и сопряжен-
сопряженные)— и чтобы эти асимптоты были касательными к данной кривой
в ее бесконечно удаленных точках (вещественных или мнимых);
в особенности же для того, чтобы — после того как введена мет-
метрика—все окружности пересекались в одних и тех же двух мнимых
«круговых» точках несобственной прямой. Теорема о том, что через
всякие три точки плоскости, не лежащие на одной прямой, можно
провести одпу-едипственную окружность, становится, таким образом,
следствием того, что через пять точек можно, вообще говоря, про-
провести лишь одну кривую второго порядка, а две точки — именно
ПРЕДИСЛОВИЕ 15
две «круговые»—принадлежат всем без исключения окружностям:
5 — 2 = 3.
Этот факт, когда я впервые узнал его, поразил меня своей не-
непосредственной математической красотой — впечатление, сохранив-
сохранившееся у меня па всю жизнь. Хорошо, чтобы начинающие математики
как можно раньше получали такие впечатления от своей науки!
Эта книга никогда не была бы написана, если бы А. С. Пархо-
Пархоменко не поб>ждал меня самым настойчивым образом к ее написанию
и если бы он не оказал мне в осуществлении этой своей инициативы
совершенно исключительной помощи. Иногда — особенно в главахХУШ
и XIX — эта помощь переходила в настоящее соавторство. Перво-
Первоначальный вариант главы XVIII основывался на определении эллип-
эллипсоидов (и других поверхностей второго порядка) их уравнениями
канонического вида, но по отношению к той или иной (произволь-
(произвольной) аффинной системе координат. Недостатки такого способа изло-
изложения значительно превосходили его возможные достоинства, в чем
меня и убедил А. С. Пархоменко. В результате его содействия гла-
главы XVIII и XIX подверглись коренной переработке с большим участием
А. С. Пархоменко. Но это только один пример сотрудничества я
помощи, оказанных мне А. С. Пархоменко. Помимо помощи при напи-
написании отдельных параграфов (например, § 8 главы XXI и во многих
других местах), А. С. Пархоменко внимательнейшим образом прочи-
прочитал и отредактировал всю книгу с первой ее строчки до последней,
сделав огромное количество отдельных, часто существенных замеча-
замечаний, содействовавших значительному улучшению книги. Наконец, уже
из заглавия книги можно узнать, что А. С. Пархоменко составил все
задачи, а задачи эти являются необходимой и существенной частью
книги. А. С. Пархоменко снабдил составленные им задачи реше-
решениями— во всех случаях, когда для этого имеется хоть малейший
повод. Это обстоятельство — при той цели, которую преследуют эти
«Лекции»,— представляется мне очень важным: всякому понятно, что
нельзя овладеть таким предметом, как аналитическая геометрия, не
решая относящиеся к нему основные задачи. Но решению задач надо
научить, и в собрании задач, которым А. С. Пархоменко так удачно
дополнил эти «Лекции», он не только предлагает задачи, но и учит
их решать.
Подводя итог только что сказанному, могу лишь добавить, что
мне очень трудно найти слова, адекватно выражающие то искреннее
чувство глубокой благодарности, которое я испытываю по отношению
к А. С. Пархоменко за все его многообразное участие и за всю его
незаменимую помощь при написании этой книги.
Приношу искреннюю благодарность рецензентам этой -книги —
профессору Л. Д. Кудрявцеву и академику АН ГрузССР Г. С. Чого-
швили, а также членам возглавляемой академиком Г. С. Чогошвилн
16 ПРЕДИСЛОВИЕ
кафедры Тбилисского государственного университета за ценные
замечания, которыми я постарался воспользоваться и которые, несом-
несомненно, послужили улучшению изложения.
Я сердечно благодарен В. А. Логвиновой, которая сотрудничала
с А. С. Пархоменко во всей его работе над этой книгой. В част-
частности, В. А. Логвинова выполнила все чертежи, за исключением
чертежей 140 и 235, за которые я благодарен А. Б. Сосинскому.
Я благодарен также моим ученикам — доктору физико-математи-
физико-математических наук В. И. Пономареву и студенту 5-го курса В. Зайцеву за
содействие и помощь, в различных формах оказанные мне ими при
моей работе.
Высокая квалификация и тщательность, проявляемые Анатолием
Филипповичем Лапко в качестве редактора математических сочине-
сочинений, хорошо известны очень многим математикам нашей страны
(в частности, всем читателям «Успехов математических наук»).
А. Ф. Лапко не отказался быть редактором и этой книги, выполнив
взятые на себя обязанности па обычном для него высоком уровне.
Я ему очень признателен за это.
Я искренне благодарен сотруднице кафедры высшей геометрии
и топологии Московского университета Галине Всеволодовне Нарке-
вич-Иодко за огромную работу, проведенную ею но окончательному
оформлению обширной и сложной рукописи этих «Лекций».
Наконец, я приношу глубокую благодарность математической
редакции издательства «Наука» в лице Н. А. Угаровой за внимание,
доброжелательность, снисходительность и терпение, проявленные ею
ко мне, как к автору этого сочинения, по разным поводам и в раз-
разной форме.
77. Александров
Болшепо, Комаровка,
28 января 1967 г.
ГЛАВА I
КООРДИНАТЫ НА ПРЯМОЙ
§ I. Отношение отрезков
Если даны два прямолинейных отрезка АВ и EF, то определено
вещественное число К (рациональное или иррациональное), показы-
показывающее, сколько раз отрезок EF укладывается в отрезке АВ: именно,
если существует такое натуральное число п, что —я часть отрезка EF
укладывается без остатка, положим, т раз, в отрезке АВ, то К есть
рациональное число — ; если же такого натурального числа п мет,
то X есть иррациональное число, к которому с любой точностью
можно приблизиться рациональными числами: нзяв как угодно боль-
большое натуральное число п, мы найдем такое натуральное число т,
| что —я часть отрезка EF уложится т раз на отрезке АВ с неко-
некоторым остатком, а т-\-\ раз уже не уложится. Взяв п достаточно
большим, можно достигнуть того, что рациональное число — со сколь
угодно малой ошибкой приближает искомое иррациональное К. Число К
называется отношением отрезка АВ к отрезку EF. Если оно равно 1
(и тодько в этом случае), то отрезки равны (конгруэнтны) между
собою. Если отрезок EF принят за единицу измерения длин, то
число К есть длина отрезка АВ, измеренная посредством этой еди-
единицы измерения.
Все это содержится в курсе средней школы; однако любознатель-
любознательный и критически настроенный читатель может испытать беспокой-
беспокойство при пользовании такими словами, как «укладывание» одного
отрезка в другом, «с остатком» или «без остатка» и т. п. Понятиям,
выражаемым этими словами, не дается точного определения. Это
беспокойство устраняется аксиоматическим построением геометрии.
Правда, при этом тоже приходится пользоваться понятиями, которые
никак не определяются (например, понятием совмещения двух отрез-
отрезков или их конгруэнтности), а также утверждениями (аксиомами),
13 КООРДИНАТЫ НА ПРЯМОЙ [ГЛ. I
которые никак не доказываются. Но при аксиоматическом построении
1 геометрии но крайней мере дается точный и полный перечень в_С?х
«первоначальных» (т. е. не подлежащих определению) понятий и
1 всех не подлежащих доказательству утверждений (аксиом). После
того как этот перечень сделан, все остальное доказывается уже
посредством строгих логических рассуждений; кроме того, доказы-
1 вается, что принятая исходная система предложений (а следовательно,
>и все, что из нее выводится посредством дальнейших рассуждений)
\не содержит противоречия, не может привести ни к какому нелепому
'выводу.
Эту цель строго аксиоматического построения геометрии наши
лекции себе не ставят. Такое построение геометрии составляет со-
содержание отдельной геометрической дисциплины, называемой «осно-
«основаниями геометрии». Мы же будем употреблять элементарные геоме-
геометрические понятия в том наивном смысле, в каком они употребляются
в школьном курсе геометрии, зная, что под них можно подвести
безупречное аксиоматическое основание.
Мы не будем также определять вещественные (действительные)
числа, хотя будем ими постоянно пользоваться: подробная теория
вещественных чисел излагается в первых главах любого современного
курса анализа, и читатель должен ее хорошо знать.
§ 2. Направленные отрезки (векторы); их отношение
Любые две точки А и В пространства, данные в определенном
порядке так, что, например, А является первой, а В—второй точ-
точкой, определяют отрезок вместе с данным на нем направлением
(а именно направлением от Л к В), или направленный отрезок с
началом А и концом В. Направленный отрезок называют короче
вектором.
Вектор с началом А и концом В обозначается через АВ, точка А
часто называется точкой приложения вектора АВ.
Вектор, начало и конец которого совпадают, называется нуле-
нулевым вектором v обозначается через 0 = АД (точка А при этом любая).
Направление нулевого вектора неопределенно.
В этой главе мы будем рассматривать лишь векторы, лежащие
на одной и той же, раз навсегда данной прямой.
На прямой возможно движение (^скольжение») точек и векторов:
точка X на прямой может скользить по этой прямой от какого-нибудь
начального положения Хо в одном из двух взаимно противоположных
направлений. Точно так же и вектор XX' может скользить по пря-
прямой (также в одном из двух возможных на прямой направлений). При
этом отрезок, определяющий данный вектор, остается все время
§ 2] НАПРАВЛЕННЫЕ ОТРЕЗКИ 19
равным (в смысле элементарной геометрии) исходному отрезку, так
что само это движение надо себе представить как скольжение по пря-
прямой твердого стержня, всеми своими точками все время лежащего
на этой прямой. Два вектора на прямой называются равными, если
посредством такого скольжения один из них может быть совмещен
с другим. Считая понятие направления на прямой первоначальным
и не подлежащим определению, можно сказать и так: два вектора АВ
и CD на прямой равны, если они имеют одно и то же направление
и если отрезки АВ и CD равны (конгруэнтны) между собою.
Для любых двух векторов АВ и CD на прямой определено их отно-
отношение, а именно число X, модуль которого равен отношению отрез-
отрезков АВ и CD (в смысле элементарной геометрии)'), а знак положителен,
если векторы имеют одно направление, и отрицателей, если их направле-
направления противоположны. Два равных вектора имеют отношение 1. Два
вектора АВ и CD называются взаимно противоположными, если их
отношение равно —1, т. е. если их направления противоположный
отрезки АВ и CD равны между собою. Если один из двух взаимно
противоположных векторов обозначен, например, через и, то другой
обозначается через —и; очевидно, — (— и) = и. Отношение нулевого
вектора к любому ненулевому равно нулю; отношение какого бы то ни
было вектора к нулевому не определено. Если отношение вектора CD
к вектору АВ равно числу X, то пишут
гг> —>- —>-
~=Я, или CD^XAB.
АВ
Поэтому- нахождение вектора CD, отношение которого к данному
вектору АВ равно данному числу X, называется умножением век-
вектора АВ на это число X. При А, > 0 вектор ХАВ имеет то же на-
направление, что и вектор АВ, при X < 0 — противоположное. Если
X = О, го ХАВ —О, каков бы ни был вектор АВ.
Очевидно, что, заменяя векторы CD и АВ равными им векто-
векторами CD' и А'В', мы не меняем их отношения:
Д^- = ^, если C7D' = CD и АВ' =АВ. A)
А'В' АВ
Если CD' = CD и С~Ъ = ХАВ, то и CD'=КАВ.
') И, значит, отношению длин этих отрезков.
20 КООРДИНАТЫ НА ПРЯМОЙ [ГЛ. I
Легко проверяется также равенство, верное для любых трех век-
векторов АВ, CD, PQ:
АВ
Ш-'Ш. B)
CjD_ CD
PQ
§ 3. Ось. Алгебраическое значение (координата) вектора на оси
Пусть на прямой дан единичный вектор, т. е. вектор, который
примят за единицу измерения длин (см. § 1), а его направление объяв-
объявлено положительным на всей этой прямой. Тогда мы говорим, что
наша прямая превращена в ось. Можно, очевидно, сказать и так:
ось есть прямая, на которой выбрана единица измерения длин и одно
из двух направлений названо положительным. Если это сделано, то
всякий вектор длины единица и положительного направления и будет
единичным вектором данной оси.
Отношение любого вектора и на данной оси к единичному век-
вектору этой оси называется алгебраическим значением или координа-
координатой вектора и на данной оси. Таким образом, алгебраическое значение
вектора и на оси есть число, модуль которого равен длине вектора и,
измеренной данной на оси единицей длины, а знак положителен, если
направление вектора положительно, и отрицателен в противном слу-
случае. Алгебраическое значение вектора АВ будем обозначать через (АВ).
Из этого определения непосредственно вытекают следующие предло-
предложения.
1. Два вектора на данной оси равны тогда и только тогда, когда
равны их координаты (их алгебраические значения).
2. Если два вектора имеют одну и ту же длину, но противопо-
противоположны по направлению, то их алгебраические значения имеют один
и тот же модуль, но противоположны по знаку:
0. A)
3. Координата единичного сектора равна 1.
Если вектор PQ есть единичный вектор, то, обозначая координаты
векторов АВ, CD соответственно через х и х', видим, что левая
X
часть равенства B) из § 2 есть —,, так что само это равенство
х ~АВ
превращается в — ==?, т. е.
х CD
§ 4] СЛОЖЕНИЕ ВЕКТОРОВ НЛ. ПРЯМОЙ 21
4. Отношение двух векторов на прямой равно отношению их
координат.
Имеет место следующее предложение, являющееся лишь геоме-
геометрическим истолкованием правила сложения чисел (с.произвольными
знаками).
5 (Лемма Шаля). При любом расположении точек А, В, Сна
оси имеет место числовое равенство
(ЛВ) + (ВС) = (АС). B)
В самом деле, если две из трех точек А, В, С совпадают (на-
(например, А = В или А = С), то равенство B) сводится к тождеству
(АС) = (АС) или же к тож-
тождеству A). А В О
Пусть все три точки
А, В, С попарно различны АС В
между собою. Тогда одна ' *1С "
из них лежит между двумя ел я
другими1) (рис. 1). Если В « 1 »¦
лежит между А и С, то
\(АВ)\-\-\(ВС)\=>\(АС)\ и Рис. 1.
векторы АВ, ВС и АС име-
имеют одно и то же направление, их алгебраические значения имеют
один и тот же знак, значит, число (АС) равно сумме (АВ)-т-(ВС),
т. е, равенство B) справедливо.
Пусть теперь С лежит между А и В. Тогда по только что заме-
замеченному
т. е.2)
(АС) = (АВ)-(СВ).
Но в силу A)
~(СВ) = (ВС)
— равенство B) снова справедливо: (АС) = (АВ) -f- (ВС).
Аналогично доказывается и третий случай, когда А лежит между
В и С.
§ 4. Сложение векторов иа прямой
Пусть на прямой даны два вектора; предположим сначала, что
начало второго вектора совпадает с концом первого, так что первый
вектор есть вектор АВ, а второй ВС.
') Вот это утверждение и может служить примером одной из аксиом,
принимаемых без доказательства при аксиоматическом построении геометрии.
2) Не забывайте, что {АВ), {СВ), (АС) — числа!
22 координаты нл. прямой [гл. i
Тогда — при любом взаимном расположении точек А, В, С —
вектор АС называется суммой векторов АВ и ВС:
АВ + ВС = АС.
При этом мы считаем себя вправе заменить вектор АС любым
равным ему вектором, так что всякий вектор PQ, равный век-
вектору АС, равен сумме АВ—ВС.
Пусть теперь АВ и MN—два произвольных вектора на прямой.
Возьмем вектор ВС, ранный вектору MN, но имеющий своим нача-
началом точку В (вектор MN можно преобразовать в вектор ВС посред-
посредством скольжения вдоль прямой). Тогда вектор АС и всякий равный
ему вектор мы считаем суммой векторов АВ и MN.
Из определения сложения векторов на прямой и из леммы Шаля
читатель без труда выведет следующее предложение.
6. Координата (на данной оси) суммы двух векторов равна сумме
координат этих векторов.
Отсюда (имея в виду предложение 1) или из самого определения
суммы векторов легко выводится:
7. Если ~АВ^аЪ' и MN=MN\ то АВ-f Ш = аЪ' + JVTN'.
Из предложений 4 и 6 вытекает, далее,
g Ли — МА' Хв , MN
PQ PQ ' PQ
§ 5. Система координат на прямой
Пусть теперь на нашеИ прямой не только дан единичный век-
вектор, по и выбрана определенная точка О—«начальная» или «пуле-
«пулевая» точка. Тогда мы говорим, что на прямой выбрана система
координат.
Определение. Координатой точки М называется алгебраи-
алгебраическое значение (координата) вектора ОМ.
Теперь не только каждый вектор, но и каждая точка имеет
вполне определенную координату.
Ставя в соответствие каждой точке прямой ее координату, мы
получаем взаимно однозначное соответствие между всеми точками
прямой и всеми вещественными числами. Поэтому прямая, на кото-
которой установлена некоторая система координат, называется числовой
прямой. Начальная точка О и только она имеет координату нуль;
на одной из двух полупрямых, на которые начальная точка разбивает
§ 6] ДЕЛЕНИЕ ОТРЕЗКА 23
прямую, координаты всех точек положительны, на другой—отрица-
другой—отрицательны: мы говорим о положительной и отрицательной полупрямой
числовой прямой.
Следующее простое замечание важно:
9. Координата вектора а = АВ равна координате его конца В
минус координата его начала А.
В самом деле, пусть координата вектора и есть х, координата
точки А есть хг, а координата точки В есть х2. Мы это записы-
записываем так:
Тв={х}, A = (Xl), B = (x2).
Тогда
Xl = (OA), а:2=(О5), х =
По лемме Шаля имеем
т. е. лг2 = хг -f- х, откуда х — х2 — xv что и требовалось доказать.
§ 6. Деление отрезка в данном отношении
Пусть дан направленный отрезок АВ прямой; говорят, что точка
М этой прямой делит отрезок АВ в отношении, равном К, где К —•
произвольное вещественное число, если
41. - о)
1
MB
Когда точка М лежит между точками А и В (т. е. внутри отрезка
АВ), то векторы AM и MB направлены в одну сторону (рис. 2) и
М
Рис. 2.
отношение A) положительно. Когда точка М лежит вне отрезка
АВ, то векторы AM и MB направлены в противоположные стороны
(Р«с. 3) и отношение A) отрицательно.
24
КООРДИНАТЫ НА ПРЯМОЙ
[ГЛ. I
Посмотрим, как изменяется отношение A), когда точка М про-
пробегает всю прямую. Когда точка М совпадает с точкой А, то отно-
отношение A) равно нулю; если затем точка М пробегает отрезок АВ в на-
направлении от А к В, то отноше-
отношение A) непрерывно возрастает,
делаясь при приближении точ-
точки М к В сколь угодно боль-
большим. Когда М = В, то дробь
A) теряет смысл, так как ее
знаменатель обращается в ну-
нулевой вектор. При дальнейшем
движении точки Ж по прямой
в том же направлении (на
рис. 3, а направо от В) от-
отношение A) становится отри-
отрицательным, причем если М
Рис. 3. находится достаточно близко
от В, то это отношение имеет
сколь угодно большую абсолютную величину.
Так как АМ = АВ-\-ВМ, то (в силу предложения 8 § 4) имеем
В
6)
К —:
AM
MB
АВ
MB
ВМ
MB
АВ
MB
(П
Когда точка М, двигаясь все время в том же направлении (на на-
нашем рис. 3, а слева направо), уходит но прямой в бесконечность,
то дробь
АВ
= стремится к нулю (так как ее числитель
MB
остается постоянным, а знаменатель неограниченно возрастает),
AM
следовательно, отношение , ¦ стремится к —1.
MB
Пусть теперь М переходит па «левую» из двух полупрямых, на
которые точка А разбивает прямую (т. с. на ту полупрямую, кото-
которая не содержит отрезка АВ). Если при этом точка М находится
. AS
достаточно далеко от точки л, то , снова сколь угодно мало
MB
и, значит, но формуле (Г) отношение
AM
MB
сколь угодно мало от-
отличается от —1. При приближении точки М слева к точке А
(рис. 3, б) отношение A), оставаясь отрицательным, непрерывно
уменьшается но модулю и наконец делается равным нулю, когда
точка М возвращается в точку А.
§ 7] ПРОПОРЦИОНАЛЬНОСТЬ ПАР ЧИСЕЛ 25
Заметим, что пи при каком положении точки М иа прямой отно-
АМ
шепие , не равно —1. В самом деле, отношение отрицательно,
MB
лишь когда точка М лежит вне отрезка АВ. Но в этом случае
отрезки AM и MB никогда не бывают равны, т. е. -==-7^1,
MB
AM ,u
MB
Пусть теперь на прямой установлена система координат и
О — начало этой системы. Обозначим координату точки А через
хх, точки В—через х2, а переменной точки М—через х. Тогда
(АМ) = х — хх, (МВ)=х2 — х н
» AM (AM)
Л =. — >и- — р
MB
т. е.
х = *?*-. C)
Эти формулы позволяют для каждой точки М = (х) найти отноше-
отношение, в котором она делит отрезок АВ, и обратно, по заданному от-
отношению X найти ту единственную точку М = (х), которая делит
отрезок АВ в этом отношении. Установленное таким образом соот-
соответствие между точками М нашей прямой и числами К, выражаю-
выражающими отношение, в котором точка М делит отрезок АВ, было бы
взаимно однозначным, если бы оно не нарушалось в двух случаях:
во-первых, точке М—В не соответствует никакое к, во-вторых,
число К=—1 не соответствует никакой точке М.
Но математика (в отличие от грамматики) не любит исключений!
Поэтому постараемся и в нашем случае их устранить.
§ 7. Пропорциональность пар чисел
Рассмотрим всевозможные пары а, а' вещественных чисел, при-
причем пару, состоящую из двух нулей: а = 0, а' = 0, будем считать
«запрещенной»; ее рассматривать не будем.
Две пары а, а' и р, р' назовем пропорциональными, если суще-
существует такое число кфО, что p = ft<z, $'=ka'; число к называется
коэффициентом пропорциональности.
26 КООРДИНАТЫ НА ПРЯМОЙ [ГЛ. I
Пропорциональность пар а, а' и {$, 0' записывается в виде
формулы
о:а' = р:Р', A)
называемой пропорциейх).
Отметим следующие свойства пропорциональности:
1 (Рефлексивность). Каждая пара а, а' пропорциональна
самой себе (т. е. а:а' = а:а', коэффициент пропорциональности k
есть 1).
2 (Симметрия). Если а:а' = Р:Р', то f5:|i'=a:a'.
В самом деле, пропорция а:а' = [}:|}' означает существование
такого k=?z=O, что р=Ла, Р'=/га'; но тогда а=-г-Р и а'=-т-Р',
т. е. Р:Р'=а:а'.
3 (Транзитивность). Если a:a' = p:P' и $:$' = у:у', то
a:a'=Y:v'-
В самом деле, имеем р = Аа, Р' = А:а'; у —АР, y'=AP'; но тогда
y = hka, y'=hka', что и требовалось доказать.
Дальнейшими свойствами пропорциональности являются:
4. Если a:a' = P:P', то и a':a = P':p.
И та и другая пропорции означают существование такого k^=0,
что P = ?a, p"'=A:a'.
5. Если в одной из двух пропорциональных пар чисел а, а' и
Р, Р' один из двух элементов равен нулю, то и в другой паре
соответствующий элемент равен нулю.
Например, если а' = 0, то и Р'=йа'=О.
6. Всякие две пары вида а, 0 и р, 0 (равно как и две пары
вида 0, а и О, Р) пропорциональны.
В самом деле, так как пары незапрещенные, то a =5^0, p^O.
о
Полагая -— = ft, имеем p = fta, 0 = ft-0—утверждение доказано.
?. Дее иары а, а' и {3, р' пропорциональны тогда и только
тогда, когда
ар'=а'р. B)
В самом деле, из пропорции A) следует, что P = fta, P'=/ea'
и, значит, ap'=a^a'=a'P, т. е. имеет место равенство B).
Пусть, наоборот, B) выполнено, и пусть, например, а'^=0.
Из B) следует
. ь) В старых английских книгах пропорция A) записывается в виде
afa'-.-.p-.p', т. е. без употребления знака равенства. Этим как бы подчерки-
подчеркивается, что формула A) выражает именно факт пропорциональности пар
а, а' и р, Р' и вовсе не обязана быть числовым равенством, в котором
двоеточие есть знак деления; если а', C' суть нули, то пропорция A) и не
является числовым равенством (так как деление на пуль невозможно).
§ 7] пропорциональность пар чисел 27
Если при этом а —0, то Р = 0 и наши пары 0, а' и О, Р' пропор
щюнальны. Если же а^=0, то положим ¦^-r = k. Тогда Р=А:а и
Р' = &а'—пары а, а' и Р, Р' снова пропорциональны.
8. Пропорция
а:а' = Р:Р' A)
эквивалентна (при а'=^= О, Р'=^0) пропорции
а:Р = а':Р'. (Г)
В самом деле, каждая из пропорций A), (Г) эквивалентна ра-
равенству B).
Замечание. Иногда, но чисто формальным соображениям, до-
допускают замену формулы A) формулой (Г) и в случае <х' = Р'—О,
т. е. пишут
а:Р = О:О (Vo)
вместо
Но при этом надо помнить, что формула AJ,) является лишь другой
записью формулы A0) и не имеет никакого отличного от нее содер-
содержания.
Если пары а, а' и Р, Р' пропорциональны, то мы говорим также,
что они имеют одно и то же отношение. Если при этом а' Ф 0 и,
значит, Р'=7^0, то числа —т и —¦ равны между собою, и мы гово-
ОС п
рим, что отношение <х:а' = Р:Р' равно числу X = —, — -j^. Если же
а' = 0, то и р' = 0, п мы говорим, что отношение а:а' = Р:Р' бес-
бесконечно, а:а'= р:р'= оо. Теперь мы можем сказать, что фор-
формула A) действительно есть равенство, а именно что она выражает
равенство отношений двух пропорциональных пар. При этом обе
части этого равенства или равны одному и тому же числу А, или
они обе равны оо.
Мы уже отметили, что все незапрсщенные пары вида а, 0 про-
пропорциональны между собою и, следовательно, имеют одно и то же
(бесконечное) отношение: при любом а=^0 можно, например, написать
а:0=1:0 = оо,
в частности,
1:0 = — 1:0,
т. е. существует только одно бесконечное отношение (никаких + оо
и —оо для отношений не существует!).
28 КООРДИНАТЫ НА ПРЯМОЙ [ГЛ. I
г> л AM ,.
Вернемся теперь к отношению Л = - , в котором точка Л1 де-
MB
лит данный отрезок АВ прямой. Нам будет удобно задавать его не
одним числом к, а произвольной парой чисел а1( а2, выбранных при
условии Я = —, т. е. писать
AM «!
MB
Если на прямой дана система координат, в которой А=(х1), В=(х2),
М—{х), то из формулы B) § 6 получаем для оиределеиия коорди-
координаты х точки М уравнение
х—х
1
хг— х
т. е.
Эта формула определяет однозначно координату х точки М, деля-
делящей отрезок АВ в заданном отношении а1:а2, для любых av a2,
за исключением случая, когда ах -fa2 = 0, т. е. ^102 = —1. В част-
частности, ирн 04 = 0, а27^=0 получаем x = xlt т. е. М=А; при cij^O,
<z2 = 0 получаем х=-хг, т. е. М=В. Итак, точка В делит отрезок
АВ в отношении, равном оо.
§ 8. Бесконечно удаленная точка прямой
Остается устранить второе исключение: отсутствие на прямой точки М,
для которой отношение АМ:МВ равнялось бы —1. Для достижения этой
цели мы пополняем прямую одной, как говорят, несобственной или беско-
бесконечно удаленной точкой М&. При этом мы считаем, что, пробегая точки
прямой в определенном направлении (например, в направлении вектора АВ>
т. е. «слева направо»), мы, придя в бесконечно удаленную точку, можем и
дальше продолжать наш путь в гом же направлении, т. е. пробегать (все
время слева направо) всю левую полупрямую, отсеченную точкой А, и вер-
вернуться таким образом в точку А слева.
Другими словами, после пополнения прямой бесконечно удаленной
точкой порядок расположения точек на прямой стал таким же, как на окруж-
окружности,— прямая стала замкнутой линией! Теперь две точки А и В прямой
разбивают ее на два куска, иа два «отрезка» с одними п теми же концами
.А и В. Один из них есть отрезок АВ в обычном смысле слова; он, в част-
частности, содержит свою середину, т. е. точку М, для которой АМ=МВ и,
AM .
следовательно, > =1; второй отрезок содержит бесконечно удаленную
MB
§ 9] ПРОПОРЦИОНАЛЬНОСТЬ ДВУХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ 29
AM
точку Л1°°. Мы определяем для нее отношение - , полагая это отноше-
МВ
ние рапным —1.
Теперь соответствие между всеми точками М нашей прямой и всеми
отношениями АМ:МВ стало взаимно однозначным: точке В соответствует
при этом отношение оо, а отношение —1 соответствует бесконечно удаленной
точке прямой.
В главах I — XX этой книги понятие бесконечно удаленной точки на
прямой не найдет применений и, следовательно, как бы повиснет в воздухе.
Лишь в главах XXI — XXIII при переходе к так называемой проективной
плоскости (и проективному пространству) понятие несобственной или бес-
бесконечно удаленной точки прямой найдет свое надлежащее.место. См., впро-
впрочем, § 5 главы пятой.
§ 9. Пропорциональность двух последовательностей,
состоящих из и чисел
Так же, как мы определяли пропорциональность двух пар чисел
а, а' п j3, р', мы можем определить пропорциональность двух троек,
двух четверок чисел и т. д.
Вообще, мы скажем, что последовательность, состоящая из я
чисел (среди которых имеются отличные от нуля1))
«!¦ а2 а„, A)
пропорциональна последовательности
Pi. P2 Р„, B)
если существует такое число ?=?0 (коэффициент пропорциональ-.
поста), что
Px^Aoi, Р2 = /«хг Р„ = йа„.
В этом случае мы пишем
а1:а2: ... :а„ = рг:р2: ... :рп C)
и эту формулу также называем пропорцией.
Очевидно, что если при этом какое-нибудь а,-=0, то и соот-
соответствующее р,= о.
Замечание. Пропорция C) часто записывается в виде
ai:Pi = <VP2= •••=<*„:?„ D)
состоящая из °ДЧ11Х "Улей, считается «запре-
30 КООРДИНАТЫ НА ПРЯМОЙ [ГЛ. I
пли даже в виде
-Hi.— J?L= = -?-± D'1
Pi Р. " ' ' Р„ ' '
Например, вместо
2:0:3:0 : 0:1=4:0:6:0:0:2
пишут
.1 — А _ JL — iL — JL — _L /^
4 ~ 0 ~ 6 ~ 0 ~ 0 ~ 2 ' 1 '
причем надо твердо помнить, что формулы D) и D') являются лишь
другой записью формулы C) и не имеют никакого отличного от нее
смысла1). Запись эта основана на том, что те из отношений а,:Р,-
в формуле C), которые имеют смысл (т. е. в которых хотя бы один
из членов а,-, р,- отличен от нуля), действительно все равны между
собою; что же касается равенств вида
в которых aft=pA = O, то при а,-^=0, р,- ф 0 они (согласно ранее
сделанному замечанию) являются лишь другой записью верного
утверждения
а,:О=р,-:О,
тогда как равенства вида а,- : 0 = 0 : 0 или 0:0 = 0:0 вообще не
содержат никакого утверждения (кроме того, что на таких-то мес-
местах в последовательностях A) и B) стоят нули).
Каждая данная незанрещениая последовательность
аъ <х2, ..., ап A)
определяет класс, состоящий из всех последовательностей, пропор-
пропорциональных данной. Таким образом, совокупность всех незапрещен-
ных последовательностей вида A), состоящих из одного и того же
числа п элементов, распадается на классы, пропорциональных между
собою последовательностей2): любые две последовательности, при-
') В частности, формула E) означает лишь, что последовательность
2, 0, 3, 0, 0, 1 E')
пропорциональна последовательности
4, 0, 6, 0, 0, 2, E")
т. е. последняя получается из первой почленным умножением па одни н тот
^ке множитель k Ф 0 (в нашем случае на й = 2).
2) См. Прибавление в конце книги, § 4. Читатель поступит правильно,
если уже сейчас усвоит содержание этого Прибавления. В дальнейшем это
будет предполагаться без всяких оговорок.
§ 9] ПРОПОРЦИОНАЛЬНОСТЬ ДВУХ ПОСЛЕДОВАТЕЛЬНОСТЕЙ 31
надлежащие одному и тому же классу, пропорциональны между
собою; если последовательность принадлежит данному классу, то и
всякая пропорциональная ей последовательность принадлежит тому
же классу, так что две последовательности, принадлежащие разным
классам, не пропорциональны между собою. Иногда класс, к кото-
которому принадлежит данная последовательность A), называется отно-
отношением (членов этой последовательности) или отношением, опреде-
определяемым данной последовательностью. При этом слоноунотреблении
пропорция C), как и при /2 = 2, превращается в равенство двух
отношений.
ГЛАВА II
ВЕКТОРЫ
§ 1. Равенство векторов. Свободный вектор
Два вектора АА' и ВВ', расположенные где угодно в простран-
пространстве, называются равными между собою, если один из них, напри-
например АА', можно совместить с другим, ВВ', посредством параллель-
ного переноса («сдвига»), т. е. движения,
состоящего в том, что вектор АА' сколь-
скользит параллельно самому себе так, что точка
А скользит по отрезку АВ, а точка А'—
по отрезкуЛ'В' (рис. 4).
Если векторы АА' и ВВ' лежат на од-
одной прямой, то по этой же прямой проис-
происходит и скольжение, совмещающее АА' с
ВВ', и мы получаем уже данное и первой
главе определение равных векторов (на
прямой).
Если же равные векторы А А' н ВВ' не
лежат на одной прямой, то при совмещении
вектора АА' с вектором ВВ' посредством
параллельного переноса вектор АЛ' зачертит параллелограмм АА'В'Б,
в котором векторы АА' и ВВ' будут противоположными сторонами.
Поэтому определение равенства векторов может быть сформули-
сформулировано и так:
Два вектора АА' и ВВ', лежащие на одной и той же прямой,
равны, если их отношение равно 1.
Два вектора АА' и ВВ', не лежащие на одной прямой, равны,
если, соединяя прямолинейными отрезками их начальные точки А и В
Рис. 4.
§ 1]
РАВЕНСТВО ВЕКТОРОВ
33
и их концевые точки А' и В', мы получим параллелограмм АА'В'В,
в котором эти векторы будут двумя противоположными сторонами.
Два равных вектора могут отличаться друг от друга только
своими точками приложения, и в большинстве тех случаев, с которыми
нам придется иметь дело, это отличие несущественно; мы будем
поэтому считать, что вектор ВВ', равный
вектору АА', — это тот же вектор АА',
но только перенесенный в другое место,
а именно приложенный к точке В. Отвле-
Отвлекаясь, таким образом, от точки приложения
вектора, мы приходим к тому, чтобы весь
класс равных между собою векторов
ММ'=АА', приложенных ко всевозмож-
всевозможным точкам М пространства, рассматри-
рассматривать как новый математический объект,
и этот объект мы называем свободным
вектором, определенным каждым из рав-
равных между собою векторов, составляю-
составляющих данный класс (рис. 5).
Мы будем часто писать и — АА' =
=ВВ'— .. . и понимать под и как лю-
любой из равных между собою некторов
АА', ВВ' и т. д., так и весь образован-
образованный ими класс, т. е. свободный вектор 1).
Предположим теперь, что каждая точка
М пространства сдвинулась вдоль при-
приложенного к ней вектора ММ' = и (одного и того же для всех
точек М) и переместилась в точку М'. Мы получаем сдвиг, или
параллельный перенос, всего пространства (в себе) на вектор и.
Таким образом, возникает взаимно однозначное соответствие между
сдвигами пространства и свободными векторами, позволяющее отож-
отождествить между собою эти два понятия.
Множество всех векторов, лежащих на дайной прямой (или на
данной плоскости), естественно, тоже распадается на классы равных
между собою векторов, называемых свободными векторами данной
прямой или плоскости; они могут быть отождествлены со сдвигами
этой прямой (или плоскости) по себе самой.
Нулевой вектор определяет нулевой (или «тождественный») сдвиг,
состоящий в том, что все точки пространства остаются неподвижными
на своих местах.
*) Если QJt—какое-нибудь множество, а х—элемент множества ЯЛ, то
пишут х?2Л; поэтому следовало бы писать ЛЛ'?и, ВВ'?и и т. д.
П. С. Александров
Рис. 5.
34
ВЕКТОРЫ
[гл. п
§ 2. Линейные операции над векторами (сложение
и умножение на число)
1. Сложение векторов. Пусть даны свободные векторы их и и2.
Прилагаем вектор их к какой-нибудь точке О, получаем и1 = ОА; прила-
прилагаем и2 к точке А; получаем И2 = /Ш. По определению вектор ОВ==щ
называется суммой векторов их и U2 (рис. 6), т. е.
ОВ=ОА + АВ. A)
Для векторов, лежащих на прямой, эти определения нам уже известны
(гл. 1, § 4).
Замечание1. Единственный элемент
произвола, содержащийся в этом определе-
определении, есть выбор точки О—точки прило-
приложения иектора и(. Прилагая вектор их
Рис. 6.
к какой-нибудь другой точке О' (рис. 7), получим вектор О'Л' = ОЛ = и,;
построим вектор А'В' = и2; иектор О'В'= О'А'-\-А'В', очевидно, равен век-
вектору ОВ = ОА-\-АВ: он получается иэ ОВ сдвигом на вектор 00'.
Если да» вектор и = 0Д то на прямой d — OA, проходящей через
точки О я А, можно построить вектор ОА'— — ОА (рис. 8).
А' -и О и A d
Рис. 8.
Всякий вектор, равный вектору ОА', также обозначаем через —и.
Очевидно, u-f-( — u) = 0 для любого вектора и. Если рассматривать
свободные векторы их и иа как сдвиги пространства, то нулевой
§ 2]
ОПЕРАЦИИ НАД ВЕКТОРАМИ
35
вектор 0 есть тождественное преобразование (нулевой сдвиг) прост-
пространства, а свободный вектор i^-i-u, есть сдвиг, получаемый в ре-
результате последовательного осу-
осуществления сначала сдвига их и
потом сдвига и2.
Свободный вектор —и при лю-
любом и есть сдвиг, противополож-
противоположный сдвигу и (так чтои-f ( —и)
есть нулевой сдвиг 0).
Замечание 2. Следующие
формулы, очевидно, верны для
любого вектора и:
О-г и = и +0 = и,
и + ( — и) = ( — и) + и = 0.
Замечание 3. Как ясно из
рис.9, при u2 ^O, u2 =Ф — их пре-
предыдущее определение суммы двух
векторов их и и3 можно сформулировать и так: приложим оба век-
вектора Ujl и u2 к одной и той же точке О, так что
Тогда u = u1 -(- ца есть вектор ОС— диагональ параллелограмма,
построенного на сторонах щ и и2.
Так как этот параллелограмм и его диагональ ОС не зависят от
того, а каком порядке даны векторы их и и2, то сложение векторов
коммутативно:
u,-f u2 = u2-f-u1.
Докажем, что сложение векторов ассоциативно, т. е. что для
любых трех векторов ult u2, u3 имеем
щ -|- u3).
В самом деле, если u1 = O41, u2 = i^2, u3 = i^3 (рис. 10), то
u2 + u3 =
= А^А3, Ul + (u, -f и3) *=
n1 + ni = OAl + A1Ai^OAt,
т. е. и ux-f (u2 + u3), и (
2*
13 = О43,
есть вектор ОАг, так
36 ВЕКТОРЫ [ГЛ. II
называемый замыкающий вектор последовательности трех векторов
г2 АЛ 3
Ассоциативность сложения векторов позволяет говорить о сумме
трех векторов ux-f u2-|-u3, понимая под этим вектор
По индукции может быть определена и сумма любого числа векто-
векторов
u1 + u2+...+un,
причем из ассоциативности следует, что, например, в случае четырех
векторов имеем
u,-f и,
U3
U4 =
= (u1 + u, + u,H-u€.
При этом в силу комму-
коммутативности можно произ-
произвольно менять порядок сла-
слагаемых.
_с » Из сказанного вытекает
(Uj + U;,) Ш3-ц,+ (цг+ц3) з следующее удобное на прак-
практике правило сложения лю-
Рис. 10. бого числа векторов («прави-
(«правило замыкающего вектора»).
Для того чтобы сложить данные п векторов, надо записать их
в любом порядке:
ult u2, ..., и„,
приложить первый вектор к какой-нибудь точке О, а каждый следую-
следующий вектор — к концу предыдущего, так что
и1 = ОЛ1, иг = А1А2, ..., и„=Л„_1у4п (рис. 11).
Тогда сумма u1-fu2+...+11,, есть замыкающий вектор ОАп.
Разность и1 — и2 двух векторов и1 и и2 определяется формулой
(— Щ
(рис. 12).
B)
При этом (iij — u2) — u2 = ux — уменьшаемое ux равно сумме вычитае-
вычитаемого u2 и разности их — и2.
Замечание 4. Мы видели, что диагональ ОС (см. рис. 9)
параллелограмма, построенного на векторах их = ОЛ и и2 = СШ,
равна сумме этих векторов.
§ 2]
ОПЕРАЦИИ НАД ВЕКТОРАМИ
37
Аналогично (рис. 13) диагональ ОС параллелепипеда
ОАСВСУА'С'В', построенного на трех векторах щ — ОА, и2 = Ш,
„ =00', приложенных к одной точке и не лежащих в одной плоскости,
Рис. 11.
«Ги2
Рис. 12.
В
Рис. 13.
есть сумма этих векторов. В самом деле, очевидно, бс'=ОО'
ОС ~ О А + ОВ, откуда и следует утверждение (оно следует и из того,
что вектор ОС есть замыкающий вектор к трем векторам 04 = 1^,
А д
38 ВЕКТОРЫ [ГЛ. И
2. Умножение вектора на число. Умножение вектора и на число X
состоит в следующем.
В § 2 главы I уже было определено, что если и=АВ, то Хи
есть всякий вектор, равный вектору АС, лежащему на прямой АВ,
и определенный условием, что его отношение к вектору АВ равно X
(рис. 14); если Х = 0, то Хи=0.
Рис. 14.
Из этого определения следует, в частности, что для любого
вектора и имеем
0.u = 0, lu = u, (— l)-u=— u. C)
Для любых двух чисел Хх и Х2 и любого вектора и имеют место
формулы:
(X1 + X2)u = X1u + X2u, D)
(^2)u = MVi)- E)
Наконец, для любых двух векторов ut и и2 и любого числа X
имеем
F)
Геометрическое доказательство всех этих формул может быть
представлено читателю в ниде упражнения (более канительного —-
разбор всех возможных случаев, — чем трудного).
Выражение
где uv . . ., и„ — векторы, а Х2, . .., Хп — какие-нибудь вещественные
числа, называется линейной комбинацией векторов uu, u2, ..., un
с коэффициентами Xv X2, ..., Хп. При п—\ получаем просто вектор
вида ^jUj.
§ 3]
ПРОЕКЦИИ
39
§ 3. Проекции
Пусть на плоскости дана прямая d и прямая d', не параллельна:!
прямой d.
Через произвольную точку А плоскости проводим прямую dA, парал-
параллельную прямой d' (рис. 15); она пересекает прямую г! в точке Ad,
называемой проекцией точки А
на прямую d вдоль (или парал- /"
лельно) прямой d'.
Если в пространстве даны
прямая d и плоскость б', не
параллельные между собою,
то для каждой точки А опре-
определены:
1) проекция Ad на прямую j
d вдоль плоскости б' — это
точка пересечения прямой
d с плоскостью ЬА, проведен-
проведенной через точку А парал- Рис. 15.
лельно плоскости б' (рис. 16);
2) проекция А&' на плоскость б' вдоль прямой d — это точка
пересечения плоскости б' с прямой dA, проведенной через точку Л
параллельно прямой d (рис. 17).
Рис. 16.
Рис. 17.
Замечание. Если d'J_d или 6'J_rf, то получаем ортогональ-
ортогональные (прямоугольные) проекции, известные читателю из курса средней
школы.
Если дан вектор АВ, то, беря проекции Ad и Bd его начала и
конца, получим вектор AdBd, называемый проекцией eturopa AB на
40
ВЕКТОРЫ
[гл. и
прямую d (вдоль прямой d' (рис. 18), соответственно вдоль плоскости б'
(рис. 19)).
Рис. 18.
Рис. 19.
Аналогично вектор А&'Въ' есть проекция вектора АВ на плоскость б'
(вдоль прямой d) (рис. 20).
Проекция нектора АВ на прямую d (на плоскость б') обозначается
через npdAB (прь'АВ), а иногда (когда невозможны недоразумения)
и просто через прАВ.
Перечислим простейшие свой-
свойства проекций.
1. Проекция вектора АВ рав-
равна нулю (т. е. является нулевым
вектором) тогда и только тогда,
когда данный вектор параллелен
той прямой или плоскости, вдоль
которой происходит проектиро-
проектирование (рис. 21).
В самом деле, в этом и только в
этом случае начало и конец век-
вектора проектируются в одну точку.
2. Проекции любого вектора на
две параллельные прямые (плос-
(плоскости) равны между собо/о(рис.22).
Основным фактом является:
рис§ 20. 3. Проекции двух равных
векторов равны.
Доказательство. Ограничиваемся случаем проекции напря-
напрямую d вдоль прямой d' (на плоскости (рис. 23, а)) или вдоль плос-
плоскости 8' (в пространстве (рис. 23, б)).
§ 3]
ПРОЕКЦИИ
41
о
а,
42
ВЕКТОРЫ
[гл. и
Пусть АА' = ВВ'\ надо доказать, что AdAd — BdBd. Сдвиг всей
плоскости (пространства) на вектор АВ = А'В' переводит прямую d
в некоторую прямую d*, прямые dA, dA- (плоскости бл, Ьл-) — со-
соответственно в dB, dB' (бд, бВ'), точки пересечения Ad, Ad прямой
d с d,\(8/[), соответственно с dx Фа') — в точки пересечения В
прямой d* соответственно с dB(8B), du-фв'), так что
т. е.
ар„АА'= пра*ВВ'.
Но й параллельна d*, поэтому npd*BB' — npdBB', так что
updAA' = npdB~L',
что и требовалось доказать.
A)
B)
C)
§ 3]
ПРОЕКЦИИ
43
Пусть даны векторы щ — ОА, щ = АА' и их замыкающий вектор
и — ОЛ'=их + и2. Тогда при проектировании па прямую d (вдоль
какой-нибудь прямой й' или плоскости б') или на плоскость б' (вдоль
прямой d) (рис. 24)
т. е. .
= OdAd, npdu2 = AdA'd, npd u = OdA'd,
,-f u2) =
D)
Вообще проекция замыкающего вектора данных п векторов u1( u2,..., и„
есть замыкающий сектор проекций данных векторов, или:
Рис. 24.
4. Проекция суммы двух (или более) векторов есть сумма проек-
проекции этих векторов.
Без труда доказывается формула
пр(Ли) = Лпри E)
(надо рассмотреть отдельно случаи Х>О,Л<О Я = 0)
44 векторы [гл. ц
Из D) и E) вытекает:
пр (Л^ + ... + А.„и„) = *-i ПР ui + • • • + К ПР un- F)
Полученные результаты кратко объединяются в следующем предло-
предложении:
Линейные операции над векторами (т. е. сложение векторов и их
умножение на число) переместительны с операцией проектирования.
§ 4. Коллинеарные и компланарные векторы;
координаты вектора относительного данного базиса
Несколько векторов называются коллинеарными (соответственно
компланарными) между собою, если все они, будучи приложенными
к одной и той же точке, оказываются лежащими на одной прямой d
(рис. 25) (соответственно в одной плоскости я (рис. 26)). В этом
случае говорят также,
Ur что рассматриваемые иек-
*" торы коллинеарны пря-
прямой d (компланарны плос-
иг 1 кости я).
Следующие утвержде-
утверждения являются непосредст-
непосредственными следствиями это-
этого определения:
1. Нулевой вектор
коллинеарен всякому век-
вектору.
2. Если. несколько
векторов коллинеарны
As О А, АгА3 А4
рнс 25 между собою, то они и
подавно между собою
компланарны.
3. Каждый вектор коллинеарен самому себе.
4. Всякие два вектора между собою компланарны1).
Векторы А-^В^ А2В2, . . ., АГВГ коллинеарны (компланарны) тогда
и только тогда, когда несущие их прямые параллельны (в широком
смысле'-)) одной и той же прямой (одной и той же плоскости).
й) Чтобы убедиться в этом, достаточно приложить их к одной и той же
точке О.
2) Две прямые (две плоскости) называются параллельными между собою
в широком смысле, если они или параллельны в обычном смысле, или совпа-
совпадают. Прямая и плоскость параллельны в широком смысле, если они или
параллельны п обычном смысле или если данная прямая целиком лежит
в данной плоскости.
§ 4]
КОЛЛИНЕАРНЫЕ И КОМПЛАНАРНЫЕ ВЕКТОРЫ
45
Пусть ux н иг — два коллинеарных вектора. Прилагая их к одной
какой-нибудь точке О, получаем векторы их = ОА1 и и2 = ОА2, лежа-
лежащие на одной прямой. Пусть по крайней мере один из данных векто-
векторов, например щ, отличен
от пуля. Тогда, как мы зна- ., ц< ^
ем из первой главы, опре-
определено вещественное число
Х — и^'.щ, называемое отно-
отношением вектора и2 к векто-
вектору их; модуль этого числа
равен отношению отрезка
ОА2 к отрезку ОАХ:
11 ОА,'
а знак берется положитель-
положительный, если векторы ОА1 и
ОА.Л направлены в одну и Рис. 26.
ту же сторону, и отрица-
отрицательный, если они направлены в противоположные стороны; если
u2 = 0, то А = 0.
Если ua:u1 = X, то по самому определению умножения векто-
вектора на число имеем и2 = Хих.
Обратно, из того же определения следует, что всякий вектор
вида u2 = Xu1, где К — какое-нибудь вещественное число, коллинеарен
вектору ur Мы доказали следующую теорему:
о. Пусть их—какой-нибудь ненулевой вектор. Тогда все векторы
вида Xtij, где К—любое вещественное число, и только векторы этого
вида коллинеарны вектору их.
Подчеркнем особо: отношение и2:щ между двумя векторами опре-
определено тогда и только тогда, когда эти векторы коллинеарны и когда
по крайней мере один из них отличен от нуля. Если отношение
Щ-иг равно числу %, то это значит, что щ = %иГ
Прежде чем идти дальше, докажем следующие две теоремы:
о. Пусть на плоскости даны две прямые dx и d2, пересекающиеся
в некоторой точке О. Тогда любой вектор и = ОА есть сумма своих
проекций их и и2 на эти прямые (проекции берутся на каждую из
двух прямых вдоль другой прямой).
Доказательство. Утверждение очевидно, если вектор и ле-
лежит на одной из наших прямых, например па dx; тогда u-u^ u2 = 0.
Пусть вектор и не лежит ни на одной из двух данных прямых.
Пусть ОАХ и ОЛ2 суть проекции вектора и —СМ на каждую из наших
46
ВЕКТОРЫ
[гл. и
прямых вдоль другой прямой (рис. 27); тогда ОА есть диагональ
параллелограмма, построенного на OAj^ — щ и ОЛ2 = и2, и п=и1-\-и2-
Замечание 1. Если вектор и = ОА является суммой двух
векторов u^Q/Ц и щ=О~А2> лежащих на прямых dx и d.z, то сла-
слагаемые их и и2 непременно являются проекциями вектора и па прямые
dx и d% и, следовательно, определены однозначно.
о
Рис. 27. Рис. 28.
В самом деле, если ОА = ОА[ + ОА'2, то, по определению сложе-
сложения векторов, ОА есть диагональ параллелограмма, построенного на
ОА[ и ОА'г\ по тогда ОА[ и ОА'г суть проекции вектора ОА' на
каждую из прямых dx, d2 (вдоль второй прямой), что и требовалось.
Совершенно аналогично доказывается предложение
7. Пусть через точку О пространства проходят три прямые, не
лежащие в одной плоскости. Тогда любой вектор и~ОА есть сумма
своих проекций vlv u2, U3 на эти прямые, причем проекции берутся
на каждую прямую вдоль плоскости, несущей две другие прямые.
Можно ограничиться случаем, когда вектор и = ОА не лежит ни
в одной из плоскостей, несущих две какие-нибудь из наших трех
прямых. Тогда проекции вектора и = ОА на каждую прямую (вдоль
плоскости, несущей две другие прямые) образуют три ребра ОАЬ
ОА2, ОА3 параллелепипеда с диагональю ОА (рис. 28) и
Замечание 2. Пусть вектор п = ОА каким-нибудь образом
представлен как сумма трех векторов и^ = 0А[, иа'=ОЛа, Щ—ОА'3,
§ 4]
КОЛЛИНЕАРНЫЕ И КОМПЛАНАРНЫЕ ВЕКТОРЫ
47
лежащих соответственно на прямых йг, d2, ds. Тогда векторы
Ui, Ua, U3 непременно суть проекции вектора и на прямые dx, d2, d3.
В самом деле, из равенства ОА = ОА[ + ОА'2-f OA'S следует, что
ОА есть диагональ параллелепипеда, построенного на векторах ОА[,
ОА'г, ОА'3\ но тогда эти векторы суть проекции вектора ОА на пря-
прямые d-y, d2, d3.
Из'доказанного будет сейчас выведена следующая
8. О с и о в и а я теорема. Пусть в плоскости даны два некол-
линеарных вектора ех и е2. Тогда каждый вектор и есть линей-
линейная комбинация
и = х1е1 + х2е2 A2)
векторов ех и е2 и коэффициенты xt и хг определены однознач-
однозначно, как алгебраические значения проекций вектора и на оси,
несущие соответственно единичные векторы ех и е2 (проекция на
каждую ось берется вдоль другой оси).
Пусть в пространстве даны три некомпланарных вектора е1; е2, е3.
Тогда каждый вектор и есть линейная комбинация
и == Х& + лг2е2 + ^з^з Оз)
векторов ех, е2, е3, в которой коэффициенты xv лг2, xs определены
однозначно, как алгебраические
значения проекций вектора и
на оси, определенные единич-
единичными векторами ег, е2, е3
(проекция на каждую ось берет-
берется вдоль плоскости, определен-
определенной двумя другими осями).
Доказательство совершен-
совершенно одинаково в обоих случаях—
плоскости и пространства.
Ограничиваемся случаем плос-
плоскости. Приложим векторы
ех и е3 к какой-нибудь точке О
(рис. 29); получим ОЕ1 = е1,
Оё2 =е2. Тогда вектор и = ОА
есть сумма своих проекций иг = ОАХ и и2 — ОА2 на прямые, несу-
несущие векторы ех и е2, причем векторы их и и2 однозначно опре-
определены условием 4 = 1^ + 42 и требованием коллинеарности векторов
их и и2 векторам ег и е2.
Из этого последнего требования вытекает, что и1 = лг1е1, u2 = x2e2,
где х1 и х2 определены однозначно, как алгебраические значения
векторов ult u2 на соответствующих осях (несущих соответственно
векторы ех и е2).
рис 2д.
48 векторы [гл. и
Итогом только что сказанного является следующее
Основное определение. Любая пара неколлинеарных век-
векторов ex, e2 на плоскости и любая тройка некомпланарных векторов
ех> е»> ез в пространстве, данных в определенном порядкег), назы-
называется базисом множества (или многообразия) всех векторов, лежа-
лежащих соответственно в плоскости или в пространстве; сами векторы
е?, е2, е3 называются базисными или единичными векторами. Одно-
Однозначно определенные коэффициенты хъ х2 (соответственно хг, х2, х3)
в представлениях
называются координатами вектора и относительно данного базиса
(xt—первая, лг2—вторая, х3—третья координата).
Каждая координата вектора и есть алгебраическое значение проек-
проекции вектора и на ось, несущую соответствующий базисный вектор.
Равенства A2) и A3) записываются часто в виде
и = {лг1, лг2} (\'г)
и
Ц = \Х^, ЛГ2, ATgJ. A3)
Сделаем два важных замечания.
Замечание 3. Мы знаем, что проекции равных векторов равны,
поэтому равные векторы имеют (относительно данного базиса) соот-
соответственно равные координаты. Обратно, если даны координаты хь
хг (соответственно хъ хг, xs) вектора, то дан и вектор и = х1е1 -f- л:2е2
(соответственно и = хгих-|-лг2е2 -j- х3е3) как свободный вектор. Дру-
Другими словами, представления A2), A3) касаются свободных векторов,
они не зависят от точек приложения векторов.
Замечание 4. Мы знаем, что при умножении вектора на какое-
либо число X на это же X умножается и проекция вектора (на любую
ось); мы знаем также, что проекция суммы двух векторов равна
сумме проекций этих векторов. Отсюда и из определения координат
вектора следует:
При умножении вектора на данное число X на это же число X
умножаются и координаты вектора. Каждая координата суммы, двух
векторов есть сумма соответствующих координат слагаемых векторов.
Если и = лг^!-j-лг2е2, v = y^i-}-y2e2, то
v = (хх + уД ех + (*2 + У2)
!) Например, в том, в каком они написаны, так что ех есть первый,
е2 —второй, е3—третий вектор.
§ 5] ЛИНЕЙНАЯ ЗАВИСИМОСТЬ ВЕКТОРОВ 49
§ 5. Линейная зависимость и независимость векторов
Эти алгебраические понятия принадлежат к важнейшим в мате-
математике; мы их изложим со всей тщательностью.
Линейная комбинация
векторов Uj, u2, ..., и„ называется нетривиальной1), если в ней
хотя бы один из коэффициентов Xv ... , "kn отличен от нуля.
Линейная комбинация вида
называется тривиальной; она, очевидно, равна нулевому вектору2).
Определение. Система векторов ux, u2, ..., и„ называется
линейно зависимой 3), если существует хотя бы одна нетривиальная
комбинация этих векторов, равная нулевому вектору. В противной
случае, т. е. если только тривиальная линейная комбинация данных
векторов равна нулю, векторы называются линейно независимыми.
Докажем несколько простых, но важных предложений о линейной
зависимости; они имеют чисто алгебраический характер и постоянно
применяются.
1. Если среди векторов их, .. . , и„ есть хотя бы один нулевой
вектор, то вся система векторов линейно зависима.
В самом деле, если, например, их = 0, то, положив К1=\,
Х2=...=Хп = 0, получим нетривиальную линейную комбинацию
равную нулю.
2. Если среди векторов их, . .. , и„ некоторые образуют линейно
зависимую систему, то и вся система их, . . . , ип линейно зависима 4).
В самом деле, пусть векторы и1; ... , ир, p^Zn, линейно зави-
зависимы. Значит, существует нетривиальная линейная комбинация
'\~ ¦ • • +^-nupi равная нулевому вектору 0. Но тогда, полагая
1=0, ..., Кп = 0, получим также нетривиальную линейную
х) Это непривлекательное слово, к сожалению, укоренилось в математике,
и заменить его другим представляется безнадежным.
2) Мы будем кратко говорить: равна нулю, понимая при этом под «нулем»
"улевой вектор.
3) Или «векторы Ui, ... ,ип называются линейно зависимыми».
4) Система иг, ... , и„ может состоять из любого числа п=1, 2, 3, ...
векторов; р частности, система, состоящая из одного вектора и, зависима
тогда и только тогда, когда этот вектор и = 0, поэтому предложение 1 есть
частный случай предложения 2.
50 ВЕКТОРЫ [ГЛ. II
комбинацию
равную нулевому вектору.
Непосредственным логическим следствием предложения 2 является
2'. Если система векторов их, . . . , и„ линейно независима, то
и всякая ее подсистема линейно независима.
3. Если система uu . . . , U,, линейно зависима, то по крайней
мере один из векторов ult . . . , uH равен линейной комбинации
остальных.
В самом деле, пусть
где по крайней мере один коэффициент отличен от нуля. Пусть,
например, Хг^=0. Тогда равенство A) можно переписать в виде
цх =
т. е. их есть линейная комбинация векторов и2, ... , и„.
Обратно:
4. Если среди векторов ии .. . , и„ один какой-нибудь есть ли-
линейная комбинация остальных, то система uv . . . , u;i линейно
зависима.
В самом деле, если, например, ц„ = X1u1-f- ... -f Xn_1un_1, то
нетривиальная линейная комбинация Xxux+ ... +Х„_1и„_1 + (—1)и„
равна нулевому вектору.
Следующее часто применяемое предложение усиливает предло-
предложение 3:
5. Если система векторов иг, и2, .. . , и„ линейно зависима,
а система VLV u2, . . . , ип_г линейно независима, то вектор и„ равен
линейной комбинации векторов иг, ..., u/l_1.
В самом деле, так как система их, ..., и„ линейно зависима,
то существует нетривиальная линейная комбинация X1u1Jr ...
. . •+Xn_1un_1 + Xnun, равная нулевому вектору; в ней Хп^=0, так
как в противном случае векторы ult u2, ..., ull_1 были бы линейно
зависимы. Следовательно, и„ = ( —^~ \ щ + ... -f- ( ^^ ) ип-1, что
и требовалось доказать.
§ 6. Геометрический смысл линейной зависимости векторов
Согласно теореме 5 § 4 из двух коллинеарных векторов один
получается умножением другого на некоторое число; отсюда следует
утверждение
1. Система, состоящая из двух (или более) коллинеарных векто-
векторов, линейно зависима.
§ 6]
СМЫСЛ ЛИНЕЙНОЙ ЗАВИСИМОСТИ
51
С другой стороны, если два вектора линейно зависимы, то в силу
предложения 3 § 5 один из них получается умножением другого на
число, а тогда векторы коллинеарны.
Итак,
2. Система, состоящая из двух векторов, тогда и только тогда
линейно зависима, когда векторы коллинеарны.
Докажем теперь утверждение
3. Система, состоящая из трех еекторов, тогда и только тогда
линейно зависима, когда данные три вектора компланарны.
В самом де/ic, пусть векторы ult u2, u3 линейно зависимы, тогда
один из них есть линейная комбинация двух других. Пусть, например,
ua = J:1u1 + J:au2. A)
Приложим векторы ux, u2, u3 к одной и той же точке О (рис. 30)>
так что
% = OAV иг = ОАг, и3 = ОАЪ.
Предположим сначала, что векторы
и1=ОЛ1, и2=ОЛ2 ие коллинеарны;
тогда несущие их прямые dv d2 пере-
пересекаются в точке О и определяют
некоторую плоскость я, проходящую
через эту точку. В этой плоскости
лежат и векторы х^щ и х2м2, а зна-
значит, и весь параллелограмм, на этих
векторах построенный, в частности и
его диагональ, которая есть вектор
дг1и1-г-^2и2 = из- Значит, все три Еек-
тора u1? u2, u3 лежат в плоскости я;
их компланарность доказана.
11редположим теперь, что векторы
ul=OA1 и и2 = ОАг коллинеарны,
тогда они лежат на одной прямой, и
на этой прямой лежат как векторы л^и^ х2и2, так и их сумма
0)— три вектора и^ и2, Щ оказываются не только компланар-
компланарными, по даже коллинеарнымн.
Первая половина теоремы доказана: три линейно зависимых век-
вектора всегда компланарны. Докажем теперь, что всякая система,
состоящая из трех (или более) компланарных векторов, линейно
зависима.
Пусть векторы щ = OAt, щ == ОА2, а3 = ОА3 компланарны. Если бы
какие-нибудь два из этих векторов были коллииеариы, то они
были бы линейно зависимы, а тогда и система всех трех векторов
была бы линейно зависимой.
Рис. 30.
52 векторы [гл. и
Итак, предполагаем, что иа и и2 не коллинеарны (см. рис. 30).
Так как все три вектора ОАХ, ОА2, ОА3 лежат в одной плоскости
и ОА^ и ОА2 не коллинеарны, то по теореме 8 § 4
чем линейная зависимость векторов и^ и2, и3 доказана.
4. Всякие четыре (или боже) вектора в пространстве линейно
зависимы.
Пусть и1; и2, и3, и4 — данные векторы. Если три каких-нибудь
вектора из данных четырех, например uv u2, u3, компланарны, то
они линейно зависимы, и тогда линейно зависима и вся система
uv u2, us, u4.
Но если векторы u^ u2, u3 не компланарны, то в силу теоремы
8 из § 4 имеем
и4 = ххих + х2и.2 -f- х3щ,
чем предложение 4 доказано.
§ 7. Векторные многообразия
Определение. Векторное многообразие есть такое непусто'е
множество1) V векторов, что любая линейная комбинация векторов,
принадлежащих этому множеству, также принадлежит ему.
Замечание 1. В определении векторного многообразия V до-
достаточно потребовать, чтобы из Uj^V, u2^V всегда следовало
u1-j-u2^V и из и ? V при любом вещественном Я следовало бы,
ЧТО Хи (; V.
Наибольшее число векторов, образующих линейно независимую
систему, в данном многообразии называется числом измерений или
размерностью этого многообразия. Так, в пространстве можно найти
три пекомплапарных (и, значит, линейно независимых) вектора,
а всякие четыре вектора линейно зависимы; поэтому
1. Множество всех векторов пространства есть трехмерное век-
векторное многообразие V3.
Всякая линейная комбинация векторов, коллинеарных данной
прямой (компланарных данной плоскости), есть вектор, коллинеарный
этой прямой (компланарный этой плоскости).
Другими словами, совокупность V1 соответственно всех векторов,
коллинеарных данной прямой (компланарных данной плоскости), есть
векторное многообразие.
Так как всякий отличный от нуля вектор образует линейно не-
независимую систему, тогда как всякие два коллинеарных вектора
линейно зависимы, то
') Предположение, что множество V непусто, означает, что существует
хотя бы один иектор, являющийся элементом этого множества.
§ 7] ВЕКТОРНЫЕ МНОГООБРАЗИЯ 58
2. Множество всех векторов, коллинеарных какой-нибудь прямой,
есть векторное многообразие размерности 1.
Легко доказывается и теорема
3. Множество V2 всех векторов, компланарных какой-нибудь
плоскости, есть векторное многообразие размерности 2.
В самом деле, всякие два неколлинеарных вектора, компланарные
плоскости л, образуют линейно независимую систему. С другой
стороны, всякие три компланарных вектора линейно зависимы.
Заметим, что множество, состоящее из одного нулевого векто-
вектора, также является векторным многообразием; оно имеет размер-
размерность нуль.
Докажем, что перечисленными только что векторными многообра-
многообразиями исчерпываются все возможные векторные многообразия (эле-
(элементами которых являются векторы, лежащие в обычном трехмерном
пространстве). Другими словами, докажем следующую теорему:
4. Пусть V—какое-либо векторное многообразие. Возможны лишь
следующие случаи:
(A) V состоит из одного лишь нулевого вектора; тогда размер-,
ность V равна нулю.
(Б) V состоит из всех векторов, коллинеарных какой-либо прямой;
тогда размерность V равна 1.
(B) V состоит из всех векторов, компланарных некоторой плос-
плоскости; тогда размерность V равна 2.
(Г) V состоит из всех вообще векторов трехмерного пространства;
тогда размерность V равна 3.
Доказательство. Заметим прежде всего, что всякое вектор-
векторное многообразие V содержит нулевой вектор.
В самом деле, по определению векторного многообразия множество
V непусто, т. е. содержит хотя бы один вектор и; но тогда по
определению векторного многообразия вектор 0-и = 0 также содер-
содержится в множестве V.
Может случиться, что есс множество V состоит из одного нуле-
нулевого вектора; тогда мы находимся в случае (Л).
Пусть в V содержится хотя бы вектор ei^O. Тогда в V содер-
содержатся и все векторы вида х^, где х1—любое вещественное число.
Если все множество V этими векторами исчерпывается, то это мно-
множество есть многообразие (размерности 1), состоящее из всех векто-
векторов, коллинеарных вектору ej (т. е. коллинеарных прямой, несущей
этот вектор). Тогда мы находимся в случае (Б).
Предположим, что в множестве V имеется вектор е2, не колли-
неарный вектору ех. Тогда в V содержатся и есс векторы еидэ
xi^i + х2е2, т. е. все векторы, компланарные плоскости, несущей
Два неколлинеарных вектора ех и е2. Если вес множество V исчер-
исчерпывается этими векторами, то мы находимся в случае (В). Если же
в множестве V имеется хотя бы один вектор е3, ие компланарный
54 векторы [гл. ii
паре векторов elt e2, то в К содержится тройка некомпланарных
векторов еь е2, е3, а следоиательно, содержится и всякий вектор
и вида
Но по теореме 8 § 4 всякий вектор и пространства может быть
представлен в виде A), если ех, е2, е3 — три компланарных вектора,
и мы находимся в случае (Г). Теорема доказана.
Замечание 2. Сформулируем общее определение базиса вектор-
векторного многообразия, лишь по форме отличающееся от основного
определения, данного в § 4.
В векторном многообразии V размерности я=1, 2, 3 возьмем
систему, состоящую из п линейно независимых векторов. Она состоит
в случае л=1 из одного ненулевого «ектора ех, и случае п = '2 —
из двух неколлинеарных векторов еь е2, в случае /2 = 3— из трех
некомпланарных векторов ег, е2, е3.
Но всех случаях эта система является максимальной линейно
независимой системой, содержащейся в V (максимальной в том смысле,
что, пополнив ее каким-либо не содержащимся в ней вектором, мы
получим уже линейно зависимую систему).
Всякая такая система, т. е. система из п линейно независимых,
векторов, взятых в данном векторном многообразии V размерности п,
называется базисом этого векторного многообразия.
Мы видели, что всякий вектор и, содержащийся в многообразии V,
представим (и притом единственным образом1)) в виде линейной
комбинации и—х1е14-х2е2~х3&3 элементов базиса этого многообра-
многообразия; Miii знаем также, что коэффициенты хъ х2, х3 в этой линейной
комбинации называются координатами вектора и относительно дан-
данного базиса.
Сделаем, наконец, следующее заключительное замечание, отно-
относящееся ко всей главе.
Замечание 3. Нигде в этой главе мы не предполагали, что
во всем пространстве выбран масштаб, т. с. отрезок, служащий для
измерения длин, нигде мы не пользовались понятием длины вектора,
мы не будем пользоваться этим понятием и в следующей главе.
г) Докажем это чисто алгебраически; пусть, например, п-=3 и векторы
eii e2- ез образуют базис; тогда, каков бы ни был вектор u^V, система clt
е2, е3, и линейно зависима, а ей, е2, е3 независима. Значит, и = л:1е1+х2е2+^зез-
Если бы существовало второе такое представление u — x'^-f-x'^-'rx'^, то,
вычитая почленно эти равенства, получили бы (х1—х'1)е1-{-(х2—х'2)е2 \-
-f (х3 — х'3)е3 = 0. Значит, в силу линейной независимости et, e2, е3 было бы
хг—^ = 0, хг—х'2 = 0, jc3—х'3 = 0, что и требовалось доказать.
ГЛАВА III
АФФИННАЯ СИСТЕМА КООРДИНАТ НА ПЛОСКОСТИ
И В ПРОСТРАНСТВЕ
§ 1. Определение аффинной системы координат
1. Аффинная система координат на плоскости. Общая, и..я
аффинная, система координат на плоскости задается точкой О (на-
(начало координат) и парой приложенных к ней нсколлинеарных векторов
ех = ОЕ1 и ej^OZJj (рис. 31), данных в определенном порядке:
ej есть первый, а е2 — второй вектор; векторы е, и е2 определяют
М
О
х
Oj
Рис. 31.
Рис. 32.
две оси, пересекающиеся в точке О, — первую и вторую ось коор-
координат— и являются по определению единичными векторами этих осей.
Первая ось называется также осью абсцисс или осью Ох, а вторая —
осью ординат или осью Оу данной координатной системы. Сама
система координат обозначается через Ое1е2 или через Охд.
Пусть М—какая-нибудь точка плоскости; обозначим через Мх
и Му проекции точки М соответственно на первую и вторую ось
координат (проекции на каждую ось берутся вдоль другой оси)
(Рис. 32). Алгебраические значения векторов ОМХ и ОМ являются
56
АФФИННАЯ СИСТЕМА КООРДИНАТ
[ГЛ. III
соответственно первой и второй координатой (абсциссой и ординатой)
точки М.
Любая пара чисел х, у однозначно определяет точку М, для
которой х является первой, а у— второй координатой. В самом деле,
искомая точка М является концом вектора ОМ, проектирующегося
на векторы ОМХ = xqx и ОМу = уе2.
Значит,
ОМ — xet -j- i/e2,
т. е, Еектор ОМ есть диагональ
параллелограмма, построенного на
ОМХ = хег и ОМу — уе2, чем точка
М определена однозначно. Точка М
с координатами х, у обозначается так:
М = (х, у).
Система координат Ое^ включает
в себя базис ех, е2 многообразия всех
векторов на плоскости. Координаты
произвольного вектора и относительно
базиса е1; е2 называются координата-
координатами вектора и относительно системы координат Ое^; они являются
алгебраическими значениями проекций вектора и на оси координат
и не зависят от выбора начала координат (рис. 33). Вектор и
с координатами х, у обозначается так: и = {лг, у}; тогда
Рис. 33.
Условие лг = О характеризует векторы, коллинеарные оси ординат,
а условие (/ = 0 характеризует векторы, коллинеарные оси абсцисс.
Очевидно, координаты любой точки М в данной системе коорди-
координат суть координаты вектора ОМ в этой системе координат.
Замечание 1. Если точка О' отлична от точки О, то
ОМ;
поэтому координаты точек (в отличие от координат вектора) зависят
от выбора начала координат.
Начало координат О разбивает каждую из координатных осей
на две полуоси: положительную, идущую от начала координат в по-
положительном направлении (т. е. в направлении единичного вектора
этой оси), и отрицательную.
Ось абсцисс состоит из всех точек, ординаты которых раины
нулю; она разбивает плоскость на две полуплоскости; та, в которой
§ 1]
ОПРЕДЕЛЕНИЕ АФФИННОЙ СИСТШЫ КООРДИНАТ
57
лежит положительная полуось оси ординат, характеризуется тем,
что ординаты лежащих в ней точек положительны; во второй полу-
полуплоскости лежат точки с отрицательными ординатами. Аналогично
ось ординат состоит из всех точек, абсциссы которых равны нулю;
она разбивает плоскость на две полуплоскости; точки той из них,
е которой лежит положительная полуось оси абсцисс, имеют поло-
положительные абсциссы; точки другой полуплоскости имеют отрица-
отрицательные абсциссы.
Совокупность обеих координатных осей разбивает плоскость на
четыре области, называемые «квадрантами» (рис. 34); в первом ква-
квадранте лежат точки, обе ко-
координаты которых положитель- /У
ны, во втором — точки с отри-
отрицательной абсциссой и положи-
положительной ординатой, в треть-
третьем— точки, обе координаты j
которых отрицательны, и в
четвертом — точки, у которых
абсцисса положительна, а орди-
ордината отрицательна. Обе коор-
координаты начала координат, оче-
очевидно, равны нулю: О = @,0).
Замечание 2. Система — -
координат на плоскости с на-
началом О и единичными векто-
рами
и е.2 определяет на
Рис, 34.
каждой координатной оси свою
систему координат, началом
которой является точка О, а единичным вектором —лежащий на
данной оси вектор ех или е2. Очевидно, каждая из координат точки
М есть координата проекции этой точки на соответствующую ко-
координатную ось.
Аналогично координаты вектора u — АВ суть координаты проекций
АХВХ и АуВу этого вектора на оси координат, т. е. алгебраические
значения векторов АХВХ и АуВ па соответствующей оси.
Два вектора АВ и CD равны тогда и только тогда, когда равны
их соответствующие координаты.
Если А = (х1, tjj), В = (х2, уг), то для координат х, у вектора
АВ имеем:
Y
У"
58
АФФИННАЯ СИСТЕМА КООРДИНАТ
[ГЛ. III
Достаточно доказать первое из этих равенств. Координата х есть
алгебраическое значение вектора АХВХ на оси абсцисс (рис. 35):
кроме того, х1 = (ОАх), х2 = (ОВх). По лемме Шаля имеем
(ОАХ) + (А,В Л = (ОВХ),
т. е. х1 -]- х = х.2, откуда утверждение \
следует.
Рис. 36.
2. Аффинная система координат в пространстве. Все сказанное
с очевидными изменениями применяется и к случаю пространства.
Аффинная система координат в пространстве состоит из точки О
(«начало координат») и приложенных к этой точке трех некомпла-
нарных векторов е1; е2, е3 (рис. 36), данных в определенном порядке
(ех — первый, е2 — второй, е3 — третий) — единичных векторов данной
системы координат1). Каждый из этих векторов определяет прохо-
проходящую через начало О ось, единичным вектором которой он является;
эти оси называются первой, второй и третьей осью координат или
соответственно «осью Oxt> (осью абсцисс), «.осью Оуя (осью ординат)
и «осью Oz» (осью аппликат; последнее название, впрочем, употреб-
употребляется нечасто). Каждые две координатные оси определяют прохо-
проходящую через них координатную плоскость. Так, оси Ох и Оу опре-
определяют координатную плоскость Оху или Ое^е2 и т. д.
Персой, второй, третьей координатой данного вектора и назы-
называются соответствующие его координаты относительно базиса
!) Очевидно, можно сказать и так: задать аффинную систему координат
в пространстве — значит взять какой-нибудь базис векторного многообразия
всех векторо!! трехмерного пространства н приложить его к произвольно
фиксированной точке О (началу координат).
Л 1] ОПРЕДЕЛЕНИЕ АФФИННОЙ СИСТЕМЫ КООРДИНАТ 59
ej, e2, е3, т. е. соответствующие коэффициенты в представлении
Они равны алгебраическим значениям проекций вектора и на оси,
определенные соответственно векторами elt e2, е3 (проекции на каж-
каждую ось' берутся вдоль плоскости, несущей две другие оси).
Координаты вектора не зависят от выбора начала координат О.
Координаты точки М суть по определению координаты вектора ОМ
М М
(рис. 37). Если Мх, Му,
Mz суть проекции точки
М, а их = ОМх, \ху =
= ОМу, uz = OMZ — про-
проекции вектора ОМ на оси
координат, то координа-
координаты х, у, z точки М суть
алгебраические значения
векторов ОМХ = их,
ОМу—\ху, OMz=uz.Тогда
'\
\
\
\
У
V/
м/ /
к
\
/V
л
\
\ Uffi
V
A)
Рис
Векторы, коллинеарные данной координатной оси, характеризуются
тем, что равны нулю их координаты, соответствующие двум другим
осям.
Мы уже знаем из главы II, что при сложении векторов их одно-
одноименные координаты складываются, а при умножении вектора и на
число Я на это А умножается каждая координата вектора и. Отсюда
(и из главы II, § 4, предложение 5) сразу следует, что два вектора
тогда и только тогда коллинеарны, когда координаты одного из
них пропорциональны координатам другого.
Каждая тройка чисел х, у, z (данных в определенном порядке)
Однозначно определяет точку М пространства, тройкой координат
которой она является. Для получения этой точки М надо прило-
приложить к точке О вектор дге1 + (/е2+ге3 = ОМ, т. е. взять диагональ
параллелепипеда, построенного на векторах хег — ОМХ,
#е2 == ОМу, ze3 = ОМг- Точка М с координатами х, у, z обозна-
обозначается так: М=(х, у, z). По определению координат точки М
60
АФФИННАЯ СИСТЕМА КООРДИНАТ
[ГЛ. III
вектор ОМ имеет те же координаты, что и его конец М. Вообще,
если А = (х1, ylt zt) и В = (х2, у2, z2), то вектор АВ имеет коор-
координаты х = х2—xv у = у2 — У-i, z = z.2 — Zi, доказательство совер-
совершенно аналогично тому, которое мы провели в случае плоскости.
Координатная плоскость Оху характеризуется тем, что ее точки
имеют координату г — 0. Эта плоскость разбивает пространство на
Рис, 38.
два полупространства; координата z у всех точек одного из этих
полупространств положительна, у точек другого — отрицательна.
Аналогичные утверждения справедливы и для других координатных
плоскостей.
Каждое из двух полупространств, на которое пространство раз-
разбито плоскостью Оху, двумя другими координатными плоскостями
разбивается иа четыре области, соответствующие четырем квадран-
квадрантам, на которые плоскость Оху разбивается осями Ох и Оу. Всего,
таким образом, получаем восемь областей, называемых октантами,
на которые пространство разбивается совокупностью трех коорди-
координатных плоскостей (рис. 38). Точки каждого октанта характери-
характеризуются распределением знаков своих координат следующим образом:
A) + + + , B) - + -1-, C) +, D) + - -К
E) + + -, F) - + -. G) , (8) + .
§ 2]
ПЕРЕНОС НАЧАЛА КООРДИНАТ
61
Кроме того, имеем z~0 для точек плоскости Оху, у—О для
плоскости Oxz, х = 0 для плоскости Oyz; на оси Ох имеем y=z — 0;
на оси Оу имеем x — z = 0; на оси Oz имеем х — у=0. Для начала
коордикат О имеем x = y=z — 0.
§ 2. Перенос начала координат
В аналитической геометрии основное значение имеет так назы-
называемая задача преобразования координат. Она заключается в сле-
следующем. Даны две системы координат (на плоскости или в про-
пространстве)—«старая» и «новая». Требуется, зная координаты какой-
нибудь точки или вектора в од-
одной системе координат, найти
координаты той же точки или
вектора в другой системе. Этой
задаче будут посвящены целые
две главы этих лекций (главы
VIII и IX), но простейший ее слу-
случай— так называемый перенос
начала координат — мы рассмот-
рассмотрим уже сейчас.
Именно, предположим, что да-
даны две координатные системы,
у которых одни и те же единич-
единичные векторы ех, е2, е3, по разные
начала О и О', так что новая
система координат О'е1е2е3 полу-
получается из старой Ое1е2е3 сдвигом
на вектор 00' (рис. 39). При
этом даны координаты точки О' относительно системы Оег&2е3:
О'—(а, Ь, с). Мы уже знаем, что в этом случае координаты каж-
каждого вектора и в обеих системах одинаковы, потому что этими
координатами являются координаты вектора и относительно одного
и того же базиса ех, е2, е3, т. е. коэффициенты х, у, z в пред-
представлении
Посмотрим, как связаны между собою координаты х, у, z и
*'• У\ %' произвольной точки М в обеих системах. Числа х, у, z суть
координаты вектора ОМ (рис. 40), а числа х', у', z' — координаты
вектора О'М (относительно того же базиса ех, е2, е3). Но
= ОО' +О'М,
A)
62
АФФИННАЯ СИСТЕМА КООРДИНАТ
[ГЛ. II/
причем для векторов ОМ, 00', О'М (и базиса ех, е2, е3) имеем
OM={x,y,z}, OO' = {a,b,c}, 6ГМ={х', у', z'l
так что векторное равенство A) равносильно совокупности трех
числовых равенств:
х = а + х', \
| B)
Эти формулы и решают поставленную задачу.
В случае плоскости вместо трех равенств B) получаем два:
если координаты нового начала
О' относительно старой системы
координат суть а, Ь, так что
О'—(я, Ь) в старой системе, то
координаты х, у произвольной
М точки М в старой системе выра-
выражаются через координаты той
же точки в новой системе фор-
формулами:
§ 3. Деление отрезка в данном
отношении
Пусть в пространстве или на
плоскости дана прямая d и на
ней направленный отрезок АВ.
Даны два произвольных веще-
вещественных числа а и §, из кото-
которых по крайней мере одно от-
отлично от нуля.
По определению, данному в главе I, § 6 точка М делит отре-
отрезок АВ в отношении а:р, если
!->яс. 40.
Задача состоит в том, чтобы по данным а и § и по координатам
точек А и В найти координаты точки М.
Лемма. Пусть на плоскости {соответственно в пространстве)
даны две прямые d и й' и прямая {соответственно плоскость) 6,
не параллельная ни одной из прямых d, d'. Пусть А', В', М' —
§ 3]
ДЕЛЕНИЕ ОТРЕЗКА
63
произвольные три точки на прямой й'\ обозначим через А, В, М
их проекции вдоль 6 «а прямую d. Тогда
~А'~М' ~Ш
Wb' MB
Доказательство леммы is случае плоскости и пространства, по
существу, одно и то же.
Излагаем его в более сложном случае пространства.
Утверждение леммы очевидно, если d'\\d (рис. 41). Пусть пря-
прямые d и а" не параллельны между собою. Проводим через точку А
М
МП
А'
прямую d" (рис. 42), параллельную прямой d', и обозначим через В"
и М" проекции точек В и Ж на прямую d" (вдоль плоскости 6).
Плоскость л, определяемая прямыми d и d", пересекает плоскость ём,
проходящую через точку М параллельно плоскости б, по прямой,
проходящей через точки М и М". Прямые ММ" и ВВ", лежащие
в плоскости л, параллельны между собою, так что по известной
теореме элементарной геометрии
AM"
М"В"
ЖЕ
или
М"В"
MB
При этом, если точка М лежит внутри или вне отрезка АВ, то и
точка М" будет лежать соответственно внутри или вне отрезка
64
АФФИННАЯ СИСТКМЛ КООРДИНЛТ
[гл. in
АВ", так что в равенстве A) можно отрезки считать направлен-
направленными, т. е. написать пропорцию
AM"
AM
М" В" MB
Но АМ" = А'ЛГ, М"В" = М'В', так что -Л-^--= —'-, и лемма до-
М'В' MB
казана.
Рис. 42.
Если обозначить через Ах, Вх, Мх проекции точек А, В, М на
ось абсцисс, то из этой леммы сразу следует, что
~АМ :~МВ = а: р = ~АХ~МХ:мХ= (АХМХ): (МХВХ).
Ко (на оси Ох) имеем (АхМх)=х — xv (MXBX) =.v2 — х, так что
(х — х1):(хг — х) = а:$,
откуда
и аналогично
что дает во всех случаях определенную точку М=(х, у, г) ирс-
мой, за исключением случая а-|~р = 0, т. е. а:Р = — 1 (когда
получаем единственную несобственную, или «бесконечно удаленную»,
точку нашей прямой).
§ 3] ДЕЛЕНИЕ ОТРЕЗКА 65
При а = Р точка М будет серединой отрезка АВ, и для коор-
координат середины отрезка мы получаем следующие формулы:
" —' о ' —
Если а + Р^=0 и Р^=0, то, полагая -ц- = Я, можем переписать
полученные формулы в виде
_
П. С. Александров
ГЛАВА IV
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ.
ПОЛЯРНЫЕ КООРДИНАТЫ
§ 1. Прямоугольная система координат
на плоскости и в пространстве.
Расстояние между двумя точками.
Уравнение окружности и сферы
1. Прямоугольная система координат на плоскости и в про-
пространстве. Задание прямоугольной системы координат на плоскости
или в пространстве прежде всего предполагает, что выбрана одна
определенная единица длины, посредством которой измеряются длины
всех отрезков (на плоскости или в пространстве). Такую единицу
длины будем называть масштабом; считая его раз навсегда выбран-
выбранным, мы называем ортом всякий вектор, длина которого равна 1.
После того, как масштаб выбран, прямоугольная система коор-
координат определяется (как частный случай общей аффинной системы)
требованием, чтобы единичные координатные векторы (е2 и е2 па
плоскости; еь е2, е3 в пространстве) были взаимно перпендикуляр-
перпендикулярными ортами.
Замечание. Теперь мы во всей этой главе будем предпо-
предполагать, что система координат прямоугольная. Все проекции также
предполагаются прямоугольными.
2. Формула для длины вектора (для расстояния между двумя
точками) в прямоугольной системе координат. Пусть дан вектор
и = {х, у} (рис. 43). Приложим вектор и к началу координат:
и=ОМ.
Длину вектора u = C/W обозначаем через |и|= |СШ|. Обозначая
через Мх, Му проекции точки М на оси координат, имеем лг= (ОМХ),
у = {ОМу) и (по теореме Пифагора)
§ И
т. е.
РАССТОЯНИЕ МЕЖДУ ДВУМЯ ТОЧКАМИ
|» = | 0M|a = .
67
Аналогично в пространстве для вектора
и = {лг, у, z)
имеем
— квадрат длины вектора равен сумме квадратов его координат.
У/
Масштаб
Рис. 43.
Рис. 44.
Отсюда непосредственно вытекает формула для расстояния
р {Мъ М2) между двумя точками (рис. 44):
Так как
= (AT1, уг), Л42 = (*2, уа).-
— х1, У?, — Ух}, то
p (Mlt Мг) — IMXM21 = 4- у (x2 — xxy + (y2—угJ.
Аналогично в пространстве для точек
имеем
Р (Мх, М2) = | МгМ21 = -f- У {х2—хг)г-\- (у2 — УуJ + {г2—гг)а.
3. Уравнение окружности; замечание об уравнении линии
Boo6nie. Пусть на плоскости дана система прямоугольных коорди-
Нат. Рассмотрим на этой плоскости окружность с центром С~(а, Ь)
3*
68
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
и радиусом г (рис. 45). Эта окружность есть геометрическое место
точек М = (х, у) плоскости, расстояние которых от точки С
равно г. Другими словами, необходимым и достаточным условием,
чтобы точка М—(х, у) лежала на нашей окружности, является
условие
р(С, М)=г,
т. е.
Так как г>0, то уравнению A) эквивалентно
A)
B)
Уравнение B) называется уравнением окружности с центром
С—(а, Ь) и радиусом г. Если центр окружности находится в на-
начале координат, то ее уравнение
имеет вид
У
Вообще, уравнение, в котором (кро-
(кроме заданных постоянных чисел)
участвуют еще переменные х, у
(координаты какой-нибудь .точки
плоскости в данной системе коорди-
—*- нат), называется уравнением дан-
ной линии, если оно выражает необ-
необходимое и достаточное условие для
того, чтобы точка М={х, у) лежала
на данной линии.
Это определение, разумеется, пригодно и в случае любой си-
системы координат (а не только прямоугольной); так, уравнение
Рис. 45.
есть уравнение оси абсцисс, а
— уравнение оси ординат (данной произвольной аффинной системы
координат).
4. Уравнение сферы. В пространстве с данной прямоугольной
системой координат сфера {шаровая поверхность) с центром
С=(а, Ь, с) и радиусом г определяется как геометрическое место
точек М=(х, у, z), расстояние которых от точки С равно г.
Поэтому уравнение
{x-af + iy-bf + iz-cf^r* C)
§ 2]
СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
69
выражает необходимое и достаточное условие для того, чтобы
точка М=(х, у, г) лежала на нашей сфере: уравнение C) есть
уравнение сферы с центром С —(а, Ь, с) и радиусом т. Если центр
сферы находится в начале координат, то ее уравнение имеет вид
§ 2. Скалярное произведение векторов;
угол между двумя векторами
1. Угол между двумя векторами. Пусть (в пространстве или
на плоскости с выбранным раз навсегда единым масштабом) даны
два вектора их и и2, отличные от нулевого. Прилагая их к какой-нибудь
точке О пространства так, что и1 = ОЛ, щ = ОВ (рис. 46), полу-
получаем угол (в самом элементарном
смысле слова) между этими век-
векторами (или несущими их полу-
полупрямыми, исходящими из точки О).
Обозначим этот угол через ф;
он лежит в плоскости, несущей
прямые ОА и ОВ, и по величи-
величине заключен между 0 и я. Счи-
Считая, что каждый из векторов их,
и2 задает положительное направ-
направление на несущей его прямой,
мы каждую из этих прямых
превращаем в ось и, следователь-
следовательно, можем говорить об алгебраи-
ческом значении (прямоугольной '))
проекции каждого вектора на
В
Рис. 46.
ось, несущую другой вектор:
азпри|и2,
Эти алгебраические значения положительны, если угол ф острый
(рис. 47, а); они отрицательны, если угол ф тупой (рис. 47, б),
и равны нулю, если ф = ~ .
Из подобия прямоугольных треугольников ОАА' и ОВВ' заклю-
чаем, что igU _
дГ
т. е.
| аз нрП[ и21
) Никаких других проекций, кроме прямоугольных, мы в этой главе
Рассматривать не будем.
70
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
Так как, кроме того, азпри1и2 и азпри,^ имеют один и тот же
знак (положительный, если угол ф острый, отрицательный, если
в
Рис. 47.
этот угол тупой), то
азпРц. »г_азпРиг»1
Каждое из этих отношений может быть принято за определение
косинуса угла <р между векторами щ и и2:
аз пр„ и.. аз пр„ ut
§ 2]
СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ
71
Как видно из рис 47, это определение cosop совпадает с опреде-
определением, известным из тригонометрии.
Из формулы A) вытекает:
азпрИ1 щ = \
cosф
B)
алгебраическое значение проекции одного вектора на ось, опре-
определенную другим, равно длине проектируемого вектора, умножен-
умноженной на косинус угла между двумя векторами.
2. Направляющие косинусы. Пусть п = {х, у, г} —какой-нибудь
ненулевой вектор, a, |S, 7 — УГЛЫ между этим вектором и ортами
ех, е2, е3 координатных осей (рис. 48). Тогда сова, cosp, cosy назы-
называются направляющими косинусами
вектора и.
Так как х= аз пре, и, у —
= азире2и, 2 = азпрСзи, то в силу
формулы B) имеем:
= |u| coscu/ = |u
z = I u I cos y.
C)
Рис. 48.
В частности, если и есть орт, то | и | =
= 1 н
л; = cos а, г/= cosp,
z = cos у
— координаты орта равны его направляющим косинусам. Далее из
C) получаем
| и I2 = х2 + г/2 + г2 = I u I2 (cos2 a + cos2 p + cos2 Y),
откуда, сокращая на |и|2=?0, имеем
cos2a + cos2p + cos2Y = l D)
— сумма квадратов направляющих косинусов любого вектора u =fc О
равна 1.
Пусть даны произвольные три числа ?> т), ?, удовлетворяющие
равенству
Отложим на осях координат векторы OCV OCZ, OCZ, алгебраиче-
алгебраические значения которых соответственно равны числам ?, т], 2j, и
построим на этих векторах (прямоугольный) параллелепипед (рис. 49).
Исходящая из точки О диагональ ОС этого параллелепипеда имеет
72
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
длину, равную ? +
| = cosa, T)~cosp",
¦2-(-?2=1, и является ортом с координатами
= С0Бу. Итак, любая тройка чисел |, г), ?,
у довлетворяющаяу равнению
D'), является тройкой ко-
координат («направляющих ко-
косинусов») некоторого орта в
пространстве.
3. Скалярное произ-
произведение двух векторов.
Введем теперь следующее
фундаментальное определе-
определение: скалярным произведе-
произведением двух векторов ux, U2
называется число (nv u2),
равное произведению длин,
этих векторов на косинус
JC
угла ср между ними:
(Ub «2> =! Ul
l «2
E)
Скалярное произведение ну-
нулевого вектора на любой
рис 49. вектор полагается равным
нулю.
Из этого определения сразу вытекают следующие свойства ска-
скалярного произведения:
¦—свойство переместительности.
тогда и только тогда, когда векторы иг и и2 перпендикулярны
между собою 1).
Далее, если U1 = u2==u, то ср = О, coscp = l, jux} = |u2| = |u |.
Итак,
HI. (u, u) == | u |2
— скалярное произведение вектора на самого себя ('.(скалярный
квадрат вектора») равно квадрату его длины; скалярный квадрат
равен нулю для нулевого вектора и положителен для всякого век-
вектора, отличного от нулевого.
') Так как нулевой вектор имеет неопределенное направление, то егэ
можно считать перпендикулярным к любому вектору.
Л 2] ' СКАЛЯРНОЕ ПРОИЗВЕДЕНИЕ ВЕКТОРОВ 73
Подставляя значение coscp из A) в E), получаем
IV. (иь и2) = |и2|азприги1 = |и1|азпри, и2
скалярное произведение двух векторов равно произведению длины
одного из них на алгебраическое значение проекции другого век-
вектора на ось, несущую первый.
В частности, для любого вектора и — {х, у, z\ и координатных
ортов ех, е2, е3 имеем (и, ех) = азнре1 п = х и т. д., т. е.
V. # = (и, еД г/ = (и, е2), z = (u, e3)
координаты любого вектора в прямоугольной системе координат
равны скалярным произведениям этого вектора на орты осей коор-
координат.
Из равенства IV вытекает: каково бы ни было вещественное
число X, имеем
(Xul u2) = ] u21 азnpu2 \ul = \u2\\ аз npU2 ux = X| u21 аз npUjиъ
т. е.
VI. (К- и2) = Я(иъ u2)
— числовой множитель можно выносить за знак скалярного про-
произведения.
Из того же равенства IV вытекает далее:
(ux + u2, v) = | v | аз npv (ux + u2) = | v 1 аз npv ux +1 v | аз npv u2,
т. е.
VIF. (u,+u8, v) = (Ul, v) + (u2, v) F)
— свойство дистрибутивности относительно сложения.
Из VI и VII следует, что скалярное произведение двух линей-
линейных комбинаций векторов можно вычислить по правилу умножения
многочленов, например:
2, v2) + Х3ц2 (u3, v2).
4. Выражение скалярного произведения и угла между двумя
векторами через координаты этих векторов. Пусть (на плоскости)
ui = {*i, yt}, и2 = {дг2, у2}.
Это значит, что
74 ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ [ГЛ. IV
Тогда в силу V—VII имеем
(«1, Щ) = (х1е1 + у1ег, Jf2e1 + «/2e2) =
= лг1лг2(е1, е^ + г/^е.,, ej + x^ (ех, е2) + .ад, (е2- е2).
Но векторы ех и е2 суть взаимно перпендикулярные орты, так что
(ei> е2) = (е2, ех)=0 и (el5 et) = (е2, е2)=1; значит,
(Ui, и2)=дг1дг2 + 1/1(/2. G2)
В пространстве для
Ui = {*i> Ук zi\, U2={x2, г/2, 2г2}
получаем (совершенно так же)
(«1, ^)=X1X2 + y1y2+ZlZ2. Gз)
Эти формулы очень важны и имеют многочисленные применения.
В частности, они позволяют определить угол <р между двумя векто-
векторами пг= {х1г yv Zj] и и2=={лг2, уг, z2] по координатам этих век-
векторов: для этого достаточно переписать формулу E) в виде
СО5ф = гН1ЬН5
Т I 1-1 "а I
и подставить в нее значение длины векторов иъ щ н их скалярного
произведения G). Получаем
cos ф =
V
(корни в знаменателе берутся положительные).
Легко получить также формулу, дающую алгебраическое значе-
значение проекции произвольного вектора и — {х, у, z] на ось с направ-
направляющими косинусами cos a, cos |3, cos у. Для этого переписываем
формулу E) в виде
т, е. в виде
(«1.
азпри1и2 —-
i "i i
Если u2 = u = {лг, у, z}, viy = e = {cos a, cos B, cos у}, т. е. | ux [
= ]ej = l, то мы получаем
азпреи = xcosa + y cos B + ^cosy. (9)
Эта формула очень удобна в применениях.
§ 3]
УГОЛ МЕЖДУ ВЕКТОРАМИ
75
§ 3. Угол от одного вектора до другого на плоскости
В §§ 1, 2 мы рассматривали векторы в пространстве. В этом
параграфе будем рассматривать лишь векторы, лежащие в плоскости.
Вращением плоскости вокруг данной ее точки О (центр вращения)
называется движение этой плоскости по себе самой, заключающееся
в том, что точка О остается
неподвижной, а все осталь-
остальные точки перемещаются
по (лежащим в нашей плос-
плоскости) окружностям с цен-
центром О.
Вращение плоскости вок-
вокруг центра О можно произ-
производить в двух направлени-
направлениях: по часовой стрелке и
против нее.
Предположим, что в
плоскости задана прямо-
прямоугольная система координат
0ехе2. Посредством враще-
вращения вокруг точки О орт ех
можно совместить с ортом
е2 двумя способами: повер-
повернув его на угол -^ в одном
или на угол ~- в проти-
противоположном направлении.
Мы условимся считать поло-
положительным то из двух нап-
направлений вращения, которое
переводит орт ех в орт е2
посредством поворота на
Y • Таким образом, если
на плоскости дана прямо-
угольнаясистема координат,
то определено и положитель-
положительное направление вращения.
Пусть на данной плоскости одно из двух возможных направлений
вращения выбрано в качестве положительного. Возьмем на нашей
плоскости два вектора и и v. Приложим оба вектора к одной и той
же точке О (рис. 50), так что
76
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
Назовем углом от вектора и до вектора v или наклоном вектора v
к вектору и тот угол ф, на который в положительном направлении
надо повернуть вектор и
так, чтобы его направление
совпало с направлением ве-
вектора v1). Этот угол изме-
а ннется от 0 до 2я. Если и
есгь единичный вектор ка-
какой-либо оси, то угол от
вектора идо вектора v назы-
называется углом наклона или
просто наклоном вектора v
к данной оси.
Пусть в плоскости дана
прямоугольная система ко-
координат. Для угла наклона а вектора v = {|, т]} к оси абсцисс
(рис. 51) имеем, очевидно,
СО
Рис. 51.
cos а =
М
, sin а =
1
Эти равенства могут служить определением тригонометрических
функций. В частности, если
<У v = {g, т]} есть орт е (рис. 52),
то его координаты ? и ц суть
? = cos а, г] = sin а. Поэтому фор-
формула (9) из § 2, дающая выражение
алгебраического значения проек-
проекции вектора и — {х, у} на ось,
определенную ортом е = {cos a,
sin а}, принимает теперь вид
аз пре и = (и, е) =
= х cos a -f- у sin а. A)
Если векторы ut и и2 наклонены
к оси абсцисс соответственно под
углами ах и а2 (рис. 53), то угол
ф от вектора щ до вектора иа
есть, очевидно,
ф = а2—av B)
(Надо сначала повернуть вектор ех на угол ах—тогда он пойдет по
') Если на плоскости с выбранным на ней положительным направлением
вращения даны два вектора и = ОА, и ч — ОВ, то каждый из углов фх от и
до v и ф2 от v до и является дополнением другого до 2я; оба угла имеют
одип и тот же косинус; тот из этих двух углов, который заключен между О
и я, есть угол между векторами и и \.
(С
Рис. 52.
§ 4]
ПОЛЯРНАЯ СИСТЕМА КООРДИНАТ
77
направлению щ; сделав еще поворот на угол ор—все время в поло-
положительном направлении, — получим направление вектора иа, накло-
Рис. 53.
ненного к оси абсцисс под углом а2, так что а1 + ф = а2.) Из фор-
формулы B) следует при nl = {x1, i/1}, u2 = {jc2, y2)
sin (а2
.
= sina2 cos аг — cosa2
= со5(а2 — ax) = cos oc2 cos ax -f- sin a2 sin ах =
, .
(ult u2)
C)
I "l I -I I I |-| I "
Мы получили, в частности, уже известную нам формулу для cosq>.
§ 4. Полярная система координат на плоскости
1. Определение полярных координат. Понятие угла наклона
вектора к данной оси находит постоянные применения в геометрии
плоскости. Одним из важнейших среди них является опреде-
определение полярных координат.
Для определения системы полярных координат на плоскости надо
задать:
1° Масштаб (г. е. единицу измерения длины).
2° Направление вращения в плоскости, считаемое положительным.
3° Точку О (называемую «началом» или полюсом системы коор-
координат).
4° Полупрямую Ох, исходящую из точки О (рис. 54) (эта полу-
полупрямая называется полярной осью1)). Положительное направление на
J) Согласно принятой нами терминологии ее следовало бы называть
полярной полуосью.
78
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРЛИНАТ
[гл. rv
полупрямой задается вектором ОЕ (где Е — любая ее точка, отличная
от точки О).
Если таким образом выбрана полярная система координат, то для
каждой точки М (рис. 55) плоскости определены ее полярные коор-
координаты, а именно:
1) угол наклона ср вектора ОМ к полярной оси (т. е. угол от
вектора ОЕ до вектора ОМ);
2) расстояние г точки М от начала О (т. е. длина векто-
вектора О~М).
Угол ф называется полярным углом1) точки М или первой по-
полярной координатой этой точки. Полярный угол определен для всех
Мати/пад
Рис. 54.
точек М плоскости (и заключен между 0 и 2л), за единственным
исключением точки О, для которой он делается неопределенным.
Число г называется полярным радиусом или второй полярной коор-
координатой точки М. Полярный радиус любой точки М, отличной от О,
положителен; для точки О он равен нулю.
Иногда бывает целесообразно считать полярный угол точки опре-
определенным лишь с точностью до слагаемых вида 2kn, где k — любое
целое2) число, т.е. считать наряду с данным <р и всякое число
Ф + 2/гл за значение полярного угла: если дано произвольное поло-
положительное г и произвольное не ограниченное никаким дополнительным
условием действительное число ф, то, взяв на полярной оси вектор
ОА длины г и повернув его в положительном направлении вокруг
точки О на угол ф, получим вектор ОМ, конец которого будет иметь
J) Или амплитудой.
2) Или любое неотрицательное целое число.
§ 4]
ПОЛЯРНАЯ СИСТЕМА КООРДИНАТ
79
полярные координаты ф и г. Точку М, полярные координаты которой
равны данным ср и г, будем обозначать так: ЛТ=<ф, л>.
Пример. Пусть а>0. Будем давать углу всевозможные значе-
значения ф ^ 0. Множество всех точек с полярными координатами ф и
/- = аф (т.е. множество всех точек /И=<ф, #ф>, где ф пробегает
Масшщав
Рис. 56.
все значения ф ^ 0 (рис. 56)) образует кривую, называемую спи-
спиралью Архимеда. Уравнение
которому удовлетворяют полярные координаты любой точки М спи-
спирали Архимеда, называется уравнением этой кривой в полярных ко-
координатах.
2. Связь прямоугольных координат с полярными. Если на пло-
плоскости дана полярная система координат, то этим определена и не-
некоторая прямоугольная система координат: за масштаб и начало
координат в этой прямоугольной системе берем масштаб и начало
полярной системы; полярную полуось объявляем положительной по-
луосыо абсцисс. Таким образом определена ось абсцисс (вместе
с ее направлением). Так как в определение полярной системы
80
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
Масштаб
входит и направление положительного вращения плоскости, то мы можем
определить oq_ ординат как ту ось, в которую перейдет ось абсцисс
я
при повороте ее на угол-^- в
положительном направлении.
Полученную таким образом
прямоугольную систему коор-
координат будем называть систе-
системой, определенной данной по-
полярной системой (рнс. 57).
Обратно, если дана какая-
нибудь прямоугольная система
координат, то однозначно оп-
определяем полярную систему,
сохраняя в ней масштаб и на-
начало данной прямоугольной
системы и требуя,чтобы поляр-
полярная полуось совпадала с поло-
положительной полуосью абсцисс,
Рис. 57.
а положительное направление
вращения было тем вращением,
которое переводит ось абсцисс
в ось ординат поворотом на угол -^. Очевидно, если мы для полу-
полученной таким образом полярной системы координат построим опреде-
определенную ею прямоугольную, то вернемся к исходной прямоугольной
системе.
Итак, каждой полярной системе координат соответствует вполне
определенная прямоугольная система, и обратно.
Посмотрим, как связаны между собою координаты х, у и ф, г
какой-нибудь точки М плоскости в обеих системах.
Имеем очевидные формулы:
x = r cos
у = г sin ф
Ф. \
A)
Они позволяют перейти от полярных координат точки М к прямо-
прямоугольным. Но онн же позволяют произвести и обратный переход по
формулам:
B)
К 4] ПОЛЯРНАЯ СИСТЕМА КООРДИНАТ
Из двух последних равенств B) вытекает
81
-i- О)
Но формула C) позволяет определить угол ф лишь с точностью до
слагаемых вида kn при целом k.
3. Примеры. Дадим еще несколько примеров кривых, заданных
их уравнениями в полярных координатах.
1° Гиперболическая спираль определяется как множество всех
точек М, полярные координаты которых связаны между собою урав-
уравнением"
где а—положительная постоянная, а полярный угол ф пробегает
все положительные значения. Начав исследование уравнения D)
с какого-нибудь положительного значения Ф = Ф0 и заставляя ф воз-
возрастать, видим, что полярный радиус точки Ж=<ф, г>, монотонно
уменьшаясь, стремится к нулю при неограниченном возрастании ф,
так что кривая, совершая бесконечное число оборотов, неограниченно
У
Масштаб
Рис. 58.
приближается к началу О, никогда его, однако, не достигая. Если
мы теперь, начиная с данного ф = ф0, будем давать углу ф монотонно
Убывающие значения, ф •—>- 0, то г будет неограниченно возрастать.
Для того чтобы понять, как при этом убывании ф и возрастании г
Удет изменяться положение точки М=<ф, г>, воспользуемся второй
из Формул A), а именно:
у; = г sin ф.
82
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
Подставляя сюда значение /" = —, получаем
у=а
sincp
"ф
откуда видно, что при ф, стремящемся к нулю, ордината точки у
стремится к а, так что кривая при возрастании г уходит в беско-
бесконечность, неограниченно приближаясь к прямой у — а. Это обсто-
обстоятельство выражают, говоря, что прямая у = а является асимптотой
гиперболической спирали D).
Произведенное исследование показывает, что гиперболическая
спираль имеет вид, указанный на рис. 58.
2° Логарифмическая спираль. Она определяется как совокупность
точек Л1 = <ф, /•>, полярные координаты которых удовлетворяют
уравнению
г=а\ в>1. E)
Примем за положительное направление вращения направление
против часовой стрелки. При ф = 0 получаем точку Л1 = <0; 1>.
При возрастании ф возрастает и г (в частности, когда <р возрастает
на 2я, то полярный радиус умножается на а2л, спираль быстро
«раскручивается» против
Масштаб часовой стрелки). Если же
1—1 ф, начиная со значения
ф = 0, принимает неограни-
неограниченно возрастающие по
абсолютной величине от-
отрицательные значения, то г
стремится к нулю — спираль
закручивается по часовой
стрелке, неограниченно при-
приближаясь к точке О.
Общий вид логарифми-
логарифмической спирали дан на
рис. 59.
Среди многочисленных
замечательных свойств ло-
логарифмических спиралей от-
отметим следующее: две подобные между собою логарифмические спи-
спирали конгруэнтны (т. е. могут быть совмещены посредством движе-
движения1)). Мы докажем важнейший частный случай этой теоремы, а
именно следующий.
Логарифмическая спираль r-а?(а»1,2)
Рис. 59.
*) Подобные преобразования и движения подробно изучаются в главе XI.
Здесь мы предполагаем известными лишь те сведения о них, которые читатель
получил в школе.
§ 4] ПОЛЯРНАЯ СИСТЕМА КООРДИНАТ 83
Пусть логарифмическая спираль дана своим уравнением
г=--а\ а>\, E)
в определенной полярной системе координат. При растяжении (гомо-
(гомотетии) плоскости с центром в начале координат О и коэффициентом
растяжения k > 0г) эта спираль переходит в ту же спираль, но
повернутую на угол —с, где
c = logo&.
В самом деле, при нашем растяжении каждая точка
переходит в точку
Л1' = <ф, kr>.
В частности, точка <ф, с?> перейдет в точку <Чр, ka?y = <<p,
Значит, множество точек, удовлетворяющих уравнению
переходит в множество точек, удовлетворяющих уравнению
Другими словами, растянутая с коэффициентом растяжения k логариф-
логарифмическая спираль имеет своим уравнением в полярных координатах
уравнение
г = ач+с. F)
При повороте на угол —с точка /И=<ср, г> переходит в точку
М* = <ф — с, /•>. Значит, если точка /И=<ф, /•> удовлетворяла
уравнению E), то после поворота она перейдет в точку
М* = <ср — с, /•>, удовлетворяющую уравнению
г=ач+с. F)
Это и будет уравнение нашей спирали, повернутой на угол —с;
мы видим, что она совпадает с уравнением спирали, растянутой
с коэффициентом растяжения k. Теорема доказана.
Замечание. Мы рассмотрели лишь случай а>1; читателю
предлагается разобрать логарифмическую спираль при положительном
в< 1. При а=\ логарифмическая спираль, очевидно, превращается
в окружность.
х) Под этим растяжением мы понимаем преобразование плоскости, ставя-
ставящее в соответствие каждой точке М, имеющей (в какой-либо полярной системе
координат с началом О) координаты <р, г, точку М', имеющую в той же
системе координаты ср, kr.
84
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
3° Кршая, уравнение которой в полярных координатах есть
г = a cos Зф
я
при—у
5я 5л; _» ^. я
-ё-, ^-<ф<—g- , имеет вид,
Рис. 60.
указанный на рис. 60. Эта кривая иногда называется «трехлепест-
ковой розой».
§ 5. Полярная система координат в пространстве
Для ее определения необходимы следующие элементы (рис. 61):
1° Плоскость (называемая далее основной) с выбранной в
ней полярной системой координат: начало О, полярная полуось Ох
(с положительным направлением ОЕ), масштаб, принимаемый в
качестве единого масштаба для всех измерений отрезков во всем
пространстве.
§ 5]
полярная система координат в пространстве
85
2° Выбор на пряной Ог, перпендикулярной к основной плоско-
плоскости одного из двух ее ортов в качестве положительного (что дает
нам' на этой прямой систему координат с началом О).
Основная плоскость разбивает пространство на два полупростран-
полупространства; то из них, которое содержит положительный орт прямой Ог,
считаем положительным.
Теперь для каждой точки М пространства (не лежащей на прямой
Oz) определяются ее координаты в данной системе полярных коор-
координат, а именно:
а) полярный радиус р точки М, т. е. длина вектора | ОАГ |; имеем
всегда р ^ 0; только для точки М = О имеем р = 0;
б) долгота ф точки М — это полярный угол ортогональной про-
проекции Мо точки М на основную плоскость относительно данной
в этой плоскости полярной системы координат; долгота изменяется
в пределах 0^ф<2я;
в) широта о|з точки М—это угол между вектором ОМ и его про-
проекцией ОМ0 на основную плоскость, считаемый положительным,
И
Рис 61.
-k-, длЯ точек М положительного полупространства и отри-
Цательным, —-^-^ajj^O, для точек отрицательного полупростран-
полупространства.
Та же полярная система координат в пространстве позволяет
Для каждой точки М пространства определить и так называемые
Цилиндрические координаты ее, а именно: полярные координаты ф, г
(н основной плоскости) точки Мо (проекции точки М на основ-
НУЮ плоскость) и аппликату, или высоту точки М над основной
86
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ
[ГЛ. IV
плоскостью, т. е. координату точки Мг (ортогональной проекции
точки М на ось Oz) относительно системы координат, данной на этой
прямой (рис. 62).
Полярная система координат в пространстве определяет прямо-
прямоугольную систему, состоящую из прямоугольной системы Оху,
Рис. 62.
порожденной в основной плоскости заданной в ней полярной систе-
системой, и оси Oz.
Читатель без труда докажет следующие соотношения, связыва-
связывающие полярные координаты р, ф, о|э и прямоугольные координаты
х, у, z в пространстве:
х = р cos г|з cos ф,
у = р cos г|з sin ф,
z—p sin -ф.
Эти формулы позволяют выразить х, у, z через р, ф, i|) и обратно.
Что касается соотношений между цилиндрическими и прямоуголь-
прямоугольными координатами точки М, то аппликата z в обеих этих системах
одна и та же, а связь между ср и г цилиндрической системы и х, у
прямоугольной дается уже известными нам формулами:
ГЛАВА V
ПРЯМАЯ ЛИНИЯ
§ 1. Направляющий вектор и угловой коэффициент прямой
(в произвольной аффинной системе координат).
Уравнение прямой
Определение. Всякий ненулевой вектор, коллинеарный дан-
данной прямой, называется ее направляющим вектором.
Так как всякие два направляющих вектора ult и2 одной и той же
прямой коллинеарны между собою, то один из них получается из
другого умножением на некоторое чис-
число фО.
Ббльшая часть этой главы посвя!цена
исследованию прямых линий на плоскости;
лишь в §§ 4 и 10 рассматриваются пря-
прямые в пространстве; прямые в простран-
пространстве будут изучаться еще и в главе X.
Предположим, что в данной плоскости
раз навсегда выбрана некоторая аффин-
аффинная система координат.
Рассматриваем сначала случай прямой
d, параллельной одной из координатных
осей. Если прямая d параллельна оси
ординат, то (согласно замечанию на
стр. 40) ее направляющими векторами
являются все векторы вида {0, г\\ и толь-
только они (здесь Г|—произвольное число
=5^=0). Точно так же ненулевые векторы
вида {|, 0} и только эти векторы являются направляющими векто-
векторами любой прямой, параллельной оси абсцисс.
Пусть прямая d параллельна оси ординат и пересекает ось
абсцисс в точке А = {а, 0) (рис. 63). Тогда все векторы ОМ, где
М—произвольная точка прямой, при проектировании на ось абсцисс
(вдоль оси ординат) переходят в один и тот же вектор ОА: для
88 ПРЯМАЯ ЛИНИЯ [ГЛ. V
всех точек М нашей прямой (и только для них) имеем
х = а.
Это и есть уравнение прямой, параллельной оси ординат. Анало-
Аналогично прямая, параллельная оси абсцисс, имеет уравнение
у = ь.
(При этом параллельность понимается в широком смысле1) — сама
ось ординат имеет уравнение лг = О, а ось абсцисс у — О.)
Имеет место следующее простое предложение:
Для всех направляющих векторов и = \х, у} данной пр'ямой, не
параллельной оси ординат, отношение у.х ординаты вектора к его
ибсциссе имеет одно и то же постоянное значение k, называемое
угловым коэффициентом данной прямой.
В самом деле, если u1 = {xl, yt\ и и2 = \х2, У2\—два направля-
направляющих вектора данной прямой d, то u2 = Xu1, т. е. одновременно
х2 = Ъ.хъ у2 = \уъ
и, значит (так как л^^О, х2=?0),
y2:x2=y1:xv
Замечание 1. Направляющий вектор прямой, параллельной
оси ординат, имеет вид и={0, т]}, ri^O; поэтому угловой коэффи-
коэффициент прямой, параллельной оси ординат, равен оо.
Угловой коэффициент прямой, параллельной оси абсцисс, есть О,
Замечание 2. Всякий вектор и=\х, у}, для которого отно-
отношение у.х равно угловому коэффициенту k данной прямой d, есть
направляющий вектор этой прямой.
Для прямых, параллельных какой-нибудь из осей координат,
утверждение очевидно (так как тогда k = О или k = оо и вектор
и = {лг, у), для которого y:x = k, параллелен соответствующей оси
координат). Пусть прямая d не параллельна ни одной из осей коор-
координат и ul=\xv уг\ есть какой-нибудь направляющий вектор этой
прямой. Тогда k=y1:x1 = у.х, -^=^1, т.е. вектор и коллинеарен
направляющему вектору их прямой d и, следовательно, сам является
ее направляющим вектором.
Замечание 3. Если система координат прямоугольная, то для
углового коэффициента k прямой d имеем k = tg а, где а есть угол
наклона любого направляющего вектора прямой d к оси абсцисс *).
Найдем теперь уравнение прямой d, не параллельной оси ординат
(система координат снова произвольная аффинная). Обозначим угло-
2) См. гл. II, § 4, сноска на стр. 44.
2) Считая, что tgoc есть отношение tga=sina:cosoc, имеем tgY=«-
§ 1]
НАПРАВЛЯЮЩИЙ ВЕКТОР
89
вой коэффициент прямой d через k, а точку ее пересечения с осью
Оу через Q=@, b) (рис. 64).
Если М = (х, у)— произвольная точка прямой d, отличная от
точки Q, то вектор QM={x, у — Ь\ есть направляющий вектор пря-
прямой d и, следовательно,
Другими словами, все точки М={х, у) прямой d удовлетворяют
уравнению:)
y = kx + b. A)
Обратно, всякая точка Мх = (хх, yj, удовлетворяющая уравне-
уравнению A), лежит на прямой d: в самом деле, существует единствен-
единственная точка М с абсциссой хъ лежащая на прямой d, и эта точка,
х
Рис, 64.
имея ту же абсциссу хг, что и точка Mv удовлетворяет уравнению
A) и, значит, имеет ординату y1 = kx1-\-b — ту же, что и точка Mv
Значит, M'—Mlt т. е. точка Мх лежит на прямой й.
Итак, уравнению A) удовлетворяют все точки прямой d и толь-
ко они, а это и значит, что уравнение A) есть уравнение пря-
прямой d.
Пусть мы каким бы то ни (}ыло способом нашли уравнение вида A),
к°торому удовлетворяют все точки данной прямой d и только они.
*) Точка Q=@, b) также ему удовлетворяет.
90 ПРЯМАЯ ЛИНИЯ [ГЛ. V
*
Докажем, что тогда непременно b есть ордината Q пересечения пря-
прямой d с осью ординат, a k есть угловой коэффициент этой прямой.
Первое утверждение очевидно: для нахождения точки Q пересе-
пересечения прямой d с осью ординат надо в уравнение A) подставить
лг = О; получаем у — Ь, т. е. Q = @, b). Далее, при любом выборе
отличной от Q точки М = (х, у) прямой d вектор QM={x, у — Ь}
есть направляющий вектор этой прямой, и, следовательно, —7~==^
есть угловой коэффициент прямой d.
Итак, существует единственное уравнение вида A), являющееся
уравнением, данной прямой d (не параллельной оси ординат). Это
уравнение — первой степени; так как и прямая, параллельная оси ор-
ординат, определяется уравнением первой степени х—а, то мы дока-
доказали, что всякая прямая на плоскости определяется некоторым урав-
уравнением первой степени, связывающим координаты ее точек.
Докажем обратное предложение. Пусть
у + С = 0 B)
— произвольное уравнение первой степени относительно х и у. До-
Докажем, что оно является уравнением некоторой прямой.
Возможны два случая: В = 0 или ВфЪ.
Рассмотрим первый случай: В = 0. Тогда уравнение B) имеет вид
Ах+С=0 B')
и Аф§ (иначе не было бы уравнения, а было бы верное или не-
неверное тождество С = 0); следовательно,
С
* = -т>
т. е. уравнение B') является уравнением некоторой прямой, парал-
параллельной оси ординат.
Переходим ко второму случаю: В^=0. Тогда уравнение B) пе-
переписывается в виде
А С
ух
определяет прямую d, пересекающую ось ординат в точке
—гг) и имеющую угловой коэффициент k= »-, что и
требовалось доказать.
Д
Замечание 4. Так как k — »-, то вектор
есть направляющий вектор прямой B). Это утверждение верно и прн
В = 0 (т. е. для прямых, параллельных оси ординат).
§ 2] РАСПОЛОЖЕНИЕ ДВУХ ПРЯМЫХ 91
Отсюда следует, что направляющими векторами пряной d (опре-
(определенной уравнением B)) являются все векторы
« = {s, л},
где | = — кВ, г\ = ХА (при каком-нибудь ХфО). Очевидно, эти век-
векторы удовлетворяют уравнению
А1 + Вц = 0. C)
Обратно, если вектор и = {?, ч\} удовлетворяет уравнению C), то
^:т] = — В:А, т. е. и есть направляющий вектор прямой d; случай
прямой, параллельной оси ординат, исключением не является.
Другими словами: все векторы u = {?, т]}, удовлетворяющие урав-
уравнению C) и только они, коллинеарны прямой, определенной урав-,
пением B).
§ 2. Расположение двух прямых на плоскости
Пусть теперь даны два уравнения:
0, A)
0. (Г)
Посмотрим, когда прямые d и d', определяемые этими уравнени-
уравнениями, параллельны в широком смысле, когда они совпадают, когда
параллельны в собственном смысле (т. е. не имеют ни одной общей
точки).
Ответ на первый вопрос получается сразу: прямые d и d' тогда
и только тогда параллельны в широком смысле, когда их направ-
направляющие векторы и0 — {—В, А} и uj, = {—В', А'} коллинеарны, т. е.
когда имеет место пропорция (—В):Д = (—В'):А', а следовательно,
и пропорция
А':В'=А:В. B)
Если эта пропорция может быть продолжена до пропорции
А':В':С =А:В:С, C)
то прямые dud' совпадают: в этом случае все коэффициенты од-
одного из двух уравнений A), A') получаются из коэффициентов дру-
другого умножением на некоторое Я и, значит, уравнения A) и A')
эквивалентны (всякая точка М — (х, у), удовлетворяющая одному
Уравнению, удовлетворяет и другому).
Обратно, если две прямые d и d' совпадают, то имеет место
чропорция C).
Докажем это сначала в случае, когда наши прямые параллельны
°си ординат. Тогда В=В' = 0, и нам нужно доказать только равен-
Ство С":А' ~С:А. Но последнее равенство (в котором А' фО,
92 ПРЯМАЯ ЛИНИЯ [ГЛ. V
вытекает из того, что обе (совпадающие) прямые пересекают ось
С С
абсцисс в одной и той же точке с абсциссой — —гг = — ~т ¦
Пусть теперь совпадающие прямые d, d' не параллельны оси
ординат. Тогда они пересекают ее в одной и той же точке Q с ор-
С С
динатой 57- = б- и мы имеем пропорцию В':С — В:С, которая
о о
вместе с пропорцией B) (выражающей параллельность прямых d и d'
в широком смысле) и дает нам искомую пропорцию C).
Параллельность в собственном смысле означает, что имеет место
параллельность в широком смысле (т. е. выполнено условие B)), но
нет совпадения (т. е. не выполнено C)). Это означает, что пропорция
А':В'=А:В B)
имеет место, тогда как
А':В':С'фА;В;С. D)
Совокупность днух соотношений B) и D) обычно записывают в виде
одной формулы х):
А ВС
ф @)
Подведем итог всему доказанному.
Теорема 1. Всякая прямая d на плоскости, снабженной аф-
аффинной системой координат, определяется некоторым уравнением,
первой степени между координатами ее точек. Обратно, всякое урав-
уравнение первой степени,
Ах + Ву + С = 0 A)
является уравнением некоторой (единственной) прямой d; при этом
все векторы и = {|, х\\, коллинеарные этой прямой, и только они
удовлетворяют однородному уравнению
AZ + Вц^О, F)
так что, в частности, вектор ио—{—В, А} является направляющим
вектором нашей прямой. Два уравнения
Ах + Ву + С = 0, A)
А'х + В'у + С' = 0 (Г)
тогда и только тогда определяют одну и ту же прямую, когда
А':В':С'=А:В:С. C)
Пропорция
А':В'=А:В B)
См. § 9 главы I.
§ 3] ЧАСТНЫЕ СЛУЧАИ ОБЩЕГО УРАВНЕНИЯ ПРЯМОЙ 93
выражает условие, необходимое и достаточное, чтобы уравнения A)
и (]') определяли прямые, параллельные в широком смысле.
Для параллельности в собственном смысле необходимым и до-
достаточным является требование, чтобы выполнялось условие B) без
выполнения условия C), что записывается и в виде E).
Замечание. Общее уравнение A) первой степени часто назы-
называют «общим уравнением прямой на плоскости»; уравнение вида
у = kx + Ь
называется «.уравнением с угловым, коэффициентом». Вместо того,
чтобы говорить «прямая, определяемая уравнением A)», говорят
просто «прямая A)».
§ 3. Частные случаи общего уравнения прямой
Мы видели, что обращение в нуль одного из коэффициентов А
или В означает, что прямая
0 A)
параллельна (в широком смысле) одной из координатных осей (оси
Ох, если А —0, и оси Оу, если В = 0).
Равенство С=0, очевидно, необходимо и достаточно, чтобы
точка О = @, 0) лежала на нашей прямой. Обращение в нуль двух
коэффициентов: Д = С=0, соответственно В — С = 0, означает, что
прямая есть ось абсцисс (при А = С = 0), соответственно ось ординат
(при ? = С=0).
Если прямая не проходит через начало координат и не парал-
параллельна ни одной из координатных осей, то ни один из коэффициен-
коэффициентов в ее уравнении A) не равен нулю, и само это уравнение может
быть записано в виде
__ c_ ^ _
A
т- е. в виде
~а"^Т
где
С
полагая в этом уравнении i/ = 0, соответственно лг = 0, получаем
точки пересечения (рис. 65)
Р=(а, 0), Q = @, Ь)
94
ПРЯМАЯ ЛИНИЯ
[гл. v
нашей прямой с осями координат—коэффициенты ииЬ уравне-
уравнении B) являются соответственно абсциссой первой и ординатой
второй из этих точек; они, как принято было говорить в старину,
Рис. 65.
«выражают отрезки, отсекаемые прямой B) на осях координат».
Поэтому уравнение B) называется «уравнением прямой в отрезках».
§ 4. Векторная и параметрическая форма уравнения прямой.
Уравнение прямой, проходящей через две заданные точки
Пусть дана какая-нибудь точка
Считаем приложенным к точке Мо:
Мо и вектор ио^=О, который
и0 =
Эти данные определяют прямую d как геометрическое место концов
всевозможных векторов вида
где t пробегает все вещественные числовые значения.
A)
Вектор
uo = ./WoM1, очевидно, является направляющим вектором прямой d.
Можно сказать, что наша прямая есть геометрическое место всех
точек /И, удовлетворяющих уравнению A), а само это уравнение
можно назвать уравнением прямой в векторной форме (или вектор-
векторным уравнением прямой). Ясно, что каждая прямая может быть за-
задана, таким образом, какой-нибудь своей точкой Мо и (приложенным
к этой точке) направляющим вектором мо-=МоМг. Существенным
преимуществом уравнения A) является то, что оно позволяет задать
прямую не только на плоскости, но и в пространстве: ведь все до
§ 4]
ВЕКТОРНАЯ ФОРМА УРАВНЕНИЯ ПРЯМОЙ
95
сих пор сказанное в этом параграфе в равной мере относится и к
прямой па плоскости, и к прямой в пространстве. Разница (и то очень
несущественная) начнется лишь тогда, когда мы будем «расписы-
«расписывать» уравнение A) по координатам входящих в него векторов
~М^ЛХ и уИ0Ж. Этих координат будет в случае плоскости две, а в
пространственном случае — три.
Если на плоскости раз навсегда дана точка О (начало координат), то
уравнение A) эквивалентно уравнению
которым часто тоже пользуются (в механике и физике) под названием век-
векторного уравнения прямой.
Пусть сначала дело происходит в плоскости (снабженной неко-
некоторой аффинной системой координат (рис. 66)). Тогда вектор
и0 = М0Мх задан двумя свои-
своими координатами:
и0 — МОМХ = {а, Ь).
Если при этом Мо = (х0, у0),
M1 = (xl, i/i), а координаты
переменной точки М суть
х и у, то уравнение A) за-
записывается в виде системы
двух уравнений:
x-x^at, \ B)
Итак, маша прямая состоит Рис. 66.
из всех тех и только тех то-
точек М={х, y)t координаты каждой из которых при некотором вещест-
вещественном значении параметра t могут быть записаны в виде B). По-
Поэтому система уравнений B) называется системой параметрических
уравнений данной прямой или, короче, ее парамет рическим уравне-
уравнением (единственное число оправдано тем, что в действительности
система двух уравнений B) является лишь координатной записью
одного уравнения A)).
Система уравнений B) равносильна одной пропорции1)
—г~ =—«г-. C)
чания
1я М§В7Пи°9ПглавЯХ Т6Перь обычно заменяем двоеточие чертой, см. заме-
96 ПРЯМАЯ ЛИНИЯ ¦ [ГЛ. V
которая часто называется каноническим уравнением прямой на пло-
плоскости.
Если прямая задана двумя своими точками Мо и Mlt то ее нап-
направляющий вектор и0 = М0М1 имеет координаты
а=х1 — х0, Ь = у1 — у0
и уравнение C) превращается в
х хо У Уо ¦ м\
xi — x0 у1 — у0 '
Это и есть уравнение прямой, проходящей через две заданные точки
М0 = (х0, у0) и Mi = {xv уг).
Переходим к случаю, когда прямая d, определенная своей точкой
Мо и направляющим вектором и0, задается в пространстве, снаб-
снабженном аффинной системой координат. Тогда
М0 = (х0, у0, z0), Щ = {а, Ь, с)
и уравнение A) в координатной записи превращается в систему трех
уравнений
х — xo=at,
\
z—zo-=ct. J
Эта система равносильна пропорции
х хо У У о z ^o if?\
~~a~-~~b ~Г~ ^D)
(теперь уже трехчленной), называемой каноническим уравнением пря-
прямой в пространстве. Не следует забывать, что пропорция F) при
подробной записи превращается не в одно, а в два уравнения, на-
например в
х—хо_у—Уо У—Уо_г — гЛ
а Ь ' Ь с
(третье уравнение - = является следствием первых двух
которым н удовлетворяют все точки прямой в пространстве.
Замечание. Если среди координат а, Ь, с направляющего
вектора и0 одна какая-нибудь равна нулю, например с = 0, то век-
вектор и0 и прямая d параллельны координатной плоскости Оху; это
видно и из уравнения E), где теперь z—zg = Q, т. е. z = z0 для всех
точек прямой d. Если одновременно две координаты направляющего
вектора ц0 равны нулю, например ? = 0, с = 0, то имеем у=у0,
z = z0; в этом случае направляющий вектор ио = {а, 0, 0}, а зна-
значит, и наша прямая параллельна оси Ох.
§ 5] ЗАДАЧА 97
Если прямая в пространстве задается двумя своими точками
М0 = (х0, У„, z0) и М1 — (х1, ylt Zj), то для ее направляющего век-
вектора ио = ЖоЖ1 = {а, Ь, с) имеем а = х1 — х0, b = y1—y0, c=z1—z0
и пропорция F) превращается в пропорцию
х—х0 у—у0 г — г0 .„.
xi хо У\ Уо zi — го
которая и определяет прямую (в пространстве), проходящую через
две заданные точки.
Условие параллельности (в широком смысле) двух прямых, задан-
заданных их каноническими уравнениями
заключается в коллинеарности их направляющих векторов, т. е.
в пропорции
a:b:c — a':b':c'. (8)
Для совпадения прямых F) и F') необходимо и достаточно, чтобы
кроме условия (8) выполнялось еще и условие
х'о— хо_ У'о—Уо_ г'о — га
а ~ b i ( '
означающее требование, чтобы точка М'о — (х'о, у'о, z'o) прямой F')
лежала на прямой F) (или — что в данном случае равносильно —
чтобы точка М0 — (х0, у0, z0) прямой F) лежала на прямой F')).
§ 5. Задача: когда прямая Ах -f- By -f- С = 0 на плоскости
проходит через точку пересечения двух заданных прямых
А1х + В1у-{-С1 = 0 и А2х-\-В2у-{-С.г = 0?
Чтобы ответить на поставленный вопрос, введем сначала сле-
следующее
Определение. Прямая d
¦U + C=0 A)
называется линейной комбинацией (с коэффициентами Ях, Я2) прямых dL
% + С,=0 B)
4 п
= 0, C)
Александров
98 ПРЯМАЯ ЛИНИЯ [ГЛ. V
если имеет место тождество
Ах-\-Ву-\-С—'к1 (Ахх + Вху + Сх) -J- Я2 (Агх 4- Вгу 4- С2), D)
означающее, что
D')
Из тождества D) следует, что пара чисел лг0, у0, удовлетворяю-
удовлетворяющая обоим уравнениям B) и C),
удовлетворяет и уравнению A),
являющемуся их линейной комбина-
комбинацией. Поэтому всякая прямая A),
являющаяся линейной комбинацией
прямых B) и C), проходит через
точку пересечения Мо = (х0, у0) пря-
прямых B) и C).
Докажем теперь, что и, обратно,
всякая прямая, проходящая через
точку пересечения Л10 = (х0, у0)
прямых d1 и d2, является их линей-
линейной комбинацией. Пусть дана пря-
прямая d, проходящая через точку Мо
(рис. 67). Очевидно, мы можем пред-
предположить, что эта прямая отлична
от обеих прямых d1 и d2. Будем ис-
искать такие числа Ях и Я.2, чтобы
выполнялось тождество D). Для
Рис. 67. этого возьмем какую-нибудь точку
Мх = (хг, j/jJ, лежащую на прямой d
и отличную от точки Мо, и напишем уравнение с неизвестными Ях и Я2:
Л + В1У1 + Сх
{А2хг
+ Сг) = 0.
E)
Точка Мх не лежит ни на одной из прямых dx и d21), так что обе
скобки в левой части уравнения E) отличны от нуля, и мы получаем
из этого уравнения
Ч Л 1 Г» . 1 /~*
F)
2) Действительно, если бы точка Afx лежала, например, на прямой dlf
то эта последняя, имея с прямой А две общие точки Мо и Mlt совпадала бы
с прямой d, тогда как мы предположили, что прямая d не совпадает ни с
одной из прямых dx и d2.
о 5, ЗАДАЧА 99
Пусть теперь ^ и Л2 — какие-нибудь числа, удовлетворяющие ра-
равенству F). Тогда выполнено и равенство E), означающее, что
точка М± лежит на прямой
Х1 {Ахх + Вху + С,) + *2 (<
Но прямая G), будучи линейной комбинацией прямых B) и C),
проходит не только через точку Mv но и через точку Мо, а пря-
прямые A) и G), имея две общие точки Мь и Мх, совпадают между
собою, прямая A) есть не что иное, как линейная комбинация G)
прямых B) и C). Утверждение доказано.
Мы получили следующий результат: для того чтобы прямая A)
проходила через точку пересечения прямых B) и C), необходимо
и достаточно, чтобы уравнение A) было линейной комбинацией
уравнений B) и C).
Интерес этого результата не только в изяществе его формули-
формулировки, но и в том новом применении понятия линейной комбинации
(и связанного с ним понятия линейной зависимости), которое в нем
содержится и которое является образцом многих аналогичных пред-
предложений.
Назовем множество всех прямых плоскости, проходящих через
данную ее точку Мо, (собственным) пучком с центром Мо. Для
того чтобы задать пучок прямых, достаточно задать его центр, а
для этого в свою очередь достаточно задать какие-нибудь две пря-
прямые, входящие в этот пучок.
Доказанное только что предложение выясняет алгебраическую
суть этого очевидного геометрического факта: все прямые пучка
являются линейными комбинациями любых двух из них.
Всякое множество прямых на плоскости, состоящее из всех пря-
прямых, являющихся линейными комбинациями каких-нибудь двух дан-
данных прямых rfx и rf2, называется одномерным линейным многообра-
многообразием прямых1).
Назовем теперь несобственным пучком совокупность всех прямых
плоскости, параллельных какой-нибудь одной прямой2). Нетрудно
¦) Пусть данные прямые dx и d2 суть соответственно прямые B) и C).
.заменив в линейной комбинации G) коэффициенты Xlt Я. пропорциональ-
пропорциональными им числами feXj, kl2, мы получим уравнение
feMA* + B1r/+C1) + ftA2(^2*
определяющее ту же прямую, что и уравнение
K(Ax+By+C)+X{A +
тсюда следует, что все прямые А, являющиеся линейными комбинациями
мини 2 ДВуХ данных прямых dv и d2, в действительности определяются
"*™ паРаметром —отношением \х-\г, что и дает основание называть сово-
совокупность этих прямых одномерным многообразием,
) параллельность, естественно, понимается в широком смысле слова.
100 ПРЯМАЯ ЛИНИЯ [ГЛ. V
доказать, что всякая прямая, являющаяся линейной комбинацией
двух каких-нибудь прямых данного несобственного пучка, является
прямой, принадлежащей тому же несобственному пучку, и что, об-
обратно, всякая прямая несобственного пучка является линейной ком-
комбинацией двух прямых rf^ d2, произвольно выбранных в этом пучке 1).
Другими словами, всякий несобственный пучок (так же как и соб-
собственный) является одномерным линейным многообразием прямых.
Пусть дано какое-нибудь одномерное линейное многообразие пря-
прямых. Оно состоит из всех линейных комбинаций двух данных прямых
йх и d2. Если прямые d1 и d2 пересекаются, то наше многообразие есть
собственный пучок; если они не пересекаются, то порожденное ими
многообразие является несобственным пучком. Другими словами, един-
единственными одномерными линейными многообразиями прямых на пло-
плоскости являются собственные и несобственные пучки. Ставя в соответ-
соответствие каждому собственному пучку его центр, мы получаем взаимно
однозначное соответствие между всеми точками плоскости и всеми соб-
собственными пучками. Можно теперь произвести пополнение плоскости
«несобственными» или «бесконечно удаленными» точками, поставив
в соответствие каждому несобственному пучку «несобственную» точку
и объявив ее единственной несобственной точкой каждой из прямых,
образующих данный несобственный пучок. Каждый несобственный пу-
пучок получает, таким образом, свой «центр»—несобственную (или «бес-
«бесконечно удаленную») точку пересечения всех прямых, образующих
этот пучок. Эта несобственная точка — точка пересечения всех парал-
параллельных прямых данного направления — называется также несобст-
несобственной точкой плоскости, удаленной в бесконечность в данном
направлении (в направлении, общем для всех параллельных прямых,
составляющих данный пучок2)). Мы уже пришли в конце первой
главы к необходимости пополнить каждую прямую одной-единствен-
ной для каждой данной прямой бесконечно удаленной точкой; теперь,
когда мы рассматриваем совокупность всех прямых на плоскости,
мы видим, что это пополнение происходит так, что две различные
прямые имеют одну и ту же бесконечно удаленную точку тогда и
только тогда, когда они параллельны между собою. Заметим, нако-
наконец, что совокупность всех несобственных точек плоскости объяв-
объявляется прямой линией — несобственной (или бесконечно удаленной)
прямой плоскости. Плоскость, множество точек которой пополнено,
как только что указано, всеми несобственными точками, а множестве
всех прямых—одной (составленной из всех несобственных точек]
1) Доказательство аналогично проведенному для собственного пучка \
может быть предоставлено читателю.
2) При этом необходимо иметь в виду, что мы теперь объединяем двг
взаимно противоположных направления на прямой в одно направленш
(в соответствии с тем, что, умножая обе части уравнения прямой на— 1, мь
получаем уравнение той же прямой).
о gi ПОЛУПЛОСКОСТИ, ОПРЕДЕЛЯЕМЫЕ ПРЯМОЙ 101
несобственной прямой, называется проективной плоскостью. На
проективной плоскости всякие две прямые dx и d2 пересекаются
в одной точке: собственной, если прямые dl и d2 на обычной пло-
плоскости не параллельны, и в их единственной общей несобственной
точке, если эти прямые были параллельны. Наконец, если одна из
двух прямых несобственная, то она пересекается со второй прямой
в единственной несобственной точке этой последней.
Легко видеть также, что на проективной плоскости (так же как
и на обыкновенной) через всякие две точки А и В проходит един-
единственная прямая. Это очевидно, если обе точки Л, В собственные.
Если А собственная, а В—несобственная точка, то прямая АВ
есть единственная прямая, проходящая через точку А и принадле-
принадлежащая несобственному пучку («направлению»), соответствующему
несобственной точке В. Наконец, если обе точки А и В несобст-
несобственные, то единственная прямая, через них проходящая, есть несоб-
несобственная прямая плоскости.
Мы только коснулись здесь вопросов, связанных с переходом
от обыкновенной плоскости к проективной,— коснулись, чтобы сразу
же отложить их до главы XXI этих «Лекций», предметом которой
и будут начала аналитической геометрии именно на проективной
плоскости.
§ 6. Две полуплоскости, определяемые данной
прямой иа плоскости
Пусть на плоскости дана прямая d своим уравнением
Ах + Ву + С = 0. A)
Для всех точек М—{х, у) этой прямой и только для этих точек
трехчлен
F(x, y)=A
обращается в нуль; если же точка М=(х, у) не лежит на пря-
прямой A), то для нее либо F(x, у) > 0, либо F(x, у) < 0. Мы гово-
говорим, что прямая A) разбивает плоскость на две полуплоскости-
одна из этих полуплоскостей определяется как множество всех
точек Ж=(дг, y)t дЛЯ КОТОрых F^ y)>o, а другая —как мно-
множество всех тех точек М=(х, у), для которых F(x, у) < 0; пер-
первая полуплоскость называется положительной по отношению к дан-
данному уравнению A) нашей прямой, а вторая - отрицательной ^).
ели ту же прямую d задать каким-либо другим уравнением
(Г)
парагпа4еМпнРИг-ЧеСКИЙ СМЫСЛ этого определения будет выяснен в этом же
у ч"=, он совпадает с наивным представлением о полуплоскости.
102
ПРЯМАЯ ЛИНИЯ
[гл. v
то, согласно доказанному в § 2 (теорема 1), имеется такое число X,
что А'= кА, В'—KB, С = кС, так что, обозначая левую часть
уравнения (Г) через F' (х, у), имеем F' (x, y)~KF(x, у). Отсюда
сразу следует, что при X > О положительная и отрицательная полу-
полуплоскости для уравнения
A) совпадают с положи-
положительной и отрицатель-
отрицательной полуплоскостями от-
относительно уравнения
(Г), а при Х<0 эти
полуплоскости меняются
местами: положительная
полуплоскость относи-
относительно уравнения A) де-
делается отрицательной
для уравнения (Г), и на-
наоборот. Но всегда две
точки, принадлежащие к
одной или разным полу-
полуплоскостям относительно
одного из двух уравне-
уравнений A), A'), сохраняют
это свойство и при пе-
переходе к другому уран-
нению.
Имеет место следую-
следующая
Теорема 2. Если
точки М0 = (х0, у0) и
М1==(х1, уг) лежат в
разных полуплоскостях,
определенных прямой A),
то отрезок М0М1 пере-
пересекает эту прямую в
О
X
Рис. 68.
некоторой
(рис. 68,
точки Мп и
точке М'
а); если же
-l лежат в
одной и той оке полуплоскости, то в этой же полуплоскости лежит
и весь отрезок М0М1 (рис. 68, б).
Доказательство. Пусть точки
Мо и Mi лежат в разных
полуплоскостях. Напишем уравнение прямой, проходящей через точки
Мо и Мх, в параметрической форме:
g gi ПОЛУПЛОСКОСТИ, ОПРЕДЕЛЯЕМЫЕ ПРЯМОЙ 103
где за направляющий вектор ио = {а, Ъ) взят вектор МцМх, так
что« = *1—х0, Ь = у1—у0. Поэтому^ и только те точки М = (х',у)
прямой B) принадлежат отрезку М0Мг этой прямой, для которых
0<^^1. Посмотрим, какие значения принимает трехчлен F(x, у),
когда точка М=(х, у) пробегает прямую B). Для этого подста-
подставим в трехчлен F (х, у) значения х и у из равенств B). Получаем
F(x, y) = (Axo + Byo + C) + (Aa + Bb)t. C)
Обозначая константы Ахо+ Вуо-{-С и Аа-\-ВЬ соответственно через
и и А, видим, что трехчлен F(x, у) превратился в линейную функ-
функцию от переменного t:
F(x, y) = M+)i. D)
При t = 0 уравнения B) дают нам координаты х0, у0 точки Мо,
а при *=1 (помним, что а=х1—х0, b = yt—у0) — координаты
xi> У\ точки Mv Так как по предположению числа F(x0, y0) и
F(xt, yt) разного знака, то и значения линейной функции Xt-\-[i
при t = 0 и t=\ имеют разные знаки, а тогда для некоторого про-
промежуточного значения t', 0</'< 1, которому соответствует точка
М' = (х', у') отрезка МОМЪ функция Я# —|— |х и, значит, трехчлен
F(x, у) обратятся в нуль1). Точка М' является точкой пересечения
отрезка M0Mt и прямой A) — первое утверждение теоремы доказано.
Доказываем второе утверждение. Помня все время, что а=хх—лг0,
Ь — ух — у0, переписываем C) в виде
F(x, y)
т. е.
F(x, y) = (\—t)F(x0,
Если 0<*<1, то числа как t. так и 1—t, положительны;
поэтому, если F{x0, y0) и F(xv yj одного знака, то число
F(x, У) = (\—t)F(x0, yo)-\-tF(xv y{) будет иметь тот же знак,
что и оба числа F(x0, у0) и F(xv у{),— любая точка УН отрезка луих
принадлежит той же полуплоскости, что и обе точки Жо и УИХ.
Теорема 2 полностью доказана.
«ыясним ее наглядный смысл (а вместе с тем и геометрический
смысл данного выше определения полуплоскости). Прямая A) не
может быть параллельна сразу обеим координатным осям; пусть,
ние и дем это значение ?. При t—О функция АЛ + ц принимает значе-
пячиыр Э п*>и ' = ^—значение Я,+ц. По предположению эти значения имеют
НаКИ: 0 Я+ > 0 Т Я | |
пячиыр * ^значение Я,+ц. По предположению эти значения имеют
значение На/КИ:,.пусть- иапР"мер. ja< 0, Я,+ ц > 0. Тогда, очевидно, Я, > |ц |;
' — t, обращающее функцию л< + [х в нуль, есть, очевидно,
% ' так ка« !* < 0, X > | а |, то 0 < f
учаи |А > о, Х-)-Ц < 0 трактуется аналогично.
104
ПРЯМАЯ ЛИНИЯ
[гл: v
например, она не параллельна оси Оу, так что 5=^0. Тогда каж-
каждая точка М0 = (х0, у0), не лежащая на прямой A), или лежит
«выше» этой прямой, или лежит «ниже» ее (рис. 69). Точный смысл
этих выражений такой. Через точку Мо проходит единственная
прямая, параллельная оси Оу, и эта прямая пересекает прямую A)
в точке М1 = (х0, ух). Если ух <у0,
то говорим, что точка Мо лежит
выше прямой A), в противном слу-
случае говорим, что она лежит ниже.
Теорема 3. Все точки, лежа-
лежащие выше прямой A), образуют
одну из двух полуплоскостей, на
которые прямая A) разбивает пло-
плоскость, а точки, лежащие ниже пря-
прямой A), образуют вторую аз этих
полу плоскостей.
Доказательство. Мы пред-
предположили, что ВфО. Пусть, нап-
например, В > 0. Докажем, что тогда
для всех точек М0 = {х0, у0), лежа-
лежащих выше прямой A), будет
^"(¦^oi У о) > 0, а для всех точек
М0 — (х0, у0), лежащих ниже этой
прямой, будет F(x0, у0) < 0.
Пусть Мц = (х0, у0) — какая-ни-
какая-нибудь точка, не лежащая на прямой
A). Как и прежде, обозначим через
Mt =(х0, уг) точку пересечения
прямой A) с прямой, проходящей
через точку Мо параллельно оси
Оу. Тогда
Рис. 69.
Так как мы предположили, что
В > 0, то при у0 > ух будет и
^о>^1'311ачит' Ахо+ву0 + с> °;
при у0 < ух будет Ву0 < Вух и
¦X
Рис. 70. При В < 0 получаются противо-
противоположные неравенства.
Итак, для нсех точек М=(х0, у0), лежащих выше прямой A),
трехчлен F(x, у) имеет один знак; для всех точек, лежащих
ниже,— другой. Теорема доказана.
Говорят также, что точки одной полуплоскости лежат по одну
сторону, точки другой полуплоскости — по другую сторону от пря-
g 7i НОРМАЛЬНОЕ УРАВНЕНИЕ ПРЯМОЙ 105
мой A) причем одну сторону (ту, где Ах + Ву + С>0) называем
положительной, а другую (где Ах + By + С < 0) отрицательной по
отношению к данному уравнению A) прямой d.
Теорема 4. Если прямая d задана уравнением A), го вектор
п={Л, В), приложенный к какой-либо точке М0 — (х0, у0) пря-
прямой A), всегда направлен в положительную сторону от этой прямой.
Это значит: если п = {А, B}=MOMV где Мо лежит на прямой A),
то точка М1 = {х1, у±) лежит в положительной полуплоскости (рис. 70),
для нее Ах1 + Ву1+С> 0. В самом деле, хх=*х0+А, у^=у
Вычисляем:
Теорема доказана.
§ 7. Прямая на плоскости в прямоугольной системе координат.
Нормальное уравнение прямой на плоскости
До сих пор предполагалось, что на плоскости дана произвольная
аффинная система координат.
Предположим теперь, что эта система координат прямоугольная.
Тогда уравнению всякой прямой на плоскости может быть придан
так называемый нормальный вид.
Рассмотрим орт е, перпендикулярный к нашей прямой d, причем
если прямая d проходит через начало координат, то понимаем под е
произвольный из двух взаимно противоположных ортов, перпендику-
перпендикулярных к прямой d, а если эта прямая не проходит через начало
координат, то обозначаем через е тот из этих двух ортов, который
направлен от начала координат О к прямой (т. е. имеет направле-
направление, совпадающее с направлением вектора ON, где N—точка пере-
пересечения прямой d с перпендикуляром, опущенным на нее из начала
координат) (рис. 71). Отсюда следует, что на оси, несущей вектор
ON (или, что то же, орт е), имеем
(ON) = аз пре ON = />> 0, A)
где р есть расстояние от начала координат до прямой d. Обозначая
координаты орта е через ? и л, имеем ? = cos а, ц - sin а, где а-
угол наклона орта е к оси абсцисс i). Итак,
e = {cosa, sin a}.
') См. § з главы IV.
106
ПРЯМАЯ ЛИНИЯ
[гл. V
Пусть М=(х, у)— какая-нибудь точка плоскости. В том и только
в том случае, когда точка М лежит на прямой d, ее (ортогональная)
проекция на прямую ON совпадает с точкой Л/, а проекция вектора
ОМ совпадает с вектором ОМ. Следовательно, для всех точек
УИ=(лг, у) прямой d и толь-
только для этих точек выполнено
условие
азпре0Л1 = р. B)
Так как 0М={х, у) и
e = {cosa, sin a}, то (см. A)
§ 3 главы IV) имеем
аз пре ОМ = х cos a -j- у sin a,
так что условие B) переписы-
переписывается в виде уравнения
х cos a + У sin a—р — 0. C)
Это уравнение и называет-
называется нормальным уравнением
прямой d.
Пусть теперь дано какое-
нибудь уравнение
Рис.71. Ах + Ву + С=0 D)
нашей прямой d.
Так как уравнения C) и D) являются уравнениями одной и той
же прямой в одной и той же системе координат, то существует
такое число Я, что коэффициенты уравнения C) получаются из
коэффициентов уравнения D) умножением на к:
cos a = Ак,
1 E)
Последнее из уравнений E) (в случае СфО) позволяет сразу опре-
определить знак к: так как р > 0, то
Ск = — р<0,
и знак к противоположен знаку С.
Для определения модуля числа Я возводим каждое из двух пер-
первых уравнений E) в квадрат и складываем. Получаем
(Л2 + ?2) А2 = cos2 a + sin2 a = 1,
g gi РАССТОЯНИЕ ОТ ТОЧКИ ДО ПРЯМОЙ 107
откуда
Число Я, модуль которого есть _ ==, а знак противоположен
знаку С, называется нормирующим множителем уравнения D); при
С = 0 знак К можно выбрать произвольно.
Умножая обе части уравнения D) на нормирующий множитель Я,
мы превращаем это уравнение в нормальное уравнение C) той же
прямой.
Заметим, что вектор {Л, В\ = п всегда перпендикулярен к пря-
прямой DI). Это вытекает из того, что векторы е и п = {Д В} кол-
линеарны (так как первый получается из второго умножением на Я),
а вектор е перпендикулярен к прямой d, определяемой уравнением D).
То же утверждение можно доказать, вспомнив, что всякий век-
вектор и = {?, т]}, лежащий на прямой D), удовлетворяет условию
т. е. (n, u)=0, которое и означает взаимную перпендикулярность
векторов п и и (значит, и перпендикулярность между вектором п
и прямой D)).
§ 8. Расстояние от точки до прямой (на плоскости)
Под расстоянием от точки Мо плоскости до прямой d, лежащей
в этой плоскости, понимается длина перпендикуляра, опущенного
из точки Мо на прямую d.
Теорема 5. Пусть в плоскости, снабженной прямоугольной
системой координат, задана прямая d своим нормальным у равнением
xcos a-\-y sin а—р = 0. A)
Тогда расстояние о (Жо, d) произвольной точки Мо = (х0, у0) от
прямой d равно числу
Доказательство. Через точку Мо проведем прямую d',
параллельную прямой d (рис. 72), и рассмотрим ось, несущую
приложенный к началу координат орт e = {cosa, sin a}; эта ось
) Читатель помнит, что уравнение D) взято относительно прямоугольной
системы координат.
108
ПРЯМАЯ ЛИНИЯ
[гл. v
перпендикулярна к обеим прямым d и d' и пересекает их соответ-
соответственно в точках N и N'. Длина вектора NN', равная модулю его
алгебраического значения (NN') (на определенной выше оси), и есть
искомое расстояние р (Мо, d) ме-
у жду точкой Мо и прямой d:
р(М0, d) = \(NN')\.
Но по лемме Шаля имеем (на той
же оси)
B)
где
(ОЛГ) = аз
Внося эти значения в B), полу-
получаем
(NN') = х0 cos а + у0 sin а — р,
р(М0, d) = \(NN')\ =
= |x0cosa + (/0sina—p\,
что и требовалось доказать.
Если прямая d дана своим
общим уравнением
Ах + Ву + С = 0, C)
то для определения ее расстояния от точки М0 = {х0, у0) надо
сначала привести уравнение прямой к нормальному виду, т. е. умно-
умножить обе его части на =. В результате получается формула
Рис. 72.
§ 9. Углы, образуемые двумя прямыми на плоскости
1. Угол между двумя прямыми. Углом между двумя прямыми
на плоскости называется угол между любым направляющим вектором
одной и любым направляющим вектором другой прямой (рис. 73).
Очевидно, это определение дает нам ие один, а два угла, допол-
дополняющие друг друга до я, т. е. оба смежных угла, образуемых
двумя пересекающимися прямыми.
§ 9]
УГЛЫ, ОБРАЗУЕМЫЕ ДВУМЯ ПРЯМЫМИ
109
Предположим, что наши прямые dx и d2 даны их уравнениями
(в прямоугольной системе координат)
= 0, A)
= 0. (II)
Тогда в качестве налравляющих векторов этих прямых мы можем
взять, например, векторы
Угол ф между векторами их и и2 дается своим косинусом:
cos ф = (+ у~~^ (+ YAJWi) '
Если АХА2 -(- ВгВ2 > 0, то мы получаем по этой формуле острый
угол между прямыми dt и dv
Если АхА2-\-BtB2 <С.О—
то тупой.
Равенство
i/Ц ~г "х ъ== ' '
выражает необходимое и
достаточное условие для
перпендикулярности прямых
dt и d2.
Часто бывает полезным
следующее
Замечание. Угол ме-
между векторами
ni== i^i< ^i}i Щ = {А2, В%},
нормальными к прямым dt
и d2, равен тому углу между этими прямыми, в котором лежат точ-
точки, принадлежащие разноименным, плоскостям, определяемым данными
прямыми.
В самом деле, пусть угол между векторами пх и п2 равен а
1рис. /4). Внутри угла, образованного данными прямыми, равного а,
возьмем точку Мо и опустим из нее перпендикуляры МОМХ и М0М2
на данные прямые. Угол р между лучами МйМх и М0Мг равен я—а.
о"'хII"ц М0М2 \\п2 и а4-р = я, то один из лучей, пусть,
апример, MoMj, одинаково направлен с соответствующим ему
по
ПРЯМАЯ ЛИНИЯ
[гл. v
вектором пъ тогда как другой луч
вектор п2 имеют
противоположные направления. Поэтому луч, являющийся продолже-
продолжением отрезка М0Мг за точку Mv лежит в положительной полупло-
полуплоскости, определяемой уравнением А^-^-В-уу-\-С1 = 0; луч же, явля-
являющийся продолжением отрезка М0М2 за точку М2, лежит в отрица-
отрицательной полуплоскости, определяемой уравнением Агх -\- В^у -j- С2 = 0.
Отсюда следует, что точка Мо лежит в отрицательной полуплоскости,
Рис. 74.
определяемой уравнением (I), и в положительной полуплоскости,
определяемой уравнением (II).
2. Угол от первой прямой до второй. Если на плоскости вы-
выбрано положительное направление вращения, то можно говорить об
угле от первой прямой до второй, понимая под этим снова угол от
любого направляющего вектора первой до любого направляющего
вектора второй прямой (рис. 75).
Так определенный угол 0Ь2 определен с точностью до слагаемых
вида kn, где k — целое.
Обозначая через аи соответственно а2, угол наклона к оси
абсцисс любого направляющего вектора соответственно первой и вто-
§ 9]
УГЛЫ, ОБРАЗУЕМЫЕ ДВУМЯ ПРЯМЫМИ
111
рой прямой (т. е. угол от орта оси абсцисс до соответствующего
направляющего вектора), мы также получаем углы, определенные
Рис. 75.
с точностью до слагаемых вида kn. При этом, все время с точностью
до слагаемых вида kn, имеем 0li2 = <z2 — <z1; откуда
sin8li2 = sin <z2 cosdj — cos <z2 sin <z1( \
cos 01J = cos a2 cos ax + sin a2 sin <zx. f
Беря снова направляющие векторы
U1 = { — B1,A1\, U2 = {— 52, <4J,
получаем:
C)
sin a
cosa,. = -
-Bt
7 УЖ+ti'
и, подставляя эти значения в формулы C), находим:
slnO1>2 = .
VaI+bI-VaI+bI
cos 0x „ =
Va\+b\
tg Qx = л\в
AA
D)
E)
112 ПРЯМАЯ ЛИНИЯ [ГЛ. V
Если один из векторов щ, и2 заменить на противоположный, то
изменится знак как у синуса угла (вследствие изменения направле-
направления вращения на противоположное), так и у косинуса (получается
угол, смежный с рассмотренным); знак же тангенса угла от первого
вектора до второго при такой замене не меняется.
Если прямые (I) и (II) даны своими уравнениями с угловым коэф-
коэффициентом:
(Г)
где &1 = tga1, A:2 = tga2, то
т. е.
Если прямые (I) и (II) взаимно перпендикулярны, то можно поло-
положить a2 = a14--o"> значит, tga2 = —ctgat, т.е. &2 =—j—, или
k1k^=—1 (условие перпендикулярности1)). B')
Формулы E') и B') можно получить и пользуясь общими уравнениями
прямых (I) и (II) — подставляя в формулы E) и B) значения угловых
коэффициентов
§ 10. Прямая в пространстве, снабженном прямоугольной
системой координат
Если в пространстве дана прямоугольная система координат, то
в качестве направляющего вектора всякой прямой всегда можно
взять орт u0={cosa, cos (J, cosy}, так что каноническое уравнение
прямой (уравнение F) из § 4) примет вид
cos a cos р cosy
^ '
где 7W0=(a:0, y0, z0)—какая-нибудь фиксированная точка пашей
прямой, а cos a, cos(J, cosy — ее «направляющие косинусы», т. е.
координаты одного из двух (взаимно противоположных) ортов, кол-
линеарных данной прямой.
¦) Так как tg-=oo,TO условие перпендикулярности B') непосредственно
следует из E') и из k2 ф kx.
о JO] ПРЯМАЯ В ПРОСТРАНСТВЕ 113
Если даны две прямые: A) и
-»'_ z—г'
О')
*-*'„ «/-«/'„ г-г'о
cos a' cosfi' cos 7' '
то углом между этими прямыми называется угол между любым на-
направляющим вектором и0 одной и любым направляющим вектором и'„
другой прямой. Таким образом, угол между двумя прямыми определен
неоднозначно: определены два угла, один — острый, другой — тупой,
дополняющие друг друга до угла п. Обозначая любой из них через ср
и предполагая, что ф есть угол между направляющими векторами
и0 и и'о, имеем
С08ф= <^> . B)
Если |ио| = 1, |и'0| = 1, т. е. направляющие векторы суть орты,
то B) переходит в
cos <р = cos a cos а' + cos p cos Р' + cos у cos у'. C)
В общем случае при uo = {a, b, с}, u'0 = {a', b', с'} имеем
аа' + ЬЬ' + сс' ...
coscp= L ' DЛ
(+Ya* + b*+c*){+y а'* + Ъ'* + с'*) '
Если это значение для coscp положительное, то мы получили острый
угол ф; если отрицательное — тупой.
Из доказанного следует, что условие перпендикулярности двух
прямых в пространстве, заданных в прямоугольной системе коорди-
координат уравнениями F) и F') § 4, есть
aa' + bb' -\-cc' =0. E)
ГЛАВА VI
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
Во всей этой главе предполагается, что в плоскости (в которой
лежат все рассматриваемые далее фигуры) выбран определенный
масштаб; рассматриваются лишь прямо-
У угольные системы координат с этим мас-
масштабом.
§ 1. Парабола
Парабола известна читателю из школь-
школьного курса математики как кривая, являю-
являющаяся графиком функции
=ахг,а>0
б) y-
Рис. 76.
(рис. 76). A)
График любого квадратного трехчлена
у = ах* + Ъх + с B)
также является параболой; можно посред-
посредством одного лишь сдвига системы коор-
координат 1) Оху (на некоторый вектор 00'),
т. е. преобразования
C)
достигнуть того, чтобы график функции
у' = ах'2 (во второй системе координат)
совпадал с графиком B) (в первой системе координат).
В самом деле, произведем подстановку C) в равенство B). Получим
У' + Ул = а (х' + лг0)- -f- b (x' + х0) + с,
>) См. § 2 главы III.
§ n
ПАРАБОЛА
115
т. е.
У' = ахч + {2ах0 + Ь)х' + (axl + Ьх0 + с—у0).
Мы хотим подобрать х0 и у0 так, чтобы коэффициент при х' и сво-
свободный член многочлена (относительно х') в правой части этого
равенства были равны нулю. Для
р
этого определяем х0 из уравнения
2ах0 + Ь =
что и дает
'2а '
Теперь определяем у0 из усло-
вия
ч
О'
и1
у
в которое подставляем уже найден-
найденное значение хо=—^. Получим
т. е.
fe b i _
17, 9л + С~-0О>
4ас — I
~4а
Итак, посредством сдвига C), в ко-
котором
_ ъ _4ас—Ь*
хо 2а> 0о— 4а >
6)
Рис. 77.
мы перешли к новой системе координат, в которой уравнение пара-
параболы B) получило вид
у' =--ах'гх) (рис. 77).
Вернемся к уравнению A). Оно может служить определением
параболы. Напомним ее простейшие свойства. Кривая имеет ось сим-
симметрии: если точка М=(х, у) удовлетворяет уравнению A), то
точка М' = ( — х, у), симметричная точке М относительно оси орди-
иат, также удовлетворяет уравнению A) — кривая симметрична отно-
относительно оси ординат (рис. 76).
Если а > 0, то парабола A) лежит в верхней полуплоскости
0, имея с осью абсцисс единственную общую точку О. При
х) Тот же результат можно получить и известным из средней школы спо-
способом «дополнения до полного квадрата».
116
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРВОЛА
[ГЛ. VI
неограниченном возрастании модуля абсцисс х ордината у = ах2 также
неограниченно возрастает. Общий вид кривой дай иа рис. 76, а.
Если а < О (рис. 76, б), то кривая расположена в нижней полу-
полуплоскости симметрично относительно оси абсцисс к кривой у = \ а\х2.
Если перейти к новой системе координат, полученной из старой
заменой положительного направления оси ординат на противополож-
противоположное х), то парабола, имеющая в старой
системе уравнение у = ах2, получит в
новой системе координат уравнение
у =—ах2. Поэтому при изучении па-
парабол можно ограничиться уравнениями
A), в которых а > 0.
Поменяем, наконец, названия осей,
т. е. перейдем к новой системе коор-
координат, в которой осью ординат будет
старая ось абсцисс, а осью абсцисс—
старая ось ординат. В этой новой сис-
системе уравнение A) запишется в виде
, 1 1 е
у =—х или, если число — обозначить
через 2/з, в виде
у* = 2рх, р>0 (рис. 78). D)
Уравнение D) называется в аналити-
аналитической геометрии каноническим урав-
уравнением параболы; прямоугольная сис-
система координат, в которой данная
парабола имеет уравнение D), назы-
называется канонической системой коор-
координат (для этой параболы).
Сейчас мы установим геометрический смысл коэффициента р.
Для этого берем точку
(f) E)
Рис. 78.
называемую фокусом параболы D), н прямую d, определенную урав-
уравнением
х= g" . (о)
Эта прямая иазывается директрисой2) параболы D) (см. рис. 78).
*) Обозначая координаты какой-нибудь точки М через х, у, получим в
новой системе для той же точки координаты х, —у.
г) Ее можно было бы по-русски назвать «направляющей» прямой: латии-
ское слово «director» (по-французски directeur) означает «правитель» (или
управитель), женский род—directrix (по-французски directrice).
§ 1]
ПАРАБОЛА 117
Пусть М=(х, у)— произвольная точка параболы D). Из уравнения
D) следует, что х^О. Поэтому расстояние точки М от директрисы d
есть число
8 =
Расстояние точки М от фокуса F есть
х>-рх + ? + у». (Т)
Но </2 = 2рх, поэтому
г =
Итак, все точки М параболы равноудалены от ее фокуса и ди-
директрисы:
г = 6я. • (8)
Обратно, каждая точка М, удовлетворяющая условию (8), лежит
на параболе D).
В самом деле,
Следовательно,
или
и, после раскрытия скобок и приведения подобных членов,
Мы доказали, что каждая парабола D) есть геометрическое 'место
точек, равноудаленных от фокуса F и от директрисы d этой па-
параболы.
Вместе с тем мы установили и геометрический смысл коэффициен-
коэффициента р в уравнении D): число р равно расстоянию между фокусом
и директрисой параболы.
Пусть теперь на плоскости даны произвольно точка F и прямая d,
не проходящая через эту точку. Докажем, что существует пара-
парабола с фокусом F и директрисой d. Для этого проведем через
118
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
{ГЛ. VI
DF. Тогда
—[-тг> 0
точку F прямую g (рис. 79), перпендикулярную к прямой d; точку
пересечения обеих прямых обозначим через D; расстояние \DF\
(т. е. расстояние между точкой F и прямой d) обозначим через р.
Прямую g превратим в ось, приняв на ней направление DF в каче-
качестве положительного. Эту ось сделаем осью абсцисс прямоугольной
системы координат, началом которой является середина О отрезка
и прямая d получает уравнение х——~ .
Теперь мы можем в выбранной сис-
системе координат написать канони-
каноническое уравнение параболы:
у2 = 2рх, D)
причем точка F будет фокусом, а
прямая d—директрисой парабо-
параболы D).
Мы установили выше, что пара-
парабола есть геометрическое место
точек М, равноудаленных от точки
F и прямой d. Итак, мы можем дать
такое геометрическое (т. е. не за-
зависящее ни от какой системы коор-
координат) определение параболы.
Определение. Параболой
называется геометрическое место
точек, равноудаленных от некоторой
фиксированной точки («фокуса» па-
параболы) и некоторой фиксированной
прямой («директрисы» параболы).
Обозначая расстояние между фокусом и директрисой параболы
через р, мы можем всегда найти прямоугольную систему координат,
каноническую для данной параболы, т. е. такую, в которой
уравнение параболы имеет канонический вид:
у2 = 2рх. D)
Обратно, всякая кривая, имеющая такое уравнение в некоторой
прямоугольной системе координат, является параболой (в только что
установленном геометрическом смысле).
Расстояние р между фокусом и директрисой параболы называется
фокальным параметром или просто параметром параболы.
Прямая, проходящая через фокус перпендикулярно к директрисе
параболы, называется ее фокальной осью (или просто осью); она
является осью симметрии параболы — это вытекает из того, что ось
параболы является осью абсцисс в системе координат, относительно
й
9 V
У
А
?
\ 2
/
Р
Рис. 79.
§ 2] УРАВНЕНИЕ ЭЛЛИПСА 119
которой уравнение параболы имеет вид D). Если точка М=(х, у)
удовлетворяет уравнению D), то этому уравнению удовлетворяет и
точка М' — (х, —у), симметричная точке М относительно оси абсцисс.
Точка пересечения параболы с ее осью называется вершиной па-
параболы; она является началом системы координат, канонической для
данной параболы.
Дадим еще одно геометрическое истолкование параметра параболы.
Проведем через фокус параболы прямую, перпендикулярную к
оси параболы; она пересечет параболу в двух точках Р1 и Р2 (см.
рис. 79) и определит так называемую фокальную хорду Р^ пара-
параболы (т.е. хорду, проходящую через фокус параллельно директрисе1)
параболы). Половина длины фокальной хорды и есть параметр па*
раболы.
В самом деле, половина длины фокальной хорды есть абсолют-
абсолютная величина ординаты любой из точек Ръ Р2, абсцисса каждой из
которых равна абсциссе фокуса, т. е. -?¦. Поэтому для ординаты у.
каждой из точек Plt P2 имеем
что и требовалось доказать.
§ 2. Определение и каноническое уравнение эллипса
Определение. Эллипсом называется геометрическое место
точек плоскости, сумма расстояний которых от двух данных точек
I*i u 1*2 (Рис- 80) есть постоянное число; это число мы обозначаем
через 2а. Точки Fx и Ft называются фокусами эллипса; расстояние
между ними обозначается через 2с и называется фокусным расстоя-,
нием. Число а называется большой полуосью эллипса (по причинам,
которые выяснятся в дальнейшем). Середина О отрезка FXF2, соеди^
няющего фокусы, называется центром эллипса, а вся прямая F±F2
называется его фокальной или первой осью. Прямая, проходящая
через центр эллипса перпендикулярно к фокальной оси, называется
второй осью эллипса2).
Пусть М—какая-нибудь точка эллипса. Так как 2a = |/-/W| +
+ | РгМ\ ^ | FXF21 = 2с, то a~^3zc. Однако если а = с, то получаем
совокупность всех точек М, для которых | FXM \ -\-1F2M \ = \FjFj,
1) Или перпендикулярно к оси.
2) Обычно их называют большой и малой осью, не считаясь с тем, что
эти оси суть прямые, а соответствующие «полуоси»—числа!
120
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРВОЛА
[ГЛ. VI
т. е. отрезок FxFr Этот случай мы в дальнейшем рассматривать не
будем и поэтому будем предполагать, что а> с.
Число
e==i
называется эксцентриситетом эллипса; оно всегда < 1. Эксцентри-
Эксцентриситет эллипса равен нулю тогда и только тогда, когда фокусы эл-
эллипса совпадают: Fl = Fi. В этом случае эллипс превращается в
геометрическое место точек М, расстояние которых от точки FX = F2
равно а, т. е. в окруж-
окружность радиуса а с центром
О = /*¦] =• Ft; иод осью окруж-
окружности понимаем всякую пря-
прямую, проходящую через ее
центр О.
Пусть нам дай эллипс;
значит, даны его фокусы Fx
и Fj и дана его большая
полуось а; все время, как
сказано в самом начале
главы, считаем данным
масштаб, которым нзмеря-
Рис. 80. ются расстояния между точ-
точками на плоскости.
Значит, нам известно и число с < а, равное половине расстоя-
расстояния между фокусами.
Построим на плоскости прямоугольную систему координат, кото-
которую будем называть канонической системой (для данного эллипса).
Ее начало О есть центр эллипса, а ось абсцисс совпадает с фо-
фокальной осью. Положительным направлением на ней считаем направ-
направление вектора F-Jf^. Положительное направление на оси ординат вы-
выбираем произвольно.
В этой системе координат имеем Fl = (— с, 0), F% = (с, 0); фокус Fx
условно называем левым, фокус F2—правым.
Предположим теперь, что М ~{х, у)— произвольная точка эллипса.
Пусть /"! = р (Flt М) и г2 = р (/""j, М) — расстояния точки М до фоку-
фокусов Fv соответственно F2. Числа гх и гг называются фокальными
радиусами точки М. Имеем:
Точка
когда
, у) является точкой эллипса тогда и только тогда,
-2a, A)
S 2] УРАВНЕНИЕ ЭЛЛИПСА 12J
т. е.
V(x + cJ + y* + V(x~ с)* + у* = 2а. (Г)
Это уравнение (в котором оба корня положительны) и есть уравне-
уравнение эллипса в выбранной системе координат.
Преобразуем уравнение A) к виду, который называется канони-
каноническим уравнением эллипса. Для этого перенесем второй радикал
в правую часть. Возведя после этого обе части уравнения в квад-
квадрат, получаем
или (после раскрытия скобок и приведения подобных членов)
а]/(х — сJ + </2 = а2 — сх. B)
Обе части равенства B) снова возведем в квадрат, получим
а2 ((л:— сJ + у2) = а* — 2агсх + сгл:а
или (после очевидных упрощений)
(а2 —с2)лг2-МУ = я2(а2 —с2). C)
Так как а > с, то число а2 — с2 положительно; обозначим его через Ь2,
называя число Ь= -\-\/"а2 — с2 малой полуосью эллипса. Теперь равен-
равенство C) можно переписать в виде
или
D)
Покажем теперь, что уравнение D) действительно есть уравнение
нашего эллипса,—ведь пока мы доказали только, что каждая точка
М=(х, у), удовлетворяющая уравнению A'), удовлетворяет и урав-
уравнению D). Остается доказать обратное утверждение, а именно, что
каждая точка М=(х, у), удовлетворяющая уравнению D), есть точка
эллипса, т. е. что для нее выполнено условие r1-f-ra = 2a; это не
очевидно, так как при переходе от уравнения (Г) к уравнению D)
мы два раза возводили обе части уравнения в квадрат, а при этом
могли появиться пары чисел (х, у), удовлетворяющие уравнению D),
ио не удовлетворяющие уравнению (Г)- Итак, пусть М=(х, у) —
произвольная точка, удовлетворяющая уравнению D). Найдем расстоя-
Ния ri> ^ точки М от фокусов F1 и F2. Имеем
гх = + ]/{х+с)*+Уг, E)
122 ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА [ГЛ. VI
причем из D) имеем
Но 62 = а2— с2; подставляя это в F), получаем
</2=а2 — с2 — х*+?х*.
Это значение у подставим в E); получим
откуда
/^-гЬ (а+?*) = ± (« + «*)¦ G)
Слева—положительное число гх; справа надо взять такой знак, чтобы
правая часть была тоже положительной. Но из D) следует, что
|лг|^а; кроме того, 0^е<1; значит, \ех\<.а, т. е. всегда
а-(-елг> 0, так что справа в G) надо взять знак -f-> и мы получаем
r1 = a-\- ex.
(I)
Точно так же
r2=+V(x-c)* + y\ (8)
Это равенство отличается от E) только тем, что в нем вместо с
имеем —с. Поэтому, не повторяя выкладок, аналогичных только что
проведенным, можем получить значение для г2 сразу, заменяя в G)
с на —с. Получаем
г2 = ±(а — ех). (9)
Снова имеем \ех\ < а, значит, всегда а — ех > 0; справа надо опять
взять знак +:
г„ = а — ex.
Из (I) и (II) получаем r1-\-ri = 2a, точка М=(х, у) принадлежит
нашему эллипсу.
Итак, мы доказали, что уравнение D) действительно есть урав-
уравнение эллипса; оно называется каноническим уравнением эллипса.
Формулы (I) и (II), очень просто — и даже линейно — выражают
фокальные радиусы любой точки эллипса через абсциссу этой точки.
Кроме того, заметим, что из Ьг = аг — с2 следует с2 = а2—Ь2;
значит,
2 <? 1 *2 *2 1 2
(И)
§ 2]
УРАВНЕНИЕ ЭЛЛИПСА
123
Эти формулы нам понадобятся в дальнейшем.
Из уравнения D) легко выводятся некоторые свойства эллипса.
Прежде всего, если точка М — (х, у) лежит на нашем эллипсе, т. е.
удовлетворяет уравнению D), то тем же свойством обладает и точка
jy[i —(х, —У) (рис. 81), симметричная точке М относительно оси
абсцисс (т. е. фокальной оси эллипса), а также точка Ж" = (— х, у),
симметричная точке М от-
относительно оси ординат
(т. е. второй оси эллипса).
Итак, обе оси эллипса (пер-
(первая и вторая) являются его
осями симметрии.
Центр эллипса является
его центром симметрии: в
самом деле, при нашем выбо-
выборе системы координат центр
есть начало координат О;
если точка М=(х, у) удов-
удовлетворяет уравнению D),
то иточкаЛ!* = (—х, —у),
симметричная точке М
относительно центра О, также
откуда утверждение следует.
Заметим, наконец, что — в силу уравнения D), которому удовле-
удовлетворяют все точки эллипса,— для каждой точки М = (х,у) эллипса
имеем
удовлетворяет уравнению D),
v2 I/2
— < 1 —
1
т. е. |лг|^а, |(/1^?> — весь эллипс лежит в прямоугольнике, огра-
ограниченном прямыми х = ±а, у = ±Ь, параллельными (второй и пер-
первой) осям эллипса и отстоящими от них соответственно на расстоя-
расстояние а и Ь. Этот прямоугольник называется основным прямоугольником
для данного эллипса.
Точки Аг = (—а, 0), Аг — (а, 0), а также точки В1 = @, —Ь),
В2 = @, Ь), т. е. точки пересечения эллипса с его осями, называются
вершинами эллипса.
Таким образом, у эллипса (не являющегося окружностью) имеется
четыре вершины.
Замечание. Непосредственно из определения эллипса вытекает
следующий общеизвестный способ его построения. В чертежную
доску вбиваются два гвоздика F1 и F2 (с расстоянием 2с между
ними). На них накидывается замкнутая нить длины 2а + 2с; натя-
натянув эту нить приложением к ней острия карандаша, передвигают
124
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ. VI
карандаш так, чтобы нить все время была натянутой. При этом каран-
карандаш вычертит эллипс, как геометрическое место точек, сумма рас-
расстояний которых от двух фокусов F1 и F2, очевидно, равна 2а1).
§ 3. Параметрическая запись уравнения эллипса;
построение эллипса по точкам.
Эллипс как результат сжатия окружности к одному
из ее диаметров
Пусть на плоскости дан эллипс своим каноническим уравнением
A)
,,2
Построим две окружности — «большую» и «малую» — с общим
центром в начале координат и радиусами а — у «большой окруж-
окружности» и b — у «малой окружности» (рис. 82). Проведем из начала
координат произвольный луч.
Угол его наклона к оси абсцисс
обозначим через <р. Точку пе-
пересечения нашего луча с боль-
большой окружностью обозначим
через L, а с малой — через К.
Через точки К и L проведем
прямые k и /, параллельные
оси Оу (пересекающие ось Ох
х в точках К.' и L'). Через точку
Л" проведем прямую, параллель-
параллельную оси Ох. Точку пересечения
этой прямой с прямой / обозна-
обозначим через М. При <р = 0 и <р = п
получаем М = L; при <р — -^- ,
(р=-2" точка /И = а; это вер-
вершины эллипса. Вообще же при
О < ф < л наше построение
дает некоторую точку верхней, а при п < ф < 2я — точку нижней
полуплоскости, так что на каждой вертикальной прямой х = т,
— а < т < а, получаем ровно две точки М.
Рис. 82.
') В чертежной практике применяются многочисленные другие способы
построения эллипса; см., например, Б. Н. Делоне и Д. А. Райков,
Аналитическая геометрия, т. I, M.—Л., Гостехиздат, 1948, стр. 257—265.
о 3] ПАРАМЕТРИЧЕСКОЕ УРАВНЕНИЕ ЭЛЛИПСА 125
Докажем, что каждая из этих точек лежит на эллипсе A). В са-
самом деле, для координат х, у точки М имеем
x = @L') = \0L\ cos q> = a cosy, \
_
так что -\ + "|т = cos2ф-)-sin2ф = 1, чем утверждение доказано.
Докажем, что наше построение — а следовательно, совокупность
уравнений B)—при некотором ф дает нам любую точку эллипса.
В самом деле, пусть N—{x0, у0)—какая-нибудь точка эллипса,
— а < л:0 < а. На прямой х = х0 наше построение дает нам две
точки М, и онн, удовлетворяя уравнению A), лежат на нашем
эллипсе. Если бы ни одна из них не совпадала с точкой N, то на
прямой х — х0 оказалось бы три точки эллипса, чего быть не может,
так как, полагая в уравнении A) лг = лг0, получаем для определения
ординаты yQ точки пересечения прямой x = xQ с эллипсом A) квад-
квадратное уравнение.
Мы доказали следующее предложение:
Все точки эллипса A) и только эти точки удовлетворяют системе
уравнений
x=acosw, \
> 0<ф<2я. C)
у = bsinqi, )
Эту систему называем поэтому «параметрической записью уравне-
уравнения эллипса» или просто (.(параметрическим уравнением эллипса» (не
боясь того, что уравнений здесь два, а не одно).
Вместе с тем мы дали способ построения эллипса «по точками,
вернее, способ построения произвольно большого числа точек эллипса.
Но мы доказали, кроме того, одно важное и наглядное свойство
эллипса. В самом деле, вернемся к рис. 82. Точка М=(х, у) есть
(произвольная) точка эллипса, a 1=(лг, Г) есть точка большой
окружности, имеющая ту же абсциссу, т. е. лежащая на той же вер-
вертикальной прямой, что и точка М. Тогда Y = (L'L), а у = (L'M) = (К'К).
Из подобия треугольников ОКК' и 011' имеем (-*^ = ЦШ = -^-,
т. е, у =—Y. Таким образом, наш эллипс получился из '<большой»
окружности преобразованием плоскости, заключающимся в том, что
все точки оси абсцисс остаются на месте, а каждая точка Р (рис. 83),
не лежащая на этой оси, переходит в точку Р* с той же абсциссой,
но с ординатой, полученной из ординаты точки Р умножением на
число —t—ордината каждой точки «сжалась» в отношении —. Такое
126
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ. VI
преобразование называется равномерным сжатием плоскости к оси
абсцисс в отношении —.
Вообще, равномерным сжатием плоскости к данной прямой d
в отношении &>0 называется преобразование плоскости, состоящее
в следующем: каждая точка прямой d остается на месте; произволь-
произвольная точка Р, не лежащая на
прямой d, переходит в точку
Р*, лежащую на перпендику-
перпендикуляре РР' к прямой d (см.
рис. 83) по ту же сторону от
этой прямой, что и точка Р
и определенную условием
}PrP*\=>k\pTP\, где Р'—ос-
Р'—основание перпендикуляра, т. е.
пересечение его с прямой d.
Термин «сжатие» наглядно
оправдан лишь при k < 1
(см. рис. 83); при &> 1 проис-
происходит ие сжатие, а «растяже-
«растяжение». Тем не менее мы будем
употреблять термин «сжатие»
в случае любого k. Читатель
сам докажет, что наш эллипс
может быть получен из малой
окружности сжатием ее в отношении — (т. е., говоря точнее, рас-
растяжением ее) к оси ординат.
Итак, доказано следующее предложение:
Всякий эллипс получается сжатием окружности к одному из ее
диаметров 1).
Из этого предложения и иллюстрирующего его рис. 83 легче
всего уяснить форму эллипса. Впрочем, вероятно, читатель представлял
себе ее и до того, как знакомился с этими лекциями.
Рис. 83.
§ 4. Эллипс как проекция окружности
и как сечение круглого цилиндра
Пусть даны две плоскости аир, пересекающиеся по некоторой
прямой d (рис. 84). Острый угол между плоскостями аир обозна-
обозначим через <р.
1) Сам этот диаметр оказывается при к < 1 первой осью эллипса
(тогда k = —j, а при k > 1—второй осью fft = -r-j.
§ 4]
ЭЛЛИПС КАК ПРОЕКЦИЯ ОКРУЖНОСТИ
127
В плоскости Р дана окружность К радиуса а с центром О, кото-
который (для удобства) предполагаем лежащим на прямой d. Докажем,
что ортогональная проекция К' окружности К на плоскость а есть
эллипс.
Рис. 84.
Для Доказательства берем в плоскостях а и В по прямоугольной
системе координат с общим началом О и общей осью абсцисс, идущей
и прямой й. Оси ординат в плоскостях а и В направляем так, чтобы
МГУ-1 °РТаМ" был Равен У™У Ч>-
произвольная точка окружности К; ее проекцию на
То" °б°г3начим чеРез М'. Угол наклона вектора ОМ (в плоско-
очкиСуИ' сцнсс Ох обозначим через t. Тогда для координат
на плоскости а, обозначая через С? ортогональную
х, у точкиуИ'
128 ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
проекцию точки М' (и точки М) на ось абсцисс, имеем
x = {OQ) =|OAf|cos/ = acos/,
y — (QM') = \QM\ cosq> = | ОМ\ sin t cosy = a cosq>sint.
Обозначая постоянную acos<p через b, имеем
x — a cos t,
y = bsin t,
[ГЛ. VI
т. е. параметрическую форму уравнения эллипса, которой, таким
образом, и удовлетворяют координаты любой точки М' нашей кри-
кривой К' (определенной как проекция окружности К на плоскость а).
Следовательно, кривая К' есть эллипс, и наше утверждение доказано.
Рис. 85.
Всякий знает из опыта, что если резать колбасу «наискось», то
полученные ломтики ее будут иметь форму эллипса. Дадим строгое
К 5] УРАВНЕНИЕ ГИПЕРБОЛЫ 129
доказательство этому факту. Докажем, что сечение круглого цилиндра
плоскостью, не параллельной оси цилиндра, есть эллипс.
Секущую плоскость обозначим через а, точку ее пересечения
с осью цилиндра обозначим через О (рис. 85). Эту точку сделаем
началом прямоугольной системы координат Ох'у, ось ординат кото-
которой идет но прямой пересечения d плоскости а с плоскостью Р,
проходящей через точку О перпендикулярно к оси цилиндра. Обо-
Обозначая через Ох проекцию оси Ох' на плоскость р, получаем в пло-
плоскости р прямоугольную систему координат Оху. Острый угол между
плоскостями а и Р обозначаем через <р.
Плоскость Р пересекает цилиндр по окружности К (являющейся
ортогональной проекцией на плоскость р интересующей нас кри-
кривой К' — кривой пересечения цилиндра с плоскостью а).
Пусть ЛГ — произвольная точка кривой К', а М—ее проекция
па плоскость р (точка М лежит на окружности К радиуса Ь).
Точки М и М' лежат на прямой, перпендикулярной к плоскости Р;
проводя через эту прямую плоскость, перпендикулярную к оси Оу,
получим в пересечении с последней точку Q—проекцию на ось Оу
обеих точек М и М'. Угол наклона вектора ОМ к оси Ох обозна-
обозначим через t. Тогда имеем для координат х', у точки М'
у = @Q) = | Ш | sin / = Ь sin t,
coscp coscp coscp
Постоянную обозначаем через а, что при подстановке в A) дает
с os ср
для координат произвольной точки М' кривой К' равенства
х' — a cost,
у =bsin t;
мы снова получили в качестве параметрического уравнения кри-
кривой К' параметрическое уравнение эллипса. Теорема доказана.
§ 5. Определение гиперболы. Каноническое уравнение гиперболы
Определение. Гиперболой называется геометрическое место
точек плоскости, модуль разности расстояний каждой из которых до
диих фиксированных точек Fx и Р.г (рис. 86) есть положительная
постоянная. Эту постоянную обозначим через 2а. Число а будем на-
называть первой полуосью гиперболы. Точки F1 и F2 называются фоку-
фокусами гиперболы. Расстояние между ними обозначается через 2с и
называется фокусным расстоянием. Как и в случае эллипса, середина
отРезка FXFZ называется центром, гиперболы. Прямая, на которой
**• С. Александров
130
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ.
лежат фокусы гиперболы, называется фокальной или первой (или
действительной) осью гиперболы. Прямая, проходящая через центр
перпендикулярно к первой оси
гиперболы, называется ее вто-
второй (или мнимой *_)) осью.
Из рис. 86 ясно, что
\MF1\-\MFi
т. е. с^ а.
Если с = а, то мы получаем
точки М, для которых или
или
Рис. 86.
Эти точки М заполняют две
полупрямые, дополняющие отрезок FtF2 до всей прямой. По-
Поэтому случай с = а рассматривать не будем. Предполагаем, что
с> а. Как и в случае эллипса, число — называем эксцентрисите-
эксцентриситетом гиперболы, и обозначаем через е. Имеем
Пусть нам дана гипербола, т. е. даны ее фокусы Ft и F2, а также
числа аи с. Как и в случае эллипса, построим на плоскости прямоуго-
прямоугольную систему координат, которую будем называть канонической (для
данной гиперболы). Начало этой системы координат лежит в центре О
гиперболы, ось абсцисс совпадает с фокальной осью гиперболы. За
положительное направление оси абсцисс примем направление век-
вектора Ef%. Тогда /=;=»(—с, 0), F2 = (c, 0).
Пусть М = (х, у) — произвольная точка гиперболы. Обозначим
через г1 — р (Fv М) и г2 = р(/г2, М) расстояния точки М — (х, у)
соответственно до фокусов Ft и Ft. Числа гх и га называются фо-
фокальными радиусами точки М.
Имеем
г, =
A)
*) Когда мы познакомимся в главе XV с пополнением плоскости так
называемыми мнимыми ее точками, то узнаем, что «мнимая» ось гиперболы
пересекается с гиперболой в двух мнимых точках (тогда как «действитель-
«действительная» ось пересекается, очевидно, в двух обыкновенных «действительных»
точках; отсюда названия—«действительная» и «мнимая» ось, вероятно, кажу-
кажущиеся читателю (как и автору) довольно бессмысленными.
§ 5] УРАВНЕНИЕ ГИПЕРБОЛЫ 131
Точка М=(х, у) есть точка гиперболы тогда и только тогда,
когда
\rx — rt\ = 2a B)
или
г1 — г2 = ± 2а.
Если принять во внимание равенства A), то имеем (предполагая
квадратные корни положительными)
V(x + cJ + y2 — V(x — сJ + у2^±2а. C)
Это уравнение и есть уравнение нашей гиперболы в выбранной сис-
системе координат.
Преобразуем уравнение C) к виду, который называется канони-
каноническим. Для этого уединим первый радикал. Возведя затем обе
части уравнения в квадрат, получаем
4а V(x — сJ + у2 + (х — сJ
или (после простых преобразований)
сх— аа = ± а\/{х — с
Обе части последнего равенства снова возведем в квадрат. Получим
c2x2—2a2cx + ai = а2х2—2а2сх + а2с2 + а2у2
или
(с2 — а2)х2 — а2у2 = а2(с2 — а2). D)
Так как су-а, то число с2 — а2 положительно; обозначим его
через Ь2, считая Ь=-\-ус2—а2. Равенство D) можно переписать
в виде
Ь2х2 — а2у2 = a2b2
или
о о
E)
Осталось показать, что уравнение E) действительно есть урав-
уравнение нашей гиперболы: пока мы доказали лишь, что каждая точка
М = (х, у), удовлетворяющая уравнению B), удовлетворяет и урав-
иению E); как и в случае эллипса, еще надо доказать, что каж-
Дая точка М=(х, у), удовлетворяющая уравнению E), удовлетворяет
и Уравнению B).
Пусть М=(х, у) — произвольная точка, удовлетворяющая урав-
уравнению E). Найдем фокальные радиусы г1 и г2 точки М. Имеем
5*
132 ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
Из E) находим (помня, что Ь2 — с2 — а2)
[ГЛ. VI
Подставляя это выражение для у2 в AХ) и учитывая, что —
имеем
гг = У лга + 2еах-\- а2е2
аг =
т. е.
Совершенно аналогично имеем
Так как гг и г2 — положительные числа, то надо знак перед скоб-
скобками выбрать так, чтобы и правые части равенств F^ и F2) были
положительными. Для этого исследуем различные возможные случаи,
представляемые равенствами F^) и F2). Из уравнения E) находим
прежде всего, что |л:|^а>0. Поэтому имеем два основных слу-
случая: в зависимости от того, лежит ли точка М — (х, у) в правой
полуплоскости х > 0 или в левой х < 0. Так как е> 1, то в обоих
случаях имеем
\ех\> а. G)
При х > 0 внутри скобки в Ft) стоит положительное число, поэтому
скобку надо взять со знаком -{-, и мы получаем
гх = а -\- ех при х > 0.
Из G) следует, что при jc > 0 внутри скобки F2) стоит отрица-
отрицательное число, скобку надо взять со знаком —, так что
j = — а-{-ех при х > 0.
Из A+) и (П+) следует, что при х > 0 имеем
и точка Л1 = (лг, у), удовлетворяющая уравнению E), лежит на
гиперболе.
Пусть х < 0; из G) следует, что теперь внутри скобки FL)
стоит отрицательное число, значит, перед скобкой надо взять
знак —, так что
гх = — а — ех при х < 0.
(I"
§ 51
УРАВНЕНИЕ ГИПЕРБОЛЫ
133
Зато внутри скобки в F2) стоит теперь число положительное,
значит,
= а — ех при х < 0.
(II-)
Имеем
r2 —rl =
Итак, во всех случаях всякая точка, удовлетворяющая уравнению E),
лежит на гиперболе — мы доказали, что уравнение E) действительно
является уравнением нашей гиперболы. Оно называется канониче-
каноническим уравнением гиперболы.
Формулы (I), (II) линейно выражают фокальные радиусы любой
точки гиперболы через ее абсциссу.
Заметив, что с* — аг-{-Ь2, получаем
(8)
(9)
Из уравнения E) вытекает (как и в случае эллипса), что обе
оси гиперболы являются ее
осями симметрии, а центр ги-
гиперболы есть ее центр симмет-
симметрии.
Переписывая уравнение ги-
гиперболы E) в виде
&2 ~~а* ~'
и замечая, что его левая часть
всегда >о, видим, что для
точек гиперболы должно быть
~^ — \>0, т. е. \х\^а.
Другими словами, в полосе
а<^х<а, ограниченной
прямыми х=±а („а рис 87
эта полоса
содержится
прямой х ^^ ? или
все они лежат или вправо от
от "рямой *=-«• кр°ме двух точек
на самих этих прямых и являю-
^lэ
134
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ. VT
Итак, гипербола распадается на две ветви: «правую», для точек
которой абсцисса х~^а, и «левую», для точек которой jc^ — а.
Чтобы ближе познакомиться с общим видом гиперболы, надо
определить прямые, называемые ее асимптотами.
§ 6. Основной прямоугольник и асимптоты гиперболы
Как и в случае эллипса, основным прямоугольником гиперболы
называется прямоугольник, ограниченный прямыми, параллельными
второй и первой осям гиперболы и отстоящими от них соответ-
соответственно на расстояния а и b (рис. 88). В канонической системе
координат уравнения этих прямых суть х=± а, у — ±Ь, тогда как
уравнение самой гиперболы
имеет вид
i!.
а2
A)
Рис. 88.
у=—х будем называть первой,
Диагонали основного пря-
прямоугольника х) суть прямые,
имеющие своими уравнениями
(все в той же системе коорди-
координат, канонической для данной
гиперболы)
у = ±±х. B)
Эти прямые называются асим-
асимптотами гиперболы. Прямую
а прямую у = х — второй
асимптотой.
Возьмем какое-нибудь значение переменного х, х^ а. Ему соот-
соответствует в верхней полуплоскости точка М гиперболы с абсцис-
абсциссой х (см. рис. 88) и течка М' (первой) асимптоты с тою же
абсциссой лг:
М=(х, у), М'=(х, у').
При этом
Ь
а
J) Под диагональю прямоугольника (и вообще многоугольника) пони-
понимается вся бесконечная прямая, проходящая через две данные (не соседние)
вершины многоугольника.
о gi АСИМПТОТЫ ГИПЕРБОЛЫ 135
Чтобы найти ординату у точки М на гиперболе, достаточно решить
уравнение A) относительно у; получим
у=±Ух2 — а*.
При этом (так как мы находимся в верхней полуплоскости) радикал
надо брать со знаком +. Сравнивая правые части равенств B+)
и A+), прежде всего видим, что — х = ~ Ух2 > —Ух2 — а2. Дру-
Другими словами, точка М, имея ту же абсциссу, что и точка М',
имеет меньшую ординату, т. е. лежит под точкой М'. Оценим
разность ординат:
_ Ь (х — Ух2 — а')(х + Ух2 — а2) __ аЬ
При неограниченном возрастанли х разность
ab
У—У =
* — а2
оставаясь положительной, монотонно убывает и стремится к нулю,
т. е. точки М и М'', уходя в бесконечность (при неограниченном
возрастании их общей абсциссы х), неограниченно сближаются
между собою. При этом точка М гиперболы все время остается
под точкой М' асимптоты.
На нижней полуплоскости положение аналогично"); при неогра-
неограниченном возрастании (положительной) абсциссы х точка М=(х, у)
гиперболы (имеющая абсциссу х и лежащая в нижней полуплоскости)
неограниченно сближается с точкой М' = (х, у') второй асимптоты,
причем
у =~т
аЬ
точка М лежит выше точки М.
Мы исследовали взаимное расположение точек гиперболы и пары
ее асимптот при х^а. Картина при *<— а получается по
ее
136
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ. VI
симметрии (так как фигура, состоящая из гиперболы и двух ее асимп-
асимптот, симметрична и относительно оси ординат). В целом общий
вид гиперболы ясен из
рис. 88.
Из произведенного ис-
исследования взаимного рас-
расположения гиперболы и
ее асимптот следует,
что гипербола не имеет
ни одной общей точки ни
с одной из своих асимп-
асимптот. Этот геометрический
факт легко доказывается
и алгебраически: если
бы существовала общая
точка М={х, у) гипер-
гиперболы и ее асимптоты, то
Рис. 89. координаты х, у этой
точки должны были бы
одновременно удовлетворять уравнениям A) и B), которые несовме-
хг fa* X2
стимы (подставляя B) в A), получим -^ — -^ -г2- = 1, т. е. 0 = 1).
Рис. 90.
Замечание. Из формул (9) § 5 следует, что эксцентриситет
гиперболы
s у] ДИРЕКТРИСЫ ЭЛЛИПСА И ГИПЕРБОЛЫ 137
(всегда больший единицы) равен отношению длины диагонали1) основ-
основного прямоугольника к его основанию (т. е. к стороне, параллель-
параллельной фокальной оси гиперболы (рис. 89)). Эксцентриситет тем
меньше, чем меньше отношение высоты основного прямоугольника
к его основанию, т. е. чем острее угол между асимптотами.
gc/IH Ь=а, т. е. если основной прямоугольник есть квадрат
(рис. 90), то эксцентриситет гиперболы равен |/^2 и асимптоты
взаимно перпендикулярны. В этом случае гипербола называется
равнобочной илн равносторонней; ее уравнение есть
хг—у2 = а2.
В главе VIII мы увидим, что если за оси координат принять асимп-
асимптоты равнобочной гиперболы, то уравнением этой гиперболы будет
а3 ,
или, полагая -5- = «,
— мы получим уравнение гиперболы, как «графика обратной про-
пропорциональности», известное из курса средней школы.
§ 7. Директрисы эллипса и гиперболы
Директрисой эллипса (гиперболы), соответствующей данному
фокусу F, называется прямая d, перпендикулярная к фокальной
оси кривой, отстоящая от центра на расстояние — н лежащая по
ту же сторону от центра, что и фокус F (рис. 91 и 92).
Таким образом, и у эллипса (не являющегося окружностью), и
У гиперболы—две директрисы.
Если взята каноническая для данной кривой прямоугольная
система координат, то уравнение директрис dv d2 (соответствующих,
фокусам Flt F3) будет соответственно
*--¦г. о.»
l) В элементарно геометрическом
смысле.
138
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ. VI
Для эллипса е < 1, поэтому директрисы эллипса удалены от
центра иа расстояние, большее а, т. е. расположены за пределами
основного прямоугольника (см. рис. 91).
Рис. 91.
Для гиперболы е>1, поэтому директрисы гиперболы удалены
от ее центра на расстояние, меньшее а, они пересекают основной прямо-
прямоугольник и проходят
между центром и соответ-
соответствующей вершиной ги-
гиперболы (см. рис. 92).
Заметим,наконец, что
расстояние А директрисы
от соответствующего ей
фокуса есть
1) в случае эллипса
1-е2 _ .
= a —;— = —-.-—
1_
e a
2) в случае гиперболы
Д — ae =
Рнс. 92.
— а ¦
2 —1 1
Итак, для эллипса и для гиперболы имеем
Д = .
е а
B)
Если в случае гиперболы (при данном а) фокусное расстояние с,
а значит, и эксцентриситет е =— увеличиваются, то (острый) угол
- -, ДИРЕКТРИСЫ ЭЛЛИПСА И ГИПЕРБОЛЫ 139
§ 'J
между асимптотами уменьшается, а директрисы все более прибли-
приближаются ко второй оси (и сближаются между собою).
Если в случае эллипса (при данном а) фокусное расстояние с,
а значит, и эксцентриситет е = — уменьшаются, то эллипс стано-
становится все более похожим на окружность, а его директрисы уходят
все дальше и дальше от второй оси (и друг от друга). Наконец,
для окружности е = Ои директрисы исчезают («уходя в бесконеч-
бесконечность»)—окружность не имеет директрис1).
Пусть дан какой-нибудь эллипс или гипербола С; один из фо-
фокусов кривой С обозначим через F, соответствующую ему ди-
директрису— через й. Для произвольной точки М обозначим через г
расстояние этой точки М от точки F, через б—расстояние точки М
от прямой d. Докажем, что для всех точек М кривой С имеем
Достаточно доказать это равенство для случая, когда F = Ft-
лервый (левый) фокус (система координат—каноническая).
Тогда имеем
откуда
Итак, равенство C) имеет место для всех точек кривой С.
Докажем обратное утверждение: если для какой-нибудь точки
М = (х, у) плоскости выполнено равенство C), то точка М лежит
на кривой С.
В самом деле, пусть снова F—левый фокус кривой С, т. е.
F~(—с, 0), а прямая d имеет уравнение
Тогда
плоскости (см п% и5с^юче"ие устраняется при переходе к проективной
вительно «ушли V б^копечи^»*8!?31'J* АиРектРисы окружности деист-
^^V66 сшшадают с несобственной (бес
вительно «ушли V б^копечи^»!?J АРР ру д
конечно удаленной) пряной n^^V66 сшшадают с несобственной (бес-
кие имело смысл, надо дать дпугое "; ДНаК° ДЛЯ Т0Г°' ЧТ°бы ЭТ° Ут?еРжАе-
) рой
кие имело смысл, надо дать дпугое ;„ Д У?Р
чие от данного выше) не^олиовал^Ъеиие АиРектРис' котоРое <в °тли"
определение дается в проективной r^tбЫ понятием Рас"ояния. Такое
за пределами этих лекций). геометрии (но, к сожалению, остается
140 ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА [ГЛ. VI
По предположению для точки М выполнено условие C), так что
Г1- 2_ ?L
&~e a2
т. e.
или
с
что после очевидных преобразований превращается в
sQ О i О i ^ О ^ / 9 O\ t А\
^ц—— С ) ДГ -}-u у = а ^ы ——с j# ^<j.|
Если кривая С—эллипс, то е==—<1, а2 — с2 = ?2 и уравнение D)
переписывается в виде
или
fl2 -Г Ьа —
— точка М лежит на эллипсе С.
