




















































































































































































































Текст
И. М. ТЕТЕЛЬБАУМ
Ю. Р. ШНЕЙДЕР
400 СХЕМ для АВМ
МОСКВА
«ЭНЕРГИЯ» 1978
Тетельбаум И. М., Шнейдер Ю. Р.
Т 37 400 схем для АВМ. — М.: Энергия, 1978.—
248 с., ил.
В пер.: 75 к.
В книге собрано большое количество схем, раскрывающих прак-
тические приемы использования операционных блоков, и показаны
пути преодоления различных трудностей, возникающих в практике
моделирования динамических систем на аналоговых вычислительных
машинах (АВМ), при решении задач как в их математической, так
и физическохх постановке.
Книга рассчитана на инженерно-технических и научных работ-
ников, занимающихся вопросами эксплуатации АВМ, моделирования
и автоматического управления. Книга может служить справочным-'
пособием для специалистов.
30502-355 _ ББК 32.973.1
1 051(01)-78 9й'78 6Ф7.’
BE
НИЕ
В-1. АНАЛОГОВОЕ МОДЕЛИРОВАНИЕ КАК МЕТОД
ДИНАМИЧЕСКИХ ИССЛЕДОВАНИИ
На современном этапе развития цифровой вычисли-
тельной техники ценность аналоговых устройств в ин-
женерных и научных исследованиях определяется в пер-
вую очередь тем, что они наилучшим образом помогают
осмыслить связь между физической сущностью и мате-
матическим описанием процесса при его изучении. Ана-
логовые устройства служат при этом моделью, своеоб-
разным «зеркалом», проверяющим гипотезы исследова-
теля, позволяя наиболее гибко использовать его логику
и интуицию.
При аналоговом моделировании любая интересую-
щая инженера динамическая характеристика легко и
быстро воспроизводится на экране осциллографа. По-
этому моделирование можно представить как проведение
определенного рода опытов средствами вычислительной
техники. Таким образом, термин «моделирование» отра-
жает и форму связи человека с вычислительной маши-
ной, которая очень близка к экспериментальным мето-
дам.
В практике работы с аналоговыми устройствами сле-
дует различать техническую процедуру решения и су-
щество дела. Нельзя сводить постановку задачи и полу-
чение решения лишь к программированной технической
процедуре: запись уравнений, составление для них струк-
турной схемы, выбор масштабов, расчет коэффициен-
тов, набор схем и регистрация решения. Такая поста-
новка может дать на практике результаты, существенно
расходящиеся с ожидаемыми. Между тем исследователь,
следуя формальному подходу, часто считает, что его
задача «должна решаться», и разочаровывается в ана-
логовой технике.
Где ошибка, как ее найти, корректно ли поставлена
задача? Ответ на этот вопрос лучше всего дает физи-
ческий подход, при котором система представляется
в виде совокупности заданных физических элементов,
агрегатов или подсистем. Система расчленяется на час-
ти, для которых известны точные решения или экспери-
ментальные характеристики, и соединение этих частей
в модели дает новые искомые зависимости. Модель
анализируется и корректируется по частям, как бы с по-
мощью постановки дополнительных экспериментов
в частных системах, которые можно анализировать
в отдельности, например, вводя возмущения, производя
линеаризацию, ставя опыты закрепления или освобож-
дения определенных точек системы, опыты холостого
хода и короткого замыкания и т. д.
При этом удается не только убедиться в правильнос-
ти постановки задачи, но и компенсировать погрешности
элементов модели. Для получения достоверных резуль-
татов нужно связывать моделирование с физическим
смыслом задачи,- чтобы исследователь был убежден
в правильноости полученных результатов или получил
неопровержимые доказательства неправильной постанов-
ки задачи, а также знал, где искать ошибку. Моделиро-
вание превращает техническую процедуру решения диф-
ференциальных уравнений в увлекательную исследова-
тельскую работу и доставляет большое удовлетворение.
Эту работу нельзя назвать чисто вычислительной.
Не следует недооценивать возможности аналоговых
машин, особенно для динамических расчетов нелинейных
систем, решения задач оптимизации и идентификации,
где успех зачастую обеспечивается искусством выбора
целевой функции, что также требует проведения много-
численных опытов и сопоставлений.
Таким образом, аналоговое моделирование—это не
формализованная процедура, а экспериментальный
поиск, Поэтому можно говорить об искусстве моде-
лирования, так же как и об искусстве экспери-
мента.
Искусство моделирования на АВМ опирается на вы-
работанные практикой работы приемы и схемы, которые
старается по крупицам собирать каждый исследователь,
чтобы наилучшим образом представить в модели специ-
фические элементы моделируемых систем, организовать
их взаимодействие.
Ниже рассматриваются аналоговые моделиоующие
устройства на операционных усилителях, предназначен-
ные для исследования динамических систем, описывае-
мых обыкновенными дифференциальными уравнениями.
Во всех рассматриваемых ниже схемах применяемые
усилители имеют один вход. Схемы, содержащие опера-
ционные усилители с дифференциальным входом, не при-
водятся вследствие ограниченного объема книги.
В-2. ПРИНЦИПЫ СТРУКТУРНОГО МОДЕЛИРОВАНИЯ
Вопросы структурного моделирования излагаются
во многих руководствах и справочниках, указанных
в списке литературы.
При составлении структурных моделей обычно диф-
ференциальные уравнения моделируемой системы разре-
шаются относительно старших производных. Для каж-
дого уравнения составляется «цепочка» интегрирующих
усилителей, последовательно понижающих порядок про-
изводной. Затем на входе каждой цепочки задается
сумма членов, выражающих в уравнениях старшие про-
изводные с помощью соответственным образом соеди-
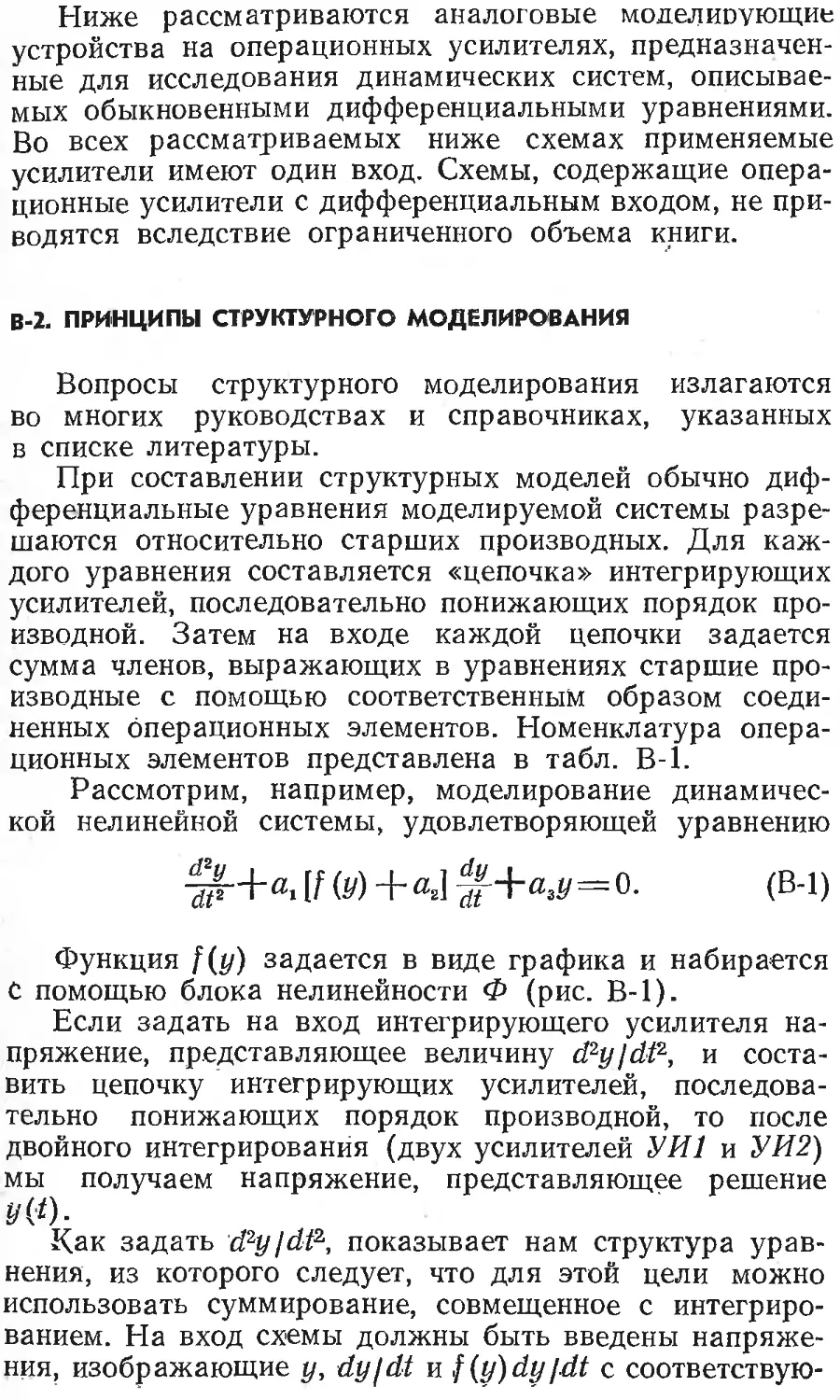
ненных операционных элементов. Номенклатура опера-
ционных элементов представлена в табл. В-1.
Рассмотрим, например, моделирование динамичес-
кой нелинейной системы, удовлетворяющей уравнению
[f (У)+«Я о. (В-1)
Функция f(y) задается в виде графика и набирается
С помощью блока нелинейности Ф (рис. В-1).
Если задать на вход интегрирующего усилителя на-
пряжение, представляющее величину d2y/dt2, и соста-
вить цепочку интегрирующих усилителей, последова-
тельно понижающих порядок производной, то после
двойного интегрирования (двух усилителей УИ1 и УИ2)
мы получаем напряжение, представляющее решение
У&).
Как задать dty/dt2, показывает нам структура урав-
нения, из которого следует, что для этой цели можно
использовать суммирование, совмещенное с интегриро-
ванием. На вход схемы должны быть введены напряже-
ния, изображающие у, dyfdt и f(y)dy!dt с соответствую-
Номенклатура операционных элементов
Таблица В-1
Элементы ЭВМ Обозначение Операция
Стандартные Операционный усилитель Ur Q> аг и2 = — Ли,
Суммирующий усилитель аг У-п _г— IZ77O hi о—I Hi I11 1 «72° у\ П | | / °--- /° с О——' о | | ' “,л «7л Rm Щ. — —=
Умножение на постоян- ный коэффициент R? и? рк uz Uf Ar I 1^2 о—|а>—о O-CZ3—-М Т>- “1 О иг П 4/2 о-—(а) о Lj5-0 и2 = — awt; й> 0; н2 = аи1; 1; a = Rz/Ri
Элементы ЭВМ
Обозначение
Интегрирующий усили- тель
Стандартные Интегросуммирующий усилитель Усилитель перемены зна- ка (инвертор)
П родолжение табп.. i
Операция
и2 = — a j tixdt -f- <72 (0);
oj
а = 1/RC
t
ч2=—2 ai f u^dz+
о
«£ = 1/^1
и2 — — их
Продолжение табл. 1
Элементы ЭВМ Обозначение Операция
Ст андартные Блок перемножения 1 Q . 1 х |—о Uy uz == maxUy
Блок нелинейности Uf 1 1 1 £ u2=f (И1)
Нестандарт- ные Функциональный генера- тор f > «г о k2 = f co
Операционный элемент Г&М~1 Z2(p)
щими коэффициентами и знаками. Здесь (на рис. В-1)
и в дальнейшем на приведенных в книге схемах входные
и выходные напряжения операционных блоков обозна-
чаются либо в виде входящих в уравнения переменных
Xi, yt и т. д., либо непосредственно в виде напряже-
ний iti. Первые два напряжения образуются на выходах
интегрирующих усилителей, а третье воспроизведено
с помощью блоков нелинейности и перемножения. Чтобы
ввести в схему суммирования напряжения с нужными
знаками, используются усилители перемены знака.
При составлении схемы
учитывается, что линейные
операционные элементы об-
ращают знак выходной ве-
личины.
В случае моделирования
системы линейных уравне-
ний структурная схема мо-
делирования носит название
матричной схемы, так как
в модели представлена ма-
трица коэффициентов ли-
нейных уравнений. Построение матричной схемы для си-
стемы уравнений первого порядка
6i ^-+а„у,+а„у, 4-... + а1Пуп=а;,
Рис. В-1. Структурная схема
моделирования динамической
системы, удовлетворяющей
уравнению (В-1).
(В-2)
dt Ч~&г.гУч 4~ • ~\~аппУп -—^1
показано на рис. В-2. Для задания коэффициентов раз-
ных знаков соответствующая переменная может пода-
ваться на суммирование положительной или отрицатель-
ной. С этой целью каждому интегрирующему усилителю
придается усилитель перемены знака.
Схема на рис. В-2 состоит из частей, которые не свя-
заны между собой изображениями проводов. Графичес-
кое соединение точек схемы заменяется здесь одинако-
выми буквенными обозначениями соединяемых электри-
чески точек. Так поступают при построении сложных
структурных схем [4]. Полезно, однако, если разделе-
ние общей модели на части при ее изображении делает-
ся не произвольно, а служит определенным целям. Если
изобразить схему рис. В-1 по принципу схемы рис. В-2,
то получим схему рис. В-3, которую, обобщая, можно
привести к схеме рис. В-4. Здесь блоки Фг- составляются
из операционных элементов по виду уравнений, реали-
зующих функции нескольких переменных на входах ин-
тегрирующих усилителей. Математическое описание схе-
мы приведено здесь к системе нелинейных дифференци-
альных уравнений первого порядка.
Целесообразно стремиться к физически более на-
глядным способам описания модели и ее схемным изо-
бражениям. С точки зрения проверки и настройки мо-
дели по частям модель автоколебательной нелинейной
системы, удовлетворяющей уравнению (В-1), лучше
представить так, как показано на рис. В-5.
В процессе моделирования на этой схеме можно про-
верить точность набора задачи и компенсировать по-
Рйс. В-2. Матричная схема для
моделирования системы линей-
ных уравнений (В-2).
Рис. В-4. Обобщенная схема
после приведения описания си-
стемы к уравнениям первого
порядка.
Рис. В-3. Схема для моделиро-
вания уравнений первого по-
рядка (В-1).
Рис. В-5. Модель нелинейной си-
стемы (В-1), предназначенная для
настройки по частям.
грешности модели, ля этого следует, разделив модель
на части по рис. В-5, отключить элементы, моделирую-
щие члены затухания (содержащие первую производ-
ную). Оставшаяся часть моделирует линейную консер-
вативную колебательную систему с одной степенью
свободы. Очевидно, что в этой части модели должны
устанавливаться незатухающие гармонические колеба-
ния, и если этого не происходит, то только вследствие
наличия погрешностей блоков модели, создающих пара-
зитное положительное или отрицательное демпфирова-
ние. Эту погрешность можно компенсировать введением
величины противоположного знака.
Разделение структурной модели на части, соответст-
вующие отдельным физическим объектам, агрегатам,
характерно, в частности, и для моделей систем автома-
тического регулирования.
При моделировании систем автоматического регули-
рования часто составляют модели по звеньям, каждое
из которых имеет передаточную функцию соответствую-
щего звена натуры, т. е. так, как строится и моделируе-
мая система. Пусть, например, требуется построить мо-
дель системы регулирования-(рис. В-6,а), состоящей из
следующих направленных звеньев:
объекта регулирования ОР (инерционное звено):
(7>+1)Ф=ЛД-<); (В-3)
регулятора Р (колебательное звено):
(T\ps + Tirp+\)^k^ (В-4)
исполнительного устройства ИУ (интегрирующее
звено):
Ttps — — т]. (В-5)
Структурная схема модели на рис. В-6,б совпадает
со структурной схемой моделируемой системы (И — мо-
дель инерционного звена, К — модель колебательного
звена). Схема модели инерционного звена приведена на
рис. В-6,в. Модели звеньев высших порядков, в том
числе колебательного звена, могут быть получены дву-
мя способами: на одном операционном усилителе по
схеме, подобной изображенной на рис. В-6,а, или на
нескольких операционных элементах — по структурной
схеме уравнения звена (рис. В-6,5). Инвертор на
рис. В-6,б нужен при К по рис. В-6,б.
Здесь проявляются две основные тенденции модели-
рования объектов со сложными передаточными функ-
циями. Первая состоит в использовании одного опера-
ционного усилителя или минимального их количества
(двух или трех) за счет усложнения пассивных .КС-це-
пей, формирующих передаточную функцию. Вторая со-
стоит в построении модели агрегата на нескольких опе-
рационных элементах на основе моделирования описы-
вающих его дифференциальных уравнений. По мере
Рис. В-6. Структурная схема системы регулирования и схемы ее
моделей.
усовершенствования операционных усилителей, умень-
шения их стоимости и габаритов вторая тенденция уси-
ливается.
Важным преимуществом агрегатного метода являет-
ся то, что такие модели дают возможность повысить до-
стоверность и точность результатов моделирования. Это
объясняется тем, что данный метод позволяет строить
модели по принципу эквивалентности уравнений объек-
та и модели в отношении получаемых результатов, т. е.
вводить коррекцию воспроизведения реальных характе-
ристик каждого агрегата общей системы на основе со-
поставления результатов моделирования отдельных час-
тей (агрегатов) с результатами их экспериментального
исследования в тех же условиях.
Из сопоставления результатов моделирования и экс-
перимента вытекает разнообразие требований к модели-
рованию нелинейных характеристик, не столько в виде
аналитических зависимостей, сколько в виде «типичных»
нелинейностей физических объектов. Наконец, Для за-
дания внешних воздействий и переменных параметров
требуется создание генераторов функций, вырабатываю-
щих напряжение, изменяющееся по заданному закону
во времени.
Обычно аналоговое моделирование связано с сопо-
ставлением многочисленных вариантов по определенно-
му критерию. Часто такой критерий (целевая функция)
окончательно вырабатывается именно в процессе модели-
Рис. В-7. Общая схема
моделирования.
Рис. В-8. Общая схема моде-
ли, разбитой на части.
рования, т. е. диалога исследователя с АВМ. Поэтому
общая схема моделирования (рис. В-7), набираемая на
АВМ, может состоять из следующий частей: собственно
модели объекта МО, блока выработки целевой функции
БЦФ и блока перенастройки модели объекта на следую-
щие варианты БП. Обычно для неавтоматизированных
АВМ, работающих в режиме диалога с исследователем,
перенастройка модели объекта осуществляется им вруч-
ную, а блоки БЦФ и БП являются советчиками иссле-
дователя в его целеустремленном поиске.
Во многих задачах вырабатываемые критерии
используются и в качестве условий изменения матема-
тического описания, т. е. структуры модели, ее парамет-
ров, вида нелинейных зависимостей, в процессе модели-
рования. Части модели при этом переключаются и
перестраиваются (в схеме на рис. В-8 они обозначе-
ны Nj}.
Для выработки целевой функции нужно уметь вы-
делить модули величин, их экстремальные значения,
интегральные оценки. Для сопоставления вариантов не-
обходимо сравнение величин, запоминание параметров
и целевых функций. Для переключения необходимы со-
ответствующие ключевые схемы и схемы управления.
В нижеследующих главах часто для рёшения одних
и тех же вопросов, возникающих в процессе моделиро-
вания, предлагается несколько вариантов схем. Как
правило, более сложные схемы обеспечивают большие
точность и быстродействие, однако требуют дополнитель-
ных затрат оборудования. Схемы, содержащие диоды и
другие электронные элементы, менее точны, чем схемы
с контактными элементами, которые, однако, существен-
но уступают первым в быстродействии.
Таким образом, выбор варианта определяется нали-
чием оборудования и требованиями задачи.
В-3. ВЫБОР ПАРАМЕТРОВ ОПЕРАЦИОННЫХ ЭЛЕМЕНТОВ
Рассмотрим вопрос выбора масштабов переменных
и времени в аналоговых устройствах с операционными
усилителями. В моделях, построенных по структурному
принципу, все физические переменные отображаются
электрическими напряжениями. Поэтому необходимо
установить соответствующие масштабы между перемен-
ными модели, т. е. напряжениями соответствующих опе-
рационных блоков и физическими величинами. Следует
заметить, что в схемах с усилителями выходные напря-
жения не должны превышать некоторых предельных
значений 17ном, воспроизводимых усилителем без иска-
жений, что соответствует границе поля значений моде-
лируемых физических величин.
При моделировании требуется рационально выбрать
масштаб времени и масштабы переменных, чтобы наибо-
лее полно использовать пределы выходных напряжений
и тем повысить точность моделирования. Чем ближе
измеряемые напряжения к номинальным, т. е. чем пол-
нее исследуемая зависимость вписывается в координат-
ную рамку, ограниченную предельными значениями ве-
личин на экране осциллографа, как это показано на
рис. В-9, тем больше точность. В электронных аналого-
вых устройствах рабочий диапазон выходных напряже-
ний ±'17Ном в равной степени относится как к выходным,
так и входным напряжениям блоков, что вытекает из
наиболее рационального использования блоков аналого-
вых устройств при их соединении между собой. В ниже-
следующих схемах ®бычн® принимается t7HOM=100 В.
Таким образом, масштаб определяется как отноше-
ние максимального значения напряжения операционного
блока t/ном к максимальному значению моделируемой
физической величины, т. е. границе поля значений этой
величины г/макс, а именно.
Л1 (В-6)
V f/макс
При этом максимальные значения физических пере-
менных выбираются из условий задачи или путем при-
ближенных вычислений. В результате первого решения
задачи на модели более точно выясняются значения пре-
делов изменения искомых величин,
ности может оказаться целесооб-,
разным изменить масштабы неко-
торых величин и повторить реше-
ние. Масштаб времени Mt выби-
рается исходя из предела дей-
ствительного времени натуры
Действ и предельного времени для
модели tM, т. е.
(В-7)
L действ
Для повышения точ-
Во всех примерах, приведен- Рис. В-9. Координатная
ных в данной книге, масштаб вре- рамка,
мени принят равным единице.
Рассмотрим методику определения коэффициентов
усиления суммирующих усилителей и постоянных RC-
усилителей, интегрирующих сумму входных напряжений.
Для выполнения операции суммирования согласно вы-
ражению
п
У2=2 а“уч
1=1
(В-8)
используется суммирующий усилитель, напряжение и2
на выходе которого связано со входными напряжениями
Пи зависимостью
п
(В'9)
1=1
Введем масштабы для переменных:
М М
Ух i U* Уя
Выразив зйачёйия й.ц й «2 через Уи, у2 й масштабы
и подставив их в уравнение модели (В-9), получим:
S-й-Чл- <в-10)
1=1
Для тождественности уравнений (В-10) и (В-8) не-
обходимо, чтобы
л - Rs
Myi >
откуда
R
Ki=^r=ail^. (В-11)
Для выполнения операции интегрирования согласно
выражению
= <В'12)
используется интегрирующий усилитель, напряжение на
выходе которого связано со входным напряжением
Ui зависимостью
Ju.tfc, (В-13)
где т — машинное время.
Введем масштабы для переменных:
Выразив значения и2, щ и т через значения У1, t
и масшабы и подставив их в уравнение (В-13), получим:
—$с J dL (в'14)
Для тождественности уравнений (В-14) и (В-12) необ-
ходимо, чтобы
M,.Mt
Vi 1 1
RCMy^ —
откуда
RC=-^-M(. (B-15)
*vi th.
Для выполнения операции интегрирования суммы не-
скольких величин согласно выражению
и
a>i^y4dt (в‘16)
используется блок, напряжение на выходе которого
связано с входными напряжениями зависимостью
п
Ян-с Ctzu-rf'T- (В-17)
/=1
Введем масштабы для переменных:
Выразив значения и2, иц, т через значения у2. Ун и t
и подставив их в уравнение (В-17), получим:
Л м*му • г
(В-18)
. Для тождественности уравнений (В-18) и (В-16) не-
обходимо, чтобы
/7 . —---
11 MyRaC •
откуда
Му Mt
Рассмотрим выбор масштабов для блоков перемно-
жения и нелинейного преобразования.
Для выполнения операции перемножения двух вели-
чин согласно выражению
z=-xy (В-20)
используется блок перемножения, напряжение на выхо-
де которого (при номинальном значении напряжения
t/ном) равно:
uz jj uxiiy. (В-21)
u ном
Введем масштабы:
откуда
-^=7Иг; -^-=MX;
z г х у у
Выразив величины uz, их и иу через z, х, у и масшта-
бы и подставив их в уравнение (В-21), получим:
M,z=МХМ уД- ху, (В-22)
НОМ
Мг=-^—МхМу. (В-23)
17 ном
Если масштабы Мх и Му выбраны, то масштаб Mz
не является независимым, а определяется согласно по-
лученному выражению.
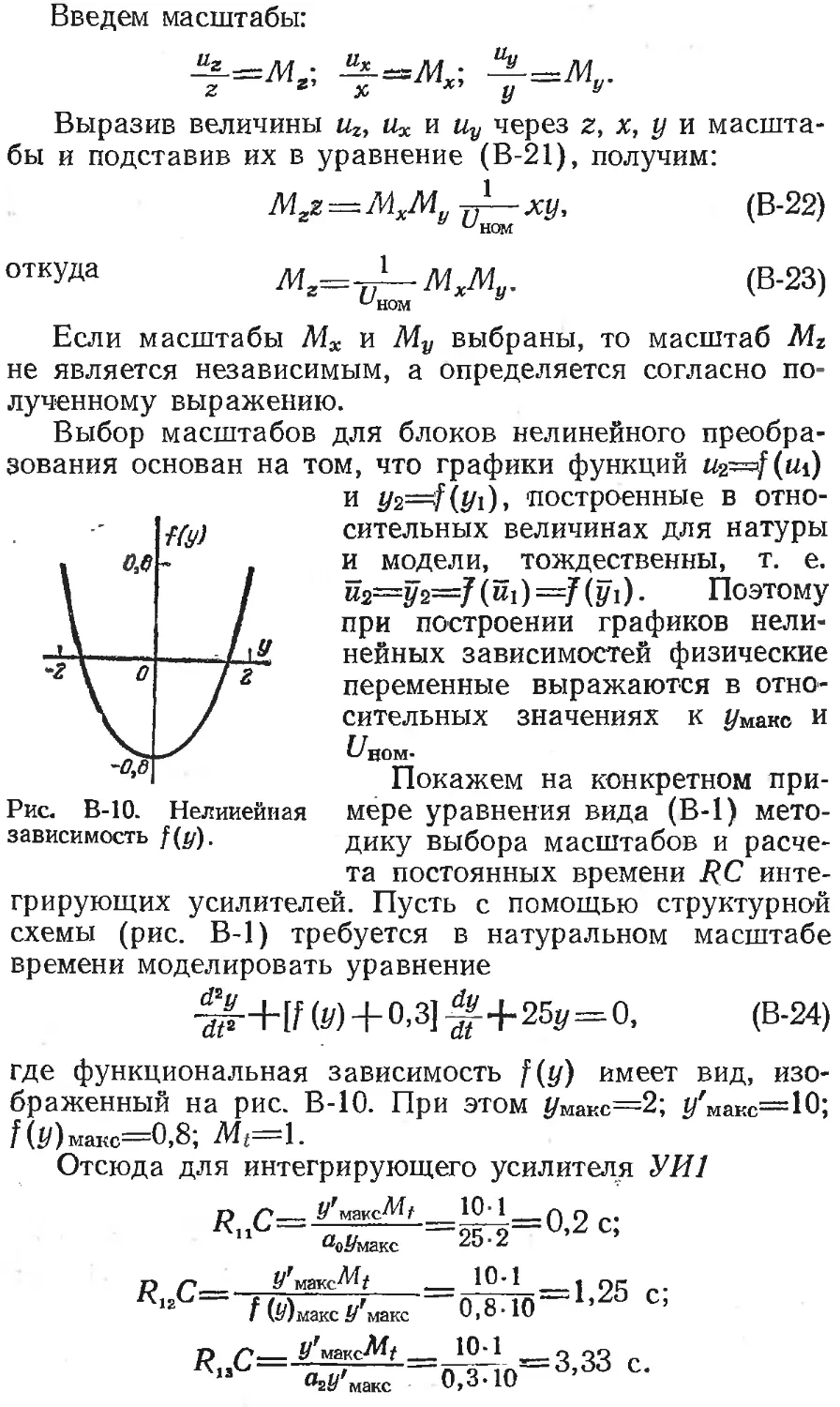
Выбор масштабов для блоков нелинейного преобра-
зования основан на
TOM, ЧТО Графики фуНКЦИЙ U2=f(«l)
и У2=4(.У1}, построенные в отно-
сительных величинах для натуры
и модели, тождественны, т. е.
Й2=У2=7(И1)=7(У1). Поэтому
при построении графиков нели-
нейных зависимостей физические
переменные выражаются в отно-
сительных значениях к г/Макс и
f/цОМ-
Покажем на конкретном при-
мере уравнения вида (В-1) мето-
дику выбора масштабов и расче-
та постоянных времени RC инте-
грирующих усилителей. Пусть с помощью структурной
схемы (рис. В-1) требуется в натуральном
времени моделировать уравнение
-g-+[f(!/) + 0,3]^+25y = 0,
где функциональная зависимость f(y) имеет
браженный на рис. В-10. При этом г/макс=2; у'ма.кс=
f (у) макс==0,8; 2И(=1.
Отсюда для интегрирующего усилителя УИ1
R,,C= у'ма|^-=^Ц==0,2 с:
104 1,25 с;
f(y)
и
-0,6
Рис. В-10. Нелинейная
зависимость f(y).
масштабе
(В-24)
вид, изо-
Ю:
^oi/макс
г> _______макс-М/
f to) макс i/макс 0,8-10
RiaC=-^cMt ^=3,33 с.
макс 0,3*10
Для интегрирующего усилителя УИ2
RC= y^Mt с.
У макс 1О
При выборе масштабов особенно трудно предвидеть
пределы изменения производных функций (#^)- В на-
шем примере i/'макс был установлен из следующих со-
ображений. Если бы в уравнении (В-24) [/(у) + 0,3]^-0,
мы получили бы уравнение, описывающее поведение кон-
сервативной системы с частотой собственных колебаний
<и— ]/25=5 1/с, в которой
У—Умакс sin (ш£ 4-'ф);
У' = I/макс05 COS (<ot -ф- ф) = у'^ COS (<ot -ф- ф),
откуда /макс~2-5==10.
В-4. СТРУКТУРА АВМ
В СССР серийно выпускается большое число видов
аналоговых устройств, которые различаются типами
операционных усилителей и схемами функциональных
элементов, числом интегрирующих усилителей, количест-
вом линейных и нелинейных операционных элементов
различного назначения, техническими характеристиками
измерительных устройств и другого оборудования. Наи-
большие комплекты содержат несколько сотен опера-
ционных усилителей.
По конструктивному выполнению операционных уси-
лителей аналоговые устройства структурного типа могут
быть подразделены на несколько поколений. К первому
относятся АВМ на ламповых усилителях, ко второму —
на транзисторах. К третьему поколению принадлежат
АВМ с усилителями в полуинтегральном или интеграль-
ном исполнении в сочетании с навесными элементами
А? С-цепей. Однако во всех АВМ можно выделить основ-
ные устройства, присущие всем видам (рис. В-11). Здесь
ОЭ — комплект линейных и нелинейных операционных
элементов; К77— коммутационное устройство (панель),
которое служит для соединения отдельных операцион-
ных элементов в общую схему решения задачи (многие
аналоговые устройства имеют съемные коммутационные
панели, что позволяет независимо подготавливать реше-
ние нескольких задач. Некоторые устройства снабжены
также системой проверки правильности набора задачи
путем сравнения компенсационным методом выходных
величин операционных блоков с их расчетными значе-
ниями); БП — блоки системы стабилизированного пита-
ния операционных усилителей постоянного тока (исполь-
зуются и для задания опорных напряжений в нелиней-
ных блоках, постоянных напряжений, вводимых в мо-
дель, а также для задания начальных условий); ИУ—•
измерительное устройство, служащее для измерения и
осциллографической регистрации напряжений, представ-
ляющих решение задачи (все
аналоговые устройства для
фиксации результата реше-
ния снабжаются электронно-
лучевым индикатором, на
экране которого одновремен-
но можно наблюдать не-
сколько переменных. Кроме
су того, результат решения
можно регистрировать с по-
Рис. B-J1. Основные устройства мощью внешних измеритель-
моделей. ных приборов типа све-
> толучевых осциллографов,
самописцев, координатных
графопостроителей.); СУ — система управления релей-
ной автоматикой, выполняющей следующие основные
операции: «пуск» — включение процесса решения задачи
с заданных начальных условий; «остановка» — прекра-
щение решения с запоминанием конечных значений ве-
личин для производства точных измерений цифровым
вольтметром или перехода к следующему этапу реше-
ния задачи; «окончание» — возврат в исходное поло-
жение.
Правила пользования АВМ, их испытания и нас-
тройка определяются технической документацией, пред-
ставляемой предприятием-изготовителем для каждого
конкретного типа аппаратуры. Наряду с этим в практи-
ке работы будут полезны схемы испытаний и настройки
блоков АВМ, указанные в § 5-4.
Глава первая
ЛИНЕЙНЫЕ ОПЕРАЦИИ
1-1. ЛИНЕЙНЫЕ ОПЕРАЦИОННЫЕ ЭЛЕМЕНТЫ
К числу линейных операционных элементов относятся интегри-
рующий усилитель, суммирующий усилитель и усилитель, интегри-
рующий сумму входных напряжений, а также их модификации.
Интегрирующим усилителем называется направленный четырех-
полюсник, выходное напряжение которого пропорционально интег-
ралу входного напряжения по времени.
Схема интегрирующего усилителя изображена иа рис. 1-1,а.
Усилитель имеет большой коэффициент усиления без обратной свя-
зи 1 * k——104-;—106. При таком коэффициенте усиления потенциал
входного зажима усилителя близок к потенциалу земли и можно
считать, что все входное напряжение и± приходится на входную
цепь R, а выходное напряжение «г—на цепь обратной связи С,
т. е. что ток входной цепи i—ui/R, а ток в цепи обратной связи
Z2=Crfu2/rfr. Так как усилитель практически не потребляет тока
(г 1 Н-гг^О), то
=: rq (Г-1)
Подобным же образом для суммирующего усилителя (рис. 1-1,6)
сумма токов в узле цепи на входе усилителя равна нулю, т. е.
1=1
ИЛИ
п
(1~2)
i=i
1 Знак минус обеспечивает устойчивость операционных элемен-
тов.
& для усилителя, интегрирующего сумму входных напряжений
(рис. 1-1,в),
п
р “1L+C* 0
ат.
z=i
или
п
аг = У Ri[C (1'3)
1=1
Начальные условия в интегрирующих усилителях задаются обыч-
но путем предварительного заряда интегрирующего конденсатора
перед началом решения. В начальный момент работы модели кон-
Рис. 1-1. Схемы операционных элементов.
1-1,в) на входе операционного усилителя (и в цепи
переключаются из положения «Подготовка», в ко-
такты реле (рис.
обратной связи)
тором они замыкают цепь заряда конденсатора, в положение «Ра-
бота», так что интегрирование начинается с заданного начального
значения напряжения.
Как видно из приведенных выражений, линейные операционные
элементы образуют результат в виде напряжения со знаком, обрат-
ным требуемому. Интегрирующие и суммирующие усилители (и их
модификации) составляют набор элементов, необходимых для ре-
шения линейных дифференциальных уравнений и их систем.
Модификациями суммирующего усилителя являются:
масштабный усилитель, для которого в схеме суммирования
(рис. 1-1,6) используется только один вход:
«и = к,; и]2 = . . . = и]£- = . . . = и1п = 0; и2
«2
R,
(1-4)
усилитель перемены знака, который получается из масштабного
при Ri=Rz и дает:
И2=—U1.
(1-5)
Усложняя цепи на входе и в обратной связи усилителя, можно
получить более сложные передаточные функции, связывающие на-
пряжения на входе и на выходе операционного элемента.
Для схемы рис. 1-1,г, содержащей двухполюсники Zi(p) и Z2(p),
Z,(p) Т Z2(p) - 0
или
^г(Р) Zg(p)
udP) zt(P)
(1-6)
Для схемы на рис. 1-1,д, в которой на входе усилителя и в цепи
его обратной связи включены пассивные четырехполюсники, напря-
жение Ut полностью приходится на четырехполюсник 1, а напря-
жение Uz — на четырехполюсник 2. Если токи на выходах этих че-
тырехполюсников выразить с помощью сопротивлений короткого за-
мыкания Zik(p) и Z2K(p), то получим:
, / ч - Г < ,ч. - z / ч i z / ч п
(р) — 21к(р) — Z2K(p) ’ — °’
т. е.
^г(р) Z2K(p)
UAP) z1K(p)
(1-7)
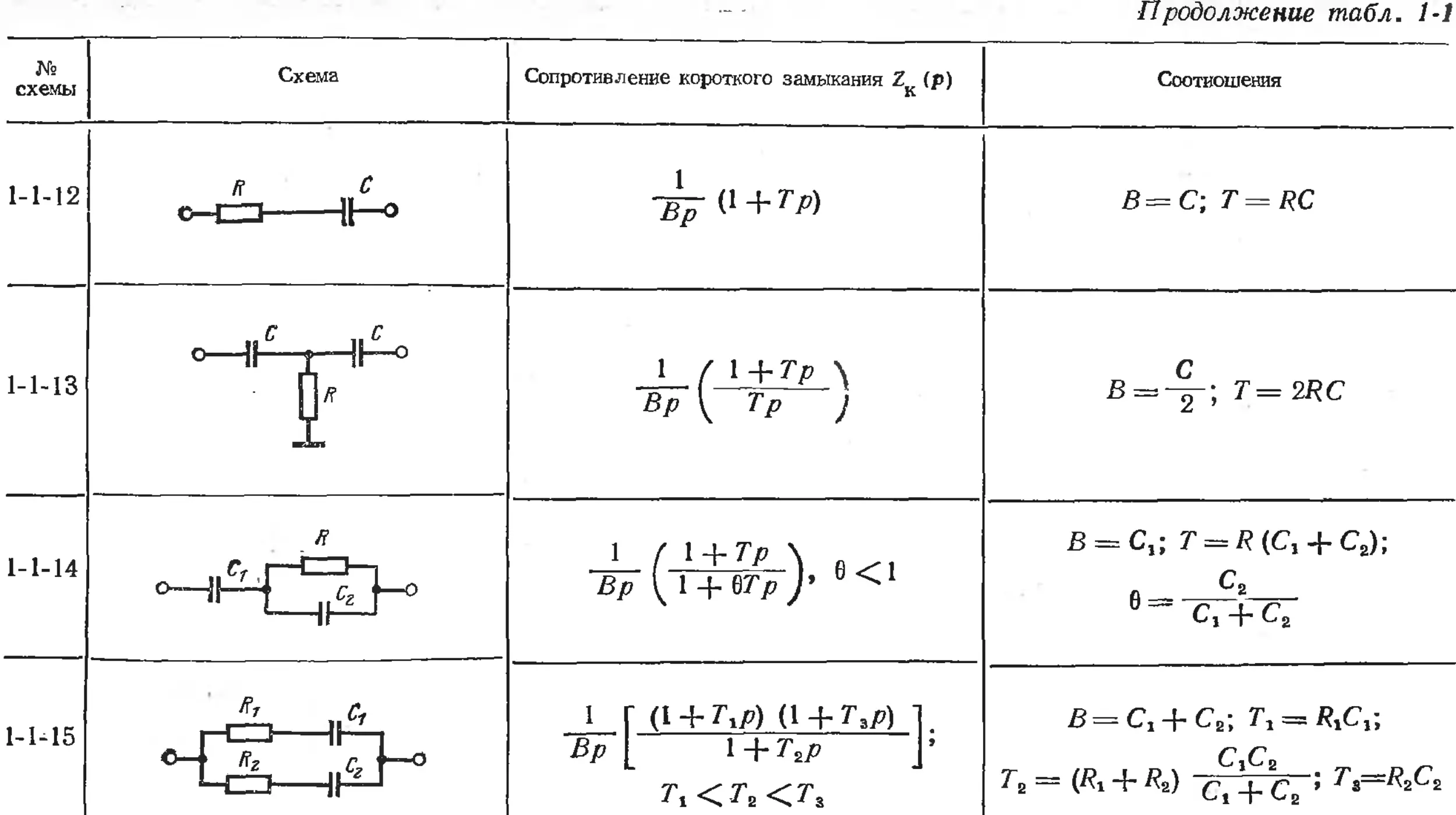
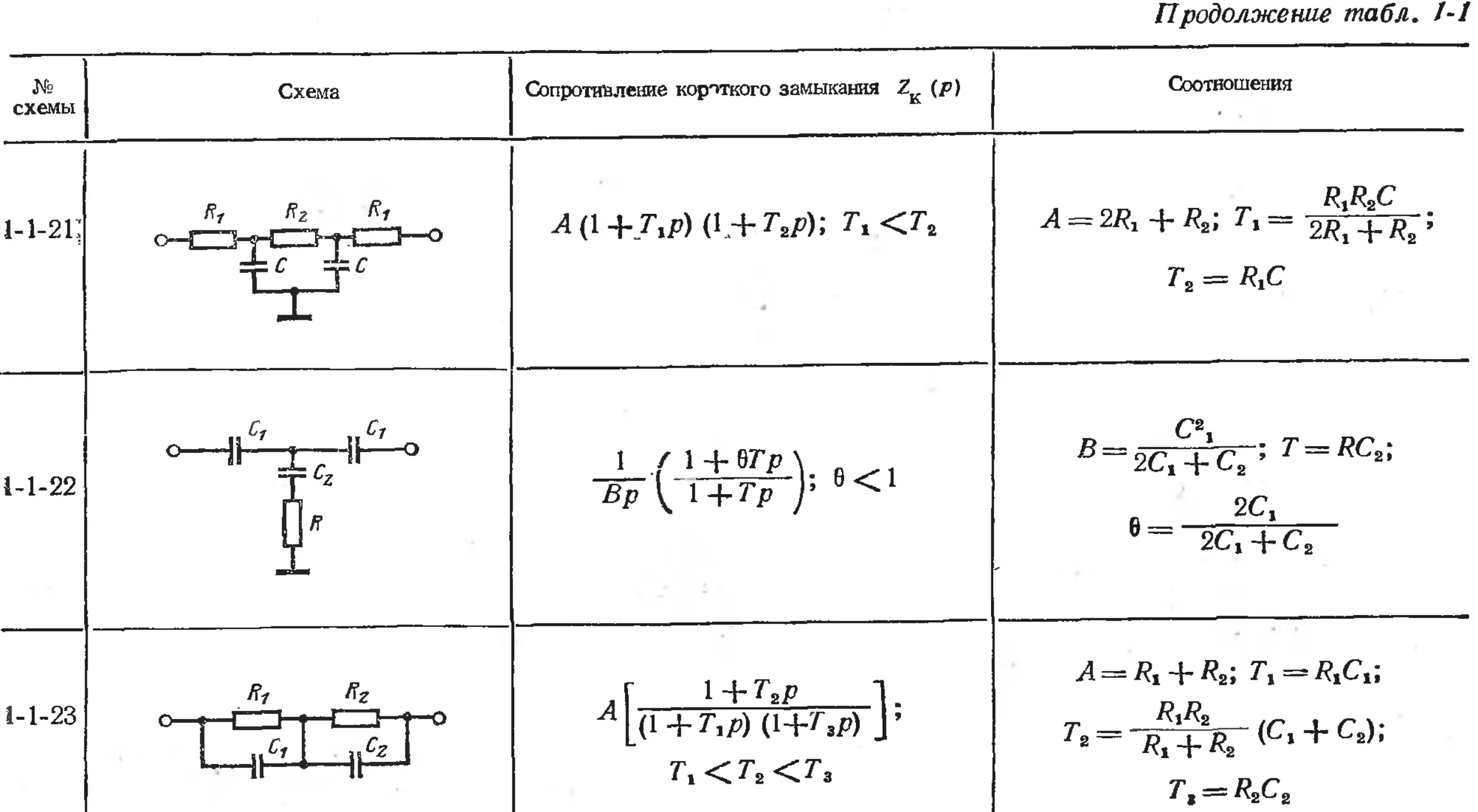
В табл. 1-1 приведены выражения для сопротивлений ZK(p)
различных RC-схем. Подбирая соответствующие схемы для цепей
входа и обратной связи, можно получить требуемую передаточную
функцию.
