









































































































































































































































































































































Текст
ПОСТРОЕНИЕ
СИСТЕМ
ПРОГРАММНОГО
ДВИЖЕНИЯ
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМЛТИЧ ЕС КОЙ ЛИТ Е РАТУРЫ
МОСКВА 1971
о ф (>.:>
п 63
УДК 03 50
А. С. ГАЛИУЛЛИН, И. А. МУХАМЕТЗЯНОВ,
Р. Г. МУХАРЛЯМОВ, В. Д. ФУРАСОВ
Построение систем программного движения. Изд-во «Наука»,
Главная редакция физико-математической литературы, М., 1971,
353 стр.
Книга посвящена вопросам аналитического построения матери¬
альных систем, совершающих движения с заданными свойствами.
В первой главе рассматривается задача программирования
изменением параметров системы во времени. Устанавливаются
условия осуществимости программы, заданной в виде закона дви¬
жения. Определяются условия устойчивости заданного движения.
Условия устойчивости определяются применением как первого,
так и второго метода Ляпунова.
Во второй главе изучается влияние начальных, постоянно
действующих и параметрических возмущений на осуществление
программного движения материальной системы и рассматриваются
вопросы оценки решений соответствующих уравнений возмущен¬
ного движения.
В третьей главе рассматривается задача программирования
замыканием системы. Управление определяется из условия ми¬
нимума нормы вектора управления.
Четвертая глава посвящена построению уравнений движения
материальной системы, когда программа задана в виде интеграль¬
ных многообразий. Строится множество динамических систем,
имеющих заданный фазовый портрет на плоскости.
Изложение теоретических положений сопровождается реше¬
нием прикладных задач механики и программного управления
станками.
Илл. 37. Библ. 96 назв.
Абдельхак Сафиуллович Галиуллин, Ильдар Абдуллович Мухаметзялюву
Роберт Гарабшсвич Мухарлямов, Владислав Дмитриевич фурасов
ПОСТРОЕНИЕ СИСТЕМ ПРОГРАММНОГО ДВИЖЕНИЯ
М., 1971 г., 352 стр. с илл.
Редактор А. А. Могилевский
Техн. редактор Л. А. Пыжова Корректор Т. С. Вайсберг
Сдано в набор 2/1'Х 1970 г. Подписано к печати 4/II 1971 г. Бумага 84x1C8V:i£.
Физ. печ. л. 11. Условн. печ. л. 18,48. Уч.-изд. л. 10,71. Тираж 50G0 ока.
Т-02161. Цена книги 1р. :9 к. Закаа 121)0.
Издательство «Наука»
Главная редакция физико-математической литературы
Москва, В-71, Ленинский проспект, 15
2-я типография издательства «Наука». Москва, Шубинскпй пер., 10
3 3-1',
101 70
ОГЛАВЛЕНИЕ
Предисловие 6
Введение 9
Г лава I. Программирование изменением параметров сис¬
темы во времени
§ 1. Постановка задачи, основные определения 15
§ 2. Решение задачи 23
§ 3. Программное движение тяжелой точки переменной
массы 29
§ 4. Характеристичные числа решения системы линейных
дифференциальных уравнений 37
§ 5. Правильность системы линейных уравнений .... 46
§ 6. О построении функции Ляпунова в задачах устойчи¬
вости программного движения 56
§ 7. Устойчивость программного движения тяжелой точки
переменной массы 61
I. Определение условий устойчивости с помощью
характеристичных чисел 61
II. Определение условий устойчивости с помощью функ¬
ций Ляпунова 64
§ 8. Устойчивость программного движения на конечном ин¬
тервале времени 71
I. Об условиях устойчивости в момент времени to • 71
II. Устойчивость па конечном интервале времени
программного движения тяжелой точки перемен¬
ной массы (общий закон сопротивления) .... 72
III. Об определении интервала устойчивости ... 89
§ 9. Программное движение тела переменной массы . . 94
I. Естественные уравнения движения тела перемен¬
ной массы 94
II. Устойчивость вращательного движения тела на
прямолинейной траектории 98
III. Устойчивость вращательного движения тела
на криволинейной траектории 101
Г л а в а II. Оценка отклонений от программы, вызванных на¬
чальными, постоянно действующими к парамет¬
рическими возмущениями
§ 1. Предварительные замечания 104
§ 2. О способах уменьшения отклонений от программы в
линейных возмущаемых системах 108
§ 3. Условия минимума наибольших отклонений от про¬
граммы в линейных возмущаемых системах 113
§ 4. Оценка отклонений от программы в нелинейных воз¬
мущаемых системах 110
§ 5. Оценка отклонений в стационарных нелинейных си¬
стемах ' . 123
§ 6. Оценка отклонений в нестационарных нелинейных
системах 127
§ 7. Оценка отклонений от программы, вызванных взаимны¬
ми возмущениями каналов системы 130
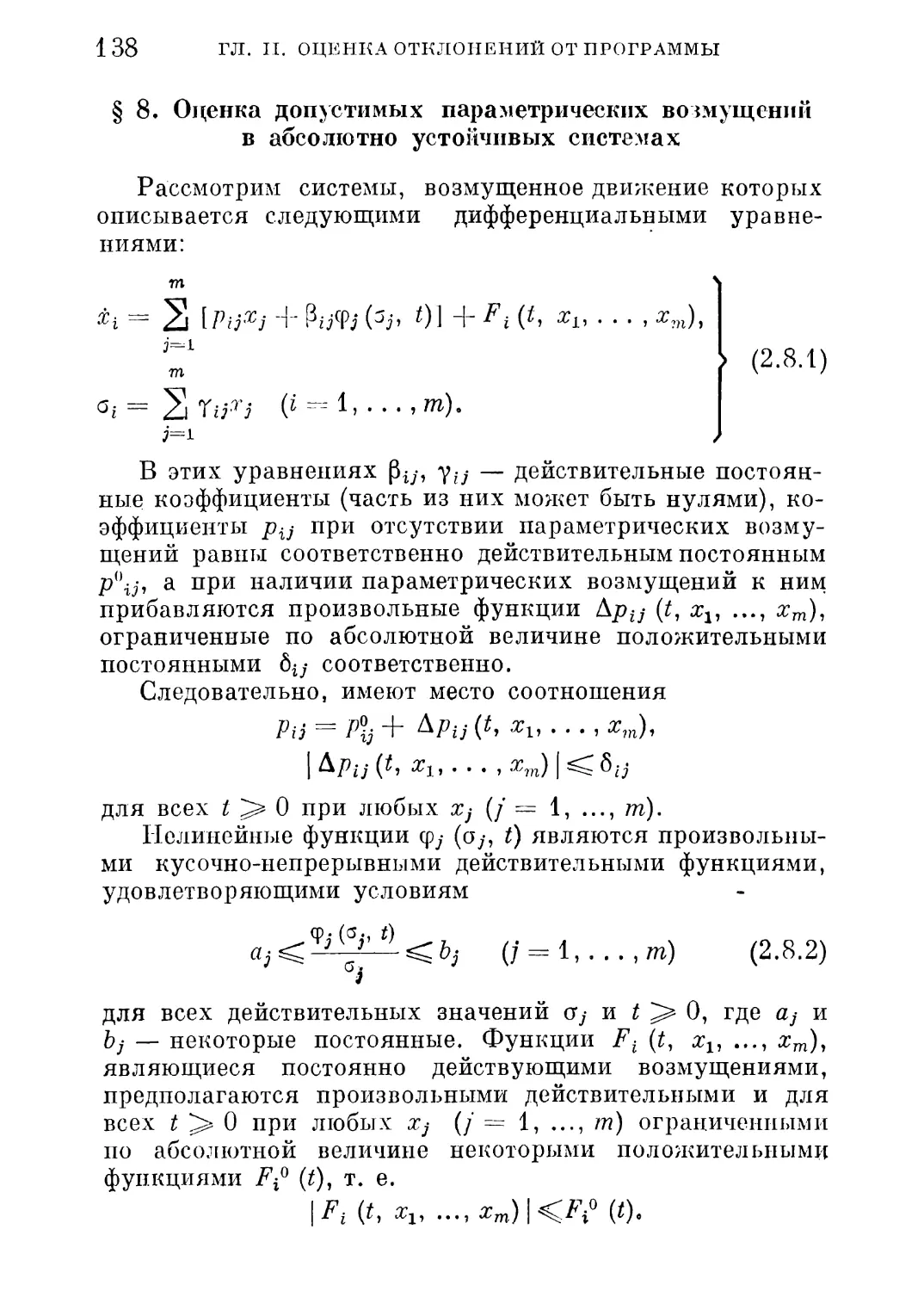
§ 8. Оценка допустимых параметрических возмущений
в абсолютно устойчивых системах 138
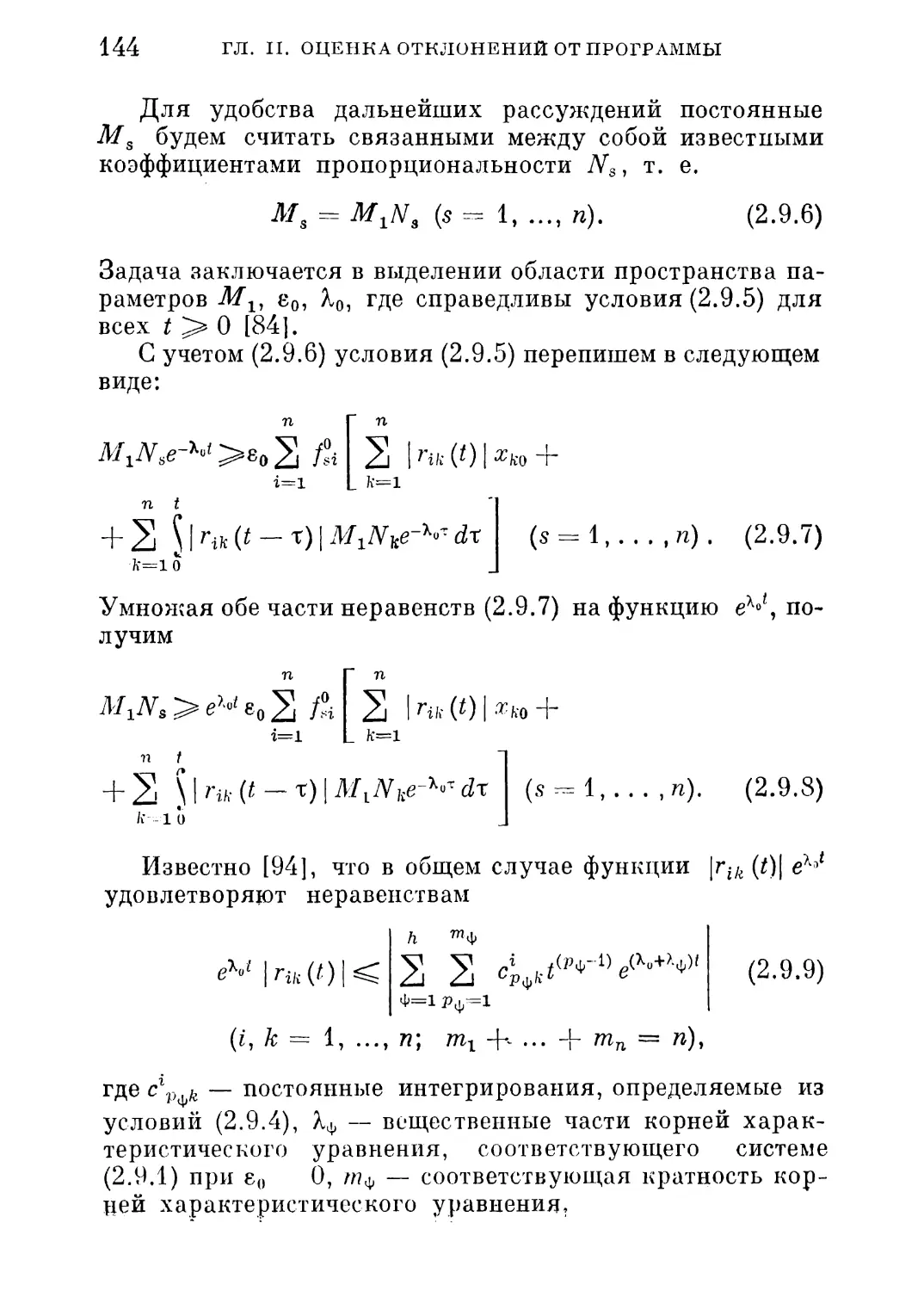
§ 9. Определение области параметров, где имеют место
асимптотически убывающие оценки отклонений от
программы 142
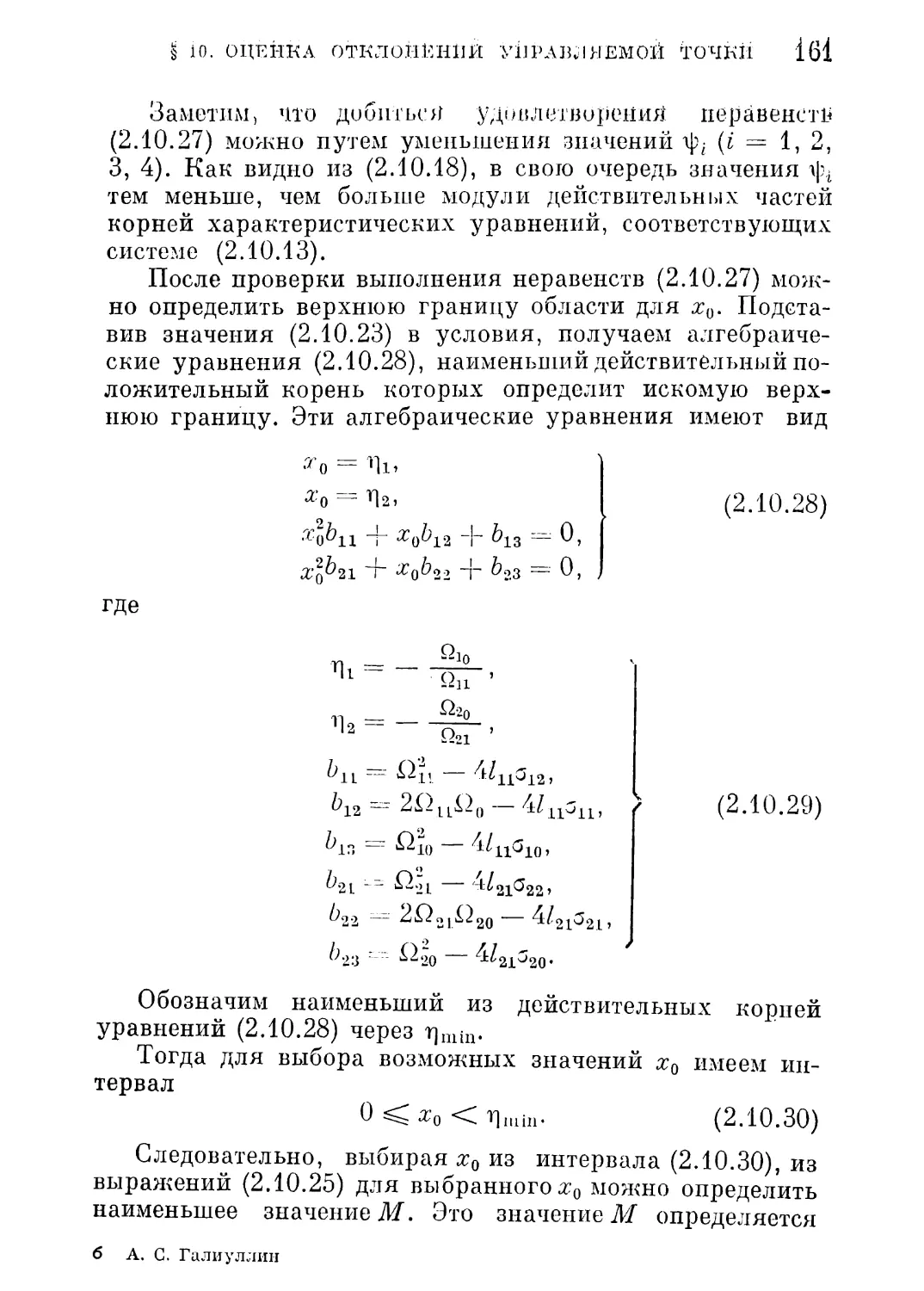
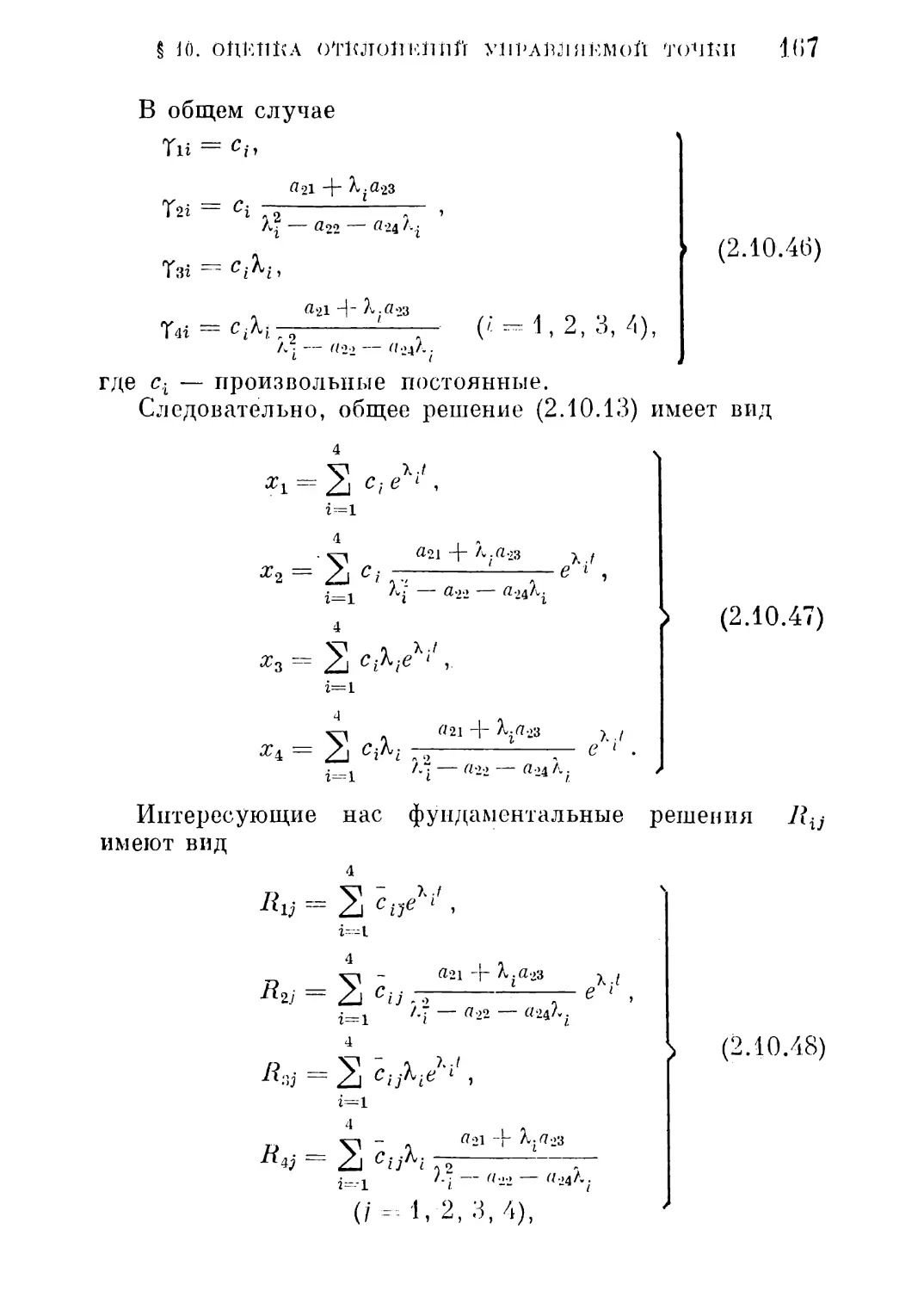
§ 10. Оценка отклонений от программы управляемой точки
в центральном поле 151
I. Случай линейного управления 151
II. Случай нелинейного управления 162
III. Числовые примеры 164
Глава III. Программирование замыканием системы
§ 1. Постановка задачи 187
§ 2. Построение уравнений движения систем с га-мерным
управлением 191
§ 3. Построение уравнений движения систем с т-мерным
управлением 195
§ 4. Особенности построения систем, описываемых диффе¬
ренциальными уравнениями второго порядка . . 201
§ 5. Скалярная оценка отклонений системы от заданной про¬
граммы 204
§ 6. Векторная оценка отклонений системы от заданной про¬
граммы 211
§ 7. Построение управления по заданной оценке откло¬
нений от программы 219
§ 8. Применение функций Ляпунова для построения систем,
имеющих заданные оценки отклонений от программы 225
§ 9. Приближенное осуществление программного движе¬
ния 232
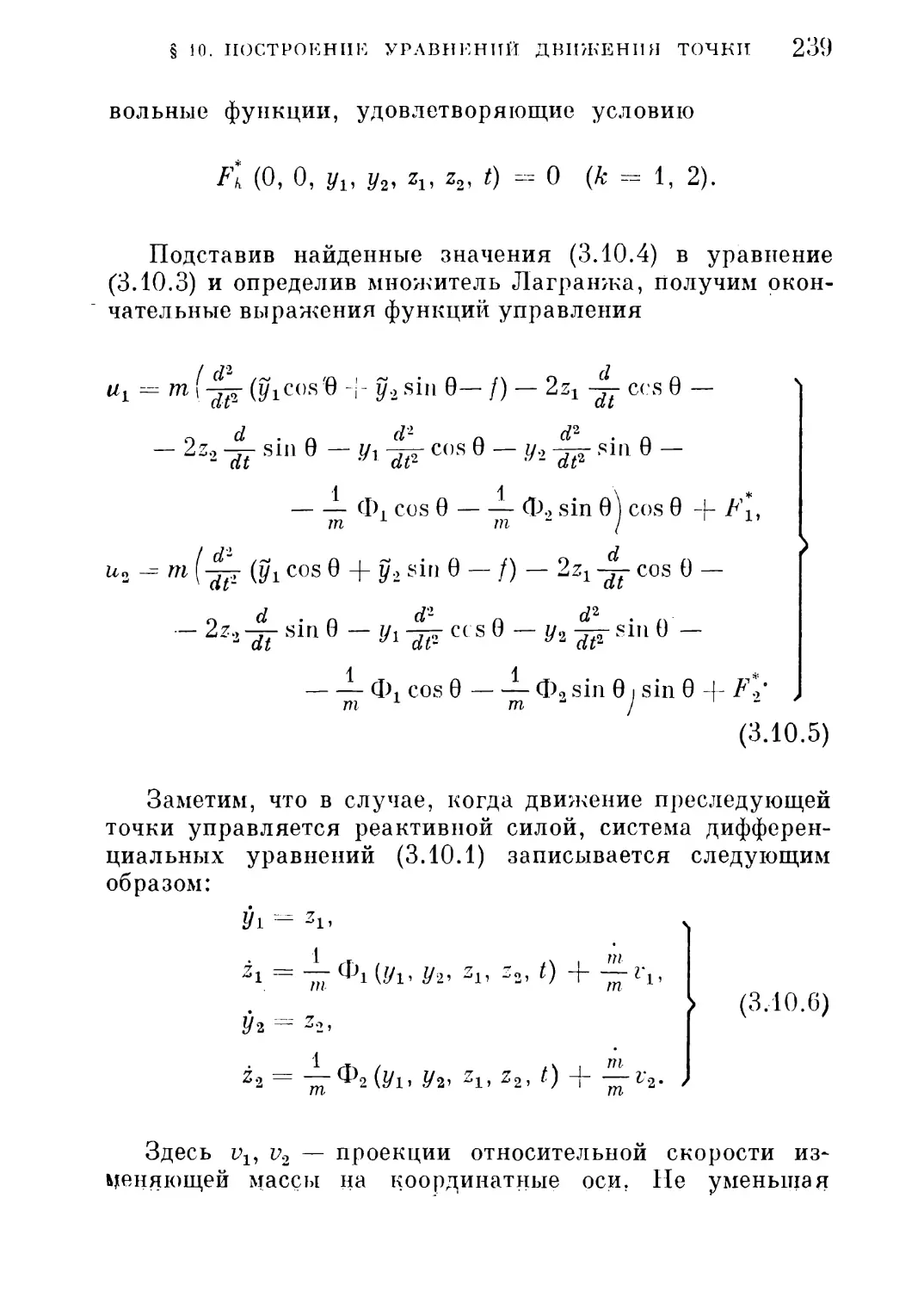
§ 10. Построение уравнений движения точки, сближающей¬
ся с целыо по заданному закону 237
I. Построение уравнений программного движения 237
И. Оценка отклонений 240
III. Построение управления по задаитюй оценке от¬
клонений 244
Г л а в а IV. Построение уравнений заданных движений
§ 1. Построение систем дифференциальных уравнений, опи¬
сывающих движения по заданной программе 248
ОГЛАВЛЕНИЕ Г>
I. Постановка задачи 248
II. Уравнения движения по плоской кривой . . . 250
III. Определение структуры систем дифференциаль¬
ных уравнений движения по заданным многообра¬
зиям 254
IV. Системы дифференциальных уравнений, списы¬
вающих движения по линейным интегральным
многообразиям 258
V. Движение по заданному закону 260
§ 2. Исследование множества автономных систем. . . . 261
I. Особые точки на интегральном многообразии . . 261
II. Первые интегралы автономных систем 268
III. Два способа осуществления движения по задан¬
ному многообразию 263
IV. Множество систем дифференциальных уравнений,
имеющих заданные интегральные гиперповерхности 264
V. Условия существования дополнительных интегра¬
лов 266
§ 3. Выбор траекторий на интегральных многообразиях 271
I. Выбор оптимальной траектории по экстремуму за¬
данной функции 272
II. Выбор оптимальной траектории по минимуму
заданного функционала 275
§ 4. Построение множества систем дифференциальных урав¬
нений устойчивого движения по заданной программе 280
I. Постановка задачи. Определения 280
II. Условия устойчивости интегральных многообра¬
зий, обладающих компактной окрестностью 286
III. Построение систем дифференциальных уравнений
устойчивого движения по многообразию с ком¬
пактной окрестностью 302
IV. Определение уравнений устойчивого движения по
линейному многообразию 313
§ 5. Построение динамических систем с заданными свойства¬
ми на плоскости 317
§ 6. Синтез структуры программирующего устройства
систем программного управления станками 328
I. Построение систем дифференциальных уравнений
движения по заданной поверхности 329
II. Построение систем дифференциальных уравнений
движения по заданной кривой в пространстве . . . 340
Литература 448
ПРЕДИСЛОВИЕ
В настоящей работе рассматриваются некоторые за¬
дачи построения систем программного движения. Задачи
эти в математической постановке сводятся к выбору пара¬
метров, содержащихся в дифференциальных уравнениях
движения материальных систем, или к определению не¬
известной части дифференциальных уравнений из условия
существования заданных частных решений или, в более
общей постановке, к построению множества дифферен¬
циальных уравнений по некоторым заранее известным
свойствам описываемых ими движений. Решение этих
задач, вообще говоря, не является однозначным, что
позволяет решать задачу с учетом дополнительных
условий, накладываемых на желаемые движения мате¬
риальной системы.
В первой главе рассматривается задача пограммирова-
ния изменением параметров системы во времени. Устанав¬
ливаются условия осуществимости программы, заданной
в виде закона движения. Определяются условия устой¬
чивости заданного движения на бесконечном или конеч¬
ном интервале времени. В связи с этим рассматриваются
вопросы правильности линейной части уравнений возму¬
щенного движения, а также вопросы установления знака
характеристичных чисел решений этих уравнений. Усло¬
вия устойчивости определяются применением также и
второго метода Ляпунова.
Рассматриваются примеры определения условий осу¬
ществимости и устойчивости программного движения
тяжелой точки и вращающегося тела переменной
массы.
Во второй главе изучается влияние начальных, по¬
стоянно действующих и параметрических возмущений на
ПРЕДИСЛОВИЕ
7
осуществление программного движения материальной си¬
стемы, также рассматриваются вопросы оценки решений
соответствующих уравнений возмущенного движения. Рас¬
сматриваются способы уменьшения отклонений от про¬
граммы, вызванных постоянно действующими возмуще¬
ниями, а также определяются условия абсолютной устой¬
чивости некоторый нелинейных систем при параметриче¬
ских и постоянно действующих возмущениях.
В качестве примера рассматривается задача оценки
отклонений от программного движения управляемой точки
в центральном поле сил.
В третьей главе рассматривается задача программиро¬
вания замыканием системы, когда программа задана в виде
интегрального многообразия. Управление определяется
из условия минимума нормы вектора управления, аналогич¬
ной принуждению по Гауссу. Определяются оценки от¬
клонений движений системы от заданной программы.
Вектор управления доопределяется из условия осу¬
ществления программного движения с заданной
точностью.
Полученные результаты применяются для построения
управления движением точки, сближающейся с целью
по заданному закону.
Четвертая глава посвящена построению множества
уравнений движения материальной системы, когда про¬
грамма задана в виде интегральных многообразий. При
этом требуется, чтобы программное движение происхо¬
дило устойчиво, а также и оптимально в некотором смысле.
Строится множество динамических систем, имеющих за¬
данный фазовый портрет на плоскости.
Различные постановки задач аналитического построе¬
ния материальных систем с заранее указанными свойст¬
вами движений и способы их решений, затронутые в этой
работе, являлись предметом постоянных обсуждений
на заседаниях возглавляемого А. С. Галиуллиным на¬
учного семинара при кафедре теоретической механики
Университета дружбы народов имени Патриса Лу-
мумбы.
Настоящая работа не претендует на исчерпывающее
Изложение всех затронутых в ней вопросов и содержит
в основном результаты исследований самих авторов,
8
ПРЕДИСЛОВИЕ
Авторы выражают глубокую благодарность Н. П. Б]ру¬
ги п у за неизменное внимание, проявленное им к настоя¬
щей работе на различных ступенях ее выполнения.
Авторы всегда с глубокой благодарностью будут вспо¬
минать Е. А. Барбашина, замечания которого во многом
способствовали улучшению настоящей работы.
Все замечания о книге авторы просят присылать по
адресу: Москва, В-302, ул. Орджоникидзе, дом 3, Уни¬
верситет дружбы народов, Кафедра теоретической меха¬
ники.
ВВЕДЕНИЕ
Основные понятия и аксиомы классической механики,
а также и методы, разработанные в ней, были направлены
в основном на решение следующих задач [53, 811.
1) Даны активные силы, действующие на механиче¬
скую систему, и связи, наложенные на частицы системы
и на систему в целом; определить закон движения системы
(прямая задача).
2) Известны кинематические элементы движения ме¬
ханической системы или некоторые свойства движения; оп¬
ределить силы, действующие на систему (обратная задача).
Естественно, что эти задачи долгое время оставались
основными задачами теоретической механики, так как
практическая деятельность человека требовала в первую
очередь решения именно задач такого рода. Однако еще
в процессе математического оформления этих задач, а так¬
же разнообразных их видоизменений вырисовывалась и
другая задача теоретической механики, а именно задача
построения механических систем, движения которых об¬
ладают заранее установленными свойствами, как, напри¬
мер, осуществимость заданного движения, устойчивость
или оптимальность этого движения в каком-либо смысле
[13, 29, 31, 36, 52, 57, 58, 60, 94].
В настоящее время эта задача уже вышла из рамок
одной лишь теоретической механики и превратилась в про¬
блему управления процессами, в проблему построения
таких систем различной физической природы и конструк¬
ции, где происходят процессы, удовлетворяющие заранее
поставленным требованиям [8, 10 —12, 14, 15, 20, 21,
23, 25, 38, 39, 46, 48, 54, 55, 75, 78, 80, 86, 90].
Одной из главных задач в этой проблеме является пост-
роение дифференциальных уравнений по заданному част¬
ному решению или но заданным частным интегралам, или
10
ВВЕДЕНИЕ
вообще по заданным свойствам некоторого частного реше¬
ния [23, 25, 34].
В настоящей работе рассматриваются некоторые во¬
просы математической теории построения материальных
систем программного движения, а именно таких систем
механической, электрической или другой физической при¬
роды, движения которых происходят по заданной про¬
грамме, причем рассматриваются лишь системы, движе¬
ния которых описываются обыкновенными дифферен¬
циальными уравнениями
у = Ф (у, t),
где у Iу1? ..., уп] — вектор состояния системы (yt — обоб¬
щенные координаты системы, i = 1, ..., п). Про¬
грамма считается заданной или в виде вектора програм¬
много состояния системы
ф [фх (0> •••> Фп (ОЬ
составленного из законов изменения координат системы
в программном движении (элементов программы), или
в виде некоторого интегрального многообразия
со (у, t) = 0,
состоящего из частных интегралов
С0 г (у, 0=0 (г = 1. ■■■, s; sen)
уравнений движения.
Сама задача построения систем программного движе¬
ния может быть поставлена математически в следующих
формах [23, 25].
А. Программирование изменением
параметров системы во времени. Име¬
ется система дифференциальных уравнений
у = Ф (у, и, и, t),
где и [иг, ..., ит\ — вектор управления материальной
системой (ик — собственные параметры системы или
силы, управляющие ее движением, к = 1, ..., тп).
Определить вектор управления и (t) так, чтобы эта система
имела заданное частное решение
V = ф (0
Введение
И
или заданное интегральное многообразие
Ю (у> t) = О-
Заметим, что такая постановка охватывает задачи
определения законов изменения управляющих параметров
материальных систем, структура которых в целом известна.
В такой форме, например, ставятся обратные задачи
динамики точки переменной массы [60], где нужно опре¬
делить изменение массы точки во времени и скорость изме¬
няющей массы так, чтобы движение точки происходило
по заданной траектории или даже по заданному за¬
кону.
Б. Программирование замыканием
системы. Имеется система дифференциальных урав¬
нений
у = Ф (у, и, t);
построить систему замыкающих уравнений
F (у, и, t) = 0,
где F (у, и, £)—оператор, включающий действие диффе¬
ренцирования так, чтобы полученная при этом замкнутая
система допускала заданное частное решение
У = ф (О
или заданное интегральное многообразие
со (у, t) ■■= 0.
Заметим, что такая постановка охватывает задачи
определения уравнений управляющих органов и урав¬
нений обратных связей в материальных системах, совер¬
шающих программное движение. При этом структура
объекта управления и все его собственные параметры
предполагаются известными.
В такой форме, например, ставятся задачи аналитиче¬
ского конструирования регуляторов [54], где строятся
Уравнения регуляторов так, чтобы регулируемая система
в целом обладала определенными, заранее указанными
свойствами, например свойством оптимальности в смысле
минимума какого-либо функционала.
12
ВВЕДЕНИЕ
В. Построен и е всей с и с т е м ы про-
г р а м м и о г о д в и ж е н и я (общая задача).
Построить систему дифференциальных уравнений
у = ф (у, О
по данному частному решению у = ф (t) или по данно¬
му интегральному многообразию
оэ (у, t) = 0.
Заметим, что если в предыдущих задачах структура
самой управляемой материальной системы считалась за¬
данной (даны уравнения движения самой системы), то
в этой задаче структура системы заранее но определена, и
задача сводится к нахождению этой именно структуры
в виде дифференциальных уравнений, описывающих дви¬
жения самой системы и управляющих органов в целом.
Таким образом, рассматриваемая задача построения си¬
стем программного движения является естественным об¬
общением предыдущих задач, и она сводится к известной
задаче построения множества систем дифференциальных
уравнений, имеющих заданное частное решение [34].
В такой форме, например, ставятся задачи программ¬
ного управления металлорежущими станками [39], где
определяется уравнение дифференциального анализатора,
управляющего движениями инструмента, обрабатываю¬
щего деталь заданных контуров.
Заметим, что задачи построения систем программного
движения во всех их видоизменениях имеют одну особен¬
ность, а именно, если имеется их решение *), то оно не¬
однозначно.
В задачах программирования с помощью изменения
параметров самой системы эта неоднозначность объяс¬
няется прежде всего тем, что элементы управления uh
определяются из необходимых условий осуществимости
*) Решение может и не существовать хотя бы потому, что
для рассматриваемой материальной системы заданное движение
окажется вообще неосуществимым. Так, например, тяжелая точка
переменной массы не может совершать движение по прямой при
условии коллинеарности скоростей самой точки и изменяющей
массы [G0J.
ВВЕДЕНИЕ
13
движения системы по заданной программе, которые полу¬
чаются подстановкой в уравнения движения вместо yt
соответствующих элементов программы ф; (/), а эти усло¬
вия обычно являются дифференциальными уравнениями
относительно элементов управления ик. Да и количество
этих уравнений может оказаться меньше количества эле¬
ментов управления.
Многозначность решения задачи построения системы
программного движения особенно ярко проявляется в ее
общей постановке. Так, например, если программа зада¬
ется в виде интегрального многообразия
“>г(Уъ---,Уп) = 0 (г = А-О),
то соответствующая искомая система уравнений имеет вид
[66]
S п
Уз = х I 2 &rjQi (®. у) -I- Е (у)
7’== 1 /» = s-|-l
а = 1,s),
Ут=рт(у) (т = S + 1, п), •
где Дrj — алгебраическое дополнение (г, у)-го элемента
д (COi, .... со ) .
в определителе А ---■ — ^у- ; А — определитель,
полученный из Д заменой у-го столбца (у = 1, ..., s) к-м
столбцом (А: — s [1, ..., п) матрицы
д (coi, ..
cos)
д(уи ..
•• у,)
В построенной системе уравнений на функции
Qi (со, у) и Ph (у) накладываются лишь условия, связанные
с требованием существования и единственности решения,
кроме того, Qr (0, у) — 0 (г -- 1, ..., s), а в остальном все
эти функции совершенно произвольны и не могут быть
как-то доопределены в пределах поставленной задачи.
Следовательно, для окончательного определения управ¬
ляющих параметров, органов управления, а также самой
системы программного движения в целом нужно наложить
Дополнительные условия как на элементы управления,
гак и на программу движения.
14
ВВЕДЕНИЕ
Этими дополнительными условиями могут быть ука¬
зание начальных значений элементов управления, огра¬
ничения значений элементов управления на некотором
интервале времени, требования оптимальности программ¬
ного движения в том или ином смысле, какие-либо
общетехнические, инженерные требования к самой си¬
стеме.
Предположим, что все элементы систехмы программного
движения так или иначе определены, например, с помощью
использования вышеуказанных дополнительных требо¬
ваний.
Однако и при этом предположении движение матери¬
альной системы по заданной программе возможно лишь
в том случае, когда исходные значения координат системы
точно совпадают с начальными значениями соответству¬
ющих элементов программы и когда отсутствуют постоян¬
но действующие возмущающие силы, а также возмущения
параметров системы (параметрические возмущения).
В действительности, конечно, и начальные, и постоян¬
но действующие возмущения, а также и параметрические
возмущения всегда имеются.
Поэтому при построении систем программного движе¬
ния следует иметь в виду еще одну группу дополнитель¬
ных требований, а именно требование устойчивости про¬
граммы при начальных, при постоянно действующих и
при параметрических возмущениях.
Заметим, что в общем случае программа движения
системы задается условно в виде совокупности некоторых
неопределенных функций фг- (t) или со,, (у, t). Тогда допол¬
нительные условия (устойчивости, оптимальности и т. д.),
доопределяющие решение какой-либо из рассматриваемых
задач будут наложены и на элементы программы. Эти
условия должны быть учтены при назначении конкрет¬
ной программы движения материальной системы.
Настоящая работа посвящена решению поставленных
выше задач построения систем обыкновенных дифферен¬
циальных уравнений по заданному частному ее решению
или по частным ее интегралам.
В качестве примеров рассматриваются некоторые за¬
дачи программного управления станками и динамики тел
переменной и постоянной массы.
ГЛАВА I
ПРОГРАММИРОВАНИЕ ИЗМЕНЕНИЕМ ПАРАМЕТРОВ
СИСТЕМЫ ВО ВРЕМЕНИ
§ 1. Постановка задачи, основные определения
Рассмотрим некоторую материальную систему, дви¬
жения которой (изменения ее состояния) описываются
дифференциальными уравнениями
у = Ф (у, и, й, t), (1.1.1)
где у \уг, ..., уп] — вектор состояния системы (yt являются
обобщенными координатами системы, i = 1, ..., п),
и [и1ч ..., ит] — вектор управления системой (ик могут
быть собственными параметрами или обобщенными
силами, управляющими движением системы, к = 1., ...
...,га), у, производные по времени переменных у и и.
Поставим следующую задачу.
Определить элементы управления uh (к 1, ..., т)
в виде функций от времени так, чтобы движение системы
происходило по заданной программе
Ф [<Pi (0. •••. Фп 0)1, (1.1.2)
где ф; (t) — элементы программы (i = 1, ..., /г), заданные
в интервале U0, ос).
В дальнейшем будем предполагать, что функции фг- (t)
(I ~ 1, ..., п) являются непрерывными и дифференцируе¬
мыми функциями в интервале U0, оо), а система уравнений
(1.1.1) удовлетворяет условиям теоремы существова¬
ния и единственности в некоторой области значений
uk (к = 1, ..., т).
Заметим прежде всего, что не всякая программа движе¬
ния может быть осуществлена в рассматриваемой мате¬
риальной системе, описываемой уравнениями (1.1.1). Для
16
ГЛ. I. ПРОГРАММИРОВАН [IE ПАРАМЕТРАМИ
осуществления программного движения необходимо, что¬
бы совокупность элементов программы (1.1.2) являлась
частным решением уравнений движений системы (1.1.1),
т. е. необходимо, чтобы
ф (t) = Ф (ф (t), и, и, /). (1.1.3)
Эти условия (1.1.3) осуществимости программного
движения уже определяют в некотором смысле искомые
законы изменения параметров системы и управляющих
сил (элементы управления uh (/), к —- 1, ..., т).
Однако если даже элементы управления и определены
согласно этим условиям, программное движение может
осуществляться .тишь при условии, что начальные зна¬
чения координат системы точно совпадают с соответству¬
ющими начальными значениями элементов программы,
а именно, когда
фго — фг Ро) Р = 1, /г). (1.1.4)
В действительности движение системы может происхо¬
дить и происходит с такими начальными значениями коор¬
динат, которые отличны от начальных значений коорди¬
нат в программном движении. Назовем отклонения на¬
чальных значений координат системы в действительном
движении от соответствующих значений координат в про¬
граммном движении
xio — Ую — фг Ро) Р г •••. п) (1.1.5)
начальным и возмущениями.
Различные начальные возмущения вызывают и соот¬
ветствующие различные движения системы, которые назо¬
вем возмущенными движениями.
Все эти возмущенные движения будут отличаться от
программного в том или ином смысле, властности разно¬
сти соответствующих координат системы в возмущенных
и программном движениях
^ Vi — фг Р) Р Г-= 1, •••> п) (1.1.0)
будут отличны от нуля и в дальнейшем при всех t > t0.
Назовем эти разности возмущениями.
§ 1. ПОСТАНОВКА ЗАДАЧИ
17
Может случиться, что для любого заданного, сколь
угодно малого числа А имеется соответствующее число X
такое, что при всех начальных возмущениях, удовлетворя¬
ющих условию
а
2
г=1
удовлетворяется неравенство
2
г -1
и для всех последующих возмущений в любой момент
времени t t0. В таком случае программное движение
является устойчивым по отношению к координатам си¬
стемы. В противном случае программное движение не¬
устойчиво.
В случае, если программное движение не только устой¬
чиво, но и отклонения координат возмущенных движений
от соответствующих координат в программном движении
являются бесконечно малыми величинами при неограни¬
ченном возрастании t, то программное движение является
устойчивым асимптотически по отношению к коорди¬
натам.
Заметим, что определение понятия устойчивости про¬
граммного движения дано в смысле Ляпунова [57, 94].
Правда, Ляпунов дает более общее определение поня¬
тия устойчивости, а именно понятие устойчивости по от¬
ношению к некоторым величинам Qx, ..., Qn, которые,
являясь некоторыми функциями от координат материаль¬
ной системы и скоростей изменения этих констант, так или
иначе характеризуют движение системы. При этом воз¬
можные движения материальной системы сравниваются
Друг с другом по изменению во времени именно этих
функций Qj, ..., Qn. И конечном итоге устойчивость или
неустойчивость какого-либо определенного исследуемого
Движения системы, называемого невозмущенным, уста¬
навливается тем, что оценивается разность этих функций
на возмущенном и на невозмущенном движениях при
всех t > t0.
18
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Если считать, что дифференциальные уравнения дви¬
жения (1.1.1) составлены именно по отношению к таким
функциям (?i, Qn и что последние являются обобщен¬
ными координатами yY, ..., уп системы, то приведенное
выше определение устойчивости по отношению к коорди¬
натам будет являться также довольно общим определе¬
нием понятия устойчивости программного движения
в смысле Ляпунова.
В дальнейшем предположим, что величины yv ..., уп
(названные обобщенными координатами), относительно
которых составлены уравнения движения (1.1.1), являются
в действительности некоторыми качественными показате¬
лями движения материальной системы, выбранными
в виде вполне определенных функций от координат систе¬
мы и скоростей изменения этих координат с учетом осо¬
бенностей рассматриваемого программного движения и
требований к нему.
Предположим также, что и программа (1.1.2) дана
в виде закона изменения именно этих величин уг, ..., уп
в движении рассматриваемой материальной системы, ко¬
торое желательно осуществить *).
Итак, задача программирования с помощью изменения
параметров системы во времени сводится к определению
законов изменения параметров (также и управляющих
сил) таким образом, чтобы движение системы происхо¬
дило с заданными показателями качества.
Точное осуществление заданного программного дви¬
жения системы практически невозможно, хотя бы потому,
что всегда имеются начальные возмущения, вызывающие
в дальнейшем отклонения действительного движения от
программного; а в процессе движения на систему действуют
различного рода возмущающие силы, неучтенные при со¬
ставлении уравнений движения, которые также вызывают
движения, отличные от программного. Поэтому постав¬
ленная выше задача о программировании изменением па¬
раметров системы должна быть уточнена.
*) Вполне естественно, что во многих задачах построения
систем, совершающих программное движение, в качестве этих ве¬
личин выбираются координаты системы пли скорости изменения
этих координат, или те и другие,
§ 1. ПОСТАНОВКА ЗАДАЧИ
1Й
Задачу эту уточним следующим образом.
Рассматривается материальная система, движения
которой описываются уравнениями (1.1.1). Определить
закон изменения параметров системы (а также и управля¬
ющих сил) uv ..., ит так, чтобы заданное программное
движение (1.1.2) являлось одним из возможных движений
системы и чтобы это движение было устойчивым.
Математически задача эта сводится к определению
функций ul{t), ..., ит (t), входящих в систему дифферен¬
циальных уравнений (1.1.1), так, чтобы совокупность
заданных функций ср±(t), ..., фп (/), определяющих про¬
грамму движения (1.1.2), являлась частным решением
системы уравнений (1.1.1), притом устойчивым.
Заметим, что устойчивость понимается здесь в смысле
Ляпунова, в смысле прочности программного движения
при наличии начальных возмущений, в смысле неподатли¬
вости программного движения к начальным возмущениям.
Указанная постановка не является единственно воз¬
можной в задачах построения систем программного дви
жения с помощью изменения параметров систехмы. Можно,
например, ставить задачи по определению управляющих
функций, обеспечивающих также и оптимальность задан¬
ного движения в том или ином смысле [12, 54, 75, 86].
Да и сама задача построения устойчивых систем программ¬
ного движения имеет ряд практически важных видо¬
изменений. Так, например, в [55] ставится и решается
задача об определении условий устойчивости программного
движения регулируемой системы, регулятор которой на¬
строен на обеспечение устойчивости некоторого опреде¬
ленного установившегося движения системы. Условия,
полученные при решении этой задачи, могут дать способы
настройки регулятора, при которой обеспечивается устой¬
чивость всего программного движения регулируемой си¬
стемы. Возможно также ставить задачу об устойчивости
программного движения при наличии возмущающих сил,
а также и параметрических возмущений [62, 64]. Необ¬
ходимость такой постановки задачи объясняется тем, что
по вышеприведенному определению понятия устойчивости
программного движения возмущенные движения проис¬
ходят под действием тех же внешних сил, при тех же
значениях параметров, что и программное движение.
20
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Предполагается, что наличие различных возмущенных
движений вызвано лишь имеющимися отклонениями в на¬
чальных условиях. 13 действительности же на систему дей¬
ствуют и силы, неучтенные при составлении уравнений
движения, а параметры системы могут претерпевать изме¬
нения в процессе движения. Все это, конечно, может
иметь существенное значение при изучении устойчивости
программного движения.
Заметим, что подобные разновидности задач устойчи¬
вости программного движения частично или полностью
всегда охватываются общей задачей устойчивости движе¬
ния в смысле Ляпунова [94]. Так, например, если считать,
что начальные возмущения являются следствием мгно¬
венно действующих внешних сил в момент времени t0
и что постоянно действующие возмущающие силы представ¬
ляют собой величины высшего порядка по сравнению
с самими возмущениями хг, ..., хп, то известная задача
Ляпунова об устойчивости по первому приближению фак¬
тически является задачей об устойчивости и при наличии
возмущающих сил (мгновенных и постоянно действующих).
Во многих практических задачах имеет значение устой¬
чивость программного движения лишь на конечном интер¬
вале времени. В связи с этим приведем определение устой¬
чивости программного движения на конечном интервале
времени в смысле Каменкова [40], которое, так же как и
определение Ляпунова, устанавливает одно из важней¬
ших свойств программного движения, а именно неподат¬
ливость его к действиям начальных возмущений, но уже
на конечном интервале времени.
Если при всяком произвольном числе Л, как бы мало
оно ни было, и при всяких начальных возмущениях
х10, ..., хп0, удовлетворяющих условию
п
SO*i*io -г ••• -г агпжп|,)2< Л, (1.1.8)
i=l
где ||а5/Л — некоторая иеособая постоянная матрица, удов¬
летворяется и неравенство
а
S(«*.*! -!• ••• +«гА)2<Л (1.1.9)
г—1
§ 1. ПОСТАНОВКА ЗАДАЧИ
21
при 10 < tu то соответствующее программное движе¬
ние устойчиво на конечном интервале времени [£0, tx],
В противном случае — неустойчиво.
Заметим, что матрица ||as7i|| определяет в фазовом про¬
странстве (хх, ..., хп) ориентацию и величины полуосей
эллипсоида
п
2(аНх1 + ... + &inxn)2 “ *4, [(1.1.10)
г=1
выделяющего в этом пространстве область, внутри которой
должна находиться изображающая точка М (хи ..., хп)
в любой момент времени в интервале
Естественно, что в качестве поверхности, ограничи¬
вающей возмущения, можно взять любую замкнутую
поверхность
V (х19 ..., хп, t) =А, (1.1.11)
стягивающуюся в начало координат при xt —0
(i = 1, п).
Тогда возможно указать и другое определение устой¬
чивости на конечном интервале времени, связанное с тре¬
бованием по крайней мере временного пребывапия фазо¬
вых траекторий внутри некоторой области, а именно
определение устойчивости по отношению к области V
(1.1.11). Так как соответствующие условия устойчивости
при этом будут зависеть и от выбора поверхности (1.1.11),
то поверхность эту желательно выбрать так, чтобы она
отражала какие-либо свойства программного движения,
или хотя бы позволяла как-то оценить последующие воз¬
мущения.
Решение задач устойчивости на конечном интервале
времени при всех возможных и разнообразных толкова¬
ниях самого понятия устойчивости устанавливает в конеч¬
ном итоге и некоторые количественные оценки возмущен¬
ных движений, а именно определяет интервал времени,
в котором изображающая точка будет находиться внутри
заданной области, или для заданного интервала времени
строится соответствующая область, ограничивающая воз¬
мущения, или определяются условия нахождения изо¬
бражающей точки в заданной области хотя бы в некотором,
также заданном интервале времени.
22
гл. i, программирование параметрами
Заметим, что прежде чем приступить к установлению
такого рода оценок, связанных с устойчивостью на конеч¬
ном интервале времени (например,интервал устойчивости),
нужно убедиться в существовании этого интервала, т. е.
необходимо выяснить, существует ли такой момент вре¬
мени *0, за которым следует сколь угодно малый интервал,
где возмущения xt будут удовлетворять условию (1.1.9),
если только для начальных возмущений xi0 справедливо
неравенство (1.1.8). А в некоторых практических задачах
может оказаться вполне достаточным лишь установление
самого существования этого интервала, пусть даже сколь
угодно малого. Поэтому имеет смысл введение следующего
понятия устойчивости.
Программное движение устойчиво в момент времени t0,
если за этим моментом следует сколь угодно малый ин¬
тервал времени, в котором возмущения удовлетворяют
условию
п
2 (ап*! + ... + ahlxn)- < А, (1.1.9)
i—1
ГДР II ask II — неособая постоянная матрица, А — сколь
угодно малое число, если только начальные возмущения
ограничены неравенством
п
(яп^ю -\- ... -f- а-1ПхтУ ^ А. (1.1.8)
г—1
В противном случае программное движение неустойчиво
в момент времени t0.
Заметим, что решение задачи устойчивости программ¬
ного движения в момент времени t0 сводится лишь к опре¬
делению условий, при которых начальные возмущения,
огранич енные эллипсоидом
it
2(аП^1 + ••• + ainxn)'1 = А, (1.1.10)
1=1
где А — сколь угодно малое число, вызывают в дальней¬
шем возмущения, ограниченные этим же эллипсоидом го
крайней мере в течение сколь угодно малого промежутка
времени. Эти условия будут являться необходимыми усло¬
виями устойчивости на конечном интервале времени [£0, tx 1.
§ 2. РЕШЕНИЕ ЗАДАЧИ
23
§ 2. Решение задачи
Предположим, что заданная программа движения
(1.1.2) материальной системы удовлетворяет необходимым
условиям (1.1.3) осуществимости этого движения.
Примем программное движение в качестве невозму¬
щенного движения материальной системы и составим
дифференциальные уравнения, которым удовлетворяют
разности соответствующих обобщенных координат систе¬
мы в возмущенных и программном движениях (возмущения):
Xi = У1 — фг (0 (i = 1, п). (1.1.6)
Эти уравнения записываются в виде
х = ф §p(t) + я, и, й, t) — Ф и, й, t), (1.2.1)
где х (хг, ..., хп) — вектор возмущений, и называются
уравнениями возмущенного движения материальной сис¬
темы.
Тривиальное решение этих уравнений
х1 = 0, ..., хп — 0 (1.2.2)
соответствует программному движению.
Предположим, что правые части уравнений (1.2.1)
разлагаются в сходящиеся степенные ряды по целым сте¬
пеням переменных хг, ..., хп в некоторой области
71
г=1
с коэффициентами разложения, являющимися ограничен¬
ными и непрерывными функциями времени t, элементов
управления ик (к = 1, ..., т), а также элементов заданной
программы ф, (t) (i = 1, ..., /г); при этом t t0, а элемен¬
ты управления принадлежат к некоторому также задан¬
ному классу функций. Тогда уравнения возмущенного
Движения (1.2.1) принимают вид
Xi ~ filxl "Ь ••• ~\~finxn ~\г~ % t (i = 1, ..., п), (1.2.3)
где Xi — функции, разложения которых по степеням
xi, ..., хп начинаются с членов выше первого порядка.
24
ГЛ. 1. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Таким образом, поставленная задача об устойчивости
программного движения сводится к задаче об устойчивости
тривиального решения (1.2.2) системы дифференциальных
уравнений (1.2.3).
Задача эта в дальнейшем будет решаться в основном
по первому приближению, а именно будут найдены усло¬
вия, наложенные на коэффициенты уравнений первого
приближения
X-i /г 1^1 Т' firv^n 1 > " "> М) ■> (1*2-4)
следовательно, на элементы управления, а также и на
элементы программы. Мри удовлетворении этих условий
тривиальное решение (1.2.2) является устойчивым и с
учетом членов высшего порядка в уравнениях возмущен¬
ного движения.
Условия эти, являясь достаточными условиями устой¬
чивости программного движения, и будут служить усло¬
виями для определения искомых элементов управления
материальной системой, а также исходными ограничениями
при назначении самой программы. Эти же условия можно
испольсозать для проверки устойчивости программного
движения различных, уже спроектированных систем.
Задачи устойчивости программного движения со всеми
ее разновидностями решаются методами Ляпунова, раз¬
работанными самим Ляпуновым и его последователями для
исследования устойчивости неустановившихся движений.
Рассматриваемую задачу построения устойчивых си¬
стем программного движения по первому приближению
будем решать, используя следующие общие положения
теории устойчивости.
1) Т е о р е м а Ляпунова об устойчи¬
вости и о первому приближению [57].
Если система уравнений возмущенного движения первого
приближения (1.2.4) является правильной и все характе¬
ристичные числа ее решений положительны, то программ¬
ное движение (1.1.2) устойчиво и с учетом членов высшего
порядка системы уравнений возмущенного движения
(1.2.3).
2) Теорема Четаева о неустойчи¬
вости по первому приближению [94].
Если система уравнений возмущенного движения первого
§ 2. РЕШЕНИЕ ЗАДАЧИ
25
приближения (1.2.4) является правильной и среди ха¬
рактеристичных чисел ее решений имеется хотя бы одно
отрицательное, то программное движение (1.1.2) неустой¬
чиво независимо от членов высшего порядка системы урав¬
нений возмущенного движения (1.2.3).
Заметим, что теорема Ляпунова об устойчивости по
первому приближению доказана также и И. Г. Четаевым
[94] с помощью так называемого прямого метода (построе¬
ния функции Ляпунова). При этом установлено, что устой¬
чивость будет асимптотической, да еще с положительными
характеристичными числами решений самих уравнений
возмущенного движения (1.2.3).
Последнее является весьма полезным уточнением,
например, при исследовании устойчивости движения по
отношению к координатам, если наличие устойчивости
по отношению к скоростям установлено с помощью имен¬
но этой теоремы.
В самом деле, в некоторых случаях уравнения возму¬
щенного движения (1.2.3) могут иметь следующий вид:
х9 = /р!#! + ... +/рг#г + Хр, \ . ,
хг+р = х, (Р= 1,..., г), J ( }
где хр — возмущения скоростей, xVJt9 — возмущения ко¬
ординат.
Такого вида уравнения получаются, например, при
исследовании устойчивости по отношению к координатам
qt и скоростям qt программного движения, которое опре¬
деляется как частное решение системы уравнений
= Яг> О (Р = 1 , •••! О- (1.2.6)
Обычно в таких случаях прежде всего решается задача
устойчивости по отношению к скоростям, а именно, ис¬
следуется устойчивость невозмущенного движения
хх — 0, ..., хг = 0.
Положим, устойчивость этого движения установлена с по¬
мощью теоремы Ляпунова об устойчивости по первому
приближению, тогда в силу вышеуказанного уточнения
ГЛ. 1. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
этой теоремы из уравнений
3r+Р *£р (р ~ 1? •••? г)
следует устойчивость и всего невозмущенного движения
хх = 0, ..., ягР = О,
т. е. имеется устойчивость программного движения и по
отношению к координатам [19].
3) Т е о р е м а Малкина об устой ч и в о -
с т и по первому приближению [58]. Если
существует знакоопределенная функция V, допускающая
бесконечно малый высший предел, имеющая в силу
уравнений первого приближения (1.2.4) знакоопределен¬
ную производную V противоположного с V знака, то
программное движение (1.1.2) устойчиво и с учетом членов
высшего порядка, лишь бы последние удовлетворяли
условиям
|Хг|<4 (1^1 + ... +|s„l) (г = 1, га), (1.2.7)
где А — некоторая достаточно малая постоянная.
Заметим, что функция V должна обладать указанными
свойствами в области
п
г=1
а неравенства (1.2.7) должны удовлетворяться во всей
области определения правых частей уравнений возмущен¬
ного движения (1.2.3).
Заметим также, что при удовлетворении условий этой
теоремы устойчивость программного движения будет асим¬
птотической, притом с положительными характеристич¬
ными числами решений системы уравнений возмущенного
движения (1.2.3).
Только что приведенная теорема вытекает непосред¬
ственно из известного положения об асимптотической ус¬
тойчивости [57].
Имеется также подобная теорема о неустойчивости
по первому приближению, являющаяся следствием теоре¬
мы Ляпунова о неустойчивости [91]:
§ 2. РЕШЕНИЕ ЗАДАЧИ
27
Если существует форма V некоторой четной степени
от хг, ..., хп с ограниченными коэффициентами, производ¬
ная которой V в силу уравнений первого приближения
(1.2.4) является знакоопределенной того же знака, что и
Ё, то программное движение (1.1.2) неустойчиво незави-
симо от членов высшего порядка системы уравнений воз¬
мущенного движения (1.2.3).
4) Теорема Каменкова об устойчи¬
вости на конечном интервале вре¬
мени [20]. Если корни характеристического уравнения
= (1.2.8)
составленного из коэффициентов уравнений первого при¬
ближения (1.2.4) в момент времени tQ лежат слева от мни¬
мой оси плоскости корней, то программное движение
(1.1.2) устойчиво на некотором конечном интервале
[t0, и с учетом членов высшего порядка уравнений возму¬
щенного движения (1.2.3).
Для определения интервала устойчивости [t0,
Г. В. Каменковым предлагается следующая последова¬
тельность действий.
а) Задается значение t0, начиная с которого нужно
определить интервал устойчивости, и составляется харак¬
теристическое уравнение (1.2.8).
б) Определяются корни характеристического урав¬
нения и производится такое линейное преобразование
с постоянными коэффициентами, которое переводит систе-
МУ уравнений возмущенного движения первого прибли¬
жения в каноническую систему
Уi = hyj -I- lj + YJ' )
= ИЛ — ПЛ + <?8 -I- Us, (1,2.9)
vs =' 9sls “Г 'ls"s "Ь «5 ■ Г Vjt -
где / = 1, ..., тг; s —1» •••> m2; Lj, Qs, Rs— члены первого
порядка относительно ys, us, vs (j =1, ..., m1, .9=1,...
..., m2), с коэффициентами, являющимися линейными фор-
мами от Afij = fu (t) — fu (t0) (i, j = 1, ..., re); Yh Us,
Vs — члены высшего порядка относительно z/y, us, vs
(j = 1, ..., nii, s=l, ..., m2)', ni1 - число вещественных
28
ГЛ. J. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
корней; т2 — число пар комплексных корней; ijj, u-s,
vs — линейные формы переменных х±, ..., хп с коэффи¬
циентами, составляющими постоянную неособую матри-
цу lk*ll-
в) Используя преобразованные уравнения возмущен¬
ного движения, находим производную суммы квадра¬
тов всех i/j, us1 vs и выделяем квадратичную форму
Q (Ун--, УтГ, ...,^ ит2; vlf ..., vmi;t), определяющую
знак этой производной.
г) Находится время tx из условий определенно-отри-
цательности выделенной квадратичной формы.
Заметим, что перед тем, как применить указанный спо¬
соб определения интервала устойчивости, нужно устано¬
вить возможность существования этого интервала, т. е.
нужно установить устойчивость или неустойчивость
программного движения в момент времени t0. Этот вопрос
в свою очередь будет решен определением такого интер¬
вала времени, в котором корни уравнения
\fik{t) - blk-K\ = О (1.2.10)
лежат слева от мнимой оси плоскости корней. Если момент
времени t0 находится именно в этом интервале, то тогда
и существует искомый интервал устойчивости [t0, tfj.
Вопросы устойчивости на конечном интервале времени
по отношению к области
V(xv ..., zn; t) = А (1.2.11)
могут быть решены отысканием условий определенно-
отрицательности производной V, найденной из уравнений
возмущенного движения первого приближения. Тогда из
этих условий будет определен промежуток времени
U0, tL], в течение которого возмущения будут такими, что
функция V является убывающей, если только начальные
возмущения достаточно малы. При этом нужно иметь
в виду, что функция У, выбранная для оценки возмущен¬
ных движений, должна быть непрерывной, определенно¬
положительной и допускающей бесконечно малый высший
предел в некоторой области
s 3. ПРОГРАММНОЕ ДВИЖЕНИЕ ТЯЖЕЛОЙ ТОЧКИ 29
Как видно из приведенных положений, установление
устойчивости или неустойчивости имеющегося програм¬
много движения или получение условий, обеспечивающих
устойчивость программного движения проектируемых си¬
стем, сводится в конечном итоге к следующим задачам:
1) Определение условий правильности систем линейных
уравнений.
2) Определение знака характеристичных чисел ре¬
шений системы линейных уравнений.
3) Построение удачных функций Ляпунова F, дающих
легко интерпретируемые и одновременно вполне конструк¬
тивные условия устойчивости.
4) Определение такого интервала времени, где корни
характеристического уравнения с переменными коэффи¬
циентами, зависящими от времени, лежат слева от мнимой
оси плоскости корней.
В настоящее время еще отсутствуют какие-либо общие
приемы решения указанных задач.
В следующих параграфах будут даны некоторые из¬
вестные частные приемы решения этих задач, будет по¬
казано практическое применение этих приемов, а также
будут приведены некоторые новые положения, решающие
эти задачи в тех или иных случаях.
Заметим, что если уравнения возмущенного движения
(1.2.3) являются линейными, то вопросы устойчивости
могут быть решены установлением знака характеристич¬
ных чисел или построением функций Ляпунова с после¬
дующим применением известных теорем Ляпунова об
устойчивости [57] и Четаева — о неустойчивости [94].
Вопросы же устойчивости на конечном интервале времени
могут быть решены приведенными выше методами Камен¬
кова. Таким образом, и в этом случае исследование устой¬
чивости программного движения сводится к тем же пере-
чи сленным задачам.
§ 3. Программное движение тяжелой точки
переменной массы
В дальнейшем при обсуждении основных положений
общей задачи построения материальных систем програм¬
много движения в качестве примера будет рассматриваться
до
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
одна из задач об устойчивости программного движения
тяжелой точки переменной массы. Задача эта может быть
поставлена следующим образом.
Имеется программа движения тяжелой точки перемен¬
ной массы в вертикальной плоскости (х, у)\
х = ф (/), у — ф (t). (1.3.1)
Определить закон изменения массы т (t) (т (t) < 0)
точки, законы изменения направления и величины ско¬
рости изменяющей массы так, чтобы заданное программное
движение (1.3.1) являлось одним из возможных движений
точки переменной массы и чтобы это движение было устой¬
чивым [17 —19].
Заметим, что в рассматриваемой задаче элементами
управления являются законы изменения массы точки,
направления и величины скорости изменяющей массы,
и задача сводится к определению условий, наложенных
на эти элементы (а также и на элементы программы),
при удовлетворении которых программное движение
(1.3.1) является возможным и устойчивым.
Для решения этой частной задачи составим прежде
всего уравнения движения тяжелой точки переменной
массы при общепринятых в таких случаях предположе¬
ниях [24, 60], далее найдем необходимые условия осущест¬
вимости заданной программы и составим соответствую¬
щие уравнения возмущенного движения. А условия
устойчивости будут определены в дальнейшем при уста¬
новлении условий устойчивости в общей задаче програм¬
мирования с помощью изменения параметров системы во
времени.
1. Квадратичный закон с о п р о т и в-
л е н и я. Предположим, что силы воздействия среды на
точку по касательной к траектории pi нормали соответ¬
ственно равны
X - кх (t)
Y = к2 (t) v2,
где v — YА2 + у2 — скорость точки, кх (t), к2 (t) — коэф¬
фициенты воздействия среды на точку, позволяющие
учесть различные поправки квадратичного закона.
§ :i. ПРОГРАММНОЕ ДВИЖЕНИЕ ТЯЖЕЛОЙ ТОЧКИ
3*
Уравнения движения тяжелой точки переменной массы
в этом случае следующие [60]:
+ У2х
^ + ifih
У** — £,
(1.3.2)
где \i — р (t), т] = т| (t) — отношения проекций скоростей
изменяющей массы и точки на координатные оси х, у.
Подставляя значения х, у в уравнения движения
(1.3.2) и считая, что ф =/= 0, ф =f= 0, получим следующие
необходимые условия движения точки по заданной про¬
грамме (1.3.1):
(г =-. 1 + — (— +/аф + ^
т \ ф и i ф
ч.. 1 -!- i (4 + 4 + У¥Т¥) ■
“ ' ф Ф тгпр J
(1.3.3)
Отсюда следует, что если задаться функциями ф (t)
и ф (t), то оставшиеся переменные ц, v и m подчиняются
лишь двум условиям. Воспользовавшись этой свободой,
возможно указать условие устойчивости движения точки
по данной программе, не входящее в противоречие
с условиями (1.3.3).
