

























































Автор: Алтаева В.Я. Наппельбаум Э.Л.
Теги: математика переводная литература издательство мир теория систем высшая экономика
Год: 1964




Текст
ОБЩАЯ ТЕОРИЯ СИСТЕМ
« М И Р »
VIEWS ON GENERAL SYSTEMS THEORY
Proceedings of the Second Systems
Symposium at Case Institute
of Technology
Edited by
MIHAJLO D. MESAROVl6
Associate Professor of Engineering
Systems Research Center
Case Institute of Technology
JOHN WILEY AND SONS, INC.
NEW YORK • LONDON • SYDNEY
1964
ОБЩАЯ ТЕОРИЯ СИСТЕМ
Перевод с английского
В. Я. АЛТАЕВА и Э. Л. НАППЕЛЬБАУМА
ИЗДАТЕЛЬСТВО < М И Р> • МОСКВА 19 66
УДК 519.95 01
Книга является сборником докладов, прочитан-
ных на симпозиуме в Кейсовском технологическом
институте (США) летом 1963 г., в котором приняли
участие видные представители кибернетики: Эшби,
Месарович, Заде, Чарнс, Купер, Рапопорт, Калаба
и др.
Сборник содержит ряд важных философско-ме-
тодологических положений, постановку оригинальных
задач, изложение различных точек зрения на фунда-
ментальные проблемы целого комплекса наук, в той
или иной степени связанных с кибернетикой. В нем
выступают и «чистые» кибернетики, и математики, и
биологи, и экономисты, и философы, и техники. Мно-
гие затронутые в докладах вопросы представляют
общенаучный интерес.
Книга дает пищу для серьезных размышлений
как для философов, экономистов и социологов, так и
д.тя математиков, кибернетиков и физиков, причем
не только для специалистов высшей квалификации,
но и для людей, делающих в науке лишь первые
шаги.
Редакция литературы по вопросам новой техники
ПРЕДИСЛОВИЕ
Если проанализировать «взаимоотношения» науч-
ных дисциплин на нынешнем этапе научно-технической
революции, то можно заключить, что «все смешалось
в доме науки». Действительно, за последние годы по-
явилось столь большое число новых научных и тех-
нических дисциплин и направлений, столь неопреде-
ленными стали границы между науками и специаль-
ностями, что сегодня физик по образованию нередко
погружен в проблемы биологии, биологу часто при-
ходится разрабатывать электронную аппаратуру,
лингвисту обращаться к основам математики, а ма-
тематику заниматься расшифровкой древних языков.
Число подобных примеров поистине безгранично, но
во всей этой «неразберихе» все явственней прояв-
ляются тенденции к осмыслению происходящих в на-
уке процессов с единых позиций, к наведению «на-
учного порядка» в царстве самой науки.
И это вполне закономерно. Диалектический про-
цесс развития науки отличается борьбой двух тенден-
ций—дифференциации и интеграции знаний. Осо-
бенно ярко эти тенденции проявляются на современном
этапе, когда накопление знаний приобрело буквально
лавинообразный характер, когда новые научные и тех-
нические дисциплины возникают с устрашающей бы-
стротой и когда, с другой стороны, все более настой-
чиво предпринимаются попытки подвести единую тео-
ретико-методологическую базу под целые комплексы
дисциплин.
6
Предисловие
Одно из «движений за объединение» происходит
под флагом итей кибернетики, в которой центральную
роль играют такие используемые во многих обла-
стях знаний понятия, как «система», «управление»,
«структура», «обратная связь», «информация» и т. д.,
и которая с момента своего возникновения в каче-
стве одного из основных методологических принципов
провозгласила принцип синтеза знаний, полученных
в различных отраслях науки.
В философском плане диалектическим и истори-
ческим материализмом уже давно подведен прочный
и единый фундамент под здание науки. Ту же задачу,
но в более конкретном аспекте пытается решать ки-
бернетика. Это выражается в стремлении к созданию
теории, охватывающей фундаментальные понятия це-
лого ряда наук, которая, с одной стороны, позволила
бы глубже познать сущность природных и обществен-
ных явлений и описать их точным языком, а с другой
стороны, дала бы более эффективные и в широком
смысле оптимальные методы синтеза сложных или,
как теперь принято говорить, больших систем, а так- <
же управления такими системами.
В ходе научно-технической революции проблема
создания больших систем и управления этими систе-
мами стала центральной проблемой как в самой на-
уке, так и в развитии общества. Все народное хозяй- ,
ство в целом, отдельные его отрасли и звенья, про-,
мышленные предприятия и научно-исследовательские
учреждения, технические объекты самой различной
природы, программы разработки и осуществления
крупных проектов, короче говоря, бесчисленное раз-
нообразие объектов можно и часто просто необходимо
рассматривать как большие системы.
Дело в том, что при изучении больших систем при-
ходится анализировать огромное «комбинаторное» бо-
гатство связей элементов и явлений, подвергать их
всестороннему исследованию, учитывать взаимодей-
ствие частей и целого, неопределенность поведения
системы, ее связи и взаимодействие с окружающей
средой. Системы этого класса выступают, как пра-
вило, в виде сложных человеко-машинных систем,
1
<
Предисловие
7
для синтеза и управления которыми необходимо при-
влечение всего арсенала методов и средств самых
различных отраслей науки и техники. Увы, этот на
первый взгляд неисчерпаемый арсенал часто оказы-
вается недостаточным для решения системных задач
на том уровне, которого требуют нужды современного
общества.
Проблема существенно осложняется еще и тем,
что в отличие от традиционных постановок задач в
точных науках, когда цели или критерии функциони-
рования систем считаются заданными, при изучении
больших систем возникают чрезвычайно сложные за-
дачи научного обоснования и формирования таких
критериев, а также согласования критерия функцио-
нирования всей системы с критериями для отдельных
ее частей, которые в свою очередь, как правило, яв-
ляются достаточно сложными системами По суще-
ству в исследованиях больших систем приходится
иметь дело со всей - сложностью и разнообразием
окружающего нас мира.
Одним словом, можно сказать, что рассмотрение
любого объекта управления как большой системы
скорее всего определяется методологическим подхо-
дом к задаче, а не материальной природой объекта,
хотя, естественно, рассматриваемый объект должен
удовлетворять некоторым требованиям. Так, один и
тот же самолет, танк, станок или прокатный стан
можно исследовать как механическую, электрическую
или автоматическую системы. Однако, введя в рас-
смотрение взаимодействие человека с таким объек-
том, расчленяя его подсистемы, выполняющие различ-
ные функции, и изучая взаимодействие подсистем с
точки зрения единого критерия достаточно «емкого»
содержания, мы переходим на позиции теории боль-
ших систем и начинаем оценивать любые решения,
исходя из качественно иной концепции. При этом од-
ним из существенных признаков большой системы яв-
ляется иерархическая структура связей между общим
критерием для всей системы в целом и частными ло-
кальными критериями, формируемыми для отдельных
подсистем различных уровней иерархии.
8
Предисловие
Итак, мы попытались дать некоторое представле-
ние о важных процессах, происходящих в современ-
ной науке, процессах, обусловленных стремлением к
синтезу знаний, к построению единых теорий, охваты-
вающих различные и на первый взгляд далекие друг
от друга отрасли науки. Правда, подобные «движе-
ния» наблюдались неоднократно и в прошлом, но
тогда их инициаторами были главным образом фило-
софы, в то время как нынешнее движение связано с
насущными потребностями повседневной практики.
Прежде чем перейти непосредственно к содержа-
нию предлагаемого вниманию читателя сборника, сле-
дует дать небольшую историческую справку. В 1959 г.,
в Кейсовском технологическом институте (Кливленд,
шт. Огайо) был создан центр исследования систем
или, точнее, системных исследований, объединивший
отделы исследования операций, вычислительной тех-
ники и автоматики. Перед этим научным коллекти-
вом, который возглавил известный специалист по ав-
томатике проф. Д. Экман (трагически погибший в ре-
зультате автомобильной катастрофы в 1962 г.), были
поставлены весьма широкие и сложные задачи. Центр
должен был приступить к разработке качественно но-
вых методов анализа, синтеза и изучения сложных
или больших систем, создать методологию системных
исследований, способствовать развитию общей теории
больших систем.
Очевидно, что только для формирования конкрет-
ной программы работы центра нужно было прило-
жить немалые усилия. С этой целью весной 1960 г.
был созван первый симпозиум под девизом «Систе-
мы— исследование и синтез», на котором известные
ученые, представляющие различные дисциплины, вы-
двинули ряд проблем в области системных исследова-
ний. Труды этого симпозиума были изданы в 1961 г.1)
В 1963 г. состоялся второй симпозиум, проходив-
ший под девизом «Взгляды на общую теорию си-
’) Systems: Research and Design, Proceedings of the First
Systems Symposium at Case Institute ol Technology, ed. bj
Eck man D. P., Wiley, N, Y., 1961,
Предисловие
9
стем», труды которого содержатся в этой книге. Чем
же обусловлена постановка этой проблемы? В конце
сороковых годов известный австрийский биолог фон
Берталанфи, переехавший примерно в это же время
в Канаду, обобщил развивавшуюся им в течение мно-
гих лет теорию так называемых «открытых систем» и
выступил с «общей теорией систем», претендующей на
роль метатеории — теории, подводящей единую базу
под все науки. Спустя несколько лет под руковод-
ством Берталанфи было создано научное общество,
которое начиная с 1956 г. регулярно издает годич-
ные сборники трудов, посвященных общей теории
систем.
Вполне естественно, что это направление привлекло
к себе прежде всего внимание кибернетиков, стремя-
щихся к синтезу знаний различного «происхождения»
с момента возникновения кибернетики как самостоя-
тельной науки. Таким образом, обсуждение «взгля-
дов» на общую теорию систем на симпозиуме Кей-
совского научного центра полностью соответствует
задачам, поставленным перед этой организацией.
Фундаментальная проблема общей теории си-
стем — выяснение законов, определяющих принципы
образования, поведения и развития любых реальных
систем, где под системой автор этой теории понимает
множество элементов произвольной материальной
природы, находящихся в некоторых заданных отно-
шениях друг к другу. Рассматривая отдельные науки
как модели, отображающие определенные стороны
реального мира, общая теория систем стремится осу-
ществить синтез этих моделей, утверждая, что их не-
возможно свести к чисто физической модели, и отвер-
гая роль физики как «науки наук». Впрочем, созда-
тель общей теории систем вовсе не отказывается от
физических представлений, широко используя в своих
конструкциях идеи термодинамики. В рамках общей
теории систем предпринимаются попытки точного ко-
личественного определения и исследования таких по-
нятий, как «целесообразность», «организация», «це-
лостность» и т. п., которые прежде считались недо-
ступными для точного изучения.
10
Предисловие
В общей теории систем применяются два метода
исследования. Один — эмпирически-интуитивный —
обеспечивает связь с реальным миром и позволяет
проводить экспериментальную проверку теоретиче-
ских построений. На базе этого метода определены
все основные понятия общей теории систем. Второй
метод — логически-дедуктивный — отличается стро-
гостью выводов, но ему свойствен ряд ограничений,
главное из которых состоит в том, что в рамках этого
метода не поддаются исследованию открытые системы,
занимающие важное место в общей теории систем.
Это направление находится на стыке естественных,
формальных и общественных наук. Оно принесло бе-
зусловную пользу в решении ряда конкретных задач
в биохимии, биофизике, физиологии, системотехнике
и психологии, а также внесло определенный вклад в
развитие методологии науки. Однако чрезмерные пре-
тензии на универсальность, выдвигаемые общей
теорией систем, явно необоснованы. Философско-
методологическая оценка идей этой теории дана в
работе В. А. Лекторского и В. Н. Садовского ’), к кото-
рой мы отсылаем читателей, интересующихся этими
вопросами. Что же касается места, занимаемого об-
щей теорией систем, то, на наш взгляд, эта теория
представляет собой скорее одно из направлений ки-
бернетики, чем самостоятельную науку, включающую
в себя кибернетику как одну из составных частей.
Труды симпозиума, собственно, и посвящены изло-
жению различных подходов к общей теории систем.
Эти труды содержат доклады и выступления 14 участ-
ников симпозиума. Четыре работы исключены из пе-
ревода, так как не содержат, на наш взгляд, ориги-
нальных идей. Среди авторов много известных уче-
ных, не нуждающихся в рекомендациях, но самое
интересное, что они представляют подчас довольно
далекие отрасли знаний и придерживаются иногда
диаметрально противоположных взглядов на общую
’) Лекторский В. А., Садовский В. Н., О принципах
исследования систем, Вопросы философии, № 8, стр, 67—79
(1960).
Предисловие
11
теорию систем, хотя, несомненно, все проявляют к ней
живой интерес.
В оригинале сборник выпущен под общей редак-
цией проф. М. Месаровича, возглавляющего в настоя-
щее время отдел общесистемных исследований Кей-
совского центра и являющегося автором одного из
наиболее интересных докладов. Работы в сборнике
расположены в том порядке, в каком они докладыва-
лись на симпозиуме. Все эти работы, пожалуй, можно
разделить на две группы. К одной принадлежат ра-
боты, содержащие конструктивные попытки развития
или интерпретации основных понятий общей теории
систем, в другую входят полемические и чисто мето-
дологические выступления участников симпозиума.
Хотя и говорится, что нет более неблагодарного
занятия, чем пересказывать в предисловии содержа-
ние книги, мы все же рискнем дать некоторое пред-
ставление о помещенных в сборнике работах.
Доклад М. Месаровича посвящен изложению осно-
ваний одного из возможных вариантов общей теории
систем. Автор формулирует требования, предъявляе-
мые к такой теории, и указывает ее отличительные
особенности. Он определяет общее понятие системы,
понятия открытой и замкнутой системы, а также
структуры, управляемости, свойств и поведения си-
стемы. Им приводится доказательство теоремы о раз-
биении системы высшего порядка на подсистемы и
о способности систем воспроизводить определенные
выходы. Формализация проведена с помощью аппа-
рата теории множеств и математической логики.
Обобщению понятия состояния в теории систем
посвятил свой доклад проф. Л. Заде, известный спе-
циалист по электротехнике и автоматике. Проанали-
зировав предложенные рядом авторов определения
понятия состояния динамической системы и указав на
их недостатки, Заде вводит понятие ориентированного
абстрактного объекта, от которого переходит к опре-
делению понятия состояния, применимого к более ши-
рокому классу систем, чем класс динамических систем,
рассмотренных в работах Биркгофа, А. А. Маркова,
В. В. Немыцкого и Л. С. Понтрягина. В то же время
12
Предисловие
Заде признает, что его определение понятия состоя-
ния не может претендовать на абсолютную универ-
сальность.
Выступление главы американской школы исследо-
вания операций проф. Р. Акофа содержит критику
общей теории систем, созданной Берталанфи, которой
Акоф противопоставляет по сути дела чисто опера-
ционный подход. Хотя эта критика безусловно содер-
жит рациональные элементы, вряд ли можно .при-
знать оправданной попытку представить исследова-
ние операций в.роли общей теории, способной дать
ключ к исследованию любых системных явлений.
В столь популярной сейчас области прикладной
математики, как линейное программирование, широко
известны имена А. Чарнса и У. Купера, которые пред-
ставили на симпозиум самый большой по объему до-
клад с изложением идей использования аппарата ли-
нейного программирования для оценки качества си-
стем.
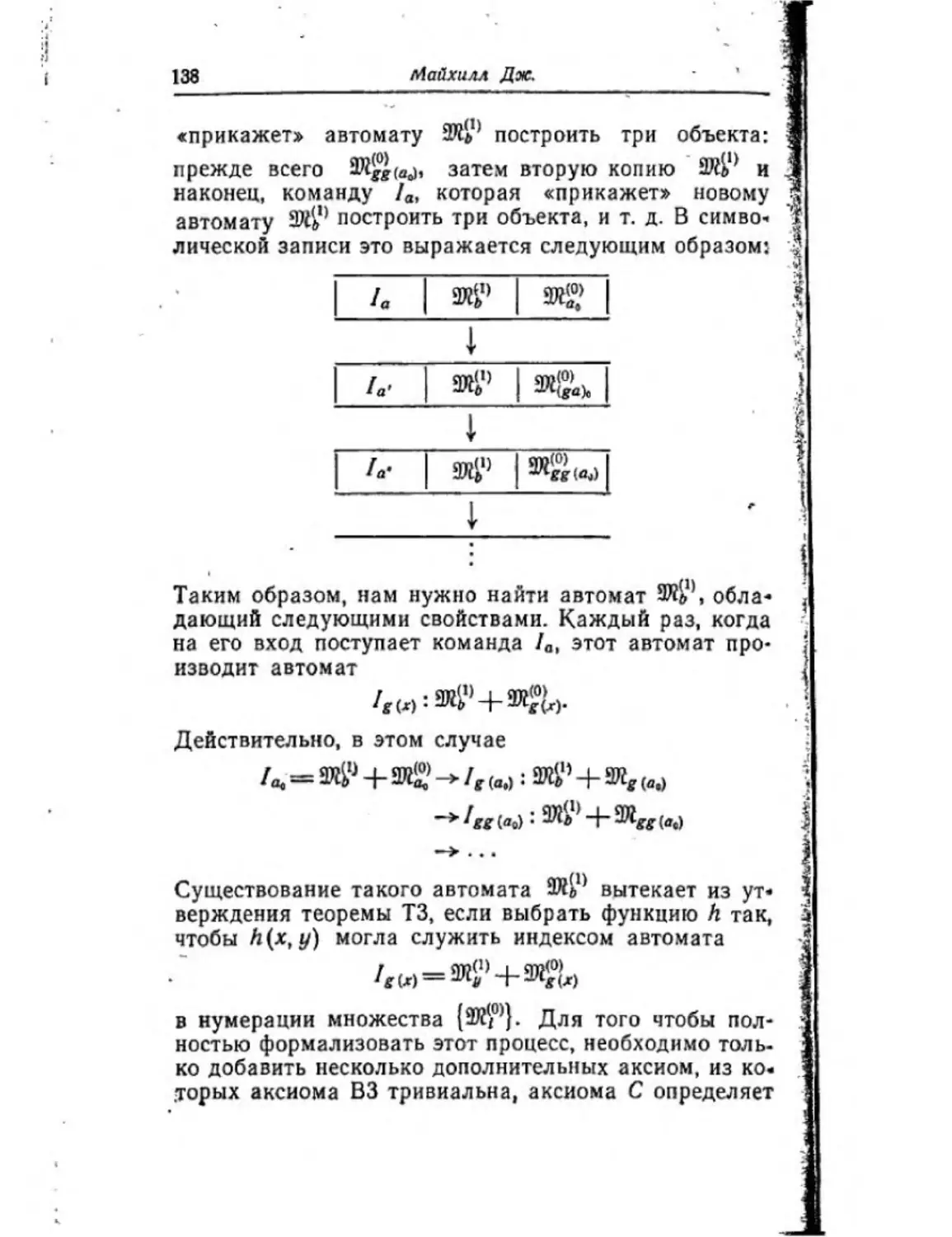
Философ Д. Майхилл развивает в своем докладе
абстрактную теорию самовоспроизведения автоматов,
применяя теорию рекурсивных функций. Он приво-
дит доказательства ряда теорем и дает содержатель-
ную интерпретацию формальных построений.
Коллега Р. Веллмана, известный математик Р. Ка-
лаба, выступил с сообщением о применении метода
инвариантного погружения для анализа процессов,
протекающих в физических системах и системах
управления. Нужно обладать достаточно богатым во-
ображением, чтобы связать это, вообще говоря, ин-
тересное сообщение с основным предметом обсужде-
ния симпозиума.
Сборник завершают четыре небольшие работы. Это
выступление Р. Дреника относительно принципа при-
чинности в физических системах и вытекающих из
него следствий, которые касаются предсказуемости
сигналов. Это замечания У. Эшби на общей дискус-
сии, обосновывающие необходимость* создания строй-
ной теории упрощения. Это ответ сподвижника Бер-
таланфи, известного биолога и психолога А. Рапопорта,
на критические высказывания Акофа в адрес общей
П редисловие
13
теории систем. И наконец, это «методологические»
аксиомы У. Чёрчмена, отражающие его взгляды на
общую теорию систем.
Что же касается докладов, которые отсутствуют
в переводе, то к ним относятся: весьма красочное по
форме, но неглубокое по содержанию выступление
К- Боулдинга, посвященное так называемой «обще-
системной» точке зрения, соображения X. Патнэма
о «системном подходе» к философии языка и пер-
спективах создания совершенного автомата-собесед-
ника, общие высказывания биолога Р. Джерарда, рас-
смотревшего роль живых систем в общей теории
систем и предложившего принцип их классификации,
а также работа У. Линвилла, показавшего возмож-
ность использования теории графов для приближен-
ного анализа линейных динамических систем, работа,
которая, по признанию самого автора, не содержит
новых результатов.
Собранные в книге доклады представляют доволь--
но пеструю картину. Однако все они по-своему инте-
ресны, и особенно интересен пример обсуждения про-
блемы, в котором, так сказать за одним столом при-
нимали участие и чистые математики и кибернетики,
и биологи, и философы, и экономисты. Пусть эта по-
пытка не совсем удалась, пусть некоторые доклады,
как мы уже отмечали, не имеют прямого отношения
к рассматривавшейся проблеме, но этот симпозиум
как бы намечает пути дальнейшего развития связей
между научными дисциплинами и демонстрирует
стремление к устранению «ведомственных» барьеров
в науке. В этом, как нам представляется, ценность
сборника, отражающего дух времени.
В. Алтаев
ОСНОВАНИЯ ОБЩЕЙ теории систем
М, Месарович ')
ВВЕДЕНИЕ
Начиная с первых научных исследований основное
свое внимание ученые поочередно уделяли то част-
ному (наблюдениям и фактам), то общему (анало-
гиям и теориям). Для всякой теории необходимы фак-
ты, на которых она могла бы основываться, а для
понимания фактов и наблюдений требуется опреде-
ленная теория. Традиционно теории строились в рам-
ках различных обособленных областей знания или,
другими словами, для различных заданных классов
реально существующих систем, таких, как биологиче-
ские, физические, химические и т. п. Быстрый про-
гресс в деле накопления фактов, как и развитие тео-
рий внутри каждой из специальных областей науч-
ного исследования, привели к постановке новых задач
более высокого уровня общности. Так появилась
необходимость в создании общей теории, которая
могла бы служить фундаментом для остальных
более узких теорий и позволяла бы преодолеть рам-
ки специализации, приведя, в конечном счете, к бо-
лее глубокому пониманию мира, в котором мы
живем.