Пример. Составить схему двойного интегрирования на одном
операционном усилителе. Требуемая передаточная функция должна
иметь вид: 17g (Р) „ „ .. й. и Ар) ~ s,p- (1)
Из табл. 1-1 выбираем схему, для которой Z2(p) содержит р2
в знаменателе (1-1-13):
„ J 1+ЛР
р2 В2Т2 •
где
Bz—Cz/Q} T2—2RzC2.
Там же выбираем схему для Zi(p), содержащую член l-j-Лр,
который мог бы компенсировать 1-j-Т2р, в числителе (1-1-4):
21К=Л1(14-Г1Р),
где
Л1=2/?1; Л=«1С!/2.
Получаем схему (рис. 1-2), для которой
_Ь1Е= 1 (1 + Т2р) 1
(7S >4sB272 (1 -|- Т\р) р2
Сопротивления короткого замыкания Таблица 1-1 пассивных цепей для синтеза линейных операций
№ схемы Схема Сопротивление короткого замыкания (р) Соотношения
1-1-1 R . А A — R
1-1-2 °—lh^-° 1_ Вр В=С
1-ЬЗ R о--СП--о Ър А 1+Тр A = R; Т = RC
1-1-4 R Я А(1+Тр) RC A = 2R- T=-^~
Продолжение табл. 1-1
№ схемы Схема Сопротивление короткого замыкания (р) Соотношения
1-1-5 Н н o-czh—| Л = 1?14-/?2; Г = 1?2С; 0 = —
1-1-6 /?7 л? °—<=> —0 «о Л = 27?,; 7= («г + 4') С> „ 2R2 ®- 2R.+R.
1-1-7 К1 С1 1 1 >—1 °-с=НЬ1 Г° 1 Г (1 + TlP) (1 + ТзР) . ВР 1 + тгР Л <т2<т3 ^=С4; ^2=^2^2> Л + ^3 + ^2^2 + ^2^1
II
1-1-8 Л’г сг ^CZ>jJ=h4 -^-(1+Лр) (1 + Лр); Т^т2 В=Са; 7,7, 7] + 7S = R^Cy + R2Cz -f- RtC2
Продолжение табл. 1-!
№ схемы Схема Сопротивление короткого замыкания ZR (р) Соотношения
1-1-9 о -HhA=j-o i" l Bp , (I +r,p) d+^p) 1 Vtj\p J Л^т2 > В ~ С2; TyTz RyR2C ,С2; Л + Т2 = R^Ct + RZCZ + R.C2
И 7 С: С3 u ‘ , It <0 CtCs
1-1-10 ° II т af • in /? Гр I Bp Г (1 + Лр) (1 + г2р) TJ\p* 1\<Т2 i b~" C, + 2CS ’ 1 T2 = R(Ci+ 2Сг)-, c, = c3
1-1-11 °Т сг i q cz || А( V + T'P \ Л = 27?,; 71 = -^1- = 27?2c2;
Л - Q jj Rz V1 + TiT^p2) T 2 “ R1^2
Продолжение табл. 1-1
№ схемы Схема Сопротивление короткого замыкания ZK (р) Соотношения
1-1-12 и с ©-CZ3 1Н° В=С; Т = RC
1-1-13 0—1^—г-Ч^-° 4- 1 ( l+Тр \ Вр \ Тр ) С В=~2\ Т= 2RC
1-1-14 я cr 1—СЮ— 1 Г 1 + т> X ... Вр \ \ + $Тр )’ 0 В = С1; 7' = К(С, + Сг); С2 0- С, + С2
1-1-15 1Д —|Д. —о 1 Г (I + Тхр) (1 + т3р) - Bp [ l+T’aP ]’ #=С1 + С2; Л = ^1С,; Т2 = (Ri + R2) ct-\- Се ’ —ВгС2
Продолжение табл. 1-Т
Продолжение табл. 1-1
№ схемы Схема Сопротивление короткого замыкания (р) Соотношения
1-1-19 F Л члр ]. [ 1 + Т3р + Т3Т^ ]’ Л>Л/4; Г2<Л л _ ₽ т _ G(2^Cg+^CQ . а~к3, 2C, + CS R^R^CjC^, гя.с^+к/?, ’ 2Р3С3С2 ,3-2C3^Cs
1-1-20
л г
l + TiP + TiTsP*
Т3>Т\/4-, Т3<7\
. __ D т _ Ri(2R*+R>) С
А-К3;13- /?1+Дг
т_____R3R3C
2RZ + R3 >
2R&C
Ja~ Ri+R3
Продолжение табл. /-/
№ схемы Схема Сопротивление короткого замыкания ZK (р) Соотношения
1-1-21: /?, /?2 Л1, A(l+_TlP)(k+TiPy, 1\<7\ RtRsC А — 2Р1 + /?2, 7, — + , Т2 = RtC
О II| 11 с? о Cs.
1-1-22 F _±_.( х + ^р\. Bp l-f-Tp J’ е<1 £!~2С1 + С2 ’ 1 -кс2> д 2С.+С2
1-1-23 Л/ /гг с л[ 1+Ь£ 1. л[(1 + г,р) (1+Лр) J’ Л = Т?1 + Т?2; Т^^Ср. т-~ ^+4 (С’+Са):
' п • и Л<7'2<7’3 7, = Л2С2
Продолжение табл. 1-1
№ схемы Схема Сопротивление короткого замыкания 2К (р) Соотношения
при
T^=Ti\ 7?2C2=Z?iCi/4
или
R. = 27?2; С, = 2Сг; -и-= -^c.yp^ = 4(7?2Сг)2р2 ‘
Возможности синтеза передаточных функций расширяются, если
использовать суммирование токов на входе операционного усилите-
ля и усилители перемены знака на выходе и на входе схемы.
Рис. 1-2. Схемы на одном опера-
ционном усилителе для моделиро-
вания передаточной функции (1-8).
Рис. 1-3. Схема для моделиро-
вания передаточной функции
(1-9).
Для схемы на рис. 1-3 имеем:
/ = JL. / _ / Jk-
/ie=7 9 *2 — 7 , 2 з . 7 > * 4 — 7 >
^1K ^2K ^4K
1_____1
, Un ^3K ZJK
Л + h + Л + К = 0; —--------— • (1-9)
В § 1-2 приведены схемы для получения передаточных функций
Р(р) с помощью суммирующих и интегрирующих блоков АВМ, вхо-
дящих в состав стандартного набора элементов для решения диффе-
ренциальных уравнений.
В § 1-3 приведены схемы операционных элементов для различ-
ных передаточных функций, в которых используется минимальное
количество операционных усилителей (в данном случае один) за
счет усложнения пассивных /?С-цепей.
В § 1-4 приведены примеры фазосдвигающих схем и схем при-
ближенного воспроизведения запаздывания, которые в идеальном
случае имеют передаточную функцию F(p)—e~pxa, где т3 —время
запаздывания.
Ва всех схемах, кроме тех, в которых оговорено особо, принято:
i-i СХЕМЫ ЛИНЕЙНЫХ БЛОКОВ С РАЗЛИЧНЫМИ
ПЕРЕДАТОЧНЫМИ ФУНКЦИЯМИ F(p)
1-2-1. Схема умножения на коэффициент, существен
но больший единицы (например Л=10-5-20).
F(p)=-A;
Ki а
1-2-2. Схема умножения на постоянную величину.
F(p)^-A-
Л ^2
0< а< 1.
1-2-3. Схема приближенного дифференцирования.
F ~ W+l)(^p+l)“:
T=RC; l\=RCf,
T2=rC.
Резистор г добавляется для предотвращения пере-
грузки предыдущего каскада и сглаживания шумов.
Для дополнительного сглаживания высокочастотных им-
пульсных помех добавляется конденсатор С/. Так как Cf
и г малы (г<с7? и то F(p)^—Тр.
1-2-4. Схемы последовательного соединения диффе-
ренцирующего и инерционного звеньев.
Для схем к а;
F (n)=z-- -Р-----7'
1 а\Р) Тр+\ ' а
для схемы б:
F6(P)^
Р
Тр+\ 5
Т = а..
Схема а обладает меньшим уровнем помех на выхо-
де по сравнению со схемой 1-2-3.
В схеме б суммирующий усилитель с большим коэф-
фициентом усиления (при малых а, см. схему 1-2-1)
должен иметь регулировку и ограничение по амплитуде.
1-2-5. Схема, представляющая сочетание схем 1-2-3
и 1-2-4,6.
1 . _____°Ь р______
+ (У8р+ 1) (Г3Р-И)
1 + «р
F(p) = ~ Р
Tt = RC; 7\ = rC; Tt = RCf.
При а/—>0 х2—t-dxijdx.
Для сглаживания шумов усилителя У1 введен кон-
денсатор Ср Схема предусматривает регулировку коэф-
фициента усиления усилителя У2 и ограничитель для
предотвращения его насыщения.
1-2-6. Схема моделирования двух передаточных
функций.
Р ( Х22 _______ / 1 Р2 ~Ь k<S>p
2 (Р) Х1 Р р2 Р<ор -J- «О2
Схема позволяет получать два выходных напряжения:
x2i — воспроизводит более точное значение производной;
х22 — с большим сглаживанием.
Для нормальной работы схемы необходимы началь-
ные условия на интегрирующих усилителях.
1-2-7. Схемы, моделирующие инерционное звено с пе-
редаточной функцией
Гр 4-1 *
Схема а используется при k^\, где Р=а1/а2; си—
=k/T и a2—l/T.
Схема б применяется при Т< 1 (а— 1 /Т).
Схемы бив дают возможность фиксации производ-
ной выходной величины (сс-—1/7).
1-2-6. Схема инерционного звена с изменяемыми скй4-
ком параметрами в функции знака переменной xs или
в функции времени, когда xs=A—kx (при x=A]k).
при xs > 0;
F(p) =
fe
Лд + i
k
при xs<0;
*=“; T, = R.C; T.=^-C.
1-2-9. Схема форсирующего звена.
F(p)=k(Tp+i); .
k=H.2l F.\, T^~F[C[.
1-2-10. Схема колебательного звена.
p f n\_ i i ___
2DTp +1 * aa~Ts*J as T'
При D<1 колебательный режим, при 0^1 апериоди-
ческий режим.
1-2-п. схема колеоательного звена.
F(P)— T*p* + 2DTp+\ :
ft _ 1
ctj—. ^2»
2D
“3 — ~Т~'
Схемы моделирования комбинированных звеньев
1-2-12. Последовательное соединение форсирующего и
интегрирующего звеньев.
1-2-13. Последовательное соединение дифференци-
рующего и колебательного звеньев.
р / ,л __ ъ____Т\Р____________
(Л « 7-2^2 + 2DTip + ! , .
2D 1
“3 — т\‘г
1-2-14. Схема моделирования передаточных функций
р (П\---------- (Р) _________kp_______
1 X. (р) т^р^ + 2DTp + 1 >
Р ( п\_ -^88 (р)__________fe________
~ Т^2 + 2D7X+1 ’
Хг1
2D , 1
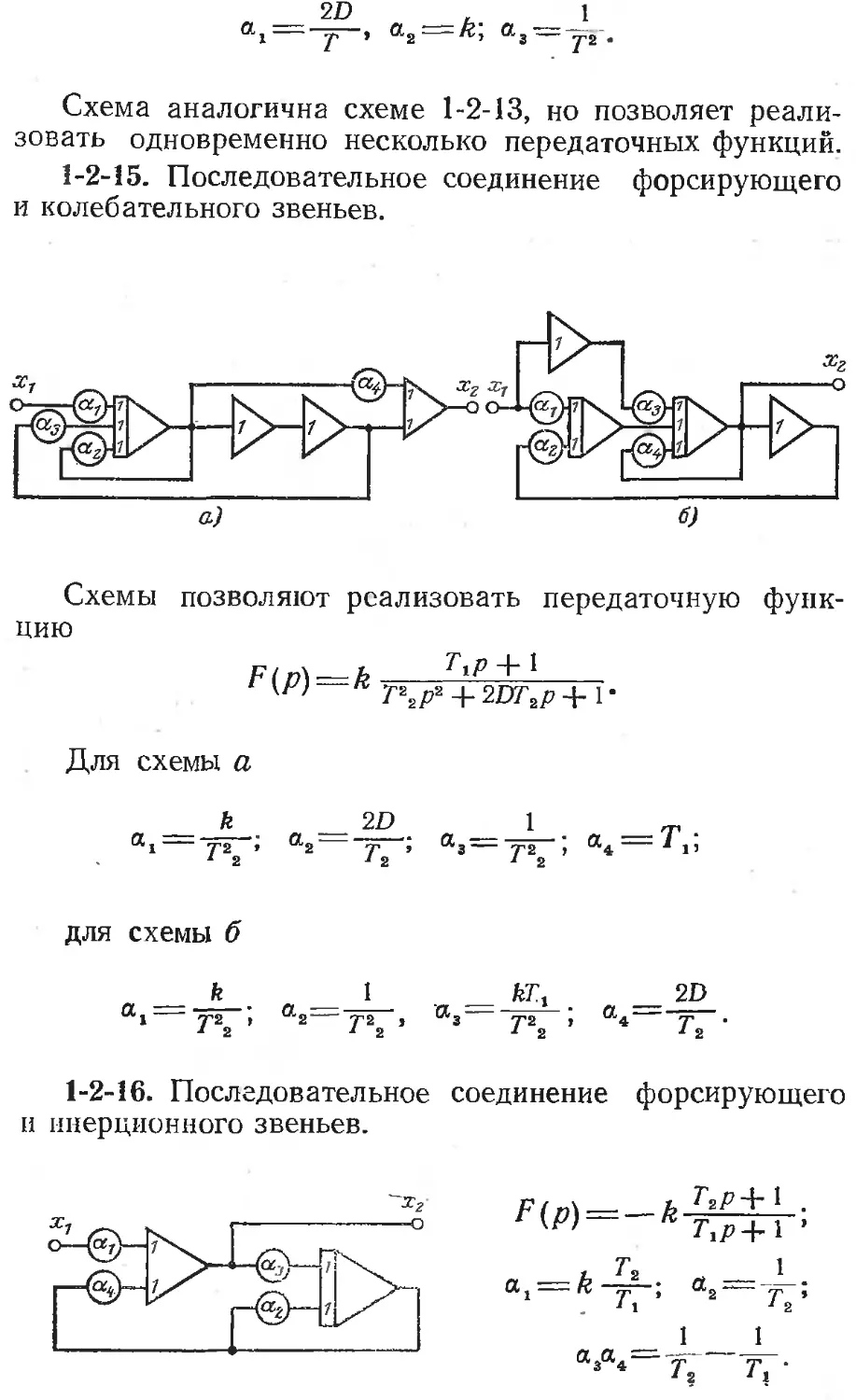
ai - / > Л2 -®3 --- y2-
Схема аналогична схеме 1-2-13, но позволяет реали-
зовать одновременно несколько передаточных функций.
1-2-15. Последовательное соединение форсирующего
и колебательного звеньев.
Схемы позволяют реализовать передаточную функ-
цию
С/ \ t ?lP + 1
Р{Р) — k т^р2 + 2DT2p 4-1 •
Для схемы а
k —2D 1 „ .
Я1 -- у-2^ > ®2 Тг ’ °"3--- Д22 ’ a'i
для схемы б
k 1 . _ kT.t _2D
®1 -- у-2^ > а2- 1 ®3 f2 > а4 у •
1-2-16. Последовательное соединение
форсирующего
и инерционного звеньев.
, Т2 1
Otj - К J, J ^2*" Т'а*
_ J_______1_
a3a4— Г, ‘
1-2-17. To же, что и предыдущая.
F(p)—k rfp+i > aia^
1 T\
1-2-18. Последовательное соединение двух инерцион-
ных звеньев.
1-2-19. Последовательное соединение двух дифферен-
цирующих и двух инерционных звеньев.
^(^)— (Лр-ННЛр-Н) ; а« —а=—г,;
ai — — а»—-г ; — ai — а» —
1-2-20. Последовательное соединение двух форсирую-
щих и двух инерционных звеньев.
(Лд+1) (?',/> +1) ’
7, —^2 I 1 .
“г~ а37,72 +1’ Я*"
TsTt
а,— ; а,
Ts-V\
aJ.T.
1
1-2-21. Последовательное соединение форсирующего
и двух инерционных звеньев.
Схема при соответствующих условиях позволяет реа-
лизовать следующие передаточные функции:
1 г/ \ А (7»Р + 1) t Ts 1
1. F(p) {T1P+1} (7,p+l) 5 «1 —^-77; “2—77»
a -k~^-
** 1 " 'j* j
Л7, 1
T. ’
2. F(p)=
fe(r,P+i)
(Г2д+1) (Лд+1)
а^ =
а =—• k— — 1
• 7,’ Я~ 7,
• Гг7, ;
3 Р(п\___ 1г(7'1Р+ О___________
3- Г(Р)~ (7^+1) (7,д+1) ’
71—7» 1 , а,7»7,
а* TtTt ’ “• 7,’ 7,
fe7, 1
727,’ 7S :
Р( \_______fe (Лр+ 0________ t.
F \Р)— Т%р\+ 2DTsp +1 > *
Г,______1 2D
Я* Т\ ’ а>~ у, ’ Тг •
1-2-23. Моделирование передаточной функции
F / м - HT’V + W.P+l) .
T\P^ + 2DtTtP+\
а1 = аЛ а2 = —1
________Л________„ — 2А 9<D’ °* )
3~2Т, (DtT,—DtTt) ’ а‘~ Тг ’ а‘~^\Тг Т, )'
1-3. СХЕМЫ ЛИНЕЙНЫХ ЭЛЕМЕНТОВ НА ОДНОМ
ОПЕРАЦИОННОМ УСИЛИТЕЛЕ
1-3-1. Схема последовательного соединения форси
рующего и интегрирующего звеньев.
Для Zbx(p) служит схема
1-1-1, для Zo.c(p)—схема 1-1-12
(см. табл. 1-1).
1-3-2. Схема последовательного соединения диффе-
ренцирующего и инерционного звеньев.
Ti=R1Ci.
Для Zbx(p) служит схема
1-1-12, для Zo.c(p) —схема
1-1-1.
1-3-3. Схема последовательного соединения диффе-
ренцирующего и инерционного звеньев.
F (п) —___kT1P— •
Тгр+1 ’
7\=RtRtC;
гр (Rv + Ri) Ri р.
k—____L___
tfi + Яз •
1-3-4. Схемы последовательного
рующего и инерционного звеньев.
соединения форси-
Для Zbx(p) и Zo.c(p) используется схема 1-1-3.
Для схемы б
T\ = R£,\ T^RjCj k=-^~ .
Для ZBX(p) и Z0.c(p) используется схема 1-1-12.
1-3-5. Схема колебательного звена при
4Cg/?3>
1-3-6. Схема последовательного соединения диффе-
ренцирующего и двух инерционных звеньев.
= _ ’W+ Wa/’+l) ;
Tt=^R2Ci, Т;=^С.г;
Tt=RtCt.
Для Zbx(p) и Z0.c(p) используются схемы 1-1-12 и
1-1-3 соответственно.
1-3-7. Схема последовательного соединения интегри-
рующего и двух форсирующих звеньев.
р /п\ .__ Д1Р+ 1) (TtP + 1)
тзР :
T^Rfip, TS=R2C2; T^Rfi,.
Для ZEX(p) и Z0.c(p) используются схемы 1-1-3 и
1-1-12 соответственно.
1-3-8. Схема последовательного соединения двух оди-
наковых интегрирующих звеньев.
T = RC; kt=~-
Для ZBX(p) и Zo.c(p)
используются схемы 1-1-4
и 1-1-13.
1-3-9. Схема полуинтегрирующего звена (модели теп-
лового объекта с распределенными параметрами).
В цепи обратной связи опера-
ционного усилителя включена не-
однородная /?С-цепочка с малым
числом ячеек (всего семь), кото-
рая по точности соответствует
однородной ДС-цепочке из 75
ячеек. Для данной схемы имеем:
F(p)=—ZBX=R;
У Р
уо.с(р)’=]/ :
x2 = -^-Xi,
где k — порядковый номер элемента; значения аь и
приведены в таблице.
1-4-1. Схема фазосдвигающей ячейки на одном усили-
теле (инерционное звено).
При гармоническом входном сигнале сигнал на вы-
ходе сдвинут на угол 0=л—arctgaT'. Соотношение
амплитуд выходного и входного сигналов определяется
формулой
k-^ т
К«г7'2+ 1 ’
т. е. зависит от /и и от Т,
1-4-2. Схема фазосдвигающей ячейкй.
ч__ k(Tp-\)
F(p)— Тр+1
. 1
ai —ai р
При подаче на вход гармонического сигнала сигнал
на выходе сдвигнут на угол 0=180°—2 arctgcoT1.
1-4-3. Схема звена запаздывания, соответствующая
приближению Паде первого порядка.
г t х Г2 — т'р
F(p) 2+Гр ’
2
4
J' ? ^2 f •
Необходимые условия реализации схемы- хМакс^
^t/H0M/2; /6fManc, где Ином — максимальное на-
пряжение линейной части характеристики усилителя
(обычно 100 В); /маис — максимальная частота сигнала.
1-4-4. Схемы воспроизведения запаздывания по при-
ближению Паде второго порядка.
И1—б/Т; 02-—Оз—1 / У; Тмакс-С 1 /2fMaiKcj
для схемы б
ai—a2=^2lT; (аТ)макс=1,5 рад.
1-4-5. Схема моделирования звена запаздывания по
приближению третьего порядка.
. 120 — 607>+ \2Г*р* — Т3р3
W 120 + 607>+127’2р® + 7’3/?3 ’
1 . 0,5 ... 1,2
а, — -у-, й8 у , а3 у .
1-4-6. Схема воспроизведения звена запаздывания по
приближению Паде четвертого порядка.
. 1680 — 8407> 4 180/ V — 20Г3/>3 4 Т*р* ,
' 1680 + 840Гр + 180Ггрг 4 20Г3р3 4 Г4/?4 ‘
= =0,168; аа = а3 = а4 = а6=1/Т, a, = ag = 0,84;
яо = ajo = 0,18; ап = а1г = 0,2; Tww/i MaKC-
1-4-7. Схема воспроизведения звена запаздывания чет-
вертого порядка.
Данная схема воспроизводит звено запаздывания
с передаточной функцией, что и для схемы 1-4-6. Однако
данная схема за счет введения суммирующего усили-
теля требует в 3 раза меньше потенциометров, чем схе-
ма 1-4-6.
1-4-8. Схема звена запаздывания на одном усили-
теле.
При Т, = 0,6 и ^ = 0,4 имеем:
^ = 47?, и R3 = -^-Rt- Rt=6Rt;
r 0,6 . r ___ 0,4 С, 9
R, ’ Cs— 3R, ’ Cs ~ 2 ’
T1 = RlCt; T3 = ~RtCi==3RJC1,
т. e., выбрав значение Ri, можно определить все осталь-
ные параметры. Передаточная функция справедлива
только для указанного соотношения параметров.
1-4-9. Схема блока запаздывания.
' 12 —67> + 7’=рг1
12 + 67> + 7’V
ё~Тр
Й схеме используется приближенное разложение
в ряд Паде второго порядка. Постоянная времени Т
плавно регулируется изменением R\ и Rz, ступенчато —
переключением С] и С2 (Ci— 5С2; /?1=2,47?2).
Глава вторая
НЕЛИНЕЙНЫЕ ОПЕРАЦИИ
2-1. НЕЛИНЕЙНЫЕ ОПЕРАЦИОННЫЕ ЭЛЕМЕНТЫ
Блоком нелинейности называется направленный четырехполюс-
ник, выходное напряжение которого пропорционально заданной
функции входного напряжения: ,
U2=f(Ui).
(2-1)
б)
Рис. 2-1. Кусочио-линей-
ная аппроксимация не-
линейной зависимости.
Блоком перемножения называется
направленный нелинейный многополюс-
ник, имеющий два входа (по числу со-
множителей) и один выход, напряжение
на котором изменяется пропорционально
произведению мгновенных значений вход-
ных напряжений
uz=muxuv, (2-2)
где т=|1/{7ЕОМ.
Для образования нелинейных зави-
симостей в основном используются диод-
ные схемы, которые осуществляют кусоч-
но-линейную аппроксимацию требуемой
зависимости, т. е. заменяют их ломаной
линией из конечного числа отрезков
(рис. 2-'1,а). В соответствии с заданным
видом кривой в схеме суммируются вы-
ходные напряжения отдельных диодных
ячеек. Эти составляющие выходного на-
пряжения или тока в отдельности пока-
заны на рис. 2-1,6. Чтобы изменить на-
правление ломаной линии в точке 1, не-
обходимо прибавить составляющую вы-
ходного напряжения, изменяющуюся про-
порционально приращению входного на-
пряжения «1—£/1в. При этом при напря-
жениях Ui<I/10 эта составляющая дол-
жна быть равна нулю. Чтобы изменить
направление ломаной линии в точке 3,
требуется уменьшить напряжение, т. е.
прибавить соответствующую состав-
ляющую отрицательного напряжения.
Каждая ячейка содержит делители на-
пряжения, диод и источник постоянного (опорного, напряже-
ния, запирающего диод при входных напряжениях, меньших, чем
заданное для данной ячейки. Переключая полюсы диода и знак
опорного напряжения, а также подавая на вход ячейки прямое или
инвертированное входное напряжение, получаем схемы диодных
ячеек (рнс. 2-2,а), которые позволяют прибавлять положительные и
отрицательные составляющие напряжения во всех четырех квадран-
тах координатной плоскости.
С помощью движка делителя 1 устанавливается пороговое на-
пряжение открывания диода для каждой диодной ячейки, а движ-
ком делителя 2 регулируется крутизна участка. Напряжения, сни-
маемые с делителей 2 всех диодных ячеек, складываются с помо-
щью суммирующего усилителя (рнс. 2-2,6).
о а
Рис. 2-2. Схемы потенциальных и токовых диодных ячеек.
Используются также схемы нелинейных элементов, основанные
на принципе суммирования токов диодных ячеек на входе операци-
онного усилителя (рис. 2-2,в).
Совокупность диодных ячеек является направленным нелиней-
ным четырехполюсником, включаемым на входе или в цепи обрат-
ной связи операционного усилителя (рис. 2-3). Так как напряжение
на входе операционного усилителя близко к нулю, четырехполюсник
работает в режиме короткого замыкания.
В общем случае для схемы по рис. 2-3,а четырехполюсник на
входе настраивается на зависимость
ii=<p(ut), (2-3)
а в цепи обратной связи на зависимость
—12='ф(—и2). (2-4)
Так как на входе усилителя ij-|-i2=0, то
«а=—ц,-1 [<₽(«!)]. (2-5)
Используя суммирование токов на входе усилителя, в схеме на
рис. 2-3,6 получаем:
Ut = — ф-1 У ?"(«!/)
(2-6)
Если, например, используются диодные квадраторы, т. е. четы-
рехполюсниками задается квадратичная функция, то
(2-7)
Подобным' же образом, складывая или вычитая логарифмы вход-
ных величин, получаем произведение или частное на выходе.
В упрощенной схеме на рис. 2-3,в
щ>=—Дф(щ).
(2-8)
Схема на рис. 2-3,г дает обратную функцию по отношению
к предыдущей.
Получение обратной функции u,,^=f~l(ux) для нелинейного бло-
ка Ф, настроенного на зависимость u2=f(ui), производится по
схеме на рис. 2-4, где их==—и^-, u,,=^-Ui.
Диодные блоки нелинейности находят применение и для соз-
дания блоков перемножения, в которых операция перемножения
выполняется в виде комбинации более простых для моделирования
операций сложения и нелинейного преобразования (возведения
в квадрат) по формуле
Г(2-9)
Схема такого блока перемножения на квадраторах показана на
рис. 2-5. С помощью делителей из равных сопротивлений в ней по-
лучают полусуммы и полуразности входных напряжений их н иу,
которые в виде модульных значений поступают на схемы диодных
квадраторов СДК, составленных из токовых диодных ячеек. Токи
диодных квадраторов, пропорциональные соответственно квадрату
полусуммы и полуразности напряжений их и иу, вычитаются на
входе операционного усилителя, так что на выходе образуется про-
изведение в соответствии с формулой (2-9).
Деление производится по методу обратной функции (рис. 2-6,а)
или по методу обратной операции (рис. 2-6,6).
В схеме по рис. 2-6,а деление производится путем умножения
на обратную величину, получаемую с помощью блока нелинейности
Ф, реализующего гиперболическую зависимость
— а/и-ц.
В схеме по рис. 2-6,6 в цепи обратной связи операционного уси-
лителя выполняется операция перемножения, На выходе усилителя
вырабатывается такое напряжение и2, при котором входное напря-
Рис. 2-3. Синтез функциональных блоков из операционных усилите-
лей и нелинейных четырехполюсников.
Рис. 2-4. Схема получения
обратной функции.
Рис. 2-6. Схемы деления.
Таблица 2-1
Схемы элементов образования линейных отрезков и
ограничения по входу и выходу на диодах
Продолжение табл. 2-1
Примечание. В схемах 2-1-1 — 2-1-7 диол работает на отпирание, в осталь-
ных—на запирание.
жение усилителя близко к нулю, т е. выходное напряжение схемы
перемножения должно быть равно —их. Так как —ux=muvUz, то
1 их
(2-W)
Более подробно схемы деления представлены в § 2-11.
Ниже рассматриваются различные схемы моделирования нели-
нейных зависимостей, В табл, 2-1 приведены схемы элементов обра-
зования линейных отрезков и ограничения по входу и выходу на
диодах. В последующих параграфах приведены схемы элементов
нечувствительности, ограничения, а также элементов образования
зоны ‘нечувствительности и ограничения одновременно.
2-2. СХЕМЫ ЭЛЕМЕНТОВ НЕЧУВСТВИТЕЛЬНОСТИ
НА КРЕМНИЕВЫХ ДИОДАХ И СТАБИЛИТРОНАХ
2-2-1.Схема, в которой зона нечувствительности обра-
зуется с помощью двух кремниевых диодов.
Вид графика функции определяется видом вольт-
амперных характеристик этих диодов.
2-2-2. Схема цепи обратной связи операционного уси-
лителя, в которой находятся два последовательно вклю-
ченных стабилитрона для ограничения по амплитуде.
2-2-3. Схема с термостабилизацией, включаемая на
вход операционного усилителя.
В данной схеме UM=(UC—1/д) (Rr\-Rz) I Rz, где Uc—
напряжение стабилизации стабилитрона; ид — напря-
жение начала открывания диода в прямом направлении.
Для термостабильности обычно включают два диода
последовательно. При наличии нескольких ячеек диоды
можно включить на входе комплекса ячеек.
2-3. МОСТОВЫЕ СХЕМЫ ЭЛЕМЕНТОВ ОГРАНИЧЕНИЯ
2-3-1. Мостовая схема на диодах.
Для плоскостных диодов
/мин
где t/д — падение напряжения на диоде в прямом на-
правлении при прохождении тока /макс или !г™».
Наклон графика функции в начале координат не ре-
гулируется, а определяется характеристиками диодов.
2-3-2. Схемы полумостового ограничения.
6-Z/o в)
2-4. СХЕМЫ ЭЛЕМЕНТОВ ОБРАЗОВАНИЯ ЗОНЫ
НЕЧУВСТВИТЕЛЬНОСТИ — ОГРАНИЧЕНИЯ
2-4-1. Схема на плоскостных кремниевых диодах.
противлений резисторов
Резистор Рц определя-
ет наклон характеристики
и совместно с /?2 образу-
ют входной делитель. Вы-
ходные резистор /?3 и диод
определяют максималь-
ный выходной ток. Ори-
ентировочный расчет со-
т быть выполнен по фор-
мулам:
Г> бхг U а е _____ D . р Рд_
Kj- — г » К2 - Kj jj , К3 1 ,
' макс Х2 • макс
где /Макс — максимальный выходной ток элемента;
Uxi — напряжение начала открытия элемента; Uxz —
напряжение перехода в полностью открытое состояние;
Un — падение напряжения на диоде при /макс.
Характеристика, изображенная штриховыми линия-
ми, соответствует положительному опорному напряже-
нию, приложенному к резистору ,/?2.
2-4-2. Схема, инверсная к 2-4-1, на выходе которой
образуется отрицательный ток.
Расчеты выполняются по
тем же формулам, что и для
схемы, представленной
в п. 2-4-1.
2-4-3. Схема элемента образования зоны нечувстви-
тельности — ограничения на стабилитронах.
При увеличений их до Vx\ напряжение на йыхоДё
делителя —’7?з увеличивается до Uc (напряжение
отпирания стабилитрона на выходе). При увеличении
их до 17x2 напряжение на выходе делителя —Л2 возра-
стает до 2UC (открываются два последовательно вклю-
ченных стабилитрона). При их<0 открывается диод, и
ток через стабилитроны не протекает. Расчет элементов
может быть выполнен по формулам:
Стакс \ Рхг ^xi/ ’
Г>_____Р<- 1^X2
2 Стакс —Uc /
(6^X2 Ру1)
3 ^макс (мх1 Рс)
Из этих соотношений выводится следующее неравен-
ство:
Uc<Uxl< (UX1 + Uc) < Ux2>2Uc,
из которого следует ограниченность активной зоны и
возможность получения малой разности Ux2—Uxi.
2-5. СХЕМЫ ОБРАЗОВАНИЯ МОДУЛЯ ПЕРЕМЕННОЙ
(СХЕМЫ ВЫПРЯМЛЕНИЯ)
2-5-1. Схема, отрабатывающая модуль переменной
с помощью компаратора и реле, причем реле срабаты-
вает от напряжения отрицательной полярности на входе
компаратора.
Динамическую погрешность, которая зависит от ско-
рости изменения входного напряжения, определяет по-
стоянная времени срабатывания реле. Статическая по-
грешность схемы менее 0,1%.
2-S-2. Схемы образования модуля йа уСйЛйТёляХ й
диодах.
Погрешность зависит от типа диодов. При использо-
вании полупроводниковых диодов (кривая 1) сущест-
вует мертвая зона в начале координат (до ±0,6 В). При
использовании ламповых диодов (кривая 2) имеется по-
стоянная составляющая (до +0,6 В).
2-5-3. Схема образования
модуля с возможностью кор-
рекции погрешности харак-
теристики из-за диодов с по-
мощью делителя [3.
2-5-4. Схема образова-
ния модуля с погреш-
ностью менее 0,2%.
2-5-5. Схема образова-
ния модуля, имеющая ха-
рактеристику, близкую к
идеальной (погрешность
менее 0,1%).
5-6. схемы ОГРАНИЧЕНИЯ ВЫХОДНОГО НАПРЯЖЕНИЯ
ПО АМПЛИТУДЕ
2-6-1. Схемы ограничения выходного напряжения по
амплитуде.
Графики 1 и 2 относятся к схемам а и б, а графики
3 и 4 относятся к схемам в и г.
2-6-2. Схема ограничения выходного напряжения ид
усилителе.
Для данной схемы
. •
ТгГ’
амплитуде на одном операционном
tg?,=
tg?i = A+jfe;
А В
. = ; а. = 7 Р-
а,
где /?д— сопротивление диода в проводящем состоянии;
^пот — полное сопротивление потенциометра; А и В —
значения напряжений ограничения в долях от шкалы
(100 В) (А< 1 и В<1).
2-6-3. Схема ограничения амплитуды выходного на-
Для данной схемы Д=100 кОм; /?0=/?1=/?2=^?з=
= 1 МОм; ai = l,l А; аг=1,1 В; А и В-—то же, что для
схемы 2-6-2. Погрешность схемы менее 0,5%. При на-
стройке делителей диоды односторонне отключить.
2-6-4. Схема ограничения амплитуды, имеющая по-
грешность <0,5%.
Для данной схемы имеем: а1=А; а2—В; А и В—то
же, что для схемы 2-6-2;
RcR
tg ?2,3 — RiR + RiR<^ + R<^R ,
где Rc~ (1—«,,)./?„+Дд; Rv— сопротивление потенциоме-
тров задания щ; /?1 = ^„=100 кОм; Д=1 Мом. При на-
стройке потенциометров цепи диодов отключить.
2-6-5. Схема ограничения.
Параметры элементов схемы связаны с графиком со-
отношениями:
С=а]/аг; D—as/ac
tg (pi=as; tg ф2=аб—а4; tg фз=аБ—аз-
Потенциометр а6 служит для смещения характери-
стики по оси ординат. Погрешность схемы менее 0,1%.
2-6-6. Схема ограничения.
Параметры элементов схемы связаны соотношениями:
Переменная хс вводится при необходимости смеще-
ния характеристики по оси ординат. Погрешность схемы
менее 0,5%
2-6-7. Схема высокоточного двойного ограничения по
амплитуде.
Наклон линейной части графика определяется отно-
шением 7?0/7?1- Уровни ограничений:
А
_______RgRj________ Р .
R1R% + Rari + ^2ri *’
В
ReR,
R<>Rz + Ror i + Rzra
E2; E2>0; f2<0.
При t7on=±300 В 7?з=7?6=150 кОм; 7?,f=/?s=50 кОм.
2-6-8. Схема двойного последовательного ограни-
чения.
Параметры элементов схемы: /?3=Т?4—У5=
= 1 мОм; Re=3 мОм; а==0,333.
2-6-9. Схема ограничения амплитуды выходного на-
пряжения на стабилитронах.
В этой схеме не достигается точное ограничение.
2-6-10. Схема ограничения амплитуды на операцион-
ных реле. *
Реле срабатывают от отрицательного суммарного
сигнала на входах компараторов. ai=B; аг—-А (А и В —
то же, что в схеме 2-6-2).
2-7. СХЕМЫ ОГРАНИЧЕНИЯ ВЫХОДНОГО НАПРЯЖЕНИЯ
ПО ЗНАКУ
2-7-1. Схема ограничения выходного напряжения по
знаку.
1—для схемы с кристаллическим плоскостным дио-
дом; 2 — идеальная характеристика; 5 — с вакуумным
диодом.
2-7-2. Схема ограничения выходного напряжения по
знаку с возможностью смещения характеристики вдоль
оси абсцисс и некоторой коррекции нелинейности харак-
теристики диода.
В данной схеме
________________(0 при
2 | — х, — А при х1 А> 0.
При включении диодов обратной полярностью
{0 при х1-\- А'^>0;
—• х, — А при х, + Л < 0.
Соединение двух таких схем может дать управляе-
мую зону нечувствительности, где A=f(x). При Д=0
имеем модель идеального диода.
2-7-3. Схема ограничения выходного напряжения по
знаку высокой точности.
В проводящем состоянии диоды оказываются вклю-
ченными внутрь контура цепи обратной связи усилителя
с большим коэффициентом усиления, так что их сопро-
тивления в проводящем направлении и приложенные
к ним опорные напряжения делятся на коэффициент
усиления по контуру. Когда диод Д\ начинает запирать-
ся, большой коэффициент усилителя в разомкнутом
состоянии приводит к скачкообразному изменению х2;
в результате диод Д\ резко запирается.
2-7-4. Схема ограничения выходного напряжения по
знаку на реле.
В этой схеме
!0 при е;
О или хг при | Xi [ <С е;
л\ при xt > е,
где е — зона нечувствительности
2-7-5. Схема для образования
специального вида.
компаратора Ki-
функции ограничения
еще одной функции
2-7-6. Схема для образования
ограничения специального вида.
2-7-7. Схема ограничения выходного напряжения по
знаку с компенсацией тока обратной проводимости крем-
ниевых диодов (с помощью диода Д2).
2-7-8. Схема ограничения выходного напряжения по
На графике приведены
характеристики схем с ва-
куумным диодом Д1 или
кристаллическим с ком-
пенсацией (кривая 1) и
с кристаллическим дио-
дом без компенсации
знаку.
(кривая 2). При обратном
токе резистор шунтируется диодом Д2, так что обрат-
ный ток не попадает в суммирующую точку (сетка уси-
лителя) .
2-7-9. Схема модели идеального диода.
х3=0. При положительном
что х3——Xi.
При малейшем отрица-
тельном х2 Диод Д2 про-
водит и охватывает ра-
зомкнутый усилитель глу-
бокой отрицательной об-
ратной связью, так что
отпирается диод Дь так
2-8. СХЕМЫ ОБРАЗОВАНИЯ ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ
2-8-1. Схема, отрабатывающая характеристику зоны
нечувствительности.
Элементы схемы и график функции связаны соотно-
шениями:
А . в
ai — 1 + А ’ а2 — 1 + в ;
. R . R
К 4-«Лют ’ Я+“Л1ОТ ’
где R — сопротивление входного резистора и резистора
обратной связи усилителя; 7?Пот— полное сопротивление
потенциометра; значения А и В заданы в долях шкалы.
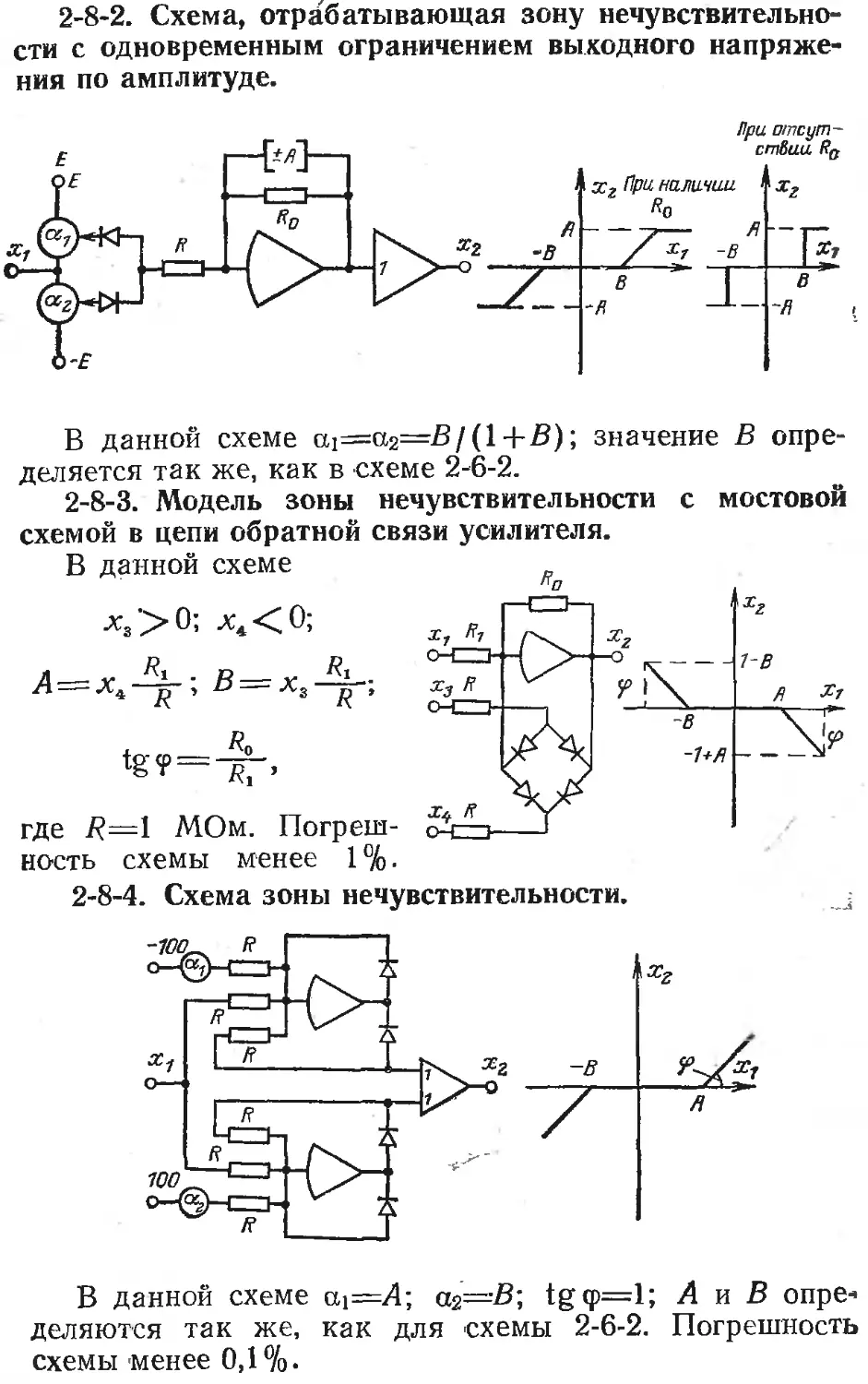
2-8-2. Схема, отрабатывающая зону нечувствительно-7
сти с одновременным ограничением выходного напряже-
ния по амплитуде.
