
















































Автор: Микрин Е.А.
Теги: авиация и космонавтика летательные аппараты ракетная техника космическая техника междупланетные соединения (междупланетные полеты) космонавтика (аэронавтика) информатика учебное пособие програмное обеспечение издательство мгу управление космическими аппаратами
ISBN: 5-7038-2178-9
Год: 2003


УДК 629.7.05
ББК 39.62
М59
Рецензенты:
зав. кафедрой «Управление движением» МФТИ,
академик РАН Б.Е. Чертой;
зав. лабораторией «Модульные системы обработки данных
и управления» ИПУ РАН, д-р техн. наук, проф. В.В. Кульба
М59 Микрин Е.А. Бортовые комплексы управления космическими
аппаратами и проектирование их программного обеспечения. — М.:
Издательство МГТУ им. Н.Э. Баумана, 2003. — 336 с.
ISBN 5-7038-2178-9
В учебном пособии изложены методология и средства создания
бортовых комплексов управления космическими аппаратами на базе сетевых
вычислительных систем.
Представлена технология разработки и отработки программного
обеспечения систем управления космическими аппаратами, включая основные
положения по методам и средствам моделирования бортовых систем
космических аппаратов.
Рассмотрена методология модульного проектирования структуры
программного и информационного обеспечения бортовых комплексов
управления и использования операционных систем реального времени в бортовых
вычислительных системах.
Содержание данного пособия соответствует курсу лекций, читаемому
автором в МГТУ им. Н.Э. Баумана на кафедре «Системы автоматического
управления».
Пособие предназначено студентам старших курсов и аспирантам
соответствующих специальностей, полезно для научно-технических работников,
занимающихся созданием и эксплуатацией систем управления
космическими аппаратами, а также специалистам по вычислительным системам и
комплексам, по информатике и программному обеспечению информационно-
управляющих систем.
УДК 629.7.05
ББК 39.62
© Микрин Е.А., 2003
© Издательство МГТУ
ISBN 5-7038-2178-9 им. Н.Э. Баумана, 2003
Глава 4
МОДЕЛИРОВАНИЕ ФУНКЦИОНИРОВАНИЯ
КОМПОНЕНТ БС И БКУ КОСМИЧЕСКИХ АППАРАТОВ
Под моделированием функционирования КА будем понимать
изучение состояния КА в целом, взаимодействия его бортовых
систем и наземных средств управления путем пробных
исследований функционирования их упрощенных наземных аналогов
(физических или математических). Моделирование позволяет
получить достаточно надежные данные о работе системы
управления КА более дешевыми средствами, чем испытание реального
объекта.
В классической постановке под моделированием понимается
воспроизведение некоторой сложной системы при помощи другой —
во-первых, более простой и доступной для разработки и, во-вторых,
более доступной для изменения ее характеристик и наблюдения ее
поведения при этих изменениях.
В нашем случае, безусловно, не упуская из виду первой
характеристики модели — ее простоты и доступности к наблюдению по
сравнению с реальным КА, не меньшее внимание должно уделяться
второй стороне модели — возможности простыми способами
изменять ее параметры. Чем шире возможности модели по изменению ее
расчетных параметров, в том числе по имитации неисправностей
систем, тем более она удовлетворяет требованиям обеспечения не
только отработки ПО БКУ, а также комплексных тренировок
наземного персонала управления полетом и экипажей КА, но и
отработки полетной документации.
240 Глава 4. Моделирование функционирования компонент БС и БКУ
4.1. Задачи и этапы моделирования полета КА
Ести мы имеем дело с испытаниями опытных образцов КА, то
моделирование оказывается единственным доступным способом
изучения количественных и качественных сторон систем
управления. Действительно, при подготовке к управлению полетом
первого опытного образца КА просто нет практической
возможности проверить взаимодействие бортовых и наземных средств
управления им в реальных условиях космического полета. А
требуется проверить, как будут вести себя все наземные и бортовые
системы не только в условиях «нормальной» последовательности
полетных операций, но и при возникновении возможных отказов
в системах.
Не уменьшается потребность в моделировании в$аимодействия
систем КА и при сопровождении БКУ. Сопровождение полета КА
расширяет знания об особенностях работы КА и наземных систем и
может потребовать дополнительного моделирования полетных
операций применительно к условиям, возникшим в реальном полете.
Таким образом, моделирование является незаменимым
инструментом в период подготовки и собственно летных испытаний КА.
Требования высокой надежности и эффективности систем
управления КА при сложной и длительной программе полета
обусловливают необходимость разносторонней и продолжительной
подготовки к его управлению. В особенности это относится к
пилотируемым КА.
В процессе подготовки к управлению полетом проводится допо-
летная автономная проверка средств ЦУП,
командно-измерительного комплекса, разрабатываются методики отработки детальных
планов полета, разрабатывается наземная и бортовая
эксплуатационная документация. Особое внимание должно уделяться процессу
обучения и тренировки экипажа КА и наземного персонала
управления полетом.
В процессе отработки в наземных условиях методика отработки
планов полета и эксплуатационная документация корректируются
и, таким образом, достигается требуемая степень их готовности к
полету. При этом отрабатываются приведенные в документации
последовательности выполнения режимов управления КА, режимов
контроля бортовой и наземной аппаратуры, уточняются временные
затраты на полетные и наземные операции управления В период
Задачи и этапы моделирования полета КА
241
наземных тренировок приобретают требуемые навыки по
управлению экипажи КА и наземный персонал управления полетом.
Предполетная подготовка к управлению происходит в несколько
этапов, на каждом из которых привлекаются различные
моделирующие средства. Особенно сложна подготовка к первым полетам
вновь созданных КА.
Вначале — это работа на специализированных наземных
стендах, каждый из которых имитирует работу какой-то одной системы
КА или нескольких тесно взаимодействующих систем. Примерами
таких стендов могут быть стенд отработки процесса сближения и
стыковки корабля и станции, динамический стенд отработки
процессов ориентации, стенд отработки систем жизнеобеспечения и
т.д. На этом этапе подготовки к полету отрабатываются отдельные
фрагменты эксплуатационной документации, а экипаж КА и
персонал управления полетом приобретают опыт работы с отдельными
системами КА.
Основной целью создания специализированных стендов является
моделирование процессов и отработка процессов управления
бортовыми системами перед полетом КА. Привлечение этих стендов к
отработке документации и процессов управления полетом дает
возможность осуществить моделирование отдельных задач
управления. Такое «частное» моделирование позволяет в последующем
объединять в общей модели процесса управления полетом уже
отработанные ее отдельные фрагменты.
Вторым и основным этапом подготовки к управлению полетом
КА являются комплексные тренировки. Под комплексной
тренировкой подразумевается дополетная отработка взаимодействия
бортовых и наземных средств управления полетом, экипажа КА и
наземного персонала управления при выполнении штатной
последовательности полетных операций, а также в процессе имитации
отказов бортовых и наземных систем. При комплексных
тренировках на Земле многократно воспроизводятся все основные
участки полета КА, причем специальное внимание уделяется
отработке действий в нештатных ситуациях. Этот этап подготовки требует
особого методического подхода и создания специальных
технических средств моделирования полета — комплексных
моделирующих стендов.
Комплексно-моделирующий стенд (КМС) является одним из
основных средств (для некоторых операций и единственным средством)
242 Глава 4. Моделирование функционирования компонент БС и БКУ
отработки документации по управлению полетом, отработки
действий персонала управления и экипажа КА при нормальном ходе
полета и, что особенно важно, при возникновении различных отказов
в системах КА и при аварийных полетных ситуациях.
Залача КМС — создать на Земле обстановку, максимально
соответствующую полетной по составу и порядку функционирования
бортовых и наземных систем управления полетом.
На КМС осуществляется окончательная проверка методик
управления КА, заключительная проверка наземной и бортовой
документации по управлению полетом. Система «комплексный
моделирующий стенд-Центр управления полетом», объединенная
каналами связи, обеспечивает проведение комплексных дополетных
тренировок.
КМС как средство имитации нештатных ситуаций и отработки
способов выхода из них целесообразно использовать и в ходе
полета КА. Может быть рассмотрено несколько вариантов привлечения
комплексного моделирующего стенда КА к управлению полетом.
Первый — привлечение КМС по заявкам ЦУП для
идентификации сложных нерасчетных неисправностей на борту КА и для
выработки рекомендаций по выходу из создавшегося в полете
положения. В этом случае КМС целесообразно использовать в комбинации
с наземным кораблем-аналогом, на котором проверяется
правомочность схемных изменений, или последовательности команд, или
управляющих воздействий, рекомендуемых к выдаче на борт КА по
результатам идентификации отказа на комплексном моделирующем
стенде.
Второй — параллельный «полет» КМС с реальным КА, с
выдачей на модель КА тех же управляющих воздействий, что и на
находящийся на орбите корабль (команды с Земли, управление с пульта
экипажа). При этом между сеансами связи с Землей
телеметрическая информация с модели передается в ЦУП для использования ее
операторами в качестве справочной при подготовке к очередным
сеансам связи с КА.
Третий — расширение второго варианта до «замыкания»
реальной телеметрической информации с телеметрической информацией
модели. В этом случае телеметрическая информация модели
используется в ЦУП как эталонная при выполнении автоматического
анализа реальной телеметрии, принимаемой с КА. Последний
вариант использования КМС требует разработки наиболее сложного
Методы моделирования полета КА
243
математического обеспечения. Кроме того, в этом варианте
привлечения КМС к контролю полета требуется его повышенная
надежность — иначе поступающая с модели телеметрия не может быть
использована как эталон при автоматическом сравнении с реальной
телеметрической информацией.
На практике может быть применена комбинация из
перечисленных вариантов использования комплексного моделирующего
стенда в процессе управления полетом. Например, при управлении
длительным полетом орбитальной станции целесообразно в
основное время полета применять первый вариант привлечения
КМС к управлению, а на наиболее сложных динамических
участках полета (стыковка с другим КА, маневры на орбите, подготовка
к спуску и т.д.) — использовать второй или третий варианты
привлечения КМС.
4.2. Методы моделирования полета КА
Может быть несколько подходов к выбору метода
моделирования.
Прежде всего это физическое моделирование КА и привлечение
на этапе комплексных тренировок реальных каналов связи и
средств управления на станциях слежения
контрольно-измерительного комплекса (КПК). В этом случае роль физической
модели выполняет наземный стенд, включающий реальную аппаратуру
КА (по сути дела это наземный аналог КА), работающий в
лабораторных условиях и связанный всеми требуемыми
информационными каналами (командным, телеметрическим, телевизионным и
телефонным) с ЦУП и участвующими в тренировках станциями
слежения КИК.
Преимущество такого моделирования — практически полная
электрическая идентичность модели реальному КА и наиболее
простое математическое обеспечение подготовки к тренировкам.
Требуется только сопряжение средств приема командной информации
и передачи телеметрических данных КА — аналога со средствами и
математическим обеспечением передачи команд и обработки
телеметрической информации в ЦУП.
Недостатком физического моделирования является узкий круг
имитируемых нештатных ситуаций. Ведь для имитации отказов
244 Глава 4. Моделирование функционирования компонент БС и БКУ
нужно изменять характеристики реальной аппаратуры, к чему она
слабо приспособлена, либо проводить работу в режимах с нештатно
включенной аппаратурой, а иногда и просто выводить
оборудование модели из строя. Кроме того, при физическом моделировании
практически невозможна имитация динамики движения КА,
тепловых и энергетических процессов, а следовательно, и всех связанных
с ними нештатных ситуаций. Затруднена в этом случае и имитация
отказов в наземных средствах управления полетом, не говоря уж о
том. что сама организация привлечения к тренировкам реальных
станций слежения КИК, занятых управлением полетами других КА,
является непростой задачей.