Если же кривая С—гипербола, то е=— > 1,
>рйвнение D) можно написать в виде
+ я V = —
пли в виде
— точка УИ лежит на гиперболе С.
Итак, доказана следующая теорема:
Как эллипс, так и гипербола С с эксцентриситетом е есть гее
метрическое место тбчек М плоскости, удовлетворяющих следук
шему условию: отношение расстояния точки М до проиэеольн
(ыбранного фокуса кривой к расстоянию точки М до соответствуй:
щей этому фокусу директрисы равно е.
Пусть теперь (на плоскости) даны точка F, прямая d, не прс
ходящая через эту точку, и положительное число е ^= 1.
Докажем, что при е<1 существует эллипс и при е"^>\—п
нербола с эксцентриситетом е, фокусом F и соответствующей ем
директрисой d.
„ ji директрисы эллипса и гиперболы 141
В самом деле, опустим из точки F перпендикуляр FD на пря-
прямую d и обозначим через А точку, делящую отрезок FD в отно-
отношении е, а через А'—точку, делящую тот же отрезок FD в отно-
отношении— е, так что
Та 7а' ,г.
AD A'D
Нетрудно показать (см. задачу 1), что тогда середина О отрезка
~АА' делит отрезок FD в отношении — е2:
OD
т. е.
OF=e-OD. E')
Из равенств E) и (о') следует, что точки F, D и А лежат по одну
сторону от точки О.
Выберем прямоугольную систему координат Оху с началом
в точке О и положительным направлением OF оси Ох. Пусть
в этой системе
Г-(с, 0), D = (d, 0), Л = (а, 0).
Так как точки A, F и D лежат на положительном луче оси Ох,
то все три числа а, с и d являются положительными, причем
c = e2-d. F')
Чтобы установить, что точка F и прямая d являются фокусом
и директрисой кривой с центром О, первой полуосью а и эксцентри-
эксцентриситетом е, достаточно показать, что
ае = с, — = d.
6
с -\- ed ее 4- еЫ ec-j-c
е 1+е 1+е 1+е
a c+ed еЧ+ed .
— — ¦ = а.
Имеем
е (Ц-е)-е A+е)-е
Утверждение доказано.
•Эксцентриситет эллипса (не являющегося окружностью) есть
положительное число е < 1; эксцентриситет гиперболы г> 1.
142 ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА [ГЛ. VI
Определим эксцентриситет для всякой параболы, положив его рав-
равным е = 1. Теперь любое положительное число е является эксцентри-
эксцентриситетом или эллипса, или параболы, или гиперболы, и мы в качестве
итога рассуждений этого параграфа получаем такой основной результат:
Класс кривых, являющихся эллипсами (кроме окружности), пара-
параболами или гиперболами, может быть определен следующим образом:
Каждая кривая С этого класса (и только кривая этого класса)
есть геометрическое место точек М, для которых отношение -—-
расстояния гп точки М от некоторой фиксированной точки F («фокуса
кривой С») к расстоянию бл1 точки М от некоторой фиксированной
прямой («директрисы кривой С») есть постоянное положительное
число е,
е = -чД- (для всех точек М кривой С),
называемое эксцентриситетом кривой С.
Кривая С есть
эллипс, если е < 1,
парабола, если е — 1,
гипербола, если е> 1.
§ 8. Фокальный параметр эллипса и гиперболы.
Уравнение при вершине
1. Фокальный параметр. Пусть С—эллипс или гипербола. Как
раньше (в случае параболы), проведем через (какой-нибудь) фокус F
кривой С прямую, перпендикулярную к ее фокальной оси. Эта пря-
прямая пересечет кривую С в двух точках Р и Р', расположенных «над»
и «под» фокусом F. Длину полученной таким образом «фокальной»
хорды РР' обозначаем через 2/?; величина р называется фокальным
параметром1) кривой С.
Фокальный параметр окружности, очевидно, равен ее радиусу.
Возьмем каноническую для данной кривой С систему координат;
тогда фокальный параметр кривой С равен модулю ординаты каждой
из точек Р, Р'. Вычислим его.
Если кривая С есть эллипс с уравнением
то для любой точки М=(х, у) этого эллипса
г) В силу симметрии кривой относительно ее второй оси безразлично,
какой из двух фокусов обозначен буквой F.
s gj ФОКАЛЬНЫЙ ПАРАМЕТР ЭЛЛИПСА И ГИПЕРБОЛЫ
Подставляя сюда абсциссу фокуса F, т. е.
х = ±с,
получим для ординат точек Р, Р' значения
Ь
Итак фокальный параметр эллипса есть
Для точки М—(х, у) гиперболы
имеем
b
¦ — аа
" ~ а '
Для х = ± с получаем
а — а
Фокальный параметр гиперболы также есть
Вспомним, что мы нашли (§ 7) для расстояния А между фокусом
и соответствующей директрисой как эллипса, так и гиперболы
выражение
Л l b%
Л =— • —.
е а
Теперь мы видим, что это расстояние А может быть выражено и через
фокальный параметр:
A = -f, B)
и это выражение годится не только для эллипса и гиперболы, но и
для параболы (для которой, как мы знаем, е=\ и А=р). Таким
образом, для всех наших кривых (кроме окружности) фокальный
параметр р может быть определен как число р = еА, где А — рас-
расстояние от фокуса до директрисы, а е — эксцентриситет.
%• Уравнение ори вершине. Объяснение названий «парабола»,
«эллипс», «гипербола». Воспользуемся фокальным параметром для
ТОго> чтобы найти такую систему координат, в которой уравнения
ех трех кривых (эллипса, гиперболы и параболы) имеют сходную
144
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ. VI
Эта система координат имеет своим началом вершину кривой,
а осью абсцисс — фокальную ось; для параболы эта система коорди-
координат уже -рассмотрена нами в § 1 под названием «канонической;;;
относительно этой систе-
У\ мы парабола имеет урав-
уравнение у2 = 2рх.
В случае эллипса
примем за начало новой
системы координат «ле-
вуюа вершину Аъ сохра-
сохранив единичные векторы
ех, е2 старой системы
(т. е. системы, канониче-
канонической для данной кривой С
(рис. 93)). Обозначая ко-
координаты какой-либо точ-
точки М в новой системе че-
через х', у', имеем формулы
перехода от старых ко-
Рис. 93.
ординат х, у к новым х', у' (см, гл. III, § 2):
х— —а-\- х',
Подставляя эти значения в каноническое уравнение эллипса
а2 i- р - »,
получаем
т. е.
а
= 1 или, после очевидных преобразований,
*¦' ?<3 и'2
а ~а* г №¦ '
= 2 —— х ~5" х .
C)
Но —— р, —j-=l—ег, так что уравнение C) переписываем в виде
\)х
'%
или, полагая
в виде
D)
E)
Пусть теперь кривая С есть гипербола
F)
§ 8]
ФОКАЛЬНЫЙ ПАРАМЕТР ЭЛЛИПСА И ГИПЕРБОЛЫ
145
Переходим к новой системе координат, перенося начало канони-
канонической (для кривой С) системы в правую вершину А., = (а, 0) гипер-
гиперболы и сохраняя единич-
единичные векторы каноничес-
канонической системы (рис. 94).
Теперь
х — х'-'г а,
Подставляя это в
уравнение гиперболы F),
получаем
-Ж1-\
v- ~
или
•1)
у а ' а2 ' Рис. 94.
таким образом (помня, что в случае гиперболы ^г =
у'2 = 2рх' + (е2— 1)л:'г,
или, наконец (при обозначении D)),
y'2 = 2px'+qx'2.
Итак, в надлежащим образом выбранной системе координат все
три кривые — парабола, эллипс и гипербола—имеют уравнения одного
и того же вида, а именно:
E')
где р — фокальный параметр кривой, а
(через е, как всегда, обозначается эксцентриситет кривой).
Из этих обозначений следует, что для эллипса q < 0, для пара-
параболы } = 0 и для гиперболы q > 0. Начало этой системы координат
есть вершина кривой1) (левая для эллипса, правая для гиперболы),
а ось абсцисс есть фокальная ось, направленная от (выбранной)
вершины к (соответствующему) фокусу.
На рис. 95 изображены кривые семейства, состоящего из эллии-
СОв, параболы и гипербол с общей вершиной, с общей фокальной
кривой.
) Поэтому уравнение (б') и называется «уравнением при вершине» данной
146
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
[ГЛ. VI
осью, с одним и тем же фокальным параметром р и эксцентрисите-
эксцентриситетом е, принимающим все возрастающие значения: начиная от нуля
(окружность) до 1 (парабола) и далее (гиперболы).
Замечание. Геометры Древней Греции не владели методом ко-
координат и не знали аналитической геометрии; но свойства эллипса,
Рис. 95.
гиперболы и параболы знали не хуже нас с вами; знания эти они
получали методами так называемой синтетической геометрии, т. е.
непосредственным геометрическим построением, определяя эти кри-
кривые— эллипс, гиперболу, параболу — как конические сечения, т. е. как
плоские сечения круглого конуса (об этом определении см. гл. XVIII, § 3).
Свойства наших кривых, выражаемые уравнением E'), греки также
знали хорошо; но ордината у была для них половиной вертикальной
(т. е. перпендикулярной к фокальной оси) хорды, одним из концов
которой была данная точка Р, а абсцисса х этой точки была рас-
расстоянием от касательной, проведенной к кривой в ее вершине. Гре-
Греческие геометры хорошо знали (и умели ценить) также и фокальный
параметр р конического сечения.
Они называли «приложением» данного квадрата к данному отрезку
построение прямоугольника с данным основанием, равновеликого
данному квадрату (т. е. фактически построение высоты этого
УРАВНЕНИЕ ЭЛЛИПСА, ГИПЕРБОЛЫ И ПАРАБОЛЫ
§ 9]
прямоугольника). Формула
147
у2 = 2рх
и разрешает (для случая параболы) задачу приложения квадрата у*
(при приведенном выше геометрическом истолковании ординаты про-
произвольной точки у) к основанию 2р (т. е. к фокальной хорде этой
кривой) — высота искомого прямоугольника есть х, т. е. расстояние
от точки М до касательной в вершине. Так хорошо задача решается
именно для параболы, отсюда и ее название: яарароМ| означает
«нахождение чего-нибудь рядом», «приложение».
Для эллипса и гиперболы задача уже не проходит так гладко:
нужен добавочный член qx2, положительный (т. е. являющийся
избытком, гяерРоЯт)) в случае гиперболы, отрицательный (т. е. явля-
являющийся недостатком ёЯл,и|нё) в случае эллипса. Слова «гипербола»
и «эллипс» и означают соответственно «избыток» и «недостаток»1).
§ 9. Уравнение эллипса, гиперболы и параболы
в полярных координатах
Фокальный параметр находит свое применение и при выводе урав-
уравнений эллипса, гиперболы и параболы в полярных координатах. Этими
уравнениями постоянно
пользуются в астрономии
и во многих вопросах ме-
механики. | ff
Начало полярной сие-
темы координат помеща-
помещаем в фокус F (левый в
случае эллипса (рис. 96),
правый в случае гипербо-
гиперболы (рис. 97) 2) и в един-
единственный фокус в случае
параболы (рис. 98)); по-
полярная ось направлена от
полюса в сторону, проти-
противоположную от соответ-
соответствующей директрисы d (т. е. так же, как направлена ось абсцисс в
канонической для данной кривой системе координат).
с ) Эл' слова в этом смысле употребляются также в стилистике и риторике;
ние <<гипеРб°ла» означает преувеличение, а «эллипсис» (точное воспроизведем
каког')еЧеСК0Г0 слова)—риторическую фигуру, заключающуюся в пропуске
прави "И Ь члеиа предложения, например: «Мой дядя —самых честных
опредЗ несча"ью, в случае гиперболы уравнение в полярных координатах
правую ЯеТ Нб ВСЮ КРИВУЮ> а лишь одну ветвь —при нашем выборе начала —
Рис. 96.
148
ПАРАБОЛА. ЭЛЛИПС. ГИПЕРБОЛА
(ГЛ. VI
Для любой точки М нашей кривой обозначаем через г расстояние
от М до фокуса F, через 6 — расстояние от М до d. Наша кривая С
есть геометрическое место точек М, для которых -^ = е, т. е.
/¦ = <?6. A)
Но г есть полярный радиус точки М. Вычислим 6. Обозначая через D
точку пересечения директри-
директрисы d с фокальной осью,
а через Мх проекцию точки
/И на эту ось, видим, что б
есть длина вектора DMX,
Рис. 97.
Рис. 98.
лежащего на оси абсцисс (канонической системы). Для алгебраических
значений векторов на этой оси имеем
(DMX) = (DF) + (FMX), B)
но
тогда как
(FMX) == r cos q>,
где ф—угол наклона вектора FM к полярной оси, т. е. полярный
угол точки Л1. На кривой С (в случае гиперболы на правой ее ветви)
§ 9]
УРАВНЕНИЕ ЭЛЛИПСА, ГИПРРБОЛЫ И ПАРАБОЛЫ
149
(DMX) = | DMXI= ^- Подставляя в равенство B) найденные значения
входящих в нею величин, получаем
б = — -f- r cos q> =
p + er cos ф
Наконец, подставляя это значение ft в A), имеем
г =p-\-er cos ф;
т. е. г A—ecos(p)=/? или
C)
Это и есть уравнение параболы, эллипса и (ветви) гиперболы в поляр-
полярных координатах.
Для параболы получаем просто
г=т-?-—; C')
здесь ф принимает все значения 0 < ф < 2гт; значение ф = 0 не
годится, что и естественно, так как ему не соответствует никакая
точка параболы.
В случае эллипса все значения Ог^ф < 2л хороши (так как всегда
:*<i).
Для гиперболы можно брать значения ф, для которых
cos ф < — =
— cos О,
где 6 — (острый) угол между асимптотой и фокальной осью гиперболы;
у всех точек правой ветви гиперболы полярный угол q> заключен
в пределах
6 < ф<2я —6,
так что
cos 9 > cos ф.
ГЛАВА VII
ДЕТЕРМИНАНТЫ
§ 1. Плошадь ориентированного параллелограмма
и треугольника
Треугольник и параллелограмм называются ориентированными, если
они снабжены определенным направлением обхода их контура (это
направление и называется ориентацией параллелограмма или тре-
треугольника).
Если рассматривать параллелограмм как построенный на двух
данных векторах U — OA и v = ОВ (рис. 99), исходящих из одной
и тон же вершины, то выбор той или
иной ориентации нашего параллело-
параллелограмма равносилен указанию, какой из
векторов ОА и ОВ является первым,
а какой—вторым. В самом деле, если
дана ориентация, т. е. направление об-
Рис. 99 хода контура параллелограмма, то пер-
первым будет называться тот из двух век-
векторов ОА, ОВ, направление которого совпадает с выбранным направ-
направлением обхода; обратно, если один из двух векторов ОА, ОВ выбран
в качестве первого, то его направление считается задающим нап-
направление всего обхода.
Задав направление обхода параллелограмма, мы этим задаем
и некоторое определенное направление вращения на плоскости—то
направление, в котором вращается луч, исходящий из центра парал-
параллелограмма и направленный в точку, совершающую обход параллело-
параллелограмма в заданном направлении. Обратно, если задано направление
вращения на плоскости, то этим задано и определенное направление
обхода всякого параллелограмма, лежащего в этой плоскости, т. е.
задана его ориентация.
Предположим теперь, что на плоскости одно из двух возможных
направлений вращения выбрано в качестве положительного; пред-
ПЛОЩАДЬ ПАРАЛЛЕЛОГРАММА
151
положим, что независимо от этого выбора на той же плоскости задан
ориентированный параллелограмм, построенный на векторах и = ОА,
v __ ов (пусть первый вектор прн этой ориентации есть и = ОА, а вто-
второй v = OB).
Если заданное этой ориентацией направление обхода параллело-
параллелограмма совпадает с положительным направлением вращения на пло-
плоскости, то ориентацию параллело-
параллелограмма назовем положительной; в
противном случае она называется
отрицательной.
Если ориентация параллелог-
параллелограмма положительна, то угол а
от первого вектора и = ОА до
второго v = OB (считаемый в по-
положительном направлении враще-
вращения на плоскости) будет < я; для
отрицательно ориентированного
параллелограмма этот угол > я
(рис. 100). Поэтому число
<u, v> = |u)|v| sin a
положительно или отрица-
отрицательно в зависимости от того,
является ли ориентация паралле-
параллелограмма (построенного на векто-
векторах а = ОА, \ = ОВ) положитель-
положительной или отрицательной. Модуль
числа <u, v>, очевидно, равняется площади (в элементарно геометри-
геометрическом смысле) данного параллелограмма; поэтому само это число
<u, v> естественно назвать площадью ориентированного параллело-
параллелограмма (построенного на данных векторах); знак площади ориентиро-
ориентированного параллелограмма совпадает со знаком его ориентации.
Если векторы а = ОА, v = ОВ заданы своими координатами
то (как мы видели в главе четвертой)
sin a = ¦
и. следовательно,
, V>=AT1(/2 —
152
ДЕТЕРМИНАНТЫ
[ГЛ. VII
Площадь ориентированного треугольника (построенного на векто-
векторах a, v) определяется аналогичным образом; она равна половине
площади ориентированного параллелограмма, построенного на тех же
векторах.
§ 2. Детерминант второго порядка. Матрицы
Определение. Выражение хху.г — xiyl обозначается так:
х,
Ух
Уг
A)
и называется детерминантом (или определителем) второго порядка.
В пашем изложении это выражение появилось как площадь ориенти-
ориентированного параллелограмма, натянутого на два вектора а1 = {дг1, </J
и иг = {л:2, у,), т. е. как функция двух векторов ult u2, данных
в определенном порядке своими координатами в некоторой прямо-
прямоугольной системе координат. Поэтому естественна и такая запись:
D (ulf u,) =
У i
при u1 =
: {*„, yt\.
B)
Эти два вектора можно записать в виде квадратной таблицы нли
квадратной матрицы
/ ^ ,, \
C)
второго порядка, строками которой являются наши векторы; тогда
детерминант A) называется детерминантом матрицы C).
Установим некоторые свойства детерминантов второго порядка.
1° Значение детерминанта не меняется, если его строки сделать
столбцами, и наоборот (если «транспонироватьа матрицу, детерминант
которой берется).
В самом деле, очевидно,
Хх
х9
х,
= х1уг—хгу1.
Ух Уг
1° Если поменять местами две строки (два столбца) детерминанта,
то его абсолютная величина не меняется, а знак меняется на проти-
противоположный:
х% Уг
*1 Ух
Xi yt
1
Ух *х
Уг xz
хх Ух
Хг Уг
За Равенство детерминанта второго порядка нулю означает, что
две строки его пропорциональны; пропорциональность строк эквива-
эквивалентна пропорциональности столбцов1).
1) В частности, детерминант равен нулю, если у него две одинаковые
строки (два одинаковых столбца).
§ 21
ДЕТЕРМИНАНТ ВТОРОГО ПОРЯДКА.
153
Это свойство можно сформулировать и так:
3'° Детерминант равен нулю тогда и только тогда, когда егс
строки (столбцы), рассматриваемые как векторы, линейно зависимы
между собою.
4° Значение детерминанта не меняется, если к какой-либо его
строке почленно прибавить другую строку, умноженную на любой
числовой множитель к.
В самом деле, непосредственное вычисление показывает, что
куг
У*
Аналогично—для столбцов.
Мы пришли к понятию детерминанта из геометрических сообра-
соображений и поэтому сразу же уяснили себе его геометрический смысл.
Понятие детерминанта является мощным орудием, применяемым
в самых различных вопросах математики.
Исторически это понятие впервые возникло при решении систем
уравнений первой степени. Пусть дана система из двух линейных
уравнений первой степени с двумя неизвестными:
D)
а21х -f аггу = bv \
Будем ее решать, например, методом уравнивания коэффициенто.ч,
Получим
X == -
«22
Детерминант
F)
азывается детерминантом системы D). Если он отличен от нуля
нИстема D) имеет единственное решение E), и это решение дает
( м единственную точку пересечения прямых, определяемых уравне-
Пусть теперь Л =0; тогда одна из строк детерминанта F) — пусть
Рая получается из другой умножением на некоторое число А.:
Hi
= ka.
154 ДЕТЕРМИНАНТЫ [ГЛ. VII
мы имеем пропорцию BlL—SiS.m Если при этом и
Ьг = Mv (8)
т. с. если имеет место пропорция -^U- ——? = -Ц то все второе урав-
кение в системе D) получается из первого умножением первого на Я,
следовательно, оба уравнения эквивалентны между собою — прямые,
определяемые уравнениями D), совпадают, система D) имеет бесчис-
бесчисленное множество решений. Если же G) имеет место, а (8)—нет, то
система D) не имеет ни одного решения, она несовместна (т. е. проти-
противоречиваI)—прямые,определяемые уравнениями D), параллельны (в
собственном смысле слова). Мы доказали следующее предложение:
Система D) двух уравнений первой степени с двумя неизвестными
имеет единственное решение в том и только в том случае, если детер-
детерминант системы отличен от нуля. В этом случае это единственное
решение дается формулами E), называемыми формулами Крамера.
§ 3. Детерминанты третьего порядка
Пусть дана квадратная таблица, состоящая из трех строк и трех'
столбцов:
/ап аи аи\
Л = 1ви ам а„\. A)
\а31 а32 а88/
Такие таблицы называются (квадратными) матрицами третьего поряд-
порядка. Назовем молнией 2) всякую такую тройку элементов этой матрицы,
что никакие два элемента из этой тройки не принадлежат одному
столбцу или одной строке. Всякая молния содержит, таким образом,
ровно по одному элементу из каждой строки и ровно но одному
элементу из каждого столбца. Она может быть, следовательно,
записана в виде
<flii,. <%,, o8i-,>. B)
если писать ее элементы в порядке возрастания номеров тех строк,
к которым они принадлежат, или в виде
<a/,i. a/,t. a/,8>. C)
если ее писать в порядке возрастания номеров столбцов.
¦) В самом деле, если х = х0, у = у0 есть решение системы D), то
h — вц*о + аЫ/о- Если при этом выполнено G), то Ь2 = а21х0-\-аггу0 ¦--
= X (а]1^0-т-о12р0) = ХЬ1, т. е. выполнено и (8). Итак, если система D) совместна
и выполнено условие G), то непременно выполнено и (8).
2) Термин заимствован мною из лекций Н. Н. Лузина по теории детер-
детерминантов.
oj ДЕТЕРМИНАНТЫ ТРЕТЬЕГО ПОРЯДКА 155
Существуют ровно две молнии, содержащие элемент аи; это молнии
а22, а33> и <аш а23, а32>. Dt)
Точно так же имеются две молнии, содержащие элемент а12, а именно:
<Я12, ^23' Я31> И <Й12> Й21> Й33>1 Dг)
и, наконец, две молнии
<ai3> а21> азг> и <а1з. а22. аз1>> Dз)
содержащие элемент а13; всего в матрице А имеется 6 = 3! молний.
Каждая молния порождает вполне определенное взаимно одно-
однозначное соответствие между строками и столбцами матрицы А, а
именно:
12 3 (номера строк),
г г г
<*i к 'з (номера соответствующих им столбцов).
Это же соответствие может быть записано в виде
Л Л h (номера строк),
г г г
1 2 3 (номера соответствующих им столбцов).
Другими словами, имеем одну и ту же перестановку1):
it /a U VI 2
так что перестановки
'1 2 3\ /12 3
к v и \к к к
взаимно обратны и, следовательно, имеют один и тот же знак: они
или обе четные, или обе нечетные. Этот знак называется знаком
данной молнии.
в записях DД D»), D3) первые молнии положительны, а вторые —
отрицательны.
Назовем теперь зарядом молнии произведение всех ее элементов,
взятое со знаком -[-, если молния положительна, и со знаком -—,
если молния отрицательна.
изложе еДПОлагается* мто читатель выучил теорию перестановок, как она
ена в § 1 Прибавления к этим «Лекциям».
156 ДЕТЕРМИНАНТЫ
Сумма зарядов всех молний матрицы
/«11 «12 «1:.
А = ( а21 а22 а
\«31 «32 «33 /
называется детерминантом этой матрицы и обозначается так:
[гл. vii
det A-
«и
ап
«81
«12
Суммирование — по всем шести перестановкам /^/з1) из трех элементов
1, 2, 3. Развернутая запись этого детерминанта есть
Существуют правила, позволяющие сразу написать значение
детерминанта третьего порядка. Одно из простейших — следующее:
Положительны молнии
(кратчайшие звенья соответствующих им ломаных параллельны глав-
главной диагонали матрицы, т. е. диагонали, связывающей левый верхний
и правый нижний угол матрицы).
Отрицательны молнии
*) Для сокращения письма мы пишем ;jB(8 вместо (,,/).
о, ДЕТЕРМИНАНТЫ ТРЕТЬЕГО ПОРЯДКА 157
Г оатчайшне звенья соответствующих им ломаных параллельны по-
побочной диагонали матрицы, т. е. диагонали, связывающей правый
верхний и левый нижний угол).
Перечислим основные свойства детерминантов в применении
к детерминантам третьего порядка. Предварительно введем следующее
Определение. Транспонировать матрицу— значит сделать ее
строки столбцами, и наоборот, сохраняя порядок тех и других1). Таким
образом, матрица, транспонированная к матрице
есть матрица
А* =
зз/
1° При транспонировании матрицы ее детерминант не меняется.
В справедливости этого свойства легко убеждаемся непосредст-
непосредственно из формулы E), а также замечая, что при транспонировании
матрицы три ломаные, образующие группу, обозначенную знаком (+),
а также три ломаные, образующие группу, обозначенную знаком (—),
переходят в ломаные той же группы.
Очевидно:
2D При умножении всех элементов какой-либо строки (столбца)
матрицы на какое-нибудь число К на то же число умножается и детер-
детерминант этой матрицы.
Строки (столбцы) матрицы естественно рассматривать как векторы
U1 = {«11. «12. «1зЬ
3 | 31' 32' 33/
(и аналогично векторы-столбцы vlt v2, v3). Поэтому и детерминант
det.A можно рассматривать как функцию векторов-строк (соответст-
(соответственно векторов-столбцов) матрицы А:
detA = D(ult u2, u3).
3° Если u,=uJ-{-U; при каком-нибудь i, например, если
Ui=u'i + Ui, u't = {aii, ai*. ai3}. ^~i = {au> а1г, а\з\,
neo ^ ^атРича А перейдет в транспонированную к ней матрицу А*, если ее
Ревернуть вокруг главной диагонали.
158 детерминанты [гл. vu
то
D(nv u2, u3)=Z)(a;, u2, us) + D(ui, a2, u3).
Для доказательства достаточно подставить в формулу E) значения
и сделать вытекающие из этой подстановки совсем простые вычис-
вычисления.
Очевидно:
4° Если в матрице какая-нибудь строка (какой-нибудь столбец)
состоит из нулей, то детерминант матрицы равен нулю.
Если поменять местами две какие-нибудь строки матрицы А, то
перестановка iti2is в записи B) произвольной молнии испытает транспо-
транспозицию и потому изменит свой знак, значит, изменит свой знак
(сохраняя абсолютную величину) и сумма зарядов всех молний, т. е.
детерминант. То же происходит и при перестановке двух столбцов.
Итак:
5° При перестановке двух каких-нибудь строк матрицы (двух
столбцов) ее детерминант, сохраняя свою абсолютную величину,
меняет знак.
Отсюда вытекает:
6° Если в матрице имеются две одинаковые строки (два. одина-
одинаковых столбца), то ее детерминант равен нулю.
В самом деле, обозначая наш детерминант через D, видим, что,
с одной стороны, при упомянутой перестановке строк в детерминанте
ничего не меняется, с другой стороны, детерминант должен изменить
свой знак; значит, D — — D, 2D=0, ?) = 0.
7° Если к элементам некоторой строки (столбца) матрицы А
(почленно) прибавить (или из них вычесть) элементы другой строки
(столбца), умноженные на какое-нибудь число Я, то значение детер-
детерминанта detA не изменяется.
В самом деле, имеем по предыдущему
Z)(Ul + Xu2, u2, u3) = D(u1, u2, u3) + D(kn2, u2, u3) =
= D(uv щ, u3) + XD(u2, u2, u3) = D(u1, щ, u3).
Повторное применение этого результата дает:
7'° Прибавляя к какой-либо строке матрицы (или вычитая из нее)
произвольную линейную комбинацию других строк, мы не меняем
значения детерминанта этой матрицы.
Отсюда вытекает:
8° Если в матрице одна строка (один столбец) является линейной
комбинацией других строк (столбцов), то детерминант матрицы равен
нулю.
В самом деле, вычитая из данной строки данную линейную комби-
комбинацию других строк, мы (в силу 7'°) не меняем значения детерми-
РАЗЛОЖЕНИЕ ДЕТЕРМИНАНТА ТРЕТЬЕГО ПОРЯДКА
159
нанта и в то же время превращаем его в детерминант, одна из строк
которого состоит из нулей. Доказанное утверждение может быть
сформулировано так:
8'° Если строки (столбцы) матрицы линейно зависимы, то ее
детерминант равен нулю.
§ 4. Разложение детерминанта третьего порядка
по элементам какой-либо строки.
Приложение к системе трех уравнений
с тремя неизвестными (правило Крамера)
Возьмем в матрице А третьего порядка какой-либо элемент
alk(i, k = \, 2, 3); вычеркнем из матрицы А строку и столбец, содер-
содержащие элемент aik.
Оставшиеся элементы матрицы А образуют матрицу второго
порядка, которую будем называть минором элемента а1кв матрице1) А.
Детерминант минора элемента а;к, умноженный на (—1)'+*, называется
алгебраическим дополнением или адъюнктой элемента aik в матрице А
(и в ее детерминанте det ^4). Так, в детерминанте
11
12
3
*22 3
алгебраическими дополнениями элементов a12l а23, a3S являются
соответственно
«81
•41
«81
¦"зз —
а1
а,
Возьмем развернутую запись детерминанта:
1
а
+
или
31
—а13а22й31=
Чг
al2ai3asl
j —а22а31)
A)
• ) Буквально: matrix minor — меньшая (или уменьшенная) матрица.
160
где
«22
«32
«23
«33
ДЕТЕРМИНАНТЫ
«21 «23
«31 «33
IГЛ. VI!
•3 —
2
«3-2
Мы вндим, что:
9° Каждый детерминант (третьего порядка) равняется сумме произ-
произведений элементов какой-либо своей строки (столбца) на адъюнкты
этих элементов.
Это представление детерминанта называется его разложением
по элементам данной строки (столбца).
Докажем, наконец, следующее свойство детерминантов:
10° Сумма произведений элементов какой-нибудь строки (столбца)
на алгебраические дополнения элементов другой строки (другого
столбца) равна нулю.
Докажем, например, что
-;- «
22Л2
Для этого разложим по элементам первой строки детерминант
22
«31
13-
Утверждение доказано.
Теперь мы можем очень быстро изложить те приложения детер-
детерминантов третьего порядка к решению систем уравнений первой
степени, которые и послужили началом их теории.
Пусть дана система трех линейных уравнений с тремя неизвестными
апх -f а1гу + alsz = bv
Предположим, что детерминант системы C), т. е. детерминант
'11
' 12
-¦32
'23
отличен от нуля. Через Aif! обозначаем адъюнкту элемента alf! этого
детерминанта. Умножаем обе части первого уравнения C) иа Ап,
обе части второго — на А>1; обе части третьего — на Asl и складываем;
получаем
(«йИи + «2И21 + fl3Hsi) х ¦ V (апАп -f о22Л21 -f a32A31) у +
+ («13^11 + «23Л21 + fl33^3l) Z = Ь1АП
§ 4] РАЗЛОЖКНИЕ ДЕТЕРМИНАНТА ТРЕТЬЕГО ПОРЯДКл 161
Но в силу предложений 9° и 10° первая скобка в левой части равна
uetA, тогда как две другие скобки суть нули. Выражение справа
есть детерминант матрицы
/A ai2
Вх = I Ьо а22
\*3 «32
полученной, если в А заменить первый столбец столбцом свободных
членов Ьх, b2, b3 системы C). Итак, уравнение D) можно переписать
так:
del А ¦ х = <let Bv EX)
Точно так же, умножая обе части первого уравнения C) на А12,
второго—на А22, третьего — на Л32 и складывая, получаем
6elA-y = detB2 E2)
и аналогично
det Л-.г = det Д,. E8)
где В2 и Вя суть матрицы, гюлучающиеся, если в матрице А заменить
второй, соответственно третий, столбец столбцом свободных членов.
Так как det/4=?0, то из E^, E2), E3) получаем:
det By _ det йг _ det Вя
Мы получили уравнении F) как следствия уравнений C) в предпо-
предположении, что/1=?0. Итак, если — в предположении ,4=?0 — система C)
имеет решение, то это решение единственно ;i длется равенствами F).
Остается проверить, что формулы F) действительно дают решение
системы C).
Для этого (все время предполагая, что det/4=?0) подставим вы-
выражения F) в первое уравнение C). Левая часть первого из этих
уравнений превращается в
^-j (ап ¦ det Вх + аа ¦ det В2 + аа ¦ det Ba) =
diO ^Ми +
iO (aiHu + auAii + aisAis)
f (Л +
П. С, Александров
1G2 '• ¦ . ДЕТЕРМИНАНТЫ* •>¦ [ГЛ. VU.
Но • . :
aiHn + «1И12 + ais^i3 = det Л,
aiH2i + «1И22 + я13Аз = 0.
«llAjl + Й12Л32 + fl13AJ3 = О-
Итак, левая часть первого из уравнений C) после подстановки зна-
значений х, у, z из F) превращается в -у~ det A = bv т. е. само это
уравнение превращается в тождество bj^^bj^. Также и два других
уравнения C) превращаются после подстановки значений х, у, z
из F) в тождества Ьг=Ь2 и Ь3=Ь3.
Мы доказали основное предложение.
Теорема 1. Если система трех уравнений с тремя неизвест-
неизвестными C) имеет детерминант
«21
31
то система C) имеет единственное решение, которое находится «по
правилу Црамера», т. е. по формулам F), в которых В}, В2, В3
суть матрицы, получающиеся из А посредством замены соответствен-
соответственно первого, второго, третьего столбца на столбец свободных чле-
членов bv b2, b3.
В частности, если однородная система
аих -г a22y + a2Sz = 0, V G)
я-и* -г а32у -f a33z = 0 J
имеет детерминант, отличный от нуля, то система G) имеет един-
единственное решение, а именно нулевое решение: х — у —z = 0.
§ 5. Системы трех уравнений с тремя неизвестными
с детерминантом системы, равным нулю
Переходим к рассмотрению случая, когда детерминант системы
C) предыдущего параграфа х) равен нулю.
Начнем с однородной системы G).
Итак, det<4 = 0. Предположим сначала, что хотя бы одна из
адъюнкт элементов матрицы А отлична от нуля, например АпФ=0.
Тогда, разлагая detA по элементам первой строки, получим
1) В этом параграфе сохраняем нумерацию формул предыдущего пара-
параграфа и продолжаем ее.
с 5J СИСТЕМЫ ТРЕХ УРАВНЕНИЙ Н$3
Кроме того, имеем иа основании предложения 10° из § 4
ailAl\ + аМА1» + fl23^13 = °> (82>
Совокупность тождеств (б^Дв^Двд) показывает, что, полагая
So==i41> ^\о==А12> Ьо==^13'
мы получаем решение
системы G), не являющееся нулевым (так как по предположению
g ==^411 =^= 0). Система G) имеет бесконечно много решений, так
как очевидно, что, каково бы ни было число К, тройка чисел
(«вектор») Хио = {Цо> ^гH, к?,0\ также является решением систе-
системы G).
Попутно мы доказали, что при deti4 = 0, Аиф0 столбцы
матрицы
/ап а12 а
А == I °2l fl22 Я23
\Й31 fl32 fl33/
образуют линейно зависимую систему. В самом деле, полагая
^1 === 1^11» ^21» ^31/' ^2 === i"l2) 22' ^32?' ^3 1^13) ^23) ^*?
можем переписать тождества (8^, (82), (83) в виде
что и означает (ввиду АХ1 =/= 0) линейную зависимость столбцов
vlt v2, v3 матрицы А.
Пусть теперь детерминанты всех миноров второго порядка в
матрице А равны нулю. Из равенства
= 0
•*22
мы заключаем, что а21:аи = a2i:au, a из
Й23 |
заключаем, что ам:а12 = а23:а13.
Итак, первые две строки матрицы А пропорциональны между
собою. Точно так же пропорциональны между собою последние две
строки этой матрицы, значит, все строки матрицы А пропорциональны
между собою, и, следовательно, все уравнения (.7) могут быть
164 ДКТЕРМИИАПТЫ [ГЛ. VII
получены из одного из них умножением на некоторые числа К и К'.
Пусть, например,
я21 = Яяи, а22 = Я.я12, я23=Ля13,
а31=к'а11, я32 = Гя12, a33=K'a13.
Тогда всякое решение уравнения
является решением и двух других уравнений системы G). Но урав-
уравнение G'), несомненно, имеет ненулевые решения. В самом деле,
если я13^=0, то такое решение получим, дав неизвестным х, у
произвольные значения лг = ^0, у=г\0 и определив ?==?„ из G'):
Если же я13 = 0, то, полагая х=0, у=0, z = tl0, где ?0 — любое
число, не равное 0, получим ненулевое решение {О, О, ?0\ уравне-
уравнения G').
Итак, во всех случаях при <letA = O система G) имеет беско-
бесконечное множество ненулевых решений {?„, ц0, ?0J, и, следовательно,
столбцы Vj, v2, v3 матрицы А связаны соотношением
в котором не все коэффициенты |0, т]0, ^0 равны пулю.
Итак, из равенства нулю детерминанта матрицы следует линей-
линейная зависимость ее столбцов. А так как, транспонируя матрицу, не
меняем ее детерминанта, то и:$ равенства нулю детерминанта сле-
следует и линейная зависимость ее строк.
Сопоставляя этот результат с предложением 8'° § 3, можем
сформулировать следующее фундаментальное предложение.
Теорема 2. Равенство нулю детерминанта квадратной матрицы
третьего порядка равносильно линейной зависимости строк (столбцов)
этой матрицы1)
Одновременно доказана и
Теорема 3. Для того чтобы система G) трех однородных
уравнений с тремя неизвестными имела ненулевое решение, необходи-
необходимо и достаточно, чтобы детерминант системы равнялся нулю. В
этом случае система G) имеет бесконечное множество ненулевых
решений.
Переходим к общему случаю системы C) трех уравнений с тремя
неизвестными с детерминантом, равным нулю. В отличие от одно-
однородных систем, неоднородная система может быть несовместной;
1) Отсюда, в частности, вытекает, что линейная зависимость столбцов
(квадратной) матрицы равносильна линейной зависимости ее строк.
с 5] СИСТЕМЫ ТРЕХ УРАВНЕНИЙ 16&
такова, например, система
allx-j-aliy + a13z = b1,
а21х + а22у + a23z = 0,
а21х + а2
(при любых значениях коэффициентов в первых двух уравнениях)
или система
(при любых значениях коэффициентов а31, aS2, o33, t3).
В обоих случаях детерминант системы равен нулю, что неизбежно
ввиду теоремы 1. Однако имеет место следующая совершенно общая
Теорема 4. Если система m уравнений первой степени с п
неизвестными
amixi + а,мх2 + • • • + атпхп = Ът
имеет решение
1 v-0 v-0 г0\
то, прибавляя (почленно) к этому решению любое решение
ifeli §2> • • • ) Ьд/
соответствующей однородной системы
ац*1 + fli-Л + • • • -\-alnxn=O, \
a2ixi -г о22х2 + • • ¦ + а2пхп = О, I
flml^l + am2X2 + ¦ ¦ ¦ "Г а«^"„ = °> J
помучим снова решение
(9), причем всякое решение
Уь ¦¦¦ , У„
системы (9) получается в виде
166 *' '''¦'• ' ' ДЕТЕРМИНАНТЫ i- - ¦• ' [гл. VU
если надлежащим образом выбрать решение {?lt ... , ln} однород-
однородной системы A0).
Мы докажем эту теорему при /к = л = 3, доказательство в общем
случае совершенно такое же.
Итак, пусть (х0, у0, z0)— какое-нибудь фиксированное решение
системы
C)
1* +'
а {Si 'Hi ?}—произвольное решение однородной системы G). Под-
Подставляя в C) значения
видим, что левая часть первого из уравнений C) превращается в
ап (*о + & + fli2 (Уо + П) + «is К + I) =
= (аихо + апУо + «is^o) -f («n? + anr\ + a13l).
Но первая скобка равна Ьъ а вторая равна нулю, так что после
нашей подстановки первое уравнение системы C) превращается в
тождество Ь1=Ь1. В аналогичные тождества превращаются и осталь-
остальные уравнения системы C).
Обратно, если (xlt yx, zx) — произвольное решение системы C),
то, подставляя в уравнения этой системы сначала х = хъ у=у1-,
z=zv а затем х = х0, у = t/0, z —z0 и производя почленное вычи-
вычитание, видим, что разности
1=х1~ х0, х\ = у1 — у0, ?=Zl — z0
образуют решение {|> Ц, 1,} системы G) и
Теорема 4 доказана.
Вернемся теперь к системе C) в предположении, что детерминант
системы равен нулю.
Если система C) несовместна, то нам с ней больше нечего
делать.
Если же она совместна и (х0, у0, z0) — какое-нибудь решение
системы, то мы получим бесконечное множество решений
складывая решение (лг0, у0, z0) со всевозможными решениями одно-
однородной системы G).
? 6} АРИФМЕТИЧЕСКОЕ ВЕКТОРНОЕ МНОГООБР83ИЕ 167
Общим итогом сказанного является
Теорема 5. Система уравнений
аих + аиУ + a\zz = h>
I C)
имеет единственное решение х'=х0, у = у0, z = z0 в том и только
в том случае, когда детерминант системы отличен от нуля; тогда
это единственное решение получается по правилу Крамера. Если
otce детерминант системы C) равен нулю, то система C) либо несов-
несовместна, т. е. не имеет ни одного решения, либо имеет бесконечное
число решений, которые все получаются из одного какого-нибудь ре-
решения (х0, у0, z0) почленным прибавлением к нему всевозможных
решений однородной системы G).
§ 6. Арифметическое Л-мерное векторное многообразие
(пространство). Общее определение матрицы.
Детерминанты любого порядка
Мы разобрали подробно детерминанты порядков п = 2 и п — 3.
Наша задача — обобщить полученные результаты на случай любого
п. Сначала распространим векторную терминологию, которой мы
пользовались при п ^ 3, также на любое п.
1. Арифметическое я-мериое векторное пространство. Итак,
пусть дано произвольное натуральное число п. Будем называть любой
набор из п действительных чисел, данных в определенном порядке:
{•*i> •х2, ... , Хп),
вектором, сами числа хг, хг, ... , х„ будем иногда называть коор-
координатами вектора v = {xlt х2, ... , х„}. Совокупность всех векторов
v = {jCj, х2, ... , хп\ будем называть арифметическим п-мерным
векторным многообразием или пространством. При л = 3 мы получаем
уже известные нам векторные трехмерные многообразия в предпо-
предположении, что в пространстве выбран определенный базис, позволя-
позволяющий записать каждый вектор трехмерного векторного многообразия
в виде у = {лг, у, г).
Суммой двух векторов v = {хъ х2, . .., хп) и \' = {х\, х'г, ..., хп\
арифметического л-мерного пространства будем называть вектор
V + V' = {*1+*ь Х2 + .*4 Хп-\-Хп).
Произведением вектора \ = \х1г х2, ..., хп\ на число X будем
называть вектор Ху = {Ллг1, Хх2, .... hxn}.
Нулевым вектором называется вектор 0 = {0, 0, ... , 0}. Эго
единственный вектор, удовлетворяющий для любого вектора v усло-
условию v-fO = v.
168 ДЕТЕРМИНАНТЫ [ГЛ. VII
Вектором, противоположным вектору v=={.V!, хг, ¦. j , xH\, на-
называем вектор
это единственный вектор, дающий в сумме с вектором v нулевой
вектор.
Легко видеть, что определенные таким образом линейные опера-
операции над векторами обладают всеми алгебраическими свойствами,
перечисленными в § 2 главы 11 (коммутативность и ассоциативность
сложения, свойства дистрибутивности умножения на число и т. д.).
В частности, верны формулы: l-v = v, 0-v=0, (—l)-v = —v. Так
же, как и в главе II, вводим для векторов я-мерного арифметичес-
арифметического пространства понятия линейной комбинации, линейной зависи-
зависимости (и независимости) и доказываем все алгебраические предло-
предложения из § 5 главы II (формулировки и доказательства сохраняются
дословно).
Замечание I. В качестве обязательного упражнения читателю
предлагается доказать, что векторы
ViHl, 0 0},
v2 = {0, 1,..., 0},
vr( = {0, 0,..., 1}
л-мерного арифметического пространства линейно независимы и что
каждый вектор v = {xv х2, ... , хп\ записывается (при этом един-
единственным образом) в виде линейной комбинации векторов vlt v2>...
2. Общее определение матрицы. Детерминанты я-го порядка.
Невырождающиеся матрицы. Матрицей называется любая прямо-
прямоугольная таблица вида
состоящая из m строк а п столбцов.
Если т = п, то матрица называется квадратной, а число т = п
называется ее порядком.
Мы будем предполагать, что элементы aik матрицы суть числа
(но в математике рассматриваются и матрицы, элементами которых
являются, например, функции и вообще любые элементы какого-
нибудь заданного множества).
й 6] АРИФМЕТИЧЕСКОЕ ВЕКТОРНОЕ МНОГООБРАЗИЕ 169
Матрица
«21
которую мы получим, сделав столбцы матрицы А строками матрицы
А* {а строки — столбцами, с сохранением порядка тех и других),
называется матрицей, транспонированной к матрице А,
Очевидно, (А*)*=А.
Переходим к определению детерминанта (квадратной) матрицы А
порядка п:
4l
_, ~O1 a.,
Л. ——— 1
0)
Назовем молнией любое множество, состоящее из п элементов
матрицы A) и удовлетворяющее тому условию, что никакие дна
элемента этого множества не принадлежат одному столбцу или одной
строке. Каждая молния содержит, следовательно, ровно по одному
элементу из каждой строки и ровно но одному элементу из каждого
столбца. Если эти элементы расположить в порядке возрастания
номеров содержащих их строк, то молния запишется в виде
<aUl, ацг, . .., а„,а>. B)
Если писать ту же молнию а порядке возрастания номеров столб-
столбцов, то она запишется в виде
C)
Каждая молния порождает вполне определенное взаимно однозначное
соответствие между строками и столбцами матрицы А, а именно:
1 2 ... п (номера строк),
г г г
/, /2 ... {'„(номера соответствующих им столбцов).
Это же соответствие может быть записано и в виде
Л Л ¦ • • Л (номера строк),
г г г
1 2 ... п (номера соответствующих им столбцов).
170
ДЕТЕРМИНАНТЫ
[гл.
Другими словами, имеем одну и ту же перестановку
1 2
так что перестановки
1 2
Л Л
1 2
1 2 ...
Л к ¦••
взаимно обратны и, следовательно, имеют один и тот же знак, на-
называемый знаком молнии. Произведение всех элементов данной мол-
молнии, взятое со знаком -f-, если молния положительная, и со знаком —,
если она отрицательная, называется зарядом молнии. Сумма заря-
зарядов всех молний данной матрицы называется детерминантом этой
матрицы. Детерминант матрицы порядка п кратко называется детер*
минантом порядка п и обозначается через
det A =
«22
Чп
Чп
"п2
(j\j2
, ... ««/„ =
ai,iah* • • -а)пп
соответственно
(суммирование по всем п\ перестановкам 1х1г
hh ¦¦¦ к)-
Уже при изучении матриц второго и третьего порядка мы могли
убедиться, насколько важным является обращение или необращение
в нуль детерминанта матрицы. Поэтому введем следующее
Определение. Матрица А называется невырождающейся,
если она есть квадратная матрица с детерминантом, отличным от
нуля.
3. Основные свойства детерминантов. Перечислим основные
свойства детерминантов я-го порядка.
1° Данная матрица
' «11 «12 • • • «1,
... а„
и транспонированная матрица
А* = I °12 °22 " '
имеют один и тот же детерминант.
я 6] ¦'• АРИФМЕТИЧЕСКОЕ ВЕКТОРНОЕ- МНОГООБРАЗИЕ 171
В самом деле, каждая молния
одной из двух матриц А, А* является молнией и другой матрицы;
при этом производимая данной молнией перестановка строк одной
матрицы является в другой матрице перестановкой столбцов. Поэтому
в обеих матрицах каждая данная молния имеет один и тот же знак,
значит, и один и тот же заряд. Сумма зарядов всех молний в матри-
матрицах А и Л* одна и та же, а это и значит, что detA = detA*.
Свойство 1° детерминанта имеет своим следствием, что каждоэ
высказывание, верное для строк детерминанта, сохраняет свою силу
и для столбцов, и обратно.
2° Если все элементы какой-либо строки (какого-либо столбца)
матрицы А умножить на произвольное число К, то на это же А,
умножится и весь детерминант матрицы А.
В самом деле, если мы строку
ahv aft2. • • • . ahn
заменим строкой
kahl, 'ka^, ... , ^ahnt •
то в каждой молнии
элемент a^lh заменится на Д-Ял;л, а остальные элементы останутся
без изменения. Поэтому заряд каждой молнии умножится на X, зна-
значит, на X умножится и детерминант detA
Обозначая векторы-строки матрицы А через
Щ = {ап, ап, ... , я1п},
U2 = {a21, o22, ... , агп\,
Un = \anV ап2< ••• . апп},
мы можем рассматривать детерминант detA как функцию векторов
ub u2, ..., в, и записывать его в виде
deM = D(ult u2, ..., uB).
В этой записи свойство 2° выражается в виде
D(ui ^- •••. uJ = XD(Ul, ...,uft, ...,un).
3° Если вектор-строка матрицы А
ua = Ki, aM, •-, ahn)
есть сумма двух векторов щ = {ahl, ..., a'hn} и nj = {ahl, .... а^},
172
ДЕТЕРМИНАНТЫ
[гл. vii
то
D(u, и„ и„) = D(uv ... , uh, ... , un) +
-<rD(uv ...,
или, в более nocровной записи,
аи а12 ... а1п
«21 «22 ••• Пй.
I • • • , ue)
4 и
*12
222
а:,1
'12
«21 «22
Чп
а1П ah2 • • • ahn
anl ап% ••• пп
В самом деле, заряд каждой молнии детерминанта Det A =
=-D(u1, . . . , иЛ, ... , ил) есть умноженное на знак перестановки
/,/, ...
i ... аЛ1„ =
О, ¦% i (I о} . . . "/)/», ••• (* tli —1 ^*i/«^*2' ••• & hi h •>. Q-ni •
*'l *B '•' /I '"II ' * *1 " -2 "¦* Д ***ft
Суммирование по всем молниям дает слева D (u1, ... , ил), а справа
D(ult .... u'ft, ..., uJ + D(Ul, ... , u;, ..., uB).
Введем теперь следующее весьма важное понятие.
Функция F(u, v, w) называется линейной — например, по аргу-
аргументу v, — если
F (и, v'-\-v", w)=F(u, v', w)-\-F(u, v", w)
и
F(u, kv, w) = XF (u, v, w).
Аналогично для функций любого числа аргументов иг, и2,.. ., ип.
Введя это определение, мы можем совокупность свойств 2° и 3°
сформулировать так:
Детерминант D (uv u2, . .. , ип) есть функция от своих п аргу-
аргументов Uj^, u2, . . . , ип, линейная по каждому из этих аргументов.
Аналогичное утверждение имеет, разумеется, место, если рас-
рассматривать детерминант как функцию столбцов матрицы.
Очевидно (и следует из 2°) свойство
4° Если в матрице А какая-нибудь строка (столбец) состоит из
нулей, то детерминант матрицы А равен нулю.
§ 6]
АРИФМЕТИЧЕСКОЕ ВЕКТОРНОЕ МНОГООБРАЗИЕ 173
В самом деле, каждая молния матрицы А будет содержать нуль
в числе элементов, значит, ее заряд будет равен нулю.
5° При перестановке двух строк (столбцов) матрицы ее детерми-i
нант. сохраняя свою абсолютную величину, меняет знак.
В самом деле, при перестановке двух каких-либо строк детерми-
детерминанта, положим /z-й и ?-й, в молшш
<al<i. аИ^ •••' ahth, •••, a-kik, •••, amn>
переставляются элементы ahih и а^к; другими словами, порождаемая
этой молнией перестановка столбцов
h ¦¦¦ 1н ¦¦¦ h ¦¦¦ ln
испытывает транспозицию I/1), от чего знак этой перестановки,
т. е. знак молнии, меняется на противоположный. Итак, при пере
становке двух строк заряд каждой молнии, сохраняя свою абсолют-
абсолютную величину, меняет свой знак, откуда утверждение 5й и следует.
Аналогичное утверждение верно, конечно, и для столбцов.
Из свойства 5° вытекает свойство
6Э Если в матрице имеются две одинаковые строки (два одина-
одинаковых столбца), то ее детерминант равен нулю.
Доказательство — как для матриц третьего порядка.
7° Если к какой-нибудь строке
UA = Kl> aft2. • • • - аПп\
матрицы почленно прибавить другую строку
помноженную на какое-нибудь число X, то детерминант матрицы нг
изменит своего значения, т. е.
D<ui »VHufe un) = D(Ul uft, .... uj.
В самом деле (на основании свойств 3° и 2°),
... ,ue) =
Последовательно применяя это предложение, получаем, очевидно:
Т Если к какой-нибудь строке (столбцу) матрицы прибавить
произвольную линейную комбинацию других строк (столбцов) той же
матрицы, то значение детерминанта матрицы не изменится.
Отсюда в свою очередь вытекает:
8° Если какая-нибудь строка (какой-нибудь столбец) матрицы
есть линейная комбинация других строк (столбцов) этой же матрицы,
то детерминант матрицы равен -нулю.
174 ДЕТЕРМИНАНТЫ [ГЛ. VH
(Доказательство—как при л = 3.)
Доказанное утверждение может быть сформулировано так:
8'° Если строки (столбцы) матрицы образуют линейно зависимую
систему, то детерминант матрицы равен нулю.
В § 7 главы XII мы докажем и обратное предложение.
§ 7. Разложение детерминанта и-го порядка
по элементам данной строки (данного столбца)
В начале § 4 мы определили минор и адъюнкту для матриц по-
порядка л = 3. Это определение остается в силе для любого /г,
Минором элемента aik матрицы
д
называется матрица, полученная из матрицы А вычеркиванием той
строки и того столбца, на пересечении которых лежит элемент aik
(т. е. i-й строки и k-го столбца). Детерминант минора элемента
aik в матрице А, умноженный на (—\)i+tt, называется адъюнктой
элемента аЛ и обозначается через A!k.
Докажем одно из самых важных свойств детерминантов, а именно:
9° Детерминант det А равен сумме произведений элементов какой'
нибудь его строки (столбца) на адъюнкты этих элементов:
det А = ааАп + ai9Ait +...+ а;пА;п,
Достаточно доказать первое из двух равенств A).
Возьмем какой-нибудь элемент aib и обозначим через Qik = Q
его минор в матрице А.
Рассмотрим какую-нибудь молнию М матрицы А, содержащую
элемент aik; остальные элемент!.] молнии М образуют молнию М'
минора Q. Следовательно, произведение элемента aik на заряд мол-
молнии М' равно заряду молнии М, помноженному на (—1) в какой-то
степени; мы сейчас докажем: (—1)'+*.
Пусть сначала г=&=1, так что
a,, ... a.
in% ... "¦„„.
с 7] РАЗЛОЖЕНИЕ ДЕТЕРМИНАНТА Л-ГО ПОРЯДКА 175
Берем произвольную молнию матрицы А, содержащую элемент atl:
соответствующая молния М' минора Q есть
М' = <аг,л, д„„ .... а„,-.>.
Знак молнии М есть знак перестановки
'1 2 3 ... л^
ч1 U *з ¦¦¦ h
Знак молнии М' есть знак перестановки
'2 3 ... ns
B)
B')
Обе перестановки B) и B') — и, значит, обе молнии Ж и М' — имеют
один и тот же знак, заряд молнии М равен произведению элемента ап
на заряд молнии М'; в то же время i = k=\, (—1)'+*=1. Итак,
для разобранного частного случая утверждение доказано.
Пусть теперь a[k — какой-нибудь элемент матрицы А. Перестав-
Переставляем последовательно i-ю строку с (/—1)-й, затем (/—1)-ю с
(I — 2)-й и т. д., пока наконец i-я строка не станет на первое место.
Например, если л = 4, i = 3, k = 2,
-42
А =
¦*зз
2 23
то получаем последовательно матрицы
'22
'13
'33
'43
'31
'11
'44'
'33
3
'42
'14
'44'
Итак, после /—1 транспозиций строк i-я строка стала на пер-
первое место, а остальные строки сохранили свой порядок.
Затем в полученной матрице мы переставляем k-й столбец с
(А—1)-м, затем с (k — 2)-м и т. д., пока он не станет на первое
место; остальные столбцы при этом сохраняют свой порядок. В ре-
результате этих k—1 транспозиций столбцов мы придем к матрице А',
в к°торой элемент aik будет стоять уже в верхнем левом углу, ^
его минор будет по-прежнему минор Q.
176
ДЕТЕРМИНАНТЫ
[ГЛ. VII
В нашем примере k = 2, и мы получим
a
•33
an a1
-41
323
= <?.
'44,
Матрица А' получается из матрицы А посредством (/—1) + (&—1) =
= i-\-k — 2 транспозиций строк и столбцов; молнии в обеих матри-
матрицах одни и те же, но заряд какой-либо молнии в одной из этих
матриц получается из заряда той же молнии в другой матрице умно-
умножением на (—1)'+* = (—l)i + fe. Пусть М—какая-нибудь молния
матрицы А, содержащая элемент aik, М' — молния минора Qjk—Q}
полученная вычеркиванием из М элемента aik. Матрица Q является
минором элемента a;it как в матрице А, так и в А'. Заряд молнии М
к А' равняется произведению aik на заряд молнии ЛГ. Но заряд
молнии М в А есть произведение заряда той же молнии М в А' на
(—1)'"+*;
\)' + kalk-зар. молнии ЛГ в Q.
поэтому
зар. молнии М в А = i
C)
Когда М пробегает все молнии матрицы А, содержащие элемент
aik, то ЛГ пробегает все молнии минора Q, причем соответствие
между молниями М и ЛГ взаимно однозначно.
Поэтому, суммируя равенства C) по всем молниям М в А, содер-
содержащим a(ft,—-или, что то же, но всем молниям ЛГ матрицы Q, — мы
справа получаем (—l)/+*alft, умноженное на детерминант матрицы Q,
т. е. получаем aikAift. Итак,
сумма зарядов молний матрицы А, содержащих aik, равна a-kAih. D)
При данном постоянном / всякая молния матрицы А содержит
единственный элемент aik. Поэтому, суммируя равенство D) по всем
k~l, 2, ..., п, получаем слева сумму зарядов всех вообще мол-
молний матрицы А, т. е. <МД справа апАп -f- а,-2Л;2 + . .. -f ainAin;
первое из равенств A) доказано.
Сделаем следующее замечание, которое понадобится нам и сей-
сейчас, и в следующем параграфе.
9'° Если в матрице
42
"*33
*-п\
апп\
§ 8]
ПРАВИЛО КРАМЕРА ДЛЯ РЕШЕНИЙ СИСТЕМ
177
заменить элементы какой-нибудь строки, положим i-й, произвольными
числами bt, b2, bs, . . . , ba, то на адъюнкты этих элементов эта за-
замена не окажет (очевидно) никакого влияния, а детерминант новой
матрицы будет равен
Аналогичное утверждение верно, разумеется, и для столбцов:
det Я,. = Vi,- + M2/-r • • • +М«/- E)
Утверждение следует из формул A) (свойство 9е).
Если, в частности, положить
Ь1 = аД) Ь2 = а/2, . . . , Ьп = ajn,
то (при i ф j) в матрице после этой замены окажутся две одинако-
одинаковые строки
ап, aJ2, . . . , а]п
на у-м и на /-м месте, так что детерминант новой матрицы окажется
равным нулю.
Мы получим формулы
а;1АИ "Г aj2A,2 + • • • + ajnAin = 0 (ПРИ ' ?= ]);
аналогично
а цАи - г avA2i -!-...+ «„/,,/ = 0 (при / ф j),
выражающие свойство:
10° Сумма произведений элементов какой-либо строки (столбца)
данной матрицы на адгюнкты элементов другой строки (другого
столбца) равна нулю.
§ 8. Правило Крамера для решений систем и уравнений
с и неизвестными
Пусть дана система п уравнений первой степени с п неизвестными
а пхх + акх2+ ...+alnxn=b1,
ailxl + ai2x2 -f .. • -f a2nxn = b2,
I
с детерминантом
гпХхх + апг>
системы
det A =
«и
«21
ап1
¦¦ +
«12
«22
аппХп=Ьп'
• • • а1п
¦ ' * 2п
* * * пп
B)
отличным от нуля. Умножая обе части первого уравнения A) на Аи,
обе части второго на Аг1, ..., обе части л-ro на Ан1 и складывая,
178 ДЕТЕРМИНАНТЫ [ГЛ. VII
получаем (на основании свойства 10° для столбцов)
КЛ; + а«Ла- + ... + в„,Л.) xi = M
Но в силу 9° коэффициент при х,- есть det/4, а в силу 9'3 правая
часть есть детерминант det Bl матрицы, полученной из матрицы А
заменой /-го столбца столбцом свободных членов Ьх, ..., bn. Поэтому
(и так как det^^O) имеем
х'=шт (/ = 1' 2' ••¦¦ п)- C)
Итак, из A) следует C); если система уравнений A) имеет ре-
решение, то это решение дается формулами C) и, следовательно,
единственно. Проверка, т. е. подстановка значений х;, даваемых
формулами C), в уравнения A), показывает (совершенно, как в § 4),
что формулы C) действительно дают решение системы A).
Итак, доказана общая
Теорема 6. Если система уравнений A) имеет детерминант B),
не равный нулю, то эта система имеет единственное решение, кото-
которое находится по формулам C) {называемым «правилом Крамера»).
В частности, система из п однородных уравнений с п неизвестными,
имеющая детерминант, не равный нулю, обладает единственным,
а именно нулевым, решением.
Дальнейшее исследование систем линейных уравнений мы отло-
отложим до главы XIV.
§ 9. Общее определение миноров матрицы. Теорема Лапласаа)
Возьмем в данной матрице А из m строк и п столбцов какие-
нибудь р строк, положим i^-ю, /2-ю, .. ., 1р-ю, и q столбцов, положим
kx-R, 62-й, . • ., kq-'A. Элементы, лежащие на пересечениях выделенных
строк и столбцов, образуют матрицу, состоящую из р строк и q столб-
столбцов. Всякая матрица, таким образом полученная, называется матрицей,
содержащейся в первоначальной матрице А, или частью матрицы А.
Например, частью матрицы
\
А =
«11
«21
«31
«41
«51
«12
«22
«32
«42
«52
«13
«23
«33
«43
«53
«14
«24
«34
«44
«54
«15
«25
«35
«45
«55
«16
«26
«Зв
«46
«56
A)
!) Лаплас (Pierre Simon Laplace, 1749—1827)—один из величайших мате-
математиков последней четверти XVIII и первой четверти XIX века, работы
которого, относящиеся к различным областям математического анализа,
а также к теории вероятностей, небесной механике и математической физике,
занимают выдающееся место в истории этих областей знания.
§ 9]
является матрица
ТЕОРЕМА "ЛАПЛАСА
17»
-2
4
'54
'56
У
Любая квадратная матрица, содержащаяся в данной матрице, на-
называется минором данной матрицы. Если минор r-то порядка образо-
образован элементами, лежащими в первых г строках и первых г столбцах
матрицы А, то он называется угловым минором г-ro порядка матри-
матрицы А; так, например, матрица
«11
«21
<2„,
«12
«22
а
а
а
23
33
есть угловой минор третьего порядка матрицы A).
Предположим, что исходная матрица А квадратная и имеет по-
порядок л. Берем какой-нибудь лежащий в ней минор р-то порядка,
р < л. Этот минор, обозначим его через Р, лежит в каких-то р
строках и р столбцах матрицы А. Остальные л—р строк и л—р
столбцов матрицы А определяют однозначно минор (л—/?)-го по-
порядка Q, называемый минором, дополнительным к данному минору Р;
свойство дополнительности двух миноров, очевидно, взаимное.
Ниже схематически изображены два взаимно дополнительных ми-
минора Р и Q соответственно четвертого и второго порядка в матрице А
шестого порядка:
«11
«21
«31
«41
«51
«61
«12
! «22 |
«32
1 fl« i
«52
«62
«13
«23
«33
°43
«63
fl63
«14
1 °24 |
«34
! «44 j
«54
«64
«16
«25
«36
«45
«55
«65
«16
«26
«36
«46
«66
«66
*п
13
15
16'
р
31
51
61
а
а
а
33
53
63
а
а
а
35
55
66
«36
«56
«ее
«44
180 ДЕТЕРМИНАНТЫ ' [ГЛ. VII
Назовем адъюнктой минора Р, лежащего в строках с номерами
iv /2, . . ., / и столбцах с номерами kv k2, ..., kp, детерминант
дополнительного минора Q, умноженный на число
называемое указателем минора Р.
Для краткости будем часто полагать
5 = 'i -г i% + ¦ ¦ ¦ -г ip + К + К + • • • + kp.
Если возьмем какую-нибудь молнию М' из Р и объединим ее
с какой-нибудь молнией1) М" из Q, то получим вполне определенную
молнию М = М'(]М" матрицы А.
Например, объединение молнии
M'=<rtl5. «31. «56- «63> B)
минора Р с молнией
М" = <а24, а„> C)
минора Q есть молния
М^^а1Ъ, а24, а31, а42, а36, а63> D)
матрицы Л. Следовательно, произведение зарядов молний B) и C)
есть заряд молнии D), умноженный, как мы сейчас докажем, на
(—1)\ т. е. на указатель мннора Р.
Докажем наше утверждение сначала в предположении, что Р есть
угловой минор:
а.1р
V ••• V'
Всякая молния минора Р имеет вид
/M' = <a1/t, .... ар!р>;
всякая молния минора Q имеет вид
х) Ведь молния есть некоторое множество элементов матрицы; речь идет
оо объединении этих множеств.
с Q] ТЕОРЕМА ЛАПЛАСА 1«81
Знак молнии М' есть знак перестановки
/1 2 ... р\
и'.... О
О E)
знак молнии М" есть знак перестановки
(г'-;
Две молнии УИ' и Ж" объединяются в молнию
знак которой есть знак перестановки
(\ 2 ... р р+\ ... п
Vl'2 •••'» Км ¦¦¦ 'г.
G)
Так как при h^.p, k~^p-\-\ всегда /й^р<р+1^^, то всяка5.<
инверсия перестановки G) содержится или в E), или в F).
Поэтому число инверсий в G) равно сумме числа инверсий ь E)
и F) и знак перестановки G) есть произведение знаков перестано-
перестановок E) и F), значит, и заряд молнии М есть произведение зарядок
М' и М". В то же время указатель углового минорг Р есть
(_1)С1+г+...+^+11 + а+...+/ч==(_1)г11 + 2+...+Я]_1_утверждеии(.. до..
казано.
Пусть теперь Р—произвольный минор матрицы А, лежащий
в строках и столбцах этой матрицы, номера которых суть соответ-
соответственно /j, ...,/• kv . .., kp. Переставляем /х-ю строку матрицы /
последовательно с (i1—1)-й, (/х — 2)-й, ..., пока oiia послу ^—1
транспозиций не займет наконец 1-го места. Потом переставляем
/2-ю строку с (/2—1)-й, (/2 — 2)-й, ... до тех пор, пока она после
h — ^ транспозиций не займет 2-го места. Продолжая эти переста-
перестановки, мы наконец поместим после L—p транспозиций i -ю строку
на р-е место.
В результате после
.. +ip)—{\ +2+ ... +р) (8)
транспозиций строк матрицы А достигнем того, что /гя, i2-n, ..., i -я
строки этой матрицы займут соответственно 1-е, 2-е, ...,р-е место,
а взаимный порядок остальных строк останется тем же, что и до этих
перестановок. Теперь возьмемся за столбцы и, поступая с ними так
182 детерминанты'
же, как только что со1строками, достигнем того, что после
p (9)
транспозиций столбцы, имевшие в матрице А номера klt ..., kp,
станут соответственно на 1-е, 2-е, ..., р-е место. В результате
всех этих перестановок матрица А превратится в некоторую матрицу А',
состоящую из тех же элементов и имеющую те же молнии, что н
матрица А, но расположенных уже по-другому — так, что минор Р
матрицы А станет угловым минором р-го порядка матрицы А', а до-
дополнительным к нему минором в матрице А' будет по-прежнему
минор Q.
Произведение зарядов произвольной молнии М минора Р и про-
произвольной молнии М" минора Q равно заряду молнии М—М'\]М"
в матрице А'. Так как матрица А' произошла из матрицы А в резуль-
результате (i1+ ... + ip) +(&!+ . .. +kp) — 2A + • • •-f-p) транспозиций,
то заряд какой-либо молнии М в матрице А отличается от заряда
той же молнии в матрице А' множителем (— IM. Поэтому произве-
произведение зарядов молний М' и М" (соответственно в Р и в Q) равно
произведению (—1)* на заряд молнии М = М'\]М" в А.
Какова бы ни была молния М матрицы А, содержащая произволь-
произвольную, но фиксированную молнию М' минора Р, совокупность осталь-
остальных элементов молнии М, т. е. элементов, не входящих в Р, образует
некоторую (однозначно) определенную молнию М" минора Q, и мы
имеем
зар. М в Л = (— 1)*-зар. ЛГ-зар. М". A0)
Пусть М пробегает все молнии матрицы А, содержащие какую
бы то ни было молнию М' минора Р. Каждая такая молния (одно-
(однозначно) представима в виде
М = М'\)М". A1)
Тогда не только М' в формуле A1) пробегает все молнии минора Р,
по и М" пробегает все молнии минора Q; это вытекает из того, что,
какую бы молнию Л? из матрицы А, содержащую молнию М' минора Р,
мы ни взяли, она однозначно дополняется молнией М" из минора Q.
При этом каждый раз имеет место формула A0). Поэтому, если мы
просуммируем равенства A0) по всем молниям, содержащим молнии
из Р, то в правой части равенства мы получим (—1)*, помноженную
на сумму зарядов всех молний М' из Р и на сумму зарядов всех
молний М" из Q.
Другими словами:
Сумма зарядов всех молний М матрицы А,
содержащих всевозможные молнии матрицы Р, A2)
равна (—l)'detP-detQ.
УМНОЖЕНИЕ ДЕТЕРМИНАНТОВ
183
Пусть теперь в матрице А фиксированы строки, имеющие номера
I *2> • • • > V Через Р будем обозначать всевозможные миноры р-го
порядка, лежащие в этих строках, через Q—дополнительные к Р
миноры.
Для каждой молнии М матрицы А существует единственный
такой минор Р (лежащий в заданных р строках), что М содержит
молнию М' этого минора. В самом деле, если лежащие в заданных р
строках элементы молнии М суть a,-,*,, а,-,*,, .. ., а1ркр, то минор Р
есть минор, лежащий в гх-й, ..., ip-R строках и А^-м, ..., кр-м
столбцах. Поэтому каждая молния М матрицы А единственным
образом представима в виде A1), и если мы просуммируем равенства
A2) по всем минорам Р (лежащим в строках с номерами г\, /2, .. ., i ),
то слева мы получим сумму всех зарядов матрицы А, а спра-
справа— сумму произведений (—l^detP-detQ, взятую по всем назван-
названным Р. Итак, нами доказана следующая знаменитая в теории детер-
детерминантов
Теорема 7 (теорема Лапласа). Пусть в матрице А про-
произвольно выбраны р строк. Тогда детерминант матрицы А есть сумма
произведений детерминантов миноров Р порядка р, лежащих в вы-
выбранных р строках, на адъюнкты этих миноров.
§ 10. Умножение детерминантов
Пусть требуется перемножить два детерминанта третьего порядка!
А =
¦42
Чг
И ?5 =
Кг
hi
Рассмотрим детерминант шестого порядка
«11
«21
«31
«12
«22
«32
«13
«23
«33
и
0
0
0
0
0
0
0
0
-11
-31
С13
С23
С33
При любых элементах сп, с12, с13; с21, с22, с23; с31, с32, с^, по-
помещенных в левом нижнем углу детерминанта A), значение этого
детерминанта по теореме Лапласа равно АВ. Пользуясь этой свобо-
свободой в выборе элементов са, с12, си; с21, Саа, с23; са1, с32, с33) можем
184
ДЕТЕРМИНАНТЫ
[гл. vti
написать
Р =
«2
fl31
- 1
О
О
«12
Я22
«32
О
— 1
«IS
«23
«33
О
о
О
О
О
О
о
о
О
О
О
ь.
О —1
ьзг ьх
Преобразуем теперь четвертый столбец нашего детерминанта, при-
прибавив к нему (почленно)
первый столбец, умноженный на Ьш
второй столбец, умноженный на Ьг1,
третий столбец, умноженный на Ь31.
К пятому столбцу прибавим
первый столбец, умноженный на Ь12,
второй столбец, умноженный на Ьгг,
третий столбец, умноженный на bS2.
Наконец, к шестому столбцу прибавим
первый столбец, умноженный на bl3,
второй столбец, умноженный на Ь23,
третий столбец, умноженный на bS3.
В результате детерминант Р своего значения
шется в виде
не изменит, но запи-
Hi
221
^12
222
13
«23 />21
«31
— 1
0
0
«32
0
— 1
0 -
«33
0
0
— 1
Рз1
0
0
0
/>32
0
0
0
Раз
0
0
0
где
Pik = «Г А* + «<2^2ft
: = 1, 2, 3)
B)
Применяя теорему Лапласа к последним трем строкам этого детер-
детерминанта, видим, что он равен
Pll Pl2 Р13
AB =
Pil
P31
P22 Pi3
Ргг Рьг
C)
Назовем (формальным) скалярным произведением двух троек чисел
{а, р, у} и (а, Ь, с) число аа -f- $b -f- Vе- Теперь можем следующим
§ 111
ДЕТЕРМИНАНТ ft-ГО ПОРЯДКА
185
образом сформулировать полученное правило i/множения детерми-,
нантов.
Теорема 8. Произведение двух детерминантов п-го порядка
А и В есть детерминант п-го порядка Р, элемент которого pik, стоя-
стоящий на пересечении 1-й строки и k-го столбца, есть (формальное)
скалярное произведение i-й строки детерминанта А на k-й столбец
детерминанта В.
Замечание 1. Замена строк столбцами в одном (или в обоих)
из перемножаемых детерминантов приводит к соответствующим ва-
вариантам правила умножения детерминантов: вместо (формального)
произведения i-i\ строки детерминанта А на /г-й столбец детерми-
детерминанта В молено (для получения элемента plk) детерминанта Р (фор-
(формально) умножать
i-й столбец А на k-i\ столбец В,
1-й столбец А па й-ю строку В,
г-ю строку А на &-ю строку В
— всего четыре варианта.
Замечание 2. Мы провели доказательство правила умножения
детерминантов л-ro порядка для я = 3; это доказательство, однако,
совершенно общее, и читатель сам должен переизложить его для
любого п.
§ 11. Детерминант га-го порядка
как линейная нечетная нормированная функция
от п векторов
Мы видели, что детерминант л-го порядка
х
12
х„
X
и1
рассматриваемый как функция D (uv u2, ..., un) от га векторов:
2> •••, Х% „},
Ur. iXnl> Xn2> • • •» Xlln\,
обладает свойством линейности по всем своим аргументам, означаю-
означающим, что
= D(tLlt ..., и„, ..., и„) + О(ии ..., щ, ..., и„), \ A)
D(ult ..., knh, .... tLH) = \D(ult .... иЛ, .... и„),
186 ДЕТЕРМИНАНТЫ [ГЛ. VII
а также свойством нечетности, или антикоммутативности, означаю-
означающим, что функция, сохраняя свою абсолютную величину, меняет
знак, если поменять местами два каких-либо ее аргумента:
D(ult .... и,., ..., и; un)=— D(uv ..., u,., ..., u,-, ..., un).
B)
Кроме того, функция D{uv ..., un), как говорят, нормирована.
Это означает, что, полагая
е1={1, 0, .... 0},
е2 = {0, 1 0},
е„ = {6,о; ..., \\,
имеем
D(elt ..., е„) = 1. C)
Мы докажем сейчас следующее фундаментальное предложение.
Теорема 9. Если функция d (t^, ..., un) от векторов (I) об-
обладает свойствами линейности по всем своим аргументам, нечетности
и нормированности, то она есть детерминант ?)(иь ..., ип).
Желая обойтись без длинных формул, мы докажем эту теорему
для я = 3—доказательство имеет общий характер и годится для
любого п (в чем читатель должен убедиться сам).
Итак,
U1=W. У1^ Zl\> U2={*2. У 2' Zi), U3 = {X3, </з> *з}>
т. е.
Вычисляем, осиовываясь на линейности функции по всем ее аргу-
аргументам:
d(uv u2, u3) =
=d(x1e1 + y1e2 + zle3, x2e± -f y2e2 + z2e3, x3ex + y3e2 -f zse3) =
3
.,,. ^y* \~ 1l У H (Q> A F* \ / ^ \
"~~ ^^t Л?*y .'*¦ ik M \^i*| l"t kf \ /
'¦ J. *=1
В этой сумме индексы i, j, k независимо друг от друга принимают
значения 1, 2, 3, так что всего имеется 27 слагаемых.
Из нечетности функции d следует, однако, что при равенстве;
двух каких-либо из индексов i, j, k значение функции d(e{, e;-, ek)
обращается в нуль (так как перестановка этих индексов, с одной
стороны, не меняет значения функции, а с другой — меняет его
знак, так что, например, о?(ех, ег) е3)=—^(ех, ег, е3), откуда
2d {ev ex> e3) = 0, d (еХ) ех, е3) = 0). Поэтому в сумме D) все те
§ 11]
ДЕТЕРМИНАНТ Я-ГО. ПОРЯДКА
187
слагаемые, в которых имеются два равных индекса, обращаются
в нуль, и остаются лишь слагаемые, соответствующие всевозможным
перестановкам трех индексов 1, 2, 3, так что
d{alt u2, u3) = хгу^3 d (et, e2, e3) + x^3zt d (e2, e3, ex)-f
1, e3, e2). E)
Ho d(elt e2, ea) = l в силу нормированности, а в силу нечетности
функции при нечетной перестановке аргументов знак функции меняется
на обратный, а при четной — остается неизменным. Поэтому
d(eh ey, eft) = 3ii(r у /г),
т. е.
d{ev e2, e3) = d(e2, e3, e1)=d(e3, ex, е2) = 1,
d(e2, ex, e3) = d(e3, e2, e1)=d(e1, е3, е2) = — 1.
Подставляя это в E), получаем
d{ulf u2, u3) = 23
суммирование по всем перестановкам /, у, k из трех цифр 1, 2, 3,
т. е.
lt u2, \x3)=
или
d(ult u2, u3) =
что и требовалось доказать.
y3 zs
ГЛАВА VIII
ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ
§ 1. Переход от одной аффинной системы координат к другой
1. Переход от одной аффинной системы координат к другой
с тем же началом. Переход от одного базиса к другому. Матрица,
обратная к данной. Как мы знаем, аффинная координатная система,
или, как мы будем кратко говорить, аффинный репер1), в простран-
пространстве 2) есть тройка некомпламарных векторов е1; е2, е3, данных
в определенном порядке и приложенных к точке О—началу репера.
Тройка векторов еь е.2, е3 называется иногда базисом репера
(или координатной системы); название основано на том, что эти
векторы образуют базис многообразия всех (свободных) векторов
трехмерного пространства.
Если наряду с репером Ое]е2е3, который будем условно называть
«старым», дан «новый» репер с началом О' и базисом е',, е'2, e's, то
возникает общая задача преобразования координат, сформулирован-
сформулированная еще в главе III, § 2: по координатам произвольной точки М
(произвольного вектора и) в одной из двух систем координат найти
координаты той же точки (того же вектора) в другой системе.
Простейший случай этой задачи — когда оба репера имеют один и
тот же базис ej, e2, е3 и отличаются между собою только началом —
уже был рассмотрен в главе III, § 2. Предположим теперь, что оба
репера имеют одно и то же начало О. Тогда новый репер вполне
определен, если заданы векторы е^, е'2, е^ своими координатами (от-
(относительно старого базиса), т. е. если даны коэффициенты aik
(/, & = 1, 2, 3) в равенствах
е1 = rtllel + а-21е2 + «31еЗ
°ззез-
') Первоначальное значение французского слова «герёге» отправной пункт,
метка, зарубка. Ударение (как всегда по-французски) на последнем слоге:
репер.
2) Мы излагаем случай пространства; случай плоскости отличается от него
только большей простотой.
R 1] АФФИННАЯ СИСТЕМА КООРДИНАТ 189
Матрица
J31
Л* = ( «12 Q22 <
V«13 «23 «33/
называется матрицей перехода от базиса е1, е2, е3 к базису ei, e2, ej,
а также матрицей перехода от первого репера ко второму. Так
как векторы е'ь ej, ej линейно независимы, то детерминант матрицы
Л* отличен от нуля1) — матрица перехода от одного базиса к дру-
другому есть всегда невырождающаяся матрица. Так как векторы
ei, е'2, e'j образуют базис, то каждый из векторов еь е.,, е3 в свою
очередь однозначно представим как линейная комбинация векторо»
(Г)
— уравнения A) однозначно разрешимы относительно старых еди-
единичных векторов ех, е2, е3.
Посмотрим, как связаны между собою координаты х, у, г и
х'', у', z' произвольной точки М (произвольного вектора и = ОМ) в ста-
старой и новой координатных системах.
Вектор и—ОМ записывается, во-первых, как линейная комбина-
комбинация векторов еь е.2, е3 с коэффициентами х, у, z и, во-вторых, как-
линейная комбинация векторов ej, е^, е, с коэффициентами х', у', z',
так что имеем тождество
и = xqx -f j/e2 + ze3 = x'e[ + y'e'2 -|- z'e3.
Вносим в это тождество выражения е',, ej, ej из A); получаем
и = дге1 + </е2 + ze3 = х' (апе1 + апе2 + а31е3) -f-
«22е2 + а32е3) + z' (ацв,. + а23е2 -\- а33е3)
или, группируя ио-новому члены,
и = хех + j/e2 + ze3 = (aY1x' + any' + aViz') ex +
K' е2+ (аЯ1х' + a3iy' + a33z')e3.
Но вектор и единственным образом представляется как линейная
комбинация векторов еъ е2, е3, следовательно, коэффициенты при
векторах cv e2, е3 в левой и правой частях последнего равенства
1) 1л. VII, § 5, теорема 2.
190 ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ
должны быть одни и те же, т. е.
[ГЛ. V1H
B)
Эти формулы и выражают старые координаты х, у, z точки М
(вектора и) через новые. Матрица
1а,
а
12
Oi
. й,
'13 \
^28 /I
¦'З! 2 Й33/
дающая это выражение, называется матрицей преобразования коор-
координат; она является транспонированной по отношению к матрице Л*
перехода от базиса еь е2, е3 к базису е[, е2, е'3. Обе матрицы
имеют один и тот же отличный от нуля детерминант. Следовательно,
уравнения B) однозначно решаются относительно х', if, z' no пра-
правилу Крамера:
j_*
X Q
У «22
2 ^42
«23
«33
det A
У =
«и
а31
X
У
Z
«13
а23
«33
det Л
Z' =
«и
«31
«12
«22
»32
У
z
det Л
Разлагая в этих формулах числители по элементам столбца х, у, z,
получаем
х' = а'пх + а'12у -f al3z
где
C)
и Aki есть адъюнкта элемента aki в матрице А.
Определение. Пусть матрица А — невырождающаяся матрица.
Матрица
^13'
а,
а,
где a'lk определены формулами C), называется матрицей, обратной
к матрице
/а„ я,„ с.
l= a
21
-*22
и32
e ]i , ¦ АФФИННАЯ СИСТЕМА КООРДИНАТ . 191
и обозначается через А'1. Другими словами: если матрица А выра-
выражает координаты л:, у, z (т. е. координаты относительно базиса
е , е2, е3) через координаты х', у', z' (относительно базиса е\, е2, е3),
то' обратная матрица определяется как матрица, выражающая коор-
координаты х', </', z\ через координаты л:, у, z, причем безразлично,
понимаем ли мы под координатами координаты точки или вектора.
2. Переход от одной аффинной системы координат к другой
с изменением начала координат. Общий случай перехода от репера
Oe^ej к реперу О'е'^ед сводится к комбинации двух случаев: пе-
переноса начала (гл. III, § 2) и только что разобранного случая пе-
перехода от одного базиса к другому. В самом деле, рассмотрим наряду
с двумя реперами Oe^eg и О'е[е'ге.'8 еще третий, «промежуточный»,
имеющий начало О' = {х0, у0, г0) и базис еь е2, е3; координаты
точки относительно этого промежуточного репера обозначим через
х , у , z . 1 огда х — хо-\-х , у ~у$-\-у , z — zQ-\-z , где х , у , z
выражаются через х', у', z' по формулам B) (в которых, естест-
естественно, надо л:, у, z (слева) соответственно заменить на х", у", я?).
Получаем окончательно:
в пространстве:
апх' + а12у' + a13z
на плоскости:
D2)
Это н есть общие формулы преобразования координат для двух про-
произвольных аффинных координатных систем.
Матрица
/ «11
= «21
\«31
«12
«22
«32
а
а
а
13
33/
коэффициентов aik в равенствах D3), соответственно D2), называется
матрицей преобразования координат.
3. Уравнение гиперболы относительно ее асимптот. Пусть ги-
гипербола дана в канонической для нее системе координат Оеге2 урав-
уравнением
1-2 >|2
^-f = 1 E)
(рис. 101). Переходим к новому реперу Oe^ej, где
192
ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ
[ГЛ. VIII
(т. е. принимаем за новые единичные векторы орты, направленные
по асимптотам гиперболы)
/-5- _*-\
¦с с
b
и, следовательно,
т. е.
внося эти выражения л:, у через х', у' в уравнение E), получаем
после очевидных преобразований
х'у'= -j- • F)
Это уравнение называется естественным уравнением гиперболы отно-
относительно ее асимптот
у У1? (ставших осями новой аф-
аффинной координатной
системы).
В частности, для рав-
равносторонней гиперболы
X2—у2=а2 G)
имеем
2
F)
(см. гл. VI, § 6).
Если в общем случае
произвольной шперболы
принять за новые оси ее
Рис. 101. асимптоты, не налагая
никаких ограничений на
длины единичных векторов, то уравнение гиперболы будет иметь
вид
х'у' = к. (9)
Число к может быть любым действительным числом, отличным от
нуля.
§ 2]
ПЕРЕМНОЖЕНИЕ МАТРИЦ 193
§ 2. Перемножение матриц. Новое определение обратной матрицы
1. Произведение двух матриц. Предположим, что, наряду с ис-
исходным базисом /=elt e.2, е3, даны два базиса /' = ei, е^, е'3 и
/" = e'i, е», е"я, причем известны матрицы перехода А* от базиса /к
базису /' н В* от базиса /' к базису /", а следовательно, и мат-
матрицы А, Б соответствующих преобразований координат. Другими
словами, даны формулы
х=апх' +
у = a2lx' + a22y' Jra.,3z', \ A)
z = а31х' + a32t/ -\- aS3z' )
z' =b3lx" +b32
Требуется найти матрицу перехода С* от базиса / к базису /" или,
что равносильно, матрицу С, выражающую координаты х, у, z через
*", У\ г":
лг= спх"+ с12у" + cl3z", \
y = c21x"+c22y"-'rc.23z", \ C)
z = с31х" + с32у" 4- c33z". J
Решение не представляет затруднений: надо просто подставить дан-
данные формулами B) выражения для х', у', z' в A) и сделать при-
приведение подобных членов.
11олучаем
* = «ц (ьцх" + bl2y" + bl3z") + ви {ЬахГ + Ь22у" 4- b23z") +
bl2y" + b13z") + а22 {Ь21х" + b22y" + b23z")
z = a3l (bnx" + b12y" + b13z") + я32 (b21x" -f
т. е.
л; == {anbn + anb21 + a13b31) х" + (аиЬ1г -|- а1
23
2111 % 2 Аг + «22*22 "Ь ^23*32) У" +
+ («21*13 + 2*23 + «13*33) г",
2 = («31*11 + «32*21 + «33*3l) Х" + («31*12 + «32^22 + «33*32) У" +
+ («31*13 "Г «32*23 + °33*3з) Z"-
П. С. Александров
D)
194 ПРКОБРЛЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ [ГЛ. VIII
Вспомним, что мы в § 10 главы VII назвали (формальным) скаляр-
скалярным произведением двух наборов чисел хг, х2, х3 и уг, у2, ys (двух
векторов арифметического векторного пространства) число х1у1-\-
-}- х2у2-т-х3у3. Мы видим теперь, что первая, вторая, третья скобка
в первом из равенств D), т. е. первый, второй, третий элемент пер-
первой строки матрицы С, есть скалярное произведение первой строки
матрицы А соответственно на первый, второй, третий столбец мат-
матрицы В и что вообще элемент cik матрицы С (стоящий на пересе-
пересечении /-й строки и /г-го столбца этой матрицы) есть скалярное про-
произведение /-й строки матрицы А на /г-й столбец матрицы В. Матрица
С, построенная по этому правилу, называется произведением матрицы
А на матрицу В и записывается в виде
С = АВ; E)
при этом легко видеть на простых примерах (даже матриц второго
порядка), что умножение матриц, вообще говоря, не коммутативно;
поэтому важно, какая из двух перемножаемых матриц является пер-
первым («левым»), а какая вторым («правым») множителем.
Сопоставляя определение произведения двух матриц с доказанным
в § 10 главы VII правилом перемножения детерминантов, видим, что
детерминант произведения двух матриц есть произведение детерми-
детерминантов этих матриц.
Следующее важное равенство доказывается непосредственной
проверкой:
где звездочка, как всегда, означает переход к транспонированной
матрице г).
Так как матрица преобразования координат, соответствующая
переходу от одного базиса к другому, транспонирована к соответ-
соответствующей матрице перехода, то, обозначая через А* матрицу пере-
перехода от базиса / к базису /', а через В* матрицу перехода от ба-
злеа /' к базису /", видим, что матрица С* = (АВ)* перехода от
базиса / к базису /" есть
С*=-.В*А*, E*)
в чем читатель легко может убедиться и непосредственным вычи-
вычислением.
г) Проверив это равенство для матриц второго (или третьего) порядка,
что не представляет никакого труда, читатель увидит, что и общий случай
квадратной матрицы порядка п допускает такую же непосредственную
проверку.
с 2] ПЕРЕМНОЖЕНИЕ МАТРИЦ 195
2. Новое определение обратной матрицы. Квадратная матрица
= Е,
главная диагональ которой состоит из единиц, а все остальные эле-
элементы суть нули, называется единичной матрицей.
Единичная матрица третьего порядка есть, очевидно, матрица
тождественного перехода от базиса ех, е2, ея к этому же самому
базису е1г е2, е3, или матрица тождественного преобразования
координат
х= х',
У= У',
г = z'.
Пусть А — произвольная невырождающаяся матрица (третьего по-
порядка). Легко вычислить непосредственно (обязательное упражне-
упражнение!I), что
АА~1=Е, А^А^Е.
Однако в этом можно убедиться и следующим образом, без вычис-
вычислений. Матрицу А мы можем рассматривать как матрицу перехода
от одного базиса ех, е2, е3 к другому ei, e'2, ej,2). Делая сначала
переход от базиса ех, е2, е3 к базису ei, e'2, е'3 (он дается матри-
матрицей А), а затем обратный переход от е,, е'2, е^ (он дается матри-
матрицей Л), ми получим тождественный переход от базиса е17 е2, е3
к этому же самому базису. Поэтому
А~гА=Е. F)
Делая сначала переход от базиса ei, e'2, ej, к е^ е2, е3 (матрица А'1)
н затем обратный переход к e'j, e'2, е^ (матрица А), мы видим, что
АА~1=Е. F')
Отсюда следует, что
det^-det^-1 = l G)
и, далее, что невырождающаяся матрица А и обратная к ней мат-
матрица А г всегда имеют детерминанты одного и того же знака.
L) При вычислении воспользоваться формулой C) § 1, определяющей
матрицу А~\ и предложениями 9°, 10° из § 4 главы VII.
) До сих пор мы ее рассматривали как матрицу преобразования коор-;
дииат; законно, очевидно, и то и другое.
7*
196
ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ
[ГЛ. VIII
§ 3. Переход от одной прямоугольной системы координат
к другой
1. Случай прямоугольного репера на плоскости. Можно огра-
ограничиться реперами с общим началом. Базис прямоугольного репера
состоит из двух взаимно перпендикулярных оргов. Такие базисы
будем называть прямоугольными или ортонормальными.
Рис. 102.
Рис. 103.
Лемма. Пусть Оеге2 и
Q2 — два ортогональных репера на
у г2
плоскости с общим началом О. Тогда поворотом репера Оехе2 в не-
несущей его плоскости вокруг точки О на некоторый угол а можно
перевести репер Oete2 либо в репер Ое[е'г, либо в репер О&\ (—е^)
(рис. 102 и 103). Другими словами: репер Ое'^ получается из ре-
§ 3]
ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ • 197
пера Оехе2 либо поворотом, либо поворотом и последующим отраже-
отражением (относительно прямой, несущей вектор е[).
Доказательство. Репер Ое^ определяет некоторое поло-
положительное направление вращения плоскости, а именно то направление,
rt / Зл \ __
в котором угол от орта ег до орта е2 равен -г- 1а не ~о~ )• Обозна-
Обозначим через а угол от орта ех до орта ei. Повернув репер Ое^
(в его плоскости) в положительном направлении на угол а, мы сов-
совместим орт ех с ортом е^; тогда орт е2, будучи перпендикулярен
к орту elt либо совместится с ортом е2 (рис. 102), либо совмес-
совместится с противоположным ему ортом — е2 (рис. 103). Утверждение
доказано.
Из доказанного следует, что относительно базиса ех, еа орт ех
имеет координаты cos a, sin а:
ei = {cosa, sin a},
тогда как для е2 имеем две возможности:
либо
e'2=;jcos ^a-|~), sin(a+|-
т. е.
е2 = {—sin a, cos a},
либо
—e'2 = {—sin a, cos a},
и тогда
e'2 = {sin a, —cos a}.
Матрица перехода от базиса е1г е2 к базису е\, е'2) имеет вид:
в первом случае
/ cos a sin a\
C= . , detC=l, (I)
\—sin a cos ay
во втором
/cos a sina\
C= . , detC = —1. (IF)
\sina —cos a/ v
Базисы еъ е2 и ei, e'2 называются в первом случае одноименными
пли одинаково ориентированными, а во втором — разноименными или
противоположно ориентированными.
Так как detC=l в случае одноименных, detC = —1 в случае
разноименных базисов, то только что высказанное определение можно
сформулировать и так:
Определение. Два ортогональных базиса (репера) одно-
именны, если матрица перехода от одного из них к другому имеет
198 ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ [ГЛ. VIII
положительный детерминант, и разноименны, если этот детерминант
отрицателен.
Формулы преобразования координат даются матрицами, транс-
транспонированными к матрицам перехода от одного базиса к другому;
это будут формулы:
х = х' cos а — у' sin а, "|
} в случае одноименных базисов,
у —х' sina-f-# cos a J
x — x' cos a + </' sin a, 1
> в случае разноименных базисов.
г/=лг sina— у cos a J
Строки матрицы С формул (I) и (II) выражают орты е'х и е'2, запи-
записанные их координатами по отношению к базису elt e2. Поэтому
скалярное произведение этих строк должно быть равно нулю, а ска-
скалярный квадрат каждой строки — единице; матрица С должна быть,
как говорят, «ортогональна по строкам», при этом каждая строка
рассматривается как вектор, записанный своими координатами.
И действительно, мы имеем:
cos2 a + sin2 a = 1,
cos a (—sin a) 4- sin a cos a = 0.
Аналогичная проверка доказывает и «ортогональность по столбцам»
(скалярный квадрат каждого столбца равен 1, скалярное произведе-
произведение двух различных столбцов равно 0I).
Пример. Берем равнобочную гиперболу в каноническом урав-
уравнении
Обозначим через е[, е2 орты ее (взаимно перпендикулярных) асимп-
асимптот, наклоненные к орту ех канонической системы координат под
„ я 7 я
углами a=zjx—т~~ап и ~Т'¦> торДа имеем:
sma = r-j-, cosa=-i2— ,
Внося эти выражения в уравнение
1) Решая уравнения ei =eL cos <x-{-t2 sin a, ±e2 = —ej sin a + e2 cos a от-
относительно лекторов ех и е2, легко убедиться, что столбцы матрицы С суть
векторы еь е2, записанные их координатами по отношению к базису e'i, e-I,—
отсюда и ортогональность по столбцам.
с 3] ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ 199
получаем
уравнение равнобочной гиперболы, отнесенное к ее асимптотам.
2. Ортогональные матрицы. Прямоугольные (ортогональные)
реперы в пространстве. Дадим следующее
Определение. Квадратная матрица С любого порядка п назы-
называется ортогональной, если транспонированная к ней матрица С*
является ее обратной матрицей:
С* = С~Х. A)
Элемент матрицы С, стоящий на пересечении &-й строки и /-го
столбца, есть, как мы видели,
(где Cik — адъюнкта элемента cik матрицы С). Ортогональность
матрицы С означает, что c'ki = cik. Итак, за определение ортого-
ортогональности матрицы С может быть принято равенство
'* ~ detC ' [ '
Через Е обозначаем, как всегда, единичную матрицу. Тогда равен-
равенство A) эквивалентно каждому из равенств СС* = Е, С*С = Е.
Если расписать равенство СС* = Е, приравнивая каждый элемент
матрицы СС* соответствующему элементу матрицы Е, то полу-
получатся (для всех / = 1, 2, ..., п, J—1, 2, ..., п) соотношения
c,ic/i + • • ¦ т сыс)п = 0 (при / ф]), с2п + . .. + с]п = 1, называе-
называемые соотношениями ортогональности (точнее, ортонормальности)
по строкамг). Точно так же, расписывая поэлементно равенство
С*С = Е, получим соотношения ортогональности по столбцам:
ci«ci/-r...+cB/cll/=0 (при 1ф]), с,2,+ ...+<& = !.
') Достаточно проверить это в простершем случае матрицы С второго
порядка. Пусть
С* = (/с"
\21 22/ \С12
1огда
гг*_ ( Сп + с?2 спс2, + с12с2й
откуда
"— ортогональность по строкам.
200 ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ [ГЛ. VIII
Нами доказана
Теорема 1. Ортогональность матрицы С в смысле равенства A)
эквивалентна как ортогональности по строкам, так и ортогональ-
ортогональности по столбцам.
Теорема 2. Детерминант всякой ортогональной матрицы С
равен + 1 •
В самом деле,
1 l
ио для ортогональной матрицы С~1 = С*, значит, det C~x =detC*=
=detC, и мы получаем
(detCJ = l, detC = ±l.
Геометрический смысл понятия ортогональной матрицы второго
или третьего порядка заключается в следующем.
Теорема 3. Ортогональные матрицы и только они являются
матрицами перехода от одного ортогонального базиса к другому.
Доказательство. Если матрица
ортогональна и в пространстве дан произвольный ортогональный
базис ех, е2, е3, то, полагая
B)
получим снова ортогональный базис ех, ej, e3; в самом деле, равен-
равенство единице скалярного квадрата каждой строки матрицы С озна-
означает, что каждый из векторов ei, e!,, е3 есть орт, а требование
равенства нулю скалярного произведения двух различных строк
означает, что любые два из этих ортов перпендикулярны между
собою.
Обратно: если С есть матрица перехода от ортогонального базиса
elt e2, е3 к ортогональному базису е^, е'г, е'3, то строки матрицы С
выражают векторы е'ъ е'2, е'3; поэтому их скалярные квадраты
равны 1, а скалярные произведения двух различных строк равны
нулю — матрица С ортогональна (по строкам). Теорема 3 доказана.
Замечание 1. Координаты сХ1, с12, с13 орта e't относительно
репера elf e2, es суть направляющие косинусы этого орта, т. с.
его скалярные произведения с ортами е17 е2, е3, так что
cn = (ei, ег), с12 = (е;, е2), cls=-(e;, е3),
о gi ПРЯМОУГОЛЬНАЯ СИСТЕМА КООРДИНАТ 201
и аналогично
С^— /л А ^ с — /а* а 1 /* —— /а а ^
21 "~^ \ 2* ^1/» 22 — \ 2> ^*>/> 23 ~"~ \ 2* 3'*
С- / /V /V А л ^^_ /л Л \ У - I Л А \
31 — vc3> ei»> '•зг— le3i е2'> сзз — \ез> сз'-
Отсюда сразу следует, что столбцы матрицы С суть орты е1? е2, е3,
записанные их координатами относительно базиса ei, e^, ej.
Ортогональность по столбцам означает, таким образом, что орты
е е2, е3 образуют ортогональный базис; транспонированная мат-
матрица С* есть матрица переход» от базиса ei, e2, е'3 к базису
ej, e2, е3 (поэтому она и совпадает с обратной!).
Итак, если в пространстве дан произвольный ортогональный
базис е1( е2, е3, то для всякой ортогональной матрицы С существует
такой (однозначно определенный) ортогональный базис ei, ej, e,,
что элементы cik матрицы С суть косинусы углов между векто-
векторами е,- и вй({, fe=l, 2, 3). В точности такое же утверждение
(с заменой я = 3 на п = 2) верно, разумеется, и для плоскости,
в чем легко убедиться, если записывать координаты х, у какого-
нибудь орта е не в виде х = cos а, у — sin a, a в виде скалярных
произведений х — (е, et) = cos a, y — {e, e2) = cos|3 (где а, |3—углы
между ортом е и координатными ортами et и ег). Тогда рассужде-
рассуждения для плоскости будут дословно теми же, что и в случае про-
пространства.
Однако для матриц второго порядка верна и следующая
Теорема 4. Для всякой ортогональной матрицы С второго
порядка можно найти такой угол а, что
cos a sina\
, если detC=1, (I)
—sin a cos a/
/cos a sina\
С= . , если detC=— \. (И)
Vsma —cos a/
В самом деле, матрица С есть матрица перехода от произволь-
произвольного ортогонального репера Оехй.г к некоторому ортогональному
реперу Ое^о. Репер Oeie^ получается из репера Ое^ или пово-
поворотом на некоторый угол а (угол наклона вектора ei к вектору е^,
или поворотом с последующим отражением относительно прямой,
несущей вектор ei.
Мы видели, что в первом случае матрица С имеет вид (I), во
втором случае — вид (II).
Замечание 2. Пусть С—ортогональная матрица второго по-
порядка, С*—ее транспонированная. Она тоже ортогональна, поэтому,
по доказанному, существует такой угол а, что С* представима
в одном из двух видов (I), (Ц). Но тогда С, как транспонированная
202 ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ [гл. VIII
матрица к матрице С*, имеет вид
/cos а —sina\
С= . , если detC=l, (I*)
\sina cos a/' ' v '
/cos a sin а\
С= , если detC = —1. (И*)
\snia —cos a/
Итак, для всякой ортогональной матрицы С может быть найден
такой угол а, что эта матрица примет вид (I), если detC=l, и
вид (II), если detC=—1.
§ 4. Действия над матрицами в общем случае
Соберем еще раз вместе (не боясь повторений) те общие све-
сведения о матрицах, которые были изложены в этой главе, и несколько
дополним их.
Для квадратных матриц любого данного порядка п было опреде-
определено действие умножения.
Если
*U 2
Кп
2 • • • л I В _ I ^21 ^22 • • • *2л ] [II
ТО
где
сп ci2
cik = a; Aft + a/2*2ft + • • • + ainbnk.
Как читатель может проверить фактическим вычислением, это умно-
умножение ассоциативно, т. е. для любых трех матриц Р, Q, R имеем
(PQ)R = P(QR).
С другой стороны, умножение матриц, вообще говоря, не ком-
коммутативно, однако имеет место равенство
det<4? = det<4-det?, B)
откуда следует, что произведение двух невырождающихся матриц
(порядка п) есть невырождающаяся матрица (порядка п).
§ 4]
ДЕЙСТВИЯ НАД МАТРИЦАМИ В ОБЩЕМ СЛУЧАЕ 203
Среди невырождающихся матриц порядка п имеется единичная
1 0 ... О
Е=(
\о о
она удовлетворяет равенству
АЕ = ЕА=А D)
для любой матрицы А (порядка п).
Для каждой невырождающейся квадратной матрицы А порядка п
однозначно определена обратная матрица А~г—ее элементы суть
где Ак; есть адъюнкта элемента aki в матрице А.
Обратная матрица А~1 удовлетворяет условию
AA~1=A-iA = E F)
(в чем убеждаемся непосредственной проверкой вычислением1)).
Из сказанного следует, что невырождающиеся матрицы порядка п
образуют группу2) (по отношению к операции умножения); отсюда
в свою очередь вытекает, что единичная матрица ? порядка л, равно
как и обратная матрица Л к данной, однозначно определяется
равенствами D) и соответственно каждым из равенств F).
Непосредственно проверяется (для любых двух матриц А, В)
порядка п равенство
G)
где, как всегда, звездочкой обозначается переход к транспонирован-
транспонированной матрице.
Далее, из ассоциативности умножения следует (для любых двух
невырождающихся матриц А, В порядка п):
(АВ) (В-1А~1)=А(ВВ~1) Л = АЕА'1 = АА~Х =Е,
что означает, что матрица В~1А~1 есть матрица, обратная к АВ:
1 = В~1А-1, (8)
— равенство, принадлежащее к простейшим предложениям теории
групп.
Применить формулу E) и предложения 9°, 10° из § 7 главы VII.
См. ПпиЛяплрнир.
2) См. Прибавление.
204 ПРКОБРАЗОПАНШ-: координат, матрицы [гл. viii
Обозначим через bik (при /, * = 1, 2, ..., п) число, равное 1,
если i — k, и равное нулю, если i=/=k.
Назовем квадратную матрицу А ортогональной, если
т. е. если выполнено любое (и, следовательно, оба) из двух экви-
эквивалентных условий:
п
2 ai/ak/ — &ik («ортогональность по строкам»)
2 ajiajk~^ib («ортогональность по столбцам»),
3=1
из которых первое означает, что АА* = Е, а второе — что А*А = Е.
Задача. Доказать, что в группе всех иевырождающихся мат-
матриц данного порядка п ортогональные матрицы образуют под-
подгруппу.
Указание. Так как единичная матрица порядка п очевидно
ортогональна, то достаточно доказать, что произведение АВ двух
ортогональных матриц и матрица А'1, обратная к ортогональной,
ортогональны. Второе утверждение сразу следует из равенства Л = А*
(для ортогональной матрицы А), первое—из
(АВГ1^ В'1А~1 = В*А* = (АВ)*.
Квадратные матрицы являются частным случаем прямоугольных
(гл. VII, § 6).
Прямоугольная матрица, имеющая т строк и п столбцов, кратко
называется матрицей вида (т, п).
Для любых прямоугольных матриц произведение не определенно.
Однако в случае, когда число столбцов п матрицы А равно числу
строк матрицы В:
«12 ••• ffi«\
/i = l 1 a* ••• °гп I. в =
произведение АВ при любых р и q определяется дословно, как и для
квадратных матриц:
= С,
ДЕЙСТВИЯ НАД МАТРИЦАМИ В ОБЩЕМ СЛУЧАЕ 205
для любых / = 1, 2, ..., р; k=\, 2, ..., д.
В частности, заметим, что если матрица А состоит из одной строки
А = (а1 а2 ... а„),
а матрица ?—из одного столбца
то
АВ = си = а А + аъЬг +...+ anbn
есть число (матрица первого порядка).
Любую прямоугольную матрицу
/ап а1г ... а1п \
А= <*и «и ••• ага \ (9)
можно умножить на любое число ^: по определению
(кап
Кроме того, любые две прямоугольные матрицы одного и того же вида (т,л)
можно почленно сложить по правилу:
/аи а,2 ... а1п ¦ /feu fe12 ... ь1п'
а21 а22 ... аг„ j . I 621 Ь22 ... b2n \
а/я2 ••• а;ип' Ч"/я1 "/яг ••• &,«п ,
/аи+*п Оц + Ьц ... al7 + bw
ап+*21 йгг + ^г» ••• ог„ + й2я
206 ПРЕОБРАЗОВАНИЕ КООРДИНАТ. МАТРИЦЫ [ГЛ. V1H
Это сложение, очевидно, ассоциативно и коммутативно. Матрица вида (т, л),
состоящая из одних нулей, называется нулевой матрицей <?„„,. Очевидно, это
есть единственная матрица, удовлетворяющая равенству
для любой матрицы А вида {т, п).
Наконец, положим
Л
для любой матрицы А. Из этих определений следует, что матрицы данного
вида (т, п) образуют коммутативную группу по отношению к операции
сложения.
ГЛАВА IX
ПРЕОБРАЗОВАНИЕ КООРДИНАТ (ПРОДОЛЖЕНИЕ):
ОРИЕНТАЦИЯ ПЛОСКОСТИ И ПРОСТРАНСТВА; УГЛЫ ЭЙЛЕРА;
ОБЪЕМ ОРИЕНТИРОВАННОГО ПАРАЛЛЕЛЕПИПЕДА;
ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ ДВУХ ВЕКТОРОВ
§ I. Ориентация пространства (плоскости)
Назовем в пространстве (или на плоскости) два координатных
базиса (два репера) одноименными, если матрица перехода от одного
из них к другому имеет положительный детерминант; в противном
случае (т. е. если детерминант матрицы перехода отрицателен) назовем
базисы разноименными. В случае ортогональных базисов на плоскости
это определение и его геометрический смысл нам уже известны из
§ 3 главы VIII1). Одноименность двух базисов elt е2, е3 и e'lt е'2, е3 бу-
будем иногда записывать так: е^е., ~ е^е^.
Покажем, что данное определение одноименности удовлетворяет
так называемым аксиомам равенства2), т. е. требованиям рефлек-
рефлексивности е1е2е3 ~ е^е,,, симметрии (из e^eg ~ eie'2e3 следует
е1е2ез ~ е1е2ез) и транзитивности (из e^eg ~ е^е2е3 и eie^e'j ~ в^вз
следует e^eg ~ в^вз).
Рефлексивность вытекает из того, что матрица перехода от базиса
ех, е2, е3 к нему самому (т. е. матрица тождественного преобразова-
преобразования) есть единичная матрица, имеющая детерминант 1.
Симметрия вытекает из того, что детерминанты матрицы С и обрат-
обратной к ней матрицы С имеют один и тот же знак3). Для того чтобы
убедиться в транзитивности, рассмотрим три базиса:
I: ev e2, е3; II: e'b e;, е3; III: е'и е\, е"8.
1) При рассмотрении прямоугольных реперов мы будем всегда считать,
что в пространстве дан единый масштаб измерения длин, общий для всех
рассматриваемых реперов.
2) См. Прибавление в конце книги, §4. Уже упоминалось, что содержание
этого Прибавления будет предполагаться известным и ссылки на него будут
Делаться лишь в редких случаях.
3) Гл. VIII, § 2, п. 2, стр. 195.
208 < ПРЕОБРАЗОВАНИЕ КООРДИНАТ [ГЛ. IX
Если обозначить матрицы перехода от I к II, от II к Ш и от I к III
соответственно через Си, Сщ, СП1, то Сщ — СщСц, значит, и
detCni = detCiiidetCn, откуда утверждение следует.
Из сказанного следует:
Множество всех базисов пространства (плоскости) распадается
на попарно не пересекающиеся классы, обладающие тем свойством,
что все базисы, принадлежащие одному какому-нибудь классу, одно-
именны, а всякие два базиса, принадлежащие различным классам,
разноименны между собою.
Докажем, что число этих классов равно двум.
Для того чтобы убедиться, что имеется по крайней мере два
класса, возьмем какой-нибудь базис ea, е2, е3 и заметим, что матрица
перехода от ех, е2, е3 к ех, е2, (— е3) есть
ее детерминант равен —1, значит, базисы е^ е2, е3 и е1; е2, (— е3)
разноименны, они принадлежат к различным классам.
Теперь мы покажем, что всякий базис ei, ej,, е3 принадлежит
к одному из двух классов: либо к классу, содержащему базис elt e2, е3(
либо к классу, содержащему базис ev е2, (— е3). Другими словами,
докажем, что всякий базис е^, е'2, е'3, не одноименный базису еь е2, е3,
одноименен базису е1, ег, (—е3).
В самом деле, матрица перехода от еь е2, е3 к ei, e^, е'3 имеет
(в силу разноименности этих базисов) отрицательный детерминант;
матрица перехода от elf е2, (— е3) к е^ е2, е3 имеет детерминант —1;
значит, матрица перехода от еъ е2, (—е3) к е[, ег, е3 (будучи про-
произведением двух названных матриц) имеет положительный детерми-
детерминант. Утверждение доказано.
В каждом из двух классов базисов имеются ортогональные базисы.
В самом деле, берем какой-нибудь ортогональный базис е3, е2, е3. Он
содержится в одном из наших двух классов; ортогональный базис
ej, е2, (— е3) содержится тогда во втором классе.
Два базиса, получающиеся один из другого одной транспозицией
(т. е. перестановкой двух каких-либо из трех векторов, образующих
данный базис), всегда разноименны. В самом деле, пусть базис
eii e2i ез получается из базиса еъ е2, е3 перестановкой двух каких-
нибудь векторов этого последнего, например векторов ех и е2, так что
е,.
К 1] ОРИЕНТАЦИЯ ПРОСТРАНСТВА 209
Тогда соответствующая матрица перехода
0
1
Q
1
0
0
0
0
1
имеет детерминант —1.
Поэтому два базиса, получающиеся один из другого произволь-
произвольной перестановкой их векторов, одноименны, если эта перестановка
четная, и разноименны, если перестановка нечетная: базисы
входят в один класс, а базисы
^2' ^1> ^3> ^3' ^2' ^1> ^1' ^3' ^2
— в другой.
Введем теперь следующее весьма важное определение.
Скажем, что базис ег, е2, е3 переходит в базис е[, е'г, е'3 посред-
посредством непрерывной деформации, если для каждого числа t, принад-
принадлежащего некоторому отрезку a^t ^.b, дан базис е{, е'2, е'3, а именно:
е1 = С11е1 Г С12е2 I С13е31
®2 == ^21^1 "Г ^22^2 "Г" ^23^3»
e3 == С31е1 "Г С32е2 ~Н C33e3i
так что все координаты с[ъ с{2 и т. д. являются непрерывными
функциями от t на отрезке a-^lt^b, причем при / = а мы получаем
исходный базис ех, е2, е3, т. е.
i ? 3 ,
с«1 = 0, с?2=1, с?з = 0,
га п -а о
С31 — и> сзг — и>
а при t = b получаем базис е'1: e'i: e's:
-а о га
сзг — и> сзз—
Теперь предположим, кроме того, что базис е,, е2, е^ приложен
к точке Ot = (x0, у'о, г'п), где х{, у[, z\ суть также непрерывные на
отрезе а <*<^ ф ь
{, у[, \ у рр
отрезке а <*<^ функции от/, причем х° = у% = га0 = 0, хь0 =
Уо = Уо. ¦го=г:о> О' ~(Х(,, у0, г0). Тогда мы говорим, что репер Ое^ед
переходит в репер O'eie2eg посредством непрерывной деформации.
Наглядный смысл этих определений таков.
Считая параметр t временем, изменяющимся от начального момента
t — а ао конечного t = b, мы имеем непрерывно меняющийся («дефор-
(«деформирующийся») во времени репер O,eie'2e$, начальное состояние
210 ПРЕОБРАЗОВАНИЕ КООРДИНАТ [ГЛ. IX
которого (при t = а) есть наш исходный репер Ое1е2е3, а конечное —
репер O'e^e^e'g (в который превратился репер Ое^вд в результате
процесса деформации, длившегося отрезок времени a^t^b).
Имеет место следующее очевидное предложение.
Если базис еъ е2, е3 переходит в базис е^, е2, е3 посредством
деформации, которая длится, положим, отрезок времени a ^.t ^.b,
а базис ei, е2, е, переходит в базис ei', е2, е3 посредством деформа-
деформации, которая длится в течение отрезка времени b ^ t ^ с, то базис
еь e2< ез переходит в e'j, е\, е3 посредством деформации, которая
длится в течение отрезка времени а^/^с.
Далее, если базис ех, e2, е3 переходит посредством непрерывной
деформации (а^^ У) в базис ei, е2, е3, то и базис е'и е2, е3 пере-
переходит посредством непрерывной деформации в базис е1, е2, е3, доста-
достаточно положить t' = (a-\-b)—t и
е1 == С11е1 ~Г С12е2~Ь C13e3'
ef = с{1е1 + с?,,е2 + 43е3,
3 "~ ''З!11! Г ''Зг^г Т 133С3'
при /' = а получаем t = b и, следовательно, efa===ej и т. д., при
t' = b имеем t — а, значит, ej* = ej и т. д.
Аналогичные предложения, разумеется, верны и для деформации
реперов.
Замечание. Обычно за отрезок a^.t^b берут единичный
отрезок 0 ^ t ^ 1.
Если рассматривать (как это привычно читателю из элементарного
курса механики) движение твердого тела в пространстве как непре-
непрерывный процесс, происходящий в течение некоторого промежутка
времени (положим, от ^ = 0 до ^=1), то становится очевидным, что
частным случаем непрерывной деформации репера Ое^ед является
движение (перемещение) этого репера (рассматриваемого как твердое
тело): в начальный момент времени ? = 0 наш репер занимает поло-
положение Ое^вз (которое будем обозначать также через O0eje§e°),
в конечный момент t =1 репер займет положение О^е;^, а в каж-
каждый промежуточный момент t репер (перемещаясь в пространстве
как твердое тело) будет находиться в положении О^[е{е13. Обозна-
Обозначим координаты вектора е[ (относительно начального репера Ое^2е3)
через с'п, с[2, с{3, так что
и аналогично
С = С1е С
с32е2 -f- c33es.
К 1] ОРИЕНТАЦИЯ ПРОСТРАНСТВА 211
Тогда непрерывность процесса перемещения и находит свое матема-
математическое выражение в том, что координаты с{,, с{2, с{3; c{i, с22, с28;
c3i, сзг> сзз СУТЬ непрерывные функции времени t.
При этом (так как ej = elf еЦ = ег, ejj = e3)
г0 1 Г0 __ Г) ,0 Г)
С11 ') С12 U1 С13 — U>
го о го 1 го п
с21—и, с22—i| сгз — и,
с31— и, с32 — и, с33—1.
Докажем следующее основное предложение:
1а. Если базис еь е2, е3 переходит в базис е'и е'г, е3 посредством
непрерывной деформации, то оба базиса одноименны.
В самом деле, положим
D{t) =
cn (t) clt (t) cu (t)
c21 (t) c22 (t) c23 (t)
si'
надо доказать, что числа Z)(a) и /5F)—одного и того же знака.
Но детерминант D(t), будучи многочленом от своих элементов cu(t),
с12 (t), . .., являющихся непрерывными функциями от t, есть непре-
непрерывная функция от t на всем отрезке a^.t^.b. Если бы ее зна-
значения в концах этого отрезка имели разные знаки, то существовало
бы промежуточное значение t0, а < *0 < ft, для которого D (t0) = 0.
Но этого не может быть, так как D(t0), как детерминант матрицы
перехода от базиса elt e2, е3 к базису е[°, е.'», е3о, всегда отличен
от нуля.
Теперь мы докажем обратное предложение:
16. Всякие два одноименных базиса (репера) могут быть переве-
переведены друг в друга непрерывной деформацией.
План доказательства таков. Мы сначала доказываем, что всякий
репер может быть непрерывной деформацией переведен в прямо-
прямоугольный. После этого доказываем, что всякие два одноименных
прямоугольных репера могут быть переведены друг в друга движе-
движением в пространстве, т. е. специальным видом непрерывной дефор-
деформации.
Предположим, что мы доказали оба эти факта. Пусть Ое1е2е3
и Ое^е2е3 — два произвольных одноименных репера, Oe1eie3~ О'е[е'ге'3;
переводим их непрерывной деформацией соответственно в прямо-
прямоугольные реперы Ое1е2е3 и О'г\г'гг3. Тогда Ое^бд ~ Ое1е2е3 ~
O''^e'g <~ О'е[еге'а, следовательно (по свойству транзитивности^
g ~ О'г\г'гг3. Но одноименные реперы Oeje2e3, О'ъ\ггг3 ортого-
ортогональны; значит, по сделанному предположению они могут быть пе-
Реведены друг в друга непрерывной деформацией. Переводим теперь
212
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
[ГЛ. IX
непрерывными деформациями последовательно
Oete2e3 в Oeje2e3, (A)
OEje2E3 в О'г\ггг3, (Б)
О'ё'^Сз в О'е',е2ез (В)
(последнее возможно: раз существует деформация, переводящая
О'е\е'2е3 в О'ъ'хг'гг3, то существует, как мы видели, и деформация,
переводящая О'е\е'гг'у в O'e^es). В результате трех последователь-
последовательных деформаций (А), (Б), (В) получаем искомую деформацию, пере-
переводящую Ое1е2е3 в O'e^e^. Основное предложение доказано.
Рис. 104.
Переходим к выполнению намеченного плана.
Доказываем первое утверждение: всякий репер может быть не-
непрерывной деформацией переведен в ортогональный.
Докажем это утверждение сначала для плоскости. Пусть Ое?е? —
данный репер, eJ=O?J, е?1 — ОЕ%. Построим ортогональный репер
Oeje^ так, чтобы орт е} — ОЕ\ лежал на оси, несущей вектор
с? = OEJ, а орт &\ — ОЕ\ (перпендикулярный к е?) лежал в той же
полуплоскости (из двух полуплоскостей, определяемых прямой O?J),
в которой лежит вектор el=OE?2. Тогда, если угол ф, 0<ф<л,
между векторами ej и е!! острый (рис. 104, а), то он весь лежит
внутри прямого угла между ОЕ\ и ОЕ\, а если угол ф тупой
(рис. 104, б), то он, наоборот, содержит прямой угол между ОЕ[ и
ОЕ\. Для каждого t, O^ifs^i, обозначим через Е[, соответственно
через El, точку отрезка EfE\, соответственно Е\Е\, делящую
этот отрезок в отношении t:{\—(). При любом t, 0 < t < 1, вектор
е[ = ОЕ{ лежит на полупрямой ОЕ°, несущей вектор е°, а вектор е?
§ 1]
ОРИННТАЦИЯ ПРОСТРАНСТВА
213
лежит внутри треугольника ОЕ%Е1, имеющего с полупрямой ОЕ\,
единственную общую точку О.
Поэтому векторы ОЕ{, ОЕ{ при любом t не коллинеарны, т. е.
образуют репер Ое(е', непрерывно меняющийся при изменении t от О
до 1 и осуществляющий непрерыв-
непрерывный переход (деформацию) от ре-
репера Oejejj к реперу Ое\е\.
Переходим к случаю простран-
пространства. В плоскости OeJeiJ произведем
те же построения, как и выше. Обоз-
Обозначим через е\ = ОЕ\ орт, перпен-
перпендикулярный к плоскости Ое°е?г и
направленный в ту же сторону от
этой плоскости, что и вектор е°
(рис. 105).
В полной аналогии с предыду-
предыдущим случаем обозначаем через Е{3,
0 ^ t ^ 1, точку отрезка Е3Е1, де-
делящую этот отрезок в отношении
t:(\—t); при любом t, 0<t<l,
определен, таким образом, век-
Рис. 105.
тор ОЕ'а = еЪ и репер Ое{е'2е'3, непрерывно зависящий от / и осуще-
осуществляющий при изменении t от 0 до 1 непрерывный переход от дан-
данного репера Oejeije? к прямоугольному реперу OeJeJeJ. Первое утвер-
утверждение доказано.
Переходим к доказательству второго утверждения. Всякий пря-
прямоугольный репер Ое^ед может быть посредством непрерывного
движения, являющегося, как было сказано выше, частным случаем
непрерывной деформации, переведен во всякий другой одноименный
с ним прямоугольный репер О'е^ез.
Посредством сдвига на вектор 00' можно прежде всего совместить
начала О и О' обоих реперов; поэтому можно ограничиться случаем,
когда оба репера имеют общее начало О. Теперь начинаем с того,
что совмещаем ортые3 = О?3 и е'3=ОЕ3. Для этого проведем через
эти орты (имеющие общее начало О) плоскость ОЕЪЕ'3 (рис. 106) и
восставим к этой плоскости в точке О перпендикуляр d. Совершим
теперь поворот репера Ое-^ед (как твердого тела) вокруг прямой d
на угол 9, 0^0^ п, между ортами е3 и ез в таком направлении,
чтобы орт е3=О?3 совместился с ортом е'3 — ОЕ'3. Этот поворот1)
') Который можно себе представить также как вращение всего простран-
пространства вокруг данной прямой (аналогично тому, как мы в главе VIII, § 3, рас:
сматривали вращение плоскости вокруг одной из ее точек).
214
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
[ГЛ. IX
переведет орты ех = ОЕХ и е2 = ОЁ2 в какие-то взаимно перпенди-
перпендикулярные орты е* и е*, лежащие в плоскости, перпендику-
перпендикулярной к орту ОЕз (и проходящей через точку О), т. с.
в плоскости ОЕ[Е'г. Теперь остается поворотом репера Ое^е^
вокруг прямой, несущей орт е3, совместить орт е*=О?* с ортом
ОЕ[. Этот поворот, оставляя пару ортов ОЕ* и ОЕ1 в их плоскости
(которая есть плоскость
ОЕ[Е'2) и совместив орт
ОЕ\ с ортом ОЕ[ = е,,
переведет орт ОЕ*г (с ко-
которым еще ранее был
совмещен орт ОЕг) в
орт, перпендикулярный к
ОЕ[ = е'1( т. е. либо в
е'2) либо в (— el). Но вто-
вторая возможность исклю-
исключена, так как реперы
разноименны и поэтому не
могут быть совмещены
движением в пространст-
пространстве. Утверждение дока-
доказано.
Вместе с иим завершено доказательство и следующего результата
(верного как для плоскости, так и для пространства).
Теорема 1. Для того чтобы два репера (два базиса) были одно-
одноименны, необходимо и достаточно, чтобы один из них можно было
непрерывной деформацией перевести в другой. Если данные реперы
прямоугольны, то их можно перевести друг в друга даже движением
в пространстве. Если реперы разноименны, то их нельзя перевести
друг в друга даже никакой деформацией, значит, и подавно ника-
никаким движением.
Поэтому
Теорема Г. Два прямоугольных репера (на плоскости или
в пространстве) тогда и только тогда одноименны, когда один из
них может быть переведен в другой непрерывным движением (в
плоскости, соответственно в пространстве).
Пусть Ое1е2е3 и O'e^e^—два прямоугольных разноименных
репера. Тогда реперы Оехе2е3 и О'е^е^ — е3) одноименны и, на-
например, первый из них может быть движением переведен во вто-
второй. Но репер O'eie'2 (—е3) является зеркальным отражением
репера О'е[е'2е3 относительно плоскости O'e^ej. Поэтому имеет место
§ 1] ОРИЕНТАЦИЯ ПРОСТРАНСТВА 215
Теорема 2. Если ортогональные реперы Oete2es и O'e'ie'2^3
разноименны, то один из них может быть переведен в другой по-
посредством движения со следующим за ним (или предшествующим
ему) зеркальным отражением.
Доказательство следующего замечания можно в качестве упраж-
упражнения предоставить читателю.
Замечание. 1. Беря зеркальные отражения относительно
произвольной плоскости всех базисов (реперов) одного какого-
нибудь класса в пространстве, получим все базисы (реперы) друго-
другого класса. Аналогичный результат, разумеется, имеет место и в
плоскости.
Определение. Ориентировать плоскость или пространство —
значит один из двух классов базисов (реперов) объявить положи-
положительным (а другой — отрицательным). Тогда и всякий базис (репер)
называется положительным или отрицательным в зависимости от того,
к какому классу он принадлежит.
Для того чтобы ориентировать (плоскость или пространство),
достаточно задать один какой-нибудь базис и объявить положитель-
положительными все с ним одноименные базисы.
Замечание 2. Если плоскость ориентирована, то в пей опре-
определяется и положительное направление вращения: это направление
кратчайшего вращения (т. е. вращения на угол ~\ из тех двух
вращений ( на ~ и па -^ J , посредством которых можно первый орт
(т. е. орт ег) положительного прямоугольного репера Oete2 перевести
во второй (т. е. в орт е2).
Обратно, если на плоскости задано положительное направление
вращения, то определена и ориентация плоскости: репер Оеге2 по-
положителен, если кратчайший поворот на угол (т. е. поворот на угол
п \
-g- J , переводящий орт ех в орт е2, происходит в положительном
направлении.
Таким образом, ориентация плоскости фактически совпадает с вы-
выбором положительного направления вращения.
«Физическое», если так можно выразиться, осмысливание двух
классов реперов па плоскости общеизвестно: назовем правым такой
репер Ое1е2, где кратчайший поворот, переводящий орт ег в орт е2,
происходит против часовой стрелки (рис. 107, а), т. е. где et и е2
расположены, как большой и указательный пальцы правой руки, если
смотреть на ее ладонь.
Левым назовем противоположно ориентированный репер (рис. 107, б)
(в нем аналогичный поворот происходит по часовой стрелке).
В пространстве репер Оеге2е3 называется правым, если наблю-
наблюдатель, стоящий вдоль вектора е3 (ногами —в начале, головой —
216
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
[ГЛ. IX
в конце этого вектора), видит кратчайший поворот, переводящий
вектор ег в вектор е2 в плоскости Ое^, происходящим против
часовой стрелки (рис. 108, б). Противоположно ориентированный
репер называется левым (рис. 108, а) (см. далее по этому поводу
замечание 4).
а) ПраВый репер . б) Левый р&Гер
Рис. 107.
Мы ориентируем пространство, объявляя в нем в качестве поло-
положительных, например, все правые реперы.
ei
а) Левый рвпвр
б) Правый репер
Рис. 108.
Замечание 3. Можно ориентировать пространство, выбрав
в нем ориентированную плоскость л и ориентированную (т. е. на-
направленную) прямую d, пересекающую плоскость л (в некоторой
точке О) (рис. 109): берем на плоскости я положительный репер Оеге2;
дополняя его ортом е3=О?, определяющим направление, выбранное
на прямой d, получим репер Ое^ез, который и объявим положи-
положительным.
Очень важно следующее
Замечание 4. Если пространство ориентировано и в нем дана
направленная прямая d, то из двух направлений вращения простран-
§ п
ОРИЕНТАЦИЯ ПРОСТРАНСТВА
217
ства вокруг прямой d следующее направление объявляется положи-
положительным: берется положительный прямоугольный репер Ое^ед, орт
е3 = ОЕ3 которого лежит на
прямой d и направлен в вы-
выбранном на этой прямой на-
направлении; тогда положитель-
положительным объявляется то вращение
вокруг прямой d, которое пере-
переводит орт е1 в орт е2 посредст-
посредством кратчайшего поворота
(т. е. поворота на угол -=- } .
Имеет место и обратное
предложение:
1) Можно ориентировать
пространство, задав в нем на-
направление вращения вокруг некоторой направленной прямой1).
Рис. 109.
а) Левый репер
б) Правый репер
Рис. 110.
2) Можно ориентировать пространство, задав в нем ориентиро-
ориентированную плоскость и одну (из двух) ее сторону (т. е. полупростран-
полупространство, на которые плоскость разбивает пространство2)).
') В самом деле, заданное направление вращения пространства вокруг
прямой d определяет и направление вращения в плоскости, перпеидикуляриой
к прямой d, значит, и ориентацию этой плоскости; так как прямая d направ-
направлена, то имеем случай, разобранный в замечании 3.
2) Задать одно из этих полупространств —значит, задать и орт, приложен-
приложенный к какой-либо точке плоскости и направленный в это полупространство.
Имеем снова ориентированную плоскость и направленный перпендикуляр
к ней.
218 ПРЕОБРАЗОВАНИЕ КООРДИНАТ [ГЛ. IX
Замечание 5. Пусть в пространстве дан прямоугольный ре-
репер Oeje2e3; этим задана н ориентация пространства. Тогда опреде-
определяется и соответствующее этой ориентации («положительное») на-
направление вращения вокруг каждой из координатных осей; это
направления кратчайших вращений ( на угол ~ ) вокруг осей Ох,
Оу, Oz (рис. ПО) (несущих соответственно орты е1; е2, е3), пере-
переводящих
вектор е2 в вектор е3,
вектор е3 в вектор ег,
вектор ех в вектор е2.
Если выбранный репер правый, то каждое из названных вращений
есть вращение против часовой стрелки (для зрителя, расположенного
вдоль соответствующей оси ногами в начале, головой в конце орта
этой оси).
§ 2. Углы Эйлера1)
Вернемся к теореме 1; нас интересует утверждение этой теоремы,
касающееся возможности перевести посредством движения данный
прямоугольный репер в любой другой прямоугольный репер, одно-
одноименный с данным. Мы можем легко дополнить эту теорему уста-
установлением тех геометрических элементов (тех «параметров»), которые
определяют положение второго репера Ое^е'^ относительно первого
Ое^ед (мы предполагаем сначала, что у обоих реперов одно и то
же начало О).
Из рассуждений, проведенных на стр. 213—214, вытекает, что поло-
положение репера Ое[е'2е3 вполне определено, если известны: прямая d
(перпендикуляр, восставленный в точке О к плоскости Ое3е3) и два
угла: угол 0, на который надо повернуть репер Oeje2e3 вокруг пря-
прямой d, чтобы совместить орт е3 с ортом e's, и угол того поворота,
который после этого надо сделать, чтобы совместить вектор ej
(в который перешел вектор ех после первого поворота) с векто-
вектором е[ (после этого второго поворота репер Oeje2e3, как мы видели
(стр. 214), оказался полностью совмещенным с репером Ое^е^ез).
!) Леонард Эйлер A707—1783), швейцарец родом, —один из величайших
математиков после Ньютона. Эйлеру принадлежат фундаментальные резуль-
результаты во всех областях математики его времени. В частности, основной запас
фактов, составляющих содержание как аналитической геометрии, так и ана-
анализа бесконечно малых (дифференциальное и интегральное исчисление), в своих
существенных чертах сложился именно в работах Эйлера. Исключительно
пажен и вклад Эйлера в механику и небесную механику. Значительную часть
своей жизни A727—1741 гг. и с 1766 г. досмертив 1783 — всего 31 год) Эйлер
прожил в С.-Петербурге, будучи одним из деятельнейших членов Российской
Академии наук.
§ 21
УГЛЫ ЭЙЛЕРА
219
Рассмотрим ближе всю картину. Прежде всего, прямая d, про-
проведенная через начало О перпендикулярно к плоскости Ое3вз, есть,
очевидно, прямая пересечения плоскостей Ое^ и Ое\е'г. Плоскость
Ое^а, в которой, таким образом, лежит прямая d, ориентирована
самим данным в ней репером Оейе2; поэтому положение прямой d
определено наклоном какого-либо ее направляющего вектора к век-
вектору ех. За направляющий вектор прямой d примем такой ее орт е^
(рис. 111), что репер Ое^е^ одноименен с репером Оехейе3. Угол
от орта ех до орта е^ (в ориентированной плоскости Ое^) мы обо-
обозначим через if, 0^-ф<2я. Тогда поворотом репера Ое^ вокруг
оси, несущей орт е3 (ось аппликат координатной системы Оехе2е3),
на угол г|э в положительном направлении вращенияг) мы совместим
орт е^ с ортом ej\ При этом повороте орт ег перейдет в какой-то
орт el, а орт е3 останется на месте.
Теперь совмещаем вектор е3 с вектором е3 посредством кратчай-
кратчайшего поворота на некоторый угол 0, 0^0^л, вокруг прямой d,
несущей орт е'^. Так как репер Oe3e:,ei одноименен с репером Ое^е,,,
то этот поворот происходит в положительном направлении. Он пе-
переводит репер ОеХ'ез в репер Ое'^'е'з, причем плоскость Ое,е2
совместилась с плоскостью Ое'^. Нам остается только сделать
2) Под положительным направлением вращения вокруг какой-нибудь
(направленной) оси мы в этом параграфе всегда понимаем направление вра-
вращения, определенное репером Oeje2e3 (см. замечание 4 к теореме 2 § 1). На
нашем рисунке направление вращения — против часовой стрелки для зрителя,
стоящего вдоль орта этой оси, ногами —в начале, головой—в конце орта.
220 ПРЕОБРАЗОВАНИЕ КООРДИНАТ [ГЛ. IX
поворот репера Oe'ie'2"e3 вокруг оси Oz' (несущей орт е3) на угол ф
(/т вектора ei' до вектора ei (в ориентированной плоскости Oejej,
в которой лежат оба вектора ei и ei), тогда и вектор ej" совме-
совместится с вектором &2.
Три угла:
< 2я, от ех до ei в плоскости Ое1е2,
0, 0^8^л, от е3 до е3 в плоскости Ое3е3,
Ф, 0^ф<2я, от ei до ei в плоскости Oeie2,
называются эйлеровыми углами репера Oeie^eg относительно ренера
Ое^^з. Зная репер Ое^ед и эти углы г|э, 0, ср, мы сразу же можем
определить единственный репер Oeie'2e3, имеющий эти углы своими
эйлеровыми углами и одноименный с репером Се^вд. В самом деле,
мы сначала совершаем поворот репера Ое^вд вокруг оси, несущей
вектор е3 (ось аппликат координатной системы Oeae2e3), на угол г|)
в положительном направлении. Этот поворот переводит орт ех в орт ei,
определяющий ось d (и весь репер Ое^ед — в Oeie^eg). После этого
совершаем поворот репера Oeie'je3 вокруг оси d на угол 8 в поло-
положительном направлении. При этом орт е3 перейдет в некоторый
орт е'3, орт ei останется на месте, а орт е^ перейдет в новый
орт е'2"; репер Oeie'jeg перейдет в (прямоугольный) репер Ое'|е'2"е;,.
Наконец, делаем поворот на угол ср в положительном направлении
вокруг оси орта е3. Этот поворот, оставляя орт е'3 на месте, пере-
переведет орты e'i, е2" в некоторые орты ei, е'г, а весь репер Oei'ej'eJ,
(значит, и Ое1е2е3) — в однозначно определенный предыдущим пост-
построением прямоугольный репер Ое'^е'з (одноименный с Ое^е,,).
Замечание 1. Таким образом, переход от одного прямоуголь-
прямоугольного репера к другому, одноименному с ним и имеющему то же на-
начало, осуществляется тремя поворотами, соответственно на углы г{>,
8 и ф, вокруг трех осей (е3, d, e's), которые (как и направления
вращения вокруг них) определены исходным репером Ое1е.2е3 и уг-
углами i|), 0, ф.
Замечание 2. Углы Эйлера определяют репер Oeiejeg лишь
в предположении, что он одноименен с репером Ое|е2е3: для полу-
получения противоположно ориентированного репера с теми же углами
Эйлера нам достаточно заменить орт е'3 ортом — е3 (сохраняя полу-
полученные ранее орты &[ и е^)-
Для репера Ое\е'2е3 его углы Эйлера (относительно исходного
репера Ое-^вз, остающегося фиксированным) являются независимыми
параметрами (определяющими этот репер); «независимость» означает,
что этим параметрам мы можем давать совершенно произвольные
значения (в пределах изменения 0^ф<2я, 0^8^31, 0^!cp<2rt
каждого из них); каждому набору значений параметров соответст-
соответствует вполне определенный репер Oeie^ej.
§ 3]
ОБЪЕМ ОРИЕНТИРОВАННОГО ПАРАЛЛЕЛЕПИПЕДА
221
Предположим теперь, что дано произвольное твердое тело с зак-
закрепленной точкой О в нем. Предположим, что в это тело ввинчен
твердо связанный с ним прямоугольный репер Oeje^ej. Тогда рал-
личные возможные положения тела взаимно однозначно соответствуют
различным положениям неразрывно связанного с этим телом репера
Oe'i^Ws "> следовательно, вполне определяются углами Эйлера этого
репера (относительно исходного данного в пространстве неподвиж-
неподвижного репера Oe^eg).
Таким образом, всевозможные положения твердого тела с одной
закрепленной точкой вполне определяются тремя независимыми па-
параметрами.
В механике этот факт выражают, говоря, что тело с одной зак-
закрепленной точкой имеет три степени свободы.
Если отказаться от неподвижности точки О, т. е. допустить сво-
свободное перемещение тела в пространстве, то к трем рассмотренным
параметрам присоединятся еще три координаты произвольной точки О',
в которую можно перенести точку О,— твердое тело, способное
свободно перемещаться в пространстве, имеет шесть степеней сво-
боЗы (его положение определяется шестью независимыми пара-
параметрами).
§ 3. Объем ориентированного параллелепипеда
1. Некоторые частные случаи определения ориентации про-
пространства. Пусть два аффинных репера Oeje2e3 и Оегеге3 имеют два
общих вектора е^ е2 и общее
начало О. Эти реперы одноимен-
ны тогда и только тогда, когда
третьи векторы е3 и е'3 направ-
направлены в одну и ту же сторону
от плоскости Ое1е2.
В самом деле, если векторы
е3 = О?3ие; = О?; (рис. 112)
лежат но одну сторону от пло-
плоскости Ое^, то по ту же сто-
сторону лежит и весь отрезок Е3Е3.
Тогда для каждого значения t,
Os^s^l, обозначаем через Е\
точку, делящую отрезок Ё^Е3 Р|)С П2
и отношении t:(\—t), и, пола-
полагая, е| = О?з, получим переменный репер Оеге2е?, осуществляю-
осуществляющий деформацию, переводящую репер 1
') При этом е3 = A — t)e3-\-(e3,
222
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
[ГЛ. IX
Если е3 и е'3 расположены по разные стороны от плоскости Ое^
(рис. 113), то векторы — е3 и е3 расположены по одну сторону, зна-
значит, по только что доказанному, реперы Oeje2 (—es) и Ое^вд од-
ноименны, значит, реперы Oe^e-j и Ое^вз разнонменны.
Рассмотрим частный случай последней теоремы, когда вектор
еч = ОЕ3 перпендикулярен к плоскости Ое{е2; тогда векторы е3 и е3
направлены в одну и ту же или
в разные стороны от плоскости
Оехе2 (рис. 114) в зависимости
от того, будет ли угол между
ними острим или тупым.
Заметим, что в первом случае
Si
/i x
/ i
/ i
/ i
/ i
/
/
N /
N. /
4 /
/
будет
аз пре, е; > О,
во втором
Рис. 113.
Мы доказали следующее пред-
предложение:
Если п — какой-нибудь вектор, перпендикулярный к двум некол-
линеарным_векторам u, v,w w — какой-нибудь вектор, не компланарный
Рис. 114.
векторам u и v, то реперы Ouvn и Ouvw тогда и только тогда одно-
именны, когда аз нр„ W > 0.
Мы сейчас воспользуемся этим предложением.
2. Объем ориентированного параллелепипеда. Пусть простран-
пространстве ориентировано. Пусть u, v, w — тройка некомпланарных векто-
векторов, данных в определенном порядке (в том, в каком они написаны).
S 3] ОБЪЕМ ОРИЕНТИРОВАННОГО ПАРАЛЛЕЛЕПИПЕДА 223
Приложим их к какой-нибудь точке О:
u = O4, v = OB, w = OC,
и построим на них параллелепипед. Объем этого параллелепипеда,
снабженный знаком -f-, если репер Ouvw положительный, и зна-
знаком —, если этот репер отрицательный, называется объемом ори-
ориентированного параллелепипеда, построенного на векторах и., v, w,
и обозначается через <u, v, w>.
Замечание. Если векторы u, v, w компланарны, то полагаем
<и, v, w>=0.
Рассматривая число <u, v, w> как функцию трех векторов u, v, w,
заметим, что из ее определения непосредственно следует нечет-
нечетность функции <u, v, w>, т. е.
Предложение 1. Функция <u, v, w> при перестановке двум
каких-нибудь из ее аргументов u, v, w изменяет знак, не меняя абч
солютной величины.
При умножении какого-либо из трех векторов u, v, w на число
Я знак тройки векторов u, v, w при Я > О остается неизменным,
а при Я < О меняется на противоположный; что же касается эле-
элементарно определенного (т. е. положительного) объема параллеле-
параллелепипеда, построенного на векторах u, v, w, то он, очевидно, умно-
умножается на | Я | . Поэтому
Предложение 2. При умножении одного из векторов U, v, W
на какое-нибудь число Я на это же число Я умножается и <u, v, w>.
Обозначим через п орт, перпендикулярный к плоскости Ouv к
направленный так, чтобы репер Ouvn был положительным (рис. 11!)).
Тогда знак репера Ouvw, как мы видели, совпадает со знаком
числа аз пр„w.
Будем считать (неориентированный) параллелограмм OADB ,
построенный на векторах
ц = ОА, \ = ОВ,
основанием нашего параллелепипеда; площадь этого параллелограмма
(положительную) обозначим через А.
Высотой параллелепипеда, соответствующей выбранному нами ос-
основанию, будет число
/г = |азпр„\у|,
так что число <u, v, w> имеет модуль, равный Д| аз прп w|, и знак,
совпадающий со знаком азпрп\у. Другими словами,
<u, v, \у> = Д-азпр„w. A)
Отсюда сразу получим (подставляя в последнем равенстве w = wx
224 ПРЕОБРАЗОВАНИЕ КООРДИНАТ
и помня, что азпр„ (w1 + w2) = a3iipn W1-f-a3npll w2):
, v, w1-fw2> = <u, v,
, v, w2>.
[ГЛ. IX
B3)
Так как каждый из векторов u, v может быть (согласно предложе-
предложению 1) поставлен на третье место, то наряду с B3) имеем
+ Ujj, V, W> = <U1, V, W>-f <U2, V,
= <u, v
v
, v2,
B2)
Предложение 2 и формулы Bг), B2) B3) означают, что функция
<и, v, w> линейна по каждому из своих аргументов.
Рис. 115.
Пусть в пространстве дан положительный прямоугольный репер
Оехе2е3. Векторы u, v, w получают теперь координатную запись:
={хх
={х2,
C)
Уз>
Кроме того, е1 = {1, 0, 0}, еа = {0, 1, 0}, е3 = {0, 0, 1}. Так как
базис еь е3, е3 положителен, то
<.е , е , е. у = 1. D)
Итак, функция <u, v, w> линейна но трем своим аргументам, она не-
нечетна и нормирована в смысле равенства D). Поэтому на основании
S 4] ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ 225
теоремы 9 § 11 главы VII функция <u, v, w> есть не что иное, как
v, w>=?>(u, v, w) =
у.г z2
y3 zz
E)
— ориентированный объем параллелепипеда, построенного на трех
векторах u, v, w, данных своею координатной записью C), есть
детерминант третьего порядка E).
Мы получили не только обобщение на случай трех измерений
теоремы о площади ориентированного параллелограмма, но и гео-
геометрическое истолкование детерминантов, которое является основой
и для понятия объема в л-мерном пространстве.
§ 4. Векторное произведение двух векторов
1. Бивекторы. Пару векторов u, v, данных в определенном поряд-
порядке н приложенных к одной какой-нибудь точке пространства, назо-
назовем (<<приложенным») бивектором.
Бивектор считается ранным нулю, если составляющие его век-
векторы коллинеарны, и только в этом случае. Модулем ненулевого би-
бивектора называется положительное число, равное площади паралле-
параллелограмма, построенного на составляющих его векторах. Модуль ну-
нулевого бивектора, естественно, полагается равным нулю.
Каждый ненулевой бивектор u, v, приложенный к какой-нибудь
точке О, определяет несущую его ориентированную плоскость,
а именно плоскость, в которой базис u, v объявлен положительным.
Мы будем говорить, что два бивектора u, v и u', v' одноименны
или одинаково ориентированы, если они, будучи приложены к одной
и той же точке О, определяют одну и ту же плоскость я и одну
и ту же ориентацию в ней (т. е. если базисы u, v и u', v' суть
одноименные базисы в плоскости я).
Два бивектора считаются равными, если они одинаково ориенти-
ориентированы и имеют один и тот же модуль (следует, разумеется, пом-
помнить, что из равенства бивекторов u, v н и', v' вовсе не следует,
что составляющие их векторы соответственно равны).
Аналогично тому, как, объединяя в один класс все векторы, рав-
равные одному какому-нибудь среди них, мы получали новый геометри-
геометрический объект — свободный вектор, так и разбивая множество всех
бивекторов трехмерного пространства на классы равных между собою
бивекторов, мы каждый такой класс назовем «свободным бивектором».
Впрочем, мы сейчас покажем, что это понятие, при всем его изя-
изяществе, излишне: в трехмерном пространстве понятие бивектора ока-
оказывается возможным свести к понятию вектора. В самом деле, пусть
наше пространство ориентировано. Тогда каждый ненулевой бивектор
° П. С. Александров
226
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
[ГЛ. IX
o\
u, v однозначно определяет (свободный) вектор n=n(u, v), длина
которого равна модулю бивектора, а направление перпендикулярно
к плоскости, несущей векторы U и v, и таково, что тройка векто-
векторов u, v, n образует положительный базис нашего ориентированного
пространства. Для нулевого бивектора u, v вектор п есть нулевой
вектор. Легко видеть, что два бивектора u, v и u', v' тогда и только
тогда равны между собою, когда равны построенные для них век-
векторы: n (u, v)=n(u', v').
С другой стороны, каждый
свободный вектор w пространст-
пространства является вектором n(u, v)
для некоторого бивектора u, v, a
именно для любого бивектора u, v,
построенного следующим обра-
образом: берется плоскость я, пер-
перпендикулярная к вектору w, и в
и ней выбираются два вектора и,
~/ v так, чтобы площадь построен-
—' ного на них параллелограмма рав-
равнялась длине | w | вектора1) w;
* *- векторы и и v берутся в таком
порядке, чтобы, присоединив к
ним третий вектор w, получить
Рис. 116. положительный базис u, v, w
пространства; тогда, очевидно,
w=n(u, v). Таким образом, со-
сопоставляя с каждым бивектором u, v построенный для него век-
вектор n(u, v), мы получаем взаимно однозначное соответствие между
всеми свободными бивекторами u, v, с одной стороны, и всеми свобод-
свободными векторами w трехмерного пространства — с другой. Получается,
что в трехмерном пространстве2) понятие свободного бивектора
сводится к понятию свободного вектора и, следовательно, излишне.
2. Векторное произведение. Определение. Векторным про-
произведением, вектора и на вектор v называется вектор п, модуль ко-
которого равен произведению модулей векторов и и v на синус угла
ср между ними: |п| = |и| • | v | sincp; этот вектор перпендикулярен
к плоскости л, в которой лежат векторы и a v, если их отложить
от одной точки; он направлен так, что упорядоченная тройка век-
>) Это можно сделать бесконечным числом способов, например, взяв за
один из двух векторов какой-нибудь орт е, лежащий в плоскости я,, а за
другой—вектор, лежащий в плоскости п, перпендикулярный орту е и имею-
имеющий длину | w |.
2) И только в трехмерном — наше построение вектора n (u, v) на прост-
пространство более чем трех измерений не обобщается; не имеет оно места и на
плоскости.
§ 4]
ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ
227
торов u, v, n имеет положительную ориентацию (рис. 116) Ч Вектор'
ное произведение вектора и на вектор v обозначается через [и, v].
Установим некоторые свойства векторного произведения.
I. Векторное произведение [u, v] равно нулю тогда и только
тогда, когда векторы и и v коллинеарны.
II (Антикоммутативность), [u, v] = — [v, и].
III. При умножении какого-либо из векторов и или v на произ-
произвольное вещественное число X на это же число Я умножается и век-
векторное произведение: [ku, v] = [u, Av] = A[u, v].
Эти свойства являются непосредственными следствиями опреде-
определения вектора [u, v].
Имеет место и
IV (Дистрибутивность).
[(u'
[U,
), v] = [u',
v], \
V"]
A)
Вследствие свойства II достаточно доказать одну какую-нибудь
из формул A), например первую. Прежде чем делать это, вычислим
(в какой-нибудь прямоугольной системе координат) координаты век-
вектора [u, v] по координатам
векторов и и v. Для это-
этого в свою очередь докажем
следующее очень важное
предложение.
V. Скалярное произведе-
произведение вектора [u, v] на ка-
какой-нибудь вектор w рав-
равняется объему ориентирован-
ориентированного параллелепипеда, натя-
натянутого на векторы и, v, w: / и/
([и, v], w) = <u, v, w>. B)
Предположим сначала,
что векторы u, v, w комп-
компланарны. Тогда правая часть
равенства B) обращается в
нуль. Докажем, что и левая равна нулю. Это очевидно, если векто-
векторы и и v коллинеарны — тогда [u, v] = 0, значит, и ([u, v], w) = 0.
Пусть и и v неколлинеарны, и пусть я— несущая их плоскость.
Так как векторы u, v, w компланарны (рис. 117), то и w лежит
Рис. 117,
*) Таким образом, вектор п (u, v) есть векторное произведение вектора и
на вектор v.
8* ^ -^
228
ПРЕОБРАЗОВАНИЕ КООРДИНАТ
[ГЛ. IX
в плоскости п. Но вектор [u, v] перпендикулярен к плоскости л,
значит, ([u, v], w)=0. Итак, в случае компланарности векторов
u, v, w равенство B) верно — обе его части равны нулю.
Пусть теперь векторы u, v, w не компланарны. Положим
п—[u, v] и будем считать параллелограмм, построенный на векто-
векторах и и v, основанием парал-
параллелепипеда, построенного на
векторах u, v, w (рис. 118);
положительное число, выра-
выражающее (элементарно опреде-
определенную) площадь этого парал-
параллелограмма, есть А = |п|, так
что формула B) переписывает-
переписывается в виде
<u, v, w> = |п|-азпр„ w.
С другой стороны, скаляр-
скалярное произведение ([u, v], w)
может быть записано в виде
([их v], w) = (n, w) --
= |п|-азпр„№,
что и требовалось доказать.
Формула B) (если ее чи-
читать справа налево) может
служить определением функ-
функции <u, v, w>, которая при
таком подходе к ней называет-
называется смешанным произведением J)
трех векторов u, v, w.
Пусть теперь — в какой-
нибудь прямоугольной системе
координат Ое1е2е3 — имеем
Рис. 118.
Найдем координаты X, Y, Z вектора
стема координат прямоугольная, то
{x v }
n = [u, v]. Так как си-
сии аналогично
K=<u, v,
= <u, v, e3>.
1) Этот термин хотя и представляется совершенно излишним, тем не
менее очень распространен, и студентам рекомендуется его знать.
я 4] ВЕКТОРНОЕ ПРОИЗВЕДЕНИЕ 229
но е1 = {1, 0, 0}, ег = {0, 1, 0}, е3 = {0, 0, 1}; поэтому
\7 ,
1
Уг г?,
О О
и аналогично
х1
А',
xi Ух
х2 у2
Другими словами, если в прямоугольной системе координат Оеге2еа
векторы и и v даны в виде и = {лг1, ух, zx\, у={лга, у2, z2\, то
вектор [u, v] может быть записан в виде разложенного по элемен-
элементам третьей строки детерминанта:
[u, v] =
хх уг г,
хг уг гг
C)
Выведем отсюда формулы дистрибутивности IV.
Пусть и' = {лг', у', z'}, и" = {лг", у", z"\, v={x, у, z\; тогда
u' + u" = {x'-l-x", y'+y", z'+z"\, и мы имеем
[(u' + u"), v] =
X' у'
II
4-
z'+z"
Z
ез
х" у'
х у
=
z"
Z
е3
= [tt',
v],
что и требовалось доказать.
ГЛАВА X
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
§ 1. Уравнения плоскости
1. Параметрическое и обшее уравнения плоскости. Всякую
плоскость в пространстве можно задать, указав какую-нибудь ее
точку Мо = {х0, у0, z0) и два произвольных приложенных к этой точ-
точке неколлипеарных вектора (рис. 119) U1 = {a1, Ьъ с1}=М()М1 и
U2= { a2, Ь2, сг} —М0М2. Эти векторы определяют двумерное вектор-
векторное многообразие, состоящее
из всех векторов и, являю-
М_^-—"" / щихся линейными комбинация-
комбинациями векторов щ и и2; прилагая
векторы и к точке Mv, полу-
получим всевозможные закреплен-
закрепленные векторы вида
где s и t — произвольные ве-
вещественные числа; концы М
Рис 119. этих векторов и заполняют
плоскость, проходящую через
точку Мо и два приложенных к ней вектора их и и2.
В координатной форме уравнение A) переписывается так:
х х0 —
У— 00 =
z — za = sc
A)
Давая в этих уравнениях переменным s я t всевозможные числовые
значения, получим все точки нашей плоскости и только точки этой
плоскости. Поэтому векторное уравнение A) или равносильная ему
§ 1]
УРАВНЕНИЯ ПЛОСКОСТИ
231
тройка числовых уравнений A) называется параметрическим урав-
уравнением плоскости.
Уравнения A) выражают линейную зависимость столбцов матрицы
что
или
в свою очередь
уравнению
/ у , у
У—У о
эквивалентно
х — х0 у —.
а2 *2
«1 «2 \
Ьх Ь2 ,
<i «./
равенству
у0 г—z0
ci
= 0
A(x—xo) + B{y—i
где
А =
с2 а2
B)
C)
D)
Таким образом, уравнение C) представляет собою необходимое и
достаточное условие, чтобы точка М=(х, у, г) принадлежала
плоскости, определяемой уравнением A), т. е. уравнение C) есть
уравнение плоскости, проходящей через точку М0 — {х0, у0, zn)
и через пару неколлинеарных векторов Ut = {av bx, cx},
u2 = {a2, b2, c2\.
Задача. Найти уравнение плоскости, проходящей через три
данные неколлинеариые точки
ая __ (ут и z \ АА ¦. (V* и 2 \ АА ^~ i v и z \
Искомая плоскость содержит точку Мп и неколлинеарные векторы
Л/Т Д/Г —. i v" v it •—• it v ** \ н АЛ /\А —~ 1 V —*тш v it — it ? — 7 >•
'"O^'l— 1Л1 -*0) i^l i>0< ^1 А0( и ^н0^'22 — \л2^^л0> У2 #0> Г2 ^0/>
ее уравнение, следовательно, есть B), т. с.
х —хп у у0 z z0
У1—У0 zi—za =0.
х2—х0 у 2—у0 z2 i
что может быть переписано и в виде
х у z \
X,
Уо
Уч.
= 0
232 плоскость и прямая в пространстве [гл. х
(в чем убеждаемся непосредственным вычислением, вычитая вторую
строку последнего детерминанта из остальных трех его строк).
2. Уравнение двумерного векторного многообразия. Мы дока-
доказали, что всякая плоскость есть множество всех точек М=(х, у, z),
являющихся решениями некоторого уравнения первой степени
с тремя неизвестными, а именно уравнения C). Переходим к дока-
доказательству обратного предложения: множество всех точек М — (х, y,z),
координаты которых удовлетворяют некоторому уравнению первой
степени, есть плоскость. Для этого рассмотрим однородное урав-
уравнение
? = 0; E)
всякое решение |, г), ? однородного уравнения E) мы будем рас-
рассматривать как вектор и = \ |, 1], ?} в пространстве, снабженном
раз навсегда заданной аффинной системой координат.
Прежде всего докажем, что множество всех векторов-решений
U = {L 1li ?} уравнения E) есть векторное многообразие.
Для этого достаточно доказать два утверждения:
1. Если векторы и1 = {?1, %, ?х} и и2 = {?2, тJ, ?,2\ являются реше-
решениями уравнения E), той вектор u1-fu2 = {g1 + g2, % + тJ, ?г + ?2}
является решением этого уравнения.
2. Если вектор и = -{|, т), ?} есть решение уравнения E), то
при любом К вектор Хи = -{Я|, Ку], Х?,\ есть решение этого урав-
уравнения.
Оба этих утверждения доказываются совершенно автоматически,
подстановкой в уравнение E) координат соответственно вектора
Uj-j-^a и вектора Ки:
= О,
Замечание. Если дано не одно однородное уравнение E),
а система таких уравнений и если векторы u1 = -{^1, r\L, ?г} и
U2 = {?2, гJ, ?2} удовлетворяют всем уравнениям этой системы,
то вектор u, 4-u2 = {g1 + g2, % + 112> Ci+S2} будет удовлетворять
всем уравнениям этой системы.
Аналогично, если вектор и = {?, г), ?} есть решение системы
однородных уравнений вида E), то и вектор Ки будет решением
этой системы. Таким образом, имеет место совершенно общая
Теорема 1. Множество всех векторов и = {?, г), ?}, являю-
являющихся решениями произвольной системы однородных линейных урав-
уравнений, есть секторное многообразие.
Вернемся к одному уравнению
-СЪ = 0. E)
о |i УРАВНЕНИЯ ПЛОСКОСТИ 233
Преаполагаем, что не все коэффициенты в этом уравнении равны
нулю. Докажем, что многообразие V всех решений u=={g, r\, ?}
уравнения E) имеет размерность d = 2. Для того чтобы доказать,
что d < 3, достаточно пайти какой-нибудь вектор w, не содержа-
содержащийся в многообразии V. По крайней мере один из коэффициентов
А, В, С отличен от нуля; пусть, например, СфО. Тогда вектор
w = {0, 0, 1 } заведомо не содержится в многообразии V. Итак,
rf^C2. Для того чтобы доказать равенство d = 2, остается найти
в многообразии V два линейно независимых вектора ult u2. Для
этого (предполагая все время, что С=^=0) положим
ux={i, о, -4}- иН°-1( -¦?¦}¦¦
Векторы их и щ линейно независимы (они, очевидно, не колли-
неарны); они удовлетворяют уравнению E) *). Утверждение до-
доказано.
Докажем обратное утверждение: всякое двумерное векторное
многообразие V есть многообразие решений некоторого линейного
однородного уравнения E).
В самом деле, все векторы и данного многообразия V и только
они суть линейные комбинации двух произвольно выбранных в V
неколлинеарных векторов u1 = {a1, bL, с1}, u2 = {a2i ^21 С2 }• П°"
этому условие, необходимое и достаточное для того, чтобы вектор
и = {|, г), ?} принадлежал многообразию V, состоит в том, чтобы
при некоторых s и t было
или, в координатной записи,
t,=scl-\-tc2.
Но это условие выражает линейную зависимость векторов-столбцов
матрицы
ц b1 b2
? «1 с2
1) Читатель, вероятно, сообразил, что для получения векторов и, и и3
мьмюдставнли в уравнение E) сначала J = l, r\ = 0, потом, наоборот, ? = 0,
Ч 1 и решили полученное уравнение относительно ?.
234
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[гл. х
что в свою очередь равносильно уравнению
I у\ I
а2 Ь2 с2
или уравнению
E)
где
А =
!>2 С2
с а
(при этом не все три коэффициента A, ZJ, С равны нулю: это сле-
следует из того, что векторы u1 = {a1, bx, ct\ и п2 = \а2, b2, с2\
не коллинеарны). Мы доказали, что векторное многообразие V есть
многообразие всех решений уравнения E).
Итак, доказана
Теорема 2. Множество всех решений однородного линейного
уравнения (о) (не вырождающегося в тождество 0 = 0) есть вектор-
векторное многообразие размерности 2; обратно, всякое двумерное вектор-
векторное многообразие есть множество решений некоторого однородного
линейного уравнения E).
3. Первая основная теорема о плоскости. Возьмем теперь
общее линейное уравнение
Ах + By + Cz + D = 0,
F)
в котором хотя бы один из коэффициентов А, В, С отличен от
нуля. Пусть М0 = (х0, у0, z0) — какое-нибудь решение этого уран-
нения г).
На основании теоремы 4 (гл. VII) мы получим все решения
М=(х, у, г) уравнения C) и только решения этого уравнения,
если положим
где {g, т), Z,) пробегает многообразие V всех решений однородного
уравнения А\-\-Вг\-\-С1 = 0. Но точка M = (xa + l, yo + r\, zn+Z)
есть конец вектора и = {?, т], Z,}, приложенного к точке Мо. Когда
вектор и = {|, т), ?,} = М0М пробегает двумерное векторное много-
многообразие V, а оно состоит из всех линейных комбинаций двух каких-
') Его нетрудно получить: в предположении, что, например, С Ф 0,
дадим произвольные значения х„, у0 неизвестным х и у; подставив их в F),
Ах0 — Ву0
определим уже однозначно г0 = -
D-
С
с ij УРАВНЕНИЯ ПЛОСКОСТИ 235
нибудь лежащих в нем неколлинеарных векторов U1 = {fl1, blt cl \
и U2 = {a2> *2t С2 Ь то ег0 конец М зачерчивает плоскость, прохо-
проходящую через точку Мо и приложенные к ней векторы ut и и2. Мы
доказали, что множество всех точек М—(х, у, z), являющихся
решениями уравнения F), есть плоскость. Вместе с тем доказана и
Теорема 3 (первая основная теорема о плоско-
плоскости). Всякая плоскость в пространстве, снабженном аффинной
системой координат, есть множество всех точек, удовлетворяющих
некоторому линейному уравнению
-Cz + D = 0. F)
Обратно, множество всех точек М—(х, у, z), являющихся реше-
решениями произвольного уравнения вида F), есть плоскость.
Определение. Всякое уравнение F), которому удовлетво-
удовлетворяют все точки данной плоскости (и только они), называется
уравнением этой плоскости.
Замечание. Добавление «и только они» является в последней фразе
излишним: если известно, что все точки данной плоскости я удовлетворяют
уравнению F), то можно быть уверенным в том, что ни одна точка, не
принадлежащая плоскости я, этому уравнению не удовлетворяет.
В самом деле, ведь множество всех точек М = (х, у, г), являющихся
решениями уравнения F), образует некоторую плоскость, которую на мгно-
мгновение обозначим через я'; так как псе точки плоскости я уравнению F)
тоже удовлетворяют, то вся плоскость я содержится в плоскости я', но
тогда обе плоскости я и я' непременно совпадают.
4. Условие компланарности вектора плоскости. Связь между
уравнением плоскости F) и соответствующим однородным уравне-
уравнением (о) дается следующим (в сущности, совершенно очевидным)
предложением.
Теорема 4. Для того чтобы вектор и — {?, т|, ?} был ком-
компланарен плоскости
i-D = O, F)
необходимо и достаточно, чтобы было
А1 + Вх\ + С? = 0. E)
Другими словами: уравнение E) есть уравнение двумерного много-
многообразия векторов, компланарных плоскости F).
Доказательство. 1е Пусть вектор и = {?, г|, ?} компланарен
плоскости F). Берем какую-нибудь точку М0 = (х0, у0, z0) этой пло-
плоскости и прилагаем к ней вектор и; получаем вектор с началом в Мо
И концом М=(хо-\-$, уо-{-\\, zo-}-Z), лежащим в плоскости F);
значит,
Axo + Byo + Czo + D = O, F0)
236 ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ [ГЛ, X
Вычитая, получим
АЪ + Вц + С1, = 0. E)
2° Пусть и = {?,*!,?} удовлетворяет уравнению E). Прилагаем
вектор и к какой-нибудь точке М0 = (х0, у0, z0) плоскости F). Полу-
Получим вектор М0М, конец М — (-*:<, +1, г/о + т), zu-\-t) которого в силу
E) и F0) лежит в плоскости F). Так как и начало Мо этого вектора
лежит в плоскости F), то и весь вектор лежит в этой плоскости.
Теорема доказана.
Следствие. Прямая
Т~' Ь -~Т ['>
тогда и только тогда параллельна (в широком смысле1)) плоскости
= 0, F)
когда
Аа + ВЬ + Сс = 0.
(8)
Если, кроме того, выполнено условие
Axo + By0 + Cz0-\-D=0, F0)
то (и только в этом случае) прямая G) лежит в плоскости.
В самом деле, условие (8) означает, что направляющий вектор
{в, Ь, с} прямой G) компланарен плоскости F), а условие F0)
означает, что точка Мо = (х0, у0, z0) прямой G) лежит в этой
плоскости.
5. Частные случаи уравнения плоскости. 1° В уравнении плос-
плоскости
Ax + By + Cz + D = 0 F)
свободный член D обращается в нуль тогда и только тогда, когда
плоскость F) проходит через начало координат. Доказательство
предоставляется читателю.
2° Обращение в 0 коэффициента С означает, что плоскость F)
параллельна оси Oz (в широком смысле слова). В самом деле, равенство
С = 0 выражает необходимое и достаточное условие для того, чтобы
вектор {0, 0,1} (являющийся направляющим вектором оси Oz) удовлет-
г) То есть параллельна в узком смысле (не имеет общих точек с плос-
плоскостью) или лежит в данной плоскости.
§
УРАВНЕНИЯ ПЛОСКОСТИ
237
ворял уравнению E), т. е. был компланарен плоскости F). Анало-
Аналогично В=0 есть признак параллельности оси Оу, аА = 0 — признак
параллельности оси Ох.
3е Если в уравнении F) обращаются в нуль два коэффициента
при координатах, то уравнение F) определяет плоскость, параллель-
параллельную одной из координатных плоскостей. В самом деле, если, напри-
например, А=В — 0, то уравнение F) превращается в Сг-\- D = 0, т. с.
г= — -Q-, и определяет плоскость, параллельную плоскости Оху.
Все три коэффициента А, В, С не могут обратиться в нуль: тогда F)
перестало бы быть уравнением, а превратилось бы в (верное или не-
неверное) тождество.
4° Если все коэффициенты в
уравнении F) отличны от нуля,
то это значит, что плоскость F)
не проходит через начало коор- \ / —^
динат и пересекается с каждой
координатной осью. Тогда урав-
уравнение F) можно представить в
виде
'У
У
О 1
- А
или, полагая
~~А~а' ~
в виде
D '
В
~В=Ь'
D
С
— -
= 1
С ~С'
(9)
Рис. 120.
Нетрудно доказать, что геометрический смысл чисел а, Ь, с таков:
точки пересечения Р, Q, R нашей плоскости с осями Ох, Оу, Ог
суть соответственно (рис. 120)
=(в, 0, 0), Q=@,b,0),
= @, 0, с).
Другими словами, числа а, Ь, с суть алгебраические значения отрез-
отрезков— векторов OP, OQ, OR, отсеченных плоскостью F) на осях
координат. Поэтому уравнение (9) называется «уравнением плоскости
в отрезках».
238
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[ГЛ. X
§ 2. Множество решений системы двух однородных линейных
уравнений с тремя неизвестными
Теорема 5. Пусть система уравнений
A)
независима, т. е. тройки коэффициентов в обоих уравнениях не про-
пропорциональны между собою, так что по крайней мере один из детер-
детерминантов
а —
отличен от нуля.
Тогда множество всех решений системы A) есть одномерное век-
векторное многообразие, состоящее из всех векторов и = {?, г|, ?}, кол-
линеарных вектору ио = {а, Ь, с).
А В
Доказательство. Пусть, например, с =
В
В'
с
с
t
, 0 =
с
с
А
А'
, и -
А
А'
В
В'
А' В'
¦ 0. Дадим
неизвестному ? произвольное значение ?=?0- Тогда значения |0, ц0
двух других неизвестных однозначно определяются из системы A),
переписанной в виде
по правилу Крамера:
So — ?о~3">
B)
и мы получаем решение {g0, г|0, ?0}.
В частности, если положить ?0 = 1, то получаем решение
Ъ
Значит,
ио = сп1 = {а,Ь, с}
также есть решение системы A).
Так как всякое решение {?0, гH, to\ определяется значением неиз-
неизвестного С = ?о п0 формулам B), то в силу этих формул всякое (от-
(отличное от нулевого) решение |0, ti0, t0 удовлетворяет пропорции
v * a b . ,
-теорема доказана.
§ 2]
МНОЖЕСТВО РЕШЕНИЙ
239
Следствие 1. Пусть даны два неколлинеарных вектора
Ul = {?l, ТЬ tvt, «2 = {^2> ТЬ ?2},
являющиеся решениями уравнения
= 0. C)
Тогда коэффициенты уравнения C) определены с точностью до общего
множителя, а именно:
А:В:С=-
В самом деле, имеем равенства
5г "Лг
D)
Рассматривая эти равенства как уравнения относительно неизвест-
неизвестных А, В, С с коэффициентами |lt r^, ?t и соответственно ?а, гJ, ?„
и имея в виду, что векторы {|ь r)lt ?J и {|2, гJ, ?2}- не коллинеарны
и, значит, Si:Tli1 Si Ф ^2:т12 :?г> мы видим, что находимся в условиях
теоремы 5, откуда и следует пропорция D).
Из доказанного следствия 1 сразу вытекает
Следствие 2. Два однородных уравнения
Al + Вц +С? =0, (
тогда и только тогда имеют одно и то же множество решений, когда
их коэффициенты пропорциональны.
В самом деле, множество решений каждого из уравнений A) есть
двумерное векторное многообразие. Если множество решений обоих
уравнений A) есть одно и то же двумерное многообразие, то, беря
в нем два неколлинеарных вектора \сх, г\х, ^х\ и {?2, тJ, ?2}, заклю-
заключаем из следствия 1, что обе тройки коэффициентов А, В, С и А', В', С
пропорциональны тройке
А
'-.В
Si
?2
':С
Аи
5г
Til
Т12
т. е.
или
А -. А = В': В = С: С. E)
Обратно, если пропорция E) имеет место, то одно из урав-
уравнений A) получается из другого умножением обеих его частей на одно
оеш Ж» ТаК ЧТ° °ба УРавнения имеют одно и то же множество
240 плоскость и прямая в пространстве [гл. х
§ 3. Взаимное расположение двух плоскостей
Если две плоскости параллельны (в широком смысле), то всякий
вектор, компланарный одной из них, будет компланарен и другой
плоскости. Две параллельные в широком смысле плоскости имеют
одно и то же множество компланарных им векторов. Обратно, если
у двух плоскостей л1 и я2 одно и то же многообразие компланарных
им векторов V, то они параллельны в широком смысле слова, если
кроме того эти плоскости различны, то они не имеют ни одной об-
общей точки (т. е. параллельны в узком смысле слова): если бы пло-
плоскости ях и я2 имели общую точку Мо, то, прилагая к этой точке
все векторы многообразия V, мы бы получили все точки каждой из
плоскостей п1 и я2 и эти плоскости были бы тождественны.
Итак, две плоскости, определяемые соответственно уравнениями
Ах -|- By -j- Cz + D = 0 A)
и
A'x+B'y+C'z-
параллельны в широком смысле слова тогда и только тогда, когда
они определяют одно и то же многообразие компланарных им век-
векторов, т. е. когда уравнения
и
имеют одно и то же множество решений. А это, как мы видели,
бывает тогда и только тогда, когда
I C)
Если, более того,
D)
то уравнения A) и (Г) равносильны, определяемые ими плоскости
совпадают. Обратно, если плоскости A) и A') совпадают, то совпа-
совпадают многообразия компланарных им векторов, т. е. выполнено C),
и, следовательно, при некотором К
Докажем, что тогда и D'= KD, т. е. имеет место пропорция D).
В самом деле, если Жо = (х0, у0, z0) — какая-нибудь точка совпа-
совпадающих между собой плоскостей A) и A'), то имеем тождества
Axo + Byo-\-Czo = — D, А'хо + В'уо +
А'
А':
:А =
4 =
В'
— D . D =
:В=С:
С:
С =
С.
D':
§4]
ПРЯМАЯ КАК ПЕРЕСЕЧЕНИЕ ДВУХ ПЛОСКОСТЕЙ
241
в которых А' = ХА, В' = ХВ, С =ХС, а следовательно, и D'=XD.
Утверждение доказано.
Итак, пропорция D) является необходимым и достаточным усло-
условием для совпадения плоскостей A) и (Г).
Наконец, параллельность плоскостей A) и A') в собственном
смысле означает, что имеет место параллельность в широком смысле,
но нет совпадения плоскостей. Другими словами, верна пропорция
C), но неверна пропорция D), а это значит, что
А':А = В'':В=С:СфО'':?>. E)
Итогом всему доказательству является
Теорема 6 (вторая основная теорема о плоскости).
Два уравнения первой степени A) и A')
А'х + В'у + C'z + D' = О
тогда и только тогда определяют одну и ту же плоскость, когда
выполнено условие
A':A = B':B = C':C=D':D. D)
Уравнения A) и A') тогда и только тогда определяют две пло-
плоскости, параллельные в широком смысле слова, когда выполнено
условие C).
Наконец, эти уравнения тогда и только тогда определяют две
плоскости, параллельные в собственном смысле, когда имеет место E).
§ 4. Прямая как пересечение двух плоскостей
Пусть две плоскости, заданные уравнениями
не параллельны, т. е. А:В:С=ФА':В':С.
Тогда по крайней мере один из трех детерминантов
(Г)
' '
отличен от нуля, и уравнения A) и (Г) совместны; чтобы найти их
совместное решение, т. е.. точку Мо = (л:0, у0, zu), принадлежащую
обеим плоскостям A) и (Г), достаточно в предположении, что, на-
Л В
., п, Ф 0, взять произвольное значение z = гй и решить
A D
в
В'
с
с
, о =
с
с
А
А'
А
А'
В
В'
пример, с =
242 плоскость и прямая в пространстве
по правилу Крамера систему уравнений
Ах+Ву = — D— Cz0,
[ГЛ. X
Итак, пусть Жо = (х0, у0, z0) есть какая-нибудь точка, принадле-
принадлежащая обеим плоскостям A) и A'). Все остальные точки М, общие
двум нашим плоскостям, найдутся, если приложить к точке Мо все-
всевозможные векторы
лежащие одновременно как в одной, так и в другой плоскости, или,
что то же самое, всевозможные векторы-решения системы однород-
однородных уравнений
= 0,
= 0. J
( '
Так как А:В:СфА':В':С, то по теореме 5 все эти векторы кол-
линеарны одному из них, например вектору
ио = {а, Ь, с).
Все общие точки наших двух плоскостей суть точки М, определяе-
определяемые векторным уравнением
они образуют прямую, проходящую через точку Мй и имеющую
вектор щ — {а, Ь, с\ своим направляющим вектором. Каноническое
уравнение этой прямой есть
х—х0 y — i
D)
(где а, Ь, с даны равенствами B)).
Пример. Даны плоскости
2z—1=0
х—г = 0.
Требуется написать каноническое уравнение прямой пересечения этих
плоскостей. Находим точку Мо, лежащую в обеих плоскостях. Пола-
Полагаем, например, z = 0, тогда х = 0, у = \; итак, М0 = @, 1,0). На-
Находим направляющий вектор прямой пересечения. Этот вектор имеет
координаты
а —-
1
0
2
-1
= —1, Ь —
2
—1
1
1
= 3,
с =
1
1
1
0
§ 41
ПРЯМАЯ КАК ПЕРЕСЕЧЕНИЕ ДВУХ ПЛОСКОСТЕЙ
243
х — х0
а
У — Уо
Ь
_z — z0
с
z—z0
с
Каноническое уравнение искомой прямой записывается в виде
х у— 1 z
Задание прямой какой-нибудь парой уравнений A), (Г) иногда
называется общим заданием, а сама система уравнений A), (Г) —
«общим уравнением» прямой.
Задание прямой каноническим уравнением есть частный случай
общего задания, так как каноническое уравнение есть система двух
уравнений
D')
каждое из которых опреде-
определяет плоскость, параллель-
параллельную одной из координатных
осей (первое из уравнений
D') определяет плоскость,
параллельную оси Оу, а
второе—параллельную оси
Ох) (рис. 121).
Никакая прямая не мо-
может быть параллельной всем
трем координатным плоскос-
плоскостям. Пусть, например,
прямая D) пересекает
плоскость Оху в точке
М1 = (х1, уг, 0); так как Рис. 121.
прямая D) и, следователь-
следовательно, ее направляющий вектор {а, Ь, с) не параллельны плоскости
Оху, то с =? 0; поэтому вектор <— , — , I > также является на-
направляющим вектором нашей прямой.
Проходя через точку М1 = (х1, у у, 0) и имея направляющий вектор
Ь , I
наша прямая имеет уравнение
*—*i __ У — У\==;:
I a b
[в котором т — —, л = —), т. е.
\ С С
х = mz -\- хх,
у =nz -\-yv
Эта система уравнений называется «.приведенным у равнением прямой».
E)
244
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[гл. х
§ 5. Пучок плоскостей
Содержание этого параграфа вполне аналогично содержанию § 5
главы V: мы введем здесь понятие пучка плоскостей, которое, в
частности, позволит решить задачу о нахождении всех плоскостей,
проходящих через прямую пересечения двух данных плоскостей.
Прежде всего мы скажем, что
плоскость
Ax + By + Cz + D = 0 A)
есть линейная комбинация плоскос-
плоскостей
= O B)
= 0, C)
если уравнение A) есть линейная
комбинация уравнений B) и C), т. е.
если найдутся такие Хг и Л2, что
имеет место тождество
= Ях (Ахх + Вху + Cxz
C2z + D2). D)
Из тождества D) следует, что вся-
всякая точка М={х, у, г), удовлет-
удовлетворяющая обоим уравнениям B) и
C), удовлетворяет и уравнению
Рис. 122. A) — всякая точка, принадлежащая
обеим плоскостям B) и C), принад-
принадлежит и плоскости A). Другими словами:
Плоскость, являющаяся линейной комбинацией двух данных пере-
пересекающихся плоскостей B) и C), проходит через прямую пересе-
пересечения этих плоскостей. Докажем, что и, обратно, всякая плоскость
A), проходящая через прямую пересечения d двух данных
плоскостей B) и C), является линейной комбинацией этих
плоскостей.
Без ограничения общности можем предположить, что плоскость
A) не совпадает ни с одной из плоскостей B) и C). Доказатель-
Доказательство совершенно такое же, как в случае прямых (гл. V, § 5).
Плоскость, проходящая через прямую d, будет полностью опре-
определена, если мы укажем какую-нибудь ее точку М1 = (xlt уг, z^)
(рис. 122), не лежащую на прямой d. Возьмем же такую точку
Mt=--(xv yv zx) на нашей плоскости A) и напишем уравнение с двумя
§ &1
пучок плоскостей 245
неизвестными Xt и А2:
К ИЛ + #i«/i + СЛ + Dj) + k2 (ЛЛ + В^ + C2Zl + A) =0. E)
Так как по предположению точка Мх не лежит на прямой d, то хотя
бы одна из скобок в левой части уравнения E) отлична от нуля;
из этого уравнения E) однозначно определяется отношение
Пусть теперь Хг и Х2— какие-нибудь числа, удовлетворяющие
пропорции F). Тогда выполнено и равенство E), означающее, что
точка Мг лежит на плоскости
Хх (Агх + В1У + Cxz + Dx) + Х2 (А2х + В2у + C2z + ?>,) =0. G)
Но эта плоскость, будучи линейной комбинацией плоскостей B) и
C), проходит через прямую й и содержит точку Мх, принадлежа-
принадлежащую плоскости A),—значит, плоскость A) совпадает с плоскостью
G) и является линейной комбинацией плоскостей B) и C). Утверж-
Утверждение доказано.
Итак, для того чтобы плоскость A) проходила через прямую пере-
пересечения двух плоскостей B) и C), необходимо и достаточно, чтобы
уравнение A) было линейной комбинацией уравнений B) и C).
Пусть теперь плоскости B) и C) параллельны. Совершенно так
же как и в § 5 главы V, мы убеждаемся в том, что всякая плоскость,
являющаяся линейной комбинацией плоскостей B) и C), будет им
параллельна и что, обратно, всякая плоскость, параллельная двум
(параллельным между собою) плоскостям B) и C), является их ли-
линейной комбинацией.
Назовем совокупность всех плоскостей, проходящих через дан-
данную прямую d, собственным пучком плоскостей с осью d; назовем
несобственным пучком плоскостей совокупность всех плоскостей, па-
параллельных (в широком смысле слова) одной какой-нибудь плоскости.
Наконец, назовем множество всех плоскостей, являющихся линейными
комбинациями двух каких-нибудь плоскостей бх и б2, одномерным,
многообразием плоскостей, порожденным двумя своими элементами
?>! и б2. Мы доказали, что всякий пучок плоскостей (собственный
или несобственный) является одномерным многообразием, порожден-
порожденным любыми двумя своими элементами.
Обратно, всякое одномерное многообразие плоскостей (порожден-
(порожденное какими-нибудь двумя плоскостями Ьх и б2) есть пучок плоско-
плоскостей— собственный, если плоскости бх и б2 пересекаются, несобст-
несобственный, если они параллельны.
В главе XXIII этих «Лекций» мы построим проективное пространство,
пополнив обычное пространство бесконечно удаленными (несобственными)
т°чками таким образом, что совокупность этих бесконечно удаленных точек
246
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[гл. х
образует бесконечно удаленную (несобственную) плоскость; все прямые, ле-
лежащие в этой плоскости, также будут называться бесконечно удаленными
или несобственными. Каждая «собственная» (т. е. обыкновенная) плоскость
пространства пересекается с несобственной плоскостью по несобственной пря-
прямой— по единственной несобственной прямой данной собственной плоскости.
При этом оказывается, что две собственные плоскости тогда и только тогда
параллельны, когда они пересекаются по (своей общей) бесконечно удален-
удаленной прямой. Таким образом, в проективном пространстве различие между
собственными и несобственными пучками плоскостей исчезает: несобственный
пучок—это пучок плоскостей, осью которого является одна из несобственных
прямых проективного пространства.
§ 6. Взаимное расположение двух прямых в пространстве
Две прямые
A)
х—хй
а
л ~"~ Xq
У — Уй
ь
У—у'о •
г — г0
с
г-г9
(П
могут лежать или ие лежать в одной плоскости (быть или не быть
компланарными).
Положим
Мо = (х0, У0, 2), Ж; = (х'о, у0, z'o).
Для компланарности прямых A) и (Г) необходимым и достаточ-
достаточным условием является компланар-
компланарность трех векторов (рис. 123):
ЛуМ0 = {д;0 —л:0, у'9 — уй, z'0 — z0\,
uo = {a, ?, с},
Uo = K> 6'. с'\,
т. е. равенство
х0 х,
Мп
а
а'
Уо—Уо
b
b'
= 0. B)
Рис. 123.
Следовательно, прямые скрещи-
скрещиваются (т. е. не лежат в одной
плоскости) тогда и только тогда, когда равенство B) не имеет места.
Найдем уравнение плоскости, содержащей две компланарные пря-
прямые A) и (Г)- Предположим сначала, что прямые A) и (Г) пересе-
пересекаются и что Л?о = (jc0, y0, z0)—их точка пересечения. Тогда пло-
плоскость, в которой лежат обе наши прямые, есть плоскость, прохо-
ПОЛУПРОСТРАНСТВА, ОПРЕДЕЛЯЕМЫЕ ПЛОСКОСТЬЮ
247
дящая через точку Мо = (л:0, у0, z0) и два приложенных к ней не-
коллинеарных вектора щ = {а, Ь, с\ и щ = {а', Ь', с'\. Уравнением
этой плоскости является, как мы знаем (§ 1), уравнение
а
а
а
-—-г.
с
с'
= 0;
C)
оно и дает ответ на поставленный вопрос.
Пусть теперь прямые A) и A') параллельны. Тогда векторы ц0
и Uq коллинеарны, следовательно, уравнение C) обращается в тож-
тождество и ничего нам не дает. Чтобы определить уравнение плоско-
плоскости, содержащей две данные параллельные прямые A) и A'), заме-
заметим, что эта плоскость содержит точку М0 = (х0, у0, z0) одной из
наших прямых, ее направляющий вектор uo = {a, b, с\ и вектор
Поэтому уравнение искомой плоскости есть
х — х0 у—у„ z — z,
о о Уо ij о о л
а Ь с
D)
Замечание. Если прямые A) и A') скрещиваются, то урав-
уравнение C) есть уравнение плоскости, проходящей через прямую A)
параллельно прямой (Г). Доказательство предоставляется читателю.
§ 7. О двух полупространствах, определяемых
данной плоскостью
Этот вопрос совершенно аналогичен вопросу о двух полуплоско-
полуплоскостях, определяемых данной прямой на плоскости (гл. V, § бI).
Пусть плоскость я задана уравнением
F(x, у, z) = Ax + By + Cz + D = 0. A)
Плоскость п разбивает пространство на два полупространства,
одно из которых состоит из всех точек М = (х, у, z), для которых
^'(л:, у, z) > 0, другое — из всех точек М— (х, у, z), для которых
^(лг, у, z) < 0. Первое полупространство называется положительным,
второе — отрицательным по отношению к данному уравнению A) пло-
плоскости я. При переходе к какому-нибудь другому уравнению той же
плоскости оба полупространства могут или остаться неизменными,
или поменяться местами: положительное полупространство для одного
Уравнения сделается отрицательным для другого. Первый или
') Читатель должен прежде всего восстановить в памяти все содержа-
Ние § 6 главы V.
248
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[гл. х
второй случай наступает в зависимости от знака того множителя, на
который надо почленно помножить одно уравнение, чтобы получить
другое.
¦М„
Рис. 124.
Совершенно так же, как в § 6 главы V, доказывается
Теорема 7. Если точки /Ио = (ха, у0, г0) и Мх = (лг1( yt, гг) лежат
в разных полупространствах, определяемых плоскостью A), то отре-
отрезок М0Мг пересекает плос-
плоскость; если же точки Мо и Мг
лежат в одном и том же по-
полупространстве, то в этом же
полупространстве лежит и весь
отрезок М0Мг (рис. 124).
Наглядный смысл этой тео-
теоремы таков же, как в случае
аналогичной теоремы о двух
полуплоскостях, определяемых
на плоскости данной прямой.
Плоскость A) не может быть
параллельна сразу всем трем
координатным осям. Пусть, на-
например, она не параллельна оси
Oz. Тогда каждая точка
Мй — {х0, у0, г0), не лежащая
на плоскости A), лежит «вы-
«выше» или «ниже» этой плос-
плоскости— в следующем смысле.
Через точку Мо = (х0, у0, z0)
проходит единственная прямая, параллельная оси Oz; она пересекут
плоскость A) в некоторой точке Мх — (х0, у0, гг) (рис. 125). Если
Рис. 125.
§ 8]
НОРМАЛЬНОЕ УРАВНЕНИЕ ПЛОСКОСТИ
249
z > гх, то говорим, что точка уМ0 = (лг0, у0, z0) лежит выше плоскости
A); если же z0 < zx, то говорим, что точка Мо лежит ниже плос-
плоскости A). Совершенно так же, как в § 6 главы V, доказывается
Теорема 8. Все точки про-
пространства, лежащие выше плос-
плоскости A), образуют одно из двух
полупространств, на которые эта
плоскость разбивает пространство;
все точки, лежащие ниже плос-
плоскости A), образуют второе полу-
полупространство.
Наконец, имеет место и тео-
теорема, аналогичная теореме 4 гла-
главы V и доказываемая совершенно
так же, как эта последняя.
Теорема 9. Если плоскость
п задана уравнением A), то
вектор П = \А, В, С}, прило-
приложенный к какой-либо точке
М0=(х0, y0, z0) этой плоскости
(рис. 126), направлен в положительное полупространство относитель-
относительно уравнения A).
Рис. 126.
§ 8. Плоскость в прямоугольной системе координат;
нормальное уравнение плоскости;
расстояние от точки до плоскости
Предполагаем до конца главы, что система координат прямо-
прямоугольная.
Теорема 10. Пусть плоскость я задана (в прямоугольной си-
системе координат) своим уравнением
Ax + By + Cz + D = 0. A)
Тогда вектор п = \А, В, С} перпендикулярен к плоскости п.
В самом деле, если и = {|, т), ?}—произвольный вектор, лежа-
лежащий в плоскости я, то
что означает, что вектор п перпендикулярен ко всякому вектору,
лежащему в плоскости я, т. е. перпендикулярен к плоскости я,
что и требовалось доказать.
Проведем теперь через начало координат О перпендикуляр («нор-
(«нормаль») ON к данной плоскости я (рис. 127); через N обозначаем
точку пересечения плоскости л с этой нормалью. Если плоскость я
250 плоскость и прямая в пространстве [гл. х
проходит через начало координат (т. е. O — N), то положительное
направление на нормали выбираем произвольно; в противном случае
считаем положительным направление вектора ON (т. е. направ-
направление от начала координат к плоскости it). Орт этого направления
обозначаем через е, его направляющие косинусы — через cos a, cos В,
cosy, так что
e = {cosa, cos p, cosy}-
На оси ON алгебраическое значение вектора ON есть число р ^ 0,
равное расстоянию плоско-
плоскости я от начала координат.
Пусть М— (х, у, z) —какая-
нибудь точка пространства.
В том и только в том случае,
когда она лежит в плоскости
я, ее ортогональная проек-
проекция на ось орта е.есть точ-
точка N, а проекция вектора
ОМ есть вектор ' ON. Сле-
Следовательно, для всех точек
-i»_ М—(Х, у, Z) ПЛОСКОСТИ Я
х и только для них имеем
азпре
Но левая часть этого ра-
равенства есть
х cos a -4- У cos В + z cos у
Рис. 127. \т
(см. гл. IV, § 2), так что
точки М=(х, y,z) плоскости я и только они удовлетворяют урав-
уравнению
atcos a +J/cos p + z cos у—р = 0, B)
которое есть, следовательно, уравнение плоскости я; оно называется
нормальным уравнением этой плоскости.
Пусть теперь дано какое-нибудь уравнение
плоскости п. Как, отправляясь от этого уравнения, получить нор-
нормальное уравнение той же плоскости?
Так как уравнения A) и B) определяют одну и ту же плоскость
л, то их соответствующие коэффициенты пропорциональны,
§ 8]
НОРМАЛЬНОЕ УРАВНЕНИЕ ПЛОСКОСТИ
251
т. е.
cos a = ЯЛ,
cos р = КВ,\
cos 7 = ЯС,
C)
при некотором Я. Из равенств C) определяем Я, а именно: из пер-
первых трех равенств C) имеем
Я2 (Л2 + В2 + С2) = cos2 а + cos2 p+a>s2у — \t
откуда
D)
Знак Я определяем лишь в случае
C): так как р > 0, то XL
противоположный знаку D.
Определение.
Число X, имеющее модуль
и знак, про-
произ четвертого равенства
< 0, и, слодопательно, X имеет знак,
тивоположный знаку коэф-
коэффициента D, называется
нормирующим множителем
уравнения A). При D — 0
можно знак Я выбрать про-
произвольно.
Мы доказали: для того
чтобы из произвольного («об-
(«общего») уравнения плоскости
A) получить нормальное
уравнение плоскостиB),надо
обе части уравнения A) пом-
помножить на нормирующий
множитель этого уравне-
уравнения.
Аналогично случаю пря-
прямой на плоскости, нормаль-
нормальное уравнение плоскости
позволяет определить рас-
расстояние любой точки прост-
пространства до этой плоскости.
Теорема 11. Расстояние р (Жо, л) от точка Мо = (х0, у0, z0)
до плоскости л, данной своим нормальным уравнением B), равно
м°дулю числа, получаемого, если в левую часть уравнения B)
Рис. 128.
252 ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ [ГЛ. X
подставить х = х0, у=У0, z = z0, т. е.
р {Мо, я) = | х0 cos а + у0 cos Р + z0 cos у —р |.
Доказательство. Через точку Мо проводим плоскость л'
параллельно плоскости л (рис. 128) и рассмотрим ось, определен-
определенную ортом
e = {cosa, cosji, cosy})
перпендикулярным к обеим плоскостям я и я' и приложенным (как
раньше) к началу координат. Эта ось пересечет плоскости я и я'
соответственно в точках N и N'. Искомое расстояние р (Мо, л)
равно длине вектора NN', т. е. модулю его алгебраического значе-
значения (Л/Л/') на только что определенной оси. Но (по лемме Шаля)
имеем (все на той же оси)
E)
причем
{ON') = аз лре ОМ0, ОМ0 = {дг0, уй, zQ\.
Поэтому
(ON') — х0 cos a + У о cos Р + z0 cos 7,
тогда как (ON)=p. Внося эти значения в E), получаем
(AW) = {ON') — {ON) = х0 cos a -f Уо cos p + z0 cos y— p,
p {Mo, n) = I (AW) I = I x0 cos a + y0 cos P +z0 cos у—р |,
что и требовалось доказать.
Если плоскость я задана общим уравнением A), то расстояние
от точки Мй = (лг0, уа, z0) до этой плоскости находится по формуле
§ 9. Угол между прямой и плоскостью; угол
между двумя плоскостями
Угол между прямой d и плоскостью я есть, по определению,
угол г|) между этой прямой и ее проекцией на плоскость п. Это
определение дает не один, а два угла (острый и тупой), дополняю-
дополняющие друг друга до я (рис. 129); каждый из этих углов заключен
между 0 и п.
В зависимости от выбора направляющего вектора прямой d и
нормального вектора к плоскости я имеем всего четыре угла (рис. 130),
§ 9]
УГОЛ МЕЖДУ ПРЯМОЙ И ПЛОСКОСТЬЮ
253
образующие две пары вертикальных углов. Обозначим через ф угол
между любым направляющим вектором и прямой d и любым некто-
ром п,нормальным к плоскости.
Так как угол г|з заключен меж-
между 0 и л, то его синус неот-
неотрицателен, причем, как легко
видеть, всегда
sini|) = | coscp|.
Если прямая d дана уравне-
уравнением
— х0 __У — У
а Ь
A)
а плоскость л — уравнением
Ax + By + Cz + D = О, B)
Рис. 129.
то угол ф между векторами щ = {а, Ь, с} и п = {А, В, С) нахо-
находится по формуле
Аа + ВЬ+С.с
У аЧ
значит,
sin г]з = •
Аа-{-ВЬ + Сс
Условие перпендикулярности прямой A) и плоскости B) есть
условие параллельности векторов и0 и п, т. е.
п
/л
г
/
zL / " /
/
~в
Рис. 130.
т,ие друг друга до л), например между
п = {А В, С}, п'={А', В', С}.
За угол между двумя
плоскостями
D = 0 B)
А 'х + В'у + C'z -|- D' = 0
B')
принимаем угол ф между
любыми двумя перпендику-
перпендикулярными к ним векторами
(что опять дает дна угла,
острый и тупой, дополняю-
254
Получаем
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[гл. х
coscp =
АА' + ВВ' + СС
Условием перпендикулярности двух плоскостей B) и B') является
АА'+ВВ'
Здесь может быть сделано замечание, аналогичное тому, которое
было сделано в § 9 главы V, а именно: угол между векторами пин'
равен тому из двугранных углов, образуемых плоскостями B) и B'),
в котором лежат точки, принадлежащие разноименным полупрост-
полупространствам, определяемым этими плоскостями. Доказательство этого
утверждения аналогично дока-
доказательству соответствующего
утверждения из § 9 главы V
(рис. 131).
§ 10. Две задачи
Рассмотрим в заключение
две задачи.
Задача 1. Написать
уравнения перпендикуляра,
опущенного из данной точки
= (ху
уъ
на прямую
d (не проходящую через точ-
точку My), данную уравнением
Рнс. 131.
A)
и найти его длину. Прн этом под перпендикуляром, опущенным из
данной точки Мх на прямую d, понимается прямая, проходящая
через точку Мх и пересекающая прямую d в некоторой ее точке М2
под прямым углом. Длина отрезка Л/11М2 называется длиной перпен-
перпендикуляра. Для решения поставленной задачи, во-первых, проводим
плоскость через точку Мх и прямую й (рис. 132). Эта плоскость,
неся на себе векторы
uo = -ja, b, с),
и содержа точку ЛТ0, имеет уравнение
х —лг0 у —у0 z —z0
хх Xq ух у0 zx z0
a b с
= 0.
§
ДВЕ ЗАДАЧИ
255
Во-вторых, проводим плоскость через точку М1 — (х1, yt, Zj)
перпендикулярно к прямой d. Уравнение этой плоскости есть
a (x—Xj) + Ь (у—уг) + с (z—Zj) = 0.
Пересечение этих двух плоскостей дает искомую прямую, проходящую
через точку Мъ пересекающую прямую d и перпендикулярную к ней.
/
/
\
/
/
W
Л
/
/
к
\ v uo a
Рис. 132.
Длину перпендикуляра, опущенного из точки Мх на прямую d,
найдем как высоту параллелограмма, построенного на векторах МОМХ
и и0, отложенных от точки ЛТ0, считая основанием сторону и0 (рис. 133).
Площадь 5 этого параллелограмма есть абсолютная величина вектор-
векторного произведения вектора МОМХ на вектор и0, а длина его основания
есть ] и01; поэтому для расстояния р (Mv d) имеем
уГ-1^
zi—zo xi — xo
Задача 2. Написать уравнение общего перпендикуляра к двум
непараллельным прямым dud'
256
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[гл. х
г-* (Г)
и найти его длину.
Под общим перпендикуляром к двум прямым (в пространстве)
понимается прямая, пересекающая каждую из двух данных прямых
в некоторых точках М и М' под прямым углом.
Решение. Берем векторное произведение w = {A, В, С} век-
векторов и0 = {«, />, с\ и tio = {а'. Ь', с') и рассмотрим плоскости а и а'
с—•*¦(> J/-J
А В
г—гй
с
С
-Vfl у I) q X 2.Q
а'
А
V
В
с'
С
= 0 B)
-0.B')
Рмс. U3.
Докажем, что плоскости B)
н('2') пересекаются по некоторой прямой I, которая и является (един-
(единственным) общим перпен-
перпендикуляром к прямым A) и
Плоскость B) содер-
содержит прямую A) и вектор
w, перпендикулярный к
обеим прямым A) и A').
Плоскость B') также
содержит вектор w, пер-
перпендикулярный к обеим
прямым A) и (Г), и,
кроме того, прямую A').
Предположим сначала,
что прямые A) и A')
лежат в одной плоскости
я. (но не параллельны
между собою); тогда век-
вектор w перпендикулярен к
плоскости it; плоскость
B), неся на себе вектор
w, перпендикулярный к плоскости я, сама перпендикулярна к плоско-
плоскости л и содержит прямую A). Точно так же плоскость B') пер-
перпендикулярна к плоскости я и содержит прямую (Г). Отсюда еле-
1-ис. 134.
ДВЕ ЗАДАЧИ
257
иг
мп
дует, что плоскости B) и B') не совпадают. Точка пересечения Q
прямых A) и (Г) лежит в пересечении плоскостей B) и B'); это
пересечение есть прямая /, проходящая через точку Q перпенди-
перпендикулярно к плоскости я и, значит, к прямым A) и (Г) (рис. 134).
Она и является искомым общим перпендикуляром к этим прямым.
Пусть теперь прямые A) и (Г) скрещиваются (рис. 135). Тогда
плоскость B) содержит прямую A), но не содержит вектора и0': если бы
он а его содержала, то вектор w, будучи перпендикулярным к и0
и Uo, был бы перпендику-
перпендикулярен ко всей плоскости B),
тогда как он лежит в ней.
По той же причине плос-
плоскость B') не содержит век-
вектора и0.
Итак, плоскость B) со-
содержит прямую A) и не
параллельна прямой (Г),
значит, пересекается с ней.
Плоскость B') содержит
прямую (Г) и пересекается
с прямой A).
Поэтому плоскости B)
и B') не могут быть парал-
параллельны (в широком смысле
слова), они пересекаются по некоторой прямой /. Прямая / содер-
содержит вектор w (содержащийся в обеих плоскостях B) и B')); зна-
значит, прямая / перпендикулярна к обеим прямым A) и (Г).
Далее, точка пересечения М плоскости B') и прямой A) содер-
содержится в плоскости B') и в плоскости B) (содержащей всю прямую (I)),
значит, и в их пересечении, т. е. в прямой /(ив прямой A)).
Итак, прямая / пересекается с прямой A). Аналогично убеждаемся
и в том, что прямая / пересекается с прямой (Г); отсюда следует,
что прямая / есть общий перпендикуляр к прямым A) и (Г). Такая
прямая единственная (в предположении, что прямые A) и (Г) не парал-
параллельны).
В самом деле, направление прямой / определено тем, что она
перпендикулярна к плоскости, натянутой на два направляющих вектора
и0 и Uo прямых A) и (Г). Поэтому, если существовало бы два общих
перпендикуляра к прямым A) и (Г), то они были бы параллельны,
значит, лежали бы в одной плоскости. Но тогда прямые A) и (Г),
как перпендикуляры к этим компланарным прямым, были бы парал-
параллельны— случай, который мы исключили (и в котором прямые в
самом деле имеют бесконечно много общих перпендикуляров).
Длину общего перпендикуляра к прямым dud' найдем как высоту
параллелепипеда, ребрами которого служат векторы, и0, «о " М0М'й,
Рис. 135.
П. С. Александров
258
ПЛОСКОСТЬ И ПРЯМАЯ В ПРОСТРАНСТВЕ
[гл. х
считая основанием параллелограмм, построенный на векторах о0 и и'о
(рис. 136). Объем V этого параллелепипеда есть модуль детерми-
детерминанта
Л'о
a
a'
Уо — Уо z<>—i
b с
b' c'
а площадь 5 его основания равна абсолютной величине векторного
Рис. 136.
произведения [и0, и„]. Поэтому расстояние между прямыми dud'
будет
p(d, d>)=V
Xo—xQ yo—y
a b
a' b'
zo—z0
с
c'
IK. "oil
V
b с
b' c'
с а
c' a'
a b
a' b'
ГЛАВА XI
ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
§ 1. Определение движений и аффинных преобразований
Мы уже имели дело с движениями, а именно со сдвигами и пово-
поворотами реперов, воспринимавшихся при этом как твердые тела, прочно
сваренные из составляющих их стержней — векторов. Однако, наряду
с этим, привычным из начального курса механики восприятием дви-
движения, мы иногда говорили о движении и в более абстрактном, собст-
собственно геометрическом смысле слова: так, еще в главе II шла речь
о сдвиге всего пространства на некоторый вектор U как о преобра-
преобразовании пространства, при котором каждой точке /И пространства
ставится в соответствие точка М' — конец приложенного к точке М
вектора
В главе VIII мы упоминали о повороте всей плоскости (в себе)
вокруг данной ее точки О на некоторый угол; в главе IX мы в ана-
аналогичном смысле говорили и о вращении пространства вокруг данной
прямой. Читателю, несомненно, известны также и простейшие несобст-
несобственные движения плоскости и пространства — это зеркальные отраже-
отражения, или симметрии плоскости (соответственно пространства), относи-
относительно какой-нибудь прямой (соответственно какой-нибудь плоскости)—
преобразования, заключающиеся в том, что каждой точке М ставится
в соответствие точка М', симметричная к точке М относительно
данной прямой на плоскости (или дайной плоскости в пространстве).
