
















































































































































































































Текст
ОПТИМИЗАЦИЯ
И ИССЛЕДОВАНИЕ
ОПЕРАЦИИ
vJ t
ТЕОРИИ
СОСТОЯ
ИССЛЕДОВАНИЯ
ОПЕРАЦИЙ
ж
'ft
га
ОПТИМИЗАЦИЯ
И ИССЛЕДОВАНИЕ
ОПЕРАЦИЙ
Редактор серии
Я. Я. МОИСЕЕВ
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
1 9 7 9 '
СОВРЕМЕННОЕ
СОСТОЯНИЕ ТЕОРИИ
ИССЛЕДОВАНИЯ
ОПЕРАЦИЙ
МОСКВА «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
19 7 9
22.19
С 56
УДК 519.6
Современное состояние теории исследо-
вания операций. Под ред. Н. Н. Моисеева.—
М.: Наука. Главная редакция физико-мате-
матической литературы, 1979 (Оптимизация
и исследование операций), 464 с.
Книга представляет собой обзор совре-
менного состояния теории исследования опе-
раций, написанный как единая работа кол-
лективом известных специалистов в этой
области. Основное внимание уделено пер-
спективным направлениям, возникшим в
последние годы: новым моделям принятия
решений в ситуациях, характеризуемых на-
личием многих целей, иерархией, разной сте-
пенью информированности и т. п., новым
численным методам для экстремальных за-
дач сложной природы (негладких, много-
экстремальных, комбинаторных), использо-
ванию имитационных моделей и вопросам
выработки решений с помощью человеко-ма-
шинных систем в режиме диалога специали-
ста с ЭВМ.
Современное состояние теории исследования операций
(Серия: «Оптимизация и исследование операций»)
М., 1979 г., 464 стр. с илл.
Редактор Д. А. Молодцов
Техн, редактор И. Ш. Аксельрод
Корректоры О. В. Бутусова, Т. А. Панькова
ИБ № 11491
Сдано в набор 22.06.79. Подписано к печати 18.10.79. Т-18627.
Бумага 84X108V32. Тип. № 1. Латинская гарнитура. Высокая
печать. Условн. печ. л. 24,36. Уч.-изд. л. 27,62 Тираж 10 000 экз.
Заказ № 4632. Цена книги 2 р. 10 к.
Издательство «Наука»
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
2-я типография издательства «Наука»
Москва, Шубинский пер., д. 10
с 74-79. 1702070000
053 (02)-79
© Главная редакция
физико-математической
литературы
издательства «Наука», 1979
ОГЛАВЛЕНИЕ
Предисловие титульного редактора .......................... 8
Глава 1. Информационная теория иерархических систем 15
§ 1. Моделирование иерархических структур ... 16
§ 2. Динамические модели принятия решений в иерархи-
ческих системах.......................................18
§ 3. Модели принятия решений в иерархических системах
в условиях неопределенности...........................44
§ 4. Методы оптимизации иерархических систем (ИС) . 47
§ 5. Модели реальных иерархических систем ... 51
§ 6. Согласование моделей региональных экономик . . 52
Глава 2. Новые направления теории активных систем 64
§ 1. Теория активных систем и ее задачи...............64
§ 2. Механизмы функционирования организационных си-
стем .................................................67
§ 3. Анализ и синтез механизмов функционирования 71
§ 4. Расширение гипотез об информированности центра 77
§ 5. Степень централизации механизмов функционирова-
ния в активных системах...............................81
§ 6. Активные системы с зависимыми элементами . . 82
§ 7. Активные системы с зависимыми периодами и адап-
тивные схемы управления...............................84
§ 8. Итеративные схемы управления в активных системах 89
§ 9. Динамические модели ограничений в активных систе-
мах ................................................. 92
§ 10. Использование агрегированных планов и агрегиро-
ванного описания моделей активных элементов. Мно-
гоуровневые системы................................... 93
§ И. Примеры практического применения ..... 94
Глава 3. Аксиоматический подход к принципам оптимальности 101
§ 1. Оптимальность при стратегической неопределенности 102
§ 2. Оптимальность при незнании......................106
§ 3. Оптимальность в кооперативных играх . . . 109
§ 4. Заключение..................................... 113
Глава 4. Аксиоматическое решение проблемы оценки важно-
сти критериев в многокритериальных задачах . 117
§ 1. Оценка важности критериев в методах решения мно-
гокритериальных задач................................117
§ 2. Определения упорядоченности критериев по важности 126
§ 3. Построение отношений предпочтения на основе каче-
ственной информации о важности критериев . . 132
§ 4. Отношения важности критериев....................137
5
§ 5. Коэффициенты важности критериев.................140
§ 6. Коэффициенты важности в обобщенных критериях и
мажоритарных схемах . ...................144
§ 7. Универсальность аксиоматической теории важности
критериев.................................................146
Глава 5. Развитие теоретико-игровых методов оптимизации
в кооперативных играх и их применение к многокрите-
риальным задачам....................................150
§ 1. Задача принятия решений в форме пространства с от-
ношением и ее теоретико-игровые варианты . . . 151
§ 2. Методы аппроксимации ядра.......................159
§ 3. Метод мажорирования и его применения . . . 164
§ 4. Метод покрытий в кооперативных играх . . . 166
Глава 6. Анализ устойчивых ситуаций в повторяющихся про-
цессах .............................................173
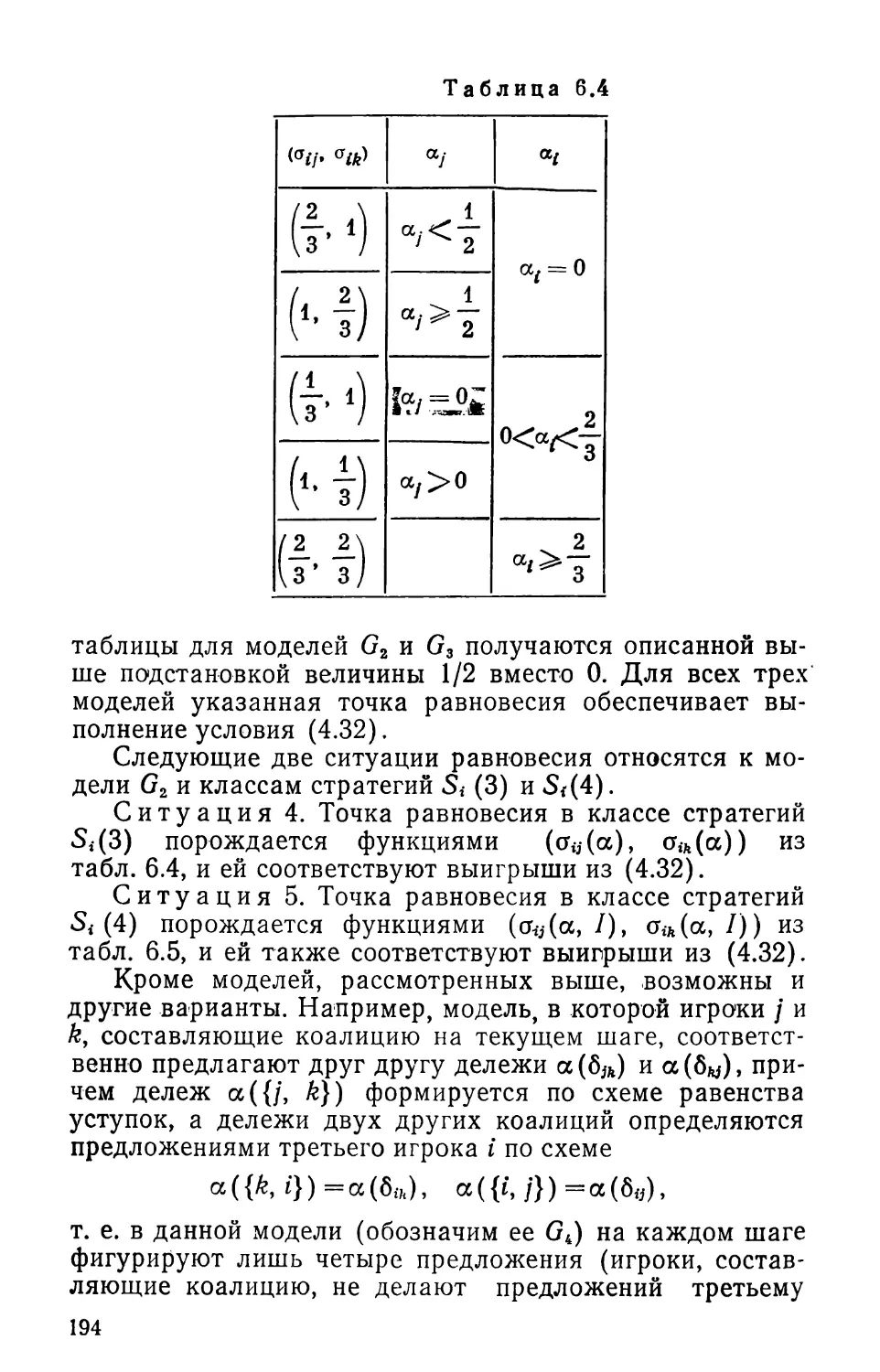
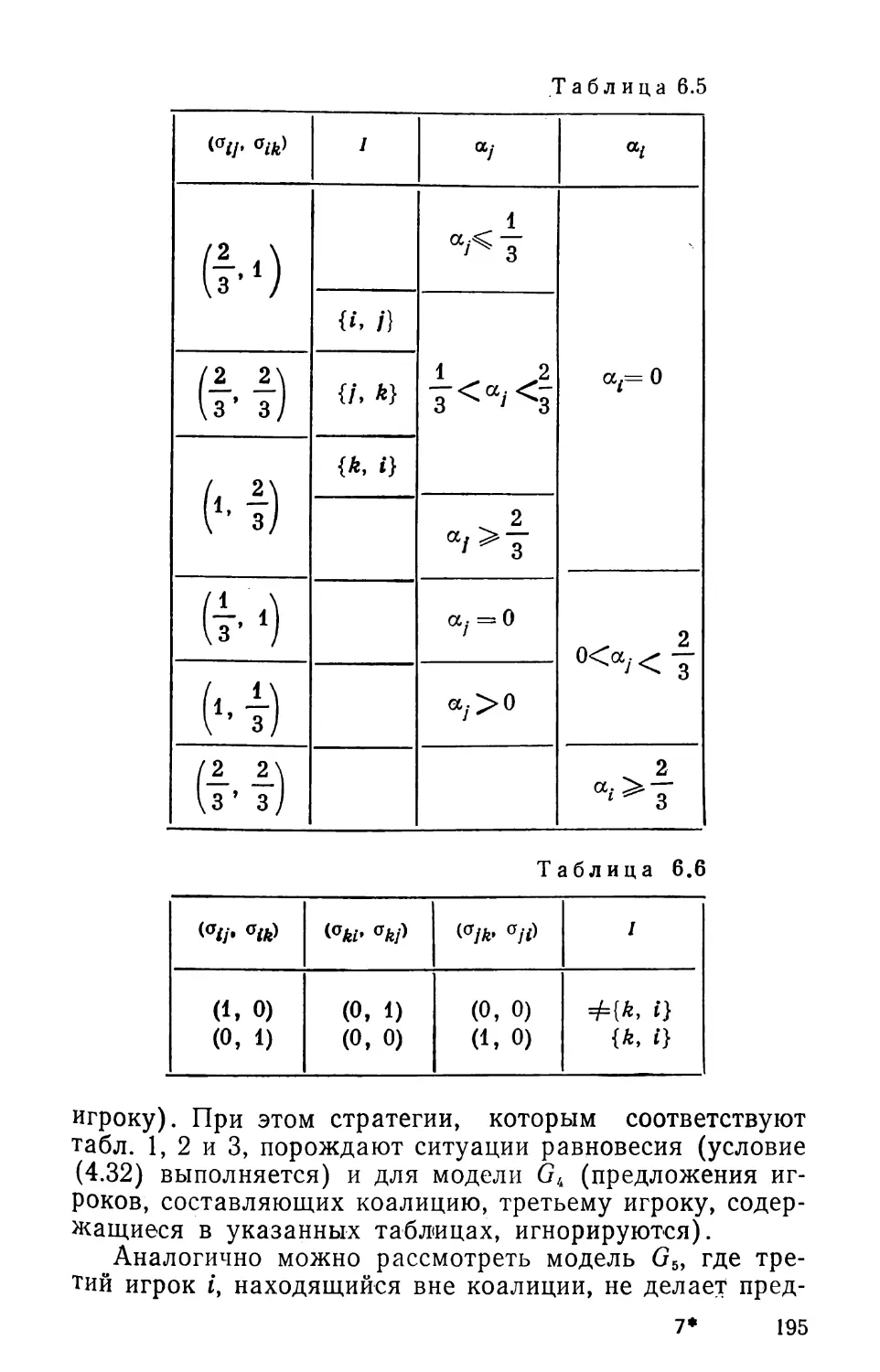
§ 1. Постановка задачи. Модель с непрерывным временем 173
§ 2. О задаче наблюдения в повторяющихся операциях. 179
§ 3. Анализ модели с дискретным временем .... 182
§ 4. О динамически устойчивых решениях в трехсторон-
нем конфликте с постоянной суммой.........................186
Глава 7. Динамические задачи принятия решений в условиях
неопределенности....................................197
§ 1. Информационные задачи управления и оценивания 197
§ 2. Программное управление.................. 202.
§ В. Информационные множества управляемой системы 207
§ 4. Эволюция информационных множеств .... 211
§ 5. Управление эволюцией информационных множеств 218
§ 6. Многокритериальные задачи................ 223
Глава 8. Устойчивость принципов оптимальности 236
§ 1. Постановка задачи........................236
§ 2. Регуляризация критериального принципа оптималь-
ности ....................................................242
§ 3. Регуляризация принципов оптимальности в задачах
со многими критериями.....................................249
§ 4. Регуляризация некоторых теоретико-игровых прин-
ципов оптимальности.......................................255
Глава 9. Построение вычислительных схем для многоэкстре-
мальных задач.......................................263
§ 1. О подходах к оценке глобального экстремума . . 263
§ 2. Вероятностное описание и оценки экстремума . 267
§ 3. Решающее правило для одномерной многоэкстре-
мальной минимизации.......................................268
§ 4. Алгоритм глобального поиска. Вопросы сходимости 270
§ 5. Учет априорного распределения экстремума . . 272
§ 6. Решающее правило для минимизации при наличии
случайных погрешностей....................................273
§ 7. Решение нелинейных уравнений....................274
§ 8. Смеси решающих правил...........................276
§ 9. Решение многомерных задач.......................277
§ 10. Замечания о реализации алгоритмов на ЭВМ . . 280
6
Глава 10 Об эффективности комбинаторных методов в ди-
скретном программировании................................f 283
§ 1. Комбинаторные методы..............................283
§ 2. Эффективность комбинаторных методов . . . 286
§ 3. Локальные приемы повышения эффективности . . 299
Глава 11. Условные субградиенты и условные субдифферен-
циалы выпуклых функций................................311
§ 1. Вспомогательные сведения..........................311
§ 2. Условный субдифференциал и условный 8-субдиффе-
ренциал .............................................314
§ 3. Представление условного 8-субдифференциала . . 317
§ 4. Условные производные по направлениям. Непрерыв-
ность условного 8-субдифференциального отображения 320
§ 5. Условия минимума в задаче с ограничениями . . 330
Глава 12. Нелинейные задачи аппроксимации .... 336
§ 1. Постановка задачи.................................336
§ 2. Вспомогательные предложения.......................337
§ 3. Условие регулярности .............................343
§ 4. Условия оптимальности.............................345
§ 5. Геометрическая интерпретация условий оптимально-
сти 348
§ 6. Условия оптимальности в форме Куна — Таккера 349
§ 7. Альтернансная форма условий оптимальности . . 351
§ 8. Условие нормальности..............................355
§ 9. Исторический обзор................................358
Глава 13. Общая схема имитационных систем, возможности
их применения и пути реализации.......................364
§ 1. Математическое программирование и имитация . 364
§ 2. Имитационные системы..............................369
Глава 14. Имитационные системы в экономических исследо-
ваниях ...............................................381
§ 1. Особенности метода машинной имитации . . 381
§ 2. Имитация хозяйственных решений на уровне произ-
водственных объединений и предприятий . . 386
§ 3. Имитационная система согласования плановых реше-
ний на народнохозяйственном уровне .... 396
Глава 15. Диалоговые системы в задачах оптимизации и
классификации.........................................404
§ 1. Диалог — новая .стратегия использования вычисли-
тельной техники .... 404
§ 2. Диалоговая оптимизация............................406
§ 3. Оптимизация описания исходных данных в диалого-
вых системах решения задач классификации . . 424
Глава 16. Программное обеспечение симплекс-метода для
задач больших размеров................................451
§ 1. Вводные замечания . .... 451
§ 2. Сервис............... . . . . 453
§ 3. Методы............... . . . . 456
7
ПРЕДИСЛОВИЕ ТИТУЛЬНОГО РЕДАКТОРА
Теория исследования операций, как самостоятельная
научная дисциплина, сложилась в период второй миро-
вой войны. Ее непосредственной предшественницей была
теория эффективности, в рамках которой еще в предво-
енные годы сформировались методические принципы
анализа, составившие позднее фундамент теории иссле-
дования операций.
Работы Д. А. Вентцеля, Б. В. Гнеденко, А. Н. Колмо-
горова, В. С. Пугачёва и многих других заложили осно-
вы понимания смысла терминов «операция», «эффек-
тивность», «неопределенность». Уже в предвоенные годы
было положено начало исследований в задачах массово-
го обслуживания, оценки эффективности стрелкового
оружия, распределения ресурсов. Именно в этот период
были созданы и культура анализа конфликтных ситуа-
ций, и то понимание значения эмпирического, нефор-
мального, присутствующего в любом исследовании, что
позволило советской школе исследования операций до-
биться в послевоенные годы замечательных успехов.
В первые послевоенные годы основное содержание
теории исследования операций составляли модели и ме-
тоды математического программирования, теории игр,
прикладные задачи теории вероятностей (главным об-
разом, задачи массового обслуживания), а также дина-
мические задачи, развитие которых сыграло определен-
ную роль в формировании теории оптимального управ-
ления и теории дифференциальных игр. При этом в раз-
деле математического программирования центральное
место занимало изучение задач линейного (в том числе
целочисленного) программирования и точных методов
их решения. Нелинейные задачи, в основном, ограничи-
вались классом выпуклых задач, для которых строились
условия экстремума, развивалась теория двойственности
и обосновывались градиентные процедуры поиска опти-
мальных решений. Исследования теоретико-игровых за-
8
дач были преимущественно связаны с изучением анта-
гонистических, бескоалиционных и кооперативных игр,
для которых рассматривались вопросы существования
седловых точек, точек равновесия, решений в смысле
Неймана — Моргенштерна и др. Исследование динами-
ческих задач привело к открытию принципа максимума,
к разработке схем последовательного анализа вариан-
тов и динамического программирования.
Указанные вопросы, остающиеся областью интенсив-
ных исследований, к настоящему времени достаточно
полно отражены в монографиях и учебной литературе,
как в отечественной, так и в зарубежной, переведенной
на русский язык.
Помимо развития «классических» направлений, ис-
следование операций начало тесно переплетаться с дру-
гими направлениями исследовательской деятельности,
связанными с проблемами принятия решений. Так, на-
пример, сегодня нельзя провести сколько-нибудь четкую
границу между исследованием операций и теорией уп-
равления. Конечно, в теории управления существуют
многочисленные проблемы, которые трудно отнести к
исследованию операций, во всяком случае, к ее тради-
ционным разделам, но, тем не менее, целый ряд вопро-
сов этой теории возник совершенно явно под воздейст-
вием идей исследования операций. Это прежде всего
проблемы управления при наличии многих критериев.
Вся теория двухэтапной оптимизации и, в первую оче-
редь, проблема разделения задач управления на задачи
построения программного управления и построение син-
тезирующего оператора относится в равной степени к
обеим дисциплинам.
Еще один пример вторжения идей теории исследова-
ния операций в теорию управления дают задачи управ-
ления нелинейными стохастическими системами, когда
экзогенная стохастика не является белым шумом и лю-
бые фильтры типа Калмана не могут быть эффективно
построены, а проблемы измерения и принятия решения
оказываются связанными.
Можно привести еще много подобных примеров, по-
казывающих, как перестраивается теория управления
под влиянием идей и успехов исследования операций.
Но и сама теория исследования операций, эволюцио-
нируя, рождает новые классы задач, создает новые на-
правления исследований и открывает новые области
9
приложения. Так, например, в рамках исследования опе-
раций возникла новая дисциплина «системный анализ»,
которую можно с полным правом считать новым разде-
лом исследования операций, характеризующим совре-
менный этап ее развития.
Термин «системный анализ», если угодно, — лингви-
стическая ошибка. Попробуем это объяснить.
Исследование операций начало свою историю с ана-
лиза задач, в которых цель (критерий) была вполне
четко сформулирована. На первом этапе, еще в период,
когда теория исследования операций носила название
«теории эффективности», исследователь занимался дву-
мя проблемами: первая (и, вообще говоря, более труд-
ная) — это проблема построения модели, т. е. матема-
тического описания изучаемого явления; вторая — оты-
скание решения возникшей оптимизационной задачи.
Критерий, целевая функция считались внешним, экзо-
генным элементом исследования, или его описание не
встречало сколь-нибудь значительных трудностей. В са-
мом деле, длина очереди или площадь эллипса рассеи-
вания были столь естественными оценками качества ре-
шения, что потребность в их обсуждении не возникла;
Позднее появились другие задачи. Еще Д. А. Вент-
цель подчеркивал принципиальную конфликтность лю-
бого проекта — его многокритериальность. Логика раз-
вития исследования операций привела к возникновению
целой новой главы, связанной с проблемой многокрите-
риальное™. Но и этого оказалось недостаточно.
Жизнь, человеческая практика ставили перед иссле-
дователями все более и более сложные задачи. Оказа-
лось, например, что при анализе систем высокой слож-
ности вообще трудно говорить о критериях, о цели.
Прежде чем начинать изучать систему более или менее
стандартными методами, появилась необходимость ор-
ганизовать предварительные исследования, позволяющие
хотя бы вчерне нащупать основные свойства системы,
наметить ограничения, представить возможные цели.
Потребности рождают методы — стали возникать
приемы и методы такого представления информации,
которое позволило бы оперирующей стороне поставить
определенные цели.
В англоязычной литературе исследователь операции
называется «analyst». Специалист, занимающийся ана-
лизом сложных систем, получил наименование «system
10
analyst», а совокупность приемов исследования — «sy-
stem analysis». На русский язык этот термин можно пе-
ревести с равным правом и как «системный анализ», и
как «анализ систем». Однако из контекста видно, что
термин «system analysis» следовало бы перевести имен-
но как «анализ систем». Но так сложилось, что в рус-
ском языке появился термин «системный анализ». И он
получил права гражданства.
Но по-русски «анализ систем» и «системный ана-
лиз» — это вовсе не одно и то же. Смысл последнего
гораздо шире первого термина. И действительно, в Со-
ветском Союзе начала возникать новая дисциплина, в
рамках которой стали создаваться и новые направления,
и новые методы исследования. В частности, на базе ин-
формационного подхода, предложенного Н. Н. Моисее-
вым *), возникла теория иерархических систем. Широкое
развитие получила техника имитации, объединяющая
различные неформальные процедуры и методы оптими-
зации, возникли новые методы в теории проектирова-
ния и т. д.
Предлагаемая читателю коллективная работа посвя-
щена обзору результатов, полученных в последние годы
и относящихся преимущественно к развитию классиче-
ских направлений исследования операций.
Она открывается изложением того развития теории
игр многих лиц, которое связано с работами Ю. Б. Гер-
мейера и его многочисленных учеников, — изложением
направления, которое послужило базой для развития
математического аппарата информационной теории
иерархических систем**). Обзор новейших результатов
этой теории содержится в гл. 1.
Близким вопросам посвящена гл. 2, где излагается
развитая В. Н. Бурковым теория активных систем.
Для математических задач, которые сегодня счита-
ются классическими моделями принятия решений (зада-
чи оптимального управления, математическое програм-
мирование и т. п.), характерно представление задачи
выбора путем указания вещественного критерия (или
линейного порядка) на множестве альтернатив, задава-
емом ограничениями. В последние годы в связи с изу-
*) МоисеевН.Н. Элементы теории оптимальных систем.— М.:
Наука, 1974.
**) Гер мейер Ю. Б. Игры с непротивоположными интереса-
ми.—М.: Наука, 1976.
11
чением сложных технических и социально-экономиче-
ских систем возникла необходимость рассмотрения бо-
лее общих подходов к понятию оптимальности. Зачастую
это связано с многокритериальностью задачи. Одним из
возможных путей решения такого рода задач является
сведение многокритериальной проблемы выбора к ска-
лярной оптимизации с помощью некоторой свертки кри-
териев. Этот подход изложен в монографии Ю. Б. Гер-
мейера*). Более общая модель, в которой в качестве спо-
соба выбора предлагается ядро некоторого (вообще го-
воря, нелинейного) отношения предпочтения, рассмат-
ривается в гл. 5.
Другой подход к проблеме выработки принципов оп-
тимальности основан на том, что в качестве исходной
посылки принимается не та или иная схема выбора, а
некоторая система требований (формализованных в ви-
де аксиом, описывающих такие содержательные поня-
тия, как «справедливость», «равноправие» и т. д.),
предъявляемых к оптимальному решению. Сама же схе-
ма выбора выводится как следствие соответствующей
системы аксиом. Такой подход изложен в главах 3 и 4.
В классической теории игр и математической эконо-
мике одним из наиболее распространенных принципов
оптимальности является принцип устойчивости, приме-
ром которого может служить равновесие по Нэшу. Од-
нако во многих моделях не существует стратегий, удов-
летворяющих этому принципу. Традиционным способом
преодоления такого затруднения в классической теории
игр является введение смешанного расширения множе-
ства стратегий. Для содержательной интерпретации и
обоснованности практического применения этого расши-
рения необходимо достаточно большое число реализаций
процесса, т. е. такой прием, по существу, подразумевает
динамику. Однако непосредственный учет динамики в
принятии решений позволяет по-другому расширять про-
странство стратегий без использования рандомизации,
что также приводит к появлению устойчивых решений.
Некоторые аспекты такого подхода рассматриваются в
гл. 6. Другие проблемы в динамических задачах приня-
тия решений, связанные с наличием неопределенностей,
исследуются в гл. 7.
*) Гер мейер Ю. Б. Введение в исследование операций.— /Л.:
Наука, 1971.
Г2
Наряду с анализом принципов оптимальности, осно-
ванных на идее устойчивости относительно изменения
стратегии участниками процесса, важной стороной ис-
следования и построения принципов оптимальности яв-
ляется их устойчивость по отношению к тем или иным
изменениям самой модели, описывающей функциониро-
вание изучаемой системы. Такая устойчивость является
необходимым требованием для возможности практиче-
ской реализации выбора, основанного на этом принципе.
Как оказывается, многие задачи, возникающие в иссле-
довании операций, не удовлетворяют требованиям устой-
чивости. В гл. 8 предлагается простая идея, с помощью
которой регуляризован широкий класс задач исследова-
ния операций и, следовательно, обоснована возможность
применения приближенных методов для их решения.
Таким образом, гл. 8 является как бы переходной от
первой части монографии, посвященной, в основном,
вопросам математического моделирования в задачах
исследования операций, ко второй части, в которой рас-
сматриваются методы анализа построенных моделей.
Наиболее распространенной оптимизационной зада-
чей в исследовании операций является задача матема-
тического программирования. Однако, если ранее огра-
ничивались, как правило, случаем выпуклых (в частно-
сти линейных) функций, то в настоящее время логика
развития теории и потребности практики потребовали
отказа от этого предположения, что привело к созданию
методов поиска глобального максимума или минимума
для многоэкстремальных задач. Одному из способов ре-
шения этой проблемы, основанному на вероятностных
предположениях об оптимизируемой функции, посвяще-
на гл. 9. Обзор комбинаторных методов и обсуждение
путей повышения их эффективности содержится в гл. 10.
В гл. 11 обобщаются понятия дифференциального исчис-
ления для выпуклых функций, с помощью которых мож-
но строить методы решения негладких оптимизационных
задач, к которым неприменимы обычные градиентные
методы.
В теории исследования операций широкое распро-
странение получили минимаксные задачи, которые уже
достаточно хорошо изучены и отражены в литературе*).
Используя разработанную технику, удалось в значитель-
*) См., например, Демьянов В. Ф., Малоземов В. Н. Вве-
дение в минимакс.— М.: Наука, 1972.
13
ной степени продвинуться в решении классической за-
дачи нелинейной аппроксимации, которая представляет
собой частный случай максиминной задачи. Этим вопро-
сам посвящена гл. 12.
Развитие исследования операций вызвало необходи-
мость анализа столь сложных моделей, к которым при-
менение обычных численных методов практически невоз-
можно. Это привело к возникновению нового метода
анализа — машинной имитации. Изложению общих
принципов направления посвящена гл. 13. В гл. 14 пока-
зана специфика экономических задач как объекта ими-
тационного анализа и приводится обзор работ в этой
области.
Использование имитационных систем в режиме диа-
лога для решения задач классификации и оптимизации
описано в гл. 15. Специфика линейных задач большой
размерности и возможные пути повышения эффективно-
сти. симплекс-метода отражены в заключительной, гла-
ве. 16................................. ....
Настоящая работа основана на обзорных докладах
III Всесоюзной конференции по исследованию операций,
что естественным образом привело к образованию ав-
торского коллектива. Усилия авторов распределились
следующим образом. Гл. 1 написана Д. А. Молодцовым
(§§ 1, 3—5), А. Ф. Кононенко и Т. Н. Данильченко (§ 2),
Ф. И. Ерешко (§ 6) (авторы благодарны В. А. Горелику
за полезные обсуждения §§ 1, 3—5); гл. 2 — В. Н. Бур-
ковым, В. В. Кондратьевым; гл. 3 — Э. И. Вилкасом;
гл. 4 — В. В. Подиновским; гл. 5 — О. Н. Бондаревой;
гл. 6 — А. Ф. Кононенко (§§ 1—3), Р. Г. Стронгиным
(§ 4) (авторы благодарны М. С. Штильману за полез-
ные обсуждения §§ 1—3); гл. 7 — А. Б. Куржанским;
гл. 8 — Д. А. Молодцовым, В. В. Федоровым; гл. 9 —
Р. Г. Стронгиным; гл. 10 — А. А. Корбутом, И. X. Сига-
лом, Ю. Ю. Финкельштейном (авторы выражают при-
знательность Дж. Немхаузеру и А. О. Слисенко за по-
лезное обсуждение ряда затронутых вопросов); гл. 11 —
В. Ф. Демьяновым, В. К. Шомесовой; гл. 12 — В. А. Дау-
гавет, В. Н. Малоземовым; гл. 13 — Ю. Н. Павловским,
Г. И. Савиным; гл. 14 — К. А. Багриновским; гл. 15 —
Д. И. Батищевым (§ 1, 2), Ю. Г. Васиным (§ 1, 3);
гл, 16 — И. В. Романовским, А. — И. А. Станевичюсом.
//. /7. Моисеев
Г Л А В A 1
ИНФОРМАЦИОННАЯ ТЕОРИЯ
ИЕРАРХИЧЕСКИХ СИСТЕМ
Необходимость учета несовпадения интересов эле-
ментов экономической системы, наличия неопределен-
ных факторов и различной степени информированности
о них органов управления разных уровней, предоставле-
ния определенной свободы действий хозяйственным еди-
ницам и т. п. в настоящее время является в достаточной
степени признанной не только среди специалистов по
исследованию операций, но и среди экономистов и прак-
тиков.
В качестве теоретической основы для принятия ре-
шений в подобных ситуациях может служить информа-
ционная теория иерархических систем. Существует и
ряд других подходов; об одном из них — теории актив-
ных систем — см. гл. 2.
Основы информационной теории иерархических си-
стем были заложены чл.-корр. АН СССР Н. Н. Мои-
сеевым и проф. Ю. Б. Гермейером в середине шестидеся-
тых годов. Состояние этой теории до 1975 г. достаточно
полно отражено в [1], [2]. Здесь мы остановимся на наи-
более перспективных направлениях и новых результатах
в этой теории.
На сегодняшний день наиболее важной как с точки
зрения внутренней логики развития теории, так и в свя-
зи с насущной необходимостью решения практических
задач является разработка следующих разделов:
— Моделирование иерархических структур.
— Динамические модели принятия решений в иерар-
хических системах.
— Модели принятия решений в иерархических си-
стемах в условиях неопределенности.
— Методы оптимизации иерархических систем.
15
— Модели реальных иерархических систем (прило-
жения).
Перейдем к последовательному описанию указанных
направлений.
§ 1. Моделирование иерархических структур
Под иерархической системой управления (ИСУ) по-
нимается совокупность взаимосвязанных элементов, об-
ладающих определенными возможностями по обработке
и передаче информации и определенными правами при-
нятия решений, а также собственными интересами, в
соответствии с которыми эти решения принимаются.
Возможности и права элементов и степень их влияния
друг на друга, как правило, неодинаковы; они связаны
с положением элементов в системе и некоторым обра-
зом регламентированы. Будем говорить, что задана
иерархическая структура, если описаны права и прави-
ла взаимодействия всех элементов системы. Среди ог-
ромного многообразия иерархических структур целесо-
образно выделить некоторые «элементарные» и постро-
ить для них соответствующие математические модели.
Базируясь на анализе таких моделей, можно исследо-
вать значительно более сложные ИСУ. К настоящему
времени уже построен и исследован широкий набор ба-
зисных моделей. Продемонстрируем современный подход
к моделированию ИСУ.
Следуя [3], цели верхнего уровня иерархической си-
стемы можно условно разделить на две группы:
а) координация действий подсистем таким образом,
чтобы обобщенные параметры, характеризующие устой-
чивость системы в целом, удовлетворяли некоторым ог-
раничениям, описывающим область гомеостазиса си-
стемы;
б) оптимизация по возможности одного или несколь-
ких обобщенных показателей эффективности функцио-
нирования системы (критериев эффективности), пред-
ставляющих собой функции от параметров всех подси-
стем.
Простейшая двухуровневая иерархическая система
состоит из одного элемента верхнего уровня (центра уп-
равления) и п элементов нижнего уровня (подсистем),
не связанных между собой. Для такой системы зада-
ча координации в общем виде может быть записана
16
следующим образом [3]:
(и, у)ей, (1.1)
где и — управление центра, v = (иь .., vn)—вектор уп-
равлений подсистем, Q — множество таких управлений,
которые переводят систему в одно из состояний множе-
ства X (X — область гомеостазиса системы). Условие
(1.1) может быть выполнено лишь на основе некоторой
совокупности предположений о поведении и информиро*
ванности всех элементов системы.
Примем следующие предположения:
(а) центр сообщает каждой подсистеме свое управ-
ление u<=U-,
(б) при известном и i-я. подсистема выбирает свое
управление v^Vtiu) так, чтобы максимизировать свой
критерий эффективности бг(£/, иг-);
(в) центр знает пространства управлений и критерий
эффективности всех подсистем, а также то, что выбор
ими управлений определяется стремлением максимизи-
ровать свой критерий, никаких других оснований для
суждения об управлениях подсистем у центра нет;
(г) при наличии неопределенных факторов центр дей-
ствует на основе обобщенного принципа гарантирован-
ного результата [4], [5].
В таких предположениях множеством допустимых
(координирующих) управлений центра называется
= {u е U | V(u) =
= Ц Vi (и) =/= 0, (и, v) е= Q V v <= R (и) = Ц R{ (и),
i=l i=l
где Ri (и) = Arg max Gi (и, vi).
v^Vi(u)
Если у центра имеется один критерий эффективности
F(u, v), то оптимальным гарантирующим управлением
является такое u°^U°, что
inf F (u°, и) = F± = sup inf F (и, v). (1.2)
u^.U* vt=R(u)
Задача (1.2) поиска максимина co связанными ограни-
чениями является типичной для оптимального управле-
ния в иерархических системах.
17
Более сложной является двухуровневая система с
двумя центрами управления верхнего уровня, также
рассмотренная в [3]. Функции оптимизации и координа-
ции теперь могут быть распределены между центрами,
один центр стремится к максимизации некоторого кри-
терия эффективности, характеризующего функциониро-
вание всей системы, а второй центр должен обеспечить
устойчивость системы. Такое двойное подчинение и рас-
пределение функций оптимизации и координации харак-
терно для территориально-отраслевого управления, ког-
да отраслевой центр интересуют общие экономические
показатели отрасли, а региональный центр отвечает за
некоторые условия сохранности и развития региона.
Возможны несколько постановок задач с двумя цен-
трами, соответствующие различной их взаимной инфор-
мированности. Эти вопросы исследованы в [3].
Следующим типом иерархической структуры являет-
ся треухровневая ромбовидная система, состоящая из
одного центра третьего (высшего) уровня, двух центров
второго (среднего) уровня и одного или нескольких эле-
ментов нижнего уровня (подсистем). Как показано в
[6], применение принципа гарантированного результата
позволяет редуцировать такую систему к двухуровневой,
но с взаимосвязанными элементами нижнего уровня.
Для управления системами с взаимосвязанными подси-
стемами (в том числе и ромбовидными) в [6] предлага-
ется схема управления с прогнозом, обобщающая, в
частности, принцип равновесия.
Новые типы иерархических структур могут возни-
кать не только в результате увеличения числа элемен-
тов и связей между ними, но и вследствие усложнения
информационного взаимодействия, приводящего к обоб-
щению понятия управления. Первое формализованное
понятие такой «сложной» стратегии (управления) было
введено в [7]. Это направление развивалось рядом ав-
торов и в настоящее время изложено достаточно под-
робно, например, в [8], [9], [10].
§ 2. Динамические модели принятия решений
в иерархических системах
1. Описание динамической модели ИСУ. Дальней-
шее усложнение понятия стратегии связано с изучением
динамических моделей ИСУ. Для динамических моде-
18
лей, описываемых системой обыкновенных дифференци-
альных уравнений, необходимый аппарат неантагонисти-
ческих дифференциальных игр был развит в работах
[11], [12]. Содержательная интерпретация описанной в
этих работах конструкции оптимальной стратегии заклю-
чается в выборе совместной программы действий и угро-
зе наказания (штрафа) за отклонение от намеченной
программы. Такая конструкция оказалась достаточно
работоспособной при исследовании различных классов
дифференциальных игр, а также при анализе содержа-
тельных моделей [13], [14].
Здесь вопросы динамики принятия решений будут
рассмотрены на дискретных (многошаговых) моделях.
Исследование будет проводиться по схеме, изложен-
ной в [11], [12].
Кроме того, при решении иерархических многошаго-
вых игр самым существенным образом используются
идеи и методы работы [15], [16].
По аналогии с [12], [17] опишем модель, двухуров-
невой динамической ИСУ следующим образом:
1°. Фиксировано множество участников-игроков
<7= {0, 1, ..., s}.
Игроков, выражающих интересы центра и Z-ro элемен-
та нижнего уровня (производителя), обозначим соответ-
ственно
По и Щ i(=I= {1, ..., s}.
Игрок По (центр) обладает правом первого хода, т. е.
первым выбирает и сообщает каждому Щ Ze/, свою
стратегию.
2°. Динамический управляемый процесс описывается
следующим образом:
Ха+1 = fk{xk,uk,Vk, ..., Vk), k = 0,N—l, (2.1)
х0 = х°, (2.2)
uk^Pk, Vk^Qk, Л = 0Л — 1, (2.3)
Вектор xk характеризует состояние системы в момент k
(на fe-м шаге). Вектор-функции uhf определяют
управляющие параметры По (центра) и игрока Пъ Ze/,
соответственно.
Множество Ph и Q{k, i^I, характеризуют возможно-
сти По и Пг, Ze/, на &-м шаге, —1.
19
3°. Критерии По и П„ ie/, описываются скалярными
функциями конечного состояния системы
Jo (и, V1, , o’) = go (xN), (2.4)
Jt (и, и1, ..., Vs) = gi (xN), it=I. (2.5)
Здесь и = {ик, k = О, N — 1}, vl = {vlk, k = Q,N — 1}, is/.
Интересы игроков Щ полностью определяются
стремлением к увеличению своих критериев.
4°. Для каждого игрока Пъ определены прави-
ла поведения, позволяющие оценить множества их ра-
циональных выборов, например:
— стремление к максимизации по своим выборам
функции цели;
— осторожность, т. е. приверженность в условиях не-
полной информации к выбору по принципу гарантиро-
ванного результата;
— стремление к достижению равновесной ситуации;
— выбор ситуации, оптимальной по Парето, и т. д.
5°. Взаимная информированность игроков друг о дру-
ге соответствует порядку ходов и определяет структуру
множества стратегий каждого игрока Пй При этом
далее предполагается, что По и Пг, fe/, имеют точную
информацию о параметрах управляемой динамической
системы (2.1) — (2.5).
При фиксации параметров, описанных выше, полу-
чаем игру, соответствующую моделируемой ситуации.
По имеющейся информации фиксируется и класс функ-
ций, на которых определяются стратегии. Тогда задача
принятия решений сводится к выбору оптимальной стра-
тегии по некоторому заданному принципу рационально-
го выбора стратегий из заданного класса функций.
Изложение начнем с исследования простейших звень-
ев иерархической системы, состоящих из двух элементов.
Сначала исследуем взаимодействие элементов, находя-
щихся на одном уровне иерархии. Заметим, что самым
распространенным способом выбора рационального ре-
шения равноправными участниками конфликта является
в настоящее время выбор равновесных ситуаций. Поэ-
тому анализ таких ситуаций представляет самостоятель-
ный интерес в теории принятия решений.
2. Определение понятия ситуации равновесия в мно-
гошаговых играх. Рассматривается многошаговая игра
с двумя участниками, которая описывается соотноше-
20
НИЯМИ
Xfc+x = fk(xk,ukyVk), k =0,^—1, (2.6)
x0 = x°, (2.7)
uk = Pk, Vk^Qk, k = 0, jV—1, (2.8)
Ji («, v) = gi (xN), i=l,2. (2.9)
Здесь xk — и-мерный вектор состояния в момент k (0^2
вектор-функции uk, vk — управления, выбирае-
мые игроками 1 и 2 в момент k (на &-м шаге) соответ-
ственно —1), Рк и Qk — компактные множест-
ва в Ет* и Е™2, соответственно задающие ограничения на
значения управляющих воздействий игроков 1 и 2. Век-
тор-функции fkf O^Zk^zN—1, непрерывны по всем своим
аргументам. Каждый из игроков стремится к увеличе-
нию своего критерия эффективности. Критерии эффек-
тивности игроков описываются непрерывными .скалярны-
ми функциями конечного состояния системы gi(xN)y i=
= 1, 2.
Программные управления, позиционные стратегии и
траектории будем обозначать следующим образом:
и ='(мо, • . •, ^-i), • • • >
и (х) = {и0 (х0), ...» “N-1 (*ЛГ-1)},
У (X) = {Vo (Хо), . . . , VN-i (Xtf-x)},
х = (Хо, ..., xN).
Здесь ик(хк), vk(xk) —произвольные функции хк, прини-
мающие значения из соответствующих множеств Ph, Qh
(Q^k^N— 1).
Далее на классе позиционных стратегий будут сфор-
мулированы необходимые и достаточные условия суще-
ствования ситуаций равновесия.
Ситуация zz°, г?° (и0, и0 или u°(x), v°(x)) называется
ситуацией равновесия в игре (2.6) — (2.9), если
(u°, и0) = max (и, и0), (2.10)
и
J2 (u°, v°) = max J2 (u°, v). (2.11)
V
21
Понятие ситуации равновесия естественным образом
обобщает широко используемое в антагонистических
конфликтах понятие седловой точки. Устойчивость рав-
новесной ситуации заключается в том, что при использо-
вании одним из игроков равновесной стратегии второй
игрок не может получить выигрыш, превышающий вы-
игрыш в равновесной ситуации.
К настоящему времени проведено достаточно полное
исследование свойств равновесных ситуаций на классе
программных управлений. Обзор работ по ситуациям
равновесия в динамических (дискретных и непрерыв-
ных) играх приведен в [18]. Достигнутые успехи в этом
направлении основываются на использовании принципа
максимума Понтрягина и принципа оптимальности
Веллмана. Однако заимствованная из статических игро-
вых задач традиционная схема исследования ситуаций
равновесия на классе позиционных стратегий уже не да-
ет возможности провести достаточно полный анализ
[19] —[21]
Далее мы будем придерживаться схемы исследова-
ния ситуаций равновесий на позиционных стратегиях,
предложенной в работе [11] при анализе непрерывных
моделей. Предлагаемая в [11] схема заключается в по-
строении взаимовыгодных множеств траекторий (или
реализующих эти траектории программных управлений).
При этом сама конструкция равновесных решений на
классе сложных, в частности, позиционных управлений
определяется выбором взаимовыгодной программы сов-
местных действий и угрозы применения стратегии нака-
зания в случае отклонения от намеченной программы.
Такой подход позволяет получить почти совпадающие
необходимые и достаточные условия существования си-
туаций равновесия в дифференциальных играх. В част-
ности, можно отметить, что множество всех ситуаций
равновесия (на классе позиционных управлений) ап-
проксимируется с любой наперед заданной точностью
стратегиями описанного вида.
3. Необходимые и достаточные условия существова-
ния ситуаций равновесия в позиционных стратегиях.
Введем аналогично [И]. [15] следующие величины и
обозначения:
(xtf) = L$ (хЛ) = gt i = 1, 2.
22
Далее во всех соотношениях
используется равенство
*п+1 = fn(xn, ип> vn), O^n^N— 1,
Ln} (xn) = min max Lnh (хПц), 0 м — 1,
vn un
(2.12)
Ln} (xn) = minmaxL^JXn+x), 1, (2.13)
un vn
Ln* (Хпу vn) — max Ln+i (x^+i),
un
Ln (Xn> Un) ~ max Ln+i (-^n+i)>
vn
1,
1.
(2.14)
Назовем стратегиями угрозы (наказания) v*n (хп), ип(хп),
—1, реализующие соответственно (2.12), (2.13).
Далее везде (и, v)-^x ((и(х), v(x))-+x) обозначает, что
программные управления (и, v) (позиционные стратегии
(tt(x), v(x))) порождают траекторию х=(х0, хъ ..., xN).
Определим множество взаимовыгодных [И], [22]
программных управлений
Si (xn) Ln) (Xn, Vn),
D = Utt, у)
(и, V) -> х: g2 (xN) (хп, ип),
OsCn^N—L
(2.15)
(Заметим, что в определении множества D для n=N~ 1
имеют место равенства
gi (xN) = L{nLi (xN-lt зд-i) = max^ (/jv-ZOOv-i, «w-i, ^w-i)),
UN~1
g2 (xN) = iff-i (Xw-1, Uw-1) = maxg2 (fN^ (xN-i, uN_t, vN^)).)
VN-1
Теорема 1. Необходимым и достаточным услови-
ем существования ситуации равновесия в позиционных
стратегиях в игре (2.6) — (2.9) является D=^=0.
Доказательство. Достаточность. Пусть (и0, и0)
(и0, w°)->x°. Тогда позиционные стратегии
[и°, xn = xQn,
ир (х) = 1 * 0 < п < N — 1,
[ип (хп)' хп хп’
(2.16)
VP (x) =
X '— x^
vn> лп xnf
vn (xn)’ xn
23
образуют ситуацию равновесия. (Заметим, что (цр (х), vp (х)) х°.
В силу условия (2.7) х0 = х° = х°, стратегии наказания на 0-м шаге
и0 (х0), у0 (х0) введены для удобства записи^равновесных стратегий.)
Действительно, пусть игрок 2 выбрал позиционную стратегию
ур(х), а 'игрок 1 выбрал произвольную позиционную стратегию й(х).
Стратегии и(х), ир(х) будут реализовывать некоторую траекторию
х = (х0, ..., xN).
Обозначим множество индексов
/0 = {0 < Xi = х?}.
Заметим, что /о=/=0, так как по условию (2.7) х0 = х°=х®, сле-
довательно, i = Oe/o.
Положим т = max i.
i^l0
Если tn = N, то выигрыш игрока 1 при использовании стратегии
ц(х) будет равен
J1 (и (х), (X)) = gi (xw) = g! (xQN) = Л (up (x), vp (x)).
Если m = N—1, то, применяя w(x), игрок 1 получит результат
Ji (й (*). v” (x)) = g! (xN) = g! (f^ (x^_r uN_v <
< max g, (fN_t (X°N_V UN_V vaN_1)) =
UN-1
= (X°N_V 4/.,) = gl (x°N) = Jt(up (x), vp (x)).
(Здесь Ид,., = Ид,., (x®,.,).)
Если же 0 tn < N —-1, то это означает, что xz =f= xi при
< i < N и vf (xt) = (xz), tn + 1 < i < N — 1, т. e. игрок 2, начи-
ная с (m+ 1)-го хода, применяет стратегию угрозы (наказания). Тогда
игрок 1, используя стратегию и (х), получит результат
Л («(*), W) = gi (xN) < Ln (хт> vm> <
< gi (4r) = Jt(uP W- vP W)-
Таким образом, доказано, что если игрок 2 выбрал стратегию
цр(х), то при любой стратегии и(х) игрока 1 и соответствующей
траектории х((и(х)> ир(х))->х) справедливо неравенство
gl (*Л) < gl (*дг).
что эквивалентно
(и" (x)V (х)).
Аналогично доказывается, что при любой стратегии и(х) спра-
ведливо неравенство
/2(ир(л:), £(x))>J2(up(x), ур(х)).
24
Итак, построенные стратегии u?(x)f v?(x) из (2.16) удовлетво-
ряют обоим условиям (2.10), (2.11) из определения ситуации рав-
новесия.
Необходимость. Допустим, что ситуация равновесия
(u?(x), vр (х)) порождает траекторию хр = {хр, .... х^}. Пусть при
реализации этих стратегий и траектории получаются программные
управления
“Р = («О- • • • •
°Р=(^.......4-1).
здесь ир= ир (хр), vp = vp (хр), 0 < АГ—1. Покажем, что (upt vp)&D.
Действительно, по определению ситуации равновесия для любой
стратегии и(х) имеет место неравенство
Ji (ир(х), </>(*))> Л (« (х), vp(x)).
В частности, для любогоп, —1,и любых Ui(Xi), n^i^N—1,
справедливо неравенство
Л (ир (х), vp (X)) = Л (uf (х0), .... и^_х (х^); v” (х)) >
> Л «(*о)> • • •. «п-1 “п (*„). • «лг-i fp W)-
Отсюда имеем для любого и, —1,
Л (up(x), ti’W) >
> max Л (ир (х0), .... ир (х„_х), ип(х„), ...
, uN,(xN); г)р (х)) min max =
= max min max ... min max Л(*, •) =
un^xn) ttn+i^n+P VN-1(XN-1) UN-1(XN-1)
(Последнее равенство следует из [23] и определения в (2,14).
Здесь обозначено
•) = (*о), • • • , Ci ип (хп)’ • • » uN-i(xN-i)> vo (*о),- • •
. . . , VP (хл), ил+1 (хл+1)» • • • > VH-1 (*ДГ-1))-)
А это и означает, что для любого и, —1,
si (4) > W <4> vn>-
25
Для n=N—1, кроме того, имеем
J1 (ир (х), v” (х)) = А (ир, .... UPN_^ VP, .... V^_j) = gi (xpN) <
max Jx (up, .. ., uft_2, uN_j\ vp, ..., Vyy_x) = £$lx (x^_x, f#_x)
uN-i
(£$_t из (2.14)), а так как по доказанному ранее имеет место и об-
ратное неравенство, то
gi (*&) = Ln-i (xn-v
Аналогично доказывается, что
gi (xpN) > ЦУ un)> 0 < n < N — 2,
gi (^) = (xN-r UN-1)-
Это означает, что. программные управления (цр, up), которые
соответствуют равновесным позиционным стратегиям up(x), ир(х),
принадлежат множеству D из (2.15), т. е. D=#0.
Замечания. 1. Фактически получен дискретный вариант тео-
рем 1 и 2 из [11]. Однако, в отличие от непрерывного случая [11],
в дискретной задаче удается выписать совпадающие необходимые
и достаточные условия. (Как уже отмечалось, в непрерывном слу-
чае имеет место совпадение с 6-точностью.) Таким образом, множе-
ство D из (2.15) и конструкция (2.16) полностью описывают реали-
зации всех возможных ситуаций равновесия на классе позиционных
стратегий.
2. Отметим, что полученные результаты справедливы и для игр
с критериями более общего вида
N-1
(и, v) = gt (xN) + 2 hln (х„, ип, vn), i = 1Л2. (2.17)
n=o
Функционалы (2.17), содержащие слагаемые (xn, ип, ип),к ви-
ду (2.9) можно свести стандартным приемом расширения фазового
пространства с соответствующим (если это необходимо) расшире-
нием области определения стратегий.
3. При построении ситуаций равновесия' по схеме (2.16) можно
использовать стратегии «неполного наказания». Достаточно выбрать
при фиксированных (u°, u°)eZ), (и°, и°)->х°, такие ип(хп), wn(xn),
—1, что
min £<» (хп, vn) < L& (х„, vn (хп)) < (х°_х, v’.x), (2.18)
°п
min £™ (x„, и„) < (x„, un (xn)) < £<& (x°_x, u®_x), 0 < n < N— 1,
un
при любых Xn.
4. Ситуации равновесия в многошаговых играх с непротивопо-
ложными интересами в отличие от игр с противоположными интере-
сами не эквивалентные и не взаимозаменяемые. Другими словами,
если v'(x)), (м"(х), и"(х))—две ситуации равновесия в игре
26
(2.6) —(2.9), то, как правило, Л(и'(х), и'(Х)) t/z(x)),
i*=l, 2; a (u'(x), и"(х)), v'(x))—вообще говоря, не явля-
ются ситуациями равновесия в игре (2.6) — (2.9).
4. Свойства и обсуждение полученных результатов.
Выше был изложен общий метод для нахождения рав-
новесных позиционных стратегий для дискретной управ-
ляемой системы, тогда как до настоящего времени такие
общие методы известны не были. В предложенных ранее
методах нахождения ситуаций равновесия для некото-
рых классов игр [21] существенно использовалось до-
пущение о единственности равновесного решения. Изло-
женный выше метод позволяет найти и полностью опи-
сать множество всех равновесных ситуаций на классе
позиционных стратегий.
Отметим, что, так как множество программных уп-
равлений игрока 1 (2) является лишь частью множест-
ва позиционных стратегий игрока 1 (2), для любого рав-
новесного программного управления существует ситуа-
ция равновесия в позиционных стратегиях, на которой
выигрыш игрока 1 (2) больше (или, по крайней мере,
не меньше).
Для рассмотренной игры не важно знание игроками
предыстории цо х и по реализациям управлений, т. е.
знание на текущем шаге k реализаций
х0, х15 ..., xft_r, Uo(x0), ... М*о),- . . ,
не изменяет результата игры и не приводит к новым си-
туациям равновесия.
Проиллюстрируем указанные свойства на примере
линейно квадратичной игры двух лиц, приведенной в ра-
боте [24], и сравним полученные результаты.
Игра имеет вид:
Xi^Xo + Uo + ^o,
x2=xi + ui,
х0 — задано;
Хп^Е1, 0^71^2; ип^Е\ n = 0, 1;
Ji = xl + ^1 + uj,
Л = X22 + u2 + put p>0.
Интересы игроков 1, 2 полностью выражаются стремле-
нием к уменьшению своих платежных функций.
27
В работе [24] отмечалось, что при 0=1 невозможно
найти нелинейное равновесное решение как для случая
игры с полной памятью, так и для позиционной игры.
Когда 0^1, нелинейное равновесное решение удалось по-
строить только для случая игры с полной памятью (т. е.
в данном примере игрок 1 на первом шаге выбирает
свою стратегию м, как функцию ф1(х0, и0(х0),
На классе позиционных стратегий в [24] построены
только линейные равновесные стратегии.
Множество D из (2.15) при произвольном значении
параметра имеет вид
(«о. «1, fo)
(«о. «1»о) (х0, xlt х2):
U1 =--------L ,
1 2
«о = — 4 (х0 + Vo)-
о
Отметим, что программные управления, соответству-
ющие всем найденным в работе [24] равновесным стра-
тегиям (нелинейным и линейным), принадлежат множе-
ству D.
Из вида множества D следует, что можно построить
нелинейное позиционное равновесное решение. А так как
множество D не зависит от 0, то существует нелинейное
равновесное позиционное решение для любого 0^0 (в
том числе и для 0=1). Например, такими позиционными
равновесными стратегиями являются стратегии вида
Vo (х0) = Ф (Хо),
«о(хо) = — 4(Х0+ф(Х0)),
о
^1(^1),
Здесь ф(х0) — произвольная скалярная функция х0, стра-
тегия «неполного наказания» (см. * (2.18)) —лю-
бая функция Xi такая, что
| ul (0)1 > У А (х0, ф0), если хх = 0,
|«1(Х1)|>|тЦ-Л(х0, Фо), если хх=/=0,
2 I Xi |
28
где неотрицательная постоянная
А (х0, ф0) = + + ф®, а фо = Ф (х0).
Если ф(х0) или и{(х.) —нелинейные функции своих ар-
гументов, то получаем нелинейное позиционное равно-
весное решение; если ф(х0) и u* (Xi) —линейные функ-
ции своих аргументов, то приведенные стратегии явля-
ются кусочно-линейным позиционным равновесным ре-
шением игры.
Интересно отметить, что на классе нелинейных пози-
ционных стратегий существует равновесная стратегия,
реализующая глобальный оптимум игроку 1 (/4=0):
up(x) =
(*о) = — х0,
щ (х0) = О,
ГО, Xi = О,
U1 Ul) = I * / \ / А
lM*i), ^¥=0.
5. Многошаговые игры двух лиц с обменом инфор-
мацией. Наличие целого семейства равновесных ситуа-
ций, определяемого множеством D из (2.15), позволяет
(как и в случае дифференциальных игр [11]) сделать
вывод о том, что точки равновесия не могут являться,
строго говоря, бескоалиционным (несогласованным) ре-
шением динамической игры. (Этот тезис впервые был
сформулирован Ю. Б. Гермейером [2] при анализе ста-
тических моделей.) Из самой структуры (2.16) равновес-
ных стратегий следует необходимость априорной дого-
воренности игроков о выборе совместной программы дей-
ствий. Выбор такой программы можно свести к задаче
оптимального управления с некоторым общим критери-
ем. В частности, всегда имеется возможность выбора
равновесного решения, оптимального по Парето на мно-
жестве программных управлений D (2.15).
Далее будет изложен подход к выбору совместной
программы, связанный с построением организационной
структуры игры.
Рассмотрим многошаговые игры двух лиц с фиксиро-
ванной последовательностью ходов. Пусть исходная иг-
ра записывается в виде
Xft+1 = fk(xk, uk, vk), k = 0,N— 1, (2.19)
x0 =X°,
(2.20)
29
Uk(= Pk, vk(=[Qk, k = O,N — 1,
Jiiu, v) =g{(xN), i = 1, 2,
(2.21)
(2.22)
где вектор состояния xk<=En (O^Z^Af); управления иг-
роков 1, 2 — соответственно uh<=Pk, vh<=Qk; компактные
множества Ph и Qk в Ет* и Е™2, соответственно, задают
ограничения на управления —1). Вектор-функ-
ции fh, 0^k^.N—1, непрерывны по всем своим аргумен-
там. Каждый из игроков стремится к увеличению своей
функции выигрыша, которая описывается непрерывной
скалярной функцией конечного состояния £<(**), *=1, 2.
Основываясь на сформулированной игре, можно по-
строить различные игры в зависимости от предположе-
ний об информированности, правилах поведения и не-
равноправии игроков при существенно различном виде
стратегий.
Пусть игроки имеют точную информацию о парамет-
рах управляемой динамической системы (2.19) — (2.22).
Игрок 1 обладает правом первого хода, т. е. первым вы-
бирает и сообщает свою стратегию и' игроку 2. После
данного хода игрока 1 исход игры в ее конкретной реа-
лизации полностью зависит от хода игрока 2, который
выбирает свою стратегию vf из условия максимизации
своего выигрыша при известной ему стратегии и' игрока
1. Игрок 1, зная о таком правиле поведения игрока 2,
своим выбором и' стремится к реализации своего макси-
мального гарантированного результата, который по ана-
логии с [12] определяется следующим образом:
sup inf J3(u',u'),
W v'^R(u')
где множество рациональных выборов игрока 2 опреде-
ляется в соответствии с правилом его поведения
R (и') = {у' I Л (и', v') SUP Л (*Л ^) — 6 («')}.
w
Величина 6 (и') равна нулю, если супремум достигается,
и равна известной игроку 1 величине бо>0 в противном
случае.
Рассмотрим некоторые игры, различающиеся инфор-
мированностью игроков о процессе протекания игры и о
действиях друг друга [12].
Игра Ги. Игрок 1 в процессе протекания игры не
рассчитывает иметь информацию ни о текущем состоя-
30
нии системы, ни о действиях игрока 2. В качестве своей
стратегии игрок 1 выбирает и сообщает игроку 2 про-
граммное управление и= (и0, и{,..., uN-i). Игрок 2 при
известной ему стратегии и выбирает свою стратегию —
программное управление v= (vQy viy. .., vN-{) из множе-
ства
7?1 (и) = {и | max J2 (и, w) = J2 (и, и)} j
w
при выполнении ограничений (2.19) — (2.21). Тогда мак-
симальный гарантированный результат игрока 1 равен
='sup”min v).
и vsRW
Игра Г2/. Игрок 1 рассчитывает иметь информацию
о выбранном игроком 2 программном управлении v.
Тогда игрок 1 выбирает и сообщает игроку 2 стратегию-
функцию и (у), ставящую в соответствие каждому про-
граммному управлению v игрока 2 некоторое програм-
мное управление и.
Игра Г2ж. Игрок 1, рассчитывая иметь информацию
о текущем состоянии процесса и о выбранной игроком 2
позиционной стратегии v (х) = {у0 (*о),. - •, ,
выбирает и сообщает игроку 2 в качестве своей стра-
тегии зависимость и(х) = ср(у (х)), где и (х) = {uQ(х0),...
..., ^-i(xN-i)}, оператор <р является отображением мно-
жества функций и(х) в множество функций и(х).
Рассмотрим наиболее подробно следующую игру.
Игра Г1Х. Игрок 1 в процессе протекания игры бу-
дет иметь информацию о текущем состоянии системы, но
не рассчитывает иметь информацию о действиях игро-
ка 2. Тогда игрок 1 выбирает и сообщает игроку 2 по-
зиционную стратегию и (х), после чего игрок 2 выбирает
свою позиционную стратегию у(х) в соответствии со сво-
им правилом поведения, т. е. из множества
Я (и (х)) =
= (и (х) | J2 (и (х), v (х)) = max J2 (и (х), v (х)) = J2U}- (2.23)
и(х)
Во всех сформулированных играх снова предполага-
ем выполненными условия, наложенные на параметры
управляемой динамической системы (2.19) — (2.22) и до-
пустимые стратегии.
31
Отметим, что возможны и другие варианты постано-
вок задач управления в динамических системах [251,
[26].
В игре Г1Х допустимые стратегии и(х) = {и0(х0),...
..., uN-i (%N-1)}, v(x) = {u0 (Хо),..., VN^ (Xtf-i)} — ЭТО та-
кие позиционные стратегии, где uk(xk), vk(xk) — произ-
вольные функции xh<=En, принимающие значения из со-
ответствующих множеств Pk и Qft, — 1. Вообще
говоря, максимум в выражении для определения R(u(x))
достигается не при всех допустимых и(х). Однако
дополнительный анализ задачи показывает, что среди
8-оптимальных решений игрока 1 имеются такие, что этот
максимум достигается. Именно такой подкласс стратегий
игрока 1 мы и будем далее использовать.
Найдем максимальный гарантированный результат
у1х и соответствующую оптимальную стратегию игрока 1
в игре Г1х.
Введем следующие величины и обозначения при ус-
ловии выполнения ограничений (2.19) — (2.21):
Ltf (Xfl) = Д/\7\С^у) = g% (<V/v) >
Ln (хп) = min max Ln+1 (хл+1), 0 n N — 1, (2.24)
un vn
Ln(xn, un) = maxLn^ (xn^)f Q<^n<^N — 1. (2.25)
Pn
(Здесь в соотношениях (2.24), (2.25) использовалось ра-
венство xn+i = fn(xn, ип, un), 1.)
Определим стратегии угрозы (наказания) ип*(хп),
l<£n<N—1, реализующие (2.24). Заметим, что нет не-
обходимости определять стратегии наказания для /г=0,
так как в силу условия (2.20) х0 — фиксировано.
Обозначим через Еп(хп, ип) множество vn, реализую-
щих (2.25), —1.
Положим с учетом (2.19) — (2.21)
Mn(xn) = g1(xN),
Мп (хп) = sup inf Mn^i (Xn+i)f 0^n<^N — 1, (2.26)
ип Vn^^n(Xn» ип)
Мп(хп,ип)= inf Мп+1(хп+1), Os^n^N — 1. (2.27)
Vn^^n^Xn’ ип)
(Как и ранее, в соотношениях (2.26), (2.27) использо-
валось равенство xn+1=fn(x„, ип, vn), —1.)
32
Определим стратегии и„(хп), O^nsgry—1, реализу-
ющие, может быть, с 6-точностью (2.26).
Обозначим
ип = («о, «1, • • • , «п), vn = (о0, V1, .... Vn), 0<П<У—1,
хп = (х0, ..., хп), Q^n^N — 1.
Пусть
Хп (Хп-i, Un-i) = {.Хп | Хп = fn-1 (.Хп-i, Un-i, Vn-г),
vn-i <= Еп-1 (Хп-1, ип-1)}, 1 < п < N, (2.28)
L>n — Un, Vn-i
(Un-1, Vn-1) -+Хп:
Ln (Xn, Un) > max
О^Гга^У— 1.
Lp (Xpj lip)
(2.29)
(Здесь и далее (un-t, ^n-i)->xn обозначает, что програм-
мные управления un-i= (w0, ulr..., un_i), vn-i= (u0, vif...
..., un-i) реализуют в соответствии с (2.19) — (2.21) тра-
екторию хп= (х0, Xi, .. , Xn-i, хл).)
С учетом xh+l = fh(xk, uk, vh), O^k^n—1, положим
Mn(un,Vn-i) = Mn(xn, un), 1- (2.30)
Пусть
/Сп = _ Slip Mn (un, Vrt-i), 0<Cn<g:Af— 1. (2.31)
(«n. Un-1^D
Здесь везде принято соглашение, что
max *ф (и) = sup ip (и) = — оо,
miniHu) = inf -ф(u) = + °°,
где 0 — пустое множество. Заметим, что К0=М0(х0),
где Мо определено в (2.26).
Пусть (Unf Vn-1) ^Pnf ((Un-ъ Vn-1) -> Xn) реализует, может
быть, с е-точностыо величину 0^/г<^:М—1 (если
Dny=0).
Определим множества
А^п+1 (Хп, ип) = Хп+1 (хп, ип),
(Xk-!, Uk-!) =
= {xfte Xk (Xk-1, uk-i) I Xk-1 e Х(Д (xk-t, uk-t)}, (2.32)
n + 2^k^N (l^n^y—1).
Множества Хк(хк-„ ик-,) определены в (2.28).
2 Под ред. Н. Н. Моисеева
33
Те’орема 2. Максимальный гарантированный резуль-
тат игрока 1 в игре Г1Х: у1х = max Кп. При этом игроку 1
о<п<ЛЛ-1
гарантируется, может быть, с г-точностью выигрыш Кп,
если он выберет и сообщит игроку 2 стратегию
f Uk, если xk = хь, 0^k^.n,
и^ (х) = I и° (xk), если xk <= X(k} (xk-i, uk^), n+ I,
^u*k(Xkj в других случаях (\ — 1),
(2.33)
1.
Доказательство. Стратегия и^пЦх) из (2.33) гарантирует
использование игроком 2 такой стратегии vn(x), чтобы
(и™ (х), (х)) -» х<"> »
= {х0, . . . , Xn_v XtV Xn^v . .. , XN I xp
ex?’(xH, п+1<р<ло, о<я<лг-1.
Такая стратегия заведомо существует, например, игрок 2 может вы-
брать в качестве и<п>(х) стратегию
{^- •••> »П-Г vn< •••• VN-11vp e Ep (xp, Up), n^p<N~ 1}
(в этом случае стратегии (u<n>(x), u<n>(x)) будут реализовывать
траекторию
{xJJ, ..., xJJ_x, xJJ, xn+v . . xN\ xp (=
e X<pn) (x^, Up-J, n + 1 < p < N}).
Покажем это. Пусть игрок 2 выбрал произвольную стратегию
v(x), (//<п)(х), о(х))->х= (хо, хь ..., xN).
Замечание. При любой заданной стратегии и(х) игрок 2,
в силу своего правила поведения, всегда будет выбирать стратегию
и(х) такую, что vN-\^EN-\ (хЛг_ь при этом xN<=XN (xN-i,
Un-i). В этом случае выигрыш игрока 2 при заданной стратегии
и(х) будет равен
Л («(*). f W) = й(М =
= max uN_v v^)) = Lw_j (^_r u^).
°N-i
В противном случае, если xN&Xn (x.v-i, uN-]) (или, что то же са-
мое, vN-i&En-i(xn-i, Un-])), игрок 2 получит лишь
л (и (X), V (х)) = ga (xN) <
< max gt (xN_v uN~v Vjf^)) = LN^ (xN_t, uN^).
VN-1
34
Введем множества индексов
- {п +.1 < i N - 11 xt е Х^ (xt_v и^)},
0<л<ЛГ —1;
если n = N— 1, то .положим по определению [/^“1=0.Множество
/" =/= 0, так как по условию (2.20) х0 = x{J = х°, 0 л < Af — 1.
Множество /” может быть и пустым.
Положим
m" = max i, т” = max {max /; 0}
и=Р i€=in
о 1
(если I" = 0, to max i = — oo и m" = 0).
Допустим, /nJ = O. Предположим сначала «л. Если л=£М—>1,
то из определения стратегии (х) в (2.33) следует, что начиная
с(л4-1)-го хода игрок 1 применяет стратегию угрозы (наказания)
uk (xk), л + 1 < £ < А/ — 1. В этом случае, так как xn+1 ^n+i(xn* ип)
(другими словами, vn Еп (хп, un))t выигрыш игрока 2 равен
J2 (uw W, v (х)) = ga_(xN) < Ln (х", unn) <
< ga (xN) = Ja (“(n) (x), v(n) (x)).
Если же л = N — 1, то отсюда, с учетом замечания, следует, что
игрок 2 всегда выбирает стратегию v (х) такую, что (= ^-1(^-1»
uN-i)» ПРИ этом будет выполняться условие xN = xN бХ^)(хдг_х, %_х)
(так как XN (xN_v uN^) = (xN_v и^), если m" = л, n=N—1).
Результат игрока 2 в этом случае будет равен
*^2 (•*)» V (г)) =□ g2 (Xjy) => =
= ga (xN) = Ja (u(n) (x), v(n) W).
Тогда, как при xN X$ (xN_v uN_j) (uw_x £w_x (xAf_x, «w_x)),
результат игрока 2
(x)t V (x)) = g2 (Xfl) <i (Яд^р =
= ga (xN) = Ja («(n) (x). »(n) (x)).
Пусть теперь mnQ = I < л. (Как и ранее, полагаем /и" = 0.) Тогда
из вида стратегии (х) из (2.33) следует, что, начиная с (/ + 1)-го
хода, игрок 1 применяет стратегии угрозы (наказания) ил(хл),
2
35
/4-1< —- 1. При этом выигрыш игрока 2
А («(п) W. V W) = Si (xN) < L-i (rf, uni) <
<Xn «") < Si (xN) = Ji («<n) (*)> v{ri) (x)).
Замечание. В силу определения множеств Х^ (xk_v uk-i) из
(2.32) следует, что если на каком-либо шаге — 1) хр&
ех^, Wp-J, то для всех k таких, что имеет
место xk Х^ (xk_v «й_х).
Теперь допустим, что 0, т. е. /" =# 0 (0 < п < N — 2).
Если m” = N— 1, то так же как и в случае = и, п = N— 1,
можно показать, что игрок 2 будет выбирать стратегию v (х) такую,
что En_1(xn__v un-i), ПРИ этом будет выполняться условие
XN=XN е Х$ (xN_vuN_J (так как прит"=ЛГ—1 XN {xN_vuN_x)=
= хлг) (xn-v uN-i))-
Если mJ = 1<N — 1, то это означает, в силу определения мно-
жества и сделанного выше замечания, что xk = xk 6z (xk-v uk-i^
х1+1 ф X^ (xt, ut) (t. e. (xt, t/z)) и xk&
ф X^ (xk__v Hfc-x), / + 2 < k < N. Отсюда, в силу определения
и™ (х) из (2.33), игрок 2 получит лишь
A (a(n) W, v (х)) = g2 (xN) < Lt (xz, ut) < g2 (xN) =
= J2 (l№ (x), U(n) (x)).
С другой стороны, vk^ Ek(xk, uk), l^k^N— 1, или иначе xk+1=
= ^Й-i uk) (ПРИ Условии ni[ = I < N — 1), I < k < N —1,
гарантируют игроку 2 выигрыш:
J2 (W(n) w, v (x)) = J2 (u{n) W, v{n} (x)) = g2 (xN) Ll (xt, ut).
Таким образом, если игрок 1 выбрал и сообщил игроку 2 стра-
тегию u<n>(x) из (2.33), то игрок 2 будет использовать стратегию
и(п)(х) такую, что
(«(п) (х), и(п) (х)) -^*х(п) =
= {хо, • • • > Xn-v xnt Xn+V • • • ’ XN I Хр ) (Xp-lf ир-1)’
n+l<p<2V}, 1.
Отсюда, в силу (2.27), (2.30) — (2.32), сразу следует неравенство
V1X> max (2.34)
0<n<7V-l
Покажем теперь, что игрок 1 не может гарантированно полу-
чить выигрыш, больший
шах Д’ .
36
Пусть игрок 1 выбрал произвольную стратегию и(х). При заданной
игроком 1 стратегии и(х) игрок 2 выбирает любую стратегию
v (х) ^R (и (х)) (R(u(x)) определено в (2.23)).
Заметим, что при заданной и(х) и и (x)f=R(u(x)) справедливо
соотношение
J2 (и (х), V (х)) = j’w = £w_x (xN_v и^) >
> max Ln (xn, un). (2.35)
0<n<W-2
Действительно, выбором лишь vn^En(xn, un), p^n^N—1, игрок2
обеспечивает себе выигрыш J2(w(x), v(x))T^Lp(xP, ир) (Os^pC
—2). А в силу замечания на стр. 34, при заданной стратегии
и(х) любая стратегия v(x) из множества R(u(x)) такова, что
vN_t^EN_i (xN_t, uN_i), при этом
J2 (и (х), V (х)) - J’M - max g2(fN^ (xN~v uN__v vN^)) =
VN~1
= (XN~V UN~1)-
Следовательно, имеет место соотношение (2.35).
Далее (u(x), v(x))=>(«, v) обозначает, что позиционным стра-
тегиям (и(х), ц(х)) соответствуют программные управления и, v.
Итак, пусть игрок 1 выбрал стратегию ц(х), при заданной стра-
тегии w(x) определим множества
2?! (и (х)) = (х) е R (и (х))
(и (х), и(х))=>(«, у):
(UN~V vN~2^ е DN-1
R2 (и (х)) =\v(x)^R(u (х))
(и (х), v (х)) => (ц, и):
(UN-V VN-J DN-1
(здесь (u(x), v(x))-+x).
Справедливо равенство R(u(x)) =Ri(u(x))t)R2(u(x)). Если
v(x)<=Ri(u(x)), то
T^Xjv-x- (2.36)
Если v (х) G Ra (и (х)), то это означает, что J*u = (xN_v и^) -=
= max L (xn, и ), т. e.
J2(u(x),v (x)) = J*u = Lf (xf, Uf) =
= Lft (xft, uK) = ... = Lfm (xftn, ufm), (2.37)
... <fm^N~2.
Аналогично [16] обозначим R^ (и (x)) — подмножество J?2(u(x))
такое, что / — наименьший номер в (2.37). Очевидно R2 (и (х)) =
= £ U R2(u (х)) (некоторые R[ (и (х)), возможно, пусты).
37
Пусть игрок 5 выбрал v (х) £ R^ (и (х)). Тогда, если (и(х), v (х))
->х, (w(x), у(х))=>(и, и), то
Ja (и (х), v (х)) = j*w = Lf (xf, uf) > 0<max Lk (xk, uk),
t. e. (uf, vhl) e Df.
Стратегия v (x) e R^ (« (x)) эквивалентна стратегии
V (x) = {vk(xk), 1; vkeEk(xk, uk), f < — 1},
т. e. v' (x) тоже принадлежит R^ (и (x)).
Действительно, из определения £д(ха, uh) следует, что
4 (м (х), V' (х)) > Lf (xf, uf) = J*w,
причем строгое неравенство противоречило бы оптимальности у (х)
G R* (и (х)). С другой стороны, равенство
J2 {и (х), у' (х)) = у*и = Lf (xf, uf)
означает, что у' (х) GE R^ (и (х)). Предположение, что J2 (и (х), v'(x))=
= Lk (xk, uk) при k < f, противоречит определению f. Следовательно,
доказано, что у' (х) ЕЕ R^ (и (х)).
Применение игроком 2 стратегии у'(х) не позволяет игроку 1
получить результат больше, чем
Л (« W, (х)) = M'f (ufi у;_г) <
< sup (и^ yf_.) = Kf < max Kn.
Отсюда, с учетом (2.36), получаем
у < max Krt,
1 o<n<N-i
откуда и из (2.34) следует:
У1Х =
max К .
Пусть DN-i — замыкание множества Dn~i из (2.29).
Определим следующие множества:
Dn-1 = 1^-1, ^-2
(Uy-a, VN-z)
L^i (ajv-i, max Ln (xni un)
o=Cn<N-2
D’n = l(u, v)
(u, v)
§2 (xn) — Ln-i (xn-i, uN-i),
g2 (xN) > max Ln (x„, un)
O^n^/V-2
38
Следствие 1. Если DN_^0 и Dn-i = Dn^u то
максимальный гарантированный результат игрока 1 в
игре Г1х равен
Tlx = _ sup , М'^ vN^)
(AIjv-i определено в (2.30)).
Оптимальная стратегия игрока 1 при этом имеет
простой вид
ui xk=xi
$<^n<^N — \y
(2.38)
где (ил-!, vN_2) ge DN-ly (un_2, vn^ -+ xN_ly и реализует,
может быть, с е-точностью величину Kn-^
Следствие 2. При условии доброжелательности
игрока 2 по отношению к игроку 1 максимальный гаран-
тированный результат игрока 1 в игре Г1х всегда опре-
деляется величиной
Kn = max Л(и, v).
(w.v)GD^
Оптимальная стратегия игрока 1 в этом случае име-
ет вид (2.38), где (u', v')^D'N, (u'yv')-+x'y и реализует
величину KN.
Следствие 3. Если игрок 2 доброжелателен по
отношению к игроку 1, то максимальный гарантирован-
ный выигрыш игрока 1 в игре Г1Х не меньше, чем его вы-
игрыш на любой равновесной ситуации в классе пози-
ционных стратегий, т. е. для любой ситуации равновесия
в позиционных стратегиях ир(х), vp(x\ справедливо не-
равенство
УIX > (ир (х), VP (х)).
При отсутствии условия доброжелательности анало-
гичное неравенство справедливо, вообще говоря, только
для строгих ситуаций равновесия.
Замечания. 1. Условие доброжелательности игрока 2 по
отношению к игроку 1 означает, что при наличии нескольких реали-
заций maxJ2(u(x), и(х)) игрок 2 выбирает ту из них, которая наи-
более выгодна для игрока 1, или, что то же самое, игрок 1 при вы-
бранной им стратегии и(х) гарантирует себе выигрыш
max v(x)).
v (х)е/?(«(х))
39
2. Игрок 1 в игре Г1х может не сообщать игроку 2 свои страте-
гии uak (xk), не меняя своего результата. Ему достаточно указать, что
при xk4= х% и xk Х(^ он будет применять стратегию угрозы (нака-
зания) uk(xk). Таким образом, при этих условиях существенно упро-
щается информация, передаваемая игроком 1 игроку 2.
3. Максимальный гарантированный результат игрока 1 в игре
Г2< вычисляется так же, как в игре Г2 [7] с платежными функциями
Л (и, у), i=l, 2, из (2.22) при выполнении ограничений (2J9)—
(2.21). Другими словами, максимальный гарантированный резуль-
тат игрока 1 в игре Г2< равен
у2* = тах(М, К),
где М, К с учетом (2.19)— (2.21) определяются соотношениями:
L = max min J2 (и, ц),
и и
Е = {v | min Ja (и, и) = L},
и
М = min max (и, v),
V~E и
D = {и, v\J2(u, v) > L},
sup
(utv)^D
4. Игра Г2х по своей структуре эквивалентна игре Г2 [7].
5. Как и в [12], получаем следующую цепочку неравенств:
Тн^Т1х^у2х^Т2Ь
где Y2x — максимальный гарантированный результат игрока 1 в игре
Г2х. При этом Yit — минимальный результат, соответствующий ми-
нимальной информированности игрока 1 о действиях партнера;
Y2t — максимальный результат при любой информации о действиях
партнера. Таким образом, гарантированный выигрыш игрока 1 при
любой информированности о действиях партнера заключен в преде-
лах [ун, Y2t] •
6. Исследование (динамической дискретной двух-
уровневой) иерархической системы управления, имею-
щей веерную структуру. Рассмотрим двухуровневую
дискретную модель иерархической системы управления,
которая сводится к исследованию следующей игры мно-
гих лиц, определяемой соотношениями:
%k+l = fk (%ki Ufa
(2.39)
fe = О Л — 1, it=I = {1,2, ..., s},
4 = х°', ieZ, (2.40)
t4<=P*, ieZ, k = Q,N—\, (2.41)
40
J0(u,v)='g0(xN), (2.42)
Ji (и1, v‘) =’g( (xn), i <=J. (2.43)
Соотношения (2.39) — (2.41) описывают управляемый
динамический процесс, связанный с игроком Щ
Здесь —Пгмерный вектор на k-м шаге дискретной
управляемой системы игрока IL, (О^й^ЛО, и\ —
ргмерные вектор-функции, которые определяют управля-
ющие параметры игрока По (центра) по управлению на
&-м шаге игроком Пг, —1); —^-мерные
вектор-функции, определяющиеся выбором на &-м шаге
игрока Щ i<=I (0^&s£:N—1). Соотношения (2.41) опи-
сывают тот факт, что возможности по управлению огра-
ничены. Функции, описывающие интересы По и П<, fe/,
задаются скалярными функциями конечного состояния
g0 и gif i<=I, из (2.42), (2.43) соответственно. Далее вез-
де множества Pk, Q{, i^.1, k=0, N—1, предполагаются
компактными, функции gif 1^3 — непрерывными, а
функции О, N—1, — непрерывными по всем
своим переменным.
Здесь и далее везде
и1 = («о, ...» Ыдг-1), (/) = {«£(4), Л •, *4-1 (4г-1)}
— соответственно программные управления и позицион-
ные стратегии По по управлению игроком Пг,
^=.(4, ил-1)Ло\(х{) = {4(4),^-1(4,-!)}
— соответственно программные управления и позицион-
ные стратегии игрока Пй 1^1;
х1 = (Xq, ..., х^)
—'Траектория f-го динамического процесса, ie7;
х= (х\ i<=I)
— траектория динамического процесса всей системы;
и = (и1, i е /), и (х) = {и1 (х‘), i е 1}
~ соответственно программные управления и позицион-
ные стратегии По по управлению множеством игроков 7;
v = (с/, i е /), v (х) = {и\(х1), i eV}
— соответственно программные управления и позицион-
ные стратегии совокупности игроков I.
41
При условиях (2.39) —(2.43) рассмотрим следующую
постановку игры, наиболее близкую к исследованной
выше игре Г1х.
Пусть центр По на k-м шаге рассчитывает иметь кос-
венную информацию о выборе управления v^ игроком
Г1< по текущим значениям xh\ i<=I (О^й^М—1). Стра-
тегия По состоит в выборе и сообщении каждому игроку
Пг- стратегии-функции
(х*) = {и' (%'), . . . , I <= А
После этого каждый игрок П; выбирает свою стратегию
V1 (х{) = {4 (4), . .., илг-х (4/-1)}
из множества
R1 (и1 (4)) = {v‘ (х‘) | J{ (и1 (х{), v1 (х‘))
> sup J( (и‘ (х<), & (х‘)) — &1 (и1 (хг))}, I е /,
где 6г'(иг’(хг')) =0, если верхняя грань функционала Л
достигается, и 6г(иг’(хг)) =60’>0 в других случаях (при-
чем точность 60г>0 известна игроку По). Центр По, зная
о таком правиле поведения игрока Пй fe/, своим выбо-
ром и(х) = {и*(х*), стремится к достижению мак-
симального гарантированного результата
у = sup___inf Jо (и, и),
где R (и (х)) = {о (х) = {1/ (xi), i е 7}'| v‘ (х1) е Л1 (и! (хг))
Введем следующие величины и обозначения с учетом
(2.39) —(2.41):
L(n (хЬ) = L$ (хм) = gi (x^), i e /.
Далее используется равенство
#n+i = fn (Xn> Un, Vn),
L{n (4) = min maxZ-^x (Xn+x),
“n vn
(xn, tin) = max Ln+i (xn+i),
J
O^n^N—1, ie=I, (2.44)
O^n^N— 1, i(=I. (2.45)
42
Определим стратегии угрозы наказания игроком По иг-
рока Пг W/?(%n), 0^/г^М—1, i<=I, реализующие (2.44).
Обозначим Еп(х1п, и1п — множество стратегий vln ,
0^.n^.N—1, /е/, реализующих (2.45).
Обозначим
En-i (*ЛГ-1> Un-i) =
= {vn-! = (nki, i e= /) I Vn-! e= ElN-i (4м, u'N-i), i e= /};
Un — (Uq, Ux, . . . , Un), Vn — (Vo, Vi, . . . , Vn),
0 n < N — 1, i e /;
Xn — (Xo, Xi, ..., Xn), O^n<zN, ie /;
йп = {йп, i(=I}, vn={v‘,iel}, Os^ns^N — 1;
xn={xn,i^I}, Q-^n^N.
Введем
D' = Vn-2
rr =
Un-i, Vn-»
(^-2,^-2)
L^i(xw-i, Uat-i)> max L(p (х1р, up),
(Un-2, VN-г) ->Xn-i-
L(n-i(x1N-i, u‘n-i)> max L(pl)(Xp, ulp), i^I
Q^p^N-2
= sup min (u, v).
VAf-2)eD* vN-1^eN~^xN~1*uN-1>
Пусть (tttf-!, vN^) D' (если D' 0), (^_2, v^-2) ->x^_2
и реализуют, может быть, с е-точностью величину Kn~i.
Теорема 3. Если D'^0 и D'=D", то в сформу-
лированных условиях игры максимальный гарантирован-
ный результат По (центра) равен
Rn-i = sup min J1 (u, v)
(^N-v ^2V-2)GD" VN~1^EN~1(XN~1'UN-1>
и достигается, может быть, с точностью е при сообще-
нии каждому игроку Щ соответствующей стратегии
'и'*> X1. — х'!,
k ’ R К ’
ie /
й{ (х1) =
1;
{здесь D' — замыкание множества D').
43
Замечание. Результат и доказательство теоремы 3 не за-
висят от величины точности достижения верхней грани функциона-
ла Ji из (2.43) (если она не достигается).
§ 3. Модели принятия решений в иерархических
системах в условиях неопределенности
До сих пор рассматривались модели ИСУ, в которых
центр и подсистемы точно информированы о внутренних
и внешних параметрах. Сейчас мы остановимся на моде-
лях, учитывающих наличие неопределенных факторов.
Одна из первых постановок конфликта двух лиц с
непротивоположными интересами при наличии неопре-
деленных факторов дана в [7]. Так ставилась задача
нахождения наилучшего гарантированного результата
первого игрока при неточном знании интересов второго
игрока. В ряде работ [9], [10], [28] — [32] эта задача
решена при различных вариантах задания неточности
информации в ИСУ. Следует отметить, что изучение по-
добных задач привело [9], [10] к расширению понятия
стратегии, которое связано с добровольным обменом ин-
формацией. Такое расширение существенно упрощает
решение задачи в случае, когда степень информирован-
ности подсистем о неопределенных факторах выше, чем
у центра.
В последнее время в этой области рассматривались
и другие постановки задач. В [10] выяснились условия,
когда центр при неточной информации о подсистемах
может получить выигрыш такой же, как при полной ин-
формированности.
Все перечисленные результаты относятся к случаю,
когда центр выбирает свое управление первым и имеет
информацию о выборе подсистем или в терминологии
игр с непротивоположными интересами к игре Г2 [2].
Для ситуации, когда центр не имеет информации о
выборе подсистем, задача нахождения наилучшего га-
рантированного результата центра при неточном знании
целей подсистем и своей собственной эквивалентна не-
которой задаче управления ИС без неопределенных
факторов [33]. Эквивалентность понимается в смысле
совпадения результата центра и его оптимальных стра-
тегий.
Если статические задачи управления ИС в условиях
неопределенности в достаточной степени нашли отраже-
44
ние в монографии [2], то проблема выбора решений в
ИС в динамике при наличии неопределенных факторов
там не рассматривалась. Поэтому остановимся более
подробно на этом важном классе задач.
Рассмотрим иерархическую систему, состоящую из
центра и подсистемы. Пусть X и Y — множество страте-
гий центра и подсистемы, а функционалы f, g: XxY->Ei
задают выигрыш центра и подсистемы при одном повто-
рении процесса управления. Мы будем рассматривать
бесконечную последовательность таких управлений. Вве-
дем информационную функцию Г. XXY-+B, смысл кото-
рой состоит в том, что если на k-м повторении центр вы-
брал xft, а подсистема — yk, то на &+1-м повторении
центр будет знать bh=I(xh, yk). Формально это учиты-
вается в задании множества стратегий центра Хж в бес-
конечно повторяющемся процессе управления
хм = ПМ
Л=о
где X[В0] =Х, Х[В*] = {<р|Ф : Вк-+Х}, k= 1, 2,...
Будем предполагать также, что центр неточно знает
интересы подсистемы в одном повторении, т. е. функцио-
нал g, а именно, центр знает только класс ga: XxY-+E\
осеЛ, такой, что существует а^А и ga=g.
Относительно подсистемы будем предполагать, что
она недальновидна, т. е. на каждом повторении подси-
стема в условиях, когда она знает выбор центра на этом
повторении, выбирает свою стратегию на этом повторе-
нии из условия максимизации g, т. е. !/еЛЦх), где
Na (х) = {у <= Y I ga (х*у)'= max ga (х, z)}.
z~Y
Одна из моделей, учитывающая дальновидность подси-
стемы, приведена в [34].
Для описания бесконечно повторяющегося процесса
управления осталось задать функцию цели центра в этом
процессе. В [34] обсуждался рациональный выбор стра-
тегии центра для одного класса ИС, где в качестве функ-
ции цели центра была принята
оо
3 yi),
i=l
в которой pi=0 при i^N, В [35] рассматривалось два
45
варианта функций цели центра. Первый задавался функ-
цией
Т7 7, „ _ 11 ’ если ПРИ ‘>k f (Х{> Уд > и — 8>
^8 (Х, У у И (о^о)) {л
(О в противном случае,
а второй — функцией
tr: (х, у, и («,))- Р- есл" । ' f‘>1}|=а,
(О в противном случае,
оо
где х е Ц X = Х°°, у е У00, а и (а) — это значение наи-
i=i
лучшего гарантированного результата центра в одном
повторении при условии, что функция выигрыша подси-
стемы есть ga и центр ее точно знает.
Эти цели имеют качественный характер. Цель VkE вы-
полнена, если, начиная с &+1 повторения, центр полу-
чает результат не меньше rz(a0)—8, а цель выпол-
нена, если центр получает на всех, за исключением, быть
может, каких-то А, повторениях результат не меньше
и(а0)—8.
Задача называется разрешимой, если ^существует
х* Хоо такой, что для любого а ge А и любых yi е
<= Na (xt ф1-1)), где б'-1 = (&!, .... bi-i), bj = yj),
j, i = 1, 2. ..выполнено
Vl{x*(b), у,и(а)У=\,
где b = (&ь &2, ...).
Разрешимость задачи определяется аналогично.
В случае, когда B=Y, 1(х,у)=у, А — конечно в [35],
показано, что если для любых а, ₽^А, аУ=р функции
ga и gfi различимы, то для любого 8>0 и |А |—1 за-
дача V* разрешима. Функции ga и g^ называются раз-
личимыми, если существует х^Х такой, что
Мх(х)ПУР(х)==0.
Если условие различимости нарушено или &<|А|—1, то
вообще говоря, при достаточно малых 8>0 задача V*
неразрешима.
При этих же условиях для разрешимости задачи
условий различимости не требуется. А именно, при лю-
бом 8>0 и |А |—1 задача Wkt разрешима.
46
Этот результат можно интерпретировать как доказа-
тельство тезиса о том, что не может быть одновременно
плохого результата по выигрышу для центра и отсутст-
вия притока дополнительной информации в одном пов-
торении процесса управления ИС.
Если А бесконечно, то при некоторых естественных
условиях на функции выигрыша f, g и множества X, У,
А типа непрерывности и компактности для любого е>0
существует k такое, что задача Wq разрешима.
Для случая «минимального» притока информации,
т. е. когда В=Е\ 1 (х, у) =f(x, у), все перечисленные ре-
зультаты как для конечного, так и для бесконечного А
сохраняются. Таким образом, центр может адаптировать-
ся к подсистемам, узнавая только значения своего вы-
игрыша на каждом повторении. Так как аналогичная
задача для ИСУ, состоящей из центра и нескольких
подсистем, сводится к задаче с одной подсистемой, этот
результат приобретает особый интерес. Легко также ви-
деть, что решение задачи Wk& позволяет получать реше-
ние для любой другой функции цели центра, зависящей
только от выигрышей центра на повторениях и не зави-
сящей от выигрышей на любом конечном числе повторе-
ний, например,
W = lim — V / (xh yi).
n->OQ П i=sl
Мы описали различные постановки и решения задач
управления ИС в случае, когда подсистемы информиро-
ваны точнее центра о неопределенных факторах. Другой
класс задач с неопределенностями составляют модели,
в которых центр информирован о некоторых параметрах
(например, состоянии внешней среды) более точно, чем
подсистемы. Первые возможные постановки такого рода
задач и анализ некоторых моделей приведены в [36],
[37].
§ 4. Методы оптимизации иерархических систем (ИС)
Анализ моделей информационной теории ИС приво-
дит к необходимости решения сложных вариационных
задач. Специфика этих задач связана со следующими об-»
стоятельствами. Иерархическая структура, и особенно
информационные связи, приводят к тому, что множества
47
стратегий элементов системы являются некоторыми клас-
сами отображений множеств возможных состояний ин-
формированности элементов в исходные множества их
выборов. Так как к моменту возникновения информаци-
онной теории ИС методы решения подобных задач не
были разработаны, то, естественно, возникла проблема
их создания.
Предложенный в [7] подход к решению таких задач
состоит в редукции их к некоторым оптимизационным
задачам на исходных множествах выборов. Этот подход
успешно применялся к различным классам моделей ИС
[8] — [12], [15] — [17], [26]. Однако оптимизационные за-
дачи на исходных множествах, к которым сводятся ва-
риационные задачи на сложных классах стратегий и ко-
торые непосредственно возникают при исследовании ИС
(например, задача (1.2)), обычно представляют из себя
задачи нахождения максиминов различной кратности
со связанными ограничениями. Такие задачи также яв-
ляются сложными и нетрадиционными, и методы их ре-
шения стали разрабатываться сравнительно недавно.
Общие подходы к их решению можно условно раз-
бить на два направления. Первое — это разработка не-
обходимых условий [3], [5], [40] — [43]. Приведем для
примера необходимые условия оптимальности для за-
дачи (1.2), полученные в [3].
Пусть пространство управлений подсистем V(u) за-
дается системой ограничений
J/(u) = {у\g(u, v) >0, ft(u, у) =0},
где и, v — элементы конечномерных евклидовых прост-
ранств, g(u, v), h(u, v) —вектор-функции размерности k
и г соответственно. Введем функцию Лагранжа
L <%, g[(u, 0)>;+{<Р» л’(«> VY>-
Конусом допустимых направлений в точке u^U°9 ин-
дуцируемым точкой v^R(u) и матрицей D, назовем'
К(и, v, D) = {Z|'3£z>0 такое, что V'e^e/ выполняется:
u+zl^U, V (и + г1)=]=09 (u + el> v4-eZ)/+p(e))eQVp(e);
такого, что ||р(е) || = о(е)}.
Теорема 4. Пусть выполнены следующие условия::
(а ) функция F(u, v) непрерывно дифференцируема
по всем переменным;
б) функции G(u, v), g(u, v), h(u9 v) дважды непре-
рывно дифференцируемы no всем переменным;
48
(<в) и°— решение задачи (1.2), £(f?) = {у0};
(г) в точке vQ выполнены достаточные условия Мак-
симума второго порядка для G(u°,v) на V(uQ) с множи-
телями Лагранжа ЛД ц0;
dh: (и0, и0) dgt (u°, и0)
(д) градиенты —------, j = 1, ..г, и-------------,
dv dv
i е I = {Z | 1 i ^k, gi (u\ v°) = 0} линейно независимы;
(e) %?>0 Vie/ (строгая дополняющая нежесткостъ);
(ж) множество V(u) ограничено Vu<=U.
Тогда необходимо выполнение условия
dF(uQ, t>°) + dF (и\ и0) . dv\ / 0,
. ди dv du) \ ’ du
где К* (и°, d°, —) — конус, сопряженный конусу допустимых
\ du
матрица — определяется из
r du г
направлений К (uQ, и0, — 1, а
к du)
матричного dv\ du dh _ du dp, du ) cootmotu d2L (u", u°, 2 dv2 diagf^l [ 6 dh (uQf vQy гния ;°, p°) Г (u°, U°)]r dv ] T
k dv
dg (u°, u°) dh (u°, -i
dv dv
diag [gf («°> t>0)] 0 X
0 0
d2L (u°, и0, Х°, |х°)
ди dv
dg (u°, и0)
ди
dh (u°, t>°)
du
Второе направление, по-видимому, наиболее перспек-
тивное, связано с идеей метода штрафов. Оказалось, что
последовательное применение метода штрафов позволяет
свести широкий круг задач теории ИС к последователь-
ности экстремальных задач, сходящейся к исходной за-
даче [43] — [46], [3], [33]. Рассмотрим один из вариан-
тов применения метода штрафов к задаче (1.2).
49
Пусть V(u) —многозначное отображение Вве-
дем штрафные функции
[ = 0, (и, о) s Q,
Н (u,v)l
Ь>0, (и,о)е ((/ X У)\Й,
Ч(и v)!=°’ °) S graf V
Ч> 0, (и, v) <= (U X V)\graf V (и).
Теорема 5. Пусть функции F(u, v), G(u, v), H{и, v),
V (и, v) непрерывны на прямом произведении компактов
UXV, R(u) непрерывно по Хаусдорфу, V(u)—непре-
рывно, замкнуто и непусто V и, F(u, v), G(u, v), H(u, v),
W(u,v) удовлетворяют условию Липшица по и равно-
мерно относительно и, существуют еь е2>:0 и константы
klt k2, пц, ш2 такие, что
(а ) У« в гг-окрестчости множества V(u)
Ч^и, о)]"',
б) У и в г2-окрестности множества R(u)
max G (и, г) — G (и, v) > k2 [р (R (и), и)]"’*.
asV(u)
Кроме того, V — параллелепипед в Ет, о — мера Лебега.
Тогда
Ft = lim max (а, —S f [J (и, v, г, X, p, v) —
X.H,v,6->oo u,ztw J
— | J (u, v, z, X, p, v) — w |]2 a (do) j-
при выполнении условии----------,----"----,----->oo, где
^max(i,mi) ^max(i,m2)
J (и, V, Z, %, |1, v) =
=F (ut v) — %H{u, u)4-p.G(r/, z)—p,G (u, v)—z).
Наряду с указанными общими подходами разрабо-
тан ряд методов и алгоритмов, учитывающих специфику
конкретных классов моделей [3], [38], [39], [43], [47].
Так, для динамических моделей ИС построены процеду-
ры типа динамического программирования, позволяющие
сводить их к решению последовательности статических
задач [25]. Для задачи типа (1.2) с конечным множест-
вом стратегий подсистем разработан метод, сводящий ее
50
к решению задачи математического программирования
[38]. Этот метод позволяет также решение некоторых
классов линейных задач свести к задаче линейного про-
граммирования [39]. Некоторые алгоритмы численного
решения подобных задач предложены в [47].
Вопросы, связанные с устойчивостью рассмотренных
и целого ряда других задач оптимального выбора, из-
лагаются в гл. 8.
§ 5. Модели реальных иерархических систем
Наряду с теоретическими исследованиями ведутся
работы по практической реализации идей и результатов
информационной теории ИСУ. По некоторым из них уже
получены конкретные рекомендации. Так, в [48] разра-
ботана модель ИСУ распределением водных ресурсов
между колхозами. Результаты конкретных расчетов для
некоторых колхозов Молдавии позволили сделать вывод
о целесообразности изменения закупочных цен на не-
сколько видов сельскохозяйственной продукции.
В [57] рассматривается проблема управления с/х
производством с помощью дифференцированных цен и
рент. Показана гибкость механизма цен с обратной свя-
зью. Задача планирования развития сетей электропере-
дач рассматривалась в [49]. Разработана методика рас-
чета сетей в условиях неточной информации о будущих
потребностях в электроэнергии. Модели, описанные в ра-
ботах [36], [37], используются в качестве теоретической
основы при организации деловой игры, предназначенной
для обучения диспетчеров железнодорожных станций в
режиме контейнерных перевозок.
Некоторые аспекты и методы оптимизации информа-
ционной теории нашли свое применение при создании
системы автоматизации проектирования сложных техни-
ческих объектов.
В настоящее время в ВЦ АН СССР начаты долго-
срочные работы по созданию системы моделей развития
с/х региона с учетом экономических, природных, соци-
альных факторов. Имеется уже и публикация по этим
вопросам [58]. В качестве методологии в этой работе
используется информационная теория ИС. Другой сфе-
рой приложения этой теории являются модели между-
народной торговли, которым посвящен следующий па-
раграф.
51
§ 6. Согласование моделей региональных экономик
Опираясь на методологию исследования операций [2],
[4], можно сформулировать единый подход к согласо-
ванию народнохозяйственных планов и долгосрочных це-
левых программ группы стран в рамках интеграции [51],
[55]. Предлагаемые далее формальные схемы имеют яс-
ное содержательное толкование, их практическое исполь-
зование определяется возможностью математического
моделирования экономики. Здесь может иметь место ана-
логия с разработкой программно-целевого подхода к
планированию: зародившись как одна из формальных
схем при анализе динамических моделей экономики,
программно-целевой подход в настоящее время оказы-
вает значительное влияние на процедуры планирования
в народном хозяйстве. Сейчас в условиях широкого рас-
пространения идеологии экономико-математического мо-
делирования и электронно-вычислительных машин соз-
дается большое количество моделей на разных уровнях
иерархии управления. Поэтому вопрос координации мо-
делей будет приобретать все большую остроту.
Прежде чем переходить к формальному анализу про-
блемы согласования моделей регионов, перечислим те
исходные посылки, на которых базируется дальнейшее
изложение:
(а) имеется группа стран, которые в силу теоретиче-
ских соображений и практического опыта отдают себе
отчет в том, что совместная деятельность для них более
выгодна, нежели автаркия или только система двусто-
ронних соглашений;
(б) все страны имеют особенности в хозяйственном
развитии, различные технологические возможности, за-
пасы природных ресурсов, традиции в изготовлении оп-
ределенного типа продукции и т. д.;
(в) каждая страна имеет собственный набор целей,
и, следовательно, может сформировать собственную
программу развития.
Участие в разработке совместных проектов и про-
грамм неизбежно приводит страны к необходимости ко-
ординирования этих проектов и согласования их с на-
циональными планами.
Дальнейшее рассмотрение будем вести с позиций ин-
тернационального органа (исследователя операции), ко-
торому поручается группой стран провести анализ воз-
52
можностей по координации. Первый шаг состоит в раз-
работке формального обоснования выгодности для стран
взаимных обменов. Такой анализ проводился и на вер-
бальном, и на формальном уровне [53].
В экономической науке это привело к разработке тео-
рий, которые утверждают, что международный обмен
выгоден странам и необходимо стремиться к междуна-
родному разделению труда. В рамках формального ана-
лиза это подтверждается, если описать экономику каж-
дой страны некоторой моделью, сформулировать ее цель
в принятых параметрах, учесть возможные взаимоотно-
шения с другими странами. Действительно, как правило,
существует взаимовыгодный обмен, но таких обменов в
то же время существует множество, причем по-разному
выгодных разным странам. В работах по теории игр
этот вывод изложен так: не существует единого понятия
оптимальности для группы активных участников. Такое
толкование кажется правдоподобным.
Исследователь операции в этих условиях обязан вы-
работать рациональные альтернативы и дать рекоменда-
ции для конкретного принятия решения. Реальный путь
состоит в следующем: создается интернациональный пла-
новый орган, он уточняет модель операции для группы
оперирующих сторон, далее рассматривается схема уточ-
нения, которая связана с выработкой единой цели для
всех стран, а затем эта метацель оптимизируется на об-
ласти неединственности взаимовыгодных обменов.
В рамках этого механизма координации предполага-
ется, что:
а) главы государств на неформальном уровне опре-
деляют метацель сообщества (или набор целей, или про-
грамму его развития);
б) страны сообщают друг другу свои модели (т. е.
формальные описания экономик), на основе которых они
предполагают осуществлять координацию обменов, а
также национальные цели (или программы развития);
в) устанавливаются возможности интернационально-
го органа по координации национальных планов, интере-
сов и общей цели сообщества.
Таким образом, предложенный механизм сочетает
принципы совместного и национального планирования.
Рассмотрим проблемы координации на базе пол-
ностью определенных моделей. Когда страны не уверены
в адекватности моделей реальному положению, они мо-
53
гут предложить плановому органу координировать моде-
ли при некоторых заданных пределах неопределенности.
Формальное изложение проиллюстрируем на простей-
шем примере обменов продукции между статическими
леонтьевскими моделями. Пусть экономика стран описы-
вается балансовыми соотношениями
^=Лл+иуг + 5й хг>0, (6.1)
и ограничениями по ресурсам
i=l, 2, ..., n, (6.2)
где Ai — матрицы прямых затрат размерности
Wi — вектор потребления продуктов хг-; — сальдо (экс-
порт минус импорт) товаров; Вг- — матрица ресурсоем-
кое™ размерности 1хт и Ri — вектор объемов наличных
ресурсов i-и страны.
Предположим, что матрица продуктивна, т. е-
(7—Л<)_1 = Т<>0. Выразим из
х,= 1\№+8<). (6.3)
Будем считать далее, что r{=Ri—В{1\ю{>0,
(6.4)
Перепишем ограничения
Т iSi > — dh BJiSi^ r{.
(6.5)
Кроме того, будем иметь в виду бюджетное ограничение
pSi=0,
где р ।— внешнеторговые цены на товары.
Совокупность ограничений (6.5), определяющих мо-
дель страны, будем обозначать Л4Й
В качестве национального критерия рассмотрим
ш
/=1
или, после преобразования,
А = Sс'^’C>1 > 0>
/=1
(6.6)
54
а в качестве общей цели
т tn
= S S с^- <6-7)
1=1 j=l
Таким образом, плановый орган, играющий роль ко-
ординирующего центра в сложившейся иерархической
структуре [53], должен провести координацию моделей
при наличии национальных критериев fi и при усло-
вии, что должен выполняться общий баланс оптималь-
ных запросов и предложений Siopt:
2 S°pt = о, (6.8)
1=1
и f0(s)->max.
Приведем некоторые возможные механизмы коорди-
нации.
Страны договариваются о едином критерии, форми-
руя его на основе национальных
fo = min pi (A (s)— fi), (6.9)
где вектор {pj соизмеряет национальные критерии, f*—
уровень, на который согласна f-я страна в коалиции. Эти
параметры являются предметом неформального догово-
ра. Задача координации выглядит следующим образом:
f0(s)->max,
Mi, i = 1, 2, .. ., tv, s< = 0.
1=1
Координирование от достигнутого предполагает нали-
чие метацели вида (6.7) и уровней критерия достигну-
тых странами либо в системе предшествующих (напри-
мер, двусторонних) соглашений, либо в состоянии автар-
кии. Тогда задача координации имеет вид:
f0(s)->max
Mt, i = 1,2, ..., n; 2 Si = 0; ft(st)>Lt. (6.10)
i=l
Страны стремятся к достижению паретовских точек
(т. е. состояний, когда нельзя улучшить положение ни
55
Одной страны, не ухудшив положения одной из оставших-
ся). На этом множестве плановый орган должен найти
максимум метацели. Поскольку функции fi линейны, мно-
жество паретовских точек характеризуется вектором
при решении задачи:
Kifi (s()H max,’
(6.11)
M{, i = 1, 2, .... n\ U > О, V h = 1.
i=l]
Обозначим множество решений этой задачи при фикси-
рованном X через S(X). Тогда задача координации со-
стоит в следующем:
гпах'Тпах /0($),
Л s<=S(M
т. е. имеет вид игры с фиксированной последователь-
ностью ходов, где выбором центра служит вектор
Механизм квотирования позволяет расчленить всена-
циональные задачи и сделать их независимыми. При
этом задача координирования состоит в выборе таких
квот ($г+, sr), чтобы выполнялся общий баланс на опти-
мальных, независимых решениях стран и при этом
f0(s)->max. Формально задача записывается в виде игры
типа 1\ при связанных ограничениях:
задача планового органа имеет вид
/0 (s) -> max, 2 si = 0, (6.12)
i=i
независимые задачи стран
A(Si)->max, Mi, ^.si ^.st, s+ > 0, st^O.
Первый ход делает плановый орган, выбирая {sf, s;+},
и затем, получив ответ Siopt каждой модели, стремит-
ся получить баланс и наибольшее значение f0(s).
Механизм координирования может реализоваться
посредством выбора величин внешнеторговых цен р:
fQ (s) -> max, V s°pt = 0,
(6.13)
ft (si) -->max, Me, i = 1,2, ..., n.
56
Здесь, как и в задаче (6.12), отдельные страны решают
свои задачи независимо.
Поскольку международная валюта едина и исполь-
зуется только при взаимных расчетах, плановый орган
может стремиться к максимизации метацели
/о (s) ->• max,s°P‘ = О
Z=1
(6.14)
путем выбора дотаций vt-, при условии
fi($i)->max, pSi=Vi.
Такое управление предполагает возможность перерас-
пределения денежных доходов между странами.
Плановый орган может регулировать экономические
связи путем независимого варьирования импортных и
экспортных цен для разных стран. При этом бюджетные
ограничения в задаче (6.14) будут иметь вид
pi exp»—qi impi=Vf.
Отметим, что перечисленные механизмы координации
могут рассматриваться в различных комбинациях.
Хотя постановки задач приведены для случая, когда
уровень потребления фиксирован, ясно, что все схемы
могут анализироваться при других ограничениях на мо-
дели и других национальных целях. Так, например, мо-
жет учитываться обмен ресурсами, может считаться,
что уровни потребления стран не достижимы собствен-
ными усилиями, могут учитываться транспортные расхо-
ды, возможности реэкспорта, расходы на увеличение
мощности и т. д. Могут рассматриваться более общие
линейные модели производства, когда уровень потребле-
ния и сальдо неоднозначно определяют интенсивность
функционирования экономики. Для указанных моделей
разработаны численные алгоритмы [47], которые были
опробованы на конкретной информации. В частности,
были проведены эксперименты по нахождению крайних
точек множества Парето при анализе задачи (6.11) для
моделей четырех регионов: Северная Америка, осталь-
ные развитые страны, Латинская Америка, остальные
развивающиеся страны. В каждом регионе межотрасле-
57
вой баланс включает 5 агрегированных отраслей: сель-
ское хозяйство, добыча ископаемых, легкая промышлен-
ность, тяжелая промышленность, услуги (включая
транспорт). В качестве функционалов регионов выби-
рались уровни выполнения заданных программ потреб-
ления (личное и государственное потребление). Инфор-
мация почерпнута из [56]. В указанном варианте было
найдено 52 крайних точки Парето взаимовыгодного об-
мена за 30 мин. счета на БЭСМ-6.
Во втором варианте, в котором по сравнению с основ-
ным верхнее ограничение на продукцию добычи ископае-
мых в Северной Америке было уменьшено в 1,5 раза,
оказалось 175 крайних точек и время счета составило
менее полутора часов. Для проведения массивных рас-
четов и удобства проведения экспериментов Меньшико-
вым И. С., Злобиным А. С. создана диалоговая система
с использованием системы Пульт-БЭСМ-6, что позволя-
ет оперативно изменять, добавлять, исключать строки и
столбцы матриц ограничений, варьировать количество
регионов. С использованием системы были проведены
эксперименты по нахождению точек равновесия и равно-
весных цен для той же модели (задача (6.13), время сче-
та 45 сек.), а также по нахождению решения игры Г\для
двух регионов с инициативой у одного из них (задача
типа (6.12) при приоритете выбора квот у одного ре-
гиона).
Такой же подход, опирающийся на представление [51],
может быть распространен на согласование сфер произ-
водства и потребление внутри одной региональной эко-
номики [55].
Рассмотрим вначале согласование, которое может
быть осуществлено центральным планирующим органом
в простейшем случае обмена продукцией потребителей.
Пусть имеется п потребителей, каждый из которых рас-
полагает начальным объемом продукции для обмена
{aj}, i=l,..., и, /=1,..., иг, стремится к максимизации
функции выигрыша Л(х<), где {%/}, i=l, ..., п, /=1, ...
..., /п, — объемы продукции у потребителей после об-
мена, в условиях ограниченности бюджета. Если потре-
битель покупает х, и продает аг за одну цену р, то бюд-
жетное ограничение будет иметь вид рх^ра^. Обозна-
чим Xi(p) = {х*(р)} — множество оптимальных выборов
Z-го потребителя при заданном векторе цен р : Д(Хг)->тах,
рх^раг. Определим сальдо по каждому продукту
58
ft
dj = (x< (p) — a{)> / = 1, • • •, tn, и соответствующую
{=1
величину общего дисбаланса s= max maxd,. Пред-
ставляется вполне разумной для центра координация по-
средством выбора цен р. Тогда, если существует вектор
цен р, так что s0 = min max max 0, то центр может
р>о х} /
рассчитывать на гарантированное равновесие спроса и
предложения. Нетрудно построить пример, показываю-
щий, что существование конкурентного равновесия в дан-
ной модели обмена не гарантирует центру непревыше-
ние спроса над предложением. Основное затруднение при
построении координирующего управления состоит в не-
единственности выборов потребителей — ситуация, кото-
рая имеет, как правило, место в широко распространен-
ных линейных моделях. Кроме указанной причины,
неопределенности могут возникнуть из-за неточной ин-
формации центра о функциях выигрышей подсистем и
исходных объемов продукции, неточного знания принци-
пов принятия решения в коалициях потребителей и т. д.
Введем в рассматриваемую модель механизм координа-
ции при помощи двойных цен р, q. Если центр занимает
место рынка, приобретая продукцию по цене р и прода-
вая по цене q, то поведение потребителей описывается
моделью ^(х^-нпах, qx^pa^ В этом случае всегда су-
ществуют наборы р*, д* («ножницы» цен), которые га-
рантируют центру баланс спроса и предложения. Однако
добиться точного совпадения спроса и предложения не
удается. Возможности центра значительно возрастают,
если центр пользуется политикой штрафов, так что бюд-
жетные ограничения потребителей принимают вид qx^.
^рсц + щ. Особая эффективность такой политики состо-
ит в том, что механизм штрафов как стратегия центра
может формулироваться в виде функций от конкретных
выборов потребителей и сообщаться им заранее в виде
правила вида аг=ссг(хг). Тогда стратегия
а/ (xi) =
0, если xi = x*i,
— pai, если xi4=x*,
когда центр угрожает полным отчислением доходов, мо-
59
Жет заставить выбрать потребителя любой набор про-
дуктов X*.