Следующий подход к моделированию — смешанное
моделирование. В этом случае физическая модель КА сопрягается с
вычислительным комплексом, на котором осуществляется математическое
моделирование процессов в системах КА (например, тепловых) и
динамики его движения. Такой подход расширяет возможности по
имитации нештатных ситуаций, но сохраняет недостатки, присущие
физическому моделированию, поскольку в вычислительном
комплексе моделируются не все процессы КА и обычно не
осуществляется моделирование КИК.
И. наконец, наиболее универсальный способ моделирования —
математическое моделирование КА, динамики его движения и
процессов, протекающих на его борту и в наземной части систем
управления полетом. При математическом моделировании в
«физическом» исполнении остается интерьер рабочих мест экипажа КА,
кабинные части приборов, пульты и органы управления. В этом
случае приборы и органы управления КА являются как бы
терминалами вычислительного комплекса, на котором осуществляется
моделирование полета КА и работы его систем.
При математическом моделировании появляются широкие
возможности по имитации нештатных ситуаций, так как в этом случае
такая имитация сводится к программному изменению части
математической модели КА. Математическая модель информационных
связей КИК позволяет проводить основной объем комплексных
тренировок без привлечения реальных станций и кораблей
слежения. Отказы в каналах связи и наземных системах имитируются
также программным изменением математической модели.
При математическом моделировании число нештатных
ситуаций, которые возможно имитировать, неограничено. Практически
Средства моделирования полета КА
245
же математическое моделирование позволяет отработать при
тренировках любую из нескольких тысяч возможных неисправностей.
Для сравнения отметим, что при чисто физическом моделировании
количество возможных имитируемых отказов исчисляется
десятками, а при смешанном моделировании — сотнями.
Степень готовности к полету экипажа, наземного персонала
управления, всех наземных средств ЦУП и КИК находится в
прямой зависимости от количества и полноты полетных операций,
отработанных в процессе тренировок с введением максимально
возможного количества нештатных ситуаций. Исходя из этого,
очевидны преимущества математического моделирования при подготовке
к полету. Но при математическом моделировании приходится
разрабатывать сложное математическое обеспечение для
вычислительного комплекса КМС, значительно превосходящее по объему
математическое обеспечение, разрабатываемое при смешанном
моделировании.
На практике, в зависимости от имеющихся в распоряжении
средств и времени на подготовку к полету, может привлекаться тот
или иной метод моделирования.
4.3. Средства моделирования полета КА
Средства моделирования полета функционально объединяются в
комплексном моделирующем стенде. При описании КМС полагаем,
что для моделирования полета КА нами принят метод
математического моделирования.
Основными элементами КМС являются:
♦ бортовая вычислительная система, в которой реализуется
программное обеспечение управления бортовыми
системами К А;
♦ рабочие места экипажа с органами управления и индикации,
которые в данном случае являются терминальными
устройствами БВС;
♦ моделирующая вычислительная платформа, обеспечивающая
штатное и нештатное функционирование бортовых систем,
включая математические модели датчиков и исполнительных
органов системы управления движением и навигацией и
модель движения КА;
246 Глава 4. Моделирование функционирования компонент БС и БКУ
♦ аппаратура передачи и обмена информацией между рабочими
местами экипажа, БВС и моделирующей вычислительной
платформой;
♦ пульты управления и контроля КМС.
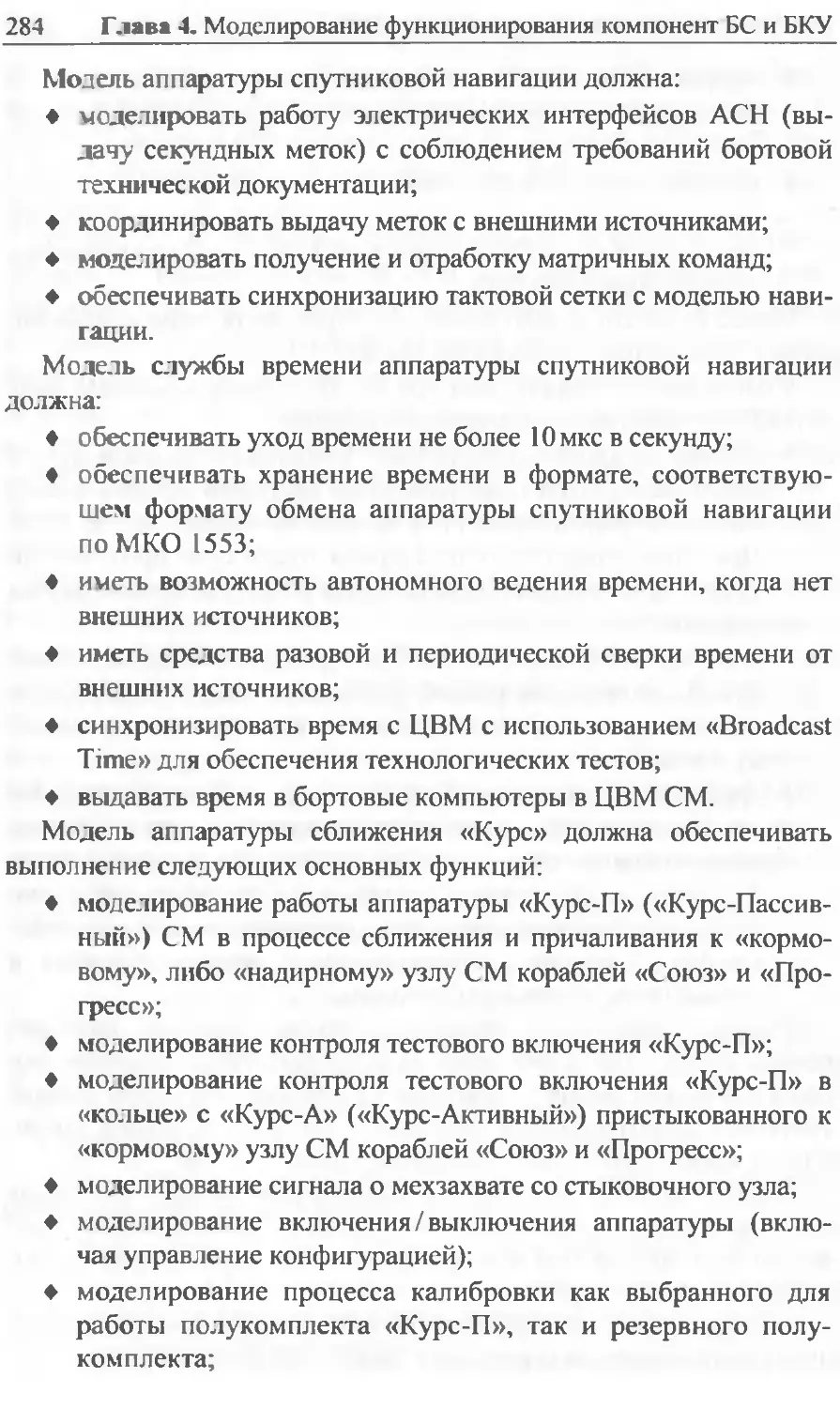
Схема комплексного моделирующего стенда и его связен с
ЦУ П может быть представлена в виде, показанном на рис. 4.1.
Моделирующая
вычислительная
платформа КМС
i
L
Рабочие места
экипажа КА
индикации
и наблюдения
* -
Аналого-цифровые
и цифро-анало1 овые
преобразователи
'
*
Аппаратура
передачи
данных
'
' '
\
БВС
комплексного
моделирующего
стенда
'
г '
1
Пульт управления
КМС
Аппаратура,
обеспечивающая
теле-и радиосвязь
с экипажем
тлф;
1
Центр
управления
полетом
КПИ
тми
j
L
Рис. 4.1. Схема комплексного моделирующего стенда
Экипаж КА находится в «кабине» КМС и с помощью органов
управления и индикации осуществляет управление и контроль
«полета». Сигналы органов управления (ручек управления движением,
клавишей командно-сигнальных устройств, тумблеров пультов)
через аналого-цифровые преобразователи и аппаратуру передачи
данных поступают в БВС КМС. В БВС КМС решаются задачи
управления движением КА и логикой функционирования его бортовых
Математическое обеспечение моделирования полета КА
247
систем. Выходная информация БВС через цифро-аналоговые
преобразователи и аппаратуру передачи данных поступает на
индикаторные устройства рабочих мест экипажа КА КМС. Контур
управления замыкается через моделирующую вычислительную
платформу КМС, на которую поступают команды управления из БВС
стенда, а в ответ формируются сигналы от датчиков, приборов и
агрегатов бортовых систем КА.
Телеметрическая информация, формируемая в моделирующей
платформе и БВС КМС, поступает по широкополосным каналам
в информационно-вычислительный комплекс (ИВК) ЦУП. Из ЦУП
в БВС КМС в сеансах связи передается командно-программная
информация, а также голосовые указания экипажу (ТЛФ) по наземным
линиям связи, имитирующим радиосвязь в полете.
Контур управления в этом случае замыкается на персонал
управления полетом через получаемую телеметрическую информацию и
переговоры с экипажем.
Комплексный моделирующий стенд может решать целый ряд
задач при подготовке и проведении полета КА.
Автономное применение КМС позволяет осуществить проверку
изменений параметров бортовой аппаратуры КА, отрабатывать
бортовую и наземную документацию по управлению системами и
режимами полета, выполнять подготовку экипажей КА.
Использование КМС совместно с ЦУП позволяет отрабатывать
математическое обеспечение обработки и анализа телеметрической
информации ЦУП, математическое обеспечение передачи
командно-программной информации на борт КА, проводить автономные
тренировки персонала управления полетом, комплексные
тренировки, а также применять КМС для идентификации полетных отказов и
принятия решений по управлению в полете.
4.4. Математическое обеспечение
моделирования полета ка
Теоретически математическая модель КА и полетной обстановки
может строиться в виде аналитической или имитационной модели.
Однако на практике создание аналитической модели КА,
позволяющей провести исчерпывающие исследования полетных операций
в любых ситуациях, не представляется возможным. Это объясняется
248 Глава 4. Моделирование функционирования компонент БС и БКУ
большой сложностью КА как объекта моделирования — наличием
очень большого числа элементов непрерывного и дискретного
действия, нелинейных связей между элементами, влиянием множества
случайных внешних воздействий сложной природы.
Поэтому математическая модель КА и полетной обстановки
строится обычно в виде имитационной модели, которая приближенно
воспроизводит сам КА с его логической структурой и процессами,
протекающими в бортовых системах. Несмотря на недостатки
имитационного моделирования, состоящие в том, что полученное
решение всегда носит частный характер, отвечающий заданным
начальным условиям и состоянию систем КА, этот вид моделирования
является наиболее эффективным методом исследования такой сложной
системы как КА при его взаимодействии с ЦУП. В дальнейшем
изложении под математической моделью будем подразумевать именно
имитационную модель.
Математическая модель должна обеспечивать:
♦ моделирование работы всех бортовых систем КА и
происходящих в них процессов;
♦ отклик моделируемых систем КА на управляющие
воздействия (радиокоманды, управление с пульта экипажа, команды
от внутренней автоматики КА);
♦ моделирование движения центра масс КА и его вращения
относительно центра масс;
♦ генерирование полного потока телеметрической
информации КА;
♦ моделирование информационных связей КИК;
♦ ввод нештатных ситуаций в модели бортовых систем КА и
наземных систем КИК.
«Глубина» моделирования каждой из систем при
математическом моделировании не ограничена, а на практике может
приниматься, например, такой, чтобы обеспечивались выходные
характеристики модели, достаточные для моделирования телеметрической
информации, поступающей с реального КА.
При разработке имитационной модели любой из бортовых
систем КА удобно выделить такие характеристики системы, как
входные и выходные генерируемые сигналы и скорость (частота) их
обновления.