Теперь мы даем строгое
Определение. Движением плоскости (пространства) называется
всякое преобразование, которое может быть задано следующим обра-
образом. Берется некоторый (произвольный) «исходный» прямоугольный
репер Oe^j на плоскости (соответственно прямоугольный репер Оехе2е3
в пространстве); наряду с ним задается «новый» прямоугольный
репер O'et'e2 (соответственно O'e^e^) с тем же масштабом, что и
первый. Этими данными определяется преобразование плоскости
(.пространства), состоящее в том, что каждой точке М ставится
260
ДВИЖКНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. XI
в соответствие точка ЛГ, имеющая относительно второго репера те же
самые координаты, которые точка М имела относительно исходного
репера (рис. 137).
Если первый репер однонменен со старым, исходным, то движение
называется собственным (рис. 137, а); в противном случае движение
называется несобственным (рис. 137,6).
О
ОС
Рис. 137.
Замечание 1. Всякое фактическое перемещение репера как
твердого тела в пространстве, происходящее, как этому учит меха-
механика, в течение некоторого промежутка времени (например, промежутка
времени O^r^l), является частным случаем деформаций, рассмот-
рассмотренных нами в § 1 главы IX; мы видели, что посредством деформации
данный репер можно перевести лишь в репер, одноименный с ним.
Отсюда следует, что посредством непрерывного процесса осуществимы
лишь собственные движения пространства. То же, конечно, относится
и к движениям плоскости, если их понимать как перемещения плос-
плоскости по ней самой: для того чтобы осуществить простейшее несоб-
несобственное движение плоскости—симметрию относительно прямой, надо
повернут!) плоскость в пространстве пл угол л вокруг оси симметрии,
т. е. выйти за пределы самой плоскости.
Из определения движения сразу следует, что при движении
сохраняется расстояние между любыми двумя точками. В самом деле,
пусть даны какие-нибудь две точки Мг и М2 своими координатами
в исходной системе координат Ое1е2: M1 = (xv уг), М2 — (х2,уг)-
Расстояние между ними есть число
Р
= У (х^-х^ + (ук-у%)
— U-\*
§ 11
ОПРЕДЕЛЕНИЕ АФФИННЫХ ПРЕОБРАЗОВАНИЙ
261
При данном движении точки Мх и М2 переходят в точки М[, М'„,
имеющие те же координаты хи у1г соответственно х2, у2, но только
в новой системе координат О'е^е^. Так как эта новая система тоже
прямоугольна и имеет тот же масштаб, что и старая, то расстояние
между точками М[ и Mi выражается (в той же единице длины) тем же
числом
р(М[, М'г) = |Л*1—-Ч? + (У1—У2J,
что и расстояние между точками Мг и М2.
В § 6 этой главы будет показано, что всякое преобразование
плоскости (и пространства), сохраняющее расстояние между любыми
двумя точками, есть движение, а в § 8 мы увидим, что никаких
движений плоскости (собственных или несобственных), кроме упомя-
упомянутых выше, не существует.
На неизбежно возникающий вопрос:
Что получится с нашим определением движений, если отказаться
от требования прямоугольности систем координат, в это определение
входящих? —
отвечаем:
получится определение аффинных преобразований.
Итак, пусть снова в плоскости (в пространстве) задана — на этот
рал совершенно произвольная аффинная — система координат Оехе2
У
{соответственно Oeje2e3). Если, наряду с этой («старой», или ^исход-
^исходной-») системой координат, задать также совершенно произвольную
«новую» аффинную координатную систему О'е^ (соответственно
О'е^ез), то определится преобразование, состоящее в том, что каждой
262
ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
[ГЛ.
точке М плоскости (соответственно пространства) ставится в соот-
соответствие точка ЛГ, которая в новой координатной системе имеет те
самые координаты, какие точка М имела в старой системе (рис. 138
и 139). Преобразование, которое может быть задано этим способом,
Называется аффинным. Очевидно, движения являются частным случаем
аффинных преобразований.
Рис. 139.
Рисунки 138 и 139, а также сделанный на их основе рис. 140
помогут читателю составить себе наглядное представление о том,
что может происходить при аффинном преобразовании.
Замечание 2. Если исходный репер считать раз навсегда данным,
то возможные аффинные преобразования плоскости (пространства)
взаимно однозначно соответствуют различным реперам O'e^ (соот-
(соответственно О'е^гвз), которые можно выбрать на плоскости (соответ-
(соответственно в пространстве). Тем из этих реперов, которые одноименны
с исходным, соответствуют аффинные преобразования, называемые
собственными; реперы, не одноименные с исходным репером, опреде-
определяют несобственные аффинные преобразования. Мы увидим в § 5,
что вопрос о том, является ли данное аффинное преобразование
собственным или несобственным не зависит от выбора исходно-
исходного репера (и, следовательно, выражает свойство самого преобразо-
преобразования).
Следующее замечание при всей своей очевидности имеет некоторую
принципиальную важность.
Замечание 3. Совершенно так же, как мы определяли аффин-
аффинное преобразование плоскости (т. е. аффинное взаимно однозначное
§ 11
ОПРЕДЕЛЕНИЕ АФФИННЫХ ПРЕОБРАЗОВАНИЙ
263
отображение плоскости на себя), мы можем определить взаимно одно-
однозначное аффинное отображение одной плоскости л на другую плос-
плоскость я': для того чтобы задать такое отображение, надо взять два
репера: репер Ое^ в плоскости я и репер O'eie2' в плоскости я'
(рис. 141).
Определяемое этими данными отображение — аффинное отображе-
отображение плоскости я на плоскость л.'— состоит в том, что каждой точке М
плоскости л ставится в соответствие
та точка М' плоскости я', которая
относительно репера O'efa имеет
те же самые координата, которые
точка М имела относительно репера
Иногда приходится рассматри-
рассматривать и два экземпляра трехмерного
0\ «,
Рис. 140.
Рис. 141.
пространства (например, два трехмерных подпространства п-мерного
арифметического пространства), и тогда необходимо определять аф-
аффинное отображение одного из них на другое совершенно так же,
как мы только что определили аффинное отображение одной плоскости
"а другую. Все эти рассуждения получат полную стройность, когда
мы в главе XIV займемся во всей общности л-мерным аффинным
пространством,
264
ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. XI
§ 2. Преобразование векторов при аффинной преобразовании
плоскости и пространства. Основные свойства аффинных
преобразований
Возьмем на плоскости (или в пространстве) какой-нибудь вектор
M^ML (рис. 142). При аффинном преобразовании точки Мо, Mt пере-
переходят соответственно в точки М'а, М[, имеющие относительно нового
репера те же координаты, которые точки Мо, Л1Х имели относительно
старого. Так как координа-
координату' ты вектора получаются вы-
вычитанием координат его
начальной точки из коор-
координат его конца, то коор-
координаты вектора М$М[ отно-
относительно нового репера те
же, что и координаты век-
вектора М0М1 относительно
старого репера. Итак:
1° При аффинном преоб-
преобразовании вектору U = /WgAfj
ставится в соответствие век-
вектор ц' = MqM[, имеющий от-
относительно нового репера те
же координаты, которые
вектор и имел относитель-
относительно старого.
Отсюда сразу следует,
что при аффинном преобра-
преобразовании равным векторам
соответствуют равные, так
что:
2Э Аффинное преобразование плоскости (пространства) порождает
ьзаимно однозначное отображение на себя (преобразование) много-
многообразия V всех свободных векторов плоскости (соответственно прост-
пространства).
Это преобразование обладает следующим свойством линейности:
если при данном преобразовании векторам и, v соответствуют векторы
и', v', то вектору u-j-v будет соответствовать вектор u'4-v', а век-
вектору 1м — вектор Аи' (доказывается сразу переходом к координатам).
Из свойства линейности вытекает, далее:
й1 Если при данном аффинном преобразовании векторам Uj, . . ., и„
соответствуют векторы \х[, ..., и^,, то всякой линейной комбинации
Рис. 142.
§ 2] ПРЕОБРАЗОВАНИЕ ВЕКТОРОВ 265
векторов Щ, ... , \Х„ соответствует линейная комбинация
векторов и[, ... , и'п (с теми же коэффициентами Xv Л2, ... , Хп).
Так как при аффинном преобразовании нулевому вектору очевидно
соответствует нулевой, то из доказанного следует:
4° При аффинном преобразовании линейная зависимость векторов
сохраняется (и, значит, всякие два коллинеарных вектора переходят
в коллинеарные, всякие три компланарных вектора переходят в
компланарные).
5° Обратное преобразование к аффинному преобразованию есть
аффинное преобразование.
В самом деле, если данное аффинное преобразование Л плоскости
задается переходом от репера Ое,е2 к реперу О'е[е.г, то аффинное
преобразование, задаваемое переходом от репера О'е[е'.г к реперу
Ое^, есть, как легко видеть, преобразование, обратное к преоб-
преобразованию Л.
То же и для пространства.
Мы видели, что при аффинном преобразовании линейная зависи-
зависимость векторов сохраняется. Сохраняется и линейная независимость
векторов:
6Э При. аффинном преобразовании А всякая линейно независимая
система векторов их, и.,, . . . переходш в линейно независимую — в
противном случае при аффинном преобразовании Л'1, обратном к -А,
линейно зависимая система и^, и'2, ¦ .. перешла бы в линейно неза-
независимую, что, как мы знаем, невозможно.
Так как репер есть система линейно независимых векторов (двух
на плоскости, трех в пространстве), приложенных к данной точке О,
то при аффинном преобразовании всякий репер переходит в репер.
Более того, имеет место предложение
7° При аффинном отображении (заданном переходом от репера I
к реперу Г) всякий репер II переходит в репер II' и всякая точка
М (всякий вектор и) переходит в точку М' (в вектор и') с теми же
координатами относительно репера II', какие точка М и вектор и
имели относительно репера II.
Доказательство в случае плоскости и в случае пространства
одно и то же. Ограничимся случаем плоскости. Пусть II есть репер
ое^., (рис. 143), а IV — репер о'е.\в'г. Докажем сначала утвержде-
утверждение, касающееся векторов. Если вектор и имеет относительно
репера oexe2 координаты g, tj, то u = He1 + ''1?2- H° тогда образ
вектора и есть, но свойству 3°, вектор
u' = ?e'i + T)e;,
имеющий координаты g\ ц относительно репера o'e'jE2. Пусть точка
М имеет координаты |, ц относительно репера ое^. Тогда
266
ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
1ГЛ, XI
о.М=%г1-т-г\гг, так что, по предыдущему, относительно репера о'е\г'г
вектор о'М', а значит, н точ_ка М имеют координаты |, tj. Утвер-
Утверждение доказано.
"X
Рис. 143.
Доказанное утверждение является существенным: из него еле-»
дует, что, задав аффинное преобразование переходом от какого-
нибудь репера Ое^2 к реперу О'е[е'2> мы можем задать его, взяв
в качестве исходного любой репер ozj?2 u указав тот репер о'е^е'2)
в который он должен перейти.
В качестве приложения только что сделанного замечания дока-
докажем, что произведение двух аффинных гфеобразований А± и Лг есть
аффинное преобразование.
В самом деле, пусть аффинное преобразование Ах задается
переходом от репера I к реперу II. Аффинное преобразование Лг
мы можем, по только что доказанному, задать переходом от репера
II к какому-то реперу III. Тогда аффинное преобразование, зада-
задаваемое переходом от репера I к реперу Ш, есть, очевидно, произ-
произведение ЛгЛ± преобразования di на преобразование </lv
§ 2] ПРЕОБРАЗОВАНИЕ ВЕКТОРОВ 267
Замечание 1. Только что доказанные свойства 1° — V
аффинных преобразований, очевидно, имеют место и для аффинных
отображений одной плоскости на другую (одного экземпляра трех-
трехмерного пространства на другой).
Тождественное преобразование плоскости, соответственно про-
пространства, есть, очевидно, аффинное преобразование. Вспомним, что
преобразование, обратное к аффинному, есть аффинное. Наконец,
как мы только что доказали, произведение двух аффинных преобра-
преобразований есть аффинное преобразование. Отсюда — на основании
условия, данного в § 6, п. 6, Прибавления, — сразу вытекает сле-
следующая основная
Теорема 1. В группе всех преобразований плоскости (про-,
странства) аффинные преобразования образуют подгруппу.
Среди аффинных преобразований движения выделяются тем, что
они могут бить заданы переходом от одной прямоугольной системы
координат к другой, тоже прямоугольной и имеющей тот же масштаб.
Обратное преобразование к движению есть движение, и произведение
двух движений есть движение. Так как тождественное преобразо-
преобразование есть частный случай движения, то (в полной аналогии с
теоремой 1) имеет место и
Теорема 1'. В группе всех аффинных преобразований движе*.
ния образуют подгруппу.
Продолжаем перечисление простейших свойств аффинных пре-
преобразований и отображений.
Три точки Мъ М2, УИ3 тогда и только тогда коллинеарны (т. е.
лежат на одной прямой), когда векторы МгМ2 и МгМг коллинеарны.
А так как коллинеарность векторов при аффинном преобразовании
сохраняется, то сохраняется и коллинеарность точек. Отсюда вы-
вытекает:
8Э При аффинном отображении (плоскости или пространства)
прямая переходит в прямую.
Мы сейчас дадим второе доказательство этого факта.
Пусть дано аффинное отображение. Оно состоит в том, что
каждая точка М с координатами х, у (в координатной системе Ое^г)
переходит в точку М', имеющую те же координаты во второй си-
системе О'е^е'о. Отсюда следует:
9° При данном аффинном отображении (определенном переходом
от репера Ое^., к реперу О'е',е^) множество всех точек, координаты
которых {в координатной системе Оехе,,) удовлетворяют некоторому
Уравнению, переходит в множество точек, координаты которых в
системе О'е^е» удовлетворяют тому же уравнению.
В частности, прямая с уравнением
-С = 0 A)
2G8 ДВИЖЕНИЯ Н АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [ГЛ. XI
(в системе Ое^») перейдет в прямую, имеющую то же уравнение,
но только в системе координат O'e',ej.
Точно так же при аффинном преобразовании пространства (опре-
(определенном переходом от репера Ое^вд к реперу О'е'[еое3) плоскость,
имеющая в системе Ое,е.:е3 уравнение
Ax + By + Cz + D = 0, B)
переходит в плоскость, имеющую то же уравнение B), но только
в системе координат Ое\е*е3.
Прямая, заданная в пространстве своим «общим уравнением»
Аух -г Rxij -J- C\z JrD1 = О,
A2x~rB^ + C2z-'rD2 = 0
или той или иной его специальной разновидностью, например кано-
каноническим уравнением
х—х0 _ у^у^ ^_ г — г0
а ' Ь с '
при данном аффинном преобразовании перейдет в прямую, имеющую
те же уравнения, но только в системе координат О'е',е'2ез- Итак,
доказана
Теорема 2. При аффинном преобразовании плоскости, соответ-
соответственно пространства, прямые переходят в прямые, плоскости пере-
переходят в плоскости.
При этом сохраняется параллельность.
В самом деле, если две прямые (или две плоскости, или прямая
и плоскость) параллельны, то их уравнения относительно репера
Ое1егез удовлетворяют известным условиям параллельности; но
образы этих прямых (плоскостей) имеют те же уравнения относи-
относительно репера O'e^e^ и, значит, удовлетворяют тем же условиям
параллельности.
Замечание 2. Сохранение параллельности при аффинном преобразо-
преобразовании можно вывести и пользуясь тем, что аффлнное преобразование взаимно
однозначно.
Действительно, при всяком взаимно однозначном отображении (например,
простраистна на себя) образ пересечения двух (любых) множеств есть пере-
пересечение образов этих множеств.
Значит, два пересекающихся множества при всяком взаимно однозначном
отображении переходят в пересекающиеся.
Отсюда следует, что при аффинном преобразопании плоскости две парал-
параллельные прямые, а при аффинном отображении пространства две параллель-
параллельные плоскости переходят в параллельные; сохраняется и свойство параллель-
параллельности между прямой и плоскостью.
Пусть в пространств даны две параллельные прямые; они лежат в одной
плоскости и не пересекаются. При аффинном преобразовании пространства
эти две прямые перейдут в две прямые, также лежащие в одной плоскости
и не пересекающиеся, т. е. в две параллельные прямые.
§ 2]
ПРЕОБРАЗОВАНИЕ ВЕКТОРОВ
269
Теорема 3. При аффинном преобразовании плоскости (про-
(пространства), переводящем прямую d в прямую d', отрезок M0ML
прямой d переходит в отрезок М'пМ\ прямой d\ а точка М прямой
d, делящая отрезок MqM-l в данном отношении К, переходит в точку
М' прямой а", делящую отрезок М'0М[ в том же отношении К
(рис. 144).
Доказательство. Так как при положительном Я. мы полу-
получаем точки, лежащие внутри отрезка M0Mt (соответственно M'0M't),
этого отрезка, то из второго v^ 0
утверждения теоремы 3 еле- \ / м'
дует первое. Доказываем \_ " ^
второе утверждение теоре-
теоремы 3, ограничиваясь случа-
случаем плоскости. Пусть (в сис-
системе координат Ое^) имеем
Л1=(л-, у).
Так как точка М делит от-
отрезок Мо/Щ в отношении
А, то
1 -\-Х
C)
Рис. 144,
в пространстве к этим равенствам присоединится еще равенство
Z— Z°,_if' ) . При данном аффинном преобразовании точки Жо, Мъ
М перейдут в точки Жо, Afj, M' с теми же координатами, что и
У точек Л10, Мг, М, но только в координатной системе O'efa. Эти
координаты связаны по-прежнему соотношениями C), из которых
следует, что М' делит отрезок M^Mi в отношении X. Этим теоре-
теорема 3 доказана.
Пусть при аффинном преобразовании А пространства плоскость
л отображается на плоскость к'. Возьмем в плоскости л какой-
нибудь репер ое^-2, т. е. пару неколлииеарных векторов ev e2,
приложенных к какой-нибудь точке о (рис. 145). При преобразова-
преобразовании Л точка о плоскости л перейдет в точку о' плоскости л',
неколлинеармые векторы сх и е2 перейдут в неколлннеарные векторы
eii е2, т. е. репер oz1si плоскости я перейдет в репер o'ejej
Плоскости л'. Всякий лежащий в плоскости я вектор a = 5ei4~1le2 ПР"
270
ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. XI
Рис. 145.
этом перейдет в лежащий в плоскости я' вектор u' = Eci -{- щ2 с
теми же координатами относительно репера о'г\гг, какие вектор и
имел относительно репера O?j?2. Отсюда следует, что и всякая
точка М плоскости л перейдет в точку М' плоскости я', имеющую
относительно репера о'е'.г!, те же самые координаты, какие точка М
имела в плоскости л отно-
относительно репера ое^. Дру-
Другими словами,имеет место
Теорема 4. Пусть при
аффинном преобразовании
пространства плоскость я
переходит в плоскость я'.
Тогда преобразование Л
отображает произвольный
репер oEjEg плоскости я на
некоторый репер o'tie'2 плос-
плоскости л' и ставит в соответ-
соответствие каждой точке М плос-
плоскости я точку М' плоскос-
плоскости л', имеющую относитель-
относительно репера o'r\&2 те самые
координаты, которые точка М имела относительно репера оехе2.
Другими словами: преобразование Л порождает аффинное отображе-
отображение плоскости л на плоскость л'.
Докажем в заключение этого параграфа следующее предложение.
Теорема 5. Существует одно и только одно аффинное преоб-
преобразование плоскости, переводящее данную тройку не ко л лине арных
точек
О, А, В
этой плоскости в (произвольную вторую) тройку неколлинеарных
точек
О', А', В'
той же плоскости.
Аналогично существует одно и только одно аффинное преобразо-
преобразование пространства, переводящее данную четверку некомпланарных
точек
О, А, В, С
в {произвольную) вторую четверку некомпланарных точек
О', А', В', С.
Доказательство в обоих случаях, плоскости и пространства,
одно и то же. Ограничимся случаем плоскости.
§ 3]
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
271
Берем координатную систему с началом О и единичными векто-
векторами (рис. 14G) _^ ^
е1 = ОЛ, е, = О#,
а также координатную систему с началом О' и единичными век-
векторами
Этим определено аффинное преобразование Л, переводящее каждую
точку М, имеющую и системе Ое5е2 координаты х, у, в точку М'
с теми же координатами, но в системе O'eje2. В частности, точка
0\ ei A
Рис. 146.
О = @, 0) перейдет в О', точка А = {\, 0) — в точку А', точка
В—в точку В', а векторы &1 = ОА и e2=OS перейдут соответ-
соответственно в е^ = ОМ', el = O'B'.
Таким образом, преобразование ^ удовлетворяет требованиям
теоремы. Оно есть единственное аффинное преобразование, удовле-
удовлетворяющее этим требованиям. В самом деле, всякое аффинное пре-
преобразование, переводящее точки О, А, В соответственно в О', А', В',
переводит векторы et, e2 соответственно в ei, e^, значит, совпадает
с преобразованием Л-
§ 3. Аналитическое выражение аффинных преобразований
Пусть аффинное преобразование плоскости задается переходом
от репера Ое2е2 к реперу O'eie^.
Покажем, как вычислить в исходной системе координат 0&1е2
координаты преобразованной точки М' по координатам данной
точки М (рис. 147).
272
ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ
[ГЛ. XI
Векторы е^, е.^ даны своими координатами относительно старого
ренера:
11СХ'
1 <>^1'
A)
-21
Кроме того, известны координаты й, Ь нового начала О'. Тогда
координаты х', у' любой точки М' относительно старого репера
связаны с координатами ?', ц' той же точки М' относительно но-
нового репера соотношениями
y'
= Г._?'-4
f С12Г|'---в,
Нам даны: произвольная точка
М с координатами х и у отно-
относительно старого репера и ее
образ М'', имеющий относительно
нового репера те же координаты
х, (/, которые точка М имела
относительно старого репера.
Требуется найти координаты точ-
точки М' относительно старого ре-
репера. Решение этой задачи дается
формулами B), в которые вместо
\\ т]' надо подставить коорди-
координаты точки М' в новой системе,
т. е. х и (/; тогда в левой части
будут искомые координаты х', у' точки М' (в старой системе),
и мы получим
Рис. 147.
у' =
C)
Это и есть формулы, дающие координаты преобразованной точки
М' по координатам точки М (те и другие координаты берутся при
этом относительно одного и того же «старого» репера *)).
Обратно, если дана невырождающаяся матрица
1-22
2) Сравнивая эти формулы с формулами D2) § 1 главы VIII (и помня
значения коэффициентов с,к), видим, что формулы C) тождественны с фор-
формулами преобразования координат, т. е. с формулами, выражающими коор-
координаты какой-либо точки М плоскости в старой координатной системе Ое^
через координаты той же точки в новой системе О'
§ 3]
АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 273
я два числа а, Ь, то, ставя в соответствие каждой точке М=(х, у)
точку М' = (х', у'), где х' и у' определены по формулам C), мы
получим аффинное преобразование плоскости — оно определено
переходом от исходного репера Ое1е» к реперу О'е[е'2, где
О'=(в. Ь),
е1 = сХ1е1 "Г с2Хе2>
е2 = С12е1 + С22е2-
Итак, мы можем определить аффинное преобразование плоскости
как такое преобразование, которое ставит в соответствие каждой
точке М--=(х, у) точку М' = {х', у'), координаты х', у' которой
находятся из координат х, у точки М по формулам C); система
координат — одна и та же. Аффинное преобразование вполне опре-
определяется системой координат Oeje2, матрицей коэффициентов С и
числами а, Ь в формулах C).
Так же доказывается и аналогичный результат для пространства:
Аффинное преобразование пространства вполне определено, если
в пространстве даны аффинная система координат Oeje2e3, невыро-
ждающаяся матрица
1 С12 С13
1 С22 С23
\с31 с32 с33/
называемая матрицей аффинного преобразования, и три числа а, Ь, с,
определенное этими данными преобразование состоит в том, что
каждой точке М=(х, у, z) ставится в соответствие точка М' =
= (х', у', z'), где
х' = сих + сггу -1- c13z + а, 1
y' = czlx + ci2y + cwz + b, I D)
z' = c31x + c32y + c33z + c. J
Система координат — одна и та же.
Замечание 1. Матрица аффинного преобразования, очевидно,
является транспонированной к матрице перехода от исходного ре-
»ера к реперу, задающему данное аффинное преобразование. Поэто-
Поэтому аффинное преобразование будет собственным или несобственным
в зависимости от того, имеет ли матрица этого преобразования
положительный или отрицательный детерминант.
Среди всех вообще аффинных преобразований их частный слу-
случай— движения выделяются тем, что и первоначальный исходный
Репер Оехе2 (соответственно Ое1е2е3), и новый репер О'е^ (соот-
(соответственно O'eie^ej) предполагаются прямоугольными с одним и
тем же масштабом, так что матрица перехода от одного репера
к дРугому, а значит, и матрица С самого преобразования являются*
ортогональными.
274 ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [ГЛ. XI
Итак, движение плоскости (пространства) полностью определено
по формулам C), соответственно D), если дани исходная прямо-
прямоугольная система координат, ортогональная матрица С и числа
а, Ь, (с).
В случае плоскости имеем формулы 1):
x'=xcosa—у sin a -f a, ) ,
, , > для собственных движений, E)
у = х sm а.-{-у cos a-{-о (
х' =xcos a 4-у sin a -f- a, ) , „ ,_,
. , > для несобственных движений. (i> )
у — я sin a—#cosa-j-# |
Если аффинное преобразование (в частности, движение) задано
равенствами D), то соответствующее преобразование многообразия
всех векторов задается однородными формулами, получающимися
из формул D) вычеркиванием в их правых частях свободных членов
а, Ь, с. Другими словами, вектор u = {x, i/, z) переходит при пре-
преобразовании D) в вектор и' = {х\ у', г'}, где
у' = с21х + с22г/ -j- c23z, [ F)
z' = с31х + с32у + c33z. J
Для доказательства этого утверждения достаточно приложить век-
вектор U к началу координат О так, что и = СШ, где М = (х, у, z);
тогда и' = О'ЛГ, где координаты точки М' даются формулами D) и
О' = (а, Ь, с). Вычитая из координат точки М' координаты точки
О', мы получим для координат вектора О'М' формулы F).
Аналогичное утверждение имеет место и для плоскости.
§ 4. Сохранение отношений площадей и объемов
при аффинных преобразованиях
Выведем из только что доказанного одно важное следствие
(сначала для плоскости).
Пусть па плоскости с выбранной на ней прямоугольной системой
координат даны два вектора: и1 = {х1, уг\, щ—{х2, уг}. Мы знаем
(гл. VII, § 1), что площадь ориентированного параллелограмма, на-
натянутого на эти векторы, есть
У2
1) См. гл. VIII, § 3, теорема 4 и замечание к ней.
с 4] СОХРАНЕНИЕ ОТНОШЕНИЙ ПЛОЩАДЕЙ И ОБЪЕМОВ 275
При аффинном преобразовании g плоскости с матрицей С векторы
Uj, u2 переходят соответственно в ui = {A'i, y\}, и'г = {х'г, г/'2}, где
имеем
так что
Ун
'lt u'2> =
С21Л2 ~~\ С22У-2
Но справа стоит (см. гл. VII, § 10) произведение детерминантов
,
Ь12
так что
с21 с22
<u'b u'2> = detC-<u1, U2>.
Пусть в пространстве дана прямоугольная система координат.
Тогда для любых трех векторов u2, u2, u3 и аффинного преобразо-
преобразования Чэ, переводящего эти векторы соответственно в и'ь и'2, Из,
доказывается формула
;, u'2) u;> =
1, u2, u3>.
Итак, имеет место
Теорема 6. При аффинном преобразовании плоскости (соот-
(соответственно пространства) площадь ориентированного параллелограмма,
построенного (в данной плоскости) на двух каких-либо векторах
(соответственно объем ориентированного параллелепипеда, построен-,
ного на трех векторах), умножается на детерминант преобразования.
Следствие. При аффинном преобразовании плоскости (соот-
(соответственно пространства) отношение площадей параллелограммов
(соответственно объемов параллелепипедов) сохраняется.
Уже из элементарной геометрии известно, что площади любых
многоугольников посредством триангуляции, т. е. разбиения этих
фигур на треугольники, сводятся к площадям треугольников, и,
следовательно, параллелограммов. В интегральном исчислении пока-
показывается, что посредством предельного перехода площади и объемы
любых фигур сводятся к элементарным, т. е. в конечном счете к пло-
Ц1ади параллелограмма, соответственно к объему параллелепипеда.
Поэтому при аффинном преобразовании площади и объемы любых
Фигур умножаются на детерминант преобразования, а отношения
площадей (объемов) сохраняются^
276 ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [ГЛ. XI
§ 5. Получение собственных аффинных преобразований
посредством деформации тождественного преобразования.
Следствия
Предположим, что аффинное преобразование является собствен-
собственным, т. е. задается переходом от исходного репера Оехе2 к одно-
одноименному с ним реперу 0'&\&гх). Репер Ое^ переходит в ренер
O'e^ej посредством непрерывной деформации. Это значит, что для
переменного /, пробегающего некоторый отрезок числовой прямой,
например отрезок О^г^!, имеем репер О'^'е'/'е),0, непрерывно за-
зависящий от t в том смысле, что коэффициенты матрицы перехода
от базиса е2, е2 к базису е(/', е'/1 и координаты точки О(О суть не-
непрерывные функции от /, причем при / = 0 ренер O^e'/'ei,0 совпа-
совпадает с Ое1е2, а при f — 1—с О'е'хе',. Обозначим через fe'(f> аффинное
преобразование, заданное переходом от репера Оеге.г к реперу
0">е(,"еа°. Оно записывается (в исходной системе координат Ое^)
с виде
и ставит в соответствие каждой точке А1=(х, у) точку
М(М = (х(", </<•'>). При этом для / = 0 имеем тождественное преобра-
преобразование, а при ^ = 1 имеем данное преобразование %; коэффициенты
Cat, с\\ с[) суть непрерывные функции от t на отрезке O^^^l.
Это положение веьчей выражают, говоря, что всякое собственное
аффинное преобразование получается непрерывным видоизменением
(непрерывной деформацией) тождественного преобразования — совер
шенно и том же смысле, в котором мы говорили, что всякий ре-
репер О'е'ге'г, одноименный с исходным репером Ое^, получается из
него непрерывной деформацией. Так как разноименные реперы не мо-
могут быть переведены друг в друга непрерывной деформацией, тс
несобственные аффинные преобразования не могут быть получень
из тождественного преобразования его непрерывной деформацией2)
Полученная только что характеристика собственных аффинных
преобразований как аффинных преобразований, получающихся и:
тождественного преобразования непрерывной деформацией, не зави
сит от выбора исходной системы координат.
В самом деле, возьмем за исходный репер какой-нибудь репер Oete2 i
напишем формулы, выражающие координаты х, у какой-нибудь точю
г) Мы снова ограничипаемся преобразованиями плоскости; случай про
странства трактуется точно так же.
2) Частный случай этого предложения, относящийся к собственным и ие
собственным движениям, уже был упомянут на стр. 260 (замечание 1).
5]
ПОЛУЧЕНИЕ СОБСТВЕННЫХ АФФИННЫХ ПРЕОБРАЗОВАНИЙ
277
относительно репера
репера Ое,ё~2:
через координаты той же точки относительно
а21
ФО.
Подставив в формулы A) эти выражения для х, у и аналогичные для x(l\
получим
Эту систему уравнений можно решить относительно x(t>, y{t) по правилу
Крамера и получить запись
преобразования
с\]) (i, &=1, 2),
l2'2', с*",
уже в координатной системе dij!.,. Здесь величины
с(„" суть линейные комбинации величин с'Д', ^) \
с„\г
с постоянными коэффициентами (выражающимися через а;;,, а, J5)
н поэтому, так же Как и с{|', являются непрерывными функциями от /.
Итак, свойство семейства преобразований й<;) осуществлять непрерывную
деформацию тождественного преобразования в преобразование % не зависит
от выбора системы координат.
Из доказанного вытекает
Теорема 7. Во всякой аффинной системе координат собствен*
ные аффинные преобразования имеют матрицу с положительным де-
детерминантом, а несобственные — с отрицательным.
Замечание. Детерминант матрицы аффинного преобразования
(относительно данного репера) называют кратко детерминантом пре-.
образования (относительно этого репера), а знак этого детерми-
детерминанта— знаком аффинного преобразования. Так как этот знак не
зависит от репера, относительно которого берется матрица данного
аффинного преобразования, то собственные аффинные преобразова-
преобразования иногда называются положительными, а несобственные — отрица-.
тельными.
При перемножении аффинных отображений их матрицы и детер-
детерминанты перемножаются, поэтому произведение двух собственных
аФфинных преобразований есть собственное преобразование. По той
"*е причине преобразование, обратное к собственному, есть собствен-
собственное. Так как тождественное преобразование является собственным, то:
Теорема 8. Собственные аффинные преобразования образую?
гРуппу (подгруппу группы всех аффинных преобразований).
Группу образуют и собственные движения.
278 ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [ГЛ. X!
Очевидно, имеет место и
Теорема 9. Группа собственных движений является в группе
всех аффинных преобразований пересечением подгруппы всех движе-
движений с подгруппой собственных аффинных преобразований.
§ 6. Движения как изометрические преобразования
Пусть Л — преобразование плоскости (пространства), образ про-
произвольной точки М при преобразовании Л будем обозначать через М'.
Образом направленного отрезка АВ при преобразовании Л будем
считать направленный отрезок А'В'.
Преобразование Л называется изометрическим, если для любых
точек Мг, Мъ расстояние между М[ и М'г равно расстоянию между
Мы знаем, что всякое движение есть изометрическое преобразо-
преобразование; в этом параграфе
мы докажем обратное
предложение.
Теорема 10. Всякое
изометрическое преобра-
преобразование (плоскости или
^_ пространства) есть дви-
А О' а' жение.
Рис 148. В основе доказатель-
доказательства лежит
Лемма. Пусть О А и ОВ—два вектора, приложенные к одной
и той же точке О (рис. 148), а О'А', О'В'—их образы при данном
изометрическом преобразовании; тогда скалярные произведения {ОА,
ОВ) и (ОТГ, О'В7) равны1).
Доказательство леммы. Имеем
АВ^АО+ОВ.
Так как равны векторы, то равны и их скалярные квадраты:
(АВ, АВ) — (АО-\-ОВ, АО + ОВ) =
= (АО, АО)+2 (АО, бВ) + (ОВ, ОВ),
т. е.
*) Мы пока еще не знаем, что при изометрическом преобразовании рав-
равные векторы переходят в равные, поэтому нам приходится принимать во
внимание точку приложения каждого вектора.
§ 6]
ДВИЖЕНИЯ
279
„ли, помня, что \АО\=\ОА\ и (АО, ОВ)= — (ОА, ОВ),
2(ОА, G?) = |O4|2-f |Q8|2 — \AB\2. A)
Эта формула верна для любых трех точек О, А, В, так что имеем
2 (О'А', О'В') = | О'А' р + | О'В' |2— | А'В'
(П
Но правые части равенств A) и A') равны (так как наше преобра:
зонание изометрично), поэтому равны и левые части, т. е.
{О'А^, 0'5') = (О4, ОБ), B)
что и требовалось доказать.
Пусть теперь Оеге2е3, где ех = ОА, е2 = ОВ, е3 = ОС, — какой-
нибудь прямоугольный репер (рис. 149). При нашем изометрическом
ез
z
М
/
/
Ч
/ "
Рис. 149.
отображении точка О переходит в О', а орты ОА, ОВ, ОС пере-
переходят соответственно в орты О'А', О'В', О'С; орты ОА, ОВ, ОС
"опарно перпендикулярны, т. е. их попарные скалярные произведе-
^"я равны нулю; то же, по лемме, будет иметь место и для ортов
°'Л', О'В', О'С. Итак, прямоугольный репер Оехе2е3 переходит
"РЧ нашем преобразовании в прямоугольный репер О'е^е'гез, где
ei = O'y4', е'2 = О'В', е'3=О'С. Координаты х, у, z ироизволь-
н°й точки М в координатной системе Oexe2Q3 суть скалярные
280 ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [ГЛ. XI
произведения
х=*@М, ОА), у = {ОМ, ОВ), г = @М, ОС).
Координаты точки М' в системе О'е\е'2е'3 суть скалярные произве-
произведения
• д-' = (О'ЛГ, О'~Х), у' = (О'ЛГ, О'ЕГ), z' = (O'~M', О'~С).
Поэтому в силу леммы
х' = х, у' = у, z'—z,
т. е. точка М'—образ точки М при преобразовании Л— имеет в
новой прямоугольной координатной системе О'е'хе'2ез те же коорди-
координаты, которые точка М имела в старой; а это и значит, что наше
преобразование есть движение.
Итак, изометрические отображения и движения (плоскости и про-
пространства)— это одно и то же.
§ 7. Преобразования подобия
1. Определение преобразования подобия. Непосредственным
обобщением движений являются преобразования подобия. Преобра-
Преобразование Л называется преобразованием подобия, если для этого
преобразования существует такое положительное число k — «коэф-
«коэффициент подобия», что каковы бы пи были две точки Л1Х и /И2,
всегда
p(M'1,M'2) = kp(MvM2). A)
При этом, как всегда, через М' обозначаем образ точки М.
Если &=1, то получаем изометрические преобразования, т. е. дви-
движения, являющиеся, таким образом, частным случаем преобразова-
преобразований подобия.
Замечание 1. Легко видеть, что преобразования подобия
образуют группу — подгруппу в группе всех преобразований (пло-
(плоскости, соответственно пространства).
2. Равномерное растяжение (гомотетия). Сначала рассмотрим
простейшие преобразования подобия, так называемые равномерные
растяжения, или гомотетические преобразования (гомотетии). Растя-
Растяжением пространства (плоскости) с центром О и коэффициентом растя-
растяжения k называется преобразование Л, состоящее в следующем:
IJ Точка О остается неподвижной.
? Всякая точка МФО переходит в точку М', лежащую на
луче ОМ и определяемую на нем условием | ОМ' \ =А | ОМ\.
§ 7]
ПРЕОБРАЗОВАНИЯ ПОДОБИЯ
281
Таким образом, название «растяжение» соответствует наглядной
картине преобразования лишь при А:>1; при к<\ наше «растя-
«растяжение» в действительности
оказывается сжатием.
Замечание 2. Так как
векторы ОМ и ОМ' лежат на
одной н той же полупрямой,
исходящей из точки О, то они
имеют одно и то же направле-
направление. Поэтому из равенства
ОМ' \ = k-\OM следует и
О
мг
"м
ОМ' = k ¦ ОМ.
Докажем, что всякое растя- Рис. 150.
жение является преобразова-
преобразованием подобия. В самом деле, пусть при растяжении с центром О и
коэффициентом к точки Мх и Мг переходят соответственно в точки
М\ и Ж.; (рис. 150). Тогда 0M\=k-0Mv О~М\ = k ¦ О~М2. Треуголь-
Треугольники ОМХМ2 и 0М\М: подобны, и, значит, p(M[,M'i)=^kp{M1,M2),
что и требовалось доказать.
Докажем теперь, что растяжение с центром О и коэффициентом
k есть аффинное преобразование. Можно ограничиться случаем
плоскости.
Возьмем произвольный координатный репер Ое^ с началом
в центре данного растяжения (рис. 151). Пусть М = {х, у)—произ-
у)—произвольная точка плоскости,
(У М' = {х', у') — ее образ
при данном растяжении
(координаты относитель-
относительно репера Оехе2). Тогда
имеем равенство ОМ'—
= к ¦ СЦИ, эквивалентное
системе равенств
Xu'ZkX\u \ B)
доказывающей наше ут-
^7 ё, * ' * ' S вержденне.
Обратно, если в ка-
рМС- 151. кой-нибудь аффинной ко
ординатпой системе Ое^
"Реобразование Л записывается в виде B), то оно есть растяжение
с Центром О и коэффициентом растяжения к. В самом деле, преоб-
282 ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [гл. XI
разование Л, оставляя точку О на месте, переводит всякий вектор
ОМ — хег-f-уе2 в вектор ОМ' = x'el-i-y'e2 — k-OM, откуда и сле-
следует утверждение.
Итак, растяжение плоскости с центром О и коэффициентом к
может быть определено как аффинное преобразование, которое в
какой»нибудь, и тогда непременно во всякой, аффинной системе ко-
координат с началом О записывается в виде B).
Замечание 3. Мы всегда в качестве исходной системы коор-
координат Оехе2 можем выбрать прямоугольную систему.
Совершенно аналогичный результат имеет место и для простран-
пространства.
Замечание 4. Все растяжения с данным центром образуют
группу — подгруппу группы аффинных преобразований (плоскости,
соответственно пространства).
3. Представление преобразования подобия в виде произведе-
произведения растяжения и движения. Из сказанного до сих пор еще не
ясно, является ли всякое преобразование подобия аффинным преобра-
преобразованием. Положительный ответ на этот вопрос содержится в сле-
следующей теореме, которая и представляет собою основной результат
этого параграфа.
Теорема 11. Всякое преобразование подобия ?f с коэффи-
коэффициентом подобия k есть аффинное преобразование, а именно произ-
произведение растяжения е/0 с тем же коэффициентом k и произвольных
центром О на некоторое собственное или несобственное движение Л.
Доказательство. Пусть Q есть растяжение с произволь-
произвольным центром О и коэффициентом -у. При преобразовании У длина
каждого отрезка умножается на к, а при преобразовании Q она
умножается иа -г-; поэтому, если сделать сначала преобразование Q,
а потом преобразование У, то получим преобразование ^Q, при ко-
котором длина каждого отрезка остается неизменной. Другими словами,
преобразование с$/<3 = <// есть изометрическое преобразование, т. е.
движение, собственное или несобственное.
Преобразование Q~l, обратное к преобразованию Q, есть, оче-
очевидно, растяжение с центром О и коэффициентом к.
Сделаем теперь сначала преобразование Q, а затем преобра-
преобразование Л, т. е. рассмотрим произведение этих преобразований;
получим Л0.~г — ^fQQ'1 — $. Итак, наше преобразование if пред-
представлено в виде произведения преобразования Q, т. е. растяже-
растяжения с коэффициентом к и произвольным центром О, на движение Л.
Так как и Q~l, и Л суть аффинные преобразования, то аффин-
аффинным преобразованием является н их произведение &f. Теорема П
доказана.
§ 8] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ ПРЯМОЙ И ПЛОСКОСТИ 283
Как всякое аффинное преобразование, преобразование подобия §f
может быть собственным или несобственным. Так как в представлении
if^dQ-1 C)
преобразование Q'1 (растяжение) собственное, то движение Л будет
собственным или несобственным в зависимости от того, будет ли
собственным или несобственным данное преобразование подобия |г.
§ 8. Классификация движений прямой и плоскости1)
1. Движения прямой. Пусть на прямой дана система коорди-
координат Оех. Всякая другая система координат на этой прямой, имеющая
тот же масштаб, либо пмеет вил О'е, (рис. 152) (т. е. отлнчаетоя
О е, 0' е1 М /?
Рис. 152
от системы Оъх лишь своим началом О'), либо имеет вид О' (—е^)
(рис. 153) (т. е. отличается от Оех началом и направлением). Системы
Оех и О'ех одноименпы; системы Ое1 и (У(—et) разноименны.
Мг 0 в, О" (-в,) о' М
Рис. 153.
Переход от Оех к О'ег порождает преобразование прямой, при
котором всякая точка М, 'имеющая в системе Ое^ координату х,
переходит в точку М', имеющую в той же системе координату
x'=x-f-a, (О
где а есть координата точки О' в системе Оег. Полученное пре-
преобразование есть, очевидно, сдвиг прямой на вектор 00'.
Переход от системы Ое1 к системе О' (— ej порождает преоб-
преобразование
х'=— х + а. (И)
Но это преобразование (оставляя неподвижной точку О""у
(
') Имеются в виду движения прямой и плоскости, определенные как
(изометрические) преобразования (т. е. отображения прямой, соответственно
плоскости, на себя).
284 ДВИЖЕНИЯ II АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [ГЛ. XI
может быть записано в виде
•_•__(,_¦). AГ)
Если перенести начало координат в точку О", т. е. сделать пре-
преобразование координат
? 1 а
то преобразование (II) примет вид
?' = -?, ("О
откуда видно, что оно является отражением (симметрией) прямой
относительно точки О".
Итак, доказана
Теорема 12. Всякое движение прямой является либо сдвигом
(всех точек прямой на один и тот же вектор un = {a}, лежащий на
этой прямой), либо отражением прямой [симметрией) относительно
некоторой точки этой прямой.
Сдвиги называются собственными, а отражения — несобственными
движениями примой; для того чтобы физически осуществить отра-
отражение прямой относительно какой-нибудь ее точки, надо повернуть
ее вокруг этой точки на угол я в какой-нибудь плоскости, содер-
содержащей нашу прямую, т. с. выйти за пределы самой прямой.
2. Движения плоскости. В предположении прямоугольной системы
координат каждое движение плоскости записывается в виде1)
х' = х cos a — г/sin a 4-a, ]
, , > если движение собственное, A)
у =х sin a -г у cos a -\~b, j
x' — x cosa + у sina-fe, )
} если движение несобственное. B)
у =xsma— ycosa-\-b J
1° Рассмотрим сначала собственные движения A) и выясним
прежде всего, когда имеется точка, остающаяся при данном дви-
движении неподвижной. Для такой точки М=(х,у) имеем
л; cos a — у sin a -I- a — x, )
} C)
xsin a -f- у cos a -\-b = y, J
т. e.
(cosa—\)x — sina-(/=—a,
sin a-x-f (cosa—Ц у =—b. j
Ч См. § 3.
§ 8] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ ПРЯМОЙ И ПЛОСКОСТИ 285
Детерминант этой системы уравнений есть
cos а — 1 —sin а
, =(cosa—l)s-fsin2a.
sin a cos a—1
Он равен нулю, лишь когда одновременно
cos a = 1, sin a = 0;
тогда формулы A) превращаются в
х' =х-\-а,
У' =¦
—движение является сдвигом плоскости на вектор ио = {а, Ь\.
Во всех остальных случаях детерминант системы C') положи-
положителен и эта система уравнений имеет единственное решение
хо,уо — при рассматриваемом (собственном) движении имеется единст-
единственная неподвижная точка О' — (х„, у0). Перенесем начало координат
в эту точку О', т. е. сделаем преобразование координат
j D)
У = 11 +</о- I
В этой новой системе координат формулы A) примут вид
^' = ;cosa — rjsina, |
т)'=с sin a~p г) cosa. )
В самом деле, коэффициенты при переменных п формулах аф-
аффинного преобразования не зависят от положения начала координат,
а свободные члены обратятся в нуль, так как образом начала О'
является сама эта точка.
Мы видим, что рассматриваемое движение есть поворот пло-
плоскости на угол а вокруг точки О'.
Мы доказали следующее предложение.
Теорема 13. Всякое собственное движение плоскости есть или
сдвиг плоскости на некоторый вектор ио = {<2, Ь), или поворот вокруг
некоторой точки О' на некоторый угол а. В частности, всякое соб-
собственное движение, оставляющее неподвижной какую-нибудь точку,
есть поворот плоскости вокруг этой точки.
Из сказанного ясно, что среди всех собственных движений сдвиги
характеризуются каждым из следующих свойств:
(а) При сдвиге (не являющемся тождественным преобразованием)
чи одна точка не остается неподвижной.
(б) При сдвиге каждый (свободный) вектор является инвариант-
инвариантным (т.е. переходит в самого себяI).
*) Каждый приложенный вектор АВ переходит в равный ему вектор Л'В'.
286 ДВИЖЕНИЯ И АФФИННЫЕ ПРЕОБРАЗОВАНИЯ [ГЛ. XI
С другой стороны, повороты (не являющиеся тождественным пре-
преобразованием) характеризуются каждым из следующих свойств:
(а') Имеется единственная неподвижная точка.
(б') Ни один вектор (кроме нулевого) не является инвариантным.
2° Пусть теперь дано несобственное движение B), При этом
движении всякий вектор а. = {х, у} перейдет в вектор W — {х', у'\
где
х' — х cos a -\- У sin а,
у' = х sin а —у cos а.
Будем искать такие (свободные) векторы а. = {х, у), которые при
рассматриваемом движении остаются инвариантными, т. с. переходят
в себя; это векторы, удовлетворяющие системе уравнений
х cos a -\-y sin а = л:, \
i F)
л; sin а — j/cosa=j/, J
т. е.
(cosa — 1) лг-j-sin а-у = 0,
—(cosa-j- \)y = 0. J
Детерминант этой системы есть
cosa—1 since
= 0
sin a —(cosa-fl)
Но не все его элементы равны нулю, так как не может быть одно-
одновременно
cos a —1=0 и cos a -j-1 = 0.
Поэтому имеется одномерное векторное многообразие решений си-
системы F'), т, е. одномерное многообразие V1 векторов, остающихся
при рассматриваемом движении инвариантными; в частности, имеется
ровно два (взаимно противоположных) инвариантных орта.
Один из них обозначим через г1 и сделаем ортом новой прямо-
прямоугольной координатной системы Оехег; начало координат О остается
пока прежним. Орт е2, очевидно, не является инвариантным.
Посмотрим, как запишется несобственное движение B) в новой
координатной системе Ог^. Для этого заметим, что при этом дви-
движении (как при всяком движении) пара взаимно перпендикулярных
ортов 8ц г2 переходит в пару взаимно перпендикулярных ортов.
Но ?t переходит в ev значит, орт е2 должен перейти или в г%, или
в —г^. Первое невозможно (так как орт ?2 не является инвариант-
инвариантным), значит, при нашем движении B) орт е2 переходит в —^
а произвольный вектор u = ^e!---Tie2 — в вектор u'=5e1-|-il( — ег)'
т. е. в 5^1—Щ2- Итак, в координатной системе Ог^ движение B)
e 3] КЛАССИФИКАЦИЯ ДВИЖЕНИЙ ПРЯМОЙ И ПЛОСКОСТИ 287
записывается в виде
Перенесем теперь начало координат в точку
О' = (о, А) , (8)
т. е. сделаем преобразование координатг)
Тогда формулы G), в которых надо положить и |' = дг', *{' =у'-\--к- ,
перепишутся в виде
х' = х -г а,
т. е.
х' — х + а,
у' = -у.
Мы видим, что рассматриваемое нами движение есть отражение от-
относительно оси абсцисс координатной системы О'?]?2, соединенное
со сдвигом вдоль этой оси (на вектор {а, 0}); при а = 0 этот сдвиг
превратится в тождественное преобразование.
Итак:
Теорема 14. Всякое несобственное движение плоскости есть
отражение относительно некоторой прямой d, соединенное со сдвигом
плоскости на некоторый вектор, коллинеарный прямой d, который,
разумеется, может равняться и нулю. В частности, всякое несобст-
несобственное движение плоскости, оставляющее неподвижной хотя бы одну
точку, есть отражение относительно некоторой прямой (и тогда все
точки этой прямой являются неподвижными).
Таким образом, разобраны все движения плоскости, как собст-
собственные, так и несобственные.
Разбор движений пространства мы откладываем до главы XXV.
') Мы новые координаты обозначаем снова через х, у, забыв окончательно,
что когда-то была начальная система координат Ое^
ГЛАВА XII
ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ)
ЛЮБОГО КОНЕЧНОГО ЧИСЛА ИЗМЕРЕНИЙ.
СИСТЕМЫ ЛИНЕЙНЫХ ОДНОРОДНЫХ УРАВНЕНИЙ
§ 1. Определение векторного пространства
В главе И, § 7, мы геометрически ввели понятие я-мерного век-
векторного многообразия для л^З. Затем в § 6 главы VII мы опре-
делили для любого п понятие л-мерного арифметического векторного
многообразия.
Общее понятие векторного многообразия, или, как мы теперь
предпочитаем говорить, векторного пространства, вводится посред-
посредством следующего основного определения.
Определение 1. Векторное пространство есть множество V
произвольных элементов, называемых векторами, удовлетворяющее
следующим условиям («аксиомам векторного пространства»):
1. Для любых двух векторов ut и и, определен вектор и, на-
называемый суммой векторов их и и2 и обозначаемый через U1 + u,
При этом для любых двух векторов иг и и2 имеем:
ux-f-u2 — и2 + иг (свойство коммутативности сложения),
а для любых трех векторов их, u2, u3
+U3=u1 + (u2 + u3) (свойство ассоциативности сложения). B)
2. В множестве V имеется элемент 0, называемый нулевым век-
вектором, удовлетворяющий для любого вектора и условию
u-f-0 = u. C)
3. Ко всякому вектору и имеется единственный вектор —и,
называемый противоположным вектору и и удовлетворяющий усло-
условию
ц + (— и)=0. D)
§ 1] ОПРЕДЕЛЕНИЕ ВЕКТОРНОГО ПРОСТРАНСТВА 289
4. Для любого вектора и и любого действительного числа "к
определен вектор Хи, называемый произведением вектора и на чи-
число X.. При этом для любых двух векторов щ, и8 имеем:
A, (Uj -f- u2) з= А*^ + A.u2 (первая дистрибутивность); E)
для любого вектора и и любых двух чисел Хг и Х,2 имеем:
(X.J -f A,2) u = Я^и + X2u (вторая дистрибутивность) F)
и
X.x(X,2u) = (Х,]^) U («ассоциативность умножения на число»). G)
Наконец,
1-11 = 11. (8)
Вот и все аксиомы векторного пространства.
Укажем на некоторые их простейшие следствия.
1° Из того, что вектор 0, удовлетворяющий условию O + U = u
для любого вектора и, существует, вытекает, что он единственный.
В самом деле, пусть существуют два «нулевых» вектора 0' и О*,
так что для любого вектора и имеем
O' + u = u, 0" + u = u.
В частности,
0'+0" = 0",
В силу коммутативности сложения отсюда вытекает, что 0' = 0",
что и требовалось доказать.
2° Из того, что к каждому вектору U существует противопо'
ложный ему вектор —и, удовлетворяющий условию D), вытекает,
что этот противоположный вектор единствен1).
В самом деле, пусть к данному вектору и имеются два «про-
«противоположных» вектора и' и и", так что
Прибавим к обеим частям первого из этих двух равенств по век-
вектору и". Получим
(и" + и) + и' = 0 + и".
Но и" + и = 0, поэтому
т. е. ц' = и".
Замечание 1. Из аксиомы 2 следует, что векторное про-
пространство всегда есть непустое множество векторов. Но состоять
') Свойства 1°, 2" вытекают из того, что векторное пространство есть
гРУпна по отношению к сложению.
U. С. Александров
290 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [ГЛ. XII
из одного нулевого вектора 0 оно может — это мы знаем уже из
последнего параграфа главы II. В этом «нулевом» векторном про-
пространстве действия таковы:
0-|-0 = 0, М) = 0 при любом Я.
Замечание 2. Совокупность аксиом 1, 2, 3 может быть, оче-
очевидно, заменена одной аксиомой:
В множестве V определена операция сложения, по отношению
к которой это множество является коммутативной группой (см. При-
Прибавление, § 5).
Определим теперь разность двух векторов, полагая
так что и — u = 0 для любого и. Там как для чисел kt и Я2 всегда
Ях-)-( — ki)=K1—Я,а, то из F) следует
(Х1 — X2)u = Vi—Хги. F')
При ^ = ^2 отсюда следует
0-и = 0 (9)
для любого вектора и.
Далее,
( —1)-и=—и (8')
для любого вектора и.
В самом деле, принимая во внимание (8) и (9), имеем
u + ( — l)-u=l-u-H — l)-u=[l -Ы —1)]-11 = 0.11 = 0,
откуда в силу аксиомы 3 следует (8').
Действия сложения векторов и умножения вектора на число на-
называются кратко линейными операциями в данном векторном про-
пространстве.
Из только что изложенного следует, что с векторами, элемен-
элементами любого векторного пространства, можно оперировать совер-
совершенно так же, как с обыкновенными свободными векторами трех-
трехмерного пространства. В частности, понятия линейной зависимости
и независимости, введенные нами в § 5 главы II, равно как и все
доказанные там предложения относительно этих понятий, дословно
(вместе с доказательствами) сохраняют свою силу в любом вектор-
векторном пространстве.
Кроме того, очевидно, арифметическое л-мерное векторное много-
многообразие является частным случаем векторного пространства.
Закончим этот параграф важнейшим понятием изоморфизма между
двумя векторными пространствами U и V. Под изоморфизмом или
изоморфным, соответствием между пространствами U и V понимается
« 1] ОПРЕДЕЛЕНИЕ ВЕКТОРНОГО ПРОСТРАНСТВА 291
такое взаимно однозначное соответствие
между множествами всех элементов (векторов) одного и другого
пространства, которое удовлетворяет следующим двум условиям:
1. Если
и
и2 *-» v2,
то и
11. Если
то при любом действительном X имеем
Хи <-» Xv.
Коротко говоря: изоморфизм между двумя векторными пространствами
есть взаимно однозначное соответствие между этими пространствами,
сохраняющее линейные операции (точный смысл последних слов
и означает как раз выполнение условий I и II).
Из условия 11 следует, в частности, что для любых двух век-
векторов и ? U, v ? V, соответствующих друг другу при данном изо-
изоморфизме:
будем иметь
0-u<-»0-v A0)
и
( — l)n<-»( —l)v. A1)
Так как 0-U есть нулевой вектор пространства U, а О-v—нулевой
вектор пространства V, то из A0) следует, что при изоморфном
соответствии между двумя векторными пространствами их нулевые
векторы соответствуют друг другу.
Так как (— 1)и = —и, (— l)v = —v, то из A1) вытекает: если
и*-* v,
то1)
( —u)<-»( —v). A2)
1) Формула A2), равно как и соответствие друг другу нулевых векторов
при изоморфизме двух векторных пространств, вытекает из того, что изомор-
изоморфизм между векторными пространствами является, в частности, и изоморфиз-
изоморфизмом между теми группами, которыми эти пространства определяются по от=
ношению к операции сложения.
10*
292 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [ГЛ. ХН
Читатель легко выведет из доказанного следующий общий факт.
Если при данном изоморфизме между векторными пространствами
U и V имеем:
U2*">V2- J. A3)
Um «"> Vm-
то при любых действительных числах Х^, ^2, ..., ^т имеем
X1u1-f >i2u2+ • ••+^fflum^X1v1-f X2v2-f ... +bmvm. A4)
Отсюда в свою очередь легко вытекает, что при изоморфном соответ-
соответствии между двумя векторными пространствами линейно зависимые
системы векторов одного пространства соответствуют линейно зави-
зависимым системам другого (и, значит, линейно независимым системам
одного пространства соответствуют линейно независимые системы
другого).
Замечание 3. В предыдущих рассуждениях ничего бы не изме-
изменилось, если бы в аксиоме 4 мы допустили любые комплексные числам,
т. е. сформулировали бы эту аксиому так: для любого вектора и
и любого комплексного числа X определен вектор ки — и далее, как
в основном тексте. Это изменение в формулировке аксиомы 4 (с со-
сохранением всех остальных аксиом) привело бы пас к определению
комплексного векторного пространства. Все результаты этой главы
применимы в равной степени и к действительным, и к комплексным
векторным нространствам.
§ 2. Размерность. Базис. Координаты
1. Базис. Если в векторном пространстве V имеется хотя бы один
отличный от нуля вектор и (а следовательно, имеются и векторы Хп
при любом К), то в V имеется по крайней мере одна линейно неза-
независимая система векторов; такой системой во всяком случае является
система, состоящая из одного вектора и.
Предположим теперь, что в данном векторном пространстве V
существует линейно независимая система, состоящая из п векторов,
и нет никакой линейно независимой системы, состоящей из большего,
чем я, числа векторов. Тогда мы говорим, что V есть п-мерное
векторное пространство, а число п называем его числом измерений или
размерностью. Если такого числа я нет, то векторное пространство
называется бесконечномерным. В бесконечномерном векторном про-
пространстве существуют линейно независимые системы, состоящие из
любого, сколь угодно большого числа векторов.
§ 2]
РАЗМЕРНОСТЬ. БАЗИС. КООРДИНАТЫ 293
Бесконечномерные векторные пространства существуют1); более
того, значение их в современной математике чрезвычайно велико;
но изучаются они в функциональном анализе, а не в аналитической
геометрии, поэтому мы ими в этих лекциях заниматься не будем.
Определение. Пусть V есть л-мерное векторное простран-
пространство. Всякая линейно независимая система, состоящая из п векторов
пространства V, называется базисом этого пространства.
Теорема 1. Если е14 е2,. .., е„ — базис векторного пространства V,
то всякий вектор U этого пространства единственным образом может
быть представлен в виде линейной комбинации
базисных векторов et, е2, ..., е„. Однозначно определенные коэффи*
цаенты дг1? х2, ..., хп называются координатами вектора и относи'
тельно базиса ev e2, ..., е„.
Доказательство. Так как в V не существует линейно не-
независимой системы, состоящей из п-\-\ векторов, то система
и, е1} е2, ..., е„
зависима, тогда как e1( е2, ..., е„ — независимая система. Поэтому
Если бы существовало второе такое представление
и = УгЧ + У2^ + ... + упеп,
') Например, рассмотрим множество всех целых рациональных функций
(многочленов) Р=Р{х) от одного действительного переменного х:
Р (х) = аох"-\-а1х"-1-\- ... -\-ап (п произвольно);
мы причисляем к ним и все константы Р (х) = а0 (многочлены нулевой сте-
степени), в том числе и многочлен, тождественно равный нулю, Р(х)=0. При
сложении многочленов, а также при умножении многочлена на любое дейст-
действительное Я получаем снова многочлен; сложение многочленов и умножение
их на действительное число удовлетворяют всем аксиомам векторного прост-
пространства; нулевым вектором в этом пространстве является многочлен, тождест-
тождественно равный нулю. Докажем, что векторное пространство всех .многочленов
бесконечномерно. Действительно, частным случаем многочленов являются
и одночлены, например одночлены
Ро(*)=1. Р,(*) = *, Р2(.*) = .*г, ..., Р„(х) = хп,
где п—любое натуральное число. Но эти одночлены образуют линейно неза-
независимую систему векторов векторного многообразия всех многочленов. В самом
деле, пусть какая-нибудь линейная комбинация наших векторов Ро, Рх, .... Рп
с коэффициентами с0, с,, ..., сп равна нулевому вектору; эго значит, что
есть многочлен, тождественно равный нулю; но тогда все коэффициенты
со> •.., сп должны равняться нулю. Таким образом, в векторном пространстве
всех многочленов можно наши линейно независимую систему, состоящую из
любого числа элементов, что и требовалось доказать.
294 ВЕКТОРНЫЕ ПРОСТРАНСТВА, (МНОГООБРАЗИЯ) [ГЛ. XII
то было бы
откуда, вследствие линейной независимости системы е1; е2, ..., е„,
вытекает, что х1 = у1, .. ., х„=у„.
Теорема 1 доказана.
Пусть даны два вектора
и
и' = х\ьг + лт;е2 + •.. + х'„е„.
Согласно правилам вычислений с векторами, содержащимся в аксиомах
векторного пространства и совпадающим с аналогичными правилами
для векторов трехмерного пространства, имеем
т. е. при сложении векторов их соответственные координаты склады-
складываются.
Точно так же, если вектор
u = -^jSj 4- х2е2 -j- ... -р хп&п
умножается на число %, то получается
Ки = Ъс,е, 4- Кх„е2 4- ... 4- Kxnen
— при умножении вектора на число % все координаты вектора умно-
умножаются на это число.
2. Переход от одного базиса к другому. Пусть elt e2, ..., е„;
ei, e^, ..., е^—два базиса векторного пространства U. Обозначим
координаты произвольного вектора и относительно этих базисов
соответственно через хх, дт2, . .., хп и х[, х'г, ..., х'ю так что
...+*яе„, A)
+ х'„е'п. (Г)
Пусть координаты векторов &\ (t = l, 2, ..., п) относитель-
относительно базиса ех, е2, ..., е„ суть соответственно с1Ь c2i, ..., cni
(i=\, 2, . .., п), так что
е;. = с1,.е14-с2,.е24-...4-с„,.е„ (/ == 1, 2, ..., п). B)
Подставляя B) в (Г), получаем
U — Л1С1 ~г • • • ~Т ЛпУп — Л1С1 Т • • • ~Г Лпсп —
С22е2 +•••"{- Сп2ел) "f*
с2пе24-...4-сппе„)
§ 3] ТЕОРЕМА ОБ ИЗОМОРФИЗМЕ 295
или, после приведения подобных членов в правой части,
и - хгъг + л-2е2 + • • ¦ + *„е„ = (сих\ + с12х2 + ... + с1пх'п) ^ -+•
+ с22х1 -f ... + сгах„) е2 -|-
Так как координаты хг, ...,хп вектора и относительно базиса
ev ..., ел определены однозначно, то
*1 = спа:; + спх'г + .. . + с1пх'п,
Х2 = ^l'^l ~Ь С22-^2 + • • • Т С1пХП1
хп = си1'||Г1 + '-пг-^г + • • • + сппХп
Эти формулы — «формулы преобразования координат» — выражают
координаты хъ ..., хп произвольного вектора и относительно базиса
е1? ...,е„ через координаты х\, ...,х'п того же вектора относи-
относительно базиса е^, ..., е'п; коэффициенты cihопределены формулами B).
Матрица
C I Х «¦« -.. Чп D)
называется матрицей преобразоеания координат (или матрицей линей-
линейного преобразования C)), соответствующего переходу от базиса
ех, е„, ..., е„ к базису е^, е'2, ..., е'п; матрица этого перехода есть
транспонированная матрица С* к матрице С.
Эти формулы и определения являются непосредственным обобще-
обобщением тех, которые были рассмотрены в главе V111 для п = 3.
§ 3. Теорема об изоморфизме между любыми
двумя векторными пространствами одной
и той же конечной размерности п
Теорема 2. Для того чтобы два конечномерных векторных про-,
странства были изоморфны между собою, необходимо и достаточно,
чтобы они имели одну и ту же размерность.
Доказательство. Условие необходимо. Из сказанного в конце
§ 1 об изоморфизме следует: если в одном из двух изоморфных между
собою пространств имеется линейно независимая система, состоящая
из п векторов, и иет линейно независимой системы, состоящей из
большего числа векторов, то то же справедливо и для второго про-
пространства.
296 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [ГЛ. XII
Другими словами: два изоморфных между собою пространства
имеют одну и ту же размерность.
Условие достаточно. Чтобы убедиться в этом, докажем, что
всякое я-мерное векторное пространство U изоморфно я-мерному
арифметическому пространству А". Пусть иъ щ, . . ., и„ — произволь-
произвольный базис пространства U. Тогда каждый вектор и ? U однозначно
записывается в виде
U = A-jili + х2и2 4- ... + хпп„.
Ставя в соответствие вектору u = XjUx + х2щ -(-¦•¦+ хпип ? U вектор
v = {х-у, х2, ..., хп} ? А'\ мы и получаем искомое изоморфное соответ-
соответствие между пространствами U и Ап (доказательство непосредственно
вытекает из того, что при сложении двух векторов и??/, и' ? U их
соответственные координаты складываются, а при умножении вектора
u ? U на какое-нибудь число к на то же к умножаются и координаты
вектора и).
Замечание 1. Так как
2+... +0-ц„,
ua=0.u1+Lu2+... +0-uB,
то при только что установленном изоморфизме между векторными
пространствами U и А" базис ult u2, .. . , и„ пространства U пере-
переходит в систему векторов
v1 = {l, 0, .... 0},
v2 = {0, 1, .... 0},
vn = {0, 0,..., Ц
пространства А", и эта система векторов образует базис простран-
пространства А".
Вообще пусть U и V—два изоморфных векторных пространства.
При (произвольно выбранном) изоморфном соответствии u<-+v меж-
между пространствами U и V любому базису ux, u2, ... , и„ простран-
пространства U соответствует некоторый базис \ь v2, . . . , vn пространства V
и всякому вектору и = х^ + х2и., + ... + хпип пространства U
соответствует вектор v = x1yl -\- хг\г -)-...+ xnvn пространства V,
имеющий относительно базиса vlf v2, ... , vn те самые координаты,
которые вектор и имеет относительно базиса ult u2, ... , un-
Обратно, выбирая в двух /z-мерных пространствах по произвольно-
произвольному базису ux, u2, . . • , ия и Vj, v2, . . . , v,, и сопоставляя друг
с другом всякие два вектора и = лгхих ¦+¦ д;2иг + .. - хпип ? U и
4] ПОДПРОСТРАНСТВА ВЕКТОРНОГО ПРОСТРАНСТВА 297
v = xiyl +^2V2+ • • • ~b~xnvn € V, имеющие относительно этих базисов
одни и те же координаты xlt xit ... , хп, получим изоморфизм u<-»v
между пространствами U и V.
Замечание 2. В дальнейшем мы будем постоянно обозначать
векторные пространства данной размерности п через V", U", L",
сохраняя для их арифметического /г-мерного пространства (которому
они все изоморфны) обозначение А".
§ 4. Подпространства векторного пространства.
Дальнейшие теоремы о линейной зависимости векторов
и о базисе векторного пространства
1. Определение подпространства векторного пространства.'
Пусть в векторном пространстве V дано множество векторов L, удов-
удовлетворяющее следующим условиям:
1° Каковы бы ни были векторы их и и2 из L, их сумма также
принадлежит множеству L.
2° Каковы бы ни были вектор и из ? и число к, вектор ка.
также принадлежит множеству L.
Всякое множество L, удовлетворяющее этим двум условиям,
называется подпространством векторного пространства V. Условия
1° и 2° в своей совокупности, очевидно, эквивалентны одному усло-
условию:
3° Всякая линейная комбинация ki\xlJrk.i\xiJr . . .-\-к^мк векто-
векторов ult . . . , йк, принадлежащих множеству L, есть вектор, принад-
принадлежащий этому множеству.
Поэтому подпространство векторного пространства V может быть
определено как множество L, удовлетворяющее условию 3°.
Замечание 1. Пусть все элементы векторного пространства U
являются в то же время элементами векторного пространства V,
причем линейные операции над векторами в У те же самые, как и
в объемлющем пространстве V. Тогда U, рассматриваемое как
множество векторов пространства V, очевидно, удовлетворяет условиям
1°, 2°.
Очевидно и обратное: всякое множество UsV, удовлетворяющее
этим условиям, есть векторное пространство, элементы которого
суть векторы из V, причем линейные операции в Уте же, что и в V.
Итак, мы можем определить векторное подпространство простран-
пространства V как всякое векторное пространство, элементы которого суть
векторы пространства V, а линейные операции над ними — те же,
что и в V.
Замечание 2. Очевидно, все пространство V, а также простран-
пространство, состоящее из одного нулевого вектора, являются подпростран-
подпространствами пространства V.
298 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [ГЛ. XII
Пусть теперь В—какое-нибудь, совершенно произвольное, конеч-
конечное или бесконечное, множество векторов пространства V. Рассмотрим
множество В, состоящее из всех векторов, являющихся линейными
комбинациями всевозможных векторов, принадлежащих множеству В.
Очевидно, множество В удовлетворяет условиям 1° и 2° и поэтому
является подпространством пространства V; это подпространство
называется подпространством, порожденным множеством В, или
линейной оболочкой (или линейным замыканием) множества В; мно-
множество В в свою очередь называется множеством, порождающим
пространство В, или множеством или системой образующих простран-
пространства В.
Может, разумеется, случиться, что пространство В совпадает
со всем пространством V, например, если есть какой-нибудь базис
пространства V. Итак, всякий базис пространства V является системой
его образующих, притом линейно независимой. Мы скоро докажем
и обратное предложение: всякая линейно независимая система
образующих конечно.мериого векторного пространства является его
базисом.
Пример. Пусть на плоскости даны две пересекающиеся пря-
прямые dl и d2; обозначим через Lx множество всех векторов, коллинеарных
прямой dv а через L2—множество всех векторов, коллинеарных
прямой d2; каждое из этих двух множеств является (одномерным)
подпространством пространства V всех векторов плоскости, но
объединение В— Lx (J ?2 множеств Lt и L2 векторным пространством
не является (почему?). Между тем векторное пространство В, порож-
порожденное множеством /?,есть все пространство V.
Следующее очень важное предложение почти очевидно.
Теорема 3. Если подпространство L конечномерного векторного
пространства V имеет ту же размерность, что и V, то оно совпадает
со всем V.
Доказательство. Пусть L и V имеют одну и ту же раз-
размерность п. Возьмем в L линейно независимую систему из п векторов
иь . .. , и„; эта система является базисом обоих пространств:L и V.
Поэтому каждый вектор и ? V, будучи линейной комбинацией векто-
векторов Ui, . . . , и„ (содержащихся в L), принадлежит подпространству L,
т.е. V^L, и, значит, V=^L.
2. Теорема Штейница «о замене». Теперь будет доказана одна
из основных теорем, касающихся векторных подпространств и линейной
независимости векторов в них, так называемая
Теорема Штейница «о замене» (теорема 4). Пусть
дано векторное пространство V, порожденное (конечным) множеством
своих элементов
Щ, Щ, • • • . um. 0)
с 4] ПОДПРОСТРАНСТВА ВЕКТОРНОГО ПРОСТРАНСТВА 299
Пусть, кроме того, в V дана линейно независимая система, состоящая
из п векторов
Vi, v2, ... , vB. B)
Тогда непременно п ^.m и среди векторов ux, u2, ... , \хт можно
какие-то п векторов вычеркнуть и заменить векторами vb v2, ... , vn,
так что получится вновь совокупность векторов, порождающая про-
пространство V.
Докажем эту теорему посредством индукции по п. Пусть дана
система векторов A), порождающая векторное пространство V, и
линейно независимая система B), состоящая из одного вектора vx ? V;
это означает просто, что в V дан вектор Vj^O. Тогда, прежде все-
всего, /2 — 1 ^ т.
Так как v^V, a V состоит из линейных комбинаций векторов
Ui, • • • , Ue, ТО
*1 = ciui + • • • + СЛ- C)
причем по крайней мере один из коэффициентов съ ... , ст отличен
от нуля; пусть, например, cx=fizQ, Тогда вектор Uj есть линейная
комбинация вектора v2 и векторов и2, ...
Всякий вектор и? V есть линейная комбинация векторов ulf ...,um:
u = а1щ + ... + атит.
Заменяя в этом равенстве иг через его выражение C'), получим
после приведения подобных членов равенство вида
ц = b1vl + Ь2иг + . • . + Ьт\хт,
показывающее, что вектор и ? V есть линейная комбинация вектора vr
и векторов и2, ... , ит. Итак, при п =• 1 теорема Штейница до-
доказана.
Докажем ее теперь для п, предполагая ее уже доказанной для я — 1.
Система векторов vu v2, .. . , vn_,, как подсистема линейно неза-
независимой системы B), линейно независима; она состоит из п — 1 эле-
элементов; поэтому по предположению индукции некоторые п—1 из
векторов A) — пусть это будут векторы Uj, u2, .. . , un-1 — могут
быть заменены векторами vx, ... , vn_1, так что в результате полу-
получится совокупность векторов
vi, v2, ... , vn-1, и„, ... , ит, D)
порождающая многообразие V. Так как вектор \п принадлежит этому
многообразию, то он является линейной комбинацией
vn — C1V1 + • • • + Cn-lvn-l + CnUn + . . . + CmUm E)
300 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [гл. XII
векторов D). Если мы докажем, что в E) хотя бы один из коэффи-
коэффициентов сп, ... , ст отличен от нуля, то это будет, прежде всего,
означать, что среди векторов A) имеется хоть один и,-, номер
которого i~^n, т. е. будет доказано неравенство т~^п. Но если бы
все коэффициенты с„, . . . , ст были нулями, то соотношение E)
означало бы, что система B) линейно зависима, вопреки предполо-
предположению. Итак, действительно и^/ги среди коэффициентов сп, .. . , ст
по крайней мере один — пусть это будет сп — отличен от нуля.
Но тогда E) может быть переписано в виде
п — 7" я Т~ J— * " ' с "-1 с Un + 1~- • • 7~ Мя» 1°)
означающем, что и„ есть линейная комбинация векторов
vi. ••• . v«. ««+1- ••• . ит- G)
Пусть теперь и — произвольный вектор из V. Он является линейной
комбинацией векторов D); если в этой комбинации заменить вектор
ип его значением F) и сделать приведение подобных членов, то
вектор и также выразится в виде линейной комбинации векторов
т. е. система векторов G) порождает все многообразие V. Теорема
«о замене» доказана.
Самым важным ее утверждением является, пожалуй, неравенство
т~^п, заслуживающее быть выделенным в виде особой теоремы.
Теорема 5. В векторном пространстве, порожденном m вектора-
векторами ии ..., um {т. е. состоящем из линейных комбинаций этих векторов),
не может существовав t> линейно независимой системы, состоящей более
чем из тп векторов.
Другими словами, размерность векторного пространства не может
превосходить числа элементов какой-нибудь произвольной системы обра-
образующих этого пространства.
Теперь в двух словах доказывается
Теорема 6. Линейно независимая система образующих В век-
векторного пространства L является его базисом.
В самом деле, пусть число элементов в данной системе образующих
В есть пг, а размерность пространства L есть п. Так как си-
система В независима, то т^.п. С другой стороны, мы только что
видели, что п^.т. Значит, т = п, система В есть линейно независимая
система, состоящая из/г векторов «-мерного пространства, т. е. базис
этого пространства,
Теорема 7. Всякая система образующих В пространства L раз-
размерности п ;> 0 содержит базис этого пространства.
с 4] ПОДПРОСТРАНСТВА ВЕКТОРНОГО ПРОСТРАНСТВА 301
Доказательство. Скажем, что линейно независимая система
векторов
vlf ...,V (8)
принадлежащих fi, максимальна в fi, если, пополняя ее произволь-
произвольным вектором v?B, получим уже линейно зависимую систему1).
Построим в В максимальную систему. Для этого выберем в В какой-
нибудь вектор Vj^^-О (он существует, так как мы предположили, что
размерность L положительна). Если линейно независимая система, со-
состоящая из одного вектора vlt максимальна в В, то наше построение
закончено. Если нет — выбираем в В такой вектор v2, чтобы си-
система vx, v2 была линейно независима. Если она максимальна, то
построение закончено. Если нет — получаем линейно независимую
систему трех векторов vly v2, v3 и так далее.
Так как пространство L имеет конечную размерность п, то после
конечного числа шагов придем к линейно независимой системе
vi. V2. •••. vm (9)
векторов из В, которая будет максимальной в В.
Я утверждаю, что эта система (9) есть базис (и, следовательно,
состоит из п элементов (/» = «)).
На основании предыдущего для этого достаточно доказать, что (9)
есть система образующих всего пространства V, т. е. что всякий
вектор u?V есть линейная комбинация векторов (9). Пусть сна-
сначала и?В. Тогда, в силу максимальности системы (9) в В, система
u. vii V2> ¦ ¦ • i vm ли"ейно зависима, а так как (9) — линейно незави-
независимая система, то и есть линейная комбинация векторов (9). Пусть
теперь и—произвольный вектор, взятый в V; так как В есть система
образующих пространства V, то вектор и есть линейная комбинация
J A0)
каких-то векторов wx, w2, ..., ws из В; но каждый из векторов,
принадлежащих В, значит, и каждый из векторов wt, w2, ..., ws
есть линейная комбинация векторов vx, ...,vm. Подставляя в равен-
равенство A0) вместо каждого вектора w, его линейное выражение через
векторы Vj, ...,vm, мы, после приведения подобных членов, выра-
выразим и и в виде линейной комбинации векторов (9). Утверждение
Доказано.
Доказано также равенство т = п; его можно формулировать так.
Теорема 8. Размерность конечномерного векторного простран-
пространства V равна максимальному числу линейно независимых векторов
в произвольном множестве образующих пространства V.
') В частности, если B = L, то система (8) называется просто максималь-
максимальной (во всем пространстве L) линейно независимой системой векторов.
302 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) (ГЛ. ХК
Замечание 3. Попутно мы доказали и следующее предло-
предложение.
Теорема 9. Всякая линейно независимая система векторов про-
пространства L'1 может быть дополнена до базиса пространства L".
§ 5. Алгебраическая (в частности, прямая) сумма подпространств
Пусть L{ и Ц — два подпространства пространства L"; их объеди-
объединение B = L{\}L% (т. е. множество векторов, принадлежащее хотя
бы одному из двух пространств L{, L%) порождает подпростран-
подпространство Ц, состоящее из всех векторов и вида u1 + u2, где u^L?,
u2 6 ?f; пространство L\ называется (алгебраической) суммой про-
пространств L\ н L\ и обозначается через Z.| =Lf-j-Z.?. Обозначим
через D пересечение подпространств L\ и L% (т. е. множество L\[\L\
всех векторов, содержащихся и в L\, и в L%). Множество D есть
векторное пространство (подпространство пространства L" и каж-
каждого из пространств L\ и Щ). Это следует из того, что всякая
линейная комбинация %l\i.x-\-... -\-'kkxi.k любых векторов их, . . ., ufe,
принадлежащих множеству D=L^f)L?i, содержится как в /-?, так и
в L\, значит, и в D. Обозначим размерность пространства D через d
(мы уже обозначили через р, q, s размерность пространств L\, Lf, Lf).
Докажем важную формулу
s—p -\-q — d.
A)
Пусть u2, ...,ud — произвольный базис пространства D; будучи
линейно независимой системой векторов, лежащих как в пространст-
пространстве L\, так и в пространстве L%, система иь ..., ud может быть
дополнена до базиса их, . .., ud; ud+1, . . ., up пространства L{ и до
базиса их, .. ., ud; vd+1, . .., \q пространства L\.
Рассмотрим систему векторов
ulf ...,ud; ud + 1, ...,up; \d^,...,vq. B)
Каждый вектор ugLf есть линейная комбинация векторов
Uj, ...,ud; ud+1, .. ., ир; каждый вектор vgAf есть линейная ком-
комбинация векторов их, .. , ud; vd + 1, ...,v?; значит, каждый вектор
v?LfHu?L^ есть линейная комбинация векторов системы B); то
же, естественно, имеет место и для каждого вектора w = u-j-v, где
и ? ??, v ? L%, т. е. для каждого вектора w ? Ц. Итак, множество
всех векторов B) есть система образующих пространства Ц.
Докажем, что эта система линейно независима и, следовательно,
есть базис пространства Lss; так как число векторов B) есть
(Р — d)-\- (q — d)—p-\-q — d, то формула A) этим будет доказана.
с 5] АЛГЕБРАИЧЕСКАЯ СУММА ПОДПРОСТРАНСТВ 303
Итак, пусть
Требуется доказать, что
лх — ... — ла — лй+, — ... — лр — Ad+1 — ... — л? — и. \о0)
Полагаем
w==^ii+)vd + l + • • • +^?v?» D)
так что w 6 ^?) и переписываем C) в виде
= A-jUj • • • kdUd kd+11Xd+1 — . . . — ЛрЦр, (о)
откуда следует, что вектор w является линейной комбинацией век-
векторов ux, ...,ud; ud+1, ...,up и, значит, содержится и в L\. По-
Поэтому w^L\{\L\==D, так что
Из D) и F) следует, что
Так как система векторов ux, ...,ud; vd+1, .. ., v^ линейно незави-
независима (она есть базис пространства L%), то все коэффициенты в равен-
равенстве G) равны нулю, так что, в частности,
л;+1 = ...=я;=о (8)
и равенство C) принимает вид
А.Ц1! -f ... + \dud + Kd+1ud+l + ...+ %'ри.р = 0.
Система векторов ult ...,ud; ud+1, ..., up (являясь базисом про-
пространства L\) линейно независима, поэтому
лх = . .. = Kd = Xd+1 = ... = Ар = 0,
что вместе с (8) дает нам искомое равенство C0). Формула A)
доказана.
Определение. Алгебраическая сумма
(9)
Двух подпространств (пространства L") называется прямой суммой
этих подпространств, если пересечение D~L\[\L\ состоит из одного
нулевого вектора (и, следовательно, имеет размерность d = 0).
Для прямой суммы (9) формула A) превращается в
s=pi-q. A0)
304 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [ГЛ. XII
Имеет место следующая
Теорема 10. Если сумма (9) прямая, то для каждого вектора
w € ^-1 существует единственное представление в виде
w=u + v, где ъ^Ц, у?Ц. A1)
В самом деле, если бы существовало два представления этого
вида
w = u1 + vi, w = u2 + v2, A2)
то было бы их -[- Vj = u2 -f- v2 и, значит,
Вектор w' = u2 — Ui = v1 — v2 отличен от нуля (иначе оба представ-
представления совпадали бы); он содержится и в L\ (так как w' = ua — %),
и в L\ (так как w' = vx — v2) вопреки предположению, что L\$\L%
состоит лишь из нулевого вектора.
§ 6. Линейные отображения векторных пространств
1. Определение и простейшие свойства линейных преобразо-
преобразований. Пусть U—отображение векторного пространства U на век-
векторное пространство V, ставящее в соответствие каждому вектору и
пространства U вектор v = ,//u пространства V.
Определение 2. Отображение Л называется линейным, если
оно удовлетворяет следующим двум условиям («условиям линейно-
линейности») х):
1) Для любых двух векторов их и и2
2) Для любого вектора и и любого числа Я имеем
Из условий 1), 2) сразу следует, что при линейном отображении
всякая линейная комбинация klul-{-... -{-"Amiim каких-либо векторов
Up . .., nm пространства U переходит в линейную комбинацию
Xjvj + • ¦ • +^mvm векторов v1 = <^u1, ..., vm = 4um пространства V
с теми же коэффициентами ~къ . .., Кт.
Замечание. Линейные отображения векторного пространства
в себя также называются линейными операторами, и это название
является даже более употребительным. Мы будем его придержи-
придерживаться в главах XXIV, XXV этих «Лекций».
Установим простейшие свойства линейных отображений.
») Ср. гл. XI, § 2.
о g] ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 305
1° При линейном отображении нулевой вектор 0а пространства U
переходит в нулевой вектор 0^ пространства V:
Л0и = 0v.
В самом деле, 0^ = 0-и (где и — произвольный вектор простран-
пространства U). Значит, А @ц) = 0-^u = 0v-. Отсюда непосредственно следует
2° Если векторы ul7 . . ., и„ линейно зависимы, то и их образы
v = Ащ, ¦ ¦ ¦ 1 vn = L'?un также линейно зависимы («линейная зависи-
зависимость векторов сохраняется при всяком линейном отображении»).
В самом деле, если их, . . ., и„ линейно зависимы, то существуют
такие числа Хх, . ..,Х„, не все равные нулю,, что
Но тогда, по только что доказанному, и
A (Mi + • • • + Ьпип) = \Ащ + ... -f КЛи„ = А0и = 0v,
векторы Ащ, . .., Аип линейно зависимы.
Следствие. Пусть А — линейное отображение пространства U
на пространство V и векторы vt, . . ., vfe образуют линейно независи-
независимую систему в V. Тогда в U существует линейно независимая система,
состоящая из k векторов их, .. ., uft, отображающихся соответственно
в vlt ..., vfe:
В самом деле, для каждого вектора v?V существует по край-
крайней мере один такой вектор и?(/, что Au = v (ведь А — отображе-
отображение на все пространство V). Поэтому можно найти в U такие век-
векторы Uj, ...,ufe, что ^иг = vx, . . ., Auk = vk. Система ux, ...,uA
линейно независима (в противном случае, в силу 2°, система vx, ..., vft
была бы зависима).
Из доказанного вытекает, далее:
Если /я-мерное пространство U линейно отображено на л-мерное
пространство V, то тп^п. В самом деле, по предположению в V
существует линейно независимая система, состоящая из п векторов;
но тогда такая система существует и в U, так что т~7^п.
3° Пусть А есть взаимно однозначное линейное отображение век-
векторного пространства U на векторное пространство V. Тогда опреде-
определено обратное отображение А'1 пространства V на пространство U.
Докажем, что оно также есть линейное отображение. Докажем,
в самом деле, что преобразование А'1 удовлетворяет обоим усло-
условиям линейности.
Пусть Vj и v2 — произвольные векторы из V, пусть v=Vj-|-v2.
Надо доказать, что A~^vi + A~1v2 — A~1v. Пусть u = ,/i~1^1
Тогда, вследствие линейности преобразования А, имеем
306 ВЕКТОРНЫЕ ПРОСТРАНСТВА (мНОГООВРАЗИЯ) [ГЛ. XII
т. е. v1 + v2 = t^u, но v1 + v2 = v, значит, Лм = \ и u = ^~1v, что
и требовалось доказать.
Положим м = Л~1ч. Тогда <Ап = \ и, в силу линейности отобра-
отображения Л,
значит, <4~гЛки =<A~lhv, т.е. ku = d~1hv, или, наконец (если под-
подставить в это равенство u=c/?~1v),
'kj,~1v — d~1'kv,
что и требовалось доказать.
Из доказанного следует, что взаимно однозначные линейные отоб-
отображения одного векторного пространства на другое суть ие что иное,
как изоморфные отображения (изоморфизмы), рассмотренные нами
в § 1 этой главы.
В частности, взаимно однозначные линейные отображения {изомор-
{изоморфизмы) векторного пространства U на себя называются линейными
преобразованиями. Из доказанных в § 1 свойств изоморфизмов сле-
следует, что при линейном преобразовании всякая линейно независимая
система векторов переходит в линейно независимую, а всякий базис
пространства U переходит в базис этого пространства.
Замечание 1. Теперь мы видим, что всякое аффинное преоб-
преобразование плоскости или трехмерного пространства порождает изо-
изоморфное преобразование многообразия всех свободных векторов плос-
плоскости (соответственно трехмерного пространства).
2. Матрица линейного преобразования. Умножение преобразо-
преобразований и умножение матриц. Пусть Л есть линейное отображение
то-мериого векторного пространства U на л-мерное векторное про-
пространство V. Мы знаем, что тогда п^.тп.
Пусть ех, е2, ...,еот—ьакой-нибудь базис пространства U. При
преобразовании Л векторы elt е2, ..., ет переходят соответственно
в векторы Ле1г Лйг, ...,Лет. Каждый вектор
m^U A)
переходит при преобразовании Л в вектор
Ли = ХХЛ^ + х2Ле2 + . . . + хтЛ&т. B)
Таким образом, линейное преобразование Л векторного пространст-
пространства U полностью определено—формулой B),— если заданы образы
Ле1г Лъг, ..., Лът векторов elf е2, , ет, образующих какой-нибудь
базис пространства U.
Если отображение Л взаимно однозначно (т. е. является изомор-
изоморфизмом), то векторы et = «/tfe1, ..., ^п = Лет образуют базис про-
пространства V и отображение Л состоит в том, что каждому вектору
2 -f-..
§ 6]
ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 807
ставится в соответствие вектор
Ли = лгх
имеющий относительно базиса е*, ..., ejj, те же самые координаты,
которые вектор и имел относительно базиса ех, .. ., ет. В частности,
это имеет место в том случае, когда V — U и Л есть линейное
преобразование пространства U.
Этим важнейшим частным случаем мы сейчас только и займемся.
Теперь векторы ej = ^e1, . . ., е*п = Лет лежат в пространстве U,
следовательно,
C)
и невырождающаяся матрица
*11 1 ••• «ml'
J12 fl22 • • • ат2
т. е. матрица перехода от базиса е^ ..., еи к базису е*, . ..,е„,
полностью определяет преобразование Л: чтобы для каждого век-
вектора и = дг1е1-|- ... -}-хтет найти координаты yv ..., ут вектора
Ли. (относительно того же базиса ех, ..., ет), надо только заме-
заметить, что вектор Лчх относительно «нового» базиса е*, ..., е^,
имеет координаты дгх, ..., хт, значит, относительно «старого»
базиса ех, ..., ет его координаты уъ ..., ут вычисляются по фор-
формулам C) из § 2 (с заменой в них хъ ..., хт на у%, ..., ут\
х\, ..., х'т на хъ ..., хт и cik на aik при п = т), т. е.
+ а12^г -!-••• т- пъЛ.
Ут — amlxl i" am2X2 "I • • • ~1~ аттХт-
Матрица
ат.,ч
называется матрицей преобразования Л относительно базиса elt ..., вга|
эта матрица транспонирована к матрице перехода Л* от базиса
еъ ..., еи к базису et еД,
308 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [ГЛ. ХЦ
Для простоты письма предполагаем /я = 3. Записывая вектор и
не в виде строки и = {хх, хг, х3\, а в виде столбца
Г1 \
\x»i
можем переписать формулы D) в виде
\ (Хх \
Уг ) = М Х* ) = -
U I \ X I \ X I
Vs/ \ 3 , 3 /
Итак, образ вектора и, заданного своими координатами xv хъ х3
при преобразовании А, есть матрица (столбец), являющаяся произ-
произведением матрицы А на матрицу
х2
Ч
Поэтому образ вектора An при преобразовании 93 с матрицей В
есть произведение матрицы В на матрицу
Ь а2»л"з I, т. е. на матрицу А-1 хъ I.
\ I
Другими словами (помня ассоциативность умножения матриц),
'*, \ (х, \
Х2 I.
к Х„ I
\ 8 /
Итак, при перемножении преобразований матрицы их также пере-
перемножаются: матрица преобразования 93d (сначала А, потом 93)
есть ВА.
Отсюда вытекает, что матрица обратного преобразования Л'1
к преобразованию Л есть матрица А'1. В самом деле, так как про-
произведение преобразований Л и Л'1 (взятых в любом порядке) есть
тождественное преобразование $, матрица которого, очевидно, есть
единичная матрица Е, то произведение матриц преобразований Л и
Л~у есть Е, откуда и следует, что эти матрицы взаимно обратны.
Решим теперь следующую задачу. Дана матрица А линейного
преобразования Л относительно базиса / = е1, е2, е3. Дан второй
базис Г =е[, ej,, е^ с соответствующей матрицей перехода Р* (»т
§ 6] ЛИНЕЙНЫЕ ОТОБРАЖЕНИЯ 309
базиса / к базису /'). Требуется найти матрицу А' преобразова-
преобразования U относительно базиса /'.
Пусть и—произвольный вектор; его координаты относительно
базисов /, /' обозначим соответственно через xlt х2, х3 и х'и х'г, х'3,
так что
u= x
Координаты вектора Ли в базисах / и /' обозначим соответст-
соответственно через уъ у2, уа и у\, у'2, у'3. Тогда имеем для любого вектора
хх \
; E)
\-«v ix°
HO
ГуЛ f'y'A
\**j \y>; W'
следовательно,
У- I П\
\Уз/
Внося в правую часть равенства G) выражение E), получим
Уч. | = р-М-(
\Уз/ \ хз
Внося сюда первое выражение из F), получаем окончательно
/у'Л /А
Уг )=р-1АР-\
\Уз
т. е.
А'=Р~1АР. (8)
Этр и есть чрезвычайно важная формула, которую мы хотели
получить.
310
Пусть
ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ)
§ 7. Теорема о равге матрицы
[гл. хн
'и
¦—произвольная матрица, имеющая т строк и п столбцов.
Определение. Рангом, матрицы А называется наибольшее
такое число г, что в матрице А содержится нввырождающаяся мат-
матрица Р порядка г.
Матрица, состоящая из одних нулей, и только такая матрица
имеет ранг 0. Матрица имеет тогда и только тогда ранг 1, когда
среди ее элементов имеются отличные от нуля и когда в то же
время всякие две ее строки и всякие два ее столбца пропорцио-
пропорциональны между собою. Далеко идущим обобщением последнего утверж-
утверждения являются следующая
Теорема 11 (теорема о ранге матрицы). Ранг мат-
матрицы А является наибольшим таким числом г, что в матрице А
имеется г строк (г столбцов), образующих линейно независимую
систему.
Из этой теоремы, в частности, следует, что максимальное число
линейно независимых строк матрицы равно максимальному числу ее
линейно независимых столбцов,—факт замечательный и неожиданный.
Доказательство теоремы о ранге матрицы. Пусть
ранг матрицы А равен г. Требуется доказать, что в матрице А
имеется г столбцов (строк), образующих линейно независимую систе-
систему, н что всякие г -j-1 столбцов (строк) образуют линейно зависи-
зависимую систему. Доказательство для строк и столбцов одно и то же,
проведем его для столбцов.
Раз ранг матрицы равен г, то в ней имеется минор Р с отлич-
отличным от нуля детерминантом. Не ограничивая общности рассуждений,
можно предположить, что этот минор Р является угловым:
«11
ап
вГ+1.
ашл
... а1г
... агг
1 • • ¦ аг + 1,г
... а
detP =
тт
«11
a
ai.
• • •
г + 1
г+1
hi, Г + 1
Г + 1
агг
•..
фО.
«1»
аг+1
& 7] ТЕОРЕМА О РАНГЕ МАТРИЦЫ 811
Так как detP-^О, то векторы
wi=Wi. •••> «rJ. •••> wr = Kr. •••. ап\
(столбцы минора Р) линейно независимы, и подавно линейно неза-
независимы векторы
\1={а11, •••> аП. •••. aml\' •••> vr={«lr> •••. ат •••> атг\
(столбцы матрицы А).
В самом деле, если бы существовало линейное соотношение
то это значило би, что при любом /=1,2, . . ., г, . . ,, т имело бы
место
Kan+KaizJr •••JrKair = °- 0)
В частности, соотношения A) выполнены при /=1, 2, ..., г, т.е.
что, ввиду независимости векторов wx, w2, ..., wr, означает, что
коэффициенты Xv . . ., Хг все равны нулю.
Итак, во всякой матрице А ранга г имеется линейно независи-
независимая система, состоящая из г столбцов. Первое утверждение тео-
теоремы доказано.
Переходим к доказательству второго утверждения: всякие r-j-1
столбцов матрицы А (ранга г) линейно зависимы. Предполагаем
снова, что отличен от нуля детерминант углового минора порядка г
матрицы А. Вспомним, что среди векторов, являющихся линейными
комбинациями данных г векторов, нельзя найти более г линейно
независимых; поэтому достаточно доказать, что каждый столбец
УЛ = {Й1Л> а2А. •• •. amh)
матрицы А является линейной комбинацией первых г столбцов:
vi = {«u, •••, aml), v2 = {«12, ..., ат2\, ..., vr = {aln ..., ат\.
Разумеется, при доказательстве этого утверждения можно предполо-
предположить h > г.
Взяв любое i^m, построим детерминант
ai
ih
и. докажем прежде всего, что при любом i он равен нулю. В са-
самом деле, если i^r, то этот детерминант имеет две одинаковые
312
ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ)
[ГЛ. XI,
строки — на /-м и (г-\-\)-м месте — и поэтому равен нулю. Если же
i > г, то О,- есть детерминант некоторого минора (г + 1)-го порядка
матрицы А, и он равен нулю, так как ранг матрицы А по предпо-
предположению есть г. Итак, ?>,=0 при любом i^.m.
Разложим детерминант D,- по элементам последней строки. Коэф-
Коэффициенты этого разложения суть адъюнкты элементов (г -}- 1)-й
строки детерминанта D,-, а именно:
ai
¦Чг
ai
a.
наконец,
•"г+1 —
'11
— адъюнкта последнего элемента а;н в (г -f-1 )-й строке.
Существенно, что эти коэффициенты Av ..., Ar+l не зависят
от /, поэтому их и можно было обозначать через Ах, ..., Аг+1.
Мы имеем
(для любого 1 = 1, 2, ..., от).
Эти соотношения, написанные для всех / = 1, 2, ..., т, выражают
равенство
в котором заведомо коэффициент Ar+1^=uetP отличен от нуля и
которое поэтому можно разрешить относительно vft:
Мы представили произвольный столбец \h матрицы в виде линей-
линейной комбинации первых г столбцов этой матрицы и этим закончили
доказательство теоремы о ранге матрицы.
Замечание. Из приведенного доказательства следует, что
при подсчете ранга матрицы можно, найдя некоторый не равный
нулю детерминант, перебирать лишь «окаймляющие» его детерми-
детерминанты.
§ 8] СИСТЕМЫ ЛИНЕЙНЫХ ОДНОРОДНЫХ УРАВНЕНИЙ 313
§ 8. Системы линейных однородных уравнения
Мы видели в главе X, § 1, что совокупность всех решений
однородного линейного уравнения с тремя неизвестными есть дву-
двумерное векторное пространство, а совокупность решений системы
двух не эквивалентных между собою однородных линейных уравне-
уравнений есть одномерное векторное пространство.
Мы сейчас обобщим эти результаты на случай любых систем,
состоящих из т однородных уравнений с п неизвестными.
Пусть дана система
A)
Вектор у = {л, ..., хп} арифметического /г-мерного пространства 1)
называется решением системы • A), если, подставив в A) значения
h — xv ¦¦•' tn~xn> получим тождество 0 = 0.
Если вектор v = {xv ..., хп\ есть решение системы A), то
решением этой системы является и вектор Xv при любом Я; если
v и v'—решения системы A), то и вектор v-f-v' есть решение.
Отсюда следует, что множество всех векторов v = {xv ..., хп\
арифметического пространства V, являющихся решениями систе-
системы A), есть векторное подпространство XsV", называемое про-
пространством решений системы A). Найдем базис этого пространства
и определим его размерность.
Мы уже знаем, что однородное уравнение
Й1Г1 -j- a2r2-+-... -f-anin ¦¦= V [i )
называется линейной комбинацией уравнений A), если вектор
\ai' ••-, ап) есть линейная комбинация строк матрицы коэффи-
коэффициентов
' iu л1а ... aln \
\ami. ami ••¦ атп '
(т- е. если левая часть уравнения A') есть линейная комбинация
левых частей уравнений A)).
ное ' вместо арифметического пространства А" можно взять любое п-мер-
^ векторное пространство L" с выбранным в нем раз навсегда базисом
в1'вй "' е11 Тогда каждый вектор v = xlei -(-... +х„ея также можно записать
314
ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ)
[ГЛ. ХЦ
После этого линейная независимость системы однородных линей-
линейных уравнений и связанные с ней понятия определяются автомати-
автоматически. В частности, рангом системы уравнений A) называется ранг
матрицы B); он равен максимальному числу уравнений системы A),
образующих линейно независимую подсистему.
Две системы линейных уравнений (с п неизвестными) называются
эквивалентными, если они имеют одно и то же пространство реше-
решений Xs V".
Пусть система уравнений A) имеет ранг г. Возьмем в ней
какую-нибудь максимальную линейно независимую подсистему; без
ограничения общности можно предположить, что такую подсистему
образуют первые г уравнений
C)
системы A); остальные уравнения системы A) являются линейными
комбинациями уравнений системы C), поэтому всякое решение
системы C) есть и решение системы A); очевидно и обратное
утверждение: всякое решение системы A) есть решение подси-
подсистемы C). Итак, система однородных линейных уравнений A) экви-
эквивалентна (всякой) своей максимальной линейно независимой под-
подсистеме C). Будем решать систему C).
В матрице
'11
'12
D)
г строк, и они образуют линейно независимую систему; значит, ранг
матрицы D) равен г и в ней имеется г столбцов, образующих
линейно независимую систему. Без ограничения общности можем
предположить, что эта линейно независимая система образована
первыми г столбцами. Тогда отличен от нуля детерминант
'22
Перепишем систему C) в виде
1 • • • "ln'n>
arrfr = — ar,
¦arJn
C')
ft 8] СИСТЕМЫ ЛИНЕЙНЫХ ОДНОРОДНЫХ УРАВНЕНИЙ 315
и дадим переменным ir+l, ..., tn какие-нибудь числовые значения:
так что правые части уравнений C') суть известные числа. Так как
детерминант системы C') отличен от нуля, то система C') одно-
однозначно решается по правилу Крамера: tl = x1, ..., tr — xr. Итак,-
каждому набору чисел E) однозначно соответствует решение
{*!, ..., Хп 6г+1, ..., 1п) F)
системы C') (являющееся решением и системы A)). Возьмем, в част-
частности, следующие наборы E):
1, 0, ..., О, EХ)
О, 1, ..., О, EЯ)
О, 0, ..., 1. E„_г)
Им будут соответствовать следующие решения системы C'):
v — iv-d) v-u) 1 о
v = Jy-B> V-B) 0 1
г > > ' > b 1 ,~
Докажем, что векторы-решения G) образуют базис простран-
пространства X всех решений A). Прежде всего докажем, что векторы G)
линейно независимы. В самом деле, пусть
Расписывая это равенство соответственно по (г+1 )-й, (г+2)-й, ..., л-й
координате входящих в него векторов G), получим:
Я1.1+Яя-0+...+Я„_г.0 = 0,
т. е. ^ = ^2= ... =А.„_Г = О, что и требовалось доказать1).
Остается доказать, что каждое решение
V / V*., У У У V
V \Л1, •*"?, . . . , Лг, ¦ . . , Л„(-
есть линейная комбинация решений G). Рассмотрим вектор
v —v xv xv (К\
х) Вместо наборов (б^—E„_г) можно было бы взять для построения
Оазиса любые наборы E), образующие невырождающуюся матрицу.
316 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [гл. XII
Очевидно, (г-{-1)-я, (г-}-2)-я, ..., /г-я координаты этого вектора
равны нулю, так что вектор v0 имеет вид
voHb, •••• Ь. о, с, о, .... о}.
Так как вектор v0 есть линейная комбинация векторов-решений
v, vx, ..., vn_r системы C'), то и v0 есть решение этой систе-
системы. Значит, подставляя в эту систем} координаты вектора v0, т. е.
полагая t1 = %v ..., ir — \r tr+l= .. . —tn = 0, превратим систе-
систему C') в систему тождеств
«llSl + «12^2 + • • • -Ml,4=0.
°2i?i + «22^2 + • • • -I- a2rlr = 0,
58 Т • ¦ ¦ Т "rrbr ~~ и>
означающую, что вектор {?х, ..., Ъ.г) есть решение системы одно-
однородных уравнений
ап*1 + аг2^2 + • • • + arrtr =0.
Но детерминант этой системы не раве-i нулю, поэтому нулевое реше-
решение ^1=...=5г==0 есть единственное решение этой системы и
вектор v0 есть нулевой вектор. Значит (в силу определения (8)
вектора v0), имеем
— произвольное решение v системы A) есть линейная комбинация
решений vx, ..., vn_r; эти решения, будучи линейно независимыми,
образуют базис пространства X. Наша цель достигнута — доказана
следующая основная
Теорема 12. Пусть дана система A) линейных однородных
уравнений с п неизвестными. Пусть L" — арифметическое п-мерное
пространство (или любое п-мерное векторное пространство с фикси-
фиксированным базисом ех, е2, ..., е„). Если ранг системы A) равен г,
то множество всех векторов
V \*Ц Л2> • ¦ • I Лп!>
являющихся решениями системы A) есть (л — г)-мерное подпрост-
подпространство пространства Ln.
Из теоремы 12 сразу вытекает вгжнейшее
Следствие. Для того чтобы система однородных уравне-
уравнений A) имела ненулевое решение, необходимо и достаточно, чтобы
ранг системы был меньше числа неизвестных.
§ 81
СИСТЕМЫ ЛИНЕЙНЫХ ОДНОРОДНЫХ УРАВНЕНИЙ 317
В частности:
1° Всякая система однородных линейных уравнений, в которой
число уравнений меньше числа неизвестных, имеет ненулевое решение.
2° Система, состоящая из п однородных уравнений с п неиз-
неизвестными, тогда и только тогда имеет ненулевое решение, когда
детерминант системы равен нулю.
Рассмотрим еще отдельно случай системы из п независимых
однородных линейных уравнений с л+1 неизвестными; ранг такой
системы равен п, следовательно, многообразие решений одно-
одномерно: если
vo = {xv . .. , хп, хп+1}
—-одно какое-нибудь ненулевое решение данной системы, то все
решения имеют вид v = X.v0. Без ограничения общности можно
предположить, что детерминант минора, состоящего из первых п
столбцов матрицы нашей системы, отличен от нуля. Тогда, записы-
записывая данную систему в виде
anix-\- .. .+alntn= —aUn+1tri + 1, )
(Ю)
anif\. ~Г • • • + anJn = аи,в + 1*и + 1 J
и давая неизвестному tn + l произвольное значение tn+1 = xn+1, можем
определить и значения неизвестных ix = xv ... , tn = хп по правилу
Крамера, а именно:
где А{ есть умноженный на (—1)|+1 детерминант матрицы, получен-
полученной вычеркиванием из матрицы
1.11 + 1
данной системы f-го столбца. Итак, решениями системы являются
все векторы v = {gXI ... , |в+1}, где
Сформулируем теперь и докажем теорему, обратную к теореме 12.
Теорема 13. Пусть дано векторное пространство L" размер-
размерности п с фиксированным базисом elf е2, ... , е„. Всякое р-мерное
подпространство If пространства Ln, Oz?Zp^.n, есть пространство
Решений некоторой системы линейных однородных уравнений с п
неизвестными ранга q = n—р, а именно линейно независимой систе-
системы из q уравнений.
318 ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ) [ГЛ. XII
Доказательству предпошлем несколько замечаний.
Раз базис ех, е2, ... , ел пространства L" фиксирован, то
каждый вектор v ? Z." записывается в виде
и для любых двух векторов vL = {xlt ... , хп\ и v~{ylt ... , уп)
определено число
(U, v)=x1y1+ ...-\-хпуп.
Число это, если угодно, можно назвать скалярным произведением
векторов и и v относительно данного базиса е1( ... , е„. Оче-
Очевидно
(v, u) = (u, v),
а также
M M X u2, v),
т. е. скалярное произведение по отношению к данному базису обла-
обладает свойствами симметрии и линейности обычного скалярного про-
произведения, определенного в главе ]V для векторов трехмерного
пространства.
Если (v, u) = 0, то мы скажем, что векторы v, u ортогональны
по отношению к базису ех, ... , е„ или что они аннулируют друг
друга.
Если дано какое-нибудь множество векторов M={v\ и векторы
ub u2 ортогональны (в только что определенном смысле) к каждому
из векторов v?M, то и всякая линейная комбинация A^Uj-|-A2u2
будет ортогональна к каждому вектору v?M.
Отсюда следует, что множество всех векторов и ? L-", ортого-
ортогональных к каждому из векторов данного множества М, есть под-
подпространство пространства L"; мы будем его называть аннулятором
множества М и обозначать через NM.
Нас будет интересовать случай, когда множество М само есть
пространство LPczL".
Пусть в пространстве LP дан какой-нибудь базис, состоящий из
векторов
С1== {СШ C12i • • • 1 С1„Ь I
A1)
Cp~\CpV Ср2> ¦•• » Срп(- )
Тогда аннулятор Li подпространства U совпадает с аннулятором
базиса съ ... , ср.
В самом деле, всякий вектор и, аннулирующий все векторы
сх, . . . , ср, аннулирует и всякую их линейную комбинацию, т- е<
все векторы v ? LP. Обратное очевидно. Но аннулятор совокупности
§ 8]
СИСТЕМЫ ЛИНЕЙНЫХ ОДНОРОДНЫХ УРАВНЕНИЙ 319
векторов A1) есть не что иное, как пространство решений системы
уравнений
I A2)
cp2t2 + ... + срntn = О,
имеющее размерность п—р.
Итак:
3° Аннулятор р-мерного подпространства LPcL" есть подпрост-.
ранство L\aLn размерности q = n—р.
Докажем теперь, что аннулятор пространства
Ц = NLP
есть пространство IJ. Прежде всего, если и — какой-нибудь вектор
из LP, a v — любой вектор из L.\ = NW, то (v, и) = 0 — каждый
вектор v из L? аннулирует все векторы из L\, т.е. v?A/I? и,
значит, Lp<=;NL4x. Но размерность пространства NL\ есть, по дока-
доказанному, п — q = n—(п—Р)=Р, поэтому Lp, будучи р-мерным под-
подпространством NLf той же размерности р, совпадает с этим
последним.
Итак, формула NL^ = LP, или
NNLp = LP,
доказана.
Возьмем теперь в пространстве L\ = NLp какой-нибудь базис;
векторы, являющиеся элементами этого базиса, обозначим через
I> = {au, а12, ... , а1и}, \
\ A3)
Тогда аннулятор пространства Z.1?, т. е. пространство L?, есть про-
пространство решений системы уравнений
ntn =0,
[ (И)
Эта система линейно независима (так как независима система век-
векторов A3)); ее ранг равен числу уравнений, т. е. q = n—р. Тео-
Рема 13 доказана.
Второе доказательство теоремы 13. Пусть A1)—базис про-
пространства Lp. Без ограничения общности можно предположить, что детерми-
детерминант
CPP
320
Если
ВЕКТОРНЫЕ ПРОСТРАНСТВА (МНОГООБРАЗИЯ)
[ГЛ. XII
х — \хи ... , Хр, ... , хп)
— произвольный вектор пространства LP, то матрица
/с1г ... с1р ... cln\
срр ... срп
имеет ранг р; поэтому координаты вектора х удовлетворяют следующей си-
системе п—р уравнений:
Си
Срг
Срг
Xl
р\
Ч
... Cip
... хр
• • • С1р
... Срр
... Хр
... Cip
... Срр
... Хр
'!,/> +
1
Ср,р + 1
хр + 1
Ср,р + 2
Сщ
Срп
Хп
= 0,
= 0,
0.
Эти п — р уравнений линейно независимы, так как в матрице, составленной
из коэффициентов этих уравнений, минор порядка п—р, состоящий из по-
последних п—р ее столбцов, имеет детерминант, отличный от нуля. Он имеет
диагональный вид, причем на главной диагонали стоит одно и то же число
d?0.
Вместе с тем мы получаем способ построения одной из систем уравнений
пространства W, если нам известны координаты вектора, составляющего
его базис.
ГЛАВА XIII
ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ
НА ВЕКТОРНЫХ ПРОСТРАНСТВАХ
§ 1. Линейные функции
Задать (числовую) функцию / на векторном пространстве Z*
(в размерности л) — значит дать правило, позволяющее поставить
в соответствие каждому вектору n?Ln некоторое число/(и) (зна-
(значение функции / для этого вектора и). Если в пространстве задан
некоторый базис elt ... , ел, позволяющий каждый вектор u ? L"
записать в виде
и = х1е1 + х2е2+...+хпеп=з{хъ хг, ...,х„\, A)
то возникает задача: выразить для каждого вектора A) значение
/(и) через координаты хх, ... , хп вектора и (посредством неко-
некоторой формулы).
Определение 1. Функция /, определенная на пространстве
¦?", называется линейной^ если она удовлетворяет условиям:
1° /(и1 + и2)=/(и1)-т-/(И2) для любых двух векторов nv u2?Ln.
2° /(A,u) =A,/(u) для любого вектора n?Ln и любого числа X.
Эти условия могут быть заменены одним условием:
(Щ), B)
из которого следует н общее условие:
Для любых векторов uv ... , и„ из L" и любых чисел Xlt ... , %п.
Для любого вектора и = х1е1+...+л;не„ значение функции/
есть /(ц) =х1/(е1)+ • • • +хп/(еп). Обозначим значение функции/
для векторов е1( ... , е„ через
/(е.) = а«>, /(е2) = а<2) /(е„) = а"". C)
Тогда имеем
/(и) = a^Xl +...+ а^хп (для и = лг^^¦+-...+ х„еп). D)
П. С. Александров
322 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [гл. ХЩ
Правая часть равенства D) есть однородный многочлен первой
степени, илн линейная форма от переменных хъ лг2, ... , хп *),
Итак, если в пространстве Vх задан базис ех, е2, .. • , еп, то
линейная функция f записывается в виде линейной формы D), вы-
выражающей значение /(и) через координаты вектора и (относи-
(относительно этого базиса).
Важно заметить с самого начала: линейная функция (и вообще
всякая числовая функция) в пространстве L" не зависит от выбора
того или иного базиса в этом пространстве, «Функция» — это значит:
каждому вектору и поставлено в соответствие число /(и); это
число определено, как скоро определен вектор и; выбор базиса в
пространстве L" здесь ни при чем. Но запись D) в виде линейной
формы, естественно, зависит от выбора базиса: если вместо базиса
ех, е2, ... , е„ возьмем другой базис е^, е^, ... , е'п, то вектор ц
относительно базиса е'и ъ'г, ...,&'„ будет иметь уже другие коор-
координаты х'у, х'г, ... , х'п и
f(u)=x1f(t1) + ... + xj(eu)=sxtf&) + ... + х'„/(е'а).
Полагая Ьа) =/{&[), ... , bKn)=f(ъп), вндим, что относительно
базиса е,, ... , е'п та же функция /(и) записывается в виде линей-
линейной формы:
f (u) = Ъ™ х[ + Ь^ *,' + •..+ Ъм х'п D')
(для и = х'гъ[-\-...
Естественно спросить: как выражаются коэффициенты йа\ ... , Ьш
через коэффициенты аA), .. . , а(л), если известно, что векторы
ej, ... , ъ'п «нового^ базиса даны своими координатами относительно
*) Одночленом от переменных хг, х2, ... , хп называется всякое выра-
выражение вида ах^'х^2 ... х"^п, где а—произвольное (вещественное или комп-
комплексное) число, a /Wj, .... mk — неотрицательные целые числа. Неотрица-
Неотрицательное целое число mi + гп2-\-... -j-mk называется степенью данного
одночлена. Если она равна нулю, то одночлен превращается в константу а.
Сумма конечного числа одночленов от переменных хи х2, ... , х„ назы-
называется многочленом от этих переменных. Наибольшее из чисел, являющихся
степенями одночленов, входящих в состав данного многочлена, называется
степенью этого многочлена. Если все одночлены, суммой которых является
данный многочлен (все «члены» этого многочлена), имеют одну и ту же
степень т, то многочлен называется однородным многочленом или формой,
степени т от данных переменных xlt x«, ... , хп. Формы первой степени
называются линейными формами. Общий в'ид линейной формы от переменных
*!, ..., хп есть, очевидно, a1^1-r-a2^2+...+а„хп. Формы второй степени
называются квадратичными.
с 2] БИЛИНЕЙНЫЕ ФУНКЦИИ И БИЛИНЕЙНЫЕ ФОРМЫ 323
«старого» базиса et, ... , е„:
«i = спех -f- с21е2 + ... + сп1е,,,
(б)
Ответ дается автоматическим вычислением:
^=/(е;.) = с1,./(е1)+...+с„,./(е„) для i = l, 2, ... , я,
т. с.
с21а<2>
Мы видим, что
— при переходе от базиса ех, ... , е„ к базису е[, ... , е^, коэф-
коэффициенты линейной формы D) преобразуются так же, т. е. посред-
посредством той же матрицы, как базисные векторы.
§ 2. Билинейные функции и билинейные формы
Рассмотрим теперь функцию от двух переменных векторов u, v
пространства L", т. е. предположим, что дано правило, ставящее
в соответствие каждой паре u, v векторов пространства L" неко-
некоторое число У (и, v); предположим, кроме того, что эта функция
является линейной по каждому из своих аргументов, т. с. что вы-
выполнены следующие условия:
YX , v),
J , v2)
(каковы бы ни были векторы их, u2, U; v, vx, v2 и числа Хг, Я,2).
огда говорим, что W есть билинейная функция (подразумевается,
от двух переменных — векторов данного векторного пространства L").
11*
324 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [ГЛ. Х1Ц
Спрашивается: если векторы и и v заданы своими координатами
относительно данного базиса elt ... , е„ пространства L", так что
и = лг1е1+ • • ¦ +*„е„, v = y1e1+...+упеп, то как выразится
значение билинейной функции ? через координаты хх, ... , хп и
yv . ¦ . , уп векторов u, v?- Ответ очень прост. Ведь
? (u, v) = V (A-^i +...+ хпеп, ухгх + ... + у„е„) =
= SS^/T(e,-,e/
(=1;=i
Положим теперь Ч^е,-, е;-) = а,-у. Тогда из A) вытекает, что
что и дает ответ на поставленный вопрос.
Многочлены вида
t|,(*i, ... . хп; У1, .... У»)- ._т
линейные по каждому из двух рядов переменных
X\i Х2, . . . , Хп,
У\1 Уч.1 • • • > У Hi
называются билинейными формами от переменных xh yf {точнее,
от двух рядов переменных хх, ... , хп\ уг уп). Матрица
... а1п
а„1 п,Л ¦ ¦ ¦ аип)
п п
называется матрицей билинейной формы 2 2 а11х{У] или
билинейной функции B) относительно базиса elt . . . , е„. Билиней-
Билинейная форма называется симметричной, если симметрична ее матрица А
(т. е. если aik = aki).
В частности, билинейная форма от двух пар переменных
хм х«; ул, уч имеет вид
2, Уъ У2)=а11х1у1 +
= (au^i + о.21х^ ух + (аих1 + а2гхг) у2 =
а12у2) хх + {а21у1
~ 2] БИЛИНЕЙНЫЕ ФУНКЦИИ И БИЛИНЕЙНЫЕ ФОРМЫ 325
Вообще,
п
¦ф (Xv • • • i Ха> УU ¦ • • > Уп) = ^ (а/1#1 + • • • ~ а1пУп) Xi ==
л
==2 («ly-^l + • • • + «,,/Xj J/,.
Вернемся к общему понятию билинейной функции W (u, v). Эта
функция называется симметричной, если ее значение не меняется
при перестановке аргументов, т. е. если для любых двух векторов
u и v имеем Y (u, v) = 4f(v, и). Тогда, в частности, а^— W (е,-, еу) =
= W{tj, е,-) = а/-|- — матрица Л оказывается симметричной. Обратно,
если в каком-нибудь базисе данная билинейная функция записы-
записывается в виде билинейной формы с симметричной матрицей, то зпа-
п п
чепие функции W(u, v), равное значению многочлена ^^aijxiUp
не меняется при замене в этом многочлене одного из двух рядов
переменных хх, . .. , хп\ yv . . . , уп другим, что означает равен-
равенство 4*^D, v) = 4f(v, u), т. е. симметричность функции 4^A1, v).
Итак, симметричная билинейная функция записывается в любом ба-
базисе в виде симметричной билинейной формы. Обратно, если билиней-
билинейная функция в каком-нибудь базисе записывается в виде симметричной
билинейной формы, то она симметрична (и, следовательно, ее записью
во всяком базисе будет симметричная билинейная форма).
Каждая функция /(u, v) от двух переменных определяет функ-
функцию g от одного неременного, если положить
g(n)=/(n, и).
Функция Ф, полученная по этому правилу из симметричной били-
билинейной функции Ч^:
Ф(и) = хК(и, и),
называется квадратичной функцией, порожденной данной билинейной
Функцией Ч?.
Теорема 1. Для каждой квадратичной функции Ф существует
лишь одна порождающая ее симметричная билинейная функция f,
называемая полярной билинейной функцией от данной квадратичной.
Доказательство. Пусть W — какая-нибудь симметричная би-
билинейная функция, порождающая данную квадратичную функцию:
Для доказательства единственности функции У достаточно доказать
формулу
У (u, v) = 1 {Ф (u + v)—Ф (а)—Ф (v)}, C)
позволяющую вычислить значение функции W для любой пары век-
векторов ц, у, зная значения функции Ф для каждого из векторов
326 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [ГЛ. XIU
u, v, u + v. Подлежащую доказательству формулу C) можно пере-
переписать в виде
ф(и + у) = Ф(и) + 2? (u, v)+O(v) C')
или (по определению функции Ф) в виде
?(u + v, u-f v) = <D(u) + 2?(u, v) + O(v). C")
Но в таком виде она непосредственно вытекает из билинейности и
симметрии функции гР(и, v):
?(u + v, u + v) = Y (u + v, u) + ?(u + v, v) =
= Y(u, u) + T(v, u) + Y(u, v) + Y(v, v) =
= ?(o, u) + 2?(u, v) + Y(v, v),
что и требовалось доказать.
Если в данном базисе симметричная билинейная функция W (u, v)
записывается в виде
W (u. v) = У aikX:yu для < х х , ' " "' а,к = akh
то очевидно
Ф (u) = Y (u, n) = У а,кх,хк для u = X& + ... + xnea.
Многочлен вида У 2 aikxixk> BCe чле|1Ы которого суть одно-
одночлены а1кХ[Хк второй степени, есть не что иное, как. однородный
многочлен второй степени, или квадратичная форма (от переменных
х1У ... , хп). Мы прн этом предполагаем, что а-1к = ак{, что не пред-
представляет ограничения общности (при aik=^aki мы бы заменили каж-
каждый из этих коэффициентов их полусуммой), так что фактически
л и
коэффициент при х{хк в 2 2 aikxixk ПРИ 1ФЬ есть 2a,ft = 2a^,-.
В частности, квадратичная форма от двух переменных х, у имеет
вид аих2-\-2а12ху-J-а22У2, а от трех переменных X, у, z имеет вид
anxs -[- 2а1гху -)- а2гу'1 -\-2aVixz
Симметричная матрица
1 = 1 1
R
называется матрицей квадратичной формы У а(кх(хк, ее детерми-
детерминант называется дискриминантом квадратичной формы.
§31
МАТРИЦА БИЛИНЕЙНОЙ И КВАДРАТИЧНОЙ ФОРМЫ 327
jVSh получили следующий результат: квадратичная функция
ф(и)=гРA1, и). порожденная данной билинейной функцией Y, во
всяком базисе записывается в виде квадратичной формы, имеющей
Ти же матрицу, что и билинейная форма, являющаяся записью
функции W.
Другими словами: квадратичная функция Ф и ее полярная функ-
функция Ф" во всяком базисе записываются в виде форм (квадратичной,
соответственно билинейной), имеющих одну и ту же (симметричную)
матрицу. Поэтому билинейная форма, имеющая ту же матрицу, что
и данная квадратичная, называется полярной формой от данной квад-.
ратичной.
§ 3. Матрица билинейной и квадратичной формы
и ее преобразование при переходе к новому базису
(при преобразовании переменных)
В пространстве Ln с заданным базисом ех, ... , е„ линейная
функция записывается в виде линейной формы, а билинейная — в виде
билинейной формы.
Чтобы задать линейную форму, достаточно задать набор ее ко-
коэффициентов av ... , ап; для того чтобы задать билинейную (или
квадратичную) форму, надо задать ее матрицу
hi
A)
ДОы выяснили в § 1, как преобразуется набор коэффициентов
o-i, ... , ап линейной формы при переходе от базиса е^ ... , ел
к новому базису е^, ... , е^. Спрашивается: как при переходе от
базиса е^ ... , еп к базису ei, ... , е'п преобразуется матрица А
билинейной формы? Мы сейчас дадим ответ на этот вопрос.
Теорема 2. Пусть билинейная функция 4F (u, v) записывается
относительно базиса ех, ... , е„ в виде билинейной формы
с матрицей А, а относительно базиса е'и ... , е'п в виде билинейной
формы
с матрицей А\
328 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [Гл. Х1Ц
Пусть
el = сиег + с21е2 + ... + си1е„, )
C)
ея = с1,;ег + с2„е2+ . ..+сЙДе„. J
Полагая г)
С12 ' • •
Ся1 Сл2 • • • спп
имеем2)
Х1 =
хп ~ сп1х1 "Ь сп2ха "Г • • • + сПпХп-
В этих обозначениях имеет место формула
А'=С*АС, F)
где С*, как всегда, есть транспонированная матрица к С (т. е. ма-
матрица коэффициентов в C)).
Прежде чем доказать формулу F), укажем на некоторые ее не-
непосредственные следствия.
Так как detC* = detC, то
Таким образом, доказана
Теорема 3. При линейном преобразовании E) дискриминант
п
квадратичной формы Ф (и) = V aikx{xk для и =*1e1+ ... +хпе„
умножается на квадрат детерминанта матрицы преобразования D) и,
следовательно, сохраняет свой знак.
В частности, если преобразование С ортогонально, то (det СJ = !,
и, следовательно, при ортогональном преобразовании E) дискрими-
дискриминант квадратичной формы не меняется.
Доказательство формулы F). Возьмем матрицы
*=( ; J. y=\ ; ] G)
\xn/ \У„.
состоящие из одного столбца и л строк.
') То есть обозначая через С матрицу, транспонированную к матрице
)фициептов в
») Гл. XII. §
коэффициентов в C).
" - -I, §2.
3]
МАТРИЦА БИЛИНЕЙНОЙ И КВАДРАТИЧНОЙ ФОРМЫ 329
Транспонированная к X матрица А"* состоит из одной строки
и п столбцов:
Умножая матрицу А на матрицу К, получим матрицу
апу1 + а12у2 + . .. + аыу„
AY= [ «ai^i + а22у2 + • • • -г а2пу„
anly1+an2yi+... + аппуп/
состоящую снова из одного столбца и п строк, а умножая X* на
матрицу AY, получим уже матрицу X*AY, состоящую из одной строки
и одного столбца, т. е. из одного элемента
который есть не что иное, как наша билинейная форма
я|>(*1- ••• . •*»: Уъ ¦•¦ . Уп)-
Итак, билинейная форма о|) (изображающая функцию ?(u, v)) мо-
может быть записана в виде следующего произведения матриц:
Y(u, v)=5i|)(*i, ••• . *„; Ух yn)=X*AY. (9)
Запишем преобразование E) в виде матричного равенства:
т. е.
Х = СХ'У Y=CY\ A0)
и, значит,
Х* = {Х')*С*. (П)
Подставим A0) и A1) в (9), получим тождество
W(u, v) = y{Xl хп; уъ ... , yn)=X*AY={X')*(C*AC)Y'.
Но в силу (9) с заменой А' на С*АС матричное произведение
{X')*(C*AC)Y'
представляет собою билинейную форму г|)' от переменных х\, ... , х'п;
У\, ¦.. , у'п с матрицей С*АС и
330 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [ГЛ. XIII
Так как матрица формы г|/ (х\, . .. , х'п\ у'и ... , у'п) была обозна-
обозначена через А', то формула F) доказана.
Подставляя в предыдущие формулы всюду u = v и, следова-
следовательно, ух~хх, ... , Уп — хп; у\—х\, ... , у'п=х'„, получаем
Следствие. Пусть квадратичная функция Ф (и), определенная
в L", записывается относительно базиса elt е2, ... , е„ квадратич-
квадратичной формой ф (xv ... , хп) с симметричной матрицей А:
п
Ф(и)=ф(дгх *„)== ^ aikx;xk при и = д;]е1+ ...+х„е„,
а относительно базиса e'lt ..., е^, — квадратичной формой ф' (х'1г..., х'п)
с матрицей А':
п
Ф(и)=ф'(д:^, ... , х'„)= У] a'lkx\x'k при ъ. — х'хъ'х-\-..
причем переход от базиса е1г .. . , еп к базису &'lt ...,&'„ дается
формулами C). Тогда
А' = С* АС. F)
§ 4. Ранг билинейной и квадратичной формы
(билинейной и квадратичной функции)
Рангом билинейной (а также рангом квадратичной) формы назы-
называется ранг ее матрицы. Одна и та же билинейная (квадратичная)
функция Ф(и) в пространстве L" представляется, в зависимости от
выбора того или иного базиса, различными билинейными (соответ-
(соответственно квадратичными) формами, матрицы которых связаны форму-
формулой F) § 3. Однако имеет место замечательный факт: у всех этих
матриц ранг один и тот же. Итак, имеет место
Теорема 4. Все билинейные {все квадратичные) формы, пред-
представляющие в различных базисах пространства L" одну и ту же би-
билинейную (соответственно квадратичную) функцию, определенную в
этом пространстве, имеют один и тот же ранг. Его естественно наз-
назвать рангом соответствующей функции.
Для доказательства этой теоремы достаточно убедиться в том,
что матрицы, образующие левую и правую части равенства F) § 3,
имеют один и тот же ранг. Так как при этом С и С* суть невы-
рождающиеся матрицы, то достаточно доказать следующее вспомо-
вспомогательное предложение:
Теорема 5. Умножая произвольную матрицу А (слева или
справа) на невырожденную квадратную матрицу Q, мы не меняем
ее ранга.
Доказательство этой теоремы, как мы увидим, опирается на сле-
следующее предложение, с доказательства которого мы и начнем.
g 4j РАНГ БИЛИНЕЙНОЙ И КВАДРАТИЧНОЙ ФОРМЫ 331
Теорема 6. Ранг произведения матриц не превосходит ранга
каждой из перемножаемых матриц.
Теорему 6 достаточно доказать для произведения двух матриц.
Итак, пусть
¦• а1
__
hk
b
Тогда
cik =
Записывая это равенство для данного k и любого /=1, 2, ..., т,
видим, что k-й столбец матрицы С есть линейная комбинация всех
р столбцов матрицы А (с коэффициентами bn, b2k, ..., bpk).
Это верно для каждого k, так что столбцы матрицы С являются
линейными комбинациями столбцов матрицы А.
Так как ранг матрицы равен максимальному числу ее линейно
независимых столбцов, то из только что сказанного и из теоремы 5
главы XII сразу вытекает, что ранг матрицы С не превосходит
ранга матрицы А.
Аналогично (опираясь все на то же равенство A)) мы доказали
бы, что ранг С не превосходит и ранга В. Теорема 6 доказана.
Теорема 5 является легким следствием теоремы 6. В самом деле,
пусть А — матрица ранга г, состоящая из т строк и п столбцов.
Пусть Qx—невырожденная матрица порядка п, Q2—невырожденная
матрица порядка т. Тогда определены матрицы C1 — AQ1 и C.2 = Q2A;
докажем, что их ранги гх и г2 совпадают с рангом г матрицы А.
Прежде всего, по теореме 6 имеем
Но
и, значит,
т. е. r = rlt r = rv Теорема 5, а следовательно, и теорема 4 дока-
доказаны.
332 ЛИНЕЙНЫЕ, БИЛНННЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [ГЛ. ХШ
§ 5. Существование канонического базиса
для всякой квадратичной и всякой билинейной функции
(«приведение квадратичных форм к каноническому виду»)
Квадратная матрица
О \
aih — 0, если i*?k, (I)
>ап О
все элементы которой, не лежащие на главной диагонали, равны
нулю, называется матрицей диагонального вида или просто диаго-
диагональной матрицей.
Квадратичная, а также билинейная форма, матрица которой имеет
диагональный вид, называется формой канонического вида, или
просто канонической формой, или канонической записью (канони-
(каноническим представлением) данной квадратичной функции или квадра-
квадратичной формы.
Теорема 7. Для каждой квадратичной и для каждой симмет-
симметричной билинейной функции, определенной в пространстве L", суще-
существует канонический базис, т. е. базис ех, . . ., е„, в котором данная
функция имеет каноническую запись.
При этом число отличных от нуля среди коэффициентов ап, .. ., апп
во всякой канонической записи равно рангу функции.
Мы знаем, что каждая симметричная билинейная функция явля-
является полярной функцией от одной и только от одной квадратичной
функции и что обе эти функции во всяком базисе имеют одну и ту
же матрицу. Поэтому достаточно доказать теорему 7 для квадра-
квадратичных функций. Заметим прежде всего, что ранг матрицы диагональ-
диагонального вида A), очевидно, равен числу отличных от нуля ее членов
ап, ..., апп. Поэтому, если квадратичная функция в каком-нибудь
базисе имеет каноническую запись, то число отличных от нуля
коэффициентов в этой записи равно рангу функции — второе утверж-
утверждение теоремы 7 есть следствие первого. Переходим к доказательству
первого утверждения. Тривиальный случай, когда Ф(и)=0 для всех
и ? ^-"> оставляем в стороне.
Пусть в пространстве L" дана квадратичная функция Ф, за-
записывающаяся в некотором базисе ех, ..., е„ в виде
п
Ф (и)= ф (д^ , хп) ~ 2 aikxiXk для u=x,ei+... +х„е„. Пусть,
наряду с базисом ех, ..., е„, дан второй базис е'ь ..., е'„. Для каждо-
каждого вектора ц ? L" имеем и = хгег -f- ..'.-}- хпеп = х[е\'-^- . . . + х'„е'п,
причем координаты xv ..., хп и х\, ..., х'п вектора U
о gi СУЩЕСТВОВАНИЕ КАНОНИЧЕСКОГО БАЗИСА 333
соответственно в базисах ev ..., е„ и еи ..., е„ связаны форму-
формулами преобразования координат:
1п )
; B)
п1Х1 "Ь • • • "Ь сппхп' )
Xn — cr*x
det С =
Тогда
Ф(и)= 2
ДЛЯ i, k = l i, k = l
u = лг1е1 + ... + лг„е„ = х\г\ + ...+ x'ne'n.
Базис ex, ..., еп и, следовательно, представление функции Ф в виде
п
формы ф (xv ..., хп)= 2 aikxixk считаем данными; задача со-
i. к=1
стоит в том, чтобы подобрать базис e'j, ..., е'п или, что то же
самое, формулы преобразования переменных B) таким образом, чтобы
матрица
' = ( 1 =
С*АС
п
квадратичной формы ф' (х\, ..., х'п)=^ 2 a'ikx'tx'k' представляю-
щей функцию Ф, в этом базисе имела диагональный вид, т. е.
чтобы было a'ik = 0 для любых i=^=k.
Задача эта обычно называется задачей приведения квадратичной
п
форпы ф (хь .. ., хп) = 2 aikxixk K каноническому виду
I. k=i
п
ф' (x'lt .. ., дг^)^2 a'iix'i посредством линейного преобразования B)
переменных хъ .. ., хп (к переменным х\, .. .,х'п).
Будем ее решать индукцией по числу переменных (т. е. по
числу измерений пространства L") — мы увидим, что все дело све-
сведется к простой алгебраической выкладке2).
') Так что формулы перехода от базиса е1 е„ к базису е^ е^
имеют вид
B*)
а) Излагаемый ниже метод доказательства теоремы 7 принадлежит вели-
великому французскому математику Лагранжу (J. L. Lagrange, 1736—1813).
334 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [ГЛ. XIII
При п = 1 форма ф имеет вид ср (xt) = аих2, и этот вид уже
является каноническим. Предположим, что теорема 7 доказана для
/и<л. Докажем ее при т = п. Предположим сначала, что в фор-
л
ме ф (хъ ..., хп)= 2 aikXiXk хотя бы один коэффициент вида
аи, т. е. коэффициент при квадрате одного из переменных, отличен
от нуля. Без ограничения общности можем предположить, что
ап Ф 0. Тогда выражение
-~(апх1 + а1гх2 + ...+а1пхп)* C)
1
(после раскрытия скобки) является однородным многочленом второй
степени, т. е. квадратичной формой от п неременных xlt ..., хп,
в которой члены, содержащие хг, суть в точности те же, что и в
форме ф {хх, ..., хп). Поэтому разность
ф {х1г .... х„)—— (а11х1 + ... + а1пхп)г
есть квадратичная форма уже от п—1 переменных дг2 хп,
которую мы обозначим через фх (х2, ..., хп):
ц>х(х2, ..., лг„) = ф(х1, ..., лг„)—— К^+.-.+^ЛJ-
В силу индуктивного предположения существует линейное преобра-
преобразование неременных х2, ..., хп:
— C22-J<:2 ~\~ ¦ ¦ • "Г С2п*П >
Ct>n . • » Са
v г v' -X- -Х- г у' I
приводящее форму фх (х2, ..., хп) к каноническому виду
Поэтому имеет место равенство1)
ф (дгг, ..., хп) = — (^nxi + • • • + ainxnJ + а'гх'г +...-)- а'пх'п. D)
Теперь положим
•^i== ал1хг. "Г а12Л:2 "Ь • • • + a\.nxni ai==H~' ' '
что позволяет нам записать D) в виде
ф (*„ ...,*„)=«;^;2+«;^2 +...+*;*;', (в)
1) Являющееся тождеством относительно xlt хг, ..., хп, если разрешить
систему B„_х) относительно х'3 х'п (что возможно ввиду det С ф 0) и
подставить полученные выражения х'2, ..., х'п через х2, .,., хп в правую
часть равенства F).
§ 3]
СУЩЕСТВОВАНИЕ КАНОНИЧЕСКОГО БАЗИСА 335
— форма ф (*!, .. •, хп) приобрела относительно переменных х\у ... х'п
канонический вид; переход от переменных xv .. ., хп к переменным
х ..., х'п есть линейное преобразование переменных с невырож-
невырожденной матрицей. В самом деле, разрешая E) относительно хх, по-
получим
Подставляя сюда вместо х2, ..., хп их выражения BП_1) через
х'2, • • •> x'ni можем—после приведения подобных членов—переписать
E') в виде
Х1 = CU-*4 "Ь С1гХг + • • • + СыХп, СИ~^~Ф О,
что вместе с Bn-1) дает нам искомые формулы преобразования
переменных
•, + ...¦
ГЦ/
•*•« — Сп2Л'2 + • • • "Т слпЛ'/г
< детерминантом
det С = с
и
?=0.
Итак, преобразование B„) приводит форму ф (хъ ..., хп) к кано-
каноническому виду F) и решает, таким образом, поставленную задачу
в предположении, что хоть одно а,-,- ?= 0.
Остается рассмотреть случай, когда все а,-,- = 0. Таким образом,
для всех отличных от нуля коэффициентов aik формы ф (хъ ..., хп) =
п
^ 2 aikxixk имеем 1фк. Среди этих коэффициентов имеются
I, k=i
отличные от нуля (иначе было бы Ф(и)^ф(лг1, ..., хп)^0 — три-
тривиальный случай, исключенный выше). Итак, пусть, например,а12^=0.
Тогда
ф (xlt ..., хп) =2а1гхгхг-\- члены, каждый из которых содержит
хотя бы одно из переменных х3, ..., хпг).
п
х) В самом деле, в форме 2 ai&ixk членами, не содержащими ни
г. k=i
одного из переменных х3, ...,хп, являются лишь altx\, 2anxlxi, аггх\, в на-
наших предположениях а11 = агг = 0, и остается только 2а1ах1л:а.
336
ЛИНРЙННР, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ
(гл. хщ
Сделаем преобразование
х1 — ЛГ]
G)
детерминант которого есть
1
1
0
— 1
1
0
0 ...
0 ...
1 ...
0
0
0
О 0 0
1
1 —1
1 1
Преобразование G) переводит форму ф (лгх, ..., хп) в форму
ф' (х\, ..., х'а), которая состоит из 2а12(х[—х'г){х'х-\-х'г), т. е.
из 2а12х\ —2аХ2х\ и из членов, содержащих по крайней мере одно
из переменных x's, ..., х'п; ни один из этих членов не может со-
сократиться ни с 2акх'х\ ни с 2а-12х\2, поэтому форма ф [х\, ...,х'п)
содержит х\ с коэффициентом 2а12, отличным от нуля; значит,
ф' (х\, ..., х'п), по предыдущему, приводится к каноническому
виду линейным преобразованием переменных х\, ..., х'п к каким-то
новым переменным х\, ..., х"п. Переход от первоначальных пере-
переменных хъ ..., хп к переменным х'[, ..., х"п (слагаясь из двух
невырожденных линейных преобразований) является невырожденным
линейным преобразованием, приводящим форму ф (хъ ...,хп) к ка-
каноническому виду. Теорема 7 доказана.
Теорема 8 («закон инерции для квадратичных
фор м»).Во всех канонических записях данной квадратичной функцииФ:
для
число положительных среди коэффициентов аъ .,., ап одно и то
же; оно называется индексомх) данной квадратичной функции (и
индексом любой квадратичной формы, представляющей эту функцию
в каком-либо базисе).
Доказательство. Пусть даны какие-нибудь два канонических
представления квадратичной функции Ф:
Ф (и) == Ф'
= а\х[2+
1) Распространено излишне длинное название «положительный индекс
инерции», которого мы придерживаться не будем.
§ 5]
ДЛЯ
для
СУЩЕСТВОВАНИЕ KAHOHHMF.CKOrO БАЗИСА
.. . -\-х'пёп,
33?
(8я)
В канонических представлениях (8') и (8") мы пишем лишь члены,
отличные от нуля; их число, по только что доказанному, в обоих
представлениях одно и то же и равно рангу г функции Ф.
Предположим, что в представлении (8') имеется k положительных
коэффициентов, а в представлении (8") число положительных коэф-
коэффициентов есть h=?k. Без ограничения общности можем предполо-
предположить, что среди коэффициентов а\ положительными являются
а'х, . • ¦, a'k (и только они) и что среди коэффициентов а] положи-
положительны а\, ..., a"h. Переход от переменных хъ ..., хп к пере-
переменным х\, ..., х'п и к переменным х"и ..., х"п осуществляется
невырожденными линейными преобразованиями, так что, обратно, как
х\, ..., х'п, так и x"lt ..., х"п линейно выражаются через хъ ..., хп:
(9')
(9")
Без ограничения общности можем предположить, что
Напишем уравнения, полученные приравниванием нулю правых частей
первых k тождеств (9') и последних п — h тождеств (9"). Получим
всего
k+n—h<n
однородных уравнений (относительно п неизвестных хх, ..., хп):
х[ = с[1х1 +...+ с\пхп = О,
с'кПх„ = О,
= с
Л+1,
Хп —
— О
A0)
Так как число уравнений меньше числа неизвестных, то система A0)
имеет решения, отличные от нулевого. Пусть {^, ..., gn} — одно
из таких решений. Подставляя значения х1 = \х, ..., хп — ?„ в (9')
338 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [гЛ. XJH
и (9"), получаем числовые значения переменных х\ и х\ (/=1, 2,..,
..., пI), причем
х[ = ... = х'к = О,
xh+l — • • •.=Хп = 0,
так что при подстановке найденных числовых значений переменных
х\, .. ., х'п и х{, ..., х"п в (8') и (8") получим числовое значение
многочлена ср (xlt ...,xn), равное одновременно
а'к+1Хн+1+---+а'гХ'гЛ О1')
и
aix1 -\- ...-\-ahxh . (I Г)
Но все коэффициенты при квадратах в (I l') отрицательны, а в (И") —
положительны, поэтому (II') и (II") могут выражать одно и то же
число лишь при условии, что одновременно все числа x'k+1, ..., х'г
и х"и ..., x"h равны нулю. Значит, выполнены не только тождества
cftn, i5i+ • • • + chu,n %n =0>
но и тождества
с" s i 4- г" ? — О
т. е. {|х, ...,|п} есть решение системы
с"У1х1 + . . . + спхп = О,
cttlxl Т ¦ • • ~\- сппхп — О
из п однородных уравнений с п неизвестными; значит, детерминант
этой системы, т. е. детерминант с", должен быть равен нулю, тогда
как он отличен от нуля. Полученное противоречие доказывает теорему.
Замечание. Пусть Ф — квадратичная функция ранга г, опре-
определенная в пространстве L"; индекс функции Ф обозначим через р.
Тогда в любом каноническом представлении функции 'Ф (относительно
любого канонического базиса е1; . . ., е„) Ф (n)~a1xlJr... -\-апх\ для
и = х1е1 -\- ... -\-хпеп число положительных коэффициентов среди
av ..., ап равно р, число отрицательных равно q = r—р, а число коэф-
J) Их следовало бы обозначать через х\ (Jjj, ... , ?„), соответственно
X{(?i, ..., |„); мы будем по-прежиему писать xi, xi, помня, что это—числа,
получающиеся, если в (9') и (9") подставить вместо переменных xt, ...,*лиХ
числовые значения gx \п.
с 5] СУЩЕСТВОВАНИЕ КАНОНИЧЕСКОГО БАЗИСА 339
фициентов а,-, равных нулю, есть п — г. Число s=/p—q называется
сигнатурой, квадратичной функции Ф (и всякой квадратичной формы,
представляющей относительно какого-нибудь базиса функцию Ф).
Из трех чисел г, р, s любые два определяют третье (и q = r—р).
В самом деле, если даны r=/>-j-<7 и s=p — q, то p = —k~, q=*
спЦр?; если даны г и р, то s — 2p — г.
Полученные результаты могут быть дополнены следующим пред-
предложением.
Теорема 9. Для каждой квадратичной функции Ф ранга г и
индекса р, определенной в п-мерном пространстве L", существует.
базис ех е„, относительно которого эта функция записывается
в виде
Ф (U) = Х* + . .
для и = *1е1-Ь..+*иея.
В самом деле, предположим, что мы уже нашли базис е1г ..., 8„,
в котором функция Ф имеет каноническую запись
Среди коэффициентов av .. ., ап число отличных от нуля равно г;
поэтому без ограничения общности можно предположить (изменив,
если нужно, нумерацию единичных векторов е1; ..., еп), что аг, ..., аг
отличны от нуля, а аг+1 = ... = ап = 0. При этом среди коэффи-
коэффициентов аъ ..., аг имеются р положительных, пусть это будут
а остальные — отрицательные
aP+i — — ар+ь • • •. аг — — аг!
все aj, .. ., af можно предположить положительными.
Перейдем теперь к базису
J
что означает преобразование координат
- 1 е1 t
Х Х
340 ЛИНЕЙНЫЕ, БИЛИНКЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [гл. ХЦ|
в результате которого получаем
Ф (а) = aRJ + . ¦ • + «III - <*1Л1+1 - ... - a?|? +
для
что и требовалось доказать.
Квадратичная функция Ф (и) и представляющая ее в любом дан-
данном базисе квадратичная форма
Ф (хъ ...,*„)= 2) S atJ*ixJ
называются положительно определенными, если для любого вектора
и=7^0 значение функции Ф(и) положительно. Итак, квадратичная
форма
положительно определенна, если она обращается в нуль, лишь когда
обращаются в нуль одновременно все переменные хъ .. ., хп, и
положительна, если значение по крайней мере одного переменного
отлично от нуля.
Из этого определения сразу следует
Замечание 1. Если квадратичная функция Ф(и) положительно
определенна, то во всяком представлении ее в виде квадратичной
формы
все коэффициенты a;i при квадратах переменных положительны.
В самом деле, если положим ап^0, то, полагая
имеем
Ф(е1) = ап<0
вопреки предположению. В частности, положительны все коэффи-
коэффициенты Хх, А.2> ..., Хй в каноническом представлении
положительно определенной функции Ф(и). Обратно, из того, что
все Я..,, . .., Хп положительны, очевидно, следует, что Ф (и) > 0 для
любого vL = x[e[-{- ... +х'пе'а, т. е. что функция Ф(и) положительно
определенна.
§ 5] СУЩЕСТВОВАНИЕ КЛНОНИЧКСКОГО БАЗНСЛ 341
Итак, имеет место
Теорема 10. Для того чтобы квадратичная функция Ф (\\\
( квадратичная форма 2 2 ai?xix;) была положительно опреде-
\ i=i j=i J
ленной, необходимо и достаточно, чтобы в ее каноническом пред-
представлении (относительно канонического базиса е[, ...,еп)
Ф (и) = V;2 + . . . + Хпхпг для и = х\ъ\ -|- . . . + хпеп
все коэффициенты Я,- были положительны.
Из теоремы 10, в частности, следует, что всякая положительно
определенная квадратичная функция Ф (и) в л-мерном пространстве I"
имеет ранг п.
Замечание 2. Дискриминант положительно определенной квад-
квадратичной формы
п п
2 S aijX;Xj
1 = 1 3=1
положителен.
Так как при переходе от одного базиса к другому дискриминант
квадратичной формы сохраняет свой знак (теорема 3), то достаточно
рассмотреть дискриминант
канонического представления данной положительно определенной
квадратичной формы, который (так как все X,- > 0), очевидно, по-
положителен.
Квадратичная функция (форма) называется полуопределенной по-
положительно, если для всех векторов и имеем Ф(и)^0. Очевидно,
для положительной полуопределенности квадратичной функции не-
необходимо и достаточно, чтобы в ее каноническом представлении все
коэффициенты Я,- были неотрицательны.
Квадратичная функция (форма) называется отрицательно опреде-
определенной или соответственно отрицательно полуопределенной, если она
для всякого 11=5^0 принимает отрицательное, соответственно непо-
неположительное, значение. Это бывает тогда и только тогда, когда все
коэффициенты в каноническом представлении отрицательны, соответ-
соответственно неположительны.
При всяком представлении отрицательно определенной квадра-
квадратичной функции Ф(и) в виде формы
Ф (U) = ? S aUxix!
1=13=1
коэффициенты аи при квадратах переменных отрицательны.
Условимся, наконец, называть симметричную билинейную функ-
функцию ^(u, v) положительно (соответственно отрицательно) опреде-
342 ЛИНЕЙНЫЕ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФУНКЦИИ [ГЛ. XIII
ленной, если этим свойством обладает порожденная ею квадратичная
функция
ф(и) = ?(и, и).
Замечание 3. В случае двух переменных докажем следующее
предложение. Для того чтобы квадратичная форма
ф [х, У) = ахххг + 2ахгху + апуг
была положительно определенной, необходимо и достаточно, чтобы
три числа
с «и а
о —
ia
были положительны.
Необходимость условия вытекает из замечаний 1 и 2. Доказы-
Доказываем достаточность. Так как б > 0, то в каноническом представлении
формы ф(лг, у) имеем Я^ > 0, т. е. Ях и Я2 одного знака; если бы
Ях и Я2 были отрицательны, то форма ср (лг, у) была бы отрицательно
определенной, и тогда было бы ап < 0, аа2 < 0 — вопреки предпо-
предположению.
ГЛАВА XIV
ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ и-МЕРНОЕ
ПРОСТРАНСТВО Rn
§ 1. Определение и-мерного аффинного пространства
В трехмерном пространстве мы имели дело и с точками, и с век-
векторами; каждые две точки А, В, данные в определенном порядке,
однозначно определяли вектор м = АВ; каждый вектор и мы могли
приложить к любой точке М, и это определяло нам точку ./V—ко-
./V—конец вектора и, приложенного к М. Прикладывая вектор и одновре-
одновременно ко всем точкам пространства, мы получали вполне определен-
определенное преобразование — сдвиг всего пространства на вектор и. При
получающемся таким образом взаимно однозначном соответствии между
векторами и определенными ими преобразованиями пространства
(сдвигами) сумме двух векторов соответстнует сумма производимых
ими сдвигов. Поэтому мы пришли (в конце § 1 главы II) к возмож-
возможности отождествлять (свободные) векторы с производимыми ими
сдвигами пространства.
Все это мы хотим теперь обобщить с трех на произвольное чи-
число п измерений. Как и в главе XII, мы пойдем при этом по аксио-
аксиоматическому пути.
Основное определение I. Аффинное точечно-векторное
п-мерное пространство R" есть множество, состоящее из элементов
двух родов: «точек» и «векторов» пространства, о природе которых
мы не делаем никаких предположений. При этом предполагаются
выполненными следующие четыре условия — «аксиомы п-мерного
аффинного пространства» 1):
I. Множество всех векторов пространства R" есть п-мерное век-
векторное пространство {которое будем обозначать через V").
1) Они были впервые сформулированы одним из наиболее выдающихся
математиков нерпой половины текущего столетия Германом Вейлем (Hermann
v>eyl, 1888—1958).
344 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
II. Каждые две точки А, В (данные в определенном порядке)
определяют единственный вектор
u = AS. A)
III. Если даны произвольный вектор и и произвольная точка А,
то существует единственная точка В такая, что
и = АВ. A)
Другими словами: точка А и вектор и определяют единственную
точку В таким образом, что вектор, определенный (по аксиоме II)
парой точек А к В, есть именно вектор и.
Пара «точка А и вектор и» называется «вектором и, приложен-
приложенным к точке Л» (или «закрепленным» в этой точке); сама точка А
называется начальной точкой приложенного к ней вектора и, а точка В
(однозначно определенная парой А, и) называется концом вектора ц
(приложенного к точке А). Мы видим, что закрепить вектор и в точ-
точке А — значит записать его в виде A). Иногда нам будет удобно гово-
говорить, что вектор АВ есть вектор, ведущий из точки А в точку В.
Формулируем, наконец, последнюю аксиому:
IV. Если \11 = АВ и п2 = ВС, то
щ + и3 = АС. B)
Выведем первые следствия из этих аксиом, но сначала сделаем
несколько замечаний, удобных для дальнейшего.
—*- -—>
1. Если AB = AC—w, то С = В — это непосредственно следует
из аксиомы III.
2. При любом выборе точки А вектор АА есть нулевой вектор 0.
В самом деле, если Q—AB, то для любого вектора и = МА
должно быть и + 0= и, т. е. МА-\-АВ~МА или МВ — МА, а это в
силу утверждения 1 означает В = А и Q — AA.
3. Если п = АВ, то — и = ВА.
В самом деле, —и есть единственный вектор, удовлетворяющий
условию и + ( — и) = 0; но АВ-{- ВА = АА = 0, откуда и следует
ВА = — и.
4. Если даны вектор и и точка В, то существует единственная
точка А такая, что АВ— и.
В самом деле, возьмем вектор—и и приложим его к точке В,
т. е. найдем ту единственную точку А, для которой —и = ВА; тогда
и = — (—и)=АВ. Если АгВ = и, то —и = Д4', откуда (в силу ут-
утверждения 1) заключим, что А'~А.
с 2] ИЗОМОРФИЗМ ВСЕХ И-МЕРНЫХ ПРОСТРАНСТВ 345
В силу аксиомы III и утверждения 4 нмеет место утверждение
5. Произвольно данный вектор и порождает вполне определенное
взаимно однозначное отображение множества всех точек простран-
пространства R" на себя.
Это отображение, называемое сдвигом пространства R" на вектор и,
состоит в том, что каждой точке A?R" ставится в соответствие
конец В приложенного к точке А вектора u = /l/i. При сдвиге
(в силу аксиомы IV) сумме векторов соответствует сумма произве-
произведенных ими сдвигов пространства1).
Пусть \i-PQ — какой-нибудь вектор, и пусть при сдвиге на
вектор v точки Р и Q переходят соответственно в Р' и Q'; это
значит, что v=PP'=QQ'. Докажем, что тогда P'Q' =PQ=u. Но
РР' -{-P'Q' -j-Q'Q = PQ, т. е. v-j-P'Q'-f-( — v)=u, или P'Q'=u,
что и требовалось доказать.
§ 2. Системы координат. Арифметическое пространство R".
Изоморфизм всех я-мерных пространств между собою
Система координат в л-мерпом аффинном пространстве R", по
определению, состоит
из некоторой точки О («начало координат»)
и из базиса еъ е2, .. ., ея многообразия всех векторов V" дан-
данного аффинного пространства R".
Координаты какого-нибудь вектора и в этой системе координат
суть, естественно, координаты этого вектора относительно базиса
е1? е2, . . ., еп; они не зависят от выбора начала координат.
Координатами произвольной точки М пространства называются
координаты вектора ОМ.
Вектор и с координатами хъ xt, . .., хп, как всегда, обозначаем
через u = \xv л, ..., хп\; точку М с координатами хх, х2, ...,хп
обозначаем через
JVl \Х±, X2, . . . , Xп). \1)
Таким образом, запись A) означает то же, что и запись
Так как координаты данного вектора относительно данного ба-
базиса определены однозначно (гл. XII, § 2), то и координаты данной
точки М относительно данной системы координат (совпадая, по оп-
') Каждый сдвиг есть преобразование; сумма сдвигов означает сумму
(произведение) этих преобразований.
346 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
ределению, с координатами вектора ОМ) также определены одно-
однозначно.
Пусть дан какой-нибудь вектор
причем u = {#1( jfa, ..., xn},A = (av a2, ..., ап), B=Jbv b^..., bn).
Тогда О4 = \alt аг, .. ., an\, ~OB = {Ьъ b2, ...,*„}• Но ~ОА + АВ = ~О~В;
так как при сложении векторов их координаты складываются, то
последнее равенство равносильно системе равенств
а<-г¦*,¦ = ** («=1, 2, •","),
т. е.
*,=*,—в, (? = 1,2, .... л), B)
—при любом закреплении вектора ц его координаты равны разно-
разностям между соответствующими координатами концевой и начальной
точек вектора.
Или, другими словами: прилагая вектор и={лг1, х2, ..., хп\ к
точке A = (av аг, ..,, ап), получим и — АВ, где
B—i^ + Xi, а2 + лг2, ..., а„ + хп).
Переход от одной системы координат Оехеа ... ея к другой
О'е^ег ... е'п производится совершенно так же, как при п = 3; соответ-
соответствующие формулы отличаются от формул главы VIII, § 1, лишь
тем, что теперь матрицы С и С* суть матрицы любого порядка п.
В качестве важнейшего примера я-мерного аффинного простран-
пространства построим л-мерное арифметическое пространство А" следую-
следующим образом1). И точка, и векторы этого пространства суть набо-
наборы из и действительных чисел хг, хг, ..., хп, отмеченные допол-
дополнительным значком, указывающим, является ли данный набор точкой
или вектором; за этот значок можно принять, например, скобки—
круглые в случае точек, фигурные — в случае векторов. Итак,
УЙ = (лг1, лг2, . . ., хп) есть точка, а и={лг1, хг, ..., хп\ есть вектор
пространства А".
I. Векторы u={xv ж2, ,..,хп\ при этом образуют арифметиче-
арифметическое векторное пространство V"; это значит, что
{хъ х2, .... *„} + {</!, У2, ••-, Уп\ = {х1
0 = {0,0, ...,
•) Этот пример, как мы увидим в этом же параграфе, на самом деле
исчерпывает все содержание понятия я-мерного аффинного пространства: не-
несколькими строками ниже мы определим изоморфизм двух аффинных прост-
пространств и докажем, что все я-мерные аффинные пространства изоморфны про-
пространству Ап и, следовательно, изоморфны между собою.
§ 2]
ИЗОМОРФИЗМ ВСЕХ Л-М1?РНЫХ ПРОСТРАНСТВ 347
Связь между точками и векторами, описываемая аксиомами II—IV,
осуществляется следующим образом:
II. Пара точек А — (ау,а%, ...,an) и B=(bvb2, ...,bn) опре-
определяет вектор
u=AB={b1 — av Ь2 — а2, ..., Ьп — ап).
III. Точка A = (av аг, ...,ап) и вектор u = \xv х%, ...,хп\ оп-
определяет точку
В={ах + хх, а2 + х2, ..., ап + хп).
При этом аксиома IV выполнена (так же как, очевидно, выпол-
выполнены и аксиомы I, II, III).
Пусть дано взаимно однозначное отображение множества всех
точек и векторов аффинного пространства А соответственно на мно-
множество всех точек и векторов аффинного пространства В, являю-
являющееся изоморфным отображением многообразия всех векторов про-
пространства А на многообразие всех векторов npocTpjHCTBa В и удов-
удовлетворяющее, кроме того, следующему условию:
(*) Если при данном отображении точки Ах и Аг пространства
А отображаются соответственно на точки Вх и В2 пространства В,
то и вектор и = А1А2 отображается на вектор \ = ВХВ2.
Такое отображение называется изоморфным отображением аф-
аффинного пространства А на аффинное пространство В. Простран-
Пространства А и В называются изоморфными между собою, если одно из них
можно изоморфно отобразить на другое. Так как изоморфизм между
аффинными пространствами включает в себя изоморфизм много-
многообразий их векторов, то, очевидно, всякие два изоморфных аффин-
аффинных пространства имеют одну и ту же размерность.
Докажем, что и, обратно, два аффинных пространства, имею-
имеющих одну и ту же размерность, изоморфны между собою. Этот
изоморфизм мы получим, построив изоморфное отображение произ-
произвольного n-мерного аффинного пространства R" на арифметическое
я-мерное пространство А". Для этого возьмем в R" какую-нибудь
систему координат Оехе2 . . . еп. Тогда каждая точка М и каждый
вектор и пространства R" однозначно записываются в виде
M = {xv хг хп), и = {х1:х2, ...,хп\,
и сама эта запись устанавливает взаимно однозначное отображение
множества всех точек и множества всех векторов пространства R"
соответственно на множество всех точек и всех векторов простран-
пространства А", удовлетворяющее, очевидно, условию (*). Изоморфизм меж-
ДУ любым пространством R" и пространством А", а значит, и между
любыми двумя и-мерными аффинными пространствами А" и В" этим
Доказан.
348 ТОЧКЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
§ 3. г-мериые плоскости я-мерного аффинного пространства;
г-мерные параллелепипеды
1. Прямая в я-мериом пространстве. Определение l\v Пусть
в я-мерном аффинном пространстве R" дана точка А = (аг, а2, ..., ап)
и ненулевой вектор ио = {а1, а2, ..., а„}. Этими данными опре-
определено множество л1, состоящее из всех точек М, являющихся
концевыми точками всевозможных векторов вида ta0, где i — произ-
произвольное действительное число, приложенных к точке А. Так опре-
определенное множество л1 называется прямой, проходящей через точку
А (в пространстве R") и имеющей (или лнесущей на себе») направ-
направляющий вектор и0.
Точка Ж=(лг1, х2, ..., хп), являющаяся концом вектора
AM—ta0, приложенного к точке А, имеет, очевидно, координаты
Эта система равенств, в которой параметр t пробегает все дейст-
действительные значения, дает нам все точки прямой л1 и только точки
прямой я1; поэтому система A) называется параметрическим урав-
уравнением этой прямой; единственное число—::уравнение>\ не «урав--
пения» объясняется (как и в случае п = 3) тем, что система урав-
уравнений A) представляет собою координатную запись всего лишь од-
одного векторного уравнения
AM=tAB, где /Ш = и0, (Г)
которому удовлетворяют все точки прямой л1 и только они.
Пусть A = (av ..., ап) и B—{bv ...,bn) — две произвольные
точки; построим прямую, проходящую через точку А и имеющую
вектор АВ своим направляющим вектором. Это будет прямая, про-
проходящая через две точки А и В; она единственна — ее параметри-
параметрическое уравнение будет A') или
При ^ = 0 получим точку А, при ^ = 1—точку В; точки, получаю-
получающиеся из (!') или B) при t, удовлетворяющем неравенству
§ 3]
/¦-мерные плоскости 349
_; 1, по определению образуют замкнутый отрезок АВ нашей
прямой. При 0 <; t <L 1 получаем открытый отрезок прямой я1.
Равенства B) можно переписать в виде
xi = (\—t)ai + tbi (/=1, 2, ..., п) B')
или, полагая 5=1—/, в виде
что мы кратко записываем так:
М = sA + tB. Ф)
Здесь числа s n t пробегают всевозможные действительные значе-
значения, связанные между собою лишь равенством
s + t=\.
Эти числа 5 и t называются барицентрическими координатами
точки М (на прямой) в системе барицентрических координат, состоя-
состоящей из пары точек А и В.
Точки открытого отрезка АВ при этом, очевидно, характеризу-
характеризуются тем, что 0<<^<1 (значит, и 0<s<l). т. е. что и s, и t
положительны.
Как известно из механики (в случае л = 3), точка с положи-
положительными барицентрическими координатами s и t есть центр тяже-
тяжести масс s и t, помещенных соответственно в точках А и В. Отсюда
и название «барицентрические координаты» (barycentrum — центр
тяжести); поэтому равенство B) выражают словами, говоря, что
точка М есть взвешенная сумма точек А и В (числа s и i суть
«веса», с которыми точки А и В входят в сумму M — sA-\-tB).
2. Общее определение г-мериой плоскости я-мерного аффии-
иого пространства R". Вернемся к определению прямой на стр. 348.
Если вектор и0 отличен от нуля, то множество всех векторов вида
*и0 есть одномерное векторное многообразие, а именно одномерное
векторное подпространство пространства V, и каждое одномерное
подпространство VlcVn состоит из всех векторов вида tn0 при не-
некотором щфО. Поэтому данное выше определение прямой может
быть кратко сформулировано так:
Прямая я1 есть множество всех точек М, получаемых, если к
какой-нибудь фиксированной точке A g R" прилагать все векторы,
принадлежащие некоторому одномерному подпространству многооб-
многообразия всех векторов пространства R".
350 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
Непосредственным обобщением этого является
Определение Нг. Пусть дано какое-нибудь /--мерное,
О^г^л, векторное подпространство V многообразия V" всех век-
векторов л-мерного аффинного пространства R". Будем прилагать все-
всевозможные векторы v g V к какой-нибудь фиксированной точке
A^l R"; множество полученных точек М — концов векторов
/Ш = у? V — есть, по определению, r-мерная плоскость лг (заданная
точкой А и r-мерным векторным многообразием V). Векторы v этого
многообразия V называются векторами, лежащими в плоскости лг.
Беря в векторном пространстве V какой-нибудь базис их, ..., пг,
можем, очевидно, сказать:
Всякая r-мерная плоскость nr?Rn задается точкой А и линейно
независимой системой, состоящей из г векторов их, . .., иг про-
пространства R", как множество точек, получаемых, если к точке А
прилагать векторы вида
v = /Л + . .. + trur,
где коэффициенты t1} ..., tr пробегают независимо друг от друга
всевозможные действительные значения. Полученная плоскость пг
называется r-мерной плоскостью, натянутой на точку А и векторы
Ui, .., V
В такой форме наше определение является непосредственным
обобщением задания обыкновенной плоскости в трехмерном прост-
пространстве точкой и парой неколлинеарных векторов.
Многообразие всех векторов v ? V, лежащих в плоскости пг,
есть множество всех векторов вида v = PQ, где Р и Q суть точки
плоскости пг.
В самом деле, пусть v ? V и Р?пг; приложим вектор v к точке
Р; получим v=PQ, надо доказать, что Q?nr. Но
P~Q=~PA+AQ,
т. е. /1Q=PQ—A4=PQ+AP. По предположению v=PQ?V, a
так как P?nr, то и AP?V; поэтому AQ ? V, т. е. Q?7ir.
Пусть, обратно, Р?яг, <3?яг; докажем, что PQ?V. Имеем
Р<2 = ЛД + ж5= —~AP+AQ. Так как и AP?V, и AQ?V, то и
PQ ^ V, чем утверждение доказано.
Из доказанного следует, что точки плоскости пг и векторы,
лежащие в этой плоскости, удовлетворяют (при действиях над век-
векторами и точками, определенными в R") аксиомам r-мерного аффин-
аффинного пространства. Другими словами: всякая r-мерная плоскость
пространства Rn, рассматриваемая как множество лежащих в ней
точек и векторов, является r-мерным аффинным подпространством
пространства R". Обратно, пусть Рг есть r-мсрное аффинное под-
§ 3]
Г-МЕРНЫЕ ПЛОСКОСТИ 351
пространство аффинного пространства R" (т. е. r-мерное аффинное
пространство, точки н векторы которого суть соответственно точки
и векторы пространства R", причем соотношения, связывающие
векторы, а также векторы и точки в Рг, суть те же самые, которые
для этих векторов и точек установлены в R"). Тогда, прилагая
к какой-нибудь точке А?РГ все векторы аффинного пространства
Рг, получим в силу аксиом II и III все точки М?РГ и только
точки А1?РГ, так что Рг есть r-мерная плоскость пространства R".
Итак, понятие r-мерной плоскости я-мерного аффинного прост-
пространства совпадает с понятием r-ыерного аффинного подпространства
пространства R". При этом О^г^л. При г = 0 получим нульмер-
нульмерную плоскость, состоящую из единственной точки А; в ней лежит
лишь нулевой вектор. При г=п единственной r-мерной плоскостью
пространства R" является само пространство R". Очевидно, одно-
одномерными плоскостями пространства R" являются лежащие в R"
прямые.
По определению r-мерпой плоскости, натянутой на точку А и
векторы uv ..., иг, ее точки М — {хх хп) удовлетворяют сле-
следующему векторному уравнению:
lUl + 4u2-f ...+*,и„ C)
где параметры tv t2, ..., tr пробегают независимо друг от друга
все действительные значения. Пусть
„ _ /„(D „(О „ОН
ul— lai > a2 i •• -i an h
ul
U2
Если приравнять между собою, при каждом / = 1, 2, ..., я, 1-е
координаты векторов, образующих левую и правую части уравне-
уравнения C), то получим следующую систему уравнений, эквивалентную
уравнению C):
-Й1 = а<Л1 + а<2>/
D)
Уравнение C) или эквивалентная ему система D) называется пара-
параметрическим уравнением r-мерной плоскости.
Если в уравнении C) или эквивалентной ему системе D) рас-
рассматривать лишь значения параметров tv ..., tn принадлежащие
сегменту [0, 1], то полученные точки М образуют множество, на-
называемое (г-мерным) параллелепипедом, натянутым на точку А а
приложенные к ней векторы uv ..., иг
352 ТОЧКЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
§ 4. Геометрически независимые системы точек.
Барицентрические координаты. Симплексы
Начнем со следующей простой леммы.
Пусть 0^р<г^л. Всякая р-мерная плоскость л? в я-мерном
аффинном пространстве R" содержится в некоторой r-мерной пло-
плоскости.
В самом деле, возьмем в пР какую-нибудь линейно независимую
систему, состоящую из р векторов их, .. ., ир. Так как р < г ^ п,
то эта система может быть дополнена до линейно независимой системы,
состоящей из г векторов и^ ..., ир, ир + 1, ..., иг. Эти векторы
порождают r-мерное подпространство V векторного пространства
V" всех векторов, лежащих в А". Произвольная точка А и вектор-
векторное многообразие V определяют r-мерную плоскость лг, очевидно,
содержащую плоскость я?.
FlycTb в пространстве R" дано множество, состоящее из конеч-
конечного числа, г+1> точек
4>, А- ¦-., Аг A)
Рассмотрим всевозможные векторы А;Ар ведущие из любой из этих
точек в любую другую. Подпространство, порожденное всеми эти-
этими векторами (в пространстве всех вообще векторов, лежащих
в R"), обозначим через V(Ао, ..., Аг), его размерность —через
р = р(А0, ..., Аг). Так как
то все векторы AsAj линейно выражаются через векторы, ведущие
из одной какой-нибудь фиксированной точки A), например из точки
Ап, во все остальные, так что множество, состоящее из векторов
является системой образующих пространства V(Ао, ,..,АГ), макси-
максимальное число линейно независимых среди них равно размерности
р всего пространства V(Ао, ...,АГ), и, значит,
Нумерацию точек A) выберем так, чтобы первые р среди векторов
и,-, т. е.
Hi = V4, u2 = Vl2, .... ир = А0Ар, C)
составляли линейно независимую систему. Тогда р-мерная плоскость
п = я(Л0, ..., Ар), натянутая на точку Ло и векторы C), содер*а
§ 41
БАРИЦЕНТРИЧЕСКИЕ КООРДИНАТЫ 353
все векторы B), содержит и все концы этих векторов, т. е. все
точки A). Не существует плоскости размерности </?, которая со-
содержала бы все точки A), так как тогда в этой плоскости лежали
бы и все векторы C), что противоречит их линейной независимости.
Всякая плоскость, содержащая все точки A), содержит как точку
А , так и векторы C), значит, содержит и плоскость л, натянутую
на них. Итак, доказано следующее предложение:
Пусть даио конечное множество точек
Л> Аъ ¦¦¦ > А, A)
пространства R". Тогда определено наименьшее число
р=р(А0, Av ... , Аг), являющееся размерностью плоскости прост-
пространства R", содержащей все эти точки A); это число (которое можно
было бы назвать «мерой независимости» точек A)) равно наибольшему
числу линейно независимых среди векторов, ведущих из какой-нибудь
определенной точки1) системы A) (например, из точки Ап) во все
остальные точки этой системы. При этом имеется одна-единствен-
ная р-мерная плоскость, содержащая все точки A), и эта р-мерная
плоскость пР= п (Д,, ..., Аг) называется плоскостью, натянутой
на точки Ао, Av ... , Аг.
Дополним этот результат следующим определением:
Если р (Ао, Av ... , Лг)=г, т. е. если мера независимости
точек Ло, /lj Аг имеет наибольшее возможное значение г,
то точки Ао, Av ... , Ат называются геометрически независимыми
(или просто независимыми) между собою в пространстве R".
Из предыдущего следует:
Точки Ао, Av ... , Аг тогда и только тогда геометрически
независимы, когда векторы AOAV AqA^, ... , АОАГ линейно неза-
независимы, или, что то же, когда точки A) (векторы B)) не лежат
ни в какой плоскости размерности < г.
Во всякой г-мерной плоскости пространства R" можно (беско-
(бесконечным числом различных способов) выбрать независимую систему
из г-\-\ точек; всякая независимая система из г-\-\ точек я-мер-
ного аффинного пространства R" содержится в единственной г-мер-
г-мерной плоскости этого пространства.
Рассмотрим в пространстве R" независимую систему из г-f-1
точек, заданных своими координатами (в какой-нибудь системе
координат пространства /?"):
А0 = (аЪ а$, .... а»),
А1 = {а\, а\, .... в»),
') Все равно, какой именно.
^ П. С. Александров
354 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
Единственную r-мерную плоскость, содержащую эти точки, обо-
обозначим через пг.
Положим
их = АйАх, щ = A0Ait ..., и, = АОАГ.
Тогда
u,.= (ai — aj, 4 — eg, ..., < — а\) (/ = 1, 2, .... г).
Плоскость л/ натянута на точку Ао и векторы uv ..., ur, поэтому
координаты xv х%, ... , хп любой точки M=(xlt ... , хп) пло-
плоскости пг однозначно записываются в виде
(ft = l, 2, ... , п).
Давая параметрам kv ... , Аг всевозможные действительные зна-
значения, получим из уравнений E) всевозможные точки М = (хх, ... , хп)
плоскости пг и только точки этой плоскости.
Положим
Aq ^^ 1 — Aj — А2 — ... ~—Л^,
Тогда система равенств E) переходит в систему равенств
что мы кратко переписываем в виде одного равенства .
М = Мо + Л1ЛХ + ... + ЯЛ F)
— точка 7W есть взвешенная сумма точек Ао, Аъ ..., Аг, взятых
соответственно с весами Ао, лх, ... , Аг. Веса %0, kv ... , лг
в равенстве F) пробегают всевозможные действительные значения,
связанные единственным соотношением
Ао= 1 —ах— ... —Лг,
т. е.
Для каждой точки М ? пг единственным образом определяются
удовлетворяющие условию G) числа Ао, kv ... , %г—веса точки М
во взвешенной сумме F).
Обратно, всякий набор чисел Ао, ... , %г> удовлетворяющих
условию G), однозначно определяет по формулам F) или F) точку М,
если дана независимая система точек Ао, Av ... , Аг.
§ 4]
БАРИЦЕНТРИЧЕСКИЕ КООРДИНАТЫ
355
Коэффициенты %0, Л.х, ... , 1Г в представлении F) или F) на-
называются барицентрическими координатами точки М относительно
системы точек Ао, Av ... , Аг в r-мерной плоскости пг, опреде-
определенной этими точками1).
Множество тех точек М?пг, все барицентрические координаты
которых (относительно системы Ао, Av . .. , Аг) положитель-
положительны называется r-мерным открытым симплексом с вершинами
А ,' Av ... , Аг\ точки, барицентрические координаты которых
относительно той же системы
Ао, Av ..., Аг неотрицатель- А,
ны, образуют, по определе-
определению, замкнутый симплекс с
вершинами Ао, А1% ... , Аг.
Очевидно, замкнутый симплекс
содержит в себе открытый сим-
симплекс с теми же вершинами.
Мы уже видели, что одно-
одномерный симплекс с вершина-
вершинами Ло, Ах есть просто отрезок
А0Л1 (открытый, соответст-
соответственно замкнутый)._
Легко доказать, что дву-
двумерный симплекс с вершина-
вершинами Ао, Av Л2 есть просто открытый треугольник /4ОЛХЛ2 (т. е. мно-
множество всех внутренних точек этого треугольника).
В самом деле, всякая внутренняя точка М треугольника есть
внутренняя точка единственного отрезка вида А0М', где М' есть
(внутренняя) точка отрезка АхАг (рис. 154).
Поэтому
Рис. 154.
', где Яо>0,
где
О,
(8')
(8")
Подставляя (8") в (8'), получим
т. е.
где
') Таким образом, система барицентрических координат в какой-
либо r-мерной плоскости яг аффинного пространства jR" задается любой не-
независимой совокупностью г+1 точек Лв, Ах Аг этой плоскости.
Понятие барицентрических координат ввел немецкий геометр А. Ф. Мебиус
A790—1868).
356 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
При этом все числа \, Kv %2 положительны и
Обратно, пусть М = К0А0-\гк1А1-\-Х2А2, причем Яо > 0, Кг > О,
> О и Яо + ^1 + ^2=1- Можно написать
М = К0А0 + (Kt + Я2)
где
значит,
Точка \1гАх -f- |д.2/42 = М есть внутренняя точка отрезка Лх/12, и
Л1 ЯЛ (^ + ^)Л1', где^о + (А,1 + ^2) = 1, так что М есть
внутренняя точка отрезка А0М', т. е. внутренняя точка треуголь-
треугольника А0А1А2.
Читателю предоставляется самому убедиться (основываясь на
только что доказанном и продолжая рассуждать аналогичным об-
образом), что трехмерный открытый симплекс с 'вершинами Ао, Av
А2, Ая есть (открытый) тетраэдр АйАхА2Аг.
Замечание. Множество X точек я-мерного пространства R"
называется выпуклым, если, каковы бы ни были две точки Р и Q
этого множества, оно содержит и все точки отрезка PQ.
Все пространство R", а также всякая лежащая в нем плоскость,
является выпуклым множеством. Выпуклым множеством является
также и симплекс любого числа измерений (как открытый, так и
замкнутый), а также любой параллелепипед (пусть читатель дока-
докажет все эти утверждения). Выпуклым является также как пустое
множество, так и всякое одноточечное множество, т. е. множество,
состоящее лишь из одной точки1). Имея в виду последнее утверж-
утверждение, читатель легко докажет важную теорему: пересечение любой
(конечной или бесконечной) совокупности выпуклых множеств, ле-
лежащих в данном R", есть выпуклое множество. Всякое множество X,
лежащее в R", содержится в некотором выпуклом множестве (за
которое можно взять, например, все пространство /?"). Поэтому
можно говорить о (непустой) совокупности всех выпуклых мно-
множеств Z^X, содержащих данное произвольное множество XczR"-
х) Доказательство этого утверждения является элементарным логическим
упражнением; упражнения такого рода обязательны для каждого изучаю-
изучающего математику.
§ 5]
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ 357
Следовательно, определено и выпуклое множество X, являющееся
пересечением всех выпуклых множеств Z, содержащих данное мно-
множество X. Множество X называется «выпуклым замыканием» (или
выпуклой оболочкой) множества X. Оно является наименьшим вы-
выпуклым множеством, лежащим в данном R" и содержащим данное
множество X.
Последнее утверждение имеет следующий смысл: каково бы ни
было выпуклое множество Y, содержащее множество X, множество Y
содержит и X. Полезным упражнением для читателя было бы дока-
доказательство следующей важной теоремы. Пусть X—конечное мно-
множество точек а0, ... , аг, образующих в R" геометрически незави-
независимую систему. Тогда выпуклое замыкание X множества X есть
замкнутый симплекс с вершинами а0, alt ... , аг
§ 5. Системы линейных уравнений
В главе XII мы рассматривали лишь системы однородных линей-
линейных уравнений, теперь рассмотрим любые системы. Итак, пусть
дана система т уравнений первой степени с я неизвестными:
+alnta =
?2 I .
й~,л*л + й„лТл -4- . . . + п„„Т = D^.
/Til. J. ' tnti & ' ' mil tl in
Решением этих уравнений является, как и в случае однородной
системы, всякий набор чисел хг, ... , хп, обращающий при под-
подстановке /1 = Jc1, ..., tn=xn систему A) в систему числовых
тождеств. Но, в отличие от случая однородной системы, мы теперь,
в общем случае, будем решение лгх, ... , хп рассматривать не как
вектор, а как точку M = (xv ..., хп) арифметического простран-
пространства R" (или, что приводит к тому же, любого л-мерного аффин-
аффинного пространства с заданной в нем системой координат). В част-
частном случае, когда система A) оказывается однородной, мы будем
отождествлять точку M=(xv лг2, ..., хп) с вектором ОМ —
~ \хъ х2, .. . , хп }, что позволит нам по-прежнему говорить о ре-
решениях однородных систем как о векторах.
Матрицей системы A) будем по-прежнему называть матрицу
ju a12 ... alt
А,ап а22 ... агп B)
358 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
составленную из коэффициентов при неизвестных; ее ранг назы-
называется рангом системы уравнений A).
Матрица
аш
А \
C)
'¦mi • • • итп
называется расширенной матрицей системы A) (или, когда невоз-
невозможны недоразумения,—просто «расширенной матрицей»). Система A)
называется линейно независимой, если совокупность всех строк
расширенной матрицы C) есть линейно независимая система.
Если заменить правые части в уравнениях A) нулями, то полу-
получится однородная система уравнений
„=0,
называемая однородной системой, соответствующей системе A).
Начнем с некоторых совершенно простых, но важных предложе-
предложений. Прежде всего, в отличие от однородных систем, которые всегда
имеют по крайней мере одно решение, а именно нулевое —¦
{0, 0, . . . , 0}, неоднородная система может не иметь ни одного
решения; в этом случае система называется несовместной. Приме-
Примером несовместной системы может служить система
х1-\- д:2=1,
а также система
2хг + х2 -)- д:3 = — 1.
Менее тривиален следующий пример. Пусть в трехмерном про-
пространстве дана плоскость
0 (I)
в прямая, определяемая уравнениями
§ 5]
СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ 359
Тогда три уравнения
Ах +Ву +Cz +D =0,
(III)
тогда и только тогда несовместны, когда прямая (II) параллельна
(в собственном смысле) плоскости (I).
В этом случае все векторы, лежащие на прямой (II), лежат и
в плоскости (I); матрица системы (Ш) имеет ранг 2; расширенная
же матрица имеет ранг 3 (если бы она имела ранг 2, то прямая (II)
лежала бы в плоскости (Г)).
Имеет место общая
Основная теорема I1). Для того чтобы система уравне-1.
ний A) была совместной, необходимо и достаточно, чтобы ранг
матрицы А системы был равен рангу расширенной матрицы Av
В самом деле, если система A) совместна и имеет решение
(хъ ..., х„), то вектор b = {blt ..., Ьп} есть линейная комби-
комбинация векторов-столбцов а,- (г = 1, 2, ... , п) матрицы А, а именно:
В этом случае вектор b содержится в векторном простран-
пространстве V, порожденном векторами ах, а2, \... , а,„ так что обе
системы векторов
ах> аг, ... , ап D)
и
ах, а2, ... , а„, b D')
являются системами образующих одного и того же пространства V;
но теореме 8 главы XII максимальное число линейно независимых
элементов, содержащихся соответственно в D) и в D'), одно и
то же. А это значит, что максимальное число линейно независимых
столбцов в матрицах А и А1 одно и то же, ранги этих матриц
равны.
Если система A) не имеет решения, то вектор Ь = { Ьъ Ьг, ... , Ьп }
не является линейной комбинацией векторов-столбцов аь ... , а„
матрицы А.
*) В учебниках высшей алгебры эта теорема часто назынается теоремой
Кронекера —Капелли. Я благодарен проф. К. А. Рыбникову за следующую
справку по этому поводу. В лекциях Кронекера A864) теория систем ли-
линейных уравнений получила, по существу, свое запершение (включая и
интересующую нас сейчас теорему). Однако изложение вопроса усовершен-
усовершенствовалось в более поздних работах Руше (Е. Rouche, 1875) и Капелли
(А. СареШ, 1892); именно у последнего мы находим теорему 1 в ее совре-
современной форме.
360 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
Возьмем какую-нибудь максимальную линейно независимую под-
подсистему системы ах, ... , а„; пусть она состоит из г векторов а,,
например из ах, ... , аг. Это означает, что ранг матрицы А
равен г. Так как вектор Ь, не будучи линейной комбинацией век-
векторов ах, ... , ая, тем более не является линейной комбинацией
векторов аг, . .. , лг, то система ах, ... , яг, b есть линейно не-
независимая система, состоящая из г-{-\ столбцов матрицы Av так
что ранг этой матрицы больше1) ранга г матрицы А. Теорема 1
доказана.
Напомним теперь совсем простой факт, доказанный еще в § 5
главы VII.
Лемма. Пусть (аъ ..., ап) — какое-нибудь определенное ре-
решение системы A). Всякое решение (хъ . .. , хп) системы A) может
быть записано в виде
где \ ?х, ... , |„} — какое-нибудь решение однородной системы A0).
Обратно, всякая точка М=(х1, ..., хп), получаемая по фор-
формуле E) из фиксированного решения (alt ..., ап) системы A) и
любого решения (с,ь ... , |п) системы A0), является решением си-
системы A).
Теперь в двух словах доказывается
Основная теорема 2. Пусть A) есть совместная система
ранга г. Тогда множество ее решений M=(xv хг, ... , хп) есть
плоскость п-мерного пространства, имеющая размерность р=п—г.
Обратно, всякая р-мерная плоскость п-мерного пространства
есть множество всех решений некоторой (линейно независимой) си-
системы, состоящей из г = п—р уравнений первой степени с п не-
неизвестными (имеющей, очевидно, ранг г).
Доказательство. Системы A) и A0) имеют ранг г; множе
ство всех решений системы A0) есть р-мерное, р = п—г, векторно*
пространство. Пусть /W0 = (<z1, ..., ап) — какое-нибудь определен-
определенное решение системы A). Тогда все решения системы A) полу-
получаются в виде E), где {|1, ?2, ..., ?„} — какой-нибудь вектор
из V; другими словами, все решения М=(хх, ... , хп) системы A)
(и только они) суть концевые точки всевозможных векторов
МйМ={%1, ?а, ... , |„} € V, приложенных к точке Мо. А это и
значит, что множество всех решений системы A) есть р-мерная
плоскость (натянутая на точку Мо и какие-нибудь векторы
ult ... , Uj,, образующие базнс пространства V).
Первое утверждение теоремы 2 доказано.
1) Нетрудно видеть, что он равен г 4-1.
с 5] СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ 361
Доказываем второе утверждение. Пусть лР есть р-мерная пло-
плоскость /г-мерного аффинного пространства /?". Предполагаем, что
в /?" выбрана некоторая система координат, тогда все точки М и
все векторы и пространства R" записываются их координатами:
M=(xv хг, ... , хп), u = {|1, gg, ••• , ln}- В плоскости я берем
произвольную точку Afo = (a1, ..., ап). Тогда любой вектор
U = { 11 • • • , 1п } плоскости я и только вектор, лежащий в пло-
плоскости я, может быть записан в виде ъ. — М0М; этим равенством
установлено взаимно однозначное соответствие между всеми векто-
векторами U и всеми точками М, лежащими в плоскости я; при этом,
если и = { Si- • • • . In}. a M = (xlt х2, ..., х„), то
lx = xx — al,...,ln = x,, — an. E')
Но множество всех векторов, лежащих в плоскости п? (будучи
р-мерпым подпространством векторного пространства V), есть мно-
множество решений %i = x1—a1, ... , |п=д;п — ап некоторой однород-
однородной линейно независимой системы из г = п—р уравнений с п не-
неизвестными 1); пусть эта система есть
auli + aisSs +¦¦¦+ alnln = 0,
a2iii + а22>2 + • • • + аг„1„ = О,
или, если заменить |х, ..., |п их значениями E'),
au (jq — ay) + ап (х2 — а2) + ... + а1п (хп — ап) = О,
F')
!—ai) + ar2(x2 —а2) + ...+аг„(х„ —ая)=О.
Вектор и = УИ0Ж={|1, ..., Е„} тогда и только тогда удовлетво-
удовлетворяет системе F), если его конец М = (хх, х2, ..., хп) удовлетво-
удовлетворяет системе F'), в которой неизвестными служат уже xlt х2, ..., хп.
Но все равно, сказать ли, что вектор Л10М — {х1—ах, ...,хп — ап\
лежит в плоскости я (т. е. удовлетворяет системе F')) или что
в этой плоскости лежит его конец; поэтому множество всех точек
М=.(хъ х2, ..., х„), удовлетворяющнх системе F'), совпадает
с множеством всех точек плоскости я. Полагая
allal+a12a2-f . .. + а1пап = Ьх,
«г1Д1 + аг2а2 + • • • + агпап = Ьп
1) Гл. XII, § 8, теорема 13.
362 ТОЧЕЧНО-ВЕКТОРНОЕ АФФИННОЕ ПРОСТРАНСТВО [ГЛ. XIV
можем представить систему F') в виде
а11х1 + а12х2 + ...+ alnxn = bb \
a21Xj + я22х2 + . . . -f а2пхп = b2, I ^
аПХ1 + аг2х2 + •¦¦ + атхп = Ьт- >
Это и есть искомая независимая система из г = п—р уравнений,
множество решений которой есть множество всех точек данной
jo-мерной плоскости и которая поэтому называется общей системой
уравнений данной плоскости.
Замечание 1 (о параллельности). Плоскость л размерности р
и плоскость л' размерности р', р^.р' ^.п—1, в я-мерном прост-
пространстве R" называются параллельными между собою (в широком
смысле), если многообразие V всех векторов, лежащих в плоскости л,
содержится в многообразии V всех векторов, лежащих в пло-
плоскости л'. Если две параллельные (в широком смысле) плоскости
я и я' имеют хотя бы одну общую точку УИ0, то одна из двух
плоскостей — та, размерность которой меньше,— целиком лежит
в другой. Доказательство может быть предоставлено читателю.
В частности, если обе параллельные (в широком смысле) плоскости
имеют одну и ту же размерность, то они либо совпадают между
собою, либо не имеют ни одной общей точки. Во втором случае
эти плоскости называются параллельными в собственном смысле
слова. Для (п—1)-мерных плоскостей в n-мерном пространстве
получаем условия параллельности, которые совершенно аналогичны
условиям параллельности обыкновенных двумерных плоскостей в трех-
трехмерном пространстве.
Плоскости размерности п—1 в л-мерном пространстве R" часто
называются гиперплоскостями /г-мерного пространства. Каждая гипер-
гиперплоскость задается одним линейным уравнением
a1x1+aix2+...+anxn + an+l = 0 (8)
между координатами точек л-мерного пространства R", и каждое
уравнение вида (8) определяет некоторую гиперплоскость в R".
Два уравнения этого вида тогда и только тогда эквивалентны между
собою (т. е. определяют одну и ту же гиперплоскость), когда их
коэффициенты пропорциональны.
Каждая гиперплоскость, заданная уравнением (8), разбивает
пространство на два полупространства: одно состоит из всех точек
М=(хъ х2, ..-, хп), в которых многочлен
Ь(хъ х2, ..., xn)E=a1xiJra2x2+ ...+anxn + ап + 1
принимает положительные значения, другое — из тех точек, в кото-
которых этот многочлен принимает отрицательные значения. Про две
точки Р—(ръ р2, ..., рп) н Q = {q1, q2, ..., qn) говорят, что они
§ 6] АФФИННЫЕ ПРЕОБРАЗОВАНИЯ 363
лежат по одну или по разные стороны от гиперплоскости (8), в за-
зависимости от того, принадлежат ли они к одному или к разным
полупространствам, определяемым данной гиперплоскостью.
Существенно отметить следующие факты: если две точки Р и Q
принадлежат к одному полупространству (лежат по одну сторону
от гиперплоскости (8)), то к тому же полупространству принадлежат
и все точки отрезка PQ. Другими словами: каждое полупростран-
полупространство является выпуклым множеством. Если же точки Р и Q при-
принадлежат к разным полупространствам (лежат по разные стороны
от гиперплоскости (8)), то отрезок PQ пересекает гиперплоскость (8)
в одной точке. Доказательства этих утверждений совершенно ана-
аналогичны доказательствам теоремы 2 (§ 6) главы V и теоремы 7
(§ 7) главы X.
§ 6. Аффинные преобразования п-мерного
аффинного пространства R"
Они определяются совершенно так же, как в частных случаях
я = 2 и л = 3. Чтобы определить аффинное преобразование /г-мер-
ного пространства, надо, наряду с одной исходной системой коор-
координат Oete2... е„, задать вторую, новую систему координат
О*е*е2. . .ej|; этим определится преобразование, ставящее в соот-
соответствие каждой точке М и каждому вектору U точку М* и вектор
и*, имеющие в новой системе O*ej...e^ те самые координаты,
которые точка М н вектор и имели в старой системе координат.
Формулы, выражающие координаты преобразованной точки М* через
координаты точки М (в одной и той же системе координат),
совершенно аналогичны формулам для трехмерного пространства
(только вместо матриц третьего порядка у нас теперь будут мат-
матрицы л-го порядка).
При аффинном преобразовании пространства R" векторное про-
пространство V" (состоящее из векторов пространства R") испытывает
линейное преобразование (матрица которого совпадает с матрицей
данного аффинного преобразования).
Так же как и в трехмерном случае, вводится понятие ориента-
ориентации л-мерного аффинного пространства.
ГЛАВА XV
АЛГЕБРАИЧЕСКИЕ ЛИНИИ И ПОВЕРХНОСТИ. КОМПЛЕКСНАЯ
ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО
§ 1. Определение алгебраических линий и поверхностей
Алгебраическим уравнением от переменных х1( ..., хп назы-
называется уравнение вида
.... хп)=0, A)
в котором левая часть F(xL, ..., хп) есть многочлен1) от этих
неременных. Степень многочлена F{хъ ..., хп) называется степенью
уравнения A).
Множество всех точек (_vlf ..., хп) арифметического п-мерного
пространства2), координаты которых удовлетворяют уравнению A),
называется многообразием решений этого уравнения или нулевым
многообразием многочлена F(xx, . . ., хп).
Замечание. Если многочлен F(хъ ..., х„) является одно-
однородным, то решение хъ ..., хп уравнения A) часто целесообразно
рассматривать не как точку, а как вектор пространства R" (с вы-
выбранной в нем системой координат).
В аналитической геометрии линии на плоскости и поверхности
в трехмерном пространстве принято определять соответственно как
многообразия решений алгебраических уравнений
F(x, y) = 0 для линий, A2)
F{x, у, z)—0 для поверхностей. A3)
Примеры нам известны: прямая линия и плоскость суть соответст-
соответственно нулевые многообразия многочленов первой степени от двух и
трех, переменных; известные нам кривые — эллипс, гипербола, пара-
парабола— суть многообразия решений своих канонических уравнений;
•) Определение многочлена от л переменных дано в подстрочном приме-
примечании на стр. 322.
2) Или любого аффинного л-мерного пространства с выбранной в нем
системой координат.
§ 1] АЛГЕ0РЛИЧКСКИЕ ЛИНИИ И ПОВЕРХНОСТИ ЗС5
сфера с центром в начале прямоугольной системы координат есть
множество решений уравнения
где г есть радиус сферы. Само собою разумеется, для того чтобы
эти определения линий и поверхностей имели смысл, необходимо,
чтобы в плоскости (в пространстве) была выбрана определенная
система координат. При этом, если, уравнение A2), соответственно A3),
определяющее данную линию (или поверхность), имеет степень т, то
говорят, что эта линия (или поверхность) имеет порядок т.
Однако с определением линии и поверхности не все обстоит так
просто, как кажется на первый взгляд. Множество всех точек пло-
плоскости, удовлетворяющих уравнению х2 = О, совпадает с множеством
точек, удовлетворяющих уравнению х = 0, и есть ось ординат коор-
координатной системы, положенной в основу наших рассуждений. Полу-
Получается, что прямая линия (в данном случае прямая дг = О) определяется
не только своим «естественным» уравнением первом степени, но еще
и некоторыми уравнениями более высоких степеней. Однако в ана-
аналитической геометрии считают, и к этому имеются серьезные осно-
основания, что уравнение х2 = 0 есть уравнение не просто оси ординат,
а «дважды взятой оси ординат» — кривой второго порядка, являю-
являющейся парой слившихся прямых, каждая из которых есть прямая
х = 0. Далее, нулевое многообразие каждого из многочленов х2-{-у2-\-1
и 2х2 -j- 3(/2-j- 7 есть пустое множество; приравнивая эти многочлены
нулю, мы получим уравнения, не определяющие никаких реальных
линий. Это второе затруднение устраняется пополнением плоскости,
соответственно пространства, так называемыми мнимыми точками,
что приводит к комплексной плоскости и к комплексному простран-
пространству, где уже не будет уравнений с пустым множеством решений.
Уже первое замечание — об уравнении х2 = 0 — приводит к важ-
важному утверждению. Ясно, что два пропорциональных между собою
многочлена от данного числа переменных, т. е. два многочлена,
каждый из которых получается из другого умножением его на неко-
некоторый числовой множитель Я.=^0, имеют одно и то же нулевое
многообразие. Возникает обратный вопрос: можно ли утверждать,
что два многочлена одной и той же степени (хотя бы только от
двух или от трех переменных), имеющие одно и то же нулевое
многообразие, пропорциональны между собою? Оказывается, что от-
ответ на этот вопрос положителен, если под решениями х, у, соот-
соответственно х, у, z, понимать наборы комплексных (не непременно
действительных) чисел. Однако это утверждение представляет собою
совсем не очевидную и вовсе не так просто доказываемую теорему
алгебры, и доказательство ее в общем виде выходит за пределы
этих лекций; лишь для многочленов второй степени от двух и трех
переменных теорема эта под названием «теоремы единственности»
366 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [гл. XV
будет доказана в главе XVII (§§ 2 и 10) для линий и в главе XX
(§ 5) для поверхностей второго порядка. Только после того, как
эта теорема будет доказана, и после того, как произойдет попол-
пополнение плоскости и пространства мнимыми точками, определение ли-
линии и поверхности второго порядка как множества точек, являю-
являющихся решениями уравнения второй степени от двух, соответственно
от трех, переменных, станет на твердую почву. Пока же в уверен-
уверенности, что разыгравшаяся маленькая драма получит счастливую
развязку, мы вынуждены пользоваться следующим, так сказать,
рабочим определением:
Задать алгебраическую линию на плоскости — значит задать неко-
некоторое алгебраическое уравнение A2) с двумя переменными и неко-
некоторую аффинную систему Оху координат на плоскости; тогда те и
только те точки М—(х, у), координаты которых в данной коорди-
координатной системе удовлетворяют уравнению A2), считаются лежащими
на данной линии (или принадлежащими ей).
Аналогично для поверхностей: задать алгебраическую поверх-
поверхность в трехмерном пространстве — значит задать алгебраическое
уравнение от трех переменных A3) и систему координат в трехмер-
трехмерном пространстве. Те и только те точки УИ = (х, у, z) пространства,
координаты которых удовлетворяют уравнению A8), называются
точками, лежащими на данной поверхности.
При этом мы считаем, что два уравнения тогда и только тогда
определяют одну и ту же линию или поверхность, когда одно из
этих уравнений получается из другого почленным умножением на
некоторый числовой множитель К.
Если на плоскости дана система координат Ое^, то левая часть
уравнения A2) — многочлен F(x, у)—определяет функцию от точки
плоскости1): каждой точке М, имеющей в данной системе координат
координаты х, у, соответствует число F(М) == F(х, у). Если мы
перейдем к другой системе координат О'е[е'2, то та же точка М,
имевшая в системе Оехе2 координаты х, у, получит в системе
О'е^еа новые координаты х', у', связанные со старыми формулами
преобразования координат:
х = спх'+ с12у'+ Cl, | '
с матрицей
l21
и детерминантом
detC =
С12
С21 С22
ФО.
Ср. гл. XIII, § 1.
§ 1] АЛГЕБРАИЧЕСКИЕ ЛИНИИ И ПОВЕРХНОСТИ 367
Для того чтобы вычислить значение того же числа F(М) через
новые координаты х', у' точки М, надо в многочлен F(x, у) вместо
X и у подставить выражения B) этих переменных через х' и у';
от этого многочлен F(x, у) тождественно преобразуется в много-
многочлен F' (х', у') от новых переменных х', у':
+ c1, сах' + с22у' + с2) ==
= Г(х', у'). C)
Координаты л:', у' какой-либо точки М в системе O'e^ тогда и
только тогда удовлетворяют уравнению
когда координаты х, у той же точки в системе Ое^ удовлетво-
удовлетворяют уравнению
F(x, У)=0. A2)
Таким образом, задавая какую-нибудь алгебраическую линию ее
уравнением A2) в данной системе координат Ое^, мы сразу же
можем написать и ее уравнение A2') в любой другой системе коор-
координат О'е^а—оба уравнения A2) и (l^), рассматриваемые соответ-
соответственно относительно координатных систем Ое^ и O'e/ej, задают
одну и ту же алгебраическую линию. При этом, если алгебраиче-
алгебраическая линия задана в данной системе координат Oeje2 уравнением A2)
степени т, то и во всякой другой системе координат O'e^ она
задается уравнением A^) той же степени т. В самом деле, при
подстановке B) каждый член ахРу4 многочлена F(x, у) переходит
в выражение
а (спх' — с12у' + Cj)p (с21х'
которое после раскрытия скобок и приведения подобных членов
дает нам некоторую совокупность членов многочлена F' (х', у'),
каждый из которых имеет степень ^.p-{-q. Итак, при переходе от
координатной системы Oeje2 к координатной системе О'е[е'2 степень
многочлена F(x, у) не может повыситься. Но она не может и по-
понизиться, так как тогда при обратном переходе от O'eje^ к Ое^
степень многочлена должна была бы повыситься.
Итак, степень уравнения A2), задающего (в какой-нибудь системе
координат) данную алгебраическую линию, есть число, не зависящее
от выбора системы координат; это число и называется порядком
алгебраической линии, задаваемой уравнением A2).
Все сказанное о кривых дословно переносится и на случай по-
поверхностей: при переходе от координатной системы Ое^е,; к коор-
координатной системе О'е^^з, в многочлене F(x, у, z), являющемся
левой частью уравнения ;
F(x, у, z)= 0 A3)
368 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
данной поверхности, происходит преобразование, или, как говорят,
замена переменных:
c2.
detC =
cu
C2X
C31
fia
C22
C82
C13
C28
C33
X — CnX -j- С1гу -у 1-is
I/ = C2^X -j- Cj^J/ "T" ^23^
*^~ ^81 ~t~ 82s/ ~i 83
При этой замене переменных многочлен F(x, у, г) тождественно
преобразуется в многочлен /¦" (х', у', г'), причем степень много-
многочлена F'{x', у', z') равна степени многочлена F(x, у, z). Поверх-
Поверхность, определявшаяся в системе координат Ое1е2е8 уравнением A3),
определяется в системе координат О'е^ез уравнением F' (х', у', z') — 0.
Степень уравнения, определяющего данную алгебраическую поверх-
поверхность, не зависит от выбора системы координат; она называется
порядком данной алгебраической поверхности.