Рассмотрим теперь взаимодействие центра с блоками
производства и потребления, состоящее из следующих
этапов: 1) центр закупает ресурсы в объеме v° у потре-
бителя по цене 2) центр сообщает о ценах на продук-
цию q и ресурсы w2f и производитель закупает ресурс
у центра по цене w2; 3) производитель осуществ-
п
ляет выпуск продукции согласно ограничениям ачУ1 =
i=i
= vjf /=1, 2, ..., ш, и функциям выигрыша f2 = qy— ВД
4) центр приобретает произведенную продукцию по за-
ранее объявленной цене q; 5) потребитель приобретает
продукцию у центра в соответствии с функцией спроса
х=Ф(р, а\и0)>0 при бюджетном ограничении рх=
= WiVQ. При такой схеме взаимодействий центр не может
обеспечить гарантированного баланса спроса и предло-
жения, поскольку среди эквивалентных выпусков для
производства могут присутствовать выпуски, для кото-
рых z/i=0. Если центр выберет цены, удовлетворяющие
условию (q—хл)2А)г=а^ где J — множество индек-
сов возможных активных ограничений, и на этапе 2 объ-
явит политику штрафов
/х ( 0, если //>0,
а (у) = I
I—У У + w2vt если ПРИ некотором i у с = 0,
то баланс х^у может быть гарантирован. В этих усло-
виях центр на множестве сбалансированных выпусков и
опросов может оптимизировать собственную функцию
выигрыша.
Литература к главе 1
1. Моисеев Н. Н. Элементы теории оптимальных систем.— М.:
Наука, 1975.
2. Г е р м е й е р Ю. Б. Игры с непротивоположными интересами.—
М.: Наука, 1976.
3. Горелик В. А. Иерархические оптимизационно-координирую-
щие системы.— Кибернетика, 1978, № 1.
4. Г е р м е й е р Ю. Б. Введение в теорию исследования операций.—
М.: Наука, 1971.
5. Горелик В. А. Принцип гарантированного результата в неан-
тагонистических играх двух лиц с обменом информацией.— Веб.:
Исследование операций.—М.: Изд. ВЦ АН СССР, 1971, вып. 2.
6. Г о р е л и к В. А. Иерархические системы с ромбовидной струк-
турой.— Тезисы докладов III Всесоюзной конференции по иссле-
дованию операций.— Горький, 1978.
60
7. Г е р м е й е р Ю. Б. Об играх двух лиц с фиксированной после-
довательностью ходов.— ДАН СССР, 1971, т. 198, № 5.
8. Кукушкин Н. С., Морозов В. В. Теория неантагонистиче-
ских игр.— М.: Изд. МГУ, 1977.
9. Кононенко А. Ф. Роль информации о функции цели против-
ника в играх двух лиц с фиксированной последовательностью
ходов.— Ж. вычисл. матем. и матем. физ., 1973, т. 13, № 2.
10. Ведерников Р. А., Кононенко А. Ф. О рациональных
процедурах обмена информацией при планировании в условиях
неопределенности.— В кн.: Модели и методы анализа экономиче-
ских целенаправленных систем.— Новосибирск: Наука, 1977.
11. Кононенко А. Ф. О равновесных позиционных стратегиях
в неантагонистических дифференциальных играх.— ДАН СССР,
1976, т. 231, № 2.
12. Кононенко А. Ф. О многошаговых конфликтах с обменом
информацией.— Ж. вычисл. матем. и матем. физ., 1977, т. 17, №4.
13. Кононенко А. Ф., Мамедов М. Б. Линейно-квадратичные
дифференциальные игры с фиксированной последовательностью
ходов.— В кн.: Вопросы прикладной математики.— Иркутск:
Наука, 1975.
14. Кононенко А. Ф., Мамедов М. Б. Одна игровая модель
экономики с учетом финансовых взаимоотношений.— Труды меж-
дународной конференции «Моделирование экономических про-
цессов».—М.: ВЦ АН СССР, 1975.
15. Данильченко Т. Н., Мосевич К. К. Многошаговые игры
двух лиц с непротивоположными интересами — ДАН СССР, 1973,
т. 211, № 6.
16. Данильченко Т. Н., Мосевич К. К. Многошаговые игры
двух лиц с фиксированной последовательностью ходов.— Ж. вы-
числ. матем. и матем. физ., 1974, т. 14, № 4.
17. Кононенко А. Ф. Теоретико-игровой анализ двухуровневой
иерархической системы управления.— Ж. вычисл. матем. и ма-
тем. физ., 1974, т. 14, № 5.
18. Тын я некий Н. Т., Жуковский В. И. Дифференциальные
игры с ненулевой суммой (Бескоалиционный вариант).— Мате-
матический анализ.— М., 1977, 15.
19. Dolezal G. Some properties of nonzerosum multistage games.—
Leet. Notes Comput. Sci., 1975, v. 27, p. 451—459.
20. H a u г i e A. Geux quantitatifs multietages a AAjoneurs equilibries
de Nash, Pareto-optimalite, C-optimalite.— Rew. CETMEDEC,
1972, V. 9, № 30.
21. В as ar T. Nash strategies for M-person differential games with
mixed information structures.— Automatica, 1975, V. 11, № 5,
p. 547—551.
22. Данильченко T. H., Кононенко А. Ф. К теории приня-
тия решений в динамических управляемых системах.— Тезисы
докладов XXXIII Всесоюзной научной сессии НТОРЭС им.
А. С. Попова.— М., 1978.
23. Е р е ш к о Ф. И., П р о п о й А. И. К теории динамических игр.—
Изв. АН СССР, Техническая кибернетика, 1970, № 2.
24. В a s а г Т. A conterexample in linear quadratic games: existen-
ce of nonlinear Nash solutions.— G. Optimiz., Theory and Appl.,
1974, v. 14, № 4.
25. Горелик В. А. Динамические системы с иерархической струк-
турой управления.— Кибернетика, 1978, № 3.
61
26. Данильченко Т. Н., М о с е в и ч К. К. Многошаговая игра
двух лиц при «осторожном» втором игроке и последовательной
передаче информации.— Ж. вычисл. матем. и матем. физ., 1974,
т. 14, № 5.
27. Данильченко Т. Н., Кононенко А. Ф. Об одном классе
многошаговых игр с обменом информацией.— Тезисы докладов
III Всесоюзной конференции по исследованию операций.— Горь-
кий, 1978.
28. Ерешко Ф. И., Кононенко А. Ф. Решение игры с правом
первого хода при неточной информации о цели партнера.—
Ж- вычисл. матем. и матем. физ., 1973, т. 13, № 1.
29. Кукушкин Н. С. Об одной игре с неполной информацией.—
Ж- вычисл. матем. и матем. физ., 1973, т. 13, № 1.
30. В а те ль И. А., Кукушкин Н. С. Оптимальное поведение
игрока, обладающего правом первого хода, при неточном знании
интересов партнера.— ЖВМ и МФ, 1973, т. 13, № 2.
31. Кононенко А. Ф., Ведерников Р. А. О принятии реше-
ний в двухуровневой иерархической системе управления при не-
полной информации о нижнем уровне.— Техническая кибернети-
ка, 1976, № 2.
32. К о н о н е н к о А. Ф., X а л е з о в А. Д. Об одной игре двух лиц
с фиксированной последовательностью ходов при неточной ин-
формации о множестве выборов партнера.— В кн.: Вопросы при-
кладной математики.— Иркутск: СЭИ, 1975.
33. Молодцов Д. А. О решении одного класса неантагонистиче-
ских игр.— Ж. вычисл. матем. и матем. физ., 1976, № 6.
34. В а те ль И. А., Дранев Я. Н. Об одном классе повторяю-
щихся игр с неполной информацией в двухуровневой экономиче-
ской системе.— Труды международной конференции «Моделиро-
вание экономических процессов».— М.: ВЦ АН СССР, 1975.
35. Молодцов Д. А. Адаптивное управление в повторяющихся
играх.— Ж. вычисл. матем. и матем. физ., 1978, т. 18, № 1.
36. Горелик В. А., Ш т и л ь м а и М. С. Игровой подход к выбо-
ру структуры функционирования двухуровневой системы в усло-
виях неопределенности.— Изв. АН СССР, Технич. киберн., 1977,
№ 5.
37. Горелик В. А., Штильман М. С. Об одном классе двух-
уровневых моделей регулирования экономико-экологических про-
цессов.— Экономика и матем. методы, 1977, № 6.
38. Молодцов Д. А. Один класс игр с нспротивоположными ин-
тересами.— Ж. вычисл. матем. и матем. физ., 1975, т. 15, № 3.
39. М о л о д ц о в Д. А. Методы решения одного класса игр с не-
противоположными интересами. Кандидатская диссертация.—
М., 1974.
40. Б е р е с н е в В. В. Необходимые условия экстремума в выпук-
лой задаче максимина на связанных множествах.— Кибернетика,
1972, № 2.
41. Демьянов В. Ф. Минимакс: дифференцируемость по направ-
лениям.— Л.: ЛГУ, 1974.
42. П ш е н и ч н ы й Б. Н. Выпуклые многозначные отображения и
их сопряженные.— Кибернетика, 1972, № 3.
43. Федоров В. В. Методы поиска максимина.— М.: МГУ, 1975.
44. Горелик В. А. Приближенное нахождение максимина с огра-
ничениями, связывающими переменные.— Ж- вычисл. матем. и
матем. физ., 1972, № 2.
62
45. Горелик В. А., Федоров В. В. Метод внешней точки в за-
даче определения кратного максимина с ограничениями.— Ж-
вычисл. матем. и матем. физ., 1975, № 3.
46. Горелик В. А., Федоров В. В. Метод внутренней точки в
задаче определения кратного максимина с ограничениями.—
Ж. вычисл. матем. и матем. физ., 1975, № 4.
47. Е р е ш к о Ф. И., Злобин А. С. Алгоритм централизованного
распределения ресурса между активными подсистемами.— Эко-
номика и матем. методы, 1977, № 4.
48. Беркович Р. Н., В а т е л ь И. А. Модель распределения во-
ды между колхозами с учетом некоторых принципов хозяйствен-
ного расчета.— В кп.: Методы системного анализа в проблемах
рационального использования водных ресурсов.— М.: ВЦ АН
СССР, 1976.
49. В а с и н Ю. Н., Горелик В. А. Принцип минимакса в задаче
выбора проводов воздушных линий.— Изв. АН СССР, Техниче-
ская кибернетика, 1975, № 2.
50. Б а г р и н о в с к и й К. А. Основы согласования плановых реше-
ний.— М.: Наука, 1977.
51. Ерешко Ф. И. Исследование операций и модели междуна-
родных экономических отношений.— В кн.: Модели и методы
анализа экономических целенаправленных систем.— Новоси-
бирск.: Наука, 1977.
52. В а те ль И. А., Дранев Я. Н. Координация в иерархической
системе в условиях неполной информированности центра об ин-
тересах и возможностях подсистем.— В кн.: Модели и методы
анализа экономических целенаправленных систем.— Новоси-
бирск.: Наука, 1977.
53. В а те ль И. А., Ерешко Ф. И. Математика конфликта и со-
трудничества.— М.: Знание, 1973.
54. Ерешко Ф. И. Координирование обменов между экономиче-
скими системами в рамках интеграции.— Материалы междуна-
родного симпозиума «Теоретические и методологические пробле-
мы комплексного совершенствования сотрудничества в области
плановой деятельности».— М.: 1977.
55. Е р е ш к о Ф. И. Теоретико-игровой подход к моделированию
обменных процессов.— В кн.: Проблемы оптимизации в систем-
ных исследованиях.— Труды ВНИИСИ, вып. 8, 1979.
56. The future of the World Economy: Nation Study/Ed. W. Leontief
et al.— New York; Oxford University Press, 1977.
57. Ведерников P. А., К о н о н е н к о А. Ф., Храбров И. М.
Цена и рента — экономические рычаги реализации программно-
плановых заданий.— В кн.: Тезисы докладов Всесоюзной конф.
«Программно-целевые методы в планировании и управлении в
свете решений XXV съезда КПСС».— Москва, 1977.
58. А н т и п о в В. И., К о н о н е н к о А. Ф., X р а б р о в И. М. Про-
граммно-целевой подход и проблемы моделирования аграрно-про-
мышленного комплекса Нечерноземной зоны РСФСР.— В кн.:
Тезисы докладов Всесоюзной конф. «Программно-целевые мето-
ды в планировании и управлении в свете решений XXV съезда
КПСС».— Москва, 1977,
ГЛ ABA 2
НОВЫЕ НАПРАВЛЕНИЯ ТЕОРИИ
АКТИВНЫХ СИСТЕМ
§ 1. Теория активных систем и ее задачи
Совершенствование функционирования организаци-
онных систем в народном хозяйстве — одна из актуаль-
ных проблем сегодняшнего дня. Трудности ее решения
во многом связаны с отсутствием до настоящего времени
достаточно развитой теории, которая бы располагала ме-
тодами описания и исследования широкого спектра орга-
низационных систем, позволяла бы ставить и решать.за-
дачи их оптимального синтеза и на этой основе разраба-
тывать рекомендации по совершенствованию функцио-
нирования существующих организаций.
Проблемы, возникающие на пути создания такой тео-
рии, хорошо известны — большая размерность возни-
кающих задач, значительное число взаимосвязей и не
поддающихся контролю факторов, иерархическая струк-
тура системы управления и т. д. К принципиальным осо-
бенностям организационных систем можно отнести и це-
ленаправленный характер функционирования составляю-
щих их подсистем.
Целенаправленное функционирование организацион-
ных систем определяется присутствием в них человека
[1]. Кроме этого, присутствие человека приводит к опре-
деленной «активности» управляемых объектов. Смысл
ее заключается в способности человека предвидеть уп-
равляющие воздействия со стороны управляющего орга-
на и действия других элементов системы и с учетом этого
выбирать (в рамках имеющихся альтернатив) свои дей-
ствия и стратегию поведения, направленные на достиже-
ние тех или иных целей. Практика хозяйствования дает
нам много примеров проявления эффекта «активности»
организационных систем. Так, в отраслевых системах с
64
централизованным планированием «активность» отдель-
ных подсистем (объединений, предприятий, институтов,
фирм и т. д.) при отсутствии согласования целей приво-
дит к таким отрицательным явлениям, как завышение
заявок на ресурсы и необходимые финансы; завышение
себестоимости продукции; невыполнение планов по от-
дельным «невыгодным» видам продукции (в том числе
по новой технике) при выполнении общих агрегирован-
ных показателей плановых заданий; занижение произ-
водственных возможностей предприятиями при составле-
нии планов; завышение сроков реализации проектов
и т. д.
Рассматривая предприятие и его подразделение, мож-
но и здесь, основываясь на материалах публикаций в ши-
рокой печати, привести длинный перечень проявлений
«активности» подсистем.
Общий вывод ясен: учет факторов целенаправленного
функционирования управляемых объектов в организа-
ционных системах и соответствующих проявлений их
«активности» является необходимым условием создания
адекватной теории управления организациями. Конечно,
учет этих факторов увеличивает трудности построения
соответствующей формальной теории. Однако их игно-
рирование делает, на наш взгляд, проблематичной саму
возможность построения достаточно адекватных матема-
тических моделей, позволяющих исследовать и решать,
например, такие важные проблемы экономической поли-
тики, как проблему выбора системы показателей, оцени-
вающих результаты функционирования элементов эконо-
мики; проблему «горизонтального» и «вертикального»
согласования планов подсистем; проблему достоверно-
сти информации и др. Заметим, что еще в 1964 г. акаде-
мик В. С. Немчинов ставил решение этих проблем как
необходимое условие эффективности хозяйственной ре-
формы [2]. Несомненную актуальность представляют эти
проблемы и сейчас (укажем, например, на проблему
«вала», проблему «выгодных» и «невыгодных» работ,
подчас встречающееся неоправданное занижение резер-
вов и т. д.). Поиск решений этих проблем представляет-
ся нам важной задачей теории активных систем. Отме-
тим, что классическая теория управления до сих пор не
имела дела с «активными» целенаправленными объекта-
ми. Теория активных систем разрабатывается в Институ-
те проблем управления с 1968 г., ее состояние на 1975 г.
3 Под ред. Н. Н. Моисеева 65
отражено в монографии [3]. Задача данной работы отра-
зить современное состояние теории активных систем.
В целом основной задачей теории активных систем
является разработка методов описания и исследования
организаций и механизмов их функционирования с целью
разработки рекомендации по их совершенствованию.
Под организационными мы понимаем системы, имеющие
целью организацию деятельности коллектива людей для
достижения определенных целей. Спектр организацион-
ных систем очень широк: экономические, социально-эко-
номические, образование, здравоохранение, военные ор-
ганизации, народное хозяйство, государство, междуна-
родные организации. Результаты, полученные к настоя-
щему времени в теории активных систем, применимы в
большей мере к организационным системам управления
в экономике и производстве. Под механизмами функцио-
нирования таких систем мы понимаем -применяемые в
них процедуры формирования информации для управле-
ния, методы формирования управляющих параметров —
планов, цен, нормативов, методы финансового управле-
ния и экономического стимулирования, организационные
и финансовые ограничения на деятельность организаций
и их подразделений, методы оперативного управления,
методы организации соревнования, в общем, весь набор
организационных, правовых, экономических, финансовых
правил, регламентирующих функционирование органи-
заций в экономике и производстве.
В последнее время, на наш взгляд, наметилась безус-
ловно положительная тенденция к объединению различ-
ных подходов и направлений, посвященных исследова-
нию тех или иных аспектов функционирования
организационных систем, более отчетливо проясняется
взаимосвязь выдвигаемых концепций и полученных в
этом направлении результатов {4]. Здесь следует назвать
работы по оптимальному планированию, начатые акаде-
миком Л. В. Канторовичем, разработки системы терри-
ториально-отраслевых моделей народного хозяйства
(А. Г. Аганбегян, К. А. Багриновский, А. Г. Гранберг
и др.), работы по оптимальному функционированию со-
циалистической экономики, ведущиеся под руководством
академика Н. П. Федоренко, методы моделирования и
оптимального управления в экономических системах
(Ю. П. Иванилов, А. А. Петров, В. В. Леонтьев, С. В. Ду-
бовский, А. Н. Дюкалов, Ю. Н. Иванов, А. Е. Илютович,
66
В. В. Токарев, А. П. Уздемир, Ю. М. Фаткин), информа-
ционную теорию иерархических систем, развитую членом-
корреспондентом АН СССР Н. Н. Моисеевым, блочное
программирование, или, как его еще называют, итера-
тивное планирование и управление (Дж. Данцш, И. Кор-
най, Т. Липтак, Т. Н. Первозванская, А. А. Первозван-
ский, В. Н. Полтерович, В. 3. Беленький, В. А. Волкон-
ский, С. А. Иванков, А. Б. Поманский, А. Д. Шапиро и др.),
теорию координации в иерархических системах (М. Ме-
сарович, Д. Мако, И. Такахара), работы по функциони-
рованию децентрализованной экономики (К. Дж. Эрроу,
Г. Дебре, Л. У. Мак-Кензи, С. Карлин, X. Никайдо,
К. Ланкастер, М. Интриллигатор, В. Л. Макаров,
А. М. Рубинов, Э. М. Браверман, М. И. Левин и др.), ра-
боты по коллективному поведению автоматов (В. И. Вар-
шавский, М: В. Мелешина, В. Д. Перекрест), работы по
динамике коллективного поведения (Ю. А. Тенисберг,
А. В. Малишевский, В. И. Опойцев), современные теоре-
тико-игровые концепции (И. А. Ватель, Р. А. Ведерни-
ков, Н. Н. Воробьев, Ю. Б. Гермейер, В. А. Горелик,
Я. Н. Дранев, Ф. И. Ерешко, Ю. П. Иванилов, А. Ф. Ко-
ноненко, Н. С. Кукушкин, М. Б. Мамедов, Д. А. Молод-
цов, В. В. Федоров и др.), программно-целевое планиро-
вание (В. А. Ириков, Г. С. Поспелов и др.), а также ряд
других направлений. Использование ряда концепций и
результатов этих работ оказалось 'чрезвычайно полезным
при разработке теории активных систем. Наряду с разра-
боткой непосредственно теории активных систем мы при-
даем большое значение разработке методологии, сравни-
тельному анализу имеющихся подходов и концепций, на-
правленных на исследование и совершенствование функ-
ционирования организационных систем [4].
§ 2. Механизмы функционирования организационных
систем
Многие проблемы управления в иерархических систе-
мах можно рассмотреть на простейшем их варианте —
двухуровневой системе. Вместе с тем двухуровневая си-
стема может служить основным блоком при исследова-
нии многоуровневых систем.
1. Структура и модель ограничений двухуровневой
системы. Будем рассматривать двухуровневую систему,
состоящую из управляющего элемента верхнего уровня
з*
67
или центра и п управляемых объектов — активных эле-
ментов. Обозначим Уг состояние гго активного элемента
(вектор), Yi — множество его возможных значений. Со-
стояние активной системы определяется как совокуп-
ность состояний ее элементов у— {yit
= 1, 2, ..., п}. Элементы в системе, как правило, взаимо-
зависимы по выбору своих состояний, что отражается
введением Угл глобальных ограничений: уеУгл. Таким
образом, множество возможных состояний системы есть
У=УГЛР)(Д У^=УГЛПУЛ, где Ул= — множество ло-
кальных ограничений на состояния элементов. Центр
будем считать административным органом, и его описа-
ние будем давать через описание действий, которые он
выполняет в процессе функционирования системы.
2. Механизмом функционирования двухуровневой си-
стемы называется набор правил (процедур, функций),
регламентирующих действия всех элементов системы в
процессе ее функционирования. Во многих случаях функ-
ционирование организационных систем имеет повторяю-
щийся (периодический) характер. В каждом периоде
функционирования можно выделить ряд этапов. Охарак-
теризуем их более подробно.
Особенностью значительного числа организационных
систем является неполная информированность центра о
моделях АЭ, в том числе о множествах возможных со-
стояний элементов Уй Поэтому первым этапом
функционирования системы является этап формирования
данных, на котором центр получает дополнительную ин-
формацию о моделях элементов*). Будем обозначать по-
лучаемую центром информацию о модели г-го элемента
как sb a Qf — множество возможных значений s^Q.i,
соответственно s={sJeQ = ]^[ Qi? — информация, полу-
чаемая центром о всей системе. Второй этап функциони-
рования системы — этап формирования управляющих
параметров и={иг, 1^1} для всех элементов системы.
*) Этот этап может и отсутствовать, если, например, центр рас-
полагает всей необходимой информацией для принятия решений, или
ориентируется только на имеющуюся у него информацию, принимая
те или иные гипотезы о неизвестных ему параметрах. Могут также
встречаться ситуации, когда исходные данные, будучи однажды сфор-
мированы, затем лишь корректируются через определенное число пе-
риодов функционирования (примером может служить использование
в экономических расчетах нормативных данных).
68
Процедура определения управляющих параметров на ос-
нове имеющейся и полученной информации u(s) =
— называется законом управления. Учет специ-
фики организационных систем в экономике и производст-
ве позволяет несколько более подробно охарактеризо-
вать структуру применяемых в них управляющих пара-
метров. Так, среди управляющих параметров системы
можно выделить параметры xif которые называют пла-
ном. План Xi — это желательное, с точки зрения центра,
значение всех или части компонент вектора состояния
элемента, или некоторых заранее заданных функций
(агрегатов) ^(у<) этих компонент. Оставшуюся часть
компонент (Л, Хг) вектора управляющих параметров бу-
дем по-прежнему называть управлением (% — управле-
ние, общее для всех элементов, — индивидуальное уп-
равление). От установленных центром управляющих
параметров и={щ} зависят целевые функции активных
элементов fi(uiy yi), i^I, и вводимые центром дополни-
тельные ограничения (ограничения механизма функцио-
нирования) на состояния элементов /;(^), i^I. На тре-
тьем этапе функционирования (этап реализации) каж-
дый АЭ (ie/) выбирает состояние yi из множества
Bi(Ui) —Zi(Ui)^\Yi. допустимых значений. На последнем
этапе (подведение итогов) информация о выбранных
элементами состояниях у= {Уг} сообщается в центр, и
определяется эффективность функционирования всей си-
стемы и составляющих ее элементов. Эффективность
функционирования каждого активного элемента в дан-
ном периоде оценивается достигнутым значением его це-
левой функции fi(Ui, у{), а системы в целом — до-
стигнутым значением целевой функции системы Ф(и, у).
Конечно, следует иметь в виду, что формализованное
описание целевых функций элементов и системы в целом
является не простой задачей. При разработке такого ро-
да описаний необходимо учитывать факторы экономиче-
ского, социального, психологического порядка. В настоя-
щее время, видимо, наибольшего продвижения удалось
достигнуть в формализации экономических составляю-
щих целевых функций активных элементов. Это уже по-
зволяет применять развиваемый подход к экономическим
системам, и в частности, к рассмотрению хозяйственного
механизма (с учетом сделанных выше замечаний).
Механизм функционирования 2 организации можно
теперь определить как совокупность (а) способа форми-
69
рования данных о моделях (применяется в случае непол-
ной информированности центра о моделях элементов) и
состояниях элементов; (б) закона управления u(s) =
= {Ui(s)}; (в) целевых функций элементов
i^I, (г) введенных в систему дополнительных ограниче-
ний i<=I, на состояния элементов, а также приня-
той в системе последовательностью действий элементов
при сообщении информации и выборе состояния.
Понятно, что, вообще говоря, не любое состояние систе-
мы у={Уг}> допустимое с точки зрения локальных огра-
ничений: //геВД^г), fe/, является допустимым и с точки
зрения ограничений глобальных Угл. Поэтому механизм
функционирования двухуровневой системы должен обес-
печивать согласованный (реализуемый) выбор элемента-
ми своих состояний, при котором выбираемые элемента-
ми состояния удовлетворяют как локальным, так и гло-
бальным ограничениям. Надо сказать, что условие
реализуемости механизма функционирования можно оп-
ределить двумя, вообще-то, различающимися способами.
А именно, механизм функционирования 2 называется
реализуемым *), если он обеспечивает выполнение одно-
го из следующих условий:
а) Состояние всей системы y—{yi}, получающееся
как результат любого локально-допустимого выбора эле-
ментами своих состояний, т. е. УУг^^Д^), te/, всегда
удовлетворяет глобальным ограничениям Угл.
б) Состояние всей системы z/*= {//,•}, получающееся
как результат любого «рационального» локально-допу-
стимого выбора элементами своих состояний, т. е. \fyi е
еВ:-(^), ге/, всегда удовлетворяет глобальным огра-
ничениям Угл. Здесь у* — рациональное (т. е. удовлетво-
ряющее принятому элементом принципу выбора рацио-
нальных стратегий) и локально-допустимое состояние
f-ro элемента, 1^1.
Случай а) соответствует сильному, а случай б) —
ослабленному (за счет задания гипотез о поведении эле-
ментов) условию реализуемости механизма функциони-
рования. Если выполняется условие а), то условие б)
заведомо выполняется, но вообще говоря, не наоборот.
Достаточным для выполнения условия а) является кон-
*) Применяются также другие названия условия реализуемости —
координируемость состояний элементов [6], горизонтальное согласо-
вание состояний элементов [7], [8].
70
струирование таких механизмов функционирования (точ-
нее— ограничений В (и) = {В^и-)} и закона формирова-
ния управляющих параметров rz={uj), что имеет место
условие: ПвДгл) с=Угл (системы с независимыми элемен-
i’g/
тами) {3], [5]. Как показывает рассмотрение ряда моделей
[З]1—[5], обеспечение условия независимости элементов
является реальным для ряда практически важных слу-
чаев.
§ 3. Анализ и синтез механизмов функционирования
Одной из центральных проблем, рассмотренных в
первых работах по теории активных систем, явилось ис-
следование и оценка эффективности ряда механизмов
функционирования двухуровневых организационных си-
стем при следующих предположениях:
а) Предположение об информированности центра.
Центр знает множества У<(г<), возможных состоя-
ний элементов с точностью до вектор-параметров ко-
нечной размерности. Значения вектор-параметров
центр не знает, но знает (может оценить) множество Qt,
которому они заведомо принадлежат: Ана-
логичное предположение может быть сделано относи-
тельно целевых функций элементов /\(иг-, У г, fi), fe/.
б) Центр стремится к полной -информированности и с
этой целью организует ту или иную процедуру формиро-
вания оценок Si неизвестных ему параметров гг, i<=/, либо
на основе анализа результатов функционирования систе-
мы в предыдущем периоде — адаптивный способ, либо
запрашивая соответствующие оценки непосредственно
от элементов — встречный способ;
в) механизм функционирования системы обеспечивав
ет независимый выбор элементами своих состояний;
г) функционирование системы может иметь как по-
вторяющийся, так и неповторяющийся характер;
д) гипотезы об активности целенаправленных эле-
ментов: элементы — знают механизм функционирования
системы;—могут выбирать любое состояние из множест-
ва его допустимых значений;—могут сообщать в центр
недостоверные оценки неизвестных ему параметров их
моделей;—могут прогнозировать последствия своих дей-
ствий;— учитывают цели не только текущего, но и буду-
щих периодов функционирования.
71
Здесь имеет смысл более подробно рассмотреть воз-
можность элементов выбирать свое состояние из некото-
рого диапазона состояний и искажать передаваемую в
центр информацию. С этой целью рассмотрим иллюстра-
тивный пример одномерного производственного элемента.
При м-е’р.ГБудем описывать r-й производственный элемент уров-
нем затратууровнем выпуска продукций #?ых. Таким образом,
вектор состояния i-vo производственного элемента есть yt = (r/?jX> #®ых).
Рис. 2.1. Производственное множество активного элемента в одно-
мерной модели «затраты — выпуск».
При традиционном подходе множество Уг- возможных состояний про-
изводственного элемента задается следующим образом: ограничения
на затраты
ограничения на выпуски при заданном уровне затрат
уТ** = Ъ (у?х),
где (г/®х) — производственная функция 1-го элемента *). Множество
возможных состояний элемента при этом есть
yt = {yt 10 < у? < оо. уГ* = ф< (г/Г)} (3.1)
и изображено для случая (fy (#®х) = ri'V'yfx на рис. 2.1 в плоскости
затрат-выпусков (r/®x, #®ых) сплошной линией. При описании модели
активного элемента предполагается, что при заданном уровне затрат
элемент может выбирать любой технологический допустимый уро-
*) Производственная функция" фг- (у ®х) определяется как мак-
симальный уровень выпуска продукции при уровне затрат г/®х (см.,
например, [8]).
72
ВеИЬ выпуска (т. е. любой уровень выпуска, не превышающий уров-
ня, задаваемого производственной функцией фг (#®х))•
и, следовательно, множество возможных состояний элемента есть
Yi = {У11 0 < уГ < оо, 0 < у™* < ср, (О- (3-2)
На рис. 2.1 множество У; (3.2) отмечено наклонной штриховкой.
Теперь разница между традиционным описанием (3.1) и описанием
теории активных систем (3.2) очевидна.
Рассмотрим принятый в работах по теории активных систем
способ, отражения неполной информированности центра о модели
элемента. Пусть производственная функция t-го элемента зависит
от параметра (норматива эффективности г с cpi(z/®x, г г)). В этом
случае множество У* (г*) возможных состояний t-го элемента есть
(Г,) = {у[\ о < °°> 0 < У™* < 4>i (У™ '•;)}•
Предположение о неинформированное™ центра, принимаемое в тео-
рии активных систем, применительно к рассматриваемому случаю,
заключается в следующем: центр знает вид производственной функ-
ции <Pi(i/fx,/"г), но не знает значения параметра гг. Примем,, что
значение параметра гг принадлежит интервалу bi]. На рис. 2.1
верхняя и нижняя пунктирные линии обозначают графики производ-
ственной функции элемента при Гг = аг (нижняя пунктирная линия)
и ri = bi (верхняя пунктирная линия). Область, располагающаяся
между этими двумя пунктирными линиями, т. е.
С< = Уг(М\*Ш),
есть область недостоверного знания центром производственных воз-
можностей элемента (обозначена пересекающейся штриховкой).
Трудности, возникающие при управлении в условиях неполной
информированности (а эти условия достаточно типичны для реаль-
ных организационных систем), понятны. Пусть центр заинтересован
в максимизации выпуска продукции i-ro элемента. Если центр при
уровне затрат х®х назначает «гарантированно реализуемый план
по выпуску х?ых^: О х®ых^< <pt- (х®х, at), то он будет «ниже произ-
водственных возможностей» элемента. Если же центр назначит план
по выпуску х?ых<2)> то при х?ых(2) (xfx, rj план
будет нереализуем (см. рис. 2.1).
Возвратимся теперь к рассмотрению развитого в тео-
рии активных систем подхода к исследованию способов
организации функционирования двухуровневых систем
в условиях такой неполной информированности центра
о моделях элементов.
Пусть в двухуровневой системе задан механизм функ-
ционирования 2 со встречным способом формирования
оценок s={sj неизвестных центру параметров
73
моделей Уг(г<), te/, элементов нижнего уровня. Ё сисТё*
мах с таким механизмом функционирования центр на
этапе формирования данных запрашивает от элементов
оценки Si неизвестных ему параметров гг- их моделей, te/.
Будем считать, что центр применяет такие законы уп-
равления, при которых управляющие параметры ик=
= u(sh) в k-м периоде функционирования зависят толь-
ко от оценок сообщенных элементами в k-м
периоде функционирования. Например, центр, принимая
сообщенные элементами оценки за достоверные, решает
задачу оптимального планирования: Ф(хЛ)->шах,
gV(s*), откуда определяет значение плана xonT(sft). Опи-
сание ряда других законов управления, при которых
Рис. 2.2. Схема функционирования активной системы при встречном
способе формирования данных. Здесь обозначено и? = и? (sp), р =
^k— 1, k, k+ 1.
назначенные центром управляющие параметры зависят
только от оценок, сообщенных элементами в данном пе-
риоде функционирования, можно найти в [3], [5].
В описанных предположениях процесс функциониро-
вания двухуровневой активной системы может быть про-
иллюстрирован схемой, изображенной на рис. 2.2. (На
этом и других рисунках применяются следующие сокра-
щения: Ц — центр, A3i — i-й активный элемент.) Видно,
что действия элементов в одном периоде функционирова-
ния никак не влияют на функционирование системы в
следующих за ним периодах (и индекс, характеризую-
щий номер периода функционирования, можно опустить).
74
Подставим в целевые функции элементов за-
кон управления u(s):
В каждом периоде функционирования (в каждой пар-
тии игры) отдельный активный элемент делает два хода,
а именно сообщает в центр оценку неизвестного
центру вектор-параметра его модели и выбирает свое
состояние yi^Bi{ui{s'), Гг) =Zi(uf(s) )П^г(л) из множе-
ства возможных состояний, пытаясь при этом максими-
зировать значение своей целевой функции
fi(Ui (s), yt)----J—-------->ma<. (3.3)
У[ ^Bi (s),rf)
Функционирование системы при заданном механизме
функционирования S можно рассматривать как игру п
лиц, в которой целевые функции участников имеют вид
(3.3), а стратегиями является сообщаемая в центр инфор-
мация и выбираемые состояния у^В^и^э), г^ =
= 2<(н<($))ПУг-(г<), Если центр не располагает ин-
формацией о принципах выбора рациональных стратегий
элементами, то в качестве критерия эффективности /С(2)
механизма функционирования S (оценивающего эффек-
тивность механизма функционирования Е до начала про-
цесса функционирования) он может принять
К (2) = min (min min Ф (u(s), #)),
гей вей i/e£)(u(s),r)
или, что более удобно в ряде случаев,
К (2) = min [(min min Ф (и (s), у)) ( max Ф (и, у))'1],
гей вей i/CED(u(s),r) u<=U
где D (и (s), г) = УГЛП f П (4 (s)) П (^))"|— множество
Че/ /
возможных состояний системы, Q = Ц Q;, U — множество
возможных управлений, max ф (^ щ — абсолютно макси-
u^U 4
уег(г)
мальное значение целевой функции системы.
Знание принципов выбора рациональных стратегий
элементов позволит построить множество /?(Q, D) реше-
ний игры элементов, т. е. ситуаций (s, у), которые выбе-
75
рут элементы, действуя рационально*)'. Поскольку
/?(Q, D)gz(QxZ)), то знание множества решений игры
АЭ позволяет построить более точную оценку «будущей»
эффективности механизма функционирования системы
К (S) = min [( min Ф (ц (s), у)) ( max Ф (и, г/))'1].
(s, £)G/?(Q,D(w(S).r)) “1у(г)
Задача анализа механизма функционирования S за-
ключается в исследовании свойств решений игры
7?(Q, D) и определении /С(2).
Задача синтеза заключается в построении механиз-
мов функционирования S*, удовлетворяющих тем или
иным заданным условиям (в число таких условий обяза-
тельно входит условие реализуемости).
Пусть мы имеем множество G механизмов функцио-
нирования, удовлетворяющих заданным условиям. За-
дача оптимального синтеза заключается в определении
S*^G максимальной эффективности:
К (S*) =max/<(S). (3.4)
Задача синтеза оптимальных механизмов функцио-
нирования (3.4) не проста, и разработанных общих ме-
тодов ее решения в настоящее время еще нет. Решения
этой задачи мы искали методом подбора и детальным
исследованием свойств «хороших» (с экономической,
практической точек зрения) механизмов функционирова-
ния. При этом часто мы старались оставаться в классе
механизмов функционирования, имеющих аналоги в ре-
альных организационных системах или обсуждаемых хо-
зяйственниками в проблемной литературе, относительно
которых у нас была та или иная степень уверенности в
возможности их практического применения. Результаты
исследования ряда механизмов функционирования с не-
зависимыми элементами при названных предположениях
об информированности центра (определение степени до-
стоверности и достаточные условия достоверности сооб-
щаемых элементами оценок, оценка значений критерия
эффективности механизмов функционирования) приве-
дены в [3], [5]. Подробный обзор более ранних результа-
тов, полученных до 1975 года включительно, приведен в
*) Если функционирование системы имеет повторяющийся харак-
тер, то к решениям игры предъявляется требование глобальной ус-
тойчивости [3], [5].
76
[10]. Интересно отметить, что удовлетворительных (или
хороших) результатов функционирования по названным
показателям удается добиться в тех случаях, когда в си-
стеме действует «достаточно полное» планирование век-
тора состояния системы и эффективная система штрафов
или обеспечивается в том или ином смысле «согласова-
ние» интересов центра и активных элементов. Так, в
наибольшей степени идею согласования интересов эле-
ментов и системы отражает закон открытого управления,
при котором каждому активному элементу центр уста-
навливает наиболее предпочтительный для элемента
план. Доказано, что этот закон является оптимальным
на множестве всех законов, обладающих следующим
свойством: план каждого элемента в решении игры явля-
ется наилучшим. Другой достаточно общий результат
связан с условием «прогрессивных» механизмов функцио-
нирования [3]. Качественно это условие соответствует
следующему. Механизм функционирования называется
прогрессивным, если целевая функция каждого элемента
возрастает при увеличении «эффективности» его функ-
ционирования.
В настоящее время ведется работа по ряду новых на-
правлений теории активных систем. Имеется в виду, что
это позволит расширить круг ее возможных практиче-
ских применений. Следующие параграфы посвящены рас-
смотрению этих направлений.
§ 4. Расширение гипотез
об информированности центра
Применяемая в первых работах по теории активных
систем гипотеза об информированности центра, конечно,
не покрывала всех практически встречающихся случаев.
Представляется, что «показатель информированности»
центра о моделях элементов в реальных организацион-
ных системах может менять свое значение в весьма ши-
роких пределах — от случая полной информированности
центра до случая его полной неинформированное™. Это
побудило расширить круг принимаемых предположений
об информированности центра. В настоящее время в тео-
рии активных систем выделены и рассматриваются сле-
дующие предположения такого рода.
Случай а). Центр располагает всей необходимой
информацией о моделях Yit элементов. В этом слу-
77
чае, естественно, отпадает необходимость в этапе фор-
мирования данных о моделях элементов, и, тем самым,
процедуры формирования управляющих параметров не
опираются на использование данных, получаемых от эле-
ментов об их моделях. Соответствующим образом изме-
няется и игровая интерпретация функционирования двух-
уровневой системы. В каждом периоде функционирова-
ния (в каждой партии игры) отдельный активный эле-
мент делает только один ход, а именно, выбирает свое
состояние tji из множества допустимых состояний
=2г(иг)Г|Уг-, пытаясь при этом максимизировать
значение своей целевой функции
^maX-
Решение игры активных элементов определяется в
этом случае как множество R(D) всех ситуаций У={Уг},
которые выберут элементы, действуя рационально. Здесь
Р = У"Т|(П
множество возможных состояний всей системы. В предпо-
ложении, что центр полностью информирован о моделях
элементов и знает принципы выбора рациональных стра-
тегий элементов, критерий эффективности К(2) меха-
низм функционирования 2 строится следующим образом:
К (2) = (mind) (и, p))’(maxd) (и, у))"1.
После этого, опираясь па постановки задач, приведен-
ные в предыдущем параграфе, уже нетрудно сформули-
ровать постановки задач анализа и синтеза механизмов
функционирования и в этом случае. Таким образом, ме-
тодика игрового подхода в случае полной информирован-
ности осталась той же, основная разница заключается в
том, что меняется вид игры активных элементов, а соот-
ветственно и способы построения решений игры и крите-
рия эффективности механизма функционирования.
Случай б). Центр знает параметрическое пред-
ставление Уг(гг) моделей элементов, но не знает точного
значения параметров гг, fe/. Как мы уже говорили, та-
кая гипотеза об информированности центра принималась
во многих работах по теории активных систем.
78
«Уменьшение или увеличение» множеств возмож-
ных значений неизвестных центру параметров со-
ответственно уменьшает или увеличивает «степень» ин-
формированности центра. В частности, если £2»=/*», то
центр полностью информирован о модели i-го элемента;
если &1=Е”\ Emi—евклидово пространство размер-
ности trii множества У», то это соответствует максималь-
ной неинформированное™ центра о параметрах моде-
ли Yitfi) i-ro элемента.
WZ)k
о -------------
Полная
информированность
центра
Уменьшение
информированности
центра
Рис. 2.3. Качественная зависимость эффективности механизмов
функционирования Soy и Son от «степени информированности» цен-
тра о моделях элементов.
Можно задаться следующим вопросом — каким об-
разом меняется эффективность того или иного заданно-
го механизма функционирования в зависимости от ин-
формированности центра о модели системы и зависят ли
от нее результаты синтеза механизмов функционирова-
ния. На рис. 2.3 приведены качественные зависимости
для механизма функционирования 2оу с законом откры-
того управления (сплошная линия) и механизма функ-
ционирования Son с законом оптимального планирования
(пунктирная линия) от степени информированности цен-
тра о моделях элементов. При плохом согласовании
целей системы и составляющих ее элементов значение
критерия эффективности механизма функционирования
20у даже при полной информированности центра может
быть меньше 1, но зато при уменьшении информирован-
ности центра сохраняется постоянным, поскольку меха-
низм функционирования 20у обеспечивает достоверную
информацию. Наоборот, даже при плохом согласовании
79
целей критерий эффективности механизма функциониро-
вания 20п при полной информированности центра равен
1, но при уменьшении информированности центра умень-
шается, если механизм функционирования не обеспечи-
вает сообщение элементами достоверной информации [3].
В силу этого вопрос о том, какой из двух механизмов
функционирования 20у или 20П имеет большую эффек-
тивность (а, следовательно, и решение задачи оптималь-
ного синтеза), зависит от степени информированности
центра. Поэтому в случае, когда степень информирован-
ности центра неизвестна, то предпочтительнее механиз-
мы функционирования, обеспечивающие достоверность
информации (это еще один аргумент в пользу таких ме-
ханизмов функционирования). Хотя поставленные в на-
чале абзаца вопросы рассматриваются здесь на качест-
венном уровне, сделанные выводы остаются справедли-
выми и при строгом формальном рассмотрении.
Случай в). Центр не знает параметрического
представления множеств У,-, а может лишь оценить мно-
жества Qt-, которые заведомо включают У»: yiCzQi, ге/.
Такого рода предположения об информированности цент-
ра делались во многих работах по итеративному плани-
рованию и управлению, например, в [11], [12] (более под-
робно см. [4]). Заметим, что, если Q = yt, то это соответ-
ствует полной информированности, а если Q=£,m<, —
полной неинформированное™ центра о моделях элементов.
Восстановление множеств Уй возможных состоя-
ний элементов при такой степени информированности
центра усложняется. Один из возможных вариантов
встречного способа формирования данных заключается
в том, что элементы сообщают и параметрическое пред-
ставление К(Гг) множеств У< (/*<), и оценки параметров
Ti. Искажать информацию элементы могут в этом случае,
и сообщая неправильное представление У<(г<) множеств
Yi(ri), и сообщая искаженные оценки параметров rit
i^I. Другой вариант встречного способа восстановления
множеств Yh может заключаться в следующем.
Каждый элемент должен сообщать в центр ряд точек
y/^Qi /=1, 2, ..., L, лежащих на границе Г(Уг) мно-
жества Yi. у/^Г (Yi), на основе которых центр строит
(например, с помощью аппроксимации) оценки мно-
жеств Yb И в этом случае элементы располагают
возможностью искажать информацию (сообщать точки
80
у/, которые не принадлежат границе Г (К) множеств У<).
Кроме этого, такая процедура восстановления множеств
Yi, вообще говоря, «работает» с некоторой ошибкой, рав-
ной ошибке аппроксимации множеств Уй ге/, с помощью
конечного числа точек.
В дополнение к сказанному можно также представить
себе процедуры формирования данных, при которых на
каждом такте для каждого элемента формируется оцен-
ка У/ не всего множества Уй а лишь его подмножества
У/с:Уг-, i<=I. Например, каждый элемент может сообщать
в центр вариант y^Qi допустимого состояния (вариант
плана), в этом случае Yi—yt, ie/.
Возникает естественный вопрос, каким образом аппа-
рат и подход теории активных систем могут быть пере-
несены на этот случай. Поставленная проблема решает-
ся, если заметить, что в случае, когда центр не знает па-
раметрического представления множеств возможных
состояний элементов, то стратегией первого хода элемен-
та является не сообщение оценки параметра rif а сообще-
ние оценки Yi множества (подмножества) У/ его воз-
можных состояний Si=Yi. Оценки У=УГЛП/^/А
Че/ /
затем используются центром при формировании управ-
ляющих параметров u(Y). Таким образом, f-й элемент в
этом случае стремится максимизировать свою целевую
функцию у{), располагая следующими стратегия-
ми: стратегия первого хода — сообщение в центр оценки
FiCzQi множества Уй стратегия второго хода — выбор со-
стояния y^BifUi) = У<П2»(иг):
А («ОТ yi) ---------->тах.
У1 {Uj)
Как только такая аналогия установлена, то сравнитель-
но несложно уже и решать вопрос об использовании рас-
смотренного выше подхода и для этого случая информи-
рованности центра.
§ 5. Степень централизации механизмов
функционирования в активных системах
Качественные обсуждения понятия «степень центра-
лизации» неоднократно приводились в литературе. Го-
раздо реже предпринимались попытки разработки фор-
81
маЛйЗбванного подхода. По-видймому, однб йз первых
конструктивных обсуждений было приведено в [13], [14]
(см. также [15]), где вопрос о централизации или де-
централизации планирования при заданном наборе по-
казателей, характеризующих состояние системы и ее эле-
ментов, предложено решать путем сравнения соответст-
вующих критериев эффективности функционирования
системы. В теории активных систем впервые в работе [16]
было предложено понятие степени централизации меха-
низма функционирования, определяемое множеством
планируемых показателей, «силой» ответственности эле-
ментов за отклонение их состояний от плана и устанав-
ливаемыми центром ограничениями на выбор состояний
элементов. Это позволило ввести отношение частичного
порядка на множестве механизмов функционирования,
формально поставить задачу выбора оптимальной степе-
ни централизации управления [3], [16], [17], предложить
вариант классификации описанных в литературе меха-
низмов функционирования (неуправляемые и управляе-
мые рынки, частично и полностью централизованное пла-
нирование [3], [14], [17], [19]) и проводить их сравнитель-
ный анализ [3], [4], [16]—[21]. Несколько более подроб-
ный обзор ряда работ этого направления приведен в
[4]. Основными полученными в этом направлении резуль-
татами являются: теорема о неубывании (возрастании)
эффективности функционирования системы при повыше-
нии степени централизации механизма функционирова-
ния (без учета затрат на управление, которые растут с
ростом степени централизации) и оценки «цены децен-
трализации» в условиях полной и неполной информиро-
ванности. Это позволяет путем построения функции эф-
фективности и функции затрат в зависимости от степени
централизации решать широко обсуждаемую в литера-
туре (см., например, [16], [17], |[22]) задачу об оптималь-
ности степени централизации управления в организаци-
онной системе.
§ 6. Активные системы с зависимыми элементами
Активная система называется системой с зависимыми
элементами, если ее механизм функционирования не
обеспечивает независимый выбор активными элементами
своих состояний. В таких системах появляется необходи-
мость введения дополнительного механизма, управляю-
82
щего самим процессом реализации элементами своих со-
стояний с целью достижения ими реализуемых («согла-
сованных») состояний. Поскольку определение реали-
зуемости механизма функционирования может давать-
ся в двух вариантах, то и обеспечение его выполне-
ния основывается на использовании приемов двух
типов.
Выполнение усиленного условия реализуемости (т. е.
реализуемость любого локально-допустимого набора со-
стояний элементов) может быть обеспечено за счет при-
влечения таких механизмов, как задание последователь-
ности «ходов» элементов (аукционы, случайные очереди,
очереди по приоритетам [18] и т. д.) или введение систе-
мы оперативного управления процессом реализации со-
стояний. Как нам представляется, формальное описание
реально существующих механизмов такого рода может
быть не простой проблемой. Дополнительные трудности
исследования систем с зависимыми элементами связаны,
очевидно, с проблемой определения решения игры эле-
ментов на этапе выбора состояний (в системах с незави-
симыми элементами выбор состояния определяется оче-
видным образом из условия максимума целевой функ-
ции). В настоящее время исследован только ряд простых
примеров [3], [23], [24]. В практическом отношении инте-
ресным представляется сведение задачи исследования си-
стем с зависимыми элементами к случаю независимых
эл-ементов при помощи гипотез о поведении. Например,
элемент предполагает, что заказы от внешних поставщи-
ков будут исполнены в срок и в требуемом количестве
[23] (см. также принцип координации путем прогнозиро-
вания взаимодействий [6]). Для «правильных» механиз-
мов функционирования (обеспечивающих достоверность
информации и выполнение планов) такая гипотеза позво-
ляет полностью применить методику исследования си-
стем с независимыми элементами. Первые шаги в разви-
тии этого направления, видимо, целесообразно сделать
также в исследовании случая полной информированно-
сти центра о моделях элементов. Действительно, в этом
случае стратегией элемента является только выбор со-
стояния по критерию максимума целевой функции, что
облегчает теоретико-игровой анализ.
Обеспечение выполнения ослабленного условия реа-
лизуемости (т. е. реализуемости любого локально-допу-
стимого рационального набора состояний элементов)
83
требует опираться на методы несколько другого рода и
требует решения следующих вопросов:
а) доказательство существования таких управляю-
щих параметров и* (их еще называют равновесными),
которые при принятых элементами принципах выбора ра-
циональных стратегий обеспечивают в данной системе
выбор элементами реализуемых состояний;
б) разработка алгоритмов расчета равновесных уп-
равлений или разработка итеративных процедур поиска
равновесных управлений, работающих с участием эле-
ментов. Ряд процедур такого рода исследовался в рабо-
тах по итеративному планированию и управлению (или,
как их еще называют, в работах по методам декомпози-
ции) {4], [11], [12]. Сюда же относятся схемы «нащупыва-
ния» конкурентного равновесия типа «невидимой руки
Адама Смита» или «невидимого аукционера» Вальраса
в моделях децентрализованной экономики [9], [25].
В принципе представляется вполне возможным пост-
роение «смешанного» условия реализуемости, объеди-
няющего оба приведенных выше определения. При этом
на части компонент состояния системы требуется выпол-
нение «усиленного» условия реализуемости, а по другой
части — «ослабленного».
§ 7. Активные системы с зависимыми периодами
и адаптивные схемы управления
К этому направлению мы относим исследование меха-
низмов функционирования активных систем в случае,
когда результаты функционирования (сообщаемая инфор-
мация и выбираемые элементами состояния) в текущем
периоде влияют на «выигрыши элементов» не только в
текущем, но и в последующих за ним периодах функцио-
нирования (при неизменной модели системы).
Например, если центр использует для формирования
управляющих параметров адаптивные процедуры, то
значения управляющих параметров и} в fe-м периоде
функционирования зависят от управляющих параметров
и выбранных элементами состояний ук~^ предыдуще-
го (k—1) периода функционирования
и*= u^uk~\yk-^, i<= I, (7.1)
В этом случае целевая функция f-ro элемента в й-м
периоде будет иметь вид А (и? (и*-1, /-1), !/*)>
84
Схема, иллюстрирующая функционирование системы
в этом случае, изображена на рис. 2.4. К аналогичной за-
висимости приводит и использование центром адаптив-
ных процедур формирования данных о неизвестных цент-
ру параметрах [3], [5].
Рис. 2.4. Схема функционирования активной системы при адаптив-
ном способе формирования управляющих параметров. Здесь обо-
значено = и? (и?'1, У?"1), р = k— 1, k, &+1.
В более общем случае, когда центр использует и
встречные и адаптивные, т. е. комбинированные проце-
дуры формирования данных (3], [5], вместо (7.1) имеет
место зависимость следующего вида:
и* = u* (sk,[oi (u*'1, s*'1/*/*'1)), i Ц (7.2)
k *
т. е. значения управляющих параметров щ в я-м периоде
функционирования зависят от информации сообщен-
ной элементами в текущем &-м периоде функционирова-
ния, а также и от управляющих параметров uh_1, инфор-
мации и состояний ук~1 системы предыдущего (й—1)
периода функционирования (см. также схему на рис. 2.5).
Соответственно целевая функция f-ro элемента в &-м
периоде функционирования есть
ft (и{ (sk, d (uk~\
При наличии зависимости типа (7.1), или в более об-
щем случае типа (7.2), для активного элемента может
оказаться целесообразным «несколько проиграть» в те-
кущем &-м периоде функционирования с тем, чтобы «вы-
играть» в последующих периодах. Одним из ключевых
85
при этом является вопрос о том, каким образом актив-
ный элемент учитывает будущее. На практике способы
и степень учета будущего, видимо, во многом определя-
ются субъективными характеристиками людей, участвую-
щих в процессе выбора решений. Один из возможных
способов «учета будущего» состоит в том, что активные
Рис. 2.5. Схема, иллюстрирующая функционирование активной си-
стемы при комбинированном способе формирования данных. Здесь
обозначено и? = ир (sp, oz, (ир-1, sp-1, ур~1))"р — k— 1, k, & + 1.
элементы учитывают в своем целевом критерии свой вы-
игрыш на периодов «вперед» (число Ni называется
степенью дальновидности элемента):
k+Ni
Wt = f'(ut,yb + 2 =
q=k+l
= fi (и* (sk, Qi (u*-1, t/*'1)), yf) +
4- 2 А И (s<7’ Ct (-u9~1> У9'1))’ У9)~*
<7=fe+l
--------------г——t~—г-—------► max .
A1)))
Другой формой отражения «учета будущего» может
быть представление целевого критерия элемента как
суммы целевой функции элемента в текущем k-м перио-
де и взвешенной суммы целевых функций элемента в по-
86
следующих периодах функционирования
00
= 2 О(«М?) =
<7=ЛН
= fi (и* (sft, ст{ (и*-1, sk~l, у*-1)), у*) +
+ i>rkfi И Gi S’-\ Z/’-1)), Z/’) -+
<7=/г+1
—---------------—„ . n . n ;-> max , i e I. (7.3)
sV efy.i/? 1ts(J~1tyQ !))) q=ktk+it... V '
В принципе можно допустить случай, когда суммирова-
ние в (7.3) распространяется только на Ni будущих пе-
риодов функционирования. Коэффициент б< называется
в экономических работах коэффициентом дисконтирова-
ния. Обычно предполагается, что 0<6£< 1. Возможны и
другие способы учета будущего [3], [5]. Отметим следую-
щую важную деталь. Поскольку величины Ni и S, выби-
раются активным элементом и в определенной мере от-
ражают его субъективные представления, то они, вооб-
ще говоря, могут быть не известны центру. Поэтому и це-
левой критерий элемента (7.3), учитывающий будущее,
центру может быть полностью не известен, даже если
ему известен вид целевой функции элемента в отдельном
периоде функционирования.
К настоящему времени ряд аспектов функционирова-
ния активных систем с зависимыми периодами уже на-'
чал исследоваться. Так, разрабатывалось понятие реше-
ний игры активных элементов в системе с повторяющи-
мися и зависимыми периодами, найдены решения игры
элементов при некоторых гипотезах о поведении [3]. От-
метим здесь только несколько существенных моментов,
освещение которых не требует детального рассмотрения
разбираемых ситуаций. Если механизм функционирова-
ния S системы задан и не изменяется от одного периода
функционирования к другому, то функционирование си-
стемы можно рассматривать как специальную многоша-
говую игру п активных элементов, целевые функции и
стратегии которых описываются (7.3). При заданных
принципах выбора рациональных стратегий П={П£} эле-
ментов множество решений игры активных элементов R
(т. е. множество рациональных стратегий элементов)
зависит от дальновидности N={N} и коэффициентов
87
дисконтирования 6={6г) элементов, а также от вида
ограничений й и У на стратегии элементов: /? = /?(?/, 6,
Q, У). С учетом этого критерий эффективности механиз-
ма функционирования в активной системе с повторяющи-
мися и зависимыми периодами функционирования стро-
ится следующим образом (предполагается, что центр
знает принципы выбора рациональных стратегий элемен-
тов) :
Л(2) =
= min min min [( min Ф (и (s), у)) (тахФ (и, г/))”1],
N^.mN усд £ £)е=Я(ДГ,6, Q.y) wet/'
где mN и т6 — множество возможных значений N и б с
точки зрения центра. После того, как определено реше-
ние игры активных элементов и задан критерий эффек-
тивности центра, уже нетрудно по описанной выше схеме
формально поставить задачи анализа и синтеза механиз-
мов функционирования в системе с повторяющимися за-
висимыми периодами. Результаты рассмотрения ряда мо-
делей такого рода приводились в [3].
Нужно сказать, что дополнительные трудности (как
для центра при исследовании и организации эффектив-
ного функционирования системы, так и для активных
элементов при выборе рационального поведения), возни-
кающие при наличии зависимости между отдельными
периодами функционирования, в значительной мере свя-
заны с трудностями «учета будущего» в критериях ак-
тивных элементов. В связи с этим представляется также
интересным рассмотрение механизмов функционирова-
ния, при которых при «связанных» периодах функциони-
рования принцип принятия решений элемента не зави-
сит (или слабо зависит) от способа учета «будущего» в
критерии элемента. В частности, к таким механизмам
функционирования относятся уже упоминавшиеся «про-
грессивные» механизмы функционирования [3], [23]. До-
казано, что при адаптивном способе формирования дан-
ных (или при встречном способе с сильными штрафами)
прогрессивные механизмы обеспечивают достоверную ин-
формацию о моделях элементов. Достаточные условия
«прогрессивности» механизмов функционирования при-
ведены в [3], [26]. Ряд простых примеров рассмотрен в
[3], [23], [26].
88
§ 8. Итеративные схемы управления
в активных системах
Под итеративными мы понимаем такие схемы, при
которых управляющие параметры на этапе планирова-
ния формируются путем организации многошаговой
(итеративной) процедуры с использованием на каждом
шаге дополнительной информации, запрашиваемой у
элементов нижнего уровня. При этом обязательным фак-
тором итеративных схем является то обстоятельство, что
этап реализации не поступает до тех пор, пока управ-
ляющие параметры в системе не будут окончательно
сформированы (см. схему, изображенную на рис. 2.6).
Рис. 2.6. Схема, иллюстрирующая один период функционирования
активной системы при итеративном способе формирования управ-
ляющих параметров.
В ряде работ [5], [11] и др. под итеративными пони-
маются также применяемые в системах с повторяющими-
ся периодами функционирования процедуры формирова-
ния управляющих параметров, использующие информа-
цию, полученную в предшествующих данному периодах
функционирования. Собственно, итеративный процесс
формирования управляющих параметров на этапе пла-
нирования в таких процедурах отсутствует, а термин ите-
ративное формирование управляющих параметров отве-
чает тому, что функционирование системы имеет
повторяющийся характер и на каждом такте функциони-
рования центр для формирования управляющих пара-
метров использует дополнительную информацию, полу-
ченную от элементов нижнего уровня в предшествую-
89
щих периодах функционирования. Такие процедуры
формирования управляющих параметров мы относим к
адаптивным (см. § 7). Как будет показано, игровые
описания функционирования систем при итеративных и
адаптивных процедурах формирования управляющих па-
раметров принципиально отличаются друг от друга, что,
понятно, приводит и к различным результатам функцио-
нирования. Ведущиеся в настоящее время в рамках тео-
рии активных систем исследования механизмов функцио-
нирования с итеративными схемами формирования
управляющих параметров направлены на разработку ме-
тодов игрового анализа и синтеза таких механизмов
функционирования. И хотя итеративные схемы управле-
ния изучаются сравнительно давно, здесь имеется боль-
шое число нерешенных принципиальных вопросов.
В общем виде закон формирования управляющих па-
раметров на Z-м шаге итеративной процедуры можно
представить следующим образом:
и1 = {u{(ul~\sl)}y /= 1,2, ..., L,
где s*«— информация, сообщаемая элементами для фор-
мирования управляющих параметров на Z-м шаге, L —
количество шагов, применяемое в итеративной процеду-
ре. В ряде итеративных схем число итераций L заранее
неизвестно, а определяется тем или иным условием оста-
новки (например, по критерию «близости» получаемых
на последовательных итерациях управляющих парамет-
ров).
Подставляя в целевые функции Д(иг-, yi) и ограниче-
ния на выбор их состояний Z,(ut) элементов управляю-
щие параметры иг, устанавливаемые на последнем шаге
итеративной процедуры, получаем следующие выраже-
ния для целевых функций элементов:
ft (tf, yi) = fi (uf-1 ... (и1 (u°, s1), . ..), sL) yi) =
= A(^L(u°, s1, s2, . . SL), yi)
и устанавливаемых центром ограничений:
Zi (и[) = Zi (и\ ... (и1 (и0, s1), ...), sL) =
= Zi (и°, s1, s2, ..., sL),
в отдельном периоде функционирования.
Игровая интерпретация функционирования системы
при заданном механизме функционирования S с итера-
90
тивной схемой формирования управляющих параметров
выглядит следующим образом. В каждом периоде функ-
ционирования (в каждой партии игры) отдельный ак-
тивный элемент делает (/>+1) ходов, а именно, первые
L ходов заключаются в сообщении информации s/eQ/,
/=1, 2, ..., L в рамках заданных ограничений й/, по-
следний (Л+1) шаг заключается в выборе при заданных
управляющих параметрах и? состояния из
множества возможных состояний. Цель элемента макси-
мизировать значение своей целевой функции (сравните с
записью целевого критерия элемента при адаптивном
способе формирования данных (7.3)):
fi(ut (u1, s1, s2, ..., sL), yi)-;—-j---------max.
(8.1)
Рассмотренную схему также необходимо дополнить опи-
санием информированности элементов. Так, например,
часто предполагается, что, делая Z-й ход, элемент распо-
лагает информацией о (/—1) предыдущих ходах или об
агрегатах от этой информации, входящих в его целевую
функцию. Таким образом, в игровом плане механизм ите-
ративного формирования управляющих параметров
представляется как достаточно сложная многошаговая
игра с фиксированной последовательностью ходов, при-
чем число ходов может быть заранее не задано и опре-
деляться посредством того или иного критерия останов-
ки. Теперь осталось определить решение описанной игры
активных элементов, и можно, аналогично тому, как мы
делали выше, ставить задачи анализа и синтеза механиз-
мов функционирования с итеративными схемами форми-
рования управляющих параметров.
Начиная с работ [26], [27]*), итеративным методом
формирования управляющих параметров (их еще назы-
вают методами декомпозиции) посвящалось большое чи-
сло публикаций. Обоснование сходимости и эффективно-
сти таких методов самым существенным образом опира-
ется на те или иные гипотезы о поведении подсистем при
сообщении информации sl, /=1, 2, ..., L. Правомерность
*) Здесь, видимо, правильнее сослаться на еще более ранние ра-
боты, в которых рассматривались итеративные схемы формирования
цен в децентрализованных экономических системах типа схем «аук-
ционера Вальраса» или «руки Адама Смита» [9],|[25].
91
такого подхода не вызывает никакого сомнения при ис-
пользовании итеративных методов для решения задач ма-
тематического программирования. Однако, если речь
идет о трактовке итеративных методов как методов пла-
нирования в двухуровневых организационных системах,
го вопрос об эффективности того или иного метода тре-
бует дополнительного критического рассмотрения. Так,
в литературе [3], [4], [29] указывалось по крайней мере на
два вопроса, требующих критического рассмотрения. Во-
первых, будут ли соответствовать положению дел в ре-
альных организационных системах те декретированные
целевые функции, которые предписываются элементами
в той или иной итеративной схеме. И, во-вторых, явля-
ются ли рациональными с точки зрения критериев (8.1)
принимаемые в тех или иных итеративных схемах гипо-
тезы о поведении элементов при сообщении информации.
Так, естественно предположить, что каждый элемент пре-
следует цель обеспечить «выгодное» значение устанав-
ливаемых центром управляющих параметров именно на
последней итерации. Понятно, что из такой гипотезы о
поведении элементов, вообще говоря, не следует, что эле-
менты будут сообщать на каждой итерации план, опти-
мизирующий их критерии на каждом шаге итеративной
процедуры, т. е. может не выполняться гипотеза о «ло-
кально-оптимальном» поведении элементов на каждой
итерации, которая лежит в основе обоснования сходимо-
сти и оптимальности итеративных схем формирования
управляющих параметров.
§ 9. Динамические модели ограничений
в активных системах
Как следует из названия, речь идет об активных си-
стемах, в которых модель ограничений системы меняется
от одного периода функционирования к другому. К тако-
го рода ситуациям может привести целый ряд факторов:
глобальные ограничения Угл (например, экзогенный ре-
сурс, конечный уровень производства) «связывают» сра-
зу несколько периодов функционирования; множества
Yh возможных состояний элементов изменяются (за счет
экзогенных факторов, научно-технического прогресса,
например) от одного периода функционирования к дру-
гому; множество Yh возможных состояний АС в текущем
k-м периоде зависит от множества возможных состояний
92
и состояний системы предыдущего (k — 1) периода функ-
ционирования УДУ*"1,
В исследовании функционирования активных систем
с динамическими моделями сделаны лишь первые шаги.
Так, показано (сначала на модели «План» [3], а затем и
в более общем случае (30]), что путем расширения про-
странства состояний системы можно перенести ряд ре-
зультатов, ранее полученных для статической модели,
на случай динамической модели. Там же рассматрива-
ется ряд проблем, связанных с использованием агрегиро-
ванного описания множеств взаимных состояний системы
в механизмах функционирования динамических моделей.
Уже упоминавшаяся проблема учета «дальновидности»
элементов возникает и в случае динамических моделей
активных систем. К возникновению этой проблемы мо-
жет привести, например, несовпадение дальновидностей
центра и активных элементов. Самостоятельной пробле-
мой является и выбор центром «горизонта планирова-
ния» (фиксированного или «скользящего»).
§10. Использование агрегированных планов
и агрегированного описания моделей
активных элементов. Многоуровневые системы
Методика распространения подхода теории активных
систем на указанные в названии параграфа случаи ча-
стично была рассмотрена в [3] и [31], [32] соответственно.
Переход к механизмам функционирования, использую-
щих ту или иную процедуру агрегирования, приводит к
необходимости решать дополнительно сложные, с мате-
матической точки зрения, задачи определения «ошибки
агрегирования». Некоторые оценки такого рода удалось
получить для случая полной информированности центра
о моделях активных элементов. Использование процедур
агрегирования информации в многоуровневых активных
системах рассматривалось в [31]. Случаи «идеального
агрегирования» рассматривались на примерах в [3], [32].
Следует отметить новый подход к определению оптималь-
ного «уровня агрегирования», впервые рассмотренный
на простой модели в [3]. Дело в том, что чем больше па-
раметров используется для описания моделей элементов,
тем точнее описание, но тем труднее управление (в том
смысле, что труднее обеспечить достоверность оценок
параметров, выполнение планов и вместе с тем высокую
93
эффективность функционирования системы). В свете
этих двух противоречивых условий существует оптималь-
ный уровень агрегирования, обеспечивающий максималь-
ную эффективность функционирования системы при ус-
ловии достоверности информации (в пределах ошибок
агрегирования). Некоторое обобщение этих результатов
[3] приведено в [30].
§ 11. Примеры практического применения
Перейдем теперь к рассмотрению некоторых при-
кладных работ по теории активных систем, которые ве-
дутся в настоящее время. Надо сказать, что область при-
ложений теории активных систем представляется нам
весьма обширной — это анализ и совершенствование ме-
ханизмов организационного управления, в том числе в
таких важных областях, как экономика и производство.
Конечно, говоря о современном состоянии теории актив-
ных систем, нужно иметь в виду, что развитая к настоя-
щему времени ее часть не покрывает существующих в
этом направлении проблем, хотя и позволяет уже сейчас
решить ряд важных практических задач. Так, при реше-
нии прикладных задач в ряде случаев удалось непосред-
ственно использовать уже полученные в теории активных
систем результаты по анализу и синтезу тех или иных
классов механизмов функционирования и составляющих
их частей. Наряду с этим приходится встречаться с си-
туациями, для которых исследования аналогов в теории
еще нет и решение практических задач требует парал-
лельного решения ряда новых теоретических задач и
дальнейшего развития теории.
1. Применение теории активных систем в АСУ ТП
(применительно к отрасли черной металлургии). Рабо-
ты проводятся в творческом содружестве Западно-Сибир-
ским металлургическим заводом, Институтом проблем
управления и Сибирским металлургическим институтом.
Анализ систем контроля и формирования технологической
информации в металлугическом производстве пока-
зал, что качество формируемой человеком-оператором
технологической информации существенно зависит от
системы моральных и материальных стимулов [33]. Недо-
оценка этого фактора может привести и приводит к сни-
жению эффективности функционирования АСУ ТП. С ис-
пользованием результатов теории активных систем по
94
стимулированию достоверной информации [3], [5], [32], [37]
были разработаны процедуры оценки качества информа-
ции и соответствующая система штрафов и поощрений.
Другой пример приложений связан с организацией че-
ловеко-машинного взаимодействия в системах типа «со-
ветчик оператора» [34]. Внедрение таких систем зачастую
сопровождалось чисто административной привязкой че-
ловека к машинной системе, и эффект от внедрения та-
ких систем достигался далеко не всегда. В качестве одно-
го из вариантов организации эффективной работы было
предложено при разработке систем типа «советчик опе-
ратора» предусматривать организацию сравнительного
анализа качества решений, реализованных человеком-
оператором, и решений, выработанных УВМ с последую-
щим поощрением за качество решений оператора по срав-
нению с решениями машины.
Третий пример применения теории активных систем
в черной металлургии относится к анализу процедур фор-
мирования нормативной информации для выработки за-
даний и расписаний участка «сталь-прокат» металлурги-
ческого завода [35], [36].
Названные предложения были использованы в ряде
разработанных и внедренных на Западно-Сибирском ме-
таллургическом заводе и Карагандинском металлургиче-
ском комбинате систем автоматизированного управ-
ления.
2. Применение теории активных систем для анализа
хозяйственного механизма и оценки экономических экс-
периментов в строительстве. Разработки, выполняемые
Институтом проблем управления в этом направлении,
входят составной частью в работы, проводимые НИИ’
экономики строительства при Госстрое СССР и Институ-
том экономики УНЦ АН СССР по анализу хозяйственно-
го механизма в строительстве, разработке рекомендаций
по его совершенствованию, подготовке и проведению со-
ответствующих экономических экспериментов. Предла-
гается использование теории активных систем в решении
следующих проблем. Прежде всего это составление фор-
мализованного описания действующего в строительстве
хозяйственного механизма, в том числе методов плани-
рования, механизмов формирования финансовых пото-
ков, финансовых ограничений и ограничений, связанных
с плановыми показателями на деятельность строительно-
монтажных организаций, действующей системы эконо-
95
мического стимулирования, экономических показателей
оценки деятельности строительно-монтажных организа-
ций. В основу такого описания положены схема описания
механизма функционирования двухуровневой активной
системы, имеющийся опыт формирования описаний фи-
нансовых потоков (применительно к задаче экономиче-
ского планирования промышленности [38], [39]) и дейст-
вующие в строительстве нормативные положения [40].
Наличие указанного описания позволяет применять
формальные методы теории активных систем для анали-
за действующего хозяйственного механизма и оценки тех
или иных предложений по его изменению (например,
[41]), разрабатывать механизмы согласования экономи-
ческих интересов участников инвестиционного процесса
в строительстве, оценивать уже предложенные механиз-
мы такого рода (см., например, [3], [42], [43]).
3. Оценка эффективности и разработка рекомендаций
по совершенствованию механизмов распределения вод-
ных ресурсов. Исследование механизмов распределения
водных ресурсов проводится Институтом проблем управ-
ления совместно с Институтом технической кибернетики
БАН на примере системы распределения водных ресур-
сов Народной Республики Болгарии. Суть проблемы за-
ключается в разработке рекомендаций по совершенство-
ванию механизма водораспределения, стимулирующих
экономное использование водных ресурсов, сообщение
объективных заявок потребностей на воду и оптимальное
распределение водных ресурсов. На основе теории актив-
ных систем предложен ряд принципов согласованного
распределения с использованием механизма цен и ана-
логичных стимулирующих механизмов типа штрафов за
потребление воды сверх определенного норматива или
премии за экономию воды. Эти механизмы аналогичны
рассмотренным в ряде работ, посвященных задаче рас-
пределения ресурсов [3], [32], (44]. Следует отметить ори-
гинальный принцип распределения водных ресурсов, не
использующий ни механизма цен, ни системы штрафов и
премий, но обеспечивающий тем не менее сообщение до-
статочно объективных заявок и равенство «спроса и
предложения» (принцип обратных приоритетов). Идея
заключается в распределении ресурсов обратно пропор-
ционально величине заявки. Обоснование такого принци-
па состоит в том, что чем больше просит потребитель
воды, тем меньше его потери на единицу неполученного
96
количества. Доказано, что в ситуации равновесия каж-
дый потребитель заказывает не больше необходимого ко-
личества и общая сумма заказов равна имеющемуся ко-
личеству водных ресурсов.
4. Планирование НИР. При составлении плана науч-
но-исследовательских работ за основу принимается важ-
ность тематики и затраты на ее успешное выполнение.
Оценка затрат на выполнение темы, как правило, произ-
водится непосредственно исполнителями данной темы
(например, заведующим лабораторией, которой поруче-
но выполнение 1соответствующей работы). На основе
принципа согласованного управления [3], [45] были раз-
работаны предложения по совершенствованию «системы
планирования и стимулирования НИР [46].
Описанный механизм прошел экспериментальную про-
верку путем проведения деловой игры «Назначение
НИР» [45], принято решение об эксперименте в реальных
условиях.
5. В настоящее время ведутся работы по применению
методов теории активных систем для совершенствования
отраслевой системы планирования и стимулирования вы-
пуска новой техники. Для применения в учебных целях
разработан комплекс деловых игр («План», «Проект»,
«Ресурс», «Ремонт», «Соревнование», «Качество», «Сте-
пень централизации» и др. [47]—[49]), успешно приме-
няемых во многих вузах и институтах повышения квали-
фикации.
Литература к главе 2
1. Трапезников В. А. Человек в системе управления.— Авто-
матика и телемеханика, 1972, № 2,.с. 5—16.
2. Н е м ч и н о в В. С. Социалистическое хозяйствование и плани-
рование производства.— Коммунист, 1964, № 5, с. 40—48.
3. Б у р к о в В. Н. Математические основы теории активных си-
стем. М.: Наука, 1977.
4. Б у р к о в В. Н., К о н д р а т ь е в В. В., Молчанова В. А.,
Щепкин А. В. Модели и механизмы функционирования иерар-
хических систем (обзор).— Автоматика и телемеханика, 1977,
№ 11, с. 106—131.
5. Бурков В. Н., Кондратьев В. В. Двухуровневые актив-
ные системы. I, II, III.— Автоматика и телемеханика, 1977, № 6,
с. 64—72, № 7, с. 62—70, № 9, с. 83—91.
6. Месарович М., МакоД., Такахара И. Теория иерар-
хических многоуровневых систем; пер. с англ.— М.: Мир, 1973.
7. Багриновский К. А. Основы согласования плановых реше-
ний.— М.: Наука, 1977.
4 Под ред. И. Н. Моисеева 97
8. Бусыгин В. П. Об одном подходе к анализу проблем согла-
сования решений в двухуровневой системе моделей.— В кн.: Мо-
делирование внутренних и внешних связей отраслевых систем.
Новосибирск: Наука, СО АН СССР, 1978, с. 52—64.
9. Интриллигатор М. Математические методы оптимизации
и экономическая теория; пер. с англ.— М.: Прогресс, 1975.
10. Емельянов С. В., Бурков В. Н. Теория активных систем
(обзор).— В кн.: Согласованное управление.— М.: Изд. Институ-
та проблем управления, 1975, с. 3—39.
11. Волконский В. А. Оптимальное планирование в условиях
большой размерности (итеративные методы и принцип декомпо-
зиции).— Экономика и математические методы, 1965, т. 1, № 2,
с. 195—219.
12. П олтеров и ч В. Н. Блочные методы вогнутого программиро-
вания и их экономическая интерпретация.— Экономика и мате-
матические методы, 1969, т. 5, № 6, с. 865—876.
13. Гермейер Ю. Б., Моисеев Н. Н. О некоторых задачах
теории иерархических систем управления.— В кн.: Проблемы
прикладной математики и механики.— М.: Наука, 1974, с. 30—43.
14. Моисеев Н. Н. Информационная теория иерархических си-
стем.— В кн.: Труды Всесоюзной школы-семинара по управле-
нию большими системами (1972).— Тбилиси: Мецниереба, 1973,
с. 88—136.
15. Моисеев Н. Н. Элементы теории оптимальных систем.— М.:
Наука, 1977.
16. В и г к о v V. N., К о n d г a t i е v V. V. The degree of control cen-
tralization in organization systems.— Prace Naukowe Instytutu
Technicznej Politechniki Wroclawskiej, 1976, № 38, Seria «Konfe-
rencje», № 10, International Conference on Systems Seience III
(Anstract of papers), Wroclaw, Wydawnictwo Politechiki Wroclaw-
skiej, p. 27—29.
17. Бурков В. H., Кондратьев В. В. Синтез оптимальных
механизмов функционирования активных систем.— В кн.: VII
Всесоюзное совещание по проблемам управления. Тезисы докла-
дов, книга II.— Москва, Минск: Изд. института проблем управ-
ления и Института технической кибернетики, 1977, с. 37—41.
18. Burkov V. N., Kondratiev V. V., Molchanova V. А.
On the centralization and decentralization of recource allocation
mechanisms in active systems.— Prace Naukowe Instytutu Cyber-
netiki Technicznej Politechniki Wroclawskiej, 1977, № 9, seria
«Konferencje», № 6, International Conference «Management of Re-
search, Development and Education», Wroclaw, Wydawnictwo Po-
litechniky Wroclawskiej, p. 33—44.
19. В u r k о v V. N., К о n d r a t i e v V. V. On the centralization deg-
ree of functioning mechanisms of two-level systems.— Prace Nau-
kowe Institutu Cybernetiki Technicznej Politechniki Wroclawskiej,
Systems Science, 1977, v. 3, № 3, p. 255—272.
20. Молчанова В. А., Щепкин А. В. Сравнительный анализ
законов открытого управления замкнутой моделью экономической
системы.—Автоматика и телемеханика, 1977, № 10, с. 100—109.
21. Burkov V. N., Kondratiev V. V. Design of optimal mecha-
nisms for active systems. In: A link between science and applica-
tions of automatical control, Preprints of the Seventh Triennial
World Congress of the International Federation of Automatic Con-
trol. 1978, Published for the International Federation of Automati-
98
cal Control by Pergamon PRESS, OXFORD, NEW YORK, TO-
RONTO, SYDNEY, PARIS, FRANKFURT, p. 1379—1383.
22. Цвиркун А. Д. Структура сложных систем.— M.: Советское
радио, 1975.
23. Бурков В. Н. Теория активных систем — Prace Naukowe In-
stytutu Cybernetiki Technicznej Politechniky Worclawskie, Systems
Science. 1976, v. 2, № 1—2, p. 23—55.
24. К о n d r a t i e v V. V., Molchanova V. A. On analysis of
functioning mechanisms of active systems with dependent ele-
ments.— Prace Naukowe Justitutu Cybernetiki Techniszhej Poli-
techniki Wroclawskiej. 1977, № 47, seria «Konferencje», № 14, In-
ternational Conference on Systems Science V (Abstractof papers),
Wroclaw, Wydawnictwo Politechniki Wroclawskiej, p. 74—75.
25. H и к а й д о X. Выпуклые структуры и математическая экономи-
ка; пер. с англ.— М.: Мир, 1972.
26. Кондратьев В. В. Согласованное планирование в активных
системах при адаптивном способе формирования данных.—Вкн.:
Согласованное планирование.— М.: Изд. Института проблем уп-
равления, 1975, с. 40—56.
27. Данциг Дж. Линейное программирование, его применение и
обобщение; пер. с англ.,—М.: Прогресс, 1966.
28. К о р н а и И., Л и п т а к Т. Планирование на двух уровнях.—
В кн.: Применение математики в экономических исследованиях,
т. 3,— М.: Соцэкгиз, 1965, с. 48—61.
29. В а т е л ь И. А., Моисеев Н. Н. О моделировании хозяй-
ственных механизмов.— Экономика и математические методы,
1977, т. XIII, № 1, с. 16—30.
30. К о н д р а т ь е в В. В., Щепкин А. В. Динамические актив-
ные системы с дискретными периодами функционирования.—
В кн.: Первая Международная конференция молодых ученых.
«Проблемы проектирования и применения дискретных систем в
управлении». Тезисы докладов.— М.: Изд. АН СССР Совета мо-
лодых ученых г. Москвы, напечатано ВИНИТИ, 1977, с. 402—404.
31. Бурков В. Н., Ен а лее в А. К., Кондратьев В. В. Трех-
уровневые активные системы.— В кн.: VI Международный сим-
позиум «Прикладные проблемы больших систем управления»;
сборник резюме.— Приморское изд. Института технической ки-
бернетики БАН, 1977, с. 46—47.
32. Бурков В. Н., О п о й ц е в В. И. Метаигровой подход к управ-
лению иерархическими системами.— Автоматика и телемехани-
ка, 1974, № 1, с. 103—114.
33. Авдеев В. П. и др. О формировании первичной информации
в активных системах управления металлургическими объекта-
ми/Авдеев В. П., Кулаков С. М., Берлин А. А., Парпаров Я. Г.,
Мышляев Л. П., Изаак К. И.— В кн.: Труды Всесоюзной школы-
семинара по управлению большими системами (1974).— Тбили-
си: Мецниереба, 1976, с. 118—124.
34. А в д е е в В. П. и др. Оперативный анализ и стимулирование
человеко-машинного взаимодействия в промышленных систе-
мах/Авдеев В. П., Белостоцкий А. А., Берлин А. А., Мышля-
ев Л. П., Соловьев В. И.— Приборы и системы управления, 1978,
№ 1, с. 10—12.
35. Кулаков С. М., Зимин В. В., Курильщиков а Г. И.
Оценивание нормативных характеристик производственных эле-
ментов активной системы.— В кн.: Труды IV Всесоюзного сове-
4* 99
щания «Статистические методы теории управления»; тезисы док-
ладов.— М.: Наука, 1978, с. 64—65.
36. Кулаков С. М., Зимин В. В., Курилыцикова Г. И.
Формирование нормативной информации в системе оперативного
планирования.— Известия вузов. Серия «Черная металлургия»,
1978, № 2, с. 30—35.
37. Ивановский А. Г. Задачи стимулирования и получения объ-
ективных данных в активных системах.— Автоматика и телеме-
ханика, 1970, № 8, с. 112—118.
38. Д ю к а л о в Ю. Н., И л ю т о в и ч А. Е. Математическое описа-
ние финансовых потоков в задаче экономического планирова-
ния.— Автоматика и телемеханика, 1972, № 10, с. 130—137.
39. Д у б о в с к и й С. В. и др. Математическое описание элементов
экономики. Ч. I, П./Дубовский С. В., Дюкалов А. Н., Ива-
нов Ю. Н., Илютович А. Е., Токарев В. В., Уздемир А. П., Фат-
кин Ю. М.— В кн.: Проблемы прикладной математической эко-
номики.— М.: изд. Института проблем управления, 1973.
40. Хозяйственная реформа в строительстве. Сборник официальных
материалов.— М.: Стройиздат, 1976.
41. Кондратьев В. В., Прокопенко А. А. Планирование сро-
ков строительства и экономическое стимулирование сдачи объек-
тов в срок и досрочно.— В кн.: II Московская городская науч-
но-практическая конференция «Проблемы совершенствования на-
учно-техническим прогрессом в свете решений XXV съезда
КПСС».— М.: изд. Московского городского совета НТО, 1979,
с. 43—44.
42. Спектор М. Д. Организации промышленного производства —
экономическую основу.— Промышленное строительство, 1976,
№ 5, с. 25—32.
43. С п е к т о р М. Д. Организационно-экономические основы комп-
лексной оптимизации процессов строительства; препринт.—
Свердловск: изд. Института экономики УНЦ АН СССР, 1978.
44. Бурков В. Н., Кондратьев В. В. Квазиоптимальность
принципа открытого управления в задаче распределения ресур-
сов.— В кн.: VI Всесоюзное совещание по проблемам управле-
ния. Рефераты докладов. Ч. I.— М.: Наука, 1974, с. 357—460.
45. И в а н о в с к и й А. Г. Задача согласованного планирования двух
отраслей.— В кн.: Системы управления.— М.: Наука, 1973,
с. 135—137.
46. Киселев В. Е., Немцева А. Н. Применение игрового мо-
делирования в задаче планирования научных исследований и раз-
работок.— В кн.: Научная организация труда и управления в
НИИ и проектных учреждениях.— Материалы семинара.— М.:
изд. МДНТП, 1977, с. 80—85.
47. Немцева А. Н. Деловая игра «Назначение НИР». В кн.: Те-
зисы докладов Ленинградской научно-технической школы «Опыт
применения активных методов обучения управлению».— Ленин-
град: изд. ИПКсудпром, 1978, с. 44—46.
48. Бурков В. Н., Ивановский А. Г., Немцева А. Н., Щ е п-
кин А. В.— В кн.: Организация и проведение деловых игр (ме-
тодические материалы).— М.: изд. Института проблем управле-
ния, 1975.
49. Бурков В. Н., И в а н о в с к и й А. Г., Немцева А. Н.,
Щепкин А. В.— В кн.: Деловые игры; препринт.— М.: изд.
Института проблем управления, 1977.
ГЛАВА В
АКСИОМАТИЧЕСКИЙ ПОДХОД
К ПРИНЦИПАМ ОПТИМАЛЬНОСТИ
Проблема принципов оптимальности в математике яв-
ляется сравнительно новой. Она возникла вместе с рас-
пространением нормативного подхода в социальных
науках и широким распространением оптимизационных
методов решения практических задач, по существу, в по-
слевоенное время. Рассмотрение хорошо определенных
задач управления в технике и задач принятия технико-
экономических решений сводилось к нахождению опти-
мума функции, выражавшей качество управления или
решения, а в отдельных случаях к нахождению максиму-
ма по заданному предпочтению — линейному порядку на
множестве альтернатив. В этих простейших задачах при-
нятия решения вопрос — что такое хорошо — не вставал.
Однако более поздние приложения математики, осо-
бенно в социальной области, привели к таким задачам
принятия решений, в которых либо выбор альтернативы
ведет к неопределенным исходам (стратегическая неоп-
ределенность, незнание состояния природы), либо каче-
ство самих исходов определено не полностью (векторные
критерии, дележ общей полезности, групповые решения
и др.). В обоих случаях из-за неполноты информации о
качестве альтернатив выбора задача становится опреде-
ленной в обычном математическом смысле лишь после
того, как указан принцип оптимальности.
Пусть Q ;— некоторый класс задач принятия решений
G(X) с множествами альтернатив X, Под принципом
оптимальности тогда понимается отображение ср, каждо-
му GeQ ставящее в соответствие множество cp(G)czX
оптимальных альтернатив. Множество <p(G) будем так-
же называть (оптимальным) решением задачи G. Для
конкретных классов задач определение решения будет
видоизменяться и уточняться.
101
В изучении проблем оптимальности особое место за-
нимает аксиоматический подход. Наряду с традиционной
функцией «наведения порядка» и формирования основ
теории аксиоматический подход исполняет функцию ме-
тода изучения новых классов задач и создания новых по-
нятий. Трудно себе представить другой подход, который
позволил бы определить «справедливое», «равное» и т.п.,
чем аксиоматический.
Аксиоматический подход к проблеме оптимальности
состоит в том, что отображение ф задается не в явном
виде, а посредством своих функциональных и других
свойств (аксиом). Аксиомы обычно определяют, как дол-
жны изменяться решения при изменении параметров за-
дачи, каким должно быть решение в частных случаях
или какими должны быть его глобальные свойства.
В настоящей главе обозреваются все наиболее изве-
стные виды задач и соответствующие им аксиоматиче-
ские определения решений. Но мы не ставим своей целью
дать какую-то мета-теорию аксиоматики 'принципов оп-
тимальности, а ограничиваемся их перечислением и ука-
заниями на сходство аксиом, на используемые и возмож-
ные принципы построения аксиоматических систем и т. п.
Такой обзор, надеемся, будет полезным сам по себе, ибо
позволит лучше проникнуть в проблематику оптималь-
ности, давая пищу для различных аналогий и гипотез.
Весьма полный обзор теоретико-игровых принципов опти-
мальности содержится в [7], а нестратегических — в [6].
§ 1. Оптимальность
при стратегической неопределенности
В стратегических играх двух или более лиц неопре-
деленность задачи принятия решения для любого игрока
i^N возникает из-за того, что исход игры определяется
не только его выбором (стратегий) а и стратегия-
ми, выбранными независимо от него другими игроками,
т. е. выигрыш игрока i есть функция f<, определенная на
множестве ситуаций (мы ограничиваемся
конечным п). Такая задача принятия решений записы-
вается как набор
G = {N,{Xl}lsN,{h}[^N> (1.1
и называется бескоалиционной игрой. Рассмотрим сна-
чала частный случай этой игры.
102
Антагонистическая игра. Пусть имеются только два
игрока и fi = —f2=f- Будем пользоваться традиционными
обозначениями Х{=Х, X2=Y. Стратегия х доминируется
стратегией х', если f(x, y)^f(x', у) для всех y^Y. Ана-
логично определяется доминирование стратегий второго
игрока. Приведем сначала аксиоматическое определение
оптимального выигрыша (значения игры).
Обозначим через <p(G) оптимальный выигрыш (пер-
вого игрока) в игре G и сформулируем его основные
свойства в виде следующих аксиом.
В1. Если две игры G и G' отличаются лишь домини-
руемыми стратегиями первого игрока, то <p(G) =
= ф(С/).
В2. Если игра G' получается из игры G перестановкой
игроков вместе с множествами стратегий, то <p(G) =
= —ф(С').
ВЗ. Если для двух игр G и G' с одинаковыми множе-
ствами стратегий у каждого игрока и функциями выиг-
рышей f и f' неравенство f(x, y)^f'(x, у) выполняется
для всех (х, у) то ф(G) (Gz).
В4. Если в игре G множество XxY состоит из един-
ственного элемента (х, у), то ф(С) = f(x, у).
В классе антагонистических игр с ограниченной функ-
цией выигрыша и с оптимальными стратегиями у обоих
игроков аксиомы В1—В4 определяют значение игры
(для матричных игр доказательство см. в [4], здесь оно
вполне аналогично). Аксиомы В1—В4, кроме того, не-
зависимы.
Другую систему аксиом для матричных игр предло-
жил Дж. Милнор [11]. Аксиомы Милнора не учитывают
второго игрока явно, поэтому применимы не только к
антагонистическим играм. Упоминание об этом будет не-
сколько ниже.
Аксиоматику Милнора можно «исправить» следующим
образом. На множестве стратегий первого игрока X введем
транзитивное бинарное отношение >-, зависящее от пара-
г
метров игры Г. Оптимальной будем считать стратегию,
максимальную по отношению >~. Для семейства отношений
г
сформулируем следующие аксиомы.
Ml. Если f (%, #)> f (х', у) для всех у€=У, то х^х'.
г
103
Если все неравенства строгие, тох>-х', т. е. х>- х' и
Г г
не выполняется х' >- х.
М2. Если игра Г' получается из игры Г присоединени-
ем новой стратегии х с произвольными значениями
f(x, у), то из x^xf должно следовать х>л/ для всех
Г Г'
х, х'^Х.
В*3. Если игра Г' получается из игры Г вычеркивани-
ем доминируемой стратегии второго игрока, то из х^х'
Г'
должно следовать х ^х'.
г
Аксиомы Ml и М2 (первая в части строгого доминиро-
вания) использовались Милнором и соответственно на-
зывались аксиомами монотонности и присоединения
строки. По существу Ml совпадает с В1. Вместо осталь-
ных четырех аксиом Милнора мы используем вполне ес-
тественную новую аксиому В*3.
Теорема 1. Аксиомы Ml, М2, и В*3 определяют
единственный принцип оптимальности — максимин.
Доказательство. Пусть (х*, у*)—пара максиминных стра-
тегий, т. е. f(x, у) для всех хеХ, г/еУ, а х—
любая немаксиминная стратегия первого игрока.
Рассмотрим игру Г1, в которой у первого игрока лишь две стра-
тегии х* и х, у второго — множество У, а функция выигрыша та же.
Из определения пары (х*, у*) следует, что все у, для которых
f(x, #)>vair (значение игры Г), доминируются в Гь Положим
У°={у: f(x, #)^val Г}
и обозначим через Г2 игру, отличающуюся от Г1 лишь тем, что У за-
менено на У0. Тогда
f(x, У) ^val T^f(x*, у) для всех у^У°, (1.2)
откуда, применяя Ml, получаем х*> х. Ввиду доминирования всех
г2
у ЕЕ У\У° по В*3 это дает х* > х, и по М2 имеем х* > х.
Гх Т
Пусть и наоборот, х> х*, т. е. не х* > х. Рассмотрим вспомога-
F г
тельную стратегию г', для которой
[(*',У) = ^(п\Г + !(Х,уУ), у^уо,
и игру Г3 со стратегиями х и х' у первого игрока и У0—у второго.
Тогда в силу (1.2)
f (*'» f (X, у) для всех у е У0, (1.3)
104
причем те у, для которых достигается равенство, будут до минироваться
в Г3, так как из немаксиминности х следует существование такого
уЕ1У°, что /(х, у) < val Г. Поэтому по аксиомам Ml и В*3 имеем
х' >> х, а следовательно и х' > х. Из транзитивности отношения > и
Гз Г Y
х > х* тогда следует х' > х*. Но на самом деле в силу (1.2) и (1.3)
F г
и аксиомы Ml имеем х* > х'. Противоречие. Единственность доказана.
Т"
Согласованность аксиом следует из того, что принцип максимина
им, очевидно, удовлетворяет.
Равновесие. Наиболее известным понятием решения
для бескоалиционных игр многих лиц являются ситуации
равновесия. Для игры (1.1) ситуация х* называется си-
туацией равновесия [13], если для всех i<=N и всех
XjGEiXi
A(**)>A(X‘N,
где х’|х4 означает ситуацию х* с измененной i-й компо-
нентой Хс на хй
Ситуации равновесия дают оптимальные исходы не
только в смысле их величины, но также в смысле их ус-
тойчивой реализации при независимых действиях игро-
ков.
Обозначим через f(x) вектор выигрышей (/\(х), ...
..., fn(x)) и будем считать их различными при различ-
ных х. Определим <p(G) как множество векторов опти-
мальных выигрышей.
1. Доминирование стратегии. Если f(x*)ecp(G), то
стратегия х± не доминируется строго любой другой стра-
тегией первого игрока.
2. Симметрия. Пусть л — любая перестановка игро-
ков, а лД nG — соответствующие перестановки компо-
нент вектора выигрышей и всей игры. Тогда из f(x)e
^cp(G) следует nf(x) еср (лG).
Для фиксированных N, {X} и {fj и любого х'^Х
обозначим через G(x*) игру, в которой выигрыши Д всех
игроков заменены на //, причем
fi'(x,|xf)=fi(x,|x1)
для всех х^Х{ и всех i^N. Игру G(x*) будем называть
^-трансформацией игры G.
3. Устойчивость. Если f (x*)e<p(G), то f (x*)ecp(G(x*))
для любой ^’-трансформации игры G.
105
Смысл первых двух аксиом очевиден. Несколько слов
о последней. При .^-трансформации выигрыши игрока
изменяются произвольно для ситуаций х#=х*|х< и в силу
аксиомы 3 становятся несущественными по сравнению с
выигрышами в ситуациях х*|х<, т. е. поведение игрока
определяется именно выигрышами в последних, как буд-
то стратегии остальных игроков были бы фиксирован-
ными.
На классе всех бескоалиционных игр, для которых си-
туации равновесия существуют, множества X компакт-
ны, а функции fi(x\Xi) непрерывны по х^Х{ для каж-
дого х^Х, аксиомы 1—3 определяют отображение <р,
каждой игре G ставящее в соответствие множество си-
туаций равновесия игры G [5].
§ 2. Оптимальность при незнании
Необходимость аксиоматического подхода особенно
очевидна для задач принятия решений при незнании,
ибо при незнании прогнозировать полезность принимае-
мых решений невозможно в принципе и, следовательно,
рациональность перестает быть основой оптимальности.
Если же за основу брать такие понятия, как справедли-
вость, равенство и т. п., то прежде всего надо их форма-
лизовать, что удобнее всего сделать при помощи аксиом.
Неудивительно поэтому, что первые аксиоматические
определения решений появились именно для задач при
незнании.
Арбитражное решение Нэша. Пусть задано выпуклое
множество U возможных распределений u=(ulf ...
... , ип) полезности п индивидам. Требуется (арбитру)
выбрать такое распределение, которое можно было бы
назвать справедливым. В множестве U выделена точка
status quo й, обозначающая распределение, при котором
останутся индивиды в случае несогласия с решением
арбитра. Решение Нэша определяется как однозначное
отображение, каждой задаче (С/, й) ставящее в соот-
ветствие некоторое ср(£/, й)е£7, удовлетворяющее сле-
дующим аксиомам.
Н1. Если (£7, й) трансформируется в (£7', й') при
помощи возрастающей линейной вектор-функции L, то
<р(£7', й') =Lq(U, й).
106
Н2. В U нет такого u=/=tp(U, й), чтобы u^xp(f/, й)
(неравенство понимается покомпонентно). Кроме того,
ср (67, й)>й.
НЗ. Если для двух задач ([/, й) и (U', и') выполня-
ются условия U'czU и ср (67, й)^67', то <р(С7Л, и') =
= ф(67, й).
Н4. Пусть л — произвольная перестановка компо-
нент вектора и. Если йг=й5, Д /=1, . .., м, и nu^U
&ля всех u<=U и всех л, то фг-(67, й)=ф;([/, й), i, j=
= 1, .. ., п.
Эти аксиомы довольно хорошо известны, подробное
их обсуждение можно найти в книге [9], поэтому мы
на них не остановимся. Теорема Дж. Нэша [12] гласит:
существует единственное однозначное отображение ф,
удовлетворяющее аксиомам Н1—Н4, причем ср(67, й)
максимизирует на U функцию
п
П (Ui —Ui).
1=1
Одну модификацию аксиом Нэша предложил
Б. И. Бутрим [2].
Игры против природы. Элегантное аксиоматическое
исследование игр против природы провел Дж. Милнор
[11]. В упомянутой книге [9] можно найти обсуждение
аксиом и определения принципов оптимальности Лапла^
са, Гурвица, Сэвиджа, Вальда и одного чисто теорети-
ческого принципа.
Здесь мы кратко рассмотрим менее известную аксио-
матику К. Эрроу и Л. Гурвица ?[22]. Пусть задача при-
нятия решения задана в виде G = <X, Q, {/ш(х)}>., где
X — множество альтернатив, Q — множество индексов
функций полезности (состояний природы), a Д>(х) —
сама функция полезности на X при (неизвестном) состоя-
нии природы оей. Будем говорить, что задача G'=
= (Х, Q', {До} X получается из задачи G путем удаления
повторяющихся функций полезности, если для любого
найдется такое со'ей', что fo(x)=.f^(x) для
всех х^Х. Рассмотрим класс задач, вместе с каждой
задачей содержащий задачу с удаленными повторяющи-
мися функциями полезности и такой, что для каждой за-
дачи существуют штДДх) и тахДДх) для всех х^Х.
со со
Обозначим через <p(G) множество оптимальных аль-
тернатив для задачи G и сформулируем его аксиомы.
107
ЭГ1. Если для двух задач 01={Х^ й, {/ш}> и Gz—
= <Х2, Й, {fw}> выполняются условия XiCzX и Л\Г1
Пф(О2) #=0, то <p(Gi) =А'1Пф(С2).
ЭГ2. Множество <p(G) не меняется от перестановки
элементов множества й.
ЭГЗ. Множество <p(G) не меняется от удаления по-
вторяющихся функций полезности.
ЭГ4. Если xecp(G), х'^Х и ДДх) ^ДДх') для всех
соей, то x'^(p(G). И наоборот, если x^cp(G), х'^Х и
/Дх) ^/Дх') для всех шей, то х'е£ф(О).
Все эти аксиомы в той или иной форме уже встреча-
лись. Первая аксиома является обобщением аксиомы
Нэша НЗ независимости от несущественных альтерна-
тив для случая неоднозначного принципа оптимально-
сти. Вторая — некоторый вариант аксиомы симметрии.
Третью можно сравнить с аксиомой В*3 вычеркивания
доминируемых стратегий второго игрока. Четвертая —
некоторый аналог аксиомы доминирования Ml, а также
аксиомы Н2 оптимальности по Парето.
Эрроу и Гурвиц получили следующий результат (не-
сколько упрощенное доказательство см. в [6]): для того
чтобы cp(G) удовлетворяло аксиомам ЭГ1—ЭГ4, необ-
ходимо и достаточно, чтобы
Ф (G) = {х: (min (х), max (х)) >-
СО (О
>- (min До (х'), max Д, (х')) для всех х' е X},
С) (О
где >» — любое упорядочение пар числе (пг, М), т^М,
удовлетворяющее соотношению
пг^пг^ М1)^(т2, М2).
Из этого результата следует, что решение <p(G) со-
стоит, вообще говоря, не из одной альтернативы. Реше-
ние неоднозначно и в том смысле, что <p(G) не одно.
Каждому упорядочению > (существование таких упо-
рядочений очевидно) соответствует свое q>(G), причем
чем неопределеннее упорядочение (больше эквивалент-
ных максимальных пар (пг, Л4)), тем больше множество
<p(G). Но главное,— что при выполнении указанных
аксиом определение оптимальности многокритериальной
задачи сводится к определению оптимальности для за-
дачи с двумя критериями minf«,(x) и тахД>(х).
(О (О
108
Об аксиоматическом подходе в задачах многоцелевой
оптимизации см. гл. 4.
Групповые решения. Под задачей принятия группо-
вого решения понимается набор (N, X, {>г}<ея), где
N — множество индивидов, X — множество альтернатив
и — предпочтееие индивида на этом множестве. Тре-
буется построить групповое предпочтение на X.
Обычно принимается, что множество X состоит из ко-
нечного числа т^2 элементов. В этой задаче мы не
знаем принципа, по которому следует выбирать
Правило группового выбора, т. е. принцип оптималь-
ности для задачи принятия группового решения, первым
аксиоматически определил К. Эрроу [21]. Аксиомы Эр-
роу хорошо известны [9], как и соответствующий ре-
зультат, называемый парадоксом Эрроу. Поэтому не
будем их разбирать, а вместо этого приведем другой, по-
ложительный, результат — аксиоматическое определе-
ние правила простого большинства.
Правило простого большинства является единственным
правилом, удовлетворяющим следующим аксиомам [10].
Ml. При любом наборе индивидуальных упорядоче-
ний правило указывает единственное предпочтение меж-
ду альтернативами каждой пары.
М2. Групповое предпочтение не зависит от обозначе-
ний индивидов.
М3. Групповое предпочтение не зависит от наимено-
вания альтернатив.
М4. Если для некоторого набора индивидуальных
предпочтений имеем x^Ny, а в другом наборе один ин-
дивид меняет свое предпочтение в пользу х, в то время
как остальное не меняется, то для нового набора долж-
но быть x^>Ny.
Теория групповых решений, в которой аксиоматиче-
ский подход явно преобладает, богата результатами
[16], имеющими определенное значение и для других
классов принятия решений при незнании. Это видно хотя
бы из того, что аксиомы правила простого большинства
имеют много общего с аксиомами других решений.
§ 3. Оптимальность в кооперативных играх
Хотя аксиоматические принципы оптимальности для
кооперативных игр попадают по содержанию (если ко-
алициям не приписывать соответствующие стратегии)
109
в класс принципов при незнании, мы все же рассмотрим
их отдельно ввиду специфики самих моделей. Будем
рассматривать кооперативные игры в форме характери-
стической функции, т. е. под игрой будем понимать функ-
цию v(/Q, определенную на множестве всех подмно-
жеств (коалиций) К множества игроков {1, ..., п}.
Кооперативная игра служит моделью для такой задачи:
игроки делят между собой выигрыш v(N) согласно чис-
лам v(К), показывающим, сколько коалиция сама мо-
жет взять. В этой игре неопределенности нет разве лишь
в случае, когда существует такой дележ (хь ..., хп),
3 Хг=и(М), что х{=и(К) для всех
KczN. В противном случае не известно априори, как
разделить либо излишек, либо недостаток полезности^
Стоимость Шепли. Первым аксиоматическим принци-
пом оптимальности для кооперативных игр явилась
стоимость Шепли. Напомним его определение.
Множество Т называется носителем игры, если
v (К) = v (КП?) для всех KczN. Для любой перестанов-
ки л множества N обозначим через rev игру с характер
ристической функцией у(лК). Суммой двух игр и и и с
одинаковыми множествами игроков называется игра ш,
для которой w(K) =v(K) +u(K), K<^N. Оптимальный
дележ обозначим, как и ранее, <р(ц).
Аксиомы:
Ш1. Для любого носителя игры Т
<pi (?) = v(T).
l~N
Ш2. Для любой перестановки п
<p„i(nv) = ф((о).
ШЗ. Для любых двух игр V, и и их суммы w
ф(а»)—ф(п) +ф(и).
Л. С. Шепли [19] показал, что на классе всех коопе-
ративных игр эти аксиомы определяют единственную
функцию, а именно:
Ф, (V) = у [V (К и {0) - f (*)L
|лч'
где IT) означает число элементов множества Т.
ПО
Из трех аксиом лишь аксиома ШЗ является принци-
пиально отличной от упоминавшихся ранее. Первую ак-
сиому можно «расщепить» на две: аксиому оптимально-
сти по Парето, т. е. 2 <Pi(a)=u(7V), и аксиому, что
игрок-«болван» i получает фг-(а)=и(г), т- е- аксиому, что
из v(K\Ji)=v(K)+v(i) для всех должно следовать
ф<(а)=и(0 [18]. Вторая аксиома — симметрии —
утверждает, что доля игрока не зависит от его названия.
Аксиома линейности функции ф относительно v вызы-
вала наибольшие дискуссии. Если играются две незави-
симые игры и и v, то естественно считать, что общий
выигрыш игрока в обоих играх есть ф<(и)+ф<(о). Одна-
ко вряд ли можно считать, что w представляет совокуп-
ность этих двух независимых игр. Поэтому появились
некоторые модификации аксиомы ШЗ наряду с большим
числом результатов собственно о стоимости Шепли. Рас-
смотрим их.
А. И. Соболев [18] показал, что аксиому ШЗ можно
заменить следующими двумя:
С1. Если для всех AczW
v'(K)=v(K) + 3 Ъ,
1<=К
где а= (аи ..., ап) — произвольный вектор, то
ф(о') — ф(п) +а.
С2. Если для всех K<=N
w(K)=v (К) — (и) + и (Л) — ф{ (и),
ТО ф(^) =0.
Аксиомы Шепли определяют единственную функцию
на классе всех кооперативных игр. На классе же простых
игр (v(K)=0 или 1 для всех К) единственность не по-
лучается. П. Дубей [8] показал, что для получения един-
ственности функции Шепли аксиому ШЗ надо заменить
следующей аксиомой:
Д. Пусть v\/и и v/\u — игры, определяемые по фор-
мулам
V V U (/Q = max (v (/С), и (Л)),
v /\и(К) = min (и (/0, и (/Q).
111
Тогда
q(v\/u) + ф(уДн) =ф(у) +ф(^)-
Функция Шепли дает оценку игры для каждого игро-
ка, как бы указывая полезность от участия в данной
игре. На этом основан совершенно новый подход к опре-
делению стоимости Шепли, предложенный А. Ротом [15].
Пусть Р — класс всех простых игр с множеством иг-
роков N. На множестве PXN определим лотереи вида
[р(и, f), (1—р) (и, /)], O^p^l, интерпретируемые как
участие с вероятностью р в игре v в качестве игрока i
и с вероятностью 1—р в игре и в качестве игрока /. На
множестве всех лотерей М определим предпочтение (не-
которого игрока) и соотношение (v, /) будем
считать: быть игроком i в игре v не хуже, чем игроком /
в игре и. Потребуем, чтобы предпочтение допускало
функцию полезности. Нам потребуются следующие обо-
значения: D^P — множество тех игр, в которых игрок i
является болваном, vR — игра с характеристической
функцией
v0 и Vi — игры, в которых игрок i получает соответствен-
но 0 или 1 «без игры».
Понимая под эквивалентностью ~ выполнение од-
новременно >* и <(, а под — выполнение )> и
сформулируем аксиомы.
Р1. Для всех перестановок л множества N, всех v^P
и всех i^N
(v, i) ~ (ли, лО.
Р2. Для всех v^Di (у, i) ~ (v0, Г). Кроме того,
(i) > (1%, i), (vf, i) > (v, i) > (v0) i)
для всех v^P и i^N.
РЗ. Для всех u, v^P
[4- 0. 4"~ [4"(w V V, i), -J- (и Л v, i)
L ~ _| z
P4. Для всех RczN, i^K
(vr, i)
112
Если предпочтение >> удовлетворяет аксиомам Р1 —
Р4, то единственная нормированная функция полезно»
сти ср(ц, Z), ф(уй 0 = 1, ф(у0, 0=0, равна функции
Шепли.
О первых двух аксиомах достаточно сказать, что од-
на — аналог аксиомы симметрии, а другая определяет,
что лучше — это больше. Третью аксиому автор назы-
вает аксиомой нейтральности к обычному риску. Лоте-
рея, составленная из двух игр с равными вероятностями,
должна восприниматься, как и лотерея с равными ве-
роятностями, составленная из «лучшей» и «худшей» игр.
Имея в виду, что здесь рассматриваются лишь простые
игры, можно почти согласиться с определением автора,
что речь действительно идет о риске в вероятностном
смысле. В последней аксиоме игровые вопросы затраги-
ваются явно. Альтернатива быть игроком единственной
минимальной выигрывающей коалиции и поэтому уча-
ствовать в дележе единицы между |/?| игроками при
равных игровых возможностях постулируется эквива-
лентной лотерее, дающей в среднем 1/|7?| без всяких
переговоров.
n-ядро. Определение м-ядра [20] соответствует мате-
матическому пониманию наиболее равномерного рас-
пределения полезности v (N) согласно возможностям
коалиций v (А). Хотя некоторые его свойства те же, как
и у стоимости Шепли, все же получить сходные опреде-
ления долго не удавалось. А. И. Соболев [17] показал,
что если в определении стоимости Шепли аксиому С2
заменить на аналогичную ей аксиому СЗ, где вместо опе-
рации сложения стоит максимум, то получим систему
аксиом, которой удовлетворяет п-ядро.
СЗ. Для любой игры w,
w(K} = max р (/Q — ф* (и)> и W — 3 ’
ДОЛЖНО быть ф(ш)= 0.
§ 4. Заключение
1. Обобщения. Выше приводились в основном перво-
начальные формулировки аксиом и теорем, которые впо-
следствии были обобщены для бесконечных множеств
игроков (целевых функций) или для более абстрактных
множеств альтернатив, в общем — для более широких
113
классов задач принятия решения. В отдельных случаях
обобщались сами аксиомы так, что прежние становились
частными случаями новых.
Наиболее интенсивно разрабатывалась стоимость
Шепли. Обобщение для неатомических игр дается в кни-
ге [1]. Другое обобщение для континуума игроков пред-
ложил В. А. Васильев [3]. Большое исследование нели-
нейной аксиоматики Шепли принадлежит А. И. Собо-
леву [17].
По-видимому, и другие аксиоматики можно довести
до такой же общности.
2. О содержании аксиом. Как мы видели, во всех си-
стемах аксиом в том или ином виде фигурируют аксиомы
оптимальности по Парето (доминирования) и симмет-
рии. Решение, определяемое этими двумя аксиомами,
рассмотрено В. В. Подиновским (14] (см. также [6]). Воз-
можны и другие варианты этих двух аксиом, но исследо-
вания в этом направлении пока не проводились.
Система из двух аксиом ।— оптимальности по Парето
и симметрии — вообще говоря, не является полной. Пред-
ставляется, что содержание присоединяемых к ним но-
вых аксиом зависит от специфики модели и выбора ма-
тематической формы самого принципа оптимальности.
Принципы оптимальности определялись в виде бинарно-
го отношения на множестве решений, которое, будучи
транзитивным, может допускать и функцию полезности.
Если же транзитивности нет, то удобнее принцип опти-
мальности определить в виде множества оптимальных
решений. Так трактуемый принцип оптимальности на
подходящем классе задач является функцией выбора.
Хотя некоторые определения (например, Эрроу — Гурви-
ца) фактически используют функцию выбора, но явного
упоминания или привлечения результатов этого раздела
теории полезности в литературе не встречалось.
Бинарное отношение или функция выбора может оп-
ределяться не на стратегиях, а на исходах, как, напри-
мер, равновесие.
Наконец, предпочтение или полезность может опреде-
ляться на множестве самих задач, если требуется иметь
однозначный принцип оптимальности.
Во всех перечисленных случаях аксиомы указывают
те операции над параметрами задач, которые вызывают
определенное изменение значения принципа оптимально-
сти (вычеркивание стратегий или альтернатив, исключе-
114
ние целевых функций или игроков, сложение игр и т.п.).
Могут накладываться и «более математические» условия
типа краевых условий (пример см. в [17]), монотонности,
непрерывности и. т. д.
3. Некоторые проблемы. Аксиоматическая теория оп-
тимальности находится на ранней стадии своего разви-
тия. Можно представить себе, что впоследствии выкри-
сталлизуются основные аксиомы наподобие аксиом то-
пологии и будут установлены характерные для каждого
набора аксиом теоремы реализуемости принципов опти-
мальности. Для такой теории безусловно важным явля-
ется нахождение максимальных классов задач, для ко-
торых заданные аксиомы совместны, или минимальных
классов, в которых системы аксиом полны. Некоторые
результаты в этом направлении, по-видимому, можно по-
лучить, не дожидаясь конца «кристаллизации». Интерес-
но для существующих аксиоматических определений
принципов оптимальности одного вида (бинарное отно-
шение, стоимость и т. д.) найти эквивалентные определе-
ния для других видов, как это сделано для максимина и
стоимости Шепли. Представляется не очень сложным пе-
ренос некоторых аксиоматических понятий, построенных
для задач одного вида неопределенности, на задачи дру-
гого вида неопределенности, как начальный шаг к гло-
бальной теории оптимальности.
Литература к главе 3
1. Ауман Р., Шепли Л. Значения для неатомических игр; пер.
с англ.— М.; Мир, 1977.
2. Бутрим Б. И. Модифицированное решение для задачи торга.—
Ж- вычисл. матем. и матем. физ., 1976, т. 16, с. 340—350.
3. Васильев В. А. Вектор Шепли для игр ограниченной полино-
миальной вариации.— В кн.: Оптимизация, вып. 17(34)—Ново-
сибирск: 1975.
4. В и л к а с Э. И. Аксиоматическое определение значения матрич-
ной игры.— Теория вероятн. и ее примен., 1963, т. 8, вып. 3,
с. 324—327.
5. Вилкас Э. И. Понятия оптимальности в теории игр.— В кн.:
Современные направления теории игр.— Вильнюс: Мокслас, 1976,
с. 25—43.
6. Вилкас Э. И. Многоцелевая оптимизация —В кн.: Математи-
ческие методы в социальных науках, вып. 7.— Вильнюс, 1976,
с. 17—67.
7. В о р о б ь е в Н. Н. Современное состояние теории игр.— УМН,
1970, т. 25, вып. 2(152), с. 81 — 140.
8. D u b е у Р. On the uniqueness of the Shapley value.— Intern. J.
Game Theory, 1975, v. 4, p. 131—139.
115
9. Л ь ю с Р. Д., РайфаХ. Игры и решения; пер. с англ.— М.: ИЛ,
1961.
10. Мау К. О. A set of independent necessary and sufficient condi-
tions for simple majority decisions.— Econometrica, 1952, v. 20,
p. 680—684.
11. Milnor J. Games against nature.— In. Decision processes.— New
York: Wiley, 1954.
12. Nash J. The bargaining problem.— Econometrica, 1950, v. 18,
p. 155—162.
13. Нэш Дж. Бескоалиционные игры.— В кн.: Матричные игры.—
М.: Физматгиз, 1961, с. 205—221.