По виду генерируемых сигналов бортовые системы КА (или
блоки систем) можно разделить на системы с дискретными выходными
Математическое обеспечение моделирования полета КА 249
сигналами, системы с непрерывными выходными сигналами и
системы (блоки) с выходными сигналами в виде телеметрической
информации (это блоки радиотелеметрической системы КА).
Для каждой из систем (блоков), классифицируемых указанным
образом, можно разработать относительно универсальные
математические модели.
Каждый из алгоритмов, описывающих эти универсальные
модели частей (блоков) систем КА, исходя из скорости обновления
выходных сигналов, может реализовываться в процессе
моделирования полета либо периодически, либо периодически по заявке, либо
непериодически по заявке.
Модель системы КА образуется из моделей ее частей, а модель
КА в целом — из моделей систем. Увязку последовательности
решения отдельных алгоритмов моделирования систем в единой
математической модели КА осуществляет операционная система
моделирующей вычислительной платформы КМС.
Математическая модель КА представляет собой комплекс
программ, работающих в реальном масштабе времени (может
использоваться также режим ускоренного моделирования полетных
операций).
Поскольку моделирующая вычислительная платформа КМС, в
которой реализуется КА, не обладает бесконечным
быстродействием, то при функционировании моделирующих программ
неизбежно организуются очереди работ и очереди сообщений. Очереди
работ представляют собой последовательности решения
алгоритмов моделирования отдельных систем КА и динамики его
движения. Реализация очередей определяется, во-первых, заданной
цикличностью (периодичностью) решения алгоритмов моделирования
и, во-вторых, приоритетностью реализации алгоритмов. Очередь
работ определяет последовательность обработки и обмена
выходной информации моделей — очередь сообщений. В каждый
момент времени в вычислительном комплексе КМС обрабатываются
сообщения (сигналы) той модели системы КА, которая стоит
первой в очереди работ. Организует работу с очередями программа
планирования операционной системы моделирующей
вычислительной платформы КМС.
Обмен информацией между отдельными алгоритмами
моделирования обычно организуется через поля сообщений, куда
поступают и фиксируются сигналы от всех моделей систем КА. Обмен
250 Глава 4. Моделирование функционирования компонент БС и БКУ
информацией с нолями сообщений происходит с помощью
программы управления базой данных вычислительного комплекса
КМС.
Поля сообщений могут быть разделены на общие и локальные.
В общее поле открыт доступ всем программам математического
обеспечения КМС. Локальные поля сообщений обмениваются
данными только с какой-либо конкретной программой
моделирования. Примером данных, размещаемых в общем поле сообщений,
является информация счетчика текущего времени. Эта
информация может использоваться всеми программами, в том числе
программой планирования операционной системы общего
математического обеспечения для организации очереди работ. Примером
информации, размещаемой в локальных полях сообщений,
являются исходные данные, описывающие логику работы какой-либо
конкретной системы КА.
4.5. Программное обеспечение моделей БС и БКУ
Рассмотрим основные требования к программному обеспечению
моделей БС на примере проекта МКС. Конкретно рассмотрим
требования к элементу конфигурации программного обеспечения
моделей бортовых систем служебного модуля «Звезда» совместно с
моделями бортовых систем стыковочного отсека (СО) «Пирс».
Данные требования действуют на период разработки,
тестирования, комплексных испытаний программного обеспечения на
наземном комплексе отладки, сопровождения полета международной
космической станции на техническом комплексе сопровождения
полета — на всех этапах развертывания и эксплуатации МКС.
Элемент конфигурации программного обеспечения моделей
бортовых систем СМ и СО предназначен для реализации следующих
основных функций:
♦ обеспечение отработки версий бортового ПО СМ на стенде
НКОСМ;
♦ обеспечение совместных испытаний с ПО Американского
сегмента МКС на НКО СМ и американском стенде SVF в
Хьюстоне:
♦ обеспечение сопровождения полета МКС в части отработки
массивов цифровой информации, подготавливаемых ЦУП-М
для управления МКС, а также в части моделирования и
разбора НШС, возникающих на орбите;
Программное обеспечение моделей БС и БКУ
251
♦ обеспечение тренировок персонала ЦУП-М с использованием
НКО СМ:
♦ обеспечение тренировок экипажей МКС с использованием
НКО СМ;
♦ моделирование логики работы бортовых систем СМ и СО;
♦ моделирование показаний аналоговых и дискретных датчиков
бортовых систем СМ и СО;
♦ имитация всех возможных типов НШС при работе бортовых
систем СМ и СО;
♦ моделирование внутренней и окружающей среды МКС;
♦ имитация всех возможных типов НШС в части внутренней
среды МКС;
♦ реализация обмена ПО моделей СМ и СО с ПО ЦВМ и ТВМ
СМ в соответствии с бортовыми протоколами обмена БВС с
бортовой аппаратурой Российского сегмента;
♦ реализация обмена ПО моделей СМ и СО с моделями
Американского сегмента при совместных испытаниях с ПО
Американского сегмента МКС на НКО СМ в соответствии с
двухсторонними протоколами обмена модельного ПО.
Требования к внешним интерфейсам. Основным транспортным
интерфейсом обмена информацией между бортовыми
компьютерами БВС СМ МКС и приборами СМ является интерфейс МКО MIL
STD 1553. Бортовые компьютеры СМ ЦВМ и ТВМ выполняют на
шинах роль контроллеров, а остальные приборы выполняют роль
оконечных устройств, в том числе компьютеры КЦП1, КЦП2,
УС21-Ц2), УС21-3(4), УС22-1(2), приборы БИТС 2-12, БОКЗ, «Лира»,
АСН и другие. ЦВМ является контроллером на шинах 3, 4. 5, 6. ТВМ
является контроллером на шинах 1, 2, 9, 10. Работающие на
модельном компьютере имитаторы функциональности бортовых приборов и
систем имеют внешние интерфейсы МКО MIL STD 1553,
аналогичные реальным интерфейсам МКО MIL STD 1553. Основным
назначением функций обмена является моделирование работы этих
интерфейсов. При этом моделируются только устройства, имеющие не
более одной посылки на прием и не более одной посылки на
передачу в каждом 100-миллисекундном фрейме.
В список основных задач функций обмена входит:
♦ синхронизация процессов моделирования и обмена с БВС по
интерфейсам МКО MIL STD 1553;
252 Глава 4. Моделирование функционирования компонент ЬС и БКУ
♦ обеспечение устойчивого функционирования системы
моделирования и обмена в условиях отказа и перезагрузки
каналов ЦВМ/ТВМ, при необходимости — переход в
режим «free running» и самостоятельная генерация тактовой
сетки:
♦ точная подстройка границы такта и номера фрейма
интерфейса МКО MIL STD 1553 в условиях ресинхронизации каналов
ЦВМ и ТВМ;
♦ соблюдение профиля обмена различных приборов по шинам
МКО MIL STD 1553;
♦ получение времени «Broadcast Time» от БВС с возможностью
выбора активного источника;
♦ моделирование той части функций приборов УС22 (в части
накопления функциональных массивов), которые нет
возможности моделировать в среде прикладных программ;
♦ обеспечение возможности подробной диагностики и отладки
в процессе работы;
♦ обеспечение надежности, устойчивости и гибкой настройки
системы.
ПО интерфейса обмена моделей (ИОМ) разделено на
компоненты в соответствии с требованиями и функциональным назначением
и включает в себя аппаратную и программную компоненты.
Программная компонента также разделена на две части:
♦ служба обмена;
♦ диспетчер ИОМ.
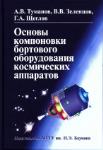
Структура взаимодействия компонент представлена на рис. 4.2.
Аппаратная компонента включает в себя набор из не более
чем 8-ми плат типа ABI V5. Каждый из этих контроллеров
может обслуживать до 2-х шин МКО MIL STD 1553. ПО ИОМ
должно взаимодействовать с контроллерами посредством
прерываний и обмена данными по шине VME. Соответствие
контроллеров и шин необходимо гибко задавать в
конфигурационных таблицах ИОМ.
Диспетчер ИОМ на основании прерываний синхроимпульсов
(«Broadcast Synch») от контроллеров ABI вырабатывает тактовую
сетку фреймов обмена и отслеживает состояние контроллеров.
В отсутствие активных контроллеров диспетчер ИОМ
самостоятельно генерирует тактовую сетку обмена.
Программное обеспечение моделей БС и БКУ
253
ТВМ
ПО прикладных молелен
ii
Буферы
передачи
*Рейма"т^Г
,, Время
НомеР «Broadcast
Буферы
приема
А
Служба
обмена
Запуск
и
поиом
"Г"
Запуск
i
Диспетчер
ИОМ
А
А
ЦВМ
Другие контроллеры
Прерывания
транзакций"
VME
Прерывания
- «Broadcast -
Synch»
Плата
AB1V5
У,
у:
Плата
ABIV5
Аппаратная компонента ИОМ
Рис. 4.2. Взаимодействие компонент
ПО обмена работает под управлением диспетчера ИОМ и
соблюдает протокол взаимодействия с контроллерами шин МКО MIL
STD 1553. ПО обмена может контролировать поступление
транзакций от контроллеров МКО MIL STD 1553 как при помощи
прерываний от плат ABI, так и с помощью опроса данных в памяти плат.
ПО обмена взаимодействует с ПО прикладных моделей
посредством промежуточных накопительных буферов передачи и приема
данных. Эта компонента также определяет номер текущего фрейма
и выдает в ПО моделей время «Broadcast Time».
ПО ИОМ имеет следующие внешние интерфейсы:
♦ интерфейс с диспетчером модельного ПО;
♦ интерфейс с модельным ПО в части моделирования работы
оконечных устройств;
♦ передача номера фрейма и «Broadcast Time» в модельное ПО;
♦ интерфейс с контроллерами МКО MIL STD 1553.
Обмен по рефлективной памяти (ОРП) является одной из
компонент ПО модельного компьютера НКО и осуществляет передачу
параметров между моделями PC с другими модельными
компьютерами, в частности с моделями АС на стендах МАТЕ. ОРП работает
под управлением ОС VxWorks.
254 Глава 4. Моделирование функционирования компонент БС и БКУ
В основные задачи ОРП входят:
♦ контроль форматов данных в рефлективной памяти;
♦ соблюдение протокола обмена между абонентами
рефлективной памяти;
♦ синхронизация 25-герцовой тактовой сетки обмена
информацией;
♦ согласование тактов обмена с тактами моделирования;
♦ обеспечение возможностей гибкой конфигурации.
Настройки конфигурации рефлективной памяти являются
частью конфигурации модельного компьютера НКО и находятся в
конфигурационном файле.
Считывание и обновление данных в рефлективной памяти
выполняется на основе тактовой сетки 25 Гц, управляемой от
контроллера «IRIG». Использующие ОРП модели PC работают с частотами,
кратными тактовой сетке 10 Гц, порождаемой режимными
командами «Broadcast Synch», поступающими по шине от бортовых
компьютеров PC. Две эти тактовые сетки не имеют синхронизации
между собой. Для их согласования ОРП использует описанный ниже
алгоритм. Последний такт 25-герцовой сетки используется ОРП для
считывания входных данных из рефлективной памяти и помещения
их во внутренний буфер. В начале ближайшего 10-герцового такта
эти данные становятся доступными для доступа из модельных
программ. Во время работы модельные программы формируют
выходные данные, которые помещаются в промежуточный выходной
буфер. По окончании работы моделей на ближайшем 25-герцовом
такте измененные данные сбрасываются в рефлективную память.
На следующем такте алгоритм повторяется.
ПО обмена обеспечивает следующие внешние интерфейсы:
♦ интерфейс инициализации;
♦ интерфейс с пользовательскими программами;
♦ интерфейс с другими абонентами рефлективной памяти.