Заметим, что ц и ц определяют величину относительной
скорости изменяющей массы
U = Г(|А — I)3 ф2 -I- (П — i)2 f2
и угол между направлением этой скорости и касательной
к траектории:
а = arccos
(Ц — 1) ф2 -1- Ql —1)ф2
V № — 1)" Ф2 'Г О — I)2 Ф2] (Ф2 Г Ф2)
ГЛ. 1. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Рассматривая программное движение (1.3.1) как пе-
возмущенное и учитывая необходимые условия (1.3.3),
получим следующую систему уравнений возмущенного
движения [17 J:
• ‘*Vf Лы
_Ф 1 /цф3 — /ьМ|^_ \ г
Ф тср
/чфф -j- Л-2ф -
гп \/ ф2-}-ф‘2
2/мф2 -г /мф” — /чф ф .
: /• —- <ri "Г
т У ф2 - р ф"
ф , g 1 /,чф» + А*Р8 \ ^
Mb ?/ Д‘2 I / 2 2’
A/? Ф Ф2 i Ф" )
где хг, x2— возмущения скоростей, x39 x4 — возмущения
координат, Xv X2 — функции, разложения которых по
степеням х19 х2 начинаются с членов выше первого
порядка.
В дальнейшем при исследовании устойчивости на бес¬
конечном интервале времени потребуем, чтобы коэффи¬
циенты уравнений при различных степенях х19 х2 были
непрерывны и ограничены для всех t t09 что будет обес¬
печено, например, если указанному условию удовлетворя¬
ют функции
ф, Й. ф..+1-v ф», Й- ф.фп+1-v (j = 1,2)
для всех натуральных чисел п и v.
При исследовании устойчивости на конечном интер¬
вале достаточно потребовать лишь непрерывность этих
функций на некотором конечном интервале времени
[*о, Т].
В случае, когда сила воздействия среды на точку пере¬
менной массы направлена по касательной к траектории
§ 3. ПРОГРАММНОЕ ДВИЖЕНИЕ ТЯЖЕЛОЙ ТОЧКИ
33
(к2 = 0), необходимые условия (1.3.3) принимают вид
т \ ф
vV + Ф3) -
=, + ^ IА + 4- + ±V¥+W‘) ■
т \ \ J) г|) т j
(1.3.5)
а уравнения возмущенного движения составляют следую¬
щую систему:
/_ф ki_
уф гп
ф2
]/"ф2 ф2
к\ фф
Хл —
Хо = —
ki ф ф
+
+Ф
лП ^ +'
Уф2_|_ф2
/♦ I g fci
\ ф ■ ф т |/ф2 + ф2
— х2 -J- Х1}
> (1.3.6)
Х2 + Х2у
хг = х1у
Х± = х2.
Если к тому же скорости изменяющей массы и самой
точки коллинеарны (р. = rj), то необходимые условия
(1.3.3) записываются в виде
ф_
ф
g
ф
(1.3.7)
2 А. С. 1'алиуллин
34
ГЛ. Т. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
а уравнения возмущенного движения — следующей си¬
стемой:
Заметим, что если задана лишь траектория программ¬
ного движения тяжелой точки переменной массы (част¬
ный интеграл уравнений движения)
то соответствующие необходимые условия движения в ко¬
нечном итоге дают и законы этого движения. Последнее
подчеркивает общность задания программного движения
тяжелой точки переменной массы в виде (1.3.1)
2. Линей и ы й закон сопротивления.
Предположим, что сильг воздействия среды на точку по
касательной к траектории и нормали соответственно равны
где кг (t), к2 (t) — коэффициенты поправки линейного
закона. Уравнения движения в этом случае имеют вид [60]
(1.3.8)
У = F (х),
X = кг (t) v,
Y = к2 (t) v,
(1.3.9)
§ 3. ПРОГРАММНОЕ ДВИЖЕНИЕ ТЯЖЕЛОЙ ТОЧКИ
35
необходимые условия движения:
Л I т
и- = 1 + —
_ф_ /С1ф + /с2ф
т ф
т\|)
(1,3.10)
уравнения возмущенного движения [18]:
Ф I к* Ф \ г /Г2 г
~ I" ~ xi TiT 2»
Ф т ф ] т
/^2 ,
'?1 +
Ч = *i.
.Тд, = Хп.
_ф_
ф
g
ф
/t2 ф
#2,
Таким образом, в рассматриваемом случае уравнения
возмущенного движения представляют собой систему ли¬
нейных уравнений.
Если предполагать, что к2 = 0, то получим следующие
уравнения возмущенного движения:
Ф
Ф
Ф
Ф
Г -Т“ х,
(1.3.12)
если же еще и \i = rj, то
хл -----
х2 = -т- £2,
Ф
^4 — ^2*
(1.3.13)
36
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
3. Общий закон сопротивления. Пред¬
положим, что сила воздействия среды на точку направ¬
лена по касательной и равна некоторой функции от ско¬
рости и высоты
R = R (г, у).
Составим уравнения движения тяжелой точки пере¬
менной массы, проектируя все действующие на точку
силы на направления касательной и нормали к траекто¬
рии. Тогда получим следующую систему [60]:
v = — g sin 0 — и
A COS 0
0 = — g I
° V
X = V COS 0,
у = v sin 0,
т R (v, у)
— cos a — —
m m
m sin a
(1.3.14)
где г, 0 — величина и направление скорости точки пере¬
менной массы, и, а — величина и направление скорости
изменяющей массы.
Уравнения возмущенного движения в этом случае со¬
ставляют следующую систему [191:
= — g (cos 0О) х2 ■
п
■I/O
Хп
-^1 (^Т> X2i X3i 0»
U0 I bill U0 , ЛГ / J\
Х2 — — Х1 “Г g х2 + ^-2 Х2у 0»
ио <- о
х3 = (sin 0О) х1 + vQ (cos 0О) ,r2 + Хэ (х2, t),
#4 = (cos е0) х1 — г о (sin 0О) х2 + Х4 (,r2, t),
(1.3.15)
где хг, х2 — возмущения величины и направления ско¬
рости точки переменной массы, (г3, х4 — возмущения коор¬
динат точки (высоты и дальности), Хг, Х2, Х.6, ХА — функ¬
ции, разложения которых по степеням возмущений xt
начинаются с членов не ниже второго порядка, х0 = <p (t),
§ 4. ХАРАКТЕРИСТИЧНЫ.!-; ЧИСЛА
37
Уо = Ф (0.
г0 = YФ2 + Ф2- 60 --= arct g -Ф- ,
Ф
' _ дЯ(г, у) .у _ dfl (г;, у)
г'° до v-Vo, У=-!‘о ’ "° ду г-^Го, //--Го
В дальнейшем будем считать, что коэффициенты урав¬
нений (1.3.15) являются непрерывными и ограниченными
функциями от t при всех t > t0 (исследование устойчиво¬
сти на бесконечном интервале) или при всех t, удовлетворя¬
ющих неравенству t0 ^ t Т (исследование устойчивости
на конечном интервале времени).
§ 4. Характеристичные числа решения системы
линейных дифференциальных уравнений
Рассмотрим систему уравнений
i’i = fii^i + ••• +finXn (i = 1, •••, n), (1.4.1)
где fij = ftj (t) — непрерывные и ограниченные функции
при t > t0.
Как известно, характеристичным числом какого-либо
решения этой системы
• • •» h • • ч ^)
называется наименьшее из характеристичных чисел функ¬
ций, входящих в это решение.
Отсюда следует, что непосредственное определение
характеристичных чисел в общем случае является зада¬
чей, равносильной решению самих дифференциальных
уравнений.
Однако в вопросах устойчивости достаточно лишь ука¬
зать границы характеристичных чисел или установить
знак наименьшего характеристичного числа.
Оценка такого вида содержится, как указывает Н. Г.
Четаев в примечаниях к работе [57] Ляпунова, в доказа¬
тельстве ограниченности характеристичных чисел реше¬
ний системы (1.4.1), данном самим А. М. Ляпуновым. Так,
например, из этого доказательства получается следующая
теорема о знаках характеристичных чисел [94].
38
ГЛ. I. ПРОГРАММИРОВАНИИ ПАРАМЕТРАМИ
Теорема 1. Если коэффициенты (t) дифферен¬
циальных уравнений (1.4.1) таковы, что главные диаго¬
нальные миноры определителя
D = |fu (t) + in (t) |
знакопеременны, причем функция fn (t) отрицательна для
всех t t0, то характеристичные числа решений такой
системы положительны.
В частности, достаточным условием положительности
характеристичных чисел решений антисимметричной си¬
стемы (fu = —fji, i =/= j) является отрицательность диаго¬
нальных коэффициентов fti (t) при всех I ^ t0.
Пример. Условием положительности характери¬
стичных чисел решений уравнений возмущений скоростей
программного движения тяжелой точки переменной массы
(линейный закон сопротивления)
'•=Л+МЬ-
\ ф т ф /
т 2 = — Xi + (-$-+-£-■
т 1 \ ф af>
к2
т *
к2 ф_
пг ф
(1.4.2)
является удовлетворение неравенств
m
ё
Ф
— е.
1П
(1.4.3)
где в — достаточно малое положительное число при всех
t > t0.
А. М. Ляпуновым дана еще одна оценка характери¬
стичных чисел в виде следующей теоремы [57].
Т е о р е м а 2. Сумма характеристичных чисел неза¬
висимых решений уравнений (1.4.1) не превосходит ха¬
рактеристичного числа функции
t п
ехр{$ 2 /«(<)*} •
То * =1 *
§ 4. ХАРАКТЕРИСТИЧНЫЕ ЧИСЛА
39
Из этой теоремы следует, что если
Jo г=1
то среди характеристичных чисел будет существовать по
крайней мере одно отрицательное.
Пример. Если справедливо неравенство
то по крайней мере одно характеристичное число решений
системы (1.4.2) отрицательно.
Характеристичные числа решений возможно оценить
и через корни соответствующим образом составленного
алгебраического уравнения с переменньплш коэффициен¬
тами. Таким именно образом оцениваются характеристич¬
ные числа в следующей теореме Н. Г. Четаева [95].
Теорема 3. Характеристичные числа решений
системы (1.4.1) удовлетворяют неравенству
где а, р — наименьший и наибольший при всех t > t0
из корней уравнения
Отсюда непосредственно следует, что для положитель¬
ности характеристичных чисел решений уравнений (1.4.1)
достаточно, чтобы
Iim у In | фф | > lim
t—►оо 1 t->оо 1 L.J т
к 2 ф2 — гр5
т фф
/о
число {xt} > хар. число
i = 1, . . п,
(1.4.6)
(1.4.7)
(1.4.8)
40
ГЛ. Г. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
11 р и м е р. Рассмотрим систему уравнений первого
приближения относительно возмущений скоростей про¬
граммного движения тяжелой точки переменной массы
(квадратичный закон сопротивления, причем к2 = 0):
ф т
ф2
Уф*+ф*
Х\ —
фф
Уф2 + Ф2 W ф
ki_ _
т У<рг + Ф2
ki Ф2
х2,
т
У Ф2+Ф2
(1.4.9)
Алгебраическое уравнение (1.4.7), составленное в этом
случае, имеет корни *)
.. = I {2 f--! - Ч> - £ VF+F+
+ ф2
Предположим, что
р — т] < 0
при всех t t0, тогда имеем, что
/и ф2 1
т Yф2_^фг I ‘
(1.4.10)
min К} > (И - *0 - Yr Yv* + Ф2.
max р1; XJ <-У-
Ф
— lim — хар. число {xv, хЛ <c!
?' Ф
*) Корна вычислены с учетом равенств (1.3.5).
§ 4. ХАРАКТЕРИСТИЧНЫЕ ЧИСЛА
41
Отсюда видно, что неравенство
lim Alnd>(f)<0.
t ->00 t Y \ / \
является условием положительности характеристичных
чисел решений уравнений (1.4.9).
Заметим, что неравенство (1.4.11) является условием
положительности характеристичных чисел решений соот¬
ветствующих уравнений (1.4.9) и в случае, когда р = р.
В некоторых случаях, накладывая дополнительные
условия на коэффициенты уравнений (1.4.1), т. е. рассмат¬
ривая частные виды этих уравнений, возможно получить
весьма узкие границы для характеристичных чисел и даже
вычислить их значения через коэффициенты уравнений.
В следующих теоремах Перрона [72] даются именно такие
оценки характеристичных чисел.
Теорема 4. Если коэффициенты дифференциаль¬
ных уравнений (1.4.1) для достаточно больших значений
t удовлетворяют неравенству
где Р (t) = max {fu (t) } (i = 2, re), Q (t) =
max {|fij (£)|} (г, /' = 1, n; i =/= j), то наименьшее ха¬
рактеристичное число заключено между следующими
границами:
Теорема 5. Если коэффициенты системы уравне¬
ний (1.4.1) удовлетворяют условиям
и
(1.4.1:5)
lim (0 = 0 (г, / = 1, .... re; i=/= /),
(1.4.14)
fu (0 > fa(0 + e (i = 2,..., re)
42
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
при t £0, где е — некоторая положительная постоянная,
то наименьшее характеристичное число решений этой
системы равно
t
— lim ~ { /п (т) dx. (1.4.15)
/ —>оо 1 J
to
Теорема 6. Если коэффициенты системы уравнений
(1.4.1) удовлетворяют условиям
lim fa (t) = 0 (i, / = 1, . . /г; i=hi), )
^°° | (1.4.16)
/г—1, г—1 (0 ^ /гг (0 + 8 (& = 2, . . ., ГС) J
при t > £0, где е — некоторая положительная постоянная,
то характеристичные числа решений этой системы равны
t
— Ит у (x)dx (г = 1, (1.4.17)
/-*оо f
to
Заметим, что системы линейных уравнений, для кото¬
рых
lim /у (0 =;0 (г, 7 = 1,..., /г; г =j= j)
t—>oo
называются почти диагональными. Таким образом, по¬
следние две теоремы могут быть применены лишь для част¬
ных видов почти диагональных систем, для очень узкого
класса систем уравнений.
Однако в этих случаях возможно непосредственное
вычисление значения наименьшего характеристичного
числа, что позволяет получить в свою очередь наиболее
широкие для рассматриваемых систем условия положи¬
тельности характеристичных чисел.
Пример. Рассмотрим систему уравнений первого
приближения относительно возмущений скоростей про¬
граммного движения тяжелой точки переменной массы
§ 4. ХАРАКТЕРИСТИЧНЫ!? ЧИСЛА
43
(квадратичный закон сопротивления):
I ф 1 &1ф3 — /с2ф3 ^ ^ /ифф -[- к2ф2 + 2/с2ф2 т
^ \ф Я1ф Уфа^^г j 1 т у ф2 _|_ -ф2
2/с2ф2 + /с2ф2 — Атф ф ^ ,
^2 = Г7=== ^1 “г
m У ф2 ф2
ф g 1 Лтф3 + ^2ф3
Ф Ф "*Ф (Ар2-j-ф2
(1.4.18)
Будем считать программное движение восходящим,
тогда
lim к± (t) = О,
t-> оо
lim k2 (t) = О
t~* со
и уравнения (1.4.18) составляют почти диагональную
систему.
Потребуем, чтобы при любом t > t0 удовлетворялось
неравенство
Ф ф g 1
=[ К (Ф2 - Ф2)
ib2 L
Ф Ф Ф т/ф* + ф<
+ tl<fc+il>s>o
фф J
или с учетом необходимых условий (1.3.5)
т ([х — г]) Yф2 + Ф2 + К СФ2 — ф2) — 2&2фф^> е^> 0. (1.4.19)
Тогда в силу теоремы 6 характеристичные числа ре¬
шений системы (1.4.18) равны
i
Г— 1 (л • С 1 &1ф3— /с2ф3 лЛ
Xl = — Ьш — In ф — \ : -■■■■ . / СЙ
t—+CQ \ <0 ТП(р 1/ (Т)2 I ф2 /
А)
f
тф Уф2 + ф2
I, = - к 1 (in* - ^ «,, + Д » )
/-0О 1 \ J гоф У Ф'“ + ф2 Ф 1
(1.4.20
44
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Заметим, что первое из них в силу предположения
(1.4.19) является наименьшим. Поэтому условием поло¬
жительности характеристичных чисел решений уравнений
(1.4.18) служит неравенство
Пример. Характеристичные числа решений урав¬
нений (1.4.2) на основании теоремы 6 равны
если только дополнительно потребовать, чтобы
Последнее из этих условий вытекает из требования
с учетом необходимых условий (1.3.10). Так как при этом
%i < Хг> то условием положительности характеристичных
чисел решений уравнений (1.4.2) является условие
Иногда характеристичные числа решений какой-либо
системы уравнений оцениваются через характеристичные
числа другой системы, так или иначе связанной с данной.
Так, например, пусть какая-либо система линейных урав¬
нений с помощью линейного преобразования приведена
lim In ф < lim -j- \
1 I
t->oo t~*oс
«Ф Y<P2 + Ф2
1 ki ф3 — к'г ф3
dt. (1.4.21)
Xi = — Hm y ГIn ф + \ -t- dt 1 ,
f-»oo 1 L .! m <p J
> (1.4.22)
(1.4.23)
'’{i — — e <( 0 при
h ф2 + Ф2
= e>0
m
iim -Г In ф <( — lim -J- ^ dt. (1.4.24)
l-»1 N ^ /-.00 1 } <p
to
§ 4. ХАРАКТЕРИСТИЧНЫ*: ЧИСЛА
45
К другой системе, для которой возможно указать границы
характеристичных чисел. Предположим, что преобразо¬
вание является ляпуиовским, а именно, коэффициенты пря¬
мого преобразования и их производные, а также и коэф¬
фициенты обратного преобразования непрерывны и огра¬
ничены при всех t > t0. По отношению к таким преобра¬
зованиям характеристичные числа решений являются
инвариантами. Поэтому границы характеристичных чисел,
найденные для преобразованной системы, являются гра¬
ницами и для исходной системы.
Может случиться, что исходная система является при¬
водимой к системе с постоянными коэффициентами, тогда
характеристичными числами ее решений являются веще¬
ственные части корней характеристического уравнения
преобразованной системы с обратным знаком.
Приведем следующую теорему Четасва — Персидского
[94, 73], где определение характеристичных чисел также
сводится к вычислению корней характеристического урав¬
нения.
Теорема 7. Если в системе линейных уравнений
(1.4.1) коэффициенты стремятся к определенным пределам
csk при неограниченном увеличении t, то ее характерис¬
тичные числа совпадают с характеристичными числами
предельной системы уравнений
i'i = спх 1 + еыхп (г = 1, п). (1.4.25)
Пример. Рассмотрим уравнения первого прибли¬
жения относительно возмущений величины и направле¬
ния скорости, а также и высоты программного движения
тяжелой точки переменной массы (общий закон сопротив¬
ления):
■>-1 - g (cos 0О) *s - ^ *3, '
0о , sin 0о
Ч = — -ri “I’s — :'’2,
^0 ^ О
Т3 = (З'П 0О)! -j- r0 (cos 0О) ,г2.
Предположим, что точка совершает нисходящее дви-
жение по кривой, асимптотически стремящейся к неко¬
торой прямой только с одной ее стороны. Предположим
(1.4.26)
46
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
также, что функции
имеют предел при t-^ оо. Тогда, как будет установлено
в дальнейшем, корни характеристического уравнения
предельной системы будут находиться слева от мнимой оси
плоскости корней и, следовательно, характеристич¬
ные числа решений уравнений (1.4.26) будут положи¬
тельными.
§ 5. Правильность системы линейных уравнений
Система линейных дифференциальных уравнений
(1.4.1) называется правильной, если сумма характерис¬
тичных чисел всех ее независимых решений может быть
сделана равной характеристичному числу функции
t и
ехрК 2 /«(0*1 •
4i=l
Отсюда следует, что непосредственное установление
правильности системы, исходя из самого определения, воз¬
можно лишь тогда, когда вычислены значения характери¬
стичных чисел ее решений.
Пример. Почти диагональные системы (1.4.18)
и (1.4.2) правильны, если только удовлетворяются соот¬
ветственно условия (1.4.19) и (1.4.23). В самом деле, в обо¬
их случаях имеем
1 2
%1 -I- X* = — йй» у \ у hi (0 dt.
IО 1—-1
Из самого определения правильности вытекает, что
правильность системы является инвариантом по отноше¬
нию к ляпуновскому преобразованию. Из определения
правильности также вытекает, что система уравнений
с постоянными коэффициентами и вообще приводимые си¬
стемы являются правильными. Поэтому рассмотрим преж¬
де всего условия приводимости систем уравнений.
§ 5. ПРАВИЛЬНОСТЬ ЛИНЕЙНЫХ СИСТЕМ
47
Пусть имеется п линейных дифференциальных урав¬
нений с непрерывными и ограниченными при t > t0
коэффициентами
X = XF. (1.5.1)
Система уравнений (1.5.1) приводима в смысле Ляпу¬
нова, если она с помощью преобразования
T = XZ (1.5.2)
(Z = || z{j Ц, Z = I Zij I, | Z11 ограничены при (t ]> t0),
переходит в систему
f - ТВ, (1.5.3)
где В = ||bjj|| — постоянная матрица.
II. П. Еругин установил следующий признак приводи¬
мости [331.
Теорема 1. Необходимым и достаточным условием
приводимости системы (1.5.1) к системе (1.5.3) с постоян¬
ной матрицей В является существование решения присо¬
единенной системы
Y = FY (1.5.4)
в виде
Y = ZeB\ (1.5.5)
где Z — матрица, ограниченная вместе с | Z'11 при t !> t0.
Ii. 11. Еругин доказал при этом, что для ограниченно¬
сти Z и | Z-11 необходимо и достаточно, чтобы
t и
^Sp {F}dt = I 2 bH+E(t),
/о i= 1
где Sp {E} — сумма диагональных элементов матрицы F,
г (t) — некоторая ограниченная функция.
Предположим, что характеристичные числа %г (г =
= 1,..., п) решений уравнений (1.5.1) положительны.
Обозначим через А,, (г — 1, ..., п) характеристичные
числа решений присоединенной системы (1.5.4).
48
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Между характеристичными числами основной и при¬
соединенной системы имеется следующая зависимость
[94]:
Хг + л, < 0 (г = 1, п),
поэтому характеристичные числа решений присоединенной
системы отрицательны:
Аг О (г 1, ..., 1ъ).
Последнее значит, что решения присоединенной систе¬
мы представляются в виде
Y = Ze~Bt, (1.5.5)
где Z — матрица, характеристичные числа элементов ко¬
торой равны нулю; В — некоторая постоянная матрицы,
след которой
п
Sp{£}= 2 Ьи = 6<0.
s=l
Ограниченность Z и | Z-11 будет обеспечена, как уже
указано, если имеет место равенство
t
^ Sp {F}dt = bt -|- е (t).
0
Таким образом, справедлив следующий признак при¬
водимости [211:
Теорема 2. Если характеристичные числа решений
системы (1.5.1) положительны, то для приводимости этой
системы достаточно, чтобы
1 п
$ 2 fu(t)dt = bt -l-e(i), (1.5.6)
to г =1
где Ъ — отрицательная постоянная, е (t) — некоторая
ограниченная функция.
Заметим, что в случае отрицательности даже всех
характеристичных чисел невозможно получить вышепри¬
§ 5. ПРАВИЛЬНОСТЬ ЛИНЕЙНЫХ СИСТЕМ
49
веденным образом подобный признак приводимости. Эго
объясняется тем, что неравенство
\г %г (г 1, 71)
в этом случае не позволяет сделать заключение о представ-
ляемости решения присоединенной системы в виде
У - Ze~m,
где Z — матрица, характеристичные числа элементов ко
торой равны нулю, В — постоянная, отличная от нуля
матрица.
При В = 0 система уравнений (1.5.1) неприводима,
если только характеристичные числа ее решений отрица¬
тельны. В самом деле, между решениями основной и при¬
соединенной системы имеется зависимость
XY = С,
где С — постоянная матрица. С другой стороны, при
В = 0 имеем
Y = Z,
или
Z = х-'с.
Отсюда видно, что в этом случае матрица Z не может иметь
такие элементы, характеристичные числа которых равны
нулю.
Пример. Пусть система уравнений (1.4.9) имеет
положительные характеристичные числа, тогда условием
приводимости этой системы является удовлетворение ра¬
венства
t
— rV + ^)dl + 1п1 ФФ \ = bt + E (0, (1.5.7)
to
где Ъ — отрицательная постоянная, е (t) — некоторая
ограниченная функция.
Естественно, что замена требования правильности
более жестким требованием приводимости при получении
Условий устойчивости программного движения дает весьма
жесткие достаточные условия, которые могут быть иногда
50
ГЛ. 1. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
просто неконструктивными. Поэтому целесообразно искать
условия устойчивости непосредственно из требования
правильности системы уравнений возмущенного движения
первого приближения.
Приведем необходимый и достаточный признак пра¬
вильности для треугольных систем, установленный А. М.
Ляпуновым [57].
Теорема 3. Для того чтобы треугольная система
^ =/iA +■•• т/iA (i = 1, •••> п) (1.5.8)
была правильной, необходимо и достаточно, чтобы все
функции
t
(0 dt
to
стремились к определенным пределам при t —>■ оо.
Используя эту теорему, возможно получить другой
признак, пригодный для установления правильности
системы уравнений, данной в общем виде.
Пусть переменные xs в системе уравнений (1.5.1) под¬
вергаются линейному преобразованию
Y = РХ (1.5.9)
с непрерывными и ограниченными коэффициентами с огра¬
ниченными матрицами
Ам II
Р-1 =
им
где
мк = 4тС1 0'Л< = 1, .... п)
ki
И Р = \\pthW при t > t0.
Тогда относительно новых переменных yt получим
также линейную систему
Vt = ЧпУ1 + ••• +4inУп U = 1, •••. п), (1.5.10)
где qih — элементы матрицы
Q = PFP1 -!- 'РР \ (1.5.11)
§ 5. ПРАВИЛЬНОСТЬ ЛИНЕЙНЫХ СИСТЕМ
51
а именно
(1.5.12)
1, . . п).
(Л .5.13)
Заметим, что преобразование (1.5.9) обладает всеми
свойствами линейных преобразований Ляпунова, относи¬
тельно которых характеристичные числа решений, а сле¬
довательно, правильность или неправильность системы
линейных уравнений инвариантны.
Потребуем, чтобы преобразованная система (1.5.10)
была треугольной, для чего достаточно удовлетворение
равенств
11 п
2 АЫ (2 Pidij + Pij) = 0 (к > i = 1, . . ., п — 1).
;/ =1 4=1 7
Тогда, используя критерий Ляпунова для треуголь¬
ных систем, возможно указать следующий достаточный
признак правильности систем линейных уравнений [21].
Теорема 4. Для правильности системы линейных
уравнений (1.5.1) достаточно существование такой не¬
прерывной и ограниченной при всех t t0 матрицы Р
с ограниченными обратной Р 1 и производной Р матри¬
цами, что удовлетворяются равенства
п и
2 ЧР- ( 2 Pill и -г■■ Pij) =0 (к > i == 1, . . ., п 1)
J=! °РЫ 4-1 '
(1.5.14)
и существуют пределы
' п Э|Р|
lim т\ 2 wf 2 + &>•)* <1-5-15)
' • ri 1 / - у
(г 1, ..., /г).
‘/а: ----- 2 | п | ( 2 Pilflj -I- Ра),
г =1 I —1 '
или
11 п
ТрТ ( 2 2 А/ 2 ^ДТ/j) (4 Л?
1 1 j г 1 i г
52
ГЛ. Г. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Заметим, что существование непрерывной и ограничен¬
ной при всех t t{) матрицы Р, обладающей ограничен¬
ными Р-1, Р и удовлетворяющей условию (1.5.14), уста¬
новлено в работе Перрона [711.
В приведенной общей теореме о правильности на п2
элементов матрицы Р наложено пока еще только п (п —1)/2
ограничений (1.5.14) и (1.5.15). Поэтому, указывая
различным образом дополнительные ограничения, воз¬
можно получить ряд достаточных признаков правильности
систем линейных дифференциальных уравнений.
Примем, например, в качестве матрицы преобразова¬
ния матрицу, являющуюся фундаментальной матрицей
решений присоединенной системы
Pi +fiiPi -f ... + fniPn “ 0 ({ = 1, n), (1.5.10)
и потребуем, чтобы она была ограниченной и имела огра¬
ниченную матрицу Р-1.
Тогда имеем
(jik 0 (^ ? ^ 1? • • • ? ^) 1
а матрица Р будет ограниченной в силу самих уравнений
присоединенной системы.
Система (1.4.1) приводится в этом случае с помощью
преобразования (1.5.9) к системе
у. =0 (i — 1, п), (1,5.17)
и получается признак приводимости, равносильный од¬
ному из достаточных признаков, указанных Н. П. Еру-
гиным [33].
Т е о р е м а 5. Для приводимости системы (1.5.1)
к системе (1.5.17) достаточно, чтобы присоединенная си¬
стема (1.5.16) имела ограниченные решения, определитель
которого отличен от нуля при tоо.
Заметим, что когда система (1.5.1) приводится к систе¬
ме (1.5.17), между решениями присоединенной системы Р
и основной существует зависимость
РХ = С,
где С — постоянная матрица.
§ 5. ПРАВИЛЬНОСТЬ ЛИНЕЙНЫХ СИСТЕМ
53
Поэтому требование ограниченности Р и Р~х возмож¬
но заменить требованием ограниченности X'1 и X. По¬
следнее позволяет указать следующий признак приводи¬
мости.
Т е о р е м а 0. Для приводимости системы (1.5.1)
к системе (1.5.17) достаточно, чтобы система (1.5.1) имела
ограниченные решения, определитель которых отличен
от нуля при t -> оо.
Заметим, что ограниченность решений данной системы
(1.5.1), определитель которых отличен от нуля при t ос,
возможно заменить требованием сходимости несобствен¬
ных интегралов
оо
\\ht\dt (/, Л-1, (1.5.18)
/ о
Тогда мы: получим признак приводимости, указанной
в [70].
Пример. Найдем достаточные условия правильности
для следующей системы:
d\ — /11^1 -Г /i2-ra “г /i3r3i |
■Г2 “ /21*^1 “Г /22,^2’ I (1.5.19)
**’з ~ /з1,Г1 “I" /з2^2» J
гДе /i/i — /i/i (0 — непрерывные и ограниченные функции
при t ^ tQ, причем /31 (t) =j= 0.
Применяя теорему 4 для этой системы, получим сле¬
дующий результат.
Для правильности системы (1.5.19) достаточно сущест¬
вования такой непрерывной и ограниченной при всех
t t0 матрицы Р с ограниченными Р'1 и Р, что удовлет¬
воряются равенства
Qik ~ ~~д~р}. ~ А2/21 “Г Аз/31 + Pi 1) 4
4 (А1/12 + А2/22 4“ Аз/32 4~ А2) 4“
ир№
-I- Э1пр|Р| (Pil/ia + Аз) = 0 (А < i = 1, 2) (1.5.20)
54
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
и существуют пределы
и
+ Э gnJ Р 1 (Pilfli + Pi*/** + Лз/з2 + Pi*) +
-I (Pnf 13 -f pe)}dt (i = 1,2, 3). (1.5.21)
Psi Pm Ргз
где pa =f= 0, а следовательно, \P\ =f= О и P~x ограничена
при любом t t0.
Тогда достаточным условием правильности является
существование такой непрерывной и ограниченной при
всех t ^ t0 матрицы (1.5.22), что
Будем искать матрицу Р в треугольной форме
Рп О О
Р = Р%\ Ръъ 0 ,
(1.5.22)
P2l/ll + Р22/21 + Р21 ” О,
P3lfll + Р 32/21 +Рзз/з1 + Р‘31 = О
P3l/l2 + Р 32/22 +Рзз/з2 + Р 32 = О
(1.5.23)
и при этом существуют пределы
(1.5.24)
Заметим, что равенства (1.5.23) установлены из усло¬
вия, что полученная после преобразования (1.5.9) система
является треугольной, причем q21 = 0, q31 = 0, q^2 = 0.
§ 5. ПРАВИЛЬНОСТЬ ЛИНЕЙНЫХ СИСТЕМ
55
Используя некоторую свободу выбора элементов ма¬
трицы Р, можно получить еще более определенные условия
правильности, которые могут быть более жесткими, но
яснее интерпретируемыми при решении конкретной
задачи.
Если, например, считать, что р31 = 0, то получим
следующий признак.
Система уравнений (1.5.19) является правильной,, если
ограничены интегралы
\fudt,
to
t
$ I /121 dty
с,
'0
t t
51 /211 exp {5/u^
dt
(1.5.25)
при всех t ^ t0 и существует
lim4~ Vm
t-+OO 1 J
to
dt.
(1.5.26)
В самом деле, в случае, когда р31 = 0, условия (1.5.23)
имеют вид
Р21 JnPn — /21/^22»
/21
Лзз - 7^- Лю,
Рз2 + (/22 ^32 =
откуда видно, что ограниченность интегралов (1.5.25)
обеспечивает непрерывность и ограниченность элементов
гл. i. 11гогглмmli 14)jj \H11ь: 11,\ глмктрлми
матрицы P *). В силу условия (1.5.26) будут существовать
и пределы (1.5.24).
Пример. Система уравнений (1.4.26) яляется част¬
ным случаем системы (1.5.19). Поэтому, применив условия
(1.5.25) и (1.5.26), для этой системы получим, что она
является правильной, если ограничены интегралы
§ 6. О построении функций Ляпунова
в задачах устойчивости про г рам иного движении
Как известно, вопросы построения функций Ляпунова,
решающих различные задачи устойчивости, являются
весьма трудными и неразрешенными в общем случае во¬
просами.
Особые затруднения возникают при использовании этих
функций для установления достаточных условий устой¬
чивости программного движения какой-либо системы,
когда эти условия должны служить ограничениями при
выборе тех или иных параметров как самой системы, так
и элементов программы. В этих случаях функции Ляпу¬
нова должны дать простые, легко интерпретируемые и
одновременно вполне конструктивные условия устойчи¬
вости.
*) Элементы матрицы Р, свободные от каких-либо условий,
предполагаются непрерывными и ограниченными с ограниченными
производными при всех t t{).
>
(1.5.27)
^ cos Q0dt
to
при всех t t0 и существует предел
(1.5.28)
§ «. о ПОСТРОЕНИИ ФУНКЦИЙ ЛЯПУНОВА
57
Общие положения о функциях V, а также и некоторые
приемы построения этих функций содержатся в работе
самого Ляпунова [67].
В настоящее время разработаны и другие новые прие¬
мы построения функций Ляпунова. Так, например, в слу¬
чае, когда система уравнений возмущенного движения
позволяет найти некоторые интегралы, функция Ляпунова
строится в виде связки этих интегралов [94], а в случае,
когда функция V построена для предельной системы, она
может служить функцией Ляпунова и для самой системы,
если предельные значения коэффициентов этой функции
заменить самими этими коэффициентами [6]; если же в пра¬
вую часть уравнений возмущенного движения в качестве
нелинейной слагаемой входит функция / (xt) такая, что
то функция Ляпунова строится в этом случае в виде сум¬
мы некоторой формы от возмущений xL и интеграла
Имеются и другие весьма эффективные приемы по¬
строения функций Ляпунова.
Однако все эти приемы применимы лишь для каких-
либо частных видов системы уравнений возмущенного
движения.
При исследовании устойчивости программного движе¬
ния в случае, когда нужно иметь достаточные условия
устойчивости для выбора параметров системы и элементов
программы, наиболее подходящим, пожалуй, приемом
является построение функций Ляпунова в виде некоторой
квадратичной формы с переменными коэффициентами,
зависящими от t, причем коэффициенты эти указываются,
исходя из требований простоты и возможности физической
интерпретации ожидаемых при этом условий устойчивости.
Условия устойчивости, полученные таким образом,
будут простыми и могут оказаться вполне конструктив¬
ными. Об этом говорит то, что эти условия будут получены
в виде неравенств и количество этих неравенств, как пра¬
вило, будет меньше количества параметров системы, под¬
лежащих определению из этих неравенств.
/ (х,) xt > О,
О
58
ГЛ. I. ПГЮГРЛММИГОВЛГШЕ ПАРАМЕТРАМИ
Кроме того, эти достаточные условия возможно сде¬
лать во многих случаях близкими к необходимым. В самом
деле, если, например, достаточные условия устойчивости
получены из требования определенно-отрицательности
производной некоторой определенно-положительной ква¬
дратичной формы, то невыполнение этих условий, а имен¬
но изменение смысла неравенств, уже вызывает неустой¬
чивость движения.
Итак, функция F, составленная для получения усло¬
вий устойчивости программного движения, имеет вид
п
v= 2 (1.6.1)
i, к= 1
где aik (t) — непрерывные и ограниченные при t ^ t0
функции, которыми нужно задаться при решении конкрет¬
ной задачи *). При этом нужно руководствоваться следу¬
ющими требованиями.
1) Функция V должна быть определенно-положитель¬
ной в некоторой области
п
t>t0-
1=1
2) Производная функции F, вычисленная в силу диф¬
ференциальных уравнений возмущенного движения пер¬
вого приближения, может быть сделана определенно-
отрицательной в этой области.
3) У словия он роде ленно-отрицател ьности производной
должны быть простыми, физически легко интерпретируе¬
мыми и конструктивными.
Довольно простые условия устойчивости программного
движения могут быть получены, если использовать форму
п
r = (1.6.2)
г=1
*) Заметим, что в силу ограниченности коэффициентов а8Д/)
форма V допускает бесконечно малый высший предел.
§ 6. О ПОСТРОЕНИИ ФУНКЦИЙ ЛЯПУНОВА
59
где функции at (t) нужно выбрать так, чтобы они были
непрерывными, ограниченными и неисчезающими при
всех t t{).
Заметим, что при указанных предположениях относи¬
тельно a* (t) уравнение
п
= (1.6.3)
i= 1
где С — некоторая положительная постоянная, опреде¬
ляет в каждый момент времени в фазовом пространстве
(хг, ..., хп) эллипсоид с центром в начале координат и с
полуосями, равными
/w = 1 »)•
Отсюда следует, что если дополнительно потребовать
неубывание всех функций a* (t) при t t0, то определенно-
отрицательность производной V приводит к уменьшению
возмущений xt по модулю непосредственно с момента
времени tQ. Если же некоторые из aL (t) убывают, то мо¬
дули соответствующих возмущений хь не обязательно
будут уменьшающимися при всех t £0; они могут неко¬
торое время даже превосходить модули соответствующих
начальных возмущений.
Последнее, может быть, и не имеет особо большого
значения при установлении лишь устойчивости или не¬
устойчивости имеющегося движения, но при определении
условий устойчивости, по которым выбираются параметры
системы и элементы программы, все эти обстоятельства,
вызванные дополнительными требованиями по отношению
к at (t), имеют исключительно большое значение.
Так, например, дополнительное требование неубыва¬
ния функций <xi (t) при всех t^tQ может привести к более
жестким условиям устойчивости, которые заметно сужают
допускаемый этими условиями класс устойчивых программ.
Пример. Рассмотрим систему уравнений первого
приближения относительно возмущений скоростей про¬
граммного движения тяжелой точки переменной массы
60
141. I.
LIP О Г1> Л М М111’ О В Л Н И И 11Л Р Л М Е Т Р А М11
(квадратичный закон сопротивления и кг = 0):
/_Ф A'i Ф \Xi_JlL. ФФ ,г3,
\Ф т Y<t2 + Ф2/ 1 т Т^Ф2 + Ф2 2'
A’i ФФ r I /Ф , % ki Ф'2 А т
- Xl r I ;Ф Ф - 2‘ )
(
(1.4.9)
Составим функции Ляпунова
(1.0.5)
и
(1.6.6)
В первом случае, когда as (t) являются убывающими
функциями, условиями определенно-отрицательности
формы V служат неравенства
где е — достаточно малое положительное число, а во вто¬
ром случае, когда as — постоянные,
Отсюда видно, что условиям (1.6.8) могут удовлетво¬
рять, вообще говоря, лишь нисходящие движения, если
же движение восходящее, то оно должно быть замедлен¬
ным. Условиям же (1.6.7) удовлетворяет более широкий
класс программных движений.
Условия определенно-отрицательности производной
квадратичной формы (1.6.2) могут служить также и для
определения интервала устойчивости U0, по отноше-
1.
Ф
—
(1.6.8)
§ 7. УСТОЙЧИВОСТЬ ПРОГРАММНОГО ДВИЖЕНИЯ
(51
нию к области
П
2 ОС; (0 4 <4,
(1.0.9)
i—1
или для определения верхних модулей возмущений х-ь
на данном интервале U0, tx] при данных значениях началь¬
ных возмущений [43]. В этих случаях определение коэф¬
фициентов at (t) и особенно дополнительные требования
к ним приобретают исключительно важное значение, так
как от этих действий в конечном итоге зависит близость
интервала устойчивости U0, tx] или верхних границ моду¬
лей хь к их истинным значениям.
§ 7. Устойчивость программного движения
тяжелой точки переменной массы
Используя признаки положительности характеристич¬
ных чисел решений и признаки правильности системы ли¬
нейных уравнений, приведенные в рассмотренных выше
примерах, устанавливаются следующие условия устой¬
чивости программного движения тяжелой точки перемен¬
ной массы.
1. Квадратичный закон сопротив¬
ления. А. Восходящее движение *). Программное дви¬
жение тяжелой точки переменной массы
т (р, — Г]) Уф2 + г))4 — (ф2 — ф2) — 2/с2фф > е (при t > t0)
(1.4.19)
I. Определение условий устойчивости
с помощью характеристичных чисел
(1.7.1)
происходит устойчиво, если
*) См. уравнения (1.4.18).
62
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
И
J—>00 L—KXJ
f Уф2 + ф2
1 /С1ф3 — Л:2ф3
dt, (1.4.21)
где е — достаточно малое положительное число.
Заметим, что удовлетворение неравенства
вызывает отрицательность по крайней мере одного из
характеристичных чисел решений уравнений (1.4.18).
Поэтому неравенство (1.4.21') совместно с неравенством
(1.4.19) составляет условие неустойчивости программного
движения (1.7.1).
Б. Случай к2 = 0 *). Программное движение тяжелой
точки переменной массы (1.7.1) происходит устойчиво,
если
где b —отрицательная постоянная, е (t) — некоторая
ограниченная функция.
2. Линейный закон сопротивления.
А. Общий случай **). Программное движение тяжелой
точки переменной массы (1.7.1) устойчиво, если при tQ
lim Ц- In ф lim
У—>m У—>ог> *
/—>СО 1 t—ЮО
,) пкр у фа фз
1 /С1ф3 — /с2ф3
dt (1.4.21')
lim In <р О
и
(х — г] < 0 (при t^t0), (1.4.10)
(1.5.7)
(1.4.3)
*) См. уравнения (1.4.9).
**) См. уравнения (1.4.2).
§ 1. УСТОЙЧИВОСТЬ ПРОГРАММНОГО ДВИЖЕНИЯ
63
где е — достаточно малое положительное число, и неустой¬
чиво, если
lim -1~ In | фф | > lim dt — g \ 4^- . (1.4.5)
,^оо * ITYI-(-,oo г LJ т <рг|> J t J V '
to <0
Б. Случай lim/с2(/) —^0*). Программное движение тя-
/—> оо
шелой точки переменной массы (1.7.1) устойчиво, если
р, — т] < — е (при t ^ £0), (1.4.23)
где е — некоторая положительная постоянная,
t
lim-^-lncp <Нцп-4-Д — (1.4.24)
t—>оо г t-+ОО 1 а т Ф
U
Заметим также, что удовлетворение неравенства
i
Йт4-1»Ф>Йт4- \ — ^dt (1.4.24')
t 1 ^ ^ t ,) т ф
вызывает отрицательность по крайней мере одного харак¬
теристичного числа решений уравнений (1.4.2), и поэтому
неравенство (1.4.24') совместно с (1.4.23) является условием
неустойчивости движения (1.7.1).
3. Общий закон сопротивления **).
Рассмотрим нисходящее программное движение тяже¬
лой точки переменной массы. Пусть траектория движения
(1.7.1) асимптотически приближается к некоторой прямой
с одной ее стороны.
Пусть функции R\Jm, R'y0/m, v0 стремятся к опреде¬
ленным пределам при t ■->- оо.
*) См. уравнения (1.4.2).
**) См. уравнения- (1.4.26).
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Тогда рассматриваемое программное движение про¬
исходит устойчиво, если ограничены интегралы
t
1L
to
t
^ cos 0O dt
to
при всех t tQ и существует
lim~T$ "
t-+oo C J
to
Vo
■dt.
(1.5.27)
(1.5.28)
Заметим, что ограниченность второго интеграла при
наших предположениях может иметь место лишь в случае,
когда траектория программного движения имеет верти¬
кальную асимптоту.
II. Определение условий устойчивости
с помощью функций Ляпунова
Получим условия устойчивости программного движе¬
ния тяжелой точки переменной массы с помощью функции
Ляпунова, составленной в виде суммы квадратов возму¬
щений с переменными коэффициентами.
1. Квадратичный закон сопротив¬
ления. Уравнения первого приближения относительно
возмущений скоростей программного движения в этом
случае имеют вид
± = / ф 1_ Амр3 - А:аф3 \ r _ fciiprj? + Алф2 + 2/с2фЗ ^
\ ф тф Уф2 ф2 / 1 Уу+г
r.t _ /лфф — 2А-2ф2 — А’оф2 г _|_ / Ф ! g Ааф3+ А;2ф3
2 т Уф2 + ф2 1 \ Ф 'l’ тФ Уф2 + ф2
(1.4.18)
Составим функцию Ляпунова
V = а (t) х\ -)- а2 (t) х\,
(1.7.2)
§ 7. УСТОЙЧИВОСТЬ ПРОГРАММНОГО ДВИЖЕНИЯ
65
и, придавая (t) и а2 (0 различные значения, получим
соответствующие условия онределенно-отрицательности ее
производной.
Если, например,
ах = а2 - ет«>,
то в силу уравнений (1.4.18) получим
Л—I
L Ф \ Ф Ф У т |/ф2 рф'2 .
thV,
(1.7.3)
где
R = 4L j д.2 [ЗАгд.ф-ф — fca (ср2 — o|52)] ххл;а +
+ ( Д^-ф2 + &2Д-') х\.
V Ф )
Легко видеть, что форма R является постоянно-поло¬
жительной, если при всех t tQ
/С1ф3 — /сг'ф3
ф
(/С1ф3 — /сгф3) (/соф3 — /о.я|)3)
<РФ
о,
ДффФ 7- (Ф2 — 'Ф2)
>0.
Учитывая, что всегда
Ф (t) > 0
и проведя элементарные преобразования, условия эти
заменяем условиями
&1ф3 — ^‘гф3 ^ ^ ^
4 А ф2-^2 > 1
^2 ф ф
(1.7.4)
Заметим, что между составляющими скорости движе¬
ния тяжелой точки переменной массы и углом 0, образо¬
ванным горизонтальной осыо и касательной к траектории
3 А. С. Галиуллин
6(3
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
движения точки, существует следующая зависимость:
tgG = .
ф
Поэтому условия (1.7.4) запишем в виде
/с, >&2lg30, 1
к, (1.7.5)
8 -j- clg 20 ;> 1. j v '
Так как условия (1.7.5) представляют собой неравенство
одинакового смысла относительно 0, то они ограничивают
этот угол лишь с одной стороны, и их возможно заменить
одним, более сильным из них. Решение вопроса о том,
которое из этих условий сильнее, зависит от знаков 0
(восходящее и нисходящее движение) и к2. Так, например,
еслиточка совершает нисходящее движение ( — я/2 О <С0)
и к2 > 0, то первое из условий (1.7.5) всегда удовлетво¬
ряется и, следовательно, остается лишь второе.
Теперь потребуем определенно-отрицательности формы
V, для чего достаточно, чтобы
Ф ! т ^ р
Г -ДТ \ — Б»
ф *
4+-Т1
■ф -ф -
(1.7.0)
(е — достаточно малое положительное число), если только
удовлетворяются условия (1.7.4).
Таким образом, приходим к следующему признаку
устойчивости программного движения тяжелой точки
переменной массы.
Программное движение тяжелой точки переменной
массы
х = Ф (0* \
,-♦«>. I
устойчиво, если при всех t t0 имеют место неравенства
Ф | >п ^
§ 7. УСТОЙЧИВОСТЬ ПРОГРАММНОГО ДВИЖЕНИЯ
67
fcjLCp3 — &2ф3 > О,
4 А. СР2 “ Ф2
кг
фф
1.
(1.7.4)
Заметим, что при малых к2 условиями устойчивости
будут служить лишь неравенства (1.7.6). В самом деле, из
V = 2еп
Ф I т \ г2 , / Ф , 8 , ™ \
- |- — Х± ~Г — ]- — — ./2
ф - ; \ ф ф ~ 1
/о
: (ф^1 -р ф^о)2 “Ь
' Т^Ф2 "Ь Ф2
т У" ф2+ф2
х\ — Д- xl {- (ф2 — ф2) Х±Хо
ф ф
(1.7.7)
следует, что при малых к2 знак V определяется знаком
суммы первых трех слагаемых, и V остается определенно-
отрицательной, если удовлетворяются лишь условия
(1.7.6).
Если считать, что
0^ = а2 = 1,
то условиями устойчивости служат неравенства
ф < — е,
Ф , £
“Д i \
ф ф
и
кхф3 — Адф3 О,
I.
4 JiL Фа ~ ^
к- ф ф
(1.7.8)
(1.7.4)
Полагая, что
ос, ---=
ф-
ф2
68
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
получим следующие условия определенно-отрицательности
формы V:
кх > к2 tg3 0,
4 (7 “Ъ кх кг ctg'0) (к1 к2 tg 0) [к1 (tg 0 -|- ctg 0) -)-
+ 2/f2(tg20 - ctg2 0)]2 > 0, (1.7.9)
где
r=—-frmV Ф2 -г ф4.
г|)3
Эти условия будут достаточными условиями устойчи¬
вости программного движения тяжелой точки переменной
массы, если ф (I), ф (£) ограничены и не равны нулю при
всех t > t0.
Если
то условия устойчивости программного движения тяжелой
точки переменной массы имеют вид
4з (к1 -|- к2 ctg8 0) (1^ — къ Ig3 0) — [ кх (tg 0 - 1
+ з clg 0) к, (2 1 g2 0 + 1) - /с.2з (2 clg2 0 + I)]2 > О, J
(1.7.10)
где
to
Заметим, что все эти полученные неравенства могут
служить для определения интервала устойчивости [t0, tx 1
по отношению к соответствующей области
«I (0 х{ + «2 (0 х\ К А (1.7.11)
§ 7. УСТОЙЧИВОСТЬ ПРОГРАММНОГО ДВИЖЕНИЯ
69
а также для оценки возмущении на некотором конечном
интервале времени при решении конкретных задач.
2. Линейный закон сопротивления.
Уравнения относительно возмущений скоростей програм¬
много движения тяжелой точки переменной массы состав¬
ляют в этом случае следующую систему:
_ф_ A \ х
ф п т 9 / 1 771 2’
к 2
Т<У — — хл
U 111 J-
(1.4.2)
Составим функцию Ляпунова также в виде (1.7.2) и,
положив
oti = а2 = 1,
получимте же достаточные условия устойчивости програм¬
много движения тяжелой точки переменной массы, кото¬
рые получены с помощью характеристичных чисел, а
именно:
_2_
, ь
JL
у
г m
Ф
JL
+ 4-
ф
Ф
Если
тп Я|,
= а, = ет«>
(1.4.3)
а1 = а2 = е
то условия устойчивости имеют вид
JL _|- Д- Л. lA^_p
-Г. • I •у
ТП ф А
ф
(1.7.12)
гДе е — достаточно малое положительное число.
Если же
70
ГЛ. 1. ИГ О Г Р А ММ И Р О Б Л Н И Е ПАРАМЕТРАМИ
ТО
то условиями устойчивости служат неравенства
< о,
к2ф m'R ?in 29,
А если
1
*i — *
Ф2
{ о С dt
In
ко;ф 0,
к2( 1 -j а2ф2)2 < 4а2тфг|3, t ^ t0.
(1.7.13)
(1,7.14)
Заметим также, что требование удовлетворения полу¬
ченных неравенств на некотором конечном интервале
U0,£il служит достаточным условием устойчивости програм¬
много движения тяжелой точки переменной массы на этом
интервале по отношению к соответствующей области
ai (0 i (0 Х1 ^ ^4- (1.7.11)
Эти же неравенства могут служить для оценки возму¬
щений скоростей на конечном интервале времени.
Добавим ко всему сказанному, что уравнения возму¬
щенного движения тяжелой точки переменной массы в слу¬
чаях к2 = 0 (1.3.12), к2 = 0 и |х = ц (1.3.13) приводятся
к квадратуре, и вопросы устойчивости решаются непо¬
средственно.
Заметим только, что условия устойчивости, получен¬
ные при этом, будут служить условиями устойчивости
программного движения тяжелой точки переменной мас¬
сы и в пустоте, так как уравнения возмущенного движения
точки в этом случае совпадают или с уравнениями (1.3.12),
если [х =f= г), или с уравнениями (1.3.13), если |х = тр
§ 8. УСТОЙЧИВОСТЬ ТТА КОНЕЧНОМ ИНТЕРВАЛЕ
71
§ 8. Устойчивость программного ДВП/КСННЛ
на конечном интервале времени
I. Об условиях устойчивости в момент времени t0
Выше (гл. I, § 2) было установлено, что, прежде чем
определить интервал устойчивости какого-либо движения,
нужно убедиться в возможности существования этого
интервала, т. е. нужно установить возможность сущест¬
вования таких значений времени t0, за которыми следует
сколь угодно малый интервал времени, в котором возму¬
щения х удовлетворяют условию
п
2 К-г1 -г ■ • -!- яьА)3 < А
г=1
(||а^|| — некоторая неособая постоянная матрица, А —
сколь угодно малое число), если только начальные возму¬
щения X;о ограничены неравенством
и
2 (агАо -Г • • • Г Яг.г^,'го)2 < А-
г=1
Вопрос этот заключается в определении такого интер¬
вала времени, где в каждый момент имеется устойчивость.
Интервал этот определяется как интервал времени, где
в каждый момент корни характеристического уравнения
I/<*(*) - blhx I ==0 (1.2.10)
лежат слева от мнимой оси плоскости корней.
При исследовании устойчивости программного движе¬
ния особо важное значение имеет решение следующей
задачи.
Определить условия, наложенные на параметры дви¬
жущейся системы и элементы программы, при удовлетво¬
рении которых имеется интервал устойчивости.
Решение этой задачи сводится к отысканию условий,
при которых корни характеристического уравнения (1.2.10)
с переменными коэффициентами (зависящими от законов
изменения параметров системы и элементов программы)
лежат слева от мнимой оси. При этом желательно, чтобы
эти условия были найдены в явном виде относительно тех
параметров и элементов, которые подлежат определению.
72
гл. I.
ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Условия расположения норией характеристического
уравнения (1.2.10) слева от мнимой оси возможно опре¬
делить, составляя неравенства Рауса — Гурвида или
Льенара — Шипара [26] и решая их относительно инте¬
ресующих нас параметров системы и элементов программы;
их возможно определить также построением ^-кривых
и годографа Михайлова [21] непосредственно для этого
уравнения (1.2.10) с переменными коэффициентами.
Все эти приемы равноценны вообще, но разноэффектны
в различных конкретных задачах.
II. Устойчивость на конечном интервале времени
программного движения тяжелой точки переменной массы
(общий закон сопротивления)
Уравнения первого приближения относительно возму¬
щений величины и направления скорости, а также и высо¬
ты программного движения тяжелой точки переменной
массы составляют в этом случае следующую систему: '
j3 = (sin 0о) хх 4- Vq (cos 0о) #2*
/
Составим соответствующее характеристическое уравнение
(1.4.26)
^0 ==0, с-8-1)
или
) = 0. (1.8.1')
4-
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
73
Найдем условия расположения корней этого уравне¬
ния слева от мнимой оси плоскости корней в момент вре-
мени t (t > *0).
Необходимыми условиями расположения корней харак¬
теристического уравнения (1.8.1) слева от мнимой оси
являются следующие условия:
Rm _ „ sin 90 ^ п
Нас интересуют главным образом пределы изменения
какого-либо показателя движения (например, закона
изменения массы иг), при которых корни уравнения (1.8.1)
лежат слева от мнимой оси в момент времени t.
Получим эти пределы, применив те или иные общие
приемы, упомянутые выше.
1. Н е р а в е н с т в а Р а у с а — Гурвица. Не¬
обходимые и достаточные условия Рауса — Гурвица или
Льенара — Шипара составляют в рассматриваемом слу¬
чае систему неравенств
v0Rv0— mg sin 0О > О,
Отсюда видно, что трудно определить указанные гра¬
ницы изменения т, используя эти условия в общем
случае.
Лишь в некоторых частных случаях эти неравенства
могут дать довольно простые, физически легко интерпре¬
тируемые условия расположения корней характеристи¬
ческого уравнения слева от мнимой оси. Так, например,
в случае вертикального движения точки (0О = + я/2)
г,
0О cos 0О
%v0 cos 0О + g sill2 0O > 0,
g Tу sin 0o p ту cos 0O . i (1.8.3)
-ZTnv Э — — “ Г v 7
m vQ
74
Г. L 1. R 1>01Ч\\\1 МИРО В.\ШГС ПАРАМЕТРАМИ
по л учим уело ВИЯ
— т V{j \ _ т Vq
>о,
(1.8.4)
из которых следует, что при вертикальном подъеме корни
уравнения (1.8.1) не могут все одновременно лежать слева
от мнимой оси (неравенства несовместны).
2. D-разбиение. Представим характеристиче
ское уравнение (1.8.1) в виде
D {%) = т)3 -f (&i -г с\.т)№ -г (&2+ сгт) ^ 0, (1.8.5)
Теперь необходимые условия (1.8.2) записываются
следующими неравенствами:
Нас интересует такая область значений т, в которой
корни характеристического уравнения (1.8.1) при некото¬
ром £ !> £0 лежат слева от мнимой оси. Для определения
границ этой области производим соответствующее
/^-разбиение плоскости одного комплексного параметра
где
(1.8.6)
- i С.>7)1 0
> 0.
(1.8.7)
W = т + iy,
где у — некоторая вспомогательная переменная.
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
75
Как известно, D-кривые являются границами облас¬
тей различного распределения корней характеристиче¬
ского уравнения (1.8.1), и для получения их уравнений
в плоскости (т, у) нужно в уравнении (1.8.5) заменить
величину т комплексным параметром W, а X выражением
по, где о) — параметр, называемый частотой.
Проделав все это, получим следующее уравнение
D-кривой в неявно-параметрической форме:
тсг(о2 -f- у (с2 — со'1) со = — &i0)2,|'
— т (с^ — со1) j- //сцо — Ь2
(1.8.8)
или в параметрической форме:
(Ьз — &1С02) Cl — (г2 — (О2)
т =
У =
,2^2 + (С2 ^2)2
1)2С\(Ч2 (^3 — hid)2) (с% — со2)
[^(02+ (^-2 — со2)2] СО
(1.8.9)
Прежде чем перейти к изучению D-кривых, укажем,
что если ограничиться выпуклыми траекториями (q0 < 0)
точки, то для восходящей ветви траектории (0о>О) имеем
Ьг >0, сг< 0, Ъ2 <0, с2 > 0,
а для нисходящей ветви (0О < 0) —
Ь1 >0, сг> 0, Ъ2 >0, с2 > 0.
Кроме того, из необходимых условий (1.8.7) следует,
что в обоих случаях должно быть Ь3 > 0.
Используя уравнение D-кривой (1.8.9), устанавливаем
следующие ее свойства:
1) D-кривая симметрична относительно вещественной
оси т;
2) D-кривая имеет вертикальную асимптоту т =
^ (^зс1 — b2C2)/c'l, к которой она стремится при со —> 0;
3) D кривая приходит в начало координат при
со + оо;
76
гл. t. ПРОГРЛМ м и Р О В А Н11Е НАР V М Е Т Р AM it
4) Д-кривая пересекает вещественную ось, вообще
говоря, в следующих точках:
т0 = О,
2bib2 ,
тл о = г-—-- |
(iЬз — Ь\Со — b2c\) -р у (63 4“ bico — Ьч<i)2—тЬЬф'&с» ’ I g |Q\
2b\b2 I
(/;a — — &2C1) — / (/^3 4“ — ^2r;i)’2—ЬЬ\Ьъ<:* J
Заметим, что точки и m2, а также и хотя и
совпадают, но соответствуют частотам, отличающимся
(в)
f
1 0
if
т
\
Рис. 1. Случай (&з 4- Ъ\с2 — &2<ч)2> Рис. 1.2. Случай (&3 4" hc^—b2ci)%y
>4МзС2, ЬзС1—Ь2с2>0, biCi— 62>0. >4МзСг, ^1 — &2^2>6, 61С1—Ь2<^-
знакохм. Поэтому в этих точках происходит самопересе¬
чение Д-кривой.
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
7?
5) Д-кривая пересекает мнимую ось, вообще говоря,
в следующих точках:
Уо = 0.
Уо — )
, h /~ bid — h |
У 1,2 _!_ С1 У b3d — b2C2 ‘ J
6) Д-кривая даже в самом общем случае, когда не учи¬
тываются ни физически возможные значения различных
Рис. 1.3. Случай (b3-\-bLc2—
— b^d)2 >4М3с2, hci — Ъ2с2 <
<0, bid — fr2>0.
Рис. 1.4. Случай (b3 + bid —
— bod)2 > 4M3c2, b3ci — b2c2<
<0, feiCi— &2 < 0.
функций, входящих в характеристическое уравнение, ни
особенности разрешаемой задачи, ни все даже необходимые
78
ГЛ. I. ПРОГРАММИРОВАНИИ парамртрамп
условия (1.8.7), имеет лишь ограниченное количество
возможных форм и расположений в плоскости (иг, у).
Укажем эти возможные формы /)-кривой с соответст¬
вующей штриховкой, которую производим со стороны той
Рис. 1.5. Случаи (6Я + Ъ,сг — Рис. 1.6. Случай (63 + Ь1Са —
—b2ci)2 < 4Ь]Ь3с2, Ь-6с\— 62л,>0, — 6,cj)2 < 4&]&3с2, &3Ci — &с2 > О,
^lCi — Ь2 0. —fr2<C0-
Рис. 1.7. Случаи (Ь3-f &ic2 — Рис. 1.8. Случай (^3 + ^iC2-^-
— &2c.i)2< 4 6ib3c2, &3С1—&.с2<0, — fr2c7)2 < 4 М3с2, г?зС1 — Ь2с2 < 0,
hd — &2 > 0. Ъ\С\ — Ь2 <^ 0.
области, где имеется большое количество корней с отри¬
цательной вещественной частью (рис. 1.1 —1.8).
Заметим, что построенные /)-кривые при изменении
t деформируются и могут переходить из одной формы в дру¬
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
79
гую, если только нарушаются соответствующие неравен¬
ства.
Заметим также, что сочетания рассмотренных случаев
со случаями
(Ьз “Ь ^lC2 ^2Cl)“ “ ^1^3С2^
Ь3с 1 — Ъ2с2 = 0, Ь1с1 — Ъг = О
не дают ничего нового в смысле поведения D-кривых;
соответствующие D-кривые получаются из имеющихся как
частные формы.
Теперь исследуем полученные формы D-кривых и ука¬
жем те из них, которые имеют место с учетом физического
смысла входящих в характеристическое уравнение функ¬
ций, с учетом постановки общей задачи *) и с учетом всех
необходимых условий (1.8.7).
Прежде всего заметим, что проведенная штриховка
D-кривой уже сама подсказывает также сочетания пара¬
метров, при которых может существовать область искомых
значений т. А именно, формы D-кривых, обозначенные
знаком ф, могут выделить на вещественной оси область
значений т, при которых все корни уравнения (1.8.5)
имеют отрицательную вещественную часть при некотором
t ^ t0. Формы же, обозначенные знаком 0, вообще не
могут выделить область таких значений т, так как в этих
случаях по крайней мере один корень уравнения (1.8.1)
всегда лежит справа от мнимой оси при любых t ^ t0.
Рассмотрим случай восходящего движе¬
ния точки (0О >> 0).
Из уравнения D-кривой (1.8.8) следует, что в точках
ее пересечения с осыо т имеем
т
и при со >> 0
dm
di о
*) В дальнейшем результаты, полученные /^-разбиением, бу¬
дут применены для определении условий устойчивости программ¬
ного движения тяжелой точки переменной массы на конечном
интервале времени,
Ьч
= - . >о,
(Го — СО2)2 ^
80
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
т. е. большим значением со соответствуют и большие зна¬
чения т. Последнее означает, что в случае, когда
jO-кривая пересекается с осыо т в трех точках ((Ь3-\-Ь1с2—
— ^i)2 ^ 4bi&3c2), из всех четырех возможных форм
D-кривой а, Ъ, с, d могут иметь место лишь две формы:
а и d.
Из необходимых условий (1.8.7) вытекает, что искомые
значения т должны быть больше некоторой положитель¬
ной величины, а именно:
Отсюда следует, что искомая область значений т
существует лишь тогда, когда имеет место форма а, при¬
чем эта область определяется как отрезок оси т между
min {т1? т3} и шах {тх, т3}.
Поэтому имеет место следующий вывод.
В случае восходящего движения тяжелой точки пере¬
менной массы корни соответствующего характеристиче¬
ского уравнения (1.8.1) имеют отрицательную вещест¬
венную часть при всех t t0, при которых удовлетворя¬
ется неравенство
0 < min {тv т3} < т < max {mv ?п3}, (1.8.12)
Если же это неравенство нарушается или пг1 и тг
становятся комплексными, то по крайней мере один ко¬
рень имеет положительную или нулевую вещественную
часть, причем нулевая вещественная часть имеется лишь
при условии, что т = т1 или т = т3.
Рассмотрим такой случай нисходящего дви¬
жения точки (0О < 0).
В этом случае в точках пересечения D-кривой с осыо
т при со > 0 имеем
m "> — 0
Cl ^
И
dm
d(i)
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
81
т. е. большим значением со соответствуют меньшие зна¬
чения ттг. Это значит, что в случае, когда D-кривая пере¬
секается с осью т в трех точках ((Ь3 -[- Ь1с2 — >
> 4Ъ1Ь3с2) из всех четырех возможных форм D-кривой
могут иметь место лишь две: Ъ и с.
Заметим, что в этом случае искомая область значений
ттг может существовать для всех возможных сочетаний по¬
казателей движения. Однако сама .D-кривая не указывает
наличия этой области (как в случае восходящего движе¬
ния). Поэтому тут нужно предварительно находить D-
области и выделить искомую область, определив корни
уравнения (1.8.1) в конкретной точке плоскости (ттг, у).
Таким образом, получим следующий вывод.
В случае нисходящего движения точки областями зна¬
чений га, соответствующими отрицательной вещественной
части всех корней характеристического уравнения (1.8.1),
могут быть области:
1) т > 0 (если пг1 << 0 и пг3 << 0);
2) ттг < min {тп!, ттг3} или ттг > max {mv ттг3} .. 0 .,
/ /Л (1.0.10)
(если пг1 > 0 и 7тг3 > 0);
3) ттг >> 0 (если mv пгг комплексны).
Во всех остальных случаях характеристическое урав¬
нение имеет по крайней мере один корень или с положи¬
тельной, или с нулевой вещественной частью, причем ну¬
левая вещественная часть имеется лишь при условии, что
m = тп1 или ттг = ттг3.
Теперь рассмотрим движение точки по некоторой, во¬
обще говоря, наклонной прямой (0О = 0).
В этом случае характеристическое уравнение (1.8.5)
имеет вид
D (X) = тп№ + {Ъ1 -|- Clm) X2 + b2X -j- Ъ3 - 0, (1.8.5')
а необходимые условия (1.8.7) —
Ъ ' " л
(1.8.7')
82
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Заметим, что условие Ь2 > 0 означает, что прямая не¬
обходимо должна быть нисходящей (0О < 0).
Уравнениями D-кривой служат уравнения
(63 — Ь-\со2) с\ Ьф)2,
т =
У =
(Г“ -|- (О2) О)2
— (h — &1СО2)
(с* со2) со
(1.8.9')
Заметим, что в этом случае D-кривая может пересекать
ось m в точках, где
со = + ос ,
Г Ь3-Ь2г,
со = ±р h ’
а ось у в точках, где
СО = -{- ос,
« = + |/ ь^-Ъг ■
Но
7 7 ' S1I12 0П .»■
Ь3 — ^2Cl = gRvO ~ 0 5
ьо
Ь1с1 — Ь2 = —. Rv0 sin 0О 0.
Поэтому D-кривая пересекает оси лишь в начале ко¬
ординат.
Заметим также, что Г ивая не имеет асимптоты и
у ± оо, m —>■ 00 при а» 0.
Таким образом, в случае движения точки по прямой
(нисходящей) областью искомых значений m может слу¬
жить область положительных тп. Установление того, что
эта область действительно является искомой или не яв¬
ляется, возможно лишь определением знака веществен¬
ных частей всех корней уравнений (1.8.5) в некоторой кон¬
кретной точке плоскости (т, у).
Остается рассмотреть случай движения точки по в о г-
нутой траектории (0О > 0).
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
83
В этом случае для восходящей ветви (0о > 0) имеем
0, Cl <С 0, Ъ2 0? £‘2 <\ Ь3 0,
а для нисходящей (0О < 0) —
Ьг > 0, Cl > 0, Ъ2 >0, с2 < 0, Ъ3 > 0.