14. П о д и н о в с к и й В. В. Многокритериальные задачи с однород-
ными равноценными критериями.— Ж. вычисл. матем. и матем.
физ., 1975, т. 15, с. 330—344.
15. Roth A. Utility functions for simple games.— Faculty Working
paper № 305, College of Commerce and Business Administration,
University of Illinois at Urbana-Champaign, 1976.
16. Sen A. K. Collective choice and social welfare.— San Francisco:
Holden-Day, 1971.
17. Соболев А. И. Характеризация принципов оптимальности в
кооперативных играх посредством функциональных уравнений.—
В кн.: Математические методы в социальных науках, вып. 6.—
Вильнюс, 1975, с. 94—151.
18. Соболев А. И. Нелинейные аналогии аксиоматики Шепли.—
В кн.: Современные направления теории игр.— Вильнюс: Мокс-
лас, 1976, с. 119—126.
19. S hap ley L. S. A value for n-person games.— In: Contributions
to the theory of games, v. II, Ann. Math. Studies, v. 28. Princeton:
Princeton Univ. Press, 1953, p. 307—317.
20. Schmeidler D. The nucleolus of a characteristic function ga-
me.— SIAM J. Appl. Math., 1969, v. 17, p. 1163—1170.
21. Arrow K. J. Social choice and individual values.— Cowles Co-
mission Monograph, v. 12.— New York: Wiley, 1951.
22. Arrow K. J., Hurwitz L. An optimality criterion for decision-
making under ignorance.— In: Uncertainty and expectation in eco-
nomics.— Oxford: Basil Balckwell and Mott, 1972.
ГЛАВА 4
АКСИОМАТИЧЕСКОЕ РЕШЕНИЕ ПРОБЛЕМЫ
ОЦЕНКИ ВАЖНОСТИ КРИТЕРИЕВ
В МНОГОКРИТЕРИАЛЬНЫХ ЗАДАЧАХ
§ 1. Оценка важности критериев в методах
решения многокритериальных задач
Одной из основных особенностей сложных, трудно
формализуемых задач исследования операций является
многокритериальность [1] — [7]: эффективность стратегий
в них естественным образом оценивается не одним, а не-
сколькими критериями Ki, ..., Кт. Под критериями в мо-
дели операции понимаются функции, определенные на
множестве ситуаций C7xV, где U — множество страте-
гий, V — множество неконтролируемых факторов (слу-
чайных и неопределенных), и принимающие значения из
соответствующих подмножеств Хг числовой прямой [8].
Множества Xif допуская некоторую вольность речи, на-
зывают шкалами критериев, а числа из Xi — оценками
по f-му критерию. Предполагается, что каждое Х{ содер-
жит не менее двух оценок. Таким образом, каждая ситуа-
ция (и, v) характеризуется векторной оценкой К (и, v) =
= (КДи, v), ..., Kn(w, ^)). В детерминированных задачах,
отличающихся отсутствием случайных и неопределенных
факторов, векторная оценка К (и) является характери-
стикой самой стратегии и.
Критерии могут быть как количественными, так и ка-
чественными (полученными, например, нумерацией
исходных оценок, сформулированных словесно). Более
точно, критерии можно характеризовать типом шкалы,
определяемым множеством допустимых преобразований
[9-10].
Считается, что во множестве векторных оценок Х=
=XiX.. .ХХт у лица, принимающего решение, сущест-
вует отношение (строгого) предпочтения Р, безразличия
/ и нестрогого предпочтения R = P\JI, на основе которых
117
с учетом имеющейся информации о случайных и неопре-
деленных факторах и надлежит выбрать оптимальную
стратегию. В однокритериальных задачах эти отношения
оказываются полностью известными, как только выбран
сам критерий эффективности, и отыскание оптимальной
стратегии сводится к решению соответствующей задачи
математического программирования, в общем случае
максиминного стохастического характера [8]. Однако в
многокритериальных задачах критерии обычно противо-
речивы в том смысле, что не существует стратегии, наи-
лучшей одновременно по каждому из них, отношения Р,
I и R оказываются заданными неполностью, и для реше-
ния задачи приходится их строить (восстанавливать),
для чего необходима информация о предпочтениях лица,
принимающего решение (сами эти предпочтения могут
окончательно сформироваться лишь в процессе решения).
В дальнейшем будем рассматривать задачи, в кото-
рых для каждого критерия Кг можно упорядочить по
предпочтительности все оценки из Х{ (такие критерии
называются независимыми по предпочтению [7]). Для
определенности будем считать, что это упорядочение со-
ответствует упорядоченности чисел: большая оценка
предпочтительнее меньшей. В рассматриваемых задачах
на множестве всех векторных оценок Х=Х{Х.. ,xXw
естественным образом вводятся отношения строгого
предпочтения P°czP, безразличия /°сг/ и нестрогого
предпочтения R°czR (называемые иногда отношениями
Парето), определяемые следующим образом: xRQy, когда
справедливы неравенства х^уь /=1, . . ., m; xPQy, когда
среди этих неравенств хотя бы одно строгое; и х!°у, когда
все нестрогие неравенства являются равенствами. Отно-
шение RQ является квазипорядком (т. е. оно рефлексив-
но и транзитивно (10]), но лишь частичным, т. е. для про-
извольно выбранных векторных оценок хну может не
выполняться ни xRQy, ни yR°x. Поэтому отношений /?°, /°
и Р° для решения задачи недостаточно, и для их расши-
рения (т. е. более полного восстановления R, Р и /) необ-
ходимо, как уже отмечалось, привлечь дополнительную
информацию о предпочтениях. Эта информация может
быть получена у самого лица, принимающего решение,
экспертов, а также в результате исследований математи-
ческой модели задачи. Разнообразие возможных спосо-
бов получения и формализации информации о предпочте-
ниях предопределило появление большого количества
118
весьма различных подходов и методов решения много-
критериальных задач [4] — [7], [11] — [18].
Большинство известных методов предусматривает ис-
пользование в той или иной форме информации о важ-
ности критериев. Одним из наиболее известных методов
такого рода является метод обобщенного критерия, со-
стоящий в следующем [4] — [6], [8], [19]-—[22]. Вначале
все исходные критерии Ki приводят к сопоставимому без-
размерному виду К{ («нормализуют» [6]). Чаще всего ис-
пользуют такие преобразования: Кг=К^а\ и Кг=
= (Ki—Щ*)I(сц—ач), где at — некоторые «эталонные»
(плановые, максимально возможные и т. п.), а — ми-
нимально допустимые (возможные) значения критериев
Ki. Далее все критерии Ki «сворачивают» в одну функ-
цию— обобщенный критерий Ф (ai, Ki,..., Km), учи-
тывая их относительную важность при помощи специаль-
ных положительных чисел ай называемых коэффициен-
тами важности (коэффициентами весомости, относитель-
ными весами и т. п.). Обычно требуют еще, чтобы
m
щ == 1. В итоге исходная многокритериальная задача
t=i
сводится к обычной задаче оптимизации по одному кри-
терию Ф. Следует заметить, что а,-, строго говоря, харак-
теризуют важность не самих исходных критериев, а
«нормализованных» Ki.
Самыми распространенными являются обобщенные
критерии, построенные на основе средневзвешенной сте-
/ m о
пенной Ф(г5) = I ’ и ос°бенно взвешенная сумма
М=1 /
m
критериев OdKi, для которой будем применять далее
i=i
специальное обозначение Ф2. Для указанного семейства
«предельным» (при s->0) является обобщенный крите-
рий ФЯ = П Л‘. Весьма распространен также и обоб-
i=l
щенный критерий Ф = min (Л}/^), где М = {1, ..., т}—
i£=.M
множество номеров критериев.
119
Заметим, что обобщенные критерии Ф2 и Ф применя-
ются и для «свертывания» критериев разной размерности
(без их предварительной «нормализации»); при этом ко-
эффициенты а$ играют более сложную роль: они не толь-
ко учитывают важность критериев, но и приводят их к
одной размерности.
Широко используется на практике метод целевого
программирования, предложенный Чарнсом А. и Купе-
ром У. [23]. Основу этого метода также составляет сведе-
ние всех критериев в один обобщенный критерий, имею-
щий смысл расстояния от рассматриваемой векторной
оценки до некоторой недостижимой «идеальной» точки
£*= (61, ..., 6т). Чаще всего здесь применяют обобщен-
г т
ный критерий Фб а/| Ki]—[bi |, так как для линейных
i=l
детерминированных задач оптимальные по Ф* стратегии
можно (после введения специальных дополнительных пе-
ременных) отыскивать хорошо отработанным симплекс-
методом линейного программирования [23] — [25].
Одним из самых ответственных и сложных этапов по-
строения обобщенных критериев является определение
коэффициентов важности. В некоторых случаях эти ко-
эффициенты удается назначить в результате анализа мо-
дели операции [6], [8], [26]. Иногда приемлемые результа-
ты можно получить, просто приняв все аг=1 [27] — [28].
Однако обычно для определения коэффициентов важно-
сти приходится использовать специальную информацию,
запрашиваемую у лица, принимающего решение, или по-
лучаемую от экспертов [29] — [30]. Существующее боль-
шое число подходов к определению коэффициентов важ-
ности указанным путем можно разделить в основном на
две группы.
Подходы одной группы характеризуются тем, что
предполагают непосредственное назначение коэффициен-
тов важности или получение их тем или иным способом
шкалирования на основе результатов прямого сравнения
критериев по важности (и представленных в виде ранжи-
рований, матриц парных сравнений и др.) [6], [17], [19]—
[20], [23]'—[25], [31] — [33]. В некоторых подходах пред-
полагается использовать обобщенные критерии, в кото-
рых коэффициенты важности а< не задавать точно, а ука-
зывать лишь область А, к которой принадлежит вектор
а= (ап ..., am), и либо считать, что одна векторная
120
оценка не хуже другой, когда значение Ф для первой не
меньше, чем для второй, при любых а из А [34], либо для
отыскания оптимальной стратегии применять принцип
гарантированного результата [8], [35]—[37]. Область А
может выделяться, например, неравенствами
^(Zi, образованными при помощи назначаемых верхней
oLi и нижней ai границ для аг-, или же отражающими
упорядоченность критериев по важности (скажем,
. .>ат). Следует иметь в виду, однако,
что для коэффициентов важности применение принципа
гарантированного результата не имеет такого естествен-
ного смысла и прочного обоснования, как для обычных
задач принятия решений в условиях неопределенности,
обусловленной наличием неизвестных природных факто-
ров или противодействием противника.
Для всех подходов разбираемой группы характерно
то, что понятие важности критериев формально не опре-
деляется: опрашиваемые лица вынуждены исходить
только из своих интуитивных представлений о нем. Кро-
ме того, важность критериев оценивается совершенно не-
зависимо от вида «нормировки» исходных критериев и
вида функции Ф (которая иногда выбирается даже по-
сле определения коэффициентов [17], [20]), хотя при од-
них и тех же а» результаты, полученные, например, для
Фл и Ф2, могут, очевидно, весьма сильно различаться.
Указанные обстоятельства существенно ограничивают
возможность корректного решения многокритериальных
задач на основе подходов данной группы к оценке важ-
ности критериев.
Подходы другой группы состоят в том, что коэффици-
енты важности отыскиваются для выбранного обобщен-
ного критерия на основе информации о сравнении некото-
рых «контрольных» векторных оценок по предпочтитель-
ности. По результатам такого сравнения составляются
система равенств и неравенств для Ф с неизвестными а<.
Если система оказывается совместной, то либо из допол-
нительных соображений (обычно весьма слабо обосно-
ванных) выбирается конкретный вектор а= (аь ..., ат)
во множестве А всех решений этой системы, либо же па-
раметр а рассматривается как неопределенный со мно-
жеством возможных значений А, и затем применяется
принцип гарантированного результата [29], [38] — [39].
Если же система оказывается несовместной, то ищется
121
такой вектор а с неотрицательными компонентами, ко-
торый обеспечивает минимум «степени несовместности»
этой системы [40]—[42]. К этой группе можно отнести
подход, согласно которому коэффициенты важности оп-
ределяются из условия обеспечения максимума выбран-
ного обобщенного критерия для использованных ранее
стратегий в аналогичных задачах [43]. Понятно, что при
этом на новые решения могут быть перенесены старые
ошибки.
Таким образом, в подходах разбираемой группы
оценки важности критериев получаются косвенным пу-
тем — в результате обработки информации о предпочте-
ниях.
Необходимо, однако, подчеркнуть, что проблема
обоснованного выбора обобщенного критерия (вида
преобразования Ki в Ki и функции Ф) оказывается обыч-
но весьма сложной, а на практике такой выбор нередко
производится, мягко говоря, недостаточно обоснованно.
Так, взвешенная сумма критериев часто применяется
лишь в силу простоты связанных с нею вычислений.
С другой стороны, использование обобщенных критериев
предполагает, что исходные критерии являются количе-
ственными [10], и поэтому невозможно для широкого
класса задач с качественными (имеющими порядковые и
балльные шкалы) критериями.
От недостатков, присущих методу обобщенного кри-
терия, свободен другой, относительно новый подход, раз-
работанный для многокритериальных задач принятия ре-
шений в условиях определенности. Этот подход основан
на понятии функции ценности: числовая функция ф(х)
называется функцией ценности, если она представляет на
X отношение /?, т. е. ф (х) ф (у) верно тогда и только
тогда, когда xRy*). Построение функции ценности в об-
щем виде ф(/С) для многокритериальных задач — ис«
ключительно сложная проблема. Оказывается, однако,
что при выполнении некоторых условий независимости
критериев можно заранее установить ее форму. Напри-
мер, если критерии взаимно независимы по предпочте-
нию (при пг=2 необходимо еще одно специальное допу-
щение), то при выполнении некоторых условий «техниче-
ского» характера существует аддитивная функция ценно-
*) В роли функции ценности может выступать обоснованно по-
строенный обобщенный критерий.
122
т
сти [7]: ф (К) = A'itKi)- Часто аддитивную функцию
i=l
tn
ценности строят в виде ф(А) = где Ф«(х0 —
1=1
функции, меняющиеся в пределах от 0 до 1, причем
фг(£г)=О для наименьшей оценки хг- по f-му критерию /Q
и = 1 для наибольшей оценки по К<. В этом «слу-
чае положительные числа щ также называют коэффици-
ентами важности. Фактически аг- характеризуют важность
критериев фД/С); в частности, если расширить интервал
[Xj, Xj], то а, изменится.
Разработаны специальные методы построения адди-
тивных функций ценности [7], [44]. Однако они требуют
получения от лица, принимающего решение, достаточно
сложной информации о его предпочтениях. Кроме того,
условия существования аддитивной функции ценности на
практике далеко не всегда выполняются.
Коэффициенты важности являются атрибутом целого
ряда и других (не связанных со «свертыванием» вектор-
ного критерия Л в одну числовую функцию) методов ре-
шения многокритериальных задач, в том числе методов
мажоритарного типа, т. е. основанных на схемах голосо-
вания типа правила большинства. Простейший из таких
методов, подробно исследованный в статье [45], состоит
в следующем. Для всяких двух векторных оценок х и у
вводятся множества
М>(х, y)={i\i£=M; х{>ус}, М< (х, у) = {i\ie=M; xi<yi}
и соответствующие им суммы коэффициентов важности
(х, у) = А< #) = 3 0,1
i<=M>(xt&) te=M<(x,y)
(если множество Л4>(х, у) или Al^x, у) пусто, то соот-
ветствующая ему сумма равна нулю), и считается, что х
предпочтительнее, чем у, при А>(х, у)>А<(х, у). Хоро-
шо известно, что определенное таким образом отношение
строгого предпочтения Р(а)> не является ациклическим,
т. е. возможны случаи, когда, например, х предпочтитель-
нее у, у продпочтительнее г, но z предпочтительнее х [10].
Коэффициенты важности для методов мажоритарного
типа назначаются непосредственно или получаются шка-
123
лированием по результатам прямого сравнения критери-
ев по важности, как и для обобщенных критериев при ис-
пользовании первого из выше рассматривавшихся двух
групп подходов. Именно из-за отсутствия свойства ацик-
личности у отношения предпочтения Р(а)>, а также в свя-
зи с отсутствием формальных определений (а потому и
строгих методов отыскания) коэффициентов важности
в мажоритарных правилах способы решения многокри-
териальных задач, основанные на таких правилах, име-
ют весьма ограниченные возможности практического
применения.
В ряде методов коэффициенты важности не вводятся,
но критерии упорядочиваются по важности. Например,
широко известен способ, состоящий в том, что из т кри-
териев один выделяется в качестве главного, на величи-
ны всех остальных накладываются ограничения, и ис-
ходная многокритериальная задача оказывается сведен-
ной к однокритериальной. Необходимо, однако, отметить,
что деление всех критериев по важности на главный и
второстепенные весьма условно, так как решающей фак-
тически оказывается роль введенных ограничений [15].
Совсем иной смысл имеет упорядоченность по важно-
сти критериев в методе последовательных уступок, пред-
ложенном Вентцель Е. С. [4]. Эта упорядоченность опре-
деляет очередность максимизации критериев с учетом не-
равенств, устанавливающих возможность отклонения
значений всех предыдущих критериев от их условных
максимумов не более чем на некоторые величины («ус-
тупки»), последовательно назначаемые для каждого оче-
редного критерия на основе анализа его «поведения»
совместно с последующим критерием. Весьма обстоя-
тельно этот метод исследован в книге [15].
В последнее время интенсивно разрабатываются че-
ловеко-машинные процедуры решения многокритериаль-
ных задач (в основном детерминированных), предусмат-
ривающие чередование этапов получения информации о
предпочтениях и ее обработки на ЭВМ [11] — [13]. Мно-
гие такие процедуры также предполагают использование
коэффициентов важности (в обобщенных критериях, схе-
мах голосования и т. п.) или упорядочение критериев по
важности, но предусматривают уточнение этих оценок в
процессе «диалога» человека с машиной [11] — [12], [46].
Отыскание оптимальных стратегий в многокритери-
альных задачах при наличии случайного параметра v с
124
известным вероятностным распределением осложняется
еще и тем, что необходимо учитывать отношение к риску
лица, принимающего решение. Это требование, которое
фактически игнорируется, например, при оптимизации по
математическому ожиданию обобщенного критерия, в
полной мере учитывается современной математической
теорией полезности, основы которой были заложены Дж.
фон Нейманом и О. Моргенштерном [1]. В этой теории
разработаны методы построения специальной функции
/(К(и, у)), математическое ожидание которой («ожидае-
мая полезность») полностью характеризует рассматри-
ваемую стратегию и [47]. Для многокритериальных задач
при выполнении некоторых специальных условий незави-
симости критериев вид функции полезности может быть
конкретизирован, что существенно упрощает ее построе-
ние. Например, при аддитивной независимости критери-
ев имеет место аддитивное представление: f(K) =
— fi(Ki) +.. . + [48], [7]. Разработан целый ряд ме-
тодов построения аддитивной функции полезности [7],
[44], которые применяются также для построения функ-
ции ценности в детерминированных многокритериальных
задачах. Согласно одному из таких методов строятся и
ранжируются по предпочтительности векторные оценки
хг’= (ль ..., хг._1? х\ xi+il ..., хт), где Xi(x{) — наиболь-
шая (наименьшая) оценка по /-му критерию. Пусть
xj — наиболее предпочтительная из оценок х\ и х=
= (хь ..., хт). Функция полезности строится в виде:
/(/() +.. . + amfm(Km), причем полагается а,= 1,
а также fifa) = 0 и fifa) — 1 для всех i^M. В этой функ-
ции коэффициенты характеризующие важность крите-
риев Кг (точнее, fi(Ki)), имеют следующий смысл: ос-
есть такое число, что «лотерея», дающая исход xj с ве-
роятностью аг- и исход х с вероятностью 1—aiy эквивален-
тна (одинакова по предпочтительности) получению на-
верняка исхода х\
Теория многокритериальной полезности, подробно из-
ложенная в монографии [7], позволила решить целый ряд
практических задач. Однако возможности ее применения
весьма значительно ограничиваются тем, что лицо, при-
нимающее решение, и эксперты нередко затрудняются
сравнивать по предпочтительности «вероятностные сме-
си» исходов [49].
125
Из всего вышеизложенного можно сделать вывод о
том, что понятия упорядоченности критериев по важно-
сти и показатели важности определяются по-разному,
применительно к методам конкретных типов, и вне ра-
мок этих методов их использовать нельзя.
Поэтому весьма актуальной стала проблема создания
общей теории и методов оценки важности критериев в
многокритериальных задачах. Такая теория начала раз-
виваться в работах Подиновского В. В. [50]— [57]. Ее ос-
нову составили точные определения понятий типа: «Кри-
терии Ki и К2 равноценны» (т. е. имеют одинаковую
важность), «Критерии К3 и К4 (в совокупности) важнее,
чем критерий Кр>, и т. п. Эти определения во всех фор-
мальных построениях по существу играют роль аксиом,
вводящих, с одной стороны, соответствующие отношения
предпочтения-безразличия во множестве векторных оце-
нок, и задающих, с другой стороны, соответствующие от-
ношения равенства и превосходства в важности во мно-
жестве подмножеств совокупности критериев. В свою
очередь, на базе последних отношений в соответствии с
математической теорией измерений [9], [58] были опреде-
лены коэффициенты важности критериев. Наконец, было
установлено, каким образом отношения предпочтения во
множестве векторных оценок можно задать непосредст-
венно при помощи коэффициентов важности.
Указанные теоретические результаты позволяют ис-
следовать известные частные определения упорядоченно-
сти критериев по важности и коэффициентов важности.
Более того, они могут быть и непосредственно применены
для решения практических многокритериальных задач,
особенно в рамках интерактивных процедур, основанных
на идее последовательного получения и использования
постепенно усложняющейся и все более сильной инфор-
мации о предпочтениях [59].
§ 2. Определения упорядоченности критериев
по важности
Вообще всякое определение равноправия, равноцен-
ности и т. п. некоторых лиц, предметов и т. д. основы-
вается всегда на использовании в том или ином виде
идеи симметрии, а понятия превосходства в важности
и т. п. — на отрицании симметрии. Симметричными же
бывают объекты, в некотором отношении одинаковые,
126
однородные. Поэтому понятия упорядоченности по важ-
ности естественным образом определяются для однород-
ных критериев. Аналогичное обстоятельство отмечалось
в § 1 при рассмотрении коэффициентов важности обоб-
щенных критериев.
Критерии Л\, ..., Кт называются однородными, если
они имеют общую шкалу Xi = .. .=Хт. Это означает, что
если критерий Kj заменить на где ц — некоторое
допустимое преобразование, определяемое типом шка-
лы [9]—[10], то и все остальные критерии Ki следует за-
менить соответственно на т] (/Q).
В .практических задачах однородными оказываются обычно крите-
рии, которые измеряют величины одной и той же «физической» при-
роды либо выражаются в баллах, назначаемых на основе общих
для всех этих критериев правил (эталонов). Так, если Ki(u)— стои-
мость продукции, выпускаемой в f-м году рассматриваемого т-лет-
него периода при использовании плана и, то все критерии однород-
ны. Еще пример: задача сравнения учеников по успеваемости на осно-
вании итоговых пятибалльных оценок является задачей с нескольки-
ми однородными критериями, каждый из которых соответствует тому
или иному учебному предмету.
На практике исходные неоднородные «количественные» критерии
(измеряющие, например, вес, цену, время, размеры и т. п.) часто для
сопоставления преобразуют в однородные, используя приведенные
в § 1 способы «нормализации». Можно предложить еще следующий
прием преобразования неоднородных критериев Ki в однородные
Ki [57]. Предположим, что каждую шкалу Xi удалось разбить на
п частей X* ,..., X” так, что можно дать общую качественную ха-
рактеристику всем оценкам Xi из каждого X J- , причем одинаковую
для всех критериев. Например, по аналогии с оценками успеваемости
можно брать п = 5 и считать оценки из Х$ очень хорошими (отлич-
ными), из X; —хорошими, и т. д. Далее, каждой оценке Xi можно
о
поставить в соответствие новую оценку Xi, равную номеру /, для
которого Хг^Х^ . В результате такого преобразования каждый исход-
ный критерий Ki будет заменен новым критерием Кг, причем все но-
вые критерии Ki будут иметь общую порядковую шкалу {1,..., п}.
Указанный прием особенно полезен для задач, в которых крите-
рии измеряются приближенно и существенную роль играет неопреде-
ленность (как, например, на ранних этапах проектирования систем).
Везде в дальнейшем будем предполагать, что все кри-
терии Ki однородны *). Поэтому, в частности, можно ут-
верждать, что если х — векторная оценка, то вектор,
*) Аксиоматический подход к оценке важности неоднородных
критериев разра<ботан в статье [55].
127
полученный из х любой перестановкой ее координат,
также оказывается векторной оценкой (т. е. принадле-
жит X). Наконец, отметим, что общая шкала критериев
может быть всего лишь порядковой.
Важность критерия (или же совокупности нескольких
критериев) определяется степенью влияния изменения
его значения (их значения) на общее «качество» (полез-
ность, ценность) исходов (ситуаций). Поскольку указан-
ное влияние можно оценить, лишь соизмеряя его с влия-
нием других критериев, то говорят об относительной
важности критериев. Соизмерить влияние изменений зна-
чений однородных критериев на «качество» исхода с
целью выяснения относительной важности этих критери-
ев можно путем перестановки соответствующих коорди-
нат произвольной векторной оценки. Применительно к
двум критериям Кт и Kt симметричными являются век-
торная оценка х и векторная оценка хт> полученная из
х перестановкой ее компонент хт и xt. Если всякие две
векторные оценки х и хг> * расцениваются как одинаково
предпочтительные, то критерии Кт и Kt следует рассмат-
ривать как равноценные, т. е. считать одинаково важны-
ми. Если же из любых двух оценок х и xr>t лучшей счи-
тается та, у которой больше r-я координата, то симмет-
рия г-го и Лго критериев нарушается, причем более
важным оказывается Кт- На этих идеях и основаны сле-
дующие определения.
Определение 1. Утверждение «Критерии Кт и Kt
равноценны» (такое утверждение cot будет обозначаться
«словом» Kr~Kt или же Kt~Kr) означает, что всякие
две векторные оценки х и хт'* одинаковы по предпочти-
тельности.
Таким образом, утверждение со± устанавливает в X
отношение безразличия Л1 : хГ*'у при у=хт>*.
Определение 2. Утверждение «Критерий Кг
важнее, чем Kt» (^=KTy>Kt) означает, что векторная
оценка %, у которой xr>xt) предпочтительнее, чем у=
==xr,t (хР^у).
Идеи данных определений можно пояснить еще следующим при-
мером. Предположим, что группа учеников изучала всего два учеб-
ных предмета, так что каждый ученик получил две итоговых оценки.
Если для характеристики общей успеваемости ученика достаточно
(и так нередко делается в жизни) перечислить полученные им оцен-
ки в произвольном порядке, не указывая, какая именно относится
к тому или иному предмету (т. е. сказать, например, что у одного
ученика пятерка и четверка, а у другого — четверка и тройка), то
128
это означает, что успеваемость по каждому предмету для нас имеет
одинаковую важность. Если же такое положение для нас не под-
ходит, и из любых двух учеников, имеющих одинаковые пары оценок,
лучше тот, у которого более высокая оценка по определенному пред-
мету, то указанный предмет важнее другого. Если предметов боль-
ше двух, то сравнивать по важности два выбранных учебных предмета
следует путем сопоставления общей успеваемости учеников, умеют
щих одинаковые пары оценок по интересующим нас предметам, но
при этом по каждому из остальных предметов оценки у них должны
совпадать.
Разберем теперь вопрос сравнения по важности мно-
жеств критериев. Пусть даны два непересекающихся
множества критериев (п^1, /^1)
{Кн, .... Кг„}, {Kt„ .... Ktl}. (2.1)
Для упорядочения по важности этих множеств прихо-
дится сравнивать векторные оценки
х, y=x[rt...rn}'{h.(2.2)
где xrt = ... = хГп, xtt— ... = xtl, a x^r'.Гп^11.—
вектор, полученный из x заменой каждой из п координат
хГ( ра Xt, и каждой из I координат на хГ1. Например,
если х = (2, 4, 4, 3, 2, 2), то = (4, 2, 2, 3, 4, 4).
Определение 3. Утверждение «Множества крите-
риев (2.1) равноценны» (®3 —{Кг„ •••, Нг,г} — ...
..., Ktt} или же со3 = {Kt,, Kti} ~ {Kr„ • • •, КГп}) оз-
начает, что всякие две векторные оценки х и у из (2.2)
одинаковы по предпочтительности (xl^y).
Определение 4. Утверждение «Из двух мно-
жеств критериев (2.1) первое важнее второго» (со4=
= {Кг„ , • • •, K,t}) означает, что из всяких
двух векторных оценок х и у (2.2) при xr,>xh первая
предпочтительнее второй (хРа>у).
Примечание. С целью упрощения записи в утверждениях о
важности критериев и векторных оценках одноэлементные множества
будут обозначаться так же, как и образующие их элементы. Напри-
мер, вместо {Ль Лз} ~ {Л2} и 3}{2} будем писать соответственно
{Ль Лз}~Лг и х{1> 3}>2. Тогда будут согласованными обозначения,
введенные определениями 1—4.
В определениях 2 и 4 превосходства в важности ниче-
го не говорилось о том, как велико это превосходство.
Для измерения степени превосходства в важности мож-
но использовать следующий подход. Пусть, например,
5 Под ред. Н. Н. Моисеева
129
т = 4, и известно, что критерий /G важнее, чем К2, а К3
важнее, чем /С4. Рассмотрим векторные оценки х=
==(а, 6, Ь, а) и у= (Ь, а, а, 6), где Ь>а. Легко понять,
что у получена из х одновременным улучшением в соот-
ветствии с и ухудшением в соответствии с Кзу>К^.
Одинаковую предпочтительность всяких двух таких век-
торных оценок х и у следует считать показателем равен-
ства степеней (интенсивностей) превосходства в важно-
сти Ki над К2 и К3 над К4. Если же всегда у предпочти-
тельнее х, то превосходство в важности Ki над К2 больше
чем Кз над К^ Введем в рассмотрение еще и вектор-
ные оценки х'= (a, b, с, d) и у'= (b, a, d, с), где я<й<
<с<&. Если принять, как было указано выше, что у
предпочтительнее х, то следует считать, что у' предпоч-
тительнее х', так как при переходе от хг к у' улучшение
за счет перестановки а и Ь «сильнее» ухудшения за счет
перестановки с и d. Эти идеи положены в основу двух
нижеследующих определений.
Для упрощения записи в дальнейшем множество но-
меров критериев, образующих множество Л, будем обо-
значать через МА, так что Л= Далее, если все
координаты векторной оценки х с номерами из МА рав-
ны между собой, то под xiA будем понимать число х{ для
i^MA.
Пусть даны попарно непересекающиеся непустые мно-
жества критериев
Л, В, С, D. (2.3)
Для них можно рассматривать векторные оценки
X, у (2 4)
где Xt = х/, когда i и / входят в одно и то же множество
из (2.3), а у получена из х заменой каждой из координат
XiA на х^в, каждой из координат xiB— на х/л, а также
xtc — на XiD, и наоборот.
Предположим, что известно: Л)>В и C^D.
Определение 5. Утверждение «Превосходство в
важности А над В равно превосходству в важности С
над D» (со5=[Л)>В]-'1[С^>£)] или же (о5 = [0^>В]~
означает, что при XiA = XiD xiB — xt-c век-
торные оценки х и у из (2.4) одинаковы по предпочти-
тельности (х1ш5у), а при xiB^XiC^>xiD^xiAisde хотя бы
130
одно нестрогое неравенство выполняется как строгое, у
предпочтительнее, чем х (уР^х).
Определение 6. Утверждение «Превосходство в
важности А над В больше превосходства в важности С
над D» (й)6=|[Л>В]>1[С>-£)]) означает, что при
XiB^ Xic>XiD^ XiA векторная оценка у из (2.4) пред-
почтительнее х (уР“6х).
Определения 1—4 позволяют сравнивать по важно-
сти критерии и множества критериев. Определения 5 и
6 дают возможность сравнивать степени (интенсивности)
превосходства в важности одних множеств критериев над
другими. Можно пойти и далее, сравнивая степени степе-
ней превосходства в важности и т. д. Это можно сделать
подобно тому, как вводятся в теории измерений первая,
вторая,..., п-я упорядоченные метрики [60]. Однако здесь
не допускается попарное пересечение множеств крите-
риев, участвующих в сравнении. Поэтому, в отличие от
общего случая упорядоченных метрик, которые можно
усложнять «беспредельно», процесс уточнения степеней
превосходства в важности оканчивается, причем тем бы-
стрее, чем меньше число критериев пг. Например, при
/п = 3 даже сравнивать степени превосходства в важно-
сти (см. определения 5 и 6) уже невозможно.
Приведем формулировки только определений, касаю-
щихся сравнения степени степеней превосходства в важ-
ности, так как определения последующих сравнений са-
мостоятельного практического интереса из-за своей слож-
ности в реализации почти не представляют (хотя они
понадобятся еще в § 5).
Пусть даны восемь попарно непересекающихся непу-
стых множеств
Л, В, С, £>, Е, F, G, Н.
Для этих множеств можно рассматривать
оценки
в', Мс,М[)',МЕ,Мр’,
(2.5)
векторные
где xi = Xj, когда i и / входят в одно и то же множество
из (2.5), а у получена из х заменой каждой на xtB и
каждой xiB — на xiA и т. д., и каждой х>с — на xtH, а
каждой XiH — на xl(J.
Пусть известно: Д)>В, C)>D, E^~F, G)>H, <о'=
5*
131
Определение 7. Утверждение «Превосходство
в важности А над В на столько же больше превосход-
ства в важности С над D, на сколько превосходство в
важности Е над F больше превосходства в важности G
над Н» (со7=[со,1 ~ 2[(o,z] или же (о7=[со,/] ~ 2[со'])
означает, что при
= Х(р = Х(,р = X(q, Xiq = Xiq = Xip = Х{ц
векторные оценки x и у из (2.6) одинаковы по предпоч-
тительности (хН'у), а при
= %i[) = %ic = =
где хотя бы одно нестрогое неравенство является стро-
гим, и при
XiQ = Xip Xiq = Xift Xip*
где также хотя бы одно нестрогое неравенство выполня-
ется как строгое, х предпочтительнее у (хР^у).
Определение 8. Утверждение «Превосходство
в важности А над В превышает превосходство в важно-
сти С над D больше, чем превосходство в важности Е
над F превышает превосходство в важности G над Н»
([(о,]>2[со,/]) означает, что при выполнении условия
(2.7) векторная оценка х из (2.6) предпочтительнее у
(хР°*у).
§ 3. Построение отношений предпочтения на основе
качественной информации о важности критериев
Под качественной информацией об относительной
важности критериев будем понимать множество Q сооб-
щений типа «Критерии Ki и К2 равноценны» и т. п., точ-
ный смысл которых устанавливается определениями
1—8. При анализе практических задач упорядочивать
критерии по важности или сопоставлять степени пре-
восходства в важности можно непосредственно на осно-
вании этих определений. Например, следует считать, что
получено сообщение К1~К2, если лицо, принимающее
решение, или эксперты утвердительно ответят на воп-
рос:' являются ли всякие две векторные оценки х и у=
= Ж1>2 одинаковыми по предпочтительности? Для про-
верки справедливости утверждений, смысл которых за-
дается определениями 5 и 6, достаточно рассматривать
132
векторные оценки (2.4) с = й пРй
одинаковой предпочтительности таких произвольно взя-
тых х и у считать [Д)>В] ~1 ; когда же у пред-
почтительнее х, полагать [А)>В][С)>£>], а когда х
предпочтительнее у, принимать [C^jDJ^M^B]. Ана-
логичное замечание справедливо и для определений 7
и 8.
Каждое сообщение co«=Q в соответствии с определе-
ниями 1—8 устанавливает во множестве векторных оце-
нок X асимметричное отношение предпочтения Р® и сим-
метричное отношение безразличия /“ (если в определе-
нии говорится лишь об одном из таких отношений, то
другое 'полагается пустым; например, 1кг>к* = рк2^к2=
= 0). Поскольку для сравнения векторных оценок
можно использовать отношения R<ji = P(*\JI0> для всякого
шей, а также введенное ранее R°, то информация Q
непосредственно определяет в X отношения /?(п), /(й) и
р(й).
Р&) __ и y(Q) __ и jti) p(Q) __ р(д
cogQ° coeQ°
где Q°_Q|J{0}. Например, xP{Q)y, если найдется co&Q0,
для которого справедливо хР^у.
Введенные отношения не являются, вообще говоря,
транзитивными. Например, из xRwy и yR{Q}z может не
следовать xR{Q}z. Однако по ряду известных соображе-
ний в задачах принятия индивидуального решения тран-
зитивность отношений предпочтения связывается с ра-
циональным поведением, а наличие циклов типа хРу,
yPz, zPx рассматривается как проявление противоречи-
вости предпочтений [1], [47]. Поэтому везде в дальней-
шем будем предполагать, что отношение нестрогого
предпочтения R лица, принимающего решение, является
квазипорядком, так что I=R(~]R~i — эквивалентность, а
— строгий частичный порядок [10], [61].
Исходя из указанного предположения, следует рас-
ширить отношения R{a\ /(й) и Р(й) до транзитивных от-
ношений Rn^R, и PQ^P, положив /?й=ТгС1 7?(£2)
и /й=ТгС1 /(й), где через TrCI обозначена операция
транзитивного замыкания бинарных отношений [61].
По своему смыслу RQ — транзитивное отношение, мини-
мально расширяющее /?(й): RQ есть пересечение всех
транзитивных отношений, включающих R{Q). Следова-
тельно, переход от R{Q) к R действительно продиктован
13(3
лишь принятием условия транзитивности. Аналогичной
соображение справедливо и для отношения /й. В соот-
ветствии с определением xRQy будет в том и только том
случае, если найдутся s векторных оценок г1, ..., zs и
s+ 1 символов о/ей0 таких, что
хЯ®*?1, ..., (3.1)
(для разных пар векторных оценок х, у число s, вектор-
ные оценки zh и символы о/ могут быть, конечно, раз-
личными). Когда в (3.1) все R суть /, то xIQy. Отноше-
ние PQ определим так: xPQy, когда можно построить
«цепочку» (3.1), в которой хотя бы одно R есть I.
В определении отношений 7?Q, /я, никаких предпо-
ложений о взаимосвязи сообщений из Q не делалось.
Однако некоторые сообщения могут, вообще говоря,
противоречить друг другу. Ясно, например, что из трех
сообщений и любые два проти-
воречат друг другу. Из-за этого отношение может
не быть иррефлексивным и пересекаться с /°. Так, если
£^={^>/<2, т=2, то (2, 1)РК1>К2(1, 2),
(1, 2) (2, 1), т. е. (2, 1) PQ (2, 1).
Легко видеть, что IQ всегда является эквивалентно-
стью, RQ — квазипорядком, а Ра обобщенно транзити-
вен по /° (т. е. из xPQy и yIQz, а также х!°у и yPQz
вытекает xPQz). Следовательно, если PQ оказывается ир-
рефлексивным, то 7?°=PQ|J/C, причем строгий частичный
порядок PQ не пересекается с /я: PQ=RQ\IQ.
Поэтому будем считать, что информация Q непроти-
воречива, если порождаемое ею отношение Ра иррефлек-
сивно.
Выяснить, связаны ли две произвольные векторные
оценки отношениями PQ или 1а, непосредственно с по-
мощью определений этих отношений слишком сложно
или даже вовсе невозможно. Поэтому встает вопрос
отыскания легко обозримых условий, при выполнении
которых векторные оценки сравнимы по RQ, и разработ-
ки на их основе достаточно простых и удобных методов
построения отношений PQ и /я.
Для общего случая этот вопрос представляется весь-
ма сложным. Однако можно указать весьма полезное
для практики правило, которое очень часто позволяет
резко упростить его решение.
Пусть множество М= {1, ..., пг} номеров критериев
можно разбить на п непересекающихся подмножеств
134
M(l), ..., M(ri) так, чтобы всякое сообщение из О от-
носилось к критериям с номерами лишь из какого-либо
п
одного из этих множеств. Тогда Q = U &(/), где Q(/) —
7=1
совокупность сообщений о важности критериев с номе-
рами из М (/).
Обозначим через х (/) вектор, полученный из хе X
выбрасыванием всех компонент, номера которых не входят
в М (/), а под X (/) будем понимать множество всех таких
векторов. В соответствии с определениями 1 — 8 в каждом
X (/) можно ввести отношения где cosQ(j), из
которых можно построить отношения /^(/), Не-
трудно убедиться в том, что xR®y тогда и только тогда,
когда
*(W'W / = (3.2)
причем xIQy (xPQy) в том и только том случае, когда в
(3.2) все R суть I (хотя бы одно R есть Р).
Таким образом, задача о сравнимости двух произ-
вольных векторных оценок х и у сводится по указанной
схеме к п задачам о сравнении векторов х(/) и y(j). Это
положение естественно назвать принципом декомпо-
зиции.
Проиллюстрируем применение этого принципа на простом примере:
m = 6, Q={K2>K5, К1~{Кз, Ле}}. Положим 7И(1) = {2, 5}, М(2) =
= {1, 3, 6}, Af(3) = {4}. Тогда Q(l) = {/C2>tf5}, Q (2) = {Кх - {К3,
Кб}}, Q(3) =0. Для х= (7, 4, 3, 6, 2, 5) и у= (3, 2, 7, 4, 3, 7) имеем
*(1) = (4, 2), (4, 2) Р*’>*» (2, 4), (2, 4) Pj (2, 3), (2,3)= «/(I);
х?(2) = (7, 3, 5), (7, 3, 5) Р® (7, 3, 3), (7, 3, 3) (3, 7, 7),
(3, 7, 7) = у (2).
х(3) = 6, 6Р®4, 4=р(3).
Следовательно, хР®у.
Подзадачи, получаемые из исходной задачи сравне-
ния двух векторных оценок с помощью принципа деком-
позиции, обычно существенно более просты — благодаря
меньшей размерности векторов и особенно за счет того,
что множества Q(j) содержат меньшие по количеству и
разнообразию сообщения о важности. Поэтому далее
ограничимся рассмотрением многокритериальных за-
дач, в которых Q содержит одно сообщение, или же не-
сколько, но какого-либо одного типа.
135
Вначале разберем задачи, в которых упорядоченны-
ми по важности являются отдельные критерии, т. е. мно-
жество Q может содержать лишь сообщения типа <х>± и
со2. Для произвольной векторной оценки у введем опор-
ные множества Iй(у) всех ^-эквивалентных, PQ(y} из
Q-улучшенных и /?п(г/) из Q-ухудшенных векторных оце-
нок, определяемых следующим образом:
/п(у) = {х| существует цепочка (3.1), в которой все R
суть I и все
PQ(y) = {x\ существует цепочка (3.1), в которой все
и хотя бы одно R есть Р);
ЯЧу)=1ЧуЮРЧуГ
Таким образом, множество IQ(y) образовано вектор-
ной оценкой у и всеми такими векторными оценками, ко-
торые можно последовательно получить из у переста-
новками компонент, соответствующих имеющимся в Q
утверждениям о равноценности критериев. Множество
PQ(y) включает все векторные оценки, в процессе полу-
чения которых из у перестановками компонент в соот-
ветствии с утверждениями из Q хотя бы один раз исполь-
зовалось утверждение о превосходстве в важности (ска-
жем, q-я компонента у у или же некоторой
полученной из нее векторной оценки была больше р-и
и эти компоненты менялись местами).
Теорема 1. При упорядочении по важности от-
дельных критериев: xRQy тогда и только тогда, когда
существует векторная оценка z^RQ(y) такая, что xR°z;
xIQy тогда и только тогда, когда х^Н(у); xPQy тогда
и только тогда, когда существует векторная оценка z^
^PQ(y) такая, что xR°y, или же w^P(y) такая, что
xP'w.
X
С .помощью этой теоремы нетрудно выяснить, сравнимы ли две
векторные оценки при наличии информации Q. Пусть, например,
/п = 5, х=(,2, 1, 6, 4, 3), r/= (1, 2, 4, 6, 3). Для Q={^>X2, Кз-КД
справедливо хР®у, ибо из у, учитывая можно получить
Й-эквивалентную векторную оценку g=(l, 2, 6, 4, 3), а из «ее,
используя построить Q-улучшенную векторную оценку
z= (2, 1,6, 4, 3), причем оказывается xIQz.
Для задач с равноценными критериями (т. е. в ко-
торых всякие два критерия равноценны) можно полу-
чить значительно более простые результаты. Пусть
ф(т)(%)—вектор-функция, располагающая в порядке
убывания все компоненты вектора х^Ет, так что
136
грх } (х) = max xi и (х) = min xt-. Обозначим множест-
во Q, состоящее из высказываний о равноценности вся-
ких двух критериев, через S.
Теорема 2. xRsy (xPsy, xlsy} тогда и только
тогда, когда гр(т) (х)К°ф(т) (у) [соответственно
ф(т) (х) Р°ф(ш) (у), ф(т) (х) /°ф(т) (у) ].
Например, (7, 4, 8, 2), Ps(8, 3, 2, 7), так как (8, 7, 4, 2)
Р°(8, 7, 3, 2).
Обратимся теперь к случаю наличия информации об
упорядоченности по важности множеств критериев.
Теорема 3. Пусть m = n + l и Q = {{K1} ..., Кп} ~
~ {Kn+i, • • •, Кт}}. Тогда xRDy в том и только том слу-
чае, если выполнено хотя бы одно из двух условий*.
1) xR°y,
2) min Xi max yn+j-, min xn+;- > max yc
/ец,/e{i, ...,n /е{1.n}
далее, xIQy тогда и только тогда, когда х=у или же у=
--тг} {тг+1, тп,} ип// Y 1 — — . - у у —- — у
-------------------------------------------JU /LpLC . Лп, .—лт.
Теорема 4. Пусть m—n+l и Q= {{К4, ...» Кп}>>
>{Kn+i, ..., Кт}} • Тогда xPQy в том и только том слу-
чае, если выполнено хотя бы одно из двух условий*.
1) xPQy\ 2) справедливы два нестрогих неравенства из
условия 2) теоремы 3, а также min xi > max yi.
Например, при m=5, x=(2, 3, 2, 5, 4), #=(4, 3, 4, 1, 2) для
Q={{Ki, Kz, Кз} ~ {K4, Ks}} по условию 2) теоремы 3 xPQy, а для
Q'= {{Ki, Кг, Кз}x*{K4, Кб}}, как показывает теорема 4, х и у несрав-
нимы по RQf.
§ Отношения важности критериев
Информация о важности Q, состоящая из сообщений,
сформулированных в соответствии с определениями § 3,
вводит во множестве подмножеств множества критериев
{Ki, ..., Km} отношения важности — бинарные « и>-,
четырехместные и и др. — следующим образом:
или В ~ А е Q;
А, В^АС, D+-+[A>-B]~ X[C>D]^Q
137
ИЛй
[С > Ь] -1 [А > 5] е 0;
А, В >4?, Д <->[Л £>]е Й;
Л, В, С, D~2E, F, G,H*-+
^[[A^B]yl[C^D]]^4lE>F]^[G^H]]^Q
или
[[Е^^^ЧС^^П-ЧИ^В^-ЧС^РПей;
Л, В, С, D£2E, F, G.H^
^[[A^B]^1[CXD]]y2[[E>-F]^4G>H]]^^
Удобно формально принять, что Л^Л, Л^0 при
Л=#0 и Л >*В, если (Л\В))>(В\Л)^й или Вс=Л, а
также считать, что если Л >• В, то Л, В^М, В; если
Л, В > 4С, В, то Л, В, С, В^2Л, В, С, В и т. п.
В соответствии с данными определениями отношение
« оказывается симметричным и рефлексивным, а >- —
иррефлексивным. Дальнейшие свойства отношений важ-
ности существенным образом зависят от того, противо-
речива ли информация й или же нет. Если й непроти-
воречива (т. е. Ра иррефлексивно), то:
— отношение >- ациклично, т. е. не существует мно-
жеств критериев Ль ..., Лп, образующих цикл Л4 ►-Л2,
Л2 >-Л3, ..., Ап А; в частности, > асимметрично;
— >- ациклично с т. е. не существует множеств
критериев Ль ..., Лп, образующих цикл вида А^@ Л2,
Л2 ® Л3, ..., Ап @ Aif где каждое ® есть > или же
но >- встречается хотя бы один раз; в частности, ►*
и не пересекаются.
Будем говорить, что информация й и информация 0
эквивалентны, если BQ=B0, PQ==PQ, IQ=IQ, Понятно,
что по отношениям важности можно восстановить ин-
формацию о важности, а тем самым и обеспечить по-
строение отношений предпочтения и безразличия в X.
Поэтому возникает естественный вопрос: как расши-
рить отношения важности, чтобы обеспечить восстанов-
ление информации о важности лишь с точностью до эк-
вивалентности, т. е. не нарушать отношений предпочте-
ния и безразличия? Этот вопрос оказывается тесно
связанным с вопросами о непротиворечивости и содер-
жательности дополнительной информации о важности,
которые состоят в следующем:
Предположим, что в дополнение к имеющейся (не-
противоречивой) информации й поступило еще одно или
138
несколько сообщений о важности, составляющих множе-
ство Д. В связи с этим встают два вопроса: не противо-
речит ли эта дополнительная информация имевшейся, и
если нет, то несет ли она что-либо новое?
Естественно считать, что дополнительная информа-
ция Д не противоречит имевшейся, если множество всех
сообщений 0=iQ|J'A — информация непротиворечивая,
т. е. PQ иррефлексивно. Всегда RQ^RQ, а при непротиво-
речивости 0 также 1Q^IQ и PQ^PQ.
В соответствии с общим подходом к решению мно-
гокритериальных задач итеративным путем [59] будем
говорить, что информация Д содержательна, если она
позволяет сравнить по предпочтительности по крайней
мере две векторные оценки, несравнимые по RQ, т. е.
если RaczRQ,
Простейшие примеры показывают, что если в Q име-
ются сообщения А — В и В~С (Л— В и В^С или же
иВ — С), то в случае, когда хотя бы одно из мно-
жеств А, В, С содержит более одного критерия, дополни-
тельное сообщение А ~ С (соответственно А >- С) может
быть содержательным. Так, (1, 1, 2, 2)/К1~к‘(2, 1, 2, 1),
однако эти векторные оценки несравнимы по RQ для Q =
= № ~ {^2, Кз}, Иг, Кз} ~ Однако если все три
множества А, В, С одноэлементы, то указанные выше до-
полнительные сообщения никогда не будут содержатель-
ными. Действительно, например, если хР х , то
и П0ЭТ0МУ будет xIA~Bz, zPB>Cw, wIA~By, так
что xPQy, где Q = {Л — В, В\ С}, z = w =
= ~мамс
В том же случае, когда {Л)>В, B)>C}&Q, то допол-
нительное сообщение А^С может быть содержатель-
ным, даже когда каждое множество Л, В, С состоит лишь
из одного критерия {53].
Далее, пусть Л, В, С и D — попарно не пересекаю-
щиеся множества критериев. Если {Л^>'В,
где каждое )>', есть ~ или ^>, но хотя бы одно из
них есть >, то сообщение (ЛиС)^> (BJZ)) не будет со-
держательным. Если же {А~В, C~D}<=Sl, то содер-
жательным не будет сообщение (Л^С) ~ (BJD).
Предположим, что [Л>В]>1[С>£>]еЙ ([Л^В]^1
Тогда не будет содержательным сооб-
щение ^(JD)^>(B|JC) (соответственно (Ли^) ~
139
~(B(JC)). Аналогичные утверждения справедливы для
случаев наличия в Q сообщений, включающих )>2
2
Указанные результаты могут быть использованы при
организации получения и обработки информации о важ-
ности критериев. Кроме того, они указывают пути рас-
ширения отношений важности. Например, отношение ~
на множестве (отдельных!) критериев может быть про-
должено до эквивалентности.
§ 5. Коэффициенты важности критериев
Построенные отношения важности могут быть исполь-
зованы для измерения важности критериев. Для этого,
в соответствии с общим подходом, развиваемым мате-
матической теорией измерений [9]—'.[10], '[58], важность
каждого критерия Ki следует оценить положительным
числом аг, важность множества критериев А характери-
зовать суммой aif и при этом обеспечить, чтобы чис-
i£MA
ла cti удовлетворяли равенствам и неравенствам, есте-
ственным образом формируемым на основе отношений
важности:
аг = а;, если Kr ~ Kt\
если Кг Kt;
3 = 3 а*’ если ~
i%=MA iGEM в
2 «<> 3 «г,
i<=MA
если А >-В;
2 ai— 3 а{ ~ 3 а‘— 3 at> если —
iGEMA iGEMg (ЕЕМд
2 a<— a< 3 — 3 a<’ если
i^MA Ig=Mq
3 a{- 3 - 2 ««- 3 «*
iEEMA iGEMp
3 «<- 3
iGEMg iGEM. f?
3 a<- 3
i(=Mg
HO
если
А, В, С, D^2E, F, G, Н;
S а<~ «<
ai~ 3 ai
3 s
iEEMp it=Mp
3 .
IeeMq iE=Mj-[
если
O,C,DH£, F,G,H, и т. д.
Положительные числа аь ..., ат, удовлетворяющие
указанным условиям, будем называть коэффициентами
важности критериев (соответствующими информации Q).
Примечания. 1. Если ai, am—коэффициенты важности,
то и числа а',..., ат, определяемые равенствами = ai!' aP
также оказываются коэффициентами важности. Следовательно,
можно, если это удобно по каким-либо причинам, считать, что коэф-
фициенты важности должны в сумме равняться единице.
2. Поскольку отношения важности прямо задаются информа-
цией Q, то систему равенств и неравенств для а< практически удоб-
нее составлять непосредственно на основе этой информации: ar = at,
если Kr~Kt^Q или и т. д.
Оказывается, что совместность системы равенств и
неравенств, задающих коэффициенты важности, тесно
связана с непротиворечивостью й.
Теорема 5. Для непротиворечивости информации
Q достаточно, а если упорядочиваются по важности лишь
отдельные критерии (т. е. если в Q могут быть лишь
утверждения типа со± и со2), то и необходимо, чтобы су-
ществовали соответствующие Q коэффициенты важно-
сти ..., am.
Доказательство утверждения о необходимости из
этой теоремы ([57] опирается на технику статьи [58],
усиленную при помощи общей теоремы об альтернативе
из теории линейных равенств и неравенств [62].
Коэффициенты важности определенным образом реа-
гируют также на содержательные дополнительные со-
общения о важности критериев:
Теорема 6. Для содержательности непротиворе-
чивого дополнительного сообщения б достаточно, чтобы
соответствующее ему линейное равенство или неравен-
ство было независимым от системы равенств и нера-
венств для коэффициентов важности, записанной на ос-
нове информации Q (т. е. чтобы множество решений
141
системы, расширенной соотношением, соответствующим
6, было уже множества решений исходной системы).
Результаты исследований содержательности дополнительной
информации, приведенные в § 4, показывают, что условия последней
теоремы являются только достаточными, но никак не необходимыми.
Несомненное теоретическое и практическое значение
представляет вопрос: можно ли задать отношение RQ
непосредственно в терминах коэффициентов важности,
порождаемых информацией Q? Оказывается, что в ряде
случаев этот вопрос решается положительно.
Разберем вначале случай, когда информация Q та-
кова, что все критерии разбиваются на п групп следую-
щим образом: внутри одной и той же группы любые два
критерия равноценны, а любой критерий из группы с
меньшим номером важнее любого критерия из группы с
большим номером. Если обозначить номера критериев,
составляющих l-ю группу, через Mh то указанную ин-
формацию iQ = <Alt, ..., Л4П> можно записать так:
..., Mn}={Ki>K5\i(=Mp, j(=Mq, i=£j, p^q; >
есть ~ при p—q\ есть при p<iq}- Для этой ин-
формации коэффициенты важности задаются системой:
ai = а/ при i е Мр, j е Mq, р ~ q, Г,
at > а/ при i е Мр, j е Mq, p<.q.
Здесь требование положительности коэффициентов важ-
ности можно не вводить. Легко видеть, что если числа
Oi удовлетворяют вышеуказанной системе, то и числа
g(at), где £ — произвольная строго возрастающая чис-
ловая функция, также удовлетворяют этой системе. Сле-
довательно, информация <Л4Ь ..., Л4П> позволяет изме-
рить важность всех критериев в единой порядковой шка-
ле. Поэтому коэффициенты важности, порождаемые ин-
формацией ..., Л4П>, будем называть порядковыми
и обозначать а?.
Пусть х и у — произвольные векторные оценки, а
G(x, y\=(gi, ..., gk(x v)> — упорядоченное множество
чисел gi>g2>-• ->gk(x, V), каждое из которых является
компонентой х или у, причем для любой компоненты
и у$ найдется равное ей число из G(x, у). Пусть a*(z) =
= (а! (z),.... c4(z)), где
t _ При Z/>gb
ai\z) — d в противном случае (d<minat).
I fcM
142
Теорема 7. xR<Mu"''Mn'у имеет место тогда и
только тогда, когда справедливы неравенства
(aot (х)) > if//70 (aot (г/)), i = 1, ..., m\ t = I, ... t k(x, у),
причем xP у, если хотя бы одно неравенство
строгое, и xl у, если все эти нестрогие неравен-
ства выполняются как равенства.
Разберем теперь случай, когда информация о важно-
сти Q такова, что упорядочивает по важности все кри-
терии и все множества критериев, а также сравнивает
все возможные степени превосходства в важности. Ина-
че говоря, если со — любое сообщение о важности, сфор-
мулированное в соответствии с определениями § 2, и
оно не противоречит Q, то co^Q. Такую информацию
будем называть полной качественной информацией о
важности критериев и обозначать Q*, а соответствующие
ей коэффициенты важности — аддитивными коэффици-
ентами важности . Последнее название объясняется
тем, что любое подмножество критериев будет характе-
ризоваться суммой соответствующих коэффициентов, раз-
личие в важности двух множеств критериев — разностью
таких сумм, и т. д.
Для вектора а = (аь ..., ат) с положительными ком-
понентами введем в X отношение /?(а), определяемое сле-
дующим образом: xR{a}y тогда и только тогда, когда при
каждом t = 1, .. k(x, у) выполняется неравенство Az(x)>
m m
> А' (у), где А' (х) = а! (х), А' (у) = (у), d=0. Не-
1=1 1=1
трудно доказать, что 7?(а) — квазипорядок, и если оц соот-
ветствуют Q, то xRQy влечет xR^y, т. е. Есть,
однако, основания предполагать, что справедливо следу-
ющее утверждение.
Утверждени е./?п*=/?(аа), где аа= (а? , ..., а^)—
вектор аддитивных коэффициентов важности, соответст-
вующих Q*.
Понятно, что отношение задать непосредственно на основе
коэффициентов важности, соответствующих информации Q, можно
также и тогда, когда она эквивалентна информации одного из двух
вышеразобранных типов, или же множество критериев можно раз-
бить на подмножества так, чтобы информация для каждого из под-
множеств была эквивалентна информации таких типов (в послед-
143
нем случае необходимо привлечь принцип декомпозиции). В общем
же случае отношение задать непосредственно по аг- невозможно.
Это объясняется тем, что отношения важности и связывающие
критерии, не транзитивны, а соответствующие отношения > и =,
связывающие числа аг-, транзитивны. Например, если Q =
0 = QU{Л\>Лз}, то может быть в то время как из
ai>;a2 и аг>а3 следует ai>a3, т. е. коэффициенты важности не по-
зволяют различать Q и 0 (пример см. в [53]).
§ 6. Коэффициенты важности в обобщенных критериях
и мажоритарных схемах
Примеры обобщенных критериев были рассмотрены в
§ 1. Общее определение обобщенного критерия можно
дать следующим образом [53].
Предположим, что все критерии Ki однородны. Пусть
ИР» О' — числовая функция, монотонно возрастающая по
t на Т при любом ip>0, где Т — множество чисел, такое,
что т] (О<=Т при любых t^Xi и преобразовании т], допу-
скаемым типом шкалы критериев Ki, a <р(у) — симметри-
ческая изотопная по R° на Zm числовая функция*), где
Z — множество значений f. Функция Ф(а, х) =
=<р(Псб1, %i), ..., f(am, Xm)) оказывается, очевидно, изо-
тонной по 7?° на Тт при любых af>0, и если ср (у) строго
изотонна, то такой же будет и Ф(а, х). Смысл функций
f и ср ясен: первая при надлежащим образом назначен-
ных коэффициентах переводит критерии Кг в равно-
ценные критерии f(a<, Ki), а вторая «сворачивает» по-
следние в Ф(а, К).
Функция Ф(а, К) называется обобщенным критерием,
а ее параметры — коэффициентами важности критери-
ев Ki, если для любых номеров р, q^M, всяких аг>0 и
х, у(=Тт выполняются условия: 1) Ф(а, х)^Ф(а, у) вле-
чет Ф(ясс, х)'^Ф(аа, у) при любом положительном числе
а; 2) если xp>xq и up>aq, то Ф(а, х) ^Ф(а, xpq); 3) если
хР>уР, xq<Zyq и Xi=y{ для всех остальных i^M, то су-
ществует такое число с(х, у), что при ap/aq>c(x, у) вы-
полняется неравенство Ф(а, х)^Ф(а, у) (если ср строго
изотонна, то неравенства в 2) и 3) должны быть стро-
гими).
Смысл условий данного определения понятен: первое
означает, что важность критериев Ki должна измеряться
* Функция <р называется изотонной (строго изотонной) по Ro
на Y^Em, если хР°у влечет гр (%) <р (у) (соответственно <р(х)>
><р(у)) Для любых х, y^Y.
144
коэффициентами а» в шкале отношений; второе показы-
вает, что выгоднее иметь большее значение по более важ-
ному критерию; а третье говорит о том, что если один кри-
терий значительно важнее другого, то выгоднее даже не-
большое приращение его значения при существенной по-
тере в величине другого критерия.
, Теорема 8. Если коэффициенты важности а* в об-
общенном критерии Ф уточняют информацию Q, состоя-
щую из сообщений типа coi и (или) <о2 (т. е. удовлетворя-
ют системе равенств и неравенств для а<, построенной на
основе Q), то из xPQy (хГ*у) следует Ф(а, х)^Ф(а, у)
(Ф(а, х)=Ф(а, у)), причем если <р строго изотонна, то
неравенство строгое.
|Например, если Ф, в котором уточняют информацию Q о (важ-
ности отдельных критериев, есть или Фя, то <из xPQy следует
Ф(а, х)>Ф(а, у), а если Ф = Ф, из хР®у вытекает лишь
Ф(а, х)^Ф(а, у).
Согласно данному выше определению коэффициенты
важности измеряют в Ф важность отдельных критериев
К-; при этом вовсе не предполагается, что важность со-
вокупности нескольких критериев характеризуется сум-
мой соответствующих коэффициентов важности. Будем
говорить, что обобщенный критерий Ф обладает аддитив-
ными коэффициентами важности, если для любых аг>0
из хР^у (хГа)у) следует Ф(а, х)^Ф(а, у) (Ф(а, х) =
=Ф(а, у)) у причем это неравенство строгое, если Ф(а, х)
строго изотонен по R° на X.
Теорема 9. Обобщенные критерии Ф(5) и Фя обла-
дают аддитивными коэффициентами важности.
В Ф коэффициенты важности аддитивными не являются. Напри-
мер, для *п=3, а=(10, 5, 6), х= (2, 1, 1), г/=(1, 2, 2) справедливо
Ф (,а, х) >Ф (а, у), хотя yR^x.
Если коэффициенты важности а, в Ф аддитивны и
уточняют Q, то на основании последней теоремы можно
утверждать, что xPQy (xIQy) влечет Ф(а, х)^Ф(а, у)
(Ф(а, х)=Ф(а, у))у и это неравенство — строгое при
строгой изотонности Ф. Указанное означает, что если ка-
чественная информация Q уточняется дополнительными
сведениями о виде обобщенного критерия и величине его
коэффициентов важности, то отношение Ra расширяется
до линейного квазипорядка /?ф, порождаемого Ф, который
обеспечивает решение многокритериальной задачи приня-
тия решения в условиях определенности.
145
Интересен также вопрос 0 Том, как связано Отношение с отно-
шениями предпочтения, порождаемыми мажоритарными правилами,
если коэффициенты важности -в них уточняют Q. Оказывается, что
даже для простейшего правила подобного рода, указанного в § 1,
нет никакой естественной согласованности этих отношений. Простей-
ший пример: для Q= {Л\>К2, К1>Кз} и х= (3, 2, 1),
у=(3, 1, 2), z=(l, 3, 2) имеем xPQy, yPQz, xPQz, хотя при iai = 4,
(Z2=3, a3 = 2 оказывается, что хР^^у, уР^^ z, zP^>x. j
§ 7. Универсальность аксиоматической теории
важности критериев
Рассмотренный в этой главе аксиоматический под-
ход к оценке важности критериев может быть непосред-
ственно применен в различных задачах принятия реше-
ний для качественного оценивания самых разнообраз-
ных факторов, таких, как компетентность экспертов,
значимость членов коллектива и т. п. Для этого доста-
точно представить исходную задачу в «многокритери-
альной форме» и дать подходящую трактовку сформули-
рованным в § 2 аксиомам. Покажем, как это можно сде-
лать, на примере задачи принятия решения по одному
критерию £(и, у) в условиях неопределенности, когда
множество значений неопределенного фактора V конеч-
но: V= {у1, ..., <Jm}, а £ не является функцией полезно-
сти*). Здесь стратегию и можно характеризовать векто-
ром К\иу= (КДи), ..., Кт(и)), где /<<(«) =^(и, у1’).
Очевидно, что все критерии Лг- однородны. Утверждение
«значения vT и v* одинаково вероятны (возможны)»
естественным образом формализуется введением отно-
шения и может быть записано «словом» KT~Kt,
а утверждение «значение vr более вероятно (более воз-
можно), чем v1» — введением отношения Р т. п.
Поэтому при наличии «качественной» (например, субъ-
ективной) информации Q о вероятности (возможности)
тех или иных значений v* можно построить отношение
RQ и сузить множество выбора оптимальной стратегии
до UQ.
Более того, такой подход имеет смысл применять и
к задачам принятия решений в условиях риска. В таких
задачах вероятности рг- значений & известны точно, и
поэтому можно использовать самое широкое из отноше-
ний — отношение 7?(а), где аг=рй Z=l, ..., т.
*) Вопросы использования качественной информации о вероят-
ностях pi значений v* (в форме pr^pt, Pj = pk и др.) для случая,
когда £—функция полезности, разбирались в [60].
146
Литература к главе 4
1. Нейман Дж., Моргенштерн О. Теория игр и экономиче-
ское поведение.— М.: Наука, 1970.
2. Коо pm an s Т. J., Analysis of production as an efficient combi-
nation of activities.— In: Activity analysis of production and alloca-
tion.—N. Y. Wiley, 1951, p. 33—97.
3. M о и с e e в H. H. Оптимизация и управление (эволюция идей
и перспективы).— Известия АН СССР. Техническая кибернетика,
1974, № 4, с. 3—16.
4. Вентце ль Е. С. Исследование операций.— М.: Советское ра-
дио, 1972.
5. О з е р н о й В. М. Принятие решений (обзор). Автоматика и теле-
механика, 1971, № 11, с. 106—121.
6. Модели и методы векторной оптимизации/Емельянов С. В. и др.
В кн.: Техническая кибернетика. Итоги науки и техники.— М..
г^изд. ВИНИТИ, 1973 —Т. 5, с. 386—448.
7. jKeeney R. L., Raiffa Н. Decisions with multiple objectives:
—''preferences and value tradeoffs.—N. Y.: Wiley, 1976.
8. Г e p м e й e p К. Б. Введение в теорию исследования операций.—
М.: Наука, 1971.
9. ПфанцагльИ. Теория измерений.— М.: Мир, 1976.
10. Миркин Б. Г. Проблема группового выбора,— М.: Наука, 1974.
11. Ру а Б. Проблемы и методы принятия решений в задачах с мно-
гими целевыми функциями.— В кн.: Вопросы анализа и процеду-
ры принятия решений.— М.: Мир, 1976, с. 20—58.
12. Ларичев О. И. Человеко-машинные процедуры принятия ре-
шений (обзор).— Автоматика и телемеханика, 1971, № 12, с. 130—
142.
13. КрасненкерА. С. Задачи и методы векторной оптимизации.—
Измерения, контроль, автоматизация, 1975, № 1 (3), с. 51—56.
14. Вилкас Э. Многоцелевая оптимизация.— В кн.: Математиче-
ские методы в социальных науках.— Вильнюс, Институт физики
и математики АН ЛитССР, 1976,— Вып. 7, с. 17—67.
15. Подиновский В. В., Гаврилов В. М. Оптимизация по по-
следовательно применяемым критериям.— М.: Советское радио,
1975.
16. Fa nd el G. Optimale Entscheidung bei mehrfacher Zielsetzung.—
Lecture notes in economics and mathematical systems.— Berlin:
Springer, 1972.—v. 76.
17. Guigou J.— L. Analyse des donnees et choix a criteres multi-
ples.— Paris: Dunod, 1974.
18. Wilhelm J. Objectives and multi-objectives decisions making
under uncertunty.— Lecture notes in economics and mathematical
systems.— Berlin: Springer, 1975.— V. 112.
19. Г e p м e й e p Ю. Б. Образование целей в задачах с векторным кри-
терием (тезисы).— Известия АН СССР. Техническая кибернетика,
1976, № 4, с. 3—13.
20. Азга льдов Г. Г., Райхман Э. П. О квалиметрии.— М.:
Изд-во стандартов, 1972.
21. Зак Ю. А. Модели и методы построения компромиссных планов
в задачах математического программирования с несколькими це-
левыми функциями.— Кибернетика, 1972, № 4, с. 102—107.
22. Saska I. Linearm multiprogramovani.— Ekonomicko-matematicky
obzor, 1968, c. 3, s, 357—373.
147
23. C h a r n e s А., С о о p e r W. W. Management models and industrial
applications of linear programming.— N. Y.: Wiley, 1961.— V. 1, 2.
24. I j ir i Y. Management goals and accounting for control.—Amster-
dam: North-Holland, 1965.
25. C h a r n e s A., Cooper W. W. Goal programming and multiple
objective optimizations.— European journal of operational re-
search, 1977, v. 1, № 1, p. 39—54.
26. К a p п e л e в и ч Ф. И., Мухина В. А. О некоторых методах
решения многоцелевых задач.— Экономика и математические ме-
тоды, 1975, вып. 2, с. 399—401.
27. Ashton R. Н. The robustness of linear models for decision-ma-
king.— Omega, 1976, v. 4, № 5, 609—615.
28. Moskowitz H. Robustness of linear models for decision-ma-
king: some comments.—Omega, 1976, v. 4, № 6, p. 743—746.
29. Глотов В. А., Павельев В. В. Экспертные методы опре-
деления весовых коэффициентов.— Автоматика и телемеханика,
1976, № 12, с. 95—107.
30. К а м е н с к и й В. С. Методы и модели неметрического многомер-
ного шкалирования (обзор).— Автоматика и телемеханика, 1977,
№ 8, с. 118—156.
31. Экенроде Р. Т. Взвешенные многомерные критерии.— В кн.:
Статистическое измерение качественных характеристик.— М.:
Статистика, 1972, с. 130—154.
32. С о 1 е J. D., S a g е А. Р. On assessment of utility and worth of
multiattributed consequences in large-scale systems.— Information
sciences, 1976, v. 10, p. 31—57.
33. S a у e k i Y. Allocation of importance: an axiom system.— Journal
of mathematical psychology, 1972, v. 9, p. 55—65.
34. Steuer R. E. Multiple objective linear programming with inter-
val critetion weights.— Management sciences, 1976, v. 23, № 3,
p. 305—316.
35. Гер мейер Ю. Б. О свертывании векторных критериев эффек-
тивности в единый критерий при наличии неопределенности в па-
раметрах свертывания.— В кн.: Кибернетику — на службу ком-
мунизму.— М.: Энергия, 1971, т. 6, с. 175—184.
36. Р а б и н о в и ч Я. И. Осторожный синтез критерия эффективности
на базе экспертных оценок.— Ж'ВМ и МФ, 1973, № 5, с. 1210—4218.
37. S о у s t е г A. L., Lev В., Т о о f D. I. Conservative linear program-
ming with mixed multiple objectives.—Omega, 19'77, v. 5, № 2,
p. 193—205.
38. Aumann R. J., Kruskal J. B. The coefficients in an alloca-
tion problem.— Naval research logistique quarterly, 1958, v. 5,
p. 111—123.
39. В о л к о в и ч В. Л. Экспертные оценки в задачах принятия слож-
ного решения. Препринт 71-14.— К.: Изд-во института кибернети-
ки, 1971.
40. Srinivasan V., Shocker A. D. Estimating the weights for
multiple attributes in a composite criterion using pairwise judg-
ments.— Psychometrica, 1973, v. 38, № 4, p. 473—493.
41. К и с e л e в Ю. В., Л и с и ц ы н В. А. Вопросы построения моделей
предпочтения.— Изв. АН СССР. Техническая кибернетика, 1974,
№ 5, с. 32—38.
42. F а г g u h а г Р. Н., R а о V. R. A balance model for evaluating
systems of multiattributed items.— Management sceince, 1976,
v. 22, № 5, p. 528—539.
148
43. Г о л о в а н о в О. В., Майков Г. П. Восстановление эквива-
лентных целевых функций по принятым решениям в задачах ли-
нейного программирования.— Экономика и математические мето-'
ды, 1973, вып. 5, с. 937—942.
44. Ф ишбер н П. К. Методы оценки аддитивных ценностей.— В кн.:
/Статистическое измерение качественных характеристик.—М.:
Статистика, 1972, с. 8—34.
45. Н u b е г О. An axiomatic system of multidimansional preferences.—
Theory and decision, 1974, v. 5, p. 161—184.
46. P у а Б. Классификация и выбор при наличии нескольких кри-
териев.— В кн.: Вопросы анализа и процедуры принятия реше-
ний.— М.: Мир, 1976, с. 80—107.
47. Райфа Г. Анализ решений.— М.: Наука, 1977.
48. Fishburn Р. С. Utility theory for decision making.— N. Y.: Wi-
ley, 1970.
49. R i v e 11 P. The dog that did not bark.—The engineering econo-
mist, 1977, v. 22, № 4, p. 298—300.
50. П о д и н о в с к и й В. В. Задачи принятия решений по несколь-
ким однородным равноценным критериям.— В кн.: III Всесоюз-
ная конференция по теории игр. Тезисы докладов.— Одесса:
Изд-во Одесского гос. ун-та, 1974, с. 131 —132.
51. П о д и н о в с к и й В. В. Многокритериальные задачи синтеза
сложных систем с неравноценными критериями.— В кн.: Автома-
тизированные системы планирования и управления.— Ереван:
Айастан, 1975, с. 106—109.
52. П о д и н о в с к и й В. В. Многокритериальные задачи с однород-
ными равноценными критериями. ЖВМ и МФ, 1975, № 2, с. 330—
344.
53. Подиновский В. В. Многокритериальные задачи с упорядо-
ченными по важности критериями.— Автоматика и телемеханика,
1976, № 11, с. 118—127.
54. П одиновский В. В. Двухкритериальпые задачи с неравноцен-
ными критериями.— Известия АН СССР. Техническая киберне-
тика, 1977, № 5, с. 44—50.
55. П о д и н о в с к и й В. В. Об относительной важности критериев
в многокритериальных задачах принятия решений.— В кн.: Мно-
гокритериальные задачи принятия решений.— М.: Машинострое-
ние, 1978, с. 48—82.
56. Подиновский В. В. О построении множества эффективных
стратегий в многокритериальных задачах с упорядоченными по
важности критериями.— ЖВМ и МФ, 1978, № 4, с. 908—915.
57. Подиновский В. В. Коэффициенты важности критериев в за-
дачах принятия решений.— Автоматика и телемеханика, 1978,
№ 10, с. 130—141.
58. A d a m s Е. W. Elements of a theory of inexact measurement.—
Philosophy of science, 1965, v. 32, p. 205—228.
59. Озерной В. M., Г а ф т M. Г. Построение решающих правил в
многокритериальных задачах.— В кн.: Проблемы принятия ре-
шений, М.: Ин-т проблем управления, 1974, с. 30—44.
60. F i s h b и г n P. C. Decision and value theory.—N. Y.: Wiley,
1964.
61. Шрейдер Ю. А. Равенство, сходство, порядок.— M.: Наука,
1971.
62. Foundations of measurement/Krantz D. H. et al.— N, Y.: Acade-
mic press, 1971—V. 1,
ГЛАВА 5
РАЗВИТИЕ ТЕОРЕТИКО-ИГРОВЫХ МЕТОДОВ
ОПТИМИЗАЦИИ В КООПЕРАТИВНЫХ ИГРАХ
И ИХ ПРИМЕНЕНИЕ К МНОГОКРИТЕРИАЛЬНЫМ
ЗАДАЧАМ
Тот раздел исследования операций, который истори-
чески принято называть теорией игр, возник сравнитель-
но недавно, однако уже сейчас ясно, что рассматривать
теорию игр как единую науку едва ли целесообразно.
В ней явно выделились несколько направлений, которые
объединяются не только общими идеями, но и возникаю-
щими там методами. Одной из таких областей является
теория кооперативных игр. По-видимому, ее можно рас-
сматривать шире, чем это принято традиционно. Причи-
нами этого являются, с одной стороны, узость и специ-
фичность первоначально рассматриваемых там задач, и,
с другой стороны, большая идейная емкость принятых
там принципов оптимальности. Возможно, что первое
явилось причиной малой популярности последних. Нам
представляется, что ценность кооперативной теории, в
первую очередь, заключается в том, что она может вос-
питать идеологию, весьма полезную для исследователя
операций.
В данной главе, с одной стороны, основные принципы
оптимальности кооперативных игр будут распростране-
ны на некоторую формальную схему общей задачи при-
нятия решений, с другой стороны, будет расширен объ-
ект их применения и прослежено дальнейшее их разви-
тие собственно в теории игр. При этом полный обзор
имеющихся результатов не является целью данной гла-
вы. Достаточно полный обзор советских работ по коопе-
ративной теории игр содержится в [2], там же имеется
и обширная библиография, которой мы будем пользо-
ваться иногда вместо ссылок на соответствующие ра-
боты.
150
§ 1. Задача принятия решений
в форме пространства с отношением
и ее теоретико-игровые варианты
1. Основные понятия. На каком-то этапе задачу при-
нятия решений упрощенно можно представить в виде
пары <Л, /?>, где А—множество произвольной природы,
a R — бинарное отношение на нем, при этом R можно
считать антирефлексивным и интерпретировать как от-
ношение «лучше». Так как в теории принятия решений
имеется естественная содержательная несимметричность
в определении R, то мы примем следующее: запись xRy
будет означать, что х «предпочтительнее» или «лучше» у.
Если пока отсутствует какая-либо дополнительная
информация относительно А, то естественно, по крайней
мере, в качестве первоначального отбора выбирать ка-
кой-либо «максимальный» элемент хеЛ, т. е. такой, для
которого не существует уеЛ: yRx. Множество таких
элементов называется ядром отношения R на множестве
А и обозначается CR{A):
Cr(A)—A—R(A),
где R(A) = □ R(x), R(x) = {y<=A: xRy}. Этот термин
и четко сформулированное понятие принадлежат амери-
канскому математику Джиллису, хотя у Неймана и
Моргенштерна в [4] вводилось понятие максимального
элемента, но лишь для отношения порядка, и определе-
ние ядра приписывается им ошибочно.
Значительно более сложным является понятие реше-
ния {Неймана — Моргенштерна') отношения R на мно-
жестве Л, а именно, максимального подмножества Л,
состоящего из элементов, не связанных отношением R
(внутренняя устойчивость) :
Vr{A)=A—R(Vr(A)).
Решение обладает свойством внешней устойчивости: для
любого y^VR{A) найдется хеУл(Л): xRy. В теории гра-
фов решение иногда называется ядром графа.
Некоторые общие результаты относительно ядер и
решений произвольных (антирефлексивных) отношений
будут приведены ниже, но сначала отметим специфику
отношений, возникающих, например, в теории игр.
Дело в том, что многие задачи принятия решений не
задаются в виде <Л, /?>, а лишь могут быть приведены к
151
нему. Большинство теоретико-игровых задач, с точки
зрения исследователя (а не отдельных игроков), отлича-
ются тем, что на множество альтернатив А задано не
одно отношение, а несколько.
2. Многокритериальные задачи принятия решений.
Часто задачу принятия решений можно формализовать
в систему, состоящую из множества альтернатив А и на-
бора отношений 7?i, R2i ...» 7?п, заданных на А. По-ви-
димому, специфика задачи, в которой все Ri принадле-
жат одному «лицу» или отдельным «лицам», не так су-
щественна, как это раньше казалось, даже с точки зре-
ния формирования общего принципа принятия решения.
Не следует думать, что приемы и методы «решения» та-
кой задачи должны быть существенно различными в этих
двух случаях. С одной стороны, в задаче с многими ли-
цами, особенно в последнее время, усиленно внедряются
методы, которые можно условно назвать «арбитражны-
ми схемами» и которые по существу вводят оперирую-
щую сторону (арбитра), навязывающую игрокам свои
решения (или, по меньшей мере, свое представление о
разумности), с другой стороны, в задачи исследования
операций (в узком смысле) проникают теоретико-игро-
вые принципы принятия решений, которые могут ока-
заться здесь весьма плодотворными. Подробнее об этом
будет сказано ниже.
Таким образом, Ri можно считать либо принадлежа-
щими одному лицу, т. е. предполагать, что на А задано п
различных предпочтений, либо, что имеется п лиц (игро-
ков), у каждого из которых свое предпочтение на одном
и том же множестве «исходов» А. Приведем примеры.
3. Примеры многокритериальных задач. 1. Пусть на
множестве А (пока не будем его конкретизировать) за-
даны п числовых функций ф1 (х), ф2(х), . .., <ря(х).
Будем считать, что xRiy, х, у^А, если <рг(х)>’
>фг(*/)> и говорить, что х (строго) предпочтительнее,
чем у, по критерию I.
2. Рассмотрим бескоалиционную игру п лиц Г =
= </, {St}ie=j, {77г}ге7>, где, как обычно, 5г-— множество
стратегий f-ro игрока, Hi — функция выигрыша t-ro иг-
п
рока, заданная на множестве ситуаций S= П$-.
i=i
В соответствии с содержательной интерпретацией
функций Нь ситуация х предпочтительнее ситуации у
152
для t-ro игрока xRy, если ЯДх) >Н^у), т. е. для каж-
дого игрока на множестве ситуаций задан линейный
порядок, который, как будет показано ниже, является
в некотором смысле избыточным.
Насколько нам известно, понятие «бескоалиционно.^
ности» раньше математически формализовано не было,
а лишь вводилось описательно. Будем называть игру
бескоалиционной, если все отношения Ri являются бес-
коалиционными, т. е. из xRty следует, что х и у отлича-
ются только t-й компонентой (стратегией t-ro игрока).
Содержательно это соответствует тому, что игрок мо-
жет эффективно предпочитать лишь те ситуации, кото-
рые различаются только его собственным выбором, так
как он не может влиять на выбор других игроков (ка-
кие-либо переговоры и совместные действия запре-
щены).
Под бескоалиционной игрой будем далее понимать
тройку Г = </, {SJiej, где Si — множество стра-
тегий t-ro игрока, a Ri — бескоалиционное предпочте-
ние, т. е. отношение строгого частичного порядка на
п
S= П Si, удовлетворяющее условию xRiy-^x=
i=l
= (Ун У2, • • •, ZA-i, yi+i, . . . , t/„).
Для конечных (с конечными множествами страте-
гий) игр близкие к приведенным рассмотрения делались
в >[5], однако там для игр, заданных с помощью отно-
шений, вводятся не ситуации равновесия, а обобщен-
ные седловые точки.
3. Рассмотрим классическую кооперативную игру
</, и>, где /={1, 2, ..., п}—множество игроков, а
v — вещественная функция, заданная на подмножествах
называемых коалициями. Можно считать, что v(i) =
=0, t’=l, ...,ии0^и($)^и(/).
Цель игры состоит в нахождении вектора х=
= (%i, х2, ..., хп)^Еп, x(J)=u(J), Xi^u(t) ( = 0), так
называемого дележа. Этот вектор должен представлять
собой «справедливое» разделение игроками суммы v(J).
Таким образом, игрокам предстоит сделать выбор
из множества А = {х<=Еп, х^с{1), i^J, x(J)=v(J)}.
Так как в игре допускается возможность коалиций,
на А вводятся коалиционные предпочтения: х домини-
рует у по коалиции S, если: 1) хг>у^ i^S, 2) x(S)^
^(S).
153
Второе условие означает осуществимость для коали-
ции S дележа х, так как u(S) интерпретируется как
наибольший гарантированный выигрыш коалиции S и
предполагается, что любой выигрыш, не превосходящий
его, может быть осуществлен для S. Таким образом, на
А задаются не п отношений, а 2П—п—1 (доминирова-
ние по i и J исключено введением условий и
x(J)=v(J)).
Во всех приведенных примерах задача первоначаль-
но формулируется как многокритериальная, поэтому
применение описанных в начале принципов оптимально-
сти требует введения промежуточного звена, состоящего
в построении некоторого единого отношения.
4. Различные способы построения общего отношения
предпочтения в многокритериальной задаче. Если обра-
титься к обычной многокритериальной задаче с число-
выми критериями, то наиболее распространенный спо-
соб свертывания критериев в один вводит некоторый по
существу единый порядок, который должен быть как-то
согласован с порядками, задаваемыми отдельными кри-
териями. Если смотреть на задачу с этой точки зрения,
то введение такого критерия не всегда представляется
естественным. Следует считать невозможным в принци-
пе получение сколько-нибудь удовлетворительного одно-
значного решения в такой задаче без внесения дополни-
тельной информации, например, о значимости критериев
[6]. Более естественно, видимо, было бы сначала сузить
область возможных выборов с учетом данных критериев
и предоставить исследователю операции делать дальней-
ший выбор, пользуясь или не пользуясь дополнительной
информацией. Одним из весьма известных сужений яв-
ляется паретовский оптимум, недостатком которого яв-
ляется то, что он, вообще говоря, слишком мало сужает
область допустимых значений. Как будет показано ниже
(см. [3]), применяя к задаче теоретико-игровые прин-
ципы, описанные в § 1.1, можно получить как сам паре-
товский оптимум, так и его дальнейшие сужения.
Поставим задачу следующим образом: по данной си-
стеме отношений ..., Rn} построим единое отноше-
ние R=f(Rit Rn) *). Приведем два очевидных спо-
соба введения R (см. [3]).
*) Записанное выражение можно понимать в теоретико-множест-
венном смысле как отображение f: R[X...XRn-+R<^AxA, Ri^AxA.
154
п
1) Ro = U Ri, т- е- xRoU, если ХОТЯ бы ДЛЯ ОДНОГО
1=1
Ri'. xRiy.
п
2) Rj = П Ri, T- e- xRjy, ^ли для всех Ri. i e J,
i=l
xRiy\ здесь, как и везде, J = {1, 2, ..., n}.
Легко проверяются следующие факты.
Утверждение. 1. Для многокритериальной задачи
(пример 1) СЛо(Л) есть множество, на котором все функ-
ции одновременно достигают максимума.
Утверждение 2. Для этой же задачи CRJ(A)
есть нестрогий паретовский оптимум.
Нестрогий паретовский оптимум, который мы здесь
рассматриваем, всегда замкнут и содержит обычный па-
ретовский оптимум.
Заметим, что если паретовский оптимум (ядро) явля-
ется еще и решением, то это означает, что он внешне
устойчив, т. е. для любого у, не принадлежащего ему,
существует эффективный (принадлежащий паретовскому
оптимуму) х, лучший его (это свойство представляется
весьма ценным, см. [7]).
Очевидно, что Cr0 (Л) CZ Crj (Л), однако Сд7(Л), вообще
говоря, слишком велико, а С^о (Л) обычно пусто. Хотелось
бы определить такое отношение R = f (R±, .... Rn), что
Ся0 (Л) CZ Ся (Л) CZ Crj (Л). Таким отношением является,
например, R = U Q Ri. где S — некоторый набор индек-
Ssa isS
сов, a (J (J е о) — множество таких наборов.
Это можно пояснить, например, следующим образом:
х предпочтительнее у. если х предпочтительнее у по
большинству критериев, т. е. o={S: | S | } (|S|>
>а-м, а<1). Такой выбор соответствует известному в
теории групповых решений правилу большинства [8].
Если cr= {S: f0<=S}, то R будет иметь место только
тогда, когда имеется предпочтение по Такое отно-
шение соответствует так называемым диктаторским
предпочтениям. Для многокритериальной задачи с чис-
ловыми критериями ядро так введенного отношения бу-
дет совпадать с множеством значений аргумента, при
которых функция <р1о(х) достигает максимума (соответ-
ственно будет пустым, если <р10(х) не достигает макси-
мума на Л).
155
Итак, сформулируем четко суть предлагаемого под-
хода:
1) По системе отношений {/?4, Rn} на А строится
единственное отношение R=f(Ri,..,1 Rn), которое, во-
обще говоря, не является порядком.
2) В качестве принципа оптимальности выбирается
ядро Cr(A) отношения R на множестве А
Отметим, что если ядро является еще и решением от-
ношения R, то оно представляет собой как бы множест-
венный максимум, так как для любого элемента вне это-
го множества найдется «лучший» элемент, принадлежа-
щий этому множеству. В пользу выбора ядра в качестве
принципа оптимальности можно привестЯ тот факт, что
для случая линейного порядка ядро есть единственный
максимум, для частичного порядка — множество макси-
мумов. По-видимому, при «хорошем» выборе отношения
R ядро является «хорошим» принципом оптимальности.
Отсюда ясно, что главный произвол содержится в выбо-
ре отношения. Подчеркнем снова, что для задачи век-
торной оптимизации свертка критериев означает выбор
в качестве R линейного порядка (здесь и далее речь
идет о линейном квазипорядке, т. е. об объединенйи
строго линейного порядка с эквивалентностью) и ядра в
качестве принципа оптимальности, т. е. мы поступаем
по предложенной схеме: вводим общий линейный поря-
док и выбираем его ядро. Необходимость отказа от ли-
нейного порядка вызывается, в частности, тем, что при
довольно естественных связях между R и {Т?4, ..., Rn}
его не существует (парадокс Эрроу [8]). Кажущаяся
непротиворечивость свертки критериев связана с тем, что
мы не пытаемся связать полученное отношение R с за-
данными, а интересуемся лишь его экстремальными
свойствами. Однако, если нас будет интересовать уже
не глобальный, а локальный максимум (вполне возмож-
но, что понадобится решать задачу для разных допусти-
мых областей), или, если решать задачу приближенно,
свойства отношения порядка, заданного критерием —
сверткой, становятся более существенными. Далее, если
принять ядро в качестве принципа оптимальности, то
отказ от транзитивности отношения R приводит в задаче
с числовыми критериями к тому, что строят простое и
естественное отношение Ro (оно даже циклично), ядром
которого является множество элементов А, на которых
все функции фг(х) достигают максимума.
156
К сожалению, мы пока не знаем ни одной практиче-
ской задачи, к которой был бы применен подобный под-
ход. Причиной этого является не только и не столько
незнакомство с ним, сколько консервативность мышле-
ния, выражающаяся в требовании от математика — ис-
следователя операций однозначного решения, как бы ни
была полна неопределенности моделируемая ситуация.
Кстати, тот факт, что «определенность» приходится вно-
сить не тому лицу, которое ответственно за последствия,
в конечном итоге ведет, с одной стороны, к дискредита-
ции науки в глазах прикладников, с другой стороны, от-
каз математика после анализа ситуации дать единствен-
ное решение трактуется как бессилие математики.
Предложенный подход по сравнению, например, со
сверткой критериев означает переход неконтролируемо-
го произвола к произволу контролируемому, так как при
этом ясно, какие мы вводим новые предположения и как
они сказываются на отношении предпочтения. Такой
подход дает также возможность поэтапного уточнения
предпочтения и применения разного рода экспертных
оценок.
5. Множество ситуаций равновесия в бескоалицион-
ной игре как ядро бескоалиционного предпочтения.
Вернемся к бескоалиционной игре, заданной в виде
<J, {SJiej, где Ri — бескоалиционные отноше-
ния предпочтения на множестве ситуаций S.
п
Элементы множества 6^(5), где RQ= U Rit естест-
i=l
венно называть ситуациями равновесия. Проиллюстри-
руем это на классической бескоалиционной игре.
Утверждение 3. Если бескоалиционные пред-
почтения Rif задаются с помощью функций выиг-
рыша Hi(s) (см. пример 2 п. 3), то 0^(8) есть множе-
ство ситуаций равновесия по Нэшу.
Доказательство непосредственно следует из определений бескоа-
лиционных предпочтений и ситуации равновесия.
Интересными являются тривиальные следствия это-
го факта.
Следствие 1. Если
Hi (s) = Hl (s) + <pz (Sj, ..., Si-i, si+1, ..., s„),
где — любая интегрируемая функция на Sj~i = П Si,
J*
157
то игры (J, {Si}, {Hi}} и (J, {St}, {Hi}} эквивалентны в
том смысле, что С%> (S) = Cr (S).
Доказательство очевидно, так как указанное преобразование хотя
и меняет линейный порядок на S, но сохраняет все отношения бес-
коалиционных предпочтений игроков, как на множестве чистых стра-
тегий, так и на множестве смешанных (вероятностных мер).
Следствие 2. Если функции выигрыша беско-
алиционной игры имеют вид Hi(siy ..., sn)—...
..., Sn) + <?:(•$!, ...» Sf-ь Si+i, • • •» 5n), где все Si — ком-
пактные множества в хаусдорфовых пространствах, а
Mi — непрерывные, ср, — интегрируемые функции на S
и Sj-i соответственно, то в игре существуют ситуации
равновесия (в смешанных стратегиях).
Доказательство следует непосредственно из теоремы Гликсберга
и следствия 1.
Следствие 3. Любая антагонистическая игра
эквивалентна неантагонистической игре, построенной,
как в следствии 1.
Отсюда непосредственно следует
Следствие 4. Если для биматричной игры с мат-
рицами А и В, размером пгХп, существуют такие век-
торы а— (-а4, ..., ат), 0= (Pi, ..., ₽т), что А-е? а=
= — (В—рт)=С, где ет и еп — строчки из единиц со-
ответствующей размерности, то биматричная игра экви-
валентна матричной с матрицей С.
Это условие легко проверить, достаточно построить
матрицу А + В, в ней разности любых соответствующих
элементов из двух различных столбцов (или строк) дол-
жны зависеть только от номеров столбцов (строк).
Следствие 5. Любая биматричная игра эквива-
лентна игре, у которой в матрице А есть строка, состоя-
щая из нулей, а в матрице В — столбец.
6. Обобщение понятия доминирования. Общие ко-
оперативные игры. Одним из примеров отношения, опи-
санного в п. 4, является отношение доминирования в
кооперативных играх. Рассмотрим некоторое естествен-
ное обобщение этого понятия |[4].
Пусть Еп — вещественное линейное пространство с мет-
рикой р (х, у) = max | Xi — у^ |. Вектор х = (хь ... , хп)
будем интерпретировать как набор выигрышей всех
игроков, поэтому i-n игрок будет предпочитать вектор
158
х вектору у, если х{>уь однако в данном случае, как и
в классической кооперативной игре, на отношения бу-
дут наложены дополнительные ограничения, связанные
с возможностью осуществления вектора х, в соответст-
вии со следующей формальной схемой.
Любому подмножеству S множества J (коалиции)
ставится в соответствие замкнутое множество X(S)cz
cz.E\ Отношение доминирования по коалиции S опреде-
ляется так:
. 1) Xi > z/i, i е S,
s 2) хеЛ(5).
Отношение доминирования >- = U X, т. e. x^y
SaJ s
тогда и только тогда, когда существует S: х^у.
s
Общей кооперативной игрой будем называть ком-
пактное множество А вместе с отношением доминиро-
вания, заданном на всем Еп. Формально это определение
отличается от игры без побочных платежей только тем,
что на Л(5) не накладывается никаких специфических
ограничений и доминирование рассматривается на всем
пространстве.
Очевидно, что данная схема включает все известные
классы кооперативных игр. В частности, классические
кооперативные игры получаются из нее при Л(5) =
= {х^Еп, x(S) ^v(S)}, А = {х^Еп, x(J) =v(J), х^
i^J}.
§ 2. Методы аппроксимации ядра
Как уже было сказано во введении, в последнее вре-
мя начали возникать некоторые общие теоретико-игро-
вые методы решения; к ним можно отнести [2] «метод
покрытий», предложенный Бондаревой в 1963 г. и полу-
чивший довольно широкое распространение, метод «ма-
жорирования», идея которого в применении к коопера-
тивным играм была предложена Джиллисом, он был
недавно обобщен Кулаковской на случай произвольных
задач принятия решений вида 1.1, и в этом виде позво-
лил получить ряд интересных результатов. Ниже будет
описан еще один метод — приближенного нахождения
ядер и решений.
1. Приближения пространств с отношениями. Рас-
смотрим задачу <Д, /?>, заданную на компактном мно-
159
жестве А метрического пространства 91 с метрикой р
(рассмотрение общего топологического пространства
можно найти в [3], оно отличается только технически-
ми деталями).
Можно приближать множество Л, например, конеч-
ными e-сетями Де в 91 для Д, при этом на каждом Де
надо задать отношение 7?е (если AeczA, это может быть
сужением 7? на Де). Если при этом С^е(Де) #=0, то
когда можно говорить о «сходимости» {Сяе(Ле)} к Сл(Д)
при 8->0?
Приведем математические формулировки. Рассмот-
рим пространство 2^ всех замкнутых подмножеств 91 с
метрикой Хаусдорфа
0 (Е, F) = max”{sup inf р (х, у), sup inf р (х/у)}.
Для сходимости множеств будем употреблять те же
обозначения, что и для сходимости элементов 91, это не
приведет к путанице, так как поточечная сходимость
является частным случаем множественной.
. Будем говорить, что последовательность {Де, 7?е>
при 8->0 слабо сходится к (Л, 7?), если
1) limАе = Д,
8—>0
2) для любых х, у^А, xRy существуют такие хе->х
и У^У, что хЛгуъ для достаточно малых 8.
Заметим, что если Аг является 8-сетью для А и Дес
с=Д, то условие 1 выполняется автоматически.
Утверждение 4. Если (Дс, 7?е) при 8->0 слабо
сходится к (Д, 7?), то существуют такие замкнутые
множества Се с Со , (Де>), что lim С C# (Д); если
8'—*0
Crz Ие) замкнуты, то Игл Сце (Д8<) с CR (Л)
е'->о
Утверждение верно и для Сд(Д) = 0, в этом случае
все Сяе(Де) для достаточно малых 8 пусты, утверждение
также верно, если С^е(Де) = 0, однако в этом случае
может быть C# (Д) =f= 0.
Для сходимости решений требуется выполнение бо-
лее жестких условий [3].
2. Применение к многокритериальной задаче с чис-
ловыми критериями. Пусть задана многокритериальная
задача с областью допустимых значений Дс:91 и число-
выми критериями фДх), ..., срп(х). Пусть 7?» задаются,
160
как в п. 1.3, А — компакт и Ае ез> А — последователь-
ность конечных 8-сетей для А.
Назовем функцию ф< (х) слабо непрерывной на А от-
носительно {Де}, если из 'фг(я) >ф<(у) следует сущест-
вование таких хв, уееДе для достаточно малых 8, что
фг (-^е) фг (//е) •
Назовем систему функций {ф^ (х)}?=1 слабо непрерывной
на А в совокупности относительно {Де}, если для любых
х, у^А и SczJ: фг(х) >фг(г/), и г/е^Де, сущест-
вуют такие хе^Де, что для достаточно малых е фг(*е)>
>фг(//е) для всех i(=S.
Из определения легко получается следующий факт.
Утверждение 5. Если^^^х)}^ слабо непрерывна
в совокупности на А относительно {Де}, то <Де, 7?> сла-
бо сходится к <Д, /?> для любого отношения R, полу-
ченного из {/?г} с помощью операций объединения и пе-
ресечения.
Следствие. Если существует такая последова-
тельность {Де}, относительно которой все фДх) слабо
непрерывны на А в совокупности, то паретовский опти-
мум не пуст.
Следует из утверждения 5 и. того факта, что Rj — ациклическое
отношение и Crj (Де) =/=0, так как Ае конечны.
Заметим, что если 7? такое, как в утверждении 5, и
ацикличное, то ядро отношения R на А не пусто. Такими
отношениями являются, например, диктаторские пред-
почтения.
Легко доказывается, что если все фг(х) полунепре-
рывны сверху на Д, то существует такая последователь-
ность {Де}, относительно которой они слабо непрерыв-
ны в совокупности, откуда получаем известный факт:
если фг (х) полунепрерывны сверху на компактном мно-
жестве, то паретовский оптимум не пуст.
Заметим, что, в отличие от полунепрерывности, сла-
бая непрерывность не требует ограниченности. Функ-
ция, заданная на компакте, имеющая конечное число то-
чек разрыва любого рода, слабо непрерывна относитель-
но любой последовательности 8-сетей, содержащих эти
точки.
3. Применение к бескоалиционной игре. Пусть за-
дана бескоалиционная игра <J, {/?i}iej>, где все
St — компактные множества в метрических пространст-
6 Под ред. Н. Н. Моисеева 161
вах и Ri—бескоалиционные отношения предпочтения
на S.
Утверждение 6. Если существует такая после-
довательность {Se}->S *), что CR(Se) =#0, и R слабо не-
прерывно на S относительно {SJ, то игра имеет ситуа-
ции равновесия.
Чтобы перевести эти понятия на язык игр, заданных
функциями выигрыша, понадобятся более общие рас-
смотрения ,[3], так как здесь придется вводить смешан-
ные расширения и поэтому рассматривать пространства
более общего вида. Тем не менее приведем здесь неко-
торые результаты. Введем понятие слабой сходимости
функций Hi (s) для простоты на примере игры двух лиц.
Положим S{ = X, S2=Y и пусть Хе, Уе— конечные
е-сети для X и У соответственно. Как обычно, через X',
У', XJ, У/, S', Sg обозначим пространства вероятност-
ных мер, заданных на X, У, Хе, Уе, S, Se, снабженные
топологией слабой сходимости, и
Н (ц, v) = j* Н (х, у) d[i (х) dv (у), X', v Y'.
X У
Будем говорить, что функция Hi (х, у) слабо непрерывна
на S’ относительно системы множеств {Se} —> S, если:
е->о
1) для любых (|i, v) е S' и (рс, ve) е Sg, |i8 -> |х, ve v,
lim sup Hi (pe, ve) Hi (h, v),
8-Ю
2) для любых (ц, v)e$' и ve-^v найдется pe->
->|i: //Дне, ve)->/7(|m, v).
Совершенно аналогично определяется слабая сходи-
мость функций Hi(s) для произвольной игры, там толь-
ко вместо v(ve) должен стоять набор стратегий всех
остальных игроков.
Утверждение 7. Если все функции H^s) сла-
бо непрерывны на S' относительно системы конечных
множеств {Se}--j S, то у игры существуют ситуации
равновесия (в смешанных стратегиях').
♦) Сходимость рассматривается, как и раньше, в 2s с метрикой
Хаусдорфа, порожденной, например, метрикой р (х, у) = rnaxp, (xz, yz),
где pj — метрики в пространствах^стратегий.
162
Утверждение следует из того, что по теореме Нэша, ввиду конеч-
ности Se, Cr (Sg) =/= 0, а слабая непрерывность функций выигрыша
влечет слабую сходимость <5^, 7?>-откуда следует
е-ю
C^(S')=^0, что эквивалентно существованию ситуаций равновесия.
Очевидно, что непрерывные функции слабо непрерыв-
ны относительно любого семейства.
Следствие. Игра с непрерывными функциями
выигрышей, заданными на метрических компактах, име-
ет ситуацию равновесия.
Так как пространства стратегий всегда можно пре-
вратить в метрические, то это утверждение по суще-
ству является теоремой Гликсберга.
Приведем еще один пример применения утвержде-
ния 7.
Пример. Пусть в игре двух лиц X— У= [0, 1] и
№ (х, У),
Hi (X, У) = Ц (х),
i = 1, 2,
х = <Р (у),
Mt(x,y), ф(у)<х^1
где Кг, Ц, Mi — непрерывные функции, а <р(х) —непре-
рывная монотонная.
Утверждение 8. Если для описанной выше
игры
max (Ki (х, qT1 (%)), Mi (х, ср'1 (х))) = Ц (х),
то игра имеет ситуации равновесия.
Для доказательства достаточно убедиться -в том, что Hi(x, у)
непрерывны на S' относительно (Se}e_>0, построенного следующим
образом: Уе—е-сеть в У, а Хе={ф(//), #еУе}.
4. Сходимость кооперативных игр. В п. 1.6 была
определена кооперативная игра как пара <Л, >- >, по
существу, она описывается набором множеств Л,
И(3)}вс/.
В [4] определяется сходимость игр следующим об-
разом:
<Ле, >е) -> (Л, », если Ае -> А
и все
Ле(5)П ЛС-->Л(5)ПЛ.
Непосредственной проверкой устанавливается следую-
щий факт.
Утверждение 9. Сходимость кооперативных
игр является слабой сходимостью.
6'
163
Из утверждения 4 следует, что из любой последова-
тельности Ае->*А можно извлечь такую Д6-->Л, что
lim С(Де<) С. С (А).
8'-*0
Для некоторых классов кооперативных игр, напри-
мер, для классических кооперативных игр, можно по-
строить такие приближения, что С(Ле)->С(Л) [4].
Сходимость решений удается наблюдать только в
весьма частных случаях ,[4].
§ 3. Метод мажорирования и его применения
1. Определение мажорирования. Как уже было ска-
зано, мажорирование было впервые введено Джилли-
сом и обобщено Кулаковской.
Пусть задано пространство с отношением <Д, /?>.
Зададим на А отношение М, удовлетворяющее усло-
виям:
1) если хМу, то xRy,
2) если zRx, а хМу, то zRy. Любое такое отношение
М назовем мажорированием, порожденным R.
Напомним, что мы рассматриваем строгие предпо-
чтения, т. е. М так же, как и R, антирефлексивно.
Заметим, что если Сд(Л)=#0 и Сд(Л)=/=Д, то суще-
ствуют непустые отношения мажорирования, порожден-
ные отношением R.
Мажорирование всегда ациклично, а отношение Af0,
«маскимальное» из отношений М, еще и транзитивно,
именно это отношение было введено Джиллисом для коо-
перативной игры.
Интуитивно ясно, что мажорируемые элементы не
могут быть признаны оптимальными. Удобнее всего для
такого отбора использовать отношение Мо, но, к сожа-
лению, его не всегда удается описать конструктивно,
иногда лишь можно указать некоторые пары, для ко-
торых имеет место 7И0, т. е. именно указать какое-то
другое отношение М, как это удается делать в коопе-
ративных играх (см. ниже). Таким образом, если из-
вестно отношение Мо, то А—А10(Д) является естествен-
ным сужением А. Если ядро А—М0(Д) является еще и
решением Мо на А, то оно представляет собой полный
набор представителей А (любой элемент, не принадле-
жащий ему, имеет в этом множестве мажоранту).
В связи с этим приобретает особый интерес вопрос
164
о существовании решения отношения частичного по-
рядка.
2. Решение (Неймана — Моргенштерна) отношения
частичного порядка. Пусть, для простоты, А — компакт
в метрическом пространстве 91 (Кулаковская рассматри-
вала более общие топологические пространства) и пусть
хп->х, будем говорить, что транзитивное отношение М
сохраняется в пределе, если из хп+1Мхп, п=1, 2, ...,
следует хМхп для всех п= 1,2,...
Кулаковской доказано следующее общее утверж-
дение.
Утверждение 10. Для того чтобы транзитив-
ное отношение М имело решение на любом компактном
подмножестве А, необходимо и достаточно, чтобы оно
сохранялось в пределе (на Л).
3. Применение к числовой^ многокритериальной за-
даче. Рассмотрим отношение Ro в задаче с векторным
критерием: xRQy, если ф;(х)^ф<(#), /=1, 2, ..., п и не
все фДх) =|фД//).
Легко проверить, что если для любой последователь-
ности хп —► х Ншзирф (хп) ^ф (х), то отношение со-
п-*оо П-ЮО
храняется в пределе. Из утверждения 10 сразу следу-
ет усиление утверждения 5 и теоремы 2.4.1 из [7].
Утверждение 11. Если функции фг(х), задан-
ные на компактном множестве А, удовлетворяют усло-
вию Нтзирф (хп) ^Ф (х), то паретовский оптимум не
хп-х
пуст и является решением Неймана — Моргенштерна
(внешне устойчив).
Оказывается, что условие утверждения 11 достаточно
и для разрешимости лексикографической многокритери-
альной задачи [6].
Многокритериальная задача называется лексикогра-
фической, если критерии упорядочены по важности. Та-
кая задача порождает естественным образом отношение
лексикографического порядка на A: xRLy, если сущест-
вует i0: <pio(x) ><Рг0(*/) и , i<_ia.
Если выполнено условие утверждения И, то RL со-
храняется в пределе и верен следующий факт.
Утверждение 12. Если все ф<(х) удовлетворяют
условию lim sup ф; (хп) Ф (х), то лексикографическая
хп^х
задача имеет решение Неймана — Моргенштерна на
165
любом компактном множестве Аг т. е. множество мак-
симумов не пусто и внешне устойчиво.
4. Применение к кооперативным играм. Хотя мажо-
рирование было введено Джиллисом для кооперативных
игр, однако ему не удалось получить сколько-нибудь
существенных результатов. Осовной причиной этого яви-
лось, по-видимому, то, что Джиллис рассматривал от-
ношение Л1о, которое не удается описать конструктивно.
Кулаковской удалось достигнуть здесь значительного
прогресса при рассмотрении других отношений М.
Приведем один из ее результатов.
Пусть дана классическая кооперативная игра, т. е.
А={х<=Еп, x(J)=u(J), x^v(i)}.
Для любой системы а подмножеств J обозначим
t/(a)= Q Л(5)- U Л(5),
Seo
т. е.
У(п)={хе£л, x(S)^v(S), Seo, x(S)>u(S), S(£a}.
Утверждение 13. Если |Jo#=/*), то
czM(A).
Следовательно, если ядро игры не пусто и (7(a) =0
для (Ja=J, то ядро игры является ее решением. Выра-
жая это условие с помощью характеристической функ-
ции, получаем следующий результат.
Утверждение 14. Если 3 ^(3)^1 для любо-
Sea
го a: (Ja=Z, Ua—5#= 7, то игра имеет решение, совпа-
дающее с ядром.
Из этой теоремы Кулаковской следуют все извест-
ные до сих пор результаты такого рода =;[2]. Ряд резуль-
татов получается применением идеи мажорирования в
сочетании с методом покрытий, которому посвящен сле-
дующий параграф.
§ 4. Метод покрытий в кооперативных играх
1. Описание метода и его история. Так как отноше-
ние доминирования и многие другие понятия в коопера-
тивных играх описываются в виде линейных неравенств
♦) Обозначим U a = U S.
166
весьма простого вида, естественно было бы модифици-
ровать для них общие теоремы о разрешимости систем
линейных неравенств, что и было сделано сначала для
ядра классической кооперативной игры.
Как известно, для классической кооперативной игры,
заданной в О-редуцированной форме (O^u(S) (J),
v(i) =0, te/), ядро
С(А) = {хенА: x(S)>u(S), SczZ}.
Поставим в соответствие каждой коалиции S век-
(0, i^S,
тор инциденций S = (s1} ..., sn), Si= 1$
Вектор A.= {X(S)}ficj назовем уравновешенным по-
крытием J, если 2 MS) -S=J, где 7= (1, ..., 1).
SdJ
Покрытие назовем приведенным, если векторы, со-
ответствующие системе множеств ©(X) = {S: Z(S)>0},
линейно независимы.
Утверждение 15. Для того чтобы ядро коопе-
ративной игры было непусто, необходимо и достаточно,
чтобы для любого приведенного покрытия Х='{Х(5)}
выполнялось S %(S) -u(S) <y(Z).
Первоначально эти условия были получены
О. Н. Бондаревой |[2] в 1962 г. с помощью модифици-
рованной леммы Фань-Цзи о разрешимости системы
линейных неравенств. В 1965 г. американский матема-
тик Л. Шепли получил утверждение 15 независимо и
другим методом. Вместо покрытий Шепли ввел поня-
тие уравновешенного набора множеств (здесь ©(%)).
Терминология покрытий представляется более удобной,
однако в зарубежной литературе принята терминология
Шепли, хотя все дальнейшие исследователи пользова-
лись методом, предложенным Бондаревой. Мы продолжа-
ем пользоваться термином покрытий, прибавляя иногда
к нему слово «уравновешенное». После работ Бондаре-
вой и Шепли появилось, как уже было сказано, много
работ, в которых использовались покрытия и лемма
Фань-Цзи. Большая часть этих результатов описана в
[2], перечислим некоторые из них. О. Н. Бондаревой
были получены необходимые и достаточные условия су-
ществования ф-устойчивых пар Льюса и непусТоты ядра
в играх Лукаса. В терминах покрытий формулируются
условия непустоты ядра для различных классов игр без
167
побочных платежей: теоремы Скарфа, Биллера и Вил-
кова. Лемма Фань-Цзи использовалась Наумовой для
получения условий непустоты ядра для игр со счетным
множеством игроков. Для игр с континуумом игроков
Канаи получил тем же методом результат, совершенно
аналогичный утверждению 15.
2. Обзор применения метода покрытий к вопросу о
существовании решений Неймана — Моргенштерна.
Вопрос о ядре, являющемся еще и решением, неодно-
кратно привлекал внимание исследователей по двум
причинам: во-первых, такое решение, как уже было
сказано, можно рассматривать как множественный мак-
симум, во-вторых, оно относительно просто описывается
в виде линейных неравенств.
Первая попытка получения условий совпадения ядра
и решения в классических кооперативных играх с по-
мощью модификации леммы Фань-Цзи была сделана
Бондаревой в [9], где было получено несколько доста-
точных условий. Необходимые и достаточные условия
совпадения ядра и решения были получены Куликов-
ской в терминах покрытий с использованием идеи ма-
жорирования. Аналогичным способом Куликовской и
Вилковым были получены соответствующие результаты
для игр без побочных платежей. Метод покрытий при-
менялся Вилковым и для получения других его резуль-
татов о решениях игр без побочных платежей. Куликов-
ская успешно применила метод покрытий и идею ма-
жорирования для исследования решений в играх с
континуумом игроков. Более подробный обзор перечис-
ленных результатов дан в [2].
3. Еще одно применение метода покрытий. Хотя, как
уже было сказано, Куликовской были получены необ-
ходимые и достаточные условия совпадения ядра и ре-
шения в классических кооперативных играх, однако они
очень трудно проверяемы, поэтому исследования в этом
направлении продолжаются. Приведем некоторые но-
вые результаты, полученные также методом покрытий.
Назовем ha= {Ха(3)} обобщенным покрытием, по-
рожденным системой коалиций о, если (5)5=7 и
М5)’МЛ<0, Sen, X0(S) -Х0(Т) >0, 3, Геа
или 5,
Обобщенное покрытие, порожденное системой о, бу-
дем называть собственным, если существует З^о:
168
^(5)5^0, максимальным, если Хо(5)=И=0 для любого
Sea, и приведенным, если системе 0={S: X(S)#=0}
соответствуют линейно независимые векторы S.
Набор чисел Xa={Xa(S)} назовем вырожденным
обобщенным покрытием, порожденным о, если
51 Xa(S) -S = 0 и ha(S) >0, S^a, Xa(S) <0, Seo. Вырож-
денное покрытие назовем приведенным, если Xa(S) = 1
и системе 0={S, A,a(S)>0, S^a, %a(J—S)>0, J—Seo}
соответствуют линейно независимые векторы S, и макси-
мальным, если все %(S) =#0, Seo.
Легко убедиться в том, что обобщенных приведенных
покрытий конечное число.
Утверждение 16. Для того чтобы /7(о) было
непусто, необходимо и достаточно, чтобы для любого
обобщенного приведенного покрытия, порожденного о,
выполнялись условия'.
3^(5) •u(S)^v(J), если ‘ka(S)<Q, Seo,
Зм$) •V(S)>V(J), если Xa(S)>0, Seo
u
или соответственно
2^(S).v(S)>W(j),
если покрытие собственное', для приведенных вырожден-
ных покрытий 3 M*S) (S) <0.
Для того чтобы ядро являлось решением, необходи-
мо и достаточно, чтобы были пустыми те 17(a), в кото-
рых существует xet/(o), не доминируемый ядром. Если
бы удалось в общем случае описать все такие о, то
можно было бы, по-видимому, получить достаточно про-
стые необходимые и достаточные условия совпадения
ядра и решения в терминах обобщенных покрытий. Пока
мы можем указать лишь некоторые такие <т.
Если |Sf| =лг—1, то необходимые условия пустоты
^7(о) можно явно выписать. Так как ядро игры не пу-
сто, то, не ограничивая общности, можно предположить,
что ядро любой подыгры также не пусто, т. е. что для
любой коалиции S: u(S)^^j Ka{T)-v(T), где — по-
крытие S коалициями TczS.
169
Пусть сначала o={S(, S2}. Очевидно, что множест-
во В:
x(S2)<v(S2),
x(n>v(T), TcSxQS,.