Требования к функциям, обеспечивающим обработку
результатов испытаний в реальном времени. Программа приема и
обработки цифровой (программной) телеметрии:
♦ принимает информацию от телеметрической системы БИТС 2-12
(320 слов — 10 слотов по 32 слова) с частотой,
соответствующей режимам работы этой системы (непосредственная
передача или «Запись»);
Программное обеспечение моделей БС и БКУ
255
♦ выделяет из принятого потока телеметрические массивы
цифровой информации (ТМЦИ) в формате CCSDS и проверяет их
целостность;
♦ из достоверных ТМЦИ ЦВМ, ТВМ и БВС ФГБ в режиме
реального времени выделяет событийную информацию и
формирует ее в строки для отображения с использованием БД для
модулей станции;
♦ все выделенные ТМ-кадры (по изменению) записывает в
архивный файл с именем, заданным оператором.
Требования к системному диспетчеру прикладных программ.
Диспетчер прикладных программ (ДПП) является одним из
основных компонент ПО модельного компьютера НКО и выполняет
роль базиса для организации порядка вычислительного процесса и
его связи с внешними источниками информации. ДПП работает
под управлением ОС VxWorks. ДПП решает следующие основные
задачи:
♦ структуризация и организация порядка выполнения
прикладных модельных программ при помощи групп синхронных
процессов;
♦ синхронизация вычислений с группами внешних источников
и получателей информации;
♦ слежение за состоянием внешних источников синхронизации,
надежная пересинхронизация и выбор оптимальной стратегии
поддержки вычислительного процесса;
♦ контроль за временем выполнения процессов и сбор
статистической информации;
♦ обработка нештатных ситуаций во время вычислительного
процесса;
♦ обеспечение возможности гибкой конфигурации;
♦ обеспечение факторов надежности, устойчивости, гибкости и
диагностируемое™ системы.
В состав ДПП входят следующие компоненты:
♦ управляющие задачи процессов;
♦ обработчики событий для каждой задачи;
♦ сторожевые таймеры для каждой задачи;
♦ обработчик исключений;
♦ менеджер задач.
Для каждой задачи создается свой обработчик событий и
сторожевой таймер.
256 Глава 4. Моделирование функционирования компонент БС и БКУ
Обработчик событий принимает события от активатора,
производит выбор текущего активатора, вычисляет номер фрейма
события, обрабатывает переполнения и управляет сторожевым
таймером.
Обработчики событий представляют собой
последовательность вызываемых процедур и выполняются в контексте
процесса активатора или обработчика прерывания для внешнего
события (обработчик событий также может вызываться из контекста
сторожевого таймера). Эти компоненты оптимизированы по
скорости исполнения. Поскольку контекст обработчика прерывания
накладывает серьезные ограничения на допустимую
функциональность программного кода, эти компоненты сами не
выполняют критических операций (например, перезапуск задач), а
делегируют их менеджеру задач.
Сторожевой таймер производит запуск задач в тех случаях,
когда активаторы неактивны, участвует в процессе определения
качества активаторов, вычисляет поправки времени с учетом
скважности таймера ОС. Сторожевой таймер вызывается в
контексте обработчика прерываний локального таймера
операционной системы и потому делегирует критические операции
менеджеру задач. Этот компонент оптимизирован по скорости
выполнения.
Управляющие задачи процессов занимаются коррекцией своего
сторожевого таймера, выбирают активные программы, управляют
списками программ, обновляют эти списки и собирают локальную
статистику. Каждая управляющая задача ДПП выполняется в
контексте задачи (процесса) ОС. Обработчик событий активизирует
задачу при помощи примитива синхронизации операционной системы
(простого семафора).
Обработчик исключений перехватывает прерывания и ловушки
исключительных ситуаций в процессоре и операционной системе,
формирует статусную информацию и передает их менеджеру задач.
Этот компонент оптимизирован по скорости выполнения и
делегирует критические операции менеджеру задач.
Менеджер задач ведет и обновляет список задач, принимает
сообщения об исключениях и переполнениях такта от обработчиков
событий и обработчиков исключений, производит перезапуск задач,
выполняет критические операции, собирает локальную
статистическую информацию по задачам и формирует глобальную статистику
Программное обеспечение моделей БС и БКУ
257
диспетчера. Менеджер задач выполняется в контексте отдельной
задачи операционной системы.
Диспетчер прикладных npoi рамм имеет следующие интерфейсы:
♦ с операционной системой;
♦ интерфейс с ПО ИОМ;
♦ пользовательскими программами;
♦ службой синхронизации;
♦ интерфейс диагностики (интерфейс пользователя).
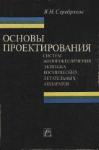
Требования к функциональному модельному ПО.
Используемые модели бортовых систем представлены на рис. 4.3.
Рассмотрим требования к программной реализации некоторых
используемых моделей.
Модельный диспетчер, работающий с частотой 10 Гц,
запускается из системного диспетчера модели и обеспечивает запуск и
выполнение следующих функций:
♦ получение из программ обмена по МКО номера такта
обмена ВС;
♦ функции модельной службы времени;
♦ функции, моделирующей систему «Регул»;
♦ функции, моделирующей систему АСН;
♦ функции, моделирующей информационный обмен блока
подсистемы передачи массивов (ППМ) БИТС;
♦ функций, моделирующих работу устройств сопряжений
УС21-Ц2), УС21-3(4), УС22-1, УС22-2, УС СО и УС
транспортного грузового корабля (ТГК);
♦ функции, обеспечивающей ввод-вывод данных с/на «Reflective
Memory».
Модельный диспетчер, работающий с частотой 5 Гц, запускается
из системного диспетчера модели и обеспечивает запуск и
выполнение следующих функций:
♦ функции, моделирующей информационный обмен блока
подсистемы выдачи данных (ПВД) БИТС;
♦ функции, моделирующей аппаратуру БИТС 2-12;
♦ функции, моделирующей работу системы блока синхрочастот
времени (БСВ);
♦ диспетчера моделей СУБА;
♦ диспетчера моделей СУДН.
258 Глава 4. Моделирование функционирования компонент БС и БКУ
2
■°Р
Л1
go
So
5<->
^о
;0
so
2<
* ы >t i* '-г—и
lil
II
if
гг
оО
SO
,р
Зр
,£
Sit
2*
rim
О —
5С
К
Jll
J!1
1У
Рис. 4.3. Структурная схема моделей бортовых систем СМ и СО:
ОРТ — измеритель вектора угловой скорости; БОКС — блок определения координат Сотца;
ГИВУС — гироскопический измеритель вектора угловой скорости; ПСС — предупредительно-
сигнальная система; БМП - блок микропримесей; ИКВ — инфракрасная вертикаль;
ТМДТ— фанипные Mai истрали дозаправки топлива; АСС - аппарагура сбора сообщений;
СПОПТ - система пожарообнаружения и пожаротушения;
ТТС телефонно-телеграфная связь: MUX инерционно-массовые характеристики
Программное обеспечение моделей БС и БКУ
259
Диспетчер моделей СУБА обеспечивает запуск и выполнение
следующих функций:
♦ функции, моделирующей работу системы ОДУ (включая ДО
иКД);
♦ функции, моделирующей работу системы перекачки топлива;
♦ функции, моделирующей работу системы СОТР СМ;
♦ функции, моделирующей работу системы ССВП СМ;
♦ функции, моделирующей работу системы внешних элементов
конструкции;
♦ функции, моделирующей работу системы СОСБ СМ;
♦ функции, моделирующей работу системы СЭП СМ:
♦ функции, моделирующей работу системы «Электрон»;
♦ функции, моделирующей работу системы «Воздух»;
♦ функции, моделирующей работу системы БМП;
♦ функций, моделирующих внутреннюю физическую среду СМ
и датчиковую аппаратуру системы обеспечения газового
состава (СОГС);
♦ функции, моделирующей работу системы «Сигнал-ВМ»;
♦ функций, моделирующих работу системы «Курс-П» СМ;
♦ функции, моделирующей работу системы ТВС СМ;
♦ функции, моделирующей работу системы ТТС СМ;
♦ функции, моделирующей работу системы пожарообнаруже-
ния СО;
♦ функции, моделирующей работу системы СОТР СО;
♦ функции, моделирующей работу системы АСС СО;
♦ функции, моделирующей работу системы ТМДТ СО;
♦ функции, моделирующей работу системы ССП СО.
Диспетчер моделей СУБА обеспечивает возможность
отключения любой запускаемой из него функции по команде оператора.
Диспетчер моделей СУДН обеспечивает запуск и выполнение
следующих функций:
♦ функции, моделирующей движение центра масс СМ;
♦ функции, моделирующей аэродинамические силы и моменты;
♦ модели координат астроориентиров;
♦ модели магнитного поля Земли;
♦ модели упругих колебаний;
♦ модели РИВУС;
♦ модели ОРТ;
260 Глава 4. Моделирование функционирования компонент БС и БКУ
♦ модели БОКЗ;
♦ модели БОКС;
♦ модели ИКВ;
♦ модели магнитометров;
♦ модели моментов двигателей ориентации;
♦ модели рулевых машинок корректирующих двигателей;
♦ модели ОНА;
♦ моделей навигационного контура.
В зависимости от режима работы модели предусмотрена
возможность отключения любой модели СУДЫ по команде оператора.
Функция моделирования УС21 включает в себя:
♦ модуль реагирования на события, связанные с включением/
выключением каналов УС21 через командный контур
управления;
♦ интерфейсный модуль, реализующий функцию получения и
обработки информационных потоков от ТВМ СМ (прием и
обработка функциональных массивов), проверку на
достоверность, в том числе проверку счетчиков обновления
командных подмассивов, распаковку и передачу в модели бортовых
систем СМ;
♦ интерфейсный модуль, реализующий функцию формирования
информационных потоков данных от математических
моделей бортовых систем СМ, предназначенных для передачи в
ТВМ СМ;
♦ модуль, реализующий функцию формирования входных
релейных команд;
♦ модуль, реализующий функцию формирования статусной
информации с последующей передачей ее в ТВМ СМ.
Математическая модель устройства сопряжения БВС СМ с
системами СМ (УС21-М) выполняет следующие функции:
♦ имитирует штатный профиль обмена ТВМ СМ и УС21 по
шинам9(Ю)МКО 1553;
♦ обеспечивает трехканальную конфигурацию моделируемого
устройства УС21 на шинах 9 и 10 МКО 1553, т.е. три
абонента для УС21-1 и три абонента для УС21-3 на шине 9, и три
абонента для УС21-2 и три абонента для УС21-4 на шине 10;
♦ обеспечивает прием и обработку входной информации в
модель УС21 из ТВМ СМ, включая проверку достоверности и
проверку счетчиков обновления командных подмассивов;
Программное обеспечение моделей БС и БКУ
261
♦ транслирует команды управления от БВС в математические
модели бортовых систем СМ, в том числе и команды
заданной длительности для управления двигателями ориентации
(УС21-3,4);
♦ обеспечивает формирование выходной информации из
модели УС21 в ТВМ СМ, в том числе и статусной информации
УС21;
♦ обеспечивает ввод и отработку нештатных ситуаций.
Математическая модель устройства сопряжения БВС СМ (УС21-М)
обеспечивает следующий информационный обмен:
♦ прием и обработку функционального массива от ТВМ СМ и
проверку его достоверности, включая проверку счетчиков
обновления командных подмассивов;
♦ транслирование содержащихся в функциональном массиве
дискретных команд управления, формируемых алгоритмами
управления системами СМ в ТВМ, моделям систем СМ.
Команды заданной длительности для управления двигателями
ориентации (УС21-3,4) предназначены для модели ОДУ СМ;
♦ формирование выходного функционального массива,
передаваемого в ТВМ СМ и включающего в себя квитанции на
выходные релейные дискретные команды управления,
квитанции на команды заданной длительности (УС21-3,4) и входные
релейные команды;
♦ формирование статусной информации УС21.