Прежде всего заметим, что при восходящем
движении тяжелой точки переменной массы отсут¬
ствует область значений т, в которой все корни харак¬
теристического уравнения (1.8.1) имеют отрицатель¬
ную вещественную часть, так как не удовлетворяется
одно из необходимых условий (1.8.7), а именно условие
Ь2 + с2т 0.
В случае, когда точка совершает нисходящее
движение, имеем (b3 -j- b1c2 — Ъ2с^ > 4Ь1Ь3с2, и
соответствующая /)-кривая пересекает ось т в трех точ¬
ках, причем
т0 = 0, т1 > 0, т3 > 0.
Последние два неравенства вытекают из того, что
в точках пересечения /)-кривой с осыо т имеем
Ъ<1
Таким образом, в рассматриваемом случае из всех форм
D-кривых имеет место лишь одна, а именно форма с.
Соответствующая штриховка этой кривой указывает,
что областями расположения корней уравнения (1.8.1)
слева от мнимой оси могут быть (притом одновременно)
области
0 < т < min {mv 7тг3},
т > max {тх, т3} > 0.
А с другой стороны, из необходимых условий следует, что
ТП>—
Отсюда видно, что и в случае нисходящего движения
отсутствует область отрицательности вещественных ча¬
стей всех корней уравнения (1.8.1).
84
ГЛ. I. ПРОГРАММИРОВАНИЯ ПАРАМЕТРАМИ
3. К р и т е р и й М и х а й л о в а. Как известно-
о распределении корней характеристического уравнения
(1.8.1) можно судить, изучая свойства кривой, вычерчен,
ной концом вектора D (гсо) при изменении со от 0 до оо.
Запишем уравнение годографа вектора D (ico) в виде
Достаточным условием расположения корней характе¬
ристического уравнения (1.8.1) слева от мнимой оси яв¬
ляется следующий ход годографа вектора D (ico).
1) Годограф начинается с точки, лежащей на положи¬
тельной вещественной полуоси:
2) Далее годограф пересекает положительную мнимую
полуось:
3) Затем годограф пересекает отрицательную вещест¬
венную полуось:
и (СО 3) < 0, 27 (СО 3) = 0.
4) Далее в третьем квадранте годограф уходит в бес¬
конечность:
Если указанный ход годографа нарушен, то по край¬
ней мере один корень имеет положительную или нулевую
вещественную часть, причем последнее не имеет места
при дополнительном требовании, что отсутствует такое
значение со, при котором одновременно
(1.8.14)
и (0) > 0, v (0) = 0.
и (со2) = 0, v (со2) > 0.
оо при СО —
оо.
и (со) = 0
и
v (со) = 0
что равносильно условию
{bL + сртг) (Ь2 + с2т) — Ъ3т =1= 0.
(1.8.15)
§ 8. УСТОЙЧИВОСТЬ НА КОН ОЧНОМ ИНТЕРВАЛЕ
85
Первое из указанных достаточных требований удовле¬
творяется, если только выполняются необходимые усло¬
вия (1.8.7).
Для того чтобы указать условие, при котором удовлет¬
воряется и второе требование, найдем точку пересечения
годографа с мнимой осыо. Соответствующее значение
частоты найдем из уравнения
и = Ь3 — (Ь1 cjri) со- — О,
а именно
0)2 = 1/ -Т—' *
У У1 - \ ЛЬ
Подставив v (со2) > 0, найдем искомое условие
(&1 Д- срп) (Ь2 + с2пь) — Ъ.3ш > 0. (1.8.16)
Поступая аналогичным образом, найдем частоту
/1)2 + сот
-Г ,
т
при которой происходит пересечение годографа с вещест¬
венной осыо, и условие, заменяющее третье требование,
которое, как легко видеть, совпадает с условием (1.8.16).
Дополнительно нам нужно требовать, чтобы частоты
CDj^O, со2 и со3, соответствующие точкам пересечения
годографа с осями, шли в порядке возрастания:
О = СО! < СО 2 < С03.
Нетрудно видеть, что и это требование удовлетворится,
если только имеет место неравенство (1.8.16).
Четвертое из указанных требований всегда удовлетво¬
ряется, так как годограф не имеет других точек пересе¬
чения с осями и
U, V —>- ос при СО —> оо.
Таким образом, имеет место следующий вывод.
Корни характеристического уравнения (1.8.1) имеют
отрицательную вещественную часть для всех t ^ £0,
при которых
щс2т2 + (Ьхс2 -|- Ь2с1 — 6а) т -\- ЬХЬ2 > 0.
(1.8.16)
86
j’.i. I. ПРОГРАММИРОВАНИИ ПАРАМЕТРАМИ
Если
-f- (^1^2 ~\~ ^2^1 b8) ^ ~b ^1^2 ^ 0, (1.8.17)
то уравнение (1.8.1) имеет по крайней мере один корень,
расположенный справа от мнимой оси плоскости корней.
Рассмотрим особо случай нисходящей тра¬
ектории точки. В этом случае применение Л-раз-
биения не привело к какому-либо эффективному достаточ¬
ному условию расположения корней характеристического
уравнения (1.8.1) слева от мнимой оси (для выпуклой
траектории 0О < 0).
Если применить только что полученный из критерия
Михайлова вывод к рассматриваемому случаю, то мы по¬
лучим следующий результат.
В случае нисходящего движения точки корни харак¬
теристического уравнения (1.8.1) имеют отрицательную
вещественную часть при любом законе изменения массы
и для всех t > t0.
В самом деле, в этом случае имеем
7 . 7 7 т-ъ' ( OS 0 . -i-)' S1 П“ 0() \
biCi + Vi — b3~— g%Rr0 b gRrо ——!>- > 0,
1 о vo
поэтому также и
с^т? + (V2 + b2c1 — Ь3) т + ЪХЪ2 > 0.
Как видим, в случае нисходящей траектории приме¬
нение критерия Михайлова намного уточняет вывод,
полученный применением /^-разбиения.
Заметим также, что если траектория точки асимпто¬
тически стремится к некоторой нисходящей прямой, то
корни предельного характеристического уравнения (1.8.1)
всегда лежат слева от мнимой оси *).
Используя приведенные выше выводы о распределе¬
нии корней характеристического уравнения (1.8.1), мож¬
но указать признаки устойчивости программного движе¬
ния тяжелой точки переменной массы.
*) Этот результат использован при определении знака характе¬
ристичных чисел решении предельной системы для уравнений
(1.4.20).
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
87
Рассмотрим прежде всего признаки, устанавливаю¬
щие отсутствие интервала устойчивости.
1) Программное движение тяжелой точки переменной
массы по вогнутой траектории неустойчиво ни в каком
интервале времени.
В самом деле, в случае движения точки по вогнутой
кривой корни уравнения (1.8.1) не могут одновременно
находиться слева от мнимой оси в какой-либо момент вре¬
мени, т. е. отсутствует такой момент времени, начиная
с которого последующие возмущения будут внутри неко¬
торого эллипсоида с уменьшающимися полуосями.
2) Программное движение тяжелой точки переменной
массы
неустойчиво по крайней мерс на конечном интервале вре¬
мени, где
В самом деле, в этом случае не удовлетворяются необ¬
ходимые условия (1.8.7) расположения корней уравнения
(1.8.1) слева от мнимой оси, и ни один корень не имеет
нулевой вещественной части.
Следовательно, в любой момент времени указанного
интервала по крайней мере один корень уравнения (1.8.1)
имеет положительную вещественную часть, и следующие
за этим моментом времени возмущения будут возрастаю¬
щими, может, быть, на^сколь угодно малом интервале вре¬
мени.
Заметим, что указанный признак имеет смысл лишь
для восходящего движения, так как при нисходящем
(1.3.1)
+ cim < О,
или
Ъ2 -f с2т < О,
(1.8.18)
или
Ъ3 < О
причем
(&1 4- сртг) (Ъ2 -f с2т) — b3m =f= 0.
88
ГЛ. I. IllJ О Г Р Л М М L1Г О В Л Н И Е ПАРАМЕТРАМИ
движении ни одно из указанных неравенств (1.8.18) не
может удовлетворяться.
3) Восходящее движение точки но закону (1.3.1) не¬
устойчиво по крайней мере на конечном интервале вре¬
мени, где
О <С т <С min {mv m3},
или
т >> max {mv m3}, (1.8.19)
или
{Ъгсг — V2 — Ь3)2 < 4Ьфгс2.
В самом деле, при выполнении первого условия зна¬
чения т будут находиться в такой области, где имеется
по крайней мере один корень уравнения (1.8.1) с положи¬
тельной вещественной частью; при выполнении второго
условия — или то же самое (если mv т,3 >> 0), или суще¬
ствует именно лишь такая область значений т (если т1У
тз < 0). Если же выполняется третье условие, то значе¬
ния mv т3 комплексны и по крайней мере один уровень
уравнения (1.8.1) имеет положительную вещественную
часть.
4) Движение точки по закону (1.3.1) неустойчиво но
крайней мере на конечном интервале времени, где
с1с2т2 + (Ьгс2 -f- Ъ2с1 — Ь3) т + ЪХЪ2 < 0. (1.8.20)
В самом деле, при выполнении условия (1.8.20) по
крайней мере один корень уравнения (1.8.1) имеет поло¬
жительную часть.
Заметим также, что признак этот имеет смысл лишь
для восходящей траектории, так как для нисходящей тра¬
ектории условие (1.8.20) вообще не имеет места.
Теперь укажем признаки устойчивости движения.
1) Восходящее движение точки по данному закону
(1.3.1) устойчиво в любой момент времени, в котором спра¬
ведливо неравенство
0 < min {/?гд, т3) << т <С max {mv /тг3}, (1.8.21)
или то же самое
с^пг2 -f (b1cl -г Ъ2сх - Ь3) т -|- ЪХЪ2 > 0.
(1.8.22)
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
89
2) Произвольное нисходящее движение тяжелой точки
переменной массы по выпуклой кривой устойчиво в любой
момент времени.
Справедливость этих признаков следует непосредст¬
венно из теоремы Каменкова об устойчивости на конечном
интервале времени, которую, как легко видеть, можно
считать общей теоремой об устойчивости в некоторый
момент времени t.
III. Об определении интервала устойчивости
Выше (гл. I § 2) был приведен способ Каменкова для
определения интервала устойчивости. Этот способ являет¬
ся общим, и, применяя его последовательно, можно опре¬
делить довольно точные границы интервала устойчивости
во всех конкретных задачах.
Рассмотрим определение интервала устойчивости
в одном из частных случаев [21].
Пусть матрица коэффициентов уравнений первого при¬
ближения системы
Xi ft i^i -}- ... ~\~ fine'll Н- X i {х jl, ..., Хп, t) (1.2.3)
(i = 1, ..., п)
является симметричной (fik = fhi) и найдены границы
корней соответствующего характеристического уравнения
I fik ~ 6ПД| = 0, (1.2.10)
зависящие, вообще говоря, от времени.
Найдем из уравнения возмущенного движения (1.2.3)
производную суммы квадратов возмущений:
п п п
ж (2 *5) = 2 2 -!- 2 2 Д.8.24)
4=1 у К к 1 г Л
Учитывая непрерывность коэффициентов уравнений
(1.2.3) в интервале [£0» Т] и ограничиваясь сколь угодно
малыми начальными возмущениями, получим, что знак
90
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
определяется знаком формы
п
Q= 2 (1.8.24)
г, к=1
Форма эта в силу наших предположений относительно
коэффициентов /,• к является определенно-отрицательной
по крайней мере в интервале R0, где верхняя граница
корней уравнения (1.2.10) является отрицательной функ¬
цией.
Этот интервал времени [£0, и является интервалом
устойчивости невозмущенного движения
хх = 0, ..., хп = 0
с учетом членов высшего порядка.
При этом устойчивость невозмущенного движения
а:х = 0, ..., хп = 0 понимается так, что для всех началь¬
ных возмущений xi0, удовлетворяющих условию
п
(1.8.25)
1 1
где А — сколь угодно малое число, имеет место нера¬
венство
п
2 х\ СА (1.8.26)
г=1
но крайней мере в интервале [£0, ^].
Таким образом, для определения интервала устойчи¬
вости в рассматриваемом случае нужно:
1) определить верхнюю границу корней характеристи¬
ческого уравнения (1.2.10);
2) найти интервал времени, который начинается с t0
и в котором верхняя граница корней уравнения (1.2.10)
остается функцией, принимающей лишь отрицательные
значения.
Найденный интервал и будет интервалом времени, на
котором движение устойчиво.
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ 91
Пример. Устойчивость на конечном интервале
времени программного движения тяжелой точки перемен¬
ной массы (квадратичный закон сопро¬
тивления, к2 = 0).
Как мы уже установили выше (гл. I, § 4) верхней
границей корней соответствующего характеристического
уравнения в этом случае служит функция
Поэтому программное движение тяжелой точки пере¬
менной массы
происходит устойчиво по отношению к скоростям в ин¬
тервале (по крайней мере), где горизонтальная составля¬
ющая скорости точки убывает и ц — ц < 0.
Пусть система уравнений возмущенного движения
имеет следующий вид:
где Xt — вещественные функции, разлагающиеся в неко¬
торой области
в ряды по целым положительным степеням переменных
хг, ..., хп с непрерывными по t коэффициентами, причем
все эти функции обращаются в нуль при хх 0,...
Как было указано выше (гл. I, § 4), в таких случаях
исследуется прежде всего устойчивость невозмущенного
У (*)
Ф (*)
при условии, что
П (0 — П (0 < 0-
(1.3.1)
xi ~ Х\ (.г,. . . . , х1П /), )
(1.8.27)
п
(1.8.28)
92
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
движения
хх — 0,.. •, х п — 0.
Положим, что это исследование уже сделано и найден
соответствующий интервал устойчивости [£0, tx], т. е. най¬
ден промежуток времени т = tx — £0, в течение которого
абсолютные значения возмущений яд, ..., хп будут меньше
некоторой сколь угодно малой величины г.
В силу сделанных относительно уравнений (1.8.27)
допущений возмущения яд, ..., хп являются непрерыв¬
ными функциями по t на конечном интервале времени.
Поэтому имеем
Хп-А = Яп+г.о + Хя. (* — to) (i = Т —. «),
где x1lLi' 0 — начальные возмущения, х^ — возмущения
Xi в некоторых соответствующих точках внутри интервала
Если считать абсолютные значения начальных возму¬
щений ограниченными некоторой величиной б0
и указать величину б, меньше которой должны остаться
возмущения xn+i по абсолютной величине, то неравенства
определяют интервал времени [£0, t2], где все возмущения
xk (к = 1, 2п) остаются по абсолютной величине мень¬
ше по крайней мере наибольшей из величин е и б, т. е.
неравенства (1.8.29) определяют интервал устойчивости
всего невозмущенного движения
Заметим, что интервал устойчивости может быть оп¬
ределен таким образом лишь при условии, что величина
б0, ограничивающая начальные возмущения яд,^0, мень¬
ше величины б, ограничивающей последующие возмуще¬
ния.
Uo, Т]
(1.8.29)
яд = 0, ..., х2п = О
§ 8. УСТОЙЧИВОСТЬ НА КОНЕЧНОМ ИНТЕРВАЛЕ
93
Заметим также, что полученные неравенства (1.8.29)
могут служить и для определения возможных наиболь¬
ших значений возмущений на заданном интервале вре¬
мени.
П р и м е р. Интервал устойчивости программного дви¬
жения тяжелой точки переменной массы по отношению к
заданной области возмущений скоростей и координат
(квадратичный и линейный законы
сопротивления).
Из уравнений возмущенного движения (1.3.4) и (1.3.11)
следует, что интервал устойчивости в рассматриваемых
случаях может быть определен из только что установлен¬
ных неравенств (1.8.29).
В самом деле, определим прежде всего интервал устой¬
чивости 1*0, по отношению к области
«1 (O^'i ' - ос2 (/) х\ А, (1.7.11)
используя для этого соответствующие неравенства, при¬
веденные в § 6 гл. I. При этом нужно найти величину
е, ограничивающую абсолютные значения возмущений ско¬
ростей, что можно сделать после выбора функций (t)
и а2 (*). Так, например, если
= а2 = ет(1\
то имеем
_™1<
е = Y Ае 4 ,
где тк — конечное значение массы точки.
Искомый интервал устойчивости [*0, t2] по отношению
к области
<*1 (t)Xl + а2 (t)x2 ^ А) | хз | <С б, | хл | <'б (1.8.30)
определяется из неравенства (1.8.29), если только задана
величина 80, ограничивающая начальные возмущения коор¬
динат,
94
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
§ 9. Программное движение тела переменной массы
I. Естественные уравнения движения тела
переменной массы
Рассмотрим тяжелое тело переменной массы m(t),
центр тяжести О которого совершает в вертикальной пло¬
скости программное движение
Предположим, что центр тяжести тела и направления
главных центральных осей инерции остаются неизменны¬
ми относительно первоначальных геометрических очерта¬
ний тела в процессе изменения его массы. Примем глав¬
ные центральные оси инерции за оси координат хх, ух, zv
Пусть А = A(t), В — B(t), С = C(t) — соответствую¬
щие моменты инерции тела. В дальнейшем будем считать,
что тело переменной массы имеет ось кинетической сим¬
метрии, неизменную также относительно первоначаль¬
ных геометрических очертаний тела, и ось zx направим
именно по этой оси (A (t) = В (£)). Пусть р, q, г — про¬
екции мгновенной угловой скорости со тела на оси хх, yv zlt
Введем еще одну прямоугольную систему координат
Oxyz, связанную с траекторией центра тяжести тела,
причем ось z направим по касательной к траектории,
ось у — по главной нормали, а ось я — по бинормали. За¬
метим, что при движении тела триэдр {Oxyz) вращается
вокруг оси х с угловой скоростью
где т — угол наклона касательной к траектории.
Предположим, что тело движется в некоторой сопро¬
тивляющейся среде, действие которой на тело переменной
массы выражается некоторой динамической парой: глав¬
ным вектором ~R и главным моментом М(1, вычисленным
относительно центра тяжести.
Отложим от центра тяжести тела единичный вектор с
вдоль оси zx и единичный вектор е вдоль линии пересече¬
(1.9.2)
§ 9. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ТЕЛА
95
ния плоскости, проходящей через ось zx и мгновенную
ось вращения тела, с экваториальной плоскостью ххОух.
Тогда
и вектор момента количества движения тела определяется
выражением
Согласно теореме о моменте количества движения тела
переменной массы 179, 42]
где М* — сумма моментов реактивных сил, обусловлен¬
ных абсолютным движением частиц изменяющей массы,
Мг — сумма моментов всех сил инерции относительного
движения этих частиц.
Исходя из принципа затвердевания [27], уравнение
(1.9.8) можно представить в виде
где —сумма моментов реактивных сил, обусловлен¬
ных относительным движением частиц изменяющей массы.
Пусть ./*, у, z— координаты конца вектора с в систе¬
ме координат, связанной с траекторией центра тяжести
со = соее + гс,
(1.9.3)
(г — Лсоев -|- (г с,
(1.9.4)
или
G — Л (о j- (С — Л) те.
(1.9.5)
Заметим, что
Г dc
(1.9.6)
Поэтому из (1.9.4) следует (791, что
(1.9.7)
96
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
тела (0:ryz). Тогда проектируя уравнение (1.9.9) па оси
координат гг, /у, s, получим
С (rx) — A (yz — yz — 2т у у — 2TZS —
— xy- — TZ2) -= Мах Г МрХ + Мгх,
С [(/ г/) — т/'z] — A(zx — zx -р 2тху —
— Т2XZ f хху) = May -|- Мру Т М,
С [(г г) -(- тп/] — Л (а:г/ — х г/ 4- 2txz -f
-(- Х'Ху 4* TXz) == Mai 4" MpZ -j- Mry.
njj
(1.9.10)
Предположим, что результирующая сила действия соп¬
ротивляющейся среды на тело выражается силой Е(у,т])
(»= /|3 + Г1*- скорость центра тяжести тела), приложен¬
ной в точке D (центр давления) оси zx на расстоянии I от
центра тяжести О и лежащей в плоскости zOzly образуя
угол б с осыо zv причем плоскость zOz± наклонена на угол
aj? относительно вертикальной плоскости. Тогда момент М '
этой силы R относительно центра тяжести тела будет на¬
правлен под углом г|) к оси х и имеет величину
или
М = Rl sin б,
М — Rfl sin а,
(1.9.11)
где / == sin б/sin а, причем предполагается, что / зависит
лишь от геометрических очертаний тела [49], а — угол
наклона оси zx относительно касательной к траектории
(угол атаки).
Заметим, что [76]
х — sin a sin г|',
у = — sin а cos г|\
z = cos а
и
Мх = - Rfly,
Му = Rflx,
М. --= 0.
(1.9.12)
§ 9. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ТЕЛА
97
Рассмотрим случай, когда в центре тяжести тела сум¬
ма моментов всех сил, обусловленных изменением массы
тела и относительным движением частиц изменяющей
массы, а также сил действия среды на тело, приводится
именно к этому моменту М в процессе всего движения. В
этом случае момент демпфирования собственного вращения
тела (вокруг оси zх) уравновешивается суммой моментов
реактивных сил и сил инерции относительного движения
частиц, поэтому [7]
г = const. (1.9.10)
В рассматриваемом случае уравнения (1.9.10) записы¬
ваются в виде
Сг х — А (yz — zy — 2туу — 2xzz — ту2 — tz2) = — Щ1уЛ
Cry — Crxz — А ( zx — xz + 2тху — x2xz -|- тху) = Rflx, >
Crz — Crxy — А {ху — ух + 2тxz -f- т2ху + тxz) = 0. J
(1.9.13)
Определим положение тела относительно систем коор¬
динат Oxyz с помощью долготы (3 и широты у следа оси
zx на сфере единичного радиуса (конца вектора с), описан¬
ной из центра тяжести тела, причем у — угол, образован¬
ный осью z± со своей проекцией на плоскости yOz, р —
угол между проекцией оси zx на плоскость yOz и осью з.
Тогда координаты конца вектора с выражаются через
эти углы следующим образом:
х = sin т,
у = — sin Р cos'p,
Z = cos р cos у.
При таком выборе координат система уравнений (1.9.10)
после несложных преобразований приводится к системе
А (Р + т) cos у — 2 А (Р + г) у sin у -(- Cry = Rfl sin Р, }
Ay — Cr{P -f t) cos у - ,L A (P -|- T)2sinTcosx= 7?//co-sPsin^./
(1.9.15)
(1.9.14)
4 А. С. Галиуллин
98
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
В таком же виде были представлены уравнения враща¬
тельного движения продолговатого снаряда постоянной
массы в [49].
Заметим, что полученная система двух уравнений
(1.9.15) полностью заменяет систему трех уравнений
(1.9.13), так как одно из уравнений системы (1.9.13) вы¬
ражает лишь то, что
X2 -f у2 -,L 22 = 1.
В дальнейшем будем считать, что программное движе¬
ние тела переменной массы осуществляется соответствую¬
щим изменением во времени величины и направления
равнодействующей Т реактивных сил (силы тяги), соз¬
даваемых изменением массы m (m (t) 0). При этом
необходимые для осуществления программного движения
значения величины и направления этой силы Т дол¬
жны удовлетворять уравнениям движения центра тяжести
тела. Эти же уравнения определяют программное значение
силы, сопротивления среды R0, входящие в правые части
уравнений вращательного движения тела (1.9.15).
П. Устойчивость вращательного движения тела
на пр смолинейной j траектории
Рассмотрим случай, когда центр тяжести тела пере¬
менной массы движется по некоторой прямой и величина
а = Rfl
остается постоянной в процессе всего движения [49, 95].
Тогда уравнения вращательного движения тела пе¬
ременной массы имеют вид
/ф соя г — 2 A Pr sin Т -|- Or - «■ «и Р. ! (1 9 16)
Ах -'г Л 8'2sin у соя х — С г Ё$ cos х — a cos р sin X■ ^
Уравнения эти допускают тривиальное решение р = 0,
у = 0 и могут быть рассмотрены как уравнения возмущен¬
ного движения тела переменной массы относительно уг¬
лов Р и у.
Рассматриваемый случай для тела постоянной массы
(снаряда) изучен в настоящее время достаточно подробно
§ 9. УСТОЙЧИВОСТЬ ДВИЖЕНИЯ ТЕЛА
99
и установлено условие устойчивости вращательного движе¬
ния снаряда (неравенство Майевского [49, 951).
В [95] это условие получено с помощью функций Ляпу¬
нова в виде связки интегралов соответствующих уравне¬
ний возмущенного движения. Используем возможности
этого приема и для определения достаточных условий
•устойчивости вращательного движения тела переменной
массы.
Составим функцию
V = \- АСгр + 2а А Рг 4- 4" СагГ2 + 4~ ЛСП2 -
— 2аА$г-'г4гСагр2, (1.9.17)
которая является определенно-положительной при усло¬
вии, что
CV _ imA > е > 0 (1.9.18)
и допускает бесконечно малый высший предел (А, С —
ограниченные и неисчезающие функции времени, е — не¬
которое малое число).
Дифференцируя функцию V по времени, получим
V - W! W2 -L W31 (1.9.19)
где
1У1 = АС г (РР у у) -f 2а А ([Зу (Зу) -f- Саг (ЭР -f уу),
W2 = (Ас) г[32 + 2аДру -[—^-Сагу2,
w3 = (Ад-) rf - 2аЛРг + \CarV.
Уравнения (1.9.16) в предположении, что Л и С не ме¬
няются, допускают следующие первые интегралы [95]:
1
— А (у2 -(- (З2 cos2 у) + a- cos р cos у /г,
А (у sin Р —(3 cos (3 sin у cos у) -J- Сг cos р cos у = А;,
4*
(1.9.20)
100
ГЛ. I. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
которые могут быть представлены в виде
-^(p3 + r2) + a(l-^ -т) = Г14) + А, |
А (Рт - Pr) + Сг{1-?--%) = И'° + к, )
(1.9.21*)
где VW — голоморфные функции, разложение кото¬
рых но степеням р, у, Р, у начинается с членов не ниже
четвертого порядка.
Дифференцируя выражения (1.9.21) по времени (пред¬
полагая также А и С неизменными), получим
Л(РР+ГГ)-а(РР -ь yr) = Wf\ | (1 9 22)
А (к — Рг)~ Сг(ЭР + ГГ) = >
где WW — голоморфные функции, разложение ко¬
торых по степеням р, у, (3, у начинается с членов не ниже
третьего порядка.
Заметим, что функция W1 в (1.9.19) является производ¬
ной от V в предположении, что А и С остаются неизменны¬
ми, поэтому в силу выражений (1.9.22), полученных из
первых интегралов (1.9.20) уравнений (1.9.16), а также в
предположении постоянства А и С имеем
H'j = CrWf — 2aWf. (1.9.23)
Последнее значит, что знак производной функции V
по времени в силу уравнений возмущенного двшкения те¬
ла переменной массы (1.9.16) в достаточно малой окрест¬
ности точки р — 0, у = 0, р " 0, у = 0 определяется
знаком квадратичной формы. W2 Jr W3.
Следовательно, если
{At) О' 4«А->р>0, | (1.9.24)
С е, J
§ 9. УСТОЙЧИВОСТЬ движения ТЕЛА
101
то производная функции V является в окрестности этой
точки определенно-отрицательной функцией.
Таким образом, условия
С*г2 — 4 аА е 0,
(АС)Сг2 — 4аА >е,
С — 8
являются условиями устойчивости вращающегося тела
переменной массы по отношению к углам отклонения оси
кинетической симметрии тела от прямой, служащей траек¬
торией его центра тяжести, и по отношению к скоростям
изменения этих углов.
III. Устойчивость вращательного движения тела
на криволинейной траектории
Рассмотрим случай, когда центр тяжести тела перемен¬
ной массы движется по некоторой программной кривой
(1.9.1) в вертикальной плоскости. Тогда соответствующие
уравнения возмущенного движения составляют следую¬
щую систему:
Х1 = PllXl + Pl2X2 + Pl3X3 + Pl4X4 + (хъ, Я4),
ГГ2 — Р21х1 Р23Х3 “Г Р?АХ4 “Т" X2 (^З» X$)i
>
х3 = х19
х4 = х2,
(1.9.26)
где хг, х2, х3, х4 — возмущения соответственно скоростей
изменения долготы |3 и широты у следа оси zl9 на сфере
единичного радиуса, описанной из центра тяжести тела, и
самих их величин (хг — Р — ро» х2 ~ У — То» хз ~ Р —
— Ро, х4 = У — То)» Х19 Х2 — голоморфные члены, раз¬
ложение которых по степеням х3, х4 начинается с членов
(1.9.25)
102
ГЛ. Т. ПРОГРАММИРОВАНИЕ ПАРАМЕТРАМИ
Сг
выше первого порядка,
Ри — 2То ^g То»
Pl2 =' 2 (Ро Ч- ^о) tg То ~х cos То
_ 7?о cos So
Р13 ai /I COs Yo ’
Pi 4 = 2 (Ро ~L т0) -j- (Ро
Сг
*о) ^ g Го?
Pil = [-
р23 = ах
Ри — ^1
Л
2 (В0 -!- То) sin Го
cos Го.
(1.9.27)
Л0
А.
Лр
Л
sin i^osin Го.
Сг
cos [30 cos Го ГГ (Р° + Т°)sin Го —
- (Ро + т0)2 cos 2г0, '
ai = fl.
Заметим, что в этих выражениях индексом «0» обозна¬
чены программные значения переменных, определяемых
непосредственно из самой программы (1.9.1) (т0, R0 (v0, т]0))
и решением уравнений (1.9.15) с учетом этой програм¬
мы (ро, у0). Переменные эти соответствуют невозмущен¬
ному движению тела переменной массы.
Естественно предполагать, что программа движения
тела выбрана так, что углы ро, То остаются достаточно
малыми в процессе всего движения и ось кинетической
симметрии тела (ось <,г) совершает движение с достаточно
малыми угловыми скоростями р0, у о-
Поэтому достаточные условия устойчивости вращатель¬
ного движения тела, определяемого программой (1.9.1),
по отношению к р, у, р, у окажутся достаточными и для
устойчивости движения тела на криволинейной траекто¬
рии в смысле малости угла, образованного осью кинетиче¬
ской симметрии тела с касательной к траектории, и скоро¬
сти изменения этого угла.
Условия устойчивости невозмущенного движения ро, То>
Ро, Уо могут быть найдены, например, с помощью функции
V= 4- АСгх\ -|- 2Aa1R0x1xi 4- -L Ca^R^xt +
Н- ACr:r\ — 2АахН0:г2х3 -f
§ 9. УСТОЙЧИВОСТЬ движения ТИЛА
103
которая является определенно-положительной при усло¬
вии, что
и допускает бесконечно малый высший предел (А, С —
ограниченные и неисчезающие функции времени, щ =
— fl, е — некоторое малое число).
Знак производной этой формы в силу уравнений возму¬
щенного движения (1.9.26) при достаточно малых |30, у0?
Ро, То определяется знаком соответствующей квадратич¬
ной формы. Условиями определенно-огрицательности
этой формы в силу малости величин p0i у0> Ро> То являются
Удовлетворение этих условий обеспечивает устойчивость
вращательного движения тела переменной массы по отно¬
шению к углам отклонения оси кинетической симметрии
тела от касательной к траектории его центра тяжести и по
отношению к скоростям изменения этих углов, если толь¬
ко эти отклонения и скорости их изменения в самом прог¬
раммном движении достаточно малы.
Заметим также, что из условий (1.9.28) и (1.9.29) при
то = 0 непосредственно следуют ранее полученные усло¬
вия (1.9.25) устойчивости движения тела переменной мас¬
сы на прямолинейной траектории.
С2г2 - AAa^Ro > е > 0,
(1.9.28)
(1.9.29)
где
Д, = г2 (АС)\ (CaiR0yt - 4 [{AaxR0);i2,
Д2 = A^Rq (АС)\ — АС (Аа^0)'г
ГЛАВА II
ОПЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ,
ВЫЗВАННЫХ НАЧАЛЬНЫМИ, ПОСТОЯННО
ДЕЙСТВУЮЩИМИ И ПАРАМЕТРИЧЕСКИМИ
ВОЗМУЩЕНИЯМИ
§ 1. Предварительные замечания
В предыдущей главе изучался вопрос об устойчивости
программного движения материальных систем, описыва¬
емых дифференциальным уравнением вида
у = Ф (t, у, к, и), (2.1.1)
где у — 7г-мерный вектор состояния системы, к — г-мер-
ньгй вектор параметров системы, и — m-мерный вектор
управления, Ф (t, у, /с, и) — я-мерная вектор-функция.
При этом предполагалось, что вектор параметров к
все время принимает вполне определенное значение в виде
постоянной или известной вектор-функции от времени, а
вектор и предполагался известной функцией от времени,
определяемой из необходимых условий точного осуществ¬
ления заданной программы.
В действительности уравнение (2.1.1) лишь приближен¬
но описывает реальную систему, так как все реальные
системы, помимо начальных возмущений, подвержены
еще постоянно действующим и параметрическим возмуще¬
ниям, а управляющие устройства всегда формируют сиг¬
налы и с некоторой ошибкой, обусловленной инструмен¬
тальными и методическими погрешностями элементов это¬
го устройства.
Уравнение возмущенного движения, составленное с
учетом постоянно действующих и параметрических воз¬
§ 1. 11Р Е Д В А РIIТ Е ЛЬ 11Ы К ЗАМЕНАII11Я
105
мущений, имеет вид [62]
А - X (С х, к0 + Д/с, а0 Н- Дм) -|-/ (t, х), (2.1.2)
где ж — тг-мерный вектор отклонений от заданной прог¬
раммы, X (/, х, к0 + ^к, и0 Ди) — /г-мерная вектор-
функция, обращающаяся в нуль при х = 0, / (/, х) —
тг-мерная произвольная вектор-функция, вызванная наличи¬
ем постоянно действующих и параметрических возмуще¬
ний, о которой известно лишь, что она ограничена по аб¬
солютной величине, к0 и и0 — невозмущенные значения
к ж и, Ак и Дм — значения векторов возможных ошибок
определения к ж и, о которых известно лишь, что они ог¬
раничены по абсолютной величине.
Убедимся в справедливости сказанного в одном част¬
ном случае задания системы (2.1.1), когда в ней отсутству¬
ет вектор и ж программой является некоторое частное ре¬
шение этого уравнения.
Итак, пусть движение некоторой реальной системы опи¬
сывается следующим w-мерным векторным дифференциаль¬
ным уравнением
у = Ф (*, у, к° -I- А/с). (2.1.3)
Предполагается существование и единственность решений
этого уравнения в интересующей нас области у, /с0, Дк
для всех t > 0. Допустим, что программа
V = 9 (t) (2.1.4)
является частным решением (2.1.3) при к = к0. Следова¬
тельно, имеет место
ф (t) = Ф (/, ф, Л°). (2.1.5)
Составим уравнение возмущенного движения, соответст¬
вующее системе (2.1.3) и невозмущенному движению (2.1.4),
полагая
У = Ф (0 + *» (2.1.6)
где х — /г-мерный вектор отклонения от программы.
Подставляя (2.1.6) в уравнение (2.1.3), получим
х — — ф -[- Ф (с ф г|- X, к).
(2.1.7)
106
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Предполагая, что функция Ф допускает разложения ее
в ряд но степеням х, уравнение (2.1.7) представим в виде
х — — ф Ф (£, ф, к) -р X (t, х, к), (2.1.8)
где X (£, х, к) — степенной ряд относительно х, обращаю¬
щийся в нуль при х — 0.
В соответствии с условием (2.1.5) вектор
F (t, к) = — ф -[- Ф (*, ф, к),
вообще говоря, в нуль обращается только при к -- к0.
Следовательно, только при к = к0 уравнение (2.1.8) бу¬
дет являться обычным уравнением возмущенного движе¬
ния Ляпунова. Следовательно, несмотря на отсутствие
постоянно действующих возмущений, уравнение возму¬
щенного движения, составленное с учетом параметриче¬
ских возмущений, будет иметь член F (t, к), не обращаю¬
щийся в нуль при х ~ 0. При наличии вектора постоянно
действующих возмущений в правой части уравнения (2.1.3)
к вектору F (С к) прибавляется вектор постоянно дейст¬
вующих возмущений, а функция X (Z, х, к) остается без
изменения.
Следует отметить, что имеются случаи, когда заданное
частное решение уравнения (2.1.3), удовлетворяющее
начальному условию у -- ф (tQ), не зависит от возмущаю¬
щих параметров системы. Например, тривиальное решение
систем линейных однородных дифференциальных уравне¬
ний не зависит от изменения коэффициентов системы. Та¬
кие случаи встречаются также и при исследовании устой¬
чивости тривиального решения в задачах о движении тела
с одной закрепленной точкой.
В таких случаях условия устойчивости, накладывае¬
мые на параметры системы, являются достаточными для
суждения об устойчивости и с учетом параметрических
возмущений.
Поэтому в данной главе рассматриваются уравнения
возмущенного движения как с функцией F (t), так и без
нее. При этом имеется в виду, что значения наибольших
верхних пределов начальных, постоянно действующих и
параметрических возмущений не предполагаются сколь
угодно малыми, а могут иметь вполне определенные конеч¬
§ 1. ПРЕДВАРИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
Ю7
ные величины. Поэтому основной задачей данной главы
является не только установление факта существования
упомянутых областей возмущений, удовлетворяющих ус¬
ловиям устойчивости, но и оценка этих областей и провер¬
ка пригодности оценок в конкретных условиях задачи.
В этой главе одновременно в некоторых частных слу¬
чаях обращается внимание и на способы уменьшения от¬
клонений от программы, вызванных постоянно действую¬
щими возмущениями, а также определяются условия аб¬
солютной устойчивости некоторых нелинейных систем с
параметрическими возмущениями.
Отметим, что и в тех случаях, когда имеется полная
информация или информация о вероятностных характе¬
ристиках вектора Д/с уравнение возмущенного движения
имеет тот же вид (2.1.2), если размерность управления и
недостаточна для осуществления движения по заданной
программе. Но при этом структура вектора / (t, х) оказы¬
вается известной [8]. В таких случаях может быть постав¬
лена задача выбора структуры вектора управления и так,
чтобы функция, оценивающая норму вектора х, была наи¬
меньшей.
Постановка и решение такого рода задач изложены
в [8].
В настоящей главе* рассматриваются лишь такие
случаи, когда вектор Д/с, а следовательно, и вектор
/ (t, я), являются произвольными ограниченными функ¬
циями.
Для решения рассматриваемых в этой главе задач ока¬
залась целесообразной скалярная форма записи многих
уравнений. В первую очередь это объясняется тем, что для
оценки отклонений от заданной программы выбрана мето¬
дика оценки не нормы вектора х, а абсолютного значения
любой из компонент этого вектора. Такая методика про¬
диктована тем, что при решении многих практических за¬
дач нет необходимости оценки значений некоторой части
компонент вектора х.
Например, при решении некоторых задач о встрече
двух тел, первостепенное значение имеет оценка возмож¬
ных отклонений координат точек в момент предполагае¬
мой встречи, и при этом нет особой необходимости оцени-
вать значения скоростей этих тел.
108
ГЛ. It. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
§ 2. О способах уменьшении отклонений от программы
в линейных возмущаемых системах
Рассмотрим некоторые вопросы, касающиеся умень¬
шения отклонений от программы, когда возмущенное дви¬
жение системы описывается линейными дифференциаль¬
ными уравнениями вида
п
*i = 2 «и (0 -о- /Л0 С-1,2,..., п), (2.2.1)
7 =1
где atj и ft — непрерывные функции в области £ЕЕ Ю, Г),
Т < ОО. «Возмущающие» функции /; (t) являются произ¬
вольными непрерывными, удовлетворяющими лишь усло¬
виям
|/i (0 I (/ = 1 /г), (2.2.2)
где q — заданные положительные числа.
Как известно, решение системы (2.2.1) может быть
представлено в виде
п п t
== 2 RM (0 :,'i (°) i- 2 § (f, Р /j (Т) сН (U 1,..., И),
7=1 7=1 О
(2.2.3)
где Т?г-7- (£) — элементы нормированной фундаментальной
матрицы решений системы (2.2.1) при fb = 0, а
п
- 21 (Т).
7П--1
Первая сумма в правой части (2.2.3) характеризует откло¬
нение координат ;гг, вызванное начальными возмущения¬
ми, а вторая сумма обусловлена отклонением, вызванным
постоянно действующими возмущениями ft (t).
Допустим, что нас интересует отклонение координаты
х.[. Из системы (2.2.3) видно, что для полной инвариант¬
ности координаты Xi в области Ге=(0, Т], 0 < Т ^ оо,
до отношению к возмущению/а (t) необходимо и достаточ¬
§ 2. О СПОСОБАХ УМЕНЬШЕНИЯ ОТКЛОНЕНИЙ
109
но выполнение условия
Ki0L (t, т) = 0 (2.2.4)
для всех t в замкнутом треугольнике, ограниченном пря¬
мыми
т = f, т = 0, t - Г. (2.2.5)
Легко заметить, что в некоторых случаях функцию (2.2.4)
принципиально невозможно обратить в нуль никакими
комбинациями конечных коэффициентов системы (2.2.1).
Например, когда i — а, функция (2.2.4) при t = 0 имеет
значение, равное единице, и, следовательно, в силу не¬
прерывности будет иметь ненулевое значение и при неко¬
торых t 0. Отсюда вытекает, что нельзя обеспечить пол¬
ную инвариантность той координаты системы, индекс ко¬
торой совпадает с индексом возмущающей функции, по
отношению к которой требуется инвариантность.
В таких случаях ставится вопрос об определении усло¬
вий инвариантности до 8, т. е. таких условий, которые га¬
рантируют отклонение координаты х\ от действия возму¬
щающей функции /а (£), удовлетворяющей лишь условию
(2.2.2), не более заданной положительной и достаточно
малой функции 8 (t).
Для решения этой задачи, например, достаточно по¬
требовать:
а) знакопостоянства функции Kioi (t, т) в замкнутом
треугольнике (2.2.5);
б) выполнения неравенства
i
e(t)^\cai{jKiy.(i,x)dx J . (2.2.6)
0
В самом деле, при выполнении условий а) и (2.2.2)
имеет место неравенство
t t
I са ^ Kix (t, т) dx | > I ^ Kix (t, x) /а (t) dx | ,
0 0
что доказывает наше утверждение. Когда структура воз¬
мущающих функций заранее определена до некоторых
110
ГЛ. LI. ОН, ГПК А ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
произвольных постоянных, то в ряде случаев возможно
обеспечить условия так называемой инвариантности до
свободной составляющей [50]. В таких случаях изменения
координат систем!)!, вызванные возмущающей функцией,
не отличаются от изменений координат, ылзванных лишь
начальными отклонениями.
В самом деле, из системы (2.2.3) видно, что если возму¬
щающая функция /а (t) удовлетворяет равенству
и t
2 Rii (0 AJ = ки (t> х) fy. СО dx,
j=1 о
где Aj —произвольные постоянные, то изменение во вре¬
мени координаты (t) будет происходить по закону
п
Ti (0 — ZJ Rij (0 \ Xj (0) +
j=l
Следовательно, если система устойчива, то в этом слу¬
чае отклонения координаты xt (t) со временем исчезают
точно так же, как исчезают свободные составляющие реше¬
ния, вызванные начальными отклонениями.
Следует отметить, что требования, при выполнении ко¬
торых отклонения координат исчезают именно по закону
изменения свободных составляющих, а не по другому зако¬
ну, кажутся искусственными и сравнительно жесткими.
А на самом деле от функции /а (I) было бы достаточно
потребовать, чтобы характеристичное число [57] функции
t
\ Ки (t, х) /а (г) dx
0
было не меньше заданного положительного числа X. В ча¬
стности, число X может быть взято равным наибольшему
характеристичному числу фундаментальных решений од¬
нородной системы (2.2.1), когда все ft =0.
При такой постановке задачи инвариантность коорди¬
наты х\ по отношению к возмущению /а (t) можно было бы
назвать инвариантностью до исчезающей функции.
Итак, накладывая на функцию К;х (t, т) определенные
условия, можно потребовать полную инвариантность, ин¬
§ 2. О СПОСОБАХ УМЕНЬШЕНИЯ ОТКЛОНЕНИЙ
111
вариантность до е, до свободной составляющей ил pi до ис¬
чезающей функции. Но при решении практических за¬
дач оперировать функцией Ki0L (t, т) довольно затрудни¬
тельно. Поэтому способы получения условий инвариант¬
ности непосредственно через коэффициенты системы (2.2.1)
представляют определенную практическую ценность.
Для системы уравнений (2.2.1) как с постоянными, так
и с переменными коэффициентами условия полной инвари¬
антности непосредственно через коэффициенты системы по¬
лучены в [80].
Для уравнений с постоянными коэффициентами метод
получения условий инвариантности до свободной состав¬
ляющей был предложен в [50]. Но этот метод непосредст¬
венно неприменим к уравнениям с переменными коэффи¬
циентами.
Ниже рассматривается один из способов получения как
условий полной инвариантности, так и условий инвариан¬
тности до свободной составляющей решений линейных сис¬
тем с переменными коэффициентами.
Для простоты дальнейших рассуждений в системе
(2.2.1) все возмущающие функции, кроме /а (г), считаем
тождественно равными нулю.
Допустим, что путем последовательного дифференци¬
рования и исключения всех переменных, кроме xh систе¬
ма (2.2.1) приводима к одному уравнению 5-го порядка
(1^5^ п)
где bt (t, р), diCL (t, р) — линейные операторы дифферен¬
цирования,
d
р = чг-
Из уравнения (2.2.7) видно, что поведение xi (t) вполне
определится, если задана возмущающая функция /а (t)
и известны начальные данные х} (t0), xi'^ (t0) (v = 1, ...
..., 5 — 1). Значения xW (t0) определяются первыми 5 — 1
уравнениями системы
bi (t, р) Xi = dia(t, р) /а,
(2.2.7)
П
112
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
где
п
^ij(v) — 2 'Т ^ijiL) ~
(v) / ^ \
a’i — />';/* p = —— , pv = —— , (pia(v) — линейные
' at at }
операторы дифференцирования порядка v — 2 с
переменными коэффициентами, причем ф;^2) = ai0L,
Фгац) = 0 при i =f= а, Фгхц.) = 1 при а = i. Система
(2.2.8) получена последовательным дифференцированием
i-то уравнения системы (2.2.1) и исключением производ¬
ных всех координат, кроме xt. Как видно из (2.2.7) и (2.2.8),
необходимыми и достаточными условиями полной инва¬
риантности решения xi (I) по отношению к возмущающей
функции /а (г) являются следующие равенства:
Фга(У) (^0, р) = о, dix (С р) = 0 (v = 1, ..., 5 — 1). (2.2.9)
Очевидно, что условия (2.2.9) эквивалентны равенст-
вам
Фга( ) (t, р) = О (V = 1, ..., 5 — 1). (2.2.10)
Так как при a = i ф^ц) (С р) = 1 и ф*а(2) (t, р) = ai0L, то
из (2.2.10) видно, что для обеспечения полной инвариант¬
ности координаты Xi по отношению к возмущению /а (t)
необходимо выполнение условий
а =/- i и ai0L = 0. (2.2.11)
Условия (2.2.11) аналогичны условиям двухканаль-
ности, сформулированным для систем с постоянными
коэффициентами в [74].
Условия (2.2.10) в случае систем (2.2.1) с постоянными
коэффициентами приводятся к виду
A ;a(v) ЕЕ 0 (V = 1, ..., 5 - 1). (2.2.12)
Теперь приведем условие инвариантности до свободной
составляющей.
Из уравнения (2.2.7) видно, что условием инвариант¬
ности до свободной составляющей координаты хх по отно-
§ 3. УСЛОВИЯ МИНИМУМА НАИБОЛЬШИХ ОТКЛОНЕНИЙ 113
шеяию к возмущению /а является удовлетворение функции
/а следующему линейному дифференциальному урав¬
нению :
di* (t, р) /а (0 = о. (2.2.13)
Следует отметить, что условие (2.2.13) мягче чем усло¬
вие (2.2.10). В частности, условие (2.2.13) можно удовлет¬
ворить даже тогда, когда условия (2.2.11) не выполня¬
ются.
Если класс возмущений /а (t) заранее задан, то для
обеспечения инвариантности до свободной составляющей
координаты хг необходимо потребовать, чтобы коэффици¬
енты системы (2.2.1) обеспечили выполнение условия
(2.2.13).
Вышеприведенный способ распространяется и на слу¬
чай нескольких возмущений. В этом случае условия
(2.2.10) или (2.2.13) должны быть записаны для каждого
возмущения.
§ 3. Условия минимума наибольших отклонений
от программы в линейных возмущаемых системах
Пусть возмущенное движение системы описывается
уравнениями
п
Ц [.г] — Xi - 2 аИ (0 хз = Ь(1) С = 1, . . и), (2.3.1)
.7 = 1
где atj (£), ft (t) — непрерывные на участке 0 ^ t0 ^ t ^
^ Т < ос функции от времени.
Решение этой системы представим в виде
п п t
хг = 2 Rij (0 х3 (U) +2 \Кгз (7 - "0 U (Т) dr (i = 1, ..., п),
j=1 j=1 'to
(2.3.2)
где (t) — элементы фундаментальной нормирован¬
ной матрицы решений системы (2.3.1) при ft (t) = 0
114
ГЛ. 11. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
(г == 1, ..., п), т. е. Ru (t0) = 0 при г ф /, Ru (t0) = 1
П
при i = j, Ki} (t, х) = 2 -Я г/тг (0 -^mj
(Т), Лт, (т) — эле-
т= 1
менты матриц!л обратной фундаментальной. • Предполо¬
жим, что возмущающие функции ji(t) являются непре¬
рывными и произвольными, удовлетворяющими лишь сле¬
дующим условиям:
!/г С)| < С; (г == 1, п), (2.3.3)
где с{ — некоторые заданные положительные постоянные.
Предположим, что xt (t0) = 0 (i = 1, . .., п). Тогда,
подставляя (2.3.3) в (2.3.2), получим
п I
I xi I 2 сд )\ I &%з x)\dx (i = 1. ., к\ к ^ п). (2.3.4)
i=i и
Неравенства (2.3.4) будут усилены, если верхний предел
интегралов (2.3.4) взять равным бесконечности (предпо¬
лагается их сходимость):
п оо
ki(OI< 2 с} J \Ki}(t,x)\dx (2.3.5)
3=1 I
Обозначим
оо
La = 5 I Kii (t> T) \dx С = 1, • • •, fc).
to
Поставим задачу о том, как распорядиться выбором коэф¬
фициентов atj системы (2.3.1) для того, чтобы числа Ltj
были минимальными [92].
Приведем решение этой задачи для случая, когда коэф¬
фициенты a,ij системы (2.3.1) постоянны.'’Для этого рас¬
смотрим одновременно другую систему дифференциаль¬
ных уравнений вида
п
Li [у] = у i — S aijUj = с,, (i = l,... , п), (2.3.6)
j = 1
§ 3. УСЛОВИЯ МИНИМУМА НАИБОЛЬШИХ ОТКЛОНЕНИЙ 115
где ац, ct — постоянные, входящие в выражения (2.3.1^
и (2.3.3).
Решение системы (2.3.6) при нулевых начальных усло¬
виях можно представить в виде
п f
yiV) = 2 cJ\!Kij{t,x)dx (i — Iк). (2.3.7)
j=1 u
При t — оо имеем
n 03
Уг{^) = 2 c) S Kij{t,x)dx (i = 1, . . . , ft). (2.3.8)
j= 1 'I о
С другой стороны, известно, что если вещественные части
всех корней характеристического уравнения системы
(2.3.6) при ct = 0 отрицательны, то значения yt (оо) явля¬
ются координатами устойчивой точки покоя, которые
можно определить как решения следующей системы алге¬
браических уравнений:
п
2 аиУ ](.<*-) = — сг С = 1,...,«). (2.3.9)
;=1
Следовательно,
п А
УгМ=- 2-^4 (i = l,...,ft), (2.3.40)
i=i
где Д — определитель матрицы ||а^||, Дг;- — алгебраи¬
ческое дополнение элемента ац определителя Д.
Сравнивая выражения (2.3.8) и (2.3.10), имеем
°° А
^Ki}(t,x)dx = (1 = 1ft). (2.3.11)
и
Так как
110
ГЛ. IT. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
то для фиксированных значений | Д^'М | (i — 1, ..., к;
j = 1, ..., п) постоянные числа Ьи будут иметь минималь¬
ные значения, равные |Дг;-/Д|, в том случае, когда функции
Ки (t, т) (i == 1, ..., к; j = 1, ..., п) являются знакопо¬
стоянными в секторе, ограниченном прямыми т = £, т = /0*
Теперь предположим, что коэффициенты. системы
(2.3.1) являются переменными.
В этом случае имеет место следующая теорема.
Если все Kij (t, т) (i = 1, ..., /с; / = 1, ..., п) в замкну¬
том треугольнике, ограниченном прямыми т = t, % = £0>
t = Т оо являются знакопостоянными функциями од¬
ного знака, то для xt{t0) =0 (i = 1, ..., п) абсолютные
величины отклонений координат xt (i = 1, ..., п) системы
(2.3.1) при действии постоянных возмущений fi(t) =
— ct = const (i — 1, ..., n) для любого момента времени
t0 <Г' Т будут не меньше абсолютных величин отклоне¬
ний координат той же системы при действии любых про¬
извольных непрерывных по t возмущений, удовлетворяю¬
щих лишь условию
l/i (01 <сг- (i = l, ...,«). (2.3.12)
В самом деле, при ft (t) = ct (i = 1, ..., п) решением
системы (2.3.1) является
п t
xi (0 = 2 СД КИ (t,x)dx (i =■ 1,. . . , 7г),
'J=1
а при произвольных возмущениях (2.3.12) —
n t
хг (0 = S I Ка •т) fi (т)dx (1 = 1. •
, п).
3=1 /о
Следовательно, в силу условия (2.3.12) и знакопостоян-
ства функций (t, т) справедливы следующие неравен¬
ства:
п t
S § (t, т) Cjdx —
J=1 u
>0 (i ft).
§ 3. УСЛОВИЯ МИНИМУМА НАИБОЛЬШИХ ОТКЛОНЕНИЙ 117
А это доказывает теорему.
Отметим, что если все коэффициенты atj (i =f= /, /, j —
= 1, ..., n) системы (2.3.1) неотрицательны, то все функ¬
ции Кц (t, т) являются положительными [9].
Теперь покажем, что условия применимости теоремы о
дифференциальных неравенствах С. А. Чаплыгина также
определяются лишь знаком функций Ktj (t, т) (i = 1, ...
..., /с; ; = 1, ..., п). Для этого вводил! в рассмотрение, не¬
прерывно дифференцируемые функции сравнения Zt (t),
удовлетворяющие условиям
HU) = (t0), (2.3.13)
где xt (t0) — решения системы уравнений (2.3.1), соответ¬
ствующие начальному моменту времени t0:
Xi {to) = Xi0 (i = 1, ..., n). (2.3.14)
Предположим, что вдоль функции сравнения Zt (t)
соблюдаются дифференциальные неравенства
Lt [Z\ — fi (t) > 0 (i = 1, ..., n) (2.3.15)
для значений t0 < ^ Г < ос. Будем говорить, что t±
есть точная граница применимости теоремы о дифферен¬
циальных неравенствах для /с координат системы уравне¬
ний (2.3.1) в точке £0, если для любых дифференцируемых
функций Zt (t) (i = 1, ..., п), удовлетворяющих условиям
(2.3.13) и дифференциальным неравенствам (2.3.15), спра¬
ведливы неравенства
Zt (t) > xt (t), t0 < t < *i (i = 1, k < n),
а по крайней мере для одного f в интервале
*о ^ ^ ^ ^1
где е — сколь угодно малое положительное число, сущест¬
вуют такие непрерывно дифференцируемые функции Zt (t),
удовлетворяющие условию (2.3.13) и дифференциальным
неравенствам (2.3.15), для которых имеет место хотя бы
одно из неравенств
Z* (?) < ЯГ! (Г)
(i - 1, ..., к).
118 ГЛ. II. ОЦЕНКА ОТКЛОНЕНИИ ОТ ПРОГРАММЫ
Будем говорить, что теорема о дифференциальных нера¬
венствах имеет в точке t0 неограниченную применимость,
если для любых непрерывно дифференцируемых функций
Zt (t), < Г < оо, удовлетворяющих условию
(2.3.13) и дифференциальным неравенствам (2.3.15), спра¬
ведливы неравенства
Zt (t) ^ xt (t) для *0 < г < Г (i = 1, ..., к).
Подставим вместо xt (t) в систему (2.3.1) функции Zt (t).
При этом в силу (2.3.15) получим
Lt [Z] - fi (t) - A i (t) = 0, t0<t< T
(i = 1, ..., /г), (2.3.16)
где Ai (t) — некоторые неотрицательные функции.
Решение системы (2.3.16) можно представить в следую¬
щем аналогичном (2.3.2) виде:
п п t
(0 = 2 Ra (0 x-j (to) + 2 $ Ka (t.T) fi (T)dx -I-
3=1 3=1 I
n t
+ 2 lKi}(t,x)A}(x)dx- (i = 1,. . . ,;t). (2.3/17)
3=1 to
Неотрицательные функции Aj (t) зависят от выбора про¬
извольных функций Zj (t), следовательно, в свою очередь
тоже являются произвольными.
Поэтому условия соблюдения неравенств
п t
zi (0 — (0=2$ Ki} (t, т) Aj (t) > 0 (i = 1, . . . , 7c; к < n)
3=1 to
(2.3.18)
выполняются только для тех значений t, для которых
функции
К ait, т) (i — 1, к; / = 1, 7г) (2.3.19)
остаются неотрицательными в замкнутом треугольнике,
ограниченном прямыми
т = £, т = £0> * “ ^ •
§ k. НЕЛИНЕЙНЫЕ ВОЗМУЩАЕМЫЕ СИСТЕМЫ
119
Так как условия (2.3.18) являются условиями применимо¬
сти теоремы о дифференциальных неравенствах С. А. Чап¬
лыгина, то неотрицательность функций (2.3.19) действи¬
тельно является условием применимости указанной теоре¬
мы С. А. Чаплыгина.
Итак, для обеспечения минимума накопленной погреш¬
ности при фиксированных значениях | Д^/Д | (i = 1, ..., к;
/ = 1, ..., 72; к ^ п) требуется лишь знакопостоянство
функций К и (Z, т) (i = 1, ..., к; j = 1, ..., п), а для неог¬
раниченной применимости теоремы о дифференциальных не¬
равенствах С. А. Чаплыгина требуется неотрицательность
этих функций.
Следовательно, когда система уравнений (2.3.1) имеет
постоянные коэффициенты, условия применимости тео¬
ремы С. А. Чаплыгина одновременно являются и доста¬
точными условиями минимума накопленной погрешности
при фиксированных значениях | Д^/Д | (i = 1, ..., к).
Отметим, что впервые задача о минимуме накопленной
погрешности в случае одного уравнения п-то порядка с
постоянными коэффициентами решена в [921, а условия
неограниченной применимости теоремы о дифференциаль¬
ных неравенствах С. А. Чаплыгина в случае одного урав¬
нения п-то порядка с переменными коэффициентами полу¬
чены в [44].
Как показано в [05], если коэффициенты уравнения яв¬
ляются постоянными, то условия применимости теоремы
С. А. Чаплыгина, полученные в [44], полностью совпадают с
условиями минимума накопленной погрешности, получен¬
ными в [92].
§ 4. Оценка отклонений от программы
в нелинейных возмущаемых системах
Рассмотрим метод оценки отклонений от программы в
нелинейных системах, подверженных начальным, постоян¬
но действующим и параметрическим возмущениям [64].
Задача формулируется следующим образом.
Указать оценки отклонений координат хх, ..., хп сис¬
темы
Ху ^ X; (хг, хп; /с£ + ДАц, ..., № + Д/сг, t) +
+ Ф,(0 (* - 1, (2.4.1)
120
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
для следующей заданной области возмущений:
Ui(<o)|Of.о (I = 1. •••, »), (2.4.2)
|Ф;(/)|<А (S = 1, .... п), (2.4.3)
[Мг | < АЩ (i = 1, ..., п), (2.4.4)
где (0 — функции, вызванные параметрическими и
постоянно действующими возмущениями, Afe], яго, —
заданные конечные положительные постоянные.
Предполагается, что функции Х,: и Ф; (t) такие, что
при условиях (2.4.2) — (2.4.4) и £ ее [£0, Г), где 0 £0 <
Т ^ оо, решения системы (2.4.1) в некоторой области
существуют и единственны.
Для решения задачи выделим из функций Хь по како¬
му-либо правилу линейную часть и представим систему
(2.4.1) в следующем виде:
п
•П = 2 РЧ (0 х) -I- h р'х. ••• - •'»> -I- Д*х. • • • . к"г Г
5—1
+ Afer, £) (t = 1, . . . , п). (2.4.5)
Как известно, систему (2.4.5) можно представить в
виде следующей эквивалентной ей системы интегральных
уравнений:
71 71 t
хг = 2 ГИ (0 Х3 (U) + 2 5 кЧ Т) f) (Х1’ • * ’ - Хп> /СХ +
j=i 5=1 h
+ Дкг k°r -I- Д/с,, т)dx (i =: 1, ... , п), (2.4.6)
где rtj (t) — элементы фундаментальной матрицы решений
системы однородных дифференциальных уравнений, по¬
лученных из (2.4.5) при= 0, удовлетворяющие условию
Г и (to) = 0 при i =/= /, ru (t0) = 1 при i = /,
П
%(/-7)= 2 гы (0 (t) (2.4.7)
7П-= 1
(r_1mj (т) — элементы матрицы, обратной \\rmj (т)||). Допу¬
стим, что мы нашли не убывающие по всем xL, ..., хп поло¬
жительные функции ср7- (,хг, ..., хп, t), удовлетворяющие
§ 4 НЕЛИНЕЙНЫЕ ВОЗМУЩАЕМЫЕ СИСТЕМЫ
121
для t0 ^ т ^ t < Т условиям
и (л-!,Хп, А"; -| АА'х, /с;: I- ла*г, о <
<ф; (xlt хп, t), (2.4.8)
а также функции R j (t) и (£, т), удовлетворяющие
для t0 ^ т ^ t <С Г условиям
ki,-(OI<№; (01, *)l < т)|
(i, / = 1, ..., n). (2.4.9)
Тогда из (2.4.6) вытекает, что для всех решений системы
(2.4.1), удовлетворяющих начальным условиям из об¬
ласти (2.4.2), имеют место следующие неравенства:
п п t
К К 2 I Rij (О I хзо + 2 \ \K-v1{t,x)\(fi{x1,...,xn,x)dx
3=1 3=1 to
(i = 1n).] (2.4.10)
Если бы мы могли найти функции M.j (t), удовлетворяю-
ющие условиям
М} (<) > Фз‘ К, 0 (/ = 1, п) (2.4.11)
в промежутке t0 t Т, то по крайней мере в этом про¬
межутке t для всех решений, удовлетворяющих условиям
(2.4.2), получили бы следующие оценки:
п п t
I xi I < 2 I Rij (01 *'30 + 2 $ I Ka (*. T)l Mi (T)dx = Vi (t)
j=l J=1 o
[(i = 1,..., и). (2.4.12)
Можно доказать, что функции М;- (г) можно искать как не¬
прерывные в промежутке t0 ^ t <С Т функции, удовлет¬
воряющие в этом промежутке системе следующих интег¬
ральных соотношений:
М} (t) > ф,- (уг, ..., уп, t) (/ ==[1, ..., п). (2.4.13)
Действительно, из выражений (2.4.8) — (2.4.10) видно,
122
ГЛ. П. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Следовательно, в силу непрерывности функций. Мj (t)
неравенства (2.4.12) в некоторой окрестности /0 сохраня¬
ют знак. Предположим, что при t ~ tx < Т хотя бы одно
из неравенств (2.4.12) превратится в равенство. Для этого
необходимо, чтобы при tQ < tr ^ tx хотя бы одно из не¬
равенств (2.4.11) имело обратный знак, т. е.
Итак, пришли к противоречию.
Следовательно, точка tx < Г, в которой нарушаются
неравенства (2.4.12), не существует, что и требовалось
доказать.
Существует множество функций, удовлетворяющих со¬
отношению (2.4.13). Следовательно, от удачного выбора
функций, Мj (t) зависит близость функций yi (t) к истин¬
ным значениям \xt (£)|.
Можно указать способ последовательного приближе¬
ния функций оценок yi (t) к значениям | x.i (£)(, сохраняя
знак неравенства (2.4.12).
Для этого нужно найти какую-нибудь одну группу
функций,Мj (t), удовлетворяющую системе (2.4.13). Под¬
ставив эти функции в (2.4.12), нужно определить значе¬
ния y^(t).
Подставив найденные значения y[l) (t) в (2.4.10), опре¬
делить
ма (С) < фа (лф, ..., хп, t').
Но из (2.4.13) видно, что
Mj (О > Ср; (г/i, уп, t') > ср,- (хг, хП1 t’)
(/ = 1, гг).
П П t.
У? S I Rij (t) I -'го -f 2 I I Kij (<’ x) I cPj — < y(a\x)dx
j 1 j=lt 0
Повторяя аналогичные шаги, имеем
ii
n
2 \ x
r~-1 to
’T T) dx (/ 1, . . . , n). (2/к 15)
§ 5. СТАЦИОНАРНЫЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
123
При этом получаем последовательность функций оценок
уР > У(р '>■■■'> уЧп) >...>! Э'г | (£ = 1, . . . , ге).
(2.4.16)
Ниже будет показано, что во многих случаях, даже не
прибегая к последовательному улучшению оценок, можно
найти значения функций М j (t), позволяющие получить
важные и интересные результаты.
§ 5. Оценка отклонений в стационарных
нелинейных системах
Рассмотрим систему нелинейных дифференциальных
уравнений с постоянными коэффициентами
п п
г/д = ciijXj -j- birj:rri'j -j- X\ ^ (i = 1, . . . , n),
j = l r,-j = 1
(2.5.1)
где a{j и birj — конечные постоянные, XW — сумма чле¬
нов разложения в ряд но степеням не ниже третьего по¬
рядка.
Как видно из (2.5.1), в данном случае предполагается,
что функции Ф; (t) равны нулю.
Известно, что если характеристическое уравнение, со¬
ответствующее уравнению первого приближения
п
•П = 2 аих) = 1 - • • • . п), (2.5.2)
J=1
имеет все корни с отрицательной вещественной частью, то
тривиальное решение х} = 0 (i = 1, ..., п) системы
(2.5.1) асимптотически устойчиво по Ляпунову независи¬
мо от членов высокого порядка.
Однако представляет интерес не только факт существо¬
вания области начальных возмущений, для которой име¬
ет место асимптотическая устойчивость тривиального ре¬
шения, но и оценка величины этой области,
124
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Исходя из этой точки зрения, займемся решением этой
задачи, для чего воспользуемся методом, изложенным
в предыдущем параграфе.
В данном случае за ф* можно выбрать следующую
функцию:
п
<Pi (.Cj, ...,хп)--= 2 I birj II ХГII Xj I-г z\3\ (2.5.3)
Г, j= 1
где — функции, полученные из заменой коэффици¬
ентов и всех хт (г = 1, ..., п) значениями их по модулю.
Тогда, согласно (2.4.12) и (2.4.13), получим
п п i
I Xi I ^ 2 I rij (О I 2 ^ I ^ ^ I ^^ =
;=i 110
(i = 1, . . . , n), (2.5.4)
■ П
M-t> 2 lbiwll г/к||^1 + Г® (г = 1, . . . ,w), (2.5.5)
К 3=1
где У(3) — функции, полученные из ZW заменой значений
| xk\ значениями yk (к = 1, ..., п).
Оценки (2.5.4) можно усилить, если заменить | ri;- (t) |
t
значениями sup \r{j (t) | = Ru, а интегралы ^ | кц (t, x) \dx
to
OO
значе ниями ^ | kij(t,x) | dx = Кц%
to
Тогда (2.5.5) будет представлять собой систему алге¬
браических неравенств относительно Mj.
Когда все корни характеристической системы уравне¬
ний, соответствующей системе (2.5.2), имеют отрицатель¬
ные вещественные части, то значения Rtj и K{j будут ко
нечными. Из (2.5.5) видно, что при xj0 = 0 (/ = 1, ..., п)
для достаточно малых значений Mj (f 1, п) условия
(2.5.5) всегда можно удовлетворить.
Верхнюю границу значениц Мj, удовлетворяющих ус¬
ловию (2.5.5), можно найти как группу наименьших ве¬
щественных положительных корней системы алгеб¬
§ 5. СТАЦИОНАРНЫЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
125
раических уравнений
71
М}= 2 МЫЫ+ГГ (/ = 1,..’..га). (2.5.6)
А‘, г=1
Если значения не равны нулю, то существование груп¬
пы вещественных положительных корней уравнений
(2.5.6) зависит от величин xj0. Наибольшие допустимые
значения Xj0 определяются как значения, соответствующие
границе области существования группы вещественных кор¬
ней системы (2.5.6).
Таким образом, определив наибольшие допустимые зна¬
чения Xj0 и соответствующие значения Mj (/ = 1, ..., п),
можно построить оценки решений согласно выражени¬
ям (2.5.4).
Если рассматривать систему (2.5.1) при постоянно
действующих возмущениях, ограниченных по модулю, то
уравнения (2.5.6) будут иметь следующий вид:
71
— 2 1 bjjti || У и II Vi l+^j3) + Lj (i = 1, ..., п), (2.5.7)
ft, i=l
где L{ — верхние пределы модулей постоянно действую¬
щих возмущений.