§ 2. Преобразование многочлена второй степени
при преобразовании координат
Так как мы в дальнейшем будем заниматься лишь линиями и
поверхностями второго порядка, то многочлены второй степени
имеют для нас преимущественный интерес.
Каждый многочлен второй степени от двух переменных
F(x, y) = anx2-
может быть записан в виде
F(x, «/)=ф(лг, у) + 21 (х, y)-\-a0, (li)
где
q>(x, у) = а11хг + 2а12ху + аггу2 B2)
есть квадратичная форма старших членов многочлена F(x, у), а
/(х, у) = ахх + а2у
— линейная форма, состоящая из членов первой степени многочлена
F(x, У).
Полагая e21 = ai2l получаем симметричную матрицу второго
порядка
— матрицу квадратичной формы
с 2] ПРЕОБРАЗОВАНИЕ МНОГОЧЛЕНА ВТОРОЙ СТЕПЕНИ 369
детерминант
6 =
°П «12
есть дискриминант формы ср (х, у).
Подобное же положение вещей мы имеем и в случае многочлена
второй степени от трех переменных. Общий вид такого многочлена
есть
F(X, у, z)==anx2 + 2
+ 2a23yz + a3sz2 + 2alX -\-2a2y + 2a3z
причем члены второго порядка этого многочлена образуют квадра-
квадратичную форму
(р(х, у, z) == aux2 + 2al2xy + а22уг + 2а13хг + 2a23yz + a3Sz*, B3)
а члены первого порядка—линейную форму 2/(х, у, z), где
1{х, у, г) = ахх + а2у + asz,
так что весь многочлен F(х, у, z) может быть записан в виде
F(x, у, г)=ф(л:, у, z) + 2!(x, у, z) + a0.
Нас интересует вопрос, как преобразуются многочлены F(х, у),
соответственно F (л:, «/, z), при преобразовании координат. Как мы
знаем, каждое преобразование координат слагается из однородного
преобразования, которое в случае двух переменных х, у записывается
в виде
\c cj' r '
и из сдвига
X = *' + Хо,
У = У'+Уо-
Однородное преобразование C) соответствует переходу от перво-
первоначального репера Ое^2 к реперу Oeiej с тем же началом, а пре-
преобразование D) — сдвигу начала координат на вектор 00' — |х0, у0}.
Посмотрим сначала, как преобразуется многочлен F(x, у) при
сдвиге D).
370 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
Подставляя в F(х, у) значения х = х' +*о. У ==У' -\-Уо> полу-
получаем (считая всегда «21 = «1г)
F (х, y)~F (х' + х0, у' f у0) = ап (х' +хоJ+2а12 (х' + х0) (у'+у0) +
+ «22 (У' + 0оJ + 2«i (*'+ *о) + 2«2 (У' + 0о) + «о =
= апх' -\-2апх'у' -\- а22у' -\-2 (axlx0-\-ау2у0-\-а^) х'-\-
+ 2 («21*0 + «2200 + «2> У' + «11*0 + 2«12*О0О + «2200 +
+ 2a1x(,-}-2a2y0 + a0-^sF' (x', у').
Обозначая, как всегда, преобразованный многочлен через
F"(X'> 0') ^«ll*'2 + 2«'l2*'l/' + «»20'2 + 2«l*' + 2«2j/' + «0. (U)
имеем:
°22 == «
«1 = «11*0+ «1200+ fll.
0 г
a'0 = F{x0, y0).
E.)
На эти формулы мы будем много раз ссылаться. Первые три из
равенств E2), а именно а'п = ап, а'12 — а12, а22 = а22, означают, что
при сдвиге D) коэффициенты при старших членах многочлена F(x, у)
не меняются.
Все это можно повторить и для случая трех переменных: много-
многочлен F(x, у, z) переходит в
+ 2a'23y'z' + a'33z'2+2a'1x' + 2a'^' -f 2a'zz' + «0, (U)
где
«11 =«11. «12 = «12. «22 =«22- «13 = «13> «23 = «28. «33 = «88.
«i = «11*0 + «1200 + «13*0 + «1.
«2 = «21*0 +«2200 +«23*0 + «2> } E8
«3 = «31*0 + «8200 + «33*0 + «8.
' P 1 у ,. ~ \
"o — ' \ло. »0> *l'
Что касается однородного преобразования C), то нас интересуют
в первую очередь квадратичные формы ф' (х', у') и ф' (х', у', z'),
в которые при этом преобразовании тождественно переходят формы
ц>(х, у) и ф (х, у, z). Исчерпывающий ответ на интересующий нас
вопрос дает доказанная в главе XIII
Теорема. Матрица А' квадратичной формы ф' (х', у'), соответ-
соответственно ij.' (x', у', z'), выражается через матрицу А формы ф (х, у),
§ 3] АФФИННАЯ ЭКВИВАЛЕНТНОСТЬ ЛИНИЙ И ПОВЕРХНОСТЕЙ 371
соответственно ф (х, у, г), и через матрицу С преобразования следую*
щим образом:
А' = С*ЛС, F)
где С*, как всегда, есть матрица, транспонированная к С.
Так как detC* = detC, то из формулы F) вытекает
de^' = det,4-(detCJ. G)
Если обе координатные системы, старая и новая, прямоугольны, то
матрица С ортогональна, detC=+l и
deM'=detA (8)
§ 3. Аффинная эквивалентность линий и поверхностей
Пусть на плоскости выбрана аффинная система координат Ое^,
Мы знаем (гл. XI, § 1), что задать аффинное преобразование Л
плоскости — значит задать, наряду с исходным репером Oexe2, но-
новый репер O'e^: аффинное преобразование Л, определенное этим
репером, ставит в соответствие каждой точке М точку М', имеющую
относительно репера O'e^e* те самые координаты, которые точка М
имела относительно исходного репера Oexe2.
Рассмотрим теперь какую-нибудь линию, определенную (в исход-
исходной системе координат Оехе2) уравнением
При аффинном преобразовании Л каждая точка М, лежащая на этой
кривой, перейдет в точку М', лежащую на линии, имеющей то же
уравнение A2), но уже относительно системы координат О'е\е\.
В соответствии с этим мы говорим, что при аффинном преобра-
преобразовании Л кривая I, заданная уравнением A2) в системе координат
Оехе2, переходит в кривую II, заданную тем же уравнением, но в
системе координат О'е^е'з- Очевидно, кривая II переходит в кривую I
при аффинном преобразовании Л~1, обратном к преобразованию Л.
Говорят также, что кривая II является образом кривой I при
преобразовании Л.
Определение. Две кривые I и II называются аффинно экви*,
валентными, если одна из них переходит в другую при некотором
аффинном преобразовании Л.
Легко видеть (читатель должен это проверить), что отношение
аффинной эквивалентности удовлетворяет условиям рефлексивности,
симметрии и транзитивности. Поэтому, в частности, две кривые,
аффинно эквивалентные одной и той же третьей, аффинно эквива-
эквивалентны между собою.
372 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
Из сказанного выше непосредственно следует:
Пусть дана алгебраическая кривая I своим уравнением
F{x,y)=0 (l2)
в системе координат Оехе2- Тогда аффинно эквивалентными кривой I
будут те и только те кривые II, которые в какой-нибудь системе
координат O'eie^ имеют то же уравнение A2).
Пусть в плоскости дана система координат Ое1е2. Тогда, как
мы знаем, всякое аффинное отображение задается формулами
у' = Cx + су + с |
выражающими для каждой данной точки М (х, у) координаты х',у'
преобразованной точки М' (в той же системе Оехе2).
Теперь легко решить задачу: пусть даиа кривая I своим урав-
уравнением A2) в координатной системе Оеге2. Найти (в той же системе
координат Оехе2) уравнение кривой II, в которую перейдет кривая I
при данном аффинном преобразовании B).
Решение просто: ведь надо найти уравнение, которому удовлет-
удовлетворяют х' и у', связанные с х и у соотношениями B), если эти
х и у удовлетворяют уравнению A2). Искомое уравнение получится,
если выразить х и у через х' и у' из B) и подставить полученные
значения в уравнение A2).
Пример. В какую кривую переходит при аффинном преобра-
преобразовании
х' = ±Х, У' = ^У C)
эллипс, заданный (в прямоугольной, канонической для него системе
координат) уравнением
Для этого находим из C)
• х = ах', у = Ьу' C')
и подставляем в D). Получаем уравнение дг'2 + (/'2 = 1, или1)
хг-\~у* = \. Итак, при аффинном преобразовании C) эллипс с урав-
уравнением D) переходит в окружность лг24-</2=1.
Попутно мы доказали важный факт:
Всякий эллипс аффинно эквивалентен окружности (следовательно,
всякие два эллипса аффинно эквивалентны между собою).
!) Ведь х', у' суть координаты (произвольной) точки М' относительно
той же системы координат O
§ 4] КОМПЛЕКСНАЯ ПЛОСКОСТЬ 373
Совершенно аналогично доказывается, что всякая гипербола
аффинио эквивалентна равнобочной гиперболе
х2 — у2 = 1.
Так как отношение аффинной эквивалентности двух кривых
удовлетворяет условиям рефлексивности, симметрии и транзитив-
транзитивности, то оно порождает распадение любого множества ж кривых
на «аффинные классы» таким образом, что две кривые из множества 2Jt
тогда и только тогда аффинно эквивалентны между собою, когда
они принадлежат к одному и тому же аффинному классу.
Все сказанное б" кривых можно повторить и в применении к по-
поверхностям: если аффинное преобразование пространства задается
переходом от репера Ое^вд к реперу Oe^e',^, то поверхность,
заданная (в координатной системе Oeje2e3) уравнением
F(x,y,z)=0, (l3)
переходит в поверхность, имеющую то же уравнение, но уже в
системе координат О'е^е'гед.
Две поверхности называются аффинно эквивалентными, если одна
из них переходит в другую при некотором аффинном преобразова-
преобразовании пространства; другими словами: те и только те поверхности
аффинно эквивалентны поверхности, заданной (в некоторой коорди-
координатной системе Ое1е2е3) уравнением A3), которые в какой-нибудь
координатной системе О'е'^е^ имеют то же уравнение A3).
Любое множество ЯЛ поверхностей разбивается на аффинные
классы таким образом, что две поверхности, принадлежащие мно-
множеству Ш, тогда и только тогда аффинно эквивалентны между со-
собою, когда они входят в один и тот же класс.
В следующей главе мы, в частности, решим задачу аффинной
классификации кривых второго порядка, т. е. задачу перечисления
всех аффинных классов, на которые распадается множество всех
кривых второго порядка.
В главе XX мы решим аналогичную задачу аффинной классифи-
классификации всех поверхностей второго порядка.
§ 4. Комплексная плоскость
Вся суть аналитической геометрии заключается в том, что, вы-
выбрав (скажем, на плоскости) систему координат Ое^, мы подме-
.ниваем точки плоскости парами (л:, у) координат этих точек, а линии
задаем их уравнениями вида
374 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
Однако уже из школьного курса алгебры мы знаем, сколь убогим
получается исследование даже уравнений второй степени с одним
неизвестным, если при рассмотрении их решений пользоваться лишь
вещественными числами. Поэтому неудивительно, что, ограничиваясь
в аналитической геометрии вещественными значениями координат, мы
не построим гармонической теории, так как будем постоянно наты-
натыкаться на досадные исключения, несносные для математика. Един-
Единственный радикальный способ их избежать — это допустить в качестве
возможных значений координат точек любые комплексные числа.
Мы приходим, таким образом, к следующему построению.
Пусть дана обыкновенная («вещественная») плоскость и произ-
произвольная аффинная система координат Оехе2 в ней*) (см. гл. III).
Точку М плоскости мы отождествляем с парой ее координат х, у
(что и находит свое выражение в записи М=(х, у), которой мы
все время широко пользовались, считая х и у произвольными веще-
вещественными числами). Теперь мы всякую пару х, у комплексных чисел
также будем считать точкой (комплексной) плоскости, а самые числа
х, у будем называть координатами точки М комплексной плоскости
относительно данной системы координат Ое^. При этом точку
А1=(х, у) будем называть мнимой точкой плоскости, если хотя бы
одна из ее координат есть комплексное число, ие являющееся ве-
вещественным.
Дальше все идет автоматически. Пара точек М1=(х1, у^ и
ЛТ2 = (л:2, </2), данных в определенном порядке (Мг—первая, М2—
вторая точка), называется вектором, приложенным к точке М1 или
закрепленным в этой точке, и обозначается через и — МхМг. Точка
Мх называется начальной точкой, а точка Ms—конечной точкой
(концом) вектора М^М^. Комплексные числа
x = x2—xv y=yi—y1
называются координатами вектора М1М2.
Два вектора МгМ2 и М[М'г называются равными, если равны их
соответственные координаты. Таким образом, множество всех векто-
векторов комплексной плоскости распадается на классы равных между
собою векторов (любые два вектора одного класса равны между
собою, никакие два вектора, принадлежащие к разным классам, не
равны между собою). Эти классы, как раньше (когда мы пользова-
пользовались только вещественными числами), называются свободными
*) Речь идет при этом лишь об обыкновенных, «вещественных» репера
§ 4] КОМПЛЕКСНАЯ ПЛОСКОСТЬ 375
векторами; они обозначаются так:
п = {х,у},
где х, у — пара координат какого-нибудь (закрепленного) вектора,
входящего в данный класс равных между собою векторов.
Таким образом, мы можем сказать: любая пара комплексных чи-
чисел х, у определяет, во-первых, точку М = (х,у), во-вторых сво-
свободный вектор и = {х, у} с координатами х, у. Каждая пара точек
Мх = [xlt (/х) и М2 = (х2, у2) определяет свободный вектор и = {х, у}
с координатами дг==~дг2 — xv у = у2—У\, точка М1 = (хъ ух) и век-
вектор и={лг, у) определяют точку Ж2 = (дг1+ х, Ух-\-у)— «конец век-
вектора и, приложенного к точке Afx».
Суммой двух векторов и = {х,у} и и' = {х', у'} называется век-
вектор и + и' = \х-\-х', у-\-у'\; произведением вектора п={х,у\ на
произвольное (комплексное) число А. называется вектор A.U = {Хх, Ху}.
Вектор 0 = {0,0} по-прежнему называется нулевым вектором',
вектор —и = {—х, —у} называется вектором, противоположным
вектору и={дг, у}.
Понятия линейной зависимости и линейной независимости вводятся
для векторов с комплексными координатами совершенно так же, как
раньше, только, разумеется, в качестве коэффициентов в линейных
комбинациях векторов теперь допускаются любые комплексные числа.
При этом все алгебраические теоремы о линейной независимости,
составляющие содержание § 5 главы II, сохраняют свою силу вместе
с их доказательствами. В частности, два вектора Щ = {хи yt\ и
и2 = {лг2, у2\ тогда и только тогда линейно зависимы, когда коорди-
координаты одного вектора пропорциональны координатам другого, т. 6.
когда
г У г
г Уг
Два линейно зависимых вектора мы будем называть коллинеарными
(мы увидим, что геометрический смысл этого наименования сохра-
сохраняется и для векторов с комплексными координатами). Важно сразу же
установить и для векторов с комплексными координатами основное
предложение.
Три вектора на комплексной плоскости всегда линейно зависимы
(и, следовательно, один из них есть линейная комбинация двух
других).
В самом деле, это утверждение справедливо (гл. II, § 5, пред-
предложение 2), если среди трех данных векторов пг, u2, u3 какие-нибудь
два, например пг и и2, линейно зависимы. Пусть векторы ^ = {1^ %}
и и2 = {?2> ^г} линейно независимы. Докажем, что тогда всякий
третий вектор и = {|, ц} является линейной комбинацией векторов
и1 и и2:
376 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
причем коэффициенты хг и х2 в этой линейной комбинации одно-
однозначно определены.
В самом деле, из линейной независимости векторов % = {§!, т^}
и u2 = {g2, тJ} следует, что
А тогда система уравнений (относительно неизвестных хг и дг2)
(равносильная одному уравнению u = лг^4-лг2и2) имеет единствен-
единственное решение относительно ху и х2, что и доказывает наше утверж-
утверждение.
Существенным является следующее
Замечание. Мы определили комплексную плоскость, взяв
обыкновенную, вещественную плоскость с заданной в ней аффинной
системой координат Оехе2. Эта система координат лежит в основе
самого определения комплексной плоскости и будет называться ее
«основной» системой координат. Начало этой системы координат
есть вещественная точка О=@, 0), а единичными векторами явля-
являются векторы е1 = {\, 0} и е2 = {0, 1}. Каждый вектор комплексной
плоскости может быть записан, и притом единственным образом,
в виде
A)
где х и у — комплексные числа.
Задать в комплексной плоскости какую-нибудь «новую» (т. е. от-
отличную от основной) вещественную х) систему аффинных координат —
значит задать вещественную точку
— начало новой системы координат и пару линейно независимых
вещественных векторов
ei = {сп, с21} = Сцв^ с21е2,
ег = {с12, с22} = с12е1-|-с22е2
(все числа cik (i,k=\, 2) при этом являются вещественными).
Тогда вектор и, записывающийся в основной системе координат в
виде A), однозначно записывается и в виде линейной комбинации
векторов ei и е'2:
;. A')
х) Только такие будут рассматриваться.
§ 5] ПРЯМАЯ ЛИНИЯ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ 377
Коэффициенты х' и у' в этой линейной комбинации называются
координатами вектора и в системе координат О'е\е\ (они, как и в
случае вещественных векторов, не зависят от выбора начала О').
Координаты точки М в системе координат O'eie'2 суть координаты
вектора О'М в этой системе координат. При определении этих ко-
координат остаются в силе все рассуждения главы VIII, и итогом
этих рассуждений являются формулы
V Г Y _U Г II -Л П
— 11 —\ Hi/ —I )
у = с21х' + с22(/' + Ь,
т. е. формулы преобразования координат, полученные на стр. 191.
Эти формулы в комплексной плоскости таковы же, как в вещест-
вещественной, и коэффициенты си, с12; с21, с22; a, b в них — веществен-
Аые числа.
§ 5. Прямая линия иа комплексной плоскости
Прямую линию на комплексной плоскости естественно определять
как линию первого порядка, т. е. задавать ее уравнением первой
степени
Ах -\-By-\~C-0 A)
('(общее уравнение прямой»}. При этом весьма частным случаем об-
общих теорем об уравнениях первой степени, доказанных в главе XIV,
§ 5, является следующее предложение.
Теорема 1. Два уравнения A) и
А'х + В'у + С' = 0 (Г)
тогда и только тогда имеют одно и то же множество решений
{«определяют одну и ту же прямую»), когда их коэффициенты про-
пропорциональны, т. е. когда при некотором k=^=0 имеем
Л' — ЬЛ R' hR /"" --. ЬС ir>\
— - №Л, LJ П/LJy V> K>\j t \ /
Уравнения A) и (Г) тогда и только тогда несовместны (задаваемые
ими прямые параллельны в собственном смысле), когда
— — — =^= —
Доказываем элементарно. Если уравнения A) и (Г) эквиралентны,
то при некотором k-фО имеют место соотношения B). В самом деле,
из предположения следует, что система двух уравнений A), (Г)
имеет бесконечное множество решений, значит, детерминант системы
равен нулю:
А В
А' В'
= 0, D)
378 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
т. е. при некотором k имеем А' = kA, В' = kB. Если при этом С =^= kC,
то, как легко убедиться, уравнения A), A') были бы несовместны.
Итак, из эквивалентности уравнений A) и (Г) следует пропорцио-
пропорциональность их коэффициентов. Обратное утверждение очевидно. Оста-
Остается доказать: из несовместности уравнений A) и A') вытекает
условие C). Но из несовместности уравнений A) и (Г) вытекает
прежде всего равенство D), т. е. пропорция
i! -EL
А "~ В *
Если бы она продолжалась до пропорции
dL — ?L — 9L.
А~~ В ~~ С '
то уравнения A) и (Г) были бы эквивалентны и, значит, совместны,
поэтому имеет место C)—и все доказано.
Замечание. Из теоремы 1 вытекает, что те трудности, кото-
которые возникают при определении алгебраической линии как множества
решений алгебраического уравнения F(x, у) —0, не возникают, когда
степень этого уравнения равна 1,—прямую линию мы сейчас уже
в праве определить как множество всех точек М=(х, у) плоскости,
удовлетворяющих уравнению A). Это было законно на обыкновен-
обыкновенной, вещественной плоскости и продолжает быть законным на комп-
комплексной плоскости.
Во многих случаях, однако, прямую на комплексной плоскости
удобнее задавать не ее «общим» уравнением A), а параметрически,
т. е. как множество точек М = (х, у) комплексной плоскости, опре-
определяемых равенствами
когда t пробегает все комплексные числовые значения (дг0, </0, a, b—¦
любые данные комплексные числа, лишь случай а = Ь= 0 исключен).
Докажем, что оба способа определения прямой эквивалентны
между собою.
1° Пусть прямая задана уравнением A). Как и на вещественной
плоскости, назовем направляющим вектором прямой A) вектор
{—В, А} и всякий ему коллинеарный ненулевой вектор и0 = X {—В, А}.
Другими словами, направляющим вектором прямой A) называется
всякий вектор uo = {a, b}, удовлетворяющий уравнению
Докажем следующее предложение:
Если Мо = (х0, у0)—какая-нибудь точка прямой A), a uo= {a, b} —
какой-нибудь направляющий вектор этой прямой, то точками
§ 5J ПРЯМАЯ ЛИНИЯ НА КОМПЛЕКСНОЙ ПЛОСКОСТИ 379
прямой A) являются те и только те точки М — (х, у), координаты ко-
которых могут быть записаны в виде E).
В самом деле, если точка М = (х, у) при некотором t записы-
записывается в виде E), то
Ах + By + C==(Axo+Byo + C) + (Aa + Bb)t = 0 + 0 = 0,
т. е. точка М лежит на прямой A).
Обратно, пусть М = (х, у)—какая-нибудь точка, лежащая на
прямой A). Так как М0—(х0, у0) тоже лежит на этой прямой, то
имеем множество
Ахо + Вуо + С = О,
и, значит,
уо)-О. F)
Так как {а, Ь) — направляющий вектор прямой A), т. е.
Аа+ВЬ^О, G)
то из F) и G) вытекает
х—х0 В а
или
х—хо_у—уо _
что и означает, что при некотором t имеем
х—xo = at, y — yo = bt.
2° Рассмотрим множество всех точек М = (х, у), которые при
каких-нибудь постоянных х0, у0, а, Ь (исключен лишь случай
а = Ь = 0) допускают запись E). Эта запись означает, что имеет
место пропорция (8), т.е. что точка М=(х, у) лежит на прямой
bx — ay + (ayo — bxo) = O. (9)
Тогда Мо = (х0, у0) тоже лежит на прямой (9), а вектор {а, Ь) является
ее направляющим вектором. Следовательно, данная с самого начала
система уравнений E) является системой параметрических уравне-
уравнений именно этой прямой.
Эквивалентность двух способов задавать прямую — общим урав-
уравнением A) или системой параметрических уравнений E)—доказана.
Как и раньше, будем разрешать себе вместо «система парамет-
параметрических уравнений прямой» говорить просто «параметрическое урав-
уравнение прямой».
Прямая, проходящая через две данные точки.
Пусть прямая дана своим уравнением A) и, значит, эквивалентным
ему параметрическим уравнением E). Если М1 = (хъу1) — точка,
380 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
лежащая на нашей прямой E) и отличная от точки Мо, то, полагая
а — хг—х0, b = yl—</0, получим направляющий вектор {а, Ь} пря-
прямой A)*); следовательно, ее параметрическое уравнение E) может
быть записано в виде
x1—xo)t, \
У1 — Уо)*- )
Уравнение (8) при этом принимает вид
A0)
или
или,
наконец,
Х1—X
х—х0
X
хо
х1
0
t
у
У
Уо
Ух
Ух — Уо
f — Уо
1
1
1
= с
= 0,
— получаем уравнение прямой, проходящей через точки Л10 = (хп, у0)
и М1 = (хъ (/х).
По аналогии со случаем вещественной плоскости говорят, что
точка М=(х, у) делит отрезок М0Л11 в отношении а:р, если
ЛГОУИ а
==-ц: ^ "я-, откуда
ммх р
х = -
В частности, при а = Р получаем точку М= ( ° 2 х » 2 Ух). на-
называемую серединой отрезка MOMV
§ 6. Замечание о действительных и мнимых линиях
Если прямая задана каким-нибудь уравнением
то все уравнения вида
A)
где k—какое-нибудь комплексное число, и только эти уравнения
задают ту же прямую. Если среди этих уравнений имеется уравне-
») В самом деле,
—С -)- С = 0.
§ 6] ЗАМЕЧАНИЕ О ДЕЙСТВИТЕЛЬНЫХ И МНИМЫХ ЛИНИЯХ 381
ние, все коэффициенты которого kA, kB, kC вещественны, то пря-
прямая A) называется вещественной; в противном случае она называ-
называется мнимой.
Например, прямая
2ix+3iy — i = 0
есть вещественная прямая: она может быть задана уравнением
2х + 3у — 1 =0.
Прямая
N х + 1у = 0
является мнимой.
Вообще, алгебраическая кривая, заданная уравнением
, У)=0,
где F(x, у) — какой-нибудь многочлен от двух переменных, назы-
называется вещественной, если комплексное число Х^=0 может быть
подобрано таким образом, что в многочлене XF(x, у) все коэффи-
коэффициенты суть вещественные числа. Может, однако, случиться, что
на вещественной кривой не лежит ни одной вещественной точки.
Так, например, кривая, задаваемая уравнением
есть вещественная кривая, однако на ней нет пи одной вещест-
вещественной точки. Эта кривая называется окружностью радиуса i (при-
(причина такого названия читателю, вероятно, ясна1).
Кривая, задаваемая в прямоугольной системе координат уравне-
уравнением
**+y* = 0, B)
называется окружностью нулевого радиуса. Она имеет единственную
вещественную точку О=@, 0). Эта кривая распадается на пару
мнимых прямых
x + iy = 0, x — iy = 0, (З)
так как
х2 + у2 -=а (х + iy) (x~iy).
i) К сожалению, общепринятая терминология (с которой невозможно не
считаться) в этом пункте непоследовательна: окружность х2 + у2-|-1=0 мни-
мнимого радиуса I обычно называется мнимой окружностью; вообще, кривая,
задаваемая уравнением -^ + ^+1 =0, называется мнимым эллипсом, хотя
она согласно только что данному общему определению является действи-
действительной кривой!
382 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
Среди всех линий на плоскости мы в этих лекциях будем рас-
рассматривать, кроме прямых, лишь вещественные кривые второго по-
порядка и будем всегда задавать их уравнениями
F(x, y)=0,
все коэффициенты в которых вещественны.
§ 7. Комплексное пространство
Пополнение трехмерного пространства мнимыми элементами — мни-
мнимыми точками и мнимыми векторами — происходит совершенно ана-
аналогично введению мнимых точек и векторов на плоскости (см. § 4).
Предполагается, что в обыкновенном («вещественном») трехмерном
пространстве дана произвольная аффинная система координат Оеге2ев.
Это позволяет каждую точку М пространства отождествить с трой-
тройкой вещественных чисел, ее координат:
М=(х, у, z).
После этого мы всякую тройку х, у, z комплексных чисел также
объявляем «комплексной» точкой пространства, а сами комплексные
числа х, у, z — называем координатами точки М в координатной
системе Ое^вд. Множество всех комплексных точек образует ком-
комплексное трехмерное пространство. Все вновь присоединенные точки,
т. е. все точки М = (х, у, z), у которых хотя бы одна из трех
координат является невещественным числом, называются мнимыми
точками комплексного трехмерного пространства.
Упорядоченная пара точек М1 = (х1, уъ Zj), М2 = (х%, у2, 2%)
комплексного пространства, называется вектором, приложенным к
точке Мг (или закрепленным в ней). Комплексные числа х — х2— х±,
у=у2 — </i, z = z2 — z1 называются координатами закрепленного век-
юра. Два вектора равны, если соответственно равны их координаты.
Классы равных между собою векторов называются свободными век-
векторами; они взаимно однозначно соответствуют тройкам комплексных
чисел х, у, z — тройкам координат всевозможных закрепленных
векторов, являющихся элементами данного класса. Свободные век-
векторы обозначаются так:
« = {*> У> г\-
Линейные операции — сложения векторов и умножения вектора на
комплексное число — определяются так же, как и в случае плос-
плоскости, т. е. «покоординатно», только координат сейчас три, а не
две, в этом вся разница. Автоматически вводится и исследуется
§ 7]
КОМПЛЕКСНОЕ ПРОСТРАНСТВО 383
также и понятие линейной независимости векторов. Как и в случае
точек, мы называем вещественными лишь те векторы ц = {х, у, z),
у которых все три координаты х, у, z суть вещественные числа.
Все остальные векторы называются мнимыми.
Существенно отметить, что в комплексном пространстве, так
же как и в комплексной плоскости, мы рассматриваем наряду с ос-
основной системой координат (введенной при самом определении ком-
комплексного пространства) и другие системы координат О'е'^е'з, но
всегда лишь вещественные; это значит, что и новое начало О' есть
вещественная точка пространства и векторы e'lt e'2) е3 суть веще-
вещественные векторы. Поэтому переход от одной координатной системы
к другой задается формулами линейного преобразования, все коэф-
коэффициенты в которых суть вещественные числа. Словом, все проис-
происходит так, как в случае плоскости, с единственной разницей, что
вместо размерности я = 2 теперь имеем я = 3.
Прямая в комплексном пространстве задается, так же как и в
вещественном, своим параметрическим уравнением, т. е. точкой
М0 = (х0, у0, zQ)', и направляющим вектором uo= {a, b, с}, которые
могут быть произвольными комплексными точкой и вектором. Плос-
Плоскость определяется уравнением первой степени (или параметрическим
уравнением); эквивалентность этих обоих способов задания плоскости
и вообще основные теоремы §§ 1—6 главы X сохраняются и в
случае комплексного пространства.
Вещественной поверхностью мы называем такую алгебраическую
поверхность, которая задается уравнением
F{x, у, *) = 0
с вещественными коэффициентами.
Замечание. Определенное в этой главе «комплексное» про-
пространство следовало бы называть комплексным пространством с вы-
выделенным в нем вещественным подпространством (которое переходит
в себя при всех аффинных преобразованиях с вещественной матри-
матрицей С, никаких других мы, как неоднократно упоминалось, рассмат-
рассматривать не будем). Такое же замечание можно сделать, разумеется,
и о комплексной плоскости. Аналогично можно было бы определить
и л-мерное комплексное пространство с выделенным в нем вещест-
вещественным подпространством.
Однако можно было бы определить и просто комплексное (век-
(векторное и точечно-векторное) л-мерное пространство дословно так
же, как мы определяли в главах XII и XIV соответственные веще-
вещественные пространства, но допуская (в аксиоматических определе-
определениях § 1 главы XII) умножение векторов на любое комплексное
число X и сохраняя все аксиомы, которым это умножение подчинено.
Но в этих лекциях мы будем пользоваться лишь определениям», при-
приведенными в настоящей главе.
384 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [гл. XV
§ 8. Распадающиеся линии и поверхности.
Цилиндрические и конические поверхности. Поверхиости вращения
1. Распадающиеся линии и поверхности. Если многочлен
F' (х, у) есть произведение двух многочленов F1(x, у) и F2 (x, у):
F(x, y)^F1(x, y)-F2(x, у),
то те и только те точки лежат на линии
F(x, y) = 0, A)
которые лежат хотя бы на одной из двух линий
F,{*, У)=0. B2)
В этом случае говорят, что кривая A) распадается на кривые BХ)
и B2).
Например, кривая второго порядка, заданная уравнением
распадается на пару действительных прямых
х-\-у = 0 и х—у — 0,
а кривая
как упомянуто выше, распадается на пару мнимых прямых
х A-iy~ 0, х—iy~0,
называемых сопряженными.
То же имеет место и для поверхностей. Если
F(x, у, z)=F1(x, у, z)-F2(x, у, z),
то поверхность
F(x,y, 2) = О
распадается на пару поверхностей
^(дг, у, z)=*0, F2(x, у, z)=0. ч
Так, например, поверхность второго порядка
распадается на пару плоскостей
= Q и х-\-у— 2 = 0.
§ 8]
РАСПАДАЮЩИЕСЯ ЛИНИИ И ПОВЕРХНОСТИ
385
\/
2. Цилиндрические поверхности. Определение. Алгебраи-
Алгебраическая поверхность называется цилиндрической (или цилиндром),
если в некоторой аффинной системе координат она может быть
задана уравнением, не содержащим одну из координат, например
уравнением
/(*, У)=0, C)
не содержащим координату z1).
Кривая, определяемая уравнением C) в плоскости Оху, называ-
называется иногда основанием или направляющей цилиндра2).
Если точка М = {х, у, z) лежит на цилиндре C) (рис. 155), то
все точки М' — (х, у, z'), где z' совершенно произвольно, тоже лежат
на цилиндре C). Все эти точки образуют
прямую, проведенную через одну из них,
например через точку Мо= {х, у, 0), па-
параллельно оси Oz. Таким образом, всякая
прямая, проведенная параллельно оси Oz
через какую-нибудь точку М0=(х, у, 0)
цилиндра, всеми своими точками лежит
на цилиндре; все эти прямые называются
образующими цилиндра. Их объединение
и образует множество всех точек, лежа-
лежащих на цилиндре.
Обратно, пусть дана алгебраическая
поверхность S, обладающая тем свойст-
свойством, что всякая прямая, параллельная
некоторому (одному и тому же) направле-
направлению и проходящая через какую-нибудь
точку этой поверхности, всеми своими
точками лежит на ней.
Покажем, что эта поверхность являет-
является цилиндрической. В самом деле, не
ограничивая общности рассуждений, мож-
можно предположить, что направление, о котором идет речь, есть на-
направление оси z некоторой системы координат.
Пусть уравнение поверхности 5 есть F(x, у, z) = 0. Всякий
многочлен F (х, у, z) от трех переменных может быть записан в виде
F(x, у, z)==i*g{x, у, z)+f{x, у),
где fe^i. Докажем, что в нашем случае g(x, у, ,г) = 0.
') Очевидно, что, переименовав, если нужно, оси координат, всегда
можно предположить, что уравнение дайной цилиндрической поверхности не
содержит именно координату г.
2) Говорят также, что данный цилиндр есть циливдр над кривой, явля-
являющейся его основанием.
Рис. 155.
13 П. С. Александров
386 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
В противном случае пусть существуют такие значения х0, у0, zOt
что g(x0, у0, гь)=^АфЪ. Тогда
F t у it v \ ^^ А "У I f { у it \
1 \ло> "о> ло' — ™»т/ \ло> У о)
и существует лишь конечное число значений z, для которых
F(x0, у0, z) = 0. Пусть zx—одно из них. Тогда точка М0=(х0, yQ, zt)
лежит на поверхности S, но прямая
У
= х0, \
проходящая через эту точку в направлении оси г, уже не лежит
целиком на поверхности 5—вопреки нашим предположениям. Итак,
действительно g(x, у, 2) = 0, и уравнение поверхности S имеет вид
чем и доказано, что 5—цилиндрическая поверхность.
Мы будем в дальнейшем рассматривать лишь цилиндрические
поверхности второго порядка; их основаниями являются кривые
второго порядка.
3. Конические поверхности. Определение. Конической
поверхностью п-го порядка называется алгебраическая поверхность,
задаваемая в некоторой аффинной системе координат Oxyz урав-
уравнением
Ф(х, у, г) = 0,
D)
где Ф (х, у, z) есть однородный
многочлен (форма л-й степени от
переменных х, у, Z).
Легко доказывается следующее
основное свойство конических по-
поверхностей:
(*). Если точка М—(х, у, z) ле-
лежит на конической поверхности D)
(рис. 156), то и вся прямая ОМ
лежит на этой поверхности (О при
этом есть начало координат).
В самом деле, если точка
М' = (х',у', z')—какая-нибудь точка
прямой ОМ, то для вектора ОМ'
имеем равенство ОМ' = КОМ при некотором числовом множи-
множителе X. А это значит, чтох' =Кх, у' —Ху, z' = Xz. Так как Ф (х, у, z)—
однородный многочлен л-й степени, то Ф (kx, Xy, Xz) = Х"Ф (х, у, z);
так как точка М~{х, у, z) лежит на поверхности D), то
Рис. 156.
§ 8]
РАСПАДАЮЩИЕСЯ ЛИНИИ И ПОВЕРХНОСТИ
387
Ф (х, У, z) = 0, значит, и Ф (х', у', г')=№Ф (х, у, z) = 0, т. е. точка М'
также лежит на поверхности D). Итак, всякая коническая поверх/*
ность слагается целиком из прямых, проходящих через точку О.
Замечание. Имеет место и обратное предложение, которое
сообщаем без доказательства: всякая алгебраическая поверхность,
обладающая свойством (*), есть
поверхность коническая.
Для поверхностей второго
порядка это утверждение можно
вывести из результатов главы
XIX, § 5.
Сопоставим только что данное
общее определение конической
поверхности с элементарным «по-
«построением конуса над данной плос-
плоской кривой». Речь идет о следую-
следующем построении. Пусть дана кри-
кривая К, лежащая в некоторой
плоскости я, и точка О, лежащая
вне этой плоскости (рис. 157).
Проведем через точку О и каж-
каждую точку М кривой К прямую
ОМ. Совокупность всех этих пря-'
Рис. 157.
мых заполняет некоторую поверх-
поверхность S, которую обыкновенно и
называют конусом с вершиной
О и направляющей К или кону-
конусом, построенным над кривой К. В соответствии с этим множест-
множество всех точек конической поверхности второго порядка
¦?+¦{1-—S = ° <5>
есть конус с вершиной О=@, 0, 0), построенный над эллипсом
*2 , </2 _, ,_.
~aF~r~W~~ ' — '
лежащим в плоскости z = c (рис. 158) и являющимся сечением по-
поверхности E) и плоскости z = с.
Сечением конической поверхности E) с плоскостью у = Ь (рис. 159)
является гипербола
Однако конус с вершиной в начале координат О, построенный над
этой гиперболой, уже не совпадает с множеством всех точек поверх-
поверхности E); чтобы получить это множество, надо к конусу, построен-
388 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЙ ПРОСТРАНСТВО [ГЛ. XV
ному над гиперболой, присоединить еще все точки двух прямых
лежащих в плоскости у = 0 и входящих в состав поверхности E).
Итак, если взять какое-нибудь сечение К конической поверх-
поверхности E) плоскостью, параллельной одной из координатных плос-
плоскостей, то конус S с вершиной О, построенный над кривой К,
Рис. 158.
Рис. 159.
может не заполнить множества всех вещественных точек, лежащих
на поверхности E); придется присоединить еще точки этой поверх-
поверхности, лежащие на соответствующей координатной плоскости. Лишь
в главе XXII, при переходе к проективной точке зрения, нам удастся,
по крайней мере в случае кривых К второго порядка, пополнить
кривую К ее бесконечно удаленными точками и этим восстановить
утраченную гармонию: множество всех вещественных точек конуса
(у) совпадет тогда с конусом, построенным над любым плоским
сечением поверхности E), являющимся невырожденной вещественной
кривой второго порядка.
После рассмотрения примера E) вернемся к общему случаю
конуса 5 с вершиной О, построенного над любой алгебраической
кривой К, лежащей в данной плоскости я, не содержащей точку О
(рис. 160). Возьмем систему координат Ое1еге3 с началом О и еди-
единичными векторами е1( е2, параллельными плоскости я; вектор е3
определим как какой-нибудь вектор 00', конец которого лежит в
§ 8]
РАСПАДАЮЩИЕСЯ ЛИНИИ И ПОВЕРХНОСТИ
389
плоскости л. Таким образом, в этой плоскости определена коорди-
координатная система О'е^, а сама плоскость л в системе Ое^^ имеет
уравнение z—\. Пусть кривая К, лежащая в плоскости я, имеет
в координатной системе О'е^ уравнение
F{x,
F)
степени.л. Пусть М— (лг, у, z)-~какая-нибудь точка поверхности S.
Тогда прямая ОМ пересекает плоскость я в точке М0 = (х0, у0, 1),
координаты х0, у0 которой удов-
удовлетворяют равенству
o, i/o) = °-
Вектор ОМй = {хп, у0, 1} являет-
является направляющим вектором пря-
прямой ОМ, следовательно, ее пара-
параметрическое уравнение имеет вид
y — yot, \
z=\-t. )
(8)
\
Рнс. 160.
Так как лежащая на прямой (8)
точка М—(х, у, z) есть произ-
произвольная точка поверхности S, то
мы доказали следующее предло-
предложение: для того чтобы точка
М — {х, у, z) лежала на поверх-
поверхности S, необходимо и достаточ-
достаточно, чтобы ее координаты удовлетворяли при некотором t уравне-
уравнениям (8), где хйл у0 удовлетворяют уравнению F).
Подставляя в G) значения
х у ,
из (8), переписываем уравнение G) в виде
Именно этому уравнению удовлетворяют все (отличные от точки О)
[
точки
эому уравнению удовлтр (
= (х, у, z) поверхности 5. Многочлен F [ у, — ]
г У
есть мно-
гочлен л-й степени относительно — , У-, значит, многочлен
390
КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
есть однородный многочлен относительно х, у, z. Среди точек
М*=(х, у, z), не лежащих в плоскости z = 0, уравнению
Ф (х, y,z) = 0 D)
удовлетворяют все точки поверхности 5 и только они. Само урав-
уравнение D) определяет коническую поверхность порядка п, множество
точек которой получается присоединением к поверхности 5 точек,
лежащих в плоскости
z = 0 и удовлетворяющих
уравнению Ф (х, у, z) = 0.
4. Поверхности вра-
вращения. Пусть в прост-
пространстве дана прямоуголь-
прямоугольная система координат
Oxyz.
Рассмотрим многочлен
Г (и, z) от двух перемен-
переменных, одно из которых, а
именно и, есть х2 — у2,
так что
F(u, z)==.
2, z).
Рис. 161.
Очевидно, выражение
F (х2 + У2, z) тождествен-
тождественно равно некоторой сумме одночленов от трех переменных х, у,
z, т. е. некоторому многочлену f(x, у, z) от этих переменных.
Если потребовать, чтобы многочлен f(x, у, z) был при этом
второй степени, то в выражение F(x2-{-y2, z) аргумент х2-\-у2
может входить только в первой степени, a z может входить во
второй и в первой степени. Итак, общий вид многочлена второй
степени /(х, у, z), допускающего запись f(x, у, z)~F (x2-\-y2, z),
есть
/(*, у, z)=F(
Но вернемся к общему случаю многочлена f(x, у, z) любой
степени, допускающего запись вида f(x, у, z) ~= F (х2 -\-у2, z), и
рассмотрим алгебраическую поверхность S, задаваемую уравнением
z) = 0. (9)
Пусть точка М0 = (х0, у0, z0) лежит на поверхности (9). В плос-
плоскости z — z0, проходящей через точку Мо параллельно плоскости
Оху (рис. 161), возьмем окружность у с центром Q = @, 0, z0),
проходящую через тоику Мо. Радиус этой окружности, очевидно,
есть г =У~х20-{-у1, а ее уравнение
§ 8]
РАСПАДАЮЩИЕСЯ ЛИНИИ И ПОВЕРХНОСТИ
391
Так как точка Мо лежит на поверхности (9), то F(r2, z) = 0,a так
как во всех точках М=(х, у, г) окружности у имеем х2-\-уг=г2,
= z
0,
то все эти точки ле-
лежат на поверхности (9). Итак,
если данная точка Мо лежит на
поверхности (9), то на той же
поверхности лежат и все точ-
точки М, в которые попадает
точка Мо при вращении прост-
пространства вокруг оси z. Поэтому
поверхности, уравнения кото-
которых при надлежащем выборе
прямоугольной системы коор-
координат могут быть записаны
в виде (9), называются поверх-
поверхностями вращения. В частно-
частности, уравнение поверхности
второго порядка, являющейся
поверхностью вращения, запи-
записывается в виде
А (л-2 -Ьг/2)+ az* +Vbz + с = О,
Линия, получающаяся при пе-
пересечении поверхности вра-
вращения плоскостью, проходящей через ось вращения (в нашем случае
через ось z), называется меридианом этой поверхности вращения.
Например, меридианом по-
поверхности вращения
Рис. 162 .
является сечение этой по-
поверхности с плоскостью
у = 0, т. е. линия
Поверхность вращения опи-
описывается при вращении ли-
- нии, являющейся ее мери-
меридианом, около оси вращения.
Рассмотрим, например,
коническую поверхность
Рис. 163. *2 + у2—г2 = 0. A0)
Ее меридианом, лежащим в плоскости у = 0, является пара прямых
392 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
«Z
Рис. 165.
Рис. 166.
Рис. 167.
Л 9] ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ 393
конус A0) описывается при вращении этой пары прямых вокруг
оси z (рис. 162).
Рассмотрим в качестве второго примера поверхность, задаваемую
уравнением'
(система координат все время прямоугольная). Это снова поверх-
поверхность1" второго порядка, являющаяся поверхностью вращения. Она
получается вращением около оси z параболы
z = x\ </ = 0;
вид полученной поверхности вращения совершенно ясен, эта поверх-
поверхность изображена на рис. 163; она называется параболоидом вращения.
Поверхности, заданные уравнениями
соответственно
получаются, как легко проверит читатель, при вращении вокруг оси z
равнобочной гиперболы, лежащей в плоскости у = О и имеющей ось z
соответственно своей второй и первой осью (рис. 164, рис. 165).
Читатель сам напишет уравнения поверхностей, получающихся
от вращения эллипса вокруг его осей (рис. 166, рис. 167).
§ 9. Несколько заключительных замечаний
о линиях и поверхностях
Алгебраические линии н поверхности, определенные в этой главе,
образуют весьма специальный класс среди линий и поверхностей,
рассматриваемых в различных частях математики. Однако общий
принцип определения линий и поверхностей посредством уравнении
вида
F(x, у)=0 A)
на плоскости и
F(x, у, z) = 0 B)
в пространстве находит применение в очень широких предположе-
предположениях о функциях, образующих левую часть уравнений A) и B), и очень
распространен в математическом анализе.
Каждый раз, когда определен какой-нибудь класс функций
F{x, у) или F(x, у, z) соответственно от двух или трех перемен-
переменных, можно определить посредством уравнений вида A) и B) и
соответствующий класс линий на плоскости и поверхностей в про-
пространстве1). Так, например, можно рассматривать функции F(x, у)
1) Разумеется, задание плоской кривой как графика непрерывной функ-
функции y~f(x) есть частный случай определения кривой уравнением A)—
достаточно положить F (х, у) = у—ft (*) = 0.
394 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
и F{x, у, z), имеющие частные производные по всем своим аргу-
аргументам, вплоть до данного порядка k, можно рассматривать
бесконечно дифференцируемые функции и т. д. Наиболее широким
представляется класс линий и поверхностей, который получается,
если от функций F(x, у) и F(x, у, z) не требовать ничего, кроме
их непрерывности; однако этот класс оказывается слишком обшир-
обширным: если определять линии на плоскости как множество точек,
координаты которых удовлетворяют уравнению F(x, y) = 0, где
F(x, у) — любая непрерывная функция, то получаются и такие мно-
множества точек, которые никак не отвечают нашему наглядному
представлению о линии; достаточно, например, рассмотреть на пло-
плоскости уравнение
F(x, у) = х + \х\ = О
-—ему удовлетворяют все точки левой полуплоскости
Предположим, мы определили тот или иной класс линий на
плоскости, задав соответствующий класс «допустимых» функций
F(x, у). Имея в пространстве какую-нибудь систему координат
Оехе2ез и задав в плоскости Оху линию тем или иным уравнением
A), мы автоматически получаем и цилиндрическую поверхность,
имеющую эту линию своим основанием, с образующими, парал-
параллельными оси Oz; эта поверхность состоит из всех точек
М=(х, у, z) пространства, координаты которых удовлетворяют
уравнению A).
Итак, понятие цилиндрической поверхности можно не ограничи-
ограничивать требованием, чтобы кривая, лежащая в основании цилиндра,
была алгебраической.
Аналогичное замечание можно сделать и о понятии конуса,
построенного над данной кривой, с данной вершиной и вообще о понятия
конической поверхности: для общего определения конической по-
поверхности надо только дать общее определение однородной функции
F(x, у, z) от трех переменных как функции, удовлетворяющей при
некотором фиксированном натуральном числе к условию
F(tx, iy, iz) = i*F(x, у, z)
для всех вещественных чисел t\ построенное для данной функции
натуральное число k называется степенью или порядком однород-
однородности функции F. Для многочленов это общее определение одно-
однородности совпадает с элементарным определением, данным на
стр. 322 в подстрочном примечании. После того как определен класс
«допустимых функций» F(x, у, z), служащий для того, чтобы
посредством уравнений вида B) задавать «допустимые» поверхности,
мы среди этих допустимых поверхностей выделяем конические по-
поверхности, как такие, которые в некоторой системе координат могут
быть заданы уравнением B), левая часть которого есть однородная
§ 9] ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАЙ ИЯ 395
допустимая функция. Естественно назвать начало соответствующей
системы координат вершиной конической поверхностих). Основное
свойство конических поверхностей оказывается выполненным и при
этом общем определении: если О—вершина конуса, а М—любая
его точ^а, то вся прямая ОМ лежит на конусе.
Определение алгебраических линий и вообще определение линий
посредством уравнений вида A) применимо лишь к линиям, лежащим
на плоскости.
Линии в пространстве можно определять, задавая два уравнения
М*. У, *) = 0, BХ)
Ft(x, у, z)=0, B2)
как пересечение поверхностей, определенных соответственно этими
уравнениями.
Пример такого определения линии мы имели, когда задавали прямую
в пространстве ее .так называемым «общим уравнением», т. е. как
пересечение двух плоскостей
А2х + Вгу -f C2z -f D2 = 0.
Вообще же, задавая линию в пространстве системой двух уравнений
вида BХ), B2), приходится принимать некоторые предосторожности,
так как не всегда пересечение двух поверхностей естественно на-
называть линией.
Широко применяется в математике и задание линий посредством
параметрических уравнений:
двух:
*
на плоскости;
трех:
> (з8)
*=/»(<) J
— в пространстве.
Большим достоинством этого способа задавать линии является
его всеобщность—он в равной мере 'применим и к плоским,
*) Следует, однако, отметить, что вершина конической поверхности,
вообще говоря, ие является однозначно определенной: так, пара пересека-
пересекающихся плоскостей является конической поверхностью, за вершину которой
можно принять любую точку прямой пересечения этих плоскостей.
396 КОМПЛЕКСНАЯ ПЛОСКОСТЬ И КОМПЛЕКСНОЕ ПРОСТРАНСТВО [ГЛ. XV
и к пространственным линиям (и даже к линиям в л-мерном прост-
пространстве).
Читатель, вероятно, оценил удобства параметрического задания
линий даже на простейшем рассмотренном в этих лекциях примере—-
параметрического уравнения прямой. Налагая те или иные условия
на класс «допустимых» функций ft(t), /2@, /з @. мы получаем
соответствующие классы линий. Среди них особенно важным является
класс дифференцируемых линий, определяемых уравнениями C2), C3),
в которых правыми частями являются дифференцируемые функции
/i@. /2 О. /ИО- Дифференцируемые линии характеризуются нали-
наличием у них касательной в каждой точке. Если у функций Д (t),
f2(t), /3 @ в каждой точке (рассматриваемого отрезка a^t^b)
существуют непрерывные производные, то линии (За) и C3) назы-
называются гладкими (или «кривыми с непрерывно вращающейся каса-
касательной»).
Кривые «гладкости ft» определяются требованием, чтобы функции
/i @> Л @i /з @ имели непрерывные производные до поряд-
порядка k включительно.
Полученные таким образом классы кривых изучаются в элемен-
элементарной дифференциальной геометрии.
В противоположность этой все возрастающей специализации по-
понятия кривой, противоположный подход—-стремление найти наиболее
широкий класс множеств, еще заслуживающих названия линий, и
изучение этих наиболее общих линий—с успехом осуществляется
в топологии. Задача определения и изучения линий в общетополо-
общетопологическом смысле слова была впервые поставлена Д. Ф. Егоровым1)
еще в 1911 г. и была решена П. С. Урысоном (а также австрий-
австрийским математиком К. Мен ге ром) в 1921 г.2). Начальные сведе-
сведения об этих вещах (а также о созданной П. С. Урысоном тео-
теории размерности) читатель может получить в превосходной
и очень доступно написанной книжке А. С. Пархоменко «Что такое
линия?».
В заключение заметим, что поверхности можно также определять
параметрическими уравнениями
х--=^{и, v),
</=фг(и, v), \ D)
>) Д. Ф. Егоров A869—1930) — выдающийся русский и советский матема-
математик, работы которого относятся к различным областям математики (диффе-
(дифференциальной геометрии, теории функций, различным вопросам анализа);
вместе со своим учеником Н. Н. Лузиным является основателем современной
московской математической школы.
2) П. С. Урысон A898—1924) —один из крупнейших топологов теоретико-
множественного направления, основатель советской топологической школы.
§ 9] ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ 397
где непрерывные функции ф^Фг.Фз определены в некоторой области
плоскости, например в квадрате
Замечание. Если требовать лишь непрерывности функций
при параметрическом определении (как кривых, так и поверхностей),
то снова получается слишком широкий класс геометрических объек-
объектов; поэтому в случае определения поверхностей уравнениями D)
требуют, например, существования частных производных функций
<Pi, Фа- <Рз-
Общая проблема топологического определения поверхностей
также решена П. С. Урысоном в построенной им теории размерности.
ГЛАВА XVI
Различные виды кривых второго порядка
В § 1 этой главы будет показано, что единственными кривыми
второго порядка являются:
эллипсы (включая так называемые мнимые эллипсы, определяемые
в надлежащей системе координат уравнениями вида —^ + -|j- + 1 = 0 j ,
гиперболы,
параболы
и кривые, распадающиеся на пару прямых (пересекающихся,
параллельных или совпадающих); при этом прямые могут быть
действительные или мнимые сопряженные *); прямая в паре совпа-
совпадающих прямых всегда действительна.
В §§ 2, 3, 4 будет показано, как определить вид кривой по ее
общему уравнению.
В § 5 будет дана аффинная классификация кривых второго
порядка.
Рассмотрим уравнение
F(x, у) = 0,
где
F(x, у)== апх2 + 2а12ху + а22у2 + 2а1х + 2а2у + а0 A)
— общий многочлен второй степени. Мы хотим найти прямоугольную
координатную систему, в которой уравнение кривой F(x, {/) = 0
приняло бы возможно простой—«канонический» — вид.
Начальную координатную систему будем предполагать прямо-
прямоугольной (если бы она не была таковой, мы бы перешли к новой
прямоугольной системе координат и этим преобразовали бы перво-
первоначальный многочлен F(x, у) в новый многочлен, тоже второй
степени, с которого и начали бы наши дальнейшие рассуждения).
J) Две мнимые прямые называются сопряженными, если они могут быть
заданы уравнениями Ах-\-Ву-\-С = 0 и ~Ах-\-Ъу-\-~С — О, в которых коэффи-
коэффициенты А и А, В к~В, С и С являются взаимно сопряженными комплексны-
комплексными числами.
§ 1] О ЛИНИЯХ, ОПРЕДЕЛЯЕМЫХ УРАВНЕНИЯМИ ВТОРОЙ СТЕПЕНИ 399
§ 1. О линиях, определяемых уравнениями второй степени
с двумя неизвестными
1. Приведение квадратичной формы от двух переменных к ка-
каноническому виду при помощи преобразований прямоугольных
координат. Первый шаг заключается в том, чтобы поворотом на-
начального прямоугольного репера Оехе2 на некоторый угол а преоб-
преобразовать квадратичную форму ф (х, у) = allxi + 2a12xy + a2iy2
старших членов многочлена
F(x, у)==апх2 + 2апху + а22у2 + 2а1х + 2агу + а0 A)
к каноническому виду
ах1х
Итак, делаем преобразование координат
Ar=x'cosa — (/'sin a, I ._.
у =х' sina-i-t/' cos a. )
Получаем тождественно
F(x, у) е^ ап (х'г cos2 a — 2х'у' cos a sina + (//2sin2a) +
+ 2a12 (x'2 cos a sin a — x'y' sin2 a—y'z sin a cosa-\-x'y' cos2 a) -\-
+ a22 (Ar'2sin2a + 2j?r'(/' cosasina+{/'2 cos2 a) +
-\-2alx' cos a — 2axy' sina-f 2a2x' sina + 2a2y' cosa + a0^
= F' (x', (/')?= а'пх'г + 2a'nx'y' + a'22y'2 + 2a[x' -f 2aty' + a0,
где
а'1г = alx cos2 a -|- 2a12 cos a sin a + «22 s'n2 a>
ai» = —au cos a sina + a12 (cos2 a — sin2a) + a22 cos a sin a,
a22 = ausin2a — 2a12 cosa sina+aa2 cos2a, J- C)
a{ = ax cos a -\- a2 sin a,
a'2 = — at sin a + a2 cos a.
Определим угол a требованием, чтобы было a'12 = 0, т.е. требованием
a12cos2a-|-(a22 — au) cos a sin a — a12sin2a = 0 D)
или
a12tgaa-f(an—a22)tgu—a12 = 0, D')
причем естественно предположить, что апФ0 (при a12 = 0 нечего
было бы делать—форма <р (лг, у) уже имела бы вид а1Гх:2 + a22(/2).
Из D') получаем
t __ а22 — аи ±
° 2а
1г
400 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
Так как (а22—апJ + 4а?2 > 0, то по формуле E) нужный нам
угол а всегда можно определить.
Замечание. Можно определить угол а и так: перепишем
D') в виде
а12 (cos* a — sin2 а) + fl22~°" 2 cos a sin а = 0,
т. е.
а12 cos 2а + а22~"п sin 2а = 0,
откуда
= ^^. E')
Так как ctg2a может принимать всевозможные действительные
значения, то найти нужное а всегда можно.
Полагая для сокращения письма aii = X1) п'гг = %%, сформулируем
полученный результат.
Поворотом координатной системы Ое^ на угол а (определяемый
из E) или E'), можно преобразовать квадратичную форму
Ф (х, у) = а1гх2 + 2а12ху -f a22t/2
к каноническому виду
а весь многочлен F(x, у)— к виду
F' (х', у') = Ххх'2 + КУ'2 + 2°W + 2в^' + а0.
Оба коэффициента Ях и Х2 не могут одновременно быть нулями:
если бы было Я1 = Я2 = О, то многочлен второй степени F{x, у)
при преобразовании B) перешел бы в многочлен первой степени,
что, как мы знаем, невозможно.
Итак, возможны два основных случая:
2° Один из двух коэффициентов Къ Я2 отличен от нуля, другой
равен нулю.
2. Первый основной случай: %хф0, K2jt0. При переносе
начала координат в какую-нибудь точку О' = (х'о, у'о), т. е. при
преобразовании
многочлен /•'' (х', у') принимает вид
Г(х', y')=F"{x\ y«) =
44+(i;),4e; (в)
§ 1] О ЛИНИЯХ, ОПРЕДЕЛЯЕМЫХ УРАВНЕНИЯМИ ВТОРОЙ СТЕПЕНИ 401
где свободный член а'„ есть (гл. XV, § 2)
во = Мо* + Ку'* + 2а\х'о + ZaWo +ao = F' (х'в, у'о).
Подберем теперь такие координаты х'о, у'й нового начала (У,
чтобы коэффициенты при х" и у" в F) обратились в нуль, т. е.
чтобы
Я1Д?; + а1=01 Х2у'0 + а'2=0. G)
Так как Aj^O, Я2=?0, то уравнения G) дают нужные значения
для х'о, у'о. Итак, в системе координат O'eieJ, первоначальное урав-
уравнение F(x, у) = 0 нашей кривой преобразуется к виду
Я^1+ *,/*+о.'= 0. (8)
Переходим к исследованию уравнения (8). Имеем два случая:
Случай А — гиперболический: коэффициенты Ях и А2 разных
знаков.
Случай Б—эллиптический: коэффициенты Ях и Я2 одного и
того же знака.
А. Гиперболический случай. Пусть сначала а'оф0,
один из коэффициентов Ях, Я2 имеет тот же знак, что и а'о; пусть
это будет, например, Я2; то!да Ях и а'о противоположны по знаку.
Переписываем уравнение (8) в виде
х"г и
-^-г + -^-7=1. (8')
Знаменатель —^ в нервом члене есть положительное число; обо-
значаем его через а\ знаменатель —^ отрицателен; обозначаем
его через —Ьг. Уравнение (8'), т. е. уравнение (8), приняло вид
а2 б2
Это — каноническое уравнение гиперболы.
Если в гиперболическом случае о„ = 0, то можно без ограниче-
ограничения общности предположить, что Хг > 0, Я2 < 0; введем обозначе-
обозначения Ях = о2, Я2=—Ьг; уравнение (8) переписывается в виде
йу!_«у' = 0, т. е. {ах" + by") (ax" —by") = 0. (9)
Это — уравнение пары прямых, пересекающихся в начале коорди-
координат О'. Уравнение (9) считаем каноническим уравнением кривой,
распадающейся на пару действительных пересекающихся прямых.
Итак, в гиперболическом случае уравнение (8) определяет гипер-
гиперболу, или пару пересекающихся прямых.
402 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
Б. Эллиптический случай. Теперь Ях и Х2 одного знака.
Снова предполагаем сначала, что а0' Ф- 0. Если общий знак чисел
Хх и Х2 противоположен знаку а». то. переписав уравнение (8)
в виде (8'), видим, что оба знаменателя —-Л и —у2 положительны;
обозначив их соответственно через а2 и Ь2, получим
± | У _ 1
а2 -Г Ь2 —
— каноническое уравнение эллипса с полуосями а, Ь.
Если же общий знак Х1 и А2 совпадает со знаком а'о, то зна-
знаменатели в (8') отрицательны, и мы получаем уравнение
Это—уравнение «мнимого эллипса», или эллипса с мнимыми полу-
полуосями ai и й/; нет пн одной действительной точки плоскости,
которая бы этому уравнению удовлетворяла.
Пусть теперь в эллиптическом случае а'0 = 0. Уравнение (8)
принимает вид
Так как Ях и Я2 одного знака, то это уравнение можно пере-
переписать в виде
йУ2 + 6У'! = 0 или в виде {ах" + Ыу") {ах"—Ыу") = 0. A1)
Это—каноническое уравнение кривой, распадающейся на пару пере-
пересекающихся мнимых сопряженных прямых; оно удовлетворяется
единственной действительной точкой О' — точкой пересечения двух
мнимых сопряженных прямых
ах" + iby" = 0, ax" — iby" = 0.
Итак, в эллиптическом случае уравнение (8) — а значит, и на-
начальное уравнение F)—определяет или обычный эллипс («дейст-
(«действительный»), или «мнимый» эллипс, или пару мнимых сопряженных
прямых с одной общей действительной точкой.
3. Второй основной случай: 7,^2 = 0. Пусть из коэффициентов
к1г Я2 в уравнении (Г) один, например Xv отличен от нуля, а
Я2 = 0. Тогда в системе координат Ое^ уравнение
F(x, y)=»0
приняло бы вид
F'(x', y')i==X1x'* + 2a1x' + 2aiy' + a0=*0. A2)
Имеются две дальнейшие возможности:
§ 2] ИНВАРИАНТЫ МНОГОЧЛЕНА ВТОРОЙ СТЕПЕНИ 403
А. а'2ф0. Тогда уравнение A2) можно решить относительно у\
т. е. представить его в виде
— наша кривая есть график трехчлена второй степени, т. е. пара->
бола.
Б. а'2 = 0. Тогда уравнение A2) есть
Это — квадратное уравнение относительно х'; оно имеет два решения:
у' Y' v' Y (\А.\
— мы имеем пару параллельных прямых A4) — действительных, если
корни х\ и х2 квадратного уравнения A3) действительны, мни-
мнимых и сопряженных, если таковы корни х\ и х'2 уравнения A3).
Наконец, если х[—х'2, то говорят, что уравнение A2), а значит и
уравнение A), опредетяет пару слившихся (или совпадающих) дей-
действительных прямых.
Подведем общий итог.
Всякая кривая второго порядка есть
или эллипс (действительный или мнимый),
или гипербола,
или парабола,
или пара прямых: пересекающихся (действительных или мнимых
сопряженных),
параллельных (в собственном смысле) (действительных или мни-
мнимых сопряженных),
совпадающих (действительных).
Приведенное доказательство этого результата содержит в себе
и способ определения вида кривой по ее уравнению, однако прак-
практически удобным этот способ не является; удобный способ будет
дан в следующих параграфах.
§ 2. Инварианты многочлена второй степени
Пусть дан какой-нибудь многочлен второй степени от перемен-
переменных х, у:
F(x, »/) = ф(лг, у) + 21(х, у) + а0, A)
ф (дг, у) = аил:2-{- 2а12ху-\- Д22(/2, 1(х, у) = ахх-\- а«у. B)
Обозначим через б детерминант
т. е. дискриминант квадратичной формы ф (лг, у).
404 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
При переходе от прямоугольной системы координат Оху к новой
прямоугольной системе координат О'х'у' многочлен F(x, у) пере-
переходит в многочлен
F'(x\ у')~<р'(х', у')+21'(х', у') + а'о. (Г)
Так как общее преобразование координат сводится к переносу начала п
к переходу к новой координатной системе с тем же началом, то
рассмотрим отдельно оба этих частных случая. Как мы знаем
(гл. XV, § 2, E2) на стр. 370), при переносе начала, т. е. при
преобразовании х = х' +лг0, У = у' + Уп, коэффициенты ап, а12, а22
при старших членах многочлена F(x, у) остаются неизменными.
Другими словами, остается неизменной матрица квадратичной формы
гр (лг, у), а значит, и ее дискриминант б.
Если же новая координатная система имеет то же начало О' = О,
что и старая, то
ф' (•*'. У') = «ii*2 '' \
причем (как мы видели в гл. XV, § 2, (8) на стр. 371) имеем
б' =
= 6.
Теперь сформулируем два определения, из которых первое уже
известно из главы VIII.
Определение 1. Общее (неоднородное) преобразование
_ ' -_L ' T C)
У — ^21"^ I ^22^ i~ ^2 J
называется ортогональным, если ортогональна его матрица
С11 С12
С21 С22
т. е. матрица, составленная из коэффициентов при переменных.
Определение 2. Пусть дана целая рациональная функция1)
J (аи, а12, о22, alt а2, а0) от коэффициентов многочлена
F (х, у) == апхг + 2апху + о22у2 + 2ulx -\- 2а
При произвольном ортогональном преобразовании C) многочлен
F(x, у) тождественно переходит в
F(х', y')^a'llX'* + 2а12х'у' + а22у'г + 2а\х' + 2a\y' + а'о.
*) Целая рациональная функция (от каких-то переменных |, г\, ?,, ...) —
зто просто многочлен от этих переменных. В данном случае | = ои, ц — вц
и т. д.
§ 2]
ИНВАРИАНТЫ МНОГОЧЛЕНА ВТОРОЙ СТКПЕНИ
405
Если при этом всегда, т. е. для любого ортогонального преобразо-
преобразования C), при любом наборе значений ап, а12, а22, аъ а2, а0
J(alu а'12, о'22, а{, а\, a'0)=J(ou, an, а22, аъ а2, а0), D)
то функция J называется ортогональным инвариантом многочлена
F(x, у).
Примером ортогонального инварианта многочлена может служить
= б(ои, а12, о22, аъ о2, ао) =
an Oj
а,. а„
'21 2
Точно так же ортогональным инвариантом является и функция
o
o
av a2
12, o22, av a2, ао) = аи+аг2.
В самом деле, если преобразование C) есть поворот координатного
репера (на какой-то угол а), то из первой и третьей формул C)
§ 1 (стр. 399) следует, что
S'=S.
Но функция S, очевидно, не меняется и при отражении
а также при переносе начала координат, следовательно, и при
любом ортогональном преобразовании.
Докажем, наконец, инвариантность функции
2. «
22,
2.
l22
1 Й2 S
Для этого наряду с многочленом ^(лг, у) рассмотрим квадратичную
форму
а наряду с преобразованием C) рассмотрим преобразование
' -f c2t',
E)
При этом преобразовании квадратичная форма Ф(х, у, t) переходит
в квадратичную форму
Ф'(х', у', t') = a[lX'2 + 2аЛ2х'у' + а\,у'г + 2a\x'i' + 2агу'Г + а'/*
(где коэффициенты а'и, а'12 и т. д. те же, что и в многочлене
f (x't у')). Дискриминант квадратичной формы Ф (лг, у, t) есть наш
406
РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА.
[ГЛ. XVI
детерминант
А =
«12
«22
Ot
«1
«2
a0
При преобразовании E) он помножается на квадрат детерминанта
этого преобразования, т. е. на
с,
¦-и
С21
0 О
С22
1
откуда и следует, что А(а[и а'1г, a'2t, a'u а'г, a') = A(alv e12, а22, аъ аг, ай).
Нами доказана
Теорема 1. Функции
= an-\-a22, 6 =
a,, a,
«21
«i
«ia
«22
«2
«!
«2
от коэффициентов многочлена A) являются ортогональными инва-
инвариантами этого многочлена.
Замечание 1. Из наших рассуждений следует: если много-
многочлен F(x, у) удовлетворяет какому-нибудь из условий 6^0, Д = 0,
то при переходе к .чюбой аффинной координатной системе О'х'у'
он преобразуется в многочлен F' (х', у'), удовлетворяющий тому же
условию (потому что детерминанты б', Д', построенные для F' {х', у'),
получаются соответственно из б и А умножением на положитель-
положительное число — квадрат детерминанта преобразования).
При этом, если квадратичная форма ф(лг, у) старших членов
многочлена F(x, у) является определенной (см. гл. XIII, § 5), то
коэффициенты ап и а22, а значит, и их сумма S = ап-{-а22 сохра-
сохраняют свой знак при любом невырожденном линейном преобразова-
преобразовании. Для неопределенной формы ц>(х, у) это не так.
Из теоремы 1 мы выведем сейчас такое фундаментальное
Следствие. Если каким бы то ни было ортогональным пре-
преобразованием
мы привели форму
ср (лг, у) = аилг2 + 2а12ху + аг2у*
к каноническому виду
Ф'(лг', y')==allX'*+ai2y'\
B')
§ 2] .ИНВАРИАНТЫ МНОГОЧЛЕНА ВТОРОЙ СТЕПЕНИ 407
то коэффициенты a'lt и а'22 непременно являются корнями квадрат:
ного уравнения
А2 — Sk + b = 0. (б)
В самом деле, из инвариантности Sub следует, что
6 =
'11 2 a'll 0
О а'
т. е. что сумма чисел а'п и а'22 равна S, а их произведение равно б-
А это и значит, что сами эти числа суть корни уравнения F).
Уравнение F) называется характеристическим уравнением квадрат
тичной формы ф (х, у). Оно всегда имеет действительные корни,
что сразу следует из того, что дискриминант уравнения F) есть
52-4б - (au+ a22J-4 (aua22-a?2) = (an — а22J + Аа\г ^ 0. (8)
Замечание 2. Этот дискриминант равен нулю тогда и только
тогда, когда одновременно
«11 = 22!, ап = 0. (9)
Равенства (9) выражают условие, необходимое и достаточное,
для того чтобы корни характеристического уравнения были равны
между собою.
Мы знаем, что поворотом на угол а (определяемым из формулы
E) § 1) квадратичная форма
преобразуется в ф' (х', у') = а'1хх'2-\-а'2гу'г, причем a'tl и а'22 всегда
суть корни характеристического уравнения F). Но если корни этого
уравнения суть Ях и Я2, то мы не знаем, какой из них есть коэф*
фициент при х' (т. е. а'ц), а какой — коэффициент при у' .
Считая, что корни Ях и Я2 характеристического уравнения даны,
найдем угол а, на который надо повернуть систему координат,
чтобы форма ср (х, у) перешла именно в XjJc:' -\-X2y'2 (а не
в Х2х' -j-Aj!/' ). Этот угол будет вместе с тем углом наклона новой
оси абсцисс (оси Ох') к старой Ох. Для этого переписываем пер-
ные два равенства C) из § 1:
a'lt — К1 = alx cos2 a -j- 2a12 cos а sin а -j- o22 sin2 а,
а'12 = 0 = — аи cos а sin а -f- a12 cos2 а— a12 sin2 a -f- o22 cos a sin a.
Умножаем первое из зтих равенств на cos а, второе на —sin a и
складываем. Получаем
Хх cosa = an(cos3 a + cosa sin2 a) + 2а12 cos2 a sin a — a12 cos2 a sina+
+ aiasin3a-j-a22(sin2a cos a — cos a sin2 a),
408 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
т. е.
Хх cos а = ои cos а + о12 sin а,
откуда
Это и есть угловой коэффициент новой оси абсцисс! Заметим, что
если о12 = 0, то форма ср (х, у) уже имеет канонический вид и нет
надобности ни в каком повороте системы координат.
§ 3. Центральный случай
Итак, поворотом первоначальной прямоугольной системы коор-
координат на угол а, определяемый из формулы A0) предыдущего пара-
параграфа, мы приводим многочлен
F(x, у)=апх2 + 2а12ху+а22у* + 2а1х + 2а!1у + а0 A)
к виду
V2 + 12у'2 + 2а\х' + 2а'2у' + а0. (Г)
Дальнейшее исследование кривой F(x, y)—0 заключалось в раз-
разборе двух случаев: центрального (когда Я1=?^0, А2=^0) и парабо-
параболического (когда лишь одно из двух чисел Хъ Х2 отлично от нуля).
Так как Х1Я2 = б, то центральный случай есть случай 6=^0,
а парабсли !еский— 6 = 0.
Предположим, что б Ф 0. Докажем, что в этом случае можно до
всякого поворота системы координат Оху переносом начала, т. е.
преобразованием
o. I B)
о, /
У = 11 + У о,
преобразовать многочлен F(х, у) в
+ а*. A*)
При этом xQ, yQ в B), т. е. координаты нового начала О'= (х0, ?/„),
являются однозначно определенными. В самом деле, подставим
* = ? + *„- у =4 +У о в A). Получим
F (х, у) = aug2 + 2о12|т1 -f а22т]2 + 2 (аих0 + а12у0 + 0^I +
Теперь определяем лг0 и уп так, чтобы коэффициенты при ? и ц
обратились в нуль, т. е. чтобы
flu*o + о»«/0 + °i = 0» ) C)
а21ха + о22г/0 + аг = °- /
§ 31
ЦЕНТРАЛЬНЫЙ СЛУЧАЙ
409
Так как по предположению
6 =
'и
то уравнения C) решаются однозначно и дают нам искомые лг0, у0.
Теперь, имея корни kv k2 характеристического уравнения
Я2 —5
нам остается только определить угол а из формулы A0) предыду-
предыдущего параграфа и—посредством поворота координатной системы
О'с,ц на этот угол а — преобразовать многочлен A) в
Р'(х',у') = Кх'г + Ь&'г + а*. (I)
Определим свободный член а*. Для этого воспользуемся инва-
инвариантностью детерминанта
откуда
«11
«21
ax
«12
«22
«2
«1
«2
=
0
0
0
0
0
0
at
Итак, при переходе от первоначальной системы координат Оху
к новой системе О'х'у' многочлен F (х, у) тождественно преобра-
преобразовался в
F(x', y') = V2+A2y + A
Нами доказана следующая
Теорема 2. Пусть в произвольной прямоугольной системе
координат Оху дана кривая второго порядка своим уравнением
F (х, у)=аихг + 2а12ху + а22у2 + 2%.*: -f 2a2(/ + а0 = 0,
у которого
6 =
'12
= 0.
Возьмем нозую систему координат О'х'у', начало которой есть точ-
точка О' = (х0, у0), определенная уравнениями C), а ось абсцисс О'х'
наклонена к оси Ох под углом а, определенным уравнением A0) пре-
предыдущего параграфа. В системе координат О'х'у' кривая F (х, у) — 0
имеет уравнение
V2+x2«/'2 + A=-o. D)
Замечание 1. Как видно из уравнения D), точка О' — (х0, уа),
являющаяся началом новой координатной системы О'х'у', есть центр
410 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
симметрии нашей кривой. Мы увидим в следующей главе, что в
случае б Ф 0 кривая F (х,ч/) = 0 имеет единственный центр симметрии.
Поэтому кривая F (х, у) = 0 называется в этом случае центральной.
Замечание 2. Существенно отметить, что и новую систему
координат О'х'у' (т. е. ее начало и наклон оси О'х' к старой оси абсцисс
Ох), и все три коэффициента Хъ Я2, -т- уравнения D) мы непосред-
непосредственно, без всяких сложных вычислений определяем по коэффи-
коэффициентам первоначального уравнения
F(x,y) = 0
нашей кривой1).
Уравнение D) называется приведенным уравнением центральной
кривой. Его исследование быстро доводится до конца (по существу,
повторением рассуждений §1, п. 2).
При Д = 0 уравнение D) имеет вид
= 0 D')
и определяет пару прямых, пересекающихся в начале координат О'
(т. е. в центре кривой). Эти прямые действительные при б = Я1Я2 < 0,
мнимые (сопряженные) при б = Я1Я2> 0.
Пусть A =?fcO, уравнение D) (т.е. уравнение (8) §1, в котором
положено а0 = -^ 1 переписывается тогда в зидо
Имеем два случая:
а) Случай гиперболический. 6 = ХХК2 < 0; обозначая че-
через Ях тот из двух корней характеристического уравнения, знак ко-
которого совпадает со знаком Д, полагаем
получаем уравнение гиперболы
^2~ -1л—^~ F')
') Поэтому и надо было сначала производить перенос начала, т. е. решать
уравнения C), а потом делать поворот системы координат: в противном слу-
случае координаты нового начала определялись бы по формулам G) из §1 (стр. 401),
в которые входят коэффициенты а', а'г, для вычисления которых нужны
последние две формулы C) из § 1 (стр. 399).
§ 3] " ЦЕНТРАЛЬНЫЙ СЛУЧАЙ 411
б) Случай эллиптический. б = Х1Х2>0, числа ХХ и Я2
одного знака, и этот знак совпадает со знаком их суммы S.
Если этот знак S противоположен знаку А, то можно положить
(обозначая через Хх тот из двух корней Хь Х2 характеристического
уравнения, для которого )Xj)^ [ Х2 \)
2>0 »2>° <7>
получаем уравнение эллипса
х'г и'г
— !
если же знак S (т. е. знак Х± и А2) совпадает со знаком Д, то по-
полагаем
уравнение E) превращается в уравнение
мнимого эллипса.
Рассмотрим частный случай \1 = \2. Тогда в G'), соответствен-
соответственно в (8'), имеем а2 = Ь2, и мы получаем уравнение окружности:
действительной
х' -\-у' = а2 (окружность радиуса а)
или мнимой
х'г+у'2' — — а2 (окружность мнимого радиуса ia).
Как было сказано в §2, замечание 2, корни ^ и Я2 характе-
характеристического уравнения равны между собою тогда и только тогда,
когда одновременно
on=a22, o12 = 0.
Так как при этом исходная система координат — совершенно произволь-
произвольная прямоугольная система, то уравнение окружности в любой
прямоугольной системе координат имеет вид
А(х2 + у2) + 2а1х + 2а2у + а0 = 0 (9)
или (по сокращении па А = оп = а22 Ф 0)
0 = 0. (9')
Обратно, если в какой-нибудь прямоугольной системе координат
кривая определена уравнением (9), то эта кривая есть окружность;
для получения ее канонического уравнения достаточно перенести
начало координат в точку О' = (х0, у0), определяемую уравнениями C),
412 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА
которые теперь (для кривой (9') ) имеют вид
[ГЛ. XVI
Уо + а\ = 0.
И действительно, полагая в (9')
получаем (после приведения подобных членов)
х'г + у'* = a'i + о2'2 — а',
что дает действительную окружность при а'х +о'2'2> а'о, мнимую
при а[ -\- а'2 < а'. При а[ -j- а'г " °о получаем
т. е.
—пару мнимых прямых с угловыми коэффициентами +/; такие прямые
называются изотропными. Итак, окружность пулевого радиуса есть
пара изотропных прямых, пересекающихся в одной действительной
точке (центре окружности).
Подведем итог.
В центральном случае, 6=^0, имеем такие возможности:
д=о,
случай вырождения
Гиперболический
случай,
б <0
Пара пересекающихся
действятельных прямых
Гипербола
Эллиптический
случай,
6>0
Пара мнимых сопряжен-
сопряженных пересекающихся
прямых
Эллипс:
действительный,
если 5 и А раз-
разных знаков
мнимый, если S и А
одного знака
Замечание 3. Мы видели (замечание 1 § 2), что если много-
многочлен F(x, у) удовлетворяет какому-нибудь из условий 6 = 0, б=т^О,
б > 0, б < 0, Л = 0, Л=^=0, А > 0, А < 0, то тому же условию
удовлетворяет и многочлен F' (х', у'), в который перешел многочлен
F(x, у) при переходе от координатной системы Оху к произволь-
произвольной аффинной координатной системе О'х'у'. Аналогичное утверж-
утверждение верно и для инварианта S (в случае определенной квадра-
§ 4]
ПАРАБОЛИЧЕСКИЙ СЛУЧАЙ
413
тнчной формы <p(jc, у) см. замечание 1 § 2 на стр. 406). Поэтому
только что приведенная таблица, решающая вопрос о том, нахо-
находимся ли мы в центральном или нецентральном (параболическом)
случае, а также в. эллиптическом или гиперболическом, вырожда-
вырождающемся или певырождающемся случае, сохраняет свою силу при
произвольно выбранной аффинной координатной системе.
§ 4. Параболический случай: 6 = 0
В любом случае, в том числе и параболическом, можно поворо-
поворотом координатной системы на угол а, определяемый из равен-
равенства A0) § 2, преобразовать уравнение
F(x, y)=allxi + 2a12xy+a22y- + 2a1x-\-2aty + aa=- 0 A)
(Г)
исследуемой кривой к виду
F' (х', у') = V'2 + КУ + 2а^' + 2а,У + а0 = 0.
При этом 6 = %-^.t.
Так как теперь 6 = 0, то один из корней характеристического
уравнения равен нулю.
Пусть ^ = 0, \гф0. Тогда S = X1->rX2 = X2, и уравнение (Г)
может быть написано в виде
F'(x', y') = Sy'°- + 2aiX' + 2a',y' + a=0. A*)
В уравнении A0) § 2 надо положить Хг = 0, так что для опреде-
определения угла а получается особенно простая формула:
я12 а22
B)
(последнее равенство следует из 6 = апа22— a|2 = 0, т.е. — = —j.
Исследование уравнения A*) начнем с вычисления инварианта А.
Имеем
А =
¦*и
a2
0 0 а[
0 S а'г
а\ а» ап
откуда
так что а\ тогда и только тогда обращается в пуль, когда А = 01).
') Так как а\ — вещественное число, то из формулы C) следует, что з
параболическом случае детерминант Д или противоположен по знаку числу S,
или равен нулю.
414 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
Рассмотрим сначала случай Д = 0, т.е. a't~0, тогда уравнение
A*) имеет вид
+ a = 0. D)
Это — квадратное уравнение; обозначая его корни через у\, у\,
видим, что линия D) есть пара прямых
У'=Уи У'=Уг,
параллельных оси Ох'.
Их угловой коэффициент относительно исходной системы коор-
координат Охи есть
«12 «22 '
Для полного определения этих прямых достаточно найти их точки
пересечения с одной из старых осей координат Ох или Оу, для
чего достаточно решить первоначальное уравнение F(x, t/)=0 сов-
совместно с х = 0 или (/ = 0.
Однако удобнее рассуждать так.
Уравнение A*) переписываем в виде
F(x>t У) = Sy'i-\-2a'lx/-f-2а'гу'-\-ао=
где
/ #2
ао = ао s~ '
Посредством сдвига
системы координат преобразуем уравнение E) к виду
Положим
— —Ь2
s ~° •
Теперь возможны три случая:
1° ?1^0 —~Ь2
S ¦> ' S '
уравнение E') записывается в виде
к 4] ПАРАБОЛИЧЕСКИЙ СЛУЧАЙ 415
имеем пару параллельных мнимых сопряженных прямых.
2° f 42
уравнение E') записывается в виде
У" = ±Ь
и определяет пару различных действительных параллельных прямых.
уравнение E') принимает вид
У = О
и определяет пару слившихся прямых.
Переходим ко второму случаю: А Ф О, т. е. а\ Ф 0. Кривая
F{x, у) —0 имеет в системе координат О'х'у' уравнение
F'(x', y') = Sy'*-}-2a'1x' + 2a2y' + a0 = 0, A*)
т.е. является (так как а[фО) параболой (что нам известно уже
из § 1, п. 3).
Найдем ее параметр р. Для этого сделаем перенос начала коор-
координат
у =¦
Внося F) в A*), получаем
F'(xr, y')^S{r\ + у0J + 2а{{1 + х0) + 2а'2 (г\ + у0) + ао=
= Srf + 2а[1 + 2 (Sy0 + at) r\ + Syl + 2а[хй -|- 2aUj0 + a0 = 0.
Так как 5 = Х2^:0, то, приравнивая коэффициент при х\ нулю,
получаем уравнение
Sy0 -1- а2 = 0,
из которого определяем у0:
После этого приравниваем нулю выражение
Sy20 + 2а'гх0 -\- 2а'2у0 + а0.
Так как а[фО, получаем уравнение относительно х0:
Syl-r2a'1x0-\-2a2y0-\-a0 = 0, (8)
откуда и определяем л:0.
416 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
В системе координат 0%т\ уравнение F (х, у) = 0 принимает вид
Srf+20^1=0 или
Меняя, если нужно, положительное направление оси О'| на проти-
противоположное, всегда можно добиться того, чтобы число
было положительным. Окончательно записываем уравнение (9)
в виде
Т12 = 2р|, Р>0, A0)
где (на основании формулы C))
(корень берется, конечно, положительный).
Направление оси параболы есть (с точностью до знака) направ-
направление оси 0%, т. е. направление оси Ох'. Ее угловой коэффициент
(по отношению к старой системе координат Оху) есть
tga=_«_il=_^.
Ь «12 «22
Для полного определения расположения параболы нужно знать еще
координаты вершины1) О' = (х0, у0), а также, в какую сторону
парабола обращена вогнутостью (т. е. каково должно быть поло-
положительное направление оси О'|, чтобы числа а[ —ах cos a -|- a2s'n a
и 5 имели противоположные знаки).
Простое решение этих вопросов будет дано в главе XVII, § 11.
§ 5. Аффинная классификация кривых второго порядка
Мы сейчас покажем, что аффинная классификация кривых вто-
второго порядка дается самими наименованиями кривых, т. е. что
аффинными классами кривых второго порядка являются классы:
действительных эллипсов;
мнимых эллипсов;
гипербол;
пар действительных пересекающихся прямых;
') Вычисление которых по формулам G) и (8) затруднительно (из-за
вхождения в них коэффициентов а'г и а2').
§ 5] АФФИННАЯ КЛАССИФИКАЦИЯ КРИВЫХ ВТОРОГО ПОРЯДКА 417
пар мнимых (сопряженных) пересекающихся;
парабол;
пар параллельных действительных прямых;
пар параллельных мнимых сопряженных прямых}
пар совпадающих действительных прямых.
Надо доказать два утверждения:
А. Все кривые одного наименования (т. е. все эллипсы, все
гиперболы и т. д.) аффинно эквивалентны между собою.
Б. Две кривые различных наименований никогда не являются
аффинно эквивалентными.
Доказываем утверждение А. В главе XV, § 3, уже было дока-
доказано, что все эллипсы аффинно эквивалентны одному из них, а
именно окружности х2 + «/2 = 1, а все гиперболы — гиперболе
х2—У2 = 1. Значит, все эллипсы, соответственно все гиперболы,
аффинно эквивалентны между собою. Все мнимые эллипсы, будучи
аффинно эквивалентны окружности х2-\-у2 — — 1 радиуса /, также
аффинно эквивалентны между собою.
Докажем аффинную эквивалентность всех парабол. Мы докажем
даже больше, а именно что все параболы подобны между собою.
Достаточно доказать, что парабола, данная в некоторой системе
координат своим каноническим уравнением
У2 = 2рх,
подобна параболе
if = 2х.
Для этого подвергнем плоскость преобразованию подобия с коэффи-
коэффициентом — :
Р
* 1 1
Тогда х = р%, у=рч\, так что при нашем преобразовании кривая
У2 -= 2рх
переходит в кривую
р*ц2 = 2р-р-1,
т. е. в параболу
что и требовалось доказать.
Переходим к распадающимся кривым. В § 1 (п. 2, формулы (91
и A1), стр. 401 и 402) было доказано, что кривая, распадающаяся
на пару пересекающихся прямых, в некоторой (даже прямоугольной)
системе координат имеет уравнение
а?х*— tfiyi — о, если она действительная,
а2*2 + blyl — 0, если она мнимая.
14 П. С. Александров
418 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ XVI
Делая дополнительное преобразование координат
х = ах', у = Ьу',
видим, что всякая кривая, распадающаяся на пару пересекающихся
действительных, соответственно мнимых сопряженных, прямых,
имеет в некоторой аффинной системе координат уравнение
хг — г/2 = 0, соответственно хг-\-у2 = 0.
Что касается кривых, распадающихся на пару параллельных
прямых, то каждая из них может быть (даже в некоторой пря-
прямоугольной системе координат) задана уравнением
у2—?2 = 0
для действительных, соответственно
для мнимых, прямых. Преобразование координат х = Ьх', у = у'
позволяет в этих уравнениях положить й=1 (или для совпадаю-
совпадающих прямых ? = 0). Отсюда следует аффинная эквивалентность
всех распадающихся кривых второго порядка, имеющих одно и
то же наименование.
Переходим к доказательству утверждения Б.
Заметим прежде всего: при аффинном преобразовании плоскости
порядок алгебраической кривой остается неизменным. Далее: всякая
распадающаяся кривая второго порядка есть пара прямых, а при
аффинном преобразовании прямая переходит в прямую, пара
пересекающихся прямых переходит в пару пересекающихся, а пара
параллельных — в пару параллельных; кроме того, действительные
прямые переходят в действительные, а мнимые — в мнимые. Это
вытекает из того, что все коэффициенты с(к в формулах C)
(гл. XI, § 3), определяющих аффинное преобразование, суть дей-
действительные числа.
Из сказанного следует, что линия, аффинно эквивалентная дан-
данной распадающейся кривой второго порядка, есть распадающаяся
кривая того же наименования.
Переходим к нераспадающимся кривым. Опять-таки при аффин-
аффинном преобразовании действительная кривая не может перейти в
мнимую, и обратно. Поэтому класс мнимых эллипсов аффинно
инвариантен.
Рассмотрим классы действительных нераспадающихся кривых:
эллипсов, гипербол, парабол.
Среди всех кривых второго порядка всякий эллипс, и только
эллипс, лежит в некотором прямоугольнике, тогда как параболы и
гиперболы (равно как и все распадающиеся кривые) простираются
в бесконечность. При аффинном преобразовании прямоугольник
§ 5]
АФФИННАЯ КЛАССИФИКАЦИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
419
ABCD, содержащий данный эллипс, перейдет в параллелограмм1),
содержащий преобразованную кривую, которая, таким образом,
не может уходить в бесконечность и, следовательно, является
эллипсом.
Итак, кривая, аффинно эквивалентная эллипсу, есть непременно
эллипс. Из доказанного следует, что кривая, аффинно эквивалент-
эквивалентная гиперболе или параболе, не может быть эллипсом (а также,
как мы знаем, не может быть и распадающейся кривой. Поэтому
остается лишь доказать, что при аффинном преобразовании плос-
плоскости гипербола не может перейти в параболу, и наоборот. Это,
пожалуй, проще всего следует из того, что у параболы нет центра
симметрии, а у гиперболи он есть. Но так как отсутствие центра
симметрии у параболы будет доказано лишь в следующей главе2),
то мы сейчас дадим второе, тоже очень простое доказательство
аффинной неэквивалентности гиперболы и параболы.
Лемма. Если парабола имеет общие точки с каждой из двух
полуплоскостей, определяемых в плоскости данной прямой d, то она
имеет хотя бы одну общую точку и с прямой d.
г) Докажем, что при аффинном преобразовании плоскости всякий парал-
параллелограмм ABCD переходит в некоторый параллелограмм A*B*C*D* (рис. 168),
так что стороны и внутренние точки одного параллелограмма соответст-
соответственно переходят в стороны и внутренние точки другого. В самом деле, две
пары параллельных прямых АВ и CD и AD и ВС переходят в две пары
.параллельных прямых А*В* и C*D* и A*D* и В*С*, причем отрезки АВ,
CD, AD, ВС переходят соответственно в отрезки А*В*, C*D*, A*D*, B*C*
и становятся сторонами параллелограмма A*B*C*D*. Всякая внутренняя
точка М параллелограмма ABCD лежит на некотором отрезке PQ, концы
которого Р и Q лежат на параллельных сторонах АВ и CD. При аффинном
Рис. 168.
преобразовании отрезок PQ перейдет в отрезок P*Q*, концы которого лежат
иа А*В* и C*D*, а все остальные точки — внутрь параллелограмма A*B*C*D*.
Значит, всякая внутренняя точка параллелограмма ABCD перейдет во внут-
внутреннюю точку параллелограмма A*B*C*D*.
2) Впрочем, читатель уже сейчас может сам попытаться придумать эле-
элементарное доказательство этого факта.
14*
420 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
В самом деле, мы видели, что существует такая система коор-
координат, в которой данная парабола имеет уравнение
у* = х.
Пусть относительно этой системы координат прямая d имеет урав-
уравнение
Ах + Ву + С = 0. A)
По предположению на параболе у2 — х имеются две точки
M1 = (xv уг) и М2='(х2, у2), из которых одна, положим Мъ лежит
в положительной, а другая, М2, — в отрицательной полуплоскости
относительно уравнения A). Поэтому, помня, что х1 — у\, хъ = у\,
можем написать
так что многочлен А у2 -f- By -f- С принимает в двух концах у1 и у2
отрезка \уъ у2] числовой прямой значения, противоположные но
знаку. Но тогда существует значение «/ = «/0> лежащее между ух и
уг, при котором многочлен Ауг-j-By-\-C принимает значение нуль;
Точка М(х0, у0), где хо=у\, лежит на параболе у2 — х и на пря-
прямой Ах-{-By -\-С — 0. Лемма доказана.
Пусть при некотором аффинном преобразовании Л гипербола К
переходит в кривую К'; докажем, что К' не может быть парабо-
параболой. Для этого обозначим через d вторую (так называемую «мни-
«мнимую») ось гиперболы К (см. гл. VI, § 5). При преобразовании Л
прямая d перейдет в некоторую прямую d', а полуплоскости, опре-
определяемые прямой d, перейдут в полуплоскости, определяемые пря-
прямой d'. Гипербола К не имеет ни одной общей точки с прямой d,
но имеет общие точки с каждой из двух полуплоскостей, на которые
прямая d разбивает плоскость; кривая К' обладает теми же свой-
свойствами относительно прямой d'. Поэтому, в силу только что дока-
доказанной леммы, кривая К' не может быть параболой — и утвержде-
утверждение об аффинной неэквивалентности гиперболы и параболы дока-
доказано. Вместе с тем и закончена аффинная классификация кривых
второго порядка.
§ 6. Несколько заключительных замечаний
Еще в школьном курсе геометрии учат, что два треугольника
и вообще две плоские фигуры равны между собою, если они совме-
совмещаются при наложении.
Другими словами: две плоские фигуры равны, если одна из них
может быть переведена в другую посредством движения. При этом
рассматривается вся группа движений, состоящая как из собственных,
так и несобственных движений плоскости (мы помним «третий слу-
§ 6]
HF-СКОЛЬКО ЗАКЛЮЧИТЕЛЬНЫХ ЗАМЕЧАНИЙ 421
чай равенства треугольников», из которого вытекает, что треуголь-
треугольники, симметричные по отношению к некоторой прямой, считаются
равными между собою). И это с точки зрения элементарной геометрии
естественно: ведь при «совмещении» двух фигур разрешается всякое
их перемещение в пространстве, в частности и поворот в простран-
пространстве вокруг какой-нибудь прямой на угол я, посредством которого
данный треугольник переходит в симметричный ему. Иное дело —
симметрия в пространстве: две треугольные пирамиды, симметричные
относительно какой-нибудь плоскости, уже нельзя совместить, пере-
перемещая их в трехмерном пространстве, а выйти за его пределы —
значит выйти и за пределы физически осуществимых движений.
Всякая группа преобразований (плоскости или пространства) по-
порождает свое понятие эквивалентности геометрических фигур: две
фигуры считаются эквивалентными (по отношению к данной группе),
если одна из них переходит в другую посредством преобразования,
входящего в данную группу. С другой стороны, всякая геометри-
геометрическая дисциплина предполагает то илн иное свойственное ей поня-
понятие эквивалентности изучаемых в ней фигур.
Выдающийся немецкий математик Феликс Клейн A849—1925)
впервые обратил внимание на то, что различные определения экви-
эквивалентности геометрических фигур, применяемые в тех нли иных
областях геометрии, являются определениями эквивалентности по
отношению к той или иной группе преобразований. В замечательной
речи, произнесенной в 1871 г. при вступлении в должность профес-
профессора Эрлангенского университета, Клейн провозгласил общий принцип:
определить какую-нибудь геометрическую дисциплину, какую-нибудь
«геометрию»—значит определить некоторую группу преобразований
пространства и изучать те свойства геометрических фигур, которые
сохраняются при преобразованиях, входящих в эту группу, т. е.
которые, принадлежа одной какой-нибудь фигуре, принадлежат и всем
фигурам, эквивалентным данной по отношению к рассматриваемой
группе преобразований. Такие свойства Клейн называл инвариантными
но отношению к преобразованиям данной группы или, короче, инва-
инвариантами этой группы. Клейн кратко сформулировал свою точку
зрения в фразе, получившей широкую известность: «Всякая геометрия
есть теория инвариантов некоторой группы преобразований» *). Так,
метрическая геометрия изучает ортогональные инварианты, т. е.
инварианты группы движений. Рассмотрим некоторые примеры таких
инвариантов. Нетрудно проверить, что две параболы тогда и только
тогда метрически эквивалентны, т. е. переходят друг в друга по-
посредством движения, когда равны их параметры, а два эллипса или
') Этим Клейн как бы дал программу систематизации геометрических
дисциплин, поэтому упомянутая его речь получила название «эрлангенской
программы».
422 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
две гиперболы, — когда полуоси одной кривой равны полуосям
другой: с точки зрения метрической геометрии эллипс и гипербола
вполне характеризуются своими полуосями, а парабола—своим пара-
параметром *).
Заметим теперь, что из формул F), G), (8) § 3 следует, что
полуоси нераспадающейся центральной кривой полностью определены
числами Хь Х2, А, значит, и числами S, А, 5 (так как Х2 и Х2, как
корни характеристического уравнения
X2 — SX + b = O,
выражаются через б и S).
Ввиду уравнения D') того же § 3 кривая, распадающаяся на
пару пересекающихся прямых, также определена (с точностью до
своего положения на плоскости) числами Xv X2, т. е. теми же инва-
инвариантами б, А и 5. Заметим, однако, что для пары параллельных
прямых это уже не так: при любом b для уравнения вида i/2:;j=62 = 0
имеем одни и те же б = Д = О. Наконец, параметр параболы, в силу
формулы A1) из § 4, записывается в виде
¦-/-?.
т. е. выражается через А и 5.
Итак, имеем следующий результат:
Пусть в некоторой прямоугольной координатной системе Оху даны
две (не распадающиеся на пары параллельных прямых) кривые вто-
второго порядка своими уравнениями
F(x, y) = 0 и F'(x, у) = 0,
и пусть инварианты б, A, S многочлена F (х, у) равны соответствую-
соответствующим инвариантам многочлена F' (х, у). Тогда кривые F (х, у) = 0
и F'(х, у) —0 изометричны между собою (т. е. эквивалентны по
отношению к группе движений плоскости).
Мы вернемся к этому вопросу в главе XVII, § 10.
Группа движений есть подгруппа группы преобразований подобия.
Изучение инвариантов этой более широкой группы составляет содер-
содержание геометрии подобия.
Две невырождающиеся кривые второго порядка тогда и только
тогда подобны между собою, когда у них один и тот же эксцентри-
эксцентриситет е. Докажем достаточность этого условия. Случай е=1 уже
был рассмотрен: подобие всех парабол между собою было установ-
установлено в § 5. При е = 0 получаем окружности, которые, очевидно,
1) Полная метрическая характеристика эллипса, гиперболы и параболы
дается также фокальным параметром р и эксцентриситетом е этих кривых;
чтобы убедиться в этом, достаточно задать эти кривые их уравнениями «при
вершине» (гл. VI, § 8), т. е. у2=2рх-\-дх*, q=e2—l.
? 6] НЕСКОЛЬКО ЗАКЛЮЧИТЕЛЬНЫХ ЗАМЕЧАНИЙ 423
также все подобны между собою. Остаются эллипсы (е < 1) и гипер-
гиперболы (е > 1). Пусть даны два эллипса своими уравнениями в кано-
канонических для них системах координат:
х2 у2
Любые две прямоугольные координатные системы (с одним и тем
же масштабом) переходят друг в друга посредством движения соб-
собственного или несобственного; поэтому можно предположить, что
у обоих эллипсов A) и B) одна и та же каноническая система
координат. Положим
а л
Так как Ьг = а2(\—е2) и Ь'2 — а'г A—е'г), то при равенстве эксцен-
эксцентриситетов, е = е', имеем -р = Х. Отсюда следует, что эллипс A)
переходит в эллипс B) посредством подобного преобразования
х = \х', y = W.
Совершенно так же доказывается, что и всякие две гиперболы
с одинаковым эксцентриситетом подобны между собою.
Доказательство обратного утверждения: всякие две подобные
между собою невырождающиеся кривые второго порядка имеют один
и тот же эксцентриситет—может быть предоставлено читателю.
Доказанные факты формулируют иногда и так:
Фокальный параметр и эксцентриситет невырождающейся кривой
второго порядка образуют полную систему ее метрических инвариантов;
полная система инвариантов кривой второго порядка относительно
группы подобия состоит из одного инварианта — эксцентриситета
кривой.
Мы вндим, что с точки зрения геометрии подобия размеры фигур
совершенно несущественны. Но то, что мы при наглядном геометри-
геометрическом восприятии разумеем под формой кривой, вполне улавливается
группой подобия: два эллипса с одним и тем же эксцентриситетом
могут иметь различные размеры, но они имеют одну и ту же форму,
они в одинаковой степени растянуты, в одинаковой степени похожи
или не похожи на окружность.
Инварианты группы аффинных преобразований составляют пред-
предмет изучения аффинной геометрии. Сточки зрения аффинной геометрии
все эллипсы эквивалентны между собою, так же как и все гиперболы
и все параболы; как мы видели в § 5, полная система аффинных
инвариантов этих кривых дается уже самими их названиями, которые
характеризуют, если так можно выразиться, наиболее грубые свойства
их формы; действительно, все эллипсы в каком-то первом приближении
424 РАЗЛИЧНЫЕ ВИДЫ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVI
похожи друг на друга. Младший школьник, еще совершенно незна-
незнакомый с аналитической геометрией, все же скажет, что эллипс есть
«вытянутая окружность», но едва ли найдет сходство между эллипсом
и гиперболой.
Однако, дойдя в главе XXII до рассмотрения кривых второго по-
порядка на проективной плоскости1), мы узнаем, что парабола есть
эллипс, так бесконечно растянувшийся, что он коснулся бесконечно
удаленной прямой плоскости, а гипербола есть не что иное, как
тот же эллипс, но пересекший бесконечно удаленную прямую и раз-
разрезанный ею на две ветви. Мы узнаем, что все три эти кривые
эквивалентны между собою по отношению к группе проективных
преобразований проективной плоскости — группе еще более обширной,
чем группа аффинных преобразований. Обо всем этом будет речь
в главах XXI и XXII.
') Мы вскользь упомянули о ней в § 5 главы V и подробно займемся
ею в главе XXI.
ГЛАВА XVII
ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
§ 1. Пересечение алгебраической кривой с прямой.
Асимптотические направления и асимптоты алгебраической кривой
Если две алгебраические линии заданы своими уравнениями
Fi(x, У)=О, F2(x, у)=0,
то их пересечение образуют те точки М = (х, у), которые лежат
и на той, и на другой линии, т. е. удовлетворяют обоим уравнениям
Fi(x, У) = 0 и F2(x, </) = 0.
Мы будем рассматривать в этом параграфе лишь пересечение
вещественной алгебраической линии, заданной уравнением
F(x, «/)=0 A)
я-й степени, с прямой; эту последнюю нам удобно задать ее пара-
параметрическим уравнением
причем {а, |3} — направляющий вектор прямой B).
Прямая B) может быть при этом как вещественной, так и мни-
мнимой. Нахождение точек, лежащих на обеих линиях A) и B), сводится
к совместному решению уравнений A) и B): значения х и у, выра-
выраженные посредством равенств B) через t, подставим в A); тогда
получим алгебраическое уравнение
6@ = 0 C)
относительно одного неизвестного; решив его, найдем одно или
несколько значений t, которые, будучи подставлены в B), определят
координаты искомых точек пересечения кривой A) с прямой B).
Все дело при этом в подсчете степени уравнения C). Ясно, что
степень многочлена 0 (t) не может быть больше числа п, являюще-
являющегося степенью многочлена F(х, у). Посмотрим, в каких случаях
степень многочлена 6 (t) может оказаться меньше п. Соберем вместе
426 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
все члены многочлена F(х, у), каждый из которых имеет высшую
степень, т. е. п. Сумму этих членов обозначим через ф (х, у). Это—
однородный многочлен степени п, т. е. форма л-й степени от двух
переменных х и у — «форма старших членов многочлена F (х, (/)».
Теперь мы можем написать тождество
F(x, y)=<p(x, У) + Р(х, у), D)
где Р (х, у) есть многочлен от х и у степени < п, состоящий из
членов, не вошедших в форму ф (х, у).
Подставляя B) в D) и делая приведение подобных членов, по-
получим многочлен
О (t)=Aata + An_1f-l+ . .. +А^ + А0, E)
в котором некоторые коэффициенты, быть может, равны нулю.
Займемся старшим коэффициентом Ап. При подстановке B) в D)
только члены вида axpyq степени p-\-q = n, т. е. члены, входящие
в ф (л:, у), могут дать член степени п относительно t; так как при
нашей подстановке член axPyq перейдет в a (xo-\-aty (yo-~ $t)q,
p-{-q = n, то он даст единственный член степени п относительной,
а именно aa.Pfiqtn. Таким образом, каждый член axPyq многочлена
ф(х, у) и только члены этого многочлена дадут нам члены степени п
в О(^). Сумма всех этих членов будет поэтому иметь вид ф (a, $)t",
и это будет старший член многочлена 0 (t). Итак, Ап=(р(а, C).
Для того чтобы этот коэффициент был равен нулю, необходимо и
достаточно, чтобы направляющий вектор {а, C} прямой B) удовлетво-
удовлетворял условию
Ф(а, р)=0. F)
Определение 1. Ненулевой вектор {а, C}, удовлетворяющий
равенству F), называется вектором асимптотического направления
относительно кривой A).
Замечание. Множество всех ненулевых векторов (комплексной)
плоскости распадается на классы коллинеарных векторов. Эти классы
нам теперь удобно будет называть направлениями: два вектора
и = {а, Р} и и' = {а', Р'} тогда и только тогда имеют, или опреде-
определяют, одно и то же направление, когда они коллинеарны, т. е. когда
а:р = а':Р'. Таким образом, в отличие от прежнего словоупотребле-
словоупотребления, мы теперь считаем, что два взаимно противоположных вектора
определяют одно и то же направление. Направление, определяемое
вектором {а, |3}, обозначаем через {а:|3}; все направляющие векторы
данной прямой определяют одно и то же направление, называемое
направлением этой прямой. После этого замечания можно говорить
о числе асимптотических направлений, определяемых данной кривой.
Пусть прямая B) не есть прямая асимптотического направле-
направления относительно кривой A). Тогда для определения ее точек
§ 1] ПЕРЕСЕЧЕНИЕ АЛГЕБРАИЧЕСКОЙ КРИВОЙ С ПРЯНОЙ 427
пересечения с кривой A) мы имеем уравнение
в(/) = 0 C)
степени п. Число корней этого уравнения (считаемых с их кратностью)
равно п, и каждому корню tm (m=\, 2, ..., п) соответствует (по
формулам B)) определенная точка пересечения (вещественная или
мнимая) нашей прямой с кривой A); при этом, если кратность корня
tm равна рт, то мы будем говорить, что и соответствующая точка
пересечения прямой B) с кривой A) имеет кратность рт, и тогда
общее число точек пересечения кривой A) с прямой B), считаемых
с их кратностями, равно п.
Итак, мы можем сформулировать следующее основное предложение.
Теорема 1. Алгебраическая кривая порядка п имеет со всякой
прямой неасимптотического направления точки пересечения (вещест-
(вещественные или мнимые), общее число которых (если их считать с их
кратностями) равно п.
К этой теореме мы (без доказательства) добавляем еще следующее
Замечание. Если многочлен степени п, стоящий в левой части
уравнения алгебраической кривой, разлагается на неприводимые1)
множители кратности 1, то каково бы ни было направление, неасимп-
неасимптотическое для данной алгебраической кривой порядка п, существует
прямая, имеющая это направление и пересекающая данную кривую
в п различных точках.
Посмотрим теперь, что происходит, если прямая B) имеет асимп-
асимптотическое направление. Тогда коэффициент Ап в уравнении
О (t) == Ant» + Ап_гГ-г + ... + Axt + Ao = 0, E')
определяющем точки пересечения прямой B) с кривой A), равен
нулю. Может случиться, что не только коэффициент Ап, но и все
коэффициенты уравнения E') окажутся нулями:
Ап = Ап_1= .. . =А1 = А0 = 0.
Тогда все уравнение E') превратится в тождество 0 = 0, означающее,
что всякая точка прямой B) удовлетворяет уравнению A), т. е.
лежит на нашей кривой: прямая B) входит в состав кривой A). Это
действительно может иметь место, например, в случае кривых второго
порядка, распадающихся на пару прямых (см. гл. XVI, § 1). Это же
может иметь место и в случае кривой любого порядка, левая часть
уравнения которой есть произведение множителей, по крайней мере
один из которых — первой степени:
F(x, y) = (Ax + By + C)-F1(x, у).
1) Многочлен степени m называется неприводимым, если он не может быть
представлен в виде произведения многочленов степени < т.
428 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА (ГЛ. XVII
Перейдем к следующему случаю, когда
i4B=...=i41 = O, но А0ф0.
Тогда уравнение E') превращается в противоречивое тождество:
Ао — О при Ао Ф 0.
Это значит, что уравнения A) и B) несовместны, и, следовательно,
не существует никакой точки — ни вещественной, ни мнимой,—лежа-
мнимой,—лежащей одновременно на кривой A) и на прямой B). Если я = 2, то
в этом случае прямая B) называется асимптотой к кривой второго
порядка х).
Остается рассмотреть случай, когда первый в ряду коэффициент
отличный от нуля, есть коэффициент Ат, где п—1^/и>0. Тогда
для определения точек пересечения кривой A) с прямой B) мы имеем
уравнение E') степени т, 1 ^/и<л, и общее число точек пересе-
пересечения (считаемых с их кратностями) меньше п.
Итак, имеет место
Теорема 2. Для прямой B), имеющей относительно данной
алгебраической кривой A) порядка п асимптотическое направление,
возможны следующие случаи:
1. Прямая B) целиком входит в состав кривой A).
2. Прямая B) не имеет с кривой A) ни одной общей точки (ни
действительной, ни мнимой).
3. Общее число точек пересечения кривой A) с прямой B), счи-
считаемых вместе с их кратностями, равно k, где 1 ^& ^ я—1; если
при этом k^ln — 2, то прямая называется асимптотой.
Закончим этот параграф доказательством следующего предло-
предложения.
Теорема 3. Для того чтобы прямая, заданная уравнением
у + С=0, G)
всеми своими точками содержалась в кривой
F(x, У)=0,
необходимо и достаточно, чтобы многочлен F (х, у) без остатка де-
делился на многочлен Ах-\-Ву-\-С, т. е. чтобы имело место тождество
F(x, y)=B(Ax + By + C)-F1(x, у), (8)
где F^(x, у) — некоторый многочлен (степени л—1).
1) Вообще, прямая называется асимптотой алгебраической кривой по-
порядка п, если число точек ее пересечения с этой кривой (считаемых с их
кратиостями) не превосходит п^2.
§ 2] , ПУЧОК КРИВЫХ ВТОРОГО ПОРЯДКА 429
Условие, очевидно, достаточно; докажем, что оно необходимо.
Доказательство. Из коэффициентов А, В в уравнении G)
по крайней мере один отличен от нуля. Пусть, например, ВфО.
Расположим многочлен F(x, у) по степеням #, т. е. напишем его
в виде
F(x, у) = с0 (*) ук+ сг (х) у*-* +...+ ск_1 (х)у + ск (х),
где, cQ(x), cl(x), ... , ск (х) — многочлены от одного переменного х.
Многочлен Ах-\-Ву-\-С также расположим по степеням у, т. е. за-
запишем его в виде
D(x, y)==By + (Ax + C).
Рассматривая расположенные по степеням у многочлены F(x, у) и
D(x, у) как многочлены от переменного!/, разделим первый из этих
многочленов на второй, т. е. найдем те (однозначно определенные)
многочлены Ft(x, у) и R(x) — частное и остаток, которые удовле-
удовлетворяют тождеству1)
F(x, y)=Fl(x, у) D(x, y) + R(x). (9)
Теорема 3 будет доказана, если мы покажем, что /?(лг) = О. Дока-
Докажем это от противного. Пусть число х0 таково, что R(xo)=?O.
Подставив х = х0 в уравнение G), находим из него у=у{), так что
Ахй-\-Вуо-\- С=0. Подставим найденные значения х0, у0 в тожде-
тождество (9). Получим
F (х„ у0) = />! (х0, у0) (Ах0 + By0 + C) + R (x0) = 0+R (х0) Ф 0;
точка Мо = (х0, у0), будучи точкой прямой G), в то же время не
лежит на кривой F(x, у)=0 — вопреки предположению.
Теорема 3 доказана. Из нее вытекает такое
Следствие. Для того чтобы кривая второго порядка распа-
распадалась на пару прямых, необходимо и достаточно, чтобы левая часть
ее уравнения разлагалась на два линейных множителя.
§ '2. Теорема единственности для кривых второго порядка.
Пучок кривых второго порядка
1. Теорема единственности. Теперь мы прервем последователь-
последовательность нашего изложения, чтобы доказать для кривых второго по-
порядка так называемую «теорему единственности», сформулированную
еще в § 1 главы XV, и этим навести в наших рассуждениях об
этих кривых должный порядок. Но сначала докажем следующее
предложение.
г) При этом остаток должен иметь (относительно у) степень меньшую,
чем делитель D (х, у), т. е. в нашем случае должен вовсе не содержать у.
430 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
Теорема 4. Пусть на плоскости даны пять точек:
¦Mi = (#i, У1), М2 = (х2, у2), М3 = (х3, у3), уИ4 = (xit уЛ), Мъ = (хъ, уь),
из которых никакие четыре не лежат на одной прямой. Тогда одно-
однозначно, с точностью до числового множителя, определены коэффици-
коэффициенты ап=А, а12=-В, а22 = С, a1 = D, а2=Е, ао=Н в уравнении
, + 2?>2+Я=0,
Ax\ + 1Вх3уъ + Cyl + 2Dx3 + 2Ey3 ~\- H^O,
F(x, «/) = апх2 + 2а12ху + аггу~ + 2atx + 2а2у + ао = О A)
кривой второго порядка, проходящей через эти точки, откуда сле-
следует, что кривая эта существует и единственна.
При этом, если данные пять точек действительны, то и проходя-
проходящая через них единственная кривая второго порядка действительна.
Доказательство. Напишем условие того, что каждая из
точек Мъ М2, М3, уИ4, Мь лежит на кривой, заданной уравнени-
уравнением A) с пока еще неизвестными коэффициентами а1г — А, а12 — В,
а22 = С, a1 = D, а2—Е, ао = Н. Получаем систему пяти уравнений:
B)
относительно неизвестных А, В, С, D, Е, Н. Это — система пяти
линейных однородных уравнений с шестью неизвестными. При этом,
если точки /И1( ... , Мь действительны, то и коэффициенты х\, 2хгух
и т. д. в уравнениях B) действительны. Если система B) — незави-
независима, то, в силу замечания в главе XII, § 8, неизвестные А, В, С,
D, Е, Н определены однозначно с точностью до числового множи-
множителя, и теорема доказана.
Предположим, что система B) зависима. Тогда одно из уравне-
уравнений, пусть пятое, есть линейная комбинация остальных четырех.
Следовательно, всякая шестерка чисел А, В, С, D, Е, Н, удовле-
удовлетворяющая первым четырем уравнениям B), удовлетворяет и пятому
уравнению B), а это значит, что всякая кривая A), проходящая
через четыре точки Мъ М2, М3, УИ4, проходит и через пятую
точку Мь. Покажем сначала, что в этом случае три точки из числа
четырех Мг, М2, М3, Af4 лежат на одной прямой. В самом деле,
в противном случае мы могли бы провести через точки уИх, М2, M3t
уИ4 две пары прямых, т. е. две распадающиеся кривые второго по-
порядка:
во-первых, уИ^з и М%М^,
во-вторых, МгМ3 и уИ2/И4.
§ 2]
ПУЧОК КРИВЫХ ВТОРОГО ПОРЯДКА
431
Обе эти распадающиеся кривые проходят через четыре точки Мъ
Мг, М3, Mt и не имеют других общих точек (рис. 169); между тем
у них должна была бы быть еще и пятая общая точка, а именно
точка Мъ. Противоречие! Итак, утверждение доказано: из четырех
точек Мъ М2, М3, М4 три, пусть Мъ Мг, М3, лежат на одной
прямой d.
Докажем, что на той же прямой d лежит и четвертая точка
(М4 или Мь). Пусть ни М4, ни Мъ не лежат па прямой d (рис. 170).
Рис. 169.
Рис. 170.
Проведем через точку М4 произвольную прямую d', не проходящую
через точку Мь. Имеем снова кривую второго порядка, а именно
пару прямых d и d', проходящую через точки Мъ М2, М3, М4, но
не проходящую через Мъ, — опять получили противоречие.
Итак, мы доказали: если уравнения B) зависимы, то из точек Мъ
Мъ М3, М4, Мъ четыре лежат на одной прямой. Теорема 4 доказана.
Теорема 5 (теорема единственности). Если два урав:
нения второй степени
F (х, у) = апх2 + 2а12ху + а22у2 + 2ахлг + 2а2(/ + а0 = 0
F' I у и \ = n' *-2
' \xi УI = ацХ
A)
а'в=0 (Г)
удовлетворяются одним и тем же множеством точек С комплексной,
плоскости, то одно из этих уравнений получается из другого почлен^
ным умножением на некоторой числовой множитель.
Добавление к теореме 5. Если известно лишь, что мно-
множество действительных точек плоскости, удовлетворяющих уравнениям
A) и A'), одно и то же и состоит более чем из одной точки, то
Утверждение теоремы 5 остается в силе (каждое из уравнений A),
A') получается из другого умножением на числовой множитель).
Докажем сначала частный случай этой теоремы, а именно слу-
случай, когда множество всех точек, удовлетворяющих уравнению A),
432 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
есть некоторая прямая d (т. е. когда линия, определяемая этим
уравнением, есть пара совпадающих, непременно действительных,
прямых). Перейдя к системе координат, осью ординат которой явля-
является прямая d, можем предположить, что ее уравнение есть х = 0.
Достаточно доказать, что в этом случае F(x, y)-=allxl.
Уравнение A), по предположению, удовлетворяется точками
М=@, у) при любом у, и только этими точками. Поэтому, подста-
подставив в A) значение х — 0, получим тождество относительно у:
Это значит, что я22 = а2 = а0 = 0 и уравнение A) имеет вид
F(x, у)=^х(а11
Оно удовлетворяется, кроме точек оси ординат, еще и всеми точ-
точками прямой d'\
аххх-\-2ахгу-\-2ах = 0.
Но уравнение A0) должно удовлетворяться только точками оси ор-
ординат, поэтому прямая d' совпадает с прямой лг = О, что имеет место
лишь при апф0, а12 — а1 = 0.
Тождество F(x, y)^anx2, а вместе с тем и разбираемый част-
частный случай теоремы 5 доказаны.
Пусть теперь кривая, определяемая уравнением A), не есть пара
совпадающих прямых. Тогда на ней можно найти пять точек
/Mj, M2, М3, М4, М& из которых никакие четыре не лежат на одной
прямой. Это очевидно, если кривая A) нераспадающаяся: тогда
никакие три ее точки не лежат на одной прямой, и, следовательно,
в качестве точек уИх, М2, Ms, Л14, Мъ можно взять любые пять
точек, удовлетворяющих уравнению A). Если же кривая A) распа-
распадается па пару различных прямых d и d', то достаточно взять три
точки на одной из этих прямых, а две другие — на другой. Точки
(из которых никакие четыре не лежат на одной прямой) лежат и на
кривой A), и на кривой (Г); поэтому, в силу теоремы 4, левые части
уравнений A) и A') могут отличаться лишь постоянным множителем.
Теорема 5 доказана.
Если A) не есть мнимый эллипс или пара мнимых (сопряженных)
прямых, т. е. если она содержит более одной действительной точки,
то множество ее действительных точек бесконечно, и поэтому точки
Мг, М2, М3, М4, Мь в предыдущем рассуждении могут быть пред-
предположены действительными. Этим доказано и добавление к теореме Г).
2. Пучок кривых второго порядка. Пусть Mlt Мъ, М3, /И4 —
четыре точки, не лежащие на одной прямой. Задавая по произволу
еще одну точку Мъ (не коллинеарную никаким трем из точек
Mit M2, М3, /М4), получим, по теореме 4, единственную кривую второго
порядка, проходящую через точки Ми Мй, Ж3, /W4 и точку Мь.
§ 2] ." ПУЧОК КРИВЫХ ВТОРОГО ПОРЯДКА ' 433
Поэтому множество всех кривых второго порядка, проходящих через
четыре точки Mv M2, М3, М4, бесконечно. Это множество кривых
называется пучком кривых второго порядка, определяемым точками
'Мг, Мъ, М3, Л14.
Будем обозначать кривую той же буквой F, которой обозначена
левая часть F(x, у) ее уравнения A), так что F и %F при любом
Л -ф 0 — это одна и та же кривая. Если
F(x, y) = 'kiF1(x, y) + KFt(x, У)>
то будем говорить, что кривая F есть линейная комбинация (с коэф-
коэффициентами Лх и Л2) кривых Ft и F2. Аналогичной терминологией
мы уже пользовались в § 5 главы V в рассуждениях о пучке пря-
прямых1). Если кривые F1 и F2 принадлежат пучку, определяемому
точками Mi = (xi, yt) (i = \, 2, 3, 4), то уравнения F1(x, у) —О
и F2(x, y)=0 удовлетворяются, если в них подставить значения
х—Х;, У=У; при любых i = 1, 2, 3, 4. Но тогда и уравнение
^!^i(x, y) + KF2(x, у)=0 будет при х = хи у=у{ удовлетво-
удовлетворяться. Другими словами, всякая кривая, являющаяся линейной
комбинацией двух (или более) кривых, принадлежащих данному пучку,
принадлежит этому пучку. Докажем обратное предложение. Пусть
в пучке кривых второго порядка выбраны две определенные кривые
Fx и F2. Тогда всякая кривая F данного пучка есть линейная ком-
комбинация этих двух кривых F1 и Fv
Пусть пучок определен четверкой точек Мъ М2, М3, М4. Возь-
Возьмем на кривой F какую-нибудь точку Мъ, не коллинеарную ни с ка-
какими тремя из точек Мъ М2, Мг, УЙ4. Кривая F есть единственная
кривая второго порядка, проходящая через точки Мъ М2, М3, УИ4, Мъ.
Поэтому для доказательства сделанного утверждения достаточно
найти такую линейную комбинацию A^ + AgFj, чтобы кривая
Лх, У)=0 C)
проходила через точку Мъ = (хъ, у5), т. е. достаточно определить
Яг и Ла, вернее, их отношение Х1:Лг, из условия
*Л(*ь, Уь) + ^Ахь, УЬ) = О, D)
т. е.
К__ Fг (хъ, уь)
h F\ (*5> Уь) '
Итак, любой пучок кривых второго порядка вполне определен,
если даны две какие-нибудь кривые Fx и F2 из этого пучка: он со-
состоит из всех кривых, являющихся линейными комбинациями X1Fl -f- K^F^
двух данных. Все эти кривые определяются значениями одного па-
параметра— отношением Я = Я,:Я2 двух коэффициентов в линейной
1) Читателю рекомендуется освежить в памяти этот параграф.
434
ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
[ГЛ. XVII
комбинации A1F1-)-A.2F2. Другими словами, пучок кривых второго
порядка является одномерным многообразием кривых — совершенно
в том же смысле, в каком пучок прямых (гл. V, § 5) является одно-
одномерным многообразием прямых (а пучок плоскостей — одномерным
многообразием плоскостей).
Понятие пучка кривых позволяет очень просто найти уравнение
кривой второго порядка, проходящей через заданные пять точек
Мъ М2, М3, Мц, Мь (в предположении, что среди них нет четырех то-
точек, лежащих на одной прямой1)). В самом деле, возьмем четыре
точки из числа данных
пяти, например Мх, М2,
Ms, M4. Легко написать
уравнения прямых:
dx: MXM2, d'x: МЪМХ,
Теперь имеем две распа-
распадающиеся кривые второго
порядка: кривую Fv рас-
распадающуюся на пару пря-
прямых d-i и d\, и кривую Fa,
Рис. 171. распадающуюся на пря-
прямые d2 и d\ (рис. 171).
Многочлены Fx (х, у) и F2 (х, у) суть произведения трехчленов пер-
первой степени, являющихся левыми частями уравнений, соответствую-
соответствующих прямым rfx и d[, d2 и d\. Распадающиеся линии Fx и F2,
очевидно, проходят через точки Мъ /И2, М3, Mit т. е. принадлежат
пучку, определяемому этими точками. Остается только определить
отношение Я^Яг из условия, чтобы кривая ^/^ + А.2^2 проходила
через точку Мъ — (хь, уъ); этим условием является равенство D),
из которого находим
= — F2(x
6,
s, уъ).
§ 3. Асимптотические направления кривых второго порядка
В § 1 асимптотические направления были определены для любой
алгебраической кривой. Сейчас мы повторим это определение для
кривых второго порядка, которыми только и будем в дальнейшем
заниматься.
1) Если четыре точки, положим Mlt M2, Ms, Mt, лежат на одной пря-
прямой d, то существует бесконечное множество распадающихся кривых второго
порядка, через них проходящих: достаточно взять пару прямых d,d', где о' —
любая прямая, проходящая через точку Мъ.
§ 3]
АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ
435
Рассмотрим кривую, заданную в произвольной аффинной системе
координат Ое1е2 уравнением
F(x, г/)=ф(лг, у) + 21(х, у) + ао = о> 0)
где, как всегда,
ф(лг, у) = апх2 + 2а12ху -
1(х, у) = ахх -f- a2y.
При переходе к новой системе координат Oeie'2 многочлен F(x, у)
тождественно переходит в многочлен F' (х', у'), а квадратичная
форма ф (х, у) старших членов многочлена F(x, у) тождественно
переходит в квадратичную форму ф' (х', у') старших членов много-
многочлена F' (х', у'). Поэтому квадратичная форма старших членов урав-
уравнения A), задающего данную кривую второго порядка в любой аффин-
аффинной системе координат, определяет одну и ту же квадратичную функцию
<Г(ц)==ф(а, р) для и = {а, Р};
в системе Oeie'a та же функция Ф (и) запишется в виде
ф(ц)=ф'(а', Р'),
если а', Р' — координаты вектора и относительно базиса е'ь е'2.
Замечание. Мы рассматривали лишь координатные системы
Ое[е'2 с тем же началом, что и исходная система Оехе2. Но перенос
начала координат не оказывает влияния ни на координаты вектора
и = {а, Р}, ни на коэффициенты формы ф (л:, у). Поэтому вывод, к
которому мы только что пришли, остается справедливым при пере-
переходе от исходного репера Ое^ к любому реперу O'eiej.
Вектор u = {a, P} имеет по отношению к кривой A) асимптоти-
асимптотическое направление, если
Из сказанного следует, что свойство вектора иметь асимптотиче-
асимптотическое направление по отношению к данной кривой зависит только от
данного вектора и данной кривой и не зависит от координатной си-
системы, в которой мы их рассматриваем.
Из условия C), определяющего асимптотические направления,
легко следует, что всякая кривая второго порядка имеет два асимп-
асимптотических направления, которые могут быть действительными и
различными, действительными и совпадающими или мнимыми сопря-
сопряженными. В самом деле, все три коэффициента аш а12, а22 не могут
быть одновременно равны нулю. Если аа Ф 0, то для определения
асимптотических направлений {а:Р} имеем квадратное уравнение
436- общая теория кривых второго порядка [гл. xvii
из которого находим два значения для отношения а:р:
Р о» • ( х)
Если известно, что а22 =? О, то вместо (Зх) для определения а:C мы
бы написали уравнение
«ii + 2«12(|) + «22(|-J=0, C2)
откуда
Р __ — Ql2 ^K 012—01,023
а ~ а22
Пусть один из коэффициентов аи, а22 равен нулю. Если, например
ап = 0, то уравнение C) превращается в
и одним из двух асимптотических направлений является направление
а =? О, Р = 0, соответствующее оси абсцисс.
Наконец, при ап—а22 = 0, а12^=0 условие C) превращает-
превращается в 2а12сф = 0, оно определяет направления а = 0, Р=^0 и
а =?0, р = 0, т. е. направления осей координат выбранной нами коор-
координатной системы.
Дискриминант квадратного уравнения (Зх) или C2) есть
а1ч — ana22 ~ — ^i где' как всегда,
ala
«22
Итак, асимптотические направления кривой второго порядка дей-
действительны и различны, когда 6 < О, т. е. когда кривая — гипербо-
гиперболического типа; они являются мнимыми и сопряженными в эллипти-
эллиптическом случае, т. е. когда б > 0; наконец, кривые параболического
типа (б = 0) характеризуются тем, что у них имеются два совпадаю-
совпадающих вещественных асимптотических направления, а именно (как сле-
следует из DХ) или D2) при 6 = 0):
а _ О]2 _ ага ,..
р- йП— 5i7- (й)
Рассмотрим частный случай окружности. Всякая окружность в
любой координатной системе задается уравнением вида
х2 + у2 + 2ахх + 2агу + а0 = 0,
н всякое уравнение этого вида определяет окружность. Для нахож-
нахождения асимптотических направлений {<х:р} имеем условие a? -j- рг = 0,
§ 3] АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ 437
из которого следует, что все окружности имеют одни и те же мни-
мнимые асимптотические направления, а именно направления, записываю-
записывающиеся в любой прямоугольной системе координат в виде
а:р = ±г. F)
Эти направления называются изотропными направлениями на плоскости.
Асимптотические направления эллипса, заданного в канонической
для него системе координат уравнением
х.1 «2
— 4- —= 1
суть а:Р = ±т'| как сразу видно из определяющего эти направле-
а2 , Р2 „ -р
ния условия —j-r тг = О. 1ак как ни одно действительное направление
не является для эллипса асимптотическим, то всякая вещественная
прямая пересекает эллипс в двух действительных или мнимых раз-
различных или совпадающих точках. При этом ко всякой вещественной
прямой можно найти параллельную ей прямую, пересекающую эллипс
в двух различных вещественных точках, достаточно взять прямую,
параллельную данной и проходящую через центр эллипса (т. е.
через начало канонической для данного эллипса системы координат).
Для гиперболы
v2 „2
а2 б2 к '
получаем асимптотические направления
Это направления диагоналей основного прямоугольника гиперболы,
т. е. прямых
уже названных нами в главе VI асимптотами гиперболы; они и дейст-
действительно являются асимптотами в общем, установленном в § 1 этой
главы смысле: каждое из уравнений у = ±—х, т. е.
? + | = 0 и 1-1 = 0, (8)
несовместно с уравнением G), что делается очевидным, если уравне-
уравнение G) переписать в виде
а + Ь )\а Ь
Докажем, что никаких других асимптот, кроме прямых (8), у
гиперболы G) нет.
438 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
В самом деле, всякая асимптота должна иметь асимптотическое
направление, т. е. направляющий вектор {а, ±Ь). Прямая с направ-
направляющим вектором {а, Ь) имеет параметрическое уравнение
x = xo+at,
Найдем общие точки гиперболы G) и прямой (9). Подставляя зна-
значения х, у из (9) в G), получаем для определения точек пересече-
пересечения гиперболы с прямой (9) уравнение (относительно t)
yl , 9 (х0
Это уравнение имеет единственное решение, за исключением случая,
когда
в этом случае оно превращается в противоречивое тождество 0 = 1
и прямая (9) действительно оказывается асимптотой. Покажем, что
Ь „
ее уравнение есть у = — х. В самом деле, система параметрических
уравнений (9) эквивалентна одному уравнению
а(у—уо)=Ь(х—хо), A1)
а тождество A0) может быть переписано в виде Ьхо = ауо, так что
уравнение A1) получает вид
. Ъ
ау = Ьх, т. е. У= — х.
Итак, единственная асимптота гиперболы G), имеющая направляющий
вектор {а, Ь\, есть давно известная нам асимптота у= — х.
Совершенно так же доказывается, что единственная асимптота
гиперболы G), имеющая направляющий вектор {а, —Ь), есть асим-
асимптота (/= — — а:.
Других асимптот у гиперболы нет.
Для параболы
у2 — 2рх = 0 A2)
квадратичная форма ф(дг, у) сводится к одному члену у\ асимпто-
асимптотические направления |$:а определяются из условия
это два слившихся направления, каждое из которых совпадает
с направлением Р = 0, т. е. с направлением оси параболы.
§ 3] АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ 439
Каждая прямая у = с этого направления имеет с параболой един-
(с2 \
ственную общую точку ( о~. с); таким образом, ни одна из прямых
асимптотического направления не является асимптотой параболы —
у параболы асимптот нет.
Рассмотрим, наконец, случай, когда кривая второго порядка
распадается на пару прямых. Если эти прямые пересекающиеся, то
их можно принять за оси координат некоторой аффинной системы Оху
и уравнением пары этих прямых будет
F(x, y)~xy = 0.
Здесь F(x, y)=(f(x, у) и асимптотические направления определяются
из уравнения
сф = 0.
Это направления а = 0 и |3 = 0 самих наших прямых.
Такой же результат мы получим и для кривой, распадающейся
на пару параллельных (в широком смысле) прямых. Взяв систему
координат, ось абсцисс которой является средней прямой между
обеими данными, а ось ординат произвольна, видим, что получаем
каноническое уравнение,— в надлежащей системе координат эта кри-
кривая имеет уравнение
Здесь (как и в случае параболы) ф (лг, г/) = г/а, и мы получаем пару
¦слившихся асимптотических направлений j32 = O, каждое из которых
совпадает с общим направлением двух данных параллельных прямых.
Замечание о кривых высших порядков. Покажем, что
алгебраическая кривая п-го порядка, определяемая уравнением
F(х,у) = <$(х, у) + Р(х, «/)=0,
где ф (х, у) есть однородный многочлен (форма) n-й степени, а Р (х, у) —
многочлен степени < п — 1, имеет п асимптотических направлений (если каждое
из них считать с его кратностью).
В самом деле, многочлен ф (а, [5) можно записать в виде
ф (а, Р) = «Т^ (а, Р), ц ^ О, vSs О,
где -ф (а, Р) уже не делится ни на а, ни на Р (так что а?, соответственно
Pv,— наивысшая степень а, соответственно р, на которую делятся все члены
Ф (а, Р); эта степень может, в частности, быть н нулевой).
Степень многочлена if (а> Р) есть
I Асимптотическими направлениями являются:
1) направления а = 0 (считаемые с кратностью (i),
р = 0 (считаемые с кратностью v)f
2) направления, удовлетворяющие уравнению
Ч( Р) 0
440 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XV11
о
это—т направлений ft=— , являющихся корнями уравнения ф((Л) = 0, где
многочлен ф, (к) = \I, ( — J есть частное от деления многочлена ф (а, Р) на
т
т. е. определяется нз равенства
Всего имеем ([i-}-v)-|-'H = /i асимптотических направлений.
§ 4. Пересечение кривой второго порядка с прямой
иеасимптотического направления. Касательные
Берем снова кривую второго порядка, заданную (в произвольной
аффинной системе координат) уравнением
F(x, y)==q>(x,y)+2l(x,y) + ao = O, , A)
где
ф (а:, у) ~ аилг2 + 2а1Ъху + a2iy*,
1{х, у)==а1х+а2у.
Введем еще следующие обозначения:
^i {х, У) = апх + а12у + аъ
F2 (х, у) = апх + aity + а„.
Решая уравнение A) совместно с уравнением данной прямой
x = xo + at, \
получим (в качестве уравнения C) из § 1) уравнение
=O, C)
где, как показывает легкий подсчет,
Л=ф(а, р), B-F^x» yo)a + F2(xo, yo)$, C = F(xo,yo). D)
Мы теперь предполагаем, что
так что уравнение C) имеет два (различных или совпадающих) корня
tlt t%. Пусть tx — t? тогда прямая B) пересекает кривую A) в двух
совпадающих точках и называется касательной к этой кривой: обе
точки пересечения слились в одну точку касания. Для нахождения
уравнения касательной удобно взять за точку Мо — (х0, у0) прямой B)
как раз ту точку, которая принадлежит и кривой A), и прямой B).
Тогда
§ 4] КАСАТЕЛЬНЫЕ 441
и уравнение C) принимает вид
t(At + 2B)=0; C')
оно имеет корень t — 0. Если в точке Мо = (х0, у0) сливаются обе
точки пересечения кривой A) и прямой B), то оба корня уравнения C')
совпадают и равны нулю. А это может случиться лишь при
В = Fj. (xut у0) a+F2 (х0, у0) р = О,
откуда
о F-l (*о, У а)
Р М*о,{/о)"
Следовательно, уравнение B) касательной, переписанное в виде
х — хо_у— у0
а - р •
получает вид
х—Хд _ У—У а
Fi(xa,ya)~ FY(xa,ya)
или
Fi(x0, y0){x—x0) + F2(x0, уо)(у—уо) = О, E)
где
^i (^о- У о) = ачхо
Подставляя в E) эти значения F\{xu, y0), Р%(х0, уп), раскрывая
скобки и принимая во внимание, что F(.?o, (/0) = 0, переписываем
уравнение E) в виде
(апх0 + апу0+ aj x + (а21лг0 + а^уо-\- аг) у+ а1х0+ а^уо+ао = О F)
Замечание. Для нераспадающихся кривых второго порядка
(для которых Fj (хп, у0) и F2 (x0, у0) не могут одновременно обра-
обратиться в нуль) уравнение касательной в виде E) совпадает с урав-
уравнением, даваемым в курсах анализа: ведь
f — J dF f i — 1 dF
*"i \xt У)—~2"dx~ ' 'г\х> У)—~2dy'
Из уравнения E) видим, что угловой коэффициент касательной есть
k== =
a F2(x0,y0)'
В случае эллипса
Уравнение F) касательной в точке Л10 = (х0, у0) получает вид
ХдХ уоу
а* "г б2
ХдХ , УоУ _,
Т иг »>
442 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
что и является самой удобной формой уравнения касательной к эл-
эллипсу в его точке М0 = (хй, уп).
Аналогично в случае гиперболы
из F) получаем
Для параболы
уравнение F) касательной в точке М0 = (х0, у0) имеет вид
или, после очевидных преобразований,
л0л УОУ -I
а2 б2 '
у2 — 2рх =
§ б. Пересечение кривой второго порядка с прямой
асимптотического направления. Геометрическая
характеристика асимптотических
и неасимптотических направлений
Пусть дана кривая
^(л:, </)== а1Ххг + 2апху + a2iy2-\-2axx + 2а2у + ао = О A)
и прямая
имеющая асимптотическое направление по отношению к кривой A).
Это значит, что
А == Ф (а, р) = апа2 + 2а12ар + ч№ = °-
Уравнение C) предыдущего параграфа, определяющее точки пере-
пересечения прямой B) с кривой A), превращается в
2№ + C = 0. C)
Возможны следующие случаи (известные нам уже из § 1).
Случай I. B=^=0\ тогда уравнение C) определяет одну-един-
ственную точку пересечения прямой B) с кривой A).
Случай И. В —0, СфО; прямая B), не имея с кривой A) ни
одной точки пересечения, является асимптотой этой кривой.
§ 5]
ХАРАКТЕРИСТИКА АСИМПТОТИЧЕСКИХ НАПРАВЛЕНИЙ 443
Случай III. /i=C=0; уравнение C) есть тождество 0 = 0,
каждая точка прямой B) лежит на кривой A). Эта кривая распадается
на пару прямых, одной из которых является прямая B).
Итак, прямая, имеющая по отношению к данной кривой второго
порядка асимптотическое направление, либо целиком состоит из точек,
лежащих на данной кривой, либо содержит не более одной такой точки.
Если же прямая имеет неасимптотическое направление, то она пере-
пересекает кривую в двух вещественных (или мнимых сопряженных)
точках, которые, однако, могут сливаться в одну точку — точку касания.
Но пара слившихся точек геометрически ничем не отличается от
одной точки, поэтому пока мы еще не умеем охарактеризовать асимп-
асимптотические (соответственно неасимптотические) направления геомет-
геометрически, не прибегая к уравнению кривой. Такая характеристика
дается следующим предложением:
Теорема 6. Пусть F (х, у)=0—кривая второго порядка, не
являющаяся парой слившихся прямых, и {а: [5} есть направление,
неасимптотическое по отношению к кривой A). Тогда существует пря-
прямая направления {а: [5}, пересекающая кривую в двух различных
точках Р и Q. При этом, если кривая содержит более одной дейст-
действительной точки (т. е. не является мнимым эллипсом или парой мнимых
сопряженных прямых) и направление {а: [5} действительно, то действи-
действительны и точки Р, Q.
Доказательство. Через каждую точку х0, у0 кривой A)
проведем прямую
B)
пеасимптотического направления {а: $}.
Требуется доказать, что среди прямых B), проведенных через
всевозможные точки (л:0, у0) кривой A), имеется по крайней мере
одна прямая, не являющаяся касательной к кривой A) в точке (х0, у0).
Но если прямая B) есть касательная к кривой в точке (л:0, у0), то,
как мы знаем из предыдущего параграфа, должно быть
В = ^i (*„. У о) « + ^2 (*о. У о) Р =
+ «2iP) *о + (ai2a + аааР) Уо + aia + ааР = °-
Если это верно для каждой точки (л:0, (/„), лежащей на кривой A),
то все эти точки должны удовлетворять соотношению
(апа -J- о12р) д:0 + (а21а + а22$) у0 + (аха + «2Р) = 0. D0)
В этом равенстве коэффициенты аиа-\-а12$ и а21а -'- а22|5 при д:0 и у0
не могут быть одновременно равны нулю; в самом деле, умножая обе
части равенств
aiia + fli2P = °.
<221a-f- й22Р =0
444 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА ' [ГЛ. XVII
соответственно на а и р и складывая нх, мы бы получили
что означает, что направление {а: р\, вопреки нашим предположе-
предположениям, является асимптотическим. Итак, равенство D0) есть уравнение
первой степени относительно х0 и у0, которому удовлетворяют все
точки (х0, у0) кривой A); другими словами, все точки этой кривой
должны лежать на прямой
(aua + aiaP) x + (a2la + a22P) y + (a1a + аф) = 0. D)
Но среди кривых второго порядка лишь кривая, являющаяся
парой слившихся прямых, обладает тем свойством, что все лежащие
на ней точки принадлежат одной прямой; поэтому кривая A), обла-
обладающая этим свойством, есть пара слившихся прямых, каждая из
которых задана уравнением D),— случай, который мы исключили.
Итак, существует точка М0 = {х0, у0) кривой A), обладающая
тем свойством, что проходящая через нес прямая d неасимптоти-
неасимптотического направления {а: [5} не является касательной; значит, эта
прямая пересекает кривую A) в двух различных точках Мо и Mv
Если кривая содержит более одной и, следовательно, бесконечное
множество действительных точек и {а: PJ" — действительное неасим-
нтотическое направление, то, повторяя наше рассуждение лишь для
действительных точек кривой Мо, видим, что найдется прямая, имею-
имеющая направление {а: [5}, проходящая через действительную точку Л70
кривой и пересекающая ее в двух различных точках. Но если точка
УЙ0 = (.?„, у0) действительная, то действительной должна быть и вто-
вторая точка пересечения /Их. Теорема доказана.
Замечание. Среди прямых асимптотического направления
асимптоты кривой характеризуются тем, что в уравнении C) § 4
имеем А = 0, В=0, но С=^=0. Следовательно, если прямая B) есть
асимптота кривой A), то, во-первых, ее направляющий вектор {а, $}
имеет асимптотическое направление (так что ср (а, |5) = 0), а, во-вто-
во-вторых, для любой ее точки (х0, у0) выполнено тождество
^i (х0, г/0) a + ?г (х0, </о) ,3 = 0
—уравнение асимптоты есть уравнение
Fx{x, y)a + F2(x, sr)P=.Of D')
где вектор {a, ji} имеет асимптотическое направление. Уравнение D')
может быть переписано в виде
+ а|р) = 0. ' D)
Читатель легко проверит, что в случае гиперболы (заданной кано-
каноническим уравнением) мы получаем наши старые уравнения асимптот.
§ 6] • ЦЕНТР КРИВОЙ ВТОРОГО ПОРЯДКА 445
§ 6. Центр кривой второго порядка
Пусть в произвольной аффинной системе координат дана кривая
F(x, у) ¦= anx2 -f-2а12лг</+ аггуг-\-2ахх-\-2а%у-\- а0 = 0 A)
и прямая
__?L+?2 _Уг±Уг /о.
неасимптотического направления; обозначим через М1 = (х1, ух) и
Мг — (хг, уг) точки пересечения кривой A) с прямой B).
Решим следующую задачу: когда хорда, имеющая направление
{а:[5}, делится в точке MQ = (xQ, y0) пополам? Другими слонами,
когда точка М0 = (х0, у0) является серединой отрезка MxN\^i
Для этого, очевидно, необходимо и достаточно, чтобы было
Но
Подставляя эти значения в C), получаем
Так как а и Р (как координаты направляющего вектора прямой B))
не могут быть равны нулю одновременно, то условие C) равносильно
условию
*!+/,=(>. D)
Но tt и t% суть корни квадратного уравнения
2S
$начит, ^i + ^2~' л ' и Условие (^) означает В = 0 или
^i (х0, у0) а + Рг {х0, у0) р == 0. E)
Это и есть условие для того, чтобы точка Мо ~ (х0, у0) была
:ерединой отрезка МгМ^, т. е. хорды, высекаемой кривой A) из
фямой B).
Определение центра. Напомним прежде всего, что точкой,
имметричной точке М=(х, у) относительно точки С=(х0, уй),
446 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVU
называется точка М' = (х', у'), обладающая тем свойством, что точка
С есть середина отрезка ММ'. Координаты х', у' точки М' одно-
X I v' it 1 у'
значно определяются из условий хо = —~—, уо = „ • Точка С
называется центром симметрии (или просто центром) данной линии,
если, какова бы ни была точка М, лежащая на этой линии, точка
М', симметричная точке М относительно точки С, также лежит на
М
—»¦
х
Рис. 172.
данной линии (рис. 172). Эти определения сохраняют силу и для
комплексной плоскости.
Докажем следующее предложение.
Теорема 7. Для того чтобы точка М0~(х0, у0) была центром
кривой A), необходимо и достаточно, чтобы координаты х0, у0 этой
точки удовлетворяли следующим уравнениям (называемым «уравне-
ниями центра»):
F2(x, у) = а2
а1 = 0, 1 ,„
а2 = 0. f V '
Доказательство. А. Условие необходимо. Пусть
М0=(х0, у0) есть центр кривой A), и пусть хотя бы одно из двух
чисел F1(x0, у0), F%(x0, y0) отлично от нуля. Приведем это пред-
предположение к противоречию. Рассмотрим равенство E) как уравнение
относительно аир. Переписывая его как пропорцию
Р:а=— F1(x0, yn)'.F%(x0, y0),
видим, что оно удовлетворяется векторами лишь одного направления,
а именно направления
Ро:ао=— ^(-^о. Уо):рг(хо> г/о)-
Между тем для любого неасимптотического направления (а таковыми
являются все направления, кроме двух) условие E) должно быть
выполнено (так как прямая B) этого направления пересекает кривую
§ 6] ЦЕНТР КРИВОЙ ВТОРОГО ПОРЯДКА 447
A) в двух точках Afx и /И2 и точка Ма есть середина отрезка М±М2).
Противоречие получено, необходимость нашего условия доказана.
Б. Условие достаточно. Пусть точка Мо = (х0, у0) удов-
удовлетворяет условию F). Перенесем начало координат в точку
М0={хп, Уо)> т-е- выполним преобразование координат
х = хо-{-х',
У = У0-'гУ'-
Оно переводит уравнение F (х, 2/)=0 в уравнение F' (х', у') —О,
где
где
F(x, y)=F'(x', y')
a12x'y' + a22y'2 + 2 (anx0 -f а12у0 + ax) x' +
+ 2 {a21x0 + a2iy0 + a2) y' + a'o = 0
и
a' =F(x0, y0).
Но ввиду равенств F) последнее уравнение имеет вид
F' (х', у') = апх'2 + 2а1гх'у' + a2iy'2 + а' = 0.
В этом уравнении отсутствуют члены первой степени, откуда сле-
следует, что новое начало, т.е. точка Afo=(jco, yn), есть центр сим-
симметрии нашей кривой. Теорема доказана.
Из доказанного вытекает, что в центральном случае, т. е. когда
6 =
кривая A) имеет единственный центр симметрии М0=(х0, у0), коор-
координаты которого и находятся из уравнений F).
1:сли центральная кривая задана своим уравнением в канонической
системе координат, то начало координат и есть, как мы теперь
знаем, единственный центр кривой.
Заметим вообще, что уравнения F) имеют силу для любой аффин-
аффинной системы координат. Поэтому для определения центра какой-либо
кривой мы можем ограничиться рассмотрением ее уравнения в кано-
канонической для нее координатной системе.
Единственным центром пары пересекающихся прямых является
их точка пересечения: это сразу следует из канонического уравнения
а*х* ± Ь*у2 = 0. G)
В параболическом случае мы имеем или
параболу, ее каноническое уравнение есть
г/2 — 2рх = 0, (8)
или
448 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVH
пару параллельных (в широком смысле) прямых
х2 ± а2 = 0. (9)
Для параболы, заданной уравнением (8), уравнения центра приобре-
приобретают вид
= 0, \
Уже первое из этих уравнений противоречиво (так как р =^= 0),
поэтому система A0) несовместна—у параболы центра нет.
Для пары параллельных прямых, заданных уравнением (9), урав-
уравнения F) имеют вид
= 0, \
Они определяют прямую х=0, все точки которой и являются цент-
центрами симметрии пары прямых (9), что очевидно и геометрически:
пара параллельных прямых имеет прямую центров (это — средняя
прямая между двумя данными).
§ 7. Диаметры кривой второго порядка
Рассмотрим все прямые, имеющие одно и то же неасимптотиче-
неасимптотическое направление {a:f5}; на каждой из этих прямых возьмем в каче-
качестве точки М0 = (х0, у0) середину хорды, высекаемой из этой прямой
кривой
F(x, y)E=a11x* + 2al2xy + a22y2 + 2alx + 2aiy + a0 = 0. A)
Эти точки М0 = (х0, у0) (координаты х0, у0 теперь уже переменные!)
удовлетворяют уравнению (§ 6, E))
Fx(x, y)a + F2(x, j/)P = O, B)
т. е.
(апх + апу + ау) а + (а21х+а22у + аг) Р = 0,
которое, группируя по-новому его члены, переписываем в виде
(апа + a12p) x+ (a21a + a22f3) y+ (axa + a,{J) == 0. B')
Это уравнение есть уравнение некоторой прямой d, на которой и
лежат середины всех хорд данного неасимптотического направления
(рис. 173). Прямая d называется диаметром кривой A), сопряжен-
сопряженным направлению {а:?5}.
Центр (или центры, если их много) кривой A), очевидно, удов-
удовлетворяет уравнению B), каково бы ни было направление {а:[5}, и
поэтому лежит на любом диаметре кривой A).
Только что данное определение диаметра имеет силу для любой
кривой второго порядка (как центральной, так и параболической).
§ 7] ДИАМЕТРЫ КРИВОЙ ВТОРОГО ПОРЯДКА 449
При этом направляющим вектором диаметра, сопряженного направ-
направлению {а:$}, является вектор {а', Р'}, где а' = — (а2 Р
p n 1
Пусть теперь A)—центральная кривая. Возьмем какую-нибудь
прямую d неасимптотического направления, проходящую через един-
единственный центр М0=(х0, у0) кривой A); уравнение прямой d запи-
записывается в виде
А(х—х0) + В(у — у0) = 0, C)
где (х0, у0) удовлетворяют уравнениям центра, т. е. уравнениям F)
предыдущего параграфа.
Рис. 173.
Мы ищем направление {а:[5}, для которого прямая d была бы
сопряженным диаметром, и решаем для этого уравнения
аиа-{-а12$=А,
c21a -f- я22Р = В-
Уравнения эти решаются однозначно (так как по предположению
6 Ф 0) и позволяют переписать C) в виде
22P)B/ — yo) = O, D)
что представляет лишь другую запись уравнения B').
В самом деле, переписываем D) в виде
(апа + ап$)х + (a21a + a22P){/ = (апа+а12Р)л:0 + (а21а+а22Р) у0. D')
П. С. Александров
450 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
Но ввиду уравнений центра, которым удовлетворяют числа х0, </0,
правая часть равенства D') есть —ata—а2Р> т-е- (^') принимает
вид B').
Итак, всякая прямая d неасимптотического направления, прохо-
проходящая через (единственный) центр центральной кривой второго
порядка, есть диаметр, сопряженный некоторому вполне определен-
определенному направлению {а:$\.
Посмотрим, что дает уравнение B') в случае, когда направление
{а:[5} асимптотическое. Тогда уравнение B'), тождественное уравне-
уравнению B), есть уравнение асимптоты (см. § 5, замечание). Таким обра-
образом, естественно считать асимптоту диаметром, сопряженным своему
собственному направлению (хотя при этом первоначальный, наглядно
геометрический смысл диаметра, сопряженного данному направлению,
утрачивается, так как хорд асимптотического направления не суще-
существует).
Теперь диаметры центральной кривой второго порядка могут быть
определены просто как прямые, проходящие через центр данной кривой.
Замечание. Из сказанного выше следует, что если направле-
направление данного диаметра неасимптотическое, то и направление, ему
сопряженное, также неасимптотическое.
§ 8. Взаимно сопряженные векторы (направления).
Диаметры и касательные
1. Взаимно сопряженные векторы. Особое направление. Диа-
Диаметр, сопряженный направлению {а:[5}, имеет направляющий вектор
{а', Р'}, где
а' = — (а
Векторы {а, [5} и {а', [5'} связаны соотношением
ацаа' + а12(аР' + а'Р) + амРР' = 0, B)
получающимся, если почленно сложить уравнения A), предвари-
предварительно умножив обе части первого из них на —[5', а второго — на
а'. Но левая часть равенства B) есть не что иное, как симметрич-
симметричная билинейная форма г|? (a, f5; a', [5'), полярная к квадратичной
форме
Ф(а, Р) = ап
Поэтому естественно ввести следующее
Определение. Ненулевые векторы и = {а, [5} и и' — {a', ft'}
(а также определяемые ими направления {а:[5} и {а':[5'}) назы-
называются взаимно сопряженными относительно квадратичной формы
& 8] ВЗАИМНО СОПРЯЖЕННЫЕ ВЕКТОРЫ 451
Ф (Х> у) = апхг + 2я12хг/ + а22у2, если они удовлетворяют уравнению
у (U, u') = t (а, Р; а', Р') = вцаа' + а12 (аР' + Ра') + я22РР' = 0. B)
Заметим прежде всего: при переходе от координатной системы
Оху к произвольной новой координатной системе Оху билинейная
форма if (а, Р; а', Р') переходит в билинейную форму if (а, Р; а', Р'),
выражающую ту же билинейную функцию if (u, и'), полярную к квад-
квадратичной функции Ф (и), записывающейся в координатной системе
Оху в виде квадратичной формы ф (а, Р) и в координатной системе
Оху в виде ф (а, Р). Поэтому билинейная функция if (и, и'), обра-
обращение в нуль которой характеризует сопряженность векторов и и и',
в любой координатной системе записывается в виде билинейной
формы, полярной к квадратичной форме старших членов уравнения
F (х, у) = 0, определяющего в этой системе координат данную кривую
второго порядка. Свойство двух векторов быть или не быть сопря'
женными относительно формы ф (х, у) не зависит от выбора той или
иной системы координат, а зависит только от квадратичной функции
Ф(и), определенной (в какой-нибудь системе координат) формой
4>(х, У).
Мы будем также говорить, что векторы и и и' (и их направ-
направления) сопряжены относительно данной кривой второго порядка,
если они сопряжены относительно квадратичной формы старших
членов уравнения этой кривой (в какой-нибудь, все равно в какой
именно, системе координат). Это позволяет нам в дальнейшем писать
условие сопряженности, пользуясь какой-нибудь определенной, на-
например канонической для данной кривой, системой координат.
Зная одно из двух сопряженных направлений, например направ-
направление {а:р}, другое определяем без труда; для этого переписываем
равенство B) в виде
а' (аиа + ацр) = -Р' (аяа + аг$), B')
что означает пропорцию
Р' :а' = — (апа + в„Р): (я21а + я22р), B")
определяющую направление вектора {a', ji'}. Точно так же выра-
выражается {а, Р} через {а', Р'}:
Р: а = - (апаг + а„Р'): (апа' + в„Р').
Посмотрим, когда два сопряженных между собою направления совпа-
совпадают. Очевидно, тогда и только тогда, когда
— («и0 + а1гР): («
т. е. когда
452 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
Другими словами, направление тогда и только тогда совпадает со
своим сопряженным, когда оно является асимптотическим 1). Поэтому
асимптотические направления называются иначе самосопряженными.
Посмотрим, не может ли случиться, что направление {а:^},
сопряженное направлению {<х':|3'}, перестанет быть определенным.
В этом случае направление {<х':|3'} назовем особым.
Очевидно, направление {а':|3'} будет особым тогда и только тогда,
когда оно удовлетворяет системе уравнений
Но вектор {а', |3'} не есть нулевой вектор, поэтому равенства C)
могут иметь место, лишь если
6 =
= 0,
т.е. если кривая F(x, у) = 0 параболическая.
Но это еще не все: умножая обе части первого из уравнений C)
на а', а второго — на |3' и складывая, получаем
т.е. направление {a':ji'} есть асимптотическое направление.
Итак, только для параболической кривой и для (единственного)
ее асимптотического направления сопряженное направление перестает
быть определенным.
С другой стороны, единственное асимптотическое направление
«' _ _?12__222
Р' «11 °21
параболической кривой F(x, y} — 0 удовлетворяет условиям
т. е. условию
для любого направления {а:^}.
Итак, в случае параболической линии ее асимптотическое направ-
направление сопряжено всякому направлению, т. е. является особым.
х) Это ясно и из того, что билинейная форма if (a, C; а', |У) переходит
при а' = а, р' = р в квадратичную форму <р (ос, C).
§ 81
ВЗАИМНО СОПРЯЖЕННЫЕ ВЕКТОРЫ
453
Вернемся теперь — в случае любой кривой второго порядка
у) = 0—к уравнению B') § 7:
(апа + а12Р) х + (a2ia + а2г$) у + {а1а + а$) = О,
т.е. к уравнению диаметра, сопряженного направлению {а:|3}.
Какова бы ни была кривая второго порядка F(x, i/) = 0, ее
диаметр, сопряженный направлению {а:|3}, имеет направление {а':р"|,
сопряженное направлению {а:|3}.
Если кривая ^(дг, у) —0 цент-
центральная, то диаметр, сопряжен-
сопряженный направлению {а':р"}> будет
иметь направление {atp1}.
Два диаметра центральной
кривой называются взаимно соп-
сопряженными между собою, если
сопряжены их направления. Каж-
Каждый из двух сопряженных между
собою диаметров делит пополам
(рис. 174, рис. 175).
Рис. 174.
хорды, параллельные другому^
Рис. 175.
Переходим к параболическому случаю. Если данная кривая
F (х, у) —0 распадается на пару параллельных прямых, то у нее—
один единственный диаметр («средняя» прямая по отношению к двум
данным); этот диаметр является геометрическим местом середин хорд
любого направления, он является прямой центров нашей кривой A),
его направление—особое, оно сопряжено любому направлению
(рис. 176).
У параболы середины всех хорд данного направления {а:$\ лежат,
как мы видели, на вполне определенной прямой, и прямая эта
имеет асимптотическое направление Р':а' =—an:ai2 =—ai2:a22i
она является диаметром параболы (сопряженным данному направ-
направлению {cr.ji}).
Докажем, что в случае параболы всякая прямая асимптотического
направления есть диаметр, сопряженный некоторому вполне опреде-
определенному направлению.
При доказательстве мы вправе выбрать любую систему коорди-
координат; возьмем такую, в которой уравнение параболы имеет вид
у* — 2рх=0. D)
Прямые асимптотического направления суть просто прямые, парал-
параллельные оси абсцисс. Пусть
У~пг E)
— такая произвольная прямая (рис. 177).
Уравнение B') § 7, т. е. уравнение диаметра, сопряженного на-
направлению Р:а, имеет в нашем случае
ВИД у
$у~ра — 0. F)
Для того чтобы оно определяло ту же
прямую, что и уравнение E), необходимо
Рис. 176.
Рис. 177.
и достаточно, чтобы было^-=т, чем отношение $:а=р:т опреде-
определено однозначно, и наше утверждение доказано.
Таким образом, диаметры параболы могут быть определены как
прямые асимптотического направления.
Предположим, что выбрана прямоугольная система координат,
каноническая для данной параболы. Для P = l, a = 0, т. е. для на-
направления, перпендикулярного к оси параболы, уравнение F) дает
У = 0, т. е. ось параболы, которая является, таким образом, диамет-
диаметром, сопряженным направлению, перпендикулярному к направлению оси.
°J
Если мы теперь будем вектор {а, |3} вращать (начиная с поло-
положения а = 0, р = 1) но часовой стрелке (от оси ординат к оси аб-
абсцисс), то сопряженный ему диаметр, все время оставаясь горизон-
горизонтальным, будет подниматься вверх, уходя в бесконечность; когда
направление вектора станет горизонтальным (т. е. асимптотическим),
сопряженный диаметр перестанет быть определенным, а при даль-
дальнейшем вращении вектора {а, |3} (по часовой стрелке) & = -?- ста-
станет отрицательным (сна-
(сначала очень малым по
абсолютной величине),
и наш диаметр (оста-
(оставаясь горизонтальным)
будет из бесконечных да-
далей нижней полуплос-
полуплоскости подниматься вновь
к оси абсцисс и совпа-
совпадет с нею, когда век-
вектор {а, Р} примет на-
направление оси ординат
(рис. 178).
Рассмотрим теперь
случай эллипса и гипер-
гиперболы, заданных их кано-
каноническими уравнениями
-^-±-p-=1- Рис. 178.
Соотношение сопряженности двух векторов {а,
запишем в виде
и {а',
т. е.
а-а'
или, полагая k = —, k' = ^r,
а ' а' '
(верхний знак—для эллипса, нижний—для гиперболы.)
Отсюда следует: угловые коэффициенты двух взаимно сопря-
сопряженных диаметров имеют в случае эллипса противоположные, а в
случае гиперболы—одинаковые знаки. А это означает, что два со-
сопряженных диаметра лежат в случае эллипса в разных парах верти-
вертикальных координатных углов, а в случае гиперболы — в одинаковых.
456
ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
[ГЛ. XVII
Рис. 179.
Возьмем за начальное значение вектора {а, $\ единичный вектор
{I, 0} оси абсцисс. Диаметр этого направления есть фокальная ось
эллипса, а сопряженный
i У ему диаметр — вторая
ось. Будем вращать
вектор {а, р1}(приложен-
р1}(приложенный к центру эллипса,
т. е. к началу координат)
против часовой стрелки;
направленный по этому
вектору диаметр эллипса
будет вращаться (нахо-
(находясь в первой и третьей
четверти) от фокальной
оси ко второй оси против
часовой стрелки, а сопря-
сопряженный ему диаметр—от второй оси к фокальной, тоже против часовой
стрелки (рис. 179) — при вращении данного диаметра сопряженный ему
будет от него убегать, вра-
вращаясь в том же направлении. у
В случае гиперболы
ж2 Ф
-%¦—¦р" = 1 диаметр, сопря-
сопряженный оси абсцисс (фокаль-
(фокальной оси гиперболы), есть
снова ось ординат, вторая
ось гиперболы, но если будем
вращать прямую y = kx,
начиная с положения k — 0,
против часовой стрелки,
то сопряженный диаметр
у = k'x—так как он должен
лежать в тех же координат-
координатных углах, что и данный
диаметр у = kx, —должен
вращаться в противополож-
противоположном направлении — при вра-
вращении данного диаметра
вокруг центра гиперболы
сопряженный диаметр бежит
ему навстречу. При этом,
когда k—«-— (т. е. когда прямая
Рис. 180.
= kx, вращаясь против часо-
часовой стрелки, приближается к асимптоте), то k' тоже—> оба со-
§ 81
ВЗАИМНО СОПРЯЖЕННЫЕ ВЕКТОРЫ
457
пряженных диаметра неограниченно приближаются к асимптоте (каж-
(каждый со своей стороны) (рис. 180).
2. Диаметры и касательные. Теорема 8. Диаметр, проходя-
проходящий через какую-нибудь заданную точку нераспадающейся кривой
второго порядка, сопряжен направлению касательной к этой кривой
в данной ее точке.
Рис. 181.
Доказательство. На кривой F(x, y) = 0 берем точку
Мо~(хо, #о)- Существует единственный диаметр, проходящий через
эту точку; если кривая центральная (рис. 181, а и б), то этим
диаметром является прямая, соединяющая точку Мо с центром; если
кривая — парабола (рис. 181, в), то ее диаметром, проходящим через
точку Жо, будет прямая (единственного) асимптотического направ-
направления, проходящая через эту точку.
Диаметр, сопряженный какому-нибудь направлению а:C, имеет
Уравнение F1(x, y)a-\-F2(x, г/)|3 = 0. Если диаметр проходит через
458 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
точку М0 = (х0, (/„), то имеет место тождество
^i (•*¦<)> У о) а + гг (•*¦<>> Уо)Р = °. .
т. е.
_?__ Р\(ч> г/о).
a F2(*o. г/о)'
но это направление есть как раз направление касательной к кривой
F(x, у) = 0 в точке М0 = (хт (/„), что и требовалось доказать.
Прилагаемый рис. 181 иллюстрирует теорему, когда кривая
F(х, у)=0 является соответственно эллипсом, гиперболой или па-
параболой.
§ 9. Вид уравнения кривой, если оси координат имеют
сопряженные направления
Пусть даиа кривая второго порядка своим общим уравнением
F(x, y)s=aux2^-2anxy+a22y2 + 2a1x + 2a2y+a0 = 0. A)
Посмотрим сначала, каковы диаметры, сопряженные направлениям
осей координат. Уравнение диаметра, сопряженного направлению
{а:рЧ, есть
(апа + а„Р) х-f (о21а + а22Р) у + (а^ + а2Р) = 0. B)
Если а=1, р = 0 (т. е. вектор {а, Щ есть направляющий вектор
оси абсцисс), то уравнение B) превращается в
а11Х+а1гу + а1 = 0. B')
Если же а = 0, Р = 1, то уравнение сопряженного диаметра есть
а22у + а2 = 0. B")
Итак, диаметр, сопряженный направлению оси абсцисс, имеет
уравнение B'), а диаметр, сопряженный направлению оси ординат,
имеет уравнение B").
Предположим теперь, что ось ординат имеет произвольное, не-
неасимптотическое для данной кривой направление, а ось абсцисс яв-
является диаметром, сопряженным направлению оси ординат. Тогда
уравнение B") есть уравнение оси абсцисс, т. е. выражает ту же
прямую, что и уравнение
У = 0.
Следовательно, коэффициенты
§ 91 вид уравнения кривой 459
уравнения B") должны быть пропорциональны коэффициентам
О, 1, О
уравнения оси Ох, а это значит, что
а21 = 0, а23=^0, а2 = 0.
Следовательно, в нашей системе координат кривая A) имеет урав-
уравнение
+ 2a1x+a0 = 0. C)
Рассмотрим отдельно два случая:
1° Кривая A)—центральная.
2° Кривая A) — параболическая (парабола или пара параллельных
прямых).
В первом случае из того, что ось абсцисс представляет собою
диаметр, сопряженный направлению оси ординат, следует, что и ось
ординат имеет направление, сопряженное оси абсцисс. Если при этом
начало координат лежит в центре кривой, то обе оси координат
являются сопряженными между собою диаметрами.
Но тогда ось ординат, будучи диаметром, сопряженным оси абсцисс,
имеет уравнение B'), которое должно быть равносильно уравнению
лг = О.
Значит, коэффициенты
aii» ап> ai
уравнения B') должны быть пропорциональны коэффициентам
1, О, О
уравнения оси Оу, т. е.
следовательно, уравнение C) имеет вид
a0 = 0. D)
Итак, если оси координат образуют пару сопряженных диаметров
данной (произвольной) центральной кривой второго порядка, то
уравнение этой кривой в этой системе координат имеет вид D)
(рис. 182).
Случай распадающейся центральной кривой характеризуется тем,
что в уравнении D) имеем яо = 0 (центр, т. е. начало координат,
есть точка кривой) (рис. 183).
Пусть теперь кривая A) (уравнение которой уже приведено
к виду C)) есть кривая параболическая. Тогда аиа22 = а\г; но в урав-
уравнении C) коэффициент а12 = 0, значит, аиа22 = 0, а так как а22=^=0,
то ап = 0.
460
ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
[гл. xvii
Итак, если в случае параболической кривой ось ординат направ-
направлена по произвольному, неасимптотическому направлению, а ось
абсцисс есть диаметр, сопряженный этому направлению (и, следо-
Рис. 182.
Рис. 183.
\
а:
Рис. 184.
вательно, имеющий асимптотическое направление), то уравнение
кривой в этой системе координат имеет вид
а22уг + 2а1х + а0 = 0. E)
Если наша кривая распадается на пару параллельных прямых
(рис. 184), то Д = 0, т. е.
О О а,
О й22 О
1022 =
ах 0 а0
Так как ааа=?0, то непременно а1 — 0, и уравнение E) необходимо
§ 9]
имеет вид
ВИД УРАВНЕНИЯ КРИВОЙ
«о.
2
461
F)
Если же наша кривая есть нераспадающаяся параболическая кри-
кривая, то непременно Oj^O.
Сделаем теперь перенос начала в точку пересечения О' кривой
с осью х, т. е. преобразование координат
х = х'+х0, у=уг,
где х0 определено требованием, чтобы точка О' = (л;0, 0) удовлет-
удовлетворяла уравнению E), т. е. чтобы было
В преобразованной системе координат уравнение E) приобретает вид
а22у'г + 2агх' + {2агх0 + а0) = О,
т. е. вид
alty't + 2alx'=0. G)
Найдем точки пересечения оси ординат О'у' с параболой. Для этого
положим в уравнении G) лг' = О; получим а22у'2 = 0, т. е. ось орди-
ординат О'у' пересекается с параболой в двух сливающихся точках
Рис. 185.
Рис. 186.
(совпадающих с точкой О') и, следовательно, является касательной
к параболе (рис. 185). Если при этом ось абсцисс перпендикулярна
оси ординат, то, деля пополам перпендикулярные ей хорды, она
окажется осью параболы (рис. 186).
462 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
§ 10. Второе доказательство теоремы единственности.
О полноте системы ортогональных инвариантов
1. Второе доказательство теоремы единственности. Речь идет
о теореме 5, сформулированной и доказанной в § 2. Преимущество
предлагаемого второго доказательства заключается в том, что оно
легко может быть перенесено на случай поверхностей F(x, у, z) = 0
(и даже на случай (п—1)-мерных поверхностей второго порядка
в л-мерном пространстве).
Обозначим через С множество точек, лежащих на кривой
F(x, у) = а11х* + 2а12ху + а2&я + 2а1х+2агу + а0=:0, A)
т. е. множество всех точек М=(х,у) комплексной плоскости, удов-
удовлетворяющих уравнению A). Предположим, что множество С совпа-
совпадает с множеством всех точек комплексной плоскости, удовлетворя-
удовлетворяющих уравнению
Вспомним, что неасимптотические направления {а : р} по отношению
к кривой A) характеризуются тем, что имеется прямая данного на-
направления {а: р}, имеющая с множеством С ровно две (различные)
общие точки, поэтому всякое направление, неасимптотическое для
одной из двух кривых A) и A), будет неасимптотическим и для
другой кривой.
Выбираем некоторое определенное неасимптотическое направление
{а : Р} для кривых A) и A).
Одну из прямых й направления {а:р} примем за ось ординат, а
диаметр, сопряженный направлению {а:Р}, — за ось абсцисс коорди-
координатной системы О'х'у'. Из результатов предыдущего параграфа
следует, что уравнения A), (l) получат в системе координат О'х'у'
вид
Г (х', у') == a'tlyft + а'пх'* + 2а\х' + а'о = 0, B)
F" (х', у') == b'tty'' + Ъ'ххх'г + 2Ъ\'х' + Ь\ =0. B)
Здесь а\„ ф 0 (и Ь'22 =^=0), в противном случае единичный вектор
{0, 1} оси у', удовлетворяющий уравнению
имел бы, вопреки предположению, асимптотическое направление.
Пересечение множества С с осью у' = 0 обозначим через С0.
Возможны следующие случаи:
1° Множество С0 пусто (рис. 187). Этот случай осуществляется
тогда и только тогда, когда какое-нибудь (и тогда каждое) из
§ 10] ПОЛНОТА СИСТЕМЫ ОРТОГОНАЛЬНЫХ ИНВАРИАНТОВ
равенств
463
? (*') = b'ltx'z + 2Ъ\х' + К = О
противоречиво, т. е. когда один какой-нибудь (и тогда каждый) из
I
ог,
Множество С пусто
Рис. 187.
Щоже/щтво О0
содпр&а&п а
Рис. 188.
многочленов f(x'), f(x') тождественно равен отличной от нуля по-
постоянной а'о, соответственно Ь'о.
2° Множество С0 совпадает со всей прямой у' ==0 (рис. 188).
Это происходит тогда и только
тогда, когда каждый из многочле-
многочленов f(x'), f(x') тождественно равен
нулю.
3° Ни одни из случаев 1°, 2°
не имеет места. Тогда множество
С0 состоит или из одной точки
(рис. 189), или из пары (быть мо-
может, совпадающих между собою)
точек (рис. 190), являющихся парой
корней как уравнения
C)
так и уравнения
Множеапдо С"
состоит
ш одной mov/w A
Рассмотрим ближе этот случай. Рис. 189.
Так как уравнения C) и (з)
имеют одни и те же корни, то при некотором Ц
b\lX'* + 2Ь\х' + &;== ц (a'nx'* + 2a'lX' + e'e)
имеем
464
ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
(ГЛ. XVJJ
и, значит, полагая Я = -^, имеем
F' (*', у') ss а„уА + (Ян*'* + 1а\х' + а',),
F' (*', у')з Ка'г2у'г + ц (аих'г + 2в>' + а'о).
Докажем, что К = ц. Для этого дадим переменному х' значение
а) Множество С°
состоит йэ Щх Вещестден-
ных точек А и В.
в) Множество С
(XlSmoum из двух
совпадающих точен А
- Рис. ISO.
х' = х\, являющееся корнем уравнения
allx'i + 2a'1x' + a0 = h
и найдем значения у', удовлетворяющие уравнению
т. е.
«22
§ 10] ПОЛНОТА СИСТЕМЫ ОРТОГОНАЛЬНЫХ ИНВАРИАНТОВ 465
Значит, точка (х\, у[) принадлежит множеству С; следовательно,
F' (*ъ Ух) = М,#? +1*• 1 = *«',, ( Ц + Ц = О,
\ «22/
т. е. к=ц, и F'(x',y') = XF'(x', у'), значит, и
Итак, в случае 3° теорема доказана.
В случае 2° имеем
F'(x',y') = a'My'\ a'2i=?0, F'(х', у')~Ъ'ггу'\
Полагая Я, = -Р, получим F'(x', y')=E:XF' (x', у')—утверждение
<*S2
теоремы верно и в этом случае.
Наконец, в случае 1° уравнения B) и B) принимают вид
/?'(*',«/')== <4,i,'2 + я; = 0, а'о ф О,
F'(x',y')~b'22y'*
— множество С есть пара прямых, определенная каждым из уравне-
уравнений
у'-± l/"—— или у' = ± V—.
Й22 *>22
Для того чтобы эти уравнения были эквивалентны, очевидно, необ-
необходимо и достаточно, чтобы было — = —?-, т. е. b'2% = %a2i, Ь'о = ^а'о
а22 Ь22
«22
Теорема 5 доказана во всех случаях.
2. О полноте системы ортогональных инвариантов. Теорема
единственности позволяет существенно дополнить высказанные нами
в § 6 главы XVI соображения о возможности характеризовать ме-
метрическую эквивалентность (т. е. эквивалентность по отношению
к группе движений) двух кривых второго порядка, не распадающихся
на пару параллельных прямых.
Будем рассматривать па плоскости лишь прямоугольные системы
координат с одним и тем же масштабом. Имеет место следующая
основная
Теорема 9. Пусть на плоскости даны две нераспадающиеся
на пары параллельных прямых кривые второго порядка С и С,
466 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
имеющие в некоторой прямоугольной системе координат Оху соответ-
соответственно уравнения
F(x,y) = 0 D)
F'(x,y) = 0. D')
Для того чтобы, кривые С и С были метрически эквивалентны,
необходимо и достаточно, чтобы после домножения одного из двух
многочленов F(x,y), F'(х, у) на некоторый числовой множитель k
оба эти многочлена имели соответственно одни и те же инварианты б,
Д, S.
Доказательство. Необходимость. Если кривые С и С"
метрически эквивалентны, то посредством некоторого движения, т. е.
ортогонального преобразования плоскости, кривая С может быть
преобразована в кривую С. При этом преобразовании инварианты б,
Д, 5 многочлена F' (х, у) (будучи ортогональными инвариантами) не
изменятся, а сам многочлен F' (х, у) перейдет в многочлен G(x, у),
имеющий то же нулевое многообразие, что и многочлен F(x, у), так
что, в силу теоремы единственности, G (x, y)=kF(x, у), при неко-
некотором k Ф 0.
Итак, инварианты многочлена F' (х, у) совпадают с соответст-
соответствующими инвариантами многочлена kF (х, у) — первая часть теоремы 9
доказана.
Переходим к доказательству второй части.
Достаточность. Если многочлены F' (х, у) и kF(x, у) имеют
одни и те же инварианты б, Д, S, то из сказанного в § 6 главы XVI
следует, что кривые F' (х, у) = 0 и kF(x,y) метрически эквива-
эквивалентны. Но кривая kF (x, у) — 0, очевидно, совпадает с кривой
F(x, у) = 0, чем эквивалентность кривых F' (х, у) = 0 и F(x, у)=0
доказана.
Полученный результат иногда формулируют так:
Ортогональные инварианты б, Д, 5 образуют полную систему
ортогональных инвариантов кривых второго порядка, не распадаю-
распадающихся на пару параллельных прямых.
§ 11. Оси симметрии я главные направления кривой
второго порядка
Пусть прямая d есть ось симметрии данной кривой второго
порядка С. Возможны два случая:
А. Направление, перпендикулярное к прямой d, является для
кривой С асимптотическим.
Б. Направление, перпендикулярное к прямой d, не есть асимпто-
асимптотическое направление для кривой С.
§ 11]
ОСИ СИММЕТРИИ И ГЛАВНЫЕ НАПРАВЛЕНИЯ
467
Пусть имеет место случай А. Возьмем какую-либо пару точек Аг,
Аг кривой С, симметричных друг другу относительно прямой d. Так
как прямая d'=AtA2 имеет асимптотическое направление и в то же
время содержит две точки А1 и Л2 кривой С, то опа вся входит
в состав этой кривой: кривая С распадается иа пару прямых d', d",
одна из которых d' перпендикулярна к прямой d. Вторая прямая й"
не может быть наклонной к прямой d, так как в этом случае пря-
прямая d, очевидно, не может быть осью симметрии фигуры, состав-
составленной из двух прямых d', d", из которых одна перпендикулярна, а
Рис. 191.
Рис. 192.
другая наклонна к прямой d. Поэтому прямая d" или тоже перпен-
перпендикулярна к прямой d, или совпадает с нею. В первом случае линия С
состоит из двух параллельных прямых (рис. 191), и тогда всякая
прямая, этим прямым перпендикулярная, является осью симметрии
линии С; кроме того, осью симметрии линии С является и единст-
единственный ее диаметр 8 — средняя прямая между прямыми d' и d".
Во втором случае линия С есть пара взаимно перпендикулярных
прямых d' и d" = d (рис. 192); каждая из этих прямых есть ось
симметрии линии С, Кроме того, осями симметрии являются две
биссектрисы б' и 8" двух пар вертикальных прямых углов, образо-
образованных прямыми dud'. Эти биссектрисы являются (взаимно пер-
перпендикулярными) сопряженными диаметрами: каждый из них делит
пополам хорды, ему перпендикулярные (и параллельные второй бис-
биссектрисе).
Итак, в случае А кривая распадается на пару параллельных или
на пару перпендикулярных между собою прямых и имеет в первом
468
ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
[ГЛ. XVII
случае бесконечно много осей симметрии, а во втором—четыре оси
симметрии.
Переходим к случаю Б: направление, перпендикулярное к оси
симметрии d, не является асимптотическим для кривой С. Пусть
а"— какая-нибудь прямая, перпендикулярная к прямой d. Кривая С
пересекает прямую d' в двух точках Ах и А2 (быть может, мнимых,
быть может, совпадающих), симметричных относительно прямой d,
так что прямая d делит пополам хорду АгА2 (рис. 193). Другими
словами, прямая d является
диаметром кривой С, сопря-
сопряженным направлению, перпен-
перпендикулярному к прямой d.
Определение 2. На-
Направление называется главным
относительно данной кривой
второго порядка С, если это
направление и перпендикуляр-
перпендикулярное к нему являются взаимно
d_
Рис. 193.
сопряженными направлениями
относительно этой кривой.
Главное направление относи-
относительно кривой С называется также главным направлением квадра-
квадратичной функции, определенной квадратичной формой ср (х, у) стар-
старших членов уравнения кривой С в любой прямоугольной системе
координат, а также главным направлением любой такой квадра-
квадратичной формы. Диаметр кривой С, сопряженный перпендикулярному
ему направлению, называется главным диаметром кривой С. Направ-
Направление главного диаметра, очевидно, является главным направлением1).
Из определения главного направления непосредственно вытекают
такие следствия:
1° Направление, перпендикулярное к главному, тоже является
главным.
2° Особое направление кривой С является главным для этой
кривой.
В самом деле, особое направление сопряжено всякому направле-
направлению, в том числе и перпендикулярному к нему. Итак, асимптотиче-
асимптотическое направление параболы является главным для нее направлением.
У параболы все диаметры имеют главное направление, но, как мы
вияели в § 8, среди этих диаметров только один сопряжен перпен-
перпендикулярному к нему направлению, и, следовательно, только один
является главным диаметром—это ось параболы.
Ось параболы — единственная ее ось симметрии.
1) Мы сейчас увидим, что обратное утверждение может быть и неверным
(а именно, оно неверно для параболы и пары параллельных прямых).
§ И] ОСИ СИММЕТРИИ И ГЛАВНЫЕ НАПРАВЛЕНИЯ 469
Из .утверждения 1° следует, что направление, перпендикулярное
к асимптотическому направлению параболы, также является главным
направлением. Никакое направление {и:р}, кроме асимптотического
и перпендикулярного к нему направления, не является главным на-
направлением параболы (так как единственное направление, сопряжен-
сопряженное направлению {а:Р}, есть асимптотическое направление и оно не
перпендикулярно направлению {а:р}). Итак, у параболы имеются
ровно два главных направления: асимптотическое и перпендикулярное
к нему.
По тем же соображениям и линия, распавшаяся на пару парал-
параллельных прямых й и а", имеет два главных направления: общее на-
направление прямых d и d' и перпендикулярное к этим прямым на-
направление.
Переходим к центральным кривым. Если направление {а:$} глав-
главное для центральной кривой С, то (перпендикулярное к нему) со-
сопряженное ему направление {и':р'[ тоже главное. Ни одно из
главных направлений центральной кривой не может быть асимптоти-
асимптотическим (потому что в случае центральной кривой каждое направление
сопряжено одному-единственному направлению, а асимптотическое
направление сопряжено лишь самому себе). Поэтому диаметр цен-
центральной кривой, имеющий главное направление, является главным
диаметром, а значит, является осью симметрии кривой. Из сказанного
вытекает, что всякая кривая второго порядка имеет по крайней мере
одну пару взаимно перпендикулярных главных направлений.
Из предыдущих рассуждений следует
Теорема 10. За исключением случая, когда данная кривая
второго порядка С есть пара параллельных или пара перпендику-
перпендикулярных между собою прямых, всякая ось симметрии кривой С есть
главный диаметр этой кривой.
Обратно, главный диаметр кривой С, очевидно, есть ось симме-
симметрии кривой С.
Переходим к нахождению главных направлений. Система коорди-
координат до конца параграфа прямоугольная.
Мы ищем такое направление, чтобы вектор {а, Р} этого направ-
направления был перпендикулярен к сопряженному ему вектору {а', Р'}.
По формуле B") § 8 имеем
— р' :а' = (апа + а120): (а21а -f а22Р).
Условие перпендикулярности векторов {а, р} и {а', Р'} есть
аа' + рр' = 0, т. е. —р':а'=а:р, т. е.
(апа + а12Р): (а21а + а22Р) == а: р.
Это условие означает существование такого к, что
470 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
или
(ап — Х) + 12$ , 1
Рассмотрим сначала центральный случай: 6^=0. Требуется найти
ненулевой вектор-решение {а, р} однородной системы (Г); это воз-
возможно, лишь когда детерминант системы равен нулю, т. е.
2и — X а19
= 0. B)
221 а22 — X
Взяв в качестве X какой-либо корень уравнения B) и подставив его
в A'), заключаем — именно в виду равенства нулю детерминанта
B), — чтс оба уравнения A) эквивалентны между собою и дают одно
и то же направление
Здесь, как только что сказано, X — какой-нибудь корень уравнения B).
Но этих корней—два, так как уравнение B) — квадратное уравне-
уравнение, которое в развернутом виде есть
X2 — Sk + b = 0 B')
(здесь, как всегда, 5 = #п+ Д22, б=апа22— а\г)- Обозначая корни
уравнения B) через Хг и Х2, получаем из C) два главных направ-
направления:
Рх: ах = (Хг — ап): ап = а21: (Хх — а22) (Зх)
и
Р2:а2 = (А2— аи):а12=а21:(Х2 — а22); C2)
мы получили давно известные нам формулы. Эти направления дей-
действительны, так как действительны корни
S±
уравнения B). Эти корни совпадают в единственном случае, когда
ап = а22 и al2 — 0, т. е. когда рассматриваемая кривая есть окруж-
окружность.
Заметим, что в центральном случае 8^=0 ни один из корней
Xlt X2 уравнения B) не равен нулю, так как, подставив Х = 0 в B),
получили бы 6 = 0.
Имеются ли случаи, когда два эквивалентных уравнения A')
(т. е. C)) не позволяют определить главное направление? В силу C)
это может случиться, только когда одновременно aI2 = 0, X = an,
Х — а22, т. е. снова лишь в случае окружности (а12 = 0, ап = а22).
Для окружности всякий диаметр есть ось симметрии, всякое направ-
§ 11] ОСИ СИММЕТРИИ И ГЛАВНЫЕ НАПРАВЛЕНИЯ 471
ление главное. Если же наша кривая не есть окружность, то фор-
формулы C) позволяют совершенно однозначно определить два главных
направления. Они заведомо различны, так как в центральном случае,
который мы рассматриваем, являются направлениями двух взаимно
перпендикулярных сопряженных диаметров1). Итак, доказана
Теорема 11. За единственным исключением окружности (когда
всякое направление — главное), мы имеем для каждой центральной
кривой второго порядка два и только два главных направления (и,
значит, не более двух осей симметрии с неасимптотическими направ-
направлениями) 2).
Дса главных направления центральной кривой перпендикулярны
между собою.
Мы уже установили непосредственно, что парабола и пара па-
параллельных прямых имеют два взаимно перпендикулярных главных
направления, одно из которых — асимптотическое. Легко убедиться
в этом и посредством простого вычисления. В самом деле, пусть
6 = 0. Тогда уравнение B) удовлетворяется при ^ = ^ = 0. Второй
корень уравнения B) не может равняться нулю, так как тогда было
бы an—-a2i, a12 = 0, S = X1~\-X2, т. е. S — 2an = 2a22 == 0 — много-
многочлен F(x,y) был бы многочленом не выше первой степени. Подста-
Подстановка К — 0 в уравнения A') дает
a21a-!-a22P=0,
что сразу приводит к асимптотическому главному направлению
Р:а = — = — параболической кривой. Второй корень X2—S
а 12 °22
дает главное направление P':a' = (S—atl):a12 = a22:a12 = а12:а1Ъ
перпендикулярное к асимптотическому направлению р:а (полагая
а— — ап, Р = а12, а' = а12, р' == ап, имеем аа' + РР' = 0).
Теперь мы легко можем найти по общему уравнению параболы
и уравнение ее оси. Ось параболы имеет угловой коэффициент
к -•¦= - = — и является в то же время диаметром, сопряженным
к хордам перпендикулярного направления, т. е. хордам с угловым
!) Легко и непосредственно убедиться, что неравным Х1 Ф Х? соответст-
соответствуют различные главные направления pV^, р2:ос2; при а12 ф 0 это непо-
непосредственно следует из C). Пусть а12 = 0, но ац Ф о22. Значит, kt Ф Х2.
Тогда не может быть одновременно X1 = alt, A1 = a22- Пусть, например, Xt з= а2,.
Тогда р,:сбх = 0 из C^. Но тогда непременно Х1 = а11 из CJ. Если бы было
P2:a2 = p1:aI, т. е. р2:а2 = 0, то было бы Я2 = ап из C2), т. е. Х1 = А2.
2) Мы уже видели, что две оси симметрии асимптотического направления
имеются у центральной кривой, распавшейся на пару перпендикулярных
прямых (у нее имеются еще и две оси симметрии неасимптетического направ-
направления, и эти направления являются главными).
472 ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА [ГЛ. XVII
коэффициентом 2lH = Es? (ИЛи с направляющим вектором {а, Р}, где
можно взять а = аи, P = «i2 или а = а12, р = а22).
Уравнение диаметра, сопряженного хордам с направляющим век-
вектором {а, Р}, есть
Значит, полагая а=аи, $ = а12, получаем уравнение оси параболы
в виде
^i (х, У) ап + F2 (х, у) а12 = О,
т. е.
(afi + а|2) х + а12 (ап + а22) у + аиаг + а^аг = 0.
Из а|2= апа22 вытекает
Поэтому уравнение оси переписывается в виде
ап^х л- a12Sy + a^ai + a12a2 = 0,
т. е. окончательно в виде
Аналогично, полагая а — а12, Р=а22, получаем для оси уравнение
а12х -+- а22у -\ ^ — и.
При а12 Ф 0 можно пользоваться любым из этих уравнений. При
я12 = 0 и ап = 0 (значит, а22=^0) надо пользоваться вторым, при
°22 = 0 (и> значит, ап =Ф 0) — первым. Получаем соответственно
уравнение оси в первом случае в виде
во втором случае в виде
а
Найдя уравнение оси параболы, мы сразу же находим и вершину О'
параболы (как точку пересечения параболы с ее осью).
Принимая вершину параболы О' за начало новой системы коор-
координат, ось параболы—за новую ось О'?, а касательную в верши-
вершине— за ось О'т], определим положительное направление 0% так,
чтобы в повой системе координат O'grj уравнение параболы имело
вид if = 2pl, р>0.
Для нахождения интересующего нас положительного направле-
направления О'Ъ, вспомним (§ 4 гл. XVI), что после поворота исходной сис-
системы координат Оху на угол а и последующего переноса начала
§ 12] ' ОСНОВНАЯ ТЕОРЕМА 473
координат в точку О' уравнение параболы приняло вид т|2 = 2( —-^ )?>
где (гл. XVI, § 1, формула C)) ai = ax cos a -f o2 sin a.
а
Для того чтобы было—-— > 0, надо иа угол а, определяемый
О
из уравнения tga=——, наложить дополнительное требование,
заключающееся б том, чтобы числа S и а1 cos a + a2 sin a имели
противоположные знаки. Найденный таким образом угол а и дает
нам положительное направление оси 0% канонической системы ко-
координат О'|г].
§ 12. Основная теорема об аффинных преобразованиях
Элементарная теория кривых второго порядка позволяет дать
простое доказательство одного из важнейших свойств аффинных
преобразований плоскости.
Пусть при аффинном преобразовании Л плоскости кривая вто-
второго порядка К переходит в кривую К'. Так как при аффинном ото-
отображении отрезок переходит в отрезок, причем середина отрезка
переходит в середину отрезка, то при преобразовании Л центр кри-
кривой К переходит в центр кривой К'.
Так как при афинном преобразовании параллельность прямых
сохраняется, то всякий пучок параллельных хорд кривой К перехо-
переходит в пучок параллельных хорд кривой К', середины хорд первого
пучка переходят в середины хорд второго пучка, а значит, диаметр,
сопряженный хордам первого пучка, переходит в диаметр, сопря-
сопряженный хордам второго пучка. Отсюда вытекает
Теорема 12. Пусть при данном аффинном преобразовании
данная кривая второго порядка К переходит в кривую К', тогда
всякая пара сопряженных диаметров кривой К переходит в пару
сопряженных диаметров кривой К'.
Выведем отсюда следующее основное свойство аффинных пре-
преобразований.
Теорема 13. Всякое аффинное преобразование плоскости яв-
является произведением собственного или несобственного движения и
двух сжатий (растяжений) плоскости, происходящих в двух взаимно
перпендикулярных направлениях.
Доказательство. Возьмем аффинное преобразование Л'1,
обратное к преобразованию Л, и рассмотрим какую-нибудь окруж-
окружность К' радиуса 1 с центром О'. При аффинном преобразовании Л'1
окружность К' переходит в эллипс К, а центр О' окружности К'
переходит в центр О эллипса К. При этом всякая пара взаим-
взаимно перпендикулярных, т. е. сопряженных, диаметров окружности
К' переходит в пару сопряженных диаметров эллипса К. Прн
474
ОБЩАЯ ТЕОРИЯ КРИВЫХ ВТОРОГО ПОРЯДКА
[ГЛ. XVII
етображении Л, обратно, эллипс К переходит в окружность К',
центр О эллипса К переходит в центр О' окружности К', а всякая
пара сопряженных диаметров эллипса К переходит в пару сопряженных,
т. е. взаимно перпендикулярных, диаметров окружности К'. Но среди
пар сопряженных диаметров эллипса имеется пара его главных осей
(и они взаимно перпендикулярны). Сделаем эти главные оси эллипса
(фокальную н вторую) осями координат аффинной системы Оху
(рис. 194), единичные векторы которой суть соответственно векторы
ej = 0.4 и е2 = О5, ведущие в соответствующие вершины А и В
эллипса (длины векторов ех, е2 обоз-
обозначим через а и Ь). При нашем
аффинном преобразовании Л пара
главных осей эллипса перейдет в
пару сопряженных и, следователь-
т' но, взаимно перпендикулярных диа-
диаметров окружности, которые примем
за оси координат системы О'х'у'.
За единичные векторы этой системы
примем радиусы е^, е'2 (они имеют
длину 1). При аффинном преобра-
преобразовании Л пара взаимно перпендику-
перпендикулярных прямых Ох и Оу переходит
в пару взаимно перпендикулярных
прямых О'х', О'у', а отрезки
е1 = ОД е2 = 0?, лежащие на Ох,
Оу и имеющие соответственно дли-
длины а и Ь, переходят в отрезки
е\, е'г длины 1, лежащие на О'х', О'у'. В чем же состоит аффин-
аффинное преобразование Л? Очевидно, во-первых, в движении (собст-
(собственном или несобственном), которое переносит пару взаимно перпен-
перпендикулярных прямых Ох и Оу, соответственно в пару взаимно пер-
перпендикулярных прямых О'х', О'у', и в последующем сжатии или
растяжении вдоль этих последних прямых в отношении а:\ и Ь:\.
Теорема 13 доказана.
Из теоремы 13 вытекает
Следствие. Пусть аффинное преобразование Л представлено
в виде произведения ортогонального преобразования (г. е. собствен-
собственного или несобственного движения) и двух сжатий с коэффициен-
коэффициентами kx и k2. Тогда отношение длины образа любого отрезка к длине
прообраза этого отрезка заключено между числами kx и k2.
В самом деле, пусть и = {а, Р}— какой-нибудь вектор, и' = {а',Р'}—
его образ при преобразовании Л. Так как ортогональное преобразова-
преобразование не меняет длины вектора, то можно предположить, что преоб-
преобразование есть произведение двух сжатий к осям прямоугольной
Рис. 194.
§ 12] ' ОСЛОВНАЯ ТЕОРЕМА 475
системы координат с коэффициентами кх и ?2. Без ограничения общ-
общности можно предположить, что, например, kx^k%. Тогда
a' = kxa, Р' = ?2р.
Поэтому
| ц' | = y^t + fb = УЩагч^Щ* > К V~a? + f2 = kx | u |.
Аналогично
что и требовалось доказать.
Если при этом k1 = ki — k, то для любого вектора а и его об-
образа и' имеем
— преобразование Л есть преобразование подобия. Итак:
Аффинное преобразование, являющееся произведением ортого-
ортогонального преобразования и двух сжатий с одним и тем же коэффи-
коэффициентом, есть преобразование подобия. Отсюда в свою очередь в
виде непосредственного следствия вытекает
Теорема 14. Аффинное преобразование, отображающее всякую
окружность на окружность, есть преобразование подобия.
ГЛАВА XVIII
КРАТКОЕ ОПИСАНИЕ РАЗЛИЧНЫХ ВИДОВ
ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
В этой главе будут перечислены различные виды поверхностей
второго порядка. В главе XX мы покажем, что каждая из поверх-
поверхностей второго порядка является одной из упомянутых в настоящей
главе, т. е. что мы перечислили все поверхности второго порядка.
Система координат во всей этой главе предполагается прямо-
прямоугольной.
§ 1. Распадающиеся поверхности
Если многочлен второй степени F(x, у, z) есть произведение
двух многочленов первой степени:
F(x, у, z) =
то поверхность F (х, у, z) = 0 распадается на пару плоскостей ях и яа:
Лгх + В^ + С^г-f D1 = 0 и A2x-\-B2y-\-C2z-\-D2 — Q. Если эти плос-
плоскости пересекаются, то сделаем прямую их пересечения осью аппли-
аппликат, а биссекторные плоскости двугранных углов, образуемых этими
плоскостями, примем за координатные плоскости Oyz и Oxz прямо-
прямоугольной системы координат, беря в качестве плоскости Оху любую
плоскость, перпендикулярную к линии пересечения данных плоскос-
плоскостей (рис. 195). Тогда данные плоскости ях и п2 получат уравнения
Ах-\-Ву = 0 и Ах—Ву = 0, а поверхность F(x, у, z) = 0, распав-
распавшаяся на эти плоскости, будет поверхностью
(Ах + Ву){Ах—Ву) = О, т. е. А2х2—BV = 0. A)
Итак, всякая поверхность второго порядка, распадающаяся на пару
пересекающихся плоскостей, в некоторой системе координат имеет
уравнение A).
Если поверхность распадается на пару параллельных плоскостей
ях и я2, то примем за плоскость Оху прямоугольной системы коор-
координат среднюю плоскость я между плоскостями пг и п2. Начало
прямоугольной системы координат О и векторы ех и е2 возьмем в
плоскости я, а вектор е3 направим перпендикулярно ьк плоскости я
§ 1]
РАСПАДАЮЩИЕСЯ ПОВЕРХНОСТИ
477
(рис. 196); тогда плоскости ях и я2 будут соответственно иметь
уравнения. 2=о и 2 =—а; уравнение пары плоскостей ях, яа
будет
г2 —а2 = 0. B)
Наконец, мы говорим, что уравнение
определяет пару совпадающих между собою плоскостей
Приняв эту плоскость за плоскость 2 = 0 новой координатной си-
системы, мы видим, что всякая поверхность второго порядка, являющаяся
7
Рис. 195.
Рис. 196.
парой совпадающих между собою плоскостей, в некоторой системе
координат может быть задана уравнением
22 = 0. C)
Мы увидим (в гл. XX), что поверхность, распадающаяся на пару
мнимых (сопряженных) плоскостей, может быть задана уравнением
если эти плоскости пересекаются, и уравнением
если они параллельны.
478
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XVIII
§ 2. Цилиндрические поверхности
Цилиндрическая поверхность (см. гл. XV, § 8) второго порядка за-
задается в некоторой надлежаще выбранной для данной поверхности кано-
IZ
Рис. 197.
Рис. 198.
пической системе координат уравнением
Р(х, у) = 0, A)
где F(x, у)— многочлен второй сте-
степени от переменных х и у. Кривая A),
определенная уравнением A) в плос-
плоскости Оху, является направляющей
кривой (основанием) цилиндрической
поверхности. Эта кривая может быть
эллипсом, действительным или мнимым,
гиперболой или параболой, в зависи-
зависимости от чего мы и различаем эллип-
эллиптические (рис. 197), мнимые эллипти-
эллиптические, гиперболические (рис. 198) н
параболические (рис. 199) цилиндры,
канонические уравнения которых сов-
совпадают с каноническими уравнениями
их направляющих кривых A). Если
направляющая A) есть пара прямых,
то цилиндрическая поверхность вырож-
вырождается в пару плоскостей (пересекающихся, параллельных или сов-
совпадающих, действительных или мнимых — в зависимости от соответ-
соответствующего свойства лежащей в основании пары прямых).
Рис. 199.
§ 8]
КОНУСЫ ВТОРОГО ПОРЯДКА
479
§ 3. Конусы второго порядка1)
Под действительным конусом второго порядка понимается по-
поверхность второго порядка, которая в некоторой прямоугольной
системе координат задается уравнением
Это уравнение и система координат, в которой данный конус им
задается, называются каноническими для этого конуса (рис. 200).
Рис. 200.
а\
Поверхность, получающаяся от вращения вокруг заданной пря-
прямой б какой-нибудь прямой d, пересекающейся с прямой б, назы-
называется круглим конусом или конусом вращения. Выведем уравнение
круглого конуса. Для этого примем прямую б (произвольно ориен-
ориентированную) за ось аппликат, точку ее пересечения с прямой d —
Сравнить с гл. XV, § 8.
480
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XVIII
за начало координат, а плоскость, проходящую через прямые 6 и
d,— за плоскость Oxz прямоугольной системы координат (рис. 201).
Уравнение прямой d в плоскости Oxz можем записать в виде
|—j = tga, у = 0, где а—острый угол наклона прямой й к оси Oz.
Тогда уравнение поверхности вращения будет
или
где k =
конуса.
лгЧ-f/2 — *•*• = <), B)
tga. Уравнение B) и есть каноническое уравнение круглого
Рис. 202. Рис. 203.
Плоскость, параллельная плоскости Оху, пересекает конус B)
по окружности (например, плоскость 2=1—по окружности
x2-\-y2 = k2). Если немного наклонить эту плоскость, то в сечении
получится эллипс (рис. 202) (читателю предлагается проверить это).
§3]
КОНУСЫ ВТОРОГО ПОРЯДКА
481
Плоскости, параллельные плоскостям Oyz и Oxz, пересекают
конус B) но гиперболам: например, в сечении конуса B) плоскостью
х = Ь получаем кривую
т. е., полагая — = а,— гиперболу (рис. 203)
C)
Не только эллипс и гипербола, но и парабола является плоским
сечением круглого конуса B). Для простоты положим * = 1, тогда
уравнение конуса будет
л:2 + «/2—z2 = 0. D)
Докажем, что параболой является, например, сечение конуса D)
плоскостью я, заданной урав-
уравнением
X — 2+1=0
(плоскость эта параллельна
образующей х — z, у = 0 ко-
конуса D) (рнс. 204)). Сделаем
преобразование прямоугольных
координат:
•~ 1/9" 2 ' У~У '
В новой системе координат
плоскость я является коорди-
координатной плоскостью z' = 0, a
поверхность D) получает урав-
уравнение
поэтому ее сечение плоскостью
z' = 0 есть парабола
у'г = х'уг2.
Итак, и эллипс, и гипербола, и парабола являются сечениями
конуса (даже круглого конуса) второго порядка. Поэтому эти кривые
и называются коническими сечениями. К плоским сечениям
Рис. 204.
П. С. Александров
482
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
[ГЛ. XVIII
поверхностей второго порядка мы еще вернемся с более общей точ-
точки зрения в главе XIX.
Наряду с действительными конусами второго порядка существуют
еще мнимые конусы, которые в канонической для них системе коор-
координат имеют уравнение
Единственная действительная точка мнимого конуса есть точка
0= @, 0, 0). Их дальнейшее изучение интереса для нас не пред-
представляет.
Заметим, наконец, что цилиндрические и конические поверх-
поверхности второго порядка (охватывающие, как мы видели, в виде част-
частного случая и все распадающиеся поверхности второго порядка)
будут объединены под общим наименованием вырождающихся по-
поверхностей второго порядка; им — в качестве иевырождающихся
поверхностей — противополагаются эллипсоиды, гиперболоиды и па-
параболоиды, к определению и краткому описанию которых мы и пере-
переходим.