Эта теория вызывает не один чисто научный инте-
рес. Привлечение такой теории необходимо для реше-
ния некоторых важных с практической точки зрения
задач. В связи с этим построение такой теории
стало делом первостепенной важности. Например, в
>) Mesarovid JA. D„ Foundations for a General Systems
Theory.
16
Мссарович М.
технике (в самом широком смысле этого слова) ощу-
щается необходимость в общей теории, преодолеваю-
щей границы специализации и позволяющей созда-
вать системы, охватывающие и людей, и вычислитель-
ную технику, и исполнительные механизмы. Точно гак
же в науке полное понимание некоторых явлений или
механизма «работы» некоторых реально существую-
щих систем невозможно, если не рассматривать их
в контексте более крупной системы, включающей си-
стемы, традиционно изучавшиеся различными обла-
стями науки.
В настоящей статье делается определенная попыт-
ка заложить основания такой общей теории систем.
Прежде чем двигаться дальше, мы хотим обсудить,
чем объясняется и чем обосновывается выбор той тео-
рии, о которой пойдет речь. За недостатком места
здесь излагаются лишь самые общие положения.
Впрочем, изложение достаточно подробно для того,
чтобы охарактеризовать выбранный подход. Более
полное изложение теории содержится в работе [11].
ОБОСНОВАНИЯ
Как уже отмечалось выше, успехи науки и тех-
ники привели к необходимости создания общей тео-
рии систем. Рассмотрим теперь, чем можно обосно-
вать эту необходимость.
В любой научной теории роль главного методоло-
гического орудия играет метод аналогий. Сейчас мы
будем говорить об этом методе нестрого. В своей
сущности метод аналогий зиждется на следующей ос-
новной идее. Установим отношение эквивалентности
между двумя системами (каждая из которых может
быть либо реально существующей, либо абстрактной).
Это отношение эквивалентности должно указывать на
те аспекты поведения систем, которые оказываются
у них одинаковыми. Затем поведение одной из этих
систем можно исследовать и наблюдать, а на основа-
нии результатов этих исследований делать некоторые
выводы относительно поведения (или некоторой его
Основания общей теории систем
17
важной особенности) другой системы. Выбор иссле-
дуемой системы подсказывается практическими сооб-
ражениями, а именно система, за поведением которой
мы собираемся наблюдать, должна быть проще ис-
ходной во всех своих аспектах, за исключением тех,
которые определяют выполнение выбранного отноше-
ния эквивалентности. В этом случае используемую
для исследования систему называют моделью.
Интересно отметить, что основные направления
выбора моделей в науке и в математике в некотором
смысле прямо противоположны. В естественных нау-
ках модели — это неизменно абстрактные математи-
ческие системы или гораздо более простые, чем ори-
гинал, физические системы. Напротив, в математике
в качестве модели чаще всего используют более кон-
кретную и менее абстрактную аналогию, чем исход-
ная система. Модели, рассматриваемые в рамках пред-
лагаемой здесь теории, можно понимать и в том и
другом смысле.
Поскольку теория любой конкретной научной
области зависит от характера выбранных аналогий,
кажется разумным предположить, что общая тео-
рия систем должна точно так же использовать более
общие аналогии. Кроме того, модели, используемые
в этой теории, также должны быть достаточно об-
щими.
Обратимся теперь к вопросам техники. Создание
сложных систем, особенно если в их работе прини-
мают участие и люди, ставит новые задачи, которые
нельзя решить традиционными средствами и мето-
дами. В связи с этим появилась новая отрасль тех-
ники— так называемая системотехника. До настоя-
щего времени она опиралась в основном на средства
и методы, заимствованные из других областей, и на
опыт и интуицию специалистов, занимающихся систе-
мотехникой. Основная причина такого положения ве-
щей заключалась в отсутствии теоретического фунда-
мента, на котором можно было бы строить соответ-
ствующую методологию. Ввиду этого одна из задач
общей теории систем как раз и заключается в созда-
нии такого фундамента.
2 Зак. 264
18
Месарович М.
ТРЕБОВАНИЯ. ПРЕДЪЯВЛЯЕМЫЕ К ОБЩЕЙ ТЕОРИИ
Рассмотрим теперь основные требования, которым
должна в свете изложенного выше удовлетворять об-
щая теория. По-видимому, самыми важными из них
являются такие два требования.
1. Общая теория должна быть настолько общей,
чтобы ей удалось охватить все различные уже суще-
ствующие конкретные теории. В связи с этим она
должна быть достаточно абстрактной, чтобы ее тер-
мины и понятия могли быть интерпретированы в каж-
дой из более узких областей. Ясно, что чем более аб-
страктно некоторое высказывание, тем на более
широкий круг объектов оно распространяется, но од-
новременно тем меньше несет оно информации отно-
сительно поведения любой конкретной системы. Об-
щие понятия должны подчеркивать то общее, что есть
в поведении рассматриваемых систем, и пренебрегать
частностями, характерными для поведения каждой
, конкретной системы в отдельности. Поэтому наиболь-
шую трудность при построении любой общей теории
представляет выбор нужного уровня общности, или
абстрагирования. Понятия такой теории должны рас-
пространяться на достаточно широкий круг систем, и
в то же время они должны позволить нам прийти к
выводам, содержащим достаточно информации для
адекватного понимания рассматриваемого частного
случая.
2. Наша общая теория должна иметь научный ха-
рактер в том смысле, что ее понятия и ее язык в со-
ответствующем контексте должны быть однозначно
определены. Для того чтобы общая теория хоть как-то
помогала решению научных и технических задач, она
должна опираться на нечто более прочное, чем ту-
манные, плохо определенные, едва ли не поэтические
аналогии. Фундамент общей теории должен быть на-
столько прочным, чтобы ее выводы имели практиче-
скую ценность при исследовании реально существую-
щих систем. Доверие к зыбким аналогиям и составляет
основную слабость общих теорий, предлагавшихся ра-
нее. Однако мы хотим сразу оговорить и то, что, тре-
Основания общей теории систем
19
буя для нашей общей теории научный статус, мы не
хотим тем самым утверждать, что эта теория должна
представлять собой определенный набор догм, содер-
жащих в себе абсолютную истину относительно явле-
ний реального мира. Напротив, следует ожидать, что
любая общая теория, так же как и всякое другое до-
стижение человеческого разума, должна со временем
устаревать, подновляться и омолаживаться. Однако
в любой заданный момент времени в рамках накоп-
ленного к этому времени опыта наша общая теория
должна покоиться на твердом фундаменте.
В следующих разделах мы предлагаем общую тео-
рию, которая, с одной стороны, является достаточно
абстрактной, а с другой, достаточно конкретной для
того, чтобы быть практически полезной. Однако в
духе замечаний этого раздела ни одно из основных
положений нельзя рассматривать как неизменное. Ин-
вариантными следует рассматривать лишь сам харак-
тер предлагаемой теории и ее направленность.
ОСНОВНЫЕ ЧЕРТЫ ТЕОРИИ
Предлагаемая здесь общая теория обладает сле-
дующими основными свойствами:
1. Она построена вокруг понятия системы. По-
скольку можно было бы возразить, что и наука и
техника имеют дело с исследованием реально суще-
ствующих систем и их поведения, общая теория си-
стем по необходимости должна изучать общие аб-
страктные системы. Формальное определение такой
системы мы введем в следующем разделе. Пока же
нам достаточно будет понимать абстрактную систему
как некоторую абстрактную аналогию или модель оп-
ределенного класса реально существующих систем.
Тогда общую теорию систем можно рассматривать
как теорию абстрактных моделей. Можно было бы
поспорить о том, не должна ли общая теория систем
быть шире понятия системы. Однако для того, чтобы
сохранить для этой теории некоторую определенность,
о которой говорилось в предыдущем разделе, очень
2*
20
Месарович М.
удобно, по-видимому, основывать ее на понятии си-
стемы.
2. Общая теория систем в качестве теории аб-
страктных моделей должна охватывать все специали-
зированные теории, посвященные более конкретным
классам моделей, например теорию линейных систем,
теорию марковских систем и т. д. Можно считать, что
эти теории изучают модели частного вида. Проведе-
ние границы между общей теорией систем и какой-
либо теорией систем частного вида — задача весьма
трудная и решаемая чаще всего достаточно произ-
вольным образом. Однако именно так и должно быть
на самом деле, поскольку искусственным разграниче-
нием различных областей знания нельзя, вообще го-
воря, ничего достичь. Гибкость в этом вопросе может
только помочь развитию и прогрессу всех этих обла-
стей. Однако сказанное выше не следует путать с во-
просом о необходимости прочного фундамента, речь
о котором была выше. Независимо от того, как мы
разграничиваем эту область знания, вводимые основ-
ные понятия и определения должны быть согласованы
с конкретным контекстом.
3. Общая теория систем объединяет также теории
различных аспектов поведения систем, такие, как тео-
рию связи, теорию управления, теорию адаптации,
самоорганизации и обучения, теорию алгоритмов
и т. п. Это объединение осуществляется, естественно,
на некотором более высоком уровне общности. Оно
также помогает человеку, интересующемуся каким-то
частным аспектом поведения систем, увидеть стоящие
перед ним проблемы с более общих позиций.
4. По мере своего развития общая теория систем
использует в основном достижения более абстрактных
областей математики. В этом смысле она оказывается
связанной с математической теорией формальных си-
стем. Однако конкретный смысл, вкладываемый в ис-
пользуемые термины, имеет первостепенную важность
лишь для общей теории систем и относительно несу-
ществен с точки зрения формальной математики. Это
становится особенно ясным, когда мы переходим к
изучению целенаправленности поведения абстрактных
Основания общей теории Систем
21
систем. Например, с точки зрения общей теории си-
стем решение уравнения может быть важным лишь
постольку, поскольку оно проливает свет на поведе-
ние рассматриваемой системы.
5. Теперь мы в состоянии более четко обрисовать
задачи и сферу действия общей теории систем, а так-
же ее методологию. Общая теория систем представ-
ляет собой область научного исследования, связанную
с изучением поведения абстрактных систем. По самой
своей природе методология этой теории должна быть
существенно научной. Отношения между исследовате-
лем и изучаемой системой по своему характеру ана-
логичны отношению между естествоиспытателем и
природой. А именно, абстрактная система задается
либо в виде математического уравнения, либо в виде
программы для вычислительной машины, либо как
некоторая физическая модель, либо с помощью сло-
весного описания и т. д., а цель исследования состоит
в обнаружении основных свойств ее поведения.
ПОНЯТИЕ АБСТРАКТНОЙ СИСТЕМЫ
Задача выбора подходящего уровня общности для
основного понятия общей теории систем необыкновен-
но трудна. В этом разделе мы в некотором смысле
обойдем эту трудность, определив понятие абстракт-
ной системы в самой общей форме и используя более
узкие определения при дальнейшем развитии теории.
Вводимое в этом разделе понятие абстрактной си-
стемы весьма поучительно, поскольку оно показывает,
как можно говорить о поведении реально существую-
щей системы, пользуясь лишь лингвистическими кон-
струкциями и удовлетворяя, тем не менее, требова-
ниям обеспечения прочности фундамента, о котором
говорилось выше.
Предлагаются три различных определения понятия
абстрактной системы, причем все эти три определения
относятся к одному и тому же уровню общности.
Первый и наиболее общий подход к определению
понятия абстрактной системы состоит в использова-
нии лингвистической формулировки. Для того чтобы
22
Месарович М.
прийти к такому определению понятия абстрактной
системы, нужно ввести прежде всего некоторые вспо-
могательные понятия.
Начнем с понятия высказывания на некотором
языке L. Таким языком может быть любой живой
язык, например английский, некоторый машинный
язык или любой формальный рекурсивный язык, вы-
работанный автоматом. Высказыванием F на языке L
называется предложение, построенное по правилам
грамматики этого языка, но такое, что истинность
этого предложения не вытекает из самого его со-
держания. Другими словами, предполагается, что вы-
сказывание (формула) содержит некоторые сво-
бодные переменные и, следовательно, может оказать-
ся истинным для некоторых значений этих пере-
менных.
Предположим теперь, что имеется некоторое мно-
жество К таких высказываний. Если некоторое под-
множество М этих высказываний принимается истин-
ным, то оно определяет теорию Т относительно К.
А именно, теория Т предполагает, что только выска-
зывания из подмножества М всегда истинны, а истин-
ность остальных остается неопределенной.
Предположим еще, что высказывания из М та-
ковы, что свободные переменные в них образуют фор-
мальные объекты. Такие высказывания называются
правильными. Тогда имеем следующее
лингвистическое определение: абстрактной систем
мой называется множество правильных высказыва-
ний (формул).
Второй подход к построению определения аб-
страктной системы основан на теоретико-множествен-
ных соображениях. Здесь формальные объекты опре-
деляются явным образом, а не с помощью концеп-
туальных классов (в смысле Карри [2]) высказываний.
Начнем с определения некоторого семейства мно-
жеств Хь ..., Хп. Каждое из этих множеств опреде-
ляет некоторый формальный объект, а именно фор-
мальный объект, соответствующий множеству Xjt
может принять вид любого элемента из этого множе-
ства. Элементы множества Xj можно называть значе-
Основания общей теории систем
23
ниями объекта в множестве Xj. Образуем теперь пря-
мое произведение X семейства множеств Xj
Х = Хг « Х2* Х3* ... */л. (1)
Теперь мы можем ввести следующее
явное определение: абстрактной системой назы-
вается некоторое собственное подмножество X
Х,сХ. (2)
В действительности некоторое собственное подмно-
жество произведения X определяет некоторое отноше-
ние между объектами Хь ..., Хп. Заметим, что каж-
дый элемент любого множества Xj может быть в свою
очередь множеством, как это, например, имеет место
в случае динамических систем. Для таких систем эле-
ментами множеств Xj являются функции времени, оп-
ределенные на подходящем интервале времени (Л, /г)
и, следовательно, бесконечные множества значений,
принимаемые этими функциями на этом интервале.
Явное определение можно сформулировать еще
и так:
абстрактной системой называется некоторое отно-
шение, определенное на произведении X.
Таким образом, абстрактная система определяется
заданием
Х = Х^ ... *ХЯ и /?=(/?!, ...» (3)
Неудобство как лингвистического, так и явного
определений понятия абстрактной системы заключает-
ся в следующем: и в том и в другом случае X и
могут быть бесконечными множествами, которые мо-
гут быть заданы лишь индуктивно, т. е. с помощью
эффективной процедуры их построения. Включение
таких процедур в определение приводит к неявному
определению понятия абстрактной системы.
Во-первых, для определения эффективной проце-
дуры построения множества Xj, используемого в опре-
делении понятия системы, требуются следующие ис-
ходные данные,
24
Месарович М.
1. Множество исходных элементов.
2. Эффективная процедура построения новых эле-
ментов из исходных или уже построенных ранее эле-
ментов.
3. Условия замыкания, в силу которых элемен-
тами Х} могут оказаться лишь элементы множества-
1) или, точнее, множества 2).
Во-вторых, отношение R, описывающее систему,
также должно быть определено индуктивно, причем
следующим образом:
1. Задается множество отношений Т
Г={Г,......Л). (4)
2. Любое отношение Р,, описывающее систему,
представляется в виде некоторой последовательности
отношений из множества Т
Rj={Tfl,Tn.....TJm}. (5)
3. Формулируется некоторое множество правил
Р={РЬ Рп), определяющее, как образуются по-
следовательности Rj — {Tlt ..., Tjm}.
Теперь можно предложить следующее
неявное (синтетическое) определение: абстрактная
система определяется.
1. Некоторым множеством неявно определенных
формальных объектов.
2. Некоторым множеством элементарных преобра-
зований Т.
3. Некоторым множеством правил Р образования
последовательностей из элементов Т.
4. Некоторым множеством высказываний, опреде-
ляющих исходный характер формальных объектов,
используемых для построения новых видов этих
объектов.
Заметим, что с точки зрения лингвистического под-
хода первые три из перечисленных пунктов опреде-
ляют класс высказываний и только последний позво-
ляет сформулировать некоторую теорию относительно
формальных объектов, т. е. определить абстрактную
систему.
Основания общей теории систем
25
ОТКРЫТЫЕ И ЗАМКНУТЫЕ СИСТЕМЫ
Рассмотрим теперь систему, определенную явным
образом. Подмножество X, — это по сути дела неко-
торая совокупность наборов из п чисел. Некоторый
набор из п чисел, любой элемент множества Х5, бу-
дем называть в дальнейшем просто экземпляром.
Элементы этих наборов состоят из всех допустимых
значений соответствующих формальных объектов.
Определим теперь некоторый класс систем X's, X],
.... X? такой, что X{a.Xs для всех /.
Вопрос перевода результатов общей теории систем
на язык, используемый для описания реально суще-
ствующих систем, связан с существованием эффек-
тивного способа различения систем Х\, X2, X™.
Предположим, что задан некоторый экземпляр x,€Xs.
Отношение эквивалентности £i(x<, Xs), определенное
на Ха, позволяет определить некоторое собственное
подмножество Xsi(L\)aX6t содержащее заданный эк-
земпляр x1€Xsi(L1). В то же время отношение М оп-
ределяет, какая из систем Xs, Xs рассматри-
вается в настоящее время, поскольку подходящими
теперь считаются только те системы, которые содержат
Xti(Li). Предположим теперь, что существует такая
конечная последовательность отношений Lit ..., Lnt
что множество Xai(Li, ..., Ln) состоит из единствен-
ного элемента. Другими словами, эта последователь-
ность Lt, ..., Ln однозначно определяет экземпляр Х{,
так как он оказывается единственным элементом мно-
жества Xai(Llt ...» Ln). Такую последовательность
отношений можно назвать эффективным процессом
идентификации. Теперь мы можем ввести еще одно
новое понятие:
абстрактная система Х{ называется замкнутой то-
гда и только тогда, когда для каждого Xi£Xl суще-
ствует эффективный процесс идентификации.
Используя подходящий эффективный процесс иден-
тификации, замкнутую систему Xjs можно отличить
от любой другой системы Существование
эффективного процесса идентификации — это не
26
Месарович М.
какое-то свойство абстрактной системы, а скорее вы-
ражение характера взаимосвязи между наблюдателем
и самой системой. Отношение эквивалентности Lj
можно рассматривать как некоторое измерение, а эф-
фективный процесс идентификации (т. е. последова-
тельность отношений Lb .Ln) —как эксперимент,
осуществленный на некоторой реально существующей
системе.
Система, для которой перечисленные выше усло-
вия не выполняются, т. е. для которой существует по
крайней мере один (экземпляр) Xi£Xhs такой, что
для него не существует эффективного процесса иден-
тификации, называется открытой.
Открытую систему принципиально нельзя отличить
от некоторой другой системы X ls. Вообще говоря, си-
стема становится открытой, если в предположениях,
которые мы можем сделать о ее свойствах (и которые
мы проверяем экспериментально), опущены какие-то
принципиально важные составляющие, например рас-
сматривается меньшее число формальных объектов,
чем необходимо.
В качестве типичных примеров открытых систем
укажем на:
I) системы, не полностью изолированные от окру-
жающей среды (система с внешними «возмущениями»
или неопределенностями);
2) системы, реагирующие на экспериментальное
исследование таким образом, что это вызывает суще-
ственное изменение в их поведении (самоприспосаб-
ливающиеся и самоорганизующиеся системы);
3) системы, с которыми экспериментатор взаи-
модействует двусторонне, т. е. воздействуя на систе-
му, он одновременно испытывает воздействия с ее
стороны (экспериментатор во время эксперимента
оказывается скорее «внутри» системы, чем «сна-
ружи»).
Изучая открытые системы, мы сталкиваемся с за-
дачами совсем иного рода, чем при изучении замкну-
тых систем. Большинство принципиальных трудностей
теории статистических решений и автоматического
Основания общей теории систем
27
управления связано с тем, что рассматриваемые там
системы являются открытыми и решения необходимо
принимать при наличии неопределенностей. Тот факт,
что некоторые физические системы моделируются'
только открытыми абстрактными системами, имеет
первостепенную познавательную ценность.
СТРУКТУРА
Понятие структуры системы — одно из самых важ-
ных, но до самого последнего времени на него обра-
щали слишком мало внимания. В этом разделе мы
собираемся ввести понятие структуры для абстракт-
ной системы и показать, что это понятие можно ис-
пользовать в теории систем, определенных неявным
образом.
Рассмотрим прежде всего систему, определенную
явным образом. Вообще говоря, отношение R имеет
по крайней мере одну постоянную составляющую,
имеющую некоторое конкретное значение. Поэтому R
можно рассматривать как частный случай более аб-
страктного отношения, в котором составляющая, о ко-
торой мы только что упомянули, не зафиксирована.
Например, в формальном высказывании «Он старше
Джека» роль определяющего отношения играет по-
нятие «старше». Однако приведенное отношение мож-
но рассматривать как одну из реализаций более обще-
го высказывания
«разного возраста»
или, что то же,
«быть
старше
моложе
В отношениях, используемых в задачах анализа,
неопределенные составляющие принимают обычно
одно из множества значений или множества функций
(чаще всего функций времени). Можно считать, что
такое отношение R определяется заданием некоторого
бол ее общего отношения и конкретным значением
28
Месарович М.
неопределенной составляющей, которую будем назы-
вать конституантой отношения
я=[г, t).
(6)
где Т — структура системы, а £ —множество консти-
туэнт отношения.
В соответствии с этим
структура системы получается в результате обоб-
щения отношения, описывающего систему, т. е. в том
случае, если положить конституэнты этого отношения
неопределенными.
Интересным примером того, как определять струк-
туру системы, может служить случай линейной дина-
мической системы с одним входом и одним выходом,
описываемой уравнением
y(t)= | F(x)x(l — i)dx
(7)
или в сокращенной записи
yRx.
Отношение для этой системы может быть описано по
крайней мере двумя способами. Во-первых, консти-
туантой можно считать функцию времени F(x) и в
этом случае отношение, характеризующее систему,
имеет вид
/?= (С, 5(т)),
(8)
где С — алгебраическое преобразование типа свертки.
В этом случае структура системы определяется преоб-
разованием С; Т=С, £ = Г(т). Во-вторых, структуру
системы можно получить, полагая неопределенными
некоторые числовые параметры, определяющие F(x).