В данной схеме ai=a,2=B/(1+S); значение В опре-
деляется так же, как в схеме 2-6-2.
2-8-3. Модель зоны нечувствительности с мостовой
схемой в цепи обратной связи усилителя.
В данной схеме
л/>0; х4<0;
Л=л4-^-; В = х3-^-;
где /?=1 МОм. Погреш-
ность схемы менее 1 %.
2-8-4. Схема зоны нечувствительности.
В данной схеме o.]=A; а2—В; tg<p=l; А и В опре-
деляются так же, как для схемы 2-6-2. Погрешность
схемы менее 0,1%.
2-8-5. хема зоны нечувствительности на операцион-
ных реле.
Реле срабатывает от отрицательного суммарного
сигнала на входе схемы сравнения. Потенциометры на-
страиваются под нагрузкой ai=A; ct2=B.
2-8-6. Схема модели зоны нечувствительности на
стабилитронах.
Модель сглаживает
изломы характеристи-
ки на переходе в зо-
ну нечувствительности.
В схеме сц регулирует зону нечувствительности, а П —
наклон ветвей характеристики.
2-8-7. Схема модели высокоточных характеристик не-
чувствительности и ограничения.
С помощью модели, выоирая соответствующие со->
противления резисторов, можно воспроизводить высоко’
точные характеристики нечувствительности, ограничения,
нечувствительности — ограничения, а также треугольные,
пилообразные, ступенчатые и релейные характеристики.
Схему можно также использовать как точный электрон’
ный ключ при замене опорных напряжений мостового
элемента управляющими напряжениями.
Характеристики %22=f(^i) 1 и 2 соответствуют раз’
ным положениям потенциометров сц и аг-
2-9. СХЕМЫ С РЕЛЕЙНЫМИ ХАРАКТЕРИСТИКАМИ
2-9-1. Схема, отрабатывающая характеристику с тре-
мя устойчивыми состояниями (реле с зоной нечувстви-
тельности) .
При —A<Xi<A на-
пряжения, поступающие
с усилителей 1 и 2 ком-
пенсируются и %2=0. При
|%1|>Л выходные напря-
жения усилителей 1 и 2
становятся одинаковой
ПОЛЯРНОСТИ И Х2—±2 В.
2-9-2. Другая схема, отрабатывающая характеристи-
ку с тремя устойчивыми состояниями.
В данной схеме сц=/); ct2=C. .
2-9-3. Схема, отрабатывающая релейную характери-
стику с тремя устойчивыми состояниями на операцион-
ных реле.
100 Ь100
В данной схеме
Величины А, В, С, D даны в относительных едини-
цах к максимальным значениям х\ и хъ. Динамическая
погрешность схемы определяется реле.
2-10. СХЕМЫ С ГИСТЕРЕЗИСОМ
2-10-1. Схема модели двухпозиционного реле с поло-
жительным гистерезисом постоянной ширины.
Я
2-10-2. Схема модели двухпозиционного реле с отри-
цательным гистерезисом постоянной ширины.
z-iu- . Схема модели двухпозиционного реле с отри-
цательным гистерезисом переменной ширины.
Ширина петли зависит от значения ха-
2-10-4. Схема модели двухпозиционного реле с поло-
жительным гистерезисом.
Прямоугольная пет-
ля несимметрична, но
с постоянными пара-
метрами:
C=azB; D=a\A.
прямоугольной петли на опера-
2-10-5. Схема модели
ционных реле.
В данной схеме cti=
—С\ a,2=D; аз—а\ ct4=
= 1,0; A=aD; В=аС.
2-10-6. Схема модели прямоугольной петли.
В данной схеме tgy=l; а=аА; Ь—аВ;
/?=100 кОм; &>10.
2-10-7. Схема, отрабатывающая двузначную харак-
теристику.
Мостовая схема служит для точного задания уров-
ней ±ЕС.
2-10-8. Схема с четырехдиодным мостовым элементом
в цепи положительной обратной связи.
2-10-9. Схема модели релейной характеристики
с точными горизонтальными участками.
Эта модель может иметь нулевое начальное состоя-
ние, однако, выйдя из этого состояния в двузначный
режим, вернуться в нулевое состояние не может. Гра-
фики функций дают представление об изменении харак-
теристики для различных положений движков потен-
циометров.
2-10-10. Схема, воспроизводящая характеристики по-
ляризованных реле, спусковых механизмов, сухого тре-
ния при небольших скоростях и других зависимостей.
В схеме сочетаются свойства управляемых диодных
ключей и четырехдиодных мостовых элементов. Изменяя
параметры схемы, можно получить множество различ-
ных характеристик; некоторые из них (центрально-сим-
метричные функции) приведены на графиках.
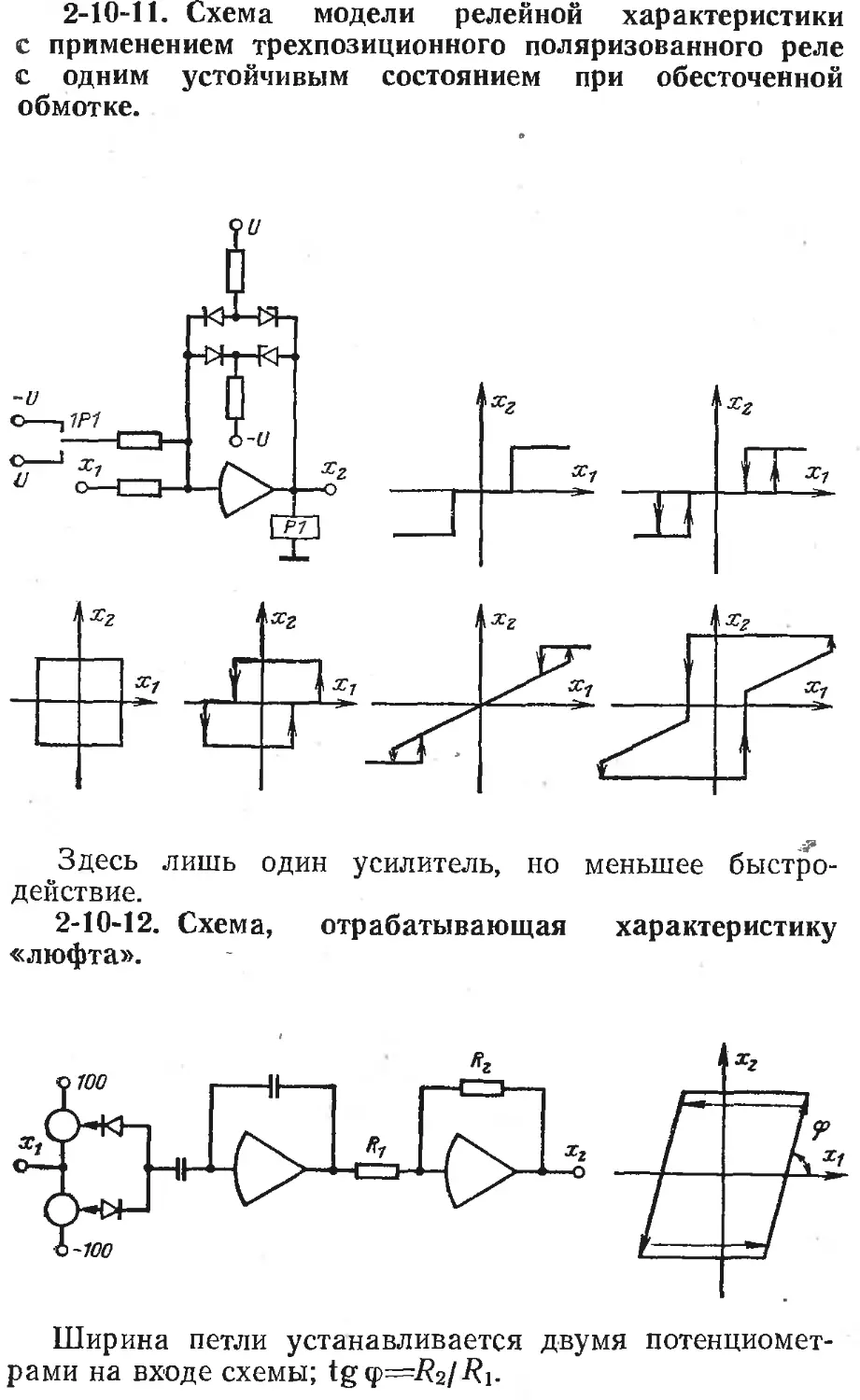
2-10-11. Схема модели релейной характеристики
с применением трехпозиционного поляризованного реле
с одним устойчивым состоянием при обесточенной
обмотке.
Здесь лишь один усилитель, но меньшее быстро-
действие.
2-10-12. Схема, отрабатывающая характеристику
«люфта».
Ширина петли устанавливается двумя потенциомет-
рами на входе схемы; tg <р=7?з/ Ri-
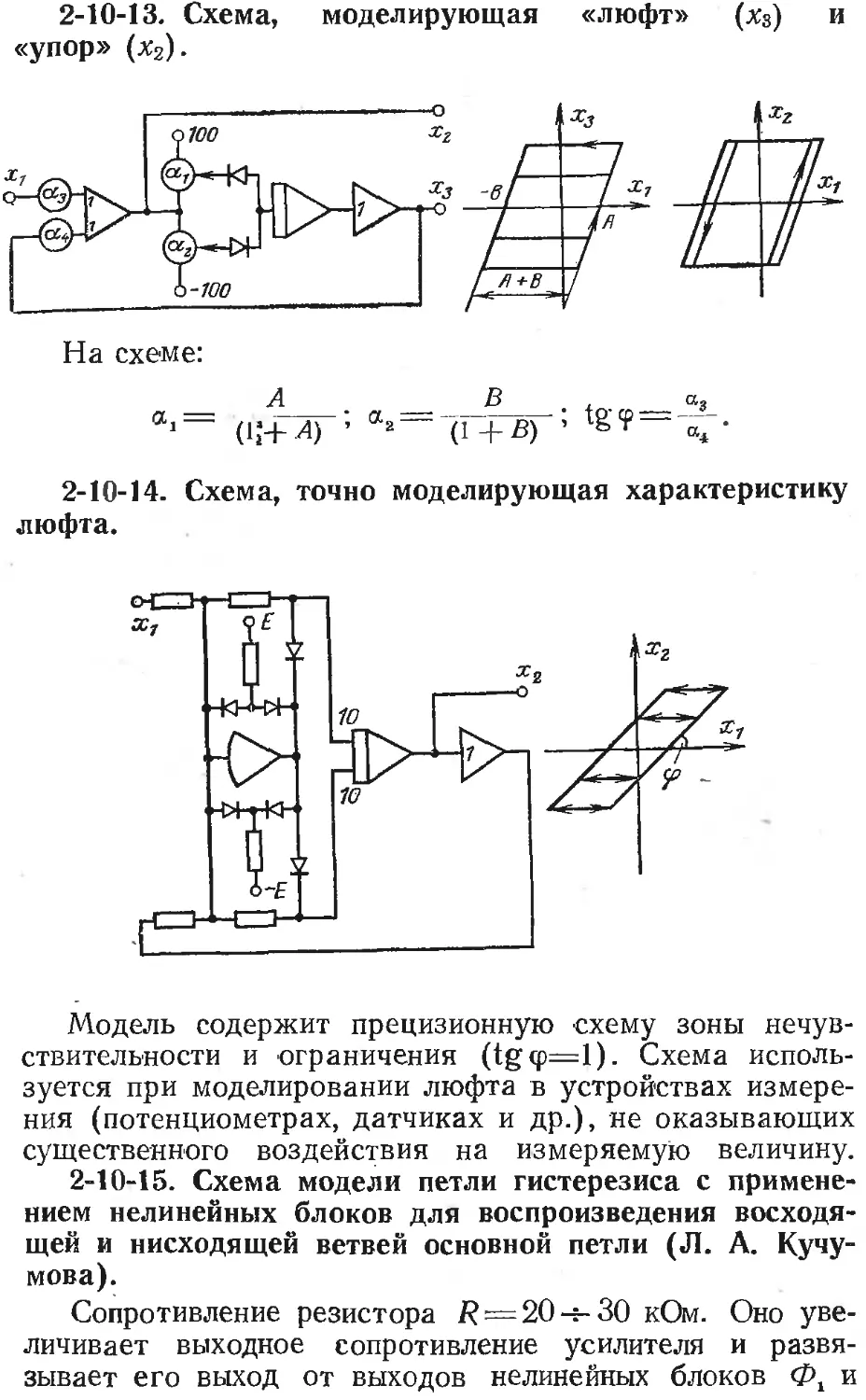
2-10-13. Схема, моделирующая «люфт» (хз)й
«упор» (х2).
2-10-14. Схема, точно моделирующая характеристику
люфта.
Модель содержит прецизионную схему зоны нечув-
ствительности и ограничения (tg<p=l). Схема исполь-
зуется при моделировании люфта в устройствах измере-
ния (потенциометрах, датчиках и др.), не оказывающих
существенного воздействия на измеряемую величину.
2-10-15. Схема модели петли гистерезиса с примене-
нием нелинейных блоков для воспроизведения восходя-
щей и нисходящей ветвей основной петли (Л. А. Кучу-
мова).
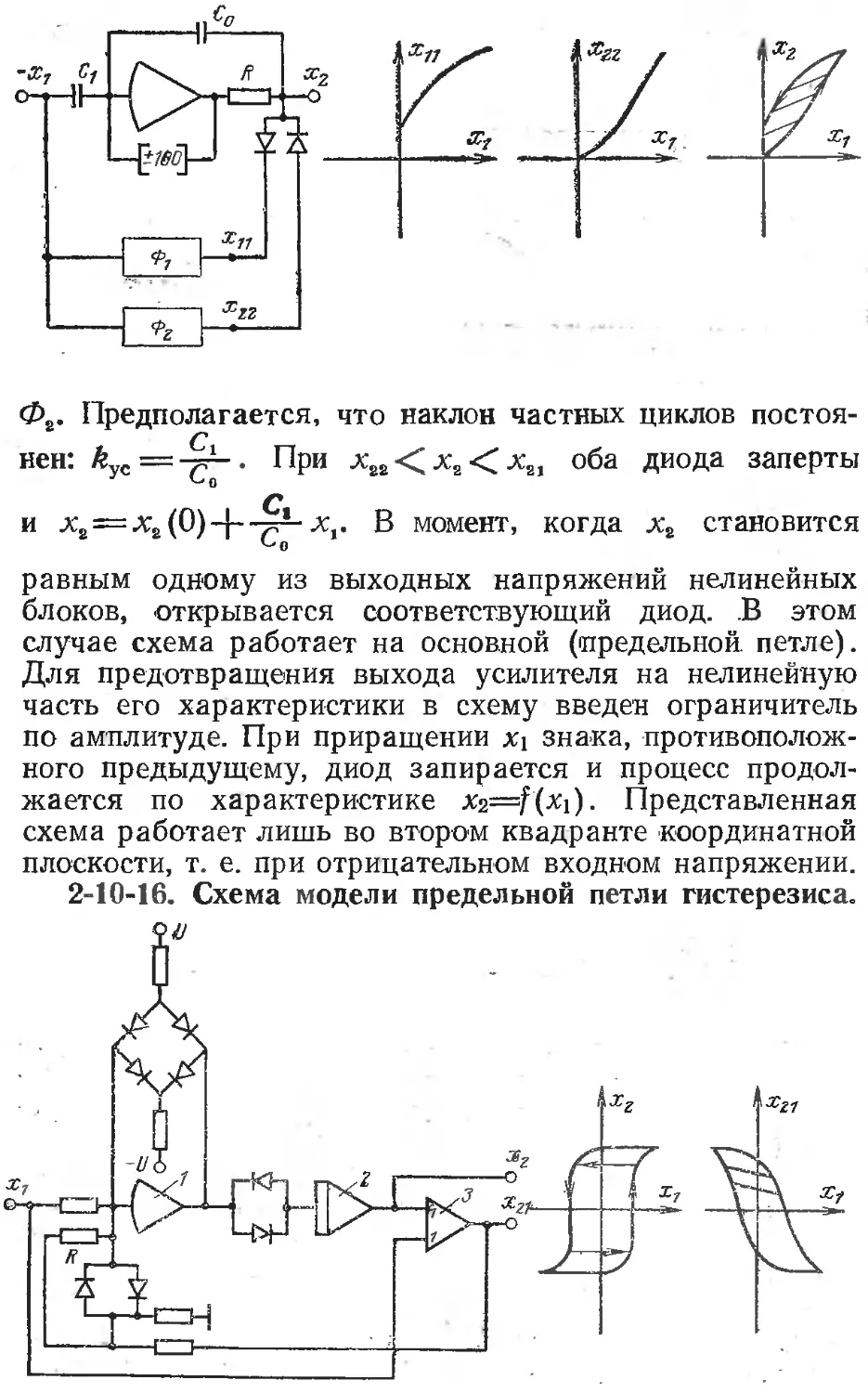
Сопротивление резистора 7?=20-е- 30 кОм. Оно уве-
личивает выходное сопротивление усилителя и развя-
зывает его выход от выходов нелинейных блоков Ф, и
Ф2. Предполагается, что наклон частных циклов постоя-
нен: kyc = . При xi2 < х2 < x2i оба диода заперты
£
и хг = хг(0)-|--7т!-л1. В момент, когда х2 становится
^0
равным одному из выходных напряжений нелинейных
блоков, открывается соответствующий диод. .В этом
случае схема работает на основной (предельной, петле).
Для предотвращения выхода усилителя на нелинейную
часть его характеристики в схему введен ограничитель
по амплитуде. При приращении xi знака, противополож-
ного предыдущему, диод запирается и процесс продол-
жается по характеристике xz—f(xi). Представленная
схема работает лишь во втором квадранте координатной
плоскости, т. е. при отрицательном входном напряжении.
2-10-16. Схема модели предельной петли гистерезиса.
В цепи обратной связи входного усилителя 1 поме-
щен четырехдиодный мостовой элемент, а на входе
интегрирующего усилителя 2 — элемент нечувствитель-
ности, состоящий из двух полупроводниковых диодов.
Вместо полупроводниковых элементов без опорных на-
пряжений на входе интегрирующего усилителя можно
помещать и диодные элементы нечувствительности
с опорными напряжениями. Включение четырехдиодного
мостового элемента в цепи обратной связи вместо ре-
зистора в обычных моделях зазора дает большую точ-
ность и большее быстродействие. Кроме того, вместо
обычного сопротивления обратной связи с выхода уси-
лителя 3 на усилитель 7 включен нелинейный элемент,
состоящий из делителя напряжения и пары-параллельно
включенных противоположно направленных кремниевых
диодов. Для регулировки насыщения или изменения на-
клона характеристики в насыщении служат резистор 7?
и характеристика нелинейного элемента на входе уси-
лителя 1. Ширина петли регулируется изменением
сопротивлений резисторов четырехдиодного мостового
элемента.
2-11. СХЕМЫ ПОЛУЧЕНИЯ НЕКОТОРЫХ ФУНКЦИОНАЛЬНЫХ
ЗАВИСИМОСТЕЙ
2-11-1. Схема для образования функции вида
2-11-2. Схема воспроизведения функции, симметрич-
ной относительно оси ординат.
На нелинейном блоке Ф настраивается лишь одна
ветвь функции x2l (%i). Полная функция x2(xj) воспро-
изводится с помощью вспомогательных релейных схем,
управляющих полярностью входных сигналов нелиней-
ного блока.
2-11-3. Схема воспроизведения функции, симметрич-
ной относительно начала координат.
На нелинейном блоке настроена функция x2i(%i).
Полная функция x2(xi) воспроизводится с помощью
вспомогательной релейной схемы, управляющей поляр-
ностью входного и выходного сигналов.
2-11-4. Схема обратной операции (обращение осей).
Если заданная функция либо неоднозначна [х2=
=f(x1)], либо очень большой крутизны, то на блоке
нелинейности настраивается соответствующая ей функ-
ция xi=f_1 (х2), и блок включается в цепь обратной
связи операционного усилителя.
2-11-5. Получение нелинейных зависимостей комму-
тацией входов блока перемножения.
Вариант f
Вариант 3
Таблица коммутации четырех входов блока перемно-
женин с учетом знаков сомножителей.
Вари- ант Входы Выход
1 2 3 4
1 + — + — —х2
2 — + + — №
3 — — + — х|х|
4 + + + — —X I X 1
5 + — 0 — —№ при х > 0 и 0 при х < О'
6 + — 0 1 х2 при х > 0 и 0 при х < 0
7 + — + 0 0 при х 0 и —х2 при х < 0
8 + — — 0 0 при х > 0 и х2 при х < 0
Знак «+» означает, что на данный вход подано на-
пряжение, пропорциональное х. Знак «—» означает, что
на данный вход подано напряжение, пропорциональное
—х, 0 означает, что данный вход заземлен.
2-11-6. Схема воспроизведения неоднозначных функ-
ций.
Схема основана на методе разбиения по какому-либо
логическому принципу функции на участки, на которых
функция однозначна. Затем с помощью логических схем
и коммутационных устройств участки в соответствующей
последовательности сочленяются в единую функцию.
На схеме приведен пример воспроизведения дву-
значной функции x2=f(xt). Функция разбивается на
два участка:
*21=Л(Х1) и X22=f2(x2).
Переход от участка к участку производится с по-
мощью поляризованного реле, управляемого от знака
производной dxi/rfr. На блоке нелинейности Ф настраи-
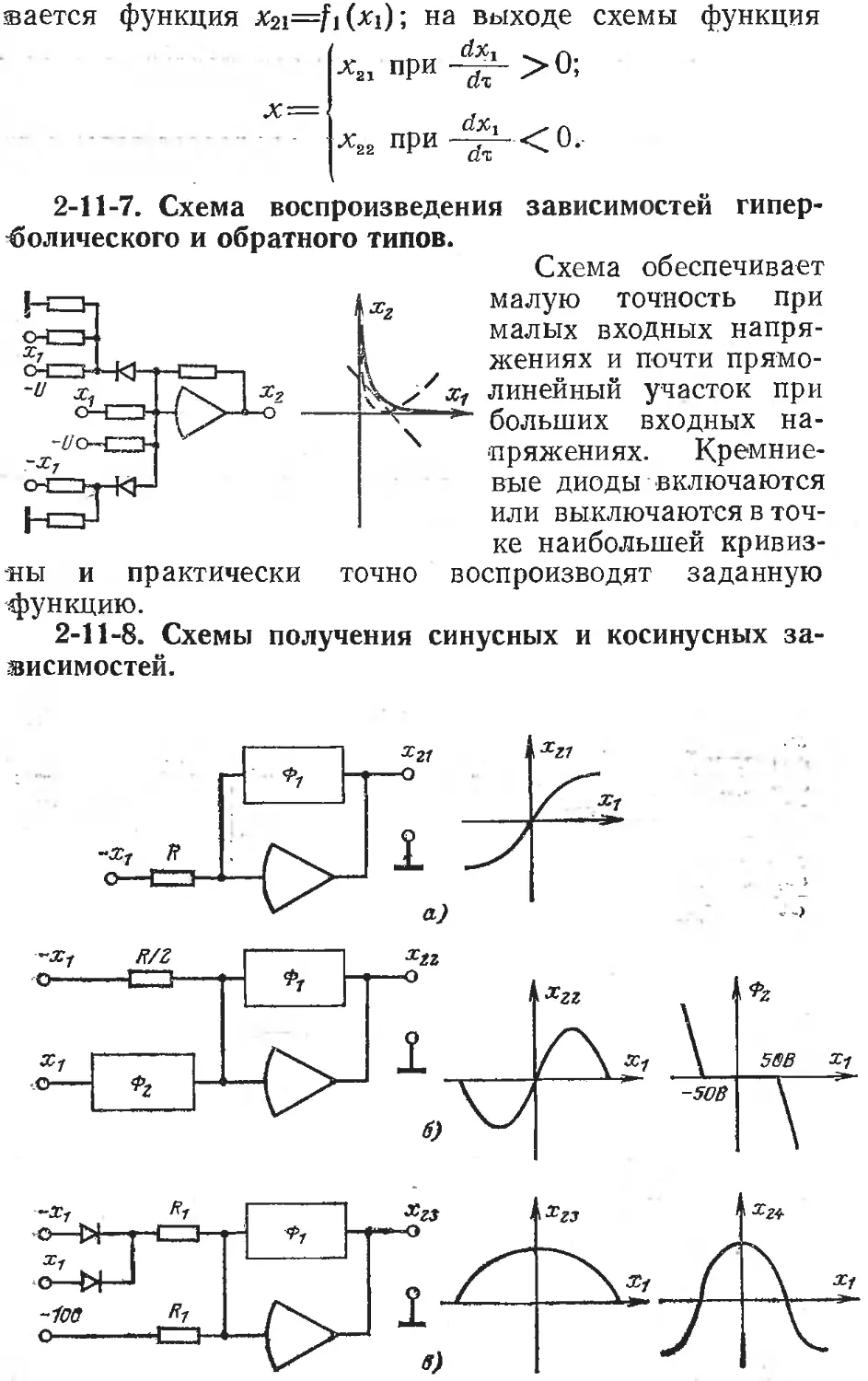
дается функция x2i—fi (%i); на выходе схемы функция
при-^->0;
' *22 при-^- <0.
2-11-7. Схема воспроизведения зависимостей гипер-
болического и обратного типов.
Схема обеспечивает
малую точность при
малых входных напря-
жениях и почти прямо-
линейный участок при
больших входных на-
пряжениях. Кремние-
вые диоды включаются
или выключаются в точ-
ке наибольшей кривиз-
ны и практически точно воспроизводят заданную
функцию.
2-11-8. Схемы получения синусных и косинусных за-
висимостей.
в)
x21=100sin-|--^-; xM= lOOsinic-^^-;
-*•2» —100 cos *2 jpg-; л?м=Д00 cos тс
при —100 В^хгСЛОО В.
При использовании одного нелинейного блока Ф^
включенного в цепь обратной связи усилителя по схе-
ме а, на выходе схемы будет воспроизведена функ-
ция Х2ь
Для получения функции х22 'Коэффициент передачи
по первому входу суммирующего усилителя увеличива-
ется вдвое и добавляется второй вход (схема б), в цепи
которого вместо входного резистора включается нели-
нейный блок Ф2, отрабатывающий характеристику
Фг—f(^i). Коэффициент передачи по этому входу равен
четырем.
Для получения функции х23 на первый вход подает-
ся сигнал |xi|, сформированный с помощью двух дио-
дов, а на второй вход — постоянное напряжение —100 В.
Коэффициенты по обоим входам равны единице (схе-
ма в).
Для получения функции х24 в отличие от предыду-
щей схемы коэффициент по первому входу удваивается.
2-11-9. Схемы воспроизведения операции деления ме-
тодом неявных функций.
Схема а применяется при х2>0 и |Xj | /х2^ 10.
коэффициенте передачи блока перемножения во
1схемах, равном 0,01 (хп=0,01хвх2), для схемы а
|=-—lOxj/х2. В схеме б
При
всех
хв=
хв =-----—-----—
. Ьх2
Ч"й“ + ~1бо
при — J0O О .
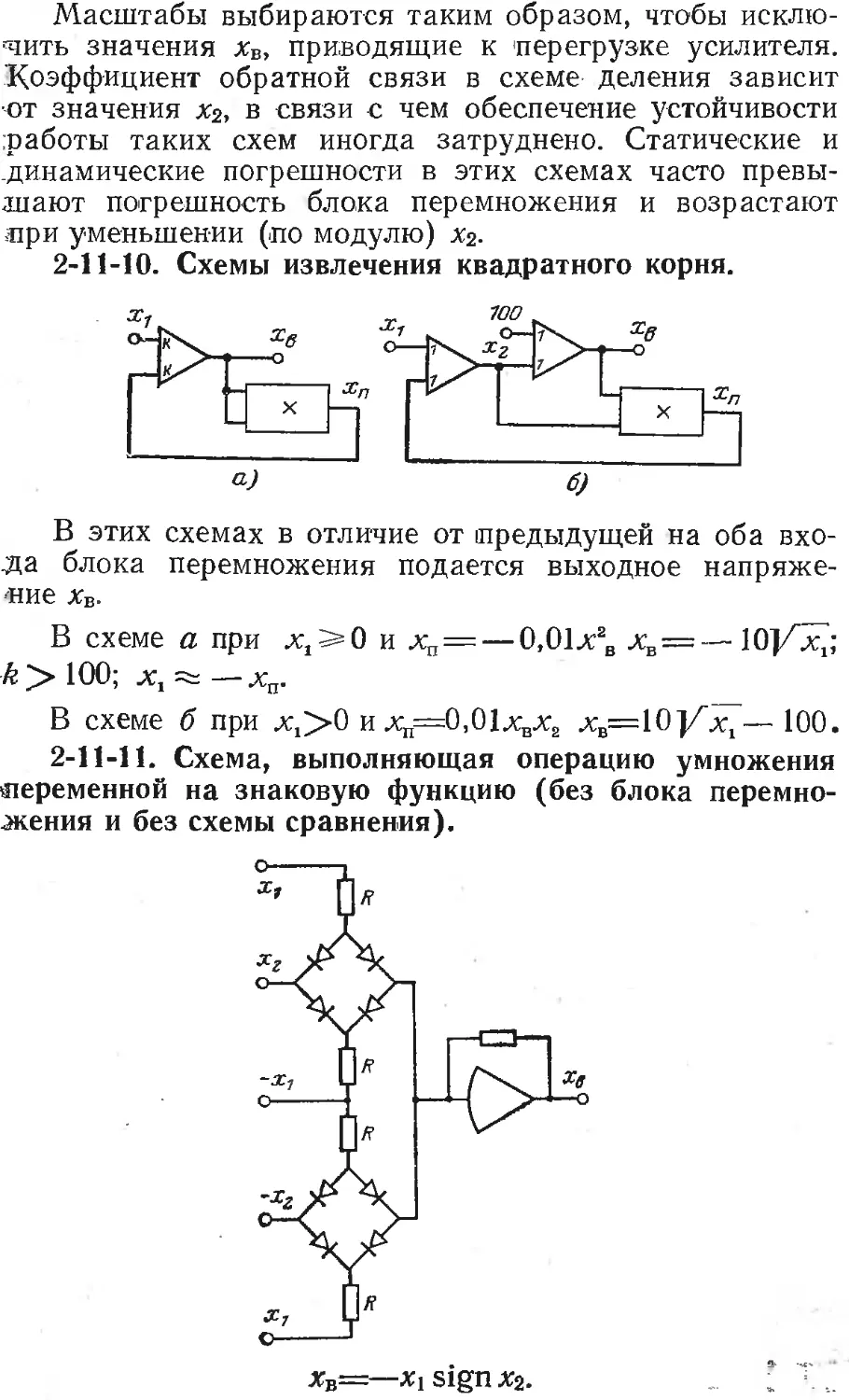
Масштабы выбираются таким образом, чтобы исклю-
чить значения хв, приводящие к перегрузке усилителя.
Коэффициент обратной связи в схеме деления зависит
ют значения х2, в связи с чем обеспечение устойчивости
:работы таких схем иногда затруднено. Статические и
.динамические погрешности в этих схемах часто превы-
шают погрешность блока перемножения и возрастают
.при уменьшении (по модулю) х2.
2-11-10. Схемы извлечения квадратного корня.
В этих схемах в отличие от предыдущей на оба вхо-
да блока перемножения подается выходное напряже-
ние хв.
В схеме а при х,э=0 и хп =— 0,01 л2в хв =— ЮрСх,;
А'> 100; х, — хп.
В схеме б при л,>0 и лп=0,01лвх, хв=ЮУ\— 100.
2-11-11. Схема, выполняющая операцию умножения
переменной на знаковую функцию (без блока перемно-
жения и без схемы сравнения).
хв=—Xi sign Xi.
Глава третья ,
ГЕНЕРАТОРЫ ФУНКЦИЙ ВРЕМЕНИ
3-1. ПРИНЦИПЫ ПОЛУЧЕНИЯ ФУНКЦИИ ВРЕМЕНИ
Для получения напряжений, изменяющихся во вре-
мени в соответствии с графически заданной зависи-
мостью, генераторы функций времени строятся на базе
блоков нелинейности. Для получения функции времени
на вход блока нелинейности включается генератор на-
пряжения развертки (линейно- или синусоидально-изме-
няющегося во времени). В качестве генератора линей-
но-изменяющегося напряжения может быть использован
интегрирующий усилитель, на вход которого подается
напряжение C7i=>t710=const. При этом
“=4rJt/..*=-KL-'- <з-»
о
Для получения напряжения, изменяющегося по за-
данной зависимости от времени, если эта зависимость
задана аналитически и может быть получена в виде
решения дифференциального уравнения, набирается
модель этого уравнения, которое называется определяю-
щим дифференциальным уравнением. Так, для получе-
ния синусоидального закона должно быть выбрано
уравнение колебаний маятника, вследствие чего эта
вспомогательная схема получила название «электронно-
го маятника». Для получения экспоненциальной зависи-
мости набирается уравнение первого порядка и т. д.
Для получения определяющих дифференциальных
уравнений заданная функция времени и ее производные
комбинируются так, чтобы исключить время в явном
виде. Полученное выражение и будет определяющим
уравнением.
Рассмотрим примеры.
1. Получить определяющее уравнение для функции z=sin at.
Записываем функцию и производные: z=sin at, z'=a cos at и
z"=—a2 sin at.
Начальные условия: Zo=O и z'o=(0-
Исключая время в явном виде, получаем: z"=—a2z, т. е. урав-
нение маятника z"-\-a2z=0- zo=0; z'o—a.
2. Получить определяющее уравнение для функции z—a-±-bt-\-
+ct2+dt!>.
Производные этой функции: z'—b-j-2ct-j-3dt2; z"=2c-^-6dt;
z”r =Gd.
При z0—a, z'a=b и z"o=2c, определяющее уравнение z"'=6d.
- 3. Получить определяющее уравнение для функции z=l/(e-|-
-Н’О-
Так как г'——Ь/ (a-\-bt)2, то при 2о=\/а определяющее уравне-
ние имеет вид z'-\bz2—Q.
Часто при исследовании динамики различных систем
возникает необходимость создания генератора нелиней-
ных циклических функций неограниченного аргумента.
Так, при расчете переходных режимов в механизмах,
приходится рассматривать решение уравнений движения
в течение многих циклов для разгона системы до уста-
новившейся скорости.
Сущность методики заключается в том, что вместо
переменной <р вводится новая переменная, представляю-
щая ее периодическую функцию, которая и использует-
ся в качестве аргумента нелинейной функциональной
зависимости. При таком представлении нелинейной
зависимости нет необходимости набора ее на блоке не-
линейности для многих циклов, а достаточно набрать ее
для одного цикла. При изменении аргумента <р нелиней-
ная функциональная зависимость может быть отработа-
на для неограниченного количества циклов.
В этом случае для каждого цикла производится ре-
шение уравнения движения с новыми начальными усло-
виями и повторением нелинейной циклической функции,
причем задание начальных условий для последующих
циклов обеспечивается автоматически, так как послед-
ние соответствуют условиям в конце предыдущего
цикла.
Необходимо отметить, что при решении задач для
установившегося режима нет необходимости точного
определения начальных условий. При задании любых
начальных условий для цикла модель автоматически
выходит на установившийся режим спустя несколько
циклов работы. В качестве периодических функций ;<р
могут быть использованы sin <р, cos <р, пилообразная
зависимость и др. Выбор используемой периодической
функции определяется удобством воспроизведения функ-
циональной зависимости на модели. Поясним сказанное
на некоторых практических примерах моделирования
циклических нелинейных функций [17].
Рассмотрим применение данной модели для моделирования одно-
значных нелинейных циклических функций, например, приведенного
момента инерции кривошипно-шатунного механизма. На рис. 3-1,а
изображена нелинейная циклическая зависимость приведенного мо-
мента инерции У(ф) кривошипно-шатунного механизма от угла по-
ворота вала. Характер изменений кривой J (ф) за период от 0 до л
и от л до 2л принимается одинаковым. На рис. 3-1,6 и в изобра-
жены периодические функции приведенного угла поворота: ф— пи-
лообразная функция, sin ф и cos ф. На рис. 3-2 изображены нели-
нейные зависимости приведенного момента инерции кривошипно-ша-
тунного механизма /(ф), аргументами которых являются периодиче-
ские функции угла поворота (соответственно пилообразная функция,
sin <р и cos ф). Для образования пилообразной функции угла пово-
рота ф может быть использована схема, изображенная на рис. 3-3,а.
На вход интегрирующего усилителя подается напряжение, про-
порциональное угловой скорости. Выходное напряжение интегрирую-
щего усилителя сравнивается с эталонным напряжением 100 В. При
достижении выходным напряжением усилителя значения 400 В
срабатывает поляризованое реле РП. Замыкание контакта (РП)
приводит к разряду конденсатора С, благодаря чему схема приво-
дится в первоначальное положение, соответствующее нулевому на-
пряжению на выходе. Данная'схема проста в исполнении, но обла-
дает рядом недостатков. При работе на большой частоте повторения
процесса разряд конденсатора должен осуществляться быстро, в про-
тивном случае конденсатор не будет успевать разряжаться за время
срабатывания реле. Такой разряд конденсатора вызывает нару-
шение нормальной работы контактов реле. С другой стороны, уве-
личение постоянной времени реле вводит дополнительную погреш-
ность из-за изменения напряжения на выходе интегрирующего уси-
лителя, соответствующего изменению частоты вращения.
Рис. 3-2. Нелинейные зависимости момента инерции криво-
шипно-шатунного механизма I в функции ф, sin ф и cos ф.
В случае изменения направления вращения схема значительно
усложняется. Функциональная зависимость, изображенная на рис.
3-2,а, набирается на блоке нелинейности, па вход которого подается
пилообразное напряжение с выхода 'интегрирующего усилителя.
Периодические функции sin ф и cos ф (рис. 3-2,6 и в) могут быть
получены с помощью схемы «электронного маятника» переменной
частоты (рис. 3-3,6), зависящей от напряжения.
Схема, приведенная на рис. 3-3,6, может быть ис-
пользована и в случае изменения знака частоты враще-
ния а. Кроме того, использование периодической функ-
ции sin ф или cos ф в качестве аргумента нелинейной
Рис. 3-3. Схемы для моделирования пилообразной функции, sin <р
и cos <р.
зависимости 7(ф) дает возможность произвести соот-
ветствующую деформацию функции (можно растянуть
кривую на участке крутого изменения функции и сжать
на участке более пологого ее изменения). Такая дефор-
мация кривой часто необходима при наборе ее .на блоке
нелинейности, так как последний позволяет набрать
нелинейную зависимость лишь при определенной макси-
мальной крутизне.
При переходе от аргумента ф к периодическому
аргументу может быть такой случай, когда функция при
одном и том же значении аргумента имеет два различ-
ных значения. Принципиально моделирование двузнач-
ных нелинейных функций ничем не отличается от моде-
лирования однозначных функций, но требует увеличения
количества блоков нелинейности и применения специаль-
ной логической схемы для переключений. Релейная схе-
ма в определенные моменты времени производит отклю-
чение соответствующего блока нелинейности или пере-
ключение с одного блока нелинейности на другой.
Управление релейной схемой осуществляется с помощью
напряжения, пропорционального sin ф или cos ф и отра-
батываемого схемой «электронного маятника».
Рассмотрим на примере мальтийского механизма применение
•указанной методики для моделирования двузначных циклических
функций. На рис. 3-4,а изображена кривая изменения приведенного
к валу кривошипа момента инерции /(ф) для мальтийского меха-
низма. Как следует из графика, приведенный момент инерции явля-
ется циклической функцией угла поворота ф вала кривошипа с пе-
риодом 2л. В качестве аргумента используется периодическая функ-
ция sin <р (использование в качестве аргумента периодической функ-
ции cos ф нецелесообразно вследствие большой крутизны изменения
преобразованной функции при cos ф—>’1). На рис. 3-4,6 представ-
лена зависимость приведенного момента инерции мальтийского ме-
ханизма в функции sin ф вала кривошипа. Как видно из рисунка,
приведенный момент инерции J при одних и тех же значениях аргу-
Рис. 3-4. Нелинейные зависимости момента инерции мальтийского
механизма I в функции ф и sin ф.
мента sin ф имеет два различных значения. Использование специаль-
ной релейной схемы, изображенной на рис. 3-5, позволяет осущест-
вить моделирование данной двузначной функции. Принцип работы
схемы состоит в следующем. Нелинейная зависимость J(sincp) на-
бирается на блоке нелинейности Ф, на выходе которого имеется кон-
такт управляющего поляризованного реле Р1. На обмотку питания
поляризованного реле подается
напряжение, пропорциональное
cos ф. При положительных зна-
чениях напряжения, соответ-
ттвующего cos ф (см. рис. 3-1,в),
цепь замкнута на блок Ф и на
выходе отрабатывается напря-
жение, соответствующее значе-
нию sin ф. При отрицательных
значениях напряжения, соответ-
ствующего COS ф, /(8Шф) =
=const, т. е. не изменяется.
Если при отрицательных значе-
ниях напряжения, соответст-
вующего cos ф, функция J (ф)
переменна, то для отработки
данной функции используется
а релейная схема осуществляет
нейности на другой.
Рис. 3-5. Схема моделирования
характеристики, приведенной на
рис. 3-4,6.
дополнительный блок нелинейности,
переключение с одного блока нели-
Схемы «электронного маятника» находят в практике
моделирования самые разнообразные применения,
в частности, могут быть использованы для гармониче-
ского анализа переменной. Схема «электронного маят-
ника» постоянной частоты с дополнительным входом
у интегрирующего усилителя и нулевыми начальными
условиями на обоих интегрирующих усилителях моде-
лирует поведение АС7?-фильтра при внешнем возмуще-
нии. При налич-ии в исследуемом сигнале гармоники, на
которую настроена схема, происходит раскачивание
выходного напряжения схемы до определенной ампли-
туды, характеризующей амплитуду данной гармониче-
ской составляющей в спектре исследуемого сигнала.
Описанный способ характеризуется тем, что его приме-
Рис. 3-6. Схема для реализации спи- Рис. 3-7. График спира-
рали Архимеда.
ли Архимеда.
нение занимает много времени, а добротность такого
фильтра должна быть небольшой, так как в противном
случае процесс установления растягивается во времени.
Схема связанных между собой двух «электронных
маятников» (рис. 3-6) дает возможность получить спи-
раль Архимеда на экране осциллографа (рис. 3-7):
где гс — радиус второго витка спирали.