Функция моделирования УС22 включает в себя:
♦ модуль реагирования на события, связанные с включением/
выключением каналов УС22 через командный контур
управления;
♦ интерфейсный модуль, реализующий функцию получения и
обработки функциональных массивов от ТВМ СМ, их
проверку, распаковку и передачу в модели датчиковой
аппаратуры и бортовых систем СУДЫ СМ;
♦ интерфейсный модуль, реализующий функцию формирования
обратных функциональных массивов ФМ1 и ФМ2 от
математических моделей датчиковой аппаратуры и бортовых систем
СУДЫ СМ, предназначенных для передачи в ТВМ СМ;
♦ модуль, реализующий функцию формирования входных
релейных команд;
♦ модуль, реализующий функцию формирования статусной
информации с последующей передачей ее в ТВМ СМ.
262 Глава 4. Моделирование функционирования компонент БС и БКУ
Математическая модель устройства сопряжения БВС СМ с дат-
чиковой аппаратурой и системами СУДН СМ (УС22-М) выполняет
следующие функции:
♦ имитирует штатный профиль обмена ТВМ СМ и УС22 по
шинам9(10)МКО 1553;
♦ обеспечивает трехканальную конфигурацию моделируемого
устройства УС22 на шинах 9 и 10 МКО 1553, т.е. три абонента
для УС22-1 на шине 9 и три абонента для УС22-2 на шине 10;
♦ обеспечивает прием и обработку входного функционального
массива от ТВМ и проверку его достоверности, в том числе и
признака обновления;
♦ обеспечивает формирование выходной информации из
модели УС22 в ТВМ СМ, в том числе и статусной информации
УС22;
♦ обеспечивает ввод и отработку нештатных ситуаций.
Математическая модель устройства сопряжения БВС СМ с дат-
чиковой аппаратурой и системами СУДН СМ (УС22-М)
обеспечивает следующий информационный обмен:
♦ прием и обработку входного функционального массива от
ТВМ и проверку его достоверности, в том числе и признака
обновления;
♦ транслирование конфигурационного подмассива и другой
управляющей информации, входящей в состав ФМ,
сформированной алгоритмами СУДН в ТВМ СМ, моделям датчико-
вой и бортовой аппаратуры СУДН;
♦ формирование и передачу выходных функциональных
массивов ФМ 1 и ФМ2, передаваемых в ТВМ СМ и включающих в
себя данные от моделей датчиковой и бортовой аппаратурой
СУДН;
♦ формирование статусной информации УС22.
Функция моделирования УС21-ТГК включает себя:
♦ модуль реагирования на события, связанные с включением/
выключением УС21-ТГК через командный контур
управления;
♦ интерфейсный модуль, реализующий функцию получения и
обработки информационных потоков от ТВМ СМ, их
проверку и передачу в модель двигателей перемещения и
ориентации (ДПО) ТГК и модель сближающего корректирующего
двигателя (СКД) ТГК;
Программное обеспечение моделей БС и БКУ
263
♦ интерфейсный модуль, реализующий функцию формирования
информационных потоков данных от математических
моделей бортовых систем ТГК, предназначенных для передачи в
ТВМ СМ;
♦ модуль, реализующий функцию формирования входных
релейных команд от моделей ДПО ТГК и модели СКД ТГК;
♦ модуль, реализующий функцию формирования статусной
информации с последующей передачей ее в ТВМ СМ.
Математическая модель устройства сопряжения БВС СМ с ТГК
(УС21-ТГК-М) выполняет следующие функции:
♦ имитирует штатный профиль обмена ТВМ СМ и УС21-ТГК
по шинам 1 или 2 МКО 1553;
♦ обеспечивает прием и обработку входной информации в
модель УС21-ТГК из ТВМ СМ;
♦ транслирует команды управления от БВС СМ в модели
систем ТГК, в том числе и релейные команды на двигатели
перемещения и ориентации ТГК и на сближающий
корректирующий двигатель ТГК;
♦ обеспечивает формирование выходной информации из
модели УС21-ТГК в ТВМ СМ, в том числе и статусной
информации УС;
♦ обеспечивает ввод и отработку нештатных ситуаций.
Математическая модель устройства сопряжения БВС СМ с ТГК
(УС21-ТГК-М) обеспечивает следующий информационный обмен:
♦ получение функционального массива от ТВМ СМ и проверка
его достоверности;
♦ транслирование содержащихся в функциональном массиве
дискретных команд управления в модель двигателей
перемещения и ориентации ТГК и модель сближающего
корректирующего двигателя ТГК;
♦ формирование выходного функционального массива,
передаваемого в ТВМ СМ и включающего в себя квитанции на
выходные релейные дискретные команды управления и входные
релейные команды, формируемые моделями двигателей
перемещения и ориентации ТГК и моделями сближающего
корректирующего чвигатсля ТГК:
♦ формирование статусной информации УС21-ТГК-М.
264 Глава 4. Моделирование функционирования компонент БС и БКУ
Функция моделирования УС СО включает в себя:
♦ модуль реагирования на события, связанные с включением/
выключением УС21 СО через командный контур управления;
♦ интерфейсный модуль, реализующий функцию получения и
обработки информационных потоков данных от ЦВМ СМ, их
проверку и распаковку;
♦ интерфейсный модуль, реализующий функцию формирования
информационных потоков данных от математических
моделей бортовых систем СО, предназначенных для передачи в
ЦВМ;
♦ модуль, реализующий функцию формирования входных
релейных команд, а также, в случае сбоев обменов по шине
МКО 1553, накопление коротких (длительность до 200 мс)
входных релейных команд для последующей передачи в ЦВМ
СМ в составе функционально-статусного массива;
♦ модуль, реализующий циклограмму отключения питания
пассивной системы стыковки (ССП).
Математическая модель устройства сопряжения БВС СМ с
системами СО (УС21 СО) выполняет следующие функции:
♦ имитирует штатный профиль обмена ЦВМ СМ и УС21 СО по
шинам 3(4) МКО 1553;
♦ обеспечивает прием и обработку входной информации в
модель УС21 СО из ЦВМ СМ;
♦ транслирует команды управления от БВС в математические
модели бортовых систем СО;
♦ обеспечивает формирование выходной информации из
модели УС21 СО в ЦВМ СМ, в том числе и статусной
информации УС;
♦ обеспечивает ввод и отработку нештатных ситуаций.
Математическая модель устройства сопряжения БВС СМ с
системами СО (УС21 СО) обеспечивает следующий информационный
обмен:
♦ получение функционального массива от ЦВМ СМ и проверка
его достоверности:
♦ транслирование содержащихся в функциональном массиве
дискретных команд управления, формируемых алгоритмами
управления системами СО в ЦВМ СМ, моделям систем СО
через модель СУБК;
Программное обеспечение моделей БС и БКУ
265
♦ формирование выходного функционально-статусного
массива, передаваемого в ЦВМ СМ и включающего в себя
квитанции на выходные релейные дискретные команды управления,
входные релейные команды, а также статусную информацию;
♦ накопление коротких (длительность до 200 мс) входных
релейных команд для последующей передачи в ЦВМ СМ в
случае сбоев обменов по шине МКО 1553.
Модель БИТС 2-12 бортовой информационно-телеметрической
системы СМ включает следующие функциональные элементы:
♦ модули, обеспечивающие функцию реагирования на
события, связанные с подачей или снятием питания с аппаратуры
БИТС 2-12 или с отдельного прибора аппаратуры БИТС 2-12
через командный контур управления;
♦ модули, обеспечивающие функцию реагирования на команды
управления режимами работы аппаратуры БИТС 2-12;
♦ функцию инициализации модели после включения — набор
моделей исходного состояния системы после подачи питания
на аппаратуру БИТС 2-12;
♦ модуль, обеспечивающий функцию работы блока по
переключению устройств;
♦ модуль, обеспечивающий функцию работы блока
записывающих устройств;
♦ сервисные функции для формирования моделями бортовых
систем цифровых потоков (моделирование программно-адресного
сбора информации), передаваемых в составе ТМ-кадров в ПО
БВС СМ;
♦ функцию выдачи команд КРЛ;
♦ функцию установки времени задержки на исполнение
команды;
♦ функцию получения текущего состояния прибора;
♦ функцию получения состояния записывающего устройства;
♦ функцию определения подсоединения кабеля для телеметри-
рования определенных параметров;
♦ функцию формирования дискретных параметров аппаратуры
БИТС 2-12, передаваемых в БВС СМ;
♦ функцию имитации НШС.
Математическая модель аппаратуры БИТС 2-12 выполняет
следующие функции:
♦ имитирует работу записывающих устройств;
266 Глава 4. Моделирование функционирования компонент БС и БКУ
♦ выставляет контрольные коды с локальных коммутаторов
(ЛК) и температурных резисторов, а также значения
мощности волн передатчиков;
♦ обрабатывает команды управления от БВС и по КРЛ;
♦ выставляет показания датчиков, характеризующих состояние
системы;
♦ обеспечивает ввод и отработку нештатных ситуаций;
♦ формирует цифровые потоки ТМ-информации от моделей
бортовых систем СМ на основании бортовой базы данных,
определяющей структуру ТМ-кадров;
♦ обеспечивает передачу ТМ-информации в БВС СМ по
МКО 1553.
Математическая модель системы БИТС 2-12 обеспечивает
следующий информационный обмен:
♦ получение и обработку команд управления от БВС СМ через
модель УС21;
♦ имитацию штатного профиля обмена с ЦВМ СМ по шинам
5 (6) МКО 1553 по передаче дискретных и аналоговых
телеметрических параметров;
♦ имитацию штатного профиля обмена с ЦВМ СМ по шинам
9(10) МКО 1553 по передаче дискретных и аналоговых
телеметрических параметров.
Рассмотрим требования к моделям СУБА.
Математическая модель объединенной двигательной установки
должна обеспечивать выполнение следующих основных функций:
♦ моделирование подготовки агрегатов ОДУ к подаче топлива к
двигателям ориентации;
♦ моделирование подготовки агрегатов ОДУ к подаче топлива к
корректирующим двигателям;
♦ моделирование приведения ОДУ в исходное состояние;
♦ моделирование штатного состояния пневмогидросхемы ОДУ
и изменения этого состояния по командам от БВС;
♦ моделирование работы ОДУ при работе корректирующих
двигателей;
♦ моделирование работы ОДУ при работе системы управления
движением изделия на двигателях ориентации;
♦ моделирование работы ОДУ при работе ДО от топливных
баков ТГК;
Программное обеспечение моделей БС и БКУ
267
♦ моделирование работы ОДУ при работе двигателей
ориентации от топливных баков ФГБ;
♦ моделирование показаний датчиков, характеризующих
состояние системы;
♦ обработку команд управления штангой стыковочной мишени
и крышками корректирующих двигателей;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций.
Математическая модель системы управления перекачкой
топлива (СУПТ) должна выполнять следующие основные функции:
♦ моделирование работы компрессоров для откачки газа
наддува из баков ОДУ;
♦ моделирование работы ОДУ и магистралей при работе
системы перекачки топлива;
♦ моделирование штатного состояния топливных магистралей и
изменения этого состояния по командам от БВС;
♦ формирование сигнальных и аналоговых параметров системы
перекачки топлива;
♦ срабатывание датчиков положения сильфона топливных
баков во время процесса дозаправки;
♦ моделирование изменения давления в пневмо- и
гидромагистралях;
♦ моделирование изменения температур в пневмо- и
гидромагистралях;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций.