Например, для дифференциальной системы первого
порядка ее отношение имеет вид
(9)
где + являются операциями интегрирования,
умножения и сложения, а конституэнты 0 и К — па»
Основания общей теории систем 29
раметры системы, называемые обычно постоянной
времени и коэффициентом усиления соответственно.
В этом случае структура системы имеет вид Т =*
= {l/s,«, ’+}, а конституэнтами отношения являются
£={е. к}-
Итак, определение структуры системы связано с
погружением отношения, описывающего систему, в
некоторое множество отношений, отличающихся друг
от друга только значениями некоторых конституэнт.
Если это множество отношений не задано в явном
виде, то, очевидно, можно выбрать много различных
множеств, в рамках которых можно рассматривать
отношение интересующей нас системы. В этом случае
выбор множества Т определяется практическими со-
ображениями. Например, если мы хотим усовершен-
ствовать уже существующую систему, отношение этой
системы нужно погрузить в такое множество отноше-
ний, чтобы выбор приемлемого отношения был воз-
можен в результате выбора подходящих значений для
конституэнт, считающихся неопределенными. Выбор
подходящего элемента рассматриваемого множества
отношений может быть произведен организованным
образом, например с помощью некоторого метода оп-
тимизации. Однако выбор самой структуры, т. е. вы-
бор соответствующего множества отношений, может
осуществляться только эвристически.
В процессе решения так называемой задачи иден-
тификации очень важно отличать задачу определения
структуры системы от задачи определения ее отноше-
ния. Вкратце задача идентификации может быть
сформулирована следующим образом: на основании
заданного множества пар входных и выходных сиг-
налов найти отношение системы. Решение этой задачи
распадается по сути дела на два этапа: 1) на выбор
структуры Т системы и 2) на сравнение поведения си-
стемы с "отношениями, принадлежащими множеству
Т, что позволяет найти оптимальные значения для
конституэнт отношения £.
Второй из этих этапов может быть осуществлен
систематически, однако очень важно понять, что ему
всегда предшествует первый этап, на котором прихо-
30
Месарович М.
дится пользоваться догадками и личным опытом. На*
пример, в случае динамической системы предположе-
ние о линейности системы эквивалентно выбору опе-
рации свертки для определения структуры системы.
Задача идентификации сводится затем к выбору та-
кой функции времени Г(т), которая в определенном
смысле является наилучшей.
Покажем теперь, как найти структуру системы, оп-
ределенной неявным образом. В качестве типичного
представителя этого класса систем рассмотрим эле-
ментарную формальную систему, которая по Смулья-
иу [10] определяется:
1) индуктивно определенным классом конечных
последовательностей, каждый член которых представ-
ляет собой правильно построенные формулы, опреде-
ленные на трех алфавитах—для символов, для пере-
менных и для предикатов;
2) двумя двоичными операциями — Rt (подстанов-
ки) и R2 (modus ponens);
3) условием замыкания, в силу которого допусти-
мые системы могут описываться лишь такими элемен-
тами, которые получаются в результате использования
операций из п. 2 (возможно, многократного) над по-
следовательностями из п. 1.
Для того чтобы найти структуры элементарной
формальной системы, нужно построить для нее опре-
деление в явном виде. Введем для этого два новых
понятия.
1. Множество индексов 0 и т
6 = К ..., ...) и £=(&, У, (10)
где 0 — множество индексов правильно построенных
формул, а £ —множество индексов, связанных с каж-
дым из отношений Ri и Rz-
2. Новую бинарную операцию z—Mj[yj, tJ, опре-
деленную следующим образом:
(х =#> ту) -> (г = 0),
(т = ту)-> (г = у,).
(П)
где У) — результат применения отношений Ri или Rz
Основания общей теории систем
31
в момент времени f=/j. Отношение Alj описывает по
сути дела операцию запоминания, осуществляемую в
момент, когда т=т;.
Рис. 1. Элементарная формальная система, для которой
*-{»/)-tl. »?>}•
у —выходной сигнал.
Теперь мы в состоянии дать явное определение
элементарной формальной системы, которая характе-
ризуется:
А. Индуктивно определенным классом правильно
построенных формул.
Б. Множеством Е триад
Е={е)\' l*’)* <12)
где ц*—либо индекс т/ или некоторая правильно по-
строенная формула; р* имеет тот же смысл, что и ц1;,
а £ равно либо либо
В. Двумя трехместными отношениями /?1 и Rz и
множеством двоичных операций {Л1;).
Г. Условием замыкания.
Принципиальная схема такой системы приведена
на рис. 1. Триады входных символов в любой момент
32
Месарович М.
времени определяют одновременно и отношения, и
формулы, к которым выбранное отношение Ri иди Rz
будет применено. Результат «запоминается» с по-
мощью отношения Mj. Подавая на вход подходящие
триады символов, получим на выходе теоремы, спра- .
ведливые для рассматриваемой системы.
Теперь структуру такой элементарной формальной
системы можно определить как следующее множе-
ство отношений:
Г={/?1, R2> Мь М2> ...» Мп, ...], (13)
где Г, вообще говоря, бесконечное множество.
Поскольку элементарные формальные системы
Смульяна и элементарные формальные системы, опре-
деленные явным образом, эквивалентны в том смы-
сле, что для них справедливо одно и то же множество
теорем, множество отношений Т можно рассматривать
как структуру первой из этих систем.
Характер явного определения системы зависит от
выбора нового отношения М. Например, можно най-
ти другую структуру элементарной формальной си-
стемы, воспользовавшись другим отношениемА!/
= (14)"
где A4j определяется следующим образом: Zj=
*=x(tj— Тj), другими словами выход Af1/ представляет
собой входной сигнал, задержанный на Tj секунд.
Такое представление является более содержательным
для изучения динамики системы, однако в этом слу-
чае значительно усложняется задача программирова-
ния входных последовательностей индексов.
Введение понятия структуры в процессе изучения
формальных систем позволяет подойти к решению
проблемы с точки зрения вопроса о воспроизводимо-
сти, речь о которой пойдет ниже. Кроме того, введе-
ние этого понятия позволяет интерпретировать в рам-
ках общей теории систем теоремы Гёделя о неполноте.
Однако эти проблемы слишком сложны для того,
чтобы на них можно было здесь остановиться.
Основания общей теории систем
33
ДЕКОМПОЗИЦИЯ И СОСТОЯНИЕ СИСТЕМЫ
С практической точки зрения весьма важен вопрос
о возможности разложения или декомпозиции систе-
мы на несколько подсистем. Интересно установить,
что можно сказать об этом, оставаясь на принятом
здесь уровне общности. Прежде всего определим по-
нятие декомпозиции. Предположим, что некоторая си-
стема определяется явным образом с помощью мно-
гоместного отношения л-то порядка
.... Х„]. (15)
Общий метод декомпозиции можно описать с по-
мощью операции умножения отношений. Отношение
называется произведением отношений и #2, если
выполняется условие
(xRyf *->- |(x/?,z) П (г/?2У)|. (16)
Общий метод декомпозиции состоит в том, чтобы
представить отношение системы в виде произведе-
ния двух других отношений Ri и /?2- После того как
два таких отношения найдены, систему можно пред-
ставить как совокупность двух подсистем
Я.1*,.....Х„ Z\,
х/+1.....Лл]. < '>
Рассмотрим теперь следующую задачу: каков наи-
меньший порядок отношения подсистем, на которое
можно разложить многоместное отношение л-го по-
рядка из уравнения (16). Решение этой задачи мож-
но представить в виде следующей теоремы.
Теорема
Систему л-го порядка можно: 1. Разложить на
(л —2) трехместных отношения {Rlt .Rn}. 2. Раз-
ложить на двухместные отношения тогда и только то-
гда, когда любое трехместное отношение, полученное
в соответствии с первым утверждением, удовлетво-
3 Зак. 264
34
Месарович М.
ряет условиям
[XtRj(Xuu Х/+2)]*->
<-> {(XiR'jZj) п \Zjrfj (Х/+1, Xt+2)]}, (18)
xi+1 и xl+2.
Доказательство-. Первое утверждение теоремы лег-
ко доказать, построив соответствующее разложение.
Представим отношение R системы в виде произведе-
ния двух других отношений Ri и Rz
R ==
[/?,(£„ Хг, %3)|П |/?2(*i. ХА.......%„)]. (19)
Поскольку вместе с новыми отношениями Ri и R2 мы
ввели новый терм Zb на выбранные отношения можно
не накладывать никаких ограничений, и, следователь-
но, такая декомпозиция вполне возможна.
Представим затем R2 в свою очередь как произ-
ведение отношений
= (20)
Тогда
Х2, Лз)]П[/?з(22. Х4)]П
П [Z?4(Z2. Х\, Х„ ...» Л’д)!. (21)
Продолжая этот процесс, получим
==^2(А-1)+1/^2(А~1)+2’» . . . (П—3),
[^1(^1» ^2» -^з)| П |/?з(^2> ^1» '’QJn •••
••• П[/?2(я_4) + 1(^-3. ^л-4» ^л-2)] П
П |^?2 (л-4)+2(^л-3. Х\, Хя)]. (22)
Как и раньше, на вводимые отношения не наклады-
вается никаких ограничений и поэтому разложение
возможно, а выражение (22) содержит ровно (п — 2)
трехместных отношений.
Для доказательства второго утверждения рассмот-
рим одну из подсистем отношения (22), скажем,
И, И), (23)
Основания общей теории систем
35
где Г1/, Y2j и Y2— соответствующие термы. Запи-
шем Rj в виде следующего произведения отношений:
(24)
Предположим, что условие (18) выполнено и обозна-
чим промежуточный терм через Ку. Тогда
[/?ИИ. K3y)]n[^(H. к}, К5)]=
(25)
и, следовательно, подсистему Rj удалось разложить
на два двухместных отношения. Поскольку такое раз-
ложение возможно для всех /, вся система в целом
разлагается на 2(п — 2) подсистем двухместных отно-
шений. Это доказывает достаточность условий тео-
ремы. Для того чтобы показать их необходимость,
предположим, что существует трехместное отношение,
для которого промежуточный терм не совпадает ни с
одним из трех термов исходного отношения. Тогда
нАу'к И. И).
(26)
IW, z'MnlW. у}. г})].
Здесь Z1 — это новый терм и, следовательно, второе
отношение трехместно. Таким образом, представление
исходного отношения в виде произведения двух дру-
гих и ф не изменило максимального порядка от-
ношения, поскольку /?/ тоже трехместно, что и за-,
вершает доказательство.
Доказанная теорема свидетельствует о том, что
система высшего порядка не может быть разложена,
вообще говоря, на подсистемы с менее чем трехмест-
ными отношениями.
Возможно, самое важное следствие этой теоремы
связано с введением понятия состояния системы. Рас-
смотрим систему, осуществляющую отображение се-
мейства множества Хг на множество элементовт. е.
X.RX^t). (27)
з»
36
J
Месарович M.
Второй элемент отношения обозначен через Х2(/); та-
кое обозначение подчеркивает, что элементами этого
множества являются функции времени, т. е. в свою
очередь некоторые множества. Предположим, кроме
того, что множества х2(/)€Х2(/) конечны и содержат
по р элементов. Отношение (27) имеет порядок р+ 1
и в соответствии с только что доказанной теоремой'
не может быть разложено на подотношения ниже тре-
тьего порядка. Предположим теперь, что элементы
упорядочены:
х2(/) = [х2(/,), x,(t2)..... x2(Q], (28)
Тогда отношение системы (27) имеет вид
Xi/?[x2(6), х2(/2), .... х2(^)]. (29)
Рассмотрим теперь подмножество всех элементов
х2(0 с индексом, большим /
Х1 (^) = ’ Х2 (^л)]* (30)
1
1
1
Тогда отношение (27) эквивалентно следующему от-
ношению:
xxR[x^t)f х/'(0]. (31)
где x{r(t) состоит из оставшихся элементов x2(t)
xir (/) = [х2 t х2 (^у)]> (32)
t
Представим теперь R в виде произведения отношений
Z‘R2Xl'(t). (33)
Терм Xt зависит теперь от промежуточного терма Z
и не зависит от элементов X2(t), у которых индекс
меньше /. Можно утверждать, что элементы Z описы-
вают состояние нашей системы. Разложение же си-
сТёйы на две в соответствии с отношениями (33) мож-
но понимать как утверждение, что А зависит лишь от
состояния системы в момент t = tj и всех будущих эле-
ментов х2, но не зависит от всех предыдущих элемен- (
тов, т. е. элементов, имеющих индекс меньше /. В ча-
1
I
1
Основания общей теории систем
37
стном случае динамических систем это обычно выра-
жают с помощью утверждения, что при известном в
момент времени tj состоянии системы элемент не
зависит от значений xj(f) вплоть до этого момента
времени.
Приведенные выше рассуждения, естественно, лег-
ко распространить на случай бесконечных множеств.
Например, если множество хг(/) имеет бесконечную
мощность, то его всегда можно представить как объ-
единение двух подмножеств, например
Х2 (0 = {*2 (О* ^(0)»
(34)
удовлетворяющих условию
АЛ {[•^2(^)с:л’2] П К < Л}» (33)
где А — квантор общности.
Тогда отношение системы можно переписать в
виде
XiR[X2,
(36)
и, вновь представляя это отношение произведением,
получим
XiR, [xj, Z],
ZR(X%.
(37)
Таким образом, можно считать, что элементы множе-
ства Z описывают состояние системы.
Заметим, что пднятие состояния системы появи-
лось здесь как следствие теоремы о разложении. Дей-
ствительно, теорема утверждает, что если нам нужно
понизить порядок отношения системы, устранив зави-
симость от любых элементов некоторого подмноже-
ства Хъ то новое отношение должно быть по крайней
мере трехместным, если только не удовлетворяются
дополнительные условия теоремы. Три терма этого
трехместного отношения в этом случае являются вхо-
дом, выходом и состоянием.
38
Месарович М.
СВОЙСТВА И ПОВЕДЕНИЕ СИСТЕМЫ
Нельзя делать слишком большой упор на парал-
лель между методологией естественных наук, с одной
стороны, и охарактеризованной в первом разделе ме-
тодологией общей теории систем, с другой. Работа
теоретика в области общей теории систем начинается
только после того, как ему задана некоторая аб-
страктная система, скажем, в своей явной форме
.... Лп]. Очевидно, невозможно изучать такую
систему, перебирая каждый элемент множества Хл
всех наборов из п чисел. Такая ситуация напоминала
бы попытку изучать какую-либо реально существую-
щую систему, не руководствуясь подходящей теорией.
И в том, и в другом случае потребовалось бы беско-
нечное число экспериментов. Для того чтобы решить,
к какому типу относится рассматриваемая система,
необходимо уметь провести различие между этой си-
стемой и некоторой другой, возможно весьма близкой,
системой с помощью относительно небольшого числа
высказываний. Эти высказывания должны относиться
к системе как к единому целому в смысле ее явного
определения, а не к какому-нибудь отдельному на-
бору из п чисел.
Рассмотрим теперь произведение
...*ХП и построим на нем пропозициональную функ-
цию L(x), область определения которой совпадает со
всем пространством X. Если предложение
истинно всякий раз, когда Xj£Xs, то считают, что
£(х) определяет некоторое свойство системы.
Свойством системы называется некоторая пропози-
циональная функция, определенная на X и истинная
на X,.
Приведем также определение понятия поведения
системы.
Поведением абстрактной системы называется не-
которое множество ее свойств
B={L}......Lp\. (38)
С практической точки зрения весьма важен вопрос
о выборе множества свойств Li, Lk и о том, как
♦ • • ♦ — •
Основания общей теории систем
39
выяснить, обладает ли данная система некоторым
свойством или нет. Это, конечно, трудная задача, вы-
ходящая по сути дела за рамки формального изуче-
ния абстрактных систем и уходящая своими корня-
ми в ту область знания, которая занимается изучением
соответствующей реально существующей системы. Ре-
шение этой задачи зависит от того, как мы собираем-
ся использовать нашу реально существующую систе-
му. Однако и формальное изучение должно указывать
на то, какого рода свойства могут быть у данной си-
стемы. Например, приступая к изучению любой си-
стемы, мы хотели бы знать, является ли эта система -
открытой или замкнутой, какова ее структура, как
можно описывать состояние этой системы и т. д. Не-
которые другие свойства, как, например, устойчивость,
могут иметь особый интерес для одних задач и второ-
степенное значение для других.
Каждый раз, когда мы изучаем некоторую абстра-
ктную систему или когда мы говорим о ней, мы поль-
зуемся языком, отличающимся от языка формальных
высказываний, образующих ХЙ. Такие высказывания
о системе называются метавысказываниями, а исполь-
зуемый при этом язык называется метаязыком. Конеч-
но, можно использовать и для формальных высказы-
ваний, и для метавысказываний один и тот же язык,
однако в этом случае нужно делать четкое различие
между высказываниями этих двух типов.
Удобный способ изучения абстрактной системы за-
ключается в том, чтобы организовать все метавыска-
зывания в новую систему, которую мы станем назы-
вать метасистемой. Такая метасистема выбирается
таким образом, чтобы она правильно отражала не-
которые свойства исходной абстрактной системы, но
в то же время легче поддавалась изучению, чем ис-
ходная система.
УПРАВЛЯЕМОСТЬ И ВОСПРОИЗВОДИМОСТЬ
В качестве примера свойств системы, которые
можно изучать на абстрактном уровне, введем поня-.
тия управляемости и воспроизводимости.
40
Месарович М.
Для этого прежде всего нужно ввести понятие
функционала качества. Рассмотрим сначала один
из вариантов поведения системы. Затем, исследуя
значения термов системы, можно определить, является
ли такое поведение системы допустимым или нет.
С технической точки зрения это означает, что вво-
дится некоторое отображение Х6 на множестве дей-
ствительных чисел Q
(39)
Управляемость системы зависит от того, можно ли
добиться определенного качества поведения для за-
данной системы и заданного множества входов.
Система называется управляемой относительно
множество, Qc тогда и только тогда, когда для каж-
дого qj С Qc существует некоторое Xj С X, такое, что
(х,—*!//)(40)
•
где Xj — величина на входе системы, а у, — величина
на ее выходе.
Другими словами, заданное множество Qc должно
быть подмножеством множества Qe, генерируемого с
помощью всех комбинаций входных воздействий, воз-
можных для данной системы
Qc = Qs-
Отображение Т обычно определяет некоторый оп-
тимальный режим, соответствующий наилучшему ка-
честву системы, которое можно достичь, не наклады-
вая на систему никаких ограничений. Например, если
Г — квадратичный функционал, то оптимальное пове-
дение соответствует минимуму этого функционала.
Обозначим точку оптимального качества q через
<7опт и несколько видоизменим определение управляе-
мости.
Система управляема, если Qc = {<7onT, qom + a\
Система не управляема, если для всех х£Х;
q> (<7оат4-tt).
Другое свойство абстрактной системы связано с
ее способностью воспроизводить на выходе заданные
Основания общей теории систем 41
_ --------------------------------—______;______*
сигналы. Это свойство получило название воспроиз-
водимости и вводится с помощью плотных множеств
как локальное. Приведем теперь соответствующее
определение.
Определение
Система называется воспроизводящей относитель-
но множества Угс:У3, если существует некоторое под-
множество yrcjczyr, такое, что:
1) УГС[ всюду плотно в Уг;
2) для каждого £/j С Уга существует некоторое
х3£Х такое, что yj-T(Xj), например, если
Зху л у} {[(Х7 е л ({/; е Yrd)\ — = Т (х,)1). (41)
Требование плотности искомого подмножества в
У, относительно которого определяется воспроизводи-
мость системы, вводится для того, чтобы нельзя было
считать воспроизводящей систему, генерирующую
лишь множество изолированных точек пространства
выходных величин У3. Действительно, в случ*ае любой
многомерной системы всегда можно так подобрать не-
которые изолированные точки из Ув, что отношенйе
системы и ее входные величины окажутся как раз
рассчитанными на воспроизведение этих выходных ве-
личин. Однако понятие воспроизводимости приобре-
тает глубокий смысл только тогда, когда оно обеспе-
чивает воспроизведение всех достаточно близких
выходных сигналов.
Общий метод, позволяющий устанавливать, яв-
ляется ли заданная система воспроизводящей или нет,
опирается на следующую теорему.
Теорема
Система S—YTX является невоспроизводящей от-
носительно подмножества Уг<ь если:
1) существует два отношения Ri и Кг, произведе-
ние которых определяет отношение систёмы T—RJR2,
например [YTX\^{{YRiZ) П (Z^2X)}';
2) общий терм произведения отношений Т являет-
ся некоторым подмножеством пространства У',
42
Месарович М.
мощность которого меньше мощности У, например
г=г'=Кй,
у/».
г = {<<Л............У.»-
(42)
Другими словами, если
[УТХ\ П . (43)
Доказательство. Существование некоторого /?1 эк-
вивалентно утверждению о существовании некоторого
отображения подмножества У' на У
V —^Y.
Обозначим подмножество всех элементов У, удовлет-
воряющих условию (43), через РсУ. Рассмотрим не-
который элемент V :у0€ V. Этот элемент является вос-
производимым. Элемент yv является векторным
У»=к(0» .....Уп(П В векторном простран-
стве У введем метрику, связанную с метрикой в про-
странстве координат соотношением
m
^[Уь У11]=2!^[У1/(0» (44)
Каждому элементу у'(0 =[<Л(0........*А(0] урав-
нение (43) ставит в соответствие элемент у"(0 остав-
шегося множества
У* (0 = k.i (О.....уп (0J: Г" = ~ [К Л У']: у" (0 € Г".
Другими словами, каждому у'(/) соответствует един-
ственное у (/) илиух'(/).