В этом случае условия существования группы положи¬
тельных реальных корней Мj этого уравнения зависит не
только от значений xj0, но и от величин Lj.
Следовательно, можно указать зависимость между xj0
и Lj (/ = 1, ..., гг), для которых существует группа поло¬
жительных вещественных корней системы уравнений
(2.5.7), и построить оценки решений согласно (2.5.4).
Когда заданные из практических соображений значе¬
ния xJ0 и Lj не могут обеспечить существование вещест¬
венных положительных корней системы (2.5.7), то оценки
(2.5.4) можно построить только на некотором конечном ин¬
тервале t.
Этот интервал будет тем больше, чем меньше значения
и Ktj, зависящие- от выбора коэффициентов первого
приближения atj системы (2.5.1).
126
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Пример. Оценим решения системы
(ti = а12х2 + х\ + Фх (I), | (2 5 8)
,Т2 — ^21^1 Т~ ^22'^2 ч ’
где |ФХ (£)| ^ Lx = const, аи — постоянные коэффициенты.
Определим фундаментальные решения г{]- (t) (г, / = 1, 2)
системы
х1 = а11х1 + а12х2,
( (2.5.9)
х2 — а21х1 + а22х2, J
удовлетворяющие условиям
ги (0) = 0 при г Ф /, гу (0) = 1 при i = /.
Составим выражения (2.5.4) и (2.5.5) для этого случая.
Они имеют следующий вид:
2 t
I xi I < S I rii (0 I XJ0 + 5 I С’ T) I d* = Yi (0
V = l. 2), (2.5.10;
+ Lt. (2.5.11)
Обозначим
S SUP I ri; (0 ! *;o = /1 (*io. *20). (2.5.12
oo
5 |Яц(#, T)|dT = Zn. (2.5.12
'to
Тогда выражение (2.5.11) будет иметь следующий вид:
Мг > (Д + М^)2 +
Рассмотрим выражение
М, = Ml (Klf + 2 MJ.Kl + fi +LX. (2.5.14
§ G. НЕСТАЦИОНАРНЫЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ
127
Решение алгебраического уравнения второй степени
относительно М г имеет следующий вид:
м = gffn + 1/ Z1—_ 1\< (2.5.15)
2(/^1°1)2 — V \ 2(/q\)2 / (к^)*
Условиями того, что М! будет иметь вещественный поло¬
жительный корень, будут
1 2Д • Kii > 0, |
(1-2/!^)* [ (2.5.16)
Следовательно, для построения оценок (2.5.10) значения
х10, х20 и должны удовлетворять условиям (2.5.16).
Выбрав соответствующие значения х10, х20, Lx, молено
найти Мг согласно (2.5.15). За значение постоянной М1?
фигурирующей в оценках (2.5.10), можно выбрать значе¬
ние М ц соответствующее знаку минус перед радикалом.
После этого можно построить оценки (2.5.10).
§ 6. Оценка отклонений в нестационарных
нелинейных системах
Рассмотрим систему дифференциальных уравнений
3=1
где — члены второго порядка относительно хх, ..., хп
с непрерывными и ограниченными коэффициентами в рас¬
сматриваемом промежутке значений t, Ф{ (t) — постоянно
действующие возмущения, ограниченные по модулю соглас¬
но (2.4.3), ри (t) — непрерывные и ограниченные функции
в рассматриваемом промежутке значений t.
Когда известны фундаментальные решения системы пер¬
вого приближения, то нахождение соответствующих оценок
можно производить аналогично предыдущему случаю.
128
ГЛ. jr. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Известно, что нахождение фундаментальных решений
системы линейных однородных дифференциальных урав¬
нений во многих сл учаях не выполняется в квадратурах, а
представляет трудную задачу.
Поэтому интересны другие способы решения этой зада¬
чи без решения уравнений с переменными коэффрщиентами.
Рассмотрим один из таких способов.
Коэффициента первого приближения системтт (2.6.1)
представим в следующем виде:
РиУ) = рЪ + ЬрцЮ, (2.6.2)
где = pij (t0)4 t0 — начальное значение t.
Тогда систему (2.6.1) можно представить в следующем
виде:
п п
*i — 2 Р°Ихз = 2 АРи (0 хэ + х<?} + фг С) (j = 1, • • • , п).
3=1 j—1
(2.6.3)
Систему (2.6.3) заменим эквивалентной системой интеграль¬
ных уравнений вида
п п t п
xt = 2 га С) х) Со) + 2 S ки С* т) 12 дРяс (т) (т) +
j=i j=i t0 U=i
+ Xi2) (агц . . . , хп, х) + Ф;-(т)]йт (i = 1, . . . ,ге). (2.6.4)
Для решений, удовлетворяющих начальным условиям
из области (2.4.2), имеем неравенства
п п t
\xi I < 2 I ra (01 xio T 2 SI Ka т) IФ? (xi> • • • > T) dx'
3=1 3=1 to
(2.6.5)
где
n
Ф; = 2 I kPu COMxi (T) I + zf} +1ф;ЮI- (2.6.6)
3=1
— функции, полученные из Ж2) заменой коэффициен¬
тов и хк (к — 1, ..., п) их значениями по модулю.
Sj G. НЕСТАЦИОНАРНЫЕ НЕЛИНЕЙНЫЕ СИСТЕМЫ 129
Применяя способ, рассмотренный выше, получаем сле¬
дующие оценки для решений системы (2.6.1) и условия
соблюдения этих оценок:
п п t
I xi I < 2 I гц (01 xj0 -1-2 51 Ku С» T) IM)dx = Vi (0 (2-6-7)
2=1 j=l to
(L = 1,. . . , ra),
(j = 1,..., и). (2.6.8)
Далее решение задачи выполняется аналогично преды¬
дущему случаю.
Пример. Допустим, что система (2.6.1) задана в виде
х + # [я — Др (01 = 0, (2.6.9)
где а — положительная постоянная
|Др (0 I < * = const. (2.6.10)
Представим уравнение (2.6.9) в следующем виде:
х + ах = Др •х.
В качестве функции cp (х, t) выберем функцию
Ф (х, t) = к \х\. (2.6.11)
Действительно,
/ (,х, t) = Др (t)x й|я|. (2.6.12)
Тогда оценка для решений (2.6.9) будет иметь вид
t
| х | | х01 e~al + e~at^ eatM{t)dti (2.6.13)
о
а условие соблюдения этой оценки —
г
М (t) > ker°t (| ж01 + S eatM (t) dt^j , (2.G/14)
5 А. С. Галиуллин
130
ГЛ. И. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
где \х0\ >|.г(0)|. Функцию М (t) будем искать из равенства
t
М = ке-°1 (| х01 + J еа,.1/ di'j. (2.6.15)
Очевидно, что решение (2.6.15) можно искать как решение
дифференциального уравнения
М + М (а —к) = 0 (2.6.16)
со следующим начальным условием:
М (0) = к\х0|.
Это решение имеет вид
М = к | а-’о | е~(а~к)1.
Следовательно, оценка (2.6.13) представится окончатель¬
но в следующем виде:
| х | <41 | e~(a~kV.
§ 7. Оценка отклонений от программы,
вызванных взаимными возмущениями каналов
системы
При решении многих практических задач встречаются
случаи, когда исследуемая система состоит из нескольких
самостоятельных каналов, которые при работе в возмущен¬
ном состоянии возмущают друг друга по определенному
закону. Например, такие задачи встречаются при иссле¬
довании гироскопических систем, различные каналы ко¬
торых возмущаются между собой гироскопическими мо¬
ментами, вызванными угловыми скоростями по другим ка¬
налам. Аналогичные возмущения возникают и между ка¬
налами курса и крена летательного аппарата.
При многих инженерных расчетах для упрощения реше¬
ния задачи пренебрегают возмущениями между каналами
системы в силу кажущейся малости этих возмущений. Та¬
кие пренебрежения иногда могут привести к существен¬
ным ошибкам. Имея это в виду, ниже будет рассмотрен
§ 7. ВЗАИМНЫЕ ВОЗМУЩЕНИЯ КАНАЛОВ1
131
метод оценки отклонении от программы, вызванных как
начальными и постоянно действующими возмущениями,
так и возмущениями между каналами системы.
В некоторых случаях для упрощения исследования
сложных систем их можно искусственно расчленить на
отдельные каналы с последующей оценкой наибольших
возможных отклонений координат системы, вызванных
как начальными и постоянно действующими возмущения¬
ми, так и методической погрешностью исследования, свя¬
занной с искусственным расчленением системы на подси¬
стемы.
Пусть возмущенное движение многоканальной систе¬
мы описывается следующей системой векторных дифферен¬
циальных уравнений [85]:
i
Xv - А, (t) ;1'ч -1- 2 Д* (0 Хц I Фу (I:) (V = 1, ... , /), (2.7.1)
где I — число каналов системы, — /^-мерный вектор
координат системы, Av (г) — квадратная матрица пара¬
метров каждого канала порядка ттг,,, В^ — матрица тv X
X т$ с ограниченными по. модулю элементами, характе¬
ризующая взаимные возмущения каналов, Ф,, (t) — /nv-
мерный вектор постоянно действующих возмущений, т, —
порядок системы уравнений v-ro канала.
Поставим следующую задачу.
В некотором заданном промежутке времени В0, Т] оце¬
нить все решения системы (2.7.1) для заданных областей
начальных, постоянно действующих и межканальных еоз-
мущений:
I Со) I < A, C’v = 1. 2, . . • , mv; V = 1, . . . , /), (2.7.2)
|Ф1у(0К*Х (i,= 1,2 пгч; v = 1 Z), (2.7.3)
17) / I <r^ do C* 1) • • • » V — 1/07/4
|0i,i3WI<Sg (2.7.4)
/Р = 1,..., Тор; (3 = 1, ... ,/,)
ГДе bi„ip (0 — элементы матрицы Др (7), £,•<’, F?v, —
заданные положительные постоянные.
Предполагается, что матрицы Av (t), 2?v/3 (г) и вектор-
функция Ov(0 таковы, что при условиях (2.7.2) — (2.7.4)
5*
132
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
и в промежутке U0, 71], где О t0 <1 Т < °о, не наруша¬
ются условия существования и единственности решений
системы (2.7.1).
Для решения поставленной задачи систему (2.7.1) за¬
меним следующей эквивалентной ей системой векторных
интегральных уравнений:
i г
= Гч (t) Z, (10) + ^ Kv (t, t) 2 CO Xfi (t) + CDV (t)
to P=1
(v = i
dx
(2.7.5)
где rv (t) — нормированная фундаментальная матрица ре¬
шений системы (2.7.1) при всех Вv (t) =Ov = О, Kv (t, т) =
= rv (ty-1 (т); здесь г”1 (т) — матрица, обратная фунда¬
ментальной.
Если бы были найдены такие положительные столбце-
вые матрицы Мv (t) порядка mv, удовлетворяющие при всех
значениях (2.7.2) — (2.7.4) и для всех tQ * "С Т нера¬
венствам
i
Mv(0> 2 5",|.rp(0|+^ (v = l(2.7.6)
Р=1
то в промежутке t0 t ^ Т имели бы место следующие
оценки:
t
I a-v I < I rv (0 I x° + \ I t) [ Mv (t) dx = y4 (t) (2.7.7)
<o
(V = 1, . ... 0.
В неравенствах (2.7.7) и далее знак модуля означает,
что каждый элемент матриц взят по абсолютной величине.
Усиливая неравенства (2.7.7) путем замены матриц
|rv.(J)|, | К* (ty т) | соответственно постоянными матрицами
Rv и К.; с элементами
Д.
sup км ДО l>
[fo.T]
t
Ks„,„ = sup \|/C,.v,-v(i, t) | cZt
['»■ 'П i.
(sv, гч = 1, . . . , ms] v = 1,. . . , I), t
(2.7.8)
§ 7. ВЗАИМНЫЕ ВОЗМУЩЕНИЯ КАНАЛОВ
133
получим
\xv < 7?vx°; + Kv-Mv = j/v (v = 1? •••» (2.7.9)
Подставляя правые части (2.7.9) в (2.7.6), получим сле¬
дующие условия соблюдения оценок (2.7.9):
i
Мч > 2 Впч (ЯР4 + ЯрМр) + Fl (V = 1 I). (2.7.10)
3=1
Совокупность матриц.Mv, удовлетворяющих (2.7.10),
можно искать как решение системы матричных алгебраи¬
ческих уравнений с постоянными коэффициентами:
i i
М* - 2 В\Кф1р = 2 В1,пуг% + Fl (V = 1, ... ,1).
3=1 3=1
(2.7.11)
В развернутой форме система (2.7.11), из которой оп¬
ределяются все элементы матрицы Mv, записывается в сле¬
дующем виде:
i тз ™з
м*- 2 =
3=i jp=i pp=i
г ™3
= 22 2 + К (2.7.12)
3=1 ;'=1 рз=1
(sv = 1, . .. ,лг„; v = l,...,Z).
Для упрощения дальнейших рассуждений введем по¬
стоянные определяемые выражениями
Лч*=-7Г- (2.7.13)
sv
(РЗ ^ ’ • • • ? ^3 j Sv 1 j • • • > ^ » Р 1, . . . , Z).
Предположим, что определитель системы (2.7.12) от¬
личен от нуля. Тогда, подставляя в систему (2.7.12) зна¬
чения Мрэ согласно (2.7.13) и разрещад ее относительна
134
ГЛ. И. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
MSv<) получим
I т3
(2.7.14)
Sv I ?пр тр
(sv = 1, . . . , rov; v = 1, . . . , I).
Из (2.7.14) видно, что для существования положительных
значений MSv достаточно выполнения условий
Итак, если верхние пределы абсолютных значений bajPi (t)
обеспечивают выполнения условий (2.7.15), то, опреде¬
ляя из системы (2.7.12) постоянные AfSv, можно постро¬
ить оценки (2.7.7).
В условия (2.7.15) х{)п и Fl не входят. Следователь¬
но, при любых конечных значениях этих постоянных, оп¬
ределяющих размеры областей начальных и постоянно
действующих возмущений, и при значениях Bsjq, удовлет¬
воряющих условиям (2.7.15), можно определить конечные
постоянные MSv и построить оценки (2.7.7).
Полученные выше результаты легко распространяются
на системы, возмущенное движение которых описывается
системой векторных дифференциальных уравнений
<3v = Tv^v (V = 1, . . . , I), >
где py и у., — постоянные квадратные матрицы порядка
mv, Pv (0 — квадратная матрица порядка rav, являющаяся
известной вещественной, постоянной матрицей без возму-
1 rnft тр
1 i I Рп, - 1 ^
(sv - 1, . . . , 1Щ\ V — 1, . . . , /).
рч («) rv 4- pv<pv (6V) + 2 b^i (()-ха + (<).
(2.7.16)
§ 7. ВЗАИМНЫЕ ВОЗМУЩЕНИЯ КАНАЛОВ
135
щсил и, а при наличии параметрических возмущений к
ней прибавляется произвольная матрица /\pv (t) с элемен¬
тами, ограниченными элементами известной постоянной
матрицы 6„, фу (cTv) — га,-мерная нелинейная вектор-функ¬
ция, Ф,, (t) — т,-мерный вектор постоянно действующих
возмущений, ЬУр (t) — т» X ^-матрицы, характеризу¬
ющие взаимные возмущения каналов.
Компоненты вектора фу (av) предполагаются нелиней¬
ными произвольными с графиками, ограниченными двумя
параллельными прямыми, как это изображено на рис. 2.1.
Компоненты фу (orv) можно представить в виде (рис. 2.1)
9iv Oiv) = *ivai„ + (0 (г = 1, . .. , mv), (2.7.17)
где kU) — угловые коэффициенты прямых, изображенных
на рис. 2.1, а < | cp°v (t) | < (p?v.
Если при решении задачи постоянные включить в
значения Fiv, а члены kitaiyj в значения pSjij то
решение задачи сводится к рассмотренной в предыдущих
трех параграфах.
Как было сказано в начале этого параграфа, предлага¬
емый здесь способ с успехом может быть применен для уп¬
рощения исследования сложных систем, состоящих из
большого числа связанных между собой каналов. При ис¬
следовании таких систем необходимо искусственно расчле¬
нить систему на подсистемы, а связи между ними рассмат¬
ривать как возмущения. Такой подход позволяет исследо¬
вать отдельно каждую подсистему с последующей оценкой
13G
ГЛ. II. ОЦКНКА ОТКЛОНЕНИЙ ОТ П^ОГРАММ'Ы
наибольших возможных значений отклонений координат
системы, вызванных как начальными и постоянно дейст¬
вующими возмущениями, так я методической погрешностью
исследования, связанной с искусственностью расчлене¬
ния системы на подсистемы.
Так, например, пусть задана система, возмущенное
движение которой описывается тг-мерным векторным диф¬
ференциальным уравнением
х = X (t, х) + Ф (*). (2.7.18)
Предполагается, что вектор-функции X (£, х) и Ф (I)
не нарушают условия существования и единственности
решений (2.7.18) в промежутке Z0 t Т °о.
Расчленим систему (2.7.18) на I подсистем, а связи меж¬
ду ними будем считать взаимными возмущениями каналов.
Для этого из вектор-функции X (£, х) по какому-нибудь
правилу выделим, линейную часть и представим (2.7.18)
в следующем виде:
i
= (0 ^0 *~f~ /v (^? *^1» • • • > %l) (у == ^ » • • • 7 О»
0=1
(2.7.19)
где sv, Л — шу-мерные векторы, Av — постоянная квад¬
ратная матрица порядка mv, (t) — переменная матрица
mv X
При этом необходимо иметь в виду, что
i
2 ГПч = п.
V=1
В дальнейшем члены с коэффициентами будем счи¬
тать взаимными возмущениями каналов.
Систему (2.7.19) заменим эквивалентной системой интег¬
ральных уравнений
t i
xv = rv (t) xv (t0) + 5 rv (t — t) Г 2 b,tJ (t) Xp (x) +
<0 1 p=l
+ U(X', хг(х),..., ж, (т))]йт (v = l, (2.7.20)
§ 8. ВЗАИМНЫЕ ВОЗМУЩЕНИЯ КАНАЛОВ
137
где rv (t) — нормированная фундаментальная матрица
решений системы
Xv = AvXv {v — 1, I).
Предположим, что найдены неубывающие по всем ком¬
понентам векторов х±, ..., xi положительные векторы-функ¬
ции ф,, (t, хх, ..., х{), удовлетворяющие для t0 ^ t ^ Т ус¬
ловиям
/„ (£, жх, Х[) < ф, (i, жх, ж,) (2.7.21)
(v = 1,’..., I).
Тогда, заменив в (2.7.20) функции /„ на функции ф.,, по-
лучим
t
«v|<| Г, (t) I X* + ^ I rv (I — т) | ф„ (г, хи ..., ж,) dt (2.7.22)
Jo
(v = 1, . . . , I),
где
I
фу (t, Xu . . . , X,) = 2 | &vp (t)l |жр (t) I + ф, (t, Жх, . . . , Xi)
P=1
(v = 1, . . . , Z).
Заменяя в (2.7.22) функции на искомые функции М v (т),
получим следующие оценки решений (2.7.18) и условия соб¬
людения этих оценок:
t
| tv | < | Г* (t) | ж? + ^ I rv (£ — t) I M,(t) dt = yv (t), (2.7.23)
t»
M* (t) >ф„(^, гц,... , ?/0 (v - 1, • • • , /)• (2.7.24)
Далее решение задачи выполняется так же, как изложено
в предыдущих трех параграфах.
138
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
§ 8. Оценка допустимых параметрических возмущений
в абсолютно устойчивых системах
Рассмотрим системы, возмущенное движение которых
описывается следующими дифференциальными уравне¬
ниями:
тп '
ii = S lPUxj T P;jcPi (Зл 01 + Fi С. ... , хт),
(i — 1, . .., т).
j=i
В этих уравнениях уг-7- — действительные постоян¬
ные коэффициенты (часть из них может быть нулями), ко¬
эффициенты p{j при отсутствии параметрических возму¬
щений равны соответственно действительным постоянным
p{\j, а при наличии параметрических возмущений к ним
прибавляются произвольные функции Дри (t, хх, ..., хт),
ограниченные по абсолютной величине положительными
постоянными б и соответственно.
Следовательно, имеют место соотношения
Pij = Pij APij (^» *^1» • • • »
I ^Pij Xif * • . , Хт) [ бij
для всех t > 0 при любых Xj (f = 1, ..., т).
Нелинейные функции cpj (а;-, t) являются произвольны¬
ми кусочно-непрерывными действительными функциями,
удовлетворяющими условиям
(/ = 1 ,...,т) (2.8.2)
для всех действительных значений Oj и t 0, где а7- и
— некоторые постоянные. Функции Ft (t, хг, ..., хт),
являющиеся постоянно действующими возмущениями,
предполагаются произвольными действительными и для
всех t !> О при любых xj (/ — 1, ..., т) ограниченными
по абсолютной величине некоторыми положительными
функциями Fi° (t), т. е.
|^г {t, xv ..., (t).
g 8. параметрические возмущения
139
Кроме того, предполагается, что для системы (2.8.1)
выполняются условия существования и единственности ре¬
шений для всех t 0 при любых xj (0) (/ — 1,2, ..., т).
Поставим следующие две задачи.
1) На коэффициенты системы (2.8.1) piy-, ytJ, р^\ на
постоянные а/, Ь/, а также на верхние пределы абсолютных
величин параметрических возмущений бг;- и постоянно дей¬
ствующих возмущений F(){ (t) наложить такие условия,
при которых гарантируется абсолютная устойчивость
или ограниченность решений системы (2.8.1).
2) Построить оценки для решений системы (2.8.1) для
любых xt (0) и t 0 при любых параметрических и посто¬
янно действующих возмущениях, удовлетворяющих ус¬
ловиям, наложенным на них при решении задачи 1.
При отсутствии параметрических возмущений решению
этих задач (в основном задачи 1) посвящено большое коли¬
чество работ [1, 28].
В отличие от этих работ, в настоящем параграфе наряду
с возмущениями характеристик нелинейных звеньев и
постоянно действующих возмущений учитываются и воз¬
мущения коэффициентов p3j (параметрические возмуще¬
ния). Кроме того, предлагаемый здесь метод позволяет ре¬
шить наряду с первой и вторую задачу, представляющую
значительный интерес при рассматривании конкретных
практических задач.
Вводя дополнительные координаты xmvi = cxi? диффе¬
ренцируя ai в системе (2.8.1) по времени и подставляя
значения хл из предыдущих уравнений, систему (2.8.1)
можно привести к виду
п
= 2 [Puxj + ЕЕф;(xi> 0] + Fi{t, x,
•?=1
(l = 1.
Введем следующие обозначения:
Щ = -j- (b} - cij), h} = -K (b} -f aj),
фj (xj, t) = hjXj -|- kjXj,
где kj — произвольная функция от t и Xj, удовлетворяю¬
щая условию | kj (xj, t) | ^ kj{).
) (2.8.3)
(2.8.4)
140
ГЛ. IГ. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
С учетом обозначений (2.8.4) систему (2.8.3) можно пред¬
ставить в матричной форме
х = сх + / (t, х) х + F (t, х), (2.8.5)
где х — ?г-мерный вектор, F (£, я) — гг-мерный вектор-
функция постоянно действующих возмущений, с, / (г, х) —
квадратные матрицы порядка п X п с элементами =
= P°ij + Pi А. О = +' которые удовлетво-
ряют условию
1/Л <A,-f APir (2.8.6)
Квадратную постоянную матрицу е с элементами
eiJ — SiJ х (2.8.7)
назовем в дальнейшем матрицей параметрических возму¬
щений.
Предположим, что характеристическое уравнение, соот¬
ветствующее системе
х = сх, (2.8.8)
имеет корни с отрицательными вещественными частями.
Для решения поставленных задач воспользуемся мето¬
дом, рассмотренным в § 4.
Для этого систему (2.8.5) представим в интегральной
форме
х = г (£) х (0) +
t t
-|- ^ /• (t — т) / (.г, т) х (т) dx -f- \ г (t — т) F (х, т) dr,
о о
(2.8.9)
где г (t) — квадратная нормированная фундаментальная
матрица решений системы (2.8.8).
Если иметь в виду обозначение (2.8.7) и условие (2.8.6),
то из (2.8.9) вытекает следующее матричное неравенство:
I х \ ^ Iг (011х (0) I + ^
| г (t — т) [ е | х (т) | dr -f ^ | г (t — т) | F0 (т) dr, (2.8.10)
о о
где | х\\ — матрица-столбец с элементами | xt | (i = 1, ..., п).
Если при t = 0 имеет место неравенство
М > е \х (0)|,
8. ПАРАМЕТРИЧЕСКИЕ ВОЗМУЩЕНИИ
141
то в силу непрерывности решений системы (2.8.5) в неко¬
тором промежутке времени будет иметь место неравенство
где М — постоянная положительная матрица-столбец,
%0 — достаточно малая положительная постоянная или
нуль.
Пока имеет место неравенство (2.8.11) для решений сис¬
темы (2.8.5) будет справедлива оценка
то оценка (2.8.12) будет справедлива для всех t 0.
Для упрощения дальнейших рассуждений предполо¬
жим, что все элементы постоянной матрицы М одинаковы и
равны некоторой положительной постоянной М0.
Тогда, деля обе части (2.8.13) на М0е~1°\ получим
где 1 — матрица-столбец с единичными элементами.
Если элементы матрицы F0 (т) произвольные ограничен¬
ные, но не исчезающие, то для всех t ^ 0 неравенства
(2.8.14) могут иметь место только при ?,0 = 0.
> е| х (t) |,
(2.8.11)
! 2' I < I г (0 11 2 (0) | + I | г С — т) I Мdx +
о
/
+ $ И* — т) |F°(r)dT. (2.8.12)
О
Если для всех t 0 имеет место условие
t
Ме~!> е [ | г (t) 11 х (0) | + § | г (t — т) | Ме-г^ dx -J-
о
t
о
P(0ll*(0)|+ 5|r(i-T)|F0(f)rft
t
+ ^ | г (t — t)|iex”(/-T) dx , (2.8.14)
о
142
Гл. IT. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
В этом случае выбором достаточно большого’; значения
М0 первые слагаемые в квадратных скобках условия
(2.8.14) можно сделать меньше сколь угодно малой положи¬
тельной постоянной Д.
Следовательно, при условиях
со
1 >е(Д1 f 5 к (О МО. (2.8.15)
О
наложенных на матрицу параметрических возмущений е,
решения системы (2.8.5) будут ограниченными с оценкой
(2.8.12) для координат.
Нетрудно показать, что условия (2.8.15) одновременно
являются условиями абсолютной устойчивости системы
(2.8.5), если элементы матрицы F° (t) являются исчезаю¬
щими функциями, имеющими положительные характери¬
стичные числа в смысле А. М. Ляпунова.
В самом деле, если в этом случае имеют место условия
(2.8.15), то выбором значения М0 достаточно большим, а
значения Х0 достаточно малым можно добиться выполне¬
ния неравенства (2.8.14) для всех t ^ 0. А это означает,
что для решений системы (2.8.5) имеют место оценки для
всех t ^ 0, стремящиеся к нулю при t оо.
Следовательно, система (2.8.5) абсолютно устойчива с
оценкой (2.8.12) для координат.
Итак, поставленные задачи решены.
В заключение отметим, что при решении конкретных
практических задач для построения оценок удобно выде¬
лить область пространства элементов матриц М, е и по¬
стоянной А,0, где имеет место условие (2.8.13) для всех t 0.
Решение этой задачи излагается в следующем параграфе.
§ 9. Определение области параметров, где имеют место
асимптотически убывающие оценки отклонений
от программы
Рассмотрим систему дифференциальных уравнений воз¬
мущенного движения вида
п
Xi = 2 (Сц + e0/ij) Xj (i = i, ... ,п), (2.9.1)
j=l
§ 9. ОПРЕДЕЛЕНИЕ ОБЛАСТИ ПАРАМЕТРОВ
143
где ctj — постоянные, е0 — некоторая положительная пос¬
тоянная, ftj — непрерывные и ограниченные функции в
интересующей нас области изменения хх, х2, ..., хп для
всех t ^ 0.
В предыдущем параграфе показано, что если все корни
характеристического уравнения, соответствующего систе¬
ме (2.9.1) при е0 = 0, имеют отрицательные вещественные
части, то тривиальное решение системы (2.9.1) асимпто¬
тически устойчиво «в целом» и при некоторых е0 =/= Ос
оценками
п п t
I xi I < 2 I m (01 *io+2 $ I rv V — T) Iмзе'х"т dx = Vi
j=1 j=l 0
= (2.9.2)
где Mj — некоторые положительные постоянные, Xj0 —
постоянные, ограничивающие пределы наибольших возмож¬
ных начальных отклонений координат
1 хз (0) I < хjo (/= 1, ...,*), (2.9.3)
Х0 — некоторая положительная постоянная, ri7- (t) — эле¬
менты фундаментальной матрицы решений системы, одно¬
родных дифференциальных уравнений, полученных из
(2.9.1) при е0 = 0, удовлетворяющие условиям
Г а (0) = 0 при i /, ru (0) = 1 при i = / (2.9.4)
(;i, j = 1, ..., n).
Условиями соблюдения оценок (2.9.2) будут неравен¬
ства
М8е~^ >
п п t
2 I rik (t) I Xu +2 S I rik (t — T) I Mlie"X“T dx
fc=i K-i о
(s = l,...,n), (2.9.5)
где
/si = sup|/si (t,xlt ... , a:,,) I ,
i> о
144
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Для удобства дальнейших рассуждений постоянные
Мs будем считать связанными между собой известными
коэффициентами пропорциональности Ns, т. е.
Ms = M,Na (s = 1, п).
(2.9.6)
Задача заключается в выделении области пространства па¬
раметров е0, К гДе справедливы условия (2.9.5) для
всех t ^ 0 [84].
С учетом (2.9.6) условия (2.9.5) перепишем в следующем
виде:
Ii=l
71 t
+ 2
■fc=l 0
(s = 1,. . . , и). (2.9.7)
Умножая обе части неравенств (2.9.7) на функцию по¬
лучим
Л/1Л^>е^е02 /“
2 k»k (01^-0 +
/С=1
п /
(s - 1,. . . ,п). (2.9.8)
Известно [94], что в общем случае функции \rik (г)| еХэ*
удовлетворяют неравенствам
кг/ДО |:
h тф
2 2
(2.9.9)
(г, /с = 1, ..., п; т1 +. ... + тп = я),
где сгРф/г — постоянные интегрирования, определяемые из
условий (2.9.4), Хф — вещественные части корней харак¬
теристического уравнения, соответствующего системе
(2.9.1) при в о 0, //?ф — соответствующая кратность кор-
цей характеристического уравнения.
§ 9. ОПРЕДЕЛЕНИЕ ОБЛАСТИ ПАРАМЕТРОВ 145
Очевидно, что из (2.9.9) для функций
t
§[rifc(f — Т)|е>»('-т) dx,
О
входящих в соотношения (2.9.8), вытекают следующие
оценки:
t
5 I Пи (t — т)| еМ(-тЫт<
О
t h тФ
S 14фк I (f — Т)(рф_1)в (b.+W'-Orft (2.9.10)
о Ф=*1 Рф=1
(i, к = 1, ..., п; ml rf- ... + тп = п).
Интегрируя правые части этих неравенств, получим
SkuA — T)|exo«-'')dt<
h тф Г /п _1)
<3 3
Ф=1 Рф= 1
+ ... + (-1)
^о + ^ф (^о + ^ф)2
(Рф-1) (Рф — !) (Рф — 2) • • • 1 „p.Q+x.pt
(Ч + V рф
_ ( _ 1 )№ф-1> -
(Ч + Ч)Рф
(i, к = 1, ..., н; + ... + т„ = га).
Введем обозначения:
Хио = 4ф^(Рф_1) е(Х"+Ч)',
*(рф-2> + ...
(2.9.11)
г | г
ГРфк — I СРфк
,<РфЛ) ( 1)
Ч + Ч (Ч + Ч^
(РФ — ^(Рф —2) • ■ .1 ,, .,
| ^ ^(Рф-1) _ - ^(Л0+Хф)(
(Ч + Ч А
-1Иг>, — 2). . . 1 ^
(2.9.12)
(Ч + Ч )рф
(iy /с = 1, ..., п\ рф — 1, ..., Шф).
146
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Подставляя правые части неравенств (2.9.9), (2.9.11) в
(2.9.8) и учитывая обозначения (2.9.12), получим
ВД,>е02 &
2
/1=1
h 771 ф
2 2 д V- (О
Ф=1 Рф=1
Я ко +
п h тф
~г Мх 2 2 2 г Рфк N к
к=1 Ф=1
(S = 1, . . . , п).
(2.9.13)
Попутно заметим, что соотношения (2.9.13) при любом
t ^ 0 могут иметь место лишь при условии
К < (Ф = 1. п).
(2.9.14)
Следовательно, значение необходимо искать всегда в
области
0< К< | Яф | (ф - 1, ..., п). (2.9.15)
Введем постоянные R% и ri( определяемые соответствен¬
но следующим образом:
*i = 2 *
(2.9.16)
h тф
sup 2 2 ДффК (О хк0,
k=i Ф=1 Рф^1
п h тф
Гг = 2 SI1P 2 2 4ф'.- (О Nk (£' =1 п)•
?.=1 />о ф=1 Рф=1
Тогда соотношения (2.9.13), которым должны удовлет¬
ворять искомые постоянные Х0, fxl5 е0, будут представлять
собой следующую систему алгебраических неравенств с
постоянными коэффициентами:
ТВД>е02 fsiiRi + nMJ (s = l,■...,«). (2.9.17)
г=1
Нахождение постоянных Вг и гь в виде (2.9.16) в об¬
щем случае может представлять некоторую трудность.
Эту задачу можно существенно упростить, если условия
(2.9.13) несколько усилить, увеличив значения Rt и г1-
по сравнению с их значениями (2.9.16),
§ 9. ОПРЕДЕЛЕНИЕ ОБЛАСТИ ПАРАМЕТРОВ
147
Рассмотрим два таких способа:
1) Значения Rt и гi будем вычислять соответственно в
виде
п h
Ri = 2 2 S1|P
Ji=l ф —1 f>°
Пф
Я/сО.
2
Рф=1
п h 777 Ф
>'г ^ 2 2 snP 2 >РфЬ (О (/ - 1,... , «).
Рф~
> (2.9,18;
В этом случае определение Яг и сводится к определе¬
нию наибольших значений функций
771 ф
2 Rpфло и 2 4Фло c,ft = i,....n). (2.9.19)
р Ф=1 Рф~1
Приравнивая к нулю производные от этих функций, по¬
лучим соответствующие алгебраические уравнения, каж¬
дый из которых (/Пф — 1)-й степени относительно t. Решая
в отдельности эти алгебраические уравнения, определяем
значения t, соответствующие максимальным значени¬
ям функций (2.9.19), а затем и значения Ri и rt согласно
(2.9.18).
2) Значения Rt и г* будем вычислять в виде
п h 772 ф
^ = 2 2 2 sup I Ярф/,- (t) | x/i0,
7с=1 ф=1 рф=1
п /г 777 Ф
ri = 2 2 2 sup Грфк (') Nk (г = 1,. . . , п).
К-1 Ф=1 Рф-=1
*>0
(2.9.20)
В данном случае нахождение значений (2.9.20) представ¬
ляет более простую задачу и сводится к определению наи¬
больших значений функций
Rp+ic (*)> (0 С- /с = 1, • . • , Рф = 1ф, • • • , тф). (2.9.21)
148
ГЛ. ГГ. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММА
Как нетрудно видеть из (2.9.12), функции Rp^k (О
наибольшие значения приобретают при t =—~Р'ь | ■.
Итак, какой-нибудь из вышеприведенных способов поз¬
воляет определить значения Rt и гг в виде определенной
функции от А,0.
Очевидно, что часть пространства параметров М1? е0,
Х0, где имеют место неравенства (2.9.17), а следовательно, и
условия (2.9.Г>), ограничивается поверхностями
Эта часть представляет собой область, находящуюся на
той стороне всех поверхностей (2.9.22), которая включает
в себя ось и где М1 > 0, е0 > 0, > 0.
Определим тип поверхностей (2.9.22) в том случае, ког¬
да все корни характеристического уравнения, соответст¬
вующего системе (2.9.1) при е0 = 0, являются вещест
венными отрицательными.
В этом случае, вычислив rt по вышерассмотренному
второму способу, получим
п
- е(,2 й(Нг -f 1-iMi) (s = 1 ,п) (2.9.22)
S=1
и плоскостями координат
мх = 0, 8о = О, = 0.
П П
fc—1 р=1
(2.9.23)
Введем обозначения для постоянных
(2.9.24)
(s,p= 1,. . . ,п).
§ 9. (Л1РЕДЕЛЕНИЕ ОП Л АСТИ ПАРАМЕТРОВ
149
Заменяя в г\ все корни Хр одним наименьшим по модулю
корнем и подставляя (2.9.23) в (2.9.22), получим
Мх = е0Л8 —
К — I а I
(s = l «), (2.9.25)
где а — наименьший по модулю корень характеристиче¬
ского уравнения. Следовательно, уравнениями поверхно¬
стей (2.9.22) в данном случае будут
М±Х0 + BgMtfo — ^se0?to — М1\а\ -f- Л8|а|е0 = 0. (2.9.26)
Уравнения (2.9.26) являются уравнениями поверхно¬
стей второго порядка.
Обозначим Мъ Я0, е0 соответственно через хк (к =
— 1, 2, 3) и представим левые части (2.9.26) в виде
/s Clij XiXj (5 — 1, . . . , Yl),
i—1 j=1
где a*. = at., x4 = 1.
Для данного случая имеем
(2.9.27)
s 8 8 Г\
аи = а22 = ^33 — 9,
s s 1 А
Я23 — а32 = ГГ“ л«,
а13
<4= -у В.,
S S 1 | |
аи = а41 = — I а I
8 S 1 з 8 1 j I I
а12 = ^21 = -ГГ' 1 U'34 '= а43 “ ~ТГ I 06 I
► (2.9.28)
ali = <4 = «4 = 0 (s = 1,. . . , n).
Определим инварианты квадратичных форм (2.9.26):
А = | | = 0 (г, / = 1, 2, 3,4), 6 = | оу | =
= (г,у = 1,2,3),
I = «п -f «22 + Я.ЗЗ — 0»
Г 8 8 , 8 s , 8 8 / 8 ч п
— #22 #33 ~Г #33 #11 ~Г #11 #22 (#2з)
-(а1а)*=-4-(Л!+Б! + !).
(2.9.29)
150
ГЛ. И. ОЦЕНКА ОТКЛОНЕНИИ ОТ ПРОГРАММЫ
Видно, что для значений и знаков (2.9.29) исходные
уравнения (2.9.26) соответствуют конусам.
Координаты вершин конусов могут быть найдены из
уравнений (см. [35], стр. 69), имеющих в данном случае
следующий вид:
"ГГ Хо Jr ~Т~ Д$ео ~ | ^ | ~ О,
4-^i-4-®о = о.
в* — А. - A I а I
-j-m1 + -j-x0+ =0.
Решением этих систем уравнений являются
= е0 = 0» Х0 = |ос|.
Для приведения уравнений конусов (2.9.26) к канони¬
ческому виду необходимо составить и решить характери¬
стические уравнения вида
А. = К,- — = 0 (г, / = 1, 2, 3; s = 1, .... »), (2.9.30)
где
f 1 при i = /,
4 j 0 при i =j= /.
Подставляя данные (2.9.28) в (2.9.30) и раскрывая оп¬
ределители, получаем
Д. = Ь®- -Г^(^ + ЯПИ) + 4 = ° (2.9.31)
(s = 1 п).
С другой стороны,
Аз = (^з Кг) (К ^32) (^s Кз) = ’
— (^sl ^S2 4~ + ^з( ^sl ^з2 + ^sl^s3 +
4" ^з2^эз) — ^slAs2 ^s3 = 0, (2.9.32)
где Xsi (i = 1, 2, 3) — корни характеристических урав¬
нений (2.9.31).
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ ТОЧКИ 151
Из сравнения (2.9.31) и (2.9.32) получаем
^Sl ~f" ^s2 ~\~ Vs3 — О»
(2.9.33)
^sl^s3 ~Г ^s2^s3 — (^-s ~\~ -h 1)
(s = 1, ..., 72)
Согласно [51] заключаем, что все корни уравнений
(2.9.31) действительные. Кроме того, из (2.9.33) следует,
что каждое из этих уравнений имеет один отрицательный
корень. Допустим, что отрицательными корнями уравне¬
ний (2.9.31) являются Яз3.
Тогда канонические уравнения конусов (2.9.26) будут
иметь следующий вид:
Рассмотрим задачу оценки отклонений от программного
движения центра тяжести твердого тела в силовом поле
одного притягивающего центра. Для решения этой зада¬
чи воспользуемся методом, приведенным в § 4.
В полярной системе координат уравнения управляемого
движения центра тяжести твердого тела в силовом поле
одного притягивающего центра имеют следующий вид [63]:
где т — масса движущегося по программе тела, Мц —
масса притягивающего центра, ц — константа притяжения,
7' — модуль радиус-вектора движущегося тела в поляр¬
ной системе координат, 0 — полярный угол, Z и II —
силы управления (тяги).
Х.1 Mi -|- ^s2^0 + | ^3 | е0 — О (S — 1 , . . . , 72).
§ 10. Оценка отклонений от программы
управляемой точки в центральном поле
I. Случай линейного управлении
(2.10.1)
152
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Введем обозначение:
к2 = цМц. (2.10.2)
Тогда систему уравнений (2.10.1) можно представить
в виде
г = гё2 - ^ + — ,
г2 1 т ■
0 = --2iiL
Г
Н
тг
(2.10.3)
Обозначим программное движение через г = г0 (0»
0 = 0о(О» а необходимые значения управляющих сил для
осуществления этой программы через Z = Z0 (t), Н =
= Н0 (t). Заменив в системе (2.10.3) г, г, 0, 0, Z и Я зна¬
чениями
г = г0 + Дг, г = г0 + Дг, 0 =00 + Д0 >
Z = Z0 + AZ, II = Но + ДЯ,
получаем следующую систему уравнений возмущенного
движения:
Дг — — Г о +
+ (г0 + Дг) (ё0 +Д60)*
(г0 + Дг)2 т
• ДЯ
лй - _ й 2(,:„ + д>) (0а + дё) , я0 +,
0 /’о + А г т?г (r0 + Д г)
(2.10.4)
Подставив
/i 2
(Гр + Дг)2
/сг
(Гр + Дг)2
2 (г0 + Дг) (9р + Д0)
г0 + Дг
я „ -ь дя
Яр + ДЯ - 2т (Гр + Дг) (0о + Д0)
т (г и -j- i\r) тг о
//о j- A IT - 2т (г о -1- А г) (00 -|- АО)
'• (Ц
+
Го + Дг
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ ТОЧКИ
из (2.10.4) получим
1 о 2
AZ
Аг = ВрАг + 2го0оА0 + -=- + гоД02 + 20оДг А0 +
4- А г Дб2 -
/С2 (2г0Дг + Аг2)
го (го + дг)2
+ ^1,
дв= — — Аг —— АО — -fДгЛ0 +
Го 1 1
Го
тг о
2
Го
+
— 2тгоОо “Ь Но А/7
- 2 (г0Д0 + 0оАг + Аг Д0)
Аг
X
г0 (г0 + Аг)
X
4“
(2.10.5)
где
л = -?.--Ь-+г.е; + |-,
го
2го0о
-0Л-
Го
Но
г? г0
(2.10.6)
Для осуществления заданного программного движения
значения Z0 и Ii0 должны выбираться так, чтобы Fx и F2
были равны нулю. Однако в практических случаях не¬
возможно строгое осуществление этого условия, так как,
например, необходимые значения тяг можно осуществить
лишь с некоторой точностью.
Поэтому в системе (2.10.5) сохраним значения Fx и F2.
Предполагаем, что тело управляется по следующему
линейному закону:
= 4~ 5г) -|- ^2 (А9 + 50) + Въ (Аг + 5г) +
+ В,( Аб + бб)*
= Ах (Аг -|- бг) А2 (Д0 -f- 50) -f- Л3 (Аг + 5r)-f~ J
+ Л4(А0 + 5б), J
(2.10.7)
154
ГЛ. П. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
где Bi, Аь (i — 1, ..., 4) — постоянные коэффициенты,
6г, 6г, 60, 60 — значения погрешностей измерения вели¬
чин А г, А г, А0, А0 соответственно.
Представим выражение (2.10.7) в виде
где
А 7 •
= BLAr Ь В,АО +.Вя±г -|- ВхАО + <2и
М- - ЛгДг -|- АЛО -I- АлАг -|- А,АО -|- Q,,
<2Х = ВгЬг + 5аб0 + Вфг + 5460,
Q2 = Axbr + Лаб0 + Аъ 6г + 4460.
(2.10.8)
(2.10.9)
Обозначив Дг = Д0 = а:2 и имея в виду выражения
(2.10.8), систему (2.10.5) приведем к нормальной форме:
хх = х3,
Х% == #*4»
4
#з 21 Q’ljZ'j ^0^4 ~b -f- Х]Х\ -
j=i
/«2 (2г0Ж1 +
г0 (г° + ^
2 <h&3 + *3*4 +
i=l
— 2тг0% -f- Hq -р АН
■ 2 (г0х4 + 0о.г3 + Ж3Ж4) J ,.0 (г*^. Д1-у + (?2 + Г2,
где
Йц = -Z?i ~f- 60, #21 — ^1>
#12 = -®2» #22 = ^-2»
#13 — *3.
^23 — ^3
2^о
Го
#14— Z?4 -|- 2гО0О, #24 — ^4 Го
(2.10.11)
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ точки 155
Возможные внешние постоянно действующие возму¬
щения моншо прибавить к значениям Fx и F2. Поэтому в
значения F1 и F2 считаем включенными и постоянно дейст¬
вующие возмущения.
Итак, система уравнений (2.10.10) является системой
уравнений возмущенного движения при начальных, по¬
стоянно действующих и параметрических возмущениях с
учетом погрешностей измерителя текущих значений коор¬
динат и их скоростей.
Следуя методу оценки возмущенных движений, пред¬
ложенному в § 4, систему (2.10.10) представим в следующем
виде:
j—i
удовлетворяющие условию
I<ij (0) = 0 при i =/= /,
Rii (°) = 1 ПРИ 1 = /.
a xjo — начальные значения координат из заданной об¬
ласти
4
Х1 = 2 RUxi* I' ^ ЫЧз (* — т) К (т) ! Ru (t — т) Jc2 (r)J dx
о
('• - 1.2.3/0,
где llLj— фундаментальные решения системы
(2.10.12)
4
(2.10.13)
4
= 2 av(°)ж;>
| хм К х{
(/ = 2,3,4). (2.10.14)
Здесь х0, щ, п3, ?г4 — некоторые положительные по¬
стоянные, характеризующие практически возможную
личину области начальных возмущений, значения к 3
156 ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
и к2 (т) определяются выражениями
h (0 = Vi + 260^x^4 -I- Ххх\ — kU2roXl +^l_
К (О = -V4 +
Го' (Го + а*)4
-j- Qi + F1 -[- Аа1Ххх -[- Да14;г4>
- 2тг*о0о + Но + дЯ
4“ ^3^4)
Xi
I’o (г0 4" ^1)
-2(гож4+0о.г3 +
4" С?2 + ^2 + Д^гз^з 4" A<224-^4t
где
Дап = ап (0 — ап (0),
Ааы = а14(*) — а14 (0),
Д#2 3 ~ а23 (0 ^2 3 (®)’
Д#24 “ ^24 (0 — ^24 (^)»
Если при t = О
М
М0)<м, л,(0) < ,
где М и i?0 — некоторые положительные постоянные ве¬
личины, то при соблюдении условий
М > | г011 г412 + 210о 11 ^ 11 г41 +1 %х 11 12 +
, кг (2 | г0 | | xi | + | xi |2) , 1П , , |Р , ,
4 гц, >. +1<Ы + |г.| +
f I ДвиП^х!+ |Дац||г«|,
|(-2тгпёо + Яо)| + |АЯ|
-|4>^г-Ы |*4| +
+ 2 (I ?’о I I 24 | + I 00 | I «з | + | «3 I I *4 I)] х
х | Го j (| r0 [ -L | ?11) + I Сг I + | Fi | + | Д«гз I I гз I +
Ч~ | Д&24 11^1
(2.10.15)
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ точки 157
имеют место оценки
xi I < I xi I = (l Ri\ I T 2 * п. ' ) x° ^
+ м$[|Дй(*)1 +
3=2
I V)l
Ло
dt
(/ = 1,2, 3, 4). (2.10.16)
Из систем (2.10.16) имеем
1^1= fi (*o> t) + (i ^ 1, 2, 3, 4), (2.10.17)
где
fi Po. 0 = a'o
t
J=2
^ (0 = \ 1^(01 +
d*(i = lg2, 3,4).
(2.10.18)
J
С целью упрощения дальнейшего исследования в ус¬
ловиях (2.10.15) значения \хг\ в некоторых членах заме¬
ним значениями рг0, предполагая
1^11 < Р lr0 |, (2.10.19)
где р — некоторое положительное постоянное.
После этого условия (2.10.15) будут иметь следующий
вид:
М>|г0| | хл |2 + 2 | 0О | | хг | | хА | -f Р | г01 ! хх |2 +
/с2 (2 I Го I I .fi I + | XI I2)
+
Г$ (1 - Р)2
м
Яо
■ 0'п X \ -[—
г„ I 4 1-1
+ | Д«11 | | | + I Д®14 I | 5 4 ! 'I"
+ |<2х| + |^х|.
2 (I Го | I II «41 +! 0о I |^i[ X
+
х IНI + РI г„ I I Г,1 I 1) + I г01 (I ill | | *1 Г + I А2 | Их
х |г2| + | Л3| |Zi| |ж3 | +
+ I А\ I ! ^1 I | £.4 |) + I г1 | ( I r0 I | Q-2 | + ' “ — j
4" | А#23 I | ^3 I 4* | A#2t I I :/;4 i 4" I Q‘2 I 4“ I 4 2 I-
(2.10.20)
Если существуют области положительных значений,М
и х0, для которых удовлетворяются неравенства (2.10.20),
158 ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
то размеры этих областей можно определить, приравнивая
левые и правые части выражений (2.10.20).
Следовательно, для определения упомянутых областей
подставим значения (2.10.17) в (2.10.20) и приравниваем
левые и правые части.
В результате получим
Mh lix + MJn + li3 = 0 (i = 1, 2), (2.10.21)
где
о • feb?
hi = I Г0 | (1 + p) ^4 + 2 I 0Q | '11т'11)4 “I 4 . _ ’ »
Г()\^ P)
кг = 21 r01 (1 H- p) ]V[>4 - 1 + 21601 (/^4 + /4^4) +
+ + у +,Agllh,| + |A„„h,
(! ~ P)
2/c-> I r0 I /1 + /12/4
r„ (* — P)'
-|-1 A%41 /4 -|-1 ДЯ44 j /4 -1- | Qx I I -1 Fx I,
hi = ^ + r2 1 (2 (I ;01 Mi -1- 10o I Ms -I-
+ P I ro I 'M’i) + I Г0 I (IA, 11|)?+| ^shMJa + l Аз I Mi +
+ Mi I'MOL
кг — (faty* T /1^3) г '.j 12 [ I r0| (/i’4'i +
+ Mi) “I- I 60 I (кЧ>з + fs'Pi) + P I >*o I (/3^4 + U3/4)] +
-l-KI II Ax I 2ij)i/i-H A3 I (/i^2 -f /^4) -I- j A3 I (/4^3 + /3^4)4-
+ Mi! (fAh + /4^1) 1 + Ь (ко 11 <?a I + —-~»",r‘,0ul)} +
+ I Д®23 | Ч’З + I A®24 I ^4 ,
2 (| 7’0 I/1/4 -|- I 60 j/4/3 -|-
/13=к 1 (i+p) ft-I- 20J4/41 - 1+
ks — ”/3/4 1—2,,
r° ^0 (! - P) L
“Ь PI ro I /3/4) 4‘ I ro i (I Ax! /1 + M-21 /1/2 + \A31 /4/3 +
+Mi I/1/4)+/1 (1 r01 q2+1 g°[) 1 -i-1 да2з 1 /3+
+ |Ааа4|/4 + |(?2|’ + М.|. i
(2.10.22)
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ тонки 159
Для удобства записи в дальнейшем в выражения
(2.10.22) подставим значения /г из (2.10.17) и представим
их в следующей форме:
^12 = ^ц-г0 + ~10> ^13 = $12х0 + а11Т0 + а10> | (2.10.23)
^22 = “21^0 ^20 > ^23 ~ ^22г0 ~Ь ^2l'Tl ~Ь ^20» ’
где
GlO = I Аяц I ^1 -I- I Д«14 | - 1 -
г0 V1 Р)
£2ц = 2 | r0 | (1 — р) ^4^4 + 2 | 0Q | (^4^1 + +
2k2yj)iRi
Го (1 — р)2
^20 ~ | Д^23 I Фз + I Д^21 I 4*4 +
-U ( I у МП I I 1 Яр I - 2т>о0о\ Ь L
[\ ° I I ^2 I I т J г2^ — ^ п0
^21 = — (^3^4 + ^4Фз) + 2 /л \ № И Г0 | (^ТФ4 +
Г0 ' Р'
+ ■^4^1) + [ ^0 I С^'Фз + Д,Ч>1) + Р | Г0 I (^3^4 + ^3^4)] ~Ь
+ \ro\\\Ai\ ~i~ I ^2 I (^г'Фг ~h -^гЧч) "~Ы ^з I (^гЧз ~b
+ ^3^1) + I ^4 I (^1^4 +*
On = j Aan I R, + I AaL 41 Rt + - ,
°12 = I '*0 I (1 + p) + 2 I 0O I /?г/?4 4 — * — ,
^0 (1 - Р)г
°io = I Ci I +1-01.
°22 = ~ ^3^4 + r2 ^ ^ [2 ( I Г0| I 0O I +
+ P Co | Д3Д4 + | г„ I (| A, I Rt -I- I Л21 R,R2 +
+ IA31 Ri R3 -)- j 441 i?4i?4) J,
^21 = |Дя2з I RS T ! Дя24 | i?4 -|~
— (\ r \ \ n \ \ \Ho — 2mr0Bo I \
°20 = I Qi ITI Г2 I.
(2.10.24) (
160
ГЛ. IT. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Решения алгебраических уравнений (2.10.21) имеют
' вид
M*=--W- + l/ 4--С = 1>2). (2.10.25)
11 - V к 1п
Так как 1п 0 и Zi3 0, то для существо5вания дейст¬
вительных положительных значений Мг достаточно вы¬
полнения следующих условий:
hi < ° -4г~ ^1й = 1 ’2)- (2.10.26)
Прежде чем перейти к отысканию положительных зна¬
чений х01 для которых возможно существование вещест¬
венных положительных значений необходимо убедить¬
ся в выполневии неравенств (2.10.26) при х0 = 0, т. е.
в выполнении следующих неравенств, вытекающих из
(2.10.26), (2.10.18) и (2.10.22):
1 > | Дап I 'Тх + f Ааи | 1)34 + 1
I Аяи | 'ti + I Айц 11|>4 + ~i], °^1" \2 — 1
Го С1 — Р)
А (| г01 (1 + р) г|з4 -)- 2 | 0О| -f- 4 * ■■ (|Ci| + |Fi|),
r^iO
~ > I Aа23 I Фз + I Да24 (Ij)4 + () r0 11 (?a I +
. \H0 + 2mr'0601
Го (1 - P)
■' Ая23 ! 'Фз T i Ай24 I “Ф4 T — ( | Г0 I I Qi I +
г; (1 — Р) \
г'о (1 — р)
I Н0 - 2тгЛ I \ 1
1
>41т4 ^ +
( 2 (I r01 -I- |0О | ^4^3 + р | г01 1|>31|Э4) +
' Г*(1-/>)
I ro I (| I 'Ф? + | А21 + | ^431 ^х'Фз +
+ |^4|^4)]}(|С.|+|^|)-
(2.10.27)
Ю. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМО!* ТОЧКИ
161
Заметим, что добиться удовлетворений неравенств
(2.10.27) можно путем уменьшения значений (i = 1, 2,
3, 4). Как видно из (2.10.18), в свою очередь значения я|д
тем меньше, чем больше модули действительных частей
корней характеристических уравнений, соответствующих
системе (2.10.13).
После проверки выполнения неравенств (2.10.27) мож¬
но определить верхнюю границу области для х0. Подста¬
вив значения (2.10.23) в условия, получаем алгебраиче¬
ские уравнения (2.10.28), наименьший действительный по¬
ложительный корень которых определит искомую верх¬
нюю границу. Эти алгебраические уравнения имеют вид
(2.10.28)
х0 —
Чъ
Х0 —
42,
■4 *п
-J- x0fc12 -|- Ь15
= 0,
#0*21
+ ^0*22 + *23
= 0, )
где
Лг =
Л2 =
Й2г
*11
- £2*п
4/цС12 1
*12
/“'I
СМ
ii
IL^O 11^11 J
*10
— О10
4/цбю,
*21
- 0;L
ч/21^221
*22
- 20
21.^20 4-^21^21
*23
: ^“20
4/2i32o-
(2.10.29)
Обозначим наименьший из действительных корней
уравнений (2.10.28) через rjmin.
Тогда для выбора возможных значений х0 имеем ин¬
тервал
0 < х0 < г],
(2.10.30)
Следовательно, выбирая х0 из интервала (2.10.30), из
выражений (2.10.25) для выбранного х0 можно определить
наименьшее значением. Это значением определяется
б А. С. Галиуллин
102
ГЛ. П. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
как наименьшее из значений М, удовлетворяющих одно¬
временно двум условиям:
Добиться существования значения М, одновременно
удовлетворяющего этим двум условиям (2.10.31), можно
соответствующим выбором вышеупомянутого положитель¬
ного постоянного Rо (см. (2.10.15)).
В конце расчетов для выбранных х0 и М необходимо
проверить условие (2.10.19).
В том случае, когда управление (2.10.7) осуществляет¬
ся по нелинейному закону
“Г
(2.10.31)
II. Случай нелинейного управления
1 До
dui (Ь)
дЬ
( ди,(Ы
\ д*2
(2.10.33)
система уравнений первого приближения (3.10.13) будет
иметь следующий вид:
§ 10. ОЦЕНКА ОТКЛОНЕНИИ УПРАВЛЯЕМОЙ ТОЧКИ 163
Xарактеристический определитель, соответствующий
этой системе, имеет вид
Как видно из определителя (2.10.35), хотя бы один ко¬
рень характеристического уравнения, соответствующего
системе (2.10.34), будет иметь нулевое значение.
Следовательно, в этом случае мы имеем дело с так на¬
зываемым критическим случаем исследования устойчи¬
вости.
Для множеств функций, заключенных между двумя
прямыми щ = и01 -} h, иг — и01 + h и и2 и02 +
+ и2 —- — и02 + £2 (рис. 2.2), в интересующей нас
области значений хх, х2, я4, в том числе и для функций,
о о — - (м--
г о \ г
- X 0 0 1
0 - % 1 о
= 0 00 —А, 2/'о0„
(2.10.35)
0 0
Рис. 2.2.
6*
164
ГЛ. 11. ОЦГСНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
обладающих свойством (2.10.33), эти функции можно
представить в виде
"'1г:= ^ Т U'10’ ! (2.10.36)
U2 — Ъ2 “Г М20» '
где |й10| ^ и10, | ^2о| ^ ^20*
Подставив (2.10.36) в (2.10.32), получаем следующие
выражения, аналогичные (2.10.8):
Обозначим Q± = Q1 + и10, Q2 = Q2 + и20.
Далее ход решения задачи остается прежним, только
вместо Q1 и Q2 будут фигурировать Q1 и (Л>.
Рассмотрим для примера программное движение точки
при следующих данных:
ЛГц — М?1 — масса Земли, к2 = рМ 3 = 398 620
км^/сек1 [631, г о (0) - 6700 кж,0о(О) 1ДГЗ • 10—3 рад/сек,
г о (0) 0 км!сек, 0<,(О) 0 рад.
В практических случаях корни характеристического
уравнения, определяющего общие решения уравнений пер¬
вого приближения (2.10.13), удобнее задавать, а затем для
этих корней определять коэффициенты управления А-п В%
[i — 1, 2, 3, 4) из соображений практической реализуемо¬
сти закона управления.
Допустим, что мы задались вещественными корнями
%2, Х3, Х4. Характеристическое уравнение для определе¬
ния этих корней имеет вид
т — В±/\г -f- Я2Д0 -|- B3/\r -j- Я4Д0 Q± -f- и10,
— А^г -f- А2Д0 -|- ^43Дг -{- Л4Д0 -j- Q2 + н20.
(2.10.37)
III. Числовые примеры
-10 1
0 — К 0
Подразумевается, что a{j = аи (0).
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ ТОЧКИ
165
Разложение этого определителя представляется в
виде
А — Я4 А,3 (#2 4 CL\з) -р А/2 ((1\з#24 «14«23 «22
«ll) ^ («12«2 3 «22«13 «Ц«24 ~Р «21«14)
+ («п«22 — «i2«2i) 0. (2.10.39)
С другой стороны,
д = (А, _ хг) (X — А2) (X — Х3) (X — Х4) =
= ХА — ХЧХ1 + Х2 -Р Х3 А4| 4- X2 [Х3Х4 +
“Ь (^1 Н- ^2) (^3 Т ^4) ^1^21 — (^1 ^2) ^3 ^4 ~Г
+ (Х3 + Ь4) ХгХ2] =■-- °- (2.10.40)
Из сравнения (2.10.39) и (2.10.40) получаем
#24 #13 ~р Х2 -|~ Х3 —J- А/4,
#13#21 «14«23 « 22 «11 ~~ '^3^ 1 —Г ^У1 А^2 —I-
+ (^1 + ^2) (^;> г А,4),
#12#23 «22«13 «Ц«21 ~~Г~ #21 «14
- (Хя -!- ко -!- kXi -L A) J
#11# 22 # j 2« 21 ~г— A^AoA^Ai.
(2.10.41)
Из системы (2.10.41) можно определить приемлемые
значения коэффициентов #i7-, задаваясь корнями Xlf
^2j ^3» ^4*
Таким образом, определены следующие данные:
К
- 0,01,
#1L
- —5-10 3 1 сен'1,
А
-0,05,
«12
о,
а-
-0,1,
«13 ;
—0,36 I. : сек,
А =
- 0,5
«и
- — 0, -И 5 • 102 км j рад
#22
•-
•5 ■ 10~3 1 /сек2
«21.
= 0,
«23
^ —
ТО-1 рад]км- сек
#24
= —
-0,3 1/сек.
(2.10.42)
16(j
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Как известно, общее решение системы однородных диф¬
ференциальных уравнений (2.10.13) ищется в виде
(/ = 1,2, 3,4). (2.10.43)
i-1
Подставив выражения (2.10.43) в (2.10.13), получим
TuAi — г si»
Т2Л1 — Т41>
Тз1^1 “ «llTll + «12Т21 + «1зТз1 + «14Т41,
Т4А1 — «2lT 11 + Я22Т21 + «2зТз1 + «24Т41*
Из (2.10.44) имеем
Тп (^1 «11 «13^1) ~г Т21 ( «14^1 «12) =
Til (—«23^1 «2l) + T2l(^l «22 a21^l) =
(2.10.44)
(2.10.45)
Так как
^ = («21 + ^«2з) («12 "Г ^«14) —
(^2 «11 «13^) (^2 «22 «21^) “ 0,
ТО
а->\ -!- )ла23
— а\\ — «1з?н
А? — (122 — "24^1
rtl2 4- ^1^14
Следовательно, решение системы (2.10.45) имеет вид
Та ^ «а
Д‘Л -1- А] (223
Т21. ~ «1 л — >
— (222 — Й24А1
Тгл — «1^1»
^21 + ^1^23
Тн — «1^1
— G22 — (224^1
где сх — произвольная постоянная.
§ 10. ОЦЕНКА ОТШЮН'КЛПЙ УИПАНЛЯКМОЙ ТОЧКИ 107
В общем случае
Tii = с,-,
й 21 -f- Х.Й23
Г2г = С{
Xj — Я22 — Я24 Xj
Tsi = cAi,
Л‘21 Н- X . 0.23
Г 4г =
X --,22 - ,24X ■
(/’ — 1,2, 3, 4),
(2.10.40)
где сj — произвольные постоянные.
Следовательно, общее решение (2.10.13) имеет вид
*1=2 С' ^ ’
г=1
Я21 + Л;а-23
е « ,
i=1 Хг — а-ц — а-цХ
(2.10.47)
*3 = 2 сА;еХ;'
г=1
S в21 + А,.Ягз }J
cfii — е 1 ■
i=i /-I-ац-а>4a.
Интересующие нас фундаментальные решения 11 {j
имеют вид
4
Ri) = 2 ,
г--1
4 I <1
,21 -р А.,23 } ^
^ ,
^ 2 ./ — 2 С и ■'
{=1 >;Г - «й - «2«А.
R,j = 2 ,
г=1
п _ V ~ 1 й‘л V23
4; ,/j С.о ,
i l Р - «22 - «24/.;
(/ = 1, 2, 3,4).
(2.10.48
108
ГЛ. 11. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
где c{j определяются из следующих четырех систем линей¬
ных ураьнений:
1
^1 j СЦч
1
4
S2j = S са
63j
г—1
4
a-уi -р 'К.а-а
ciAz»
i=i
S 7 Д21 + ^23
г- 1 г “ I
(у = 1, 2, з, 4),
где 6г,- = 1 при i = /, 6^ = 0 при i =£= /.
Подставив данные (2.10.42), получаем
10-2
#21 ^;#23
К- — а 2
■ аиХ.
21
10~2
15
10-2
15
10-2
21'
при
i = l,
при
i = 2,
при
i = 3,
при
I = 4.
Из (2.10.49) находим
CiJ ~ X-
Для данных (2.10.42) имеем:
Д = - 319,65-10"10,
19017,3-10-12, д;з = - 381-10"10,
26652,6-10-12, Д23 = — 2665,6-10“
Д31 - 13326-10“12, Д33 = 2666-10-10,
Д41 = 380,3-10-12, Д43 - 380,4-10'10,
Дп =
Д21 —
Д-7
д42 = 57-10-*,
(2.10.49)
(2.10.50)
■10
Д12 = - 2856-10"8,
Д22 = 5597,5-10"*,
Д32 = — 2798-10-8,
Д = - 57-10-6,
14
Дг4 =
Д 34 =
559,7- 10“е,
559,68-10"6,
Д44 = 57,11-10-“.
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ ТОЧКИ 169
Подставив эти значения в (2.10.50) и (2.10.48), получим:
И,
Ю-12
д (—19017,7 e~aMt - 26652,6 е-0-05' +
+ 13 326 е~°'и + 380,3 е“°'5(),
1
_ 10-м / 19017.7 ( , 26652,6
«81— А \ ~Д £ "Г
15
g-0,05/
13 326
15 '
8-0,1/
380,3
21 (
-0,51
R
10-^2
д ( —190,18с_0)01/ + 5-266,53 ег0’0^ +
+ 1332,6е-м* +5.38,ОЗе-о-3'),
+ 5-266,53 , _
41 А \ 21 е ^ 15 е
1332,6 П 1/ . 5*38,03
. !—z>-0,lt I ! /=>—0,эг
15 т 21 е
10-8
Д12 = -г- (—2856е"°-01( + 5597,5 «-»■»«*
i?22=^f_^L6e-0,0„ _5iE^.-o.03i Л
21
—2798e-°'u-1-57 е-о.5'),
е~
15
+ ?ZL8e-:M/ л_Ше-»м
т 15 1 21 е
(2.10.51)
Т?32 —
10-8
д (—28,56е °’о:' -|-5-55,97 е-0’05' —
— 279,8е-°.й -!- 5-5,7е'0-5'),
R _ 10-i° / 28,58 5-55,97
42 Д~ 1 21“ е 15— <Г°'0а‘ +
+.2^,-0,Н + W ,
1 1э 21 ) ’
= -д1 ( —381в-э.01' — 2665,6 е-°>051-L
+ 2666б-о-1( -f- 380,4е-О’51),
Ю-1°
Д„ = (_ е-о,ш + 2005-6
15
£-0,051
»V„,
15
170
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
1° (_3,81<r».°i' - 5-26,66е~°'05( +
-|- 266,6е-о.и -[-5-38,04 е-0-5'),
_ 10-и/ 3,81 , 5-26,66 ,
«- А- у 2Г 1 15
R
266,6 „л/ , 5’38'04 -n.st
~ТЕ~е "г 21 е
10-6
j?14 = iiL-(_57e- -o.ou-i- 559,7<г®.»« -
— 559,68 е-о.» + 57,11 в-»-*1),
R
24
^ 8 ^ ZZ e-o,oif 559^7 e_0>05f
15
.•W»*-o,i* ,57
15
57,11
21
—0
10“" ,
R3i — — -д- (— 0,57 g-o.oi1 -]- 5-5,597 е-".»5' —
— 55,97e-°-w -|- 5-5,711с °'5!),
(_ е-о.ок _ е-о,о5( ,
44 Д V 21 е 15 е 1
. ^e-0'U .5
1 15 6 +
(2.10.51)
Для определения значений (2.10.18) необходимо знать
интервалы знакопостоянства кривых R{j (t). Для этого
построим графики, они изображены на рис. 2.3—2.18.