§ 4. Эллипсоиды и гиперболоиды
Эллипсоидом (вещественным) называется поверхность, имеющая
В некоторой («.канонической» для нее) прямоугольной системе коор-
координат («каноническое»)
уравнение
1.2 „2 72
Положительные числа а,
Ь, с называются полуосями
эллипсоида A).
Эллипсоид лежит внутри
прямоугольного параллеле-
параллелепипеда
" О, —b^
с.
У
Рис. 205. Другими словами, эллипсои-
эллипсоиды суть ограниченные по-
поверхности. Все плоские сечения эллипсоида являются поэтому ограни-
ограниченными кривыми второго порядка, т. е. эллипсами.
Общий вид эллипсоида изображен иа рис. 205.
Предположим, что а2~^?Ьг~^с2 (переименовав, если нужно, оси
координат, мы всегда можем достигнуть этого). Если а = Ьфс, то
§ 4]
ЭЛЛИПСОИДЫ И ГИПЕРБОЛОИДЫ
483
сечения эллипсоида плоскостями z = h суть окружности
(радиуса гп = —\гсг — Ла, вещественного лишь при |А]
С
х2 г2
эллипсоид получается вращением эллипса ^2+rj==l>#
), а сам
вокруг
Рис. 206.
Рис. 207.
оси z. Так как с < а, то вращение эллипса происходит вокруг его второй
оси (рис. 206), и полученный при этом эллипсоид естественно назвать
сжатым эллипсоидом вращения (он имеет форму поверхности ман-
мандаринаI). Если же а>#=с, то сечения эллипсоида плоскостями
х = h суть окружности
b-2.
1,2
1
Радиусы этих окружностей равны Гн=
пенны лишь при
эллипса
эллипсоид получается от
х2
«а — Ла (они вещест-
вращения
z2 х2 ца
a + -i = 1, У = ° (или эллипса ^- + р-= 1, 2 = 0) вокруг
оси Ох, т. е. вокруг его фокальной оси. Полученная поверхность
называется вытянутым эллипсоидом вращения (рис. 207); она похожа
на поверхность лимона.
Наконец, при а~Ь=с эллипсоид A) является сферой (шаровой
поверхностью радиуса а) (рис. 208).
Поверхность, задаваемая в какой-нибудь прямоугольной системе
координат уравнением
у2 ц2 22
а2 """"б2 "'с2 ~ '
J) В первом приближении поверхность Земли является, как известно,
сжатым эллипсоидом вращения.
16*
484 РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XVII
Рис. 208.
Рис. 209.
Рис. 210.
ЭЛЛИПСОИДЫ И ГИПЕРБОЛОИДЫ
485
называется мнимым эллипсоидом. Мнимый эллипсоид не имеет ни
одной вещественной точки.
Однополостным, соответственно двуполостным, гиперболоидом
называется поверхность, имеющая в некоторой прямоугольной сис-
системе координат уравнение
^•4-р-—V=1 (гиперболоид однополостный (рис. 209)), B)
соответственно
—^—# _|.L=1 (гиперболоид двуполостный (рис. 210)). C)
Прямоугольная система координат,
в которой данный гиперболоид
имеет уравнение вида B), соответ-
соответственно C), называется канони-
канонической для этого гиперболоида, а
сами уравнения B) и C) называ-
называются каноническими уравнениями ги-
гиперболоидов. Положительные числа
а, Ь, с называются полуосями
гиперболоидов B) и C), Конус
^5 + р — ^- = 0 определяется как об-
общий асимптотический конус обоих
гиперболоидов B) и C) (рис. 211).
Из уравнений B) и C) видно,
что начало канонической для дан-
данного гиперболоида системы коорди-
координат является его центром симмет-
симметрии, координатные плоскости пря-
прямоугольной канонической системы —
его плоскостями симметрии, а оси
координат этой системы — осями
симметрии. Всякий гиперболоид
имеет три плоскости симметрии1).
Рис. 211.
Если а — Ь = с, то гиперболоид называется правильным. Предпо-
Предположим, что а = # = с = 12), тогда правильный однополостный гипер-
гиперболоид имеет уравнение
, B')
C')
а правильный двуполостный—уравнение
]) Мы увидим в главе XX, что при а фЬ—только три.
а) Изменив, если нужно масштаб, т. е. сделав при а=*Ь=с преобразо-
преобразование координат х = ах\ у = ау', г—az', мы всегда можем свести дело к
рассматриваемому случаю.
486
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
[ГЛ. XVIII
Плоскость у = 0 (плоскость чертежа) пересекает правильный
одиополостный гиперболоид B') но равнобочной гиперболе
D)
y2 ,, у2 1 11 Л
И/ *¦ » j */ ~~ '-'j
а плоскость х=0 — по равнобочной гиперболе
Гиперболы D) и D') конгруэнтны между собою: одна из них
переходит в другую при вращении
пространства на прямой угол
вокруг оси z.
Плоскости
параллельные плоскости Оху,
пересекают гиперболоид B') по
окружностям
Г
I
I
I
^--Y~7t—
\,
Рис. 212.
радиуса V^l + h2. Из всего ска-
сказанного ясно, что вся поверх-
поверхность B') есть поверхность, по-
получаемая от вращения гиперболы
D) (или D')) вокруг оси z (т. е.
вокруг второй оси гиперболы).
Общий вид правильного од-
нополостного гиперболоида пока-
показан на рис. 212.
Переходим к правильному дву-
двуполостному гиперболоиду. Ои
определен (в прямоугольной системе координат) уравнением
_x2-»«-i-z»=l. C')
Его сечения плоскостями у = 0 и х = 0 суть соответственно (кон-
(конгруэнтные) равнобочные гиперболы
z* — x*=\, у = 0 E)
*-у* = \, * = 0, E')
имеющие ось z своею фокальной осью; эти гиперболы переходят
друг в друга вращением на прямой угол вокруг оси z.
Плоскость z = k, параллельная плоскости Оху, пересекает по-
поверхность C') по окружности
§ 4]
ЭЛЛИПСОИДЫ И ГИПЕРБОЛОИДЫ
487
вещественной при |Л|> 1 и мнимой при |Л|<1, в соответствии с
чем на плоскости z = h при |Л|<1 вещественных точек нашей
поверхности нет. Вся поверхность C') описывается гиперболой E) при
вращении ее вокруг оси z.
Поверхность состоит из ! /
двух простирающихся в ! / /
бесконечность «чаш» (или
«полостей)), описываемых
каждой из ветвей гипербо-
гиперболы E) (рис. 213).
Вернемся к общему слу-
случаю любых гиперболоидов.
Плоскость z — h пересекает
однополостный гиперболоид
B) по кривой
х2 , и2 , , h2 ,
F)
Полагая 1 А—5- =
видим, что кривая F) есть
эллипс
Все эти эллипсы подобны Рис. 213.
между собою: отношеиие.их
полуосей -^- == — одно и то же, их эксцентриситеты равны эксцен-
эксцентриситету эллипса
аг "Г Ь2 — »> ¦? —U,
являющегося пересечением однополостного гиперболоида B) с плос-
плоскостью z — 0; этот эллипс называется горловым эллипсом данного
однополостного гиперболоида. При а = Ь эти сечения являются
окружностями, а гиперболоид B) делается однополостным гипер-
гиперболоидом вращения — он получается при вращении гиперболы
х2 z2 и2 г2
~а—72~ = ^' У—0 (или гиперболы -^- г=^ х=0) вокруг оси г,
являющейся второй осью каждой из этих гипербол.
Сечения однополостного гиперболоида B) плоскостями у = h суть
х2 г2 h2 h2 i i .
кривые —i 4г-=1—тт ¦ Полагая Я?= 1 — -г~- при |Л|<
а*
и
= -г, 1 при | h | > Ь, видим, что эти кривые суть соответственно
488
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XVIII
гиперболы (рис. 214)
у =h и
У — h.
Аналогично доказываем, что сечения однополостного гиперболои-
гиперболоида B) плоскостями x = h суть ги-
гиперболы
<а, Ч = \-~,
?__^
v_
при |
z2
(Ад)»
при|/г|>а, "к\=~—1.
Сечение однополостного гиперболоида
B) каждой из плоскостей у = +Ь есть
пара прямых
Точно так же сечение однополостиого
гиперболоида B) каждой из плоскос-
плоскостей х = rfc a есть пара прямых
Рис. 214.
Мы увидим в § 6, что через каждую точку однополостного
гиперболоида проходит пара вещественных прямых — «прямолинейных
образующих» гиперболоида.
Замечание1). Возьмем какую-нибудь плоскость
z=px-\-qy -\-k,
G)
не параллельную оси z, и найдем ее пересечение К с одиополостным
гиперболоидом B). Подставляя G) в B), получим
__,
(8)
— уравнение проекции Ко линии пересечения К на плоскость Оху.
После раскрытия скобок и приведения подобных членов можем
а) Заимствовано из «Курса аналитической геометрии» Н. И. Мусхе-
лишвили.
§ 4] ЭЛЛИПСОИДЫ И ГИПЕРБОЛОИДЫ 489
переписать уравнение (8) в виде
апх2 -\- 2апху + а22у2 -|- 2ахх -j- 2а2у + а0 — О,
где
1 р2 pq 1 q*
а11—-^г- ^2> а12=— ~^Г ' а2%— Ь2 С2'
Придавая надлежащие значения коэффициентам рад, можно до-
доап а
п а12
аг
стигнуть того, чтобы детерминант 6 =
1
обратился в пуль, а также чтобы он был положительным или
отрицательным. В соответствии с этим уравнение (8) определит
в плоскости Оху кривую Ко любого заданного типа (эллиптического,
гиперболического, параболического); при этом можно потребовать,
чтобы было Л=т^0, т. е. чтобы кривая не распадалась. Но кривая
Ка есть проекция (вдоль оси z) кривой К, а при параллельном
проектировании аффинный класс кривой второго порядка не меняется
(читатель легко докажет это геометрически).
Итак, выбрав надлежащим образом плоскость, не параллельную
оси z, можно получить в качестве кривой пересечения К этой пло-
плоскости с однополостным гиперболоидом B) невырождающуюся кри-
кривую второго порядка любого типа (эллипс, гиперболу, параболу).
Мы видели, что пересечением однополостного гиперболоида может
быть пара пересекающихся прямых; мы увидим в § 6, что может
получиться и пара параллельных прямых.
Заметим, что в наших рассуждениях ничего не изменилось бы,
если бы в правой части уравнения (8) мы заменили 1 на 0; итак,
плоскость G) пересекает однополостиый гиперболоид и его асимп-
х2 и2 z2
тотический конус —г + -г5- 5- = 0 по кривым одного и того же
J а2 Ь2 с2 г
типа.
Читателю предоставляется доказать, что всякая плоскость, па-
параллельная оси Oz, пересекает однополостный гиперболоид B) по
линии гиперболического типа (т. е. по гиперболе или по паре пересе-
пересекающихся прямых). Для плоскостей, параллельных координатным
плоскостям Oxz или Oyz, это уже было доказано.
Рассмотрим теперь пересечения двуполостного гиперболоида
_х2 {/2_ i!__i
а2 Ь2 ~т~~~с2~~ F>
с плоскостями, параллельными координатным.
11лоскость .г = Л при | /z | < с пересекает поверхность C) по мнимым
эллипсам, при |Л|>с — по вещественным. Если а=Ь, то эти эллип-
эллипсы являются окружностями, а гиперболоид C) есть гиперболоид
вращения: он получается при вращении гиперболы -j- 2=1> У^3®
490
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
[гл. xviii
I или —j -^-=1, л: = 0] вокруг оси z (являющейся фокальной
осью каждой из этих гипербол). При |А| = с получаем пару мни-
мнимых сопряженных прямых с одной вещественной точкой @, 0, с),
соответственно @, 0, —с).
Плоскости x = h и y = h пересекают гиперболоид C) по гипер-
гиперболам (рис. 215) (плоскости
x — zta, У = тк.Ь исключения не
представляют).
Мы определили асимптотический
конус для обоих гиперболоидов B)
и C) как конус
Сравним сечения плоскости z = h с
каждым из гиперболоидов B), C)
и с конусом (9). При этом предпо-
предполагаем h > с.
Получаем эллипсы, полуоси ко-
которых суть
(сечение с
/5 \ усечение с
ЙЛ=Й"|/ ПГТ^ I | ОДНОПОЛО-
__f > стпым ги-
№ j_ \ I перболои-
* ' 'дом BJ),
A0)
Рис. 215.
соответственно
ан=<*
1 ,
;• (сечение с двуполостным гиперболоидом C)) A1)
к,
Мы
наконец,
видим,
h ~
что
|Л|
а-!—¦
с
с
(сечение с конусом (9)).
A2)
«А
аН,
b'h.
Это значит, что в каждой плоскости z — h эллипс, являющийся
сечением этой плоскости с конусом (9), лежит между эллипсами,
являющимися сечениями той же плоскости с гиперболоидами B) и
§ 4]
эллипсоиды и гиперболоиды
491
C): общий асимптотический конус обоих гиперболоидов расположен
«между» обоими этими гиперболоидами, как показывает рис. 216.
Далее, имеем
Преобразуя скобку справа, получим
т. с. выражение, стремящееся к нулю при \h\—>¦ оо. Итак, при
| h | —>- оо имеем a'h—а'^ -—*0 и (аналогично) b'h — Ь\—*¦ 0 и подавно
a'h—ял —>-О, b'h — bh—*0 —три эллипса, сечения плоскости z — h
с гиперболоидами B), C) и их асимп-
асимптотическим конусом (9), имея общие iz
направления осей и общий центр, не- !
ограниченно сближаются (так что при
достаточно большом |Л| все три эл- К<' Т С
липса лежат в сколь угодно тесной Ч s\ ' У
окрестности любого, например средне-
го, из них).
Можно сказать, что при \z\—^oo \ \
оба гиперболоида B) и C) неограни-
ченно сближаются со своим общим
асимптотическим конусом.
Определение. Прямая, всеми
своими точками лежащая на данной
поверхности, называется прямолиней- /-^-?
ной образующей этой поверхности. /{'{К
Мы знаем, что прямолинейные об- ^
разующие имеются и у цилиндрических,
и у конических поверхностей; в § 6 Р 216
этой главы будет показано, что они име-
имеются и у однополостного гиперболоида.
Докажем, что у двуполостного гиперболоида вещественных
прямолинейных образующих нет. В самом деле, предположим,
492
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XVIH
что вещественная прямая d является прямолинейной образующей
гиперболоида C). Прямая d не может пересекаться с плоскостью Оху
(или лежать в ней), так как плоскость Оху не содержит ни одной
вещественной точки гиперболоида C). Но прямая d не может быть
и параллельной плоскости Оху, потому что в этом случае она со-
содержалась бы в пересечении гиперболоида C) с некоторой пло-
плоскостью z = h, что невозможно, так как это пересечение есть эллипс
(вещественный или мнимый) и значит, не содержит никакой прямой.
Утверждение доказано.
Мы видели, что начало канонической для данной поверхности
системы координат является ее центром симметрии (единственным,
как мы докажем в главе XIX). Поэтому эллипсоиды и гиперболоиды
получат в главе XIX общее название центральных невырожденных
поверхностей второго порядка (класс вырожденных центральных по-
поверхностей составят конусы второго порядка).
§ 5. Параболоиды
Эллиптическим, соответственно гиперболическим, параболоидом
называется всякая поверхность, которая в некоторой (канонической
для данной поверхности) прямо-
прямоугольной системе координат
Ое^ед имеет каноническое урав-
уравнение
2z = -—\- для эллиптичес-
эллиптических параболоидов, A)
х2 и2
2z = для гиперболи-
Р q
ческих параболоидов; B)
при этом р и q — положительные
числа («параметры» параболои-
параболоидов).
Общий вид эллиптического
параболоида представить себе
очень легко (рис. 217): он рас-
расположен весь по одну сторону от
плоскости 2 = 0, а именно в полу-
полупространстве z~^ 0; сечения илос-
Р r'q
х
Рис. 217.
костями z — h, h > 0, суть кривые \- — — 2h, т. е. эллипсы
Iph n Iqh
= 1, z = h.
C)
§ 5]
ПАРАБОЛОИДЫ
493
Сечеиия эллиптического параболоида
= 0 суть соответственно параболы
A) плоскостями у = 0 и
> D)
E)
— главные параболы параболоида A); при этом параболу D) условно
назовем неподвижной, а параболу E)—подвижной.
Сечение эллиптического параболоида A) плоскостью z — 0 есть
пара мнимых сопряженных прямых с единственной вещественной
точкой О («вершина пара-
параболоида»).
Вся поверхность A) име-
имеет вид чаши, лежащей в
полупространстве z^O,
касающейся в точке О пло-
плоскости г = Ои уходящей в
бесконечность.
Все эллипсы C), являю-
являющиеся «горизонтальными»
сечениями эллиптического
параболоида A), подобны
между собою—они имеют
одно и то же отношение
Рис. 218.
полуосей: ,-_!_ =
V2ph
и один и тот же эксцент-
эксцентриситет. В частности, если
р = с/, то все эти эллипсы
суть окружности радиусов
\r2ph; параболоид в этом случае есть параболоид вращения: он
получается вращением параболы x2=2pz (расположенной в плос-
плоскости i/ = 0) вокруг ее оси (рис. 218).
Эллиптический параболоид вещественных прямолинейных обра-
образующих не имеет. В самом деле, прямая d, параллельная плоскости
Оху, лежит в некоторой плоскости z — h, следовательно, все ее
топки пересечения с параболоидом A) принадлежат эллипсу, по
которому плоскость z = h пересекает параболоид (значит, у нее не
более двух общих точек с параболоидом A)).
Если же прямая d не параллельна плоскости Оху, то целая ее
полупрямая лежит в полупространстве z <С 0, не содержащем ни
одной точки параболоида A).
Итак, никакая прямая не может быть образующей парабо-
параболоида A).
494
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XV111
Можно дать следующее очень наглядное построение эллипти-
эллиптического параболоида посредством скольжения одной параболы вдоль
другой (система коорди-
\z i i , нат все время предпола-
предполагается прямоугольной).
Возьмем сечение пара-
параболоида A) плоскостью
х=хд (рис. 219); полу-
получим в этой плоскости,
снабженной (прямоуголь-
(прямоугольной) системой координат
Осе2е3, где О0 = (х0, О, 0),
кривую, уравнение кото-
которой будет
или
где
— гй
Рис. 219.
о
2р
х--=х0,
F)
G)
Перейдем в плоскости х = х0 от системы координат О0е2е3 к си-
системе координат О'е2е3, где О' — (х0, 0, z0) есть точка пересечения
плоскости лг = лг0 с неподвижной параболой
х2 = 2pz, у = 0. D)
Перенеся начало координат системы О0е2е3 в точку О', мы произ-
произвели преобразование координат
в результате которого уравнение кривой F) получило вид
у'*~2рг', х = х0; (8)
кривая F) есть та же «подвижная» парабола, но перенесенная парал-
параллельно себе в плоскость х — х0; перенос этот можем осуществить так,
что вершина подвижной параболы скользит по неподвижной параболе
из точки О в точку О', а сама парабола при этом перемещается,
как твердое тело, оставаясь все время в плоскости, параллельной
плоскости Oyz. Этот результат мм можем сформулировать так:
Эллиптический параболоид (заданный уравнением A) ) есть по-
поверхность, описываемая при движении одной («подвижной») параболы
E) вдоль другой, неподвижной D) так, что вершина подвижной
§ 5]
ПАРАБОЛОИДЫ
495
параболы скользит по неподвижной, а плоскость и ось подвижной
параболы остаются все время параллельными самим себе, причем
предполагается, что обе параболы (подвижная и неподвижная) обра-
обращены вогнутостью в одну
и ту же сторону (а именно
в положительную сторону
оси г).
Аналогичный способ
построения применим и к
гиперболическому парабо-
параболоиду (рис. 220), поверх-
поверхности, наглядное представ-
представление о которой при первом
знакомстве с ней обычно
требует от учащегося неко-
некоторого небольшого усилия.
Сечениями гиперболиче-
гиперболического параболоида B) с пло-
плоскостями у — 0 и х = 0 снова
являются две «главные» па-
параболы:
«неподвижная» парабола
и подвижная
уг = — 2qz, х = 0, (9)
обращенные теперь вогну-
вогнутостью в противоположные
стороны: неподвижная —
«вверх» (т. е. в положитель-
положительном направлении оси г), а
подвижная —«вниз» (в отрицательном направлении оси г). Сечение пло-
плоскостью х~х0 имеет в системе координат О0е2е3 (где О0=(х0, 0, 0))
уравнение
ч
или
где
' ^™* 9 \ V -
*о.
A0)
G)
496
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
[ГЛ. XVIII
или, наконец, после перенесения начала координат в точку О'= (х0,0, z0)
(лежащую на параболе х* = 2pz, у — 0), уравнение
y'2 = —2gz', x = x0. A1)
Последнее уравнение показывает, что кривая A0) есть та же подвиж-
подвижная парабола (9), только сдвинутая параллельно себе посредством
скольжения ее вершины вдоль неподвижной параболы из точки О
в точку О'. Отсюда следует, что
гиперболический параболоид (за-
(заданный в прямоугольной системе
координат уравнением B)) есть
поверхность, описываемая под-
подвижной параболой уг — — 2 q z,
X = 0 при ее движении вдоль не-
неподвижной параболы D) так, что
вершина подвижной параболы
скользит по неподвижной пара-
параболе, а плоскость и ось подвиж-
подвижной параболы остаются все вре-
время параллельными себе самим,
при этом обе параболы вогнутостью все время обращены в противо-
противоположные стороны: неподвижная — вогнутостью «вверх», т. е. в поло-
положительном направлении оси z, а подвижная — «вниз».
Из этого построения видно, что гиперболический параболоид
имеет вид седла.
Сечение гиперболического параболоида плоскостью z — О есть
пара (вещественных) прямых (рис. 221)
/ х у
Рис. 221.
Г~Р VI
(являющихся парой образующих гиперболического параболоида).
Сечение плоскостью г — Н=фО есть гипербола, уравнение которой
есть (в системе координат OAeje2, где Oh — точка пересечения оси z
с плоскостью z = h, а векторы е1( е2 те же, что и в исходно?
системе Oe^e.)
х2 j/2
~2ph~qh= *' z = h-
При Л> 0 фокальная ось этой гиперболы направлена по вектору {1,0, 0}
т. е. параллельно оси абсцисс, а при Л<0 — параллельно оси ординат
так что проекции на плоскость Оху гипербол, получающихся i
сечении параболоида B) плоскостями
z = h и z = — Л,
являются сопряженными гиперболами в плоскости Оху.
§ 6] ПРЯМОЛИНЕЙНЫЕ ОБРАЗУЮЩИЕ 497
При |Л|—>-оо эти гиперболы имеют неограниченно возрастающие
полуоси |/ 2р | h | и у 2q | А |, отношение которых постоянно и равно
у —, так что все гиперболы, являющиеся горизонтальными сече-
сечениями гиперболического параболоида, подобны между собою.
§ 6. Прямолинейные образующие
Нас интересуют в этом параграфе лишь вещественные прямо-
прямолинейные образующие только что рассмотренных поверхностей.
Мы видели, что эллипсоиды, двуполостные гиперболоиды и эллип-
эллиптические параболоиды их не имеют вовсе. Докажем, что через
каждую точку однополостного гиперболоида и гиперболического
параболоида проходят (по крайней мере) две (различные) вещест-
вещественные прямолинейные образующие 1).
1. Прямолинейные образующие однополостного гиперболоида.
Рассмотрим сначала «правильный» однополостный гиперболоид, задан-
заданный уравнением
* *-z*=\. A)
Как мы видели, он описывается гиперболой
при вращении пространства вокруг оси г, в соответствии с чем
его сечения плоскостями z = h суть окружности
В частности, при z = h = 0 получаем так называемую горловую
окружность
Докажем, что через каждую точку Мо горловой окружности про-
проходят две прямолинейные образующие гиперболоида.
Повернув систему координат на надлежащий угол вокруг оси z,
можно достигнуть того, что ось у пройдет именно через точку Мо,
причем вид уравнения A) при этом преобразовании не изменится 2).
г) В главе XIX мы увидим, что их только две.
2) В самом деле, при повороте системы координат вокруг оси z
x=x'cos(p—у' sintp, y=x' sin(p+(/cos<p, г —г'
на любой угол <р уравнение A) переходит в
(х'г cos2 (p—2x'y' coscp sin (p+у'2 sin2 (p) +
+ (х'г sin2<p + 2xy costp siiKp + i/'2 cos2<p) — z'W' + i/'2—z'2=l,
т. е. сохраняет свой вид.
498
РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XVIII
Итак, достаточно доказать наше утверждение для точки
Л10 = @, 1, 0).
Но плоскость
очевидно, пересекает гиперболоид A) по паре прямых
у = \, \
» = 1. J
X—г = 0,
B)
Они лежат на нашем гиперболоиде A), проходят через точку
М0 = @, 1, 0) и, значит, являются искомыми образующими.
Докажем, что при вращении пространства вокруг оси z каждая
из прямых B), например прямая йъ опишет весь гиперболоид A).
Пусть Мх-—какая-нибудь точка
прямой dj\ она лежит на окружности,
по которой гиперболоид пересекает
горизонтальная, т. е. параллельная,
плоскость Оху, плоскость, прохо-
проходящая через точку Мх\ при враще-
вращении пространства вокруг осн z точка
Мх описывает всю эту окружность,
т. е., во-первых, не покидает гипер-
гиперболоида, а во-вторых, попадает
в любую его точку, лежащую
на той же высоте (т. е. на той же
горизонтальной плоскости), что и
точка Мг.
Следовательно, при вращении
вокруг оси z и вся прямая йъ
во-первых, в каждый момент време-
времени всеми своими точками лежит на
гиперболоиде A), а во-вторых, в не-
некоторый момент оказывается прохо-
проходящей через любую точку М гипер-
гиперболоида,
То же справедливо и для пря-
прямой rf2: прямая d2 при вращении
пространства вокруг оси z в некоторый момент также пройдет че-
через любую точку М гиперболоида.
Все нрямые, в которые при вращении пространства вокруг оси z,
переходит каждая из двух прямых dXl d2, составляют два семейства
прямолинейных образующих правильного однополостного гипербо-
гиперболоида A) (рис. 222). Через каждую точку М гиперболоида прохо-
проходит по одной из образующих каждого семейства.
Рис. 222.
§ 6] ПРЯМОЛИНЕЙНЫЕ ОБРАЗУЮЩИЕ 49Э
Можно было бы чисто геометрически доказать, что любые две
образующие, принадлежащие различным семействам, лежат в одной
плоскости (следовательно, или пересекаются, или параллельны между
собою), тогда как любые две образующие, принадлежащие одному
и тому же семейству, скрещиваются.
Замечание. Аффинное преобразование пространства
переводит всякую прямую в прямую, а однополостный гиперболоид
в правильный однополостный гиперболоид
/ + /-z'!=l;
поэтому на любом однополостном гиперболоиде имеются два семейства
прямолинейных образующих, каждое из которых покрывает его так,
что через всякую точку гиперболоида проходит по одной образующей
каждого семейства.
Мы сейчас дадим аналитическую трактовку того же вопроса.
Пусть однополостный гиперболоид задан своим каноническим уравне-
уравнением
хг yi Z2
а2 ' b'z с2 * '
Перепишем это уравнение в виде
или
Рассмотрим теперь пару вещественных чисел а, р\ не равных
одновременно нулю, и для каждой такой пары напишем систему
уравнений
,5)
В частности, при а^=0, р = 0 получаем
F)
--г--
а ' с
1 » П
h — >
500 РАЗЛИЧНЫЕ ВИДЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XVIII
а при а = 0, Р ^ 0
G)
Для каждой пары чисел а, Р наши уравнения определяют пару
плоскостей, как легко видеть, не параллельных (в широком смысле
слова) и, следовательно, пересекающихся по прямой. Прямая эта
целиком лежит на гиперболоиде C). В самом дйе, каждая ее точка
M=(x,y,z) удовлетворяет обоим уравнениям E), а следовательно,
уравнению, полученному почленным перемножением уравнений E),
и, значит, уравнению C). Случай, когда один из множителей а, |3
равен нулю, исключения не представляет, так как точка М=(х, у, z),
удовлетворяющая системе уравнений F) или G), удовлетворяет и
уравнению C).
Итак, мы получили семейство прямолинейных образующих гипер-
гиперболоида C). Семейство это назовем семейством I; оно, очевидно,
зависит от одного параметра
Докажем, что через каждую точку Мо = (х0, г/0, z0) гиперболоида
C) проходит одна-единственная прямая семейства I.
В самом деле, мы ищем прямую E), проходящую через точку
M0 — (xg,yg,zQ) и удовлетворяющую уравнению C), так что для
определения отношения Р:а имеем уравнения E), которые (после
замены х, у, z на хд, у0, z0) могут быть записаны в виде следую-
следующих пропорций:
причем выполнено тождество
§) (§)(Ь&) D0)
получающееся, если подставить в C) координаты х = х0, у=у0,
z = z0 точки Мо. В силу тождества D0) мы можем для определения
отношения Р:а воспользоваться любым из уравнений Eг), Ц52).
Первое из них делается неопределенным, лишь если одновременно
1+|=0 и - + - = 0; но в этом случае мы можем воспользо-
О О. С
ваться уравнением E2), так как при l-f^=0 во всяком случае
1—if^O, и> значит, отношение |5:а определится из E2). Итак,
§ 6] ПРЯМОЛИНЕЙНЫЕ ОБРАЗУЮЩИЕ 501
если задана точка М0 = (х0, у0, z0), то однозначно находится отно-
отношение р:а, определяющее прямую семейства 1, проходящую через
точку Мо.
Отсюда следует, что никакие две прямые семейства I не пере-
пересекаются (так как если бы они пересекались в некоторой точке Mlt
то эта точка была бы точкой гиперболоида C), через которую
проходят две прямые семейства 1, а такой точки, но только что
доказанному, не существует).
Легко проверить, что среди прямых семейства I нет двух па-
параллельных.
Аналогично уравнениям E) можно было бы для любой пары чисел
а', р', не равных одновременно нулю, написать систему уравнений
.„
определяющую прямую, лежащую на гиперболоиде C): каждая точка
М = (х, у, z), удовлетворяющая двум уравнениям E'), удовлетворяет
и уравнению, полученному от почленного перемножения этих урав-
уравнений, и, значит, удовлетворяет уравнению C).
Итак, уравнения E') также определяют семейство прямолиней-
прямолинейных образующих однополостного гиперболоида C), зависящее от
одного параметра г>=р':а'; это семейство мы назовем семейством II.
Совершенно так же, как выше, мы убеждаемся в том, что через
каждую точку М=(х, у, z) гиперболоида C) проходит одна-единст-
венная образующая семейства 11.
Наконец, совместное рассмотрение уравнений E) и E') (для
данных р:а = и и f>':a'—v) позволяет установить, что каждая
образующая семейства I пересекается с каждой образующей семей-
семейства II (или параллельна ей в узком смысле слова). Читателю пред-
предлагается (в виде задачи) провести относящиеся сюда рассуждения.
2. Прямолинейные образующие гиперболического парабо-
параболоида. Начинаем с чисто геометрического рассмотрения вопроса.
Пусть дан параболоид
1z = -—y~. (8)
р q
Рассмотрим аффинное преобразование
, _ х ,,'__1_ ' =zz
Тогда уравнение параболоида примет вид
2z'=xrl—y'\ (9)
502 РАЗЛИЧНЫЕ ВИЛЫ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XV111
Рассматриваем сечения параболоида (9) плоскостями
У'=х' + с, A0)
У' = — x'-t-c., (V.)
параллельными плоскостям у' = ±х'. Подставляя A0) в (9), видим,
что пересечение параболоида (9) с плоскостью A0) есть прямая
2z' = — 2cx' — с2, у' = х' + с. A2)
Аналогично пересечением параболоида (9) с плоскостью A1) есть
прямая
2z' = -f 2cx'~c*, y'^—x' + c. A3)
Когда с пробегает все значения от —сю до -f оо, плоскость A0)
(так же как и плоскость A1)) пройдет через все точки параболоида,
Рис. 223.
который, таким образом, оказывается покрытым двумя семействами
прямых I и II, определяемыми уравнениями A2) и A3) (рис. 223).
Через каждую точку М параболоида (9) проходит единственная
плоскость вида A0) и единственная плоскость вида A1), а значит,
и единственная прямолинейная образующая каждого из семейств
I и II. При этом все образующие семейства 1 параллельны пло-
плоскости (/'=лг', а все образующие семейства II параллельны пло-
плоскости у' = —х'.
Можно было бы получить тот же результат и для любого пара-
параболоида, заданного своим каноническим уравнением
2z = - у- (8)
р q v '
I только вместо плоскостей у' = ± х' были бы рассмотрены плоскости
§ 6] ПРЯМОЛИНЕЙНЫЕ ОБРАЗУЮЩИЕ 503
Прямолинейные образующие гиперболического параболоида могут
быть аналитически найдены способом разложения на множители,
аналогичным тому, который мы применили в случае однополостиого
гиперболоида. Именно, перепишем каноническое уравнение
2z = ——^- (8)
Р q K '
гиперболического параболоида в виде
и рассмотрим дли каждой пары чисел а, р, не равных нулю одно-
одновременно, уравнения двух плоскостей:
1 Гр^Уч) К A5)
Эти плоскости пересекаются по прямой, целиком лежащей на пара-
параболоиде (8). Прямые A3), каждая из которых определена отноше-
отношением f5:a, образуют одно семейство прямолинейных образующих
параболоида. Второе семейство получим, если рассмотрим (для каж-
каждой пари чисел а', р', не ранных нулю одновременно) систему
уравнений
O=2Pz, ]
^Р Vq) \
х . У \—„> I
Снова доказываем, что через каждую точку гиперболического пара-
параболоида (8) проходит по одной образующей каждого семейства,
что две образующие, принадлежащие к разным семействам, пересе-
пересекаются, а принадлежащие к одному и тому же семейству всегда
скрещиваются.
Наконец, очевидно, что образующие семейства I, определяемого
уравнениями A5), параллельны плоскости
4=—?=-о,
Ур Vq
а образующие семейства II, определяемого уравнениями A5'), па-
параллельны плоскости
ГЛАВА XIX
ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА. I
(ПЕРЕСЕЧЕНИЕ С ПЛОСКОСТЬЮ И С ПРЯМОЙ;
АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ;
КАСАТЕЛЬНАЯ ПЛОСКОСТЬ; ЦЕНТР)
§ 1. Ранг и детерминант малой и большой матрицы
многочлена второй степени
Рассматриваем общее уравнение поверхности второго порядка в
произвольной аффинной системе координат Oxyz:
F(х, у, z) = апх2 + 2апху + а22у* + 2a13xz-f 2a23yz + aS3z2 +
+ 2aix + 2a2y + 2asz + a0 = 0. A)
Как всегда, полагаем
<p(x, у, z) = anx2 + 2а12ху + a22y2 + 2anxz+2aiSyz + as!iz2. B)
Вводим еще следующие обозначения:
«И
«21
«31
«1
«12
«22
«32
а2
«13 «1
«23 «2
«зз «а
«3 «0
*11 2
, = а,
21 2 3
«32
Матрицу Ар называем большой матрицей уравнения A), матрицу
/L — малой матрицей. Ранги этих матриц называем соответственно
большим и малым рангом поверхности, задаваемой уравнением A),
и обозначаем их соответственно через R а л; мы сейчас увидим,
что эти ранги не зависят от выбора системы координат, в которой
задается уравнение поверхности. Детерминанты матриц АР и А„
обозначаются соответственно через А и б.
Мы знаем (гл. XV, § 2), что при сдвиге начала координат малая
матрица, а значит, и ее детерминант не меняются.
§ 1] РАНГ И ДЕТЕРМИНАНТ МАЛОЙ И БОЛЬШОЙ МАТРИЦЫ 505
При линейном однородном преобразовании
— с31х' +cS2y' + c3Sz
1 |
', j
C32
'"ЗЗ
ранг г матрицы Л? не меняется, а детерминант 8 (как дискрими-
дискриминант квадратичной' формы <р (х, у, z)) умножается на с2 (гл. XIII,
§ 3).
Так как всякое преобразование координат сводится к сдвигу
начала координат и к однородному преобразованию вида C), то при
переходе от системы координат Oxyz к произвольной новой системе
координат O'x'y'z' ранг г матрицы Л? не меняется, а ее детерми-
детерминант 8 умножается на квадрат детерминанта преобразования.
Докажем аналогичное утверждение для большого ранга R и
детерминанта Д.
Возьмем общие формулы преобразования координат:
у = с21х
c2iy'
c23z'
сп с12
сп с22
D)
U3i '•зг '-зз
Наряду с многочленом F(x,y, z) рассмотрим квадратичную форму
Ф (х, y,z, t) = anx2-{-2al2xy-\-a22y2-^r2a13xz-{-2ai3yz-Jrasszi-{-
-t- 2axxt + 2a2yt + 2a3zt + aot*
и преобразование
x = cnx' + с12г/' + cX3z' + dj',
I
D')
= W -
= c3lx'--
r с22У -
f c32y' -
f «23^'
f c33z'
+ d2f,
+ dst',
t'.
Тогда Ар есть матрица формы Ф (х, у, z, t), а Д — ее дискриминант.
При преобразовании D') ранг R формы Ф остается неизменным, а
ее дискриминант умножается на квадрат детерминанта преобразо-
преобразования D'), т. е. на
С22 °23
«3i «32 «зз d3
0 0 0 1
«11 «12 «13
«21 C22 «23
«31 «32 C33
E)
доказали следующее предложение.
506 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. Х!Х
Основная лемма. При преобразовании координат D) ранги
R и г матриц Ар и Аа остаются неизменными, а их детерминанты
А и и улчгожа:сг:г. чсг квлдппт детерминанта преобразования D) и,
следовательно, сохраняют свой знак.
Замечание 1. Если преобразование D) есть сдвиг начала
координат, то сП = с22 = с33 == 1, а с12 = с13 = сп — с33 = csl — cs2 = 0,
так что детерминант E) равен 1. Поэтому при переносе начала
координат не только детерминант б, но и детерминант А остается
неизменным.
Замечание 2. Так как детерминант б есть детерминант тре-
третьего порядка, то при умножении всех его элементов на ¦—1 знак
б меняется на обратный. Зато знак детерминанта Л не меняется
при умножении его элементов (т. е. всех коэффициентов уравнения
A)) на —1, значит, и на любой вообще множитель
§ 2. Пересечение поверхности второго порядка с плоскостью
Пусть даны поверхность второго порядка и плоскость. Перей-
Перейдем к такой системе координат Oxyz, в которой данная плоскость
была бы плоскостью Оху, т. е. имела бы уравнение
Запишем в этой системе координат уравнение нашей поверхности:
F(x, у, z)~a11xi-i-2a12xy + a22y2 + 2a13xz+2a25yz-l-aS3z2-\-
¦Jr2a1x + 2aiy + 2asz+a0 = 0, A)
и будем решать его совместно с уравнением
г = 0. B)
Получим уравнение
F (х, у) = апх2 + 2а12ху + а22у2 -f 2axx -f- 2a2(/ + а0 = 0. C)
Этому уравнению и удовлетворяют точки, одновременно лежащие
на поверхности A) и на плоскости B). Мы видим, что, вообще
говоря (т. е. за исключением особого случая ап— а12= а.,2~- 0,
который мы сейчас отдельно разберем), уравнение C) есть уравне-
уравнение второй степени, определяющее некоторую (лежащую в плоско-
плоскости z = 0) кривую второго порядка, которая и является пересече-
пересечением данной поверхности второго порядка с данной плоскостью.
Переходим к случаю
aii =ахг=аг2 = 0.
Предположим, что по крайней мере один из коэффициентов аъ а%
отличен от нуля. В этом случае пересечение поверхности A) с
§ 2] . ИЕРЕСЕЧКНИЕ ПОВЕРХНОСТИ С ПЛОСКОСТЬЮ 507
плоскостью z=0 есть прямая
Пусть теперь ::с только ctl — ~12 — а22 = 0, по и
а1= а2 = 0.
Если при этом и а = 0, то уравнение поверхности A) имеет вид
г BaiSx + 2a23y + a33z +2a3) = 0
— поверхность распадается на пару плоскостей:
одной из которых является данная плоскость г=0. Наконец, по-
последняя возможность состоит в том, что
a11 = aI2 = a22 = a1=a2 = 0, но ao=?0.
Тогда уравнение C) приводит к противоречию: ао = О (тогда как
дано, что а ф 0), означающему, что нет ни одной точки (ни вещест-
вещественной, ни мнимой), которая лежала бы одновременно на данной
плоскости и па данной поверхности второго порядка.
Итак, доказана
Теорема 1. При пересечении поверхности второго порядка с
плоскостью могут представляться лишь следующие случаи:
(а) поверхность пересекается с плоскостью по кривой второго
порядка;
(б) поверхность пересекается с плоскостью по (вещемвенной)
прямой линии;
(в) поверхность распадается на пару плоскостей, одной из кото-
которых является данная плоскость (входящая, таким образом, в состав
рассматриваемой поверхности);
(г) поверхность не имеет с плоскостью ни одной общей точки (ни
вещественной, ни мнимой)г).
*) Эта теорема с указанными в пей четырьмя различными случаями пред-
представляется довольно уродливой; в главе XXIII мы перейдем от обыкновенного
(комплексного) пространства к проективному пространству, получаемому из
обыкновенного пространства пополнением его бесконечным множеством так
называемых несобственных (или бесконечно удаленных) точек, образующих
в своей совокупности несобственную (или бесконечно удаленную) плоское1 ь
(с лежащими в ней несобственными, или бесконечно удаленными прямыми).
Ьсли рассматривать нашу поверхность в проективном пространстве, то слу-
случаи (б) будет состоять в том, что пересечение поверхности с плоскостью яв-
является кривой второго порядка, распавшейся на пару прямых, одна из кото-
которых лежит в несобственной плоскости («ушла в бесконечность»), а случай
*^)"~в том, что пересечением является пара совпадающих между собою не-
несобственных прямых. Таким образом, в проективном пространстве возможны
лишь два случая: либо пересечение поверхности второго порядка с плоско-
плоскостью есть кривая второго порядка, либо поверхность распадается на пару
плоскостей, одной из которых является данная плоскость.
508
ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКЛ.
[гл. xix
Замечание. В случае (а) кривой второго порядка, являю-
являющейся пересечением данной поверхности второго порядка с данной
плоскостью, может быть
(ax) нераспадающаяся действительная или мнимая кривая, т. е.
эллипс (действительный или мнимый), гипербола или парабола;
(а2) пара пересекающихся вещественных прямых;
(а3) пара мнимых сопряженных прямых, имеющих единственную
вещественную (общую) точку, которая и является единственной
вещественной точкой, лежащей одновременно на данной поверхно-
поверхности второго порядка и данной плоскости;
(а4) пара параллельных в собственном смысле вещественных или
мнимых сопряженных прямых;
§ 3] касательный; прямые и касательная плоскость 509
(а5) пара совпадающих вещественных прямых.
Как мы увидим ниже, возможности (а2), (а3), (а5) характеризуют
различные случаи касания данной поверхности второго порядка с
плоскостью (рис. 224).
§ 3. Пересечение поверхности второго порядка с прямой.
Асимптотические направления. Касательные прямые
и касательная плоскость. Особые точки поверхности
второго порядка
То, что говорилось в § 1 главы XVII о пересечении алгебраи-
алгебраической кривой с прямой, можно было бы — с несущественными и
очевидными изменениями — повторить и о пересечении алгебраиче-
алгебраической поверхности
F(x,y,z)=0 Oa)
с прямой
x = xo + at, \
} B)
Как всегда, мы будем предполагать, что и поверхность Aд), и пря-
прямая B) являются вещественными; в соответствии с этим все коэф-
коэффициенты в уравнениях Aд) и B) всегда предполагаются вещест-
вещественными.
Мы ограничимся случаем, когда данная поверхность AА) — второго
порядка, т. е. когда ее уравнение есть
F(x, у, z) = a11x2+2al<,xy + a22y2 + 2awxz-\-2a2Syz-\-a3sz2 +
a0 = 0. A)
Старшие члены многочлена F(x,y,z) образуют квадратичную форму
Ф (*, у, z) = апх2 + 2а12ху -f- a2iy2 + 2a13xz + 2a2Zyz + aSbz2. C)
Мы будем пользоваться еще следующими обозначениями, кото-
которых будем постоянно придерживаться не только в этой главе, но
и в последующих 1):
F2 (x, у, z) = a21x + а22г/ -f a23z + a2, > D)
J-i / . . . • ]
A* IX t/ Z\ ^^ Cl У |_ /> // _i л у —4— Л '
,. .. dF dF dF
) Читатель, знающий, что такое частные производные -^—, -*—, -=—
Функции F (х, у, г) от трех переменных, сразу заметит, что F1(x, у, z) =
=iif с .. 1 dF „ ,.. .. _4_ 1 dF
510 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XIX
Для нахождения точек пересечения поверхности A) с прямой B)
ПСДСТЭ2ИМ 19.) в A1: после приведения подобных членов получим
уравнение второй степени относительно г, а имении'.
0, E)
где, как легко проверить,
A = <p(a,$,y)=anas+2alia$ + a22$2-i-2aiSay + 2a<,s$y+aS3yi!, л
В = F\ (х0, у0, z0) a + F2 (х0, у0, z0) $ + F3 (х0, у0, z0) у, } F)
C=^F(x0, у0, z0). )
Уравнение E) есть квадратное уравнение, за исключением того
случая, когда
<p(a,p,Y) = O. G)
Вектор u = {a, C, у\, удовлетворяющий условию G), называется
вектором асимптотического направления или просто асимптотическим
вектором поверхности A); прямая, направляющий вектор которой
является асимптотическим, называется прямой асимптотического на-
направления для данной поверхности.
Замечание. Повторяя в точности рассуждения § 3 главы XVII,
убеждаемся в том, что вопрос о том, является ли данное направление
асимптотическим или нет для данной поверхности второго порядка,
зависит только от этой поверхности и от данного направления и не
зависит от системы координат, в которой задано уравнение этой
поверхности.
Если прямая B) имеет неасимптотическое направление, то урав-
уравнение E) квадратное и имеет два корня tv t2 — вещественные раз-
различные, или мнимые сопряженные, или совпадающие (вещественные).
Подставляя эти значения /х и t2 в равенства B), получим две точки
пересечения (вещественные или мнимые, быть может, совпадающие)
прямой B) и поверхности A). Итак:
Если прямая B) имеет неасимптотическое направление, то она
пересекает поверхность A) в двух точках — различных (действительных
или мнимых сопряженных) или совпадающих (действительных), полу-
получающихся, если подставить в B) любой из двух корней t = tl или
t — t2 квадратного уравнения E).
Если обе точки пересечения прямой B) с поверхностью A)
сливаются в одну, т. е. уравнение E) имеет совпадающие корни,
то прямая B) называется касательной к поверхности.
Б этом случае за точку Мо = (х0, у0, z0) прямой B) возьмем точку,
лежащую на поверхности (эта точка и будет точкой прикосновений
прямой к поверхности). Тогда C = F (x0, уй, zo) = O и уравнение E)
принимает вид At2-\- 2Bt = 0, т. е.
t(At-i-2B) = 0.
§ 3] КАСАТЕЛЬНЫЕ ПРЯМЫЕ И КАСАТЕЛЬНАЯ ПЛОСКОСТЬ 511
2В
Один его корень есть ^ = 0, второй t^= -j; для того чтобы он
тоже был равен нулю, надо, чтобы было В=0. т. е.
Fi (*о. Уо, zo) а -г F2 (х0' У о, *о) Р -г ^з (*о. Уо, *о) Y = °- (8>
Это и есть условие, которому должен удовлетворять направляющий
вектор {а, р, у\ прямой B), проходящей через точку М0 = (х0, у0, г„)
поверхности A), чтобы эта прямая была касательной (и тогда она бу-
будет касательной в точке Мо).
Имеется бесконсчноемножествопрямых, проходящих через точку Л!,,,
с направляющими векторами, удовлетворяющими условию (8), т. е.
бесконечное множество касательных к поверхности A) в данной ее
точке Мо. Пусть М={х, у, z) — произвольная точка любой из этих
прямых. Тогда \х—xQ, у—у0, z—z0) есть направляющий вектор этой
прямой, и он удовлетворяет уравнению
Л (*о. Уо. zo) (х—х0) -f F2 (х0, у0, z0) {у—у0) +
(х0, yQ, z0) (z — z0) = 0. (9)
Итак, все точки M=(x,y,z) всех касательных, проведенных к по-
поверхности A) в точке М0 = (х0, у0, z0), удовлетворяют уравнению (9);
уравнение (9)—первой степени, следовательно, это уравнение пеко
торой плоскости, проходящей через точку ЛТ0. Плоскость эта назы-
называется касательной плоскостью к поверхности A) в точке ЛТ0: она
несет на- себе все прямые, касающиеся поверхности A) в точке
Мо = (xQ, y0, zQ). Уравнение (9) и есть уравнение касательной пло-
плоскости к поверхности A) в ее точке М0 = {х0, у0, z0). В развернутом
виде это уравнение записывается так:
(аилг0 + а12у0 -f агзг0 -\-aJx-\- (а21л;0 -f а22у0 + a23z0 + а2) у +
+ («31*0 + аз2*/о + азз*о + аз)z + (агх0 + а2у0 + asz0 -f a0) = 0. (9')
В самом деле, уравнение (9) может быть записано в виде
(апх0 ~ avlyQ + a13z0 + а1)х + (апх0+ аму0 -f a2Sz0 -f a2) у +
-T (aslx0 + as2y0 + a33z0 + a3) z—(anxl + 2a12x0y0 + ai2y\ +
+ 2а13лг0г0 + 2aiy30z0 + a33z\ + aLx0 + a2y0 -f asz0) = 0.
Но в силу равенства
°ii*o + 2a12x0y0 + апу\ + 2al3x0z0 + 2ai3y0z0 +
+ a33z20 + 2alxQ + 2a2y0 -f 2a3z0 + a0 = 0
имеем
-~(а1Лх\ + 2а1гх0у0 + a22y\ + 2a13x0z0 + 2a23yozQ + a33zl -f
+ atx0 + a2yQ + a3z0) = atx0 4- а^у0 -f- a3z0 -f a0,
откуда и следует уравнение (9').
512 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [гл. XIX
Уравнение (9) может быть переписано в виде
где через (-^— и т. д. обозначены значения соответствующих част-
\ ox ] о
пых производных функции F(x, у, z) в точке Ж0 = (лг0, у0, z0); в этом
виде в курсе анализа записывается уравнение касательной плоскости
к поверхностям, значительно более общим, чем поверхности второго
порядка (и алгебраические поверхности вообще).
Особые точки поверхности второго порядка. Воз-
Возникает вопрос: когда уравнение (9) касательной плоскости становится
неопределенным?
Очевидно, это происходит лишь тогда, когда одновременно
'1 \Xq> Уо, z0) ¦ о I я„ I — ^и-^о "
4. \ VX Jo
p \—L(HL\ —a
причем в то же время
Но
F (х0, у0, z0) = (а1Хх0 + av2y0 -]- alsz0 + c^ лг0
+ (а21лг0 + a22y0 + «2зго + a2) <у0 + {a3lx0 + а
+ а^о -|- a2i/0 + ag^o + ao-
Если выполнено A0), то тождество A1) превращается в
F (хо> У о, z0) =s а^д -L- c2i/0 + a3z0 + a0.
а A0) —в
A2)
Это равенство вместе с равенствами A0) показывают, что четверка
чисел (х0, у0, z0, 1) образует ненулевое решение системы уравнений
апх + а12у + alsz + aj = 0,
о21лг + аг2у + aiaz + a2t = 0,
a3t = 0,
§ 4] АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ 513
Значит,
А =
а, ая аа
= 0. A3)
Поверхности второго порядка, данные уравнением A), коэффици-
енты которого удовлетворяют условию A3), называются вырождающи-
вырождающимися, а точка М0 = (х0, у0, z0), удовлетворяющая уравнениям A0)
и A0), называется особой точкой поверхности A).
Из доказанного следует, что только у вырождающихся поверх-
поверхностей могут быть особые точки. Подробнее мы рассмотрим весь
этот вопрос в § 5 главы ХХШ.
Итак, только в случае вырождающейся поверхности второго
порядка и только а ее особой точке Мо = (xQ, y0, zQ) касательная
плоскость к поверхности A) оказывается неопределенной. Попутно
мы доказали, что при выполнении условий A0) условия A0) и A2)
эквивалентны между собою.
§ 4. Асимптотические направления, конус асимптотических
направлений, прямолинейные образующие поверхностей
второго порядка
Пусть вектор {а, Р, у} есть вектор асимптотического направления
для поверхности второго порядка
z) = 0, (I)
т. с. пусть (р (а, р, у) = 0. Прямая
— xo~at, '
B)
имеет вектор {а, р, у\ своим направляющим вектором, т. е. есть
прямая асимптотического направления. Тогда коэффициент А в урав-
уравнении E) предыдущего параграфа равен нулю, и само это уравнение
приобретает вид
2Bt + C=0. C)
Возможны следующие случаи:
1° ВфО; тогда уравнение C), т. е. уравнение E) предыдущего
параграфа, есть уравнение первой степени; единственный его корень
определяет единственную точку пересечения поверхности A) с пря-
прямой B).
'7 II. С. Александров
614 ОВЩЛЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [гл. XIX
2° /?=0, С=т^0; уравнение C) противоречиво (так как принимает
вид С—0 при С =#= 0), уравнения A) и B) несовместны, прямая B)
чр имррт г. поверхностью A) ни одной общей точки, ни действитель-
действительной, ни мнимой. В этом случае прямая B) называется асимптотой
поверхности A).
3° В= С— 0; .уравнение C) обращается в тождество 0 = 0, оно
удовлетворяется при всех значениях t, все точки прямой B) при-
принадлежат поверхности A), прямая B) есть прямолинейная образую-
образующая поверхности A).
Доказана следующая
Теорема 2. Прямая B), имеющая асимптотическое направление
по отношению к поверхности A) второго порядка, может находиться
в одном из следующих положений:
1° Она имеет с поверхностью A) единственную и тогда непременно
вещественную общую точку.
2° Она является асимптотой поверхности (т. е. не имеет с ней
ни одной общей точки, ни вещественной, ни мнимой).
3° Она является прямолинейной образующей поверхности (т. е. всеми
своими точками лежит на поверхности A)).
Посмотрим теперь, каковы асимптотические направления поверх-
поверхностей различных видов, определенных в предыдущей главе.
В случае эллипсоида, заданного своим каноническим уравнением
х2 , У2 , z3 , , о \
—г- + -рН—2" = I, асимптотические направления {а: р: у} определя-
а2 В3 V2
ются из уравнения — + гг4" "з^О; все эти направления являются
мнимыми.
Асимптотические направления сднополостного и двуполостного
гиперболоидов, заданных их каноническими уравнениями
Л'2 f/2 Z2 V2 J/3 Z2
—,--\--гт, г~1, соответственно ¦—~ —-]—5- = 1, D)
а2 ' bL i- а- б2 ' с2
суть направления образующих нх общего действительного асимпто-
асимптотического конуса
Эллиптический параболоид
-?-fj?.=.2z, p>0, q>0, F)
имеет асимптотические направления {а: E: у], удовлетворяющие
уравнению
а2 й2
§ 4] АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ 5l5
все эти направления мнимые, за исключением одного, а именно на-
направления {0:0:7}, УФ®, оси z канонической для данного парабо-
параболоида системы координат. Асимптотические направления гиперболи-
гиперболического параболоида
определяются условием
это всевозможные направления, коллинеарные какой-либо одной (или
обеим) из плоскостей
-?= + -!= = 0, -?=—-?= = 0. (8)
Ур Vq Vp Vq
Есе эти направления действительны.
Все прямые, являющиеся образующими асимптотического конуса E)
обоих гиперболоидов D), суть асимптоты каждого из этих гипер-
гиперболоидов; любая другая прямая асимптотического направления пере-
пересекает двуполостпый гиперболоид
в единственной точке; в случае однонолостного гиперболоида име-
имеются, кроме того, и прямолинейные образующие (известные нам из
§ 6 предыдущей главы).
Все действительные прямые асимптотического направления по
отношению к эллиптическому параболоиду F) параллельны между
собою (они параллельны оси z) и пересекают параболоид в един-
единственной точке; читатель легко проверит это. У эллиптического
параболоида нет ни действительных асимптот, ни (как мы уже знаем
из предыдущей главы) действительных прямолинейных образующих.
Прямая, имеющая асимптотическое направление по отношению
к гиперболическому параболоиду G), параллельна одной из двух пло-
плоскостей (8); она или является прямолинейной образующей (см. гл. XV11!,
§ 6), или пересекает параболоид в одной точке, или, наконец, не
имеет с ним ни одной общей точки (является его асимптотой).
Асимптотические направления конуса суть направления его образу-
образующих. Асимптот конус не имеет. Всякая прямая, имеющая по отно-
отношению к конусу асимптотическое направление и не являющаяся его
образующей, пересекает его в одной точке.
Переходим к асимптотическим направлениям цилиндрических по-
поверхностей.
17*
516 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XIX
1° Асимптотические направления эллиптического цилиндра
суть направления {а: E: у\, удовлетворяющие условию
среди них действительным является лишь направление {0: 0: у\,
оси z канонической системы координат.
2° Асимптотические направления гиперболического цилиндра
а3 Ь* ~
суть все направления, параллельные одной (или обеим) из двух пло-
плоскостей
а ' Ь ' а Ь
3° Асимптотические направления параболического цилиндра
у2 = 2рх
суть все направления, параллельные плоскости «/ = 0. Прямая, имею-
имеющая асимптотическое направление но отношению к данному цилиндру,
может находиться в любом из трех положений, предусмотренных
теоремой 2: эта прямая .может быть образующей цилиндра, она может
быть параллельной образующей и не иметь с цилиндром ни одной
общей точки, наконец (в случае гиперболического и параболического
цилиндров), она может пересекать поверхность в единственной точке.
Асимптотические направления поверхности, распавшейся на пару
плоскостей, суть направления, параллельные одной и:$ этих плоско-
плоскостей (или им обеим).
Если все векторы, имеющие относительно данной поверхности A)
второго порядка асимптотические направления, прилагать к какой-
нибудь точке Мп, за которую удобнее всего брать начало данной
системы координат1), то эти векторы (и их концы) заполнят коничес-
коническую поверхность с вершиной Мо; если Л40=@, 0, 0), то уравнение
этой поверхности есть ф (х, у, z) — 0. Эта коническая поверхность
называется конусом асимптотических направлений данной поверхности.
Если поверхность центральная, то конус асимптотических на-
направлений с вершиной в центре данной поверхности называется просто
асимптотическим конусом поверхности. Иногда это наименование упо-
употребляется и как сокращение наименования «конус асимптотических
направлений», что, впрочем, достойно порицания.
Асимптотический конус гиперболоидов известен нам уже из гла-
главы XV1H; асимптотическим конусом эллипсоида является мнимый конус,
Относительно которой данная 'поверхность имеет уравнение A).
§ 4]
АСИМПТОТИЧКСКИЕ НАПРАВЛЕНИЯ
517
заданный (в канонической для данного эллипсоида системе коорди-
х2 , ч2 , z2 л ..
пат) уравнением—г"+~р-~1—г~^- Конус асимптотических направ-
направлений параболоида
у2 ,,2
2г = — + JL
р — я
распадается в пару пересекающихся плоскостей, мнимых и сопря-
сопряженных:
р ' я ~ ~-
для эллиптического параболоида, и действительных:
——-^- = 0
Р Я
для гиперболического параболоида.
Асимптотический конус конической поверхности совпадает с самой
этой поверхностью. Наконец, конус асимптотических направлений
Рис. 225
цилиндрической поверхности есть пара плоскостей — мнимых и со-
сопряженных (пересекающихся по действительной прямой), если цилиндр
эллиптический; пересекающихся действительных, если цилиндр гипер-
гиперболический (рис. 225а); совпадающих (и действительных), если цилиндр
параболический (рис. 2256).
Наиболее интересными среди прямых, имеющих по отношению
к данной поверхности асимптотическое направление, являются прямо-
прямолинейные образующие этой поверхности.
518 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА. [гЛ. XIX
Прямая B), проходящая через точку Мо = (xQ, уп, zn) поверх-
поверхности A), является образующей этой поверхности, если для нее
ubiiiu.iricnbi ус.~ог,"г. Л — 0, В — п {утплпо С = О выполнено автома-
тически: оно означает, что точка Жо лежит на поверхности A)).
Первое из этих условий, т. е. Д = 0, или
Ф(а, Р, 7) = 0, О)
означает, что прямая B) имеет асимптотическое направление; вто-
второе условие В = 0, т. е.
^i (•*(}. Уо, ^o)a + F2(x^ Уо< z»)P-rF3(*o, Уо, zo)y = O, A0)
означает, что прямая B) лежит в касательной плоскости к поверх-
поверхности A) в ее точке Мп. Итак,
Теорема 3. Прямолинейные образующие поверхности A), про-
проходящие через точку Ма этой поверхности, суть не что иное, как
прямые асимптотического направления, проходящие через точку Мо
и лежащие в касательной плоскости к поверхности в этой ее точке.
Замечание 1. Так как мы рассматриваем прямолинейные обра-
образующие, проходящие через данную точку Мо поверхности, то для
их нахождения нам надо только определить их направляющие векторы.
Но эти векторы должны удовлетворять условиям A0) и (9). Из
уравнения A0) можно, вообще говоря1), одну какую-нибудь коор-
координату, например у, выразить через две другие — а и E и подставить
полученные для нее выражения в (9); после этого квадратное урав-
уравнение (9) даст нам два значения (действительных или мнимых) для
отношения а:E; этим и дан способ фактического нахождения прямо-
прямолинейных образующих. Так как они лежат в касательной плоскости,
то они и составляют ту (распадающуюся) кривую второго порядка, по
которой касательная плоскость в точке Мо пересекается с поверх-
поверхностью A).
Рассуждение это делается несостоятельным, если одно из двух
уравнений (9) и A0) является следствием другого, в частности,
если уравнение A0) обращается в тождество, что имеет место,
если поверхность A) есть конус, а точка М0 = (х0, у0, z0) — его
вершина: тогда
^i(*o> У о, ^0)=F2{x0, y0, zo) = F.j(x0, y0, zo)=0.
Если же поверхность распадается на пару пересекающихся плоскостей,
то уравнение (9) эквивалентно двум линейным однородным уравнениям,
определяющим двумерные векторные многообразия, соответствующие
тем плоскостям, на которые распадается поверхность A). Если вектор
{а, р, у\ принадлежит векторному многообразию, соответствующему той
') То есть если не наступают исключительные случаи, о которых будет
сказано ниже в этом же замечании.
§ 4] АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ 519
плоскости, в которой лежит точка {хп, у0, z0), то уравнение A0) есть
следствие уравнения (9). В противном сл>чае уравнения (9) и A0)
Если поверхность нераспадающаяся п (в случае, когда она ко-
конус) точка Мо не есть вершина конуса, то все обстоит благо-
благополучно, в чем читатель легко может убедиться, перейдя к канони-
каноническим уравнениям соответствующих поверхностей. Подробнее об
этом будет сказано в § 5 главы ХХШ. Полное исследование случая
иевырождающейся поверхности дается следующим предложением.
Теорема 4. Касательная плоскость к невырожоающеися по-
поверхности второго порядка в данной ее точке Мо пересекается с этой
поверхностью по паре различных прямых. Эти прямые и являются
единственными двумя образующими поверхности, проходящими через
точку Мо.
Доказательство. Возьмем систему координат, началом кото-
которой является данная точка М„, а плоскостью О'х'у' — касательная
плоскость к нашей поверхности в точке Мо. Так как начало коор-
координат /И0^О' лежит на поверхности, то ее уравнение в выбранной
системе координат будет иметь вид
F' (*', у', г') = а'пх'г -(- 2av,x'y' + a\.ly'i -\- 2а[3х'г' +
-;- 2a'i3y'z' -;- a33z'' + 2а\х' + 2а'гу' + 2a'3z' = 0
(свободный член равен нулю). Уравнение касательной плоскости
в точке /И = @, 0, 0) имеет вид
F\{0, 0, 0)х'-ГГ,@, 0, 0)у'+Г3@, 0, 0)г'=0.
Но эта плоскость есть плоскость z' = 0. Значит,
F\@, 0, 0) = 0, Г,@, 0, 0)=0. A1)
Так как F\@, 0, 0) = с,', F't@, 0, 0) = а'г, то равенства A1) озна-
означают, что а\ = а'г=0, так что уравнение поверхности имеет вид
F' (*', У', z')=z а'^х'' -\-2а\2х'у' -г а^у'* ~2a[3x'z' +2а'2.,у'г' ~\-
'га'33г'*-^-2а3г'=0. (Г)
Решая его совместно с уравнением z' = 0, получаем для кривой
пересечения нашей поверхности с (касательной) плоскостью 2г' = 0
уравнение
а'их'2 ¦\-2а\гх'у' -т а\гу'г = 0. A2)
Это — уравнение распадающейся кривой второго порядка. Если бы
эга кривая была нарой совпадающих прямых, то было бы
2
a'
= 0.
22
') Случай, когда поверхность A) есть пара параллельных или слившихся
поверхностей, рекомендуем разобрать читателю самостоятельно.
520 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
Но тогда
[гл. xtx
Л' =
1 „'
•• 11
«21
0
о
а'з*.
0
п\~
«23
°33
а'3
0
0
0
= — «з
«21 а2г
= 0
и поверхность A), вопреки предположению, была бы вырождаю-
вырождающейся. Теорема 4 доказана. Ил нее вытекает такое
Следствие. Касательная плоскость к невырождающейся по-
поверхности второго порядка в произвольной ее точке Мо пересекает
эту поверхность по паре различных прямых, действительных или
мнимых сопряженных, а именно по паре проходящих через точку Мо
прямолинейных образующих данной поверхности. Эти прямые имеют
асимптотические для данной поверхности направления. Они действи-
действительны, если поверхность есть однополостный гиперболоид или гипер-
гиперболический параболоид; они являются мнимыми для двуполостного
гиперболоида и эллиптического параболоида, а также и для эллипсо-
эллипсоидов.
Замечание 2. Аналитическим критерием для того, будут ли
прямолинейные образующие, проходящие через иеособую точку
вещественной нераспадающейся поверхности, действительными различ-
различными, мнимыми сопряженными или, наконец, действительными совпа-
совпадающими, может служить знак детерминанта Д: при Л > 0 обра-
образующие действительны, при Д<0 они мнимые, при Д —0 они сов-
совпадают.
В самом деле, из инвариантности знака детерминанта Д много-
многочлена второй степени с тремя переменными относительно перехода от
одной аффинной системы координат к другой (§1) вытекает, что
если Д^О, то соответственно Д' = 0. Поэтому, если Д > 0, то и
ап а12
а21 а'г%
0, и, следовательно,
av,
«22
Линия пересечения поверхности A') с касательной плоскостью
z' = 0, определяемая уравнением A2), есть пара прямых, проходя-
проходящих через вещественную точку O'^M0l и так как ,а
а2| а
то в этом случае линия A2) распадается на пару вещественных
прямых.
Точно так же покажем, что если Д, а следовательно и Д', —
число отрицательное, то уравнение A2) определяет пару мнимых
прямых.
§ 4] АСИМПТОТИЧЕСКИЕ НАПРАВЛЕНИЯ 521
Предположим, наконец, что А—О и, значит, Д' = 0; тогда из
равенства А' =— а'3-
как если бы
а
о„ о
вытекает, что | , , |= 0, так
22 I I 1 2 |
=7^=0, а'3 = О, то уравнение A') определяло
о21
бы коническую поверхность с вершимой в начале координат О',
т.е. в точке MQl а мы предположили, что точка Мо — неособая, следова-
аи ап
= 0, и уравнение A2) определяет пару слившихся
тельно,
а2
прямых.
Существенно отметить, что вопрос о том, является ли пересече-
пересечение нераспадающейся поверхности второго порядка с касательной
плоскостью к ней в данной неособой точке парой действительных
(различных или совпадающих) или мнимых прямых, решается для
всех неособых точек поверхности одинаково; мы увидим, что реше-
решение этого вопроса вполне определяется аффиннымх) классом данной
поверхности.
Геометрическая характеристика асимптотичес-
асимптотических и неасимптотических направлений для данной
поверхности второго порядка. Совершенно так же, как
в случае кривых, мы доказываем следующее предложение, аналогич-
аналогичное теореме 6 главы XVII (§ 5).
Теорема 5. Пусть
F(x,y,z)=0 A)
— поверхность второго порядка, не все точки которой лежат в од-
одной плоскости2). Пели {а: 0: у}—направление, неасимптотическое
для данной поверхности, то существует прямая этого направления,
содержащая ровно две различные точки поверхности A). Напротив,
всякая прямая, имеющая асимптотическое для данной поверхности A)
направление {а: 0: у }, или целиком состоит из точек, лежащих на
поверхности A), или же содержит не более одной точки, лежащей
на поверхности A).
Надо доказать лишь утверждение, касающееся неасимптотнчес-
кого направления {а: 0: у). Через каждую точку (х0, у0, z0), ле-
лежащую на поверхности A), проводим прямую
B)
1) И даже проективным.
2) Это оговорка не бессодержательна: поверхность второго порядка,
являющаяся парой совпадающих между собою плоскостей, вся целиком ле-
лежит в одной плоскости (с которой и совпадает). Этот случай мы и исключаем
в формулировке теоремы 5.
522 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XIX
направления {а: {$: у). Требуется доказать, что не все эти прямые
являются касательными к поверхности A). Предположим противное:
пусть К5>;сдал примг.1.: B) к')с^етг« поверхности (П в соответствую-
соответствующей точке { х0, у0, z0 }. Тогда имеет место равенство
B^FL(xQ, у0, zo)a + F2(xo, у0, z0) Р -\-F3 (х0, у0, го)ув=
s- (aua -г a,2P + ai3\) xo -i- (a2ia "Г а2йР + a2sY) У о +
+ (а31а — fl32P -f a33y) z0 +(а^ + a2f> + а3у) = 0.
Среди коэффициентов alla-\-al2^-]-а13у, а21а ~ а„г$-'г а2зУ.
a31a-р а3„Р-г а33у при x0, yu, z0 по крайней мере один отличен от
нуля; в цротивном случае мы бы имели одновременно
Умножая эти равенства соответственно на a, f>, у и складывая, мы
бы получили
ana2 -i- 2ai2uP -г a^fj2 -f 2ai3aY + 2a23[iv + a33y2 = 0,
т. е. направление { a: P: у } бь;;;о бы, вопреки нашим предположе-
предположениям, асимптотическим.
Итак, равенство
(япи -Ь fli,P -г- «ib?) x0 -!- (a21a + c22p -I- g2sY) i'o +
-г («3ia -г «згР i- сзаУ) ~о "Г («1« — «2Р + «зУ) = ° A3)
представляет собою уравнение первой степени относительно л:0, у0, z0,
которому удовлетворяют все точки ха, у0, z0, лежащие на поверх-
поверхности A). Все эти точки лежат, таким образом, на плоскости, опре-
определяемой уравнением A3), — вопреки предположению. Теорема до-
доказана.
§ 5. Центр поверхности второго порядка
Пусть снова даны: произвольная аффинная система координат
Gxyz, поверхность второго порядка с уравнением
F(x, у, г)-0 A)
и прямая
пеасимптотпческого направления.
§ 5] ПЕНТР ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА 523
Точки пересечения прямой B) с поверхностью A) суть точки
М1 = (дг1, (/1( zt) и М2 = (х2, (/,, z2), где
«- — v -!-"»/ „ — ,, .:. R/ „ „ J_ лч1
"-U . -11 ;/1 >и , t" H -1 -O.I L>
a ix и /2 СУТЬ корни квадратного уравнения
Л<2-1-2ВН-С = 0, C)
в котором коэффициенты A, /i, С суть
Л = Ф{а, р, у},
B = F1(x0, у0, zo)a+F2(xQ, у0, z0) $ + F3 (xQ, y0, zo)y, , D)
C = F(xu, y0, zQ),
и, как всегда,
о. zo) = o3lx0 -|- a32 (/0 + a332r0 + a3.
Точка Л10 —(jc0, y0, z0) является серединой отрезка М1М2 тогда и
только тогда, когда 1) одновременно
'i±?
p'.i±?»=o,
±
т. е. (так как среди чисел a, P, у по крайней мере одно отлично
от нуля) когда f1-{-t2 = 0.
2В
Но tt +12 = —¦ -j-, следовательно:
и только тогда точка M0 = (xQ, y0, z0) есть середина от-
отрезка М1М2, когда В = 0, т. е. когда
F1(xQ, у0, zo)a~F2(xo, у0, zo)$ + F3(xo, у0, zo)y = O. (Б)
Теперь возникает вопрос: нет ли такой точки А10 = (х0, у0, z0),
которая являлась бы серединой всякой хорды, через нее проходя-
проходящей? Заметим, что такой точкой Мо является всякий центр симмет-
симметрии нашей поверхности (если он существует).
Итак, мы ищем те точки М0 = (х0, у^г0), для которых условие F)
выполняется при любом выборе неасимптотического направления
a:p:Y.
Докажем, что для искомых точек Мо = (х0, у0, z0) должны од-
одновременно удовлетворяться равенства
Fi{xQ, уо, zo)~O, Рл(х0, yQ,z0) = 0, F3(x0, y0, го)=О. G)
М Ср. гл. XVII, § 6.
524 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТКЙ ВТОРОГО ПОРЯДКА [ГЛ. XIX
Лемма. Для всякой поверхности второго порядка A) можно
найти три неасимптотических направления, не компланарных между
IOUOHJ.
В самом деле, рассмотрим множество всех точек М = (х, у, z),
удовлетворяющих уравнению
<р (х, у, z) =~ аХ1х* -1- 2аиху + а22у2-f 2a13xz -f- 2a23yz4- а33г^ = 0. (8)
Точки М = (х, у, г), удовлетворяющие этому уравнению, и только
они обладают тем свойством, что вектор ОМ — {х, у, z) имеет асим-
асимптотическое направление.
В плоскости z — 1 уравнение (8) определяет кривую второго
порядка
altx"--\-2a12xy + а22у2 -j-2a13x + 2ai3y -j- ass -^0 (9)
(быть может, если «n —я12 —я22 = 0, вырождающуюся в прямую).
Возьмем на плоскости z— 1 три неколлинеарпые точки
M1~(ai, (?!, Yi). Mt-— (Яо, Р2, Ye), ^я — (аз. Рз> Уз). не лежащие ма
кривой (9). Тогда ОМХ — { а2, р,, ух }, ОУИ2— { а2, Р2, Y2 }»
ОМ3 = {а3, р3. Уз} ДаДУт нам три некомнланарных неасимптотиче-
неасимптотических направления. Лемма доказана.
Итак, пусть {а,, Рх, Yi}, { «2, Рг. Тг}. { аз. Рз. 7з } — ТРИ не"
компланарных направления, не асимптотических но отношению к
поверхности A). Для каждого из них должно, по предположению,
выполниться равенс1во F), т. е. должно быть одновременно
/-• (у tt 7 \ Ct ! г*" I V* IJ У \ ft ' - г*" { V II 7 I Л' О 1
1 \Л0> . •'О/ul i '2\Л0' > *0' rl '3X^0. i'O. А0' II "> I
/¦'i(^o. Уо. ^о)^ i-JM*o» Уо. zo)P2 !-^3(^o. Уо. ¦го)Т2 = 0. }¦ A0)
Р {v II 7 \ ft ' /-* I \' и -у \ ft ' f7 {v и ?"\л) — О I
7 ] \-*О, »0> *О> Ц3 Г* 2 \ЛО- Уо> Z0> Рз'Г '3 lx0; i'O. 40) ГЗ — u- J
Но векторы {aj, Pj, Yi}, {c-2, P^, Y-2 У. { аз. Рз. Тз У не компланарны,
т. е. в матрице
строки, а значит, и столбцы линейно независимы, а это значит, что
в равенствах A0) коэффициенты F1(x0, у0, z0), F2(x0, у0, г0),
F3(x0, (/,„ z0) должны равняться нулю. Утверждение доказано: вся-
всякий центр симметрии MQ=-(x0, yQ, z0) поверхности A) удовлетворяет
равенствам
Л(*о. У о, zo)=^O,
F2 (*o. Уо. zo) = °.
^з(*о. г/о, ^о) = °
§ 5] ЦЕНТР ПОВЕРХНОСТИ ВТОРОГО ПОРЯДКА. 625
или, в развернутом виде,
«11*0 ! «12^0 + а13-г0+а1 = 0.
22У0"Г3''0- — *Л f
з2Уо + азз^о + а3 = О. J
Докажем теперь обратное предложение:
Всякая точка MQ — (xQ, yQ, zQ), координаты которой удовлетворяют
уравнениям A1), есть центр симметрии поверхности A).
Для доказательства вспомним (гл. XV, § 2), что при замене пе-
переменных
соответствующей перенесению начала координат в точку
М0 = (х0, j0, z0), многочлен F{x, у, г) переходит в многочлен
F'(x', y\ z') = <p(x', у', г') + 2о[х'-1-2а,у' + 2а',г' + а„ в ко-
котором коэффициенты а'^, а'2, а'3, а'о суть
а\ = апх0+ апу0-\- а13г0^ аг, а'г = а,пхй-\-аг2уй-{- a^zQ^- аг,
а'3 =anx0-\a32y0~-a33zQ \-a3, a'0 = F(xQ, yQ, zQ).
Итак, если, сохраняя единичные векторы системы координат Oxyz,
мы перенесем ее начало в точку М0 — (х0, у0, z0) = 0', удовлетво-
удовлетворяющую уравнениям A1), то в полученной таким образом новой
системе координат O'x'y'z уравнение поверхности A) будет
F'(x', у', г')^апх'г-г-2а12х'у' -\-a2Oya + 2alsx'z' -\-
M-a3/ + fl'o = O, (Г)
где a'0—F(xa, y(), z0). Из этого уравнения ясно, что новое начало
координат О', т. е. точка Мо, есть центр симметрии поверхности
(Г). Утверждение доказано.
Заметим, что уравнения A1) решаются однозначно тогда и
только тогда, когда
б==
1 2 3
а.п я22 а23
а
31
0,
т. е. дискриминант квадратичной формы ф (х, у, z) отличен от нуля.
Поверхности, удовлетворяющие этому условию, принято называть
центральными: это те поверхности второго порядка, которые имеют
центр симметрии, и притом только один.
Пусть поверхность A) является центральной, т. е. пусть ЬфО
(или, что то же, г = 3), а значит, поверхность A) имеет единствен-
единственный центр О' = (л-0, (/0, z0). Положим a'0=F(xQ, y0, г0) и перенесем
начало координат в точку О' = (х0, у0, z0). В полученной таким
526
0В1ЦЛЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
[гл. xix
образом новой системе координат O'x'y'z' (единичные векторы
которой суть те же, что и в первоначальной системе Oxyz) урав-
::с::::с (\) наше!* ппррпунпгти принимает вид
Г (х', у', z') — allX'2 + 2altx'y' + a2iy'2 + 2a13x'z' -f
'г' + а,3гА + а'о = 0. (Г)
Заметим, что большой детерминант Д' = Д многочлена F' (х'} у', z')
есть
А==
«11 «12 Й13 0
21
«
31 2 3
т. е.
0 0 0
А
, у0, ZQ).
A2)
Итак, в любой системе аффинных координат, начало которой есть
единственный центр центральной поверхности A), уравнение этой
поверхности имеет вид
Г(х', у', z')==if{xf, у', г')-г| = О,
где
Ф (*', у', z') - апх'2-\-2апх'у' + a2iy'2 -j-2a13x'z' + 2aiStj'z' + a33z'2.
Если Д=/=0, то и а'о -- — = F (ж0, у0, га)ф0. Разделив с самого
начала обе части уравнения A) на —F(x0, y0, z0), .можем предпо-
предположить, что а'о ¦¦=—1, т. е. что уравнение (V) имеет вид
(f(xf, у', z')=sanx'2 + 2al2x'y'-ra22y'2jr2a13x'z' +
-r2a2Sy'z' + assz'2 = l.
Если же Д=0, то уравнение (Г) имеет вид
(f(x', у', z')~anx'2 + 2а^х'у' ^- а«.,у'2 + 2alsx'z' +
'12 3
В нецентральном случае, т. е. в случае 6 = 0, ранг г матрицы
'ах, о,, а,
= 1 а„
fl
32
квадратичной формы не превосходит 2. В этом случае уравнения A1)
либо несовместны,и тогда поверхность не имеет ни одного центра,
либо система этих уравнений совместна, и тогда точки, являющие-
§ 5] HF.tiTP поверхности второго порядка 527
ся решениями, заполняют целую прямую (при г = 2) или целую
плоскость (при г=\).
Выясним, наконец, когда центр (или один из центров)
Мо = {х0, г/0, г0) поверхности A)лржит на самой этой поверхности.
Для этого нужно, чтобы кроме равенств A1) имело место еще и
равенство F(x0, у0, z0) =¦-- 0. Как было установлено в § 3, замечн-
ние на стр. 513, последнее равенство при выполнении равенств A1)
эквивалентно равенству о^лгд-[-а2г/0-f-a3zo "+¦ ао = 0. Другими словами,
необходимое и достаточное условие для того, чтобы точка
M0 = (xQ, yn, z0) была лежащим на поверхности A) центром это;!
поверхности, заключается в том, чтобы координаты точки удовлет-
удовлетворяли системе четырех уравнений:
31 О **Т~ 3%УО I"" ./\ 0 —Г"" 3 — у
ai*o +а2Уо + «s*o + «о = °-
Как мы уже напоминали в § 3, система этих уравнений сов-
совместна, лишь когда равен нулю детерминант
\ /У /1 П ff
] "ll 2 3
_ j a.n a2i a23 а2
I ^31 ^32 Я33 ^3
{fli a2 а3 а0
т. е. когда поверхность A) является вырожденной. Точка
Мо = (х0, у0, z0), удовлетворяя уравнениям A3), есть особая точка
поверхности (см. конец § 3). Итак, лежащий на (вырожденной)
поверхности центр ее является особой точкой поверхности *).
Мы увидим в следующей главе, что особые точки имеются
лишь у следующих поверхностей второго порядка:
1) Конус: единственная особая точка, являющаяся вместе с тем
единственным центром конуса, есть его вершина.
2) Пара пересекающихся плоскостей: прямая пересечения этих
плоскостей есть вместе с тем прямая центров распавшейся поверх-
поверхности, совпадающая с множеством ее особых точек.
3) Поверхность, являющаяся парой совпадающих плоскостей,
вся состоит из особых точек: каждая из них есть центр поверхности.
') Мы видели в § 4, что касательная плоскость а особой точке поверх-
поверхности перестает быть определенном.
ГЛАВА XX
ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА. II
(ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ; ОСОБЫЕ И ГЛАВНЫЕ
НАПРАВЛЕНИЯ; АФФИННАЯ КЛАССИФИКАЦИЯ)
§ 1. Диаметральные плоскости. Особые направления
1. Плоскость, сопряженная данному неасимптотическому
направлению. Пусть (в какой-нибудь аффинной системе координат)
дана поверхность второго порядка
F(x, у, 2)=cp(jr, у, z)-\-2l{x, у, z) + ao = O, A)
где, как всегда,
ф(дг, у, 2)~апх2-\-2а12ху-\-а2<,у2-\-2а13хг + 2агяуг-\-а33г2,
Цх, у, z)==a1x + a2y + aaz.
Рассмотрим совокупность всех прямых d, имеющих одно и то же
неасимптотическое для данной поверхности направление -{а:Р:у}.
Каждая такая прямая d пересекает поверхность A) в двух точ-
точках Mf, Mi (вещественных, быть может, совпадающих или мнимых
сопряженных); отрезок MfMf называется хордой, высекаемой из
данной прямой d поверхностью A).
Уравнение прямой d записывается в виде
х = х0 + at,
У=У„+№, \ B)
J
где Мо—какая-нибудь произвольно зафиксированная точка этой
прямой.
В § 5 главы XIX было установлено, что точка Ж0=(л:0, у0, ze)
прямой d тогда и только тогда является серединой хорды, высечен-
высеченной из этой прямой поверхностью A), когда выполнено условие
F\(xu, у0, zo)a + F2(xe, i/0) zb)$+Fb{x0, yQ, z9)y = 0, C)
§ 1] ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ 529
где, как всегда, положено
fi(x0, Уо> zo)==aiiXo + апУо + aiszn + аъ I
'^2 (-И. Уо> ^о) — 1^0 "Г 2i/0 "Г" a23Z0~f a2, > D)
^( J
^ «31*0 +
0~f a2, >
0 + аЗ- J
Перепишем уравнение C), внося в него значения Fb F2, F3 из D)
и отбрасывая индекс нуль у координат. Получим
(аих + а12у + aizz + аг) а + (а2
или, раскрывая скобки и по-новому группируя члены,
(antt + a2iP + a3iY) •« + (ai2a + a22P -f a32Y) У +
+ (al3a + a23p -f а33у) 2 -j- (ata -f a2p + a3Y) = 0. C*)
Уравнению (З"), которое есть уравнение некоторой плоскости яарг,
удовлетворяют все те и только те точки, которые являются сере-
серединами хорд, высекаемых поверхностью A) из всевозможных прямых
направления {а:{$:у\. Другими словами: плоскость C") есть геомет-
геометрическое место середин хорд поверхности A), имеющих направление
\а:^>:у); эта плоскость называется плоскостью, сопряженной на-
направлению {а-.р:у} относительно поверхности A).
Замечание 1. Плоскость я^, сопряженная данному направ-
направлению, определена геометрически как геометрическое место середин
хорд направления {а:$:у\; поэтому она не зависит от выбора той
или иной системы координат.
2. Плоскость, сопряженная асимптотическому направлению;
общее определение диаметральной плоскости. В определении пло-
плоскости, сопряженной данному направлению, предполагалось, что это
направление неасимитотическое. Это предположение обосновано,
так как из прямой асимптотического направления поверхность не
высекает никакой хорды.
Однако уравнение C") может иметь смысл и для асимптотиче-
асимптотического направления {а:Р:у{-; определенную этим уравнением пло-
плоскость мы будем и в случае асимптотического направления
{а:р:у|- называть плоскостью, сопряженной направлению {а:$:у\.
Наконец, назовем какую-нибудь плоскость диаметральной пло-
плоскостью поверхности A), если существует (хотя бы одно) направле-
направление, неасимптотическое или асимптотическое, для которого эта
плоскость является сопряженной относительно поверхности A).
Уравнение диаметральной плоскости, сопряженной направлению
{а:Р;у}> всегда будем писать в виде
0, E)
530 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
где '
т = « 21U -f- =Р "Г " 23 У. I „
Замечание 2. Диаметральную плоскость, сопряженную на-
направлению {а:р:у}-, будем называть, когда это покажется удобным,
и плоскостью, сопряженной любому вектору этого направления.
3. Простейшие свойства диаметральных плоскостей. Пусть
(х0, у0, z0) — точка, являющаяся центром поверхности A) (может
быть, не единственным). Тогда
^i(*o. У о* ¦Zo)=/7*(-*:o. У^ ^0)^Fs(x0, yQ, го) = О,
и уравнение C') (или, что то же, уравнение C")) удовлетворено
при любых а, р, у.
Другими словами:
I. Всякая диаметральная плоскость содержит все центры данной
поверхности.
Мы увидим (в § 2, ип. 1 и 2), что если поверхность A) имеет
хотя бы один центр, то верно и обратное предложение:
Всякая плоскость, содержащая все центры данной поверхности,
является ее диаметральной плоскостью.
II. ToiKa Мо, принадлежащая всем диаметральным плоскостям
[или хотя бы всем тем из них, которые сопряжены неасимптотиче-
неасимптотическим направлениям), является центром поверхности.
В самом деле, точка Л10 = (х0, yQ, z0) есть середина проходящей
через нее хорды любого неасимптотнческого направления, а это
означает (гл. XIX, § 5), что удовлетворены уравнения центра
/^ (.г0, у0, z0) = /% (xQ, i/0, zo) = F3(xo, у0, 20) = 0.
III. Если для данного асимптотического направления {а:|3:у}
существует сопряженная ему плоскость, то она параллельна направ-
направлению {а:р.-у}-. Обратно, если направление {а:C:у} параллельно
сопряженной ему плоскости, то это направление является асимпто-
асимптотическим.
В самом деле, непосредственным подсчетом проверяется, что
?а + Дф + Л/у^Ф(а, р, у). G)
Условием параллельности вектора {а, р, у} и диаметральной пло-
плоскости
является равенство
La -f- Лф -f Ny = 0,
§ 1] ДИАМКТРАЛЬНЫЕ ПЛОСКОСТИ 531
т. е. ср (а; Р; Y)=O'> это равенство означает, что вектор {ог.р:у}
имеет асимптотическое направление.
IV. Пусть вектор u = {u, р, у\ есть линейная комбинация век-,
торов U1 = {a1) Р1э ух\ и u2 = {a2) р2, у,}, т. е.
а = Xiai + Ка2,
Если векторам а1 и и2 сопряжены диаметральные плоскости л± и п2,
то плоскость Х,л14-А2Л2 является диаметральной плоскостью, со-
сопряженной вектору и.
Возьмем уравнения плоскостей, сопряженных соответственно
направлениям {a: P: у), {а^. pt: уг}, {а2: Р„: у2\. Коэффициенты
этих уравнений обозначим соответственно через
L, Л1, N, Р,
Llt Мъ Nx, Р„
L2, Мъ Л'2, Рг,
причем из самого определения F) этих коэффициентов следует, что
L = Аду, j -р Л.1^2,
Геометрическое содер>кание полученного важного результата
таково:
IV. Пусть векторам av u2 сопряжены сооюетсюенно плоско-
плоскости nlt л„. Тогда всякому вектору и, компланарному обоим векто-
векторам ut и и,,, сопряжена плоскость л, принадлежащая пучку пло-
плоскостей, определенному плоскостями nx и л.2.
Значит, если плоскости лх и л„ пересекаются, то плоскость я
проходит через прямую их пересечения, а если они параллельны,
то и плоскость л им параллельна.
4. Особые направления. Посмотрим, не может ли случиться,
что для данного направления не существует сопряженной ему пло-
плоскости. Очевидно, ьто произойдет тогда и только тогда, когда
в уравнении E) все три коэффициента L, /Л, N при переменных
х, у, z обращаются в нуль. Тогда система однородных уравнений
(8)
1 =0 I
определяет направление {«:P:y}.
532 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
Определение. Направление {а: C: у} называется особым,
если оно удовлетворяет системе уравнений (8).
В lAaai XIX, § 1, l".i К2222ЛЕ! ««? чым ПЯНГГШ ГГОверхИОСТИ A)
ранг квадратичной формы <р(лг, у, z), т. е. ранг г матрицы
а12 а
«
22
Из определения особого направления непосредственно следует пред-
предложение: поверхность малого ранга г имеет 3 — г и не более линейно
независимых особых направлений.
В частности, центральные поверхности (для них 8^0 и, значит,
г —3) вовсе не имеют особых направлений.
Умножая пераое из уравнений (8) на а, второе на р, третье
на у и складывая, получаем
La + Aty+Ny=<f(a, р, у)=0;
всякое особое направление является асимптотическим. Итак, только
в нецентральном случае1) и только асимптотическое направление
может оказаться особым; для всех неособых направлений сопряжен-
сопряженная плоскость существует и определена однозначно.
Посмотрим, какие имеются особые направления поверхностей
различных типов. Параболоиды и центральные цилиндры (включай
поверхности, распадающиеся в пару пересекающихся плоскостей)
суть поверхности, для которых /- = 2; у них имеется единственное
особое направление. Если эти поверхности даны своими канониче-
каноническими уравнениями:
2z = — ± — (параболоиды),
-j±?j-=±1 (центральные цилиндры),
— ±:— = 0 (пары пересекающихся плоскостей),
то их единственным особым направлением является направление
{0:0:1}, т. е. направление оси Oz. В этом сразу убеждаемся, напи-
написав для наших канонических уравнений уравнения (8), определяю-
определяющие особые направления; это будут
— о = 0, — Р = 0, 0 = 0.
Р Я
В случае центральных цилиндров (и пары пересекающихся плоско-
плоскостей) полученное направление есть направление прямой центров
рассматриваемой поверхности.
') То есть когда центров много или совсем нет.
§ 1] ДИЛМ! ТРАЛЬНЫЕ ПЛОСКОСТИ 53С
Для эллиптического параболоида особое направление являете»
и единственным вещественным асимптотическим направлением; то ж<
справедливо и для эллиптического цилиндра Но во всех четыре>
случаях (эллиптических и гиперболических параболоидов и нилинд
ров) единственное особое направление есть направление (вещест
венной) примой пересечения тех двух плоскостей (вещественны)
или мнимых), на которые распался конус асимптотических маправ
ленпй поверхности, а именно плоскостей:
-т=Н—7= = 0 —;= г4= = 0 для гиперболического параболоида
Vp V я V р V я
Х I 'У П Х 'У Г\
, И—?= ~0, ,._ г4= = 0 дтя эллиптического параболоида
Vp Y Я V Р V Я V
—j-y = O, у = 0для гиперболического цилиндра
Л I i^.__0 Л ^ = 0 дЛЯ эллиптического цилиндра (ве
а Ь ' а Ь щественного и мнимого).
Для поверхностей, у которых г=\, имеется два независимы)
особых направления; значит, особыми являются все направления
параллельные некоторой плоскости. Так обстоит дело у параболи
ческого цилиндра
у1 = 2рх
и у пары параллельных плоскостей
У* = с.
И в том и другом случае уравнения (8) превращаются в
0-^=0, 1-Р = 0, 0=0;
им удовлетворяют все векторы {а, Р, у}, у которых C = 0, а аи1)
какие угодно, т. е. все векторы, параллельные плоскости у — 0
Так как конус асимптотических направлений параболическогс
цилиндра вырождается в пару слившихся плоскостей у2 = 0, то ва
асимптотические направления параболического цилиндра являютег
особыми.
Легко доказывается следующее предложение.
V. Для того чтобы направление {\:\l:v\ было особым, необхо
димо и достаточно, чтобы оно было параллельно всякой диаметраль
ной плоскости.
В самом деле, пусть дана диаметральная плоскость
0, E
534 ОБЩАЯ TFOPnn ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
сопряженная направлению {a:|i:y}-, так что
Условие параллельности направления {X:fi:v} плоскости E) есть
U-f-Affi-|-Afv = O. (9)
Подставляя в это равенство значения L, М, N из F), раскры-
раскрывая скобки и по-новому группируя члени, переписываем равенство
(9) в виде
(апХ -|~ а21и + c31v) a -;- (а18Я -f Д2# -f as.2v) Р -|-
Если направление {X:fx:v} особое, то выражения в скобках, являю-
являющиеся коэффициентами при и, C, у в равенстве A0), равны нулю,
и условие параллельности направления {X:fi:v} плоскости, сопря-
сопряженной любому направлению ^<х:|5:у}, выполнено. Первое утверж-
утверждение теоремы V доказано.
Докажем второе утверждение. Итак, известно, что для данного
направления -[Л.:jx:vJ- и любого (неособого) направления -{ot:Р:у}-
выполиемо условие A0); требуется доказать, что направление
{к: (л: v}- особое.
Берем три некомнланарных пеасимптотических направления
{ai:Pi:Yi}' {а2:Р2:ТгК {аз:Рз:7з}—такие существуют для всякой
поверхности второго порядка в силу леммы § 5 главы XIX — и пи-
пишем для них уравнения A0):
+ (а 13к + агзц -j- a33v) уг = 0,
(пцХ + Ял}* -f- a3iV) Ct2 -';- {atoh -f- 0-22^ ~\~ fl32V) P2 T"
-j- (fl13X -j- <z23[.i -(- a33v) у2 = 0,
(fljjA -•- UoiH" ~i~ ^31^) Okj -(- (й12Я. ~ U2l\b -T" ^32V) Рз "f"
Так как векторы \av Рх, уЛ, {а2, Р2, Т2}, {«з- Рз. Уз} не компла-
компланарны, то строк!!, а значит, и столбцы матрицы
a2 Ра V2
аз Рз Vs
§ 1] ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ 535
линейно независимы. Значит,
a21iu
Ч- «32v = О,
- + a33V = 0,
т. е. направление {к, ц, v\ особое. Предложение V доказано.
Докажем в заключение этого параграфа следующее предложение.
VI. Плоскости Лг и я2, сопряженные относительно данной по-
поверхности- A) двум различным направлениям {c^ip^Yi} и {а2:р2:ТгЬ
тогда и только тогда параллельны между собою, когда плоскость я,
несущая оба направления {а^р^у^ и {о.г:^2'Ул}> параллельна
(некоторому) особому направлению поверхности A).
Доказательство. Обозначим коэффициенты при л", у, z
в уравнении плоскостей, сопряженных направлениям {ах: Рх:Yj ^,
соответственно {а2:Р2:у2}> через Lu Л1и Л',, соответственно 12,
Л12, Л/2; запишем условие параллельности этих плоскостей в виде
пропорции
или
X1N1 -i- X2N2 = 0.
Подставляя сюда значения
L\ '-= an"i -r «12^1 + aisVi. Li = «и"г "г «1202 + «13V2.
Nt = a3la1 — «^Pi -f agsYi, .V, = «3la2 -f a32P2 + a33y2,
получаем irocie раскрытия скобок и перегруппировки членов
равенства:
^11 (^1«1 И" ^2U2> + al2 (^lPl Т- K$t) + fl13 (?-lYl "Г "'-гУ-z) - 0.
й21 (l1al — X2a2) -;- я22 (kl$l + X262) та,8 (А^^ -4- л2у2) = 0,
«si (^iai + ^s«i) + a32 (^iPi -;- K$z) -r «33 (^iYi"I" hV-i) = °.
по-прежнему выражающие необходимое и достаточное условие па-
параллельности (в широком смысле слова) плоскостей ях и п„.
Но эти же равенства выражают условие, необходимое и доста-
достаточное для того, чтобы направление
очевидно, лежащее в плоскости л, было особым, т. е. чтобы пло-
плоскость я была параллельна некоторому особому направлению. Пред-
Предложение VI доказано.
536 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
§ 2. Диаметральные плоскости поверхностей различных видов
I. Цектралытьге яеггрхнест" (поврпуипгти с единственным
центром). Докажем, что:
Всякая плоскость, проходящая через {единственный) центр поверх-
поверхности второго порядка
F(x, у, г)=0, A)
является диаметральной плоскостью, сопряженной некоторому одно-
однозначно определенному направлению \а:$:у).
Доказательство. Предположим, что начало координат на-
находится в центре поверхности. Тогда уравнение поверхности запи-
записывается в виде
ц>{х, у, z) + ao = O,
а уравнение данной плоскости, проходящей через центр,—в виде
Для определения направления { a:jJ:y}, для которого эта плоскость
является сопряженной, надо решить систему уравнений
а-па + а3$ + азйу = С,
что и делается однозначно ввиду того, что детерминант этой систе-
системы есть дфО.
2. Поверхности с прямой центров и с плоскостью центров.
Поверхности с прямой центров суть «центральные цилиндры», т. е.
цилиндры над некоторой центральной (быть может, распадающейся)
кривой второго порядка. В надлежаще выбранной аффинной систе-
системе координат уравнение такой поверхности имеет вид
х*±уг-\-а0--=0. B)
Единственным особым направлением поверхности B) является (как
показывает непосредственная проверка) направление вектора { 0, 0, 1 },
т. е. направление оси z выбранной координатной системы.
В этой же координатной системе уравнение диаметральной пло-
плоскости, сопряженной направлению {а:^:у^, есть
ал- + $у = 0.
Итак, всякая плоскость, проходящая через прямую центров, и
только такая плоскость является диаметральной плоскостью нашей
поверхности, а направление прямой центров есть (единственное)
особое направление.
§ 2] ДИАМЕТРАЛЬНЫЕ ПЛОСКОСТИ ПОВЕРХНОСТИ 537
Мы знаем (предложение VI § 1), что всяким двум направлениям,
лежащим в некоторой плоскости, параллельной особому направле-
направлению Поверхности ВТОПОГП попяль-я гпппиж-рны лиамртпяльиир пап.
скости, параллельные между собою. В данном случае для поверх-
поверхности B) эти плоскости совпадают: два направления, не коллине-
арные (единственному) особому направлению поверхности B), т. е.
направлению оси z, лежащие в плоскости, параллельной оси z,
задаются векторами вида
{«> Р- Yi} и {«. Р> Тг1.
где по крайней мере одно из чисел а, E отлично от 0. Обоим этим
направлениям сопряжена относительно поверхности B) диаметраль-
диаметральная плоскость алг±Р#— 0 (знаки при $у соответствуют знакам
при уг в уравнении B)). Конус асимптотических направлений по-
поверхности х2—У2 + а0--0 распался на «ару действительных плос-
плоскостей
*-1-0 = 0, (я,)
' ¦ х—у = 0. . . , (л2)
Каждому направлению, лежащему в одной из этих плоскостей и
коллинеарному оси z, например направлению { 1: 1: у], лежащему
в плоскости я2, сопряжена сама эта плоскость.
Если поверхность A) имеет плоскость центров, то эта плоскость
и является единственной диаметральной плоскостью поверхности A)
(так как всякая диаметральная плоскость должна содержать все
центры поверхности). Все направления, параллельные плоскости цент-
центров, являются особыми.
Поверхность, имеющая плоскость центров, распадается на пару
параллельных плоскостей; сама плоскость центров есть средняя плос-
плоскость между двумя плоскостями, составляющими данную поверх-
поверхность; направления, параллельные этим плоскостям, суть асимптоти-
асимптотические для нашей поверхности; все они особые.
Остается рассмотреть тривиальный случай двух слившихся пло-
плоскостей я. Здесь каждая точка плоскости я есть центр поверхности,
значит, имеется одна-едннственная диаметральная плоскость — сама
плоскость я. Она есть геометрическое место всех хорд поверхности,
каждая из которых вырождается в пару своих слившихся концов
(и определяется прямой, не параллельной плоскости я).
Все направления, параллельные плоскости я, являются особыми.
3. Поверхности без центров. Малый ранг такой поверхности
равен или двум (параболоиды), или единице (параболический цилиндр).
Мы уже видели, что единственным особым направлением парабо-
параболоида (гиперболического или эллиптического) является направление
прямой пересечения d тех двух плоскостей ях и п„
538 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
распался конус асимптотических направлений параболоида. В силу
предложения V всякая диаметральная плоскость параболоида парал-
параллельна :>1ий нуп.-пип d. До;:а,:гс", ':те ", обратно, »c«"»« плпгклгть
параллельная единственному особому направлению параболоида, яв-
является его диаметральной плоскостью.
Для этого воспользуемся уравнениями
x2 + y* = 2z C)
и
X* — lf^2z D)
соответственно эллиптического и гиперболического параболоидов в
надлежаще выбранной (аффинной) системе координат.
Диаметральная плоскость, сопряженная направлению {аф:у)}
будет в той же системе координат иметь уравнение
ах+$у— 7 = 0,
соответственно
ах — §у — у — 0.
Очевидно, всякая плоскость, параллельная оси г, может быть при
надлежаще подобранных и, р, у задана каждым из этих уравне-
уравнений, причем различным направлениям сопряжены различные диамет-
диаметральные плоскости.
Итак, диаметральными плоскостями параболоида являются все
плоскости, параллельные (единственному) особому направлению па-
параболоида, и только они.
Замечание 1. Из доказанного следует, что всякая плоскость,
параллельная диаметральной плоскости параболоида, сама является
диаметральной плоскостью этого параболоида.
Замечание 2. Пусть поверхность A) есть параболоид. Наря-
Наряду с нею будем рассматривать пару плоскостей пх н л2, на кото-
которые распался конус асимптотических направлений
ф(дг, у, 2)^0 (G)
параболоида A)- Обе поверхности A) и (о) имеют, очевидно, одни
и те же асимптотические и одно и то же (единственное) особое
направление. Легко проверить также, что плоскости, сопряженные
относительно поверхностей A) и E) одному и тому же направле-
направлению {a:f5:y}, параллельны (коэффициенты L, М, N в уравнениях
этих плоскостей будут одни и те же). Но мы видели, что для по-
поверхности E) плоскостью, сопряженной асимптотическому направ-
направлению, лежащему в данной плоскости я,-(/=1, 2), будет сама эта
плоскость я,-. Поэтому диаметральная плоскость параболоида A).
сопряженная (неособому) асимптотическому направлению {а:р:у},
параллельна той из двух плоскостей д1( я2, которая несет на себе
направление {а:^:^].
§ 3] сопряжьнныс направления 539
Переходим к параболическим цилиндрам. Конус асимптотических
направлений параболического цилиндра
у2 = 2рх F)
вырождается в пару совпадающих плоскостей
г/2 = 0
(«дважды взятая» плоскость у = 0).
Так как у параболического цилиндра имеется двумерное много-
многообразие особых направлений, то все асимптотические направления
параболического цилиндра являются особыми.
Докажем, что диаметральными плоскостями параболического
цилиндра F) являются все плоскости, параллельные плоскости
у = О, и только они.
Это непосредственно следует из того, что плоскость, сопряжен-
сопряженная направлению {а:Р:у} относительно поверхности F), имеет
уравнение $у—/>а = 0.
§ 3. Сопряженные направления
Пусть дана поверхность второго порядка, определенная в неко-
некоторой аффинной системе координат уравнением
F(x, у, z) = tf(x, У, z) + 2l(x, у, z) + ao = O, A)
Ф(А", у, z) = аих*--\-2аугху + «22(/2 + 2a13xz + 2a23 ijz-\-аз3г2,
, у, z)z^alx + aiy-lraaz.
Квадратичная форма ф(лт, у, z) определяет свою полярную билиней-
билинейную форму, а через нее — билинейную функцию ЧЧи,, Щ) от двух
векторов: если ир и2 — два произвольных вектора, заданных своими
координатами в выбранной нами системе координат Oxyz:
"iHai. Pi. Yib u'^ («г- fa> Vs}.
TO
Y(u,, u2)==:i|3(a1, P^ Yi; a2. Pz. У2)^апа1аг+а1,(а1
-f йго^Ра + «is («iTa-f a^Yi) + a23 (Pi7z + P2T1) v' «ззТЛ- С2)
Билинейная функция *F не зависит от выбора системы коорди-
координат: если мы возьмем другую систему координат Ox'y'z', то
векторы и1 и и. получат координаты a^, Pi, y'i> соответственно
а2. Рг, Y-2. а форма -ф (au Р„ Yi! «2. Р2. V2) перейдет в форму
¦Ф' ^ai. Pi. Yo a2. Рг> Тг). причем если векторы u1( u2 имели в ко-
координатных системах Oxyz и Ox'y'z' соответственно координаты
ai- Pi, Vv а\, Pi. Vi и a2. P2. T2; a2, P2, y't, то
^ K, Pl Yi'. a2. Р-г. Y-J = V (ai- Pi» Yi» a?> P?» Y^)»
540 ОБЩАЯ ТЕОРИЯ nOBEPXHUCIl-.li biuivjiu nui «ш„ ,
так что имеет место тождество
Ч'Си,. Uo) ==; г1) (а,, Ръ у}; а.,, Р2, Y2) —'I3' (ai. Pi. Yi! аг, P2,Y -г)- №')
В частности, если для каких-нибудь двух векторов иг, и2 имеем
xF(u1, u2) -= 0, то этот факт не зависит от того, как мы выбрали
координатную систему, в которой задавалось уравнение A) поверх-
поверхности.
Определение. Два вектора Uj, u2 называются сопряженными
относительно поверхности A) (или относительно квадратичной формы
Ф (х, у, z) старших членов уравнения этой поверхности в любой
системе координат), если для этих векторов
Если векторы Uj, u2 заданы в системе координат Oxyz своими коор-
координатами : ¦
Ui = {«i. Pi, Yi), и* = {аг, Р2> ТгЬ
то условие их сопряженности записывается так:
?A^, u^seiK^, Pa, Vi; аг, Р2. 72)-^aii«ia2 + «i2(
+ «22Р1Р2 + «13 («iY2 -г ra27i) + «23 (P1T2 + P2Y1) +
-r («3iai + a32Pi + a33Yi) Y2 s («n«2 + «иРг
Pi -r (a3ia2 + a32|52 + a33y2) yt = 0. C)
Из симметрии условий C) относительно векторов ult u2 следует,
что сопряженность двух векторов есть понятие взаимное, не- зави-
зависящее от порядка, в котором рассматриваются векторы.
Очевидно, далее, что вектор и2, сопряженный векторам щ и vlt
сопряжен и любой их линейной комбинации Лих -•- fAvx.
Отсюда, в частности, вытекает, что из сопряженности векторов
их и и2 следует и сопряженность любых векторов Я^ и Я2и2, т. е.
любых векторов, имеющих соответственно те же направления, что
и векторы и, и и2. Поэтому мы говорим, что два направления со-
сопряжены между собою, если вектор одного из этих направлений
сопряжен вектору другого.
Из равенства C), далее, очевидно, вытекает, что особое направ-
направление {ос1:Р1:у1} сопряжено всякому направлению {а:Р:у}. Верно и
обратное предложение: если направление {a^P^Yi} сопряжено вся-
всякому направлению {а:р:у}, то оно является особым. Это вытекает
из следующего предложения.
VII. Если {ах: (Зх: Yi} не особое направление, то сопряженными
ему являются те и только те направления {a:P:y}i которые лежат
в плоскости, сопряженной направлению ^ах: Px:Ti}-
ЬинГИЖЬННЫГ НАПГАВЛГМИН 541
В самом деле, уравнение плоскости, сопряженной направлению
{<*i:Pi:Yib есть
Lx ' Mv J Nz '- P — Q
где
Всякий вектор {a, p, у}, лежащий в этой плоскости, и только та-
такой вектор {a, p\ у}, удовлетворяет условию
которое как раз и есть условие сопряженности вектора {alt pit уг\
вектору {а, р, у}.
Из доказанного следует, что свойство направления {o:P:y} быть
алы не быть особым относительно данной поверхности (данной квад-
квадратичной формы ф (л;, у, z)) не зависит от выбора той или иной си-
системы координат 1).
Более подробно. Пусть, наряду с координатной системой Охуг, дана ко-
координатная система О'х'у'г', при переходе к которой многочлен
F(x, у, г)^апх*-\-2а12ху-\-аыУ2-\-2а13хг + 2аыуг-\-
-\-а33г* + 2а1х + 2агУ + 2а3г + а0 A)
преобразуется в
F' (*', У', г')» a'u.v'2 -I- 2a-vix'y' +а'22у'2 + Ы^х'г' + 2а'2:>у'г' +
Ч-а^г'Ч-га'^' + га^' + га'зг'+а;, A')
так что форма
преобразуется в
Ф' (лг', у1, 2')^allX l; n13 2333
Пусть вектор и имеет в системе координат Охуг координаты а, р\ у.
а в системе координат Ох'у'г' координаты а', р", у'-
Если при этом оказывается, что координаты а, [$, у вектора и в системе
Oxyz удовлетворяют уравнениям особого направления (относительно формы
Ф(*. У, г))
a3ia+a3ifi-\-a33y=0.
') Это следует и непосредственно из самого определения особого на-
направления.
542 ОБШЛЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [гл. XX
то координаты а', $', у' того же вектора и в системе G.x'y'z' будут удовлет-
удовлетворять уравнениям
а\а! А-а'. 3' -\-а\„у' = 0,
Это очень важный факт, которым мы вскоре воспользуемся. Из
пего вытекает, что вполне законно было воспользоваться для опре-
определения особых направлений поверхностей данного типа (параболо-
(параболоидов, цилиндрических поверхностей и т. д.) их каноническими урав-
уравнениями, что мы и делали в предыдущем параграфе.
§ 4. Уравнение поверхности второго порядка
относительно координатной системы
с сопряженными направлениями осей
Пусть дана поверхность второго порядка. Возьмем прямую d,
направление которой не асимптотично относительно данной поверх-
поверхности. Если поверхность центральная, то предполагаем, кроме того,
что прямая d проходит через центр поверхности. Плоскость л, со-
сопряженная направлению примой d, не может быть параллельной
прямой d (так как пеасиммтотическое направление не компланарно
сопряженной ему плоскости). Плоскость л пересекает прямую d n не-
некоторой точке О, которую и объявим началом новой координатной
системы. При этом, если поверхность центральная, то О —ее центр.
Осью z сделаем прямую d, а остальные две оси возьмем в пло-
плоскости л.
Плоскость л, будучи плоскостью Оху нашей координатной си-
системы, имеет уравнение
2 = о. A!
Пусть в выбранной нами координатной системе уравнение данной
поверхности есть
F{x, у, z) -= апх* + 2а12ху + амуг -j-2al3xz + 2ar3yz + assz2 -f
+ 2а1* + 2<720 + 2а3г + яо=О. B)
Так как плоскость A) сопряжена вектсру -{0, 0, 1}, то ее уравнение
в нашей системе координат должно быть
(ал-0 + «12-0 -г а13-1) х + (а2ГО + а22-0 + а23-1) у +
+ («si • ° + аз2 • ° + «зз • 1) г + aL¦ 0 -j- а2 ¦ 0 -j- а3 ¦ 1 = 0,
т. е.
а13х + аму + a33z + a3 = 0. Cj
§ 5] ТЕОРЕМА ЕДИНСТВЕННОСТИ ГАЗ
Так как уравнения A) и C) определяют одну н ту же плоскость,
то непременно
Мы доказали следующее предложение:
Если координатная система выбрана так, что ее ось z имеет
направление, не асимптотическое относительно данной поверхности
второго порядка, а плоскость Оху является сопряженной к направ-
направлению оси Oz относительно той же поверхности, то в этой системе
координат данная поверхность имеет уравнение вида
(апх* + 2апху + a^tf + 2ахх + 2а2у + а0) + a3sz°- = 0, D)
где
«зз Ф О-
Пусть теперь наша поверхность центральная. Тогда в уравнении
D) имеем ах = а<, — О. От осей Ох и Оу мы требовали пока только,
чтобы они лежали в плоскости, сопряженной направлению оси Oz.
Теперь мы можем, кроме того, потребовать, чтобы ось Ох имела
неасимAтотическое направление. Сопряженную ей плоскость (она
проходит через ось z, так как направления осей Ох и Oz сопряже-
сопряжены) объявим плоскостью Oyz, так что ось у, как пересечение пло-
плоскостей Оху и Oyz, будет сопряжена и оси z, и оси х; итак, все
три оси координат имеют теперь попарно сопряженные направления.
Плоскость у = 0, будучи сопряжена вектору {0, 1, 0}, имеет уравнение
а1гх + о2ау 4- ai2z -}- а2 = 0,
так что
Теорема 1. У равнение центральной поверхности в системе ко-
координат, направления осей которой попарно сопряжены между собою,
имеет вид
«и*2 + a2"jr -г «зз-г2 + «о = 0-
Таков (при п = 3) геометрический смысл «приведения квадратич-
квадратичной формы к каноническому виду».
Основным приложением только что полученного результата яв-
является «теорема единственности», доказанная в следующем параграфе.
§ 5. Теорема единственности
Содержание этого параграфа совершенно аналогично содержанию
§ Ю главы XVII.
Теорема 2. Два многочлена второй степени Рг(х,у, z) и
^2 (х, У, z) тогда и только тогда имеют одно и то же нулевое к но-
544 ОЫЦЛЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
гообразив*), когда они пропорциональны между собою, т. е. когда
один из них получается из другого умножением на некоторое число
Как н в случае многочленов от двух переменных, только одна
половина этой теоремы нуждается в доказательстве: надо доказать,
что два многочлена второй степени Fx (х, у, z) и F2 (x, у, г), имею-
имеющие одно и то же нулевое многообразие Cfl — Cj;s — C, пропорцио-
пропорциональны между собою.
Рассмотрим поверхности
F^x, у, г) = 0 A)
н
F2(x, у, 2) = 0. B)
Берем какое-нибудь направление {а: р: у}, неасимптотическое для
поверхности (!); оно будет неасимптотическим и для поверхности B).
Диаметральная плоскость я поверхности A), сопряженная на-
направлению {а: р: у}, будет и диаметральной плоскостью поверхно-
поверхности B), сопряженной тому же направлению.
Возьмем теперь систему координат O'x'y'z', ось z' которой имеет
направление {а: Р: у}, а две другие оси лежат в плоскости л.
В этой системе координат уравнения A) и B) примут соответст-
соответственно вид
F[(x't у', z')^.a',zz'*~f\(x', У') -О, (Г)
/%(*', у', z')^-b-33z'*+ft(x', y') = 0, B')
где
Здесь а'33 ф 0 (и ^зз^О). в противном случае единичный вектор
{О, 0, 1} оси г', удовлетворяя уравнению
<pi (*', У', z')zsa'ux"i-!r2a'lix'y' + a'22y'2 + a'tl3z"z = Q,
был бы вектором асимптотического направления для поверхности A)
(соответственно для B)) — вопреки нашим предположениям.
Нам надо доказать пропорциональность многочленов Fx (x, у, z)
и F2 (x, у, г), т. е. пропорциональность тождественно равных им мно-
многочленов F\(x\ у', г') и F'z(x', у', z'). Для этого обозначим через
С пересечение множества С с плоскостью z' = 0. Множество С°
есть множество всех точек плоскости О'х'у', в которых обращается
в нуль один какой-нибудь (и, следовательно, любой) из многочленов
/i (*'. У'), /г (*'> у')- Другими словами, это есть (лежащее в пло-
плоскости О'х'у') нулевое многообразие каждого из этих многочленов.
1) Гл. XV, § 1, стр. 364.
§ 5] ТЕОРЕМА ЕДИНСТВЕННОСТИ 545
Возможны следующие случаи:
1° Множество С" пусто. Этот случай осуществляется тогда и
только тогда, когда какое-нибудь (и тогда каждое) из равенств
f[(x', y') = 0, /2 (*', г/') = 0 противоречиво, т. е. когда одни какой-
нибудь (и тогда каждый) из многочленов /[ (х', у'), /2 (х', у') тож-
тождественно равен отличной от нуля постоянной а'о, соответственно Ь'о.
2° Множество С0 совпадает со всей плоскостью О'х'у'. Это про-
происходит тогда и только тогда, когда один какой-нибудь (и тогда
каждый) из многочленов f\ (х1, у'), /'2 (х', у') тождественно ра-
равен нулю.
3° Ни один из случаев 1°, 2° не имеет места. Тогда множество
С0 есть множество всех точек кривой второго порядка, определяемой
в плоскости О'х'у' каждым из уравнений
/К*', У') = 0, f'Ax', у') = 0. C)
В этом случае в силу теоремы единственности для многочленов вто-
второй степени от двух переменных имеем /2 (а', у') е== \if\ (х', у') при
некотором Ц=^0. Полагая Х=—™ (что возможно, так как а'33 Ф 0),
можем написать
F\(x', if, z')^a'33z"+/:(x', у'),
F'2(x', у', г'):^Яа33г'2-г-ц/.'^', </')•
Для того чтобы доказать в случае 3° пропорциональность много-
многочленов F\ (х', у', z') и /% (х', у', z'), надо только показать, что
fx = A.. Так как многочлен f[(x', у') не равен тождественно посто-
постоянной, то существуют значения х'— х\, у' = у',, для которых
/,' (х\, у[) = 1 х). Найдя такие значения, решаем относительно z' урав-
уравнение
F[ (х'и у[, z') el- a'33z'2 -I-1 = 0.
Получаем z'x— у г-. Итак, точка уИ1= (x'lt y'u z[) принадлежит
') В самом деле, если в многочлене f't (x', у') хотя бы один из коэффи-
коэффициентов ап, а22 отличен от нуля, например ои Ф 0, то, полагая в уравнении
/| (*'. i/') = l значение i/' = i/^ = 1, пол>чаем квадратное уравнение для опре-
определения х'х. Если а'г1=-а'^ = 0, а'1г ^р 0, то уравнение f[(x', y'\ — \ можно за-
записать в виде 2 \а'хгу'-\-а^) х'-\-2а'гу'-\-а'0= 1. Полагая в нем у' равным лю-
« а'
оому числу i/j ф — , получаем уравнение первой степени для определе-
ни-я х'х. Наконец, если в /' (х', у') все коэффициенты при членах второй
степени равны нулю, то f'{x', i/')=l есть уравнение первой степени с двумя
неизвестными, имеющее бесчисленное множество решений х'%, y'v
°
П С. Александров
546 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
множеству С. Следовательно,
-Л-) + ц • 1 = 0, т. е. ц = X.
Итак, в случае 3° утверждение теоремы 2 доказано.
В случае 2° имеем
F\(x\ у', z')^a'33z'2, а'мф0,
F\(x\ у', z')^b33z'\ ЬпфО,
Ь'
и, следовательно, полагая Я = —4^ , имеем F'2 (х\ у', z') н== XF[ (x',y',z')
°33
—утверждение теоремы 2 верно и в этом случае.
Наконец, в случае 1° уравнения A'), B') принимают вид
F[(x', у', z')^a'33z'2-i-ao = 0, а'о Ф 0,
F't (х\ у', г') = b'33z'2 + b'0 = 0, Ь\Ф 0.
Множество С есть пара плоскостей, определяемая каждым из урав-
уравнений
или г' =
Для того чтобы эти уравнения были эквивалентны, очевидно, необ-
а ь'
ходимо и достаточно, чтобы было —?- = -—, т. е. Ь'33 — "ка33, Ь'о = ка'о
азз зз
приА. = —Р-. Теорема 2 доказана во всех случаях.
°зз
Аналогично тому, что мы сделали в главе XVIF, § 10, мы теперь
можем определить поверхность второго порядка как множество всех
точек комплексного трехмерного пространства, координаты которых
в некоторой аффинной координатной системе удовлетворяют уравне-
уравнению второй степени F(х, у, z)=0. При этом два таких уравнения
определяют в одной и той же системе координат тогда и только
тогда одну и ту же поверхность второго порядка, когда одно из
этик уравнений получается из другого почленным умножением на не-
некоторое число Я ф 0.
§ 6. Главные направления
В этом параграфе и до конца главы рассматриваются лишь пря-
прямоугольные системы координат.
Пусть дана поверхность второго порядка своим уравнением
F(x, у, ,г)==ф(*, у, z)+2l(x, у, z) + ao = O A)
относительно некоторой прямоугольной системы координат Oxyz.
§ 6] ГЛАВНЫЕ НАПРАВЛЕНИЯ 547
Обозначим через Ф (и) квадратичную функцию, записывающуюся
в этой системе координат в виде формы
Ф (и) = ф (х, у, z) = апх- -f 2апху-f а,„у2 + 2a13xz-f 2a.,3yz + a33z2
(если vl = {x, у, z\).
Направление {a:j}:Y} называется главным, если оно перпендику-
перпендикулярно ко всем сопряженным ему направлениям. В частности, всякое
особое направление (если оно существует у поверхности A)) глав-
главное, потому что сопряжено всякому направлению, в том числе и
всякому направлению, ему перпендикулярному.
Замечание 1. Так как понятие сопряженности двух направ-
направлений относительно данной поверхности не зависит от выбора топ
или иной системы координат, то не зависит от этого выбора и по-
понятие главного направления.
Замечание 2. Пусть {а : Р : у\— неособое направление, пер-
перпендикулярное к каким-нибудь двум сопряженным ему направлениям.
Тогда направление {а :р : у} перпендикулярно к сопряженной ему диа-
диаметральной плоскости и, следовательно, является главным.
Итак, для того чтобы направление было главным, достаточно
(и, разумеется, необходимо), чтобы оно было перпендикулярным к двум
сопряженным ему направлениям.
Пусть направление {а:р: у\ главное. Если оно особое, го
М = a21a + ai2P + aiSy -= О,
N hi=- a31
Если {а : Р : у} главное, но не особое направление, то оно перпен-
перпендикулярно к сопряженной ему диаметральной плоскости
и тогда вектор {а, р, у\ коллипеарен нормальному вектору {?, М, N}
плоскости, т. е.
= ЯР, I B)
= ^ Y J
при некотором А. =^= 0.
Итак, какова бы пн была прямоугольная система координат, от-
относительно которой поверхность задана своим уравнением A), вся-
всякое главное направление удовлетворяет уравнениям B), причем для
особых направлений имеем А. = 0, а для неособых А.^0. Обратно,
всякое направление {a: P : у}, удовлетворяющее уравнениям B), есть
главное направление, особое, если X — 0 (и только в этом случае).
Следовательно, вопрос о нахождении главных направлений есть
18*
548
ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
[гл. хх
вопрос о нахождении ненулевого вектора {а, Р, у}, удовлетворяю-
удовлетворяющего системе уравнений B) при некотором К, равном нулю или нет.
Переписываем эту систему уравнений в виде
(аа —Я)а-Ьа12Р+0 \
Она тогда и только тогда имеет ненулевое решение, когда
„—к я,, а.
*21
Чз
«23
Я,о — к
= 0.
C)
I 1 2 3
Уравнение C) называется характеристическим уравнением квадратич-
квадратичной формы (f(x, у, z) и выражаемой ею квадратичной функции Ф (и);
левой частью этого уравнения является многочлен D{k) третьей
степени; многочлен этот называется характеристическим многочленом,
а корни его — характеристическими числами функции Ф (и) и формы
ф(х, У, z).
Многочлен D (к), очевидно, есть дискриминант квадратичной формы
Q\(x, у, z)sEH(p(x, уч г)—к (х2 -{-уг-\-z2).
Этот многочлен является ортогональным инвариантом. Для того чтобы
убедиться в этом, достаточно заметить, что при переходе от одного
ортонормалыюго базиса к другому форма х2 -\- у2 -|- z2 переходит в
форму x'2-\-y'2-\-z'" и, следовательно, форма <р (х, у, г)—к (х1-\-у2-{-z2)
переходит в форму
ф' (х', у', г') — к (х'2 ~у -\-z'2).
Из доказанной таким образом ортогональной инвариантности
многочлена D (к) вытекает следующее утверждение:
Если при переходе от прямоугольной системы координат Oxyz
к новой, тоже прямоугольной системе координат Ox'y'z', квадра-
квадратичная форма ф (л:, у, г) преобразуется в квадратичную форму
<р' {x',y',z')=~a'lv
то при любом к
«11—^ «12
+ 2a'i3x'z'
«21
«31
«22 '
«32
«зз —
аи-к
21
'12
^22"
723
•*Я2
Так как характеристический многочлен D(k) не зависит от
выбора той или иной прямоугольной системы координат, то то же
справедливо для его корней, характеристических чисел къ Ха, к3
§ 61 ГЛАВНЫЕ НАПРАВЛЕНИЯ ' 549
формы ф (л:, у, z), они вполне определены самой квадратичной
функцией Ф(и)=ср(л:, у, z).
Уравнения B') суть не что иное, как уравнения, определяющие
особые направления формы О (х, у, z)=(f(x, у, z)— К (х- +у2 -f г2).
Поэтому • главные направления формы ср (а:, у, г) — это особые на-
направления формы Э (а:, у, z). Отсюда мы снова выводим, что главные
направления не зависят от выбора системы координат; для их опре-
определения можно написать уравнения B'), пользуясь при этом любой
прямоугольной координатной системой.
Переходим к доказательству основного факта:
I. Для каждой квадратичной формы ц>(х, у, z) существует
прямоугольная система координат Ox'y'z', в которой форма при-
принимает канонический вид
q>(*, у, z) = Ax'*+By'* + Cz'\
Доказательство. Многочлен D (к) — третьей степени; по-
поэтому по крайней мере один из корней является вещественным;
пусть это будет, например, ^3. Этому корню соответствует веще-
вещественное главное направление, и мы можем с самого начала пред-
предположить, что ось z исходной координатной системы Oxyz имеет
именно это направление; тогда ортом его является вектор { 0, 0, 1 },
и уравнения B') должны удовлетворяться, если в них подставить
а = О, E = 0, Y=l. так что имеем
(оц —Х„)-0+ а12.0 +«,.,-1 =0,
«21-0+ (а„ —Л8).0 + а„-1 =0,
«31-0 + «32-0 +(«33— Я3)-1=0,
т. е. а13 = 0, а23 = 0, а33 = Я3—в избранной системе координат
квадратичная функция Ф (и) записывается в виде формы
Ф(и) = ф(лг, у, z) = anx
Как известно из главы XVI, § 1, можно поворотом координатной
системы Оху в ее плоскости (вокруг точки О) на некоторый угол и
перевести ее в такую систему Ох'у', в которой квадратичная форма
an-*2 + 2a]2x(/-j-a22(/2 примет канонический вид а'пх'2 -\-а'г2у'2. Этот
поворот можно рассматривать как поворот всего пространства
вокруг (остающейся неподвижной) оси z па тот же угол а. В ре-
результате получаем прямоугольную координатную систему Ox'y'z',
в которой функция Ф(и) записывается в виде
Ф(и)=ф(дт, у, *)=q>'(*', У', z') = anx'* + a'2iy'*+l3z'-\
Утверждение I доказано.
Заметим, что если бы не только ось z, но и оси х и у имели
главные направления, то и векторы { 1, 0, 0 f и { 0, 1, 0 } удовлетво-
удовлетворяли бы уравнениям B'), откуда следовало бы, что и а12 —0. Итак,
550 ОБЩАЯ ТКО!>ИЯ ПОВЕРХНОСТКЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
II. Если оси прямоугольной системы координат Ox'y'z' имеют
главные направления относительно квадратичной функции Ф (и), то
в такой системе координат функция Ф (и) непременно имеет кано-
канонический вид:
Ф(и)=«р'(*', У', z')=Ax'2 + By'* + Cz'\ D)
Докажем теперь следующее утверждение
III. Если в какой-нибудь прямоугольной системе координат Ox'y'z'
квадратичная функция Ф (и) имеет канонический вид D), то коэф-
коэффициенты А, В, С в этом каноническом представлении непременно
равны характеристическим числам функции Ф(и).
В самом деле, в системе координат Ox'y'z' характеристический
многочлен D (А.) записывается в виде
А— К 0 0
0 В — X 0
О О С —
= (А — I) (В—к) (С —К);
его корнями, очевидно, являются А, В, С, откуда утверждение
следует.
Так как функция Ф (и) действительна, так же как и рассматри-
рассматриваемые нами системы координат, то всякая квадратичная форма,
изображающая функцию Ф (и), имеет действительные коэффициенты;
поэтому действительны и коэффициенты в каноническом представ-
представлении функции, т. е. характеристические числа К1, А.2, А.3. Итак,
IV. Все характеристические числа любой {действительной) квадра-
квадратичной функции действительны.
Доказываем теперь утверждение
V. Если в данной прямоугольной системе координат Ox'y'z'
квадратичная функция Ф(и) имеет канонический вид
Ф (и) — К^х'2 4-К2у'2 -\-ksz'2, то направления осей этой координатной
системы непременно являются главными направлениями функции Ф(и).
Это утверждение вытекает нз того, что в системе координат
Ox'y'z' уравнения B'), определяющие главные направления,
имеют вид
E)
и при Л = Яь вектор {1, 0, 0}, при К — К2 вектор {0, 1, 0}, при
К — hs вектор {0, 0, 1 } этим уравнениям удовлетворяют.
Мы убедились сначала в том, что существуют прямоугольные
системы координат, в которых форма ср (х, у, z) принимает канони-
канонический нид; затем мы доказали, что оси всякой такой системы
координат имеют главные направления. Отсюда следует, что для
К 6] ГЛАВНЫЕ НАПРАВЛЕНИЯ 551
всякой квадратичной формы существует по крайней мере одна
тройка взаимно перпендикулярных главных направлений. Сейчас мы
полностью выясним вопрос и о числе таких троек. Оказывается,
ответ на этот вопрос зависит от кратности корней характеристи-
характеристического уравнения.
Мы докажем последовательно следующие утверждения:
VI. Простому корню характеристического уравнения соответствует
одно-единственное главное направление.
VII. Главные направления, соответствующие двум различным
корням характеристического уравнения, взаимно перпендикулярны.
Непосредственным следствием предложений VI и VII является
предложение
VIII. Если все три корня характеристического уравнения раз-
различны между собою, то имеются три и только три главных направ-
направления, и они взаимно перпендикулярны.
Другими словами, имеется одна-единственная тройка взаимно
перпендикулярных главных направлений.
Далее, имеет место предложение
IX. Если из трех корней Хх, Х2, Х3 два равны между собою и
отличны от третьего, например:
Х1 — Х2=^= Х3,
то все направления, перпендикулярные к единственному направле-
направлению, соответствующему корню Х3, являются главными направлениями,
соответствующими корню Х1=Х2. Таким образом, имеется бесконечно
много троек взаимно перпендикулярных главных направлений; каж-
каждая из этих троек содержит единственное главное направление е3,
соответствующее простому корню Х3, тогда как два других направ-
направления суть произвольные направления еъ е2, перпендикулярные
между собою и перпендикулярные к направлению е3.
И наконец,
X. Если все три корня характеристического уравнения равны
между собою, то каждое направление является главным.
Переходим к доказательствам.
Доказательство утверждения VI. Возьмем прямо-
прямоугольную систему координат Oxyz, относительно которой форма
Ф (х, у, z) имеет канонический вид. Относительно этой системы
координат уравнения B') принимают вид E).
Пусть Х3 — простой корень, Х3фХ1, Х3^=Х2. Тогда система
уравнений E) превращается при А, = А,3 в
(Хх — Х3)а^0 (т. е. о = 0), |
(Х2-Х3)р = 0 (т. е. 0 = 0), I E')
е.у = о. J
552 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
Единственное ненулевое направление {а:Р:у}, определяемое этой
системой, есть {0:0:1}.
Доказательство утверждений VII—X.
Пусть А.2=^=А.3. Так как А.х не может одновременно совпадать и
с кг и с кя (=? к2), то без ограничения общности можем предполо-
предположить, что к1 ф л3 (но, может быть, Х1 = к2). Тогда Х3 оказывается
простым корнем, и ему, как только что доказано, соответствует
единственноэ главное направление, записывающееся в нашей системе
координат в виде {0:0:1 }.
Посмотрим, какие направления соответствуют корню Х2. При
к = к2 система уравнений E) превращается в
О-Р-О, ¦ E*)
(Х3 — A.2)y = 0 (т. е. 7 = 0)- j
При A^^Xg получаем единственное направление а —0, Y==0> Рт^О.
т. е. {0:1:0}, и оно перпендикулярно к направлению {0:0:1},
соответствующему корню к3.
При k1 = k.i уравнения (о") превращаются в
0-а =0,
E"')
им удовлетворяют все векторы вида {а,р,0}, т. е. все векторы,
перпендикулярные к вектору е3 = {0, 0, 1 }, и только они.
Этим доказано и утверждение VII (значит, и VIII), и утвержде-
утверждение IX.
Наконец, при Х1 = Х2 = А.3 уравнения E"') превращаются
в тождества
0-Р =0,
0-y =0;
им удовлетворяет любое направление {a:{$:Y}, чем доказано
утверждение X.
Рассмотрим случай, когда имеется равный нулю корень характе-
характеристического уравнения, например А3 = 0; как мы знаем, соответ-
соответствующее этому корню главное направление является особым. На-
Направим по этому направлению ось z, так что вектор {0, 0, 1}
является особым; подставив a = 0, P = 0, y = 1 b уравнения
= aua + a12p + algY = 0, j _
Л1 = а21а-|-а::.,р-га237 = 0, > F)
N — а31а + a32(i -f a33Y = 0, J
К 7] ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 553
которые характеризуют особые направления, получим:
«1з = °. я>з = °> о83 = 0. G)
Итак, в прямоугольной системе координат, в которой ось z
имеет особое направление, форма ср (л:, у, z) имеет вид
<р(лг, у, г)~апх* +2al2xy + ai2y2 + 0-Z2,
а после поворота на надлежащий угол имеет вид
<р(л-, у, г)=ц>'{х', у', г')=А,л:'2 + А2г/'2.
Если при этом имеется лишь одно особое направление, то г = 2
и, значит, A.J =/= 0, Х2=/=0. Если же имеется два различных особых
¦направления, то их имеется целое двумерное многообразие, так
что можно, например, осям z и у придать взаимно перпендикулярные
особые направления. Подставляя в уравнения F) а = 0, fi = l,
7 = 0, получим в добавление к G) еще и
а12 = 0, а2г = 0, а32 = 0, G')
так что в такой координатной системе будет
ц>(х, у, z)~aux2 + 0-y2 + Q.z-,
где ail = k1— единственный не равный нулю корень уравнения C).
Все дальнейшие упрощения в уравнении
Г(х, у, z)=q>(x, у, z) +2ai
достигаются надлежащим переносом начала координат (и в одном
случае еще дополнительным поворотом осей координат).
§ 7. Приведение к каноническому виду уравнения
поверхности второго порядка
Пусть дана поверхность второго порядка своим уравнением
F(x, у, z)L=y(x, у, z)+2l{x, у, г) + ао=О A)
относительно некоторой прямоугольной системы координат Охуг.
Как мы видели в § 6, всегда существует по крайней мере одна
прямоугольная система координат Ox'y'z', оси которой имеют глав-
главные направления. В этой системе координат уравнение поверхно-
поверхности (I) имеет вид
F (*', «/',*') = V'2 -г *•¦.«/'* + V2 + 2a'i*' + 2д2У' + 1a\z' + а0 = 0.
(Г)
Начнем с центрального случая: 6=^=0, г = 3, В этом случае Х1,
^¦2=^0. К3Ф0. Если перенести начало координат О системы Ox'y'z'
в единственный центр поверхности A), то уравнение (Г)
554 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА (ГЛ. XX
примет вид
F{x, у, г) = Г"(х", у", z")^klX + k2y + k3z + ao = 0. (I)
Помня, что большой и малый детерминанты А и б суть ортого-
ортогональные инварианты, можем для их вычисления воспользоваться
правой частью уравнения ((), что дает 6 = klk.1k3, \=-klk2ksa'o,
т. е. а'0 — -т~ (результат, известный нам еще из главы XiX, § 5).
Итак, окончательный вид уравнения A) в выбранной нами прямо-
прямоугольной системе координат есть1)
Здесь все коэффициенты однозначно (с точностью до общего числового
множителя k) определены уравнением A) поверхности, в какой бы исходной
прямоугольном системе координат Oxyz мы его ни задавали. Если та же
поверхность задана в той же исходной системе координат другим уравнением:
G(x, у, z) = 0,
то в силу теоремы единственности все коэффициенты многочлена G (х, у, z)
получаются из соответствующих коэффициентов многочлена F (х, у, z) умно-
умножением на некоторое число ft ф 0. Так как при переходе к новой системе
координат O'x'y'z' многочлены F и G тождественно преобразуются соответ-
соответственно в многочлены F' (х', у', z') и С (х1, у', z'), то и для соответствую-
соответствующих приведенных многочленов F' и G' сохраняется соотношение G'—к!-',
так что, в частности, характеристические числа многочлена G (т. е. квадра-
квадратичной формы его старших членов) получаются из характеристических чисел
многочлена F умножением на то же ft; то же справедливо и для отноше-
отношения -г (при б ф 0). Последнее ясно и непосредственно: так как детерми-
детерминант Д — четвертого порядка, а 6—третьего, то при умножении всех коэф-
коэффициентов многочлена F (х, у, г) на ft детерминант Д умножается на ft4,
а детерминант б — на ft3, значит, -г- умножается на k. Отсюда следует,
в частности, что, умножая, если нужно, обе части уравнения F (x,y,z) = 0
на k — —1, можно всегда достигнуть того, чтобы (при б ?? 0) число -^-
было отрицательным (или равным нулю). Эта нормировка уравнения централь-
центральной поверхности совпадает с той, о которой мы говорили в § 5 главы XIX,
так как -тг есть значение многочлена F (х, у, г) в единственном центре
центральной поверхности A).
Теперь имеется две возможности: Д = 0 и Д==?0. Начнем
с первой.
1° Д = 0. Получаем коиус второго порядка вещественный, если
среди характеристических чисел kv kit k3 имеются числа разных
Пишем свова х, у, г вместо л", у", г".
71
привг.ДЕНие к каноническому виду 555
знаков1). Умножая, если понадобится, обе части уравнения A)
на it можем предположить, что среди его коэффициентов Я,,
> \ имеется два положительных и один отрицательный. Изменив,
если потребуется, наименования осей координат и обозначая поло-
положительные коэффициенты через -^, -^ , а отрицательный через
L можем представить при А = 0 уравнение A*) в виде
2 '
. ? ii о
fl2 "Г ьз сг - и
(причем здесь и всюду дальше берем й, Ь, с положительными).
Это каноническое уравнение вещественного конуса.
Заметим, что равенство Л.1 = Я2 означает п = Ь; тогда мы имеем
круговой конус или конус вращения, его сечения плоскостями z=h
суть окружности; если Я1 = А2 = — к3, то уравнение конуса пре-
превращается в
имеем круговой конус, образующие которого наклонены к его осп
я
под углом — .
Если все характеристические числа — одного знака, мы можем
переписать уравнение (I*) при Д = 0 в виде
Это каноническое уравнение мнимого конуса.
2° Пусть теперь Д^=(); это значит, что мы имеем невырожден-
невырожденную центральную поверхность.
Переписываем тогда уравнение (I*) в виде
= 1. (I*-)
') Здесь целесообразно привести так называемое правило Декарта длл
определения знаков корней алгебраического уравнения, псе корни которого—
действительные числа. Это правило в применении к уравнению третьей
степени с действительными корнями можно сформулировать так. Пусть дано
уравнение ax3-\-bx2-\-cx-\-d — 0. Назовем «переменой знака» пару соседних
коэффициентов в этом уравнении (т. е. (а, Ь), (Ь, с) или (с, d), состоящую
из двух чисел различных знаков. Оказывается, что число положительных
корней уравнения третьей степени (псе корни которого действительны) равно
числу перемен знака в этом уравнении. При этом корни считаются вместе
с их кратностями. Доказательство можно найти, например, в «Курсе выс-
высшей алгебры» А. Г. Куроша, § 41, стр. 258 (издание восьмое).
656 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКЛ [ГЛ. XX
Возможны четыре случая *):
а) Все три характеристические числа имеют один и тот же
знак, и А>0, тогда можем положить
A_fl« А~&* А-с*
6А.1 "" ' 6А2 ~ ' <U3 ~ '
причем а, Ь, с всегда считаем положительными. Переписываем
уравнение A**) в виде
— получили каноническое уравнение мнимого эллипсоида.
б) Все три характеристических числа имеют один и тот же
знак, и Д < 0. Тогда полагаем
А
СЛ|
_А-С2
¦—получаем каноническое уравнение вещественного эллипсоида
v2 U2 ,2
fl2 "Г b2 -f C2 — •
в) Характеристические числа имеют разные знаки, и А < 0.
Предположим, что числа к1 и к2 имеют одинаковые знаки, а Я3
имеет знак, им противоположный. Полагаем
Получаем уравнение
2 2 ,2
?
-—каноническое уравнение двуполостного гиперболоида. И наконец,
г) Характеристические числа имеют разные знаки, и А > 0.
Предположим снова, что числа kt и Л2 имеют одинаковые знаки,
а число к3 — знак, им противоположный. Тогда, полагая
А— „2 А__ А2 А-л2
6Я, ~а ' 6Х2~ ° • 6Я3~С '
придаем уравнению (!**) вид
аг "'" *г с2 ~ -
Это каноническое уравнение однополостного гиперболоида.
Итак, каждая центральная поверхность второго порядка есть
либо конус (действительный или мнимый), либо эллипсоид (действи-
(действительный или мнимый), либо гиперболоид (двуполостный или однопо-
лостный).
*) Пишем снова х, у, г вместо х", у", г".
§ 7]
ПРНВКДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 557
Положительные числа а, Ь, с в каноническом уравнении централь-
центральной поверхности, являющиеся ее полуосями, выражаются черен
характеристические числа klf К,, К3 и детерминанты Д, б, т. е.
через ортогональные инварианты многочлена F(x, у, z), и, значит,
не меняются при переходе от прямоугольной координатной системы
Oxyz, в которой задано уравнение F(x, у, z) = 0 рассматриваемой
поверхности, к любой другой прямоугольной координатной системе.
Но они не зависят также и от того, каким из уравнений, опреде-
определяющих в первоначальной системе Oxyz данную поверхность, мы
воспользовались. В самом деле, уравнения эти отличаются друг от
друга только числовым множителем k. Но при умножении всех
коэффициентов многочлена F(x, у, г) на данное число k на это
же k умножаются и -V, н все характеристические числа \lt Х2, кя;
поэтому а2, Ьг, с2, значит, и а, Ь, с остаются неизменными. Итак,
полуоси центральной поверхности не зависят ни от выбора прямо-
прямоугольной системы координат, ни от того уравнения (из числа опре-
определяющих данную поверхность), которым в этой системе координат
мы нашу поверхность задали; они зависят только от самой поверх-
поверхности как геометрической фигуры, т. е, как множества точек
в пространстве.
Обратно, если дано наименование центральной поверхности и ее
полуоси а, Ь, с, то поверхность вполне определена с точностью до
ее положения в пространстве. В самом деле, две одноименные поверх-
поверхности с одними и теми же полуосями имеют одно и то же каноническое
уравнение; значит, отличаться они могут лишь тем, что первая hj
них этим уравнением определена в одной прямоугольной коорди-
координатной системе, а вторая — в другой; но, совмещая первую коорди-
координатную систему со второй посредством (собственного или несобствен-
несобственного) движения, мы совместим одну из наших поверхностей с другой.
Итак, две центральные поверхности тогда и только тогда изо-
метричны между собою, когда они имеют одно и то же наименова-
наименование и когда их полуоси (соответствующие членам канонического
уравнения данных знаков) соответственно равны между собою.
Заметим, что (как непосредственно следует из определени.Ч
чисел а, Ь, с) во всех рассмотренных случаях два характеристи-
характеристических числа равны между собою тогда и только тогда, когда
соответствующие две полуоси центральной поверхности равны и
Входят в каноническое уравнение поверхности с одним и тем же
знаком.
Мы видели (в гл. XVUI), что равенство двух каких-либо полу-
полуосей, например а=Ь, эллипсоида означает, что мы имеем эллип-
эллипсоид вращения (сферу, если а—Ь — с). Поэтому признаком эллип-
эллипсоида вращения является равенство двух характеристических чисел,
а признаком сферы —равенство Х1 = Х2 = Х3.
658
ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА
[гл. хх
Точно так же одноиолостный гиперболоид является гиперболоидом
вращения, если а2— Ь2, т. е, Х1 = ?»2; то же верно и для двуполост-
двуполостного гиперболоида, и для конуса. Итак, равенство двух характери-
характеристических чисел необходимо и достаточно для того, чтобы централь-
центральная поверхность была поверхностью вращения, а равенство )ч = Х2 = К3
верно для сферы (действительной или мнимой), и только для нее.
Переходим к случаю поверхности A) ранга г = 2. Покажем, что
в этом случае уравнение A) определяет: при А=^0 (т. е. /? = 4)
параболоид,
эллиптический, если Д < О,
гиперболический, если А > О,
а при А = 0, А? = 3—«центральный» (т. е. эллиптический или гипер-
гиперболический) цилиндр, вырождающийся при R — r—2 в пару пересе-
пересекающихся плоскостей.
Итак, пусть г = 2. Тогда среди характеристических чисел много-
многочлена F(x,y,z) два, положим Ях и Хг, отличны от нуля и Х3 — 0.
В некоторой прямоугольной системе координат Ox'y'z' (с тем же
началом, что и исходная система Oxyz) уравнение A) принимает вид
Г' (х', у', z')~klX'
' +2a'sz'
Имеем
Яд. О О
о х2 о
0 0 0
а', а» аз
B)
откуда заключаем, что Д=^0 тогда и только тогда, когда а'3ф0.
Рассмотрим сначала случай, когда Д=^=0 и, следовательно, а'3 ф 0.
Перенос начала координат О в произвольную точку О' — (л^, у'ь, z'o),
т. е. преобразование
У'= У"-г у'о,
переводит миогочлен F' (х', у', z') в
Г (х", д\ z") == к.х"' + к2у"г + 2 (XlX't -f а[) х" + 2 (Х2у'о + a't) у" +
+ 2a'3z"-j-k1x'^-Jrkiy'oi-\-2a'1x'0 -\-2агу'а -1-2а^0 + а0 =
Определяя х'ь, у'о и z'o из уравнений
^-l-^o + ai = 0, к2у0-га'г = 0,
Кх'о + Ку'? + 2a'ix'o + ZaWo + 2л3г0 + а0 = 0,
получаем
F" (х", у", z") = llX"z + l2y"z + 2a3z" = 0.
§ 7] ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 559
Итак, в надлежаще выбранной прямоугольной системе координат
уравнение всякой поверхности ранга г = 2, R = 4 принимает вид
/2a^"=--0. (II)
Из B) получаем
Так как а'3 — вещественное число, то Л имеет всегда знак, про-
противоположный знаку Х^. Другими словами, Д положителен, если
характеристические числа кг и К2 разных знаков (гиперболический
случай), и отрицательно, если К1 и к.г одного и того же знака (эллип-
(эллиптический случай). Изменив, если нужно, положительное направление
оси z на противоположное, всегда можем предположить, что знак а'3
противоположен знаку Я17 так что уравнение (II) можно переписать
в виде (мы отбрасываем штрихи при координатах)
v-2 „2
2г = -?-г + ^-Гг (II*)
где—Л- есть положительное число, которое мы обозначим через/?:
P — r— —
Число Д положительно, если знак X, совпадает со знаком Хт
(т. е. в эллиптическом случае, Д < 0), и отрицательно, если Х,х и А.а
разных знаков (т. е. в гиперболическом случае, Д > 0).
Поэтому, полагая в обоих случаях
имеем:
д = —^- в эллиптическом случае,
I
q= ~- в гиперболическом случае.
л.2
Соответственно получаем: в эллиптическом случае уравнение
560 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
эллиптического, а в гиперболическом случае уравнение
гиперболического параболоида. Параметры р и q параболоида выра-
выражаются через ортогональные инварианты А, Ях, к2 а поэтому не
зависят от той прямоугольной системы координат, в которой было
задано первоначальное уравнение (I) параболоида. Они не меняются
при умножении многочлена F(x, у, z) на числовой множитель k (так
как при этом А умножается на к*, а Х1 и Хг — на k), поэтому они
зависят лишь от самой поверхности (рассматриваемой как множество
ее точек) и в свою очередь определяют ее однозначно (с точностью
до ее положения в пространстве).
Равенство Х1 = Я2 означает, что мы имеем эллиптический парабо-
параболоид с равными параметрами р=<], т. е. параболоид вращения.
Пусть теперь Д = 0, значит, и а, = 0. Тогда большой ранг R ^3.
Уравнение A') в этом случае приобретает вид
¦КуХ'* + Ку'2 + 1а\х' + 2а2у' + а0 = 0. C)
Применим к этому уравнению преобразование параллельного пере-
переноса
X — X ~Z~Xq)
Тогда будем иметь
V'8 + КУ'Л +2 A^ + а\) х" + 2 Ск2у'0 + а'2) у" + а'0 = 0. D)
где
а' = Я1хвЧ-Я2у;
Определяя х'о и у'д из уравнений
приведем уравнение D) к виду
причем R=3, если flj^O, и R — 2, если а'0 = 0. Уравнение A)
задает (в системе координат O'x"y"z") цилиндр над лежащей в пло-
плоскости z" — 0 центральной кривой второго порядка, имеющей (в прямо-
прямоугольной системе координат О'х"у") тоже уравнение (Ш). При/? —3
(т. е. а'вф0) эта кривая нераспадающаяся, при /?—2 она распа-
распадается на пару прямых, а цилиндр (HI) вырождается в пару пересе-
пересекающихся плоскостей. Любая плоскость z" = h пересекает цилиндри-
цилиндрическую поверхность (Ш) по кривой, имеющей то же уравнение (Ш),
§ 7]
ПРИВИДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 561
в плоскости z" = h (в системе координат с началом О" = @, О, А) и
теми же направлениями осей х" и у", что и в координатной си-
системе O'x"y"z"). Все эти кривые конгруэнтны между собою; доста-
достаточно знать одну из них, чтобы цилиндрическая поверхность (III)
была определена. Пусть R = 3. Тогда полуоси a, b кривой (III) (назы-
(называемые также полуосями цилиндрической поверхности (III)), вместе
с ее наименованием, полностью определяют поверхность (III) с точ-
точностью до ее положения в пространстве и в свою очередь всецело
определяются ею. Чтобы определить полуоси a, b по первоначаль-
первоначальному уравнению (I), надо только определить а'о.
Для определения числа а' надо найти какую-нибудь точку прямой
центров (из системы определяющих ее уравнений в исходной системе
координат) и подставить координаты этой точки в левую часть
первоначального уравнения поверхности. Полученный результат не
зависит от выбора точки на прямой центров.
Переписывая уравнение кривой (III)в каноническом виде, мы полу-
получаем и каноническое уравнение
*! + ]? _1
О2 — 62
эллиптического, соответственно гиперболического, цилиндра, а также
х и"г
(если кривая A11) есть мнимый эллипс) уравнение ^ — тг = 1
мнимого эллиптического цилиндра в прямоугольной системе коорди-
координат O'x"y"z". Снова равенство ХХ = Я2 является признаком того, что
наша цилиндрическая поверхность есть поверхность вращения, т. е.
так называемый круглый цилиндр; его сечения плоскостями, перпен-
перпендикулярными к образующим, суть окружности.
Пусть теперь R = r = 2; тогда а'0 = 0 и уравнение (III) превра-
превращается в уравнение
к1х"*-\Лгу"*=0,
задающее (в прямоугольной системе координат O'x"y"z") пару пере-
пересекающихся плоскостей (вещественных, если Ях и К2 разных знаков;
мнимых, если Кх и Я2 одного знака). При этом отношение -J-, харак-
характеризующее двугранный угол между плоскостями, полностью опре-
определяется этой парой плоскостей и в свою очередь полностью ее
определяет.
Переходим к поверхностям ранга г—\. Для этих поверхностей
лишь одно характеристическое число, пусть К2, отлично от нуля и
Если ось Оу' прямоугольной системы координат направить по
единственному главному направлению, соответствующему отличному
от нуля корню характеристического уравнения, а оси Ох' и Oz'
562 ОБЩАЯ ТЕОРИЯ ПОВКРХПОСТКЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
взять под прямым углом в плоскости, перпендикулярной к уже выбран-
выбранной оси Оу' (а в остальном — произвольно), то во всякой такой
системе координат уравнение нашей поверхности будет иметь вид
F(x, у, z)~F' (*', у', z') = Ky'' + 2a\x' +2a;,y' + 2a'3z' + яо=О. E)
Для поверхности ранга г=1 всегда R ^ 3.
Пусть R = 3; тогда по крайней мере один из коэффициентов а\, а!,
отличен от нуля (иначе в матрице коэффициентов многочлена
F (х', </', z') все детерминанты третьего порядка будут равны нулю).
Пусть, например, а'л-ф0. Покажем, что в рассматриваемом случае
поверхность E) будет параболическим цилиндром. Наша задача
сейчас — найти такую прямоугольную систему координат, в которой
уравнение E) примет канонический вид
у* = Чрх. (IV)
Для этого произведем поворот координатной системы Ox'y'z' вокруг
оси у' на некоторый, пока произвольный, угол а, т. е. сделаем
ортогональное преобразование координат
х' = х" cos a —z" sin а,
у' = у",
z' = x" sin а -f- z" cos а,
что тождественно преобразует левую часть уравнения E) в
F" (х", у", z") ~ Я-5,1/ + 2а', (х" cos a—z" sin a) +
+ 2а'гу" + '2а'3 (х" sin а -{- z" cos а) + а0 ?=
^skzy 4-2a'.i/"-f2 {a\ cos а -f a's sin а) х" -f-
4- 2 (a'3 cos а — a[ sin a) z" -f- a0 = 0.
Приравниваем коэффициент при z" нулю, что дает тригонометриче-
тригонометрическое уравнение
а'3 cos a — а\ sin a = 0,
из которого и определяем а:
ctga =-±-.
аз
В полученной прямоугольной системе координат уравнение E) при-
приобретает вид
л2</"Ч2а;</" + 2^"г + йо = О, F)
где положено
Ъ = а\ cos a + a3 sin a.
При этом ЬфО (иначе матрица коэффициентов уравнения F) имела
бы ранг ^2 вопреки предположению, что R = '6).
§ 7] ПРИВЕДЕНИЕ К КАНОНИЧЕСКОМУ ВИДУ 563
Уравнение F) есть уравнение цилиндра над параболой, лежащей
в плоскости z" = О и имеющей (в системе координат Ох"у") то же
уравнение F). Остается только произвести сдвиг начала координат
(в той же плоскости Ох"у"). Мы получим после этого сдвига прямо-
прямоугольную систему координат, в которой уравнение F) параболы, а
следовательно, и построенного над нею цилиндра примет канониче-
канонический вид (IV). Поставленная задача решена.
Число р, являющееся параметром параболы, получающейся при
сечении параболического цилиндра плоскостью, перпендикулярной
к его образующим, называется параметром параболического цилиндра.
Это число определено самим цилиндром и в свою очередь опреде-
определяет его с точностью до его положения в пространстве. Можно
было бы указать формулы, позволяющие вычислить параметр пара-
параболического цилиндра непосредственно по коэффициентам его урав-
уравнения в произвольной прямоугольной системе координат. Мы, однако,
этого делать не будем, отсылая читателя к более подробному курсу
Б. Н. Делоне и Д. А. Райкова.
Пусть теперь R ^2. Тогда поверхность является нарой парал-
параллельных (в широком смысле) плоскостей яь я2; канонической систе-
системой координат будет произвольная прямоугольная система координат,
одна из осей которой (положим, ось у) перпендикулярна к плоско-
плоскостям л1у я2, а две другие оси расположены в средней плоскости
между этими плоскостями. Тогда уравнение пары плоскостей яъ л.г
будет
У = ±Ь. G)
К этому результату можно прийти и из рассмотрения уравнения E),
в котором теперь непременно а1 = а3 — 0 (если хотя бы один из
коэффициентов alt a3 был =^= О, то мы имели бы параболический
цилиндр и, значит, /? = 3).
Итак, уравнение E) имеет в нашем случае вид
К2у'г-'г2а'2у'-{-а0 = 0.
Посредством сдвига начала координат но оси ординат преобразуем
его в
Х,у ¦¦rk = 0, (V)
что эквивалентно каноническому уравнению G).
Общим итогом этого параграфа является
Теорема 3. Каждая поверхность, определяемая уравнением вто-
второй степени с вещественными коэффициентами, принадлежит к одному
из следующих семнадцати классов:
1. Эллипсоиды вещественные'.
2. Эллипсоиды мнимые.
3. Гиперболоиды однхтолоаные.
664 ОБЩАЯ ТКОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
4. Гиперболоиды двуполостные.
5. Конусы вещественные.
6. Конусы мнимые.
7. Параболоиды эллиптические.
8. Параболоиды гиперболические.
9. Цилиндры эллиптические вещественные.
10. Цилиндры эллиптические мнимые.
11. Цилиндры гиперболические.
12. Цилиндры параболические.
13. Поверхности, распадающиеся на пару пересекающихся веще-
вещественных плоскостей.
14. Поверхности, распадающиеся на пару пересекающихся мнимых
сопряженных плоскостей.
15. Поверхности, распадающиеся на пару (различных) параллель-
параллельных вещественных плоскостей.
16. Поверхности, распадающиеся на пару (различных) параллель-
параллельных мнимых сопряженных плоскостей.
17. Поверхности, распадающиеся на пару совпадающих веществен-
вещественных плоскостей.
§ 8. Аффинная классификация поверхностей второго порядка
Докажем, что любые две поверхности, принадлежащие к какому-
нибудь одному из перечисленных в конце предыдущего параграфа
классов, аффннио эквивалентны между собою.
Для этого достаточно показать, что каждая из перечисленных
поверхностей аффинио эквивалентна некоторой простейшей поверх-
поверхности того же наименования.
Возьмем эллипсоид, заданный в канонической (прямоугольной)
системе координат Oxyz уравнением
у2 иЪ у%
Рассмотрим аффинное преобразование 1,
Х' — — и'~У Г'--* i\\
Это преобразование переводит эллипсоид в сферу, имеющую в той
же (прямоугольной) системе координат Oxyz уравнение
Таким образом, каждый эллипсоид аффинно эквивалентен единичной
сфере, концентрической с данным эллипсоидом.
§ 8] АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 565
То же аффинное преобразование A) переводит однополостный
гиперболоид
а2 "" Ъ1 с2
в гиперболоид
Г2 ' „2 ~2 1.
двуполостный гиперболоид
_^2__j/2_ ,i!_ = i
а2 Ь1 """ с2
в гиперболоид
конус
х2 </2 г2
'—S 1 7^ ~~Р U
в конус
Х2 + у2 — Z2 = 0;
мнимый конус
аг Г j,2 ~ С2 «
в мнимый конус
Возьмем теперь эллиптический параболоид
1-2 „2
— , &4,
Р Я
и применим к нему аффинное преобразование
„' Х ,,' У _' /г.1
Это преобразование переводит данный параболоид в простейший
параболоид, имеющий в той же системе координат уравнение
То же преобразование B) переводит гиперболический параболоид
Т2 „2
*- = 2г
Р Я
566 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА [ГЛ. XX
в параболоид
Эллиптический цилнидр
~аг~!г~Ьг~'1'
мнимый эллиптический цилиндр
х2 , у2
пара мнимых пересекающихся плоскостей
а2 г й2 '
гиперболический цилиндр
пара действительных пересекающихся плоскостей
_i L__ n
Q2 Й2
аффинным преобразованием
<3>
переводятся соответственно в одноименные поверхности, имеющие
в той же системе координат уравнения:
Параболический цилиндр
if = 2рх
после преобразования
х'=рх, у'—у, z'=z D)
получает уравнение
i/2 = 2х.
Поверхности, распадающиеся на пары параллельных плоскостей
§ 8] АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 567
аффинно эквивалентны соответственно поверхностям
Х2± 1=0
(верхний знак-f- соответствует мнимым, нижний знак —действитель-
—действительным плоскостям).
Остается доказать, что две поверхности, принадлежащие к раз-
различным классам, не могут быть аффинно эквивалентными. Мы сейчас
дадим чисто геометрическое доказательство.
Рассмотрим прежде всего свойство поверхности быть центральной,
т. е. иметь единственный центр симметрии. Так как при аффинном
преобразовании центр симметрии данной фигуры переходит в центр
симметрии преобразованной фигуры, то всякий аффинный образ по-
поверхности второго порядка с единственным центром снова есть
поверхность второго порядка с единственным центром').
Итак, при аффинном преобразовании всякая центральная поверх-
поверхность переходит снопа в центральную.
Далее, среди центральных поверхностей невырожденные характе-
характеризуются тем, что их центр не лежит на данной поверхности. Поэтому
аффинный образ невырожденной (соответственно вырожденной) цент-
центральной поверхности есть невырожденная (соответственно вырожден-
вырожденная) центральная поверхность.
Невырожденные центральные поверхности суть эллипсоиды, одно-
полостные и двуполостные гиперболоиды; ни одна из этих поверх-
поверхностей не может при аффинном преобразовании перейти в поверх-
поверхность другого наименования.
В самом деле, эллипсоид не может быть аффинно эквивалентен
никакой другой поверхности второго порядка, так как среди всех
поверхностей второго порядка лишь эллипсоиды обладают свойством
лежать внутри некоторого параллелепипеда (все остальные поверх-
поверхности второго порядка простираются в бесконечность 8)).
Двуполостный и однополостный гиперболоиды аффинно не экви-
эквивалентны, так как у двуполостных гиперболоидов нет вещественных
прямолинейных образующих, а у однополостных они есть. Очевидно
также, что при аффинном преобразовании вещественный эллипсоид
не может перейти в мнимый, так же как вещественный конус не
может перейти в мнимый.
Итак, любой аффинный образ центральной поверхности данного
наименования есть необходимо центральная поверхность того же
наименования.
') Если бы у преобразованной поверхности было несколько центров, то
при обратном преобразовании все эти центры перешли бы в центры перво-
первоначальной поверхности. А у нее, по предположению, имеется лишь один
центр.
2) Ср. с аналогичным свойством, выделяющим эллипсы среди всех кри-
кривых второго порядка (гл. XVI, § 5).
568 ОБЩАЯ ТЕОРИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА, (ГЛ. XX
Переходим к нецентральным поверхностям.
Прежде всего, очевидно, что аффинный образ всякой поверхно-
поверхности, распадающейся в пару пересекающихся, соответственно парал-
параллельных (и широком или собственном смысле), плоскостей есть снова
поверхность того же наименования, причем сохраняется и свойство
поверхности быть вещественной или мнимой.
Остаются параболоиды и цилиндры.
Нецентральная поверхность при аффинном преобразовании
не может перейти в центральную (иначе обратное преобразование
перевело бы центральную поверхность в нецентральную). По-
Поэтому аффинный образ параболоида или цилиндра не может
быть центральной поверхностью; не может он быть и парой плос-
плоскостей.
Далее, аффинный образ параболоида не может быть ни эллип-
эллиптическим, ни гиперболическим цилиндром (так как у параболоидов
нет ни одного центра, а у названных цилиндров имеется целая пря-
прямая центров).
Гиперболический и эллиптический параболоиды аффиино различ-
различны, так как у гиперболического параболоида имеются (веществен-
(вещественные) прямолинейные образующие, а у эллиптического параболоида
их нет.
По этой же причине эллиптический параболоид аффинно отличен
от параболического цилиндра. Аффинная неэквивалентность гипер-
гиперболического параболоида и параболического цилиндра вытекает n:i
того, что асимптотические векторы гиперболического параболоида
заполняют два различных двумерных векторных многообразия (это
все векторы, параллельные одной какой-нибудь из двух пересекаю-
пересекающихся плоскостей), тогда как асимптотические направления парабо-
параболического цилиндра образуют одно-единственное двумерное вектор-
векторное многообразие.
Неэквивалентность (какого бы то ни было) цилиндра (какому бы то ни было)
параболоиду вытекает также из того, что у цилиндра все образующие парал-
параллельны между собою, тогда как ни один параболоид этому условию не удов-
удовлетворяет.
Из сказанного следует, что аффинным образом эллиптического
(соответственно гиперболического) параболоида может быть только
параболоид того же наименования.
Аффинным образом гиперболического или эллиптического цилиндра
не может быть ни параболоид, ни пара плоскостей, ни центральная
поверхность; не может им быть и параболический цилиндр, у кото-
которого нет ни одного центра, тогда как у эллиптического и гипербо-
гиперболического цилиндров имеется прямая центров.
Остается доказать, что эллиптический и гиперболический ци-
цилиндры аффинно различны. Это вытекает из того, что совокупность
§ 8] АФФИННАЯ КЛАССИФИКАЦИЯ ПОВЕРХНОСТЕЙ ВТОРОГО ПОРЯДКА 569
вещественных асимптотических векторов гиперболического цилиндра
есть объединение двух двумерных векторных многообразий, тогда
как многообразие всех вещественных асимптотических векторов эл-
эллиптического цилиндра одномерно.
Аффинная неэквивалентность эллиптического и гиперболического цилинд-
цилиндров вытекает также из того, что у эллиптического цилиндра имеются плоские
сечения, являющиеся эллипсами, тогда как у гиперболического цилиндра
таких сечений нет (читатель должен это доказать).
Из предыдущего анализа вытекает, наконец, что параболический
цилиндр аффшшо отличен от поверхностей всех других названных
выше типов.
Задача аффинной классификации поверхностей второго порядка
решена до конца.
ГЛАВА XXI
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
§ 1. Перспективное соответствие между плоскостью и связкой
Множество всех прямых и плоскостей трехмерного пространства,
проходящих через данную точку О, называется связкой с центром О
или, кратко, связкой 1) О. Возьмем какую-нибудь плоскость я, не
проходящую через точку О.
Тогда через каждую точку
М плоскости я прохо-
проходит единственная прямая
m = ОМ связки О. Прямые
связки будем называть лу-
лучами2). Таким образом, ус-
установлено соответствие, на-
называемое перспективным со-
соответствием, между всеми
точками плоскости я и лу-
лучами связки О.
При перспективном со-
соответствии каждой прямой
d, лежащей в плоскости я,
рис. 226. соответствует некоторая
вполне определенная пло-
плоскость сзязки — плоскость б, проходящая через точку О и прямую й-
Плоскость эта образована всеми лучами, идущими из точки О в
точки прямой й; мы будем ее обозначать через Od — 8 (рис. 226).
Итак, при перспективном соответствии точкам плоскости я соот-
аеитвуют лучи связки О, а прямым плоскости я — плоскости связки О.
') Таким образом, связка с данным центром содержит, во-первых, связку
прямых и, во-вторых, связку плоскостей с этим центром.
2) Название объясняется тем, что эти прямые удсбно представлять себе
как лучи, посылаемые во все стороны источником света, расположенным в О.
Однако следует помнить, что луч свяжи есть полная прямая, а не полупря-
полупрямая.
§ 11
ПЕРСПЕКТИВНОЕ СООТВЕТСТВИЕ
571
Назовем луч и плоскость связки О инцидентными между собою,
если данный луч лежит в данной плоскости. Точно так же назовем
точку и прямую па плоскости л инцидентными между собою, если
данная точка лежит на данной прямой. Очевидно, при перспективном
соответствии между связкой О и плоскостью я инцидентность
сохраняется: если на плоскости я точка М инцидентна прямой d,
то соответствующие луч ОМ и плоскость Od связки будут также
инцидентны между собою, и
обратно.
Возникает вопрос: является
ли перспективное соответствие
между плоскостью я и связкой
О взаимно однозначным? Дру-
Другими словами, каждый ли луч
связки О соответствует неко-
некоторой точке М плоскости л?
Легко видеть, что этой
взаимной однозначности нет:
лучи связки, параллельные
плоскости л, не соответствуют
при перспективном соответст-
'Особая плоскость
Рис. 227.
вин никакой точке плоскости
л, а плоскость связки, парал-
параллельная плоскости л, не соот-
соответствует никакой прямой плос-
плоскости л. Для сокращения речи назовем особым лучом связки всякиЛ
луч, параллельный плоскости л, а особой плоскостью связки назовем
единственную плоскость, принадлежащую этой связке и параллель-
параллельную плоскости я. Особые лучи и особая плоскость связки не соот-
соответствуют никаким точкам и никакой прямой плоскости л. В каждой
неособой плоскости связки имеется единственный особый луч
(по которому эта плоскость пересекает особую плоскость связки),
и особые лучи заполняют всю особую плоскость связки.
Посмотрим, в каком случае две плоскости Od и Od' связки пере-
пересекаются по особому лучу (рис. 227). Так как особый луч связки
не имеет общих точек с плоскостью л, то плоскости Od и Od' не
могут иметь общих точек, принадлежащих плоскости л, т. е. пря-
прямые d и d', лежащие в плоскости л, не имеют никакой общей
точки, следовательно, они параллельны. Обратно, если две прямые
d и d' в плоскости л параллельны, то соответствующие им плоскости
Od и Od' не могут иметь общих точек, лежащих в плоскости л,
т. е. луч, по которому плоскости Od и Od' пересекаются, парал-
параллелен плоскости л, он является особым лучом. Итак, две плоскости
Od и Od' связки О тогда и только тогда пересекаются по особому
лучу, когда соответствующие им прямые dud' параллельны.
572 ПРОККТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
Представляется естественным пополнить плоскость новыми —
«несобственными», или «бесконечно удаленными»,—точками, обра-
образующими несобственную, или бесконечно удаленную, прямую, и
поставить их в соответствие с особыми лучами связки так, чтобы
перспективное соотнетствие между связкой и пополненной плоскостью
было уже взаимно однозначным. На введенные таким образом не-
несобственные элементы мы распространим понятие инцидентности,
считая, что данная обыкновенная ('собственная») прямая d пло-
плоскости я инцидентна несобственной точке Жю тогда и только тогда,
когда особый луч, которому точка Л4Х соответствует, инцидентен
плоскости Od; несобственная прямая, по определению, инцидентна
любой несобственной точке. Итак, при перспективном (теперь уже
взаимно однозначном) соответствии между пополненной плоскостью
и связкой отношение инцидентности сохраняется.
Таким образом, пополнение плоскости несобственными элементами
(несобственными точками и несобственной прямой) происходит при
соблюдении следующих условий:
1° Каждая прямая d плоскости л пополняется единственной не-
несобственной точкой (соответствующей единственному особому лучу
плоскости Od).
2° Две прямые d, d' плоскости я тогда и только тогда имеют
общую несобственную точку, когда она параллельны (т. е. тогда и
только тогда, когда плоскости Od и Od' имеют общий особый луч).
3° Совокупность всех несобственных точек плоскости образует
несобственную прямую (совокупность всех особых лучей связки обра-
образует особую плоскость этой связки).
Пополненная несобственными точками и несобственной прямой
плоскость я называется проективной плоскостью1); мы будем ее
обозначать через л\ Перспективное соответствие между проективной
плоскостью л и связкой есть взаимно однозначное соответствие
между точками и прямыми плоскости, с одной стороны, и лучами и
плоскостями связки, с другой стороны; это соответствие сохраняет
инцидентность.
Из условий 1°, 2°, 3°, которым подчинено пополнение плоскости
несобственными точками, вытекают следующие два свойства проек-
проективной плоскости:
А. Всякие две прямые dud' проективной плоскости пересека-
пересекаются в одной точке.
В самом деле, если прямые dad' собственные и если на пер-
первоначальной обыкновенной плоскости я они пересекаются в точке М,
то эта же точка М является и точкой пересечения прямых dud
на проективной плоскости я"; так как несобственные точки пер«се-
') Точнее, проективной плоскостью в ее первом изображении или пер-
первой моделью проективной плоскости.
о 2] ОДНОРОДНЫЕ КООРДИНАТЫ ТОЧЕК НА ПЛОСКОСТИ 573
кающихся прямых d и d' различны, то точка М есть единственная
общая точка прямых dud' на проективной плоскости. Если пря-
прямые d и d', рассматриваемые на обыкновенной плоскости л, парал-
параллельны между собою, то па проективной плоскости я они имеют одну
и ту же несобственную точку, и она является их единственной об-
общей точкой.
Наконец, несобственная прямая пересекается со всякой собствен-
собственной прямой в несобственной точке этой последней.
Предложение А можно сформулировать так: для всяких двух
различных прямых проективной плоскости имеется единственная точка,
которой обе эти прямые инцидентны.
Этому предложению как бы двойственно предложение
Б. Для всяких двух различных точек на проективной плоскости
имеется единственная прямая, которой обе эти точки инцидентны.
Или: через каждые две точки плоскости проходит одна и только
одна прямая. Это известно, если точки собственные. Предположим,
что даны две точки А и В, из которых одна, положим А, собствен-
собственная, а другая В— несобственная. Точка В есть несобственная точ-
точка некоторой прямой b и всех прямых, параллельных прямой Ь.
Поэтому, проведя через точку А прямую Ь', параллельную прямой Ь
(а такая прямая единственная), мы и получим прямую, инцидентную
собственной точке А и несобственной точке В.
Наконец, единственная прямая, инцидентная двум несобственным
точкам, есть несобственная прямая.
Аналитически пополнению плоскости несобственными точками
соответствует введение так называемых однородных координат, к
которому мы сейчас и переходим
§ 2. Однородные координаты точек на плоскости
и лучел в связке
1. Определение однородных координат. Определение 1.
Предположим, что на плоскости л дана система аффинных коорди-
координат оехе2 (начало ее обозначаем строчной буквой о). Пусть М—
произвольная точка плоскости, х и у — ее координаты в системе
oexe2. Тогда всякая тройка чисел
xlt х2, х3,
пропорциональная тройке
х, У, 1,
называется тройкой однородных координат точки М (определенных
данной аффинной координатной системой oeje2).
Решим две простые задачи:
а) по аффинным координатам точки М найти все тройки одно-
однородных координат этой точки;
574 ПРОККТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
б) по одной какой-нибудь тройке однородных координат данной
точки найти ее аффинные координаты.
Первая задача решена самим определением однородных коорди-
координат: тройки однородных координат данной точки М— (х, у) суть
все тройки л:,, лг2, х3, пропорциональные тройке х, у, 1.
Вторая задача состоит в том, чтобы но данной тройке xlt x.,, ха
однородных координат точки Л1 найти ту тройку х, у, 1, которой
тройка лг1; хг, x-j пропорциональна. Значит, надо решить пропор-
пропорцию
откуда х1:х3 = х:\, х2-х3 = у: 1, или
Каждая точка М = (х, у) плоскости получила бесконечное множе-
множество троек однородных координат.
Какими свойствами обладает это множество троек?
Во-первых, в нем не содержится «запрещенная тройка», состоящая
из трех нулей, так как эта тройка не может быть тройкой, пропор-
пропорциональной тройке вида х, у, 1, ни при каких х и у.
Во-вторых, любые две тройки, являющиеся элементами этого
множества, пропорциональны между собою.
В-третьих, всякая тройка, пропорциональная какой-либо тройке,
входящей в наше множество, сама входит в это множество.
Другими словами: множество всех троек однородных координат
какой-либо точки плоскости есть один из классов, на которые распа-
распадается множество всех вообще незапрещенных числовых троек, если
считать эквивалентными всякие две пропорциональные между собою
тройки.
Кратко: множество всех троек однородных координат какой-либо
точки плоскости есть класс пропорциональных троек.
Возникает обратный вопрос: всякий ли класс пропорциональных
троек есть множество троек однородных координат какой-либо точки
плоскости?
Пусть дан какой-нибудь класс троек К, и пусть хх% х2, х3 —
какая-нибудь тройка, входящая в этот класс. Возможны два случая:
либо х3 Ф 0, тогда мы эту тройку лг1, х2, х3 назовем обыкновенной;
либо х3 — 0, тогда мы назовем тройку хъ х2, х3 особой.
При этом, если в класс входит хотя бы одна обыкновенная
тройка, то все тройки этого класса обыкновенные; если в класс
входит хотя бы одна особая тройка, то все тройки этого класса
особые.
Если класс К состоит из обыкновенных троек, то, взяв какую-
нибудь одну из них, xlt x2, х3, мы можем найти точку М—(х, У)
с 2] ОДНОРОДНЫЕ КООРДИНАТЫ ТОЧЕК НЛ ПЛОСКОСТИ 57с
по формулам A); это и будет точка, для которой л^, х„, х3 явля-
является одной из троек однородных координат, а потому и весь данные
класс К будет классом троек однородных координат точки М.
Если же данный класс состоит из особых троек, то в нем нет
тройки вида х, у, 1, следовательно, такой класс не является клас-
классом, соответствующим какой-либо точке плоскости.
Итак, точки плоскости находятся во взаимно однозначном соот-
соответствии с классами обыкновенных числовых троек.
Посмотрим, каков геометрический смысл этого соответствия п
что можно сказать об особых классах, т. е. о классах, состоящих
из особых троек.
Для этого вернемся снова к связке с каким-нибудь центром О.
Возьмем произвольную аффинную координатную систему Ое^е.,
в пространстве с началом в точке О. Координаты какого-нибудь
вектора относительно этой координатной системы будем обозначать
через хъ лг2, хя (а не через х, у, z).
Определение 2. Пусть дан произвольный луч связки. Тройку
координат хъ х2, х3 любого направляющего вектора этого луча
назовем тройкой однородных координат этого луча (в дайной аффин-
аффинной координатной системе Oete.2e3).
Так как существует бесконечное множество направляющих век-
векторов данного луча, то каждый луч связки получаст бесконечное
множество троек однородных координат. Среди этих троек нет за-
запрещенной тройки 0, 0, 0, так как она не может служить тройкой
координат никакого направляющего вектора. Все эти тройки про-
пропорциональны между собою; наконец, если дан какой-нибудь направ-
направляющий вектор {хъ х2, xs) данного луча и если тройка х[, х'г, х3
пропорциональна тройке хъ хг, xs, то вектор {х[, х'г, х'3\ также
будет направляющим вектором того же луча. Итак, множество всех
троек однородных координат произвольного луча связки есть класс
пропорциональных троек.
Нетрудно видеть, что любой класс числовых троек является
классом троек однородных координат некоторого луча связки. В самом
деле, пусть дан произвольный класс и в нем произвольная тройка
хъ лг2, лг3. Так как эта тройка не состоит из одних нулей, то она
является тройкой координат некоторого вектора и, отличного от
нуля. Этот вектор есть направляющий вектор вполне определенного
луча связки, и, значит, тройка xv x2, х3 и все пропорциональные
ей тройки являются тройками однородных координат именно этого
луча.
Каким же лучам связки соответствуют, в качестве троек их
координат, особые тройки вида хи х2, 0? Очевидно, тем и только
тем лучам, которые лежат в плоскости Ое^.
Это положение вещей позволяет понять геометрический смысл
введения однородных координат на плоскости.
576 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
Пусть, в самом деле, дана плоскость л с системой аффинных
координат оегег на ней. Возьмем аффинную систему Oeje2e3 в про-
пространстве с началом Офо, с теми же двумя векторами еь е2, что
и в системе ое1е2 на плоскости л, и с третьим вектором е3 ^ do
(рис. 228).
Всякую такую координатную систему Ое^ед в пространстве
называем системой, естественно связанной с системой oeje2 (в пло-
плоскости я). В системе координат
Оехе2е3 плоскость л, очевидно,
имеет уравнение
х3— 1. B)
3 а м с ч а н ие 1. Мы снова
обозначаем координаты в систе-
системе Oeje2es через х^ хг, х3. С
другой стороны, в плоскости л
относительно системы координат
оехе2 координаты точек (и векто-
векторов) будут обозначаться через
х, у, так что координатами любой точки М—(х, у) плоскости л
являются в системе Oe^ej
Эти координаты хь х2, х3 суть, очевидно, и координаты вектора
ОМ; тройка х^ лг2, х3 есть, следовательно, одна из троек однород-
однородных координат луча ОМ, идущего из центра связки О в точку М
плоскости л.
Итак, тройки однородных координат какой-либо точки М пло-
плоскости суть не что иное, как тройки однородных координат перспек-
перспективного к этой точке луча связки (в предположении, что аффинная
координатная система Ое,е2е3 естественно связана с системой оейе2).
Так как классы особых троек суть классы однородных коорди-
координат лучей связки, параллельных плоскости я, и именно этим лучам
и должны соответствовать несобственные точки плоскости я, то
естественно считать особые тройки тройками однородных координат
несобственных точек плоскости.
Возвращаясь к началу этого параграфа, можем сказать:
Если в плоскости дана аффинная система координат ое^, то
для каждой точки плоскости определены ее однородные координаты
относительно системы ое^, причем для собственных точек пло-
плоскости аффинные и однородные координаты связаны между собою
формулами A). Пополнение плоскости несобственными точками с0"
стоит в том, что каждому классу особых троек вида х1; х2, 0 ста-
ставится в соответствие несобственная точка плоскости.
я 2] ОДНОРОДНЫЕ КООРДИНАТЫ ТОЧЕК ИЛ ПЛОСКОСТИ 577
В результате этого пополнения множество всех без исключения
классов числовых троек оказывается поставленным во взаимно одно-
однозначное соответствие с множеством всех точек плоскости.
Точку М с однородными координатами х1г х», х3 записываем так:
М= (x1:x2-xs).
Замечание 2. Пусть М—несобственная точка плоскости,
тогда
М= (х1:х2:0).
Пара чисел xv x2 есть пара координат некоторого не равного нулю
вектора {хъ х2\ плоскости; несобственные точки
M = (xl:x2;Q) и Л/= (г/, :г/2:0)
совпадают тогда и только тогда, когда тройки xlt x2, О и yv у2, О,
т. е. пары xlt x2 и yt, y2, пропорциональны, а это значит, что
векторы {хи хг\, {уъ у2) коллинеарны, или определяют в плоскости
одно и то же направление (являются направляющими векторами
одной и той же прямой).
Таким образом, несобственные точки плоскости взаимно одно-
однозначно соответствуют направлениям в плоскости (при этом надо
помнить, что два противоположных вектора определяют одно и то
же направление). Несобственные точки называют также бесконечно
удаленными и говорят, что бесконечно удаленная точка
А\— (х1:х.1:0) «удалена в бесконечность» в направлении вектора
{хх, х2\ (или {—хх:—лг2}), т. е. в направлении прямой, имеющей
эти векторы своими направляющими векторами.
Мы вернулись к тому представлению о несобственных точках
плоскости, которое было дано еще в § 5 главы V.
2. Уравнение прямой на плоскости в однородных координа-
координатах. Пусть на плоскости л; дана прямая d споим уравнением
-«3 = 0 C)
в системе координат ое^.
Найдем уравнение, которому удовлетворяет всякая тройка одно-
однородных координат любой точки прямой d. Другими словами, найдем
уравнение прямой d в однородных координатах. Для этого, взяв
произвольную точку М—{х, у) прямой d и какую-нибудь тройку
х1} хь х3 однородных координат этой точки, выразим аффинные
координаты х и у точки М через ее однородные координаты xv x2, х3
по формулам A) и подставим полученные значения
Xi Хг
в уравнение C). Получим
П. С. Александров
578
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[гл. xxi
т с.
aixi т а2х2 -Ь asx3 = 0. D)
Это и есть искомое уравнение.
Замечание 3. Этому же уравнению удовлетворяют и ко-
координаты хъ х2, х3 (в системе Oeje2e3) любого луча связки
О, лежащего в плоскости Od, и только координаты такого луча
(рис. 229).
Обратно, пусть дано уравнение D); предположим сначала, что
в этом уравнении по крайней мерс один из коэффициентов а1, аг
отличен от нуля. Посмот-
Посмотрим, каковы те собствен-
собственные точки плоскости, ко-
которые удовлетворяют
этому уравнению. Пусть
собственная точка М
плоскости я имеет тройку
однородных координат
л^, х2, х3, удовлетворяю-
удовлетворяющую уравнению D).
Тогда и всякая тройка
однородных координат
точки удовлетворяет
уравнению D); в частно-
частности, этому уравнению
удовлетворяет и тройка х, у, 1, где х и у — аффинные координаты
точки М. Итак, если однородные координаты точки Ж удовлетворяют
уравнению D), то аффинные координаты х и у этой точки удовлет-
удовлетворяют уравнению C) и, следовательно, лежат на прямой C).
Но на проективной плоскости я имеется и несобственная точка,
и притом только одна, удовлетворяющая уравнению D). В самом
деле, если хг, х2, 0 — тройка однородных координат несобственной
точки, удовлетворяющей уравнению D), то
Рис. 229.
a1x1-\-a2xi
D')
откуда
единственная несобственная точка, удовлетворяющая уравнению D),
есть точка
( — а2:ва:0). (о)
Тройки класса E) и только они суть тройки координат единст-
единственного несобственного луча, лежащего в плоскости Od. Так как
при перспективном соответствии между связкой О и плоскостью л
К 3] ОБЩЕЕ ОПРЕДЕЛЕНИЕ ПРОЕКТИВНОЙ ПЛОСКОСТИ 579
отношение инцидентности сохраняется, то несобственная точка E)
должна считаться инцидентной прямой d, т. е. эта точка есть (един-
(единственная) несобственная точка пряной d (в направлении которой
точка и ушла в бесконечность).
Как и следовало ожидать, две прямые тогда и только тогда
имеют общую несобственную точку, когда они параллельны.
Мы до сих пор рассматривали случай, когда в уравнении D) по
крайней мере один из коэффициентов ах, а2 отличен от нуля. Если
оба коэффициента а1 = а2 = 0, то третий коэффициент а3ф0, и
уравнение D), имея вид а3х3 = 0, а3^=0, равносильно уравнению
*з = 0. F)
Этому уравнению удовлетворяют все несобственные точки плоскости
и только они. Уравнение F) есть уравнение первой степени, его
и естественно считать уравнением несобственной прямой плоскости.
§ 3. Координаты прямой; арифметическая проективная плоскость;
общее определение проективной плоскости
1. Координаты прямой. Читателю уже давно известно, что
координаты можно определять не только для точек, по и для других
геометрических объектов; например, мы с самого начала этих «Лек-
«Лекций» говорим о координатах вектора и только что ввели понятие
однородных координат луча связки. Координаты любого геометри-
геометрического объекта (точки, вектора, луча связки) всегда являются
числами, вполне определяющими данный геометрический объект.
Пусть теперь на проективной плоскости л дана прямая своим
уравнением
а1х1-\-а2х2 ~ а3х3 = 0. A)
Тройка коэффициентов ах, а2, а3 вполне определяет уравнение A)
и, следовательно, прямую, выражаемую этим уравнением. При этом
два уравнения: A) и
a=0, B)
тогда и только тогда определяют одну и ту же прямую, если их
коэффициенты пропорциональны между собою, т. е. если
Ь1:а1 = Ь2:а2 — Ь3:а3. C)
В саном деле, если уравнения A) и B) определяют одну и ту же
прямую, то всякая тройка чисел хъ х2, х3, удовлетворяющая одному
из этих уравнений, удовлетворяет и другому, т. е. уравнения A) и B)
эквивалентны (см. гл. X, § 2,следствие 2 теоремы 5), но два однород-
однородных уравнения A) и B) эквивалентны тогда и только тогда, когда
их коэффициенты пропорциональны.
19*
580 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [|-Л. XXI
Определение 3. Тройка коэффициентов alt a2, а3 любого
уравпення данной прямой d называется тройкой (однородных) коор-
координат этой прямой, а также тройкой координат плоскости Od связки О
(в системе координат Ое^ед, естественно связанной с системой ое^,
данной в плоскости л).
Очевидно: «запрещенная» тройка 0, 0, 0 не может быть тройкой
координат никакой прямой. Далее, из только что доказанного следует:
1. Любые две тройки координат данной прямой пропорциональны
между собою.
2. Если данная тройка аа, аг, а3 есть тройка координат данной
прямой, то и всякая тройка, пропорциональная тройке аъ а2, а3,
есть тройка координат той же прямой.
Другими словами: множество всех троек координат данной прямой
есть класс троек. Положение с однородными координатами прямых
совершенно такое же, как с однородными координатами точек. Мы
можем резюмировать это положение следующим образом:
Всякая (незапрещенная) тройка чисел может рассматриваться
и как тройка однородных координат некоторой точки на проективной
плоскости, и как тройка координат некоторой прямой. Две тройки
определяют при этом одну и ту же точку, соответственно одну и
ту же прямую, тогда и только тогда, когда они пропорциональны,
между собою.
Прямую с координатами их, и2, и3 мы обозначаем так:
Прямая {и1:и2:и3} и точка (xl:x2:x3) инцидентны, если
и\.хг -г и2х2 ~г цзхз = 0-
Пример. Прямая х=у или хх — лг2 = 0 есть прямая {1:—1:0};
прямая у=\ или х.г—х3 = 0 есть прямая {0:-|-1: — 1 }; прямая
х = 0 (ось ординат) или х1 = 0 есть прямая {1:0:0}; несобственная
прямая х3 = 0 есть прямая {0:0:1 }.
2. Арифметическая проективная плоскость. Теперь читатель
готов к введению следующего определения.
Определение 4. Арифметической проективной плоскостью на-
называется множество Рар элементов двух родов, называемых соответ-
соответственно «арифметическими точками)) и «.арифметическими прямыми)).
И те и другие суть классы пропорциональных между собою число-
числовых троек, снабженные отметкой, указывающей, имеется ли в виду
«точка» или «прямая»: точки обозначаются, например, через (х^.х^'.Хо),
а прямые — через {к1:и2:к3}. При этом между точками и прямыми
установлено отношение инцидентности, состоящее в том, что точка
(х^.х^-.х^) и прямая {и,:м2:й3} называются инцидентными между
Собою, если
utxt -I- unXo 4- ИчЛг, = 0. D)
§ 3]
ОБЩЕЕ ОПРЕДЕЛЕНИЕ ПРОЕКТИВНОЙ ПЛОСКОСТИ 581
Замечание 1. Ставя в соответствие точкам (Xj^t.Vj'.Xg) и пря-
прямым { «1'• и»:из} арифметической проективной плоскости прямые и
плоскости связки О, имеющие в некоторой фиксированной системе
координат соответственно координаты xv хг, хя и ил, и.,, и3, видим,
что получаем взаимно однозначное соответствие между элементами
арифметической проективной плоскости и элементами связки, сохра-
сохраняющее отношение инцидентности (точка и прямая арифметической
плоскости инцидентны между собою тогда и только тогда, когда
инцидентны между собою соответствующие им луч и плоскость связки).
3. Общее определение проективной плоскости. Наконец, мы мо-
можем дать и следующее общее
Определение о. Проективной плоскостью называется вообще
всякое множество Р, состоящее из элементов двух родов, называ-
называемых соответственно «точками» н «прямыми» и связанных между
собою некоторым отношением, называемым отношением инцидент-
ности между какой-нибудь «точкой» и какой-нибудь «прямой»1).
При этом требуется, чтобы существовало сохраняющее инцидент-
инцидентность взаимно однозначное соответствие между «точками» и «прямыми»
проективной плоскости Р, с одной стороны, н лучами и плоскостями
связки, с другой стороны: «точка» и «прямая» проективной плоскости Р
инцидентны между собою тогда и только тогда, когда инцидентны
соответствующие им луч и плоскость связки. В частности, проектив-
проективной плоскостью является и сама связка, если ее лучи называть
«точками», а плоскости—«прямыми».
Замечание 2. Взаимно однозначное соответствие между эле-
элементами (точками и прямыми) двух проективных плоскостей, сохра-
сохраняющее отношение инцидентности, называется изоморфным соответ-
соответствием (изоморфизмом) этих двух плоскостей. Мы видим, что все
проективные плоскости изоморфны связке2) и, следовательно, изо-
изоморфны между собою. Очевидно также, что всякая проективная
плоскость изоморфна арифметической проективной плоскости (так как
связка ей изоморфна).
Замечание 3. До тех пор, пока в пространстве не выбрана
аффинная координатная система Oe^eg, все лучи связки О и все
плоскости этой связки (т. е. все «точки» и все «прямые» проективной
плоскости) равноправны между собою — никаких несобственных «точек»
и никаких несобственных «прямых» связка О сама по себе не знает.
Не знает их и проективная геометрия, которая есть не что иное,
как геометрия связки. Лишь после того, как выбрана система коор-
координат Оехе2ея с началом в центре связки — и этим выбором установ-
установлен определенный изоморфизм между связкой и арифметическ >й
*)_ Смысл последнего утверждения заключается в том, что относительно
каждой данной точки М и каждой дайной прямой d известно, инцидентны
они между собою или мет.
) То есть могут быть изоморфно отображены на связку.
582 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
проективной плоскостью, — можно говорить о несобственных лу-
лучах связки (несобственных точках плоскости) как о лучах (о точ-
точках), третья координата х3 которых равна нулю; можно говорить
и о несобственной прямой {0:0:1 \, которой все эти точки ян-
цидентны.
Положение аналогично тому, которое мы имели в теории «-мерных
векторных и точечно-векторных пространств: выбор в таком простран-
пространстве определенного базиса (определенной системы координат) озна-
означало установление определенного изоморфизма между данным про-
пространством и соответствующим арифметическим пространством, что
в свою очередь позволяло ограничиться исследованием этого по-
последнего.
Подобным же образом, изучая любую проективную плоскость Р,
мы можем всегда заменить ее по нашему желанию связкой илн
арифметической проективной плоскостью Рар. Последнее особенно
целесообразно, если желательно с самого начала выделить несобст-
несобственные элементы. При этом удобно и законно представлять себе
арифметическую проективную плоскость как результат введения
однородных координат (относительно некоторой «исходной» аффинной
координатной системы ое1е2) на данной обычной плоскости л, как
это мы делали в начале § 2.
Проективную плоскость с выделенной на ней несобственной прямой
называют «аффинно-проективной» плоскостью — по причинам, которые
выяснятся н § 6.
4. Комплексная проективная плоскость. Л\ы ограничимся определе-
определением арифметической комплексной проективной плоскости.
Комплексной арифметической проективной плоскостью называется
множество элементов двух родов, называемых соответственно комп-
комплексными арифметическими точками и комплексными арифметическими
прямыми1). И те и другие суть классы пропорциональных между
собою троек, теперь уже произвольных комплексных, чисел, снабжен-
снабженных по-прежнему отметкой, указывающей, идет ли речь о точках
или прямых; точки будут обозначаться через (х1:хг:дг3), прямые —
через { ul:u2:u3}. Среди всех троек комплексных чисел лишь одна
тройка 0, 0, 0 по-прежнему остается запрещенной. Точка (соответ-
(соответственно прямая) называется вещественной (действительной), если
среди троек хг, х2, х3, классом которых она является, имеется
тройка, состоящая из действительных чисел. Так, точка M = (i:i:i)
есть действительная точка: она может быть записана и в виде
М = A:1:1). Все не действительные точки (прямые) называются
мнимыми.
Между точками и прямыми комплексной проективной плоскости
установлено отношение инцидентности: точка (x^.x^'.Xg) и прямая
Мы, естественно, будем их называть просто точками и прямыми.
§ 4] ПРИНЦИП ДВОЙСТВЕННОСТИ 583
lul:u2:u3} называются инцидентными между собою, если
Так же можно говорить и о комплексной связке как о множе-
множестве всех комплексных прямых («лучей» связки) и плоскостей, про-
проходящих через одну какую-нибудь действительную точку О комп-
комплексного трехмерного пространства. В дальнейшем (уже в следующем
napaipaqbe) мы будем предполагать, что в связке О (вообще говоря,
комплексной) дана система координат Ое1е2е3, которая всегда будет
предполагаться действительной (т. с. не только точка О, но и век-
векторы е1,е2,е3 будут всегда вещественными). Отождествляя луч связки,
имеющий в избранной «исходной» системе координат Оеге^3 коор-
координаты хи х2, х3, с точкой (jqiJur-jiATg), а плоскость связки, име-
имеющую координаты^, и2, и3,—с прямой \ul:u.2:u3) арифметической
проективной плоскости, мы н саму связку можем отождествить
с арифметической проективной плоскостью.
§ 4. Принцип двойственности для проективной плоскости
Вернемся к условию инцидентности
и1х1 + и2х2-\-и3х3 = 0 A)
точки (х1:х2:х3) и прямой {ul:u2:us\.
Поставим в соответствие каждой точке (xl:x2:x3) проективной
плоскости прямую {xl:x2:x3\ с теми же координатами (и, наоборот,
прямой {ul:u2:u3\ — точку (u1:u2:u3)), т. е. сделаем взаимно одно-
однозначное отображение множества всех элементов (точек н прямых)
проективной плоскости на себя, записывающееся в виде
(х1:хг:х3L-+{х1:хг:хз\. B)
Тогда имеет место следующий очевидный и тем не менее заме-
замечательный факт.
Отображение B) сохраняет отношение инцидентности, т. е. пе-
переводит точку (х1:х2:х3) и прямую {и1:и2:и3\, инцидентные между
собою, в прямую {jCjiATgiXg} н точку (UjitfjiWj,), по-прежнему инци-
инцидентные между собою.
В самом деле, условие инцидентности A) не зависит от того,
считаем ли мы тройки хи х2, х3 и иъ и2, и3 тройками координат
точки и прямой или, наоборот, прямой и точки, т. е. не зависит
от того, какую из двух троек xlt x2, х3 и аи и2, и3 мы заключаем
в круглые, а какую —в фигурные скобки.
Непосредственным следствием этого факта явлается следующий
Принцип двойственности для проективной плос-
плоскости. Пусть верно какое-нибудь предложение, касающееся точек.
584
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[ГЛ. XVI
прямых и отношения инцидентности между ними. Тогда будет верно
и двойственное предложение, получаемое, если в данном предложе-
предложении поменять слова «прямая» и «точка».
В самом деле, речь идет о предложении, которое может заклю-
заключаться лишь в утверждении инцидентности таких-то прямых
{u1:u2:us} и таких-то точек (xl:x2:x3). Эти утверждения выражаются
в тождествах вида A), в которых ничего не изменится, если мы в
формулировке нашего предложения заменим прямые точками, а точ-
точки— прямыми (т. е. заменим фигурные скобки круглыми и наобо-
наоборот).
Прежде чем приводить примеры взаимно двойственных предложе-
предложений, сделаем следующее общее замечание.
В плоской аффинной геометрии точки и прямые не были равно-
равноправны: плоскость состояла из точек, а прямые определялись как
множества точек, координаты которых удовлетворяли уравнениям
первой степени.
Теперь мы можем стать на другую точку зрения: и прямые и
точки суть совершенно равноправные геометрические объекты, и те
и другие взаимно однозначно соответствуют классам числовых тро-
троек; эти геометрические объекты связаны между собою основным
отношением инцидентности, выражающимся условием A). Если мы
в A) будем считать прямую {иг, и2, us\ данной, то равенство A)
является уравнением, определяющим множество точек, инцидентных
данной прямой. Если же мы в равенстве A) будем считать данной
точку (х1:х^:хя), то оно превращается в уравнение, определяющее
множество всех прямых [их:и2:и.6), инцидентных данной точке, т. е.
пучок прямых с центром в данной точке. С таким же правом, как
мы раньше считали первоначальным понятие точки, а прямую опре-
определяли как множество точек, удовлетворяющих уравнению A), мы
могли бы считать первоначальным понятие прямой и определять
точку как множество инцидентных ей прямых (как пучок прямых),
удовлетворяющих тому же уравнению A). Свое полное выражение
это равноправие точек и прямых проективной плоскости и находит
в сформулированном выше принципе двойственности.
Приведем примеры двойственных в указанном смысле предложе-
предложений; их доказательства будут тоже «двойственны»: одно получится
из другого, если в каждый момент доказательства слово «прямая»
заменить словом «точка» с сохранением каждый раз отношений
инцидентности.
Теорема 1. Ко всяким двум
различным точкам А, В имеется
единственная прямая, им инци-
инцидентная; она обозначается через
АВ (или просто через АВ).
Теорема \'. Ко всяким двум
различным прямым а и Ь имеет-
имеется единственная точка, им инци-
инцидентная; она обозначается через
(а-Ь) (или просто через а-Ь).
§ 4]
ПРИНЦИП ДВОЙСТВЕННОСТИ
Доказательство
Пусть al:ai'.a3 и Ь1:Ь.2:Ь3 суть две данные различные
585
точки,
прямые
| прямые.
Мы ищем всевозможные
| точки
инцидентные двум данным
точкам | прямым
a1:ai:a3, bl:b2:b3. Искомые l^^:!^ удовлетворяют условиям
C)
D)
откуда следует, что
«2 аЗ
1>2 Ь3
а3
h
ai
Ь\
а2
Ь2
E)
т. е. что координаты ^l7 g2, ?3 определены с точностью до
пропорционального множителя однозначно; значит, существует
единственная
прямая
точкам
| точка (gjj
инцидентная данным двум
прямым
Замечание. Теорема 1 выражает хорошо известный читателю
из школьного курса геометрии факт: через всякие две различные
точки проходит одна и только одна прямая. Двойственная теореме
1 теорема 1' в более привычной формулировке звучит так: всякие
две различные прямые пересекаются в одной точке, собственной
или несобственной; в собственной точке они пересекаются тогда,
когда пересекаются на обычной (не пополненной несобственными
точками) плоскости, в несобственной — тогда, когда они на обыч-
обычной плоскости параллельны. На проективной плоскости параллельных
прячык нет.
Вернемся к доказательству теорем 1 и 1'. Единственная прямая
(точка), инцидентная двум данным точкам (прямым) al:a2:a3 и
bi'-b2:bs, имеет координаты, определяемые формулами E):
а.г
Ьг
а3
bs
«3
ь3
ai
ь,
al
bx
a2
586 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
Если А=(ах:аг:аъ) и В= (ЬХ:Ь„:Ь.^) суть две различные точки, то
прямая E) есть прямая {е^ег^з}. этим ДВУМ точкам инцидентная;
ее уравнение есть
| х -{-?, х -f- ~3х3 = 0, F)
где J-j, 12, ?3 даны пропорцией E), так что уравнение F) можно
переписать в виде
ах а2 аг =0. G)
\ h b3
Уравнение F) или G) есть уравнение, которому удовлетворяют
координаты всех точек, инцидентных прямой {?1:?2:?3}'. Это урав-
уравнение G) выражает тот факт, что первая строка матрицы
есть линейная комбинация второй и третьей, т. е. что
х2 = 1а2 -(- \ib2, I (8)
xs = la3 + \ib3. J
Давая параметрам к и ц всевозможные числовые значения (кроме
запрещенной пары значений Л. = (.1 = 0), будем получать по форму-
формулам (8) тройки однородных координат всевозможных точек М пря-
прямой АВ. Очевидно при этом, что двум пропорциональным парам
к':ц' = Х":ц" будут соответствовать пропорциональные тройки
х\:х'2:х'3 и х'[:х"г:х\. Обратно, если формулы (8) определяют для
данных значений к', fx' соответственно к", fx", одну и ту же точку,
т. е. две пропорциональные тройки х[, х\, х'3 и х'[, х, х'3, то 1тары
X', ц' и X", ц" пропорциональны: X' :\i' = %":\х". В самом деле,
пусть xl—kx'u xl~kx'2> x'3~kx'3. Тогда
Van, -f ,u"*2 =
т. е.
(V — kV)a1=(k\i' — n.")blt
откуда следует, что или V — kX\ fx" = &fi', т. е. X": \i" = X': \i',
или тройки rtj, a2, аг и Ьъ b.,, b3 пропорциональны и, значит, точки
А и В совпадают между собою — вопреки предположению.
§ 4] принцип двойствьнностн 58?
Итак, точки прямой {^с^:;.,} =AB взаимно однозначно соот-
соответствуют классам пропорциональных пар значений параметров /., ц,
поэтому система уравнений (8) называется системой параметри-
параметрических уравнений или, для краткости, просто параметрическим урав-
уравнением прямой АВ. Однако следует помнить, что для того, чтобы
написать эту систему уравнений, надо не только знать самые точки
А, В, определяющие нашу прямую, но и выбрать среди троек од-
однородных координат этих точек определенную тройку аи а2, а3,
соответственно Ьъ Ьъ Ь3.
Если а = {а^. а2: а3\ и b = {b1:bi:b3\ суть две различные прямые,
то формулы E) определяют их точку пересечения (fl-*) = (&1:|2:s3).