Для данной схемы имеем:
х21=г0ют sin ют; %22=/'ойт cos <от;
01—02=04=06=и; Оз=05=ГоЮ.
График на фазовой плоскости получается при вклю-
чении сигналов х21 и х22 соответственно на вертикаль-
ный и горизонтальный входы осциллографа.
Ниже приведены некоторые примеры схем генериро-
вания различных функций.
3-2. СХЕМЫ ГЕНЕРАТОРОВ НЕКОТОРЫХ ЕДИНИЧНЫХ СИГНАЛОВ
В ФУНКЦИИ ВРЕМЕНИ
3-2-1. Схема, воспроизводящая линейно-возрастаю-
щую функцию с ограничением.
Параметры схемы связаны с графиком соотношения-
ми: tg <р=(Л-|~В) /Ti=ai; а2=Д/(1+Д) и аз—В. Здесь и
далее А и В представлены в относительных единицах
(к шкале 100 В). 3% значения ограничения в за-
висимости от характеристики диода. Погрешность ра-
боты схемы зависит от уровня ограничения А.
3-2-2. Схема генератора единичных сигналов.
о
. _ аЛт~~ Ti)
А—«»(’—’J
о
при ^<1,;
при т,< t<t2;
при т2<х<т3;
при
При 1 < tji
при
при т >т3;
А при
А — 1 при
Реле срабатывает при отрицательном сигнале на вхо-
де компараторов.
3-2-3. Схема, отрабатывающая временную функцию,
аналогичную 3-2-1.
Отличие данной схемы от схемы 3-2-1 состоит в том,
что ограничение производится не с помощью диода
в цепи обратной связи, а с помощью схемы сравнения
и реле:
СС1—(A-j-B) /тц аг—А; аз—В.
Погрешность зависит от А и параметров реле, кото-
рое срабатывает при положительном суммарном сигна-
ле на входе схемы сравнения.
3-2-4. Схема генератора единичных сигналов.
ai
' ;л.,= !Л ">" "1Ж ’<’-;
to пр»
3-2-5. Схема генератора единичных сигналов.
грешность определяется временем срабатывания реле.
Здесь реле Р1 срабатывает от отрицательного сигнала,
на входе компаратора К\, а реле Р2 — от положитель-
ного сигнала на входе компаратора Кг-
3-2-6. Схема генератора единичных сигналов.
В данной 'Схеме форма
такая же, как в схеме 3-2-5:
основного сигнала х2(т)
О при
х= “Л’-'’*) при
2 Л —as(t—^г) при t2<t<t3;
О при t>t3.
Схема содержит три ключа.
Ключ Ли срабатывает в момент ть ключи К21 и К22
срабатывают в момент т2. Компаратор Ki и реле Р1
срабатывают в момент тз (при х2=Ю)
о.1=Д / (т2—Ti); а2=Д / (тз—т2).
Ключи могут быть как релейные, так и электронные.
3-2-7. Схема генератора полупериода sin от и cos от.
та1=а2=о; аз~0,01 и устанавливается так, чтобы
Д/—>0; 04^03.
Схема а работает с диодами, характеристики кото-
рых близки к идеальным; схема б дает возможность
компенсировать неидеальность характеристики диодов.
3-2-8.хема генератора единичного сигнала по типу
одноходового мультивибратора.
100
Потенциометр си предназначен для задания исход-
ного состояния мультивибратора, а также коррекции
схемы ограничения, если она на диодах. Отрицательный
импульс для запуска мультивибратора выбирается из
условия [7<—100(04 +аг). Длительность импульса'
должна быть такова, чтобы он был короче, чем время1
т2—ть за которое x2i достигнет значения 100(а1 + аг).
Потенциометр аз регулирует скорость нарастания х2ь
т. е. длительность положительного импульса Х22; т=
=т2—Tt=l /a2a3.
Диод Д1 служит для убыстрения спада x2i До 0,.
а диод Д2 ограничивает по знаку хгь
3-3. СХЕМЫ ГЕНЕРАТОРОВ НЕКОТОРЫХ ПЕРИОДИЧЕСКИХ
ФУНКЦИЙ ВРЕМЕНИ
3-3-1. Схема генератора пилообразных напряжений»
Время срабатывания реле должно быть небольшим,
но достаточным для полной разрядки конденсатора.
В цепь разряда конденсатора может быть включено не-
большое сопротивление (десятки Ом) для ограничения
тока при замыкании контактов. С помощью потенцио-
метра ai регулируется период колебаний: at=l/7\ Реде
срабатывает от отрицательного суммарного сигнала на
входе схемы сравнения.
3-3-2. Схема генератора синусоидальных колебаний
без стабилизации амплитуды.
100st'jp(cos¥>o) 100siqn(siny>)
х2=А sin (ит+<ро);
(o=const;
а> = -Г—cos?,;
Амане
Л
—sin%;
Atanc
а3 =а4 = в>.
3-3-3. Схема генератора синусоидальных колебаний
с простейшей стабилизацией амплитуды колебаний за
счет постоянной положительной обратной связи, компен-
сирующей затухание.
х2=Д sin (от + <р0);
(o=const; ai—A cos <р0;
а2=Л sin (ро; 03=04=©.
Значение as подбира-
ется экспериментально;
обычно 05=0,02. Для
предотвращения переком-
пенсации к усилителю,
охваченному положитель-
ной обратной связью, под-
ключена схема ограниче-
ния по амплитуде [±Л].
3-3-4. Схема генератора синусоидальных колебаний,
состоящая из генератора треугольных колебаний [х21 (т) ]
и блока нелинейности.
x2==sin<0T; to=const; oi=o>.
На блоке нелинейности настроена функция х2=
=sinx21 в диапазоне —п/2^х21^л/2.
Постоянство амплитуды колебаний зависит от часто-
ты, параметров реле и точности настройки блока нели-
нейности. Реле срабатывает от отрицательного суммар-
ного сигнала на входе схемы сравнения.
3-3-5. Схема генератора синусоидальных сигналов со
стабилизацией амплитуды.
Стабилизация амплитуды в данной схеме произво-
дится с помощью решения вспомогательного уравнения
A2 sin2 от+A2 cos2 сот—А2=0. (3-2)
Схема, состоящая из двух блоков перемножения,
трехвходовой схемы сравнения и реле, работает как
следящая система. Если левая часть уравнения (3-2)
отлична от 0, то включается либо положительная, либо
отрицательная связь (через потенциометр as), коррек-
тирующая работу схемы.
Таким образом, чтобы выполнялось уравнение
(3-2), на вход as подается напряжение и=
——A sin сот sign (A2 sin2 олН-А2 cos2 сот—А2).
Напряжение коррекции, подаваемое на второй вход
интегрирующего усилителя 2, равно as| A sin ют|, а знак
соответствует знаку выражения A2 sin2 от+A2 cos2 от—А2.
В данной схеме
xi = Asin(<ot-4~%); aI=as=<o;
xsl=A cos(a>t-|-y0); a3 = —sin<p0;
-^макс
A A£
co = const; a4==-j---cos<p0; a6= ------
У1макс макс
где Л2Макс — максимальное значение квадрата амплиту-
ды, соответствующее максимуму выходного напряжения
усилителей (100 В).
Значение а5 подбирается экспериментально для каж-
дой частоты и амплитуды (a5^s=0,02).
3-3-6. Схема генератора синусоидальных колебаний
со стабилизацией амплитуды.
В отличие от схемы
3-3-5 коррекция ампли-
туды происходит не с
помощью релейной схе-
мы, а путем подачи на
as непрерывного кор-
ректирующего сигнала,
пропорционального
х22=— (Л2 sin2 йт-Ь
4->42cos2(bt—А2).
Так как
х2—А sin (сот+<р0);
Х21=Д COS ((0Т + фо) ;
Х23~Ах22 COS ШТ,
то знак корректирующего сигнала соответствует зна-
ку х22, а ло значению пропорционален х2з;
А А А2
а1 = аг = “; -----cos?»: а4=-т-------sin %; ---
лмакс ^макс 74 макс
Значение а5 определяет время переходного процесса
и подбирается экспериментально.
3-3-7. Схема генератора синусоидальных колебаний
со стабилизацией амплитуды без применения блоков
перемножения.
•100
В этой схеме, как и в схеме 3-3-3, для компенсации
затухания применена небольшая положительная обрат-
ная связь через потенциометр а5 (а5===0,02). Для пред-
отвращения перекомпенсации действует отрицательная
связь, замыкающаяся через элемент зоны нечувствитель-
ности (а3, 04 и два диода). Элемент зоны нечувстви-
тельности настроен таким образом, что отрицательная
обратная связь работает лишь тогда, когда амплитуда
сигнала x2i начинает превышать заданный уровень А.
Поэтому этот элемент коррекций является менее пред-
почтительным, так как вносит в сигнал нелинейность
в зоне экстремумов A cos (гот+фо)- Точность схемы
уменьшается при увеличении частоты.
х2=Д sin (гот+фо);
л21 = А cos (<«t <р0); <» = const; а1 = а2 = со; а6 0,02;
А А А .
«з = «4 = Г4-4-; аб = -д—СО8?0; ’’—л—
1 и Аиакс -^макс
3-3-8. Схема генератора синусоидальных колебаний
с переменной частотой без стабилизации амплитуды.
л2 = Д sin(on-[-<р0); х21 = Лсо8(ют4-<р0); <D==f(t);
'А А
ai шмакс’ а» — cosy0; я4—sin <рс,
Лмакс пмакс
где ©макс — максимальное значение частоты, которое
должно быть получено в схеме.
На входы схемы извне подается управляющее на-
пряжение, пропорциональное частоте го.
3-3-9. Схема генератора синусоидальных колебании
переменной частотой со стабилизацией амплитуды.
Стабилизация амплитуды происходит таким же обра-
зом, как и в схеме с постоянной частотой колебаний 3-3-5,
с той лишь разницей, что релейная коррекция произво-
дится одновременно на входах обоих интегрирующих уси-
лителей, что обеспечивает более быструю и более точную
коррекцию.
sin (шт-|-<р0); х21 = Лсо8(аи + ?0);
А Л
ai=«2=“MaKc; °ч= д—cos%; —sinfo;
-^макс У1макс
Л2
ае и ав зависят от ш (as а6 0,02); а7=-&-------.
макс
3-3-10. Схема генератора синусоидальных колебаний
с переменной частотой и стабилизацией амплитуды.
Коррекция амплитуды производится таким же мето-
дом, как в схеме генератора с o=const 3-3-6. Различие
состоит в том, что коррекция производится на обоих
интегрирующих усилителях.
co=f (т); *2=71 sin (<dt+q>o); х21=Л cos (<вт+фо);
а 1 —- аг 0>мако «з - “д COS<po, а4 = —-j sin<p„.
Лмакс -^макс
Значения as=ae определяют время переходного про»
цесса и подбираются экспериментально, значение а7=
=42/Л2макс определяет амплитуду колебаний генератора.
3-3-11. Схемы формирования нескольких синусоидаль-
ных сигналов, сдвинутых друг относительно друга на раз-
ные углы.
cosat^-^
о—
CXSinfCdt-ji’c)
Sinuit—^
-cosut^-^
o—{««
Напряжения, пропорциональные sin сот и cos сот, по-
ступают от одного генератора; a1=a4=a5=a8=cos ф0;
а2—а3=аб=ат—sin <ро. Значения ф0 для разных формиро-
вателей могут быть различными.
3-3-12. Схема модели трехфазного генератора сину-
соидальных сигналов.
JC21 = SincoT; X22 = sin 1(от4~ -3- ; X23 = Sin/toT-g-l;
а1 = а3 = ав = 2<в/|/Л3 ;
аг = а4—; a7=ct8=sin (2л/3) =0,867.
Статическая и динамическая погрешности существен-
но зависят от частоты и точности установки делителей,
3-3-13. Схема модели трехфазного генератора синусои-
дальных сигналов с подкачкой (стабилизацией амплиту-
ды).
Схема работает так же, как и схема 3-3-12. Стаби-
лизация производится по тому же принципу, что в схеме
3-3-3, и имеет те же свойства.
3-3-14. Схема упрощенной модели мультивибратора.
/?1==90 кОм, Rz^Rs—/?4=Ю0 кОм. Ограничитель на
стабилитронах дает амплитуду сигнала ±50 В.
3-3-15. Схема генератора треугольных и прямоуголь-
ных колебаний. (Верхние графики получены при й4=0).
Диоды используются для ограничения входного на»
пряжения усилителя 1 до очень малого напряжения,
равного падению напряжения на открытом диоде. Этого
напряжения, однако, достаточно, чтобы перебросить уси»
литель 1 в противоположное состояние.
И1—4А / Т; аг—А; аз—Х21 (0) /Х21макс‘,
i/?=100 кОм; Ri=l мОм.
При добавлении входа ±£ at эта схема может гене»
рировать прямоугольные импульсы с различной скваж»
ностью и пилообразные колебания с различным накло»
ном фронтов. При ai>«4; аг—А (настройка амплитуды
пилообразных колебаний) и £=±100 В имеем:
с1 л гр __ 2/4
для £<_0 т, —----------j--Т =-------------
1 “1 + “4 2 “1 — “<
г7 /л гр ____ 2/1 m ___ 2/4
ДЛЯ £>0
3-3-16. Схема генератора прямоугольных импульсов
с регулируемой скважностью.
На вход такого генератора, состоящего из схемы
сравнения и реле, приходит внешний сигнал лч(т) тре-
угольной симметричной формы, полученный с помощью
внешнего генератора треугольных колебаний ГТК, по-
строенного по одной из ранее приведенных схем (на-
пример, 3-3-15). С помощью второго входа схемы срав-
нения, на который подается постоянное напряжение че»
рез делитель ai, меняя настройку делителя, можно изме-
нять скважность генерируемых прямоугольных импуль-
сов. Если период симметричного сигнала ГТК равен Т,
амплитуда сигнала А, а скважность импульсов положи»
тельной полярности должна быть равна Ti/T, то посто-
янное смещение должно быть равным:
' С=Л(1—2Т1/Т), a ai=l—2Л/Т.
Значения аг и а3 определяют амплитуды положитель-
ных и отрицательных прямоугольных импульсов: О2=В;
a3=D.
3-3-17. Схема генератора треугольных и прямоуголь-
ных колебаний.
С помощью делителя аг и полярности постоянного
напряжения Е, подаваемого на вход этого делителя,
можно изменять наклоны фронтов треугольных импуль-
сов, скважность и полярность прямоугольных импульсов.
При ai>aa имеем:
для £>0 Т\ =
2
• Т
“1 — «2 ’ 2
для £<0 7\= —4—; т2= 2
“1 —“2
3-3-18. Схемы генераторов треугольных и прямоуголь-
ных колебаний.
Отличие этих схем от схемы 3-3-15 состоит в том, что
нет ограничительных диодов на входе и сигнал положи-
тельной обратной связи приходит на единичный вход
суммирующего усилителя. Для обеих схем ai=4/71. Зна-
чение аг и знак напряжения начальных условий уси-
лителя соответствуют значению и знаку Х21 (0). Ампли-
тудное значение Х21 равно 100 В.
3-3-19. Схема генератора треугольных колебаний с не-
равнобокими зубьями (скважность прямоугольных им-
пульсов не равна 0,5).
2 2
“1 ' «2
Разделение сигналов на выходе Хгг, имеющих раз-
личную полярность, осуществляется диодами. Диод
в схеме может быть и один, но тогда при сигнале одно-
го знака работают оба делителя, а при сигнале другого
знака лишь один.
3-3-20. Схема точного мультивибратора с использова-
нием на выходе суммирующего усилителя диодной мосто-
вой схемы вместо различных схем ограничителей в цепи
обратной связи сумматора.
Период колебаний определяется значением а; £=
=const.
3-3-21. Схема генератора точных треугольных, пара-
болических и прямоугольных колебаний.
3-4. СХЕМЫ ФОРМИРОВАНИЯ НЕКОТОРЫХ НЕЛИНЕЙНЫХ
ФУНКЦИЙ ВРЕМЕНИ
3-4-1. Схема воспроизведения степенной функции вре-
мени x2i—(kty.
При построении схемы принято, что t=x—1 (т — ма*
шинное время), т. е. при изменении х от 0 до 2 t ме-
няется от — 1 до +1. Масштаб всех переменных взят
равным 100.
» = 1. 2,7 = SlaKC = 2.
Так как каждый усилитель меняет знак, воспроизво-
димая схемой функция преобразуется к виду
и поэтому начальные условия на всех интегрирующих
усилителях равны —1 (—100 В).
3-4-2. Схемы, воспроизводящие функции вида'!л=
= e^.
Для схемы о: л21=е~*т;
для схемы б: x22 = efot',
а , = А; а — 1/е*т ,
kt
где £макс соответству-
ет 'макс! делитель а2 на
схеме б не показан.
Значения можно
получить лишь на ограни-
ченном интервале време-
ни О^Т^Тмакс»
При этом решаются определяющие уравнения:
схема а: — kx21; схема б: -^~-=kx22 при на-
чальных условиях л2/(0)=1.
3-4-3. Схема, воспроизводящая функцию х==1п/.
Схема решает определяющее уравнение
d2x / dx \2
du2 [du J ’
где х — новая переменная, определяемая из выражения
£=яг+1. Начальные условия:
t(0) = 0, т. е /(0)= 1; л(0) = 0; ^-(0) = 1.
3-4-4. Схема, воспроизводящая функцию x=tg t.
Схема решает опреде-
ляющее уравнение
d2x о dx
-7xr—2x-ir
dtz dt
при начальных условиях
х(0)=0 и^- (0)=1. Схе-
ма работает в ограничен-
ном диапазоне измене-
ния /(О^/^л/2). ai=
=СОз2(/макс) j ^макс^л/2.
3-4-5. Схема, воспроизводящая функцию x=ctg£.
Схема решает опре-
деляющее уравнение
d2x о dx
at2 at
Схема работает
в ограниченном диа-
пазоне изменения
t: 0^т^/2—ti, причем ^>0, /2<л, ?=r+fi, где
т — машинное время. При >ti=n—/2 начальные условия
имеют вид:
• , , dx 1
х 1т=о — ct&'W т=0— sin21,;
а, = 2ctg t,; а, = . )-----т-.
1 & >’ 2 sin COS
Начальные условия х и dx/dx есть одновременно и
максимальные значения этих переменных.
3-5. СХЕМЫ ГЕНЕРАТОРОВ НЕКОТОРЫХ СПЕЦИАЛЬНЫХ
ФУНКЦИЙ ВРЕМЕНИ
3-5-1. Схема, дающая возможность возводить в п-ю
степень выражение т+1 и извлекать корень n-й степени
из этого выражения.
Решение уравнения
1)х — пх—0... (3-3)
при начальном условии _х(0) = 1 имеет вид л = (*-f- 1)".
Например, решая уравнение (i-j-l)^— 5л=0, получаем
х=(т4_1)6> а решая уравнение (t-1-1) х ^-л=0 при
тех же начальных условиях, получаем х= 7(-+i)s-
При моделировании уравнение (3-3) приводится к виду
х= — *х-\-пх. На схеме а=-------.
Хмакс
3-5-2. Схема моделирования специальной функции
Бесселя.
Функция /р(/) является решением дифференциаль-
ного уравнения
ЯР (0+tJp (0+а2 - р2) JP (О=о. (3-4)
Известно, что
А=0
(-1)*
k\r (р + *+ I)
(3-5)
при начальных условиях 7р(0)—О, если р>0; 7р(0) =
=1/Г(+1)—1, если р=0, и 7_п(0)=0, если р<0, но
является целым числом, так как
Начальные условия для Jp по времени определяются
при дифференцировании уравнения (3-5) по времени:
МО
(—l)fe (р + 2й)
2Р 2jk\r(p+k+ 1)
fe=0
Если р>1, то 7р(0)=0; если р=0, то Л(0)— 1; если
р=п<0, то J_n(0)=0.
Уравнение (3-4), преобразованное к виду, удобному
для моделирования, имеет вид:
JP (О+A, (О=(1 - ’!) ЙР (О - h WI - (О+P2h (О-
3-5-3. Схема моделирования полинома «Пагерра.
Полином Лагерра Q(s) (t) является решением диффе-
ренциального уравнения
^Q(ns) (0+(^4-i-+ (3-6)
при начальных условиях Q(s)(0) = 2~"-l-3-.....(2n—1);
Q<s> (0) = 0.
При моделировании уравнение (3-6) приводится
к виду
= (!-’)- С1-’)~<’
3-5-4. Схема моделирования полинома Лежандра. _
Полином Лежандра Pk{t) описывается уравнением
(1-0 Pk (t) - 2tPk (t) + k (k + 1) Pk (t) = 0.
Это уравнение имеет два линейно-независимых реше-
ния: одно, ограниченное на интервале [—1, +1], опре-
деляет полиномы Лежандра, другое решение содержит
логарифм и на интервале [—1, 4-1] не ограничено.
Для получения полиномов Лежандра необходимы
следующие начальные условия:
при k—2n
Л»(0)=(-1Г 1'-32.4т2.И2~п1)- ? ^(°)=°;
при Л = 2п-|- 1
Л„+1 (0) = 0; Ргп+1 (0) = 2 (n +1) (—1)" •
Моделируется следующее уравнение:
К (0 = ^Pk СО + (О ~ k (k 4- 1) Pk (г),
3-5-5. Схема моделирования полинома Эрмита.
Полином Эрмита образуется решением дифференци-
ального уравнения
Я,(О-ЙЯЙ(О+2ЛНИО=О.
Начальные условия определяются следующим обра-
зом:
при четном k (k=2n)
Hzn (0) = 0; Н2п (0) = (-1 )"2n 1 • 3 ... (2п - 1);
при нечетном k(k = 2и-|-1)
Н!П+1 (0) = 0; Йгп+1 (0)=2п (— 1)" 2п 1 3 5•... (2п — 1).
Глава четвертая
СХЕМЫ ЛОГИЧЕСКИХ ОПЕРАЦИЙ, ЗАПОМИНАЮЩИЕ
УСТРОЙСТВА, СХЕМЫ КВАНТОВАНИЯ
И ПРЕОБРАЗОВАТЕЛИ
4-1. СХЕМЫ СРАВНЕНИЯ (КОМПАРАТОРЫ)
4-1-1. Схема сравнения.
Компаратор — операционный усилитель, в цепи об-
ратной связи которого имеется лишь элемент ограниче-
ния по амплитуде (схема а). Усилитель нельзя исполь-
зовать без обратной связи (без ограничителя) из-за то-
го, что он выходит из насыщения с запаздыванием.
У усилителя может быть один или несколько входов.
При наличии одного входа усилитель реагирует на
изменение знака входного напряжения. При наличии не«
скольких входов усилитель реагирует на изменение зна-
ка суммарного входного напряжения. Если одно из на-
пряжений, подаваемых на входы усилителя, постоянно,,
то в момент равенства суммы остальных входных на-
пряжений этому постоянному напряжению выходная пе-
ременная схемы сравнения будет изменять свое состоя-
ние.
В качестве схемы сравнения могут быть также ис-
пользованы поляризованные реле (схемы б).
Реле Р1 срабатывает при Xi>0, а реле Р2 при х2>Е.
При использовании реле необходимо, чтобы источники
напряжений, управляющих их работой, были достаточ-
но мощными, т. е. были в состоянии обеспечить пра-
вильную работу реле.
4-1-2. Схема сравнения, у которой в цепи обратной
связи усилителя в качестве ограничителей включены ста-
билитроны.
На графике: А — напряжение стабилизации стабили-
тронов.
4-1-3. Схема сравнения, в которой в цепи обратной
связи усилителя включены диоды с опорными напряже-
ниями.
4-1-4. Быстродействующая схема сравнения с точными
уровнями выходного сигнала.
Здесь совмещены схемы операционного усилителя,
у которого в цепи обратной связи включена схема огра-
ничения, и выходного четырехдиодного моста, дающего
точные уровни выходного сигнала. Так же, как в пре-
дыдущих схемах, эта схема сравнения становится поро-
говым триггером при x2=const. Напряжения |Е| мосто-
вой схемы устанавливаются несколько меньше соответ-
ствующих уровней ограничения у= + В; Если $>Е, то
запираются диоды Д(иД4и открываются диоды Д2 и Дз-
4-2. СХЕМЫ КЛЮЧЕЙ
4-2-1. Схема простейшего электронного замыкающего
ключа.
В схеме Xi — входной сиг-
нал; ±х2— управляющий сиг-
нал, открывающий диоды в мо-
мент «замыкания» ключа;
±Е — опорные напряжения,
запирающие диоды во время
отсутствия сигнала х2; У — вы-
ходной сигнал полярности, об-
ратной полярности Х1.
4-2-2. Схема размыкающего ключа.
При отсутствии управляю-
щего сигнала ±х2 входной сиг-
нал проходит на выход усили-
теля. При наличии сигнала
+х2 диоды запираются, и ключ
«размыкается».
и у=0; R=2G-±-
4-2-3. Схема ключа, управляемого двухполярными пря-
моугольными импульсами амплитудой (7= ±100 В.
Когда С/=±100 В, диоды
открыты и схема проводит: у=
в противном случае диоды
закрыты
100 кОм;
Схема
рующего
входного
не оказывает шунти-
влияния на источник
сигнала.
4-2-4. Схема ключа, в которой в отличие от схемы
4-2-3 диодный мост включен между входным сопротив-
лением и входом операционного усилителя.
В схеме управляющие
прямоугольные импульсы
U имеют амплитуду
±100 В; /?=2(Ь-100 кОм;
Л?1==Л?2=1 мОм. Принцип
работы тот же, что и схе-
мы 4-2-3. Обе схемы при-
годны для квантования.
Достоинство этой схемы
в том, что она не оказы-
вает шунтирующего влия-
ния на источник входного сигнала.
4-2-5. Схема ключа, пригодная для квантования.
При управляющем сигнале ы>0 (—ы<0) диоды Дь
и Д2 открыты, а Д3 и Д4 закрыты и у—0. При отсутст-
вии управляющих импульсов у—х; если входное напря-
жение х не меняет знака, то можно использовать лишь
одну половину диодной схемы. Два дополнительных вхо-
да с подаваемыми на них постоянными напряжениями Е
>и —Е вводятся в схему для устранения зоны нечувст-
вительности в тех случаях, когда диоды Д3 и Дь крем-
ниевые. Характеристика открытого ключа у(х)—ли-
нейна.
4-2-6. Схема электронного ключа, позволяющая ком-
мутировать два равных и противоположных по знаку сиг-
нала.
Схема работает следующим образом. При x2i>0 и
-Х22<0 диоды Д1 и Д2 закрыты и x#i=—Xi. При противо-
положной полярности управляющих сигналов x2i и х22
диоды Д1 и Д2 оказываются открытыми, а диоды Д3 и
,Д4 закрытыми. В результате xOi=O. Так как коэффи-
циенты передачи входов усилителя 2 отличаются между
собой в 2 раза, то в первом случае y=xit а во втором
У=—Xi.
В данной схеме Ri=R2=R3; Rt—Re^Rs-
Достоинством этой схемы являются малые значения
напряжений х21 и х22, необходимых для управления дио-
дами.
4-2-7. Схема электронного ключа, в котором четырех-
диодная мостовая схема включена в цепь обратной связи
усилителя.
Управляющие прямоуголь-
ные импульсы (L'=±100 В)
открывают диоды моста и де-
лают равным нулю сопротив-
ление цепи обратной связи
усилителя: у=0; при отсутст-
вии управляющих импульсов
у=х; в данной схеме Д1=Д2=
—1 мОм; Д=20-4-100 кОм.
4-2-8. Схема электронного ключа с точной линейной
передаточной характеристикой, за счет параллельно вклю-
ченных диодных элементов ограничения и нечувствитель-
ности.
Нестабильность напряжений управления и термоста-
бильность диодов практически не влияют на точность
работы ключа. При парафазных управляющих сигна-
лах (Ху2——xVi) данный ключ работает так же, как и
схема 4-2-7, т. е. при xJ/2>0 и ху1<0, у=£>, а при х^СО
и х,д>0, у-^РлХ l-Ri.
В случае применения не связанных между собой
управляющих сигналов ху1 и ху2 ключ выполняет логи-
ческие операции. При выполнении неравенств хмакс/^1>
>xyilRs и Xumj/Ri^Xyi/Rt ключ в открытом состоянии
выполняет функцию зоны нечувствительности. На гра-
фиках приведен пример реализации логической опера-
ции:
х при ^,>0 и xys,<Q;
0 в остальных случаях.
4-3. СХЕМЫ ВЫДЕЛЕНИЯ ПЕРЕМЕННОЙ, ИМЕЮЩЕЙ
НАИБОЛЬШЕЕ (НАИМЕНЬШЕЕ) ЗНАЧЕНИЕ
4-3-1. Схема выбора максимальной из нескольких пе-
ременных: t/=max(xi, х2, ..., хп).
Самое большое напряжение, открыв свой диод и бу-
дучи приложено к катодам остальных диодов, одновре-
менно их все закроет.
Без резистора R и опорного напряжения —Е схема
работает правильно, если хотя бы одно из входных на-
пряжений положительно. При наличии вышеупомянутых
элементов это условие отпадает. Схема работает по
уравнению
У = ^max(A> > хп)
при условии, ЧТО Xi
Ri + R
4-3-2. Схема выбора минимальной из нескольких пе-
ременных: y=min(xi, х2, ...,хп).
Без резистора R и опорного напряжения Е схема
работает правильно, если хотя бы одно из входных на-
пряжений отрицательно. При наличии R и Е это уело-
вие отпадает. Схема работает по уравнению
#=-^-min(x1I , х„)
. R, р
при условии, что лг< R
4-3-3. Схема для получения максимальной (минималь-
ной) из нескольких переменных:
y=max(aiXi, «2X2, - > апхп) при х<>0.
Для получения у=
=min (aiXi, «2X2, ..., anxn)
при х,<0 диоды надо вклю-
чить наоборот.
Отличие этой схемы от
двух предыдущих в том, что
каждая из входных перемен-
ных подается с заранее вы-
бранным коэффициентом,
определяемым отношением
сопротивлений усилителя
ai=RzilRu. Кроме того, на
входе усилителей могут
быть потенциометры для
возможности быстрого изме-
нения коэффициентов не-
скольких входных сигналов
(в том числе и постоянных).
Такие схемы могут быть ис-
пользованы во многих логи-
ческих операциях (например, при моделировании узлов
сетевого графика [20]).
Так как все диоды, кроме одного, будут запертыми,
то все усилители, кроме одного, окажутся без обратной
связи, и у них загорятся сигнальные лампочки, сооб-
щающие о «режиме перегрузки». Следовательно, опера-
тор будет знать, какая величина является максимальной
(минимальной). Если же это, например, схема модели-
рования сетевого графика, то эти сведения определяют
критический путь.
4-3-4. Прецизионная схема селектора для выбора из
двух переменных максимальной.
Кроме указанной операции, эта схема может быть
использована также в качестве ограничителя и ключа.
В отличие от предыдущей схемы усилители не попадают
4-3-5. Схема для
менных:
в «режим насыщения» при
оценке максимума, когда
сравниваемые сигналы от-
рицательны, так как у них
имеются еще и диодные
ограничители. Следова-
тельно, для этой схемы не
обязательно условие %;>
>0. Если все х<<0, то на
выходе инвертора у появ-
ляется сигнализирующий
об этом небольшой отри-
цательный сигнал, кото-
рый проходит через /?4.
Если все остальные
сопротивления равны
100 кОм, то Т?4=10 мОм.
яия суммы модулей пере-
у=2 k/l-
Z = 1
В данной схеме с по-
мощью диодной сборки
все х<>0 проходят после-
довательно через усилите-
ли 2 и 1.
4-3-6. Схема слежения за максимальным из всех по-
ложительных значений х по огибающей.
Схема представляет собой инерционное звено с от-
носительно малой постоянной времени, на входе и в це-
ли обратной связи усилителя которого включены диоды.
Интегрирующий усилитель работает лишь то!да, когда
выполняется условие х>у. Во всех остальных случаях
[усилитель запоминает величину, бывшую в конце пе-
риода выполнения условия х>у. Когда х^л/, разрядки
|конденсатора цепи обратной связи не происходит, так
1как в замыкающей ее цепи включены навстречу друг
другу два диода.
При обратном включении диодов отслеживается ми-
нимальная отрицательная величина х.
4-3-7. Схема слежения за максимумом переменной.
В схеме 7?i=7?2=1OO кОм;
7?з< ЮО кОм; 0=0,1 мкФ. Ста-
тическая погрешность схемы
примерно 2%, динамическая
погрешность зависит от часто-
ты входного сигнала. Измене-
ние напряжения на выходе
этой нелинейной 7?С-схемы
зависит от сочетания знаков
входного сигнала и его произ-
водной.
4-3-8. Схема, представляющая сочетание прецизионно-
го селектора с интегратором.
Схема выполняет одновременно сравнение по ампли-
туде и хранение аналогового сигнала. Она предназначе-
на для непрерывного считывания максимального значе-
ния тахх по огибающей для изменяющегося входного
напряжения х. При изменении полярности диодов
и опорных напряжений образуется величина min (х)
(см. график). Маркерные сигналы (резкие скачкообраз-
ные изменения напряжения) и у2 формируются
в моменты достижения частных максимумов (миниму-
мов).
4-3-9. Схема для получения максимума (минимума)
положительного (отрицательного) сигнала.
Для получения мини-
мума достаточно изме-
нить полярность включе-
ния диодов и опорных на-
пряжений. Верхняя часть
схемы работает как один
из каскадов схемы 4-3-4.
Она проводит сигнал
лишь одной полярности.
Для другой полярности
работает схема ограниче-
ния, но диод не пропуска-
ет этот ограниченный сиг-
нал в нижний каскад. На
схеме показаны выходы
маркерных сигналов.
Нижний каскад ана-
логичен схеме 4-3-8.
4-3-10. Схема для получения огибающей входного сиг-
нала.
Первый и третий каскады схемы — это усилители пе-
ремены знака входного напряжения с ограничением по
знаку выходного напряжения. Первый каскад выполня-
ет однополупериодное выпрямление. После суммирова-
ния удвоенного выходного напряжения первого каскада
с входным сигналом на втором и третьем входах сумми-
рующего усилителя (при отсутствии обратной связи
с интегрирующего усилителя на первый вход суммирую-
щего усилителя) образуется сигнал, представляющий
входное напряжение после двухполупериодного выпрям-
ления, который подается на схему слежения за макси-
мумами (минимумами) напряжения х.
Коэффициенты а и k> 1 подбираются в зависимости
от характера и частоты изменения входного сигнала.
4-4. НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ ЛОГИЧЕСКИЕ СХЕМЫ
4-4-1. Схема,
скую операцию
воспроизводящая специальную логиче-
(х, при т<Гт
У = {
при т>т1,
где Ti — момент време-
ни, В КОТОРЫЙ Хз+*4=
=0. Ключ К включает-
ся в момент пуска схе-
мы. Реле срабатывает
от положительного сум-
марного сигнала на
входе схемы сравнения.
При прохождении сигнала х3+х4 через нуль реле сра-
батывает и самоблокируется через контакт 1Р1.
4-4-2. Схема, отрабатывающая специальную логиче-
скую операцию.
при хг >• 0\/л2 з> 0;
в ^стальных случаях.
4-4-3. Схема, отрабатывающая логическую опера-
цию И (в соответствии с табл.
Сигнал 1 соответствует на-
пряжению 100 В. Ri=Rz=
=1 МОм; 7?з=550 кОм.
Данная схема отрабатыва-
ет и другую логическую опе-
рацию в соответствии с табл. 2
(схема ИЛИ), если увеличить
в 2 раза сопротивление рези-
стора /?3.
1 — схема совпадения).
Таблица 1
Х1 Хц *1Лх2
1 0 0 1 0 1 0 1 0 0 0 1
Таблица 2
*1 ха XiVxa
1 0 1 0 0 1 1 0 1 1 1 0
4-4-4. Схема, отрабатывающая логическую операцию
в соответствии с таблицей
X = х, Х=х
0 1 1 0
(схема НЕ).
В схеме 7?i=l МОм; R2—1,1 МОм.
4-5. НЕКОТОРЫЕ СХЕМЫ ЗАПОМИНАНИЯ
4-5-1. Схема запоминающего устройства.
При замкнутом ключе Л на выходе схемы воспро-
изводится входной сигнал. При размыкании ключа на
выходе схемы запоминается мгновенное значение вход-
ной переменной в момент размыкания Ti. Коэффициент
передачи схемы равен отношению емкостей конденсато-
ров входа и выхода.
переменной, изменяющейся со-
4-5-2. Схема запоминания мгновенного значения пер -
мениой.
При достаточно ма-
лой постоянной време-
ни (обычно /?=
=100 кОм, С=0,1 мкФ)
такое инерционное зве-
но применяется как
схема запоминания
мгновенного значения
скоростью до 20 В/с.
4-5-3. Схема улучшенного запоминающего устройства.
Включение допол-
нительного (форсирую-
щего) конденсатора Ci
позволяет согласовать
постоянную времени
входной цепи с посто-
янной времени цепи об-
ратной связи и уменьшить задержку в передаче инфор-
мации, которая создается элементами 7? и С.
Ключ К работает от внешнего генератора. В мо-
мент замыкания ключа К источник входного сигнала х
и усилитель схемы нагружаются большими токами и на.
выходах (из-за неравенства нулю выходного сопротив-
ления) появляются выбросы напряжения. При электрон-
ных ключах схема работает с частотами до 1 кГц. На
более высоких частотах емкость Ci препятствует сраба-
тыванию ключа. Обычно /?=0,1 МОм и C=Ci=0,l мкФ.
4-6. СХЕМЫ КВАНТОВАНИЯ ПО УРОВНЮ
4-6-1. Схема ступенчатой аппроксимации входной пе-
ременной (квантования по уровню).
Ключ К работает пе-
риодически от внешнего х у к. у
генератора. Первый уси- °——J°
литель РУ, являющийся
в данной схеме раздели-
тельным, должен иметь большое входное сопротивле-
ние. Погрешность схемы примерно 0,1% при времени из-
мерения (ключ замкнут), превышающем не менее чем
в 7 раз постоянную времени цепи заряда конденсатора.
Постоянная времени цепи разряда конденсатора в режи-
ме запоминания должна превышать время хранения
(ключ разомкнут; не менее чем в 1000 раз.
4-6-2. Другая схема квантования входной переменной
«о уровню.
В отличие от схемы
4-5-2 перед ключом вве-
ден усилитель У с боль-
шим положительным ко-
эффициентом усиления и
малым выходным сопро-
тивлением. Следящий усилитель может быть выполнен
на обычном операционном усилителе с дополнительным
инвертором. Ключ К коммутируется от внешнего гене-
ратора.
4-6-3. Схема квантования по уровню на одном уси-
лителе.
Эта схема обеспечивает
точные вертикальные и гори-
зонтальные участки кривой у.
4-6-4. Схема квантования по уровню при амплитудно-
импульной модуляции с единичной скважностью.
На входе интегрирующего усилителя применена схе-
ма, которая с зоной нечувствительности ±А отрабаты-
вает характеристику х3==/1(—signjfe).
Для точной фиксации уровня в схемах ограничения
целесообразно использовать на выходах усилителей 2
и 3 диодные мостовые схемы (см. § 2-3). Сигналы с вы-
ходов усилителей 2 и 3 подаются на суммирующий
усилитель 4, а затем на усилитель перемены знака 5.
Схема, замкнутая через усилитель перемены знака 5
положительной обратной связью, является моделью ре-
лейной характеристики с зоной нечувствительности и
гистерезисом. Для ра оты о щей схемы квантования не-
обходимо, чтобы высота и ширина петель гистерезиса
были равны А. Интегрирующий усилитель 6, имеющий-
большой коэффициент передачи (обычно 100 при R—
=100 кОм, С=0,1 мкФ), вместе с подключенной на вхо-
де вышеописанной схемой охвачен отрицательной об-
ратной связью.
Схема работает следующим образом. Входным сиг-
налом для схемы является сумма xi+x3—у. Пусть ис-
ходная точка находится в начале координат. При уве-
личении Xi до уровня А и Х2 до —А срабатывает модель
реле и х3 становится равным А. Этот сигнал поступает
на вход интегрирующего усилителя 6 и на вход схемы.
Когда —у станет равным —А, сумма станет несколько
меньше А, реле попадет в зону нечувствительности
и Хз=0.
Интегрирование прекращается. Теперь лишь изме-
нение Xi на ±А вызовет переход схемы на новый уро-
вень квантования.
Для того чтобы обеспечить малый уровень квантова-
ния, резко увеличивают (в k раз) коэффициенты по пер-
вому и второму входам суммирующего усилителя 1.
При этом меньше влияние погрешностей диодных схем
ограничения.
Особенно важно, чтобы внутри зоны нечувствитель-
ности х3 был точно равен 0. В противном случае
в режиме хранения интегрирующий усилитель 6 будет
продолжать интегрирование, что недопустимо. Обыч-
но k берется равным 10—100 в зависимости от уровня
квантования, Л=100 В, следовательно, уровень кванто-
вания равен 100/й.
4-6-5. Схема диодного
квантования по уровню.
Схема квантователя
состоит из входного ре-
зистора J?o, операцион-
ного усилителя 1 и
квантующего диодного
блока К ДБ. Последний
состоит из каскадного
делителя напряжений,
состоящего из резисто-
ров Дц, причем Ras>
>Rd2> >Rdn, ре-
зисторов RCj, опреде-
ляющих значения скач-
ков выходного тока, ре-
зисторов Rmj, опреде-
ляющих ширину ступе-
ни и групп по два по-
следовательно вклю-
ченных противополож-
но направленных дио-
да, .причем
— | Д%; | ^0’ %ci ~ | Д£у | ’
где AXj — ширина /-й ступени; Atj— значение /-го скач-
ка тока.
Опорное напряжение каскадного делителя напряже-
ний рекомендуется брать в несколько раз большим вы-
ходного напряжения усилителя. Подавая с выхода
усилителя 2 через резистор положительной обратной
связи напряжение на вход усилителя 1, можно про-
изводить квантование по уровню с гистерезисными
петлями.
4-7. НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ СХЕМЫ С ЗАПОМИНАЮЩИМИ
ЭЛЕМЕНТАМИ
4-7-1. Схема линейной экстраполяции входного сиг-
нала.
Схема работает сле-
дующим образом. При за-
мыкании ключа К осу-
ществляется практически
мгновенная фиксация по-
ступающего дискретного
сигнала х (постоянная
времени цепи ДС0 должна быть достаточно мала).
При разомкнутом ключе уравнение схемы в интерва-
ле п7’<т< (п+ 1)Т имеет следующий вид:
пТ
1 ch — du
(4-1)
(4-2)
Дифференцируя (4-1) и подставляя dy/dt из (4-2), по-
лучаем:
о C. j 6ZT
Устанавливая a=C0/Ci, получаем di/dx—O. Таким
образом, в цепях Сь Ri и Со протекает постоянный ток
и, следовательно, происходит линейное изменение напря-
жений на конденсаторах и Со, т. е. линейное измене-
ние у.
4-7-2. Схемы запоминания, позволяющие сравнить те-
кущее значение запоминаемой величины с предыдущим.
В схемах а и 6 предыдущее значение величины пред-
ставлено в виде напряжения на конденсаторе С.
При подаче текущего значения запоминаемой вели-
чины путем замыкания ключа К конденсатор С либо до-
заряжается, либо разряжается, что характеризуется зна-
ком и интенсивностью импульса у (т) в момент комму-
тации ключа. Схемы применяются для решения
итерационных задач шаговыми методами при необходи-
мости сравнения результатов соседних циклов.
В схемах виг вместо конденсаторов используются
интегрирующие усилители.
4-7-3. Схема запоминающего устройства с последова-
тельной передачей информации (для итерационного про-
цесса).
Каждый усилитель работает в режиме слежения-хра-
нения. Самой простой схемой для этого является инер-
ционное звено с малой постоянной времени и ключами
на входах. Два последовательно включенных инерцион-
ных звена, входные ключи которых управляются сдви-
нутыми друг относительно друга во времени, или пара-
фазными, импульсами Si и S2, представляют запоминаю-
щую пару.