ядром не доминируется, так как для у^С(Л) выполне-
но у(SJ (SJ и f/(S2) ^a(S2), а следовательно, и
yix^xix, yh^lxi2, где ii = J—Si, i2=J—S2. Необходимым
(и достаточным) условием пустоты В является сущест-
вование такого максимального что —^(St)—y(S2) +
+ 2 МЛ-V(T) у(7), где {МЛ} есть покрытие
51Г|52. По предположению, v (SiQS2) КДТ) -v (Т),
т. е. необходимо выполнение условия y(Si)+y(S2) —
-^(SinS2)^t;(J).
Утверждение 17. Для того чтобы ядро игры
являлось решением, необходимо, чтобы для любого на-
бора (п—1) -элементных коалиций {Sj, S2}, выполнялось
условие
v(S^+v(S2) - v(SinS2)^t/(Z).
Заметим, что неравенства утверждения 17 получены
из максимального обобщенного покрытия, связанного с
системой {Si, ..., Sk}.
Для игры четырех лиц эти условия будут
1) у({1. /> k}) +^({i, /'» 0)—f({A /})d>(-9;
Остальные не доминируемые ядром множества опи-
сываются системами коалиций оч= {{7, /}, 7—/}, сг2=
= {{м), {A k}, {i, I}}.
Условия их пустоты будут
2) v({t, — !»(/);
3) v({i,j})+v({i,k})+v({i,
Получаем окончательно следующее
Утверждение 18. Для того чтобы ядро игры
четырех лиц было решением, необходимо и достаточно,
чтобы для любых {/, /, k, /}=.{!, 2, 3, 4}
V «А /}) + V ({i, k}) 4- v ({i, I})
v({i, + —
v ({a /, k) + v ({i, /, /}) — v ({i, /}) (J).
170
Эти условия ранее были получены другими способа-
ми Т. Е. Кулаковской и О. Р. Меньшиковой.
4. Применение метода покрытий для нахождения
Af-ядра. Обозначим ё(х) =max е(х, S), где, как обычно,
s
е(х, S)=u(S)—x(S). Отсюда t>(S)—x(S) , т. е.
любой дележ х удовлетворяет системе линейных нера-
венств
x(S) (S)—ё(х),
x(J).=v(J).
Тогда ,[9] для любого X из множества приведенных урав-
новешенных покрытий А должны выполняться условия
2 х (S) • v (S) - ё (х) • 2 X (S)< v (J).
„ 3MS) • v(S)-u(J)
Следовательно, е(х)>тах—----------------- .
XGA 2 Ь (S)
Легко показать, что эта граница достигается.
Утверждение 19. Для любой игры
е = min е (х) =
х^А
У X (S) • v (S) — V (J) У X* (S) • V (S) — V (J)
= max —----------------= —------------------- ,
Кел 2 MS) У%*(5)
Этот же результат получен Шимялисом Ч. П. для
монотонной игры в ,[10] другим способом.
Утверждение 19 облегчает вычисление У-ядра, осо-
бенно для игр малой размерности, так как М-ядро при-
надлежит множеству х: x(S)=i>(S)—ё для S: V(S)>0.
Вычислим для примера Af-ядро игры рынка трех лиц [1]:
({1,2,3}) = v({1,2}) = с, и({1,3}) = Ь, 1>({1}) = а,
для остальных S, v(S)=0.
Все приведенные покрытия имеют вид:
I. V({1, 2}) = V({2, 3})=:V({1, 3})=у, V(S)=0 для
остальных S *
II. X2({i, /})=1, X2 ({&}) = 1, X2 (S) = 0 для остальных S.
Следовательно,
( — (b+c)—c\
e (x) >max I c b^- с a — c 2____________ I _
I 2 ’ 2 ’ 2 ’ A /
4 2
171
Отсюда TV-ядро принадлежит множеству х3 = 0, Xi+x2 = c. Далее
применяем тот же алгоритм для игры u'(S) на множестве {1, 2}:
и* (1) = max (v (1,3) — е, и (1) е) = Ь,
v' (2) = max (v (2, 3) — e, v (2) — e) = 0,
cf'(1,2) = c.
b — c
Получаем e (x) —-— и xx = b
x2 = —
b—c
Оконча-
b — c
2
2
тельно V-ядро есть вектор
(Т
с — Ь
, 0
2
Меньшикова О. Р. также использовала метод покры-
тий для нахождения обобщенного А/’-ядра (см. [И]).
Утверждение 19 является, по существу, первым шагом
описанного там алгоритма. Ею выписаны явно приве-
денные покрытия для игры пяти и шести лиц.
Литература к главе 5
1. Нейман Дж., М о р г е н ш т е р н. О. Теория игр и экономиче-
ское поведение.— М.: Наука, 1970, 709 с.
2. Б о н д а р е в а О. Н., Вилков В. Б. и др. Обзор советских
работ по теории кооперативных игр.— В кн.: Исследование опера-
ций и статистическое моделирование.— Л., 1977, вып. 4, с. 81—
126.
3. Бондарева О. Н. Сходимость пространств с отношением и
теоретико-игровые следствия.— Ж. вычисл. матем. и матем. физ.,
1978, т. 18, № 1, с. 84—92.
4. Б о н д а р е в а О. Н., Конечные приближения для ядер и ре-
шений кооперативных игр.— Ж. вычисл. матем. и матем. физ.,
1976, т. 16, № 3, с. 624—633.
5. Партхасаратхи Т., Рачхаван Т. Некоторые вопросы
теории игр двух лиц.— М.: Мир, 1974, 296 с.
6. Подиновский В. В., Гаврилов В. М. Оптимизация по по-
следовательно применяемым критериям.— М.: Советское радио,
1975, 192 с.
7. Подиновский В. В. Методы многокритериальной оптимиза-
ции.— М., 1971, вып. 1, 123 с.
8. Миркин Б. Г. Проблема группового выбора.— М.: Наука, 1974,
256 с.
9. Бондарева О. Н. Некоторые применения методов линейного
программирования к теории кооперативных игр.— Проблемы ки-
бернетики, 1963, № 10, с. 119—139.
10. Шимя лис Ч. П. Одно замечание об V-ядре монотонной игры.—
Литовский мат. сб., 1977, т. XVII, № 3, с. 105—109.
11. Меньшикова О. Р. О вычислении обобщенного V-ядра.—Ж.
вычисл. матем. и матем. физ., 1976, т. 1, № 5, с. 1121 —1135.
ГЛABA 6
АНАЛИЗ УСТОЙЧИВЫХ СИТУАЦИИ
В ПОВТОРЯЮЩИХСЯ ПРОЦЕССАХ
§ 1. Постановка задачи. Модель
с непрерывным временем
Одним из способов выбора рациональных решений
в игровых моделях является выбор устойчивых (равно-
весных) решений, обладающих тем свойством, что ни
одному из участников исследуемого конфликта не вы-
годно отклоняться от устойчивой ситуации, если осталь-
ные ее придерживаются. Для более формального опи-
сания конфликтной ситуации рассмотрим следующую
модель взаимодействия элементов, преследующих раз-
личные цели.
Пусть Xi — множество возможных выборов игрока i,
..., N}, a Mi(xiy ..., xN) — функция выигры-
ша, которую он стремится максимизировать. Здесь
х = (хх, ..хдг) Xj=rXiX ... x’Xjv, xt^ Xi, ie I.
Ситуация x° называется равновесной no Нэшу (устой-
чивой) ситуацией, если выполняются неравенства
№ (*°) > Mi (х£, ..., xi, x°vi, ..., x0N) V Xi (= Xi,
(1.1)
Использование равновесных ситуаций в качестве осно-
вы для выбора решения наталкивается на целый ряд
трудностей, широко и подробно освещенных в много-
численных публикациях по этому вопросу [1], [2]. Во-
первых, ситуации равновесия не всегда существуют (в
чистых стратегиях) даже в простейших игровых моде-
лях.
Во-вторых, если существует несколько ситуаций рав-
новесия, то отсутствуют основания для конкретного вы-
173
бора решения ввиду невзаимозаменяемости равновесных
ситуаций и их неравнозначности для игроков.
В-третьих, могут существовать решения, более вы-
годные, чем равновесные для всех участников конф-
ликта.
Эффектом «одновременной неулучшаемости» обла-
дают только ситуации хп, оптимальные по Парето, т. е.
такие ситуации, что для любого х^Х из неравенства
хотя бы при одном каком-либо i следует, что для неко-
торого /
Л4/(хп)>М/(х).
Однако, в свою очередь, ситуации, оптимальные по Па-
рето, вообще говоря, неустойчивы относительно воз-
можных отклонений со стороны отдельных участников
конфликта. Вполне возможно, что у игрока i найдется
выбор Хг=И=^Г такой, что
М£(хГ, •••, х"1, XI, х&, х$)>Л1£(хп).
Традиционным способом [2] преодоления первого из
перечисленных препятствий является расширение мно-
жества используемых стратегий за счет введения сме-
шанных (рандомизированных) стратегий, т. е. распре-
деления вероятностей на исходных множествах выборов.
При этом в качестве функции выигрыша рассматрива-
ется математическое ожидание функций Мь а любое
конкретное действие игроков определяется случайной
реализацией в соответствии с выбранным распределени-
ем вероятностей. Однако использование смешанных
стратегий требует дополнительного обоснования. Более
подробно этот вопрос будет освещен в § 3. Расширение
множества используемых стратегий можно достичь так-
же за счет обмена информацией игроками о своих дей-
ствиях. Такое расширение также приводит к появлению
устойчивых ситуаций. Например, устойчивые ситуации
всегда существуют в игре с полной информацией <[2],
т. е. в игре, где стратегии игроков определяются следу-
ющим образом:
Х1=%1, Х2=ф2(Х!), ..., XN = фдг(х1,\ . ., Xjv-1).
Описание свойств ситуаций равновесия на классе «слож-
174
ных» стратегий, построенных по принципу обратной свя-
зи, проведено в [4].
Таким образом, первое препятствие принципиально
преодолимо. Что касается всех перечисленных трудно-
стей, то они могут быть сняты введением динамики (по-
вторения) в процесс принятия решений. Этот тезис впер-
вые четко сформулирован Ю. Б. Гермейером i[3] и раз-
вит в его монографии {1]. Основная идея заключается
в том, что построение устойчивой ситуации проводится
при условии дальнейшего повторения игры, что приво-
дит к возможности наказания игрока, отклонившегося
от выбора, соответствующего равновесной ситуации. По-
строенные таким образом равновесные ситуации были
названы Ю. Б. Гермейером слабоустойчивыми совмест-
ными решениями. При этом устойчивое решение счита-
ется состоящим из двух компонент:
а) стационарное решение х°, являющееся, вообще
говоря, результатом неформального компромисса;
б) реализация минимума фуцкции М^х\ хг) в т<
последующих повторениях, если в данном повторении
игрок i нарушил решение х? и в дальнейшем использо-
вал стратегию хг-=хДх9 (хг‘ означает набор {хь ..., х^и
xi+1, ..., xN}). Здесь и далее будем считать, что мно-
жества Xi компактны в соответствующих евклидовых
пространствах, а функции Мг- непрерывны. Игроку i нет
о
смысла нарушать решение xt-, если выполнено неравен-
ство
(пц + 1) • Mi (х°) > max Mi (х‘°, xi) + пи • max min Mi (/, xi).
xi li x*
(1.2)
При этом предполагается, что результаты предыдущих
повторений игры становятся известными к следующему
повторению, а функция выигрыша игрока i определяется
в виде суммы выигрышей в т<+1 повторениях, Заме-
тим, что при rrii—Q (отсутствии повторений) определе-
ние (1.2) слабоустойчивых совместных решений транс-
понируется в определение (1.1) равновесных по Нэшу
ситуаций.
В этом и следующем параграфе мы изучим свойства
устойчивых ситуаций на модели, отличающейся от опи-
санной модели Ю. Б. Гермейера.
Рассмотрим игру с непрерывным временем, происте-
кающую на отрезке [0, 1]. Множества выборов Х\ игро-
175
ков описываются измеримыми функциями xt(t) : [О, 1J-*
а функции выигрыша определяются равенствами
(1.3)
О
Здесь, как и ранее, x(/) = (Xt(/), ..., xN(t)). Построим
и изучим свойства ситуаций равновесия на классе стра-
тегий
где хг’(*, /) = {хг‘(т), 0^т<7}. По определению при t =
= 0 положим Содержательно использование
стратегии игроком предполагает наличие у него инфор-
мации в данный момент времени о действиях партне-
ров во все предыдущие моменты времени. Итак, будем
в игре Г(ф) с функциями выигрыша Л(фъ ..., (₽n) изу-
чать свойства равновесных решений, формально удов-
летворяющих условию, аналогичному (в соответствую-
щих переобозначениях) (1.1), где множества выборов
игроков Ф{ определяются функциями фг-. Введем обо-
значения:
Ц = min max Mi (х*, х^),
xi
D = {x^X\Mi(x)>Lh
D° = {xeX|Af/(x)>Li, i£/},
x* (h) e Argmin max Mi (x1, xi).
л/
Выберем элемент x°^D° и построим стратегии:
<р’(х‘(-,/М) =
х®, х'(«,/) e=xZo,
= х{(н), х7(., /)^=х®, x*(.,0=x*, k=H,j, О-4)
произвольной константе в остальных случаях.
Набор таких стратегий очевидно реализует ситуацию
х.= х°, следовательно, каждый игрок получает выигрыш
Л(ф°) =Л4г(х°) Более того, справедливы соотно-
шения
Fi (<Р°) > Fi (<pj, ..., ф,-, ..., фд,) V фг, Vie/, (1.5)
т. е. стратегии ф®, ie / образуют ситуацию равновесия.
Действительно, пусть фг =^= ф®, но ф/ = ф®, / =/= i. Пусть tx —
176
время начала отступления игрока i от выбора х?, т. е.
х/(*, t) = х°, Ze [О, ZJ,
Х/(», Z)=/=X?, t>tr.
Тогда при учете ф/ = ф/, j =/= i, выигрыш игрока i оцени-
вается следующим неравенством:
Ft (Ф?, ..., Фь ..., Фл/)
ti 1
J Mi (х°) dt + j max Mi (х* (н), xi) dt =
о t Xi
= Mt (x°) • tx + Ц (1 -ti) Mi (x°) t. + Mi (x°) (1 - ZJ =
= Mi^)=Fi№,
эквивалентным (1.5). В проведенных рассуждениях, в
частности, использовалось неравенство
МДх°И + Лг(1—0^^(х°), ZeZ, Ze[0, 1], (1.6)
которое по своему содержанию близко к неравенству
(1.2). Действительно, неравенство (1.6) можно интер-
претировать следующим образом. Игрок Z, пытаясь на-
рушить в момент времени t соглашение о выборе х°>
будет наказан в последующие моменты времени, что в
итоге приводит к потере в выигрыше. Однако имеется и
принципиальное отличие условия (1.6) от определения
слабоустойчивых совместных решений (1.2). В (1.2)
число повторений все время фиксировано и постоянно, а
в (1.6) «число повторений» убывает с ростом величи-
ны t. Таким образом, если множество DQ непусто, то в
описанной игре можно построить ситуацию равновесия
вида (1.4). Более того, можно построить ситуации рав-
новесия, приводящие к нестационарной траектории
x°(Z). Для этой траектории должно выполняться соот-
ношение, аналогичное (1.6):
1
J Mi (х° (т)) Li • (1 — Z), i e /, Ze [0,1].
t
Заметим, что множество Z)° непусто, если
Li = max min (x*, xi) = L}, (1.7)
Xl Xi
т. e. соответствующих антагонистических играх суще-
177
ствуют седловые точки. Равенство (1.7) может выпол-
няться при всех te/, кроме одного какого-либо /. Все
равно и в этом случае множество DQ непусто. Как из-
вестно, седловая точка присутствует в игре, в которой
игроки могут использовать смешанные стратегии. По-
этому всегда можно построить ситуации равновесия при
использовании случайных функций ф». Более того, эти
функции можно подбирать такими, чтобы их реализация
x°(t) была детерминированной, так что стохастика про-
явится только в стратегии наказания, которая в силу
принятых предположений о рациональном поведении
игроков никогда не реализуется.
Особо подчеркнем, что при условии осторожности
игроков (т. е. в случае, когда они придерживаются прин-
ципа гарантированного результата) можно построить по
величинам L} непустое множество, аналогичное D°.
Тогда, не зная заранее конкретных выборов партнеров,
нарушивший соглашение игрок, в силу своей осторож-
ности, будет рассчитывать только на L* в каждом по-
следующем повторении. Таким образом, введение дина-
мики в исходную игру позволяет делать любой «взаимо-
выгодный» исход игры равновесным. В частности,
можно сделать устойчивыми точки, оптимальные по
Парето. Выбор конкретной такой точки или траектории
можно определить из некоторого компромиссного кри-
терия. Другой способ принятия решения заключается в
введении организационной структуры в игру [5], [6].
В заключение параграфа остановимся на важном, с
точки зрения практических приложений, вопросе о воз-
можности уменьшения объема используемой для приня-
тия решений информации. Формально при использова-
нии стратегий ср^ игрокам требуется запоминать все
предшествующие действия партнеров. Однако из кон-
струкции равновесной стратегии (1.4) следует, что фак-
тически нужно помнить только о том, нарушил кто-либо
из партнеров соглашение или нет. Этот факт дает боль-
шие возможности по упрощению вида функций фй В част-
ности, если выписать дискретный вариант игры (1.3),
то любую реализацию xQ<=D можно сделать устойчивой,
используя информацию о действиях всех игроков толь-
ко на одном предыдущем шаге (такая же информация
используется в игре из § 4). Если x°^D° и Л4,(х°)=Д,
то к такой информации следует добавить аналогичную
178
информацию о вспомогательной вектор-функции, каж-
дая f-я координата которой принимает значение 0, если
игрок i выполнил соглашение на этом шаге, либо 1, если
этот игрок i нарушил соглашение.
Кроме того, в случае М=2 игроки могут ограничить-
ся информацией о текущих значениях функции выигры-
ша, т. е. о величинах
t
yt (/) = J Mi (x (т)) dr, i <= I.
0
При этом для отслеживания согласованной траектории
каждый игрок может ограничиться информацией только
о своей функции выигрыша. В такой постановке задача
сводится к поиску позиционных равновесных стратегий
для дифференциальных игр простейшего вида. В общем
случае решение задачи приведено в работе '[7].
В следующем параграфе будут обсуждаться возмож-
ности дальнейшего уменьшения объема используемой
информации.
§ 2. О задаче наблюдения
в повторяющихся операциях
В предыдущем параграфе была построена равновес-
ная стратегия на классе стратегий, при использовании
которых предполагается постоянное наблюдение и конт-
роль за действиями партнеров. Оказывается, что такое
постоянное наблюдение не обязательно. Зададимся
целью определить такие моменты времени контроля (на-
блюдения) th, А=1, 2, ..., что выбранное решение
останется устойчивым по отношению отклонения от
него игрока i. При этом предполагается, что в момент
времени 4 партнеры игрока i будут иметь информацию
о его действиях на интервале времени [0, /1). Главное,
партнеры должны знать, отклонялся ли на этом интер-
вале игрок i от решения х?. Далее, аналогичную инфор-
мацию о поведении игрока i на [^, /2) партнеры долж-
ны иметь в следующий момент времени наблюдения
и т. д.
В дальнейшем будут использованы следующие обо-
значения:
Mi (х°) = Л4?, тахтИ/ (х/о, xi) = М}.
xi
179
Момент времени первого наблюдения определяется из
условия
м\. t{ + Ц -(1 -$=Л4?. (2.1)
Смысл равенства (2.1) заключается в том, что до мо-
мента игрок г, отклонившись от намеченного решения,
будет наказан всеми партнерами после этого момента
времени. Тогда левая часть равенства (2.1) определяет
его максимально возможный выигрыш в этом случае, а
правая — планируемый выигрыш.
Из (2.1) получаем
t{ = . (2.2)
Mc-L,
Аналогично для следующего момента времени наблю-
дения имеем
м; (й - &+Ldi-1\)=M°i (i -
Следовательно,
, , M’, — Af°. M°, — L,
= ---+ 4-------• (2.3)
M{ — * Mt — L{
Обозначим
Qi = , H = —-----•
M t —
В силу того, что x°^Z), имеем
Кроме того, очевидно
/г<1, ?г<1, 7г+^г=1.
Окончательно для произвольного момента времени
наблюдения получаем
/*=//(1+<7/+. ..+<??-*) = !-??• (2.4)
В силу того, что
«<<1. ’
точки наблюдения расположены на отрезке [0, 1] нерав-
номерно и сгущаются к концу этого отрезка. Несложно
показать, что задаваясь некоторой точностью, можно
провести конечное число проверок действий игрока i.
180
Более того, из результатов работы |[6] вытекает, что
если игроки имеют возможность выплачивать ограни-
ченный побочный платеж друг другу, то при достаточно
большом начальном объеме побочных платежей также
можно ограничиться конечным числом наблюдений.
Полученным результатом можно дать и другую со-
держательную интерпретацию. Игроки могут создать не-
который организационно-информационный центр наблю-
дения, основная задача которого заключается в контро-
ле за действиями игроков и своевременном сообщении о
«нарушителе». В частности, игроки могут образовать за-
пас побочных платежей, который потом возвращается
им (за исключением расходов по содержанию центра) в
случае, если они придерживаются выбранного решения.
При этом возникает задача минимизации расходов цент-
ра на проведение наблюдений. В одном из вариантов
возможных постановок такая задача выглядит следую-
щим образом. Пусть наблюдение можно проводить как
непрерывным, так и дискретным образом. Будем считать,
что каждое дискретное наблюдение и начало непрерыв-
ного обходится центру в di временных единиц (I — но-
мер контролируемого игрока), а непрерывное наблюде-
ние оценивается величиной отрезка наблюдения. Требу-
ется так организовать наблюдение, чтобы расходы вре-
мени (и связанные с ними финансовые расходы) были
минимальными.
В силу (2.1) раньше момента времени t\ наблюде-
ние за игроком i проводить не нужно. Очевидно также,
что непрерывное наблюдение требуется проводить толь-
ко после последнего момента «включения» наблюдения.
Следовательно, в данной модели расходы на наблюде-
ние за игроком i можно определить следующим обра-
зом:
T(=Mtdt
где Mi — число «включений» наблюдений. Таким обра-
зом, расходы на наблюдение определяются числом дис-
кретных проверок и последующего непрерывного наблю-
дения. Оптимальное значение при <Л + 7г<1 должно
удовлетворять системе неравенств:
ЛГ/ М{ Н -1 . М; ri _
qi ^.di+qi , qi > di + qi . (2.5)
Из (2.5) получаем соотношение для определения целого
181
положительного числа
dc
In --- In ---
—-----С М< + 1. (2.6)
1п?£ Ing,
В случае di + q^i имеем №=1, т. е. необходимо
один раз провести фиксированное наблюдение, после ко-
торого следует непрерывно наблюдать за игроком i.
Заметим, что суммарные затраты центра по наблю-
дению за всеми игроками можно определить, например,
следующим образом:
т = 3 Tt.
i=I
§ 3. Анализ модели с дискретным временем
В этом параграфе мы рассмотрим модель динами-
ческой игры с дискретным временем (повторяющуюся
игру), обобщающую модель, рассмотренную в [3], и
сформулируем для нее результаты, аналогичные резуль-
татам для модели с непрерывным временем, приведён-
ным в § 1.
В повторяющейся игре с дискретным временем дей-
ствие xin^Xi применяется f-м игроком в n-м повторении
на основе информации о действиях всех игроков во всех
предыдущих повторениях. При формировании критерия
t-ro игрока в повторяющейся игре за конечное число m
шагов можно взять величину
m
(Хщ, . • • , %Nn), (3.1)
n=l
являющуюся аналогом критерия (1.3) в случае непре-
рывного времени. Коэффициенты агп^0 отражают воз-
можное изменение ценности платежной единицы от по-
вторения к повторению, причем для каждого участника
такое изменение может быть своим. При переходе к бес-
конечному числу шагов естественно рассматривать пре-
дел временных сумм (3.1):
Ф (#ц, • • • > -^12> • • •) =
1 m
= lim — V ainM( (xln, . . . , xNn), (3.2)
182
где Sim=aii + .. . + агт. Поскольку предел в правой ча-
сти (3.2), вообще говоря, может не существовать, то
нужно рассматривать нижний или верхний предел.
Стратегией f-ro игрока в повторяющейся игре явля-
ется последовательность (хя, <pf2, <pin, . . ,),гдехне
— действие в первом повторении, и (pin(*)—функ-
ция, сопоставляющая каждой предыстории (хи, ..., xNl,
*12, • • •, *xn-i) действие в n-м повторении.
Пусть (%и, %2ь . • •, *jvi, xj2, . • •, *?п, ...) — некоторая
последовательность действий всех игроков во всех повто-
рениях и х' (н) е Argmin max Mt (х*, Xi).
xi
Положим Хи = i = 1, ..., N и для n > 2
Фг'/l (*11> • • • , *12, • • • , *Ml-l) ~
х°, если xlk = x^, k^n — 1,
= *Hh), xjk=f=Xjk, xJk = x!k, k^n— 1, (3.3)
.произвольно в остальных случаях.
Для того чтобы стратегии (хя, <pi2, ..., q\n, ...), i=
= 1, 2, ..., N, определенные таким образом, образовы-
вали ситуацию равновесия в повторяющейся игре (3.2),
необходимо и достаточно, чтобы последовательность
(*н, *°i, • • •, *?п,> •.) удовлетворяла следующим нера-
венствам, являющимся дискретным аналогом неравен-
ства (1.6) [8], [10]. Для любого и любого
7 (*11, *21, • • • , *ЛГ1, *12, • • •) ^
~п-1
> lim Sim 0CikM[ (*i&, . .., XNk) -f-
fn'*°° L=i
ТП
+ a,„ max Mt (x‘n0, Xt) + Ц V alk
v.c=Y. ---1
(3.4)
Если рассматривать случай осторожных игроков, то в
(3.4) Ц можно заменить на L}, и тогда (3.4) будет яв-
ляться обобщением условия (1.2).
На случай дискретного времени могут быть перене-
сены все замечания § 1, касающиеся уменьшения объ-
ема информации, необходимой для формирования рав-
новесных стратегий.
183
Таким образом, переход к повторениям позволяет по-
лучать равновесные решения, не прибегая к рандомиза-
ции, т. е. не вводя случайности в процесс принятия ре-
шений. Но, может быть, использование только чистых
стратегий в каждом повторении сужает множество ожи-
даемых исходов-выигрышей?
Исследуем этот вопрос. Обозначим через W множе-
ство в EN всех возможных исходов в игре с множества-
ми чистых стратегий Хь и функциями выигрышей Л4г(х),
te/, т. е.
IT = {(о\, . . . , wN) | Э Xi <= Х£, i е /, такие что Mi (x)=w£}
Применение совместных смешанных стратегий в этой,
игре и переход к математическому ожиданию выигры-
шей расширяет множество возможных ожидаемых исхо-
дов до выпуклой оболочки множества W: со W. Пусть в
n-м повторении ’(п=1, 2, .. .) игроки применили совмест-
ную смешанную стратегию, которая дает вектор мате-
матических ожиданий выигрышей
(wln, wNn) <=со W.
Пусть, кроме того, последовательность совместных сме:
шанных стратегий такова, что существуют пределы
lim Sm У ainWin = w' i <= I.
m~*x> ।
n=i
Тогда имеет место следующее утверждение [9].
Если
00 Q2
3^<о°’ где Q/m=a?1+ ... 4-а?от,
m=i ^im
для каждого то существует такая последователь-
ность (хи, x2i, • • •, х12, ..., xin, . ..) чистых страте-
гий игроков во всех повторениях, что
Ф (*п, *21, • • •, *12, • • • > . .) = i е /,
т. е. результаты, которые могут быть получены с помощью
смешанных стратегий, могут быть достигнуты при ис-
пользовании только чистых стратегий в каждом повто-
рении.
В частности, таким образом могут быть получены и
все точки множества cl со W— замыкания множества
со W в EN.
184
CO Q2
Условие ———- oo не является слишком ограни-
m=i $1т
чительным. Ему удовлетворяют, например, последова-
тельности ain, и=1, 2, ..., для которых существуют
константы В{, и bt, сс —1 <&^Сг<^г + 1/4, такие,
что Bir!4 ^.ain В действительности это условие
может быть ослаблено.
Для наиболее часто встречающегося в моделях про-
цессов управления случая монотонно убывающих после-
довательностей а1П справедлив следующий результат [9].
Пусть ain удовлетворяют условиям
1) ain^afn+i>0, агп^-О при п~+оо, г=1, 2, ..., N,
2) Sim-+oo при т-+оо, 1= 1,2,...,#,
3) существует последовательности номеров m±<Z m2<Z...
.. . < mt < .. . такая, что mt¥1 — mt -> оо,
(m^+i — mty(mt — mt_^ 1, -> 1, i = 1, ..., N
при t->oo.
Тогда для любого вектора (tc^, ..., wN) ecl co W
найдется последовательность (хи, x21, • • • , *t-n, • • •) такая,
что
Gt -^21, • • •» • • •) = t = 1» 2, ..., N.
Вышеперечисленным условиям удовлетворяет, например,
набор совпадающих при разных i последовательностей {а^},
т. е. ain = ап, i = 1, 2, ... , N, где ал>ап+1>0, ап->0
00
при п --> оо и ап = °°.
П=1
Заметим, что в случае совпадающих при разных i
последовательностей {агп} использование смешанных
стратегий не может дать векторы выигрышей, выходя-
щие за границы множества cl со W.
Таким образом, переход к повторяющимся игрокам
позволяет с одной стороны, получить устойчивые реше-
ния в широком классе игр без использования смешан-
ных стратегий, и, с другой стороны, достигнуть тех же
результатов, которые могут быть получены с помощью
рандомизации. Кроме того, как легко видеть из струк-
туры ситуаций равновесия (3.3) повторяющаяся игра
остается, хотя бы формально, бескоалиционной, а ре-
зультаты в ней могут быть получены такие же, как и в
смешанном расширении одношаговой игры с использо-
ванием совместных рандомизированных стратегий.
185
Рассмотренная в настоящем параграфе модель по-
вторений может быть усложнена введением внешней
среды, меняющей игровую ситуацию. До сих пор изме-
нение от повторения к повторению состояло лишь в том,
что менялась ценность платежной единицы. Можно рас-
смотреть более сложную модель динамики, когда функ-
ции выигрышей зависят не только от х, но и от па-
раметра seS, характеризующего состояние среды. При
этом изменение значения s происходит в зависимости
от предыстории, а множества допустимых действий
игроков меняются в зависимости от s. Можно также
рассматривать случай, когда s зависит от предыстории
не детерминированным образом, а случайным, т. е. за-
дается распределением вероятностей на 5, зависящим
от предыстории. При этом стандартным приемом можно
свести общий случай зависимости от всей предыстории
к зависимости только от предыдущего шага, к так на-
зываемой модели марковской игры [11]. Здесь возни-
кают свои специфические проблемы, связанные с вопро-
сом существования стационарных ситуаций равновесия
[И], [12].
§ 4. О динамически устойчивых решениях
в трехстороннем конфликте с постоянной суммой*)
Как показано в предшествующих разделах, динами-
ческое рассмотрение задач принятия решений в много-
сторонних конфликтах, описываемых на языке теории
игр, позволяет получить решения типа точки равнове-
сия, которые могут одновременно обладать и выгодно-
стью для всех участвующих сторон, и устойчивостью.
При этом устойчивость фундаментально связана с по-
вторяемостью некоторой стандартной ситуации выбора
(рассматривается сверхигра, любая партия которой есть
последовательность партий подыгры) и возможностью
наложения штрафа на участника, допустившего в неко-
торой партии подыгры отклонение от рекомендаций со-
ответствующей равновесной стратегии сверхигры. По-
следнее обстоятельство предполагает достаточную сте-
пень информированности сторон о действиях друг
друга в прошлом, т. е. наличие у игроков достаточно
*) Параграф основан на результатах работы [13] и их обобще-
ниях, полученных А. В. Баркаловым.
186
«глубокой» памяти, фиксирующей ситуации, имевшие
место в прошлых партиях подыгры.
Однако в §§ 1—3 показано, что равновесные реше-
ния в играх с повторениями партий могут существовать
и при более скромной информации. Далее исследуется
пример, когда каждая из сторон помнит лишь состав
коалиций, имевших место в последней партии подыгры
(«марковское» свойство — действия сторон на следую-
щем шаге определяются некоторой информацией о дей-
ствиях на текущем шаге), и доказывается существова-
ние равновесных решений при повторениях многосторон-
него конфликта, описываемого моделью игры трех лиц
с нулевой суммой. При этом возможны различные ва-
рианты сверхигры в зависимости от принимаемой схе-
мы формирования коалиций в партиях подыгры и от
предположений о степени информированности игроков.
Ниже будут рассмотрены несколько таких вариантов.
Пусть v — характеристическая функция игры трех
лиц с постоянной суммой, заданная в (0, 1) —редуци-
рованной форме, которая в силу безобидности игры [2]
может быть описана выражениями
уо = У1 = О, u2=vs = l, (4.1)
где нижний индекс указывает число игроков, составля-
ющих коалицию. Исходом такой игры является дележ
а=(аь а2, а3), для координат которого справедливо со-
отношение
а1 + а2 + а3=1, а2, а3^0, (4.2)
причем at — выигрыш игрока te{l, 2, 3}.
Рассмотрим несколько моделей формирования деле-
жа а. Каждый игрок i предлагает другому игроку / об-
разовать коалицию {г, /} с дележом
аг = 1 — S£/, az = 6iZ, ak = 0, (4.3)
который обозначим а (6^), и независимо предлагает иг-
року k (условимся, что (t, /, k) —либо кортеж (1, 2, 3),
либо первая или вторая степень циклической подста-
новки элементов этого кортежа) образовать коалицию
{k, i} с дележом а(6,А) вида
а£ = 1 — б£/г, ау = 0, ak = б£Л, (4.4)
причем, в силу (4.2), величины 6ijt 6iA из (4.3), (4.4),
именуемые в дальнейшем предложениями игрока i со-
187
ответственно игрокам / и k, должны удовлетворять сле-
дующим неравенствам:
0^бо, 6iA^l. (4.5)
При этом предполагается, что дележ а(6рд) известен
игроку i лишь в случае, если он сам предлагает его дру-
гому игроку (т. е. i=p) или другой игрок предлагает
этот дележ игроку i (т. е. i=q).
Поскольку существуют два предложения сформиро-
вать коалицию {f, /} соответственно с дележами а(60-)
и a(6ji), которые в общем случае не совпадают, то воз-
можны различные схемы формирования дележа ос ({/, /}),
соответствующего коалиции {/', /}. Приведем две такие
схемы.
Схема 1 («равенство уступок»).
««/,/}) = ya(6v)+ya(dz<). (4.6)
Схема 2 («поощрение щедрости» — реализуется
дележ того игрока, который предложил партнеру боль-
шую долю, чем себе; при равенстве предложений реа-5
лизуется любой из дележей, но игроки априори не зна-
ют, какой именно).
a ({*,/}) =
a (fy),
Рла (в//) + (1 — Р^) a (б//),
= S/i,
Si/ <S/i,
(47)
где коэффициент pA (pA=0 или pA=l) априори не из-
вестен игрокам.
Выражения для дележей a({&, I}) и а({/, k}) для
каждой из двух схем получаются соответственно из
(4.6) или (4.7) путем замены индексов согласно цикли-
ческим подстановкам, переводящим кортеж (г, /, k) в
(k, i, j) и (/, k, i). При этом в случае второй схемы вы-
ражения а({й, I}) и a({j, k}) содержат, соответственно,
коэффициенты и (3<, подобные |3А из (4.7), которые так-
же предполагаются априори неизвестными игрокам.
В дальнейшем, модели, основанные на первой и вто-
рой схемах, будем обозначать соответственно Gt и G2.
Возможны также модели, основанные на «смеси» схем.
Например, формирование дележа а({i, j}) основано на
равенстве уступок, а формирование дележей a({/e, i})
188
и а({/, &}) —на поощрении щедрости. Различные сме-
шанные модели такого типа будем обозначать G3.
Рассмотрим правило формирования коалиций / на
основе предложений игроков. Для каждого игрока i вве-
дем величину
2[а, ({/, /}) ({k, 0)1, (4.8)
причем величины d} и dh получаются из (4.8) путем цик-
лической перестановки индексов.
Заметим, что при ^>0 для игрока i естественно
предпочесть коалицию {i, /}, а не {k, i}; при d,<0 пред-
почтение изменяется на обратное; при й,=0 обе указан-
ные коалиции равноценны для i-ro игрока. Теперь при-
мем, что образуется коалиция I={i, /}, при выполнении
любого из следующих условий:
d, >’A>’dh
(4.9)
min (di, dk) >dj^O,
max (d{, dk) <.di^.O,
(4.Ю)
(4.П)
dt> — dk>dj = Q, (4.12)
dj <Z — dk^dt = 0,
dt dk = df^ 0,
dj <Z dk — di 0,
(4.13)
(4.14)
(4.15)
t. e. I={i, j} имеет место, когда: либо оба игрока i и /
предпочитают эту коалицию (случай (4.9)); либо все
игроки предпочитают разные коалиции, и окончательное
формирование выбора определяется тем, что игрок, не-
сущий меньшие потери, изменяет свое предпочтение
(случаи (4.10) и (4.11)); либо для одного из игроков f, j
безразлично, в какой коалиции участвовать, и образу-
ется коалиция с участием игрока, имеющего максималь-
ную заинтересованность (случаи (4.12) и (4.13)); либо
два игрока имеют одинаковую заинтересованность (на-
пример di^dk), и образуется коалиция с участием треть-
его, более заинтересованного игрока (случаи (4.14) и
(4.15)).
Условия формирования I={k, 1} или 1= {/, k} полу-
чаются из (4.9) — (4.15) путем циклической замены ин-
дексов /, /, k. В случае, когда
di=dj=dhi (4.16)
189
т. е. степень заинтересованности игроков в образовании
предпочитаемых ими коалиций одинакова, образуется
коалиция /=Д, где
70е{{1, 2}, {2, 3}, {3, 1}}, (4.17)
а в случае, когда
4>^.=0, (4.18)
образуется коалиция /=/,, где
/}, {/, k}},
(4.19)
причем значения /0, Л априори неизвестны игрокам. Из
условия (4.18) путем циклической перестановки индек-
сов выводятся еще два условия, соответствующих обра-
зованию коалиции по правилу 1=Ц и правилу I=Ih, где
Л и 1к также априори неизвестны игрокам, а множества
их значений определяются из (4.19) путем соответству-
ющей перестановки индексов. Таким образом, /={г, /},
если либо справедливо одно из условий (4.9) — (4.15),
либо справедливо (4.16) и /0={/, /}, либо справедливо
(4.18) и Ij={i, /}, либо справедливо
dh——dj^>di=O
и Ii={i, /}. В [13] показано, что рассмотренные усло-
вия охватывают все возможные случаи.
Теперь введем сверхигру, в которой в каждый мо-
мент времени /, /=0, 1, 2, ..., реализуется партия рас-
смотренной выше игры трех лиц, причем на каждом
шаге сверхигры игроки /, /, k могут изменять свои пред-
ложения в зависимости от исхода предшествующих пар-
тий по правилу
М*+ О =<М-)> (4.20)
О^М’Х 1, (4.21)
причем значениями функции являются узлы равно-
мерной конечной сетки в отрезке [0, 1] (заметим, что
условие (4.21)—следствие условия (4.5)), включаю-
щей точки 0, 1/3 и 1. Вид аргумента функции из (4.20)
может быть различным в зависимости от предположений
об информированности игроков в момент t, например:
б0- (/+!)= Ql7, (4.22)
М* + 1) =М/(0), (4.23)
190
fy(/ +1) = <MZ(/), /(/-1)), (4.24)
5z/(/+l) = al7 (a (/(/))), (4.25)
Ъц (t + 1) = Oti (a (I (/)), / (t - 1)), (4.26)
где I(t) и a(/(/)) —коалиция на шаге t и соответству-
ющий ей дележ. Выражения для предложений 61Л,
6Л, Sji, как функций времени, определяются из
(4.20) — (4.26) путем соответствующей перестановки
индексов. Заметим, что правила (4.24) и (4.26) предпо-
лагают задание коалиции /(—1). Условимся, что каж-
дый игрок i может иметь свое значение Л(—1) этой ве-
личины (т. е. возможно, например, что Л(—1)=И=Л(—1)),
отражающее его представление о взаимоотношениях
сторон до начала игры. Таким образом, величины Л(—1),
являются заданными (они принадлежат мно-
жеству (4.17)).
Определим стратегию s{ игрока i, 1 <5^3, в сверх-
игре как упорядоченный набор
Si = (dz/ (0), 6^(0), oif (•), a^(-)) (4.27)
и обозначим множество всех таких стратегий через 5<=
= Si(v), где индекс v, 0^v^4, указывает, какой тип
функций (5ij из числа указанных в (4.22) — (4.26) исполь-
зуется при построении набора (4.27). Например, в клас-
се стратегий S<(0) функции сгъ- и oih являются констан-
тами (см. (4.22)). Далее зададим последовательность
семерок
т={Р1(0, р2(0, Рз(0, МО, Л(0, МО, МО), (4.28)
элемент которой, соответствующий любому фиксирован-
ному /, служит для определения коэффициентов рь 02,
р3 в выражениях, получаемых из (4.7), и для определе-
ния множеств /0, Л, Л, Л при выполнении условий (4.16)
и условий, выводимых из (4.18), на шаге t сверхигры.
При этом первые три элемента каждой семерки есть
числа 0 или 1, четвертый элемент имеет значения из
множества (4.17), остальные элементы имеют значения
из множеств, в которые переводится (4.19) соответству-
ющей подстановкой индексов 1, 2, 3. Обозначим множе-
ство всех возможных последовательностей у из (4.28)
через Г и положим, что элемент уеГ, входящий в опи-
сание сверхигры, априори неизвестен игрокам.
191
В качестве выигрыша игрока i в сверхигре примем
Mt (Si, s2, s3) = lim —inf V af (I (t)), (4.29)
T->00 T + 1 ver
где аг(7(/)) —выигрыш (доля) игрока I в коалиции /(/)
(зависящей от у). Поскольку при фиксированных стра-
тегиях число возможных значений предложений игроков
конечно, то для у, соответствующего минимуму в (4.29),
в пространстве значений шестимерных векторов
(612 (0, • • •, 632(0) возможно либо периодическое движе-
ние, либо неподвижная точка. Таким образом, функция
(4.29) существует.
Теперь для различных моделей и различных классов
стратегий рассмотрим ситуации равновесия в сверхигре,
причем сначала ограничимся рассмотрением симметрич-
ных ситуаций равновесия (когда стратегии sit sJf sk, об-
разующие точку равновесия, могут быть получены одна
из другой путем соответствующей перестановки индек-
сов) . Описываемые ниже ситуации характеризуются
лишь функциями Oij, 6ih (для каждого игрока), началь-
ные же предложения 6о(0), 6гА(0) считаются произволь-
ными и, следовательно, каждый раз речь идет не об од-
ной точке равновесия, а о классе таких точек, различа-
ющихся начальными предложениями, которые могут
быть выбраны независимо для стратегии каждого игро-
ка (т. е. симметрия подразумевается лишь для функций
о). Следующие три ситуации относятся к каждой из мо-
делей Gi, G2, G3.
Ситуация 1. В классе стратегий Sf(0) страте-
гии с функциями
ау=1, (yik= 1 (4.30)
порождают ситуацию равновесия, которой соответству-
ют выигрыши
М1=М2=Л13 = 0. (4.31)
Заметим, что в (4.30) информация о прошлых партиях
не используется, т. е. это, по существу, статически устой-
чивое решение.
Ситуация 2. В классе стратегий Sf(l) устойчивые
решения соответствуют функциям а<Д7), oift(7) из
табл. 6.1. Другой тип точки равновесия соответствует
192
Таблица 6.1
°ik> I
(0,1) {k, i}
(0,0) {i, !}
(1,0) {/, k}
Таблица 6.2
Wij- °ik> I
(0,0) {k, i}
(1,0) {«, /}
(0,1) {/. k}
Таблица 6.3
Wii' aik> /(O /(/-1)
(0,0) =/={/, k} =Hi, k}
(1,0) {»•> /} {/, k} {j, *} {i, П
(0,1) {i, k} {k, i} {/, *) {j, k} {b k} {k, i]
функциям из табл. 6.2. В обоих случаях (ср. с (4.31))
1
Mi=M2=M,= ~. (4.32)
Заметим, что табл. 1 и 2 соответствуют модели G,. При
рассмотрении G2 следует заменить числа 0 в указанных
таблицах значениями 1/2. Аналогичная замена необходи-
ма в случае модели G3, но в этом случае замена делается
лишь для предложений, на основе которых формируются
коалиции по принципу поощрения щедрости.
Ситуация 3. В классе стратегий 3, (2) ситуация
равновесия соответствует стратегиям с функциями
(<Тц(/, /), а«(Л /)) из табл. 6.3. Как и в предшествующем
случае, таблица соответствует модели G,. Аналогичные
7 Под ред. Н. Н. Моисеева 193
Таблица 6.4
таблицы для моделей G2 и G3 получаются описанной вы-
ше подстановкой величины 1/2 вместо 0. Для всех трех
моделей указанная точка равновесия обеспечивает вы-
полнение условия (4.32).
Следующие две ситуации равновесия относятся к мо-
дели G2 и классам стратегий St- (3) и Sf(4).
Ситуация 4. Точка равновесия в классе стратегий
Si(3) порождается функциями (о„(а), oift(a)) из
табл. 6.4, и ей соответствуют выигрыши из (4.32).
Ситуация 5. Точка равновесия в классе стратегий
Si (4) порождается функциями (сц>(а, /), a<ft(a, /)) из
табл. 6.5, и ей также соответствуют выигрыши из (4.32).
Кроме моделей, рассмотренных выше, возможны и
другие варианты. Например, модель, в которой игроки j и
k, составляющие коалицию на текущем шаге, соответст-
венно предлагают друг другу дележи a(6Jft) и a(6w), при-
чем дележ а({/, &}) формируется по схеме равенства
уступок, а дележи двух других коалиций определяются
предложениями третьего игрока i по схеме
а({£, 0) =^(6/0, a({f, /}) =a(6/j),
т. е. в данной модели (обозначим ее G4) на каждом шаге
фигурируют лишь четыре предложения (игроки, состав-
ляющие коалицию, не делают предложений третьему
194
Таблица 6.5
(<ту. I ai az
СМ | СО 1 az= 0
{1, П A R A 00 1 to
см | со см | со " ' {/, k}
00 | to {k, i}
2
/1 \ (г *) a;- = 0 °<a/<7
G. -"1 \ з/ a. >0
00 | to 00 | to > ' 2 а/>Т
Таблица 6.6
(%. ^kl- t°lk’ aii> I
(1, 0) (0, 1) (0, 0)
(0, i) (0, 0) (1, 0) {k, i}
игроку). При этом стратегии, которым соответствуют
табл. 1, 2 и 3, порождают ситуации равновесия (условие
(4.32) выполняется) и для модели G4 (предложения иг-
роков, составляющих коалицию, третьему игроку, содер-
жащиеся в указанных таблицах, игнорируются).
Аналогично можно рассмотреть модель G5, где тре-
тий игрок I, находящийся вне коалиции, не делает пред-
7*
195
ложений и дележи а({/, /}) и a({k, i}) совпадают с пред-
ложениями а (6л) и a(6fei), которые делаются игроку i
членами коалиции I(t) = {/, k}. В этой модели на каждом
шаге также фигурируют лишь четыре дележа.
В заключение отметим, что кроме рассмотренных вы-
ше «симметричных» ситуаций равновесия, возможны «не-
симметричные» ситуации. Например, стратегии sif sjf sh,
которым соответствуют функции а из табл. 6.6, порожда-
ют для модели Gi ситуацию равновесия, в которой
№=1/2, №=№=1/4.
Циклическая перестановка индексов в табл. 6.6 позво-
ляет получить еще две ситуации равновесия.
Литература к главе 6
1. Гер мейер Ю. Б. Игры с непротивоположными интересами:—
М.: Наука, 1976.
2. Нейман Дж., Моргенштерн О. Теория игр и экономическое
поведение: пер. с англ. (Под ред. Н. Н. Воробьева).— М.: Наука,
1970.
3. Г е р м е й е р Ю. Б. Слабоустойчивые совместные решения в по-
вторяющихся играх.— ДАН СССР, 1974, т. 216, № 3, с. 481—484.
4. Кукушкин Н. С., Морозов В. В. Теория неантагонистиче-
ских игр.— М.: Изд. МГУ, 1977.
5. Кононенко А. Ф. Об одном классе иерархических повторяю-
щихся игр.— В сб.: Тезисы докладов.— III Всесоюзн. конф, по
исследованию операций.— Горький, 1978, с. 189—190.
6. М о х о н ь к о Е. 3. Задача наблюдения в повторяющихся играх.—
В сб.; Тезисы докладов.— III Всесоюзн. конф, по исследованию
операций.— Горький, 1978, с. 403—404.
7. Кононенко А. Ф. О равновесных позиционных стратегиях в
неантаго-нистических дифференциальных играх. — ДАН СССР,
1976, т. 231, № 2.
8. ГермейерЮ. Б., Штил ь м а н М. С. Некооперативные повто-
ряющиеся игры с произвольным дисконтированием.— Доклады
АН СССР, 1975, т. 221, № 1, с. 22—25.
9. Штил ь м а н М. С. Повторяющиеся игры с изменяющейся цен-
ностью платежной единицы. I. Достижимые векторы выигры-
шей.— Техн, кибернетика, 1978, № 1, с. 26—33.
10. Штил ь м а н М. С. Повторяющиеся игры с изменяющейся цен-
ностью платежной единицы. II. Ситуации равновесия.— Техн,
кибернетика, 1978, № 5, с. 26—34.
11. ParthasarathyT. Disconted, positive and noncooperative sto-
chastic games.— Int. J. Game Theory., 1975, v. 2, № 1.
12. Штил ь м а н M. С. Ситуации равновесия в дискретных стохасти-
ческих играх с критерием среднего дохода.— Труды МИИТа, вып.
510, 1976.
13. Баркалов А. В., Стронгин Р. Г. О динамическом рассмот-
рении компромиссных решений в многостороннем конфликте.—
/К. вычислит, матем. и матем. физ., 1978, т. 18, № 4, с. 897—907.
гЛAB A 7
ДИНАМИЧЕСКИЕ ЗАДАЧИ ПРИНЯТИЯ РЕШЕНИЙ
В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ
§ 1. Информационные задачи управления
и оценивания
Процесс принятия решений в условиях неопределен-
ности, как правило, приводит к необходимости решать
некоторую задачу о наилучшем выборе в условиях непол-
ной информации о рассматриваемой системе. Типичной
ситуацией, связанной с принятием решения в динамиче-
ских системах, является необходимость организовать
процедуру управления в условиях неопределенности. Дан-
ную процедуру, направленную на достижение той или
иной цели управления, часто бывает необходимо сопро-
водить процессом оптимизации, позволяющим выделить
гарантированный или даже наилучший в некотором смыс-
ле результат. В настоящей главе мы обсудим некоторые
задачи управления в условиях неопределенности для ди-
намических объектов, приняв в качестве модели систему,
описываемую обыкновенными дифференциальными
уравнениями. Однако основные схемы, излагаемые ниже,
сохраняют свое значение и для иных динамических объ-
ектов, описываемых, например, рекуррентными соотноше-
ниями, функционально-дифференциальными уравнения-
ми или распределенными системами.
Математическая теория оптимизации процессов уп-
равления динамическими системами известна широко.
Принципиальные ее положения, начиная с фундаменталь-
ного принципа максимума Л. С. Понтрягина, приобрели
характер классических результатов. В данной теории
предполагается, что существует строгая математиче-
ская модель системы и что априорная и текущая инфор-
мация о системе являются полными. Вместе с тем, имеет-
ся немало математических задач, связанных с приклад-
197
ними постановками, в которых указанная информация
является неопределенной. Имеющихся сведений здесь
уже недостаточно для прямого применения классических
результатов. Последнее приводит к так называемым ин-
формационным задачам теории управления, сформулиро-
ванным в иных предположениях по сравнению с класси-
ческими. Так, весьма распространенной является ситуа-
ция, когда априорные сведения о параметрах и входных
воздействиях системы, а также об ее текущем состоянии
являются неполными: какое-либо статистическое их опи-
сание отсутствует, но заданы лишь области изменения со-
ответствующих величин. Природа указанных «неопреде-
ленных» величин при этом может быть произвольной.
Изучение ситуаций, характеризуемых указанными инфор-
мационными ограничениями, приводит к теории управ-
ления в условиях неопределенности. Отсутствие статисти-
ческого описания неизвестных параметров как раз и от-
личает ее от теории стохастического управления, когда
такое описание предполагается доступным.
Обсудим ситуацию подробнее. Итак, пусть имеется
динамический объект, описываемый обыкновенным диф-
ференциальным уравнением
dx
=f{t, x,u,w), (1.1)
заданным на промежутке времени Здесь
f(t, х, и, w) — n-мерная векторная функция, обеспечи-
вающая единственность и продолжаемость решения урав-
нения (1.1) на промежутке Т при любом начальном зна-
чении x(tQ)=xQ и любых измеримых реализациях и=
= w = w(t) функций u(t), w(t) размерностей р и q
соответственно.
Далее будем рассматривать следующие ограничения
на систему (1.1), связанные с неопределенностью в ин-
формации о системе.
1) Неопределенность во входных воздействиях. Здесь
предполагается, что начальный вектор х° и функция
^(0=^(*), неизвестны заранее, но удовлетворя-
ют априорным ограничениям
x°g=X°, иф)е=№,
(1.2)
где Х°, W— некоторые известные множества, заданные
в Еп и в пространстве функций {ау (/)}.
198
Функция u(t) будет далее означать управление в си-
стеме. Ее реализации во времени будут поэтому предпо-
лагаться известными.
При названных условиях каждому выбранному уп-
равлению u(t) будет соответствовать уже не одно изоли-
рованное движение системы (1.1), а целый пучок движе-
ний или ансамбль траекторий, полученных путем объеди-
нения решений по всем неизвестным величинам х°, до(*),
удовлетворяющим (1.2). Выбирая воздействие мо-
жем управлять положением ансамбля в пространстве.
Указанное управление здесь формируется в виде функции
времени, исходя из априорных сведений о системе. Таким
образом, речь идет о программном управлении ансамблем
траекторий. При этом предполагается, что никакой до-
полнительной информации о системе по ходу процесса
уже не поступает.
Улучшение результата управления может быть полу-
чено, вообще говоря, если по ходу процесса использовать
дополнительную информацию, например, результаты из-
мерения текущего положения системы.
2) Неопределенность в информации о текущем поло-
жении. Предполагается, что прямое измерение вектора х
текущего положения системы (1.1) невозможно, а про-
цесс косвенного измерения (наблюдения) этого положе-
ния подчиняется уравнению
(1.3)
Здесь g(t, х, g) —известная функция размерности /п^п,
являющаяся, например, измеримой по t (в смысле теории
функций) и непрерывной по х, g. Параметр g размерно-
сти п изображает входное воздействие в системе измере-
ния. Информация о реализациях g(/) = g(*), t^T, ограни-
чивается заданием включения
g(-)eS, (1.4)
где S — известное множество в пространстве функций
Располагая измеренной реализацией t/(/)=z/(.),
где t пробегает множество euaz[/0, t>] = 7’„ точек замера век-
тора у, зная уравнения (1.1), (1.3) и ограничения (1.2),
(1.4), можно построить в фазовом пространстве неко-
торое информационное множество ЗВ(&,•) =^’(6', у(•)),
совместимое с результатами измерений. Это множество
будет состоять из концов тех и только тех траекторий
199
системы (1.1), которые могли бы породить при некоторых
значениях x(t0) =х°, w(t), £(/), удовлетворяющих ограни-
чениям (1.2), (1.4), как раз измеренную реализацию y(t).
Среди элементов & •) будет, очевидно, находиться и
неизвестное нам истинное состояние системы. Множест-
во <^’('&, •) вбирает в себя всю априорную и текущую ин-
формацию о совокупном динамическом процессе измере-
ния и управления. Поэтому за текущее состояние — по-
зицию совокупной системы — может быть принята пара
{t, 35 (t, •)}. Управляющее воздействие и можно теперь
формировать согласно принципу обратной связи как по-
зиционное управление, т. е. как функционал и=
= u(t, •)) от позиции {/, 35 (t, •)} (строгое описа-
ние допустимых ограничений на и и классов u=u(t,
35 (t, •)), а также краткое изложение этой процедуры
будет дано ниже, в § 5).
Таким образом, решение задачи позиционного управ-
ления системой (1.1), (1.3) в условиях неопределенности
по входным воздействиям и текущему состоянию будет
включать в себя следующие этапы:
а) описание информационных множеств — задача по-
зиционного наблюдения;
б) описание эволюции информационных множеств —
задача минимаксной фильтрации;
в) управление эволюцией информационных мно-
жеств— сочетание позиционного управления и наблю-
дения.
Упомянутые задачи составляют раздел развиваемой в
последние годы теории игровых задач динамики. К реше-
нию последних естественно применять методы минимак-
са и теории игр. Решения, излагаемые ниже, опираются
на методы, развитые в данной области Н. Н. Красовским
[21]—[24].
Данный круг вопросов находит интересные приложе-
ния, например, в задачах управления движением, в за-
дачах коррекции и оценки параметров механических си-
стем, в теории систем автоматического управления, в ис-
следованиях по экономической динамике, в описании ря-
да биологических систем (см. [5], [7], [34], [60], [66]—
[68], [70], [71]).
Следует сказать, что целенаправленные воздействия
на систему (1.1) можно приписывать не только управле-
нию и (первому «игроку»), но и параметру v, который
может быть рассмотрен как управление второго «игро-
200
ка». Подобные ситуации являются характерными для за-
дач теории дифференциальных игр. Если, однако, рас-
сматривать эти ситуации применительно к нашей систе-
ме, то естественно предположить, что «игрок» v распола-
гает своим измерительным устройством
z/(2)=g(2)(Z, х, со), (1.5)
отличным от (1.3), с неопределенным возмущением
co(*)^Q, где Q — известное множество. Тогда, од-
нако, этот второй игрок v будет располагать и своим
информационным множеством й?2(/, •), отличным, вооб-
ще говоря, от <^1(^ •)=^>(^, •). Таким образом, осуще-
ствляя позиционное информационное управление, игроки
и и v будут воздействовать уже на различные информа-
ционные множества (а именно, на <^’1(/, •) и $?2(t •)
соответственно), а, стало быть, и на разнотипные инфор-
мационные эволюционные системы. Интересы игроков
уже, следовательно, не будут прямо противоположными.
Вследствие этого обсуждение данной ситуации естествен-
но проводить уже в рамках понятий многокритериально-
сти и неантагонистических игр, ставя задачу так, чтобы
описать некоторые ситуации игрового равновесия в си-
стеме (как это принято в теории многокритериальных
неантагонистических игр). Следует подчеркнуть, что
в общем случае каждый из игроков располагает уже по
существу не одним, а несколькими критериями (приняв,
например, за один критерий время Ф0 наибыстрейшего
приведения процесса ^(ft, •) в заданную 8-окрестность
Ж целевого множества Л, за другой — наименьшую ве-
личину такой окрестности ^Ео(Ф) при фиксированном ft,
за третий — критерий максимизации размеров множест-
ва (Ф, •) для второго игрока в момент #ит. д.; крите-
рии могут быть, естественно, самыми разнообразными).
Учитывая сказанное, для совокупной реальной инфор-
мационной системы следует определить понятие некото-
рого обобщенного равновесия, придерживаясь которого,
оба игрока смогли бы достигнуть удовлетворительных
результатов. Возможный подход к такому решению зада-
чи излагается ниже, в § 6 данной главы. Как мы увидим
Далее, указанное понятие оказывается удобным для рас-
смотрения и других задач оценивания и управления, ког-
да, в частности, возмущение уже не обязательно форми-
ровать по позиционному принципу.
201
В заключение параграфа остановимся еще на одном
виде информационных ограничений.
3) Неопределенность в модели. Здесь предполагается,
что в уравнении (1.1) реализации u(t), w(t) параметров
и, v и вектор х° известны, однако сама функция /(•) =
=f(t, х, и, w) точно не определена. Именно, задан лишь
класс 3*"(.) таких допустимых функций, т. е. условие
f(-)^(«). (1.6)
Располагая условием (1.6), можно снова сформиро-
вать ансамбль траекторий, объединяя движения, выпу-
щенные при всех возможных f(*)^F(*), и рассмотреть
задачу программного управления этим ансамблем.
Если к тому же располагать дополнительной инфор-
мацией о системе, измеряя, например, у при условиях
(1.3), (1.4), то в фазовом пространстве можно снова
сформировать информационные множества #(•))
состояний, совместимых с измерениями y(t). Опре-
деление множества 3S(t, •), связанное с уточнением об-
ласти ^'(•), приводит нас к задаче об идентификации си-
стемы (1.1), (1.6), а управление эволюцией •) —к
задаче адаптивного управления в условиях неопреде-
ленности. Заметим, что трактовки указанных задач в
рамках ограничений 2) (неопределенность на входе) и
3) (неопределенность в модели) оказываются связанны-
ми и могут часто взаимно переплетаться (по поводу дан-
ного класса задач см. [14]).
Ниже мы обсудим первые два вида ограничений на
неопределенные параметры системы. Изложение резуль-
татов по данному кругу задач будем проводить для ли-
нейной модели, для выпуклых геометрических и квадра-
тичных интегральных ограничений на неизвестные пара-
метры.
§ 2. Программное управление
1. Ансамбль траекторий. Задача программного управ-
ления. Предположим вначале, что априорная информа-
ция о системе сводится к заданию на промежутке Т*=
= {t • уравнения
= A(t)x + B(t)u + C(f)v, (2.1)
at
т. е. к заданию непрерывных матриц A(t), B(t), C(t) и
202
к описанию множеств Х°, <?(/), задающих ограничения
х(/0)еГ, tf=Tv, (2.2)
на начальные данные х(/0)=х° и входные воздействия
v(t). Здесь предполагается, что множества X°czEn и
(2(t)czE4 — компактные, выпуклые и £?(/) изменяется не-
прерывно по t (в общепринятом смысле, см., например,
гл. 11).
Неопределенность в задании х° и v(t) порождает ан-
самбль X(t; «(•)) траекторий системы (2.1), получен-
ный путем объединения последних по всем значениям не-
определенных параметров. Именно,
X (*;«(.)) =
= { и* а; U (.), V (•), х°)| v (0 е= а а), / еТ#; х°е X0},
где x(t-, «(•), »(•), я0) — единственное решение уравне-
ния (2.1), выпущенное из состояния х(^0) =х° при задан-
ных u(»)=u(t), t>(»)=v(/), Выбирая измеримую
функцию
ы(0е^(0 (2.3)
{ф (t)czEp—выпуклый компакт, изменяющийся непре-
рывно по t), будем осуществлять программное управле-
ние положением ансамбля X(t-, «(•)) в пространстве.
Среди множества подобных задач управления при на-
личии ограничений отметим два типичных класса. К пер-
вому классу отнесем задачи с критериями и ограничения-
ми, порожденными интегральными функционалами. Ко
второму классу отнесем задачи, содержащие условия
минимакса. Рассмотрим по одному представителю из
каждого класса. (Подробное изложение методов реше-
ния задач о программном управлении ансамблем траек-
торий для линейных, квазилинейных и некоторых клас-
сов нелинейных систем приведено в работах [30,], [3], [4]).
Пусть <p(z) (ze£m) —выпуклая, всюду конечная
функция, R(t) —непрерывная матрица
Z (f; и (•)) = R (t) X (t; «(•)) =
= {г : z — R(t)x(t;u (•), v (•), х°) | v (т) (= Q (г),
Т €= Т/, Х° €= X0}.
203
Обозначим
Т («(•)) = $ Ф (г) dz,
(2.4)
<b(u(.)) = max {ср (z)| z е Z (fr; и (•))}.
3 а д а ч а А. Среди измеримых функций u(t), удовлет-
воряющих (2.2), найти оптимальное управление u°(t),
для которого
то = 7(ыо(.)) = min {?[(«[(•)) 1“(0 е ^(0. Л»}- (2-5)
Задача Б формулируется аналогично, с заменой
у(м(«)) на ©(«(•)) и у0 на о»0.
Здесь <р (z) может, в частности, означать расстояние в
некоторой метрике точки z до а^Ет\ d(z, a) = |z—а|.
Приведем решения задач А и Б, которые могут быть
получены при помощи стандартной техники теории ли-
нейных систем [20], [9], [6] (подробное описание именно
данного класса задач дано в [30]).
2. Интегральный критерий. Введем следующие обо-
значения. Пусть штрих означает транспонирование,
(/, h) —скалярное произведение в конечномерном прост-
ранстве; —измеримая /n-векторная функция,
заданная на £m; s(t; I) —решение уравнения, сопряжен-
ного к однородной части (2.1):
— = — sA(i), s (&)=!'#(&),
dt
Z = Z (ft; 0) = (0) X (ft; 0); (2-6)
Ф*(/) =sup{(/, z) — ф(г) |zeEm} — функция, сопряжен-
ная ф(г) (см. [46]);
Ж (/(.),«(.)) =
о
= J J {а (/; / (р)) В (0 и (0 + (/ (р), р) - Ф- (/ (р))} dp dt.
t, z
Теорема 1. Пусть
?*=SUP{T(Z(.))|/(p)},
(2.7)
Т (Z(.)) = min{£ (/(.),и(.))|ы (0 <= 54/), /ё=7\>},
где верхняя грань берется по всем измеримым 1(р) и вы-
полнено условие
-ф‘(0)<у‘. (2.8)
204
Тогда
1) Верхняя грань в условиях (2.7) достигается на эле-
менте В(р) ^0 и 7*=7°.
2) В условиях (2.7) оптимальное управление u”(t)
удовлетворяет условию минимума
s(i-, l(p))B(t)u°(i)dt =
— min
s (/; I (p)) В (t) и (t) dpdt\u (t) e ST (t), To
(2-9)
3) В условиях (2.7) для оптимальности u°(t) необхо-
димо и достаточно, чтобы существовал такой элемент
1°(р), что пара {/“(•), и°(«)} доставляла бы седловую
точку функции Лагранжа Z(/(•), «(•)):
% (I (•), ио (.)) £ (10 (•), и* (•)) ^2(1» (•), и (•)).
Итак, центральным моментом здесь является реше-
ние двойственной экстремальной задачи (2.7) о максиму-
ме вогнутого негладкого функционала Чг{/(*)}.
Решение данной задачи упрощается, если <p(z) имеет
специальный вид, например,
Ф (z) = ^(z — tn, М (z — /и)) + (с, г),
L2 J
где М — положительно определенная матрица, с — изве-
стный вектор. В этом случае, приняв обозначения
= p(Z), $(p,Mp)dp = p(Z),
z z
можем искать 1(р) в виде l(p) =М(р + 1). Функционал
Т(/(•)) будет тогда зависеть от конечномерного пара-
метра /, и функция Лагранжа
|О
£(/(•), «(•)) = Js(Z; l)B(t)u(t)dt + f(l), (2.10)
где
f (I) = p (Z)'— (tn, M(p(Z)+l-c)) — - (I,
2 (2.И)
Теперь Чг(/(-)) =ЧГ(/) есть вогнутая на Ет функция
205
вида
¥(/) = + (2.12)
to
(Символом
p(s|P) = sup{(s, z) IZ€=P}
здесь обозначена опорная функция множества Р.) При-
няв /° за элемент, максимизирующий Т(/) (он сущест-
1
вует в предположении (с, т) — -% (с, Л4_1с) <у’), находим,
что u°(Z) удовлетворяет условию минимума
= min{s(/;/o)B(O«|ue^(O. tf=T<>}, (2.13)
в которое теперь превращается соотношение (2.9).
Итак, оптимальное управление «“(/) следует находить
из условия (2.13), где s°(Z)=s(Z; 1°) — решение уравне-
ния (2.6) с краевым условием s°(&)=/?(ф)/0/.
Рассмотренный случай допускает простейшую веро-
ятностную интерпретацию. Действительно, примем, что
неопределенные величины х° и v(t) случайны и таковы,
что вектор Д(Ф)х(Ф; О, ФО), х°) распределен на множе-
стве 7=2(Ф; 0) равномерно. Тогда, положив с=0, Л4=
=о'*£, где <т= j dp, Е — единичная матрица, сразу ви-
z
дим, что ?(«(•)) будет изображать среднеквадратичное
отклонение случайного вектора г(Ф; и(«), t»(*), х°) от т,
т. е.
?(Ы(.))=М(2(Ф;и(.),и(.),х°)-т)2,
где М —символ математического ожидания. Посредст-
вом выбора функции <р (z) могут быть охвачены и случаи
иных распределений, заданных на Z.
3. Минимаксный критерий. Решение задачи Б описы-
вается с помощью утверждения, аналогичного теореме 1.
Различие здесь состоит в том, что Т(/(•)) уже с самого
начала зависит не от функции 1(р), а от конечномерного
параметра /, а функционал Z(/(•), «(•)) записывается в
виде (2.10), где теперь
НО =£“(/),
g(l) = (т, /)+<p-(Z)-p(/|Z)
и есть вторая сопряженная функция по отношению
206
к g(l) (т. е. £**(•) = (£*(•))*)- в условиях
—Ф*(0) <co* = sup
имеем причем верхняя грань вогнутой функции
¥(0 достигается на элементе /°=#0. Функция uQ(t),
оптимизирующая <о(и(*)), удовлетворяет условию мини-
мума вида (2.13) на элементе s(Z; Z) при указанном 1=1°.
Для оптимальности uQ(t) необходимо и достаточно, чтобы
пара /°, н(«) доставляла седловую точку функции Лаг-
ранжа «<?(/, £/(•)).
В данном случае центральным пунктом решения сно-
ва является максимизация негладкого вогнутого функ-
ционала Т(/). Дополнительную трудность здесь состав-
ляет вычисление функции f(O=g**(O> что, в свою оче-
редь, требует проведения дополнительных процедур ма-
ксимизации некоторых конечномерных функций. Однако
следует учесть, что если ограничения .Х° и Q(t) таковы,
что множества Z(-&, •) суть эллипсоиды или параллело-
топы, то вычисление можно провести заранее и
получить соответствующие формулы в явном виде. (Та-
кие формулы приведены в [30] в гл. 5). Решение задачи
сводится в таком случае к тем же самым процедурам, что
и для задач управления изолированными траекториями.
Таким образом, задача управления ансамблем траекто-
рий вполне укладывается в рамки конечномерных мето-
дов теории линейных систем.
В заключение отметим, что столь же полное решение
может быть получено также для задач с фазовыми огра-
ничениями на ансамбль траекторий, если последние
задавать снова при помощи интегральных функционалов
или минимаксных условий, а также для случая смешан-
ных и иных функциональных ограничений (по этому по-
воду см. [30]).
Остальные параграфы данной главы будут посвяще-
ны позиционному, т. е. построенному по принципу обрат-
ной связи, управлению в условиях неопределенности.
§ 3. Информационные множества управляемой системы
1. Определение информационных множеств. Для рас-
смотрения задачи позиционного управления следует
прежде всего остановиться на описании информацион-
ных свойств системы, когда неопределенность возникает
в сведениях об ее текущем положении.
207
Вернемся снова к уравнению (2.1) при ограничениях
(2.2), (2.3), где u(t) —известная функция. Пусть уравне-
ние измерений текущего положения системы имеет сле-
дующий вид:
y=G(t)x+%. (3.1)
Здесь у — m-мерный вектор, G(t) —непрерывная матри-
ца; g — не известное заранее неопределенное возмуще-
ние в системе измерения, подчиненное лишь априорному
геометрическому ограничению
5(0 (3.2)
причем 5?(0 —выпуклый компакт в Ет, изменяющийся
непрерывно по t.
При отмеченных предположениях истинное движение
системы (2.1), порожденное некоторой парой {х° = х(/0),
0(0, — единственно и нам неизвестно.. Дополни-
тельную информацию об этом движении содержит функ-
ция у=у(О, полученная в результате измерения на про-
межутке o’ доступных наблюдению параметров
системы и реализовавшаяся в силу уравнения (3.1). Зная
реализацию у(0> можно теперь оценить истинное состоя-
ние системы (1.1) в любой момент времени О из проме-
жутка /оЛ, где
Следует обратить внимание на то, что функция y(t)
могла реализоваться в силу уравнений (2.1), (3.1), разу-
меется, не при любых значениях х°, v(t), допускае-
мых ограничениями (2.2) и (3.2). Совокупность тех троек
£(*) = {х°, 0(*)> 5(*)}> которые могли бы, в принципе,
породить именно реализацию y(t), будем называть мно-
жеством S)(*| #(•)) = {5(•)!//(•)} неопределенных пара-
метров {х°, 0(*), £(•)}, совместимых с результатами из-
мерений. Множеству S) (• | у (•)) будет соответствовать не-
который ансамбль траекторий {x(t\ и(»), и(«), х0)}
системы (1.1), среди которых будет содержаться и неиз-
вестная нам истинная траектория. Сечение в момент О
этого ансамбля будет представлять собой некоторую об-
ласть в фазовом пространстве — «информационное мно-
жество» состояний системы (2.1) в момент совмести-
мых с результатами измерений. Это множество опреде-
ляется через 3)(• |у(-)) и будет, следовательно, зависеть
от реализации 1/(0- Таким образом, приходим к следую-
щему определению.
Определение 1. Информационным множеством
ЗВ (Ф, о, у (•))=$? (Ф, о, •) состояний системы (2. 1) в мо-
мент совместимых с функцией y(t), измеренной на про-
208
межутке Ta=[tQ, а], будем называть совокупность тех то-
чек из Еп, через каждую из которых проходит в момент
ft траектория x(t; u(-), v(-), х°) системы (2.1), порожда-
ющая на промежутке Та вместе с некоторой функцией
£(/), в силу уравнения (3.1), именно функцию y(t). Эле-
менты х°, v(t), g(Q должны при этом удовлетворять огра-
ничениям (2.2) и (3.2).
Итак, опишем множества <^(ft, а, •) и их эволюцию во
времени. Будем различать три основные ситуации, где
рассматриваются:
а) при ст=ft — задача фильтрации;
б) при a<ft — задача прогнозирования (экстраполя-
ции) ;
в) при a>ft — задача уточнения («сглаживания» или
интерполяции).
Определение 1 и последующие выводы остаются в
силе, когда вектор y(t) доступен измерению лишь на не-
котором подмножестве I промежутка Т={/0, Л]- Далее
ЗВ ('О’, • К означает области, которые определяются
аналогично ЗВ (ft, о, •), но с заменой /0 на t (при х (Z) еХ) .
В частности, ЗВ (ft, о, • | /0, X0) = ЗВ (ft, о, •).
2. Свойства информационных множеств. Прежде чем
перейти к конструктивному описанию информационных
множеств ЗВ (ft, о, • |/, X), перечислим некоторые общие
свойства этих множеств. Ниже всюду полагаем, что X —
выпуклый компакт в Еп.
Лемма 1. Множества ЗВ (ft, о, *|/, X) суть выпуклые
компакты в Еп.
Данное свойство является следствием линейности си-
стемы, выпуклости и компактности множеств, задающих
ограничения на х°, v (Z), §(/).
Лемма 2. Пусть известна реализация y(t), te[r, ft]
u /o^T^T'^ft. Тогда
3B(&, 0*,//(*)|т, X) =
= (&, O', у (•)!т', a? « V, у (•) | т, x))
Данное равенство выражает своеобразное полугруп-
повое свойство преобразования ЗВ (ft, ft, • \ t, X). Эволюци-
онирующие множества (ft, ft,//(•) |т, X), следовательно,
образуют некоторую обобщенную динамическую систему,
вобравшую в себя динамические и информационные свой-
ства уравнений (2.1), (3.1) при условиях (2.2), (3.2).
Множества ЗВ (ft, ft, #(•) |т, X) обладают и своеобраз-
ным марковским свойством: множество ЗВ (ft, ft, //(•) |т, X)
209
содержит всю предысторию процесса, и дальнейший его
ход при зависит лишь от этого множества, но не от
предшествующих его реализаций, полученных при
Лемма 3. Пусть Тогда спра-
ведливо включение
ЗВ (ft, а', у (•) | т, X) <= ЗВ (ft, о, у (•) | т, X).
Отсюда видно, что множество <^(ft, о, */(•) |т, X) бу-
дет тем «меньше», чем продолжительней промежуток на-
блюдения [т, о].
Пусть (ft, ft, у(-) |Z0, Х°) означает реализацию
во времени множества <^(ft, О, • )=<§? (ft, О, £/(•) |/0, Х°).
Справедливо следующее свойство.
Лемма 4. Многозначное отображение <^[ft] полуне-
прерывно сверху по включению, т. е. в каждой точке fte
е[/0, ZJ будет выполнено условие: для любого числа 8>0
существует такое число б>0, что справедливо включение
^[ft'j^^elft], лишь только |ft — О'| <е (Ж’е — евклидова
^-окрестность множества ЗВ).
Пусть p(Z|^) — опорная функция множества ЗВ. Бу-
дем говорить, что отображение 3B\t\ имеет скачок в точке
£=т, если функция времени р(/|<^И) имеет в точке t
скачок *) хотя бы при одном значении /=Г=^=0.
Лемма 5. Отображение 3B[t\ имеет не более чем
счетное множество скачков.
Таким образом, множество 3B\t\ может скачкообразно
стягиваться в точках, множество которых не более чем
счетно.
Следующий шаг будет заключаться в описании эво-
люции множеств 3B\t\ = 3B(t, /, •) во времени. Особенность
решения здесь состоит в том, что по аргументу I опорные
функции р(/|йф]) уже не будут гладкими, а по аргумен-
ту t — даже непрерывными. Вследствие сказанного, для
описания динамики областей 3B[t\ аппарата обыкновен-
ных дифференциальных уравнений будет уже недостаточ-
но. Соответствующие эволюционные соотношения можно,
однако, получить, если аппроксимировать решение рас-
сматриваемой задачи с геометрическими ограничениями
при помощи решений аналогичных задач, полученных
уже для некоторой вспомогательной системы с квадра-
*) Здесь за определение скачка скалярной функции р[/] взято
понятие, принятое в теории функций (см. КолмогоровА. Н., Ф о-
м и н С. В. Элементы теории функций и функционального анализа,
с. 322. М.: Наука, 1976).
210
тичными ограничениями на неопределенные параметры.
В последнем случае решения будут уже гладкими, их вы-
числение может быть доведено до конца, а соответству-
ющие эволюционные дифференциальные уравнения запи-
саны в явном виде. Таким образом, изучение эволюции
областей t, •) начнем с соответствующих квадра-
тичных задач.
§ 4. Эволюция информационных множеств
1. Квадратичные ограничения. Определение инфор-
мационных множеств, аналогичное изложенному выше,
справедливо, естественно, и при иных ограничениях на
тройки £(*) = {х°, v(«), £(•)}, в том числе при совмест-
ных ограничениях
где /)(•) — некоторое априорно заданное множество. На-
иболее простые решения получаются, как мы увидим, при
интегральных квадратичных ограничениях на £(•).
Рассмотрим линейную систему
-^- = Л(0г+>(0 + /(0,
at
(4.1)
z (Q = z° + z’,
r/ = G(0z+7l(0 + m (4.2)
где матрицы Л (О и G(f) —такие же, как ив (2.1), (3.1),
f(t) и £*(/)—известные функции соответствующих раз-
меров, z* — известный вектор. Информация о функциях
а»(0> Л (О и векторе z° исчерпывается заданием нера-
венства
(z«, Lz°) + J (и/ (0 Af«(O w (t) + if (0 N (0 n (0) dt p2, (4.3)
h
где матрицы L и N(t) (при всех t) положительно опре-
делены, а матрица M(t) неотрицательно определена. Эле-
менты матриц Л4(/), N(t) измеримы по t.
Пусть на промежутке реализовалась функ-
ция y(t). Зная эту функцию, можно определить инфор-
мационные множества о, о, //(•)) систе-
мы (4.1), (4.2), совместимые с реализацией у (Г) при
ограничении (4.3). Соответствующее определение здесь
211
точно такое же, как и в п. 1 § 3, однако место системы
(2.1), (3.1) теперь занимают уравнения (4.1), (4.2), а
место ограничений (2.2), (3.2)—неравенство (4.3). Сле-
дуя методам работ [27], [30], приходим к следующему
утверждению, относящемуся к описанию эволюции мно-
жеств (ft, о, •).
Теорема 2. Области (ft, о, •) суть эллипсоиды,
опорные функции которых удовлетворяют уравнениям'.
а) для задачи фильтрации (ft=!o)
Р (/1 3L (ft, ft, •)) = (/, 2° (ft)) + ((p2 - /i2 (ft)) (/, P (ft) 0)1/2,
где центр эллипсоида — п-вектор z°(ft=z°(ft|ft), матри-
ца P(ft) и скалярная функция h2(ft)=h2(ft, ft) опреде-
ляются путем решения уравнений (^^Z^ft)
= А (I) 2* (0 + Р (0 G (t) N (0 (у (0 - G (/) г» (Z)) + f (t)
at
(4.4)
z° (t0) = 2*,
dP (/)
dt
=A (0 P (0 + P (t) A' (0 — P (0 G' (0 N (0 G (0 P (t) + MT1 (Or
(4.5)
= (y (/) _ G (i) z° (0)W (0 (У (/) - G (/) 2° (0); (4.6)
dh
б) для задачи прогнозирования (o^ft)
P(/| Z (&, a, •)) =
= (/, 2“ (ft | ст)) + ((H2 — /i2 P, a)) (I'P (ft, ст) Z))V2, (4.7)
где имеем при
d2°^0) =Л(/)г°(/|ст) +
+ k (t, ст) {P (t, ст) G' (t) N (t) (y (t) -G (/) 2» (t | ст))} + f(t), (4.8)
, ,, . (0, если ст •< t,
k (t, ст) = i ,
(1, если a>t,
= A(t)P(t, o) + P(t, ст)Д'(/) —
dP(t,c)
dt
— k (t, ст) P (t, CT) G' (0 N (t) G (0 P (t, ст) + ЛГ1 (0,
(4.9)
212
P(t0, а) = £Л
dh4t'°} = (У (0 - G (О г» (t I a))W (t) (у (t) - G (f) & (t | a))’
at
(4.Ю)
h (t0, a) = 0 при
h2 (t, o) = h2 (a, a) при a < / < ft;
в) для задачи уточнения (о > ft)
р(П SL (ft, О, •)) =
= (I, (ft | a)) + ((p2 — h2 (ft, a)) (I’P (ft, a) I))1/*, (4.11)
где
z° (t | a) = P? (t, a) z<« (f | a) + P? (t, a) z<»’ (t | a),
P-1 (t, a) = P? (t, o) + Pi1 (/, a), (4.12)
h2 (t, a) = hl(t, a) + a) +
+ (z« (t |a), P?1 (t, a) z^(t |a))+ (z<«>a|a), P?(t, cr)z«(f|a))—
— (z° (Z|a), P(t, <j)z°(Zjo))»
причем матрицы (Pw(t, a) (t, a), i= 1, 2, удовлет-
воряют уравнениям
0) = — A ® a) ~ T<°O) +
+ (— 1/ (T(<) (t, a) AT1 (0 T(<) (/, a) — G' (t) N (t) G (t))
(4.13)
T(1)(/0,<j) = L, T(2)(a, ct) = 0,
—°(<|a) = Л(Ог<<>(/|0) —
dt
_ (_ 1/ (T(,) (t, (0 (t) (y (0 - G (0 z<0(/1 a)) + f (0,
2(1) (^ I o) = z‘, zW (a I a) = 0. (4.14)
Здесь при Z=1 уравнения (4.13), (4.14) следует ре-
шать в прямом времени, а при i = 2 — в обратном време-
ни; каждая из функций h? (t, о) удовлетворяет уравнению
(4.10) с заменой z°(/|a) на z(i)(/|o).
Отметим, что при cf=ft справедливо равенство P('ft) =
= (ЧГ(1)('&, ft))_1 и решения задачи для случаев а), б), в)
совпадают. Теорема 2 содержит, как мы видим, весьма
полное описание эволюции множеств <2^(/ft, о, •). О геоме-
213
трической интерпретации решений данного круга задач
можно прочитать в [30], §§ 11, 13, 14.
2. Геометрические ограничения. Вернемся к описанию
множеств <8? (О, о, •), введенных в п. 1 настоящего пара-
графа. Прямое описание указанных множеств достига-
ется, как и решение почти любой содержательной беско-
нечномерной задачи оптимизации, при помощи достаточ-
но трудоемкой процедуры ([30], §§ 12, 15). Здесь, одна-
ко, будет использован иной прием. А именно, прибегнем
к следующему рассуждению.
Пусть y(t)—функция, измеренная в силу системы
(2.1), (3.1) при геометрических ограничениях (2.2), (3.2)
и породившая информационные множества $?('&, а, •),
подлежащие изучению. Предположим теперь, что та же
самая функция y(t) реализовалась не в силу уравнений
(2.1), (3.1), а в силу вспомогательной системы (4.1),
(4.2), где £(0=Г(0 и вектор
z* суть известные фиксированные величины, а функции
о>(/), т](0 и вектор z° не определены заранее, но удовлет-
воряют ограничению (4.3) с известными матрицами {L,
M(t), N(/)}, образующими тройку й.
Зная y(t), можно рассмотреть информационные мно-
жества 2^('0‘, ст, «/(•) |Q, £(•)), введенные в п. 1 и завися-
щие, естественно, как от й, так и от тройки £(•) =
= {z*, о (•), £(•)}• Последнее обстоятельство отмечено
появлением новых аргументов й, £(•) в символах
а, • |Й, £(•)), z»(O, ст|й, £(•)), Р(®, а|Й, £(•)) по
сравнению с символами и, •), z0^, о, •), Р(О, о)
п. 1. Напомним также, что всюду в настоящем парагра-
фе u(t) — одна и та же известная функция.
Важно заметить, что если z*=x°, v(t) и %(t) образуют
тройку £(•), удовлетворяющую ограничениям (2.2),
(3.2), а число р>0 достаточно велико, то множества
о, у(’) |Q, £(•)) будут обязательно непустыми. Эво-
люция этих множеств и, в частности, эволюция их цент-
ров z(t, о, »|й, £(.)) будет описываться уравнениями,
приведенными в теореме 2. Рассмотрим множество
£ (&, О, у (•) |й, t, (•)) = иКФ. о. ч (•) IС (•). Й) I S (•)}.
объединяющее центры всех описанных эллипсоидов
^(0, ст, z/(-)|й, £(♦)) по всем тройкам £(•), удовлетво-
ряющим ограничениям (2.2), (3.2):
?>(.)е ®(.) ={z*. v(.),|(.): z’e Х°, £(/)<=
GE: Ml (/), t GE
2.14
при фиксированных {L, Л4(»), М(«)}=й. Тогда области
<^(Ф, о, •) будут удовлетворять следующему условию.
Л е м м а 6. Справедливо включение
а, -)^(«, о, -|Q), (4.15)
какова бы ни была тройка Q.
Кроме того, справедливо более сильное утверждение.
Теорема 3. Для любого вектора 1(=Еп справедливо
равенство
Р (/1 % (0, о, •)) = inf {р (/1 3L (О, а, • | Q)) | Q}, (4.16)
в котором нижняя грань берется по всем тройкам Q =
= {L, 7И(*), AZ(*)}, описанным в п. 4.1 (см. формулу
(4.3)).
Следствие. Справедливо равенство
3?(Ъ, а, а, . |Q) |Q}. (4.17)
Таким образом, для любой фиксированной тройки Q
можно построить свое множество ^(Ф, о, *|Q) (не обя-
зательно эллипсоидальное), охватывающее искомую об-
ласть 3S (О, о, *|Q). Пересечение областей (О, о, *|Q)
по всем допустимым тройкам Q будет уже теперь не
только совпадать с 3?(Ь, а, • |Q), но оказывается, что для
каждого направления 1^Еп нижняя по Q грань проек-
ций на I множеств (ft, о, •)£}) будет совпадать с про-
екцией на I множества (*&, о, • |Q). Подчеркнем также,
что множества 3L (Ф, о, •) от выбора числа ц в ограниче-
нии (4.3) уже не зависят.
Описанную процедуру удобно представить в следу-
ющем виде (для определенности будем рассматривать
случай фильтрации, отвечающий значениям <}=а). Со-
ставим дифференциальное включение
+ Р (t) G' (/) N (0 (у (0 - Я (0 - G (0 г» (0) +
+ + (4.18)
г’^еХ», (4.19)
где Ха, Q(t) и 3?(/) суть множества, фигурирующие в гео-
метрических ограничениях (2.2), (3.2), P(t)—решение
уравнения (4.5) при Р(/о) = £_i, a y(t) — реализация, по-
родившая множества ^’(О, • )=#’('&, &,•).
Пусть J£(/|Q) — ансамбль траекторий z0(Z|Q), со-
стоящий из всех решений включения (4.18) при началь-
215
ных условиях, удовлетворяющих (4.19), и зависящий,
естественно, от Q. Множество <2>(/|Q) компактно и вы-
пукло. Результаты теоремы 3 и леммы 6 можно теперь
переформулировать в следующем виде.
Л е м м а 7. Справедливо равенство
/, .|Q)=^(Z|Q). (4.20)
Сформулируем теперь основной результат данного
пункта.
Теорема 4. Для любого вектора 1^Еп справедливо
равенство
р(/|^(л •)) =
= inf max{(/, г« (i IQ)) I z° (t IQ) e Z (t, Q), Й}. (4.21)
Таким образом, определение функции p(Z|^’('&, t, •))
можно трактовать как задачу управления для дифферен-
циального включения (4.18), (4.19) и уравнения (4.5),
где роль управляющих параметров играют измеримые
матричные функции Л4(/)^0, М(/)>0 и матрица L>0.
Замечания. 1. Теорема 4 остается справедливой, если во
вспомогательной квадратичной задаче отбросить члены, содержащие
v(t). Тогда в уравнениях (4.5), (4.18) можно опустить члены, содер-
жащие C(t) и а в условии (4.21) можно проводить миними-
зацию лишь по парам Q={L, N(t)}, причем матрицы L и N(t) до-
статочно считать диагональными.
2. Результат, аналогичный теореме 2, справедлив для задач про-
гнозирования и уточнения, где вместо уравнений (4.3) — (4.5) сле-
дует применить (4.8), (4.9) и (4.11) — (4.14). Он также верен и в том
случае, когда вектор y(t) доступен измерению не на всем промежут-
ке ,[/0> а] = Та, а лишь на подмножестве е этого промежутка.
3. Вероятностная интерпретация. Решения квадратич-
ных задач, изложенные в п. 1, допускают естественную
вероятностную интерпретацию. Действительно, если в
уравнениях (4.1), (4.2) зафиксировать, как это было сде-
лано выше, функции f(/), g*(Z) и вектор z* и далее пред-
положить, что т](/) и z° суть соответственно реали-
зации взаимно независимых гауссовских случайных про-
цессов ш, т) типа «белого шума» [41] и гауссовского слу-
чайного вектора z с ковариационными матрицами Л4(/).
N(t) и L, то рассмотренные в § 4, п. 1 решения детерми-
нированных задач а), б), в) будут совпадать с решения-
ми задач стохастической фильтрации, экстраполяции и
сглаживания для указанной стохастической системы,
укладывающихся в рамки известной теории Р. Калмана
216
и Р. Бьюси [65] (см. также [7]). Уравнения для центров
информационных множеств <2^ (О, о, •) будут совпадать с
уравнениями условных средних, оценивающих истинное
состояние системы, а матрицы P(t, о) — с матрицами
условных ковариаций для этих оценок.
Следует обратить внимание на то, что функции f(Z),
£*(/)> могут рассматриваться как средние значения для
случайных функций w(t), т](/) и случайного вектора z*.
Если теперь посчитать, что эти детерминированные функ-
ции могут изменяться в пределах, обусловленных ограни-
чениями
z* €= Х°, f(t) - В (t) u(f}+C (t) v (0,
(4.22)
v(/)e@(Z), t<=T,
to (4.1), (4.2) можно будет рассматривать как статисти-
чески неопределенную систему, содержащую случайные
гауссовские возмущения V+л» ^*+^° с известными
матрицами ковариаций М (t), N(t), L, но с неизвестными
средними Д £*, 2*, удовлетворяющими ограничениям
(4.22) типа неопределенности. Вместо «обыкновенного»
уравнения фильтра Калмана— Бьюси мы приходим к
дифференциальному включению (4.18), решение которо-
го, ансамбль Z(t| й), есть множество условных средних
оценок (оно возникает вследствие того, что априорные
средние f, £*, z* точно не определены), каждая из которых
имеет одну и ту же матрицу ковариаций P(t). Результат
теоремы 4 теперь означает, что искомые выпуклые обла-
сти %? (t, •) (с негладкими, вообще говоря, опорными
функциями) для детерминированной системы (2.1), (3.1),
(2.2), (3.2), можно описать при помощи процедуры сто-
хастической аппроксимации путем решения подходящей
стохастически возмущенной (или, иначе, стохастически
неопределенной) вспомогательной задачи.
Именно, искомые области суть пересечения множеств
Z(t |й), являющихся решениями уравнения фильтрации
(4.18) для статистически неопределенной системы, по
всем возможным матрицам ковариаций L
случайных возмущений w(t), Y](Z), z°.
Дискретная реализация данной процедуры (подроб-
ное ее изложение дано в работах [17], [29]) потребует не
только решения дискретных аналогов уравнений линейно-
квадратичной фильтрации Калмана — Бьюси, но и про-
ведения на каждом шаге дополнительных процедур
217
оптимизации соответствующих функций по всем матрицам
ковариаций M(t), Af(O, Последнее имеет аналогию с
процедурами стохастической аппроксимации в решении
задач негладкой оптимизации.
§ 5. Управление эволюцией информационных множеств
1. Общая постановка задачи. Итак, совокупную си-
стему (2.1), (3.1) с квадратичными ограничениями (4.3)
или геометрическими ограничениями (2.2), (3.2) можно
представить себе как некоторую обобщенную динамиче-
скую систему, текущая позиция которой изображается
при помощи информационных множеств SB (t, •) в фазо-
вом пространстве. Эволюция указанных множеств опи-
сывается при помощи дифференциальных уравнений и
экстремальных операций, приведенных в предыдущем па-
раграфе. В упомянутых уравнениях управление u = u(t)
считалось заранее известным, фиксированным. Если те-
перь варьировать и, в зависимости от реализующихся
значений многозначной функции 3B[t]=SB(t, •), то мож-
но осуществлять позиционное управление эволюцией ин-
формационных множеств SB[t]. Переходя к обсуждению
соответствующих задач, заметим, что здесь возможно
большое число весьма разнообразных постановок. Мы
ограничимся лишь несколькими типичными ситуациями.
Начнем изложение с достаточно общей процедуры.
Пусть задана система (2.1), (3.1) с геометрическими
ограничениями (2.2), (3.2), причем известно, что на про-
межутке реализовалась функция y(t). Под по-
зицией системы будем понимать пару {t, SB (/, •)}, где
SB(t, *)=SB(t, t, #(•)) — решение соответствующей за-
дачи фильтрации. Предположим далее, что SB — выпук-
лый компакт, t^T, U — отображение, ставящее в соот-
ветствие каждой паре {/, SB} некоторый выпуклый ком-
пакт в Ер.
Определение 2. Отображение U(t, SB), полуне-
прерывное сверху по {/+0, SB} *) и удовлетворяющее для
любого t^T включению U(t, SB)&P(t), будем называть
допустимой стратегией управления.
*) Другими словами, для любого 8>0 существует б>0, для ко-
торого U(t+ht, 37')^Ue(t, 37), коль скоро О^Д/^б,
Здесь 37'— выпуклый компакт, <^б — евклидова
б-окрестность 37.
218
Подставляя u=U(t, SB) в уравнение (2.1), получаем
дифференциальное включение
+ Зв (t, .))-(?aW), (5.1)
dt
в терминах которого будем описывать задачу.
Определение 3. Функцию x(t) будем называть ре-
шением уравнения (5.1) в силу системы (3.1) (при задан-
ном £(ф) = {*°, а(*), £(•)}), если выполнены условия'.
а) существует такая измеримая функция н(/)е^(/),
t^T, что x(t) есть решение уравнения (2.1) при u = u(t)
и при заданном £ (•);
б) при почти всех t<=T справедливо включение u(t)^
йф]), где SB[t] = SB(t, t, у(•)) — реализация ифор-
мационного множества SB(t, *)=SB(t, t, у(•)), совмести-
мого с функцией y(t), полученной в силу системы (2.1),
(3.1) при u = u(t) и при заданном £>(•).
Если U(t, SB) — допустимая стратегия управления, то
решение системы (5.1), (3.1) существует. Однако это ре-
шение, вообще говоря, неединственное. Множество реше-
ний системы (5.1), (3.8) при заданном £(•) обозначим
как {х(*)|У, £}. Таким образом, каждая пара U(t, SB),
£(•) генерирует множество траекторий х[(| системы (2.1),
(3.2), отвечающих реализациям u(t) е^(/), удовлетворя-
ющим определению 3. В свою очередь, каждой такой тра-
ектории х[/] отвечает своя функция y[t\, вычисленная в
силу уравнения (3.1), и далее — своя область SB (t, •),
совместимая с этой функцией. Следовательно, каждая
пара U(t, SB), £(•) генерирует некоторое множество об-
ластей SB ('&, •), характеризующих состояние системы в
предписанный момент Ф окончания процесса. Итак, не-
полнота измерения фазового вектора вызывает появление
информационных областей SB (t, •), характеризующих те-
кущую позицию процесса, а неединственность решения
системы (5.1), (3.1) приводит к рассмотрению уже цело-
го семейства {SB(О, •)} таких областей. Важно подчерк-
нуть, что при заданной паре элементы этого множества
{^’('0*, •)} совпадают с точностью до сдвига, определяе-
мого реализацией u(t).
Пусть tp(z) — выпуклая, всюду конечная функция, за-
данная на Em, 3£(t, •) =R{t)SB(t, •),
J Ф (z) dz = у (Z).
z
219
Задача В. Среди допустимых стратегий управления
U(t, выбрать оптимальную t/°(/, й?), удовлетворя-
ющую условию
у0 = max max у (3$ С&, •)) =
= min max max у(<2^(^, •)).
и S(-)e^(.) w-Wl
Ниже приведем решение этой задачи для достаточно
простого критерия, иллюстрирующего ее особенности.
Именно, положим
ср (z) = (z—т) 'М (z—т),
где М — известная матрица, т — заданный вектор. Та-
ким образом, показатель у будет характеризовать сред-
ний квадрат отклонения точек области •) от задан-
ного вектора т.
2. Вспомогательные построения. Предположим, что
х(/; w(-), £(•), х*, т)—решение уравнения (2.1) при
х(т)=х* и при заданных u(*)=u(t)> u(.)=t>(/),
Обозначим
X (/; и (•), v (.), X, т) = и {х (^; " (•), V (•), х\ т) | х* е X},
Z (/; и (•), v (•), X, т) = R (0 X (/; и (•), и (•), X, т),
Z(0; 0, 0, X, t)=Z(X, т),
у0(т, X) = max min {у (Z (ft; u(-), ц(-), X, т))},
v(.) и(.)
v (/) е @ (I), (/), t^T. ;
Величина у0(т, X) есть решение задачи программного
управления на максимин. Следуя аналогии с материалом
§ 2, ее решение можем записать в виде
% (т, X) = max {Уо (/, X, т) 11 е £т},
где
о
%(/, Х,т) Z)d/ + f0(/),
f (t, I) = p (s (/; /) C (0 | © (/)) - p (- s (/; I) В (t) | (0), (5.2)
f0 (I) = (X, t)) - m'M (p (Z (X, т)) + /) - j I'Ml.
Априорная оценка у0(т, X) получена путем проигры-
вания процесса вперед, на промежуток [т, О], без учета
220
будущего уточнения области X за счет дополнительных
измерений вектора у.
Рассмотрим еще одну априорную оценку. Пусть из-
вестны позиция системы и пара {т, <^(т, •)} (<^(т, •) —
информационное /множество, полученное за счет измере-
ния y(t) на промежутке [/0, т]). Составим прогноз
дальнейшей эволюции этого множества на промежутке
[т, -О1]. Ясно, что будущее (т. е. взятое на [т, -0]) поведение
реализации y(t) будет определяться тройкой
3) (т, X) = {х, и’(-), I (•): х е X, v (/) е (/),
#=[т, #]}
и функцией u(t), заданной на [т, 0*]. Каждой такой паре
£(*)е$(т, ЗВ (т, •)), w(*) будет соответствовать некото-
рая реализация z/(/), te[r, -ft], полученная в силу (2.1),
(3.1) и далее,—множество ^(О1, О', у(-) |т, ^(т, •)) —
решение задачи фильтрации для указанного у(/).
Перебирая все возможные £(*)е^(т, ЗВ (%, •)) и и(»)е
<=^(* |т) — {u(t) : u(/)^^(/), te[r, О1]}, получим всевоз-
можные будущие реализации информационного множест-
ва ЗВ (О’, • | т, ЗВ (т, •)) = ЗВ (О’, О’, у (•) | т, ЗВ (т, •)). Но в
таком случае можно построить оценку
Тоо(т> <^(т> •)) = max min у (jg (О’, • |т, (т, • )))
£(•) «(•)
повеем £(*)е^)(т, ЗВ (%, •)), и(*)е^(*|т). Оценка
Уоо(т, ЗВ (%, •)) получена путем проигрывания процесса
вперед, на промежуток [т, О], о учетом возможных уточне-
ний области ЗВ (%, •) за счет дополнительных измерений
вектора y(t). Конструктивные формулы для вычисления
Уоо(т, ЗВ (х, •)) мы опускаем, лишь заметив, что они по-
лучаются путем объединения соотношений §§ 2, 3. (Для
минимаксного показателя качества процесса со, заменя-
ющего в излагаемой задаче величину у, подробные фор-
мулы приведены в [30], §§ 17, 18.) При С(/)=0 имеем
Тоо(т, X) ^Уо(т, X).
Относительно вычисления у0(т, X) справедливо сле-
дующее утверждение.
Л е м м а 8. Если у0(т, X) >0, то максимум по I функции
Чг0(/, X, т) достигается на элементе /°=7^0. Управление
uQ(t)y доставляющее вместе с некоторым v°(t) оценку
у0(т, X), удовлетворяет условию минимума (2.13) для
указанного 1°.
221
3. Решение задачи позиционного управления. Исполь-
зуем результаты леммы для решения задачи позицион-
ного управления.
Пусть X) — множество, построенное по прави-
лу: при уо(^, Х)>0 имеем £?(/, X) = {ue\t, X}, где ие суть
векторы, удовлетворяющие принципу минимума вида
(2.13), составленного по вектору Z0, максимизирующему
функцию 4%^, X, t) (см. лемму 8); при y0(t, Х)=0 име-
ем U'(t9 X)=0>(t).
Справедливо утверждение:
Теорема 5. Пусть у0(^0, Х0)>0 и функция f(t, Z)
формулы (5.2) выпукла при почти всех t. Тогда U*(t,
•)) —допустимая стратегия, доставляющая условие
max max у ('&, •)) у0 (Zo, Х°). (5.3)
Таким образом, использование программной конст-
рукции предыдущего пункта позволяет, при соответству-
ющих условиях, получить гарантированную оценку (5.3).
Теорема 6. Пусть U°(t, X) — допустимая стратегия,
доставляющая оценку
max max у (35 (^, •) у00 (Zo, Х°). (5.4)
£(.)e=^(.Uo.xo) {х(.)|с/»Х}
Тогда U°(t, X) — решение задачи В.
Конструктивные способы построения стратегии
U°(t, X) в целом аналогичны способу, указанному для
Z7*(Z, X), но требуют более сложных вычислений.
Заметим, что условия, обеспечивающие справедли-
вость теорем 5, 6, позволяют использовать для построе-
ния соответствующих стратегий решение задачи програм-
много управления на однократный максимин. Однако
напомним, что для систем с полной информацией програм-
мные «однократные» и позиционные решения дают оди-
наковые результаты лишь в специальном классе регуляр-
ных ситуаций [21], [25]. Отмеченное обстоятельство лишь
усугубляется в задаче с неопределенной информацией о
текущем положении, и результаты, сформулированные в
теоремах 5 и 6, как раз отражают аналогию с упомяну-
тыми регулярными ситуациями. В более общем случае
решение задачи позиционного управления может быть
достигнуто путем применения операции многократного
(повторного) максимина ([34], [52]).
Весьма характерная ситуация возникает, если постро-
ение управления в системе (2.1), (3.1) рассматривать как
многокритериальную задачу.
222
§ 6. Многокритериальные задачи
1. Отношения предпочтения. Обобщенное равнове-
сие. Обсудим в краткой и достаточно вольной форме од-
ну из возможных формализаций задач управления и оце-
нивания в условиях неопределенности, использующую
понятие многокритериального решения.
Введем ряд понятий, полезных для дальнейшего из-
ложения.
Пусть Y—некоторое множество, пусть х, у, z^Y и
символ означает бинарное отношение на У, на кото-
рое могут быть наложены следующие требования:
1) рефлексивность — для каждого хеУ имеем х^х,
2) транзитивность — из х^у и y^z вытекает условие
X^.Z,
3) антисимметричность — из х^у и у^х вытекает
условие равенства х=у,
4) связность — для любых х, у имеем либо х^2у, либо
у^х, либо одновременно оба отношения.
Определение 4. Будем говорить, что символ
определяет на множестве Y отношение предпочтения, если
при помощи этого символа задается либо частичный по-
рядок на Y (выполняются требования 1)—2)*)), либо
полный порядок на У (выполняются требования 1)—4)).
Указанный частичный порядок можно определить,
например, следующим образом:
а) У=£п, х^2 в том и только том случае, если z—хе
е/С, где К — замкнутый выпуклый конус в Еп (выполне-
ны условия 1), 2));
б) У=2г есть множество всех подмножеств множества
Z, Де У, Be У; Д^В в том и только том случае, если
Д^В (выполнены условия 1)—3));
в) возможна комбинация случаев а), б). Именно, если
У=22, Z=£n, ДеУ, Be У, конус К аналогичен указанно-
му в случае а), то можно положить Д^В в том и только
том случае, если найдется такой вектор ае^ что
а+А^В.
Полный порядок на У может быть, например, опреде-
лен путем введения скалярной «функции полезности» —
функционала Ф(х), заданного на У. Тогда х^у в том и
только том случае, если Ф(х) ^Ф(у).
*) Иногда частичный порядок определяется условиями 1) —3).
223
В указанных выше условиях вместо отношения
возможно и строгое предпочтение, операция <, означа-
ющая условия х^.у, х^=у.
Располагая множеством У и заданным на этом множе-
стве отношением предпочтения, можно поставить задачу
о нахождении наилучших элементов из У, в смысле ука-
занного отношения. В качестве таковых могут быть при-
няты так называемые недоминируемые элементы из У
(напомним, что элемент х^У называется недоминиру-
емым или неулучшаемым в смысле введенного отношения
предпочтения, если для любого уеУ из условия у^х вы-
текает, что у=х). В случае, когда сущестует точная ниж-
няя грань элементов из У, т. е. такой элемент х°, что х0^
для любого у^У, и выполнены условия 1)—3) опре-
деления 4, оказывается, что х° будет недоминируемым
элементом и притом единственным. Последняя си-
туация встречается не часто, однако имеется ряд со-
держательных задач, где она может возникать ([56], [57],
(72]).
Предположим теперь, что X=XiX.. .ХХГ, где Хь 1 =
= 1, ..., г, суть множества стратегий r-го игрока, f —
отображение X в множество У возможных показателей
качества решения. Предположим также, что каждый из
игроков i имеет свою шкалу ценностей, выражаемую сво-
им отношением предпочтения (так, в рамках примера
а), каждый игрок имеет свой конус Ki, задающий отноше-
ние частичного порядка). Если теперь рассмотреть мно-
жество У, то станет ясно, что у каждого из i игроков бу-
дет свое понятие о наилучших элементах из У (ибо по-
следние определяются как недоминируемые элементы в
смысле заданного отношения частичного порядка, а это
отношение у каждого игрока — свое). Таким образом,
совокупное решение будет заключаться в поисках состоя-
ния обобщенного равновесия — нахождении такого эле-
мента х°, который оказался бы неулучшаемым любым из
игроков i (по «своему» конусу Ki).
Уточним данное понятие. Пусть х= (хь х2, ..., хп)
х^Хь z = l, ..., /г, и символ x(f) означает вектор (хь ...
..., хг-_ь xi+1, ..., хп) с опущенной i-й «координатой» хг-.
Зафиксировав элемент х(£), обозначим символом ^г-(хг-)
множество таких стратегий хг игрока г, для которых
f(xt, ..., Xf_!, хъ xi+1, ..., xn) является недоминируемым
элементом множества f(xb .. ., х^ Хь х/+1, ..., хп) в
смысле отношения
224
Определение 5. Элемент х*еХ, х* = (х/, ..., хп*),
x/e^G, будем называть состоянием обобщенного равно-
весия, если х/е^^х*^*)) для любого i= 1, ..., п.
В случае, когда элементы х* суть точные нижние гра-
ни множеств %?i(x*(i)) (в смысле отношения ;><), будем
говорить о состоянии сильного обобщенного равновесия.
Сразу отметим, что если в условиях случая а) данного
пункта мы имеем Ki = E+n = {у = (yl9 ..., г/Л)|у<^0, V i}
(все конусы Ki совпадают с положительным ортантом),
то все игроки имеют одно и то же отношение предпочте-
ния. В этом случае можно считать, что они образуют ко-
алицию, и множество точек обобщенного равновесия бу-
дет содержать все точки У, «оптимальные по Парето»
[68].
Напротив, если каждый из конусов Ki= {у= (yi9 ...
..., Уп)\Уг^О} есть полупространство, то мы приходим к
известному определению равновесной ситуации в смысле
Нэша для бескоалиционной игры п лиц с целевыми функ-
циями fi для f-ro игрока (f= (flf . .., fn)). Таким образом,
отмеченные два случая образуют своего рода крайние
ситуации, между которыми находится множество «про-
межуточных», отвечающих той или иной степени общно-
сти интересов рассматриваемых игроков. «Промежуточ-
ные» ситуации возникают за счет варьирования выбора
конусов Ki для i-x игроков.
Важным моментом в решении задач на многокрите-
риальное равновесие является переход к скаляризован-
ным задачам. Приведем две леммы, относящиеся к дан-
ной процедуре.
Лемма 9. Пусть К — замкнутый выпуклый конус, не
являющийся подпространством, К° — полярный конус
(KQ={p\ (р, q)^b V q^K}, f(y) —отображение множе-
ства Y в Еп. Если для некоторого int (—К0) *)
имеем (Z, f(//o))=min {(Z, y<=Y}, y0(=Y, mo f(y0) —
недоминируемый элемент множества Y (в смысле отно-
шения, задаваемого конусом К).
Таким образом, недоминируемые (по К) элементы
можно искать путем решения указанной задачи со ска-
лярным критерием.
*> Символ rel int Q означает относительную внутренность мно-
жества Q, т. е. совокупность внутренних точек множества Q, если
последнее рассматривать как подмножество L(Q) —аффинного мно-
жества наименьшей размерности, содержащего Q.
8 Под ред. Н. Н. Моисеева 225
Лемма 10. Пусть конус
К= П {гel int (-Kf°) \i= 1, .. ., n} =#0
и для некоторого l^K функция (/, f(x)) полунепрерывна
снизу на X. Тогда существует ситуация обобщенного рав-
новесия (в смысле определения 5) для функции f и ко-
нусов Ki.
Более подробное описание ситуаций обобщенного рав-
новесия приведено в работе [13].
Замечание. Определение 5 обобщенного равновесия сохра-
няется, если на координаты вектора х= (хь .... хп) наложено совме-
стное ограничение x^D, где D не обязательно представимо в виде
произведения множеств Xi.
2. Квадратичные ограничения. Недоминируемые эле-
менты. Обсудим несколько конкретных решений для си-
стем с квадратичными ограничениями. В задаче управ-
ления будем выбирать воздействие и в форме достаточно
простого закона обратной связи со структурой, задава-
емой линейным уравнением.
Рассмотрим систему (2.1), (3.1) при ограничении
о
J (V' (/) М (0 V (/) + г (0 N (0% (/)) dt < ц2,
^о>
(6.1)
% (/0) = 0.
Если фиксировать u(t) и положить, что на промежутке
[t0, /] измерена функция y(t), то уравнение центра соот-
ветствующего информационного множества — эллипсои-
да (t, •) —будет описываться, согласно § 4, уравне-
нием
= А (0 х«+ В (/) и + Р (t) G' (/) N (t) (у (0 - G (t) х°), (6.2)
at
где Р(0 — известная функция, удовлетворяющая урав-
нению (4.5) приР(/о)=О.
Будем предполагать, что позиционное управление и
формируется как функционал от реализации y(t), в силу
уравнения
u=F(t)u + H(t)y, u(to) = и°. (6.3)
Предположим теперь, что функцию y(t) породила кон-
кретная тройка £(•) = {х°=0, £>(•), £(•)}, удовлетворя-
ющая (5.1). Полагая х—x° = z и сравнивая (2.1), (3.1),
226
(6.2) и (6.3), находим (х°(/о)=О, z(Q=0, u(/0) =и°):
= А (I) х° + В (t) и + Р (О G' (/) W (/) G (/) z +
dt
+ P[t)G'
— =F(t)u + H(t)G(t)xP — H (I) G (t) z + H (6.4)
dt
— = A(t)z — P(t) G' (0 W (0 G (/) z — P (0 G' (t) N (/) I.
dt
Каждой тройке £(•), задающей неопределенные воз-
действия в системе, будет соответствовать ансамбль
Г (/,//(•), F(-)) =
= {х-« (/; Н (•), F (•)), и (f, Z (•), Н (•), F (•))
состояний при фиксированных Н(1) и F(t) из решений
х°(/; £(•), #(•), /7(-)), ы(/; &(•). #(•). Л*)) системы
(6.4), отвечающих всем возможным значениям £(•),
удовлетворяющим неравенству (6.1). При помощи стан-
дартных выкладок теории линейных управляемых систем
[20] можно убедиться в том, что Ж(/, //(•), F(*)) —эл-
липсоид, эволюционирующий во времени. Предполагая
далее и° = 0, замечаем, что множество Ж(/, //(•), F(«))
симметрично относительно начала координат.
Поставим следующую задачу: среди эллипсоидов
Ж (О, //(•), F(*)) найти за счет выбора матричной функ-
ции H(t) наименьший по включению'.
Я°(-), F(.))<=r(ft, //(•), F(.)) (6.5)
для любого H(t) ^0.
Таким образом, речь идет о нахождении на множестве
эллипсоидов Ж('&, #(•), f(*)) недоминируемого элемен-
та, в смысле отношения предпочтения, описанного в п. 1
данного параграфа.
Следует обратить внимание на то, что в уравнениях
(6.4) функция P(t) от выбора £(•) не зависит. Поэтому
каждой паре £(*) = {у(*)> !(•)} будет соответствовать
свой измеренный сигнал y(t), и далее, свое информацион-
ное множество — эллипсоид 38 (О, •). При этом все эл-
липсоиды 38 (О, •), отвечающие всем возможным £(•),
будут подобными между собой. Таким образом, условию
(6.5) будет отвечать наименьшее, в некотором смысле,
отклонение центров х°(О; £(•), #(•), F(•)) эллипсоидов
8*
227
HF (ft, • ), а вместе с тем, и самих эллипсоидов от начала
координат.
Решение данной задачи можно осуществить, опира-
ясь на необходимые и достаточные условия оптимально-
сти для экстремальных задач на вполне упорядоченных
множествах, изложенные в [56], [57] и обобщающие клас-
сические результаты теории оптимального управления
[43], [20], [6], [10]. Здесь лишь укажем, что эволюция эл-
липсоида Ж(/; Я(-), F(»)): р(/|^(/; #(•), F(.))) =
= (/, WI)1/2, описывается уравнением Риккати
W = ЛУ + УЛ' + Г'ЛГ1^, У (0) = 0,
где
Л = (А' + 0), f =(Q\ Н — (PG'N\ .
\0 F) \е)к ' \е/ \ 0 )
Условия существования оптимальной матрицы //°(/),
решающей задачу, имеют вид
PG'N = rnG', Н = — NW21G', (6.6)
где W{j определяются разбиением матрицы W на блоки:
W==(V«,
V^21> ^22/
(№ц, W22—квадратные матрицы размеров соответ-
ственно п и т). Если т = п, В (t) =E==N (t),
(t) ==H(t), то решение задачи заведомо существует
и условие (6.6) означает, что или множества ^(/&, •) и
Ж('&, /7°(*), F(•)) подобны, или множество
Ж (ft, Н° (•), F (•)) — одноэлементное.
Замечание. Если не предполагать, что х(/о) =0, и ввести огра-
ничение вида (4.3) на всю тройку £(•) = {х°, и(-), ё(-)}, то множе-
ства Ж9 (О, //(•), Е(-)) уже не будут симметричными относительно
начала координат, и вместо условия (6.5) целесообразно рассматри-
вать отношение, задаваемое случаем b) п. 1. Тогда решение требует
некоторой дополнительной оптимизации, которую можно осуществить
подбором матриц Е(-), #(•), В(-) или дополнительных переменных.