Из рис. 2.3 — 2.18 видно, что
L/-J с х;
$|Д18| <**== - 5 lh3dt,
о о
со 55 со
\ I ^231 dt = \ R2%dt ^ R2з dt,
О 0 55
со 15 со
5 I Д331 dt = ^ R^dt -f- ^ R^dt,
О 0 15
ОО 15 55 со
5 I ^431 ^ ^ R\‘0dt — ^ R^dt -J- ^ R^dt,
} (2.10.52)
15
55
»з:1‘г ooi ов 08 ol 09 оо о*? ое ozoi
$ 10. О ЦК и К А ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ. ТОЧКИ 171
1
ЧсГ
1!
§
§
§§
-
§
■
—
Рис. 2.5. ‘’"С. 2-<5
172
ГЛ. II. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
5 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ ТОНКИ 173
% j0-*
174
ГЛ. II. ОЦКТША ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Рис. 2.15.
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ точки 175
Рис. 2.17.
17G
ГЛ. II. (ЩК.ПКЛ отклонении ОТ ПРОГРАММЫ
оо 55 ОО
\ ! Пи[,н = \ ПиФ ~\ Hud',
О 6 оо
со со
5 | /?.д| dt = - 5 Xoidt,
О О
со 15 '.''j со
^ I Ни I dt = - 5 Н?л<1> + 5 И?л - 5 tl3ldi,
О 0 15 У")
со 15 со
^ | | dt — — ^ R±\d: Jr ^ Ji.ndt,
> (2.10.52)
О о 13
Из (2.10.51) и (2.10.52) имеем
со
5 |/iw 1^ = 200,1, \ | /7и|Л = 15,69-101, '
О <>
оо 03
5 ! 7/яз I dt = 51,6 • «Г3, 5 I 77*241 dt = 199,7,
о о
СО СО
I (И 6,2, J |7?я1|(й = 0,688.10*
>(2.10.53)
СО ОО
^ | /?431 dt = 1,75-10~:\ ^ | Т?44 | cZ^ = 7.26.
Выбираем следующие значения коэффициентов, фигу¬
рирующих в выражениях (2.10.18):
Ко = г0 (0) = 6700,
п2 = г0 (0) = 6700,
Щ Юа, (2.10.54)
тг4 = г0 (0)103 =67-104.
Чтобы не делать громоздких расчетов, за значения | Ru\
t
и определяющие значения fi (i = 1, 2, 3, 4)
§ 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ точки 177
в выражении (2.10.18), берем их максимальные значения.
Естественно, этим мы несколько усилим оценки (2.10.16),
но неравенства останутся справедливыми.
На рис. 2.3—2.18 видно, что
sup
|/?ui
A 0_1-
- 31964
sup
Iflial
, = 1300 "'S-
sup
1 flail
10-1'1
=410 V'
sup
I ^22 I
1 0~i°
= 320-—-
Д
sup
1 flail
= 490 ^ ,
sup
1 ^32 |
/clO-»
= ’
sup
Iflul
. c 10-n
= Д ’
sup
| -^4.2 |
sup
Iflial
\ 0-10
= 1000 Ц ,
Д
sup
l*u|
= 90^.
sup
Iflaal
sup
I -^21
1 = 12^,
sup
| ^33 1
ИП-Ю
- 320 ,
sup
\^\
— 1210"°
sup
|^з|
, 10~12
sup
1^1
— 3 210_S
- 6’г— •
(2.10.55)
178
ГЛ. 11. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
Подставив значения (2.10.53), (2.10.54) и (2.10.55) в
(2.10.18), получим
tl
215,8,
81,4-10 :t,
7,22,
2,85.10'Л
(2.10.56)
/, 0,29-10~:| ,т0,
/я - .0,028.г0,
./, 10,32- 10"г> .го
Далее рассмотрим два случая задания программы.
Сначала рассмотрим случай, когда программа задана
как движение, происходящее с постоянной угловой ско¬
ростью по круговой траектории. При этом предположим,
что постоянно действующие и параметрические возмуще¬
ния отсутствуют.
Допустим, что заданы
/•„ -= 0700,
0о 1,15-10
|Лаи| =---= |Ла,,,| ■ 0,
р - 10"2,
I(СI - I <?11 - I<?а I = IQ, I = | | = I *\ I = о.
В этом случае из (2.10.24) имеем
Qu = 415,46.10-®,
Qai- 12,734.10-®,
1,492-Ю '. о,, -= 105-10
-1. з,., 720- ЮЛ
310 ~ С20 —
сп = 2,92 • 10~(!,
й3о
!
гп
2И>
-- 0.
Следовательно, из (2.10.23) получим
1п = 50,15-10"3,
11г = — 1 -|- 415,46 -10-6г0,
113 = 720-10"» а* -|- 2,92- 10_гд0,
(2.10.57)
1п - 136,05 -10"6,
U, = 12,734-10-® х0
1-гг
1,492-Ю"4
165,25-Ю"1^.
§ 10. ОЦЕНКА OTKHOHIHim'r У1 ПАЛ Г, Л Я Г, 1\Ю П ТОЧКИ 179
Для этих значении имеем
- = 8,904 - 8,708-10'%,
#■)“ = 79,21 — 00,032-10'3-г0 +
-41;
-|- 13,749-1 (ГУ;,
-р - 12,8.10-» л! [-0,052-1(ГУ0,
1> 11
Щ -0,5183- 4,079-10-
От?—V* = 0,30048-5,1.8089 • 10-*j:0-|-
-#21 /
0,219-10 (\хп,
I (2.10.58)
h:i
hi
1,214-10 Л/’о.
Подставив значения (2.10.57) в (2.10.28), для определе¬
ния rjmiu получим следующую систему:
1) #о = Tli = 2-103,
2) .г0 == р2 --= Ю3,
3) х\ — 66084 • х0 + 79,21 • 106 = 0,
4) xl + 577,1.т0 - 0,3021•10е - 0.
(2.10.59)
Наименьшие вещественные корни уравнений 3), 4) из
( 2.10.59) имеют соответственно следующие значения:
х0 =г= Ю3,
^0
332,4.
(2.10.60)
Из полученных значений х0 видно, что для дальнейших
вычислений за расчетное значение х0 можно выбрать зна¬
чение из интервала
0 ^7 х0 ^7 332,4.
Возьмем х0 = 10 км. Для этого значения х0 неравенства
(2.10.31) для определения минимального значения М
180
ГЛ. ТТ. ОЦЕНКА ОТКЛОНЕНИЙ ОТ ПРОГРАММЫ
имеют следующий вид:
3-10М<ЛА <17,751, )
1,12 • 10м СЛА< 1,087. |
(2.10.С1)
Из зтих условий имеем
М in in ~
Мж ах -1,087.
Для проверки соблюдения неравенства (2.10.19) оп¬
ределим
l^il = /1+ = 11,00474.
Следовательно, неравенство (2.10.19) 11.00474 <<67 в
данном случае удовлетворяется.
Для полученного М = 3• 10“' при х0 — 10 построим
графики оценок; они изображены на рис. 2.19—2.22.
Теперь рассмотрим случай программного движения с
переменными значениями0 0 и 7'0 при наличии возмущений
Пусть программа задана как множество программных
движений, на которые накладываются лишь следующие
общие ограничения:
I :Аг0 (01 = 1 го (0 — го (°) | < 300 км,
I Д00(0 I = 1^о(0 — 60(0) | <11,15-10“3 рад/сек,
I ^го (01 = 1 го (0 го (0) | ^ 5 к м/сек,
50
I °о (0 I < *10'° рад/сек,
|г0|^50-Ю_3 км/сек2 (около 5<у),
/*0 (0) = 0700 км,
О0(0) = 1,15-10_3 рад/сек,
Оо(0) = 0,
г0 (°) = 0-
(2.10.02)
% 10. ОЦЕНИЛ ОТКЛОНЕНИИ УПРАВЛЯЕМОЙ ТО'ШЛ
181
*Г
Рис. 2.21. Рис.
182 ГЛ. II. (ЩЕПКА ОТКЛОТ1 ETTTTff ОТ ПРОГРАММЫ
Из (2.10.11) имеем:
|АяпК1|ёо (0) | + | А0011'2 — (0) —
- | А0» |'2 -|- 2Э0 (0) Д0О - 2,960 • 10-°,
| Дя141 < 2 11 г0 (0) | -|- | Дг„ 11 • 11 Й„(0) | -|- | Д0„ 11 -
— 2/о0о — 3,22, } (2.10.63)
|Аям|<2-^-ЮЛ
1^.1<Г7^гЬ
Допустим, что погреишости измерения величин Дг,
ДО, Дг, А0 таковы:
|(V|< I им, I ев | ,
|6/-|^0,05 км!сак, | 601 sg—Л-Е... рад/сек.
Из (2.10.11) и (2.10.42), (2.10.62) получаем
А
о,
А2= -яаа = 5-10-я,
А3 = - а аз - --= Ю,049-10
Л4 - — ао, -
Го (0)
2го (0)
Го(0)
0,3,
В1 = яи - О2(0) - -5,0013-10л
— U [2 — 0,
Яр — я,, — —0,36,
(2.10.64)
'3 ~~ "13
— avi — 2г0 (0) • 0О (0) - -40,91.
Для выбранных значений (2.10.63) и (2.10.64) имеем
/ Qi I ^ I | j 6г | -|- | В‘А I 50 I 1 Л311 8г I -|-
-!- | В4||6Й| - 23,35-10~3,
jC2i<|A1||6r|-i-|A2||60|-|43||6/:| +
-f Мл 11 S0 | = 8-10 A
> (2.10.65)
8 10. ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ ТОЧКИ 183
За значения | F\ | и | /С | возьмем примерно один про¬
цент максимальных значений Z,,//??, Я0/ (rnrQ) [63], опре¬
деляемых необходимыми условиями движения по задан¬
ным программам (2.10.62). Следовательно, из (2.10.6) по¬
лучаем
FtlKOJMO'3,
/С!< 0,11 • 10-°.
(2.10.86)
В дальнейшем для упрощения расчетов значения про -
грамм г0 (0, г о (0’ 0 о (0> го (0> 0о (0 заменяем их наиболь¬
шими или наименьшими значениями, возможными для
всех программ, ограниченных только условиями (2.10.62),
но усилив при этом неравенства (2.10.20). Заметим, что
II — 2/7? 7*00 п
в дальнейшем воспользуемся равенством =
777
-; ! %) г0, вытекающим из (2.10.6).
Прежде чем перейти к отысканию значений х0 и М,
проверим выполнение условий (2.10.27):
1) 1 > 11,0464-10“3,
2) (0,98895)2 > 248-10_3 • 23,95• Ю*3,
3) 2£2_ > 8,897.10-»,
4) 1,9684-Ю"8 > 0,5-10-*.
Убедившись в выполнении этих условий, можно перей¬
ти к отысканию значений г0 и М. .
Из (2.10.22) получили
/и 61,941 • 10 Л
/,, 150-10 8.
Из (2.10.24) имеем:
Й21 = 14,353-10-*,
з18 = 0,8052-Ю-»,
с,, = 41-10-»,
183,52-10-
за1 - 20,016-10“”.
Q
с10 = -0,989,
Q20 = — 140,3-10-»,
о10 = 23,95-10-»,
зм = 8,11-10 «,
Q,. = 450,887-10-»,
‘‘11
(2.10.67)
Из (2.10.23) имеем:
7U , G2-10-:1
1п , - 1,5-10-®,
lvl 450,887-10"% - 0,989,
l13 0,8052-10-%2 -|-41.10%o + 23,95-10-*,
l„, - 14,353-10-% - 141,113-10-®,
1,з - 183,52.10-%2 + 20,016.10-% + 19-10-".
Отсюда
I
__ — 3,636.10-^o + 7,975,
■ 2/u j
( + + _ 1,322-10-®4 - 57,98 -10-% + 63,6,
\ /
- 1,298-10-6®S + 0,6612-10-% + 0,387,
hi
_ f Je_\ = _ 4,784-10-6®,, + 47,037-10-®,
\ 2/‘>1. /
^_)4 :-= 22,887-10-8®? —450,05-10-®®o + 22,125-10-2,
122,4.10-8®? + 133,4.10-% + 1,26-10-2.
(2.10.68)
Подступив значения (2.10.67) в (2.10.28), получим:
1) r|i = 2-10",
2) т]3 = 10®,
3) ®?-244,3.10%+ 285-10® = 0, ^ (2.10.69)
4) ®? + 5,863-10% - 20,96-104 = 0.
Наименьшие вещественные корни уравнений 3) и 4) из
(2.10.69) будут иметь соответственно следующие значения:
х0 — 103, х0 -- 250.
Следовательно, х0 можно выбрать из интервала
о < х0 < 250.
§ 10* ОЦЕНКА ОТКЛОНЕНИЙ УПРАВЛЯЕМОЙ ТОЧКИ 185
ш
6,4
10 20 30 40 50 60 70 90 90 100 t, сек
Рис. 2.23.
|27о
,рад
30
24.4Z
20 40 60 60 100 t, сек
Рис. 2.24.
186
ГЛ. 11. ОЦ1ШТСЛ ОТСЛОИ ИГТПГГ ОТ 11 РОГ Г Л!VfМI>1.
Возьмем
х0 ~ 10 км.
Для этого значения х0 неравенства (2.10.31) имеют сле¬
дующий вид:
0,03 < М С 15,85, )
0,015(5 < М <Z 0,9156. j (2.10.70)
Из этих условий имеем Л/пИп-3-10"2, Л/тах-0,9156.
Щ {t)\W6,рад/сек
100
85,5
66
33
15
0
-
1
10 20
40
60
во
100
t, сек
Рис. 2.26.
Для проверки соблюдения неравенства (2.10.19) оп¬
ределим
Ы - Л 'г Mil - 17,474.
Следовательно, неравенство (2.10.19) 17,474 <С 67 вы¬
полняется.
Для полученного значения М = 3-10-2 при ;г0 = 10
построим графики оценок (2.10.16). Они изображены па
рис. 2.23-2.26.
ГЛАВА III
ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ СИСТЕМЫ
§ 1. Постановка задачи
Рассмотрим материальную систему, управляемое дви¬
жение которой на интервале времени t Е= [О, Т\ описы¬
вается дифференциальными уравнениями
где у — га-мерный вектор состояния, и — яг-мерный век¬
тор управления, Ф — непрерывная ограниченная функ¬
ция, имеющая первые частные производные по ух,..., уп
в рассматриваемой области переменных /у, а, t.
Программа движения системы при t ЕЕ [О, Т\ опре¬
делена уравнениями
Пересечение поверхностей, заданных уравнениями (3.1.2),
в пространстве Yn переменного у образует (п — s)-Mep-
uoe многообразие Q. В окрестности G этого многообразия
со,, определены и непрерывны вместе с производными
и удовлетворяют условию: ранг функциональной матрицы
у = Ф (у, и, t),
(3.1.1)
со, (у, I) = 0 (г 1,..., S'. .9<л).
(3.1.2)
в каждый момент времени t ЕЕ [О, Т] равен s.
188
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
Считая заданной квадратичную форму
т
/л0^ 2 (1\Л №= const, <4>0),
1: 1
называемую в дальнейшем принуждением, поставим за¬
дачу.
На классе С кусочно-непрерывных функций требуется
определить такое управление и = и (у, t), чтобы движение
системы происходило по заданной программе и на всех
движениях этой системы, удовлетворяющих условию
(3.1.2), величина Zw в каждый момент времени Zt=[0, Т]
получила наименьшее значение.
Целесообразность постановки такой задачи можно
объяснить следующим образом.
Пусть дана, например, механическая система из N
материальных точек. Ее управляемое движение, согласно
второму закону Ньютона, описывается дифференциаль¬
ными уравнениями
сРгч \ I
= J_ ф„ _ _L Uv (v = 1,.. N),
clt1 my) mv v 7
где 7\, — радиус-вектор и m,} — масса v-й точки, Ov —
равнодействующая активных сил, действующих на эту
точку, ze, — управляющая сила. Управляющие силы
их, .. , uN должны выбираться из условия движения
системы по заданной программе
(О, (Г1; Г Д, Г,. ...,rX,t) 0 (?•: 1, *) .
Зададимся целью определить и., так, чтобы управляемое
движение системы не противоречило существующим прин¬
ципам движения механических систем. Одним из наибо¬
лее общих принципов механики является принцип наи¬
меньшего принуждения Гаусса [81J. Он заключается в том,
что истинное движение системы отличается от всех воз¬
можных тем, что для истинного движения принуждение
(по Гауссу)
§ 1. ПОСТАНОВКА ЗАДАЧИ
189
имеет минимум. Но дня рассматриваемой управляемой
системы
Следовательно, решение поставленной задали при Zw =
= Z*w позволяет определить управление таким образом,
чтобы движение изучаемой системы удовлетворяло клас¬
сическим принципам механических систем.
С другой стороны, хорошо известно, что в реальных
системах элементы управления ui, ..., ит не могут при¬
нимать сколь угодно большие значения и подчинены огра¬
ничениям, которые могут быть сформулированы в виде
неравенства
Решение задачи в этом случае при Zw = ||^||2 с после¬
дующей оценкой наибольшего значения Zw может быть ис¬
пользовано для решения вопроса о возможности осуще¬
ствления программного движения при ограничениях (3.1.3),
Следует отметить, что поставленная задача не имеет
единственного решения. Как будет показано в §§ 2—4,
управление, обеспечивающее движение системы по за¬
данной программе (3.1.2) с наименьшим принуждением
Zw, можно представить в виде
где и0 находится как решение некоторой системы алгебраи¬
ческих уравнений, F — произвольная вектор-функция,
обращающаяся в нуль на заданном многообразии Q. При
построении конкретных систем произвол в выборе F мо¬
жет быть использован самым различным образом. Так,
например, можно потребовать, чтобы закон управления
(3.1.4) имел заданную структуру или не содержал пере¬
менных /д, ..., уп_3, измерение которых в конкретных
условиях задачи может быть связано с определенными
трудностями. И в том и другом случае нужно иметь в виду,
что невыполнение условия
|j и\\ ^ с (с — const, с >* 0).
(3.1.3)
и и" (у, 1.) F,
(3.1.4)
со,, (у (0), 0) - 0 (г 1, ..., s)
190
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
приводит к отклонениям управляемой системы от задан¬
ной программы движения. Поэтому вопрос об осуществле¬
нии программного движения можно считать решенным,
если при выбранном значении F отклонения системы от
заданной программы не превышают допускаемых вели¬
чин.
Способ построения оценок отклонений управляемой
системы от заданной программы (3.1.2) дается в §§ 5, 6
настоящей главы. При этом предполагается, что откло¬
нения системы оцениваются функциями
г|зг (у, t), грр (у, t),
которые обращаются в нуль на программном движении
и удовлетворяют условию
V
'Мг/.0>о, 2 гМг/>0>0 (v = i
V=1
па любом другом движении системы.
При выбранном значении F отклонения не всегда удов¬
летворяют требованиям точности, предъявленным к си¬
стеме. В связи с этим представляется целесообразным выб¬
рать F таким образом, чтобы отклонения от заданной
программы движения (3.1.2) не превышали допускаемых
величин. Решению этого вопроса посвящены §§ 7—8,
где по заданным функциям фд, ...,ф;, и функциям вре¬
мени q±, ..., qn находится такая вектор-функция F
в (3.1.4), чтобы любое движение системы, определенное
н а ч a j I ь н ы м и з н а ч е н и я м и
о < 4'v (У (0), 0) < gv (0) (v = 1, р),
удовлетворяло условию
0 < ф<, (у (t), t) < gv (t) (v = 1, ..., p)
на заданном интервале времени t Е= [0, ТJ.
В § 9 дается способ построения управления, обеспе¬
чивающего приближенное осуществление заданной про¬
граммы движения.
Полученные результаты используются для построения
уравнений движения точки, сближающейся с целью по
заданному закону.
§ 2. СШУГ'КМЫ С n-MKPlTT.lM УПРЛСШКТТП 1Ш
191
§ 2. Построение уравнении движении системы
с п>мерным управлением
Прежде чем переходить к решению поставленной за¬
дачи, заметим, что движение материальной системы при
выполнении условия
со,. (у (0), 0) 0 (/• = 1, s)
происходит по программе (3.1.2), если заданное много-
образие Q является интегральным для уравнений (3.1.1).
Решение задачи, таким образом, сводится к определению
элементов управления ..., ит, при которых много¬
образие Q является интегральным для уравнений (3.1.1)
и Zw получает наименьшее значение на всех решениях
уравнений (3.1.1), удовлетворяющих условию (3.1.2).
Начнем решение задачи с рассмотрения случая, когда
управляемое движение изучаемой системы описывается
дифференциальными уравнениями
2/г г Pi (2/i- 2Л>, 0 ' Ь Щ (i ----- 1, 2), (3.2.1)
а программой движения является кривая
М (2/1. 2/2, t) - 0. (3.2.2)
В этом случае в [34] при р1 =- 0 (i = 1, 2) было полу-
чено множество дифференциальных уравнений (3.2.1), для
которых заданная кривая (3.2.2) является интегральной.
Следуя [34], для решения задачи производную функ¬
ции со, определенную на решениях уравнений (3.2.1),
запишем следующим образом:
^ (Pi + “О -г ^ (р-2 + и г) -Г % = R К 2/1,2/2, о, (3.2.3)
где R — произвольная функция, удовлетворяющая ус¬
ловию
R (0, yi, У2? 0 ^ 0. (3.2.4)
Поскольку (3.2.3) определяет множество всех диффе¬
ренциальных уравнений (3.2.1), имеющих заданную кри¬
вую (3.2.2) интегральной, потребуем, чтобы при выполне¬
нии (3.2.3) величина Zw получила наименьшее значение.
192
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
Очевидно, что мы имеем задачу на условный экстре-
мум функции Zw — -j- cl2u2z при выполнении до¬
полнительного условия (3.2.3). Используя для решения
этой задачи метод неопределенных множителей Лагран¬
жа, получим
Для определения а1? и2 и X имеем теперь систему из
трех алгебраических уравнений (3.2.3) и (3.2.5). Решение
этих уравнений позволяет определить окончательные вы¬
ражения для элементов управления щ, и2, обеспечиваю¬
щих выполнение условия (3.2.2) на решениях дифферен¬
циальных уравнений (3.2.1) с наименьшим принужде¬
нием. Они будут иметь вид
где Fi = Ft (со, ух, у2, t) — произвольные функции, удов¬
летворяющие условию
Пусть теперь управляемое движение изучаемой си¬
стемы описывается дифференциальными уравнениями
У1 '-=Рг (уи •••, Уп, 0 -!- ai (i ; : 1, ••• , «). (3.2.6)
а программа движения определена уравнениями (3.1.2).
Рассмотрим систему алгебраических уравнений [891
где Rr = Rr (со1? ..., со3, ух, ..., уп, t) — произвольные
функции, удовлетворяющие условию [34, 66]
При выполнении указанного условия система алгебраи¬
ческих уравнений (3.2.7) определяет множество дифферен-
U 2 d2 ду2
'1 5со
(3.2.5)
5со 5со 5(0
и
1 ду\ Р1 ду2 Р2 "И dt 5(0
Fi (0, у2/2» t) = 0 (i = 1, 2).
Rr (0, О, ух, ..., уп, t) = 0 (г = 1, ..., s). (3.2.8)
§ Ч. СИСТЕМЫ С н-МЕРПЬТМ УПРАВЛЕНИЕМ
циальных уравнений (3.2.6), имеющих заданное много¬
образие Q интегральным. Следовательно, для решения
задачи достаточно потребовать, чтобы при выполнении
уравнений (3.2.7) элементы управления и17 ..., ип удов¬
летворяли условию
s
ui = -5: S 'v С = 1 »)• (3.2.9)
1 Г 1
В этом случае при выполнении уравнений (3.2.7) принуж¬
дение Zw получает наименьшее значение, а для опреде¬
ления неизвестных множителей Лагранжа Xlt ..., Xs,
подставив (3.2.9) в (3.2.7), получим систему алгебраиче¬
ских уравнений
(3.2.10)
(г = 1 •?)•
S/^1 1 d(Dr d(Dj \
n ^ cli diJi dVi )
i=*l г=1
Определитель этой системы у при сделанном предполо¬
жении относительно ранга функциональной матрицы
ды/ду на заданном многообразии не равен нулю.
Следовательно, общий вид элементов управления, обес¬
печивающих выполнение условия (3.1.2) на решениях диф¬
ференциальных уравнений (3.2.6) с наименьшим значе¬
нием Zw в каждый момент времени £ее[0, Г], можно
определить следующим образом:
5 II
1 Vi Vrj I Vi д(йг дч>г \ 0C0j
А . . V ' . дУ* St I dtj;
r,j=l
(i 1,. .n),
-г F,
(3.2.11)
где Fi = Ft (сог, ..., <og, ylt ..., yn, t) — произвольные
функции, удовлетворяющие условию [34, 89]
Ft (0, ..., 0, уи ..., ул, 0 = 0 (i = 1, ..., п), (3.2.12)
7 А. С. Галиуллин
194
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
yrj — алгебраическое дополнение элемента
п
1 5(or 50j
di dyt ~dyl
определителя у.
Полученные выражения (3.2.11) могут быть записань
в более компактной форме, если использовать матричные
обозначения. Пусть
и =
их
di
I
5(0i
501
, D =
i
5(0
дуг ’'
’ ’
.
’ ay “
5o)s
50s
ип
dn
1
dyi ‘ ‘
‘ * Wn
(3.2.13)
~дГ
50i
A
л
dt
. =
, F =
50s
•
•
dt
A
Fn
тогда
и =
- Z)-i (-
Зсо
ду
ду \ ду
_1 / 5со , 5(0 \ . тр
wp+sr) + F-
Следует отметить, что определение элементов управ¬
ления их, ..., ип становится особенно простым, если
и векторы
grad о)!
[5<oi 5o)i] j Г5(о8 5cosl
..grado>e= ^
для всех у ее Q образуют ортогональную систему, т. е.
(grado)r, grades) = 0 (3.2.14)
при г =f= j (г, / = 1, ..., s). В этом случае в соответствии
с (3.2.11)
§ 3. СИСТЕМЫ С m-МЕРНЫМ УПРАВЛЕНИЕМ
195
П р и м е р. Пусть уравнения движения имеют вид
X = рх (X, у, z, t) + Uy,
У = Pi (х, у, z, t) -f а2,
z =■■ рз (х, у, z, t) -|- и3.
Программа движения определена уравнениями
W1 (х, У, 2, t) =- X2 -|- У2 + Z2 — / = 0 (/ > 0),
со2 (х, у, 2, t) = а^2 -г 6//2 — 22 = 0 (а, 6 > 0)
и
Zw; = w2 -|- ^2 -j-
Поскольку функции сOj, со2 удовлетворяют условию
(3.2.14), то в соответствии с (3.2.15)
Щ = (0i + 02Фт + Fx,
^2 = (01 + 02% + F2,
u3 = (0i 0г)2 ~r Fз,
где
_ 0,5/ — — ?/p2— ~рз
Dl Z2 + 1/2 + .2
azpi + Ьур^ — zp'z + 0,5az2 -f- 0,56i/2
2 a2z2 + bhf -|- z1 ’
^ — произвольные функции, удовлетворяющие условию
(3.2.12).
§ 3. Построение уравнений движения систем
с m-мерным управлением
Рассмотрим решение поставленной задачи, когда диф¬
ференциальные уравнения (3.1.1) приводятся к виду
т
£| = МУ1.--ч Уп»0+ 2 Ь1к(Уи ■ ■ (3.3.1)
к=1
(i = 1, . . ., п).
В этом случае множество элементов управления и1?...
..., ит определяется из условия [87]
п т п :
2%гл+ + ^ = (r = i,
4=1 ** К=1 4=1
(3.3.2)
7*
196
ГЛ. IU. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
где Rr = Rr (<olt ..., сог, уг, ..., уп, t) и
Rr (0. •••> 0, уг, ..., уп, t) = 0 (г = 1, ..., s).
При выполнении условия (3.3.2) Zw получает наимень¬
шее значение, если
S П
1
и
ч< «* / s 2 £ + С* (ft = 1. • • • - т). (3.3.3)
CL,: , | г 1
Здесь Хг, ..., Ь, — неопределенные множители Лагранжа,
Fit == («!, ..., СО,, г/!, ..., г/„, t)
— произвольные функции, удовлетворяющие условию
FH (0, 0, yv ...; уп, 0 = 0 (/с - 1, т). (З.ЗЛ)
При л ом связь между функциями Rr и FK устанавливается
но формулам
т п
Rr= 2 2 1^7 bikFk (г = 1,..., р),
fc=l г—1
а для определения множителей Лагранжа, подставив
(3.3.3) в (3.3.2), получим систему алгебраических урав¬
нений
s т п п
2 2И2$г*»)(2£»..К-
0=1 7с=1 К i=1 г=1
— Р=» «>• (3.3.5)
i=l “1
Пусть
^ = 6; (Уи У„, t) (/ = 1, ..., s)
решение уравнений (3.3.5). Тогда
S п
“к =-/2 2 й^гк0;(г/п • • --г/пО) + ^ (А = 1,...,т).
7=1 г=1 1
(3.3.6)
Заметим, что если определитель у уравнений (3.3.5)
не обращается в нуль на заданном многообразии, то функ¬
§ 3. СИСТЕМЫ С m-МЕРНЫМ УПРАВЛЕНИЕМ
197
ции Qj определяются единственным образом:
дву I дву_\ v,
дУ1 iJi ^ dt ) v
r=1 i—1
(к = 1, m),
где уп- — алгебраическое дополнение элемента
т п п
S Г (2 &*..)( 2 £ у.)-
■*' г:,891
определителя у.
В этом случае
S It
1 v Vrj ( S} д(йг ,
!'н ~ ~~ 3ii Pi
dor
dt
X
X
d//
или в матричной форме
и = - Z)-1 £>-1 ( ^ J5 j']"1 ^
где к обозначениям (3.2.13) добавляется
В =
до \
'It)’
Ъц.
. ^17П
Ьщ.
. Ьпт
Если определитель уравнений (3.3.5) обращается в нуль
на заданном многообразии Q, решение задачи имеет не¬
которую особенность. Например, пусть в области
P-о (Йо с: Q)
S =\° = 1 m). V(6_1) Ф °>
ду-,
198
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
где v(S_1) — диагональный минор (s — 1)-порядка опре¬
делителя у. В этом случае для значений у ЕЕ вместо
уравнений (3.3.3) получим
S—1 п
ик — “лгЗ 2 ЬпгЬ} + Pit (& = 1, .. ., m)j
7=1 г=1 °Уг
а система алгебраических уравнений (3.3.5) запишется
следующим образом:
s—1 т п п
S 2-£(2 fc‘..)(2
7=1 k=1 К г=1 'п i=l
= -S^7 Pt-d-w (r = l,...,s-l), (3.3.8)
2%Pi + d-w = 0- (3-3-9)
2=1
Следовательно, если заданное многообразие Q яв¬
ляется интегральным для уравнений (3.3.1), то для зна¬
чений у ее й о функции р{ и cos должны удовлетворять
условию (3.3.9), а элементы управления их, ..., ит, обес¬
печивающие выполнение условия (3.1.2) на решениях
дифференциальных уравнений (3.3.1) с наименьшим при¬
нуждением Zw для значений у Е=й0, должны определять¬
ся выражениями
«.■- - i а %{afeft+9-Й(а +'•
К r,j=1 V г=1 i=i
(й = 1, . .., т).
Здесь у(г*_1) — алгебраическое дополнение элемента
т п п
a£(2fc»..)(a$!‘«)
)С=1 Л 1=1 Уг 1=1 -п
определителя уравнений (3.3.8), Fк, как и раньше,—
произвольные функции, удовлетворяющие условию
(3.3.4).
§ 3. СИСТЕМЫ С тп-МЕРНЫМ УПРАВЛЕНИЕМ
199
Рассмотрим теперь решение задачи в случае, когда
движение управляемой системы описывается дифферен¬
циальными уравнениями (3.1.1). Тогда заданное много¬
образие является интегральным для уравнения (3.1.1),
если
где Rr — произвольные функции, обращающиеся в нуль
на заданном многообразии £2.
Элементы управления ах, ..., ит, обеспечивающие вы¬
полнение уравнений (3.3.10) с наименьшей величиной
Zw, представим в виде суммы
где ..., — неопределенные множители Лагранжа,
Fk — произвольные функции, удовлетворяющие усло¬
вию (3.3.4).
Из сравнения полученных уравнений (3.3.10) и (3.3.11)
следует, что неизвестные множители Лагранжа ...
...,Х3 и элементы управления иг, ..., ит должны находить¬
ся как решение системы из т + s алгебраических урав¬
нений
п
п
(к = 1,. . т),
(3.3.11)
71
(3.3.12)
Пусть
Uk = G/i,..., Уп, t) (к = 1, ..., т)
— решение этих уравнений; тогда
И* = Uk° (г/i. •••, Уп, t) + Fk (к = 1, ..., т)
200 ГЛ. 111. I1РОГРЛММИРОВЛH ПК ЗАМЫКАНИЕМ
или в векторной форме
и и0 (г/, £) -!- (3.3.13)
Пример. Пусть Zw = || и ||2, программа движения
имеет вид
п
СО (ljv . . ., уп, t) = 2 «гЙ — / = 0 (/т^О),
2 —г 1
движение системы описывается дифференциальными урав¬
нениями
Уг = Рг (j/l. •••. 2/п. 0 Ч- Ь (Ун •••. 2/п> 0 «1«2
(г = 1, и)-
Б этом случае система алгебраических уравнений (3.3.12)
приводится к виду
п п п
2 а{Рх -f Ъиц1г 2 <4 + 2 &гУ% — / = 0.
■i=l г =1 а=1
?г п
Ux = 2 аг> и2 = 2 йг-
г = 1 г =1
Отсюда легко увидеть, что при выполнении неравенства
п
^ 2 °г ~i~ о (г/efi),
г = 1
(w(i)'2= (иЬ2 =0(г/i. • • •. г/,». 0.
где
п п
/—2 “г^г— 2 “i!/i
'(г/i. ■ • г/,,, 0
г =1
^2
Ч
г =1
причем
и\{Уъ • ••> г/п. 0 =; м? (г/i. •••. г/п. 0. еслие (г/х, ..., уп) /)>о
И
и?(г/г. •••.г/п. *) = -иЦу^.-чУп, t),еслие (ух, ...,yn,t)<о.
§ 4. ОСОБЕННОСТИ ПОСТРОЕНИЯ
201
§ 4. Особенности построения систем,
описываемых дифференциальными уравнениями
второго порядка
Рассмотрим особенности решения поставленной за¬
дачи, когда управляемое движение изучаемой системы
описывается дифференциальными уравнениями
у = z, z = Р (у, z, t) + и, (3.4.1)
где
У {Uli Уп}» ^ {^1> *•*> Р {^1* ***’ ^n}t
и = {ult ..., ип},]
(3.4.2)
а заданная программа двюкеиия имеет вид
С'Мг/> 0 = 0 (а = 1, . . ., sj,
со3 (у, z, 1) = 0 ([В -- -|-1, . . s).
Здесь Р — заданная вектор-функция переменных у, z,
не нарушающая условий существования и единственности
решения уравнений (3.4.1) в рассматриваемой области Г
переменных у, z при t GE [0, Г], и — вектор управления,
сэг — заданные функции (г = 1, s).
В Гозг определены и непрерывны вместе со своими част¬
ными производными
д2соу <92соа д-соа до). додсо[3
д Hid И у, ’ ’ д/2 ’ fy/* ’ dzi ’ .дг
(а = 1, ..., sx; р = Sj + 1, s; i, у = 1, и)
и удовлетворяют условию: ранг функциональной мат¬
рицы
/ д(0^\
/ =
д>,
дсоч
\~щ-
(а = 1, [} = -f 1, ..., s; i = 1, ..., и)
на многообразии Q, образованном пересечением поверх¬
ностей (3.4.2), равен s.
Рассмотрим, каким условиям должен удовлетворять
вектор и, чтобы заданное многообразие Q было интеграль¬
ным для уравнений (3.4.1) и на всех решениях этих
202
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
уравнений, удовлетворяющих условию (3.4.2), величи¬
на Zw = ||а||2 в каждый момент времени £ЕЕ[0,*Г] полу¬
чила наименьшее значение.
Для решения задачи поступим следующим образом.
Известно, что если поверхность
со (у, t) = 0
является интегральной для уравнений (3.4.1), то и по¬
верхность
z’0= If = 0
г = i ' г
должна быть также интегральной для уравнений (3.4.1).
Поэтому вместе с первыми производными функций
сор (Р = sx -f 1, s), взятыми в силу уравнений (3.4.1),
обозначив
( д®а 9с°а 1 ^ 5а)3
ега<1(0“ = Г^Г- • • •• 1ДД • §гаа ^ = •••> lh~
да>„ \ г] 9сор асоп
dt dii. / 1 1 dt dt 1 p ' q1, it ^
г =1 4 ^ 7 i=»i
(a = 1, ..., p — 5^ 1, ..., s),
рассмотрим вторые производные функций coa (a = 1, ...
..., sx), определенные на решениях дифференциальных
уравнений (3.4.1). Полученную систему уравнений за¬
пишем следующим образом:
(grad соа, Р -j- и) + Мл = Д * (а = 1, . . 5Х), |
(grad со-з, Р 4 и) + Мр = Др ((J = sx + 1, s), J
где Br*—R* («!,..., coSl, coj,..., w9, y,z,t) —произвольные
функции, удовлетворяющие условию
Дг* (0, 0, 0, 0, р, z, t) = О (г = 1, s). (3.4.4)
Заметим, что для случая sx = s = 1 уравнения (3.4.3)
были получены в [61].
§ 4. ОСОБЕННОСТИ ПОСТРОЕНИЯ
203
Общий вид вектора управления, обеспечивающего вы¬
полнение уравнений (3.4.3) с наименьшим принуждением
Zw, представим в виде
St S
и = S ^jgrad CDj -f 2 ^vgrad* cov -f F\ (3.4.5)
; =1 v=si+i
Здесь F* = F* ((b1? ..., cb31, co^ ..., ©8, y, z, t) — про¬
извольная вектор-функция, удовлетворяющая условию
|| F* (0, ..., 0, 0, ..., 0, у, z, г) || = 0, (3.4.6)
..., Я8 — неопределенные множители Лагранжа. Для
определения Хг, подставив (3.4.5) в (3.4.6), получим сис¬
тему алгебраических уравнений
S1 8
2 (grad <в„ grad2 (grad ©д, grad* cov)A,v= —
j=l V=s,+ 1
s
2 (grad*cop, grad©_,)^j+ 2 (grad* co3, grad* cov) Xv= — Afp
j =1 v=s1+l
(3.4.7)
(a =- 1, ..., Si; P = -f 1, ..., s). (3.4.7)
Определитель этой системы у* ПРИ сделанном пред-
положении относительно ранга функциональной матрицы
I на заданном многообразии Q* не равен нулю. Следова¬
тельно, система (3.4.7) имеет единственное решение
S *
Ч = -2л*г-^- (А = 1, • • - S),
Г=1 V
где — алгебраическое дополнение элемента r-й стро¬
ки и к-то столбца определителя у*.
Таким образом,
и = — 2 (2 м* §га(1 —
3=1 а=1 V
s s *
— 2 ( S grad*cov-f F*. (3.4.8)
v=Sl+!^ 3=1 v '
204
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
Если найденное значение и подставить в (3.4.1), то
получим множество дифференциальных уравнений
1 s \ * s
У — z, z = Р (у, z, t) — 2 ( S М«- ) g['atl oyj —
j=l^a=r V 7
S S *
- S I Is ^)gradcov + F\
V=Si+1 V 3=1 V 7
на всех решениях которых, удовлетворяющих условию
(3.4.2), величина \\и\\2 в каждый момент времени tEz
£Е[0, Т] получает наименьшее значение.
Пример. Управляемое движение материальной
точки в центральном поле сил описывается дифференци¬
альными уравнениями, которые приводятся к виду
2/i = Z{, ^=—77==='к + Щ
V ( v\ + V , + !/-л)3
(i = 1, 2, 3, р, = const).
Пусть программа движения точки задана уравнением
“ (2/1- Уг, 2/зЛ = I/i2 + 2/г2 T 2/з2 — / == 0 (/ > 0).
Тогда, в соответствии с (3.4.8),
/- 2 «л- 2 *!+*(% ?/*
М. = ^ ^ }-± 2/i -!- Fl (i = 1,2, 3).
;=i
§ 5. Скалярная оценка отклонений системы
от заданной программы
Множество дифференциальных уравнений, для кото¬
рых заданное многообразие Q является интегральным
с наименьшим принуждением Zw, имеет вид
у = Ф (у, и0 + F, /),
(3.5.1)
§ Г). СКАЛЯРНАЯ ОЦЕНКА
205
где и0 — решение алгебраических уравнений (5.5.12),
F — произвольная вектор-функция, обращающаяся в нуль
на многообразии Q.
При выполнении условия
сог(у (0), 0) = 0 (г = 1, ...,*) (3.5.2)
любое решение у (t) дифференциальных уравнений (3.5.1)
принадлежит заданному многообразию Q на интервале
времени tEz[0, Тj. Нетрудно увидеть, что невыполнение
условия (3.5.2) приводит к отклонениям решений уравне¬
ний (3.5.1) от интегрального многообразия Q, следова¬
тельно, приводит к отклонениям управляемой системы от
заданной программы движения.
В этом параграфе дается способ построения оценок от¬
клонений движений управляемой системы (3.1.1) от за¬
данной программы движения (3.1.2) в случае, когда мерой
отклонения является скалярная функция ф (у, г), кото¬
рая в рассматриваемой области G переменного у при
t ЕЕ [0, Т] определена и непрерывна вместе со своими
частными производными по уг, ..., уп t, обращается в нуль
на заданном многообразии Cl и удовлетворяет условию
■ф (у, *) > 0. есл11 у е Q,
|| grad\|) || ф 0, если ф (у, t) ф 0.
Предполагая произвольную вектор-функцию F в
(3.5.1), выбранной исходя из конкретных условий, рас¬
сматриваемую задачу сформулируем следующим образом.
По заданной функции ф и заданной положительной ве¬
личине г) нужно найти такую функцию времени h {h[0)
= т]), чтобы любое решение у (t) дифференциальных урав¬
нений (3.5.1), определенное начальными значениями
ф (у (0), 0) <г), (3.5.3)
удовлетворяло условию
Ф (у (t\ t)<h (t) (3.5.4)
на заданном интервале времени I [0, Т\.
Для решения задачи введем в рассмотрение функции
Ц (у, t), Vt (у, t),
206
ГЛ. Ш. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
во многом аналогичные функциям Ляпунова [57, 59, 66],
а именно, в области G функции Vj и их первые производ¬
ные
О (£> 0=(ф, gradVj)+ ф (7 = 2,..., I), (3.5.5)
взятые в силу уравнений (3.5.1), определены и непрерыв¬
ны при t ЕИ [0, Т]. Кроме того, функции Vj обращаются
в нуль на многообразии удовлетворяют неравенствам
Vj(y, 0) < cj ф (у, 0) (cj = const, Cj > 0, / = 2, ..., Z)
(3.5.6)
и для всех значений у £, t Gr [0, Г]
V;(y,t)p> 0, если (3.5.7)
и
|| grad Fj || ф 0, если F,- (у, Z) =f 0 (/ = 2, ..., Z).
Заметим, что указанному условию (3.5.7), например, удов¬
летворяют функции Vj (сох (г/, t), ..., со3 (у, Z), Z), если
F,- (0, .., 0, t) = 0
и
я
(сох, . . ., со,, Z) >0, если 2 =f=0 (j = 2, . . ., Z).
Вместе с Vj рассмотрим также производную функции
ф, определенную на решениях уравнений (3.5.1):
Ф (У, 0 = (Ф, grad г|>) + . (3.5.8)
Для простоты записи обозначим
Ф (у: t) = И (г/, t)
и перепишем уравнения (3.5.5), (3.5.8) следующим обра-
§ 5. СКАЛЯРНАЯ ОЦЕНКА
207
Пусть теперь
(Fx, Vh t) = Sa (V, (у, t), F, (у, t), t)
(a = 1, I)
— непрерывные и ограниченные функции, неубывающие
по внедиагональным переменным, т. е.
S«(£lt . . 1а_1, 1а, 1а+1 1„ 0 <
<$«(&!, . . 1а-Н 1а, 1а+1, • • ., 1/, 0,
если
5l ^ • • •» Еа—1 £а—1» ^a+l ^ £а+1» * * *» ^ £I (& = 1, • • •, 0*
Далее, пусть ра — положительные, непрерывные и
непрерывно дифференцируемые функции времени t,
Pi (0) = ть Pj (0) = ср\ (/ = 2, I).
Обозначив через Gx (Gx с: G) множество всех у, удов¬
летворяющих при t ЕЕ [0, Г] условию
7«&.0<Pa(f) (a = 1 0. (3.5.10)
покажем, что имеет место следующее утверждение.
Теорема 1. Любое решение у (t) дифференциаль¬
ных уравнений (3.5.1), определенное начальными значе¬
ниями (3.5.3), удовлетворяет условию
Ф (у (0, 0 < Pi 00, t е= [0, Г], (3.5.И)
если
Fa(y, 0 — Sa (Fi, . . ., 0<Pa —5a(pi, . . ., pht)
(a = 1, . . ., Z) (3.5.12)
для всех i/ G E [0, Г].
Д о к а з а т е л ь с т в о. Обозначим через у = у* (t)
некоторое решение дифференциальных уравнений (3.5.1),
определенное начальными значениями (3.5.3), т. е.
ф (у* (0), 0) < т), или в принятых обозначениях
Vx (у* (0), 0) ^ рх (0). Через n'a = ra (t) обозначим ча¬
стное решение уравнений
W* = Sa {Wx, . . ., Wh t) + pa — S* (pi, . . Рь t)
(a = 1, . . .. /). (3.5.13)
208
ГЛ. Ш. UP О Г J * А М М 11Р О В Л ТТII10 ЗАМЫКАНИЕМ
Решению у* (t) уравнений (3.5.1) соответствуют вполне
определенные значения функций Va (у* (t), t) = £a(Z),
которые при / 0 удовлетворяют условию |а (0) ^ ра(0)
(ос = 1, ..., Z). Пусть при выполнении этого условия
1а (0) = га (0) (ос 1, ..., Z). В этом случае, как следует
из [47], Ьх (t) ^ гу (/), /Ег 10, Т] (ос —- 1, ..., Z), если для
всех Vx > lx (I) при t ЕЕ [0, Т]
Va <;Sa (Vu . . ., Va, t) + pa —Sa (pi, ..., Pi, t)(a=l,. . ., I).
В свою очередь, в силу [41 j,
ra (t) < pa (Z), Ze[0, T\ (a = 1, ..., *),
поскольку pa (0) l'y (0) и pa являются решением урав
пений (3.5.13). Следовательно,
la (/) < Pa (0, t ЕЕ [0, Г] (a = 1, ..., Z),
если неравенства (3.5.12) имеют место для всех у £= G3.
Таким образом, любое решение уравнений (3.5.1), оп¬
ределенное начальными значениями (3.5.3), при выпол¬
нении неравенств теоремы удовлетворяет условию
К (У (Z), Z) < pa (Z), t ЕЕ [0, Т] (а = 1, .. , Z). (3.5.14)
Следовательно, оно удовлетворяет и условию (3.5.11)
Теорема 1 требует выполнения неравенств (3.5.12)
для всех г/, удовлетворяющих условию (3.5.10). Пусть
теперь 6?2 — множество переменного у, определенное не¬
равенствами
ga (t) < К (г/, 0 < Ра (*), *S[0, Г] (а = 1, Г),
где при выполнении условия ga (Z) >0 — непрерыв¬
ная функция времени Z (ос = 1, ..., Z).
Теорема 2. Любое решение у (Z) дифференциаль¬
ных уравнений (3.5.1), определенное начальными значе¬
ниями (3.5.3), удовлетворяет условию (3.5.11), если для
всех у Er G2, t ЕЕ Ю, Т)
У у. (у, 0 — S« (Vx, . . ., Vu t) <Pa — Sa(pi, . . . ,p/, t)
(a — 1, . . ., Z). (3.5.15)
F, (//i *)(FA, . . ., F„ Z) > ia - 5a (сд, . . ., gh t)
(a = 1, . . ., Z). (3.5,16)
§ 5. СКЛЛЯРТ1ЛН. ОДР-МИЛ
209
Доказательство. По аналогии со сказанным
выше можно утверждать, что любое решение дифферен¬
циальных уравнений(3.5.1), определенное начальными зна¬
чениями
Va (у (0),0) >*«(()) (а ~ 1, ..., Z),
удовлетворяет условию
V* (У (t), t) > g. (t) (CC = 1, ..., I)
на заданном интервале времени t ЕЕ [0, Г], если неравен¬
ства (3.5.16) имеют место для всех у, удовлетворяющих
условию
Va (у, t) > ga (t), t GE [0, Г] (a = 1, I).
В то же время
Va (У (t), t) < f)a (t),
если
Va (y (0), 0)< pa (0) (a= 1, Z),
и неравенства (3.5.15) имеют место для всех у, удовлет¬
воряющих условию (3.5.10). Таким образом, любое реше¬
ние дифференциальных уравнений (3.5.1), определенное
начальными значениями
ga (0) < Va (у (0), 0) < pa (0) (3.5.17)
при выполнении неравенств теоремы удовлетворяют ус¬
ловию
С) < Va ('у (Г), £)< pa (t) (a = 1,..., I)
на заданном интервале времени £ ЕЕ [0, Г], следователь¬
но, оно удовлетворяет и условию (3.5.14). Покажем те¬
перь, что условие (3.5.14) будет выполняться и в случае,
когда начальные значения решений уравнений (3.5.1)
не удовлетворяют неравенствам (3.5.17). Действительно,
пусть у — у* (t) — решение уравнения (3.5.1), опреде¬
ленное начальными значениями (3.5.17), а у (£) — любое
другое решение с начальными значениями (3.5.3). Пусть
в некоторый момент ^ Т
^ (у Ci), h)'S> Pi О»
210
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
но в этом случае должно существовать такое значение
t = t\ для которого
Ч> (у (О, О = V (у* (А О,
т. е. при соответствующем выборе у* (0)
у (О = у* (О.
что противоречит сделанному предположению о суще¬
ствовании и единственности решений дифференциальных
уравнений (3.5.1).
Следовательно,
0<Pi(0. *е[0, Г]-
Следует отметить, что при выполнении неравенства
т
(у, 0 < 2 (у> 0
;=2
I
(fj > 0, fj = const, 2 U > 0. / = 2
j=2
полученные оценки (3.5.14) функций позво¬
ляют наряду с (3.5.11) указать еще одну оценку откло¬
нений управляемой системы от заданной программы дви¬
жения:
i
*апо,о<2/^(о = Р1(0. <е[о,п. (3.5.18)
j— 2
При этом в некоторых случаях может оказаться, что рц ^
Pi, но следует иметь в виду, что оценка (3.5.18) функ¬
ции ф не является решением поставленной задачи, если
i
pi (0) = 2 fjPj (0) =h Л*
3=2
Более того, в этом случае в силу свойства интегральной
непрерывности [70] всегда существует промежуток вре¬
мени £ЕЕ[0, £*], на котором pi < pi- Поэтому при решении
§ 6. векторная оценка
211
конкретных задач за функцию h в (3.5.4) следует брать р1?
если рх ^ рц и функцию р1? если рх < р1#
п
Пример. Пусть со = ф = F = 2 i/i» Л = 1 и уравне-
i =1
ния движения имеют вид
Уг = Уг (i = ^ •••, га). (3.5.19)
За функции ра, ga, Sol примем
р = 1 + з«, g = 0, S(V) = ^-K
В этом случае неравенства (3.5.12) записываются следую¬
щим образом:
2(%!-4)<8-(т + т«)-
i —1 '
Отсюда легко увидеть, что любое решение дифферен¬
циальных уравнений (3.5.19), определенное начальными
значениями
п
г=1
удовлетворяет, в соответствии с теоремой 1, условию
п
1 + з*
7 г
г =1
Г 11
по крайней мере при? ЕЕ 0, -g- . Поэтому функция 1 + 31
является решением поставленной задачи, если Г ^ 1/6.
§ 6. Векторная оценка отклонений системы
от заданной программы
В этом параграфе дается способ построения оценок от¬
клонений управляемой системы (3.1.1) от заданной про¬
граммы движения (3.1.2) в случае, когда отклонения си¬
стемы оцениваются функциями
% <У, t), г|)р (у, t).
212
ГЛ. ИГ. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
Предполагается, что ..., ф,, в области G переменного
у при t ЕЕ 10, Т\ определены и непрерывны вместе со
своими частными производными по у±1 ..., уп, t и удовлет¬
воряют условиям
г|>„ (у, t) = 0, у е й,
Р
2 гМг/, 0>0, т|\,(гЛ t) >0, у ей,
V=1
|| grad i|>„|| =f= 0, если г|т, (г/, г) ф 0 (v = 1, р).
Задача состоит в том, чтобы по заданным функциям
и положительным величинам найти функции
(fev (0) = т]у (v = 1, ..., р)), удовлетворяющие усло¬
вию
(0,0 < (0 (v = 1, р) (3.6.1)
на всех решениях дифференциальных уравнений (3.5.1),
определенных начальными значениями
(У (0), 0) < i]v (v = 1, ..., р). (3.6.2)
Для решения задачи поступим следующим образом.
Пусть в (3.5.9)
К (у, t) =-- фа {у, t) (а = 1, ..., р),
a Vv+1, ..., Vi (I > p) — произвольно выбираемые функ¬
ции Ляпунова, удовлетворяющие всем условиям § 5
с той лишь разницей, что
Р
Vp+n (у, ох 2 (у, о)
V=1
р
(с*,, = const, ckv >0, 2 >0, /с = 1, . . ., I — Р)
V—1
V = 1, . . ., р).
Пусть, как и раньше, Sa — произвольные функции, не¬
убывающие по впедиагональиым переменным, a G3 (G3 а
§ 0. В ТС КТО РИЛ я оцтстткл
213
cz G) — множество всех у, удовлетворяющих условию
go. (t) ^ Vo. (У, t) ^ ра (t), t ЕЕ [0, Г],
где при выполнении неравенств
go. (t) ^ТС^Ра (t),
начальные значения ра определяются по формулам
v
р*(0) = Г|.„ Pp.fi; (0) = 2 CkJ1v
V= 1
(a = 1, . . Z; v = 1, . . ., p\ к = 1, . . I — p).
Если при выполнении указанных условий неравен¬
ства (3.5.15) и (3.5.10) имеют место для всех у ЕЕ G3, то,
как было показано выше, функции У1? ..., У/удовлетво¬
ряют оценкам (3.5.14). Следовательно, в этом случае лю¬
бое решение уравнений (3.5.1), определенное начальными
значениями (3.G.2), удовлетворяет условию
ТС {у (t), t) < p., (t), t <= [0, T\. (3.6.3)
Из сравнения выражений (3.6.1) и (3.6.3) следует, что
функции рь ..., рр могут быть выбраны в качестве функ¬
ций h{).
Следует отметить, что полученные неравенства (3.5.15)
и (3.5.16) можно записать в несколько иной форме, мо¬
жет быть, более удобной для практических приложений,
если ввести в рассмотрение функции
ма (тс, ..., тс, t) = Ма (ТС (У, 0, -, v,(y, t), t),
Na (ТС, -, TC, t) = No (ТС (у, ty, ..., тс (у, t), t)
(a = 1, ..., I),
неубывающие по Ух, ...,
Относительно функций Afa, Na и Sx будем предпола¬
гать, что при t ЕЕ: [0, Т]
214
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
Теорема 3. Любое решение у (t) дифференциальных
уравнений (3.5.1), определенное начальными значениями
(3.6.2), удовлетворяет условию (3.6.3), если неравенства
К (у, t)-sa{vlt..., f„
^ — Рг, О
"" (01, . . .. р(, I)
Ул{у, t)-Sx<y» ..., vu
^ ia - • • •• SV О
Ma(F, F;, г),
Na(Vlt . ..,V u t)
(3.6.5)
Atete1 ev I)
(a = 1,...,/)
имеют место для всех г/ G3, t 6Е [О, Г].
Действительно, при выполнении условия (3.6.4) для
всех i/eGj, (G [О, Т]
Na ten, .
Ma (Г, Fp О
>1.
Ma (Pi,
p;, /)
. i'r ')
;l (a = 1, ...,/).
Следовательно, неравенства (3.5.15) и (3.5.16) всегда спра¬
ведливы при выполнении (3.6.5).
Рассмотрим теперь решение задачи, когда отклонения
системы оцениваются самими функциями «ц ,..., со8.
В этом случае по заданным положительным величинам
т)г нужно найти функции hT (t) (hT (0) = цг (г = 1, ...
..., s)), удовлетворяющие условию
I йг (у (t), «) | < /гг (t), t е [0, Т] (г = 1, ..., s) (3.6.6)
на всех решениях дифференциальных уравнений (3.5.1),
определенных начальными значениями
1иг (у (0), 0)1 < т]г (г = 1, ..., s). (3.6.7)
Для решения этой задачи рассмотрим уравнения (3.5.9),
где будем считать
V) (у, t) = C0j (у, t) (j = 1, ..., s),
§ 6. ВЕКТОРНАЯ ОЦЕНКА
215
a F,+1, Vi — произвольно выбранными функциями,
удовлетворяющими условиям
\Vs+k (у, 0)|<h,j ,г?
если | Vr (у, 0) [ тц (г = 1, . . ., s\ к = 1, . s;
T|e+1, тр — положительные числа).
Пусть теперь ра — положительные и непрерывные
функции времени t, ра (0) = т}а, Sа — непрерывные и ог¬
раниченные функции, неубывающие по внедиагональным
переменным,
Ра 5а (pi, •••, Р/, 0 ^ 0»
- Ра - ^а (- Pi, - Р/, «X 0, * (ЕЕ [0, Л
(а = 1, /);
Ма — функции, неубывающие по Vly ..., F/?
1
ма (Flf . . F„ 0 > 0, если 2 Vt ф 0,
a = l
G4 — множество всех у, удовлетворяющих при t ЕЕ
ЕЕ [0, Г] неравенствам
I Гх (г/, <)К ра (t) (а = 1, I).
Теорема 4. Любое решение уравнения (3.5.1), оп¬
ределенное начальными значениями (3.6.7), удовлетво¬
ряет условию
I Юг (у (0. 01<Рг (0 (г = 1, •••, S) (3.6.8)
на заданном интервале времени t ЕЕ [0, Л, если для всех
у ЕЕ С?4, *<=[0, Л имеют место неравенства
I Га (г/, о — 5а (Flf . OK
< Ч^Чо'1 F" <> <ЗЛ9>
(a = 1, ..., I)
при выполнении условия
— Sa (рх, ..., рг, 0 < Sa (— pl; ..., — t) (3.6.10)
216
ГЛ. III. ПРОГРАММИРОВАНИИ ЗАМЫКАНИЕМ
и неравенства
(а = 1, I)
при выполнении условия
' 5а (pl? •••) Pi 1 0 *^а ( Pi? •••) Ро ^)»
(3.6.12)
Доказательство. В соответствии со сказан¬
ным выше
“ Ра (t) < Fa (у (<), <) < ра Д), £ ЕЕ [О, Т]
(а = 1, ..., Г),
если в области (г4 при t ЕЕ [О, Т\
V* (У, 0 — -5а (Fx, . . ., Vi, i) <ра — Sa (рь . . ., p(, £),
Fa (у, t) — 5а (Flt . . ., F„ t) > — pa — 5a(— p4, ..., — p„ £)
(a = 1, . . ., I),
I Fa (y (t), О К pa (0. f e [0, Л, (3.6.13)
если при t EE [0, T] в G4
I Ba (У, t) — 5a (F4, . . ., V[, t) К pa — 5* (plt . . ., pb t)
(3.6.14)
при выполнении условия (3.6.10) и
I Va (у, t) — 5а (Vъ . . ., Vh t) I > Ра + 5a (— pb . . ., — P,, t)
(3.6.15)
при выполнении (3.6.12).
§ 0. ПТ'КТО РИЛ Я О ЦП П К Л
217
При сделанном предположении относительно функций
Ма и ра для всех значений у Е? fi4, t GG [О, Т]
Ма(о 1, . . ^ ’
поэтому неравенства (3.6.14), (3.6.15) всегда имеют место
при выполнении неравенств (3.6.9), (3.6.11).
Таким образом, при выполнении неравенств (3.6.9),
(3.6.11) все решения уравнения (3.5.1), определенные на¬
чальными значениями (3.6.7), удовлетворяют оценкам
(3.6.13), следовательно, они удовлетворяют и условию
(3.6.8).
Как и раньше, функции рг, удовлетворяющие условиям
сформулированной теоремы, могут быть приняты за функ¬
ции hr, входящие в неравенства (3.6.6), т. е. функции
К = Рг (0 (Г = 1, р)
являются решением поставленной задачи.
Пусть теперь отклонения системы от заданной про¬
граммы движения по-прежнему оцениваются функциями
сох, ..., со3, а область начальных отклонений определена
неравенством
to (У (0)) < 11, (3.6.16)
где ф0 — заданная функция, удовлетворяющая условию
Фо Ь) - 0, 1/ G 2 и ф (у) > 0, если у ёЁ Q.
Найдем функции hr (г = 1, ..., s), удовлетворяющие ус¬
ловию (3.6.6) на всех решениях уравнений (3.5.1), опре¬
деленных начальными значениями (3.6.16).
Для решения этой задачи выбирем функцию V (у, t),
удовлетворяющую условию V (у, 0) = ф0 (у). Затем, ис¬
пользуя метод построения оценок отклонений движения
управляемой системы от заданной программы, предложен¬
ный в § 5, найдем функцию А, удовлетворяющую условию
V(y (о, t) <А(0, t е [О, т] (3.6.17)
на всех решениях дифференциального уравнения (3.5.1),
определенных начальными значениями (3.6.16).
218
ГЛ. ПГ. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
При выполнении неравенства (3.6.17) поставленная за¬
дача будет решена, если функция V выбрана таким обра¬
зом, что существует квадратичная форма
S
W(y,t)= 2 Brjco,,(y,t)(aj(y,t),
г, j=1
удовлетворяющая условию
к 2 Вп®г {у у t) (у у t)<y (У у О-
Г, j= 1
В этом случае
(3.6.18)
2 Вгрг (у, t) СО; (у, t) < -i- h (t).
Г, j=l
Отсюда, используя оценки, полученные в [43, 77], найдем
каао.ок}/. *е=[о,л ^ = 1,...,*),
(3.6.19)
где Втт — алгебраическое дополнение элемента Втт оп¬
ределителя В:
В =
вп.
• •В1а
вл..
■ вы
Из сравнения оценок (3.6.19) и неравенств (3.6.6)
легко увидеть, что функции /гг, определяемые по фор¬
мулам
hr= У BTTB^h{t) (r = l,...,s),
являются решением поставленной задачи.
Пример. Пусть 5 = 2, область начальных откло¬
нений определена неравенством
®\(у (°)>°) -I- ®2(У(0),0)<Г12,
§ 7. ПОСТРОЕНИЕ УПРАВЛЕНИЯ ПО ОЦЕНКЕ
219
производные функций со1? со2, определенные на решениях
дифференциальных уравнений (3.5.1), приводятся к виду
*i (у. О = РИ1 (гл 0 + е~т (г/. 0. \
®2 (2Л t) = — е-’И (Ох (у, t) + (Р — (Д,) <о8 (г/, t) ((3, ц = const), j
(3.6.20)
В этом случае за функцию V выбираем
V (у, t) - СЙ1 (у, t) -I- e2!J(coI (у, t).
При выполнении условия (3.6.20) производная этой функ¬
ции, определенная на решениях уравнений (3.5.1), за¬
писывается следующим образом:
V (у, t) = 2р [со* (у, t) + е^щ (у, *)] = 2pF (у, t).
Следовательно, co'i (у (t), t) + e2Fщ (у (t), t) < т)2е2"'.
Отсюда получаем следующие оценки:
I ®1 (у (0> t) I <'пе3', | Oh (у (0> 01 <'Пе(3_1Л) '•
§ 7. Построение управления по заданной оценке
отклонений от программы
Рассмотрим теперь, каким условиям должна удовлет¬
ворять вектор-функция F в уравнении (3.5.1), чтобы уп¬
равляемая система на интервале времени t Е= [0, Т]
имела заданные оценки отклонений
о < 1|>V (у (t), t) < qv (t) (v = 1, ..., p) (3.7.1)
от программного движения (3.1.2).
При этом будем предполагать, что функции ...
...,фр удовлетворяют всем условиям § 6, за исключением, мо¬
жет быть, условия а дх, ..., qp являются положи¬
тельными, непрерывными и ограниченными функциями
времени при t ЕЕ [0, Т].
Для решения задачи производные функций ...,фр,
взятые в силу дифференциальных уравнений (3.5.1),
220
ГЛ. III. ПРОГРАММ И Р О В АН И Г ЗАМЫКАН ПКМ
представим в виде соотношений [88]
дф,
(grad Ф (у, ип -h F, t)) + —д-- =
= К., (\|\, . . . y,t) (v = 1, . . . , р), (3.7.2)
где К, — непрерывные, ограниченные функции, обра¬
щающиеся в нуль па заданном многообразии Q. Кроме
того, в области G переменного у, определенной неравен¬
ствами (3.7.1), при t ЕЕ [0, Т\
д., > К., (qu ..., qp, у, t) (v = 1, ..., р) (3.7.3)
и каждая функция Kv является неубывающей по вне-
диагональным переменным.
При выполнении указанных условий любое решение
дифференциальных уравнений
■ф„ = Кч (г|'х, ... ,0рр, у, t) (v — 1, . . ., р)
(где у следует рассматривать как неизвестную функцию
времени t), определенное начальными значениями
(0) < q, (0) (v = 1, ..., р),
удовлетворяет условию
фу (t) < q, (t) (v = 1, ..., p), t (= [0, Л.
В то же время при t ЕЕ [0, T]
ф, (t) > 0 (v = 1, ..., р),
если
фv (0) > 0 (v = 1, ..., р).
Таким образом, система алгебраических уравнений
(3.7.2) определяет множество управляемых систем (3.5.1),
а следовательно и (3.1.1), имеющих заданные оценки от¬
клонений (3.7.1) от программного движения (3.1.2).
Общий вид вектор-функции F, удовлетворяющей ус¬
ловию (3.7.2), можно определить следующим образом:
F = F0 (у, t) + С, (3.7,4)
§ 7. ПОСТРОЕНИЕ УПРАВЛЕНИЯ ПО ОЦЕНКЕ
221
где С — произвольная вектор-функция, удовлетворяю¬
щая условию
|| С\\ = 0, если г/£Й, £ ЕЕ [О, Я, (3.7.5)
(Ф (у, u°+ F0 + С, t), grad 1|)V) = Ф (у, и0 + F°, t), grad я|)„)
(v = l, (3.7.6)
если у ЕЕ G, t ЕЕ [О, Я, а через F0 обозначается решение
уравнений (3.7.2) и уравнений
V Q
FK --- 2 ЖГ (ф. 8'ra(1 ^ № - 1, .... т) (3.7.7)
v=l l!
(Хх, ..., — неопределенные множители Лагранжа).
Следует отметить, что при выполнении полученных
условий Я и С не должны нарушать существования и
единственности решения дифференциальных уравнений
(3.5.1).
Рассмотрим более подробно определение вектор-функ¬
ции в случае, когда управляемое движение изучаемой
системы описывается дифференциальными уравнениями
(3.2.6). Для этого, подставив найденные значения эле¬
ментов управления (3.2.11) в (3.2.6) и обозначив
о. - р, - F 2 ^ (2 + £■)1......),
1 г, j=1 а=1 ' а 7 ■ *
1 2 Vri 1 ^ d(i>r ■ 9(0' d(1)i
, 3=
систему дифференциальных уравнений
Vi = Qi (Уъ •••. Уп, t) + Fi (i = 1, ..., п)
запишем в векторной форме
У — Q (У, t) + F. (3.7.8)
В соответствии со сказанным выше множество управляе¬
мых систем (3.7.8), имеющих заданные оценки откло¬
нений (3.7.1) от программы движения (3.1.2), определяет¬
ся системой алгебраических уравнений
222
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
Общий вид вектор-функции F, обеспечивающей выполнение
уравнений (3.7.9) в соответствии с (3.7.4), можно опре¬
делить следующим образом:
v
F = S ^gradij), + С, (3.7.10)
3=1
где Xv ..., Xjt — неопределенные множители Лагранжа;
С — произвольная вектор-функция, удовлетворяющая
условию (3.7.5) и (3.7.6), т. е.
|| С|| = 0, если 1/БЙ, (С, grad ф>,,) = 0, если уШ&
(V = 1, р).
Для определения подставив (3.7.10) в (3.7.9), получим
систему алгебраических уравнений
УГ\ dib
2 (gra<l ''I'v, grad а|^) к} = Кч—(Q, grad ij>v) — (v = 1, ... , p),
3=1
(3.7.11)
которая имеет единственное решение, если ранг функцио¬
нальной матрицы
(v = l,...,/>;i = l,...,n)
равен р для всех у ЕЕ G, кроме, может быть, у ЕЕ й.