4-7-4. Упрощенный вариант схемы запоминающей па-
ры с одним усилителем, использующий реле (для мед-
ленных процессов).
При замкнутом контакте 1 реле заряд на конденса-
торе Ci=2C составит:
qc=X-^T-2C = (x+y)C,
а на конденсаторе С
qc=yC.
При замыкании контакта 2 реле конденсатор Ct раз-
ряжается, а на конденсаторе С остается заряд
q'c=yC—(х+у) С——хС,
т. е. новое запомненное значение у=—х.
4-8. СХЕМЫ РАЗЛИЧНЫХ ВИДОВ МОДУЛЯЦИИ СИГНАЛОВ
4-8-1. Схема преобразователя для амплитудно-им-
пульсной модуляции.
Это — разомкнутая схе-
ма, состоящая из модулято-
ра (электронного ключа) и
элемента памяти. При от-
сутствии управляющих сиг-
налов (двухполярных им-
пульсов ±U) диоды запер-
ты опорным напряжением
±Е. Управляющие им-
пульсы ±U, приходящие
ски открывают диоды. В
от генератора, периодиче-
этой схеме входной сиг-
нал квантуется и подается на вход элемента памяти.
В момент прохождения сигнала от генератора на выходе
устанавливается напряжение у——х, которое сохраня-
ется постоянным до прихода следующего импульса. На-
копление погрешности в схеме происходит в основном
из-за наличия небольших токов «покоя» диодов.
4-8-2. Схема преобразователя для амплитудно-им-
пульсной модуляции.
Схема имеет замк-
нутую обратную связь.
При отсутствии управ-
ляющих импульсов на-
пряжение на выходе
схемы постоянно. Инте-
грирующий усилитель
используется как схе-
ма запоминания.
При подаче управляющих импульсов +U диоды от-
крываются, и схема работает в режиме апериодического
инерционного звена. За счет постоянного сравнения
выходного напряжения с входным происходит система-
тическая компенсация погрешности, накапливаемой
в течение периода.
4-8-3. Схема преобразователя для широтно-импульс-
ной модуляции, у которого полярность выходного напря-
жения у соответствует полярности входного напряже-
ния хь
На выходе схемы формируются прямоугольные им-
пульсы постоянной амплитуды А, длительность которых
пропорциональна значению входного сигнала %i в диск-
ретные моменты времени. Однополярный сигнал х2
(х2<0) пилообразной (или треугольной) формы, зада-
ваемый внешним генератором, изменяется пропорцио-
нально времени, отсчитываемому от некоторого фикси-
рованного момента. Усилители с ограничением в цепи
обратной связи работают в релейном режиме поочеред-
но в зависимости от знака входного напряжения. В мо-
мент равенства сигналов xt и х2 происходит отключение
соответствующего релейного усилителя. Длительность
выходного импульса пропорциональна значению входно-
го сигнала в фиксированные моменты времени. Ампли-
туда выходного сигнала определяется настройкой
ограничений ±А в цепи обратной связи усилителей.
4-8-4. Схема преобразователя для широтно-импульс-
ной модуляции с возможностью изменения коэффициен-
та пропорциональности скважности выходных импуль-
сов амплитуде входного сигнала.
Изменение коэффициента пропорциональности вос-
производится с помощью делителей напряжения сц и а2
(ai—2/Ti и а2=2/Т2). При Г1=Т2 х2— равнобокий двух-
полярный треугольный сигнал.
На выходе генератора (усилители 6—8) сигнал х3
имеет вид двухполярного пилообразного напряжения
с регулируемым соотношением длительности однополяр-
ных частей сигнала и а2). С помощью инерционного
звена (усилители 1—3) с очень малой постоянной вре-
мени (Лу2~ 100) на выходе усилителя 2 (х4) получается
квантованный по времени входной сигнал хь На усили-
телях 3 и 4 воспроизводится модуль квантованного сиг-
нала х4. Схема отрабатывает следующее соотношение:
Г—|—100 В при (| xt | -f- х,) 5* 0 и xt > 0;
У — < — 100В при (| xt |-|-х,)>0 и х,-<0;
I 0 при ([ 14- х,) < 0.
4-8-5. Схема преобразователя для комбинированной
амплитудно-широтной модуляции.
Длительность выходных импульсов определяется
входным сигналом Хп, а их амплитуда — входным на-
пряжением Х12. При Л=£1=100 В амплитуда у равна
значению сигнала xi2. Сигнал х2 — однополярный сигнал
развертки, подаваемый с генератора пилообразного
(треугольного) напряжения; Е и Е\—постоянные опор-
ные напряжения.
4-9. СХЕМЫ НЕКОТОРЫХ ПРЕОБРАЗОВАТЕЛЕЙ
4-9-1. Схема преобразования декартовых координат
в полярные.
Усилители, на выходах которых отрабатываются
сигналы Z] и z2, работают в режиме следящих систем.
Коэффициенты усиления а усилителей выбираются мак-
симально возможными. Ограничение на а накладывает
качество усилителей. Для данной схемы имеем:
x=/?cos0; y=/?sin0; Zi = cos0;
z2=sin0; 7?=xcos0+#sin0.
При необходимости получения 0 в схему добавляется
нелинейный блок <2>=arcsin0, где Ф=<р(г2).
4-9-2. Схема мультикомпаратора, воспроизводящая
квантование входного сигнала, которая может отмечать
совпадение значения входного сигнала с заданными зна-
чениями в нескольких фиксированных точках.
Эта схема построена с помощью усилителя постоян-
ного тока с большим коэффициентом усиления, в цепи
обратной связи которого включен диодный функцио-
нальный преобразователь ДФП, на котором настроена
функция z—f (у). При таком включении функциональ-
ная зависимость выходного напряжения от входного
у—F(x) получается обращением осей функции z=f(y).
Диодный функциональный преобразователь обеспечи-
вает чередование сигналов отрицательной и слабой по-
ложительной обратных связей. В точках V, схема фор-
мирует однократные положительные или отрицательные
перепады напряжения, удобные для использования
в цифровых схемах. Если число диодов равно 2м, то
схема имеет п+1 перепад (состояние) всего на двух
усилителях. Схема используется лишь при низкочастот-
ном входном сигнале. В схеме /?=500к0м; /?] = 1М0м;
/?2> 15 МОм.
4-9-3. Схема с двумя устойчивыми состояниями, об-
ладающая свойствами симметричного триггера.
В случае, когда yi>0,
а г/2<0 (диод Д\ открыт и
диод Д2 закрыт), через Д2
пройдет только положи-
тельный импульс х, ампли-
туда которого больше А.
В этом случае триггер пере-
бросится в противополож-
ное состояние, т. е. скачком
изменится полярность и
и у2. Схема нечувствительна
к отрицательным входным
—1 МОм, С=0,1 мкФ, Д=50
импульсам. В схеме R=
В.
Глава пятая
НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ МЕТОДИЧЕСКИЕ ПРИЕМЫ
5-1. СХЕМЫ С ОТСЛЕЖИВАНИЕМ
5-1-1. Схема выполнения операции дифференцирова-
ния z=dx/dx с помощью интегрирования z——х+
Ч- J z dx+az.
В данной схеме следует
а устремлять к 1 (насколь-
ко позволит схема, если
учитывать паразитные свя-
зи и самовозбуждение).
При этом имеем:
х= Izd-c-j- (а — 1)г =s=J zd*.
5-1-2. Схема, применяемая для тех же целей, что и
схема 5-1-1 с операционным усилителем в качестве схе-
мы сравнения для следящей системы.
Конденсатор С подбирается минимальной емкости,
обеспечивающей устойчивую работу схемы.
5-1-3. Схемы решения дифференциального уравнения
с малым коэффициентом при старшей производной.
«П^(П)^+Х- *’ + • • • + а.х = f (т); ап < ап.,.
Первый способ. При разрешении уравнения относи-
тельно старшей производной при всех членах правой
части появляются большие коэффициенты, которые
трудно задать на АВМ:
“л '
где
. *\(.)=: — ап_^п-^ ... —
Поэтому Fi(«) формируется на входе операционного
усилителя с разомкнутой цепью обратной связи, кото-
рый служит для отслеживания старшей производной
(схема а). Для исключения самовозбуждения возмож-
но включение в цепь обратной связи конденсатора не-
большой емкости.
Второй способ. Для формирования правой части ис-
пользуется предварительное преобразование уравнение
(схема б).
В уравнении прибавляют и отнимают а затем
разрешают уравнение относительно х№>:
Х(п)==(1—.... х, -г).
Используя суммирующий усилитель с дополнитель-
ной положительной обратной связью с коэффициентом
в~1, решают уравнение в неявном виде. Схема требует
мер по обеспечению устойчивости.
Третий способ. Уравнение разрешается относительней
инерционного звена (схема в):
—4-x(n-I> + x(n-I) =
*> —... — аох +
**п -1
т. е.
(Гр-Н)х("-Ч==—F2(x("-2), ..., X, т)=—
Емкость конденсатора С в цепи обратной связи усш-
лителя выбирается в соответствии с значением ап/еп_ь
и масштабом времени.
5-1-4. Схема четырехквадрантного устройства деле-
ния, обеспечивающая воспроизведение функции z—xly;
путем минимизации функции F — ~-(yz— х)л.
При постоянном значении у напряжение z следит
за входным сигналом х с некоторым запаздыванием..
Постоянная времени цепи запаздывания, обратно про-
порциональная коэффициенту усиления k— 1/aesi, в пет»
ле обратной связи обычно весьма мала. Исходное зна-
чение z(0) =х(0)/#(0) должно быть точно задано.
Оперируя с делителем у любой полярности, схема
воспроизводит соотношение
dz , dF , , .
= — k ~ ky (yz ~
Схема допускает одновременное прохождение через
нуль делимого х и делителя у. При минимизации
= \yz—х| второе множительное устройство заменяется
аналоговым переключателем. Уравнение, решаемое схе-
мой, принимает вид:
~= — ky sign {yz - - л).
5-2. ИНТЕГРИРОВАНИЕ ПО НЕВРЕМЕННОМУ АРГУМЕНТУ
5-2-1. Схема интегрирования по невременному аргу-
менту— по машинной переменной х(т).
z =
Интегрирование по машинной переменной х(т) воз-
можно в тех случаях, когда в модели имеется напряже-
ние, пропорциональное производной по времени х'(т).
Погрешность определяется в основном точностью
блоков перемножения.
у'т уЮ1‘С1
5-2-2. Схема моделирования функции #=sinx.
Схема основана на ре-
шении определяющего диф-
ференциального уравнения
§-+>/-О
с начальными условиями
£(0) = 1.
5-2-3. Схема моделирования функции
у = у(0)е~Ьх1\
Основана на решении
вспомогательного уравнения
dyjdx-\-by=0, преобразован-
ного к виду
= у,
ch dt s
В схеме
ai=b; сс2=] Г/(0) |.
5-2-4. Схема воспроизведения функциональной зави-
симости
г/=1п х(т).
б)
Схема основана на решении вспомогательного опре-
деляющего уравнения
dx
dy _
dt х
Ограничения: |х|>Д и незнакопеременный; ai=
=1п х(0).
В схеме а для деления применяется блок деления,
в схеме б деление выполняется в неявном виде: й^ЮО.
5-2-5. Схема моделирования функциональной зависи-
мости у=Аха.
Схема основана на решении определяющего урав-
нения
dx
^- — Aaxa~l dx — аи
dt-dz~ay х •
В схеме ai = a. (Условием работоспособности схемы
является х=И=0.)
S-3. НЕКОТОРЫЕ СПЕЦИАЛЬНЫЕ СХЕМЫ
5-3-1. Схема для автоматического выбора масштабов
в делительном устройстве.
Компаратор, используемый в схеме а, может не об-
ладать высокой точностью. В схеме использовано реле,
с помощью которого производится автоматическое из-
менение масштабов х и у. Реле срабатывает при
у<Ес\ а1=аг=0.9. При решении некоторых задач не-
обходимо контролировать |г/|. Тогда используются
двойные компараторы.
Схема б позволяет осуществить непрерывное авто-
матическое изменение масштаба.
.5-3-2. Схема для получения определенных интегра-
лов, входящих в уравнения.
Интегрирование
схеме получения
в
У —
производится в убыст-
ренном масштабе вре-
мени (7ИТ по от-
ношению к основной
исследуемой системе.
Интегрирование произ-
водится двухтактной
двухканальной схемой, так что в период, когда один из
каналов используется для получения интеграла, выход-
ное напряжение другого канала используется в основ-
ной схеме.
Контакты 1Р1 и 2Р1 реле Р1 (на схеме не показаны)
управляют последовательностью работы каналов в ре-
жиме «интегрирование — запоминание», а контакты ре-
ле 1Р2 и 1РЗ служат для быстрого разряда конденса-
торов в конце полупериодов запоминания каждого из
каналов. Для формирования управляющих работой ре-
ле Р1—РЗ (на схеме не показаны) необходимы гене-
раторы периодических сигналов.
5-3-3. Схема моделирования годографа исследуемой
линейной системы.
Обозначения в схеме: Ф\ — блок нелинейности, на
котором построена функция модуля Ф1(у) = |у|; Ф2—
линейная система (исследуемый объект), на вход кото-
рой подается гармонический сигнал cos со/ от схемы
моделирования электронного маятника.
Ключ К замыкается после окончания переходного
процесса; напряжение и, управляющее яркостью луча
•осциллографа, подается на соответствующий его вход z
через два последовательно включенных контакта реле
Р1 и Р2 или соответствующих им два электронных клю-
ча Ki и К2. Если осциллограф не имеет входа для
управления яркостью луча, то сформированный для
этого сигнал z управляет синхронной коммутацией на-
пряжений х и у соответственно на горизонтальный и
вертикальный входы осциллографа. Реле Р1 позволяет
фиксировать из двух симметричных относительно осей
координат точек лишь одну (при cos ит одной полярно-
сти). Реле Р2 производит кратковременную коммутацию
яркости луча (или входов х и у) при прохождении
0i=|sincor| через нулевую точку (ai=0,005).
Каждому значению и=а соответствует высвечивае-
мая точка, соответствующая концу вектора годографа;
меняя плавно со, можно получить график годографа.
Плавное изменение и можно реализовать, заменив
в схеме делители а блоками перемножения и подав на
их входы в качестве сомножителя линейно-изменяющее-
ся напряжение, пропорциональное и.
5-3-4. Схема подготовки сомножителей одного знака
к перемножению.
Из двух сомножителей схемно выбираются макси-
мальный и минимальный. Значение напряжения, соот-
ветствующее минимальному сомножителю, увеличивает-
ся с помощью масштабного усилителя k (Л=24-10).
Сомножители, подаваемые на логические ячейки Л\
и Л2, должны быть одного знака:
Л1—тах(х1, х2); Л2=тш(Х], х2).
Наихудший случай имеет место, когда Xj=x2 (мо-
мент перекоммутации). Особенно удобна схема, когда
произведение примерно постоянно (либо известно, что
максимум произведения много меньше 100 В).
5-3-5. Схема переключения крутых участков двух
функций одной переменной.
f — ПРИ
I—h(x) при fi(^i)=f2(^i)-
Для этого может быть применена схема получения
максимальной из двух функций 4-3-1, но без инвертора.
Применение такой схемы является методическим при-
емом при необходимости отработки на модели функцио-
нальной зависимости [/з(х)1 с разрывом первой произ-
водной в экстремуме [/з(Х1) ].
На блоке нелинейности такую функцию получить
трудно, поэтому настраивают две функции [(fi (х) и
f2(*)] и применяют схему 4-3-1 со смещением (—Е).
5-4. СХЕМЫ ИСПЫТАНИЙ И НАСТРОЙКИ БЛОКОВ АВМ
5-4-1. Схема для ускоренного определения дрейфа
нуля усилителя.
R
На выходе интегрирующего усилителя с постоянной
времени RC, замкнутого положительной обратной связью
через усилитель перемены знака (схема а), спустя вре-
мя т образуется напряжение, равное Е. При этом из
эквивалентной схемы б следует:
Ц-е0 = gd(e0-Е). и==_Е
аг ’
^=^=/?С1пА(£+..),
ео
где ео — дрейф усилителя, приведенный ко входу.
При т=0 имеем:
£=0; Л=1/6о.
Дрейф «о, приведенный ко входу, можно рассчитать
в зависимости от значения tfRC по формуле
Е
6о - •
Например, при £ = 25 В; т=13 с; RC—1 имеем:
е = = 60 мкВ.
° е”
Оценка моделируемого процесса х=/(т) с точки зре-
ния дрейфа интегрирующего усилителя за время реше-
ния Тмакс (СМ. б)
Е
е0 gt/SC _ ! ИЛИ
aiar.v
a ., __^макс _
л“да "яс s«-
Рациональный выбор масштабов переменных требует,
чтобы 1 _
р/"* 1 тмакс
со — 2и/г ’
где п — число циклов колебаний за время решения.
Ожидаемый дрейф усилителя составит Аидр—2лмео.
5-4-2. Схема для компенсационного метода проверки
коэффициента передачи интегрирующего усилителя и
временных параметров управляющих реле.
Значение I7i пропорционально разности во времени
срабатывания управляющих реле.
На участке I зависимости и(х) усилители 1 и 2 в ис-
ходном состоянии: на участке II — усилитель 1 в режи-
ме «Решение», а усилитель 2 в исходном состоянии
(или наоборот); на участке III — оба усилителя в режи-
ме «Решение».
Негоризонтальность характеристики п(т) на участке
III характеризует различие коэффициентов передачи-
интегрирующих усилителей.
5-4-3. Схема для оценки динамической погрешности
с помощью электронного маятника.
с) = лое cos шт,
где (о=1//?С; б — фазовая погрешность, учитывающая
полную погрешность интегрирующего усилителя (вслед-
ствие конечности коэффициента усиления, утечки кон-
денсатора, входных и выходных сопротивлений усили-
теля), а также долевую (половинную) погрешность
вспомогательных блоков — усилителя перемены знака
и делителя напряжения (если имеется).
За время т
— ==1-е~2лга1^2^,
Г 0
где а — изменение радиуса фигуры Лиссажу за п—
=х1Т=ых12п циклов колебаний; Т — период колебаний
маятника.
5-4-4. Схема для оценки динамической погрешности
блока нелинейности.
73"
Электронный маятник (часть схемы без блока Ф, но
со связью, показанной штриховой линией) с помощью
одной из схем автоматической компенсации погрешно-
стей (проще всего подбирается постоянная положитель-
ная обратная связь для компенсации затухания) на-
страивается на колебания постоянной амплитуды. За-
тем в разрыв маятника включается нелинейный блок Ф,
настроенный для испытаний на линейную характеристи-
ку Ф(х). Затухание маятника за конечное время опре-
деляется динамической погрешностью блока. Аналогич-
но испытываются блоки перемножения, если их вклю-
чить в схему электронного маятника, как это делается
при необходимости получения а=/(т).
5-4-5. Схема для оценки погрешности задания пара-
метров операционных элементов.
В этом случае про-
изводится испытание
операционных блоков,
отобранных в схему
двух маятников. Оба
маятника тщательно
настраиваются на одну
и ту же частоту о0=
=1 l>RC. Контроль про-
изводится по времени
превращения эллипса
(фигура Лиссажу на
экране осциллографа) впрямую. Так как Aco=ci)06/2 ит=
=2n/Aci), где 6 — погрешность, вносимая блоками; т —
время между двумя совпадениями фаз (превращение
фигуры в прямую),
. п Ав 4п 4п/?С
§ :== 2--------------------------
<>„ <о„т т
5-4-6. Схема для компенсации погрешности на-
стройки.
В практике моделирования некоторые коэффициенты
требуется настроить особо точно, чтобы не исказить
физический смысл задачи.
Например, в моделируемой /?С-цепочке (схема а)
конденсаторы не имеют утечки. Уравнение для узла 1
имеет вид:
— 1 f Ид Щг + 1 [ /-» dllfi
R R ‘ С fa —
или
RC и^-ап_1-[-2ип-ип+1 = 0.
При наборе уравнений узлов на операционных эле-
ментах (схема б) необходимо строго выполнить усло-
вие: R\\R = RI2. Нарушение этого условия из-за неточ-
ности сопротивлений резисторов приводит к тому, что
в модели появится эквивалент утечки конденсатора.
Чтобы избежать этого, настройку блоков производят по
схеме компенсации погрешностей настройки коэффици-
ентов передачи. В схеме в введен нуль-индикатор НИ,
указывающий условие настройки сопротивлений рези-
сторов /?]|/? и R/2. После настройки резистор с сопро-
тивлением R/2 включается в цепь обратной связи уси-
лителя (см. схему б).
5-4-7. Схема для испытания блока перемножения.
На схеме а1=1ссз=Д; az=B.
Схема производит сравне-
ние выходного напряжения
интегрирующего усилителя
%1, умноженного на постоян-
ный коэффициент аз—А, с выходным напряжением бло-
ка перемножения, на входы которого поступают напря-
жения, пропорциональные Xi и «1=Д. Погрешность
определяется как удесятеренное рассогласование этих
двух напряжений. В этой схеме блок перемножения ме-
няет знак выходного напряжения.
5-4-8. Схема для проверки блока нелинейности Ф,
настроенного на квадратичную параболу (или блока
перемножения).
Схема оценивает по-
грешность: 1) по удесятерен-
ной разности напряжений и;
2) по линейности характе-
ристики на экране осцилло-
графа.
5-4-9. Схема интегральной оценки несовпадения двух
функциональных зависимостей Фг и Ф2.
т
= j | Ф, —Ф21 dz.
о
Схема применяется в задачах идентификации для
выработки целевой функции. В этом случае Ф2 пред-
ставляет собой модель исследуемой системы.
5-4-10. Схема, употребляемая при различных измере-
ниях и позволяющая произвести измерение без по-
требления тока.
Эта схема используется
как развязка при подклю-
чении измерительных при-
боров к потенциометрам и
другим элементам, чтобы
их не нагружать. В схеме
/?2=2/?i; у=2х.
5-4-11. Экспериментальное определение погрешности
линейного звена при различных формах входного
напряжения
К исследуемому линейному звену на операционном
усилителе 1, на вход которого подается напряжение щ
заданной формы, а с выхода которого снимается напря-
жение и2+Д«2, содержащее погрешность Ли2, присоеди-
няется вспомогательная схема, содержащая высокока-
чественный операционный усилитель 2 (схема а), в ко-
торой элементы z*\(p) и z*2(p), соответствующие
элементам z^p) и z2(p), точно подобраны для заданной
передаточной функции
Для операционного усилителя 2-.
Ki I «г + и3 ______п
z*i (Р) ’ z*2 (Р) nz*2(p)
т. е. с учетом уравнения передаточной функции
и3=—пДи.2.
На схеме б показан пример исследования дифферен
пирующего элемента. Для интегрирующих элементов
необходимо иметь в виду начальные условия.
Глава шестая
МОДЕЛИРОВАНИЕ ЭЛЕКТРИЧЕСКИХ ЦЕПЕЙ
И ФИЗИЧЕСКИХ ЭЛЕМЕНТОВ МЕТОДОМ ПРЯМЫХ
АНАЛОГИЙ
6-1. ЭЛЕКТРИЧЕСКИЕ АНАЛОГИИ
Электрические цепи являются моделями прямой аналогии мно-
гих физических систем. Составление электрических цепей-моделей
производится в соответствии с методом электрических аналогий
[18], основанным на подобии дифференциальных уравнений, опи-
сывающих динамические процессы различной физической при-
роды. Основные виды электрических аналогий представлены
в табл. 6-1—6-4.
Для каждой системы аналогий могут быть получены две элек-
трические модели — цепи-двойники (дуальные цепи). Уравнения ду-
Таблица 6-1
Электромеханические аналогии
Механические системы
Э.пектрические аналоги
Поступательное перемещение
Вторая система аналогий
4
Сила Q Момент аилы 7И Напряжение и Ток i
Перемещение х Угловое перемещение <р Заряд q Потокосцепление Ф
Скорость v=dxfdt Угловая скорость R—d^/dt Ток i=dq[dt Напряжение u—d№[dt
Под атливость с=х/ Q= 1 /с (с—жесткость) Податливость ef^=w/M=\/ch К к (С£—жесткость) Емкость С=$!и Индуктивность Ls=4?fi
Масса т=--2-« dvldt Момент инерции массы dRfdt и Индуктивность L— di!di Емкость С— . dufdt
Механическое сопротивление S=Q/V Механическое сопротивление Sk=M/R Сопротивление /?=«/1 Проводимость Ё—Чи
Время t Время t Время t Время t
Электрогидродинамическая аналогия
Гидродинамические системы
Табища 6-2
Электрические аналоги
1. Напорное течение несжи- 2. Течение сжимаемой жид- 3. Течение несжимаемой Для гидродинамических Для гидродинамиче-
маемой жидкости кости (газа)—в отклонениях от установившегося состояния (акустические аналоги) жидкости в упруговязких трубопроводах (кровообра- щение) систем 1 и 2 ских систем 3 L л*
Пьезометрический напор h Давление Р Напряжение и
Объем жидкости Q Заряд q
Расход G=dQ/dt Ток i=dq/dt
Зеркало резервуара Гидравлическая емкость Cr=QjP Емкость C—q/и
Р Инерционность Л4 = и Индуктивность
Гидравлическое сопротивление Rr- при фильтрационном и ламинарном течении; Rr = Р/С — const при турбулентном течении Rr=k | G"-1 | Сопротивление R=u/i
Время t Время t
Таблица 63
Электротепловая аналогия
Электрический аналог
Тепловая система
Температура Т Напряжение и
Количество тепла Q Заряд q
Расход тепла G=dQ./dt Ток i=dq/dt
Теплоемкость CT=Q./T Емкость C—q/u
Теплопроводность kT —G/Т 12; Ла == Л~Л Проводимость 2——^2
Время t Время t
альных цепей подобны, но сопоставляемые (сходственные) величи-
ны в них имеют различную физическую природу (кроме времени):
Первая система
аналогии. ... и^ /j Ц Сг /j
Вторая система
аналогии. . . • ijj Мц Cjj
Так, распределение токов в исходной цепи должно соответство-
вать распределению напряжений в дуальной и наоборот; последова-
тельные соединения элементов исходной цепи соответствуют парал-
лельным соединениям в дуальной, а параллельные — последователь-
ным.
Для получения дуальной цепи без составления описывающих ее
уравнений может быть использован следующий метод. В каждом
контуре исходной цепи (натуры) и вне ее ставится точка — узел
дуальной цепи. Между этими точками-узлами проводятся линии, пе-
ресекающие все элементы исходной цепи так, что каждая линия
пересекает лишь одни элемент исходной цепи. Эти линии пересече-
ния и составляют схему дуальной цени, если в них на пересечениях
Таблица 6-4
Электродиффузионная аналогия
Электрический аналог
Концентрация диффундирующего вещества Р Напряжение и
Количество диффундирующего ве- щества Q Заряд q
Перенос диффундирующего веще- ства' G~d.Q/dt Ток i=dq/dt
Объем содержания вещества А: Q=AP Диффузионная проницаемость G ^Do—Pit> Рг> KDla^Da Время t Емкость С: q—Cu Проводимость i £12 ~ ~и » W12—М1 и12 Время t
Таблица 6-5 Элементы дуальных цепей
Первая система аналогий. 1, г fVx=~ У 1 9i (^) их (^) ?г 1
вторая Система аналогий. % О11 О Ln сн ъ-о о-@-о 4
с исходной цепью поместить элементы дуальной цепи, замещающие
элементы исходной цепи, как указано в табл. 6-5.
Пример составления дуальной цепи .показан на рис. 6-1.
Проверка правильности составления дуальной схемы может
быть произведена путем построения дуальной схемы от полученной
дуальной, т. е. возвращением к исходной схеме.
Приведенный выше метод составления дуальных схем пригоден
для планарных цепей, т. е. таких, которые могут быть изображены
на плоскости в виде схемы без
Рис. 6-1. Принцип составления
дуальных цепей.
перекрещивающихся ветвей. В слу-
чае необходимости дуальные схе-
мы могут быть получены и для не-
планарных цепей включением до-
бавочного элемента — идеального
трансформатора [18].
В таблицах аналогий
(табл. 6-1—6-4) показано соответ-
ствие между элементами-звеньями
исходных физических систем и
моделирующими их электрически-
ми цепями.
Для сложных систем можно
представить, что электрическая
модель составляется из отдельных
элементов четырехполюсников так
же, как составляется из элемен-
табл. 6-6, например, показаны схе-'
тов-звеньев исходная система. В
мы замещения (четырехполюсники) для элементов упругой системы
при растяжении или кручении, составленные по методу электроме-
ханических аналогий. Такой же подход в принципе применим и для
других видов аналогий, указанных в таблицах.
При моделировании механической системы схема замещения
упругого элемента, не имеющего массы, представляет собой четы-
рехполюсник, содержащий один конденсатор С по первой системе
аналогий, или один элемент самоиндукции L по второй системе ана-
логий. Сосредоточенная масса, наоборот, замещается индуктивно-
стью по первой системе аналогий и емкостью по второй. Модели
элемента трения — это четырехполюсники, содержащие омические
сопротивления R или проводимости g. Рычаг или редуктор пред-
ставлен четырехполюсником в виде трансформатора. Коэффициент
трансформации соответствует передаточному числу редуктора или
рычага.
В точках сопряжения пассивных четырехполюсников, замещаю-
щих элементы механической системы, включаются источники напря-
жения и тока, соответствующие приложению внешних сил.
Если в узле механической системы сопрягается несколько вет-
вей системы, то он моделируется узлом электрической модели, в ко-
тором при первой системе аналогий сумма напряжений равна нулю,
а при второй — сумма токов равна нулю.
Разомкнутые выводы четырехполюсников соответствуют в пер-
вой системе аналогий жесткому закреплению конца механического
элемента, а во второй системе аналогий — свободному концу его.
Замкнутые накоротко выводы четырехполюсника, наоборот, соответ-
ствуют в первой системе аналогий свободному концу, а во второй —
жесткому закреплению.
Таблица 6-6
Схемы замещения элементов упругой системы при
растяжении, составленные по методу электромеханических
аналогий
Механическая система Электрическая модель
Iсистема аналогий 1[шстема аналогий
7 е Z 1 ° О 7 = о 0 = г 0 L 1 г о 0
-<т м -4 ’ 4 о i < 0 7 $ 2 О 0
7 г ° V J ° Z 7 г О О о 7 С- О 0 = 2 о
е 71 гГ 5 У J? о у о Т£ LJk! Z 9 о 0
7 о~\т г ГУГр Z к 1 2 о—-———о о-г г—о 7 i 2 О—Г 1 о
Fl JLL Ь- -:7^ -гг □С k=lz/li □IG
о— о 1— 7 — о 2 о 7 Z о о Id У о ?)г г
F - О 0—1 а б О O-J f—о о а б I—о о
7 Г о- ♦ 3 Z о J ? 7 г О- о о 7 О ГПI М <А)
Из четырехполюсников, заметающих отдельные элементы, си-
ставляется электрическая модель динамической системы в целом.
На рис. 6-2 приведен пример применения метода четырехполюс-
ников к одномерной механической системе.
Модели многомерных систем составляются из многополюсников.
Для задачи изгиба стержневых систем путь построения моделей
заключается в том, что стержневая система моделируется по стерж-
ням — участкам системы. Каждый стержень замещается электриче-
ской схемой — восьмиполюсником, воспроизводящим связи между
динамическими перемещениями, углами поворота, изгибающими мо-
ментами и перерезывающими силами на его концах. Участки стерж-
невой системы соединяются между собой в соответствии с условия-
ми сопряжения и граничными условиями.
Выше было показано, что для продольных и крутильных пере-
мещений уравнения, связывающие значения сил и перемещений на
концах каждого участка одномерной системы, выражаются так же,
как и для электрических четырехполюсников. Задачи изгиба значи-
тельно сложнее, так как здесь необходимо для каждого участка
воспроизвести в схеме замещения связи между восемью величинами.
Если представить участок стержневой системы в электрической
модели в виде эквивалентного восьмиполюсника, то последний бу-
дет иметь четыре пары полюсов, на которых моделируются следую-
щие механические величины:
\WsW4sS
а)
Рис. 6-3. Восьмиполюсники — модели участка стержиевой системы
по первой (/) и второй (//) системам аналогий.
1) изгибающий момент и угловое перемещение фл-ь
(угловая скорость ipft-i) начала рассматриваемого участка;
2) перерезывающая сила Qk-i и прогиб уъ-i (линейная ско-
рость ук-i) начала рассматриваемого участка;
3) изгибающий момент М>_ и угловое перемещение фл (угловая-
скорость фь) конца рассматриваемого участка;
4) перерезывающая сила (Д и прогиб уь (линейная скорость.
Уъ.) конца рассматриваемого участка.
По первой системе аналогий обобщенным силам на концах уча-
стка соответствуют напряжения, а обобщенным скоростям — токи-
(рис. 6-3,а), по второй системе аналогий обобщенным силам соот-
ветствуют токи, а скоростям — напряжения (рис. 6-3,6).
Рис. 6-4. Модель неразрезных балок с различными видами опор.
Общий метод построения электрических моделей для задач из-
гиба стержневых систем состоит в соединении восьмиполюсников,
представляющих отдельные ее стержни, в соответствии с граничны-
ми условиями и условиями сопряжения. Граничные условия в мо-
делях изгиба осуществляются так же, как и в моделях продольных
и крутильных колебаний: жесткому закреплению по какой-либо ко-
ординате в электрической модели по первой системе аналогий соот-
ветствуют разомкнутые полюсы, а по второй — полюсы, замкнутые-
накоротко.
Из рис. 6-4 видны особенности электрического моделирования
неразрезных балок с различными видами опор.
Для упрощения чертежа здесь многополюсники упругих участ-
ков изображены в виде прямоугольников. Внутренние их схемы на-
операционных усилителях рассматриваются далее.
6-2. МОДЕЛИ ПРЯМОЙ АНАЛОГИИ НА ОПЕРАЦИОННЫХ
ЭЛЕМЕНТАХ
Желание сохранить преимущества физической наглядности ме-
тода прямой аналогии и вместе с тем не прибегать к созданию^
специализированных установок, а использовать АВМ общего назна-
чения, приводит к реализации моделей прямой аналогии на опера-
Таблица 6-7
Основные четырехполюсники и моделирующие
их операционные элементы
щионных элементах. Моделируемая система представляется в виде
эквивалентной электрической цепи (см. § 6-1). Модель прямой ана-
логии строится из операционных элементов непосредственно по схе-
ме электрической цепи в соответствии с определенными правилами
и так, что сохраняется соответствие между физическими элементами
-натуры и модели.
Электрическая цепь расчленяется иа элементарные четырехпо-
люсники, которые замещаются операционными блоками. При этом
каждый четырехполюсник исходной цепи замещается операционным
блоком, воспроизводящим связи между его напряжениями и токами.
Эти операционные блоки имеют по четыре полюса, которыми они
соединяются между собой в единую схему. Напряжения относитель-
(Рис. 6-5. Модель механической системы на операционных усили-
телях.
но земли на двух из них (верхних) соответствуют напряжениям на
входе и выходе моделируемого четырехполюсника, а напряжения на
двух других (нижних) соответствуют входному и выходному токам
четырехполюсников. Таким образом, операционные блоки объединя-
ются в общую схему двумя проводами: один (верхний) служит для
выполнения условий сопряжения напряжений, а другой (нижний) —
для выполнения условий. сопряжения токов. Основные четырехпо-
люсники и моделирующие их операционные блоки изображены
в табл. 6-7, где показаны модели граничных условий и условий со-
пряжения (модели узлов), т. е. схемы отработки законов Кирхгофа
в узлах разветвленных цепей. В табл. 6-7 даны различные варианты,
позволяющие замещать двухполюсники Z (р) и У (р) как прямыми,
так и дуальными цепями, что дает возможность строить модели на
КС-элементах без применения индуктивностей L.
При сопряжении моделей четырехполюсников необходимо со-
гласовать входы и выходы операционных усилителей, входящих
в соединяемые операционные блоки. Для этого могут потребоваться
изображенные в табл. 6-7 схемы сопряжения на операционных уси-
лителях в режиме следящей системы. Последовательные и парал-
лельные двухполюсники моделируемой цепи Z (р) и У (р) непосред-
ственно и наглядно отображаются в виде прямых и дуальных двух-
полюсников в цепях операционных усилителен моделирующих
блоков. Это относится и к моделированию нелинейных элементов.
При составлении модели по блокам очень наглядно выявляется
правильность выбора знаков, т. е. расстановка инвертирующих эле-
ментов, а именно, в каждом замкнутом контуре модели при моде-
лировании пассивных цепей должно быть нечетное количество опе-
рационных усилителей. Наилучшим образом комплектуются цепочки
четырехполюсников, в которых чередуются элементы с последова-
тельно включенными сопротивлениями Z(p) и параллельно включен-
ными элементами У(р). При этом согласование входов и выходов
соседних четырехполюсников получается, естественно, с помощью
простых проводящих перемычек.
Рис. 6-7. Исходная цепь — мо-
дель гидродинамики сердечно-
сосудистой системы.
Рис. 6;6. Схема модели гидро-
динамики сердечно-сосудистой
системы на операционных уси-
лителях.
Если же (рядом находятся однотипные четырехполюсники, то
для согласования входов и выходов операционных элементов тре-
буются схемы сопряжения на операционных усилителях в режиме
следящих систем.
Приведем примеры построения моделей цепей на операцион-
ных усилителях.
На рис. 6-5 представлена модель механической системы по рис.
6-2,а, выполненная на операционных усилителях и соответствующая
пассивной модели по схеме на рис. 6-2,6.
На рис. 6-6 показана простейшая модель большого круга крово-
обращения в сердечно-сосудистой системе на операционных усили-
телях, полученная из пассивной модели, приведенной на рис. 6-7,
Рис. 6-8. Механическая система (балка), модели изгиба балки на
пассивных восьмиполюсниках и на операционных усилителях.
Рис. 6-9. Модель упругого стержня — восьмиполюсник
на операционных усилителях.
Таблица 6-8
Механи- ческая система Модель на пассивных элементах Модель на операционных усилителях Механи- ческая система Модель на пассивных элементах Модель на операционных усилителях
Ч-i Qk l«k ‘hk
y'k-i %-1 М1Ц(Й-1) y'k % “lift
Ч-i ЫШ (*—1) Mk ч ИП14
V'k-1 %-1 KIV (й-1) f'k s MIVft
которая составлена на основе электрогидродииамической аналогии
(см. табл. 6-2). В последней сердечный насос представлен управляе-
мым конденсатором переменной емкости Сж, сердечные клапаны
диодами, пороки сердечных клапанов сопротивлениями резисторов
/?с н /?п, упругость артериальной системы емкостью конденсатора
Са, венозное депо — Св, периферическое сопротивление 7?а. Особен-
ность методики перехода к операционным усилителям в том, что не-
линейные схемы клапанов представляются в виде дуальных цепей.
Последний пример относится к моделированию изгиба балки
(рис. 6-8,а). Пассивная модель балки по второй системе аналогий
показана на рис. 6-8,6, пассивная модель, переведенная на операци-
онные элементы, приведена на рис. 6-8,в. Основу этой модели со-
ставляют модели восьмиполюсников упругих стержней на операци-
онных элементах, представленные на рис. 6-9. Соответствие величин
для стержней механической системы пассивной модели и модели на
операционных усилителях приведено в табл. 6-8. Подобно тому, как
восьмиполюсники пассивной модели сопрягались с помощью соот-
ветствующих четырехполюсников (см. рис. 6-4), в модели на опера-
ционных усилителях использовались аналоги этих четырехполюсни-
ков по табл. 6-7.
6-3. СХЕМЫ МОДЕЛЕЙ РЕЛЕ, ВЕНТИЛЕЙ
И ЭЛЕКТРОМАГНИТНОГО ПРЕРЫВАТЕЛЯ
6-3-1. Схемы моделей последовательного включения
вентиля с индуктивностью и активным сопротивлением.
Схема а соответствует вентилю с заданной несим-
метричной характеристикой; схема б — идеальный ве-н-
тиль.
6-3-2. Схемы моделей последовательно соединенных
Тиристора и индуктивности (без реле и ключевых схем).
ное к аноду тиристора; н2 — напряжение, приложенное
к катоду тиристора (через L); i — ток через тиристор;
иу — управляющие положительные импульсы, амплиту-
да которых больше нуд, соответствующего току удержа-
ния тиристора /Уд.
Характеристика сопротивления тиристора принята
идеальной, т. е. /?T.np(i) =0; /?т.Обр(/) =о°.
Благодаря диоду включенному в цепь обратной
связи интегрирующего усилителя, ток i может быть
только положительным или равным нулю (схема а).
В цепи обратной связи суммирующего усилителя вклю-
чен диод Д2. Поэтому как при наличии Uy, так и при
отсутствии Uy, но при t^/уд напряжение на выходе
усилителя равно 0. При отсутствии >С7У и при 1</уд на
выходе суммирующего усилителя появляется положи-
тельное напряжение, моделирующее ток /уя—i. В схеме
CR2=CR3 соответствует L; Ri^.R2 (все параметры взя-
ты для /Mt—1). Поэтому при и2—/=0 (тиристор
закрыт); при и2—щ<;0, но положительном напряжении
на выходе суммирующего усилителя ток i либо быстро
падает до 0, либо остается равным 0 (тиристор быстро
закрывается либо закрыт). При и2—Wi<C0, но при
0 на выходе усилителя (наличие Uy либо 1^/уд)
i — ~ (u, — и2) dt
(тиристор открыт). Таким образом, функцию ключа
здесь выполняет суммирующий усилитель с диодом.
Аналогично работает и схема б, где диоды включе-
ны в обратном направлении, а на входы суммирующего
усилителя все величины поданы с обратной поляр-
ностью.
Таким образом, эти модели удовлетворяют следую-
щим требованиям работы тиристора:
1) до подачи управляющего импульса тиристор за-
крыт независимо от знака приложенного напряжения
(ui—-и2);
2) при ui—п2>0 тиристор открывается с момента
подачи управляющего импульса;
3) тиристор запирается после уменьшения протека-
ющего через него тока до тока удержания.
Три схемы моделирования поляризованного реле и
релейного модулятора (вибропреобразователя), осно-
ванные на использовании характеристики с тремя устой-
чивыми состояниями.
Н.а блоках нелинейно-
сти Ф либо с помощью
специальных схем • (см.
§ 2-9) реализуется соот-
ветствующая нелинейная
функция x2=0i(xi), где
Хх — напряжение, подаваемое на обмотку реле, а х2—
напряжение на якоре реле.
6-3-3. Схема модели безынерционного реле.
6-3-4. Схема модели реле с учетом инерционности.
Инерционное звено
воспроизводит запа-
здывание, связанное с.
постепенным нараста-
нием поля и движени-
ем якоря. Эта же схе-
ма может быть моделью модулятора с внешним возбуж-
дением в случае, когда x^sin ыт.
6-3-5. Схема модели модулятора с самовозбуждением
(электромагнитного прерывателя для автоматического
замыкания и размыкания тока).
6-4. СХЕМЫ МОДЕЛЕЙ НЕКОТОРЫХ ЭЛЕМЕНТОВ
ЭЛЕКТРИЧЕСКИХ УСТРОЙСТВ
6-4-1. Заградительный фильтр на одном операцион-
6-4-2. Фазовоащатель.
Передаточная функция
заградительного фильтра
__ Р2 +
где (dq—1/RC.
Передаточная функция фазовращателя
«о —Р
<»о-Ьр’
В установившемся процессе при синусоидальном
входном сигнале частоты а выходное напряжение х2
отстает по фазе от входного напряжения Xj на
2 arctg(tt>/<Bo), где wo=«i/«.
/г1=1/а; А2=2/а; a=const.
6-4-3. Моделирование вольт-амперной статической
характеристики (ВАХ) туннельного диода.