3. Оценка фазового состояния. Рассмотрим систему
(2.1) при условии, что воздействия и и v представляют
интересы двух игроков, каждому из которых доступно
измерение своего набора параметров. Именно, первый из
них может измерять сигнал
=Gl(t)x + Fl(t)l (6.7)
228
при i=l, а второй — при i=2. Здесь | — неопределенная
помеха, Fit F2—неособые матрицы (вследствие отличия
Fi от F2 помеха | может, в частности, влиять на /Пг и
т2-мерные векторы i/(1) и ут различными из своих
координат). Предполагается, что «м» и «о» по-разному
информированы о неопределенных величинах: первому
игроку известны матрицы и число Ць задающее ограни-
чение
Л (х°, v (.), | (•)) = (х° - (х° -х?’)) +
fl
+ [ (v' (О Л4Х (0 v (0 + g' (/) N, (О g (0) dt с; НГ (6-8)
*0
а второму — матрицы и число р2, задающее ограни-
чение
12 (X», и (.), g (.)) = (х° - х<а), Ь2 (х° - X?’)) +
fl
4- J («' (о м2 (о и (о + % (0 n2 (о g (/)) dt н;. (6.9)
*0
Классы матриц L,-, N{(f) здесь те же, что и выше,
в § 3.
Располагая реализациями yw (t) и ym(t), каждый из
игроков мио может сформировать свое информацион-
ное множество — эллипсоиды ^>1(Z, •)=SFl(t, z/(1,(«)) и
^2(t, • )=<^’2(/, i/(2)(’)), опорные функции которых
имеют вид
•)) = (/, (о)+((н? - hi(t)) (i'pt (о;/))1/а,
где х(<)0(/) и Pt(t) удовлетворяют уравнениям (i=l, 2),
указанным в п. 4.1 (х(4)0(/0) =х®),
= А (Л х(«° +
dt ’
+р( (о о; (о (о (i/(o а) - Gi (о х<о°)+/(<) (t),
dPt
-^ = Л(/)Л + Л4'(0-
- PiGi (0 F't (t) Nt (0 Ft (t) Gt (0 Pi + F(,) (/),
причем
f(1)(0 = 5(/)M(0, f(2)(o = c (/)»(/),
№(1) (t) = C (/) M? (t) C (t), F(a) (t) = B' (t) Mi1 (t) В (t).
229
Функции й/ (f) удовлетворяют условию
Л(-)=Л?(0) =
о
= J (У{1} (0 - Gi (О (/))' Nt (/) Q/«> (0 - G( (t) (0) dt.
^0
Из указанных формул вытекает, что функция Л(/),
hl (/) не зависят от выбора и, а функции Р2(0> hl(t)—
от выбора v. Таким образом, посредством назначения,
соответственно, реализаций u(t) и v(t) каждый из
игроков «и» и «V» может влиять на положение центра
«своего» эллипсоида, а также на центр и на диаметр
(т. е. на «размеры») «чужого» эллипсоида.
Далее будем предполагать, что целью «и» является
максимизация в момент О* диаметра эллипсоида
Я?2(-0, •) (т. е. минимизация функционала (•)),
а целью «V»—максимизация в момент fl* диаметра
эллипсоида <^i(O, •) (т. е. минимизация функционала
Л(*)). Будем считать, что целью до(*) = {х°, £(•)} явля-
ется максимизация диаметров обоих эллипсоидов — ми-
нимизация в момент -О’ всего вектора /(•) = {Л (•), /2(*)}
в смысле частичного порядка, задаваемого положи-
тельным ортантом пространства Е2.
Таким образом, находясь в рамках случая а) п. 1, мы
приходим к экстремальной задаче с тремя игроками
(первым —«и», вторым —«и», третьим — парой
«w={x\ £}») и с двумерным векторным функционалом
J(.) = {/4(.), /2(*)}. Каждый из игроков г=1, 2, 3 рас-
полагает своим конусом —
К1 = {У = (У1, Уг): Уг > 0}. Кг = {У = (У1, Уг) У1 > 0}»
К3 = {у = О/i, yj '.yx>G, У3> 0}.
Цель решения будет заключаться в том, чтобы найти
множество троек {и°(*), ^°(е), М*)}, являющихся
состояниями обобщенного равновесия для системы (2.1),
(6.8) при ограничениях (6.8), (6.9).
Если ввести обозначение z(f)=x(<)—х(г)0 и положить
f(3) (t) =f{i) (/), то решение задачи сведется к рас-
смотрению системы
^- = (Л (0 - Л (0 Gt (/) Ni (t) Gi (0) -
- Pi (/) G'i (t) Ni (t) Fi (t) I + p (/), (6.10)
230
где i=l, 2, функции f(/+1) (/) изображают входные воз-
действия, порожденные управлениями и и v, и начальный
вектор z{i) (t0) = х\'\ Функционалы Л(») примут вид
Ji (•) = j (Gi (t) z<‘> (0 + F{ (/) £ (0)' N (t) (Gt (t) & (f) +
+ Fi(t)l(t))di.
Если опираться на лемму 9, учесть линейность уравне-
ний (6.9) и квадратичный характер функционалов Л, Л,
то решение сведется к минимизации по {и (•), v (•), w (•)}
квадратичного функционала /«(•) = аЛ(*) + (1—а) Л,
0^а^1, в силу линейной системы (6.10), при квадра-
тичных ограничениях (6.8), (6.9) или путем введения
неопределенных множителей Х2—к безусловной мини-
мизации по {^(ф), ^(*), ^(*)} квадратичного функцио-
нала /(•)=/„(•) +Mi(*) +М2(*) с последующим
определением Л2 из условий (6.8), (6.9).
Здесь каждому значению а из [0, 1] будет соответ-
ствовать своя тройка {^(*), t£(«), (•)}. Совокуп-
ность всех таких троек, отвечающих названным а,
образует решение задачи — множество ситуаций обоб-
щенного равновесия (оно не пусто в силу линейно —
квадратичного характера задачи).
Таким образом, определение точек обобщенного
равновесия свелось к решению линейно-квадратичной
задачи — стандартной процедуре теории оптимальных
систем.
4. О позиционном управлении. Предположим теперь,
что в системе (2.1), (6.7), г=1, 2, наложены геометри-
ческие ограничения (2.3), (2.4), (3.2) на х°, и(-), и(*),
£(•) и эти ограничения известны обоим игрокам. Рас-
полагая сигналами г/(1)(/) и У(2)(0> игроки «и»
и «V» могут в момент -0* сформировать соответствующие
информационные множества Ж\(т, т, у(1)(-)р0, Х°) =
= й?4(т, .) и й?2(т, т, ^/(2) (•) ро, Х°)=^2(т, •). Пусть
— известные матрицы размеров г\Хп, /=1, 2,
£i (V, •) = Ri%t (ft, •), yi (Z) = [ <pf (z) dz,
z
где cpi(-z) — всюду конечные, выпуклые функции, причем
^\ = /?(i()) и (fi(z) =ср(г) из п. 1 §5. Далее, пусть
231
Тот (т, •)) =Тоо('Г, ^(т, •)) (см. § 5 п. 2) и
у<2> (т, (т, •)) = max min у2 (2£2 («, . | т, %2 (т, • ))),
и(.) а(-)
где
о (•) = {х, и (•), | (•): Звг (т, •), и (/) е 3^ (f),
l(t)^ (0, t е [т, &]}, v(t) е © (t), t е [т, &].
Как иу^Цт, ^х(т, •)), показатель у^Цт, й?2(т, •)) получен
путем проигрывания процесса вперед, с учетом наблюде-
ний, доступных второму игроку. Определив допустимую
стратегию U(t, •)) игрока «ы» по схеме п. 1 из § 5
и аналогичным образом — стратегию V (t, %?2(t, •))
игрока «о» (с очевидной заменой и на v в соответствую-
щем определении), приходим к следующему заключению.
Теорема 7. Пусть U°(t, •)) — допустимая
стратегия игрока и, доставляющая оценку (5.4) при
ЗЦВ, •)=^|(й, •), т=т<‘>. Пусть V°(t, %2(t, •)) —
допустимая стратегия игрока v, доставляющая оценку
max max у» (^2 •)) С Уот (^2 (&> •))•
<тю
Тогда пара U°(t, •)), У°(/, 3?2(t, •)) доставляет
системе (2.1), (6.7), (2.3), (2.4), (6.2) состояние обоб-
щенного равновесия по двумерному функционалу
Yw(.) = {7(‘>(^1(^ .)), у<2>(й:2(е, .))}, с конусами
z2): Zi^O}, i=l, 2, в классе допустимых пози-
ционных стратегий управления •)),
V(t, &2(t, •))}*)•
Завершая данную главу, подчеркнем еще раз, что
теория принятия решений в динамических ситуациях —
весьма обширный предмет для обсуждения. В данной
1лаве мы коснулись лишь проблемы решения информа-
ционных задач для систем, описываемых обыкновенными
дифференциальными уравнениями с ограничениями типа
неопределенности. Излагаемый материал можно рас-
сматривать скорее как введение в предмет, которое
может дать читателю представление о существе рас-
сматриваемых вопросов, о способах постановки и форма-
лизации решений, а также о характере получаемых
результатов.
*) Определение обобщенного равновесия в классе позиционных
стратегий здесь предполагает естественную модификацию опре-
деления 5 из п. I в соответствии с постановкой задачи В из § 5.
232
Литература к главе 7
1. А й з е к с Р. Дифференциальные игры,— М.: Мир, 1967.
2. А н а н ь е в Б. И. Минимаксная квадратичная задача коррекции
движения —ПММ, 1977, т. 41, вып. 9.
3. Ананьин а Т. Ф. Задача управления но неполным данным.—
Диф. уравнения, 1976, т. 12, № 4.
4. Ананьина Т. Ф. К задаче управления по неполным данным.—
Диф. уравнения, 1977, т. 13, № 10.
5. Богуславский И. А. Методы навигации и управления по не-
полной статистической информации.—М.: Машиностроение, 1970.
6. Болтянский В. Г. Математические методы оптимального
управления.— М.: Наука, 1969.
7. Б р а й с о н А. Е., X о Ю - ш и. Прикладная теория оптимального
управления.— М.: Мир, 1972.
8. Виноградова Т. К., Демьянов В. Ф. Принцип минимакса
в задачах оптимального управления.— ДАН СССР, 1973, т. 213,
№ 3.
9. Габасов Р., Кириллова Ф. М. Оптимизация линейных
систем. — Минск: Изд-во Белорусск. ун-та, 1973.
10. Гамкрелидзе Р. В. Основы оптимального управления.—
Тбилиси, Изд-во Тбилисского ун-та, 1977.
11. Гермейер Ю. Б. Игры с непротивоположными интересами.—
М.: Наука, 1976.
12. Гусев М. И. Векторная оптимизация линейных систем.— ДАН
СССР, 1972, т. 207, № 1.
13. Г у с е в М. И., К у р ж а н с к и й А. Б. О ситуациях равновесия в
многокритериальных игровых задачах.— ДАН СССР, 1976, т. 229,
№ 6.
14. Гусев М. И., Куржа некий А. Б. Многокритериальные игро-
вые задачи управления <в условиях неполной информации.—Док-
лад на VII Международном конгрессе И ФАК.—Хельсинки, 1978.
15. Демьянов В. Ф., Малоземов В. Н. Введение в минимакс.—
М.: Наука, 1972.
16. Ермольев Ю. М. Стохастическая аппроксимация.— М.: Наука,
1976.
17. Кац И. Я., Куржанский А. Б. Минимаксное оценивание в
многошаговых системах.—ДАН СССР, 1975, т. 221, № 3.
18. Колмановский В. Б., Черноусько Ф. Л. Оптимизация
помех при наблюдении за динамической системой.— Изв. АН
СССР. Техн, кибернетика, 1972, № 2.
19. Красовский Н. Н. К теории управляемости и наблюдаемости
линейных динамических систем.— ПММ, 1964, т. 28, вып. 1.
20. К р а с о в с к и й Н. Н. Теория управления движением.— М.:
Наука, 1968.
21. Красовский Н. Н. Игровые задачи о встрече движений.—
М.: Наука, 1970.
22. Красовский Н. Н. Дифференциальная игра сближения-укло-
нения.— Изв. АН СССР, Техн, кибернетика, 1973, №№ 2,3.
23. Красовский Н. Н. Игровое управление игры неполной фазо-
вой информации.— Проблемы управления и теории информации,
1976, № 5.
24. К р а с о в с к и й Н. Н. Дифференциальные игры: реальные за-
дачи и их формализация.— Доклад на VII Международном Кон-
грессе ИФАК. Хельсинки, 1978.
233
25. Красовский Н. Н., С у б б о т и п А. И. Позиционные диффе-
ренциальные игры.— М.: Наука, 1974.
26. Кощеев А. С. Об оценивании состояния управляемых си-
стем в условиях неопределенности.— Диф. уравнения, 1977,
№ 12.
27. К у р ж а н с к и й А. Б. О построении оптимального управления,
минимизирующего среднеквадратичную ошибку.— Автоматика и
телемеханика, >1964, № 6.
28. К у р ж а н с к и й А. Б. Дифференциальные игры наблюдения.—
ДАН СССР, 1972, т. 207, № 3.
29. К у р ж а н с к и й А. Б. Информационные множества управляемых
систем.— Диф. уравнения, 1977, № 11.
30. К у р ж а н с к и й А. Б. Управление и наблюдение в условиях не-
определенности.— М.: Наука, 1977.
31. Куржанский А. Б. Об информационных множествах управ-
ляемой системы.— ДАН СССР, 1978, т. 240, № 1.
32. К у р ж а п с к и й А. Б., О с и п о в Ю. С. Управление и оценивание
в системах с распределенными параметрами.— Доклад на VI
Международном конгрессе ИФАК.— Бостон, 1975.
33. Льюис Р., Райфа X. Игры и решения.— Ж-, ИЛ, 1961.
34. Меликян А. А., Ч е р н о у с ь к о Ф. Л. Игровые задачи управ-
ления и поиска.— М.: Наука, 1978.
35. Мищенко Е. Ф., Понтрягин Л. С. Линейные дифферен-
циальные игры.— ДАН СССР, 1967, т. 174, № 1.
36. Мищенко Е. Ф., Никольский М. С., С а т и м о в Н. Ю. За-
дача уклонения от встречи в дифференциальных играх многих
лиц.—Труды МИАН СССР, 11977, т. 643.
37. Моисеев Н. Н. Элементы теории оптимальных систем.— М.:
Наука, 1975.
38. Нейман Дж., Моргенштерн О. Теория игр и экономиче-
ское поведение.—М.: Наука, 1970.
39. Никольский М. С. Преследование не полностью известного
объекта.— Вестник МГУ, сер. матем., мех., 1971, № 1.
40. Нэш Дж. Бескоалиционные игры.— В сб.: Матричные игры.—
М.: Физматгиз, 1961.
41. Острем К. Ю. Введение в стохастическую теорию управле-
ния.— М.: Мир, 1973.
42. Понтрягин Л. С. О линейных дифференциальных играх.—
I II.—ДАН СССР, 1967, т. 174, № 6; т. 175, № 4.
43. Понтрягин Л. С., Болтянский В. Г., Гамкрелид-
з е Р. В., М и щ е н к о Е. Ф. Математическая теория оптимальных
процессов.— М.: Наука, 1969.
44. Пшеничный Б. Н. О линейных дифференциальных играх.—
Кибернетика, 1968, № 1.
45. П ш е н и ч н ы й Б. Н. Простое преследование несколькими объек-
тами.— Кибернетика, 1976, № 3.
46. Рокафеллар Р. Т. Выпуклый анализ.—М.: Мир, 1973.
47. Салуквадзе М. Е. Методы векторной оптимизации.— Тби-
лиси: Мецниереба, 1976.
48. Сейдж Э. П., Мелса Дж. Л. Идентификация систем управле-
ния.— М.: Наука, 1974.
49. Тихонов А. Н. О методах регуляризации задач оптимального
управления.— ДАН СССР, 1965, т. 162, № 4.
50. Ф и л и п п о в А. Ф. О существовании решений многозначных диф-
ференциальных уравнений.— Матем. заметки, 1971, 10, вып. 3.
234
51. Цыпкин Я. 3., Поляк Б. Т. Огрубленный метод максималь-
ного правдоподобия.— Динамика систем.— Горький, 1977, вып. 12.
52. Ченцов А. Г.— Об игровой задаче, сходящейся в заданный мо-
мент времени.— Матем. сб., 1976, т. 99 (141), № 3.
53. Ч е р н о у с ь к о Ф. Л. Одна задача уклонения сил многих пре-
следователей.— ПММ, 1976, т. 40, вып. 1.
54. Эйкхофф П. Основы идентификации систем управления.— М.:
Мир, 1975.
55. Эрроу Дж., Гурвиц Л., У д з а в а X. Исследования по ли-
нейному и нелинейному программированию,— М.: ИЛ, 1962.
56. A t h а и s М., G е е г i n g Н. Necessary and sufficient conditions for'
differentiable nonscalar functions to attain extrema.—IEEE Trans.
Automat. Contr., 1973, v. AC-18.
57. Athans M., Geering H. The Infimum Principle.—IEEE Trans.
Automat. Contr., 1974, v. AC-19, № 5.
58. В a s i 1 e G., M a г г о G. A New Characterization of Some Structu-
ral Properties of Linear Systems.— Int. J. Contr., 1973, v. 17, № 5.
59. BertsekasR., Rhodes J. B. Recursive State Estimation for
a Setmembership Description of Uncertainty.—IEEE Trans. Auto-
mat. Contr., 1971, v. AC-16, № 2.
60. Bucy R., Joseph P. D. Filtering for Stochastic Processes with
Application to Guidance.— J. Wiley and Sons, 1968.
61. Fleming W. H., Rishel R. W. Deterministic and . Stochastic
Optimal Control: Springer-Verlag, 1975.
62. F r i e d m a n A. Differential Games. Wiley-Interscience, 1971.
63. H о Y. C. Differential Games, Dynamic Optimization and Genera-
lized Control Theory.—J. Opt. Theory and Appl., 1970, v. 6, № 3.
64. H о Y. С., C h u К. C. Information Structure in Many-Person Opti-
mization Problems.—Automatica, 1974, v. 10.
65. Kalman R. E., Bucy R. S. New Results in Linear Filtering and
Prediction Theory.— Trans. ASME, 1961, v. 83D.
66. Keeney R., R a i f f a H., Bell D. (editors). Conflicting Objecti-
ves in Decisions. Intern. Series on Appl. System Analysis. J. Wiley
and Sons, 1977.
67. L e i t m a n n G. Cooperative and Noncooperative Many Player Dif-
ferential Games.—Vienna: Springer-Verlag, 1974.
68. Leitmann G. Stabilization of Dynamic Systems Under Bounded
Input Disturbance and Parameter Uncertainty.— Proc. 2-nd King-
ston Conf, on Different. Games and Control Theory, N. Y., 1976.
69. Leitmann G., Marzollo A. Multicriteria Decision-Making.
CISM Courses and Lectures № 211: Springer-Verlag, 1975.
70. L e i t m a n n G., W a n H. Y. Macro-Economic Policy for an Uncer-
tain Dynamic Economy.— Proc. 15-th Allerton Conf, on Communica-
tion, Control and Computing, 1977.
71. Morishima M. Equilibrium, Stability and Growth.— Oxford:
Clarendon Press, 1964.— [Рус. перев.: Моришима M. Равно-
весие, устойчивость, рост.— М.: Наука, 1972].
72. Ritter К. Optimization Theory in Linear Spaces I—III.— Math.
Ann., 1969, 1970, v. 182—<184.
73. S c h 1 a e p e e r F., S c h w e p pe F. C. Continuous-Time State Esti-
mation Under Disturbances Bounded by Convex Sets.— IEEE
Trans. Automat. Contr., 1972, № 2.
74, Won ham W. M. Linear Multivariable Control. A Geometric Ap-
proach.: Springer-Verlag, 1974.
ГЛABA 8
УСТОЙЧИВОСТЬ ПРИНЦИПОВ ОПТИМАЛЬНОСТИ
§ 1. Постановка задачи
Одним из важнейших вопросов в исследовании
операций является вопрос о выборе решений оперирую-
щей стороной в соответствии с введенным понятием
оптимальности или принципом оптимальности. Поэтому
для исследования удобно выделять такие понятия, как
модель и принцип оптимальности оперирующей стороны.
Под моделью мы будем понимать математическое
описание реальных физических и информационных
связей, информированности различных участников
операции, их множества стратегий (включая возмож-
ности в передаче информации, описание принципов
оптимальности некоторых участников операции, за
исключением оперирующей стороны, и т. п.) [1], [2].
Множество моделей будем обозначать М и считать, что
на нем задана некоторая метрика |ы. Эта метрика явля-
ется формализацией понятия близости моделей и малых
возмущений моделей. Сделаем еще одно допущение, не
ограничивающее общности. Будем считать, что любой
модели т^М соответствует одно и то же множество
стратегий оперирующей стороны S. Этого всегда можно
добиться, выбирая в качестве S объединение множеств
стратегий S(m) для каждой модели т и дополняя поня-
тие оптимальности в модели т требованием заведомой
неоптимальности стратегий из S\S(m).
Под принципом оптимальности R будем понимать
отображение R: N-+28\{0}, где NczM.
Важную роль играют принципы оптимальности,
задаваемые с помощью критерия эффективности
F(x, rri), где xeS, Оптимальными считаются
236
стратегии из множества
{х е S | F(x"tri) >'supF (у, т) — е},
y^s
где е^О—фиксированное число, определяющее точность
оптимизации критерия или чувствительность оперирую-
щей стороны к изменению выигрыша. Такой принцип
оптимальности мы будем называть критериальным прин-
ципом оптимальности.
В проблеме выбора оптимальных решений можно
выделить, по меньшей мере, три основные задачи.
Первая — частный оптимальный выбор, т. е. нахож-
дение хотя бы одной стратегии х^7?(т).
Вторая — полный оптимальный выбор, т. е. нахожде-
ние всего множества /?(т). Эта задача возникает, напри-
мер, когда окончательный выбор производится из R(ni)
на основе другого принципа оптимальности в случае,
когда^ модель т и принцип оптимальности R есть часть
некоторой глобальной модели.
Третья задача возникает, когда производится выбор
на основе критериального принципа оптимальности,—
это поиск W (tri) = supF (х, т), т. е. поиск оптимальной
xeS
оценки эффективности.
Однако при решении этих задач в силу различных
причин (неизбежные ошибки вычислений, неточная
информация о параметрах модели и т. п.) вместо
модели т приходится иметь дело с некоторой моделью
т^М такой, что ц(т, т&) ^б, б>0.
Первый вопрос, возникающий в связи с этим: опре-
делен ли принцип оптимальности R для любой
модели mfi? И второй: как можно оценить R(m) по
R(m5) при б>0?
Будем считать, что S — метрическое пространство с
метрикой г. Определим для множеств A, BczS
отклонение
Р (А, ВУ= sup inf г (а, Ь)
а^А Ь^В
и метрику Хаусдорфа
d(A, B)=max{p(A, В), р(В, А)}.
Определение 1. Пусть принцип оптимальности R
задан на и m — внутренняя точка N. Принцип
оптимальности R называется слабо устойчивым на
237
модели т, m<=N, если для любого е>0 существует S>0
такое, что для любого п^М, p,(zn, п)<6 выполнено
неравенство р (7? (п), 7? (т)) <е.
Определение 2. Принцип оптимальности R назы-
вается устойчивым на модели пг, m^N, если для любого
е>0 существует 6>0 такое, что для любого п^М,
р,(пг, n)<S выполнено неравенство d(R(n), 7?(m))<e.
В случае, когда R(m) для всех m^N состоит из
одной точки, эти определения совпадают с определением
корректной задачи, данным в [3].
Введение определений 1, 2 естественно по следующим
соображениям. Если R задан в некоторой окрестности т,
слабо устойчив на модели m, xh^R(mh), где mh-+m, то
для любой предельной точки х0 последовательности {л\}
можно утверждать, что р(х0, R(m))=0. Поэтому х0
является приближенным решением задачи частного
оптимального выбора. Если .же R(m) замкнуто, то
x0^R(m) и является решением задачи частного опти-
мального выбора.
Если принцип оптимальности R устойчив на модели
пг, то в качестве приближенного решения задачи полного
оптимального выбора можно брать R{n), если п доста-
точно близко к пг.
Если необходимо найти оптимальную оценку эффек-
тивности по приближенным данным, то естественно
ввести специальное определение для этого случая.
Определение 3. Критериальный принцип опти-
мальности, задаваемый функционалом F (х, пг), называ-
ется устойчивым по критерию на модели пг^М, если
функция W (пг) =sup F (х, пг) непрерывна на модели пг.
xes
Итак, если критериальный принцип оптимальности
устойчив по критерию на модели т, то в качестве при-
ближения для оптимальной оценки эффективности
можно брать W(n), где п достаточно близко к пг.
Однако для широкого класса естественных и обще-
принятых метрик ц, г и принципов оптимальности либо
принципы оптимальности определены не для всех близ-
ких моделей, либо принципы оптимальности не являются
устойчивыми в смысле определений 1—3. Приведем
соответствующие примеры.
Условимся, что если есть функция п переменных
F(xiy ..., хп), то обозначение Ф(Е, ...) означает зави-
симость от F как от функции п аргументов. Обозначение
238'
ф(Р(х4, •, ...), ...), где на некоторых местах вместо
аргументов стоят точки, означает зависимость от функ-
ции F тех аргументов, вместо которых стоят точки.
Остальные значения аргументов фиксированы.
1. Задача математического программирования (частный случай
критериального принципа оптимальности). Множество моделей М
есть множество числовых функций, определенных на отрезке [0, 1]
с равномерной метрикой р,. Множеством стратегий S является отре-
зок [0, 1] с обычным расстоянием.
'• ““ *е!01' “ гМ>"' гем,
(—оо, если х£[0, 1] и g(x)<0,
R(g) = {xeS]F(x, g) = max F(ytg)}.
z/e[o.i]
Нетрудно видеть, что если ge(x)=—ex, то
max F(x, 0)=l, R (0) = {1}, max F (x, g&) = 0,
X^[0,l] XE[O,1]
/?tee) = {0), e>°*
t. e. нет ни устойчивости по критерию, ни слабой устойчивости, а сле-
довательно и устойчивости.
2. Множества точек Парето и полуэффективных точек. Для на-
глядности в качестве множества моделей М рассмотрим множество
ограниченных подмножеств Е2 с метрикой Хаусдорфа р, порожден-
ной евклидовой метрикой. Множество стратегий S совпадает с Е2,
метрика евклидова.
Через nJ [[/] будем обозначать множество точек Парето, а через
Ро Р] — множество полуэффективных точек для модели U. Пусть мо-
дель V = (и GE Е21 + uj < 1}, а модель V0 = {и е Е2 | и* + и*<\}.
Очевидно, П° [V] = Ро [V] = {и GE Е21 + и* = 1, н2>0}, а
по [Vго] = Ро [V0] = 0. Поскольку р, (V, V0) = 0, то слабой устойчиво-
сти нет.
Причина неустойчивости заключается не только в том, что V0 не
замкнуто.
Пусть модель W = {и е Е21 0 < ult и2 < 1}, а модель WE = {и ЕЕ
eE2|wb ^>0, 1 + 8(1 — th), wx < 1 4-е (1 — Ua)} (см. рис.
8.1). Нетрудно видеть, что р (W, We) < е, р, (W, W_B) < е, П° [F] =
= (1, 1), nJ [№е] = {и&Е2\иъ u2>0, min{l — u2 + e (1 — их),
l-W1+e(l_W2)} = 0} и р (11J [IF], nJ[IFe])> 1 для любого е>0.
Аналогично при 0 < е < 1 выполнено
P0[IF] = {u<=E2\ui, и2^0, max {ub и2} = 1},
P41F_e] = (l, 1),
а р(Ро[№], Ро[№_е])=1.
239
3. Множество точек равновесия. Пусть N — множество числовых
функций, заданных на квадрате [О, I]2. В качестве множества моде-
лей возьмем M=N2, а метрику ц зададим следующим образом:
p(gi, g2\ fi, f2)=max{v(gi, fi), v(g2, f2)}, где v — равномерная метри-
ка. Множество стратегий S=^[0, I]2. Множество точек равновесия
Рис. 8.1.
пары функций gi, g2 обозначим R(gi, g2). Пусть (f, g)^M таковы,
что g)=0, f и g ограничены. Очевидно, f и g можно вы-,
брать даже непрерывными.
Тогда
|1(0, 0; ef, 8g)->0 при е->0+, 7?(0, 0) = [0, I]2,
а
8g) =0 при 8>0.
Список таких примеров можно продолжить. Так, неустойчивы
лексикографические задачи [4], [5], [6], некоторые задачи теории
игр, например, задача определения максимина со связанными ограни-
чениями {7] и т. д.
Перечисленные неустойчивые задачи широко распро-
странены. Поэтому для их решения естественно восполь-
зоваться подходом, предложенным А. Н. Тихоновым
[3], [8] (см. также [9]—[11]).
Итак, пусть принцип оптимальности 7? задан на
модели т0^М. Рассмотрим принцип оптимальности 7?а,
зависящий от параметра а^Е*. Следуя [3], введем
Определение 4. Принцип оптимальности Ra
называется регуляризующим принцип оптимальности
R на модели mQ^M, если выполнены условия'.
1) Существует б0>0 такое, что принцип оптималь-
ности Ra определен для любых а>0 и т^М таких, что
р (т, т0) ^60.
240
2) Существует отображение А (6) такое, что
А(б)с=Е+ и
lim rd(Ra(m), R О,
ц(т.т0)-+о
а->о £
где а^А(д(т, т0)).
Определение 5. Принцип оптимальности Ra назы-
вается слабо регуляризующим принцип оптимальности R
на модели т0^М, если выполнены условия',
1) Существует 60>0 такое, что принцип оптималь-
ности Ra определен для любых а>0 и т^М таких, что
р.(т, /п0) <60.
2) Существует отображение Л (б) такое, что
A(8)<=Ek+u
lim р (Ra (tri), R (m0)) = 0,
|i(m,mo)-+o
a->o
где a^A (ус\;п, /n0)).
Критериальный принцип оптимальности является
весьма распространенным. Поэтому целесообразно пере-
формулировать приведенные выше определения специ-
ально для этого случая.
Итак, пусть критериальный принцип оптимальности
задан критерием F(x, /п), а
W (пг) = sup^(x, пг).
x<=S
Рассмотрим функционал Wa(m), зависящий от пара-
метра а^Е*.
Определение 6. Функционал Wa называется
регуляризующим W на модели пгое=М, если выполнены
условия'.
1) Существует 60>0 такое, что функционал Wa
определен для любых а>0 и пг<=М таких, что
V(m, пг0) =^б0.
2) Существует отображение Л (6) такое, что
A(fi)ciE+ и
lim Wa(tri) = №(m0),
JI (Z72,r7Z0)—>0
a-»o
где а^Л(ц(/п, m0)).
Регуляризация дает возможность производить
вычисления с любой моделью из некоторой окрестности
241
в то время как принцип оптимальности R не обяза-
тельно определен в окрестности т0.
Введение отображения А (6) означает, что а и
б = ц(т, т0) должны согласованно стремиться к нулю,
а из существования предела в определениях следует,
конечно, что требования а, 6->0 и а<=Л(6) непротиво-
речивы.
§ 2. Регуляризация критериального принципа
оптимальности
1. Задача математического программирования*).
Пусть S — множество стратегий оперирующей стороны
есть полное метрическое пространство с метрикой
г, Ф — множество функционалов, определенных на S,
v — равномерная метрика на Ф.
В качестве множества моделей рассмотрим
Л4 = Ф2Х25
с метрикой
н(А, gl, А'ь f2, g2, X2)=max{v(fit f2), v(git g2), d(Xt, X2)},
где d — метрика Хаусдорфа на 2s, порожденная метри-
кой г.
Рассмотрим критерий эффективности
F(x f g Х) = (^’ еСЛИ и
|— оо в противном случае,
х «= S, (/, g, X) е= М.
Тогда оптимальная оценка эффективности крите-
рия F есть W (f, g, X) = sup F (x, f, g, X) = sup f (x).
x~s xsx
g(x)>0
Всюду далее будем считать, что sup f (х) =—оо.
хе0
Для е^О рассмотрим критериальный принцип опти-
мальности
Ъ (А g,X)={x^S\F (х, /, g, X) > W (Л g, X) - 8}.
Пусть Об (В) = {хе S\d (х, В)^8} —S-окрестность множест-
ва В, mf (8) = sup | f (x) — f (у) | — модуль непрерывности
x,y^S
r(x,y)^6
функции f.
♦) Приводимые без ссылки на литературу результаты в данный
главе получены Д. А. Молодцовым.
242
Теорема 1. Пусть f, и непрерывны на ком-
пакте S, X — компакт в S. Тогда функционал
Ц7(<р, ф + а, У) является регуляризующим для функцио-
нала W на модели (f, g, X) еЛ'1, если
Л(д) ={ae£i|a>:6’+'mg(S)},
г. е.
lim Г(<р, г|) + a, Y) = W(f, g, X),
а-м)
д-*о
где 6 = ц(ф, ф, У; f, g, X) и a^6 + /ng(6).
Доказательство. Пусть б = |л(ф, ф, У; f, gt X), тогда не-
трудно видеть, что выполнено неравенство
lF(<p, ф + a, У)< g + *+b, Об(Х)) + б.
Покажем, что при а^А (6)
{X е XI g (х) > 0} С об ({X е У |ф (х) + a > б}).
Пусть х^Х и g(x)^sO. Так как d(X, У)=<6, существует г/^У такой,
что г(х, у)^д. Тогда имеем ф(*/)+а>£(#)—б+а^£(*) —
—т^(б)—б + а^0, т. е. г/е{хеУ|ф(х)+а>0}. Поэтому
W (/> g, X) < sup f (х) < sup f (x) + mf (6) <
' л^ОЛ({^еУ|Ш)+а>о}) хе/,
ip(x)+a>o
< sup Ф (x) + 6-|-(6) = IT (ф, ф + а, У) + 6 + m/(6).
x(=Y
я|)(х)+а>о
Итак, при аеЛ(б) справедливо неравенство
W (f, g,X) — b-mf (б) < W (ф, ф + а, У)<
g + a + б, Об(Х)) + 6. (2.1)
В условиях теоремы нетрудно показать, что
Нш V (f, g + a + 6, O6 (X)) = W (f, g, X).
a-H)+
d->o+
Переход к пределу в неравенстве (2.1) завершает доказательство
теоремы.
Покажем на примере, что условие a^S+vng(6)
неулучшаемо.
Положим S= [—1, 1], Х= {0}, g(x) =—&|х|, f(x) = 1, £>0. Тогда,
очевидно, W(f, g, X) = l, tng(o)—kd. Пусть У={б}, ф(х) =
= 5f(x)—б, ф(х)=/(х), б>0.
Тогда нетрудно видеть, что
{1, если a > 6 + А?б,
с
— ос, если а<б + Лб.
Замечание. Если бы в качестве множества .моделей М было.
взято Ф2, т. е. не допускались вариации X, то для того, чтобы в усло-
243
виях теоремы 1 функционал №(<р, ф+а, X) был регуляризующим
достаточно положить А(6) = {cteEj |а^б}. Нетрудно привести при-
мер, показывающий, что и условие а 1а 6 неулучшаемо.
Теорема 2. Пусть f, ged> и непрерывны на ком-
пакте S, X —компакт в S, W(f, g, —оо. Тогда для
любого е^О принцип оптимальности /?е+т(<р, ф + а, У)
является:
1) Слабо регуляризующим принцип оптимальности
Rt на модели (f, g, X) ^М, если
А (б) = Bi (е, б) = {(а, у) е Е+ |'а > б + mg (б), у + е > 0},
т. е.
lim р (7?e+v (<р, ф + а,'У), ₽е (f, g, Х))> 0,
а,у,д-м)
где 6=ц.(ф, ф, У; f, g, X) и (а, б).
2) Регуляризующим принцип оптимальности Rs на
модели (f, g, X) еЛ4, если
А (б) = В2 (б) = {(а, v) е Е* | а> б + mg (б), у >
> W (f, g + а 4- б, Ой (X)) - W (f, g, X) + 26 + mf (б)},
т. е.
lim d (Re^ (ф, ф + а, У), Rt (f, g, X)) = 0,
a,v.6->o
где 6=|1(ф, ф, У; f, g, X) и (а, у)^В2(6).
Доказательство. Пусть б = ц(ф, ф, У; f, g, X). Так как
№(f, Х)=/=—°°> то {xsX|g(x) >0} =й=0 и, используя условие
a>mg(6)+6, получаем, что {хеК|ф(л:)-|-а>О}=#0. Следователь-
но, если (а, у)еВ1(е, 6), то Т?8+?(ф, ф+а, У)=#=0. Используя не-
равенство (2.1), получаем
*e+v(Ф> Ф + а» У)с{хеоб(Х)|/(х)^1Г(/, gi х)-
—>26 — mf (6) — е — у, g (х) + 6 + а > 0} = Т (6, а, у).
Используя лемму 1 из [7], можно показать, что
lim d(T(6, а, у), R*(ft g, X)) = 0.
6,a,v-*o4-
Отсюда следует доказательство первого утверждения теоремы. Пред-
положим теперь, что второе утверждение теоремы не выполнено.
Тогда существуют Д>0, х0^7?е(А g, X), последовательности фп, г|)п,
Yn, &п, уп такие, что
Yn о, и (<р„. ф„, Уп; f, g, X) = б„ о, (а„, уп) е в2 («„)
и d(x0, Ке+7П(фп, фп+ап, Уп))>Д. Так как d(X, Yn)^6n, то су-
ществует последовательность {«/ЛеУп} такая, что r(x0, f/n)^6n.
244
Тогда
i|>„ Ю + ап > е (уп) - + % > S М - mg (6„) - 6„ + а„ > О,
Ф„ Ю > f Ю ~bn>f М ~ mf (6„) - 6„ >
> W (f, g, X) - е - mf (б„) - 6„ > W (f, g + а„ + 6„, О6п (X)) +
+ еп-Тп-8>и7(Фп> %+ап- Гп)-Тп-6-
т. е. f/ne/?e+vn (фп, 1рп+ап,Уп), откуда при бп->0 получаем противо-
речие. Теорема полностью доказана.
Покажем на примере, что оба неравенства для а, у, 6, опреде-
ляющие В2(6), неулучшаемы. Пусть S=[—3, 3], Х={— 1}U[1, 2],
g(x) = max{—&|x-f-l1, —А?|х—11}, f(x)=c|x|, k>0, с>0.
Тогда W, g, Х)=с. Ro(f,g, %) = {-!, 1}, W(f, g+a+d, Об(Х)) =
= c+4<a+s)’
к
B2 (6) = I (a, y) G E2 I a > 6 + 66, у > 4 (a + 6) + 26 + сб) •
I 6 J
Положим У={—1+6}U[1, 2], <p(x) =f(x) 4-6 sign (x), i|?(x) =g(x)4-
+6 sign (x). Элементарные вычисления дают
Я?(ф, 'I’ + a, У) =
(Г /. , , a+fi Yl . , a + 61
I если (a, y)^B2(6),
LI » c J я J
. если (a, y)eB2(6).
Поэтому, если (a, у) B2(S), to d(Ro(f, g, X),/?T(<p, ip + a, У)>1.
Так как условие (а, у)еВ2(6) не совсем удобно для
практического использования, то можно использовать
более грубые оценки, вытекающие из условий регуляр-
ности [12].
Приведем результат для частного случая задачи
математического программирования, когда отсутствует
ограничение g(x) ^0. Обозначим
w°y*X)]=Wi(f, о, f2, х2) =
= H(/i,g,Xi;fa,g,X2),
Rl(f, X) = {хе Х| f(x) > W\(f, X) -е}, е> 0.
Следствие. Пусть /еФ и непрерывна на ком-
пакте S, X — компакт в S, е^О. Тогда
1) U7’ непрерывен на модели (f. X) в метрике ц°.
2) Принцип оптимальности 7?е+т(<р, У) является слаёд
регуляризующим принцип оптимальности Rl на модели
245
(f, X), если
у е А (6) ={ у е Е+1 у + е > 0}.
3) Принцип оптимальности ^’+?(ср, У) является регу-
ляризующим принцип оптимальности 7?е на модели
( f, X), если
у еЧ (6) =,{у <= Е+1 у > 2S +2mf№)}.
2. Задача линейного программирования. Метод регу-
ляризации, изложенный выше, применим для задач
математического программирования на компактных
множествах стратегий. Однако далеко не всегда пред-
положение о компактности выполняется. В частности,
множество допустимых планов задач линейного програм-
мирования может быть неограниченным в евклидовом
пространстве..
Поэтому представляется целесообразным специально
рассмотреть вопрос об устойчивости задач линейного
программирования и, используя их специфику, полу-
чить результаты,' более приспособленные для практиче-
ского использования.
Множество моделей в этом случае есть множество
векторов (с, а, Ь), где с^Еп, a=(ai9 ..., ат), а^Еп,
b<=Em. Метрика ц определяется через евкли-
дову норму следующим образом:
И fci, ^1, К; с2, а2, Ь2) =
= шах {|| — с2 J, max || alt — a2i ||, max || Ьц — b2i ||}.
Оптимальная оценка эффективности в задаче линейного
программирования равна
W (с, a, b) = sup (с, х),
x^D
где D= {хе£п| (ай х)—6^0,
При е=0 рассмотрим критериальный принцип опти-
мальности
/?0’(с, а, Ь)]= {х g= D х) = W (с, а, &)}.
Очевидно, что устойчивая (слабо устойчивая или устой-
чивая по критерию) задача линейного программирова-
ния имеет ограниченное множество решений Ro.
Связь между слабой устойчивостью и устойчивостью
по критерию устанавливает
246
Теорема 3 [13]. Для слабой устойчивости принципа
оптимальности Ко на модели т=(с, а, Ь) необходимо и
достаточно, чтобы критериальный принцип оптималь-
ности W был устойчивым на этой же модели.
Таким образом, можно говорить просто об устой-
чивых задачах линейного программирования.
Как показывает пример 1 из § 1, ограниченность
множества решений не является достаточным условием
устойчивости. Достаточные условия устойчивости,
состоящие в ограниченности множеств решений прямой
и двойственной задач, сформулированы в [14]. Однако их
эффективная проверка, как правило, затруднительна, за
исключением некоторых простых случаев, Кроме того,
для большого числа задач линейного программирования
множество решений двойственной задачи неограничено.
Поэтому целесообразно регуляризовать задачу линей-
ного программирования по методу п. 2.1. При этом
оказывается полезной
Лемма 1 [13]. Критериальный принцип оптималь-
ности W устойчив на модели ma— (с, а, b—а) *) при
любом а>0.
Из этой леммы в силу сходимости
Fj(C) a,b-[a)-^+W(c, a, b)
и оценки
0<IF(c, a, b — a) — W(c, а, Ь) ^К -а,
где К>0—некоторая постоянная, следует
Теорема 4 [13]. Если множество D допустимых
планов в задаче линейного программирования (модели)
т — (с, а, Ь) ограничено, то
1) lim W (с', a', V — а) - W (с, а, Ь),
а-»о+
cta,b)
а
т. е. функционал W(c', а', Ь'—а) является регуляри-
зующим для функционала W на модели пг.
2) Принцип оптимальности Ra(c', а', Ь'—а) — слабо
регуляризующий R0(c, а, Ь) на модели пг, если
Л(6) = -[(а)?)е^+|-
I а
= Th
*) Если b(=Em, а<=Е\ то b—а=(Ь{—а, ..., bm—а).
247
т. е.
lim” 0 (Ro (с'> a'ty — а)Л/?0 (с, а, b)) = О,
a,v,d->o
где 6 = р, (с', а', Ь'; с, а, Ь) и (а, у) еА (6).
Указанный способ регуляризации задачи не выводит
из класса задач линейного программирования.
Рассмотрим теперь проблему получения устойчивого
приближения к решению задачи т= (с, а, Ь).
Следуя [3], поставим задачу поиска «нормального»
решения задачи т, т. е. решения, ближайшего к фикси-
рованной точке х. В математическом плане задача
поиска нормального решения есть лексикографическая
задача оптимизации с двумя критериями (п. 3.3).
Одноэтапный способ решения данной задачи в соче-
тании с регуляризацией позволяет строить последова-
тельности точек, сходящихся к нормальному решению.
Следующая теорема по существу объединяет метод
регуляризации А. Н. Тихонова задач линейного про-
граммирования [3] с методом регуляризации, изложен-
ным выше.
Теорема 5 [13]. Пусть множество D допустимых
планов задачи т=(с, а, Ь) ограничено и последователь-
ности {Th}, {SJ, {aj, {еА}, {о*} таковы, что
S?
5*->оо, ---- -> 0,-----> О, а£->0, >0 при £->оо.
Tk ak
Тогда последовательность точек {xft}, определяемая
условием
Фа* (Xfc, Тк, Sk) sg min Фа* (x, Tk, St) + co*,
x^En
где
Фа(х, T,S) =
= || x — x ||2 + T 2 [min {0, (a«, x) — 6? + a}]2 — S (c*, x),
f=l
сходится к нормальному относительно х решению задачи
линейного программирования.
Здесь ц(с, а, Ь; с*, az, и, следовательно, число
с^О можно интерпретировать как погрешность исход-
ных данных в модели т= (с, а, Ь).
248
Теорема 5 усиливает результат работы [3], так как
сводит проблему регуляризации задачи линейного про-
граммирования к решению задач однопараметрического
семейства.
§ 3. Регуляризация принципов оптимальности
в задачах со многими критериями
1. Множество полуэффективных точек. Пусть множе-
ство моделей М есть множество ограниченных под-
множеств V в Еп с метрикой Хаусдорфа ц, порожденной
метрикой г (и, v) = шах \щ — ^|, а множество стратегий
оперирующей стороны S есть Еп с метрикой г.
Множество полуэффективных точек Р0[К] для
есть С-ядро отношения доминирования на V, где и доми-
нирует и, если u>v (неравенство понимается покоорди-
натно) .
Обозначим для У^М, v<=En
р (у, У) = sup min (tii — vi).
Нетрудно видеть, что если v^V, то р(и, У)^0 и мно-
жество полуэффективных точек есть
Pq[V]={veeV\p(v, V)=0}.
Если УеЛ1 и V замкнуто, то PO[V]:7^0 и совпадает с
множеством точек минимума по v^V функции p(v, V).
Как показано в примере 2 § 1, принцип оптималь-
ности Ро неустойчив, поэтому естественно воспользо-
ваться методом регуляризации § 2.
Обозначим для у^О, W^M
Ру [Г] = WI р (у, W) inf р (ш, W) + у}.
w^W
Пусть W есть замыкание W. Тогда легко видеть, что
р (v, W) = р (u, W) и inf p(w,W) = inf р (w, 0.
Поэтому
Чтобы применить следствие из теоремы 2, возьмем в
качестве множества стратегий оперирующей стороны
не Еп, а множество {ue£n|r(0, при доста-
точно большом X так, чтобы VcsS*-» при некотором
249
а>0, где V^M — фиксированное замкнутое под-
множество.
Теперь осталось подсчитать, как меняется p(v, IT) в
равномерной метрике при изменении W и модуль непре-
рывности функции /?(•, V). Пусть f(u, v) = min (щ— Vi).
Нетрудно видеть, что справедливы неравенства
t(u, v)—f(w, v)^.r(u, ay); —r(«, и)—f(w, v).
Применяя к обеим частям первого неравенства операцию
sup inf, а второго — операцию inf sup, получаем
u~V w^W u^V
\p(v, V) — p(v, Г)|^н(К W).
Отсюда имеем
sup | p (v, V) — p (v, W) I < 6.
^sK
W,V<=M
H(V,U7)<6
Пусть г(у, w)^6, тогда f(u, w)+6. Отсюда
получаем p(u, V)^.p(w, V)+6. Меняя в этом неравен-
стве v и w местами, имеем оценку на модуль непрерыв-
ности функции р(% V):
sup \'р (u,’ V) — р[(ю'У) | < S.
Из следствия теоремы 2 получаем следующую теорему.
Т е о р е м а 6. Пусть V — компакт в Еп. Тогда:
1) Принцип оптимальности Л[№] является слабо
регуляризующим принцип оптимальности Ро на модели
V, если
Д;(6) ={ТеЕЦу>0}.
2) Принцип оптимальности Р^[W7] является регуляри-
зующим принцип оптимальности Ро на модели V, если
А (8) ={7еЕ1+|7>4б}.
2. Множество точек Парето. Пусть множество моде-
лей и метрики такие же как в п. 1. Для V^M множество
точек Парето П?[У] является С-ядром отношения доми-
нированияНна V, где uHu, если u^v и существует /,
1 такое, что
Рассмотрим теперь «возмущенное» отношение доми-
п р
нирования. Для а, будем считать, что и\-v, если
Ot
250
u^v—а и существует j, такое, что ^>цх+р,.
С-ядро на V такого отношения доминирования есть
Па [V] =’{v е V | если и е V, и >’и— а.^то и v +$}•
Введем обозначения: для а, и^Еп, У^М,
R (и, V) — {о е V | v и},
лУ (и, а) = sup Vi — i = 1, ..., n.
v=R(u-atV)
Если ueV, то очевидно, nv(u, а) ^0 для а^О.
Нетрудно видеть, что для а, р^О
ПЙИ ={vey|nv(y,a);^ р),
и, в частности, для а=р = 0 получаем, что множество
точек Парето для замкнутого совпадает с множе-
ством точек минимума по u<=V функции max лУ (и, 0).
Однако непосредственное применение методов регуляри-
зации § 2 здесь невозможно, так как лу(% 0) не явля-
ется, вообще говоря, непрерывной функцией. Поэтому для
регуляризации принципа оптимальности По нужны
специальные методы.
Обозначим для ДсУ,
со У (а, А) = sup л у (и, а).
и~А
Теорема 7 [15]. Пусть V замкнуто и
семейство множеств {Z)e}, £eczIIo[V] таково, что
limp(Z)e, П°о[У])=0, причем Dz замкнуто для любого
е -»о+
е>0. Тогда принцип оптимальности Па является регу-
ляризующим принцип оптимальности Ш на модели . V,
если
A (6) = {(а, р) ее ЕТ | а > 26, Р > 26 +
+ cov (а + 26, Z?e(6)), е (6) -> 0 при 6 -> 0} *),
т. е.
lim р(п£[№], П? [7]) = 0,
а,3,е,б-»о
где а>26, р>26 + соу(а + 26, Ое), 6 = p(V,<).
*) Для аеЕ71, беЕ1 будем считать а + (а+б) ,- = «<4-6,
а неравенство а^б понимать, как аг^б при всех /г.
251
Покажем теперь, как выбрать множество De так,
чтобы можно было просто оценить величину
cov(a+26, Dt).
Положим е^Еп, et= 1, i= 1, ..., п,
Вб [V] = е V | V а > 0, (и, аё) -у
для 6>0, B[V] = U
д>0
Множество B[V] будем называть множеством М-регу-
лярных точек V. Это понятие является обобщением поня-
тия множества регулярных точек для выпуклого V [16].
Можно дать простую геометрическую интерпретацию
v^V является М-регуляр-
ной, если можно так не*
много расширить коорди-
натный угол, соответству-
М-регулярной точки. Точка
ющий и помещенный
вершиной в точку и, что-
бы пересечение V и рас-
ширенного угла состояло
из одной точки v (см.
рис. 8. 2).
Будем говорить, что
VczEnограничено сверху,
если существует и^Еп
такой, что для любого
v^V выполнено v^Zu.
Пусть Vcz£n, V зам-
кнуто и ограничено свер-
ху. В [15] показано, что множество Л4-регулярных то-
чек V всюду плотно в множестве точек Парето V.
Используя этот факт, можно показать, что DZ = B&
удовлетворяет всем требованиям теоремы 7 и
(а, ве) С 11^1 .
е
Поэтому при таком выборе множеств De теорема 7 при-
нимает следующий вид.
Теорема 8 [15]. Пусть V^M, V — замкнуто,
у(а)->0+ при а->-0+, причем ||а|| =о(у(а)). Тогда
принцип оптимальности Па[№] является регуляризующим
252
для принципа оптимальности П® на модели V, если
A (6) = {(а, р) е= ЕТ | а > 26, ₽ > 26 + у (а)},
т. е.
lim и (П& [И7], П“ [V]) = О,
а.3.б-»о
где а^26, р^26+у(а), 6=|i(V, W).
Очевидно, что в качестве у (а) можно взять ||а||а при
0<а<1.
3. Лексикографическая задача оптимизации. Пусть
f(x) = (A(x), •••> — вектор-функция, определен-
ная на множестве X. Множество моделей зададим как
совокупность непрерывных на компакте X вектор-функ-
ций f(x).
Под лексикографической задачей оптимизации будем
понимать задачу нахождения оптимальной оценки
эффективности
1F(/,X)= тах/„(х), (3.1)
где
R{ = {х <= I f( (х) = max ft (у)}, 1 i n,
R° = X,
(3.2)
и множества
R”(f, X) = {xe/?"-‘|fn(x) = W. Ж
которое задает принцип оптимальности.
Существует два основных способа решения лексико-
графических задач. Одноэтапный способ [4]—[6] состоит
в сведении ее к задаче математического программирова-
п
ния с критерием вида cifi (*)• • Однако в случае
i=i
конечного множества X может оказаться полезным
применение многоэтапного способа, когда по рекуррент-
ным формулам (3.2) определяется множество
а затем находится величина (3.1). Но прямая реализа-
ция такого метода практически невозможна, так как
из-за неизбежных ошибок вычислений нельзя найти
точно все множества R\
Чтобы преодолеть возникающие трудности, введем
«уступки» а, по каждому из частных критериев fi и
253
рассмотрим задачу отыскания
W (f, х, а"’1) max fn (х),
ле^п~1(ап~1Л)
R1 (а‘\ /) = {х f= R^1 f) | fi (х) > max /< (у) — aj,
lJ)
а1— (аь .., а;), аг^0, i= 1, . .., м— 1, R°=X.
Введение «уступок» на практике правомерно, когда
возможна компенсация убытков по одному из критериев
за счет некоторого выигрыша по другому критерию.
На множестве моделей введем метрику
Н (A g)> max | fi (x) — gi (x)
x<=X
KKn
Пусть множество X конечно. Тогда для всех достаточно
малых а;>0 будут верны равенства
Rl(ait f)=Rl, R4a2,f)=R2, ..., R-i(an-\f)=Rn-it
и поэтому W(f, X, a71"1) = W(f, X). Отсюда вытекает
Лемма 2 [6]. В случае конечного множества X для
всех достаточно малых ап-1>0 и всех g(x) таких, что
an-i—2|x(f, g)^0, справедливо неравенство
IW X,a"-*)-r(A Х)|^И(А ёу
Кроме того,
Яо (аg) = {хе Rn~* (а"'1, g) | gn (х) - W (g, X, а'2'1)} С
CZRn (Л X),
г. е. принцип оптимальности R” (ап-1, g) является слабо
регуляризующим Rn (f, X) на модели m = f при
A (d) ={ап1 е= ЕГ\|
Утверждение леммы существенно опирается на конеч-
ность множества стратегий X. Распространение его на
общий случай требует иного метода согласования пара-
метров регуляризации с точностью ц задания исходной
информации и, вероятно, целесообразно для тех классов
лексикографических задач, для которых существует
метод отыскания всех точек оптимумов (3.2). Дальней-
шие результаты по регуляризации лексикографических
задач оптимизации как при многоэтапном, так и при
одноэтапном способе их решения можно найти в [5].
254
§ 4. Регуляризация некоторых теоретико-игровых
принципов оптимальности
1. Точки равновесия. Пусть — полные метрические
пространства с метриками riy а Ф — множество
п
функционалов, определенных на S = JJ Si. В качестве
i=i
множества моделей М возьмем
п s-
м = Ф" х П 2 ‘
i=i
с метрикой
Н (F, V; О, W) = max max {di (Vh Г.-); v (F{, Gi)},
l<i<n
где V=(V„ Vn), IF=(UZ„ .... Гп),
F={Ft, ..., Fn), G—(Gi, Gt), dj —метрика Xayc-
дорфа на 2si, порожденная a v — равномерная метрика
на Ф. Множество стратегий оперирующей стороны
равно S с метрикой
г {и; о) = max rt (uit о,).
Для x^S, (F, X)^M рассмотрим функцию
H(x,rF, X)]='inf min [F{(x) — Fi(x\yi)],
y^X
где y=(ylt yn), a F({x\yt)=Fi{xl, х(_„ y(,
xi+i, xn). Тогда множество точек равновесия для
модели (F, Х)^М равно [17]:
N (F, X) = {х<=Х | Н (х, F, X) = 0}.
Так как Н(х, F, X) ^0, то N(F, Х)^=0 только тогда,
когда 9 (F, X) -= max Н (x,rF, X) = 0. Задача вычисления
х(=Х
0 (F, X) является устойчивой в метрике р. Пусть
mF (S) = sup | Fi (x) — Fi (y) |,
xty^s
r(x,y)^6
(F, X) = {x e X | H (x, F, X) > — ?}.
Теорема 9. Пусть Si — компакт, Ft непрерывна на
S, Xi — компакт, i=l, n. Тогда, если 0(F, X)=0, to
255
1) Принцип оптимальности N^G, У) является слабо
регуляризующим принцип оптимальности N на модели
(F, X) ей, если
А (8) = {у е= Е\ | у > 28 + bnF (6)}.
2) Принцип оптимальности N-,(G, У) является регу-
ляризующим принцип оптимальности N на модели
(F, X) еЛ1, если
А (8) = (уе E\ |7V >J28 + 4mF (8)}.
Доказательство этой теоремы вполне аналогично
доказательству теоремы 2.
2. Игра двух лиц с передачей информации (типа Гх).
Пусть Si, S2—полные метрические пространства с метри-
ками г12 г2, Ф — множество функционалов, заданных на
S.XS2, с равномерной метрикой у. В качестве множества
моделей М возьмем Af=O2X2s'X2S2 с метрикой
ц(Л,/72,Х1,Х2; G1( G2, У4, У2) =
=max{v(F4, G4), y(F2, G2), dt(Xt, У4), d2(X2, У2)},
где df—метрика Хаусдорфа на 2st, порожденная метри-
кой гь Множество стратегий оперирующей стороны
-сть S4 с метрикой г4. Введем обозначения:
(^2 •), Х2) = sup F2 (хъ у),
-),Х2) =
= {х2 <= Х21F2 (хъ х2) > W (F2 (хъ •), Х2) — а}, ц > О,
fa(Fi(xu >),F2(X1> «)Х2) = inf FAx^y),
yS«2(F2(x„.),X2)
UodFt, Fa, Xlt X2) = sup .), F2(x1, .), X2),
xt€=Xj
7? (Л, F2, X12 X2) = {X1 e Xx IA (Fx (xX) •), F2 (xb •), X2) >
>Ga(F1,F2)X1, X2)-y}.
Принцип оптимальности T? в игре F'^Ft, F2, Xlt X2) [18]
задается с помощью критерия fj. Непосредственное
применение результатов § 2 невозможно, так как fi
может не быть непрерывной функцией от х4. Введем
модуль непрерывности
mF (8) = sup | F (хъ x2) — F (ylt y2) |.
Xi,y^Si, x2,y2^S2
rAxiM^r^M^
250
Лемма 3. Пусть xly гДл,, z,)^6, Xit Z^Sly
y>0, d^Xt, Z.) s^6, a—v^2mF2(6). Тогда
•),F2(x1, •),X2)>fa(F1(21J •),F2(z1) • ), A'2),
С/Т(Л, F2, Xiy X2)^UJFiy F2, Zly X2).
Доказательство следует из справедливости включения
(F2 (гх, •), Х2) Z) Я* (F2 (хь •), *2) Ф 0.
Теорема 10. Пусть Sb S2—компакты, XtCzSj,
X2czS2, Х\, Х2— компакты, функции F{, Р2(=ф и непре-
рывны на SiXS2. Тогда функционал иа{й^ G2, Уь У2)
является регуляризующим функционал Uo на модели
{F^ F2, Х2) ^М, если A (б) = {a е Е\ | a>26+4mF2 (б)},
пг. е,
lim Ua (G1? G2, У., У2) = Vo (F1? f2, X., X2),
а,6-ю
где 6 = p,(F\, F2, X15 X2; G1? G2, Уь У2) и a^264-4mF2(6).
Доказательство. Пусть [i(Fb F2, Xi X2; Gb G2, Уь У2)=б.
Применяя очевидные рассуждения, нетрудно получить, что при
a^Y+26+2mF2(6) выполнены неравенства
•), F2(xb •),Х2) + 6 + /иГ1(6)>
>/а(<А(*ь •), 62(хь -),У2)>
>fa1(F1(x1, -), F2(xx, .^Х^б^/иГНб)
где ai = a+2d+2/nF2(6). Возьмем от каждой части неравенств
верхнюю грань по х^У^
(Л, F2, Уь Х2) + 6 + mF. (6) > Ua (G1? 62, Ylf У2) >
>t7ai (Fb F2, Ylt XJ-d -mF. (6).
Положим Y=2mF2(6) и применим лемму 3 к обеим частям неравен-
ства. Получим
Go (Fb F2, Хь Х2) + б + mF. (б) > Ga (G., G2, Уь У2) >
> Цх2 (Л, F2, Хх, Х2) б - mF. (б),
где £z2=a+26+4/nF2 (б).
Осталось заметить, что t/a(Fi, F2, Xi, X2)->Go(Fi, F2, Xi, X2) при
a^O [7].
Теорема 10 является обобщением результатов [7],
[19]. Так, в [7] рассматривалась регуляризация Uo
отдельно для возмущений F2 и Х2. В [19] доказана сходи-
мость метода сеток по Хх в задаче нахождения £70, кото-
рый является частным случаем возмущений Х4 в метрике
Хаусдорфа.
9 Под ред. Н. Н. Моисеева 257
Теорема 11. В условиях теоремы 10 для любого
у>0 принцип оптимальности (Gb G2, У15 У2) является
слабо регуляризующим принцип оптимальности Ту на
модели (Л, F2, Хп если
Л(6) = {(а, р)е£+|а^26+4тЛ(б), Р>0}.
Доказательство. Нетрудно видеть, что T®(Gi, б2, У1, У2) ф
^0 при (а, ₽)е4(б), где 6 = ц(Л, F2, Х2; Gb G2, Уь У2).
Пусть (Gi, О2, Уь У2), тогда существует такой, что
п(х, Используя лемму 3 и оценки, полученные при доказа-
тельстве теоремы 10, имеем
/S (Fi(x, .),F2(x, -),Х2)>
>4Хб+2тР2(в)(С1(^ •), С2(х. •). F2)~6-mF1(6)>
> £б+4г»Р2(б) «?1 (<Л О- <?2 (</. •). Г2) - 6-mF, (6) >
> Ua (G,, О2, Л, У2) - 6 - mF, (6) - р >
> Ua2 (F„ F2, Х„ Х2) - 26 - 2mF, (6) - р > U„ (F„ F2, Х„ Х2) Ъ
если у > Uo (F,, F2, Х„ Х2) - £7^ (F„ F2, Х„ Х2) +26 + 2mF, (6)+Р-
Поскольку при достаточно малых а, р, 6 последнее неравенство вы-
полнено, то
Т$ (G„ G2, Y„ Y2) C O6 (T°y (F„ F2, X„ X2)),
откуда и следует доказательство слабой регуляризации.
3. Игра двух лиц с передачей информации (типа Гг).
Пусть множество моделей М и метрика ц такие же, как
в п. 4.2. Для (F„ F2, X,, Х2)^М, а, у^О введем обо-
значения L[F2, X,, Х2]= sup inf F2 (х,, х2),
Х2^Хг
Ev[F2, х„ Х2]-^
= {х2 Х% | inf F2 (-^i, -^2) > 2> -^1, ^2] т}>
Му [Flt F2, Х2] = inf sup x2),
Хг^^Гу^ггХ^Хг] x^^-Xi
Da [F2, x2] = {X± у X21F2 (xlt x2) >
B[F2i Xx, X2] ex},
Xa[Fx, F2, Xly X2] =
sup Fx (x1? x2), если Da [F2, Х1У X2] Ф 0,
= {(x^eDatFs.Xj.Xj
— оо в противном случае.
Если Fb F2 непрерывны на произведении компактов
Х2, то наибольший гарантированный результат пер-
258
вого игрока в игре ^(Л, Г2, Х1( Х2) равен
maxfW, Л, Xt, Х2], М4Л, F2, Хь Х2]} [18].
Теорема 12. Пусть So S2—компакты,, Х^З^
X2czS2, Xt, Х2—компакты, функции Flt F2czO непре-
рывны на StxS2. Тогда, если б=р.(Л, Л, Хь Х2;
Gi, G2, Tj, У2), то
1) lim Xa[G1>G2,y1,ya]=/C0[F1,F2,X1,X2].
d,a-»o
а>2б4-гтГ2(6)
2) lim Mv [Gx, G2) Ylt У2] = Mu [F1( F2, Xlt X2].
6,v-»0
?>26-HmF2(6)
Доказательство нетрудно получить, применив результаты и мето-
ды § 2.
Из теоремы 12 следует, что регуляризующим функ-
ционалом для вычисления наибольшего гарантирован-
ного результата в игре Г2 являются max{Xa, Л4Т} при
соответствующих условиях на а и у.
4. Кратный максимин. Метод регуляризации из п. 4.2
обобщается на задачу отыскания последовательного
максимина с ограничениями:
W(F, g, h, X, У) = [ sup inf у), (4.1)
xi£=At У(^в1
где обозначено:
[ sup inf ]?=1 F (x, y) =
xi^Ai y^Bi
= sup inf ... sup inf F (хь уъ . .., xn, yn),
x^At xn-An Уп^п,
At = A( (л?-1, у1-1) = {xt e Xi | gi (x{, у1-1) > 0},
Bi = Bt (х1, yt-1) = {y( e= Yi | hi (xl, yl) 0},
g = (gi, • • •, gn), h = (А,, . .., hn), X = (Xx> Xn),
Y = (YU .... Yn).
Такое обобщение оказывается возможным при более
жестких предположениях, чем в игре типа Гп т. е. в
задаче отыскания однократного максимина со связан-
ными переменными. А именно, на точечно-множествен-
ные отображения (4.2), связывающие переменные,
нужно наложить дополнительные условия типа непре-
рывности в метрике Хаусдорфа.
9*
259
Введем многозначные отображений:
Д“‘ = А? (?Л ?~1) = {х, е= Xt | gi (х{, ~у1-*) + а, > 0},
в11 = В%1 (х‘, у1'1) = {yt ^Y{\hi (?, у1) + fy> 0},
<Xi, Pz^> 0, i = 1, 2, ..., n.
Ч-
Сделаем следующие предположения, которые в даль-
нейшем будем считать всюду выполненными:
а) Множества А? (лЛ1, /Л1), В? (х\ г/1’"1) не пусты при
i
любых (хх, уг, ..., xt, yi) е ТТ (X/ХУ/),
/=1
б) Отображения А&‘ (х1~\ у‘~г), В^1 (х1, у1~1) непрерывны
в метрике Хаусдорфа по (х1; уъ х;) йри а^у,
где у>0.
в) F, git hi непрерывны на произведении компактов
Х{, Yi.
Условия а) и в) являются обычными для задачи
(4.1)—(4.2). Условие б) следует признать наиболее
жестким. Оно будет, например, выполнено для Л“‘, если
gi(xit У1, Xj) вогнута по хг на выпуклом Xt и удовле-
творяет условию Слейтера: для любых (хь yt, ..., z/i-J
существует х^Х{ такое, что gf(xt, у,,..., х^ >0 или, иначе,
min max g{ (хь ylt..., х<) > 0.
Определим теперь величину
W (F, g, h, X, Y, a, P) = [ max min ]"=1F (x, y),
XisA^
при a = (a1; . .., a„) > 0, p = (ръ . . . , p„) > 0.
Достижимость верхних и нижних граней здесь выте-
кает из сделанных предположений. Справедлива
Л е м м а 4 [20].
lim W (F, g, h, X, Y, a, p) = W (F, g, h, X, Y).
a i-
260
Пусть вычисления в задаче (4.1) — (4.2) производятся
с точностью 8>0. В результате такой погрешности
вместо функций F, git hi появляются некоторые другие
функции Fe, gf, ft® такие, что в равномерной метрике р
p(F, Fe) <е, n(gi, gl) s^e, р(hl, hf)^.е,
Обозначим
W (FQ, g*, ft®, X, У, а, р) = [ sup inf ]?=1F® (%, у),
х^Аа^ у^В^
1 18 1 18
. ла1 r-А’ Ла1 глЗ/
где отображения Д-е, BZe определяются аналогично At , Bi
по функциям gt, hf.
Покажем, как нужно согласовать точность 8 с пара-
метрами а, р для получения результата (4.1) в задаче
(4.1) — (4.2). Из леммы 4 вытекает
Теорема 13 [20].
Jim W (Fe, g8, ft8, X, У, a, P) = Г (F, g, ft, X, У).
a, p—>o,
a>8, p>e
Основываясь на теореме 13, можно выяснить вопрос
об аппроксимации множеств стратегий Хй У; в задаче
(4.1) — (4.2) сеточными множествами. Введем на ком-
пактах Xh Yi конечные сетки X?, У?. . Предполагается,
что для любой точки х^Хг найдется х* е X) такая, что
расстояние между ними не превышает т. Точно так же
вводится сетка Ух на У/. Вопрос об аппроксимации
решает
Теорема 14 [20].
lim W (F, g, ft, Xх, Y\ a, P) = U7 (F, g, ft, X, У),
t, a, p->o
где
«i---Pi--------------6i(l)^0,
4i (r) = max max | gt (x{, ~y^) — gi (x1; ..., y^, 2f)|,
Xu-.yi-i xi,^i
6/(r)= max max | hi (x{, yl) — hi (x1; ylt ..., Xi, z()|,
XU..tXi у 1,21
^(yi.z^T
1 i n.
261
Доказательство этой теоремы следует из теоремы 13, поскольку
сеточная аппроксимация множеств Xi, Yi эквивалентна кусочпо-по-
стоянной аппроксимации функций F, g, h.
Легко сформулировать и более общее утверждение о
регуляризации задачи (4.1) — (4.2), когда неточно зада-
ются функции F, g, h и компакты Xit заменяются
конечными сетками.
Литература к главе 8
1. Гермейер Ю. Б. Введение в теорию исследования операций.—
М.: Наука, 1971.
2. В о р о б ь е в Н. Н. Современное состояние теории игр.— В кн. Тео-
рия игр —Ереван, 1973, с. 5—57.
3. Тихонов А. Н., А р с е н и п В. Я. Методы решения некоррект-
ных задач.— М.: Наука, 1974.
4. Подиновский В. В., Гаврилов В. М. Оптимизация по
последовательно применяемым критериям.— М.: Советское ра-
дио, 1975.
5. Молодцов Д. А. К вопросу о последовательной оптимиза-
ции.— В сб.: Вопросы прикладной математики.— Иркутск, 1975.
6. Федоров В. В. О задачах оптимизации с упорядоченной сово-
купностью ограничений.— ЖВМ и МФ, 1975, т. 15, № 5.
7. Молодцов Д. А., Федоров В. В. Аппроксимация игр двух
лиц с передачей информации.—ЖВМ и МФ, Г973, т. 13, № 6.
8. ТихоновА. Н. Об устойчивости задачи минимизации функцио-
налов.— ЖВМ и МФ, 1966, т. 6, № 4, с. 631—634.
9. Васильев Ф. П. Лекции по методам решения экстремальных
задач.—М.: Изд-во МГУ, 1974.
10. К а р м а н о в В. Г. Математическое программирование.— М.:
Наука, 1975.
11. Морозов В. А. О регуляризации некоторых классов экстре-
мальных задач.— В сб.: Вычислительные методы и программи-
рование.— М.: Изд-во МГУ, 1969, вып. 12, с. 24—37.
12. Федоров В. В. Методы поиска максимина.— М.: Изд-во МГУ,
1975, вып. 1.
13. Федоров В. В. К вопросу об устойчивости задачи линейного
программирования.— ЖВМ и МФ, 1975, т. 15, с. 1419—1423.
14. Гольштейн Е. Г. Теория двойственности в математическом
программировании и ее приложения.— М.: Наука, 1971.
15. Молодцов Д. А. Регуляризация множества точек Парето.—
ЖВМ и МФ, 1978, т. 18, № 3, с. 597—602.
16. Эрроу К. Дж., Баранкин Е. В., Блекуэлл Д. Допусти-
мые точки выпуклых множеств.— В сб.: Матричные игры.— М.:
1961, с. 274—280.
17. Никайдо X., ИсодаК. Заметки о бескоалиционных выпуклых
играх.— В сб.: Бесконечные антагонистические игры.— М.: Физ-
матгиз, 1963, с. 449'—458.
18. Гермейер Ю. Б. Игры с непротивоположными интересами.—
М.: Наука, 1976.
19. М о л о д ц о в Д. А. Сходимость метода сеток в одной задаче тео-
рии игр.—ЖВМ и МФ, 1974, т. 14, № 3, с. 783—785.
20. Ф е д о р о в В. В. Об устойчивости задачи отыскания кратного
максимина.— ЖВМ и МФ, 1975, т. 15, № 1, с. 79—86.
ГЛАВА 9
ПОСТРОЕНИЕ ВЫЧИСЛИТЕЛЬНЫХ СХЕМ
ДЛЯ МНОГОЭКСТРЕМАЛЬНЫХ ЗАДАЧ
§1.0 подходах к оценке глобального экстремума
Рассматриваемые ниже вычислительные схемы пред-
назначены для отыскания абсолютного минимума дейст-
вительной функции ф(х) (по координате х* или по
значению ф*) в Af-мерной области D (например, в гипер-
кубе), т. е.
Ф* = ср (х*) = min ф (%).
х (=D
При этом можно вычислять значения функции в любых
выбранных точках области D (эти вычисления условимся
называть испытаниями), причем в общем случае испыта-
ния могут сопровождаться погрешностями, в том числе
имеющими случайный характер, например, когда функ-
ция вычисляется путем вероятностного моделирования.
В результате задача выглядит следующим образом.
В точках х°, ..., х\ ... вычисляются значения функции
2°, 2й, ... (допустим сначала, что вычисления
осуществляются без погрешностей, т. е. гй=ф(хй),
й=0, 1, ...), и требуется построить по этим результатам
некоторую оценку абсолютного экстремума. Речь может
идти об асимптотической оценке (при &->оо), но для
приложений важна оценка по усеченной последователь-
ности, ибо реальный вычислительный процесс позволяет
выполнить лишь конечное число испытаний.
Разумеется, возникает также вопрос о том, как
выбирать точки последовательности {хй}, и вопрос об
остановке вычислений (т. е. об усечении последователь-
ности по заданной точности решения задачи еще до
исчерпания вычислительных ресурсов). Однако цент-
ральным вопросом является оценка экстремума по
263
результатам конечного числа испытаний, ибо условие
остановки неизбежно опирается на такую оценку, а
выбор испытаний направлен на ее улучшение (мини-
мизация числа испытаний, необходимых для достижения
заданной точности, либо максимизация точности при
заданном числе испытаний).
Поскольку в общем случае не существует оценок
экстремума по конечному числу значений функции, то
для существования таких оценок приходится ограничить
рассмотрение некоторым функциональным классом,
который вводится как исходное предположение. При
этом необходимо, чтобы, с одной стороны, описание
введенного класса позволяло развить эффективный коли-
чественный аппарат для построения оценок экстремума,
а, с другой стороны, этот класс должен быть достаточно
интересен в прикладном отношении.
Одним из таких удачных предположений, изучению
различных вариантов которого посвящено большое число
работ, является требование унимодальности (выпук-
лости, квадратичности и т. п.) минимизируемой функ-
ции. В этом случае прозрачная геометрическая идея
градиентного спуска или условия экстремума (которые
в выпуклом случае являются достаточными) позволяют
построить сжимающие отображения области D в себя,
неподвижной точкой которых является искомая точка
минимума (причем сжатие обеспечивает и оценки
экстремума по усеченной последовательности, и оценки
для условия остановки; поэтому основные утверждения
теории таких методов обычно охватывают в явном виде
не сами оценки, а вопросы сходимости и скорости
сходимости).
Если отказаться от требования унимодальности и
допустить, что функция многоэкстремальна, то локаль-
ные методы обеспечивают скатывание или сжатие лишь
в пределах области притяжения локального минимума,
содержащей выбранную точку начального прибли-
жения.
Попытки приспособить локальные методы для отыска-
ния глобального минимума в классе многоэкстремаль-
ных задач (без использования предположений, сужаю-
щих этот класс) сводятся к тому, чтобы найти все
локальные минимумы, для чего необходимо побывать во
всех областях притяжения. Делать это можно различ-
ными способами (локальный спуск из последователь-
264
кости случайно или регулярно выбираемых начальных
точек, предварительное интегрирование минимизируемой
функции с целью сглаживания, моделирование процес-
сов случайного блуждания в области определения
и т. д.— см. обзоры литературы в [1], [2]), но достигаемая
таким путем асимптотическая сходимость к минималь-
ному значению ср* обычно основана на том, что любая
точка области D является предельной точкой последова-
тельности {xft}. Поэтому в таких алгоритмах нет оценок
экстремума по усеченной последовательности, и, следо-
вательно, нет оценок для условия остановки по заданной
точности (т. е. результат похож на асимптотическую
сходимость в методе перебора при неограниченном
дроблении шага сетки). Ряд таких, схем представляет
несомненный интерес, если их рассматривать, например,
как модели эволюции, но для вычислительных целей
нужны более экономные методы.
Для существования оценок глобального экстремума
по конечному числу испытаний достаточно ограничен-
ности разностей значений функции некоторой мерой
разностей значений аргумента (липшицевость, равно-
мерная гёльдеровость и т. п.). В этом случае задача, в
принципе, может быть решена по методу перебора, но
при таком подходе необходимое для достижения задан-
ной точности число испытаний зачастую оказывается
неприемлемо велико.
Чтобы при тех же предположениях решить задачу
более экономно, приходится строить более сложные
алгоритмы, причем обычный подход основан на выборе
точек испытаний из некоторого условия оптималь-
ности *), связывающего затраты на испытания с достига-
емой точностью. Для липшицевых функций соответ-
ствующая теория развита в работах Ю. Б. Гермейера,
А. Г. Сухарева и других авторов (см., например,
[4]—[11]). Однако условие Липшица не исчерпывает
вопроса.
Во-первых, требуется априорное задание константы
Липшица, причем при занижении значения константы
исчезает достоверность получаемых оценок экстремума,
*)Идея построения алгоритмов поиска экстремума как оптималь-
ных стратегий в некоторой игре с природой впервые, по-видимому,
была использована Дж. Кифером при анализе одномерных унимо-
дальных задач (см. [3]).
265
а при завышении значения константы число испытаний,
необходимое для решения TV-мерной задачи с заданной
точностью, резко возрастает, зачастую выводя за преде-
лы допустимых вычислительных ресурсов (при увели-
чении константы в 2 раза число испытаний возрастает
в 2N раз).
Во-вторых, выбор итераций и оценка экстремума
сводятся к трудной задаче построения оптимальных
покрытий.
В-третьих, при липшицевом подходе оценки при-
ходится строить в расчете на худший случай (алгоритмы
выводятся на основе принципа максимина), а этим
случаем оказывается функция-константа, хотя в при-
ложениях задача минимизации констант обычно не воз-
никает.
Указанные трудности вызвали к жизни другой под-
ход, в основе которого лежит вероятностное описание
свойств минимизируемой функции (если нет удовле-
творительных достоверных оценок для относительных
разностей значений функции, то следует воспользоваться
оценками, носящими вероятностный характер, и дать
аппарат для пересчета таких предположений в вероят-
ностные оценки экстремума). При этом параметры
описания могут оцениваться по выборке результатов
прошлых испытаний (адаптация модели в процессе
решения конкретной задачи минимизации), и можно
избежать влияния оценок по функции-константе, вы-
брав модель, в которой вероятность того, что миними-
зируемая функция является константой, близка к
нулю.
Фактически такой подход означает, что минимизиру-
емая функция рассматривается как элемент ансамбля с
заданной вероятностной мерой, причем после каждого
испытания исходная вероятностная мера пересчитыва-
ется в апостериорную, на основе которой и строятся
оценки экстремума.
Различные аспекты вероятностной трактовки задачи
оценки глобального экстремума рассматриваются
многими авторами (см., например, [12]—[17]). Следую-
щие разделы посвящены рассмотрению одной из таких
схем, названной информационно-статистическим под-
ходом (см. [1], [15]), и вопросам ее использования для
построения численных методов решения многоэкс-
тоемальных задач.
266
§ 2. Вероятностное описание и оценки экстремума
В область D погружается конечная сетка с узлами xh
fe/={0, п}, и минимизируемая функция считается
заданной лишь в узлах этой сетки, т. е. фг=ф(*г),
и, следовательно, может рассматриваться как
точка п+1-мерного пространства En+1, с которым отож-
дествляется класс всех функций. Прочие предположения
о функции описываются заданием непрерывной положи-
тельной плотности f (ф) на пространстве En+i.
Что касается испытаний, которые могут осущест-
вляться в узлах сетки, то в формальное рассмотрение
входит лишь понятие результата z испытания в точке Z,
который описывается как реализация случайной вели-
чины с условной функцией распределения вероятностей
Tf (z | ф). Если
<2-1>
то исход z с вероятностью 1 совпадает со значением
функции ф^ в точке испытания (испытания без погреш-
ностей). Но можно задать Т^^ф) и с помощью непре-
рывной положительной плотности фг(г|ф) (например,
плотности нормального закона), что позволяет охватить
случай, когда испытания сопровождаются случайными
погрешностями.
Если указанные распределения заданы, то они опре-
деляют априорные т](а) и апостериорные т](а|а)Л)
вероятности того, что искомый глобальный минимум
находится в узле ае/. При этом символ cofe обозначает
множество пар
со = соА= {(и г5): (2.2)
соответствующих индексам fs, для которых известны
результаты испытаний zs.
Подобно тому, как для липшицевых функций оценки
экстремума основаны на построении покрытий, вычисле-
ние вероятностей т] требует решения трудных задач
интегрирования. Однако при некоторых предположениях
эти трудности удается обойти. Пусть плотность /^ф)
представлена разложением
/(<Р) =3 /(<₽|«)£(«)• (2.3)
ае/
267
Тогда ([1]), если условные плотности f(ср|а) зависят от
вещественного параметра с таким образом, что
lim f fc (<р | a) dtp = 1, as/, (2.4)
Фа
где
Фа = {<ре£п+1:<ра<Фь ieZ\{a}},
то с вероятностью 1
lim | £ (а | coft) — т] (а | ®А)| = 0, а е /,
С->0
причем аналогичное утверждение справедливо для g(a)
ит](а), т. е. g(a) можно интерпретировать как априорное
распределение для расположения экстремума. Достоин-
ством распределений g(a|cDft) по сравнению с т] (а | coft) яв-
ляется то, что они определяются интегралами по всему
пространству, и в ряде случаев, представляющих при-
кладной интерес, это интегрирование можно выполнить
аналитически.
Теперь, когда намечен путь построения оценок экстре-
мума, можно перейти к вопросу о выборе точек проведе-
ния испытаний, т. е. к построению схем поисковых алго-
ритмов. Возможный подход состоит в том, чтобы выво-
дить схемы выбора испытаний как оптимальные байесов-
ские решающие правила, задавшись соответствующей
функцией потерь.
§ 3. Решающее правило для одномерной
многоэкстремальной минимизации
Рассмотрим задачу минимизации одномерной функ-
ции ср(х) на равномерной дискретной сетке в отрезке [а, Ь],
х0 = а, ..., Xi = a + ief ..., xn = b,
и определим плотности /(ф|а) из (2.3) из условия, что
функция фй является реализацией случайной
функции с независимыми приращениями Уф<=ф<—фг—i,
подчиненными нормальному закону с математи-
ческими ожиданиями
Г—m, f<^cc,
ггц(а) = \ . (3.1)
4 7 ( m, i>a,
и стандартами о<=с/и, где т>0, с>0, причем значение
268
ф0 есть также нормальная случайная величина со сред-
ним т0 и стандартом а0. Введенное описание удовлетво-
ряет условию (2.4), и в случае испытаний, описываемых
функцией (2.1), ему соответствует
£ (а | со) = — а) -(tt) , (3.2)
5] Л (<о, с) НО
где для любого а из интервала is-i^a^is,
h(a, а) = exp
(3.3)
(а — а*)2
2р1
(3.4)
__2 V
R (S) = rn (is - is-J + * • - 2 (zs + zs_x), (3.5)
т (ls ~ rS-l)
(3.6)
Заметим, что выражения (3.2) — (3.6) получены для слу-
чая, когда все узлы в (2.2) перенумерованы в порядке
возрастания значений i8f причем z8 = qls и, кроме того, мно-
жество coft включает пары для iQ = 0 и ih=n, т. е.
io — 0<i*i<С.. .<лк=п» (3.7)
На основе распределения g(a|co) можно получить так-
же точечную оценку экстремума, выбрав, например, в
качестве такой оценки точку а*, в которой достигается
максимум распределения g(a|(o). Оценка а* имеет ряд
достоинств. Во-первых, она является байесовским реше-
нием для некоторых достаточно естественных функций
потерь ([1]) и допускает (при малом с) прозрачную ин-
терпретацию как точка наивероятнейшего расположения
глобального минимума. Во-вторых, при g(a) = (л + I)-1,
оценка а* вычисляется достаточно просто, если
параметр т принятого описания (3.1) удовлетворяет не-
равенствам
т > | zs — zs-i \/(is — is-i), 1 < s k.
Чтобы обеспечить выполнение указанных неравенств,
условимся (на каждом шаге) определять т по из
269
соотношения
tn = г max | zs — zs_x |/(is — is-i),
(3.8)
где коэффициент
к а*, т. e.
г>1. Тогда а* есть ближайшее целое
a* = Е fa* + — ,
\ 2/
(3.9)
где t удовлетворяет условию = max{/?(s): 1 ^s^k}.
В результате получен алгоритм минимизации функции
на дискретной сетке, согласно которому каждое
очередное испытание осуществляется в узле а* из (3.9),
соответствующем текущему значению coft из (2.2). После
каждого шага в множество со включается очередная пара
(ih+i9 Zk+i) и выполняется перенумерация пар в соответ-
ствии с (3.7).
§ 4. Алгоритм глобального поиска.
Вопросы сходимости
Описанный выше алгоритм может быть применен не-'
посредственно для минимизации функции ф(х) на отрез-
ке [а, Ь] без использования сетки, для чего достаточно пе-
рейти от номеров i узлов к их координатам. В резуль-
тате получим следующую вычислительную схему.
Первые два испытания выполняются на концах интер-
вала [а, Ь], т. е. в точках х° = а и х1 = Ь. После выполнения
каждого £-го (6^1) испытания точки х°, ..., хк перену-
меровываются (нижним индексом) в порядке возрастания
значений координаты, т. е. a = xQ<zxi<... .<xk=b9 и оче-
редное испытание осуществляется в точке
xk.i = t (4.1)
2 2т
где
г,=ф(х,), Q^-s^k,
I ~ Zs-1 I о.
tn = г max ——;--------- , (4.2)
ls ls-i
и t определяется из условия
R (0 = max R (s), (4.3)
270
причем
R («) = m (xs — xs_j) -|-j-— 2 (zs + z^). (4.4)
Любая предельная точка x последовательности {x*},
порождаемой таким алгоритмом при минимизации лип-
шицевой функции ф(х), необходимо является локально
оптимальной, и значения функции во всех предельных точ-
ках (если их больше, чем одна) совпадают. При этом
гл=ф(хл) ^ф(х), & = 0, 1, ... Если на некотором шаге
выполняется условие т>2/С, где К есть константа Лип-
шица функции (выполнения этого условия можно достичь,
выбирая в (4.2) достаточно большой коэффициент г>1),
то множество предельных точек последовательности со-
впадает с множеством точек глобального минимума
функции.
Число испытаний, порождаемое описанным алгорит-
мом в подынтервале области определения, в котором
дуга функции является линейной или близкой к линейной,
пропорционально логарифму от числа узлов сетки пере-
бора в этом интервале. Более детальные оценки читатель
найдет в [1].
Отметим еще одно важное свойство рассматриваемой
схемы. Она обеспечивает геометрическую сходимость к
глобальному экстремуму, если в некоторой окрестности
точки х* экстремума минимизируемая функция имеет вид
ф(х)^/<|х—х*|, (4.5)
где К — константа Липшица. Выполнения условия (4.5)
можно достичь путем преобразований функции в процес-
се решения задачи минимизации, что приводит к новому
классу вычислительных схем (монотонные алгоритмы гло-
бального поиска [1]). Использование эффекта геометри-
ческой сходимости позволяет поднять скорость решения
прикладных задач, сохраняя сходимость именно к гло-
бальному экстремуму (в отличие от обычного способа
ускорения, состоящего в том, чтобы в конце поиска перей-
ти к локальному методу, что часто приводит к локально-
му решению вместо глобального).
Алгоритм может быть дополнен условием остановки
по заданной точности 8, прекращающим поиск, если для
номера t из (4.3) справедливо, что xt—Xf-^e. Различ-
ные оценки, связанные с указанным условием остановки,
приведены в [1].
271
§ 5. Учет априорного распределения экстремума
В ряде случаев может представлять интерес (особен-
но на первых итерациях) учет априорной информации о
расположении глобального экстремума, описываемой рас-
пределением £ (а) из (2.3) (следует, однако, иметь в виду,
что при уменьшении параметра с уменьшается и влияние
этого распределения на оценку а* наивероятнейшей точ-
ки экстремума из (3.9), что является свойством конкрет-
ного вероятностного описания, принятого в § 3).
Пусть, например,
I (а) = Л ехр (— (а J0*),
I 2р2 J
(5.1)
где А есть нормировочный множитель, а р описывает
априорно наивероятнейшую точку глобального миниму-
ма. Максимизируя в интервале i8_i^a^zia распределение
g(a|со) из (3.2) — (3.6) для g(a) из (5.1), получим, что
наивероятнейшая точка а° глобального минимума в этом
интервале определяется условиями
is-i,
a$
as
Is,
ls-1
as
где
OCj •= A»s(Zs (1 %s) p,
Xs = p2/(p2 + p|).
И, если положить, что as°=as, то выбор точки а*, макси-
мизирующей g(a|co), сводится к задаче максимизации
D(t) — max D(s),
где
причем R(s) из (3.5) и т из (3.8), после чего
a* = Е + -Г) .
272
§ 6. Решающее правило для минимизаций
при наличии случайных погрешностей
Изменим вероятностное описание, принятое в § 3,
введя предположение, что вычисление значений функции
сопровождается независимыми аддитивными нормальны-
ми помехами с нулевыми математическими ожиданиями
и стандартами о, т. е. вместо распределения (2.1) будем
использовать
Т,(г|ф) =
Z
f (и — <pt)2 ]
{ 2а2 J
dv.
Заметим, что в общем случае стандарт о можно полагать
различным в различных узлах i и даже при различных
испытаниях в одном и том же узле [18], но в данном рас-
смотрении условимся считать, что а одинаково во всех
испытаниях. Тогда [1], [19] распределение g(a|wft) описы-
вается выражением (3.2) при условии, что
h (со, а) = ехр
причем
h У2 4- М а2
М}-=* + М/+1,о=М V mt.(a),
22 = 22+1>о = -% Л- (С/П)3 (i/n - if), (6.1)
¥/о+°2
мо = т0, 20 = а0, t0 = 0. (6.2)
При этом
bf = Zj! + • • • + Zjkp 1
где через zjh обозначены результаты k5 испыта-
ний, проведенных в точке ij (таким образом, k = ki + ...
+ причем, как и в (3.7), . .<7К). Кроме того,
если обозначить через 62($) дисперсию значения ср3 ми-
нимизируемой функции в точке где
. .<ZiN, то
aa(s) = <r^/(o2 + BS?),
273
причем
6о = S/-1 + (cm)2 (s — C'-1)>
где определяется из (6.1), (6.2) и
N i~l / у \ 2 i / V \ 2
5 = 3 Н г п г ’
«=/ v=/ \ v0 / v=i \ v0 I
где Sv и Svo определяются из (6.1) в предположении, что
S/o = (ст)2 (ij—s).
Одно из байесовских решающих правил [1], основан-
ное на рассмотренной вероятностной модели, предписы-
вает проведение очередного испытания в узле s*, удовле-
творяющем условию
Sv(s‘)B(s*|®) = max6v(s)g(s|co), (6.3)
sGZ
где показатель степени v есть вещественное положитель-
ное число.
Решающее правило (6.3) порождает последователь-
ность испытаний, обладающую следующим интересным
свойством [20]. Пусть независимые аддитивные (не обя-
зательно нормальные) помехи имеют нулевое среднее и
равномерно по всем испытаниям ограниченную диспер-
сию (не обязательно одинаковую во всех испытаниях),
и пусть для выбора точек испытаний используется реша-
ющее правило (6.3) при любых фиксированных положи-
тельных значениях величин с, т, о, m0, <т0, v и при £(а) =
= (п+1)-1, ае/. Тогда, если есть точка абсолютного
минимума функции срг-, fe/, a ki и ka есть соответственно
числа испытаний, проведенных в точках i и а (при дан-
ном k), то при k-+oo с вероятностью, равной 1,
(kdka) -> exp { — 4 (<р/— (pa)/vmc2}.
Другими словами, распределение испытаний по точкам
области определения, описываемое отношением kjk, при-
ближается к кривой, имеющей максимум в точке искомо-
го абсолютного минимума и экспоненциально спадающей
по мере увеличения значений функции.
§ 7. Решение нелинейных уравнений
Решение уравнения cp(x)=O, х^[а, 6], может быть
сведено к задаче минимизации невязки |ф(х) |. При этом
известно, что минимальное значение невязки в искомой
274
точке корня уравнения равно нулю, и эту информацию
целесообразно учесть при построении алгоритма мини-
мизации невязки. Для вывода такого алгоритма восполь-
зуемся вероятностным описанием задачи, аналогичным
описанию из § 3. Будем считать, что функция <р(х), хе
Ь], есть некоторая реализация однородного случай-
ного процесса с независимыми приращениями, подчинен-
ными нормальному закону. При этом математическое
ожидание р и дисперсия о2 величины ф(х+Дх)—ф(х)
соответственно равны
р = р (Дх) = ут Дх, о2 = о2 (Дх) = (ст)2 Дх, (7.1)
где т>0 и с>0 — некоторые параметры, а у — случайная
величина, возможные значения которой есть ±1. Теперь
можно задать начальные условия, используя предполо-
жение о существовании хотя бы одного корня уравнения
в некоторой точке а, рассматриваемой как непрерывная
случайная величина с априорной плотностью распределе-
ния g(a), т. е.
ь
Ф (а) = 0, ^(a)da = 1.
а
Можно также рассмотреть модель, в которой априор-
ное математическое ожидание случайного процесса не
изменяет знака, для чего следует заменить описание р
из (7.1), например, таким описанием:
/ * \ (— ту Дх, х + Дх а,
р = р (х, Дх) = I
( ту Дх, а х.
Обе эти модели [1], [21] в предположении малости па-
раметра с из (7.1) приводят к одному и тому же алгорит-
му поиска корня, согласно которому каждое очередное
k+l-е вычисление левой части ф(х) уравнения осущест-
вляется в точке xft+1, являющейся оценкой максимального
правдоподобия для точки искомого корня. При этом (ис-
пользуются те же обозначения z3 и условие нумерации
точек хв по нижнему индексу, что и в § 4)
где номер t определяется из условия R(t) = min R (s),
275
причем
/? (s) -I °’ гл-1^0’ (7 21
I ^s^s-i/C^g Zs^s-i 0.
Свойства описанного алгоритма изучаются в [1], [21],
[22]. Отметим, например, что порождаемая алгоритмом
последовательность {%*} сходится к точке х* единствен-
ного корня уравнения ф(х)=0, х^[а, &], если непрерыв-
ная левая часть ф(х) удовлетворяет в этой точке усло-
вию Гёльдера с показателем 1 (возможны и более общие
условия [1]).
§ 8. Смеси решающих правил
Различные исходные описания задачи и основанные
на них стратегии поиска экстремума могут быть исполь-
зованы для построения смесей стратегий (детерминиро-
ванных или стохастических) в ситуациях неопределен-
ности, когда нет достаточных данных для выбора того
или иного описания. Например, решение задачи аппрок-
симации может рассматриваться и как задача миними-
зации невязки, и как задача поиска корня уравнения, если
известно, что при оптимальной аппроксимации невя'зка
близка к нулю. В подобной ситуации можно применить
смешанный алгоритм, согласно которому итерации вы-
полняются (например) поочередно то по правилам поиска
минимума (§ 4), то по правилам поиска корня (§ 7), и
при этом накапливается общий массив пар
сол={(х5, za): O^s^k}. (8.1)
Такие смеси могут обеспечивать и более высокую эф-
фективность, чем каждый из смешиваемых алгоритмов в
чистом виде. Для иллюстрации приведем пример задачи
отыскания корня уравнения
1,5 sin (0,42х2) + sin 7х + 21g (х + 8) + |х| — х — 2,7 = 0,
х^ [—5; 15,8],
с точностью 0,001 (по невязке). Решение этого уравнения
по алгоритмам из §§ 4 и 7 соответственно потребовало 84
и 45 итераций. Применение случайной смеси решающих
правил этих алгоритмов (с вероятностями 1/4 и 3/4, при-
чем случайный выбор осуществлялся перед каждой ите-
рацией) позволило решить задачу за 33 итерации (пример
предложен И. Н. Высоцкой и Г. Ф. Травкиной).
276
Комбинации решающих правил при общем массиве
(8.1) могут использоваться и для совместного решения
задач минимизации и максимизации одной и той же функ-
ции [1]. Смеси могут возникать и в связи с задачей выбора
коэффициента г из (4.2) [1], и в ряде других ситуаций.
§ 9. Решение многомерных задач
В § 1 уже отмечалось, что для построения алгоритмов
более эффективных, чем метод перебора, используются
решающие правила, согласно которым выбор точки оче-
редного испытания определяется из некоторого условия
оптимальности, т. е. в свою очередь также связан с необ-
ходимостью решения некоторой вспомогательной экстре-
мальной задачи. Заметим, что именно этот путь был ис-
пользован при построении рассмотренных выше одномер-
ных алгоритмов, однако в многомерном случае соответ-
ствующая вспомогательная задача также оказывается
многомерной и многоэкстремальной (как, например, за-
дача построения оптимальных покрытий при липшицевых
подходах). Поэтому почти все алгоритмы для решения
многомерных оптимизационных задач включают как су-
щественный элемент ту или иную схему редукции размер-
ности. Для локальных задач эти схемы основаны на по-
нятиях градиента, сопряженных направлений и их обоб-
щений. В многоэкстремальных задачах обычно использу-
ется многошаговая схема редукции, согласно которой
минимизация функции ф(//) и TV-мерной области D сво-
дится к последовательности «вложенных» одномерных
задач
min ср (у) = min ... т1пф(уь ...r/jv). (9.1)
ух yN
Схема (9.1) лежит в основе таких мощных вычислитель-
ных методов, как динамическое программирование (см.,
например, [23]), метод последовательного анализа вари-
антов [24] и др. (заметим, что многомерный перебор так-
же реализуется по этой схеме). Она может использовать-
ся и в сочетании с одномерными многоэкстремальными
алгоритмами, рассмотренными выше [1].
Но возможен и другой подход к решению многомер-
ных многоэкстремальных задач, не связанный с исполь-
зованием схемы (9.1). Этот подход основан на использо-
вании отображений типа кривой (или развертки) Пеано
277
(см., например, [25]) и приводит к новому классу много-
мерных алгоритмов.
Если у(х) есть кривая Пеано, отображающая (непре-
рывно) отрезок [0, 1] вещественной оси на Af-мерный ги-
перкуб £), то решение многомерной задачи минимизации
непрерывной функции ф (у) может быть сведено к реше-
нию одномерной задачи минимизации непрерывной функ-
ции ф(у(х)), поскольку
пппф (у) = min ф (у (х)). (9.2)
у—D хе[о,1]
Главное достоинство таких отображений состоит в том,
что они сохраняют ограниченность разностей значений
функции некоторой мерой разностей значений аргумента
(заметим, что гладкие отображения таким свойством не
обладают; отображение у (%) типа кривой Пеано являет-
ся всюду негладким). Например, для липшицевой с кон-
стантой К функции ф(г/) справедливо, что функция
ф(г/(х)) будет равномерно гёльдеровой с показателем
1/N и коэффициентом Гёльдера = (конкретное
значение коэффициента указано для случая, когда кри-
вая у(х) строится по схеме Гильберта), т. е.
]Ф(^(х + Дх))-(р(г/(х))|<М(|Дх])1/\ (9.3)
Алгоритм из § 4 допускает естественное обобщение на
случай минимизации функций, удовлетворяющих усло-
вию (9.3). С этой целью в выражениях (4.2), (4.4) раз-
ности xs—xs-i следует заменить расстояниями (xs—xs_i)1/N
(т. е. перейти к метрике, обеспечивающей ограниченность
разностей значений функции) и, кроме того, необходимо
изменить выражение (4.1) с тем, чтобы выполнялось усло-
вие xh+l^(xt_i, xt). Например, можно положить
X. 4- X/ - 1 (Т | г, , 1 > м
= ---Tr Sign (Zt ~ Zi~1} { m ~ } •
Алгоритмы такого вида (обобщенные алгоритмы глобаль-
ного поиска) при минимизации функций, удовлетворяю-
щих условию (9.3), обладают свойствами, аналогичными
свойствам алгоритма из § 4.
Развертки у(х) позволяют также обобщить алгоритм
поиска корня из § 7 на случай решения системы нелиней-
ных уравнений. Если невязка А (у), y^D, системы удовле-
творяет в точке у* корня системы условию Гёльдера с по-
казателем 1, то функция Д(у(х)), хе[0, 1], также удовле-
278
творяет условию Гёльдера (но с показателем 1 /N) в
любой точке х*е{0, 1], являющейся прообразом корня у*
при соответствии у (%), т. е. у*=у(х*). Поэтому решение
системы сводится к решению уравнения
Д"(г/(х))=0, хе[0, 1],
с помощью алгоритма из § 7 (возведение невязки в N-ю
степень обеспечивает выполнение условий сходимости ал-
горитма поиска корня).
Заметим, что отображение типа кривой Пеано не явля-
ется взаимно однозначным, причем число прообразов точ-
ки y^D при соответствии у(х), хе[0, 1], зависит от раз-
мерности N гиперкуба D, Для кривой, построенной по
схеме Гильберта, это число не превышает 2N. В результа-
те сходимость к единственной точке абсолютного мини-
мума в гиперкубе D может обусловливать наличие до 2N
предельных точек минимизирующей последовательности
в отрезке [0, 1]. Чтобы исключить возможное при этом
замедление сходимости (см. [1]), следует рассматривать
вычисление значения г=<р(у) функции ср (у) в точке y^D
как вычисление значений одномерной функции ф(у(х))
сразу во всех точках хъ ..., xq, являющихся прообразами
точки у, поскольку г = ф(г/(%1)) =.. . = ср((/(хд)) (при этом
все q пар вида (х, г) включаются в соответствующий мас-
сив (8.1), на основе которого выбирается следующая точ-
ка испытания).
Возможность редукции размерности многомерных за-
дач с помощью кривых Пеано (например, в задачах ин-
тегрирования по многомерным областям) указывалась
еще Лебегом и Риссом (см., например, [26]), однако необ-
ходимые для ее прикладного использования алгоритмы
вычисления точек кривых Пеано и их прообразов появи-
лись значительно позднее (подробное рассмотрение не-
которых конкретных алгоритмов читатель найдет в [1]).
В настоящее время такие отображения используются
также в задачах классификации и распознавания обра-
зов [27].
Наконец, нужно отметить и то, что кривые Пеано, ре-
дуцируя многомерную задачу к одномерной, позволяют
выполнять минимизацию в сложных областях, не прибе-
гая к методу штрафов, ибо минимизация на системе по-
дынтервалов в отрезке [0, 1] соответствует минимизации
на системе подкубов гиперкуба D, на которые отобража-
ются эти подынтервалы разверткой у (х') [1].
279
§ 10. Замечания о реализации алгоритмов на ЭВМ
Рассмотренные выше алгоритмы содержат решающие
правила, в описания которых входят отображения типа
х*+1 = СА(соА), где соА из (8.1). В связи с этим возникает
задача обработки множества соА (будем называть его
матрицей состояния), включающего значительное число
пар вида (х, г) (при решении многомерных задач по схе-
ме (9.2) с использованием ряда прообразов каждой точ-
ки у, в которой вычисляется значение функции <р(у), чис-
ло пар в (оА может достигать десятков тысяч). Однако это
не приводит к существенным вычислительным трудностям,
если при организации вычислений учесть специфику ото-
бражений Gk. Остановимся коротко на этих вопросах
[28], [29].
Для ускорения сортировки матрицы состояния <оА (при
включении очередной пары должна сохраняться упорядо-
ченность пар по значению координаты х) можно разбить
ее на блоки, размещаемые (при больших значениях k) на
внешних запоминающих устройствах. При этом включе-
ние очередной пары (х, z) в блок, содержащий макси-
мальное установленное число пар, приводит к его разде-
лению на два новых блока.
Далее, из выражений (4.2), (4.4), (7.2) следует, что
нет необходимости на каждом шаге повторно вычислять
величины R(s) для интервалов (xs_!, xs), не изменивших-
ся в результате очередной итерации. Можно запомнить
ряд значений этих величин, близких к максимальному
значению из (4.3) (или минимальному — для алгоритма
из § 7) в памяти магазинного типа, и вновь вычислять
лишь значения R(s) для интервалов, возникающих после
проведения новых испытаний. Можно обеспечить также
запоминание трудновычислимых величин (см. § 9) типа
(xs—xs-i)i/N, включив их (для каждой смежной пары) в
матрицу состояния, и т. д.
Литература к главе 9
1. Стронгин Р. Г. Численные методы в многоэкстремальных
задачах (Информационно-статистические алгоритмы).—М.: Нау-
ка, 1978.— Оптимизация и исследование операций).
2. Васильев Ф. П. Лекции по методам решения экстремальных
задач.— М.: Изд-во МГУ, 1974.
3. Kiefer J. Sequential minimax search for a maximum.— Proc.
Amer. Math. Soc., 1953, v. 4, № 3, p. 502—506.
280
4. Гермейер Ю. Б. Введение в теорию исследования операций.—
М.: Наука, 1971.— (Оптимизация и исследование операций).
5. Сухарев А. Г. Оптимальный поиск экстремума.— М.: Изд-во
МГУ, 1975.
6. Иванов В. В. Об оптимальных алгоритмах минимизации функ-
ций некоторых классов.— Кибернетика, 1972, № 4, с. 81—94.
7. Л е о н о в В. В. Метод покрытий для отыскания глобального
максимума функции от многих переменных.— В кн.: Исследова-
ния по кибернетике.— М.: Советское радио, 1970.
8. Данилин Ю. М., П и я в с к и й С. А. Об одном алгоритме
отыскания абсолютного минимума.— В кн.: Теория оптимальных
решений.— Киев: Изд-во института кибернетики АН УССР, 1967.
9. Евтушенко Ю. Г. Численный метод поиска глобального экс-
тремума (перебор на неравномерной сетке).— ЖВМ и МФ 1971,
т. 11, № 6, с. 1390—1403.
10. Тимонов Л. Н. Алгоритм поиска глобального экстремума.—
Изв. АН СССР, Техническая кибернетика, 1977, № 3, с. 53—60.
11. Shubert В. О. A sequential method seeking the global maxi-
mum of a function.— SIAM J. Numer. Anal., 1972, v. 9, № 3,
p. 379—388.
12. Жил и иска с А. Г. Одношаговый байесовский метод поиска
экстремума функции одной переменной.— Кибернетика, 1975,
№ 1, с. 139—144.
13. Kushner Н. A new method of locating the maximum point of
an arbitrary multipeak curve in the presence of noise.— Trans.
ASME, Ser. D, Basic. Eng., 1964, v. 86, № 1, p. 97—106.
14. Mo цк у с И. Б. О байесовых методах поиска экстремума.—
Автоматика и вычислительная техника, 1972, № 3, с. 53—62.
15. Неймарк Ю. И., Стронгин Р. Г. Информационный подход
к задаче поиска экстремума функций.— Изв. АН СССР, Техниче-
ская кибернетика, 1966, № 1,с. 17—26.
16. Шал тяни с В. Р. Об одном методе многоэкстремальной опти-
мизации.— Автоматика и вычислительная техника, 1971, № 3,
с. 33—38.
17. Юдин Д. Б. Решающие правила в экстремальных задачах.—
Изв. вузов, Радиофизика, 1972, т. 15, № 7, с. 957—966.
18. Стронгин Р. Г. Минимизация многоэкстремальных функций
нескольких переменных.— Изв. АН СССР, Техническая киберне-
тика, 1971, № 6, с. 39—46.
19. Стронгин Р. Г. Информационный метод многоэкстремальной
минимизации при измерениях с помехами.— Изв. АН СССР, Тех
ническая кибернетика, 1969, № 6, с. 118—126.
20. Стронгин Р. Г. Оценка сходимости помехоустойчивого алго-
ритма глобального поиска.— В кн.: Проблемы случайного поис-
ка.— Рига: Зинатне, 1977, вып. 6.
21. Стронгин Р. Г. Вероятностный подход к задаче определения
корня функции.— ЖВМ и МФ, 1972, т. 12, № 1, с. 3—13.
22. С т р о н г и н Р. Г. Информационно-статистический метод реше-
ния систем нелинейных уравнений.— В кн.: Проблемы случайного
поиска.— Рига: Зинатне, 1975, вып. 4.
23. Моисеев Н. Н. Элементы теории оптимальных систем —М.:
Наука, 1975.— (Оптимизация и исследование операций).
24. М и х а л е в и ч В. С. Последовательные алгоритмы минимиза-
ции и их применение.— Кибернетика, 1965, № 1, с. 45—56, № 2,
с. 85-89.
281
25. Лузин Н. Н. Теория функций действительного переменного:
Учебное пособие для педвузов.— 2-е изд.— М.: Учпедгиз, 1948.
26. Рисе Ф., Секеф а л ьви-Н а дь Б. Лекции по функциональ-
ному анализу.— М.: ИЛ, 1954.
27. А л е к с а н д р о в В. В., Лагинов В. М., Поляков А. С.
Рекурсивная алгоритмизация кривой, заполняющей многомер-
ный интервал.— Изв. АН СССР, Техническая кибернетика, 1978,
№ 1, с. 192—198.
28. Ге pre ль В. П. Организация памяти при численном решении
многомерных многоэкстремальных задач.— В кн.: Тезисы докла-
дов III Всесоюзной конференции по исследованию операций.—
Горький: Изд-во Горьковского университета, 1978.
29. Стр онг ин Р. Г., Гер гель В. П. О реализации на ЭВМ мно-
гомерного обобщенного алгоритма глобального поиска.— В кн.:
Вопросы кибернетики.— М.: Наука, 1978, вып. 45.
ГЛАВА 10
ОБ ЭФФЕКТИВНОСТИ КОМБИНАТОРНЫХ
МЕТОДОВ В ДИСКРЕТНОМ ПРОГРАММИРОВАНИИ
§ 1. Комбинаторные методы
1. Значение комбинаторных методов в дискретном
программировании. В настоящее время комбинаторные
методы, в первую очередь — методы типа ветвей и гра-
ниц, занимают доминирующее положение в дискретном
программировании по следующим причинам. Прежде все-
го, общая схема подобных методов настолько гибка и
универсальна, что допускает применение практически ко
всем задачам дискретного программирования (независи-
мо, скажем, от их линейности или иных свойств). Далее,
эта схема может быть применена непосредственно к ис-
ходной, естественной формулировке экстремальной ком-
бинаторной задачи, без сведения ее к (частично) цело-
численной задаче (линейного) программирования. Как
известно, подобное сведение часто бывает связано с рез-
ким увеличением размерности задачи и нередко приводит
к «неестественным» и трудоемким в вычислительном от-
ношении формулировкам. Наконец, не последнюю роль
играет и то, что вопроса о конечности метода обычно не
возникает, ибо вычислительный процесс чаще всего явля-
ется конечным по самому своему построению.
Отметим, что существенным стимулом широкого рас-
пространения комбинаторных методов, начиная с середи-
ны 60-х годов, явилась «непредсказуемость» поведения
методов отсечения. Обзор некоторых известных в связи с
этим фактов приведен в [20, гл. 9]; за истекшее десятиле-
тие ситуация существенно не изменилась. Более того, по-
следующие теоретические исследования полностью цело-
численного алгоритма Гомори, проведенные Ю. Ю. Фин-
кельштейном [33], показали, что для методов этого класса
существуют «трудные» задачи, в которых число итераций
283
быстро растет с ростом коэффициентов и увеличением
числа переменных, и, помимо этого, в текущих симплекс-
таблицах появляются весьма большие числа.
Аналогичные результаты, основанные на сходной кон-
струкции, получены А. А. Колоколовым [17], [18] для пря-
мого алгоритма метода отсечения.
Основная идея всех комбинаторных методов состоит
в использовании конечности множества решений и в за-
мене полного их перебора сокращенным (направленным)
перебором. Главную роль в сокращении перебора играет
оценка и отбрасывание неперспективных (т. е. заведомо
не содержащих оптимума) подмножеств решений. Эта
идея реализуется, грубо говоря, путем последовательного
разбиения множества всех допустимых решений на под-
множества. При этом среди подмножеств, последователь-
но порождаемых на каждом шаге процесса, могут обна-
ружиться как подмножества, не содержащие допустимых
решений, так и подмножества, которые заведомо не мо-
гут содержать оптимальных решений. Отбрасывание та-
ких подмножеств позволяет заменить полный перебор
частичным и тем самым делает реализуемым вычисли-
тельный процесс.
К настоящему времени известно несколько общих фор-
мальных описаний намеченной выше идеи (основные
ссылки — в обзорной статье [19]). Большинство этих опи-
саний касается схемы ветвей и границ, которая занимает
ведущее место среди современных комбинаторных ме-
тодов.
Роль описаний такого типа можно сравнить с ролью
алгоритмических языков, ибо формирование конкретных
вычислительных алгоритмов требует существенного ис-
пользования специфики соответствующего класса задач.
Одной из наиболее удачных общих схем нам представля-
ется схема ветвей и границ Джеффриона — Марстена [57],
в которой найден разумный компромисс между формаль-
ным изложением и обращением к интуиции исследователя.
В то же время, в рамках схемы Джеффриона — Марстена
удается компактно и наглядно описать многие другие ме-
тоды (в том числе и методы, не относящиеся к классу ме-
тодов ветвей и границ).
Из других работ, посвященных общим комбинаторным
схемам, отметим статью [38], в которой прослеживаются
некоторые «внутриматематические» связи схемы ветвей и
границ, а также [9], [10].
284
2. Классификация комбинаторных методов. Как ужё
говорилось выше, основную массу комбинаторных мето-
дов составляют методы ветвей и границ. Поэтому в лите-
ратуре нередко все комбинаторные методы объединяют
под названием методов ветвей и границ или методов неяв-
ного перебора. В [19] принято несколько более узкое тол-
кование, согласно которому к методам ветвей и границ
относятся алгоритмы, характеризуемые, во-первых, древо-
видностью схемы поиска оптимума и, во-вторых, исполь-
зованием релаксаций для нахождения оценок.
Помимо методов ветвей и границ (как с релаксацией,
так и без нее), выделим следующие группы алгоритмов:
а) методы последовательного анализа вариантов [24], [25];
б) последовательностные схемы [9], [10]; в) локальные
алгоритмы [12]—[14]; г) метод последовательных расче-
тов [44]; д) аппроксимационно-комбинаторный метод [41];
е) принцип расширения М. Шоха [75]; ж) метод динами-
ческого программирования.
В развитии математического программирования, наря-
ду с разработкой новых алгоритмов, приобретает важное
значение отыскание новых объектов для приложения уже
разработанных методов. С точки зрения специалистов-
прикладников, появление новых объектов для приложе-
ний важно не только как источник новых математических
или вычислительных идей, но прежде всего — само по
себе. С другой стороны, использование специфики решае-
мых задач позволяет глубже понять природу и возмож-
ности разрабатываемых алгоритмов.
Сказанное в полной мере относится к комбинаторным
методам в дискретном программировании. Еще в 1963 г.
Литтл и др. [66] предсказывали, что одно из наиболее
перспективных направлений в развитии метода ветвей и
границ состоит в использовании специфики исследуемых
задач. Этот прогноз в полной мере оправдался.
Универсальность схем комбинаторных методов обус-
ловливает чрезвычайную широту их приложений к кон-
кретным задачам. Практически любая задача дискретного
программирования может быть объектом их применения.
Поэтому здесь было бы совершенно нереалистично пы-
таться дать обзор разработанных к настоящему времени
специализированных алгоритмов или хотя бы соответ-
ствующих постановок задач. Некоторая попытка класси-
фикации этих задач вместе с выборочными литературны-
ми ссылками по методу ветвей и границ предпринята в [19].
285
§ 2. Эффективность комбинаторных методов
1. Основные вычислительные тенденции в развитии
метода ветвей и границ. Сразу же оговорим, что мы не
будем давать таким основньъм для дальнейшего поняти-
ям, как эффективность и сложность (трудоемкость), фор-
мальных определений, понимая их в несколько «гумани-
тарном» плане. Чуть точнее, будем рассматривать в ка-
честве меры сложности время вычислений (а также такие
непосредственно связанные с ним показатели, как число
итераций, число концевых вершин дерева ветвления
и т. п.). Разумеется, любой алгоритм может характеризо-
ваться также «емкостной» сложностью, отражающей тре-
бования к объему памяти; однако здесь мы будем иметь
в виду только сложность по времени. Эффективность же
естественно считать величиной, обратно пропорциональ-
ной сложности.