Рассмотрим теперь некоторую окрестность точки
У®як(0» У,х(0]. которую мы станем обозначать че-
рез /([у», е]. Для любой внутренней точки У5 —
== [у'» у' ] этой окрестности К
Л [у»- УJ < в. (45)
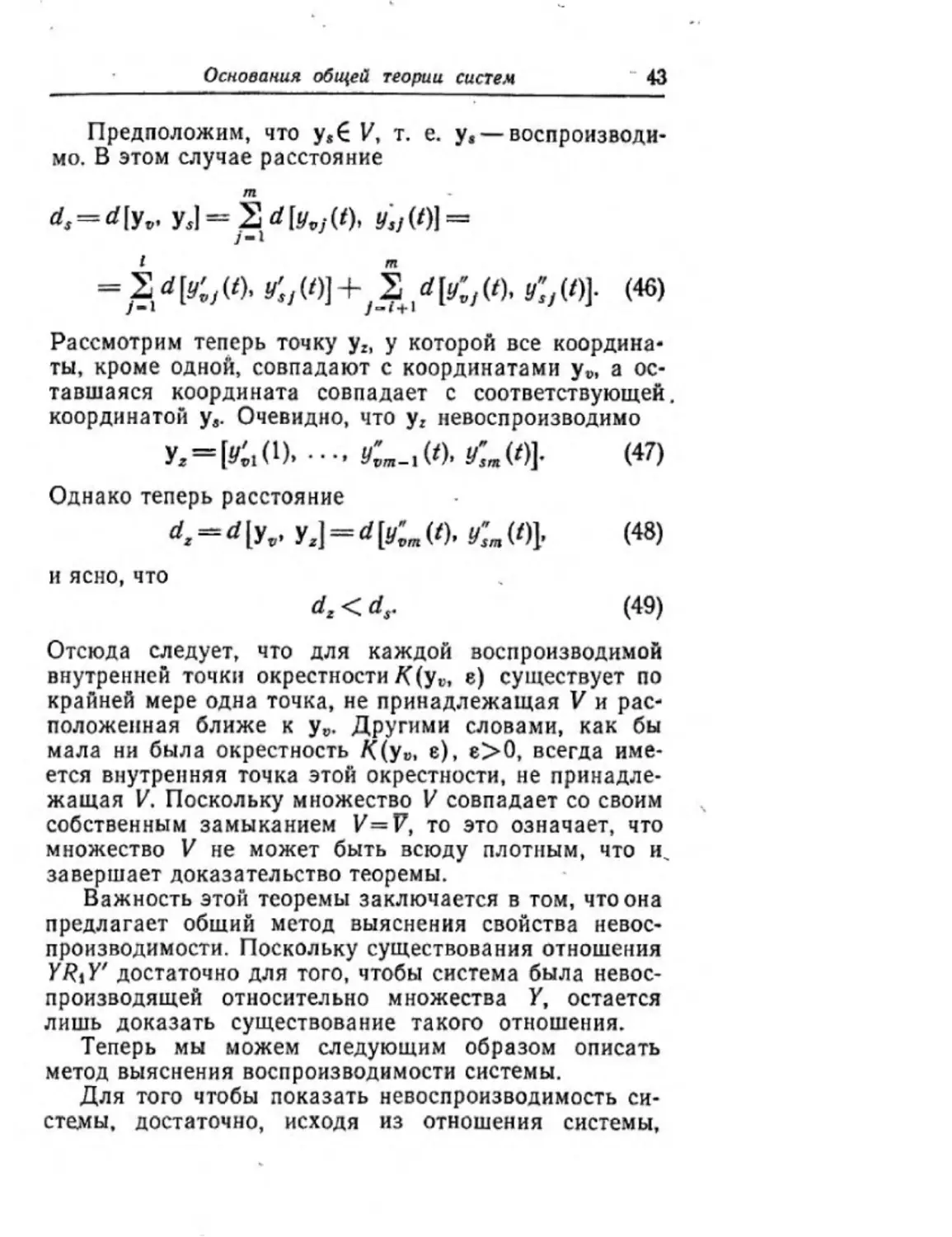
Основания общей теории систем ' 43
Предположим, что ye€ V, т. е. у, —воспроизводи-
мо. В этом случае расстояние
m
<7, = ^|У». У,|“2<*М' !б/(01 =
/-1
I m
= KyWj+'S(46)
Рассмотрим теперь точку yz, у которой все координа-
ты, кроме одной, совпадают с координатами yv, а ос-
тавшаяся координата совпадает с соответствующей,
координатой уа. Очевидно, что yz невоспроизводимо
уг=[у;.(1). •••• гС-.м. (47)
Однако теперь расстояние
d,=d 1У„. yj = d [С. (0. У’,п (01- (48)
и ясно, что
dz < ds. (49)
Отсюда следует, что для каждой воспроизводимой
внутренней точки окрестности/((у^, е) существует по
крайней мере одна точка, не принадлежащая V и рас-
положенная ближе к yv. Другими словами, как бы
мала ни была окрестность K(yv, е), е>0, всегда име-
ется внутренняя точка этой окрестности, не принадле-
жащая V. Поскольку множество V совпадает со своим
собственным замыканием V=V, то это означает, что
множество V не может быть всюду плотным, что и^
завершает доказательство теоремы.
Важность этой теоремы заключается в том, что она
предлагает общий метод выяснения свойства невос-
производимости. Поскольку существования отношения
YRtY' достаточно для того, чтобы система была невос-
производящей относительно множества У, остается
лишь доказать существование такого отношения.
Теперь мы можем следующим образом описать
метод выяснения воспроизводимости системы.
Для того чтобы показать невоспроизводимость си-
стемы, достаточно, исходя из отношения системы,
44
Месарович М.
построить некоторое отношение между выходными ве-
личинами (или их свойствами, связанными с метри-
кой), не содержащее входных сигналов системы.
По своей общности 'полученный метод выяснения
воспроизводимости аналогичен таким методам ис-
следования различных свойств систем, как метод
Гурвица, метод Ляпунова и т. п. Основная слабость
этого метода заключается в том, что он решает лишь
вопросы существования и не дает конкретных указа-
ний на то, как построить критическое отношение
ЦЕЛЕНАПРАВЛЕННОЕ ПОВЕДЕНИЕ
До сих пор мы всегда рассматривали систему как
некоторое отношение между термами, не уточняя, ка-
кой смысл можно придать термам по отношению к
поведению системы. В то же время, как подчеркива-
лось в разделе «Основные черты теории», именно то
значение, которое вкладывается в различные термы,
и придает общей теории систем специальный харак-
тер, отличающий ее от чисто математической дисцип-
лины. Каждому терму в описании системы необхо-
димо придать смысл, связанный с поведением системы
и отличный от того, который обычно приписывается
ему при математических исследованиях формальных
систем.
Есть два основных направления для обсуждения
систем и, следовательно, два контекста, в соответ-
ствии с которыми можно интерпретировать термы,
взятые из описания системы. Эти два направления
характеризуются принципиально различными отноше-
ниями наблюдателя к изучаемой системе. При первом
подходе система изучается как бы извне, а ее поведе-
ние рассматривается как некоторое отображение од-
ного подмножества термов (входных величин и со-
стояний) в другое. Такой взгляд на поведение систем
мы мр1 будем называть терминальным подходом. При
втором подходе предполагается, что известны некото-
рые инвариантные аспекты поведения системы, отра-
жающие ее цель. Кроме того, мы отдаем себе полный
отчет в действиях системы, обеспечивающих достиже-
Основания общей теории систем
45
ние этой цели. В связи с этим такой подход называет-
ся целенаправленным. Целенаправленные действия
системы также представляют собой некоторое преоб-
разование одних термов в другие, однако свойства
системы, определяющие ее поведение, теперь рассмат-
риваются под особым углом зрения, связанным с эти-
ми преобразованиями.
Все, что говорилось в предыдущих разделах, отно-
сится к области терминального подхода. Для того
чтобы развивать целенаправленный подход, необхо-
димо дать такое же четкое определение понятиям
«принятие решения», «управление», «адаптация», «са-
моорганизация» и т. д., как и основным понятиям тер-
минального подхода. Недостаток времени и места не
позволяет нам рассматривать здесь вопросы, связан-
ные с целенаправленным поведением, сколь-нибудь
подробно. Ограничимся лишь следующими общими
замечаниями.
1. Каждая система, по крайней мере в принципе,
может быть описана с точки зрения либо терминаль-
ного подхода, либо целенаправленного подхода. Вы-
бор соответствующего подхода определяется отноше-
нием наблюдателя к системе и той информацией о
поведении системы, которой он располагает. Конечно,
имеются системы (например, механические), цели ко-
торых либо неизвестны, либо, насколько об этом мож-
но судить, не существуют вообще. В таких случаях
использование целенаправленного подхода выглядит
очень искусственным и приводит к тривиальным ре-
зультатам. Нам кажется, что нет особой необходимо-
сти останавливаться на таких системах, поскольку
оба вида подходов с успехом использовались для изу-
чения наиболее интересных систем.
2. Поведение целенаправленных систем гораздо
• сложнее поведения терминальных систем.
3. Поведение целенаправленных систем значитель-
но менее изучено, чем поведение терминальных.
Для чего же нам нужен целенаправленный подход,
если систему можно удовлетворительно описать в рам-
ках любого из этих двух подходов и если терминаль-
ный подход заведомо проще? Суть ответа на этот
46
Месарович М.
вопрос заключается в возможности использования
описания системы для прогноза ее поведения. Дру-
гими словами, если у нас есть описание поведения
системы с позиций целенаправленного подхода, то
это дает нам гораздо более мощные возможности
предсказания поведения системы при условиях, кото-
рые отличаются от наблюдавшихся в прежних экспе-
риментах.
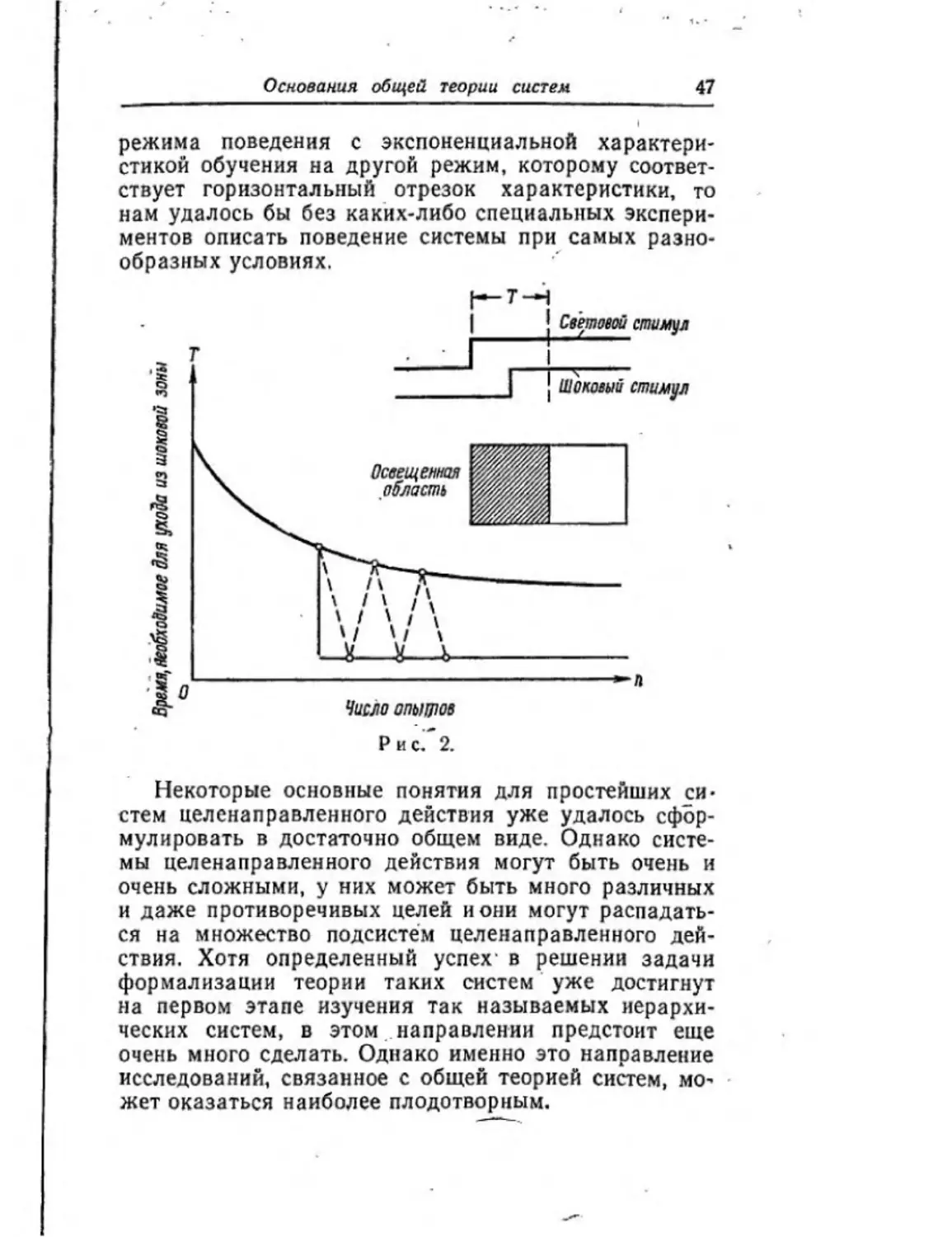
Покажем это на примере. Пусть имеется подопыт-
ное животное, на которое воздействует пара стимулов.
Первый стимул, световой сигнал, на короткий проме-
жуток времени опережает второй стимул, электриче-
ский шок. Подопытное животное может покинуть
шоковую зону, преодолев некоторый барьер, ограж-
дающий зону безопасности. Производя опыты много-
кратно, мы сможем построить для этого животного
кривую обучения, откладывая на одной оси время, за-
трачиваемое на уход из шоковой зоны, а на другой —
число уже выполненных опытов. Типичная кривая
обучения приведена на рис. 2. Если пренебречь пере-
ходными процессами, то легко видеть» что у этой кри- "
вой есть явно выраженная точка разрыва. Она соот-
ветствует, грубо говоря, тому моменту времени, когда
животное улавливает взаимосвязь между световыми
и шоковыми стимулами и начинает бежать к барьеру,
ограждающему зону безопасности, сразу же как толь-
ко загорается лампочка.
Очевидно, что для получения разрывной кривой
обучения (рис. 2) нельзя пользоваться теми же пре-
образованиями стимулов в реакцию, которые наблю-
даются для того же животного при других условиях
эксперимента, например приводящих к непрерывной
характеристике обучения. Поэтому если мы хотим
объяснить поведение некоторой обучающейся системы
в различных ситуациях, то нам нужно лучше разоб-.
раться в самом процессе обучения, происходящем
внутри системы. Именно в этом случае исключитель-
но эффективными оказываются модели, в которых
используется целенаправленный подход. Так, напри-
мер, если бы нам удалось обнаружить, по какому
принципу система принимает решение о переходе из
Основания общей теории систем
47
режима поведения с экспоненциальной характери-
стикой обучения на другой режим, которому соответ-
ствует горизонтальный отрезок характеристики, то
нам удалось бы без каких-либо специальных экспери-
ментов описать поведение системы при самых разно-
образных условиях.
— Т—Н
| Световой стимул
*3 • ‘ J i—4—г—-
§ __________| | Шоковый стимул
Рис. 2.
Некоторые основные понятия для простейших си-
стем целенаправленного действия уже удалось сфор-
мулировать в достаточно общем виде. Однако систе-
мы целенаправленного действия могут быть очень и
очень сложными, у них может быть много различных
и даже противоречивых целей и они могут распадать-
ся на множество подсистем целенаправленного дей-
ствия. Хотя определенный успех в решении задачи
формализации теории таких систем уже достигнут
на первом этапе изучения так называемых иерархи-
ческих систем, в этом .направлении предстоит еще
очень много сделать. Однако именно это направление
исследований, связанное с общей теорией систем, мо-
жет оказаться наиболее плодотворным.
48
Месарович М.
ЛИТЕРАТУРА
I. Berta la nf у L., An Outline of General Systems Theory,
The British Journal of the Philosophy of Science, 1, №2 (1950).
2. Curry H B., Outlines of a Formalist Philisophy of Mathema-
, tics. North Holland Co., Amsterdam, 1951.
5 3. A s h b у W. R., Introduction to Cybernetics, Wiley, N. Y., 1955;
> имеется русский перевод: Эшби У. Р.. Введение в киберне-
тику, Физматгиз, М., 1959.
4. В о u 1 d i п g К., General Systems Theory-Skeleton of Science,
General Systems Yearbook, 1, Univ, of Michigan, Ann Arbor,
1956.
5. Zadeh L., From Circuit Theory to Systems Theory, Proc. IRE
(May 1962).
6. Mesarovii M. D., Eckman D. Р.» On Some Basic Con-
cepts of a General Systems Theory, Proc, of the Third Interna-
tional Conference on Cybernetics, Namur, Belgium, 1961.
7. M e s a г о v i 6 M. D., Towards the Development of a General
Systems Theory, Neue Technik (August 1963).
8. Mesarovii M. D., On Self-Organizational Systems, in Self-
Organizing Systems, Spartan Press, Washington, D. C., 1962.
9. Mesarovit M. D., Self-Organizing Control Systems, in
Symposium on Discrete Adaptive Processes, Al EE, 1962.
10. S m u 11 у a n R. M., Theory of Formal Systems, Princeton
Univ. Press, Princeton, N. J., 1961.
11. Mesarovit M. D., General Systems Theory, Notes from the
Class Lectures Delivered at Case Institute, I960.
12. C u г г у H. В., Foundation of Mathematical Logic, McGraw-
Hill, N. Y„ 1963.
13. Mesarovid M. D., The Control of Multivariable Systems,
MIT Press and Wiley, N. Y., 1960.
ПОНЯТИЕ СОСТОЯНИЯ В ТЕОРИИ СИСТЕМ
Л. Заде')
ВВЕДЕНИЕ
Понятие состояния уже давно играет важную роль
в физических науках, особенно в термодинамике,
механике и физике. В этих областях раньше, да и
сейчас понятие состояния системы определяли эври-
стически как некоторое число из множества чисел,
содержащих в совокупности всю информацию о пре-'
дыстории системы, существенную для определения ее
поведения в будущем.
Однако в конце прошлого века понятие состояния
получило более точную формулировку в работах
Пуанкаре [I], посвященных его теории динамических
систем — теории, которая была в дальнейшем развита
Биркгофом (2], Марковым [3], Немыцким [4] и Понтря-
гиным [5].
В последние годы понятие состояния стало играть
важную роль в таких новых областях знания, как тео-
рия информации, теория статистических решений и
теория оптимальных систем. По существу в этих, да
и в других областях с понятием состояния сталкива-
лись в основном при попытках дать математическое
описание исследуемых систем. Все возрастающая
сложность таких систем и их широкое разнообразие
привели к необходимости более общей формулировки
понятия состояния, формулировки, пригодность кото-
рой не была бы ограничена системой какого-то кон-
кретного физического или математического вида, нап-
ример термодинамическими системами, системами
l) Zadeh L. A., The Concept of State in System Theory.
4
4 Зак. 264
50
Заде Л.
динамическими в смысле Биркгофа, системами с ко-
нечным числом состояний, системами, поведение ко-
торых описывается дифференциальными уравнениями,
и т. д.
Определить понятие состояния так, чтобы оно под-
ходило для всех систем, это трудная, а возможно
даже и невыполнимая задача. Здесь мы преследуем
более скромную цель — наметить подход, который ка-
жется естественным, и в то же время более общим,
чем те, которым следовали до настоящего времени, но
который все же не претендует на исчерпывающую общ-
ность. Мы начнем с того, что сделаем следующие
ограничивающие предположения относительно рас-
сматриваемых систем: а) такие системы являются
детерминированными, т. е. не содержат источников
помех или не подвергаются вероятностным (случай-
ным) воздействиям и б) такие системы физически
возможны1) (не предвосхищают событий), т. е. пре-
образуют лишь предшествующие и текущие (но не
будущие) значения входных сигналов, действующих
на систему.
Для того чтобы яснее представлять себе место на-
шего более общего понятия состояния, полезно напом-
нить вкратце, как вводится понятие состояния: а) в
теории динамических систем и б) в теории конечных
автоматов. Этим мы и займемся в следующем раз-
деле.
ПОНЯТИЕ СОСТОЯНИЯ для ДИНАМИЧЕСКИХ СИСТЕМ
И КОНЕЧНЫХ АВТОМАТОВ
Определение 1
Согласно Немыцкому, динамической системой на-
зывается некоторая группа преобразований {Rt]t опре-
деленных на сепарабельном метрическом простран-
стве R и обладающих следующими свойствами:
1. Rt определены для всех /, принадлежащих ин-
тервалу —оо</<оо.
') В оригинале nonanticipative — нелредвосхищающие
(англ.). — Прим, перев.
Понятие Состояния в Теории систем 51
2. Функция q—Цр, i). Где q — образ точки р из R
в соответствии с Rt, обладает групповым свойством
f(P> *o-R)=W(a 4). О- (1)
3. Группа Rt непрерывна в том смысле, что для
всех tQ и Ро и всех последовательностей {/п} и {рп},
сходящихся соответственно к t0 и ро, справедливо сле-
дующее соотношение:
limf(p„, = t0).
п-+оо
Элемент р из R является состоянием рассматри-
ваемой динамической системы, a q=f(p, t) описывает
состояние системы в момент t при условии, что в
момент /=0 система находилась в состоянии р.
Приведенное выше определение динамической си-
стемы было сформулировано на основе анализа задач
небесной механики или, если смотреть шире, задач
динамики твердого тела. Поэтому в нем явным обра-
зом не выделены входы и выходы системы. Однако
распространение этого определения на системы с вхо-
дами и выходами требует лишь незначительного его
изменения. Одно такое видоизмененное определение
приведено в одной из недавних работ Калмана [6].
Это определение воспроизводится ниже.
Определение 2
Динамической системой называется математическая
структура, определяемая следующими аксиомами:
1. Для системы определено пространство состоя-
ний S и множество 6 моментов времени, в которых
определено поведение системы; S — некоторое тополо-
гическое пространство, а 9 — упорядоченное топологи-
ческое пространство, являющееся подпространством
пространства вещественных чисел.
2. Для системы определено некоторое топологиче-
ское пространство Q функций времени, определенных
на 0 и называемых допустимыми входными сигнала-
ми системы.
. 3. Для произвольного начального момента вре-
мени t0 из 0, произвольного начального состояния хо
52
Заде Л.
из 2 и произвольного входного сигнала и из Q, опреде-
ленного для />/о, все будущие состояния системы
определяются, видом функции перехода <p:QX
Х0Х6Х2—>2, что символически записывается сле-
дующим образом: <ри(/; /о,*о)=*(. Эта функция опре-
делена только для />/0. Более того, для любых
646 4/г из 0, любых хо из 2 и любых фиксирован-
ных и из Q, определенных на [fo, М П 0, справедливы
следующие соотношения:
фц (А)« ^0» -^о) = -^0> (2)
<р«(6; 4. *о)=Ф«(4г; 6» Фа(Л: *о))- (3)
Кроме того, система должна быть физически возмож-
ной1), т. е. если и, и u=v на [/0, /] П 0, то не-
обходимо, чтобы
ч Фи (^’ 6)> ^) = Ф»(^» A)» Xq). (4)
4. Каждый выходной сигнал системы является не-
которой вещественной функцией ф, определенной на
произведении пространств 6X2.