Уравнение F) или G) есть уравнение (относительно xlt х2, х3),
которому удовлетворяет любая тройка координат всякой прямой
d = \xl:x2:x3\, инцидентной точке (а-b) — (\1:с,г:\.л) (т. е. прохо-
проходящей через эту точку); другими словами, уравнение G) есть урав-
уравнение пучка прямых с центром (а-b). Уравнения (8) образуют сис-
систему параметрических уравнений этого пучка; они выражают давно
известный нам факт, что каждая прямая пучка есть линейная ком-
комбинация двух каких-нибудь прямых этого пучка.
Из доказанного вытекает
Следствие. Пусть xv х2, х3, аг, аг, а3, bv b.2, Ь3 суть про-
произвольные тройки координат каких-нибудь трех
точек. | прямых.
Необходимым и достаточным условием для того, чтобы эти три
точки j прямые
были инцидентны одной и той же
прямой
(т. е. чтобы три данные точки
лежали на одной прямой),
точке
(т. е. чтобы три данные прямые
проходили через одну точку),
является равенство G), т. е. выражаемая им линейная зависимость,
между (произвольными) тройками координат
Х\, Х2, Xs; alt а2, а3; Ьх, Ь2, Ь3
данных трех
точек. | прямых.
Дальнейшим примером двух двойственных между собою предло-
предложений может служить знаменитая теорема Дезарга1).
!) Дезарг A593—1662)—выдающийся французский геометр, явившийся
вместе с Паскалем и некоторыми другими предтечей современной проектив-
проективной геометрии.
588 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
Теорема 2. Пусть на плоскости даны два треугольника1);
вершины и стороны одного треугольника обозначим соответственно
через А, В, С и а, Ь, с (так что2) а — ВС, Ь = СА, с = АВ и
А--^(Ь-с), В = (с-а), С=(а-Ь))\ вершины и стороны второго треу-
треугольника обозначим аналогично через А', В', С и а', Ь', с' (снова
а'—В'С и т. д.). Предположим, что не совпадают никакие две
соответственные вершины и никакие две соответственные стороны этих
прямоугольников. Тогда имеют место следующие двойственные друг
другу предложения (рис. 230):
Если три
точки (а-а'), (b-b1), (с-с') | прямые ~АА , Ъ~В , ~СС
инцидентны одной и той же
прямой, | точке,
то
три прямые АА', ВВ', СС \ три точки (a-a'), (b-b')t (с-с')
инцидентны одной и той же
точке. | прямой.
Читатель легко убедится в том, что эти две теоремы не только
взаимно двойственны, но и взаимно обратны. Достаточно доказать
одну из них. Докажем «правую» теорему.
Предположим, что па плоскости введены однородные координаты.
Обозначим какую-нибудь тройку координат точек А, В, С, Л', В', С
соответственно через 1 а |, | b |, с |, I a' |, \b^\, \ с' \. По пред-
предположению три прямые АА', ВВ', СС инцидентны одной и той же
точке Q. Пусть | (о | —какая-нибудь тройка координат этой точки.
Так как три точки A, A', Q коллинеарны, то три тройки | а |, | а'\
и I со | линейно зависимы, а так как тройки | а | и | а' | (будучи
тройками координат различных точек А и А') не пропорциональны,
т. е. линейно независимы между собою, то тройка I о) | есть линей-
линейная комбинация троек а и \ а' . По тем же соображениям трой-
тройка [ со | есть линейная комбинация троек | b | и | Ь' |, а также FcJ
у) Треугольником в проектигиюй геометрии вообще называется совокуп-
совокупность каких-либо трех не коллинеарных между собою точек и трех прямых,
каждая из которых инцидентна каким-либо двум из данных трех точек.
Можно было бы сказать и так: треугольником называется совокупность трех
прямых, ие инцидентных одной н той же точке (т. е. не принадлежащих
одному пучку), и трех точек, каждая из которых инцидентна днум каким-
либо из данных трех прямых.
2) Пря.чую, инцидентную точкам А и В, обозначаем через АВ; точку,
инцидентную прямым а и Ь, обозначаем через (а-Ь).
g 4] ПРИНЦИП ДВОЙСТВЕННОСТИ
и Гс7"]. Итак, мы имеем тождества
589
нз которых следует:
ft — v
с =v'c' — д' ft'
v В -?- И=я' И -v' [?]•
(9)
Обозначая тройку Ц [jFj—v| с | — v' [ с' |—
через | и |>
тройку v [Т] — Я. |_oj = Я,' [о]] — v' | с' | через jo], тройку
X I a I — |х | fl [ = ц' | ft' | — Я.' Га7"! через [да , замечаем, что тройка
и| , будучи линейной ком-
комбинацией троек jjT| и [~с~|
(т. е. координатных троек то-
точек В и С), есть тройка
координат некоторой точки
Р прямой ВС. Но тройка
I и\ есть в то же время и
линейная комбинация троек
["с7*! и [Z/], т. е. коорди-
координатных троек точек С и
В'. Поэтому точка Р, одной
из координатных троек ко-
которой является тройка и >
является не только точкой
прямой ВС, но и точкой
прямой В'С—точка Р есть
точка пересечения прямых
ВСтл В'С. Аналогично точ-
точка Q, определенная коор-
координатной тройкой I v |, есть
точка пересечения прямых
СА и С А', а точка R, определенная координатной тройкой \w_
есть точка пересечения прямых АВ и А'В'. Складывая почленно
равенства (9), имеем
• ¦ ¦ ¦ > ¦ > - Гй] + [V] + Щ = Щ.
590 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [Гл. XXI
где | 0 | — тройка, состоящая из одних нулей. Итак, координатные
тройки | и |, | v |, | w | точек Р, Q, R линейно зависимы, следова-
следовательно, точки Р, Q, R коллинеариы, что н требовалось доказать.
§ 5. Проективная система координат в связке
и на проективной плоскости
Пусть снова дана связка О (действительная или комплексная),
и пусть, наряду с аффинной системой координат Ое^е.;, дана вто-
вторая система координат1) Oe^e'^ с тем же началом О, единичные
векторы ei,e2, е^, которой получаются из векторов et, e2, е3 умноже-
умножением их на одно и то же число X. Две такие координатные системы
назовем эквивалентными. Всякая тройка чисел xlt хг, х3, являю-
являющихся тройкой координат какого-нибудь вектора и в одной из двух
эквивалентных координатных систем, будет тройкой координат кол-
линеарного вектора Хп (соответственно — uj в другой системе.
Поэтому совокупность всех троек однородных координат какого-ни-
какого-нибудь луча связки будет в двух эквивалентных координатных систе-
системах одной и той же.
Легко доказать и обратное утверждение. Если относительно двух
координатных систем Oeje2e3 и Ое^е'ое'з в связке О каждый луч этой
связки имеет одни и те же однородные координаты, то системы
Ое^.^з и Ое^е'2е'3 эквивалентны.
В самом деле, так как луч, несущий вектор е'ь имеет в системе
Oeie'ae3 тройку координат {1, 0, 0}, то в обеих системах Ое1е2е3 и
Oeiejjejj тройками координат этого луча являются все тройки вида
\XV 0, 0}, Хг =Ф 0, и только они, откуда, в частности, следует, что
вектор e't имеет в системе Ое1е2^3 координаты Xv 0, 0, где Ххф0,
так что е'1=Я]е1. Аналогично е'2=Х,2е2, е'3 = А3е3. Остается дока-
доказать, что Кг = Я2 = Х3. Но луч, несущий вектор е' = е'х + е!2 — е3, име-
имеет, по предположению, в обеих системах Оеге.,ея и Ое^е'2е3 одну и ту
же координатную запись {1:1:1}, так что мы имеем для самого
вектора е' равенство е' =Х (ех-[-е2-|-е3) при некотором X =^= 0. Так
как, с другой стороны, е' = Х1е1-\-Х2аг-'-Хяа3, то X — Х1 = Х2 = Х3,
что и требовалось доказать.
Замечание 1. Из приведенного доказательства вытекает, что
для эквивалентности двух координатных систем Ое1е.,е3 и Ое^е'2е3
в связке О необходимо и достаточно, чтобы три координатных луча
{1:0:0}, {0:1:0}, {0:0:1} и «единичный луч» {1:1:1} одной си-
системы имели бы ту же координатную запись {1:0:0}, {0:1:0},
{0:0:1} и {1:1:1} и в другой системе координат.
а) Согласно сказанному в конце § 3 мы будем рассматривать лишь ДеИ'
ствительные системы координат.
К 5] ПРОЕКТИВНАЯ СИСТЕМА КООРДИНАТ • 591
Вводим теперь следующее
Определение 6 (первое определение проектив-
проективной системы координат). Задать в связке О систему проек-
проективных координат — значит задать в пространстве какую-нибудь
систему аффинных координат с началом О. При этом две эквивалент-
эквивалентные системы аффинных координат, по определению, задают в связке
одну и ту же систему проективных координат.
Другими словами: система проективных координат в связке с
центром О есть класс эквивалентных между собою аффинных коор-
координатных систем с началом О.
Посмотрим, как определить этот класс геометрически.
Чтобы задать аффинную систему координат с началом О, можно,
вместо того чтобы задавать сами единичные векторы О?1=е1,
О?2 = е2, OEs = e3, задать несущие их прямые ОЕ1 = Х1, ОЕ2 = Х2,
~ОЕ3~Х3 (оси координат) и точку Е — (\, 1, 1). Проекции Ev E2,
Е3 этой точки Е на оси координат*) и определят единичные век-
векторы ОЕ1 = ev ОЕг = е2, ОЕ3 = е3, причем ОЕ == О?, +ОЕ2 +~OES.
Точка Е называется единичной точкой данной аффинной системы
координат. Очевидно, две аффинные системы координат с началом О
тогда и только тогда эквивалентны, когда у них одни и те же оси,
а единичные точки лежат на одном и том же луче — на «единичном»
луче Е связки.
Поэтому определение 6 может быть сформулировано и следую-
следующим образом.
Определение 6' (второе определение проективной
системы к о о р д и и а т). Задать проективную систему координат
в связке — значит задать в этой связке три некомиланарных коор-
координатных луча -Y,, Х2, Xs и четвертый, «единичный» луч Е, не ком-
компланарный ни с какими двумя из координатных лучей Xt, Х2, Х3.
Пусть в связке О дана проективная система координат
ХгХгХЛЕ. Спрашивается: как найти класс эквивалентных между со-
собою аффинных координатных систем, определяющих (в смысле пер-
первого определения) данную проективную систему координат? Для этого
возьмем на единичном луче /;' данной проективной координатной
системы ХхХгХ3Е произвольную точку ? (рис. 231), обозначив через
^1, Еъ Е3 ее проекции на оси координат (т. е. на лучи Xt, X2,X3)t
получим векторы е,=О?1, е2 = О?2, е3 = ОЕя.
Аффинная координатная система Ое1е2е3 и все системы Oe'ie'2e3,
ей эквивалентные, и образуют, очевидно, класс, определяющий дан-
г) Здесь (и далее) проекции на какую-либо координатную ось берутся
вдоль плоскости, несущей две другие оси координат.
592
ПРОР.КТИВНАЯ ПЛОСКОСТЬ
[гл. xxj
ную проективную систему ХХХ^ХЯЕ. Каждая система Ое^е3, вхо-
дящая в этот класс, получается, если на том же единичном луче ?
взять какую-нибудь точку ?' и ее проекции Е\, Е'г, Е'3 на лучи
Хх, X2t Xs. ^
Из этого построения ясна и роль единичного луча Е проектив-
проективной координатной системы: если брать разные тройки векторов
е'ь е2, е3, лежащих соответственно на координатных осях Xlt X2, ~XZ,
и не связывать эти тройки требованием, чтобы сумма векторов
Рис. 231.
каждой тройки была направляющим вектором одного и того же
(для всех троек) луча связки О, то будем получать различные, вообще
говоря, не эквивалентные между собою аффинные координатные
системы.
Тройки координат произвольного луча связки О в аффинной коор-
координатной системе Oe1eie3 или что то же, в любой аффинной коор-
координатной системе, эквивалентной системе Oejeae3, и называются, по
определению, тройками проективных координат этого луча в проек-
проективной системе Х^^Х^Е. __
В частности, координатные лучи Хг, Хг, Х3 и единичный луч Е
получают в системе Х^Х^Х^Е соответственно координатную запись
~Хх = (\:0:0), Z(=@:l:0). Аз = @:0:1), ? = A:1:1).
Далее, любая тройка коэффициентов иъ иг, us любого уравнения
§ >г>1
ПРОРКТНВНЛЯ СИСТКМЛ КООРДИНАТ
593
произвольной плоскости связки О относительно системы координат
Ое е2е3 является, по определению, тройкой проективных координат
этой плоскости в проективной системе координат Х1ХгХ3Е.
Все это переносится посредством изоморфного, а именно пер-
перспективного, отображения и па плоскость Р=л, получаемую по-
пополнением обычной плоскос-
плоскости л несобственными точка-
точками. Все остается по-преж-
по-прежнему, только вместо «луч
связки О» надо говорить
«точка плоскости Р», а
вместо «плоскость связки
Ф» — «прямая плоскос-
плоскости Р». Координатные
лучи Хи Х2, Xs превраща-
превращаются в точки Хъ Хг, Хя
(рис. 232); эти точки при-
принято называть вершинами
координатного треугольни-
треугольника, состоящего из трех
точек Хъ Хг, Х3 и трех
прямых Х^Хг, ХгХ3у ATjjA'l,
инцидентных парам этих
точек; эти прямые называ-
называются сторонами координат-
координатного треугольника. Единич-
Единичный луч Е делается еди-
единичной точкой Е. Четыре
точки Хъ Х2, Х3, Е назы-
называются фундаментальными
(или базисными) точками данной проективной координатной системы
на плоскости.
Замечание 2. Пусть л; — плоскость трехмерноно пространства
с заданной в ней аффинной системой координат оехе2. Построим
в пространстве аффинную систему координат Ое1ъ2еъ, естественно
связанную с системой oete2 на плоскости я. Система Ое^вд опре-
определит на проективной плоскости я, происшедшей от пополнения
плоскости я несобственными элементами, проективную систему ко-
координат ХхХгХ%Е (рис. 233), причем проективная плоскость я
отображена на связку О естественным изоморфизмом, а именно
перспективным отображением. Очевидно, что проективные координаты
точек плоскости п относительно системы Х^^Х^Е суть не что
иное, как их однородные координаты относительно аффинной
системы координат oeje2. Поэтому только что определенная
Рис. 232.
594
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[ГЛ. XXI
нами на проективной плоскости я проективная система координат
ХгХ2Х3Е называется однородной системой координат, соответствую-
соответствующей данной аффинной координатной системе oeie2 на л. Из трех
вершин координатного треугольника X1X2XZ вершины
суть, очевидно, несобственные точки соответственно оси абсцисс и
оси ординат системы ое^ («точки, удаленные в бесконечность
Рис 233
в направлении соответственно прямых ох и of/»), тогда как точка
Х3 = @:0:1) есть начало координат о системы ое^, а точка
-С = A:1:1)—точка плоскости л, имеющая в системе координат
ое1е2 координаты х = у = 1.
Прямая XZXX (т. е. прямая, инцидентная точкам Х3 и Ху) есть
ось абсцисс, а прямая Х3Х2— ось ординат координатной системы
ое^, прямая ХхХг есть несобственная прямая.
Вообще, если проективная система координат определена вер-
вершинами координатного треугольника Хх, Х2, Х3 и единичной точ-
точкой Е, то прямая Х3Хг должна иметь такие координаты иь иг, к3,
чтобы точки Х3 = @:0:1) и Х1 = (\ :0:0) удовлетворяли уравнению
откуда сразу вытекает, что #3 = ^ = 0 (тогда как, естественно,
третья координата иг отлична от нуля). Итак, прямая Х3Хг имеет
координаты 0: 1:0. Аналогично заключаем, что прямые XSX2 й
ХгХ„ имеют соответственно координаты 1: 0: 0 и 0: 0: 1.
с 5]
ПРОЕКТИВНАЯ СИСТЕМА КООРДИНАТ , 595
Итак, наряду с формулами ,
^ = A:0:0),
Л", = @:1:0), , ...
дающими координатную запись вершин Хх, Хг, Х3 координатного
треугольника, имеем следующую координатную запись сторон этого
треугольника:
(Г)
Отождествляя каждую точку плоскости я с классом троек ее
однородных координат, мы превращаем плоскость я в арифметиче-
арифметическую проективную плоскость с данной в ней основной, «привилеги-
«привилегированной» проективной координатной системой X^^XgE, где точки
Хъ Х2, Х3, Е, как точки арифметической проективной плоскости,
даны своей записью A). Эта система координат называется систе-
системой однородных координат на арифметической проективной плоскости.
Пусть в связке О (или какой-нибудь плоскости Р, изоморфно
отображенной на связку О) даны две проективные координатные
системы — исходная ХХХ„Х3Е и «новая» система Х[Х'2Х'3Е'; новая
система задана какими-то тройками координат ее фундаментальных
точек Х[, Х'2, Х'3, Е' относительно исходной системы:
Х[ =(си:с21:с31),
^==(c12:c,2:cS2), ¦
S*3 == (С13 • С23 • СЗз)>
?' =(е1:Е2:е3).
Требуется написать «формулы преобразования координат», выра-
выражающие координаты хъ х„, х3 любой точки М относительно исход-
исходной системы координат через координаты х\, х'2, х'3 той же точки
в «новой» системе координат.
Предположим сначала, что тройки координат B) каждой из то-
точек Х[, Х'2, Х'3, Е' выбраны согласованными, т. е. так, что имеет
место векторное равенство
{С Г Г \ ' $ Г Г Г \ ' i Г Г Г \ IP Р Р >' (Н.
11> *-21i '1/ . (''12' 22> U32/ ~Г I°13» L23' 33/ |°1> °2> °3/> V"/
тогда, считая векторы х)
__ е1=={с1ь с.л, с31}, е; = {с12, с22, с32}, е; = {с13, с23, с33\ B')
J) Данные своими координатами в системе
596 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
единичными векторами аффинной системы координат в связке О, ви-
видим, что эта аффинная координатная система задает именно проек-
проективную систему Х\Х\Х'ЪЕ' и что, следовательно, проективные
координаты какого-либо луча т связки О (и соответствующей ему
точки М плоскости Р) в системе Х^Х^Х'^Е' суть не что иное, как
координаты того же луча и аффинной системе Ое^е'2е3.
Вернемся теперь к системе Oeje2e3.
Выберем на луче Е какой-нибудь вектор ОЕ — ефО и возьмем
его проекции ОЕЪ ОЕг, ОЕ3 .ча лучи Хъ Х,г, Х3. Тогда Oeje2e3
есть аффинная система координат в связке, задающая проективную
систему Х^^Хз Е. Каждая тройка хь хг, х3 проективных координат
в системе Х1Х2Х3Е луча т есть тройка координат в аффинной си-
системе Ое1е2ез некоторого направляющего вектора и этого луча 1).
С другой стороны, тройка координат х'ь х'2, х'3 луча т в си-
системе Х\Х'2Х'3Е' есть тройка координат (в аффинной системе коор-
координат Oeie'2e'3) какого-то направляющего вектора u' = Xu того же
луча т. Поэтому из B') и из формул преобразования аффинных
координат получаем (имея в виду, что координаты вектора и в си-
системе Oeie'2e'3 суть -г-х\, -г-х'г, -т-х'Л , что
_ х\ , x'-i х'з
_ Х\ . X» . Х3
Х2 ~ С21 ~Y ~Г С22 ">7"i" С23 X '
Xl . Х.2 Х3
Х3 — С31 ^ I С32 "к "Г'-ЗЗ ^ 1
т. е. что
Это и есть формулы перехода от проективной системы ХхХгХгЕ к
проективной системе Х\Х.,Х'3 Е' в предположении, что для координат-
координатной записи фундаментальных точек Х\, Х2} Х'х, Е' выбраны (отно-
(относительно системы Х^^Х^Е) согласованные тройки координат B').
х) Выбор другого вектора е = 0? на луче Е привел бы к аффинной си-
системе координат, эквивалентной системе Ое^ез; каждая тройка координат
луча т в одной из этих координатных систем была бы тройкой координат
того же луча и в другой системе, так что для последующих рассуждении
не имеет значения, какой именно вектор е взят на луче Е.
§ 5]
прокктмвнля систгмл координат
597
Предположим теперь, что выбраны какие угодно, может быть, и
не согласованные между собою, тройки координат B)г) точек
А", А"г, Хз> ?'. Тогда их надо заменить определяющими те же точки
согласованными тройками, т. е. надо найти такие отличные от нуля
множители Х1г Я2, ка, чтобы
Лз =
B")
и чтобы, кроме того, имело место векторное равенство
^1 {С11' С21> С31/ "Ь ^2 {C12i С22> C32I ~T ^3 1С13> С23> СЗз} =
= {е1, е2, е3\. C')
Но векторное равенство C') равносильно системе уравнений (отно-
(относительно К1г Я2, К3)
1 1 "
C")
Детерминант d этой системы отличен от нуля (так как столбцы
матрицы коэффициентов линейно независимы), поэтому система C")
решается однозначно по правилу Крамера. При этом пи одно из
чисел Klt X2, К3 не равно нулю. В самом деле, имеем, например,
е2
^33
Если бы числитель этой дроби был равен нулю, то столбцы стоящего
в числителе детерминанта были бы линейно зависимы, что невоз-
невозможно, так как эти столбцы суть тройки координат не коллинеар-
иых между собою точек Е', Х'г, Х'3.
Найдя из уравнений C") значения Ях, Х2, К3 и подставив их в
B"), получим координатную запись B) точек Х[, Х'2, X's, E' уже
посредством согласованных троек координат и формулы преобразо-
преобразования координат:
Ах3 —
-\- С28х8
В исходной системе Х-^
598 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
где
т. е. коэффициенты c'ik вполне определены первоначальными («не-
(«несогласованными») тройками B).
Замечание 3. Пусть на проективной плоскости Р задана
некоторая привилегированная («исходная») проективная система
координат, например, на арифметической проективной плоскости за-
задана исходная система однородных координат. Координаты какой-
нибудь точки в этой исходной системе будем обозначать через
хъ х2, х3. Тогда переход к какой-нибудь новой системе координат
определяется просто некоторой невырождающейся матрицей С—мат-
С—матрицей коэффициентов и формулах D) или D'). Поэтому можно, не
вдаваясь в приведенные выше «геометрические» рассуждения, просто
сказать: задать на арифметической проективной плоскости систему
проективных координат х'и х'„, х'3 — значит задать невырожденную
матрицц С. В определенной этой матрицей новой системе координат
точка /И получает в качестве координат всевозможные тройки вида 1)
х[ = К (dnxt + di.,x2 + d13xa), \
x'2^X(d21x1-^-d2tx2-\-d23x3), I E)
а-'з = К (d91x1 + dSix2 + d33x3), J
где матрица коэффициентов D есть обратная матрица к матрице С
коэффициентов в D), так что формулы D) и E) эквивалентны между
собою и выражают взаимно однозначное соответствие между классами
троек старых «однородных» и новых «проективных» координат ка-
какой-либо точки проективной плоскости21).
Замечание 4. Можно было бы рассуждать следующим образом: для
того чтобы определить на проективной плоскости (снабженной принилегиро-
ванной «однородной» системой координат Х1Х2Х3Е) новую проективную си-
систему координат с заданным координатным треугольником Х'^Х^Хз, доста-
достаточно задать точки Х\, Х%, Хз вместе с какими-нибудь определенными
г) Множитель Я, в правой части равенств E) позволяет по одной тройке
координат хи х2, хя точки М в старой координатной системе найти все
тройки координат тон же точки в новой системе.
2) На эту простую и во многих случаях удобную точку зрения стано-
становится, например, Н. И. Мусхелишвилн в своем классическом «Курсе анали-
аналитической геометрии»; я не думаю, чтобы такой подход заслуживал упрека
в чрезмерном алгебраическом формализме: ведь задать на обыкновенной
аффинной плоскости новую систему координат, по существу, тоже значит
задать матрицу, столбцы которой выражают векторы нового репера через
векторы старого. В конце концов, вся аналитическая геометрия сводится
к такого рода алгебраическим формализмам.
g g-i ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 699
тропками их координат (в системе Л1АаЛ3?), а именно»
Сц, Сп, ^31 ЛЛЯ 1ОЧКИ Х1г \
с12, си, csa для точки Ха, j. F)
ClZt С28. ^33 ДлЯ ТОЧКИ А3. j
Тогда единичная точка Е однозначно определится требованием, чтобы тройка
ее координат elt е.2, е3 была согласована с тройками F), т. е. требованием
{е,, гг, &3} = {cUl с21, с31} + {с12> c.z2, c3i\ + {cV6, c23, с33}
или
Это попятно и геометрически: выбор троек F) означает, что в связке вы-
выбраны не только оси координат Х\, Х2, Х3, но и единичные векторы на них,
т. е. выбрана аффинная система координат, определяющая данную проективную.
Приведенным рассуждением иногда бывает удобно пользоваться, однако
надо иметь в виду следующее.
Среди троек координат точек (и прямых) проективной плоскости нет
привилегированных: отдельная тройка — например, с1Ь с21, с31 для точки
X! — никакого смысла на проективной плоскости не имеет; выделяя ее, мы,
по существу, покидаем проективную плоскость (как множество ее точек и
прямых), возвращаемся к породившему ее трехмерному пространству и даже
выбираем в нем определенную аффинную систему координат. Поэтому только
что предложенное рассуждение выпадает из рамок проективной геометрии;
это можно делать, лишь рассматривая проективную геометрию плоскости
как часть аффинной геометрии трехмерного пространства, как геометрию
конкретно данной в нем связки, без всякой претензии на проективную чи-
чистоту метода.
§ 6. Проективные преобразования
и отображения проективной плоскости
1. Определение и аналитическая запись проективных преобра-
преобразований. Пусть на проективной плоскости Р задана определенная
(«исходная») система проективных координат. Без ограничения общ-
общности можно предположить, например, что есть арифметическая про-
проективная плоскость с системой однородных координат на ней.
Задать на плоскости Р проективное преобразование — значит задать
некоторую новую проективную систему координат; этим определится
преобразование плоскости Р, состоящее в том, что каждой точке М
плоскости, координаты которой в исходной системе пусть будут
*i: х2: х3, ставится в соответствие точка М' плоскости, имеющая
те же координаты хх: хг: х9, но уже в новой системе координат.
Читатель видит, что это определение проективных преобразований
совершенно аналогично определению аффинных преобразований, дан-
данному в главе XI.
Замечание 1. Из этого определения непосредственно следует,
что преобразование проективной плоскости Р, обратное к проектив-
проективному преобразованию, есть проективное преобразование. Очевидно
600 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XX]
также, что тождественное преобразование плоскости Р есть проек-
проективное преобразование.
Если новая система координат задана матрицей С, то, как не-
непосредственно следует из формул преобразования координат, данных
в предыдущем параграфе, точка ЛГ, имеющая в новой системе
координат координаты xv х2, х3, будет иметь в старой системе
координаты
Хх = Л (СцХ^ —- С12Х2 ¦{-
*2 = Я (С21*1 + С.22Х2-'ГС
Xз = Л. (CgjXj -j- С3%Х2 ~Г
Поэтому проективное преобразование можно определить как пре-
преобразование, ставящее в соответствие каждой точке М— [хг \х2:х3)
проективной плоскости точку М' = (х\ : х\ : х'3), где координаты
х\, х\, А:, даны формулами A), причем детерминант матрицы С
преобразования A) не равен 0. Система координат при этом все
воемя одна и та же1).
Задается проективное преобразование любой неособой невырож-
невырожденной матрицей С. Поэтому, считая исходную («однородную»)
систему координат раз навсегда данной, мы будем обозначать
проективное преобразование тою же буквой, что и задающую его
матрицу.
Если проективные преобразования Л и S3 задаются соответствен-
соответственно матрицами А и В, то произведение матриц А а В задает проек-
проективное преобразование, являющееся произведением преобразований
Л и S3. Отсюда следует, что произведение двух проективных пре-
преобразований есть проективное преобразование.
Аналогично, если проективное преобразование 'ё задается мат-
матрицей С, то матрица С задает проективное преобразование, об-
обратное к преобразованию 'ё; преобразование, обратное к проектив-
проективному, есть проективное преобразование. Так как, наконец, тождест-
тождественное преобразование, очевидно, является проективным, то из
доказанного вытекает
Теорема 3. Совокупность всех проективных преобразований
проективной плоскости есть группа (подгруппа группы всех преобра-
преобразований проективной плоскости).
При проективном преобразовании $ множество точек
М= (х1:х2:дг3) какой-либо прямой d = {u1:u2:us\, определенной
уравнением
u1xl-\-u2x,i-^usx3-=0, B)
х) Множитель к в правой части равенств A) позволяет по одной какой;
нибудь тройке координат точки ЛГ найти любую тройку координат этой
точки.
„ r, ПРОГКТНВНЫЕ ПРЕОБРАЗОВАНИЯ 601
§ °J
переходит в множество точек М, координаты которых в некоторой
новой проективной системе координат удовлетворяют тому же урав-
уравнению B) и которые поэтому образуют некоторую прямую d'.
Уравнение этой прямой d' в исходной системе координат получится,
если' подставить в B) вместо координат xv х2, х3 какой-нибудь
точки М их значения, выраженные через координаты х\, х\, х'3
(в той же исходной координатной системе) точки М' — <ёМ. Эти значе-
значения получаются, если решить уравнения A) относительно
xv хг, х3, т. е.
xl = A (dllxl -\- dl2x.2 -•- disxs),
хг = к'(dilx\~-diix\-\-d2ax'3), \ C)
хз —
d3Sx'3),
где матрица D коэффициентов dlk есть матрица, обратная к С.
Очевидно, формулы C) равносильны формулам A). Внося C)
в B), получим
Ч (dii*'i + rfi2*2 "I" й\ъх'з) -f ui (rf-л*l -:- di2*'* -г аг»х'з) +
-j- us (dslx\ + dSix\ + d33x3) = 0
или
{dnut 4- dnu2 •;- dslus) x\ -[- {dl.iul ¦ | - d22u2 -f d32u3) x\ ¦ |-
+ (rf13«l "i ^23Ц2 + d33«3) х'з = 0.
Полагая
видим, что при проективном преобразовании i? всякая прямая d
с координатами Uj, u%, и3 переходит в прямую d' с координатами
иъ и\, и3. Так как образом прямой при проективном преобразовании
всегда является прямая, то проективные преобразования называются
иначе коллинеарными преобразованиями (пли, короче, коллинеациями):
они сохраняют коллинеарность точек1).
Замечание 2. Из доказанного, очевидно, следует, что при
проективном преобразовании всякая тройка иеколлинеариых точек
переходит в тройку неколлннеарных точек (иначе при обратном
преобразовании коллипеарные точки перешли бы в неколлипеарные).
') Верно и обратное утверждение: всякое преобразование {вещественной)
проективной плоскости, сохраняющее коллинеарность точек, есть проективное
преобразование.
Доказательство последнего утверждения читатель может найти в книге
А- С. Пархоменко и П. С. Моденова «Геометрические преобразования»,
а также в «Аналитической геометрии» Б. Н. Делоне и Д. А. Райкова и
«Высшей геометрии» Н. В. Ефимова.
602 прокктивиля плоскость [гл. xxi
2. Основная теорема о проективных преобразованиях плоско-
плоскости. Докажем сначала следующее предложение. Пусть при проек-
проективном преобразовании Л проективной (арифметической) плоскости
четверка фундаментальных точек Ylt K2, YSt Е некоторой проективной
системы координат переходит в четверку точек Y[, К'„, У'3г Е'.
Так как никакие трн из точек Y\, У",, У'3, E', по только что
сказанному, не лежат на одной прямой, то эти четыре точки опреде-
определяют снова проективную систему координат. Пусть М — произвольная
точка проективной плоскости, М' — ее образ при преобразовании Л.
Тогда М' имеет относительно системы Y\Y\Y'3E' те же коор-
координаты, какие точка М имела относительно системы Y1Y2Y3E.
В самом деле, пусть координатная запись точек Yv, К2, У3, ?
в исходной системе координат Х^Х^^ есть
? = (г1:г2:е3),
причем в каждой скобке тройки координат выбраны согласованно,
т. е. так, что
{а1У а2, as\ + {bu Ь2, bs)~{clt с2> с3} = {еъ е2, е3 }.
Тогда, по сказанному в § 5 (формулы B) и D)), однородные коор-
координаты хи хг, хг произвольной точки М связаны с координатами
Уъ Уг> Уа той же точки в системе У^КдЕ соотношениями
\ D)
= а3у^ b3y2 -f csys.
Проективное преобразование Л задано тем, что, наряду с исходной
(однородной) системой координат .Y1ArsA'3^), дана некоторая проек-
проективная система Х'хХ'гХ'3(§', так что тройки координат точки М'
относительно системы Х\Х'гХ'3$' суть не что иное, как тройки
координат х1: х2: х3 точки М в исходной однородной системе.
Это верно для любой точки М. Так как, в частности, точки
У\, У'г. Y'a, Е' сУтЬ образы точек У,, К2, Ya, E при преобразова-
преобразовании Л, то тройки координат точек Y'lt У'г, У'3, ?' относительно
системы Х\Х'ъХ'3(§' пропорциональны тройкам однородных коорди-
координат точек Уъ Y2, Y3, Е, т. е. соответственно тройкам ал, аг, а3,
^i> Ьг, bz; съ с2) с, и в,: е2: е3. Значит, формулы преобразования
координат, соответствующие переходу от системы Х\Х\Х'3$' к си-
системе Y [Y'гУ3Е', имеют ту же матрицу коэффициентов, что
g gj ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 603
и преобразование D). Поэтому, обозначая через у\ : у'.г :у'3 координаты
точки ЛГ в системе Y\Y\Y'3E' и помня, что в системе Х'^Х'Х'^'
координаты точки ЛГ суть х1:хг:х3, будем иметь
J D')
Кх3 = а3у'1 + b3 y\ -|- с3 у'3,
Так как и D) и D'), рассматриваемые как уравнения относительно
Уи Ун Уз> соответственно у[, у'г, у'3, однозначно разрешимы, то мы
видим, что тройки координат точки ЛГ в системе У'{У"гУЕ' совпа-
совпадают с тройками координат точки М в системе YvY^f3E. Наше ут-
утверждение доказано.
Из доказанного утверждения мы выведем следующий основной
факт.'
Теорема 4. Пусть К„ У2, Уя, Е и Y\, Y\, Y'3, E'— две чет-
четверки точек проективной плоскости, удовлетворяющие тому условию,
что никакие три точки, принадлежащие одной и той же четверке,
не коллинеарны между собою. Тогда существует одно и только
одно проективное преобразование Л проективной плоскости, перево-
переводящее каждую из точек одной четверки в соответствующую точку
другой (т. е. Гг в Y'x, Y2 в Y't, Y3 в Y'3 и Е в Е').
В самом деле, рассматривая данные четверки как четверки фун-
фундаментальных точек двух проективных координатных систем н ставя
в соответствие каждой точке М ту точку ЛГ, которая относи-
относительно координатной системы Y'^Y'?Y3E' имеет те самые тройки
координат, которые точка М имела относительно системы УгУгУаС,
мы получим проективное преобразование, переводящее соответствен-
соответственно точки Ylt Yit К8, Е в точки Y'u Y\, Y'%, ?".
Это преобразование единственно, так как, по только что дока-
доказанному, при всяком проективном преобразовании Л, переводящем
точки К,, К2, К3, Е соответственно в точки Y\, Y't, Y3, E', тройки
координат точки ЛМ относительно системы Y\ Y\ Y'3 E' суть
не что иное, как тройки координат точки М относительно системы
Y V V f
Замечание 3. Непосредственными следствиями теоремы являются та-
такие простые утверждения:
1° Существует бесконечно много проективных преобразовании плос-
плоскости, переводящих данные три ее неколлинеарные точки Л, В, С в любые
тРн неколлинеарные точки А', В', С. Тем более существует бесконечно
много проективных преобразований, переводящих одну заданную точку
в другую.
2" Существует бесконечно много проективных преобразовании плоскости,
переводящих пару заданных прямых d, g в пару заданных прямых d', g'.
Достаточно взять любые две точки А, В на прямой d, две точки С и О на
604 проективная плоскость [гл. х.м
прямой g, а также точки А', В' на прямой d', точки С, D' на прямой g' ;1
построить проективное преобразование, переводящее точки А, В, С, ?> соот-
соответственно в А\ В', С, D'.
Тем более существует бесконечно много проективных преобразований,
переводящих одну из двух данных прямых в другую, а также отображающих
любую данную прямую саму па себя.
Предполагая, что в плоскости выбрана определенная система проектив-
проективных координат, запишем, в частности, преобразование, отображающее одну
из координатных прямых на другую, положим прямую *! = (> на прямую
х3 = 0. Таким преобразор.анием является, например, преобразование
*; =
Запишем в качестве второю примера преобразование, переводящее лю-
любую прямую { а1:а2;аз } в °ДИУ пз координатных прямых, например, пред-
предполагая, что aL ffc 0, в прямую xl = 0. В качестве такого преобразования
можно взять
3. Задание проективных преобразований проективной плоскости аффин-
аффинными преобразованиями трехмерного пространства. Проективную плоскость
рассматриваем как связку с центром О. Данное проективное преобразование Л
задается переходом от исходной проективной системы координат ХхХгХ3Е
к новой системе координат X\x'nXsE'. Берем в классе аффинных координат-
координатных систем с началом О, соответствующих проективной координатной систе-
системе Х1Х2Х3Е, какую-нибудь определенную систему Ое^е,, а в классе аффинных
систем, соответствующих проективной координатной системе ХгХгХзЕ',—
какую-нибудь систему Ое^гед. Аффинное преобразование, задаваемое пере-
переходом от системы Ое1е2Сз к системе Ое^ез, переводит каждый луч т = 0М
связки О в луч
являющийся образом луча ОМ при преобразовании Л, и в этом смысле
определяет в связке 0 заданное в ней проективное преобразование Л.
Обратно, каждое аффинное преобразование jl трехмерного пространства,за-
пространства,задаваемое переходом от (какой-нибудь) аффинной координатной системы Ot-ffa
к (какой-нибудь) координатной системе Ое^е» (с тем же началом О), определяет
проективное преобраз^овшше^ связки О, задаваемое переходом от проективной
системы координат Х-^ХлХ^Е (состоящей из класса всех аффинных систем,
эквивалентных системе Ое^вз) к проективной координатной системе Х\Х\Хъ^'
(состоящей из всех аффинных систем, эквивалентных системе Ое'^ез). Спра-
Спрашивается: когда два аффинных преобразования Л' и Л" (оставляющих непод-
неподвижной точку О) определяют одно и то же проективное преобразование Л
связки О? Без ограничения общности можно предположить, что оба преоб-
преобразования Л' и Л" определены переходом от одной и той же аффинной си-
„ Л) ПРОСКТИВНЫЬ ПРЕОБРАЗОВАНИЯ 605
гтемы координат Ое,еле3 соответственно к системам Ое^ез и Oeie1e3. Для то-
о чтобы они определяли одно и то же проективное преобразование, очевидно,
б O О^ б
о ч
еобходимо и достаточно, чтобы системы Oeie2e3 и Ое^ез были эквивалентны,
т е. чтобы существовало такое >. Ф 0, что
ei=A.ei, e2 = Xe2, е3 = А.ез-
Но тогда аффинное отображение Л" получается пз аффинного отображения А'
умножением его на растяжение (гомотетию) с центром О и коэффициентом рас-
растяжения X. Итак, доказана
Теорема 5. Всякое проективное преобразование связки О порождается
некоторым аффинным преобразованием трехмерного пространства, оставля-
оставляющим неподвижную точку О; обратно, всякое аффинное преобразование про-
пространства, оставляющее неподвижной точку О, порождает некоторое проек-
щиьное преобразование связки О; два аффинных преобразования (оставляющие
неподвижной точку О) тогда и только тогда порождают одно и то же про-
проективное преобразование слязки О, когда каждое из этих аффинных преобра-
преобразований получается из другого последующим растяжением пространства с
центром О.
4. Подгруппа проективно-аффинных преобразований. Проек-
Проективное преобразование проективно-аффинной плоскости (т. е. про-
проективной плоскости с выделенной в ней несобственной прямой1))
называется проективно-аффинным, если оно отображает несобствен-
несобственную прямую саму на себя (т. е. отображает всякую несобственную
точку на несобственную).
Замечание 4. Для того чтобы проективное преобразование было
проективно-аффшшым, достаточно, чтобы оно отображало две какие-нибудь
несобственные точки ML и М2 на несобственные же точки Mi и М2: тогда
и несобственная прямая, будучи инцидентной точкам М± и УИ2, отобразится
на прямую, инцидентную несобственным точкам Mi н М'^, т. е. на несобствен-
несобственную прямую.
Замечание 5. При проективно-аффинном преобразовании 'б
всякая собственная точка М отображается на собственную
точку М'.
В самом деле, пусть точка М'—%№ несобственная. В силу
взаимной однозначности отображения # точка М', будучи образом
собственной точки М, не может быть образом никакой несобствен-
несобственной точки. Поэтому из сделанного предположения следует, что при
отображении % несобственная прямая отображается на свою истинную
часть, что невозможно, так как при проективном преобразовании
всякая прямая (как множество инцидентных ей точек) отображается
на прямую.
Итак, при проективно-аффинном отображении 'ё проективной
плоскости происходит отображение множества всех собственных то-
точек плоскости на себя, т. е. происходит некоторое преобразование #0
. ') Можно ограничиться рассмотрением арифметической проективной
плоскости с несобственной прямой х3 = 0 на ней.
606
проективная плоскость
[гл. xxi
той аффинной плоскости, от пополнения которой несобственными
элементами произошла данная проективная плоскость. Докажем
что это преобразование #0 является аффинным.
Предполагаем, что данная проективная плоскость есть ариф-
арифметическая проективная плоскость с несобственной прямой
х3 = 0.
Рассмотрим сначала какое-нибудь проективное преобразование ?,
задаваемое формулами
Х1 ~ "¦ (СЦЛГ1~Ь С12ЛГ2~Ь Ct3^3/t
Х'г = А (СпХ1 + С22ДГ2 + C23.V3),
Xs = A (Cgj*! -|- C32X2 — сззхз)>
A)
выражающими однородные координаты х'и х'г, х'ъ точки
М' =
через однородные координаты лгх, хъ х3 точки М.
Предположим, что при преобразовании i» образом несобственной
точки всегда является несобственная же точка. Тогда, полагая
в последнем равенстве A)
будем при любых значениях х± и х2 всегда иметь х'3 = 0. Но это
возможно лишь тогда, когда
с31 = с32 = О.
Так как детерминант матрицы С отличен от луля, то
cw Ф О,
так что преобразование A) записывается в виде
E)
Перейдем к аффинным координатам собственных точек ариф'
метической проективной плоскости. Для этого поделим левую
*1 =
х'3~-
det
= к (с
= Х (с
С =
li-^i
21-^1
СП
с21
0
+ с12х2
"Т С1з-^з)|
^^зз-^а-
t12 L13
С 22 С23
0 с33
— сзз
С11
«и
12
ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ
§ 61
и правую части равенств E) »а х'3==ксяях3; получим
1_ С\ 1 Ху . Cj 2 Х% ^ц Ci3
х„ сзз хз ' сзз хз сзз
607
полагая
получим
х„ сзз *з сзз -^з ' сзз
а -
2 ""
1 »
?»
<-33
Л _ С21 _ С2г _С23
1 —Т~ > 2 — 7~' 23 — 7^'
<-зз сзг сзз
а,.,
у' = аг1лт -f а22г/ + я23.
F)
Итак, проектиино-аффнипое преобразование, рассматриваемое на
множестве собственных точек плоскости, есть аффинное преобра-
преобразование.
Обратно, если дано аффинное преобразование
у' = а.пх + ачгу -г- а23
плоскости, то, перехоля к однородным координатам, можем написать
Л±-а х-±4 a -2J a
Отсюда
так что
-Г а23'
+ а12х2 -)- а1Ял-3) = л.-;:х3 = лт'2: (а.лл;1 -
г = Л @-2!^! -р О22-*
= К
G)
что дает при лг3 = О непременно х'3-~0, — получаем проективное
608 проективная плоскость [гл ХХ[
преобразование, оставляющее на месте несобственную прямую, т. е
ироективпо-аффинное преобразование. Доказана следующая
Теорема 6. Всякое проективно-аффинное преобразование, рас-
рассматриваемое лишь на множестве собственных точек проективной
плоскости, есть аффинное преобразование.
Обратно, всякое аффинное преобразование посредством формул
G) может быть распространено на всю проективную плоскость таким,
образом, что получится проективно-аффинное преобразование проек-
проективной плоскости.
Отсюда легко следует, что совокупность всех проективно-аф-
финных преобразований есть подгруппа группы всех проектив-
Hix преобразований проективной плоскости, изоморфная группе
агх аффинных преобразований (обыкновенной аффинной плос-
к >гтиI).
Иногда доказанную теорему кратко, но неточно формулируют
так: аффинные преобразования суть проективные преобразования,
при которых несобственная прямая отображается на себя.
В заключение покажем, какой вид имеет в аффинных коорди-
координатах любое проективное преобразование, если его рассматривать
лишь на множестве собственных точек плоскости.
Итак, пишем снова формулы проективного преобразования A) и
переходим к аффинным координатам, для чего переписываем эти
формулы в виде
*^1 "^2 ¦
лз л.ч
Х% X
¦* ^31 "Г ^'У2 I" ^33
Х3 Х3
и полагаем в них
Получаем
х —
<8>
. ==:.. . ci2y + ct3
Это и есть формулы, дающие проективное преобразование
J) То, что проективно-аффинные преобразования образуют группу, без
труда выводится из самого их определения.
§ 6)
ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ
609
бственных точек плоскости в аффинных координатах. Эти
Формулы перестают действовать для точек, лежащих на прямой
+ У + с = 0 те* на прямой схг + смх + сх = 0
рмул р
х + с32У + с33 = 0,
т.е.*
на прямой спхг +
ф (
р
+ с33х3 = 0.
с х + с32У + с33 0, т.е. р пг + мг + 33х3 .
31 Но как показывает последняя из формул A), эти точки при
нашем' преобразовании переходят в точки вида \x\\x\ :0), т. е. в
несобственные точки плоскости; естественно, что мы не можем
найти аффинных координат этих точек.
Пусть дано какое-нибудь проективное преобразование плоскости,
не являющееся нроективно-аффинным. Оно переводит несобственную
Рис. 234.
прямую в некоторую обыкновенную прямую d. Пусть при этом не-
несобственные точки A:0:0) и @:1:0) оси абсцисс и оси ординат
какой-нибудь (хотя бы прямоугольной) координатной системы пере-
переходят соответственно в точки OL и О2 прямой d. Тогда два несоб-
несобственных пучка прямых х = а и у = Ь, параллельных (на обыкно-
обыкновенной плоскости) соответственно оси ординат и абсцисс выбранной
прямоугольной координатной системы, перейдут соответственно
в пучки с центрами Ох и О2, а квадратная сетка, изображенная на
ркс. 234, а, перейдет в сетку четырехугольников, изображенную на
П. С. Александров
610
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[ГЛ. XXI
рис. 234, б. Эти рисунки, а также сделанный на их основе рис. 235
помогут читателю составить себе наглядное представление о том,
что может происходить при проективио\? преобразовании.
J.
^~-
-^Т4—
Г
1
1
——..
э
— —
кит
1—
Рис. 235.
5. Проективные отображения одной плоскости на другую. Пер-
Перспективные отображения. До сих пор мы рассматривали лишь про-
проективные преобразования, т. е. проективные отображения какой-либо
проективной плоскости на себя. Однако легко определить и взаимно
однозначные проективные отображения одной проективной плоскости
Р на другую Р'. Для того чтобы задать такое отображение, надо
задать на плоскостях Р и Р' но проективной координатной системе
Х1ХгХ3Е и Х\Х'гХ'лЕ': этим определится отображение % плоскости
Р на плоскость Р', которое каждой точке М плоскости Р ставит
в соответствие ту точку /И' плоскости Р', которая в системе Х^Х'^Х^Е'
имеет те самые тройки координат, какие точка М имела в системе
3
Пусть я и я' — две плоскости в трехмерном пространстве; по-
пополняем их соответствующими несобственными точками до проек-
проективных плоскостей я и л'. Берем какую-нибудь точку О, не лежа-
лежащую ни в одной из двух плоскостей я и я'. Каждой точке М про-
проективной плоскости я ставим в соответствие ту собственную или
несобственную точку М' плоскости я', в которой эту плоскость я
пересекает луч т — ОМ связки О (рис. 236). Полученное таким
образом отображение плоскости я на плоскость я' называется перс-
перспективным отображением с центром, перспективы О.
§ 61
ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ
611
Легко видеть, что всякое перспективное отображение является
проективным. В самом деле, возьмем в связке О какую-нибудь сис-
систему проективных координат Х1Х.1Х3Е. Она определит в плоскости я
проективную систему ХХХ2ХЪЕ, а в плоскости л' —систему Х[Х'%Х'ЪЕ'.
Очевидно, и точка М плоскости л (в системе ХкХгХвЕ), и точка М'
Рис. 236.
плоскости п' в системе Х\Х'гХ'3Е' будут иметь те самые координаты,
которые луч т — ОМ = ОМ' имеет и системе Х1ХгХ3Е.
Замечание 6. Важность перспективных отображений вытекает нз
следующей теоремы, выражающей один из основных фактов проективной
геометрии:
Всякое проективное отображение плоскости п на плоскость л' либо
отображает несобственную прямую плоскости я на несобственную прямую
плоскости л' (и, следовательно, сводится к аффинному отображению плос-
плоскости я на плоскость п.'), либо может быть осущестелено посредством соб-
собственного или несобственного движения плоскости л в пространстве, попол-
пополнения перемещенной плоскости я.' до проективной плоскости л' и последую-
последующего перспективного отображения плоскости я. на плоскость л'.
Доказательство этой теоремы читатель может найти в книге Л. С. Пар-
Пархоменко и П. С. Моденова «Геометрические преобразования» (Москва, Из-
Издательство Московского университета, 1961). Эта книга вообще может быть
горячо рекомендована читателю, желающему э доступном изложении по-
подробнее ознакомиться с основными свойствами проективных преобразований.
20*
612
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[ГЛ. XXI
Замечание 7. Легко видеть, что всякое перспективное ото-
отображение какой-нибудь плоскости я на параллельную ей плоскость
я' есть аффинное отображение (так как оно отображает множество
всех несобственных точек плоскости я на множество несобственных
точек плоскости л').
§ 7. Проективные координаты иа прямой.
Проективные отображения прямой
Подобно тому, как проективная плоскость находится в естест-
естественном взаимно однозначном (перспективном) соответствии со связ-
связкой, так проективная прямая находится в естественном соответствии
с пучком прямых.
Пусть в самом деле па какой-нибудь плоскости я, проходящей
через данную прямую d, взята точка О, не лежащая на прямой d.
Прямые т, проходящие через
точку О, — мы будем их в даль-
дальнейшем называть лучами — обра-
образуют пучок, который будем обоз-
обозначать одной буквой О. Каждой
точке М прямой d соответствует
единственный ведущий в нее луч
т = ОМ пучка О, и этим уста-
установлено соответствие, называемое
перспективным, между точками
М прямой d и лучами m пучка
О. Соответствие это взаимно од-
однозначно, если считать, что лучу
пучка О, параллельному прямой
d, соответствует несобственная
точка этой последней.
Рис. 237, Далее все идет знакомым нам
путем, только проще, чем в слу-
случае плоскости и связки. Всякая аффинная система координат Оехе2
на плоскости л, начало которой лежит в центре О пучка О, назы-
называется системой координат в пучке (рис. 237); координатами дан-
данного луча пучка называются координаты любого направляющего
вектора этого луча относительно системы Ое^. Две координатные
системы Oeje2 и Ое',е'2 называем эквивалентными, если при некото-
некотором X Ф О имеем е, = Улъ е'2 — >.е2. Совокупность всех нар хъ х%
координат всякого луча тп пучка О в двух эквивалентных коорди-
координатных системах 0eje2 и Ое^е'., будет одна п та же. Обратно, если
две аффинные координатные системы Oeie.1 и Ое^е^ в пучке таковы,
что каждый луч пучка имеет в обеих этих системах одни и те же
§ 7] ПРОЕКТИВНЫЕ КООРДИНАТЫ НА ПРЯМОЙ 613
множества пар координат лгг, лт2, то — как легко видеть (ср. § 5) —
системы Oeje2 и Ое\е'2 эквивалентны между собою.
Определение 7. Задать в пучке О систему проективных
координат — значит задать в этом пучке какую-нибудь аффинную
систему Оеуе2, причем дне эквивалентные аффинные системы коор-
координат, по определению, задают одну и ту же проективную систему.
Другими словами: проективная система координат в пучке есть
класс эквивалентных между собою аффинных систем.
Чтобы определить проективную координатную систему в пучке,
достаточно задать два каких-нибудь его луча Х1 и Х„, называемых
координатными лучами, и третий, «единичный» луч Е: беря на луче
Е произвольную точку Е и проектируя ее па координатные лучи
Х1 и Х2, получим векторы ОЛ1 = е1 и ОЕ2=е2, которые и опреде-
определяют аффинную систему Ое^.,, задающую данную проективную.
Беря на луче Е всевозможные точки Е, получим указанным способом
все аффинные координатные системы, задающие данную проектив-
проективную. Всегда при этом имеем векторное равенство
ОЕ= е = et — e2.
Поэтому задать в пучке проективную координатную систему — зна-
значит задать в этом пучке три луча: два координатных Х^ и Х2 и
один единичный Е.
Проективную прямую d считаем раз на всегда поставленной во
взаимно однозначное перспективное соответствие с пучком О; по-
последующие рассуждения в равной мере относятся к пучку О и к
перспективной ему прямой d, надо только считать равноправными
слова «точка М прямой d» и «луч m пучка О». В частности, про-
проективная система координат на прямой есть тройка «фундаменталь-
«фундаментальных» точек: две координатные точки Хг и Х.} и единичная точка <§
(см. рис. 237). В системе координат XvX.t<8 сами фундаментальные
точки имеют следующую координатную запись:
Каждая точка М прямой (каждый луч m = ОМ пучка О) запи-
записывается в виде
где любая пара координат хг:х2 есть пара координат луча m = ОМ
в любой аффинной системе координат Оехе.г, задающей данную
проективную систему XVX.CE.
Если точка М отлична от точки Л\ = A:0), то для нее х2ф0
и число — называется неоднородной проективной координатой точки
х
614 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
М (в данной системе координат). Пусть наряду с дайной, «исход-
«исходной» системой координат ХхХп§ на прямой d дана вторая, проек-
проективная система координат Х\Х'г§' и координатная запись точек
X'i, X'it g' в системе XtX2S есть
Предположим, что пары координат alt a2; bx, Ьг; elt e.z берутся
«согласованно» в смысле векторного равенства
/
I
означающего, что взятые пары координат суть пары координат
соответствующих лучей пучка в одной и той
же аффинной системе, задающей данную про-
ективную. Тогда координаты х\, х\ какой-ни-
Y будь точки М в системе X\X\i$' связаны
с координатами хъ xi той же точки М в
системе Х±Х2$ формулами преобразования
координат
Хх1=а1х'1\-Ь1х'2,
кх2 —
(ср. формулы B) —D) в § 5, стр. 595—596).
Рис. 238. Если пары A) не являются согласован-
согласованными, то их можно согласовать, умножая
первые две из'них иа множители А^^О, А.2^=0, однозначно опре-
определяемые требованием
(ср. § 5, стр. 597).
Замечание 1. Пусть на прямой d дана «аффинная» система
координат оех в элементарном смысле главы I с началом о и еди-
единичным вектором е,. Ей соответствует на плоскости пив пучке О
вполне определенная аффинная координатная система Оехег с тем
же первым единичным вектором е1 и вторым вектором гг = Оо
(рис. 238). Проективная система координат, определенная в пучке
О этой системой Ое^, переходит (посредством перспективного
соответствия между пучком О и прямой d) в систему Х^Х^Е на
прямой d, называемую системой однородных координат на прямой d,
соответствующей аффинной системе оех. Точка ^ = A:0) есть при
этом несобственная точка прямой d (это несобственная точка плос-
плоскости я, удаленная в направлении прямой d); точка Х.г = @:\)
§ 7] ПРОЕКТИВНЫЕ КООРДИНАТЫ НА ПРЯМОЙ ЫО
есть точка о, а точка ? = A:1) есть конец вектора е^ приложен-
приложенного к точке о. Координаты xv:x.2 точек М прямой d в этой сис-
системе координат называются однородными координатами (соответ-
(соответствующими данной аффинной системе). Связь между аффинной
координатой х и однородными координатами xv лг2 точки М дается
формулой х = —.
Замечание 2. Если на прямой d даны две точки А и В
своими совершенно произвольно фиксированными парами координат
A = (al:ai), B= (bl:b2) в любой (исходной» проективной системе
координат (например, в однородной), то любая пара координат
а*!, лг2 (в той же исходной системе) любой точки М прямой d может
быть записана в виде
лг2 = ка f \ib \
(«параметрическое представление прямой через пары координат точек
А и В»). Любая такая запись определяет (при произвольных X и
ц, не равных нулю одновременно) некоторую точку М прямой d.
При этом, если
x'1 = k'al \-p'blt \
х'2--=Х'а2 + \х'Ь2, J [
то xl:x2 = x[:х'г тогда и только тогда, когда Х-.ц — X':\i'. Все это
следует из того, что, задавая точки А, В вместе с определенными
парами их (однородных) координат, мы фактически уже задаем па
прямой новую проективную координатную систему: полагая (в аф-
аффинной координатной системе на плоскости, соответствующей исход-
исходной проективной системе координат на прямой) е' ={аь аг\,
62 = 1^!, Ь»\, т. е. ei = ОА, е'2 = ОВ, получим на плоскости я аффин-
аффинную систему Ое^е'2, в которой вектор и = {лг1, лг2} = лг1е1 ^ лг2е'2
есть направляющий вектор луча ОМ.
Проективное отображение прямой d на прямую d' (отличную от
прямой d или совпадающую с нею) определяется как отображение
Л прямой d на прямую d', задаваемое выбором на прямых dud'
но проективной системе координат Х1Х2Е и Х[Х'2Е', и состоящее
в том, что каждой точке М прямой d ставится в соответствие та
точка М'', которая в координатной системе Х[Х'2Е' имеет те самые
координаты, которые точка М имела в системе Х1Х2Е.
Совершенно аналогично определяется и проективное отображение
пучка О на пучок О', а также проективное отображение прямой d
на пучок О'.
Если прямые d и d' совпадают, так что ХуХ.,Е и Х\Х'.гЕ' суть
две проективные координатные системы на одной и той же прямой,
616
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[гл. хх i
то координаты точки М' = ЛМ в исходной системе Х^Х^Е опреде-
определяются но формулам
ЛЛГ| ——— Ct-tX 1 ~ri~ илрС.у
. , . для М — (х,:хЛ;
доказательство совершенно аналогично доказательству соответ-
соответствующего предложения для проективных преобразований плоскости
(см. § 6, стр. 600), только проще. Совершенно так же, как теорема
4 (§ 6) для плоскости, доказывается и следующая
Теорема 7. Пусть Хъ Х.ъ Е и Х\, Х'2, Е' — две тройки {по-
{попарно различных) точек на проективной прямой. Тогда существует
единственное проективное пре-
преобразование прямой, переводя-
переводящее соответственно точки
XltX2l E в Х[, Х'г, Е'.
Рассматривая эти точки
как фундаментальные точки
двух проективных координат-
координатных систем на нашей прямой,
мы получим искомое преобра-
преобразование как преобразование,
ставящее в соответствие каж-
каждой точке М прямой ту точку
М, которая в координатной
системе Х[Х'%Е' имеет те са-
самые координаты, которые точка
М имела в системе ХХХ^Е.
Если прямые dud' раз-
различны, то, считая их раз на-
навсегда перспективно отобра-
Рис. 239. жениыми на один и тот же пучок
О, мы можем всякое проектив-
проективное отображение одной из этих прямых на другую свести к проек-
проективному преобразованию пучка О, откуда следует, что теорема 7
имеет место не только для проективного преобразования прямой, по
и для проективных отображений одной прямой на другую.
Частным случаем проективного отображения прямой d па прямую
d' является перспективное отображение. Для того чтобы задать
какое-нибудь перспективное отображение ('.(перспективу») прямой d
на прямую d' (обе прямые предполагаются лежащими в одной плос-
плоскости), надо задать какую-нибудь точку О, не лежащую ни на одной
из этих прямых (эта точка называется центром перспективы); тогда
перспективное отображение прямой d на прямую d', определяемое
выбором точки О, состоит в том, что каждой точке М прямой d
ставится в соответствие точка пересечения М' прямой d' с лучом
§ 7]
ПРОЕКТИВНЫЕ КООРДИНАТЫ НА ПРЯМОЙ
ОМ пучка О (рис. 239). То, что всякое перспективное отображение
одной прямой на другую есть проективное отображение, доказыва-
доказывается совершенно так же, как аналогичное предложение для перс-
перспективного отображения одной плоскости на другую (§ 6, п. 5).
Частным случаем проективного отображения пучка О на пучок О'
(оба пучка предполагаются лежащими в одной и той же плоскости
Рис. 240.
я) является перспективное отображение. Оно задается осью перспек-
перспективы, т. е. прямой |, не являющейся лучом ни одного из пучков
О и О', и состоит в том, что каждому лучу m = ОМ пучка О, где
М — точка пересечения луча от с прямой ?, ставится в соответствие
луч пг' = О'М пучка О' (рис. 240).
Для того чтобы убедиться, что полученное таким образом ото-
отображение Л пучка О на пучок О' есть проективное отображение,
достаточно взять на прямой g какую-нибудь проективную систему
координат; она определит в пучках О л О' проективные координат-
координатные системы Х1 Х2 Е и ХгХ^Е'. Очевидно, луч m имеет в системе
Х1 Х2 Е те же координаты, что и его образ т' в системеХ1Х2Е'.
Связь между проективными отображениями плоскостей и прямых,
лежащих в этих плоскостях, дается следующим предложением.
Теорема 8. Пусть Л—проективное отображение плоскости Р
на плоскость Р\ d — прямая на плоскости Р, d' — ее образ при ото-
отображении А.
Тогда отображение Л, рассматриваемое на множестве точек пря-
прямой d, является проективным отображением прямой d на прямую й'.
618
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[гл. XXI
Доказательство, Пусть А'}, А'2—две различные точки пря-
прямой d. Возьмем на плоскости Р произвольную точку Ха, не лежа-
лежащую на прямой d, и пусть Е — точка плоскости Р, не лежащая ни
на одной из прямых ХгХъ ХгХг, ХЯХ1 (рис. 241). Обозначим через
Х\, Х'г, А"з, Е' образы точек Xlf A*2, Xs, E при отображении Л.
\
Рис. 241.
Пусть Ео — точка пересечения прямых d = XlX2 и ХЯЕ. Ее образ
при отображении Л будет точкой пересечения прямых
d'= Х[Х'г и Х'3Е'. Рассмотрим две системы проективных координат:
X Х'^' Р' В
XtX2X3E на плоскости Р и Л
системах имеем соответственно1):
^ = A:0:0),
А2= @:1:0),
Х3= @:0:1),
? = A:1:1),
?0 = A:1:0),
р
на плоскости Р'. В этих
X; = A:0:0),
Х; = @:1:0),
Х;== @:0:1),
?' = A:1:1),
?i-A:1:0).
1) Лишь последняя строка в этой совокупности равенств требует, может
быть, некоторого пояснения. Достаточно показать, что ?0 ==_(_!: 1:0). Прямая
й—ХгХ2 имеет уравнение х3 = 0. Если уравнение прямой Х^Е есть «i*i +
+ и2л\,-ги-*., = 0, то (так как точки А'3 = @:0:1) и ? —A:1:1) лежат на этой
прямой) имеем цэ = 0, ul-{-u2 = 0, так что можно положить щ=[, ы2 = —1,
и3 = 0. Точка ?0, будучи точкой пересечения прямых х3=0 и х^—*а = 0,
имеет координаты Хх = х.г у= 0 и х3 = 0, чго 1| дает запись ?0 = A:1:0).
§ 7]
ПРОЕКТИВНЫЕ КООРДИНАТЫ НА ПРЯМОЙ
619
Пусть М — произвольная точка прямой d и АГ — ее образ пр:г
отображении Л. Точка М' лежит на прямой d'. Так как точка Л!
лежит на стороне Х±Х% = d координатного треугольника Х1ХгХг,
то третья ее координата равна нулю.
Пусть
М = (х1:хг:0).
Так как Л —проективное отображение, то в системе Х[Х'гХ'3Е' имеем
Предположим, что обе плоскости отображены посредством фик-
фиксированного (перспективного) изоморфизма на связку О, и пусть
Ое^вз — аффинная система координат в связке О, задающая проек-
проективную координатную систему ХгХгХаЕ; тогда Ое^ есть аффинная
координатная система в плоскости (и в лежащем в этой плоскости
пучке лучей), задающая проек-
проективную систему координат XiX2E0
на прямой Х^2 = d.
Следовательно, в системе
XtX2E0 точка М имеет коорди-
координатную запись М = (лг1:лг2).
Подобным же образом уста-
устанавливается, что в проективной
координатной системе Х^Х'^Ед
на прямой d' = Х\Х'г имеем
М'= (x^.Xj), откуда и следует,
что посредством отображения Л
прямая d проектнвно отобра-
отображается на прямую d'.
Теорема 9. Всякое проек-
проективное отображение прямой d
на прямую d' слагается из дви-
движения прямой d и последующего
перспективного отображения.
Доказательство. Пусть при данном проективном отобра-
отображении прямой d на прямую d' точка А прямой d отображается
в точку А' прямой d'.
Посредством движения прямой d можно совместить точку А с
точкой А'. Поэтому теорема 9 вытекает из следующего пред-
предложения.
Теорема 10. Пусть прямые dud' пересекаются в некоторой
точке А. Всякое проективное отображение'Л прямой d на прямую d',
отображающее точку А на эту же самую точку, есть перспективное
отображение прямой d на прямую d'.
Рис. 242.
620 проективная плоскость [гл. xxi
Доказательство теоремы 10. Возьмем на прямой d две
различные точки В и С, ни одна из которых не совпадает с точкой А
(рис. 242). Образы точек В и С при данном проективном отображе-
отображении Л обозначим через В' и С. Обозначим через О точку пересе-
пересечения прямых ВВ' и СС. Два проективных отображения прямой d
на прямую d'—заданное отображением Л и перспективное отображе-
отображение прямой d на прямую d' с центром перспективы О — отображают
три точки А, В, Ссоотнетстненно на А'(=А), В', С. Следовательно,
по теореме 7 оба эги отображения совпадают между собою, что и
требовалось доказать.
Аналогично доказываются двойственные теоремы.
Теорема 10. Пусть пучки О и О' имеют общий лцч
а=ОО',
переходящий в себя при данном проективном отображении Л пучка О
на пучок О'¦ Тогда это отображение является перспективным.
Из этой теоремы вытекает, что всякое проективное отображение
одного пучка на другой слагается из движения и перспективы.
§ 8. Двойное отношение
1. Определение двойного отношения четырех точек иа прямой.
Пусть А, В, С, D—четыре точки, лежащие на одной прямой g.
Предположим сначала, что как прямая g, так и взятые на ней точ-
точки А, В, С, D являются собственными. Двойным отношением четы-
четырех точек А, В, С, D называется число
. _лс.ар
СВ DB
Это число мы будем обозначать через
(A BCD);
его называют также сложным или ангармоническим отношением че-
четырех точек А, В, С, D. Иногда (ABCD) называют двойным отно-
отношением точки D к трем точкам А, В, С.
Двойное отношение (ABCD) положительно, если обе точки С и
D лежат внутри или вне отрезка АВ; оно отрицательно, если из
двух точек С и D одна лежит внутри, а другая вне отрезка АВ;
в этом случае говорят, что пары точек А, В и С, D разделяют друг
друга (на данной прямой). Если точка D уходит в бесконечность,
AD
а точки Л, В, С остаются па своих местах, то отношение — стре-
DB
АС
мится к пределу —1, a (ABCD) — к пределу — —.
СВ
§ 8]
ДВОЙНОЕ ОТНОШЕНИЕ
621
Введем на прямой g аффинную систему координат, и пусть
в этой системе
тогда
(ABCD) =
Если перейти к однородным координатам, полагая1)
и вводя обозначения
A--={xv:iv), B = (Xi:ti), C=(x3:ts), D = (*4:^4),
то для двойного отношения четырех точек А, В, С, D будем иметь
53 — Sl.i4 «1
= = =- .= z.
Sa — 5з 6г — ?4
il
Х1
ЛГ,
и
и\
Ч
«4
1 *2
t4
h
т. e.«)
л,
xt
и
«1
t
хг
и
t»
h
B)
l) Наши привычные обозначения xlt хг для однородных координат нз
прямой мы здесь заменяем через к, t (а аффинную координату на прямой
обозначаем через %).
г) Правилом для запоминания детерминантов в числителе и знаменателе
правой части формулы B) может служить следующее. В четверостишиях
различают рифмы перекрестные (самые распространенные), когда рифмуются
первая и третья, вторая и четвертая строки, и рифмы опоясывающие, когда
рифмуется перная строка с четвертой, а вторая с третьей. Первые четыре
стиха во всякой строфе «Евгения Онегина» рифмованы перекрестно, например:
Меж тем Онегина явленье
У Лариных произвело
На всех большое впечатленье,
И всех соседей развлекло.
Третье четверостишие онегинской строфы имеет опоясывающие рифмы:
Иные даже утверждали,
Что свадьба слажена совсем,
Но остановлена затем,
Что модных колец не достали.
Детерминанты в числителе правой части формулы B) построены по прин-
принципу перекрестных рифм: A, 3); B, 4), детерминанты в знаменателе—но
принципу опоясывающих: A, 4); B, 3).
622
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[гл. хх1
Выражение, стоящее в правой части равенства B), имеет смысл
и в том случае, когда одна из точек А, В, С, D является несоб-
несобственной.
Если Л, В, С—собственные, a D — несобственная точка, то
в формуле B) можно положить:
•^ i — 5ъ хч ~ ы-* хз — 2з>
t1 = ti = t3 = 1,
^фО, /« = 0,
и мы получаем
(ABCD) = —
ж:
ев
— в соответствии со сказанным выше.
Если при этом С есть середина отрезка АВ, то (ABCD) = — 1.
Перейдем теперь от однородных координат х'Л к каким-нибудь
другим проективным координатам х'' :t' на прямой g, и пусть в этих
координатах
/4 = (*i:*i), ?=(*;:*;), C=(x'a:f9), D=(x't:Q.
Покажем, что тогда
(ABCD) =
*1
*3
Xl
X,
M
t»\
h
\хг
1*4
*a
-«a
<4
x\ ti
*3 ^3
Xl h
x't t't
Xi
x\
*a
<;
и
В самом деле, пусть
х = ах' -1- W,
ФО.
C)
D)
Тогда
Л1
лг3
сл-i -f rf/i
\х,
Х-,
и аналогично для трех остальных детерминантов, стоящих в правой
части формулы D).
Мы видим, что при преобразовании проективных координат на
прямой каждый из упомянутых детерминантов умножается на одно и
то же число, следовательно, оно появляется в качестве сомножителя
два раза в числителе и два раза в знаменателе формулы C). Итак,
доказана формула C), выражающая инвариантность двойного отно'
шения относительно преобразования проективных координат на прямой.
Теперь естественно дать следующее основное
§ 8]
ДВОЙНОЕ ОТНОШЕНИЕ
623
Определение. Пусть А, В, С, D — четыре точки, лежащие
на проективной прямой g, на которой дана какая-нибудь, совер-
совершенно произвольная система проективных координат. Пусть в этой
системе проективных координат
А = (х,:*х), B = (x2:t2), c= (*,:/,), D = (x4:^4).
Двойным отношением четырех точек А, В, С, D называется число
{ABCD), определенное равенством
(ABCD) =
*:> <я
*€
B)
X, tt
Равенство C) показывает, что двойное отношение четырех точек
не зависит от того, в какой системе проективных координат на пря-
прямой взяты координаты этих точек. Если, в частности, принять за
фундаментальные точки проективной системы координат точки А и В,
а за единичную точку — точку С и положить D = {X:\i), то будем
иметь
{ABCD) =
1
1
0
1
0
ll
1 i
11
о
X
11
\х
1
и-
0
и-
т. е.
{ABCD) =
E)
двойное отношение {ABCD) равно неоднородной проективной коор-
координате точки D в системе проективных координат ABC.
Пусть А, В, С — раз навсегда зафиксированные точки прямой g,
a D — произвольная (переменная) точка; она вполне определяется
отношением своих координат ^:(Л, которое в свою очередь опреде-
определяется из равенства E) двойным отношением {ABCD). Мы получили
следующий очень важный результат.
Теорема 11. Если на прямой даны три зафиксированные точки
А, В, С, то всякая четвертая точка однозначно определяется своил:
двойным отношением к трем данным точкам.
2. Гармонические четверки точек. Если
{ABCD)= — \,
то четверка точек А, В, С, D называется гармонической. В этом
случае говорят также, что две точки С и D являются гармонически
сопряженными относительно точек А и В пли что пары точек А, И
и С, D гармонически разделяют друг друга. Точку D также назы-
называют четвертой гармонической к тройке точек А, В, С.
624 прокктивиая плоскость [гл. xxi
Замечание. Из определения двойного отношения следует (и
читатель легко убедится в этом), что при перестановке точек
А, В, С, D двойное отношение может менять свой знак, а также
может менять свою величину на обратную.
В частности,
(ABCD) - {CDAB) = (BADC) = ^ ^
Поэтому, если пары А, В и С, D гармонически сопряжены, то гар-
гармонически сопряжены и пары С, D и А, В; гармоническая сопря-
сопряженность двух пар точек не нарушается также при перестановке
точек в какой-нибудь паре.
Наконец, мы видели, что если двойное отношение (ABCD) от-
отрицательно, то пары точек А, В и С, D разделяют друг друга;
в частности, разделяют друг друга две гармонически сопряженные
пары.
3. Двойное отношение и проективные отображения. Теоре-
Теорема 12. Пусть Л — проективное отображение плоскости Р на пло-
плоскость Р'\ Л, В, С, D — четыре точки плоскости Р, лежащие на пря-
прямой g, а А', В', С, D' — их образы при проективном отображении Л,
лежащие на прямой g' (в которую при отображении перешла пря-
прямая g). Тогда
(A'B'C'D') = (ABCD),
т. е. двойное отношение четырех точек есть инвариант проективного
отображения одной плоскости на другую.
Доказательство. Введем на прямой g систему проективных
координат с фундаментальными точками X и Т и единичной точкой Е,
и пусть в этой системе
A = (xl:tl), B = (x2:f2), C=(x3:t3), D = (xt:tt).
При проективном отображении плоскости Р на плоскость Р'
прямая g проективно отображается на прямую g'.
Это значит, что на прямой g' имеется система проективных
координат с фундаментальными точками X' и 7" и единичной точкой Е',
по отношению к которой точки А', В', С", D' кмеют такие же
координаты, какие точки А, В, С, D имеют в системе проективных
координат, введенной на прямой g, т. е.
i4'=(*i:'i), В' = (хг:*2), С = (*,:/,), D' = {x4:ft),
а отсюда следует, что
(A'B'C'D') = (ABCD).
Из этой теоремы и теоремы 11 вытекает
§ 8]
ДВОЙНОЕ ОТНОШЕНИЕ
625
Теорема 13. Всякое взаимно однозначное отображение упря-
упрямой g на прямую g', сохраняющее двойное отношение любой чет-
четверки точек *), есть проективное отображение.
В самом деле, пусть А, В, С—какие-нибудь три различные точки
на прямой g, и пусть А'=<рА, В'=ц;В, С—уС—их образы при
отображении ф. Тогда существует единственное проективное от-
отображение Л, отображающее точки А, В, С соответственно на
А', В', С. При отображении Л любая точка М прямой g переходит
в точку Ж*, для которой
{А'В'С'МУ) = (АВСМ).
Но при отображении ф точка Ж переходит в точку Ж', для которой
тоже (А'В'СМ')-^(АВСМ).
Значит, в силу теоремы 11 для любой точки М прямой g точки
М* = ЛМ и Ж'=фЖ совпадают, а это и значит, что отображение
ф совпадает с проективным отображением ,//.
4. Двойное отношение в пучке прямых. Пусть на плоскости л
дан пучок О и в нем четь/ре луча а, Ь, с, d. Возьмем на плоскости я
какие-нибудь две прямые
g и g'', не проходящие
через точку О. Они пере-
пересекают прямые а, Ь, с, d
соответственно в точках
A,B,C,D и A',B',C',D'
(рис. 243). При перспек-
перспективном отображении
прямой g на прямую g' с
центром перспективы О
точки А, В, С, D пере-
переходит соответственно в
точки A',B',C',D'. Так
как при перспективном
отображении (являющем-
(являющемся, как мы знаем, част-
частным случаем проективно-
проективного отображения) одной
прямой на другую двойное отношение любой четверки точек сохра-
сохраняйся, то (ABCD) = (A'B'C'D'), и мы получили такой результат:
Теорема 14. Пусть на плоскости я дан пучок прямых О и
в нем четыре луча а, Ь, с, d. Тогда, какова бы ни была прямая g,
лежащая в плоскости я и не проходящая через точку О, двойное
Рис. 243.
]) В то.м смысле, что (АВСD) = (A'B'C'D'), если А, В, С, D—любые
четыре точки на прямой g, а А', В', С', D'— образы этих точек прл данном
отображении.
626 ПРОЕКТИВНАЯ ПЛОСКОСТЬ [ГЛ. XXI
отношение (ABCD) четырех точек A, /J, С, D, в которых прямая g
пересекает прямые а, Ь, с, d, одно и то же: оно не зависит от вы-
выбора прямой g. Это двойное отношение называется поэтому двойным
отношением (abed) четырех лучей а, Ьу с, а пучка О.
Если в пучке О дана проективная система координат, в которой
а = (.1:0), *=@:1), c = (l;l), d = (cr.p), то
-j.
Этот результат непосредственно следует из определения двой-
двойного отношения четырех лучей пучка и из формулы E) (стр. 623).
Читателю предоставляется доказать следующую теорему: ото-
отображение ф пучка О на пучок О' тогда и только тогда является
проективным, когда оно сохраняет двойное отношение любых четы-
четырех лучей.
Лучи а, Ь, с, d образуют гармоническую четверку, если (abed) = — 1.
О них можно повторить сказанное выше по поводу гармонических
четверок точек.
Возьмем прямую g так, чтобы она не была параллельной ни
одному из четырех лучей а, Ь, с, d. Тогда все четыре точки
А, В, С, D, в которых прямая g пересекает лучи с, Ь, с, d,—собст-
d,—собственные, и двойное отношение (ABCD), а значит и (abcd)y равно сле-
следующему выражению через площади ориентированных треугольников:
пл А АОС пл Д AOD
плдСОВ : пл
Но пл Д ЛОС = -?-| ОА 11 ОС\ sin (а, с), где (а, с) есть угол от вектора
ОА до вектора ОС и т. д., так что
| 0~Л | | ОС | sin (а, с) | 0Z>| | OB | sin(d, 6)
| ОС |Ofl|sin(c, ft) I ОА И OD I sin (a, d) '
T- e- , , sin(a, c) .sin (a, d)
(а'7СЙ) ~ sin (c, ft) * sin (d, ft) ¦
5. Выражение двойного отношения четырех точек на прямой,
заданных своими координатами относительно системы проективных
координат на плоскости. Пусть в системе проективных координат
XiX^XgE точки А, В, С, D, лежащие на прямой g (рис. 244), имеют
следующие координаты:
C={cl:c2:c3),
D = (d1:d2:d3).
Так как точки A^A^,^ не лежат на одной прямой, то прямая g не
проходит по крайней мере через одну из этих точек. Предположим,
§ 8]
ДВОЙНОЕ ОТНОШЕНИЕ
627
например, что прямая g не проходит через точку Х3 — @:0:1), и
рассмотрим перспективное отображение прямой g на прямую Х-уХ%
с центром перспективы Х3. Пусть А', В', С, D'—образы точек
/\ В, С, D при этом ото-
отображении. Так как при проск- v \9
тивном, и в частности при
перспективном, отображе-
отображении двойное отношение че-
четырех точек на прямой оста-
остается неизменным, то
{ABCD) = (А'В'CD').
В системе проективных
координат Х)Х2Х3Е точки
A',B',C',D' имеют следую-
следующие координаты:
В' = {Ь1:Ь2:О),
Пусть Е' — точка пересече-
пересечения прямой Х3Е с прямой
ХХХ2. Тогда
?' = A:1:0).
Введем на прямой ХХХ2 систему проективных координат с фунда-
фундаментальными точками Хх, Хг и единичной точкой Е'. В этой системе
координат (см. доказательство теоремы 8 (§ 7)) точки А', В', С, D'
имеют следующие координаты:
A' -={aL:a2), В' = (b1:bi), С = (с1: с2), D' = (dl:di).
Поэтому
Рис. 244.
| о, а211Ь-
{A'B'C'D')^-^
Но
Ki
(A'B'C'D') = (ABCD),
и потому имеем окончательно
(ABCD) =
°1 а2 1
°1 °2 1
di d2\
|*i
k
I*!
1 ^1
b2
d.
b2
FJ
628
ПРОЕКТИВНАЯ ПЛОСКОСТЬ
[гл. XXI
Точно так же можно показать, что если прямая g не проходит через
точку Х2, то
2i \\ 6, Ьа
(ABCD) =
и, наконец, если g не проходит через Xv то
(ABCD)=-^
а
F')
F"
в. Двойное отношение четырех точек на прямой, заданной
параметрическими уравнениями. Пусть прямая g проходит через
точки
Так как точки А и В различны, то матрица
а, аг
имеет ранг 2. Предположим, например, что отличен от нуля де-
детерминант
а, а2
Ьх Ьг ¦
Пусть теперь — в параметрическом представлении прямой g через
координаты точек А и В—имеем:
G)
где С = (с1: с2: с3) и D — (rix : d2 : d3) — точки прямой g. Тогда
CXU! ,- |
= a
§ 81
и аналогично
ДВОЙНОЕ ОТНОШЕНИЕ
629
dt
«2
d2
d\
ai
h
«2
b2
a.2
так что формулу F) можно переписать в виде
±:j. (8)
Замечание. Так как точки С=(с1:с2) и D={d1:d2) отличны
и от Л, и от В, то все коэффициенты в G), G') отличны от нуля,
так что мы можем положить, например, ц = 1, C = 1 и в этом пред-
предположении переписать (8) в виде
{ABCD) = - .
(8')
Если четверка точек А, В, С, D гармоническая, то формула
(8) дает
1 с/
(х E
или (при нормировке C = 1, Ц = 1)
Х = —a, ?i-fa=0. A0)
ГЛАВА XXII
КРИВЫЕ ВТОРОГО ПОРЯДКА
НА ПРОЕКТИВНОЙ ПЛОСКОСТИ
§ 1. Определение. Теорема единственности
Алгебраической кривой порядка п на проективной плоскости
(действительной или комплексной) называется множество всех точек
этой плоскости, координаты которых в некоторой проективной
системе координат удовлетворяют уравнению вида
Ф(хь ха, х3)=0, A)
где Ф{х{, х2, x.j) есть однородный многочлен (форма) степени п от
переменных хъ х2, х3, коэффициенты которого мы будем всегда
предполагать действительными.
При переходе от одной проективной координатной системы к дру-
другой координаты испытывают однородное линейное преобразование,
переводящее форму Ф^, x.z, x3) в форму Ф'(х[, х'„, х'3) той же
степени п от новых координат, поэтому данное выше определение
порядка кривой не зависит от выбора той или иной системы проек-
проективных координат. Если не оговорено противное, мы будем считать,
что на плоскости выбрана привилегированная система координат и что
л^ : х.,: х3 являются координатами по отношению к этой системе.
Проще всего представить себе при этом данную проективную
плоскость как арифметическую проективную плоскость или, что
сводится к тому же, но нагляднее, как проективную плоскость я,
происшедшую от пополнения несобственными точками обычной пло-
плоскости л с аффинной системой координат ое^о на ней, а систему
проективных координат на проективной плоскости л— как однородную
систему, соответствующую аффинной системе ое^. Тогда несобствен-
несобственные точки (х1:х2'-х3) характеризуются условием
х3 = 0,
которое и является уравнением несобственной прямой. При перспек-
перспективном отображении плоскости я па связку О координаты xt: х2: х3
какой-нибудь точки М плоскости я переходят в коордилаты луча
§ 1] ТЕОРЕМА ЕДИНСТВЕННОСТИ 631
т=ОМ связки, а уравнение A) превращается в уравнение кони-
конической поверхности с вершиной в центре связки О, сечением которой
плоскостью я и является кривая, определенная в этой плоскости
тем же уравнением A). Мы будем рассматривать лишь кривые вто
рого порядка, так что левая часть уравнения A), задающего данную
кривую, будет всегда квадратичной формой и уравнение кривой
будет иметь вид
ф (Xj, х2, х3) = апх\ -{- 2а12х1х2 + a2ix\ + 2а13х1х3 -f
+ 2а23х2х3\-авгх\ = 0. B)
В силу только что сказанного кривые второго порядка суть плоские
сечения конуса второго порядка.
Кривая второго порядка называется невырождающейся, если левая
часть ее уравнения есть квадратичная форма ранга /? = 3.
Посмотрим, чем отличаются кривые второго порядка, определенные
на проективной плоскости я, от давно известных нам кривых на
аффинной плоскости Л.
Возьмем аффинную систему координат ое^, соответствующую
данной однородной системе ХгХ2Х3. Тогда множество X собствен-
собственных точек проективной плоскости я, удовлетворяющих уравнению B},
совпадет с множеством точек аффинной плоскости я, координаты
которых
х, х2
х = — , у ——
(относительно системы ое^) удовлетворяют уравнению
F (х, у) = апхг -Ь 2а12ху + а22уг + 2а13х + 2а23у + а33 = 0. C)
Множество X пусто в том и только том случае, когда уравнение
C) противоречиво, т, е. когда а33=?0, а все остальные коэффициенты
aui аг2> а~2. Й1з> а2з равны нулю. В этом случае уравнение B)
превращается в
= 0, B.)
т. е. в xl=-0, и является уравнением дважды взятой несобственной
прямой.
Итак:
Теорема 1а. Если все точки кривой B) несобственные, то кри-
кривая B) есть дважды взятая несобственная прямая; тогда ее уравнение
непременно имеет вид BШ).
Предположим теперь, что кривая B) содержит все несобственные
точки плоскости и хотя бы одну собственную. В силу только что
доказанного, в этом случае хотя бы один из коэффициентов ап,
Й12> Й22. ai3> йгз отличен от нуля.
632 КРИВЫЕ ВТОРОГО ПОРЯДКА НА. ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
По нашему предположению, всякая несобственная точка (х1:хг:0)
удовлетворяет уравнению B), т. е. равенство
Ф (хь х2, 0) = апх14- 2а12лг1лг2 -f аггх\ = 0
есть тождество, верное для любых значений х,, хг. Это значит, что
и уравнение B) имеет вид
2a13xix3 ~ 2aiix.2x3 + о.ъзх\ = 0,
т. е.
х3 {2aVix1 + 2агзхг -f а33х3) = 0, B'м)
в котором по крайней мере один из коэффициентов а13, а.гг отличен
от нули.
Кривая B) в этом случае распадается на пару различных прямых:
несобственную прямую х3 = 0 и собственную прямую
а33х3 = 0.
Итак:
Теорема 16. Если кривая B) содержит все несобственные точки
плоскости и хотя бы одну собственную, то она распадается на пару
различных прямых, из которых одна есть несобственная прямая.
Уравнение B) в этом случае непременно имеет вид B'<х>).
Очевидно и обратное утверждение: если уравнение B) имеет
вид B'сю), то кривая B) распадается на пару прямых: на несобст-
несобственную прямую
и на прямую
2а13х1
это вторая прямая оказывается несобственной тогда и только тогда,
когда я13 = а23 = 0 (и тогда непременно я33=^=0).
Предположим теперь, что не все несобственные точки плоскости
лежат на кривой B) (т. е. что несобственная прямая не содержится
в кривой B)). Тогда среди коэффициентов ап, а|2, a.i2 по крайней
мере один отличен от нуля и уравнение B) определяет на аффинной
плоскости я с координатной системой оее2 некоторую кривую второго
порядка.
Для определения несобственных точек кривой B) подставляел»
в уравнение B)
х3 = 0.
Получаем
апх\ -•- 2аг.х1хг -f &ггх\ = °- D
§ 1] ТЕОРЕМА ЕДИНСТВЕННОСТИ , 633
Это уравнение определяет дна значения (действительные различные,
мнимые сопряженные или совпадающие действительные) для отно-
отношения х^.х^. Итак:
Теорема 1в. Кривая второго порядка B), не содержащая не-
несобственную прямую, имеет лишь две несобственные точки: действи-
действительные (бьпь может, совпадающие) или мнимые сопряженные.
Так как вектор {хъ х2}, удовлетворяющий уравнению D), есть
вектор асимптотического направления кривой (ЗI), то несобственные
точки кривой второго порядка, не содержащей несобственную прямую,
суть точки, удаленные в бесконечность в одном из двух направлений,
асимптотических для данной кривой.
Из доказанного легко следует
Теорема 2 (теорема единственностиJ). Если два
уравнения
Ф{ХХ, X.,, Х3) =
\ + 2\ \ -f- 2alixix
Х3)==
+ 2a'ltx1xs -\- а'ггх\ -f 2а\йх1х3 + 1а'%3х2х3 -\- а'33х* = 0, B')
рассматриваемые относительно одной и той же системы проективных
координат, определяют одну и ту же кривую втооого порядка, то
одно из двух уравнений B), B') получается из другого почленным
умножением на некоторый числовой множитель к.
Доказательство. Без ограничения общности можем пред-
предположить, что выбранная проективная координатная система есть
однородная система, соответствующая некоторой аффинной коорди-
координатной системе3) ое^. Рассматриваем три случая.
1° Кривая у состоит из одних несобственных точек. Тогда в силу
теоремы 1а оба уравнения B) и B') имеют вид
и утверждение теоремы 2 доказано.
2° Кривая у есть пара прямых, одна из которых есть несобствен-
несобственная прямая х3 = 0, а другая — собственная прямая d. Тогда по
1) Состоящей из собственных точек кривой B).
2) Второе доказательство теоремы единственности будет дано в начале
§ 3, читатель может его прочитать уже сейчас.
s) В самом деле, рассматривая данную проективную координатную систему
как класс эквивалентных между собою аффинных систем в связке О, берем
одну из этих систем Ое^вз и определяем плоскость л как плоскость д:3 = 1
а точку о в ней —как точку с координатами 0, 0, 1 (в системе О
Система ое^ есть искомая.
634 КРИИЫК ВТОРОГО ПОРЯДКА НА IIPUtKIMBHUrt H.'lUlMJ^in [I/,. ЛЛ|.
теореме 16 уравнения B) и B') имеют соответственно вид
xs Ba13xl + 2a,sx2 -{- а3зх3) =- О
и
х3 Ba'l3x1 -J- 2а'23х2 -}- а'33х3) = О,
а прямая d определяется каждым из уравнений
2alsx1 -г 2агзх2 + а33х3 ^ О
и
2а'13х1 -|- 2а„3хг -{¦ а'33х3 = О,
из чего следует, что при некотором X =??= О
01з = ^й13, а'23 = ка _3, й^з =-- Яя33.
Так как, кроме того,
аи = я'а=0, а12 = а'12=0, Й22=,«;2=О,
то утверждение теоремы единственности доказано и в случае 2°.
3° Кривая у не содержит несобственной прямой. В этом случае
кривая у, определяемая уравнениями B) и B') имеет две (быть
может, слившиеся) несобственные точки и только ими отличается
от кривой второго порядка, определяемой на плоскости ое^ урав-
уравнениями
Ф(дг, у, \)==anx1i-;i-2alixy + a2<1y2jr'2alsx + 2aS3y + as3^0, C)
Ф'(лг, у, \)==a1llxi-\-2a'l2xy-j-a'22y2-ir2a'l3x + 2a'23y + a33=0. C')
Так как кривые C) и C'), по предположению, состоят из одних
и тех же точек, то в силу теоремы единственности главы XVII,
§ 2, коэффициенты уравнения B'), т. е. коэффициенты формы
Ф' [xlt x2, х3), получаются из соответствующих коэффициентов
уравнения B), т. е. из коэффициентов формы Ф (xlt x2, х3), умно-
умножением их иа некоторый числовой множитель Х=^=0. Теорема 2
доказана.
§ 2. Пересечение кривой второго порядка с прямой.
Касательные; асимптоты
Пусть дана кривая второго порядка у споим уравнением
Ф(х1, х2, x3) = anxl + 2a^ixlx2 + a2ixl + 2al3XyX3 +
+ 2ai3x2x3 + a33xl = 0 A)
и прямая, заданная двумя своими точками P — iPi-Рг-Рз) и
Q = (qL, q2, q3) и имеющая, следовательно, параметрическое уравнение
B)
J
§ 2] касательные; асимптоты 635
(параметры к, [х принимают всевозможные числовые значения, за
исключением случая, когда А=0, [i = 0 одновременно).
Найдем точки пересечения кривой A) и прямой B). Для этого
подставим значения хъ хг, х3 из B) в уравнение A). Получим после
приведения подобных членов уравнение
АХ2 + 2ВХц -j- q*2 = 0. C)
Обозначая через W (xlt x2, х3; уу, уъ Уа) билинейную форму, по-
полярную к квадратичной форме Ф (хи х2, х3), имеем, как нетрудно
вычислить,
А = Ф(р1,р2,р3), Я^Ч^ь/3»,/>3; <7i, <72. <7з). C= Ф (qv q2, q3). D)
Если в уравнении C) все три коэффициента обращаются в нуль,
то это уравнение обращается в тождество, означающее, что при
любых значениях X и \х точка с координатами B) лежит на кривой A),
т. е. вся прямая B) входит в состав кривой A) (которая в этом
случае является распадающейся).
За исключением этого случая, из однородного уравнения C)
всегда определяются два — действительные, мнимые или совпадаю-
совпадающие— значения для отношения X:[i, которые обозначим через А^ц,
и А2:|я2- Внося эти значения в равенства B), получим две точки
пересечения кривой A) с прямой B).
Посмотрим, при каких условиях эти две точки пересечения сли-
сливаются в одну точку, т. е. прямая B) касается кривой A). Без огра-
ограничения общности можем взягь в качестве точки Р = (/V/V-Ps)
именно точку касания прямой B) и кривой A). Тогда двойная точка
пересечения кривой A) и прямой B) должна получиться при значе-
значениях X Ф 0, (J. = 0; так как точка Р=(р1:р2:р3) взята на кривой A),
то в уравнении C) надо положить
уравнение C) примет вид
2?X[i + Сц2 = 0
или
HB5X + CW=0. E)
Это уравнение должно иметь корень ц = 0 своим двойным корнем.
А это означает, что и уравнение
2SX + С\к = 0
должно иметь корень ц = 0, т. е. что 2ВХ = 0. Но так как (при
И—0) заведомо ХфО, то условие, чтобы прямая B) касалась кри-
кривой A) в точке Р, есть
B = W(pu рг, р3; <7i, q2, <7з) = 0
636 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
или
(апр1 -\- а1гр2 + а13р8) qL -f {апру + а22р2 + а.13р3) q2 +
-i-(a3lpl + a3.ipi+asapa)g3 = 0 F,)
для любой точки Q= (qi'-q2'-q3) прямой B). Поэтому уравнение F?),
в котором теперь естественно однородные координаты произвольной
точки Q обозначать через xv x2, хя (вместо qv q2, q3), есть уравне-
уравнение касательной к кривой A) в точке Р ={p\'<Pi'-p3). Это уравнение
мы переписываем в виде
4(Pi., />?> Рз< xi, хг, х.6)=0 F)
или, подробнее, в виде
(auPi + а1*Рг + апРз) xi +
Итак, касательная к кривой A) в ее точке Р—(р1'-р2-Рз) есть "Ря-
мая G), т. е. прямая с координатами
= ai,p1 -\- а.яРь + ar3ps, I (8)
)
Не может ли случиться, что всякая прямая, проходящая через
точку P—{Pi'-P2'Ps) кривой A), пересекает эту кривую в двух совпа-
совпадающих точках (или целиком содержится в нашей кривой)? Очевидно,
это происходит тогда и только тогда, когда уравнение F,;) удовлет-
удовлетворяется для любой точки Q=(qi'-t/2-<l3)i 'IT0 B свою очередь озна-
означает, что все коэффициенты этого уравнения равны нулю, т. е. что
F*)
•2 + пЗЗРз = 0-
Точка P—(pl:pi:ps), удовлетворяющая системе равенств F*), назы-
называется особой или двойной точкой кривой A) Если кривая A) нера-
нераспадающаяся, то детерминант системы уравнений F*) отличен от
нуля, система не имеет ни одного ненулевого решения: нераспадаю-
нераспадающаяся кривая не имеет особых точек. Если кривая A) распадается
на пару различных прямых du d.-,, то из геометрических соображений
ясно, что она имеет единственную особую точку, а именно точку
пересечения Р прямых dlt d2.
Из доказанного следует, что эта точка Р непременно удовлетво-
удовлетворяет системе уравнений F*). Наконец, у кривой, являющейся нарой
совпадающих прямых, все точки особые. Формально алгебраическое
доказательство этил утверждений предоставляется читателю.
§ 2]
касательные; асимптоты 637
Посмотрим, какая прямая является касательной к кривой A) в ее
несобственной точке
Я=(о:р:0). (9)
Так как Р—несобственная точка кривой A), то {а, р} есть вектор
асимптотического направления. Подставляя р1 = а, р2 = Р> />з = 0
в уравнение G), получаем уравнение искомой касательной:
(апа + «хгР) xi + (Й21а "I" йггР) ** + (а31а + азгР) хз = °- A0)
Но мы видели в главе XVII (§ 5, стр. 444, формула D)), что урав-
уравнение асимптоты есть
(аиа + а12р) х -j- (а21а + а^) у 4- (а31а + а32Р) =0 A0')
при условии, что {а, р} есть вектор асимптотического направления.
Переходя в уравнении A0') от обыкновенных координат к однород-
однородным, получаем как раз уравнение A0)—касательной в несобственной
точке кривой A). Итак, асимптоты кривой второго порядка суть
касательные к этой кривой в ее несобственных точках.
Мы нидели, что кривая второго порядка (не содержащая несоб-
несобственную прямую) имеет две (быть может, совпадающие) несобст-
несобственные точки, удаленные в бесконечность в асимптотических для
данной кривой направлениях. Поэтому кривые эллиптического типа
(эллипс и пара мнимых прямых) пересекают несобственную прямую
в двух мнимых сопряженных точках; кривые гиперболического типа
(гипербола и пара действительных пересекающихся прямых) пересе-
пересекают несобственную прямую в двух различных действительных точках.
Наконец, парабола (и пара параллельных прямых) имеет с несоб-
несобственной прямой пару слившихся точек пересечения: парабола ка-
касается несобственной прямой. В соответствии со сказанным выше
естественно считать несобственную прямую асимптотой параболы.
Восстанавливается полная гармония:
эллипс имеет две мнимые сопряженные асимптоты,
гипербола —две действительные,
парабола имеет две слившиеся с несобственной прямой асимптоты.
Найдем несобственные точки окружности.
Систему координат ое^е2 на плоскости л предполагаем прямоу-
прямоугольной. Тогда уравнение A) изображает окружность, если
Поэтому несобственные точки окружности суть точки, координаты
которых хг: x,j, удовлетворяют уравнению
аих\ + аг.,х\ = 0
или, сокращая иа ап = а2г.
638 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
т. е.
или
Итак, все окружности имеют одни и те же несобственные точки
A:«:0) A1)
Эти точки называются круговыми (или циклическими) точками
(арифметической комплексной) проективной плоскости я, снабженной
однородной системой координат, соответствующей прямоугольной
системе координат на плоскости я. Круговые точки удалены в беско-
бесконечность в изотропных направлениях1).
Докажем, что всякая кривая второго порядка, проходящая через
две круговые точки, есть окружность (с действительным, мнимым
или нулевым радиусом2)).
В самом деле, подставляя в уравнение A) координаты
круговых точек, получим
eu±2alfij— a22 = 0.
Так как ап, а1г, с23 — действительные числа, то из этого равенства
следует ап—а2г = 0, а12 = 0, откуда в свою очередь вытекает
(см. гл. XVI, § 3), что кривая A) есть окружность.
Итак:
Теорема 3. Среди всех кривых второго порядка окружности
характеризуются тем, что они проходят через две круговые гонки.
Выведем отсюда следующее очень важное предложение.
Теорема 4. Среди всех проективных преобразований плоскости
Р—п преобразования подобия*) характеризуются г ем, что они не
только отображают на себя несобственную прямую, но отображают
') При переходе от одной прямоугольной системы координат на плоскости я
к другой координатная запись круговых точек не меняется. Читателю пред-
предлагается проверить это.
2) Напомним, что окружность нулевого радиуса (х — аJ + (у—ЬJг=0есть
пара изотропных прямых (х—а) ± i (у—6)=0, проходящих через центр (а,*)
окружности.
3) Следовало бы сказать: «проективные преобразования, являющиеся
преобразованиями подобия, если их рассматривать на обыкновенной плоско-
плоскости л (состоящей из собственных точек проективной плоскости л)»—см. § 6.
н. 4 главы XXI. Упомянув об этом один раз, мы освобождаем себя от
дальнейшего повторения аналогичных замечаний.
§ 2] касательные; асимптоты 639
ее так, что каждая из двух круговых точек отображается на ту же
самую или на другую круговую точку.
Доказательство, Если данное проективное преобразование
<g есть преобразование подобия, то, будучи аффинным преобразова-
преобразованием, оио отображает несобственную прямую на себя. Так как при
преобразовании % каждая окружность К переходит в некоторую
окружность А", то пересечение окружности А'с несобственной прямой,
состоящее из пары круговых точек, переходит в пересечение окруж-
окружности Л" с несобственной прямой, т. с. снова в пару круговых точек.
Итак, при преобразованиях подобия несобственная прямая отобра-
отображается на себя и каждая круговая точка или остается неподвижной,
или переходит в другую круговую точку.
Первое утверждение теоремы доказано.
Докажем второе утверждение. Если данное проективное преобра-
преобразование переводит несобственную прямую в несобственную, то оно
является аффинным; если оно, кроме того, переводит круговые точки
в круговые, то оно переводит всякую кривую второго порядка, про-
проходящую через круговые точки, в кривую второго порядка, также
проходящую через круговые точки, т. е. переводит всякую окруж-
окружность в окружность. А тогда, как было доказано в главе XVII, § 12,
теорема 14, преобразование является преобразованием подобия.
Из доказанного вытекает
Следствие. Если при данном аффинном преобразовании *&
плоскости п хотя бы одна окружность К переходит в окружность Л",
то преобразование 5? есть преобразование подобия.
В самом деле, дополним аффинное преобразование Чв до проек-
проективного преобразования Ча проективной плоскости л. При преобра-
преобразовании # несобственная прямая dx отображается на себя. Пара
круговых точек (как пересечение прямой dx с окружностью К) ото-
отображается на пересечение прямой <ix с окружностью К', т. е. на
пару круговых точек. Значит, по теореме 4 преобразование & есть
преобразование подобия.
Определение. Множество, состоящее из двух элементов:
несобственной прямой и пары круговых точек на ней,— называется
абсолютом евклидовой геометрии.
Название это основано на том, что евклидова геометрия по преи-
преимуществу является геометрией подобия: все теоремы, касающиеся
«формы» тех или иных фигур (а не их размеров), суть теоремы,
выражающие те или иные свойства фигур, сохраняющиеся при преоб-
преобразовании подобия. Мы доказали, что абсолют как бы «управляет»
всеми этими свойствами, потому что преобразования подобия — это
как раз проективные преобразования, сохраняющие абсолют.
Читатель сейчас достаточно подготовлен, чтобы познакомиться и с
простейшими понятиями, касающимися так называемой неевклидовой
640 КРИВЫЕ ВТОРОГО ПОРЯДКА ИЛ ПРОЕКТИВНОЙ ПЛОСКОСТИ |ГЛ. XXII
геометрии; он может почерпнуть сведения о них, например, из моей
небольшой книжки «Что такое неевклидова геометрия.) (Москва,
1950, Издательство Академии педагогических наук).
§ 3. Пучок кривых второго порядка.
Второе доказательство теоремы единственности.
Теорема Паскаля. Теорема Штейнера
Вместо того, чтобы сводить доказательство теоремы единствен-
единственности для кривых второго порядка на проективной плоскости к до-
доказательству аналогичной теоремы для аффинной плоскости, можно
было бы дать прямое доказательство, почти дословно переписывая
§ 2 главы XVII, с единственным изменением, заключающимся в том,
что аффинные координаты х, у заменяются однородными координа-
координатами лгг: х.,: xs, а общий многочлен F(x,y) второй степени от двух
переменных заменяется квадратичной формой Ф (хи х», х3) от трех
переменных. В частности, дословно с точностью до указанных изме-
изменений сохраняется доказательство теоремы 4 главы XVII, которая
теперь приобретает такой вид:
Теорема 5. Пусть на проективной плоскости даны пять точек:
Mi = (/V<7i:''i). M2 = (/V92:r2), M3 = (p3:q3:r3),
№А = (рА: <74: ri), №b = (Рь ¦ <h ¦ гь),
никакие четыре из которых не лежат на одной прямой. Тогда одно-
однозначно, с точностью до общего числового множителя, определены
коэффициенты ап, оп, яг.Л, а13, a,:a, a3S в уравнении
Ф(хг, х2, x3)^aux\-r2al.ixlxi ¦- аггх\ ¦^2aiaxlx3 \-
кривой второго порядка, проходящей через эти пять точек, откуда
следует, что эта кривая существует и единственна. При этом, если
данные пять точек действительны, то действительна и проходящая
через них кривая.
Без всяких изменений, кроме указанных выше, переносятся на
случай проективной плоскости и рассуждения § 2 главы XVII о
пучке кривых второго порядка.
Одно замечание! Если среди данных пяти точек одна или две
несобственные, то задать их — все равно что задать одно или два
асимптотических направления кривой. Итак, нераспадающаяся кривая
второго порядка однозначно определена, если известны четыре
собственные ее точки и одно асимптотическое направление или три
собственные точки и два асимптотических направления.
Из теоремы 5 вытекает и следующее предложение, известное
из начального курса геометрии, — теорема об окружности, описанной
вокруг данного треугольника:
§ 3| ПУЧОК КРИВЫХ ВТОРОГО ПОРЯДКА 641
Через всякие три собственные точки плоскости, не лежащие
на одной прямой, проходит одна и только одна окружность.
В самом деле, если к данным трем точкам присоединить еще две
круговые точки, то получатся пять точек, через которые проходит
единственная кривая второго порядка; а так как кривая эта проходит
через круговые точки, то она непременно есть окружность.
Раз пять точек однозначно определяют проходящую через них
кривую второго порядка, то ясно, что такую кривую нельзя про-
провести через любые шесть точек. И в самом деле, мы сейчас докажем
теорему, выражающую необходимое условие для того, чтобы данные
шесть точек лежали на некоторой кривой второго порядка1).
Теорема эта есть знаменитая теорема Паскаля2):
Теорема 6. Пусть на не вырождающей с я3) кривой второго по-
порядка даны шесть точек: Мъ Мг, Mz, Mit Мъ, Мв (рис. 245). Эти
шесть точек и порядок, в котором они записаны, определяют шесть
прямых:
Тогда три точки
Л-UVft). Л = №-й). Л = Dгй)
пересечения прямых 4)
^1 « ft. ^2 и ft. rf3 « ft
лежат на одной прямой.
Замечание 1. Совокупность шести точек Мъ Мг, М3, МА,
Мь, Ме, записанных в определенном порядке, и шести прямых
МХМЪ М2М3, MsMit MtM6, МъМе, МеМг
называется в проективной геометрии шестиугольником M^M^M^M^N^M^.
Точки Мъ М2, Мъ, Ж4, Мъ, Ме называются вершинами, а прямые
М^Мг, М2М3, М3МА, МАМЪ, МъА1в, МйМг — сторонами шестиугольника
') Это условие не только необходимо, но и достаточно, чего мы, однако,
доказывать не будем; читатель может иайти это доказательство в многократно
цитированной книге Б. Н. Делоне и Д. А. Райкова, т. 2, стр. 368.
2) Паскаль (Blaise Pascal, 1623—1662)—один из замечательных людей
своего времени — выдающийся математик и физик, а также философ. В историю
математики он вошел ие только как замечательный геометр, но и как одни из
зачинателей целой ноной области науки—теории вероятностей. Теорему,
известную под его именем, ои доказал в возрасте 16 лет.
3) Теорема Паскаля имеет место и для вырождающихся кривых второго
порядка (см. теорему 6' ниже).
4) Мы помним, что точка пересечения двух прямых d и g обозначается
через (d-g).
21 П. С. Александров
642 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
в; при этом стороны
dx = МХМ^ и ?i =
и ?-2 =
и ^з =
d2 =
называются противоположными.
Если все шесть вершин Aflt /И2, ЛТ3, ЛТ4, ЛТ5, ЛТе шестиуголь-
шестиугольника лежат на данной кривой, то шестиугольник называется
Рис. 245.
вписанным в эту кривую. Имея в виду это словоупотребление, можно
теорему Паскаля сформулировать так:
Точки пересечения противоположных сторон всякого шестиуголь-
шестиугольника, вписанного в какую-нибудь кривую второго порядка у, лежат
на одной прямой. Эта прямая называется паскалевой прямой данного
шестиугольника1).
Замечание 2. Существенно заметить, что, переставив в ка-
каком-нибудь новом порядке данные шесть вершин, мы получим,
вообще говоря, новый шестиугольник; например, шестиугольники
МхМ.гМъМ^МъМ^ и M2M1M3MiMbMe различны: сторонами первого
1) Например, три точки пересечения противоположных сторон правиль-
правильного шестиугольника, вписанного в окружность, лежат на одной прямой
(на несобственной прямой).
g 3] ПУЧОК КРИВЫХ ВТОРОГО ПОРЯДКА 643
являются прямые МгМ,, М2М3 и т. д., а сторонами второго — прямые
М2М1 = М1Ма, МХМ3 и т. д. Таким образом, во втором шестиуголь-
шестиугольнике имеется сторона МХМ3, которой нет в первом, и зато нет
стороны М«М3.
Два шестиугольника тождественны, если у них одни и тс же
вершины и одни и те же стороны. Поэтому циклическая перестановка
вершин является допустимой; шестиугольники Ж1Ж2М3Ж4Л/1вЛ1е и
М1.М3М^ъМеМх тождественны между собой.
Кроме того, если в данном шестиугольнике MjMjMgA/^WgAfg
изменить порядок всех вершин на противоположный: M6MbMiM3M2M1,
то получится шестиугольник, тождественный с данным1).
Доказательство теоремы Паскаля. Как мы уже делали
неоднократно, будем и теперь обозначать одной и той же буквой
какую-нибудь прямую d, левую часть ее уравнения и тройку ее
координат, помня все время, что d и kd при любом й^=0 есть одна
и та же прямая. Обозначим через/прямую, проходящую через точки
Mi = (ds-g1) и M1 = (d1-g3). Кривая второго порядка, распадающаяся
на пару прямых dt и d3, имеет уравнение
dxd3 = 0 0)
и принадлежит пучку кривых второго порядка, проходящих через
точки Мъ Мг, М3, МА (так как точки Мг и Ж2 лежат на прямой du
а точки М3 и М4—на d3). Тому же пучку кривых второго порядка
принадлежит и пара прямых d<, = M2Ms, f=MiM1, т. е. кривая вто-
второго порядка, имеющая уравнение
d2/=0. B)
Исходная кривая у также принадлежит этому пучку, поэтому ее
уравнение может быть записано в виде
Я1^з + ^2^/=О. C)
Кривая у, по предположению, нераспадающаяся; поэтому оба коэф-
коэффициента Хх и Х2 отличны от нуля, так что, разделив обе части
уравнения на один из них, можем переписать уравнение C) в виде
^3+Ы2/=0. D)
Но кривая у принадлежит и пучку кривых, проходящих через точки
М4, Мъ, Ме, Мх. Этому же пучку принадлежат и распадающиеся
*) Группа всех перестановок из шести точек Mi, М2, М3, Mt, Мъ, М9
состоит из 1-2-3-4'5-6 = 720 элементов; допустимых перестановок при этом
имеется 12, значит, число различных шестиугольников с данными вершинами
есть 720:12 = 60. Поэтому каждые шесть точек кривой Второго порядка опре-
определяют шестьдесят паскалевых прямых, на каждой из которых лежат по три
паскалевых точки.
21*
644 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
кривые
Значит, кривая у является линейной комбинацией и двух последних
распадающихся кривых; уравнение кривой у может быть записано
в виде
Так как уравнения D) и E) выражают одну и ту же линию второго
порядка, то но теореме единственности одно из этих уравнений
получается из другого умножением на некоторый числовой множи-
множитель к:
F)
Заменив многочлены йъ d2 через -г dv -r d2 и обозначив их после
этой замены снова через dlt d2, можем считать множитель k в правой
части тождества F) равным 1 и переписать это тождество в виде
gvis-r^esf=d1d, + hij' G)
или в виде
(В)
Прямая р, заданная уравнением
принадлежит пучку прямых, задаваемому двумя прямыми d2 и ^2, и
проходит, следовательно, через точку пересечения Pi={d2-gi) этих
двух прямых.
Ввиду тождества (8) уравнение
есть уравнение той же пары прямых, что и уравнение
0. (9)
На этой паре прямых лежат точки (d1-gl)=P1, (ds-g3)=Ps,
ЛТ4 = (dg-^j), M1 = (d1-gA). Итак, эти четыре точки лежат на паре
прямых, которая может быть задана уравнением (9).
Точки M1 = (d1-g3) и (d3-g1) = Mi лежат на пря.\юй /, но ни
одна из точек Pi=(di-g1) и Ps = (ds-gs) на этой прямой не лежит.
В самом деле, если бы точка пересечения Рг прямых d1 = MlMi
и gl = MiMb лежала на /=МХМ^ то прямая / имела бы с прямой ufx
общие точки М1 и Ръ а с прямой gr — общие точки Ж4 и Рх. Точка Ях
отлична по крайней мере от одной из двух точек Mlt Ж4; пусть,
например, РхфMv Тогда прямые dx и f=MxMi, имея две общие
точки Мх и Pv совпадали бы между собою, и точки Мх, М2, ^4
§ 31
ПУЧОК КРИВЫХ ВТОРОГО ПОРЯДКА
645
лежали бы на одной прямой — вопреки предположению. По аналогич-
аналогичной причине точка P3—{da-g3) не лежит на прямой/. Итак, ни
одна из точек Pt и Р3 не лежит на прямой /; в то же время каждая
из этих точек лежит на кривой, распадающейся на пару прямых /up;
значит, обе точки Pt и Р3 лежат на прямой р, которой по самому
ее определению инцидент-
иа и точка P2 = (d2-g2).
Следовательно, все три точ-
точки Рг= (dx ¦ gj), P2 = (d.2 ¦ g2),
p3 = (d3-g3) лежат на пря-
прямой р, и теорема Паскаля
доказана.
Если кривая у распадаю-
распадающаяся, то от вписанного в
нее шестиугольника естест-
естественно требовать, чтобы ни-
никакая его сторона не сов-
совпадала ни с одной из двух
прямых, на которые распа-
распадается кривая у. В соответ-
соответствии с этим требованием
теорема Паскаля для рас-
распадающейся кривой полу-
получает следующую формули-
формулировку:
Теорема 6'. Пусть
даны две прямые d и d' и
на них шесть точек:
Рис. 246.
А, В, С; А', В', С,
из которых точки А, В, С лежат на прямой d, а А\ В', С —
на прямой а" (рис. 246). Кроме того, предполагается, что на
одна из этих точек не совпадает с точкой пересечения E = (d-d') пря-
прямых dud'.
Обозначим прямые ВС и В'С, СА' и С А, АВ' и А'В соответст-
соответственно через а=--ВС, а' = В'С; b = CA', b' = C'A; с = АВ', с'^А'В.
Тогда точки Р=(а-а'), Q= (b-b')t /? = (c-c') лежат на одной пря-
прямой—«паскалевой» прямой шестиугольника.
Дадим краткое доказательство этой теоремы х).
Точку пересечения прямых АВ' и СА' обозначим через G, а точку
пересечения прямых АС' и СВ' через Н. Требуется доказать, что
точка Р совпадает с точкой Рх пересечения прямых СВ' и RQ, для
') Оно заимствовано из «Аналитической геометрии» Б. Н. Делоне и
Д- А. Райкова.
646 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. ХХИ
чего в свою очередь достаточно доказать равенство двойных отношений
(СНВ'Р1) = (СНВ'Р).
Имеем следующие тройки коллинеарных точек:
Q, С, G; Q, Н, A- Q, Pv R,
так что четверки точек
С, И, В', Рх и О, А, В\ R
находятся между собою в перспективном соответствии с центром
перспективы Q, откуда следует, что
(СИВ'Ру) = (GAB'R).
Аналогично убеждаемся в том, что четверки точек
О, А, В', R и С, А, Е, В
перспективны между собою (при центре перспектив» А\ так что
(GAB'R) = (САЕВ).
Наконец,
С, А, Е, В и С, Н, В', Р
находятся в перспективном соответствии при центре перспективы С,
так что
(САЕВ) = (СНВ'Р)
и, значит,
(СЯ5'Р1) = (СНВ'Р), т. е. PX = P,
что и требовалось доказать.
Только что доказанная теорема 6' была известна еще греческому
геометру Паппу Александрийскому, жившему во второй половине
Ш века н. э. Поэтому ее следует называть теоремой Паппа, как
это обычно и делается. Можно ей дать и другое доказательство,
не пользующееся двойным отношением и похожее на приведенное
в предыдущей главе доказательство теоремы Дезарга (но более
сложное); заинтересовавшийся читатель может попытаться провести
такое доказательство.
В заключение этого параграфа докажем следующую очень извест-
известную теорему, установленную швейцарским геометром Я. Штейнером
(Jakob Stciner, 1796—1863).
Теорема 7 (об образовании кривых второго по-
порядка посредством проективного отображения
одного пучка прямых на другой). Пусть на плоскости
даны два пучка прямых с центрами О и О' и проективное отображе-
отображение % одного пучка на другой, ставящее в соответствие каждому
§ 3]
ПУЧОК КРИВЫХ ВТОРОГО ПОРЯДКА
647
не является
лучу т пучка О луч т' пучка О'. Если отображение
перспективным, то точки пересечения
M = {m-m')
лучей, соответствующих друг другу, при этом отображении лежат
на некоторой кривой второго порядка, проходящей через точки О и О'.
Обратно, если на какой-нибудь кривой второго порядка у взяты две
точки О и О' и каждому лучу
m пучка О ставится в соответст-
соответствие луч ш' пучка О', идущий в
точку пересечения М луча т' с
кривой у, то полученное отобра-
отображение %> есть проективное отоб-
отображение пучка О на пучок О'
(очевидно, не являющееся пер-
перспективным).
Предположим, что на плос-
плоскости дана система однородных
координат хг, х2, лг3; левые части
уравнений всех рассматриваемых
далее прямых и кривых второго
порядка суть многочлены пер-
первой, соответственно второй,
степени относительно переменных
Докажем сначала второе ут- Рис- 247.
верждение теоремы 7. Возьмем ка-
какие-нибудь два луча т1з тг пучка О и соответствующие им лучи
т\, т'2 пучка О' (рис. 247). Точки О и О' лежат на данной кривой у
второго порядка. Пара прямых тъ т\ есть распадающаяся кривая
второго порядка, уравнение которой может быть записано в виде1)
!»!«;=о. (ю)
Точно так же пара прямых т'и т2 есть распадающаяся кривая
второго порядка, уравнение которой может быть записано в виде
/!i1ftli = и. A1)
Кривая у проходит через четыре точки М1^=(т1'т1), Мг — (тЪ'т'ъ),
О = (/я1-/я2) и О' = (т\-ml), каждая из которых принадлежит обеим
кривым A0) и A1); поэтому кривая у принадлежит пучку кривых,
определенному кривыми A0) и A1).
1) Как и раньше, мы обозначаем левую часть уравнения прямой той же
буквой, что и саму прямую (так что т и km при любом числовом множителе
k ф 0—одна и та же прямая).
648 КРИВЫЕ ВТОРОГО ПОРЯДКА НЛ ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. ХХН
Следовательно, уравнение кривой у можно записать в виде
kntyin'^ — k'тгт\ = О
или (помня о возможности заменить тх через kmlt а т'х через k'mx\
в виде
тхт'г — т^т^ — О,
т. е. в виде
Возьмем теперь в каждом из пучков Он О' по проективной
системе координат, имеющей лучи тх и тг, соответственно т\ и т'г,
своими фундаментальными лучами. Каждая прямая т пучка О имеет
уравнение вида
Х1/й1 + Х2/и2 = 0, A3)
а каждая прямая т' пучка О' — уравнение вида
; = о, A3')
причем Хъ Х2, соответственно к[ и Xj, суть координаты лучей т и
т' в соответствующих координатных системах (т1г т2, е) и
(т\, т'г, е'). Если прямые т и т' соответствуют друг другу в рассматри-
рассматриваемом отображении, то их точка пересечения М принадлежит кри-
кривой у, значит, координаты этой точки удовлетворяют уравнению A2).
Но эти координаты удовлетворяют и уравнениям A3) и A3').
Подставляя координаты точки М в эти уравнения, получаем
равенства
т2 то
правые части и г которых суть определенные числа, рав-
ные между собою в силу A2), так что K1:K2 = X'1'.K'i. Итак, при
нашем отображении % пучка О на пучок О' лучу, имеющему в вы-
выбранной в этом пучке координатной системе координаты X1:Ki,
соответствует в другом пучке луч, имеющий в соответствующей
координатной системе координаты Х'1:Х'г = Х1:Х2. Проективность ото-
отображения % этим доказана.
Доказываем первое утверждение теоремы Штейнера.
Пусть между пучками О и О' установлено проективное соответ-
соответствие. Тогда при надлежаще выбранных в каждом пучке проективных
координатных системах соответствующие друг другу лучи т и т'
обоих пучков имеют пропорциональные пары координат: %1:%2 = Х1'-^-2-
и, следовательно, выражаются через координатные лучи тх, Щ<
соответственно т[, т'2, одинаковым образом:
т = 'к1т1-]-'к2т2, т' — 'к1т1-\-'к2т2.
§ 4]
поляры и полюсы 649
Координаты точки пересечения М лучей т и т' удовлетворяют обоим
уравнениям т = 0 и т'— 0, т. е.
'2 — 0. A4)
7\ т'
Определяя из второго из этих уравнений ~ = -, и подстав-
подставка mi
ляя результат в первое уравнение A4), получаем
/712 ^2
т. е. уравнение
т^т'ъ — т[т2 = 0 A5)
степени не выше второй (относительно xv х2, х3). Пусть уравнение
A5) — первой степени, тогда оно является уравнением прямой ОО',
которая оказалась бы осью перспективы для проективного отобра-
отображения & — вопреки нашим предположениям.
Итак, уравнение A5) — второй степени и определяет кривую вто-
второго порядка, проходящую через точки О и О'. Теорема Штейнера
доказана.
§ 4. Поляры и полюсы
Мы доказали в § 2, что если точка P=(Pi'-p2'-ps) есть точка
(нераспадающейся) кривой у, определенной уравнением
Ф(хъ х2, ха) = 0, A)
то прямая
(anPi + аг2р2 + alsPs) х1 + (а21р1 + а22р2 + а2зРз) х2 +
+ («3lPl + a32^2+«33JD3)-*rS = 0, B)
т. е. прямая с координатами
22P2 + 23s, B')
a3lPl + +
есть касательная к кривой A) в ее точке P={p1:p2:ps). Но пря-
прямую с координатами B') можно рассматривать для любой точки
P==(Pi'-P2'P3), независимо от того, лежит ли точка Р на кривой A)
или нет. Эта прямая B) называется полярой точки Р=(р1-р2'Р3)
относительно кривой A). Поляра точки Р, лежащей на кривой,есть
касательная к кривой в точке Р.
Замечание 1. Это определение поляры годится как для не-
нераспадающейся кривой второго порядка, так и для распадающейся
на пару пересекающихся прямых.
650 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
Однако во втором случае не будет определена поляра точки
P—(Pi'-P2:Pa)> координаты которой удовлетворяют системе урав-
уравнений
«и Pi + «12^2 + aisPs = 0,
Единственной такой точкой Р является точка пересечения обеих
прямых, на которые распалась данная кривая. В этом и двух сле-
следующих параграфах мы не будем рассматривать кривые, распадаю-
распадающиеся на пару слившихся прямых.
Будем теперь предполагать (если не оговорено противное), что
кривая у нераспадающаяся. Тогда
an a12 аг
a d a
а„, a,, a..
и уравнения B') однозначно разрешаются относительно рх, ръ р3:
B")
"f" ^*22b2 ~Н -^г
! "Г -^32?2 "f" -^З
Другими словами, если дана произвольная прямая, координаты кото-
которой обозначим через %ъ 5г> Ез? то существует единственная точка
iPx'-Pt'-Pt), имеющая прямую {|г:е2:53} своей полярой. Эта точка
(Pi'-Pt'-Рз) называется полюсом прямой {^^бг^з}-
Пусть [х1:хг:х3) = Х — какая-нибудь точка плоскости. Тогда
уравнение B), которое можно записать в виде
У (Pi,
Ps< хъ
C)
представляет собою условие для того, .чтобы точка Х=(х1:х2:х3)
лежала на поляре точки Р. Но выражение W (ръ рг, р3; хъ х2, х3)
симметрично относительно троек чисел хъ хъ хъ и ръ р2, Р3'<
поэтому равенство C) выражает также условие того, что точка
P=(px'-P2:Ps) лежит на поляре точки X. Итак, имеем следующий
основной результат.
Теорема 8 (теорема взаимности). Если точка X лежит
на поляре точки Р, то и точка Р лежит на поляре точки X.
Пусть прямая q с координатами ?ъ |2, |3 есть поляра точки Р-
Обозначим через Qu Q.z точки пересечения прямой q с кривой A)
§41
ПОЛЯРЫ И ПОЛЮСЫ
651
(эти точки могут быть различными или совпадающими, действитель-
действительными или мнимыми) (рис. 248).
Точка Qt лежит на поляре точки Р; значит, по теореме взаим-
взаимности точка Р лежит на поляре точки Qv т. е. на касательной
к кривой A) в точке Qv
Другими словами, точка Qt есть точка прикосновения касатель-
касательной, проведенной из точки Р.
Итак, всякая точка пересечения поляры точки Р с кривой A)
есть точка прикосновения касательной, проведенной из точки Р.
Так как имеется две точки пересечении Q1( Q2 поляры точки Р
с кривой A), то из точки Р можно провести к кривой A) две ка-
касательные— одна будет касаться нашей кривой в точке Qx, другая—•
в Q«. Доказана
Теорема 9. Из каждой точки Р плоскости можно провести
к кривой A) две касательные, совпадающие между собою, если точка
Р лежит на кривой, и только
в этом случае. Поляра точки
Р есть прямая, соединяющая
точки прикосновения обеих ка-
касательных, проведенных к кри-
кривой A) из точки Р.
Тот же факт можно выска-
высказать и так:
Полюс прямой q есть точка
пересечения двух касательных,
проведенных к кривой A) в
точках пересечения прямой q с
кривой A).
Это определение поляры и
полюса не зависит от того,
каким именно уравнением и в
какой системе координат мы
определим данную кривую вто-
второго порядка.
Приведенное определение
годится независимо от того,
будут ли касательные, про-
проведенные из точки Р, действительными или мнимыми. Однако ри-
рисунок осуществим, конечно, лишь если касательные из точки Р
действительные. В этом случае говорим, что точка Р лежит вне
кривой A).
Если же касательные к кривой A), проведенные из точки Р,
мнимые, то мы говорим, что точка Р лежит внутри кривой A);
в этом случае рисунок уже не имеет реального смысла. Спраши-
Спрашивается: как в этом случае свести построение поляры точки Р
Рис. 248.
652 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. ХХН
к построению касательных? Для этого проведем через точку Р две
какие-нибудь прямые АВ и А'В' (рис. 249), точки пересечения этих
прямых с кривой A) обозначим через А, В, соответственно А', В'.
Касательные в точках А, В, А', В' к нашей кривой обозначим со-
соответственно через а, Ь, а', Ь'. Точку пересечения прямых а и b
обозначим через С, точку пересечения прямых а' и Ь' обозначим
через С. Прямая СС и есть поляра точки Р.
В самом деле, прямая АВ есть поляра точки С, и Р лежит на
этой поляре; так как Р лежит на поляре точки С, то точка С
лежит на поляре точки Р; точ-
точно так же точка Р лежит на
поляре точки С, значит, точ-
точка С лежит на поляре точки
Р. Поляра точки Р, таким
образом, проходит через обе
точки С и С, а значит, эта
поляра есть прямая СС.
Это построение применимо
не трлько к случаю, когда
Р—внутренняя точка кривой
A) (см. рис. 249), а к любо-
любому случаю. На рис. 250 наше
построение сделано для точки
Я, внешней к кривой A).
Определение поляры точки
и полюса прямой относительно
данной нераспадающейся кри-
кривой второго порядка A) уста-
устанавливает взаимно однозначное
соответствие между всеми
точками и всеми прямыми проективной плоскости: каждой точке X
плоскости соответствует вполне определенная прямая этой плоскости,
а именно поляра точки X; каждая прямая является полярой лишь
одной точки (своего полюса). Если точка X дана своими однород-
однородными координатами
Х= (х1:х2:х3),
Рис. 249.
то координаты
ее поляры находятся по формулам:
= а21х1
D)
Обратно, если дана прямая своими координатами |х, |а, ?3, то
с 4] ПОЛЯРЫ И ПОЛЮСЫ
координаты ее полюса находятся по формулам:
653
E)
где коэффициенты Aik получаются, если решить уравнения D) от-
относительно xlt хг, xs (что возможно, так как deM^O); матрица
(Aik) есть матрица, обратная к матрице (aik).
~г-^3262 "г -^зз5з>
Рис. 250.
Только что описанное соответствие между точками и прямыми
плоскости называется полярным соответствием, порожденным данной
нераспадающейся кривой второго порядка A). При полярном соот-
соответствии сохраняется отношение инцидентности между точками
и прямыми, именно в этом заключается содержание теоремы 8. Эта
теорема может быть сформулирована и так:
Теорема 8'. Если данная точка X пробегает некоторую пря-
прямую d, то ее поляра пробегает весь пучок прямых с центром в по-
полюсе D прямой d.
Обратно, если прямая ? пробегает весь пучок прямых с центром
в данной точке D, то ее полюс X пробегает прямую d, а именно
поляру точки D.
В самом деле, если точка X пробегает поляру d точки D, то
точка D лежит иа поляре каждой из точек X, т. е. поляры всех
точек X пробегают весь пучок прямых с центром D.
Другое определение поляры. Пусть снова
Ф(хг, хг, х3) = 0 A)
есть уравнение кривой у второго порядка.
654 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
Назовем две точки Ж = E1'.|2:?зIи ^—(Л1:Л2:Ла) сопряженными
относительно кривой у, если точки М и N образуют пару точек,
гармонически сопряженную к паре точек пересечения Р = (р^Рг'Рз)»
Q— {Дг'Яг'-Яз^ прямой MN с кривой у, T. е. если
(MNPQ)=—\.
Параметрическое уравнение прямой MN может быть записано в виде
х2 = | Д + г\2ц, У F)
а координаты точек пересечения Р я Q определяются подстановкой
в эти уравнения значений X и ц,
ляется из квадратного уравнения
в эти уравнения значений X и ц, отношение которых k = — опреде-
опреде0, G)
где
А = ФA1г 12, 5а), B^W(l,, \2, U -п1э т)а, Т13), С-Ф^, ti2i tj,).
Корни уравнения G) обозначаем через k' и /fe", так что теперь
Из формулы A0) § 8 главы XXI нам известно, что четверка
точек М, N, P, Q тогда и только тогда будет гармонической, когда
т. е. если в квадратном уравнении G) коэффициент Z?=0. А это
значит, что
Y(glf Е2> |,; Ль Ла. *Ь) = 0-
Если теперь точка yW=(|1:^2:^3) дана, а точка ЛГ определена тре-
требованием быть гармонически сопряженной точке М относительно
кривой у, то координаты точки N, которые мы теперь будем обо-
обозначать через xlt x2, х3, должны удовлетворять уравнению
* (ell b2i =3i -^li Х2' Х3' == О"
Но это уравнение есть не что иное, как уравнение поляры точки М
относительно кривой у.
Итак:
Теорема 10. Поляра точки М относительно данной кривой
второго порядка есть геометрическое место точек, гармонически со-
сопряженных с точкой М относительно этой кривой у.
« 5] КОРРЕЛЯТИВНОЕ СООТВЕТСТВИЕ 655
Теорема 10 может рассматриваться как новое определение поляры.
Это определение может быть перенесено и на случай распадающейся
кривой второго порядка. Существенно при этом, что уравнение по-
поляры точки yW=(g1:g2:|3) есть
* (Sl> §2' ?3> XV Х2> "^з) = ^)
что тоже может быть принято за определение поляры. Однако при
обращении в нуль дискриминанта А формы Ф (хи х2, х3) соответ-
соответствие между полярой и полюсом перестает быть однозначным.
Замечание 2. Если кривая у распалась на пару различных
прямых d и d', пересекающихся в некоторой точке О, то, как мы
знаем, определенное этой кривой полярное соответствие между точ-
точками и прямыми плоскости перестает быть взаимно однозначным.
Тем не менее для каждой точки М, отличной от точки О, имеется
единственная поляра, и эта поляра проходит через точку О. Для
самой точки О поляра перестает быть определенной (если угодно,
можно считать любую прямую, проходящую через точку О, каса-
касательной, а следовательно, и полярой этой точки).
§ 5. Коррелятивное, в частности полярное, соответствие.
Тангенциальное уравнение кривой
Пусть дала какая-нибудь невырождающаяся, в остальном совер-
совершенно произвольная матрица
°23
C33 i
Напишем формулы:
§2 ==
6з==
(I)
Здесь каждая тройка хъ х2, xs есть тройка однородных координат
некоторой точки X проективной плоскости. Если мы под соответ-
соответствующей тройкой Jj:g2:g3 будем понимать также тройку координат
точки плоскости, то формулы (I) дадут нам некоторое проективное
преобразование (коллинеацию) плоскости.
Но мы можем под %г, \г, ?3 понимать координаты некоторой
прямой; тогда формулы A) дадут нам некоторое взаимно однозначное
соответствие между точками и прямыми плоскости; взаимная одно-
однозначность этого соответствия следует из того, что матрица С не-
невырождающаяся; поэтому, решая уравнения (I) относительно
656 КРИВЫЕ ВТОРОГО ПОРЯДКА НЛ ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
xl,x2, х3, мы по данным gj, g2, Е3 получим хь х2, ха по формулам:
Xl — QlSl + ^-12»2 "Т" ^13ЬЗ
¦*S = Qlll "I" ^32^2 4" СзЗ?3
где (Cift) есть матрица, обратная к матрице (cik).
Взаимно однозначные соответствия между точками и прямыми
проективной плоскости, даваемые формулами типа (I) и (II), в которых
данной точке (данной прямой) ставится в соответствие прямая (точка),
координаты которой линейно и однородно выражаются через коор-
координаты данной точки (данной прямой), называются коррелятивными
соответствиями или корреляциями на проективной плоскости. При
этом сама плоскость понимается как множество всех лежащих в ней
точек и прямых, и речь идет, следовательно, о таком взаимно одно-
однозначном отображении этого множества на себя, при котором его
разноименные элементы, точки и прямые, переходят друг в друга.
Полярные соответствия составляют частный случай корреляций;
полярное соответствие — это такая корреляция, матрица С которой
есть симметрическая матрица. Каждая симметрическая матрица есть
матрица некоторой квадратичной формы; приравнивая эту форму нулю,
получим уравнение кривой второго порядка; полярное соответствие,
определенное этой кривой, и есть, очевидно, данная симметрическая
корреляция.
Когда при данном полярном соответствии точка переходит в ин-
инцидентную ей прямую? Другими словами, когда данная точка
Х=(х1:х2:х3) лежит на своей поляре {s1:E,2:|3}'1
Пишем условие инцидентности:
ei*] ~!" ь-г-^а "t~ Ьз-^з = "i .
т. с.
+ (яз!*! -г aS2x.2 + a33xs) x3 = О,
т. е.
Ф^, х2, xs) = 0. A)
Итак, точка (Х1:х2:х3) инцидентна своей поляре тогда и только
тогда, когда она лежит на кривой A). Но тогда поляра данной
точки есть касательная в этой точке.
Тот же вопрос можно, естественно, поставить и для прямой:
когда данная прямая \ инцидентна своему полюсу XI Если прямая \
инцидентна своему полюсу X, то этот полюс инцидентен своей по-
поляре, т. е. точка Улежит на кривой A), а прямая ? является каса-
касательной к кривой A) в этой точке.
S 5] КОРРЕЛЯТИВНОЕ СООТВЕТСТВИЕ 657
Скажем, что точка инцидентна данной кривой, если она лежит
на ней, и что прямая инцидентна кривой, когда является ее каса-
касательной.
Мы имеем следующее предложение.
Теорема П. Два элемента — точка и прямая, соответствующие
друг другу при полярном соответствии, определенном данной невы-
рождающейся кривой второго порядка, тогда и только тогда инци-
инцидентны между собою, когда сами эти элементы инцидентны данной
кривой.
Теперь легко ответить и на такой вопрос: какому условию удов-
удовлетворяют координаты.^, ?2, |3 всех прямых, инцидентных данной
кривой Ф (л^, х2, х3) = О?
Прямые, инцидентные кривой A), — это прямые {Б^ег^зЬ инци-
инцидентные своим полюсам, где
Условие инцидентности x1t,1Jrx2l,2'rx3l3 = 0 дает в данном
случае
(¦"llSl "Г" ¦2^2 "Т ^гзвз) Si ~Г (-^2lSl ~Ь -^22b2 "Г ^23?з)ё2 "Г
т. е.
Ф (Si, U, Is) = Aul\ -|- 2
-\-Л33Ц = 0. B)
Этому уравнению и удовлетворяют координаты всех прямых, инци-
инцидентных данной кривой (т. е. всех касательных к этой кривой).
Ввиду равноправия точек и прямых на проективной плоскости
всякую алгебраическую кривую на плоскости естественно рассмат-
рассматривать не только как множество инцидентных ей точек, но и как
множество инцидентных ей прямых. Уравнение A) есть уравнение,
которому удовлетворяют координаты всех точек, инцидентных данной
кривой второго порядка; это обычное, или «точечное», уравнение
данной кривой. Уравнение B) есть уравнение, которому удовлетво-
удовлетворяют координаты всех прямых, инцидентных данной кривой второго
порядка; это уравнение называется «тангенциальным» (т. е. «каса-
«касательным») уравнением данной кривой или уравнением ее в «танген-
«тангенциальных» координатах (под тангенциальными координатами понима-
понимаются координаты прямой). Тангенциальное уравнение кривой второго
порядка есть также уравнение второй степени. Для кривых высших
порядков это уже не так.
658 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
Имеет место следующий факт, являющийся усилением принципа
двойственности, сформулированного в § 4 предыдущей главы.
Пусть доказано какое-нибудь предложение, касающееся точек,
прямых и кривых второго порядка и отношений инцидентности между
ними. Тогда имеет место и двойственное предложение, получающееся
из первоначального заменою слов «прямая» п «точка» друг на друга.
Эта же замена, систематически осуществляемая во всех рассужде-
рассуждениях, образующих доказатель-
доказательство одного из двух двойственных
между собою предложений, пре-
превращает их в доказательство вто-
второго предложения.
Классическим примером может
служить теорема, двойственная
в этом смысле к теореме Паска-
Паскаля, а именно следующая теорема
Брианшона;
Теорема 6. Пусть даны
шесть прямых:
Щ-, Щ, Щ, ти ть-, м%,
инцидентных данной невырож-
дающейся кривой второго поряд-
порядка (рис. 251). Эти шесть прямых
даны, определяют шесть точек:
М,
Рис. 251.
в том порядке, в котором они
Тогда три прямые
М2МЪ,
проходят через одну точку ¦{«три прямые, соединяющие пары противо-
противоположных вершин шестиугольника, описанного вокруг кривой второго
порядка, проходят через одну точку»).
Теоремой, двойственной к теореме 5, является
Теорема 5. Всякие пять прямых, из которых никакие четыре
не проходят через одну точку, определяют единственную кривую
второго порядки, этим прямым инцидентную, т. е. касающуюся
каждой из них.
Наконец, следует отметить и двойственное предложение к тео-
теореме 7.
Теорема 7. Пусть даны кривая второго порядка у и две каса-
касательные d и d' к ней. Каждой точке М прямой d поставим, в соот-
соответствие ту точку М' прямой d', в которой эту прямую пересечет
касательная, проведенная к кривой у из точки М. Полученное ото-
я 6] ДИАМЕТРЫ КАК ПОЛЯРЫ НЕСОбсТВЕННЫХ ТОЧЕК 659
бражение прямой d на прямую d' является проективным (но не
перспективным). Обратно, если дано проективное отображение пря-
прямой d на прямую d', не являющееся перспективным, то множество
всех прямых вида ММ', где М и М' суть какие-нибудь соответ-
соответствующие друг другу при данном проективном соответствии точки
прямых dud', есть множество всех касательных к некоторой кривой
второго порядка.
Доказательство всех этих теорем, состоящее из рассуждений,
двойственных к доказательствам теорем 6, 5, 7, было бы для чита-
читателя полезным упражнением.
§ 6. Диаметры как поляры несобственных точек
Диаметры центральной кривой второго порядка были определены
как прямые, проходящие через ее единственный центр. Диаметры
параболы суть прямые асимптотического направления, т. е. прямые,
проходящие через единственную точку параболы. Если назвать не-
несобственную точку параболы ее центром, то диаметры любой не-
нераспадающейся кривой второго порядка суть не что иное, как пря-
прямые, проходящие через центр этой кривой.
Уравнение диаметра кривой
Ф(*1:*а:*3) = 0, A)
сопряженного данному направлению {а: р}, есть (гл. XVII, § 7), б
однородных координатах,
згР) *з = О Х). B)
Это же уравнение является, как показывает непосредственная про-
проверка, и уравнением поляры несобственной точки (a:|3tO). Итак до-
доказана
Теорема 12. Диаметр нераспадающейся кривой второго по*
рядка, сопряженный данному направлению {а : $\, есть поляра не-
несобственной точки (сс:р:О), удаленной в бесконечность в этом на-
направлении.
Из доказанного следует, что поляра любой несобственной точки
проходит через центр кривой; значит, поляра центра проходит через
все несобственные точки, т. е. является несобственной прямой.
Полюс несобственной прямой относительно данной нераспадаю-
нераспадающейся кривой второго порядка есть центр этой кривой.
*) Чтобы получить это уравнение, надо в уравнение § 7 главы XVII
(ena+a12p) x + (a21a + a22P) у + а^+а^ = 0 подставить х = — , у = — и
х3 х$
изменить обозначения коэффициентов, положив а^ = а13 = а31, a2 = a23 = a3i.
660 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
§ 7. Автополярный треугольник
Пусть у — нераспадающаяся кривая второго порядка. Треуголь-
Треугольник ABC называется автополярным относительно кривой у, если
каждая его вершина есть полюс противолежащей ей стороны тре-
треугольника (т. е. точка А есть полюс прямой а —ВС, точка В — полюс
прямой b — СА, точка С—по-
С—полюс прямой с — АВ).
Докажем, что имеется бес-
бесконечное множество треуголь-
треугольников, автополярных относи-
относительно кривой у.
В самом деле, возьмем
произвольную точку А, не ле-
лежащую на кривой у. Обозна-
Обозначим через а поляру точки
А относительно кривой у
' (рис. 252). На прямой а возьмем
произвольную точку В; ее по-
поляру обозначим через Ь. Точка
А, не принадлежащая кривой
у, не инцидентна своей поляре
а и поэтому заведомо отлична
от точки В, которая взята на
прямой а. Поэтому прямые а
и b не совпадают между собою
и, следовательно, пересекаются в некоторой точке С—{а-Ь), так
что а—ВС. Поляру точки С обозначим через с. Так как точка С
инцидентна обеим прямым а и Ь, то поляра с этой точки инци-
инцидентна полюсам прямых а и Ь, т. е. с — АВ. Аналогично точка А,
как полюс прямой а (инцидентной точкам В и С), инцидентна по-
полярам b и с точек В и С, т. е. А = (Ь-с).
Пусть теперь за координатный треугольник проективной системы
координат Xv Х2, Х3 взят какой-нибудь треугольник ABC, авто-
полярный относительно данной кривой второго порядка
Мы сейчас докажем, что при таком выборе системы координат форма
Ф (xv x2, х3) непременно имеет канонический вид, т. е. что
(X 1% :=z CL-tq ^^ ^23 ~~ *
Будем считать, например, что Xt = A, X2~B, Х3 — С, так что
координатная запись точек А, В, С и прямых а, Ь, с есть
Рис. 252.
8 7] автополярный треугольник 661
соответственно
Л = A:0:0), Я=@:1:0), С=@:0:1),
а = Х2Х3 = {1:0:0}, Ь = ХлХ3 = {0: 1:0}, с = Х1Х2 = {0:0:1}.
Прямая а есть поляра точки А, значит,
Но а есть прямая {1:0:0}, так что а1Хф0, a21 = 0, а31 = 0. Из
того, что прямая b =.{0:1:0} есть поляра точки В — @:1:0), мы
таким же точно образом выведем, что и а23=0; поэтому уравне-
уравнение A) действительно имеет вид
апх\ + а22лг1 -f- а33х\ = 0.
Итак, по крайней мере для форм Ф (х1г х.,, х3) ранга 3 мы дока-
доказали, что приведение их к каноническому виду означает выбор лю-
любой такой системы проективных координат, координатный треуголь-
треугольник которой является автополярным по отношению к кривой
Вернемся с этой повой точки зрения к ранее доказанному факту,
что в аффинной системе координат, начало которой есть центр
центральной кривой второго порядка, а оси являются сопряженными
диаметрами, уравнение кривой имеет вид
или, в однородных координатах, соответствующих данным аффинным,
Координатный треугольник этой системы координат есть треуголь-
треугольник ABC, где
Л = A:0:0), ? = @:1:0), С=@:0:1).
Нетрудно видеть, что этот треугольник является автополярным. В
самом деле, его стороны суть несобственная прямая и оси коорди-
координат соответствующей аффинной системы. Но несобственная прямая
с = АВ есть поляра центра кривой, т. е. начало координат
С =@:0:1), тогда как ось абсцисс b — СА (будучи диаметром, со-
сопряженным к оси ординат а=СВ) есть поляра несобственной точки
этой последней, т. е. точки В, а ось ординат а есть поляра не-
несобственной точки А оси абсцисс.
662 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
§ 8. Проективная классификация кривых второго порядка
Пусть дана кривая второго порядка
Ф (xlt х2, х3) = апх\ + 2anxtx2 -\- аа_гх% -j- 2alsxtx3 -f
+ 2az3x2x3 + a33x% = 0 A)
на проективной плоскости я.
Предположим сначала, что квадратичная форма Ф (хъ х.г, х3)
имеет ранг 3, т. е. что кривая A) нераспадающаяся. Тогда невы-
невырожденным линейным однородным преобразованием
Х\ = С\.\Х\ -г c12X2-~Cl3X3, I
Хг = с21х[ + с22х2 ->гс23х3, \ B)
форма Ф {хг, х2, х3) может быть приведена к форме Ф' (x'lt x'2t х'3),
имеющей один из следующих видов:
Xх -t- х'г 4- г'2
v'l i_ v'2 j,1*
Л1 1 Л 2 -*3 )
^.'2 ^.'2 I ^-'2
Л) Л2 ТЛ3)
Здесь третья и четвертая строчки получаются соответственно из
второй и первой умножением на —1. Так как нас интересуют не
сами формы Ф (xlt хъ х3), а уравнения, полученные приравниванием
этих форм нулю, и так как формулы B) суть формулы перехода
от однородных координат Х1:х2:х3 к нроектииным координатам
х'х'.х'г-.х'з, то мы можем высказать следующее предложение:
Всякая нераспадающаяся кривая второго порядка в надлежаще
выбранной системе проективных координат получает одно из следую-
следующих уравнений:
у'2 ' ,,'2 • у'2 _(\ \
•Х-1 — Х2 ГХ3 —ui I ,о\
Разрешая уравнения B) относительно х[, х'2, х'3 (что возможно,
так как detC^=O), получаем:
х = их1Х-1 —
i D)
формулы мы можем рассматривать как формулы проективного
преобразования плоскости: каждой точке X с однородными коорди-
координатами Xj^-.x^-.Xg, в силу формул D), соответствует точка X' с од-
однородными координатами х\:х'2\х3. При этом, если xlt x%, х3
§ 8] ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ КРИВЫХ ВТОРОГО ПОРЯДКА 663
удовлетворяют уравнению
Ф (Xlt Х2, Х3) = О,
то х[, х'2, х'3 удовлетворяют уравнению
Ф'(х[,х'2,х'3) = 0. (V)
Другими словами, при проективном преобразовании, определяе-
определяемом формулами D), кривая A) переходит в кривую
Ф'(х'1,х'2,х'3) = 0.
Следовательно, полученный результат может быть сформулирован
и так:
Надлежаще подобранным проективным преобразованием всякая
нераспадающаяся кривая второго порядка у может быть преобразо*
вана в кривую у' одного из двух следующих видов:
xl-rxl-rxl = 0 E)
или
Je{~x\ — x\ = 0. F)
При этом уравнения всех кривых рассматриваются в одной и
той же системе проективных координат; мы будем ее считать систе-
системой однородных координат на проективной плоскости п, а именно
системой, соответствующей данной аффинной системе координат на
плоскости п.
Кривая вида E) не содержит действительных точек; она назы-
называется мнимым овалом.
Кривая вида F) при переходе к неоднородным координатам в
системе оехе2 получает уравнение
лг2-|-1/2-1=0. G)
Если система координат оех&2 прямоугольная, то кривая G) — просто
окружность.
Итак, всякая действительная нераспадающаяся кривая второго
порядка проективным преобразованием может быть преобразована в
окружность. Следовательно, любые две действительные нераспадаю-
нераспадающиеся кривые второго порядка могут быть переведены друг в дру-
друга; все такие кривые образуют один и тот же проективный класс —
класс действительных овальных кривых.
Как следует из результатов! установленных в § 1, действитель-
действительная овальная кривая является эллипсом, гиперболой или параболой
в зависимости от того, как она расположена относительно несобст-
несобственной прямой: эллипсы пересекают несобственную прямую в двух
различных мнимых точках, гиперболы — в двух различных действи-
действительных точках, параболы касаются несобственной прямой. Найдем
664 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. XXII
проективное преобразование, переводящее гиперболу
*2-</2=1 (8)
в окружность
хг-т-уг~1 G)
(система координат oeje2 прямоугольная).
Для этого перепишем уравнение (8) в однородных координатах:
*?-**-*; = о, (9)
и сделаем проективное преобразование:
x'2=xit I A0)
x'3 = xv j
Гипербола (8) переходит при этом преобразовании в кривую,
состоящую из всех точек М' = (x'1:x'i:x'3), удовлетворяющих урав-
уравнению
х'*-х22-х[2 = 0. A1)
Так как в уравнении A1) через х\, х'2, х'3 обозначены координаты
переменной точки в тех же однородных координатах, то нет надоб-
надобности обозначать эти координаты штрихованными буквами: просто
при проективном преобразовании A0) кривая (9) переходит в кривую
^2 I *-2 *-2 Л
Ai";~ л2 — •*¦ з — ^
или, в неоднородных координатах, в окружность
Полученный результат естественно вытекает из того, что при
преобразовании A0) несобственная прямая
перешла в прямую л:1 = 0, а в несобственную прямую лг3 = 0 пе-
перешла прямая ^ = 0, т. е. ось ординат, с которой гипербола (8)
не имела общих действительных точек. Поэтому преобразованная
кривая не будет пересекать в действительных точках образ оси
ординат, т. е. несобственную прямую; она будет вся расположена
в конечной части плоскости.
Возьмем параболу
г/2 = 2* A2)
или, в однородных координатах,
х\~ 2*1л:, = 0.
К 8] ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ КРИВЫХ ВТОРОГО ПОРЯДКА 666
При проективном преобразовании
' — — — )
хг = х2, \ A4)
лз *i i 2 з )
[при котором хх = -^ х'х-'г~2Х'з, X2 = x'i., xz= — x'i-\-x'A кривая
A3) переходит в кривую с уравнением
х'2 (х'2 д.'2\ __ Q
т. е.
или, в прямоугольных координатах, в кривую с уравнением
х2-У2— 1=0.
Кривая эта представляет собою окружность. Итак, проективное пре-
преобразование A4) переводит параболу у2 = 2х в окружность G).
Переходим к случаю, когда форма Ф (xlt x2, х3) имеет ранг 2.
Тогда эта форма преобразованием B) приводится к одному из двух
видов:
х'\ -т X'Z,
Кривая A) проективным преобразованием D) переводится либо в
кривую
¦*i-b*! = 0, т. е. (x1 + ix2)(x1 — ix2) = 0, A5)
либо в кривую
xl—xi = 0, т. е. (xl-'rX2)(x1-x2) = 0. A6)
Кривая A5) есть пара мнимых прямых; их уравнение в неодно-
неоднородных координатах есть
х — iy = 0, х — iy = 0.
Кривая A6) есть пара действительных прямых
х+у = 0, х — у = 0.
Наконец, если ранг формы Ф {xv х2, х3) равен 1, то эта форма
преобразованием вида B) приводится к виду
666 КРИВЫЕ ВТОРОГО ПОРЯДКА НА ПРОЕКТИВНОЙ ПЛОСКОСТИ [ГЛ. ХХ11
Это значит, что некоторым проективным преобразованием D) кривая
A) переводится в кривую
— в пару совпадающих прямых.
Итак, имеет место следующая
Теорема 13. Невырождающаяся кривая второго порядка у есть
овал (действительный или мнимый); некоторым проективным преоб-
преобразованием она переводится соответственно в действительную окруж-
окружность
у2 i у-2 „2 О
Л j — Л 2 Л3 U,
Т. в.
или в мнимую окружность
*?+*;+*!=о,
т. е.
Вырождающаяся кривая второго порядка есть пара прямых, дей-
действительных (быть может, совпадающих) или мнимых сопряженных,
В то же время все перечисленные пять типов кривых проектив-
проективно различны: очевидно, ни одна из них не может быть переведена
в другую посредством проективного преобразования.
Замечание. Последнее утверждение, очевидное геометрически,
вытекает также из следующего предложения, являющегося в свою
очередь следствием теоремы единственности, с одной стороны, и
теоремы об инвариантности ранга и индекса квадратичной формы,
с другой.
Теорема 14. Если
суть уравнения в данной проективной системе координат I двух
проективно эквивалентных кривых второго порядка у1 и уг, то формы
Фх (xv хъ х3) и Ф2 (*!, х2, х3) имеют один и тот же ранг, а сигнатуры
их имеют одну и ту же абсолютную величину (могут отличаться
только знаком).
В самом деле, пусть при проективном преобразовании, перево-
переводящем кривую Yi B кривую у2, проективная система координат /
переходит в проективную систему координат /'. Тогда кривая уг
имеет в системе координат /' то же уравнение, которое кривая Yi
имела в системе /, т. е. уравнение Фх (х'и х2, х'3) = 0.
8]
ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ КРИВЫХ ВТОРОГО ПОРЯДКА 667
Но при переходе от системы координат / к системе /' уравне-
уравнение Q>2 (xi' xi> *з) — 0 кривой тождественно преобразуется в какое-
то уравнение Ф'г(х'и х',,х'3) = 0 той же кривой у2. Итак, кривая у2
имеет в одной и той же системе координат /' два уравнения:
Ф1(лг'1) х'2, х'3) = 0 и Ф»(*ь х'2,х'3)==0. Значит, формы Ф1 (х'ъ х'2, х'3)
и Ф'2{х\, х'г, х'з), как левые части уравнений одной и той же кривой
у в одной и той же системе координат У, могут отличаться лишь
постоянным множителем, так что их сигнатуры совпадают, а индексы
могут отличаться лишь знаком. В то же время форма Ф'2(^, х2, х3)
получилась из формы Ф2 (xlt хъ х3) тождественным преобразованием
(переходом от переменных хи х2, х3 к переменным х[, х'2, х'3), зна-
значит, ранг и индекс форм Ф2 и Ф'2 одни и те же; поэтому ранги
форм Ф, и Ф2 совпадают, а сигнатуры могут отличаться лишь знаком.
Теорема доказана.
ГЛАВА XXIII
НАЧАЛЬНЫЕ СВЕДЕНИЯ ИЗ АНАЛИТИЧЕСКОЙ ГЕОМЕТРИИ
ПРОЕКТИВНОГО ПРОСТРАНСТВА
§ 1. Проективное пространство; его плоскости и прямые
Начнем с того, что вкратце повторим для четырехмерного про-
пространства то, что в начале главы XXI было сказано для трехмер-
трехмерного.
Возьмем в четырехмерном аффинном пространстве Я4 какую-нибудь
точку О и рассмотрим множество всех проходящих через точку О
прямых, плоскостей и гиперплоскостей (т. е. трехмерных подпрост-
подпространств) пространства R*. Это множество называется связкой с цен-
центром О в пространстве R*, мы будем его обозначать одной буквой О.
Между различными элементами связки — ее прямыми, плоскостями
и гиперплоскостями — установлено отношение инцидентности: прямая
инцидентна плоскости или гиперплоскости, если она содержится
в ней, и т. д.
Отношение инцидентности симметрично: если прямая d инцидентна
плоскости л, то говорим, что и плоскость л инцидентна прямой d,
и т. д. Прямые связки называются, когда это удобно, ее лучами.
Мы можем переименовать связку О четырехмерного пространства
в трехмерное проективное пространство Р3, соответственно пере-
переименовывая лучи, плоскости, гиперплоскости связки в точки, прямые,
плоскости проективного пространства Р3, — совершенно аналогично
тому, что мы делали в случае проективной плоскости и связки
трехмерного пространства х).
') При аксиоматическом построении проективной геометрии точки, пря-
прямые и плоскости проективного пространства рассматриваются как не подле-
подлежащие определению самостоятельные элементы, связанные между собою отно-
отношением инцидентности так, что выполнены определенные условия, составля-
составляющие содержание аксиом проективной геометрии (аксиоматическое построение
проективной геометрии читатель может найти, например, в пятой главе мшгя
Н. В. Ефимова «Высшая геометрия»).
Мы на эту точку зрения становиться не будем (хотя и коснемся ее на
мгновение, когда будем говорить о двойственности между точками и плоско-
о ji ПРОЕКТИВНОЕ ПРОСТРАНСТВО 669
Всякая аффинная система координат Ое1еаеяе4 пространства R*,
начало которой есть центр О данной связки, называется аффинной
координатной системой в связке О.
Любая четверка чисел хъ хъ х3, х4, являющаяся четверкой
координат какого-нибудь направляющего вектора и данного луча m
связки О, называется четверкой координат луча m (в аффинной си-
системе координат Oeje2e3e4). Очевидно, все четверки координат луча
m образуют класс пропорциональных между собою четверок и, об-
обратно, всякий класс пропорциональных между собою числовых чет-
четверок хь хъ х3, х является классом четверок координат (относи-
(относительно дайной системы координат Ое1е2е3е4) некоторого луча связ-
связки О. Если при этом предполагать, что исходное четырехмерное
аффинное пространство является комплексным, то в нем рассматри-
рассматривается и связка, состоящая из всех комплексных прямых, плоско-
плоскостей и гиперплоскостей, проходящих через данную действительную
точку О. Так получается комплексная связка О, или, после соот-
соответствующего переименования ее элементов, комплексное проектив-
проективное пространство.
В предположении, что в комплексной связке выбрана система
координат Ое1е2е3е4 (начало и единичные векторы которой всегда
предполагаются действительными), мы получим, как и выше, взаимно
однозначное соответствие между всеми лучами комплексной связки О
и всеми классами пропорциональных четверок (х1:х2:хя:х4), состо-
состоящих теперь уже из произвольных комплексных чисел хг, х2, х3, х4.
Лишь четверка, состоящая из одних нулей, как всегда, оказывает-
оказывается запрещенной.
Отождествляя каждый луч связки с классом четверок его коор-
координат относительно данной, раз навсегда выбранной аффинной коор-
координатной системы Ое1е2е3е4, мы приходим к понятию арифметиче-
арифметического проективного пространства, точками которого являются все-
всевозможные классы пропорциональных между собою четверок чисел —
действительных в случае действительного, комплексных в случав
комплексного проективного пространства. Плоскостью арифметиче-
арифметического проективного пространства называется множество всех его
точек {xl:x.2:x3:xi), удовлетворяющих однородному уравнению пер-
первой степени
и4х^ = 0. A)
Два уравнения вида A) тогда и только тогда имеют одно и то же
множество решений, когда их коэффициенты пропорциональны;
стями проективного пространства); для нас основными элементами связки
являются ее лучи; плоскости н пгперплоскости связки мы будем восприни-
воспринимать как множества составляющих их лучей. Другими словами, прямые
и плоскости проективного пространства будут для нас множествами точек;
отношение инцидентности сводится к отношению включения одного множества
8 другое.
670 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [гл. ХХЩ
пропорциональность коэффициентов в двух уравнениях вида A) являет-
является необходимым и достаточным условием, чтобы эти два уравнения
определяли одну и ту же плоскость в арифметическом проективном
пространстве.
Итак, множество всех плоскостей арифметического проективного
пространства, так же как и множество всех его точек, находится
во взаимно однозначном соответствии с множеством всех классов
состоящих из пропорциональных между собою четверок чисел. По-
Поэтому— во временное изменение только что принятого определения1)
и в полной аналогии с тем, что было сказано в главе XXI, § 3,
о проективной плоскости, — мы можем рассматривать и проективное
пространство как содержащее элементы двух родов — точки и пло-
плоскости. И те и другие суть классы пропорциональных между собою
числовых четверок, снабженных опознавательным знаком, указы-
указывающим, идет ли речь о точке или о плоскости проективного про-
пространства. Каждая из четверок, составляющих данный класс, будет
называться четверкой' «однородных координат» соответствующего
элемента (точки или плоскости) проективного пространства, именно
мы будем говорить о точках (х1:х2:х3:х4) и плоскостях {и^и,:«3:и4}.
При этом точка (x1:x2:x3:xi) и плоскость {ul:ui:u3:ui} арифме-
арифметического проективного пространства называются инцидентными между
собою, если они связаны равенством A), являющимся в этом случае
числовым тождеством.
На проективной плоскости мы имели равноправие между точками
и прямыми. Теперь имеет место аналогичное равноправие между точ-
точками и плоскостями проективного пространства, выражающееся
в следующем «принципе двойственности». Если верно какое-нибудь
предложение, касающееся точек и плоскостей проективного прост-
пространства и тех или иных соотношений инцидентности между ними,
то, заменяя в данном предложении (и его доказательстве) слово
«точка» словом «плоскость» и сохраняя «инцидентность», мы получим
формулировку (и доказательство) двойственного предложения.
Мы рассматривали сначала равенство A) как уравнение, которому
удовлетворяют все точки (x1:x2'X3:xi), инцидентные плоскости
{м1:и.2:м3:и4}, координаты которой, т. е. коэффициенты иъ и2, и3, к4
в уравнении A), считались данными. Считая, наоборот, данной точку
M=(x1:xz:x3:xi), мы можем рассматривать равенство A) как
уравнение, которому удовлетворяют координаты всех плоскостей
{м1:и„:и3:и4}; инцидентных данной точке M={x1:x.2:x3:xi), т. е. как
уравнение связки плоскостей с центром (x1:x2'-x3:xi) в трехмерном
проективном пространстве.
Мы давно привыкли к понятию линейной комбинации двух прямых
на плоскости, двух плоскостей в пространстве. Если две плоскости
х) См. сноску на стр. 668—669.
§ 1]
ПРОЕКТИВНОЕ ПРОСТРАНСТВО 671
а „ Р заданы в проективном пространстве какими-нибудь четверками
их координат av а2, а3, а4 и bv b2, b3, bit то всякая плоскость,
четверка координат иь и2, и3, и4 которой является линейной комби-
комбинацией двух четверок av a2, а3, а4 и bv b2, b3, bit называется
линейной комбинацией двух плоскостей а и |3*).
Аналогично, если две точки Р и Q заданы в проективном про-
пространстве какими-нибудь четверками своих координатР — {Pi'p2'P3-Pi)
„ Q= (91W2W3W4). то всякая точка М, четверка координат
которой является линейной комбинацией четверок ръ р2, р3, р4 и
qv q2t q3, qt, называется линейной комбинацией точек Р и Q.
В арифметическом проективном пространстве прямую линию, рас-
рассматриваемую как множество ее точек, можно определить двумя
способами, эквивалентность которых мы сейчас докажем: во-первых,
прямая есть пересечение двух различных плоскостей, во-вторых,
прямая есть множество точек X— (xl'.x2:x3:xi), являющихся линей-
линейными комбинациями двух заданных точек Р={Р\'-Рг'-Р3'-Рц) и
Q=(q1:q2:q3'.qi).
Если считать, что арифметическое проективное пространство Р
поставлено в естественное взаимно однозначное соответствие со связ-
связкой О четырехмерного аффинного пространства, то первое опреде-
определение выражает тот факт, что пересечение любых двух различных
гиперплоскостей связки есть плоскость той же связки, тогда как
второе определение означает, что любая плоскость связки состоит
из лучей связки, являющихся линейными комбинациями двух каких-
нибудь определенных лучей, лежащих в данной плоскости. Отсюда
и следует эквивалентность двух данных определений прямой в про-
проективном пространстве. Однако легко доказать эту эквивалентность
и непосредственным простым вычислением, что мы сейчас и сделаем.
Пусть прямая d дана как пересечение двух плоскостей
\аг:а2:а3\а^ и {b1:b2:b3:b4}, т.е. как множества всех точек
(x1:x2:x3:xi), где хъ х2, х3, лг4 есть решение системы уравнений
2x2 -|- Ъ3х3 -г *4лг4 = 0. /
Так как плоскости \аг:аг:а3:а^) и \b1:b2:b3:bi] различны, то ранг си-
системы B) равен двум, следовательно, все ее решения хъ х2, х3, лг4
суть линейные комбинации двух каких-нибудь независимых реше-
решений р1( р„, р3, р4 и qx, q2, q3, qt — все точки прямой d суть линейные
комбинации двух точек Р=(р1:р2'Рз'-Рд и Q= {Ях'-Чъ'-Чз'-Яь)- Обратно,
рассмотрим множество всех точек (х1:х2:х3:х4), являющихся
г) Нам давно известно, что в обыкновенном аффинном трехмерном про-
пространстве любые две пересекающиеся плоскости аир определяют собствен-
собственный пучок плоскостей, состоящий из всех плоскостей, являющихся линей-
линейными комбинациями плоскостей ос и р.
672 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [ГЛ. ХХЩ
линейными комбинациями двух каких-нибудь данных точек
P=(Pi-P2-P3-Pi) и Q={4i'4z'-4a'4*)' To"a Для всех этих точек
(x1:xi:x3:xi) имеем параметрическое представление
C)
причем к и ц пробегают всевозможные числовые значения, кроме
запрещенной пары значений А = |Д> = 0. Точки Р и Q различны, зна-
значит, четверки их координат не пропорциональны между собою и без
ограничения общности можно предположить, что, например,
Pl * Ф 0.
Рг Чг
Тогда из первых двух равенств C) мы можем к и ц однозначно
выразить через х1 и х2; подставляя полученные выражения к и (х
в третье и четвертое равенства, получаем (очевидно, независимую)
систему уравнений вида
= 0, \
D)
которой удовлетворяет то же множество четверок хъ хъ х3, лг4,
что и системе C).
Эквивалентность двух данных определений прямой в проективном
пространстве доказана.
Систему уравнений C) естественно назвать параметрическим
представлением или параметрическим уравнением прямой в проектив-
проективном пространстве.
Замечание 1. Из сказанного следует, что в проективном
пространстве всякие две различные плоскости пересекаются по пря-
прямой. Так как всякая плоскость, лежащая в проективном простран-
пространстве (и совпадающая, с точностью до переименования, со связкой
некоторого трехмерного подпространства пространства R*), есть
проективная плоскость, то всякие две различные прямые, лежащие
в одной плоскости проективного пространства, пересекаются в одной
точке.
Наконец, прямая B) и любая не содержащая ее плоскость
с1х1 + с2х2 -~ с3х3 -f с4лг4 = 0 E)
пересекаются в одной точке. В самом деле, так как плоскость E),
по предположению, не содержит прямой B), т. е. не принадлежит
пучку, определенному двумя плоскостями, уравнения которых состав-
составляют систему B), то три уравнения — B) и E) — линейно независимы*
к 2) игиьКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 673
из них однозначно определяется отношение х1:х2:х3:х4, т. е. един-
единственная точка пересечения прямой B) и плоскости E).
Итак, проективная геометрия не знает понятия параллельности.
Замечание 2. Из только что доказанного вытекает, что для
расположения трех различных плоскостей в проективном пространстве
имеются лишь две возможности: три различные плоскости или при-
принадлежат одному пучку (и тогда имеется единственная прямая, им
всем инцидентная, — ось пучка), или же три плоскости независимы
между собою (тогда имеется единственная точка, инцидентная этим
трем плоскостям). Двойственная теорема гласит: всякие три различ-
различные точки проективной плоскости либо инцидентны одной прямой
(т. е. коллинеарны между собою), либо определяют единственную
плоскость, им всем инцидентную.
Проведение доказательства может быть предоставлено читателю.
Замечание 3. Мы считаем точку основным элементом проек-
проективной геометрии пространства, а плоскость и прямую определяем
как множества точек, удовлетворяющих тем или иным уравнениям.
Но можно было бы считать основным элементом плоскость; тогда
точка определится как множество всех плоскостей \ul:u2:us:ui\,
удовлетворяющих данному уравнению
«1*1 "Г Х 2 + ПЪХЪ + *4 = О
(где хъ хг, х3, Хц — данная четверка чисел), т. е. как множество
плоскостей некоторой связки; прямую мы в этом случае определили
бы как множество плоскостей, являющихся линейными комбинациями
двух данных плоскостей, т. е. как пучок плоскостей, определенный
двумя данными плоскостями.
§ 2. Проективные координаты1). Проективные преобразования.
1. Проективные координаты. Две аффинные системы координат
Оъ^^^ь и Ое[е'2е^е1 в связке О четырехмерного пространства на-
называются эквивалентными между собою, если имеется такое КфО, что
Относительно двух эквивалентных координатных систем всякий луч
связки (всякая точка проективного пространства) имеет одни и те
же четверки координат.
Как и в случае связки в трехмерном пространстве, класс экви-
эквивалентных между собою аффинных координатных систем в связке О
•) Этот параграф, по существу, является сокращенным пересказом § 5
главы XXI с незначительными и очевидными изменениями (вызванными изме-
изменением числа измерений рассматриваемых пространств).
" П. С. Александров
674 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА. [гл. XXIII
пространства R* называется системой проективных координат
в связке О.
Четверками координат любого луча m (любой гиперплоскости а)
в связке относительно данной системы проективных координат явля-
являются, по определению, четверки координат этого луча (этой гипер-
гиперплоскости) относительно любой аффинной системы координат (в связ-
связке О), определяющей данную проективную координатную систему.
Переименовав связку в проективное пространство и повторяя рас-
рассуждения § 5 главы XXI, убеждаемся в том, что каждая проектив-
проективная координатная система в проективном пространстве Р3 задается
пятью точками, из которых никакие четыре не лежат в одной пло-
плоскости: четырьмя вершинами
координатного тетраэдра и пятой «единичной» точкой Е. Эти пять
точек называются фундаментальными точками данной координатной
системы.
В арифметическом проективном пространстве имеется привилеги-
привилегированная система координат, определенная точками
^=A:0:0:0), Х. = @:1:0:0), Х3 = @:0:1:0), Xi = @:0:0:1),
?=A:1:1:1).
Относительно этой «привилегированной», или «однородной», системы
координат четверками координат любой точки арифметического про-
проективного пространства как раз и служат те числовые четверки,
классом которых и является, по определению, данная точка
Ж=(лг1:д:2:лг3:лг4).
Если наряду с исходной «привилегированной», или «однородной»,
системой координат в арифметическом пространстве дана («новая»)
проективная система координат X'^X^X'^X'Ji' какими-нибудь четвер-
четверками однородных координат своих фундаментальных точек:
Хх— (си: с21:с31: с41),
у" I г . г . г • г \
Л3 — Vе 13 • С23 • С33 • МЗ/>
"Л4= (С14:С24:С34: С44):
Е = (е1:е2: е3:е4),
то, предварительно умножив, если нужно, каждую из четверок
C12> C22> C32i C42i
C13> C23i C33> C43)
C14) C24> C34> C44
§ 2]
ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 675
на надлежаще подобранные числовые множители Ах, Я2, Л3> Л4, всегда
можно предположить, что пять четверок A) являются согласован-
согласованными между собою в смысле векторного равенства
{Сц, C2l> C31i С41/~Ь 1С12> C22i С32> C42f + lC13l C23i С33) С43Г +
-|-{ci4> С24. С34. С44} = {е1, е2, е3, е4}
(см. об этом гл. XXI, § 5).
В этом предположении однородные координаты xv х2, х3, лг4
произвольной точки М связаны с проективными координатами той
же точки относительно системы координат Х'хХ'гХ'гХ'?' формулами
преобразования координат:
^1= сххх
11Л1'
4- с„сХ* 4- с<.„х'* 4- с„.х'.. I
B)
сзз-*
з
-j- с42дг2 -|- с43лг3 -f-
( — произвольный числовой множитель1)). Матрица коэффици-
коэффициентов clk в этих формулах невырождающаяся.
Как и в случае плоскости, мы можем сказать: переход от исход-
исходной («однородной») системы координат к новой системе проективных
координат X'\X'<iX'zX'JE' задается невырождающейся матрицей порядка
4 (а не 3, как было в случае плоскости,—в этом единственная раз-
разница). Самый переход от старых координат к новым осуществляется
формулами B).
2. Проективно-аффинное пространство. До сих пор у нас не
было оснований к выделению среди точек, плоскостей или прямых
проективного пространства несобственных, или бесконечно удален-
удаленных. Проективное пространство, в котором одна какая-нибудь пло-
плоскость выделена и названа «несобственной», называется проективно-
аффинным пространством,; точки и прямые, лежащие в несобствен-
несобственной плоскости, тоже называются несобственными. Так как каждая
собственная плоскость (т. е. плоскость, отличная от несобствеиной)
пересекается с несобственной плоскостью по прямой, а каждая
собственная прямая (т. е. прямая, не лежащая в несобственной
плоскости) пересекается с несобствеиной плоскостью по одной точке,
то на каждой собственной плоскости проективно-аффинного прост-
пространства имеется одна несобственная прямая, а на каждой собствен-
собственной прямой имеется одна несобственная точка. Повод для выделения
в проективном пространстве его несобственных элементов тот же,
как и в случае проективной плоскости. Мы вкратце повторим отно-
относящиеся сюда рассуждения.
*) Он поставлен для того, чтобы, имея одну какую-нибудь четверку коор-
координат точки М в одной из двух координатных систем, иметь возможность
написать все координатные четверки этой точки в другой системе координат.
Очевидно, X можно перенести из левой части уравнений B) в правую.
22*
676 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА. [гЛ. ХХЩ
Пусть в четырехмерном аффинном пространстве /?4 дано трех-
трехмерное подпространство /J3 и в нем — аффинная система координат
oeje2e3. Назовем аффинную систему координат Ое1е2е3е4 простран-
пространства R* естественно связанной с координатной системой ое^ед трех-
трехмерного подпространства R3, если начало О системы Ое1е2е3е4 не
лежит в подпространстве R3. Первые три единичных вектора ех, е2, е3
в системе Ое1е2е3е4 те же, что и в системе оеуе2е3, а четвертый
вектор е4 есть вектор е^—Оо. Очевидно, в системе координат
Ое1е2е3е4 уравнение подпространства R3 пространства Ri есть
Возьмем теперь в пространстве R* связку О с центром О. Если
М — произвольная точка гиперплоскости R3, координаты которой
в системе оехе2е3 суть х, у, z, то координаты этой точки в системе
Ое!е2е3е4 суть
хх = х, х2 = у, x3 = z, лг4 = 1.
Поэтому четверками координат луча т = ОМ связки О являются
все четверки xt, x2, x3, xit пропорциональные четверке х, у, z, 1.
Все такие четверки хь хг, х3, х4 называются четверками однород-
однородных координат точки М «в системе однородных координат, соот-
соответствующей аффинной координатной системе оехе%е3». Таким обра-
образом, однородные координаты xlt хг, х3, xt точки М связаны с ее
аффинными координатами х, у, z в системе ое1е2е3 пропорцией
xt: x2:x3:x i = х: у: z:\,
так что аффинные координаты х, у, z выражаются через однород-
однородные по формулам:
Xi Х& Xt
Соответствие между точками М гиперплоскости и лучами т — ОМ
связки О называется перспективным соответствием.. При этом соот-
соответствии каждой точке М гиперплоскости R3, имеющей однородные
координаты хх, х2, х3, xit соответствует луч связки, имеющий
те же координаты в системе Ое1е2е3е4.
Обратно, каждому лучу m = (x1:x2:x3:xi) связки, у которого
четвертая координата лг4^=0, соответствует точка М гиперплоско-
гиперплоскости R'6 с теми же координатами д:1:лг2:д:з:лг4. Однако лучам связки
m = (x1:x2:x3:xi), у которых лг4 = 0, не соответствует никакая
точка М гиперплоскости R3. Чтобы перспективное соответствие
между связкой О и гиперплоскостью R3 сделать взаимно однознач-
однозначным, нужно дополнить гиперплоскость несобственными точками,
которым и приписать четверки однородных координат xv x2, х3, 0.
Пополненная таким образом гиперплоскость превращается в проек-
проективное пространство P3 = R3, которое, естественно, делается ариф-
с 2] ПРОЕКТИВНЫЕ ПРЕОБРАЗОВАНИЯ 677
метическим, если отождествить каждую его точку М с классом
четверок ее однородных координат. Таким образом, арифметическое
проективное пространство естественно рассматривать как проектив-
проективное пространство, происшедшее от пополнения несобственными
элементами обыкновенного трехмерного аффинного пространства
с заданной в нем системой аффинных координат Ое1е2е3е4. Несоб-
Несобственные точки этого пространства суть точки (хг '.х2:х3:хл), у ко-
которых xi = 0. Эти точки образуют несобственную плоскость, урав-
уравнение которой есть
xt — U.
Каждая несобственная точка M=(a:fi:y:0) однозначно определяет
класс коллинеарных векторои трехмерного пространства R3, а именно
всех векторов, тройка координат которых (в данной аффинной коор-
координатной системе oeje2e3) суть тройка а, р\ у первых трех одно-
однородных координат точки М. Другими словами, как и на плоскости,
так и в пространстве несобственные точки взаимно однозначно
соответствуют различным направлениям; это «бесконечно удаленные»
точки пространства, удаленные в данном направлении (точка
М= (а:$:у:0) удалена в бесконечность в направлении, общем всем
прямым, имеющим направляющий вектор {а, Р, у}).
3. Проективные преобразования. Проективные преобразования
проективного пространства определяются совершенно так же, как
проективные преобразования проективной плоскости. Задать в
проективном пространстве проективное преобразование — значит
задать, наряду с исходной координатной системой (например, одно-
однородной системой координат арифметического пространства), некоторую
новую систему проективных координат; определяемое этим преобразо-
преобразование состоит в том, что каждой точке М пространства ставится в
соответствие точка, имеющая в новой координатной системе те самые
координаты, которые точка М имела в исходной системе координат.
Замечание 1. Совершенно так же определяются и проектив-
проективные отображения одного проективного пространства на другое.
Из определения проективного преобразования следует (так же
как в случае плоскости), что проективное преобразование можно
определить как такое преобразование, которое ставит в соответст-
соответствие каждой точке М = (х1:х2:х3:х1) арифметического проективного
пространства точку М', однородные координаты которой суть1)
Х1 = К [Ci1X1 -р С12ЛГ2 -f-
Х2 = "¦ \С-ЦХ1 ~Г С22Х2~\~ С23-*-3 ~Ь C2iXi)> V M\
Х3 = Л (СщХ^ -\ ^Х '^ ^^
с4,,лг4).
*) Множитель К позволяет (как и в случае формул преобразования коор-
координат B)) по одной какой-нибудь четверке координат xlt xit ха, лг4 точки М
найти все четверки координат точки М .
678 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [ГЛ. XXIII
При этом матрица коэффициентов С есть нсвырождающаяся матрица.
Поэтому задать проективное преобразование проективного простран-
пространства— значит задать невырождающуюся матрицу четвертого по-
порядка х).
Совершенно так же, как теорему 4 главы XXI, мы теперь дока-
доказываем основную теорему о проективных преобразованиях простран-
пространства, а именно следующее предложение.
Теорема 1. Пусть Yv Y2, Y3, У4, Ей Y[, Y'%, Y;, Yt, E'—две пя-
пятерки точек проективного пространства, удовлетворяющие тому усло-
условию, что никакие четыре точки, принадлежащие одной из этих двух
пятерок, не компланарны, т. е. не лежат в одной и той же пло-
плоскости. Тогда существует одно-единственное проективное преобразо-
преобразование пространства Р3, переводящее первую пятерку точек во вто-
вторую, т. е. переводящее точки Yx, У2, Ys, У4) Е соответственно в
Y'u Fj, Fji ^4. E'\ эт0 преобразование ставит в соответствие каждой
точке М пространства Р3 ту точку М', которая в проективной
системе координат YlY'^Y^Y^E' имеет те самые координаты, которые
точка М имела в системе YxYzYaY\E.
Из этой теоремы вытекают следствия, аналогичные следствиям
теоремы 4 главы XXI (см. в главе XXI замечание 3 на стр. 604),
в частности утверждение, что посредством проективного преобразо-
преобразования пространства можно (и притом бесконечным числом способов)
перевести любую данную плоскость я в любую другую я'. При
этом преобразовании плоскость я проективно отображается на пло-
плоскость я'. Можно, в частности, легко написать и формулы, анало-
аналогичные формулам, данным на стр. 604, по которым любую коорди-
координатную плоскость можно перевести в любую другую.
Из определения проективного преобразования следует, что про-
произведение двух проективных преобразований пространства снова
является проективным преобразованием. Так как преобразование,
обратное к проективному, очевидно, также является проективным,
то из сказанного вытекает основной факт.
Теорема 2. Проективные преобразования проективного прост-
пространства образуют группу (подгруппу в группе всех преобразований
пространства).
Впрочем, теорема 2 легко выводится непосредственно из опре-
определения проективных преобразований посредством матриц: если
проективное преобразование 'ё задается матрицей С, то обратное
преобразование i? задается матрицей С~г\ если преобразования
3) Заменяя в D) четверку хъ х2, х3, лг4 любой пропорциональной ей
четверкой kxly kx2, kx3, kxit видим, что x'v x'2, x'3, x't также умножатся на к.
Поэтому точка ЛГ, координаты которой определяются формулами D), зави-
зависит действительно лишь от точки М и матрицы С, определяющей само пре-
преобразование, и не зависит от выбора той или ниой четверки координат
*!¦ *2> *3> xi ТОЧКИ М,
S 3] понятие об n-мерном проективном пространстве 679
<gx и i?2 задаются соответственно матрицами Ct и Съ то произве-
произведение этих преобразований задается произведением их матриц.
Непосредственно переносится на пространство и все сказанное
в главе XXI, § 6, п. 4, о проективно-аффинных преобразованиях;
с оговорками, аналогичными тем, которые были сделаны на стр. 608
по поводу теоремы 6 главы XXI, мы можем теперь сказать:
Аффинные преобразования суть проективные преобразования, при
которых несобственная плоскость отображается на себя.
Наконец, и для пространства имеют силу формулы, аналогичные
формулам (8) на стр. 608, дающие запись (в аффинных координа-
координатах) образов собственных точек пространства при проективном пре-
преобразовании его, а именно:
х>
, _ c2lx + c22y + c23z +с21
> _.
§ 3. Понятие об и-мериом проективном пространстве
Определение л-мерного проективного пространства Р" для любого
л совершенно аналогично определению пространства Р3; по суще-
существу, л-мерное проективное пространство есть связка в (л + 1)-мер-
ном аффинном пространстве Rn + 1, т. е. совокупность всех прямых
(«лучей»), а также плоскостей всевозможных размерностей k^n
пространства Rn+1, проходящих через данную точку О, причем лучи
связки переименовываются в точки пространства Рп, двумерные
плоскости связки — в прямые пространства Рп, вообще, ^-мерные
плоскости связки, k^in, переименовываются в (k—1)-мерные пло-
плоскости проективного пространства Р". Система аффинных, а затем
и проективных координат в связке О пространства Rn+1 опреде-
определяется, как выше при л = 3. Введение в связке аффинной системы
координат позволяет установить взаимно однозначное соответствие
между лучами связки и классами пропорциональных между собою после-
последовательностей (хъ х2, .,., дгл + 1)изл+1 чисел, что автоматически
приводит к понятию л-мерного арифметического проективного прост-
пространства, точками которого являются сами эти числовые классы
(xl:x2:... :х„+1). Гиперплоскости (т. е. (л— 1)-мерные плоскости)
в «-мерном проективном пространстве определяются каким-либо
линейным однородным уравнением
и1х1 + и2х2+...+ип+1хп+1 = 0 A)
относительно однородных координат хь х2, ..., хп+1; множество
точек М= (Xj,:x2:... :хп+1), этому уравнению удовлетворяющих, и
680 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [ГЛ. XXIII
образует гиперплоскость, определенную данным уравнением A).
Коэффициенты иъ и2, ..., и„ + 1 произвольного уравнения A) данной
плоскости определены с точностью до общего числового множи-
множителя, эти коэффициенты называются координатами данной гиперпло-
гиперплоскости. Системы, состоящие из г линейно независимых однородных
уравнений вида A), определяют (п — г)-мерные плоскости простран-
пространства Р". Общая теория линейных однородных уравнений, изложенная
в главе XII, § 8 без труда приводит и к параметрическому предста-
представлению ^-мерной плоскости любого числа измерений k=\, 2, ...
...,п—1 в л-мерпом проективном пространстве Р".
Определение систем проективных координат и проективных пре-
преобразований я-мерного проективного пространства совершенно ана-
аналогично соответствующим определениям в частном случае л—-3 и
может быть предоставлено читателю.
Плоскость хп+1 = 0 в арифметическом проективном пространстве
Р"+1 выделяется в качестве несобственной; ее точки называются
несобственными точками соответствующего «проективно-аффинного»
пространства.
Выделение несобственных точек и несобственной гиперплоскости
имеет и в общем случае тот же смысл, как и при п = 3: оно позво-
позволяет рассматривать проективное пространство P"=R" как результат
пополнения аффинного пространства R" несобственными точками.
Полное перенесение со строгими доказательствами всего мате-
материала, изложенного в §§ 1 и 2 настоящей главы, на общий случай
/z-мерного проективного пространства может быть рекомендовано
читателю как весьма полезное упражнение,
§ 4. Поверхности второго порядка в проективном
пространстве. Теорема единственности
Алгебраической поверхностью в проективном пространстве назы-
называется множество точек, задаваемое в какой-либо проективной
системе координат уравнением
Ф(х1} х.г, х3, л:4) = 0, (I)
где Ф^ц х2, х3, xt) — однородный многочлен (форма) от перемен-
переменных x
v х2, х3, лг4.
При переходе к другой системе проективных координат
х'и х'2, х'3, х\ координаты хъ х2, х3, лг4 испытывают однородное линей-
линейное преобразование с невырождающейся матрицей С, тождественно
преобразующее форму Ф (xv х%, х3, ;е4) в форму Ф' (х[, х\, х'3, xt)
той же степени, что и форма Ф (xv x2, х3, лг4); степень уравне-
уравнения (I), задающего данную поверхность, не меняется при переходе
к другой системе координат, она называется порядком данной по-
поверхности.
§ 4]
ТЕОРЕМА ЕДИНСТВЕННОСТИ 681
Мы будем рассматривать лишь поверхности второго порядка и
в соответствии с этим будем предполагать, что левая часть урав-
уравнения (I) есть квадратичная форма, и уравнение поверхности будет
иметь вид
(ЛХ, Л2, Л3, A,?l "Ц^! -|- Аи^ЛцЛ
Как всегда, билинейную форму, полярную к форме Ф (хъ х2, х3, дг4),
обозначаем через W (хъ х2, х3, xt; yuy2, y3, yt) или, сокращенно,
4
через ^(дг, у) == У a/ftjc((/fc.
Мы будем предполагать, что проективное пространство Р3 есть
результат пополнения несобственными точками аффинного трехмер-
трехмерного пространства R2 с выбранной в нем аффинной системой коор-
координат ое1е2е3, порождающей раз навсегда заданную систему одно-
однородных координат. В соответствии с этим будем писать P3 — R3.
Если не оговорено противное, будем предполагать, что уравнения
рассматриваемых поверхностей заданы именно в этой однородной
системе координат. Это не помешает нам, разумеется, считая эту
систему координат исходной, привлекать произвольные другие про-
проективные системы координат.
Дальнейшие рассуждения идут по пути, аналогичному тому, по
которому мы шли в § 1 предыдущей главы.
Множество X собственных точек поверхности A) совпадает
с множеством точек аффинного пространства R3, координаты кото-
которых в системе оехе2е3 удовлетворяют уравнению
4343=0. B)
Множество X пусто в том и только в том случае, когда а44=^=0,
а все остальные коэффициенты aik равны нулю. В этом случае
уравнение A) превращается в уравнение
дважды взятой несобственной плоскости.
Итак:
Теорема Зх. Если поверхность A) состоит из одних несобст-
несобственных точек, то уравнение A) необходимо имеет вид A^) и опре-
определяемая этим уравнением поверхность есть дважды взятая несоб-
несобственная плоскость.
Переходим ко второму случаю: пусть все несобственные точки
пространства принадлежат поверхности A), и пусть эта поверхности
кроме того, содержит по крайней мере одну собственную точку.
Тогда по крайней мере один из коэффициентов au, a12, a2S, a13j
682 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [ГЛ. XXIII
С2з> азз> аи> а24> аы отличен от нуля. По предположению, всякая
несобственная точка (xl:x2:x3:0) удовлетворяет уравнению A), так
что равенство
Ф(х^ х2, х3, 0)==ап
является при любых хъ х2, х3 числовым тождеством. Поэтому
в рассматриваемом случае
aU — а12 = Д22 = а13 = а23 = «33 = °
и уравнение A) имеет вид
*4 Bй1Л+ 2аыхг + 2a3ix3 + а44х4) = 05 (С)
наша поверхность распадается на пару плоскостей, из которых одна
есть несобственная плоскость xt = 0, а другая имеет уравнение
2аыхг + 2a2ix2 + 2с34*з + аах* = °»
в котором по крайней мере один из коэффициентов а14, й24, а34
отличен от нуля и которое поэтому определяет некоторую соб-
собственную плоскость.
Итак:
Теорема 32. Если поверхность A) содержит всю несобствен-
несобственную плоскость, но не совпадает с нею, то она распадается на пару
плоскостей, из которых одна есть несобственная, а другая — собст-
собственная плоскость. Уравнение A) в этом случае имеет вид A^,).
Наконец, если поверхность A) не содержит несобственной пло-
плоскости, то в ее уравнении по крайней мере один из коэффициентов
ain ai2. a22i cisi а23» азз отличен от нуля. Тогда уравнение B)
определяет в аффинном пространстве R2 поверхность второго по-
порядка, совпадающую с множеством X всех собственных точек
поверхности A).
Эта последняя получается пополнением поверхности B) всеми
несобственными точками (х1:х2'-х3:0), удовлетворяющими уравне-
уравнению A), переходящему при л;4 = 0 в уравнение
Оц*1 -г taxixxx2 + аггх\ + 2а13х1х3 -\- 2а23хгх3 + а33х\ = 0. C)
Поэтому несобственные точки поверхности A) суть не что иное,
как несобственные точки, удаленные в бесконечность в направле-
направлениях, асимптотических для поверхности B). На плоскости xt=0
эти точки образуют кривую второго порядка, определяемую урав-
уравнением C) и являющуюся пересечением несобственной плоскости
с конусом асимптотических направлений поверхности A). Мы вер-
вернемся к этому в § 8.
о 4] ТЕОРЕМА ЕДИНСТВЕННОСТИ 683
Совершенно так же, как в случае кривых, мы выведем из
доказанных результатов следующую теорему единственности для
поверхностей второго порядка.
Теорема 4 (теорема единственности). Если два урав-
уравнения
Ф(*1, *г. хз, xt) = a11x\ + 2al2x1x2 + a22xl + 2а13х1х3 +
+ агзх\ + 2alix1xi+2a2ixixi+2a3ix3xi-\- auxj = О A)
и
Ф'(xlt х2, x3, xi) = a'11xl
+ 2а'гзх2х3 + a'33xl -f 2a'lix1xi + 2a'2ix2xt + 2a'3ix3xt-,- аых\ = 0 (Г)
определяют одну и ту же поверхность Г второго порядка в проек-
проективном пространстве Р2 = R3, то коэффициенты в обоих уравнениях
A) и A') соответственно пропорциональны между собою.
Доказательство, как и доказательство аналогичной теоремы для
кривых, данное в § 1 предыдущей главы, состоит в разборе, трех
возможных случаев.
1° Все точки поверхности Г несобственные. Тогда уравнения
A) и (Г) имеют вид амх1 = 0, соответственно а'цХ\ = 0, и утверж-
утверждение доказано.
2° Поверхность Г содержит несобственную плоскость, но не
совпадает с нею.
Тогда уравнения A) и A') имеют вид
jc4 Balix1 + 2a2ix2 + 2a3ix3 -|- a44x4) = 0,
соответственно
*4 Ba'llx1 + 2a'2ix.2 -\- 2a'3ix3 + a44x4) = 0.
Тогда поверхность Г распадается на пару плоскостей, из которых
одна — несобственная плоскость дг4 = 0, а другая — собственная пло-
плоскость, определяемая любым из двух уравнений
2аыхг + 2a2ix2 + 2aSix3 + attxt = 0,
2aid*i -f 2a;4x2 + 2a'3ix3 + a'uuxt = 0.
Поэтому соответствующие коэффициенты в этих двух уравнениях
пропорциональны; так как остальные коэффициенты в уравнениях
A) и (Г) равны нулю, то утверждение теоремы единственности
доказано и в рассматриваемом случае.
3° Остается последний случай: поверхность Г не содержит несоб-
несобственной плоскости. Тогда множество X собственных точек поверх-
поверхности Г определяется в аффинной координатной системе оеге2е3 из
684 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [гл. ХХШ
уравнений
ху + ay2 + 2axz + 2ayz + az2 + 2ах + 2аму
апх2 + 2а12ху + ai2y2 + 2alsxz + 2a23yz + assz2 + 2аых + 2а
44 = 0 B)
а'22у2 + 2a'13xz + 2а'гзуг + a'33z2 + 2а'14х -f 2a'2iy +
-r-2a'3iz + a'u = 0. B')
Каждое из этих уравнений определяет в пространстве Rs одну и
ту же поверхность второго порядка. Поэтому по теореме 2 главы XX
соответственные коэффициенты в уравнениях B) и B'), а значит,
и в уравнениях A) и A') пропорциональны.
§ 5. Пересечение поверхности второго порядка
с плоскостью и с прямой. Касательные прямые.
Касательная плоскость. Прямолинейные образующие
Мы видели в предыдущем параграфе, что поверхность второго
порядка
Ф(х1у хг, х3, л:4)=0 A)
или содержит несобственную плоскость, или пересекается с нею
по некоторой кривой второго порядка.
Это частный случай следующего общего предложения.
Теорема 5. В проективном пространстве произвольно данная
плоскость либо пересекается с данной поверхностью второго порядка
по кривой второго порядка (действительной, мнимой, быть может,
распадающейся), либо целиком содержится в данной поверхности.
Доказательство. Сделаем предварительно такое проектив-
проективное преобразование 'ё, при котором данная плоскость а перейдет в
какую-нибудь координатную плоскость а', например в плоскость1)
лг3=0.
Данная поверхность Г при этом перейдет в некоторую поверхность Г'.
Пусть уравнение поверхности Г' есть
4 + 2а;4л:2л:4+ 2а;4хзлг4 + а^ = 0. A')
Решаем его совместно с уравнением х3 = 0 плоскости а'. Получаем
в координатной плоскости х3 = 0 (т. е. в плоскости ое1&2) уравнение
а'ггх\ + 2а \хххх^ + 2a'ux2xt + а'^х\ = 0. A о)
J) Можно было бы взять, конечно, и плоскость x4 = 0 и тогда применить
рассуждения предыдущего параграфа.
§ 5]
КАСАТЕЛЬНЫЕ ПРЯМЫЕ. КАСАТЕЛЬНАЯ ПЛОСКОСТЬ 685
Если не все коэффициенты в этом уравнении равны нулю, то мы
имеем уравнение кривой второго порядка, которая и является пере-
пересечением поверхности Г' с плоскостью а'. Прн проективном преоб-
преобразовании <6~х, обратном к сделанному преобразованию #, поверх-
поверхность Г' перейдет в Г, плоскость а' — в плоскость а, а кривая их
пересечения Г„ — в некоторую кривую второго порядка Го, явля-
являющуюся пересечением поверхности Г с плоскостью а. Пусть те-
теперь все коэффициенты а'1и а[2, а'г2, а'ш а'и, а'и в уравнении (Гс)
равны нулю. Тогда
ф'(xv х2, х3, xt) = 2a'lsx1x3 + 2a'Mx2x3+ a33xt-Jr2a'3ix3xi =
= хг Bа'13х1 + 2а'23х2 + а'33х3
и поверхность Г' есть пара плоскостей х3 = 0 и 2а'13х1-\-2а'23х2-\-
+ a'a3x3~h2a3ixt = 0, одной из которых является плоскость х3 = 0,
т. е. наша плоскость а'. Тогда плоскость а входит в состав по-
поверхности A). Теорема доказана.
Теорема 6. В проективном пространстве Р3 произвольная
данная прямая d либо пересекается с данной поверхностью Г вто-
второго порядка в двух точках — различных (действительных или мни-
мнимых) или совпадающих (действительных) — или же целиком содер-
содержится в данной поверхности.
Доказательство. Пусть уравнение поверхности Г есть
Ф(хъ хг, х3, х4) = 0, A)
а параметрическое уравнение нашей прямой есть
Решаем совместно B) и A), т. е. подставляем B) в A). Получаем
уравнение второй степени относительно X, (Д., а именно:
АК2 + 2ВХц + Сц2 = 0, C)
где, как легко видеть,
А = Ф(Р!, р2, р3, Pt),
В=-Л?(ръ р2, р3, р^, qv q2, q3, qx),
С=Ф(^1, <72, q3, qd-
Если хотя бы один из коэффициентов А, В, С отличен от нуля, то
уравнение C) есть уравнение второй степени; из него получается
686 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [ГЛ. XXIII
два значения (действительных, мнимых или совпадающих) для отно-
отношения ц:Х, которые и определяют, будучи подставлены в B), две
точки пересечения нашей прямой с поверхностью A). Если все три
коэффициента уравнения C) суть нули, то условие для того, чтобы
точка данной прямой содержалась в поверхности A), оказывается
выполненным тождественно, и вся прямая содержится в данной по-
поверхности. Такая прямая называется прямолинейной образующей
поверхности.
Замечание 1. Каждый из случаев расположения прямой d
относительно поверхности Г сохраняется при проективном преобразова-
преобразовании. Это значит следующее. Пусть при проективном преобразовании Л
поверхность Г и прямая d переходят соответственно в поверхность?'
и прямую d'.
Если прямая d пересекается с поверхностью Г в двух различ-
различных (действительных или мнимых), либо в двух совпадающих точ-
точках, либо целиком содержится в поверхности Г, то таково же
расположение прямой d' относительно поверхности Г'. Доказатель-
Доказательство можно предоставить читателю.
Посмотрим, когда прямая B) пересекается с поверхностью A)
в двух совпадающих точках; такая прямая называется касательной
прямой; обе совпавшие точки пересечения образуют точку каса-
касания прямой и поверхности.
Без ограничения общности можем предположить, что точка
P=(p1:p2:p3:pi) нашей прямой лежит на поверхности и, следова-
следовательно, является точкой касания, а точка Q= (<7i: <?2'• <7з'• <?4) не лежит
на поверхности. Тогда
А = Ф (plt р2, p3, pt) = 0;
уравнение C) превращается в
Одним из корней этого уравнения является [л = 0, т. е. отношение
fx:Ро = 0:1, а второй корень есть ц:А,=—2В:С, где СфО. Чтобы
и второй корень был нулевой, надо, чтобы было В — О, т. е.
У(Ръ Рг, Рз, Pi> 4i, 4i, ?з> 4t) = 0. D)
Всякая прямая B), удовлетворяющая условию D), есть касательная
к поверхности A) в точке Р; за Q может быть принята любая
точка любой такойпрямой.Обозначаем ее через Q= (хх:х2:х3:xt) вместо
Q = Di:Q2:<l3:<Ii)> мы видим, что все точки всех касательных к по-
поверхности A) в точке Р этой поверхности удовлетворяют уравнению
Y (Pv Рг, Рз, Pt> *i, *г> хз, xi) = 0
§ 5] КАСАТЕЛЬНЫЕ ПРЯМЫЕ. КАСАТЕЛЬНАЯ ПЛОСКОСТЬ 687
или, в развернутом виде,
i -г а12р2 — aisPs -'г anPi) xi "г Кл + а22р2 + агоРз ~т <*мр4) хг -г
i -г «32Р2 -г "ззРз+йзЛ) *з "- (a4i/>i "г я4гРг -г я4з/>з + aiipi)xi = О,
D')
т. е. заполняют плоскость, уравнением которой и является урав-
уравнение D'). Эта плоскость называется касательной плоскостью к
поверхности (\) в ее точке P=(pl:p2:p3:pi)-
Замечание 2. Из замечания 1 вытекает следующее: пусть
плоскость т есть касательная плоскость к поверхности второго по-
порядка Г в ее точке Р. Пусть при данном проективном преобразо-
преобразовании пространства Ps поверхность Г, ее точка Р и плоскость т
переходят соответственно в поверхность Г', ее точку Р' и плос-
плоскость т'. Тогда плоскость т' есть касательная к поверхности Г' в
точке Р'.
Как и для кривых (см. гл. XXII, § 2), возникает вопрос: не мо-
может ли случиться, что всякая прямая, проходящая через точку
P=(Pi.p3'Pa:Pt) поверхности A), либо пересекает эту поверхность
в двух совпадающих точках, либо целиком содержится в поверх-
поверхности A) (т. с. является ее образующей)? Очевидно, это происхо-
происходит тогда и только тогда, когда уравнение D') удовлетворяется
координатами любой точки Q= (x1:x2:x3:xi) пространства, т. е. при
любых значениях хъ х2, х3, х4. А это в свою очередь имеет место
тогда и только тогда, когда все коэффициенты уравнения D')
равны нулю, т, е. одновременно выполнены тождества:
E)
a3iPi -г
°ilPl "Г «42^2 ;¦ °43/'3 -Г й44/>4 ==
Всякая точка Р= (Pi'-p^'Pa'-Pi)* удовлетворяющая системе равенств E),
называется особой или двойной точкой поверхности A).
Если ранг R поверхности A) наивысший, т. е. равен 4, то де-
детерминант системы E) отличен от нуля, система уравнений E) не
имеет ни одного ненулевого решения. Другими словами, певырож-
дающиеся поверхности второго порядка особых точек не имеют.
Если ранг R поверхности равен 3, то система E) имеет (с
точностью до постоянного множителя) единственное решение
Ръ Р2, Рэ, Рц, т. е. поверхность A) имеет единственную особую
точку Р; такой точкой является вершина конической поверхности;
мы к этому вернемся в § 7.
Если /? = 2, то система E) имеет два независимых решения:
Pi> Рг, р'з, Pi и p'i, р"г, р, р\; все остальные решения являются
688 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [ГЛ. XXHI
линейными комбинациями этих двух. Все точки прямой Р'Р", где
Р'— (p'l'-Pi'P's'-Pi) и Р" = (Pi'-P'-Pa'-P"u), и только точки этой прямой
являются особыми. Это случай поверхности, распадающейся на
пару различных плоскостей; прямая пересечения этих плоскостей и
является множеством особых точек поверхности.
Наконец, при R=\ поверхность A) есть пара слившихся пло-
плоскостей, все ее точки особые.
Заметим, что, как и следовало ожидать, касательная плоскость
к поверхности A) в точке Р этой поверхности тогда и только тогда
перестает быть определенной, когда эта точка особая. В самом
деле, в этом и только в этом случае все коэффициенты в уравне-
уравнении D') касательной плоскости обращаются в нуль.
В частности, невырождающаяся поверхность во всякой своей
точке имеет (единственную) касательную плоскость.
Посмотрим, какие прямые, проходящие через данную неособую
точку Р= (Pi'-Pi'-Ps'-Pi) поверхности A), являются прямолинейными
образующими нашей поверхности. Это те прямые, для которых все
три коэффициента А, В, С в уравнении C) равны нулю. Равенство
А = 0 не означает ничего большего, как то, что точка Р лежит на
поверхности A). Равенство В=0 означает, как мы видели, что
прямая B) лежит в касательной плоскости в точке Р к поверх-
поверхности A). Таким образом, прямолинейные образующие поверхно-
поверхности A) лежат в касательной плоскости к поверхности A). Кроме
того, по самому своему определению прямолинейные образующие
содержатся в поверхности A). Другими словами, прямолинейные
образующие поверхности A), проходящие через точку Р поверхности,
содержатся в пересечении поверхности с касательной плоскостью к
ней в точке Р. Но пересечение нераспадающейся поверхности вто-
второго порядка с плоскостью есть кривая второго порядка; если эта
кривая содержит прямые линии, то она сама есть пара прямых.