В этом случае
д^
* ^v-^gradtv)--^-
hj — 2j д ^vj,
V^l
где A — определитель алгебраических уравнений (3.7.11),
Д.,. — алгебраическое дополнение элемента (grad г|э„,
gradijjj) определителя Д.
Таким образом, если движение управляемой системы
описывается дифференциальными уравнениями (3.2.6),
§ 7. ПОСТРОЕНИЕ УПРАВЛЕНИЯ ПО ОЦЕНКЕ
223
то
F = i (S *• ^ Ц ~ * А„) gr,J + С. (3.7.12)
j=i v=i
Если движение системы описывается дифференциаль¬
ными уравнениями (3.3.1), то уравнения (3.5.1) приводят¬
ся к виду
т
iii = Qt (yi> • • •. Ун. О + 2 (yi. Ун. О Fk (i = 1,.... в),
fc=l
где
m s n _
О* = л - 2 x-S 2 jf-btkQjiyi’ • • • .Уп.О
k=l k j=1 a=l * a
(i = 1, . . . , re).
В этом случае (3.7.2) принимает вид
+ ^ = (v = 1.....,).
i=l k=i 4=1
а (3.7.4) -
P n |
^ fc = 2 2 ^ibA/ + С к (к = 1, . . . , m),
j=l i=1
где Ck— произвольные функции, обращающиеся в нуль на
заданном многообразии Q и удовлетворяющие условию
П 771 Д|
2 2-^7 Ьг*А = 0 (v = 1» • • • , р).
г=1 fc=l
Я1? ..., Яр — неопределенные множители Лагранжа, кото¬
рые находятся из условия
-7^ (V = 1 Р). (3.7.13)
224
Г Л. III. TIP О ГР Л М М11Р О В А Н И Е 3 А М Ы К А И11Е М
Из рассматриваемых уравнений (3.7.13) следует, что если
(11 (Уг, •••. Уп, t), (уи Уп, О
— непрерывные, ограниченные функции и
р т n п
2 2 (2 ттг М Ё Ы ^ (г/i- •... г/п. О =
j=l k=l i 1 -'i 1 i=l <■ 1
VI dll)
<v --—р>,
г 1 4
ТО
VI VI ^7
Fic = 2j 2л 1)~Г bnMk Сг/i- • • • > Уп, t) + Ск(к = I, . . . , т).
3*=1 г=1 " *
Пример. Пусть уравнения (3.5.1) имеют вид
iJi = (?; (г/i. •••, Уп, t) + Fi (i = 1, re),
p = 1 и g = const. Выберем функцию К:
К = — РФ (ух, ..., уп, t) + \f (Ух, Уп, t) (Р ^ q),
тогда в соответствии с (3.7.12)
а
Pi-2^4г c = i.....»).
а=1 ‘ а
где
Ми
П
- РФ (.VI,..., ?/„, О + Ф2 0/1. •.., ?/„, t) - J U Q;. -
jil 9.1/; 1 dt
у г' ^ф \ -
I ^ J
Мха = Л/{а (со, г/х, ..., рп, 7) — произвольные функции,
удовлетворяющие условиям:
Mi0L = 0, если рей,
Л'Аа = —Ма1 (а, i = 1, ..., re), если рей.
§ 8. ПРИМЕНЕНИЕ ФУНКЦИЙ ЛЯПУНОВА
225
§ 8. Применение функций Ляпунова для построения
систем, имеющих заданные оценки отклонений
от программы
При определении F в § 7 предполагалось, чтог^, ф,,
заданы таким образом, что существуют функции Fx, ..., Fm,
удовлетворяющие условию (3.7.2) и не нарушающие
при этом условий существования и единственности реше¬
ния дифференциальных уравнений (3.5.1). В случае, когда
сделанное предположение не выполняется, для решения
поставленной задачи может оказаться более удобным на¬
ряду с ф1? ..., фр рассматривать функции Ляпунова У1? ...
...,Уь выбираемые определенным образом. Действительно,
если при некоторых значениях
Fk = Fk (уъ ..., уп, 0 (к = 1, т)
могут быть указаны такие функции Ляпунова
У\ (у, t), ■■■> Vi (у, t)
и такие функции
р! (От •••. Рl(t),
что любое решение уравнения (3.5.1), определенное на¬
чальными значениями
о < Va (у (0), 0) < Ра (0) (а - 1, ..., Z),
удовлетворяет условию
0 < У« (у (0» *) < Р* (*)» t е [о, Т] (а = 1, ..., /),
(3.8.1)
то поставленная задача будет решена, если при выполне¬
нии неравенств (3.8.1) любое решение уравнений (3.5.1)
будет удовлетворять условию (3.7.2) на заданном интер¬
вале времени t Ez [0, Т].
Поясним сказанное на примере дифференциальных
уравнений
m
У ---- Q 0/. 0 + 2 ьк (У> 0 [<\- (3.8.2)
к--= 1
8 А. С. Галиуллин
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
При зтом ограничимся рассмотрением случая, когда допу¬
скаемые отклонения управляемой системы от заданной
программы движения оцениваются одной функцией
ф (i/, t), которая, кроме указанных в § 7 соотношений,
удовлетворяет у с л о в г ю
Для решения задачи в этом случае поступим следую¬
щим образом. Пусть V (у, t) — функция Ляпунова, имею¬
щая в G непрерывные частные производные по ух, ..., уп, t,
обращающаяся в нуль на многообразии Q и удовлетво¬
ряющая условию
V (у, t) > 0, если у ЕЕ Q.
Пусть, кроме того,
Производную функции V, определенную на решениях
дифференциальных уравнений (3.8.2), запишем следую¬
щим образом:
где К — произвольная функция, удовлетворяющая ус¬
ловию
Предположим теперь, что существуют функции
обеспечивающие выполнение условия (3.8.3) и
не нарушающие при этом условий существования и един¬
ственности решения дифференциальных уравнений (3.8.1).
В этом случае поставленная задача будет решена, если
где S — неубывающая функция по F, и неравенства
V (г/, 0) <^сф (г/, 0) (с = const, с >> 0).
т
к (0, у, t) = 0.
т
(Q -г S grad V) + < £(т|> (у, t), V (у, t), t),
I: — 1 '
(3.8.4)
§ 8. ПРИМЕНЕНИЕ
ф у н к ц 11 п 1 я п ути) в л
227
имеют место для всех у, удовлетворяющих условию
Ф (//> 0 < У (t), У (*Л 0 < Р (0» 1 ^ [Oi Я. (3.8.5)
Общий вид функций 7^, удовлетворяющих условию
(3.8.3), можно определить по формулам
Fk = X (ЬЛ, grad F)+ С, (А = 1, т), (3.8.6)
где — произвольные функции, обращающиеся в нуль
на заданном многообразии и удовлетворяющие условию
т
2 (&/A'.gi-aciF)=0.
fc=l
Для определения X, подставив (3.8.6) в (3.8.3), получим
алгебраическое уравнение
т
2 (Ьк, grad V)*X=K-(Q, grad V)-^-. (3.8.7)
k=i
Из (3.8.7) легко увидеть, каким условиям должна удов¬
летворять функция F, чтсбы при выполнении условия
(3.8.3) Fx, ..., Fm не нарушали условий теоремы о суще¬
ствовании и единственности решения. Действительно,
пусть G1 — множество значений у (Gx cz G), удовлетво¬
ряющих условию
т
2 (bk- grad V)'1 Ф 0.
к=1
Тогда из (3.8.7) X определяется единственным образом:
<)V
K-(Q, grad V>~^f
X — .
?n
У (&fc,grad V)2
fe=l
8*
228
ГЛ. 1L1. ИГОГГАММПГОВЛМИГ ЗАМЫКАН 11 ИМ
В этом случае
(IV
*-(<?, 7)--^
Fk = т С/с, gracl V)+ C'fc (/с = 1, . . . , т).
У (bk, grad F)2
/7=1
(3.8.8)
Если в некоторой области G0 (G0 cz G)
m
s (bt,gradF)2=0,
h—i
то для значений у GE G0 условие (3.8.7) записывается сле¬
дующим образом:
£_(<?, grad F)-^-,-0. (3.8.9)
Следовательно, в этом случае поставленная задача будет
решена, если для всех значений у ЕЕ G0 функция Ляпунова
удовлетворяет условию (3.8.9). При выполнении этого
условия для у ЕЕ G0
Fh = Ск (к — 1, . . . , т), (3.8.10)
где С(1 — произвольные функции, обращающиеся в нуль
на заданном многообразии.
При решении конкретных задач в ряде случаев пред¬
ставляется целесообразным потребовать, чтобы при выпол¬
нении условия (3.8.3) величина || jF||2 получила наименьшее
значение. Легко увидеть, что этому требованию функ¬
ции Fk будут удовлетворять, если в (3.8.8) и (3.8.10) по¬
ложить
Ск=Ък = 0 (к-Л,...,т).
В этом случае любое решение дифференциальных
уравнений (3.8.2), определенное начальными значени¬
ями
(У (°). 0)< я (°)|
§ 8. i м.» 11. mi*: и кип к функции. Ляпунова 223
у д о в л е т в о р я ег г у слов ию
t (у С). I) <q (t)
на заданном интервале времени t S [О, Г], если
0V
т K-(Q, grad 7)- дт-
(<?, grad ♦) г-1 (grad $, У M —5 C/.-,grad V)
\ У (ft,, grad V?
4 v -=1
и неравенства (3.8.4) имеют место для всех значений у,
удовлетворяющих условию (3.8.5).
Предложенный способ решения задачи можно легко
распространить на случай, когда допускаемые отклоне¬
ния системы от заданной программы движения характе¬
ризуются не одной, а несколькими функциями фд, ..., ф,,.
При этом, как и в случае р = 1, решение поставленной
задачи зависит в конечном счете от построения функций
Ляпунова, удовлетворяющих условиям типа (3.8.3) при
значениях функций Ffi, не нарушающих условий теоремы
о существовании и единственности решения.
Заметим, что в частном случае, когда производные
функций о)г, определенные на решениях дифференциаль¬
ных уравнений (3.5.1), приводятся к виду
s т
«,■ = У arjiо, + brkFk (a,.j, brk = coast; г = 1, . . . , s),
j=l k-i
(8,8.11)
а функции управления Fk должны определяться по фор¬
мулам
s
рк = 2 hj®j (kj = C0|isl ,к = I, . . . ,т), (3.8.12)
;=i
полученные выражения (3.8.3), (3.8.6) позволяют из мно¬
жества функций
8
^ (У> 0 = 2 crj^r(aj (crj = const), (3.8.13)
h r=-JL
230
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
удовлетворяющих условию
S
2 crj®r(y(t),t)<Aj(y( 03Х
h г=1
а
< 2 ^о),(г/(0),0)оЪ.Оу(0),0)е-.« (3.8.14)
([В -- const, (3 0)
ыа решениях дифференциальных уравнений (3.5.1), вы¬
делить функции Ляпунова с определенными свойствами.
Действительно, в рассматриваемом случае
V(y (t), f)< V (у (0), 0)е"У, <£ [0, Л,
если
s s га
2 -££- (2 -!- 2 &.-л) = - fo, о + ж (у, о,
r=l >’ j=l i 7
(3.8.15^
где РУ — произвольная квадратичная форма
S
w (у.<)= 2 (^ = const),
j, /-i
удовлетворяющая условию
РВ (г/, t) ^ 0, если у Ш Ы, t Ег Ю, Г].
Выделим теперь из всех V, удовлетворяющих условию
(3.8.15), функции Ляпунова, которые удовлетворяют ус¬
ловию (3.8.15) с наименьшим значением величины Ц/^Ц2.
Такие функции будем называть оптимальными функциями
Ляпунова.
В соответствии с (3.8.6), при выполнении полученного
условия || F ||2 получает наименьшее значение, если между
функциями jPj, ..., Fm и V существует следующая зави¬
симость:
s
^ = ^2£Л*) = (3.8.16)
Г= 1 Г ■*
§ 8. ПРИМЕНЕНИЕ ФУНКЦИЙ ЛЯПУНОВА
231
Подставив (3.8.16) в (3.8.15)
s s ms
2 2 (2 ^гьгк? =-?v(y,t)+w(y,t)
r=1 j I у k=i 1—1 г 1
и приравняв в полученном выражении коэффициенты,
стоящие при произведениях согсоj, мы получим уравнения
для определения величин crj
s т s ,s
2 (av,-c^ + av;cvt.) + ^2 (2 Cvjbvt) (2 с«У/>) +
V=1 и- 1 V v I ' V -1
-J- 0 (crj — с^г, vvj — ljr, i, j 1,... , s). (3.8.17)
Таким образом, вопрос о построении оптимальных
функций Ляпунова будет решен, если при выбранных зна¬
чениях величин А/, р, vrj удастся найти решение алгебраи¬
ческих уравнений (3.8.17) такое, что форма (3.8.13) ока¬
жется определенно-положительной. При этом в конкрет¬
ных условиях задачи нужно иметь в виду, что множитель
Лагранжа X в (3.8.17), как следует из сравнения полу¬
ченных выражений (3.8.16) и (3.8.12), может быть только
постоянной величиной, причем величиной отрицательной.
В противном случае, т. е. если (3.8.17) выполняется при
Х^О, условие (3.8.14) заведомо имеет место на реше¬
ниях дифференциального уравнения (3.5.1) при F = 0.
Пример. Пусть производные функции о)г, взятые
в силу дифференциального уравнения (3.5.1), приводятся
к виду
<ог FT (г 1, ..., s).
Требуется по заданному положительному числу |5 найти
функцию Ляпунова, удовлетворяющую условию (3.8.14)
и оптимальную в указанном выше смысле. Функции уп¬
равления Fl4 ..., Fa при этом должны определяться по фор¬
мулам (3.8.12).
Для решения задачи составим уравнения
S
2 ^ FТ = - рV(y, 0 f W (у, 0, (3.8.18)
7—1
^ (г ^ (3.8.19
ГЛ. IIJ. ПРОГРЛММИНОВЛНИК ЗАМЫКАНИЕМ
Пусть W гГг 0, тогда (3.8.18) запишется следующим обра¬
зом:
Г=1 ^ Г '
Отсюда легко увидеть, что функция Ляпунова, оптималь¬
ная в указанном выше смысле, имеет вид
у (//. о - ^2
г=1
при этом связь между постоянной величиной к и множи-
телем Лагранжа X устанавливается формулой
Функции управления /'\, ..., Fs, обеспечивающие вы¬
полнение условия (3.8.18) с наименьшим значением вели¬
чины || ||2 в рассматриваемом случае определяются по
формулам (3.8.19) и имеют вид
Fг = 2Х,.(ог (г =■ 1, s).
Следовательно,
Fr =— С = К • • • . «).
§ 9. Приближенное осуществление программного
движения
Рассмотрим способ построения систем программного
движения в случае, когда заданное многообразие £3 не
является интегральным для дифференциальных уравнений
(3.1.1), что, например, может иметь место при т <С s.
Пусть движение управляемой системы описывается
диффе |)о 1 гциа л ьньтми у ра в iюпиями
II i I’idU’ • • • ,У,п>)-\ 2 l)ik(Uiy • • • . 2/,м0»к (' !>•••• ")•
к- L
§ 9. IIP И P Л 11Ж Е И Н С) Е О С У Щ Е С Т В Л Е HI 1J ■; 11 Р О Г Р А М М Ы 2.3 3
или в матричной форме
у = Р (у, t) -I- в (у, t) и. (3.9.1)
Для простоты рассуждений производные функций
сог, определенные на движениях системы (3.9.1), предста¬
вим в виде
ы(у, t) = А(й(у, t) + Z (у, t), (3.9.2)
где о— со {сохcoj, А — постоянная матрица размер¬
ности 5X5,
'/ / дсо о л , дсо п . <9со
/{У^) =-щВи-А‘Л-\^Р !-ж.
Если бы заданное многообразие было интегральным для
дифференциальных уравнений (3.9.1), то искомое управ¬
ление находилось бы из условия
г/ 5 СО т-j л . d(0 t\ . ()(0 /\
/ = — Л о f Р - — 0.
а / 1 с))/ ot
При невыполнении этого условия, в соответствии с (3.9.2),
t
СО (у (<), о = L (0 0) (г/ (0), 0) -1- (< — т) Z (г/ (г), т) dt, (3.9.3)
0
где L (t) — фундаментальная матрица решений системы
со г- А о.
Введя норму отклонения системы от заданной про¬
граммы
5
II «F - 2 «г (г/. 0.
г=1
будем при со (/у (0), 0) = 0 иметь
i
Iсо(y(t), t) |p<$||L(< — т)If--Ц^О/С), т)f dt.
о
234
ГЛ.. 111. .ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
Следуя [81, задачу о минимизации максимума ||(о||2
заменим задачей об отыскании минимума ||Z||2 в каждый
момент времени t.
Управление, доставляющее минимум ||Z||2, найдем из
условия
и если для всех у G, £ [О, Т] определитель полу¬
ченной системы
Полученное решение допускает, как и в [8], простую
геометрическую интерпретацию, если Z представить в
виде
здесь аг, — элементы матрицы А.
Пусть при данных у и t Q — гиперплоскость, постро¬
енная на векторах gl4 gm. Очевидно, || Z ||2 определяет
квадрат расстояния от точки М, радиус-вектор которой
/, до некоторой точки TV, N GE Q, с радиусом-вектором
^jghub'- Следовательно, || Z |2 получит наименьшее зна¬
ОтСТО;
U
тп
Z = f(y,l)— S 8к(у> 1)ик,
к=1
где / и gk — 5-мерные векторы с составляющими
Ч 0. ПРИБЛИЖЕННОЕ ОГУПТЕГ.ТРЛГНИЕ ПРОГРАММЫ 235
чение, если мх, ит выорать таким образом, чтобы
N была проекцией точки М на гиперплоскость Q.
Считая векторы gm линейно независимыми,
найдем, в соответствии с [8], иг, ..., ит как решение алге¬
браических уравнений
т
2 (8>->8к) ик = (/• 8г) ('• = 'I. • • т).
и--=1
При сделанном предположении относительно g11 ..., gm
определитель системы
ыы • • • U'lXj
(gm-Ml) ••• (grw.gnt)
не равен нулю. Следовательно,
(3.9.5)
** = 2(/.gг) У1’-’’„У {к■=(3-9-6)
Г=1 1 W’ • • •» w
где Гг/г (g,1, ..., gm) — алгебраическое дополнение эле¬
мента r-й строки и к-го столбца определителя Грама
(3.9.5).
Найденное управление (3.9.4), или (3.9.6), обеспечи¬
вает выполнение условия (3.9.3) с точностью
Г (b j! • • ч £ т1 I)
г- -О ’
где
(8i,gi) ■
■ ■ (gl,8m) (8uf)
Г (gl, ■ ■
•» 8т * /)
(gnngl)' •
• (8mi8m)(8m-> /)
(/,g.) ■
• • (gm,/) (/,/)
Если векторы gx, ..., gm образуют ортогональную ел
стему, т. е.
(gr-.gk)^ О (г Ф О г, к ^ !. •••. т),
Г Л. 111. Tl РОГ P AM M П РО P, A I T TT R 3 А МЫ Tv A H I T ГАМ
TO
“л :-= I, (/;gfcI.„- (k - 1, . . m) (3.9.7)
И
m
14-Н/Ол or— 2(/.Ы-
/i 1
Последнее выражение позволяет достаточно просто оп¬
ределить необходимое значение т, при котором условие
(3.9.3) выполняется с заданной точностью.
II р и м е p. 11 уеть .движение управляемой системы
о п и с ы в а е т с* я д и ф ф е р е 111 рт ал ьп ым и у j) а в и е 11 и я л i и
У\. Л (?/i, •••, Уп, i) +
+ ^i (уI, ■ ■■, Уп, t)u (i = 1, п),
программа движения системы задана в виде
«1 (;/i, Уп, t) - о,
со2 (г/i, у,,, t) - 0.
Обозначив
./?i = ап tox (i/l5 уп, t) -}- а12 со2 (уи уп, t),
R.2 ■--- а.п coj (г/j, уt) а22 ы2 (уи уп, t),
в соответствии с (3.9.7) получим
§ 10. ПОСТРОЕНI1R УРАВНЕНИЙ ДВИЖЕНИЯ точки
237
§ 10. Построение уравнении движения точки,
сближающейся с целью по заданному закону
I. Построение уравнении программного движения
В качестве примера, иллюстрирующего предложен¬
ный способ построения управляемых систем, рассмотрим
построение уравнений движения точки, сближающейся
с целыо по заданному закону.
Для простоты рассуждений ограничимся рассмотре¬
нием случая, когда движение преследуемой точки А и
преследующей точки В происходит в одной плоскости
Оу1у2. Обозначим у3, у2 координаты преследуемой точки
-4» У\, У2 координаты точки В. Угол, образованный пере¬
сечением прямой АВ с осыоОг/,, обозначим через 0. В при¬
нятых обозначениях расстояние между точками А ж В
определяется по формуле
D ^ Q/i - У\) c°s 6 (у2 — J/a) si'i 0.
Пусть управляемое движение преследующей точки опи-
с ы в а етс я д иффер е ш рта л ыт ыми ура в не пи я ми
У1 = Zi,
Н = A <I>i (JA, //■>- Д. г2, I) -j- ^-«i,
У 2 = Z2>
1 1
= — СИ(г/1, У•>. 2, , 23, /) -\- — и.2,
(3.10.1)
где Ф1? Ф2 — силы, действующие па точку, ul7 и2 — уп¬
равляющие силы, т — масса точки.
Задача состоит в том, чтобы найти силы управления
иъ и2, обеспечивающие сближение преследующей точки
с целыо по заданному закону
<*> (г/i, г/2, t) = (г/х — ух) cos 0 4-
4-(г/2 — г/2)sin 0 — / СЖ-О (З.Ю.2)
с наименыпим значением величины [| и ц2 в каждый мо¬
мент времени t сЕ [0, Т].
238
ГЛ. ITT. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
При этом предполагается, что заданная положитель¬
ная функция /, а также функции у1ч у2 являются непре¬
рывными при t G: [О, Г].
Для решения задачи вместе с первой производной
функции
6) — — zx cos 0 — z2 sin 0 — yx cos 0 — y2 sin 0 -j-
-Г (tii cos 0 + tii sin 0 — t)
мы рассмотрим вторую производную от, определенную на
решениях дифференциальных уравнений (3.10.1), кото¬
рую запишем следующим образом:
— Ф, cos 0 — Ф., sin 0 —иj cos 0 — и2 sin 0 —
rn ft1 " т т
— 2z, cos 0 - 2z, ~ sill 0 — г/i cos 0 —
— y*JFsin 0 + (Vicose + #*sin 0 — Л = R*• (2.Ю.З)
Здесь произвольная функция R* = R* (со, со, уг, у2,
z2, t) удовлетворяет условию
R* (0, 0, уи у2, zlt z2, t) = 0.
Поскольку уравнение (3.10.3) определяет множество
всех их, и2, обеспечивающих сближение преследующей точ¬
ки с целью по заданному закону (3.10.2), потребуем, что¬
бы при выполнении условия (3.10.3) элементы управле¬
ния определялись по формулам
", (к —А, 2), (3.10.4)
где, как и раньше, Fu (сох, со2, уг, т/2, Zj,z2, t)—произ-
§ 10. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ ТОЧКИ 239
вольные функции, удовлетворяющие условию
Fl (0, 0, ух, у2, Zj, z2, t) -- 0 (к = 1, 2).
Подставив найденные значения (3.10.4) в уравнение
(3.10.3) и определив множитель Лагранжа, получим окон¬
чательные выражения функций управления
Ul -=m \-Jj2 G/lCOS?0 Т У-2 sin 9— /) — 2zl -Jf C( S 0 —
- 2za 4 sill 0 - yx ■£,r cos 0 - ih sin 0 -
- — Ф, COS 0 — Ф., sin 0^ cos 0 -(- F*x,
m 1 m j
u3 ~ m cos ® ® ~ ^ — ^Zl ~Jt cos ® _
о (i • n n ^ • n
- 2г* wsm 0 - У'-dWC( s 0 - v*dfi Slu 0 -
— Ф, cos 0 — Ф, sin 0 j sin 0 + F\'
m 1 m - j 1 -
(3.10.5)
Заметим, что в случае, когда движение преследующей
точки управляется реактивной силой, система дифферен¬
циальных уравнений (3.10.1) записывается следующим
образом:
г/i =
2i,
i, =
1
I
т
Уа =
Zo
1
(3.10.6)
т
т
Здесь 1д, v2 — проекции относительной скорости из¬
меняющей массы на координатные оси. Не уменьшая
240
ГЛ. Ш. ПРОГРАММИРОВАН!! К ЗАМЫКАНИЕМ
общности рассуждений, будем считать
v\ -г v2 = 1.
Используя найденные значения функций управления
(3.10.5), легко увидеть, что сближение с целью пресле¬
дующей точки, управляемой реактивной силой, проис¬
ходит по заданному закону (3.10.2) с минимальным значе¬
нием величины Zw — | в каждый момент времени
t ЕЕ [0, Г], если при выполнении условия
(ж (г/i008 9 -I- У2 sill 9 — /) — 2zx cos 0 — 2z2 sin 0 —
d2 d2 1 1 \
— yi-jp cos 0 — у2 — Sin 0 — — <D± cos 0 — — Ф, sill 0 j < 0
элементы управления иг, v2, mlm определить по формулам
Vi = cos 0, v2 = sin 0,
4. = (w (&1 cos 0 + sin 9 — Я ~ 2z! 4rcos 9 —
0 d . a d2 n d2 . a
- 2z* w sin Q-y,w cos 0 - ik sin 0 -
— Ф, cos 0 — ('[)., sin 0) -|- F*, (3.10.7)
111 1 111 I
где F* = F* (to, to, yx, y2, zl7 z2, t) — произвольная
функция, удовлетворяющая условию
F* (0, 0, уи у2, zL, z2, t) = 0.
II. Оценка отклонений
Пусть
F* = — есо (yL, у2, t) — eco (у{, у2, t) (0 < в < 1),
где в — некоторая постоянная величина. В этом случае
§ 10. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ ТОЧКИ 241
уравнения движения преследующей точки имеют вид
я, — — Фх sin2 0 — тт— Ф2 sin 20 — cos 0 + с-у- cos0 + .
1 т 1 1т 4 V dt1 1 dt
-4- в cos 0j yL cos 0 — (0 r e -Jy- sill 0 + в sin 0) X
X 7/2 C()S 0 — [2 COS 0 -}- C COS 0 j 2Ц cos 0 —
— ( 2 sin 0 -j- e sin 0j z2 cos 0 -|- p (t) cos 0,
У2 = za,
i.> = — ®2cos20 — ■£- sin 20 — (4ry cos 0 -|- 8 cos 0 -|-
m Л X//t \ <n2 a/
-|- e cos 0) yL sin 0 — f ~77t siri 0 4- e ~4r sin 0 + e sin 0) X
X уi sin 0 — (2 cos 0-1-e cos 0) zL sin '0 —
— (2 -4-sin 0 + с sin 0) z2 sin 0 + /> (/) sin 0,
dt2 1 dt
dt
dt
(3.10.8)
где
r/2
p (0 = -ш (y 1C()S 0 -I- у2sin 0 - /) +
f/i2
+ 8 "dF ^ cos 0 ^'2 ,sil1 0 ~ ^ S Oi cos 0 + j/, sill 0 - /).
В случае, когда отклонения преследующей точки от
заданного закона сближения оцениваются функцией
Ф Oi, Уа> zi> z2> 0 = °>5tij2 (Ух, Уг, 0 + °>5<оа (Ун Уа, г)-
поставленную задачу, обозначив для простоты записи
® (У1, Уа, 0 = ii, <Ь (г/х, г/2, 0 = |г,
сформулируем следующим образом.
По заданной функции
Ф (Ух, Уа, zi, Z2, t) = °,5£\ T 0,5^|
242
ГЛ. J J1. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
и положительной величине г| нужно найти такую функ¬
цию h (t), h (0) = т|, чтобы любое решение дифференци¬
альных уравнений (3.10.8), определенное начальными зна¬
чениями
0,5£* (0) f 0,5£я (0) < ть (3.10.9)
удовлетворяло условию
0,5£* (0 + 0,511(0 < Л (0 (3.10.10)
на заданном интервале времени t 6Е [0, Т]. Для решения
задачи, обозначив
V, = 0,5|| + 0,5||,
выберем функции Ляпунова
П2 = 0,54! + 0.54& + 0,5^2*
При 0 < е <; 1
O.SeFj (z, у, 0 < V2 (z, у, t) < (1 i 0,5е) Vy (z, у, t).
(3.10.11)
Производные функций Vx, V2
. r 1 dlt . , db . .dli . , dl« • . dl
^{dyi Уу ^ ду-i y’L r dzi Zl 'r dzi 2 * dt
Vt(y, z, t) = e£x (g- y, + g y2 -I- g ъ -I- g z2 + Щ-
+ °'5eii (g -I" g У г + g Zl + 177 z* + g) +
, n r t / db . . db. . , оь • , , db \ .
+ 0,5^ (^ I/L + y« -I- T~ z.. + -gj-) -1-
. . / dU . . , dU . , d?2 \
V2 \ dyi 'Jl ^ dy, У- ' dzi Zl dz, Z‘2 ^ dt ) ’
определенные на решениях дифференциальных уравне¬
ний (3.10.8), после элементарных преобразований приво¬
дятся к виду
Vl (у, z, 0 = (1 - е) 1&2 - гЦ
V% (у, z, 0 = — 0,5е2|| — 0,5е2£]|2 — 0,5е||.
dli . ,
~д£У' +
*L*1 +
dzi 1 +
Л 1
35*, ,
dy-, У- 1
' dzy Zl
1 дЬ •, 1
•
177 У2 _|
а ^1
dzi 1
s 10. ttocfpoKin-TK Уравнения движения точки 243
В качестве функций qx, Sx, рх возьмем
4i = Ч-г = о,
0 = - 2(1 -0,625e)Vl(y,z, I) -|~ у Fa(y, z, f),
^(^i, V2, t) = - eFo (г/, z, <).
1+0,5b _c/ , /л 1 4- 0,5e \ ,,r.u
()i t- (1 — 0,()25k) 116 ' I ~ »(1 — O.liZSe)) 11<5 ’ ’
p., - (l -j- 0,5e) r|e~£(.
(3.10.12)
Поскольку
7, (у, z; <)-^(7lt V.,,/),=
= - 0,125e|x - ^ifs- -Ы,H25b - 1Д!<0,
V2(y, z, I) - 5j(Flf Vt, 0<0,
в соответствии с теоремой 1, любое решение дифферен¬
циальных уравнений (3.10.8), определенное начальными
значениями (3.10.9), удовлетворяет условию
0,5|* (0 + 0,56* (0 < Pi (0
на заданном интервале времени t ее Ю, Г], где pL опреде¬
ляется по формуле (3.10.12).
При выполнении неравенства (3.10.11) имеет место
еще одна оценка отклонений преследующей точки от
заданного закона сближения с целью
0,5£f (t) + 0,5Е! (0 < Pi (0.
где
14-0.5*
Однако J)1 не является решением поставленной задачи,
так к а к
/п\ 1 0,5в
0i(°) - ~(ГбГ- 11 ^ 11
244
ГЛ. 111. ■ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
и, более того,
Pi (t) < Pi (О
по крайней мере при t ЕЕ Ю, £*]. Поэтому
^ = Pi (О ПРИ * £= [О, Z*]
и
h = pi (t) при £ ЕЕ (£*, Л.
Для определения £*, вычитая рх из р1? получим
/ \ //\ 0,6Л5в2 -j- 0, /5е — 1 .
К W - К <*> = е (1 — 0,fe5s) ^ -
_ 0,025вг 0,5к-[- 1
8(1—0,И^-5в)
При 0 < е < 1
0,б25е»-0,5в + 1 3(1-,11ШЕ)( % о
е (1 - 0,625е) 1 ^
Следовательно,
Z* = оо,
если
0,G25ea+ 0,75е - 1 < 0
и
In (0,0258- — 0,5е + 1) — In (0,625в2 + 0,75е — 1)
2—0,758
если
0,625е2 + 0,75е - 1 > 0.
III. Построение управлении по заданной оценке
отклонении
Рассмотрим теперь, каким условиям должна удов¬
летворять функция F*, чтобы сближение преследующей
точки с целыо происходило с заданной точностью. При
этом будем предполагать, что допускаемые отклонения
точки от заданного закона сближения характеризуются
функцией
Я|) (у, Z, t) = + У,
где - о» {уъ у2, t), 12 = or (г/1; у2, t).
§ if). ПОСТРОЕНИЕ УРАПНГ/ГПТЙ ДВИЖЕНИЯ ТОПКИ 24Г)
В ртом случае задача, поставленная в § 8, состоит
в том, чтобы по заданной функции ф и положительной
функции q (t) найти такую функцию Z1*, чтобы любое
движение точки, определенное начальными значениями
I! (0) -I-Е! (0)<д(0), (3.10.13)
у довл е тво р я ло уело вию
Ш0 + U(t)<g(t)
на заданном интервале времени i ЕЕ [0, Т].
При решении этой задачи будем считать, что функция
управления F* должна определяться по формуле
F* = ll(,yL (ylt у2, i) 12<л (уи у2, I) (lu l2 = const).
Для решения задачи уравнения движения точки, сбли¬
жающейся с целью по заданному закону, запишем сле¬
дующим образом:
У1 = *i,
z.1 -= Qг/2. =1.. 2.,, /) -|- ^*cos'0,
г/2 -= 2:м
h = С(.г/|. //г. zi. z2, /) + /’*sin 0,
(3.10.14)
где
О, — — Ф, sin2 0 Р- sin 20 — и, (4— cos 0 I cos 0 —
m 1 ini v 1 \ dt 1
- У2 f^rsin 0) cos 0 - Zl (2 ^cos 0j -
— z2 (2 -ij sin 0) cos 0 + (-^r Q7i cos 0 + y3sin 0 — /) j cos 0,
Q'2 = 4“ Ф2 cos2 0-4- Ф1 sill 20 - yl (~ cos 0) sin 0 -
¥lu,T
— y2 {-jp sin 0j sin 0 — 2zx cos 0j sin 0 —
— z.J 2 sin 0 j sin 0 -I- (Ж (y 1 cos 0 + i/2sin 0 - /) j sin 0.
Поскольку производные функции £lf |2, определен
иые на решениях уравнений (3.10.14), приводятся к виду
ЖЖ, Е 7*, (3.10.15)
246
ГЛ. III. ПРОГРАММИРОВАНИЕ ЗАМЫКАНИЕМ
в дальнейшем будем рассматривать дифференциальные
уравнения (3.10.15). Следуя предложенному в § 8 способу
построения оптимальных функций Ляпунова, составим
систему алгебраических уравнений (3.8.17)
г%с{\ + (ки = 0,
с12 + 2кс222 + = 0 ((3 = const, р > 0).
Полученная система при к = — 1 имеет решение
сп = -2 (Г)3, *12 = (р*Г; с22 = -р* (2р* = - р),
которое удовлетворяет неравенствам Сильвестра
сп = — 2 (р*)3 > 0,
-сх1 + спс22 = 2 (Р*)4 — (Р*)4>0.
Следовательно,
V = —2 (Р*)Ч1 + 2 (ГШ2 ~ Р*&
В соответствии с (3.8.6)
F*= - щ-2 = - 2(Р»)2|1 + 23*|,. (3.10.16)
В этом случае
V (у, z, t) = —PF (у, z, t),
и так как при 0 < р <С 1
V (у, z, t) < - Р* [1,1 + (Р*)2Ж»> 2, *),
то в соответствии со сказанным выше любое решение диф¬
ференциальных уравнений (3.10.14), определенное на¬
чальными значениями (3.10.13), удовлетворяет условию
-2 (Р*Ш (0 + 2 (Р*)2!, (0 62 (t) - р*£2 (t) ^
< - Р* [1,1 +(Р*)2] q (Q)e-&
на заданном интервала времени t ЕЕ. [0, Т].
§ 10. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЯ точки 247
Рассмотрим теперь производную функции ф, опреде¬
ленную на решениях дифференциальных уравнений
(3.10.14). При выполнении (3.10.15), (3.10.16)
ф (у, Z, О = [2-4 (Р*)’] gx|2 + 4р*&
Таким образом,
тр (у, z, t) <1,8(Гг|) (у, z, I) 4- —V (у, z, t),
(Р г
и поставленная задача будет решена, если
г>1,8р?(0 +-^гр(0
или если
1Д + (.з')-
0,'ЛфГу
ГЛАВА IV
ПОСТРОЕНИЕ УРАВНЕНИЙ ЗАДАННЫХ
ДВИЖЕНИЙ
§ 1. Построение систем дифференциальных уравнений,
описывающих движения но заданной программе
I. Постановка задачи
Пусть в некоторой области G фазового пространства
Yn переменных у1? ..., уп уравнениями
со (у, t) = 0, (4.1.1)
де со и у —■ соответственно 5И/г-мерный векторы (s ^ /г),
заданы гиперповерхности Qx (£), ..., Q. (t), зависящие от
параметра t.
Будем предполагать, что функции со,. = со,, (у, t)
(г = 1, ..., 5), составляющие вектор со, непрерывны и об¬
ладают непрерывными частными производными
дсо дсо
-иг с-Г...V; у :,-1
дсо D( со to )
и ранг функциональной матрицы = уууу Ра¬
вен s при всех у CEE G, £ ^ /0-
Некоторые из гиперповерхностей Qx (£), ..., Qs (t) мо-
гуть иметь общие части М;,;,..(t) (Ч <С U <С ... ^
^ .v), которые являются многообразиями в области 6",
образованными пересечением гиперповерхностей Qlx (/),
Qi2 (/), ..., Qi (£). Число многообразий М\ли... i (/) при
фиксированных значениях индексов ix, i3, ..., it может
§ 1. ГЮСТРОКНИК /ЦТФФКРКНТиТЛЛЬНЬТХ. УРАВНЕНИЙ 249
быть как конечным, так и бесконечным. Пронумеруем их
в определенном порядке и обозначим каждую из них сим¬
волом М1-‘1г2...г1 (t) (к = 1, ..., р ^ оо). Размерности
всех многообразий (t) неизменны при всех
t ^ t0 и равны п — Z, где I — число гиперповерхностей,
участвующих в образовании многообразия (Z).
Каждая гиперповерхность £2,. (t) явлчется многообразием
размерности п — 1. В случае / -- s -- п многообразие
-Wi2...-n (0 обращается в точку.
Область G может быть как односвязной, так и много-
связной. В последнем случае будем предполагать, что она
состоит из т односвязных непрерывных множеств СД, ...
(т ^ оо) и многообразие (Z), находящееся
в области Gq при t = Z0, остается в нем при всех t ^ t0.
Если все функции сог = оз7. (у, t) (г ™ 1, ..., s) ли¬
нейны относительно координат г/А, ..., г/п, т. е. уравнение
(4.1.1) имеет вид
О -1 // — / • 0, (4.1.2)
где Л = A (t) — переменная матрица порядка s < /г,
элементами которой служат непрерывные дифференци¬
руемые функции arj = arj (Z), удовлетворяющие усло¬
виям
п
О й ^ 2 ^ ^ (г = 1, . . ., s), (4.1.3)
j=i.
(^ и Г/ — некоторые постоянные) и / — переменный
.9-мерный вектор-столбец, составленный из непрерывных
дифференцируемых функций Д (Z), ..., /8 (Z), то (Z), ...
£Д (Z) являются «перемещающимися» гиперплоскостя¬
ми в пространстве Yn, Если ранг матрицы А максимален
при всех t ^ t0, то существует единственное «переме¬
щающееся» многообразие М12... s (Z), общее всем гиперпло¬
скостям £Д (Z), ..., £2. (Z).
В случае же, когда матрица А является единичной
матрицей Е порядка /г, то уравнение (4.1.2) принимает
вид
у _/(/)== О
(4.1.4)
250
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
и определяет закон движения точки у в пространстве Yn.
Очевидно, что в этом случае многообразием (t)
является точка, движущаяся по закону (4.1.4).
Пусть движение материальной системы описывается
системой дифференциальных уравнений
У - Р (У, t), (4.1.5)
где Р—га-мерная вектор-функция. Обозначим символом
у (t) ЕЕ (t) понятие «точка у (t) принадлежит
1' /с
многообразию (t)». Многообразие (0 будем
называть интегральным многообразием системы (4.1.5),
если из у (t0) е М1ь..л1 (t0) следует у (t) £Е (t)
при всех t > t0.
Задавая программу движения в самом общем пред¬
ставлении как совокупность многообразий
(t) (it <г2<. . . к = 1 р), (4.1.6)
по которым может происходить движение точки у --= у (t),
выделим прежде всего те системы дифференциальных
уравнений, которые допускают движения по ним. Иначе го¬
воря, определим все множества систем обыкновенных диф¬
ференциальных уравнений, для которых все множества
(4.1.6) или некоторые заданные из них являются интег¬
ральными многообразиями.
II. Уравнения движения по плоской кривой
Задача осуществления программного движения по
кривой, заданной на плоскости хОу, ставится в следующей
форме [34]. Построить все множество систем обыкно¬
венных дифференциальных уравнений
= Р(х, у), у = Q(x, у), (4.1.7)
для которых кривая £2, определенная уравнением
со (х, у) =- 0, (4.1.8)
является интегральной. Метод решения этой задачи
[34] состоит в отыскании всей совокупности правых
§ 1. ПОСТРОЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 251
частей искомых систем (4.1.7), удовлетворяющих равен¬
ству
0) = ёр у) ё Q (х'у) ~0 (4Л -9)
вдоль кривой Q. В остальных точках плоскости хОу
функции Р (х, у) и Q (х, у) могут быть произвольные.
Следовательно, равенство (4.1.9) должно выполняться
с точностью до произвольной функции R (х, у), обра¬
щающейся в нуль на кривой Q:
^Р(Х,У) +^iQ(x,y) = R, (4.1.10)
где R = R (х, у) и R (х, у) = 0 при со (х, у) = 0.
Функцию R, обладающую этим свойством, будем обозна¬
чать
R (со; х, у), (4.1.11)
имея в виду, что R (0, х, у) = 0.
В качестве функции R (со; х, у) можно принять, напри¬
мер, многочлен
71
# = 2 ik (х, у) со'1'
/I------1
или ряд
со
R = 2 Ыг.2/)®,;
/1-1
с ограниченными коэффициентами fk (х, у) при всех х, у,
принадлежащих заданной области G.
Равенство (4.1.10) представляет собой линейное ал¬
гебраическое уравнение относительно Р и Q, решение
которого содержит одну произвольную функцию и зави¬
сит от функции R вида (4.1.11). Полагая в качестве про¬
извольной функции
Р = Р (*, у),
252
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
найдем, что
О =
дсо
R (u\x,y)--faP(c, у)
дм
~дй
Следовательно, искомое множество систем дифференци¬
альных уравнений получаем в виде
dt
d\!
dt
дм
R (со; а:, у) - ^7 Р (г, у)
дм
дц
(4.1.12)
Представляя решение уравнения (4.1.10) в виде
р _ г м о — р и м
1 ~ 1 1 ду М ’ V ~ 2 1 дх М ’
где М = М (х, у) — произвольная функция, a F± и F2—
функции, удовлетворяющие условию
%Fl+d-^F2 = R(^x,y) (4.1.13)
можно получить множество систем вида [34]
dX /7 дм л т / \
d\f [7 , дм . . . v
1Г = ^ + аД7 й-Л.
(4.1.14)
часто более удобное для приложений. Если в системе
(4.1.12) или в равенстве (4.1.13) функция R обращается
в нуль только в точках кривой Q, то функция (4.1.8)
является частным интегралом системы (4.1.12) или
(4.1.14). Если же функция R тождественно равна нулю,
то функция
со (х, у) = с,
§ 1. ПОСТРОЕНII К ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 25 \
где с — произвольная постоянная, является первым ин¬
тегралом системы (4.1.12) или (4.1.14).
Пусть F1 и F2 в (4.1.14) выбраны так, что
Fi = Fi (ю; X, у), F2 = F2 (со; х, у).
Тогда точка (х0, у0) кривой й, в которой выполняется
равенство
5 со
дх
М (г, y)J + j ~ М (.т, y)J = О,
является точкой покоя или особой точкой системы (4.1.14).
Определим структуру систем дифференциальных урав¬
нений, имеющих в качестве интегрального многообразия
М12 (t) точку пересечения «перемещающихся» кривых
йх (£) и й2 (t), заданных соответственно уравнениями
®i (*» У, t) = О, со2 (х, у, t) = 0. (4.1.15
Вычислим производные функций (4.1.15) в силу иско¬
мой системы (4.1.7) и приравняем их соответственно фун¬
кциям /?! и R2:
?gP(xty) + d-%Qtx,y) + *% = Hlt |
я я я (4.1.10)
ОС02 г) / \ . 5(02 хл / ч - 5(02 73
1-С (*. 0) + ж = Д*. J
Функции и R2 выберем следующим образом. Если тре¬
буется, чтобы синтезируемая система имела только ин¬
тегральное многообразие М12 (t), то правые части ра¬
венств (4.1.16) должны обращаться в нуль только в точке
пересечения кривых (t) и й2 (t). Такие функции будем
обозначать через
7?! (щ, со2; х, у, t) и Я2 (со1; со3; х, у, t),
имея в виду, что
Ri (0, 0; х, у, t) з 0, R2 (0, 0; х, у, t) = 0.
Например,
Nr
Rr = S fik(x,y,t)0){(»2,
j+k=i
ГЛ. IV. ПОСТ ГО ГНИ К УРАВНЕНИЙ ДВИЖЕНИЙ
где г — 1,2, Nr ^ оо и функции (.г, у, £) ограничены
при любых I ^ t0 и х, I/, принадлежащих области G.
Если же требуется, чтобы система (4.1.7), кроме ин¬
тегрального многообразия А/12 (t) имела еще интегральное
многообразие Мr (t) = £2Г (t) (г -- 1, или г — 2), то соот¬
ветствующая функция Rr должна обращаться в нуль
вдоль кривой (t):
Например,
/?г (С0Г, X, У, t).
R> = 2 frn (Х’У - 0 “г,
/7-1
где |//j (я, г/, t) | С L при всех х, у G, t ^ £0, Nг ^ оо,
г = 1,2. Далее, решая систему линейных алгебраичес¬
ких уравнений (4.1.16) относительно Р и Q в предполо¬
жении, что
а дон 5оо2 5(01 5(02
'dyTx=F'
найдем правые части искомой системы (4.1.7):
п , ч 1 Г г» d(02 7) 5wl . 5(02 5(0i 5coi 5(02
,л , ч 1 I 7> 5(0i 5о)> 5o)i 5(0-» 5g>2 5(0i1
С (* = аД'
III. Определение структуры систем дифференциальных
уравнений движения по заданному многообразию
Обратимся к решению основной задачи, поставленной
в п. I. Для определения структуры множества систем
дифференциальных уравнений (4.1.5), имеющих заданные
интегральные многообразия А/?.(t) (ix < i2 <С.
<Д/ ^ s, k --- 1, ..., p ^ оо), вычислим производные
функций (4.1.1) в силу искомой системы (4.1.5) [66—68]:
+ 0-1 »)• («.IV)
j = l *J
§ 1. ПОСТРОЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 255
Правые части равенств (4.1.17) будут представлять собой
некоторые функции Rr переменных у, t\
2 д£ pj + - R>- <r ^1 *>• (4Л -18)
j=i 1 j
Для того чтобы многообразия
М Ui-2..^ (О ft ~~ ^2i • • • ’
1 << /»2 < • • • < /^ < Р < 00 , 1 < h < h <С • • • \ h ^ 5)
(4.1.19)
из совокупности (4.1.6) были интегральными многообра¬
зиями системы (4.1.5), необходимо и достаточно, чтобы
функции RT (г = 1,2,..., Z) обращались в нуль в тех точ¬
ках соответствующих гиперповерхностей Qr(Z) (г = 1, 2, ...
..., Z), которые принадлежат многообразиям (4.1.19).
Пусть, например, гиперповерхности (Z), Q2 (Z), ...
..., Ql (Z) имеют общие части (t) (к = 1,2, ..., p),
одна из которых (Z) является интегральным мно¬
гообразием искомой системы (4.1.5). Тогда, если система
(4.1.5) не имеет других интегральных многообразий, об¬
разованных гиперповерхностями QL (Z), Q2 №> •••> (О»
то функции R1} ..., Я/ должны обращаться в нуль только
в точках многообразия М^..л (Z) и являются произволь¬
ными при всех остальных у ее G, Z 5^ Z0.
Если каждое многообразие (Z) (А = 1, ..., р)
является интегральным многообразием искомой системы,
то функции 7?т, ..., должны обращаться в нуль при
всех у ЕЕ G, Z ^ Z0, при которых одновременно выполня¬
ются равенства
«г (г/, 0 = о (г 1, 2, /).
Функции, удовлетворяющие этому условию, будем обоз¬
начать
Rr = Я,. (o)j, ..., со,; у, t) (г •=■= 1, ... /),
256
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
имея при этом в виду, что
Rr (0, ...,0; у, 0 = О
(Г = 1, Z).
Во всех остальных точках области G, в частности, и в
точках гиперповерхностей Q1 (£), ..., Qi(t), не принадле¬
жащих многообразиям М^.л (0 (к ~ 1, •••, р), эти
функции могут быть заданы произвольно. Их можно
выбрать, например, в виде конечных или бесконечных
сумм
Hr = 2 Qrklk,...kl{y< ю1'®22 • • • Щ1 (г = 1, . . . , Z),
где (у, t) — произвольные ограниченные при
всех у ег- G, t ^ t0 функции и сумма распространена на
все целые неотрицательные числа Ад, fc2, ..., Ад, удовлет¬
воряющие условию
Ад+ А:2 -Ь Ад ^ 1.
Если 7г — 5-мерное многообразие М (£) при любом
t 7^ t0 является единственной общей частью гиперповерх¬
ностей (£), ..., Qs (t), то для того, чтобы оно было
интегральным многообразием системы (4.1.5), необходи¬
мо и достаточно выбрать функции так, чтобы
R = R {со; у, t),
где
R = (Ru Rs).
В случае, когда требуется построить множество си¬
стем дифференциальных уравнений, для которых каждая
гиперповерхность Qr (t) (г -- 1, ..., s) являлась бы интег¬
ральной, необходимо и достаточно выбрать функции Rr
(г — 1, ..., 5) так, чтобы они обращались в нуль только
вдоль соответствующей гиперповерхности Qr (£):
RT = RT (сог; у, t) (г = 1, s).
Теперь, когда наложены условия на правые части ра¬
венств (4.1.18), можно определить функции Ръ ..., Рп.
§ 1. ПОСТРОЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 257
Считая, что
Д<8> =
дам
3<oi
dyi
’ ' Ws
Зсо,
dyi '
. .
ду»
:0,
и полагая TVi, Рп произвольными функциями пере¬
менных у, t, получим из (4.1.18)
к—s-j~l
где Дrj — алгебраическое дополнение элемента д(ог/ду;-
определителя A<s), Д^
определитель, полученный из
A<s> заменой его у-го столбца к-м столбцом матрицы ды/ду.
Таким образом, искомое множество систем дифферен¬
циальных уравнений получаем в виде
dyj 1 Г у
dt a (S) | ^-J
*Утп
ск
д(-) L-
Rr
дсо
~dt
= р.
' fc = S+l
(/ = 1,..., s),
m = 5 +1,
Г
, п).
(4.1.20)
Оно содержит s произвольных непрерывных функций
..., i?s, выбранных согласно условиям наличия задан¬
ных интегральных многообразий и п—s совершенно про¬
извольных функций iJs+1, ..., Рп переменных у, t.
Система (4.1.20) при соответствующих функциях
i?!, ..., Rs обладает в силу построения тем свойством, что
если начальная точка выбрана на некотором многообразии
(^0), то точка у — у (0» движение которой в про¬
странстве Yn описывается этой системой, остается при
любом t ^ t0 на многообразии М{х{2..л1 (t), если про¬
извольные функции выбраны в соответствии с условиями
единственности решения системы дифференциальных урав¬
нений. Если заданные функции (4.1.1) не зависят явно
9 А. С. Галиуллин
258 гл. IV. ПОСТРОЕНИЙ УРАВНЕНИЙ движений
от t:
со (У) = 0, (4.1.21)
то, выбирая функции Д1? Rs, Ps+1, ..., Рп также не
зависящими от t:
R = R (со (у), у),
Рн = Р* (У) (к = s+ 1, ..., и),
и учитывая, что d(oT!dt = 0 (г = 1, ..., s), можно полу¬
чить автономную систему дифференциальных уравнений
S п '
^ = ЖГЛЗлгИ»),»)ЛЙ)ы- 2 л^ЫПО/)]
\У) г= 1 ?c=s—[-1
(/ = l,...,s), *
-%г = рт(у) (m = s + i,...,n). t
(4.1.22)
IV. Системы дифференциальных уравнений,
описывающих движения по линейным
интегральным многообразиям
Определим множество систем дифференциальных урав¬
нений, которые описывали бы движение по гиперплоско¬
стям (t), ..., Q3 (t), заданным уравнением (4.1.2), или
по линейному многообразию М (t), определяемому их пе¬
ресечением. Запишем для этого в матричной форме выра¬
жения (4.1.18), соответствующие рассматриваемому слу¬
чаю:
1±Я + АР-^=И. (4.1.23)
Вектор-функция R выбирается в зависимости от по¬
становки задачи. Если требуется построить множество си¬
стем дифференциальных уравнений, имеющих заданные
интегральные гиперплоскости (t), ..., £23 (t), то каж¬
дая функция Rr, являющаяся г-й компонентой вектор-
функции R, должна обратиться в нуль на гиперплоско¬
сти йг (£). Это условие будет соблюдено, если выбрать
§ 1. ПОСТРОЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ 259
вектор-функцию R, например, в виде
R = А (Ау - /),
где А — постоянная матрица вида
^ О
(4.1.24)
А =
о к
Если же требуется построить множество систем диффе¬
ренциальных уравнений, которые имели бы линейное ин¬
тегральное многообразие М (t), определяемое пересече¬
нием гиперплоскостей (t), ...,QS(£), то вектор-функция R
должна обратиться в нуль только на многообразии М (t).
В качестве такой вектор-функции R может быть принято,
например, произведение (4.1.24) произвольной постоян¬
ной матрицы
^11 ■ '
' ' ^ls
V • ■
• • к
на вектор Ау — /.
Таким образом, соотношение (4.1.23), записанное
в виде
dt
(4.1.25)
может быть использовано для решения как первой, так
и второй задачи, если матрица А выбрана соответствую¬
щим образом.
Определяя вектор-функцию Р вышеуказанным спо¬
собом из (4.1.23), можно легко получить множество иско¬
мых систем дифференциальных уравнений. Попытаемся
выделить из этого множества совокупность линейных си¬
стем. Обратимся с этой целыо к равенству (4.1.25). Пред¬
ставим в нем произведение АР в виде
АР = АР + АР,
9*
260
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
где
А =
au (t)
. . . als(t)
e.i(0 •
■ . ass
(0
Pi
P =
Ps
р =
ai, *+i (0 ■ ■ ■ aln(t)
as,s+1(t) ... asn(t)
Р s+l
Далее, приняв Ps+1, ..., Рп произвольными функция¬
ми у и t, из (4.1.25) получим
SP-UA-^)y-.M + 4L-JT,
dt ]у ' 1 dt
откуда, предполагая, что |А (£)] =f= 0, будем иметь
Положив
= Р = By }- Т,
где В, Т — постоянные или зависящие только от tматри¬
цы размерностей соответственно (п — s) X п и (п — s) X 1,
получим искомую систему в виде
*L = n{t)y + T{t),
(4.1.26)
где
R(t) =
T{t) =
Ж-г(\А -4г- А В'
\ (It
В
M-f + lT
т
V. Движение по заданному закону
Выясним структуру систем дифференциальных урав¬
нений, интегральным многообразием которых является
точка, движущаяся по закону (4.1.4). Полагая с этой
§ 2. ИССЛЕДОВАНИЕ АВТОНОМНЫХ СИСТЕМ
261
целыо в (4.1.23)
А = Еп, / =
/1(0
fa (0
где Еп — единичная матрица п-го порядка, легко полу¬
чим, что
При
Р--ЗГ + ".
R = Л (у - / (0),
где А — произвольная постоянная матрица порядка
(п X тг), получим совокупность систем дифференциаль¬
ных уравнений, имеющих заданное частное решение
(4.1.4) в виде
* = л»-|-5-л/.
dt
§ 2. Исследование множества автономных систем
Полагая, что Q1? ..., Q; — гиперповерхности в про¬
странстве Yn, заданные уравнением (4.1.21), изучим неко¬
торые свойства множества автономных систем дифферен¬
циальных уравнений (4.1.22).
I. Особые тмк'А, гьа иптегрхлыюм многообрхши
Пусть все гиперповерхности Ql5 ..., Qs имеют общую
часть Q. Множество систем дифференциальных уравнений,
имеющих п — ^-мерное интегральное многообразие Q, запи¬
сываются в виде (4.1.22), где функции RT выбраны как
Rr == Rr (со; у) (г = 1, ..., s).
Если в некоторой точке уг Q все функции Ps+1 (г/), ...
..., Рп (у) одновременно обращаются в нуль, причем
(Уi) =h 0? то точка уг является точкой покоя для; сис¬
темы (4.1.22).
262 гл. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
Особая точка у2 многообразия £2, в которой выполняются
равенства
A(s) (Уа) = О» А(5)’3'’'''Ы = 0 (/ = 1,..., s;k = s + 1, ... , п),
являются и особой точкой системы (4.1.22).
Если все определители порядка s матрицы дсо/ду, за
исключением Д(ч), обращаются в нуль на некотором мно¬
жестве А точек многообразия £2, то на этом множестве А
координаты уъ ..., ys не изменяются при условии, что во
всех точках множества А функции Ps+1 (z/), ..., Рп (у) не¬
прерывны и ограничены. Этого явления можно избежать,
выбирая функции P8fl (у), ..., Рп (у) в виде
Р к — Q к (у) —5 (к — s + 1 » • • • 1 п) >
П A(s)> *
j—i
где Qk (у) ограничены и отличны от нуля всюду на мно¬
жестве А. Однако в этом случае не будет выполняться ус¬
ловие Липшица и множество А может состоять из осо¬
бых точек. Особая точка у3 может появиться и в результа¬
те того, что в точке у3 определитель A<s) обращается в
нуль, причем
S п
2 2 [л^^ыг^о.
j== 1 к—s-l-1
Эту особую точку можно исключить, выбирая функции
Rr, Ръ в виде произведений RrA<s), P/eA(s) (г = 1, ...
...,s; к = s + 1, ..., п).
Если в некоторой части В многообразия £2 выполняет¬
ся равенство
т п
2( 2 Л«.^/»*)а = 0,
j=l k=s-j-l
то координаты ylf ..., ут в этой области не изменяются.
§ 2. ИССЛЕДОВАНИЕ АВТОНОМНЫХ СИСТЕМ
263
II. Первые интегралы автономных систем
Если Rх, ..., Rm тождественно равны нулю, т. е.
Rr = 0 (г = 1, т),
то функции
«Г (у) + Сг = 0 (г = 1, т), (4.2.1)
где сТ — произвольные постоянные, являются первыми
интегралами системы (4.1.22), и всякое многообразие,
определяемое пересечением гиперповерхностей, заданных
уравнениями
«7- (у) + ст = 0 (г = 1, тп),
Щ {У) = 0 (к = m + 1, s)
(при условии, что оно существует), а также каждая ги¬
перповерхность, описываемая одним из уравнений (4.1.1),
является интегральным многообразием системы (4.1.22).
III. Два способа осуществления движения
по заданному многообразию
Движение по многообразию £2 может быть осуществле¬
но системой (4.1.22) и в том случае, когда функции Rx, ...
..., Rs выбраны согласно
Rr = RT (сог; у) (г = 1,..., s)
и удовлетворяются условия теоремы единственности ре¬
шения в области G. Действительно, если начальная точка
У0 — У (t0) принадлежит многообразию Q, то при даль¬
нейшем своем движении в силу системы (4.1.22) точка
у = у (t) не сойдет ни с одной из гиперповерхностей Q1? ...
..., £2S и, следовательно, будет оставаться на многообра¬
зии £2. Если же у0 не принадлежит многообразию £2, а рас¬
полагается на одной из гиперповерхностей £21? ..., £2., то
точка y = y(t), двигаясь по соответствующей гиперповерхно¬
сти, ни при каком конечном t не попадет на многообразие
Однако при выборе функций RXl ..., RS1 согласно
R г г (со, у) у
264
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
множество систем (4.1.22) оказывается шире, так как
в точках гиперповерхностей Q1? ..., Q., не принадлежа¬
щих Q, эти функции могут быть определены произвольно.
IV. Множество систем дифференциальных уравнений,
имеющих заданные интегральные гиперповерхности
Рассмотрим множество систем (4.1.22), в которых
Rr = Rr (сог; у) (г = 1, s).
Предположим, что матрица дсо 1ду такова, что
А^фО, (/ = 1, ... , s\ к = s + 1, ... , п).
Это может случиться, например, в том случае, когда со¬
вокупность функций СО!, ..., cds зависит только от s коор¬
динат уъ ...,ys. Тогда, выбирая функции RT (г = 1, ...,s)
также зависящими только от соответствующих сог (г =
= 1, ..., s) и координат уг, ..., z/s, получим искомую си¬
стему, которая будет состоять их двух систем:
s
У) = А) 2 &nRr К; Уи ••• » Ув) (/ = 1, , S) (4.2.2)
д 7~1
Ук = Рк (у) (к = S + 1, ..., п). (4.2.3)
При этом первая система (4.2.2) не будет зависеть от вто¬
рой (4.2.3), являющейся совершенно произвольной. Си¬
стема вида (4.2.2) получается также в том случае, когда
s = 7г. Именно, система, интегралами которой являются
функции
Юг (у) = 0 (г = 1, .... га), (4.2.4)
может быть записана в виде
п
Уз = 77й) 2 ^п]{г К; У) (/ = !,...,«). (4.2.5)
Д Г=.I
Для того чтобы на гиперповерхностях Q1? ..., Q?;, за¬
данных уравнениями (4.2.4), не было точек покоя и особых
§ 2. ИССЛЕДОВАНИЕ АВТОНОМНЫХ СИСТЕМ
265
точек, необходимо, чтобы выполнялись условия
=/=0 (/ = 1, ... , п) .
00 j-о
Исследуем тот случай, когда функции (4.2.4) зависимы и
ранг матрицы дсоЮу равен п — 1. Множество систем,
для которых функции (4.2.4) являются интегралами, будем
считать построенным в виде (4.2.5). Можно показать, что
в этом случае любая из функций
(У) + сг = О С = С •••. «). (4.2.6)
где Ci — произвольные постоянные, является первым
интегралом системы
п
У} = 2 АДЯ,- (у) п), (4.2.7)
Г—1
где множитель 1/Д(п) включен в произвольные функции
-Иъ ..., Rn, причем на функции эти не накладывается
никаких условий. Действительно, продифференцировав
любую из функций (4.2.6) в силу системы (4.2.7), получим
2 Ш2 = 2 V(n>’lRr. (7*-2.8)
j 1 ' /- 1 V=r. I
где получается заменой г-й строки определите¬
ля Д(п) строкой^, ..., . Очевидно, что правая часть
(4.2.8) равна тождественно нулю:
п
2 у<п)-г'1Дг = о,
7—1
так как при I ={= г определитель имеет две оди¬
наковые строки, а при I = г обращается в определитель
доо, который также есть тождественный нуль в силу
зависимости функций сщ, ..., (щ.
Д(")
0,2 (АЯЧ)а
266
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
В частном случае, когда в уравнениях (4.2.6)
сг = ... = сп_! = 0, сп — некоторая фиксированная по¬
стоянная, и>1 (у) = (оп (у) + сп, задачу построения мно¬
жества систем дифференциальных уравнений, имеющих
интегральные гиперповерхности ..., Qn, можно ре¬
шать двумя путями:
а) Искомое множество систем дифференциальных
уравнений можно построить в виде (4.2.7). В рассматри¬
ваемом случае оно запишется как
Уз = &ij)R (у)>
так как
д£> = 0 (» =2, п - 1; / = 1, п), Д$ =
= Д(!? и Rt (у) + Rn (у) = R (у).
б) Введем в рассмотрение функцию
(0 = 0) (со1; (On-!; у),
которая обращается в нуль при сох = 0 и оу1 = сп, на¬
пример,
(0 = 0)! (©! — Сп) ф (С02, (Оп-х", у),
где ф (со2, ..., (оп-1; у) — некоторая дифференцируемая
функция, и построим множество систем дифференциаль¬
ных уравнений, имеющих интегралы
(О (у) = 0, со2 (у) = 0, (On-х (у) = о
в виде (4.1.22). Полученная система будет иметь в каче¬
стве интеграла любую из функций = 0, ..., соп-1 = О,
со! — сп = 0. Если какие-то гиперповерхности, вдоль
которых со (у) обращается в нуль, имеют общую часть, то
она состоит либо из точек, где нарушено условие един¬
ственности, либо из точек, в которых по крайней мере часть
координат остается неизменной.
V. Условия существования дополнительных интегралов
Теорема 1. Для того чтобы некоторая функция
(у) = О,
зависящая от функций со17 ..., cos, т. е.
®s+x = соа+1 (®Х, со„), (4.2.9)
| 2. ИССЛЕДОВАНИЕ АВТОНОМНЫХ СИСТЕМ
2(57
была также интегралом системы (4.2.22) при условии, что
Rr = Rr (со,.; у) (г = 1, ..., s), достаточно потребовать,
чтобы функции Rlf ..., Rs удовлетворяли дополнитель¬
ному условию
(4.2.10)
г=1
Действительно, учитывая (4.2.9) и равенства
сЬг = Rr (г = 1, ..., s),
будем иметь
V ^C°£+1 d(0r __ V 5c°s+1 п
S+1 — ^ да>г dt ~ ^ дыг
г=1 г г=1 7
т. е. при соблюдении условия (4.2.10) функция (4.2.9) яв¬
ляется интегралом системы (4.2.22).
Теорема 2. Если осц = осц (у), ..., con = соп (у) —
однозначные функции, а в (4.2.5) Д(п) 0 и функции
Фг ((ог; у) (г = 1, ..., я) удовлетворяют условию
СО | ■<
-Q^-Rr (<ЫУ1 К- ••• .<). ••• — .ч,)) = 0
г=1 Г
при con+i (г/i (©!, со„), j/„ (coj., ©„)) = 0, то
«W (У) = 0 (4.2.11)
является интегралом системы (4.2.5). Вычислим прежде
всего производную функции co„+1 в силу системы (4.2.5).
Будем иметь
К; г/),
а г, j=i
ИЛИ
п
«п+1 = 4-, 2 v(n),,'’n+l7?r К; у). (4.2.12)
г=1
208
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
При выполнении условий теоремы из системы уравнений
(О,. = со, (г/х, уп) (г = 1, п)
можно найти
Уг = У Г («1: •••> “.г) (г = Г •••, п)
и, подставив их в (4.2.11), рассматривать как функ¬
цию от со1? ..., со,г. Определитель V(/,)’/v'+l преобразуется
при этом следующим образом:
и равенство (4.2.12) примет вид
Для того чтобы функция (4.2.11) являлась интегралом
системы (4.2.5), достаточно обращения в нуль правой
части выражения (4.2.13) на гиперповерхности за_
данной уравнением (4.2.11), что и доказывает теорему.
Для системы (4.2.7), имеющей п зависимых интегра¬
лов оц (у) = 0, ..., со7г (у) = 0, может быть доказана
Теорема 3. Пусть соп = соя (сох, ..., (од_1) и функ¬
ция (4.2.11) не зависит от со1? ..., con_x. Для того чтобы
(4.2.11) было интегралом системы (4.2.7), необходимо
и достаточно выполнение условия
Необходимость. Если функция сопа (у) = 0
является интегралом системы (4.2.7), то ее производная,
вычисленная с учетом (4.2.7),
(4,2.13)
=0
= 0.
(4.2.14)
§ 2. ИССЛЕДОВАНИЕ АВТОНОМНЫХ СИСТЕМ
269
должна обращаться в нуль в тех точках, где выполняется
(4.2.11). Преобразуем правую часть (4.2.14):
и, учитывая, что соп = сол (сох, ..., оц^), получим
Отсюда, принимая во внимание, что функции оц, ..., со71_1?
conli независимы и V(n), п> пл1 =/= 0, получаем, что выра¬
жение в скобках должно равняться нулю при соп+1 (у)= 0.
Достаточность условия не вызывает сомнений.
Следствие. В случае, когда функции оц, ..., соп„1}
соп+1 зависимы, выполняется тождество у(П)’n> ni_1 = 0
и из (4.2.15) вытекает, что со7га (у) — с = 0 является
первым интегралом системы (4.2.7).
VI. Пример 1. Построим множество дифферен¬
циальных уравнений движения по поверхности конуса
Составив уравнение для определения правых частей
искомой системы
найдем
х =а2
(4.2.16)
>
77 _ Р
270
ГЛ. tv. ПОСТ'РОЁЙЙЁ УРАВНЕНИЙ ДВИЖЕНИЙ
При R = 0 система (4.2.16) имеет в качестве интеграль¬
ной любую поверхность
(Уравнение (4.2.17) представляет однополостный .(ПРИ
q > 0) или двуполостный (при q < 0) гиперболоид.)