5. Функции (риф непрерывны относительно топо-
логий, выбранных на 2, 6 и Q.
Как станет ясно впоследствии, серьезным недостат-
ком такого определения является то, что оно не охва-
тывает систем, выходной сигнал которых не выра-
жается в виде некоторой функции состояния и време-
ни. Простейшим примером подобной системы может
служить дифференциатор, т. е. система, входной сиг-
нал которой связан с входным соотношением y—duldi,
где через u(t) и y(t) обозначены соответственно зна-
чения входных и выходных сигналов в момент вре-
мени /.
Значение группового свойства, выраженного в ура-
внениях (1) и (3), станет яснее в свете более общего
определения, приведенного в разделе «Понятие со-
стояния». Сейчас же мы вкратце остановимся на том,
как вводится понятие состояния в теории конечных
автоматов [7, 8].
’) См. примечание на стр. 50,
Понятие состояния в теории систем
53
Определение 3
Системой с конечным числом состояний или конеч-
ным автоматом А называется система, описываемая
тремя конечными множествами 2, U и У и парой ото-
бражений
giSxi/x^r,
где Г —множество целых чисел, Т={..., —1, 0, 1,...}.
Элементы множества 2 называются состояниями авто-
мата А, элементы множества U — входными сигнала-
ми автомата А, элементы множества У—выходными
сигналами автомата А. Временной параметр t пред-
полагается определенным на Г, а состояние автомата
А и его входной и выходной сигналы в момент вре-
мени t обозначаются через $/, Ut и yt соответственно.
Отображения fug связывают состояние автомата в
момент времени и его выходной сигнал в момент
времени t с состоянием и входным сигналом в мо-
мент времени t. Другими словами,
st = f (S/, ult Г), (5)
yt = S(^> »i> t). (6)
Интересно сравнить это определение с определе-
нием 2. Прежде всего аналогом функции фи(^;Аь х0),
описывающей состояние автомата А в момент вре-
мени как функцию состояния А в момент вре-
мени /о (т. е. х0) и значений входного сигнала и меж-
ду t и /о, является итерированная функция
f(* • • f (/($/,» Q»* ute+i> zo~H) •••» O’
выражающая st+i через s/0, to, t и «/,» ..,, ut. Легко
убедиться в том, что эта итерированная функция об-
ладает групповым свойством (уравнение (3)].
Кроме того, выражение для выходного сигнала ко-
нечного автомата имеет несколько более общий ха-
рактер, чем приведенное в аксиоме 4 для динамиче-
ской системы, так как оно позволяет учитывать за-
висимость выходного сигнала от входного, а не только
54
Заде Л.
от текущего состояния и времени. Поэтому для того,
чтобы конечные автоматы можно было рассматривать
как частный случай динамических систем, необходимо
определять вещественную функцию ф на произведе-
нии 6x2 XQ, а не на произведении 0X2, как в опре-
делении 2.
Приведенные выше определения можно подверг-
нуть критике с двух точек зрения. Во-первых, опреде-
ление 2 не обладает достаточной общностью, даже
если учитывать отмеченное выше видоизменение опре-
деления ф. Во-вторых, и это более существенно, хоте-
лось бы определить динамическую систему как неко-
торое геометрическое понятие, не зависящее от того,
как с ним связывается понятие состояния. Ясно, что
ни определение 2, ни определение 3 не дают такой
внутренне замкнутой характеристики динамической
системы.
В следующем разделе мы приведем одно простое
и естественное определение, свободное от этих недо-
статков. После этого мы введем понятие состояния и
выведем некоторые из его основных свойств1).
ПОНЯТИЕ ОРИЕНТИРОВАННОГО АБСТРАКТНОГО
- ОБЪЕКТА
Грубо говоря, под ориентированным абстрактным
объектом мы понимаем абстрактно определенную
систему, связанную с некоторым входным сигналом
(причиной) и и выходным сигналом (следствием) у.
Здесь и далее символы типа и — векторные функции
времени, принимающие в момент времени t значения
u(t). Поэтому, если не делается специальной оговор-
ки, и обозначает множество пар{(/, и(/))|—оо</<оо).
В самом общем случае взаимосвязь между и и у, уста-
навливаемая системой, не является взаимно однознач-
ной. Так некоторой конкретной входной функции вре-
мени и может соответствовать несколько выходных
') Описанный в двух следующих разделах метод представ-
ляет собой видоизмененный вариант метода, развитого в ра-
боте [9].
Понятие состояния в теории систем
55
функций времени и, обратно, некоторый конкретный
выходной сигнал может соответствовать нескольким
входным функциям.
Прежде чем попытаться формализовать понятие
ориентированного абстрактного объекта, полезно бу-
дет ввести следующие обозначения. Через в
дальнейшем обозначается отрезок функции и, опреде-
ленный на некотором интервале наблюдения [f0, /J.
Точнее, через обозначается множество пар
{(/, u(t)) |/о-< t-СЛ}- Точно так же для полуоткрытого
интервала наблюдения, по определению,
41 “ и (0)! Л} • (8)
Довольно часто символы и„ Г) и Z ] в дальней-
шем заменяются на и — символ, который используется
и для обозначения функции u = {(t,u(t)) |—оо</<оо}.
Обычно смысл, который вкладывается в символ и,
ясен из самого контекста.
Возвращаясь к исходной задаче формализации
понятия ориентированного абстрактного объекта, заме-
тим, что при экспериментальном исследовании физи-
ческих устройств на их вход обычно подаются некото-
рые входные функции времени, определенные на
интервале наблюдения {/о, и на том же интервале
измеряются соответствующие выходные функции вре-
мени. Таким образом, в результате этого эксперимен-
тального исследования обычно получают то, что мож-
но было бы назвать множеством пар вход — выход
(к14. 41’ у\^ 41Г
Если такой же входной сигнал подать на вход
другого образца исследуемого устройства, то выход-
ной сигнал его не обязательно должен быть таким
же, как и в первом случае, так как начальные усло-
вия для второго образца могут быть отличными. По-
этому наше определение должно отразить тот факт,
что заданному ult^ может соответствовать более од-
ного Уи. <л-
Обозначим через некоторое множество упо-
рядоченных пар функций времени, определенных на
t
. 56 Заде Л.
интервале наблюдения [/0, Ч, т. е. пусть, по опреде-
лению,
/.1= {("!/•. 61»
Пользуясь этим понятием, можно предложить сле-
дующее определение ориентированного абстрактного
объекта.
Определение 4
Ориентированным абстрактным объектом А назы-
вается некоторое семейство {-fy* zj), /о» /i€(—оо)
множеств упорядоченных пар (и, у) функций времени,
где первый элемент, по определению, « = z назы-
вается отрезком входного сигнала или просто входным
сигналом, а второй у = у^(у также, по определению,
называется отрезком выходного сигнала или просто
выходным сигналом. Про некоторую пару (и, у)
= р у = у^ Л!) будем говорить, что это пара
вход — выход, принадлежащая 4; последнее символи-
чески записывается как (и, у)£А, если (и,
для некоторых t0, t\ из .(—оо, оо). Таким образом,
ориентированный абстрактный объект можно отожде-
ствить с множеством пар вход — выход, принадлежа-
щих А.
Элементы семейства {/,|) должны удовлетворять
следующему условию внутренней непротиворечивости:
если (#f,e. Г(р Уу* м) — некоторая пара вход —выход,
принадлежащая А, то А должен принадлежать и лю-
бой отрезок этой пары, т. е. любая пара вида
(^То, Т1р У|Т#, т,])’ ДЛЯ КОТОРОЙ ТО<Т1<Л
11 “|Л,| = «и./.1’ = на интервале [т0, т,].
Другими словами, это условие требует, чтобы любая
часть любой пары вход —выход, принадлежащей 4,
сама была бы парой вход — выход для 4. Смысл этого
условия в том, чтобы обеспечить внутреннюю непро-
тиворечивость определения семейства д), /о,
€(—оо, оо).
Множество всех отрезков и, определенных на-
интервале [/0, Ч» и таких, что (и, */)€4, будем на-
зывать пространством входных сигналов А и обо-
Понятие состояния в теории систем 57
значать через /?[и]. Точно так же множество всех
отрезков у, таких, что {и, у) € А, станем называть
пространством выходных сигналов и обозначать через
/?[(/]. Отсюда следует, что множество /,| всех пар
лг м)’ принадлежащих А, есть некоторое под-
множество произведения /?[и] X/?[//].
Суть приведенного выше определения в том, что
оно отождествляет ориентированный абстрактный
объект с «перечнем» упорядоченных пар (и, у) отрез-
ков функций времени, непротиворечивым образом оп-
ределенных на всех подынтервалах оси вещественных
чисел. В этом «перечне» каждому фиксированному и
соответствует, вообще говоря, множество различных у
и, обратно, каждому фиксированному // — множество
различных и.
С точки зрения математики это сводится по суще-
ству к определению системы *) как некоторого отно-
шения, а не, как обычно, — некоторой функции или
оператора. Для того чтобы показать, в чем тут раз-
личие, рассмотрим простейшую систему — интегратор.
В этом случае значения входного сигнала u(t) в мо-
мент времени t и выходного сигнала y(t) в тот же
момент времени связаны друг с другом с помощью
дифференциального уравнения
= «(/). (10)
Эквивалентом такого определения будет утвержде-
ние, что интегратор—это ориентированный абстракт-
ный объект, который можно описать совокупностью
упорядоченных пар функций времени следующего ви-
да («(/)» а-4- | u&jdl I, fiC (—00,00),
' ^0 '
где параметр а принадлежит пространству веществен-
’) Понятие «системы» используется здесь в том же смысле,
что и ориентированный абстрактный объект. В действительности
понятие системы несколько шире понятия ориентированного, аб-
страктного объекта, поскольку система не обязательно должна
быть ориентированной. Этот вопрос более подробно рассматри-
вается в работе [9].
58
Заде Л.
ных чисел, а функция и —классу функций времени,
интегрируемых на любом конечном интервале. В этом
случае каждому фиксированному значению u[lo> f ]
соответствует некоторое множество y[ft tJ, каждый
элемент которого отвечает различным значениям па-
раметра а
t
у(0=а-Ь J (И)
В дальнейшем любое математическое отношение
между и и у, определяющее совокупность пар вход —
выход, образующих А, называется характеристикой
вход — выход для А. В этом смысле уравнение (10)
является характеристикой вход —выход для интегра-
тора. Отметим, что мы не рассматриваем интегратор
как некоторый оператор, так как любой оператор, по
определению, должен ставить в соответствие любой
функции времени, на которую он действует, един-
ственную функцию времени, получаемую в результате
преобразования. В более общем плане, если входной
и выходной сигналы системы А удовлетворяют неко-
торому дифференциальному уравнению вида
••• -+<Zo(/)!/ =
=мо-^-++ыо. (12)
*
то это уравнение и составляет характеристику вход —
выход для А, поскольку оно определяет множество
всех пар вход —выход, принадлежащих А *)..
До сих пор ничего не говорилось о состоянии си-
стемы А. В качестве оправдания введению этого по-
нятия заметим, что было бы полезно, если бы удалось
параметризировать (или переметить) множество пар
вход — выход Ry* /,] таким образом, чтобы каждому
’) Следует подчеркнуть, что здесь и вообще в этой системе
нас можно упрекнуть в недостаточной математической строгости.
В случае уравнения (12) это сразу бросается в глаза, поскольку
мы не накладываем никаких условий регулярности на вид ко-
эффициентов а и Ь, а также вид функций у и и.
Понятие состояния в теории систем
59
отрезку входного сигнала и каждому значению
параметра соответствовал единственный отрезок вы-
ходного сигнала Такая параметризация соот-
ветствовала бы, грубо говоря, нумерации страниц
«перечня» пар вход — выход, на каждой странице ко-
торого выписаны пары с одинаковыми выходными
сигналами. Как будет показано, состояния А —это по
существу значения такого параметра.
С этой точки зрения основная роль понятия со-
стояния состоит в обеспечении возможности связать
с каждым входным сигналом единственный выходной
сигнал, используя состояние системы в качестве пара-
метра. О том, как это можно сделать, более подробно
рассказывается в следующем разделе.
ПОНЯТИЕ СОСТОЯНИЯ
Пусть а — некоторый параметр, принимающий зна-
чения в пространстве 2. (Обычно а — это л-мерный
вектор, а 2 — это /^-пространство упорядоченных по-
следовательностей из п вещественных чисел.) Пусть,
кроме того, (и, у)—некоторая пара вход — выход,
принадлежащая А, где, по определению, u — uitb /
у = у^ jj. Тогда будем говорить, что параметр а па-
раметризует А, если найдется некоторая функция А,
определенная на произведении пространств 2х/?[и]
и такая, что для всех («, у), принадлежащих Л, и
всех t0 и ti можно выбрать из X такое а, что
у — А(щ и). (13)
Более того, для каждого а из 2 и для каждого и
из /?(«] в этом случае пара (и, А (а; и)) является
парой вход—выход, принадлежащей А.
Эти условия, другими словами, означают, что каж-
дая пара (и, у), удовлетворяющая уравнению (13)
для некоторого а из 2, является парой вход — выход,
’) В дальнейшем станет ясно, что в этом разделе удобнее
рассматривать полуоткрытые, а не закрытые интервалы.
60
Заде Л.
принадлежащей А, и, обратно, любая пара вход —
выход, принадлежащая А, удовлетворяет уравнению
(13) при некотором а из 2.
Одного факта параметризации А с помощью пара-
метра а еще недостаточно для того, чтобы называть а
состоянием системы А. Для этого нужно еще потре-
бовать, чтобы функция А обладала свойством сопря-
жения реакций, сформулированным ниже в определе-
нии 5.
Прежде чем переходить к этому определению, ус-
ловимся, что через uv будем обозначать сигнал, в
котором отрезок v = следует за отрезком
и = и^(]. (Это одна из причин, почему мы предпочи-
таем пользоваться полуоткрытыми, а не закрытыми
интервалами наблюдения. Если бы мы пользовались
закрытыми интервалами, то возникла бы трудность
с определением значения uv в точке t при условии,
что В частности, если, по определению,
а = й(/,Л и М’ то
Определение 5
Функция Л (а; и) обладает свойством сопряжения
реакций, если для каждого а из S и каждого ии' из
R[uu'] найдется такой элемент а* из S, однозначно
определяемый значениями а и и, что
Л (а; ии') = А(а\ и)А(а*, и'). (14)
Другими словами, условие. (14) означает, что вы-
ходной сигнал, или, что то же, реакция системы, соот-
ветствующая значению параметра а и отрезку ии'
входного сигнала, совпадает с отрезком реакции, со-
ответствующим параметру а и входному сигналу а,
за которым следует отрезок реакции, соответствую-
щий параметру а* и входному сигналу и'.
Важность свойства Сопряжёния реакций станет
нам более ясной, как только будет определено то, что
мы называем состоянием Системы А. Это делается
следующим определением.
Понятие состояния в теории систем
.61
. Определение 6
Если с помощью а осуществляется параметриза-
ция А и функция А (а; и) обладает свойством
сопряжения реакций, то элементы S представляют со-
стояния системы А, пространство S называется про-
странством состояний А, а у=А(а, и)—характери-
стикой вход — выход — состояние для А. Если
a = «(fo, л» т0 а из ^(“1 и) называется начальным со-
стоянием системы А в момент времени t0 и обозна-
чается через s(/o). В связи с этим характеристика
вход —выход —состояние системы А может быть
представлена в более явном виде как
Уу., н = (s (?о)’ и(Ь '1)’ 5)
где и(," д — отрезок входного сигнала, s(t0) — началь-
ное состояние системы, а у(/° — соответствующий
выходной сигнал. Другими словами, уравнение (15)
утверждает, что начальное состояние системы А в мо-
мент времени и отрезок входного сигнала u(ig d од-
нозначно определяют отрезок реакций
Таким образом, мы определили, что мы подразу-
меваем под состояниями системы А вообще и началь-
ным состоянием системы А в частности. Однако по-
прежнему у нас нет ответа на вопрос, что мы назы-
ваем состоянием системы А в момент времени t. Для
того чтобы определить это понятие, мы можем вос-
пользоваться свойством сопряжения реакций [урав-
нение (14)]. Если мы это сделаем, то придем к сле-
дующему определению.
Определение 7
Пусть система А первоначально находится в со-
стоянии 5(/0)—а и на ее вход подан сигнал и — и., ...
Благодаря сопряжению реакций Л (а; и) существует
элемент а*С £, такой, что уравнение (14) справед-
ливо для любого и u(i /(|, Элемент а*, однозначно.
определяющийся значениями s(/o) и «(,о назы-
вается состоянием системы А в момент времени i и
62
Заде Л.
обозначается через s(t). Таким образом, состояние
системы в момент времени t однозначно определяется
состоянием системы в момент времени /о и значения-
ми сигнала на ее входе в промежутке между этими
моментами времени. Символически это может быть
записано с помощью отношения
5 (0 = 5 (5 (Qi /])» (1б)
а полученное уравнение называется уравнением со-
стояний А. Отметим, что в уравнении (16) s является
функцией, определенной на произведении пространств
SX/?(u], и что u{ta> (]) имеет тот же смысл, что
и io, *о) в определении 2.
С помощью введенных выше символов свойство
сопряжения реакций [уравнение (14)] может быть
выражено следующим образом:
A(s(4); uu') = A(s(toY, u)A(s(tyt и'). (17)
Записанное в таком виде оно становится более по-
нятным: реакция системы А, находящейся в состоянии
s(t0), на входной сигнал ии' должна быть идентична
“реакции системы Л, находившейся в состоянии $(/0),
на входной сигнал и и последующей реакции этой же
системы, находившейся в состоянии s(t), на входной
сигнал и'.
Как показано в работе [9], из того, что функция
Л (а; и) обладает свойством сопряжения реакций, оп-
ределенном уравнениями (14) или (17), следует, что
функция 5 из уравнения (16) обладает свойством со-
пряжения состояний
s(s(toy uu') = s(s(s(toy и); и'). (18)
Это свойство эквивалентно групповому свойству (урав-
нение (3)], с которым мы встретились ранее при опре-
делении понятия динамической системы.
В качестве простого примера рассмотрим систему
А со следующей характеристикой вход — выход: 4
4 + </ = «• (19)'
Понятие состояния в теории систем
63
В этом случае пары вход—выход, определенные
на (/о, 6]. имеют вид
(t \
и (/). «-('-« -I- J (У . 4 < t < (20)
Если отождествить теперь S с осью вещественных
чисел (—оо.оо), параметр а из уравнения (20) мо-
жно использовать для параметризации А. Более того,
написав
t
y(t) = ae-«-V+ f е-«-Ъи(№, t0< (21)
^0
легко проверить справедливость следующего тожде-
ства: .
t t
(I) d£ = j e-(t-$u (i)
T
(22)
где /о<т</ и
t
a*=a<?-CT“'«>+ [ e~^u(l)dl. (23)
Уравнение (21) эквивалентно соотношению вида
у=А(а; и) [см. уравнение (13)], поскольку оно опре-
деляет значения у для t>t0. Более того, уравнения
(21) и (23) свидетельствуют о том, что функция в
правой части уравнения (21) обладает свойством со-
пряжения реакций. В связи с этим уравнение (21)
можно назвать характеристикой вход — выход — со-
стояние для системы А, где a — состояние этой систе-
мы в момент времени /0 и £ = (—оо, оо). Отметим
также, что, положив t=tQ (что допустимо, если и не
содержит дельта-функций с особенностью в точке /0)»
получим
s(/0) = a = ytt>). (24)
откуда следует, что состояние системы А в момент to
можно отождествить с выходным сигналом этой си-
стемы в момент времени /о-
64
Заде Л.
На этом заканчивается определение понятия со-
стояния и маленький пример, иллюстрирующий это
определение. Для того чтобы подвести итог, перечис-
лим основные черты этого определения.
1. Исходным пунктом нашего определения служит
понятие ориентированного абстрактного объекта А,
определяемого как некоторое семейство упорядочен-
ных пар функций времени. В соответствии с опреде-
лением 3 абстрактный объект определяется сам по
себе независимо от того, как вводится для него по-
нятие состояния.
2. Понятие состояния вводится как способ пара-
метризации множества пар вход — выход, обеспечи-
вающий однозначную зависимость выходного сигнала
от входного сигнала и состояния системы. Поскольку,
вообще говоря, существует много (а на самом деле
и бесконечно много) способов, какими можно пара-
метризовать множество пар вход — выход, следует
заключить, что любой характеристике вход — выход
может соответствовать несколько (бесконечно много)
характеристик вход — выход — состояние, которые, хо-
тя и отличаются по форме, по существу оказываются
эквивалентными. Иначе говоря, подобно тому как
матрицу можно рассматривать характеристикой ли-
нейного оператора в какой-то конкретной системе ко-
ординат, так и характеристику вход — выход — состоя-
ние можно рассматривать как описание ориентиро-
ванного абстрактного объекта при конкретном выборе
системы параметров для совокупности его пар вход —
выход. Это не ясно из определения динамической
системы, поскольку в нем понятие состояния вводится
с самого начала.
3. Определение 3 распространяется на более ши-
рокий класс систем, чем динамические системы.
В связи с этим определения 5 и 6 являются более
общими определениями понятия состояния, чем кос-
венное определение этого понятия, содержащееся в
неявном виде в определении динамической системы.
Мы не затронули здесь многочисленных разветвле-
ний понятия состояния, а также не остановились на
его использовании в задачах анализа и синтеза ли-
Понятие состояния в теории систем 65
нейных и нелинейных систем. По этим вопросам мы
отсылаем читателя к работе [9] и к многочисленным
работам по теории оптимальных систем, динамиче-
скому программированию, теории конечных автома-
тов и теории информации.
ЛИТЕРАТУРА
1. Р о 1 п с а г е Н., Sur les courbes definles par les equations diffe-
rentielles, J. Math. Pures et Appl., part 3, 1, 167—244 (1835),
part 4, 2, 151—217 (1886).
2. В i r k h о f f G. D., Dynamical Systems, Amer. Math. Soc. Col-
loq. Publ. (1927).
3. M a p к о в A. A., Sur une propriete gSnerale des ensembles
minimaux de M. Birkhoff, Comptes Rendus, Acad. Set. Paris,
193, 823—825 (Nov. 1931).
4. Немыцкий В. В., Топологические вопросы в теории ди-
намических систем, Успехи мат. наук, 4, 91—153 (ноябрь—
декабрь 1949)'.
5. Понтрягин Л. С., Шиирельман Л. Г., Общее иссле-
дование динамических систем, Неопубликованная рукопись
30-х годов; цитируется по п. 4.