Модель системы обеспечения теплового режима должна
обеспечивать следующие основные функции системы управления СОТР:
♦ переключение электронасосных агрегатов (ЭНА) контуров
охлаждения и контуров обогрева при отказе
функционирующего ЭНА;
♦ переключение на другие контуры охлаждения (обогрева) при
отказах всех элсктронасосных агрегатов функционирующего
контура;
♦ отключение системы кондиционирования воздуха при всех
возможных отказах;
268 Глава 4. Моделирование функционирования компонент БС и БКУ
♦ отключение термоэлектрического охлаждающего устройства
(ТОУ) при всех возможных отказах;
♦ отключение вентиляторов при их отказах;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций.
Модель телефонно-телеграфной системы должна обеспечивать
выполнение следующих основных функций:
♦ моделирование включения 'выключения системы;
♦ моделирование режимов работы системы при задании их с
пульта экипажа;
♦ моделирование выдачи команд управления через БВС, Laptop,
КРЛ.
Математическая модель телевизионной системы должна
выполнять следующие функции:
♦ обработку команд управления системой от бортовых
программ управления и контроля системы;
♦ моделирование подачи питания на аппаратуру системы;
♦ моделирование показаний датчиков, характеризующих
состояние системы;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций системы.
Модель командной радиолинии «Регул» должна обеспечивать
функциональное и информационное моделирование логики работы
«Регула» как физического устройства в реальном масштабе
времени, в том числе:
♦ моделирование сигнальных интерфейсов «Регула»;
♦ формирование массивов диагностики;
♦ прием и выдачу команд управления;
♦ циклограммы процессов разворачивания антенн.
Модель «Регул» должна поддерживать следующие режимы:
♦ сеансный режим с передачей КПИ от НКУ и данных
обратного канала;
♦ сеансный режим с передачей только данных обратного канала;
♦ дежурный режим.
Модель системы внешних элементов конструкции (ВЭК) должна
обеспечивать выполнение следующих основных функций:
♦ обработку команд управления системой от бортовых
программ управления системой ВЭК;
Программное обеспечение моделей ЪС и БКУ
269
♦ изменение параметров ВЭК;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций.
Математическая модель системы электропитания должна
обеспечивать выполнение следующих основных функций:
♦ моделирование динамики изменения напряжения и тока в
бортовой сети в соответствии с энергопотреблением
задействованных систем, заданными запасами электроэнергии и
приходами электроэнергии от первичных источников тока в
зависимости от специально заданной или вырабатываемой
моделью движения световой обстановки;
♦ обработку команд от бортовых программ управления и
контроля системы;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций.
Математическая модель системы СЭП должна обеспечивать
моделирование следующих режимов работы:
♦ режим неполного заряда и разряда аккумуляторных батарей;
♦ режим полного заряда и разряда аккумуляторных батарей;
♦ режим поочередного глубокого циклирования
аккумуляторных батарей;
♦ режим доразряда отключенных аккумуляторных батарей;
♦ режим электроснабжения.
Математическая модель системы ориентации солнечных батарей
должна обеспечивать моделирование следующих режимов работы:
♦ первоначальное включение СОСБ;
♦ включение СОСБ;
♦ выбор режимов СОСБ (автономный, совмещенный, режим
работы от СУДЫ);
♦ установку СБ в заданную зону;
♦ расчет заданной зоны;
♦ режим ручного управления.
Модель аппаратуры СОСБ должна обеспечивать следующие
основные функции:
♦ изменение параметров СОСБ с учетом паузы их срабатывания
и сигнализации на пульте управления в соответствии со
штатной логикой работы системы СОСБ;
270 Глава 4. Моделирование функционирования компонент БС и БКУ
♦ моделирование состояния параметров элементов конструкции
системы СОСБ (лонжеронов);
♦ обработку команд от бортовых алгоритмов управления
системой СОСБ и пульта управления;
♦ моделирование движения солнечной батареи в заданное
положение по коду зоны, выдаваемому из СУДЫ, и изменение
номера текущей зоны при движении;
♦ получение данных от модели движения о положении Солнца
(модель СУДН) и изменение в модели СОСБ номера текущей
зоны СБ при движении;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций системы СОСБ.
Математическая модель системы «Электрон-ВМ» должна
обеспечивать следующие функции:
♦ обработку команд управления системой от бортовых
программ управ тения и контроля системы «Электрон-ВМ»;
♦ моделирование датчиков системы «Электрон-ВМ»;
♦ моделирование работы блока перекачки;
♦ моделирование работы вентилей ВН1 и ВН2;
♦ моделирование работы микронасосов;
♦ расчет произведенного количества кислорода и выдачу его в
модель атмосферы;
♦ моделирование показаний датчиков, характеризующих
состояние системы;
♦ формирование ТМ-параметров, но которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций системы «Электрон-ВМ».
Математическая модель системы «Воздух» должна выполнять
следующие функции:
♦ обработку команд управления системой от бортовых
программ управления и контроля системы;
♦ расчет поглощенного количества углекислого газа и передачу
его в модель атмосферы;
♦ моделирование подачи питания на устройства (клапаны,
насосы, датчиковую аппаратуру);
♦ моделирование показаний датчиков, характеризующих
состояние системы;
Программное обеспечение моделей БС и БКУ
271
♦ взаимодействие модели системы «Воздух» с моделью
атмосферы в части расчета парциального давления углекислого
газа и водяного пара;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций системы «Воздух».
Математическая модель системы блока микропримесей должна
обеспечивать моделирование следующих режимов работы:
♦ очистка;
♦ регенерация.
Математическая модель системы БМП должна обеспечивать
следующие функции:
♦ обработку команд управления системой от бортовых
программ управления и контроля системы;
♦ моделирование подачи питания на устройства (клапаны,
вентилятор, датчиковую аппаратуру, нагреватели);
♦ моделирование показаний датчиков, характеризующих
состояние системы;
♦ возможность ускоренного нагрева и остывания
поглотительных патронов по требованию инженера-оператора;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций системы БМП.
Математическая модель «Сигнал-ВМ» должна обеспечивать
выполнение следующих функций:
♦ обработку команд управления системой от бортовых
программ управления и контроля системы «Сигнал-ВМ» и от
виртуального пульта управления;
♦ срабатывание датчиков дыма при прохождении команды на
проверку работоспособности датчиков на время 15 с и при
тестировании датчиков с пульта управления;
♦ срабатывание любого из датчиков дыма в случае имитации
задымления или пожара;
♦ исправную работу датчиков дыма;
♦ отказ датчиков дыма;
♦ взаимодействие с виртуальным пультом управления.
Модель газового состава атмосферы должна обеспечивать
следующие основные функции:
♦ моделирование физических процессов в атмосфере модулей
МКС СМ, ФГБ, СО, ТГК в части расчета атмосферного
272 Глава 4. Моделирование функционирования компонент БС и БКУ
давления, парциальных давлений азота, кислорода,
углекислого газа, водорода и водяного пара;
♦ учет изменения состава атмосферы в зависимости от
количества членов экипажа, вида деятельности космонавтов и
времени суток;
♦ учет работы систем обеспечения газового состава («Воздух» и
«Электрон»);
♦ моделирование датчиковой аппаратуры системы обеспечения
газового состава (датчиков потока, датчиков давления,
газоанализаторов).
Математическая модель системы стыковки внутреннего
перехода должна обеспечивать следующие функции:
а) получение и обработка команд управления системой от
бортовых программ управления и контроля ССВП:
♦ выбор стыковочного узла, на котором выполняется заданный
режим;
♦ включение питания системы;
♦ исходное состояние системы перед началом выполнения $а-
данного режима;
♦ выбор режима работы системы;
♦ выключение питания системы в случае возникновения
нештатных ситуаций и по окончании выполнения режима;
б) моделирование углов поворота механизма закрытия / открытия
крюков (в %);
в) моделирование углов поворота крышки переходного люка (в %);
г) моделирование показаний датчиков, характеризующих
состояние системы;
д) формирование ТМ-параметров, по которым контролируется
состояние системы;
е) ввод и отработку нештатных ситуаций ССВП.
Математическая модель аппаратуры сбора сообщений СО
должна выполнять следующие основные функции:
♦ выставлять контрольные коды с локальных коммутаторов и
температурных резисторов, а также значения мощности волн
передатчиков;
♦ обрабатывать команды управления от БВС и по КРЛ;
♦ выставлять показания датчиков, характеризующих
состояние системы;
Программное обеспечение моделей ЪС и БКУ
273
♦ обеспечивать формирование цифровых потоков ТМ-информа-
ции от моделей бортовых систем СО на основании бортовой
базы данных, определяющей структуру ТМ-кадров;
♦ передавать ТМ-информацию в БВС СМ по МКО 1553 в
составе информации аппаратуры БИТС 2-12;
♦ вводить и отрабатывать нештатные ситуации.
Математическая модель системы пожарообнаружения модуля
СО должна обеспечивать выполнение следующих основных
функций:
♦ прием и обработку команд управления системой от бортовых
программ управления и контроля системой
пожарообнаружения модуля СО;
♦ срабатывание датчиков дыма при прохождении команды на
проверку работоспособности датчиков на время 12 с;
♦ срабатывание любого из датчиков в случае имитации
задымления или пожара;
♦ исправную работу датчиков дыма;
♦ моделирование отказов датчиков дыма при проверке от БВС и
при самотестировании;
♦ взаимодействие с виртуальным пультом системы
сигнализации.
Математическая модель системы транзитных магистралей
дозаправки топлива модуля СО должна выполнять следующие функции:
♦ моделирование включения питания ТМДТ;
♦ моделирование приведения ТМДТ в исходное состояние;
♦ моделирование особенностей функционирования и
взаимодействия элементов ТМДТ;
♦ моделирование штатного состояния магистралей ТМДТ и
изменение этого состояния по командам от БВС;
♦ моделирование дозаправки окислителя через ТМДТ;
♦ моделирование дозаправки горючего через ТМДТ;
♦ моделирование продувки окислителя через ТМДТ;
♦ моделирование продувки горючего через ТМДТ;
♦ моделирование показаний датчиков, характеризующих
состояние системы;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций.
274 Глава 4. Моделирование функционирования компонент БС и БКУ
Математическая модель системы стыковки перехода модуля СО
должна выполнять следующие функции:
а) прием и обработку команд управления системой от бортовых
программ управления и контроля системы ССП СО:
♦ включение питания системы;
♦ исходное состояние системы перед началом выполнения
заданного режима;
♦ выбор режима работы системы;
♦ выключение питания системы в случае возникновения
нештатных ситуаций и по окончании выполнения режима;
б) моделирование временных интервалов закрытия/открытия
крюков, упоров и крышки переходного люка;
в) моделирование показаний датчиков, характеризующих
состояние системы;
г) формирование ТМ-параметров, по которым контролируется
состояние системы;
д) ввод и отработку нештатных ситуаций системы ССП СО.
Модель системы обеспечения теплового режима модуля СО
должна обеспечивать выполнение следующих основных функций:
♦ моделирование показаний датчиков измерения давления,
перепада давления, расхода теплоносителя, оборотов двигателей
электронасосных агрегатов;
♦ моделирование изменения показаний датчиков температуры в
результате включения соответствующих агрегатов системы
(жидкостного электронагревателя, термоэлектрического
охлаждающего устройства) по командам из БВС СМ и
алгоритмов СОТР;
♦ переключение электронасосных агрегатов при отказе
функционирующего ЭНА;
♦ формирование ТМ-параметров, по которым контролируется
состояние системы;
♦ ввод и отработку нештатных ситуаций системы.
В заключение рассмотрим требования к моделям СУДЫ.
Модель движения вокруг центра масс формирует угловую
скорость МКС как твердого тела в середине и в конце каждого такта
интегрирования с учетом гравитационных моментов,
аэродинамических моментов, управляющих моментов от двигателей
ориентации, корректирующих двигателей (КД1 и КД2) и американских
силовых гироскопов (CMG).