Получим теперь из множества (4.2.16) некоторые ча¬
стные системы дифференциальных уравнений. Полагая
где X — произвольная постоянная, будем иметь линей¬
ную систему
При Р2 = сгх + c3z, Р3 = dxx -j- d2y, R = 0 получается
система, построенная в [39]:
коэффициенты которой должны удовлетворять условиям
Пример 2. Пусть требуется построить множество
систем дифференциальных уравнений, интегральным мно¬
гообразием которых является линия пересечения сферы
о)! =5 я2 + у2 + z2 - R2 = 0, R ф 0 (4.2.18)
х — Ъ2у -f- b3z, '
у = сгх + c3z, f
Z = dxx + d2y, >
а2сг -f b2b2 = 0,
b2d2 — c2c3 = 0,
c2b3 — a2d1 = 0.
и эллиптического параболоида
-* = 0, я2>62>0. (4.2.19)
§ 3. ВЫБОР ТРАЕКТОРИЙ
271
Составим матрицу
2х 2 у 2 z
D = 2х 2у ,
а2 62
и ПОЛОЖИМ
2 у 2 z
В силу предположения относительно постоянных
Л, а, Ь определитель Д<2) не обращается в тождественный
нуль. Согласно (4.1.22) искомое множество систем получим
в виде
где Р = Р (х, у, z), Дг = i?r (%, о)2; ж, у, z) (i = 1, 2).
Полагая i?x = = О, Д(2)/2, можно получить сис¬
тему
которая построена в [39].
§ 3. Выбор траекторий на интегральных
многообразиях
Пусть s < п и функции В.ъ ..., Д5, входящие в правые
части системы (4.1.20), выбраны такими, что некоторое
многообразие Q (t), определяемое пересечением гиперпо¬
верхностей (t), ..., (t) является ее интегральным
> (4.2.20)
272 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
многообразием. Тогда, если у (t0) ЕЕ Q (t0) и на всем мно¬
гообразии Q (£), за исключением конечного числа особых
точек, достигаемых при t —>■ оо, выполнены условия тео¬
ремы единственности решений систем дифференциальных
уравнений, то движение точки у (t) в силу системы (4.1.20)
будет происходить только по многообразию Q'(t), следо¬
вательно, функции jR1? ..., во все время движения будут
оставаться равными нулю и движение точки у (t) по мно¬
гообразию £2 (t) будет зависеть лишь от произвольных
функций P8+i, •••> Рт оп])еделяющих правые части систе¬
мы (4.1.20). Этим произволом можно распорядиться для
задания необходимых траекторий на многообразии Q (t).
В качестве таковых, например, могут быть приняты тра¬
ектории, вдоль которых заданная функция или функцио¬
нал достигает своего экстремального значения. К решению
подобных задач сводятся вопросы отыскания экстремумов
на пересечениях многомерных поверхностей при помощи
дифференциальных анализаторов [39] и многочисленные
задачи на условный экстремум в вариационном исчисле¬
нии [13, 29, 52].
I. Выбор оптимальной траектории по экстремум,у
заданной функции
Пусть наряду с многообразием Q, определяемым урав¬
нением (4.1.21), задана функция V — V (у) и выполнены
следующие услэзия:
1) Функция V (у) однозначна, непрерывна и обладает
непрерывными частными производными dV!dyi (i =1 , п)
в любой точке у ЕЕ й.
2) Функция V имеет единственную экстремальную
точку (максимум) у = уд на многообразии в ко¬
торой
£ = °
причем положение точки уэ заранее неизвестно.
§ 3. ВЫБОР ТРАЕКТОРИЙ
273
3) Ни в одной точке у Ez Q, кроме у = г/э, не могут
одновременно обратиться в нуль определители
dV
dV
dv
dflk
dm
ду8
д(0\
дон
d(Di
д>/к
dyi *
dys
dcos
Зсо8
дУк
дщ
d'/s
Требуется подобрать остающиеся произвольными в
правых частях системы (4.1.22) функции Ps+1(y), ..., Рп (у)
так, чтобы обеспечить движение к точке экстремума
на многообразии Q.
Из условия 2) следует, что в точке экстремума выпол¬
няется равенство
г—1 'п
Необходимым и достаточным условием монотонного
приближения к точке экстремума (максимуму) является
выполнение в любой точке, за исключением у = уэ,
неравенства [39] V > 0.
Производная V функции F, вычисленная вдоль реше¬
ния системы (4.1.22) равна
2ЗД[2*«и. я*м-
i—1 Jl j=1 J * ~ r= 1
- S Л^'ЫЛЛг/)] + 2 шгр}(у)-
fc=S+l ^ j=S+1 J
Так как функции Rr (оз (у), у) (г = 1, ./.,‘s)"равны нулю
при движении по многообразию Q, то, учитывая, что
274
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
после небольших преобразований будем иметь
k=s+l
dk(V, со)
. Д<?>
Рк (У)-
(4.3.1)
Следовательно, для осуществления движения к точке
экстремума функции Рк (у) {к = s -f 1, п) должны
быть выбраны так, чтобы обеспечить- определенную поло¬
жительность правой части выражения (4.3.1)
^ оз)
2j рн(у)>о.
Этого можно добиться, если положить, например,
п
P*(v) = A(s) 2
r=s+l
где агк — произвольные постоянные коэффициенты. Тогда
выражение (4.3.1) примет вид
п
у= 2 ar,d,(F.co)^(F, со). (4.3.2)
г, 7c=s+l
В силу предположения 3) правая часть равенства
(4.3.2) не обращается в нуль ни в одной точке у ЕЕ £2,
у =/= уэ и представляет собой квадратичную форму отно¬
сительно переменных dr (F, со) (г = s + 1, ..., п). Необ¬
ходимые и достаточные условия знакоопределенности
квадратичной формы (4.3.2) выражаются критерием
Сильвестра [94]
1, 3
К3, s i-1
К33
0 (/ — s -f-1,..., п).
Замечание. Изложенный метод можно считать
распространением метода градиента на задачи отыскания
экстремума при наличии ограничений.
§ 3. ВЫБОР ТРАЕКТОРИЙ
275
Действительно, если освободиться от условия принад¬
лежности решения у (t) системы (4.1.22) многообразию Q,
то все ее правые части Ръ ..., Рп остаются произвольными.
Тогда, полагая s = 0 и выбирая в (4.3.2) коэффициенты
соответствующим образом:
агг = а > 0, атк = 0, г =f= к (г, к = 1, ..., п), .
получим метод градиента.
II. Выбор оптимальной траектории по минимуму
заданного функционала
Обратимся к системе уравнений (4.1.20), имеющей
интегральные многообразия (4.1.6). Определим на много¬
образиях М£-1г-2...}7 (t) такие траектории, вдоль которых
функционал
/1
I = {y,i/U)dt, (4.3.3)
/V
где F (г/, г/, t) — определенная и непрерывная вместе со
всеми производными функция, принимал бы минимальное
значение.
К предположениям, принятым в § 1 относительно
функций (д1 (у, £), ..., cos (у, t), добавим еще требование
существования и непрерывности их вторых производных
по всем переменным.
Полагая, что функции ..., Rs определены из условия
существования интегральных многообразий (4.1.6), по¬
стараемся подобрать функции PSfl (г/, t), ..., Рп (у, t)
так, чтобы на многообразии функционал (4.3.3) принимал
минимальное значение. Заменяя в (4.3.3) компоненты век¬
тора у правыми частями системы (4.1.20), можно считать,
что подынтегральная функция F является функцией ар¬
гументов у, Р, t, где Р = (Ps+1, ..., Рп), т. е. функционал
(4.3.3) имеет вид
/1
I = [F(ij,P,t)dl.
и
276
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
Теперь, полагая в системе (4.1.20) функции Ps+1, Рп
«управлениями», задачу выбора этих «управлений» можно
решать, привлекая метод динамического программирова¬
ния Беллмана [10, 11] или принцип максимума Понтря-
гина [14, 75].
Согласно методу динамического программирования для
отыскания функций Рк (у, t) (к = s-\- 1, ..., п) в некоторой
области Q (у, L) пространства Yn X Т (Т — множество
значений, принимаемых t, Yп X Т — прямое произведе¬
ние пространств Yп и Т) необходимо решить уравнение
Беллмана, которое применительно к рассматриваемой за¬
даче принимает вид
При использовании принципа максимума функции
Ри (0 (к = s -р-1, п), которые выбираются из некото¬
рого класса Z (непрерывных или кусочно-непрерывных
функций) и соответствуют оптимальной траектории ~у (t),
найдутся как решения системы уравнений (4.1.20) и
S S п
sup
Peg (у, о
(4.3.5)
P(t),t)= sup И (у, Р, t),
Р (/)<=z
где
п _ п
п
п
- 2 А(5)',ДХ + S ЪкР*-Р, (4.3.6)
hi =8 + 1
fc = S+l
при граничных условиях
У Со) = У0, У Cl) = У1-
§ 3. ВЫБОР ТРАЕКТОРИЙ
277
В случае линейного многообразия М (£), полагая
Р = By -j- Du Г,
где В, D, Т — постоянные или переменные матрицы соот¬
ветственно порядков (72 — S) X 72, (72 — S) X 772, (72 —.6*) X 1,
a Z2 — произвольная 772-мерная вектор-функция, элементы
которой выбираются из класса непрерывных или кусочно-
непрерывных функций переменных у, £, можно получить
систему
у = Ly + Ей !- Т,
где
L =
А'1 (Л А — А — АВ)
, Е =
— A^AD
В
D
Т --
Л-1 (/-Л/ - АТ)
Т
Уравнение Веллмана (4.3.4) в этом случае принимает
вид
s"P [ ■}; (Еу -!- Ей -j- Т) — g (у, и, I) -|- ^ ] = О,
где g (у, и, t) — F (у, Ly + Ей -|- Т, t), а система (4.3.5),
(4.3.G) записывается в векторном виде:
у = _ L>,
// (у (г), й (0, t) = sup II (у, и, t),
и
Н (у, и, t) = ф (Ly + Ll2 -I- Т) — g (у, 12, *),
L* — матрица, сопряженная к L.
Задавая в качестве функционала длину дуги
11
«- \ Yii\ -I 1- К
dt,
функции Pk(k = s -\- 1, ..., 72) можно определить такими,
что система (4.1.20) будет описывать движение по геоде¬
зическим линиям на (4.1.6).
278
ЁЛ. TV. ПОСТ'РОЁНЙЁ УРАВНЕНИЙ ДВИЖЕНИЙ
Пример. Рассмотрим задачу определения геоде¬
зических линий на поверхности вращения, которая в ци¬
линдрических координатах задается уравнением
Z - / (г) = 0. (4.3.7)
Длина дуги в цилиндрических координатах определя¬
ется функционалом
8 =■ $/1 + (£/+ г‘ (а?/ <4-3-8'
Го
Множество систем дифференциальных уравнений, для
которых поверхность вращения (4.3.7) является интеграль¬
ной, имеет вид
% =f’(r) + R(a\ z, ф, г),
£ = *<*• Ф. г),
(4.3.9)
где Р (z, ф, г) — произвольная функция, R (со; z, ф, г) —
произвольная непрерывная функция, удовлетворяющая
условию R (0; z, ф, г) = 0. Перепишем функционал (4.3.3)
с учетом системы (4.3.9) в виде
г
s = \ Y1 + (/' + R f + г2Р2
а
Г 0
dr
и составим систему уравнений (4.3.5), (4.3.6). Функция J?"
имеет вид
Н = ^ (/' + R) + г|>2Р -/1 + (/' + Л)2 + г2Р2,
и фд, ф2 определяются из системы
§ 3. ВЫБОР ТРАЕКТОРИЙ
279
Считая пределы изменения функции Р неограничен¬
ными, определим ее из условия максимума функции Н:
дН , г2Р Л
о Y> ’ Ф 2 ' г- ■ 9,
дР /1 + (//_|_ Я)2 + Г2р2
откуда
Р_Ф2 Л + (/' + Д)
г |/ г2-ф*
Если функцию 7? выбрать не зависящей явно от ф,
т. е. в виде
R = R (со; Z, г),
то функция Н не будет зависеть от ф и из второго урав¬
нения (4.3.10) будем иметь
ф2 = с = const
и, следовательно,
с /1 + (Г+Р)2
2 t г2 - с2
Таким образом, множество систем дифференциальных
уравнений движения по геодезическим линиям на поверх¬
ности вращения (4.3.7) записывается в виде
p = f’(r) + R(z-f(r), г,г), )
(4.3.11)
с /1 + [Г (г) + R (Z - / (г), z, г)]2
dr г У г2 — с2 ‘ J
При 7? = 0 из (4.3.11) можно получить уравнения
геодезических линий на поверхности вращения в виде
2 =f(r),
. f с ,/1 + Г(г),
(р = (ро + )—у ГТ1С; dr,
г0
что совпадает с известными результатами.
280
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
§ 4. Построение множества систем
дифференциальных уравнений устойчивого движении
по заданной программе
I. Постановка задачи. Определения
В § 1 была выяснена структура множества систем диф¬
ференциальных уравнений, имеющих заранее заданные
интегральные многообразия (4.1.6). Всякая система, полу¬
чаемая из этого множества (4.1.20) при определенном
выборе произвольных функций, обеспечивала движение по
многообразию (0> если начальная точка у° =
= у (t0) принадлежала этому многообразию. Однако
вполне естественно, что в силу различного рода погреш¬
ностей установление начальной точки у° на многообразии
• • 'n(tо) в реальных системах может быть осуществлено
лишь с некоторой точностью. Постановка вопроса о след¬
ствиях, к которым может привести это неизбежное откло¬
нение начальной точки от многообразия, т. е. будет ли
решение у = у (t) системы (4.1.20) оставаться в малой
окрестности многообразия М\г,...^(£) или с течением вре¬
мени будет от пего удаляться, вызывается необходимостью
установления определенных гарантий для осуществления
движения по интегральному многообразию.
Классическая задача об устойчивости движения [31,
57, 58, 94] сводится к исследованию систем дифференци¬
альных уравнений возмущенного движения, имеющих
тривиальное решение, которое изображается в фазовом
пространстве неподвижной точкой. В работах А. М. Ля¬
пунова и его последователей устанавливаются условия
устойчивости и неустойчивости этого тривиального ре¬
шения и даются способы определения области начальных
отклонений, гарантирующих заданные пределы последую¬
щих отклонений возмущенных движений. Методы
А. М. Ляпунова применяются [37, 66, 69] к исследованию
устойчивости неподвижных в фазовом пространстве ин¬
вариантных множеств (т. е. множеств, состоящих из тра¬
екторий) систем дифференциальных уравнений.
В настоящем параграфе будут определены условия
устойчивости и неустойчивости некоторых классов инте¬
гральных многообразий, на основе которых строятся си¬
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 281
стемы дифференциальных уравнений, описывающих ус¬
тойчивое или неустойчивое движение по заданному ин¬
тегральному многообразию.
Пусть система дифференциальных уравнений
у = Р (у, t) (4.4.1)
имеет интегральное многообразие Q (t) в фазовом про¬
странстве Yn, определяемое уравнением
со (у, t) = 0 (4.4.2)
(у и Р — 7г-мерные векторы, со — 5-мерный вектор, s ^ п).
Будем предполагать, что при всех t ^ t0 выполняются
следующие условия:
1) правые части системы (4.4.1) непрерывны по всем
переменным и удовлетворяют условиям Липшица отно¬
сительно у ЕЕ G;
2) функции со/. = со г (у, t) (г = 1, ..., 5), составляющие
вектор со, непрерывны вместе с частными производными
dtoT/dyj, d<s)T!dt (г = 1, ..., s; j = 1, ..., п) в некоторой зам¬
кнутой ограниченной односвязной области G cz Yn, со¬
держащей многообразие Q (£);
0ч у о dco D (coi, . . cos)
0) ранг функциональном матрицы г
и У [у 1, . . уп)
равен s во всех точках многообразия Й (t).
В качестве расстояния р (у, Q (t)) от точки у ЕЕ Yn до
многообразия Q (t) в момент времени t примем, как
обычно,
р(г/, Q(0)= inf P(y,z(t)),
z (0<=п (О
где р (у, z) — неотрицательное число, обладающее свой¬
ствами:
1) Р (У, z) = 0 при у = z,
2) Р (У, z) = Р (z, у),
3) р (х, у) < р (я, z) + р (z, у) при любом ж е
Определение 1. Интегральное многообразие
Q (t) дифференциальных уравнений (4.4.1) устойчиво,
если по любому в > 0, меньшему некоторого фиксиро¬
ванного числа> 0, можно подобрать такое rj ^ в, при
282
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
котором из р (у0, £2 (10)) ^ г] следует, что р (у (t), £2 (t))
при всех t^t0. В противном случае многообразие £2 (t)
неустойчиво.
Определение 2. Интегральное многообразие
£2 (t) дифференциальных уравнений (4.4.1) называется
устойчивым асимптотически, если оно устойчиво и
limp (у (О, й (<)) = °-
О
Определен pie 3. е-окрестностыо £2е (£) много¬
образия £2 {t) называется множество точек у, удовлетво¬
ряющих условию
Р (У, Q (t)) < е
при всех t ^ t0.
Определение 4, Многообразие £2 (t) обладает
компактной окрестностью £2/г (t), если существует такое
h > 0, что множество точек £2Л (£) является компактом
при всех t
Например, многообразие £2 (t) на плоскости (уъ г/2)>
заданное уравнением
® — г/* + у\ — (1 + ае~Х1) = 0- о,
расстояние до которого определено равенством р (г/, £2 (t)) =
= со2, обладает компактной окрестностью £2^ (t) при всех
0<А<1 и t ^ 0.
Будем предполагать, что вектор-функция со обращается
в нуль только на многообразии £2 (t) и отлична от нуля во
всех остальных точках области £2/t (£), каково бы ни было
t ^ £0. В пространстве переменных сох, ..., cos введем норму
вектора со:
| 6) II = р (со, 0).
Определение 5. Вектор-функцию со будем
называть ограниченной в области £2/t (t), если существует
такое число N > 0, что при всех у £Е £2/t (t), t ^ £0, будет
| со I < Аг.
Например, функция со = (у\ + у\ — 1)£, определяющая
посредством уравнения со = 0 многообразие £2 (t) при
р (у, £2 (£)) = | yl + у\ — 1 I и II ю II — не является
ограниченной, а функция со = sin [(г/i + yl — 1)2], кото-
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 283
рая определяет то же многообразие при тех же р (у, £2 (t))
и || со ||, и функция со = у\ + у\ — (1— е~и) (к > 0) при
р (у, Й (t)) = I со || = со2 являются ограниченными в об¬
ласти й/г (t).
Вектор-функция со = А (t)y — / (£), определяющая ли¬
нейное многообразие й (t) при выполнении условий (4.1.3),
является ограниченной, если норма вектора со и расстоя¬
ние до многообразия й (t) вычисляются по формулам
s
N1= (4.4.3)
Р (¥, Q (0) = SUP Р?» (4.4.4)
Г
где
п
2 arj W У 5 /?' (0
dM=. (4.4.5)
2 ah №
j=i j=l
В справедливости этого утверждения можно убедиться,
рассматривая цепочку неравенств
s S п S п
S = 2 р;2 2 aij (г) <Л 2 2 (о <= ЛГ- (4.4.6)
Г=1 Г—1 7—1 j=l
составленную для всех г/ ЕЕ й^ (г), t ^ £0.
Определение 6. Ограниченная вектор-функция
со допускает бесконечно малый высший предел, если для
всякого сколь угодно малого б > 0 существует такое
у > 0, что при всех р (у, й (t)) и t ^t0 выполняется
неравенство | со || 6.
Например, функция со = sin [(у\ + у\ — 1)^1 при
р (у, й (*)) = (г/1 + у\ — I)2, II со I = (О2 не допускает
бесконечно малого высшего предела, если Й (t) определя¬
ется уравнением у\ + у\ — 1=0, а функция со = у\ +
+ у\ — (1 + e~li) (к > 0) при р (у, Й (*)) = (yl + у\) о)2,
|| со || = со2 допускает бесконечно малый высший предел.
Из (4.4.6) следует, что вектор-функция (4.1.2) при выпол¬
1f х/’
284 ГЛ. 1Y. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
нении условий (4.1.3), (4.4.3), (4.4.4), (4.4.5) допускает
бесконечно малый высший предел.
Из того, что вектор-функция со допускает бесконечно
малый высший предел, следует, что если справедливо
неравенство || со || ^ б при t ^t0, то обязательно выпол¬
няется неравенство р (у, £3 (t)) ^ у, при t ^ t0, и что
существует число ;> 0 такое, что || со || ^ для всех
у <= Qh (t), t ^t0.
Введем в , рассмотрение скалярную функцию
У = У (со; у, t), непрерывную вместе с частными произ¬
водными по всем аргументам и удовлетворяющую усло¬
вию У (0; у, t) = 0. Будем считать, что функция У опре¬
делена при всех со, у, £, подчиненных условиям
II ш II < Р (г/> О (0) < h, t t0. (4.4.7)
Область значений со, у, t, ограниченную условиями (4.4.7),
будем обозначать через К.
Определение 7. Функция У (со; у, t) называется
знакопостоянной положительной (отрицательной), если
она неотрицательна (неположительна) в области К.
Определение 8. Функция У (со; у, t) называется
.знакопеременной, если она может принимать как положи¬
тельные, так и отрицательные значения в области К.
Определение 9. Функция У (оз; у, t) называется
знакоопределенной, если существует такая зпакоопреде-
ленная функция W — ТУ (со) *), определенная в области
I со || ^ бх, что во всей области К выполняется одно из
условий:
У (<*>; у, t) ^ W (со) или —У (со; у, t) ^ W (со).
Пример ы. 1) Пусть
W = у\+ у\ — (1 4- е~и), р (у, О (t)) = II со II = со'2,
К : I со || ^ а, р (у, £3 (t)) ^ а, t ^ 0, 0 < а < 1.
Тогда У = со2у^ — знакопостоянная, У = со2уу — знако¬
переменная, У — со2 (у- -j- у;) и У = со2 (e~l -|- 1) — по¬
ложительно-определенные функции.
*) Функция W (со) называется знакоопределенной, если W (со)>
> 0 или W (со) < 0 при |[со|| ф0 и W (со) = 0 при ||со|| = 0
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 285
2) Функция V (со; у, t), определяемая скалярным про¬
изведением
V = (со, В (у, *)<о), (4.4.8)
где В (у, £) — матрица, элементы (у, t) которой явля¬
ются непрерывными ограниченными функциями, удо¬
влетворяющими условиям Сильвестра при всех у ЕЕ £2/г(£),
£ ^ £0» является определенно-положительной в области К.
Определение 10. Функция V (со; у, t) ограни¬
чена, если существует такое постоянное число L > 0,
что в области К выполняется неравенство | V | < L.
Определение 11. Если ограниченная функция
V (со; у, t) такова, что для всякого сколь угодно малого
I > 0 найдется такое отличное от нуля б < б15 что для
со, у, С подчиненных неравенствам
IMI < б> Р (У, & (0) < L, tQ,
будет выполняться ограничение |F| < I, то функция V
допускает бесконечно малый высший предел.
Например, V = sin cot, где со — скалярная функция
переменных у, t, не допускает бесконечно малого высшего
предела, а V = со2 (1 + е~1) допускает бесконечно малый
высший предел, если Q (t) определяется скалярным урав¬
нением со (х, t) = 0. Функция (4.4.8) также допускает
бесконечно малый высший предел, если многообразие
Q (t) определяется векторным уравнением (4.4.1). В слу¬
чае, когда функция V не зависит явно от х и t, то очевидно,
что она допускает бесконечно малый высший предел
Если V есть функция, допускающая бесконечно ма¬
лый высший предел, то из условий
\v\> I, р (г/, й(0) < л, г > г0
следует, что ||со|| б.
Производная V функции V, вычисленная в силу
системы (4.4.1), равна
dv даг , ov \ п , dv
где Pj (/= 1,..., п)— компоненты вектора Р.
286
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
II. Условия устойчивости интегральных многообразий,
обладающих компактной окрестностью
Достаточные условия устойчивости, асимптотичес¬
кой устойчивости и неустойчивости интегральных мно¬
гообразий, обладающих компактной окрестностью, уста¬
навливаются в следующих теоремах, аналогичных тео¬
ремам Ляпунова об устойчивости тривиального реше¬
ния системы уравнений возмущенного движения.
Теорема 4. Интегральное многообразие £2(£)
дифференциальных уравнений (4.4.1), обладающее
компактной окрестностью £2 ДО» устойчиво, ес¬
ли существует определенно-положительная функция
F(co; у, 0» производная которой V (со; у, t), составлен¬
ная в силу системы (4.4.1), является знакопостоянной
отрицательной функцией.
Доказательство. Так как многообразие
£2 (0 обладает компактной окрестностью £2/г (£), то мно¬
жество точек у, удовлетворяющих условию
р(у, й(0) = е (е < h)
и образующих границу Г£ (t) области £2е(£), может быть
составлено из конечного числа кусков Г£; (t) гиперпо¬
верхностей Qtj(t) (/ = 1,..., N), не имеющих общих то¬
чек с Q(t), каково бы ни было t tj. Обозначим через
Г£.(0 замыкание множества точек, составляющих
3 —
Ге^.(£) при фиксированном t. Ге.(£) является компактом
в пространстве Yn и || со [| имеет на нем положительную
нижнюю грань бj(t). Пусть
б (t) = min {6Д0,..., бдг (0).
Очевидно, что б = б(£) является непрерывной функци¬
ей t. Из определенно-положительности функции V сле¬
дует существование такого l(t), что при
|| со 1 б(£), у е Ге (0, ^ ^ до¬
будет V l(t) > 0.
А так как Tz(t) не имеет общих точек с £2(£) ни при
каком tQ и V — функция положительно-определен¬
ная, то существует такая постоянная I, что при любом
t > to будет I (t) ^ I 0.
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 287
Ввиду непрерывности функции V при t ---= t0 по
любому I можно указать такое 60 = 60(Z), что для
всех со0 и г/0 (со0 = со(г/°, £0)), удовлетворяющих
условию
К1<601 j/“GQ£(g, (4.4.9)
будет
F0 - F(co°; у\ U) < I, (4.4.10)
а так как норма вектор-функции со = со (у, tQ) непрерыв¬
на в области G, то по любому 60 < можно • указать
такое г), что как только
р(гЛ & (h)) < Л. (4.4.11)
ТО || (0° II < б0.
Итак, по числу I (следовательно, по числу е) построе¬
но число ц. Покажем теперь, что при выполнении ус¬
ловия (4.4.11) будет выполняться неравенство
Р (у (t), Q(0)<e (4.4.12)
при всех t t0.
Из равенства
F-F0 = ^Ftft
имеем, что
F0< Z. (4.4.13)
Так как при t = t0 выполняется р (г/°, Q (Z0)) < ц (ц ^
< е), то в силу непрерывности будет выполняться нера¬
венство (4.4.12) и при значениях t, достаточно близких
к t0. Допустим, что в некоторый момент t неравенство
(4.4.12) обратится в равенство. Но тогда обязательно
будем иметь
V(t) > I, (4.4.14)
и противоречие неравенства (4.4.14) условию (4.4.13)
завершает доказательство теоремы.
Из доказательства теоремы 4 вытекает способ опре¬
деления по функции V числа ц, соответствующего выб¬
ранному г ^ h.
288
ГЛ« IV, ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
Взяв в качестве расстояния р (у, Q (Z)) от точки у
до многообразия Q (t) и за || со || в момент времени t
определенные функции, находим 6(t) как точную ниж¬
нюю грань I со I на множестве Ге (t) и точную нижнюю
грань I функции V при условиях
IHI>s(0>*. уеге(0. • (4.4.15)
Найдя таким образом Z, определим такое 60, чтобы
при условиях (4.4.9) выполнялось (4.4.10) и далее
по б0 найдем г) такое, что при условии (4.4.11) будет
И| < б0.
Примечание 1. Если положить р(у, ^(0) =-*
=|| со |), то решение задачи определения числа г\ по задан¬
ному е значительно упрощается ввиду вытекающих из
этого условия равенств 6 = е, ц = б0.
Примечание 2. В общем случае определе¬
ние такой нижней грани Z функции V при условиях
(4.4.15) часто может быть затруднительно. Задачу мож¬
но несколько облегчить, если в качестве области К,
участвующей в определении свойств функции F, взять
область Кг, определенную множеством значений со, у, Z,
ограниченных условиями
IIсоII^бх, z/ее, *>z0.
Доказательство теоремы при этом может быть с соот¬
ветствующими изменениями полностью повторено.
Однако наименьшее значение 1Х функции F, определен¬
ное в области Кх, естественно, в общем случае будет
меньше, чем Z, что в свою очередь приведет к более за¬
ниженной оценке числа ц.
Покажем, как по заданному числу е найти соответ¬
ствующее ему число т], если принять, что
IIсоII = (со, со),
и в качестве функций р(у, 0(0) и V взяты определенно-
положительные квадратичные формы.
р(у, 0(0) = (со, А(у, t)cо), V = (со, В(у, t)co),
коэффициенты которых ar. (Z), Ъг. (t) (г, /' = 1,..., s) —
соответствующие элементы матриц А (у, t) и В (уш t) —
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 289
являются непрерывными ограниченными функциями,
удовлетворяющими условиям Сильвестра при всех
у G и t > /0- Заметим, что при этих условиях функ¬
ции Хг (у, I) и р,. (у, /) (г 1,..., s), определяемые соответ¬
ственно из уравнений
| А(у, t) — X |-0, (4.4.16)
\B(y,t) - fi | = 0, (4.4.17)
будут вещественными, непрерывными, положительными
и ограниченными при всех у ЕЕ G, t ^ t .
Найдем прежде всего число б, ограничивающее сни¬
зу I со I при р(у, Q(£)) = е, £ ^ £о- С этой целью поло¬
жим
U = (to, со) + j- |е — (со, А (у, t) со],
где ИХ — неопределенный множитель Лагранжа, и из
условий минимума U по со
£ = 2((Л-тл(г'Л)а>) = 0
с учетом уравнений (4.4.16) получим, что
I со Ц = р (у’ Q (*)} . (4.4.18)
" 11 Мзл *)
Оценивая правую часть выражения (4.4.18), будем иметь
значение
6 = 4, (4.4.19)
X
где
X = sup sup Хг (у, t) > 0.
Г v<=Gt
t>U
В частном случае, когда матрица А (у, t) является диа¬
гональной, элементами главной диагонали которой яв¬
ляются функции аг(у, t) (г —■ 1,..., s), X определяется
10 А. С. Галиуллин
290 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
как число, ограничивающее функции ar(y, t):
X = sup sup ar (у, I).
r ?/eG
t>t0
Совершенно аналогичными рассуждениями убежда¬
емся в том, что
1г - цб, (4.4.20)
где
[х = inf inf [хг (у, t)
~ г ?/e=G,
t>t0
И
|Л= inf inf &г (г/, г),
” г
t>tQ
если В(у, t) — диагональная матрица с элементами
Ьг (у, t) (г = 1,..., s), расположенными по главной
диагонали.
Теперь по найденному числу 1Х можно определить
число т]. Для этого прежде всего необходимо найти та¬
кое б0, чтобы при
II “°|l < 60, У°€=. Qt(t0) С= G
было
F0 - (со0, 5° 0<
(Здесь 5° = В(у°, t0). Очевидно, такое б0 будет опре¬
деляться равенством
6о = - , (4.4.21)
ро
где
|х0 = sup sup pr0 > 0
г i/°eOE(f0)
и (Хг0 (г = 1,..., s) — корни уравнения
I в° - р°| = 0.
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 291
По известному б0 определяется число г], ограничи¬
вающее область начальных отклонений £2Дг0):
р(у0, й(£0)) < г),
в которой || со01| < б0. Для него опять легко получить
выражение
Г) = К So, (4.4.22)
где Я0 = inf inf Xr0, (Кп {г = I,---, s) — корни
~ г i/cgO£ (tn)
уравнения \А(у°, f0) — А,0 | = 0).
Из (4.4.19) — (4.4.22) окончательно будем иметь, что
Пример 1. Система
ill ■--= иг/i [у\ + У1 - (я + Ье-и)\ + у, — чу* Ые^‘,
1 2 {у{ + у:,)
У-> = \Ч1> \у\ Г yl - (а + be-и) | — гу3 - Т. Ь1е~Х1,
1 2 (1/j + у:,)
где ^>0, (.1 ^ 0 и 6 — некоторые постоянные, имеет
на плоскости (у1? у?) интегральное многообразие Q(t),
определяемое уравнением
® = у\ + У\ — (я -h be~xt) = 0
и обладающее компактной окрестностью £2Дг) при всех
/г, удовлетворяющих условию 0 < h'< а2. Положим
р(у, Q(t)) = IIHI = И®; У, t) = «а
Тогда функция F является положительно-определенной
в области Qh(t). Ее производная
V = 4р(г/2 G гф®2
при этом постоянно отрицательна. Следовательно,
многообразие £2 (£) является устойчивым.
Ю*
292 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
П р и м е р 2. Система
yi(y\ + yl-R) , ч
У1 — ~ о. Уч (Ь + Уз),
У 2 =
УI + 3/5
3/2 (2/£ + Уо — R)
+ У\ {Ъ + Уз)>
2/ч — 2/, + У\ — 2у3 — 7? — 2 sin at -f a cos at,
9 I 2
Vi + 3/5
(4.4.23)
где а, Ъ yl R — положительные постоянные (причем 6 >
^>1), имеет частные интегралы
= 2/;
2/5
Л = 0, оз2 = у3 — sin at = О,
которые определяют многообразие Q(t) в пространстве
У3 векторов (у17 1/2, у3). Полагая а > 0 и р ос некото¬
рыми постоянными, определим р (г/, Q(Z)), ||со|( и
У(м; у, /):
р(г/, Q(Z)) = acot роК.
У (со; y,t) =■-= !|со|| = со-2 (Оо.
(4.4.24)
(4.4.25)
Многообразие Q(t) обладает компактной окрестно¬
стью Qh (t). Значение h может быть определено следую¬
щим образом. Система (4.4.23) удовлетворяет условиям
единственности решения при всех t 0 и
0< 1(0,1 < Л, |со2| < Ъ — 1.
Следовательно, (4.4.24) должно удовлетворять неравен¬
ству
р(у, O(t)) < inf (аЛ2, Р(Ь — I)2} = h.
Так как функция V (4.4.25) является определенно¬
положительной, а ее производная
V --- — 4(0^ -{- 2(0,002 — 4(02
— определенно-отрицательной, то многообразие Q(t)
является устойчивым. Найдем по заданному е соответ-
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 293
ствующее число т]. Для этого составим уравнения
(4.4.16), (4.4.17)
о
1
JS
= 0,
1 - [1 0
= 0
0 Р-%
0 1 -ц
и найдем
^о = а, А, = Э, \i0=y=l. (4.4.26)
Из формулы (4.4.22) с учетом (4.4.26) будем иметь
Теорема 5. Интегральное многообразие £2(£) диф¬
ференциальных уравнений (4.4.1), обладающее компакт¬
ной окрестностью Q/t(0> устойчиво асимптотически,
если можно найти знакоопределенную функцию
У (ог, у, t), производная которой F(ro; г/, t)7 составленная в
силу системы (4.4.1), является знакоопределенной
функцией, противоположного знака с F, и функция
V и вектор-функция со допускают бесконечно малый выс¬
ший предел.
Доказательство. Допустим, что функция
V определенно-положительна. В силу теоремы 4 много¬
образие й(£) устойчиво. Следовательно, существует такое
г\ г|(б), что как толькоу° ei- QTi(t0), то г/(/)Е-й£(/) при
всех t^t 0. Так как У всюду в Qe(£) отрицательна при лю¬
бом t С» и обращается в нуль только на многообра¬
зии Q(t), то в силу единственности решения системы
(4.4.1) она ни при каком конечном t не может обратиться
в нуль вдоль решения у ^ y(t). Тогда функция V мо¬
нотонно убывает и достигает нуля лишь при t — оо .
Допустим, что этого не случится и выполняется нера¬
венство F(co; у, t) а > 0. Но в силу того, что функ¬
ция V допускает бесконечно малый высший предел,
существует такое 6, что ||со|| >6 при р(у, Q(t)) < h
(или yEE.G) и^ > /0 (в качестве h в данном случае может
быть принято е). А так как вектор-функция со допуска¬
ет бесконечно малый высший предел, то из || со || >6
294 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
вытекает неравенство р(у, &(t)) а, т. е. что существу¬
ет такое £2а(г), в которое не может попасть точка y(t).
Множество Qh_a(t) точек у, для которых а ^ p(y,Q(t))^.
^ h при любом t >*о, является компактом, а согласно
принятым условиям на этом множестве выполняются
неравенства 6 ||оо||<^ б1? и функция У(го; у, £) до¬
стигает в области б С' [;го|| б17 у GI- £2,г (0 точной верх¬
ней грани b(t). Функция b = b(t) является непрерыв¬
ной, положительной и ограниченной снизу числом
b ^ b(t). Из равенства
t
V(t)-V(l0) = \vdt
to
имеем
^(0 < V(t0) - b(t - t0).
Так как при больших t это неравенство противоречит
допущению, что V — определенно-положительная
функция, то V(t) -> 0 при t —ос. Следовательно, p(y(t),
Q(t))-+0 при t -■> оо , т. е. многообразие Q(t) устойчи¬
во асимптотически.
Из доказательства теоремы 5 вытекает способ приб¬
лиженного определения момента времени Т, начиная с
которого величина р(y(t), Q(t)) станет и в дальнейшем
всегда будет оставаться меньше наперед заданной вели¬
чины у, если начальные условия ограничены неравенст-
вами y< r]j < р(у°, Q(t0)) < г].
Примем за исходную формулу равенство
т
V(T) -V0= \vdt. (4.4.27)
to
Так как многообразие Q(t) устойчиво, то любому ц соот
ветствует такое е, что как только р(г/°, Q(£0)) ц-
то выполняется p(y(t), Q(£)) ^ 8 ПРИ всех t t0. При
t0 ^t справедливо условие у ^ p(y(t), fi(/)) ^ е, и,
следовательно, для вектор-функции со, имеющей бес¬
конечно малый высший предел, выполняются ограниче-
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО движения 295
яия
6 < || со || < р < бх,
а для положительно-определенной функции — V су¬
ществует точная нижняя грань V и, если она ограничена,
точная верхняя грань V. Из (4.4.27) с учетом нера¬
венств
т
V (Т - t0) < - \Vdt< и (Т - *0)
t-o
определим границы, между которыми заключено Т.
+ + (4.4.28)
Однако предельные значения Т определяются через зна¬
чения V0 и V(T) функции F(co; у, t), которые в общем
случае невозможно вычислить точно. Поэтому прихо¬
дится расширить границы (4.4.28). Оценим для этого
VQ и V(T). Если при t = t0 задано, что гц <1
^ р(г/°, Q(£0))s^r|, то можно найти такие б0 и Ро» что
б о IKII ^ Р°, и такие 10 и L0, что l0 ^ F0 ^ L0. Нахо¬
дим также значения J и х, ограничивающие ||со||:
6 < II w II < « ПРИ Р(У, й(0) = У, t > to,
и такие I и L, что I ^ V(t) ^ L при р(у, ii(t)) ™ у,
t ^ tо, б <1 [| со || ^ к. Следовательно, неравенства
(4.4.28) могут быть заменены следующими:
т^т^г, T1 = t0 + 1^, T' = t0 + L^=±.
Величина Т может быть вычислена точно в случае, ког¬
да функция р не зависит явно от у и производная вектор-
функции со, вычисленная в силу системы (4.4.1), также
является вектор-функцией, зависящей явно только от
о) и / [61, 66—68]:
(5 = Н(со; t). (4.4.29)
При этих условиях со(Г) может быть определена как зна¬
чение решения системы (4.4.29) при t — Г, соответст-
296 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
вующее начальному условию со(t{)) = со0. Следователь¬
но, Т определяется как корень уравнения
Р(у(Т), ЩТ)) = е.
Пример 3. Вернемся к примеру 2 (стр. 292).
Так как функция V и вектор-функция со = (сох, со2)
допускают бесконечно малый высший предел, то, сог¬
ласно теореме 5, многообразие Q(t) устойчиво асимптоти¬
чески.
Для определения значения t — Т, при котором до¬
стигается равенство
р(у(Т), Q(Т)) = е, (4.4.30)
вычислим производные функций (гц и со2 в силу систе¬
мы (4.4.23):
сох = — 2со,, со2 = сох — 2со2.
Решая полученную систему найдем, что
сох (Т) = со^~2Т, со2 (Т) = (со0 -|- со°Т) е~2Т. (4.4.31)
Подставляя (4.4.31), (4.4.24) в (4.4.30), получим уравне¬
ние для определения искомого Т:
(око»2 + Р(002 -J- 2Рсо°со°Г + рсоfTz) е-*т = в.
Теорема 6. Интегральное многообразие Q(£)
дифференциальных уравнений (4.4.1), обладающее ком¬
пактной окрестностью £2^(0, неустойчиво, если можно
подобрать функцию F(co; у, t) не обязательно знако¬
определенную, которая стремится к нулю вместе
с р(y(t), Q (t)) и обладает знакоопределенной производной
F(co; г/, t), вычисленной в силу системы (4.4.1), при этом
функция F(co; у, t) и вектор-функция со (у, t) допускают
бесконечно малый высший предел, и если для сколь
угодно малого б < 6Х функция F может принимать
в области
НК6, i/eQh(t), t^t0,
знак F(co; у, t).
; 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 297
Доказательство. Полагая F(co; у, t) оп¬
ределенно-положительной в области К, будем иметь, что
V(t) F0 при всех t t0. Согласно условиям теоре¬
мы существует такое у0 и любому б соответствует та¬
кое у, что при р(у°, Q(t0))fZy будет || со01| <6 и
F(o)°; у0, ^0)>0. Так как V (со; у, t) допускает бесконечно
малый высший предел, то из неравенства V (со; у, t) >> F0
вытекает существование такого 6(F„), что ||со||^>б
при всех у е й/г (t).
В силу определенно-положительности F(co; у, t) су¬
ществует такое V, что при .||со|| > б, уЕ
t ^ выполняется ограничение F Z' 0, но тогда
из равенства
t
V(t) = V0 + ^V(t)dt
L
следует, что V(t) F0 + Z'(Z — Z0).
Из последнего неравенства видно, что F(Z) при неко¬
тором конечном t станет равной числу L, которое опре¬
деляется как точная верхняя грань функции F в области
К. А из равенства V(t) = L, согласно тому, что функ¬
ция F и вектор—функция со допускают бесконечно ма¬
лый высший предел, соответственно следуют неравенства
|| со || ^ бх и p(y(Z), Q{t)) ^ h, откуда заключаем, что
существует такое конечное Z, при котором точка y(t)
покинет множество Qh (Z).
Из доказательства теоремы 6 также вытекает спо¬
соб определения значения t = Т, при котором достигает¬
ся равенство
р(у(Т), Q(T)) = е<Л,
если
Р(У°, Q(h)) = т] < е.
Для этого, аналогично предыдущему случаю, опреде¬
ляются такие б и х, что б ^ ||со|| % < бх при у ЕЕ
ЕЕ Ге(Г) и затем такие Z и L, что Z ^ F(27) ^ L при б ^
|(^|| ^ и, уЕЕ'ГДГ). Далее определяются б'и W такие,
что 6' ^ ||со||^ W при г] ^ p(y(Z), Q(Z))^ е, t ^ Z0, и такие
Г и L\ что V ^ F(Z) ^ 2/ при б' ^ ||со|| ^ к',
298
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
у ЕЕ Qe_rj(£)i t £0- Используя эти оценки, из равенства
(4.4.27) получаем пределы, ограничивающие число Т:
^Д04-«0<г<Е=71!? + го
или
если известно, что Цх ^ р(у°, Q(/0)) ^ Л*
Если функция р(у, Q(l)) не зависит явно от у и про¬
изводная (о вектор-функции со, вычисленная в силу
(4.4.1), может быть выражена только через со и t, то
со = i? (со, t)
и значение Г может быть вычислено по известному со0.
Пример. Система
Ух = ^;УЛУ\ + У\ — (2+ sinn/,)]2 - i/2)
У2= \;УАу\ + у1 — (2 + sinn012 + i/i
имеет интегральное многообразие
а = г/£ ■+• У'\ — (2 + sin я*) = 0. (4.4.32)
Пусть
to= 0, р(г/, fi(*)) = INI = СО2, V = (0, р(у°, Q(0)) = г).
При этом V —■ со = (г/2 _и урсо2 ^>0 в области ||со|| <
<< 1, 0 < ^ ^ у2 + у2, и удовлетворяются все ус¬
ловия теоремы 0, вследствие чего интегральное много¬
образие Q(2), определяемое уравнением (4.4.32), неус¬
тойчиво. Вычислим пределы, между которыми заключе¬
но значение Т, при котором достигается равенство
р(у(Т), Q(T)) = е< 1.
В промежутке 0 ^ t ^ Т со2 подчиняется ограниче¬
ниям
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 299
Используя выражения (4.4.32), (4.4.33), получим, что
Т1 (1 - fix V < е (3 + Уё), V (Т) = е, F0 = г].
Подставляя эти значения в равенство (4.4.27), будем
иметь
с *1 ^ J <^- с Г)
(3 + V е)е ^ ^ (1 — "Кв) rj
Теорема 7. Интегральное многообразие Q(t)
дифференциальных уравнений (4.4.1), заданное уравне¬
ниями (4.4.2), где вектор-функция со допускает бесконеч¬
но малый высший предел, и обладающее компактной
окрестностью Qfl (t), неустойчиво, если можно найти ог¬
раниченную функцию И(со; у, t), производная которой
У(со; у, t), составленная в силу системы (4.4.1), приво¬
дится к виду
V = чУ W, (4.4.34)
где х — или положительная постоянная, или такая по¬
ложительная функция времени £, что интеграл
/
/о
неограничен и растет вместе с t, a W или тождественно
равна нулю, или является знакопостоянной функцией
W (о; у, t), и если в последнем случае существует такое
сколь угодно малое 6 0, что при выполнении условий
li 0) II у сЕ (/), /' ^ £0,
функцию V можно сделать величиной одинакового зна¬
ка с W.
Доказательство. Рассмотрим сначала слу¬
чай, когда W не равна тождественно нулю и является
знакопостоянной функцией. Так как вектор-функция оз
допускает бесконечно малый высший предел, то сущест¬
вует такое /;> 0, что для всех у £Е £2/г(г) и t ^ t0
выполняется неравенство || со|[г^ <\. В силу того, что
функция V ограничена и W знакопостоянна (например,
•300 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
положительна) при всех со, у, г, удовлетворяющих
условиям
II03II ^ ^1» у S &h (0* ^ ^
имеют место ограничения
|У(со; у, 0| < L, W(a; у, 0 > 0.
Рассмотрим какое-нибудь решение у = y(t) системы
(4.4.1), начинающееся с точки у{) ЕЕ Q}L(t0), и покажем,
что при некотором t t0 точка у —- г/(0 достигает гра¬
ницы области Qe(0, где е — произвольное положитель¬
ное число, удовлетворяющее условию ц < е h.
Вдоль этого решения вектор-функция со и функция V яв¬
ляются функциями аргумента t:
сo(t) = сo(y(t),t), V(t) = F(co(0, г/(0» 0»
и в начальный момент выполняются равенства
ю(*Л *о) = <*Л *о) = Вн¬
если у0 ЕЕ Qri(^o) ci: "£ (t), то в силу непрерыв¬
ности решения у — y(t) системы (4.4.1) функция
Р = Р&(*)) 1]РИ ^ достаточно близких к t0, будет
принадлежать Qe(£). Но для значений y(t), принадлежа¬
щих Qe(0? вектор-функция со будет ограничена по норме
некоторой постоянной б ^ 61? т. е. ||со|| ^ б, и функ¬
ция W для со, у, t, удовлетворяющих условиям
II0311^^» уе^/i(0»^^
будет неотрицательна: Щсо; г/, г) 0. Учитывая это,
из равенства (4.4.34) получим, что
И-%Н>0, (4.4.35)
где V рассматривается как функция t.
Замечая, что по условиям теоремы надлежащим вы¬
бором вектора со0, а следовательно и у0, величину V0
можно сделать положительной, будем рассматривать
только такие решения у —- y(t) системы (4.4.1), кото¬
рым соответствуют величины у0, удовлетворяющие,
кроме условия у0 ЕЕ Q-^o), еще неравенству V0 > 0.
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 301
Тогда, если в промежутке от t0 до ty(t) ЕЕ йе(0, т. е.
выполняются условия
|| со ||^ б, уЕЕЙ/г(/), t £0, (4.4.36)
то из неравенства (4.4.35) будем иметь, что
t
1 X (0 м
V>V0e°
Но при значениях со, у, t, выбранных согласно (4.4.36),
функция V ограничена некоторым числом Л, зависящим
от б, которое в свою очередь зависит от в. Следователь¬
но, справедливо неравенство
1
5 Х(/)сН
F0e'° < А. (4.4.37)
Но так как левая часть этого неравенства при V{) > 0
есть положительная монотонная функция, то сущест¬
вует такое Т > 10, что при t > Т неравенство (4.4.37)
обратится в неравенство противоположного смысла.
Следовательно, условия (4.4.36) должны нарушаться,
т. е. при t > Т будет ||со|| б. А так как вектор-
функция со допускает бесконечно малый высший пре¬
дел, то при t > Т это приведет к неравенству р(y{t),
Q(t)) > е.
Этим самым для случая \¥ф0 теорема доказана. Если
t
W = 0, то V = откуда получаем, что V — V0el"
А тогда при всех у0 ЕЕ ЙГ1(£0) имеем неравенство
t
Ц X(t)rlf
\Vo\e*' <Л,
из которого, предполагая, что V{) =/= 0, аналогичными
рассуждениями опять делаем заключение о неустой¬
чивости многообразия Q(£). Теорема полностью дока¬
зана.
302 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
Из доказательства теоремы опять можно получить
пределы, между которыми заключено число Т. Полагая,
что х ^ ^ Zi из условия
t
J X(t)dt
V(T) = V0eu
с учетом неравенств I ^ V(t) ^ L и !() V0 ^ L0 бу¬
дем иметь
III. Построение систем дифференциальных уравнении
устойчивого движения по многообразию
с компакп ной окрестностью
Используя теоремы 4— 7, выясним условия, которые
следует наложить на произвольные функции, содержа¬
щиеся в правых частях системы (4.1.20), чтобы ее интег¬
ральное многообразие й(£), определяемое уравнением
(4.1.1) и обладающее компактной окрестностью, было
устойчиво, асимптотически устойчиво или неустойчи¬
во и чтобы решения этой системы, начинающиеся из
заданной т]-окрестности многообразия й(£0), ни
при каком t у> t0 не покидали заданной области Qz(t)
или чтобы эти решения достигали границы задан¬
ной области Q£ (t) при определенном значении аргу¬
мента t — Т.
Предположим, что функщш сог = со,, (у, t) (г = 1,...
..., s) и все их частные производные первого порядка
непрерывны и ограничены при всех у ЕЕ G, t ^ t0, где
G — некоторая односвязная область пространства
У7М и что вектор-функция со допускает бесконечно ма¬
лый высший предел. Функции i?r, Рт (г = 1, ..., s;
т = s + 1, ..., п) будем выбирать так, чтобы они удов¬
летворяли условиям теоремы существования и единст¬
венности решения системы (4.1.20) в области К±: ||со|| ^
^ б1? у ЕЕ G, I ^ t0 (или в области К\ || со | ^ б1? y^Qh(t),
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 303
t t0) и чтобы функции RT(r 1, s) допускали
бесконечно малый высший предел.
Произвольные функции Rr(cо; у, t) (г = 1, s),
содержащиеся в правых частях системы (4.1.20),
и функцию F((o; у, t) будем искать в виде конечных
или бесконечных рядов относительно переменных
N
Rr = 2 /к,...ft, (У. 0 «I* • • • , (4.4.38)
7t’i+.. .+fcg=l
Nt
v S co^, (4.4.39)
/u+...+/fs=2
где — целые неотрицательные числа, N и —
некоторые целые числа илиоо, /£ А. (у, t) (г = 1, 5;
4" ••• ~Ь = 1, 2,..., N), bki»»-ks (у, 0 (^i 4~ ••• 4“
-f- fcs = 2, 3,..., Л7!) — непрерывные, ограниченные при
всех у eG, t tо функции. Функции /?г и функция
F допускают при таком выборе бесконечно малый выс¬
ший предел.'-
Теорема 8. Произвольные функции (4.4.38),
содержащиеся в правых частях системы (4.1.20), мож¬
но выбрать таким образом, что производная F(co; у, t)
функции (4.4.39), составленная в силу системы (4.1.20),
будет знакоопределенной функцией требуемого знака
и будет допускать бесконечно малый высший предел,
каковы бы ни были непрерывные, ограниченные при
всех у GE G,. t ;> t0 функции Рт (т = s + 1,..., п) и не¬
прерывные, ограниченные вместе со всеми их частными
производными первого порядка при всех у g G, ( t0
функции bkt ... ks(y, t).
Для доказательства теоремы вычислим производную
функции У(со; у, t) в силу системы (4.1.20):
F(<o; y,t) = 'Z юг + 2 щ- Уз + (4.4.40)
Г=1 r j=1
304
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
Учитывая (4.1.20) и равенства сог = у, t), запи¬
шем равенство (4.4.40) в виде
и подставим в правую часть равенства (4.4.41) значения
(4.4.38), (4.4.39) функций Rr(r = 1, ..., s), V. Получим,
У= 2 (4.4.42)
Г=1 /hi + ... + /Cs1- 1,
friS+...+fce2=l
/сц, ..., ksl, к12, ks2 — целые неотрицательные числа,
через W&) (о; у, t) обозначены члены, содержащие пере¬
менные со1, (o.s в степени не ниже третьей.
При соблюдении условий, наложенных на функ¬
ции со;., Рт, fkx... ks^ bnii ... ms знак V при достаточно
малой || со || совпадает со знаком первого слагаемого
правой части равенства (4.4.42), которое представляет
собой квадратичную форму относительно со^ ..., cos с
r,j=1 ' ■
(4.4.41)
что
h’i+... +/>’ — 2
где
4,...!s = ckl
m=s-\-l
п
(
dbk,...k(V'
■I я7 ’
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 305
коэффициентами, зависящими от переменных у, t и s'*
произвольных функций f /п... us (г = 1, 5; кг + ...
... + к8 = 1).
Эти функции можно выбрать так, чтобы при всех
у EH G, t tо выполнялись условия Сильвестра опреде-
ленно-положителъности (отрицательности)
^20...0 (У. 0>е>Е
2^20 . 0 (У) 0^1Ю...о(У) 0
^110-..о
(г/, 2d0,0...о О* О
2<^20. . О 0/’ 0 ^11..0 (.У it)
dn...Q(y,t)2d0.2...0(y,t)
d,
i (У, О
.0. о
квадратичной формы
• • • 2<200...2 ((/, О
2 dk,."ks(y, О®?1 • • • со\
е>0,
> е>0
(4.4.43)
/й+. . . +/>' „—2
В силу того, что коэффициенты квадратичной формы
(4.4.43) и форм более высокого порядка W(3) (со; у, t) яв¬
ляются ограниченными при всех у (ЕЕ G, t ^ t0 функция¬
ми, то V допускает бесконечно малый высший предел.
Этим самым теорема полностью доказана.
Выбирая функцию 7(оз; у, t) знакоопределенной и под¬
бирая затем функции Z?r(co; у, t) (г = 1,..., s) так, что¬
бы ее производная Ё(со; у, t) была знакопостоянной или
знакоопределенной, можно добиться того, чтобы интег¬
ральное многообразие системы (4.1.20) было устойчиво,
асимптотически устойчиво или неустойчиво.
Накладывая на функцию F(co; у, t) дополнительные
условия и подбирая по ней соответствующим образом
функции Rr(со; у, t) из множества (4.1.20), можно выде¬
лить такие системы, решения которых, начинающиеся
из заданной окрестности Qr,(£0) многообразия Q(t0),
ни при каком t tо не покинут заданной области
Qe(t) или достигнут границы области Qe (t) при значении
t = Т.
Методика построения систем дифференциальных
уравнений, решения которых при заданных ц и е удов-
306
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
летворяли бы условиям у0 ЕЕ £2Дг0)» y{t) ЕЕ (0» состоит
в следующем. Берем произвольную постоянную симмет¬
ричную матрицу В{), удовлетворяющую условиям Силь¬
вестра и имеющую наибольший корень характеристи¬
ческого уравнения р0, и подбираем элементы симмет¬
ричной матрицы В(у, I) так, чтобы они удовлетворяли
условиям Сильвестра при всех у ЕЕ G, i > t0 и выпол¬
нялись равенства
inf inf jxr (у, t) = p= Д— (х0,
г y^G -0
t>t о
В(у\ t0) =~- В\
В частности, в качестве В (у, t) можно взять ту же
матрицу £°, если ее наибольший корень р0 связан с
наименьшими ц0 равенством
ц0 = ^-Цо- (4.4.44) ■
Определив таким образом функцию Б(оз; у, t) в виде квад¬
ратичной формы относительно со1?..., cos
V = (со, В(у, t)(a),
подбираем функции В,.(со; у, I) (г = 1,..., s) так, чтобы
ее производная V была знакопостоянной или знакоопре¬
деленной отрицательной.
Если V является определенно-отрицательной, то вы¬
полняются все условия теоремы 5 и интегральное много¬
образие Q(t) является асимптотически устойчивым.
Для того чтобы решения у = y(t) системы (4.1.20), на¬
чинающиеся из заданной области QTi(t0), при данном
значении t = Т входили и в дальнейшем всегда оста¬
вались в заданной области QY(£), необходимо наложить
дополнительные условия на функцию V и Rs.
Для определения этих условий обратимся к неравенст¬
вам, полученным в п. 2:
^—“^7 Ь ^0
(4.4.45)
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 307
в случае, когда Т задается приближенно
Тг < Т < Г, (4.4.46)
или к равенству
р(у(Т), Й(Л) = У,
когда значение Т задается точно и р(у, Q(Z))ne зависит
явно от у. В первом случае, сравнивая выражения
(4.4.45) и (4.4.46), получаем зависимость между точной
верхней грани и точной нижней грани функций F, F:
L'=Y^l' = Y^i- <4-4-47)
Далее подбираем числа Z, Z0 и L, Ь0 так, чтобы выпол¬
нялись неравенства
Т1 — to Т' — to
и строим функцию F(co; у, t), удовлетворяющую усло¬
вию
Z < F(co; у, Г) < L
при 6 ^ || со || х, у ЕЕ (71), ^ Т Т' (или
z/E;G), где б и х— наименьшее и наибольшее значения
|| ев || на множестве точек у ЕЕ Гу (Г), ^ Т < Г',
и условию Z0 ^ F(со0; г/°, Z0) L0 при ^ р(г/°,
£2(Z0)) < г), б0 < || co,J || < р°, где б0 и (30 — на¬
именьшее и наибольшее значения |[со°|| при ^
<Cp(i/°: £2(^о)) ^ Л- Для построения функции F(co; 1/, t)
можно опять воспользоваться результатами, получен¬
ными в н. 2. При F = (со, В(у, t)со), ||со|| = (со, со) числа
I и L связаны с матрицей В(у, t) посредством формул
I = |л8, L = |ях, Z0 = - L0 — p-oPoi
где
|х = inf inf \ir (г/, Т), ц = sup sup рг (г/, Г),
г f/eG ?• yeG
Т,<Т<Т' Ti<r<T'
^0 = inf (Рт (г/°, <о). Ио= sup ц,. (гД f0),
308 гл. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
а |ыг(г/, Т) (г — 1, 5) — корни уравнения |В(у, Т) —
— р. [ = 0. Таким образом, задача опять сводится к
выбору произвольной матрицы В(у, t) такой, чтобы
I ~ L /о _ La
11 = т ’ ^ = ~ “бГ ’ 1X0 = ТГ'
Далее подбираем функции Rr(r~ 1,..., s) таким обра¬
зом, чтобы удовлетворялись неравенства
V < - V(o>; у, 0 <//
при б' ^ || оз || ^ к', у ЕЕ 6\ где б' и
и' — наименьшее и наибольшее значения [| со || при
(у,О(0)<Ц,
Во втором случае, выбирая вектор-функцию R не
зависящей явно от у и учитывая, что р(у, Q(l)) является
функцией g переменных со и t : q = g(co, г) строим такую
систему 6з = 7?(со, t), решения которой со = со(£), со¬
ответствующие начальным условиям оз(£0) = со0,
ограниченным неравенством ||со°|| ^ б° (где б° опреде¬
ляется по ц, ограничивающему р(г/°, Q(£0))> удовлетво¬
ряли бы условию
q(co(t), t) ^ е при t Г.
От у задачу легко решить, например, полагая Rr =
= 2 //■ /0У/ с соответствующим образом выбранными
3=1
постоянными коэффициентами frj.
Для выделения из множества (4.1.20) систем диффе¬
ренциальных уравнений, имеющих неустойчивое ин¬
тегральное многообразие Q(t) и заданные значения
Pi ^ Л, е> можно опять, полагая
V = (со, В(у, t)co), р(у, Q(t)) = (со, А (у, t)a), ||со|| =
= (со, со),
подобрать матрицу B(y,t) и вектор-функцию R так, что¬
бы V и V были определенно-положительными и выпол-
§ 4. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 309
нялись неравенства
т 1 I — и L — /0
Т1 - to ^ Г'-to ’
Z<F((o;y,r)<L
при б ^ || (о || ^ х, у Gr Г£ (У), Т ^ Г',
(4.4.48)
Г'-*„ ^ 7\-to
при б' || со || ^х', у ЕЕ G, t0^t <. Т',
если Т задается неравенствами 1\ ^ Т ^ Г'. Если
значение 71 задается точно и р(г/, 0(£)) не зависит явно
от у, то неравенства (4.4.48) заменяются равенством
р{у (Т), Q(T)) = е.
При использовании для построения систем теоремы
7 числа I и L находятся из равенств
r1 = <0 + -Lin-^-,r = «o + 4-ln-
h
где х и X — произвольные числа, причем % ^ х> и за~
тем определяются функция V и функция х = Х(0»
удовлетворяющая условиям X ^ X (0 ^ X ПРИ ^ t ^ Т'
и выбирается вектор-функция /? так, чтобы выполнялось
равенство
дУ о s? 0V даг д (S)
л<‘ Zj ТьТГ я/ a,'j
дсо
r= 1 * 7-j=l
dV Д dV
dilm
-s
дщ dt
Д jp
П= 1
an
“аГ-
an
fy/y
+
дгл<?.
Пример. Обратимся к примеру § 2, п. VI. Для
определенности положим в (4.2.20)
Р =
a"xz (Ца>1 + vo)a)
а2 + 2-~
+ ay"(62 + 2Z)/(x,i/,Z),
310
ГЛ. IY. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
где [1, v и т — произвольные постоянные, причем т >
1 иf(x,y,z) — произвольная функция, которая выби¬
рается таким образом, чтобы система (4.2.20) при опре¬
деленных и i?2 не имела особых точек в окрестности
Qh многообразия £2, определяемого уравнениями (4.2.18),
(4.2.19). Примем в качестве G область, ограниченную не¬
равенствами
и определим p(r, Q) (г — вектор (х, у, z) ) и ||со(| форму¬
лами
р(г, Q) - йцО)!2 ■!- а22а>22, ||o>|j =-- +
+ 0322^
где ап, а22 ап — положительные ностоянные.
Выберем функции Rt, Я2 так, чтобы система (4.2.20)
описывала асимптотически устойчивое движение по
многообразию Q и была обеспечена оценка р(г(£), £2)
при всяком t Т ^ Т' и у < г)х < P(r°i ^ 'П-
Зададим некоторые
При p(r, £2) ^ /г, p(r, Q) = у и p(r°, £2) соответствен¬
но будем иметь
В соответствии с (4.4.44) и (4.4.49) получим, что
Из (4.4.51), (4.4.52) следует, что за функцию V может
быть принята || со ||:
e<h,r\ = г, Г< Пг01-
(4.4.49)
6 (^п "I- ^22)
awcioji
(4.4.51)
и положим
I б, Z/Q Ро*
(4.4.52)
§4. ПОСТРОЕНИЕ УРАВНЕНИИ УСТОЙЧИВОГО ДВИЖЕНИЯ 311
Определим по (4.4.47) с учетом (4.4.50), (4.4.52)
V = агД~аД-г. (4.4.53)
аиа2 2 (Tr —to) v 7
Производная функции V в силу системы (4.2.20), оче¬
видно, равна
V = 2(01R1 + 2оэ2Д2. (4.4.54)
. Подберем функции и Т?2 такими, чтобы функция
V была определенно-отрицательной в области ||со|| ^ б,
X2 V2
|—р- >0, z *> 0 и допускала бесконечно малый выс¬
ший предел. Этого можно добиться, полагая
— 2([ix2 + xy2)z<S)x,
В2 = — (ух2 + 0у2)(о2,
где ц, v, т, 0 — положительные постоянные. Подставляя
эти значения в (4.4.54), определим производную
V = — 4((ля2 -f тy2)z&l — (уд:3 -f- 0z/2)(o2. (4.4.55)
Так как функция V и ее производная (4.4.55), вычислен¬
ная в силу системы (4.2.20), удовлетворяют всем усло¬
виям теоремы 5, система
х =
(l'~XZ (Ц03] VC02) | о 771/7 ° I О \ -£ / \
-+ a*ym(b* + 2г)/(ж, г/, z),
. _ _ +°а> ■ _ 4V-. (0> + г.) /(*, у, г),
х2 (a2v(L)2 — . >/2 (b2ft0)2 — 2T2(0i) .
z = -2—r^T- r -
b2 + 2г. 1
-f 2 (b'J — a?) xymf (x, y, z)
будет описывать асимптотически устойчивое движение
по линии пересечения сферы и эллиптического парабо¬
лоида.
Определим теперь по заданным числам (4.4.49)
коэффициенты ц, v, т, 0. Положим
к ^ к _ к D к
Iх — 4а2 ’ Т = ~4Р“ ’ v = ~2а?~ ’ ~ТЯГ *
312
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
где к — произвольная положительная постоянная, и
оценим правую часть выражения (4.4.55) в области
Qe y. Будем иметь
= + -$-)<*+ 1>И|.
Принимая во внимание, что j|co|| > у/а22 и
+ —>0,
- ' а- 1 Ь2 ^ - г а22
где z = inf {zx, z2},
Zl ” ^ V I^T’
_ - Л + у A* + D ,/■“iГ"
2 a2 r 022 ’
2Л - «* - 2„> /IT , 2£ = _ 2b-y^ ,
c=b‘(R‘—t+Vrlt)-l>=yc-
из (4.4.56) получим, что
у>к[*-/^г)(*+')У <4/‘-58>
Число /г определяется как наименьшее значение е, при
котором нарушается второе из условий (4.4.57). При¬
равнивая правые части (4.4.58) и (4.4.53), определим
коэффициент к:
д. А22Л — flllT
«„ (Г - !„)( £ - (/^) (; + <)!•
(4.4.56)
(4.4.57)
§ К. ПОСТРОЕНИЕ УРАВНЕНИЙ УСТОЙЧИВОГО ДВИЖЕНИЯ 313
IV. Определение уравнений устойчивого движения,
по линейному много об разшо
Множество систем дифференциальных уравнений,
имеющих заданное линейное интегральное многообра¬
зие О(г), было построено (гл. IV, § 1, п. V) в виде
-g- =A-4h + f-Ay-=AF\:
где
Уг
у8+г
У =
» У =
•
Ув
Уп
Для выделения из этого множества систем, описы¬
вающих устойчивое или неустойчивое движение по ли¬
нейному многообразию, необходимо выяснить условия
устойчивости или неустойчивости этих многообразий и,
исходя из них, распорядиться произволом, остающим¬
ся в правых частях уравнений системы (4.4.59). Усло¬
вия устойчивости, асимптотической устойчивости и не¬
устойчивости линейных многообразий выражаются тео¬
ремами 9—12. Условия (4.1.3), (4.4.3) — (4.4.5) при
этом предполагаются выполненными.
Теорема 9. Линейное интегральное многообра¬
зие Q(t) дифференциальных уравнений (4.4.59) устойчиво,
если существует определенно-положительная функция
F(cо; у, t), производная которой F(co; у, £), составленная в
силу системы (4.4.59), является знакопостоянной отрица¬
тельной функцией.
Доказательство. Определим прежде всего
точную нижнюю грань 6 нормы ||со|| вектора со = A(t)y —
— f(t) на множестве Г£ (t) точек у, удовлетворяющих ра¬
венству р(у, Q(£)) = в. С учетом (4.4.3)— (4.4.5) имеем
S S п
IIм II = S “г = S Р?2 af.j(t)^ea = 6. (4.4.60)
Т= 1 Г=1 j = l
314
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
Далее из положительной определенности функции V
следует существование такого I, что при
|j(o|j>6, уег.(0. t>4,
выполняется неравенство
V > I > 0.
Так как функция V непрерывна при t = t0, то по лю¬
бому I можно указать такое 60 = 60(Z), что для всех со0 =
= со(г/°, Z0), у0, удовлетворяющих условию
II 0)0 II ^ У° ^ ^в(^о)?
будет выполняться неравенство
V0 = W; у0, t0) < I,
а вследствие непрерывности в области G нормы вектор-
функции со = со(у, t0) по любому 60 << 6 можно указать
такое т], что из неравенства
р(г/°, й(^0)) < г)
следует ограничение || со01| < б0.