6. К а 1 m а п R., Mathematical Description of Linear Systems,
RIAS Techn. Rep. 62-18 (Nov. 1962).
7. Gill A., Introduction to the Theory of Finite-State Machines,
McGraw-Hill, N. Y., 1962; имеется русский перевод: Рил л А.,
Введение в теорию конечных автоматов, изд-во «Наука>, 1966.
8. G i п s b u г g S., An Introduction to Mathematical Machine
Theory, Addison-Wesley Publ. Co., Reading, Mass., 1962.
9. Z a d e h L. A., D e s о e г C. A., Linear System Theory — The
State Space Approach, McGraw-Hill, N. Y., 1963.
10. Vogel T., Dynamique theorique et heredity Rend, del Semi*
nario Mat. Univ. Torino, 21, 87—98 (April 1962).
5 Зак. 264
=
ОБЩАЯ ТЕОРИЯ СИСТЕМ И ИССЛЕДОВАНИЕ СИСТЕМ
КАК ПРОТИВОПОЛОЖНЫЕ КОНЦЕПЦИИ НАУКИ
О СИСТЕМАХ
Р. Акоф')
Я хотел бы сравнить некоторые существенные чер-
ты общей теории систем и направления, получившего
название «исследования систем». Мои высказывания
относительно общей теории систем основаны главным
образом на работах Берталанфи, а утверждения отно-
сительно исследования систем отражают мое соб-
ственное представление об исследовании операций.
В исследование систем входит, помимо исследования
операций, множество других дисциплин, но я убеж-
ден в том, что, с точки зрения рассматриваемых мною
особенностей, наиболее характерной дисциплиной яв-
ляется исследование операций. При этом я совер«
шенно не претендую на то, чтобы все сторонники об-
щей теории систем, операционисты и ученые, работаю-
щие в более широкой области исследования систем,
разделяли мои взгляды.
Я не претендую также и на то, что рассматривае-
мые мною два подхода к теории систем являются
единственно возможными. Я хочу только привлечь
внимание к двум в некотором смысле крайним точкам
зрения. Но, естественно, существует еще много «про-
межуточных» взглядов. Наконец, мои оценки методо-
логических выводов, вытекающих из указанных двух
подходов, отнюдь не означают, что я отрицаю цен-
ность всех работ, выполненных представителями од-
ного лагеря, и безоговорочно одобряю все исследова-
) Ас к о Г f R. L., General System Theory and Systems Rese-
arch: Contrasting Conceptions of Systems Science,
Общая теория и исследование систем ' 67
ния, проведенные представителями другого. Безуслов-
но важные и полезные результаты получены
сторонниками обоих подходов, точно так же, как у
первых и у вторых наблюдались неудачи. Я оцени-
ваю методологические особенности каждого из этих
подходов, а не особенности работ отдельных ученых,
придерживающихся первого или второго подхода.
Хотя я испытываю глубокое уважение ко многим
работам, выполненным под флагом общей теории си-
стем, у меня имеются опасения относительно некото-
рых выводов, к которым приводит представление Бер-
таланфи об этой теории с точки зрения возможностей
единства науки. Вспомним, что его взгляды были про-
диктованы прежде всего стремлением объединить на-
уки с помощью общей теории систем.
Я попытаюсь показать, что Берталанфи предпри-
нял попытку объединить науки, рассматривая комп-
лексно те аспекты природы, которые рассматриваются
изолировано отдельными научными дисциплинами.
Моя позиция основана на том, что науки можно
объединить, не прибегая к исходному расчленению.
Далее я постараюсь показать, что предложенный Бер-
таланфи метод объединения наук приведет лишь к
дальнейшему разделению как теоретических и при-
кладных направлений неформализованных наук, так
и к увеличению разрыва между формализованными
(точными) и неформализованными науками.
Понятие науки относится и к процессу целена-
правленного исследования, т. е. к некоторому виду
деятельности, и к результату этого процесса, т. е.
к полученной в итоге этого процесса сумме знаний.
Однако далеко не безразлично, с какой точки зрения
подходить к наукам, пытаясь объединить их. Общая
теория систем характеризуется тенденцией рассмат-
ривать науку как некоторую совокупность фактов, за-
конов и теорий. Эта тенденция выражена в высказы-
вании К. Боулдинга о том, что «наука есть то, что
могут плодотворно обсуждать ученые, если они дей-
ствительно выступают в роли «ученых» [3, стр. 198]».
Напротив, специалисты по исследованию систем рас-
сматривают науку как вид деятельности, а знания —
5*
68
А коф P.
как ее продукт. Для одних объединение науки пред-
ставляет собой вопрос, связанный с понятиями, сим-
волами и утверждениями относительно явлений, для
других — это вопрос о том, как проводится научное
исследование. Боулдинг высказывает на этот счет та-
кое мнение:
«По мере того как наука расчленяется на отдель-
ные дисциплины..., между ними становится меньше
связей и тем выше становится вероятность замедления
прогресса всей науки вследствие утраты необходимого
общения. Распространение «глухоты специализации»
приводит к тому, что те, кто должны знать о том, что
знают другие, не в состоянии обнаружить эти необхо-
димые знания из-за отсутствия «обобщенного слуха».
Одна из основных целей нашей общей теории си-
стем — развить такой обобщенный слух и, создавая
структуру общей теории, предоставить возможность
специалисту в какой-либо одной области знаний по-
лучать информацию от представителей других обла-
стей» [3, стр. 198—199].
В отличие от этого исследователи систем, хотя они
обычно имеют специальное образование, работают со-
вместно в комплексных научных коллективах, стре-
мящихся приобрести конкретные и общие знания о
системах, знания, которые нельзя разложить по от-
дельным дисциплинам. Эти знания служат основой
для синтеза более эффективных систем и более эф-
фективного управления. Иными словами, они состав-
ляют как науку, так и технику систем.
Боулдинг отличает «простые гибридные научные
дисциплины», «происходящие от добропорядочных и
законных академических родителей» (например, со-
циальную психологию или биохимию), от «сложных
гибридных дисциплин», имеющих несколько различ-
ных, а подчас и неопределенных предков и возникаю-
щих вследствие появления объектов исследования на
стыке многих областей знания» [3, стр. 199].
В таком «сложном гибриде» как исследование опе-
раций, объект исследования не появляется так, как
это представляет Боулдинг, ибо предмет изучения во-
обще не расчленяется на отдельные элементы, отно-
Общая теория и исследование систем
69
сящиеся к различным специализированным дисцип-
линам. Следовательно, в отличие от утверждения
Боулдинга операционисты «не выхватывают некото-
рые общие явления, изучаемые различными дисципли-
нами, и не стремятся построить общие теоретические
модели, описывающие эти явления» [3, стр. 200]. На-
против, они строят теорию, относящуюся к «систем-
ным» явлениям, взятым в целом, не обращая внима-
ния на барьеры, разделяющие науку на отдельные
дисциплины.
Берталанфи [2] предпринял попытку построения
новой структуры науки на обломках движения за
единство науки, начатого несколько десятилетий на-
зад логическими позитивистами, которые стремились
объединить науку на основе принципа редукции поня-
тий.- В соответствии с этим принципом все научные
понятия сводимы к некоторому множеству абсолютно
первичных (непреобразуемых) понятий, которые, как
полагали одни, формируются на основе непосред-
ственных наблюдений, и, как считают другие, яв-
ляются неопределимыми понятиями некоторой фор-
мальной системы. Эти понятия независимо от мнения
об источнике их происхождения получили название
«предикатов физического объекта», т. е. физических
свойств объектов. Поскольку эти категории, из кото-
рых считалось возможным вывести все остальные
имеющие смысл понятия, рассматривались как физи-
ческие свойства, физика заняла положение на вер-
шине иерархии научных дисциплин. Химия, биология,
психология и общественные науки следовали далее
в порядке их перечисления, изучая предположительно
понятия, которые можно синтезировать из понятий,
фигурирующих в «первичных» дисциплинах. Таким
образом, физика была признана единственной дисцип-
линой, независимой в логическом отношении от дру-
гих дисциплин, а все зависимости остальных дисцип-
лин были приняты односторонними.
По многим причинам науку не удалось объединить
под знаменем редукции понятий. Здесь я могу рас-
смотреть лишь одну из этих причин. Логические по-
зитивисты не смогли понять, что простые закономер-
70 Акоф Р-
МОСТИ нельзя выявить в начале исследования и что
если такая закономерность вообще обнаруживается,
ТО только в самом его конце. Сложные понятия не
строятся из простых, а, наоборот, простые абстраги-
руются из сложных. В итоге логические позитивисты
оказались в положении, когда они старались объеди-
нить науку, логически восстанавливая ее из отдель-
ных дисциплин, на которые она была расчленена.
Берталанфи [2] не отвергает попытки логических
позитивистов, основываясь на логических или методо-
логических соображениях, а лишь указывает на прак-
тические трудности.
«До сих пор единства науки стремились достичь
сведением всех наук к физике, конечным приведением
всех явлений к физическим. Если этого вообще
удастся добиться, то только в весьма и весьма дале-
кой перспективе» [2, стр. 306].
Следовательно, Берталанфи не усмотрел логиче-
ского заблуждения в попытке приобретения или по-
строения знания сложного из знания простого, и в
результате он стал жертвой этого заблуждения, попав
в более тонкую ловушку, чем логические позитивисты.
Берталанфи взял за отправной пункт существую-
щую структуру науки, разбитой на отдельные дис-
циплины. Отыскивая структурное сходство у законов,
установленных в различных научных дисциплинах, он
надеялся построить более общую теорию, чем теории,
развитые в рамках отдельных дисциплин. Таким об-
разом, Берталанфи в неявном виде предположил, что
структура природы изоморфна структуре науки. Нет
ничего более далекого от истины. Природу нельзя де-
лить в соответствии со структурой науки. Явления и
проблемы, предлагаемые нам природой, нельзя раз-
нести по сложившимся научным дисциплинам. Мы
пытаемся втиснуть явления природы в различные на-
учные дисциплины, а не она навязывает их нам. Не-
которые вопросы, которые мы ставим, изучая явле-
ния и проблемы природы, можно классифицировать
как физические, химические, биологические и т. д.,
но этого отнюдь нельзя делать с явлениями как та-
ковыми.
Общая теория и исследование систем
71
Чтобы построить модель чисто физического явле-
ния (а ее необходимо именно строить), мы должны
исключить из рассмотрения огромное количество не-
физических элементов, которые содержатся в инфор-
мации, описывающей данное явление. Так, например,
автомобильные катастрофы можно рассматривать по
крайней мере как физические, биологические, психо-
логические, социологические и экономические явле-
ния. Изучение их с любой из перечисленных точек
зрения требует прежде всего исключения из рассмот-
рения переменных, относящихся ко всем остальным
подходам. Можно признавать правомерность приве-
денного примера, но отрицать общность, которую он
призван иллюстрировать. Так, можно спросить, имеет-
ся ли какая-либо иная возможность рассмотрения
движения планет, кроме как физического явления?
Но можно ли объяснить различия в трактовке этого
движения в теориях Коперника и Птолемея, исходя
лишь из одних физических соображений?
Опыт, накопленный в результате изучения движе-
ния планет, является в такой же мере биологическим,
психологическим, социологическим и экономическим
явлением, как и физическим. Любой опыт всегда
включает наблюдателя и наблюдаемое и это взаимо-
действие характерно для любой дисциплины.
Именно вследствие этого постановка задачи объ-
единения науки путем «увязывания» результатов, по-
лученных отдельными дисциплинами как в форме
фактов и понятий (т. е. в рамках логического позити-
визма), так и в форме законов и теорий (рассматри-
ваемых с точки зрения общей теории систем), равно-
сильна попытке запереть конюшню после того, как
лошадь уже украдена.
Рассмотрим теперь более детально, какие выводы
стремится получить общая теория систем. В качестве
примера общесистемного принципа, обнаруживаемого
в результате признания структурного изоморфизма,
Берталанфи приводит экспоненциальный закон.
«Экспоненциальный закон применим к радиоак-
тивному распаду, к распаду химического соединения
при мономолекулярной реакции, к гибели бактерий
72
Акоф Р.
под воздействием света или дезинфицирующих
средств, к падению веса голодающего животного и
к уменьшению численности популяции животных или
людей, если смертность превышает рождаемость»
[2, стр. 305].
Этот конкретный пример получил следующую оцен-
ку Джонаса.
«Кривая одного и того же общего вида описывает
результат количественных изменений, происходящих
во всех этих случаях. Единственным условием для по-
лучения такой кривой является непрерывное измене-
ние одной из переменных в одном направлении при
сохранении постоянной средней скорости изменения
каждой единицы этой переменной. Подобное условие
выполняется в неограниченном числе случаев, начи-
ная от снежной лавины до возрастания числа изобре-
тений. Для любого конкретного случая применимость
экспоненциального закона является важным фактом,
но является ли то, что он справедлив в других слу-
чаях, также заслуживающим внимания фактом? Это
было бы так, если бы выполнение одного и того же
математического соотношения указывало на некото-
рую общую закономерность и если бы таким образом .
характеризовался с какой-либо стороны порядок, на-
блюдаемый в природе или в некоторых ее проявле-
ниях» [5, стр. 330].
Гемпел дал более общую оценку задачи обнаруже*
ния структурного изоморфизма.
«Я не считаю..., что признание изоморфизма зако’
нов добавляет что-либо новое или углубляет наши тео-
ретические представления о явлениях в двух рассма-
триваемых областях. Дело в том, что такие представ-
ления складываются лишь в том случае, если для этих
явлений справедливы общие законы или теории, а
применимость определенного набора теоретических
принципов к данному классу явлений можно обосно-
вать только эмпирическими исследованиями, но не чи-
стой теорией систем» [4, стр. 315].
Берталанфи ответил на эти критические замечания
следующим образом.
Общая теория и исследование систем
73
«Классическим примером нормального распреде-
ления является распределение отклонений попаданий
от центра мишени. Но в то же время нормальная кри-
вая характеризует, среди бесчисленного множества
других явлений, распределение фенотипов в наслед-
ственности, не подчиняющейся, очевидно, законам
Менделя и обусловленной множеством факторов (на-
пример, длина колоса у злаков или другие разли-
чия в размерах. Этот пример соответствует по своей
логической структуре примеру Джонаса. Прежде
всего общая формула описывает непосредственно на-
блюдаемые явления. И, кроме того, для объяснения
наблюдаемого явления привлекаются гипотетические
абстрактные предложения. Если следовать линии рас-
суждений Джонаса, то нужно было бы сказать: на на-
следственность, обусловленную множеством факторов,
бесспорно, не сказываются ружье, стрелок или ми-
шень. Было бы совершенно бессмысленным использо-
вать эти понятия при построении гипотетической суб-
структуры наследственности. То обстоятельство, что
-один и тот же интеграл имеет место в обоих случаях,
означает не более того, что 2 + 2 = 4, а статистика ни-
чего не доказывает. Однако подобного вывода не де-
лают, так что остается открытым вопрос о том, что
лежит в основе подмеченного изоморфизма. В случае
стрелка, стреляющего по цели, на результаты стрель-
бы влияет ряд независимых факторов. В случае мно-
жества факторов, влияющих на наследственность, рас-
пределение фенотипов получается в итоге комбина-
ции ряда независимых условий, определяющей такую
характеристику, как размер. Поэтому в обоих случаях
имеет место биномиальное распределение.
...Безусловно, совпадение математических выраже-
ний само по себе не является доказательством того,
что рассматриваемые явления принадлежат к «гомо-
логическим» явлениям системы. Единственно, что мо-
жно утверждать — это то, что если изучать системы,
то к ним приложимы определенные общие принципы»
[2, стр. 340—341].
Я не нахожу этот ответ достаточно убедительным.
Нет никакой необходимости изучать применимость
74
Акоф Р.
нормального закона в различных дисциплинах, для
того чтобы понять, что это связано со случайностью.
Таким образом, мне совершенно неясно, чему можно
научиться, наблюдая подобный изоморфизм. В за-
ключительной части своего ответа Берталанфи, оче-
видно, прибегает к утверждению, что обнаружение
такого изоморфизма имеет эвристическую ценность.
Иными словами, это может привести к открытию не-
которого «системного» принципа, но сам по себе ука-
занный факт не дает ничего нового относительно
структуры или функционирования систем.
Мне представляется, что исследование систем ба-
зируется на более твердой почве, чем общая теория
систем, ибо в рамках первого подхода системы изу-
чаются в таком виде, в каком они существуют, с уче-
том всего их многостороннего характера. Этот подход
объединяет различные дисциплины в процессе самого
исследования, и таким образом он дает фактическую
информацию и формирует законы и теории, комплекс-
ные по самой своей природе. Так, например, теории,
развитые в исследовании операций, содержат нечто'
большее, чем обобщение ряда существующих теорий,
выраженное на языке, общем для различных дисцип-
лин, ибо операционные теории возникают в результате
изучения самих систем, а не как продукт изучения
«системных» теорий.
Рассмотрим в качестве иллюстрации характер тео-
рии управления запасами, являющейся одним из про-
дуктов исследования операций. Эта теория применима
ко всем незамкнутым системам, в которых обмен ве-
щества или энергии (а следовательно, и информации)
с окружающей систему средой поддается управлению
по крайней мере частично.'Если увеличение скорости
изменения входной переменной системы сопрово-
ждается возрастанием по крайней мере одной (точно
определимой) выходной переменной, рассматривае-
мой как прибыль системы, и одной (точно определи-
мой) выходной переменной, имеющей смысл потерь,
то реализуются условия, необходимые для протека-
ния процессов образования запасов.
Общая теория и исследование систем
75
Наиболее привычной интерпретацией процесса уп-
равления запасами являются процессы в торговле и
промышленности. Фирма может управлять скоростью
поступления сырья, изменяя объем или частоту его
закупок, либо оба параметра одновременно. Если
темпы закупок (скорость изменения входной перемен-
ной) превосходят скорость изменения выходной пере-
менной (скажем, темпы сбыта), возникают запасы,
которые обычно приводят к потерям в форме «затрат
на поддержание запасов» (например, расходов, свя-
занных с хранением, страхованием, налогами, порчей -
и устареванием). С другой стороны, при наличии боль-
ших запасов может уменьшиться вероятность их ис-
тощения и потерь, связанных с дефицитом и задерж-
кой поставок, а при закупках в большом количестве '
могут уменьшаться как цена закупаемой продукции
(благодаря скидкам при оптовых закупках), так и за-
траты на переналадку производства для обработки
закупленного сырья.
Теория управления запасами описывается уравне-
ниями, выражающими суммарные затраты и (или)
прибыль (критерий эффективности Р) как функцию:
а) значений управляемых переменных С, и б) значе-
ний неуправляемых переменных U), характеризующих
соответствующие свойства как самой системы, так и
ее среды. В самом общем виде эти уравнения запи-
сываются в такой форме:
Р = 1(С1, и,).
Если на значения, которые могут принимать управ-
ляемые переменные, наложены ограничения, то эти
ограничения выражаются в виде системы дополни-
тельных равенств или неравенств, например
^>0.
Среди уравнений, составляющих основу теории запа-
сов, имеются уравнения весьма общего вида и урав-
нения, относящиеся к отдельным частным случаям.
Полное обобщение пока не получено, но в этом на-
76
Акоф Р.
правлении наблюдается быстрый прогресс. (Пример
весьма общей постановки задач можно найти в книге
Эрроу, Карлина и Скарфа [1].) Уравнения для част-
ных случаев выводятся из более общих уравнений, но
не все уравнения для частных случаев обязательно
получены дедуктивным методом. Многие из них были
найдены в ходе конкретных исследований, а затем об-
общены. В этой области происходит непрерывный об-
мен данными между учеными, ведущими эксперимен-
тальные и теоретические исследования.
Теорию такого типа можно использовать: I) для
предсказания будущего поведения системы, 2) объяс-
нения ее поведения в прошлом, 3) исследования влия-
ния на поведение системы, оказываемого изменением
значений ее основных переменных, и 4) для отыскания
тех значений управляемых переменных, которые опти-
мизируют функционирование системы.
В условиях промышленности теорию запасов мож-
но применить к таким разнообразным явлениям, как
получение и использование оборотного капитала, найм
и обучение рабочей силы, определение того, в каком
объеме и как часто необходимо расширять производ-
ственные мощности. Она применима также к системе
любого класса со входами и выходами, которой мож-
но приписать прибыли и потери. Так, например, про-
цессы обмена в живом организме можно изучать как
некоторый процесс управления запасами. Работу на-
гревательной системы, вычислительного или информа-
' ционного центра и естественную водную систему ка-
кого-либо географического района также можно ис-
следовать в рамках теории управления запасами.
Входные и выходные переменные, а также сама си-
стема могут в каждом конкретном случае иметь спе-
цифические значения, однако эти особенности рассма-
триваемых переменных не играют никакой роли для
теории управления запасами.
В исследовании операций развито еще лесколько
теорий с аналогичными характеристиками. К ним от-
носятся, например, теории распределения, массового
обслуживания, упорядочения, выбора маршрута, за-
мены, состязаний и поиска. Эти теории открывают
Общая теория и исследование систем
77
новые пути изучения явлений в целом, а не ограни-
чиваются отысканием структурных аналогий в старых
подходах к явлениям.
Указанные восемь направлений теории, развиваю-
щейся в рамках исследования операции, не являются
ни исчерпывающими, ни взаимоисключающими. Уже
обнаружен структурный изоморфизм у нескольких ас-
пектов этих теорий, например у теории игр и линей-
ной теории распределения. Таким образом, нет ника-
ких сомнений в том, что будут получены обобщения
еще более высокого порядка. Эти обобщения позво-
лят нам глубже понять особенности фундаментальной
структуры организованных систем.
Теперь я перейду ко второму аспекту общей тео-
рии систем. Берталанфи рассматривал эту теорию как
чисто формальную.
«Общая теория систем должна быть точной док-
триной целостности и выступать как «чистая естест-
венная наука»... Иными словами, это гипотетически
дедуктивная система принципов, вытекающих из опре-
деления системы и обусловленных более или менее
частными специальными соображениями. В этом смы-
сле общая теория систем является априорной и не за-
висит от того, как она интерпретируется в терминах
эмпирических явлений, однако она применима ко всем
эмпирическим областям, связанным с системами. Ее
положение аналогично, например, роли теории вероят-
ностей, которая сама по себе является формальным
математическим построением, но которую можно при-
менить в силу эмпирической трактовки ее символов к
самым различным областям» 2, стр. 304].