При различных схемах замещения туннельного
диода одним из элементов этих схем является нелиней-
ный элемент, имеющий характеристику статической
ВАХ этого диода. С учетом большой крутизны ВАХ мо-
делирование характеристики на стандартном диодном
блоке нелинейности методом линейно-кусочной аппро-
ксимации затруднено. Вольт-амперная характеристика
туннельного диода аппроксимируется либо тремя экспо-
нентами
i (и) = А (е~а'и — е~зд) +# (ebu — 1),
либо выражением типа «двучлен»
i(u) =Аие~аи + В(еЪи—1).
Пользуются обычно выражением типа «двучлен», так
как, зная ВАХ, его коэффициенты определить проще.
Здесь приведена схема, моделирующая выражение типа
«двучлен».
ПриМ<=1 ai = a; a.2=b.
6-4-4. Моделирование статической характеристики
последовательно включенных резистора и туннельного
диода.
При R2=oo моделируется статическая ВАХ туннель-
ного диода с малым сопротивлением последовательно
включенного резистора.
Схема состоит из суммирующего усилителя 1 и мо-
дели падающей характеристики на усилителе 2, вклю-
чающей плоскостные кремниевые диоДы. Регулировкой
R2 можно изменять форму петли гистерезиса, а измене-
нием отношения R5/R4— наклон ВАХ в начале коор-
динат,
При увеличении и возрастают Ui и I до тех пор, пока
их линейная комбинация не достигнет значения, доста-
точного для открывания диода Дз. Тогда ток i начи-
нает уменьшаться, что приводит к одновременному уве-
личению щ, которое в свою очередь еще больше умень-
шает I. Происходит скачок Ui в сторону увеличения,
a i в сторону уменьшения до тех пор, пока не откроется
кепочка, состоящая из двух последовательно включен-
ных диодов Д1 и Д2, которая ограничит положительную
обратную связь. При дальнейшем увеличении и проис-
ходит увеличение i с наклоном, меньшим, чем в начале
координат, так как открыта дополнительная обратная
связь через диод Д3. При уменьшении и наступает мо-
мент, когда диоды Д\ и Д2 закрываются и снимают
ограничение с положительной обратной связи, которая
способствует скачку напряжения и (в сторону уменьше-
ния) и скачку тока i (в сторону увеличения), пока не
закроется диод Дз.
Для получения гистерезиса необходимо выдержать
соответствующие отношения сопротивлений потенцио-
метров Т?2 и 7?6 к сопротивлениям резисторов обратных
связей усилителей 1 и 2.
Для получения более резкого излома в вершине гра-
фика (при ^2=°°) необходимо 7?3 подключить не к зем-
ле, а к источнику опорного напряжения.
Вольт-амперная характеристика настраивается Экс-
периментально регулировкой потенциометров /?3 и /?б
и остальных резисторов.
6-5. СХЕМЫ МОДЕЛЕЙ ХАРАКТЕРИСТИК
НЕКОТОРЫХ МЕХАНИЧЕСКИХ СИСТЕМ, ЭЛЕМЕНТОВ И УЗЛОВ
6-5-1. Схема модели сухого трения.
Как правило, при моделировании сухое трение вос-
производится в соответствии с формулой /?тр=Л sign х,
и для его модели применяется усилитель в ключевом
режиме. В действительности F^t после скачка при про-
ходе скорости через нуль имеет падающий участок и
только с определенной скорости начинает возрастать.
В схеме, воспроизводящей сухое трение, скачок Fni при
проходе скорости через нулевое состояние осуществ-
ляется с помощью четырехдиодной мостовой схемы.
Падающие участки FTp(x) или AFTp формируются
с помощью блока нелинейности Ф. Обе составляющие
суммируются на выходном усилителе.
6-5-2. Схема, реализующая кусочно-линейную аппро-
ксимацию характеристики сухого трения на одном уси-
лителе.
Расчетные формулы для симметричного случай:
при Х>Х^
О <л<л\;
^4 Тр
^4 ^тро dx
xt , и t fTpi X, Л
‘ Ъ "I" Ъ Яз “
Так как независимых уравнений меньше, чем ре-
зисторов, то сопротивление одного из них выбирается
исходя из частотных и нагрузочных характеристик уси-
лителя.
6-5-3. Схема, позволяющая получить плавные харак-
теристики сухого трения (например, в случае необходи-
мости дифференцирования зависимых переменных, свя-
занных с силами сухого трения).
В схеме применены управляемые диодные ключи и
используются нелинейные характеристики кремниевых
диодов в проводящем направлении. Эта схема может
применяться для моделирования характеристик сухого
трения, полусухого трения, асинхронных двигателей,
туннельных диодов, газоразрядных приборов и т. д.
6-5-4. Схема модели связи с зазором в механической
системе.
Данная схема соответ-
ствует весьма упрощенной
модели с малой точностью
и малым быстродействием.
В схему надо включать ре-
зисторы, имеющие неболь-
шие сопротивления и конденсаторы с минимально воз-
можной емкостью. Точность зависит от частоты.
6-5-5. Схема точной быстродействующей электронной
модели упругофрикционной связи с зазором в механи-
ческой системе.
Модель содержит четырехдиодный мостовой элемент
в цепи обратной связи входного усилителя и пару
параллельно включенных и противоположно направ-
ленных кремниевых диодов на входе интегрирующего
усилителя. Эта пара диодов без опорных напряжений,
моделирующая зону нечувствительности, может быть
заменена кремниевыми диодами с опорными напря-
жениями' (см., например, параллельное включение схем
2-1-1 и 2-1-2). В приведенной схеме зазор устанав-
ливается сопротивлением четырехдиодного моста, а на-
клон характеристики — сопротивлением резистора R3.
Используя стабилитронные или другие элементы нечув-
ствительности, можно получать и другие зависимости
(х2ь х22), как показано на графиках.
Делители щ и а2 изменяют смещение положитель-
ных частей функций x2i и х22 относительно отрицатель-
ных.
6-5-6. Схема модели упругой связи с зазором и демп-
фированием.
Схема состоит из модели комбинированной релейной
характеристики 1 и интегрирующего усилителя 6 с эле-
ментом нечувствительности 4 на его входе (два стаби-
литрона). В цепи обратной связи усилителя 3 помещен
элемент нечувствительности — ограничения 5, в котором
диоды должны иметь малые обратные напряжения. Для
этого более пригодны кремниевые стабилитроны; если
применены обычные диоды, то необходим еще ограни-
читель выходного напряжения усилителя 3 (не показан-
ный на схеме).
Изменяя максимальный выходной ток элемента 5
(т. е. сопротивления четырехдиодного моста), можно
изменять ширину зоны нечувствительности характери-
стики с зазором, а увеличивая положительную обратную
связь или изменяя параметры элемента ограничения 2,
увеличиваем размер скачков характеристики с зазором.
6-5-7. Схема моделирования удара в моделях элек-
тромеханических систем.
В схеме с помощью ре-
ле происходит перекомму-
тация полярности напряже-
ния конденсатора Сг в мо-
мент удара. При переклю-
чении постоянная времени
сохраняется, а напряжение
на выходе усилителя изме-
няется скачком. При этом
коэффициент восстановления
- Ci — Cg
Ci + C2
6-5-8. Схемы моделирования неупругого ограничения
с помощью реле (а) и диодного ключа (б).
F—сила, действующая на движущееся тело; х —
координата перемещения тела; Х] — координата поло-
жения ограничителя.
Диод Д исключает эффект «прилипания». В обеих
схемах из-за конечного значения прямого сопротивле-
ния диодов (50—100 Ом) на выходе интегрирующего
усилителя 1 при /•’>0 образуется небольшой сигнал.
Иногда приходится на входе интегрирующего усилите-
ля 2 ставить еще один ключ, устраняющий эту помеху.
6-6. СХЕМЫ ВОСПРОИЗВЕДЕНИЯ ВОЛЬТ-АМПЕРНЫХ
ХАРАКТЕРИСТИК РЕАЛЬНЫХ ЭЛЕМЕНТОВ, ПОДКЛЮЧАЕМЫХ
К МОДЕЛИ
6-6-1. Специальная функциональная схема, воспроиз
водящая ВАХ исследуемого реального элемен
та ZH.
При
_RzRs ] R3 । Rs
к*
Rt . , х,
гэ ,
где х8 — напряжение
на исследуемом эле-
менте zH; ia — ток че-
рез этот элемент; xi — напряжение модели, отоора-
жающее ток через исследуемый элемент; Хг — напряже-
ние на модели, отображающее напряжение на исследуе-
мом элементе.
6-6-2. Специальная функциональная схема, воспроиз-
водящая ВАХ i=f(u) исследуемого реального элемен-
та ZH.
При
^2^3 I R3 I Ri
a~RiRt'Rt *r^i
• n Ri
^ = ^-Xe,
где ха, Xi, Х2 и ia — то же, что для схемы 6-6-1.
6-7. УПРАВЛЯЕМЫЕ ЭЛЕМЕНТЫ НА ОПЕРАЦИОННЫХ
УСИЛИТЕЛЯХ ДЛЯ РАБОТЫ С ПАССИВНЫМИ ЦЕПЯМИ
И МОДЕЛЯМИ ПРЯМОЙ АНАЛОГИИ
6-7-1. Схема управляемого источника тока, пропор-
ционального значению щ.
Из схемы следует:
Г:
«3— «2
R3
U1 I «3
Rt Rjt,
«2
Re ;
^2^5, __Q
ТО
то
При /?в ==-.&, и так Кай
। ,, R&
~ Rt ~rU*R,
Я4 ’
_ „ 1 I_L-lLS__L\ п
~~ /УСД Ri'R& Rt ) *'
Если выполняется условие компенсации
1 I Re _____ 1
R3 "Г*Л R^r
RtR3
I
i —
6-7-2. Схема управляемого источника тока.
В данной схеме вы-
ходной ток зависит от
входных напряжений.
Идеальный источник
тока генерирует ток, не
зависящий от полного
сопротивления нагруз-
ки zB. Степень откло-
нения реального гене-
ратора от идеального определяется его выходным со-
противлением. Эта схема совмещает функции суммато-
ра и генератора тока. Преимуществом схемы является
то, что полное выходное сопротивление можно регули-
ровать потенциометром установки коэффициента усиле-
ния по замкнутому контуру. Потенциометр настраивает-
ся таким образом, чтобы коэффициент усиления был
близок к единице, так как в этом случае достигается
максимальное значение полного выходного сопротивле-
ния. Расчетная формула:
М1'+ «2 -из --и* 1
R . (Л — 1) гн
Ко
где
J____1 .
Ro ~ R 5
л 2kRk
A^R + Rk :
здесь А — коэффициент усиления по замкнутому кон-
туру-
Полное выходное сопротивление равно $0/(1—Л).
Обычно 204-40 кОм; 7?i = l МОм; ^<,=0,5 МОм,
a R — несколько килоом.
6-7-3. Схема модели управляемой активной проводи-
мости.
где а — коэффициент передачи блока перемножения.
Параметры схемы те же, что и для схемы 6-7-1.
6-7-4. Схемы модели управляемой емкости.
Схема а основана на модели источника тока 6-7-1.
Для работоспособности этой схемы необходима очень
точная компенсация источника тока, входящего в схему.
Управляемая емкость имеет невысокую добротность
из-за остаточной проводимости неполной компенса-
ции g-H.K.
Для схемы б модели управляемой емкости условие
компенсации выполняется с помощью емкостей. Зависи-
мость заряда от напряжения для управляемой емкости
имеет вид:
Я = Jidt=С3аиуи - fg-С,—С3 -С^и=
— С («у) н-|-Сн кн; С6 = Св,
где Сн.к — остаточная емкость неполной компенсаций.
Нарушение условия компенсации не приводит
к уменьшению добротности управляемого конденсатора,
так как усилитель перемены знака 2 выполнен на кон-
денсаторах.
6-7-5. Схема модели последовательного отрицатель-
ного сопротивления.
Схема работает на холо-
стом ходу и возбуждается
при коротком замыкании со
стороны входа (6=ь400).
6-7-6. Схема модели параллельного отрицательного
сопротивления.
Схема устойчива при ко-
ротком замыкании входной
цепи. Усилитель имеет поло-
жительную обратную связь.
6-7-7. Схема гиратора (дуального трансформатора)
с постоянным коэффициентом трансформации, обладаю-
щая свойством взаимности
Если
где коэффициент транс-
формации
х. ^2 _____
R'iR'* •
выходов.
Схема требует точной настройки параметров элемен-
тов, без нагрузки (на холостом ходу) не работоспособ-
на. При включении емкости С в качестве нагрузки Z2
схема гиратора моделирует индуктивность L=C/fe2.
6-7-8. Упрощенная схема гиратора с постоянным
коэффициентом трансформации.
Если
Схема требует точной настройки параметров элемен-
тов, без нагрузки (на холостом ходу) не работоспо-
собна.
6-7-9. Схема гиратора с переменным коэффициентом
трансформации, обладающая свойством взаимности вы-
ходов.
где
___ R^Ua ___________R1
RiRJJwm R'lR't^Hon *
из — напряжение, управляющее коэффициентом транс-
формации; UH0M— номинальное напряжение операцион-
ного усилителя.
6-7-10. Упрощенная схема гиратора с переменным
коэффициентом трансформации.
Вместо блоков перемножения здесь применены схе-
мы диодных квадраторов СДК без усилителей. Поясне-
ния те же, что и к схеме 6-7-9.
Глава седьмая
ТЕХНИЧЕСКИЕ СРЕДСТВА АНАЛОГОВОЙ
ВЫЧИСЛИТЕЛЬНОЙ ТЕХНИКИ
7-1. АНАЛОГОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА АВК-31
Малая АВМ третьего поколения АВК-31 [3]
(рис. 7-1) предназначена для исследования динамиче-
ских систем методом математического моделирования
в реальном и ускоренном масштабах времени, интегри-
рования систем линейных и нелинейных дифференциаль-
ных уравнений до шестого порядка. Для моделирования
нелинейных систем до 18-го порядка возможна совме-
стная работа до трех машин АВК-31.
Машина АВК-31 относится к классу машин малой
мощности. Машина имеет две модификации: АВК-31,
АВК-31-1, отличающиеся составом операционных блоков.
Рис. 7-1. Общий вид АВМ АВК-31.
Машина АВК-31 позволяет осуществлять одновре-
менно:
до шести операций интегрирования суммы;
до шести операций суммирования или инвертиро-
вания;
задание до 34 постоянных коэффициентов вручную
с помощью груботочных потенциометров;
до двух операций перемножения двух переменных,
или возведения в квадрат, или деления, или извлечения
квадратного корня;
до двух операций воспроизведения нелинейных функ-
ций от одной переменной;
логические операции с помощью 16 логических эле-
ментов (два триггера, два элемента НЕ, четыре элемен-
та И-НЕ, четыре реле, два компаратора, два элемента
индикации);
воспроизведение типовых нелинейностей (одна опе-
рация воспроизведения зоны нечувствительности и до
восьми операций типа двустороннего ограничения).
Машина АВК-31-1 позволяет осуществлять одновре-
менно:
до шести операций интегрирования суммы;
до шести операций суммирования или инвертиро-
вания;
задание до 42 постоянных коэффициентов вручную
с помощью груботочных потенциометров;
до четырех операций перемножения двух перемен-
ных, или возведения в квадрат, или деления, или извле-
чения квадратного корня;
до четырех операций воспроизведения нелинейных
функций от одной переменной;
логические операции с помощью логических элемен-
тов (до 16 элементов);
воспроизведение типовых нелинейностей (одна опе-
рация воспроизведения зоны нечувствительности и до
восьми операций типа двустороннего ограничения).
Системы управления и контроля АВК-31 и АВК-31-1
обеспечивают:
работу интеграторов по двум независимым програм-
мам;
проверку правильности набора задачи без раском-
мутации решающих цепей;
измерение напряжений стрелочным прибором пря-
мым или компенсационным способом.
Машины допускают возможность их параллельной
работы и сопряжения с внешней аппаратурой автомати-
ческого регулирования или управления.
Диапазон изменения аналоговых величин, В От 0 до ±10
Время интегрирования, мкс:
максимальное ................................ 108
минимальное.................................. 10
Максимальная частота периодизации реше-
ния, кГц...................................... 50
Питание от сети переменного тока .... 220 В, 50 Гц
Потребляемая мощность, кВ-А . 0,15
Габариты, мм........................... 622X565X551
Масса, кг................... . , . : : 60
Максимальная приведенная погрешность интегриро-
вания (в зависимости от значения постоянной времени
интегрирования Т), %:
±0,15 при Т=1 с (/?=1 МОм, С=1 мкФ);
+0,15 при Т=0,1 с (/?=100 кОм, С=1 мкФ);
+ 0,15 при Г—0,01 с (/?=100 кОм, С=0,1 мкФ);
±0,3 при Г=1 мс (/?=10 кОм, С=0,1 мкФ);
+0,3 при 7=0,1 мс (Z?=10 кОм, С=0,01 мкФ);
+2,0 при 7=0,01 мс 1(7?=10 кОм, С=0,001 мкФ).
Максимальная приведенная погрешность выполнения
операций инвертирования, умножения на постоянный
коэффициент и перемножения двух переменных, %, при-
ведена в табл. 7-1.
Таблица 7-1
Вид погрешности Наименование операций
Инвертиро- вание Умножение на ПОСТОЯННЫЙ коэффициент Перемножение
БП-31 БП-32
Статическая +0,03 ±0,02 ±0,3 Г±0,2
Динамическая иа часто- те, кГц:
0,1 0,03 0,04 0,3 0,2
0,25 0,04 0,04 0,3 0,3
0,5 0,04 0,045 0,35 0,35
1,0 0,04 0,05 0,4 0,4
2,5 0,06 0,06 0,75 0,5
5,0 0,1 0,1 2,5 1,0
10,0 0,2 0,2 4,5 2,0
Максимальная приведенная погрешность воспроизве-
дения функции, %, в зависимости от средней скорости
изменения аргумента приведена в табл. 7-2.
Таблица 7-2
Воспроизводимая функция Средняя скорость изменения аргумента
10В' 4 мс 10 В 2 мс 10В 1 мс 10 В 10 В 10 В 10 В
200 мкс 100 мкс 50 мкс 25 мкс
У = —0,1 (—х)« <1,0 <1.0 1.0 5.0 12,5
у= 0,1 (—х)» <0,75 <0.75 <0,75 <0,75 0,75 1,25 4,0
р=-10/(^х); и,75 2,0 3,5 13,5 — — —
(10 2s х 3=1) 1.0 1,75 3.5 12,5 — — —
Максимальная приведенная Статическая погрешность
воспроизведения параболы ±0,15%, гиперболы ±0,5%.
Машина рассчитана для работы в стационарных ла-
бораторных условиях при температуре окружающей сре-
ды от 5 до 35°С и относительной влажности до 80% при
температуре 30°С.
Наработка на отказ не менее 3000 ч.
Гарантийный срок службы 18 мес со дня ввода
в эксплуатацию.
В состав комплекта машины АВК-31 входят: каркас
машины с панелью управления и блоками (1 шт.), комп-
лекты монтажных, запасных частей и эксплуатационной
документации (по 1 шт.).
В состав комплекта машины АВК-31-1, кроме пере-
численного выше комплекта, входит комплект сменных
блоков.
7-2. АНАЛОГОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА МН-7М
Малая АВМ первого поколения МН-7М [1, 2, 5, 8,
17, 18] является одной из наиболее распространенных
малогабаритных настольных АВМ. Она предназначена
для интегрирования систем обыкновенных линейных и
нелинейных дифференциальных уравнений до шестого
порядка с постоянными коэффициентами. Для решения
более сложных задач возможна параллельная работа
нескольких машин.
Машина содержит 16 операционных усилителей,
предназначенных для выполнения операций интегриро-
вания, суммирования, инвертирования, масштабного
преобразования, и два усилителя для вспомогательных
целей в схеме управления и контроля машины. В маши-
не есть четыре ячейки, в которые можно включать ком-
бинированные нелинейные блоки типа БНК. Каждый
блок состоит из двух функциональных схем: одна вос-
производит нелинейную функцию, а другая осуществля-
ет перемножение (деление) двух величин. В состав ма-
шины входит также один блок типа БДУ-2, взаимозаме-
няемый с блоком БНК и имеющий две схемы перемно-
жения (деления).
Кроме того, машина содержит 8 типовых диодных
ячеек для воспроизведения нелинейных характеристик
звеньев автоматических систем регулирования, 24 по-
тенциометрические схемы для задания постоянных коэф-
фиЦйейтов и 6 схем для задания начальных условий И
постоянных возмущений.
В машине осуществляется как одноразовое решение,
так и автоматическое повторение решения. Машина
имеет схему совпадения, которая в процессе решения
может сравнивать две переменные и вырабатывать сиг-
нал условного перехода для изменения структурной схе-
мы решаемой задачи или для фиксации решения.
Набор схемы решения задачи производится комму-
тацией входов и выходов отдельных элементов на ком-
мутационном поле машины.
Результат решения наблюдается на экране трубки
электронно-лучевого индикатора И-6 и регистрируется
внешними измерительными приборами. Переменные,
входящие в решаемую систему уравнений, воспроизво-
дятся в машине напряжениями постоянного тока, изме-
няющимися в диапазоне от —100 до -]-100 В.
Предельные приведенные погрешности выполнения
решающими блоками операций: умножения—1%, деле-
ния— 7%, интегрирования за 100 с с постоянной време-
ни интегрирования 1 с—1%; задания постоянных коэф-
фициентов с помощью делителя напряжения'—0,5%.
При решении на машине контрольных задач предель-
ная приведенная погрешность не превышает 10%. Реко-
мендуемая длительность процесса интегрирования 200 с.
Процесс интегрирования может происходить в реаль-.
ном или преобразованном масштабе времени.
Основные технические данные
Максимальный порядок решаемых маши-
ной уравнений .........................
Количество усилителей постоянного тока
Количество блоков:
перемножения двух переменных . . .
нелинейных.............................
Общее количество входных элементов и об-
ратных связей .........................
Рабочая шкала установки, В.............
Питание от сети переменного тока ....
Потребляемая мощность, кВ-А............
Максимальная площадь, занимаемая уста-
новкой, м2.......................
Габариты, мм:
электронной модели ........
комплектующих устройств:
индикатора И-6 ................
блока питания ЭСВ-1 ......
Масса, кг........................... « :
Шестой
18 (2 вспомогательных)
4
4
64
±100
220 В, 50 Гц
Не более 0,85
0,5
725X455X430
217X586X392
305X485X238
150
7-3. АНАЛОГОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА МН-10М
Аналоговая вычислительная машина второго поколе-
ния МН-ЮМ [1. 2, 17, 18] относится к малогабаритным
настольным машинам небольшой мощности и предна-
значена для интегрирования систем обыкновенных ли-
нейных и нелинейных дифференциальных уравнений
с постоянными коэффициентами до десятого порядка.
Для решения более сложных задач возможна парал-
лельная работа трех машин.
Машина содержит 24 операционных усилителя. Эле-
менты входных цепей и цепей обратных связей решаю-
щих усилителей скомпонованы в отдельных блоках
(блок интегрирования и суммирования типа БИС-1, не-
линейный универсальный блок типа БН1П-3, блок пере-
множения типа БП-17), которые размещаются в 12 ячей-
ках машины. Все блоки в ячейках взаимозаменяемы,
благодаря чему при одном и том же числе операцион-
ных усилителей в машине можно изменять соотношение
между ее линейными и нелинейными решающими
устройствами в зависимости от специфики решаемой за-
дачи. Количество блоков в комплекте машины не фикси-
ровано и согласуется при заказе.
В состав машины входят также логический блок
условного перехода типа БОР-1 и отдельные цепи и эле-
менты для образования специальных схем.
Комплект оборудования машины позволяет осуще-
ствлять: до 10 операций интегрирования с одновремен-
ным суммированием нескольких величин, до 24 операций
инвертирования или суммирования, до 6 операций пере-
множения (деления) двух переменных с одновременным
суммированием, до 4 операций условного перехода, вос-
произведение до 6 однозначных непрерывных нелиней-
ных функций от одной переменной с одновременным
суммированием и до 6 типичных нелинейных характери-
стик звеньев автоматических систем регулирования вида
зоны нечувствительности, ограничения координат, сухо-
го трения и т. д., задание на делителях напряжения до
60 постоянных коэффициентов.
Входные и выходные напряжения машины изменяют-
ся в диапазоне от —25 до —1-25 В. Длительность процес-
са интегрирования не должна превышать 200 с. Наблю-
дение и регистрация результатов решения могут произ-
водиться по стрелочному измерительному прибору
машины или по внешнему регистрирующему при ору
(электронно-лучевому индикатору, светолучевому осцил-
лографу, цифровому вольтметру, ДРП).
Среднеквадратические приведенные погрешности вы-
полнения отдельных математических операций при по-
стоянных входных сигналах: суммирования двух пере-
менных и инвертирования 0,2%; перемножения 2,5%;
воспроизведения нелинейных зависимостей 0,8%; уста-
новки постоянных коэффициентов 0,2%; интегрирования
(J?C=1 с, за- 100 с) при подаче на вход блока ступен-
чатой функции 0,5%.
С помощью машины МН-10М целесообразно решать
задачи, допустимая погрешность решения которых со-
ставляет 5—8%.
Схемы машины и блока питания выполнены на полу-
проводниковых элементах.
Питание машины осуществляется от сети однофазно-
го переменного тока напряжением 220 В, частотой
50 Гц с помощью стабилизированного блока питания
типа ЭСВ-4, входящего в комплект.
Основные технические
Количество операций:
инвертирования или суммирования . .
интегрирования с одновременным сум-
мированием .........................
условного перехода .................
Количество воспроизводимых типовых не-
линейных зависимостей..................
Количество постоянных коэффициентов, за-
данных на делителе напряжений . . .
Фиксированные значения постоянных коэф-
фициентов .............................
Шкала делителя напряжений для установ-
ки постоянных коэффициентов ....
Значения постоянных времени интегрирова-
ния, с:
фиксированных.......................
произвольно устанавливаемых ....
Длительность процесса интегрирования, с
Диапазон изменения выходных напряже-
ний, В...........................; : .
Потребляемая мощность. Вт..............
Габариты, мм ..........................
Масса, кг
данные
До 24
До 10
До 4
До 6
До 60
0,1; 0,2; 0,4; 0,5; 1; 2;
4; 5; 10
0,01—10
0,1; 0,2; 0,5; 1
0,1—100
До 200
От —25 до +25
Не более 250
460X615X445
250
7-4. АНАЛОГОВОЕ ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО «АМПЕР»
Аналоговое вычислительное устройство «Ампер»
[12] —набор решающих блоков, работающих с частотой
периодизации до 2000 решений/с.
Устройство предназначено для решения дифферен-
циальных уравнений до седьмого порядка с четырьмя
нелинейностями.
Устройство выполнено в настольном варианте из трех
конструктивных блоков: вычислителя, блока управления
и блока питания (рис. 7-2).
Рис. 7-2. Общий вид устройства «Ампер».
Вычислитель содержит 14 масштабных усилителей
с четырьмя входами каждый, 14 интеграторов с четырь-
мя входами (1Х104, 5хЮ3, 5Х103, 2Х103 с-1), 7 сту-
пенчатых коэффициентов (от 1 до 0,01 с дискретностью
0,01), 2 перестраиваемых функциональных преобразова-
теля с семью линейными отрезками каждый, 2 умножи-
теля, 4 компаратора и источник опорных напряжений
+ 10 В, 50 мА.
Блок управления служит для выработки тактовых
импульсов, синхронизации от внешних устройств и кон-
троля питающих напряжений. Импульсы синхронизации
с частотой 250 Гц — 2 кГц от внутреннего генератора
или до 4 кГц от внешних устройств поступают в вычи-
слительный блок для управления ключами.
Блок питания осуществляет выдачу напряжения +15,
±20, +24 В в вычислительный блок.
Общее питание устройства осуществляется от сети
220 В, 50 Гц, потребляемая мощность не более 100 Вт.
Масштабный усилитель работает без периодизации
в режиме инвертирования постоянного напряжения и
имеет один вход с коэффициентом передачи 1, два входа
по 0,5 и один вход 0,2.
Интегратор работает только в режиме периодизации.
Коэффициент передачи интегратора 104 с множителями,
указанными для масштабного усилителя. Приведенные
погрешности операций: инвертирования 0,2%, интегри-
рования 0,5%, перемножения 0,2%. Сопротивление в це-
пи ввода начальных условий интегратора 10 кОм.
Постоянные коэффициенты, меньшие единицы, наби-
раются вручную с дискретностью 0,01.
Шкала выходных напряжений устройства +10 В.
Блоки размещены в унифицированных каркасах.
Платы устройства выполнены на кремниевых полу-
проводниковых приборах и интегральных схемах мето-
дом печатного монтажа.
7-5. АНАЛОГОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА МН-17М
Большая АВМ первого поколения МН-17М [1, 2, 4, 7,
8, 17] предназначена для интегрирования систем обык-
новенных линейных и нелинейных дифференциальных
уравнений до 50-го порядка с постоянными и перемен-
ными коэффициентами.
Машина состоит из двух полукомплектов, каждый из
которых содержит секцию контроля и управления
типа СКУ-М, секцию операционных блоков типа СБО-М
и секцию потенциометрических следящих систем типа
СБСС-3. Включение в состав машины двух секций кон-
троля и управления, а также наличие двух сменных на-
борных полей позволяют решать одновременно две зада-
чи независимо. Если объем задачи велик и ее невозмож-
но набрать на одной машине, объединяют две машины
в один комплекс.
Машина позволяет выполнять до 50 операций инте-
грирования с одновременным суммированием 10 пере-
менных, до 50 операций суммирования 10 переменных,
до 130 операций суммирования, инвертирования и мас-
штабного преобразования одной или суммы 5 пере-
менных.
Машина содержит:
160 многооборотных потенциометров с ручной уста-
новкой значений для умножения на постоянный коэффи-
циент в пределах от 0 до 1;
10 дйоДйых нелинейных блоков Для Воспроизйеденйй
нелинейных функций одной переменной, каждый из ко-
торых используется совместно с двумя операционными
усилителями;
12 схем перемножения (деления), построенных на
диодных квадраторах, каждая из которых выполняет
операцию перемножения (деления), используя три опе-
рационных усилителя машины;
6 специализированных блоков для воспроизведения
тригонометрических функций, каждый из которых вос-
производит синусную или косинусную функцию с исполь-
зованием двух операционных усилителей;
24 блока электромеханических следящих систем по-
тенциометрического типа, каждый из которых воспро-
изводит 4 нелинейные функции одной переменной или
выполняет 4 операции перемножения различных пере-
менных на одну и ту же переменную или ее функцию;
10 блоков для выполнения операций условного и
безусловного перехода;
4 специализированных нелинейных блока для полу-
чения характеристик петли гистерезиса, ограничения ко-
ординат и зоны нечувствительности.
Наблюдение результатов решения может произво-
диться по двум электронно-лучевым индикаторам
типа И-10 или с помощью цифрового и стрелочного
вольтметров.
Машина предусматривает возможность подключения
к ней других типов регистрирующей аппаратуры, а так-
же подключения двух секций время-импульсных блоков
перемножения (деления) типа СБПД, двух секций бло-
ков фотоследящих систем типа СБСС-2 и двух секций
блоков переменных коэффициентов типа СПК.
Система управления машиной обеспечивает как одно-
кратное решение задачи, так и решение с повторением.
Искомые величины в машине представляются мгно-
венными значениями напряжений постоянного тока,
изменяющимися в диапазоне от —100 до —|—100 В.
Максимальная приведенная погрешность при подаче
ступенчатой функции на вход блока интегрирования не
превышает 0,3% (^С=1 с за 100 с). При постоянных
входных сигналах в режиме суммирования и инвертиро-
вания максимальная приведенная погрешность не пре-
вышает 0,1%, при перемножении на блоках электроме-
ханических следящих систем 0,3%-
СреднекйаДратйческая приведенная погрешность опё-
раций перемножения и воспроизведения нелинейных
функций на диодных нелинейных блоках при постоянных
входных сигналах не превышает 0,3%, операций воспро-
изведения тригонометрических функций и извлечения
квадратного корня 0,85%, операции деления на диодных
блоках 1% (при изменении делимого от 0 до ±100 В
и делителя от ±10 до ±100 В).
В машине предусмотрена система вентиляции про-
изводительностью 4500 м3/ч.
Мощность, потребляемая машиной от трехфазной
сети переменного тока напряжением 380 В, частотой
50 Гц, составляет около 15 кВт.
Габариты машины-—не более 7520X1042x2390 мм
без отдельно устанавливаемых пульта проверки функ-
циональных блоков типа ПФБ-5 (1500x700x1000 мм)
и стабилизатора типа СТ-10 (760x580X1820 мм), мас-
са не более 6000 кг, площадь, занимаемая машиной,
около 8 м2.
7-6. АНАЛОГОВАЯ ВЫЧИСЛИТЕЛЬНАЯ МАШИНА МН-18М
Аналоговая вычислительная машина второго поколе-
ния МН-18М [2, 3, 5, 17, 21] предназначена для работы
в составе аналого-цифровой вычислительной системы
АЦЭМС-1М или самостоятельно для решения и иссле-
дования методом математического моделирования слож-
ных динамических систем, описываемых обыкновенными
нелинейными дифференциальными уравнениями. Общий
вид машины МН-18М представлен на рис. 7-3.
. Схема управления позволяет производить различ-
ные операции управления в режимах контроля и реше-
ния задачи. В частности, возможен одновременный и
раздельный запуск интеграторов по группам, однократ-
ное решение задачи и решение задачи с повторением.
В случае, когда объем решаемой задачи велик и задача
не может быть набрана на одной машине, допустимо
объединение до четырех машин МН-18М в единый
комплекс.
Результаты решения задачи можно наблюдать с по-
мощью электронного цифрового вольтметра или элек-
тронно-лучевого индикатора типа И-10 или И-11. В ма-
шине предусмотрены выходы для подключения реги-
стрирующих приборов другого типа, а также внешней
исследуемой аппаратуры.
Рис. 7-3. Общий вид АВМ МН-18М.
Элементной базой машины являются полупроводни-
ковые приборы.
Технические характеристики
Количество операционных усилителей . .
Максимальный порядок решаемых урав-
нений ....................... . , , 1 !
Диапазон изменения переменных величин, В
Максимальное время интегрирования, с . .
Дрейф нуля усилителей за 8 ч, мкВ . . .
Максимальная погрешность интегрирования
за 100 с, %.............................
Максимальная погрешность суммирования и
инвертирования, %........................
Максимальная погрешность основных нели-
нейных операций, %......................
Потребляемая мощность, кВ-А.............
Питание от однофазной сети переменного
тока....................................
Габариты, мм............................
Масса, кг'...............................
52
10
±50
1000
±300
Не более ±0,3
±0,1
0,1—0,5
Не более 0,7
220 В, 50 Гц
1090x530X1710
400
Машина МН-18М относится к классу машин средней
мощности. Она выполнена на полупроводниковых опера-
ционных усилителях постоянного тока с компенсацией
дрейфа нуля и имеет разнообразный и легко изменяемый
состав линейных и нелинейных операционных блоков.
Входы и выходы операционных блоков машины выведе-
ны на наборное поле. Три съемные панели наборного
поля, входящие в состав машины, позволяют произво-
дить набор структурной схемы задачи без затраты ма-
шинного времени. Структурные схемы моделируемых на
машине уравнений могут включать до 50 операционных
усилителей. Операционные усилители размещены в
25 блоках, каждый из которых предназначен для выпол-
нения двух операций. В состав машины входят 45 бло-
ков обратных связей (блоки суммирования, интегриро-
вания, перемножения; блоки универсальных и специали-
зированных нелинейных функций от одной переменной;
блок функций, набираемых оператором). В режиме ин-
вертирования погрешность не более ±0,1%.
Структурная схема машины МН-18М приведена на
рис. 7-4, где ДРП — двухкоординатный регистрирующий
прибор; АЦЭМС-1М — аналого-цифровая вычислитель-
ная система, описанная в § 7-8.
Рис. 7-4. Структурная схема АВМ МН-18М.
В состав машины входят: система управления и кон-
троля, набор блоков обратных связей, делители напря-
жения, инверторы, наборное поле, измеритель времени,
эталонный источник, блок выпрямителя, блоки стаби-
лизаторов.
Система управления и контроля включает блок изме-
рителя времени, ячейки управления, панель управления
и позволяет производить различные операции управле-
ния в режимах контроля и решения задачи. Возможны
одновременный и раздельный запуск интеграторов по
группам, однократное решение задачи, решение с повто-
рением (периодизацией) и т. д.
Набор блоков обратных связей состоит из блоков
операции суммирования ОС-3, операции интегрирования
ОИ-1, операции перемножения ОП-ЗМ, нелинейных уни-
версальных НУ-5 и НУ-6, нелинейной функции специа-
лизированный НС-4, набора операций БНО-1.
Блок операции суммирования ОС-3 выполняет две
операции суммирования с общим числом входов не бо-
лее 10.
Блок операции интегрирования ОИ-1 выполняет одну
операцию интегрирования суммы трех переменных.
Блок операции перемножения ОП-ЗМ выполняет опе-
рации перемножения и возведения в квадрат с погреш-
ностью ±0,1%, деления с погрешностью ±0,5%, извле-
чения квадратного корня с погрешностью ±0,3%.
Нелинейный универсальный блок НУ-5 обеспечивает
кусочно-линейную аппроксимацию нелинейных функций
10 отрезками с погрешностью в точках аппроксимации,
не превышающей ±0,4%.
Нелинейный универсальный блок НУ-6 обеспечивает
кусочно-линейную аппроксимацию нелинейных функций
19 отрезками с погрешностью в точках аппроксимации
не более ±0,4%.
Специализированный блок нелинейной функции НС-4
воспроизводит регулируемую зону нечувствительности
слева и справа и регулируемое ограничение сверху и
снизу или характеристику петли гистерезиса с регули-
руемыми шириной и ограничением для входных сигна-
лов от 0,01 до 5 Гц.
Блок набора операций БНО-1 содержит отдельные
элементы входных цепей и цепей обратной связи для
операционных усилителей (высокоточные резисторы и
конденсаторы, потенциометры, диоды, реле) и предна-
значен для воспроизведения специальных, преимуще-
ственно линейных, передаточных функций, вид которых
задается оператором на наборном поле блока.
Машина имеет сменные коммутационные панели, на
которых набирается схема модели задачи.
Достоинством машины является возможность изме-
нения в широких пределах состава операционных бло-
ков, а также применения ряда новых элементов (на-
бор микропроволочных резисторов, магазины проводи-
мости). Благодаря этому обеспечивается гибкость при
наборе задачи и большая точность моделирования опе-
раторов.
Для проверки операционных блоков и настройки не-
линейных функций предусмотрен пульт проверки функ-
циональных блоков ППФБ-6М.
Для проверки и настройки операционных усилителей
предусмотрен пульт проверки усилителей ППУ-13М.
В машине предусмотрены выходы для подключения
к ней других типовых регистрирующих приборов (на-
пример, двухкоординатного регистрирующего прибора
ДРП-5), а также внешней исследуемой аппаратуры.
С целью расширения объема вычислительных опера-
ций предусмотрена воз-
можность подключения
к двум машинам МН-18М.
одной секции потенцио-
метрических следящих
систем СУСС-1 (рис. 7-5).
Секция СУСС-1 осу-
ществляет моделирование
операторов умножения и
нелинейного преобразова-
ния аналоговых величин.
Секция может также мо-
делировать операторы де-
ления и извлечения квад-
ратного корня при исполь-
зовании операционных
усилителей, находящихся
в линейной части анало-
говой вычислительной ма-
Рис. 7-5. Секция следящих си-
стем СУСС-1.
шины.
Секция СУСС-1 вклю-
чает в себя 10 независи-
мых следящих систем.
Машина рассчитана
для работы в стационар-
ных условиях при темпе-
ратуре окружающей сре-
ды от 5 до 35°С и относительной влажности до 80% при
температуре 30°С.
Наработка на отказе не менее 80 ч. Коэффициент го-
товности не менее 0,997.
Гарантийный срок службы 12 мес со дня ввода в экс-
плуатацию, но не менее 18 мес со дня отгрузки заводом-
изготовителем.
В состав комплекта машины МН-18М входят: стойка
машины (1 шт.), пульт проверки усилителей ППУ-13М
(1 шт.), пульт проверки функциональных блоков
ППФБ-6М (1 шт.), блок стабилизированных напряже-
ний БСН-А-1М (1 шт.), комплекты сменных частей,
тары, укладок, запасных частей и эксплуатационной до-
кументации (по 1 шт.).
7-7. АНАЛОГОВЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС АВК-2
Аналоговый вычислительный комплекс АВК-2 [2, 3,
13, 17, 19, 21] предназначен для моделирования динами-
ческих систем, решения обыкновенных линейных и нели-
нейных дифференциальных уравнений и ряда других за-
дач, сводимых к системам обыкновенных дифференци-
альных уравнений.
Аналоговый вычислительный комплекс АВК-2 выпол-
нен на полупроводниковых операционных усилителях
постоянного тока и имеет разнообразный состав линей-
ных и нелинейных операционных блоков.
Схема управления АВК-2 отличается гибкостью и по-
зволяет производить одноразовое решение и решение
с периодизацией, одновременный и раздельный запуск
интеграторов по группам. Подключение каждой из че-
тырех групп к любой из двух программ управления про-
изводится на специальном наборном поле. Предусмотре-
на возможность управления комплексом от цифровой
вычислительной машины.
Схема контроля допускает проверку исправности опе-
рационных усилителей, источников питания, а также
проверку правильности набора задачи и правильности
установки постоянных коэффициентов без перекоммута-
ции цепей решения на коммутационных полях аналого-
вых устройств.
Наличие надежных съемных наборных полей с ре-
монтоспособными коммутационными шнурами и съем-
ных операционных блоков в типовом наборе обеспечи-
вает быстрый переход от одной задачи к другой. В слу-
чае, когда объем задачи велик и она не может быть
поставлена на одном наборе, возможно объединение
нескольких типовых наборов в единую систему.
Конструктивно типовой набор АВК-2 выполнен в ви-
де секции, образованной из сменных унифицированных
блоков.
Секция имеет габариты 1240 X 749 X 2388 мм и массу,
не превышающую 900 кг.
В зависимости от состава функциональных блоков
аналоговый вычислительный комплекс АВК-2 выпускал-
ся в виде трех моделей, получивших название АВК-2(1),
АВК-2 (2), АВК-2 (3). В настоящее время выпускается
АВК-2 (3).
Технические характеристики моделей АВК-2 приве-
дены в табл. 7-3. Внешний вид комплекса АВК-2 (2) при-
веден на рис. 7-6.
Рис. 7-6. Общий вид комплекса АВК-2 (2).
Таблица 7-3
Параметр
АВК-2 (I) АВК-2 (2) АВК-2’(3)
Количество операционных усилителей
Максимальный порядок решаемых урав-
нений
Диапазон изменений переменных вели-
чин, В
Максимальная погрешность задания и
измерения напряжения, %
Максимальное время интегрирования, с
Максимальная погрешность интегриро-
вания, °/0
Максимальная погрешность инвертиро-
вания напряжения постоянного тока, %
Максимальная погрешность перемноже-
ния двух переменных и возведения
в квадрат, %
Максимальная погрешность извлечения^
квадратного корня, %
Максимальная погрешность воспроизве-
дения гиперболы в узловых точках, %
Максимальная погрешность воспроизве-
дения тригонометрических функций, °/о
Максимальная погрешность задания по-
стоянных коэффициентов, %
Максимальная погрешность задания те-
стовых напряжений, %
Значение фоновой составляющей (приве-
денная ко входу усилителя), мВ
Питание от однофазн й сети:
напряжение, В
частота, Гц
Питание от трехфазной сети:
напряжение, В
частота, Гц
Потребляемая мощность, кВ-А
Масса, кг
Условия эксплуатации:
температура окружающего возду-
ха, °C
относительная влажность воздуха
при температуре ЗО°С, %
атмосферное давление, мм рт. ст.