Особое положение среди комбинаторных методов за-
нимает метод динамического программирования, основан-
ный на идеях Р. Веллмана. Там, где этот метод применим,
можно заранее довольно точно оценить количество опе-
раций и память. Метод динамического программирования
позволяет обычно снизить число операций (по сравнению
с полным перебором) за счет увеличения объема памяти.
Соответствующие алгоритмы и оценки приведены в (20]
для задачи коммивояжера (модификация результата, по-
лученного независимо и одновременно Веллманом и Хел-
дом и Карпом), а также для обобщенной задачи о ранце
(задачи сепарабельного дискретного программирования).
Хотя метод динамического программирования приме-
ним в сравнительно узких границах, но вместе с тем его
поведение при вычислениях может быть достаточно точ-
но спрогнозировано. Следует также отметить, что оконча-
тельный результат этой прогнозной оценки зависит и от
параметров имеющейся вычислительной техники.
Другие комбинаторные методы решают задачи, недо-
ступные для метода динамического программирования;
однако для этих общих методов, как правило, не удается
дать точных априорных характеристик (трудоемкость,
память и т. п.).
Долгое время единственным способом оценки эффек-
тивности остальных комбинаторных методов было числен-
ное экспериментирование. Литература по машинному экс-
перименту весьма обширна. Ограничимся здесь лишь
286
ссылками на работы [55], [57]. Более подробная библио-
графия (по методам ветвей и границ) приведена в [19].
В настоящее время удается решать задачи довольно
больших размеров (так, в [50] сообщается о решении за-
дачи со 131 булевой переменной, 7626 непрерывными пе-
ременными и 4132 ограничениями). При этом, однако,
следует отметить, что решенные задачи «рекордных» раз-
меров почти всегда представляют собой частично цело-
численные задачи линейного программирования с весьма
небольшой долей булевых переменных и незначительным
«вкладом» этих переменных в целевую функцию. Чаще
всего эти задачи решались с использованием мощных
коммерческих систем математического обеспечения, про-
даваемых или сдаваемых в аренду в составе современных
пакетов программ.
Как правило, в литературе не приводится никаких
сведений об этих системах (детали их конкретной струк-
туры и реализации, максимальные размеры решаемых
задач, время счета и т. п.). Общей чертой этих коммерче-
ских систем является наличие в них мощных средств для
решения оценочных задач, в частности — сильных сим-
плексных программ для решения задач линейного про-
граммирования.
Отметим некоторые тенденции, которые отчетливо
проявились во всех достаточно представительных сериях
машинных экспериментов по методам типа ветвей и
границ.
а) Тенденция к экспоненциальному возрастанию тру-
доемкости вычислений при росте числа переменных.
Это явление было подмечено еще Литтлом и др. [66]
в численных экспериментах с задачей о коммивояжере.
Аналогичное обстоятельство отмечено в ряде других ра-
бот, например, в работе [30].
б) Большие трудности в доказательстве оптимально-
сти полученного решения (установление оптимальности
решения нередко требует больше времени, чем его фак-
тическое получение).
В частности, для многих решенных задач больших
размеров оптимальность полученных решений не была
доказана [19].
Следует отметить, что в имеющейся статистике экспе-
риментов трудности начинаются уже при 50—70 целочис-
ленных переменных и существенно нарастают при увели-
чении их числа до 100 и выше.
287
в) Сильная зависимость трудоемкости решения от
конкретных приемов, применяемых на различных этапах
вычислительного процесса (например, в методах ветвей и
границ — от выбранной стратегии ветвления и от способа
вычисления оценок).
Имеются примеры решенных задач, в которых подоб-
ное изменение стратегии приводило к снижению трудо-
емкости в 10—20 раз. По этому поводу см., например, ра-
боту [50].
Естественно, что на основании одних только резуль-
татов машинных экспериментов нельзя в полной мере
оценить характер возникающих трудностей. Полное пред-
ставление о них может дать лишь совместный анализ ре-
зультатов экспериментов и полученных сравнительно не-
давно теоретических результатов. Отметим сразу же, что
практически все эти теоретические результаты связаны с
обстоятельством, отмеченным выше, в п. а), примени-
тельно к различным схемам метода ветвей и границ. До-
вольно подробный анализ результатов машинных экспе-
риментов по методу ветвей и границ дан в обзоре [19], к
которому мы еще раз отошлем читателя. Что же касается
других комбинаторных методов, то масштабы вычисли-
тельных экспериментов по ним хотя и значительны, но
все же несопоставимы с масштабами экспериментов по
методам типа ветвей и границ. Некоторые данные об экс-
периментах по другим методам будут приведены ниже.
2. Некоторые теоретические результаты. Работы по
теоретическому исследованию эффективности комбина-
торных методов посвящены почти исключительно приме-
нению методов типа ветвей и границ к задаче линейного
целочисленного программирования с булевыми перемен-
ными (и чаще всего — к задаче о ранце).
Начнем с результатов В. П. Гришухина [7], [8]. Он
показал, что в весьма естественно определяемом классе
задач целочисленного линейного программирования с бу-
левыми переменными существуют задачи, для которых
аддитивный алгоритм Балаша дает число итераций, имею-
щее порядок 2п//п, т. е. лишь несущественно отличаю-
щееся от объема полного перебора (в этом пункте через
п мы всегда будем обозначать число переменных). Кроме
того, показано, что среднее число итераций одного из
вариантов алгоритма Балаша также экспоненциально за-
висит от числа переменных.
268
Поскольку алгоритм Балаша не использовал релакса-
ций, естественно возникает вопрос о том, не могут ли
улучшить положение оценки, получаемые путем решения
оценочных линейных подзадач. К сожалению, ответ ока-
зывается отрицательным. В работе И. В. Венгеровой и
Ю. Ю. Финкельштейна [2J построен пример задачи о ран-
це с булевыми переменными, для которой алгоритм вет-
вей и границ, использующий в качестве оценок решения
соответствующих задач линейного программирования,
имеет трудоемкость порядка 2п1^п. Пример имеет следую-
щий вид (п^4, переменные — булевы):
п п
2 2х;->тах,
Отметим интересный результат Джерослоу [60], кото-
рый показывает, что метод ветвей и границ не только «не-
чувствителен» к распознаванию достигнутого оптимума,
но и не в состоянии за приемлемое время указать на оче-
видную несовместность задачи. Именно, Джерослоу рас-
сматривает задачу с булевыми переменными,
шах, 2%! + 2л:2 + • • • + 2хп = /г,
где п— нечетное. Оказывается, что любой алгоритм вет-
вей и границ, независимо от его конкретной организации,
должен пройти по крайней мере 2[n/2]+1 вершин дерева
ветвления, прежде чем будет обнаружена очевидная не-
совместность задачи.
Изложенные результаты подсказывают следующее
предположение (содержащееся в цитированной рабо-
те [60]).
Гипотеза (/). Не существует комбинаторного ме-
тода решения целочисленных задач линейного програм-
мирования с полиномиальной (в отличие от экспоненци-
альной) оценкой трудоемкости.
Результаты вычислительных экспериментов и упомя-
нутых только что теоретических исследований говорят в
пользу справедливости гипотезы (J) в общем случае — по
крайней мере для точных комбинаторных методов. Одна-
ко при переходе к приближенным методам ситуация мо-
жет существенно измениться. Этот вопрос будет более
подробно обсужден ниже (п. 3).
Интересно отметить, что за последние годы стали вы-
являться глубокие связи между дискретным программиро-
Ю Под род. II. Н. Моисеева 289
ванием и математической логикой. Упомянем в связи с
этим интересную работу Галила [52], посвященную выяс-
нению противоречивости данного набора высказываний.
Автор предлагает несколько схем, которые являются бо-
лее «мощными», чем известные схемы с экспоненциаль-
ной сложностью (например, метод резолюций); однако
выясняется, что новые схемы также имеют экспоненциаль-
ную сложность. В качестве побочного результата полу-
чается следующая
Теорема 1. Схемы неявного перебора в дискретном
программировании имеют экспоненциальную трудоем-
кость,
В каком-то смысле эта теорема Галила устанавливает
справедливость гипотезы (7), являясь наиболее общим
результатом в данном направлении. Этот круг вопросов
оказывается тесно связанным с интенсивно развивающей-
ся в последнее время общей теорией сложности вычис-
лений.
3. О применении теории сложности вычислений для
оценки эффективности. Говоря о теории сложности вычис-
лений применительно к интересующему нас кругу вопро-
сов, ограничимся лишь не очень формальным описанием
основных фактов. Более строгое изложение можно найти,
например, в книге [45]. Обзор некоторых достижений и
основных тенденций развития теории сложности дан в
статье [71].
Прежде всего напомним замечания, сделанные в са-
мом начале этого параграфа, относительно понимания
сложности. Разумеется, уточнение этого понятия требует
привязки к некоторой конкретной схеме вычислений.
Обычно в качестве такой схемы рассматривается машина
Тьюринга или так называемая адресная машина (отметим
попутно, что эти описания эквивалентны в том смысле,
что одно сводимо к другому посредством полиномиально-
го преобразования). Однако мы можем принять модель,
более близкую к реальному ходу вычислений в оператив-
ной памяти машины с одним процессором, и считать, что
вычисления реализуются программой, написанной на не-
котором упрощении (подмножестве) языка АЛГОЛ.
Основной проблемой теории сложности вычислений
является вопрос о том, что и как можно фактически вы-
числить; упор при этом делается на позитивные результа-
ты и на количественные оценки сложности. На первона-
чальных этапах развития теории сложности в ней чаще
290
всего рассматривались задачи, на которые можно дать
лишь один из двух ответов: ДА или НЕТ. Для дискрет-
ного программирования типичными являются экстремаль-
ные задачи, требующие численного ответа. Например,
классическая «сложностная» постановка известной задачи
о ранце (с ограничением — равенством) будет заклю-
чаться в выяснении того, существуют ли для заданных
чисел ah j= 1, 2, ..., и, и b значения булевых переменных
удовлетворяющие ограничению
W = b. (2.1)
/=1
Обычная же формулировка задачи о ранце состоит в мак-
симизации суммы
п
2 = (2*2)
/=1
при условии (2.1). Однако легко видеть, что ответы на
последовательность задач типа «существует ли набор бу-
левых переменных удовлетворяющих (2.1), такой, что
z = k при & = 0, 1, 2, ...» дадут решение задачи о ранце в
привычной формулировке. (Отметим, что подобное све-
дение является наиболее простым, но далеко не самым
экономным.)
Под задачей мы будем понимать весь класс однотип-
ных вопросов, различающихся входными данными. На-
пример, в только что разобранном случае вход представ-
ляет собой набор {k, {aj, {cj, b}, так что задача о ранце
сводится к вопросу: «существует ли значение целевой
функции, равное k, в ситуации, описываемой остальными
входными данными?». Конкретный набор исходных дан-
ных определяет реализацию задачи. Будем обозначать
задачу через П, а ее реализацию — через л. Под размером
реализации будем понимать число символов (например,
двоичных), необходимых для записи входных данных этой
реализации. Размер реализации л будет обозначаться
| л |. Под временем решения tn реализации л понимается
сумма времен выполнения всех команд программы.
Введем теперь важное понятие класса Р (класса за-
дач, разрешимых за полиномиальное время). Этот класс
состоит из всех задач П, обладающих следующим свой-
ством: для любой П(=Р существует АЛГОЛ-программа
10* 291
Яп и полином fn(-), такие, что любая реализация л зада-
чи П решается программой §1п за время /я (§1П) =^/п (| л |).
Примерами задач из класса Р могут служить задачи
нахождения кратчайшего пути между двумя вершинами
графа, минимального разреза в сети, минимального де-
рева — остова ([45], [62], [72]).
Для определения следующего важного класса NP
(класса задач, недетерминированным образом разреши-
мых за полиномиальное время) необходимо будет рас-
ширить наш язык, добавив к нему новую команду
CHOOSE(x'). Эта команда придает недетерминирован-
ным образом переменной х значение 0 или 1. Расширен-
ный за счет этой команды язык назовем N- А Л ГОЛ. Будем
говорить, что программа на АЛАЛГОЛЕ (сокращенно
Af-программа) выдает на некоторую реализацию задачи
ответ ДА (напомним, что задача поставлена в форме воп-
роса), если yV-программа выдает ответ ДА при некоторой
комбинации значений, реализовавшихся при выполнении
команд CHOOSER. Если ^программа выдает для не-
которой реализации ответ ДА, то под временем выполне-
ния ^программы будем понимать минимальное время
для всех детерминированных программ, полученных пу-
тем замены CHOOSE (х) нулями или единицами, которые
выдают ответ ДА. Если ^программа дает ответ НЕТ, то
время ее выполнения для данной реализации не опреде-
ляется.
Отметим, что приведенное «оптимистическое» опреде-
ление времени для реализаций с ответом ДА является в
значительной мере условным. Действительно, любая ре-
альная схема вычислений является детерминированной, и
тем самым в принципе необходимо просмотреть все по-
следовательности реализаций CHOOSE (х), чтобы опре-
делить, выдает ли хоть одна из них ответ ДА. Это потре-
бует суммы времен, необходимых для каждого набора
реализаций. Однако в теоретическом отношении такое
определение представляется полезным.
Определим теперь NP как класс всех тех задач П, для
которых существует АЛпрограмма 91п и полином /я(*),
такие, что для любой реализации л задачи П, для которой
имеется ответ ДА, программа Яп выдает ответ ДА за вре-
МЯ М^п) ^fn( | ЛI).
Так как любая программа является Af-программой, то,
очевидно, PczNP. Вопрос о том, имеет ли место равен-
ство P = NPy остается пока открытым; большинство иссле-
292
дователей склоняются к мнению, что ответ на него явля-
ется отрицательным.
Введем еще одно определение. Будем говорить, что
множество А полиномиально сводимо к В (обозначение
А^В), если существует функция ср, вычислимая [45] за
полиномиальное время и такая, что при всех а<=А
a<=A<=^q(a)<=B.
Если А^В и В^А, то А и В полиномиально эквивалентны.
Множество Е называется NP-полным (или универ-
сальной переборной задачей), если E^NP и для любого
A^NP имеем А<^Е. Множество TVP-полных задач мы
будем обозначать NPC (в отличие от обозначений Р и
NP, это обозначение не является общеупотребительным).
Из определения следует, что NPCczNP.
Вне зависимости от того, имеет ли место в действи-
тельности равенство P = NP, поиск полиномиально разре-
шимых подклассов NP представляет большой теоретиче-
ский (и еще больший практический) интерес. Многие по-
линомиально разрешимые подклассы NP уже обнаруже-
ны, однако далеко не все они достаточно содержательны.
В настоящее время установлено ([62], [72]), что многие
важные классы задач принадлежат NPC. Назовем среди
них задачу о существовании гамильтонова цикла в пло-
ском графе, проблему существования допустимого реше-
ния для задачи целочисленного линейного программиро-
вания (с булевыми или с целочисленными переменными),
тот же вопрос применительно к задаче о ранце. Разуме-
ется, «оптимизационные» варианты этих задач также при-
надлежат NPC. Попытки дальнейшей специализации за-
дач, как правило, ни к чему не приводят; так, Папади-
митриу [69] показал, что если в задаче коммивояжера
потребовать, чтобы определяющие задачу расстояния
были евклидовыми, то и задача коммивояжера с этим
дополнительным требованием принадлежит классу NPC.
В работе Д. А. Супруненко [82] и некоторых других
работах (см., например, [79]) рассматриваются разреши-
мые случаи задачи коммивояжера. Для некоторых спе-
циальных видов матриц расстояний предложены и обос-
нованы алгоритмы с полиномиальной сложностью. Даль-
нейшие ссылки по работам этого направления можно
найти в [79].
Весьма любопытно в связи с вышеизложенным отме-
тить, что теоретически трудными являются не только ком-
293
бинаторные задачи, но и такой, казалось бы, простой и
хорошо изученный объект, как обычные задачи линей-
ного программирования. Именно, Кли и Минти [64] пока-
зали, что при решении задачи линейного программиро-
вания стандартным симплекс-методом невозможно дать
верхнюю оценку числа итераций в виде полинома от двух
параметров, характеризующих размеры задачи. Тем са-
мым симплекс-метод не является полиномиальным, и воп-
рос о том, принадлежат ли задачи линейного программи-
рования классу Р, оставался открытым.
На первый взгляд результат Кли и Минти является
парадоксальным, ибо он противоречит огромному вычис-
лительному опыту, накопленному к настоящему времени.
Действительно, экспериментально известно, что для ре-
шения задачи линейного программирования с т ограни-
чениями и п переменными обычно требуется от т до 3m
итераций; как правило, для задач не слишком больших
размеров число итераций близко к Зт/2.
Таким образом, большой разрыв между тем, что уста-
новлено теоретически, и тем, что многократно наблюда-
лось в практике вычислений, наводит на мысль о том, что
для задач линейного программирования весьма правдо-
подобно существование алгоритма с полиномиальной
оценкой трудоемкости. Действительно, один такой алго-
ритм (применительно к задаче определения совместности
системы линейных неравенств) описан в недавней работе
Л. Г. Хачияна [83].
Этот результат является первым результатом подобно-
го рода; несомненно, он будет иметь большое теоретиче-
ское значение. В связи с этим следует отметить, что лю-
бой полиномиальный алгоритм для задачи линейного
программирования будет представлять в основном акаде-
мический интерес, так как обычный симплекс-метод в
практических вычислениях ведет себя достаточно хорошо.
Более того, было бы ошибочно считать, что такой поли-
номиальный алгоритм будет непременно проще симплекс-
метода по своей реализации или во всех случаях эффек-
тивнее его при решении конкретных задач.
Казалось бы, описанные в настоящем пункте и подоб-
ные им теоретические результаты ставят принципиальный
барьер на пути повышения эффективности комбинатор-
ных методов. Однако при этом следует иметь в виду,
что одни результаты теоретических исследований
сложности алгоритмов при слишком прямолинейном их
294
понимании могут оказаться несколько дезориентирующи-
ми. Действительно, эти результаты дают представление о
поведении задач в наихудших возможных случаях, тогда
как для вычислительной практики существенно более
важно их поведение в среднем*). И уже совсем ничего
не говорят эти результаты о том, как будет вести себя
конкретный алгоритм на конкретной задаче (в термино-
логии, принятой нами в этом пункте, лучше было бы гово-
рить о конкретной реализации). Среди задач одного клас-
са сложности (мы будем говорить о классе NPC) могут
найтись реализации, весьма сильно различающиеся меж-
ду собой по трудоемкости. Так, в статье [51] указано
«трудное» семейство задач о покрытии, имеющих специ-
фическую структуру. Для некоторых задач этого семей-
ства оптимальное решение до сих пор неизвестно, хотя
«обычные» задачи о покрытии таких же размеров реша-
ются на машине достаточно быстро.
Неверно было бы и огульное отнесение всех задач с
полиномиальной оценкой трудоемкости к «легким» зада-
чам. В самом деле, вычислительная реализация алгорит-
ма, трудоемкость которого оценивается полиномом доста-
точно высокой степени, может оказаться далеко не про-
стым делом. Поэтому уместно будет различать два уров-
ня повышения эффективности комбинаторных методов —
локальный и глобальный. Мы не будем пытаться дать
формальное определение этих понятий. Под локальным
уровнем будем понимать любые приемы, позволяющие
расширить имеющиеся на сегодняшний день возможности
фактического решения задач. Глобальный уровень имеет
в виду перевод определенных классов задач на более низ-
кий уровень сложностной иерархии, например, из NP в
Р, если считать, что они не совпадают. Примером может
служить упомянутый выше алгоритм [83] решения задачи
линейного программирования с полиномиальной оценкой
сложности.
Сейчас мы укажем ряд случаев, когда глобальное
повышение эффективности приносит реальную пользу.
Правда, способы такого глобального улучшения прихо-
дится искать путем перехода от точных методов к при-
ближенным.
*) Едва ли не единственный общий результат в этом направлении
(для среднего числа одного из вариантов алгоритма Балаша) по-
лучен В. П. Гришухиным [8].
295
В тех случаях, когда рассматриваемая задача не име-
ет характера вопроса (что характерно для многих чисто
«сложностных» постановок), а явным образом содержит
целевую функцию, уместно ставить вопрос о нахождении
не точных, а приближенных решений с оценкой их откло-
нения от оптимума. Более точно, рассмотрим задачу на-
хождения оптимума функции f (х) на допустимом множе-
стве G. Пусть х*— оптимальное решение этой задачи.
Говорят, что допустимое решение х является е-прибли-
женным решением, если
Н(х)-/(х*)£<с
\Нх*)1 ’
где 8>0 — заданное число (считаем, что f(x*)7^O).
Исследования в этом направлении весьма интенсивно
развиваются за последние несколько лет. Наиболее любо-
пытный обнаружившийся при этом факт состоит в том,
что различные типы экстремальных задач из класса NPC
ведут себя при этом по-разному. Например, оказалось, что
поиск 8-приближенного решения задачи коммивояжера
снова представляет собой задачу класса NPC. Для задачи
о ранце, напротив, имеются алгоритмы поиска е-опти-
мального решения, имеющие полиномиальную сложность
по длине входа и по 1/е [59]. Ю. Ю. Финкельштейн [36]
исследовал поиск 8-приближенных решений для много-
мерной задачи о ранце (т. е. для задачи линейного цело-
численного программирования с булевыми переменными
и с неотрицательными коэффициентами), содержащей т
ограничений-неравенств и п переменных. Он указал ва-
риант алгоритма ветвей и границ, в котором дерево вет-
вления растет не быстрее некоторого полинома от п (с ко-
эффициентами и степенью, зависящими от т и е).
Эффективный полиномиальный алгоритм 8-оптимиза-
ции для задачи об одномерном ранце указан в работах
[80], [81].
Библиографию по поводу приближенного решения пе-
реборных задач можно найти в работах [73], [53], [35].
Сказанное наводит на мысль о том, что перспективным
путем глобального повышения эффективности комбина-
торных методов является выявление подклассов задач из
класса NPC, для которых поиск 8-приближенных реше-
ний (вместо оптимальных) переводит их в класс Р.
Сделаем одно небольшое отступление, а затем коротко
опишем результаты ряда машинных экспериментов.
296
Хотя это и выводит нас за пределы комбинаторных
методов, нельзя не упомянуть здесь о статистически эф-
фективных алгоритмах. Пусть п — параметр, характери-
зующий размерность задач некоторого класса. Ищется
«быстрый» алгоритм, т. е. имеющий трудоемкость, напри-
мер, не выше пА, где k фиксировано. Отдельные задачи
такой алгоритм может решать плохо (т. е. с большим от-
клонением от оптимума). Но в подавляющем большинстве
случаев получается оптимальное (в другой постановке —
e-приближенное) решение. Иначе говоря, с ростом п доля
точно оптимизируемых (соответственно е-оптимизируе-
мых) задач среди всех задач стремится к 1, кроме того,
при 8-оптимизации 8->0 при п->оо. Результатами подоб-
ного типа мы обязаны в основном В. А. Перепелице (на-
пример, [26]).
Статистически эффективные алгоритмы представляют-
ся перспективными для практического применения при
массовом счете. В то же время не следует забывать, что
в каждой отдельной задаче отклонение от оптимума мо-
жет быть весьма большим.
4. Результаты машинных экспериментов по другим
методам. Приведем данные о некоторых результатах ма-
шинных экспериментов по комбинаторным методам, от-
личным от схем типа ветвей и границ.
а) Методы последовательного анализа вариантов ши-
роко применялись к различным прикладным задачам.
Ограничимся некоторыми недавними результатами ма-
шинного эксперимента на ЭВМ БЭСМ-6 по задачам це-
лочисленного линейного и дискретного сепарабельного
программирования {5] и [6]. Параметры задач генериро-
вались случайным образом.
Решались задачи целочисленного линейного програм-
мирования с булевыми переменными при
(/пхп)-(10х 10), (20x 10), (50x 10), (100x50), (10x 100),
(100х 100)
В каждой серии было от 5 до 10 задач. Большинство из
них решено точно. Время решения не превосходило 25 мин
(в пределах одной серии). За приемлемое время удава-
лось решать и задачи больших размеров:
(40X250), (20X400), (10x500), (2X1000).
б) Последовательностные схемы В. А. Емеличева
были опробованы на серии задач средних размеров. В ра-
297
боте [11] приводятся результаты машинного эксперимента
по решению многомерной задачи о ранце. Проводилось
сравнение с некоторыми модификациями аддитивного
алгоритма Балаша. Решались на ЭВМ Минск-22 задачи
различных размеров, в том числе при
(яг Хп)=(5x32), (9x48), (10x48), (28x91), (20x 100).
Во многих случаях (как и в методе ветвей и границ) оп-
тимальный план строится довольно быстро, однако время
доказательства его оптимальности может оказаться до-
статочно большим. На исследованной группе задач время
доказательства оптимальности (завершения решения за-
дачи) иногда превосходило время получения оптимума в
несколько десятков раз; однако время решения задачи в
целом было сравнительно небольшим (до 25 мин).
в) Некоторые результаты машинных экспериментов
по методу последовательных расчетов В. П. Черенина
приведены в работах [3], [4], [42]. Другие ссылки можно
найти в [20] (стр. 289). Из более ранних работ отметим
статью [39].
В этих работах рассматривается задача о размещении
с т возможными пунктами размещения производства
(с неограниченными объемами производства) и п пункта-
ми потребления (с заданными объемами потребления).
Минимизируемая функция f определена на семействе 2м
всех подмножеств множества М= {1, 2, ..., т} и удовле-
творяет условию В. П. Черенина: для любых S, Т<=2М
справедливо неравенство
f(S)+f(T)^f(S{JT) + f(Sm. (2.4)
На ЭВМ БЭСМ-6 удалось решить большое количество
задач значительной размерности. При этом выявился сле-
дующий основной экспериментальный факт: при объеме
полного перебора, равном 27П, для т^50 количество вы-
численных (до получения оптимума и обоснования его
оптимальности) значений f(S) имеет порядок яг3.
В работе [40] предложена модификация метода после-
довательных расчетов, позволяющая находить не только
оптимальное решение, но все 8-приближенные решения.
г) Аппроксимационно-комбинаторный метод В. Р. Ха-
чатурова [41] успешно использовался при решении многих
прикладных задач. В работе [16] рассматривается одна
задача, возникающая при оптимизации параметров раз-
личных сетей на нефтяном месторождении. Сочетая ап-
298
проксимационно-комбинаторный метод с методом дина-
мического программирования, автору удалось решить за-
дачи значительных размеров. Точнее говоря, анализиро-
валась дискретная динамическая модель с количеством
моментов времени Л^^90, с числом значений фазовой
координаты (для каждого момента времени) |Х-| ^100 и
с числом управлений (для каждого момента времени)
| Ut \ ^45. Время решения на ЭВМ БЭСМ-6 не превышало
10 мин. Было решено несколько сотен задач.
Некоторые результаты машинного эксперимента по
применению аппроксимационно-комбинаторного метода
для решения распределительной задачи с булевыми пе-
ременными приведены в работах [43] и [15].
§ 3. Локальные приемы повышения эффективности
Мы начнем этот параграф с дальнейшего рассмотре-
ния приближенных методов в дискретном программиро-
вании, которые за последние годы развиваются исклю-
чительно бурно. Весьма большое количество материала
по этой проблеме систематизировано в монографии [35];
здесь мы сосредоточим внимание на некоторых новых
идеях, лишь в незначительной мере повторяя указанную
работу.
Можно указать на два основных стимула к развитию
приближенных методов. Прежде всего, результаты ма-
шинных экспериментов и опыт решения прикладных за-
дач выявили, что возможности точных методов ограниче-
ны и не удовлетворяют потребностям практики. Это под-
тверждается и теоретическим исследованием эффектив-
ности точных методов. С другой стороны, потребности
практики чаще всего покрываются и приближенными ре-
шениями, что обусловлено как неизбежной неточностью
задания исходной информации во многих прикладных за-
дачах, так и тем, что модели отражают реальные ситуа-
ции лишь с определенной степенью приближения.
1. Эвристические методы. Нужно сказать, что в лите-
ратуре термин «эвристический» получил несколько рас-
плывчатое и неоднозначное толкование. Имеется, напри*
мер, точка зрения [35], согласно которой к эвристическим
следует относить методы, являющиеся человеко-машин-
ными, т. е. методы, которые не во всех своих деталях мо-
гут быть записаны формально и требуют непосредствен-
ного принятия решений человеком на некоторых стадиях
299
вычислительного процесса. Примеры подобных методов
рассмотрены в [19] и [35].
Здесь нам будет удобнее принять несколько иную трак-
товку, согласно которой эвристические методы характери-
зуются использованием некоторых правдоподобных сооб-
ражений, не являющихся формально обоснованными и
чаще всего непосредственно опирающихся на конкретные
особенности структуры рассматриваемых задач.
Идею одного из наиболее популярных в последнее вре-
мя алгоритмов этого класса удобно будет описать приме-
нительно к одномерной задаче о ранце. Пусть требуется
найти максимум
f(x)=^c/x/ (3.1)
/=1
при условии
(3.2)
/=1
где х;е{0, 1}, /=1, 2, ..., п. Здесь с;>0, ^>0, &>0. Не
умаляя общности, можно предположить, что переменные
занумерованы так, что или cja^
^02/0,2^.^сп/ап. Будем пытаться максимизировать
f(x) за счет самых больших значений Cj (или с^щ), пола-
гая последовательно Xi=l, х2=1 и т. д. до тех пор, пока
не начнет нарушаться ограничение (3.2). Разумеется,
аналогичный метод легко построить и в случае, когда пе-
ременные задачи — не булевы, а целочисленные. Подоб-
ные методы названы в (35] методами последовательного
назначения единиц; в западной литературе за ними утвер-
дилось название «пожирающих» (greedy) алгоритмов.
Идеи алгоритмов этого типа уже хорошо известны в
математическом программировании. Назовем в качестве
примеров известный алгоритм Краскала для построения
дерева-остова с максимальным весом, метод минималь-
ного элемента для нахождения начального плана в транс-
портной задаче или правило «иди в ближайший» для
задачи коммивояжера. Однако, если в первом из этих
примеров алгоритмы пожирающего типа всегда приводят
к оптимальному решению, то во втором и третьем приме-
рах это, как известно, не так.
300
В связи со сказанным возникают две естественные
проблемы: 1) выделение классов задач, для которых алго-
ритмы «пожирающего» типа приводят к оптимальному
решению; 2) анализ точности приближений, даваемых по-
жирающими алгоритмами в остальных случаях.
Решение первой из этих проблем оказывается непо-
средственно связанным с теорией матроидов. Соответ-
ствующую библиографию можно найти в работах [48]
и [76].
Разумный подход к решению второй проблемы дол-
жен, по-видимому, основываться на некоторых «характе-
ристиках функционирования» алгоритмов.
Точность пожирающего алгоритма для задачи о ком-
мивояжере рассмотрена в работе [22].
Разумеется, упомянутые только что вопросы пол-
ностью сохраняют свое значение и применительно ко всем
другим классам эвристических алгоритмов.
В связи со сказанным естественно дать следующее
определение. Рассмотрим некоторый класс задач и неко-
торый приближенный алгоритм 31. Будем говорить, что
число 8>0 есть гарантированная характеристика алгорит-
ма 31, если для любой реализации задачи алгоритм 51 дает
приближенное решение х, для которого выполняется не-
равенство (2.3). Наряду с е целесообразно ввести тадсже
величину ц:
{l-Не в случае задачи минимизации,
1 — 8 в случае задачи максимизации.
Если, например, мы имеем для задачи о ранце алгоритм,
характеризующийся некоторым ц, то применение его к
любой конкретной реализации задачи дает решение х, для
которого будет f (х) pf (х*).
Существуют алгоритмы, для которых ц есть постоян-
ная. Для некоторых других алгоритмов ц есть величина,
зависящая от размерности задачи (или иных характери-
стик множества допустимых решений). Разумеется, луч-
шие гарантированные характеристики получаются в слу-
чаях, когда ц оказывается константой, близкой к еди-
нице.
Наряду с анализом гарантированного функциониро-
вания значительный интерес представляет исследование
поведения методов «в среднем». В этом случае надлежит
прежде всего точно определить понятие среднего на дан-
ном множестве реализаций за счет надлежащего выбора
1301
распределений. Ряд результатов в этом направлении от-
ражен в монографии [35] и (применительно к задачам
типа сортировки) в монографии [45]. Следует отметить
также интересные подходы к этой проблеме, предложен-
ные в работах [63] и [70].
Выше, в связи с обсуждением симплекс-метода, мы
отмечали, что оценки поведения метода в среднем неред-
ко имеют более значительную практическую ценность,
чем исследование теоретических показателей гарантиро-
ванного функционирования. Для эвристических алгорит-
мов это высказывание следовало бы смягчить. Нам пред-
ставляется, что между характеристиками обоих типов су-
ществуют определенные взаимосвязи. Их установление
представило бы весьма интересную, хотя и трудную, за-
дачу.
Упомянем еще об одном интересном цикле работ. Пер-
вой здесь была работа Корнюжоля, Фишера и Немхаузе-
ра (ее журнальный вариант см. в [46]), в которой иссле-
довались релаксации и эвристические процедуры для од-
ного варианта задач размещения. Этот подход обобщен
в [49], [67], [68], первую часть журнального варианта этой
серии работ см. в [78]. Постановка вопроса сводилась, к
следующему. Пусть N — конечное множество, 2N— семей-
ство его подмножеств. Функция f на 2N называется суб-
модулярной, если для любых S, T<=2N
f(S)+f(7’)>f(Sun+f(5nn, (3.3)
и неубывающей, если из SczT следует f(S)^f(T).
Ставится задача максимизации неубывающей субмо-
дулярной функции по всем подмножествам 2N, мощность
которых не превосходит заданного £>0 *).
Основные результаты названных работ сводятся, гру-
бо говоря, к анализу различных эвристических алгорит-
мов пожирающего типа для этого класса задач, нахожде-
нию для них гарантированных характеристик (которые
во многих случаях оказываются абсолютными константа-
ми) , а также установлению того, что эти алгоритмы ока-
зываются лучше в смысле гарантированных характери-
стик, чем эвристические методы некоторых других типов.
Последнее наводит на мысль о том, что можно ставить
*) Отметим, что точные методы оптимизации функций такого типа
(без условий монотонности) впервые начал рассматривать В. П. Че-
ренин [44] (§ 2 п. 4); условие (3.3) аналогично условию (2.4), отно-
сящемуся к задаче минимизации.
302
вопрос о разработке оптимальных в определенном смысле
эвристических алгоритмов.
Отметим одно возможное приложение алгоритмов по-
жирающего типа, которое можно назвать методом вариа-
ции параметров задачи [35]. Известно, что задача цело-
численного линейного программирования весьма чувстви-
тельна к малым изменениям параметров. В то же время
для многих прикладных задач коэффициенты заданы не
точно. Очевидно, что одновременное использование этих
двух обстоятельств может привести к новым эффектив-
ным алгоритмам. Поясним эту идею на простейшем при-
мере. Пусть решается задача о ранце (3.1), (3.2) с буле-
выми переменными, в которой все коэффициенты поло-
жительны. Пусть с^с^.. .^сп. Предположим, что а5=
= a + aj, где малы по сравнению с а. Если условия ис-
следуемой прикладной задачи позволяют считать, что
величины а, лежат в пределах точности измерения коэф-
фициентов, то в качестве приближенного решения задачи
(3.1), (3.2) естественно принять точное решение задачи
максимизации (3.1) при условии
где х;е{0, 1}, /= 1, 2, ..., п. Но для последней задачи по-
жирающий алгоритм сразу дает оптимальное решение
л\ =.. ,=хг=1, хг+1 = .. . = хп = 0, где г=[Ь/а]. Для этого
подхода несложно дать также гарантированную харак-
теристику.
Перенесение этой идеи на более общие классы задач
представило бы несомненный интерес. Например, анало-
гичный подход к задаче коммивояжера можно было бы
наметить, основываясь на работе [23].
Одним из наиболее важных современных приложений
эвристики в дискретном программировании является при-
менение различных эвристических правил «внутри» точ-
ных методов. Так, наиболее современные реализации схе-
мы ветвей и границ широко используют эвристические
правила выбора переменной для ветвления, получения
рекордов и т. д. (См. по этому поводу, например, работу
Форреста, Херста и Томлина [50]).
2. Зависимость эффективности от формы представле-
ния задачи. Значительный интерес представило бы раз-
витие теории, которую мы бы назвали «обратной теорией
303
эффективности». Мы имеем здесь в виду анализ поведе-
ния конкретного алгоритма на различных эквивалентных
формулировках задачи (в противоположность более обыч-
ной постановке вопроса о сравнении эффективности раз-
личных алгоритмов на одной фиксированной задаче или
на классе задач). Начало этой возможной будущей тео-
рии было положено интересным экспериментальным ис-
следованием Вильямса [77], рассматривавшего на пяти
задачах чувствительность коммерческой программы вет-
вей и границ к различным (но эквивалентным) их фор-
мулировкам. Так, одна из рассмотренных задач в перво-
начальной формулировке содержала 30 булевых перемен-
ных и 14 ограничений. Эквивалентная формулировка
содержала те же 30 переменных и 56 ограничений суще-
ственно более простой структуры. Время счета по второй
формулировке оказалось в полтора раза меньше, чем по
первой.
Сказанное наводит на мысль о том, что для различных
методов могут существовать формулировки задач, наи-
лучшим образом к этим методам приспособленные (близ-
кие соображения развиты в [35]). Возможно, что «опти-
мальной» является та формулировка, для которой линей-
ная релаксация дает наиболее точную оценку целевой
функции. Исследование этого вопроса представляется
весьма интересным.
3. Усиление оценок, гибридные схемы, специализация
задач и методов. Попытки получения более сильных оце-
нок целевой функции, чем даваемые линейными релакса-
циями, представляют существенный резерв повышения
эффективности комбинаторных методов. Эта идея исполь-
зуется в методе отсечения и ветвления, предложенном в
[31], [32] и независимо в [58]. Отметим, что первые числен-
ные эксперименты показали преимущество метода отсе-
чения и ветвления над стандартным методом ветвей и
границ.
Другой подход к улучшению оценок предложен в ра-
боте [21]. Еще один путь связан с использованием так на-
зываемых лагранжевых релаксаций [56]; вычислительные
эксперименты подтвердили его высокую эффективность.
Следует также отметить методы штрафных добавок [57].
Вообще «гибридные» схемы, сочетающие в себе идеи
комбинаторных методов и методов отсечения, представля-
ются весьма перспективными. Так, в [47] речь идет об
использовании метода отсечения в сочетании с поиском
304
по дереву для задачи о покрытии. Алгоритм оказался до
статочно эффективным — он позволил решать задачи с
2500 переменными и 150 ограничениями.
Наряду с этим заслуживает внимания и поиск клас-
сов задач, наилучшим образом приспособленных для при-
менения методов того или иного типа. На эту мысль на-
водит, например, работа (74], в которой сообщается о
построении для задачи о покрытии варианта метода от-
сечения, который (как показала серия численных экспе-
риментов с задачами размеров до 200x500) оказался
эффективнее метода ветвей и границ.
4. Об адаптивных стратегиях ветвления. Естествен-
ным образом возникает вопрос об адаптивных стратегиях
в методе ветвей и границ. В частности, разрабатывая и
исследуя адаптивные стратегии ветвления, А. И. Самы-
ловский [29] для задачи квадратичного программирования
с булевыми переменными экспериментально получил сле-
дующий интересный результат. Адаптивная стратегия
ветвления всегда давала большую точность решения
(меньшую оценку отклонения от оптимума), чем любая
из «базовых» стратегий за примерно одинаковое время.
Представляется, что развитие описанных выше подхо-
дов к повышению эффективности комбинаторных мето-
дов приведет к существенному расширению возможностей
реального решения задач дискретного программирования.
Литература к главе 10
1. Ахпателов Э. А., Черенин В. П. Оптимальная последова-
тельность обслуживания единственным устройством.— ЖВМ и
МФ, 1977, т. 17, № 2, с. 328—338.
2. Венгерова И. В., Финкельштейн Ю. Ю. К вопросу об
эффективности метода ветвей и границ.— Экономика и матем.
методы, 1975, т. 11, № 1, с. 186—193.
3. Веселовский В. Е. О некоторых подходах к решению зада-
чи размещения большой размерности.— В кн.: Третий Всесоюз-
ный симпозиум по системам программного обеспечения задач
оптимального планирования.— М.: ЦЭМИ АН СССР, 1974, вып. 1.
4. Веселовский В. Е. О некоторых алгоритмах решения зада-
чи размещения большой размерности.— Экономика и матем. ме-
тоды, 1977, т. 13, № 4, с. 732—737.
5. Волошина. Ф. Об одном методе оптимизации целочисленных
моделей.— В кн.: Моделирование и оптимизация систем управ-
ления.— Киев: Вища школа, 1974, с. 58—65.
6. Волошин А. Ф., Волков и ч В. Л. Об одном алгоритме ре-
шения задачи дискретного сепарабельного программирования.—
В кн.: Исследование операций и АСУ.— Киев: Вища школа, 1977,
вып. 9, с. 33—41.
305
7. Г р и ш у х и н В. П. Оценка сложности алгоритма Балаша.—
В кн.: Математические методы решения экономии, задач.— М.:
Наука, 1972, № 3, с. 93—105.
8. Гришухин В. П. О среднем числе итераций алгоритма Бала-
ша.— В кн.: Исследования по дискретной математике.— М.: Нау-
ка, 1973, с. 58—68.
9. Емеличев В. А. Дискретная оптимизация. Последователь-
ностные схемы решения I.—Кибернетика, 1971, № 6, с. 109—121.
10. Емеличев В. А. Дискретная оптимизация. Последователь-
ностные схемы решения II.— Кибернетика, 1972, № 2, с. 92—103.
11. Емеличев В. А., Краверский И. М. Машинный экспери-
мент по решению задач целочисленного линейного программиро-
вания методом построения последовательности планов.— ЖВМ
и МФ, 1973, т. 13, № 2, с. 467—471.
12. Журавлев Ю. И. Локальные алгоритмы вычисления инфор-
мации I.— Кибернетика, 1965, № 1, с. 12—19.
13. Журавлев Ю. И. Локальные алгоритмы вычисления инфор-
мации II.— Кибернетика, 1966, № 2, с. 1—11.
14. Журавлев Ю. И., Финкельштейн Ю. Ю. Локальные
алгоритмы для задач линейного целочисленного программирова-
ния.— В кн.: Проблемы кибернетики,— М.: Наука, 1965, вып. 14,
с. 289—295.
15. К а л д ы б а е в С. У. Алгоритм аппроксимационно-комбинатор-
ного метода для решения распределительной задачи с булевыми
переменными.— Изв. АН КазССР, сер. физ.-матем.— Алма-Ата,
1975, вып. 5, с. 43—49.
16. Коваленко А. Г. Алгоритмы отыскания оптимальных и всех
близких решений в задаче дискретной оптимизации многошаго-
вых процессов и их применение.— В кн.: Сборник работ по ма-
тематической кибернетике.— М., 1977, вып. 2, с. 65—69.
17. Колоколов А. А. Некоторые оценки для прямых алгоритмов
метода отсечения в целочисленном программировании.— В кн.:
Математический анализ экономических моделей, ч. 3 — Новоси-
бирск: 1972, с. 154—161.
18. Колоколов А. А. О длине лексикографически монотонных
последовательностей.— В кн.: Оптимизация территориальных и
отраслевых систем. Методы решения экономических задач, ч. 3.—
Новосибирск: 1973, с. 93—99.
19. Корбут А. А., Сигал И. X., Финкельштейн Ю. Ю. Ме-
тод ветвей и границ.— Math. Operationforsch. Statist., Ser. Opti-
mization, 1977, Bd. 8, № 2, S. 253—280.
20. К о p б у т А. А., Финкельштейн Ю. Ю. Дискретное про-
граммирование.— M.: Наука, 1969.
21. Лебедев С. С. Обобщенные множители Лагранжа и оценоч-
ные задачи в целочисленном программировании.— В кн.: Труды
VI Зимней школы по математическому программированию и
смежным вопросам.— М.: 1975, с. 114—157.
22. Леонтьев В. К. Исследование одного алгоритма решения за-
дан коммивояжера.—Ж'ВМ и МФ, 1973, т. (1’3, № 5, с. 1228—4236.
23. Леонтьев В. К. Устойчивость задачи коммивояжера.— ЖВМ
и МФ, 1975, т. 15, № 5, с. 1298—1309.
24. Мих ал ев ич В. С. Последовательные алгоритмы оптимизации
и их применение I.— Кибернетика, 1965, № 1, с. 45—56.
25. М и х а л е в и ч В. С. Последовательные алгоритмы оптимизации
и их применение II.— Кибернетика, 1965, № 2, с. 85—88.
306
26. Перепелица В. А. Асимптотический подход к решению не-
которых экстремальных задач на графах.— В кн.: Проблемы ки-
бернетики—М.: Наука, 1973, вып. 26, с. 291—314.
27. Романовский И. В. Методы неявного перебора для реше-
ния задач целочисленного программирования с бивалентными пе-
ременными.— Изв. вузов. Математика, 1970, № 4, с. 17—29.
28. Романовский И. В. Численные методы дискретного програм-
мирования.— В кн.: Труды IV Зимней школы по математическо-
му программированию и смежным вопросам.— М., 1972, вып. 5,
с. 76—128.
29. С а м ы л о в с к и й А. И. Об экономном представлении невы-
пуклого полиэдра. Депонировано в ВИНИТИ, № 347-77 Деп.
(РЖ Матем., 1977, № 5, реф. 5В651).
30. С и г а л И. X. Последовательный анализ вариантов при реше-
нии экстремальных задач.— В кн.: Системы распределения ресур-
сов на графах.—М.: ВЦ АН СССР, 1970, с. 63—84.
31. Финкельштейн Ю. Ю. Метод отсечения и ветвления для
решения задач целочисленного линейного программирования.—
Изв. АН СССР, Технич. киберн., 1971, № 4, с. 34—38.
32. Финкельштейн Ю. Ю. Дискретный алгоритм метода отсе-
чения и ветвления.— В кн.: Вопросы экономико-математического
моделирования.— М.: МГУ, 1972, с. 363—368.
33. Финкельштейн Ю. Ю. Теоретическая оценка максимально-
го числа итераций для полностью целочисленного алгоритма Го-
мори.— В кн.: Проблемы кибернетики.— М.: Наука, 1973, вып. 26,
с. 315—326.
34. Финкельштейн Ю. 10. К вопросу о приближенном решении
задач целочисленного линейного программирования.— Киберне-
тика, 1975, № 3, с. 143—145.
35. Финкельштейн Ю. Ю. Приближенные методы и приклад-
ные задачи дискретного программирования.— М.: Наука, 1976.
36. Финкельштейн Ю. Ю. е-подход к многомерной задаче о
ранце: полиномиальный рост дерева ветвления.— ЖВМ и МФ,
1977, т. 17, № 4, с. 1040—1042.
37. Ф р и д м а н А. А. О некоторых современных направлениях в
дискретной оптимизации.— Экономика и матем. методы, 1977,
т. 13, № 5, с. 1115—1131.
38. Фридман А. А., Вотяков А. А. Дискретные задачи и ме-
тод ветвей и границ.— Экономика и матем. методы, 1974, т. 10,
№3, с. 611—620.
39. Хачатуров В. Р. Алгоритм и программа решения задачи раз-
мещения предприятий с неограниченными объемами производ-
ства.— Экономика и матем. методы, 1967, т. 3, № 2, с. 240—
251.
40. X а ч а т у р о в В. Р. Определение оптимального и всех близких
к нему вариантов размещения предприятий с ограниченными
объемами производства.— Изв. АН КазССР, сер. физ.-матем.,
1967, № 3, с. 38—43.
41. Хачатуров В. Р. Аппроксимационно-комбинаторный метод и
некоторые его приложения.—ЖВМ и МФ, 1974, т. 14, № 6,
с. 1464—1487.
42. Хачатуров В. Р., Веселовский В. Е. Решение задач раз-
мещения большой размерности.— В кн.: Численные методы не-
линейного программирования. Тезисы II Всесоюзного семинара.—
Харьков: 1976.
307
43. Хачатуров В. Р., К а л д ы б а е в С. У. Решение распредели-
тельной задачи с булевыми переменными аппроксимационно-ком-
бинаторным методом.— В кн.: Труды V Всесоюзной зимней шко-
лы по математическому программированию, 1972.— М.: ЦЭМИ
АН СССР, 1973, вып. 2, с. 226—240.
44. Ч е р е н и н В. П. Решение некоторых комбинаторных задач оп-
тимального планирования методом последовательных расчетов.
(Матер, к конф, по опыту и перспективам применения матем. ме-
тодо<в и ЭВМ в планировании.)—Новосибирск: Изд-во СО АН
СССР, 1962.
45. A h о А., Н о р с г о f t J., Ullman J. The design and analysis
of computer algorithms.—'Reading, Mass., Addison-Wesley Publ.
Co., 1974. [Русский перевод: Ахо А., Хопкрофт Дж., Уль-
ман Дж. Построение и анализ вычислительных алгоритмов.—
М.: Мир, 1978.]
46. С о г n u е j о 1 s G., F i s h е г М. L., N е m h a u s е г G. L. Loca-
tion of bank optimize float: an analytic study of exact and
approximate algorithms.— Manag. Sci., 1977, v. 23, № 8,
p. 789—810.
47. Delorme J., Heurgon E. Problemes de partitionnement: ex-
ploration arborescente ou methode de troncatures?—Rev. franc,
automat, inform, rech. operat., 1975, t. 9, № V-2, p. 53—65.
48. Edmonds J. Matroids and the greedy algorithm.— Math. Pro-
gramming, 1971, v. 1, № 2, p. 127—136.
49. F i s h e r M. L., N e m h a и s e r G. L., Wolsey L. A. An analysis
of approximations for maximizing submodular set functions.—
Discussion Paper 7629, CORE, Louvain, December 1976.
50. F о г г e s t J., H i r s t J., Tom 1 i n J. A. Practical solution ' ol
large mixed integer programming problems with UMPIRE.— Ma-
nag. Sci., 1974, v. 20, № 5, p. 736—773.
51. Fulkerson D. E., Nemhauser G. L., Trotter L. E. Two
computationally difficult set covering problems that arise in com-
puting the Z-width of incidence matrices of Steiner triple systems.—
In: Math. Programming Study. Amsterdam, 1974, 72—81.
52. G a 1 i 1 Z. On enumeration procedures for theorem proving and
for integer programming.— In: Automata, language and programm-
ing, Edinburgh, 1976, p. 355—381.
53. Garey M. R., Johnson D. S. Approximation algorithms for
combinatorial problems: an annotated bibliography.— In: Algo-
rithms and complexity. New directions and recent results. New
York, Acad. Press, 1976, p. 41—52.
54. G a r f i n k e 1 R. S., Nemhauser G. L. Integer programming.—
J. Wiley, New York, 1972.
55. G a r f i n k e 1 R. S., Nemhauser G. L. A survey of integer pro-
gramming emphasizing computation and relations among models.—
In: Mathematical Programming, T. C. Hu, S. M. Robinson, eds.,
New York —London, Acad. Press, 1973, p. 77—105.
56. Geoffrion A. M. Lagrangean relaxation for integer programm-
ing. In: Math, programming Study 2, Amsterdam, 1974, p. 82—Ш4.
57. GeoffrionA. M., Marsten R. E. Integer programming algo-
rithms: a framework and state of the art survey.— Manag. Sci.,
1972, v. 18, № 9, p. 465—491.
58. H о f s t e d t K-, T h a m e 11 W. Uber einen Algorithmus zur Lo-
sung gemischtganzzahliger Optimalprobleme.— Math. Operations-
forschung u. Statistik, 1971, Bd. 2, № 3, S. 199—212.
308
59. Ibarra О. H., Kim С. Е. Fast approximation algorithms for
the knapsack and sum of subsets problems.— J. Assoc. Comput.
Mach., 1975, v. 22, № 4, p. 463—468.
60. J его slow R. C. Trivial integer programs unsolvable by branch-
and-bound.—Math. Programming, 1974, v. 6, № 1, p. 105—109.
61. Kann an R., Monma C. L. Computational complexity of spe-
cially structured integer programming problems.—School of Ope-
rations Research and Industr. Engineering, Cornell Univ., Techn.
Teport № 350, 1977.
62. К a r p R. M. Reducibility among combinatorial problems.— In:
Complexity of computations, R. E. Miller and J. M. Thatcher, eds.,
Plenum Press, New York, 1972, p. 85—103. [Русский перевод:
Карп P. Сводимость комбинаторных проблем.— Киберн. сбор-
ник, новая серия.— М.: Мир, 1975, вып. 12, с. 16—38.]
63. Karp R. М. The probabilistic analysis of some combinatorial
search algorithms.— In: Algorithms and complexity. New directi-
ons and recent results. J. F. Traub, ed. Acad. Press, New York —
San Francisco — London, 1976, p. 1—19.
64. Klee V., Minty D. J. How good is the simplex algorithm? —
In: Inequalities, v. Ill, Acad. Press, New York, 1972, p. 15'9—
175.
65. Land A. H., D о i g A. G. An automatic method of solving dis-
crete programming problems.—Econometrica, 1960, v. 28, № 3,
p. 497—520.
66. L i 111 e J. D. С., M u r t у K. G., S w e e n e у D. W., К a r e 1 C. An
algorithm for the traveling salesman problem—Operat. Res., 1963,
v. 11, № 6, p. 972—989. [Русский перевод: Литл Дж., Мур-
ти К., Суини Д., К э р е л К. Алгоритм для решения задачи
о коммивояжере.— Экономика и матем. методы, 1965, т. 1, № 1,
с. 94—107.]
67. N е m h a u s е г G. L., Wolsey L. A. Best algorithm for appro-
ximating the maximum of a submodular set function.— Discussi-
on Paper 7636, CORE, Louvain, December 1976.
68. Nemhauser G. L., Wolsey L. A., Fisher M. L. An ana-
lysis of approximations for maximizing submodular set function.—
Discussion Paper 7618, CORE, Louvain, July 1976.
69. P a p a d i m i t r i о u С. H. The euclidean travelling salesman pro-
blem is VP-complete.— Theor. Comput. Sci., 1977, v. 4, № 3,
p. 237—244.
70. R a b i n M. O. Probabilistic algorithms.— In: Algrorithms and com-
plexity. New directions and recent results. J. F. Traub, ed. Acad.
Press, New York — San Francisco — London, 1976, p. 21—39.
71. Rabin M. O. Complexity of computations.— Communs. ACM,
1977, v. 20, № 9, p. 625—633.
72. Sahni S. Computationally related problems.— SIAM J. Comput.,
1974, v. 3, № 4, p. 262—279.
73. S a h n i S. General techniques for combinatorial approximation.—
Operat. Res., 1977, v. 25, № 6, p. 920—936.
74. Salkin H. M., Kone al R. D. Set covering by an all integer
algorithm: computational experience.— J. Assoc. Comput. Mach.,
1973, v. 20, № 2, p. 189—193.
75. Schoch M. Das Erweiterungsrinzip und seine Anwendung zur
Entwicklung von Algorithmen fur die Losong kombinatorscher
Optimierungsaufgaben.— Berlin, VEB Deutscher Verlag der Wis-
senchaften, 1976.
309
76. W е 1 s h D. J. A. Matroid theory.— Acad. Press, London — New
York — San Francisco, 1976.
77. W i 11 i a m s H. P. Experiments in the formulation of integer pro-
gramming problems. In: Math. Programming Study 2. Amsterdam,
1974, p. 180—197.
78. Nemhauser G. L., Wolsey L. A., Fisher M. L. An ana-
lysis of approximations for maximizing submodular set functions.
I.— Math. Programming, 1978, v. 14, № 3, p. 265—294.
79. Айзенштат В. С., Максимович Е. П. Некоторые классы
задач о бродячем торговце.— Кибернетика, 1978, № 4, с. 80—83.
80. Б а б а т Л. Г. Линейные функции на М-мерном единичном кубе.—
ДАН СССР, 1975, т. 221, № 4, с. 761—762.
81. Баб ат Л. Г. Приближенное вычисление линейной функции на
вершинах n-мерного единичного куба.— В кн.: Исследования по
дискретной математике.— М.: Наука, 1976, с. 156—169.
82. С у п р у н е н к о Д. А. К задаче о бродячем торговце.—Киберне-
тика, 1975, № 5, с. 124—12*4.
83. X а ч и я н Л. Г. Полиномиальный алгоритм в линейном програм-
мировании.— ДАН СССР, 1979, т. 244, № 5, с. 1093—1096.
ГЛАВА 11
УСЛОВНЫЕ СУБГРАДИЕНТЫ
И УСЛОВНЫЕ СУБДИФФЕРЕНЦИАЛЫ
ВЫПУКЛЫХ ФУНКЦИЙ
§ 1. Вспомогательные сведения
Пусть f — конечная выпуклая на Еп функция, т. е.
f (аХх + (1 - а) Х2) < а/ (Хх) + (1 - q) f (Х2)
Уае [0, 1], V Хх, Х2<=Еп.
Если существует т>0 такое, что
f (аХх + (1 - а) Х2) af (Хх) + (1 - а) f (Х2) -
-/па(1 - а)||Хх — Х2||8
Уае[0, 1], Хх, Х2е£",
то функция f называется сильно выпуклой на Еп.
Положим
df (X) = {У g=Enlf (Z) — f (X) >(V, Z — X) V ZeEn}, (1.1)
dtf(X) = {Ve£n|f(Z) — f(X)>(V, Z — X)—e VZe£}.
(1.2)
Множества df(X) и дф(Х) называются соответственно
субдифференциалом и г-субдифференциалом функции f в
точке X. Элемент V^df(X) называется субградиентом
(или обобщенным градиентом), а элемент V&Xf(X)—
г-субградиентом (или обобщенным е-градиентом) функ-
ции f в точке X. Свойства выпуклых функций подробно
изучались в [4], [13], [17], [18]. Множества df(X) и дф(Х)
непусты, выпуклы, замкнуты и ограничены. Легко видеть,
что если fi и f2—выпуклые на £" функции, то и функция
f=fi+f2 является выпуклой, причем
df(X)=dfi(X)+df2(X). (1.3)
Аналогичная формула для дф (X) уже не имеет места.
зп
Приведем пример вычисления е-субдифференциала.
Пример 1. Пусть f(X) = 6(Х—а)2, где а<=Епу 6>0 фиксиро-
ваны. Пусть Vedef(X). Представим V в виде V = f' (Х)+г=
= 2б(Х—а).+г, г^Еп. По определению е-субградиента (1.2)
/(Z) — /(X) XV, Z-X)-8 v ze£n,
т. е.
d(Z-a)2 —6(Х —a)2>(26(X-^a) + r, Z - X) — 8 V Z G Еп.
Отсюда
6(Z —X)2—(г, Z-X) + 8>0 VZe£n.
Найдем минимум по Z функции /i(Z)=6(Z—X)2—(г, Z—Х)+е. Он
достигается в точке Z* = X+f/26. Из предыдущего неравенства при
Z — Z* имеем
Цг11^2уГб.
Обратно, если ||г|| =С2Уе6, то для V=26(X—л)+г будет
f (Z)- f (X)>(v, z-X)-е v zееп,
г. е. V^dEf(X). Итак,
def (X) = {V = 26 (X — а)r\r (Е Еп, ||г||<2
Субдифференциалы и е-субдифференциалы успешно
используются для разработки методов минимизации вы-
пуклых функций ([1]—[3], [7], [8], [12], [16], [20]). В послед-
нее время появились различные обобщения понятия суб-
градиента и субдифференциала на другие классы функ-
ций (подробный обзор и обширную библиографию по
этому вопросу можно найти в [19]).
Пусть QcE"—выпуклое множество. Обозначим Г(Х)
конус возможных направлений множества й в точке Jfe
ей, являющийся замыканием множества
?(X) = {V=X(Z—X) [Х>0, ZeQ},
а Г+ (X) — конус, сопряженный конусу Г (X):
Г+(Х) = {№еЕЕ"| (V, №)>0 У КеГ(Х)}.
Известно ([4], [5], [17], [18]), что
Г++(Х) = (Г+(Х)) + = Г(Х). (1.4)
Для того чтобы выпуклая на множестве Q функция f
достигала своего наименьшего на Q значения в точке
Х*ей, необходимо и достаточно, чтобы
д[(Г)Г)Г+(Г)¥=0. (1-5)
312
Пусть Q= {X^E?\h(X) sglO}, где h — выпуклая на Еп
функция, причем существует такая точка Х^Еп, что
/г(Х) <0 (условие Слейтера) .Тогда ([17],[18])
г+ /Х) = ( {0}» если h (X) < 0,
' |{У = W<=dh(X)}, если 1г (X) = 0.
Пусть GcnEn. Обозначим 2G совокупность всех непу-
стых подмножеств множества G. Пусть G{ и G2— множе-
ства в
Отображение <р: G1->2G2 называется полунепрерывным
сверху (п.н.св.) в точке Х^вь если из того, что X^G^
Х->Х0, Уг&ф(Хг), Уг->У0, следует У0^ф(Х0).
Отображение ср называется полунепрерывным снизу
(п.н.сн.) в точке X0^Gi, если для любого Уоеф(Хо) и лю-
бой последовательности {XJ, X^Gif Хг+Х0, существует
последовательность {Уг}, У^ф(Хг), такая, что Уг->У0.
Отображение <р называется ограниченным, если оно
переводит каждое ограниченное множество в ограни-
ченное.
Пусть Acz.En, B(ziEn. Функция
pG4,B)=sup inf ||У —Z||+sup inf ЦК — Z II
УеЛ ZsB Z~B Y^A
называется метрикой Хаусдорфа, а число р(Л, В) —рас-
стоянием между множествами А и В в метрике Хаус-
дорфа.
Пусть ср: Еп-^2ЕП. Отображение ср называется непре-
рывным по Хаусдорфу (Н-непрерывным) в точке Хо, если
р(ф (Х),ф(Х0))-^->0.
Отображение ф называется непрерывным по Какутани
(К-непрерывным) в точке Хо, если оно в этой точке полу-
непрерывно сверху и полунепрерывно снизу.
Теорема 1 [13]. Если отображение q ограничено в
некоторой окрестности точки Хо, а множество ф(Х0) замк-
нуто, то из непрерывности q в точке Хо по Хаусдорфу сле-
дует непрерывность ф в точке Хо по Какутани, и наоборот,
т, е. понятия Н-непрерывности и К-непрерывности в этом
случае эквивалентны.
Напомним ([4], [17], [18]), что если f — конечная
выпуклая на Еп функция, то в каждой точке Х<=Еп функ-
ция f непрерывна и дифференцируема по любому
313
направлению g^En, причем
д-^~ = lim — [f (X + ag) — f (X)] = max (У, g).
dg a->+o a V^df(X)
r. df W
Величина ' называется производной функции f в
точке X по направлению g. Пусть е^О. Величину
dJ (X)
1. = max (V м
dg V<=def(X) v ’ 67
будем называть ъ-производной функции f в точке X по
направлению g.
§ 2. Условный субдифференциал
и условный е-субдифференциал
Пусть QczEn— выпуклое множество, Г (X) — конус
возможных направлений множества Q в точке X. Пусть
на множестве Q определена выпуклая функция Д которая
предполагается конечной всюду в области определения.
Положим для фиксированных XeQ и е^О
dQf(X) ={V^En\f(Z) — f(X)>(V, Z — X)V ZeQ},
d°f(X) ={Vs£n|f(Z) -f(X)>(V, Z — X) — eVZeQ};
Множества dBf(X) и d®f(X) назовем соответственно
условным субдифференциалом и условным г-субдиффе-
ренциалом функции f в точке XeQ по множеству Q. Эле-
мент V^daf(X) назовем условным субградиентом, а эле-
мент V^d^f(X)—условным ъ-субградиентом функции f
в точке X<=Q по множеству Q [6].
Условные субградиенты и условные субдифференциа-
лы рассматривались в работах [9]—[11]. Если функция f
определена и выпукла на Е", то дЕ f (X) =df (X) и
df 'f(X)=def(X) (см. (1.1) и (1.2)).
Лемма 1. Если Xoeint Q и f — конечная выпуклая
на Еп функция, то для любого фиксированного е^О мно-
жество d^f^xo) непусто, выпукло, замкнуто и ограничено.
Доказательство. Непустота, выпуклость и замкнутость мно-
жества dgf(X0) очевидны. Докажем его ограниченность. Допустим
противное. Тогда существует последовательность {7^}, Vk d®f (Хо)>
V*
такая, что || VA-> + оо. Возьмем Zk = Хо + б0 .. ~ , где 60 > О
Л-*оо ||ИЛ||
314
таково, что й. Имеем
f (Zk) > f (Xo) + (^, lk - Xo) - e = f (Xo) + 601| Vk\\ - e —> +
' K k-^-oo
что противоречит ограниченности непрерывной функции f на огра-
ниченном замкнутом множестве {Z|||Z—Х0||^60}. Лемма доказана.
Лемма 2. Если функция f конечна и выпукла на Еп,
то
d°f (Хо) = df (Хо) —Г+ (Хо) (2.1)
где Г+ (Хо) — конус, сопряженный конусу возможных на-
правлений множества Q в точке X0(=Q.
Доказательство. Пусть У=У1-)-У2} где У^д{(Хо),
—У2еГ+(Х0). Тогда y^D и
f (X) - f (Хо) > (Vb X — Хо) V X е Еп,
(_у2, х-хй)>0 у Хей.
Складывая эти неравенства, получим
+ X—Хо) УХе=Й,
т. е. 1Л=дй/(Х0) и
DC^f(Xo). (2.2)
Пусть теперь VedQf(X0). Тогда
f (X)-f (Хо) > (V, Х-Хо) V Хе=й. (2.3)
Положим /г(Х) =f(X)—f(X0)— (V, X—Хо). Очевидно, что функция h
выпукла на й, а из (2.3) следует, что /г(Х)^О для всех XeQ, при-
чем А(Хо)=О. Значит, Хо—точка минимума h на множестве й. Из
(1.5) имеем ^(Х0)ПГ+(Х0)Но dh(X0) =df(X0)—{V}. Поэтому
найдутся У0<=д}(Х0) и №оеГ+(Хо) такие, что Уо— V=^o, т. е.
У=Уо—№0. Отсюда
d°f(X0)^D. (2.4)
Из (2.2) и (2.4) следует (2.1). Лемма доказана.
Следствие 1. Если X0&ntQ, а функция f конечна
и выпукла на Еп, то
daf(X9)=df(Xe). (2.5)
Действительно, для Xo^int Q имеем
Г(Хо)=£л,Г+(Хо) = {О}.
Таким образом, условный субдифференциал во внут-
ренних точках множества Q совпадает с субдифференциа-
лом функции f.
Положим Q6=S4(Ao) = {Х| ||Х—Хо11^б}, 6>0. Тогда
по доказанному выше (см. (2.5)) df (Хо) =<5йб/(Х0). Отсю-
315
да ясно, что субдифференциал функции f определяется
лишь локальными свойствами функции f.
Замечание 1. Вообще говоря, при е>0 будет
д^f(Хо) =/=сЦ(Х0), что видно из примера. Пусть f(X) =
= (а, X) +а, а^Еп, ае£‘. Нетрудно показать, что в этом
случае
def(X) — df(X) ={а} ЧХе=Еп, Уе>0.
Пусть Q={Ze£n|||Z—Хо||^1}. Покажем, что
d^f(X0)={V = a + r\r^En,\\r\\^}. (2.6)
По определению d^f (Хо) для любого Vеда/ (Хо) будет
f(Z)-f(X0) = (a,Z-X0)>(V,Z-X0)-eVZen,
т. е.
(V —a, Z-X0)^e VZeQ.
(2.7)
Но шах (У — a, Z — Хо) = (V — a, Zo — Хо), где Zo — Хо =
zsu
---------. Отсюда и из (2.7)
имеем
max (7 — a, Z — Хо) =
гей
= ||V-a\\^s VVe^/(X0).
Из последнего неравенства и
следует (2.6).
Таким образом, при е>0
для линейной функции ъ-суб-
дифференциал и условный
ъ-субдифференциал не совпа-
дают.
Следствие 2. Из (2.1) ясно, что (см. рис. 11.1)
daf(Xo) = /nWf(X0),
где Ха(Х0) = {Х=Х0+У|УеГ(Х0)}, Г(Х0)=у(Х0).
Следствие 3. Если g^T(XQ), то
+ sup (V,g) =
dg а-»ю а
= max (V, g).
У^даЦХ,)
316
Действительно, пусть Ved°f(X0). Тогда по лемме 1 !z=Vi—W,
где jZtedftAo), »'еГ+(Л'о). Так как (№, g)>0 для всех
^еГ(Хо), то g) = (vb g)-{W. g) <(V„ g).
Отсюда
sup (V, g) < max (V, g).
Vt=d®f(X0) V^dKX0)
Поскольку dQf(X0)=>df(Xo), то справедливо неравенство
max (V, g) < sup (V, g).
Vf=df(X0) V(=dQKX0)
Таким образом,
sup (V, g) = max (V, g).
В силу компактности множества df(X0) супремум в последнем ра-
венстве достигается. Следствие 3 доказано.
Следствие 4. Если функции и f2 конечны и вы-
пуклы на Е\ то для функции f=fi+f2 справедливо
соотношение
даПХ.)=да1АХ„)+^(ХЛ).
Действительно, поскольку из (1.3) df(XQ) =dfi(Xo)4-df2(Xo), то
dQf (Хо) = df (Хо) - Г+ (Хо) = df, (Хо) + df2 (Хо) - Г+ (Хо) =
= [dfi (Хо) - Г+ (X.)] + [df2 (Хо) - Г+ (Хо)] = daf, (Х„) + daf2 (Хо).
Здесь использовано равенство Г+(Х0) =Г+(Хо)+Г+(Хо)-
Очевидно также, что
д°[ (х0) = (Хо) + df2 (х0) = df, (Хо) + daf2 (Хо). (2.8)
§ 3. Представление условного е-субдифференциала
Зафиксируем е>0, Х0<=Еп. Положим
WX0) ={Vt=En\3X<=En: V^df(X), (V,X0-X) +
+ f(X)-f(X0)>-e}.
Для хоей введем множество
tffVQ =
= {V е Еп 13 X е й : V е dQf (X), (V, Хо — X) + /(X) —
-/(Хо)>-4
Теорема 2. Имеет место соотношение
dlf(Xa)=B^f(X0). (3.1)
317
Доказательство. Возьмем V Е: (Хо). Тогда V = lim Vk,
Л-*оо
где Vkf= B°f (Хо). По определению множества B®f (Хо) найдутся
Xk е Q такие, что Vk е daf (Xk),
(Vk, Xo ~ Xk) + f (Xk) - f (Xo) > - e.
Поскольку Vh&)af(Xk), to
f(Z)~f(xk)>(vk. Z~xk) vzeo.
Складывая два последних неравенства, имеем
f(Z)-/(X0)>(Vft,Z^X0)-e vZcQ.
Переходя здесь к пределу по k при любом фиксированном Z е Q,
получим f(Z)~-f (Хо) (V, Z-X0)-e V ZGQ. Значит, V&fy (Хо) и
В“/(Хо)СЭ«/(Хо). (3.2)
Пусть теперь V G d®f (Хо), т. е.
/(Z)-/(X0)>(K, Z-X0)-e VZSQ. (3.3)
Положим /i(Z)=f(Z)—f(X0)— (V, Z—XQ). Тогда из (3.3)
/i(Z)>-e VZeQ. (3.4)
Зафиксируем любое б>0и построим функцию
h6(Z) = h(Z) + 6 max \z.-xQi\ = h(Z) + 6-q(Z),
l^i^n
где Z=(zi, ..., zn), X0=(x0I, xOn). Функции h, q, h& выпуклы
на Q. Из (3.4) следует, что h&(Z)-^+oo при ||Z||-Н~оо. Поэтому при
любом фиксированном б>0 функция достигает наименьшего на
Q значения в некоторой точке Z&. По условию (1.5) будут
^6(Za)nr+(Z6)=^0. (3.5)
Но
dh6 (Z) = dh (Z) + 6 • dq (Z), (3.6)
где dh(Z)=df(Z) — {V}t dq(Z)=co{ui]i^(Z)}t
^(Z) = {iel:n[\z{-xoi\ = q(Z)},
2i-xof<0,
ei — единичные орты. Из (3.5) и (3.6) следует существование
W^dq(Z&) такого, что
= (V _ 6U7e) е df (Z6) - г+ (Ze) = dQf (Z6). (3.7)
Ясно, что
V6 V. (3.8)
318
Из (3.4) следует h6 (Z6) h (Z6) > — e. Отсюда
f (Z6) - f (Xo) + (V - SW6, Xo - Z6) - e. (3.9)
Так как max I —xo£ | = (IT6, Z6~-X0), то из (3.7) и (3.9) ясно,
что V6GBg/(X0)> а из (3.8) имеем V (XQ). Таким образом,
^(Хо)СВеа/(Хо). (3.10)
Из (3.2) и (3.10) получаем (3.1). Теорема доказана.
Следствие 5. Для £1 = Еп из (3.1) имеем dcf(Xo) =
= Вф(Х0). Можно показать, что если функция f сильно
выпукла на множестве й, то
d^X0)^BQsf(XQ).
Пусть функции fi и f2 конечны и выпуклы на Еп, Хоей.
Положим f = ft + f2.
Теорема 3. Справедливо соотношение
def (Хо) = и [д°К (Хо) + dlf2 (Хо)] = D. (3.11)
Е1+е2=е
ei>o,e2>o
Доказательство. Включение
DCd°f(Xe) (3-12)
очевидно. Докажем противоположное включение. Пусть V GE d®f (Хо).
По теореме 2 существует последовательность {УЛ} такая, что
Vk^B°f(X0), Vk-»V, (3.13)
т. е. для каждого Vk найдется такое что
vk е daf (Xk), (Vk, X» - xk) + f (Xk) ~ f (Xo) > - e.
Из формулы (2.8) следует _ =
+ - (3.14)
где vk е даЕ (Xft), Tft е df2 (Xk). Поэтому
[(yft, Xo - Xk) + h(Xk) - ft (XO)1 +
+ [(Fft> Xo - Xk) + f2 (Xk) - f2 (X0)J > - s. (3.15)
Так как выражения, стоящие в квадратных скобках, неположитель-
ны, то неравенство (3.15) возможно лишь тогда, когда существуют
ел1>0, 8л2^0 такие, что е^и+елг^е и
(v k, Хо - xk) + ft (Xk) - ft (Xo) > - ekl,
(Vfe, Xo - Xk) + f2 (Xft) - f2 (Xo) > - efta,
319
т. е. Поскольку
Bekifa (Хо) С де^2 (Хо) С def2 (Хо),
а множество def2(XQ) ограничено, то без ограничения общности мож-
но считать, что
eft2-e»>0,
при этом е'+е"^^ Отсюда, из (3.13) и (3.14) заключаем, что и по-
следовательность {Ул} сходится, т. е. Vh-+V'. Так какVk 6Е д® то
/1(2)-Л(Х0)>(УЛ, 2-Х0)-еЛ1 VZGQ.
Переходя здесь к пределу по k при каждом фиксированном ZeQ,
получим
Л (Z) - К (Хо) > (У', z - х0) - в' V z е Q,
т. е. V'6= dg,/i (Хо). Проводя аналогичные выкладки для последова-
тельности {Ул}, получим У"е^/2(Х0). Поэтому из (3.13) и (3.14)
имеем
v = (V' + V) е (Хс) + de„f2 (XO)J с
CP?Jx(Xo) + ^(Xo)]CD,
т. е. dEf (Хо) СО- Отсюда и из (3.12) следует (3.11). Теорема до-
казана.
Следствие 6. Из доказательства теоремы 3 ясно,
что вместо (3.11) можно написать
def (Хо) = и [двЛ (Хо) + 5еЛ (Хо)] =
8i+e2=e
ei>o,e2>o
= U Ре,А(Хо)+^Л(Хо)]. (3.16)
8i+e2=8
8i>0,82>0
При Q = En имеем
def(X0)= U [<Wl(Xo)+<W2(Xo)l. (3-17)
81+е2=е
ei>o,e2>o
§ 4. Условные производные по направлениям.
Непрерывность условного 8-субдифференциального
отображения
1. Пусть функция f определена и выпукла на £л,
QczEn—замкнутое выпуклое множество. Возьмем
е>0, g^Ent ||g|| = l.
320
Положим
= sup (V,g), def{X°} .= sup (V g)
dg veaQKX0) dg v&Ofixj
dQf (Xo) „ 5 . , r
Величину — - назовем условной производной функции f
dg
в точке Хо по направлению g (по множеству Q), а вели-
а“/(Хо) „ , „ , ,
чину —----------условной ^-производной функции г в точке
dg
Хо по направлению g (по множеству Q).
Из следствия 3 заключаем, что
dQf(X<,) . dg (df (^о) _ р /у \ ds , ger(X0), (41) .+ о°, gГ (Хо).
Поскольку имеет место включение daf(X0) Z)df (Хо), то из
d?f (Хо)
(4.1) -------— 4-оо при £ОЁГ(Хо). Положим h(a) —
dg
= — [f (Хо + ag) — f (Xo) + e] = — q (а). Здесь функция
a a
q (a) = f (Xo + ag) — f (Xo) + e выпукла на (0, + °°)-
Лемма 3. Если а*— точка локального минимума
функции h на интервале (0, +оо), то /г(а)^й(а*)
V a^a*.
Доказательство. Пусть а* — точка локального минимума
функции h, т. е. существует a>a* такое, что
ft(a)^/i(a*) V ae[a*, а]. (4.2)
Надо показать, что неравенство (4.2) справедливо для всех
a^a*. В силу определения функции h из (4.2) имеем
q (a) > q (a*) V ae [a*, a]. (4.3)
a*
Возьмем любое a>a. Ясно,_что его_можно представить в виде
a = 0a*+(l— P)a, где 0=(a—a)/(a*—a), p<0. Поэтому в силу
выпуклости q будет __
^(a)>P(7(a*) + (l-P)t7(a). (4.4)
Поскольку 1—Р>0, то из (4.3) и (4.4) получим
9 (“) > ₽9 (а*) 4- (1 — ₽)-~ 9 9 (а*) [— 0 + ~ (1 — ₽)] •
a* a* L a a J
11 Под ред. Н. Н. Моисеева
321
Но
а* а а* / а'— а \ а а* — а
— Р + — (1 — ₽) ~ + Z”
а а а \а* — а/ а \ а*—а
= 1.
Поэтому
9 (а) > “ 9 (а*) V а > а.
а*
Итак,
h (а) h (а*)
V а > а*.
Лемма доказана.
Лемма 4. Пусть X — граничная точка множества Q,
||g|| = 1. Если g<=int Г(Х), то g,=—g^r(X).
Доказательство. Допустим противное. Пусть ^1еГ(Х).
Так как по условию g&ntf(X)сгГ(Х), то из (1.4)
(IT, g)>0 V^er+(X), (4.5)
W, gi) = W, -g)>Q У№(=Г+(Х). (4.6)
Из (4.5) и (4.6) получим
(W\ g) = 0 VIFer+(X). (4.7)
— j? — aW
Возьмем W e Г+ (X), || W || > 0. Положим g = ;-----—
||g —aU7||
Тогда Ua||= 1. Из (4.7)
(W, g) — air2
= .'Дп ~<0-
, где a > 0.
Значит, £а^Г(Х). Поскольку a>0 — произвольное, то g — гранич-
ный элемент множества Г(Х), что противоречит условию.
Лемма доказана.
Теорема 4. Если Х0(=й, gey (Xo), ||g|| = 1, то
Г^-= sup (V,g) = inf T[f(X0+ag)-/(X0)+e].
dg v^r.W Ao«>»eQ«
(4.8)
Доказательство. По определению условного 8-субдиффе-
ренциала имеем
/ (Хо + (Хо) > a • (V, g)-e V V е (Хо),
V а 0 : Ха = Хо -|- ag £ Й.
Отсюда inf Л(а)>(Г, g) V Геа^(Хо), где h (а) =
а>о,Хаей
322
= — [/ (Хо + »g) -- / (Хо) + Значит,
а
inf h (а) > sup (V, g). (4.9)
а>о,ХаЕЙ
Установим противоположное неравенство. Возможны четыре случая:
1) множество Q в направлении g не ограничено, т. е.
Ха = Хо + ag е й V а ХО;
2) инфимум в (4.9) достигается, т. е. inf h (a) = h (ax),
a>o,XaeQ
причем существует a2^>ai такое, что
3) множество Q в направлении g ограничено и инфимум в (4.9)
достигается, т. е. inf Л (a) = ft(ai)> где Ха ей, 0<al<+°°,
a>o,Xasfi
Xa Q V « > aiJ
4) множество й в направлении g ограничено и
inf h (a) = inf _ h (a) = h (cq),
a>o,xaeQ a>o,Xaefi
где Xai Q, но Xai e 0<a1< + V a > »i-
В случае 1)
inf h (a) = inf h (a). (4.10)
a>ojaeQ a££(o,+oo)
Предположим вначале, что инфимум в (4.10) достигается в неко-
торой точке aj. ’Очевидно, что ai>0. По необходимому условию ми-
нимума
. .. h (aL + ₽) — h (a,)
й+(«х) = lim ------------------- >0,
3—ю p
.... h (ax — P) — h (a,)
ft- (ai) = Jim ----------------- > 0.
3->+o p
Ho
, 1 df (Xi) 1
ft+ (ax) -----4-^ - — [f (X,) - f (Xo) + e],
ai dg a*
h’_ (ax) - — + ~7[/ (Xx) - f (Xo) + e],
«x d (— g) a2
где Xi = XQ+aig. Поэтому
—------> ft (ax), —-------- > — ft (aj).
dg d (— g)
Значит, найдутся Vi^df(Xi) и Vt^df(XJ такие, что
Отсюда
(V„ g)^ft(a1), (V2,-g)^-ft(a>).
(V1,g)>ft(a1),
(V2, g)^ft(a>).
11
323
Так как df(Xi) — выпуклое множество, то существует такое
Vo<=df(Xi), что (Vo, g)=/i(ai),T. е.
(Vo, Xo-Xi)+f(Xi)-f(Xo) = —е. (4.11)
По определению множества B®f (Хо) и из теоремы 2 в этом случае
имеем V0<=d°f(X0). Из (4.11)
inf h (а) = h (ах) = (Ио, g) < sup (V, g).
а>о,Хаей
Утверждение теоремы следует теперь из (4.9). Фактически установ-
лено, что
inf h (а) = max (V, g). (4.12)
а>о Vedef(X0)
Теперь рассмотрим случай, когда инфимум в (4.10) не дости-
гается. Введем функцию fl6(X) =f(X)+f6(X)t где f6(X)=6X2, 6>0.
Функция fie является сильно выпуклой, поэтому
inf к (а) = inf — [f16 (X. + ag) - f16 (Хо) + е]
а>о а>о а
достигается в некоторой точке аю>0 и из (4.12)
inf hi (а) = hi (а16) = max (V, g).
а>о 1 Vs5ef16(X,)
Имеем
«ntf h (а)< ft (alfl) = hl (а1б) — 6 [2 (Xo, g) + «1б1 <
< max (V, g)~- 26 (Xo. g). (4.13)
ve<V16(%.)
Из (3.17)
VioW= U (V(X0) + <VdWl- (4.14)
81+62—6
8i>o,e2>o
В примере 1 было показано, что
<Уб (*о) = {v = 26ХО + г I г е Еп, II г К 2 1^6} •
Поэтому из (4.13) и (4.14) при 6->0 получаем
inf /i(a)< max (V, g)< sup (V, g),
a>o Vsdef(Xo)
что вместе с (4.9) и дает (4.8).
В случае 2) также справедливо (4.10), так как по лемме 3 точ-
ка ai будет точкой глобального минимума функции h на (0, +«>).
Как и выше, устанавливается (4.12), а поскольку def(Xo)czd g f(X0),
то из (4.12) и (4.9) снова получаем (4.8).
Рассмотрим случай 3). По необходимому условию минимума
имеем //_(ai)^0. Поэтому, как и выше, найдется Voedf(Xi)
324
такое, что
(Vo, -g)+ft(a,)>o.
Отсюда
- (Vo, g) + — [f (*x) - f (Xo) + e] = 0. (4.15)
предположим вначале, что X0&nt Q. В этом случае, как следует из
леммы 4, g-^r(Xi). Тогда найдется №<=Г+(Х1) такое, что
Рис. 11.2.
(U7, g)<0. Поскольку Г+(Х1)—конус, то существует такое,
что №0=%№еГ+(Х1), и в (4.15) будет
(- Vo + IVO, g) + — [/ (ХО - f (Xo) + e] = 0. (4.16)
al
Но Г1=(Уо-^о)ед0/(Х1), g = -1 ~ Из (4.16) получим
al
(Vi, X0-X1)+f(X1)-f(X0)=-e.
По определению множества B®f (Xo) и из теоремы 2 будет V±^d^f (Хо).
Из (4.16) имеем
inf h (a) = h (aj = (Vi, g) < sup (V, g).
a>o,XaGQ
Отсюда .и из (4.9') следует (4.8).
Пусть теперь Хо— граничная точка множества Q. Введем мно-
жества 5б(Х0) = {Х| ||Х—Х0||^б}, Q6=co{Q|j56(Xo)}, где б>0.
В этом случае (рис. 11.2)
йб П {X = Хо + ag 1 a> 0} = [Хо, Х1б],
где Х1б = Хо + a^g- Покажем, что Х1б —> Хх = Хо + aig- Посколь-
6->+о
КУ £5£у(Х1), то при любом фиксированном a>ai будет Ха=
=X0+ag^Q. По теореме отделимости найдутся q^En и а>0 та-
кие, что
(X-Xa, д)<-а VXeQ.
При достаточно малых б>0 будет
(X Xa, q) < - -у у X е Q и S6 (Хо),
325
а тогда
(X-Xa,9)<-Y vxeQ6,
т. e. Xa^Qo и Xi6^[X0, Xa] при достаточно малых 6>0. Для мно-
жества Qe точка Xq — внутренняя. По доказанному выше
--------= sup (V,g) = inf Л (ex). (4.17)
£ V&®&f(X9) а>о.Хаейб
Так как ZD Q, то d^f (Хо) С d*f (Хо). Следовательно,
sup (V, 8) < sup (V, g).
V(=d&KXc)
Из (4.17)
inf HaX sup (V, g).
ae(o.a16] I sd^f(Xe)
Поскольку
inf h (a)—> inf /i(a),
aeco.a^] 6->+o aeco.aj
TO
inf Ha)< sup (V, g).
a>o,xaeQ Vfed^f(Xo)
Отсюда и из (4.9) следует (4.8).
Осталось рассмотреть случай 4). Рассуждая для множества Q,
как и в случае 3), получим
inf _/i(a)= sup (V, g).
a>o,XacQ V(_dQf(X^
Ho
inf h (a) = inf h (a),
a>o,XasQ a>o,XaeQ
^(Xo) = ^/(X0), xoefl.
Следовательно, и в этом случае имеет место (4.8). Теорема дока-
зана.
Заметим, что соотношение (4.8) может быть получено из тео-
ремы 23.6 работы [18], если рассмотреть функцию
(.“Г °°, X И •
Следствие 7. Из доказательства теоремы ясно, что
при 8>0
^ = + ~vgtev№).
326
Действительно, пусть XoseQ, е>0, ^еГ(Х0)\у(Х0), т. е. (см.
пис Н-З) g^Y(*o), Hog=limgb, gk^y(XQ). Рассмотрим подмноже-
г Л-*оо
ства
Qj=co{QU'So(A'0)}r>Q, 6>0.
Тогда где уб(Ло) = {g=X(X—Xo) |%>0, XeQe}. В силу
теоремы 4
h == inf h (a) =
cx>o »Хд^й^
sup (V, g)
Q6
Ve^e /(Xo)
Имеем На = inf
ae(o,ad)
g^y(Xo)> T0 ad —► +0. Поэтому
6-*+o
sup (V, g).
Vsdgfw
(4.18)
h (a). Поскольку
h6
d?f(X0)
Из (4.18) получим -------= 4-oo. в (4.1) уже было
г.
Й®/(Х0)
показано, что —----= 4-00 при g Г (Хо)-
og
Следствие 8. Если для некоторого ||g0||=l,
^f(X0)
оказалось —--------<0, то
dg0
inf f(Xa)<f(X0)-8,
a>o.XaGC
(4.19)
i'de Xa Xfl’bocgo.
Действительно, в силу (4.8) найдется ai>0 такое, что
Л (ai) = — и (Xai) - f (Хо) + 8] < о, (4.20)
<^1
причем Поскольку ^>0, то из (4.20) имеем f (Хар —
f (^о) + е < 0, откуда и следует (4.19).
Следствие 9. Если функция f сильно выпукла и
де/(Хо) _
— ---0, то
dg0
inf /(Ха)^/(Х0)-е.
а>о,Ха1=а
327
„ 3“/(Хо)
Доказательство. Случай -----------<*0 рассмотрен в следст-
dg
d°f(X9)
вии 8. Пусть теперь -----= 0. Найдутся последовательности {ос^},
dgo
{Р^} такие, что
«*>0, X ей, ft(atX₽4, —+0.
л я-*оо
В силу сильной выпуклости функции f существует ос0>0 такое, что
сс/г^а0. Поэтому f(Xak)— f (Х0)+е^ослрл^осорь. Отсюда
inf
a>o,xaeQ
HXa)-/(X0) + e<0,
что и требовалось доказать.
Условие сильной выпуклости существенно, что видно из следую-
щего примера.
Пример 2. Пусть f(X) = const, Х<=Еп. Тогда для любого
g^En
1 в
inf — [f (Хо + ag0) - f (Хо) + 8] = inf — = 0,
a>o ос a>o ос
но уменьшить функцию f нельзя.
2. Точечно-множественное отображение dgf:£2X
X (0, +оо)->2еЛ назовем условным ь-субдифференциаль-
ным отображением. Это отображение, как и dQf, вообще
говоря, не является ограниченным.
Теорема 5. Отображение def непрерывно по Каку-
тани по X и г на множестве QX (0, +оо) (т. е. полуне-
прерывно и сверху и снизу), если Q — замкнутое выпук-
лое множество.
Доказательство. Полунепрерывность сверху отображения
d®f следует непосредственно из определения. Установим полунепре-
рывность его снизу. Пусть даны е0>0, X0EQ, V0GEdgJ(X0) и
произвольные последовательности {efe}, {Xk}, такие, что
&k -» 80> XkG: Q, Xk XQ. Надо показать, что найдутся Vk^d^f (Xk)
такие, что Vk -> Vo. Допустим противное. Пусть существует а>0 та-
кое, что
min \\V-VQ\\ = \\Vk-Vd>a \fk.
V^(xk)
V0-Vft
Можно считать, что Vk -» V*, gk —--;. -> g^ Имеем
II VoVk\\
(v- Vo, gk)<(Vh-v0,gk)<-a V vedfy (Xft).
328
Значит,
----= S“P (^ gk) = <П- Sk)
dSk v^f(Xk}
(4.21)
и (Vft, ghX(Vo> gk)—a. Отсюда и из (4.21) ясно, что
/(<;оо такое, что
dsk
а
2
найдется
(4.22)
Поэтому
a
dga dgk 2
(4.23)
По теореме
dSk
4
inf — [f (xk + agk) - f (Xk) + eft] =
a>o, a
inf h (Xk, gk, a, 8:).
a>o,
X^+ag^Q
Из (4.22) ясно, что существует а0>0 такое, что
—;------= inf h (xk< 8k' a> ek>-
dgk а>ао,хАчагЛе2
(4.24)
Предположим вначале, что функция f сильно выпукла. Тогда
при каждом &
ссА > О, т. е.
инфимум в (4.24) достигается в некоторой точке
—-------= h(Xk,gk,a.k, eft),
°Sk
(4.25)
где aie(0, оо) —одно и то же для всех
причем aft^ai,...............
считать, что a/t->a'^a0. Тогда из (4.23) и (4.25)
eV<X*> ,,у , . Xw> а
Так как <%kgk G Q, то и Хо + a'go €= Поэтому
5е.Н^о)
—-------= inf h(X0, g0, a, e0)<ft(X0> g0, a', e0),
ogo a><xo,
Xo+O&go(=^
k.
Можем
(4.26)
329
что противоречит (4.26). Из полученного противоречия и следует
полунепрерывность снизу отображения dg f в точке [Хо, е0].
Пусть теперь f — произвольная выпуклая функция. При любом
фиксированном 6>0 функция = f(X)+6(X—Хо)2 сильно вы-
пукла. По доказанному выше отображение д® fi& полунепрерывно
снизу в точке [Хо, ео]- По формуле (3.16) имеем
ф1в(Х) = и Р®/(Х) + ^в(Х)],
+ —В
Ei>ote2>o
где f6(X)=6(X—Х0)2. В примере 1 было показано, что
aje(X)=4V-26(X -Х0) + г\геЕп, ||г||<2
Отсюда ясно, что если
вЛ-,е0, Xk-.X0, Vk&^kflb(Xk), Vw-,Vo.
TO
Vk6 = Vk6 + V№ где Vk& e dekf ’ Vk6 e dekf
Поскольку при всех k будет || 1| —* 0, то можно выбрать последо-
6—*+о
вательность {V^} такую, что V'k& ^о» где 6Л-> + 0. Значит, от-
ображение d®f полунепрерывно снизу в точке [Хо, е.о]. В силу произ-
вольности точки [Хо, е0] отображение d®f полунепрерывно снизу на
множестве Q х (0.+ оо).
Теорема доказана.
Следствие 10. Если Xoeint Q, е0>0, то отображе-
ние d&f непрерывно по Хаусдорфу в точке [Хо, е0].
Доказательство немедленно следует из леммы 1, так как
тогда отображение d®f ограничено в окрестности точки [Хо, е0].
Замечание 2. Из теоремы 5 следует и непрерыв-
ность по Хаусдорфу на ЕеХ(0, +оо) отображения dtf.
Свойство непрерывности def по X при фиксированном
е>0 сформулировано в [15].
§ 5. Условия минимума в задаче с ограничениями
Рассмотрим задачу минимизации конечной выпуклой
функции f на выпуклом замкнутом множестве Qcz£n .
Справедливо следующее утверждение.
Лемма 5. Для того чтобы в точке X*eQ функ-
ция f достигала своего наименьшего на множестве Q
330
значения, необходимо и достаточно, чтобы
Of=d°f(X*). (5.1)
Доказательство. Необходимость. Если X*eQ—точ-
ка минимума функции f на множестве Q, то f(X)>f(X*) V XeQ.
Отегада / (X) — f (X*) >(0, X—X*) УХей,
т. е. Оед°((Х*).
Достаточность. Пусть выполнено (5.1). По определению
условного субдифференциала
/(X)-/(х*)>(у, х—х*) vveaB/(x*), vxeo.
Отсюда и из (5.1) для всех XeQ будет
f(X) - f (X*) sup (V, X — X*) > 0,
т. е. f(X)^f(X*) для всех XeQ, а это и означает, что X* — точка
минимума функции f на множестве Q.
Замечание 3. Если функция f конечна и выпукла на
Еп, то по лемме 2 dQf (X*) =df(X*)—Г+(Х*), и условие
(5.1) эквивалентно соотношению (1.5). Если Q=En, то
условие (5.1) имеет вид_0е^(Х*).
Пусть е^О. Точка Хей называется ь-стационар ной
точкой функции f на множестве Q, если
0б=Э°/(Х). (5.2)
Лемма 6. Соотношение (5.2) эквивалентно нера-
венству
(5.3)
где Г = inf f (X).
х^я
Доказательство. Пусть выполнено (5.3). Тогда 1
f(X)-f(X)>z*-f(X)>^8 vxeQ,
т. е. О (X), а это и есть (5.2). Пусть теперь имеет место вклю-
чение (5.2). П£ определению условного е-су б дифференциала для лю-
бого Уе^/(Х) будет
f (X)-/:(X)>(v, х-х)-е v хей.
В силу (5.2) имеем f (X) f (X) > — 8 Отсюда 0>
> inf f (X) — f (X) > — e, что равносильно (5.3).
331
Следствие 11. Условие (5.2) (или, что то же, (5.3))
эквивалентно тому, что
inf ^>0.
M=i.gEvW
Это следует из приводимой ниже цепочки равносильных утверж-
дений:
oe^(X)<^f(X)-HX)>-e ухейф>
для произвольного g<=y(X), ||g|| = l,
f(X + ag)-f(X)> —8 Уа>0: Ха = Х + а^еЙФФ
^-^-[/(X + ag)-f(X) + e]>0 Va>0:
xaefi, Vgey(X), Ш=1*>
^/(Х) 1 _
—= inf — [HX + ag)-/(X) + eJ>0
dg a>o,Xa^Q а
0.
Vgey(X),
d“/(X)
ФФ inf _ —--------
W=l.gSV(A) dS
Следствие 12. Если 0^daf (X), то существует нап-
__________________ д&Р
равление g0^y (X), || g01| = 1, такое, что —-- < 0.
Л dgo
п । /v\ • f n
Положим ф (X) = inf —------------. Рассуждая так же,
UgH— l.gGV(X) dg
как и в [14], можно доказать следующую теорему.
Теорема 6. Если 0 е inf daf (X), то ф(Х)=г>0 и
г есть радиус наибольшего шара с центром в начале коор-
динат, содержащегося в множестве daf(X).
Пусть gtJ<=Erl, ||go|| = 1. Если
da/(X0) .nf daf(X0) <Q,
dgo M=i dg
то направление g0 будем называть направлением услов-
ного наискорейшего спуска функции f в точке Хоей по
множеству Q.
Из (4.1) очевидно, что £0^Г(Х0). Если функция f ко-
нечна и выпукла на Еп и Q^d°f (Хо), т. е. д/(Х0)П
ЯГ+(Хо)=0, то (см. [4], [17]) существует единственное
332
направление наискорейшего спуска (рис. 11.4). Если
inf ag/(X0) <Q
dgo И=1 dg
то направление g0 будем называть направлением услов-
ного ъ-наискорейшего спуска функции f в точке Х0^Й
по множеству й. В § 4 было показано, что в этом случае
g-oey(Xo) и
inf f (Хи + ag0) / (Хо) — 8.
a>o,Xo+agoeQ
Опишем метод последовательных приближений для на-
хождения 8-стационарных точек выпуклой функции f на
выпуклом множестве Й. Предположим, что /* = inf f (X) >
> — оо. Возьмем произвольное Пусть уже най-
дено Xk е Q. Если 0 <= d®f (Xk), то точка Xk является е-ста-
ционарной, и процесс заканчивается. Если же 0<£dgf(Xk),
то найдется gk^y(Xk), ||g*|| = 1, такое, что
&<Xk) <р
дёк
Пусть [ь =-- inf f (Xk + ot,gk). Если инфимум дости-
a>o,A'^+ag^Q
гается в некоторой точке ak, то полагаем Лл+1 — Xk+<%kgk-
(5.4)
333
По следствию 8
f(Xk+l)<f(Xk)—e,.
Если же инфимум не достигается, то найдем ак такое,
что
f(Xk+akgk)^f(Xk)-e/2
(такое ак найдется, так как fh^f(Xk)—е), и снова пола-
гаем Хк+1=Хк+а^к. При этом f(Xk+l) (Хк) — е/2.
Далее продолжаем аналогично. В силу конечности f*
этот метод за конечное число шагов 'приведет к 8-стацио-
нарной точке.
Для практической реализации описанного метода
надо уметь находить направления, удовлетворяющие не-
равенству (5.4).
Выбирая последовательность {еЛ}, такую, что еЛ-> + 0,
можно построить метод последовательных приближений
для нахождения точки минимума функции f на множе-
стве Q.
Литература к главе 11
1. Bertsekas D. Р., Mi t ter S. К. A descent numerical method
for optimization problems with non-differentiable cost functions.—
SIAM J. Control, 1973, v. 11, № 4, p. 637—652.
2. Вопросы теории и элементы программного обеспечения мини-
максных задач.— Л.: Изд-во ЛГУ, 1977.
3. W о 1 f е Р. A method of conjugate subgradients for minimizing
non-differentiable functions.— In: Mathematical Programming Stu-
dy 3, Amsterdam, North-Holland Publ. Co., 1975, p. 145—173.
4. Демьянов В. Ф. Минимакс: дифференцируемость по направ-
лениям.— Л.: Изд-во ЛГУ, 1974.
5. Демьянов В. Ф., Малоземов В. Н. Введение в мини-
макс—М.: Наука, 1972.
6. Демьянов В. Ф., Шомесова В. К. Условные субдиффе-
ренциалы выпуклых функций.— ДАН СССР, 1978, т. 242, № 4.
7. Е р м о л ь е в Ю. М. Методы решения нелинейных экстремаль-
ных задач.— Кибернетика, 1966, № 4, с. 1—17.
8. Ермольев Ю. М., Ш о р Н. 3. О минимизации недифференци-
руемых функций.— Кибернетика, 1967, № 1, с. 101—102.
9. Заботин Я. И., Кораблев А. И., Хабибуллин Р. Ф.
О минимизации квазивыпуклых функционалов.— Изв. вузов, Ма-
тематика, 1972, № 10 (125), с. 27—33.
10. Иоффе А. Д., Тихомиров В. М. О минимизации интеграль-
ных функционалов.— Функциональный анализ, 1969, т. 3, № 3,
с. 61—70.
11. Левин В. Л. О суб дифференциалах выпуклых функционалов.—
УМН, 1970, т. 25, вып. 4 (154), с. 183—184.
12. Lemarechal С. On extension of Davidon methods to nondiffe-
rentiable problems.— In: Mathematical Programming Study 3,
Amsterdam, North-Holland Publ. Co., 1975, p. 95—109.
334
13. Макаров В. Л., Рубинов А. М. Математическая теория
1 экономической динамики и равновесия. М.: Наука, 1973.
14. Малоземов В. Н. О достаточных условиях локального ми-
нимакса.— Вести. ЛГУ, 1976, № 7, с. 55—59.
15. Нурминский Е. А. О непрерывности е-субградиентных ото-
бражений.—Кибернетика, 1977, № 5, с. 148—149.
16 Поляк Б. Т. Один общий метод решения экстремальных за-
’ дач.—ДАН СССР, 1967, т. 174, № 1, с. 33—36.
17. Пшеничный Б. Н. Необходимые условия экстремума. М.:
Наука, 1969.
18. РокафелларР. Выпуклый анализ. М.: Мир, 1973.
19. Rockafellar R. Т. The theory of subgradients and its appli-
cations to problems of optimization. Lecture Notes. Univ, of Mon-
treal, Montreal, 1978.
20. Шор H. 3. Обобщенный градиентный спуск.— Труды первой
зимней школы по математическому программированию. М.: 1969,
вып. 3, с. 578—585.
ГЛАВА 12
НЕЛИНЕЙНЫЕ ЗАДАЧИ АППРОКСИМАЦИИ
§ 1. Постановка задачи
Пусть D и «в — некоторые метрические компакты,
причем D непусто, т — целое неотрицательное число.
Рассмотрим задачу
Ф (X): = max\f(X, t) I ->min, (1.1)
t^D
где
l/i (X, p)<0
I d/(X) = 0
Vfieo), |
Vie 1: tn j
(1-2).
Q =
Предположим, что выполнены следующие условия:
f(X, t) непрерывна вместе с f'x (X, f) на Q'XD, где
Q'czf" — некоторое открытое множество, содержащее й;
h(X, р) непрерывна вместе с h (X, р) на £nXco; d4(X)
непрерывно дифференцируемы на т<п и
т!ф(Х)>0. (1.3)
лей
Задача (1.1) является нелинейной задачей аппроксима-
ции.
Введем обозначение ф1(Х):=тах h(X, р). Тогда
ограничения, определяющие й, можно переписать в виде
ф1(Х)^0, cf4(X)=O Vfel:m.
Задачу (1.1) будем называть выпуклой, если в допол-
нение к сформулированным предположениям функция ф
и множество й выпуклы. Задачу (1.1) будем называть
линейной, если функция f(X, i) линейна по X, а й зада-
ется с помощью конечного числа линейных неравенств
336
и равенств. В случае непротиворечивости ограничений
линейная задача аппроксимации всегда разрешима. Раз-
решимость различных классов нелинейных задач тре-
бует специальных доказательств, иногда довольно тон-
ких ([36], [60], [62]).
Нашей основной целью является характеризация точ-
ки локального минимума функции ср на Q.
Постоянно будут использоваться следующие обозна-
чения:
7?(X)=VeD||/(XJ)|=<p(X)},
Q(X)={pS<o|/i(X,P) = 0).
Заметим, что если <р1(Хо)=О, то Q(X0) есть множество
точек максимума функции h(X0, р).
§ 2. Вспомогательные предложения
1. Рассмотрим функцию максимума
Ф(Х) : = maxF(X, Y),
где G — некоторый метрический компакт. Зафиксируем
Х=Хо и допустим, что F(X, У) непрерывна вместе с
F'x (X, У) на иь(Х0) XG, где С7б(Х0) —открытая 6-окрест-
ность точки Хо- Введем обозначение M(X) = {Y^
e=G\F(X, У)=Ф(Х)} и пусть S=Ue£"|||^|| = l}.
Важную роль в теории минимаксных задач играет
Предложение 1 ([14], с. 233—237). Для любого
g^S справедливо разложение
где
и
Ф (Хо + %g) = Ф (Хо) + х ^Ф(-о)- + О (g, X),
dg
(2.1)
= max (F'x(X0,Y),g)
og Yf=M(X0)
o(g,^)A-^->0
(2.2)
равномерно no g^S.
Факт равномерности no g предельного соотношения
(2.2) весьма нетривиален. Он будет неоднократно ис-
пользоваться в дальнейшем.
Применим предложение 1 к функции
cp1(X)=max/i (X, р).
0(40
337
Пусть ф1(Хо)=О. Тогда согласно (2.1)
Ф1 (Хо + Xg) = X ^(%о) + о (g, X),
dg
Где дч>1 (Х2) = тах (Хо, р), g).
dg PsQ(X0)
Разложение вида (2.1) имеет место и для функции
Ф (X) = max|f(X, t)\. Нужно только учесть, что
t^D
ф(Х) = max
l=±l.tsD
В частности,
- шах {(4 (Х„, /), g) sign f (X., f)},
dg /ексх.)
если ф(Х0) >0, и
Mo) = max | (Л (Xo, t),g)\,
og t^D
если ф(Л’о) =0.
2. Вариацией точки XQ^En будем называть любое
гладкое отображение Х-^(Х) отрезка [0, е] в Еп такое,
что и(О)=Хо. Опираясь на предложение 1, легко дока-
зать следующее утверждение.
Лемма 1. Для любого g^S и любой вариации v
точки Хо, у которой ^/(0)=g, справедливо разложение
ф (V (X)) = Ф (Хо) + х -MsL + о (X),
dg
где о(Х)/Х->0 при Х-> + 0.
3. Пусть Х= (хь хп). Положим
X1 = (хъ ..., хп, 1), Х° = (хь ..., хп, 0).
Напомним, что n-мерные векторы Хо, Xiy Хг называ-
ются аффинно независимыми, если линейно независимы
векторы Xj, Xi, ..., Xj.
Введем более общее понятие. Будем говорить, что
система Хо, Хь ..., Хг p-независима, где р^О : г, если ли-
нейно независимы векторы Xj, Xi, ..., Хр, Х°р¥1, ..., X?.
Очевидно, что г-'независимость совпадает с аффинной не-
зависимостью, а 0-независимость равносильна линейной
независимости векторов Хь ...,ХГ. В общем случае отсутст-
вует мажорирующая независимость. Так, в Е2 векторы
338
(1, 0), (0, О, (0> —О аффинно независимы, но не явля-
ется О-независимыми, а векторы (1, 0), (1, 0), (0, 1)
О-независимы, но не являются аффинно независимыми.
Наконец, отметим, что p-независимая система п-мерных
векторов содержит не более п+1 элементов.
Обозначим через V[Af] вектор с компонентами V[i],
i^N, и пусть N= 1 : п.
Теорема 1. Для того чтобы, векторы V0[A^], V\|W],
Vr[Af], где г^п, были p-независимы (р^0: г) и ли-
нейная однородная система
2^^]=0[ЛГ] (2.3)
i=0
имела решение с Х(>0 V teO : р, необходимо и достаточ-
но, чтобы
1) векторы Vi [АД teO: г, были линейно зависимы;
2) существовало подмножество N'c^N, состоящее из
г индексов, такое, что для всех ie0 : р определители г-го
порядка Ай составленные из столбцов V0[N'], ...
... ,V<-i[/V'], V<+1[W'], ..., Vr|7V'], были отличны от нуля и
имели чередующиеся знаки, т. е.
sign == — sign А{_! Viel:p.
Доказательство. Необходимость. Выполнение ус-
р
ловия 1) очевидно. Будем считать, что Хг=1. Запишем систему
f=o
линейных уравнений
3 МЦЛЧ = 0[ЛД
! <=° Р <2-4)
V, xf= I.
. Z=o
Из р-независимости столбцов Vi|W] следует, что ранг матрицы си-
стемы (2.4) равен числу неизвестных и система имеет единственное
решение. Более того, найдется подмножество индексов N'aN та-
кое, что 12VZ| =г и матрица системы
J '=° р (2.5)
3 -=1
. /=о
339
—невырожденная (последняя строка обеспечивает ранг г+1, Так
как [TV], feO : г, линейно зависимы). По формуле Крамера
%i= (—1) ^+гАг/Д, teO:r,
где А — определитель системы (2.5). Принимая во внимание, что
Xi>0 V/ sO: р, заключаем, что А< при всех teO : р отличны от
нуля и имеют чередующиеся знаки. Необходимость доказана.
Достаточность. Рассмотрим систему (2.5). На основании
р
условия 2) ее определитель А=^ (—1)*+гАг отличен от нуля. Зна-
1=0
чит, система имеет единственное решение, которое согласно формуле
Крамера можно записать в виде
%i==(_1)г-+гдг./д, te0:r.
Ясно, что %о, Лъ •••» положительны. Из того, что А =0=0, следует
также p-независимость системы УоГТУ']» ..., Vr[N'], а зна-
чит, и системы V0[TV], VipV], ..., Vr|W]. Осталось заметить, что в
силу (2.5) и условия 1)
г
3 WAT] = 0[JVJ.
i=o
Теорема доказана.
Замечание. Если система (2.3) имеет решение с ^>0 V 1&):р
и векторы Vo [TV], Vi[W], ..., Vr[TV] р'-независимы, где р'^р, то
те же векторы являются и р-независимыми.
Действительно, допустив противное, получим, что система
' г
2 fwm-opvj,
•t=a с <2-6>
S р< = °
1=0
р' р'
имеет ненулевое решение, причем Р/ ¥=0» Можно считать, что Р<в
i=o 6=о
Рк
=> На основании (2.3) и (2.6)
6-о
5J (х,m=ow,
£=о
i=o
340
р р
откуда bf = V i е 0 : г. В частности, X, > О, что про-
/=0 f=0
тиворечит (2.6).
4. В дальнейшем существенную роль будут играть
представления нуля
atVi + 2 KfWf + ykZk = 0, (2.7)
i^l /<=J k=l:s
где I и J — конечные множества индексов, V{, Wj, Zk —
n-мерные векторы, причем Z1( ..., Zs линейно независимы,
cq > О V i<=I, X/ > О V j е J, а{ = 1.
Лемма 2. Любое представление нуля (2.7) может
быть преобразовано в другое представление нуля
2 а,'?,, + 3 2 YkZk = 0, (2.8)
Г=/' /eJ' ftfers
в котором !'<=!, J'cJ и система векторов {V(, Wh Zh} яв-
ляется (11' | + | J' | — 1) -независимой.
Доказательство. Положим p=|7|—1 и допустим, что
система векторов, порождающая, представление нуля (2.7), является
p-зависимой. Тогда система
Tj V/Fz+ 3 т)^ = 0,
(<=! j&J k^r.S
l(=I
имеет нетривиальное решение. В силу линейной независимости век-
торов Zi, ..., Zs среди Цг, Vj есть ненулевой коэффициент, который
можно считать положительным. Введем обозначения
8 = min { min а£7ц£; min X.-/V,},
= X^Xy-evp yk = yk - 8^-
Очевидно, что a'- > 0 Vie/, Ху > О V j G J, aj = 1 и no
крайней мере один из коэффициентов aj, X*. обращается в нуль. По-
скольку
3 a'ivi+S + Tj =0 - <2-9)
tsz /е/ tei:s
341
го, выбрасывая из (2.9) слагаемые, соответствующие нулевым а},
получаем новое представление нуля с меньшим, чем в (2.7), числом
слагаемых. Продолжая эту процедуру, приходим к представлению
нуля (2.8) с (|/'|—1)-независимой системой векторов. На основа-
нии замечания к теореме 1 эта система автоматически является
(|/'| + | J'|—1)-независимой. Лемма доказана.
Замечание. В случае s = 0 система векторов из (2.8) будет
аффинно независимой.
5. Пусть D — компакт, содержащий не менее п+1
элементов, и
и2, ип (2.10)
— система непрерывных на D функций. Положим <U =
= («,, ..., «„). Систему (2.10) (и вектор-функцию CU') на-
зывают чебышевской,, если для любых попарно различ-
ных ..., /„ из D векторы ..., <?/(/„) линейно не-
зависимы.
Система (2.10) тогда и только тогда является чебы-
шевской, когда любой нетривиальный полином по этой
системе имеет на D не более п — 1 нулей.
В дальнейшем нам понадобятся следующие свойства
чебышевских на отрезке D=[a, &] систем.
I. Для любого набора точек Л<...</я из [а, &] опре-
делители, составленные из столбцов
имеют одинаковые знаки ([21], с. 52).
II. Пусть — произвольный набор точек
из [а, &]. Тогда система линейных уравнений
п
3 ми, (Н) = 0
1=0
имеет единственное с точностью до множителя ненуле-
вое решение Хо, ..., <ХП, причем signXi =—sign
Vtel :n (доказательство непосредственно следует из I
и формулы Крамера).
п
III. Существует полином Х1Щ, положительный всюду
на [а, &] ([21], с. 58).
Последнее свойство допускает интересное обобщение.
Теорема 2 (И. К. Даугавет [ 16]). Пусть D — ком-
пакт, на котором может быть задана хоть одна чебышев-
ская система, состоящая из п>\ непрерывных функ-
342
иий*)- Для того по любой такой системе можно
было построить положительный на D полином, необходи-
мо и достаточно, чтобы компакт D состоял не более чем
и3 п связных компонент.
§ 3. Условие регулярности
1. Прежде чем переходить к задаче аппроксимации
(1.1), рассмотрим отдельно множество ограничений Q
вида (1.2) и введем понятие регулярности ограничений в
точке. Существенно при этом, что компакт со может быть
бесконечным.
Пусть XoeQ. Вариация v точки Х^ называется до-
пустимой, если ф)еЙ при малых А,>0. Рассмотрим
всевозможные допустимые вариации v точки Хо. Через
у(Х0) обозначим множество всех ненулевых векторов
t/(0). Легко видеть, что у(Хо) —конус в Он назы-
вается конусом возможных направлений множества Q
в точке Хо. Положим r(X0) =у(Х0).
Введем выпуклый замкнутый конус
(h’x(X0,^,g)^Q V₽<=Q(X0), '
(d't(Xo),g) = O
Нетрудно показать, что Г(Хо)<=С(Х0).
Построим конус, сопряженный С(Х0). Напомним, что
конус, сопряженный С(Х0), определяется следующим
образом:
С+ (Хо) = {у е= Еп | (у, g) > О V g <= С (Хо)}.
Введем множество
С(х0)= geE"
Х(Х0) =
. у = - 3 У1* Р/) - 3 (Х»} I> °>
/=»1 Л=1
P/eQ(X0), <7 — любое натуральное число .
{0}, если Q (Хо) = 0 и tn = 0.
Легко проверить, что К (Хо) — выпуклый конус и
ВД)=С+(Х0).
Определение. Ограничения Q в точке X0<=Q на-
зываются регулярными, если Г(ХО)=С(Л'О) и конус
Д(Х0) замкнут.
*) В этом случае по теореме Мзрхьюбера компакт D гомеомор-
фен либо окружности, либо ее части.
343
Важным следствием регулярности является равен-
ства Г+(Х0)=Х(Х0).
Если Q(X0)—конечное множество, то замкнутость
/С(Х0) очевидна, так что в этом случае условие регуляр-
ности сводится к известному требованию Г(Х0)=С(Х0)
([32], с. 35—41).
Покажем на примере, что .конус К(Хо) может быть не замкнутым,
хотя выполнено равенство Г(Х0) = С(Х0).
Пример. Пусть co={p=(p1,p2)|(p1^l)2 + pj=l) и й
= {X ЕЕ Е21 (X, Р) < О V Р ЕЕ со}. Нетрудно понять, что
Й = {X == (Х1 х2) | X! < 0, х2 = 0}.
Возьмем точку Хо=(О, 0). В этом случае
C(X0) = {ge£2|(g, ₽)<0 V Ре со} = Й = Г (Хо).
Вместе с тем конус Х(Х0) не замкнут, ибо он совпадает с выпуклой
конической оболочкой множества —со.
2. Приведем известный случай выполнения условия
регулярности. Пусть Q имеет вид
Q = (xe£n| V/el:s1( |
I I (Ah X) + bt < 0 V/esj+lrsJ
где h(X, j)—выпуклые и непрерывно дифференциру-
емые функции. Условие регулярности выполняется в
любой точке X0^Q, если, во-первых, Q состоит не менее
чем из двух точек и, во-вторых, в одной из этих точек,
скажем в X, будет
Л(Х\ /)<0 V/ge1 (3.1)
([14], с. 176—182). Если s4 = 0 (Q задается с помощью
конечного числа линейных равенств и ’неравенств), то
условие (3.1) следует опустить.