Сравнение общей теории систем с теорией вероят-
ностей приводит к заблуждению. Обе эти теории дей-
ствительно можно рассматривать как формальные
априорные построения, но теории, развиваемые в рам-,
ках отдельных научных дисциплин, ни в какой мере
не являются частными случаями или интерпрета-
цией теории вероятностей. Если же следовать Берта-
ланфи, то их якобы можно вывести из общей теории
систем. Иначе говоря, общая теория систем как будто
выступает в роли некоторой метатеории, разъясняю-
7а
Акоф Р.
щей сущность теорий, развитых в отдельных дисцип-
линах. Ее справедливость определялась бы в таком
случае возможностью вывести из нее теории отдель-
ных дисциплин, а следовательно, в свою очередь
доказать справедливость теорий самих этих дисцип-
лин. Таким образом, она дважды отделена от экспери-
ментальных и прикладных аспектов науки. В итоге
развитие этой теории, с одной стороны, и ее примене-
ние в исследовании систем, с другой, удалены друг
от друга в еще большей степени, чем прикладные
и «чистые» аспекты в традиционных научных дисци-
плинах.
Теоретик, работающий в рамках какой-либо од-
ной науки, может по крайней мере часто обращаться
к соответствующей экспериментальной и прикладной
области, но мало вероятно, что теоретик — специа-
лист по общей теории систем, может достаточно ква-
лифицированно обращаться к каждой дисциплине с
целью синтеза индуктивных и дедуктивных аспектов
науки. Поэтому мне кажется, что разрыв между тео-
рией, экспериментом и приложением, который и так
слишком заметен в ряде дисциплин, возрастет в еще
большей степени. •
В противоположность этому исследование опера-
ций предназначено для реализации принципа совме-
щения дедуктивных и индуктивных этапов исследова-
ния систем одним и тем же коллективом ученых сме-
шанного состава и мыслится именно в таком свете.
В операционных исследованиях стремятся объединить
индуктивные и дедуктивные процедуры, обеспечивая
их непрерывную взаимосвязь в ходе проведения кон-
кретного исследования. В результате операционные
проекты, как правило, позволяют получить как тео-
ретические, так и физические знания о системах.
Операционный подход к методологии науки так
же целостен, как и подход к самому предмету
науки.
Безусловно, в исследовании операций отнюдь не
отрицается необходимость специалистов по отдель-
ным дисциплинам, точно так же, как при проектиро-
вании зданий и сооружений мало одного архитектора
Общая теория и исследование систем
79
и нужны еще инженеры-строители, механики и элек-
трики. С одной стороны, операционисты способны об-
наружить пробелы в специализированных знаниях
в пределах одной или нескольких дисциплин. Так, если-
ограничиться одним примером, то они оказали суще-
ственное влияние на математику, особенно на разви-
тие математического программирования. Но, с другой
стороны, успехи, достигнутые в отдельных науках, от-
крыли широкие возможности для операционистов. Об-
ращаясь за примером снова к математике, можно от-
метить, что развитие теории графов оказывает все
более заметное влияние на методы и область приме-
нимости исследования операций.
В заключение я хотел бы высказать свое мнение
по поводу понятия системы, используемого в общей
теории систем. Берталанфи определяет системы как
«комплекс взаимодействующих элементов, к которому
применимы определенные «системные» законы» [2,
стр. 307]. Если вникнуть в содержание терминов, ис-
пользуемых в этом определении, то станет ясно, что
оно не включает в себя системы понятий, например
логические, числовые, языковые, философские, эти-
ческие и религиозные. Системы понятий включают в
себя результаты формальных наук, а также и выводы
многих неформализованных дисциплин. Системы по-
нятий могут существенно отличаться от реальных си-
стем, но можно ли только на этом основании не отно-
сить их к системам? Чтобы охватить и такие системы,
необходимо дать более общее определение системы
как комплекса взаимосвязанных объектов, а не взаи-
модействующих материальных элементов.
Если теория систем должна обладать полной общ-
ностью, то она должна изучать и системы понятий.
Я полагаю, что стремление отыскать общие принципы,
применимые как к понятиям, так и к конкретным си-
стемам, представляет собой одно из самых многообе-
щающих направлений науки о системах. Это направ-
ление может не только устранить разрыв между
точными и общественными науками, но и между
наукой, с одной стороны, и искусством и литерату-
рой, с другой.
80
Акоф Р.
ЛИТЕРАТУРА
1. А г г о w К. J., Karlin S., Scarf Н., Studies In the Mathe-
matical Theory of Inventory and Production, Stanford Univ.
Press, Stanford, California, 1958.
2, Bertalanffy L. von, Problems of General System Theory,
Human Biology, 23, 302—312 (1951); Conclusion, Human Bio-
logy, 23, 336—345 (1951).
3. В о u 1 d i n g К. E., General Systems Theory — The Skeleton
of Science, Management Science, 2, 197—208 (1956).
4. H e m p e I C. G., General System Theory and the Unity of
Science, Human Biology, 23, 313—322 (1951).
5. Jonas H„ Comment on General System Theory, Human Bio-
logy, 23, 328-335 (1951).
МОДЕЛИ УСЛОВНОЙ ЭКСТРЕМ ИЗАЦИ И
И ИХ ИСПОЛЬЗОВАНИЕ ДЛЯ ОЦЕНКИ
КАЧЕСТВА СИСТЕМ
А. Чарнс, У. Купер')
ВВЕДЕНИЕ
В этой статье рассматриваются математические
модели, которые описываются следующими соотноше-
ниями:
л
max 2 CjX,
У-l
при ограничениях
л
(LlfXj I ==11 • • •, /71, 0)
ху>0, /=1, ...» п.
Это позволяет проводить анализ с применением от-
точенного аппарата линейного программирования.
Такой путь дает возможность обрисовать некоторые
общие идеи, которые могли бы быть использованы в
ряде задач синтеза систем; разработка этих идей на-
чинается с введения искусственных приемов, позво-
ляющих распространить существующие методы на мо-
дели оптимизации при наличии ограничений. Тем са-
мым будут созданы предпосылки для использования
методов решения экстремальных задач при «эквива-
лентных преобразованиях» систем. Эти преобразова-
ния могут служить таким целям, как выбор подходя-
щей меры для оценки качества (функционирования)
системы или выявление принципов, которыми следует
’) Cliarnes A., Cooper W. W, Constrained Extremization
Models and their Use in Developing System Measures.
6 Зак. 264
82
Чарнс А., Купер У.
руководствоваться при моделировании, используемом-
в качестве средства синтеза систем1).
Предметом обсуждения в этой статье будут при-
меры из области хозяйственного планирования, в ко-
торой упомянутая мера призвана служить для сравни-
тельной оценки конструктивных предложений. В та-
ком контексте предложения обычно оцениваются
путем сопоставления с оптимальным вариантом2). Но,
разумеется, различные вспомогательные приемы дают
возможность применять модели условной экстремиза-
ции и для таких систем, где оптимизация сама по себе
не является конечной целью. Эти модели могут ис-
пользоваться и другим путем—например, в тех слу-
чаях, когда желательно произвести дополнительные
изменения в системе, руководствуясь при этом оцен-
ками, которые могут быть определены на основании
побочной информации, получаемой при оптимизации.
Конечно, при употреблении искусственных приемов —
не исключено, что сама оптимизация будет именно
таким приемом, — может потребоваться принятие не-
которых мер предосторожности, прежде чем окажется
возможным использовать дополнительную информа-
цию такого рода3).
КАНОНИЧЕСКАЯ ФОРМА ЗАДАЧИ И НЕКОТОРЫЕ
ТЕРМИНОЛОГИЧЕСКИЕ ЗАМЕЧАНИЯ
Для удобства введем некоторые термины, ссылаясь
на следующую запись, которая полностью эквива-
лентна задаче, формулируемой с помощью соотно-
шений (1):
л
max2= S CjXj
’) Дополнительные примеры искусственных приемов, кото-
рые могут применяться совместно с алгоритмами линейного про-
граммирования, см. в работе [3].
2) Отметим, например, что экономичная цена устанавливает-
ся именно по такому принципу.
3f Дальнейшее обсуждение этого вопроса проводится в за-
ключительной части статьи.
Модели условной экстремизации
83
при ограничениях
п
2 OrijXj У1 — bh Xj, yt> О,
/-1
/= 1, ...» от, J= 1...............п.
(2)
Величины yi называются свободными переменными, и
каждая такая переменная входит в неравенство вме-
сте со структурными переменными х, и структурными
коэффициентами — теми же самыми, что и в не-
равенствах (1); таким образом, у,>0 означает, что
условия ^aijXj<.bi обеспечиваются как соотношения-
ми (1), так и (2). Постоянная Ь{ в таком неравенстве
называется ограничением. Скалярная переменная z
представляет собой «показатель качества», образован-
ный линейной комбинацией компонент программы —
значений х;, которые могут принимать структурные
переменные, входящие в функционалы1) соот-
ношений (1) и (2); коэффициентами этой линейной
комбинации являются «коэффициенты стоимости» q.
Наконец, указание «максимизировать г » назовем
«целью». Таким образом, на основании вычисленного
значения показателя качества z любую программу мо-
жно сравнить с другой допустимой программой в со-
ответствии с целью «максимизировать z».
СООТНОШЕНИЯ ДВОЙСТВЕННОСТИ
Иногда модель в форме, определяемой соотноше-
ниями (1), называется прямой, или исходной, задачей
линейного программирования в отличие от соответ-
ствующей ей «двойственной» задачи, которая форму-
лируется с использованием тех же самых постоянных
коэффициентов следующим образом:
m
ming=2
') Здесь и далее не будем проводить различия между тер-
минами «функция» и «функционал».
6’
84 Чарнс, А., Купер У,
при ограничениях
j — 1 > • • •» Л> I — 1» • • • । Ш.
Рассматривая эту двойственную задачу, можно уви-
деть, что новой «цели» соответствует новый показа-
тель качества g. Можно также заметить, что в соот-
ношениях (3) и (1) используются одни и те же ко-
эффициенты, но со следующими отличиями: а) при
переходе от одной модели к другой матрица струк-
турных коэффициентов транспонируется; б) знаки не- 1
равенств в структурных ограничениях изменяются на
противоположные; в) ограничения для одной задачи
являются коэффициентами стоимости для другой, и
наоборот. Наконец, заметим, что соотношение
т
ming= 2 wibi
z-i
при ограничениях
—= ку>0,
4-1
I — 1, /71, j —1, • - • । Л
является канонической формой задачи (3) в том же
смысле, в каком задача (2) являлась канонической
формой задачи (1).
Свойствам двойственных задач линейного про-
граммирования [9а] посвящено большое количество
работ. Эти свойства- часто используются для получе-
ния приближенных решений, на их основе также вы-
полняются эквивалентные преобразования моделей;
последний метод используется, например, в тех слу-
чаях, когда подмена одной задачи другой приводит
к уменьшению объема вычислительной работы — ска-
жем, вследствие изменения количества или вида огра-
ничений при переходе от прямой задачи к двойствен-
ной.
Модели условной, экстремизации
85
ДВОЙСТВЕННОСТЬ И НЕКОТОРЫЕ МЕРЫ КАЧЕСТВА
СИСТЕМЫ
Теория двойственности, устанавливающая связь
между задачами (1) и (3), может также быть исполь-
зована для оценки качества системы. Некоторые ас- •
пекты этого вопроса иллюстрируются соотношениями
которые должны выполняться для любых наборов
значений Xj и ич» удовлетворяющих ограничениям в
задачах (1) и (3). Далее, если обе задачи имеют ре-
шения, то z* и g* являются оптимальными показате-
лями качества в том и только в том случае, когда
z- = g-.. (6)
Один из путей использования соотношений (5) со-
стоит в следующем. Рассмотрим некоторую данную
задачу, формулируемую, например, в виде соотноше-
ний (I), и предположим, что каким-то путем найден
набор значений wit удовлетворяющий соотношениям
(3) ’). Тогда, зная эти значения нетрудно получить
на основании определения %Wibi=g и соотношений
(5) верхнюю границу для показателя качества z:
g>z, которая, возможно, одна и представляет инте-
рес. Если к тому же известен набор значений xj, удо-
влетворяющих соотношениям (I), в результате чего
имеет место g—z=d>0, то из равенства (6) можно
заключить, что, хотя эта программа и не оптимальна,
тем не менее дальнейшие вычисления могут быть пре-
кращены в тот момент, когда б достаточно мало. Бо-
лее того, при желании можно рассматривать величину
б>0 как разумную скалярную меру отклонения пове-
дения системы от оптимального в том смысле, что
эта величина представляет собой верхнюю границу* 2)
для возможных отклонений.
’) Например, если применяемый вычислительный алгоритм
гарантирует допустимость этого набора. См. гл. ХШ и XIV в [3].
2) Если известно оптимизирующее значение g*. то оно опре-
деляет точную верхнюю границу для этих отклонений.
86
Чарнс А., Купер У.
Равенство (6), которое является усилением соот-
ношений (5), иногда может быть использовано для
установления некоторых критериев качества системы.
Один из возможных способов поясняется следующим
рассуждением. Предположим, что для задачи, форму-
лируемой с помощью соотношений (I), получен опти-
мальный набор компонент программы л’, но это ре-
шение сочтено неудовлетворительным, скажем, из-за
того, что показатель качества при этом недостаточно
высок; поэтому желательно попробовать изменить не-
которые коэффициенты д,. Пусть также известно1),
что на некотором заданном множестве вариаций пер-
воначальных ограничений bit которое связано с по-
пытками улучшить показатель качества для исходной
задачи, определенный набор оптимальных значений
wj остается постоянным. Отметим теперь, что ограни-
чения для задачи (3) соответствуют коэффициентам
стоимости в задаче (1), которые не подвергаются из-
менениям. Таким образом, если разбить множество
всех индексов i на подмножества /< и /2 в соответ-
ствии с тем, варьируется ли соответствующее ограни-
чение bi или нет, то можно затем использовать полу-
ченные ранее значения ну* и записать
g= 2 (*,+Ч)+;2 <»<•
(7)
Вычисленное значение g оптимально для новой двой-
ственной задачи, которой соответствует новая прямая
задача с измененными параметрами, записываемая
в такой форме:
maxz= 2
') Обычно это легко выясняется при использовании большин-
ства современных вычислительных алгоритмов для задач линей-
ного программирования.
Модели условной экстремизации
87
при ограничениях
2 ciifXj bi -f- &blf
jS j & C ^2»
/-1
лу>0, /=1» •••» Л,
(8)
где варьируются ограничения с индексами ith. Те-
перь, вспомнив, что нас интересует лишь исследование
изменений показателя качества, мы можем продви-
гаться в этом направлении, не сталкиваясь с необхо-
димостью определять величины xj, которые придавали
бы z оптимальное значение. Действительно, это выте-
кает из равенства (6), так как если z— оптимальное
значение показателя качества для задачи (8), то из
соотношения (6) следует g=z, и, таким образом,
вместо исследования обычно более сложной системы
можно ограничиться только рассмотрением единствен-
ного уравнения (7).
Конечно, во многих случаях может оказаться же-
лательным избрать другой путь, когда заранее пред-
писывается минимальный уровень приращения для z*
и, помимо описанной выше вариации ограничений,
допускаются изменения других параметров. В сле-
дующем разделе будут обсуждаться методы таких
преобразований; сейчас сделаем лишь одно предва-
рительное замечание о том, что оптимальные значения
двойственных переменных w’ иногда называют «оцен-
ками». И действительно, иногда полезно рассматри-
вать эти величины как элементы множества мер, пред-
назначенных для оценки изменений или операций в
различных частях системы.
Возможный простой подход к этому вопросу за-
ключается в трактовке всех этих величин w' таким
способом, который подобен методу объяснения пред-
полагаемого механизма ценообразования в условиях
рыночной экономики. В самом деле, такие двойствен-
ные оценки могут быть совершенно определенно
88
Чарнс А., Купер У.
интерпретированы при этом таким образом, что они
окажут реальную помощь в изучении некоторых типов
рыночного хозяйства или в исследовании влияния воз-
можных значений оценок на выбор политики децен-
трализованной фирмы. Один из методов такой интер-
претации, предложенный Купмансом [96], сводится в
общих чертах к следующему1). Пусть переменные
Xj обозначают интенсивности различных производ-
ственных способов; назовехМ каждый вектор, образо-
ванный из величин aij, которые соответствуют пере-
менной xj, вектором производственного способа. Эти
векторы производственных способов представляют со-
бой столбцы матрицы элементов в отличие от них
назовем векторы-строки, образованные из этих же
элементов, векторами затрат производственных фак-
торов. Каждый вектор затрат находится под наблюде-
нием лица, называемого «кладовщиком». Каждый
производственный способ подчиняется «мастеру». Ка-
ждому «кладовщику» известны лишь данные (вклю-
чая ограничения) по его собственной строке. Каждый
«мастер» знает только данные по своему собственному
столбцу.
Теперь обратим внимание на то, что такое описа-
ние системы в терминах «кладовщик» — «мастер» со-
образуется в широком смысле с транспонированием
коэффициентов при переходе от некоторой задачи ли-
нейного программирования к двойственной ей задаче.
Следовательно, исходя из такой, возможно, крайней
степени неосведомленности, можно предусмотреть
использование двойственных соотношений для созда-
ния информационных устройств, действующих через
посредство механизма затрат и цен2), которые дают
возможность координировать работу отдельных ча-
стей системы для достижения определенных всеобщих
организационных целей (даже если эти цели сами по
') Дальнейшее обсуждение и развитие этой темы см. в ра-
боте [10], а также в работе [3, гл. IX и приложение D],
2) Иногда называемых «условными оценками» для того, что-
бы отличить нх от других сходных величин, фигурирующих в
бюллетенях цен, торговых сводках и т, д. См, работы [96] и [10],
а также [3, гл. XIII].
Модели условной экстремизации 89
себе не являются побуждающим фактором для неза-
висимых частей и, более того, могут быть неизвестны
для них). В некоторых случаях, например для отдель-
ных фирм, глобальная цель может быть описана та-
кой единственной скалярной величиной (показателем
качества), как максимальная прибыль. В других слу-
чаях, например для экономической системы, может
оказаться необходимым или желательным использо-
вать целый набор мер для того, чтобы охарактеризо-
вать, скажем, полное благосостояние потребителей,
достижимое в рамках такой системы. В некоторых
случаях, однако, допустимо рассматривать проблему
с точки зрения линейного или нелинейного программи-
рования, а затем сформулировать соответствующую
двойственную задачу. Значения переменных этой за-
дачи, интерпретированные как «цены», предоставляют
требуемую информацию, теоретически достаточную
для осуществления координации, которая достижима
без конфликта с существующей степенью децентрали-
зации.
НЕКОТОРЫЕ СКАЛЯРНЫЕ ХАРАКТЕРИСТИКИ,
ИСПОЛЬЗУЕМЫЕ ДЛЯ ОЦЕНКИ СИСТЕМ1)
Рассмотрим теперь некоторые аспекты «эквива-
лентности моделей» в таком плане, который позволит:
а) пролить дополнительный свет на возможные при-
менения моделей условной экстремизации при усовер-
шенствовании систем и б) продолжить предыдущее
обсуждение метода вариации ограничений, исследо-
вавшегося применительно к задачам, сформулирован-
ным с помощью соотношений (1) и (8). Предположим
для определенности, что задача снова поставлена в
форме, выраженной соотношениями (1), и что сфор-
мулированная таким образом задача уже решена. Это
означает, конечно, что оптимальное значение г* из-
вестно.
Полагая, что это известное значение показателя
качества сочтено неудовлетворительным, приступим к
*) Материалы этого раздела взяты из [4].
90
Чарнс А., Купер У.
рассмотрению более общей модели, в которой допу-
скаются изменения не только исходных ограниче-
ний bit НО И ИСХОДНЫХ СТруКТурНЫХ КОЭффиЦИеНТОВ Qij.
С этой целью сформулируем задачу следующим
образом:
Найти
л
max z = 2 CjXj — С} (... etJXj .. •) —С2(... yt...)
при ограничениях
Здесь К—известная положительная постоянная;
как уже отмечалось, величина z* также известна. Та-
ким образом, принятие z*(14-K) в качестве ограни-
чения (в последнем неравенстве) означает, что задает-
ся требуемое приращение показателя качества при
переходе к новой модели, которое должно быть не
менее Kz*. Разумеется, коэффициенты стоимости Q и
структурные коэффициенты ац также известны, по-
скольку они взяты без изменений из задач, сформули-
рованных в виде соотношений (1) и (2). В то же
время величины являются переменными; они отра-
жают возможность изменения структурных коэффи-
циентов до новых значений ац=(йц — е,,). Аналогич-
ным образом предусматривается возможность измене-
ния исходных ограничений до новых значений
5i = 6t + {/i. Последние изменения ограничены задан-
ными постоянными величинами d,-, так что допуска-
ются вариации у^сЦ. С другой стороны, вариации
структурных коэффициентов должны удовлетворять
более слабые ограничения где е,, для лю-
бых i и / — заданная постоянная величина (в том
числе, возможно, нуль).
Модели условной, экстремизации
91
Функции С»(... ZijXj...) и Сз(... ..), фигури-
рующие в последнем неравенстве и в функционале1)»
символизируют издержки на проведение указанных
улучшений; обе они предполагаются выпуклыми функ-
циями своих аргументов, причем в большинстве задач
организационного управления функции и С2 яв-
ляются не только выпуклыми, но и возрастающими
строго монотонно.
Задачу, сформулированную с помощью соотноше-
ний (9), можно интерпретировать как задачу органи-
зационного управления, где искомый оптимум одно-
временно определяет: а) наилучшую модификацию
структурных коэффициентов, описывающих используе-
мые процессы; б) увеличение запасов материалов, ко-
торое также должно быть предпринято, и, наконец,
в) оптимальные уровни интенсивности различных про-
изводственных процессов, а также затраты материа-
лов и выпуск конечных продуктов.
Если обеспечивается получение положительных и
конечных значений показателя качества в обеих зада-
чах, то можно записать
maxz = z*>z*(l-|-K)>z*=maxz, (10)
где величина z* соответствует новой задаче, формули-
руемой с помощью соотношений (9), а величина г*
соответствует исходной задаче, формулируемой с по-
мощью соотношений (1). Тогда, очевидно, величины
г* и г*, так же как и d*=z* — z*>0, могут использо-
ваться в качестве скалярных мер для оценки каждой
из систем и полезности предпринятых изменений.