Наработка на отказ, ч
Коэффициент готовности
Гарантийный срок службы со дня ввода
в эксплуатацию, мес
68 68 76
20 20 20
±100
Не более ±0,015
10 000
Не'более']±0,1
Не более ±0,01
Не более ±0,1
Не более ±0,2
Не более ±0,2
Не более ±[(0,15—0,25)
Не более ±0,02
Не более’±0,015
25
220
400
380/220
50
4,5 I 4,1 I 4,2
862 | 742 | 842
5—35
До;80
До 780
Не менее 150
Не менее 0,998
12
Комплекс АВК-2(1) обеспечивает решение диффе-
ренциальных уравнений до 20-го порядка со сложными
нелинейными зависимостями, с постоянными и перемен-
ными коэффициентами.
Комплекс АВК-2(2) позволяет решать дифференци-
альные уравнения до 20-го порядка с большим количе-
ством постоянных коэффициентов.
Основными устройствами, входящими в состав
АВК-2(1) и АВК-2(2), являются аналоговое вычисли-
тельное устройство АВУ-5, устройство следящих систем
УСС-2 (в модели 1) и УСС-3 (в модели 2), пульт управ-
ления секцией П-4, устройство термостатирования и
вентиляции УТ-Б-1, коммутационное поле, блок изме-
рительных приборов БИП-Б-1, программно-временное
устройство ПВУ-Б-1, пульт проверки усилителей
ППУ-Б-1, пульт проверки функциональных блоков
ППФБ-Е-1, источник стабилизированных напряжений
ИСН-6, блок выпрямителей БВ-Г-5. Связь с другими
секциями и устройствами осуществляется с помощью ка-
белей. Связь устройства с внешней аппаратурой осуще-
ствляется с помощью разъемов.
Комплексы АВК-2(1) и АВК-2(2) позволяют осуще-
ствлять:
до 40 операций суммирования с одновременным
умножением на постоянный коэффициент;
до 52 операций инвертирования;
до 20 операций интегрирования суммы;
до 160 операций умножения на постоянный коэф-
фициент;
до 8 операций перемножения или деления двух пере-
менных, или возведения в квадрат, или извлечения квад-
ратного корня с помощью электронных блоков;
до 6 операций воспроизведения нелинейных функций
одной переменной с помощью электронных блоков;
до 4 тригонометрических зависимостей с помощью
электронных блоков;
воспроизведение до 20 нелинейных зависимостей, ха-
рактерных для автоматических систем регулирования
типа сухого трения, ограничения, люфта;
выполнение логических операций с помощью 120 эле-
ментов и схем для воспроизведения типовых нелиней-
ных зависимостей;
выполнение на 6 функциональных электромеханиче-
ских следящих системах до 12 операций воспроизведе-
Рис. 7-7. Структурная схема типового набора комплекса
АВК-2 (2).
ния нелинейных функций от одной переменной с одно-
временным умножением на другую переменную;
до 12 операций- перемножения двух переменных.
На рис. 7-7 представлена структурная схема
АВК-2 (2), где ИСН-6 — источник стабилизированных
напряжений; БВ-Г-5 — блок выпрямителей.
Аналоговое вычислительное устройство АВУ-5 явля-
ется основным устройством всех моделей АВК-2 и пред-
назначено для решения линейных и нелинейных диффе-
ренциальных уравнений с постоянными коэффициентами.
Основные данные
Максимальное время интегрирования, с............... 10000
Максимальная погрешность, %:
интегрирования...................................±0,1
задания постоянных коэффициентов ...............±0,02
перемножения двух переменных................... ±0,1
воспроизведения гиперболы в узловых точках . , . ±0,2
Устройство следящих систем УСС-2 предназначено
для воспроизведения нелинейных зависимостей (до 8)
и переменных коэффициентов (до 8) с плавной аппро-
ксимацией и большим количеством экстремумов, а так-
же для выполнения операций перемножения (до 12).
В состав УСС-2 входят четыре функциональные сле-
дящие системы, каждая из которых обеспечивает вос-
произведение следующих выражений:
yi=^fi(x0)Xi, i=l, 2;
yi=x0Xj, /=1, 2,
где Хо— выходная величина функциональной следящий
системы; х< и Хд — входные величины, задаваемые на
решающие потенциометры функциональной следящей
системы; /ч(хо) —нелинейная функция одной переменной
или переменный коэффициент.
Нелинейные функции Д-(хо) задаются в виде графи-
ков, выполненных на миллиметровой бумаге размером
300X100 мм, и считываются с помощью фотоследящих
систем с погрешностью 1 % •
Основные данные
Максимальная скорость ввода графика, мм/с:
по оси х......................................... 50
по оси у......................................... 100
Максимальная статическая погрешность, %:
перемножения (г/;=ХоХ3) . . ±3
воспроизведения линейной функции, yi=x0 .... ±0,5
Максимальная динамическая погрешность воспроизведе-
ния линейной функции $i=x0 при максимальной ско-
рости ввода графика по оси Xi, % ............... ±1
Максимальная крутизна считываемого графика . . . 88е
Устройство следящих систем УСС-3 осуществляет
выполнение операций автоматической дистанционной
установки значений постоянных коэффициентов и на-
чальных условий.
Основные данные
Количество постоянных коэффициентов .... 60
Диапазон изменения значений постоянных коэффи-
циентов ...................................... 0,002—0,9998
Максимальное время установки постоянного коэффи-
циента, с .... . .......................... 6
Максимальная погрешность установки значений по-
стоянных коэффициентов........................ ±0,02%
Пульт управления секцией П-4-1 осуществляет управ-
ление АВМ в составе от одной до десяти односекцион-
ных моделей АВ К-2.
Устройство термостатирования и вентиляции УТ-Б-1
обеспечивает постоянную температуру в отсеке набора
с функциональными блоками с погрешностью не более
±1°С, что позволяет получать в наборе высокую ста-
бильность и повторяемость решения задачи. Система
вентиляции обеспечивает вертикальный продув опера-
ционных усилителей и источников питания. В АВК.-2
предусмотрена возможность подключения ее к системе
централизованной вентиляции.
Пульт проверки усилителей ППУ-Б-1 осуществляет
проверку исправности операционных усилителей, источ-
ников питания, а также проверку правильности набора
задачи и правильности установки постоянных коэффи-
циентов без коммутации цепей решения на наборных по-
лях аналоговых устройств.
Пульт проверки функциональных блоков ППФБ-Е-1
входит в состав всех моделей АВК-2.
Основные данные
Диапазон изменения выходных напряжений, В . . . . ±100
Количество датчиков тестовых напряжений........ 3
Максимальная погрешность датчиков тестовых напря-
жений, % .....................................±0,015
Максимальная погрешность измерения напряжения ком-
пенсационным методом, %.......................±0,02
Блок измерительных приборов БИП-Б-1 производит
измерение знакопеременных напряжений постоянного
тока.
Программно-временное устройство ПВУ-Б-1 предна-
значено для задания времени начала и окончания инте-
грирования и управления внешними устройствами.
Устройство ПВУ-Б-1 имеет две программы для раздель-
ного запуска интеграторов и одну программу для полу-
чения временных импульсов. Устройство обеспечивает
следующие режимы работы: периодизация, периодиза-
ция со сбросом счетчика, одноразовый без останова
счетчика, одноразовый с остановом счетчика.
Основные данные
Максимальная длительность цикла, с............... 10 000
Максимальная погрешность измерения времени, % . . . ±0,01
Число десятичных разрядов счетчика................... 3
Операционные усилители У-Г-1, конструктивно объ-
единенные по два в блоке, предназначены для работы
в качестве основных решающих элементов в режиме
масшта'бного звена при приведенном коэффициенте уси-
ления k—0-5-100 в схемах с сопротивлениями Авх и 7?0бр
не более 1000 кОм и в режиме интегрирования с посто-
янной времени 7?С=0^-10 с при сопротивлении 7?вх—
= 10—5—1000 кОм.
Основные данные
Максимальный ток нагрузки, мА .... 20
Коэффициент усиления на постоянном токе 5-10е
Коэффициент усиления на частоте 100 Гц 10*
Временной дрейф выходного напряжения,
приведенный ко входу, в режиме мас-
штабного звена за 8 ч, мкВ................. Менее ±100
Допустимые емкостные нагрузки, пФ:
на входе............................ : До 250
на выходе.................................. До 2000
Линейный блок БЛ-Б-2 совместно с двумя усилителя-
ми постоянного тока блока У-Г-1 предназначен для вы-
полнения линейных операций: суммирования, инверти-
рования, интегрирования. Линейный блок допускает вос-
произведение типовых нелинейностей систем автоматиче-
ского регулирования (зоны нечувствительности, релей-
ной характеристики и т. д.).
Основные данные
Выполняемые операции:
суммирования (с входными переменными до 11) 1
инвертирования ................................ 1
или
суммирования (с входными переменными до 12) 2
или
интегрирования с одновременным суммированием
(с входными переменными до 12).................. 1
инвертирования .................................... 1
или
интегрирования................................. 1
суммирования (с входными переменными до 13) 1
Максимальная погрешность установки постоянных коэф-
фициентов, %:
с помощью ручных потенциометров (4 шт.) . . . ±0,02
с помощью потенциометров, устанавливаемых сле-
дящей системой АВУ (4 шт.)................... ±0,05
Максимальная погрешность интегрирования нулевого
входного напряжения за 100 с для RC= 1 с, % - • ±0,01
Максимальная погрешность интегрирования напряжения
постоянного тока 1 В за 100 с для /?С=1 с, °/о . . . ±0,1
Максимальная погрешность инвертирования напряже-
ния постоянного тока, %.......................... ±0,01
Блок нелинейности БН-Б-2 предназначен для воспро-
изведения нелинейной однозначной непрерывной функ-
ции методом кусочно-линейной аппроксимации.
Основные данные
Количество отрезков аппроксимации....................... 15
Максимальная крутизна функции, воспроизводимая каж-
дым отрезком, В/В....................................... 10
Максимальная погрешность воспроизведения функций
в узловых точках (для гиперболы у— 1/х при изменении
х от 0,1 до 1), %.................................. ^ ±0,2
Блок специальных нелинейностей БНС-Б-2предна-
значен для воспроизведения тригонометрических функ-
ций.
Основные данные
Максимальная погрешность”воспроизведения
п х
функции у = 100 sin -g- Iqq , -о/о . . . . + о,15
Максимальная погрешность воспроизведения
гсХ т.Х
функций У =100 sin iQQ , У=Ю0 cosy^p •
%’
У=100 cos п уро , °/о............... + 0,25
Блок произведения БП-Д-1 предназначен для вы-
полнения следующих операций:
перемножения 2=+0,01 ху,
возведения в квадрат г=±0,01 х2;
деления z==—lOxfy;
извлечения корня квадратного 2=— 10]/~х.
Основные данные
Максимальная погрешность перемножения и возведения
в квадрат, %....................................±0,1
Максимальная погрешность деления (при изменении напря-
жения х от 0 до ±100 В, напряжения у от ±10 до
±100 В), %......................................±1,5
Максимальная погрешность извлечения корня квадратного
£при изменении напряжения х от 1 до +100 В), % - - ±0,2
Блок логических операций БСП-Б-2 предназначен
для выполнения логических операций и воспроизведения
типовых нелинейных зависимостей автоматических си-
стем регулирования.
В блок входят: элемент ограничения; элемент выбо-
ра максимума; элемент выбора минимума; два диоцных
ключа; триггер со счетным и установочными входами;
одновибратор; элемент НЕ; семь обычных многоконтакт-
ных реле; четыре реле поляризованных.
Элементы блока расположены на сменных платах.
Количество мест для сменных плат 10.
Комплекс АВК-2(3) осуществляет решение диффе-
ренциальных уравнений до 20-го порядка с постоянны-
ми и переменными коэффициентами, с большим количе-
ством нелинейных операций и решение различных задач
линейного программирования, уравнений в частных про-
изводных и др.
Комплекс АВК-2 (3) отличается от комплексов
АВК-2 (1) и АВК-2 (2) тем, что имеет в наборе цифро-
вой вольтметр БЭЦВ-Е-1, вместо устройств УСС-2
(УСС-3) — устройство следящих систем УСС-7 и в нем
отсутствует БИП-Б-1.
Структурная схема АВК-2(3) приведена на рис. 7-8,
где ППУ-Б-1— Пульт проверки усилителей; ППФБ-Е-1—
пульт проверки функциональных блоков; ИСН-6 —
источник стабилизированных напряжений; УТ-Б-1 —
устройство вентиляции и термостатирования; УСС-7 —
устройство следящих систем; АВУ-5 — субблок монтаж
ный; П-4 — пульт управления секцией.
Рис. 7-8. Структурная схема типового набора комплекса
АВ К-2 (3).
Цифровой вольтметр БЭЦВ-Е-1 предназначен для
измерения знакопеременных напряжений постоянного
тока.
Результаты измерения представляются в виде пяти-
разрядного десятичного числа на световом табло с одно-
временной индикацией полярности измеряемого напря-
жения. Номер канала измерения высвечивается на
табло.
В блоке предусмотрен вывод результатов измерения
е целью печати их на МПУ16-2 или перфорации на
ПЛУ-К
Основныеданные
Диапазон измеряемых напряжений, В . . От +105 до —105
Количество каналов измерения............ 1, 5, 10
Максимальная относительная погрешность
измерения напряжений постоянного тока
при работе в составе модели, % . . . . ±0,02
Входное сопротивление по каждому каналу
измерения, кОм................................. 500
Максимальное время измерения, мс . . . 150
Устройство следящих систем УСС-7 предназначено
для воспроизведения нелинейных зависимостей (до 12)
и переменных коэффициентов (до 12) с плавной аппро-
ксимацией, а также для выполнения операций перемно-
жения и инвертирования (до 24).
Нелинейные функции y;—fi(x0) задаются в виде гра-
фиков, образованных наклеенной на диаграммную бума-
гу проволокой, и считываются с помощью операционных
потенциометров.
Основные данные
Максимальная длина рабочей части графика, мм:
по оси х................................300
по оси у .................. 150
Максимальная скорость ввода графика, мм/с.. 50
Максимальная статическая погрешность, %:
перемножения .......................±0,3
воспроизведения линейной функции ......±1
инвертирования . . . . ...............±0,01
Основной комплект аналогового вычислительного
комплекса АВК-2 приведен в табл. 7-4.
Таблица 7-4
Наименование устройства АВК-2 (1) АВК-2 (2) АВК-2 (3
Аналоговое вычислительное устройство АВУ-5 2 2 2
Программно-временное устройство ПВУ-Б-1 1 1 1
Пульт управления секцией П-4-1 1 1 1
Устройство термостатирования и венти- ляции УТ-Б-1 1 1 1
Пульт проверки усилителей ППУ-Б-1 1 1 1
Пульт проверки функциональных блоков ППФБ-Е-1 1 1 1
Источник стабилизированных напряже- ний ИСН-6 1 1 1
Продолжение табл. 7-4
Наименование устройства АВК-2 (1) АВК-2 (2) АВК-2 (3)
Устройство следящих систем:
УСС-2 1 —- —
УСС-3 . 1 ——
УСС-7 — — 1
Блок измерительных приборов БИП-Б-1 1 1 1
Блок электронного цифрового вольтмет- — -—’ —-
ра БЭЦВ-Е-1
Блок выпрямителей 1 1 1
Источник стабилизированных напряжений 1 1 1
Шкаф сменных блоков 1 1 1
Комплекты сменных блоков, заглушек, 1 1 ]
запасных частей и эксплуатационной
документации
7-8. АНАЛОГО-ЦИФРОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА АЦЭМС-1
Полупроводниковая аналого-цифровая вычислитель-
ная система АЦЭМС-1 [2, 9, 17, 20], в которой осуще-
ствляется параллельная работа цифровой и аналоговых
вычислительных машин общего назначения, предназна-
чена для исследования методом математического моде-
лирования сложных динамических систем в реальном
масштабе времени с повышенной точностью.
АЦЭМС-1 содержит универсальную цифровую вы-
числительную машину (ЦВМ) типа М-220, две аналого-
вые вычислительные машины (АВМ) типа МН-18, стой-
ку потенциометрических следящих систем типа СУСС-1,
центральное устройство управления ЦУУ, устройство
преобразования данных типа УП-3, двухкоординатный
регистрирующий прибор типа ДРП-3 с устройством пре-
образования типа УП-7.
В расширенный состав системы могут быть дополни-
тельно включены еще две машины МН-18, стойка
СУСС-1, устройство преобразования УП-3 и электронно-
лучевой индикатор типа И-10.
Имеется возможность соединять систему с реальной
аппаратурой и дополнительным внешним оборудо-
ванием.
Вычислительные машины, входящие в систему,
в функциональном отношении самостоятельны и могут
использоваться не только в комплексе, но и каждая
в отдельности при решении менее сложных задач.
Работа системы АЦЭМС-1 организуется с помощью
ЦУУ, в функции которого входят управление, синхро-
низация работы, связь между функциональными блока-
ми отдельных частей системы и с внешней исследуемой
аппаратурой, контроль за работой отдельных частей си-
стемы при отладке программы решения задачи и про-
верке правильности работы системы.
Устройство преобразования данных УП-3 служит для
преобразования данных из аналоговой формы в цифро-
вую и из цифровой в аналоговую. Преобразуемая ин-
формация может представлять собой как значения ма-
шинных переменных, так и коды сигналов управления,
поскольку на ЦВМ, помимо вычислений, могут быть воз-
ложены и некоторые функции управления аналоговой
частью. В УП-3 содержится 15 параллельно действую-
щих цифро-аналоговых преобразователей (ЦАП), каж-
дый из которых состоит из запоминающего триггерного
регистра с потенциальным входом, преобразователя по-
тенциального кода в аналоговый сигнал и выходного
операционного усилителя. Количество разрядов, вклю-
чая знаковый, в коде входной величины равно 15, диа-
пазон изменения выходного напряжения от —50 до
+50 В. Среднеквадратическая погрешность преобразо-
вателя в диапазоне температур 5—-35°С не превыша-
ет 0,05%.
В основу построения схемы 15-канального АЦП по-
ложен способ следящего кодирования, обеспечивающий
хорошие характеристики по точности и быстродействию
в режиме преобразования малых приращений входного
сигнала. Максимальная приведенная погрешность
АЦП не превышает 0,1%. Максимальная динамическая
погрешность преобразования не превышает 0,1% при
частоте входного синусоидального сигнала 5 Гц. Диапа-
зон изменения входной величины от —50 до +50 В, вы-
ходная величина представляется 12-разрядным двоич-
ным числом в прямом или обратном коде. Четыре канала
аналого-цифрового и четыре канала цифро-аналогового
преобразования (с 12-го по 15-й) могут быть использо-
ваны для формирования 60 одноразрядных двоичных
команд управления, сигнализации и контроля.
Устройство преобразования УП-7 выполняет преобра-
зование выходных данных ЦВМ в аналоговую форму
для регистрации их на двухкоординатном регистрирую-
щем приборе ДРП-3 (см. § 7-12).
Стойка потенциометрических следящих систем
СУСС-1 содержит потенциометрические блоки перемно-
жения (деления) и блоки нелинейных функций одной
переменной, построенные на базе следящих систем. С их
помощью можно одновременно осуществлять до 10 опе-
раций перемножения или деления, образовывать до
30 нелинейных функций. Максимальная приведенная по-
грешность воспроизведения часто встречающихся функ-
ций не превышает 0,5%.
Точность решения контрольной задачи на опытном
образце АЦЭМС-1 оказалась на один-два порядка выше
точности решения этой же задачи, полученной на АВМ
разных типов.
Аппаратура АЦЭМС-1 имеет массу (без ЦВМ) около
2000 кг, занимает площадь 25—35 м2. Потребляемая от
сети 50 Гц мощность АЦЭМС-1 составляет около
5 кВт.
7-9. АНАЛОГОВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ЭМУ-200
Аналоговая вычислительная система третьего поко-
ления ЭМУ-200 [15] предназначена для работы как
автономно, так и в составе гибридных (аналого-цифро-
вых) комплексов. Она представляет собой систему па-
раллельных аналоговых процессоров высокого класса
точности, объединенных общим пультом управления
(рис. 7-9). Система применяется:
в качестве аналоговой части в современных гибрид-
ных (аналого-цифровых) вычислительных комплексах;
в качестве вычислительной части комплексных тре-
нажеров различного назначения в системах управления
с прогнозированием, в системах автоматизации научных
исследований для предварительного сжатия сообщений
и обработки информации в реальном масштабе времени;
для моделирования в натуральном и ускоренном
масштабах времени сложных нелинейных динамических
систем, описываемых дифференциальными уравнениями
до 20X7= 140-го порядка с подключением реальной ап-
паратуры;
для решения задач оптимизации, параметрической
идентификации и других задач, сводящихся к выполне-
нию итеративных процедур;
для решения задач, требующих помимо решения
дифференциальных уравнений выполнения логических
Рис. 7-9. Общий вид аналоговой части ЭМУ-200.
операций, а также изменения в процессе решения не
только параметров, но и самой структуры дифференци-
альных уравнений.
Эти возможности ЭМУ-200, а также высокая точ-
ность и надежность ставят эту систему в ряд лучших
образцов вычислительных систем третьего поколения.
Конструкция ЭМУ-200 состоит из нескольких (до 7)
аналоговых параллельных процессоров, подсоединенных
к общему пульту управления. С пульта посредством
соответствующих органов управления оператор может
осуществлять управление всеми процессорами как еди-
ным целым; кроме того, через пульт производится авто-
матическое управление АВМ от ЦВМ и пересылаются
данные о состояниях вычислительных, логических и
управляющих элементов АВМ и ЦВМ.
Для обеспечения ввода-вывода данных процессор
оснащается электронно-лучевым индикатором, многока-
нальным самопишущим прибором и двухкоординатным
регистрирующим устройством.
Каждый параллельный процессор представляет собой
АВМ, полностью приспособленную для самостоятельной
работы, в том числе и для работы с программным управ-
лением от своей параллельной логики. Два аналоговых
процессора могут соединяться друг с другом по управ-
лению. При этом процессор, с панели управления кото-
рого осуществляется управление основными операциями
этих двух соединенных процессоров, называется веду-
щим, а второй—-ведомым. Предусмотрена возможность
переключения процессора из состояния «ведущий» в со-
стояние «ведомый». При подключении к пульту общего
управления аналоговый процессор переключается в со-
стояние управления от пульта. Питание каждого ана-
логового процессора осуществляется от стойки питания.
Общий пульт управления предназначен:
для объединения нескольких аналоговых процессоров
в одну вычислительную систему с единым централизо-
ванным управлением, контролем и измерением;
для организации программного управления аналого-
вой частью гибридного вычислительного комплекса от
цифровой части.
Управление аналоговыми процессорами ЭМУ-200 осу-
ществляется через регистры, расположенные в общем
пульте управления:
регистры адреса вычислительного элемента и номера
аналогового процессора;
регистр коэффициента;
регистры и триггеры управления.
Стойка питания содержит выпрямители стаоилизиро-
ванных источников питания и нестабилизированные
источники питания для одного аналогового процессора.
Параллельный аналоговый процессор включает в себя
решающие элементы и другие устройства и системы,
обеспечивающие решение линейных и нелинейных диф-
ференциальных уравнений до 20-го порядка как в режи-
ме одноразового решения, так и с повторением решения.
В его состав входят:
линейные и нелинейные решающие элементы;
элементы параллельной логики;
системы управления, контроля и измерения;
сменные наборные поля (аналоговые и логические);
источники опорных напряжений и другие элементы.
Габариты процессора 1300X1650X1060 мм.
В параллельном аналоговом процессоре значительно
повышено быстродействие за счет применения специ-
ально разработанных решающих и коммутирующих эле-
ментов. Применение бесконтактных коммутаторов в си-
стемах адресации и автоматических потенциометров
позволяет быстро менять коэффициенты дифференциаль-
ных уравнений. Кроме того, введены новые решающие
элементы, такие, как компараторы, устройства слеже-
ния-хранения, функциональные реле, параллельная
логика, электронно-управляемые коэффициенты (с гру-
бой и точной установкой), парафазные выходы и преци-
зионные управляемые ограничители в сумматорах и ин-
теграторах, существенно расширяющие возможности
установки ЭМУ-200 по сравнению с другими серийно
выпускаемыми АВМ.
Аналоговые элементы, параллельная логика и систе-
ма управления выполнены с широким использованием
интегральных схем, что обеспечивает высокую точность
и надежность решающих элементов. Значительная часть
монтажа выполнена по прогрессивной технологии
(«скруткой»)., В контактных соединениях, подвергаю-
щихся частой коммутации, применено золочение.
ехнические данные
Аналоговые решающие элементы
Интегратор
Коэффициент усиления усилителя по по-
стоянному току........................
Постоянная времени, с.................
Число входов .........................
Погрешность........................ .
Выходной ток, мА .... ................
Сумматор
Коэффициент усиления усилителя по по-
стоянному току........................
Число входов .........................
Погрешность...........................
Динамическая погрешность на частоте
20 кГц, %...........................
Выходной ток, мА................. . . . .
10’
1; 0,1; 0,01; 0,001
5
Не более 0,005% ±26
(6 — относительная по-
грешность пассивных
элементов цепи обрат-
ной связи)
20
10’
5
Не более 0,005%±26
0,1
20
Автоматический электронный
потенциомет р
Погрешность установки, %.................... Не более 0,02
Время установки с погрешностью установки:
0,02%....................................... Не менее 2 мс
1%.............с................... 10 мкс
Универсальный функциональный
преобразователь
Количество цепочек по схеме идеальных
диодов .................................
Выходной ток, мА........................
Статическая погрешность, %..............
Динамическая погрешность на частоте
20 кГц, %...............................
Специализированные функциональные
п реобразовате ни
Создаваемые функции...................
Статическая погрешность, %..............
Динамическая погрешность на частоте
2 кГц, %................................
10
20
0,1
1
sinx, cosx, arcslnx,
arccos х, In x, exp x
0,1
1
Al ножительно-делительное
устройство
Создаваемые функции...................0,1 ху\ \Qx/y, —V10 J^x
Максимальная статическая погрешность, % ±0,2
Динамическая погрешность на частоте
2 кГц, %.................................... 0,5
Продолжение
Компаратор
Зона нечувствительности, мВ........................ +2
Запаздывание переключения на частоте
1 кГц при амплитуде входного сигнала
10 В, мкс............................ . 0,5
Элементы параллельной логики
Регистр общего применения
Режимы................................Регистр, двоичный счет-
чик; 4 независимо
управляемых триггера
Управление триггера...................От кнопок управления и
от гнезд логического
наборного поля
Режимы работы двоичного счетчика .... Сложение и вычитание
Счетчик десятичного кодирования
Режимы................................Сложение и вычитание
до 100
Запись^числа в счетчик................С гнезд наборного поля
и от десятичного задат»
чика на панели управ-
ления
Элемент И
Количество элементов И с числом входов
2 , 4, 6 и с индикацией единичного со-
стояния ............................ 48
Одновибратор
Длительность импульса, определяемая спе-
циальным задатчиком....................... От 1 мкс до 99 с
Состав р’ешающих элементов параллельного
аналогового пр оце с с о р а
Линейные аналоговые решающие
элементы
Интегратор......................... 20
Сумматор........................... 20
Автоматический электронный потенциометр 100
Потенциометр с ручной установкой .... 70
Устройство слежения — хранения....... 10
Свободное сопротивление ........................ 20
Свободный конденсатор.............. 12
Нелинейные аналоговые решающие
элементы
Множитель — делитель............................ 20
Универсальный функциональный преобразо-
ватель ....................................... 18
Продолжение
Специализированный финкциональный преоб-
разователь ..................................... 10
Свободный диод ................................... 60
Ограничитель интегратора и сумматора . . 20
Элементы параллельной логики
и связи с ЦВМ
Регистр общего применения ........................ 8
Счетчик десятичного кодирования .................. 2
Элемент И........................................ 48
Логический дифференциатор......................... 8
Одновибратор ..................................... 8
Счетчик на три интервала времени .... 1
Компаратор....................................... 20
Функциональные реле с управлением от
цифровой части................................. 10
Функциональные реле с управлением от па-
раллельной логики.............................. 10
Электронный переключатель — идеальный
диод-инвертор.................................. 10
Линия управления ................................ 16
Линия чувствительности .......................... 16
Линия прерывания................................. 6
Линия индикации.................................. 16
7-10. ГИБРИДНАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА ГВС-100
Гибридная вычислительная система ГВС-100 [6, 11,
14] относится к классу сбалансированных ГВС средней
мощности. Она разработана как единое целое и в то же
время допускает автономное использование основных со-
ставных частей. Предусмотрена возможность гибкого
наращивания системы за счет увеличения объема опера-
тивной памяти, количества периферийного оборудова-
ния, числа аналоговых стоек, числа модулей устройства
сопряжения и преобразования.
Использование магнитных дисков в качестве внешней
памяти, использование гибкой системы связи не только
по вычислительной, но и управляющей информации, на-
личие быстрой периодизации решения и полностью
электронной системы установки коэффициентов в анало-
говой части придает этой вычислительной системе по
сравнению с существующими ряд новых и важных воз*
можностей.
Структура математического обеспечения ГВС-100
отличается объединением в единую систему программно-
го обеспечения цифровой и аналогой частей. Система
математического обеспечения ГВС-100 обеспечивает ре-
шение гибридных задач на ЦВМ и АВМ в реальном
масштабе времени, работу цифровой части в мультипро-
граммном режиме, автоматизацию подготовки задач
для АВМ.
Система программирования для ГВС-100 предусма-
тривает:
использование языков ФОРТРАН, BASIC, а также
языка АВТОКОД, дополненного операторами связи
между отдельными устройствами ГВС-100 и оператора-
ми управления АВМ по сигналам от ЦВМ;
использование специализированных языков, объеди-
ненных в систему автоматизации аналогового програм-
мирования (СААП) и позволяющих вводить в ЦВМ
уравнения, подлежащие решению на АВМ;
получение по уравнениям схемы аналогового набора;
определение значения масштабов и коэффициентов
передач отдельных решающих элементов, начальных
условий и возмущений, значений напряжения для стати-
ческого контроля;
печатание схем набора в принятой международной
символике и всех относящихся к ним данных. В систему
входит библиотека служебных программ (включая про-
граммы связи с АВМ) и алгоритмов. Все библиотечные
программы, записанные в кодах машины, хранятся на
магнитных дисках. Предусмотрена возможность объеди-
нения в одну программу отдельных частей программ,
написанных на разных языках.
Система отладки осуществляет:
обнаружение ошибок в программах, написанных на
различных языках;
внесение необходимых изменений и добавлений в от-
лаживаемую программу.
Организующая система ГВС-100
осуществляет ввод программ и массивов информации,
предназначенных для обработки;
организует трансляцию программ с алгоритмическо-
го языка в коды машины;
производит перевод массивов цифровой информации
при вводе (в двоичный дополнительный код) и выводе
(в прямой десятичный код);
совмещает решение нескольких программ, используя
систему прерываний;
о еспечивает обмен информацией между оператором
и машиной;
производит согласование решения во времени для
аналоговой и цифровой частей, используя систему пре-
рывания и часы.
Вычислительная система ГВС-100 построена на осно-
ве новейшей электронной технологии с широким исполь-
зованием кремниевых интегральных схем в цифровой
и аналоговой частях и устройстве сопряжения и преоб-
разования.
Наличие развитого общего и специального гибридно-
го математического обеспечения, повышенная точность
и быстродействие аналоговой части, высокое быстродей-
ствие цифровой части и устройства сопряжения и преоб-
разования ставят эту вычислительную систему в ряд
наиболее совершенных современных гибридных вычис-
лительных систем.
Структурная схема ГВС-100 представлена на рис. 7-10,
где 1 — магнитные диски; 2— ферритовая память; 3 —.
блоки управления; 4 — периферийные устройства; 5 —
центральный процессор; 6 — цифро-аналоговая подсисте-
ма; 7 — коммутационная панель; 8 — управление анало-
го-цифровой и цифро-аналоговой частями; 9— блок
слежения — хранения; 10•—блок управления и синхро-
Рис. 7-10. Структурная схема системы ГВС-100.
низации; 11 — аналого-цифровая подсистема; 12 — сиг-
налы управления; 13—аналоговая стойка; 14 — блоки
аналоговой периферии; 15 — общий пульт управления;
1 — цифровая часть; II — устройство сопряжения и пре-
образования; III—аналоговая часть.
Цифровая часть ГВС-100 представляет собой ЦВМ
среднего быстродействия с развитыми системой команд
и системой прерывания (32 канала прерывания). Ариф-
метическое устройство обеспечивает схемно операции
с 32-разрядными числами с фиксированной и плаваю-
щей запятой. Оперативное запоминающее устройство
имеет объем 16к 36-р азрядных слов с возможностью
расширения модулями объемом по 8к до 64к, время цик-
ла не более 0,9 мкс. Предусмотрена возможность работы
с восемью периферийными устройствами. Внешнее запо-
минающее устройство на магнитных дисках со сменными
пакетами емкостью 768000 и 1536 000 слов каждый.
Аналоговая часть ГВС-100 (рис. 7-11) состоит из не-
скольких (до 7) аналоговых стоек, подсоединенных
к общему пульту управления, который объединяет все
Рис. 7-11. Общий вид аналоговой части системы ГВС-100.
эти стоики в одну о щую систему. С этого пульта по-
средством соответствующих органов управления опера-
тор может осуществлять управление всеми стойками как
единым целым. Кроме того, через пульт производится
автоматическое управление АВМ от ЦВМ и пересыла-
ются данные о состояниях вычислительных, логических
и управляющих элементов.
Аналоговая стойка представляет собой АВМ со шка-
лой ±10 В, приспособленную для функционирования
с цифровой частью и без нее. Отдельные стойки могут
объединяться в систему с выделением одной из них в ка-
честве ведущей. Аналоговая стойка предназначена для
решения линейных и нелинейных дифференциальных
уравнений до 20-го порядка в режиме однократного и
многократного (до 2 кГц) повторения решения. В состав
стойки входят: 70 линейных решающих элементов, 26 не-
линейных решающих элементов, 66 элементов парал-
лельной логики, 100 электронно-управляемых от ЦВМ
коэффициентов с блоками памяти на 100 коэффициен-
тов и системой регенерации.
Для обеспечения ввода-вывода данных аналоговая
часть ГВС-100 оснащается следующим периферийным
оборудованием: электронно-лучевым индикатором, само-
пишущим 8-канальным прибором и двухкоординатным
регистрирующим устройством.
Обмен вычислительной информацией между анало-
говой и цифровой частями системы осуществляется через
АЦП и ЦАП, размещенные в устройстве связи. В устрой-
стве связи находятся также регистры функциональных
и индикаторных линий, служащие для обмена логиче-
скими данными между АВМ и ЦВМ. Наличие функцио-
нальных линий, в частности, обеспечивает возможность
мультипрограммной работы аналоговой части.
Каждая отдельно взятая вычислительная стойка
представляет собой АВМ, полностью приспособленную
для самостоятельной работы, в том числе и с про-
граммным управлением от своей параллельной логики.
Стойки могут также присоединяться друг к другу. При
этом стойка, с панели управления которой осуществля-
ется управление основными операциями соединенных
стоек, называется ведущей, а остальные — ведомыми.
Перевод стойки из состояния ведущей в состояние ведо-
мой осуществляется переключателем. При подключении
к общему пульту управления стоика переключается в со-
стояние управления от пульта.
Аналоговая стойка включает в себя элементы, необ-
ходимые для нормального функционирования стойки как
самостоятельной АВМ, предназначенной для моделиро-
вания линейных и нелинейных дифференциальных урав-
нений как в режиме одноразового решения, так и с по-
вторением решения.
Состав решающих элементов аналоговой стойки
Линейные аналоговые решающие элементы
Интегратор ..............................................20
Сумматор ... ...,. 20
Инвертор...............................................; 20
Автоматический потенциометр.............................100
Потенциометр с ручной установкой.........................28
Устройство слежения —хранения............................10
Свободное сопротивление .20
Свободный конденсатор....................................10
Нелинейные аналоговые решающие элементы
Множитель высокой точности................................2
Множитель средней точности.............................. 8
Универсальный функциональный преобразователь..............4
Генератор фиксированных нелинейностей.....................8
Свободный диод ........................................ 20
Ограничитель.............................................20
Элементы параллельной логики
Регистр общего применения.................................8
Счетчик десятичного кодирования...........................2
Схема совпадения...................................... . 48
Логический дифференциатор ................................4
Одновибратор .............................................4
Прочие элементы
Компаратор ..............................................20
Функциональное реле с автоматическим управлением .... 10
Функциональное реле с ручным управлением..................10
Электронный ключ..........................................10
Управляющая линия.........................................16
Линия чувствительности...................................16
Линия прерывания........................................ 6
Линия индикации...........................................16
Аналоговые решающие элементы, параллельная логи-
ка и система управления собраны из интегральных эле-
ментов, что обеспечивает высокую точность. Применение
бесконтактных элементов в системе селектирования и
потенциометров позволяет быстро менять коэффициенты
дифференциальных уравнений.
Технические данные основных решающих
элементов
Аналоговые решающие элементы
Интегратор
Коэффициент усиления усилителя по по-
стоянному току................................ 107
Постоянные времени, с ...... .
1; 0,1; 0,01; 0,001
Число входов.................................... 5
Погрешность за 100 с, %.............. Не более 0,1
Электронное управление режимами
с временем изменения режимов, мкс Около 1
Выходной ток, мА ......................- 30
Сумматор
Коэффициент усиления усилителя по по-
стоянному току................................ 108
Число входов......................... 5
Полоса пропускания, мГц............. 2
Погрешность в полосе частот до 1 кГц, % Менее 0,1
Выходной ток, мА ......................... 25
Электронный потенциометр
Погрешность, %............................... Менее 0,01
Время установки, мс.................. • Менее 2,5
Выходной ток, мА ... .......................... 5
Универсальный функциональный
преобразователь
Количество цепочек по схеме «идеаль-
ных» диодов.................................... 20
Погрешность установки каждой це-
почки, %’..................................... 0,1
Выходной ток, мА................................. 25
Полоса пропускания каждой цепочки,
мГц ............................................ 1
Множитель — делитель
Тип 1: Погрешность статическая, % • • 0,01
Выходной ток, мА ..... 25
Тип 2: Погрешность статическая, % 0,25
Выходной ток, мА.............. 5
Генератор фиксированных
нелинейностей
Вырабатываются функции............... sinx, cosx, arcsinx,
arccos x, In x, exp x
Частота сигнала, при которой динами-
ческая погрешность не превышает
1%, кГц:
при большом сигнале ...... 2
при малом сигнале.......................... 10
Выходной ток, мА . . .......................... 30
Продолжение
Компаратор
Полоса пропускания, МГц................. Ю
Зона нечувствительности, мВ........................ + (1—5)
Элементы параллельной логики
Регистр общего применения
Режимы .............................
Управление триггера . .......
Режимы работы двоичного счетчика . .
Счетчик десятичного кодирования
Режимы .............................
Запись числа в счетчик..............
Элементы И
Количество элементов И с числом вхо-
дов 2, 4, 6 и с индикацией единичного
состояния.................. ... .
Одновибратор
Длительность импульса, определяемая
специальным задатчиком..............
Регистр, двоичный счет-
чик, четыре независи-
мо управляемых триг-
гера
От кнопок управления и
от гиезд логического
наборного поля
Сложение и вычитание
Сложение и вычитание
до 100
С гнезд наборного поля
и от десятичного за-
датчика на панели
управления
48
От 0,1 мкс до 1 с
Аналоговый пульт управления. Пульт управления
аналоговой частью предназначен:
для объединения нескольких аналоговых вычисли-
тельных стоек в одну вычислительную систему с единым
центральным управлением, контролем и измерением;
для организации программного управления аналого-
вой частью от цифровой части.
Управление аналоговой частью осуществляется через
регистры, расположенные в пульте управления:
регистр адреса вычислительного элемента и номера
вычислительной стойки;
регистр коэффициента;
регистры и триггеры управления.
Дополнительная аппаратура. В состав дополнитель-
ной аппаратуры входят пульт для проверки и настройки
нелинейных вычислительных элементов АВМ и комплект
запасных частей для первого года эксплуатации.
Устройство сопряжения и преобразования ГВС-100
объединяет АВМ и ЦВМ в единую гибридную вычисли-
тельную систему и обеспечивает:
эффективный и высокоскоростной обмен данными
в процессе вычислений при помощи 32 аналого-цифро-
вых каналов (время преобразования 100 мс, длина сло-
ва 13 разрядов плюс знак) и 32 цифро-аналоговых кана-
лов преобразования (время преобразования 2 мкс, по-
грешность 0,01%);
передачу сигналов управления от ЦВМ и АВМ и об-
ратно с помощью функциональных и индикаторных
линий.
Устройство сопряжения и преобразования имеет мо-
дульную конструкцию, позволяющую расширять систе-
му до максимального числа используемых каналов пре-
образования и числа аналоговых стоек.
В состав устройства сопряжения входят:
блок управления,
блок преобразования,
блок связи с параллельной логикой АВМ,
блок связи с общим пультом управления АВМ,
блок синхронизации,
блок проверки и контроля.
Блок управления предназначен для приема команд
управления от ЦВМ, расшифровки и передачи сигналов
управления в соответствующие устройства АВМ. Он
обеспечивает синхронизацию с ЦВМ при передаче дан-
ных. Блок управления состоит из регистра команд с де-
шифратором, синхронизатора связи с ЦВМ, комму-
татора распределения данных и пульта блока управ-
ления.
Блок преобразования предназначен для обмена дан-
ными в процессе вычислений и преобразования из ана-
логовой формы представления данных в цифровую фор-
му и обратно.
Блок преобразования состоит из следующих суб-
блоков:
аналого-цифрового преобразования,
цифро-аналогового преобразования,
распределения аналоговых сигналов по отдельным
стойкам.
Субблок аналого-цифрового преобразования в свою
очередь состоит из:
аналого-цифрового преобразователя (АЦП),
коммутатора аналоговых сигналов,
параллельного устройства слежения — запоминания,
местного устройства управления.
Основные данные субблока аналого-
цифрового преобразования:
Количество каналов преобразования
Диапазон входного напряжения, В . .
Ток потребления, мА ..................
Число разрядов (включая знак) . . .
Кодирование ..........................
Погрешность АЦП ......................
Время преобразования, мкс.............
16 (с возможностью рас-
ширения до 32)
±10
0,5
14
Дво.ичный дополнитель-
ный код
0,01 % ± 0,5 (младшего
разряда)
10
Субблок цифро-аналогового преобразования состо-
ит из:
цифро-аналоговых преобразователей (ЦАП),
цифро-аналоговых множителей (ЦАМ),
буферных регистров,
местного устройства управления.
Основные данные субблока цифро-ана-
логового преобразователя:
ЦАП
Диапазон выходного напряжения, В
Ток потребления, мА.................
Число разрядов (включая знак) . . .
Кодирование.........................
Погрешность, %......................
Время установления (до заданной точ-
ности) , мкс.........................
Число ЦАП...........................
ЦАМ
Диапазон выходного сигнала, В . . .
Число разрядов (включая знак) . . .
Кодирование..................... .
Погрешность, %......................
Время установления выходного сигнала
(до заданной точности), мкс . . . .
Число каналов ЦАМ ..................
±10
±20
14
Двоичный дополнитель-
ный код
0.01
2
16 (с возможностью рас-
ширения до 24)
±10
13
Двоичный дополнитель-
ный код
0,015
2
8
Блок связи с параллельной логикой АВМ, предна-
значенный для передачи логических сигналов в АВМ,
обеспечивает:
связь с линиями управления (16 двоичных разрядов
на каждой АВМ);
связь с линиями чувствительности (сигналы условно-
го перехода) (16 двоичных разрядов на каждой АВМ);
связь с линиями индикации (16 двоичных разрядов
на каждой АВМ);
связь с функциональными реле (10 двоичных разря-
дов на каждой АВМ);
связь с регистром дополнительной аппаратуры
(16 двоичных разрядов на каждой АВМ);
связь со схемой прерывания (6 двоичных разрядов
на каждой АВМ).