Программное обеспечение моделей БГ и БКУ
275
Модель движения автоматически пересчитывает основные
параметры углового движения при изменении инерционно-массовых
характеристик после стыковок и расстыковок корабля «Space
Shuttle», транспортных и грузовых кораблей «Союз» и «Прогресс»
с МКС.
Модель движения учитывает влияние упругих колебаний
конструкции в месте установки прибора ГИВУС при формировании
угловой скорости.
Модель движения формирует кватернион разворота из инер-
циальной системы координат J2000 в связанный базис [9]. При
наличии готовности кватерниона разворота из системы J2000 в
орбитальный базис (готовность навигационного контура) модель
формирует кватернион разворота из орбитального базиса в
связанный базис. Кватернионы формируются с учетом упругих
колебаний конструкции в месте установки чувствительного
элемента.
Расчетная схема обеспечивает устойчивый вычислительный
процесс при величинах угловых скоростей не менее 10 градус/с.
Модель аэродинамических сил и моментов формирует на
каждом такте вектора этих сил и моментов в проекциях на связанные
оси служебного модуля.
Модель атмосферы, используемая при вычислении аэродинами:
ческих сил и моментов, учитывает суточные колебания плотности
верхней атмосферы. Также учитываются колебания плотности
атмосферы, связанные с активностью Солнца, высотой полета и
наклонением орбиты.
В основу расчетной схемы положена зеркально-диффузионная
модель обтекания свободно молекулярным потоком набегающих
частиц. Эффективные площади обтекаемых элементов конструкции
рассчитываются на основании соответствующих документов.
Модель координат астроориентиров выполняет следующие
функции:
♦ вычисление координат Солнца в системе координат J2000;
♦ вычисление координат Луны в системе координат J2000;
♦ вычисление координат Земли в системе координат J2000;
♦ определение признаков «День» и «Ночь»;
♦ предоставление возможности обходить расчет координат
астроориентиров таким образом, чтобы заданные координаты
Солнца, Луны и Земли не менялись.
276 Глава 4. Моделирование функционирования компонент БС и БКУ
Модель магнитного поля Земли вычисляет вектор
напряженности магнитного поля Земли и модуль этого вектора на основании
информации о текущем времени и номере текущего года.
Модель упругих колебаний формирует параметры,
обусловленные динамикой конструкции, в виде добавочных угловых скоростей
и углов в месте установки прибора ГИВУС. Модель учитывает все
доминирующие в этом месте гармоники упругих колебаний,
которые возбуждаются силовыми и моментными нагрузками на
конструкцию МКС при работе ДО, КД и CMG.
Собственные частоты, линейные и угловые формы упругих
колебаний, используемые в модели, формируются пакетом NASTRAN
для каждой сборки по исходным данным.
Программная модель ГИВУС имитирует следующие основные
особенности функционирования измерителя угловой скорости
ГИВУС на базе поплавковых гироскопов:
♦ вычисляет выходные показания прибора в соответствии с
внешней угловой скоростью, заданной в связанных осях КА;
♦ адекватно отражает частотные свойства измерительного
тракта (амплитудные искажения и фазовые запаздывания), а также
специфику показаний измерительных каналов в стадии
набора (функциональной и точностной готовности) и на границе
измерительного диапазона;
♦ воспроизводит систематические и случайные погрешности
измерений, а также погрешности дискретизации выходных
сигналов.
Дополнительно предусматривается возможность моделирования
характерных отказов отдельных измерительных каналов.
В рамках алгоритма измерительного тракта в соответствии с
математической моделью чувствительного элемента вычисляется
приращение интеграла проекции вектора угловой скорости,
накопленное за такт на внешних счетчиках в блоке устройств
сопряжения. Поскольку по отношению к входному параметру
(угловая скорость в связанных осях КА) модель измерительного
канала выполняет интегрирующие функции, то для более точной
оценки приращения угла предполагается на вход модели задавать
угловую скорость как в конце, так и в середине базового такта.
Внутри модели измерительного тракта предполагается
интерполяция функции угловой скорости на такте полиномом второго
Программное обеспечение моделей БС и БКУ
277
порядка по трем значениям — в начале, в середине и конце
базового такта работы модели. Математическая модель
измерительного тракта должна, по возможности, в полном объеме отражать
физические процессы, происходящие в датчике. Допускается
приближение модели измерительного канала, но не ниже 2-го
порядка.
В модель измерительного тракта для каждого канала
включаются следующие характерные погрешности:
♦ угловые погрешности ориентации оси чувствительности;
♦ погрешность масштабного коэффициента:
♦ систематическая составляющая нулевого сигнала;
♦ случайное отклонение нулевого сигнала постоянное в запуске;
♦ некоррелированная случайная шумовая составляющая
(«белый» шум);
♦ погрешность дискретизации выходного сигнала.
Для тестирования и отладки бортовой версии ПО
паспортизированные параметры (масштабные коэффициенты измерительных
каналов, углы положения осей чувствительности в приборной системе
координат и постоянные смешения нуля) приводятся в соответствие
с формуляром на конкретный штатный прибор.
Внутренняя система отсчета временных интервалов в модели
базируется на подсчете количества обращений к программе. Для
удобства отладки совместно с моделью ГИВУС алгоритмов БИНС
вводится внешний признак, ускоряющий выход модели на
точностной режим (в обход интервала ожидания функциональной и
точностной готовности). Также предусматривается возможность
маскирования случайной шумовой составляющей каждого
измерительного канала в отдельности установкой определенного
признака в ноль.
В модели ГИВУС должна предусматриваться возможность
имитации следующих НШС:
♦ залипание одного из датчиков на нуле;
♦ залипание одного из датчиков на границе диапазона
измерения;
♦ аномальный дрейф нулевого сигнала.
Тот или иной вид отказа каждого измерительного канала
задается установкой соответствующего признака отказа в
определенное значение.
278 Глава 4. Моделирование функционирования компонент БС и БКУ
Математическая модель ОРТ-М имитирует механические,
электрические и информационные принципы функционирования
прибора в соответствии с техническим описанием и паспортными
данными.
В составе НКО модель выполняет следующие функции:
♦ моделирование дискретных выходных сигналов по угловой
скорости прибора ОРТ-М;
♦ моделирование аналоговых выходных сигналов по угловой
скорости прибора ОРТ-М для формирования телеметрических
сигналов:
♦ обеспечение как штатного, так и ускоренного выхода на
стационарный режим работы для испытаний в составе НКО;
♦ моделирование отказов измерительных каналов и
формирование соответствующих квитанций;
♦ моделирование сбоев обмена между ОРТ-М и устройством
сопряжения.
Масштабный коэффициент по дискретному выходу составляет
2' рад/имп. Длительность базового такта накопления импульсов в
УС составляет 0.2 с, что соответствует частоте обращения к
прибору 5 Гц.
При штатном включении прибора ОРТ-М продолжительность
циклограммы разгона гиромоторов составляет 1 мин.
Продолжительность выхода на стационарный тепловой режим
работы не превышает 20 мин.
Для ускорения процесса запуска НКО в математической модели
прибора предусматривается флаг, который устанавливает
внутренние признаки наличия питания, включения дискретных выходов,
функциональную и точностную готовности и имитирует работу
прибора после выхода на стационарный режим.
В математической модели прибора предусмотрены следующие
признаки отказов прибора:
♦ отказ на «ноль» (залипание в нуле);
♦ отказ на максимум показаний;
♦ отказ на минимум показаний.
Модель звездного датчика БОКЗ представляет имитацию
работы двух приборов (БОКЗ-1 и БОКЗ-2) с отличающимися
характеристиками.
Модель состоит из двух частей: собственно модели прибора и
модели фрагментатора БОКЗ, отражающего структуру и состав
Программное обеспечение моделей БС и БКУ
279
получаемых от прибора данных с результатами экспозиции
(содержимое видеобуфера).
Модель прибора БОКЗ отражает следующие свойства:
♦ включение ^ отключение прибора при подаче/снятии
напряжения;
♦ прием и выдачу слов данных по МКО MIL STD 1553;
♦ положение защитной крышки.
Модель БОКЗ в качестве входных данных (видеобуфер от БОКЗ
с результатом экспозиции) получает массив оговоренной структуры
от модели фрагментатора БОКЗ.
Модель БОКЗ реализует следующие НШС по работе приборов
БОКЗ:
а) отсутствие напряжения питания при включении БОКЗ;
б) неотключение напряжения питания при выключении БОКЗ;
в) начальное состояние незакрытой крышки по ТМ-коду БОКЗ;
г) начальное состояние неоткрытой крышки по ТМ-коду БОКЗ;
д) состояние незакрытой крышки по ТМ-коду БОКЗ после подачи
команды на закрытие;
е) состояние неоткрытой крышки по ТМ-коду БОКЗ после подачи
команды на открытие;
ж) отказы ОУ БОКЗ по проведению операций обмена:
♦ отказ при приведении ОУ в исходное состояние;
♦ отказ при выдаче заданной команды;
♦ отказ при выдаче части видеобуфера на заданном такте (тактах);
♦ отказ по составу получаемых от БОКЗ данных (замена
полученных от модели фрагментатора данных) для имитации
событий реально неоткрытая крышка; реально незакрытая крышка;
отсутствие ТМ-кода.
Работа модели (имитация отклонения от штатной работы БОКЗ)
задается управляющим словом модели.
Модель фрагментатора в качестве выходных данных формирует
массив видеобуфера для следующих режимов БОКЗ:
♦ съемка звезд;
♦ тест.
Модель фрагментатора реализует следующие НШС:
♦ засветка;
♦ смена порога;
♦ нет локализации;
♦ нет распознавания.
280 Глава 4. Моделирование функционирования компонент БС и БКУ
На основании информации о текущем времени вычисляется орт
направления на центр диска Солнца в инерциальнои системе
координат J2000.
На основании информации о текущем значении орбитального
кватерниона должен вычисляться орт направления на центр диска
Земли в инерциальнои системе координат J2000.
Должны вычисляться признаки:
♦ «день» — полный диск Солнца вне Земли;
♦ «ночь» — полный диск Солнца скрыт за Землей.
Должна быть предоставлена возможность формировать
определенное неподвижное положение Солнца, Луны и Земли
относительно связанной системы координат.
Модель солнечного датчика (СД) должна выполнять следующие
основные функции:
♦ моделирование циклограммы включения приборов
солнечного датчика;
♦ моделирование теста приборов СД;
♦ моделирование работы приборов солнечного датчика в
режиме определения координат Солнца;
♦ ввод и отработку нештатных ситуаций.
Модель приборов солнечного датчика должна формировать
следующие нештатные ситуации:
♦ не выдается признак «Наличие Солнца»;
♦ не выключается контрольный имитатор;
♦ недостоверные сигналы теста.
Модель датчика инфракрасной вертикали предназначена для
выполнения следующих функций:
♦ моделирование циклограммы включения приборов датчика
инфракрасной вертикали;
♦ моделирование циклограммы переключения траекторий;
♦ моделирование информации на выходе из УС при измерении
углового отклонения центра проекции Земли от местной
вертикали;
♦ ввод и отработку нештатных ситуаций.
Модель магнитометров должна выполнять следующие функции:
♦ выполнение циклограммы включения прибора;
♦ выполнение циклограммы проведения калибровки;
♦ определение показаний прибора;
♦ ввод и отработку нештатных ситуаций системы.
Программное обеспечение моделей БС и БКУ
281
Модель рулевых машинок корректирующих двигателей
должна формировать во время коррекции орбиты вектор
корректирующего импульса и управляющего момента с учетом профиля
нарастания тяги при выходе двигателей на режим и импульса
последействия.
Модель должна включать в себя динамическую модель рулевых
машинок камер сгорания корректирующих двигателей,
содержащих:
♦ модель рулевого привода;
♦ модель редуктора;
♦ блок управления приводом.