Итак, пересечение поверхности второго порядка с касательной
плоскостью к пей в неособой точке Р есть пара прямых, а именно
пара прямолинейных образующих поверхности. Можно убедиться в
этом и другим способом. Пусть пересечение поверхности A) с ка-
касательной плоскостью т в точке Р есть кривая второго порядка у.
Тогда всякая прямая d, проходящая через точку Р и лежащая в
плоскости т, будучи касательной к поверхности A), пересекает эту
последнюю в паре совпадающих точек, а именно точек, совпадаю-
совпадающих с точкой Р. Но эта пара совпадающих точек есть вместе с
тем и пара точек пересечения прямой d с кривой у. Таким обра-
образом, точка Р есть особая точка кривой у, и кривая у есть распа-
распадающаяся кривая.
Обратно, если какая-нибудь плоскость 0, проходящая через
неособую точку Р поверхности A), пересекается с этой поверх-
поверхностью по паре прямых у (быть может, сливающихся между собою,
К 5] КАСАТЕЛЬНЫЕ ПРЯМЫЕ. КАСАТЕЛЬНАЯ ПЛОСКОСТЬ 689
но имеющих точку Р своею общей точкой), то плоскость В есть
касательная плоскость к поверхности A) в точке Р. В самом деле,
всякая прямая d, проходящая через точку Р и лежащая в пло-
плоскости 6, пересекает распадающуюся линию у, а значит, и поверх-
поверхность A) по паре слившихся точек, т. е. является касательной
прямой к поверхности A) в точке Р.
Возьмем какие-нибудь две различные прямые d и d', лежащие
в плоскости Э и проходящие через точку Р. Обе эти прямые, будучи
касательными к поверхности A), лежат в касательной плоскости т
к ней в точке Р; значит, плоскости т и 0, содержа одну и ту же
пару пересекающихся прямых, совпадают между собою; 0 есть ка-
касательная плоскость. Итак:
Теорема 71). Касательная плоскость к поверхности второго
порядка A) в данной ее неособой точке Р может быть определена
как единственная плоскость, проходящая через точку Р и пересека-
пересекающаяся с поверхностью A) по паре прямых d, d', содержащих
точку Р.
Так как каждая прямолинейная образующая поверхности, прохо-
проходящая через данную ее (неособую) точку Р, лежит в касательной
плоскости в точке Р, то прямые d и а" и являются (единственными)
проходящими через точку Р прямолинейными образующими поверх-
поверхности A). Может случиться, что эти прямые сливаются между собою;
это имеет место, если поверхность A) коническая, а Р—ее неосо-
неособая точка.
Докажем следующее предложение.
Теорема 8. Касательная плоскость т к невырождающейся по-
поверхности второго порядка Г пересекает ее по паре действительных
или мнимых (но всегда различных) прямых2).
Доказательство. Произведем проективное преобразование, пе-
переводящее плоскость т в плоскость xs = 0, а точку Р — в точку
Р' = @^0:0:1) этой плоскости. При этом преобразовании поверх-
поверхность Г перейдет в некоторую поверхность Г', уравнение поверхно-
поверхности Г' пусть будет
-|- 2а'23хгх3 j- а33х\ — 2a'ux1xi -(- 2a'2ixixi ¦,- 2a'3ixtxt + аих\ = 0,
а касательная плоскость в точке Р к поверхности Ф (xv хъ xs, xt) = 0
') Из этой теоремы следует второе доказательство приведенного в за-
замечании 2 утверждения о том, что свойство плоскости быть касательной
плоскостью к данной поверхности второго порядка s сохраняется при про-
проективных преобразованиях пространства.
*) Из теоремы 8 следует, что прямолинейные образующие невырожда-
невырождающейся поверхности второго порядка, проходящие через данную ее точку,
суть всегда две различные (действительные или мнимые) прямые.
В §§ 7, 8 мы разберем, когда эти прямые являются действительными,
когда —мнимыми.
690
ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА
[ГЛ. ХХ1Н
перейдет в касательную плоскость к поверхности Г' в точке
Рг = @:0:0:1). Уравнение плоскости т' будет
0, 0, 0,
т. е.
а'их
ихл -f
„ х8, *4)=0,
= 0.
F)
Но эта плоскость есть плоскость х3 = 0; следовательно, в уравне-
уравнении F) коэффициенты а'и, a'2i, a'u при хг, хг, xt суть нули, а
a'3i =/Ь (). Значит, уравнение Ф' (хъ х2, х3, л;4) = 0 имеет вид
Решая его совместно с уравнением л:3 = 0 касательной плоскости,
получаем уравнение кривой пересечения Т'о в виде
а это есть уравнение кривой второго порядка ранга 2, т. е. распа-
распадающейся кривой1).
Если бы эта кривая была парой совпадающих прямых, то диск-
дискриминант
aii «ia
«il «22
был бы равен нулю. Но тогда дискриминант формы Ф' (хх, х2, х8, х,
был бы
О
«1
0
«34
О О
0
= 0,
т. е. поверхность Г', а значит и Г, была бы вырождающейся, во-
вопреки предположению.
§ 6. Полюсы и полярные плоскости
Полярная плоскость точки и полюс плоскости относительно невы-
невырождающейся поверхности второго порядка определяются в полной
аналогии с определением поляры точки и полюса прямой относи-
относительно невырождающейся кривой второго порядка: мы определяем
для данной точки X^(xl:x2:xs:xt), принадлежащей или нет
1) В аффинных координатах
уравнение кривой Го есть
g 6] ПОЛЮСЫ И ПОЛЯРНЫЕ ПЛОСКОСТИ 691
поверхности второго порядка
ч/ \х1г Х2, ХЯ, Х4> — и> \1)
полярную плоскость как плоскость ? с координатами
L + G12X2 ~^~ alSXS + а14Х4>
I
,а ...... , W
|4 = a^jq -f ai2x2 + а4з*8-|-а44*4
Если дана плоскость ? = {^г!^:^:^}, то из уравнений B) однозначно
определяется точка ^r=(x1:jc2:x3:A:4), полярной плоскостью которой и
является плоскость ?. Единственная точка Л', полярной плоскостью
которой является данная плоскость, называется полюсом этой пло-
плоскости относительно невырождающейся поверхности A).
Очевидно, уравнением полярной плоскости точки Р = (р1:рг:/K:р4)
относительно поверхности A) является уравнение
^ (Pi, Рг, Рз, Pi, xv Х2, хз, xi) = °.
где xv jc2, x3, x4—текущие координаты.
Аналогично теореме 8 главы XXII доказывается
Теорема 9 (теорема взаимности). Если точка X лежит
на полярной плоскости точки Р, то точка Р лежит на полярной
плоскости точки X.
Точка Р тогда и только тогда инцидентна своей полярной плос-
плоскости, когда она лежит на поверхности A); тогда ее полярная
плоскость касается поверхности A) в точке Р.
Формулы B), рассматриваемые сами по себе с единственным
условием, чтобы матрица коэффициентов A = (aik) была невырождаю-
невырождающейся (но, может быть, и несимметричной), определяют взаимно
однозначное соответствие между точками X = (x1:x2:xs:xi) и пло-
плоскостями Е = { Ei^2:^3:^4} проективного пространства. Такое соот-
соответствие называется коррелятивным соответствием, определенным
матрицей А. Если невырождающаяся матрица А является симметрич-
симметричной, то она есть матрица коэффициентов некоторой квадратичной
формы Ф (хъ х2, х3, xt), определяющей иевырождающуюся поверх-
поверхность второго порядка
Ф(хъ х2, х3, х4) = 0. A)
Тогда коррелятивное соответствие B) называется полярным соот-
соответствием, порожденным поверхностью A): оно сопоставляет с каж-
каждой точкой X полярную плоскость | этой точки относительно по-
поверхности A).
Аналогично случаю кривых, можно всякую невырождающуюся
поверхность второго порядка рассматривать не только как множество
692
ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА
[ГЛ. XXIII
лежащих на ней точек, но и как множество касательных к ней
плоскостей. Как и в § 5 главы XXII, убеждаемся, что координаты
?ъ ?г> ?з> ?4 плоскостей, касательных к данной поверхности второ-
второго порядка, удовлетворяют некоторому однородному уравнению вто-
второй степени, которое называется тангенциальным, уравнением дан-
данной поверхности. Понятие сопряженности двух точек относительно
поверхности второго порядка определяется так же, как аналогичное
понятие для кривых; доказы-
. вается, что полярная плос-
'" кость данной точки Р есть
геометрическое место точек,
сопряженных данной точке Р
относительно поверхности A).
Рассуждениями, аналогич-
аналогичными рассуждениям § 6 главы
XXII, доказывается, что диа-
диаметральная плоскость, сопря-
сопряженная данному направлению
{ а : C: у }, есть полярная
плоскость несобственной точки
(а:C:у:0), удаленной в бес-
бесконечность в данном направ-
направлении; центр есть полюс не-
несобственной плоскости.
Замечание. На плоскос-
плоскости поляры точки Р относи-
относительно кривой второго порядка
есть прямая, соединяющая точ-
точки касания двух касательных,
проведенных к данной кривой из точки Р. Это предложение обоб-
обобщается на случай поверхностей следующим образом: все каса-
касательные прямые, проведенные к данной поверхности A) второго
порядка из данной точки Р (не лежащей на этой поверхности),
образуют конус второго порядка (действительный или мнимый),
общие точки которого с поверхностью A) образуют кривую второго
порядка у, по которой этот конус как бы «касается» поверхно-
поверхности A) (рис. 258)г); плоскость, в которой лежит кривая Y, и есть
полярная плоскость точки Р. Доказательство этого факта,
равно как обобщение теории полярных плоскостей на случай вы-
вырождающихся поверхностей второго порядка, читатель может най-
найти в «Аналитической геометрии» Б. Н. Делоне и Д. А. Райкова,
том 2, § 216.
Рис. 253.
') Если точка Р лежит на поверхности A), то конус этот сплющивается
в касательную плоскость, а кривая у стягивается в точку Р.
§ 7]
ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ 693
s 7. Проективная классификация поверхностей второго порядка
Посредством линейного преобразования переменных
. .
' ' ' i ' > (С J
xi — cilxl +
квадратичная форма Ф (х1, лг2, лг3, лг4) может быть, как известно
(гл. XIII, § 5), тождественно преобразована к каноническому виду,
т. е. к виду
Ei#i -f-e2X2 +е3Хз -i-e4x4 для форм ранга /? = 4,
ехх^ + е.2Хг2 + е3vrj для форм ранга /? = 3,
ei^i2 + e2x22 для форм ранга R = 2,
e^i для форм ранга R = l,
где все коэффициенты ех, е2, е3, е4 равны ± 1 • При этом число
положительных коэффициентов в любом каноническом представле-
представлении данной формы Ф (хъ хъ х3, х4) одно и то же1); оно называется
индексом, формы2) ф.
Для форм ранга 4 индекс может принимать значения 4, 3, 2, 1, 0.
Однако при умножении формы на —1 форма ранга 4 и индекса 0
превращается в форму индекса 4, форма индекса 1 превращается
в форму индекса 3. Поэтому поверхность второго порядка у, задан-
заданная в однородных координатах уравнением
Ф(лг1? х2, х3, х4)=0, A)
где форма Ф имеет ранг 4, может быть в некоторой новой проек-
проективной системе координат задана уравнением вида
^1-83*1 + 8^ = 0 B)
(мы опускаем штрихи у переменных), где все е{ равны +1 и число
положительных среди них равно или 4, или 3, или 2.
Формулы линейного преобразования 'б мы можем понимать по на-
нашему желанию или как формулы перехода от одной проективной
координатной системы к другой, или как формулы, определяющие
х) То есть не зависит от того, каким преобразованием (с) мы привели
форму Ф и к какому именно каноническому виду.
2) Обычно —положительным индексом, что представляется, впрочем, из-
излишним удлинением.
694 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [ГЛ. ХХШ
проективное преобразование пространства. Поэтому полученный ре-
результат мы можем сформулировать и так: всякая поверхность Г вто-
второго порядка и ранга 4 может быть превращена проективным пре-
преобразованием в поверхность Г', уравнение которой имеет вид B)
в первоначальной однородной координатной системе.
Так как посредством дополнительного проективного преобразо-
преобразования всегда можно любую из координатных плоскостей х; — О
(/=1, 2, 3, 4) перевести в любую другую, то без ограничения
общности мы можем предположить, что в каноническом уравнении B)
поверхности Г ранга 4 члены с положительными коэффициентами
предшествуют членам с отрицательными. Поэтому мы имеем следую-
следующий результат:
Всякая поверхность второго порядка Г, имеющая ранг 4, может
быть посредством проективного преобразования пространства Р3=/?з
переведена в поверхность Г", уравнение которой в той же исходной
системе координат имеет один из следующих видов:
*¦ + *!-:-*! + *! = о, (К1)
xl + xl-,-xl—xl = O, (K2)
х\ + х\—х\ —xl = 0. (КЗ)
Другая формулировка того же результата: для каждой поверх-
поверхности Т ранга 4 существует «каноническая» система проективных
координат, в которой уравнение этой поверхности Г имеет канони-
канонический вид, т. е. один из видов (Kl), (K2), (КЗ).
Перенося на «проективный случай» терминологию, к которой
мы привыкли еще в аффинной геометрии, мы скажем, что две по-
поверхности проективно эквивалентны, если посредством проективного
преобразования пространства одна из этих поверхностей может
быть переведена в другую. То же определение может быть, очевидно,
сформулировано и так: две поверхности Гх и Г2 ироективно экви-
эквивалентны, если существуют две проективные системы координат
I и II такие, что уравнение поверхности Гх в системе I таково же,
как уравнение поверхности Г2 в системе II.
Повторяя те же рассуждения для поверхностей ранга 3, мы по-
получаем следующий результат:
Всякая поверхность второго порядка Г, имеющая ранг 3, мо-
может быть проективным преобразованием переведена в поверхность
Г', имеющую (в исходной системе координат) уравнение одного из
двух следующих видов:
§ 7] ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ 695
или: каждая поверхность Г ранга 3 в некоторой проективной сисл
теме координат имеет «каноническое» уравнение вида (К4) или (К5).
Далее: всякая поверхность ранга 2 проективным преобразованием
может быть переведена в поверхность, имеющую уравнение одного
из видов:
х\ + х\ = 0, (Кб)
х\—х\=0. (К7)
И наконец:
Всякая поверхность ранга 1 может быть проективным, преобразо-i
ванием переведена в поверхность
*J = 0. (K8)
Итак, каждая поверхность второго порядка попадает в один us
восьми классов поверхностей К1 —К8, каждый из которых опреде-
определен соответствующим уравнением (т. е. состоит из поверхностей,
проективно эквивалентных поверхности, задаваемой в исходной си-
системе координат этим, уравнением). Из самого этого определения
классов К1—К8 следует, что все поверхности, принадпежащие
к одному из этих классов, проективно эквивалентны между собою.
Поэтому для того, чтобы показать, что полученные восемь клас-
классов образуют полную проективную классификацию вещественных
поверхностей второго порядка, надо лишь убедиться в том, что
всякие две поверхности, принадлежащие к разным классам, проек-
проективно различны (т. е. проективно не эквивалентны) между собою.
Совершенно так же, как в заключительном замечании предыду-
предыдущей главы (стр. 666), доказывается
Теорема 10. Если Фх(хъ хъ х3, х4) = 0 и Ф2 (хх, х,, х3, х4)—0
суть уравнения в проективной системе координат I двух проективно
эквивалентных поверхностей второго порядка, то формы Ф1 и Ф2
имеют один и тот же ранг и одну и ту же абсолютную величину
сигнатуры.
Из этой теоремы, прежде всего, следует, что две поверхности
различных рангов заведомо не могут быть проективно эквивалентны.
Далее, если невырождающаяся поверхность Г принадлежит к классу
К1, то ее индекс, т. е. индекс квадратичной формы Ф (хъ хъ х3, xt),
образующей левую часть уравнения поверхности Г, равен или 4,
или 0; в этом же смысле индекс поверхности, принадлежащей к классу
К2, равен 3 или 1, а индекс поверхности класса КЗ всегда ра-
равен 2. Мы видим, что квадратичные формы, являющиеся левыми
частями уравнений поверхностей, принадлежащих к двум различ-
различным среди классов К1 — КЗ, всегда имеют различный индекс; по-
поэтому никаким линейным преобразованием уравнение одной из этих
696 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [гл. ХХЩ
поверхностей не может быть переведено в уравнение другой — поверх-
поверхности проективно различны 1).
Из аналогичных соображений следует, что поверхности классов
К4 и К5, а также классов Кб и К7 проективно различны; однако
эти утверждения очевидны без всякого доказательства: поверхность
класса К4 содержит единственную действительную точку, тогда
как поверхность класса К5 содержит бесконечно много действи-
действительных точек. Точно так же класс К7 состоит из поверхностей,
распадающихся на пару действительных различных плоскостей, а
класс Кб — из поверхностей, распадающихся на пару мнимых сопря-
сопряженных плоскостей. Итак, всякие две поверхности, принадлежащие
к различным классам, проективно различны между собою. Посмотрим,
что за поверхности содержатся в каждом из перечисленных классов.
Мы только что ответили на этот вопрос в применении к классам
Кб, К7.
Класс К8 состоит, очевидно, из поверхностей, каждая из кото-
которых есть пара слившихся плоскостей.
Переходим к остальным классам. Для определенности и удобства
предположим до конца предпринятого нами исследования, что си-
система однородных координат, являющаяся исходной в пространстве
Р3 = /?3, соответствует прямоугольной системе координат ое^вд
пространства R3.
Класс К5 состоит из поверхностей, называемых вещественными
коническими поверхностями; все поверхности этого класса проек-
проективно эквивалентны поверхности, определяемой в однородных коор-
координатах уравнением
Собственные точки этой поверхности в системе координат oe^eg
удовлетворяют уравнению
Это уравнение обыкновенного вещественного круглого конуса2).
Поверхность
х\" х\ Л~ х\= О, (К4)
которой проективно эквивалентны все поверхности класса К4, содер-
содержит единственную действительную точку @:0:0:1). При переходе
') В дополиепие к этому алгебраическому доказательству мы несколькими
строками ниже дадим и простое, чисто геометрическое доказательство проек-
проективной неэквивалентности поверхностен классов К2 и КЗ; что касается
поверхностей класса К1, то они состоят из одних мнимых точек и поэтаму
не могут быть проективно эквивалентны поверхностям классов К2 или 1^
2) Круглого, так как по предположению ое1еге3 есть прямоугольна
система координат.
§ 7]
ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ 697
к неоднородным координатам в системе ое1е2е3 уравнение (К4) пере-
переходит в уравнение мнимого конуса л:2 -4-- у2 -\-z2 — О. Поэтому все
поверхности класса К4 называются мнимыми коническими поверх-
поверхностями.
Переходим к поверхностям классов К.1, К2, КЗ. Класс К.1 со-
состоит из поверхностей, проективно эквивалентных поверхности,
задаваемой уравнением
-*2 = ° (Ki)
или, в неоднородных координатах,
Это уравнение мнимого эллипсоида, в прямоугольной системе ое^е.,—
даже мнимой сферы. Поверхности класса К.1 не содержат ни одной
вещественной точки. Они называются мнимыми овальными поверх-
поверхностями.
Поверхности, образующие класс К2, называются действительными
овальными поверхностями; это поверхности, проективно эквивалент-
эквивалентные поверхности
х\ — х\ = 0 (К2)
или, в неоднородных координатах, поверхности
Лг2+(/2+22— 1 =0. (II)
В прямоугольной системе координат ое^еовд уравнение (II) опреде-
определяет обыкновенную действительную сферу. Итак, все поверхности
класса К2 суть поверхности, проективно эквивалентные шаровой
поверхности. Так как все прямолинейные образующие поверхности
шара мнимые, то действительные овальные поверхности (и тем более
мнимые овальные поверхности) не имеют действительных прямоли-
прямолинейных образующих.
Класс КЗ состоит из поверхностей, проективно эквивалентных
поверхности
•Я-1 -р ЛГ2 — Xq X4 ^^ (J
или, в неоднородных координатах,
х2-\-уг — z2 —1=0. (III)
Это однополостный гиперболоид.
Так как однополостный гиперболоид имеет два семейства дейст-
действительных прямолинейных образующих, то тем же свойством обла-
обладают и все поверхности, проективно эквивалентные ему, т. е. все
поверхности класса КЗ. Отсюда следует, что поверхность класса
*\2 не может быть проективно эквивалентной поверхности класса
698 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [гл.
ххщ
КЗ. Мы получили обещанное чисто геометрическое доказательство
этого факта.
Замечание 1. Так как каждая действительная прямая пере-
пересекается со всякой действительной плоскостью в действительной
точке, то из существования на поверхностях КЗ действительных
прямолинейных образующих вытекает, что каждая поверхность Г
этого класса имеет по крайней мере одну общую действительную
точку М со всякой действительной плоскостью а. Поэтому кривая
второго порядка у, являющаяся пересечением поверхности Г с пло-
плоскостью а, не может быть мнимой овальной кривой. Не может она
быть и парой мнимых сопряженных прямых, так как тогда эти пря-
прямые были бы парой мнимых прямолинейных образующих поверхности
Г, проходящих через действительную точку М, между тем как
прямолинейные образующие этой поверхности, проходящей через
действительную точку, суть вещественные прямые. Следовательно,
поверхность Г пересекается с плоскостью по действительной кри-
кривой второго порядка.
Итак: любая поверхность класса КЗ пересекается со всякой
действительной плоскостью по действительной кривой второго поряд-
порядка, распадающейся на пару действительных прямых, лишь когда эта
плоскость является касательной плоскостью к данной поверхности.
С другой стороны, легко доказать, что для всякой овальной
поверхности Г имеется действительная плоскость а, пересекающаяся
с поверхностью Г по невырождающейся мнимой кривой второго по-
порядка. В самом деле, по такой кривой поверхность
пересекается с несобственной плоскостью т. Берем проективное
преобразование Л, переводящее поверхность Т в поверхность (К1,2).
Это преобразование переводит несобственную плоскость т в неко-
некоторую действительную плоскость а, с которой поверхность Г пере-
пересекается по мнимой овальной кривой.
Поверхности класса КЗ называются кольцевидными. Название
объясняется тем, что всякая поверхность класса КЗ, будучи проек-
проективно эквивалентной однополостному гиперболоиду, целиком покрыта,
как и этот последний, каждым из двух семейств своих прямолиней-
прямолинейных образующих. Но прямая в проективном пространстве есть замк-
замкнутая линия, поэтому прямолинейные образующие однополостного
гиперболоида (и всякой проективно эквивалентной ему поверхности),
будучи замкнутыми линиями, и придают всей покрытой ими поверх-
поверхности кольцеобразную форму — однополостиый гиперболоид, пересе-
пересекаясь с бесконечно удаленной плоскостью по действительному
овалу, смыкается в бесконечности в кольцо.
с у, ПРОЕКТИВНАЯ КЛАССИФИКАЦИЯ 699
Замечание 2. Вспомним, что ни одна точка невырождаю-
щейся (т. е. овальной или кольцевидной) поверхности не является
особой точкой, тогда как на конусе имеется единственная особая
точка. Если уравнение конуса записано в каноническом виде
х\ + х\±х\ = 0 (К4.5)
или если перейти к аффинным координатам, в виде
x2 + y2±z* = 0, (AK4.5)
то особой точкой является вершина конуса (К4,5), т. е. точка
@:0:0:1),—ее координаты ^ = 0, лг2 = 0, лг3 = О, л:4=11)) оче-
очевидно, удовлетворяют уравнениям E) из § 5.
Как мы уже упоминали, прямая пересечения пары различных
плоскостей и все точки поверхности, состоящей из пары слившихся
плоскостей, являются особыми; это очевидно геометрически и легко
доказывается посредством проверки условий E) § 5 в применении
к каноническому уравнению распадающейся поверхности.
Замечание 3. Две образующие, проходящие через каждую
отличную от вершины точку действительной конической поверхности,
сливаются в одну образующую. Это вытекает из того, что именно
так обстоит дело с круглым конусом x2jry2 — z2 = 0, которому
нроективно эквивалентны все действительные конические поверх-
поверхности. Наконец, через каждую точку распадающейся поверхности
проходит бесконечное множество лежащих на этой поверхности
прямых.
Замечание 4. Если через данную точку Р поверхности прохо-
проходят две мнимые прямолинейные образующие, что имеет место для
всех точек вещественной овальной поверхности, то точка Р является
единственной вещественной общей точкой поверхности и ее касатель-
касательной плоскости—точка Р является точкой, в которой — в элементарном
и наглядном смысле слова — происходит касание поверхности с ее
касательной плоскостью в этой точке. Если же через точку Р про-
проходят две различные действительные прямолинейные образующие,
как это имеет место в любой точке кольцевидной поверхности, то
поверхность пересекает свою касательную плоскость по двум вещест-
вещественным прямым — вблизи точки Р поверхность имеет седловидную
форму, никакой кусок кольцевидной поверхности нельзя так поло-
положить на стол, как мы кладем мячик или арбуз.
В заключение этого параграфа приведем простой алгебраический
критерий, позволяющий судить, будет ли данная невырождающаяся
поверхность овальной или кольцевидной. Если поверхность ранга 4
Ф(х1г хъ ха, л;4) = 0 A)
г) Это начало координат аффинной координатной системы се2еае8, в ко-
и конус имеет уравнение (АК.4,5).
700 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [гл. XXIII
есть действительная овальная поверхность, то дискриминант Д формы
Ф (лгг, хъ х3, xt) отрицателен.
Для кольцевидных и мнимых овальных поверхностей этот дискри-
дискриминант положителен.
В самом деле, дискриминант квадратичной формы Ф при линей-
линейном преобразовании (с) переменных умножается на квадрат детер-
детерминанта преобразования и, значит, сохраняет свой знак. Так как
в данном случае число переменных равно 4, т. е. четному числу
то знак дискриминанта А не меняется и при умножении формы ф
па любой числовой множитель. Поэтому достаточно проверить сфор-
сформулированный выше критерий после приведения уравнения A) к ка-
каноническому виду (Kl), (K.2) или (КЗ), что не представляет затруд-
затруднений.
§ 8. Распределение по проективным классам поверхностей
различных аффинных классов. Проективио-аффиниая
классификация поверхностей второго порядка
Очевидно, все мнимые эллипсоиды принадлежат классу К.1 мни-
мнимых овальных поверхностей, а все действительные эллипсоиды —
классу К2 действительных овальных поверхностей. Однополостные
гиперболоиды, как мы только что видели, являются поверхностями
класса КЗ; каждая поверхность второго порядка должна попасть
в один из классов К1—К8, в частности, это относится к двупо-
двуполостным гиперболоидам и параболоидам. Но и (двуполостные) гипер-
гиперболоиды, и параболоиды суть действительные поверхности ранга
/? = 4, поэтому каждая из этих поверхностей находится в одном
из классов К2 или КЗ.
Гиперболические параболоиды, имея действительные прямолиней-
прямолинейные образующие, не могут находиться в классе К2, значит, они
содержатся в классе КЗ.
Наоборот, эллиптические параболоиды и двуполостные гипербо-
гиперболоиды лишены действительных прямолинейных образующих, им нет
места в классе КЗ, и они попадают в класс К2.
Итак, среди поверхностей пространства P3 = R3 все действитель-
действительные эллипсоиды, все двуполостные гиперболоиды и все эллиптиче-
эллиптические параболоиды после пополнения их несобственными точками
оказываются действительными овальными поверхностями, т. е. обра-
образуют класс К2.
Однополостные гиперболоиды н гиперболические параболоиды
являются кольцевидными поверхностями, они заполняют собою
класс КЗ.
Переходим к поверхностям ранга 3. В пространстве R3 это ко-
конусы, действительные и мнимые, а также всевозможные цилиндры
второго порядка. В проективном пространстве Р3 = /?3 все эти по-
о 8] ПРОЕКТИВНО-АФФИННАЯ КЛАССИФИКАЦИЯ 701
верхности попадают в классы К4 и К.5. При этом цилиндры над
невырождающимися действительными кривыми второго порядка попа-
попадают в класс К5, цилиндры иад мнимыми эллипсами содержатся
в классе К.4. Итак, в проективном пространстве все цилиндрические
поверхности становятся конусами; так как все образующие цилиндра
параллельны между собою, то в проективном пространстве все обра-
образующие данного цилиндра проходят через одну и ту же несобст-
несобственную точку — вершину той конической поверхности, в которую,
по пополнении несобственными точками, превратится наш цилиндр.
Наконец, поверхности, распадающиеся на пару плоскостей, нахо-
находят в Р3 свое естественное место в классах Кб, К7, К8. Однако
в классах Кб и К8 содержатся, кроме того, поверхности, не пред-
представленные поверхностями второго порядка в Ra (т. е. не получаю-
получающиеся из них посредством пополнения их несобственными точками).
Именно, в классе Кб имеется поверхность, распадающаяся на пару
плоскостей, из которых одна собственная, а другая несобственная,
в классе К8 имеется дважды взятая несобственная плоскость.
За исключением этих двух случаев, каждой поверхности второго
порядка Г в проективном пространстве P8 = R8 соответствует в R3
вполне определенная поверхность второго порядка Г, а именно по-
поверхность, состоящая из всех собственных точек поверхности Г.
Для краткости мы часто будем называть поверхность Г «аффинной
поверхностью» соответствующей поверхности Г.
Замечание 1. Результаты, изложенные в этом параграфе,
могут быть получены и простым вычислением.
Покажем, что двуполостные гиперболоиды и эллиптические пара-
параболоиды принадлежат к классу К2, а гиперболические параболоиды —
к классу КЗ.
Для этого перейдем в уравнении двуполостного гиперболоида
к однородным координатам; получим
Проективное преобразование
Л-1 =
хл= х8
переводит эту поверхность в поверхность
т- е. в шаровую поверхность хг -f у% + z* — 1 = 0.
702 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [гл. ХХЩ
Переходим к параболоидам. Их уравнения
2z = x2±y2
при переходе к однородным координатам превращаются в
JXSX^ = Х1 Ч; ЛГ2.
Проективное преобразование
т. e.
•^з 2 rX'4J
л2 — лвг
v - 1 x +±X'
переводит эти поверхности в поверхности
.х^ + лга — JCg-)-A:| = O (в случае эллиптического параболоида);
х\ — х\ — х\-\~х\ = 0 (в случае гиперболического параболоида).
Первая из них — овальная, вторая — кольцевидная поверхность.
Покажем теперь непосредственным вычислением, что все цилиндры
относятся к проективному классу конических поверхностей. Для
гиперболического и эллиптического цилиндров
х* ± \)г = 1
это сразу следует из того, что их уравнение после перехода к одно-
однородным координатам превращается в
*;+*!-*; = о, 0)
соответственно в
*1—**—.*; = о. B)
Проективное преобразование
. _ соответстивнно "_
x't= х3, х{ =' х3,
переводит поверхности A), B) соответственно в
x'i + x'i—x'i^O и x'i—л:'22 — х? = О,
С1 ПРОЕКТИВНО-АФФИННАЯ КЛАССИФИКАЦИЯ 703
§ °1
е. (отбрасывая штрихи и умножая второе уравнение на —1) в
•*i -;-л2 — дг8 — и.
Случай цилиндра над мнимым эллипсом читатель разберет сам.
Наконец, параболический цилиндр у2 = 2х в однородных коорди-
координатах получает уравнение х\— 2лг1лг4 = 0 или после преобразования
координат
_ 1 , 1 ,
¦*-1 — 2 *1 '2 1*'3'
Х2 = х'2,
лг4 = —хх -\-xs,
уравнение x'i-\-x'*— дгзг = О. Это уравнение конической поверхности.
Переходим к просктивно-аффинной классификации, т. е. к разбиению
совокупности поверхностей второго порядка в проективном прост-
пространстве P3 = R3 на классы поверхностей, эквивалентных между
собою по отношению к проективно-аффинным преобразованиям (см. § 2).
По существу1), проективно-аффинная классификация поверхностей
второго порядка Г в Rs совпадает с аффинной классификацией
соответствующих аффинных поверхностей Г в R3. Если 1\ и Г2 —
две поверхности, принадлежащие к одному и тому же проективно-
аффинному классу в R3, то соответствующие им поверхности Т1 и
Г2 в Rs, очевидно, аффинно эквивалентны. Однако если существует
аффинное отображение Л пространства Rs, переводящее поверх-
поверхность Гх в поверхность Г2, то при этом отображении направления,
асимптотические для поверхности Тх, перейдут в направления, асимп-
асимптотические для поверхности Г2; поэтому проективно-аффинное пре-
преобразование Л, являющееся продолжением аффинного преобразова-
преобразования Л на все пространство Rs, переводит несобственные точки
поверхности Т1 в несобственные точки поверхности Г2 и отображает
первую^из этих двух поверхностей на вторую. Итак, две поверх-
поверхности Гх и Г2 проективного пространства R3 тогда и только тогда
принадлежат к одному и тому же проективно-аффинному классу,
когда соответствующие аффинные поверхности Тг н Г2 принадлежат
к одному и тому же аффинному классу.
Мы покажем, что проективно-аффинный класс поверхности вто-
Р°1° поРя^ка Г в проективном пространстве R3 или {что то же)
аФфинный класс поверхности Г в Rs полностью определяется
^ ^° есть за исключением случая, когда поверхность содержит несоб-
нную плоскость.
704 ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА [гл хх
проективным классом данной поверхности и проективным класса
той кривой второго порядка, которая является пересечением данпо'
поверхности с несобственной плоскостью.
Итак, посмотрим, по каким кривым поверхности различных про
ективно-аффинных классов пересекаются с несобственной плоскостью
Заметим, прежде всего, следующее: мы видели, что если при данном
проективном преобразовании пространства какая-нибудь плоскость л
отображается на некоторую плоскость я', то это отображение плос-
плоскости я на плоскость л' есть отображение проективное. В част-
частности, производимое проективно-аффинным преобразованием преоб-
преобразование несобственной плоскости является проективным преобра-
преобразованием. Отсюда следует, что всякие две поверхности, принадле-
принадлежащие к одному и тому же проективно-аффинному классу, пересекают
несобственную плоскость по проективно эквивалентным кривым вто-
второго порядка. Поэтому для определения проективного класса кривых
по которым несобственную плоскость пересекают кривые данного
проективно-аффинного класса, достаточно взять какую-нибудь по-
поверхность этого класса, например поверхность, задаваемую про-
простейшим каноническим уравнением поверхностей данного класса.
Этим уравнением будет для действительных конусов уравнение
х2 -|- Уг— z2 = 0 или, в однородных координатах,
Х1 + Х2 — Х3 = U; A40)
для мнимых конусов хг-J- у2 -\- z2 = 0 или, в однородных координатах,
Х\ -}-*! + *! = (>; (К4)
для эллипсоидов х2 -J- у2 -}- z2 = ± 1 или, в однородных координатах,
и т. д.
Заметим, во-вторых, что, по сказанному в § 4, несобственные
точки данной поверхности второго порядка совпадают с несобствен-
несобственными точками ее асимптотического конуса.
Как следует из простейших канонических уравнений (К5) и(К4)
конических поверхностей, действительный, соответственно мнимый,
конус пересекается с несобственной плоскостью по действитель-
действительному, соответственно по мнимому, овалу. В главе XIX, § 4, мы
выяснили, каков конус асимптотических направлений поверхностей
любого аффинного типа.
Конус асимптотических направлений эллипсоида является мнимым,
а конус асимптотических направлений как двуполостного, так и
однополостного гиперболоида — действительным конусом; конус асимп
тотических направлений параболоида вырождается в пару различны
плоскостей: действительных для гиперболического и мнимых сопр
женных для эллиптического параболоида.
§ 8] ПРОЕКТИВНО-АФФИННАЯ КЛАССИФИКАЦИЯ 705
Итак, эллипсоид, как действительный, так и мнимый, пересека-
пересекается с несобственной плоскостью по мнимому овалу. Гиперболоиды,
как однополостный, так и двуполостный, пересекаются с несобст-
несобственной плоскостью по действительному овалу. Параболоиды каса-
касаются несобственной плоскости по паре различных прямых: действи-
действительных в случае гиперболического, мнимых и сопряженных в случае
эллиптического параболоида1). Таким образом, в применении к невы-
рождающимся поверхностям мы уже доказали наше основное утвер-
утверждение: проективно-аффинный тип такой поверхности полностью
определен ее проективным классом и проективным классом ее пере-
пересечения с несобственной плоскостью.
Переходим к поверхностям ранга 3. Мы уже видели, что дейст-
действительный конус пересекается с несобственной плоскостью по
действительному овалу, а мнимый — по мнимому.
Остаются цилиндры. Как мы видели в § 4 главы XIX, конус
асимптотических направлений всякого цилиндра вырождается в пару
плоскостей: действительных и различных для гиперболического ци-
цилиндра, мнимых и сопряженных для эллиптического. Конус асимп-
асимптотических направлений параболического цилиндра вырождается в пару
совпадающих плоскостей. В соответствии с этим все цилиндры дают
в пересечении с несобственной плоскостью кривую, распадающуюся
на пару прямых, другими словами, все цилиндры касаются несоб-
несобственной плоскости; при этом гиперболические цилиндры касаются
несобственной плоскости по паре различных действительных прямых,
эллиптические — по паре мнимых сопряженных прямых, параболи-
параболические цилиндры касаются несобственной плоскости по паре совпа-
совпадающих прямых.
Чтобы наглядно представить себе всю картину, возьмем самый
обыкновенный круглый конус и три плоскости а, а', а", проходящие
через его вершину и расположенные следующим образом. Плоскость а
пересекает конус по паре его образующих. На рис. 254, а плос-
плоскость а есть плоскость рисунка. Единственной действительной точ-
точкой конуса, лежащей в плоскости а', пусть является его вершина
(рис. 254, б), так что плоскость а' пересекает конус по паре мнимых
сопряженных прямых. Наконец, плоскость а" возьмем так, чтобы
') Таким образом, гиперболоиды могут быть определены как невырож?
дающиеся поверхности второго порядка, пересекающиеся с несобственной
плоскостью по действительному овалу; среди этих поверхностей однополост-
ные гиперболоиды являются кольцевидными, а двуполостные—овальными.
Параболоиды могут быть определены как невырождающиеся поверхности,
касающиеся несобственной плоскости; при этом гиперболические параболои-
параболоиды являются кольцевидными, а эллиптические — овальными поверхностями,
в соответствии с чем касание первых происходит по паре действительных,
а касание вторых—по паре мнимых сопряженных прямых. Наконец, эллип--
соиды суть невырождающиеся поверхности (содержащие или нет действи-
действительные точки), пересечение которых с несобственной плоскостью происходит
по мнимому овалу.
П. С. Александров
706
ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА
Тгл. ххш
она касалась конуса по его образующей, которая, дважды взятая,
и является пересечением плоскости а" с нашим конусом (рис. 254, в).
Представим себе теперь три проективных преобразования Л, Л', Л"
пространства Р3, переводящих соответственно плоскости а, а', а
в несобственную плоскость. Каждое из этих преобразований превра-
превратит наш конус в цилиндрическую поверхность: преобразование А~~
в гиперболический, преобразование А' — в эллиптический, преобра-
преобразование Л" — в параболический цилиндр.
с g] ПРОЕКТИВНО-АФФИННАЯ КЛАССИФИКАЦИЯ 707
Переходим к поверхностям, распадающимся на пару плоскостей1).
Пара различных действительных плоскостей х2 — у2 = 0, соответ-
соответственно хг—1=0, записывается в однородных координатах в виде
д.2 х* = 0, соответственно х\—х? = 0. Пересечение с несобственной
плоскостью есть в первом случае пара различных прямых
хх ± х2 = 0, х4 = 0,
во втором — пара совпадающих прямых
Точно так же пара мнимых сопряженных плоскостей х\-\-х\ = 0,
соответственно х\^- х\ = 0, в пересечении с несобственной плос-
плоскостью дает в первом случае пару мнимых сопряженных прямых
х! ± ix2 = 0, xi = 0,
во втором — пару совпадающих (действительных) прямых
Итак, выяснение вопроса о характере расположения поверхностей
различных аффинных классов относительно несобственной плоскости
закончено. Закончена и проективно-аффинная классификация поверх-
поверхностей, так как из сделанного разбора всех представляющихся
случаев вытекает, что аффинный класс каждой поверхности взаимно
однозначно соответствует паре, состоящей из проективного типа
данной поверхности и из проективного типа ее пересечения с не-
несобственной плоскостью.
Заметим, что проективный класс пересечения поверхности данного
аффинного класса с несобственной плоскостью легко установить и
непосредственно, не обращаясь к конусу асимптотических направ-
направлений: достаточно взять простейшее уравнение поверхности данного
аффинного класса для эллипсоида х2 -f- у2 -\-z2 = ± 1, для однополост-
ного, соответственно двуполостного, гиперболоида хг~\-у%— z2 = ±1,
для параболоидов 2z — хг + у2, перейти затем в этих уравнениях
к однородным координатам и, наконец, положить x4 = 0.
Таким образом, получаются следующие кривые пересечения
с несобственной плоскостью х4 = 0:
х\ -г *H-*3 = 0, x4 = 0 для эллипсоида (действительного и мнимого),
xi~r*2 — ^e^Oj xt = 0 для однополостного и двуполостного
гиперболоидов,
х\±х\ = 0, xt = 0 для параболоидов.
2) Относящимися сюда очевидными соображениями мы уже воспользова-
воспользовались, когда устанавливали расположение цилиндров относительно несобст:
венной прямой. Сейчас повторяем сказанное для полноты картины.
23*
708
ГЕОМЕТРИЯ ПРОЕКТИВНОГО ПРОСТРАНСТВА
[ГЛ. ХХШ
Уравнения цилиндров в однородных координатах записываются
в виде
*i i" x\ -F х\ = 0 для эллиптического цилиндра
(действительного и мнимого),
х\— х\— А = 0 для гиперболического цилиндра,
х\— 2jcxx4 = 0 для параболического цилиндра,
из уравнений видно, что пересечения с несобственной плоскостью
дают: пару действительных прямых
х\—х\ = 0, х4 -•= 0 для гиперболического цилиндра,
пару мнимых прямых
х\-\-х\ — 0, xt = 0 для эллиптического цилиндра,
пару совпадающих прямых
xl — 0, x4 = 0 для параболического цилиндра.
Итогом всего исследования является следующая таблица:
Таблица поверхностей второго порядка
А. Невырождающиеся поверхности (поверхности ранга 4)
Аффинный класс и
его представитель
Проективный класс
поверхности
Проективный класс
пересечения поверхности
с несобственной плоскостью
1) Действительные
эллипсоиды
2) Мнимый эллипсоид
3) Двуполостные ги-
гиперболоиды
4) Однополостные ги-
гиперболоиды
5) Эллиптические па-
параболоиды
6) Гиперболические
параболоиды
7) Действительный
конус
Действительная оваль-
овальная поверхность
Мнимая овальная по-
поверхность
Действительная оваль-
овальная поверхность
Кольцевидная
иость
поверх-
Действительная оваль-
овальная поверхность
Кольцевидная
ность
поверх-
Действительная кони-
коническая поверхность
Мнимый овал
Мнимый овал
Действительный овал
Действительный овал
Пара мнимых сопря-
сопряженных прямых (од-
(одна действительная
точка пересечения)
Пара различных дей-
действительных прямых
Действительный овал
§ 8]
ПРОЕКТИВНО-АФФИННАЯ КЛАССИФИКАЦИЯ
709
Продолжение
Б. Поверхности ранга 3 (конические и цилиндрические)
Аффинный класс и
его представитель
Проективный класс
поверхности
ПроектипныГг класс
пересечения поверхности
с несобственном плоскостью
8) Мнимый конус (од-
(одна действительная
точка)
9) Действительный
эллиптический ци-
цилиндр
10) Мнимый эллипти-
эллиптический цилиндр
11) Гиперболический
цилиндр
12) Параболический
цилиндр
Мнимая коническая по-
поверхность (одна дей-
действительная точка)
Действительная кони-
коническая поверхность
Мнимая коническая
поверхность (един-
(единственная действитель-
действительная точка — несоб-
несобственная)
Действительная кониче-
коническая поверхность
Действительная кониче-
коническая поверхность
Мнимый овал
Пара мнимых сопря-
сопряженных прямых (од-
(одна действительная
точка пересечения)
Пара мнимых сопря-
сопряженных прямых (од-
(одна действительная
точка пересечения)
Пара действительных
различных прямых
Пара совпадающих
(действительных)
прямых
В. Поверхности проективного ранга 2 и 1 (пары плоскостей)
13) Пара действитель-
действительных пересекающих-
пересекающихся плоскостей
14) Пара мнимых пере-
пересекающихся плос-
плоскостей
15) Пара действитель-
действительных параллельных
плоскостей
16) Пара мнимых па-
параллельных плос-
плоскостей
17) Пара (действитель-
(действительных) совпадающих
плоскостей
Пара действительных
различных плоскостей
Пара мнимых различных
плоскостей
Пара действительных
различных плоскостей
Пара мнимых различных
плоскостей
Пара (действительных)
совпадающих плоско-
плоскостей
Пара различных дей-
действительных прямых
Пара различных мни-
мнимых прямых с дей-
действительной точкой
пересечения
Пара (действительных)
совпадающих пря-
прямых
Пара (действительных)
совпадающих пря-
прямых
Пара (действительных)
совпадающих пря-
прямых
ГЛАВА XXIV
ЕВКЛИДОВО «-МЕРНОЕ ПРОСТРАНСТВО
§ 1. Введение. Ортогональные матрицы
В я-мерном векторном пространстве L" мы можем говорить о ли-
линейной зависимости и независимости векторов, в я-мерном аффинном
(«точечно-векторном») пространстве R" мы, кроме того, можем го-
говорить о параллельности подпространств; но ни о длине векторов,
ни об углах между ними мы говорить не можем: у нас для этого
нет нужных определений, да и сама геометрия аффинного простран-
пространства направлена на другое, даже если мы ограничимся пространством
двух или трех измерений: в ней изучаются лишь так называемые
аффинные свойства фигур, т. е. свойства, которые, принадлежа
одной какой-нибудь фигуре, принадлежат всем фигурам, аффннно
эквивалентным данной. Такими свойствами являются, например,
свойство кривой или поверхности второго порядка быть (или не
быть) центральной, или иметь прямую центров, или не иметь ни
одного центра; свойство иметь (или не иметь) вещественные асимп-
асимптотические направления, вещественные прямолинейные образующие
и многие другие. Свойство кривой (или поверхности) второго по-
порядка иметь данный малый ранг г (или большой ранг R) также
является аффинным.
С точки зрения аффинной геометрии все аффинные координатные
системы равноправны: ведь переход от одной аффинной координатной
системы к другой равносилен аффинному преобразованию простран-
пространства, а при таком преобразовании аффинные свойства лежащих в нем
фигур остаются неизменными.
Ни длины векторов (т. е. расстояния между точками), ни углы
между векторами не являются аффинными свойствами: пара взаимно
перпендикулярных прямых при аффинном преобразовании может, как
мы знаем, перейти в любую другую пару пересекающихся прямых
(но не может перейти в пару параллельных).
Но при ортогональных преобразованиях, являющихся частным
случаем аффинных, длины векторов и углы между ними остаются
неизменными. По отношению к ортогональным преобразованиям при-
§ 11
ВВЕДЕНИЕ. ОРТОГОНАЛЬНЫЕ МАТРИЦЫ 711
моутольные координатные системы исполняют ту же роль, какую
любые аффинные системы координат исполняют по отношению к аф-
аффинным преобразованиям вообще; поэтому длины векторов и углы
между ними удобно рассматривать, именно пользуясь прямоугольными
системами координат.
Создать в данном л-мерном векторном (или точечно-векторном)
аффинном пространстве возможность измерять длины векторов и углы
между ними по образцу того, как это делается в обыкновенном
трехмерном пространстве, — это и значит, как говорят, ввести в это
пространство евклидову метрику, сделать его евклидовым простран-
пространством. Этим мы и будем сейчас заниматься.
Мы знаем, что квадратная матрица
называется ортогональной, если транспонированная матрица С* со-
совпадает с обратной С, т. е. если
СС* = Е или, что то же, С*С = Е A)
(где, как всегда, Е—единичная матрица). Расписывая каждое из
этих равенств согласно правилу умножения матриц, получаем два
условия 1):
условие ортогональности по строкам
СПС/1 + */2<72 + ••• + CinCjn = б,У B)
и условие ортогональности по столбцам
сисцЛ- c2ic2r\-.. • + cnienl = btl1 C)
причем и то и другое условие предполагается выполненным для
всех i и j.
Каждое из этих условий эквивалентно условию ортогональности
A). Из определения A) ортогональности сразу следует, что детер-
детерминант ортогональной матрицы равен + 1. В самом деле, из A)
вытекает, что
detCdetC* = (detCJ=l,
откуда утверждение и следует. Далее, обратная матрица С к ор-
ортогональной матрице ортогональна. В самом деле, требуется дока-
доказать, что
') Через S./обозначается, как известно, число, равное 1, если i=i, и равное
"Улю, если i ф {.
712 ЕВКЛИДОВО' Л-МЕРНОЕ ПРОСТРАНСТВО [ГЛ. XXIV
Но это равенство верно, так как и правая, и левая часть его есть С
Наконец, произведение двух ортогональных матриц Сх и С2 есть
ортогональная матрица. В самом деле,
Так как единичная матрица Е, очевидно, ортогональна, то ортого-
ортогональные матрицы данного порядка п образуют (по умножению) груп-
группу— подгруппу группы всех невырождающихся матриц порядка п.
Определение 1. Пусть elt . .., еп и ei .. ., z'n —два базиса
в линейном пространстве L". Скажем, что эти базисы ортогонально
эквивалентны, если матрица перехода от одного из них к другому
есть ортогональная матрица.
Из только что доказанного следует, что отношение ортогональ-
ортогональной эквивалентности удовлетворяет условиям рефлексивности, сим-
симметрии и транзитивности, так что все базисы пространства L" рас-
распадаются на непересекающиеся классы Кх ортогонально эквивалент-
эквивалентных между собою базисов.
§ 2. Положительно определенные симметричные билинейные
функции в векторном пространстве
Предположим, что в л-мериом векторном пространстве L" дана
положительно определенная симметричная билинейная функция
? (u, v). Значит, для любого вектора и =5^0 имеем W {и, и)>0.
Как известно (из § 5 гл. XIII), существует базис ех, ..., еп про-
пространства L", относительно которого ?(u, v) записывается в виде
канонической билинейной формы:
(n, v)= 2i Х;У; "ри
1 = 1 v — #1е1 +••• "Г Упеп-
Мы сейчас дадим новое доказательство этой теоремы, не опираю-
опирающееся на теорию квадратичных форм.
Замечание 1. Во всей главе мы под "*? (u, v) всегда будем
понимать положительно определенную симметричную билинейную
функцию.
Лемма 1. Для того чтобы относительно данного базиса ех, ...,е«
функция Y (u, v) записывалась в виде (I), необходимо и достаточно,
чтобы было
W (е/( еА) = б,А для любых /, А=1, 2 л. B)
В самом деле, пусть базис ех, ..., еп удовлетворяет условию B).
Тогда, вследствие билинейности функции Y(u, v), имеем
? (u, v) - ? (х^ +...+ хпеп, ухег + ... + уяе„) =
= S *,у, ? (е,., еу) = S x,yfiu = Sх,У{-
0 2] БИЛИНЕЙНЫЕ ФУНКЦИИ В ВЕКТОРНОМ ПРОСТРАНСТВЕ 713
Обратно, пусть относительно базиса ех, ..., е„ функция У(u, v)
записывается в виде A). Подставив в A) векторы u = e,-, v = eft
и помня, что относительно базиса ех, ..., е„ вектор е,- имеет коор-
координату дг,- = 1, а координаты Xj=0 при ]ф1, а вектор eft—коор-
eft—координату J/ft=1 и У]—® ПРИ }фк, видим, что формула A) переходит
в ЧЧе,-, efc) = 6,ftI т. е. в формулу B).
Назовем теперь векторы u, v ортогональными между собою (от-
(относительно функции ?), если W (u, v) = 0; совокупность векторов
Ui ..., us назовем ортогональной, если при /, А=1, 2, ..., s,
1 ф к, любые два вектора u,-, uk этой совокупности ортогональны;
если при этом Т (u;, и,) = 1 (/=1, 2, ..., s), то совокупность
векторов их, ..., us называется ортонормальной.
В частности, базис ех, . . ., еп называется ортоноршальным отно-
относительно функции Ч? (u, v), если он удовлетворяет условию B).
Лемма 2. Всякая ортогональная {относительно функции Ч (и, v))
совокупность отличных от нуля векторов их, ..., us пространства
L" линейно независима (и, значит, ^)
В самом деле, пусть
Требуется доказать, что Х(- = 0 (при любом / = 1, 2 s).
Так как v=0, то Y (v, u() = 0, так что
0 = Y (v, и,) = W2 Xj&j, иЛ = 2 Ь/Р (иу, и,.) - Х,-? (и,, и
Так как W (и,-, и() Ф 0, то Я,- = 0, что и требовалось доказать.
В силу леммы 1 наша задача—построить для данной функции
^? (u, v) базис, в котором она принимает вид A), — равносильна
доказательству следующего предложения.
Теорема \. В векторном пространстве L" существует базис,
ортонор мольный относительно любой наперед заданной положительно
определенной симметричной билинейной функции W (u, v).
Доказательство. Пусть в векторном пространстве L" дан
какой-нибудь базис их, .. ., и„. Мы прежде всего построим попарно
ортогональные между собою отличные от нуля векторы vx, ..., \п,
являющиеся линейными комбинациями векторов их, ..., un. Построе-
Построение будет вестись по индукции. Положим vx=ux. Ищем теперь
такое число Хх, чтобы вектор
v2 = u2 + Vi
был ортогонален к вектору vx, т. е. чтобы
714 ЕВКЛИДОВО Л-МЕРНОЕ ПРОСТРАНСТВО [ГЛ. XXIV
Так как Y (vx, ух)=^=0, то из условия
число Я,х определяется однозначно:
Так как
v2 = и3 + XlVl = и2
и векторы иг и и2 линейно независимы, то Vg^O.
Предположим теперь, что построена ортогональная система от-
отличных от нуля векторов \ъ ... , vft_j, являющихся линейными
комбинациями векторов их, ... , uft_x. При любых Хх, ... , \к
вектор
v* = tt* + Vi+"-+^*-iV*_i C)
является, очевидно, линейной комбинацией векторов nk, vx, ... , \k_x
и, значит, линейной комбинацией векторов uk, ulr ... , tlA_1:
vA = uA+c1ui+---+c*-iuft-i; C')
при этом вектор щ входит в линейную комбинацию C') с тем же
коэффициентом 1, с которым он входил в комбинацию C); это про-
происходит от того, что векторы vx, ... ,vA_x суть линейные комбина-
комбинации одних лишь векторов uv ... , щ_1.
Найдем теперь такие Хх, ... , ХА_Х, чтобы вектор C) был ор-
ортогонален к каждому из векторов vx, .. . , vft_x, т. е. чтобы для
каждого г = 1, 2, ... , k—1 выполнялось условие
условие D) может быть записано в виде
(v,, v,.)=0, D')
откуда и определяется однозначно Я,,-. Остается доказать, что A
В линейную комбинацию C') вектор nk входит с коэффициентом 1;
поэтому C') есть нетривиальная линейная комбинация линейно не-
независимых между собою векторов иь ... , uk; значит, \кф0.
Индукция заканчивается на k = n построением ортогональной (зна-
(значит, линейно независимой) системы векторов vx, . .. , vn в л-мерном
пространстве L"; поэтому vx, ... , vn есть ортогональный базис про-
пространства L". Положим, наконец, е;= v- при i = \,2,... ,п-
У ? (v,-, v,)
Тогда
— базис ex, ... , е„ является ортонормальным, и теорема 1 доказана.
g 21 БИЛИНЕЙНЫЕ ФУНКЦИИ В ВЕКТОРНОМ ПРОСТРАНСТВЕ 715
Замечание 2. Если векторы их, ... , um, от <! л, уже являются
попарно ортогональными, то наше построение автоматически дает
В самом деле, vx = ur Предположим, что равенства У,- = и,. до-
доказаны для / = 1, ..., k—1, где Аг^те. Докажем, что vk = uk.
В наших предположениях равенство C), определяющее вектор
\к, превращается в
а условия D') для определения А,х, ... , кк_1 — в
W(uk, u.-H-W"/. и;) = 0 (/ = 1, 2 k-l). (V)
Но так как / < k ^ го, то ? (uk, U,) = 0; кроме того, ? (и,-, и,) Ф 0,
так что D") означает просто, что Х,=0 при всех izz^k—1, т. е.
\k = uk. Мы доказали следующее
Добавление к теореме 1. Всякую ортогональную (орто-1
нормальную) относительно данной функции XV (u, v) систему векто-
векторов Uj, . .. , um пространства L" можно дополнить до базиса про-
пространства L", ортогонального (ортоноршального) относительно функции
?(и, v).
Замечание 3. Описанный выше переход от произвольного ба-
базиса и,, . . . , ип пространства L" к базису .vx, ... , vn ортогональ-
ортогональному (относительно некоторой функции Y(u, v)) принято называть
ортогонализацией (базиса их, ... , и„).
Этот процесс ортогонализации с различными его обобщениями
имеет в математике очень большие и разнообразные применения.
Теорема 2. Пусть базис ех, ... , е„ пространства L" ортонор-
мален относительно функции Ч; (u, v). Для того чтобы базис &[,..., е'п
также был ортонормален (относительно той же функции), необходимо
и достаточно, чтобы матрица перехода от базиса е1( .., , еп к ба-.
зисУ е^, . . . , е^, была ортогональной.
В самом деле, пусть
ei- = ai;ei + • • • + ani е„ (/ = 1, 2, ... , л).
Тогда
s4r(a1.ex+.. .+eA,eA+.. .+aB,eB, avex+... +
Поэтому условие W (e[, e'f) — Ьц тождественно с условием
716 ЕВКЛИДОВО Л-МЕРНОЕ ПРОСТРАНСТВО [гл. XXIV
т. е. с условием ортогональности матрицы
"а ••• ат
«22 ••• апг
и2п • ' • ипп
чем теорема 2 доказана.
Так как матрица А является матрицей линейного преобразована
переводящего базис е1; ... , е„ в базис е'ъ ... , е„, то мы можем
сформулировать теорему 2 и следующим образом.
Теорема 2'. Все ортогональные матрицы и только они являются
матрицами линейных преобразований, переводящих один ортонормаль-
ный (относительно какой-нибудь функции Ч1" (u, v)) базис пространства
L" в другой ортонор мальный (относительно той же функции) базис.
Перефразированной теоремой 2' является
Теорема 2". Совокупность всех базисов пространства Ln, op-
тонормальных относительно данной функции Ч? (u, v), или, что то же,
базисов, в которых функция принимает канонический вид A), есть
некоторый класс Кчг ортогонально эквивалентных между собою бази-
базисов пространства L".
Обратно: пусть в пространстве L" выбран некоторый класс К ор^
тогонально эквивалентных базисов. Возьмем какой-нибудь из этих
базисов ех, . .. , е„ и зададим симметричную положительно опреде-
определенную билинейную функцию, положив
Тогда во всех базисах ei, е'ъ ... , е^, принадлежащих к классу К
(и только в этих базисах), функция ^?k (и, v) будет иметь канониче-
каноническое представление
так что класс ортонормальных (относительно функции ^?k) базисов
есть не что иное, как первоначально данный класс К:
§ 3. Определение евклидовых пространств
и простейших относящихся к ним понятий
Определение 2. Ввести в векторном пространстве Ln евкли-
евклидову метрику — значит определить в этом пространстве положительно
определенную симметричную билинейную функцию W (u, v). Прост-
Пространство L" с какой-нибудь введенной в нем евклидовой метрикой
называется евклидовым п-мерным пространством.
_ 3] ОПРЕДЕЛЕНИЕ ЕВКЛИДОВЫХ ПРОСТРАНСТВ 717
Определение 3. Значение билинейной функции ?A1, v) для
двух данных векторов u, v называется их скалярным произведением
(в данном евклидовом пространстве) и обозначается через (u, v).
Базисы ортонормальные относительно функции W (и, v) называют-
называются ортонормальными базисами данного евклидова пространства.
Из только что данного определения скалярного произведения
(U> v) следует, что оно обладает алгебраическими свойствами эле-
элементарного скалярного произведения в обычном трехмерном прост-
пространстве:
1° (u, v) = (v, и).
2° A1, + Uj, v) = (u1I v) + (u2, v).
3° (%vl, v) = X(u, v).
4° Число (и, и) для всех векторов u^O положительно, для
U = 0 равно нулю. Оно называется скалярным квадратом вектора U.
Определение 4. Число
называется длиной вектора и в евклидовом пространстве L". Только
нулевой вектор имеет длину, равную нулю. Если в данном ортого-
ортогональном базисе ех, еа еп имеем
т. е.
то, очевидно, | u|=J/*i + *i+ • • • +*п-
На основании теоремы 2 основное определение 2 может быть
сформулировано и так:
Определение 2'. Ввести в л-мерное векторное пространство
L" евклидову метрику — значит выбрать среди всех классов ортого-
ортогонально эквивалентных между собою базисов пространства один оп-
определенный класс К- Пространство L", рассматриваемое вместе с этим
классом К, называется п-мерным евклидовым векторным простран-
пространством L". Базисы, составляющие этот класс, называются ортонормаль-
ными базисами евклидова пространства L". Положительно определен-
определенная симметричная функция xSk (U, v), определенная в любом (и тогда
в каждом) из ортогональных базисов е15 ... , е„ пространства Ln
по формуле
называется скалярным произведением (u, v) векторов и и \; базисы
класса К тождественны с базисами, ортонормальиыми относительно
Функции Wk.
718 ЕВКЛИДОВО Л-МЕРНОЕ ПРОСТРАНСТВО [ГЛ. XXIV
Определение 5. Ввести евклидову метрику в л-мерное то-
точечно-векторное пространство R" — значит ввести ее в векторное
пространство L" всех векторов пространства R".
Точечно-векторное пространство R" с введенной в нем евклидо-
евклидовой метрикой называется точечно-векторным п-мерным евклидовым
пространством (или просто л-мерным евклидовым пространством)
и обозначается через Еп.
Определение 6. Координатная система Оех, е2, ... t e в
пространстве Е", единичные векторы ех, е2, ... , е„ которой обра-
образуют ортопормальыый базис (векторного пространства L" всех век-
векторов пространства Е"), называется прямоугольной (или ортогональ-
ортогональной) системой координат евклидова пространства Е".
Определение 7. Расстоянием между двумя точками А, В
пространства Е" называется длина вектора АВ; оно обозначается через
р(А, В) = 9 (В, А) = \АВ\
и равно нулю тогда и только тогда, когда точки А и В совпадают.
Если точки А и В заданы своими координатами в какой-нибудь пря-
прямоугольной системе координат:
А-=(хъ х2, ... , хп), В={уъ уг, ... , у„),
то для вектора АВ имеем
АВ={у1—х1, у2 — х2 У„ — х„},
так что
р(Д В) = V(Xl—yj)*+...-r(х„-упJ
— обобщение формулы расстояния между двумя точками на плоско-
плоскости и в трехмерном пространстве.
Наконец, имеет место следующее почти очевидное, но тем не
менее очень важное предложение, доказанное в главе IV, § 2, для
трехмерного пространства.
Теорема 3. Координаты каждого вектора U евклидова прост-
пространства относительно данного ортоноршального базиса ех, е2, .. ¦ , ел
равны соответственно скалярным произведениям вектора и на век-
векторы elf е2, ... , е„; для и = xxex -f-... -f *„е„ имеем х,- = (и, е,-)
(/ = 1, 2, ... , л).
В самом деле, из и = ххех -f-... -J- хпеп следует
(и, е/) = дг1(е1, е,-) -f ... + xi (е,-, е,-)Н +хп(е„, е,-)=*„
что и требовалось доказать.
- ,, НЕРАВЕНСТВО КОШИ — БУНЯКОВСКОГО 719
§ *J
§ 4. Неравенство Коши—Буняковского и его следствия. Углы
Чтобы идти дальше, нам понадобится следующее предложение:
Для любых двух векторов u, v евклидова п-мерного пространства
имеет место неравенство
(и, v)^|u|-|v| (неравенство Коши—Буняковского), A)
причем равенство получается, лишь если векторы и и v коллинеарны
(т е. один получается из другого умножением на некоторое число Я).
Достаточно доказать это неравенство для векторов, отличных
от нуля.
Предположим сначала, что | и | = | v | = 1. Возьмем какой-нибудь
ортонормальный базис е1? ... , е„, и пусть
Тогда подлежащее доказательству неравенство A) при |u| = |v| = l
превращается в
2 **</*<!¦ (!')
k
Но, очевидно,
B)
причем в B) равенство наступает, лишь когда xk = yk для всех k,
т. е. когда u = v.
Так как 2*| = | u|2 = I, 2#ft = lvl2 = 1> T0 неравенство B) в
рассматриваемом частном случае совпадает с 2 ]У xkyk ^ 2, т. е. с не-
неравенством A'), причем мы помним, что равенство получается лишь
при и = v.
Итак, в частном случае | и | = | v | = 1 наше предложение доказано.
Пусть теперь u, v — какие угодно отличные от нуля векторы.
Тогда векторы —, -г-^у имеют длину 1, так что для них
т- е. (u, v) з?^| и|-| vl, что и требовалось доказать.
и v
Если при этом (u, v) = | и ] • | v |, то для векторов у^-г > т^т имеем
TSJ' 1Тг) = 1> 0ТКУда> по доказанному, следует -щ
= у^-, т. е.
при А, = ¦¦ Теорема Коши — Буняковского доказана.
720 ЕВКЛИДОВО Л-ЫЕРНОЕ ПРОСТРАНСТВО [ГЛ. XXIV
Замечание 1. Пусть в евклидовом пространстве дан ортонор-
мальпый базис, так что tt^foj, х2, ... , хп\, v = {ylt t/2, ... , #J.
Тогда |u| = |/*M-*?-r ... + *¦, \\\ = Уу\->гУ\+ •¦•~гу1,
(u, v) = x1y1-j- ... -\-хпуп и неравенство Коши — Буняковского превра-
превращается в арифметическое неравенство
/^>1 О")
верное для любых вещественных чисел хъ ... , хп; yv ... , у .
Определение 8. Величиной угла между двумя отличными от
нуля векторами u, v в л-мерном евклидовом пространстве называется
число ф, О^ф^я, определенное условием
Из теоремы Коши — Буняковского следует, что угол ф (в пределах
О^ф^Гя) однозначно определен. При этом ф^-^- (т. е. векторы
и и v перпендикулярны или ортогональны между собою) тогда
и только тогда, когда
(u, v) = 0.
Теперь мы можем сказать, что оргонормальный базис в л-мерном
евклидовом пространстве есть просто система из п попарно перпен-
перпендикулярных (ортогональных) между собою ортов, т. е. векторов
длины 1.
Из неравенства Коши — Буняковского легко вытекает так назы-
называемое «неравенство треугольника для векторов», а именно:
|tt-rv|<|tt| + |v|. D)
Для того чтобы его доказать, напишем тождество
|u + v|2 = (u4-v, u + v) = (u, u) + 2(u, v) + (v, v) E)
(непосредственно вытекающее из билинейности и симметрии скаляр-
скалярного произведения, как функции от двух векторов).
Из E) выводим, далее (пользуясь неравенством Коши — Буня-
Буняковского),
Мы уже заметили, что расстояние р (А, В) между двумя точками
л-мерного евклидова пространства Е" удовлетворяет следующим
условиям:
§ 5]
ПОДПРОСТРАНСТВА ЕВКЛИДОВЫХ ПРОСТРАНСТВ 721
1° р (А, В) равно нулю тогда и только тогда, когда точки А и В
совпадают.
2° р(Д В) = р(В, А).
Имеет еще место так называемое неравенство треугольника (для
точек), а именно: каковы бы ни были три точки А, В, С, всегда
3° р(А, В) + р(В, С)>р(Д С). _^ _^ _^
Для доказательства положим и — АВ, v — BC; тогда \у=ЛС =
= u + v, н мы имеем по формуле D)
РИ, С)<р(Д В)-г-рE, С).
Замечание 2. Из формулы E) вытекает, что для двух взаимно
перпендикулярных векторов u, v справедливо
|u + v|* = |u|2 + |v|2. F)
В частности, если точки А, В, С определяют прямоугольный тре-
треугольник, т. е. если векторы и=^АВ и \ = ВС взаимно перпенди-
перпендикулярны (являются катетами треугольника ABC), то для его гипо-
гипотенузы АС имеем АС — АВ-\-ВС, н, следовательно (по формуле F))
G)
Это равенство (или эквивалентное ему равенство. F)) выражает тео-
теорему Пифагора в л-мерном евклидовом пространстве.
§ 5. Подпространства евклидовых пространств.
Ортогональное дополнение к данному подпространству
Так как функция (u, v), т. е. скалярное произведение любых
двух векторов евклидова пространства Е", определена, в частности,
и для векторов, лежащих в произвольно данном подпространстве
пространства Е", то всякое подпространство евклидова пространства
есть евклидово пространство.
Пусть Ер есть подпространство евклидова пространства Е". На-
Назовем вектор u?Z:" ортогональным к подпространству Ер, если он
ортогонален ко всякому вектору v, лежащему в этом подпростран-
подпространстве. Так как никакой (отличный от нуля) вектор не ортогонален
к самому себе, то ни один (отличный от нуля) вектор, ортогональ-
ортогональный к подпространству Ер, не лежит в этом подпространстве. Из
линейности скалярного произведения следует, далее, что вектор и,
ортогональный ко всем векторам v2, .. . , vpt образующим какой-
нибудь базис подпространства Ер, будет ортогонален и ко всему
подпространству Ер.
722 ЕВКЛИДОВО Я-МЕРНОЕ ПРОСТРАНСТВО [ГЛ. XXIV
Далее, если векторы ult ... , ик ортогональны к подпростран-
подпространству ЕР, т. е. ортогональны к любому vg?P, то тем же свойством
будет обладать и всякий вектор u = A^Uj-+-...+ ^ftuft, являющийся
линейной комбинацией векторов щ, ... , щ. Отсюда сразу вытекает
предложение.
Совокупность всех векторов и ? ?", ортогональных к подпрост-
подпространству ?f пространства Еп, есть некоторое векторное подпрост-
подпространство El — A/?f ^ Е"; оно называется ортогональным дополнением
к подпространству ЕЧ в пространстве Еп или, короче, аннулятором1)
подпространства ?f в Е".
Мы уже заметили, что нулевой вектор есть единственный вектор,
одновременно принадлежащий данному подпространству Е% и его ан-
нулятору NE?.
Возьмем в подпространстве ?f какой-нибудь ортонормальный базис
elf е2, ... , ер A)
и дополним его до ортонормального базиса
^l! •. • 1 е^; ер+1, ... , е„ B)
всего пространства Еп (мы видели на стр. 715, что это всегда
возможно).
Векторы е^+1, ... , е„ (будучи ортогональными ко всем векторам
ei. • • • . еР< составляющим базис подпространства ?f) ортогоиальны
ко всему подпространству ?f и, следовательно, лежат в Е%. Отсюда
следует, что подпространства ?f и ?| в своей совокупности порож-
порождают все пространство Еп; а так как пересечение Е{ и Е\ состоит
из одного нулевого вектора, то Е" есть прямая сумма (любого)
подпространства Е{ и его аннулятора E\ = NE{.
В главе XII, § 8, мы доказали (опираясь на основную теорему
о системах однородных линейных уравнений), что размерность анну-
аннулятора р-мерного подпространства ?f равна
q = n—р. C)
Даднм теперь второе, прямое доказательство формулы C). Для этого
достаточно доказать, что ортонормальная система
состоящая из п—р векторов, есть базис пространства Е\. В самом
деле, система D) линейно независима (так как ортогональна), остается
доказать, что каждый вектор v?E% есть линейная комбинация
*) В главе XII, § 8, мы определили аннулятор NW подпространства L
векторного пространства L", снабженного фиксированным базисом et, ¦¦¦ < |«'
Теперешнее определение аниулятора совпадает с определением, данным в з
главы XII, если в последнем под базисом elf ... , е„ понимать любой орт-
нормальный базис пространства L" с введенной в нем евклидовой метрико
^ 5] ПОДПРОСТРАНСТВА ЕВКЛИДОВЫХ ПРОСТРАНСТВ 723
векторов D). Но это почти очевидно. Если
v = х^Ч-... +хр
то
*i = (v> ej) =
v = xp+
что и требовалось доказать.
Формула C) эквивалентна основной теореме о системах однород-
однородных уравнений (теорема 12 главы XII): достаточно вспомнить, что
аннулятор подпространства Ер cz Е", снабженного каким-нибудь ба-
базисом
ai = {«11, в„, .... аы\,
совпадает с аннулятором этого базиса, т. е. с пространством реше-
решений системы уравнений
оа*1 + аи*г+ •••+ а ы*п = О,
«2 А + «22^2 + • ¦ • + a2ntn = О,
«|.l'l + аР*** +•¦¦+ йрп1п = 0.
Таким образом, дав прямое доказательство формулы C), мы этим
заново и очень просто доказали основную теорему о системах одно-
однородных линейных уравнений.
Замечание 1. Два подпространства Е' и Е" пространства Е"
называются ортогональными между собою, если каждый вектор од-
одного из этих подпространств ортогонален к каждому вектору другого.
Очевидно, что каждое подпространство Е", ортогональное к данному
подпространству Е', содержится в анпуляторе NE' этого последнего.
В этом смысле аннулятор подпространства Е' в Еп есть макси-
максимальное подпространство пространства Еп, ортогональное к данному
подпространству ?'.
Напомним, наконец, формулу г)
NNEp = Ep, E)
выражающую симметрию свойства одного подпространства быть ан-
аннулятором другого: если подпространство Е% состоит из всех векто-
векторов v?En, ортогональных к пространству Е\, то Е\ состоит из всех
векторов, ортогональных к Е\.
х) Доказанную в главе XII, § 8, стр. 319.
ГЛАВА XXV
ЛИНЕЙНЫЕ ОПЕРАТОРЫ, БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ
ФУНКЦИИ В ЕВКЛИДОВЫХ ПРОСТРАНСТВАХ. ПОВЕРХНОСТИ
ВТОРОГО ПОРЯДКА
§ 1. Инвариантные подпространства и собственные векторы
линейного оператора в любом векторном пространстве
Сведения о линейных операторах, изложенные в главе ХП, мы
в этом параграфе дополним некоторыми дальнейшими предложениями;
онн имеют место в любых векторных пространствах, но в этих лек-
лекциях будут рассматриваться лишь главным образом в применении
к пространствам с евклидовой метрикой.
Определение 1. Пусть Л —>линейный оператор в векторном
пространстве L". Подпространство Lo пространства L" называется
инвариантным подпространством для оператора Л, если для любого
вектора u?L0 имеем <Au?L0 (т. е. если оператор Л отображает
пространство Lo в себя AL0 ^ Lo).
Рассмотрим, в частности, случай одномерного инвариантного под-
подпространства Ц s L". Тогда для всякого вектора и ? L\ имеем
Ли?Ц, т. е.
Лп = ки, A)
где X — некоторое вещественное число.
Определение 2. Всякий отличный от нуля вектор и, удов-
удовлетворяющий равенству A) (при некотором числе X), называется
собственным вектором оператора Л, а число X (однозначно опреде-
определенное равенством A)) называется собственным значением оператора Л,
соответствующим данному собственному вектору и.
Замечание. Про собственный вектор и, удовлетворяющий ра-
равенству A) при данном Я, говорят, что он соответствует собствен-
собственному значению X, При этом из самого условия A) следует, что
каждый собственный вектор оператора Л соответствует лишь одному
собственному значению, тогда как данному собственному значению
соответствует бесконечное множество коллинеарных между собою
_ <i ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА 725
собственных векторов, но могут соответствовать и линейно незави-
независимые между собою собственные векторы.
Мы видим, что каждый (отличный от нуля) вектор одномерного
инвариантного подпространства (данного оператора А) есть собст-
собственный вектор оператора Л. Очевидно и обратное: одномерное под-
подпространство, порожденное данным собственным вектором оператора Л,
есть инвариантное подпространство этого оператора.
Непосредственно из определения собственных векторов вытекает
следующее предложение:
Если базис пространства L" состоит из собственных векторов
е, ¦¦•,еп Данного оператора А, соответствующих собственным зна-
значениям
Хг, . . ., Х„,
то в этом базисе оператор А имеет матрицу А диагонального вида:
К О
B)
о
Обратно, если в некотором базисе ег, ...,е„ матрица оператора
имеет вид B), то ех, ..., е„ являются собственными векторами опе-
оператора Л, а Хг, ..., Х„ суть соответственно их собственные значения.
В этой главе мы до конца выясним вопрос о тех линейных опе-
операторах евклидова пространства, матрица которых в некотором ор-
тонормальном базисе имеет вид B), для которых, другими словами,
можно найти ортонормальный базис пространств, состоящий из п
собственных векторов.
Но пока мы рассматриваем еще произвольное векторное прост-
пространство L" и в нем произвольный линейный оператор Л. Будем разы-
разыскивать собственные векторы и собственные значения этого опера-
оператора и, следовательно, его одномерные инвариантные подпространства.
Мы увидим, что если оператор А не имеет инвариантного одномер-
одномерного подпространства г) (а значит, не имеет собственных векторов),
то он имеет инвариантное подпространство размерности 2.
') Таков, например, оператор А, определенный как вращение плоскости
вокруг точки О (начала прямоугольной системы координат Оху) на некоторый
угол а, 0 < а < л, т. е. линейное (ортогональное) преобразование, записы-
записывающееся в виде
х1 = х cos а—у sin а,
yi = х sina+г/ cos а.
При этом преобразовании каждый вектор и поворачивается на угол а,
л< а < Л) следовательно, никакой вектор и не переходит в вектор ви-
вида Аи, т. е. не оказывается собственным вектором.
726
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
[гл. xxv
Выберем в пространстве L" какой-нибудь базис ех, е2, ... е
относительно которого оператор Л имеет матрицу ' "'
U21 • • • an
fl22 • • • пп1
а„„ ... а„
C)
Тогда для вектора и = лгге, + .. . + лгпеП с координатами хъ ...,х
вектор Ли будет иметь координаты
х\ =
х\ ==
агзхг
а1пхп,
а2пх„,
D)
annxn.
Условие для того, чтобы вектор и был собственным вектором
с собственным значением X, есть
Ла = Хи- A)
расписывая это условие покоординатно, получим уравнения
аПХ1 + а!2Х2-Г • • • + аЫХп = *¦*! (' = 1. 2. •••>«), A')
т. е. уравнения
(an — X)xl+ a12x2+...+ alnxn = 0,
E)
"„Лт
Это — система однородных линейных уравнений относительно коор-
координат xL, x2,...,xn вектора и; нас интересуют лишь ненулевые
векторы — решения системы E); они существуют тогда и только
тогда, когда детерминант системы E) равен нулю, т. е. когда Я
удовлетворяет уравнению л-й степени
ап — К а12 ...аы
а21 а22 ^ • • • аЪп
= 0.
F)
Обозначим детерминант, составляющий левую часть уравнения F),
через Д. (X). Значок е прн D (X) поставлен потому, что мы построили
детерминант, пользуясь базисом е = [е1, е2, ..., еп].
g ]i ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА 727
Очевидно,
Д {X)=det(A — XE). F')
Докажем, что в действительности многочлен Д (Я) от выбора
базиса е пространства L" не зависит, т. е. что для любого другого
базиса e' = [ei, ...,e'n] пространства L" имеем
Пусть матрица перехода от базиса ej, ..., е„ к базису е^, ..., е„ есть
(невырождающаяся) матрица С. Относительно базиса е^, ..., е^, опе-
оператор Л имеет матрицу
v Л'
так что
= C-1AC—C~iXEC= С (Л—Я?) С
н
Д., (Я) hs det (А' —ХЕ) з= det С det (Л — Х?) det С =
= det(i4—Я?)=Д (Я,),
чем наше утверждение доказано.
Итак, многочлен л-й степени
,1—Я
,... a,
...ann-X
F*)
не зависит от выбора того или иного базиса пространства L", т. е.
от того, какой именно матрицей А записан данный оператор Л, он
зависит лишь от самого этого оператора и потому называется ха-
характеристическим многочленом оператора Л. Уравнение F), т. е.
уравнение D(X) = 0, называется характеристическим уравнением опе~
ратора Л (и матрицы А, представляющей этот оператор в любом
базисе е1>...,еп); корни уравнения F) называются характеристиче-
характеристическими числами оператора Л и его матрицы А.
Каждое число Я, являющееся собственным значением какого-либо
собственного вектора оператора Л, есть корень характеристического
многочлена D (X), т. е. характеристическое число оператора Л. Об-
Обратно, если X есть корень уравнения F), то, подставляя его в урав-
уравнения E), сможем получить ненулевое решение и={лг1, ...,хп) си-
системы уравнений E), т. е. собственный вектор оператора Л, соот-
соответствующий собственному значению Я. Поэтому характеристические
числа оператора Л являются собственными значениями; однако при
этом надо помнить, что только вещественные характеристические
728 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
числа соответствуют вещественным решениям и. = {хъ .. ,,хп\ си-
системы E), т. е. вещественным векторам пространства L", являю-
являющимся собственными векторами для данного оператора Л.
Так, мы уже упоминали, что преобразование плоскости, записы-
записывающееся в прямоугольной системе координат равенствами
х' = х cos a — у sin а,
у' =х sin а -\-у cos а
(вращение вокруг начала координат), не имеет (вещественных) соб-
собственных векторов; но оно нмеет мнимые характеристические числа —
корни уравнения
cos а—% —sin а
, з=Л2 — 2cosa-X-j-l =0,
sin a cos а—л
а именно:
Хьг = cos a ± }^cos2 a — 1 = cos a ± / sin a.
Во всяком случае все корни, равно как все коэффициенты, много-
многочлена D (к) не зависят от выбора базиса ег еп, онн, как гово-
говорят, являются инвариантами оператора Л (т. е. числами, опреде-
определенными, как скоро задан сам оператор Л).
Теорема 1. Всякий линейный оператор Л в векторном прост-
пространстве L" имеет инвариантное подпространство размерности 1 или 2.
Доказательство. Если характеристический многочлен D{X)
оператора Л нмеет хотя бы один вещественный корень1), то этот
оператор имеет хотя бы один собственный вектор, а следовательно,
имеет и одномерное инвариантное подпространство (этим вектором
порожденное).
Требуется доказать, что если среди корней многочлена D (X) нет
вещественных, то оператор Л имеет двумерное инвариантное под-
подпространство. Это вытекает из следующего вспомогательного пред-
предложения.
Лемма. Если Яо= a -f- р/, E=5^=0, есть корень многочлена D (X),
то существуют два линейно независимых вектора и и v, которые
в своей совокупности порождают инвариантное подпространство опе-
оператора Л {имеющее, очевидно, размерность 2).
Итак, остается доказать лишь лемму.
Берем какой-нибудь базис ег, ..., е„ пространства L" и подстав-
подставляем в уравнения E) значение X = X0 = a-{-$i. Тогда этим уравне-
уравнениям удовлетворяет набор комплексных чисел2)
G)
') В частности, если п нечетно.
2) Координаты относительно базиса tt е„ собственного «мнимого»
вектора оператора Л-
R 1] ИНВАРИАНТНЫЕ ПОДПРОСТРАНСТВА 729
которые не все равны нулю. Отсюда уже следует, что из векторов
ч = 6Л + ---+6ве„, v = TIe1+...+T]nen (8)
по крайней мере один отличен от нуля; то, что они оба отличны от
нуля и, более того, линейно независимы, будет доказано несколькими
строками ниже. Набор комплексных чисел {лг^, .. .,хп) есть решение
системы E) при Х = Х0, так что имеет место система числовых тож-
тождеств
flu F1 + »li) + «и E2 + »
(9)
61 + /rU) +
(Si +
Приравнивая в этих тождествах соответственно их вещественные и
мнимые части, получаем, во-первых, систему тождеств
sn = a52 — N2.
.во-вторых, систему тождеств
т. е.
Jit = ПН Rv \
(Ю)
.-au-Pv, 1
= Pu~av. j
Другими словами, векторы Ли и Ач принадлежат векторному под-
подпространству Psi", порожденному векторами и и v. Докажем, что
и и, и v отличны от нуля. Предположим, что и = 0; тогда, по до-
доказанному, v ф 0. Вставляя этн значения и и v в первое нз равенств
A0), получим
и так как v=^0, то E = 0, что противоречит условию леммы. Пусть
теперь v = 0 и, следовательно, и^=0; тогда из второго равенства A0)
730 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
получим
О = Ри,
откуда снова |3 = 0— вопреки условию леммы.
Докажем, наконец, что векторы и и v линейно независимы. Пред.
положим противное, тогда v = &u при некотором 4^0 и равенства
A0) принимают вид
Ли=(а-*Р)и \
Переписывая второе нз зтнх равенств в виде
Ли = -j- u -)- аи
и вычитая нз него первое равенство A0), получим
откуда снова следует E = 0, что противоречит условию леммы.
Лемма, а следовательно, и теорема 1 доказаны.
§ 2. Ортогональные преобразования я-мериого евклидова
пространства
Преобразование (т. е. взаимно однозначное отображение Л ев-
евклидова пространства Е" на себя 1)) называется ортогональным, если,
оно сохраняет скалярное произведение, т. е. если для любых двух
векторов u, v пространства Е" имеем
(Ли, Лч) = (и, v).
Из этого определения вытекает, что ортогональное преобразование Л
сохраняет скалярные квадраты, а значит, и длины векторов:
1 ^а |2 = (Ли, Ли) = (и, и) = | и |2.
Докажем следующее предложение.
Теорема 2. Всякое ортогональное преобразование евклидова
пространства Еп есть линейное преобразование, матрица которого
в любой ортонормальной системе координат ортогональна.
Обратно: всякое линейное преобразование пространства Еп, мат-
матрица которого хотя бы в одной ортонормальной системе координат
ортогональна, является ортогональным.
]) При этом линейность преобразования Л не предполагается, она будет
доказана несколькими строками ниже.
§ 2]
ОРТОГОНАЛЬНЫЕ ПРЕОБРАЗОВАНИЯ 731
Доказательство. Берем в Е" ортонормальный базис
{ev е2 ея}. Тогда ^ ^
при ортогональном преобразовании ортонормальный базис ех,..., еп
переходит в ортонормальный базис Ле1у ...,Лгп. Пусть вектор ц
имеет относительно базиса ev ...,е„ координаты хъ ...,хп; тогда
xi = (u, е,.) (/ = 1, 2, ...,я)
и
(Ли, Ле^ = (и, е,) = х: (/ = 1, 2, ..., л)
— при преобразовании ^ всякий вектор и переходит в вектор Ли,
имеющий относительно базиса Лгх, . . ., Леп те самые координаты,
которые вектор и имел относительно базиса ех, .. .,еп. А это зна-
значит (см. гл. XII, § 6), что преобразование Л линейно.
В силу теоремы 2' главы XXIV линейное преобразование Л, пе-
переводя ортонормальный базис е1; ...,е(! в ортонормальный базис
Лбь ...,Леп, имеет ортогональную матрицу А.
Первое утверждение теоремы 2 доказано.
Доказываем второе утверждение. Пусть линейное преобразова-
преобразование Л пространства Е" имеет ортогональную матрицу; тогда оно
(по теореме 2 главы XXIV) переводит любой ортонормальный базис
ех, ..., еп в ортонормальный базис е'1 = Ле1} . . ,,еп = Леп. Пусть
и = х1е1 + ... +х„е„, v = у^ + ... + у„е„,
так что
(u, v)=xly1+... +хпуп.
Тогда
^u = A;1e;-f ... -!-лг„е;, Л\ = у1е'1+... +упе'п
и
(Ли, Л\) =
что и требовалось доказать.
Так как (по теореме 2 главы XXIV) среди всех линейных пре-
преобразований преобразования с ортогональной матрицей и только они
переводят ортонормальный базис в ортонормальный базис, то
ортогональные преобразования могут быть определены как ли-
линейные преобразования, переводящие один какой-нибудь (и тогда
всякий) ортонормальный базис в ортонормальный же базис.
Заметим, наконец:
для ортогональности линейного преобразования пространства Еп
достаточно (и, очевидно, необходимо), чтобы оно сохраняло длину
каждого вектора и, т. е. чтобы было
| Ли | = | и |.
' 732 ЛИНЕЙНЫЕ ОПЕРАТОРЫ
[гл.
В самом деле, пусть это условие выполнено. Тогда (Аи, Аи) = (и, щ
для любого вектора и. Но для любых векторов и, v имеем (гл. XXIV
§ 4, формулы E))
2(ц, v) = (u-f v, u-t-v) — (и, и) —(v, v),
значит,
2 (Ли, Л\) = (Ли + <dv, Ли -f- Лу) — {Ли, Ли) — (<4v, Л\).
Так как
(Ли + Лч, Ла + Л\)^(Л(и + \), ^(u + v)) = (u + v, u + v),
(Ли, Ла) = (и, и), (Л\, Л\) — {ч, v),
то
2 (Лп, Л\) = (u + v, Щ- v) - (и, и) - (v, v) = 2 (a, v),
откуда утверждение следует.
Подведем итог:
Теорема 2'. Ортогональные отображения характеризуются среди
всех линейных отображений Л евклидова пространства Е" каждым
из следующих свойств:
1° Они сохраняют длины векторов.
2° Они переводят ортонормальный базис в ортонормалъный.
3° Их матрицы, относительно любого ортонормального базиса ор-
тонормальны.
Докажем еще следующие две совсем простые теоремы.
Теорема 3. Собственные значения ортогонального преобразо-
преобразования Л равны ± 1.
В самом деле, пусть и — собственный вектор ортогонального
преобразования Л и Я — соответствующее ему собственное значение.
Тогда
Ли = Ли
и
(Лп, Ли) = (Ы, Щ = А,2 (и, и).
С другой стороны, в силу ортогональности преобразования Л имеем
(Ли, Лп) = (и, и). Итак, к2 (и, и) = (и, и).
Так как (и, и)=?0, то I2 = 1, 1 = ±\.
Теорема 4. Пусть Ер — инвариантное подпространство евкли-
евклидова пространства Еп по отношению к ортогональному отображе-
отображению Л- Тогда ортогональное дополнение Е9 к Ер также инвариантно
по отношению к Л.
Лемма. При отображении Л инвариантное подпространство Ер
отображается на себя.
Пусть е1( ..., е_ — какой-нибудь ортонормальный базис инвариант'
кого подпространства Ер. Тогда векторы е^ — Л^, ..., бр = ^е^
лежат в Е? и ортогональны между собою; так как их число
§ 2]
ОРТОГОНАЛЬНЫЕ ПРЕОБРАЗОВАНИЯ 733
равно р, то Они образуют ортонормальный базис пространства ЕР. Пусть
w = x1e'l+ ... +хръ'р — произвольный вектор из ЕР; тогда вектор
u = xxQx + • • • + хрЪр также лежит в ЕР и Ли = ч1. Итак, всякий
вектор vi?EP является образом Ли некоторого вектора ц??Л
Лемма доказана.
Доказываем теорему 4.
Пусть v — произвольный вектор из ортогонального дополнения Е4
к подпространству ЕР. Надо доказать, что Лч ? ??, т. с. что (Лч, и) = О,
каков бы ни был вектор \х?Е?. Берем вектор w ?Ep при условии
jv/ = u. Тогда (v, w) = 0, значит, и (t^v, ^w) = 0, т. е. (Лч, и) = 0,
Ач?Ед при всяком v ? Еч, что и требовалось доказать.
Сделаем, наконец, следующее замечание (относящееся к любым
векторным пространствам i" и к любым линейным отображениям).
Замечание. Пусть пространство L" есть прямая сумма своих
подпространств U[ и L"~p, каждое из которых инвариантно относи-
относительно (произвольного) линейного оператора Л. Тогда, взяв базис
ех, . ...е, в L{ и ея+1> ..., е„ в Ц~р,
получим, как известно, базис
elt ..., ер; ер+1, ...,е„ пространства L".
Покажем, что оператор Л имеет в этом базисе матрицу вида
«21
0
0
0
«12 • • •
«22 • • •
«Я3 ...
0 ...
0 ...
0 ...
alp
«2,
app
0
0
0
0
0
0
«p+l> p+1
up+2i p + 1
0
0
0
a +1, 2
fljB + 2' p+2 • • •
«n, p+2
0 \
0 \
0
«p + 1, n
/
В самом деле, так как Лег, . . ., Лер лежат в L{ (и, значит, являются
линейной комбинацией векторовех, ..., е^,), то имеем при / = 1, 2,.. .,р
Л&1 = a, ji,-+... +а,>ея + 0-еЛ)+1~... +0-еи.
Точно так же Ле +1, ..., Лгп лежат в Ц~р, так что при
~Р -\-\, .. ., п имеем
отсюда и следует утверждение.
Теперь мы располагаем всеми средствами, чтобы доказать основ-
основной результат этого параграфа — теорему о структуре ортогональных
преобразований.
734
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
[ГЛ. XXV
Теорема 5. Для каждого ортогонального преобразования л
евклидова векторного пространства Е" существует ортопормальный
базис, в котором матрица А преобразования имеет видх)
1
— 1
— 1
все остальные элементы матрицы суть нули.
Доказательство будем вести индукцией по п. При л=1 имеем
ортогональное преобразование Л одномерного векторного простран-
пространства. Так как |</?u| = |u|, то
или Лъ. =
или
—— U.
В первом случае матрица преобразования состоит из одного эле-
элемента 1, во втором — из элемента —1. При л = 2 имеем ортогональ-
ортогональное преобразование двумерного векторного многообразия.Мы можем
его рассматривать как собственное или несобственное движение
плоскости, оставляющее неподвижным начало координат О. Как было
установлено в § 8 главы XI, такими движениями являются поворот
на некоторый угол а, 0^а<2я, вокруг точки О (собственное дви-
движение) и отражение относительно некоторой проходящей через
точку О прямой, которую можем принять за ось абсцисс (несобствен-
(несобственное движение).
В первом случае преобразование А имеет матрицу
/cos a —sin а\
Л =
\sina cos а/'
B)
х) Базис, в котором матрица ортогонального преобразования имеет вид
A), и саму эту матрицу A) мы называем каноническими для данного орто-
ортогонального преобразования.
e 2] ОРТОГОНАЛЬНЫЕ ПРЕОБРАЗОВАНИЯ 735
во втором —матрицу
л-{о-гУ C>
Итак, при п ^2 теорема доказана.
Предположим, что она доказана для евклидовых пространств Еп
размерности < л; докажем ее для Е".
Имеются лишь две возможности:
1° Преобразование Л имеет хотя бы одно вещественное характе-
характеристическое число.
2° Вещественных характеристических чисел преобразование Л не
имеет.
В случае 1° преобразование Л имеет вещественный собственный
вектор, соответствующий (по теореме 3) характеристическому числу
Я = ±1. Этот вектор определяет подпространство ?}.
Возьмем ортогональное дополнение ??~х к инвариантному под-
подпространству Е\. Оно также инвариантно по отношению к преобра-
преобразованию Л.
Так как преобразование Л, рассматриваемое в ??~\ продолжает
быть ортогональным, то, согласно предположению индукции, в Е"'1
имеется ортонормальный базис е2) ...,е„, относительно которого
матрица преобразования Л (в ?"~х) имеет канонический вид A). Взяв
в Е\ собственный вектор ех длины 1, видим, что матрица Ах преоб-
преобразования Л в пространстве Е\ состоит из одного элемента ±1.
В полученном базисе еь е2, ..., е„ матрица Л имеет, согласно заме-
замечанию на стр. 733, вид
AJA^ °W±i о'
V 0 Aj \ О А2
Так как А2 имеет канонический вид A), то и вся матрица А имеет
после необходимого, быть может, изменения нумерации векторов
< ..., е„ канонический вид.
В случае 2° преобразование Л имеет двумерное инвариантное
многообразие ?|. В нем имеется ортонормальный базис еь е2, отно-
относительно которого матрица Ах преобразования Л (рассматриваемого
лишь в Е\) имеет вид1)
/cosq) — sinq>\
Ai— •
\sinq> cos ф/
Обозначим через Щ~2 ортогональное дополнение к подпространству ?|;
х) Преобразование Л в Е\ не может иметь матрицу ( q _j) . так как тогда
оно (а следовательно, и преобразование Л всего Еп) имело бы вещественное
характеристическое число.
736 ЛИНЕЙНЫЕ ОПЕРАТОРЫ |гл
пространство Я"~2 инвариантно относительно преобразования Л; сле-
следовательно, согласно предположению индукции, в Е%~'1 существует
базис е3, ...,ел, относительно которого преобразование <4 (рас-
(рассматриваемое в Ё"~г) имеет матрицу Аг канонического вида.
В базисе
eii е2> ез> • • • > ел
всего пространства Еп преобразование Л имеет матрицу
О
/cos(p —sm ф
_/ S'n(p
О Ао '
О
О
которая (даже и без изменения нумерации векторов1)) имеет канони-
канонический вид.
Теорема 5 доказана.
§ 3. Движения трехмерного евклидова пространства
В случае я = 3 получаем следующие возможности для матрицы
ортогонального преобразования («нормальные формы ортогональных
матриц третьего порядка»):
/1 О ОХ
1„. А = \ 0 1 0 —тождественное преобразование
\0 0 1/
У' = У,
z' = z.
20. А = \ 0 10 —несобственное преобразование
\ 00 1/
х' = — лг,
У'= У,
г'= z,
т. е. отражение относительно плоскости Oyz.
L) Дело в том, что элементы ±1 на главной диагонали матрицы А появ-
появляются лишь при наличии вещественных характеристических чисел. В данном
случае их нет, а потому матрица Л2 вся состоит из «ящиков» второго поряд-
порядка, откуда, в частности, следует, что ее порядок, а значит, и число п четны.
§ 3] ДВИЖЕНИЯ ТРЕХМЕРНОГО ЕВКЛИДОВА ПРОСТРАНСТВА 737
/1 0 0\
1°. ^4 = 0 —1 0 —собственное преобразование
\0 0 —1 /
у'=* -у,
*' = -Z,
т. е. поворот на угол я вокруг оси Ох (отражение относительно
втой оси).
/1 0 0 \
\°. Л=0 cos а —sin а 1—собственное преобразование
\0 sin a cos а/
х' =х,
у' = (/cos а—г sin а,
z' — у sin а + z cos а,
т. е. поворот вокруг оси Ох на угол а; преобразования 1° и 1^
являются частными случаями преобразования 1^, получающимися
соответственно при а = 0 и а = я.
/-10 0 \
2°. Л= 0 cos а —sin а —несобственное преобразование
\ 0 sin а cos а /
X == — АГ,
(/'= i/cosa—2 sin a,
z' = у sin a -|- z cos a,
т. е. поворот вокруг оси Ох на угол а, соединенный с отражением
относительно плоскости Oyz. В частности, при а=0 получаем чистое
отражение 2°:
У'= У,
z' = 2
относительно плоскости Oyz, а при а = л—преобразование
ЛГ = — X,
у' = -i/,
Z' = -Z,
т. е. отражение относительно точки О.
¦" П. С. Александров
738 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
Замечание. Для многообразия инвариантных векторов полу-
получаем следующие возможности. Оно в случае
1° трехмерно,
V (при любом а =7^=0) одномерно,
2° двумерно,
2°а (при любом афЪ) нульмерно.
Итак, при всех собственных ортогональных преобразованиях трех-
трехмерного пространства многообразие инвариантных векторов имеет не-
нечетную размерность 1 или 3, а при несобственных — четную размер-
размерность 2 или 0.
Естественно, что это замечание сохраняет свою силу для всех
движений трехмерного пространства (так как любое движение порож-
порождает ортогональное преобразование многообразия всех векторов про-
пространства).
Переходим к классификации движений трехмерного пространства.
Всякое движение трехмерного пространства в произвольной пря-
прямоугольной системе координат записывается в виде
х' = апх -\- a12y-{-a13
у' — а21х -f
где матрица А коэффициентов aik ортогональна. Имея в виду только
что полученные нормальные формы ортогональных матриц третьего
порядка, мы можем всякое движение в некоторой прямоугольной
координатной системе записать в одном из следующих видов:
Случай 1°.
х' = х -\-а,
у'= г/cosa — zsma-\-b, \ A)
z' — у sin a --!- z cos a -j- c.
Перенесем начало, координат б точку О' = @, у0, z0), где у0, z0 опре-
определяются из уравнений
(/„cosa — г0 sin a + 6 = „„, .
> B)
у0 sin a -f ¦ zu cos a + с = z0,
т. e.
(cosa — 1) y0—
sina-(/0 + (cosa
|-(cosa — l)^o — — c- )
Детерминант системы C) есть (cosa—lJ-psin2a; он равен нулю,
лишь когда одновременно cosa = l, sina = 0; в этом случае
S 3] ДВИЖЕНИЯ ТРЕХМЕРНОГО ЕВКЛИДОВА ПРОСТРАНСТВА 739
формулы A) превращаются в
х'=х Л-а
У'= У +*.
z' = z-\-c
и определяют сдвиг пространства на вектор цо = {а, ь, с}. Во всех
остальных случаях из уравнений B) значения у0, z,t определяются
однозначно, так что определено и преобразование координат
* = ?,
означающее перенос начала координат в точку О' = @, у0, zn) с сохра-
сохранением единичных векторов исходной прямоугольной координатной
системы. В новой системе координат движение A) запишется в виде
I' =1 +а,
т)' -\-уо= У] cos а— ^sina + ((/0 cos a—zQ sina-\-b),
t,'+zQ=s T]sina + ?cosa+(!/0 sina-f-z0 cosa + c),
т. е., ввиду тождеств B), в виде
?'=? -га, \
т]'= t]cosa—gsina, > D)
t,'= У] sin a -f- S cosa- J
Это—поворот вокруг оси О'с, на угол а, соединенный со сдвигом
вдоль этой же оси па вектор цо = (а, 0, 0). При <х = 0 получаем чис-
чистый сдвиг
л'= л.
i — it
при а =0 получаем чистый поворот
tj' = г] cos a — ? sin a,
?' = г) sin a -)-1, cos «.
Сдвиг вдоль прямой, соединенный с вращением вокруг этой же
прямой, называется в механике винтовым движением.
Итак, в случае 1° получаем винтовое движение.
Случай 2°.
х' = — х +а
У'= У +Ь, } E)
740 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
Перейдем к новой прямоугольной координатной системе, оставив
единичные векторы прежними и перенося начало координат в точку
О' = (-~- , 0, 0 ) . Другими словами, сделаем преобразование координат
р а к.
В новой системе координат движение E) запишется в виде
б' +
V = М-с,
т. е. в виде
Оно представляет собою отражение относительно плоскости О'т)?,
соединенное со сдвигом вдоль этой плоскости на вектор и0 —{0, b, с).
Случай 3°.
х' = — х, +а, 1
у' = (/cos а—z sin а -•-?, > F)
г'= г/ sin а -\-z cos а -j- с. J
Перейдем опять к новой прямоугольной координатной системе с теми
же единичными векторами и с началом О' = (~, у0, гЛ , где yQ, z0
определяются из уравнений BII т. е. сделаем преобразование
координат
В новой системе координат движение F) получит запись
т|'= T)cosa —
t,'= r\ sin a -|- t, cos a,
из которой видно, что оно представляет собою отражение относи-
относительно плоскости Orfe, соединенное с поворотом вокруг оси О\ на
угол а. Итак, доказана следующая
х) Если уравнения C), эквивалентные уравнениям B), имеют детермииа11Т'
равный нулю, то cosa=l, sina = 0 и преобразование F) имеет вид
х'= —х-\-а, y'=y-\-b, z' = z-{-c. Тогда достаточно сделать преобразование
¦ж = SЧ—q~ . ?'=='П' 2 = ?> чтобы представить движение F) в виде |'=—S.
Ч ц + , ?' = ?+с. Мы имеем только что разобранный случай отражения
относительно плоскости О'г|?, соединенного со сдвигом вдоль этой плоскости
иа вектор ио = {О, Ь, с}.
§ 4]
ПРЕОБРАЗОВАНИЯ ПОДОБИЯ 741
Теорема 6. Имеются лишь следующие движения трехмерного
пространства:
1. Собственные движения:
1. Винтовое движение, т. е. сдвиг вдоль некоторой прямой d,
соединенный с поворотом вокруг этой же прямой; это движение
включает как частные случаи чистый сдвиг вдоль прямой d и чистый
поворот вокруг прямой d (в частности, и поворот на угол л, т. е.
отражение относительно прямой d).
II. Несобственные движения:
2. Отражение относительно некоторой плоскости л, соединенное
со сдвигом на вектор и0, компланарный этой плоскости; в частности,
при ио = О чистое отражение относительно плоскости п.
3. Отражение относительно некоторой плоскости л, соединенное
с поворотом вокруг прямой d, перпендикулярной к плоскости я,
на некоторый угол а, 0^Га<2я; в частности, при а = л отраже-
отражение относительно некоторой точки (точки пересечения плоскости я и
прямой d).
Выше (замечание на стр. 738) уже было выяснено, какое у каж-
каждого из этих движений имеется многообразие инвариантных векторов;
читателю предоставляется самому определить множество неподвижных
точек движений каждого и-з перечисленных типов.
§ 4. Преобразования подобия. Дальнейшие проблемы
Ортогональные преобразования характеризуются тем, что остав-
оставляют неизменной длину любого вектора. Их ближайшим и естествен-
естественным обобщением являются преобразования подобия, т. е. линейные
преобразования Л, при которых длина каждого вектора и умножается
на одно и то же положительное число X:
|t^u|==X |u| (для любого вектора и).
Число X называется при этом коэффициентом подобия. Для случая
трехмерного пространства преобразования подобия рассматривались
в главе XI.
Частным случаем преобразований подобия являются так назы-
называемые гомотетические преобразования (гомотетии) с коэффициентом А.,
т. е. линейные преобразования вида
$%и = Хм (где X =^= О одно и то же для всех и?Е").
Таким образом, гомотетии суть линейные преобразонания, для
которых все векторы являются собственными с одним и тем же соб-
собственным значением Х=?0 (коэффициент гомотетии). Гомотетия
называется также растяжением (или сжатием) пространства1).
1) Естественно при Х> 1 говорить о растяжениях, при Я< I-—о сжа-
сжатиях; при Ji=l имеем тождественное преобразование. Мы будем употреблять
термин растяжение (во всех случаях).
742 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
Очевидно, в любом базисе е1? ..., е„ гомотетия &СХ с коэффи-
коэффициентом \ имеет матрицу
Как известно, матрица называется диагональной, если все ее отлич-
отличные от нуля элементы расположены на главной диагонали. Диаго-
Диагональная матрица, у которой все лежащие на главной диагонали эле-
элементы равны между собою, называется скалярной. Таковой и является
матрица Ях.
Докажем следующее предложение.
Теорема 7. Всякое подобное преобразование Л с коэффициен-
коэффициентом, подобия К является произведением растяжения Ж\ с тем же
коэффициентом К и некоторого ортогонального преобразования Э$\
при этом порядок множителей $СХ и SB безразличен 1).
В самом деле, имеем, очевидно,
Рассмотрим преобразование C^\)~х А — ЗВ; имеем для любого век-
вектора и
так что
откуда следует, что Si — ортогональное преобразование; из опреде-
определения преобразования (@ = (\%'х)~1^ следует
л = svtfa,
что и требовалось доказать.
Естественным обобщением гомотетических преобразований яв-
являются преобразования Л, матрица которых (в некоторой ортонор-
мальной системе координат) есть диагональная матрица
х) Так как для любой матрицы В и скалярной матрицы С имеем, оче-
очевидно, ВС —СВ.
§ 5]
САМОСОПРЯЖЕННЫЕ ОПЕРАТОРЫ
743
Особенно наглядный геометрический смысл имеют среди этих
преобразований Л те, в матрице A) которых все А.,- положительны.
Можно сказать, что рассматриваемые преобразования Л слагаются
из п растяжений (с, вообще говоря, различными коэффициентами
л ¦ ¦ • i ^л) вдоль взаимно перпендикулярных направлений.
' В самом деле, преобразование с матрицей A) является, очевидно,
произведением п преобразований Л; с матрицами
1 О
1
О
1
каждое из которых при А.;>>0 естественно называть растяжением
с коэффициентом Я,- вдоль оси координат, несущей вектор е;.
Возникает вопрос: какие преобразования можно получить пере-
перемножением таких «многократных» растяжений и ортогонального
преобразования? Ответ на этот вопрос очень сильный. Оказывается,
все линейные (т. е. все аффинные) преобразования евклидовых про-
пространств можно получить таким образом! Этот фундаментальный
результат является непосредственным обобщением теоремы 13
главы XVII об аффинных отображениях плоскости. Он будет дока-
доказан в § 6; доказательство опирается на важные и интересные поня-
понятия и теоремы, которыми мы и займемся в следующем параграфе.
§ 5. Самосопряженные операторы
Мы теперь будем говорить не только о преобразованиях, но и
просто о линейных отображениях пространства Е" в себя, о линей-
линейных операторах в
Прежде всего напомним, что в базисе
ел матрица А
оператора Л тогда и только тогда имеет диагональный вид
А=\
когда векторы ех, ... , ел, составляющие этот базис, являются
собственными векторами преобразования Л, a Xv ..., 'кп — собст-
собственными значениями этих собственных векторов. При этом кх, ... , Хп
744 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
могут быть какими угодно вещественными числами (среди них могут
быть и нули).
Пусть в каком-нибудь ортонормальном базисе матрица А преоб-
преобразования Л есть
B)
'2л • • • апп>
Это значит, что
Ле1 = аи^ + а2(е2 + ... + akiek +...+ а„,е„ C)
для всех ? = 1, 2, ..., п, т. е. что
(Ле,-, ek) = akt (для любых /, А=1, 2, ... , л). DЛ Л)
Поэтому, если С'?* есть преобразование, задаваемое в том же
базисе et, . .., ел матрицей А*, транспонированной к матрице А,
то для любых i, к имеем
(Л*е,-, ек) = aik D*. к)
(k-я координата вектора ^*е,- равна а!к, чем отображение Л*
определено однозначно).
Равенства D,->ft) и D,- *) в своей совокупности эквивалентны
одному равенству
{Л*й{, ек) = (б:, Лек), E*)
означающему, что k-я координата вектора с4*е,- равна ?-й коорди-
координате вектора Лък (это и значит, что матрицы преобразований Л,
Л* в базисе е^, ... , ев транспонированы друг другу).
Если теперь U = 2jcicY> v==^j^fteft' To
I З'^П Р ^ = у^ У I /t^fr A \ =i W /p /J(* \ z=± { у^ V .А //а N /11 //е« ^
\^ **) А/ —?j i \ м к' —' ?^"i \ it *™ к) ~~ ( ^J^i ii ' ft } — \ i к'
i i \ I /
и, далее,
Итак, если в каком-нибудь ортонормальном базисе операторы А
и Л* имеют взаимно транспонированные матрицы А и А*, то они
связаны соотношением
(Л*а, v) = (u, Л\) (для любых векторов и, v), E)
не зависящим, очевидно, от выбора того или иного базиса про-
пространства Е".
§ 5) САМОСОПРЯЖЕННЫЕ ОПЕРАТОРЫ 745
Обратно, если операторы Л и Л* связаны условием E), то,
каков бы ни был ортонормальный базис е1? ... , е„, подставляя в E)
u = e,-, v = eft)
получим соотношение
(А*е,, e») = (e,-, Лек), E*)
показывающее, что оператор Л* в этом базисе имеет матрицу,
транспонированную к матрице А оператора Л. Отсюда следует,
что если дан оператор Л, то соотношение E) определяет единст-
единственный оператор Л*, этому соотношению удовлетворяющий.
Определение 3. Пусть дан оператор Л в евклидовом про-
пространстве Е". Единственный оператор Л*, удовлетворяющий соот-
соотношению E), называется оператором, сопряженным к оператору Л*
Переписывая E) в виде
(Ли, v) = (u, Л*\),
замечаем, что оператор, сопряженный к оператору Л*, есть опе-
оператор Л:
(Л*)* = Л,
т. е. что отношение сопряженности есть отношение симметричное:
Л и Л* сопряжены между собою.
Мы доказали следующий факт.
Теорема 8. Если матрицы операторов Л и Л* в каком-нибудь
ортонормальном базисе транспонированы друг к другу, то опера-
операторы Л и Л* являются сопряженными между собою, и тогда их
матрицы взаимно транспонированы в любом ортонормальном базисе.
Определение 4. Оператор Л называется самосопряженным
(или симметричным), если он совпадает со своим сопряженным
оператором
Л = Л*,
т. е. если
(Ли, v) = (u, Лч). F)
Из предыдущего следует, что оператор Л является самосопря-
самосопряженным, если в каком-нибудь (и тогда во всяком) ортонормальном
базисе он имеет симметричную матрицу.
Теперь предстоит доказать фундаментальное предложение.
Теорема 9. Для всякого самосопряженного оператора Л
имеется ортонормальный базис, относительно которого матрица этого
оператора имеет диагональный вид.
Доказательству теоремы 9 предпошлем несколько теорем о
собственных векторах и собственных значениях самосопряженных,
операторов.
746 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ.
XXV
Теорема 101). Два собственных вектора их и иа самосопря-
самосопряженного оператора Л, которым соответствуют различные собствен-
собственные значения Яг ^= Я2, ортогональны между собою.
В самом деле,
(Лщ, u1) = (u2, ^u1) = (tiu1, u2),
так что
С другой стороны, Ли2 = К2и2, tiu1 = A1u1 и
0 = (^и2, u,.) — (Лиь и2) = Я2(и2) uj — Я^, u2) = (A2 — XJ (ult u2).
Так как Я2— ^=?0, то (u^ u2) = 0, что и требовалось доказать.
Теорема 11. Все характеристические числа самосопряженного
оператора Л вещественны.
Первое доказательство теоремы 11. Берем в про-
пространстве Е" какой-нибудь ортогональный базис еъ ... , е„ и обо-
обозначаем через А матрицу оператора Л в базисе е^ ... , ел. Каж-
Каждому вектору ц^?" соответствует набор чисел хъ ..., хп его
координат, и мы пишем
u = { x\i • • • i хп\-
Пусть
.— характеристическое число оператора Л.
Подставляя Я»^ в систему уравнений, определяющую собст-
собственные векторы:
(аи—ЮХ1+ а12дг2+...+
ai.ixiJr(azz—Ях)дг2-}-...-•-
ап\х1+ ап„х%-\-... +
получим в качестве координат собственного вектора, соответствую-
соответствующего характеристическому числу Я1? комплексные числа xv ... , хп,
набор которых является «мнимым» вектором пространства Е" (снаб-
(снабженного ортонормальным базисом ех, ... , е„).
Определим на мгновение скалярное произведение мнимых векто-
векторов (а также мнимого на вещественный) по-прежнему формулой
(u, v)=
*) В общем случае лгобвго оператора Л в любом векторном пространстве
можно только утверждать, что собственные векторы Uj, ... , ига, соответ-
соответствующие различным собственным значениям Xlt ..,, km, всегда образуют
линейно независимую систему.
§ 5] САМОСОПРЯЖЕННЫЕ ОПЕРАТОРЫ '747
если
и = {хи ... , хп}, v = {ylt ... , уп].
Все свойства скалярного произведения сохраняются, кроме одного:
скалярный квадрат (и, и) мнимого вектора может не быть поло-
положительным х).
Так как доказательство теоремы 10 от этого свойства не зави-
зависит, то теорема 10 сохраняет свою силу и для «мнимых» векторов.
Характеристический многочлен D(h) есть многочлен с вещест-
вещественными коэффициентами; поэтому, если комплексное число
является корнем характеристического многочлена DCk), то сопря-
сопряженное число
также является корнем многочлена DCk). Отсюда следует, что,
решая систему уравнений G) (сначала при Х = Х1, затем при Х~ХО),
получим два комплексных собственных вектора и1 (при Х = Х1) и
и2 (при Х = Х.2), соответствующие координаты которых будут
комплексно-сопряженными числами, так что
111 = { *V ХЪ • • • . *п К
щ = {xlt хг, ..., хп }.
Векторы а1 и и2, как соответствующие различным характеристиче-
характеристическим числам, должны иметь скалярное произведение (щ, и2) = 0, т. с.
х1х1+ xJc2 -1- ... + хпхп =0 (8)
или
где \х1\, \x<i\, •.., \хп\ суть модули комплексных чисел
xlt хг, . . . , хп, т. е. неотрицательные числа. Поэтому из равен-
равенства (8) следует, что \х1\ = \х2\= ... =\хп\ = 0, значит, и
д:, =х2= .. . =хп = 0, т. е. вектор и1 — нулевой вектор, тогда
как мы имели собственный, т. е. ненулевой, вектор и оператора Л.
Полученное противоречие доказывает теорему 11.
Второе доказательство теоремы 11. Это доказатель-
доказательство тоже проведем от противного. Пусть % = a-\-$i, Р=И=О,— ха-
характеристическое число оператора Л. По теореме 1 (§ 1) оператор Л
имеет двумерное инвариантное подпространство, порождаемое
') В дальнейшем мы, как раньше, будем рассматривать скалярное про-
произведение лишь для действительных векторов.
748 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
векторами u, v, удовлетворяющими соотношениям
tiu = cm—{W,
Л\ = p"u + av.
Имеем
(Л\1, v) = a(u, v) —P(v, v),
(Л\, и) = Р(и, u) + a(v, и).
В силу самосопряженности оператора Л имеем
(Ла, v) = (u, Л\),
т. е.
а (а, v) — P(v, v) = P(u, u)+a(v, u),
или
что, так как |tt|2 + | v|2^=0, означает Р = 0 — вопреки предположе-
предположению. Теорема 11 доказана.
Теорема 12. Пусть Р = Ер— подпространство пространства Е",
инвариантное относительно самосопряженного оператора Л. Тогда
ортогональное дополнение Q = Eq к подпространству Р также ин-
инвариантно относительно Л.
Теорема 12 содержится, очевидно, в следующем предложении.
Теорема 12'. Если Л — какой-нибудь оператор в Е", имеющий
Р = Е? своим инвариантным подпространством, то ортогональное
дополнение Q = Eq есть инвариантное подпространство сопряжен-
сопряженного оператора Л*.
В самом деле, пусть v — произвольный вектор из Q, а и—про-
и—произвольный вектор из Р. Так как Р инвариантно относительно Л,
то Лй?Р,
(Л*ч, u) = (v, Ли) = 0,
т. е. Л*\ ^ Q, что и требовалось доказать.
Из теорем 11 и 12 основная теорема 9 следует в двух словах.
Она, как мы знаем, может быть сформулирована так: каков бы
ни был самосопряженный оператор Л в пространстве Е", существует
ортонормальный базис е^ ... , е„ этого пространства, состоящий
из собственных векторов оператора Л.
Докажем эту теорему посредством индукции. При л=1 онг
очевидна: всякий вектор е длины 1 образует в Е1 ортогональны?
базис и является собственным вектором любого оператора Л.
Предполагая теорему доказанной для п—1, докажем ее для п
Пусть характеристические числа оператора Л в Еп (вещественные
§ 6] СТРУКТУРА ПРОИЗВОЛЬНОГО ЛИНЕЙНОГО ПРЕОБРАЗОВАНИЯ 749
в силу теоремы 11 *)) суть
А-1, ... , Х„.
Возьмем одно из них, например %п. Пусть е„ — собственный
вектор длины 1, соответствующий числу %п. Он порождает одно-
одномерное, инвариантное для Л подпространство Р = ЕХ. Ортогональное
дополнение к Р обозначим через Q = E"~1. По теореме 12 подпро-
подпространство Q инвариантно относительно Л; поэтому, рассматривая Л
как оператор, действующий в Q, можно (по предположению индук-
индукции) найти в Q базис et, .. . , en_lt состоящий из собственных векто-
векторов оператора Л. Тогда векторы ех, .. . , en-1, е„ образуют базис
пространства Е", состоящий из собственных векторов оператора Л.
Теорема 9 доказана.
§ 6. Теорема о структуре произвольного линейного
преобразования евклидова пространства
Эта теорема уже была сформулирована в конце § 4. Повторим
эту формулировку.
Теорема 13. Всякое линейное преобразование Л2) евклидова
пространства Е" может быть представлено в виде произведения
ортогонального преобразования и самосопряженного преобразования,
имеющего в некотором базисе elt ... , еге матрицу
'. A)
о \
в которой все %( положительны.
Доказательство опирается на две леммы.
Лемма 1. Для любых двух операторов Л и 53 имеем
Доказательство. Тождество B) следует из тождества
(АВ)* — В*А* для матриц (доказанного в главе VIII, § 2). Из дока-
доказанного вытекает
Следствие. Произведение двух самосопряженных операторов
Л и 3d тогда и только тогда является самосопряженным, когда
эти операторы переместительны при умножении.
') В остальном —какие угодно: среди них могут быть равные между
собою, могут быть равные нулю.
2) Невырожденный линейный оператор.
750 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
В самом деле, если Л = Л*, 35=-3$*\ то
(Л5В)* =
и, значит, (АЗЗ)* = ЛЗЗ тогда и только тогда, когда !ВА =
Лемма 2. Для всякого линейного преобразования Л про-
пространства Е" преобразование S) = Л*Л (равно как и &>' = ЛЛ*)
является самосопряженным с положительными характеристическими
числами.
В самом деле, по лемме 1 имеем
2)* = {Л* Л)* = Л*Л = т.
Оператор й> является самосопряженным.
Докажем, что его характеристические числа положительны.
Пусть ц — собственный вектор оператора Л*Л, соответствующий
собственному значению X. Тогда
Почленно скалярное умножение этого равенства на ц дает
(Л*Ли, и) = А. (и, и)
ИЛИ
(Ли, Лм)=%(и, и).
Так как и (Ли, Ли)>0, и (и, и) > 0, то и Х>0.
Лемма 2 доказана.
Пусть теперь Л — произвольное линейное преобразование про-
пространства Е". Рассматриваем самосопряженный оператор Л*А~@)
и строим для него ортонормальный базис из его собственных век-
векторов еи ..., ел. В этом базисе оператор @) имеет матрицу A)
с положительными X,-. Обозначим через 'в преобразование, имеющее
в базисе е1( ... , е„ матрицу
+VK о \
Очевидно,
А 0\
§ 6] СТРУКТУРА ПРОИЗВОЛЬНОГО ЛИНЕЙНОГО ПРЕОБРАЗОВАНИЯ 751
Далее,
ТСГ 0 \
/ 1
Рассмотрим преобразование
Тогда
При этом i? по самому своему определению есть самосопряженное
преобразование, и базисные векторы являются для 'ё собственными
векторами с положительными собственными значениями.
Остается доказать, что 33— ортогональное преобразование,
т. е. что 33*3$ = &.
Имеем
.53*53 =
Но
= &>, поэтому
33*53
чем все доказано.
Помня, что было сказано в §§ 2 и 3 о геометрической струк-
структуре ортогональных преобразований и преобразований, имеющих
в каком-либо ортонормальном базисе матрицу A) с положитель-
положительным Я,-, мы можем следующим образом переформулировать только
что доказанную теорему.
Теорема 13'. Любое линейное преобразование А векторного
евклидова пространства есть произведение преобразований, каждое
из которых есть
либо симметрия (относительно (п—\)-мерного пространства),
либо поворот,
либо сжатия (растяжения), причем сжатия происходят вдоль
взаимно перпендикулярных осей.
Аффинные преобразования л-мерного точечно-векторного евкли-
евклидова пространства ?'", оставляющие неподвижной какую-нибудь
точку О (которую берем за начало координат прямоугольного ре-
репера Ctej, ... , е„), естественным образом отождествляются с ли-
линейными преобразованиями соответствующего векторного про-
пространства.
752 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
Но всякое аффинное преобразование Л пространства Е" может
Сыть представлено в виде
где Л' есть преобразование, оставляющее неподвижной некоторую
точку О' пространства, a SD есть сдвиг всего пространства на
некоторый вектор и (т. е. преобразование, ставящее в соответствие
каждой точке М точку, для которой ОМ' = СШ + u). В самом
деле, пусть при аффинном преобразовании Л точка О (начало
координат) переходит в некоторую точку О'. Тогда, обозначая
через 3) сдвиг пространства Е" на вектор и0 = ОО', видим, что
при преобразовании
' 1
точка О остается неподвижной и Л = @) 1Л'&). Из доказанного
следует
Теорема 14. Всякое аффинное преобразование точечно-вектор-
точечно-векторного п-мерного евклидова пространства есть произведение преобра-
преобразований, каждое из которых является одним из следующих элемен-
элементарных преобразований:
сдвиг (на некоторый вектор),
симметрия (относительно некоторой (п—\)-мерной плоскости),
поворот на некоторый угол а, 0^а<л,
сжатие (растяжение),
причем сжатия, если их несколько, происходят вдоль взаимно пер-
перпендикулярных осей.
§ 7. Билинейные и квадратичные формы в евклидовых
пространствах
Основным результатом этого параграфа является
Теорема 15. Пусть в евклидовом пространстве Е" дана сим-
симметричная билинейная функция Q (u, v). Тогда в Е" существует
ортонормальный базис еХ) е2, • • • , е„, в котором функция Q (и, v)
записывается в каноническом виде:
-L"en, A)
Доказательство основывается на следующей лемме, представ-
представляющей и самостоятельный интерес.
Лемма. Если билинейная функция1) Q (u, v) и линейный опера-
оператор Л, определенные в евклидовом пространстве Е", имеют в каком-
2) Быть может, и ве симметричная.
§ 7] БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ 753
нибудь ортонормальном базисе е = [ег, ... , еп] одну и ту же
матрицу Аь , то и во всяком ортонормальном базисе е' = [е']7 . .. , е'п]
они будут иметь одну и ту же матрицу Ае-.
В самом деле, пусть матрица перехода от базиса е к базису е'
есть С. Тогда матрица оператора А в базисе е' есть
Г~1А С— А .•
что же касается билинейной функции Q (u, v), то, имея в базисе е,
но предположению, матрицу Ае , она будет иметь в базисе е' матрицу
С*А С.
Но С (как матрица перехода от одного ортонормального базиса
к другому) есть ортогональная матрица, поэтому С*=С~1, н били-
билинейная функция Q (u, v) имеет в базисе е' ту же матрицу Ле-, что
и оператор А.
Замечание 1. Из доказательства этой леммы ясна существен-
существенность предположения, что базисы е и е' ортонормальны: в против-
противном случае матрица С не была бы ортогональна, следовательно,
С* не совпадала бы с С и все рассуждения были бы несправед-
несправедливы. Интерес леммы состоит в том, что она позволяет установить
естественное взаимно однозначное соответствие между всеми били-
билинейными формами, с одной стороны, и всеми линейными операторами,
с другой стороны (определенными в данном евклидовом пространстве
Е")'. соответствующими друг другу считаются форма Q и оператор А,
имеющие в каком-нибудь (и тогда во всяком) ортонормальном ба-
базисе одну и ту же матрицу.
Из теоремы 9 и только что доказанной леммы теорема 15 вы-
вытекает в двух словах.
Пусть в пространстве Е" дана симметричная билинейная функ-
функция О, (u, v); пусть А — ее (симметричная) матрица (в каком-нибудь
ортонормальном базисе е1; ..., е„); пусть А — соответствующий
форме Q (u, v) оператор (имеющий в базисе ех, ... , е„ ту же
матрицу А, что и форма Q (u, v)).
Так как матрица А симметрична, то оператор А самосопряжен,
следовательно (в силу теоремы 9), существует ортонормальный
базис e'j, ... , е^,, в котором матрица оператора А имеет диаго-
диагональный вид:
Ь2
О
B)
О
754 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XX
где klt ..., \п суть характеристические числа оператора Л (т.
корни характеристического уравнения матрицы А).
Но по только что доказанной лемме матрица B) является и ма
рицей билинейной формы Q (u, v) в базисе ei е'я, так что
Q(u, v) = Klx'iy[ + ... + Хпх' у'п
для и=гх[&[-\-... + х'пе'п, * =
Теорема 15 доказана.
Следствие. Для всякой квадратичной функции ф (u) ^ Q (и, t
определенной в евклидовом пространстве Е", существует ортонормал
ный базис еи ... ,е„, в котором функция ф (и) записывается ki
квадратичная форма канонического вида:
<p(u) = k1x\ + ...+Xnxl для и = *1е1-т-...+лг„е„.
При этом коэффициенты klt ..., Я„ суть характеристические чис,
функции tp (и), т. е. характеристические числа ее матрицы (в любе
орт анормальном базисе).
§ 8. (и — 1)-мерные многообразия (поверхности) второго поряд]
в «-мерном аффинном и евклидовом пространствах
Пусть в /z-мерном аффинном пространстве R" дана аффинная си
тема координат Oeje2. .,е„. Всякое алгебраическое уравнение ст
пени т, т. е. уравнение
левая часть которого есть многочлен степени т от перемени!
xv x2, ...,хп, задает в R" некоторое алгебраическое многообраз.
размерности п — 1 и порядка т\ мы будем кратко говорить: некотору
алгебраическую поверхность порядка m в пространстве R". В свя
с этим определением можно было бы привести высказывания, ан
логичные тем, которые в свое время были приведены в главе XV, §
об алгебраических поверхностях в обычном трехмерном пространств
В частности, имея уравнение данной поверхности в данной систе;
координат, мы совершенно так же, как в случае л = 3, находим
уравнение во всякой другой системе координат, и все эти уравнен:
будут одной и той же степени: порядок поверхности не зависит ¦
той системы координат, в которой мы поверхность задаем. Следу
также сказать, что удовлетворительное построение теории алгебра
ческнх поверхностей требует перехода к комплексному пространств
более того, к комплексному проективному пространству.
Мы, однако, ограничимся лишь самыми краткими замечаниям
касающимися поверхностей второго порядка в л-мерном аффинш
и л-мерном евклидовом пространствах.
§ 8] (л—1)-МЕРНЫЕ МНОГООБРАЗИЯ ВТОРОГО ПОРЯДКА 756
Общее уравнение второй степени от переменных хг хп
имеет вид
F(xL, ...,лгп)=ф(лг1, ...,xn) + 2l(xlt ...,хп) + ао = 0, A)
где ф (хь ..., хп) есть квадратичная, а / (xlt ..., хп) —линейная форма
от л переменных xlt ..., хп:
О')
* V*l> • • • > хп) — .JLJ ajXj.
Вектор u = {xv x2, ..., хп) пространства R", удовлетворяющий усло-
условию
Ф (л: , х , ... х ) = 0, B)
называется асимптотическим для данной поверхности A). Поверхность,
определяемая однородным уравнением B), так же как и в случае
трехмерного пространства, называется конической поверхностью.
В данном случае, когда форма <f(xltx2, ...,х„) есть квадратичная
форма старших членов уравнения A), коническая поверхность B)
называется конусом асимптотических направлений поверхности A).
Точки пересечения поверхности A) с какой-либо прямой
C)
находятся совершенно так же, каки в случае л = 3: решая уравнения C)
совместно с уравнением A), получаем квадратное уравнение для t:
где
п
А = <р{а1,...,а„), B=%Fk(xl х°„) ак,
С Fir0 x°\
Ь — Г [Xlt . . ., Л„),
причем
Fk(xx, ..., хп)=~-^-=ак1х1 + ак2х2+...+акпхп + а11
(ft=l,2, .... л),
откуда выводим, что поверхность A) пересекается со всякой прямой
неасимптотического направления по паре точек, которые могут быть
действительными (различными или совпадающими) или мнимыми
сопряженными. Прямая асимптотического направления или вовсе не
756
ЛИНЕЙНЫЕ ОПЕРАТОРЫ
XXV
пересекается с поверхностью A), или пересекается с нею в одной дей-
действительной точке, или целиком содержится в поверхности A), явля-
являясь в последнем случае прямолинейной образующей этой поверхности.
Как и в случае л = 3, мы определяем большой ранг поверхности ff
т. е. ранг матрицы
... Й1„ С
А =
а2п
*1 • • • "л |
всех коэффициентов aik, a/ и а многочлена
п п
I \Л1» * • • , "п/ j?J ife / ft ~Г" ^J U/Л 1 ~J~ II»
Поверхность называется вырождающейся, если ее большой ранг
Малым рангом поверхности A) называется ранг г квадратичной
п
формы ф (хъ . . ., хп) = 2 aikxixk старших членов ее уравнения A).
Точка Мо = {х\, .. ., л") поверхности A) называется особой точкой
этой поверхности, если
Fk (х°и . .., х°„) = 0 для всех k—\,2, ..., п,
D)
т. е. если все частные производные многочлена F (лг1( ..., хп) равны
в этой точке нулю.
Так как имеет место тождество
л я
F (*!, Х2, . . ., ЛГП) = 2j xkFk \X1> ' • • > *п) ~Ь -2j ajxl ~Ь a0>
то из равенств D) и из F(a:?, . ..,л:{})=0 следует, что особая
точка Мо = (xj лг°) удовлетворяет системе уравнений
E)
-Ь ... + агпхйп -f a2 = 0,
аппх1 + ап = 0,
Другими словами, если Мо = (л:?, лгЦ, ..., лг^) есть особая точка поверх-
поверхности A), то отличный от нуля вектор {лг?, лг? лг°, 1} арифмети-
арифметического [п-\- 1)-мерного векторного пространства является решением
S 8] (И—1)-МЕРНЫЕ МНОГООБРАЗИЯ ВТОРОГО ПОРЯДКА 757
однородной системы из л + 1 уравнений
«uli + а12|2 -1- ... + alnln + atln+1 = О,
Ъп + a2ln+1 = О,
Отсюда вытекает, что особые точки могут существовать лишь
у вырождающихся поверхностей: при /? = л поверхность имеет не более
одной особой точки; если же R < л, то особых точек или вовсе пет
(если уравнения E) несовместны), или же они образуют (л — /^-мер-
/^-мерную плоскость. Все касательные прямые в неособой точке
MQ = (д-J, ..., дг°) поверхности A) заполняют (л— 1 )-мерную плоскость,
уравнение которой есть
эта плоскость называется касательной плоскостью к поверхности A)
в ее точке Мй. Интересным упражнением для читателя было бы
установление того факта, что касательная плоскость в неособой
точке к невырождающейся поверхности второго порядка пересекает
ее по (п — 2)-мерной конической поверхности, слагающейся из прямо-
прямолинейных образующих поверхности A), проходящих через данную
ее точку М0 = {х1,х\, ...,х°п).
Понятие центра симметрии поверхности определяется в л-мерном
пространстве так же, как и трехмерном, и уравнения центра имеют
такой же точно вид. В зависимости от того, каков малый ранг г
поверхности, она имеет или единственный центр симметрии (при г=п,
поверхность A) называется в этом случае центральной), или не
имеет ни одного центра, или же она имеет целую (л — /-)-мерную
плоскость центров.
Наконец, вводится и понятие направлений, взаимно сопряженных
относительно данной поверхности A), вернее, относительно квадра-
квадратичной формы старших членов ее уравнения: два направления, задан-
заданные векторами и и v, называются сопряженными, если т|з (u, v) = 0,
где г|) — билинейная форма, полярная к форме tp.
Так же, как в случае л = 3, доказывается, что середины всех
хорд данного направления и лежат в одной (л—1)-мерной плоскости;
эта плоскость несет иа себе все направления, сопряженные направ-
направлению и, и называется плоскостью, сопряженной направлению и отно-
относительно данной поверхности. Всякая (п—1)-мерная плоскость, сопря-
сопряженная какому-нибудь направлению относительно данной поверхности
второго порядка, называется диаметральной гиперплоскостью этой
поверхности. Диаметральные плоскости размерностей k, 1^й<л—1,
758 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
определяются как плоскости, являющиеся пересечением нескольких
диаметральных плоскостей размерности п—1.
В случае центральных поверхностей диаметральные плоскости —
это просто плоскости, проходящие через центр поверхности.
Понятие особого направления вводится и исследуется так же,
как и в случае п — 3; исследование этого и других вопросов общей
аффинной теории поверхностей второго порядка предоставляется чита-
читателю. Решившись на такое исследование, любознательный читатель
едва ли пожалеет о затраченных на него времени и усилиях. В част-
частности, он, вероятно, сумеет дать (по индукции) доказательство теоремы
единственности (см. § 5 главы XX) для поверхностей второго порядка
в л-мерпом пространстве.
Несомненно, читатель докажет (по крайней мере для центральных
поверхностей) следующую теорему: если направления единичных
векторов eL, е0, .. ., ел данной аффинной координатной системы в про-
пространстве R" являются попарно сопряженными между собою относи-
относительно поверхности A), то в этой координатной системе квадратичная
форма старших членов уравнения A) имеет канонический вид.
Теперь до конца этого параграфа мы предполагаем, что в про-
пространстве R" выбрана такая аффинная координатная система
Ое^.-.е,,, в которой форма <f(xltx2, ...,хп) имеет вид
Ф (xlt х2, ..., х„) = rlx\ -|- г2х\ -f ... -|- ггхгг,
где г, как всегда, есть ранг формы ср и все коэффициенты е^ е2, ..., ег
Равны + 1. В этой системе координат уравнение данной поверхности
имеет вид
F (xlt ...,х„) = г^\ + ... + srx2r -f 2alx1 + ... -f- 2anxn + a0 = 0.
A*)
Покажем теперь, что посредством сдвига начала координат в неко-
некоторую точку О' — [х\, xl х°г, 0, ..., 0), координаты которой вдоба-
вдобавок однозначно определены, можно достигнуть того, чтобы коэффи-
коэффициенты аъ ..., аг при хг, ..., хг в линейной форме а1лг1 + . . • -г а„х„
обратились в нуль. В самом деле, сделаем преобразование координат
F)
-*"Г + 1 ¦*/¦+!!
х„ = х„
§ 8] (П—1)-МЕРНЫЕ МНОГООБРАЗИЯ ВТОРОГО ПОРЯДКА ' 759
при пока еще не определенных постоянных х°, ...,х°г. При преоб-
преобразовании F) многочлен F (х1г ..., ха) тождественно перейдет в
_J-9^c 1-°_1_л \ с' ! 9 /g v-°_l n \ v' J- ' 9 1ч vO I n \v-' I
—] ^ \*-*Л"™ 1 1 1/ 1 —— |ЬоЛ2 —I 2/ " Т~~ • • • —j— ** \*-*г"™г —— г) *^г ' i—
-\-2ar+1xr+L-\- ... -\-2апх'п-
где
Так как гъ ..., гг все отличны от нуля, то из уравнений
значения х\, ..., х°г определяются однозначно, и тогда коэффициенты
при первых степенях х\, . .., х'г в F' (х[, ..., х'п) обратятся в нуль,
а само уравнение A*) примет вид
ZLX? -f . . . -J- MV* + 2ar + l X'r+i. + ••¦"!- 2anX'n + a'o ^ 0- G)
Если все ar+1, ..., an равны нулю, то с системой координат
О'х[.. .х'п, имеющей репер О'е^...е„, больше ничего не делаем.
Если же среди аг+1, ...,ап имеются отличные от пуля, то без огра-
ограничения общности можем предположить, что аг+1^0; тогда переходим
к новому аффинному реперу О'&'[...&'„ посредством преобразования
координат
¦^•1 ==' Х\)
X, = Хг,
^~ a
r+2
.х'г+2 +...+ а„х'п + —¦, \ (8)
Хп — хп> )
это преобразование (8) переводит уравнение G) в уравнение
:+1 = о. о)
Мы доказали следующее основное предложение.
Теорема 16, В надлежаще выбранной аффинной системе коор-
динат пространства R" всякая поверхность второго порядка (малого)
ранга г ^.п имеет при г = п уравнение
Ъ + ао = О, A0)
760 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [ГЛ. XXV
при г < /z либо уравнение
eLxt-{-...+егх2г + а0 = О,' (Ц)
либо уравнение
e1*J+...+e#.** + 2jfr + 1 = 0. A2)
Геометрический смысл этой теоремы выясняется по аналогии
с трехмерным случаем.
Уравнение A0) есть простейшее уравнение центральной поверх-
поверхности в аффинных координатах. При а0 ^= 0 мы имеем невырождаю-
щуюся центральную поверхность, при а0 = 0 — конус второго порядка.
Если в данной аффинной координатной системе уравнение
центральной поверхности имеет вид A0), то начало координат этой
системы является единственным центром поверхности A0).
Нормируя уравнение A0) требованием, чтобы его свободный член
ао^=О был отрицательным, основываем аффинную классификацию
невырождающихся центральных поверхностей на индексе квадратичной
формы ф (xlt ..., хп), т. е. на числе положительных среди коэффи-
коэффициентов еь . .. , еи. Мы получаем, прежде всего, два крайних случая
действительного и мнимого эллипсоидов: действительный эллипсоид
получается, когда все ех, ... , еп положительны, мнимый — когда они
все отрицательны. Между этими крайними случаями лежат п—1
гиперболоидов различных сортов.
Если в уравнении A0) мы имеем я = 0, то это уравнение опре-
определяет конус второго порядка; в этом случае, умножая, если надо,
обе части уравнения A0) на —1, мы всегда можем предположить,
что число положительных среди коэффициентов не меньше, чем -=¦ ;
ограниченные этим требованием значения индекса квадратичной формы
tp (хъ ... , хп) и дают нам различные аффинные классы конусов
второго порядка в R"; число этих классов равно g- + I1); они вза-
взаимно однозначно соответствуют аффинным классам невырожденных
поверхностей второго порядка в R"'1.
Пусть теперь г = п—1. Тогда наша поверхность задается либо
уравнением
elxt+...+en_1xU + 2xn = 0, A3)
либо уравнением
г1х1+...+вп_1х*-1 + а0 = 0. (Hn_i)
В первом случае имеем параболоид. Умножая, если нужно, обе
части уравнения A3) на —1, меняя направление последней коорди-
координатной оси, а также порядок других осей, можно всегда достигнуть
того, чтобы число положительных среди коэффициентов еь е2 en-i
2) [k\ означает наибольшее целое число < k.
§ 8] (n — 1)-мёрныё многообразия второго порядка 761
было ^ и чтобы они стояли на первых местах. Это и даст нам
нормальный вид уравнения параболоида. Число аффинно различных
классов параболоидов равно у—х— ~М-
В случае (lln_j) имеем цилиндр над (п—1)-мерной центральной
поверхностью, в частности, при а0 = 0 — над (п—1)-.мерным конусом
второго порядка.
Переходим теперь к случаю любого г < п—1. Введем прежде
всего следующее определение. Поверхность, заданную в /г-мерном
пространстве R" уравнением вида
F(xlt...,xp)=0, A4)
где р < п и, следовательно, q~n—р > О, назовем q-кратным ци-
цилиндром над (р—\)-мерной поверхностью A4), лежащей в р-мерной
плоскости
х — — х — О
пространства R" (т. е. в плоскости, проходящей через точку
О —@, . . . , 0) и натянутой на векторы еь ... , ер). Теперь
можно сказать, что при любом г < л—1 уравнение A2) определяет
(п — г—\)-кратный цилиндр над r-мерным параболоидом, лежащим
в (г-\- 1)-мерной плоскости
хг+2 =..•=•*:„ = 0
и заданным в ней уравнением A2).
Уравнение A1) определяет (п — г)-кратный цилиндр над (г — 1 )-мер-
ной центральной поверхностью /•-мерной плоскости
вырождающейся при ао = О в конус.
Предполагаем теперь, что аффинное пространство R" снабжено
евклидовой метрикой, т. е. является евклидовым пространством Е".
Имеет место следующая основная
Теорема 17. В надлежаще выбранной прямоугольной коорди-
координатной системе евклидова п-мерного пространства Е" всякая лежащая
в этом пространстве поверхность второго порядка малого ранга г ^.п
имеет уравнение одного из следующих видов:
А. Если ранг г—п {центральный случай), то
%хх\ + VI + . . . + Kxl + Ч = 0, A5)
причем при ао^О получаем невырождающуюся центральную поверх-
поверхность, при а0 = 0 — вырождающуюся (конус).
Б. Если г=п — 1, то или
2цхп = V? + Кх\ + ... + К-\*\-\ (параболоид), A6n_x)
762 ЛИНЕЙНЫЕ ОПЕРАТОРЫ ГГЛ- хху
или
xXU + <*о = 0 A7n_x)
— цилиндр над (п — 2)-мерной центральной поверхностью в плоскости
хп^0.
В. При г < п — 1 либо
Vi - г Кх\ -I- . • • + V? + а0 = О A7Г)
— (/г—г)-кратный цилиндр над центральной (г—\)-мерной поверх-
поверхностью в r-мерной плоскости (вырождающейся при йо=Ое конус), либо
2цхг+1 = Vl + Kxl +...+ Kxr A6,)
— (п — г—\)-кратный цилиндр над r-мерным параболоидом.
Доказательство. Пусть
F(xv... ,xn) = (f(xv ... ,хп) -|- 2/ (xlt ...,xn) + a0 = 0 A)
— уравнение поверхности второго порядка в прямоугольной системе
координат О&1 ... е„,
п
Ф (Хх, ... ,хп)= 2 <*«*¦****
— квадратичная форма ранга r^Zn,
п
I {xv ... , х„) = 2 «у-^/
— линейная форма.
Предположим сначала, что г — п; тогда существует ортонормаль-
иый базис, составленный из собственных векторов е^,... , е^ квадра-
квадратичной формы ф, в котором эта форма принимает вид
Х^ + ... +'кпх'п\
причем все числа Хг, ... , Хп отличны от нуля. В системе координат
Ое'х ... е'а уравнение A) принимает вид
Кх'* +...+ Кх'п + 2а[х[ +...+ 2апх'п + а0 = 0. A8)
Так как все числа Xt, .. . , Яп отличны от нуля, то посредством
переноса начала О системы координат Ое[ ... е'п в точку О' можно
достигнуть того, что все коэффициенты линейной формы уравнения
поверхности обратятся в нуль и в системе О'е[ ... е'п уравнение
поверхности будет иметь вид
Vi2+---+V«2+ao'=O. A5')
При а'о =ф 0 получаем невырождающуюся центральную поверхность,
при а'0 — 0 — вырождающуюся (конус).
Пусть теперь г < п. Найдем такой ортонормальный базис
eii • • ¦ ) ел»
§ 8] (n—1)-мерные многообразия второго порядка 763
в котором квадратичная форма ср имеет канонический вид
а линейная форма / принимает вид
В качестве первых г векторов искомого базиса возьмем ортонор-
мальную систему из г собственных векторов е[, ... , е'г квадратичной
формы <р, соответствующих ее г отличным от нуля собственным
значениям Xlt ... ,ХГ.
Чтобы найти (г-)-1)-й вектор нужного нам базиса, представим
вектор
a = {ai, ... ,ап\
(координатами которого являются коэффициенты линейной формы /)
в виде
а = а1е'1+...-l-aA + b, A9)
где b — вектор, ортогональный к каждому из векторов е^, .,. , е'г.
Для получения такого представления вектора а умножим равен-
равенство A9) на каждый из векторов е[, ... , е,'г. Тогда будем иметь
а,- = (а, е^) (/ = 1, ... , г),
откуда
Ь = а-(а, е;К-...-(а, е;К. A9')
Из равенства A9') видно, что вектор b ортогонален к каждому
из векторов е'и ... , е'г.
Теперь возможны два случая:
1. Ь = 0.
2. ЪфО.
В первом случае равенство A9) принимает вид
а = ate; + • • • + «А-
Дополним ортоиормальную систему векторов е^, ... , е, до (какого-
нибудь) ортонормального базиса е^, .. . , е^, е)-+1, . .. , е'п всего про-
пространства R" и будем рассматривать линейную форму l(xt, .. . , хп) =
== axxt +... -\-апхп как скалярное произведение векторов
а = {аь ... ,ап\ и x = {*i> ••• . хп)-
В базисе е'ъ ... , е'п К+и • • • , *'п
а = {alt ... ,ап 0, .... 0}.
Пусть в этом базисе
х = \xlt ... , хг, хг+и ¦ • • , хп\,
764 ЛИНЕЙНЫЕ ОПЕРАТОРЫ [гл. xxv
тогда
/' (х\, ... , х'п) = (а, х) = ахх'х + ... + агх'г.
Таким образом, в системе координат Oei ... е'„ уравнение по-
поверхности A) принимает вид
' * ао = 0.
Так как все числа Kv ... , Хг отличны от нуля, то сдвигом начала
координат О в новую точку О' снова можно достигнуть того, чтобы
уравнение не содержало членов с первыми степенями координат.
В системе О'е[ ... е'„ уравнение A) принимает вид
н, в частности, при г = я—-1
Пусть теперь b ф 0. Положим | b | = ц н представим вектор b
в виде
Ь = це;+1.
Формула A9) в этом случае принимает вид
а = ахе; + ... + аге'г + це'г+1.
Дополним снова ортонормальную систему векторов е'ь ... , е^, е^+1
до ортомормального базиса е'ъ ... , е'п всего пространства и будем
рассматривать снова форму / (xv ... , хп) как скалярное произведе-
произведение векторов а и х. В базисе е'и ... , е'„ линейная форма / примет вид
Поэтому уравнение A) в системе Ое[ ... е'п принимает вид
V;* + • • • + Кх'т + 2а^ + ... + 2агл;; + 2цх'г+1 + а0 = 0. B0)
Ввиду того, что все числа Хъ ... , Хп ц отличны от нуля, пере-
переносом начала координат О в точку
^ — I i. , • • • , -j ¦. -07— , u, . . . , и ,
где
и изменением направления оси О'х^+1 на противоположное можио
добиться того, что уравнение A) примет вид
*i*i2 + • • • + Mv* = 2px"r+i при г < л A6^)
и, в частности,
++^2; при г«я—1. (I6,i_i)
§ 8] (n — 1)-мерныв многообразия второго порядка 765
В заключение несколько слов о поверхностях второго порядка
в (комплексном) /г-мерном проективном пространстве Р". Они опре-
определяются уралнением (в однородных координатах)
O(xltxt,...,xn + 1) = 0, B1)
левая часть которого есть квадратичная форма от этих координат.
Пусть а — какая-нибудь прямая, не содержащаяся целиком в по-
поверхности A) и, следовательно, пересекающаяся с нею по паре
точек: действительных (быть может, совпадающих) или мнимых (со-
(сопряженных). Если прямая пересекается с поверхностью B1) по паре
совпадающих точек, то она называется касательной, и все касатель-
касательные прямые к поверхности B1) в данной ее точке Р= (/V-/V • • • -Рп-ы)
образуют касательную плоскость, уравнение которой есть
^(Pi. •••,P» + i; x1,...,xa+1) = 0, B2)
где W, как всегда, билинейная форма, полярная к квадратичной
форме Ф. Если Р= (/v/v ... :р„ + 1) —какая-нибудь точка, быть
может, и не принадлежащая поверхности B1), то плоскость я, опре-
определяемая уравнением B2), называется полярной плоскостью точки Р
(относительно поверхности B1)), а точка Р называется полюсоц
плоскости п. О полярных плоскостях и полюсах можно повторить
все, что о них было сказано в главе XXIII (для случая /г = 3) и еще
ранее в главе XXII (для п — 2).
Со всякой гиперплоскостью пространства поверхность B1) пере-
пересекается по (п — 2)-мерной поверхности второго порядка. Если по-
поверхность B1) невырождающаяся, то (п — 2)-мерная поверхность, по
которой она пересекается с гиперплоскостью я, вырождается тогда
и только тогда, когда плоскость п является касательной плоскостью
к поверхности B1); тогда в пересечении получаем (п—2)-мерный
конус прямолинейных образующих поверхности B1), проходящих
через данную точку. В частности, если поверхность B1) не содержит
несобственной гиперплоскости хп+1 = 0, то ее пересечение с этой
последней совпадает с {п — 2)-мерной поверхностью, являющейся
пересечением с несобственной плоскостью конуса асимптотических
направлений данной поверхности.
Так как всякая плоскость любого числа измерений есть пересе-
пересечение нескольких гиперплоскостей (т. е. (п—1)-мерных плоскостей),
то пересечение поверхности B1) со всякой плоскостью (любой раз-
размерности) есть поверхность второго порядка соответствующего
числа измерений.
Проективная классификация поверхностей второго порядка
в пространстве Р" сводится к классификации квадратичных форм
Ф(хь .. . , хп+1) от п-\-\ переменных по их рангу и индексу.
Умножая, если нужно, обе части уравнения B1) на —1, всегда
можно достигнуть того, чтобы индекс квадратичной формы
766 ЛИНЕЙНЫЕ ОПЕРАТОРЫ {гл хху.
Ф{хьх2,...,хп+1) был не меньше, чем у, где г —ранг формы Ф.
Предполагая, что все рассматриваемые уравнения нормированы этим
требованием, видим, что для каждого значения г, 1</-^я4-1
каждый проективный класс поверхностей данного ранга г определяется
значением индекса k нормированной формы Ф и состоит из поверх-
поверхностей, проективно эквивалентных поверхности, уравнение которой
(в «канонической» системе координат) имеет вид
где k принимает все значения, удовлетворяющие неравенству
так же как в случае п = 3.
Доказательство теоремы единственности для поверхностей второго
порядка в /г-мерном проективном пространстве сводится к доказатель-
доказательству аналогичной теоремы для поверхностей в аффинном простран-
пространстве R".
Наконец, так же как в трехмерном пространстве Р3, проективно-
аффмнный класс поверхности второго порядка в Р" определяется
проективным классом самой поверхности и проективным классом ее
пересечения с несобственной гиперплоскостью.
ПРИБАВЛЕНИЕ
ПЕРЕСТАНОВКИ, МНОЖЕСТВА И ИХ ОТОБРАЖЕНИЯ; ГРУППЫ
§ 1. Перестановки
Боря, Володя и Шурик сидят в лодке в определенном порядке
(считая, например, от иоса к корме лодки). Боря гребет на перед-
передних веслах, Володя — на средних, Шурик — за рулем. Их можно пере-
пересадить шестью различными способами — существует шесть различ-
различных порядков, в которых они могут разместиться в лодке (считая
все время от носа к корме), а именно:
1) Боря, Володя, Шурик; 4) Володя, Шурик, Боря;
2) Боря, Шурик, Володя; 5) Шурик, Володя, Боря;
3) Володя, Боря, Шурик; 6) Шурик, Боря, Володя.
Переход от одного из этих порядков к другому, т. е. само действие
пересаживания мальчиков в лодке, называется перестановкой (или
подстановкой)г).
*) Термин перестановка спокон веку употребляется именно в этом смысле
в русском языке: всякий знает, что такое перестановка клиг на полке или
стульев за столом. В алгебраической (особенно учебной) литературе устано-
установилась другая, представляющаяся мне неразумной, терминология: переход
от одного порядка элементов данного конечного множества к другому стали
называть подстановкой, а сами эти порядки — перестановками. Такая терми-
терминология не только идет вразрез с обычным словоупотреблением, по и по
существу относится к тому ушедшему в прошлое времени, когда в матема-
математике еще не привыкли к словам «множество» и «упорядоченное множество».
К этому же периоду относятся уже попсе неудачные термины «сочетание»
(вместо «подмножество» конечного множества) и «размещение» (вместо «упо-
«упорядоченное подмножество»).
Мы будем говорить: порядок (элементов данного конечного множества)
и перестановка или подстановка (переход от одного порядка к другому).
В комбинаторной топологии такое словоупотребление давно установилось:
говорят о различных порядках вершин данного симплекса и о перестанов-
перестановках этих вершин (т. е. о переходах от одного порядка к другому). См., на-
например, Л. С. Поитрягин, Основы комбинаторной топологии, Москва,
Гостехиздат, 1947, стр. 43. Я опасаюсь даже, что иногда мы будем (сознаная
всю непозволительность этого) употреблять слово «перестановка» в обоих
смыслах: и как действие («подстановка»), и как результат действия (поря-
(порядок, возникший в результате действия подстановки).
768 ПРИБАВЛЕНИЕ
Перестановка записывается так:
/Боря, Володя, Шурик
\Володя, Шурик, Боря
Это значит, что Володя сел на место Бори, Шурик — на место Во-
Володи, Боря — на место Шурика.
Следующее замечание при всей его очевидности очень важно.
При этом перестановка элементов какого-нибудь множества, напри-
например множества гребцов на лодке, вполне определена, если указано,
какой гребец сел на место какого. Именно это и только это ука-
указано в записи A). Поэтому в записи A) и вообще в записи любой
перестановки совершенно несущественно, в каком порядке написаны
элементы верхней строки. Та же перестановка A) может быть, оче-
очевидно, записана и в виде
/Володя, Боря, Шурик
\Шурик, Володя, Боря
и в виде
/Шурик, Володя, Боря \
^Боря, Шурик, Володя/ '
Простейшими из перестановок являются так называемые транс-'
позиции; это перестановки, при которых все элементы данного мно-
множества, кроме двух элементов, остаются неподвижными, а упомяну-
упомянутые два элемента меняются местами. Например:
/Боря, Ваня, Володя, Витя, Шурик^
\Боря, Витя, Володя, Ваня, Шурик,
В этой перестановке Боря, Володя, Шурик остались на месте,
а Ваня и Витя поменялись местами.
Всякую перестановку можно осуществить, делая последователь-
последовательно транспозиции (в лодке так и полагается пересаживаться, в осо-
особенности при волнении). Строгое доказательство этого факта (ин-
(индукция по числу элементов множества) нетрудно и может быть пре-
предоставлено читателю.
Определение. Перемножить две перестановки, первую на
вторую,—значит сделать сначала первую перестановку, потом
вторую.
Например, пусть даны две перестановки:
„ /Володя, Шурик, Боря, Витя, Ваня\
1~\чБоря, Ваня, Володя, Шурик, Витя/'
о _ /Шурик, Володя, Ваня, Боря, Витя \
2~ДБоря, Ваня, Витя, Володя, Шурик/
§ 1] . ПЕРЕСТАНОВКИ 769
В результате перестановки 6\ на место Володи сел Боря, но в ре-
результате второй перестановки на место Бори сел Володя. Значит,
после двух перестановок St и S2 Володя остался на месте. На ме-
место Шурика после перестановки Si сел Ваня, но в результате вто-
второй перестановки S2 на место Ванн сел Витя. Значит, после двух
перестановок на место Шурика сел Витя. После первой переста-
перестановки на место Бори сел Володя, на место которого вторая пере-
перестановка посадила Ваню. В результате двух перестановок, сначала
Sj, потом S», на место Бори сел Ваня. Так же убеждаемся в том,
что после перестановок St и S2 на место Вити сел Боря, а на ме-
место Вани — Шурик. Итак, произведение перестановок S1 и Su есть
перестановка
« /Володя, Шурик, Боря, Витя, Ваня \
3~ \ Володя, Витя, Ваня, Боря, Шурик/
Мы записываем этот результат так:
т. е. пишем справа первую перестановку, а слева — вторую1).
Заметим, что при перестановке S3 Володя остался на месте.
Если при данной перестановке элементов какого-нибудь множества
все элементы этого множества Остаются на своих местах, то пере-
перестановка называется тождественной. Тождественная перестановка
наших трех гребцов есть
/Боря, Володя, Шурик N
\Боря, Володя, Шурик/
Мы будем обозначать тождественную перестановку через Е (или е).
При тождественной перестановке вообще ничего не происходит, ни-
никакой перестановки нет. Спрашиваете»: нужно ли ее рассматривать?
Оказывается, нужно, так же как нужно, например, рассматривать
покой как частный Случай движения, иначе изложение всей механики
очень осложнилось бы. (Лы сейчас убедимся в эТом.
Ко всякой перестановке 5 существует однозначно определенная
обратная к ней перестановка S~*; перестановка ?~х возвращает
элементы, перемещенные перестановкой S, на rfx первоначальные
места.
Например, перестановка, обратная к перестановке
__/Боря, Володя, ШуршЛ
~ \ Володя, Шурик, Боря ) '
>) Причина такой записи выяснится немного позже, в § 3 атого Прибав-
Прибавления.
25 п. С. Александров
770 ПРИБАВЛЕНИЕ
есть перестановка
,,_, _ /Володя, Шурик, Боря \
\Боря, Володя, Шурик/ •
или если в записи перестановки S~* сохранить тот же порядок эле-
элементов первой строки, какой был в записи перестановки S, то та
же перестановка S~l записывается в виде
„_1_/Боря, Володя, Шурик N
~~\Шурнк, Боря, Володя/
Очевидно, если S есть перестановка, обратная к перестановке 5,
то 5 есть перестановка, обратная к S~1; перестановки 5 и S'1
суть взаимно обратные перестановки.
Очевидно также, что, если сделать сначала какую-нибудь пере-
перестановку, а потом—обратную к ней, мы получим тождественную пе-
перестановку:
Читатель легко докажет, что для данной перестановки S обратная
перестановка S'1 есть единственная перестановка А", удовлетворяю-
удовлетворяющая какому-нибудь из условий
SX=E или XS = E.
Тождественная перестановка есть единственная перестановка X,
удовлетворяющая для любой перестановки 5 каждому из уравнений
SX S XS S
При этом, разумеется, все время рассматриваются перестановки
одного и того же множества (например, множества трех гребцов
на нашей лодке).
Мы уже подчеркивали, что, записывая данную перестановку в виде
двух строк и указывая таким образом, какой элемент данного мно-
множества каким элементом этого же множества заменяется, мы вольны
в верхней строке написать элементы нашего множества в любом
порядке, лишь бы под каждым элементом верхней строки был под-
подписан тот элемент, которым он заменяется. Поэтому можно раз на-
навсегда занумеровать элементы данного множества Хп натуральными
числами, т. е. записать их в виде
а произвольную перестановку этих элементов записать в виде
__ /х1 х2 .. ,хп \ #
W *,¦,•¦•¦*.¦„/'
эта запись показывает, что при перестановке 5 элемент ХЛ заме-
заменился элементом x(i, элемент х2 — элементом х{ и т. д. Но при
§ 1] ПЕРЕСТАНОВКИ 771
этой записи все дело сводится к перестановке не самих элемен-
элементов хъ х2,..., хп, а их номеров 1, 2 л, так что, например,
все шесть перестановок произвольных трех элементов — после того
как эти элементы занумерованы какими-нибудь числами 1, 2, 3—мо-
3—могут быть записаны в виде
1 2 3\ /1 2 3\ _/1 2 3\
1 2 3/' Ol \1 3 2/' 2 \2 1 3/'
1 2 3\ „ _/1 2 3\ „ _/1 2 3
2 3 1/' *~\3 2 \J' ^"C1 2
Конечно, жаль расставаться с нашими гребцами в лодке и заме-
заменять их невыразительными цифрами, но делать нечего — так все по-
получается гораздо короче.
Теперь мы можем сказать: перестановка
/1 2 3 ... п\
-U «2 «з ... «J
в множестве Хп, состоящем из чисел 1, 2, ..., п, заключается
в том, что каждому элементу к множества Хп ставится в соответ-
соответствие элемент ак того же множества Хп, притом так, что различ-
различным k соответствуют различные ak.
Это положение вещей выражают, говоря, что перестановка A')
есть взаимно однозначное отображение множества Хп на себя.
Можно написать
ak = S(k) B)
и сказать, что перестановка 5 есть функция B) такая, что и зна-
значения аргумента k, и значения функции суть числа 1, 2, 3, ... , п,
причем различным значениям аргумента соответствуют различные
значения функции. Перестановка A') вполне определена, если для
каждого к (А=1, 2, ... , п) определено S [к), т. е. ak. Отсюда
сразу следует свойство ассоциативности (сочетательности) умножения
перестановок, т. е. свойство, выражаемое формулой
St (S2SS) = (ЗД) Sa, C)
т. е. если сначала сделать перестановку S2S3, являющуюся произ-
произведением перестановок S3 и S2 (в этом порядке), а затем —пере-
—перестановку Sv то это все равно, что сделать сначала перестановку
S3, а потом перестановку Sj^. являющуюся произведением пере-
перестановки S, на перестановку Sx. В самом деле, если записать
перестановки Sly S2, S3 соответственно в виде функций:
«* = •*! (A), bk = St(k), ch = Sa{k)
(&= 1, 2, ... , п),
25*
772
ПРИБАВЛЕНИЕ
то и левая, и правая часть равенства C) есть перестановка S,
ставящая в соответствие элементу k множества X элемент
т. е.
= S1(St(S3(k))),
/1 2 ... п\ /1 2 ... п\ /1 2 ... я\
/1
Замечание 1. Свойством переместительности (коммутатив-
(коммутативности) умножение перестановок, вообще говоря, не обладает: если
2 3
3 1
то
1 2 3>
2 1 3>
2
Замечание 2. Если натуральные числа, являющиеся
элементами множества Хп, записать в их естественном порядке
1, 2, 3, ... , п,
то каждая перестановка множества Хп переводит этот порядок
в какой-то порядок
и, обратно, каждый порядок аъ а«, ... , ап получается в резуль-
результате вполне определенной перестановки. Итак, различные порядки,
в которых можно записать элементы множества Хп, взаимно одно-
однозначно соответствуют перестановкам в этом множестве. Поэтому
число этих перестановок равно числу различных порядков в мно-
множестве Хп. Докажем, что это число равно п\. Это ясно, если
л=1, тогда имеется лишь один порядок. Ясно это н для л = 2,
тогда имеется два порядка: 1, 2 и 2, 1. Предположим, что наше
утверждение доказано для п — 1, докажем его для п. Каждому
порядку
«1. аъ • • • i a,,-i,
в котором можно написать числа 1, 2, ... , п—1, соответствует п
различных порядков, полученных от присоединения числа п, а именно
порядки
•> "rt-i-
n.
§ 1] FTEPFXTAHOBKH 773
Так как по предположению всех порядков аъ а2, ... , ап_1, в
которых можно написать числа 1, 2, ... , я—1, имеется (л—1)!,
то всех порядков, в которых можно написать числа 1, 2, ... л
будет (л—1)!л = л!, что и требовалось доказать.
Четные и нечетные перестановки. Пусть дана пере-
перестановка
=П 2 ... п
\«1 «2 ••• пп)
Рассмотрим какую-нибудь пару различных элементов множества Хп,
т. е. два натуральных числа /, k, каждое из которых не превос-
превосходит л. Пару /, k назовем правильной по отношению к переста-
перестановке S, если разности k — / и ak—ai имеют один и тот же знак.
В противном случае говорят, что наша пара неправильна по отно-
отношению к перестановке S или образует в ней инверсию. Следова-
Следовательно, если пара /, k образует инверсию, то имеем либо / < k и
a(>aft, либо, наоборот, />& и а1 < ак.
В тождественной перестановке ( ) нет ни одной инвер-
\\ 2 6J
сии — все пары правильны.
/1 2 3\
В перестановке (910) имеется единственная инверсия A, 2).
В перестановке [ „ ) имеются две инверсии: A, 3) и B 3).
Определение. Перестановка, содержащая четное число ин-
инверсий, называется четной перестановкой; перестановка, содержащая
нечетное число инверсий, называется нечетной перестановкой.
Знаком перестановки называется число +1, если перестановка
четная, и число —1, если она нечетная. Назовем теперь знаком
действительного числа х число -j- 1, еслих > 0, число — 1, если х < О,
число 0, если х = 0. Теперь ясно, что знак перестановки 5 равен
i—k . ,
произведению знаков всех чисел ———, соответствующих парам i, k,
i — k k — i
причем дробь ——— = ¦—^-^ строитая по одному разу для каж-
каждой пары, взятой из чисел 1, 2, 3, ... , п1).
Этим замечанием мы воспользуемся для доказательства следу-
следующего предложения:
Знак произведения двух перестановок равен произведению знаков
этих перестановок.
]) Читатель знает (и легко докажет), что число всех этих пар равно
774 ПРИБАВЛЕНИЕ
Пусть даны две перестановки:
/ 1 2 3 ... л \ /12 3.
А = ! ), В=(
\aj_ а.г а3 ... aj V*i *2 ьз •
Их произведение есть, очевидно, перестановка
———J . Знак В равен
произведению всех знаков т г- . Однако можно также написать
\bi—bk)
«2 ••• «„
Ьа, К J
—г^
г. / <*! — ,
поэтому имеем: знак В равен произведению всех знаков I ,
\ ai
Отсюда сразу следует:
/ ¦, , щ / ' — k \ fa; — пи \
(зн А) (зн В) = произв. всех зн ( )-зн I , _, ] =
= произв. всех зн I— • • -^——-
I я._аА ьа-Ьак
f i — k \ t г, л\
= произв. всех зн ( -г г— )=зн(йЛ),
V ° —W
что и требовалось доказать.
Из доказанной теоремы непосредственно следует: произведение
двух перестановок одинаковой четностих) есть четная, а произве-
произведение двух перестановок различной четности 8) есть нечетная пере-
перестановка. Тождественная перестановка Е не содержит ни одной
инверсии и, следовательно, есть четная перестановка. Далее,
т. е. произведение данной перестановки А и обратной к ней есть
четная перестановка; отсюда, по только что доказанному, следует,
что любая перестановка имеет ту же четность, что и обратная ей.
Итак, имеет место
Теорема 1. Произведение двух четных перестановок есть чет-
четная перестановка, тождественная перестановка есть четная переста-
перестановка; перестановка, обратная четной перестановке, есть четная
перестановка.
1) То есть произведение двух четных или двух нечетных перестановок.
2) То есть произведение четной и нечетной или нечетной и четной.
§ 1] ПЕРЕСТАНОВКИ 776
Докажем теперь следующее предложение.
Лемма. Любая транспозиция
/1 ...
с
- ....
k
а • •
• • •
k
i
. •. п
•. • п
есть нечетная перестановка х).
Для доказательства заметим, что какая-нибудь пара (/г, /) только
тогда может образовать инверсию относительно перестановки S,
когда одним из элементов этой пары есть какое-нибудь из чисел
i, k. Каждую пару будем записывать в ее естественном порядке:
(А, /), если h < /.
Ни одна пара вида А,/, А</, инверсией не является, так как
в (^ Л имеем А < / < k.
Среди пар (/, /) инверсиями являются пары (г, /+1), ... , (/, k),
всего k — i инверсий.
Пары (/, /), где / >• k, инверсиями не являются, так как в
^ А имеем / < k < /. Нет инверсий среди пар (_/, k), j < /.
Пара (/, k) есть инверсия, но мы ее уже считали. Среди пар
U, *)> У> h имеются инверсии
{i+h A), .... (ft-1, k),
всего k—1—i инверсий.
Наконец, ни одна из пар (k, j), y> k, инверсией не является.
Итак, в нашей транспозиции 5 имеем всего
¦— нечетное число инверсий.
Лемма доказана.
Из теоремы 1 и из леммы вытекает
Теорема 2. Всякая перестановка, являющаяся произведением
четного числа транспозиций, является четной перестановкой, а вся-
всякая перестановка, являющаяся произведением нечетного числа транс-
транспозиций, есть нечетная перестановка.
Так как всякая перестановка есть произведение некоторого
числа транспозиций, то из теоремы 2 следует, что нечетные, соот-
соответственно четные, перестановки могут быть определены как пере-
перестановки, которые являются произведением нечетного, соответст-
соответственно четного, числа транспозиций.
') Может, конечно, случиться, что в транспозиции S имеем » = 1 или
= п или и то и другое одновременно.
776 ПРИБАВЛЕНИЕ
Замечание 3. Данная перестановка может быть, вообще
говоря, различным образом представлена в виде произведения
транспозиций, и число множителей в различных этих представле-
представлениях может быть различным; однако из доказанного следует, что
по всех представлениях одной и той же перестановки в виде про-
произведения транспозиций четность числа множителей всегда одна и
та же.
Замечание 4. Число четных и число нечетных среди пере-
перестановок данных п элементов одинаково и равно •=-. В самом деле,
пусть все четные перестановки в Хп суть
Умножив каждую из этих перестановок на одну и ту же нечетную,
например на одну какую-нибудь транспозицию, которую обозначим
через Sk+1, получим нечетные перестановки
Все эти перестановки различны между собою. В самом деле, если
бы, положим, было
то, умножая обе части этого тождества на S^lt получили бы
т. е. (так как S^ Sk+1 есть тождественная перестановка)
вопреки тому, что Sh и Sj — различные перестановки. Итак, все к
нечетных перестановок E) различны между собою. Я утверждаю,
что всякая нечетная перестановка 5 есть одна из перестановок E).
В самом деле, перестановка Sk+lS есть четная перестановка
(так как Sk+1 есть транспозиция, a S—нечетная перестановка),
поэтому SkiiS есть одна из перестановок So, ... , Sk. Пусть
Sk^.lS = Sh i^.k. Умножая обе части этого тождества на транс-
транспозицию Skh — Sk+1, получим S = Sk + 1Si.
Итак, перестановки (о)—это все нечетные перестановки; их
число равно k, т. е. числу всех четных перестановок. Значит, 2k
есть число всех перестановок из п элементов,
что и требовалось доказать.
§ 2] МНОЖЕСТВА 777
§ 2. Множества
В § 1 мы имели дело лишь с конечными множествами. Но бывают
и бесконечные множества. Таковы, например, множество всех нату-
натуральных (т. е. целых и положительных) чисел, множество всех
точек плоскости или пространства, множество всех прямых, прохо-
проходящих через данную точку (в плоскости или в пространстве), мно-
множество всех окружностей, проходящих через две данные точки,
множество всех плоскостей, проходящих через данную прямую,
и т. д.
Теория множеств посвящена в основном изучению именно бес-
бесконечных множеств.
Теория конечных множеств называется иногда комбинаторикой.
Но простейшие свойства множеств, те, о которых мы только и
будем здесь говорить, в большинстве случаев в равной мере отно-
относятся как к конечным, так и к бесконечным множествам.
Заметим еще одно обстоятельство: в математике вполне допус-
допускаются к рассмотрению множества, число элементов которых
равняется единице, а также множество, вовсе не содержащее эле-
элементов («пустое» множество).
Предположим, в самом деле, что мы вообще говорим о множе-
множестве окружностей, проходящих через несколько данных точек. Если
этих точек две, то множество проходящих через них окружностей
бесконечно; но если этих точек три, то имеется (в случае, если
эти три точки не лежат на одной прямой) лишь одна проходящая
через них окружность. Другими словами, множество окружностей,
проходящих через три точки, не лежащие на одной прямой, состоит
из одного элемента. А множество окружностей, проходящих через
три точки, лежащие на одной прямой, не содержит ни одного
элемента; это — пустое множество, так как таких окружностей
вовсе нет.
Заметим, наконец: запись а?Х означает, что а есть элемент
множества X. Например, если X есть множество всех точек плос-
плоскости, а М—какая-нибудь из этих точек, то пишут: М?Х.
Подмножества. Рассмотрим множество А всех студентов,
присутствующих на данной лекции. Тогда множество тех из них,
которым меньше 20 лет, является примером подмножества множе-
множества А.
Примеры других подмножеств множества А: подмножество, со-
состоящее из всех студентов, рост которых больше 165 см, или из
тех, которые родились в Москве, и т. д.
Каждый отдельный элемент множества А образует подмноже-
подмножество, состоящее из этого одного элемента.
Кроме того, пустое множество является подмножеством всякого
множества.
778 ПРИБАВЛЕНИЕ
Общее определение подмножества такое:
Множество В называется подмножеством множества А, если
каждый элемент множества В является в то же время элементом
множества А.
Подмножество множества А называется несобственным, если оно
совпадает с множеством А (другими словами, само множество А
причисляется к своим подмножествам и называется своим несобст-
несобственным подмножеством). Если множество В есть подмножество мно-
множества А, то говорим также, что В содержится в А или В включено
в А, и обозначаем это так: В?Л или А^В. Знак ? называется
знаком включения. Подмножество В множества А называется соб-
собственным подмножеством, если В не пусто и не совпадает с А
(т. е. имеется элемент множества А, не содержащийся в В). Если В
есть собственное подмножество множества А, то пишут
Вс:А или AzsB.
Дадим еще примеры. Множество всех четных чисел есть собст-
собственное подмножество множества всех целых чисел, которое в свою
очередь есть подмножество множества всех рациональных чисел.
Действия над множествами, а) Сумма множеств.
Вернемся к уже рассмотренному примеру.
Среди всех студентов, присутствующих в данной аудитории, рас-
рассмотрим множество М всех тех, которые удовлетворяют хотя бы
одному из следующих признаков:
1) они моложе 20 лет,
2) их рост больше 165 см.
Другими словами, в наше множество М войдут все студенты,
которым меньше 20 лет (независимо от их роста), а также все те,
рост которых больше 165 см (независимо от их возраста). Множе-
Множество М называется суммой двух множеств: множества А1г всех сту-
студентов моложе 20 лет и множества Ж2 всех студентов, рост которых
больше 165 см.
Общее определение суммы двух множеств Ли В.
Суммой множеств А и В называется множество, состоящее из всех
элементов множества А и из всех элементов множества В (при этом
множества А и В могут иметь общие элементы, а могут и не
иметь их).
Заметим, в частности, следующее: если множество В есть под-
подмножество множества А, то сумма множеств В и А совпадает с А.
Совершенно аналогичным образом определяется сумма любого
числа множеств. Можно определить и сумму бесконечного числа
множеств. Все это содержится в следующем определении.
Пусть дана какая-нибудь конечная или бесконечная совокуп-
совокупность множеств. Суммой множеств данной совокупности называется
множество всех элементов, принадлежащих хотя бы одному из
множеств, входящих в данную совокупность.
§ 3] отобрлжкния или функции 779
Например, пусть fik есть множество всех правильных &-уголь-
ников на плоскости (где й = 3, 4, 5, ...). Таким образом, А3 есть
множество всех правильных треугольников, Д, — множество всех
правильных четырехугольников и т. д.
Множество всех правильных многоугольников есть сумма мно-
множеств А,, Л4, Аъ, ... , Ак, ...
Обозначим через Bk (k — 3, 4, 5, ...) множество всех правиль-
правильных многоугольников, число сторон которых не превосходит k.
Тогда Вк есть сумма множеств А3, Ait ..., Ak_v Ак, и множество
всех правильных многоугольников есть сумма всех множеств
Вк(к = 3, 4, ...).
Очевидно, далее, что А3 — В3 и что
В3 с ?4 с Въ с ... с Вк <= Вн+1 с ...
б) Пересечение множеств. Пусть Мх —множество при-
присутствующих в аудитории студентов моложе 20 лет, а Мг—мно-
Мг—множество тех присутствующих в аудитории студентов, рост которых
больше 165 см.
Под пересечением множеств Мх и Мг понимается множество
элементов, принадлежащих и к множеству Мх, и к множеству Мг,
т. е. в нашем примере множество всех студентов моложе 20 лет,
рост которых в то же время больше 165 см. Конечно, это множество
может оказаться и пустым.
Вообще, пересечением множеств данной (конечной или бесконеч-
бесконечной) совокупности множеств называется множество, состоящее из
элементов, принадлежащих ко всем множествам данной совокупности.
Заметим: если Вс=А, то пересечение множеств А н В есть
множество В.
Задача. Условимся под треугольником понимать множество
всех точек, лежащих внутри этого треугольника.
Докажите, что сумма всех правильных треугольников, вписанных в
круг с центром О и радиусом 1, есть множество всех точек, лежа-
лежащих внутри этого круга, а пересечение этих треугольников есть мно-
множество точек, лежащих внутри круга с центром О и радиусом -5-.
Сформулируйте и решите аналогичную задачу для вписанных
квадратов и других правильных многоугольников, а также для пра-
правильных многоугольников, описанных около круга.
§ 3. Отображения или функции
Большая компания студентов (состоящая, положим, из всех
студентов одного курса) отправилась кататься на лодках. Лодок
хватило: каждый студент попал в какую-то лодку. Обозначим мно-
множество всех наших студентов через А, множество всех лодок
780 ПРИБАВЛЕНИЕ
через В. Каждому элементу а множества А (т. е. каждому студенту)
поставлен в соответствие определенный элемент b множества В (та
лодка Ь, в которой оказался студент а).
Мы говорим, что множество А отображено в множество В или
что мы имеем функцию, аргумент которой пробегает множество А,
а значении ее принадлежат множеству В. Для того чтобы показать,
что данный элемент Ъ поставлен в соответствие элементу а, пишут
b=f(a) и говорят, что b есть образ элемента при данном отобра-
отображении / (или что b есть значение функции для значения а аргу-
аргумента).
Множество тех элементов множества А, которым поставлен в
соответствие данный элемент b множества В, называется прообразом
этого элемента1) b и обозначается через f~xb; в нашем примере
f~lb есть множество всех студентов, оказавшихся в данной лодке Ь.
Могут представиться следующие частные случаи.
1° Для каждого элемента Ь?В множество f~^b не пусто, т. е.
каждый элемент b множества В является образом хотя бы одного
элемента а множества А; в применении к нашему примеру это зна-
значит, что в каждую лодку сел хотя бы один студент, т. е. что все
лодки оказались разобранными.
В этом случае мы говорим, что имеем отображение множества А
на множество В. Этот случай является наиболее важным. К нему
легко приводится и общий случай отображения одного . множества
в другое. В самом деле, пусть дано какое-нибудь отображение /
множества А в множествр В; множество всех тех элементов мно-
множества В, которые в силу отображения / поставлены в соответ-
соответствие хотя бы одному элементу множества А, назовем образом
множества А при отображении / и обозначим через f(A). Очевид-
Очевидно, что отображение / есть отображение множества А на мно-
множество /(А).
Это замечание дает нам возможность в дальнейшем ограничиться
рассмотрением отображений одного множества на другое.
2° Если прообраз /~г(Ь) каждого элемента b множества В со-
состоит лишь из одного элемента множества А, то отображение
множества А на множество В взаимно однозначно.
В нашем примере имеем взаимно однозначное отображение мно-
множества А всех студентов на множество В всех лодок в том случае,
когда в каждую лодку сел лишь один студент.
Взаимно однозначное отображение множества А на множество В
автоматически производит также взаимно однозначное отображение
множества В на множество А: ведь если каждое множество /~г(Ь),
где b—любой элемент В, состоит лишь из одного элемента а, то
3) В некоторых книгах это множество называется полным превбраэом
елемен-та Ь.
§ 3] отображения или функции /81
мы получаем отображение /~1 множества В на множество А, ста-
ставящее в соответствие каждому элементу b множества В элемент
a=f~x(b) множества А. Отображение f~l называется обратным
отображением к отображению /.
Итак, при взаимно однозначном отображении множества А на
множество В происходит следующее: каждый элемент а множества А
объединяется в пару с некоторым вполне определенным элементом
/(а), и при этом оказывается, что каждый элемент Ь множества В
находится в паре с единственным вполне определенным элементом а
множества А. Ставя в соответствие каждому элементу Ъ множества
В находящийся с ним в паре элемент а множества А, мы получим
взаимно однозначное отображение f~l множества В на множество А,
обратное к отображению /.
Таким образом, при взаимно однозначном отображении одного
множества на другое оба множества занимают равноправное поло-
положение (так как каждое взаимно однозначно отображается на Дру-
Другое). Для того чтобы подчеркнуть это равноправие, часто говорят
о взаимно однозначном соответствии между двумя множествами,
разумея под этим совокупность обоих взаимно однозначных и вза-
взаимно обратных отображений каждого множества на другое.
Отображения множества в себя и на себя. Пре-
Преобразование множества. Когда мы определяли отображение
какого-нибудь множества А на какое-нибудь множество В, то могло,
в частности, случиться, что множество В является собственным или
несобственным подмножеством множества А. Например, пусть А есть
множество всех точек плоскости а, а В — множество всех точек
прямой d, лежащей на плоскости а.
Пусть М—произвольная точка нашей плоскости. Обозначим
через f{M) проекцию точки М на прямую d, т. е. основание пер-
перпендикуляра, опущенного на прямую d из точки М. Ставя в соот-
соответствие каждой точке М плоскости точку f{M), получаем отобра-
отображение множества А на множество BczA.
Всякое отображение / множества А на собственное или несоб-
несобственное подмножество В множества А называется отображением
множества А в себя; если при этом В = А, то имеем отображение /
множества А на себя.
Взаимно однозначное отображение множества А на себя называ-
называется преобразованием множества А. Преобразования множеств имеют
в геометрии очень большое значение, и им уделяется в этих
лекциях большое внимание. Примером преобразования (прямой, плос-
плоскости или пространства) может служить преобразование симметрии
относительно данной точки О, т. е. взаимно однозначное отображение
(прямой, плоскости пли пространства) на себя, состоящее в том,
что каждой точке М ставится в соответствие точка М', симметрич-
симметричная точке М относительно центра симметрии О.
782 ПРИБАВЛЕНИЕ
Примером преобразования плоскости является также симметрия
(или отражение) относительно данной прямой d, лежащей в этой
тоскости. Это преобразование состоит в том, что каждой точке М
плоскости ставится в соответствие точка М', симметричная точке М
относительно прямой, т. е. точка М', лежащая на перпендикуляре,
опущенном из точки М на прямую d, на том же расстоянии от
этой прямой, что и точка М, но по другую сторону от прямой d.
Аналогично определяется и преобразование пространства, называ-
называемое симметрией относительно данной плоскости. В дальнейшем мы
узнаем много других преобразований плоскости и пространства.
Для конечных множеств понятие преобразования совпадает с
ранее введенным понятием перестановки.
Мы видели, что для перестановок, т. е. преобразований конечных
множеств, естественно определяется действие перемножения, которое
будем также называть композицией: произведение (композиция) двух пре-
преобразований / и g данного множества X, заданных в данном порядке —
сначала /, потом g,— есть преобразование множества X, полу-
получающееся, если сделать сначала преобразование /, а потом преобра-
преобразование g. Более подробно: преобразование / ставит в соответствие
каждому элементу х множества X элемент f(x) того же множества;
преобразование g ставит в соответствие каждому элементу х мно-
множества X элемент g(x) множества X, в частности, элементу f(x) —
элемент g(f(x)); преобразование h (являющееся произведением пре-
преобразований /Kg) ставит в соответствие каждому элементу х
множества X элемент g(f(x)) того же множества X. Поэтому мы
и пишем:
Это определение произведения, или композиции, двух отображений
без всяких изменений пригодно и для любых двух отображений
множества X в себя (без требования взаимной однозначности). Если,
как это принято, например, в анализе, называть отображения
функциями, то композиция двух отображений fug есть не что иное,
как сложная функция g(f(x)). Например, каждая из функций
f(x) = sinx-\-3, g(x) = | log x |, определенных, скажем, на положи-
положительной полупрямой, осуществляет отображение этой полупрямой в
себя. Композиция h=gf этих отображений есть сложная функция
h (x)=g(f(x)) = | log (si
Этот пример, в частности, показывает, почему, наряду с обще-
общепринятым в геометрии термином произведения двух преобразований,
вообще, двух отображений какого-либо множества в себя, удобно
иметь еще и другой термин, например, композиции двух отображе-
отображений: при переходе к функциям, рассматриваемым в анализе, мы таким
образом избегаем конфликтов с общепринятой терминологией (не-
§41 РАЗБИЕНИЕ МНОЖЕСТВА НА ПОДМНОЖЕСТВА 783
удобно было бы сложную функцию g(f{x)) называть произведением
функций f(x) и g{x)).
Из приведенного примера видно также, что композиция (пере-
(перемножение) двух отображений, вообще говоря, зависит от порядка,
в котором берутся эти отображения:
^(/(jc)) = |log(s«n*-r3)| и /(?¦(*))= sin | log* | + 3
отнюдь не одно и то же. Впрочем, мы видели па примере переста-
перестановок, т. е. преобразований конечных множеств, что даже в этом
простейшем случае перемножение преобразований не коммутативно.
Определенное нами перемножение (композиция) преобразований
удовлетворяет свойству ассоциативности: для любых трех преобра-
преобразований fy, /2, /3 множества^ выполнено условие (fif2)fs =/i (Л/з)-
В самом деле, полагая (/1/2)/з = А, Д (/2/3) = h', имеем при любом
выборе элемента Х
Л (f8 (
Наконец, заметим, что среди преобразований множества имеется так
называемое тождественное преобразование е, ставящее в соответ-
соответствие каждому элементу х множества X этот самый элемент х
(говорят, что тождественное преобразование оставляет неподвижными
все элементы множества X). Легко видеть, что тождественное пре-
преобразование множества X есть единственное преобразование е этого
множества, произведение которого на любое преобразование / сов-
совпадает с преобразованием /: fe (х) = ef(x) —f(x) для любого х ? X.
Наконец, мы видели, что для каждого преобразования / множества
X определено обратное преобразование /~г. Оно вполне определено
каждым из условий /~1/=е, //~1 = е, означающих соответственно,
что f~lf(x)=x, //~1(х)=х при любом х?Х.
§ 4. Разбиение множества на подмножества.
Отношение эквивалентности
1. Множества множеств. Мы можем рассматривать множества,
состоящие из самых различных элементов. В частности, можем рас-
рассматривать множества множеств, т. е. множества, элементы которых
сами суть множества. Таково, например, множество всех пар весел,
имеющихся на данной лодочной станции. Множеством множеств
является также множество всех спортивных команд Москвы (каж-
(каждая спортивная команда есть множество составляющих ее спорт-
спортсменов).
Множество всех профессиональных союзов, а также множество
всех воинских частей (дивизий, полков, батальонов, рот, взводов
и т. д.) данной армии являются множествами множеств. Эти примеры
показывают, что множества, являющиеся элементами данного
784 ПРИБАВЛЕНИЕ
множества множеств, могут в одних случаях пересекаться, з других
случаях, наоборот, не иметь общих элементов. Так, например, мно-
множество всех профессиональных союзов СССР есть множество по-
попарно не пересекающихся множеств, так как гражданин СССР не
может быть одновременно членом двух профессиональных союзов.
С другой стороны, множество всех воинских частей какой-либо
армии есть пример множества множеств, некоторые элементы которого
являются подмножествами других элементов: так, каждый взвод есть
подмножество некоторого полка, полк есть подмножество дивизии
и т. д.
Множество спортивных команд данного города состоит, вообще
говоря, из пересекающихся множеств, так как одно и то же лицо
может входить в несколько спортивных команд (например, в команду
пловцов и в команду волейболистов или лыжников).
3 а м е ч а н и е. Для облегчения речи иногда вместо выражения
«множество множеств» употребляются как совершенно равнознача-
равнозначащие выражения «система множеств» или «совокупность множеств».
2. Разбиение на классы. Очень важный класс систем множеств
получаем, если рассматриваем всевозможные разбиения какого-нибудь
множества на попарно не пересекающиеся множества. Дано мно-
множество X, представленное в виде суммы попарно не пересекающихся
подмножеств; множества, слагаемые нашей суммы, и являются эле-
элементами данного разбиения множества X.
Пример 1. М есть множество всех учащихся в средних шко-
школах Москвы. Множество М можно разбить на попарно не пересека-
пересекающиеся подмножества, например, следующими двумя способами:
1) мы объединяем в одно слагаемое всех учащихся одной и той же
школы1) (т. е. разбиваем множество всех учащихся по школам);
2) мы объединяем в одно слагаемое всех учащихся одного и того
же класса (хотя бы и разных школ).
Пример 2. Пусть X есть множество всех точек плоскости;
возьмем на этой плоскости какую-нибудь прямую g и разобьем всю
плоскость на прямые, параллельные прямой g. Множества точек
каждой такой прямой и являются теми подмножествами, на которые мы
разбиваем множество X.
Если данное множество X разбито на попарно не пересекающиеся
подмножества, дающие в сумме множество М, то для краткости говорят
просто о разбиении множества М на классы.
Теорема 3. Пусть дано отображение f множества А на мно-
множество В. Полные прообразы f'1 (b) всевозможных точек b множества
В образуют разбиение множества А на классы. Множество этих
классов находится во взаимно однозначном соответствии с мно-
множеством В.
В предположении, что каждый учащийся учится лишь в одной школе.
§ 4] РАЗБИЕНИЕ МНОЖЕСТВА НА ПОДМНОЖЕСТВА 785
Эта теорема, в сущности, очевидна: каждому элементу а мно-
множества А соответствует, в силу отображения, один и только один
элемент Ь=/(а) множества В, так что а входит в один полный
прообраз/~] (^)- А это и значит, что полные прообразы точек Ь,
зо-псрвых, дают в сумме все множество А, во-вторых, попарно не
пересекаются.
Множество классов находится во взаимно однозначном соответ-
соответствии с множеством В: каждому элементу b множества В соответ-
соответствует класс f~1{b), и каждому классу /~г(Ь) соответствует
элемент b множества В.
Теорема 4. Пусть дано разбиение множества А на классы.
Это разбиение порождает отображение множества А на некоторое
множество В, а именно на множество В всех классов данного раз-
разбиения. Это отображение получается, если заставить соответствовать
каждому элементу множества А тот класс, к которому он принад-
принадлежит.
Доказательство теоремы уже заключено в самой ее формули-
формулировке.
Пример. Тем самым, что учащиеся Москвы распределены но
школам, уже установлено1) отображение множества А всех учащихся
на множество В всех школ: каждому учащемуся соответствует та
школа, в которой он учится.
При всей самоочевидности наших двух теорем факты, устанавли-
устанавливаемые ими, не сразу получили в математике отчетливую формули-
формулировку; получив же эту формулировку, они приобрели очень важное
значение в логическом построении различных математических дисцип-
дисциплин и прежде всего алгебры.
3. Отношение эквивалентности. Пусть дано разбиение множества
X на классы. Введем следующее определение: назовем два элемента
множества X эквивалентными по отношению к данному разбиению
множества X на классы, если они принадлежат к одному и тому
же классу.
Таким образом, если мы разобьем учащихся Москвы по школам,
то двое учащихся будут «эквивалентны», если они учатся в одной
и той же школе (хотя бы и в разных классах). Если же мы разобьем
учащихся по классам, то двое учащихся будут «эквивалентны»,
если они учатся в одном и том же классе (хотя бы и различных
школ).
Отношение эквивалентности, только что определенное нами,
очевидно, обладает следующими свойствами.
Свойство симметрии (или взаимности). Если а и Ь эквивалентны,
то эквивалентны также Ь и а.
В предположении, что каждый учащийся учитея лишь в одней школе.
786 ПРИБАВЛЕНИЕ
Свойство транзитивности (или переходности). Если эквивалентны
элементы а и Ь, а также Ъ и с, то а и с эквивалентны («два элемента
сие, эквивалентные третьему Ь, эквивалентны между собою»).
Наконец, мы считаем каждый элемент эквивалентным самому
себе; это свойство отношения эквивалентности называется свойством
рефлексивности.
Три условия: рефлексивности, симметрии и транзитивности, ко-
которым подчинено отношение эквивалентности, называются условиями
или аксиомами эквивалентности (а также аксиомами равенства).
Итак, всякое разбиение данного множества на классы определяет
между элементами этого множества некоторое отношение эквива-
эквивалентности, обладающее свойствами симметрии, транзитивности и
рефлексивности.
Предположим теперь, что нам удалось, каким бы то ни было
способом, установить некоторый признак, дающий нам возможность
о некоторых парах элементов множества X говорить как о парах
эквивалентных элементов. При этом мы требуем от этой эквивалент-
эквивалентности, только чтобы она обладала свойствами симметрии, транзи-
транзитивности и рефлексивности.
Докажем, что это отношение эквивалентности определяет раз-
разбиение множества X на классы.
В самом деле, обозначим классом Ка данного элемента а множестаа
X множество всех элементов, эквивалентных элементу а.
В силу того, что наше отношение эквивалентности по предпо-
предположению обладает свойством рефлексивности, каждый элемент а
содержится в своем классе.
Докажем: если два класса пересекаются (т. в. имеют хоть один
общий элемент), то они непременно совпадают (т. е. каждый элемент
одного класса является в то же время элементом другого).
В самом деле, пусть классы Ка и Кь имеют общий элемент с.
Записывая эквивалентность двух каких-нибудь элементов х и у так:
X -V- у, имеем по определению классов:
а ~ с, b ~ с.
Следовательно, в силу симметрии c~Jhb силу транзитивности
а~Ъ. A)
Пусть у — какой-нибудь элемент класса Кь. Имеем;
Ь~ у.
Значит, в силу транзитивности и A)
т. в. у есть элемент класса Ка.
§ 5] ОПРЕДЕЛЕНИЕ ГРУППЫ 787
Пусть теперь х— какой-нибудь элемент класса Ка. Имеем!
а ~ х
и по симметрии
х ~ а,
а в силу A) и по транзитивности
х-^Ь.
Вследствие симметрии
Ь~х,
т. е. х принадлежит к классу Кь.
Таким образом, два класса Ка и К^> имеющие общий элемент с,
действительно совпадают между собой.
Мы доказали, что различные классы Ка образуют систему попарно
не пересекающихся подмножеств множества X. Далее, классы в сумме
дают все множество X, так как каждый элемент множества X при-
принадлежит к своему классу.
Повторим еще раз доказанные выше результаты, объединив их
в следующее предложение.
Теорема 5. Каждое разбиение на классы какого-нибудь мно-
множества X определяет между элементами множества некоторое отно-
отношение эквивалентности, обладающее свойствами симметрии, транзи-
транзитивности и рефлексивности. Обратно: каждое отношение эквивалент-
эквивалентности, установленное между элементами мноокества X и обладающее
свойствами симметрии, транзитивности и рефлексивности, определяет
разбиение множества X на классы попарно эквивалентных между
собой элементов.
§ 5. Определение группы
Возвратимся к рассмотрению множества О всех преобразований
данного множества X. Мы видели, что для любых двух элементов
множества О, т. е. для любых двух преобразований gu #,, опреде-
определен элемент g.^gi, т. е. преобразование, называемое произведением
(или композицией) двух элементов gb g.it заданных в данном порядке
(сначала gv потом g2). При этом выполнено условие ассоциативности
gt (g2g3) — (gig-г) g3- Кроме того, среди элементов g множества О
имеется элемент е (тождественное преобразование), удовлетворяющий
условию
для любого элемента g. И, наконец, для каждого элемента g мно-
множества G имеется обратный элемент g'1, удовлетворяющий условию
/03 ПРИБАВЛЕНИЕ
Предположим теперь, что дано некоторое (произвольное) конеч-
конечное или бесконечное множество О для любых двух элементов g1 и
g2 (данных в этом порядке) и определен некоторый третий элемент g3
того же множества, называемый произведением или композицией
элемента g1 и элемента g^v обозначаемый через g3 — g.,gv Предпо-
Предположим, наконец, что эта операция умножения, или композиции (т. е.
операция перехода от двух данных элементов g1 и g.2 к элементу
gs — gigi), удовлетворяет следующим условиям:
I. Условие сочетательности, или ассоциативности. Для любых трех
элементов gt, g.z, g3 множества справедливо соотношение
Si Ш*Яг) = (g&) ?з-
II. Условие существования нейтрального элемента. Среди элемен-
элементов множества О имеется некоторый определенный элемент, называе-
называемый нейтральным элементом и обозначаемый через е, такой, что
при любом выборе элемента g.
III. Условие существования обратного элемента к каждому дан-
данному элементу. К каждому данному элементу g множества О можно
подобрать такой элемент g'1 того же множества О, что
Множество О с определенной в нем операцией умножения (ком-
(композиции), удовлетворяющей только что перечисленным трем условиям,
называется группой; сами эти условия называются аксиомами поня-
понятия группы или, короче, групповыми аксиомами.
Пусть в группе О, кроме трех групповых аксиом, оказывается
выполненным еще и следующее условие.
IV. Условие переместительности, или коммутативности:
В этом случае группа О называется коммутативной или абвлевой.
Группа называется конечной, если она состоит из конечного числа
элементов; в противном случае она называется бесконечной.
Число элементов конечной группы называется ее порядком.
Познакомившись с определением группы, мы видим, что множе-
множество всех преобразований какого-либо множества X есть группа.
В частности, группой является множество всех перестановок в ка-
каком-либо конечном множестве, например множество всех перестано-
перестановок чисел 1, 2, . .. , п.
Замечание 1. Мы назвали операцию композиции в группе
умножением. С таким же успехом ее можно было бы назвать ело-
§ 5] ОПРЕДЕЛЕНИЕ ГРУППЫ 789
жениемх). Это общепринято, в частности, в применении к коммута-
коммутативным группам.
Иногда, желая подчеркнуть, что композиция в данной группе G
названа сложением, саму группу G называют аддитивной. Аналогично,
желая подчеркнуть действие умножения как композицию в группе,
называют группу мультипликативной. Простейшими примерами ком-
коммутативных групп являются:
1. Аддитивная группа J всех целых чисел с обычным сложением
в качестве композиции и числом нуль в качестве нейтрального эле-
элемента. «Обратный» элемент к целому числу п есть при атом число — п.
2. Аддитивная группа всех вещественных чисел, также с обычным
сложением в качестве композиции. Нейтральный элемент есть снова
число нуль, — х есть «обратный» элемент к числу х.
3. Если в аддитивной группе всех вещественных чивел сохранить
(не меняя композицию) лишь рациональные числа, получим аддитив-
аддитивную группу всех рациональных чисел.
4. Мультипликативная группа всех положительных вещественных
чисел. Композиция в этой группе есть арифметичеокое умножение;
нейтральным элементом является число 1; обратным элементом к
числу х является число —.
5. Группа Ж всех свободных векторов (на плоскости, соответственно
в пространстве). Композиция определяется как сложение векторов
(см. гл. II). Нейтральным элементом является нулевой вектор; лоб-
ратным» элементом к вектору и является вектор — и.
6. Группа всех вращений плоскости (самой по себе) вокруг дан-
данной точки О (на всевозможные углы ф). Каждое такое вращение
рассматривается как преобразование плоскости (т. е. как взаимно
однозначное отображение плоскости на себя). Поэтому два вращения
на углы ф и ф', разность которых есть целое, кратное 2я:
ф'—ф —2/гл, k — целое,
должны рассматриваться как совпадающие (тождественные) между
собою вращения; значит, достаточно говорить о вращениях (поворотах)
плоскости на ввевозможные углы ф, 0«^ф<2(п.
7. Группа $?3) состоящая из трех вращений плоскости (вокруг
точки О), а именно из вращений на углы О (тождественное враще-
вращение), —, —, Это вращения плоскости, отображающие на себя
правильный треугольник с центром в точке О.
') Так сделано, например, в моей книжке «Введение в теорию групп»,
из которой читатель может почерпнуть некоторые дальнейшие элементарные
сведения о группах.
790 ПРИБАВЛЕНИЕ
Аналогично можно говорить о группе 5%п, состоящей из п ера-
п 2л 2-2л (п — 1)-2л ~
щвнии плоскости на углы О, —, , ... , ^ '- . Это враще-
вращения плоскости вокруг данной точки О, отображающие на себя пра-
правильный л-угольник с центром в точке О.
Наконец, определим группу Ж% как группу, состоящую из двух
вращений плоскости: на угол 0 и на угол л.
8. Пусть m — данное целое число ^ 2. Назовем любые два це-
целых числа пил' эквивалентными между собою относительно числа щ
(или эквивалентными по модулю гп), если их разность п — п' без
остатка делится на число т. Это определение эквивалентности удои-
летзоряет аксиомам рефлексивности, симметрии и транзитивности и,
следовательно, порождает разбиение всего множества целых чисел
на классы чисел, эквивалентных между собою по модулю т. Один
из этих классов состоит из чисел, делящихся без остатка на т,
остальные состоят из чисел, дающих при делении на т один и тот
же положительный остаток г(г=1, 2, ... , т—1).
Так, например, при w = 3 имеем классы Ко, Klt K2, причем
класс Ко состоит из чисел вида Зя, т. е. из чисел
... , —9, -6, —3, 0, 3, 6, 9, 12, ... ;
класс Кх — из чисел вида Зп-{-\, т. е. из чисел
... , -8, -о, -2, 1, 4, 7, 10, 13, ... ;
класс /С2 — из чисел вида Зл + 2, т. е. из чисел
... , —7, -4, —1, 2, 5, 8, 11, 14, ...
При любом т имеем классы
Ао, А], . . . , Кт_1у
состоящие соответственно из чисел вида
тп, тп-\-\, ... , тп + г, ... , тп + {т~\),
где п пробегает все целочисленные значения.
Эти классы кратко называются «.классами по модулю т». Для
них вводится следующее правило сложения: для сложения двух
классов Kft и К{ надо выбрать из каждого класса по одному какому-
нибудь элементу: kH из Kh, k{ из К(; класс Кп содержащий число
kh-\-k;, будет одним и тем же, как бы ии выбрали число kh в
классе Kh и число kx в классе К{. Поэтому класс Кг, содержащий
элемент kh -\-kt) зависит только от классов Kh, Kj, а не от того,
какие элементы kh, ki мы выбрали в этих классах; класс КТ назы-
называется суммой классов Кн и К,'.
§ 5] ОПРЕДЕЛЕНИЕ ГРУППЫ 791
Это сложение, очевидно, коммутативно и ассоциативно. Легко видеть,
что при этом всегда Ко + А",- = Kt.
При тя = 3 имеем:
Ко-\- Ко = Ко> Ко -f Кг = К1 -j- А"о — А\, Ко-\- А = А + Ко — К2,
Кх -f Кх = К 2, A'i -г Кг — А + А^ = А',,, А'г + К.г = Kv
При /я = 4 имеем:
Ко + К^К; (» = 0, 1, 2, 3),
K. + K^Ks, Кг + К3=К0,
Кй ~г Ао == А'о, А'г + К3 = Къ К3 -\- К3 = Аа
и далее по коммутативности сложения.
Для каждого класса А,- имеется единственный класс А}, удовле-
удовлетворяющий условию
^"г~Ь А"; = А"о.
Если ki—какое-нибудь число из класса Kit то класс, содержащий
число —k; (этот же класс содержит и число m — /г,-), является иско-
искомым. Например, при т=Ъ имеем
K-l + Кг = А'о,
при т = 4
^1 + ^3 = А"о
и т. д.
Классы К; (i = 0, 1, ... , «—1) чисел по модулю т с приве-
приведенным сложением в качестве композиции образуют коммутативную
группу, которую обозначаем через &Гт и называем группой классов
или группой вычетов по модулю т.
Понятие изоморфизма групп. Определение. Взаимно
однозначное отображение / группы X на группу Y называется изо-
изоморфным отображением или изоморфизмом группы X на группу Y,
если при этом сохраняется композиция элементов, т. е. из
всегда следует, что
/(*i)-/(**)=/(*s) в У-
Если / есть изоморфное отображение группы X на группу Y, то
обратное отображение /-1 группы К на группу X также есть изо-
изоморфизм.