3. Установим общий достаточный признак выполне-
ния условия регулярности (ср. с [32], с. 37).
Теорема 3. Пусть в точке XoeQ векторы
dl(X0), 4(Х0) (3.2)
линейно независимы и существует направление gQ^S
такое, что
Ж(хо,р),^о)<о v₽^Q(Xo), (33)
(de (Хо), g*o) = 0 V i f= 1: m.
Тогда ограничения Q в точке Хо регулярны.
344
Доказательство. Замкнутость конуса К(Хо) очевидна,
если Q(Xo)=0. Если же Q(Xo)#=0, то замкнутость Х(Х0) можно
установить, опираясь на (3.3).
у Проверим, что £оеГ(Хо). Так как g0 удовлетворяет равенствам
из (3.3) и векторы (3.2) линейно независимы, то существует вариа-
ция v(X) точки Хо, v'(O)=go, допустимая для ограничений-равенств
множества й (доказательство см., например, в [32], с. 37—38).
Если при этом Q(X0) =0, т. е. cpi (Хо) <0, то полученная вариация
является допустимой для всего множества Q. Если же Q(Xo)=£0,
то на основании леммы 1 и (3.3) при малых Х>0 получаем
ф1(у(%))<0, т. е. v — допустимая вариация для Q. Таким образом,
во всех случаях £0£еГ(Х0).
Покажем теперь, что С(Х0) с=Г(Х0). Любой вектор g из
C(X0)fiS представим в виде g= lim у где уе= (g-\-sgo)IWg+
е->+о ’
+egol|. Очевидно, что уе при малых 8>0 удовлетворяет условиям
(3.3) (с заменой g0 на уе). По доказанному, г/ееГ(Х0), так что и
^еГ(Хо). Регулярность ограничений Q в точке Хо установлена.
Замечание 1. Пусть di (X) линейны при всех teil : т. Тогда
выполнение только условия (3.3) гарантирует регулярность ограни-
чений в точке Хо. Действительно, в этом случае линейная вариация
и (%) =Xo + Xgo является допустимой для ограничений-равенств.
Замечание 2. Допустим, что в определении Q отсутствуют
ограничения-равенства. Если в точке Хо множество Q(X0) состоит не
более чем из п связных компонент и вектор-функция h'x (Хо, 0) яв-
ляется чебышёвской на Q(X0), то ограничения Q в точке Хо регу-
лярны. Это следует .из теорем 2 и 3.
Замечание 3. Условия теоремы 3 не являются необходи-
мыми.
Пример. Пусть множество. Q задается системой неравенств
h(X, 1): = -4+х2<0,
h(X, 2):== xi <0,
h(X-,3):= - х2<0.
Проверим выполнение условия регулярности в точке Хо= (0, 0).
Имеем Q(XO) = {1, 2, 3}, С(Х0) = {g= (gi, g2) |£i^0, £2=0} =
= Г(Х0). Однако легко видеть, что не существует направления go,
удовлетворяющего строгому неравенству из (3.3).
§ 4. Условия оптимальности
1. Введем обозначение CS(X) = С (X)QS.
Лемма 3. Если XQ— неизолированная точка мно*
жества Q, то С8(ХО)У=0.
Доказательство. Если Хо — внутренняя точка Q, то ут-
верждение очевидно, так как в этом случае у(Х0)=Еп и, значит,
С(Х0)=Еп.
Допустим, что XoedQ. Рассмотрим для определенности самый
общий случай, когда cpi(Xo) =0 и т^\. Так как Хо—неизолирован-
ная точка, то найдется последовательность {Х/J точек из Q такая,
что X. =[= Хо V k = 1, 2, ... и Хо = lim Xk. Положим =
/г-*оо
345
= ||XA-Xoll, gk=(Xk—XoW Тогда
дфИХо) , °o(gk>h)
w;<A,). с,) + °‘(8*' >‘*) -0 Vlel:m.
где Oi(gy %)/X->0 при X->0 равномерно no g^S и ieO : т. Из последо-
вательности {gft} выделим^ частичную последовательность сходящую-
ся к g^S. В пределе для g получаем
дф1 (*о)/д£< 0, (d't (Хо), I) = О V i е 1 : т,
т. е. geCS(Xo). Лемма доказана.
Заметим еще, что в изолированной точке XoeQ не мо-
жет выполняться условие регулярности. Действительно,
для изолированной точки Хо множество у(Х0) пусто, а
С(Х0) всегда содержит нулевой элемент. Таким образом,
выполнение условия регулярности предполагает неизоли-
рованное™ точки Хо.
2. Обратимся к задаче (1.1). Для неизолированных
точек X множества Q определим функцию
ф (X): = min М .
geCS(X) dg
Теорема 4. Пусть в точке Х*ей справедливо ра-
венство С(Х*)=Г(Х*). Для того чтобы X* была точкой
локального минимума функции ф на Q, необходимо, чтобы
ф(Х*)>0. (4.1)
Доказательство. Допустим, что для некоторого
&Y(X*)pS выполняется неравенство d<p(X*)/dg<0. Тогда на осно-
вании леммы 1 для любой допустимой вариации у(Х) точки X* та-
кой, что i/(0)=g, при малых Л>0 будет
Ф(и(%))_ ф(Х*)<0.
Но это невозможно, так как X* — точка локального минимума функ-
ции ср на Q. Значит,
дф(Х*)/д£>0 V g(=Y(X*)f]S.
Возьмем теперь произвольный вектор g из CS(X*). Так как
CS(X*) =r(X*)f)S, то £=Ит£л, где £Аеу(Х*)Г|5. При всех k
k-^CO
имеем
= max М(х*’0. fir*) sign/(Х\ 0}>0.
dgk
В пределе дф(Х*)/dg^O. Теорема доказана.
346
Точка X*^Q, для которой выполняется условие (4.1),
называется стационарной.
3. Рассмотрим выпуклую задачу (1.1) и предположим,
что выпуклое множество й состоит более чем из одной
точки (тем самым CS(X) =/=0 V Хей). Условие (4.1) в
этом случае является достаточным для оптимальности
точки X*. Справедлива следующая
Теорема 5. Пусть задача (1.1) выпукла и й содер-
жит более одной точки. Если для Х*ей выполнено усло-
вие (4.1), то X* — решение задачи (1.1).
Доказательство. Зафиксируем произвольную точку X из
Q, отличную от X*. В силу выпуклости ср на Q
1У, Ф(Х» + 1(Х-Х‘))^ф(Х«)
ф (X) — ф (х ) >--------------------- V1 е (0,1).
Л
Положим g= (X—Х‘)/||Х-Х*||, а = Х-||Х—Х*||. Тогда при малых
а>0
vii Ф(ХЧ-ая)-ф(Х’)
Ф (X) — Ф (X ) > К X — X ||-----------,
а
откуда следует, что
Ф(Х)-Ф(Х’)>||Х-Х’||^^УР .
og
Учитывая, что g<=CS(X‘), получаем
ф(Х)>ф(Х*) + ||Х-Х,||. ф(Х*) УХеЙ. (4.2)
Остается воспользоваться условием (4.1). Теорема доказана.
Замечание. Если в точке X* выполнено строгое
неравенство -ф(Х*) >0, то X* является единственным ре-
шением выпуклой задачи (1.1). Это немедленно следует
из (4.2).
4. Вернемся к о'бщей задаче (1.1).
Теорема 6. Пусть в точке Х*ей выполняется не-
равенство i|)(X*)>0. Тогда X* — точка строгого локаль-
ного минимума функции ф на й. Более того, найдутся
числа г>0 и 6>0 такие, что
Ф(Х)><р(Х*) + г||Х-Х’|| УХеЙПВв(Х‘), (4.3)
где ВДХ*) —замкнутая 8-окрестность точки X*.
Доказательство. При е>0 положим
с$в(Х*)= £65
(Лх(х*. ₽),£)<8- у Ре<2(х*),
I (4 (X*), g) | < 8
347
Очевидно, что CSe(X*)—компакт, CSo(X*) = CS(X*) и при увеличе-
нии е множество CSe(X*) расширяется. Нетрудно проверить, что
найдется 8*>0, для которого
%. (Х*):=
gGCS8.(X«)
d<P(X*)
dg
>0-
min 1’’
Пусть ф1(Х*)=0 и т^1 (в противном случае соответствую-
щие ограничения не рассматриваются). В силу неизолированности
точки X* множество Qf]Be(X*) при любом 6>0 содержит точки,
отличные от X*. Зафиксируем б>0 (ниже уточняется, каким обра-
зом), возьмем XeQnBa(X*), Х=£Х*, и положим %=||Х—Х*||, g=
= (X—X*) /X Тогда
ф(Х)^ф.(х*) = Н-х*|| + t
\ dg л /
d<Pi (А'*) о0 (g, X)
<0’
, °z (g> X)
(di(X*),g) +-------------=0 Vielim,
л
где о{ (gt к)/к -> 0 при X -> 4- 0 равномерно по g (Е S и i — 1 : т. По
г* = min {е*, фе* (X*)
найдется б > 0 такое, что
max |^(g, X)|A<r* VXe(0, 6].
Согласно (4.4) g ЕЕ CSe* (X*) и
Ф (X) - ф (X*) > и х - х* II (фе, (X*) - г*) у х е Q п Вб (х*).
Полагая г = ф8* (X*) — г*, получаем требуемое. Теорема доказана.
§ 5. Геометрическая интерпретация
условий оптимальности
1. Обозначим А(Х) выпуклую оболочку множества
Н (X) = {Z = 1-(X, t)-f'x(X, t)\t<=R(X)}, где ЦХ, /) =
=signf(X, f). В силу (1.3) L(X) при любом Хей явля-
ется выпуклым компактом.
Лемма 4. Условие стационарности i|>(X*)^0 экви-
валентно соотношению
Л(Х*)ПС+(Х*)^0. (5.1)
Доказательство. Допустим, что X* — стационарная точ-
ка, но (5.1) не выполняется. По теореме о строгой отделимости
найдется вектор g^S такой, что
(2,^о)<о vze//(x*),
(2,^о)>о vzec+(x*).
348
tia основании второго неравенства £оеС++(Х*). Учитывая, что
—замкнутый выпуклый конус, получаем gQ^C(X*). Соглас-
но первому неравенству dq>(X*)ldgo<zO. Но это противоречит усло-
вию стационарности.
Обратное столь же очевидно. Лемма доказана.
Напомним, что С+(Х*) = К(Х*) и, если в точке X*
выполнено условие регулярности, то С+(Х*) =/<(Х*).
Теорема 7. Пусть в точке X*«=Q выполнено условие
регулярности. Для того чтобы X* была точкой локаль-
ного минимума функции ср на Q, необходимо, чтобы
Л(Х*)ПК(**)^0.
Доказательство немедленно следует из теоремы 4 и лем-
мы 4.
2. Обратимся к достаточному условию строгого ло-
кального минимума -ф(Х*)>0 и дадим его геометриче-
скую интерпретацию. Введем в рассмотрение замкнутое
выпуклое множество Т (X) = L (X) —С+ (X).
Теорема 8 ([25]). Пусть X*^Q. Неравенство
1р(Х*)>0 выполняется тогда и только тогда, когда О
является внутренней точкой множества Т(Х*). При этом
величина г=ф(Х*) равна радиусу наибольшего шара
с центром в нуле, содержащегося в Т(X*).
Следствие. Если С'(Х*)=Еп, то неравенство
1р(Х*)>0 выполняется тогда и только тогда, когда 0 яв-
ляется внутренней точкой множества L(X*).
Действительно, в этом случае Т(Х*) =L(X*). § *
§ 6. Условия оптимальности в форме Куна — Таккера
1. Определение. Будем говорить, что в точке Х*е
выполнено условие Куна — Таккера, если сущест-
вуют точки
индексы
и числа
tQ, tlf ..., Ip из R (X*), р > О,
Pi, ^ из Q(X*), 7>0,
ix, is из 1 : m, s > О,
р
>0,1Е0:р, X/>0, / е 1:q; yR, 1:s,
l“=s0
349
такие, что
3 a&f'x (X*. ti) + 2 Wx (X*, P/) +
1=0 /=1
“I" 3 ^{1г = °’ (6.1)
k=l
где £i = sign f(X*, tf) и векторы
Ух (Г, /0), Ух (Х-, ..., Ух (X’, tp),
(6.2)
hx (X*, pj, h'x (X*, р,), < (X’), .... < (X*)
(р + q) -независимы.
Из (p + q)-независимости векторов (6.2) следует, в
частности, что p + q + s^n. Если p + q + s = n, то будем
говорить, что X* удовлетворяет полному условию Куна —
Таккера.
Замечание. При s = 0 система векторов (6.2) является аф-
финно независимой.
2. Обозначим 3? (X) линейную оболочку множества
{d/(X), ..., d/(X)}.
Теорема 9. Пусть X*eQ — точка локального ми-
нимума функции ср на Q и ограничения в ней регулярны.
Тогда в X* выполняется условие Куна — Таккера, при-
чем s равно размерности пространства 2?(Х*).
Доказательство. Воспользуемся теоремой 7. Обозначим
d^(X*), , di (X*) базис пространства X (X*). Согласно определе-
нию L (X*) и К (X*) существуют точки /fGE/?(X*), G Q (X*), а-
р
также положительные числа’с^, и числа yk, где а* = 1, такие,
i=o
что имеет место представление нуля (6.1). По лемме 2 можно полу^-
чить представление нули вида (6.1) с (p + q) -независимой системой
векторов. Теорема доказана.
Теорема 10. Выполнения условия Куна — Таккера
в точке X*^Q достаточно для того, чтобы в выпуклом
случае точка X* являлась решением задачи (1.1).
Доказательство немедленно следует из соотношения
X(X*)czC+ (X*), леммы 4 и теоремы 5.
Теорема 11. Пусть точка X:f:<=Q удовлетворяет
полному условию Куна — Таккера. Тогда X* является
350
гочкой строгого локального минимума функции ср на Q.
%олее того, существуют г>0 и б>0 такие, что
ф(Х) >ф(Х*)+г||Х —Х*|| VXeQQ Вб(Х*).
Доказательство. На основании теоремы 6 достаточно
установить, что величина а := max (f'x (X*, ^), g) для любого
g^CS(X*) положительна. В силу (6.1) для любого
gt==CS(X*) имеем
Р Q
6:= S (х*< <i). ff) = - 3 <Х*- ₽Р’ S) > 0, (6.3)
Л=0 /=1
откуда следут, что
Допустим, что а = 0. Тогда, учитывая (6.3), получаем
(f'x (X*. ti), g) = 0 Vieo-.p. (6.4)
Снова согласно (6.3)
(Ал (X*. ₽,). g) = 0 У/е1:р. (6.5)
Кроме того, по определению
(^(х*), g) = ° (6.6)
Из системы п+1 линейных уравнений (6.4) — (6.6) и (р+g)-независи-
мости векторов (6.2) следует, что £=0. Но это невозможно, ибо
||g|| = l. Значит, а>0, и теорема доказана.
Замечание. В теореме 11 по существу установлено, что пол-
ное условие Куна — Таккера гарантирует неравенство ф(Х*)>0.
Обратное, вообще говоря, неверно.
Пример. Пусть Q = Е2, <р (X) = max | f (X, i) |, где
iso:3
f(X, 0) = хх+ 1, f(X, 1) = Xi- 1, f(X, 2) = х2+1,
f(X, 3) = — I
Рассмотрим точку Х*=(0, 0). Имеем R(X*) =0 : 3, Н(X*) = {(1, 0),
(—1, 0), (0, 1), (0, —1)}. На основании следствия из теоремы 8
Ф(Х*) =]/2/2>0. Однако в Н(Х*) нет трех векторов, выпуклая ком-
бинация которых с ненулевыми коэффициентами равнялась бы нулю.
§ 7. Альтернансная форма условий оптимальности
1. Определение. Будем говорить, что точка X*eQ
обладает {г +1) -точечным альтернансом (г^0:п), если
найдутся
t0, tlt ..., tp из R(X*),
Pi, ..., р, из Q(X‘),
4, .... 4 из 1 : tn
(^ > 0, </>-0, s>0, рqs = г)
35!
такие, что векторы К[TV], ieO : г, где
Vi [Ai] = sign (/ (Х‘, /»•)) f’x {X*,tf), i<= 0 : p,
Vp4[N]=hx{X*,fr), je=\:q,
Vp^N]=d’ik(X'), k^lts,
удовлетворяют следующим условиям:
1) они линейно зависимы;
2) существует подмножество N'czN, состоящее из г
индексов, такое, что для всех i^O:p+q определители
r-го порядка Д4, составленные из столбцов
vm,.... к-т к+1т.... кт
отличны от нуля и имеют чередующиеся знаки
sign Af = — sign Ai-X Vie 1: p + q.
Отдельно рассмотрим три случая.
а) г=п. Наличие («+1)-точечного {полного) альтер-
нанса равносильно существованию
t0, tlt ..., tp из R{X*),
рх, .... из Q(X’),
ix, ..., is из 1:m
(р > О, </>0, s > О, p + ^ + s = n)
таких, что у матрицы составленной из столбцов
Ух (Х‘, to), Ых (X*. h), ..., Wx (X*, tp), h’x {X*, рх), ...
h'x{X*,fiq), d'i^X*), ..., dis{X'),
где £f = sign f(X*, it), определители А; подматриц, полу-
чаемых из исключением i-го столбца, при ieO : p + q
отличны от нуля и имеют чередующиеся знаки.
б) r —S (р = q = 0). Наличие (s + 1)-точечного альтер-
ната означает существование точки t0 R (X*) и индек-
сов ix, ..., is из 1: rn таких, что векторы f’x {X*, t0),
d‘it{X*), ..., df (X*) линейно зависимы, а те же векторы
без f'x(X", t0) линейно независимы.
в) г — 0. Наличие одноточечного альтернанса равно-
сильно существованию точки t0 е R (X*), в которой
fx(X‘,io)=O.
2. Принципиальным является то обстоятельство, что
согласно теореме 1 выполнение условия Куна — Таккера
3&2
р точке X*^Q равносильно существованию в X*
(p+?+s+l) -точечного альтернанса. В связи с этим все
теоремы характеризации предыдущего параграфа могут
быть переформулированы в альтернансных терминах.
Теорема 12. Пусть X* — точка локального мини-
мума функции ф на Q и ограничения в ней регулярны.
Тогда X* обладает (г +1) -точечным альтернатом, где
геО ’ п.
Теорема 13. Наличия (г +1)-точечного альтернан-
са в точке X*eQ достаточно для того, чтобы в выпуклом
случае точка X* являлась решением задачи (1.1).
Теорема 14. Пусть X*<=Q обладает полным альтер-
натом. Тогда X* — точка строгого локального минимума
функции ф на Q. Более того, существуют такие г>0 и
б>0, что
ф(Х)>ф(Х*)+г||Х —Х*|| V Хе=С2ПВб(Х*).
3. Рассмотрим линейную задачу аппроксимации:
п
Ф (X): = max V (0 — “о (0 -> min, (7.1)
t^D ~ XsQ
п
где Q = Х^Еп ctjXi ^bh j t= 1:1
. Предположим, что
uQ, иъ ..., ип — не-
D — непустой метрический компакт,
прерывные на D функции, множество Q содержит по край-
ней мере две точки и тшф(Х)>>0. Введем обозначения
Р (X, f) = xtu{ (t), f (X, t) = P (X, t) - щ (0.
f=l
Очевидно, что f'x (X, t) = (ux (/), ... , un (/)) =6lL(t). Огра-
ничения задачи (7.1) можно переписать в виде
h (X, /): = (С/, X) — bf 0, / ge 1:
где С/ = (clf, ..., cnj). При этом hx (X, /) = С/.
Очевидным следствием теорем 12 и 13 является
Теорема 15. Для того чтобы вектор X*eQ был ре-
шением задачи (7.1), необходимо и достаточно, чтобы
он обладал (г + 1) -точечным альтернатом (г^0:п),
т- е. чтобы нашлись точки t0, tif ..., tp из /?(Х*) и индек-
CbL jq из Q(X*) (р^О, q^O, p + q = r) такие, что
12 Под ред. н. Н. Моисеева 353
векторы K|W], где
IMAT] = sign (/ (X*. k)) i e 0: p,
Vp+k [N ] = Cjk, 1 *q9
удовлетворяют условиям 1), 2).
Множество IF={/0, Л, ...» tp, ji, ...» /J 'будем называть
альтернансом точки X*.
Замечание. В случае отсутствия ограничений на коэффи-
циенты аппроксимирующего полинома Р(Х, t) теорема 15 эквива-
лентна соответствующей теореме Е. Я. Ремеза [30].
4. Покажем, что в линейном случае 'понятие альтер-
нанса эквивалентно понятию критического' множества,
def
Пусть /czl : 1=М и G — компактное подмножество D.
Положим
Qy = {X Еп | (С/, X) bh j g=V},
р (G, J) = min max IP (X, t) — uQ (t) |.
X^Qj i~G
Очевидно, что QM = Q.
Определение. Конечное множество W={tQ, Ц, ...,
tp, ji, jq} = {T, /}, где p^O, q^O и T(zzD, JczM, назы-
вается критическим, если p(T, J)=p(D, Л4) wp (?*,/*)<
<p(Z), Л4) для всякого собственного подмножества 1Г* =
= {Т*, /*} множества W такого, что Т*#=0.
Теорема 16. Для того чтобы множество W={T, J}
было критическим, необходимо и достаточно, чтобы на-
шелся вектор X*eQ, для которого это множество явля-
ется альтернансом.
Доказательство. Необходимость. В качестве X*
возьмем решение задачи (7.1). Поскольку X*sQj- и
р (Г, /) = р (D, М) = max | f (X*, t) | > max | f (X*, t) |,
i^D t£=T
то X* является решением следующей задачи:
max I f (X, t) I ->! min .
t-т ‘ X&ij
(7.2)
Согласно теореме 15 точка X* как решение задачи (7.2) обладает
альтернансом MZ*={71*, /*}, где 7*gz7, J*czJ. Нужно показать, что
Т* = Т, J* = J. Но это очевидно, ибо по теореме 15 р(Т*, /*) =
= ц(Т, /), а если бы W* было собственным подмножеством множе-
ства W, то по определению критического множества выполнялось бы
неравенство ц(Г*, /*)<р(7\ /). Необходимость доказана.
Достаточность. Пусть множество = {Т, /} является
альтернансом вектора X*eQ в задаче (7.1). Покажем, что
354
критическое множество. По теореме 15 р(Л /) =р,(£>, Л4)>0. При
этом любые г=|№|—1 столбцов из системы V0[N], УДМ], ...
yr[tf] линейно независимы. Возьмем произвольное собствен-
ное подмножество W*—{T*, /*} множества W такое, что Т*#=0.
Нетрудно понять, что р,(Г*, /*) = 0<p,(Z), Л1). Действительно, ли-
нейная система
(ler.
разрешима, ибо строки матрицы этой системы линейно независимы.
Теорема доказана.
В случае отсутствия ограничений на коэффициенты этот резуль-
тат был установлен в [11].
§ 8. Условие нормальности
1. Вернемся к задаче (1.1). Прежде всего заметим,
что точка может обладать несколькими альтер-
нансами и не обязательно с одним и тем же значением
r=p + q + s.
Пример. Пусть Q = £I, q?(x)==max |f(х, /)|, где f(x, t) =
= 1—xt. Рассмотрим точку х* = 0. Имеем /?(х*) = [—1, 1], 77(х*) =
= {—/|te[—1, +1]}. В точке х* выполняется условие Куна — Так-
кера. Действительно, возьмем произвольные ае(0, 1], де (О, 1].
Тогда
b а
( -0)ея(х*). »еям и —Г7(-<О + -Г7(0 = °.
а + b а+ о
причем точки (—а) и b аффинно независимы. Значит, х* имеет бесчи-
сленное множество полных альтернатов. Вместе с тем х* обладает
и одноточечным альтернатом, ибо f'x (х*, 0) = 0.
В этом параграфе рассматривается наиболее интерес-
ная ситуация, когда точка обладает хотя 'бы одним пол-
ным альтернансом и не имеет ни одного неполного аль-
тернанса. Такие точки'будем называть нормальными.
2. Определение. Скажем, что в точке вы-
полняется условие (Т), если для любых
/0, /1, ...» tp из
Pi, .... Р? из Q (X’),
i’i, ..., is из \:m
(р > 0, > 0, s> 0, р + q + s^n — 1)
12
355
найдутся коэффициенты at, ап такие, что
п
sign (/ (X*, ti)) <Х*» ^)-> 0 v 1 е 0: Р>
V=1
. 2 aXv (X’, Р/) > о V / е= 1: q, (8.1)
avddik (X*)/dxv = 0 V k е 1: s.
< V=1
Лемма 5. Пусть в точке выполнено условие
Куна — Таккера. Для того чтобы точка X* была нор-
мальной, необходимо и достаточно, чтобы в ней выпол-
нялось условие (Т).
Доказательство. Необходимость. Возьмем произ-
вольные /0, t\, • ••> tp из R(X*), Pi ..., Рд из Q(X*) и A, ...» iB из
1 : пг, где p+q+s^n—1, и покажем, что при некоторых ах, ..., ап
выполняется (8.1).
Обозначим через L выпуклую оболочку множества I
£0: р}, а через К — выпуклую коническую оболочку множества
. - hx (X*, ₽?). ±<(Х»), ±d'ls (X*)}. Не-
трудно понять, что Ц\К=0. Действительно, в противном случае су-
ществует представление нуля, которое на основании леммы 2 можно
привести к виду (6.1) с (p+q) -независимой системой векторов (6.2).
Заметим, что в полученном представлении нуля p+q+s^n—1. Но
это противоречит условию леммы, согласно которому исключается
наличие у точки X* неполного альтернанса.
Итак, Lf|K=0. По теореме о строгой отделимости существует
вектор А= (аь ..., ап), такой, что
(Л, Z)>0 yZeL, (Л, Z)< 0 yZeK. (8.2)
Из (8.2) очевидным образом следует (8.1).
Достаточность. Поскольку точка X* удовлетворяет усло-
вию Куна — Таккера, то она обладает хотя бы одним альтернансом.
Покажем, что этот альтернанс не может быть неполным.
Допустим, вопреки утверждению, что существует представление
нуля (7.1), в котором p-\-q-\-s^n—1. По условию леммы найдется
вектор Л=(аь ап) такой, что выполняется (8.1). Но тогда
р Q
О = 2 (A, fx (X*. /,)) + 2 X, (A, h'x (X*. ₽,)) +
1=0 /=1
S
+ 3 4k(A,d\kQC*))>Q.
А=1
Получили противоречие. Лемма доказана.
356
Из теоремы 12 и леммы 5 следует
Теорема 17. Пусть Х*^& —точка локального ми-
нимума функции ф на Q, ограничения в ней регулярны
и выполнено условие (Т). Тогда X* — нормальная точка.
3. Желательно иметь 'простые достаточные условия,
гарантирующие выполнение условия (Т). В связи с этим
рассмотрим задачу аппроксимации -без ограничений
Ф (X): = max | f (X, t) | -> min , (8.3)
/GD Х^Еп
где D — компакт, содержащий не менее п+1 элементов.
Лемма 6. Если в точке X* система функций
(0 = (X*, /), i g= 1 : п, (8.4)
является чебышёвской на D, то в X* выполняется усло-
вие (Т).
Доказательство немедленно следует из разрешимости
при любых попарно различных to, /ь ..., tn-\ из D интерполяцион-
ной задачи
3 avf’Xy(X*. t{) = sign/(X*. t<), iG0:n-l.
Замечание. Чебышевские свойства системы (8.4) не явля-
ются необходимыми для выполнения условия (Т).
Пример. Пусть п—1, ф(х)=тах Jf(x, /)|, где f(x, t) =
/е [-1,1]
=xt—t2. Нетрудно проверить, что точка х* = 0 имеет единственный
альтернанс tQ =—1, /1 = 1. Поскольку это полный альтернанс, то
согласно лемме 5 в х* выполняется условие (Т). Однако функция
fx (х, /)=/ не является чебышевской на [—1, 1].
На 'основании теоремы 17 и леммы 6 получаем сле-
дующий результат.
Теорема 18 ([24]). Пусть X* — решение задачи
(8.3) и система функций (8.4) является чебышёвской на
D. Тогда X* обладает полным альтернансом.
Наличие полного альтернанса в данном случае сводит-
ся к существованию точек /0, Е, ..., tn из 7?(Х*) таких,
что определители feO : /г, составленные из столбцов
Wx(X*, /о), ...
.... b~ifx (X*, t^), Ых (Xе, , w; (Х-, tn),
гДе £i=sign f(X*, ti), отличны от нуля и имеют чередую-
щиеся знаки. Обозначим Аъ teO: п, определители,
357
столбцами которых являются векторы
f'x (Х\ t0), ...,f’x(X* t^), f'x (X', t(+1), f'x (X*, tn).
Тогда
n
= &Д/[J if=Q'.n.
1=0
Отсюда заключаем, что наличие полного альтернанса
равносильно существованию точек ...» tn из /?(Х*)
таких, что определители Д< отличны от нуля, а величины
giAi имеют чередующиеся знаки
sign = — sign V i е 1: п. (8.5)
Замечание. В случае линейных задач аппроксимации теоре-
ма 18 была установлена в [34].
Теперь очевидна
Теорема 19 ([53], [54]). Пусть X*— решение за-
дачи
Ф (X): = max | f (X, t) | min
Х^Еп
и система функций =f'Xl(X*, t), : n, является че-
бышёвской на [а, Ь]. Тогда существуют п+1 точек t0<
из [а, Ь] таких, что \ f (X*, | = ф(Х*) и
signf(X*, ti)=— signf(X*, ti-C)-
Доказательство следует из теоремы 18, формулы (8.5)
и свойства I чебышёвских на отрезке систем функций (§ 2, п. 5).
§ 9. Исторический обзор
Начало систематическому изучению нелинейных задач аппрок-
симации положили работы Моцкина [55] и Торнхейма [61], посвя-
щенные наилучшему равномерному приближению непрерывной
функции элементами унисольвентного семейства. Примерно в то же
время появилась работа М. И. Морозова [27], [28], в которой рас-
сматривалась эквивалентная задача аппроксимации посредством
функций интерполяционного класса. Эти и более поздние работы
других авторов базировались на классических исследованиях
П. Л. Чебышёва [33], Е. И. Золотарева [18], А. А. Маркова [26] и
С. Н. Бернштейна [3]. В частности, в теории унисольвентной ап-
проксимации формализовалось, по существу, доказательство теоре-
мы П. Л. Чебышёва об альтернансной характеристике алгебраиче-
ского полинома наилучшего приближения.
Вне унисольвентных семейств оказалась дробно-рациональная
функция, хотя в случае дробно-рациональной аппроксимации
358
П. Л. Чебышевым и впоследствии Н. И. Ахиезером были получены
законченные результаты в альтернансных терминах [1]. Это обстоя-
тельство приводило к тому, что теория унисольвентной аппроксима-
ции воспринималась как красивая, но весьма ограниченная теория.
Райс рассмотрел варисольвентные семейства [57] — [59], вклю-
чающие как унисольвентные семейства, так и дробно-рациональную
функцию, и построил теорию варисольвентной аппроксимации, полу-
чившую широкое признание. Он же совместно с Хобби ввел важ-
ный аппарат аппроксимации с нелинейно входящими параметрами —
так называемые у-полиномы [47]. Из более поздних работ о у-по-
линомах отметим [37], [38]. Некоторое уточнение теории Райса
имеется в [52]. Попытка дальнейшего расширения аппроксимирую-
щего семейства функций предпринята в [45].
Следующий шаг в исследовании нелинейных задач аппроксима-
ции сделали Майнардус и Шведт [53], [54]. Они потребовали на-
личия чебышёвских свойств у системы частных производных аппро-
ксимирующей функции по параметрам вместо выполнения интерпо-
ляционных условий, встречающихся у Моцкина, Торнхейма, Морозо-
ва и Райса. Это не привело к новым результатам, но существенно уп-
ростило технику доказательств. В [35] установлена связь между тео-
риями Райса и Майнардуса — Шведта.
К настоящему времени изучены различные семейства функций с
нелинейно входящими параметрами. Их сравнительный обзор имеет-
ся в [39]. Интересные результаты по нелинейной аппроксимации по-
лучены в [35], [41], [42], [46], [48], [49], [56]. В [43] дан обзор
некоторых из этих результатов, а в [40] приведена обширная биб-
лиография.
В последние годы на теорию аппроксимации заметное влияние
оказывает бурно развивающаяся теория экстремальных задач [5],
[17], [19], [29], [44], [50], [51]. Особенно это касается линейных
задач аппроксимации [6], [7], [20], [23], [30], [31]. Бесспорно и
обратное влияние.
В данной главе строится общая теория нелинейных задач ап-
проксимации с нелинейными ограничениями. Указанные задачи рас-
сматриваются как экстремальные, точнее, как минимаксные, что поз-
воляет использовать недавно разработанную технику [13]—[15]. В
отличие от предыдущих теорий, мы формулируем отдельно необходи-
мые и отдельно достаточные условия оптимальности. С нашей точки
зрения, такое разделение вполне естественно и иногда проводится
даже в линейном случае ([12], с. 21—24). При этом, разумеется,
наиболее привлекательными, хотя и редкими, остаются те классы
нелинейных задач аппроксимации, в которых необходимые и доста-
точные условия совпадают.
Остановимся на основных результатах главы. В теории экстре-
мальных задач условия оптимальности записываются в форме Ку-
на— Таккера (в виде представления нуля), в теории аппроксима-
ции — в альтернансной форме. В данной главе удалось так уточ-
нить условие Куна — Таккера и так расширить понятие альтернан-
та, что для задач аппроксимации условия оптимальности в форме
Куна — Таккера и в альтернансной форме стали эквивалентными
(§ 7). Это позволяет, в частности, развить общий метод получения
альтернансных условий оптимальности. Он сводится к чисто алгеб-
раическому анализу представления нуля.
Выяснилось, что общее альтернансное правило в задаче ап-
проксимации без ограничений заключается не в чередовании зна-
359
ков максимальных по модулю уклонений, как это считалось в тео-
риях Моцкина — Торнхейма—Морозова, Райса и Майнардуса —
Шведта, а в чередовании знаков некоторых определителей (§ 7).
Появилась возможность, в частности, получать альтернансные ус-
ловия оптимальности в многомерных задачах аппроксимации.
Найдены необходимые и достаточные условия нормальности ре-
шения задачи аппроксимации (§ 8). Установлено, что наличие пол-
ного альтернанса гарантирует, что соответствующий вектор пара-
метров является точкой строгого локального минимума целевой
функции на множестве ограничений (§ 7).
Показано, что в случае линейных задач аппроксимации понятие
альтернанса эквивалентно понятию критического (характеристиче-
ского) множества (§ 7).
Некоторые приложения построенной теории (в ее первона-
чальном варианте) имеются в [16], где рассмотрены задача аппрок-
симации с интерполяцией, задача аппроксимации с двусторонними
ограничениями и доказана при минимальных предположениях схо-
димость алгоритма Ремеза в нелинейном случае. В [2] получена
нестандартная альтернансная характеристика алгебраической дро-
би наилучшего приближения в задаче аппроксимации непрерывной
функции на системе непересекающихся отрезков.
В заключение отметим, что дальнейшее развитие теории нели-
нейных чебышёвских приближений во многом стимулируется разно-
образными задачами теории электрических цепей и, в частности,
задачами синтеза электрических фильтров [4], [22].
Предварительные результаты по рассмотренной в этой главе
теме были опубликованы в [8]—[10], [16].
Литература к главе 12
1. Ахиезер Н. И. Лекции по теории аппроксимации.— М.: Нау-
ка, 1965.
2. Белых В. М., М а л озе мо в В. Н. Наилучшая дробно-рацио-
нальная аппроксимация на системе отрезков.— Вести. Ленингр.
ун-та, 1978, № 7, с. 5—8.
3. Бернштейн С. Н. Экстремальные свойства полиномов и наи-
лучшее приближение непрерывной функции одной вещественной
переменной.—<М.; Л.: ГТТИ, 1937.
4. В о й т о н Е. Ф. О методах решения некоторых экстремальных
задач синтеза электрических цепей.— В кн.: Исследование опе-
раций.— М.: ВЦ АН СССР, 1976.—Вып. 5.
5. Г и р с а н о в И. В. Лекции по математической теории экстре-
мальных задач.— М.: Изд-во МГУ, 1970.
6. Гольштейн Е. Г. О некоторых оценках теории приближе-
ний.— В кн.: Исследования по математическому программирова-
нию.— М.: Наука, 1968.
7. Гольштейн Е. Г. Теория двойственности в математическом
программирования и ее приложения.— М.: Наука, 1971.
8. Д а у г а в е т В. А. Альтернансные свойства решений нелинейных
минимаксных задач с нелинейными ограничениями.—ЖВМ и МФ,
1976, т. 16, № 3, с. 784—788.
9. Даугавет В. А., Малоземов В. Н. Альтернансные свой-
ства решений нелинейных минимаксных задач с невыпуклыми
ограничениями.—ДАН СССР, 1975, т. 225, № 2, с. 253—255.
360
10. Даугавет В. А., Малоземов В. Н. Альтернансная тео-
рия.— В кн.: Численные методы нелинейного программирования:
тезисы II Всесоюзного семинара.—Харьков, 1976.
11. Даугавет В. А., Малоземов В. Н. О характеристических
множествах.— Вести. Ленингр. ун-та, 1978, № 7, с. 9—14.
12. Даугавет И. К. Введение в теорию приближения функций.—
Л.: Изд-во ЛГУ, 1977.
13. Демьянов В. Ф., Малоземов В. Н. К теории нелинейных
минимаксных задач.—УМН, 1971, т. 26, вып. 3(159), с. 53—
104.
14. Демьянов В. Ф., Малоземов В. Н. Введение в мини-
макс—М.: Наука, 1972.
15. Демьянов В. Ф. Минимакс: дифференцируемость по направ-
лениям.— Л.: Изд-во ЛГУ, 1974.
16. Вопросы теории и элементы программного обеспечения минимакс-
ных задач./Под ред. В. Ф. Демьянова и В. Н. Малоземова.—Л.:
Изд-во ЛГУ, 1977.
17. Дубовицкий А. Я., Милютин А. А. Задачи на экстре-
мум при наличии ограничений.— ЖВМ и МФ, 1965, т. 5, № 3,
с. 395—453.
18. Золотарев Е. И. Полное собрание сочинений.—Л.: Изд-во АН
СССР, 1932.—Вып. 2.
19. Иоффе А. Д., Тихомиров В. М. Теория экстремальных за-
дач.— М.: Наука, 1974.
20. К о р н е й чу к Н. П. Экстремальные задачи теории приближе-
ний.—М.: Наука, 1976.
21. Крейн М. Г., Нудельман А. А. Проблема моментов Мар-
кова и экстремальные задачи.— М.: Наука, 1973.
22. Л а н н э А. А. Оптимальный синтез линейных электронных схем.—
М.: Связь, 1978.
23. Лоран П.-Ж. Аппроксимация и оптимизация: пер. с франц./
/Под ред. Г. Ш. Рубинштейна и Н. Н. Яненко.— М.: Мир, 1975.
24. Малоземов В. Н., Певный А. Б. Альтернансные свойства
решений нелинейных минимаксных задач.— ДАН СССР, 1973,
т. 212, № 1, с. 37—39.
25. М а л о з е м о в В. Н. О достаточных условиях локального ми-
нимакса.— Вести. Ленингр. ун-та, 1976, № 7, с. 55—59.
26. Марков А. А. Избранные труды.— М.; Л.: Гостехиздат, 1948.
27. Морозов М. И. О некоторых вопросах равномерного прибли-
жения непрерывных функций посредством функций интерполя-
ционных классов.— ДАН СССР, 1951, т. 77, № 3, с. 381—383.
28. Морозов М. И. О некоторых вопросах равномерного прибли-
жения непрерывных функций посредством функций интерполяци-
онных классов.— Изв. АН СССР. Сер. матем.., 1952, т. 16, № 1,
с. 75—100.
29. Пшеничный Б. Н. Необходимые условия экстремума.—М.:
Наука, 1969.
30. Ремез Е. Я. Основы численных методов чебышевского прибли-
жения.— Киев: Наукова думка, 1969.
31. Тихомиров В. М. Некоторые вопросы теории приближений.—
М.: Изд-во МГУ, 1976.
32. Фиакко А., Мак-Кормик Г. Нелинейное программирова-
ние: пер. с англ./ Под ред. Е. Г. Гольштейна.— М.: Мир, 1972.
33. Чебышёв П. Л. Полное собрание сочинений.— М.; Л.: Изд-во
АН СССР, 1947, т. 2.
361
34. Ш н и р е л ь м а н Л. Г. О равномерных Приближениях.— Изй.
АН СССР. Сер. матем., 1938, т. 2, № 1, с. 53—59.
35. В а г г а г R., Loeb Н. On the continuity of the nonlinear Tshe-
bysheff operator.— Pacific J. Math., 1970, v. 32, № 3, p. 593—601.
36. В r a e s s D. Chebyshev approximation by spline functions with
free knots.—Numer. Math., 1971, Bd. 17, H. 5, S. 357—366.
37. Braes s D. Chebyshev approximation by ^-polynomials. I.— J.
Approxim. Theory, 1973, v. 9, № 1, p. 20—43.
38. Braess D. Chebyshev approximation by ^-polynomials. II.— J.
Approxim. Theory, 1974, v. 11, № 1, p. 16—37.
39. Braess D. Geometrical characterizations for nonlinear uniform
approximation.— J. Approxim Theory, 1974, v. 11, № 3, p. 260—
274.
40. Braess D., Brink-SpalinkJ., Sc h aback R. Eine Biblio-
graphie zur nichtlinearen Approximationstheorie. Sonderforschungs-
bereich 72, Approximation und Optimierung.— Bonn.: Universitat
Bonn, 1974.
41. Brosow ski B. Nichtlineare Tschebyscheff-Approximation.—
Mannheim: Bibliographisches Institut, 1968.
42. Brosowski B., Hoffmann K.-H. Eine Variationsungleichung
und Anwendungen.—Numer. Math., 1974, Bd. 22, H. 2, S. 137—
147.
43. Cheney E. W. A survey of recent progress in approximation
theory.— In: Proceedings of the International Congress of Mathe-
maticians; Canad. Math. Congress.— Montreal, Que., 1975, v. 2.
44. Gehner K. R. Characterization theorems for constrainted appro-
ximation problems via optimization theory.— J. Approxim. Theory,-
1975, v. 14, № 1, p. 51—76.
45. G i 11 о 11 e M. J., M c L a u g h 1 i n H. W. On nonlinear uniform
approximation.—J. Approxim. Theory, 1.977, v. 21, № 2, p. 174—1187.
46. G i s 1 a s о n G. A., Loeb H. L. Nonlinear Tchebysheff approxi-
mation with constraints.— J. Approxim. Theory, 1972, v. 6, № 3,
p. 291—300.
47. Hobby C. R., Rice J. R. Approximation from a curve of fun-
ctions.— Arch. Rational Meeh. Anal., 1967, v. 24, № 2, p. 91 —
106.
48. Hoffmann K.-H. Zur Theorie der nichtlinearen Tschebyscheff-
Approximation mit Nebenbedingungen.— Numer. Math., 1969,
Bd. 14, H. 1, S. 24—41.
49. Hoffmann K--H. Nichtlineare Tschebyscheff-Approximation mit
Nebenbedingungen: Anwendungen.—Numer. Math., 1970, Bd. 14,
H. 4, S. 383—393.
50. Holmes R. B. A course on optimization and best approxima-
tion.—Berlin; Heidelberg; New York; Springer, 1972.
51. Krabs W. Nonlinear optimization and approximation.— J. Appro-
xim. Theory, 1973, v. 9, № 4, p. 316—326.
52. Ling W. H., T о r n g a J. E. The constant error curve problem
for varisolvent families.— J. Approxim. Theory, 1974, v. 11, № L
p. 54—72.
53. M e i n a г d u s G. Approximation von Funktionen und ihre nume-
rische Behandlung.— Berlin: Springer, 1964.
54. Meinardus G., Schwedt D. Nicht-lineare Approximationen.—
Arch. Rational Meeh. Anal., 1964, v. 17, № 4, p. 297—326.
55. Motzkin Th. Approximation by curves of a unisolvent family.—
Bull. Amer. Math. Soc., 1949, v. 55, № 8, p. 789—793.
362
56. Powell M. J. D. Theory of general nonlinear minimax approxima-
tion.— In: Methods of numerical approximation/ Ed. by D. C.
Handcomb.— Oxford: Pergamon Press, 1966.
57. Rice J. R. Tchebysheff approximations by functions unisolvent
of variable degree.—Trans. Amer. Math. Soc., 1961, v. 99, № 2,
p. 298—302.
58. Rice J. R. The approximation of functions: Linear theory.— Lon-
don; Ontario: Addison-Wesley, 1964—V. 1.
59. Rice J. R. The approximation of functions: Nonlinear and multiva-
riate theory.—London; Ontario: Addison-Wesley, 1969.—V. 2.
60. Schmidt E. Zur Kompaktheit bei Exponentialsummen.— J. Ap-
proxim. Theory, 1970, v. 3, № 4, p. 445—454.
61. Tornheim L. On n-parameter families of functions and asso-
ciated convex functions.— Trans. Amer. Math. Soc., 1950, v. 69,
№ 3, p. 457—467.
62. Werner H. Tshebysheff-approximation with sums of exponen-
tials.— In: Approximation theory/Ed. by A. Talbot.—London;
New York: Academic Press, 1970.
ГЛАВА 13
ОБЩАЯ СХЕМА ИМИТАЦИОННЫХ СИСТЕМ,
ВОЗМОЖНОСТИ ИХ ПРИМЕНЕНИЯ
И ПУТИ РЕАЛИЗАЦИИ
§ 1. Математическое программирование и имитация
1. В настоящее время можно считать сложившимися
два подхода к изучению сложных социально-экономиче-
ских управляемых процессов математическими метода-
ми. Первый из них естественно назвать «математическим
программированием». Он состоит в том, что разрабаты-
вается математическая модель процесса, связывающая
его внутренние (эндогенные) характеристики и влияю-
щие на него внешние (экзогенные) факторы, в числе ко-
торых находятся и управления, и ставится задача (за-
дача «математического программирования») на опреде-
ление таких управлений процессом, которые доставляют
экстремум некоторому функционалу, характеризующе-
му качество управления.
Если исследуемый процесс таков, что на его течение
могут влиять с помощью своих управлений не одно, а
несколько лиц (игроков), то формулировка для каждого
из этих лиц функционала, характеризующего качество
его управления, приводит к постановке теоретико-игро-
вых задач. Эта постановка должна включать гипотезу
об информированности игроков относительно течения
процесса и действиях друг друга. Гипотеза об информи-
рованности в определенном смысле моделирует проте-
кание информационного процесса (процесса сбора, об-
работки, передачи, хранения информации) в изучаемой
социально-экономической системе.
На протяжении этой главы будем считать теоретико-
игровой подход к изучению социально-экономических
процессов разновидностью математического програм-
мирования, так как в дальнейшем для нас 'будет суще-
ственной не разница между «чистой» оптимизацией и
364
«игровой» оптимизацией, а то общее, чем оба эти под-
хода обладают: так же как решение оптимизационной
задачи дает возможность определить управление про-
цессом (а значит, и его течение на рассматриваемом
промежутке времени), решение игровой задачи дает воз-
можность определить управления (оптимальные страте-
гии) всех лиц, участвующих в управлении процессом.
2. Второй подход к изучению сложных социально-
экономических процессов связан с имитационным моде-
лированием. В советской литературе, относящейся к ис-
следованию экономических, военных, биологических
процессов,, имитационной принято называть такую мо-
дель управляемого процесса, в рамках которой не пред-
полагается ставить и решать задачи математического
программирования (оптимизационные или игровые).
Имитационные модели используют путем проведения
так называемых имитационных экспериментов, т. е. пу-
тем воспроизведения течения изучаемого процесса с по-
мощью модели при нескольких вариантах управлений,
назначаемых экспертами, с последующим анализом по-
лученных результатов. Каждый акт воспроизведения
течения процесса с помощью модели и называется ими-
тационным экспериментом. Если на исследуемый про-
цесс могут влиять с помощью 'своих управлений несколь-
ко групп лиц, то имитационные эксперименты прини-
мают характер имитационных игр.
Большой объем исследований в настоящее время
связан с разработкой так называемых методов «эксперт-
ного синтеза» в рамках имитационных моделей. В этом
случае в процессе проведения имитационных экспери-
ментов управления вырабатываются алгоритмически, но
не путем решения оптимизационных или игровых задач,
а с помощью экспертного синтеза, т. е. путем разработ-
ки алгоритмов, дающих возможность вычислить в каж-
дый момент времени «разумные» управления по- значе-
ниям величин, характеризующих состояние процесса в
этот момент (либо на некотором интервале времени,
предшествующем этому моменту).
Таковые алгоритмы возникают в результате опросов
экспертов, а также после обработки результатов наблю-
дений за действиями реальных управляющих органов,
и просто из соображений здравого смысла.
Конечно, термин «имитационная модель» не совсем
Удачен, потому что определение «имитационная» опи-
365
сывает, по существу, не саму модель, а способ ее исполь-
зования. Однако этот термин широко распространен, и
авторы считают, что попытки ввести в обиход более
удачный термин будут вносить еще большую термино-
логическую сумятицу, чем та, которая имеет место сей-
час. К тому же в большинстве случаев отказ от поста-
новки оптимизационных задач накладывает отпечаток
на модель. Как правило, имитационные модели сложны,
имеют большую размерность, характерны присутствием
большого числа экзогенных величин, часть из которых
являются случайными функциями времени. Во многих
случаях постановка задач математического программи-
рования в рамках таких моделей невозможна, посколь-
ку бывает очевидной невозможность сформулировать
единственный критерий качества управлений, или просто
из-за сложности возникающей задачи. Тем не ме,нее су-
ществуют модели, которые, с одной стороны, являются
оптимизационными, т. е. в рамках которых решаются за-
дачи математического программирования, а с другой
стороны,— имитационными, т. е. в рамках этих же моде-
лей проводятся имитационные эксперименты с назна-
ченными экспертами управлениями.
В западной научной литературе терминам «имита-
ция» и «имитационное моделирование» соответствует
термин «simulation». Этот термин определяется в [2]
как «численный метод проведения на цифровых вычис-
лительных машинах экспериментов с математическими
моделями, описывающими поведение сложных систем
в течение продолжительных периодов времени», в [3] —
как «процесс конструирования модели реальной системы
и постановки экспериментов на этой модели с целью
понять поведение системы либо оценить (в рамках огра-
ничений, накладываемых некоторым критерием или со-
вокупностью критериев) различные стратегии, обеспе-
чивающие функционирование данной системы».
Отметим, что термин «имитация» (simulation) пер-
воначально1 возник в теории случайных процессов. Этим
термином было принято называть приближенный способ
вычисления статистических характеристик сложных
случайных процессов, основанный на наборе статистики
путем многократного воспроизведения его течения с по-
мощью достаточно подробной модели. Применение это-
го термина для характеризации модели социально-эко-
номических процессов, используемой путем организации
366
йМйтаЦйонйых экспериментов, имело то основание, что
в начале развития этого направления исследования
большая часть таких моделей являлась моделями слу-
чайных процессов. Затем, в сфере изучения социально-
экономических, военных, биологических процессов ма-
тематическими методами произошло естественное рас-
ширение смысла термина «simulation», в результате
чего он приобрел ту семантику, представление о кото-
рой можно получить из приведенных выше цитат из книг
Т. Нейлора и Р. Шеннона.
В основном трактовки терминов «simulation» в за-
падной литературе и «имитационное моделирование» в
советской совпадают, за исключением того обстоятель-
ства, что в советской литературе весьма явно выражен
оттенок противопоставления имитационного моделиро-
вания методам ’математического программирования.
Имитационное моделирование стало широко разви-
ваться в СССР в сфере изучения социально-экономиче-
ских процессов математическими методами в шестиде-
сятых годах. Толчок развитию имитации дал накопив-
шийся к этому времени опыт внедрения экономико-
математических разработок, основанных на методах
математического программирования, в практику плани-
рования и управления народным хозяйством. Попытки
внедрения экономико-математических разработок в
практику аналогичны экспериментам по проверке мо-
делей в сфере изучения «естественных» явлений. Весьма
скромные успехи дали возможность понять, что методы
математического программирования не смогут стать
единственным практическим инструментом народнохо-
зяйственной деятельности. Основная причина заключа-
ется в принципиальной сложности и большой взаимной
связи между различными по своей внутренней природе
социально-экономическими управляемыми процессами.
Выяснилось, что необходимость формулировать в конеч-
ном счете единственный критерий качества управления,
а также необходимость затрачивать вычислительные ре-
сурсы на поиск оптимальных управлений неизбежно
приводит в большинстве случаев к слишком большому
огрублению модели, отбрасыванию таких факторов, ко-
торые необходимо учитывать при практическом управ-
лении. Оказалось, что «оптимальные» управления, по-
лученные путем решения задачи математического про-
граммирования, в «чистом» виде использовать нельзя
367
из-за возникновения перекрывающих положительный
эффект непредвиденных отрицательных последствий,
происходящих вследствие неадекватности модели.
Оптимальные управления, полученные методами ма-
тематического программирования, могут использоваться
при практическом управлении пока, главным образом,
как вспомогательная информация. Однако, чтобы их ис-
пользовать в таком ракурсе, лица, принимающие реше-
ния, должны четко представлять модель, 'понимать, ка-
кие факторы они учитывают, а какие нет, к чему могут
привести имеющие место в модели неучет или огруб-
ление тех или иных связей. Это предъявляет слиш-
ком высокие требования к квалификации в области
моделирования и математики лиц, принимающих ре-
шения.
Наблюдающееся в настоящее время резкое увеличе-
ние объема исследований в сфере имитационного мо-
делирования связано со всеми этими обстоятельствами.
Отказ от постановки и решения в рамках имитационной
модели математических задач на выбор управлений по-
зволяет истратить имеющийся вычислительный потен-
циал на более тщательное воспроизведение процесса,
сделать более адекватными модели, лежащие в основе
выработки рекомендаций относительно рационального
управления процессом. Результаты имитационного мо-
делирования гораздо легче объяснить лицам, принимаю-
щим решения, особенно если эти лица сами участвуют
в проведении имитационных экспериментов.
Однако имитация обладает и рядом недостатков, яв-
ляющихся продолжением ее достоинств. Это, прежде
всего,— сложность организации и относительно высокая
стоимость проведения имитационных экспериментов
(особенно если эксперимент является имитационной
игрой), возможность просмотреть и сравнить лишь не-
большое число заранее отобранных вариантов управле-
ний, интуитивный характер оценок, касающихся рацио-
нального управления процессом. Имитация предъявляет
также весьма часто трудновыполнимые требования к
информационному обеспечению модели, причем чем под-
робнее и точнее модель, тем труднее получить для нее
необходимую информацию.
В настоящее время имитационные модели считают
альтернативой методам математического программиро-
вания и аналитическим методам исследования. Счита-
368
ется, что для применения имитации должны быть доста-
точные основания.
В соответствии с общепринятыми взглядами таковы-
ми основаниями могут быть следующие:
— не существует законченной математической поста-
новки данной задачи, либо еще не разработаны методы
математического программирования или аналитические
методы решения сформулированной математической
задачи;
— методы имеются, но они столь сложны, что 'ими-
тационное моделирование дает более простой способ
решения задачи;
— методы математического программирования или
аналитические методы существуют, но их реализация
невозможна вследствие недостаточной подготовленно-
сти лиц, принимающих решения.
§ 2. Имитационные системы
1. Понятие имитационная система возникло в ВЦ АН
СССР [1] в результате тщательного изучения некото-
рых специфических социально-экономических процессов.
Этот термин показался удобным для обозначения того
объекта, который возникает, если, во-первых, снабдить
имитационную модель совокупностью программ, обес-
печивающих «должную» степень удобства при общении
с машиной в процессе проведения имитационных экспе-
риментов, во-вторых, снабдить имитацию совокупностью
упрощенных или агрегированных моделей этого же про-
цесса или отдельных его сторон, вместе с алгоритмами,
позволяющими решать в рамках этих моделей задачи ма-
тематического программирования.
Итак, имитационная система есть объект, состоящий
из следующих трех основных частей:
1. Имитационной модели процесса вместе с програм-
мой, реализующей модель на ЭВМ. Если модель доста-
точно сложна, то программа, реализующая модель на
ЭВМ, является, как правило, совокупностью программ
(модулей), оперирующих с единым банком данных.
2. Совокупности упрощенных моделей процесса или
отдельных его сторон й алгоритмов, позволяющих ре-
шать оптимизационные или игровые задачи выбора
Управлений. Для этой части имитационной системы упот-
ребляются еще два названия: внешнее математическое
369
обеспечение имитационной системы и математическое
обеспечение процесса принятия решений.
3. Совокупности программ, реализующих должную
степень удобства при общении -с ЭВМ во время проведе-
ния имитационных экспериментов, облегчающих исполь-
зование в процессе имитации результатов оптимизации,
осуществляющих также другие «сервисные» операции.
Для этой части имитационной системы употребляется
еще название внутреннее математическое обеспечение
имитационной системы.
По-видимому, нет надобности объяснять подробно
необходимость внутреннего обеспечения для имитации.
Сейчас широко известно, что для внедрения имитации
в практику исследований и в особенности в практику
планирования и управления необходимо выдавать из
машины информацию о течении процесса в удобной для
восприятия форме, в -максимальной степени используя
имеющиеся дисплеи, необходимо быстро вводить инфор-
мацию в машину. Во многих случаях необходимо
обеспечивать оперативный режим общения с маши-
ной в процессе проведения имитационных экспери-
ментов.
Конкретные требования к организации связи челове-
ка с машиной зависят от характера процесса, от того,
какие задачи решаются с помощью имитации, -от того,
каким временем располагают управляющие органы для
принятия решения. Если, например, имитация применя-
ется в чисто исследовательских целях, то требования к
внутреннему обеспечению могут быть невысоки. Одна-
ко, если имитация используется в практике планирова-
ния и управления, то «должное» качество организации
связи человека с машиной становится решающим требо-
ванием, без обеспечения которого внедрить систему бу-
дет невозможно.
2. Включение в имитационную систему внешнего ма-
тематического обеспечения — совокупности оптимиза-
ционных моделей — позволяет одновременно использо-
вать имитацию и математическое программирование для
рационализации управления сложными процессами. Од-
новременное использование имитации и математическо-
го программирования при «должном» распределении
функций между ними представляется эффективным ин-
струментом как исследования процесса, так и практиче-
ского управления им. Авторы считают идею одновремен-
370
ного использования имитации и математического про-
граммирования чрезвычайно важной и плодотворной.
Для пояснения этой идеи рассмотрим два примера
управленческих задач в социально-экономической 'сфе-
ре. Первый пример касается планирования деятельности
механического участка на машиностроительных пред-
приятиях с мелкосерийным производством и стендовой
сборкой- Дадим общее описание ситуации. Это описание
будет носить довольно конкретный характер, что необ-
ходимо для объяснения реального содержания описы-
ваемой управленческой задачи. На участке имеется по-
рядка сотни станков, объединяемых в несколько десят-
ков групп взаимозаменяемого оборудования, выполняю-
щего механическую обработку деталей. Детали после
обработки поступают либо прямо на сборку, либо сна-
чала на склад, а уже со склада на сборку. Каждый
плановый период (декада, месяц) участку «спускают»
план, состоящий из перечня деталей, которые нужно
обработать в данном плановом периоде с указанием ко-
личества по каждой детали. Для некоторых деталей
(тех, которые, минуя склад, идут прямо на сборку)
могут быть указаны сроки, не позже которых эти детали
должны быть обработаны.
Общая номенклатура деталей, которые проходят че-
рез цех (за достаточно большой промежуток времени),—
порядка десятка тысяч. План каждого планового пе-
риода может содержать несколько сот наименований де-
талей.
Каждая деталь имеет свой технологический маршрут.
Для того, чтобы объяснить, что такое технологический
маршрут, будем считать, что все виды оборудования
перенумерованы. Технологический маршрут некоторой де-
тали— это последовательность номеров оборудования,
через которые эта деталь должна пройти при обработке.
Можно считать, что операционные времена, т. е. времена
обработки каждой детали на каждом из видов оборудо-
вания, известны.
Управленческая задача, которая здесь возникает,
заключается в указании порядка запуска деталей в про-
изводство. Отметим один аспект этой задачи. Детали с
малыми операционными временами, которых обычно
требуется большое количество, объединяются всегда в
«партии». Партия деталей, запущенная в производство,
никогда затем не дробится, и поэтому партию можно
371
считать одной деталью. В связи с объединением деталей
в партии возникает специфическая задача о выборе раз-
мера партии, хорошо известная специалистам по опера-
тивно-производственному планированию. Существо дела
здесь состоит *в том, что, с одной стороны, маленькие
партии позволяют -составлять более «плотные» распи-
сания, т. е. расписания с малыми простоями оборудова-
ния, но, с другой етороны, маленькие партии увеличи-
вают затраты 'Времени на переналадку оборудования,
так как, если, например, после /*-й детали на z-м виде
оборудования нужно обрабатывать k-ю деталь, то не-
обходима соответствующая переналадка f-го оборудова-
ния, что равноценно простою /-го оборудования.
Обычно в плане, спускаемом участку, детали уже раз-
биты на партии. Однако планирующие органы участка
имеют в своем распоряжении дополнительный ресурс
управления: они могут разбить партию деталей, фигу-
рирующую в плане, на несколько партий.
Сформулированная задача хорошо известна как за-
дача составления расписания. Решение подобного сорта
задач составляет предмет теории расписаний [6], [7],
являющейся разделом математического программиро-
вания. С теорией расписаний связан в настоящее время
значительный объем исследований (несколько сот ста-
тей, ряд монографий).
В теории расписаний используются различные кри-
терии оптимальности. Наиболее распространенными яв-
ляются суммарное время обработки всех деталей, содер-
жащихся в плане (время, которое проходит от начала
выполнения первой операции в технологическом марш-
руте первой детали данного расписания до конца выпол-
нения последней операции в технологическом маршруте
последней детали данного расписания), суммарное вре-
мя всех простоев оборудования, суммарное время откло-
нения моментов окончания обработки деталей от задан-
ных.
Мы не будем описывать разработанных методов ре-
шения задач теории расписаний, отсылая интересую-
щихся читателей к обстоятельным монографиям [6],
[7]. Для наших целей достаточно описать общее состоя-
ние дел в этой сфере. В настоящее время нельзя сказать,
чтобы с помощью методов теории расписаний можно
было за приемлемые времена найти оптимальное реше-
ние любой задачи реальной размерности. Однако, если
372
бы У рассматриваемой реальной управленческой задачи
планирования производственного процесса было только
то содержание, которым эта задача наделяется в тео-
рии расписаний — определение порядка запуска дета-
лей в 'производство, исходя из перечисленных выше ве-
личин (или какой-нибудь другой), то приближенные
численные методы, имеющиеся сейчас в теории распи-
саний, несомненно давали бы за приемлемые времена
счета с использованием той вычислительной техники,
которой сейчас уже оснащены многие заводы, лучшие
расписания, чем то, что -могут дать плановые органы без
использования вычислительной техники на базе лишь
опыта и интуиции.
Попытаемся теперь донести до читателя содержание
реальной задачи планирования производственного про-
цесса в рассматриваемых условиях (мелкосерийное про-
изводство, стендовая сборка). Прежде всего, эта задача
существенно многокритериальна. Деятельность участка
оценивается целой системой технико-экономических по-
казателей (обычно — раз в месяц). Главные из них —
план по «валу», план по «товару», фонд заработной пла-
ты, процент брака по вине участка, производительность
труда и т. д. План по валу — это суммарное количество
нормо-часов, выработанное, в данном плановом периоде.
План по товару — это количество нормо-часов, которое
было истрачено на детали, обработка которых была
полностью закончена в данном плановом периоде. Фонд
заработной платы — это планируемая на данный период
зарплата людям, работающим на участке. Эти показа-
тели не противоречат явно такому критерию, как, на-
пример, суммарный простой оборудования, но и не тож-
дественны (за исключением, -может быть, плана по валу)
с ним. Например, необходимость выполнения плана по
товару, т. е. необходимость закончить обработку неко-
торых деталей <в конце планового периода, может по-
влечь увеличение простоя оборудования, так как вполне
возможны такие ситуации, что освободившееся в неко-
торый момент оборудование не будет загружаться теми
Деталями, обработка которых не может закончиться в
течение планового периода, а будет ждать тех деталей,
которые могут войти >в план по товару.
Предметом особых забот планирующих органов яв-
ляется фонд заработной платы, который планируется,
т. е. назначается высшими плановыми органами на каж-
373
дый плановый период, исходя из объема работ в этом
периоде. На участке работают рабочие различной ква-
лификации. Если операции, выполнение которых не тре-
бует высокой квалификации, будут выполнять высоко-
квалифицированные рабочие, то возникает опасность
превышения фонда заработной платы. Обратная ситуа-
ция приводит к увеличению процента брака.
Система технико-экономических показателей, по ко-
торым оценивается деятельность подразделений пред-
приятия и которая поэтому в большой мере определяет
реальное -содержание задачи оперативно-производствен-
ного планирования, конечно, сама нуждается в совер-
шенствовании. Исследования в этом направлении ведут-
ся. Изменения в системе технико-экономических пока-
зателей будут вызывать изменения содержания задачи
оперативно-производственного планирования. Однако
эта задача всегда будет иметь многокритериальный ха-
рактер, потому что любая система технико-экономиче-
ского планирования будет включать несколько показа-
телей.
Кроме выполнения запланированных технико-эконо-
мических показателей, планирование производственного
процесса на участке должно удовлетворять еще ряду
требований. Наиболее существенные из них связаны с
распределением операций среди рабочих, от которого
зависит их зарплата. Заработок каждого рабочего должен
укладываться в некоторые «стандарты», которые опреде-
ляются его квалификацией, а также социологическими
факторами. В каждом производственном коллективе
действуют социологические механизмы, оценивающие
работника. Социологическая оценка работника, выра-
батываемая коллективом, влияет на тот уровень зар-
платы этого работника, который должны ему «обеспе-
чить» плановые органы. Игнорирование при планирова-
нии и распределении работ этих факторов ведет к
конфликтам и к текучести рабочей силы, что весьма от-
рицательно сказывается на эффективности производства.
Какие из перечисленных факторов являются наибо-
лее существенными, зависит от состояния производства
на предприятии в целом, от того, какие показатели были
у данного подразделения на предыдущих плановых пе-
риодах. На разных плановых периодах существенными
могут быть разные факторы. Каким из факторов, харак-
теризующих производственный процесс в подразделении,
374
можно на данном плановом 'Периоде «Пожертвовать»
иля улучшения других и !в какой мере, также определя-
ется состоянием дел на предприятии в целом и «пред-
ысторией». Если, например, на предприятии в целом име-
ется угроза перерасхода фонда заработной платы, то
для данного подразделения становится существенной
экономия фонда заработной платы. На другом плановом
периоде предметом главных забот может стать выпол-
нение плана «по товару» и т. д. Формализовать «важ-
ности» всех факторов, определяющих деятельность под-
разделения предприятия, установить строгие отношения
предшествования между ними раз и навсегда невозмож-
но, а в каждом плановом периоде весьма затрудни-
тельно.
Мы надеемся, теперь читателю будет понятной мысль
о том, что введение «жесткого» планирования производ-
ственного процесса на основе методов математического
программирования (пусть даже критерий оптимальности
является некоторой сверткой различных частных крите-
риев, характеризующих производственный процесс) бу-
дет приводить к отрицательным последствиям, могущим
не только перекрывать положительный эффект от опти-
мизации, но и дезорганизовать производственный про-
цесс.
Кажется разумной мысль о том, что в рассматрива-
емой ситуации улучшить качество управления можно,
используя имитацию. Действительно, ничего, кроме поль-
зы, не может дать возможность плановым органам до
фактической реализации процесса просмотреть его тече-
ние и вычислить все его показатели при нескольких ва-
риантах порядка запуска деталей в производство. Конеч-
но, нужно позаботиться о том, чтобы в максимальной
степени упростить связь с машиной в процессе проведе-
ния экспериментов, сделать наглядными и легко усваи-
ваемыми результаты экспериментов. Однако в рассмат-
риваемом случае, даже если обеспечить возможность
работы с терминалом в режиме оперативного общения
с ЭВМ, внедрение имитации в практику реального пла-
нирования будет затруднено необходимостью в процес-
се каждого эксперимента вводить в машину несколько
сот наименований деталей (подлежащих обработке в
Данном плановом периоде). Эта процедура требует
тщательности и внимания. Учитывая ту обстановку, ко-
торая имеет место в реальном производстве, она вряд
375
ли выполнима имеющимся сейчас персоналом плани-
рующих органов в те 'Сроки, которые можно отвести на
процесс планирования.
Поэтому необходимо иметь возможность автомати-
чески генерировать варианты запуска деталей в произ-
водство, которые затем будут просматриваться <в ими-
тационном режиме, и обеспечить возможность вносить
любые изменения в эти варианты. Для автоматической
генерации вариантов управлений, анализируемых затем
в имитационном режиме, естественно использовать ме-
тоды математического программирования. При этом мо-
дели, в рамках которых решаются задачи математиче-
ского программирования, могут быть грубыми, а методы
решения — приближенными. Главное, чтобы эти методы
работали достаточно быстро. Рационально также пре-
доставить возможность плановым органам фиксировать
порядок или определять время запуска в производство
только части деталей и иметь алгоритмы, которые про-
изводят оптимальное (в том или ином смысле) доопре-
деление всего расписания. Если обеспечить автоматиче-
ское поступление исходного плана прямо в машину, то
труднореализуемой процедуры ввода в машину боль-
шого числа наименований деталей, содержащихся в
плане, можно избежать и получить тем самым инстру-
мент, позволяющий улучшить качество планирования.
Как нетрудно видеть, этот инструмент представляет
собой объект, который в начале данного параграфа оп-
ределен как «имитационная система». Он состоит из
имитационной модели, позволяющей при заданных уп-
равлениях достаточно адекватно воспроизвести процесс,
системы упрощенных моделей процесса и алгоритмов,
позволяющих решать в рамках этих моделей задачи ма-
тематического программирования, а также программ,
обеспечивающих должную степень удобства при обще-
нии с ЭВМ.
Мы далеки от мысли, что имитационные системы сни-
мают все трудности, связанные с внедрением экономико-
математических методов в практику планирования со-
циально-экономических процессов при помощи матема-
тических методов и ЭВМ. В рассматриваемом случае,
например, успех внедрения будет зависеть от того, сколь
много изменений нужно будет сделать в оптимальном
расписании, чтобы получить приемлемое расписание.
Нельзя игнорировать трудности, связанные с обучением
376
планирующих органов работать с системой. Значитель-
ные трудности вызывает также обеспечение модели не-
обходимой нормативной информацией и т. д. Тем не ме-
нее, по нашему мнению, имитационные системы предо-
ставляют наибольшие возможно для практического
применения. Одновременное использование имитации и
математического программирования позволяет скомпен-
сировать недостатки обоих подходов и проявить их пре-
имущества.
3. В качестве второго примера приведем систему про-
ектирования генеральных схем обустройства (СПГСО)
нефтяных месторождений на ЭВМ, разработанную в ВЦ
АН СССР [8].
СПГСО позволяет спроектировать на ЭВМ следующие
четыре технологические системы, обеспечивающие нор-
мальное функционирование месторождения:
— систему сбора, транспортировки и подготовки нефти
и газа на промыслах;
— систему заводнения продуктивных пластов (систему
поддержания пластового давления);
— систему электроснабжения;
— систему внутрипромысловых автодорог.
Основное предназначение системы — поиск реальных
проектов, т. е. тех, что, с точки зрения экспертов, являют-
ся наилучшими среди всех проектов, которые могут быть
внедрены [9].
Опишем, следуя [8], возможности системы.
1. Система позволяет рассчитывать генеральные схе-
мы как в статике (в предположении, что все объекты
вводятся в строй одновременно), так и в динамике на
любой интервал планирования.
2. При помощи системы может быть осуществлена
имитация всевозможных проектных решений, реализую-
щих в режиме человеко-машинного общения поиск реаль-
ного проекта: проектировщик указывает на карте места
строительства объектов, а ЭВМ осуществляет рутинные
операции (гидравлические расчеты, расчеты, связанные
с построением сети дорог, информационно-поисковые ра-
боты и т. д., вычерчивание графиков, составление
таблиц).
3. Система позволяет определять оптимальные по за-
данному критерию варианты проектов генеральных схем
обустройства и варианты, близкие в заданных пределах
к оптимальному.
377
4. Система позволяет производить «дообустройство»
т. е. она учитывает уже построенное. Кроме того, проек’
тировщик может задать местоположение некоторых объ-
ектов и их характеристики, а система произведет опти-
мальное дообустройство. Учет системой построенных
объектов создает условия также для реализации режима
слежения за ходом фактического обустройства, измене-
нием исходной информации и корректировки ранее при-
нятых решений.
5. Система позволяет автоматизировать процесс фор.
мирования генеральных схем: результаты расчетов выда-
ются в виде таблиц, вычерчиваются схемы в привычном
для проектировщика виде.
Система проектирования генеральных схем обустрой-
ства нефтяных месторождений представляет собой объ-
ект, который мы ранее назвали имитационной системой.
В СПГСО присутствуют все три части имитационной си-
стемы: совокупность моделей, в рамках которых при за-
данных управлениях рассчитываются характеристики
проектов обустройств, совокупность моделей, в рамках
которых решаются разнообразные задачи математиче-
ского программирования, вычисляющие оптимальные
управления, совокупность программ, обеспечивающих
должную степень удобства при работе с системой.
Система внедрена и внедряется при проектировании
генеральных схем конкретных нефтяных месторождений.
Имеющийся опыт показывает, что использование СПГСО
по сравнению с традиционными методами проектирова-
ния дает экономию капитальных затрат до 10% и более.
4. В качестве итога выскажем ряд следующих поло-
жений:
1. Так как имитация не предполагает, вообще говоря,
никакой коренной ломки сложившихся механизмов
управления, то имитационные системы можно внедрять
постепенно, используя их на первом этапе наряду с су-
ществующими методами и формами управления.
2. Возможность постепенного внедрения имитацион-
ных систем создает удобный механизм сопоставления мо-
делей, лежащих как в основе имитации, так и в основе
оптимизационных алгоритмов, с практикой. Это одно из
важнейших преимуществ имитационных систем, так как
при исследовании общественных процессов возможность
ставить эксперименты, удостоверяющие адекватность ма-
тематических моделей, крайне затруднена. В определен-
ие
ной мере имитационная система, работающая в режиме
инструмента в руках планирующих и управляющих орга-
нов, может заменить эксперименты.
3, Возможность постепенного внедрения имитацион-
ных систем в определенной мере облегчает также пробле-
му сбора внешней информации для математических мо-
делей. Программы, осуществляющие накопление и обра-
ботку измеряемых характеристик реального процесса,
могут быть непосредственно включены в имитационную
систему и увязаны с программами, которые реализуют
вычисление внешней информации для моделей системы.
4. Использование имитационных систем создает ре-
альную базу для внедрения 'методов математического
программирования в практику планирования и управле-
ния. Наличие в системе имитационной модели позволяет
осуществить «системную» проверку управлений, которые
вырабатываются оптимизационными алгоритмами, про-
верку качества моделей, лежащих в основе оптимизации,
и определение допустимых областей их использования.
5. Само собой разумеется, что программное обеспече-
ние имитационных систем следует строить так, чтобы в
систему легко было добавить или изъять из нее ту или
иную модель, тот или иной алгоритм. Вообще «оптимиза-
ционная фаза» имитационной системы должна быть до-
статочно подвижна и формироваться окончательно толь-
ко в процессе эксплуатации системы. Наличие в системе
организованной таким образом оптимизационной фазы
дает практическую возможность распределить оптималь-
но функции по принятию решений между машиной и че-
ловеком. Подобное распределение определяется социаль-
ной и политической структурой общества, степенью объ-
ективных познаний о процессах, в нем происходящих,
развитием вычислительной техники и других средств
автоматизации процессов сбора, обработки, хранения и
передачи информации, развитием фундаментальных и
ряда прикладных областей, в первую очередь таких, как
методы оптимизации, теории игр, исследования операций.
Ясно также, что по мере развития общества все большее
количество функций по принятию решений должно пере-
даваться ЭВМ.
6. Авторы считают, что то направление, по которому
пока продолжают в основном развиваться автоматизиро-
ванные системы управления (АСУ) —создание систем
оптимизационных моделей вместе с пакетами программ,
379
реализующих алгоритм получения оптимальных управ-
лений, не может обеспечить рационализацию управлении
сложными процессами. По мнению авторов, дальнейшее
развитие АСУ будет происходить по пути создания ими-
тационных систем. Всякая автоматизированная система,
которую можно внедрить, будет неизбежно представлять
собой некоторое взаимодействие оптимизации и имита-
ции, т. е. некоторую имитационную систему.
Литература к главе 13
1. Ю. Г. Евтушенко, П. С. Краснощеков, Н. Н. Мойсе-
е в. Имитационные системы.— Экономика и организация промыш-
ленного производства, 1973, № 6, с. 39—45.
2. Нейлор Т. Машинные имитационные эксперименты с моделями
экономических систем.— М.: Мир, 1975.
3. Ш е н н о н Р. Имитационное моделирование систем — искусство и
наука.— М.: Мир, 1978.
4. Бусленко Н. П. Моделирование сложных систем. М.: Наука,
1978.
5. М о и с е е в Н. Н. Имитационные модели.— В кн.: Наука и чело-
вечество.— М.: Знание, 1975.
6. Танаев В. С., Шкур ба В. В. Введение в теорию расписа-
ний.— М.: Наука, 1975.
7. Конвей Р. В., Максвелл В. Л., Миллер Л. В. Теория рас-
писаний— М.: Наука, 1975.
8. Хачатуров В. Р. и др. Система проектирования генеральных
схем обустройства нефтяных месторождений.— В кн.: Системы
программного обеспечения решения задач оптимального планиро-
вания.—М.: ЦЭМИ, 1976.
9. Хачатуров В. Р. О динамическом проектировании и его реа-
лизации при освоении нефтяных месторождений.— В кн.: Фактор
неопределенности при принятии оптимальных решений в больших
системах энергетики. Т. 2.— Иркутск: СЭИ СОАН СССР, 1974.
ГЛАВА 14
ИМИТАЦИОННЫЕ СИСТЕМЫ
В ЭКОНОМИЧЕСКИХ ИССЛЕДОВАНИЯХ
§ 1. Особенности метода машинной имитации
Подход к изучению явлений с позиций машинной ими-
тации открывает возможность широкого использования
вычислительной техники для экспериментального иссле-
дования экономических процессов в тех случаях, где или
очень затруднительно, или невозможно осуществить пря-
мой «натурный» эксперимент.
При реализации машинной имитации эксперимент
проводится не с самим исследуемым объектом, а с его
моделью. При этом основа имитационного эксперимен-
та— математическая модель процесса или объекта — не
выбирается из какого-либо заранее определенного клас-
са моделей; она должна удовлетворять, в первую оче-
редь, требованию максимального приближения к иссле-
дуемому объекту и предоставлять наибольшую воз-
можность воспроизведения изучаемого процесса или яв-
ления.
Полученная таким образом модель подвергается тща-
тельному анализу, в результате которого, в частности,
может быть выяснено, что эта модель принадлежит к ка-
кому-либо известному, хорошо изученному типу. В этом
случае задача экспериментального исследования исход-
ной системы значительно упрощается.
Основным полем приложения экспериментальных ме-
тодов являются те задачи анализа сложных систем, в ко-
торых требуется производить оценку параметров состоя-
ния по данным о входных воздействиях и выходных ха-
рактеристиках системы.
Если имеется возможность провести натурный экспе-
римент, то путем изменения входных воздействий (фак-
торов) и наблюдения за соответствующими реакциями
381
можно оценить набор параметров состояния и затем
интерпретировать его в исходных терминах для управле-
ния системой.
В тех случаях, когда невозможно или очень затрудни-
тельно организовать подобные эксперименты с объекта-
ми народного хозяйства, строится некоторое приближен-
ное описание объекта или процесса, его модель, и вы-
полняется расчетный эксперимент с моделью реальной
системы при помощи имитации поведения системы по-
средством искусственного изменения либо параметров
состояния, либо входных воздействий, либо обоих наборов
одновременно. При этом осуществляется наблюдение за
расчетной реакцией «модельной системы», и на этой
основе выносится суждение о рациональной интерпрета-
ции результатов.
Создание достаточно надежной для экспериментиро-
вания имитационной системы должно начинаться с изу-
чения самого исходного процесса или явления, анализа
его свойств, и, в первую очередь, с выделения основных
управляющих параметров процесса и возможных границ
их изменения.
Полученная таким образом информация служит осно<
вой для конструирования собственно имитационной си-
стемы.
Разработка имитационной системы состоит из не-
скольких основных этапов.
Прежде всего формулируется главная цель, или цели
предполагаемого эксперимента. Эта цель может быть вы-
ражена, например, в виде требования проверить некото-
рые предположения, или в виде требования изучить пове-
дение реальной системы в условиях определенных воз-
действий, или в форме желательных ответов на серию
вопросов.
После того как цель эксперимента поставлена, необ-
ходимо разработать математическую модель реальной
системы и при этом организовать ее таким образом, что-
бы интересующие экспериментатора величины выступали
как выходные данные модели. Математическая модель в
имитационной системе должна удовлетворять условию
наибольшего возможного соответствия реальному процес-
су. Конечно, она не должна быть слишком сложной, что-
бы не затруднять расчеты на ЭВМ, однако, в первую оче-
редь, от нее требуется достаточно точное соответствие
реальности.
382
В модели четко выделяются экзогенные переменные,
йзменение которых в течение имитации процесса будет
иметь заранее определенный характер, кроме того, выде-
ляются управляющие 'переменные, при помощи которых
имитируется воздействие на данный объект внешних
управляющих инстанций.
В конечном счете математическая модель записывает-
ся в форме программы для ЭВМ. Эта операция может
быть выполнена на каком-либо универсальном языке, но
во многих случаях используются специальные языки ма-
шинной имитации.
Данные, получаемые в результате имитационных рас-
четов, должны быть подвергнуты анализу, чтобы экспери-
ментатор мог оценить пригодность системы для достиже-
ния поставленных целей.
Проблема оценки пригодности имитационной модели
по существу очень близка к проблеме оценки параметров
статистических соотношений, используемых для прогно-
за, поэтому ее решение обычно ищут при помощи анало-
гичных методов. Наиболее распространенным является
способ сопоставления полученных расчетных траекторий
с динамическими рядами, характеризующими изменение
состояния реальной системы в некоторые предшествую-
щие периоды времени. На основе этого сопоставления
при помощи более или менее точных способов делается
вывод о принципиальной пригодности данной имитацион-
ной системы. При этом понятно, что суждение о принци-
пиальной пригодности не означает еще, что результаты,
получаемые для будущего процесса, будут полностью до-
стоверны. В задачу экспериментатора входит постоянный
контроль за изменением расчетных значений и организа-
ция необходимой экспертизы.
В организации экспериментальной работы нужно
ясно определить и выделить набор величин, выражающих
реакцию системы на внешние воздействия (факторы), и
предусмотреть возможность оперативного воздействия
экспериментатора на ход расчетов. Для этого расчеты по
имитационной модели должны быть организованы таким
образом, чтобы они не требовали слишком длительной
работы ЭВМ между двумя последовательными момента-
ми вмешательства экспериментатора. В случае мгновен-
ной расчетной реакции на управляющее воздействие по-
является возможность обеспечить идеальный диалоговый
режим взаимодействия эксперта и ЭВМ.
383
Существенной особенностью в данном случае являет-
ся наличие таких периферийных устройств, которые обес-
печивают получение информации о реакциях системы в
удобной форме, выдавая результаты на графопостроитель
или телевизионный экран (дисплей). Если становится
ясной необходимость внесения корректив в первоначаль-
ную модель, то обычно осуществляется повторное иссле-
дование измененной модели путем анализа ее свойств
точными методами или путем дополнительных экспери-
ментальных расчетов.
Если выносится решение о пригодности модели для
имитации данного процесса, то она используется для про-
ведения массовых вариантных расчетов при различных
значениях управляющих параметров. Основной целью
таких расчетов является нахождение наилучшего в опре-
деленном смысле набора значений параметров. При этом
само понятие «наилучшего» набора вырабатывается, как
правило, в процессе взаимодействия коллектива экспер-
тов с ЭВМ в ходе работы имитационной системы. Ма-
шинная часть имитационной системы выполняет за чело-
века всю тяжесть стандартных ' расчетов вариантов и,
отбрасывая заведомо негодные, позволяет человеку, .от-
ветственному за окончательное решение, выбрать наи-
лучший, руководствуясь своими собственными, зачастую
неформальными, правилами выбора.
В процессе дальнейшего развития методов машинной
имитации будут использованы методы «обучения» элект-
ронных машин, применяемые при автоматической клас-
сификации и распознавании образов [1]. Это направление
откроет возможность применения диалогового режима в
основном для обучения машины и может привести к тому,
что многие неформальные правила выбора будут «осо-
знаны» машиной, которая -будет выполнять не только ру-
тинные расчеты, но и возьмет на себя решение некоторых
задач принятия решений.
Метод имитационного моделирования применяется, в
первую очередь, к экспериментальному изучению дина-
мических процессов и становится мощным вспомогатель-
ным средством в различных областях науки и техники.
К настоящему времени советскими и зарубежными ис-
следователями разработано и используется большое ко-
личество имитационных моделей.
Область приложения метода имитационного модели-
рования весьма широка. Этот метод используется для
384
исследования процессов управления биоценозами [2], эко-
логическими системами, для решения проблем рацио-
нального использования ресурсов [3], для решения задач
управления сложными автоматическими устройствами,
для исследования систем массового обслуживания, изу-
чения возможных вариантов развития исторических про-
цессов и т. п.
Для наиболее удобной реализации имитационных мо-
делей на ЭВМ разработаны специальные алгоритмиче-
ские языки: SIMULA [4], DINAMO [5], SIMSCRIPT
и другие.
В области исследования экономических процессов
имитационные модели применяются для решения многих
задач.
Известные нам имитационные системы, разработан-
ные в США, базируются на ЭВМ третьего поколения и
достаточно развитых комплексах периферийных устройств
[6]. Имитационные модели в США применяются для ис-
следования макроэкономических процессов [7], процессов
ценообразования, вопросов управления крупными фирма-
ми и промышленно-сбытовыми системами и т. п.
В нашей стране выполняется большой объем работ по
имитационному моделированию; отечественная литера-
тура, посвященная вопросам имитации, насчитывает око-
ло 400 названий [8].
В процессе разработки систем экономического плани-
рования и управления метод имитационного моделирова-
ния находит приложения как способ проверки и экспери-
ментального опробования предложений, вытекающих из
теоретических утверждений, а также как путь создания
диалоговой человеко-машинной системы, которая будет
играть важную роль в реализации основных положений
теории оптимального планирования. Особенно велика
роль имитационного моделирования при эксперименталь-
ной проверке предложений, связанных со структурными
изменениями, модернизацией экономических механизмов
и другими усовершенствованиями, не поддающимися
формальному количественному описанию. Различные ва-
рианты ценообразования, соотношения экономических и
административных методов управления, планируемых по-
казателей деятельности предприятий и объединений,
принципов экономического стимулирования, финансиро-
вания и кредитования могут изучаться с помощью имита-
ционных систем. В то же время их исследование другими
13 Под ред. Н. Н. Моисеева 385
средствами достаточно затруднительно. Рассмотрим бо-
лее подробно два типа систем, которые ориентированы
на решение указанных задач.
§ 2. Имитация хозяйственных решений на уровне
производственных объединений и предприятий
Имитационные системы для хозрасчетных объедине-
ний и предприятий позволяют изучить и эксперименталь-
но проверить различные рекомендации, относящиеся к
способам формирования фондов экономического стиму-
лирования (ФЭС). При помощи этих систем можно бу-
дет исследовать также влияние таких важных для пред-
приятий факторов, как порядок изменения цен на раз-
личные виды продукции в процессе производства,
правила распределения прибыли, и других.
Таким образом, конкретные предложения по усовер-
шенствованию хозрасчета на объединениях и предприя-
тиях могут быть отработаны в экспериментальном
порядке.
В качестве машинной модельной части отдельных эле-
ментов имитационной системы используются динамиче-
ские имитационные модели, в которых явным образом
выражена обратная связь между результатами производ-
ства и главными первичными производственными факто-
рами. В основном варианте модель подобного типа состо-
ит из пяти крупных блоков.
Первый блок модели служит для расчета текущих
величин производственных факторов. В этом блоке ис-
пользуется информация о состоянии производства на на-
чало расчетного периода, в особенности сведения об ис-
пользуемых технологических способах, о возможности
использования новых технологий, о ресурсах труда, основ-
ных и оборотных производственных фондах, которыми
располагает исследуемая производственная ячейка.
В частности, основные производственные фонды
(ОПФ) различных видов (здания, сооружения, оборудо-
вание, передаточные устройства и т. п.) на конец данного
расчетного периода (начало следующего) исчисляются
через фонды на начало периода (с учетом выбытия),
централизованные капиталовложения (ЦКВ) и фонд раз-
вития производства (ФРП) предприятия.
В качестве параметров управления здесь используют-
ся величины долей ЦКВ и ФРП, которые определяют от-
386
носительную важность того или иного направления капи-
тальных вложений, а также коэффициент использования
ФРП в текущем расчетном периоде. При этом в соответ-
ствующих формулах учитывается величина строительных
лагов, времени монтажа и освоения оборудования.
Аналогичные соотношения используются для расчета
величин оборотных фондов, фонда заработной пла-
ты и т. п.
Поскольку основные производственные фонды вводят-
ся в действие в течение всего расчетного периода (года),
то в качестве характеристики производственной мощно-
сти используются среднегодовые показатели. При усло-
вии равномерности ввода в действие среднегодовой пока-
затель равен полусумме соответствующих показателей
на начало и конец года.
Обозначая через t номер текущего периода, а через
х= (хв ..., xh ..., хп) — вектор величин производствен-
ных факторов (количество основных производственных
фондов различных видов; наличие трудовых ресурсов
различной специальности и квалификации; нормативы
оборотных фондов), имеем в достаточно общей форме
динамическую связь вида
х‘ = F, (лЛ1; е'; f; и‘). (2.1)
Здесь вектор хЧ**"1) представляет собой состояние про-
изводственных факторов на конец периода t (соответ-
ственно (/—1)); вектор е* выражает влияние в течение
периода t внешних факторов (централизованных капи-
тальных вложений, кредитов и т. п.); вектор f* дает коли-
чественную характеристику фондов экономического сти-
мулирования; вектор управлений и* дает возможность
моделировать различные тактики формирования произ-
водственных факторов в зависимости от управляющих
воздействий руководства предприятия или производ-
ственного объединения.
В частности, например, уравнение движения основных
производственных фондов в целом имеет вид
К* + +
Здесь /С— стоимость основных производственных фондов
на конец периода /, р/ — коэффициент выбывания фондов,
—объем освоенных в течение периода t централизован-
ных капитальных вложений, fi —величина фонда разви-
13* 387
тия производства (ФРП), полученная 'предприятием в те-
чение периода t, —доля ФРП, которую предполагает-
ся использовать в течение периода t (O^Zui ^1). Для
характеристики собственно производственного процесса
(второго блока) употребляется вектор среднегодовых по-
казателей
Х = (Xi, . . . , Xj, ..., xm).
Правило вычисления каждого из них диктуется конкрет-
ными особенностями показателя. В частности, среднего-
довой показатель основных производственных фондов
обычно принимается равным
что эквивалентно предположению о том, что ОПФ вво-
дятся в действие равномерно в течение года.
Второй блок модели используется для расчета коли-
чества производимой продукции в натуральном выраже-
нии. Этот расчет осуществляется либо при помощи про-
изводственной функции, либо путем формирования
специальной модели оптимизационного типа.
Вычисленные в первом блоке среднегодовые показа-
тели выступают либо прямо в виде аргументов производ-
ственной функции, либо косвенно — в качестве правых
частей ограничений оптимизационной задачи. В общем
случае подбор параметров производственной функции
или коэффициентов условий оптимизационной задачи
является очень сложным делом. Сравнительно простое
решение этой проблемы можно получить, если произвести
выделение наиболее существенных, лимитирующих про-
изводственных факторов на основе предварительного
экономического анализа.
Например, для многих предприятий обрабатывающей
и особенно добывающей промышленности лимитирую-
щим фактором являются основные производственные
фонды. В этом случае расчет данных во втором блоке
осуществляется при помощи коэффициентов фондоотда-
чи. При этом влияние ряда других, менее существенных,
факторов описывается через изменение коэффициентов
фондоотдачи. Множество таких факторов можно условно
принять состоящим из двух больших групп.
В первую из них вводят характеристики интенсифика-
ции использования труда, роста производительности тру-
да и т. п.
388
Вторую группу образуют показатели, отражающие
влияние степени использования основных производствен-
ных фондов (уменьшение времени простоя оборудова-
ния и т. п.).
В рассматриваемом имитационном комплексе предус-
мотрено, что изменение (рост) фондов экономического
стимулирования вызывает увеличение фондоотдачи за
счет изменения характеристик первой группы.
Показатели, входящие во вторую группу, зависят от
различных организационных мероприятий, осуществле-
ние которых находится в сфере компетенции руководства
предприятием.
В достаточно общем виде выпуск товарной продукции
в натуральном выражении описывается производствен-
ным оператором
^^(Г; g<). (2.2)
Здесь вектор у= ..., yif ..., уп) выражает собой ас-
сортимент и объемы различных видов производимой про-
дукции в натуральном выражении; g— вектор показате-
лей, характеризующий уровень интенсификации процесса
производства.
В простейшем случае монопродуктового производства
и в том случае, когда основным лимитирующим факто-
ром являются основные производственные фонды, выпуск
продукции можно описать при помощи простейшей про-
изводственной функции вида
yi=giK‘,
где величина gi есть коэффициент фондоотдачи, который
изменяется под действием описанных выше факторов.
Расчет компонент вектора g осуществляется в специаль-
ном (пятом) блоке имитационной модели.
Третий блок модели предназначен для расчета глав-
ных экономических показателей работы предприятия в
стоимостном выражении. Здесь вычисляются стоимость
товарной продукции, себестоимость и прибыль по различ-
ным изделиям, рентабельность. Делается расчет платы
фонды, фиксированных платежей, суммы отчисления
в бюджет и некоторых фондообразующих показателей,
используемых далее в расчете фондов экономического
стимулирования, после чего определяется свободный
остаток прибыли.
389
Ёсе указанные стоимостные показатели находятся по
известным формулам экономической статистики с учетом
возможности случайных возмущений. При этом исполь-
зуются те цены на различные виды продукции, которые
соответствуют данной стадии 'производства продукции.
Для расчета цен в модели заложена возможность осу-
ществить одну из следующих систем ценообразования
производственной продукции: на основе концепции усред-
ненной стоимости, стоимостной системы, концепции цены
производства и цены воспроизводства. Применение раз-
личных методов ценообразования позволяет проводить
сравнительные экспериментальные расчеты при выявле-
нии преимуществ той или иной системы в конкретных
условиях данного предприятия. В наиболее употреби-
тельной ныне системе ценообразования в качестве осно-
вы формирования цены изделия используется его себе-
стоимость, .к которой добавляется некоторый процент
(у), обеспечивающий «нормальную» прибыль предприя-
тию. Поскольку в процессе освоения производства неко-
торого изделия (с номером i) снижается его себестои-
мость, обычно применяемая расчетная формула цены
имеет вид
Pi = min {рЬ1; с\ + ус\}.
Здесь —плановая себестоимость изделия с номером i
на период t. Указанная формула цены дает возможность
«отслеживать» отмеченное выше снижение цены.
Расчет стоимости товарной продукции выполняется
по формуле
т
У1 = и рЫ,
1—1
себестоимость равна
т
с‘ = с\у{,
1=1
а прибыль определяется как разность стоимости товар-
ной продукции и общей (расчетной) себестоимости:
= С'.
Таким образом, общее выражение для вектора h эконо-
мических показателей оценки деятельности предприятия
390
имеет вид
h‘ = F3(y‘; р‘, у*-1), (2.3)
где р=(Рь •••> •••» Р">)—вектор цен на продукцию,
способ формирования которого зависит от управляющих
решений вышестоящих инстанций. Важным параметром
управления в руководстве предприятия на стадии расче-
та главных экономических показателей является выбор
стратегии управления запасами материалов и 'полуфаб-
рикатов.
В описываемом блоке имеется возможность использо-
вать два варианта стратегии выбора времени пополнения
запасов: в заранее определенные 'моменты времени и в
критические моменты, определяемые достижением мини-
мально допустимого запаса. Предусмотрены также две
стратегии пополнения запаса в случае надобности: попол-
нение постоянным объемом и дополнение до максималь-
но возможного уровня.
Таким образом, в описываемом комплексе оказывает-
ся возможным выбирать один из четырех вариантов
управления запасами для имитации деятельности органа
управления предприятия.
Полученные расчетные величины используются в чет-
вертом блоке для исчисления фондов экономического
стимулирования (ФЭС). В этом блоке имитируется
управление прямой связью между результатами произ-
водства и фондами стимулирования со стороны выше-
стоящего органа управления. В модели принята схема
образования ФЭС на основе следующего набора фондо-
образующих показателей: объем реализации, индекс при-
роста объема реализации, прибыль, рентабельность, про-
изводительность труда, качество выпускаемой продукции.
В условиях конкретного предприятия или отрасли для
образования фонда развития производства (ФРП), фон-
да материального поощрения (ФМП), фонда социально-
культурных мероприятий (ФСКМ) используются обычно
лишь некоторые из этих показателей, причем их вклад в
общую сумму данного ФЭС регулируется при помощи
нормативов, устанавливаемых руководством отрасли.
Увеличение нормативов приводит к увеличению сум-
мы ФЭС, но к уменьшению отчислений в бюджет, поэто-
му^здесь возникает задача оптимального выбора значе-
ний указанных нормативов, которая решается в процессе
работы имитационного комплекса. С помощью этого
391
комплекса могут быть проверены и другие предложения
по формированию ФЭС. Таким образом, при формирова-
нии системы ФЭС используются набор фондообразующих
показателей /i=(/ii, ..., /is) и вектор нормативов фондо-
образования q= (q^ ..., ^r), которые выступают как па-
раметры управления хозрасчетной деятельностью пред-
приятия со стороны руководства отраслью. Общее выра-
жение для фондов экономического стимулирования имеет
вид
Г=Л(Л‘; q(). (2.4)
В одной из наиболее простых систем экономического сти-
мулирования величина каждого фонда экономического
стимулирования определяется через темп роста стоимо-
сти товарной продукции на каждом последующем пе-
риоде.
Таким образом, например, фонд развития производ-
ства (ФРП) равен
t tY1 -
1 — »
Y*
фонд материального поощрения (ФМП):
Наконец, пятый блок системы служит для описания
обратной связи — влияния ФЭС на производственные
факторы.
Наиболее простой пример обратной связи дает влия-
ние ФРП на основные производственные фонды (ОПФ)
предприятия, поскольку ясно, что увеличение ФРП при-
водит к соответствующему увеличению ОПФ. Определен-
ная возможность неполного использования полученного
в данном году ФРП, а также накопления этого фонда
для использования в последующие периоды реализована
в имитационном комплексе в виде системы управляющих
параметров и*.
Значительно более сложным оказывается исследова-
ние влияния ФМП и ФСКМ. В рассматриваемом имита-
ционном комплексе принято, что эти фонды оказывают
воздействие по двум основным направлениям: в сторону
снижения затрат на производство продукции и в сторону
увеличения показателя производительности труда. В ка-
392
честве регулирующих параметров в этом блоке выступа-
юТ доли ФМП (ФСКМ), выделяемые для использования
по тому или иному направлению. Изменение этих пара-
метров, также относящихся .к системе и*, дает возмож-
ность экспериментально оценить наиболее выгодные их
значения. Основные вычислительные формулы этого бло-
ка относятся к расчету 'вспомогательных величин, харак-
теризующих направленность и силу влияния обратных
связей на интенсификацию производства
gt = Fs{ft-g^- и<). (2.5)
В частности, улучшение использования основных произ-
водственных фондов выражается через увеличение коэф-
фициента фондоотдачи основных производственных фон-
дов по формуле
gi 1 + а( 1 — exp •
Здесь а > 0 — некоторый числовой параметр, — фонд ма-
териального поощрения, L* — фонд заработной платы, —
доля ФМП, выделенная на стимулирование улучшения
использования оборудования.
Таким образом, математическая часть имитационной
системы представляет собой сложную систему нелиней-
ных уравнений (2.1) — (2.5) относительно неизвестных
У*\ h*; f*; g*. Никакая из указанных групп уравнений
не является автономной, поэтому расчет /показателей на
период t осуществляется одновременно. Вопрос о сущест-
вовании экономически осмысленных решений и о сходи-
мости итерационных процессов для расчета показателей
на год t решается на основе результатов теории положи-
тельных решений операторных уравнений, приведенных
в [9]. При этом для доказательства теорем существования
и сходимости решений существенно используется моно-
тонная зависимость векторных функций F2\ F3\ F^ F5
относительно инструментальных переменных у1; h1; f*;
g* в разумной области изменения управляющих парамет-
ров ег; рг\ ql. Типичный цикл работы имитационной
системы состоит в том, что расчетные величины х*; у*; h'\
I J gf поступают на выход ЭВМ полностью или выбороч-
ного определенной методике, но в виде серии показате-
лей, относящихся к определенному периоду планирова-
ния Т (5 и более лет). Таким образом, на периферийных
393
устройствах ЭВМ (экране или графопостроителе) появ-
ляется информация о возможной траектории развития
предприятия. В имитационной системе (рис. 14.1) пре-
дусмотрено наличие двух уровней анализа полученных
результатов и принятия решения группами экспертов.
Рис. 14.1. Схема управления в имитационной системе для хозрас-
четных объединений и предприятий.
Первый уровень управления приблизительно соответству-
ет компетенции руководства предприятия или производ-
ственного объединения, что выражается в возможности
имитировать воздействия «местных» управляющих фак-
торов (организационных мероприятий; решений по на-
правлениям использования ФЭС; принятия технологиче-
ских решений и т. п.). В приведенной системе уравнений
эти параметры объединены в векторе и* управляющих
воздействий. Обычно работа экспертов первого уровня
состоит в том, что они стремятся при помощи изменения
указанных параметров построить траекторию, достаточ-
но близкую, по их суждению, к идеальной. В процессе
Э94
формирования такой траектории либо выясняется воз-
можность такого построения, и тогда первая основная
задача имитационной системы решена, либо управление
первого уровня оказывается не в состоянии решить по-
ставленную задачу средствами местного управления.
В первом случае имитация управления второго уровня
(соответствующего руководству отраслью или подот-
раслью) осуществляется обычно лишь для эксперимен-
тирования. В последнем же случае центр тяжести управ-
ления переносится на второй уровень, который путем
изменения внешних управляющих параметров (нормати-
вы отчислений в ФЭС; направление капитальных вложе-
ний и других ресурсов) стремится получить идеальную
траекторию. Необходимо отметить, что хотя количество
управляющих воздействий второго уровня достаточно ве-
лико, однако диапазон их возможного изменения обычно
мал, и поэтому эффективность воздействия второго уров-
ня в процессе получения «идеальной» траектории не сле-
дует преувеличивать. Однако оказывается весьма полез-
ным и перспективным значение описываемой имитацион-
ной системы для экспериментальной обработки предло-
жений по совершенствованию хозрасчетных отношений в
промышленности и сельском хозяйстве.
Рассмотренная имитационная система применялась на
материале конкретных предприятий.
В качестве промышленного предприятия была выбра-
на одна из шахт Кузбасса, особенности которой — моно-
продуктовое производство, относительная стабильность
технологий, полная реализация товарной продукции —
были сочтены наиболее подходящими для математическо-
го моделирования. В результате работы имитационной
системы был получен «пучок» подходящих траекторий
развития шахты на период 5 лет. Анализ этих вариантов
послужил исходной базой для принятия решений о выборе
фактической (плановой) траектории развития предприя-
тия.
Кроме того, был проведен ретроспективный анализ
предыдущего пятилетнего плана шахты с точки зрения
возможности разработки планов, менее напряженных, в
начале пятилетки. В результате имитации удалось пока-
зать, что имеется возможность создания альтернативных
вариантов плана, при которых достигается большее соот-
ветствие плана динамическим возможностям шахты, и в
ТО же время обеспечено увеличение общего объема реа-
395
лизованной продукции за пятилетку по сравнению с ис-
ходным вариантом. Описанная имитационная система
применялась также для решения некоторых проблем раз-
вития цементного завода, машиностроительного пред-
приятия и сельскохозяйственного предприятия (колхоза).
Особенно перспективным представляется использова-
ние имитационной системы для исследования проблем
совершенствования экономического механизма управле-
ния предприятием. Одно из основных требований к меха-
низму состоит в том, чтобы он служил наилучшему соче-
танию интересов общества в целом и отдельных производ-
ственных ячеек. В исследованиях, проводимых с помощью
имитационной системы, за основу берется упрощенное
представление об этих взаимоотношениях, когда обще-
ство представлено вышестоящей организацией (второй
уровень управления), которая устанавливает предприя-
тию перспективный пятилетний план и заинтересована в
неукоснительном его выполнении. Интересы коллектива
хозрасчетного предприятия естественно связать с форми-
рованием фондов экономического стимулирования (ФЭС).
Согласование интересов взаимодействующих сторон до-
стигается на пути разработки системы экономических
нормативов, наилучшей системы ценообразования, оцен-
ки степени сближения плановых и фактических показа-
телей. Задача выбора наиболее подходящих значений па-
раметров решается при помощи рассмотренной имитаци-
онной системы, и здесь могут быть получены обнадежи-
вающие результаты.
§ 3. Имитационная система согласования плановых
решений на народнохозяйственном уровне
Предлагаемая система предназначена для исследова-
ния процессов координации структурных изменений про-
изводства и потребления в многоотраслевой экономике.
Проблема обеспечения сбалансированной экономики,
согласование плановых решений в различных сферах на-
родного хозяйства может быть в принципе представлена
как задача исследования сложной системы — народного
хозяйства — с целью выяснения, какие именно параметры
являются ответственными за обеспечение сбалансирован-
ности и какие значения они должны иметь для решения
поставленной задачи. Среди этих параметров наиболее
важными представляются величины плановых заданий на
396
производство важнейших видов продукции, экономиче-
ских нормативов длительного действия, цен и других эко-
номических рычагов (рис. 14.2).
Представляется ясным, что осуществление «натурно-
го» эксперимента для определения параметров в народно-
хозяйственном масштабе вряд ли возможно.
Рис. 14.2. Схема управления в имитационной системе согласования
показателей производства и потребления.
Для осуществления имитационного эксперимента ис-
пользуется модельное представление экономики при по-
мощи комплекса моделей производства и потребления,
при этом параметры обеспечения сбалансированности вы-
ступают как величины, характеризующие связь и согла-
сованность между отдельными блоками комплекса.
Первая очередь модельной части имитационной систе-
мы реализована в составе группы моделей отраслей на-
родного хозяйства, группы моделей потребления, а также
моделей согласования структуры производства и потреб-
ления в масштабе народного хозяйства при помощи кор-
ректировочных показателей спроса и предложения
Впоследствии в систему будут включены имитационные
модели взаимодействия элементов среднего звена (от-
раслей и регионов) с хозрасчетными предприятиями и
ЭД7
объединениями. Использование этих моделей даст воз-
можность экспериментального исследования предложе-
ний по совершенствованию хозяйственного механизма, по
отработке различных способов взаимодействия строго
планового начала и хозрасчетного элемента в народном
хозяйстве.
В качестве отраслевой модели используется описание
процесса производства при помощи совокупности произ-
водственных способов с характеристиками затрат и вы-
пуска продукции, меняющимися во времени по опреде-
ленным законам. Входами в модель служат данные о
предполагаемом плане выпуска основных видов продук-
ции данной отрасли. Параметрами состояния, на основе
которых осуществляется выбор, являются интенсивности
производственных способов. Выбор наилучшего решения
производится по некоторому определенному правилу,
чаще всего используется принцип минимизации приведен-
ных затрат. В модели учитываются также возмущения
случайного характера, которые способны изменить тех-
нико-экономические показатели отраслевых производст-
венных способов. Выходными характеристиками отрас-
левой модели служат данные о величинах издержек
продукции других отраслей народного хозяйства и не-
воспроизводимых ресурсов, необходимых для реализа-
ции намечаемого планового задания.
Оператор, выражающий необходимые издержки от-
расли с номером /, имеет следующий вид:
У!=Р1^.
Здесь х/—вектор, компонентами которого являются пла-
новые задания по основным видам продукции отрасли /
на период (год). /; у,-—вектор отраслевых издержек, ком-
понентами которого являются величины материальных,
трудовых и капитальных затрат, соответствующих пла-
новому вектору Xj. Среди различных материальных видов
издержек следует особенно выделить затраты продукции
других отраслей (f = 1, ..., я), которые мы будем обозна-
чать X#, и трудовые затраты, обозначаемые далее /Дх/).
Для пробных расчетов на ЭВМ обычно используется
линейная зависимость отраслевых издержек от объема
производства, тогда коэффициентами пропорционально-
сти являются коэффициенты прямых материальных за-
трат (а0) и трудоемкости (Z,). В этом случае применяются
398
формулы
Xi/ = ClijXj (l = 1, . a Ц)$
h (xi) = hxb
Для имитации процесса согласования отраслевых пла-
нов используется модель балансового типа с дополни-
тельными ограничениями по невоспроизводимым ресур-
сам. Процесс согласования планов отраслей имитируется
как итеративный процесс составления постепенно улуч-
шающихся планов. Существование согласованного реше-
ния и сходимость итераций гарантированы при выполне-
нии некоторых экономически справедливых предположе-
ний [9]. Основная балансовая система имеет следующий
вид:
X/ = 2 + N‘i + Cl (i = l, .... n),
„ /=1 (3.1)
2 //(х') = ^.
./=1
Здесь N*— плановое поступление продукции i-и отрасли
в фонд накопления, С* —плановое поступление в фонд
потребления; L*—наличие трудовых ресурсов в году /,
определяемое на основе демографических прогнозов.
В линейном варианте балансовая модель записывает-
ся с помощью системы уравнений:
+ + d (i = 1, .... п),
/=1 (3.2)
п
2 = L*,
0=1
М = Л^Р(1+д1(), (з.з)
d=см. (3.4)
Система уравнений (3.2) является линейным вариантом
системы (3.1). Уравнение (3.3) определяет заданный темп
роста фонда накопления по фондообразующим отраслям
народного хозяйства. Более сложным является уравнение
(3.4), которое предназначено для выражения фонда
399
потребления через коэффициенты ассортиментного набо-
ра (С?) и корректировочные показатели (л{).
В результате решения системы уравнений первого бло-
ка определяются величины валовых выпусков отраслей
xl, ..., Хп и подходящее количество ассортиментных на-
боров V.
По этим данным определяются важные для дальней-
шей имитации объемы непроизводственного потребления
продукции различных отраслей С\ (i= 1,..., ri).
Во втором блоке комплекса в качестве экзогенных па-
раметров управления используются ставки заработной
платы в различных отраслях народного хозяйства. На
основе этих данных и расчетов валовых выпусков произ-
водится имитация распределения доходов между различ-
ными группами семей [10], которые отличаются между со-
бой различной структурой спроса. Формирование спроса
групп населения выполняется при помощи оптимизации
функций спроса в группах с учетом бюджетных ограни-
чений. Общий доход населения в год t выражается фор-
мулой
= з 3Л-
/=1
где через 3/ обозначена зарплатоемкость, т. е. заработ-
ная плата, выплаченная в отрасли с номером / за произ-
водство единицы продукции в стоимостном выражении.
В этом коэффициенте учитываются также поправки, свя-
занные с пенсионным обеспечением, стипендиями и т. п.
Предполагается далее, что население состоит из т групп
различной численности, но приблизительно одинаковой
доходности. Каждая группа (с номером k) формирует
свой собственный спрос на продукцию непроизводствен-
ного потребления, решая оптимизационную задачу:
Uk (Zk, л/) -> max,
(3.5)
2 Ik-
i-~l
Здесь ик— функция предпочтения потребления в £-й груп-
пе потребителей, Ih—доход k-й группы, вектор z*=
— (zM, ..., z*„) определяет уровень потребления каждого
400
ида продукции k-и группой населения, л*—вектор кор-
ректировочных показателей. Очень часто для расчетов
используются функции предпочтения вида
/ ^kizki \
1П 1 4----------
п I л/ /
Uk (Zk, л<) = V к .
i=i
решением задачи (3.5) для каждой группы является век-
тор 110 одинаковым компонентам этих векторов
определяется спрос населения на продукцию i-й отрасли:
т -
Di (л/) =2 zki(rf).
k=l
В третьем блоке комплекса на основе сопоставления
расчетных данных спроса и сведений о конечной продук-
ции системы производится вычисление корректировочных
показателей плановой сбалансированности, которые в
определенном смысле служат характеристиками соответ-
ствия структуры фонда конечного потребления и потреб-
ностей групп населения в данных условиях.
Корректировочный показатель л ^вычисляется для каж-
дой группы продуктов, производимых данной отраслью.
Значение показателя, большее единицы, соответствует
случаю, когда спрос на данный вид продукции превышает
его производство (предложение); значение, меньшее еди-
ницы, свидетельствует об обратном явлении.
Вектор показателей получается в результате итера-
тивной процедуры, в течение которой происходит обраще-
ние к расчетам в первом и во втором блоках. В качестве
основы для расчетов используется соотношение между
спросом и предложением
t Dt
Л/ =----—
3
(/ = 1, ..., п).
В конце работы третьего блока производится провер-
ка и, если корректировочные показатели всех продуктов
оказываются с заданной точностью равными единице,
соответствие структур производства и спроса признается
идеальным, а имитационная система готова к переходу к
Расчетам на следующий год.
401
Если же полное соответствие предложения и спроса не
достигнуто, то осуществляется корректировка данных для
расчета балансовой системы в первом блоке и расчет
производится снова. При этом управление экспериментом
осуществляется с помощью имитации перераспределения
капитальных вложений между различными направления-
ми их приложения в народном хозяйстве. Получив рас-
четные данные после работы первого и второго блоков,
экспериментатор имеет возможность варьировать доли
общей суммы капитальных вложений по различным на-
правлениям и тем самым «вызывать» изменение фондо-
вооруженности труда, а следовательно, и его производи-
тельности. При этом используются формулы вида
1| - Г (. = 1...п),
1 + И/
где —коэффициент, трудоемкости (см. систему уравне-
ний (3.2)), величины
(4 = n)
/=1
представляют собой объем капитальных вложений, на-
правляемых в i-ю отрасль, при этом коэффициент Зг- ха-
рактеризует связь между фондовооруженностью и произ-
водительностью труда в данной отрасли, а числа 6# (Z, / =
= 1, ..., п) выступают в роли параметров управления.
Затем снова производится вычисление данных в первом
и втором блоке, и получаются новые значения корректи-
ровочных показателей. Таким образом, эксперименталь-
ным путем находятся наилучшие значения параметров
распределения капиталовложений, обеспечивающие наи-
более полное при данных условиях соответствие структу-
ры предложения и спроса.
При этом правило выбора наилучших значений вы-
рабатывается в процессе проведения имитационного экс-
перимента, что дает богатую возможность для сравни-
тельного исследования различных критериев оценки раз-
вития отраслей народного хозяйства.
Экспериментатор использует для осуществления опе-
ративного диалога с ЭВМ информацию о корректировоч-
ных показателях и предполагаемых темпах роста отдель-
ных отраслей, выводимую на телевизионный экран (ди-
402
сплей). Для более детального исследования различных
вариантов в динамике полученные данные выводятся на
печать и на графопостроитель.
На основе анализа динамики указанных показателей
экспериментатор может провести эксперимент по измене-
нию совокупного дохода населения или отдельных его
групп, а также по существенному изменению темпов на-
копления и т. п. (см. рис. 14.2).
Из сказанного выше ясно, что метод имитационного
моделирования не является каким-либо противопоставле-
нием применяемым методам математического моделиро-
вания экономических процессов, но, напротив, дальней-
шим развитием этого подхода с учетом возможности бо-
лее эффективного применения ЭВМ.
Опыт показывает, что имитационный комплекс дол-
жен быть основан на использовании в высшей степени
хорошо апробированных и отлаженных математических
моделей различных сторон сложного экономического яв-
ления. Только при выполнении этого условия можно рас-
считывать на получение достаточно достоверных резуль-
татов при многократном обращении к ЭВМ, которое тре-
буется при проведении имитационного эксперимента.
Литература к главе 14
1. Хант Э. Искусственный интеллект: пер. с англ./ Под ред. В. Л.
Стефанюка.— М.: Мир, 1978.
2. Моисеев Н. Н. Математик задает вопросы...— М.: Знание,
1974.
3. К о р я в о в П. П., Сушков Б. Г. Имитация динамических про-
цессов.— М.: Знание, 1973.
4. Яковлев Е. И. Машинная имитация.— М.: Наука, 1975.
5. Форрестер Дж. Динамика развития города: пер. с англ.