Для модели УС математическая модель рулевых машинок
должна формировать сигналы, пропорциональные углам поворота
приводов качания камер сгорания, в соответствии с состоянием
управляющих сигналов на рулевых машинках, формируемых в модели
объединенной двигательной установки.
Модель должна формировать отказы КД на включение и работу
КД с нерасчетной тягой.
Модель моментов двигателей ориентации должна формировать
управляющие моменты с учетом разбросов тяги двигателей и
перекосов в их установке. Модель должна формировать также силовые и
моментные нагрузки, которые возбуждают упругие колебания в
конструкции.
Модель двигателей должна включать координаты установки и
вектор тяги в системе координат МКС каждого из ДО СМ, ДПО
состыкованных с МКС грузовых кораблей «Прогресс» и других
модулей.
Выбор работающих на каждом такте двигателей должен
осуществляться в соответствии с матрицей команд, формируемой в
СУБА по требованиям бортовой программы управления
двигателями.
Длительность включения каждого двигателя или группы
двигателей должна формироваться по сигналам из УС пропорционально
количеству квантов по 0.012с и с учетом импульса последействия.
Модель должна формировать отказы ДО на включение и на
неотключение, а также моделировать нештатные ситуации при работе
ДО с нерасчетной тягой.
Модель приводов слежения и электронного преобразователя
ОНА должна в соответствии с состоянием дискретных сигналов,
282 Глава 4. Моделирование функционирования компонент БС и БКУ
контролирующих команды включения питания комплектов
приводов слежения (ПС) ОНА по входным управляющим сигналам для
ПС ОНА, формировать в блоках моделей шаговых двигателей
приводов углы поворота, а также параметры углового положения
зеркала ОНА.
Модель ПС и электронного преобразователя ОНА должна
моделировать функционирование двух комплектов приводов
качания, двух комплектов приводов вращения, а также комплектов
электронного преобразователя, которые представляют собой
датчики углового положения приводов слежения, выполненные в
виде вращающихся трансформаторов. При этом должно
учитываться, что ЭП должны функционировать как в режиме штатной
работы, так и в режиме своего тестирования, когда они
формируют тестовые значения углов в ответ на команду проведения
теста.
Модель радиопеленгатора остронаправленной антенны должна
формировать в зависимости от положения радиус-вектора линии
визирования (ЛВ) на спутник-ретранслятор (СР) пеленгационную
информацию — сигналы, пропорциональные угловому отклонению
ЛВ по двум взаимно-перпендикулярным каналам, для двух уровней
точности: грубого и точного пеленга в системе координат,
связанной с зеркалом ОНА. Кроме этого, модель радиопеленгатора ОНА
должна формировать пороговые сигналы о достоверности пеленга-
ционной информации с двумя уровнями точности: о захвате грубого
пеленга и о захвате точного пеленга.
Модель должна включать следующие основные блоки:
♦ блок определения координат радиус-вектора ЛВ на СР в
системе координат, связанной с зеркалом ОНА;
♦ блок формирования пороговых сигналов о достоверности пе-
ленгацнонной информации;
♦ блок формирования пеленгационной информации;
♦ блок формирования данных с радиопеленгатора (РП).
Модель навигационного контура СУДН МКС предназначена для
выполнения следующих основных функций:
♦ определение текущих параметров движения центра масс;
♦ прогнозирование движения центра масс с целью подгонки
вектора состояния к текущему бортовому времени (после
перезакладки вектора состояния);
Программное обеспечение моделей БС и БКУ
283
♦ построение расчетной орбитальной системы координат;
♦ вычисление необходимой для работы модели СУДЫ текущей
навигационной информации;
♦ моделирование информационной части работы АСН;
♦ расчет синхронного движения спутника-ретранслятора, а также
прогноз движения СР на период до 1 часа для моделирования
сеансов связи через ОНА.
Расчет баллистико-навигационных параметров должен
производиться с дискретностью не более чем 40 с.
Модель навигационного контура СУДЫ должна выполнять ввод
и отработку следующих нештатных ситуаций:
♦ временное пропадание признака готовности навигационного
обеспечения (НО) при проведении операции «сверка
времени», если разрыв времени в модели составляет более 325 с.
При этом ориентировочное время отсутствия признака
готовности НО должно быть не более 20% от величины скачка
времени;
♦ нерасчет вектора состояния. При нерасчете вектора состояния
для восстановления режима навигации следует подготовить
прогнозируемый вектор состояния и осуществить его
закладку в модель;
♦ время ВС вне диапазона. При скачке времени на величину
более 2-х суток, а также при закладке нового вектора состояния,
отличающегося от модельного времени на величину более
2-х суток, должен появляться признак «Время ВС вне
диапазона». Для восстановления режима навигации в этом случае
следует подготовить прогнозируемый вектор состояния и
осуществить его закладку в модель.
Модель движения и прогноза вектора состояния спутника
ретранслятора должна обеспечивать получение точного уровня
прогноза компонент вектора состояния СР. Модель движения должна
учитывать гравитационный потенциал Земли до четвертой
гармоники, а также гравитационное влияние Луны и Солнца.
Модель должна выполнять синхронизацию вектора состояния
спутника ретранслятора с текущим бортовым временем СМ, а
также его подгонку на этот момент времени при перезакладке нового
вектора состояния спутника ретранслятора.
Модель должна обеспечивать прогноз вектора состояния
спутника ретранслятора на период до 1 часа от текущего момента.
284 Глава 4. Моделирование функционирования компонент БС и БКУ
Модель аппаратуры спутниковой навигации должна:
♦ моделировать работу электрических интерфейсов АСН
(выдачу секундных меток) с соблюдением требований бортовой
технической документации;
♦ координировать выдачу меток с внешними источниками;
♦ моделировать получение и отработку матричных команд;
♦ обеспечивать синхронизацию тактовой сетки с моделью
навигации.
Модель службы времени аппаратуры спутниковой навигации
должна:
♦ обеспечивать уход времени не более 10 мкс в секунду;
♦ обеспечивать хранение времени в формате,
соответствующем формату обмена аппаратуры спутниковой навигации
поМКО 1553;
♦ иметь возможность автономного ведения времени, когда нет
внешних источников;
♦ иметь средства разовой и периодической сверки времени от
внешних источников;
♦ синхронизировать время с ЦВМ с использованием «Broadcast
Time» для обеспечения технологических тестов;
♦ выдавать время в бортовые компьютеры в ЦВМ СМ.
Модель аппаратуры сближения «Курс» должна обеспечивать
выполнение следующих основных функций:
♦ моделирование работы аппаратуры «Курс-П»
(«Курс-Пассивный») СМ в процессе сближения и причаливания к
«кормовому», либо «надирному» узлу СМ кораблей «Союз» и
«Прогресс»;
♦ моделирование контроля тестового включения «Курс-П»;
♦ моделирование контроля тестового включения «Курс-П» в
«кольце» с «Курс-А» («Курс-Активный») пристыкованного к
«кормовому» узлу СМ кораблей «Союз» и «Прогресс»;
♦ моделирование сигнала о мехзахвате со стыковочного узла;
♦ моделирование включения/выключения аппаратуры
(включая управление конфигурацией);
♦ моделирование процесса калибровки как выбранного для
работы полукомплекта «Курс-П», так и резервного
полукомплекта;
Программное обеспечение моделей БС и БКУ 285
♦ функционирование модели работы аппаратуры «Курс-П» СМ
как по отдельности, так и совместно с моделью «Курс-П» ФГБ
(при осуществлении процесса стыковки к ФГБ);
♦ формирование и выдача информации в БВС для поддержки
функционирования процесса сближения и причаливания;
♦ прием и обработка командной логической информации из БВС,
в том числе команды на разрешение формирования в системе
«Курс-П» СМ-«Курс-А» корабля «Прогресс» («Союз»)
режима, обеспечивающего прич&чивание его к СМ.
СОДЕРЖАНИЕ
ВВЕДЕНИЕ 3
Глава 1. РОЛЬ БОРТОВОЙ ВЫЧИСЛИТЕЛЬНОЙ
ТЕХНИКИ И ОСНОВНЫЕ ТРЕБОВАНИЯ
К СЕТЕВЫМ ВЫЧИСЛИТЕЛЬНЫМ СИСТЕМАМ
И ЗАДАЧАМ БОРТОВЫХ КОМПЛЕКСОВ
УПРАВЛЕНИЯ 7
1.1. Беспилотные космические аппараты 8
1.2. Пилотируемые космические корабли 9
1.3. Проектирование БКУ — концепция построения,
основные характеристики и особенности 12
1.4. Бортовая вычислительная система как основное
средство обработки информации и управления 39
1.5. Структура управления КА от НКУ и экипажа 50
1.6. Контуры управления космическим аппаратом 79
Глава 2. КОМПЛЕКСНАЯ ОТРАБОТКА
ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ
БОРТОВЫХ КОМПЛЕКСОВ УПРАВЛЕНИЯ 94
2.1. Основные положения и реализация концепции
КОПОРФИС для проекта Международной
космической станции 94
2.2. Основные положения концепции динамической
отработки для объектов ракетно-космической
техники узкого целевого назначения 134
Глава 3. ПРОЕКТИРОВАНИЕ ПРОГРАММНОГО
И ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ
БОРТОВЫХ КОМПЛЕКСОВ УПРАВЛЕНИЯ
В АРХИТЕКТУРЕ СЕТЕВЫХ БОРТОВЫХ
ВЫЧИСЛИТЕЛЬНЫХ СИСТЕМ 149
3.1. Особенности разработки программного
и информационного обеспечения БКУ на базе
систем обработки данных реального времени 149
Содержание 333
3.2. Методология модульного проектирования
архитекторы ПО БКУ 152
3.3. Методология структурного проектирования
компонент ПО БКУ 164
3.4. Операционные системы реального времени —
ключевой элемент ПО бортовых комплексов
управления 178
3.5. Синтез оптимальных модульных СОД РВ КА.
испозьзующих бесприоритетную дисциплину
обслуживания 205
3.6. Синтез оптимальных модульных СОД РВ КА.
ИСПОЛЬЗУ ЮШИХ ПРИОРИТЕТНЫЕ ДИСЦИПЛИНЫ
ОБСЛУЖИВАНИЯ 217
3.7. ОПТИМ1ГЗАЩ1Я СТРУКТУРЫ БАЗ ДАННЫХ
ИНФОРМАЦИОННОГО ОБЕСПЕЧЕНИЯ БКУ НА ОСНОВЕ
СИСТЕМ ОБРАБОТКИ ДАННЫХ РЕАЛЬНОГО ВРЕМЕНИ 230
Глава 4. МОДЕЛИРОВАНИЕ ФУНКЦИОНИРОВАНИЯ
КОМПОНЕНТ БС И БКУ КОСМИЧЕСКИХ
АППАРАТОВ 239
4.1. Задачи и этапы моделирования полета КА 240
4.2. Методы моделирования полета КА 243
4.3. Средства моделирования полета КА 245
4.4. Математическое обеспечение моделирования
полета КА 247
4.5. Программное обеспечение моделей БС и БКУ 250
Глава 5. РАЗРАБОТКА СТРУ КТУРЫ ТЕХНИЧЕСКОГО,
ПРОГРАММНОГО И ИНФОРМАЦИОННОГО
ОБЕСПЕЧЕНИЯ СИСТЕМЫ УПРАВЛЕНИЯ
РОССИЙСКИМ СЕГМЕНТОМ МКС 286
5.1. Основные положения концепции
автоматизированного управления
Российским сегментом МКС 287
5.2. Основные характеристики программно-
технического комплекса МКС 296
5.3. Функции служебного программного
обеспечения МКС 310
СПИСОК ОСНОВНЫХ СОКРАЩЕНИЙ 322
ЛИТЕРАТУРА 330