Блок связи с общим пультом управления АВМ пред-
назначен для передачи команд управления режимами
работы АВМ и обеспечивает полное использование про-
граммных возможностей ЦВМ с целью автоматического
набора задачи и контроля состояния отдельных
устройств АВМ. Блок связи с общим пультом управле-
ния АВМ осуществляет передачу команд управления
режимами работы наборной панели, интеграторов, па-
раллельной логики, команд адресации к стойкам и от-
дельным вычислительным элементам выбранной стойки
и передачу информации в ЦВМ о режимах работы и
аварийном состоянии стоек.
Блок синхронизации предназначен для выработки
временных сигналов с целью синхронного обмена дан-
ными между АВМ и ЦВМ в процессе вычислений. Син-
хронизация осуществляется от генератора 1 МГц,
расположенного в общем пульте управления. За
элементарный временной интервал принят интервал
в 100 мкс.
Максимальный временной интервал может состав-
лять до 105 элементарных интервалов. В блок синхрони-
зации входят регистр числа элементарных интервалов,
схема коррекции и пересчетная схема.
Блок проверки и контроля обеспечивает автономную
проверку тракта передачи аналоговых сигналов. С этой
целью предусматривается схемная поэтапная проверка
самого устройства связи, устройства связи с распреде-
лителем аналоговых сигналов по стойкам и расширен-
ная проверка совместно с аналоговыми стойками.
Устройство сопряжения размещено совместно с ис-
точниками питания в стандартной стойке, обеспечиваю-
щей свободный доступ к основным блокам и элементам
устройства. Габариты устройства 165X50X60 см.
7-11. ОПЕРАЦИОННЫЕ УСИЛИТЕЛИ
Важнейшим элементом аналоговых вычислительных
машин (АВМ) и гибридных вычислительных систем
(ГВС) являются операционные усилители (ОУ) [10,16].
В настоящее время операционные усилители широко
применяются в информационных и управляющих систе-
мах, системах автоматики и связи, в активных фильтрах,
в измерительных приборах и ряде других устройств.
В АВМ и ГВС операционные усилители используются
для выполнения основных и вспомогательных математи-
ческих операций, а также в составе электронных
устройств задания коэффициентов, селекторов, электрон-
ных переключателей, ключей и др. Важными требова-
ниями к ОУ современных машин являются малые габа-
риты, низкая стоимость и высокая надежность. Такими
ОУ являются усилители третьего поколения, выполнен-
ные по интегральной полупроводниковой технологии.
В зависимости от выполняемых функций требования,
предъявляемые к ОУ, весьма различны. В АВМ и ГВС
целесообразно применение ОУ пяти класов, параметры
которых приведены в табл. 7-5 [16].
Операционные усилители 1-го класса — усилители
высокой точности (УВТ) с одним входом. Они предна-
значены для работы в составе интеграторов, сумматоров,
устройств слежения — хранения, электронных коэффици-
ентов. Высокий коэффициент усиления, предельно ма-
лые значения смещения нуля, входного тока и дрейфа
нуля, высокое быстродействие обеспечивают снижение
погрешности, вносимой усилителем, ниже 0,01%.
Операционные усилители 2-го класса — усилители
средней точности (УСТ) также с одним входом. Они
обладают меньшим коэффициентом усиления и больши-
ми значениями смещения и дрейфа нуля. Предназначе-
ны эти ОУ для применения в составе электронных
коэффициентов, инверторов, электронных переключате-
лей, в функциональных преобразователях, множитель-
ных устройствах.
Операционные усилители 3-го класса — дифференци-
альные УСТ. Необходимость в дифференциальных УСТ
Таблица 7-5
Наименование параметра Единица измерения Классы ОУ
1 2 3 4 S
Диапазон выходных напряжений в ±11 +11 ±10 + 10 + 10
Диапазон выходных токов мА +20 +20 +20 +5 +5
Коэффициент усиления: в/в
при /=0 3- 10s 10s 5-Ю6 106 2-Ю4
при /=1 кГц 5-10s 5-10s 5-Ю4 104 103
Частота единичного усиления МГц 30 30 10 10 0,5
Максимальная скорость нарастания выходного напряже- В/мкс 1000 1000 20 50 0,3
НИЯ
Э. д. с. смещения нуля мкВ 2 1000. 1000 3-103 104
Входной ток пА 2 300 300 105 106
Коэффициент ослабления синфазных напряжений дБ — — 80 — 60
Диапазон синфазных напряжений В — — +10 — + 10
Температурный дрейф э. д. с. смещения мкВ/°С 0,3 30 30 25 25
Температурный дрейф входного тока пА/°С 0,5 30 30 1000 5000
Размах э. д. с. шумов в полосе 0,01—1 Гц мкВ 2 20 20 50 50
Размах тока шумов в полосе 0,01—1 Гц пА 1 1 1 100 1000
Эффективное значение э. д. с. шумов в полосе 10 Гц— мкВ 10 10 10 10 10
10 кГц
Эффективное значение тока шумов в полосе 10 Гц— пА 60 10 10 100 1000
10 кГц
Допустимая емкость нагрузки1 пФ 100 100 100 100 200
1 При изменении /?0 с от 1 до 100 кОм, емкости на входе от 0 д© 20 пФ и коэффициента передачи от 0,01 до 30.
Таблица 7-б
Наименование параметра Единица измерения Типы ОУ
УВТ20-74 УВТ14-72 УВТ-21 УСТ36-72 УСТ37-72 УСТ42-72 УСТ46
Диапазон выходных напряжений в ±12 ±12 ±11 ±11 ±12 ±12 ±11 ±20'
Диапазон выходных токов мА ±20 ±20 ±20 ±20 ‘ ±20 ±20
Коэффициент усиления (высокочастотная в/в
модификация):
при f==0 при f=l кГц 10® 10в 5-10® 5-105 10е 105 5.105
МГц 5-105 5-10^ •— 2-10« 5-105 5-104 —
Частота единичного усиления:
высокочастотная модификация 100 30 100 — 30 30 100
низкочастотная модификация — — 5 5 — —- 5
Максимальная скорость нарастания выход- В/мкс 2000 400 120 20 400 400 120
ного напряжения Э. д. с. смещения нуля Входной ток мкВ мА 1 1 50 2 100 20 Юз 300 Юз 300 Юз. 2-104 2-Ю4 2-Юз
Коэффициент ослабления синфазных напря- дБ — — — 86 — •— •—'
жений ±ю
Диапазон синфазных напряжений В — — -— 10 — —
Температурный дрейф э. д. с. смещения мкВ/°С 0,05 0,3 2 10 25 200
нуля Температурный дрейф входного тока мА ГС 0,07 0,5 I * Юз 100
Размах э. д. с. шумов в полосе 0,01—1 Гц мкВ 1,5 1,5 5 — — —-
Размах тока шумов в полосе 0,01—1 Гц nA 0,5 0,5 5 •—- — 10
Эффективное значение з. д. с. шумов в мкВ 8 8 50 8 8 — 20
полосе 10 Гц—10 кГц 1 л
Эффективное значение тока шумов в поло- пА 60 60 20 — — —
се 10 Гц—Ю кГц Допустимая емкость нагрузки"* **: пФ
высокочастотная модификация 100 200 — — 200 200 •—
низкочастотная модификация Габариты Выводы мм 2000 40X80X20 2000 40X80X20 87X46X23 200 40X00X20 40X40X20 40X30X20 44X46X23
— Жесткие Жесткие Гибкие Жесткие Жесткие Жесткие Г ибкие
* Устанавливается при повышении температуры на каждые 10°С.
** При изменении /?о с от 1 до 100 кОм и емкости на входе от 0 до 20 пФ.
возникает при построении высококачественного селекто-
ра, а также некоторых нелинейных решающих элемен-
тов. По большинству параметров ОУ 3-го класса совпа-
дают с ОУ 2-го класса, однако дифференциальные ОУ не
позволяют обеспечить требуемое быстродействие.
Операционные усилители остальных классов предна-
значены для выполнения вспомогательных операций,
поэтому уровень требований к электрическим параме-
трам этих ОУ значительно ниже.
В табл. 7-6 [16] приводятся электрические пара-
метры серии ОУ 1—4-го классов, в основу которой при-
нят интегральный усилитель 5-го класса К1УТ531А, но
с дополнительными каскадами, выполненными на ди-
скретных (корпусных) транзисторах. Все усилители по-
строены по структурной схеме с параллельными канала-
ми усиления и снабжены выходным усилителем для
увеличения выходной мощности и быстродействия.
7-12. РЕГИСТРИРУЮЩАЯ И ИЗМЕРИТЕЛЬНАЯ АППАРАТУРА
ЭЛЕКТРОННО-ЛУЧЕВЫЕ ИНДИКАТОРЫ
Электронно-лучевые индикаторы (ЭЛИ) [1, 2, 4, 17]
предназначены для визуального наблюдения на экране
электронно-лучевой трубки (ЭЛТ) постоянных и мед-
ленно изменяющихся электрических сигналов, получае-
мых на выходе АВМ и устройств.
Они рассчитаны на совместную работу с АВМ как
в режиме однократной развертки, так и в режиме авто-
матического повторения процесса решения. Индикаторы
обеспечивают возможность наблюдения на экране ЭЛТ
одной или нескольких величин в функции времени пли
в функции любой из переменных, а также измерение
длительности и амплитуды наблюдаемых процессов.
Размер фоновой составляющей на экране трубки от
пика к пику не превышает диаметра луча.
Конструктивно ЭЛИ выполняются в виде отдельного
блока и могут быть использованы как в комплекте АВМ,
ак и в качестве самостоятельного прибора. Основные
элементы схемы ЭЛИ:
ЭЛТ с длительным послесвечением (до 30 с),
усилители управления лучом,
генератор линейной развертки луча,
генератор меток времени,
источник питания.
Технические характеристики
И-4М
Электронно-лучевая трубка 31Л033
Размеры рабвчей части экрана, мм 180X220
Количество одновременно наблюдае- мых процессов 2
Амплитуда наблюдаемых сигналов, В +200
Чувствительность по координатным осям, мм/В 8
Длительность развертки луча, с 1—1000
Диапазоны развертки, с 1—10 5—50 10—100 50—500 100—1000
Период следования меток времени, с 0,04; 0,1; 0,2; 1
Входное сопротивление, МОм 2,2
Потребляемая мощность, кВт 0,15
Габариты, мм 715X375X495
Масса, кг 40
Таблица 7-7
Марка индикатора
И-5М И-6 И-10
13Л036 13Л036В 31Л033В
0130 0130 180X220
2 2 6
±150 ±200 ±200
7 10 5,5
1—250 0,1—250 0,01—50
1—5 5—25 10—50 50—250 0,1—1 1—10 5—50 25—250 0,01; 0,02; 0,05; 0,1; 0,2; 0,5; 1; 2; 5; 10; 20; 50
0,1; 1; 10 0,01; 0,1; 1; 10 0,001; 0,01; 0,1; 1; 5
2,2 2,5 —
0,04 0,09 0,6
236X528X416 270X390X586 1085X530X750
22,5 19 115
Для регистрации кривых, полученных на экране
ЭЛТ, используются фотоприставки типа ФП-2 и ФП-3.
При этом изображение фотографируется на стандарт-
ную фотопленку шириной 60 мм с помощью фотоаппа-
рата типа «Любитель».
Основные технические данные ЭЛИ приведены
в табл. 7-7.
Индикатор И-10 состоит из следующих блоков и
узлов:
ЭЛТ с длительным послесвечением, источником высо-
ковольтного питания и системой формирования луча;
усилителей вертикального и горизонтального откло-
нения луча;
генератора линейной развертки луча и генератора
высокой частоты;
схемы сравнения и формирования импульсов;
генератора меток времени;
схемы гашения обратного хода луча;
блока питания.
Индикатор обеспечивает воспроизведение от одного
до шести сигналов в функции времени и от одного до
пяти сигналов в функции любого другого сигнала, по-
данного на второй вход индикатора.
Индикатор обеспечивает калибровку амплитуды
входного сигнала от —200 до -}-200 В с погрешностью
±5%.
Нелинейность амплитудных характеристик усилите-
лей вертикального и горизонтального отклонения луча
составляет не более 5%.
Питание индикатора осуществляется от сети пере-
менного тока напряжением 220 В (+5-г-—10%).
Прибор выполнен в виде блочной конструкции, обе-
спечивающей свободный доступ к любому элементу кон-
струкции при наладке и ремонте, а также замену вы-
шедших из строя блоков.
ДВУХКООРДИНАТНЫЕ РЕГИСТРИРУЮЩИЕ ПРИБОРЫ (ГРАФОПОСТРОИТЕЛИ)
Двухкоординатные регистрирующие приборы типа
ДРП [4, 17, 22] предназначены для автоматического
вычерчивания графиков на бумаге по данным, поступаю-
щим из АВМ. Они могут быть использованы совместно
с устройством преобразования данных для графической
записи результатов решения задач на ЦВМ, а также для
регистрации динамических процессов в системах авто-
матического регулирования.
Прибор состоит из двух электромеханических следя-
щих систем потенциометрического типа, пишущего
устройства, кинематической системы, перемещающей
перо в прямоугольной системе координат, стола и
устройства для крепления бумаги к столу, схемы управ-
ления и лентопротяжного механизма. Кроме того, в со-
став ДРП входят схемы и механизмы, специфические
для данной марки прибора. Имеется также ряд устройств,
расширяющих возможности тех или иных ДРП.
Основные технические данные двухкоординатных ре-
гистрирующих приборов типа ДРП приведены в табл. 7-8.
Двухкоординатный регистрирующий прибор ДРП-5
(рис. 7-12) предназначен для автоматического вычерчи-
Таблица 7-8
Наименование параметра ДРП-З ДРП-5
Рабочее поле записи, мм 800X800 300X400
Время пробега пером по всей шка- 2,5 1
ле, с Максимальная чувствительность, 30 50
мВ Амплитуда напряжений, В + 100 +5; +10; ±25
Входное сопротивление, кОм/В 1 +50; +100 50...400
Максимальная скорость записи 400 350
графика, мм/с Количество цветов записи — 2
Скорость перемещения бумаги, — 1; 2; 5; 10;
мм/с 50; 100
Максимальная статическая погреш- — +0,2
ность, о/о Максимальная динамическая по- 0,1 —
грешность регистрации гармони- ческих воздействий при макси- мальной скорости записи, % Среднеквадратическая приведен- 0,050 0,07
ная погрешность записи графика, ”/о Вариация показаний (зона нечув- 0,05
ствительности), % Скорость внутренней временной — 1; 2; 5; 10;
развертки по оси х, мм/с 0,8 20; 50; 100
Потребляемая мощность, кВт 0,3
Габариты, мм 1055X1210X880 245X650X576
Масса, кг 360 30
Рис. 7-12. Двухкоординатный регистрирующий прибор ДРП-5.
вания графиков на рулонной и планшетной бумаге по
данным, поступающим от модели.
Для расширения возможностей ДРП-5 предусмотрены:
схема внутренней временной развертки, с помощью
которой приводится в равномерное движение ось х;
нулевые потенциометры, с помощью которых начало
координаты одной или двух осей может быть выбрано
в любой точке поля стола.
Для удобства расшифровки двух или нескольких за-
писанных кривых в приборе используются два пера,
заправленные разными чернилами. Выбор цвета записи,
управление подъемом и опусканием перьев производят-
ся с пульта или дистанционно.
Кроме описанных выше в настоящее время выпуска-
ются и другие типы координатных регистрирующих
приборов (графопостроителей).
Графопостроитель Н306 [22] имеет следующие
основные технические данные:
Площадь диаграммы, мм...................
Верхние пределы диапазонов по оси х . .
Верхние пределы диапазонов по оси у . .
Основная погрешность, % ............
300X200
3 мВ — 300 В
(16 диапазонов)
2 мВ — 200 В
(16 диапазонов)
±0,5
Графопостроители Н306/1; Н306/2; Н306/3 — моди-
фикации прибора Н306, имеющие сменные блоки, по-
зволяющие иметь на входе переменное напряжение U ~
в диапазоне частот 45—20 000 Гц (градуировка в дей-
ствующих значениях). Детектор среднего значения с по-
грешностью регистрации ±15%; f — постоянные реги-
страции от 5 до 25 000 Гц/см.
Графопостроители ПДП4-001 и ПДП4-002 [22] (от-
личаются конструктивно: у первого одна, у второго две-
рейки) имеют следующие основные технические данные:
Площадь диаграммы, мм...................
Верхние пределы диапазонов по оси х . .
Верхние пределы диапазонов по оси у . .
Основная погрешность, %:
по записи . ... .............
по показаниям . . . .
400X250
4 мВ — 800 В
(11 диапазонов)
2,5 мВ — 50 В
(11 диапазонов)
±0,5
±0,25
Двухкоординатный самопишущий прибор ЛКД-003
[26] предназначен для регистрации функционально свя-
занных величин, а также записи одной измеряемой ве-
личины в функции времени. Прибор ЛКД-003 является
автокомпенсатором для измерения напряжения постоян-
ного тока и благодаря большому количеству масштабов,
измерения и достаточному быстродействию является
универсальным. Он отличается высокой чувствитель-
ностью, простотой обслуживания и удобством в работе.
Высокое входное сопротивление позволяет использовать
прибор в качестве регистрирующего прибора для разно-
образных измерительных задач.
Регистрация параметров осуществляется на отдель-
ных листах диаграммной бумаги размером 297X420 мм..
Прибор выполнен в виде настольной конструкции план-
шетного типа и рассчитан на работу в горизонтальном
или вертикальном положении.
Масштабы измерения:
Прибор имеет 15 масштабов измерения от 0,1 мВ/см:
до 5 В /см с диапазонами измерения:
по координате х — от 0 до 200 В,
по координате у‘—от 0 до 125 В.
Прибор имеет дополнительный диапазон измерения
0—1 мВ по каждой из координат.
Предусмотрено также плавное расширение диапазо-
!нов по обеим координатам на масштабах от 1 мВ/см до
5 В /см с кратностью перекрытия каждого диапазона не
менее двух раз, смещение нуля в пределах всей шкалы
по каждой координате, а также дискретное подавление
нуля от ±1 до ±5 диапазонов каждого масштаба изме-
рения.
Прибор имеет 12 масштабов развертки времени: от
0,2 до 10 с/см и от 0,2 до 10 мин/см. Время развертки
по координате х: от 8 до 400 с и от 8 до 400 мин; по
координате у. от 5 до 250 с и от 5 до 250 мин.
В основу работы прибора положен компенсационный
метод измерения, обеспечивающий высокую точность
контроля параметров по каждой координате.
Основная погрешность прибора не превосходит
±0,25% диапазона измерения при установке нуля на
начальную отметку и ±0,5% диапазона измерения на
дополнительном пределе.
Погрешность максимального времени развертки не
превышает следующих значений заданного времени:
±1% для (1—9)-го масштабов времени развертки,
±2,5% для (10—12)-го масштабов.
Вариации показаний на каждом масштабе измере-
ния 0,1% диапазона измерения и 0,25% на дополни-
тельном диапазоне 0—1 мВ. Время прохождения указа-
теля вдоль всей шкалы по координате х равно 1,6 с, апо
координате у 0,9 с.
Схема прибора обеспечивает защиту от влияния про-
дольных и поперечных помех.
Технические данные
Верхние пределы измерения:
по координате х . ... .
по координате у.............
Время развертки:
по координате х . ... .
по координате у .... .
Поле записи, мм.................
Напряжение питания..............
4; 8; 20; 40; 80; 200; 400; 800 мВ;
2; 4; 8; 20; 40; 80; 200 В
2,5; 5; 12,5; 25; 50; 125; 250;
500 мВ; 1,25; 2,5; 5; 12,5; 25;
50; 125 В
8; 16; 40; 80; 160; 400 с; 8;
16; 40; 80; 160; 400 мин
5; 10; 25; 50; 100; 200 с; 5;
10; 25; 50; 100; 250 мин
250X400
220 В±10—15% при частоте
50 Гц
Продолжение
Потребляемая мощность, В-А . .
Масса, кг.......................
Габариты, мм...................
50
30
550X565X185
Условия эксплуатации: температура окружающего
воздуха 5—35°С, относительная влажность 30—80% •
БЫСТРОДЕЙСТВУЮЩИЕ САМОПИШУЩИЕ ПРИБОРЫ
Быстродействующие самопишущие приборы (БСП) —
аналоговые регистрирующие приборы прямого действия.
Отечественной промышленностью выпускаются следую-
щие БСП [22]:
типа Н338-1; Н-338-2; Н-338-4; Н338-6; Н338-8 (по-
следняя цифра — число каналов). Эти приборы обеспе-
чивают чернильную запись в криволинейной системе ко-
ординат. Носитель — диаграммная лента типа ЛР;
типа Н338-1Б; Н338-2Б; Н338-4Б; Н338-6Б; Н338-8Б.
Эти приборы выполняют запись на теплочувствительную
бумагу в прямоугольной системе координат. Носитель —
диаграммная лента типа ЛПГ.
Все приборы имеют встроенные усилители, позво-
ляющие записывать сигналы в масштабе от 0,02 до
4 В/см (8 диапазонов).
Основные данные БСП
Ширина поля записи каждого ка-
нала, мм...................
Длина диаграммы, м . . .
Входное сопротинление, кОм
40
50'
От 10 до 2000 в зависимости от
Диапазон рабочих частот, Гц . .
Нелинейность по постоянному то-
ку, % .........................
Нелинейность АЧХ, дБ . . . .
диапазона регистрации
0—J50
Смещение нулевого уровня за 8 ч
±3
До 3
работы, %.....................
Скорость перемещения носителя,
Не более 1
мм/с..........................
От 1 до 250 (8 номиналов); для
серии Б от 0,2 до 100 (8 но-
миналов)
СВЕТОЛУЧЕВЫЕ ОСЦИЛЛОГРАФЫ [22, 23]
Осциллографические гальванометры (ОГ). В настоя-
щее время выпускаются только рамочные осциллогра-
фические гальванометрические вставки. Автономные ОГ
с собственным магнитом практически не выпускаются.
Диаметр гнезда ОГ 6 мм. Магнитная система общая
для 12 ОГ с внутренним термостатированием (-}-40±
±2°С). Применяемые виды успокоения: магнитоиндук-
ционное (обмоточное и каркасное) и жидкостное.
Наибольший диапазон частот имеют следующие
типы ОГ:
М1017: 0—12 кГц при чувствительности по току ST=
=0,37 мм/(мА-м);
М1019: 0—20 кГц при S/=0,8 мм/(мА-м).
Светолучевые осциллографы Н010М и Н004М1. Наи-
большее число каналов (30) имеет светолучевой осцил-
лограф типа Н010М. Носитель — обычная фотолента.
Осциллограф Н004М1 имеет 20 каналов. Регистрация
также на обычной ленте.
Во многих светолучевых осциллографах регистрация
производится с помощью ультрафиолетового луча от
ртутной лампы высокого давления на специальном носи-
теле— бумаге, не требующей «мокрого» проявления
{типа УФ).
Светолучевые осциллографы Н115, КН5 [23] пред-
назначены для одновременной регистрации световым лу-
чом на фотоленте и наблюдения на экране до 12 пере-
менных. Осциллографирование может производиться на
•бумаге УФ или фотографической записью с химическим
проявлением.
Ширина фотоленты, мм . . . .
Емкость кассеты, м...............
•Скорость движения фотоленты,
мм/с.............................
«Отметки времени, с..............
35, 60, 100, 120
25
0,5; 1,25; 2,5; 5; 10; 25; 50;
125; 250; 500; 1000; 2500;
5000; 10 000
2; 0,2; 0,02; 0,002 (переключе-
ние отметок времени сблоки-
ровано с переключением ско-
ростей)
Диапазон регистрируемых гальванометрами частот
«от 0 до 15 000 Гц при полных токах от 7 мкА до 130 мА.
В комплект K-Пб входят следующие приборы: соб-
ственно осциллограф Н-115 с габаритам 528Х280Х
Х316 мм и массой 35 кг; блок питания П133 с габарита-
ми 205x265x390 мм и массой 17 кг; монтажный стол
с блоком магазинов шунтов и добавочных сопротивле-
ний с габаритами 800X1090x508 мм и массой 39 кг.
Светолучевые осциллографы Hl 17/1, К121 [23] име-
ют следующие основные данные:
Количество каналов ......
Ширина фотоленты, мм ... .
Емкость кассеты, м ..............
Скорость перемещения фотолен-
ты, мм/с......................
18
35; 60; 100; 120
25 (кассета имеет стрелочный
указатель запаса фотоленты
в процентах от полного объ-
ема рулона и нож для деле-
ния экспонированной части
рулона)
0,5; 1; 2,5; 10; 25; 50; 100;
250; 500; 1000; 2500; 5000;
10 000
Отметчик времени оптико-механический линующего
типа с интервалами между основными отметками 2; 0,2;
0,02; 0,002 с. Каждая десятая отметка имеет увеличен-
ную ширину. Переключение частот отметок сблокирова-
но с переключением скоростей. В осциллографе приме-
няются ОГ с шагом на канал 4,5 и 9 мм и диапазоном
регистрируемых частот от 0 до 15 000 Гц при полном
токе от 7 мкА до 130 мА.
В комплект К121 входят: осциллограф Н117/1 с га-
баритами 528X280X313 мм и массой 33 кг; блок пита-
ния П133 с габаритами 205 x 265 x 390 мм и массой
17 кг; монтажный стол с избирателями пределов габа-
ритами 810X1100x510 мм и массой 70 кг.
Комплект регистрирующей аппаратуры К003 (Н030А)
[22] предназначен для согласования с исследуемыми
цепями и для записи на фотобумагу УФ-67 световым
лучом изменений во времени электрических процессов.
Его основные данные:
Число каналов ..................
Ширина носителя записи, мм . .
Скорость движения носителя за-
писи, мм/с......................
Запас носителя записи, м . .
12
200
1, 2, 5, 10, 25, 50, 100, 200, 500,
1000, 2500, 5000
50
В состав комплекта входят: осциллограф типа
Н030А с размерами 520X288X522 мм, набор избирате-
лей пределов типа Р009 и РОЮ с размерами 480Х168Х
Х321 мм, калибрат каналов типа П029 с размерами
80Х 147x321 мм.
Масса всего комплекта составляет 67 кг.
Табшца 7-9
Наименование параметра Тип вольтметра
Щ1514 Щ68002-01 Щ31
Метод регистрации Максимальное воспроизводимое чи- сло Значение единицы дискретности Кодоимпульсный (поразрядное уравновешивание) 119 999 10 мкВ Двухтактное интегрирова- ние 11 999 1 В Комбинированный (кодоимпульсныйплюс двухтактное интегрирование) 1 199 999 0,1 мкВ
Номинальное напряжение, В Входное сопротивление, Ом 1 10» 10; 102; io 107 10-1; 1 10® 10; I02; 108 10’ 10-» 10’ ю-i 10s 1 10» 10 101° 102 103 107
Коэффициенты для определения погрешности* cfd, %/% 0,006 0,0025 0,01 0,0025 0,02 0,005 0,05 0,03 0?б2 0,01 0,005 0,002 0,02 0,005
0,005
Время одного измерения, с Коэффициент подавления помех нормального вида (поперечных) на частоте 50 Гц, дБ 0,5** о** 40*** 5*** 60*** 0,25—1,0 60 0,08 80
Коэффициент подавления помех об- щего вида (продольных) постоян- ного тока, дБ Выбор знака Выбор поддиапазона Прибор позволяет измерять 100 Автомагический Ручной Только постоянное'напряжение 120 Автоматический Ручной, автоматический и дистанционный Кроме постоянного напря- жения с помощью смен- ных блоков позволяет из- мерять сопротивление, а также действующие зна- чения переменного тока и напряжения 120 Автоматический Ручной Кроме постоянного напряжения сопро- тивление и действующее значение пе- ременного тока
* Погрешность 8=»c+d — 1 ), %, где С.'к—конечное (предельное) значение напряжения; U—текущее значение напряжения,
** Без фильтра.
*** С фильтром.
Для регистрации можно использовать такие осцилло-
графы, в которых вместо ОГ стоит ЭЛТ [23]:
Н040: диапазон частот 0—100 кГц, число каналов 6;
Н023: диапазон частот 0—50 кГц, число каналов 9;
Н045 с микропроцессором для обработки информа-
ции, число каналов 9.
ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВОЛЬТМЕТРЫ
В табл. 7-9 [24, 25] приведены основные данные не-
которых электронных цифровых вольтметров, серийно
выпускаемых промышленностью.
СПИСОК ЛИТЕРАТУРЫ
Практические приемы моделирования
•1. Аналоговая вычислительная техника. Терминология. Под ред.
В. Б. Ушакова. М., «Наука», 11972. '28 с.
2. Аналоговая и аналого-цифровая вычислительная техника. М.,
«Советское радио», -19’68—1977, выл. 1—7.
3. Верлань Л. Ф., Евдокимов В. Ф. Электронное -моделирование
передаточных функций. Киев, «Техшка», 11971. 231 с.
4. Витенберг И. М. Программирование аналоговых вычислитель-
ных .машин. М., «Машиностроение», 1972. 407 с.
5. Вычислительная техника. Под ред. Г. Хаски и Г. Корна. Т. 1.
М., «Энергия», 1964. 720 с.
6. Коган Б. Я. Электронные моделирующие устройства и их
применение для исследования систем автоматического -регулирова-
ния. М., Фпзматгиз, 11963. 510 с.
7. Корн Г. Моделирование случайных процессов на аналоговых
и аналого-цифровых -машинах. М., «Мир», 1968. 3115 с.
8. Корн Г. и Корн Т. Электронные аналоговые -и аналого-цифро-
вые вычислительные машины. М., «Мир», 1967, т. 1. 462 с.; 1968,
т. 2. 311 с.
9. Левин Л. Методы решения технических задач с -использова-
нием аналоговых вычислительных машин. М., «Мир», 4966. 415 с.
'10 . Моделирование на аналоговых вычислительных машинах.
Л., «Энергия». 108 с. Авт.: Е. А. Архангельский, А. А. Знаменский,
Ю. М. Лукомский, Э. П. Чернышев.
11. Нетушил А. В., Лычкина Г. П., Тетельбаум И. М. Модели-
рование иррациональных -передаточных функций. — В кн.: Вычисли-
тельная техника в управлении. М., «Наука», 1964.
12. Марше Ж. Операционные усилители и их применение. Л.,
«Энергия», 1974. 216 с.
13. Применение аналоговых вычислительных .машин в энергети-
ческих системах. М.—Л., «Энергия», 1964. 408 с. Авт.: И. -А. Груздев,
К. П. Кадомская, Л. А. Кучумов и др.
14. Саткевичус Э. Б. Электрическое .моделиравааше механиче-
ских связей (кандидатская диссертация). ИЭиЭ АН Литовской
ССР, Каунас, 1966.
'15. Справочник по аналоговой вычислительной технике. Под
ред. Г. Е. Пухова. Киев, «Техщка», 1975. 481 с.
16. Статистическое моделирование динамических систем сред-
ствами АВТ. Под ред. И. М. Витенберга. М., «Машиностроение»,
1976. 197 с.
17. Тетельбаум И. М., Шлыков Ф. М. Электрическое моделиро-
вание динамики электропривода механизмов. М., «Энергия», 1970.
191 с.
18. Тетельбаум И. М. Электрическое моделирование. М., Физ-
матгиз, 1959. 319 с.
19. Урмаев А. С. Основы моделирования на аналоговых вычис-
лительных машинах. М., «Наука», 1974. 320 с.
20. Шилейко А. В. Основы аналоговой вычислительной техники.
М., «Энергия», 1971. 273 с.
21. Giloi W., Lauber F. Analogrechnen. Berlin, Springer Verlag,
1963, 400 p.
22. Roth M., Reif R., Reschke D. Programmbibliothek fiir die
Analogrechner. «MEDA Т» und «endim 2000». Technische Hochschu-
ie Ilmenau, 1968. 122 S.
Технические средства аналоговой техники
1. Аналоговая вычислительная техника. Каталог «Изделия ра-
диопромышленности». Т. IV, М., 1966. 88 с.
2. Аналоговая и аналого-цифровая вычислительная техника.
Каталог «Изделия радиопромышленности». Т. IV, М., 1972. 124 с.
3. Аналоговая и аналого-цифровая вычислительная техника.
Каталог «Изделия радиопромышленности», Т. II, М., 1977. 16 с.
4. Анисимов Б. В., Голубкин В. Н. Аналоговые вычислительные
машины. М.: «Высшая школа», 1971. 447 с.
5. Грубов В. И., Кирдан В. С. Электронные вычислительные ма-
шины и моделирующие устройства. Киев, «Наукова думка», 1969.
184 с.
6. Аналоговая часть гибридной вычислительной системы
ГВС-100. — В кн.: Гибридная вычислительная система ГВС-100.
Аппаратура и принцип ее построения. М., ИПУ, 1974, с. 42—Ь2. Авт.:
Б. Я. Коган и др.
7. Особенности и основные технические характеристики анало-
говой вычислительной машины МН-17М. — В кн.: Средства аналого-
вой и аналого-цифровой вычислительной техники. М., «Машино-
строение», 1968, с. 87—93. Авт.: Н. Б. Лакунин и др.
8. Основные технические и эксплуатационные характеристики
аналоговых вычислительных машин. Под ред. И. М. Витенберга.
М., «Машиностроение», 1972. 303 с.
9. Аналого-цифровой вычислительный комплекс АЦЭМС-1.—
Аналоговая и аналого-цифровая вычислительная техника. Под ред.
В. Б. Ушакова. М.: «Советское радио», 1968, вып. 1, с. 59—80. Авт.:
Г. М. Петров и др.
10. Полонников Д. Е. Решающие усилители. М., «Энергия», 1973.
247 с.
11. Гибридная вычислительная система ГВС-100 (Проспект). М.»
Внешторгиздат, Изд. № 7495М. 8 с.
12. Аналоговое вычислительное устройство «Ампер» (Проспект).
М., Внешторгиздат, Изд. № 7494М. 4 с.
13. Аналоговый вычислительный комплекс АВК-2. Проспект МРП
СССР. М„ 1972. 20 с.
14. Гибридная вычислительная система ГВС-100. Проспект
Института проблем управления (СССР) и Института автоматики и
связи (СФРЮ). М. — Белград. 20 с.
15. Электронная моделирующая установка ЭМУ-200 (Проспект).
М., Внешторгиздат. Изд. № 7531М. 12 с.
16. Система аналоговых элементов. Под общ. ред. Д. Е. Полон-
никова (Препринт). М., ИПУ, 1976. 68 с.
17. Верлань А. Ф., Годлевский В. С. Основные данные о серий-
ной отечественной аналоговой аппаратуре. — В кн.: Справочник по
аналоговой вычислительной технике. Под ред. Г. Е. Пухова. Киев,
«Техшка». 1975. 431 с.
18. Средства вычислительной техники. Номенклатурный справоч-
ник. М., ЦНИИТЭИприборостроения, 1977.
19. Типовой набор аналогового вычислительного комплекса
АВК-2. Проспект МРП СССР. М., 1970. 8 с.
20. Ушаков В. Б., Петров Г. М. Аналого-цифровая вычислитель-
ная система АЦЭМС-1. — «Приборы и системы управления», 1967,
№ 11, с. 18—21.
21. Шелихов А. А., Селиванов Ю. П. Вычислительные машины.
Справочник. М., «Энергия», 1978. 224 с.
22. Отраслевой каталог «Приборы и средства автоматизации».
М., ЦНИИТЭИприборостроения, 1976.
23. Номенклатурный справочник «Приборы и средства автома-
тизации». Электроизмерительные приборы. М., ЦНИИТЭИприборо-
строения, 1975. 96 с.
24. Номенклатурный справочник «Приборы и средства автомати-
зации». Электроизмерительные приборы цифровые. М., ЦНИИТЭИ-
приборостроения, 1977. 44 с.
25. Цифровой вольтметр Щ-31. Проспект ВДНХ. М.,
ЦНИИТЭИприборостроения. Изд. № Пр 1287.
26. Андреев А. А. Автоматические показывающие, самопишущие
и регистрирующие приборы. Л., «Машиностроение», 1973.
ББК 32.973.1
Т 37
УДК 681.332.00.'! .57
_ 30502-355
Т 051(01)-78 95‘78
© Издательство «Энергия», 1978 г.
ПРЕДИСЛОВИЕ
Аналоговые вычислительные машины (АВМ) с опе-
рационными усилителями постоянного тока нашли в на-
стоящее время широкое применение для решения инже-
нерных задач и в первую очередь для исследования
динамических систем. Вопросы конструирования элек-
тронных моделей, технические и математические прин-
ципы их построения заняли уже довольно большое место
в нашей технической литературе. Довольно широко
представлена в отечественной технической литературе и
методика применения АВМ. в различных областях тех-
ники. Имеются многочисленные примеры решения задач
на АВМ обычными методами. В то же время практичес-
кие вопросы применения АВМ пока еще мало освещены.
Отсутствует руководство, обращающее внимание на
«тонкости» применения АВМ, на практические приемы
использования операционных блоков и пути преодоле-
ния различных трудностей, возникающих в практике мо-
делирования динамических систем. Восполнению этого
пробела должна способствовать предлагаемая книга.
При использовании аналоговых вычислительных
устройств существует опасность сведения работы на них
лишь к формализованной технической процедуре реше-
ния дифференциальных уравнений. Физический подход,
превращающий эту техническую процедуру в содержа-
тельное научное исследование, требует использования
специальных приемов моделирования.
Основное место в книге занимает сводка приемов мо-
делирования, отражающих различные особенности мето-
дики моделирования. Книга в значительной мере обоб-
щает опыт авторов по разработке методики аналогового
моделирования на кафедре вычислительной техники и
Вычислительным центре Московского ордена Ленина
энергетического института. Авторы выражают призна-
тельность руководителю ВЦ МЭИ доценту, канд. техн,
наук Н. И. Челнокову за постоянное внимание к данной
работе. В книге использованы многие отечественные и
иностранные источники; основные из них указаны в спис-
ке литературы. Составители данного руководства ни
в коей мере не претендуют на авторство публикуемых
схем, хотя некоторые из них были, по-видимому, впер-
вые осуществлены ими или с их участием в МЭИ. Схемы
представляют собой коллективный опыт, часто собирае-
мый по крупицам. В этой связи следует указать на боль-
шой вклад М. Рота и его соавторов, Э. Б. Саткевичуса
и др. Мы рассчитываем, что книга поможет читателю вы-
брать сведения, необходимые ему при постановке кон-
кретных задач.
Нам представляется, что данная книга будет встре-
чена с интересом, так как теперь, когда наша промыш-
ленность широко выпускает электронные моделирующие
устройства, важнейшей проблемой является повышение
технического уровня их применения. В связи с этим
авторы надеются, что будут весьма полезны приведен-
ные в отдельной главе книги справочные сведения о тех-
нических характеристиках АВМ, находящихся в настоя-
щее время в серийном производстве или достаточно
широко используемых на практике, а также характери-
стики внешних устройств и новых операционных усили-
телей АВМ, скомплектованные из материалов проспек-
тов, каталогов и справочников.
Улучшению книги способствовали замечания, сделан-
ные рецензентом канд. техн, наук Я. Н. Луганским и
профессором, доктором техн, наук И. М. Витенбергом,
взявшим на себя труд по редактированию книги. Авторы
приносят им искреннюю благодарность.
Пожелания, замечания и, что очень важно, дополне-
ния просьба посылать по адресу: 113114, Москва, М-114,
Шлюзовая наб., д. 10, издательство «Энергия».
Авторы
ОГЛАВЛЕНИЕ
Предисловие.......................................... 3
Введение .................................................. 5
В-1. Аналоговое -моделирование как метод динамических
исследований ....................................... 5
В-2. Принципы структурного .моделирования .... 7
В-3. Вы!бор .параметров операционных элементов ... 16
В-4. Структура АВМ...............................21
Глава первая. Линейные операции......................23
1-1. Линейные операционные элементы..............23
1-2. Схемы линейных блоков с различными передаточными
функциями F(p)......................................35
1-3. Схемы линейных элементов на одном операционном
усилителе ..........................................43
<1-4. Схемы моделей временного запаздывания .... 46
Глава вторая. Нелинейные операции......................50
241'. Нелинейные операционные элементы.............50
2-2. Схемы элементов нечувствительности на кремниевых
диодах и стабилитронах ............................ 56
2-3. Мостовые схемы элементов ограничения .... 57
2-4. Схемы элементов образования -зоны нечувствитель-
ности — ограничения.................................58
2-5. Схемы образования модуля переменной (схемы вы-
прямления) .......... 59
2-6. Схемы ограничения выходного напряжения по ампли-
туде ...................-...........................61
2-7. Схемы ограничения выходного напряжения по знаку 65
2-8. Схемы образования зоны нечувствительности . . 68
2-9. Схемы с релейными характеристиками............71
2-10. Схемы с гистерезисом..........................72
2-14. Схемы получения некоторых функциональных зави-
симостей ............................................79
Глава третья. Генераторы функций времени .... 85
3-1. Принципы получения функций времени .... 85
3-2. Схемы генераторов некоторых единичных сигналов
в функции времени...................................91
3-3. Схемы генераторов некоторых периодических функций
времени.............................................95
3-4. Схемы формирования некоторых ‘нелинейных фуик-
ций времени .........................................
3-5. Схемы генераторов некоторых специальных функ-
ций времени .........................................
Глава четвертая. Схемы логических операций, запоми-
нающие устройства, схемы квантования и преобразователи
4-1. Схемы сравнения (компараторы)......................
4-2. Схемы ключей....................................
4-3. Схемы выделения переменной, имеющей наибольшее
(наименьшее) значение................................
4-4. Некоторые специальные логические схемы
4-5. Некоторые схемы 'запоминания....................
4-6. Схемы квантования по уровню.....................
4-7. Некоторые специальные схемы с запоминающими
элементами ..........................................
4-8. Схемы различных видов модуляции сигналов
4-9. Схемы некоторых преобразователей................
Глава пятая. Некоторые специальные методические
приемы .................................................
5-1. Схемы с отслеживанием...........................
5-2. Интегрирование по непременному аргументу
5-3. Некоторые специальные схемы.....................
5-'4. Схемы испытаний и настройки блоков АВМ .
Глава шестая Моделирование электрических цепей и
физических элементов методом прямых аналогий .
6-1. Электрические аналогии...........................
6-2. Модели прямой аналогии на -операционных элементах
6-3. Схемы моделей реле, .вентилей и электромагнитного
прерывателя...........................................
6-4. Схемы моделей некоторых элементов электрических
устройств ............................................
6-5. Схемы моделей характеристик некоторых механиче-
ских систем, элементов и узлов .......................
6-6. Схемы воспроизведения вольт-амперных характери-
стик реальных элементов, подключаемых к модели .
6-7. Управляемые элементы на операционных усилителях
для работы с пассивными цепями и моделями прямой
аналогии..............................................
Глава седьмая. Технические средства аналоговой вычи-
слительной техники ......................................
7-1. Аналоговая вычислительная машина АВК-31 .
7-2. Аналоговая вычислительная машина МН-7М .
7-3. Аналоговая вычислительная машина МН-10М
7-4. Аналоговое вычислительное устройство «Ампер» .
7-5. Аналоговая вычислительная машина МН-17М
7-6. Аналоговая вычислительная машина МН-’18М
7-7. Аналоговый вычислительный комплекс АВК-2
7-8. Аналого-цифровая вычислительная система АЦЭМС-1
7-9. Аналоговая вычислительная система 'ЭМУ-200
7-10. Гибридная вычислительная система ГВС-100 .
7-11. Операционные усилители . . . .. . .. 225
7-12. Регистрирующая и измерительная аппаратура . 228
Электронно-лучевые индикаторы ....................228
Двухкоординатные регистрирующие приборы (графо-
построители) ...............................230
Быстродействующие самопишущие приборы . 235
Светолучевые осциллографы.........................235
Электронные цифровые вольтметры...................238
Список литературы........................................240