/Под ред. Д. М. Гвишиани — М.: Прогресс, 1974.
6. Шенн о н Р. Имитационное моделирование систем — искусство
и наука: пер. с англ./Под ред. Е. К. Масловского.— М.: Мир,
1978.
7. Нейлор Т. Машинные имитационные эксперименты с моделями
экономических систем: пер. с англ./Под ред. А. А. Петрова —
М.: Мир, 1975.
8. Имитационное моделирование экономических систем/под ред.
К. А. Багриновского — М.: Наука, 1978.
9-Багриновский К. А. Основы согласования плановых реше-
ний.— М.: Наука, 1977.
10- Дифференцированный баланс доходов и потребление населения./
Под ред. А. X. Карапетяна и Н. М. Римашевской — М.: Наука,
ГЛАВА 15
ДИАЛОГОВЫЕ СИСТЕМЫ В ЗАДАЧАХ
ОПТИМИЗАЦИИ И КЛАССИФИКАЦИИ
§ 1. Диалог — новая стратегия использования
вычислительной техники
В конце 60-х годов одним из направлений в использо-
вании ЭВМ для решения сложных научно-технических
задач стало диалоговое общение человека с машиной [1],
под которым понимается взаимодействие с ЭВМ пользо-
вателя, ничего не знающего ни о самой машине, ни о
средствах связи с ней, посредством терминала {2]. При
этом основной целью диалога является обеспечение .наи-
более эффективного использования возможностей как че-
ловека, так и ЭВМ, объединенных для решения общей
задачи. Таким образом, диалог — это двусторонняя связь
между пользователем и ЭВМ в реальном масштабе вре-
мени, отличающаяся от других режимов использования
вычислительной техники следующими особенностями [3]:
— непосредственный и оперативный обмен сообщения-
ми между человеком и машиной;
— удобства для пользователя при обмене сообщения-
ми (наглядность сообщений машины; лаконизм и мощ-
ность входного языка и т. д.);
— высокий уровень взаимопонимания партнеров и
определенная степень «равноправия» человека и машины
при распределении функций, выполняемых в процессе ре-
шения задачи, начиная от ее постановки и до получения
результатов счета по отлаженной программе.
Обтпим вопросом организации диалога на современ-
ных ЭВМ посвящено большое число публикаций. Поэто-
му, не останавливаясь на этих вопросах, отметим новые
факторы, которые привели к возможности говорить сегод-
ня о диалоговом режиме как о новой стратегии использо-
вания вычислительной техники;
404
_____прогресс в области развития технических средств
обидеипя человека с ЭВМ (разработка быстродействую-
щих графических и буквенно-цифровых дисплеев; увели-
чение производительности мини-ЭВМ; наличие режима
разделения времени и т. д.);
— создание операционных систем и систем програм-
мирования, на базе которых стало возможным построе-
ние человеко-машинных систем, проблемно-ориентиро-
ванных на решение конкретных научно-технических за-
дач;
— необходимость участия человека в решении слож-
ных задач, когда он берет на себя функции, которые не
поддаются формализации.
В качестве примера задач, для решения которых ис-
пользование диалога оказалось наиболее эффективным,
можно отметить следующие: планирование и управление
[4]—[7]; автоматизация проектирования [8]—[11]; машин-
ная графика [12]; обучение языкам программирования
[13]—[14]; составление и отладка сложных программ
[15]—’[18]; обработка экспериментальных данных [19]; ра-
бота с большими информационными массивами и банка-
ми данных [20] и т. д.
Общими для построения человеко-машинных систем
принятия решений на основе диалогового взаимодействия
«человек — машина» являются следующие проблемы:
— создание диалоговых языков общения;
— минимизация времени отклика системы на запросы
пользователя;
— применение мини-ЭВМ и микропроцессов в диало-
говых системах;
— разработка новой технологии решения практических
задач в интерактивном режиме (создание «сценариев»
поиска оптимального решения; получение интегральных
оценок по большим массивам промежуточной информа-
ции; оптимальное распределение «обязанностей» между
пользователем и ЭВМ и т. д.);
— адаптация системы к пользователям различной ква-
лификации;
— разработка программного обеспечения и способов
хранения обрабатываемой информации с ориентацией на
решение задач в режиме диалогового взаимодействия
пользователя с ЭВМ.
Отмеченные проблемы по-разному решаются в раз-
личных областях применения диалоговых систем [4]—[20].
405
§ 2. Диалоговая оптимизация
Одно из направлений исследования операций, харак-
терное для многих областей науки и техники, связано с
задачами принятия оптимальных решений, которые воз-
никают при проектировании технических систем и уст-
ройств. Для выбора наилучшего (в некотором смысле)
варианта проектировщику приходится решать задачи как
структурной, так и параметрической оптимизации. Про-
цесс структурной оптимизации в большинстве случаев
неформализуем и осуществляется путем «редактирова-
ния» конфигурации (топологии, структурной схемы)
устройства на основе диалогового взаимодействия «чело-
век— машина». Для выбора оптимальных параметров
проектируемого объекта используются обычно методы
поисковой оптимизации [21]. При этом модель принятия
оптимального решения формулируется как одна из экс-
тремальных задач:
— задача безусловной минимизации:
minQ(x15 ..., хл); (2.1)
Х^ЕП
— задача математического программирования:
minQ(Xj, ..хп), (2.2)
где
D = {х | gi (х1? ..., хп) > 0, i = 1, 2, ..., /и};
— задача многокритериальной (векторной) оптимиза-
ции:
minQita, ..., хл); minQ2(xx, ..., хл); ...
x^D x^D
..., min Qs (xt, ..., Xn). (2.3)
При численном решении задач (2.1) — (2.3) приходит-
ся сталкиваться со следующими трудностями:
— большим временем просчета одного варианта про-
ектируемого объекта из-за сложности математической
модели объекта и сравнительно невысокого быстродей-
ствия многих ЭВМ, что не позволяет просмотреть боль-
шое число возможных вариантов;
— неопределенностью принятия оптимального решения
из-за многокритериальное™ формулируемых задач, а так-
406
мйого^кстремальйости и стохастичности оптимизируе-
мых функций цели;
— отсутствием рекомендаций по эффективному ис-
пользованию методов поисковой оптимизации для реше-
ния экстремальных задач, возникающих в процессе опти-
мального проектирования конкретных технических си-
стем и устройств.
Для преодоления отмеченных трудностей при приня-
тии оптимальных решений необходимо, во-первых, созда-
вать специализированные пакеты программ моделирова-
ния и анализа технических систем и устройств с учетом
специфики их применения для решения задач структур-
ной и параметрической оптимизации и, во-вторых, решать
указанный выше класс экстремальных задач в интерак-
тивном режиме оптимизации [22], под которым понимает-
ся такой подход к решению экстремальных задач, когда
человек может вмешиваться в процесс решения задачи на
любом его этапе. При этом он может изменять не только
настроечные параметры метода поисковой оптимизации
или сам метод, но и математическую формулировку ре-
шаемой задачи (вид критерия оптимальности; значения
ограничений, накладываемых на параметры; число и тип
варьируемых переменных). Такой подход позволяет со-
четать алгоритмические процедуры решения экстремаль-
ных задач с неформализуемыми приемами принятия опти-
мальных решений, но для этого необходимо разрабаты-
вать языковые и программные средства организации ин-
терактивного режима оптимизации на современных ЭВМ.
В зависимости от рассматриваемой модели принятия
оптимального решения можно выделить следующие клас-
сы экстремальных задач, в которых применение интерак-
тивного режима оптимизации оказывается эффективным
по затратам машинного времени и точности получаемого
решения.
В задаче безусловной оптимизации (2.1):
— минимизация многопараметрических функций боль-
шой размерности;
— минимизация функций «овражного» типа;
— поиск глобального минимума;
— поиск экстремума в присутствии помех;
В задаче математического программирования (2.2):
— выбор начального допустимого приближения;
— решение задач линейного программирования боль-
шой размерности;
407
— поиск экстремальных точек вдоль нелинейных гра.
ниц допустимой области Z);
— минимизация функций, заданных в невыпуклой или
многосвязной области допустимых решений.
В задаче векторной оптимизации (2.3):
— выбор способа свертывания векторного критерия
оптимальности для отыскания решений, оптимальных по
Парето (эффективные точки);
— поиск оптимально-компромиссного решения среди
множества эффективных точек, принадлежащих области
компромиссов.
По-видимому, одной из первых систем решения экстре-
мальных задач в режиме диалогового взаимодействия
«человек — машина» была система автоматизации про-
цесса принятия оптимальных решений (САППОР) [22],
разработанная в НИИ ПМК при Горьковском универси-
тете на базе ЭВМ БЭСМ-4 с нестандартно подключенным
алфавитно-цифровым экранным пультом. Данная систе-
ма предназначена для решения задач (2.1) — (2.3) в одном
из трех режимов: пакетном, интерактивном и режиме
«вопросов — ответов». Алгоритмы поисковой оптимиза-
ции, реализованные в системе, изложены в [21]. Особен-
ностью входного языка системы является возможность
его персональной ориентации на математическую модель
пользователя. В настоящее время система реализуется в
рамках операционной системы ДОСЕС [23].
В дальнейшем для решения задач безусловной опти-
мизации, линейного и нелинейного программирования
был разработан ряд систем диалоговой оптимизации, сре-
ди которых можно отметить следующие.
АИДА — система Аппроксимации Исходных Данных
[24] — разработана в МФТИ на базе ЭВМ «Одра-1013» и
текстового дисплея «Видеотон-340», который подключен
к ЭВМ через модифицированный телеграфный интерфейс.
Предназначена для построения эмпирических моделей по
имеющимся экспериментальным точкам. В режиме диа-
лога выбирается тип аппроксимирующей функции (ли-
нейная или квадратичная зависимость) и метод поиска
оптимальных параметров х. Язык общения реализован
по методу синтаксических подпрограмм и включает
набор из 10—15 команд-операторов (директив), каж-
дой из которых поставлен в соответствие программ-
ный модуль, реализующий именно эту языковую кон-
струкцию.
408
в системе;
поиска и
LPI — пакет программ для решения задач линейного
программирования в интерактивном режиме [25], позво-
ляющий в режиме диалога менять коэффициенты целевой
функции, значение элементов матрицы ограничений, чис-
ло варьируемых переменных и метод решения задачи.
ОРБИТАЛЬ — диалоговая система для решения задач
безусловной оптимизации и аппроксимации [26] — разра-
ботана в Институте кибернетики АН УССР на базе ЭВМ
БЭСМ-6 и комплекта графических дисплеев АСПРО-2.
Предназначена для решения данного класса экстремаль-
ных задач, возникающих в молекулярной физике. Система
позволяет в режиме диалога выводить на экран дисплея
график значений минимизируемой функции в зависимости
от номера итерации; осуществлять многократную замену
алгоритмов оптимизации из числа имеющихся
проводить настройку параметров методов
строить на экране дисплея сечения целевой функции
вдоль любого заданного направления поиска.
MINUIT — пакет программ для безусловной оптими-
зации функций нескольких переменных [27]. В пакет вхо-
дят три метода оптимизации: метод Монте-Карло, симп-
лекс-метод и метод переменной метрики. Кроме поиска
минимума, пакет позволяет определять ковариационную
матрицу, величину доверительных интервалов различных
параметров и строить линии уровня в пространстве двух
переменных. Управление работой пакета осуществляется
при помощи управляющих карт и определенного порядка
расположения карт исходных данных.
ГРАДИЕНТ — пакет программ для поиска минимума
функций нескольких переменных без ограничения обла-
сти их допустимых значений [28], разработанный в Киев-
ском политехническом институте для ЭВМ «Мир-2». В па-
кете реализованы метод наискорейшего спуска и методы
сопряженных градиентов Флетчера и Полака — Рибьера.
Пакет позволяет осуществлять оперативную смену мето-
дов оптимизации в режиме диалога в соответствии с
выводимой на печать информацией о ходе поиска мини-
мума.
ДИСПЛАН — Диалоговая Система Планирования[29],
разработанная в институте кибернетики АН УССР на базе
ЭВМ БЭСМ-6. В математическом плане система позво-
ляет получать решение системы линейных алгебраических
Уравнений большой размерности (2.1) (до 1200 перемен-
ных) и проверять, насколько полученное решение удовле-
409
творяет ограничениям (2.2) — (2.3) на ресурсы (до 100
ограничений):
х = Ах + у,
Вх<^Ь,
х > 0.
Для обращения матрицы (Е—А) используется алгоритм
мультипликативного представления обратной матрицы
[30]. Система применяется для многокритериальной опти-
мизации народнохозяйственных планов путем изменения
технологических нормативных коэффициентов (столбцы
матрицы Л) и вектора ресурсов (В) в режиме диалога с
целью максимизации чистого выпуска и минимизации рас-
хода одного или нескольких внешних ресурсов. Система
может также использоваться для решения задач линей-
ного программирования в режиме диалога [31].
ПМП — Пакет Математического Программирования
общего назначения для решения задач линейного про-
граммирования [32] на базе операционной системы ОСЕС
для ЭВМ ЕС-1030 с минимальным объемом основной
памяти 64К байтов. В пакете реализован модифициро-
ванный симплекс-метод с мультипликативной формой
представления обратной матрицы. Пакет может быть
использован для решения задач сепарабельного про-
граммирования, в которых пользователь каждую нели-
нейную функцию предварительно аппроксимировал соот-
ветствующей кусочно-линейной зависимостью с необхо-
димой ему точностью. Пакет спроектирован на основе
принципов построения пакета MPS Фирмы IBM, являю-
щегося его прототипом. Языки управления пакетом и
представления табличной информации похожи на языки
ПЛ/1 и ФОРТРАН, но они специально ориентированы на
решение задач линейного программирования.
ВЕКТОР-1—пакет программ для решения комбина-
торных задач дискретного математического программиро-
вания [33], разработанный в Институте кибернетики АН
УССР на базе операционной системы ОСЕС. Для реше-
ния задач поиска экстремума функции, заданной в л-мер-
ном пространстве, элементы которого являются комбина-
циями (перестановками, сочетаниями и т. п.) из элемен-
тов некоторого дискретного множества, используются раз-
личные модификации метода вектора спада [34], [35]. За-
дача и метод ее решения жестко связаны между собой.
Пользователь может только задавать информацию о том?
410
какую задачу ему необходимо решить, и исходные дан-
ные для ее решения. Входной язык пакета, состоящий из
управляющих операторов, является языком интерпрети-
рующего типа и построен по модульному принципу.
F ДИЛОС — диалоговая система оптимизации [36], [37],
разработанная в ВЦ АН СССР для ЭВМ БЭСМ-6 в
рамках диалоговой информационно-логической операци-
онной системы [37], на основе которой осуществляется
взаимодействие пользователя с прикладными программ-
ными модулями (методами оптимизации). Система пред-
назначена для решения задач безусловной оптимизации,
нелинейного программирования и оптимального управле-
ния. В системе реализованы следующие алгоритмы опти-
мизации: градиентный метод, метод наискорейшего спу-
ска, метод сопряженных градиентов, метод Ньютона и
его модификации, метод случайного поиска, два вариан-
та метода штрафов, метод проекции градиента, метод
линеаризации и метод нагруженного функционала. Си-
стема может работать в трех режимах: режиме метапро-
цессора, когда диалоговая оптимизация ведется с по-
мощью специализированного языка; режиме логического
процессора, когда система сама подбирает методы и осу-
ществляет переключение на другой метод, и режиме линг-
вистического процессора, когда диалог с системой ведет-
ся на языке, близком к естественному.
НЕДОПТ— диалоговая система оптимизации на ими-
тационных моделях [39], для описания и программирова-
ния которых используется система НЕДИС [40]: НЕДис-
ОПТимизация. Система разработана в Институте кибер-
нетики АН УССР для ЭВМ БЭСМ-6 на базе графиче-
ского дисплея АСПРО и математического обеспечения к
нему. Используется для решения задач нелинейного про-
граммирования, сформулированных в процессе имитаци-
онного моделирования:
min Q (х1? . .., хп), (2.4)
x^D
где Z) = Z)ir|Z)2; Di = {x/gi(xl9 ..., хп)>0, Z=l, ..., т} —
множество, ограничения в котором заданы явно в виде
системы неравенств; D2—множество, заданное неявно и
определяемое спецификой требований, которые предъяв-
ляются к функционированию системы. (Принадлежность
х множеству D2 может быть выяснена лишь в ходе мо-
делирования. Невыполнение ограничений D2 классифици-
411
руется как ситуация, приводящая к нарушению имитаци-
онной модели.)
Для решения задачи (2.4) используются следующие
алгоритмы оптимизации: метод случайного поиска, моди-
фикация метода сопряженных градиентов и метод мини-
мизации функции без вычисления производных.
ДИСПОР — Диалоговая Система Принятия Опти-
мальных Решений [41]—[43], разработанная в Таллин-
ского электро-технического завода НИИ им. М. И. Кали-
нина для ЭВМ. «Минск-32» в рамках инструментальной
системы программирования ПРИЗ [44]. Система предна-
значена для решения задач безусловной оптимизации,
нелинейного программирования и многокритериальной
оптимизации. В первой очереди системы, предназначен-
ной для оптимального проектирования силовых диодов
[45], реализованы следующие алгоритмы оптимизации:
методы случайного поиска, метод сопряженных градиен-
тов, метод Резенброка, информационно-статистический
алгоритм глобального поиска, автоматный алгоритм гло-
бальной оптимизации и метод скользящего допуска. На-
личие в системе ПРИЗ базового семантически расширя-
емого языка УТОПИСТ позволяет просто создавать вход-
ные проблемноориентированные языки для диалогового
взаимодействия с системой ДИСПОР.
ОТЭКС — пакет прикладных программ для Обработки
Таблиц Экспериментальных данных [46], разработанный
в Институте математики СО АН СССР и в Новосибир-
ском университете на базе ЭВМ «Минск-32». Пакет соз-
дан для многоцелевой обработки экспериментальных дан-
ных, представленных в табличном виде, путем решения
задач таксономии (автоматическая группировка объектов
и признаков); построения решающих правил для распо-
знавания; планирования и обработки экспериментов при
поиске приближенного глобального минимума функции;
восстановления многоэкстремальной функции методом по-
тенциальных функций с оптимизацией их параметров.
Методы решения задач таксономии и распознавания, реа-
лизованные в пакете, изложены в [47]. Для глобальной
оптимизации используется процедура адаптивного поиска,
основанная на вычислении константы Липшица [48].
АСОПР — Автоматическая Система Оптимального
Проектирования [49], разработанная в МАИ в рамках
операционной системы ОСЕС. Предназначена для выбора
оптимальной стратегии поиска решения оптимизационных
412
задач, для чего процесс решения последних разбивается
на ряд подзадач, которыми могут служить типовые ситуа-
ции, возникающие при исследовании задач поиска мини-
мума функций нескольких переменных. Выбор предпочти-
тельного метода производится на основе анализа эври-
стических оценок алгоритмов оптимизации, совершенство-
вание которых осуществляется с помощью подсистемы
самоорганизации путем обработки статистических дан-
ных, получаемых при решении оптимизационных тестовых
задач.
При создании систем диалоговой оптимизации, кроме
общих вопросов, которые приходится решать при построе-
нии интерактивных систем (сокращение времени отклика
системы на запросы; получение интегральных оценок о
решаемой задаче; оптимальная конфигурация техниче-
ских средств обеспечения диалога и т. д.), на первый
план выступают следующие проблемы:
— построение математических моделей проектируемых
объектов и методов поисковой оптимизации, ориентиро-
ванных на решение экстремальных задач в интерактив-
ном режиме;
— экспериментальное тестирование методов поиска и
их идентификация соответствующим классам экстремаль-
ных задач;
— разработка «интеллектуальных советчиков», обес-
печивающих автоматическую адаптацию методов поиско-
вой оптимизации к особенностям экстремальных задач,
которые встречаются на разных этапах поиска;
— создание диалоговых языков, ориентированных на
постановку и решение экстремальных задач, в том числе
и языков, близких к естественному.
Первая из указанных выше проблем связана с тем,
что процесс поиска оптимальных решений является ите-
рационным процессом, требующим просмотра большого
числа вариантов проектируемого объекта. В связи с этим
машинное время, необходимое для просчета одного ва-
рианта по математической модели, должно быть как
можно меньшим. С другой стороны, решение задачи па-
раметрической оптимизации не всегда позволяет полу-
чить оптимальный вариант, удовлетворяющий пользова-
теля. Поэтому математическая модель должна быть по-
строена таким образом, чтобы пользователь на ней мог
решать задачу структурной оптимизации в режиме диало-
га. Многократное решение задач структурной и парамет-
413
рической оптимизаций требует применения методой
исковой оптимизации, обладающих повышенной ско-
ростью сходимости, что также накладывает определен,
ные требования на математическую модель оптимизируй
мого объекта.
Одним из путей решения этой проблемы является по.
строение пакетов программ анализа, специально ориен-
тированных на использование в системах диалоговой оп-
тимизации. При этом должно обеспечиваться выполнение
следующих условий:
— необходим входной язык описания структуры опти-
мизируемого объекта, позволяющий осуществлять авто-
матическую генерацию на одном из алгоритмических язы-
ков (ФОРТРАН, ПЛ/1 и т. п.) конкретной программы
анализа;
— при внесении изменений в структуру объекта долж-
на перегеиерироваться не вся программа, а только ее
часть, связанная с изменениями в модели;
— должна быть предусмотрена возможность автома-
тической генерации программ вычисления матриц поэле-
ментной чувствительности характеристик объекта;
— при генерации программ вычисления характеристик,
и матриц чувствительности для конкретной задачи пара-
метрической оптимизации должно автоматически осуще-
ствляться разбиение программ на постоянную составля-
ющую и переменную часть, оперирующую с варьируемыми
переменными;
— необходимо предусмотреть автоматический кон-
троль точности вычисления характеристик и возможность
перехода в процессе поиска оптимального решения к вы-
полнению операций с повышенной точностью;
— должно допускаться усложнение математической
модели объекта без перегенерации программ анализа
только за счет введения новых моделей базовых компо-
нент объекта.
В общем случае удовлетворение указанных требова-
ний представляет определенные трудности. Однако для
конкретных классов задач оптимального проектирования
использование специфики проектируемых объектов позво-
ляет учесть отмеченные требования при построении паке-
та программ анализа. В качестве примера рассмотрим
класс частотно-преобразующих электрических цепей, со-
стоящих из регулярных соединений линейных четырехпо-
люсников [50]. В зависимости от функционального назиа-
414
чеНия это могут быть частотные электрические фильтры,
амплитудные выравниватели, фазовые корректоры, согла-
сующие цепи и т. д. С точки зрения схемной реализации
йХ можно представить в виде сложных /?£СЛ4-структур,
образованных из компонент следующих иерархических
базовые элементы
Элементарные четырехполюсники
Типы соединений четь/рехполюсникод
Рис. 15.1. Класс проектируемых /?ЛСМ-цепей.
уровней: базовые элементы, сложные двухполюсники, эле-
ментарные и сложные четырехполюсники (рис. 15.1). Та-
кое представление проектируемых устройств позволяет
разработать [51] для автоматизации процесса построения
и анализа моделей входной язык описания их структуры,
который по терминологии близок к естественному языку
проектировщика электрических цепей. Модульный прин-
цип построения языка обеспечивает возможность его рас-
ширения без изменения синтаксиса путем введения новых
основных понятий и конструкций. Не останавливаясь на
Синтаксисе и семантике языка, приведем в качестве при-
415
мера описание структуры двухполюсника, показанного на
рис. 15.1:
Z = ((Cl + LI) — L2 — /?1) — ((С2 — (L3 + СЗ) — R2) +
+ (L4 + С4) + (L5 + С5) + £3).
Здесь параллельное соединение обозначается знаком
«*+», а последовательное — знаком «—».
В качестве алгоритма математического описания схем
(вычисления частотных характеристик и производных от
них по параметрам цепи) используется метод линейного
четырехполюсника, наиболее полно отвечающий специ-
фике рассматриваемого класса цепей и характеру решае-
мых для него задач анализа. В отличие от известных мат-
рично-топологических методов, этот метод оперирует с
матрицами собственных параметров цепи, порядок кото-
рых не зависит от числа элементов и равен двум. Это
значительно экономит время анализа модели и позволяет
рассматривать цепи по числу элементов практически
сколь угодно сложные. Кроме того, для сокращения вре-
мени просчета одного варианта алгоритм автоматическо-
го построения модели реализуется по принципу компиля:
ции рабочих программ вычисления частотных характе-
ристик. При этом осуществляется деление программы на
постоянную составляющую и переменную часть, опери-
рующую с варьирующими параметрами, которые указаны
при постановке задачи параметрической оптимизации.
При разбиении цепи на элементарные четырехполюсники
и составляющие их двухполюсники пользователь может
сравнительно легко выделить элементарные звенья, со-
держащие варьируемые параметры, т. е. задать оптималь-
ное разбиение цепи, обеспечивающее минимальную часть
рабочей программы.
Оперируя с матрицами Д-параметров элементарных
четырехполюсников и всей цепи в целом, нетрудно реали-
зовать автоматический контроль точности вычислений по
определителю Д-матрицы, который для рассматриваемого
класса схем должен быть равен единице. Если отклоне-
ние значения определителя от единицы по модулю пре-
вышает заданную величину, то в генерируемых програм-
мах организуется выполнение операций с удвоенной точ-
ностью.
Рабочая программа вычисления частотных характе-
ристик и функций поэлементной чувствительности цепи
416
формируется в виде исходного модуля на языке
ФОРТРАН-IV, использующего стандартные процедуры
операций вычисления и дифференцирования импедансов
базовых элементов и двухполюсников, A-матриц четырех-
полюсников и т. п.
В качестве другого примера построения пакета про-
грамм анализа, учитывающего вышесформулированные
требования, можно сослаться на специализированный
транслятор арифметических выражений (СТАВ) [52], ко-
торый ориентирован на автоматическую генерацию мате-
матических моделей объектов, описываемых аналитиче-
скими формулами.
Для решения экстремальных задач одного и того же
класса разработано большое число алгоритмов оптими-
зации [21]. Это приводит к тому, что у пользователя перед
решением конкретной задачи возникают вопросы: Какой
алгоритм выбрать для решения задачи? Что считать
наилучшим алгоритмом поиска? В какой-то степени от-
ветить на эти вопросы возможно, если рассматривать раз-
личные алгоритмы поисковой оптимизации с единых по-
зиций, как некоторый класс игр с природой. В процессе
такой игры по некоторому алгоритму (стратегии) F по-
следовательно осуществляются испытания в точках xk,
продолжающиеся до обнаружения с заданной точностью
точки минимума х*, либо до исчерпывания средств, кото-
рые отпущены на поиск.
При решении конкретной оптимизационной задачи
пользователь обычно ориентируется на некоторые мате-
матические особенности критерия оптимальности Q(-v),
тем самым он формализует класс минимизируемых функ-
ций Kq, обладающих одними и теми же фиксированными
свойствами (количество локальных минимумов, ширина
зоны их притяжения, предельные оценки значений пер-
вых производных и т. д.).
Класс алгоритмов AF выбирается в соответствии с
классом минимизируемых функций Q(x) и содержит ал-
горитмы F, определенные с точностью до вектора настро-
ечных параметров:
(ос) geAp, ocgeZ)^.
При определении наилучшего для некоторого класса
алгоритма поисковой оптимизации, а также при под-
боре оптимальных значений параметров а предполагает-
ся возможность задания отношения предпочтения на мно-
14 Под ред. Н. Н. Моисеева
417
жестве алгоритмов AF с помощью критерия эффектив-
ности W(Fl(a)f Q). В этом случае выбор наилучшего для
некоторого класса KQ алгоритма оптимизации F* можно
сформулировать, используя, например, принцип гаранти-
рованного результата [33] следующим образом:
W (F*) = min min max W (У (a), Q). (2.5)
F4=Af a^Da Q(=Kq
Решение задачи (2.5) в общем случае возможно толь-
ко на основе экспериментального исследования некото-
рого класса тестовых задач.
В качестве примера, иллюстрирующего рассмотрен-
ный подход к тестированию методов поисковой оптими-
зации и назначению оптимальных значений настроечных
параметров, рассмотрим следующую задачу [54].
Класс минимизируемых функций представляет собой
множество многомерных «овражных» функций типа «ба-
нана» Розенброка, Тестируемые алгоритмы F принад-
лежат классу алгоритмов АР, в которых выбор направле-
ния поиска осуществляется по схеме, аналогичной методу
переменной метрики, а выбор шага — либо с помощью,
процедуры глобальной минимизации произвольной кри-
вой F1, либо на основе метода квадратичной аппроксима-
ции F2. Переключение с одной процедуры на другую зави-
сит от близости к точке локального минимума. Например,
при решении системы нелинейных уравнений путем мини-
мизации суммы квадратов невязок в качестве условия
переключения можно использовать неравенство
Q(xr)^aQ(x°),
где O^a^l—параметр переключения процедуры выбо-
ра длины шага; Q(-*°), Q(xr) —соответственно значения
минимизируемой функции в начальной точке и точке, по-
лученной на r-й итерации.
В качестве критерия эффективности W(F) расматри-
валось число испытаний, необходимое для достижения
минимального значения минимизируемой функции с точ-
ностью е=10“5, усредненное по равномерно распределен-
ным по границе области D= {х|—2^х^2, /=!,..., п}
начальным точкам х°:
min М {N (a)} = min С N (а, х°) dxQ. (2.6)
ocaci 0<а^1 J
418
Задача (2.6) решалась с помощью помехоустойчивого
алгоритма глобального поиска [55]. Для п = 2 с вероят-
ностью р = 0,81 оптимальное значение . параметра пере-
ключения а находится в интервале [0,6, 0,8]; для п = 4 —
с вероятностью р = 0,82 в [0,65, 0,75] и для п = 6 — с веро-
ятностью р = 0,8— в [0,1, 0,2].
Из полученных экспериментальных данных следует,
что при использовании алгоритмов с переключением про-
цедур выбора длины шага поиска существует диапазон
оптимальных значений параметра переключения а, при
которых средние затраты на поиск М{N} значительно
меньше, чем для алгоритмов F1 только с глобальным
(0 = 0) или алгоритмов F2 только с локальным (0=1) вы-
бором длины шага, причем это преимущество сохраняет-
ся во всем диапазоне оптимальных значений параметра
переключения, что облегчает его практическую реали-
зацию.
В связи с тем, что во многих случаях пользователю
класс минимизируемых функций KQ априори неизвестен,
выбор наилучшего алгоритма оптимизации и назначение
для него оптимальных настроечных параметров представ-
ляет определенные трудности. В то же время для того,
чтобы использовать эффективно те или иные методы по-
иска, необходимо быть специалистом высокой квалифи-
кации в этой области. Поэтому для обеспечения возмож-
ности использования пакетов программ оптимизации спе-
циалистами разной квалификации и в различных при-
кладных областях необходимо в рамках пакета иметь
модули, обеспечивающие адаптацию алгоритмов оптими-
зации (выбор настроечных параметров; их уточнение по
информации, получаемой в процессе поиска; смена алго-
ритмов поиска и т. д.) к особенностям решаемой задачи.
При этом возможна автоматическая адаптация пакета к
решаемой задаче, в процессе которой пользователю вы-
даются рекомендации по наиболее эффективным в кон-
кретной ситуации вычислительным возможностям.
Для решения отмеченной проблемы в пакетах диало-
говой оптимизации используются блоки «накапливания
опыта» [23], [33], в которых собирается статистика по ре-
шаемым задачам, что позволяет вырабатывать рекомен-
дации по использованию методов поиска; логические про-
цессоры [36], реализующие методы искусственного интел-
лекта, для решения задач выбора наиболее подходящего
в конкретной ситуации метода поиска; эвристические
14* 419
оценки [49], полученные при решении тестовых задач и
индентифицирующие возникающую в процессе поиска
ситуацию «типовым» ситуациям и т. п.
Эффективность системы диалоговой оптимизации во
многом определяется входным языком общения, на кото-
ром пользователь формулирует экстремальную задачу,
указывает методы ее решения и управляет процессом
поиска оптимального решения. Чтобы описать задавае-
мую информацию наиболее компактно и наглядно, язык
общения должен быть построен по модульному принципу
и включать следующие языковые модули: описания объ-
екта модели (указание конкретных идентификаторов для
переменных и характеристик делает язык общения объ-
ектноориентированным на класс проектируемых уст-
ройств) ; описания постановки задачи (так как постанов-
ка задачи оптимального проектирования не зависит от
модели устройства, а связана с решением задачи оптими-
зации, то язык общения является в то же время проблем-
ноориентированным); описания метода решения (при
этом могут указываться как методы с фиксированной
структурой, так и методы, конструирование которых осу-
ществляется в процессе поиска); описания выдаваемой
информации и описания операторов редактирования ис-
ходной информации (изменение постановки задачи, на-
строечных параметров метода поиска, осуществление
переключения с одного алгоритма поиска на другой
и т. п.). В качестве примера на рис. 15.2 приведены язы-
ковые модули аналитической модели, заданной на языке
ФОРТРАН, и постановки задачи многокритериальной
оптимизации, решаемой с помощью аддитивного критерия
оптимальности [56].
Синтаксис языка общения задается в такой форме,
чтобы расширение возможностей языка осуществлялось
не путем изменения существующих конструкций, а по-
средством введения новых понятий и фраз. Проблемная
ориентация языка общения на решение задач параметри-
ческой оптимизации приводит к тому, что синтаксис язы-
ка общения остается инвариантным к различным классам
проектируемых объектов, а меняются лишь идентифика-
торы параметров и характеристик, которые отражают фи-
зическую суть оптимизируемых объектов. В табл. 15.1
приведен пример, показывающий, как для двух разных
объектов проектирования (пассивная электрическая цепь
и интегральная схема), для которых модель принятия
420
оптимального решения формулируется как задача без-
условной оптимизации, изменяется запись на языке ПРОЗ
(Постановки и Решения Оптимизационных Задач) [56].
МОДЕЛЬ (ФОРТРАН)
ПАРАМЕТРЫ XI : 2, Х2 : 1, ХЗ : 1,5;
ХАРАКТЕРИСТИКИ: Fl, F2;
СТРУКТУРА:
SUBROUTINE MODI (XI, Х2, ХЗ, Fl, F2)
F1 = Х1 * Х2 4-ХЗ/Х1
F2 = SIN (X1) 4- Х2 * ХЗ/Х1
RETURN
END
ФУНКЦИИ Р: =F1/F2;
R: = LOG (Fl);
ЗАДАЧА
ПЕРЕМЕННЫЕ: XI, ХЗ;
КРИТЕРИИ:
МИН Q1=P/R
МИН Q2=.F1
СВЕРТКА:
МИН 0=0.3*Q1 + 0.7»Q2;
Рис. 15.2. Языковые модули аналитической модели и постановки за-
дачи многокритериальной оптимизации.
Рассмотренный выше подход к решению задач опти-
мизации при помощи использования различных методов
поиска и конструирования наиболее эффективных алго-
ритмов в интерактивном режиме оптимизации требует
определенной квалификации пользователей. Чтобы си-
стемы диалоговой оптимизации могли быть использованы
более широким кругом пользователей, необходимо, что-
бы они обладали адаптацией к квалификации пользова-
телей.
Адаптация к квалификации пользователя может быть
осуществлена с помощью разработки языка, близкого к
естественному языку пользователя. В терминах такого
языка машине отдаются указания на выполнение некото-
рых действий (вычисление характеристик, решение за-
дачи оптимизации и т. д.). Множество предложений ес-
тественного языка является расплывчатым, так как при
421
Таблица 15.1
Пассивная электрическая цепь 1 Интегральная схема
Задача оптимального проектирования Определить значения емкости Ci и индуктив- ности £2> обеспечиваю- щих минимальное зна- чение рабочего зату- хания в заданном диа- пазоне частот от со~ до со+. Определить значения сопротивления базы R и толщину диффузион- ного перехода h, обес- печивающих минималь- ную мощность рассеи- вания Р логической транзисторной схемы.
Математическая мо- дель принятия опти- мального решения min Q (xi х2), Xi,X2 где *1—емкость Сх; г2—индуктивность Л2; QUi, х2) = = max а (со, xlf х2). й)-<СО<(й+ р min Q (хь х2), *1,*2 где хх—сопротивление базы R; х2—толщина диффу- зионного перехода /т; Q(x,, X2)=P(xlt х2).
Задание информации для пакета программ оптимизации на языке общения (языковый модуль описания по- становки задач) НАЙТИ ЕМКОСТЬ Сх; ИНДУКТИВНОСТЬ Ь2; МИН (МАХ РАБОЧЕ- ГО ЗАТУХАНИЯ [со”, со+]). НАЙТИ СОПРОТИВЛЕНИЕ БАЗЫ Я; ТОЛЩИНУ ДИФФУ- ЗИОННОГО перехо- да Л; МИН (МОЩНОСТИ РАССЕИВАНИЯ).
образовании предложений учитываются индивидуаль-
ные особенности пользователей. Поэтому единственное
требование к предложениям этого множества — чтобы
они подчинялись правилам русского языка и были грам-
матически правильными, т. е. пользователь может опи-
сывать свои действия любыми словами и строить пред-
ложения разными способами, но они не должны быть
бессмысленными с точки зрения русского языка. При
этом словари в трансляторах с языка, близкого к естест-
венному, должны быть частотного типа, чтобы повыша-
лась скорость трансляции. Это требование реализуется
422
при помощи блока «Накапливание опыта», в котором
вероятность использования отдельных слов и словосоче-
таний накапливается и корректируется в процессе экс-
плуатации системы. Таким образом, в процессе исполь-
зования системы происходит ее «персональная ориента-
ция», но уже не на модель объекта проектирования, а на
класс решаемых задач оптимизации и лексикон языка
пользователя.
Блок «Накапливание опыта» также собирает статис-
тические данные о работе отдельных модулей (выявляет
наиболее часто используемые функции свертывания век-
торного критерия; оценивает вероятность использования
отдельных методов поиска и их настроечных параметров,
запоминает наилучшие алгоритмы блочной структуры,
сконструированные пользователем, и т. д.). Эти данные
в дальнейшем используются для обучения пользователей
приемам наиболее эффективного использования системы
диалоговой оптимизации при решении конкретных задач
оптимального проектирования.
Один из способов обучения пользователя работе с
системой и изучения синтаксиса языка общения может
быть реализован при помощи диалогового режима во-
просов и ответов, когда система направляет действия
пользователя в процессе решения задачи оптимизации.
При этом информация, сообщаемая пользователю (во-
прос или ответ), может быть либо заранее запасенной в
соответствующих массивах, либо сконструированной са-
мой системой, т. е. может оказаться новой и интересной
для пользователя в том смысле, что он обнаружил бы
в этом сообщении полезный для себя комментарий. Как
трансляция с языка, близкого к естественному, так и ге-
нерация ответов, сконструированных на концептуальной
основе, осуществляется с помощью методов искусствен-
ного интеллекта.
В заключение необходимо отметить, что из обзора су-
ществующих систем диалоговой оптимизации следует,
что реализация интерактивного режима оптимизации на
современных ЭВМ возможна, преимущества и эффектив-
ность такого подхода к решению экстремальных задач
очевидны, и теперь первоочередной задачей является
разработка новой технологии решения экстремальных
задач в режиме диалогового взаимодействия «человек —
машина» с учетом физических и математических особен-
ностей конкретных задач оптимального проектирования.
423
§ 3. Оптимизация описания исходных данных
в диалоговых системах решения
задач классификации
В задачах технической и медицинской диагностики,
контроля сложных технологических процессов и объек-
тов, проектирования новых технологических систем
и т. д. разработчику приходится иметь дело с обработкой
больших массивов экспериментальной информации в ви-
де высокоразмерных сигналов Исследователя при
этом интересует либо создание модели изучаемого про-
цесса, либо анализ структуры и выявления некоторых
существенных параметров, позволяющих различать за-
данные наборы исходных процессов, проводить группи-
ровки этих сигналов и т. п.
При решении указанных задач человека зачастую
можно считать «образцом для подражания». Ему следу-
ет предоставить руководящую роль в процессе разработ-
ки решающих правил и в оценке результатов. Однако
ему необходимо дать автоматического помощника —
ЭВМ, с которым он может работать в режиме диалога.
Для успешной работы этого «дуэта» интервал времени
между моментами задания «вопроса» и получения «от-
вета» должен быть достаточно малым, чтобы не преры-
вать ход мыслей человека — «проблема реального вре-
мени». Кроме того, важно обеспечить человека возмож-
ностью интегрально оценить большой объем исходной
информации путем компактного представления исходных
данных на устройствах обратной связи — «дисплеях».
Успешное решение указанных проблем «общения» во
многом зависит от создания эффективных методов опти-
мизации исходного описания экспериментальных дан-
ных, ориентированных на разработку и реализацию на
ЭВМ.
В работе описываются разработанные методы и ал-
горитмы «невырожденных» процедур кодирования и
адаптивного сжатия сигналов, в основе которых лежат
идеи построения «хорошо приспособленных» аппрокси-
мирующих подпространств, а также методы и алгорит-
мы построения «вырожденных» «хорошо приспособ-
ленных» разделяющих подпространств, для выявления
наиболее информативных признаков и нахождения
решающих правил в режиме диалога «человек —
ЭВМ».
424
Задача кодирования исходного описания xit х2, ..хп
экспериментальных данных состоит в выборе такого ми-
нимального набора некоторых характеристик clt с2, ...
...» Ст (/п<п), которые с заданной точностью описыва-
ют исходные сигналы. Для удобства рассмотрения ис-
ходные данные на интервале обработки Т можно пред-
ставить в виде точек n-мерного пространства Еп, по осям
координат которого отложены значения ординат процес-
са, взятые в равноотстоящие дискретные моменты вре-
мени. При такой геометрической трактовке задача со-
кращения избыточности в исходном описании может
быть сформулирована следующим образом [57].
В n-мерном пространстве Еп с координатами хь
>2, ..., хп задано множество точек xfeX, / = 1, 2, ..., 2V.
Требуется найти ортонормированный базис и\ и2, ..., ит
некоторого подпространства Ет, в котором с заданной
точностью е, в смысле некоторой заданной метрики р,
лежат все точки xj^X. Как только указанный базис най-
ден, любая точка х^Х может быть описана с заданной
точностью е при помощи новых признаков с2, ..., ст,
вычисляемых согласно формуле
п
= Xtukt,
i—1
£ = 1, 2, ...» /и, i = 1, 2, ..., n.
Как известно [58], ортонормированный базис и1,
и2, ..ит подпространства Ет, до которого среднестати-
стическое среднеквадратичное расстояние
<82> = ([х—(хи1) и1—(хи2) и2—...— (хит)ит]2)
минимально, совпадает с т первыми собственными век-
торами, расположенными в порядке убывания соответ-
ствующих им собственных чисел Х2, ..., корреля-
ционной матрицы S, где S = <x,x>, о<;=,<ед>, х*— тран-
спонированный вектор х, скобки ( > означают статисти-
ческое среднее. При этом минимально возможная сред-
неквадратичная ошибка приближения составляет
<82> = Лт+1.
Таким образом, базисные векторы для оптимального ко-
дирования с минимально возможной среднестатистичес-
кой среднеквадратичной погрешностью являются собст-
венными векторами корреляционной матрицы.
425
Ограничения указанного метода заключаются в труд-
ностях нахождения собственных векторов при размер-
ностях исходного пространства Еп порядка n^5-103, к
которым приводит непосредственное задание многих
экспериментальных данных. Кроме того, часто более
предпочтительны критерии равномерного (чебышёвско-
го) приближения точек множества X линейным много-
образием Lmi когда справедливо
р (%/, Lm) = min р (х/, х) < е,
где е — требуемая точность приближения, и р(х5, х) —
расстояние между любой точкой х^Х и точкой x^Lm.
Для решения заданной задачи в [57], [59] был пред-
ложен следующий алгоритм построения «хорошо при-
способленных» базисных функций. Находится средняя
точка х* исходного множества X. Орты и1, и2, ..ит при-
способленного базиса определяются последовательно из
равенств
us =
x/s — х* — (%/s — **, uk) uk х
k=i
xls — x* — (x/s — x*, uk) uk
где каждая из точек x/s множества X выбирается так,
чтобы
р$ = — X* — uk) uk ~
= max xi — x* — V (x^ — x*, uk) uk j
7 II ’
Указанный процесс построения базисных векторов
ul, и2, ..., ит оканчивается, как только последняя из ис-
комых величин pt, р2, ..., pm окажется меньше заданной
точности аппроксимации 8. По найденному «хорошо при-
способленному» базису и1, и2, ..., ит всякая точка х^Х
кодируется т числами cs=(x—х*, ue), s=l, 2, m, и
декодируется по формуле
X = X* + 2 Cs '
426
при этом расхождение между исходной точкой х и деко-
дированной х удовлетворяет неравенству
Их—5-Ц^е.
Описанный алгоритм был апробирован на кодирова-
нии ряда экспериментальных кривых типа электрокар-
диограммы (ЭКГ), сфигмограммы (СФГ), реограммы
(РЭГ), баллистокардиограммы (БКГ) и т. д. Первона-
чальное задание кривых состояло из 392 равноотстоя-
щих отсчетов. Во всех случаях размерность приспособ-
ленного базиса оказалась порядка 25—30 при точности
описания 6^1% [60, 61]. На рис. 15.3 приведены резуль-
таты кодирования ЭКГ, БКГ, СФГ, РЭГ по соответст-
вующим найденным базисным функциям. Верхние кри-
вые соответствуют исходной кривой, нижние — восста-
новленной.
Рис. 15.3. Кодирование функциональных кривых по «хорошо при-
способленным» базисным функциям и1, и2, ..., ит. (Для ЭКГ /п = 32;
для БКГ, СФГ, РЭГ т = 23.)
Поиск путей сокращения объема вычислений при ко-
дировании по «хорошо приспособленным» базисным
функциям (вычисление коэффициентов с2, ..ст)
427
привел к построению систем базисных функций К1,
Д'п, при восстановлении по которым коэффициен-
ты разложения совпадают с отсчетами исходного сигна-
ла Ха [62—64]
X/ = ’ -К? 9
i = 1, 2, ..., и, а = 1, 2, ..., т.
При этом, в случае отсутствия [шумов, кодирование сво-
дится просто к выбору т неравноотстоящих отсчетов
хх, , хт. Алгоритм нахождения базисных функций Да
состоит в следующем. По «хорошо приспособленным»
базисным функциям и1, и2, ..., ит вычислим п сглажи-
вающих функций Г1, Г2, ..., Гп с ординатами
т
’ Ukt
k^l
i = 1, 2, ..., n, v = 1, 2, ..., m.
Среди n векторов P, используя алгоритм построения
«хорошо приспособленных» базисных функций, выделим
т линейно независимых Г*1, Г*2, ..., Г*т. В ортонормиро-
ванием подпространстве Ет базисных векторов Q^(qf ,
q*, .qn), И = 1, 2, m, полученных ортогонали-
зацией векторов Г*а, справедлива система уравнений
т
= ха’
Ц=1
а = 1, 2.....т, р = 1, 2
где с? — проекции векторов Г*“ на базис Q. Тогда /(“ =
м
= 3 где Фа = (— 1)ц+а —— , Д — определитель
д
системы (3.1), Ма& — миноры.
Процедура кодирования посредством базисных функ-
ций К была применена для сжатого описания экспери-
ментальных данных типа ЭКГ, БКГ, СФГ, РЭГ и т. д.
Полученные результаты, свидетельствующие об эффек-
тивности данной процедуры, представлены на рис. 15.4,
где ряд меток соответствует выбранным отсчетам
%1, %2, .... х*т, средняя и нижняя кривые — соответст-
венно исходный и восстановленный сигналы. Исходная
428
(3.1)
......т,
размерность кривых равнялась п==392, точность аппрок-
симации 6» 1%.
При обработке экспериментальных кривых в шумах
важной становится задача подавления помех. В [64] бы-
ло показано, что «хорошо приспособленные» базисные
СФГ
Рис. 15.4. Кодирование функциональных кривых по «хорошо при-
способленным» базисным функциям К1, №, ...» Кт.
функции являются эффективным способом решения за-
дачи выделения сигнала из шума.
Допустим, что непосредственное описание сигнала
определяется n-мерным вектором J/n), пред-
ставляющим собой сумму полезного сигнала х(хъ х2, ...
..., хп) и случайной помехи |2, • • •> £п), так что
При обработке сигналов в шумах с использованием ба-
зисных функций К необходимо выбирать не сами отсчеты
y*v У2> . •., У*т, а их сглаженные оценки
= 3 а = 1, 2, ..., т.\
Ui
429
Можно показать, что для получения наилучшей оценки
у при выделении сигнала из шума по базису К в
смысле минимума среднеквадратичного отклонения
у от х в системах с некоррелированным шумом требуется
функции r*a(Yia, , у„а) вычислять по оптимально-
му среднеквадратичному базису и2, ..ит, а т*—
число базисных функций — выбирать из условия
М (С/п*) > М (Ртп*), М (^m*+i) М (р-т*+1),
где М — математическое ожидание,
п п
Ck = 2 и* = 2 М-
Результаты экспериментальной проверки обработки
ЭКГ-сигнала на фоне миографической наводки приведе-
ны на рис. 15.5.
Рис. 15.5. Кодирование ЭКГ-сигнала на фоне миографического шума.
а — ЭКГ-сигнал; b — ЭКГ-сигнал в шумах; с — восстановленный
ЭКГ-сигнал.
Рассмотренные регулярные методы кодирования ис-
ходных данных с помощью вычисления коэффициентов
разложения ск по «хорошо приспособленным» базисным
функциям либо выбора «хорошо приспособленных» регу-
лярных выборок отсчетов ха в исходных кривых эффек-
тивны, когда экспериментальная информация носит ре-
гулярный характер, т. е. можно указать некоторый ха-
рактерный участок и его точку отсчета, либо для стацио-
430
парных сигналов, в которых расположение границ не
имеет значения.
В случае нестационарных процессов характеристики
параметров, описывающих процесс, меняются с течени-
ем времени, и эффективное кодирование данных может
быть достигнуто лишь применением адаптивных методов
сжатия, когда вид и число параметров, характеризую-
щих обрабатываемый процесс в каждый момент време-
ни, необходимо автоматически согласовывать с характе-
ром текущей реализации экспериментальной кривой.
При этом необходимо решать проблемы выбора наибо-
лее подходящих систем базисных функций, определения
оптимальных границ интервалов обработки, числа ис-
пользуемых базисных функций и т. д. [65].
Ниже задача построения алгоритмов адаптивного
сжатия сигналов сводится к построению для каждой ор-
динаты исходной информации «хорошо приспособлен-
ных» локальных сглаживающих функций Р, позволяю-
щих вычислять сглаженные значения ординат с заданной
точностью, и выбору из получаемой последовательности
фунцкий Г линейно независимых, которые определяют
номера запоминаемых значений существенных ординат
[63, 66].
Для построения набора «хорошо приспособленных»
локальных сглаживающих функций Гу поступим следую-
щим образом.
Введем функцию-ступеньку, которую определим сле-
дующим образом:
Jn — 2k+\'
\ 2
1,
п — нечетное.
О, k^.0, k>n,
Умножая исходную последовательность отсчетов х', .
. Л. /Л-2НП1 ,
..., xJN на f г — ---!, получим функцию со зна-
2
чениями исходных отсчетов на интервале
li Н----—) и значениями, равными нулю в остальных
точках. Изменяя i в пределах от до
указанным выше способом, получим множество из от-
резков xq исходных сигналов размерности и для всех /.
431
Для вновь сформированного множества Q точек №
{xj, • • • • хп } постРоим «хорошо приспособленный»
среднеквадратичный базис и1, и2, ..ит. Как известно,
направление выстраиваемых базисных ортов совпадает
с направлением первых т наибольших собственных век-
торов матрицы корреляции. Для центральной точки
хп-1 интервала [1, п] вычислим функцию Гц(у1, ..., у”)
с координатами
У? = 2
k=-i «
i = 1, 2, ..., п, k= 1,2, ..., tn.
Число m подбираем экспериментально, исходя из условия,
т
что в среднем | хс — Xi ] < 8П, где Xi = ckui- Полученную
функцию примем за первое приближение искомой ло-
кальной «хорошо приспособленной» сглаживающей
функции Г1. _
Используя Гц, вычислим сглаженные значения xv отсче-
тов %v исходной последовательности ординат {х{, х^, х^},
используя выражение
Xv = (ХГЦ) = Хг (гс-2г-ы) 1
' 2 J
Среди подряд следующих отсчетов, для которых спра-
ведливо |xv—xv| <8°, выберем существенные отсчеты с
шагом Д^ (рис. 15.6).
z? х? • • • х*
Рис. 15.6. Выбор существенных ординат xk с шагом по «хоро-
шо приспособленной» сглаживающей функции Г1.
Оптимальное в среднем восстановленное значение xi
несущественных отсчетов Xj по т ближайшим отобран-
ным существенным отсчетам вычисляется с помощью
коэффициентов a{k «хорошо приспособленной» локальной
восстанавливающей функции, определяемой, исходя из
432
выражения
Х=(*ГМ)= (X. 5 alk~xk,
\ k—1 / k—i
1 — 1),
отсчеты xi расположены между существенными ордината-
MHZxm/2 И xm/2+i (Рис- 15.6), где alk есть решение системы
т
Л=1
v = 1, 2, ..., т, 6 = 1,2, ..., т, т — четное,
4 = (РМ. Г1ЛУ), 4 = (T*,u,v . Г^*),
Г^ЦЛ — ортонормированная система векторов Г*’цД, Г*’ц’*, ...
... , Г*,ц,'л, по которым вычисляли сглаженные значения
существенных ординат х*. Для оценки сверху величины
покоординатной ошибки восстановления справедливо нера-
венство
| XI — XII =
т
(хг'ц)- з 4 •*,
k=l
где
г,д—4г‘*ц’*
Таким образом, величина покоординатной ошибки вос-
становления зависит от точности представления функ-
ции Г*’ц, по которой вычислялась сглаженная оценка от-
счета xh подпространством функций Г*>ц«\ соответст-
вующих т близлежащим к Xi существенным отсчетам
4 х'г, ... , Х*т (рис. 15.7).
Уменьшение величины покоординатной ошибки мож-
но добиться, решая следующую задачу:
Найти
min min СР ‘ “8 — 2 а* (5} СР '
«Ь 4 II р k=i \ р / II
при условии
i-а.
р ' ср-
15 Под ред. Н. Н- Моисеева
433
и
4 Р= 1.2, .... т,
₽ /=1
п
где ср = (Гц • и₽) = у“ • и?, ор — дисперсия совокупности
участков исходной информации в направлении ортов и?.
Найденную функцию Гц с координатами
т ~ я
У} = ср • «/
p=i
возьмем за первую локальную «хорошо приспособлен-
ную» сглаживающую функцию
Рис. 15.7. Роспись Г-функций
для представления Гц> * под-
пространством функций Г*’ ц’ \
соответствующих ближайшим к
Xi существенным отсчетам xk>
Г1.
Для получения сле-
дующей сглаживающей
функции Г2 сформируем
новые последовательности
из сглаженных значений
существенных отсчетов,
взятых с шагом Д^. Рас-
сматривая полученные по-
следовательности как ис-
ходный сигнал, произве-
дем все описанные выше
процедуры вычислений.
В результате получим но-
вую сглаживающую функ-
цию Г2. Аналогично опре-
деляем локальные «хоро-
шо приспособленные»
сглаживающие функции
Г3, Г4, ..., Гр.
Процесс построения
искомых функций Tv про-
должается до тех пор, по-
ка на очередном проходе
не будет получена новая
последовательность су-
щественных отсчетов, для которой построение системы
базисных функций и1, и2, ... не приводит к сокращению
описания. Тогда алгоритм адаптивного сжатия экспери-
ментальных данных может быть представлен следую-
щим образом.
434
Допустим, нам заданы исходная последовательность
отсчетов xiy 1=Л, 2, ..Af, которые условно обозначим
как отсчеты ранга 0, принадлежащие последовательнос-
ти 0, а также набор из л типов «хорошо приспособлен-
ных» локальных сглаживающих функций Гр, р=1, 2, ...
..л, с соответствующими интервалами Д/р выбора су-
щественных ординат. Используя функцию Г1, вычислим
для всех отсчетов хг
ранга 0 сглаженные
значения х° = (х-Г‘д) =
= 3^4_^+vVcPe-
V=1 V 2 J
ди следующих подряд
сглаженных отсчетов,
для которых | Xi —
— Тг°|+6?<8П, отберем
существенные ордина-
ты ранга 0 с шагом Д/4
(бгмк-е1).
Сглаженные орди-
Рис. 15.8. Роспись функций Г?»1
для представления функции
Г2М =2 Yp,zrp’1.
Р=1
функцию Г2, вычислим
наты хг составят по-
следовательность «1» с
элементами х/. Для от-
счетов х^ последова-
тельности «1», удовле-
творяющих условию
|хг°—| Н-б/Се", используя (
сглаженные значения (рис. 15.8)
х‘ - 3 'х(n-+i>AZi- +wu,i1
Р=1 L 2 J
где
«1 = 4» 2 х, „ $ к о дь +р.д/1
V=1 ' 2 '
Данное выражение после несложных преобразований
можно привести к виду
где Г2М = 3 • Г11Р = V у/Г L
15* 435
Среди подряд следующик]точек, для^которых | xf—X/JH+
+ б/ < еп, выбираем существенные ординаты ранга 2 с
шагом Д/21
414 • |г,м- 3 4,г-*21-*).
Отсчеты, для которых |xz—xi | > 8П, кодируются сущест-
венными отсчетами ранга 1, отобранными на предыду-
щей итерации алгоритма. При этом, переходя с кодиро-
вания информации по функции Г21 на кодирование по
функции Г1 и наоборот, необходимо соблюдать дополни-
тельные ограничения на закон переключения, вытекаю-
щие из требования представления восстанавливаемых
функций Рг аппроксимирующими подпространствами
ближайших к ним т линейно независимых функций Г*1
и Г*-21. Указанные ограничения на порядок расположе-
ния функций Гр при переключении определяются экспе-
риментально на этапе построения функции Гр.
Для отсчетов хц удовлетворяющих неравенству |jq —
— х* ( + 6? <Z еп и закодированных по функции Г21, вычис-
лим сглаженные отсчеты, используя функцию Г3, и про-
изведем отбор существенных ординат третьего ранга.
Аналогично поступаем до тех пор, пока на /См про-
ходе не будет получена последовательность сглаженных
отсчетов, среди которых нельзя выбрать ни одного су-
щественного отсчета /(-го ранга. Схематично описанный
процесс адаптивного сжатия представлен на рис. 15.9.
.......X • • • X • • • X • • «X’’’X-Х’Х’Х’Х
у»*,24/ p^z^z j'+'tifyn
Рис. 15.9. Схематичное представление процесса выбора существен-
ных ординат в адаптивной процедуре сжатия.
В результате работы алгоритма получим последова-
тельность сглаженных значений хь существенных орди-
нат с указанием типа Гр функций, по которым они вы-
числены. На этапе декодирования значения несущест-
венных ординат вычисляются согласно выражению
т ~
= 2 4 *
3=1
436
Где — коэффициенты «хорошо приспособленной» ло-
кальной восстанавливающей функции, получаемой по
конкретно найденному на этапе сжатия для отсчета х9
набору Гр* функций (Гр>*— функции, соответствующие
ближайшим к xq т существенным отсчетам х*р).
Например, на рис. 15.9 для восстановления отсчета
xq используются 6 ближайших функций Г*’21, помечен-
ные звездочкой.
Результаты экспериментальной проверки работы пред-
ложенного алгоритма адаптивного сжатия представлены
на рис. 15.10, где средняя кривая соответствует исходно-
му процессу, верхний набор точек — существенным орди-
натам, нижняя кривая — восстановленному процессу.
Валласта- Ре о грат а Вфагмограта
кардиограмма (ВеВренная)
Рис. 15.10. Адаптивное сжатие функциональных кривых.
Существенного сокращения необходимого числа вы-
числительных операций можно достигнуть, реализуя ре-
куррентные адаптивные алгоритмы сжатия с прорежива-
нием, когда на каждом проходе для дальнейших вычис-
лений оставляются только существенные ординаты, полу-
ченные на очередном проходе, как показано на рис. 15.11.
X X X X X X X X X X X X X X X X X х х Iпроход
ооооооооо J проход
+ + 4- + , Inpoxod
Рис. 15.11. Схематическое представление работы рекуррентного ал-
горитма адаптивного-сжатия с прореживанием.
Обозначим = | xi —9х% | общую покоординатную ошиб"
ку декодирования отсчета xi после /С-го прохода алгоритма,
437
а Через gp = |xp — Xp\ — покоординатную ошибку, получае-
мую на Л-м проходе. Можно показать, что
м
ek,i = е*-м + pUv,
V=1
где pt представляет собой суммы произведений до К — 1
порядка компонент а] локальных восстанавливающих функ-
ций, используемых на предыдущих итерациях (^=1, 2,.. .,k).
Отсюда следует, что увеличение общей покоординатной
ошибки &М при переходе от Л—1-го к /С-му проходу опре-
деляется значениями покоординатных ошибок 8*, получае-
мых на /С-м проходе. При переходе к доверительным пока-
зателям оценки покоординатной ошибки процедуры адап-
тивного сжатия можно экспериментально определить для
каждого из проходов такую величину Sv, что если на v-m
проходе |8p|<Sv, то при восстановлении исходной после-
довательности вероятность того, что покоординатная ошибка
восстановления ер1 = | xi — xi\ больше заданной величины Л,
меньше заданного значения рдоп:
? (| | > Л) Рдоп-
Удобным при практической реализации оказался сле-
дующий рекуррентный алгоритм адаптивного сжатия с
прореживанием. Пусть заданы локальная «хорошо при-
способленная» сглаживающая функция Г1 с шагом Д/4=
= 2 выбора линейно независимых существенных отсче-
тов и пороговые значения 60, 8к- Исходную после-
довательность отсчетов обозначим как последователь-
ность 0, состоящую из отсчетов ранга 0. Используя Г1,
вычислим сглаженные значения хА=(хГ1’Л) и сформи-
руем последовательность 1 по следующему правилу.
Если |xft—х ft[ <б0, то хк присвоим имя «отсчет 1 ранга»
с включением в последовательность 1. Отсчет хк^ про-
пускаем, если хк_2— отсчет 1 ранга (иначе хк_± оставля-
ем под именем «отсчет 0 ранга»), и переходим к вычис-
лению хк+2. Аналогично поступаем до тех пор, пока не
будут исчерпаны все отсчеты 0 ранга в последователь-
ности 0, либо не встретится отсчет, для которого
|хЛ+т—хк+т | > 60» В этом случае в последовательность 1
переносим значения xh+m_i и хк+т с сохранением имени
«отсчет 0 ранга» и переходим к вычислению хк+т+2 . Та-
438
ким образом, будет сформирована последовательность
1, состоящая из отсчетов 1 и 0 рангов. В последователь-
ности 1 отсчеты 1 ранга подвергаются аналогичной об-
работке. При этом обработке подвергаются те отсчеты
1 ранга, у которых предыдущий и последующий от-
счет xl+i в последовательности 1 также 1 ранга. В этом
случае, если |xz—xt\ <бь то xt переносится в формируе-
мую последовательность 2 с именем «отсчет 2 ранга».
В противном случае отсчеты xt и х^ передаются в после-
довательность 2 с сохранением своих рангов, присвоен-
ных им на предыдущих этапах. В результате получим
последовательность 2, состоящую в общем случае из
отсчетов 0, 1 и 2 рангов. Вычисления, согласно указан-
ным правилам, продолжаем до тех пор, пока не будет
получена последовательность /С+1, в которой нет ни
одного отсчета 7<+1 ранга.
В результате получим последовательность, состоя-
щую из отсчетов 0, 1, 2, ..., К рангов, которые являются
существенными ординатами и подлежат дальнейшему
запоминанию вместе с их номерами рангов. Восстанов-
ление исходного процесса осуществляется в обратном
порядке. По отсчетам последовательности К и значениям
а* получаем отсчеты последовательности К—1 и т. д.
Результаты экспериментальной проверки предложен-
ного алгоритма представлены на рис. 15.12, где средняя
Рис. 15.12. Адаптивное сжатие ЭКГ-сигнала по рекуррентному ал-
горитму с прореживанием.
кривая соответствует исходной ЭКГ, верхняя указыва-
ет выбранные отсчеты, нижняя — восстановленную кри-
вую. Адаптивное сжатие при этом осуществлялось с
использованием функции Г1, ординаты которой приведе-
439
ны в табл. 15.2. Декодирование сигналов производилось
по 4-м ближайшим существенным отсчетам х* по коэф-
фициентам локальной восстанавливающей функции К
(табл. 15.3).
Таблица 15.2
Ординаты локальной сглаживающей функции Г1
Yi —0,015 Те 0,2287 Тю 0,0482
?2 —0,0256 Т7 0,2595 Тп —0,0120
Тз —0,0120 Те 0,2287 Т12 —0,0256
Y4 0,0482 Те 0,1458 Т1з 0,015
Тб 0,1458
Таблица 15.3
Коэффициенты локальной восстанавливающей функции К
ах а2 а. а4
—0,106 0,606 0,606 —0,106
Рис. 15.13. Адаптивное
сжатие ЭКГ-сигнала по
алгоритму с использова-
нием коэффициентов а *
локальной восстанавли-
вающей функции.
В описанных выше алгоритмах построения процедур
адаптивного сжатия выбор существенных ординат осу-
ществляется посредством вычис-
ления х* по найденным наборам
типов Г-функций, а восстановле-
ние отсчетов хк— по существен-
ным ординатам с использованием
коэффициентов а *, которые опре-
деляются через функции Г. Одна-
ко при отсутствии шумов значе-
ния коэффициентов можно
находить непосредственно по ис-
ходной информации, и выбор су-
щественных ординат осуществ-
лять не по набору Г функций, а
по набору коэффициентов
На рис. 15.13 для примера
приведены результаты экспери-
ментальной проверки предложенного алгоритма при
сжатии электрокардиосигнала по набору коэффициентов
440
Верхняя кривая изображает реальную Исходную
ЭКГ. Над ней отмечены существенные отсчеты, выбран-
ные алгоритмом с использованием . Нижняя кривая
соответствует восстановленной ЭКГ. Максимальная по-
координатная ошибка, полученная в эксперименте, Д^5
(динамический диапазон сигнала ±128). При этом
коэффициент сжатия равнялся 15—20 в зависимости от
сложности исходных кривых.
Выше речь шла о минимизации описания при требо-
вании, чтобы оно представляло исходные данные с неко-
торой заданной точностью. Такая постановка задачи без-
относительна к тому, для какой цели нужно описа-
ние. Учет конкретной задачи, для которой нужно сокра-
щенное описание, может позволить провести дальнейшую
его минимизацию [59], [61]. Пусть X и Y — два множе-
ства точек подпространства Еп и задача состоит в вы-
работке решающего правила, отделяющего точки мно-
жества X от точек множества У. Ясно, что возможность
решения задачи классификации не нарушится, если про-
странство Ет вместе с множествами X и У спроектиро-
вать на некоторое подпространство Ет меньшей размер-
ности, и при этом расстояние между множествами X и У
не уменьшится или уменьшится незначительно.
Итак, задачу дополнительного сокращения исходного
описания (выбора информативных признаков) можно
трактовать как построение базиса подпространства, «хо-
рошо приспособленного» к максимально возможному
сохранению расстояния между множествами Х(х\ х\ ...
..., xN') и У (г/1, у2, ..., yNi), т. е.
Рт(Х,У)>ИРп(Х,У), 0<И^1,
где pm (X, У) = min V (х1 — yi, и*) uk I, p„ (X, Y)
llfe=l II
= min||x* — y*\\ .
hi
Отыскание искомых базисных векторов и1, и2, ..., ит
ведется последовательно. В качестве 1-го базисного век-
тора берется вектор и1, равный
и1 = (xSi — ур*) || xSi — уР* II'1,
где точки Xs* и yPi множеств X и У выбираются так,
чтобы l|xS1—уР1Н=рЛ И, У). Последующие векторы
441
определяются, исходя из выражения
где точки х\ yPv удовлетворяют условию
Pv-i yPv) =
= 3 (%Sv — yPv>и'
II /=1
= min
5} (х‘ — yi, и1) и1
1=1
(в формулах через Qv_i обозначено множество пар то-
чек (х\ yj), для которых справедливо неравенство
pv_4 (х\ < цр„) .
Приведенный алгоритм является слабо помехозащи-
щенным. Однако он позволяет работать с точками мно-
жеств большой размерности (п=.1ООО) исходного описа-
ния, а значения коэффициентов разложения объектов по
ортам разделяющего подпространства берутся в качест-
ве исходных данных для более помехозащищенного ал-
горитма.
За направления разделяющего подпространства в
этом случае берутся т собственных векторов матрицы
DT, определяемой по формуле
Алгоритм построения среднеквадратичного разде-
ляющего подпространства положен в основу человеко-
машинной процедуры построения простых разделяющих
поверхностей. При этом человек качественно оценивает
разделяющие свойства для образов точек множеств X и
У подпространства Ет собственных векторов при т=2
для различных значений 0.
Выбирается лучшее в смысле разделимости X и У
подпространство, соответствующее некоторому 0 — 0О.
В плоскости векторов ир0, ^строятся (в диалоговом ре-
жиме) простые разделяющие поверхности. Из прообра-
442
зов множеств X и Y неверно классифицируемых объек-
тов (после их верификации) строятся новые последова-
тельности обучающих выборок Х^Х и УхеУ, и все по-
строения среднеквадратичного разделяющего подпрост-
ранства размерности т=.2 повторяются. Этот процесс
продолжается до тех пор, пока на каком-то этапе мно-
жества X1 и У1 не окажутся пустыми.
В конечном результате получаем последовательность
собственных подпространств и разделяющих поверхнос-
тей, которые используются как классификатор классов
X и У.
Приведенные выше алгоритмы были применены при
построении классификатора для разделения пяти клас-
сов (инфаркт, ГЛЖ, ГПЖ, ишемия и норма) медицин-
ских кривых типа ЭКГ. Первоначально при построении
разделяющего подпространства между обучающими вы-
борками классов «норма» и «не норма» были отобраны
по 13 информативных отсчетов с каждого из 4-х ортого-
нальных отведений X, У, Z, У4, которые затем использо-
вались как исходные данные для вычисления матриц Dr.
При нахождении решающих правил для какого-либо оп-
ределенного класса обучающие последовательности А
и В формировались следующим образом. К множеству
А были отнесены все те отведения, у которых содержа-
лись признаки данного, класса, а к множеству В — отве-
дения, не обладающие этими признаками.
В результате применения алгоритма построения про-
стых решающих правил было получено в совокупности
14 (учитывая и базисные функции для определения ло-
кализаций по инфаркту) направлений, которые описы-
вают информативное разделяющее подпространство.
Схема разделения — пороговая.
При апробации полученного решающего правила на
контрольных выборках было установлено, что процент
правильной диагностики пяти классов изменяется в пре-
делах 92—96%.
На базе указанных, а также ряде других методов бы-
ла выработана методика проведения комплексных работ
по получению конкретных алгоритмов обработки экспе-
риментальных данных. Создан аппаратурно-программ-
ный комплекс на базе ЭВМ-М-222 (БЭСМ-ЗМ) для авто-
матизации этих работ в диалоговом режиме. В качестве
терминалов используются графопостроитель и графичес-
кий дисплей. Данный комплекс позволяет в диалоговом
443
режиме решать широкий круг задач по обработке экспе-
риментальных данных, связанных с кодированием, сжа-
тием, фильтрацией, выбором информативных признаков
и построением решающих правил.
На этом комплексе был сформирован банк меди-
цинских экспериментальных данных, включающий функ-
циональные кривые типа электрокардиограмм (ЭКГ),
баллистокардиограмм (БКГ), сфигмограмм (СФГ), ре-
ограмм (РЭГ) и т. д., а также данные карт обследова-
ния и формализованных историй болезни. Проведена
математическая обработка больших массивов обучаю-
щих данных. В результате получены «хорошо приспо-
собленные» базисные функции для кодирования и адап-
тивного сжатия функциональных данных, найдены ин-
формативные разделяющие подпространства и получены
решающие правила по постановке ЭКГ — заключений,
диагнозов заболеваний «стенокардия», «предынфаркт»
и т. д.
На основе полученных конкретных алгоритмов на
базе «мини-ЭВМ» создана серия диалоговых систем ав-
томатизированной обработки экспериментальных дан-
ных кардиологических обследований, предназначенных
для постановки диагноза и прогноза ишемической бо-
лезни сердца, разграничения типа «норма — патология»,
съема, обработки и получения сокращенных формали-
зованных описаний функциональных кривых для форми-
рования банков данных [67], [68].
В отличие от подобных систем, в разработанной се-
рии комплексов описание электрофизиологических дан-
ных не основывается на врачебных признаках, а процес-
сы диагностики не являются формализацией врачебного
мышления. Используемое формализованное машинное
сжатое описание является полным, чего ни об одной
системе врачебных признаков сказать нельзя. Оно ком-
пактно, и это делает его удобным для диагностики и
прогнозирования, для хранения в архиве и передаче по
каналам связи. Решающие машинные правила диагнос-
тики превосходят традиционные врачебные алгорит-
мы по достоверности и экономичности используемых
данных. Функциональная схема описываемых систем
представлена на рис. 15.14. Система состоит из «мини-
ЭВМ», оснащенной привязанными к ней с помощью
блоков сопряжения и управления биоусилителями, пре-
образователями «аналог — код» и «код — аналог», элек-
444
трической пишущей машинкой «Consul» и графическим
отображающим устройством на базе электронно-лучево-
го индикатора.
Рис. 15.14. Технологическая схема съема и обработки анкетных
клинических и электрофизиологических данных пациентов.
Обработка данных о состоянии пациентов включает
два последовательных этапа. Первоначально произво-
дится регистрация и машинное документирование систе-
мой анкетных, клинических и электрофизиологических
данных пациентов. Обрабатываемые данные о каж-
дом пациенте разбиваются на отдельные массивы.
Всего для одного пациента допускается формирование
до 8 массивов. В нулевой массив объединяются все
445
данные, представленные на тех или иных формализован-
ных документах. Общий объем нулевого массива может
достигать до 2000 тысяч шестиразрядных символов. Мас-
сивы с номерами от 1 до 7 связаны с результатами обра-
ботки функциональных данных. Поскольку система ис-
пользует четырехканальный синхронный ввод непрерыв-
ных данных, каждый массив содержит информацию о
4-х электрофизиологических процессах в пределах 5—
7 секунд. Кроме того, предусмотрена возможность сфор-
мировать массив данных о ритме сердца. Обработка
функциональных данных предусматривает их автомати-
ческий ввод в память ЭВМ, цифровую фильтрацию,
кодирование и адаптивное сжатие по «хорошо приспособ-
ленным» базисным функциям, получение перфорирован-
ного документа с результатами обработки. Универсаль-
ность системы на первом этапе достигнута за счет возмож-
ности задания системе конкретного плана обследования.
При этом предусмотрено использование не только неко-
торого стандартного плана обследования, но и его
модернизированных вариантов, выбираемых для об-
следования определенного контингента больных.
Второй этап связан с обработкой результатов ма-
шинного документирования пакетом прикладных про-
грамм. На этом этапе производится индикация резуль-
татов кодирования, разметка электрофизиологических
сигналов с целью дальнейшего их анализа по врачебным
методикам, морфологический анализ электрокардиосиг-
налов по врачебным формальным признакам, диагнос-
тика аритмий и нарушений проводимости. Каждая про-
грамма обработки предусматривает пакетный режим
ввода исходных данных и использует диалоговую схему
общения оператора с системой, что позволило создать
системы сравнительно небольшой стоимости (ориенти-
ровочно 30—60 тыс. руб.) при качественном и быстром
решении большого круга задач экспериментальной и
практической медицины.
Литература к главе 15
1. Ющенко Е. Л., Перевозчикова О. Л. Развитие языков
программирования и диалоговых систем в СССР.— Кибернетика,
1976, № 6, с. 16—33.
2. Глушков В. М. Диалог с вычислительной машиной: современ-
ные возможности и перспективы.— Управляющие системы и ма-
шины, 1974, № 1, с. 3—7.
446
3. Глушков В. М., Довгялло А. М., Рабинович 3.
Стогний А. А. Диалог, управляемый машиной.— Управляю-
щие системы и машины, 1974, № 6, с. 1—12.
4. Моисеев Н. Н. Математика — управление — экономика.— М.:
Знание, 1970.
5. С к у р и х и н В. И., Гуриев М. А. Многокритериальная орга-
низация процессов управления поточным производством.— Уп-
равляющие системы и машины, 1975, № 5, с. 13—17.
6. Глушков В. М. Макроэкономические модели и принципы по-
строения ОГАС.— М.: Статистика, 1975.
7. Поспелов Г. С., Ириков В. А. Программно-целевое плани-
рование и управление.— М.: Советское радио, 1976.
8. Батищев Д. И., Б аса л ин П. Д. Проектирование линейных
J^LC-цепей на основе взаимодействия «человек — машина».—
Изв. вузов. Радиоэлектроника, 1972, т. 15, № 2, с. 214—224.
9. Глушков В. М., Капитонова Ю. М., Л етиче fl-
ски й А. А. Математическое обеспечение автоматизированной
системы проектирования вычислительных машин и систем
(ПРОЕКТ).— Кибернетика, 1970, № 4, с. 1—6.
10. Андрилл Дж., де Мелло Ф., Костиняк Т., Миллс Р.
Использование ЭВМ в интерактивном режиме при анализе энер-
госистем.— Труды института инженеров по электротехнике и ра-
диоэлектронике, 1974, т. 62, № 7, с. 179—191.
И. Петренко А. И.х Добронравов О. Е. и др. Диалоговая
система проектирования топологии гибридно-интегральных
схем.— Управляющие системы и машины, 1977, № 3, с. 114—118.
12. Труды института инженеров по электротехнике и радиоэлектро-
нике. Тематический выпуск «Машинная графика», 1974, т. 62,
№ 4.
13. Довгялло А. М., Ющенко Е. Л. Обучение и диалоговое
программирование с помощью вычислительных машин.— Управ-
ляющие системы и машины, 1974, № 1, с. 27—32.
14. Р ы н г а ч В. Д., Алексеенко Е. А. и др. Обучающе-програм-
мирующая система ДИПРОФОР и некоторые результаты ее эк-
спериментального исследования.— Управляющие системы и ма-
шины, 1975, № 6, с. 48—56.
15. Борисенко Л. Г., Лаврищева Е. Н. Система диалоговой
отладки ОПАЛ.—Управляющие системы и машины, 1974, № 1,
с. 70—75.
16. Е л и н В. С., О л ю н и н В. Ю., Скрыдлов Н. В., Со-
мин Н. В. Система для разработки больших программных ком-
плексов.— Программирование, 1977, № 2, с. 55—59.
17. Новоселов П. Н. Учебная система класс для откладки про-
грамм в интерактивном режиме.— Программирование, 1976, №5,
с. 88—94.
18. Кон оз ен ко В. И. Диалоговая система автоматизации проек-
тирования и отладки машинно-счетных программ.— Управляю-
щие системы и машины, 1977, № 1, с. 69—74.
19. Говорун Н. Н., Иванченко И. М., Нефедьева Л. С.
Диалог в системах автоматизированной обработки данных.—
Управляющие системы и машины, 1974, № 1, с. 8—13.
20. Афанасьев В. И., Скороходько Э. Ф., Стогний А. А.
Применение и реализация диалогового режима в автоматизиро-
ванных информационных системах.— Управляющие системы и
машины, 1974, № 1, с. 14—26.
447
21. Батищев Д. И. Поисковые методы оптимального проектиро-
вания.— М.: Советское радио, 1975.
22. САППОР — система автоматизации процесса принятия опти-
мальных решений/ Батищев Д. И., Басалин П. Д. и др.— В кн.:
Кибернетические системы автоматизации проектирования.— М.:
МДНТП, 1973.
23. Батищев Д. И., Бедная Р. И. Особенности организации па-
кетов программ оптимизации, используемых в системах автома-
тизированного проектирования.— В кн.: Автоматизированное
проектирование в радиоэлектронике и приборостроении.— Л.:
Известия ЛЭТИ, 1977, вып. 224, с. 12—29.
24. Губин М. И., Ириков В. А., Шабунин М. М. Об одной
реализации диалоговой процедуры построения эмпирических мо-
делей на малой ЭВМ.— Управляющие системы и машины, 1976,
№ 4, с. 73—77.
25. S h u d d е R. Н. LPI — an interactive linear programming Packa-
ge.— Monteray, 1974.
26. Распопов В. Б. Диалоговые средства для решения некоторых
классов экстремальных задач.— В кн.: Тезисы докладов III Все-
союзной конференции по исследованию операций.— Горький,
1978, с. 296—297.
27. Roos J. F. MINUIT — a system for function minimisation and
analysis of parameter errors and correlations.— Comput. Phys.
Commput. Phys. Communs., 1975, v. 10, № 6, p. 343—367.
28. А с о в и ч П. Л., Кузнецов И. Р. Реализация интерактивного
режима при решении оптимизационных задач на инженерных
ЭВМ.— Изв. вузов. Радиоэлектроника, 1978, т. 21, № 3, с. 77—
82.
29. Глушков В. М., О л е я р ш Г. Б. Диалоговая система плани-
рования ДИСПЛАН.— Управляющие системы и машины, 1976,
№4, с. 123—124.
30. Глушков В. М., Олеярш Г. Б. О применении метода муль-
типликативного представления обратной матрицы в диалоговой
системе планирования.— Кибернетика, 1976, № 4, с. 142—144.
31. Глушков В. М. О диалоговом методе решения оптимизацион-
ных задач.— Кибернетика, 1975, № 4, с. 2—6.
32. Пакет программ ВЕКТОР-1/ Гуляницкий Л. Ф., Каспшицкая
М. Ф. и др.— Программирование, 1976, № 4, с. 42—54.
33. Состав и функциональные характеристики пакета математиче-
ского программирования/Богданов А. В., Демин Б. С. и др.—
Управляющие системы и машины, 1976, № 2, с. 40—42.
34. Сергиенко И. В. Вопросы разработки одного подхода к ре-
шению дискретных задач оптимизации в системах обработки и
АСУ.— Управляющие системы и машины, 1974, №6, с. 107—4il4.
35. Каспшицкая М. Ф., Сергиенко И. В., Хильчен-
к о В. И. Об одном подходе к решению задач размещения.—
Кибернетика, 1974, № 5, с. 51—60.
36. Брябрин В. М., Евтушенко Ю. Г., Семовский С. В.
Диалоговая система оптимизации.— В кн.: Численные методы
нелинейного программирования: тезисы II Всесоюзного семина-
ра.— Харьков, 1976, с. 3—7.
37. Моисеев Н. Н., И в а н и л о в Ю. П., Столярова Е. М. Ме-
тоды оптимизации.— М.: Наука, 1978.
38. Брябрин В. М. Диалоговая информационно-логическая систе-
ма.— В кн.: Семиотика и информатика.— М.: ВИНИТИ, 1977.
448
39. Марьянович Т. П., Петросян А. А., Распопов В. Б.
Диалоговый метод в направленном имитационном моделирова-
нии— Кибернетика, 1978, № 3, с. 56—62.
40. Система программирования НЕДИС.— Киев: Институт киберне-
тики АН УССР, 1975,-4. I, II.
41. Григоренко В. П., Сотников Н. С., Ш лафит И. А.
Диалоговая система принятия оптимальных решений.— В кн.:
Методы выбора и оптимизации проектных решений.— Горький:
1977.
42. С о т н и к о в а Н. С. Формализация задач оптимального проек-
тирования в системе ДИСПОР.— В кн.: Моделирование и опти-
мизация в условиях системы автоматизированного проектирова-
ния.— Таллин: 1977.
43. Ю л е г и н К). Н. Принципы построения и состав оптимизирую-
щей части системы ДИСПОР.— В кн.: Моделирование и оптими-
зация в условиях системы автоматизированного проектирова-
ния.— Таллин: 1977.
44. Система программирования ПРИЗ/ Кархо М. И., Манниса-
лу М. А., Саан Ю. П., Тыугу Э. X.— Программирование, 1976,
№ 1, с. 38—46.
45. Григоренко В. П. Оптимизация проектных решений в систе-
ме автоматизированного проектирования силовых полупроводни-
ковых приборов.— Электротехника, 1978, № 6, с. 27—32.
46. 3 а г о р у й к о Н. Г., Лбов Г. С., Машаров Ю. П. Пакет
прикладных программ для обработки таблиц экспериментальных
данных «ОТЭКС».— В кн.: Вопросы кибернетики: Адаптация в
системах со сложной организацией.— М.: 1977.
47. 3 а г о р у й к о Н. Г. Методы распознавания и их применение.—
М.: Советское радио, 1972.
48. Лбов Г. С., Г р у н о в А. А. Об одном алгоритме поиска гло-
бального экстремума функций.— В кн.: Вычислительные систе-
мы.— Новосибирск, 1976, вып. 67, с. 69—76.
49. Кузина Г. Ф., Ч у я н Р. К. АСОРП — автоматическая система
оптимального проектирования.— В кн.: Тезисы докладов III Все-
союзной конференции по исследованию операций.— Горький,
1978, с. 300.
50. Батищев Д. И., Б а с а л и н П. Д. Проектирование линейных
RLC-цепей на основе взаимодействия человек — машина.— Изв.
вузов. Радиоэлектроника, 1972, № 2, с. 214—222.
61. Батищев Д. И., Басалин П. Д. Автоматизированный рас-
чет частотных характеристик пассивных четырехполюсников.—
В кн.: Автоматизация проектирования в электронике.— Киев:
Техника, 1970, вып. 2.
52. Батищев Д. И., Конюгина Л. А., Фомина И. А. Гене-
рация программ аналитически заданных моделей для решения
задач оптимизации.— В кн.: Моделирование и оптимизация в
условиях системы автоматизированного проектирования.— Тал-
лин: 1977.
53. Гермейер Ю. Б. Введение в исследование операций.— М.:
Наука, 1970.
54. Батищев Д. И., Бедная Р. И., С т р о н г и н Р. Г. О выбо-
ре параметров алгоритмов поисковой оптимизации.— Автоматика
и вычислительная техника, 1972, № 5, с. 56—60.
55. С т р о н г и н Р. Г. Численные методы в многоэкстремальных за-
дачах.— М.: Наука, 1978.
449
56. Ё а т и щ е в Д. И., Конюгийй Л. А. Язык для формулировки
задач параметрической оптимизации в системах машинного про-
ектирования.— В кн.: Математическое обеспечение САПР.—
Горький: 1978.
57. Н е й м а р к Ю. И., Васин Ю. Г. Кодирование больших масси-
вов информации в связи с задачами распознавания образов.—
Изв. вузов. Радиофизика, 1968, с. 1081—1085.
58. А н д е р с о н Т. Введение в многомерный статистический ана-
лиз.— Физматгиз, 1963.
59. Н е й м а р к Ю. И., Васин Ю. Г. Алгоритмы приспособленного
базиса в задачах распознавания образов.— Изв. АН СССР. Тех-
ническая кибернетика, 1971, № 4, с. 147—151.
60. Васин Ю. Г., Беликовская Л. М., Гохштейн Л. Е.
Полные системы признаков электрокардиограмм и других меди-
цинских кривых.— В сб.: Автоматизация, организация, диагно-
стика.— М.: Наука, 1971, с. 424—432.
61. Ней мар к Ю. И., Баталова 3. С., Васин Ю. Г., Б р е ft-
до М. Д. Распознавание образов и медицинская диагностика.—
М.: Наука, 1972, с. 328.
62. Васин Ю. Г., С а в и н а Т. В. Кодирование ЭКГ неравномерны-
ми отсчетами.— Сб.: Биологическая и медицинская кибернети-
ка.— М.: 1974, ч. 4, с. 73—74.
63. В а с и н Ю. Г., Разборов В. А., Савина Т. В. Кодирова-
ние и адаптивное сжатие функциональных данных.— Труды II
Республиканской конференции по применению математических
методов в медицине.— Тбилиси: 1974, с. 212—215.
64. В а с и н Ю. Г. Регулярные выборки отсчетов исходной инфор-
мации и задача кодирования электрокардиографических дан-
ных.— Кибернетика и вычислительная техника.— Киев: Наукова
думка, 1978, вып. 41, с. 92—98.
65. Ольховский Ю. Б., Новоселов О. Н., Паковцев А. П.
Сжатие данных при телеизмерениях. М.: Советское радио, 1971,
с. 304.
66. Васин Ю. Г. Нерегулярные выборки отсчетов исходной инфор-
мации и задача кодирования электрокардиографических дан-
ных.— Кибернетика и вычислительная техника.— Киев: Наукова
думка, 1978, вып. 41, с. 98—104.
67. Васин Ю. Г., Громов В. П., Цветков Е. Г. Автоматизи-
рованная система обработки электрокардиограмм.— Некоторые
проблемы биологической кибернетики.— М.: Наука, 1972, с. 363—
372.
С8. Васин Ю. Г., Громов В. П., Гер вагин Ю. Г., Разбо-
ров В. А. Система автоматического ввода архивных данных и
первичной обработки медицинской информации о больных кар-
диологического профиля.— Вопросы кибернетики.— М., 1975,
вып. 24, с. 59—65.
ГЛАВА 16
ПРОГРАММНОЕ ОБЕСПЕЧЕНИЕ
СИМПЛЕКС-МЕТОДА ДЛЯ ЗАДАЧ
БОЛЬШИХ РАЗМЕРОВ
§ 1. Вводные замечания
Под симплекс-методом здесь понимается совокуп-
ность численных методов решения задач линейного про-
граммирования (ЛП), основанных на выделении базис-
ной системы ограничений, которая изменяется от итера-
ции к итерации, и на опирающихся на решение
выделенной системы способах оценки локальных вариа-
ций (допустимого или нет) текущего решения задачи.
Развитие различных подходов к повышению эффектив-
ности симплекс-метода продолжается уже три десяти-
летия. Как правило, все современные исследования в
этой области связаны с программной реализацией новых
предложений. Разработка программного обеспечения
для прикладного (или «коммерческого») использования
находится в тесной и не очень простой связи с разра-
боткой программного обеспечения для исследователь-
ских целей — «испытательных стендов», на которых
достаточно быстро и эффективно можно опробовать но-
вые вычислительные идеи.
Среди различных направлений развития симплекс-
метода следует упомянуть первым направление разви-
тия традиционной схемы решения общей задачи ЛП.
Здесь большое внимание уделялось разработке специ-
альных схем для часто встречающихся в практических
расчетах матриц с редким заполнением. Развивались
способы представления и повторного получения обрат-
ной базисной матрицы, обладающие различными вы-
числительными преимуществами. Создавались методы
построения удовлетворительного начального приближе-
ния. Предлагались изящные схемы реализации наиболее
важных вычислительных конструкций метода (например,
451
для скалярного произведения двух редко заполненных
векторов). Все шире изучаются (хотя еще на экспери-
ментальном уровне) вопросы управления ходом вычис-
лительного процесса, становящиеся особенно важными в
связи с диалоговыми формами ведения расчетов. Возрос
интерес к вопросам повышения устойчивости вычисле-
ний (включая вопросы нормировки, защиты от пропада-
ния знаков, выбора констант, определяющих точность, и
динамического управления этими константами).
Последний круг вопросов возникает также в связи с
проблемами развития программного обеспечения, пред-
назначенного для непрофессионального пользователя.
В таком программном обеспечении важно наличие «сер-
виса». Понятие сервиса, в частности, включает возмож-
ность преобразования данных от внешнего удобного для
пользователя представления к представлению, удобному
для машинной обработки, и обратного преобразования,
возможность организации расчетов, в которых симплекс-
метод используется как элементарная операция, возмож-
ность постоптимизационного анализа, включающего вы-
числение маргинальных значений отдельных параметров
задачи, округление и поиск частично-целочисленных ре-
шений.
Большое внимание уделялось задачам со специаль-
ной структурой матрицы ограничений, в особенности
блочным и окаймленным задачам простой и разветвлен-
ной структуры, двухкомпонентным задачам, задачам с
большим числом неравенств.
Важным и в теоретическом, и в прикладном отноше-
нии было развитие методов, связанных с генерировани-
ем столбцов матрицы ограничений. С помощью этих ме-
тодов, к которым можно отнести известный метод деком-
позиции для блочных задач и метод отсекающих гипер-
плоскостей для задач выпуклого программирования,
был решен ряд важных практических задач, в частности,
многие из задач массового раскроя и широкий класс
задач производственного планирования.
В настоящее время все чаще сообщается о комплекс-
ных алгоритмах, сочетающих несколько «первоначаль-
ных» подходов. Это обстоятельство делает особенно
важным структурирование программ, выделение систе-
мы понятий, которые позволят уменьшить число техниче-
ских деталей, возникающих при разработке сложной
программы.
.452
В данной главе описываются подходы к разработке
пакетных вариантов симплекс-метода, используемые в
нашей стране и за рубежом. Характеризуется также но-
вый подход к программированию сложных алгоритмов,
использующий понятие службы, т. е. комплекса проце-
дур, объединенных общей для них структурной инфор-.
мацией. Обсуждается применение этого подхода, к со-
зданию пакета программ симплекс-метода.
Не рассматриваемые детали алгоритмов симплекс-
метода можно найти в недавно появившихся итоговых
работах [1]—[3].
§ 2. Сервис
Прежде чем говорить о методах ЛП и о реализую-
щих их программах, следует остановиться на окружении
последних, которое во многом определяет практическую
ценность системы программ для решения задач ЛП (си-
стемы ЛП).
Применение программ в реальных задачах обуслов-
ливает такие пути развития системы, которые не всегда
можно предвидеть по исходной математической поста-
новке. Трудно было представить себе, как часто потре-
буется решать серии задач ЛП с незначительными изме-
нениями исходных данных. Но практика показала, что
такой серийный счет характерен для многих планово-
проектных задач, в которых различные не учтенные в
модели гипотезы развития моделируемого объекта, раз-
личные выборы целевой функции сравниваются, глав-
ным образом, путем многовариантных расчетов. Другой
случай многовариантных расчетов — когда решение не-
линейной задачи сводится к решению ряда задач ЛП.
Примером может служить процесс решения частично-це-
лочисленной задачи ЛП методом ветвей и границ, кото-
рый организован как процесс решения динамически фор-
мируемых задач ЛП.
Для обеспечения таких расчетов разрабатываются
пакеты программ. Не претендуя на полноту, определим
пакет программ как совокупность программ-модулей, свя-
занных между собой по данным и управлению и обеспе-
чивающих возможность выбора из большого числа ре-
жимов решения задачи.
Практически каждая солидная фирма, выпускающая
ЭВМ и снабжающая их программным обеспечением,
453
имеет стандартные пакеты ЛП (широко известны пакеты
АПЕКС и ОФЕЛИЯ для машин СДС, ТЕМПО для Бор-
роуз, ряд пакетов ИБМ и др., подробности можно найти
в [4]). Успешно эксплуатируются пакеты для советских
ЭВМ (пакет Л. М. Кутикова для машины Минск-32, па-
кеты ЦЭМИ АН СССР и СЭИ СО АН СССР для
БЭСМ-6, первые появившиеся пакеты ПМП и ЛП в АСУ
для ЕС ЭВМ).
Если для коммерческих пакетов характерны более
высокие эксплуатационные параметры надежности и
размерности, чего добиваются тщательным программи-
рованием, отбором численных методов, реализацией бо-
лее эффективных и надежных вычислительных конструк-
ций, то в исследовательских пакетах большее внимание
уделяется их алгоритмической гибкости, которая дости-
гается, с одной стороны, возможностью доступа к от-
дельным составляющим программ и данных и, с другой
стороны, значительно более широким набором методов.
Из коммерческих пакетов практически во все разви-
тые современные системы ЛП пришла как стандартная
услуга возможность идентифицировать условия и пере-
менные задачи не только с помощью порядковых номе-
ров, но и по именам, которые могут сопоставляться им
заранее и независимо от получающейся нумерации. Ап-
парат поиска по образцу дает возможность в случае
необходимости определять различные подмножества ус-
ловий и переменных задачи ЛП в терминах их имен, что
упрощает для пользователя технические трудности обра-
ботки результатов вычислений, внесение корректив в
исходные данные и даже формирование рекомендаций о
ходе вычислений. Так, исходя из априорных представ-
лений о структуре оптимального решения, пользователь
может сформировать (пользуясь именами) приоритетное
подмножество переменных, появление которых в базис-
ном решении особенно желательно или правдоподобно.
Ценой некоторых дополнительных затрат при построе-
нии идентификаторов можно прослеживать связи тех
или иных параметров задачи с первичной информацией,
использованной при определении их значений.
Как правило, развитый пакет ЛП содержит некото-
рые стандартные сервисные возможности, среди кото-
рых, кроме собственно решения задачи ЛП, можно на-
звать формирование и корректировку исходных данных
задачи, генерирование программ вывода промежуточных
454
и конечных результатов расчета, средства постоптимиза-
ционного анализа, включающие анализ чувствительнос-
ти и устойчивости решения, параметрическое исследова-
ние, округление до целочисленности, учет простейших
нелинейностей.
Рассмотрим несколько подробнее систему ЛП/
/БЭСМ-6 [5]. Она позволяет решать на машине БЭСМ-6
задачи ЛП, содержащие до тысячи ограничений общего
вида и до шестнадцати тысяч переменных, при условии
малой заполненности матрицы ограничений.
Система ЛП/БЭСМ-6 состоит из библиотеки про-
грамм-модулей, реализующих некоторые (стандартные)
операции, и аппарата, реализующего входной язык си-
стемы (ЛП-язык) [5], [6]. Важной стандартной опера-
цией является решение общей задачи ЛП. Эффектив-
ность ее реализации на машине определяет эффектив-
ность системы в целом, тем более, что операция часто
выполняется многократно в процессе решения даже од-
ной прикладной задачи.
ЛП-язык позволяет сформулировать проблему в тер-
минах стандартных операций системы. Он содержит ми-
нимально необходимый аппарат управления, некоторый
вычислительный аппарат, достаточно развитые средства
вывода информации, аппарат подпрограмм и средства
обращения к модулям. Аппарат переменных с индексом
дает пользователю доступ ко всем входным и выходным
данным модели ЛП: матрице условий, вектору ограниче-
ний, вектору коэффициентов целевой функции, прямому
и двойственному решениям и др.
Кроме того, ЛП-язык позволяет, используя значения
элементов массивов-результатов, сформировать массив-
аргумент необходимой структуры для любого модуля.
Таким образом, этот язык может рассматриваться как
средство взаимодействия не только между пользовате-
лем и системой, но и между отдельными модулями си-
стемы. Это обстоятельство существенно по той причине,
что возможности системы модулей определяются не
только самим набором модулей, но и тем, насколько
гибок аппарат увязки этих модулей в целях решения
конкретных задач. В частности, целиком от этого аппа-
рата зависит возможность эффективной реализации в
системе нестандартных операций — индивидуальных и
редко встречающихся действий, которые не могут и не
должны быть предусмотрены основными режимами
455
системы. Примером нестандартной операции может еду*
жить выполняемый для выбора той или иной ветви ал-
горитма анализ промежуточных результатов расчетов.
В ЛП-языке имеется достаточно богатый набор
средств для программирования таких нестандартных
операций. Эти средства позволяют, например, провести
весьма детальный анализ результатов работы модуля и
запрограммировать для каждого возможного исхода
свой процесс, который, в свою очередь, может ветвиться
и использовать в каждой ветви собственную комбина-
цию модулей.
Возможность относительно дешевого доступа ко всем
входным и выходным данным модели ЛП позволяет лег-
ко программировать на ЛП-языке различные нестан-
дартные операции формирования очередной задачи ЛП
из последовательности решаемых. В этом одно из глав-
ных преимуществ системы ЛП/БЭСМ-6 по сравнению с
подобными ей системами.
§ 3. Методы
Совершенствование методов решения задач ЛП не-
престанно продолжается. Общая схема метода на алго-
лоподобном языке может быть записана так:
подготовка1
while есть улучшение do
изменение базиса od;
выдача результата
Основная часть исследований связывается с методом
представления обратной базисной матрицы, особенно в
связи с ее редкой заполненностью. Изучаются и вопро-
сы получения этой матрицы в начале вычислений и в так
называемом процессе повторения.
Наиболее распространена мультипликативная схема,
в которой матрица представляется в виде произведения
некоторых элементарных матриц. Важная разновид-
ность этой схемы основана на /.[/-представлении — раз-
ложении матрицы в произведение нижней треугольной и
верхней треугольной матриц. Главные преимущества
мультипликативной схемы — компактность представле-
ния информации и простота корректировки матрицы в
режиме «Изменение базиса».
456
Важный и не до конца решенный вопрос организации
процесса повторения — выбор наиболее рациональной
последовательности базисных переменных. От их поряд-
ка существенно зависит и компактность информации, и
надежность вычислений. Вместе с тем алгоритмы, оп-
ределяющие выбор, не могут быть чрезмерно трудо-
емкими, иначе затраты на эти алгоритмы не окупят
выгод.
В добавление к методам, описанным в [1], [2], упо-
мянем две практические реализации известного критерия
Марковица [7], в которых поиск ведущего элемента уп-
рощается либо за счет его ограничения «наиболее пер-
спективными» строками и столбцами [8], либо за счет
создания и поддержания специальной информации о
расположении в базисной матрице ненулевых элемен-
тов [9].
В случае /^-представления возникают вопросы опе-
ративного поддержания треугольного представления.
(Подробнее об этом см. в [1], [2].)
Можно перечислить некоторые специальные классы
задач, допускающие более эффективное представление
обратной матрицы. Это узкоблочные задачи, в которых
переменные разбиваются на группы, каждой из которых
отвечает одно «собственное» ограничение (узкий блок),
и эти собственные ограничения не увеличивают размер-
ности задачи. В ряде пакетов возможность решения та-
ких задач рассматривается как одна из стандартных
возможностей.
Задачи блочной структуры, в том числе с многоуров-
невыми структурами, допускают два подхода к их реше-
нию. Первый — это модификация формы представления
обратной матрицы. Такой подход активно развивается в
Новосибирске [3]. К задачам с блочной структурой раз-
личной сложности приводятся, в частности, такие важ-
ные практические задачи, как производственно-транс-
портные модели планирования. Другого подхода, прин-
ципа разложения, мы коснемся ниже.
В двухкомпонентных задачах каждый столбец мат-
рицы ограничений содержит не более двух элементов,
отличных от нуля. Такие задачи по методам их решения
чрезвычайно близки транспортной задаче, и допускае-
мая в них теоретико-графовая интерпретация усло-
вий позволяет ввести аналог метода потенциалов с под-
держанием специальной структуры базисной матрицы.
457
Эта структура основана на специальной удачной нумера-
ции ограничений и базисных переменных задачи.
Задачи с большим числом неравенств*), лишь немно-
гие из которых окажутся лимитирующими и будут вы-
полняться как равенства в оптимальном решении, допус-
кают специальную технику «базиса переменного разме-
ра», позволяющую ограничиться той частью базисной
матрицы, которая отлична от единичной.
Непосредственный учет переменных, не ограниченных
по знаку, также следует рассматривать как дальнейшее
развитие реализации симплекс-метода. Источником за-
дач с такими переменными являются линейные модели
управления с дискретным временем, различные динами-
ческие модели ЛП. Исключение рассматриваемых пере-
менных из модели далеко не всегда является лучшим
выходом, так как .увеличивается плотность заполнения
матрицы условий.
Отдельные важные стандартные операции основной
процедуры подвергаются весьма хитроумным усовер-
шенствованиям с целью повышения их вычислительной
эффективности и устойчивости счета.
Рассмотрим в качестве примера известную операцию
жорданова исключения и опишем вычислительную схему
[9] вычитания одного (ведущего) столбца матрицы из
другого с заданным весом а.
Пусть столбцы матрицы хранятся в компактной фор-
ме, т. е. в виде последовательности ненулевых элементов
и номеров строк, которым принадлежат эти ненули. Ос-
новная идея описываемого приема заключается в том,
что ведущий столбец переводится из сокращенной запи-
си в полную, а за счет этого удается обойтись без упо-
рядочения ненулей-столбцов по номерам строк и су-
щественно упростить самый внутренний цикл про-
граммы.
Подготовка полной формы ведущего (Л-го) столбца
осуществляется циклом по его ненулям: имея первона-
чально полный нулевой вектор W соответствующей раз-
мерности, для каждого ненуля полагаем Wi: = xik.
Пересчет каждого столбца X/ по формуле X/ +
состоит из двух шагов: пересчета имеющихся в X/ ненулей
*) В последнее время идея априорного отсева лишних ограниче-
ний привлекла много сторонников, к сожалению, без существенного
продвижения в численных методах отсева.
458
С временным изменением вектора 1F и добавления в занйсВ
x.j новых элементов с восстановлением W. Более детально:
Шаг 1. Для каждого ненуля Хц полагаем
хц 4-:аXxtk, Wi\=Q.
Шаг 2. Для каждого ненуля xik (ведущего столбца):
если wi = 0, то wi: = Xik,
•иначе добавляем ненуль хц : = aXXik к записи столбца x.j
Легко учесть возможность образования нулевых зна-
чений из старых ненулей x.j на шаге 1, чего мы не делаем
здесь для упрощения общей схемы. Между тем разде-
ление ненулей на две категории облегчает проверку зна-
чимости их величин — более сложные проверки остают-
ся только для ненулей первого шага.
Отметим, что полный вектор W в данном случае ис-
пользуется как удобное средство для хранения и поис-
ка ненулей ведущего столбца. В случае, если размер-
ность матрицы делает размещение полного столбца в
оперативной памяти затруднительным, его функции мо-
гут быть выполнены другими системами хранения дан-
ных (скажем, или ЛВЛ-деревьями для ненулей, или
полными записями отдельных зон столбца x.k или дру-
гими способами).
К сожалению, в литературе по линейному програм-
мированию описание симплекс-метода наиболее часто
связывают с выделением допустимой базисной системы
ограничений. Опыт показал, что практичнее оказывается
алгоритм симплекс-метода, в котором для текущего ба-
зисного решения нет строгой обязательности выполне-
ния выбранного набора условий. Такой алгоритм более
гибок в тех случаях, когда в ходе итераций симплекс-ме-
тода происходят «вылеты» из допустимой области и
когда найденный оптимальный базис используется в ка-
честве начального для той же задачи с измененными ус-
ловиями.
Такой алгоритм не намного сложнее обычного и от-
личается только правилом выбора выводимой из базиса
переменной [10].
Осуществление некоторых составных частей метода
по достаточно эффективной схеме требует использования
современной техники организации и поддержания дан-
ных [11]. Например, пересчет базисной матрицы, осу-
ществляемый после выбора ведущего элемента, жела-
459
теЛьйо проводить так, чтобы работа с непересчитыбае-
мыми столбцами была минимальной.
Для этой цели используется система поддержания
разметки памяти, отведенной для хранения обрабаты-
ваемой базисной матрицы. Эта память делится на поля,
часть из которых занята информацией об отдельных
столбцах, другая часть свободна и учитывается систе-
мой. При пересчете столбца, если он не может быть раз-
мещен на том же поле," система выделяет ему новое мес-
то с соответствующей пересылкой информации, а старое
место утилизирует как свободное. Когда резерв свобод-
ной памяти окажется исчерпанным, осуществляется так
называемый «сбор мусора», при котором все свободные
поля соединяются в единое целое.
Схема пересчета базисной матрицы с использованием
«сборщика мусора» более экономна с точки зрения за-
трат машинного времени по сравнению со схемами, в
которых производится пересылка ненулей не подлежа-
щих пересчету базисных столбцов. Вместе с тем нужно
иметь в виду, что от программиста требуется определен-
ное мастерство при реализации данной схемы, чтобы не
свести на нет ее вычислительные выгоды.
Теперь перейдем к одной важной вычислительной
идее, которая не получила еще (и не случайно) доста-
точного отражения в стандартных пакетах линейного
программирования.
Если проанализировать вычислительную схему симп-
лекс-метода с точки зрения использования в ней исход-
ной информации о задаче, то окажется, что матрица ус-
ловий задачи появляется лишь в режиме «Есть улучше-
ние», где проверяется, вообще говоря, для всех перемен-
ных, условие вида и%а.}—с^О. Можно представить
себе, что таким образом ищется максимум
max (и ха./ —<?/).
j^N
В том случае, когда эта вспомогательная экстремальная
задача может быть решена проще, чем непосредствен-
ным перебором, оказывается возможным обойтись без
хранения матрицы условий а в традиционном виде.
Первая задача такого рода была рассмотрена и ре-
шена Л. В. Канторовичем и В. А. Залгаллером [12]. Это
была задача линейного (а затем и плоского) ассорти-
ментного раскроя. В ней вспомогательная экстремальная
460
задача заключается в нахождении раскройной карты,
дающей максимальную прибыль при векторе цен заго-
товок и, и легко решается методами динамического про-
граммирования.
К той же схеме относится метод разложения Дан-
цига-Вулфа для блочных задач линейного программи-
рования [8]. В этом случае вспомогательная экстремаль-
ная задача распадается на ряд независимых общих или
специальных задач линейного программирования, соот-
ветствующих отдельным блокам матрицы ограничений.
Идея генерирования столбцов существенно повышает
возможности симплекс-метода. Задачи с миллионами
переменных решаются таким способом без особых вы-
числительных затруднений, если только соответствую-
щая вспомогательная экстремальная задача не требует
больших затрат машинного времени и большой числовой
информации. Такие специальные задачи возникают до-
статочно часто, например, в тех случаях, когда требует-
ся составить комбинацию фронтов работ или технологи-
ческих маршрутов, ограниченных в совокупности ис-
пользованием оборудования и получением конечных
результатов (маршрутизация автомобильных перевозок,
задача планирования прокладки кабеля в судах и т. п.).
Интересную задачу проектирования рельефа на регуляр-
ной сетке точек рассмотрели Ю. Г. Падчин [13] и
У. X. Малков. В их методе решения этой задачи генери-
рование столбцов удачно сочетается с использованием
структурных особенностей остающейся базисной матри-
цы, которые позволяют применить эффективную специ-
альную процедуру повторения.
Если оставить в стороне возможные сложности рабо-
ты с обратной матрицей, то для каждой конкретной за-
дачи реализация методов генерирования столбцов до-
статочно проста. Между тем хотелось бы и для таких
задач использовать совершенную технику общесимп-
лексных операций, разработанную для больших пакетов,
подключая к ней систему взаимносогласованных проце-
дур пользователя, обслуживающих функции генерирова-
ния столбцов. Таких функций насчитывается четыре*):
*) Отметим, что У. Орчард-Хейс (США) во время его выступле-
ния в Ленинграде летом 1978 г. при обсуждении проблем, связанных
с генерированием столбцов в симплекс-методе, также перечислил
именно эти четыре режима.
461
— решение вспомогательной экстремальной задачи с
компактной записью информации о выработанном
столбце;
— развертывание выработанного столбца в полный
вектор;
— вывод выработанного вектора (для определен-
ности) на печать;
— вычеркивание упомянутой компактной записи
вектора при его удалении из базиса.
Осуществление этих функций требует существования
специальной области памяти, предназначенной для хра-
нения собственной информации этой системы процедур,
как исходной, так и появляющейся в ходе расчетов.
Именно это обстоятельство и затрудняет создание паке-
тов, в которых допускались бы достаточно широкие воз-
можности генерирования столбцов.
Действительно, необходимость описания и резервиро-
вания дополнительной памяти при традиционной техни-
ке программирования на уровне Фортрана и Алгола-60
требует изменения основной программы при каждом из-
менении частей, связанных с генерированием столбцов.
Выход заключается в том, что можно воспользовать-
ся более разнообразной техникой описания и резервиро-
вания памяти, которая предоставляется таким, напри-
мер, языком, как ПЛ/1. Упомянутая система процедур
имеет при этом одинаковый набор описаний общей па-
мяти, а сама эта память передается от процедуры к про-
цедуре стандартным образом с помощью одного указа-
теля (ссылки).
Разбиение сложной программы, в данном контексте
симплекс-метода, на группы процедур, объединенных
общегрупповой информацией, непосредственно недоступ-
ной и не представляющей интереса для внешнего про-
граммного окружения, оказывается достаточно удобным
при создании пакетов программ с гибкими возможностя-
ми варьирования алгоритмов, реализующих отдельные
части метода. Выделение таких групп процедур, назовем
их службами, может иметь различную программную реа-
лизацию, но наиболее гибкие возможности предоставля-
ет использование ссылок на процедуры, допускаемые
языком Алгол-68. При использовании ссылок на проце-
дуры каждую службу можно задать как структурный
вид, состоящий из ссылок на составляющие ее процеду-
ры и на общую для них информацию.
462
Предложенная в [14] система служб для симплекс-
метода состоит из четырех основных служб:
— служба базиса, в функции которой входит хране-
ние информации о базисных элементах, исправление
этой информации и выдача «справок по согласованной
форме»;
— служба обратной базисной матрицы, в функции
которой входит решение прямой и двойственной систем
и корректировка матрицы при замене столбца;
— служба выдачи информации при получении опти-
мального решения, при выходе в аварийную ситуацию
(например, при неограниченности целевой функции или
отсутствии допустимых решений), при прерывании из-за
досрочной остановки вычислений;
— служба данных и проверки оптимальности, в
функции которой входит, кроме ввода данных и провер-
ки оптимальности, выработка рекомендаций по началь-
ному базису и выдача «справок» по правым частям и
знакам ограничений.
Последняя служба имеет дело с группами перемен-
ных, каждая из которых также описывается службой,
имеющей упомянутые четыре режима.
Такая организация позволит, в частности, использо-
вать при решении вспомогательных экстремальных за-
дач те же процедуры работы с обратной матрицей, что
и для связывающей полосы.
Развитие вычислительной техники и общего матема-
тического обеспечения позволяет проектировать и ис-
пользовать системы ЛП, работающие в диалоговом
режиме.
В качестве примера интерактивной системы матема-
тического программирования назовем систему «Се-
зам» [4], разработанную У. Орчард-Хейсом. Интерак-
тивный режим дает пользователю ряд дополнительных
возможностей. Можно эффективно сочетать получение
оптимальных решений задач ЛП с нестандартизирован-
ным и неполностью формализованным анализом резуль-
татов. Можно задавать и уточнять программу исследо-
вания во время сеанса связи с системой, а не заранее,
как это делается в пакетном режиме. Можно (и это
очень важно при решении «капризных» задач, требую-
щих регулирования параметров счета) оперативно реа-
гировать на различные прерывания, возникающие при
работе системы,
463
Диалоговый режим имеет еще одно важное преиму-
щество, если он обеспечивает возможность общения с
системой ЛП пользователю, детально с ней не знакомо-
му, и обучает пользователя работе с этой системой.
Литература к главе 16
1. Малков У. X. Обзор путей повышения эффективности муль-
типликативного алгоритма симплекс-метода.— В кн.: Математи-
ческие методы решения экономических задач. М.: Наука, 1977,
вып. 7, с. 30—51.
2. Брэгман Л. М., Прыгичев А. Н.,_ Сурин С. С. Повыше-
ние эффективности мультипликативного алгоритма метода после-
довательного улучшения плана.— В кн.: Исследование операций
и статистическое моделирование.— Л.: Изд-во ЛГУ, 1977, вып. 4,
с. 3—49.
3. БулавскийВ. А., Звягина Р. А., Яковлева М. А.
Численные методы линейного программирования.— М.: Наука,
1977.
4. S а 1 k i n Н., S a h a J. Studies in linear programming. North.-
Holland/Am. Elsevier, 1975.
5. Гончарова Л. И., Станевичюс A.— И. А. Автоматиза-
ция решения оптимизационных задач на основе системы моду-
лей.— В кн.: Согласование и анализ решений оптимизационных
задач./ Отв. ред. А. С. Некрасов —М.: Наука, 1976, с. 122—230.
6. Гончарова Л. И., Станевичюс А.— И. А. ЛП-язык.—
В кн.: Алгоритмы и алгоритмические языки. М.: Изд-во ВЦ АН
СССР, 1971, вып. 5, с. 94—104.
7. Marko vitz Н. М. The elimination form of the inverse and its
application to linear programming.— Manag. Sci., 1957, v. 3,
p. 255—269.
8. Лэсдон Л. С. Оптимизация больших систем.— M.: Наука. 1975.
9. D u f f I. S. MA28—a set of FORTRAN subroutines for sparse un-
symmetric linear equations.—Oxfordshire, AERE Harwell, R. 8730.
10. Уилкинсон Дж. X., P а й н ш К. Справочник алгоритмов на
языке Алгол. Линейная алгебра.— М.: Машиностроение, 1976.
11. Кнут Д. Искусство программирования для ЭВМ.— М.: Мир,
1976, т. 1. Основные алгоритмы.
12. Канторович Л. В., Залгаллер В. А. Расчет рациональ-
ного раскроя промышленных материалов.— Л.: Лениздат, 1951.
13. П адчин Ю. Г. Из опыта эксплуатации специализированного
мультипликативного алгоритма.— В кн.: Системы программного
обеспечения решения задач оптимального планирования. 5 Все-
союзный симпозиум. Нарва — Иыэссуу. Краткие тезисы докла-
дов.—М.: Изд-во ЦЭМИ АН СССР, 1978, с. 25.
14. Б р э г м а н Л. М., Романовский И. В., Сурин С. С. и др.
Пакет программ по линейному программированию в терминах
служб.— В кн.: Системы программного обеспечения решения за-
дач оптимального планирования. 5 Всесоюзный симпозиум, Нар-
ва— Иыэссуу. Краткие тезисы докладов.— М.: Изд-во ЦЭМИ
АН СССР, 1978, с. 192—193.
2 р.ю *•