В самом деле, пусть
.Г1 (#l) = *!, /~Ч#2)=*2,
и пусть
792 ПРИБЛВЛР.НИЕ
Пусть /~1{/3 = лг3. Надо доказать, что х3 = ххх2. Доказываем от
противного: пусть х3Фхххг. Так как /—изоморфное, в частности
взаимно однозначное, отображение, то из нашего предположения
следует, что/(^^/(лг,.^) ==/(#,)-/(лгг). Между тем /(лг3) = {/3,
f(x1)/{xi) = y1yi, т. е. Уз^УхУъ, вопреки предположению.
Основное определение. Две группы называются изоморф-
изоморфными, если существует изоморфное отображение одной из них на
другую.
Примеры изоморфных групп. 1) Пусть К2 есть группа
всех свободных векторов на плоскости. Эта группа изоморфна группе
Z.8, элементами которой являются упорядоченные пары {л:, у} дей-
действительных чисел с покоординатным сложением:
Мы получаем изоморфное отображение группы У2 на группу L8,
ставя в соответствие каждому свободному вектору U пару его коор-
координат х, у (в какой-либо определенной системе координат на плоскости).
2) Поставим в соответствие каждому положительному числу л:
его (натуральный) логарифм In x. Этим определено изоморфное ото-
отображение мультипликативной группы всех положительных чисел на
аддитивную группу всех действительных чисел. Другой изоморфизм
между этими же группами получим, если возьмем вместо натураль-
натуральных логарифмов десятичные (или вообще логарифмы по любому
основанию а).
3) Группа Жт изоморфна группе ST т. (Доказательство предо-
ставляетхя читателю.)
Определение. Всякая группа, изоморфная группе <?Гт (или,
что то же, группе Жт), называется (конечной) циклической группой
порядка т. Всякая группа, изоморфная аддитивной группе всех целых
чисел, называется бесконечной циклической группой.
4) Назовем два вещественных числа х и х' эквивалентными по
модулю 1, если их разность есть целое число. Это определение
эквивалентности порождает разбиение множества всех вещественных
чисел на классы \. Суммой двух классов \г, %2 назовем класс |3,
содержащий сумму хх+х2 каких-либо двух чисел х1г х2, взятых
соответственно в классах с.и ?2- Легко видеть, что класс |., не за-
зависит от выбора элементов xlt лга в классах %lt |8. Это определе-
определение сложения превращает множество всех наших классов в группу Гц
изоморфную группе Ж всех вращений плоскости вокруг данной ее
точки (доказать!).
Указание. Надо прежде всего доказать, что группа 1\ изо-
изоморфна группе Г.,л, полученной как группа классов вещественных
чисел, если считать экнииалентиыми всякие два числа, разность
которых есть целочисленное, кратное 2я. Теперь легко видеть, что
§ 5] ОПРЕДЕЛЕНИЕ ГРУППЫ 793
каждому элементу | группы Г„., взаимно однозначно соответствует
некоторый поворот плоскости (на любой угол <р, где <р принадлежит
классу ?; все такие углы отличаются друг от друга на кратные 2я,
т. е. определяют одно и то же вращение). Полученное взаимно одно-
однозначное соответствие между группами Г2Л и 5% есть изоморфизм.
Замечание. Группа STт, а также Г\ и Г2Л являются приме-
примерами, иллюстрирующими (в частном случае коммутативных групп)
важнейшее в теории групп понятие фактор-группы. Пусть дана ка-
какая-нибудь коммутативная группа G. Ее мы пишем аддитивно, т. е.
композицию в ней называем сложением, и (для двух каких-нибудь
элементов gl и g» группы вместо g^g2 пишем gx-\-g^1)) в соответ-
соответствии с этим нейтральный элемент называем нулем и обозначаем
его через 0, а элемент, обратный к данному элементу g, назы-
называем противоположным и обозначаем через—g. Вместо gt^-(—g.z)
пишем просто gx—^2. Имеем (в коммутативной группе) всегда
— (gi—?s)= Si — gv Пусть в коммутативной группе Сдана какая-
нибудь подгруппа Н. Два элемента g1 и gu группы G называем экви-
эквивалентными относительно подгруппы И, если их разность gx — gi
есть элемент этой подгруппы. Читатель легко проверит, что это опре-
определение эквивалентности удовлетворяет трем аксиомам равенства и,
следовательно, вздет к распадению всей группы на классы К экви-
эквивалентных элементов по отношению к подгруппе Н. Одним из этих
классов является, как легко видеть, сама подгруппа Н; этот класс
называем нулевым. Как бы мы ни выбирали элементы gt и gZt при-
принадлежащие соответственно двум каким-нибудь классам Кг и К.г,
элемент g1-{-g2 принадлежит всегда одному и тому же классу К3,
определенному, таким образом, самими классами Кг и К%, а не вы-
выбором принадлежащих им элементов gt и g%. Класс К3 называется
суммой классов /С, и Kt. Таким образом, множество всех классов
эквивалентнооти, на которые распадается коммутативная группа G
относительно своей подгруппы Н, превращается в группу О*, назы-
называемую фактор-группой коммутативной группы G по ее подгруппе И
и обозначаемую так: G* = G/H. Нулевым элементом этой группы
является нулевой класс, т. е. подгруппа И. Фактор-группы определя-
определяются и для некоммутативных групп, однако уже не по любой под-
подгруппе, а только по некоторым так называемым инвариантным
подгруппам (или нормальным делителям), определение которых чита-
читатель может 'найти, например, в моей маленькой книжке «Введение
в теорию групп-/.
Стазя в соответствие каждому элементу группы О единственный
содержащий ее класс относительно подгруппы Н, получим отобра-
отображение / группы G на фактор-группу G/H. Это отображение, уже
') Аддитивно можно, конечно, записывать и любые группы—см. уже
упомянутую мою книгу «Введение в теорию групп».
794 ПРИБАВЛЕНИЕ
не будучи взаимно однозначным 1), тем не менее сохраняет компо-
композицию в том же смысле, как мы говорили об этом при определении
изоморфизма: если gx и g2— любые элементы группы G, то
/(Si+ &)=/(&)+ /(&).
Отображения какой-нибудь группы X на какую-нибудь группу Y,
удовлетворяющие этому условию, называются гомоморфными ото-
отображениями или гомоморфизмами. Изоморфные отображения суть не
что иное, как взаимно однозначные гомоморфные отображения одной
группы на другую (коммутативность групп при этом не предпола-
предполагается).
§ 6. Простейшие теоремы о группах
1. Аксиома ассоциативности. Аксиома ассоциативности имеет
в теории групп очень большое значение: она позволяет определить
не только произведение двух, но и произведение трех и вообще
любого конечного числа элементов данной группы G.
В самом деле, если даны, положим, три элемента glt g.z, gs
группы О, то мы пока еще не знаем, что значит перемножить эти
три элемента: ведь аксиомы группы говорят лишь о произведении
двух множителей и выражения вида g\gygs еще не определены.
Однако условие ассоциативности гласит, что, перемножая, с одной
стороны, два элемента g1 и g2gs, с другой стороны, два элемента
S\gi и gs> мы получим один и тот же элемент gx (g^) = (g&J gs,
который и обозначаем через g&gg-
Таким же точно образом можно определить произведение четырех
элементов glt g3, g.s, gt, например, как
Аналогично определяется произведение любого числа элементов
группы.
2. Нейтральный элемент. Условие существования нейтрального
элемента гласит: в группе существует некоторый элемент е такой,
что для любого элемента g группы выполнено условие
ge = eg--=g. A)
В этом условии не содержится утверждения, что не может
быть в данной группе второго элемента е', отличного от е, но
•) За исключением тривиального случая, когда группа Н состоит из од-
одного нулевого элемента группы 0. Во всех случаях прообразом нулевого
элемента фактор-группы GjH при отображении /, очевидно, является множе-
множество всех элементов подгруппы Н.
§ 6J ПРОСТЕЙШИЕ ТЕОРЕМЫ О ГРУППАХ 795
обладающего тем же свойством
ge' = e'g=g {У)
для любого g.
Отсутствие такого второго элемента е' вытекает из следующей
более сильной теоремы, которую иногда называют теоремой о един-
единственности нейтрального элемента.
Теорема 6. Если для какого-нибудь определенного элемента g
группы G найден элемент eg, удовлетворяющий одному из условий
geg = g или egg=g,
то непременно
eg = e.
Доказательство. Предположим сначала, что ge. = g. Заме-
Заметим прежде всего, что для любого элемента g' имеем
что при замене е через g~1g дает
= g'gg=
Точно так же имеем
eggf=gf.
Итак, для любого g1 имеем g'eg — egg' —g'. Возьмем, в частности,
g' = e. Получаем
eeg = e. B)
Но по определению элемента е имеем, с другой стороны,
eeg = ee. C)
Из уравнений B) и C) следует:
что и требовалось доказать.
Совершенно аналогичным образом можно вывести тождество
eg — e из предположения egg — g.
3. Обратный элемент. Условие существования обратного эле-
элемента гласит: для каждого элемента g существует определенный
элемент g'1 такой, что
Здесь опять-таки утверждается лишь существование элемента
g'1, а никак не единственность его. Докажем эту единственность,
т. е. докажем следующую теорему.
796 ПРИБАВЛЕНИЕ
Теорема 7. Если для данного g имеем какой-нибудь элемент g',
удовлетворяющий одному из условий
gg' = е или g'g = е,
то непременно
Доказательство. Пусть
gg' = е-
Отсюда следует, что
g-1{gg')=g'\
(g-1g)g'=g~\
следовательно,
отсюда
g'*=g~1'
Совершенно аналогичным образом можно из предположения g'g = e
вывести g' =g~1.
Итак, для данного g существует единственный элемент g', удо-
удовлетворяющий равенству gg' = e или равенству g'g=e, а именно
элемент g'1.
Возьмем теперь элемент^. Элемент ^удовлетворяет равенству
g~1g~e, т. е. является для элемента ^-1 обратным элементом. Итак,
4. Замечания об аксиомах понятия группы. Мы не ставили себе
задачей дать наименьшее число требований, достаточных для опре-
определения понятия группы. Действительно, мы потребовали, чтобы
нейтральный элемент удовлетворял сразу условиям
для всех элементов g?G, а обратный элемент g'1 к любому эле-
элементу g—условиям
gg~1=g~1g*=e-
Между тем па основании доказанного в пп. 2 и 3 настоящего
параграфа достаточно было бы потребовать, чтобы выполнялось
одно какое-нибудь из условий
ge = g или eg = g,
а также одно какое-нибудь из условий
gg~l = e или g~1g=e.
§ 7] ЭКВИВАЛР.НТНОСТЬ ПОДМНОЖЕСТВ ДАННОГО МНОЖЕСТВА 797
Наконец, заметим, что в определении группы (§ 5) условие су-
существования нейтрального элемента и условие существования обрат-
обратного элемента ко всякому данному можно было бы заменить одной
следующей аксиомой:
Ко всяким двум элементам а и b группы G можно найти эле-
элементы х и у такие, что ах — b и уа = Ь.
Доказательство предлагаем провести самому читателю (или про-
прочитать его, например, в книге А. Г. Куроша «Теория групп»).
5. Понятие подгруппы. Определение. Если дана какая-нибудь
группа G и если множество Ж, состоящее из некоторых элементов
группы О, образует (при композиции, господствующей в G) группу,
то группа Ж называется подгруппой группы G.
Таким образом, аддитивная группа целых чисел является подгруп-
подгруппой аддитивной группы рациональных чисел, а эта последняя—под-
последняя—подгруппой аддитивной группы всех вещественных чисел. Читатель легко
докажет, что множество всех четных перестановок из п элементов
есть подгруппа множества всех перестановок из этих элементов
и т. д.
6. Условие, чтобы подмножество группы было подгруппой.
При доказательстве того, что некоторое подмножество Ж группы G
является подгруппой, удобнее всего бывает пользоваться следующей
общей теоремой:
Подмножество Ж группы G тогда и только тогда является под-
подгруппой группы G, если выполнены следующие условия:
1. Произведение всяких двух элементов hx и /г2 из Ж (в смысле
умножения, определенного в G) есть элемент множества Ж-
2. Нейтральный элемент группы G есть элемент множества Ж.
3. Элемент, обратный к какому-нибудь элементу множества Ж,
есть элемент множества Ж-
Для доказательства достаточно заметить, что наши условия вы-
выражают как раз требование, чтобы умножение, определенное в G,
но применяемое лишь к элементам множества Жс:О, удовлетворяло
всем аксиомам группы (ассоциативности требовать не нужно: будучи
выполнена при умножении любых элементов множества G, она тем
более выполнена в частном случае, когда эти элементы являются
элементами множества Ж).
§ 7. Эквивалентность подмножеств данного множества
по отношению к дайной группе его преобразований
Множество всех преобразований данного множества X является
группой (по отношению к определенному выше умножению преобра-
преобразований); группа эта называется группой всех преобразований мно-
множества X или симметрической группой множества X (последнее
798 ПРИБАВЛЕНИЕ
название употребительно главным образом в случае, когда множество X
конечно, и тогда его симметрическая группа есть группа всех перестано-
перестановок данного конечного множества X). В группе всех преобразований
данного множества X содержится великое множество подгрупп, и все
эти подгруппы, естественно, называются группами преобразований
множества X. В частности, в симметрической группе конечного мно-
множества X в качестве подгруппы содержится, например, группа всех
четных перестановок, содержатся и другие подгруппы. Но во всех
группах преобразований данного множества закон композиции всегда
один и тот же: это то правило перемножения преобразований, которое
мы сначала определили для преобразований конечных множеств
(т. е. для перестановок), а потом дословно повторили в § 3 для преоб-
преобразований любых множеств.
В этих лекциях нас интересуют преобразования плоскости,
пространства (рассматриваемых как множества лежащих в них точек
и векторов) и вообще преобразования множеств, являющихся те-
теми или иными геометрическими объектами; при этом мы изучаем
лишь преобразования, удовлетворяющие некоторым геометрическим
условиям. Так, мы изучаем группы движений плоскости и трех-
трехмерного пространства, линейные преобразования векторных прост-
пространств и другие группы преобразований пространств различного числа
измерений. Во всех случаях первостепенное значение для нас имеет
порождаемое данной группой преобразований множества X понятие
эквивалентности подмножеств множества X. Это понятие эквива-
эквивалентности мы сейчас и определим.
Два подмножества А и А' множества X называются эквивалент-
эквивалентными относительно данной группы преобразований G множества X,
если в числе элементов группы G имеется преобразование /, «пере-
«переводящее А в А'», т. е. отображающее множество А на множество А'.
Это определение эквивалентности удовлетворяет требованиям
рефлексивности, симметрии и транзитивности^ В самом деле, рефлек-
рефлексивность вытекает из того, что одним из элементов группы G (как
и всякой группы преобразований) является тождественное преобразо-
преобразование е. Мы не изменим множество А, подвергая его тождественному
преобразованию; следовательно, каждое множество А эквивалентно
самому себе (относительно группы преобразований G множества X).
Симметрия вытекает из того, что группа О, содержащая преобразо-
преобразование /, переводящее множество А в некоторое множество А', содер-
содержит и обратное преобразование/, переводящее множество А' в мно-
множество А. Поэтому, если множество А эквивалентно множеству А',
то и множество А' эквивалентно множеству А. Остается транзитив-
транзитивность. Если посредством преобразования f1 множество А переходит
в множество Аи а посредством преобразования /2 множество Ах пере-
переходит в множество A.z, то преобразование }\fx переводит множество А
в множество А2: если множество А эквивалентно множеству Аь а
§ 7] эквивалентность подмножеств данного множества 799
множество /^—множеству А.г, то множество А эквивалентно мно-
множеству А2.
Итак, все три аксиомы эквивалентности выполнены. Поэтому
любая совокупность подмножеств множества X распадается на классы,
состоящие из множеств, попарно эквивалентных между собою по
отношению к данной группе преобразований G множества X.
Замечание. Нам часто приходится доказывать, что такая-то
совокупность геометрических фигур состоит из фигур, эквивалентных
между собою по отношению к такой-то группе преобразований.
Почти всегда мы делаем это, доказывая, что все фигуры этой сово-
совокупности эквивалентны какой-нибудь одной среди них,—они тогда
будут эквивалентны между собою (в силу аксиомы транзитивности).
Пример. Назовем преобразование/плоскости (или пространства)
преобразованием подобия или подобным преобразованием, если сущест-
существует такое число k (коэффициент подобия), что, обозначая через
уИ, и М.г две произвольные точки плоскости, а через М\ и М'г их
образы при преобразовании /, имеем р (М\, М'2) = kp (Мъ М.2), где
р (Mv уИ2) — расстояние между точками М1 и уИ2 (длина отрезка
М1М2)- Легко видеть, что подобные преобразования плоскости (про-
(пространства) образуют группу преобразований. Два множества точек
плоскости или пространства (две любые геометрические фигуры)
называются подобными между собою, если они эквивалентны по
отношению к группе подобных преобразований. Совокупность всех
множеств, лежащих в плоскости, а следовательно и любая совокупность
тех или иных специальных фигур, например совокупность всех плоских
многоугольников или всех кривых второго порядка, распадается на
классы подобных между собою фигур. То же и в пространстве.
Мы доказываем (в главе XVI), что все параболы подобны между
собою. Для этого достаточно доказать, что все параболы подобны
одной определенной параболе, например той, которая в данной
системе координат имеет уравнение у2 = 2х. В главе XVI мы так
и поступаем.
В этих лекциях вопросы классификации геометрических фигур
по отношению к той или иной группе преобразований (того прост-
пространства, в котором эти фигуры рассматриваются) занимают видное
место.
ЗАДАЧИ
К главам I, II, III
Задача 1. Говорят, что пара точек С, D гармонически разде-
разделяет пару точек А, В, если четыре точки А, В, С, D лежат на одной
прямой и АС:СВ= —AD-.DB.
Доказать, что если пара точек С, D гармонически разделяет
пару точек А, В и Е—середина отрезка CD, то точка Е лежит вне
отрезка АВ.
Доказательство. Пусть хг, х2—координаты точек А, В в какой-нибудь
системе координат, введенной на прямой АВ. Тогда, обозначая соответственно
через х3, xt, хъ коордиваты точек С, D, Е в той же системе и полагая
АС:СВ = К, будем иметь:
~AD:~DB=— %
_
3~
*5=2
Итак,
1—
Это равенство показывает, что точка Е делит отрезок А В в отношении
— Я* < 0, откуда следует, что точка Е лежит вне отрезка АВ.
Задача 2. Доказать: для того чтобы два вектора АВ и CD
(лежащие на прямой, на плоскости или в пространстве) были равны,
необходимо и достаточно, чтобы середины отрезков AD и ВС сов-
совпадали.
Доказательство необходимости. Пусть AB — CD н О —сере-
—середина отрезка AD. Докажем, что О будет также серединой отрезка ВС. Так
ЗАДАЧИ 801
как О—середина AD, то A0 — 0D. Чтобы установить, что О является сере-
серединой отрезка ВС, надо показать, что ВО —ОС. Но
Об = В~А + А~О = АО — ~АВ = OD—CD = OD + DC = O~C.
Таким образом,
1ю=дс,
т. е. О — середина ВС.
Доказательство достаточности. Пусть середины отрезков ВС
и AD совпадают в точке О, т. е.
~ВО = ОС, ~A0 = 0D.
Докажем, что
1b=cd,
~АВ =~ Ъ~Ъ ~6' Ы5Ъ
Задача 3. Даны радиусы-векторых) г1 и г2 двух точек А и В
(прямой, плоскости или пространства). Найти радиус-вектор г точки М,
делящей направленный отрезок АВ в данном отношении X'.'
—>
—->. >. ЛАЯ ». ,.
Решение. АМ = г—т1г М8 = га-г, ¦ г = 1 или АМ = ШВ, откуда
MB
Г—Г1=Х(гг—Г)
и, следовательно,
В частности, если Х=1, то
г_?х±?г
Г~Т
т. е. радиус-вектор середины отрезка равен полусумме радиусов-векторов его
концов.
Задача 4. Доказать, что: 1) отрезки, соединяющие середины
противоположных ребер тетраэдра, имеют общую точку и делятся
в этой точке пополам; 2) эта же точка является общей для отрезков,
соединяющих вершины тетраэдра с центрами тяжести противополож-
противоположных граней, причем она делит эти отрезки в отношении 3:1, считая
от вершины.
Доказательство. Пусть О — произвольная точка пространства.
Рассмотрим векторы:
ОА = ти ОВ = гг> ОС=т3, оВ = г4,
идущие из точки О в вершины тетраэдра ABCD.
!) Радиусом-вектором точки М (относительно данной аффинной системы
координат с началом О) называется вектор ОМ.
26 П. С. Александров
802 ЗАДАЧИ
1) Пусть Е и F—середины ребер АВ и CD, a M—середина отрезка
тогда
OE=rj.; =
Из симметрии выражения для Г/ц относительно векторов rt, r2, г3, г4,
идущих из точки О в вершины тетраэдра, заключаем, что точка М будет
серединой отрезков, соединяющих середины двух других пар противоположных
ребер тетраэдра.
2) Пусть К — точка пересечения медиан грани ABC. Тогда
Обозначим через N точку направленного отрезка DK, делящую его в отно-
отношении 3:1. Тогда для вектора r^ — ON получим выражение
Отсюда видно, что точка N совпадает с точкой М и что она одна и та же
для всех отрезков, соединяющих вершины тетраэдра с центрами тяжести про-
противоположных граней.
Задача 5. Доказать, что сумма векторов, идущих из центра
правильного многоугольника в его вершины, равна нулю.
Доказательство. Пусть AlAiA3.. ,Ап—правильный п-уголь*ник,
О—его центр. Требуется доказать, что
j-f-... +ол„=о.
Повернем фигуру, составленную из отрезков OAlt ОАг, ОАЯ, ..., ОАп,
вокруг точки О, как твердое тело, на центральный угол многоугольника. Тогда,
с одной стороны, сумма векторов OAi-{-... ~\-ОАп, не меняя сиоей длины,
повернется в том же направлении и на тот же угол. С другой стороны, эта
сумма не должна измениться, так как после поворота мы получим ту же
систему векторов, что и прежде. Вектор ОАг совместится с вектором ОА2,
вектор ОАг совместится с вектором ОА3, ..., вектор ОАп совместится с век-
вектором ОАХ. Из сопоставления двух утверждений относительно суммы
ОАХ -fCM2+... +ОАп следует, что она равна нулю.
Задача 6. Дан правильный шестиугольник ABCDEF. Принимая
за начало аффинной системы координат вершину Л, за единичный
вектор оси абсцисс — вектор АВ, а за единичный вектор оси орди-
ординат— вектор АС, найти н этой системе координаты вершин шести-
шестиугольника.
ЗАДАЧИ 803
Решение.
Л = @, О)," В=A, 0), С = @, 1)}
ВС-{ — 1, 1}, ~AD=2~BC={—2, 2},
?> B 2)
?> = (—2,
, 0}, ~AE
? = (—3,
F = (-2,
К главе
= AD + D?' =
2);
= AE+?F =
1).
IV
= \~ 3
I'
•2}.
1}.
Задача 7. Доказать, что если А, В, С, D—произвольные че-
четыре точки прямой, плоскости или пространства, то всегда имеет
место равенство
(АВ, БС) + (ВС, DA)-i-(CA,
Доказательство.
'ab=*~db—da, ~вс=Бс—Бв, са=Ба—Ъс.
Поэтому
(АВ, БС) + (ВС, DA) + {CA, DB) =
= (DB—ЪА, DC) + (DC — DB, 1)A) + (DA—'dC, DB) =
= (db, dc)—(da, dc)+(dc, Ъ~а)—(Бв,Ъ~а)+(Ъ~а,Ш)—(Бс,5в)=о.
Следствие. Если два ребра тетраэдра перпендикулярны к про^
тивоположным им ребрам, то перпендикулярны и противоположные
ребра третьей пары.
Задача 8. Найти вектор v, являющийся ортогональной проек-
проекцией вектора и на ось, направление которой определяется вектором а.
Решение. Алгебраическое значение ортогональной проекции вектора и
па ось с направляющим вектором а определяется по формуле
(а, и)
ношения
Единичный вектор, имеющий направление вектора а, находится из соот»
ения
Следовательно, вектор v, являющийся ортогональной проекцией вектора и
на ось с направляющим вектором а, будет
(а,
26*
804 ЗАДАЧИ
Задача 9. Зная длины трех ребер параллелепипеда, выходящих
из одной нершины, и образуемые ими углы, найти длину диагонали
параллелепипеда, выходящей из той же вершины.
Решение. Пусть а, Ь, с —длины ребер параллелепипеда, выходящих
из вершины О:
\Ш\=а, \~ОВ\ = Ь,
обозначим через а, E, у углы, образуемые этими ребрами:
Пусть d — длина диагонали OD параллелепипеда, выходящей из вершины О.
Имеем:
OD = ОА+~ОВ + OC
или, полагая О А = а, ОВ = Ь, ОС = с, OD = d:
Возводя это равенство скалярно в квадрат, получим:
d* =
или
+¦ с2 -f- 2ab cos у + 2ac cos p + 26c cos a,
откуда
d= ]/"a2 + i2 + c2 + lab cos у + 2ac cos В + 26c cos a.
Задача 10. Доказать, что сумма квадратов всех сторон и всех
диагоналей правильного многоугольника равна л2г2, где п — число
сторон многоугольника, а г — радиус описанной окружности.
Доказательство. Пусть АхАг...Ап — правильный многоугольник,
п — число его сторон, О —его центр, г — радиус описанной окружности.
Положим
0^1=^, оТ2 = г2 ОЛ„=г„.
Найдем сумму квадратов сторон и диагоналей многоугольника, выходя-
выходящих из вершины Аг. Имеем:
1^1 = 1-1 — Г! = 0, Л7л2=г2—гг, ^Из = Гз— <Ч ЛИ„=г„—iv
Возводя эти равенства скалярно в квадрат и складывая, получаем
= |rl|a-2(r1, гх) + |г1|24|г1|2-2(г1. г2) + |г2|2 + !г1|2-2(г1, г3) + |г3|2+ ...
•••+|г1|2-
Но (см. задачу 5)
Поэтому
Точно так же докажем, что сумма квадратов сторон и диагоналей много-
многоугольника, исходящих из любой его вершины, равна 2пгг.
ЗАДАЧИ
805
Так-как у многоугольника п вершин, то, беря сумму квадратов сторон
и диагоналей, исходящих из каждой вершины, и складывая эти суммы, по-
получим в результате число n-2w2 = 2n2ra. Но при этом каждую сторону
и каждую диагональ мы берем два раза; следовательно, сумма всех сторон
и всех диагоналей правильного n-угольника равна пггг.
Задача 11. В вершине куба приложены три силы, равные по
абсолютной величине 1, 2 и 3 и направленные по диагоналям граней
куба, исходящим из этой вершины.
Определить величину равнодействующей этих сил и ее углы
с данными силами.
Решение. Обозначим данные силы через Fj, F2l F3, а их равнодей-
равнодействующую через F. Тогда F=Fi + F, + F3. Пусть |FX| = 1, |F2| = 2, |F3| = 3.
Введем прямоугольную систему координат, принимая за начало коорди-
координат вершину куба, в которой приложены силы, а за оси — ребра куба. Пусть,
например, сила F, лежит в плоскости уг, сила F2 — в плоскости гх, сила
F3 — в плоскости ху. Тогда
откуда
= /JL _!_ _з_1.
!F| = 5, cosZ(F1, F)=T5> cos^(Flf F)=jg, cos ? (F,, F) =1.
Задача 12. Из начала координат выходят два луча, образую-
образующие с положительными направлениями осей Ox, Oy, Oz углы, соот-
соответственно равные ct1( Plt Yi и а2- р2> Тг-
Найти направляющие косинусы биссектрисы угла между данными
лучами.
Решение. Отложим на данных лучах единичные векторы:
1, ccs Pi,
{a.2, cosf!2,
Их сумма
~OB = OAl 4-ОЛ2 = {cos aj +cos a2, cos p
пойдет но биссектрисе угла между данными лучами, как диагональ ромба
ОАХВА2; далее,
| ОВ | = ]/"(cos «х + cos a2J + (cos px 4- cos рг)" + (cos yx + cos уг)" =
= У 2 + 2 (cos Oi cos Oj + cos $! cos р"г + cos Yi cos y2) =
806 ЗАДАЧИ
где ф — угол между данными лучами. Следовательно, направляющие косинусы
биссектрисы угла между данными лучами суть
cos а,
cosa = 1-
2cos-|
cosPj
2cos|
cos v, + cos Y2
cos v = — - .
2cos-|
Задача 13. Найти геометрическое место точек, сумма квадра-
квадратов расстояний которых до двух вершин А и В треугольника ABC
равна квадрату расстояния до третьей его вершины С.
Решение. Введем на плоскости прямоугольную систему координат,
и пусть в этой системе A — (xlt у{), В — (хг, уг), С = (л;3, у3).
Если М = (х, у) — произвольная точка искомого геометрического места, то
откуда для координат точек искомого геометрического места получаем урав-
уравнение
йI A)
yl-yt=(). B)
В полученном уравнении второй степени с двумя неизвестными коэффициенты
при квадратах координат одинаковы, а член с произведением координат
отсутствует. Следовательно, это уравнение определяет ^окружность, действи-
действительную, нулевую или мнимую.
Выясним, при каких условиях имеет место тот или иной случай. Для
этого преобразуем уравнение B), дополнив выражения, содержащие х и у,
до полного квадрата. Мы будем иметь
t—ys)*. C)
Преобразуя правую часть уравнения C), приведем его к такому виду:
2-y1)% D)
Таким образом, координатами центра D найденной окружности будут
а радиус ее определяется из равенства
ЗАДАЧИ 807
Определим положение центра относительно вершин треугольника. Из вы-
выражений для координат центра находим
Эти равенства показывают, что середины отрезков ~АВ и ~СЬ совпадают.
Следовательно, центр D искомой окружности находится в вершине парал-
параллелограмма ACBD, противоположной вершине С.
Рассматривая выражение для квадрата радиуса, видим, что квадратные
скобки суть квадраты длин сторон СА, СВ и АВ данного треугольника, т. е.
г2 = | ЛСр + |~вС|2 —I Afl|*«=2|C34| \CB\cos/.C.
Итак, геометрическое место точек, сумма квадратов расстояний которых
до двух вершин А, В треугольника ABC равна квадрату расстояния до его
третьей вершины С, есть
1) окружность, если угол прн вершине С острый; центр D этой окруж-
окружности находится в вершине параллелограмма ACBD, противоположной вер-
вершине С; радиус ее
/• = ")/1 ACf + \~BC\*-\AB\* ;
2) единственная точка D, если угол при вершине С прямой;
3) пустое множество, если угол С тупой.
К главе V
Задача 14. Вершина D параллелограмма ABCD соединена
с точкой К, лежащей на стороне ВС и делящей отрезок ВС в от-
отношении 2:3. Вершина В соединена с точкой L стороны CD, деля-
делящей отрезок DC в отношении 3:5. В каком отношении точка М
пересечения прямых DK и BL делит направленные отрезки DK и BL?
Решение. Примем за начало аффинной системы координат вершину А,
а за единичные векторы оси абсцисс и ординат соответственно векторы AD
и АВ. Тогда будем иметь:
Л = @, 0), В = @, 1), С = A, 1), О-A, 0),
«=(!,,). ,.(,.4).
Пусть точка М имеет координаты х, у и делит отрезок DK в отношении К,
а отрезок BL в отношении р.. Найдем координаты точки М, решая совместно
уравнения прямых DK н BL.
DK: ^~=У,
808 ЗАДАЧИ
или
5х+3(/—5=0.
BL: x = -|nl,
или
5х + 8у — 8 = 0.
Решая совместно уравнения прямых DK и BL, найдем:
16
¦ _ DM _ 3
Л —> о '
мк
ВМ 16
Задача 15. Относительно аффинной системы координат даны
уравнения двух смежных сторон параллелограмма
Ахх + Вгу-~С1 = 0, Агх + Вгу .-)- С, = 0
и точка пересечения его диагоналей М=(х0, у0). Написать уравне-
уравнения двух других его сторон.
Решение. Так как искомые стороны параллельны данным, то их урав-
уравнения можно написать в виде
A1x-\-Bly + D1=0, Л2х + В2(/-Ь?>2 = 0,
взяв при х и у те же коэффициенты, что н в уравнениях данных сторон.
Свободные члены Dx и D2 можно найти, используя то обстоятельство, что
если точка М лежит между двумя параллельными прямыми на одинаковом
расстоянии от этих прямых и коэффициенты при соответствующих неизвестных
в уравнениях этих прямых одинаковы, то результаты подстановки координат
течки в левые части уравнений прямых равны по абсолютной величине и
противоположны но знаку Таким образом,
Из этих равенств и определяются свободные члены Dt и D2 искомых сторон
параллелограмма:
Задача 16. Относительно аффинной системы координат даны
две пересекающиеся прямые Ахх-\-Вгу -1-6^ = 0, Агх +В^у-\-С., = 0
и точка /М=(лт0, у0), не принадлежащая ни одной из данных прямых.
Найти напранлсния сторон того из четырех углов, образованных
данными прямыми, в котором лежит данная точка М.
ЗАДАЧИ " 809
(Говорят, что точка М лежит внутри угла, сторонами которого
служат лучи A, k, если точка М и луч k лежат по одну сторону
от прямой, содержащей луч h, и точка М и луч h лежат по одну
сторону от прямой, содержащей луч k.)
Решение. Пусть А = {х', у'} — точка пересечения данных прямых.
Точка А делит первую прямую на два луча: направление одного из них опре-
определяется вектором |fllt —Ах\, направление другого—вектором |—Bt, Ai\.
Если отложить эти векторы от точки А, то конец нужного нам вектора должен
лежать по ту сторону от второй прямой, что и точка М.
Пусть В — конец вектора •jS1, —Ах}, отложенного от точки А; тогда
B = (x' + Blt у' —Ах).
Чтобы узнать, удовлетворяет ли условию задачи вектор {Вг, —At\ или
вектор, ему противоположный, подставим в левую часть уравнения второй
прямой координаты точек М и В. Если получатся числа одного знака, то
вектор {Bj, —Аг} годится. Если же получатся числа разных знаков, то
условию задачи удовлетворяет вектор {—В1; At). Имеем
так как Аг
Таким образом, вектор {В,, — Ах) годится, если числа
At
одного знака. В противном случае условию задачи удовлетворяет вектор
{-Ви А,}.
Точно так же найдем нужный вектор на второй прямой. Это будет вектор
•{В4, —Л2}> если числа
\\
одного знака. В противном случае условию задачи удовлетворяет вектор
{-В2, А*\.
Задача 17. Найти условия, необходимые и достаточные для
того, чтобы точка М = (х0, у0) лежала внутри треугольника, стороны
которого заданы уравнениями:
О (BQ,
0 (CA),
0 (АВ).
(Говорят, что точка М лежит внутри треугольника ABC, если
она расположена по одну сторону от прямой АВ вместе с точкой С,
по одну сторону от прямой ВС вместе с точкой А, по одну сторону
от прямой С А вместе с точкой В.)
Решение. Найдем координаты х3, уа точки С пересечения первой
и второй прямой и подставим их в левую часть уравнения третьей прямой.
810
ЗАДАЧИ
Имеем:
fii С,
в2 сг
л, в,
л2 вг
л1 с1
3 + В3У3 + сз = Лз —-.
1 i
Л, В,
1 ~2 , Г
л 5 "Гь
4
с,
Вг
В2
Й
I
о / _
Т 1
— Вз
Л
А
Л С
л, я,
л2 в,
1 С,
-t-
! В,
2 в2
/
к
л2
л
в
в
в
1
2
1
2
в
в
с
с
с
J
2
1
2
3
л, в,
л2 в2
Для того чтобы точки М и С лежали по одну сторону от прямой ЛВ,
необходимо и достаточно, чтобы числа А3х0-{- В3у0-\-С3 и Л3х3-|-В3г/3 + С3
имели одинаковые знаки, а для этого в свою очередь необходимо и достаточно,
чтобы были одинаковые знаки у чисел
Л
л
л
1
2
3
л
л
в
в
в
1
2
1
2
я
в
в
с
1
с.
Сз
1
2
Точно так же убедимся, что для того, чтобы точки М и В лежали по
одну сторону от прямой АС, необходимо и достаточно, чтобы были одинаковые
знаки у чисел
л2 в\ с\
А з Dj С и
л3 в3
Лх Si
Наконец, чтобы точки М и Л были расположены по одну сторону от
прямой ВС, необходимо и достаточно, чтобы были одинаковы знаки чисел
1,
t
л
л
в
в
3
1
2
в
Е
С
1
с2
2
Отсюда следует, что если точка М лежит внутри треугольника, то числа
либо имеют, соответственно, такие же знаки, как определители
Л2
А*
Во
Вз
•
Аа
в3
Si
А\
Л2
В!
в2
либо знаки, им противоположные.
Обратно, если это условие выполнено, то числа
!, А2ха-\~В2у0+С2, А-д
ЗАДАЧИ
811
либо имеют одинаковые знаки с числами
Аг Вг С,
Аг В2 С,
А» Вз С3
Аг В%
А, Вя
1
1,
А\
А3
А
А
Вг
в\
в3
з t
1 В
С
1
С'г
Cs
Ах В, С,
^2 »*а ^2
-4;, В., С,
Аг В,
Л, 8,
либо знаки, им противоположные. В первом случае точка М лежит по ту же
сторону от прямой ВС, что и точка А, по ту же сторону от прямой АС, что
и точка В, и по ту же сторону от прямой АВ, что и точка С, т. е. является
внутренней точкой для треугольника ABC.
Второй случай не может иметь места, так как, какова бы ни была точка
М, не лежащая ни на одной из прямых АВ, ВС и СА, по крайней мере
одна из полуплоскостей, определяемых этими прямыми, одновременно содер-
содержит и точку М, и вершину треугольника, противолежащую этой прямой.
Но в этом случае результат подстановки координат точки М в левую часть
уравнения соответствующей прямой имеет знак, одинаковый с одним из напи-
написанных выше отношений детерминантов.
Итак, для того чтобы точка (х0, у0) лежала внутри треугольника, обра-
образованного прямыми
необходимо и достаточно, чтобы числа
Ai*o +Btft + C» Агх0 + В&0 + Сг, А3х0 + Bsy0 + С8
имели б'л соответственно такие же знаки, как определители
Аг
Вг
Вз
А3 В3
Аг Вг
Аг
Вг
в8
либо знаки, им противоположные.
Задача 18. Относительно прямоугольной системы координат
даны уравнения двух прямых
и точка Л=(л;0, у0). Написать уравнения биссектрисы того угла
между данными прямыми, в котором лежит точка А.
Решение. Пусть М = (х, у) — произвольная точка искомой биссектрисы,
лежащая внутри -юго угла между данными прямыми, в котором содержится
точка А.
Так как расстояния от точки М до данных прямых равны, то
VaI+bI
VaJ+bI
A)
Так как, далее, точки А и М лежат внутри одного угла, то они расположены
по одну сторону как от первой прямой, так и от второй прямой. Поэтому
числа
А+В С и
имеют одинаковые знаки; числа
также имеют одинаковые знаки.
812 ЗАДАЧИ
В уравнении A) дроби, стоящие в лево» и правой частях, равны по
абсолютной величине. Они имеют одинаковые знаки, если одинаковы знаки
чисел
А гУ0 + С2, B)
и противоположные знаки, если различны знаки чисел B).
Поэтому уравнение искомой биссектрисы будет
VaT+bI
если числа
одного знака, и
VaI+bI '
если числа
А1х0 + В1у0 + С1, AiX0-\-В2у0-+С9
разных знаков.
Задача 19. Написать уравнения биссектрис внутренних углов
треугольника, стороны которого заданы уравнениями
Ахх-,-ВуУ -i- Ct = О (ВС),
2=0 (СА),
3 = 0 (АВ)
в прямоугольной системе координат.
Решение. Найдем биссектрису внутреннего угла С, образованного
первой и второй прямыми. Пусть М = (х, у) — произвольная точка этой бис-
биссектрисы, лежащая внутри треугольника. Так как расстояния от точки М
до прямых СА и СВ рамы между собой, то
VaT+bI VaJ^b\
Так как, далее, М — внутренняя точка треугольника ABC, то точки М
и А лежат но одну сторону от прямой ВС, а точки М и В — по одну сторону
от прямой АС. Поэтому числа
имеют соответственно или такие же знаки, как определители
Л3 В3 Л! Ох
или знаки, им противоположные.
Таким образом, уравнение искомой биссектрисы внутреннего угла С будет
VaI+bI VaI+bI
ЗАДАЧИ
813
если определители
Аг Вг
А, В3
имеют одинаковые знаки, и
VaJ+b\
V~aJ+b\ '
если знаки этих определителей противоположны.
Аналогично найдем, что биссектриса внутреннего угла А между второй
и третьей прямыми имеет уравнение
VaI+bI
Va
причем знак плюс или минус берется в зависимости от того, будут ли опре-
определители
А3 В3\ Ах В,
Л, В, I ' Аг В2
одного или разных знаков.
Уравнение биссектрисы внутреннего угла В, образованного третьей и
первой прямыми, будет
знак плюс берется, если определители
\а\в\\>
А2 Bt
Ая В3
имеют одинаковые знаки, и знак минус, если знаки определителей различны.
Задача 20. Даны две пересекающиеся прямые
и точка М0 = (х0, у0), не принадлежащая ни одной из данных пря-
прямых. Найти косинус того угла между данными прямыми, в котором
лежит данная точка. (Система координат прямоугольная.)
Решение. Согласно замечанию, сделанному в § 9 главы V на стр. 109,
угол между векторами
{^ B} {А В}
равен тому из углов между данными прямыми, в котором лежат точки, при-
принадлежащие разноименным полуплоскостям, определяемым данными прямыми.
Поэтому, A) если числа
имеют разные знаки, то угол а, образованный данными прямыми и содер-
содержащий внутри себя точку Мо, равен углу E между векторами П! и п2, и по-
потому в рассматриваемом случае
СО.—СО.Р
814 ЗАДАЧИ
B) Если числа
f-Cj, A2xB-\-B2yB-
имеют одинаковые знаки, то угол |3 между векторами П! и п2 равен углу
между данными прямыми, смежному с тем, в котором лежит точка /Мо, т. е.
Р = л — а, откуда а = л — р. Следовательно, в настоящем случае
оч о ("г. п2) А-,А.,-\-В,Вг
cosa = cos (л —р)= —cos р=—-у 1 J ^
Итак,
cos a = + _^
причем перед дробью берется знак плюс или минус в зависимости от того,
имеют ли числа
разные или одинаковые знаки.
Задача 21. Даны две пересекающиеся не перпендикулярные
прямые
Написать уравнение биссектрисы острого угла между ними. (Система
координат прямоугольная.)
Решение. Пусть А1 = (х, у) — произвольная точка искомой биссектрисы.
Так как ее расстояния до данных прямых раины между собой, то
VaJ+b\ VaJ+bI
Согласно замечанию § 9 главы V, угол между векторами
равен тому из углов, образованных данными прямыми, внутри которого ле-
лежат точки, принадлежащие разноименным полуплоскостям, определяемым
данными прямыми.
Поэтому, если угол между векторами ii! и п2 острый, т. е. если
то все точки, лежащие внутри острых углов, образуемых данными прямыми,
н, в частности, точки искомой биссектрисы принадлежат разноименным полу-
полуплоскостям, определяемым данными прямыми. Это означает, что числа
AlX+Biy+Cv A2x + B.zy + C2
имеют противоположные знаки, и потому в рассматриваемом случае уравнение
искомой биссектрисы будет
А2х+В2у+Сг
^ г
VaT+Щ Va\+b\
Если угол между векторами ii! и п2 тупой, т. е. если
ЗАДАЧИ 815
то для точек, лежащих внутри острых углов, образуемых данными прямыми,
и, в частности, для точек искомой биссектрисы числа
имеют одинаковые знаки, и потому уравнение искомой биссектрисы в этом
случае будет
Итак, уравнение биссектрисы острого угла между прямыми
имеет вид
Vc + gjy + Ci
Va\+b\
причем знак минус или плюс берется в зависимости от того, будет ли выра-
выражение /4!/42+ BiB^ больше или меньше нуля.
Задача 22. Определить внутренние углы треугольника, сто-
стороны которого заданы уравнениями:
1 = 0, (ВС)
2 = 0, (СА)
a = 0. (AB)
(Система координат прямоугольная.)
Решение. Найдем тангенсы внутренних углов треугольника. Зануме-
Занумеруем каким-либо образом стороны треугольника числами 1, 2, 3 и обозначим
через ф12, Ф2з и Фзг углы от первой прямой до второй, от второй до третьей
и от третьей до первой.
Докажем, что положительные значения всех трех углов ф12) ф23, ф31,
заключенные между 0 и я, являются либо значениями внутренних углов
треугольника, либо значениями его внешних углов.
При определении угла от первой прямой ВС до второй прямой СА за
направляющие векторы этих прямых возьмем векторы СВ и СА. Угол от
второй прямой СА до третьей прямой АВ определим как угол от вектора АС
до вектора АВ. Наконец, угол от третьей прямой АВ до первой прямой ВО
определим как угол от вектора В А до вектора ВС. Так как упорядоченные
пары векторов СВ, СА; АС, АВ\ ВА, ВС имеют одну и ту же ориента-
ориентацию, то все три угла: от СВ до СА, от АС до АВ и от ВА до ВС—будут
положительны, если указанные пары векторов имеют положительную ориен>
тацию, и отрицательны в противном случае.
816
ЗАДАЧИ
Если рассматриваемые углы оказываются положительными, то они явля-
являются внутренними углами треугольника.
Предположим, что все три угла: от СВ до С А, от АС до АВ и от
ВА до ВС — оказываются отрицательными. Тогда будут положительными
углы: от—СВ до СА, от — АС до АВ н от — ВА до ВС, т. е. внешние углы
треугольника ABC.
До сих нор мы пользовались специальным выбором направляющих век-
векторов прямых ВС, С А и А В. Но тангенс угла от одной прямой до другой
не зависит от того, какие направляющие векторы мы берем на рассматрива-
рассматриваемых прямых.
Тангенсы углов ф12> <р.,3, q>3i находятся по формулам:
А, В,
An. B2
A, B2
Ал В3
А3 В3
А, В,
или, если Вг Ф О, Вг Ф О, В3 Ф 0> по формулам:
kn k, , fe.i- ko .
tg^ = ^ tg
ft. ka
Если все три числа lg (pi2, tg ф.23, lg ф31 положительны или два из них
положительные, а одно отрицательное, то ф12, ф23, фз1 — внутренние углы
треугольника. Если же все три тангенса tg ф12, lg <f 2з, tg ф3! или по край-
крайней мере два из них отрицательны, то углы ф12, ф23, ф31 будут внешними
углами треугольника. В этом случае мы получим тангенсы его внутренних
углов, взяв числа 1§ф]2, tg Ф2з> tg Фз1 с обратными знаками.
Задача 23. Дано уравнение стороны АВ
2х— у — 2 = 0
треугольника ABC, координаты противолежащей вершины С=( — 3, 2)
и тангенсы внутренних углов, прилежащих к данной стороне,
1 4
tg/l=-7j-, ^? = -о-. Написать уравнения двух других сторон тре-
треугольника. (Система координат прямоугольная.)
Решение. Занумеруем стороны треугольника каким-либо образом
числами 1, 2, 3 и будем обозначать угол от первой стороны до второй через
ф12, угол от второй стороны до третьей через ф23, угол от третьей стороны
до первой через ф31- Тогда все эти углы будут либо внутренними, либо
внешними углами треугольника.
Пусть, например, АВ — первая сторона треугольника, АС — вторая, ВС —
третья его стороны. Возможны два случая.
1) Все три угла ф12, <р2з> Фз1 — внутренние углы треугольника, тогда
t<P lg<F
задачи 817
Обозначим через klt ft2, ft3 угловые коэффициенты прямых АВ, АС и ВС.
Имеем:
ft, =2,
J— fe2—2
T""l+2V
ft2 = oo,
AC: * + 3 = 0,
4^2-fe3
3 l+2ft3"
2
ВС: у-2 = ^|
или
2x— llu + 28=0.
2) Все углы <p12, q>23, ф31 — внешние для треугольника АВО. Тогда
1 4
tg<Pi2=— ~2' Ig93i=—у. fti=2,
1 ft',-2
2 1+2*;'
3
или
ох — 4 у ~\- 17===
4_2—fe'3
3'
ft3=-2,
CS': у— 2=— 2i
или
2л; + у + 4 = 0.
К главе VI
Задача 24. Доказать, что длина отрезка, соединяющего центр
;эллипса с произвольной его точкой, заключена между большой и
малой полуосями этого эллипса.
Решение. Пусть
v2 ,,8
/ — 4-—=i\
818' ЗАДАЧИ
— каноническое уравнение эллнпса, причем а > Ь, О — его центр и М = 1х,у)-
произвольная его точка. Тогда
i=fi+—>—+—=x4~lJi
т. е.
и, следовательно,
\0М\ < а.
Точно так же
у2 ti2 Г2 ,i2 v2 I fi2
a8 ft2 ft2 Ь2 &2 '
т. е.
л:2
и, следовательно,
Задача 23. Вычислить эксцентриситет эллипса, зная, что в
эллипс можно вписать равносторонний треугольник, одна из вершин
которого совпадает с концом большой оси эллипса, а противолежа-
противолежащая ей сторона проходит через фокус эллипса.
Решение. Пусть ABC — равносторонний треугольник, вписанный в
эллипс
так что его вершина А совпадает с вершиной эллипса (—а, 0), а противо-
противолежащая ей сторона ВС проходит через фокус эллипса F.
Заметим прежде всего, что сторона ВС перпендикулярна к большой оси
эллипса. Это следует из того, что расстояние от точки Л = (— а, 0) до про-
произвольной точки эллипса М = (х, у) есть строго возрастающая функция абс-
абсциссы х точки М. Докажем это последнее утверждение. Имеем
\АМ\* = (х + аJ + (/2 = U+аJ-j-б2 — ^ = ( 1 —
откуда и следует утверждение о том, что расстояние р(А, М) есть монотонно
возрастающая функция х. Так как
то из доказанного утверждения следует, что у точек В и С одинаковые абс-
абсциссы и, следовательно, равиопротивоположные ординаты, т. е. что ВС | AF.
Имеем
lBF\=- = ""^"'^ "', A)
а а
с другой стороны,
Иг =—^= Лг. W
ЗАДАЧИ 819
Теперь надо рассмотреть два случая в зависимости от того, проходит
ли сторона ВС через фокус, ближайший к вершине А, или через фокус, да-
далекий от нее. В первом случае
\AF\ = a—c
и мы имеем в силу равенств A) и B)
откуда
или
-4=
/3
что невозможно; следовательно, сторона ВС не может проходить через фокус,
ближайший к вершине А.
Во втором случае
\~AF\ = a+c
и равенства A) и B) дают
откуда имеем
1_
и, следовательно,
e=l-yf'
Задача 26. Доказать, что отрезок, соединяющий произволь-
произвольную точку гиперболы с ее фокусом, равен отрезку прямой, парал-
параллельной асимптоте гиперболы, заключенному между рассматриваемой
точкой и директрисой, соответствующей взятому фокусу.
Доказательство. Пусть М—произвольная точка гиперболы, F—>
ее фокус, А—основание перпендикуляра, опущенного из точки М на директ-
директрису, соответствующую фокусу F, В—точка пересечения прямой, проходя-
проходящей через точку М параллельно асимптоте гиперболы, с этой директрисой.
Требуется доказать, что
В силу директориалыюго свойства гиперболы
Ш _
Жл~ '
Так как прямая МА параллельна действительной оси, а прямая MB —
асимптоте гиперболы, то угол АМВ равен острому углу а, образуемому
820 задачи
асимптотой гиперболы с ее действительной осью. Поэтому
cos / АМВ = cos а = — — —.
се
COS ^_
MF
AMB
MB
MA
MA
MB
-e.
MB
MA
Но
следовательно,
Из двух соотношений
выводим, что
MF = ~MB.
Задача 27. Доказать, что если две вершины параллелограмма
лежат на гиперболе, а его стороны параллельны асимптотам этой
гиперболы, то прямая, соединяющая две другие вершины паралле-
параллелограмма, проходит через центр гиперболы.
Доказательство. Возьмем уравнение гиперболы в виде
ху — с,
принимая за оси координат ее асимптоты. Пусть А = (хь у,), С = (хг, уг) —
две вершины параллелограмма, лежащие на гиперболе. Имеем:
Так как стороны параллелограмма параллельны осям координат, то две дру-
другие его вершины будут
B = (*i, Уч\ D = (xt, yy).
Напишем уравнение прямой BD по днум точкам в виде
х у 1
*i Уг 1
= 0
ИЛИ
В силу соотношений A)
Следовательно, в уравнении прямой BD отсутствует свободный член, и, зна-
значит, прямая BD проходит через начало координат, являющееся центром ги-
гиперболы.
ЗАДАЧИ 821
Задача 28. Две вершины треугольника закреплены в точках
А и В, а третья его вершина С перемещается так, что угол при
вершине А остается все время вдвое больше угла при вершине В.
Найти линию, описываемую вершиной С, если длина стороны ЛБ = /.
Решение. Введем полярные координаты, принимая за полюс вершину
А, а за направление полярной оси направление АВ. Положим
тогда
По теореме синусов имеем
А~С А~В
sin В sin С
или
г I
. (p — . / 3 \ '
sin -~ sin I я—=- ф
2 \ 1 J
откуда
' - . 3 '
sin —ф
Преобразуя правую часть уравнения, приведем его к виду
I
Изменим направление полярной оси на противоположное, оставляя полюс
в вершине А. Обозначим новый полярный угол через 0. Тогда
<р = 0 + л,
coscp = cos @ +л)= —cos 8.
В новой системе уравнение искомой линии имеет вид
Г~"\— 2 cose"
Сопоставляя это уравнение с уравнением линии второго порядка в поляр-
полярных координатах
1 — ecos 0 '
видим, что найденное уравнение определяет ветвь гиперболы, фокальная ось
которой — прямая АВ, фокус — вершина А, параметр—длина стороны АВ, а
эксцентриситет равен 2.
Задача 29. Доказать, что если оси двух парабол взаимно
перпендикулярны, то четыре точки их пересечения лежат на одной
окружности.
822 задачи
Решение. Если за оси прямоугольной системы координаг принять оси
данных парабол, то их уравнения в этой системе координат будут
у* = 2р(х—а), (I)
x* = 2q{y-b). B)
Складывая уравнения A) и B), получим
2— 2рх —2qy + 2ap + 2bq = 0. C)
В этом уравнении C) коэффициенты при квадратах координат одинаковы,
а член с произведением координат отсутствует. Следовательно, это уравне-
уравнение определяет окружность. Но если координаты точки удовлетворяют урав-
уравнениям (!) и B), то они удовлетворяют и уравнению C), а это и значит,
что точки пересечения данных парабол A) и B) лежат на окружности C).
Задача 30. Через фокус параболы проводятся всевозможные
хорды, и на каждой из них от фокуса в направлении более удален-
удаленного конца хорды откладывается отрезок, равный разности отрез-
отрезков, на которые фокус делит хорду. Найти геометрическое место
концов этих отрезков.
Решение. Пусть F—фокус параболы, АВ— проходящая через него
хорда, не перпендикулярная к оси параболы. Предположим, что
ТА > ТВ.
Обозначим через ср угол от оси параболы до луча FA. Тогда угол от оси-
параболы до луча FB будет ф + я. Пользуясь полярным уравнением пара-
параболы, будем иметь:
-,— , \FB\ = -t— .
1— cos<p ' l+cos<p
где
-у <ф<0, 0<ф <у .
Пусть М—точка искомого геометрического места, лежащая на хорде
АВ. Тогда
1—СОвф 1+СОБф
Итак,
2р cos ф
Перейдем к декартовым координатам. Имеем:
ЗАДАЧИ 823
Вставляя эти значения р, cos <p, sin<p в найденное полярное уравнение,
получим после преобразований
(Г« = 2р*.
Таким образом, искомое геометрическое место есть парабола, получаю-
получающаяся из данной параболы сдвигом в направлении оси, переводящим вер-
вершину параболы в ее фокус.
К главе VIII
Задача 31. На плоскости даны две системы координат с об-
общим началом О и единичными векторами еь е2 у первой системы и
ej, ej, у второй системы, причем эти векторы связаны соотношениями
(е„ e'k) = 6д,
т. е.
(вц el) = (е2, е2) = 1, (е^ е'2) = (е2, е\) = 0.
Найти формулы перехода от одной системы координат к другой,
если |ег| = |е2|==1, /_{ъъ е2) = оа.
Решение. Пусть и—произвольный вектор, имеющий в первой системе
координаты X, Y, а во второй системе координаты X', У". Тогда
Умножая это равенство скаля рно сначала на еь а затем на е2, получим!
(u, t1) = X(ti, еО + К (е2, ег) = Х' (t'l, eJ + У" (е'„ ег).
(и, е2)=Х(е1, е2) + Г(ег, еа)= X' (еь е2) + Г'(е'2) е2)
или
Х' = (и, ег) =
Отсюда найдем выражения старых координат через новые:
X'—cosw-Г у —cosw-X'+V"
sin2 со ' sin2 со
Задача 32. Найти формулы перехода от одной прямоугольной
системы координат в пространстве к другой прямоугольной системе,
если начала этих систем различны, а концы единичных векторов-
реперов совпадают,
Решение. Начала О и О' обеих систем находятся п точках, симмет-
симметричных относительно плоскости, проходящей через общие концы А, В, С их
единичных векторов. Точки А, В, С в обеих системах имеют координаты!
А = A, 0, 0), В = ф, 1, 0), С = @, 0, 1),
а плоскость, проходящая через точки А, В, С, определяется уравнением
в первой системе,
во второй системе.
824 -задачи
2 ? 9
Начало второй системы О' имеет в первой системе координаты —, —, -?. ¦
3 3 * 3 *
единичные векторы второй системы имеют относительно первой системы
следующие координаты:
' ^,7*" | 2 2
3~ ~\ """?' ~Т '
Поэтому для координат точек в одной системе мы получаем следующие
выражения через координаты во второй системе:
х=-х'--у'--г--{--,
=*——х' ' — '— — г' + —
3 3 3 3
о о о о
Задача 33. Новые оси координат О'у' и О'х' относительно
старой системы Оху заданы соответственно уравнениями
Найти формулы, выражающие новые координаты х', у' произ-
произвольной точки через ее старые координаты л:, у.
Какой вид примут эти формулы, если точке Е, имеющей в ста-
старой системе координаты Л'о, у0, приписать в новой системе коорди-
координаты 1, 1?
Решение. Формулы, выражающие новые координаты х', у' через
старые координаты х, у, имеют вид
х' = +
y' =
Отсюда видно, что х'=0, когда
Сц.х
Так как, с другой стороны, прямая
А^х +
должна быть осью О'у', то для ее точек л:' = 0. Следовательно, уравнения
выражают одну и ту же прямую О'у', а это возможно лишь в том случае,
если коэффициенты одного уравнения пропорциональны соответствующим
ЗАДАЧИ 825
коэффициентам другого, т. е. если
Cii = Mi- cli = klBl, cls = klCl.
Поэтому при всех значениях х и у выполняется тождество
спх + с1гУ + с13^к1(А1х + В1у + С1).
Точно так же можно показать, что
СцЧ + СюУ + Сы =й2 (А2х+В2у+С2).
Отсюда следует, что искомые формулы преобразования координат могут быть
записаны в следующем виде:
Значения kt и kt определяются выбором единичных иекторов на осях О'у'
и О'х'.
Если какой-нибудь точке Е, не лежащей ни на одной из данных прямых
и имеющей в старой системе координаты х0, у0, приписать координаты 1, 1
в системе О'х'у', то для kl и fe2 получим соответственно значения _,
i ' г А2х0+В2у0 + С2
Формулы преобразования координат в этом случае принимают вид
,_ А^х-'r В1у-\-С1 ,_ А2х-\-В2у-\-С2
Задача 34. Относительно прямоугольной системы коорди-
координат Оху даны уравнения двух взаимно перпендикулярных прямых:
О'у': А х-\-В у-{-С =0
Принимая эти прямые за новые оси прямоугольной системы коорди-
координат и выбирая за положительное направление оси О'х' направление
вектора п1 = {Л1, Вх}, а за положительное направление оси О'у'
направление вектора п2 = {Л2, В2\, найти формулы, выражающие
новые координаты произвольной точки плоскости через ее старые
координаты.
Решение. Так как прямоугольные координаты точки по абсолютной
величине равны расстояниям этой точки до осей координат, то
_ \А1к + В1у + С1\ ,
Но для точек, лежащих по ту же сторону от прямой
где находятся конец вектора nt, отложенного от точки О', должно быть х' > 0.
С другой стороны, для точек этой полуплоскости
0.
826 ЗАДАЧИ
Для точек другой полуплоскости оба числа х' и А1х+В1у + С1 должны выть
отрицательны. Поэтому окончательно имеем
и точно так же
К главе IX
Задача 35. Даны три некомпланарных вектора:
О4 = а, 05 = Ь, ОС=с,
отложенные от одной точки О и направленные по ребрам трехгран-
трехгранного угла ОАВС. Найти (какой-нибудь) вектор d, который, будучи
отложен от точки О, находился бы внутри трехгранного угла ОАВС
и образовывал с его ребрами ОА, ОБ и ОС равные углы.
Решение. Рассмотрим векторы
ОС'=с'=~
|с| J
и найдем вектор d', перпендикулярный к плоскости А'В'С.
Для того чтобы вектор d' был перпендикулярен к плоскости А'В'С,
достаточно, чтобы он был перпендикулярен к векторам
А/Ъ'^Ъ'—а'
Поэтому в качестве искомого вектора можно взять, например, вектор
d' = l(b'-a'), (с'-а')].
Но
I(b'-a'). (с'-а')] = |а', Ь'] + 1Ь', с') + |С, а'].
Поэтому
а'1. B)
Вектор d' составляет равные углы с векторами а', Ь' и с'. Так как эти
последние—орты, то для того, чтобы убедиться в равенстве указанных углов,
достаточно показать, что
(d\ a') = (d', b') = (d', с').
ЗАДАЧИ 827
Но
(d'( а') =(!«'. b'J + [b', c'} + [c', а'}, а') = <Ь', c\ a'>
и точно так же
(d', b') = <c', a', b'>,
(d', c') = <a', b', c'>.
Так как
<Ь', с', а'> = <с', a', b'>=--=<a', b', с'>,
то
(d', a') = (d', Ь') = («Г, с').
Для того чтобы вектор d', будучи отложен от точки О, ггаходился внутри
трехгранного угла ОА'В'С, нужно, чтобы равные между собой углы векто-
вектора d' с векторами а', Ь', с' были острыми, для чего в свою очередь необхо-
необходимо выполнение равенства
(&', а') = (<Г, b') = (d\ с') = <а', Ь', с'> > 0.
Это неравенство будет выполнено, если ориентация пространства выбрана
так, что тройка а', Ь', с' оказывается положительной. В этом случае век-
вектор d' удовлетворяет всем требованиям задачи.
Возвращаясь к первоначальным обозначениям, подставим в равенство B)
вместо а', Ь', с' их значения из равенства A). Тогда для вектора d' полу<
чим выражение
[с, а]
Положим, наконец,
Тогда будем иметь
при условии, что тройка а, Ь, с имеет положительную ориентацию.
Задача 36. Даны два вектора а и п, причем вектор п пер-
перпендикулярен к вектору а и равен по длине 1. Найти вектор Ь,
получающийся поворотом вектора а на угол ф вокруг оси, направ-
направление которой определяется вектором п.
Решение. Вектор [п, а] получается из вектора а поворотом вокруг
оси п на угол + -д- . Так как I п | = 1 и п _]_ а, то | [п, а] | = | а |.
Положим
Имеем
Представим искомый вектор b в виде
Так как |Ь | = |а|, то
/=|а| sin<p,
828'
ЗАДАЧИ
и потому
IT
a | sin cp = a cos<p + [n, a] sin<p.
Задача 37. Вычислить объем параллелепипеда, зная длины
трех его ребер, выходящих из одной вершины, и углы между ними.
Решение. Пусть а, Ь, с—длины ребер параллелепипеда, выходящих
из вершины О:
\ОА\=а, \ОВ\ = Ь, \ОС\ = с;
а, р, у— углы между ними:
Введем прямоугольную систему координат с началом в точке О, и пусть
в этой системе
OB = b = { X2, Y2, Z2 },
Объем V параллелепипеда вычисляется по формуле:
V =
Возводя это равенство в квадрат и применяя теорему об умножении
определителей, получим
Y2 Zu
Y3 Z3
Xi X2 X3
Yi Y2 Ys
7, Z2 Z3
; + Z3Z,
Каждый член последнего детерминанта представляет ссбою скалярное
произведение двух из трех векторов, направленных по его ребрам ОА, ОВ, ОС.
Имеем
аг ab cos у ас cos P
ba cos у Ьг be cos a
са cos В cb cos а с2
(а, а) (а, Ь) (а, с)
(Ь, а) (Ь, Ь) (Ь, с)
(с, а) (с, Ь) (с, с)
откуда
1 cos y cos P
cos y 1 cos«
cos p cos a 1
V = abc VI +-2cosacos pcos Y—cos2a—cos2 ji—cos2 Y-
задачи 829
Задача 38. Доказать, что сумма векторов, перпендикулярных
к граням тетраэдра, равных по абсолютной величине площадям этих
граней и направленных в сторону вершин, противолежащих граням,
равна нулю.
Доказательство. Пусть О ABC— данный тетраэдр. Будем считать
положительной ориентацию пространства, определяемую упорядоченной трой-
тройкой векторов OA, OB, ОС. При этом условии следующие упорядоченные
тройки векторов имеют положительную ориентацию:
ОА, ОВ, ОС; ОВ, ОС, ОА; ~0С, Ш, ОВ; ~АС, АВ, АО.
Проверим это, например, хотя бы для последней тройки. Для этого раз-
разложим векторы АС, АВ, АО по векторам ОА, ОВ, ОС. Имеем:
ОЛ = {1,0,0}, ~ОВ = {0, 1,0}, ОС = {0,0, 1},
ЛС = ОС-о2= {-1,0, 1},
А"В--=О~В—ОА = {—1,1,0},
ЛО = {—1,0,0}.
Детерминант, составленный из координат векторов АС, АВ, АО, будет
Четыре тройки векторов
ОА
ОВ
ОС
АС
— 1 0
— 1 1
— 1 0
ОВ,
ОС,
ОА,
АВ,
1
0
0
1
VB,
~ос,
АС,
Ыз],
ОС],
ОА],
АВ]
ориентированы соответственно так же, как тройки
ОЛ, Об, Ъс,
ОВ, ОС, ~ОА,
ОС, ОА, ОВ,
~АС, АВ, ~АО.
Так как первые пары векторов соответственных троек одинаковы, то третьи
векторы этих троек расположены по одну сторону от граней тетраэдра,
определяемых первыми двумя векторами троек. Таким образом, векторы
щ=±-[0А, ОВ], пг = 1[Об, ОС], щ=1[0С,0А], п4 = 1[ЛС, AS]
2, Л 2, J,
830 ЗАДАЧИ
перпендикулярны к граням тетраэдра, равны по абсолютной величине их
площадям и направлены в сторону противолежащих вершин. Докажем, что
их сумма равна нулю. Имеем:
1[ОХ OS] + i[OS, O?] + 1[OC ОЛ] +
у , ОС\-\-\ОС, ОА)+[(ОС—ОА), (ОВ
= у{[0Л, ОВ\+ [ОВ, дс]+[О~С, ОА\ + [ОС, ОВ] — [ОА, О~В\-~
— [ОС, ОА] + [ОЛ, ОЛ]} = 0.
К главе X
Задача 39. Найти отношение, в котором плоскость, проведен-
проведенная через концы трех ребер параллелепипеда, исходящих из одной
вершины, делит диагональ параллелепипеда, исходящую из той же
вершины.
Решение. Примем три ребра параллелепипеда, исходящих из одной
вершины О, за единичные векторы аффинной системы координат. Тогда
уравнение плоскости, проходящей через концы ребер, будет
а уравнение диагонали OD, исходящей из той же вершины, будет
= I -^ , -^, -^ J;
онали D = (l, 1,1).
Точка пересечения диагонали и плоскости будет М = I -^ , -^, -^ J; началь-
начальная точка диагонали О=@, 0,0), конец диагонали D = (l, 1,1). Следовав
тельно,
ОМ_ 1
MD 2 '
Задача 40. Найти вектор v, являющийся ортогональной проек-
проекцией вектора и ={X, Y, Z) на плоскость, заданную уравнением
Ах + By + Cz — 0.
(Система координат прямоугольная.)
Решение. Представим вектор и как сумму его проекции v на данную
плоскость и вектора w, перпендикулярного к этой плоскости:
u = v-fw.
Так как вектор w ортогонален к данной плоскости, то он коллинеарен
с вектором п = {Л, В, С}, нормальным к данной плоскости. Поэтому
ЗАДАЧИ 831
V = U — W = U — Хп.
Но вектор v лежит в данной плоскости и, значит, нормален к п, а пото-
потому
0 = (п, v) = (n, u—Яп) = (п, и) — Я.п2,
откуда
(п, и) _ AX + BY + CZ
п2 ~ Л2-{-Й2 + С2
и, следовательно,
\ = и-кп = {Х-кА, Y-kB, Z-kC),
где
._ AX + BY-j-CZ
А* + В* + С* '
Задача 41. Написать уравнение плоскости, проходящей через
линию пересечения плоскостей
= 0, х — z + 4 = 0
и образующей с плоскостью
х — 4r/ — 8z+12 = 0
угол -г-. (Система координат прямоугольная.)
Решение. Уравнение искомой плоскости можно записать в виде
По формуле для косинуса угла между двумя плоскостями находим!
1 _ , « + Р — 20а—8а + 8Р
У" 2 ~ = 9 У а2 + 2ар + Р2 -|-25а2 +а2—2сф +^
или
откуда
«1=0, p1 = l,
«2 = 4, р, 3.
Условию задачи удовлетворяют две плоскости:
х—
Задача 42. Даны две прямые
х — 3 _ у _ г — 4 х + 10 _ у + 8 _ г —1
2 ~~ — 2— 1 ' 1Г~~ 10 ~~ 2 '
Доказать, что эти прямые пересекаются, и написать уравнения
биссектрисы тупого угла между ними. (Система координат прямо-
прямоугольная.)
832
ЗАДАЧИ
Решение. Первая прямая проходит через точку Л = C, 0, 4) и имеет
направляющий вектор ti = {2,—2, 1}-; вторая прямая проходит через точку
В=*(—10,—8, 1) и имеет направляющий вектор v = {ll, 10, 2}.
Чтобы установить, что данные прямые пересекаются, надо показать,
что они удовлетворяют условию компланарности двух прямых:
» —Н У2—У1
—z,
0.
1
=0;
В рассматриваемом случае это условие принимает вид
13 8 3
2 —2
11 10
следовательно, данные прямые пересекаются н система уравнений, определя-
определяющих данные прямые, совместна. Решая эту систему, найдем точку пересече-
пересечения данных прямых М = A, 2, 3).
Направляющие векторы и н v данных прямых образуют острый угол,
так как их скалярное произведение
(u, v) = 4 > 0.
Значит, векторы — и = {—2, 2,— 1 }, v = { 11, 10, 2} образуют тупой угол.
Найдем единичные векторы ех и е2, имеющие соответственно те же
направления, как векторы —и и v. Имеем:
и | | 3 ' 3 ' 3 / '
5 ' 15 ' 15 /'
v
м
Вектор b = ej + e2 направлен по биссектрисе тупого угла, образованного
данными прямыми (как диагональ ромба, построенного иа векторах ех и е2).
Найдем вектор Ь:
^ _П_ ^,ip_ La--2- I — / JL J?°- _JL
О 10 О 10 О 10 I I 10 10 10
В качестве направляющего вектора искомой прямой можно взять любой
вектор Ь', коллинеарный с вектором Ь. Возьмем, например, вектор
Ь* = { 1» 20, —3 у, тогда уравнения биссектрисы тупого угла примут вид
х—\ _ у — 2 _ г —3
~Т~-~2<Г~-^Г'
Задача 43. Доказать, что три плоскости
х— 2y + 2z-\-3 =0,
2y + z -6 =0,
-2z — 21=0
образуют призму; иайти уравнения оси и радиус круглого цилиндра,
вписанного в эту призму. (Система координат прямоугольная.)
ЗАДАЧИ 833
Решение. Так как три плоскости попарно пересекаются и не имеют
общей точки, то они образуют призму.
Осью цилиндра будет линия пересечения биссек горных плоскостей внут-
внутренних двугранных углов призмы.
Уравнение бнссекторной плоскости внутреннего двугранного угла призмы,
образуемого нервой и второй плоскостью, определяется одним из уравнений
х — 2г/ + 2г4-3 _ l 2х-г2;/+г—6
3 ~ - 3
Чтобы определить, с какими знаками нужно приравнивать дроби, стоящие
в левой и правой частях этого уравнения, возьмем какую-нибудь точку
C \
0,-=-, 0 ),
и подставим ее координаты в левую часть уравнения второй плоскости.
В результате получится отрицательное число; следовательно, подставляя
координаты точек биссекторной плоскости внутреннего двугранного угла
между первой и второй плоскостями в левую часть уравнения второй
плоскости, мы будем получать отрицательные числа.
Беря какую-нибудь точку на линии пересечения второй и третьей
плоскостей, например точку ( 0, -^ , -^-) , и подставляя ее координаты в ле-
вую часть уравнения первой плоскости, получим положительное число;
значит, положительным будет результат подстановки координат любой точки
биссекторной плоскости, лежащей внутри двугранного угла между первой
и второй плоскостями. Таким образом, в уравнении биссекторной плоскости
перед дробями надо брать разные знаки. Следовательно уравнение биссектор-
биссекторной плоскости внутреннего двугранного угла между первой и второй
плоскостями будет
х — 2у + 2г т 3 2x + 2y+z — 6
3 ~ 3
Уравнение биссекторной плоскости внутреннего двугранного угла призмы,
определяемого первой и третьей плоскостями, будет
х — 2y + 2z + 3_ Ьх+Ну — 2г — 21
3 " 15
Упрощая найденные уравнения биссекторпых плоскостей, получим уравнения
оси цилиндра:
x + z— 1 = 0, 2у — г — 3 = 0.
Возьмем на оси цилиндра произвольную точку, например @, 2, 1),
и найдем ее расстояние до какой-нибудь из гранен призмы. Это и будет
радиус цилиндра г^=—.
О
К главе XI
Задача 44. Найти неподвижную точку собственного ортого-
ортогонального преобразования
х' =х coscp — г/sincp -\~х0,
у' = х sincp-f-i/cos ср + у0, ср Ф0.
(Система координат прямоугольная.)
27 Ц. С. Александров
834 ЗАДАЧИ
Решение. Координаты неподвижной точки определяются из системы
уравнений
— у s'niq> + .v0.
или
A — cos <р) х + sin <р у = х0,
— sin ф х-г A — coscp) y = y0.
Детерминант системы
1 — cosq>
— sin ф 1—cosq>
2-
= 2 —2cos ф = 4 sin2 -2- > 0;
(l-cos(f)-*0-stnq:.j/o X° ct"
х~ 2 —2"собф 2
81пф-де,-гA-со5ф).у0 Ctg Т'*
У 2—2 cos ф 2
Если перенести начало координат в неподвижную точку О*, сохранил
положительное направление осей, то в новой системе 0*х*у* формулы
преобразования будут иметь вид
х'* = х* cos ф—у* sin ф,
у'*=Х* Sin ф + {/* СОБф.
Задача 45. Найти ось симметрии и вектор переноса вдоль
оси симметрии несобственного ортогонального преобразования
х' = х cos ф + у sin ф -- х0,
У' =Х БШф — I/ COSq-+-lJj.
(Система координат прямоугольная.)
Решение. Направляющий вектор {X, Y\ оси симметрии находится
й
р
из системы уравнений
= Х соБф-{- Y sin ф, \
X i К { ' *
Y = X siii ф — К
которую можно переписать в ииде
A—с
Детерминант системы B)
1—cos ф —sin ф !
j —Sin ф 1+СО5ф[
ранен нулю; следовательно, эта система имеет ненулевое решение. Решением
этой системы могут служить, например, координаты вектора
{1 +СО5ф, Sitl ф}
или координаты коллкиеарпого ему вектора
ф . ф \
е^< cos-?-, sin^- J..
¦"{'
ЗАДАЧИ 835
Вектор v переноса в направлении оси симметрии найдем, как ортогональную
проекцию вектора и„ = \хв, у0, } на ось симметрии. Направляющий вектор
оси симметрии
С Ф
e=|coSy,
Искомый вектор переноса
v = (e, uo)e = (xo cos -|- + (/o sin -|-) e
или в координатах
V
( •* Ф , • Ф Ф -Ф Ф , О Ф 1
= !х0 cos2 у + г/0 sin -i cos у, x0 sin |cos| + y0 sin2 у \ .
Если M = (x, y) — какая-нибудь точка оси симметрии и М' = (х', у')—ее
образ при данном преобразовании, то
ЛШ'=у,
т. е.
Ф Ф Ф
= х0 cos2 -|- -f-1/0 sin -i- cos -у ,
ф ф ф
дс =*т- ^Ocos2 -у+ 1/0 sln cos">
откуда
Вставляя в эти равенства вместо х' и у' их значения из формул пре-
преобразования, получим
OS2 у +у0 Sitl yCOSy,
дс sin ф — у cos ф + !/„ = у -г л0 sin у cos-y + (/о sin2 -у .
Каждое из этих эквивалентных друг другу уравнений и определяет
искомую ось симметрии.
Упрощая какое-нибудь одно из них, мы получим для оси симметрии
данного преобразования следующее уравнение:
Если принять за новую ось абсцисс прямоугольной системы координат
ось симметрия О*х* и в качестве ее положительного направления взять
направление вектора переноса в направлении оси симметрии (ось ординат
О*у* может быть выбрана при этом произвольно), то в новой системе формулы
преобразования будут иметь вид
у'* = —у*
27*
836
ЗАДАЧИ
Задача 46. Относительно прямоугольной системы координат
даны четыре прямые:
= 0, A)
= 0. B)
= 0, C)
= 0. D)
Найти площадь параллелограмма, образованного этими прямыми.
Решение. Рассмотрим аффинное преобразование
Это преобразование переводит данные прямые соответственно в прямые
*'=0, (Г)
у'=0, B')
=0, C')
Обозначим через S площадь параллелограмма, образованного данными
прямыми A), B), C), D), а через S' — площадь прямоугольника, образован-
образованного прямыми (!'), B'), C'), D'). Стороны этого прямоугольника равны
поэтому его площадь
и |С,—?>,|.
Но площадь образа какой-либо фигуры равна площади прообраза этой
фигуры, умноженной на детерминант преобразования:
А, I
откуда
S=
s1
Ах В]
А. В,
Задача 47. Найти двойные плоскости аффинного преобра-
преобразования
у' == — 2
z' = ~ Зл- — 6(/ — 2z + 5
трехмерного аффинного пространства.
(Плоскость называется двойной, если она совпадает со своим
образом при данном аффинном преобразовании.)
Решение. Прообразом плоскости
Ах' + Ву' + Сг' + п^О A)
служит плоскость
А Fх-~2у — Зг + 1) + Д<—2х + 3у — 6z + 4) + C(— Зх—6у—2г+ 5L-^ = 0
ЗАДАЧИ ggj
ИЛИ
F<4_2B—ЗС)х + (— 2А +ЗВ—6С)у +
+ (—ЗЛ —6В —2С)г + (Л +4B + 5C + D)=0. B)
Если плоскость A) двойная, то она совпадает со своим прообразом B).
Необходимым и достаточным условием совпадения двух плоскостей является
пропорциональность соответствующих коэффициентов их уравнений. Применяя
эту теорему к плоскостям, определяемым уравнениями A) и B), получим:
6Л—2В —ЗС = ХЛ,
—2А + ЗВ —6С = ХВ,
—ЗЛ —6В —2С = ХС,
или
F—X) Л—2В —ЗС = 0, \
_2А + C—Х)В—6С = 0, V C)
—ЗЛ —6В+( — 2 — Х)С=0, )
Л + 4В+5С + A — X)D = 0. D)
Так как числа А, В, С не могут равняться нулю одновременно, то
детерминант, составленный из коэффициентов уравнений системы C), должен
быть равен нулю, т. е.
6—X —2 —3
—2 3-Х —6
_3 —6 -2-Х
= 0 E)
— Х» +7X2 +49Х—343 = 0. E')
Из уравнения E') находим Xi= —7, Х2 = А3 = 7. Полагая в системе C) Х= —7,
получим:
13Л — 2В—ЗС = 0, ч
—2Л + 10В—6С=0, I C')
—ЗЛ —6В + 5С=0, I
откуда находим:
Л1 = 1, В1=2, С1 = 3.
Вставляя эти значения Хг, Л1; Bj, Сх в уравнение D), найдем D1 — —3.
Таким образом, имеем двойную плоскость, соответствующую корню К1 = —7:
Ъг— 3=0.
Полагая теперь в системе C) Х = 7, получим систему
— А—2В—ЗС=0,
—2Л—4В —6С = 0,
—ЗЛ —6В —9С = 0
трех равносильных уравнении. Уравнение D) при Х = 7 принимает вид
Л+4В + 5С—6?) = 0,
откуда
п Л + 4В+5С
и =
838 ЗАДАЧИ
Следовательно, уравнения всех двойных плоскостей, соответствующих
корью А,= 7, могут быть написаны в виде
или
Последнее уравнение показывает, что все двойные плоскости, соответствующие
корню Х=7, проходят через точку ( —-д-, —5", —~-] , а из равенства
\ о о о J
заключаем, что все они параллельны вектору { 1, 2, 3}.
Итак, семейство двойных плоскостей, соответствующих корню Я, = 7,
образует пучок плоскостей, проходящих через прямую
'6 3 6
i = 2 = з
Задача 48. Найти общий вид аффинных преобразований, при
которых гипербола
ху = с A)
переходит в себя.
Решение. Пусть
\ B)
— аффинное пресбразопаиие, переводящее гиперболу A) в себя. Так как
преобразование B) оставляет на месте центр гиперболы, совпадающий с
началом координат, то отсюда следует, что
х'=аих-\-а1гу,
1гу, \
у' = апх + аггу. )
и, следовательно,
Преобразонаиие C) переводит асимптоты гиперболы, совпадающие с осями
координат, п асимптоты этой же гиперболы. Однако возможны два случая:
1) каждая асимптота переходит сама в себя,
2) каждая асимптота переходит в другую асимптоту.
Рассмотрим первый случай. Так как ось Ох в рассматриваемом случае
переходит сама в себя, то отсюда следует, что когда {/ = 0, то и у' = 0 при
любом значении х, а отсюда в свою очередь вытекает, что а21 = 0. Из того,
что ось Оу является двойной прямой, точно так же выводим, что а12 = 0.
Таким образом, в разбираемом случае формулы C) принимают вид
=а2гУ- )
ЗАДАЧИ 839
Если точка М = (х, у) лежит на гиперболе, то н ее образ М' =(х/ у')
лежит на той же гиперболе, т. е. равенства ху — с и х';/'=с имеют место
одновременно. Поэтому, воспользовавшись равенствами (Ах), имеем
с=х'у' = (ацх) (ai2y) = {апа22) (ху) = апа22с,
откуда следует, что
Полагая
будем иметь
Таким образом, в рассматриваемом случае искомое аффинное преобразование
имеет вид
x'=kx, ч
1 } l5i)
Во втором случае искомое аффинное преобразование переводит ось Ох
в ось Оу. Отсюда следует, что при у=0 и при любом х значение *' обра-
обращается в нуль. Первое из равенств C) в этом случае дает а11 = 0. Точно
так же из того, что ось Оу переходит в ось Ох, вытекает, что у'— 0 при
любом у, если только х = 0. Поэтому во втором равенстве C) а2г==0- Таким
образом, в рассматриваемом случае имеем
\ D.)
Как и в перлом случае, доказывается, что
а12аг1=1,
и потому, полагая
O12=fe,
имеем
1
и формулы C) в этом случае принимают вид
х'=ку,
Задача 49. Найти общий вид линейных преобразований трех-
трехмерного пространства, при которых каждый вектор переходит в
вектор, ему ортогональный.
Решение. Если
u'=<//u A)
— искомое преобразование, то
(u, ^u) =0. B)
840 . ЗАДАЧИ
Применяя это соотношение к вектору u + v, выведем отсюда
(u, <Av)~— (v, Ju). C)
Введем в пространстве ортопорчировапный базис е,, е2> е3, н пусть
/ «II «12 «13 \
А=\ ап a2i а23 \ D)
^ «31 «32 «33 '
— матрица рассматриваемого преобразования в этом базисе. Это зиачнт, что
Je1 = {a11, a2U asi\,
t/te2 = {a12, а22, а32),
•Лея = {«13. «г.?. «ззГ
Применяя равенство B) к векторам ех, е2, е3, найдем, что
Применяя к этим же векторам равенство C), увидим, что
Таким образом, оказывается, что матрица D) преобразования A) во всяком
ортонормированном базисе имеет вид
О а12 а,3\
"«12 ° «23
V—«1з —«23 °
т. е.
А = — А*.
Положим
«31= Р> «12—V
и рассмотрим вектор а = {а, E, у}. Пусть
и = {х, у, г}
— произвольный вектор,
и' = {х', у', г'}
— образ вектора и при преобразовании^. Тогда, используя принятые нами
обозначения, можем записать преобразование A) в виде
Р У
У г
у= чх-™=1ах
F)
а
У\
Равенства F) могут быть заменены одним равенством
и' = [а, и]. G)
Таким образом, преобразование Л, переводящее каждый вектор и в век-
вектор, ему ортогональный, сводится к векторному умножению постоянногб век-
вектора а на переменный вектор и.
ЗАДАЧИ §41
К главе XII
Задача 50. Дана система линейных однородных уравнений
х1 -f- 2лг2 -(- 4лг3 — Злг4 = 0,
Зхг -f- 5лг2 -f- 6лг3 — 4лг4 = 0,
Злгг + 8лт2 + 24лг3 — 19лг4 = 0.
Найти фундаментальную систему ее решений; проверить, что
система чисел {—2, 0, 5, 6} является решением данной системы
уравнений; представить это решение как линейную комбинацию
фундаментальной системы решений.
Решение. Вычислим ранг матрицы, составленной из коэффициентов
уравнений этой системы:
¦¦ " 4 _3\
6 —4 \
—2 3 I1
24-19/
Для этого найдем минор этой матрицы наивысшего порядка, определитель
которого отличен от нуля. Левый верхний элемент этой матрицы равен 1 Ф 0.
1 2
Определитель минора, окаймляющего этот элемент,
3 5
=—1 Ф 0. Определи-
Определители всех миноров третьего порядка, окаймляющих этот определитель второго
порядка, равны нулю. Следовательно, ранг матрицы данной системы равен 2.
(Можно было бы проверить, что третья строка матрицы есть линейная ком-
комбинация первых двух ее строк с коэффициентами —5 и 3, а четвертая стро-
строка— линейная комбинация тех же строк с коэффициентами 9 и —2.) Поэтому
все решения системы, составленной из первых двух уравнений, будут в то
же цремя решениями исходной системы.
Найдем фундаментальную систему решений системы уравнений
xs — 3x4 = 0,
3 — 4.v4 = 0.
Так как определитель
1 2
3 5
составленный из коэффициентов пря неизвест-
неизвестных xL и х2, отличен от нуля, то х3 и х4 можно принять за свободные неиз-
неизвестные.
Перепишем последнюю систему в виде
Зх, -|- 5x2 =
решая ее относительно х1 и хг, найдем
Полагая сначала х3=1, л\, = 0, а затем х?, = 0, xt=l, получим фундамен-
фундаментальную систему решений данной системы уравнений
а1 = {8, —6, 1, 0]
а2 = {—7, 5, 0, 1
842 задачи
Подстановкой убеждаемся, что вектор х = {— 2, 0, 5, 6} действительно
является решением системы. Так как а,, а2 сбразугот фундаментальную си-
систему решений, то
{—2, 0, 5, 6} = ^ {8, -G, 1, 0} + Х2{— 7, 5, 0, 1},
откуда находим
>ч = 5, Л2 = 6,
и, следовательно,
х = 5а! + 6а2.
Задача 51. Доказать: для того чтобы две системы векторов
я-мерного линейного пространства
Ь1 = { *11> • • ¦ . Ь
1п
Ъг = {Ьп, ..., brn\,
каждая из которых линейно независима, определяли одно и то же
r-мерное подпространство, необходимо и достаточно, чтобы соответ-
соответственные детерминанты миноров порядка г матриц
Л =
\ап ... aj
гу
Й11 ••• Кп
ьл ... ьгп
составленных из координат этих векторов, были пропорциональны.
Доказательство необходимости. Если лекторы аь ..., аЛ и
bt Ьг обеих систем определяют одно и то же г-мериое линейное под-
подпространство, то, в силу линейной независимости векторов
а, аг,
они образуют базис этого подпространства, и потому векторы
через векторы ах аг линейно выражаются:
ЗАДАЧИ
843
иля в координатах:
...-\-clrarn,
О)
.+crrarn.
Введем в рассмотрение матрицу
c'rr'J'
тогда равенства A) могут быть переписаны в виде
В = СА.
B)
Так как матрицы А и В имеют один и тот же ранг г, то из равенства B)
следует, что матрица С невырожденная, т. е. что det С Ф 0. Из равенства B),
далее, следует, что если мы возьмем детерминант порядка г, составленный из
каких-нибудь г столбцов матрицы В, то он будет равен детерминанту мат-
матрицы С, умноженному на детерминант, составленный из г столбцов матрицы Л
с такими же номерами. Необходимость условия, таким образом, доказана.
Доказательство достаточности. Без ограничения общности
можно предположить, что детерминант, составленный из первых г столбцов
матрицы А, отличен от нуля. Но тогда, в силу пропорциональности детер-
детерминантов матриц А я В, составленных из столбцов с одинаковыми номерами,
детерминант, составленный из первых г столбцов матрицы В, также будет
отличен от нуля.
Линейное подпространство, натянутое па векторы
а],
..., аг,
определяется следующей системой п — г линейно независимых уравнений
"a
an
xx
«„
On
X,
....alr
... arr
... xr
... alr
... arr
. .. Xr
Ol,r-
ar,r + i
xr + l
aTn
х„
= 0
= 0.
Коэффициентами этих уравнений являются детерминанты порядка г, со-
составленные из столбцом матрицы А.
Аналогичной системой уравнений определяется подпространстви,
натянутое на векторы Ь^ ..., Ъг, причем коэффициентами этих уравнений
будут детерминанты r-го порядка, составленные из столбцов матрицы В.
См. второе доказательство теоремы 13, § 8, гл. XII.
844 задачи
Коэффициенты соответственных уравнений при одинаковых неизвестных суть
детерминанты, составленные из столбцов матриц А и В с одинаковыми номерами.
Но, но предположению, такие детерминанты пропорциональны; следовательно,
подпространства, натянутые соответственно на векторы at, ...,аг и Ьь ...,ЬГ,
определяются системами уравнений, в которых коэффициенты соответствен-
соответственных уравнении при одинаковых неизвестных пропорциональны. Следовательно,
эти подпространства совпадают.
Задача 52. Найти матрицу линейного преобразования g", кото-
которое линейно независимые векторы
а2
а„ = { а1п, а2п, ..., апп\
переводит соответственно в векторы
Ь1 = { *Ц, *21. ¦ ¦ • > Йи1 }•
Решение. Обозначим через Л матрицу, столбцами которой являются
координаты векторов а,, а2 а„, через В — матрицу, имеющую своим?
столбцами координаты векторов Ьь Ь2, ..., Ь„, а через С — матрицу иско-
искомого линейного преобразования. Тогда будем иметь
CA = B,
откуда
C = B(A)-K
К главе XIII
Задача 53. Доказать: для того чтобы ненулевая билинейная
форма представлялась в виде произведения двух линейных форм
необходимо и достаточно, чтобы ранг этой билинейной формы бы1
равен 1.
Доказательство необходимости. Пусть билинейная форма
ЦУ«+...+агпх2у„ +
+атхпУ\ + а„гх„уг 4- ... -г а„пх„уп, A
х—/х у \
злллчи 845
с матрицей
, о„, ап2 ... апп
представляется в виде произведения двух линейных форм:
b(x) = blx1 + Ьгх.г + ... + Ьпх„
и
С (У) = с1Ух + сгу2 + ... + спу„.
В таком случае матрица А этой билинейной формы представляется в виде
/ b1c1 bjfiz .. • Ь^сп
С\ Ьпсг ... Ь„с„ ,
Мы видим, что все строки матрицы А получаются умножением системы
чисел
Cj.> С2, . .., Сп
последовательно на числа
bi, Ь2 Ьп.
Так как форма
о(х, у)
ненулевая, то в каждой системе чисел
V ьг ь„,
имеются числа, отличные от нули; следовательно, ранг матрицы А равен 1.
Доказательство достаточности. Предположим, что ранг
матрицы билинейной формы равен 1. Это значит, что найдутся две системы
чисел
с1; с2, ..., сп
и
Ь\, Ь2, ..., Ъп,
каждая из которых содержит числа, отличные от нуля и такие, что
аи =?7,61, ai2 = c2fc, «i«=cA.
a,,i=c,bn> апг—с2Ьп, .... апп—спЬп.
Подставляя эти значения элементов матрицы А в равенство A), найдем, что
а (х, у) = (Mi + • • • + Ьпхп) (ci{/i + •.. + спу„).
846 ЗАДАЧИ
Задача 54. Доказать: для того чтобы ненулевая квадратич-
квадратичная форма с вещественными коэффициентами представлялась в виде
произведения двух линейных форм (с вещественными или комплекс-
комплексными коэффициентами), необходимо и достаточно, чтобы ранг этой
квадратичной формы не превосходил 2.
Доказательство необходимости. Пусть а (х, х) — ненулевая
квадратичная форма, представляющаяся а виде произведения двух линейных
форм:
а (х, х) = (&Л -г ... -|- Ь„х„) (clXl + ... + спхп).
Тогда по крайней мере одно из чисел
Ь[ A = 1, 2 п)
и по крайней мере одно из чисел
С] (/ = 1, 2 п)
отлично от нуля.
Могут представиться два случая.
1° Числа
с,, с2> ..., с„
пропорциональны соответственно числам
h, Ь2 Ьп.
Без ограничения общности можем считать, что
но тогда и
c1 = Xfc1 Ф 0.
Рассмотрим преобразование координат
В новой системе координат квадратичная форма примет вид
а(х, x)=Xxf,
откуда следует, что ранг ее в этом случае равен 1.
'2° Числа
С\. <2 Сп
не пропорциональны числам
Это значит, что для некоторых i <j (i, /=1, 2, ..., п)
ЗАДАЧИ g^y
Рассмотрим снова преобразование координат
(детерминант этого преобразования, равный
Ь
, отличен от нуля).
с,- с,-
В новой системе координат квадратичная форма будет иметь вид
о(х, х) = х\х'!;
(° т\
ее матрица , имеет ранг 2.
W v
Доказательство достаточности. 1" Предположим, что ранг
квадратичной формы равен 1. Тогда существует базис, в котором эта квад-
квадратичная форма имеет вид
а(х, x) = foc,'2.
Возвращаясь к старым координатам, будем иметь
\Л, Л.) —— Л \Ь\ 1A j ~~\~ • ¦ • ~~\~ t'lfl^fi/i
и наше утверждение доказано.
2° Предположим теперь, что ранг квадратичной формы равен 2. Тогда
существует базис, в котором эта квадратичная форма имеет вид
а (х, \) = Xi ± х'}.
Рассмотрим подробнее случай
а(х, \) — х'\ -\-х'ч =>(xi + ix'i)(x\—iXi).
Возвращаемся к старым координатам. Пусть
"Г" • • •
¦•¦-\-стх„
В исходной системе квадратичная форма принимает вид
а(\, \) =
откуда и следует наше утверждение.
848 ЗАДАЧИ
Если ранг квадратичной формы равен 2, а положительный индекс инер-
цни равен 1, то форма представляется в виде произведения двух линейных
форм с вещественными коэффициентами.
Задача 55. Доказать: для того чтобы существовал базис,
в котором ненулевая квадратичная форма не содержит членов
с квадратами координат, необходимо и достаточно, чтобы эта форма
принимала как положительные, так и отрицательные значения.
Доказательство необходимости. Предположим, что квадра-
квадратичная форма в некотором базисе не содержит членов с квадратами коорди-
координат. Так как форма ненулевая, то в этом базисе по крайней мере один ее
коэффициент а,-у, i ф /, отличен от нуля.
Без ограничения общности можно предположить, что а12 Ф 0. Тогда на
векторах
{1, 1, 0 0}
и
{1, -1, 0, .... 0}
наша функция принимает значения, противоположные по знаку.
Доказательство достаточности. Предположим, что форма
принимает как положительные, так и отрицательные значения. Тогда в ее
нормальном виде встречаются как положительные, так и отрицательные
квадраты.
Пусть
е1( ..., е„
— базис, в котором квадратичная форма имеет нормальный вид
xi + •• ¦ -\-х%~х1-ц •• -~хг
(здесь п—размерность пространства, г — ранг формы, к — положительный
индекс инерции).
Положим
Векторы е^, ..., t'n образуют базис, так как определитель матрицы
перехода отличен от пуля (его абсолютная величина равна двум).
Покажем, что каждый из векторов e't, ..., е'п обращает форму в 0.
Этим будет показано, что в новом базисе форма не содержит членов с квад-
квадратами координат.
ЗАДАЧИ
Пусть сначала 1 <('<:&. Тогда
а(е'г е;.) = о(е/ + еЛ+1, е,- Ч е-+1) =
= а(е,-, е,) + 2а(е,-,
Точно так же покажем, что если
k + 1 «S 1 < г,
то
а(е;, е;) = 0.
Наконец, если
г + 1 < / < я,
то
l, et+1)«= 1 +.0— 1 =0.
Задача 56. Доказать, что если р и </ — положительный и отри-
отрицательный индексы инерции невырожденной квадратичной формы
в /г-мерном пространстве, то существует линейное подпространство
размерности, равной меньшему из индексов инерции, все векторы
которого обращают эту форму в нуль, н не существует подпрост-
подпространства большей размерности, обладающего тем же свойством.
Доказательство. Предположим, что в базисе
elf .... е„
квадратичная форма имеет нкд
—%-•
•—*?•
Пусть, например,
Р Эг<? = п — Р-
Рассмотрим подпространства, определяемые следующей системой урав-
уравнений:
xi—xp, ,=0,
Хр .j. q = U,
Эта система состоит из р = п—q линейно независимых уравнений и, следо-
следовательно, определяет подпространство размерности q. Каждый вектор, являю-
являющийся решением этой системы, обращает квадратичную форму в 0.
Предположим, что существует подпространство размерности г > q, век-
векторы которого обращают форму в 0. Такое подпространство может быть
задано системой из п — г линейно независимых уравнении.
Наряду с этой системой рассмотрим вторую систему уравнений, полу-
получающуюся добавлением к п—г уравнениям прежней системы еще q урав?
нений
0
850
ЗАДАЧИ
Новая система состоит из n — r + q уравнений. Но n — r + q < я, следо-
следовательно, эта система уравнений имеет ненулевое решение. Это решение
является решением и первых п — г уравнений и потому обращает форму в 0.
С другой стороны, так как в этом решении
у Y Г)
Ар 4- I — • * • АН —" w'
то подстановка его значений в форму дает положительное число. Получен-
Полученное противоречие показывает, что не существует подпространства размерно-
размерности г > q, векторы которого обращают форму в 0.
К главе XIV
Задача 57. Даны три плоскости:
А%х -|- Вгу — C2z -;- D2 = 0,
= 0, \
= 0. J
В зависимости от рангов г и R матриц
,АХ Вг СЛ
L В, С,
•' А.,
С,
в = [
в,
в,.
выяснить взаимное расположение плоскостей, заданных уравне-
уравнениями A).
Решение. 1°. Пусть г = 3, т. е.
1 Bl CA
3 ?3 ^3
В этом случае и R=3. Система A) имеет единственное решение; это зна-
значит, что три плоскости, задаваемые уравнениями A), имеют единственную
общую точку.
Векторное многообразие, определяемое системой
B)
состоит из нулевого нектора.
2°. г = 2, R = 2. В этом случае система A) совместна, -а система B) опре-
определяет одномерное векторное многообразие. Данные три плоскости имеют
единственную общую прямую — принадлежат одному собственному нучку.
Эта прямая проходит через какую-нибудь точку, определяемую системой A),
и параллельна вектору, определяемому системой B),
ЗАДАЧИ 851
Если никакие две строки матрицы В не пропорциональны, то плоско-
плоскости A) попарно различны. В противном случае какие-нибудь две плоскости
совпадают, а третья плоскость их пересекает.
3°. r = 2, R = 3. Система A) несовместна, система B) определяет одно-
одномерное векторное многообразие. Этот случай содержит в себе два подслучая.
3°а. Никакие две строки матрицы А не пропорциональны. В этом слу-
случае каждые две плоское!и пересекаются, причем линия их пересечения
параллельна третьей плоскости, а все три плоскости общей точки не имеют.
Плоскости образуют призму.
3°б. Какие-нибудь две строки матрицы А пропорциональны. Соответст-
Соответствующие строки матрицы В не могут быть пропорциональны, так как в про-
противном случае мы находились бы в условиях случая 2°. В этом случае две
плоскости, задаваемые уравнениями (I), параллельны, а третья их пере-
пересекает.
4°. г=1, /? = 1. Уравнения A) определяют одну и ту же плоскость}
уравнения B) — одно и то же двумерное векторное многообразие.
5°. г=\, /? = 2. Система A) несовместна; система B) определяет двумер-
двумерное векторное многообразие.
В матрице А каждые две строки пропорциональны. Поэтому три пло-
плоскости, определяемые уравнением A), параллельны в широком смысле слова.
При этом возможны два подслучая.
5°а. Никакие две строки в матрице В не пропорциональны: каждые две
плоскости A) параллельны в узком смысле слова.
5°б. Какие-нибудь две строки матрицы В пропорциональны; тогда
третья строка не может быть им -пропорциональна, так как /?=2. В этом
случае две плоскости совпадают, а третья им параллельна в узком смысле
слова.
Задача 58. Написать параметрические уравнения плоскости,
заданной системой уравнений
охх f 6лг2 — 2л -'- 7х4 -f 4хь = 3,
2хг )-Зх2— лг34-4*4-!-2лг5 = 6,
д>Ху-\-Ъх2— х3 -•- Злг4-Г 2хъ =—3.
Решение. Выясним прежде всего, является ли система совместной;
для этого вычислим ранг матрицы из коэффициентов при неизвестных и ранг
расширенной матрицы. Ранги обеих матриц оказываются одинаковыми: оба
они равны 2. (Третье уравнение получается вычитанием из первого уравне-
уравнения второго.) Поэтому рассмотрим систему, состоящую из первых двух
уравнений:
5*j -|-6*2 — 2*3 + 7*4 -j- 4х5 = 3,
2*!
Определитель
5 6
2 3
составленный из коэффициентов при неизвестных
хх и *2, отличен от нуля: он решен 3. Поэтому систему можно разрешить
относительно неизвестных хх и *2, принимая за свободные неизвестные *3,
Xj, x3. Имеем
5*! + 6*., = 3 + 2*3 — 7*4 —• 4*5,
з—4*4—2*5.
Найдем частное решение этой системы, полагая
852 задачи
тогда
х, = — 9, х2 = 8.
Следовательно, плоскость проходит через точку (—9, 8, 0, 0, 0).
Найдем теперь фундаментальную систему решений однородной системы
уравнений
5% + 6х2 — 2х3 + 7х4 + 4х6 = О,
соответствующей данной неоднородной системе. Полагая последовательно
получим следующую фундаментальную систему решений:
|0, - , 1, 0, 0 |,
{1, -2, 0, 1, 0 } , I A)
{о.-4,»,о.,}.|
Таким образом, данная плоскость содержит векторы A). Параметрические
ураанення плоскости можно записать а виде
Задача 59. Даны параметрические уравнения плоскости
xi = 1 -г ^i -г ^г>
*з= — 1—3^ + 2/,,
Написать систему линейно независимых уравнений, определяющих
эту плоскость.
Решение. Составим матрицу из координат векторов, компланарных
данной плоскости:
'1 2—3
—3 2
1 3\
-3 — 1) •
Ранг этой матрицы равен 2, следовательно, векторы
а, = {1, 2, -3, 1, 3},
аа = .{1, —3, 2, —3, — 2)
ЗАДАЧИ
853
линейно независимы, и данная плоскость является двумерной. Так как она
находится в пятимерном пространстве, то для ее задания необходимы
три уравнения с неизвестными *,, хг, хя, х4, хъ. Плоскость проходит через
точку Мо = A, —2, —1, 3, 0). Для того чтобы произвольная точка
M={xlt x2, х3, xit хъ) лежала на данной плоскости, необходимо и доста-
достаточно, чтобы три вектора
а, = {1, 2, —3, 1, 3}, аг = {1, -3, 2, -3, -2},
были линейно зависимы. Следовательно, ранг матрицы, составленной из ко-
координат этих векторов:
1 2-313
1 —3 2—3 —2
Х-л ~Т" 1 Хх О Ха
отличен от нуля:
равен 2. Значит, определители всех миноров третьего порядка этой матрицы
равны нулю. Но детерминант, стоящий в левом верхнем углу этой матрицы,
1 2 I
= —5. Беря детерминанты окаймляющих его миноров
1 —о J
и приравнивая их нулю, получаем три линейно независимых уравнения дан-
данной плоскости:
2
-3
—3
2
1
1
xi — 1
= 0,
2
—3
Xt+i
1
1
3
__2
г ч
2
—3
«2+2
1
-3
Xi—3
= 0,
= 0,
или
Злг, — 4*24-5х:4 — 26 = 0,
JCi + Jc8—дс6 -I-1=0.
Задача 60. Доказать, что если плоскость Lx имеет размер-
размерность г, а плоскость Z2 — размерность s, то существует плоскость L,
содержащая как Llt так и /,2, размерность которой ^r --s+1.
В частности, две прямые всегда содержатся в плоскости, размерность
которой ^ 3; прямая и двумерная плоскость — в плоскости, размер-
размерность которой <; 4; две двумерные плоскости — в плоскости, раз-
размерность которой <5, и т. д.
Доказательство. Рассмотрим сначала случаи, когда плоскости L^
и L2 «скрещиваются», т. е. сами они не имеют общих точек, а соответствую-
соответствующие им векторные многообразия не имеют общих ненулевых векторов.
Пусть плоскость Z.J проходит через точку А и ей компланарны линейно
независимые векторы
плоскость
векторам
проходит через точку В и компланарна линейно независимым
854 задачи
Введем еще вектор с — АВ и рассмотрим плоскость L, проходящую через
точку Л и компланарную пекторам
ai аг, Ъъ ..., bs, с.
Плоскости Z-! и 12 содержатся в плоскости L. Докажем, что плоскость L
имеет размерность r-\-s-\-\. Для этого надо показать, что компланарные ей
векторы
аь ..., ar, bj, ..., bs, с
линейно независимы. Векторы
а,, ..., аг, Ь1; ..., bs
линейно независимы. В самом деле, из соотношения
следует, что
Mi -f-...
Вектор
принадлежит векторному многообразию, соответствующему Llt а вектор
— [Xjbi —...— |ХЯЬ4
— многообразию, соответствующему L2. Но у этих многообразий общим яв-
является только нуль-вектор; поэтому
а так как векторы at, ..., аг линейно независимы, так же как и векторы
Ь,, .... bs, то
^ = ...=^ = 0, (.4=... =1-4 = 0,
н, следовательно, векторы
аь ..., ar, bj bs
линейно независимы.
Если бы все векторы
аь ..., ar, by ,..., bs, с
были линейно зависимы, то вектор с можно было бы представить в виде
Отложим от точки В вектор
Точка М принадлежит плоскости L2- Рассмотрим вектор
Мы видим, что конец пектора AM принадлежит плоскости Lt. Итак, во-
вопреки предположению оказывается, что плоскости Lj и L2 имеют общую
точку М. Следовательно, вектор с не может быть представлен как линейная
комбинация векторов
а,, ..., аг, Ь,, ..., bs.
Значит, векторы
аи ..., аг, bj bs, с
линейно независимы и размерность плоскости L равна r-\-s~\-l.
ЗАДАЧИ 855
При сделанных предположениях плоскости Ц и Z.2 ие могут содержаться
в плоскости меньшей размерности, так как иначе r + s+l векторов
а„ .... &г, Ь1г ..., bs, с
оказались бы линейно зависимыми. Если же одно из условий будет нарушено,
то размерность плоскости L, содержащей Ц и Ц, будет меньше, чем r + s-rl!
Задача 61. Доказать, что если плоскость а не имеет общих точек
с гиперплоскостью я, то плоскость а параллельна гиперплоскости я.
(Две плоскости называются параллельными, если они не имеют
общих точек и векторное многообразие, соответствующее одной
из этих плоскостей, содержится в векторном многообразии, соответ-
соответствующем другой плоскости, или совпадает с ним.)
Доказательство. Пусть
— уравнение гиперплоскости л. Мы должны показать, что всякий вектор,
принадлежащий векторному многообразию, соответствующему плоскости а,
принадлежит и векторному многообразию, соответствующему гиперплоскости я.
Предположим, что это не так; тогда в многообразии, соответствующем
плоскости а, найдется вектор с = {с1, ..., сп\, не принадлежащий много-
многообразию, соответствующему я, т. е. вектор, удовлетворяющий неравенству
ajc,-(-... +апсп ^0.
Возьмем в плоскости а точку В — (blt ..., Ьп) и рассмотрим прямую, прохо-
проходящую через точку В и имеющую своим направляющим вектором вектор с.
Она определяется системой параметрических уравнений
Эта прямая принадлежит плоскости а и пересекает плоскость л, так как
в силу неравенства
aiCi-Г•••+««?« 9=0
система уравнений
a1x1-lr...+anx,r\-b = 0,
совместна. Значит, плоскости аил имеют общую точку, что противоречит
предположению. Отсюда следует, что не существует вектора, компланарного
плоскости а и ие компланарного плоскости л. Следовательно, векторное
многообразие, соответствующее плоскости а, содержится в векторном много-
многообразии, соответствующем гиперплоскости л, или совпадает с этим послед-
последним, т. е. плоскость а параллельна плоскости я.
Задача 62. Доказать: для того чтобы две плоскости Lx и Z.2,
не имеющие общих точек, были параллельны, необходимо и доста-
достаточно, чтобы обе они содержались в плоскости, размерность которой
равна г-f-l, где г — наибольшая из размерностей плоскостей Ll
и L2, если эти размерности различны, и является их общим значе-
значением, если размерности плоскостей Lx и L2 одинаковы.
856 ЗАДАЧИ
Доказательство необходимости. Пусть размерность г пло-
плоскости Lt больше или равна размерности плоскости L2. Это значит, что су-
существует г линейно независимых некторов
компланарных плоскости Lx и порождающих соответствующее этой плоскости
векторное многообразие.
Возьмем точку А в плоскости Lx и точку В в плоскости ?2. Вектор
с = Л5 не принадлежит векторному многообразию, порожденному векторами
at, ..., аг, так как в противном случае его конец В принадлежал бы пло-
плоскости Z.lF а плоскости Lx и L, общих точек не имеют. Следовательно, век-
векторы
*i а,., с
линейно независимы и вместе с точкой А определяют .(/¦-(-1)-мерную пло-
плоскость L, содержащую как плоскость Lt, так и плоскость L2, так как в силу
параллельности плоскостей Lx и 1.2 векторы, компланарные Ц, содержатся
в векторном многообразии, порожденном векторами a.lt ..., &г.
Доказательство достаточности. Предположим, что плоско-
плоскости Lx и Л2 не имеют общих точек и обе содержатся в плоскости L размер-
размерности /¦ —f— 1, где г — наибольшая из размерностей плоскостей Lt и L2, если
их размерности различны, и является их общим значением, если размерности
плоскостей одинаковы. Пусть плоскость Ly имеет размерность г. Мы можем
рассматривать плоскость L как (/•+1)-мериое аффинное пространство; тогда
/¦-мерная плоскость 1.г будет его гиперплоскостью, а плоскость 1-2, не имею-
имеющая с Z-j общих точек, в силу предыдущей задачи будет параллельна L\.
Задача 63. Доказать, что если через концы ребер /г-мериого
параллелепипеда, исходящих из одной вершины О, провести пло-
плоскость л, а затем через все вершины параллелепипеда провести
плоскости, ей параллельные, то они разобьют диагональ ОА парал-
параллелепипеда, выходящую из вершины О, на п равных частей.
Доказательство. Примем вершину О за начало, а выходящие из
нее ребра за единичные векторы осей аффинной системы координат. В этой
системе уравнение плоскости зх будет
а уравнение диагонали О А —
Уравнения плоскостей, проходящих через вершины параллелепипеда и
параллельных плоскости я, будут
k = 0, I, 2, ..., п, где k — число координат вершины параллелепипеда,
равных 1. При fe = 0 получаем плоскость, проходящую через вершину О;
ЗАДАЧИ 857
при k = и—плоскость, проходящую через вершину А. Остальные п—1
плоскостей пересекут диагональ в точках
44 4)-
44 4
разбивающих диагональ ОА на п равных частей.
К главе XV
Задача 64. Даны две точки Fx и F2 на расстоянии 2а друг
от друга: \FlF2\ = 2a. Найти геометрическое место точек, произведе-
произведение расстояний которых до точек F3 и F2 равно о2.
Р е ш е н и е. Введем прямоугольную систему координат, принимая за
ось абсцисс прямую FiF2. a за ось ординат перпендикуляр к прямой FSF2,
проведенный через середину О отрезка F,f8. В этой системе
FL = (— a, 0), /г2 = (а, 0).
Пусть М = (х, у) — произвольная точка искомого геометрического места.
Тогда
или, в координатах,
Преобразуя это уравнение, приведем его к виду
№+у*)* = 2аг(хг—уг). A)
Перейдем к полярным координатам, принимая за полюс точку О, а за
полярную ось луч OF2. Имеем
jt = rcos<p, y = r sin ф.
Вставляя эти значения х и у в уравнения A), получим
г4 = 2aV2 cos 2ф,
или
л2 = 2а2соз2ф B)
[сокращая на гг, мы не потеряли ни одной точки, так как значение г=0 по-
я \
думается при ф = —- I .
858
ЗАДАЧИ
По уравнению B) нетрудно составить себе представление о полученной
кривой. Она изображена на рис. 255. Эта кривая носит название лемнискаты
Бернулли.
Задача 65. Дана точка 0и прямая d на расстоянии |0Л| = а
от точки О (рис. 256). Вокруг точки О вращается луч, пересекающий
прямую d в переменной точке В. На
этом луче по обе стороны от точки В
откладываются отрезки "
где А — основание перпендикуляра,
опущенного из точки О на прямую d.
Составить уравнение линии, описывае-
описываемой точками Мг и М„, в полярной сис-
системе координат, принимая за полюс
точку О, а за полярную ось луч ОА.
Рис. 255.
Cmpopouffa
Рис. 25G.
Перейти затем к декартовым координатам, взяв прямоугольную
систему координат, соответствующую данной полярной системе.
Решение. Точки кривой будут получаться для значений <р, лежащих
в интервале
пусть сначала
ЗАДАЧИ 859
Обозначим через /И,.= (<р, п) точку луча ОВ, ближайшую к точке О,
а через /И2 = (<р, r^) —точку, лежащую за прямой d. Тогда
г2 = \Ш2\ = \0В\ + \~АВ\ = ^— + a tg ф = ^^2— A + sin ф).
Г1 = _^_A_5!пф)> A)
1 СОЭф Т V
Оба уравнения можно объединить и одно, записав их в виде
Т a tg ф. C)-
При ф=0
'¦i=''2=a;
точки Мг и /И2 совпадают с точкой А.
Когда ф возрастает, оставаясь положительным, гг монотонно убывает
/Ч —0.
В самом деле, в равенстве
/¦, = A — sin ф)
1 СОЭф Т
умножим и разделим правую часть на l + sin9; тогда это равенство поело
упрощений примет вид
_ асозф
откуда и следует, что г^ монотонно убывает с возрастанием ф и стремится
к нулю при
Таким образом, когда ф возрастает от нуля до -^-, точка Мг описывает
дугу, начинающуюся в точке Л, концом которой является точка О, предельная
для этой дуги, но ей не принадлежащая.
Посмотрим теперь, как ведет себя точка М2, когда ф, оставаясь поло-
положительным, возрастает от 0 до -^-. Из ныражеиия для гг непосредственно
л
видно, что г2 монотонно возрастает с возрастанием ф и при ф—с -^
Г2—+<М.
Выясним, не будет ли у нашей кривой асимптот. Найдем абсциссу х3
точки Af2:
860 ЗАДАЧИ
Отсюда следует, что при ф —> ~ хг —* 2а, т. е. что прямая
х — 2а
является вертикальной асимптотой пашен кривой.
Из выражений для гх и гг видно, что, когда ф меняется от 0 до — -^
точка Mi описывает кусок кривой, асимптотически приближающейся к прямой
х = 2а,
а точка М2 описывает дугу, начинающуюся в точке А и имеющую точку О
своей предельной точкой.
Из этих соображений можно составить себе представление о виде кривой.
Она изображена на рис. 256. Эта кривая называется строфоидой.
Переходим к декартовым координатам. Положим
г=Ух+^, cosy= ,
у х* -f if-
и подставим эти значения /¦, cos ф и tg ф в \ равнение C). Мы будем иметь
: a ~x~ №
или
x — а у—, ., у
X X
Возводим это равенство в квадрат:
и освобождаемся от знаменателя, умножая обе части равенства на х2, получим
(х — af (xi -f У'1) = a2if,
или (после небольших преобразований)
(а:2 + у2) (х1 — 2ах) + а2л:2 = 0,
или, наконец, деля обе части равенства на х,
(xi + y>)(x-2a)+a*x=Q. E)
Уравнения D) и E) не равносильны: координаты 0, 0, не удовлетворяя
уравнению D), обращают в нуль левую часть уравнения E). Постороннее ре-
решение получилось от умножения обеих частей уравнения на х (мы сначала
умножили обе части уравнения на х'г, а потом после преобразований, не на-
нарушающих равносильности, разделили обе части уравнения па х; возведение
в квадрат обеих частей уравнения D) посторонних решений не принесло,
так как справа стоял двойной знак ч").
Строфоида—кривая третьего порядка.
Задача 66. По окружности радиуса а с центром в начале пря-
прямоугольной системы координат перемещается точка С. Из этой точки
опускаются перпендикуляры: СА — на ось Ох, СВ—на ось Оу и СМ—
на прямую АВ (рис. 257). Линия, описываемая точкой М при дви-
движении точки С по окружности, называется астроидой. Составить
параметрические уравнения астроиды, принимая за параметр угол t
-— >
от оси Ох до луча ОС.
ЗАДАЧИ
861
Решение. Опустим из точки М перпендикуляры МР и MQ на оси
Ох и Оу. Тогда будем иметь
Далее,
и, наконец,
cos<| (из /SQBM).
\Ш\ = \~ВС\ 1 cos ^ I (из Д МВС),
\ВС\ = \ОС\ | cos t | = а | cos t\ (из Д ВОС).
Сопоставляя полученные равенства, найдем
| х | = а | cos 113.
Точно так же, рассматривая последовательно треугольники РЛМ, МСА
и ЛОС, найдем:
11/1 = |ЛТ]р] = |Л7Й|! sin /¦ |,
откуда
\AC\ = \OC\ | sin t\=a\ sin t\,
\y\=a | sirW |3.
Так как точки С и М всегда принадлежат одной и той же четверти, то
отсюда следует, что знаки х и у совпадают соответственно со знаками cos t
Астроида
Рис. 258
и sin t. Поэтому для астроиды (рис. 258) получаем следующие параметри-
параметрические уравнения:
x = acos3t,
у = а s\n3t.
862
ЗАДАЧИ
Замечание. Возводя каждое из этих равенств в степень с показате
2
лем — и складывая, исключим параметр t и получим уравнение астроиды в виде
Задача 67. Написать уравнение поверхности, получающейся
при вращении окружности
(x — aJ + z2=r2, y = 0, г<\а\
вокруг оси z.
Решение. Пусть М = (х, у, г) — произвольная точка искомой поверх-
поверхности, d—расстояние точки до оси г.
По определению поверхности вращения вместе с точкой М ей принад-
принадлежат и все точки окружности радиуса d с аппликатой г и с центром на
Рис. 259.
оси г. Эта окружность пересекает плоскость хОг в двух точках (± d, 0, г).
По крайней мере одна, из этих точек принадлежит линии, от вращения которой
получается данная поверхность, в нашем случае—окружности
(х—aJ + z2 = r2, i/ = 0.
Другая точка принадлежит линии, лежащей в плоскости хОг и симметричной
с данной линией относительно оси Ог. В нашем случае это будет окружность
(— х — aJ + zs = r2, y = 0.
По определению при вращении обе линии дают одну и ту же поверхность.
Таким образом, имеют место равенства
Но
ЗАДАЧИ S63
поэтому имеем:
(± Ух2 -ту2—а)* -4 z2 = r2,
х1 + и1 ± 2а V х2+у2 + а* + г2 = г\
±2а yr*r+J%-=r*—d* — x*—y* — z*.
После возведения в квадрат, что не приносит посторонних решений благодаря
двойному знаку i, и простых преобразований получим окончательно
4a2 (a:2 -j- y1) ¦¦
или
(x2 -f </2J + 2(z2 — a- — г2) (x2 + if) -j- z2 + a- — z*)* = 0.
Эта поверхность называется тором (рис. 259).
К главам XVI и XVII
Задача G8. Найти фокусы и директрисы линии второго порядка
бху — 8у2+12х — 26у— 11 =0.
(Система координат прямоугольная.)
Решение. Инварианты: S = —8, б=—9, Д = — 81. Это гипербола.
Характеристическое уравнение
№+8Х — 9 = 0, л,= —9, Х2 = 1.
Приведенное уравнение
_81
~ ~*~ ~ —9 ~~
Каноническое уравнение
Уравнения для определения центра:
Зх — 8у— 13 = 0.
Центр О' = (— 1, —2).
Угловой коэффициент (тангенс угла наклона) действительной оси
?1=:tga = — 3;
1 Я
cosa= ± —?=.
^ :¦
/10
Здесь верхние или нижние знаки можно выбрать произвольно; от этого будет
зависеть положительное направление новой оси абсцисс, совпадающей с фо-
фокальной осью гиперболы. Возьмем, например, нижние знаки, т. е. положим
1 . 3
cosa= т= , sna
/ю
,
у ю
Координаты фокусов в новой системе:
f,-(/TO, 0), F2 = (-/TO, 0).
864 ЗАДАЧИ
Координаты фокуса в старой системе:
F1 = (-2, I), Ft = @. -5).
Координаты точек пересечения директрис гиперболы с ее действительной
осью соответственно будут в новой системе
fiO J \ V Ю
в старой системе
Угловой коэффициент директрис /г2=—. Следовательно, уравнения
о
директрис, соответствующих фокусам Ft и F2, будут
*—3<,—4 = 0, х—Зу—6 = 0.
Задача 69. Найти фокусы и директрисы линии второго по-
порядка
х2 ~- Аху -\- 4у2 -I- 8л: -]¦ 6у -f- 2 = 0.
(Система координат прямоугольная.)
Решение. Инварианты: S = 5, 6 = 0, Д = —25. Это парабола.
Параметр р== _ _ . Уравнение оси
У 5
Система уравнений для определения вершины
x2 + 4x(/+4(/2 + 8* + 6(/-|-2=0,
*+2(/+2=0.
Решение системы:
, = -2,
х = 0, у = —\.
Вершина О' = @, —1).
Угловой коэффициент (тангенс угла наклона) оси параболы fc = tga=—^-.
Определение направления луча оси, идущего внутри параболы:
cosa=±—т^=, sina=T-?^>
F^5 V^5
Из условия (а1 cos a+aa sin a) S < 0 находим
2 . 1
= -p= , sina = —-r^.
/5 ^5
ЗАДАЧИ
865
Координаты фокуса в новой системе
1
Координаты фокуса в старой системе
1
Точка пересечения директрисы с осью параболы в новой системе
1
в старой системе
D=U' ~ТОУ
Угловой коэффициент директрисы k' =2. Уравнение директрисы
4х—2у—3 = 0.
Задача 70. Общее уравнение второй степени с двумя не-
неизвестными
определяет эллипс. Написать уравнение эллипса, гомотетичного дан-
данному, с центром гомотетии в центре эллипса и с коэффициентом
гомотетии k. (Система координат аффинная.)
Решение. Уравнение искомого эллипса может быть записано в виде
F(x,y)+C = 0.
В самом деле, если это уравнение определяет эллипс, то его центр и на-
направления осей те же, что и у данного эллипса, так как они не зависят от
свободного члена. Этот эллипс гомотетичен данному, так как отношение квад-
квадратов их полуосей одно и то же, а именно:
Ьг ~ Л '
где
Д =
а. а., ап
Л' =
ai а° аа+С
-.A+CS.
Подберем теперь С так, чтобы отношение квадратов соответственных
полуосей равнялось /г2,
а2 б2 Д ~ Л
откуда
А_
6 '
Поэтому уравнение искомого эллипса будет
f I*. |
28 п. с. Александров
8G6
ЗАДАЧИ
Задача 71. Доказать, что все ромбы, вписанные в один
и тот же эллипс, описаны около одной окружности.
Решение. Диагонали ромба, вписанного в эллипс, проходят через его
центр. Следовательно, центр окружности, вписанной в ромб, совпадает
с центром эллипса, описанного около этого ромба. Остается показать, что,
каков бы ни был ромб, вписанный в данный эллипс, радиус вписанной в ромб
окружности будет один и тот же.
Примем диагонали ромба, вписанного в эллипс, за оси прямоугольной
системы координат. В этой системе уравнение эллипса будет иметь вид
Вершинами ромба бугут точки пересечения эллипса с осями координат, сле-
следовательно, они имеют координаты
1 Л\ Л 1 \ / 1 Л /п 1
¦, 0
Уравнения сторон ромба будут
О, — •
— \/~a11x—Yraiiy=\, У~апх—У~а.г.,у=1.
Расстояние г от центра эллипса до всех сторон ромба будет одно и тоже,
а именно:
1 1
Отсюда видно, что радиус г не зависит от выбора ромба, так как он яв-
является инвариантом эллипса относительно поворота прямоугольных осей.
Задача 72. Общее уравнение второй степени с двумя неиз-
неизвестными
F(x,y)=0 A)
определяет гиперболу. Написать уравнение пары ее асимптот. (Систе-
(Система координат аффинная.)
Решение. Напишем уравнение искомой линии в виде
F(x, </) + C = 0 A')
и подберем С так, чтобы это уравнение определяло линию, распадающуюся
на пару прямых. Для этого нужно, чтобы детерминант Д', составленный из
всех коэффициентов уравнения линии A'), был равен нулю:
откуда
Д' =
а1
С= —
'21 2
ап а1г
а21 а22
-г С
= Д + Сб=0,
Искомое уравнение принимает вид
F (*.</) = -*¦ ¦
ЗАДАЧИ 867
Это—уравнение пары прямых, являющихся асимптотами гиперболы так как
точка их пересечения совпадает с центром гиперболы и прямые имеют асимп-
асимптотические направления относительно этой гиперболы.
Задача 73. Найти условие, необходимое и достаточное для
того, чтобы ветви гиперболы лежали в острых углах, образуемых
ее асимптотами. (Система координат прямоугольная.)
Решен и е. Следующие утверждения A) —(8) эквивалентны между собой:
A) ветви гиперболы лежат в острых углах, образуемых ее асимптотами;
B) острый угол а между действительной осью гиперболы и ее асимп-
я
тотои меньше — ;
C) tga< 1;
D) Ь- < 1;
E) ^т < 1;
но
где
Xj Д > О, Х2 Д < 0;
F) -?<1;
G) ^2 > 0;
но
X,1+X2 = S, А,аЛ<0;
поэтому
(8) SA < 0.
Это и есть искомое условие.
Задача 74. Доказать, что если в уравнениях парабол 'все
коэффициенты, кроме свободных членов, пропорциональны, то эти
параболы имеют общую ось и получаются одна из другой парал-
параллельным переносом по направлению их общей оси.
Доказательство. Параметры у всех таких парабол одинаковы,
так как в формуле, по которой определяется параметр
Р =
правая часть не зависит от свободного члена аа, в чем можно убедиться,
разлагая определитель А по третьей строке и принимая во внимание, что
алгебраическое дополнение элемента аа есть определитель б, равный нулю.
28*
868 ЗАДАЧИ
Уравнение оси параболы, а также условие, определяющее направление
луча оси, идущего внутри параболы, от а0 не зависит.
Задача 75. Доказать, что если из точки М проведены две
касательные к линии второго порядка, то диаметр, проходящий
через точку /И, делит пополам хорду, соединяющую точки касания.
Доказательство. Примем диаметр, проходящий через точку М, за
ось абсцисс, а какую-нибудь прямую сопряженного к нему направления — за
ось ординат. Уравнение линии и этой системе будет иметь вид
аг2 ф 0.
Пусть хй — абсцисса точки М в этой системе координат. Обозначая
через § и г| координаты точек касания касательных, проведенных из точки М,
можем уравнения этих касательных записать в виде
Так как точка М=(х0, 0) принадлежит этим касательным, то
{ан1 + а,)х0-\ а
откуда
Чтобы найти ординаты течек касания, нужно полученное значение абс-
абсцисс | вставить в уравнение линии. Так как это уравнение содержит только
квадрат ординаты, то значения ординат точек касания равны но абсолютной
величине и противоположны по знаку. Поэтому, если А и В — точки каса-
касания, то Л = (?, ii), ? = (!, — ц). Середина С отрезка АВ имеет координаты
?, 0, т. е. лежит на диаметре, проходящем через точку М.
Задача 76. Найти геометрическое место точек, обладающих
тем свойством, что две касательные, проведенные из точки геомет-
геометрического места к действительной нераспадающейся линии второго
порядка, не являющейся окружностью, равны между собой.
Решение. Пусть М — точка искомого геометрического места, А и
В—точки касания касательных, проведенных из точки М к линии второго
порядка, С — середина отрезка АВ. Прямая МС является диаметром линии
второго порядка, а так как по условию
Жа=Жв,
то диаметр МС перпендикулярен к сопряженной ему хорде АВ; следова-
следовательно, этот диаметр—ось симметрии кривой.
Итак, точки искомого геометрического места лежат на осях симметрии
линии. В случае эллипса искомое геометрическое место состоит из четырех
лучей, являющихся продолжениями осей эллипса за его вершины; в случае
гиперболы это геометрическое место состоит из точек отрезка действитель-
действительной оси, заключенного между ее вершинами, и всех точек мнимой оси, за
исключением центра; в случае параболы это луч оси симметрии, лежащий
вне параболы.
задачи g6g
Задача 77. Доказать, что диагонали параллелограмма, опи-
описанного около эллипса, являются сопряженными диаметрами' этого
эллипса.
Доказательство. Преобразуем аффинно эллипс в окружность.
Тогда описанный около эллипса параллелограмм преобразуется в ромб'
описанный около окружности. Диагонали этого рочба, будучи взаимно
перпендикулярными диаметрами окружности, при обратном аффинном преоб-
преобразовании перейдут в сопряженные диаметры эллипса, являющиеся диаго-
диагоналями описанного около него параллелограмма.
Задача 78. Доказать, что гипотенузы всех прямоугольных тре-
треугольников с общей вершиной прямых углов, вписанных в кривую
второго порядка, проходят через одну и ту же точку, лежащую на
нормали *) к кривой в точке, являющейся общей вершиной прямых
углов.
Доказательство. Примем точку кривой, в которой находятся вер-
вершины прямых углов вписанных в нее прямоугольных треугольников, за
начало координат, нормаль к кривой в этой точке — за ось абсцисс, а каса-
касательную в ней — за ось ординат. В этой системе уравнение кривой будет
иметь вид
0, A)
ам ф О,
а уравнение линии, распадающейся на пару прямых, являющихся катетами
вписанного в кривую прямоугольного треугольника с вершиной прямого угла
в начале координат, может быть записано в виде
</2 = 03). B)
Умножая уравнение B) на а22 и складывая с A), получим
* [("и-гам)х+2 (а12 + Ьагг) у+ 20^=0. C)
Так как уравнение C) получено как линейная комбинация уравнений A) и
B), то всякое решение системы, состоящей из уравнении A) и B), будет
решением и уравнения C). Но это означает, что линии, определяемой урав-
') Нормалью к крином в лежащей на ней точке называется прямая, про-
проходящая через эту точку и перпендикулярная к касательной кривой в рас-
рассматриваемой точке.
2) В самом деле, уравнения катетов всегда могут быть записаны в виде
y = ktx, y = k2x,
так как kx Ф О, k2 Ф 0; уравнение линии, распадающейся на эти прямые,
поэтому будет
(у — kxx)(y—fc2x) = 0, или if —
так как ft,ft2=—1. Умножая это уравнение иа —1 и полагая 1гх-\-к.г=2Ь,
получим уравнение B).
870 ЗАДАЧИ
пением C), принадлежат все три вершины вписанного в кривую A) прямо-
прямоугольного треугольника с вершиной прямого угла в начале координат.
Линия C) распадается на пару прямых: прямую # = 0, т. е. касатель-
касательную к кривой в начале координат, и прямую
являющуюся, гипотенузой прямоугольного треугольника.
Точка пересечения этой прямой с осью абсцисс имеет абсциссу
ul
пц 1- 022
не зависящую от Ь, т. е. от выбора нары прямых, являющихся катетами.
Следовательно, гипотенузы всех рассматриваемых треугольников проходят
через одну и ту же точку, лежащую па нормали к кривой в общей вершине
прямых углов.
К главе XVIII
Задача 79. Дан эллипсоид
И ПЛОСКОСТЬ
2x~2y~z —3-^-0.
1) Выяснить, пересекает ли плоскость эллипсоид.
2) Найти центр линии пересечения.
Решение. Первый способ. 1) Найдем уравнение цилиндра, проек-
проектирующего линию пересечения эллипсоида и плоскости на плоскость хОу. Для
этого исключим г из уравнений эллипсоида и плоскости. Сделаем это следу-
следующим образом: найдем г из уравнения плоскости и подставим полученное
выражение для г в уравнение эллипсоида:
г = 3~2лг—Чу,
или, после преобразований,
/ + 8</2 — 12*—
Это и есть уравнение цилиндра, проектирующего линию пересечения эллипсоида
и плоскости на плоскость хОу. Вместе с уравнением г = 0 оно определяет
проекцию линии пересечения на плоскость хОу. Так как проектирование есть
аффинное отображение, то линия пересечения эллипсоида и плоскости и ее
проекция на плоскость хОу относятся к одному н тому же аффинному классу.
Определим аффинный класс проекций. Имеем:
5=16, 6 = 48, Л = —48.
Проекция — эллипс; значит, плоскость пересекает эллипсоид по эллипсу.
ЗАДАЧИ gy J
2) При проектировании центр сечения проектируется в центр проекции
Найдем центр проекции. Имеем: «=пц» нуиекции.
-6 = 0,
центр проекции (-д- , -=• , 0
Так как проектирование производится параллельно оси г, то первые две
координаты у центра проекции те же, что и у центра сечения. Чтобы найти
третью координату центра сечения, подставим в уравнение плоскости координаты
центра проекции х = -д-, у—-^; тогда найдем, что 2 = 1. Итак, центр сечения
2 ' 2 ' \
Замечание. Этим же способом решается следующая задача: 1) уста-
установить, по какой линии данная плоскость пересекает данную поверхность
вюрого порядка; 2) если в сечении получается центральная пиния, найтн
координаты ее центра.
Второй способ. 1) Рассмотрим аффинное преобразование
г'--
2 •
Это преобразование переводит эллипсоид в сферу
а данную плоскость—в плоскость
2х' + 2у' +2г' — 3 = 0.
Так как расстояние от центра сферы до преобразованной плоскости равное
< 1, то преобразованная плоскость пересекает сферу по окружности.
Следовательно, данная плоскость пересекает данный эллипсоид по эллипсу.
2) Найдем осноиание перпендикуляра, опущенного из центра сферы на
преобразованную плоскость. Уравнения этого перпендикуляра будут
х = у = г.
Следовательно, основание перпендикуляра, опущенного нз центра сферы на
преобразованную плоскость, имеет координаты
,_ 1 ,_ 1 ,_ 1
Х — 2 ' ^ — 2 ' Z —~2~ *
Это и есть центр сечения сферы плоскостью.
Производя обратное аффинное преобразование
х = х',
у=у',
г = 2г',
найдем координаты центра линии пересечения эллипсоида и плоскости:
1 1 ,
872 задачи
Задача 80. Доказать, что если р и q — большая и малая
полуоси эллипса, получающегося в сечении эллипсоида
хг и- z2
^ + + =1 «
плоскостью а, проходящей через его центр, то всегда имеют место
неравенства
~^ ^b~~^ с.
Доказательство. Заменяя в левой части уравнения эллипсоида все
знаменатели дробей иа наибольший из них а2, получим неравенство
а при замене всех знаменателей наименьшим из них с2 приходим к неравен-
неравенству
Из этих неравенств вытекает, что а есть наибольшее, а с—наименьшее из
расстояний от точек эллипсоида до его центра и, в частности, что
a Зг p 52 Ц 53 с.
Остается показать, что
p^sb^q.
Обозначим через г длину отрезка прямой пересечения плоскости а с плоско-
плоскостью хОу, заключенного между эллипсоидом и его центром, а через s длину отрез-
отрезка прямой пересечения плоскости а с плоскостью уОг, заключенный между
эллипсоидом и его центром. На основании задачи 24 из рассмотрения сече-
сечения эллипсоида плоскостью хОу заключаем, что г^Ь, а применяя тот же
результат к эллипсу, получающемуся в сечении эллипсоида плоскостью а,
находим, что р^г, следовательно, рз=6.
Точно так же, применяя задачу 24 сначала к сечеиию эллипсоида пло-
плоскостью уОг, а затем плоскостью а, находим последовательно 6 5* s, s^q,
откуда выводим, что b
Задача 81. Доказать, что через центр трехосного эллипсоида1)
проходят две и только две плоскости, пересекающие его по окруж-
окружностям.
Доказательство. Пусть
v-2 Н2 72
ач + b2 i Ci-1 W
—уравнение эллипсоида, причем
а> Ь>с. B)
На основании предыдущей задачи можно утверждать, что если существует
плоскость, проходящая через центр эллипсоида A) и пересекающая его по
окружности, то радиус этой окружности равен Ь.
Рассмотрим сферу
1) Эллипсоид называется трехосным, если длины его полуосей попарно
различны.
ЗАДАЧИ 873
i! перепишем ее уравнение в виде
?2 "Г ?2 + ?2 =='- C)
Вычитая из уравнения C) уравнение A), получим уравнение
В силу неравенстн B)
поэтому можно положить
-I—L-Л* J__i-_C3
ft2 fl2 с2 б2
Тогда уравнение D) принимает вид
следовательно, оно определяет пару плоскостей:
г = 0, Ax — Cz = O. E)
Точки пересечения эллипсоида и сферы, координаты которых удовлетво-
удовлетворяют одновременно уравнениям (!) и C), принадлежат плоскостям D), так
как уравнение D) есть линейная комбинация A) и C). Но эти плоскости,
проходя через центр сферы, пересекают ее по окружности радиуса Ь. Таким
образем, у эллипсоида имеется два круговых сечения, проходящих через его
среднюю ось, радиус которых равен средней полуоси.
Задача 82. Написать уравнение конуса, вершина которого на-
находится в точке 6* = @, 0, р), а направляющей служит парабола
2 = 0.
Пользуясь преобразование:» координат, привести полученные уравне-
уравнения к каноническому виду. (Система координат прямоугольная.)
Решение. Пусть М = (х, у, г) — произвольная точка поверхности ко-
конуса и Д —(х,, i/l Z[)—такая точка направляющей, что точка М принадле-
принадлежит образующей SA. Следовательно, координаты точки А удовлетворяют
уравнениям направляющей
у\ = 2рхи 2Г-0,
а координаты точки М — уравнениям образующей SA
х _ У =г-р^
х\ Ух —Р
Из трех соотношений
У1 = 2рх„ A)
Тг"Тх~-Р B>
исключим два переменных хг и yL.
874 задачи
Для этого выразим xv и {/, из соотношений B) и подставим найденные
для них выражения в соотношение A):
ргуг — 2р~х
(z^-~p~j*~~ z-p
или
(z~p)*~z-p' (i)
откуда
г/2-г2л:(г — р)=-0. D)
(Заметим, что уравнения C) и D) не равносильны: наряду с точками,
удовлетворяющими уравнению C), полученному непосредственно из условия
задачи, уравнению D) удовлетворяют еще точки прямой
не получающиеся из условия задачи.)
Итак, уравнение искомого конуса имеет вид
у*-\-2х(г—р) = 0.
Перенеся начало координат в вершину конуса, приведем его уравнение к виду
y'2 + 2x'z' = 0. E)
Применим к последнему уравнению формулы поворота системы координат
вокруг оси Sy' на угол -^—:
1 „ 1 „ x" — z"
х = —р= х — г = -
/2 /2 У~2~
1 п . I „ x"-\-z"
z = —— х -\—^^ г = —Уг=- .
Y2 V2 У 2
F)
Вставляя в уравнение E) вместо х', у', г' их значения из формул F),
получим каноническое уравнение конуса
Задача 83. Найти направляющие векторы прямолинейных об-
образующих однополостного гиперболоида
проходящих через точку гиперболоида (х0, у0, z0).
задачи 875
Решение. Пусть {/, т, п\ — координаты искомых направляющих век-
векторов. Тогда параметрические уравнения прямолинейных образующих, иро-
зюдящих через точку (л:0, r/0, z0), будут
x = xo-~lt, y = yo-\-mt, 2 = 2р + п«.
Так как каждая точка образующей принадлежит гиперболоиду, то, вставляя
в его уравнение вместо х, у, г их выражения из параметрических уравнений
образующей, получим равенство, справедливое при всех значениях t:
или, раскрывая скобки и принимая во внимание, что точка (x0, yg, z0) при-
принадлежит гиперболоиду, т. е. что
V2 и- 72
будем иметь
Последнее равенство справедливо при всех значениях (, что возможно лишь,
когда оба коэффициента (при t2 н при t) равны нулю:
«о , тУо "го_р
а2 ^ б2 с2
Так как прямая, параллельная плоскости ху, пересекает гиперболоид ire
более чем в двух точках, то для всякой прямолинейной образующей п ?= О,
и поэтому можно всегда положить
п — с.
Тогда получим два уравнения для определения двух оставшихся координат
lam искомого вектора:
1*о , ту а го
а2 "*" 62"~ с '
Для решения этой системы подвергнем гиперболоид аффинному преобра-
преобразованию
? 11 7
у z. V -L 7
а Ь с
и введем обозначения:
X0 = -^L, Yo=-^-, 2„ = -^-, A)
~~~а ' ~~Ъ~ ' ~~ с
876 задачи
Тогда получим следующие уравнения для определения L и Ml
и, кроме того, для координат Хо> Ко будем иметь равенство
Далее, воспользуемся тождеством
Но так как
то из последнего тождества получаем
откуда
Вместе с уравнением
полученное равенство дает следующую систему уравнений для определе-
определения L и М;
L
х0
L
М
у»
м
I 1
X0L-\-Y0M=Z0.
Y7_!V V7"lV
L = - а 9 ± г° М= "' ° ".
Решая ее, найдем
') Это тождество можно доказать, например, так: если {L, М) и \Хп, Yn)
два вектора, образующие угол а, то
\L M
cos2a=
no cos2a+sin2a?= 1, поэтому
L M
или
L M
ЗАДАЧИ 877
Вставляя в эти равенства вместо Хо, Yo, Zo, L, М их значения из ра-
равенств A), B), получим
х0 2р . Уо Уо 20 д. хр
lac b m b с а
х* у* ' Ь х\ уп
_ У1
2 ~ Ьг
откуда получим окончательно выражения для координат направляющих век-
векторов образующих, проходящих через точку (х0, у0, г0) гиперболоида:
хо го , Ун Ун го т- ^о
, а с Ь Ь с а
1 — а ;; -. ¦, т=Ь , П = С.
а2 ^ б2 а2 + б2
Задача 84. Доказать, что параболоид вращения и круглый
цилиндр, оси которых параллельны, пересекаются по эллипсу. Боль-
Большая ось этого эллипса лежит в плоскости, проходящей через оси
цилиндра и параболоида, малая его ось перпендикулярна к этой
плоскости.
Х1оказательство. Принимая за начало прямоугольной системы ко-
координат вершину параболоида, за ось г —ось параболоида, а за плоскость
xz — плоскость, проходящую через оси обеих поверхностей, мы можем урав-
уравнения параболоида и цилиндра написать соответственно в виде
хг-\ у2=
Вычитая из первого уравнения второе, получим
Чах—2рг—а2 + г2 = 0.
Это уравнение определяет плоскость, в которой лежат точки пересечения
параболоида и цилиндра. Так как плоскость, не параллельная оси круглого
цилиндра, пересекает его по эллипсу, то, значит, и линия пересечения рас-
рассматриваемых параболоида и цилиндра есть эллипс.
Проекция этого эллипса иа плоскость ху, есть окружность; плоскость, в
которой лежит эллипс, параллельна оси у (эго непосредственно следует из
отсутствия в уравнении плоскости члена, содержащего у). Следовательно,
линия пересечения плоскости эллипса и плоскости окружности, являющейся
его проекцией, параллельна оси у. А так как малая ось эллипса параллель-
параллельна линии пересечения секущей плоскости и плоскости, ортогональной к обра-
образующим цилиндра, то в рассматриваемом случае малая ось эллипса парал-
параллельна оси у.
Плоскость хг является плоскостью симметрии цилиндра, а плоскость, в
которой лежит эллипс, к пей перпендикулярна, следовательно, в нашем слу-
случае большая ось эллипса лежит в плоскости хг. Но плоскость хг проходит
через оси параболоида и цилиндра.
Таким образом, доказано, что большая ось эллипса лежит в плоскости,
проходящей через оси параболоида и цилиндра, а малая его ось перпенди-
перпендикулярна к этой плоскости.
878
ЗАДАЧИ
К главам XIX и XX
Задача 85. Дана поверхность второго порядка
х2 — '2tf -f z% + 4ху — Sxz — 4yz — \4х — 4у -\-14z + 18 = 0.
Определить вид этой поверхности, доказать, что она является
поверхностью вращения, написать ее каноническое уравнение и найти
ось вращения. (Система координат прямоугольная.)
Решение. Имеем
2
б= 2—2—2 =54,
2
1
2
—4
—7
2
—4
2
—2
—2
—2
—2
1
7
—4
—2
J
— 7
— 2
7
18
= 108.
Поверхность невырожденная центральная.
Характеристическое уравнение имеет вид
1-Х
2
—4
2 —4
—2-Х —2
-2 1-Я
= 0
или
X3 — 27Х — 54 = 0.
Так как А > 0 и среди корней характеристического уравнения имеются
как положительные, так и отрицательные (согласно правилу Декарта один
корень положительный и два отрицательных), то поверхность — однополост-
ный гиперболоид.
Для того чтобы поверхность второго порядка была поверхностью вра-
вращения, необходимо и достаточно, чтобы ее характеристическое уравнение
имело кратный корень, для чего в свою очередь необходимо и достаточно,
чтобы корень характеристического многочлена был в то же время и корнем
его производной. Производная характеристического многочлена
ЗХ2—27.
Корни производной ±3. Подвергаем проверке только корень —3, так как у
характеристического многочлена только один положительный корень. Дейст-
Действительно,
Х = -3
оказывается корнем характеристического многочлена, поэтому можно положить
лА = Х2 = — 3;
по теореме Виетта найдем, что Х3 = 6.
Приведенное уравнение поверхности
Ъу '* + 6z'2 + Х—
04
0.
Каноническое уравнение поверхности
*'2 , у'2 /'« _ ,
~+'2 j
ЗАДАЧИ 879
1 Уравнения для определения центра
х+2у—4г~ 7 = 0,
2х—2у —2г — 2 = 0,
—4х—2</-fz + 7 = 0.
Центр О'=A, 1, —1).
Направляющий вектор оси вращения — собственный вектор, соответст-
соответствующий простому корню Я3 = 6. Уравнения для определения координат на-
направляющего вектора оси вращения:
—5a+2f} — 4y = 0,
2a —8p"— 2y=0,
—4a — 2p— 5y = 0,
откуда находим направляющие
или
Уравнение оси вращения
х —
косинусы
2
"'
2
?'
1
1
Т' '
1
~з'
у — 1
оси
2
~~3
2
з •
2 +
вращения:
1
1 -2
Задача 86. Пользуясь методом Лагранжа, доказать, что по-
поверхность второго порядка
2х2 + 12ху -}- 16г/2 -1- oxz + \2yz + 2z* -}- х + 4у + 2г = О
распадается на пару плоскостей, и найти эти плоскости.
Решение. Преобразуем левую часть уравнения поверхности:
5хг+х +
4 (-<гу—
880
ЗАДАЧИ
Таким образом, данная поверхность второго порядка распадается на две
плоскости:
1=0,
х f- \у ¦+- 2г = 0.
Задача 87. Составить уравнение поверхности второго порядка,
пересекающей плоскость Оху по параболе, а плоскости Oxz и Oyz
но окружностям радиуса г, касающимся положительных полуосей
координат. Пользуясь преобразованием координат, привести получен-
полученное уравнение к каноническому виду. (Система координат прямо-
прямоугольная.)
Решение. Пусть
" + 2а12ху + а2„
— уравнение искомой поверхности.
Линия ее пересечения с плоскостью уОг определяется уравнениями
Яу2 + 2a2Syz -j- aMz 2 -f 2а2у -|- 2оа г + о0 = 0. /
По условию эта линия есть окружность
2 — 2п/—2гг+га=0. )
По теореме единственности для линий второго порядка коэффициенты урав-
уравнений B) пропорциональны соответствующим коэффициентам уравнений C),
т. е.
а22=Я, а23 = 0, as:i = X, о2=—Ъг, а3 = —^г> ао = Кг2.
Точно так же, рассматривая сечение поверхности плоскостью хОг, полу,
чим систему уравнений
У = °' \ D)
a11xi + 2a13xz+a33z-+2a1x + 2a3z-\-a0 = 0. \
Эта линия есть окружность
Системы D) и E) определяют одну и ту же линию, поэтому
Так как а3з = ^ и азз = }г> то (х=='1> и потому уравнение A) можно на-
написать теперь в виде
— 2rXx—2rly—2гХг+лг2 = 0,
или, деля на А, и полагая
ЗАДАЧИ 881
получим
2 — 1гх — 2ry~ 2rz-:-r2 = 0. F)
Линия пересечения этой поверхности с плоскостью хОу будет
z=-0, )
2 — 2гх—2г</+г2=0. J G)
Так как по условию эта линия есть парабола, то детерминант, составлен-
составленный из коэффициентов старших членов ее уравнения, должен быть равен
пулю, т. е.
1 Ь -О
Ь 1 -0'
откуда
Ь=±\.
При Ь=-\-\ система G) определяет пару слившихся прямых; при Ь = — 1—
параболу. Таким образом, годится лишь значение Ь = — 1. При Ь = —1
уравнение F) принимает вид
2 — 2гх — 2ry—2
Приведем полученное уравнение к каноническому виду. Для этого пере-
перепишем уравнение (8) в виде
(х — у)* — 2r(x + y)-'r(z-r)-^0. (9)
Положим
V* '
Тогда уравнение (9) примет вид
или
— эллиптический параболоид.
Задача 88. Доказать, что плоскость, проходящая через две
образующие конуса, является диаметральной плоскостью этого
конуса, сопряженной хордам, параллельным линии пересечения плос-
плоскостей, касающихся конуса вдоль этих образующих.
Решение. Примем образующие копуса, о которых идет речь в условии
задачи, за оси Ох и Оу, а линию пересечения плоскостей, касающихся ко-
конуса вдоль этих образующих, —за ось Ог. Пусть
0 A)
—уравнение конуса в этой системе координат. Уравнение плоскости,
882
ЗАДАЧИ
касательной к конусу в точке (х0, у0, z0), отличной от вершины, имеет вид
(вц*0 + апу0 + а13г0) х + (апх0 + а22</0 + а23г0) у +
+ (а3Л +«згУо+ «ззг0) г = 0- B)
Плоскость xOz можно рассматривать как касательную плоскость к конусу, про-
проведенную в точке A, 0, 0). С одной стороны, в силу B) ее уравнение будет
а с другой стороны, уравнение этой плоскости
0 = 0,
откуда следует, что
ап — а13 = 0, «lz Ф 0.
Точно так же, принимая во внимание, что плоскость yOz есть касатель-
касательная плоскость к конусу, найдем
а22 = о23 = 0, а1а 5^0.
Таким образом, уравнение конуса в нашей системе координат имеет вид
Отсюда следует, что всякая прямая, параллельная оси Ог, пересекает конус
в двух точках (х0, у0, г0) и (х0, у0, — z0), т. е. что плоскость хОу делит
пополам хорды, параллельные оси Oz.
К главе XXI
Задача 89. Написать уравнения несобственной прямой отно-
относительно проективной системы координат, базисными точками кото-
которой являются вершины треугольника ABC, а единичной точкой —
точка М пересечения его медиан.
Решение. Пусть
= @:1:0), С = (
Обозначим через D, E, F середины сторон ВС, СА, АВ треугольника ABC
к найдем координаты этих точек в проективной системе координат АВСМ.
Координаты точки D найдем, рассматривая ее как точку ^пересечения
прямых ВС и AM. Уравнение прямой ВС
пли
уравнение прямой AM
О 1 О
О 0 1
Х-^ Х% ДГд
1 О О
1 1 1
= 0
= 0
задачи 883
Точка пересечения прямых ВС и AM
D = @.1:l).
Точно так же найдем, что
Так как D — середина отрезка ВС, то четвертой гармонической к точ-
точкам В, С, D будет несобственная точка D' прямой ВС. С другой стороны
так как (BCDD )= — 1, то '
D' = @:l: — 1).
Подобным же образом найдем, что несобственной точкой прямой АС
является точка
Напишем теперь уравнение несобственной прямой D'E' по двум ее точ-
точкам D' и ?':
х1 хг х3
0 1 —1
1 0 —1
= 0
Задача 90. Найти проективное преобразование, которое точки
A:0:0), @:1:0), @:0:1), A:1:1)
переводит соответственно в точки
@:1:0), @:0:1), A:0:0), A:1:1).
Решение. Пусть
%х'г = °2 А + а22*
Кх'з = a^xi + аз А + аззХз
— искомое преобразование. Так как A:0:0) переходит в @:1:0), то
an = 0, a2i5^O, a31=0.
Из того, что @:1:0) переходит в @:0:1), следует, что
Наконец, так как @:0:1) переходит в A:0:0), то
а13т=0, a23 = 0, a33 = 0.
Таким образом, формулы проективного преобразования принимают вид
Наконец, принимая во внимание, что точка A:1:1) остается на месте,
находим, что
884 задачи
и формулы преобразования окончательно принимают вид
Задача 91. Относительно системы однородных координат
проективное преобразование задано соотношениями:
X% —- dX^ ~y~Л?2 ~i ~Xgt
X$ = 4-ЛГ^ &Х2 ~p OX3.
Найти несобственную точку плоскости, прообразом которой является
также несобственная точка.
Решение. Пусть {х[:х2-0) — искомая несобственная точка, (х1:х2:0) — е&
прообраз при данном проективном преобразовании. Так как при дс3 = 0 должно
быть Л'з = 0, то из последнего из равенств, определяющих данное проективное
преобразование, находим
4*1-2х2=0,
откуда
Следовательно, прообразом искомой точки будет точка
A:2:0),
и, значит, искомая точка будет
(-3:4:0).
Задача 92. Найти общий вид проективных преобразований,
оставляющих на месте каждую точку несобственной прямой. Какие
аффинные преобразования соответствуют проективным преобразова-
преобразованиям этого рода?
Решение. Введем на плоскости систему однородных координат, и пусть
в этой системе уравнением несобственной прямой будет
Запишем искомое преобразование в виде
•в12*2-Га13*з).
23*3). > С)
Хз ="¦ ^ (в3Л "Т~ аах2 Н" Озз*з) • J
Так как образом каждой несобственной точки снова является несобственная
точка, то при х3 — 0 также и х3 = 0 при любых х1 и хг. Поэтому, подставляя
в третье из равенств A)
и
получим равенство
выполняющееся при всех значениях хх н х2. Но это возможно лишь тогда,
ЗАДАЧИ 885
когда
При этом
«зз ^ °.
так как иначе линейное преобразование A) было бы вырожденным.
Так как при рассматриваемом проективном преобразовании каждая не-
несобственная точка остается на месте, то отсюда следует, что при х3 = 0
т. е.
ax1
ах., = агххх + аггх.1
при любых *i и х2. Но это возможно, лишь если
a = ail = a.,2,
a12 = a21 = 0.
Таким образом, формулы искомого преобразования имеют вид
B)
Деля первое и второе из этих равенств B) на третье и полагая
Х\ Х2 Xi Х2
— = ¦*, = У< —г = х, —- = У .
3 3 з з
— =k, — = а — = Ь,
аз.ч ' а33 ' о3.ч
получим следующие формулы для аффинного преобразования собственной
плоскости, соответствующего данному проективному преобразованию:
x' = kx + a, \
y'=ky + b. )
При k=l это перенос; при k ф 1—это гомотетия с центром в точке
О' = ( -. т . -; г ) и с коэффициентом гомотетии к, быть может, отрица-
тельным.
Задача 93. Найти неподвижные точки проективного преобра-
преобразования
Xi = Xs,
у' — 9 Y
х'3 =- 4хг
проективной плоскости.
886 ЗАДАЧИ
Решение. Если (хх:хг:х3)— неподвижная точка проективного преобра-
преобразования, то координаты ее образа будут Кхх, Кх.г, Kxs, и потому имеем:
илн
— b-j + х3 = 0,
2х, — Хх2 = 0,
4хг — кх3 = 0.
Так как числа xlt хг, хъ не равны нулю одновременно, то
X 0 1
2-Х 0
0 4-Х
=0
откуда для X получаем едипстненное действительное значение
А. = 2,
а для определения координат неподвижной точки получаем систему уравнений
~2хх +х3 =0,
2*! — 2х2 =0,
4х, — 2х3 = 0,
и, следовательно, неиодвижная точка будет A:1:2).
К главе XXII
Задача 94. Дана парабола
х2 —2у = 0
и гипербола
—1 =0.
Найти точку, поляры которой относительно обеих кривых сов-
совпадают.
Решение. Пусть (х0, у0) — искомая точка. Поляры этой точки относи-
относительно данных кривых будут соответственно
V — У — Уо = °.
уох + хоу — 1 = 0.
Так как поляры искомой точки относительно обеих кривых должны совпадать,
то
*о _ —I .^—Уа
Уо хо — 1 '
откуда
1
ЗАДАЧИ 887
Несобственной точки получиться не может, так как диаметры параболи
параллельны асимптоте гиперболы.
Задача 95. Написать уравнение линии второго порядка, касаю-
касающейся сторон базисного треугольника АХА2А3 в его вершинах Ах
и А2 и проходящей через единичную точку "п.
Решение. Пусть
0 A)
— искомая линия. Так как прямая АхА.г — поляра точки
Л3 = @:0:1),
то ее уравнение может быть записано в виде
в13*1 +в23*2+вЗЗ*3 = °-
Но эта же прямая определяется уравнением
х3 = 0.
Отсюда следует, что
ai3 = a23 = 0, азз 5^ 0.
Поэтому уравнение кривой A) может быть записано в виде
\ \ l = 0. B)
Так как, далее, точки
Лх = A:0:0), Л2 = @:1:0)
принадлежат кривой, то
аи=а22 = 0
и уравнение B) принимает вид
2а12*1лг2 + а33*з = 0. C)
По предположению точка
? = A:1:1)
принадлежит кривой, что дает
2а12 + а33 = 0,
и потому уравнение C) переписывается в виде
или, ввиду ai3 Ф 0, уравнение кривой окончательно имеет вид
х\
* А == х\. D)
Задача 96. Около треугольника описана линия второго по-
порядка. В вершинах треугольника к этой липни проведены касатель-
касательные. Показать, что три точки пересечения сторон треугольника
с касательными в противоположных вершинах лежат на одной прямой.
Решение. Примем треугольник А1А2А3, вписанный в кривую, за базис-
базисный треугольник проективной системы координат. В этой системе уравнение
ЗАДАЧИ
кривой будет иметь вид
012*1*2 +<>23Х2Хз + а31ХяХ1 =0. A)
Так как а12 Ф 0, а2Л Ф 0, а31 ф 0, то разделим обе части уравнения A) иа
?l ijL -)_ -ffi ^1 _i_ —L ?l — о A')
оО а31а aa
и напишем полученное уравнение в виде
Полагая
Xj X2 ДС3
«23 a.-u aX2
что соответствует выбору новой единичной точки, перепишем уравнение A) так:
2у1у2 + '2у.2у3 + 2у3у1 = 0. B)
Уравнение касательной к этой кривой в точке Лх = A:0:0) будет
0,
а точка ее пересечения со стороной А.,АЯ, противолежащей вершине Лх и опре-
определяющейся уравнением
01 = 0,
будет
В, = @:1:-1).
Точно так же найдем точку пересечения касательной в вершине А2 с про-
тинолежащей ей стороной AtA3. Это будет точка
Точка пересечения касательной в вершине А3 со стороной АХА2 будет
В3 = A: —1:0).
Чтобы показать, что трн точки Blf Вг, В3 лежат на одной прямой, со-
составим определитель из их координат:
0 1—1
1 0 —1 .
1 -1 О
Он равен нулю, значит, точки В,, B2, Вя лежат на одной прямой.
К главе XXV
Задача 97. Пусть
'«11 «13 Й13'
а,
азг
¦—матрица ортогонального преобразования.
ЗАДАЧИ 889
Доказать, что:
1) если это ортогональное преобразование—поворот вокруг
прямой, то косинус угла поворота определяется из соотношения
cos ф = -
2) если данное преобразование является произведением симметрии
относительно плоскости на поворот вокруг прямой, перпендикулярной
к этой плоскости, то косинус угла поворота определяется из соот-
соотношения
Доказательство. 1) Примем ось вращения за ось z новой прямо-
прямоугольной системы координат xyz. В этой системе формула поворота будет
иметь вид
х' =х cos ф — у sin ф,
у' = х sin ф -|-у cos ф,
z' = z,
а матрица преобразования будет
/cos ф —этф 0\
I в\пц> соэф О
V о оь
Пользуясь инвариантностью следа матрицы линейного преобразования при
переходе от одной системы координат к другой 1), можем написать
aii + a22 + a33 = cos ф + cos ф+1,
откуда
2) Примем ось вращения за ось г, а плоскость симметрии за плоскость ху
новой прямоугольной системы координат xyz. В этой системе формулы пре-
преобразования будут иметь вид
х' = х cos ф —у sin ф,
у' — х s\n (f -\-у
г' — — z,
а матрица преобразования будет
/cos ф —sin ф О
( sin ф cos<p О
V о о—1
г) Следом матрицы А порядка п называется сумма S ее элементов,
стоящих на главной диагонали. Характеристический многочлен матрицы А
есть
det (A — lE)=( — l)nl" + ( — l)n-1Sln-1-\-. . . +det A.
Следовательно, инвариантность следа S матрицы А линейного преобра-
преобразования относительно изменения базиса вытекает из инвариантности коэффи-
коэффициентов соответствующего ей характеристического многочлена.
890 ЗАДАЧИ
Применяя теорему об инвариантности следа матрицы линейного преобра-
преобразования относительно перехода от одной системы координат к другой, будем
иметь
откуда
Задача 98. Доказать, что если и — произвольный вектор
ориентированного пространства, и' — его образ при повороте про-
пространства вокруг оси с данным направляющим вектором а, то тройка
векторов и, и', а имеет одну и ту же ориентацию независимо от
выбора лектора и.
Доказательство. Введем в пространстве прямоугольную систему
координат, принимая за положительное направление оси z направление вектора
а, и обозначим через ф угол поворота. Тогда формулы поворота будут иметь вид
x' = xcos ф—у sin ф,
у' =х sin ф -гу cos ф,
г' = г.
Пусть и = {х, у, г| — произвольный вектор пространства, и' = {х', у', г'} —
его образ при данном повороте. Вычислим определитель, составленный из
координат векторов и, и', а:
х у г
х У г'
= ху-ух =
О 0 1
=x(A:sin ф + усоэф) — у (х cos ф—у sin ф)= sin ф (х2-\-у2).
Мы видим, что знак определителя, составленного из координат векторов
и, и', а, не зависит от выбора вектора и, причем это верно не только в рас-
рассмотренной системе координат, но и во псякой другой, так как этот определи-
определитель есть смешанное произведение векторов и, и , а, инвариантных по самому
своему определению. Это означает, что ориентация тройки векторов не за-
зависит от вектора и, а определяется заданным преобразованием и выбором
положительного направления на оси вращения.
Будем называть вращение вокруг оси с направляющим вектором а
положительным, если тройка векторов и, и', а имеет положительную
ориентацию, в противном случае будем считать вращение отрица-
отрицательным.
Задача 99. Дано ортогональное преобразование
х' =
У' =
z' = ¦
2
11
2
2
ю
+ 75^
I
У + -jz,
2
У—152'
Найти единичный направляющий вектор неподвижной прямой, опре-
ЗАДАЧИ
891
деляющий положительное направление вращения и угол поворота
(см. задачи 97 и 98).
Решение. Матрица преобразования
.1 JL -L
т т т
И _10 _2_
15 15 15
А А _!!
15 15 15
является ортогональной с определителем +1. Следовательно, данное преобра-
преобразование—поворот вокруг некоторой прямой. Выберем такой единичный направ-
направляющий вектор этой прямой, чтобы рассматриваемое вращение было положи-
положительным Для этого определим сначала какой-нибудь вектор v —{X, У, Z},
лежащий на неподвижной прямой. Так как такой вектор при ортогональном
преобразовании остается неизменным, то его координаты удовлетворяют
следующей системе уравнений:
11
~"T5
= !5*
10,
~T5V
'--=-Z
'""Is2
илн
}1
15
1о
15
15 15 15 ~~
Определитель этой системы
1
3
11
15
2
15
2
3
25
15
5
15
1
Т
2
15
29
15
= 0.
Следовательно, система имеет ненулевое решение, например, v = {7, 3, l}.
Возьмем какой-нибудь вектор, не коллинеарный иектору v = {7, 3, I},
например вектор и = {1, 0, 0}, и найдем его образ и' при данном преобра-
преобразовании:
И 2t
15" Щ'
892
ЗАДАЧИ
Детерминант, составленный из координат векторов и, и', v,
1 О О
| 11 |
3 15 15
7 3 1
Следовательно, вектор v = {7, 3, I} определяет такое направление оси, что
данное ортогональное преобразование оказывается положительным вращением
вокруг этой оси.
Чтобы получить единичный направляющий вектор оси, нормируем вектор v:
| = ут.
откуда искомый вектор
3
Р^ Г •
]/19' ^59' У 59)
Косинус угла поворота найдем из соотношения
В рассматриваемом случае
cos ф = -
-2__Н)_Н
3 15 15"
20
0'
Sin ф :
Если перейти к новому ортонормированному базису
* * *
ei, e2, е3,
приняв в качестве е* вектор а, то в новом базисе формулы преобразования
будут иметь вид
29 „ /59
30
¦У
30 " +30y*'
z'* = z*.
Задача 100. Выяснить геометрический смысл преобразования
. , П.. , 2 , 10 . , ,
z =—г
задачи 893
Решение. Матрица преобразования
11
15
2
15
2
3
2
15
14
15
1
3
10
15
5
15
2
3
ортогональная с определителем +1. Поэтому данное преобразование является
композицией поворота вокруг прямой и переноса в направлении этой прямой.
Таким образом, мы должны найти: 1) вектор переноса в направлении оси
вращения; 2) точку на оси вращения; 3) определить, будет ли вращение
положительным или отрицательным, если за направление оси принять направ-
направление вектора переноса, и 4) найти угол поворота.
Найдем сначала какой-нибудь направляющий вектор оси вращения. Его
координаты определяются из системы уравнений
И 2 10
X X+y+Z
9 1 9
x+y+
4 vi 2
15
Решением этой системы будут, например, числа 1, 2, 0. Следопателыю,
вектор а = {1, 2, 0} является направляющим вектором оси вращения.
1) Вектор переноса v в направлении оси вращения найдем как орюю-
пальную проекцию на эту ось вектора uo = jl, 3, 5}, координатами которого
служат свободные члены в правых частях формул, определяющих данное
преобразование:
2) Точку А = (х, у, г) на оси прящения найдем, используя то обстоя-
обстоятельство, что ее образ А' = (х', у', г') также лежит на оси вращения, при-
причем вектор АА' = \. Поэтому
-jr- , у у — -?- , 2 2=
,7 , , 14
х =Дс-1-дГ, У'=г/ + у, г =г.
894
ЗАДАЧИ
Вставляя эти значения х', у', г' в формулы, определяющие данное преобра-
преобразование, получим систему уравнений для нахождения координат точки на оси
вращения:
10
7
14
11
_
2
2
14
._
2 1
Решением этой системы могут служить, например, числа 6, 0, 3. Таким об-
образом, точка А с координатами 6, 0, 3 лежит на оси вращения.
3) Чтобы определить направление вращения, возьмем какой-нибудь век
тор, не коллинеарнын с вектором переноса, например вектор
и найдем его образ:
= {1, 0, 0},
) 15' 15' 3
Составим детерминант из координат векторов и, и', v:
28
Так как детерминант положителен, то и вращение вокруг оси, направляющи
вектором которой является вектор переноса, будет положительным.
4) Угол поворота найдем из соотношения
1
11
15
7
5
0
2
15
14
15
0
2
3
и
cos ф =
В нашем случае
cos<p=-
15+15+3
- = ^-, SIt1Cp =
V"s
Если за начало новой прямоугольной системы координат O*x*y*z* пр
пять какую-нибудь точку О* неподвижной прямой, а за положительное н
правление новой оси О*г* вектор переноса вдоль новой оси, то в новой си
теме координат формулы преобразования будут иметь вид
у
г'»
ЗАДАЧИ 895
Задача 101. Выяснить геометрический смысл преобразования
х' = — х 4- — i
' — —— 4-— ! —
'—— --4-- — — 4-3
Решение. Матрица преобразования
_L 2l JL
3 3 3
11 10 'l_
'15 15 15
15 15 15,
6
ортогональная с определителем —1;ее след равен т-= == 1; следовательно,
преобразование представляет собой произведение симметрии относительно
плоскости на поворот вокруг оси, перпендикулярной к плоскости симметрии.
Точка пересечения плоскости симметрии и оси вращения остается при
данном преобразовании неподвижной, поэтому ее можно найти из системы
уравнений
9 9 1
Решая ее, найдем:
_10 _ 2 _5
х-3 , y-~Y> г~3 *
Направляющий вектор п оси вращения найдем как собственный вектор
линейного преобразования
, 2,2 1
11 ,10 ,2
2 15Х+ 15У 15г"
соответствующий собственному чначению —1, из следующей системы уравнений;
-+P +
896
ЗАДАЧИ
Решением этой системы могут служить, например, числа 1, 1, —7.
Эти же числа могут служить н коэффициентами при неизвестных в урав-
уравнении плоскости симметрии. Так как, кроме того, иам известна точка
10 2 5\
-=- I , то уравнение плоскости симметрии может быть записано
/10
I -5-, —
в виде
тН (-4)-
х + у
Угол поворота найдем из соотношения
В нашем случае cos Ф = гт; •
Найдем на оси вращения такой вектор, чтобы вращение вокруг этой
оси было положительным. Для этого возьмем какой-нибудь вектор и, не
коллинеарнын оси вращения, например {1, 0, 0}, найдем его образ и' при
линейном однородном преобразовании, соответствующем данному преобра-
преобразованию:
! 11 2
Г' ~Г5' 15
составим детерминант из координат векторов и, и , п:
1 0 0
2_ _П 2
15 15
1
1 -7
=5 > 0.
Значит, для того чтобы вращение вокруг оси, перпендикулярной плоскости
симметрии было положительным, нужно за положительное направление этой
оси взять вектор
п = {1, 1, -1).
Если за начало новой прямоугольной системы координат О*х*у*г* взять
~ /10 2 5\
точку О* = -=-, —тг • тг ) пересечения плоскости симметрии и оси враще-
Y о о о J
ния, а за положительное направление оси О*г* принять направление вектора
и = {1. 1. ~?}, то в новой системе координат данное преобразование
b иметь вид
~10 10 у
задачи 897
Задача 102. Выяснить геометрический смысл преобразования
х —-^х yH т"
У' = —jX + уУ— у 2+14,
3 6 2,
z =-jX — -Ty—~fz—7.
Решение. Матрица преобразования
6_ _2_
7 7
2_ ?
7
ортогональная с определителем —1; ее след равен 1; следовательно, преобра-
преобразование является произведением симметрии относительно плоскости на пере-
перенос в направлении, параллельном плоскости симметрии.
Найдем прежде всего (какой-нибудь) вектор п, перпендикулярный пло-
плоскости симметрии, как собственный вектор линейного оператора
, 6 2 3
соответствующий собственному значению —1, из следующей системы:
6 2 3
тХ--у-ту=-Х,
2 3 6
~Тх+Ту~Тг==~у'
3 6 2
-тх~ту-тг=-г-
Решением этой системы могут служить, например, координаты вектора
п={1, 2, 3}.
29 П. С. Александров
898 задачи
Вектор переноса v найдем как ортогональную проекцию на плоскость
симметрии вектора
ио = {7, 14, -7},
координатами которого являются свободные члены правых частей формул
данного преобразования. Вектор п = {1,2, З} нормален к плоскости симметрии.
Представим вектор и0 в виде
умножая это равенство скалярно на п и принимая во внимание, что
(v, п) = 0,
получим
(u0, n) = Xn2,
откуда
(iV_n)
п2 "
Вставляя сюда координаты векторов и0 и п, найдем, чтоЛ=1 и, следовательно,
v = u0 — Xn={6, 12, —10},
|v|= У~Ш.
Если (х, у, г) — произвольная точка плоскости симметрии (*', у' г') —ее
образ при данном преобразовании, то
х'—
2'=2—10.
Вставляя эти значения х1, у', г' в формулы, определяющие данное пре-
преобразование, и упрощая, например, первое из получаемых равенств:
, . 6 2 3
получим уравнение плоскости симметрии
х-\-2у-\-Ъг—7 = 0.
Если принять плоскость симметрии за плоскость х*у* новой прямоуголь-
прямоугольной сстемы координат х*у*г*, взяв за положительное направление оси
абсцисс направление вектора переноса, то в новой системе формулы преобра-
преобразования примут вид
ЗАДАЧИ
899
Задача 103. Доказать, что при подобном преобразовании л-мер-
ного пространства с коэффициентом подобия к=?\, всегда сущест-
существует неподвижная точка, и притом только одна.
Доказательство. Докажем утверждение для случая трехмерного
пространства; в обшем случае доказательство такое же. Так как преобра-
преобразование подобия может быть представлено как композиция преобразо-
преобразований гомотетии, поворота и переноса, то в прямоугольных координатах оно
может быть записано в следующем виде:
где (С(ь)—ортогональная матрица.
Если (х, у, г)—неподвижная точка этого преобразования, то для нее
х' = х, у'=у, г' = г,
и, значит, координаты х, у, г такой точки удовлетворяют системе уравнений
X — k (СцЖ-f C12!/ + C13Z)+X0,
или
(ксц —
kcnx+ксзгу + (kc 23 — 1) г + 20 = 0.
Для того чтобы эта система имела решение, и притом единственное, не-
необходимо и достаточно, чтобы определитель
i-l kclt
kc31
fee,, — I
A)
был отличен от нуля. Но если бы этот определитель обратился в нуль, то име-
имело бы место равенство
1
Cll~T
C31
c12
1
c32
cl3
сзз —
1
к
=0.
B)
29*
900 ЗАДАЧИ
Значит, собственное значение матрицы (c;k). Но это невозможно, так
ь.ак матрица (с1к) ортогональная и, следовательно, ее собственные значения
го абсолютной величине равны 1, а по предположению
следовательно, и
т-»-
Таким образом, предположение, что определитель A) равен нулю, привело нас
к противоречию, из чего мы должны заключить о справедливости утвержде-
утверждения теоремы.
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Абсолют евклидовой геометрии 639
Абсцисса 56
Адъюнкта 159, 174, 180
Аксиома ассоциативности 794
Аксиомы векторного пространства 288
— n-мерного аффинного (точечно-век-
(точечно-векторного) пространства 343
— понятия группы 788
— равенства 786
— эквивалентности 786
Амплитуда 77
Аннулятор 318, 722
Асимптота алгебраической кривой 428
— крииой второго порядка 428, 439,
444, 450, 637
— поверхности второго порядка 514
Асимптоты гиперболы 134, 437
Астроида 860
Базис 54, 56, 59, 188, 293, 294, 345
— биллисйиоЛ и квадратичной функ-
функции канонический 332
— координатной системы 188
— многообразия векторам 48
— ортогонального преобразования ка-
канонический 734
— ортогональный 196, 197
— ортонормальный 196, 713, 717
— репера 188
Базисы одноименные 197, 207, 214
— ортогонально эквивалентные 712
— разноименные 197, 207, 208,
214
Бивектор 225
Вектор 18, 167, 288
— асимптотического направления 426,
435—439, 443,510, 514,521,633,682
— вещественный 383
Вектор единичный 20, 48, 55, 58
— закрепленный 344, 374. 382
— замыкающий 36, 43
— лежащий в г-мерной плоскости
350
— линейного оператора собственный
724
— мнимый 374, 383, 746, 747
— нулевой 18, 44, 167, 288, 344,
375
—, ортогональный к подпростран-
подпространству 721
—, перпендикулярный к плоскости
249
—, прямой 107
— поверхности асимптотический
755
— противоположный 168, 191, 288
— прямой направляющий 87, 90, 92,
348, 378
— свободный 33, 377, 382
Векторы базисные 48
— взаимно противоположные 19
— — сопряженные 450, 451
— инвариантные 285, 286, 738
— колли ней рные 44, 51, 59, 375
— компланарные 44, 51
—, сопряженные относительно поверх-
поверхности 540
Величина угла между двумя векторами
в п-мерном евклидовом пространство
720
Вершина конической поверхности 387,
395
— кривой второго порядка 119, 123,
133, 472
Вид билинейной формы канонический
J32
— квадратичной фору.ы канониче-
канонический 332, 754
?02
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Вид матрицы ортогонального преобра-
преобразования 734
Вращение плоскости 75, 725, 728
Высота точки 85
Геометрия аффинная 423
Гипербола 129, 133, 192, 410, 663
— равнобочная 137
— равносторонняя 137
Гиперболоид в я-мерном пространстве
760
— вращения 487, 558
— двуполостпьш 485, 556, 705
— — вращения 558
— — правильный 485
— одиополостный 485, 556, 705
— — вращения 487
— — правильный 485
— правильный 485
Гиперплоскость 362, 679
— диаметральная 757
Гомоморфизм групп 794
Гомотетия 280, 281, 741, 886
Группа 788
— абелева 788
— аддитивная 788, 789
— вращений 789
— вычетов 791
— коммутативная 781, 788
— матриц 203
— мультипликативная 789
— перестановок (симметрическая
группа) 798
— преобразований 797
— — аффинных 267
— — движений 267
— — проективно-аффиниых 608
— — проективных 600, 678
растяжений (гомотетий) с общим
центром 282
— свободных векторов 789
— циклическая 792
Движение 259, 278, 284—287, 738, 740,
741
— винтовое 739
— несобственное 260, 284, 736, 737, 841
— собственное 260, 284, 736—741
Деление отрезка в данном отношении
23, 25, 62—65, 81, 380, 801
Детерминант матрицы аффинного пре-
преобразования 277
второго порядка 152
порядка п 170, 186
третьего порядка 156
— мннора 159, 174
Детерминант преобразования 277
— системы линейных уравнений 153,
160, 177
Деформация непрерывная 209, 276
Диагональ многоугольника 134
Диаметр кривой второго порядка 448,
450, 454, 649
Диаметры взаимно сопряженные 453
— гиперболы 456
— главные 468
— параболы 454, 455
— центральной кривой сопряженные
453
— эллипса 455
Директриса параболы 116, 117, 142
Директрисы гиперболы 137, 140, 142
— эллипса 137, 140, 142
Дискриминант квадратичной формы 326
Длина вектора 66, 67, 717
— отрезка 17
Долгота 85
Дополнение алгебраическое 159
— ортогональное 722
Единица измерения длин 17, 20, 66,
77, 84
Зависимость векторов линейная 49—
52, 290, 300, 375
— строк и столбцов матрицы линейная
164
Закон инерции для квадратичных форм
336
Замыкание выпуклое 357
— линейное 298
Заряд молнии 155, 170
Знак аффинного преобразования 277
— включения 778
— действительного числа 773
— молнии 155, 170
— перестановки 773
Значение вектора алгебраическое 20
— линейного оператора собственное
724
— проекции вектора алгебраическое
56—59, 69, 71, 76
Изоморфизм аффинных (точечно-век-
(точечно-векторных) пространств 347
— векторных пространств 290, 295,
306
— групп 791
— проективных плоскостей 581
Инвариант группы преобразований 421
Инвариантность двойного отношения
624
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
903
Инварианты многочлена второй степени
ортогональные 371, 405, 406, 548
— оператора 728
Инверсия 773
Индекс квадратичной формы 336
— — функции 336
Инцидентность точек, прямых, пло-
плоскостей 571, 573, 583, 584, 668, 670,
673
Касательная к кривой второго порядка
440, 441, 635, 636
— — поверхности второго порядка
510, 686
— плоскость 511, 519, 520, 687, 689,
757
Квадрант 57
Класс эквивалентности группы 793
— эквивалентных аффинных систем ко-
координат 590, 612, 673
Классификация линий второго порядка
афинная 416
проективная 666
проективно-аффинная 663
— поверхностей второго порядка 564
проективная 695
— — проективно-аффинная
700—705
Классы базисов 208
— вычетов 790
Коллинеарность вектора прямой 91, 92
— векторов 44, 51, 59, 375
Коллииеации 601
Комбинация линейная векторов 38,
47, 168
нетривиальная 49
плоскостей 244, 671
прямых 97, 98
— — точек 671
Компланарность вектора плоскости 235
— векторов 44, 51
Композиция преобразований 782
— элементов группы 788
Конус асимптотический 485, 516
— асимптотических направлений 516,
517, 755
— вращения 479, 558
— второго порядка 479, 554, 696, 760
— действительный 479, 555, 696
— круглый 479, 696
— мнимый 482, 555, 697
Координаты барицентрические 355
— вектора в арифметическом я-мер-
иом векторном пространстве 167
комплексном пространстве
382
Координаты вектора в n-мерном аф-
аффинном пространстве 345
векторном пространстве
293
евклидовом пространство
718
— прямоугольной системы ко-
координат 73
на комплексной плоскости 374,
376, 377
плоскости и в пространстве
48, 56-58
прямой 20, 23
— гиперплоскости 680
— однородные в пространстве 670, 674,
676
на плоскости 573, 594
— прямой 615
— плоскости в проективном простран-
пространстве 670
связки 580
— проективные луча связки 575, 592
пучка 612
четырехмерной связки 669,
673, 676
плоскости связки 593
точки в пространстве 673
— — — на плоскости 593
прямой 613, 623
— прямой 580
— тангенциальные 657
— точки аффинные 22, 56, 59, 345,374,
382
однородные 573, 594, 615, 670,
674, 676
полярные 78, 80, 84—86
проективные 593, 613, 623, 673
— — прямоугольные 66, 67
цилиндрические 85, 86
Коэффициент гомотетии 280, 741
— подобия 280, 741
— пропорциональности 25, 29
— прямой угловой 88
— растяжения 280, 741
Кривая вещественная алгебраическая
381
— второго порядка невырождающаяся
631
— параболическая 459
Кривые аффинио эквивалентные 371
— второго порядка изометрические 422
метрически эквивалентные 466
Лемниската Бериуллн 857
Лемма Шаля 21
Линнн второго порядка 366, 398
904
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Линии второго порядка аффинно
эквивалентные 417
на проективной плоскости
631
— распадающиеся алгебраические 384,
414, 415, 428
— эллиптического, гиперболического
и параболического типа 436
Линия 393, 395
— алгебраическая 366, 630
вещественная 384
— гладкая 396
— дифференцируемая 396
— центральная 447, 510
Луч пучка 612
— связки 570
— — особый 571
Масштаб 66, 77, 84
Матрица 168
— аффинного преобразования 273
— билинейной формы 324
— — функции 324
— второго порядка квадратная 152
— диагональная 742
— единичная 195
— квадратичной формы 326
— — функции 326
— линейного преобразования 307
— л-го порядка квадратная 168
— невырождающаяся 170
— нулевая 205
— обратная 190, 195
— ортогональная 199, 200, 711
— перехода 189, 200
— поверхности второго порядка боль-
большая 504
— — малая 504
— преобразования координат 190, 191
— прямоугольная 204
— системы линейных уравнений 357
— — — — расширенная 358
— скалярная 742
— транспонированная 152, 157, 169
— третьего порядка квадратная 154
Меридиан поверхности вращения 391
Мннор, дополнительный к минору 179
— матрицы 179
— угловой 179
— элемента матрицы 159, 174
Многообразие алгебраическое 754
— многочлена нулевое 364
— плоскостей одномерное линейное 245
— прямых одномерное линейное 99
— решений алгебраического уравнения
364
Многообразия векторные 52, 167, 232
288
Многочлен 322
— неприводимый 427
— однородный 322
— характеристический 548, 727
Многочлены пропорциональные 365
Множество 777
— выпуклое 356
— пустое 777
Множитель нормирующий 107, 251
Модуль бивектора 225
Молния 154, 169
Наклон вектора к вектору 76
¦ оси 76
Направление 426
— вращения 75
— — положительное 75
— линии второго порядка особое 452
468
— поверхности второго порядка осо
бое 532, 540, 541, 758
— прямой 426
— самосопряженное 452
Направления асимптотические алге
браической кривой 426, 439
—,взаимно сопряженные отноентельш
поверхности 757
— для линий второго порядка сопря
женные 450
поверхностей второго порядке
в я-мерном пространстве сопряжен
иые 757
сопряженные 540
— изотропные 437, 438
— кривой второго порядка асимпто
тическис 435—443, 633
главные 468
— поверхности второго порядка асим
птотнческие 510, 514, 521, 682
— главные 547
Направляющая конуса 387
— цилиндра 385, 482
Направляющие косинусы 71
Начало координат 55, 58,77, 84, 34Е
Неравенство Коши — Буняковского
719
— треугольника для векторов 720
точек 721
Нормаль 869
Оболочка выпуклая 357
— линейная 298
Образ кривой 371
— множества 780
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
905
Образ элемента множества 780
Образующие прямолинейные гипербо-
гиперболического параболоида 501—503
однополосного гиперболоида
498—501
поверхности второго порядка
491, 518, 686, 688
Объем ориентированного параллеле-
параллелепипеда 223, 275, 828
Одночлен 322
Окружность 67, 68, 411
— мнимая 381
— нулевая 381
Октант 60
Оператор линейный 304, 724
— — самосопряженный 745
— — сопряженный 745
— симметрический 745
Операции над векторами линейные
34—38, 44
Ордината 56, 58
Ориентация 215
— бивектора 225
Орт 66, 72
Ортогонализация 715
Оси гиперболы 129, 130
— эллипса 123
Ось 20
— абсцисс 55, 56, 58
— апликат 58
— гиперболы вторая 130
действительная 130
— — мнимая 130
первая 130
— — фокальная 130
— координат 55, 58, 77
— ординат 55, 58
— параболы 118, 468
фокальная 118
— перспективы 617
— полярная 77, 84
— пучка плоскостей 245
— симметрии кривой второго порядка
468, 469, 471
— эллипса вторая 119
— — первая 119
— — фокальная 119
Отношение 27, 31
— ангармоническое 620
— векторов 19, 21, 45
— отрезков 17,23
— четырех лучей пучка двойное 626
точек двойное 620, 624
сложное 620, 624
— эквивалентности 785
Отображение аффинное 263
Отображение в 780
— векторных пространств линейное 304
— взаимно однозначное 780
— групп гомоморфное 794
— изоморфное 791
— множества в себя 781
иа себя 781
— на 780
— обратное 781
— перспективное плоскости на пло-
плоскость 610
— — прямой на прямую 616
пучка па пучок 617
— проективное плоскости на плоскость
610
— — прямой на прямую 615, 616, 619
— пучок 615
пучка на пучок 615
Отражение относительно плоскости 737
прямой 781, 782
точки 737
Отрезок 17
— замкнутый 349
— направляющий 18
— открытый 349
Парабола 114—118, 416, 637, 663
Параболоид в я-мерном пространстве
760
— вращения 393, 493
— гиперболический 492, 496, 559, 705
— эллиптический 492
вращения 393, 493
Параллелепипед аффинного простран-
пространства л-мерный 351
— ориентированный 222
Параллелепипеды n-мерного прост-
пространства 351
Параллелограмм ориентированный 149
Параллельность в широком смысле
слова, 44, 362
— двух плоскостей 241
— — — в я-мерном пространстве 362
— — прямых в пространстве 97
— на комплексной плоскости
377
— плоскости 92, 93
— прямой и плоскости 236
Параметр параболического цилиндра
563
— параболы 118, 119, 416
— фокальный гиперболы 142, 143
параболы 118, 119
— — эллипса 142, 143
Параметры параболоидов 492, 559
Пары чисел пропорциональные 25
906
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Перенос начала координат 61, 62
— параллельный 32
Пересечение алгебраической кривой
с прямой 425, 427
— двух алгебраических линий 425
— линии второго порядка с прямой
440, 442
— множеств 779
— поверхности второго порядка с пло-
плоскостью 506, 507, 684
— — — прямой 685
— в я-мерпом про-
пространстве 755
— подпространств 302
Перестановка 767, 771
— нечетная 773
— обратная 769
— четная 773
Перпендикуляр из точки на прямую 254
— общий к двум прямым 256
Перпендикулярность двух векторов 72
плоскостей 254
прямых в пространстве 113
на плоскости 109, 112
— прямой и плоскости 253
Плоскости в «-мерном аффинном про-
пространстве 350
проективном пространстве 679
Плоскость арифметическая проектив-
проективная 580
— бесконечно удаленная 246, 675—680
— двойная 836
— диаметральная поверхности вто-
второго порядка 529, 692, 757
— комплексная 374
проективная 582
— мнимая 383
— несобственная 246, 675—680
— полярная 765
— полярной системы координат в про-
пространстве основная 84
— проективная 100, 101, 572, 581
— проективно-аффипная 605
— связки особая 571
— центров 521
Площадь ориентированного параллело-
параллелограмма 151, 275
— — треугольника 152
Поверхности аффинно эквивалентные
373
— второго порядка аффинно эквива-
эквивалентные 564
вырождающиеся 482, 513, 756
— изометрические 557
— распадающиеся алгебраические 384
Поверхность 393
Поверхность алгебраическая 366, 680
754
вещественная 383
— вращения 391
— второго порядка 366, 504, 563, 564
в я-мерпом аффинном про-
пространстве 755, 759
проективном прост-
пространстве 766
проективном простран-
пространстве 681
действительная овальная 697
невырождающаяся 482, 687,
699, 760
— кольцевидная 698—700
— коническая 386—394, 755
— мнимая овальная 697
— центральная 525
в гс-мерном пространстве 727
— цилиндрическая 385, 386, 394, 478
— шаровая 68, 69, 483
Поворот вокруг оси 737
Подмножество 778
— несобственное 778
— собственное 778
Подпространства ортогональные 723
Подпространство векторного прост-
пространства 297
•— евклидова пространства 721
— инвариантное 724, 728
—, порожденное множеством 298
Подстановка 767
Полуоси гиперболоидов 485
— гиперболы 129, 131
— центральных поверхностей 557
— цилиндрической поверхности 561
— эллипса 119, 121
— эллипсоида 482
Полуось эллипса большая 119
малая 121
Полуплоскость положительная 101, 105
Полупространство положительное 84,
247
Полупрямая положительная 23
Полюс плоскости 765
— полярной системы координат 77
— прямой 650
Поляра 649
Порядок алгебраической линии 365,
367, 630
поверхности 365, 368, 680, 754
— группы 788
Правило Декарта 555
— замыкающего вектора 36
— Крамера 162, 178
— параллелограмма 35
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
907
Правило умножения детерминантов
185
Преобразование аффинных координат
61, 62, 189, 190, 191
— изометрическое 278
— координат в комплексном прост-
пространстве 383
— — — я-мериом векторном прост-
пространстве 294, 295
— евклидовом пространстве
716
на комплексной плоскости 376,
377
— множества 781
— ортогональное 404, 730
— подобия 280, 741
— проективно-аффинное в простран-
пространство 679
на плоскости 605, 608
— проективное проективного прост-
пространства, 677, 678
проективной плоскости 600, 603
прямой 615, 616
— проективных координат в прост-
пространстве 674, 675
на проективной плоскости
595, 596
— прямоугольных координат в прост-
пространстве 200
на плоскости 198
— собственное ортогональное 737, 738
— тождественное 736, 783
Преобразования аффинные 261—277,
363, 607, 679, 752
— — несобственные 262
— — «-мерного пространства 473
собственные 262
— коллинеарные 601
— линейные 306, 749
Принадлежность прямой плоскости
236
Принцип двойственности для проек-
проективного пространства 670
проективной плоскости 583,
584, 658
Проекция вектора на плоскость 39, 40
— — — прямую 39, 40
— ортогональная 39
— точки на плоскость 39
— — — прямую 39
Произведение вектора на число 19, 38,
48, 167, 289, 375
— векторов векторное 226
— — скалярное 72, 74, 717
смешанное 228
— детерминантов 185
Произведение матриц 194, 202, 308
— матрицы на число 205
— преобразований 308, 782 .
— элем гитов группы 788 \
Прообраз полный 780 \
Пропорция 26, 29 ''
Пространство арифметическое п-мер-
ное аффинное 346
векторное 167
проективное 669, 679
— аффинное (точечно-векторное)
я-мерное 343
— бесконечномерное 292
— векторное 167, 288
— евклидово «-мерное 716
— — — точечно-векторное 718
— комплексное 382, 669
— проективно-аффинное 675
— гс-мерпое 680
— проективное я-мерное 679
— решений системы уравнений 313
Прямая, бесконечно удаленная 100,
245, 246, 572
— в комплексном пространстве 383
rt-мерном аффинном пространстве
349
— вещественная 381, 582
— мнимая 381, 582
— па комплексной плоскости 377—
380
— несобственная 100, 245, 246, 572,
579, 675
— паскалева 642
— центров 448, 527
— числовая 22
Прямоугольник гиперболы основной
134
Прямые изотропные 412
— мнимые сопряженные 384, 398
Пучок кривых второго порядка 431,
640
— плоскостей 245
несобственный 245
— собственный 245
— прямых 99
несобственный 99
— — собственный 99
Равенство векторов 20, 32, 374, 800
Радиус-вектор 801
Радиус полярный 78, 85
Радиусы фокальные гиперболы 130
эллипса 120
Разбиение множества на классы 784,
785
Разложение вектора 47—49
S08
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Разложение детерминанта по элемен-
элементам строки 160, 174
Размерность векторного многообразия
52
пространства 292, 301
Разность векторов 36, 290
Ранг билинейной формы (функции) 330
— квадратичной формы (функции) 330
— матрицы 310, 330, 331
— поверхности иторого порядка боль-
большой 504, 756
— — — — малый 504, 756
— системы уравнений 314, 358, 359
Расположение двух поверхностей вза-
взаимное 24
прямых в пространстве взаимное
246
— — — на плоскости взаимное 92, 93
— трех плоскостей взаимное 840
Расстояние между двумя прямыми 258
точками 67, 718, 721
— от точки до плоскости 251, 252
— — прямой (в пространстве)
¦255
— (на плоскости) 107,
108
— фокусное гиперболы 129
— — эллипса 119
Растяжение 280, 741
Репер 188
— левый 215, 216
— правый 215
— прямоугольный 196
Реперы одноименные 214, 222
Решение системы уравнений 313
Снязка комплексная 669
— прямых и плоскостей 570
— — — — в четырехмерном прост-
пространстве 669
Снизь прямоугольных координат с по-
полярными в пространстве 86
— — — — — на плоскости 80
Сдвиг 32, 61, 345. 739
— нулевой 33, 35
Середина отрезка 65, 380, 801
Сечение коническое 387, 481
— конуса 387, 481
— цилиндра 129
Сжатие 281, 741
— плоскости к прямой равномерное
126
Симметрия 737, 781, 782
Симплекс 355
— замкнутый 355
— открытый 355
Система векторов максимальная ли-
линейно независимая 301
— инвариантов кривой второго поряд-
порядка полная 423, 466
— координат аффинная 55, 58
в проективном пространство 674
— — — проективная 674
— — — пространство однородная 676
—- — — — полярная 84, 85
— пучке проективная 612, 613
— — — связке проективная 591
четырехмерной связке про-
проективная 674
каноническая для гиперболоидов
485
гиперболы 130
— — — — конуса второго порядка
472
— — параболоидов 492
— — — — параболы 116
— — эллипса 120
— — — — эллипсоида 482
— — на плоскости и в пространстве
55, 58, 66
— — — — однородная 576, 594
— — полярная 77, 80
— — проективная 593
— — — проективной плоскости 593
— — — прямой 22
— — — — однородная 614
— — — — проективная 613
— — прямоугольная 66
— линейных уравнений 154, 160—167,
357—360
— — — несовместная 164, 358
однородная 162, 164, 232, 234,
313, 316, 358
— — — совместная 359
— образующих векторного простран-
пространства 298
— однородных координат на арифме-
арифметической проективной плоскости 594,
595
— уравнений линейно независимая 358
Системы координат естественно свя-
связанные 576, 676
— — эквивалентные 590, 612, 673
— линейных уравнений эквивалентные
314
След матрицы 889
Сложение матриц 205
Совокупность векторов ортогональная
713
— — ортонормальная 713
Совпадение двух плоскостей 241
прямых в пространстве 97
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
909
Совпадение двух прямых на комп-
комплексной плоскости 377
— — плоскости 92
Соответствие взаимно однозначное 781
— коррелятивное 656, 691
— перспективное между плоскостью
и связкой 571
— — — прямой и пучком 612
— четырехмерной связкой и ги-
гиперплоскостью 676
— полярное в пространстве 691
— — на плоскости 653
Спираль Архимеда 79
— гиперболическая 81
— логарифмическая 82
Степени свободы 221
Степень многочлена 322
— однородной функции 394
— одночлена 322
— уравнения 364
Строфоида 860
Сумма векторов 22, 34, 36, 167, 288, 375
— множеств 778
— подпространств 302
алгебраическая 302
— — прямая 303
Сфера 68, 69, 483
— действительная 697
— мнимая 697
Теорема Вриантопа 658
— взаимности 650, 691
— Дезарга 587—588
— единственности для кривых второ-
второго порядка 366, 431, 462, 633, 640
— — — поверхностей второго по-
порядка 366, 543, 544, 683
— — — — — — в «-мерном проек-
проективном пространстве 766
— Кронеккера — Капелли 358
— Лапласа 183
— о замене 298
— — плоскости вторая основная 241
— — — первая основная 235
— — проективных преобразованиях
плоскости основная 603
— — пространства основная 678
— — — — прямой основная 616
ранге матрицы 310
— — структуре линейного преобразо-
преобразования 749
— об аффинных преобразованиях ос-
основная 473
— — изоморфизме векторных прост-
пространств 295
— Паппа 645—646
Теорема Паскаля 641
— Пифагора (в n-мериом евклидовом
пространстве) 721
— Штейкера 646, 647
— Штейница 298
Тетраэдр координатный 674
Тор 863
Точка бесконечно удаленная 28, 64,
100, 577, 677
— вещественная 383, 582
— единичная 591
— кривой внешняя 651
— внутренняя 651
второго порядка двойная 636
— — — — особая 636
— мнимая 374, 382, 582
— начальная 22
— неподвижная 284, 285, 899
— несобственная 28, 64, 100, 572, 576,
577, 675, 680
— поверхности второго рода двойная
687
особая 513, 527, 687, 756,
757
— треугольника внутренняя 809
— угла внутренняя 809
Точки базисные 593, 672
— гармонически сопряженные 623,
654, 692
— геометрически независимые 353
— круговые &38, &39
— фундаментальные 593, 674
— циклические 638
Треугольник автополярный 660
— координатный 593
— ориентированный 149
Трехлепесткопая роза 84
Тройка координат базисных точек сог-
согласованных 636
Углы Эйлера 220
Угол между двумя векторами 69, 70,
74, 76
плоскостями 253, 254
прямой и плоскостью 252, 253
прямыми 108, 109, 113
— наклона 76, 77
— от вектора до вектора 76, 77
— — прямой до прямой 110—112
— полярный 78
Умножение перестановок 768
Уравнение алгебраическое 364
— гиперболы относительно ее асимптог
192, 199
— каноническое гиперболического па-
параболоида 492
910
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Уравнение каноническое гиперболоида
двуполостного 485
— однополостиого 485
гиперболы 133
конуса второго порядка 479
— — мнимого конуса второго порядка
482
— эллипса 381
— — — эллипсоида 485
— — параболы 116
— — прямой в пространстве 96
— иа плоскости 96
— — эллипса 121
— — эллипсоида 482
эллиптического параболоида 492
— касательной к гиперболе 442
— кривой второго порядка 441,
636
параболе 442
¦ эллипсу 442
плоскости к поверхности вто-
второго порядка 511, 687
— кривой второго порядка общее 409
— — относительно ее сопря-
сопряженных диаметров 459, 460
— линии 68
¦ алгебраической 366, 630
— окружности 68, 411
— плоскости 230—237
— — нормальное 250
общее 235
— поверхности второго порядка общее
504
относительно сопряжен-
сопряженных осей координат 543
— при вершине эллипса, гиперболы н
параболы 145
— прямой 89—97
— — в векторной форме 94
— отрезках 94
пространстве общее 243
— — на плоскости общее 93
— — нормальное 106
— —, проходящей через две точки 97
— — с угловым коэффициентом 93
— сферы 68, 483
—- тангенциальное 657
— характеристическое 407, 548, 727
— центра кривой второго порядка 446
— центральной кривой приведенное
410
поверхности второго порядка 525
— эллипса, гиперболы и параболы в
полярных координатах 149
Уравнения параметрические липни 396
плоскости 231
Уравнения параметрические поверх-
поверхности 396
прямом 95, 348
r-мерпой плоскости 351
эллипса 125
— прямой приведенные 243
Условие коллинеарности вектора пря-
прямой 91
— компланарности вектора плоскости
235
— ортогональности матрицы по стро-
строкам и по столбцам 199, 711
— параллельности двух плоскостей
241
прямой и плоскости в широком
смысле 236
прямых 97
— перпендикулярности двух векто-
векторов 72
плоскостей 254
прямых в пространстве 113
на плоскости 109—113
прямой и плоскости 253
— распадения билинейной формы 844
— — квадратичной формы 846
Фактор-группа 793
Фигуры эквивалентные 421
Фокус параболы 116
Фокусы гиперболы 119, 120
— эллипса 119
Форма билинейная 324
симметричная 324, 332
— квадратичная 322, 326, 332, 754
— линейная 322
— нормальная ортогональных мат-
матриц третьего порядка 736
— сгепоии т 332
Функция 782
— билинейная 323
симметричная 325, 322, 752
— квадратичная 325, 754
— линейная 321
Хорда кривой 445
— параболы фокальная 119, 142
— поверхности 528
— эллипса фокальная 142
Центр вращения 75
— гиперболы 129
— гомотетии 280
— линии второго порядка 446
— перспективы 610, 016
— поверхности 525
— связки 570, 669
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
911
Центр симметрии линия 525
— эллипса 119, 123
Цилиндр 385, 478
— в п-мсрном пространстве 761
— гиперболический 478
— круглый 561
— мнимый эллиптический 478
— параболический 478
— эллиптический 478
Четверка точек гармоническая 623, 800
Числа характеристические 548, 727
Число измерений 52, 292, 301
Широта 85
Эквивалентность линий проективная
663
Эквивалентность поверхностей про-
проективная 694
Эксцентриситет гиперболы 130, 140, 142
— параболы 142
— эллипса 120
Элемент аддитивной группы противо^
положный 793
— группы нейтральный 794
— обратный в группе 787, 795
Эллипс 119—J 29
— горловой 487
— действительный 402
— мнимый 381
Эллипсоид 482
— в л-мериом пространстве 766
— сращения вытянутый 483
сжатый 483
— действительный 482
— мнимый 485, 556, 697, 760
Павел Сергеевич Александров
Лекчии по аналитической геометрии,
пополненные необходимыми сведениями
иi алгебры с приложением
собрания задач, снабженных решениями,
составленного А С. Пархоменко
М , 1968 г., 912 стр. с нлл
Редакторы А. Ф. Лапко, А. С. Пархоченко
Техн. редактор К. Ф. Бруднп
Корректор Г С. Плетнева
Сдано в набор 6/Х1 1967 г. Подписано
к печати 2/IV 1968 г. Бумага 60Х901/,».
тип „\"» 2. Физ печ. л. 57. Условн печ.
л. 57. Уч.-изд. л. 50,8 Тираж 60 000 зкз.
Т-00189. Цена книги I p " 55 к
Заказ Хя 2 149.
Издательство «Наука»
Главная редакция
физико-математической литературы
Москва, B-7I. Ленинский проспект, 15
Ордена Трудового Красного Знамени
Первая Образцовая типография имеии
А. А Жданова
Главполиграфпрома Комитета по печати
прн Совете Министров СССР.
Москва, Ж-54, Валовая, 28