Покажем, что при таком определении числа ц будет
выполняться неравенство
р(y{t), Q(Z)) < е (4.4.61)
при всех t ^ t0. Из равенства
V=V0 + \Vdt
имеем, что
V < F0 < I. (4.4.62)
Так как при t = t0 выполняется неравенство
р(гД Q(t0)) < т] < е,
то в силу непрерывности р(y(t), Q(Z)) будет выполняться
неравенство (4.4.61) и при значениях t, достаточно близ¬
ких к t0. Допустим, что в некоторый момент t неравенство
§ 4. ПОСТРОЕНИЕ УРЛТШЕНПП УСТОЙЧИВОГО ДВИЖЕНИЯ 315
(4.4.61) обращается в равенство. Но тогда обязательно
V(t) > Z,
что противоречит условию (4.4.62). Следовательно, ли¬
нейное многообразие Q(t) устойчиво.
Для определения числа т], соответствующего заданно¬
му числу е > г], можно воспользоваться результатами п. 2
с заменой (4.3.19) на (4.4.60). Полагая
V = (со, В(у, t) со),
где матрица В (у, t) удовлетворяет указанным в и. 2 ус¬
ловиям, из равенств (4.4.60), (4.4.20)— (4.4.22) можно по¬
лучить, что
*
р - е.
N
Т е о р е м а 10. Линейное интегральное многообра¬
зие Q(Z) дифференциальных уравнений (4.4.59) устойчи¬
во асимптотически, если можно найти знакоопределенную
и допускающую бесконечно малый высший предел функ¬
цию У(со; 7/, Z), производная которой У (со; т/, Z), состав¬
ленная в силу системы: (4.4.59), является знакоопределен¬
ной функцией знака, противоположного знаку У.
Доказательство этой теоремы является почти дослов¬
ным повторением доказательства теоремы 5. Отличие со¬
стоит лишь в том, что для линейных многообразий при
а ^ р(т/, Q(Z)) ^ h имеет место
б ^ аа ^ ||со|| ^ sha = б1?
что' вытекает из (4.4.3) —(4.4.5)
Для определения значения t = Т, при котором дости¬
гается равенство р(у(Т), Q(T))= е, если Т1Х р(т/°, Q(Z)) ^
г], можно также воспользоваться методом, вытекающим
из доказательства теоремы 5.
Теорема 11. Линейное интегральное многообра¬
зие Q(I) дифференциальпых уравнений (4.4.59) неустой¬
чиво, если можно подобрать функцию У(со; у, Z), не обя¬
зательно знакоопределенную, но допускающую бесконеч¬
но малый высший предел, которая стремится к нулю
316
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
вместе с р (y(t), Q(t)) и обладает знакоопределенной про¬
изводной F(co; у, t), вычисленной в силу системы (4.4.59),
и если для сколь угодно малого 6 <С бх функция V может
принимать в области || со || <6, г/Е й/г (t), t ^ t0, знак V.
Теорема 12. Линейное интегральное многообра¬
зие Q(£) дифференциальных уравнений (4.4.59) -неустойчи¬
во, если можно найти ограниченную функцию F(co; у, t),
производная которой F(co; у, t), составленная в силу си¬
стемы (4.4.59), приводится к виду
V xV -!- W,
где х — Ш1И положительная постоянная, или такая поло-
1
жительная функция времени, что интеграл \ %(t) dt неог-
с
раничеи и растет вместе с t, a W или тождественно равна
нулю, или является знакопостоянной функцией IF(co; у, t),
и если в последнем случае существует такое сколь угодно
малое 6 0, что при выполнении условий ||со|| < б,
t ^ t0, функцию V можно сделать величиной
одинакового знака с W.
Чтобы убедиться в справедливости теорем И, 12 и оп¬
ределить значение t = Т, при котором достигается равен¬
ство р(у(Г), £}(£)) = е <1 &, если р(у°, £2(£0)) ^ Л < е,
достаточно опять с соответствующими изменениями при
определении пределов, ограничивающих ||со||, повторить
доказательство теорем 6, 7 и их следствий.
Задача построения систем дифференциальных уравне¬
ний, имеющих заданное линейное многообразие своим ус¬
тойчивым, асимптотически устойчивым или неустойчи¬
вым интегральным многообразием, сводится к построе¬
ниям, изложенным в п. III.
В частном случае, когда вектор-функция R выбирается
не зависящей явно от у, то для того, чтобы синтезируе¬
мая система имела данное линейное многообразие или дан¬
ное многообразие с компактной окрестностью своим
устойчивым, асимптотически устойчивым или неустойчи¬
вым интегральным многообразием, достаточно соответст¬
венно устойчивости, асимптотической устойчивости или
§ 5. ПОСТРОЕНИЕ ДИНАМИЧЕСКИХ СИСТЕМ
317
неустойчивости тривиального решения системы
со = R(со; t).
Так, устойчивости или неустойчивости линейной сис¬
темы (4.1.26) можно добиться соответствующим выбором
произвольной постоянной матрицы Л.
§ 5. Построение динамических систем
с .заданными свойствами на плоскости
В § 1 при определении функций соr(y,t) (г = 1,..., s)
предполагалось, что каждая из них описывает только од¬
ну гиперповерхность Qr(t) в пространстве Yn.
Это предположение было вызвано лигиь стремлением
к ясности в постановке задачи и к упрощению изложения
метода ее решения, а также анализа построенной системы.
Задача может быть поставлена шире: построить множество
систем дифференциальных уравнений, имеющих заданные
интегралы
со,.(г/, t) = 0 (г = 1,..., 5),
где соr(y, t) — соrl(y, t), ..., co7.S/t (у, £), причем на некото¬
рые гиперповерхности Qrj(t), определяемые уравнением
о)rj(y, t) = 0, накладывается требование ее устойчивости
или неустойчивости.
В настоящей главе будет построена динамическая си¬
стема на плоскости с заданными свойствами.
Пусть равенства
со;(я, у) ~ 0 (i = 1, ..., п), (4.5.1)
где со;(сг, у) — непрерывные, обладающие непрерывными
частными производными доi-Jdx, dcoJdy функции, опреде¬
ляют в некоторой области G плоскости хОу совокупность
гладких кривых Г; (i = 1,..., s) и отдельных точек
( 5coi \2
A] U = 5 + 1, •••, п)- Будем предполагать, что ( ) +
,,,.^4= 0, если со, (х, у) = 0 есть уравнение кри-
+ ' *./
вой
/ д(0. У ( д(й. у
’ и1“зГ7 + ®-=о ==0> когда функция со, (х, у)
318
ГЛ. IV. ПОСТРОЕНИИ УРАВНЕНИЙ ДВИЖЕНИЙ
обращается в нуль только в отдельной точке Aj(xj0,yj0). Тре¬
буется построить множество систем дифференциальных
уравнений
х = Р(х, у), у = Q(x, у),
для которых кривые Г* являются интегральными и точки
Aj суть ее особые точки.
Введем в рассмотрение функцию
где (о0 ее 1, и построим множество систем дифференциаль¬
ных уравнений, имеющих заданный интеграл со = 0, в
виде [34]
где F-l и Р2 — непрерывные функции от х и у, обращаю¬
щиеся в нуль вдоль кривых Г, и в точках Aj, М —
произвольная непрерывная функция от х и у. При этом
очевидно, что точки A j являются особыми точками систе¬
мы (4.5.2). Для доказательства того, что кривая Г;
является интегральной кривой системы (4.5.2), вычислим
производную dcoildt в силу системы (4.5.2). Она будет
равна
Правая часть равенства (4.5.3) обращается в нуль вдоль
кривой со; = 0. Действительно, Рг и F2 равны нулю вдоль
Гь а выражение, записанное под знаком суммы, содер¬
жит множитель со;,. Если кривые и Гт (1 ^ I, т ^ s)
дересекаются в точке И*т, то в этой точке
СО = COqCOj... соп,
(4.5.2)
1^1
COoGV . .
дсо, дсо. дсо, дсо.
Li 1.1
со;+1. . . (0„. (4.5.3)
1 \ дх дц ду дх
§ 5. ПОСТРОЕНИЕ 7 ДИНАМ И ЧЕСКИ X СИСТЕМ
зю
и она является особой точкой системы (4.5.2). Для того
чтобы на кривых Гt не было точек покоя и особых точек
системы (4.5.2), отличных от точек А[т, функция М =
= М(х, у) не должна обращаться в нуль на этих кривых.
Если кривая замкнута и не содержит особых точек, то
выбором функций jFjl и F2 можно добиться того, чтобы эта
кривая была устойчивым, неустойчивым или полуустой-
чивым предельным циклом системы (4.5.2). Изложенные
положения могут быть использованы для построения ди¬
намических систем с заданными свойствами на плоскости.
Пусть
(О = o)0(o1...a)po)iJ+1...coQcoQ+1 ... согсог+1 ... (о8ю8+1.
Здесь
со0 == cos+i = 1, C0i = Д- (и\ + v\ — г*) (i = 1. . , q),
ri== 0(4 - 1, . . . ,p), ri> 0(4 - p + I, . . q),
Щ - aux f bity j- cu, Vi == au.r -j- bi2y -j- cH,
At auhi — а-ьФгI 4= 0 (j = 1, • . . , q),
(0j = aj.v - bjij + Cj (/ = g -[ 1, . . . , r), co)£ = щ (.r, y)
(k = r f s).
(4.5.4)
Уравнения Ю; == 0 при i = 1, p ])авносилы1ы уравне-
ни ям пары прямых
щ — 0, Vi — 0,
определяющих в пересечении точку И?-; при i = р 1,...
..., q получаем эллипсы Г* и при i = q 4- 1,..., г — прямые
Ь\. Будем считать, что каждая прямая Lj(j ~ q -f- 1,..., г)
пересекается по крайней мере с одной прямой Ьт (т =
= q + 1, ..., г; т =1= j) в точке Ajm, через которую не прохо¬
дят прямые, отличные от Lj и Ьт, не пересекается ни с
одной Г| и не проходит ни через одну точку А-п что кри¬
вые Гi не пересекаются между собой, а также не прохо¬
дят через точки Аг и что все точки А-ь различны. Равенст¬
ва Ю/Ля, у) = 0 (к = г + 1, ..., $), где сок(х, у) — непре¬
рывные, обладающие непрерывными частными производ¬
ными по обоим аргументам функции, определяют кривые
320
ГЛ. TV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
ф/г, которые не имеют общих точек с кривыми Г, и не
проходят через точки А}.
Требуется построить множество систем дифференци¬
альных уравнений, имеющих особые точки типа фокус
или центр в точках Аи предельные циклы (устойчивые,
неустойчивые или иолуустойчивые) Г*,' особые точки типа
узел или седло в точках Ajm и сепаратрисы ф,{. Под сепа¬
ратрисами будем иметь в виду граничные кривые, разде¬
ляющие области, заполненные траекториями разных типов.
Решение задачи будем искать во множестве систем диф¬
ференциальных уравнений определенных структурой (4.5.2),
где М (х, у) =f= 0 в области G и функции Fx и F2 выбраны в
виде
^ / dco, dcoI \
F1 = Ф >j (о0о)|. . . о,-! ^а, + р, -щ-) сот. . . (о6,
Г
^ / dco, dco \
F2 = Ф 2j со0со, . . . со1_1 (j, -у— + б/ -у- ) 0)/+1. . . со,.
(4.5.5)
Здесь
Ф = F (х, y)iо,мЛ ... со?, (4.5.6)
a F (х, у) — произвольная непрерывная функция, отличная
от нуля в области G. Будем иметь систему
VI I ^со/ д(й, \
X = Ф 2i «0«1- • • «/-1 I Ctl -ftr + ft -gr- ) W/+L • • • —
l-=l
^ dco >
— M 2j w0“i- • • C0'+l • • • (0»+l’
-
^ ^ / dco, dco \
У = ф 2j W0C0x. . . co,_L у -r 6, -y J co/+l. . . -f
Sdco у
OJoCOj^. . . CO;-! ft>, +1 . . . C0S+1.
(4.5.7)
§ 5. ПОСТРОЕНИЕ ДИНАМИЧЕСКИХ СИСТЕМ
321
Как было отмечено выше, система (4.5.7) при произволь¬
ных а/, р/, у/, б; имеет особые точки A -L и интегральные
кривые Г;. Покажем, что за счет выбора коэффициентов
aji Ру> Ту» в у (7 ="= (7 + 1» •■•» г) можно добиться того, чтобы
и прямые Lj были интегральными прямыми этой системы.
Вычислим для этого производную dj)jlclt в силу системы
(4.5.7). Она будет равна
г
т VI ( док дх. дс о7 Зсо:
(IV = Ф 2| Л аг -JJ— -1- 3, ^ —J I
Z I
З.с З.г 1 ^ 5// З.г
Зац dcQj dent дсо„
ъ ~дГ ~w + di~djr^rl ■ ■ с0* +
г>
-|- М 2 «о- • • Щ-1 (
1=1 v
Зоц За). 3coz За).
3// 3// 3# у ^+i* ws+i
Отсюда видно, что для того, чтобы правая часть равенства
содержала множитель со у, необходимо коэффициенты
«л Рл 7л М; = (М- 1, г)
подчинить условиям
Е = — Tj (/ = Q + Г •••, г).
Следует отметить, что к функциям Fx и F2 могут быть
добавлены члены, содержащие в качестве множителей бо¬
лее высокие степени оц, ..., cos. Коэффициентами а*, р^,
yh бi можно распорядиться так, чтобы система (4.5.7)
имела заданные особые точки и предельные циклы устой¬
чивыми или неустойчивыми.
Исследуем поведение решений системы (4.5.7) в окрест¬
ности точки А±. Покажем, что в точке Аг система (4.5.7)
имеет в зависимости от выбора аъ р1? у15 Ь1 устойчивый или
неустойчивый фокус или центр. Учитывая, что дщ/дх и
ды^ду линейны относительно хир сох мало в окрестности
точки П1? систему (4.5.7) в рассматриваемой окрестности
можно заменить линейной системой
х = [ф1а.1^- + (ФА-М1)^
У = [(Ф1Г1+ -!- ФА
СО ,
(4.5.8)
со'
11 А. С. Галиуллин
322
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
где Фх, М1 и со' соответственно значения функций Фи М
и произведения со2... cosb точке Аг. Так как функции Ф,
со2, cos не обращаются в нуль в точке Аъ то постоянные
Фх и со' не равны нулю.
Имея в виду, что сох — положительно-определенная
функция, вычислим ее производную в силу системы (4.5.8).
Она будет равна
со
а,
5W1 ]2 + (Pi + Гг) + «1 (-я-Г-)2] Фг«'.
дх j 1 vri 1 ii; дх дц 1 W1 \ dif
(4.5.9)
Постоянные осх, рх, у1? можно выбрать так, чтобы выпол¬
нялось равенство
дон
_ . дац \2 /Q ч дон 3(01
ос, (-5— ] + (Pi + Ti)
дх
ду
f Si
ду
ФхСо' = ^цССЦ
где — произвольная постоянная. Заменяя «ц его выра¬
жением (4.5.4) и учитывая, что
Зон
дх
— all^l a12vh
dcoi
ду
путем приравнивания коэффициентов при
получим условия, которым должны удовлетворять ах, рх»
Yi. Sx:
aiiai + а11^ц (Pi + Ti) + SiiSi = "ф~т- *
гаца^аг. + (anbl2 + anblt) (Pi + Ti) + 2ЪпЪ1ф1 = 0,
A,i
#12а1 + а12^12 (Pi "T Tl) ^12^1 — ф1(1)/ •
(4.5.11)
Условия (4.5.11) представляют собой систему линейных
однородных уравнений относительно переменных ах, Pi +
+ Yi, б1? которые всегда разрешимы. При этом одна из
переменных может быть определена произвольно. Зада¬
ваясь и учитывая, что
2
(2ц
2 а11а1
2
#12
aii^ii
#11^12 “Г #12^11
#12^12
Ь2п
2^11^12
Ъ\2
= A?=f 0,
§ 5. ПОСТРОЕНИЕ ДИНАМИЧЕСКИХ СИСТЕМ
323
из уравнений (4.5.11) можно определить аъ ^ -f
через Следовательно, выражение (4.5.9) может быть
записано в виде
и, следовательно, при ‘> 0 точка А1 есть неустойчивый
фокус, при = 0 — центр и при <С 0 — устойчивый
фокус. Нетрудно убедиться в том, что при выборе а1? рх,
Y1? б1? согласно (4.5.11), характеристическое уравнение
системы (4.5.8) имеет комплексные корни с вещественной
частью, равной Действительно, переходя с помощью
формул (4.5.4) от переменных х, у к переменным ии vx
и учитывая (4.5.10), заменим систему (4.5.8) следу¬
ющей :
Рассмотрим теперь интегральные кривые системы (4.5.7),
расположенные в окрестности кривой 1\.
Покажем, что выбором коэффициентов ah |3Ь у*, 6*
предельный цикл Г* также можно сделать устойчивым или
неустойчивым. Рассматривая решения
системы (4.5.7) как динамическую систему в пространст¬
ве Е2 и предельный цикл Г* как инвариантное множество
по отношению к этой динамической системе [37], определим
условия устойчивости и неустойчивости этого предельно¬
го цикла. Для этого составим функционал
сох —
(4.5.12)
где \ii = о/Л, (^Ф1 ^ t-> ^1 -f , а характеристическое
уравнение системы (4.5.12) имеет корни
кг = ф- щ19 х2 = — i^.
X - X (х0, у о, t), У = У (х0, у0, t)
v =
11*
324
ГЛ. 1Y. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
и вычислим его производную в силу системы (4.5.7).
Она будет равна
( 9со. \2 9(0. 9(0, л / 9м. \-
ai\~dr) + ( ‘ + Ti) ~дГ "ду~ + 6i (~У J
х
г
VI / 9(0, 9(0. 9(0,
Хфмл- • . С0;_!С0т. . . (О, + 2j (а« -gj- + Рг -щ- X
I =^=г
9ш. 9(0. 9(0. 9(0, 9(0. \
х ~~а^Г ^ “ai aj) I- 1 ~ду а^Д) х
_ J-i ( дсо} 9(0. 9(0. 9(0, \
X ФсОоСО,. . . (0^(0,+1. ..ffl.+ ^__L-_i--_jx
X Л/ю/о^ . . . . (Ds+1). (4.5.13)
Выберем ОС/, (5/, у, б/ аналогично вышеизложенному так,
чтобы
/ 9(0. \2 9(0. 9(0. / 9'со. \2
а* ("э^-) + + Ti) “a^ ijT + 1 (~дТ) = Xi ^ + Г;)’
(4.5.14)
где X/— некоторая постоянная. Учитывая (4.5.14) и за¬
меняя Ф его выражением (4.5.6), равенство (4.5.13) можно
записать в виде
V = [Xjfi (X, у) -I- gi (X, i/)](02i -ИЕ (4.5.15)
где
h (х, у) = . . CV-4+1- • • . . . о)SF (x, у),
gi(x,y) = Л/(.г, г/) 2 (
I -I '
9(01 9(0. 9(0. 9(0 L
I х ^ дх ду дх ду
X С00. . . (Of-iCOz+i. . . . . oy+i,
Qi — совокупность членов, имеющих множитель со/. Из
(4.5.15) видно, что знак dVlclt в достаточно малой е-окрест-
ности S (1\, в) кривой совпадает со знаком выражения
Kfi {х, у) + gi (х, у)- (4.5.16)
§ 5. ПОСТРОЕНИЕ ДИНАМИЧЕСКИХ СИСТЕМ
325
Но так как функции fi (х, у) и g{ (х, у) непрерывны и
/г (#, у) ие обращаются в нуль ни в одной точке кривой Г*,
то существуют такие е > 0 и щ (е), N\ (е), что в области
S (Гь е) функции fi (х, у) принимают значения только
одного знака и выполняются неравенства
\h (х, г/)1 > пи \gi {х, г/)| < Ni.
Отсюда вытекает, что если будет удовлетворять неравен¬
ству
|4>-т-’ (4-5-17)
г
то знак выражения (4.5.16) будет совпадать со знаком его
первого слагаемого. Следовательно, при выполнении ус¬
ловий (4.5.17) и А,j/г (х, у) 0 ('k-Ji (х, у) > 0) производ¬
ная dV/dt отрицательна (положительна) всюду в S (Г*, е) и
равна нулю на Г*.
Равенство |оц (х, у)\2 = h2 при произвольном доста¬
точно малом h > 0 представляет в области S (Гь е) се¬
мейства эллипсов
(х, у) = + h И СО; {х, у) = — h,
зависящих непрерывно от параметра h и обращающихся в
Tj при h = 0. Как бы ни было мало положительное число
гг С е, можно всегда указать такую величину hx, что
[ со г (#, у)]2 для любой точки А (х, у), расстояние
р (А, Гг) которой до больше В качестве такого hx мож¬
но, например, взять inf [оц (х, у)]2 на совокупности точек
(х, у), расположенных на расстоянии ех от кривой Г*. Да¬
лее, для любого сколь угодно малого h2^> 0 можно указать
такое е2 > 0, что для любой точки А (х, у), расположен¬
ной в области S (Гг, е2) будет [со* (х, у)]2<С h2. В качестве
такого h2 можно, например, взять suptcoi (х, у)]2, на сово¬
купности точек (х, у), расположенных на расстоянии е2
от кривой Г;. При Xifi (х, у) < 0 и | Xt \ > Nilrii функция
1щ (х, у)]2 убывает вдоль любого решения
х = х (х0, у0, /), у = у (х0, у0, t),
расположенного в области £(Г*, е), и [сщ (х, г/)Р -> 0 при
£ -f оо. Следовательно, при выполнении условий (4.5.17)
326
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
и Xifi (х, у) < 0 удовлетворяются все необходимые и до¬
статочные условия асимптотической устойчивости ин¬
вариантного множества [37] и рассматриваемый предель¬
ный цикл будет асимптотически устойчивым.
Пусть теперь выбрано так, что
hfi (*, У) + gi (х, у) > Vi > О,-
где Vi — некоторая постоянная. Тогда производная V
может быть представлена в виде
V = vtV + W,
где
W = [Xifi (X, у) + gi (х, у) — Vj] C0i2 + Qi
есть неотрицательный в области S (1\, е) функционал. Так
как функционал V ограничен и У )> 0 в S (Г*, е), то оче¬
видно, что выполнены все необходимые и достаточные ус¬
ловия неустойчивости инвариантного множества Г* и
рассматриваемый предельный цикл в этом случае является
неустойчивым.
Для получения полуустойчивого предельного цикла
функцию соi в Ф следует взять в квадрате.
Докажем теперь, что точка Ajm пересечения прямых
Lj и Lm в зависимости от выбора коэффициентов (37- и (Зт
будет особой точкой типа узел или седло. Принимая во
внимание, что в (4.5.4) функции со7 и сот выражаются ли¬
нейно через х и у, и учитывая их малость в окрестности
точки Ajm, заменим систему (4.5.7) системой первого
приближения
* = {ф;ш [(а;0/ + РА) Ют -I- + РпАп) —
Mjm {bj(Om -j- bm(Oj)} СОym,
У {®jm ^jbj) C0m -f- (Ут^т ^rn^m) юД -j-
Mjm (o/com -f- #тсоД}со7т,
где Ф7.т, Mjm, co7m — соответственно значения функций
Ф, М и произведения соо^ ... оо^Ю/и ... com_1com,1...
... cos+1 в точке Ajm. В силу принятых предположений Ф7ГД
и (0j*m отличны от нуля. Вводя вместо х, у переменные
§ 5. постгоннигс дин лмпч и ежих систем
327
СО;, С0т, ПОЛуЧИМ СИСТОМу
О)у* = (hmj ~f~ Мmj^rnj^mj) ~Ь ^jj^m »
~ “Ь (^jm “f~ Мjm^jm^jm) ^т»
где
= famO'mQ'j 4~ “Ь Тт®т^' _1~
Amjf = ^77 fij M mj ^;т»
= Ф,/т> ®/ni “ w;m*
Заметим, что Д^- = — Д7-т ^=0в силу принятых нами
предположений. Согласно выбору коэффициентов имеем
O&j = am = = = Pj — У j, Рт = Тт*
Следовательно,
= ^mm = = Pm Amjf^mjf^m./
и система (4.5.18) принимает вид
COj* = ^тп ~
где
== {Mmj Pm^mj) A mjCDmy,
^jm = {Mjm Pj^jm) Аут COjfm.
Очевидно, что в зависимости от выбора коэффициентов
Р;- и рт будем иметь в точке Ajm устойчивый (при Xjm <
< 0, Xmj < 0) или неустойчивый (при Xjm > 0, A,mj- >
> 0, узел или седло (при XjTnXmj < 0).
Следует заметить, что в общем случае только за счет
коэффициентов Р7* (/ = g + 1, , г) невозможно сделать
все точки Ajm (/, т ==■ q + 1, ..., г) особыми точками тре¬
буемого типа. Если функции Ф и М заданы, то произвол
в выборе коэффициентов Р;- (/ = q + 1, ..., г) позволяет па
каждой прямой Lj получить только одну особую точку оп¬
ределенного типа (устойчивый узел, неустойчивый узел
или седло). Предположим, что таковой является точка Ajm.
Но на прямой Lj имеется по крайней мере еще г — q — 2
(если среди прямых Lq+1, ..., Lj_i, Lj+1, ..., Lr пет парал¬
лельных прямой Lj) особых точек Ajk (к =j= т) системы
(4.5.18)
328
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
(4.5.7) типа узел или седло. Для того чтобы узнать, к
какому типу особых точек (устойчивый или неустой¬
чивый узел или седло) принадлежит точка Ajh, достаточ¬
но вычислить соответствующие коэффициенты Xjh и Xhj,
которые вполне определяются значениями Р7-, ФЛу,
M-kji ij-
Таким образом, мы доказали, что множество систем
дифференциальных уравнений, определенных структурой
(4.5.7), имеет заданные особые точки и предельные циклы.
В заключение заметим, что системы, построенные в
[4, 5], могут быть получены из множества (4.5.2). Например,
при
*1 = ь-5г ^ =
где со = сор+1 ... соасог+1 ... cos, получается система
7 0(о ,Зо) . доо дм
х = ь-дГ<й + ~дГ' =
имеющая заданные кривые своими предельными цикла¬
ми [5].
§ 6. Синтез структуры программирующего
устройства систем программного управления станками
Рассмотрим задачу обработки на станках с програм¬
мным управлением заданного участка поверхности детали,
описываемого уравнением
(0 (х, у, Z) = 0. (4.6.1)
Будем предполагать, что на рассматриваемом участке
поверхность (4.6.1) не имеет особых точек, т. е. (дсо/дя)2 -f-
+ (да)/ду)2, + (dco/dz)2 =f= 0.
Как известно, автоматиче¬
ская обработка поверхности
проводится системой с функ-
Рис. 4.1. циональной схемой, приве¬
денной на рис. 4.1, в которой
программирующее устройство ПУ является генератором
управляющих воздействий, подаваемых на объект О (ста¬
нок) для того, чтобы принудить обрабатывающий иистру-
§ G. СИНТЕЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА i
мент перемещаться по определенному закону
х = х (*), у = у (t), z = z (t). (4.6.2)
Чаще всего закон движения (4.6.2) не бывает строго за¬
данным. Он должен удовлетворять прежде всего основному
требованию: траектория (4.6.2) точки (х, у, z) при любом
t (t0 ^ t <Z °°) должна лежать па поверхности (4.6.1),
т. е. должно выполняться условие
(О (х (t), у (t), z (*)) = О (4.6.3)
при любом t ^ t0, если оно выполняется в начальный мо¬
мент:
Ю {х (t0), у (t0), z (t0)) = 0. (4.6.4)
Аналитическая структура ПУ, осуществляющего такое
движение, может быть описана некоторой системой диф¬
ференциальных уравнений
X = Qi(x,y,z), |
У = QAx,y,z), (4.6.5)
Z = Q3{x,y,z), J
имеющей в качестве интеграла функцию (4.6.1) (см. [39]).
Из содержания §§ 1—4 видно, что система (4.6.5), имеющая
интеграл (4.6.1), содержит произвол в определении пра¬
вых частей, которым можно воспользоваться для задания
траекторий на поверхности (4.6.1) и для обеспечения устой¬
чивости движения по этой поверхности. Определим систе¬
му (4.6.5) таким образом, чтобы ее интегральной кривой
была линия пересечения поверхности (4.6.1) с цилиндром,
направляющей которого служит логарифмическая спи¬
раль, или с плоскостью [68].
I. Построение систем дифференциальных уравнений
движения по заданной поверхности
1. Множество систем дифференциальных уравнений
(4.6.5), интегральные кривые которых расположены на
поверхности (4.6.1), определяются, согласно (4.1.22),
330
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
структурой
X = Qx{x,y,z),
У = Qz(x,y, Z),
z
R (со; x, у, z)
dz
где R (со; x, у, z) — произвольная непрерывная функция,
удовлетворяющая условию
Выберем эту функцию так, чтобы она удовлетворяла ус¬
ловиям устойчивости движения но поверхности (4.6.1)
(по отношению к начальным отклонениям), полученным
в § 4. Согласно этим условиям функция R должна удов¬
летворять неравенству
Условие (4.6.7) может быть выполнено, например,
если выбрать функцию R в виде
R = Ясо,
где X — произвольная отрицательная постоянная.
Система (4.6.6) содержит еще две произвольные функции
(?! и Q2. Этим произволом можно воспользоваться для под¬
чинения движения дополнительным условиям. Попытаем¬
ся выбрать их таким образом, чтобы обрабатывающий ин¬
струмент на заданном участке поверхности (4.6.1) дви¬
гался по некоторой спиралевидной кривой. Как будет по¬
казано ниже, выбирая функции Qx и (Л2 наиболее просты¬
ми, именно линейными относительно х и у, можно добиться
того, чтобы проекция точки соприкосновения обрабаты¬
вающего инструмента с деталью на плоскость хОу была ло¬
гарифмической спиралью (рис. 4.2).
2. Пусть Г — кривая, ограничивающая участок по¬
верхности (4.6.1), который необходимо обработать, и Г' —
проекция кривой Г на плоскость хОу, Будем считать, что
R (0; х, у, z) = 0.
(оЛ < 0 .
(4.6.7)
§ (j. СИНТЕЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА 331
существует эллипс Е, заданный уравнением
Ах2 + 2 Вху + Су- + 2 Dx + 2 Еу + F = 03 (4.6.8)
внутри которого целиком располагается кривая Г'.
Приведем уравнение эллипса (4.6.8) к каноническому
виду. Для этого прежде всего с помощью замены
х9 = х — х0, у' = у — у о,
где х0 и у0 определяются из уравнений
Ах0 + Ву0 + D = О,
Вхо + Су0 ■[■ Е = О,
332
Г.Л. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
приведем выражение (4.6.8) к виду
А'х’2 + 2В'х'у' + Су'2 + F'= 0, (4.6.9)
А' = А, В' = В, С' = С,
F' = Ах1 + 2Вх0у0 -{-Cyl + 2Dxb -f 2Еу0 + F.
Далее, переходя к переменным х, у с помощью формул
хг = х cos а — у sin ос, у' = х sin а f у cos ос,
где а определяется из соотношения
Здесь
А = A' cos2 a -f 2В' sin а cos а -[- С" sin2 а,
# = Ar sin2 а — 2В' sin а cos ос + С' cos2 а,
F = F\
Уравнение (4.6.10) можно переписать в виде
Заменой
где к = Ыа — коэффициент сжатия эллипса, преобразуем
эллипс (4.6.11) в окружность
где
запишем уравнение (4.6.9) в виде
Az2 + By2 = F.
(4.6.10)
и = х, v = ку,
и2 + v2 = а2.
Теперь составим систему
(4.6.12)
й = U (и, v), |
V - V (и, v) J
(4.6.13)
§ г». СИЙТКЗ ШЧЛЧКЛММПРУЮГЦКГО УСТРОЙСТВА
333
таким образом, чтобы ее фазовыми траекториями на пло¬
скости (и, г) были логарифмические спирали
V , v
! : гг — — «ИЧ'Ы —•
у и1 i ■ - ( с ч
или в полярных координатах
р = Ce-v*,
где р2 = и1 -f- ^‘2, ф г г а|‘с1 о; ~ ? it —- -А , С — произволь¬
ная постоянная, определяемая из начального условия
С ^ ае'^\
Система (4.6.13), интегральными кривыми которой яв¬
ляются логарифмические спирали, определяется не одно¬
значно, а представляет собой некоторое множество систем
дифференциальных уравнений, из которого мы выбираем
наиболее простую линейную систему с постоянными ко¬
эффициентами:
u-=pu + qv, 1 „ г
I | (4.6.14)
v = — qu + pv. )
Для того чтобы спираль, исходя из некоторой точки
окружности (4.6.12), в дальнейшем при возрастании ф
накручивалась на начало координат, оставаясь в круге
(4.6.12), р и q должны удовлетворять условию
Абсолютные величины р и q определяются в соответствии
с условиями обработки поверхности с частотой линий не
реже заданной и требуемой скоростью прохождения обра¬
батывающего инструмента. Определим величину р, исхо¬
дя из заданного расстояния между смежными линиями тра¬
ектории на плоскости (и, v). Пусть требуется обработать
участок поверхности с такой частотой, чтобы при измене¬
нии угла ф на 2я значение р изменилось с рх = а до р2,
334
ГЛ. IV. ПОСТРОЕН!-™ УРАВНЕНИЙ ДВИЖЕНИЙ
(4,6.15)
Если отношение Др/а достаточно мало, формулу (4.6.15)
можно заменить следующей приближенной:
Возвращаясь к исходным переменным, вместо (4.6.14>
будем иметь систему
а13 — (а11%0 4" ai2l/o)i а23 — (^21.^0 4~ а22Уо)'
Для определения величин рх и р2 через переменные
х, у, z необходимо из системы уравнений
найти х19 уъ zl9 а по ним определить ul9 v± и рх. Так как при
изменении угла ср на 2л величина z должна принять задан¬
ное значение z29 v (х9 у) должна опять обратиться в нуль и
со (х, у, z) оставаться равной нулю, то х29 у2> z2 найдем как
решение системы
где
О) (х, у, z) = О,
z — zx = О,
v (х, у) = О
(О (х, у, г) = О,
z — z2 = О,
v (х, у) = О,
§ 6. СИНТЕЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА
335
определяющее точку (х21 у2, z2), ближайшую к (хг, уг, zx).
По найденным х2, у2 можно вычислить u2, v2 и затем р2.
3. Полагая R = Xсо (х, у, z) и учитывая (4.6.17),
систему (4.6.6) можно записать в следующем виде:
х = апх + а12у + а13,
у = а2Лх + а22у + а23,
дсо дсо >
ХСО (х, »/, 2) — (а\\Х -|- Д12У + Я1з) — g— (Я21Я + Я22?/ + «2з)
Z = ^:
dz '
(4,6.18)
Для того чтобы точка х = #(£)» У = У (*)» z = z (t)
при любом £ О оставалась на поверхности (4.6.1), необ¬
ходимо и достаточно, чтобы она находилась на этой поверх¬
ности в начальный момент, т. е.
® (*1, У1, Ч) = 0, (4.6.19)
где хг = х (0), уг = у (0), zv — z (0). Однако невозможность
реального осуществления равенства (4.6.19) очевидна.
Допустим, что оно может быть выполнено с точностью до
некоторого е > 0:
I Ю (хъ уъ Z,)| < 8,
и требуется удовлетворить неравенству
I Ю (х2, У2> Ч)\ < 6 (4.6.20)
в момент t± (здесь х2 = x(t^), у2 = у (^), z2 — z (^)). Этому
требованию можно удовлетворить выбором коэффициен¬
та X. Согласно изложенному в § 1 имеем
со (х (t), у (t), z (t)) = Ясо (х (t), у (/), Z (/)),
откуда
со (х (t), у (t), z (/)) = со (xlt ylt Zj) е>\
Следовательно, справедлива оценка
336
ГЛ. IV. ПОСТРОЕНИИ УРАВНЕНИЙ ДВИЖЕНИЙ
которая дает условия для выбора Я:
^ Д 8
Эта формула позволяет определить величину Я, исхо¬
дя из допустимых погрешностей е и 6. Однако заданное
б оценивает лишь точность выполнения равенства (4.6.1)
и не определяет расстояния d от точки (х2, у2, z2) до по¬
верхности (4.6.1). Учитывая, что точка (х2, у2, z2) находится
в малой окрестности поверхности (4.6.1), заменим эту по¬
верхность плоскостью касательной к пей в точке (х, z/, z),
ближайшей к (х2, у2, z2). Расстояние d от точки (х2, у2, z2) до
касательной плоскости определяется формулой
дсо дсо дсо
(Х-2 — х) + -у- (,?/2 у) + о— (Z2 —
d= д!1 , (4.6.21)
9 /а~ 9 /да>*
/"/Зсо \2 /дсо ч2
V wj +(л) +
■dzj
где
дсо дсо дсо
дх ’ ду ’ dz
— частные производные функции со в точке (х, у, z). Учи¬
тывая разложение
ю (ж2, г/.,, z2) = со (х, у, z) + ~ (х2 — х) -|- ~ (г/2 — у) +
+ qt (Ч — z) + • • •.
выражение (4.6.21) можно записать в виде
rj СО (жг, Vi, гг)
-1 /"/^СО '2 /^СО \2 , /дсо \2
V \ш) +W] + W
Обозначая через иг точную нижнюю грань выражения
f /дсо* ,../дсох2 , /дсо/2
F '■ д х) ‘ ^ О// у 1 ' дл у
в области, ограниченной Г, и учитывая неравенство (4.6.20),
получим окончательное выражение для оценки расстояния
§ 6. СИНТЕЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА
337
от точки (я2, у2, z2) до поверхности (4.6.1):
При заданных 8 и 6 можно также определить время tx,
за которое точка (х (£), у (£), z (t)) попадает в 6-окрест-
ность поверхности (4.6.1), если фиксирован коэффици¬
ент X.
Пример 1. Пусть требуется обработать участок
поверхности, представляющей собой часть параболоида
вращения, заданного уравнением
со (х, у, z) = Z — А (х2 + у2) = О
с шагом, обеспечива ющим изменение z с гг до z2 при измене¬
нии угла ф от 0 до 2я.
В данном случае в качестве р можно принять величину
Yх2 + у2. Решая систему
z — А (х2 + у2) = О,
z — zx = О,
х = О,
определим yL = =hYzi/A. Аналогично найдется
у2 = -3zVz'ilA. Из условия изменения угла ср на 2л выте¬
кает, что уг и у.2 должны иметь одинаковый знак. Полагая
г/i = VzjA и у2 = Yzi!A, найдем р1? р2 и ц:
Р1 = у>.=уг А,
j*, = у2 = ,
u= A in—•
Г 4л Z2
Полагая р = щ и X = 2цд (ц >> 0, q < 0), получим
линейную систему
я: = д (jl.r -| у),
у = q(—х + |Л!/),
z = 2 ycqz.
338
ГЛ. IV. ПОСТРОЕНИЕ У ГАШЕНИЙ ДВИЖЕНИЙ
Предполагая, что начальная точка (хг, уъ zx) может
быть установлена на расстоянии, не превосходящем ех
от поверхности параболоида, определим время £1? по ис¬
течении которого точка (х (£), у (t), z (t)) будет находиться
на расстоянии не более чем е от поверхности параболоида
при выбранном нами А,. Из неравенства
СО (Х\, Уь Zi)
будем иметь
где
т/" /дсоС2 /9со-.2 (да
V ы + М +(al
I® (*i. Уи zi)| < М,
М
/&)■+(£/■+Щ-
Далее из выражений
(О (х (<), У (t), z (t)) - © {хъ уи z-l) еп
и
со (х (г), у (*), z (0)
.//асо2 /а©2 /асо,2
к (te) +(%} +(ат)
<е
следует, что должно выполняться неравенство
e^'fe** < е/п, (4.6.22)
где
“=“CW+W+W'-
Из (4.6.22) получаем оценку
I
§ (i. синтез программирующего устройства 339
и учитывая, что для параболоида вращения М= V l-j-4Az,
(J In —
?П — 1 И к -- , ПОЛуЧИМ
/, - -In -. Л,-,.
<7 in — BiVl+4-Ьх
1 22
4. В заключение из выражения (4.6.18) определим
системы уравнений движения по некоторым простейшим
поверхностям.
Л. Для’движения по поверхности кругового конуса
со = х2 + У2 + 6z2 = 0 (б <С 0),
полагая
х - рх + qy,
У — — qx + ру,
к = р < 0,
получим третье уравнение системы в виде
z =pz.
B. Уравнение движения по круговому цилиндру
о) = я2 -|- у* - R* = 0
при к = 0 будет иметь вид
£ = qy,
у = — qx,
z = R (х, у, z),
где R (х, г/, z) — произвольная функция.
C. Для того чтобы движение по плоскости
со = ах + by + cz -|- d = 0 (с =/= 0)
было асимптотически устойчиво, достаточно, чтобы оно
подчинялось системе уравнений
х = рх + qy,
У = — QX + РУ,
z = ах + |Зу + yz -|- б,
ГЛ. IV. ПОПТГОЕТШЕ УРАВНЕНИЙ ДВИЖЕНИЙ
где у = X < 0, а ос, р, 6 должны удовлетворять равенствам
II. Построение систем дифференциальных уравнении
двиоюения по гадаиной привои в пространстве
1. Известно [39], что около 90% видов деталей общего
машиностроения представляют собой участки произвольно
ориентированных в пространстве поверхностей второго
порядка, ограниченные плоскими сечениями этих поверх¬
ностей. Естественно, что выяснение простейших структур
систем дифференциальных уравнений, обеспечивающих
движение по поверхности второго порядка и их плоским
сечениям, представляет прямой интерес.
Построим систему дифференциальных уравнений дви¬
жения
по линии пересечения произвольно ориентированной в
пространстве поверхности второго порядка, которая за¬
дается уравнением
2щ (х, у, £) = апх2 + а22у2 + a33z2 + 2а12ху +
+2a13xz -j- 2a23yz -[- 2аих -,L 2а2ру + 2a3lz 4- a44 =0 (4.6.24)
с произвольной плоскостью
со2 (х, у, z) = ах -г by + cz -j- d = 0. (4.6.25)
Для определения правых частей системы (4.6.23) составим
соотношения
ах — Ха = bq — ар,
$с — ХЪ = — aq — bp,
6с — Xd = 0.
(4.6.23)
(4.6.26)
§ Г). СИНТСЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА
341
в которых функции Rx и R2 выберем в виде
R± — 2а11со1 + а12о)2 + а^со.], | ^ g ^
R% = &22®2 1
где аи, а12, а13, а22 — произвольные постоянные коэффи¬
циенты.
Из (4.6.26) и (4.6.27) получаем систему дифферен¬
циальных уравнений относительно со4 и со2
оц — 2а11со1 4- сс12со2 + ос1зот2, | ^ g
со2 = а22(о2. )
Равенствам (4.6.26) можно удовлетворить линейными
относительно х, у, z функциями
— $1\Х 4“ Р12У ~Р Pl3* + Pl4> I
^ 2 — fi'2lX + $221/ 4“ ?23* + ?2U | (4.6.29)
Р3 ~ Рз1^ ~г P32У + Рзз* 4~ Рз4* '
Подставляя (4.6.24),(4.6.25), (4.6.27), (4.6.29) в (4.6.26),
будем иметь равенства
(апх 4- «12У -г «13* -j- аы) (рпя 4~ Pi2У + Р13* 4- Pi4) 4~
4- («21*^ 4“ «22У 4- «23* 4- «24) (Ргг2' “Г
4-р22У 4- Р23* 4- Р24) + («31* 4- «32У + «33* + «34) X
X (pgi* 4- р32У + Рз2* + Рз4)= ап («п*2 4-«22*/2 4~«зз*2 4-
+ 2а12ху 4- 2a13xz + 2a23yz + 2а14х + 2а24у 4-
+ 2а34 z + а44) а12 {ах 4- by 4- cz 4- d) + а13 (аУ +
+ b2у2 4- c2z2 -f- 2abxy + 2acxz -f 2bcyzJr 2adx 4-
+ 2b dy + 2c dz 4- d2), (4.6.30)
« (Pn* 4- PпУ + P13* 4- Ры) 1- b (p21* + p22y 4- P23* +
4- P24) 4- с (р31ж 4- Рз2У + Рзз* 4- Р34) = а22 (ах +
4- by + cz 4- d). (4.6.31)
Приравнивая коэффиценты при одинаковых членах, по¬
лучим систему четырнадцати линейных алгебраических
уравнений для определения шестнадцати неизвестных
342
1'Л. IV. ПОСТРОР/ЛИВ УРАВПИТТИЙ ДВИЖГШИЙ
коэффициентов 1, 2, 3; j= 1, 4), an, a12, a13, a22:
aJlPll 4“ a2lP‘2l "I" a3lf^3l aliail a“ai3 Oj
^12^12 + ^22^22 + ^32^32 ^22^11 ^^13 ~
^13^13 й23р23 4~ ^ЗзРзЗ ^33^11 ^^13 = 0»
а12?11 “l~ ailPl2 + a22p21 + a2l?22 4~ a32?31 4“ fl3lPs2
— 2ai2an — 2 aboc13 = 0,
ai3pil 4_ ^и[дз 4~ fl23p2l 4~ ^21^23 “4 йЗзРз1 ^31^33
—■— 22&CiC(*-^q — 0,
t713pl2 + ^12^13 _Г fl23?22 4- ^22^23 4~ ^33^32 ^32^33
— 2^23^11 2bccc^Q — 0)
^llPu 4“ ail3ll 4“ a2\?2l 4- a2Lp2l “Ь аЗ*Рз1 “1“ ^31^34 . p rjr
r (4.b.o2)
2al la11 скх^2 2ci ^^13 — 6^
tt14pl2 4- ^12^14 4- ^21p22 4" tt22p24 -|- ^31^32 4_ ^32^34
— 2й/21^ц bcc-^ 2 2b dchy g — 0,
^ыРъЗ 4~ ^1зРн “i ■ ^24^23 + ^23^24 “f" ^31^33 4“ ^33^34
2^23^ji — ^*^12 — 2c dcf*^ —— Oj
ai4?i4 4“ a24^2 4 4~ ^34^34 ^44ail d<X12 C?20t13 = 0,
a3ll + ^21 + C’?31 — a(%22 — 0?
aPl2 4- ^22 + СРз2 — Ь(Х22 = 0,
aPl2 4“ ^^23 4" C?33 — CCX22 —
akBi4 -j- b22i 4- сРз4 — d(X22 = 0. J
Из системы (4.6.32) определяются все неизвестные коэф¬
фициенты, причем какие-то два из них могут быть выб¬
раны произвольно. Этим произволом можно воспользо¬
ваться для обеспечения необходимой точности движе¬
ния по интегральной кривой. Ниже будут получены
ограничения, накладываемые па коэффициенты an, a12,
aig, a22, ПРИ соблюдении которых отклонение движущей¬
ся точки от интегральной кривой не превосходит заранее
заданных пределов.
§ 6. СИНТЕЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА
343
Укажем некоторые частные случаи, когда вычисление
коэффициентов, удовлетворяющих условиям (4.6.32), мо¬
жет быть упрощено. Выбирая плоскость, параллельную
координатной плоскости xOz
со2 (х, у, z) = by + d = О,
получим из системы (4.6.32)
(4.6.33)
Р21 — Р23 — р.
22 — Л22» Рг4 — у #22»
ailPll 4~ ^31^31 — O’
tt12Pl2 + ^32^32 а22&11 Ь2<Х'13 -p #22^22 “ О,
^13^13 4" аззРзз ^33^11 — О,
Л12рц 4~ flnPi2 4~ ^32^31 4~ Я31Р32 2alaau -|-
4” a2ia22 = О,
а1зРп 4" anPi3 4“ аз$з1 4- я31Р33 — 2a13an = О,
^13^12 4" а12р13 4“ йЗзРз2 4- <?32p33 “ 2a230t11 -|-
4- а 23^22 ~ 0?
ai$n 4“ ^uPi4 4" Я34Р31 -Т ^3iP34 — 2altan -f-
+ а21 у ^22 0?
^14^12 4“ ^12^14 4“ ^3tPs2 4“ ^32р34 ^2X^11 ^&12 —
— 2Ъ da13 (а2, у -f я,,'] аза О,
&1$13 4“ ^ 13Р14 4 ^злрзз 1“ ^ЗзРз4 2tf31au | -
"1“ Я23у ^22 — О,
^llPlt 4“ Я34Р31 Я’44^11 doCi2 df-aJ3 -j-
-{ ' «24 у а22 ~ О-
(4.6.34)
Таким образом, система (4.6.32) сокращается до деся¬
ти уравнений (4.6.34) с двенадцатью неизвестными.
344 ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
Далее, пусть коэффициенты уравнений (4.6.24), (4.6.33)
удовлетворяют одному из условий:
1) Д =
с?п а31
^13 ^зз
= 0,
^12 0 О 22
Л
т
ь
d
■ а
2\
а1Ъ %3 а2\ ^34
d
0
- ъ
о
^14 ^34 ^34
Тогда, полагая
получим
0.
Рзз — ОСо2 —* ОС j
Р
11»
Р 31 ' Pl3 = О»
^12^12 ~Ь ^32^32 ^“^13 ~
^11^12 "Г ^31^32 = О»
^13^12 ~Ь ^?,зРз2 ~ О,
allPl4 “Ь ^31^34 “Ь (^а21 а14у а11 — О?
^14^12 —Г ^12^14 ^3 1Р32 ^^12 2tb d<X^ -j~
~\- i^a22 a2\j а11 — 0>
а13р14 + ^33 Рз 4 + {a23J} Яз4^ a1JL — О,
^llPll Т" ^3 4^34 d(X 12 d2oс13 -|-
[ (4.6.35)
^24 ^ ^44^ ^11 — 6.
Рассмотрим последовательно случаи 1) и 2).
1) Пусть а1Х =f= 0. Тогда из второго уравнения (4.6.35)
и меем
§ fi. СИНТЕЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА 345
и из первого уравнения (4.6.35) с учетом (4.6.36)
1 ( #31 \ п
«13 — -pf 1^32 “ Я12 — ) I 32 *
Оставшиеся коэффициенты р^4, рз2, р^4, ап, а12 выбираются
так, чтобы удовлетворялись условия
ftllPl4 + а31^34 ~\~ а21 у а11^ «11 = О,
^ , ъ (#34#Ц — #l4#3l) Jr zd (#12#31 — #32#ll) ft ,
fl12 Pl4 + - ^ P32 +
^22 ~jj ^24^ «11 ^«12 ~ 0»
^13^14 “Г #33^34 + ^#23 ^'34 j «11 = 0»
^14^14 4“ ^34^34 4~ ^24 ^44 j «11 <^«12
, d2 I #3i \ Q n
Г ^2 yai2~ a32j P32 — 0*
2) В этом случае из первых трех уравнений (4.6.35)
получаем
Pl2 ~ Р 32 ~ «13 “ 0
и из оставшихся уравнений
ailPl4 ~\~ ^31^34 “Ь [^a2l~fr aiij «11 — 0,
^ТгРы “Ь ^32^34 4“ (й22 ^ a2lj «11 ^«12 == 0»
^13^14 + йЗзРз4 + ( ^23~£ ^34j «11 = 0?
^llPll + а31р34 "Ь (a2l~fr а44^«11 — 0
определяем рХ4, р34, а1Х, а12.
2. Коэффициенты системы (4.6.28) можно подобрать,
исходя из требуемых оценок отклонений точки (хх, ух, zx),
где х1 = х (£х), у± = у (t±), z1 = z (£х) от кривой Г пересе¬
чения поверхностей (4.6.24) и (4.6.25) при заданных на¬
чальных отклонениях. Пусть при t = 0 начальная точка
(я0, У01 zo), где х0 = х (0), у0 = У (0), z0 = z (0), может
346
ГЛ. IV. ПОСТРОЕНИЕ УРАВНЕНИЙ ДВИЖЕНИЙ
бмть установлена в такой окрестности кривой Г, что вы¬
полняются неравенства
j о>ю | < г10, |«го| < 82о> (4.6.37)
где оз10 = (х0, у о, 20), со20 “ «2 Уоч zo)i и требует¬
ся, чтобы при t = tx удовлетворялись условия
I «ill < е11> I «211 < 82Ы (4.6.38)
где
«11 ~ «1 (Xh 2/ь Z1 )> «21 “ «2 (Xli Уli 2l)*
Система (4.6.28) имеет решение
«1= [«10 — «20 («12 + «1з)1 + «20 К^Ч- «1зб2а*-0*1
«2 = «20^^ - J
(4.6.39)
Из (4.6.37)—(4.6.39) нетрудно получить, что коэф¬
фициенты системы (4.6.28) должны удовлетворять неравен¬
ствам
ам < —21 ~1п 820 , (4.6.40)
*1
^ 1 S20 (611 + 8-211 ai21) + е2 J ааз | //е.,ч
аи<Г-^т-щ 1——| 1 г-—. (4.6.41)
11 ^ 6t\ е20 (8j0 + е201 «12 + ai3 I) 4 7
По еп и е21 можно, как это сделано в предыдущем па¬
раграфе, оценить расстояния 6П и 621 до поверхностей
(4.6.24) и (4.6.25):
с ^8п
где
т2 = rain \(апх -f аУ2у + anzf + (а.21х + а22у + a23z)2 +
(х, У, г)еГ
+ (asix -1- а3,у + amzf],
о ^ 821
0-21 У г - .
^ V а2 + + с2
Условия (4.6.32), (4.6.40), (4.6.41) позволяют опреде¬
лить коэффициенты системы, обеспечивающей движение с
заданной точностью по плоскому сечению поверхности вто¬
рого порядка.
§ 6. СИНТЕЗ ПРОГРАММИРУЮЩЕГО УСТРОЙСТВА
347
3. Пусть требуется обработать участок поверхности
(4.6.24) по кривым Г1? ..., Гп, получающимся пересече¬
нием ее плоскостями. Для движения по кривой Г* имеем
систему
х = [ЗДх + $\2У + Р1з2 ~г Pi в
У — fillX + ?22 У + PL2 + р2В
2 = Рз1* + Рз *У + Рзз2 + Рз4»
коэффициенты которой заранее подсчитываются. Схема
программного устройства, синтезированного на основе
Рис. 4.3.
дифференциальных анализаторов, состоит из трех инте¬
гралов и трех сумматоров (рис. 4.3). При переходе с линии
на линию ri+1 коэффициенты'Р'34 меняются на
ЛИТЕРАТУРА
1. Л й з с р м а п М. А., Гант м а хор Ф. Р., Абсолютная устой¬
чивость регулируемых систем, Изд-во АН СССР, М., 1963.
2. Александров А. Г., Об асимптотической устойчивости в
целом одного класса оптимальных систем, Труды УДН им.
'П. Думумбы, Математика, вып. 2, 1967.
3. Александров А. Г., О построении функционала каче¬
ства в задачах аналитического конструирования регулято¬
ров, Труды УДИ им. II. Лумумбы, Математика, вып. 2, 1967.
4. Аль муха медов М. И., Обратная задача качественной
теории дифференциальных уравнений, Известия вузов, Мате¬
матика, № 4, 1963.
5. А л ь м у х а м о д о в М. И., О конструировании дифферен¬
циального уравнения, имеющего своими предельными циклами
заданные кривые. Известия вузов, Математика, № 1, 1965.
6. А м и и о в М. III., Некоторые вопросы движения и устойчи¬
вости твердого тела переменной массы, Труды Казанского
авнац. ин-та, вып. 48, 1959.
7. А м и и о в М. III., Об одном методе получения достаточных
условий устойчивости неустаиовившихся движений, ПММ,
вып. 5, 1955.
8. Барба ш и н Е. А., Введение в теорию устойчивости, Изд-во
«Наука», М., 1967.
9. Б е к к с и бах Э., Б е л л м а и Р., Неравенства, Изд-во
«Мир», М., 1965.
10. Белл м а и Р., Динамическое программирование, ИЛ,М., 1960.
11. Бел л май Р., Г л и к с б е р г И., Г р о с с О., Некоторые воп¬
росы математической теории процессов управления, ИЛ, М., 1962.
12. Б е л л м а и Р., ДрейфусС., Прикладные задачи динами¬
ческого программирования, Изд-во «Наука», М., 1965.
13. Блисс Г. А., Лекции по вариационному исчислению, ИЛ,
М., 1950.
14. Болтянский В. Г., Математические методы оптималь¬
ного управления, Изд-во «Наука», М., 1966.
15. Булгаков Б. В., Колебания, Гостехиздат, М., 1954.
16. Г а л и у л л и и А. С., Об одной задаче устойчивости движения
тяжелой точки переменной массы на конечном интервале
времени, Труды Казанского авиац. ин-та, вып. 28, 1953.
17. Г а л и у л л и и А. С., К устойчивости движения тяжелой
точки переменной массы, Труды Казанского авиац. ин-та,
вып. 37, 1957.
18. Г а л и у л л и и А. С., Об устойчивости программного движе¬
ния тяжелой точки переменной массы, Труды Казанского
авиац. ин-та, вып. 37, 1957.
ЛИТЕРАТУРА
349
19. Галиуллин А. С., Об устойчивости движения тяжелой
точки переменной массы, Труды Казанского авиац. ин-та,
вып. 45, 1959.
20. Г а л и у л л и и А. С., О некоторых вопросах основной за¬
дачи внешней баллистики неуправляемых ракет, Известия
вузов, Авиационная техника, № 4, 1960.
21. Г а л и у л л п н А. С., Некоторые вопросы устойчивости про¬
граммного движения, Таткпигоиздат, Казань, 1960.
22. Г а л it у л л и и А. С., К вопросу о правильности систем ли¬
нейных дифференциальных уравнений, Труды Казанского
авиац. ип-та, вып. 59, 1960.
23. Г а л и у л л и н А. С., О задачах динамического программи¬
рования, Труды УДII им. П. Лумумбы, Теоретическая меха¬
ника, вып. 2, 1964.
24. Г а л и у л л и и А. С., Об аналитическом построении управ¬
ляющего органа ракет, Труды УДII им. П. Лумумбы, Теоре¬
тическая механика, вып. 1, 1963.
25. Galiullin A. S., Certain Problems in the Design of Pro¬
grammed Motion Systems, a Symposium on Thcoret. Physics
and Mathematics, vol. 8, Ch. 16, 1968.
26. Гантмахер Ф. P., Теория матриц, Г осте хиз дат, М.— Л., 1956
27. Гантмахер Ф. Р., Левин Л.М., Теория полета неуп¬
равляемых ракет, Физматгиз, М., 1959.
28. Гантмахер Ф. Р., Якубович В. А., Абсолютная
устойчивость нелинейных регулируемых систем, Труды Вто¬
рого Всесоюзного съезда по теор. и прнкл. механике, выи. 1,
Изд-во АН СССР, М., 1965.
29. Г е л ь ф а и д И. М., Ф о м и и С. В., Вариационное исчис¬
ление, Физматгиз, М., 1961.
30. Д а с П. Ч., К прямой и обратной задачам оптимизации квад¬
ратичных функционалов в линейных автономных и управляе¬
мых системах, Автоматика п телемеханика, № 9, 1966.
31. Дубошии Г. II., Основы теории устойчивости движения,
Изд-во МГУ, М., 1952.
32. Дэвис Л., Ф о м и и Д., Б л и т ц е р Л., Внешняя бал¬
листика ракет, Восниздат, М., 1961.
33. Круги и Н. П., Приводимые системы, Труды Математичо
ского ин-та им. Стеклова, 1946.
34. Еру гпн II. П., Построение всего множества систем диф¬
ференциальных уравнений, имеющих заданную интегральную
кривую, 1IMM, вып. 6, 1952.
35. Е ф и м о в II. В., Квадратичные формы и матрицы, Изд-во
«Наука», М., 1963.
36. Жуковский II. Е., О прочности движения, Собр. соч.,
т. I, М.— Л., Гостехиздат, 1948.
37. Зубов В. П., Методы А. М. Ляпунова и их применение,
Изд-во ЛГУ, 1957.
38. Зубов В. И., Теория оптимального управления судном и
другими подвижными объектами, Изд-во «Судостроение», 1967.
39. И г н а т ь е в М. Б., Голономные автоматические системы,
Изд-во АН СССР, М.-Л., 1963.
350
ЛИТЕРАТУРА
40. Каменков Г. В., Об устойчивости движения на конечном
интервале времени, ПММ, вып. 5, 1956.
41. Камке Э., Справочник по обыкновенным дифференциальным
уравнениям, Изд-во «Наука», М., 1965.
42. Карагодин В.М., Теоретические основы механики тела
переменного состава, Оборонгиз, М., 1963.
43. К а р а ч а р о в К. А., Пилютик А. Г., Введение в техни¬
ческую теорию устойчивости движения, Физматгиз, М., 1962.
44. Кащеев Н. А., Точная граница применимости метода Чап¬
лыгина для линейного дифференциального уравнения, ДАН
СССР, № 5, 1954.
45. К и р г и з б а е в Ж., К вопросу устойчивости программного
движения точки переменной массы с учетом вращения Земли,
Изв. АН Каз. ССР, Серия физ.-мат. наук, № 1, 1966.
46. Коренев Г. В., Введение в механику управляеАмого тела,
Изд-во «Наука», М., 1964.
47. Красносельский М. А., Оператор сдвига по траекто¬
риям дифференциальных уравнений, Изд-во «Наука», М., 1966.
48. К р а с о в с к и й Н. Н., Теория управления движением,
Изд-во «Наука», М., 1968.
49. Крылов А. И., О вращательном движении продолговатого
снаряда во время полета, Собр. трудов акад. А. И. Крылова,
т. 4, Изд-во АН СССР, М.-Л., 1937.
50. Кулебакин B.C., Об основных задачах и методах повы¬
шения качества автоматически управляемых систем, Труды
Второго Всесоюзного совещания по теории автомат, регули¬
рования, т. 2, Изд-во АН СССР, М., 1955.
51. К у р о ш А.Г., Курс высшей алгебры,Изд-во «Наука»,М., 1963.
52. Лаврентьев М. А., Л ю с т е р н и к Л. А., Курс ва¬
риационного исключения, Гостехиздат, М.— Л., 1950.
53. Лагранж Ж., Аналитическая механика, Гостехиздат,
М.—Л., 1950.
54. Л ё т о в А. М., Аналитическое конструирование регулято¬
ров, Автоматика и телемеханика, № 4—6, 1960; № 4, 1961;
№ И, 1962.
55. Л ё т о в А. М., Устойчивость нелинейных регулируемых си¬
стем, Физматгиз, М., 1962.1
56. Л ё т о в А. М., Выбор оптимизирующего функционала в проблеме
аналитического конструирования, Труды Третьего Всесоюзно¬
го совещания по автомат, управлению, Изд-во АН СССР, 1967.
57. ЛяпуновА. М., Общая задача об устойчивости движения,
Гостехиздат, М.— Л., 1950.
58. Малкин И. Г., Теория устойчивости движения, Изд-во
«Наука», М., 1966.
59. Матросов В. М., Развитие метода функций Ляпунова в
теории устойчивости, Труды Второго Всесоюзного съезда по
теорет. и прикл. механике, вып. 1, Изд-во АН СССР, 1965.
60. Мещерский И. В., Работы по механике тел переменной
массы, Гостехиздат, М.— Л., 1952.
61. Мухаметзянов И.А., Построение множества систем
дифференциальных уравнений устойчивого движения по за¬
ЛИТЕРАТУРА
351
данной программе, Труды УДН им П. Лумумбы, Теоретиче¬
ская механика, вып. 1, 1903.
62. М у х а м с т а я и о в И. А., Некоторые вопросы устойчивости
движения, возникающие при составлении закона управления
объектов программного регулирования, Труды УДН им.
П. Лумумбы, Теоретическая механика, вып. 2, 1964.
63. М у х а м е т з я н о в И. А., Об устойчивости движения управ¬
ляемого тела в центральном иоле, Труды УДН им. И. Лу¬
мумбы, Теоретическая механика, вып. 2, 1964.
64. М у х а м с т з я п о в И. А., Об оценке максимальных откло¬
нений координат нелинейных возмущаемых систем автомати¬
ческого управления, Автоматика и телемеханика, № 2,
1965.
65. М у х а м е т з я п о в И. А., О связи условий минимума на¬
копленных погрешностей САР с условиями применимости
теоремы о дифференциальных неравенствах, Труды УДН
им. П. Лумумбы, Теоретическая механика, вып. 5, 1968.
66. М у х а р л я м о в Р. Г., Построение множества систем диф¬
ференциальных уравнений, имеющих заданные интегралы,
Дифференциальные уравнения, № 2, 1967.
67. Мухарлямов Р. Г., Построение множества систем диф¬
ференциальных уравнений, решения которых обладают за¬
данными свойствами, Труды УДЫ им. П. Лумумбы, Матема¬
тика, вып. 2, 1967.
68. Мухарлямов Р. Г., Построение систем дифференциаль¬
ных уравнений устойчивого движения по заданной кривой
в пространстве, Труды УДН им. Г1. Лумумбы, Математика,
вып. 2, 1967.
69. Мухарлямов Р. Г., К обратным задачам качественной
теории дифференциальных уравнений, Дифференциальные
уравнения, № 10, 1967.
70. Немы цк ий В. В., Степанов В. В., Качественная тео¬
рия дифференциальных уравнений, Гостехиздат, М.—Л., 1949.
71. Perron О., Uber cine Matrixtransformation, Mathem.
Leitschr., Bd. 30, 1929.
72c Perron O., Die Ordnungszahlen linearer Differential-gleichun-
gen, Mathem. Leitschr., Bd. 31, 1930.
73. Персидский К. П., О характеристичных числах диф¬
ференциальных уравнений, Изд-во АН Каз. ССР, Серия физ.-
мат. наук, № 1, 1947.
74. Петров Б. Н., О реализуемости условий инвариантности,
Теория инвариантности и ее применение в автоматических
устройствах, Труды совещания АН УССР, М., 1959.
75. П о н т р я г и н Л. С., Болтянский В. Г., Г а м к р е-
л и д з е Р. В., Мищенко Е. Ф., Математическая теория
оптимальных процессов, Физматгиз, М., 1961.
76. Р о р о f f К., Die Hauptprobleme der Ausseren Ballistin im
Lichte der modernen Mathematik, Leipzig, 1954.
77. Разумихин Б.С., Оценки решений системы дифферен¬
циальных уравнений возмущенного движения с переменными
коэффициентами, ПММ, вып. 1, 1957.
352
ЛИТЕРАТУРА
78. Р о й т с п б о р г Я. II., Некоторые задачи управления дви¬
жением, Физматгпз, М., 1003.
79. Розе И. В., Динамика твердого тела, Изд-во ЛГУ, 1932.
80. Р о з о и о э р JI. И., Вариационный подход к проблеме инва¬
риантности систем автоматического управления, Автоматика
и телемеханика, № 6, 7, 1963.
81. Суслов Г. К., Теоретическая механика, Гостехиздат, М.,
1946.
82. Ф а т х у л л и н Э. Ф., Одноосная система управления плат¬
формой с помощью активного гироскопа, Труды УДН им.
И. Лумумбы, Теоретическая механика, вып. 5, 1968.
83. Ф а т х у л и н Э. Ф., Формирование сигналов программного
управления угловыми движениями платформы, Труды УДН
нм. П. Лумумбы, Теоретическая механика, вып. 5, 1967.
84. Ф а т ы х о в Ф. Ф., Об оценках координат линейных парамет¬
рически возмущаемых систем, Сборник научных работ аспиран¬
тов факультета физико-математических и естественных наук
УДН им. П. Лумумбы, вып. 1, М., 1968.
85. Ф а т ы х о в Ф. Ф., М у х а м е т з я и о в И. А., Об оценках
погрешностей в системах с взаимовозмущаемыми каналами,
Труды УДН им. П. Лумумбы, Теоретическая механика, вып. 5,
1968.
86. Ф е л ь д б а у м А. А., Основы теории оптимальных автома¬
тических систем, Изд-во «Наука», М., 1966.
87. Фурасов В. Д., О построении уравнений программного
движения управляемых систем, Сборник [84].
88. Фурасов В. Д., О построении управляемых систем, имею¬
щих заданные оценки отклонений от программного движения,
Сборник [81].
89. Ф у р а с о в В. Д., Об оптимальном построении множества
дифференциальных уравнений, имеющих заданную интеграль¬
ную кривую, Дифференциальные уравнения, № 8, 1968.
90. Цянь Сюэ-сэнь, Техническая кибернетика, ИЛ, М., 1956.
91. Чаплыгин С. А., Новый метод приближенного интегри¬
рования дифференциальных уравнений, Избран, труды,
Гостехиздат, М., 1954.
92. Письмо II. Г. Чеботарева об одной математической задаче,
возникшей в связи с оценкой отклонений регулируемой коор¬
динаты, если возмущающая сила ограничена по модулю, Авто¬
матика и телемеханика, № 4, 1948.
93. Червякова Л. Д., О построении систем дифференциаль¬
ных уравнений по заданному устойчивому частному решению.
Сборник [81].
94. Ч е т а е в II. Г., Устойчивость движения Гостехиздат, М., 1955.
95. Чета ев Н. Г., О некоторых вопросах, относящихся к за¬
даче об устойчивости неустановившнхся движений, Сб. «Устой¬
чивость движения, Работы по аналитической механике»,
Изд-во АН СССР, М., 1962.
96. Четаев II. Г., Об устойчивости вращательных движений
снаряда, Сб. «Устойчивость движения, Работы по аналити¬
ческой механике», Изд-во АН СССР, М., 1962.