Введем теперь модель
шах£=н^сАхй
k
при ограничениях
^alkxk-^l)r, xk^>0 для всех k (11)
’) Тем самым данная модель является задачей «целевого
программирования,, что обсуждается в работе [3, приложе-
92
Чарнс >1., Купер У.
как вспомогательную задачу линейного программиро-
вания, призванную разъяснить ряд идей, которые мы
будем связывать с «изменением цен», «изменением
функционирования» и «изменением структуры». Пред-
положим также, что известны определенные соотно-
шения, а именно:
Xj =s I j (• • •» • • • /»
Уi== Ф/ (• * •» *^а> • • •)» (12)
/==1> ...» т, /=1, ...» я,
причем, в частности, х’=/Д..х’, ..так что
если найдены оптимальные значения переменных для
задачи, формулируемой с помощью соотношений (11),
то подстановкой их в уравнения (12) могут быть по-
лучены аналогичные значения для задачи, формули-
руемой с помощью соотношений (9)1).
Введение терминов «изменение цен», «изменение
функционирования» и т. д. может быть обосновано
тем фактом, что задача, формулируемая с помощью
соотношений (11), имеет ту же самую форму, что и
исходная задача, формулируемая с помощью соотно-
шений (1), за исключением лишь того, что в качестве
коэффициентов стоимости, структурных коэффициен-
тов и ограничений в ней выступают повые величины.
Так, если в этих двух моделях количества переменных
и ограничений одинаковы и если bt = bt и для
всех i, /, но не для каждого / выполняется условие
c} = cit то можно сказать, что соотношения (11) опи-
сывают вариант исходной модели с «изменением цен».
Если же для некоторых /, / имеет место или
но для всех / выполняется условие Q = q, то
соотношения (11) описывают модель с «изменением
функционирования». Наконец, если число ограничений
’) Или по крайней мере должна существовать возможность
выделения решений новой задачи, которые могут затем быть ис-
пользованы для получения оптимальных значений переменных
для задачи, формулируемой с помощью соотношений (9).
Модели условной экстремизации
93
или переменных в моделях, описываемых соотноше-
ниями (1) и (11), не совпадает, но, с другой стороны,
обе эти модели имеют одинаковую общую форму, то
будем называть этот случай «изменением структуры».
Если существует способ, которым следует произ-
водить упомянутые изменения параметров модели,
чтобы с помощью соотношений (12) выявить эквива-
лентность моделей, описываемых соотношениями (11)
и (9), то можно сказать, что установлена «теорема
изменения цен», «теорема изменения функционирова-
ния», «теорема изменения структуры» или некоторая
комбинация этих теорем — в зависимости от требо-
вании, предъявляемых в случае конкретной системы.
Если Ci и С2 — кусочно-линейные функции, то, как
установлено авторами [1], эти теоремы могут быть ис-
пользованы для введения модифицированного вариан-
та системы, представляемого соотношениями (9), с
учетом изменения цен, функционирования и струк-
туры. Такой вариант описывается следующими выра-
жениями:
I
ШаХ 2 4“ (с? 2^' ^pq^pq\ Xq 2 С [У I
j-fq q \ p / i
при ограничениях
(Яру apq} Xq Ур Ьр> (13)
<7
Xp xq, yp, yt>0,
причем уравнения (12) приобретают крайне простой
вид
= У'^Уг
- - (И)
ytj — zifxj' aij — zip
где eij^O для всех i, /, кроме i=p и j=q.
Возможно, следует особо подчеркнуть, что «экви-
валентность» моделей оптимизации устанавливается
94
Чарнс А., Купер У.
только для оптимальных программ. Действительно,
даже значения показателя качества для эквивалент-
ной пары систем не обязательно должны совпадать.
Заметим, например, что оптимальное значение z* для
задачи, формулируемой с помощью соотношений (11),
вообще говоря, не равно оптимальному значению z*
для задачи, формулируемой с помощью соотноше-
ний (9).
Соотношения (14) имеют очень простой вид, но в
общем случае, разумеется, следует ожидать наличия
более сложных зависимостей. Если, однако, установ-
лены соотношения вида (12), то с точки зрения ска;
лярных показателей качества не происходит значитель-
ного усложнения задачи, поскольку искомое значение
находится простой подстановкой соответствующих
величин в функционал системы (9). В то же время
необходимость определения компонент программы
приводит к более серьезным трудностям. Например,
задача, формулируемая с помощью соотношений (11),
имеет двойственную ей задачу, но соответствующие
«оценки» w* без дополнительного анализа не всегда
могут быть использованы для целесообразного изме-
нения ограничений bi в задаче, формулируемой с по-*
мощью соотношений (1). Очевидно, при этом должны
учитываться соотношения (12); если предметом иссле-
дования являются изменения параметров aijt bit di
или efj, то зависимости должны быть подвергнуты
дальнейшим преобразованиям.
НЕКОТОРЫЕ ВЕКТОРНЫЕ МЕРЫ КАЧЕСТВА СИСТЕМ
Выше уже упоминалась ситуация^ когда может
оказаться необходимым (или желательным) образо-
вание некоторого множества (вектора) мер для оцен-
ки системы. Поскольку в предыдущем обсуждении
случай скалярной меры рассматривался применитель-
но к моделям, непосредственно основанным на опти-
мизации, то теперь, может быть, полезно дать пример
ситуации, когда такая оптимизация может использо-
ваться только как искусственный прием.
Модели условной экстремизации
95
С этой целью введем теперь ряд матричных обо-
значений. Сведем всю нужную информацию, содержа-
щуюся в структурных коэффициентах, в матрицу
соответствующего порядка; обозначим ее через А.
Следуя терминологии Купманса [96], назовем А «тех-
нологической матрицей». Свяжем с матрицей А век-
тор интенсивностей производственных процессов —
вектор управляемых переменных, который мы обо-
значим через х. Тогда соотношения
Ах = у,
х >0
означают, что произведение вектора х и технологиче-
ской матрицы А определяет множество «продуктов»1)»
обозначаемое вектором у, компонентами которого, в
частности, являются все входы и выходы системы.
Снова, следуя Купмансу, выделим подмножество ком-
понент, которому соответствуют выходы — «конечные
продукты», и сведем эти компоненты в вектор yF. По-
скольку yF имеет смысл множества «видов продук-
ции», которое является требуемым выходом системы,
на него налагается условие е/р>0. Другое подмноже- •
ство компонент у, обозначаемое как вектор уР, описы-
вает «первичные продукты» (входные производствен-
ные факторы), которые выступают в качестве входных
величин данной системы. В соответствии с согла-
шением, принятым в исследованиях такого рода, этим
входным величинам обычно приписывается отрица-
тельный знак и на них налагается условие вида
—Ур-^—т]р, где т)р-С0 — вектор ограничений, лимити-
рующий расход каждого входного производственного
фактора. Наконец, оставшиеся компоненты вектора у
описывают так называемые промежуточные производ-
ственные факторы, которые являются внутренними
по отношению к системе (примером служит передача
полуфабрикатов от одной машины или обслуживаю-
щей установки к другой). Эти величины символизи-
руются вектором у! и подчиняются условию г/; = 0.
') Термин «продукт» должен трактоваться в самом широком
смысле, охватывая не только продукцию, но и услуги.
95
Чарнс 4., Купер У.
Несмотря на то что в работах Купманса перемен-
ные yFy уР и {/;*) используются непосредственно для
описания «эффективности» системы, анализа цен
и т. д., мы хотели бы начать с рассмотрения общего
понятия, названного нами «функциональной эффек-
тивностью»* 2), в противоположность более простому
понятию «К-эффективпости»э), используемому Куп-
мансом. Введем с этой целью вектор функционалов
fiW
/2 (Ур)
f (Ур) =
(16)
Jk (Ур) -
так что вектор конечных продуктов yF является аргу-
ментом как вектор-функции /, так и ее компонент —
функций fj(yp)i /=1,...»&4 5). Изложим теперь идею
функциональной эффективности следующим образом.
Определение функциональной эффективности (fp
эффективности): вектор yF является «/^-эффективным»
в том и только в том случае, когда для любого yF
1Ау?)>Ь(у?)^Ыу*)ЧАу'), /=1. 2...,лб).
Для того чтобы лучше уяснить смысл этого опреде-
ления, предположим, что каждая компонента fj(yr)
•) Может быть, следует особо отметить, что такое разложе-
ние вектора у предполагается полным разложением на непере-
секаюшиеся подмножества. Это не такое жесткое ограничение,
как может показаться, так как в тех случаях, когда некоторая
продукция или услуга должна входить более чем в одно под-
множество, можно исправить положение с помощью какого-либо
искусственного приема [9а, 10].
2) Эти и другие материалы, приведенные в данном разделе,
см. в работе [3, гл. IX].
з) К—в честь Купманса, но, конечно, эти идеи связаны
также с такими построениями, как оптимум Парето и т. д.
См. работу [3, гл. IX].
<) Случай, когда некоторые из функций fj(yr) не зависят
от каких-либо конечных продуктов, естественно, охватывается
такой формулировкой. См., например, работу [3, приложение DJ.
5j Символ означает «из .... следует
Модели условной экстремизации
97
есть функция полезности, служащая мерой удовле-
творенности некоторого потребителя вектором продук-
ции i/f, который может быть произведен системой.
Как обычно, эти функции полезности предполагаются
не всегда сопоставимыми. В частности, без дополни-
тельных и несколько произвольных допущений они
не могут быть связаны с объективными оценками сте-
пени удовлетворенности, которую могут испытывать
различные потребители от различных наборов конеч-
ных продуктов yF, производимых системой. С другой
стороны, по крайней мере при определенных условиях
возможно «упорядочить» удовлетворения, которые мо-
жет получать каждый индивидуальный потребитель.
Так, некоторый потребитель (скажем, /-й), будучи по-
ставлен перед возможностью выбора между двумя
различными векторами yF и yF, может оказаться в
состоянии указать, какой из этих векторов он пред-
почитает другому. Если он предпочитает вектор yF
вектору yF или проявляет безразличие, мы можем на-
писать f)(yFY^fj(yFh а в противоположном случае
напишем fj(yF) <Ь(Ур) — даже если мы не можем ка-
ким-либо удовлетворительным способом приписать
численную оценку разности этих функций.
При исследовании условной оптимизации полезно
отличать случаи такого рода от тех, когда, как можно
предполагать, многочисленные цели могут быть легко
учтены путем введения соответствующих ограничений.
Например, руководители предприятий заинтересова-
ны, как иногда утверждается, не только в максимиза-
ции прибыли, но и в таких целях, как стабильная за-
нятость, обеспечение рынков сбыта и т. д. Но условия
такого типа часто могут быть включены в ограниче-
ния или, возможно, могут быть отображены с по-
мощью других приемов; в последнем случае такие
ограничения не связаны, строго говоря, с дополни-
тельными целями. Отметим, например, что если усло-
вие обеспечения рынков сбыта включено в задачу
линейного программирования, сводящуюся к макси-
мизации прибыли, то «рыночное» ограничение пред-
станет как часть общей цели в соответствующей
7 Зак. 264
98
Чарнс А., Купер У.
двойственной задаче. Это означает, в частности, что
такое ограничение допускает численную оценку, и,
следовательно, сохраняется возможность сопоставле-
ния этой, как можно было бы думать, самостоятельной
цели и глобальной цели — максимизации прибыли1)*
Случаи несопоставимости, упомянутые выше на
примере потребительских предпочтений, в общем слу-
чае нельзя обойти столь просто. При любой оптими-
зации сравнение различных векторов yF, связанных с
соответствующими функциями fj(yF), может быть до-
пущено только в терминах каждой такой функции.
Именно это послужило основанием, для введения
вышеприведенного определения. В самом деле, рас-
смотрим случай, противоположный сформулирован-
ному в определении. Пусть задан вектор yF и пусть
после обследования всех возможностей, предоставляе-
мых моделью, обнаружен вектор yFt который удовле-’
творяет неравенствам Ь(Ур)^1](Ур) для всех /; это
означает, что ни для одного потребителя положение
не ухудшилось. Такой вектор всегда можно получить,
попросту положив yF=yF. Если, однако, мы нашли
некоторый вектор yF=/=yF, удовлетворяющий неравен-
ствам fj(yF)^fj(yF) (что означает, как уже отмечено,
что ни для одного потребителя не произошло ухудше-
ния положения), и если вдобавок к этому условие
fi(yF) не выполняется для всех /=1, ..., k, то
отсюда с необходимостью следует (yF) >fj(yp) для
некоторого /. Таким образом, при переходе от векто-
ра конечных продуктов yF к вектору yF степень удо-*
влетворенности по крайней ме^р одного потребителя
повысилась и в то же время удовлетворение ни одного
из потребителей не уменьшилось. Следовательно, со-
гласно определению, вектор yF не является эффектив-
ным и в силу этого же определения следует принять,
что другой вектор yF является более предпочтитель-
1) Эти же соображения относятся и к случаю, когда «пер-
спективная прибыль» рассматривается дополнительной целью,
помимо «текущей прибыли».
Модели условной экстремизации
99
ным в соответствии с избранной мерой качества си-
стемы.
Теперь остается задача создания модели, которая
могла бы быть использована для проведения желае-
мых исследований эффективности. С этой целью сна-
чала разложим технологическую матрицу А на под-
матрицы Ар, А/ и АР, связанные с разбиением компо-
нент у на yF, У1 и уР. Сформулируем теперь задачу
следующим образом:
найти
тахе'Зр
при ограничениях
Арх — !/Р = О,
Д,х — О,
Арх — //р = 0, (17)
Ур>т\р,
х, Бли-
новым элементом здесь является лишь вектор не-
отрицательных переменных Зл, имеющий то же самое
число компонент, что и f(yF) [см. соотношения (16)],
и вектор-строка 1). В этой задаче макси-
мизируется величина 5 Зл7- Подчеркнем, од-
нако, что это только вспомогательный прием, на что
указывает следующее утверждение.
Теорема. Вектор yF является ^-эффективным в
том и только в том случае, когда max е'Зл—О-
Условия f(yP) — Зл =КУр) и Зл^О. очевидно,
исключают появление набора интенсивностей произ-
водственных процессов и связанного с ним вектора yF,
для которого f (yF) <f (yr). С другой стороны, если
е' Зл>0, то это означает, что для некоторого j
а для всех других компонент fr(yF)>
^fr(yF). Отсюда можно заключить, что вектор уР
нс является эффективным, и, далее, если желательно
7*
100
Чарнс А., Купер У.
отыскать эффективный вектор, следует проверить yF.
В то же время не проводится различия между двумя
векторами, каждый из которых эффективен. Более
того, в общем случае не всегда можно сопоставлять
два различных вектора yF, основываясь лишь на том,
что один из них связан с большим, а другой с мень-
шим значениями функционала. Иначе говоря, при
сопоставлении векторов можно сравнивать только их
соответствующие компоненты, а это в свою очередь
означает, что допускается лишь частичное упорядо-
чение.
Если на функционалы fj(yF) не наложены надле-
жащие ограничения, то теорема двойственности, во-
обще говоря, не может быть применена. В этом слу-
чае не могут использоваться двойственные «оценки»
и, следовательно, не могут быть введены внутренние
цены.
В некоторых случаях желательно все-таки оты-
скать подходящий способ оценки в соответствии с ин-
дивидуальными функционалами fj(yF), чтобы гаран-
тировать достижение определенных всеобщих целей
при максимизации каждого fj(yF). Примером такой
необходимости может служить получение прибыли
местными отделениями децентрализованного пред-
приятия, когда каждое отделение, добиваясь макси-
мизации собственной прибыли, должно а) способство-
вать максимизации полной прибыли всей фирмы в
целом и б) подчиняться определенным глобальным
ограничениям1). Очевидно, однако, что это не всегда
может быть достигнуто, если реальные данные, харак-
теризующие состояние рынка, не регулируются в
соответствии с рассмотренными выше теоремами об
изменении цен и функционирования. Так, если некото-
рые отделения могут производить и продавать продук-
цию с прибылью только в том случае, если другие
отделения терпят убыток, то может оказаться необ-
ходимым согласовать их деятельность путем поддер-
’) Например, в соответствии с некоторыми дополнительными
сцелями», такими, как обеспечение рынка сбыта, перспективное
развитие и т. д.
Модели условной экстремизации
101
жания искусственных цен для последних (и, возмож-
но, для первых).
Вопросы такого’ рода уже рассматривались пре-
жде1 2)» и M,J не бУДем повторять здесь эти рассужде-
ния. Нашей главной задачей было продемонстриро-
вать, каким образом может быть обеспечена надлежа-
щая векторная мера качества системы, даже если
преследуются многочисленные и несовместимые цели.
На некотором этапе изучения можно считать, что
наше определение /^-эффективности и наша модель,
описываемая соотношениями (17), удовлетворяют этой
цели. В следующем разделе мы сможем вернуться к
проблеме оценки систем, которая предъявит нам, воз-
можно, менее жесткие требования. Это будет сделано
после некоторых предварительных замечаний в нача-
ле раздела.
АЛГОРИТМИЧЕСКОЕ ЗАВЕРШЕНИЕ
ФОРМАЛЬНОЙ МОДЕЛИ ’)
Тема данного раздела, а также некоторый вводный
материал для следующего раздела иллюстрируются на
примере, изображенном на рис. 1. Этот чертеж можно
рассматривать как схему транспортной сети, где вет-
ви символизируют улицы, а узлы обозначают возмож-
ные пункты отправления и назначения для транспор-
та, потоки которого циркулируют в этой системе. Так,
в этой интерпретации жирная стрелка, входящая в
узел 1, призвана символизировать то, что в этой
точке в систему должно входить десять транспорт-
ных единиц. Жирные стрелки, выходящие из узлов 5,
7 и 9, призваны означать, что эти узлы являются
конечными пунктами для двух, пяти и трех транспорт-
ных единиц соответственно.
Имея в виду наши ближайшие цели, можно пред-
ставить себе, что эти данные используются диспетче-
ром по перевозкам, цель которого — составить рас-
писание маршрутов для этих 10 транспортных единиц
') См., например, работу [3, гл. IX и приложение D|.
2) Материал этого раздела вздт из работы [3, гл. XVII].
102
Чарнс Л., Купер У.
таким образом, чтобы минимизировать суммарное ко-
личество часов пробега, которое требуется для обес-
печения требуемого грузооборота. Для этого ему, ко-
нечно, нужно знать времена пробега, которые, скорее
всего, известны для его маршрутов из предыдущего
Р и с. 1. Транспортная сеть с одним входом (источник [2, стр. 642]).
опыта’). Эти данные выражены цифрами, проставлен-
ными у острия каждой стрелки. Так, например, если
бы диспетчер послал две транспортные единицы через
ветви 1—2 и 2—5, то суммарное время пробега в ча-
сах составляло бы 2x5 (по ветви 1—2) плюс 2X1
(по ветви 2—5), т. е. всего 12 машино-часов.
*) Эти величины могут быть получены с помощью подходя-
щего механизма усреднения или же, если это не представляется
удовлетворительным и если известны соответствующие распреде-
ления вероятностей, то можно перейти к обобщенному виду этой
задачи в терминах случайных ограничений или стохастического
линейного программирования [2, 6],
Модели условной экстремизации - 103
Две дуги, связывающие узлы 2 и 5, призваны от-
разить нелинейность этого участка: индивидуальное
время пробега по этому участку, равное 1 час, дости-
жимо только в том случае, когда по нему будет про-
ходить не более 4 транспортных единиц. (Обратите -
внимание на обозначение 4 у прямой линии, соеди-
няющей узлы 2 и 5.) Если же по этому участку
должно пройти более 4 транспортных единиц, то ин-
дивидуальное время пробега будет возрастать в за-
висимости от их числа. Чтобы показать, как отра-
жается этот эффект в расчетах, предположим сначала,
что на этот маршрут назначено 5 транспортных еди-
ниц. В соответствии с приближенной моделью, кото-
рой мы сейчас придерживаемся1), время пробега
должно увеличиваться с 1 до I’A час на одну транс-
портную единицу, согласно соотношению (4+Д2)/(4 +
+ A)=6/s2)- Иначе говоря, при вычислении суммар-
ного времени, затрачиваемого на пробег по данному
маршруту всеми транспортными единицами, время
пробега для четырех из них принимается равным по
1 час, а время пробега пятой составит 2 час. Аналогич-
но, если на этот маршрут назначено шесть транспорт-
ных единиц, среднее индивидуальное время пробега
будет равно (4 + Д2)/(4 + Д) =8/e, 11/з час на одну
транспортную единицу, и т. д. Таким образом, даже
при различном характере функционирования модели,
который зависит от того, превышает ли число транс-
портных единиц четыре или нет, результат, тем не
менее, может быть связан при подсчете показателя
качества с наличием определенного среднего индиви-
дуального времени пробега.
Теперь мы хотим проиллюстрировать то, что мы
назвали «алгоритмическим завершением модели». Под
этим мы подразумеваем любое использование мате-
матических свойств какого-либо алгоритма, позволяю-
щее найти подход к модели, которая не может быть
’) Конечно, могут быть выдвинуты и иные допущения, но
данная гипотеза соответствует функциональной модели времени -
пробега, используемой в этом случае специалистами по транспорту.
2) Символ Д здесь и ниже обозначает количество транспорт-
ных единиц сверх четырех; в данном случае Д«1, — Прим, перев.
104
Чарнс А., Купер У.
Таблица 1
Матрица инциденцнй для схемы на рис. I
X. Ветви Переменные Огра- ниче- ния
<7i <?» th <74 <74 Qt «г th <7* <7.о «и «и <711
Узлы X. 1 «О 1 2-3 2-5 2-5 3-4 5—1 4-9 6-5 5-Ь 6-7 8-7 8-9
1 2 3 4 5 6 7 8 9 1 —1 1 -1 1 — 1 1 -1 1 —1 1 —I -1 1 1 —1 —1 1 1 — 1 1 — 1 —1 1 1 —1 10 0 0 0 —2 0 0 -3
Времена пробега 5 2 3 1 2 9 3 8 6 2 7 3 4
исследована никаким другим способом, — например,
из-за невозможности найти допустимое решение.
Чтобы облегчить построение модели (т. е. «фор-
мальной модели») для рис. 1, перейдем к соответ-
ствующей «матрице инциденций», которая синтези-
рована в таблице следующим образом. Номера узлов
на рис. 1 проставлены сбоку, а обозначения дуг (вет-
вей, связывающих узлы) —сверху таблицы. Коэффи-
циенты инцидентности для ветвей, соединяющих узлы
i и /, выбраны в соответствии со следующим опреде-
лением ’):
1, если дуга k положительно
инцидентна узлу i
а _ —1, если дуга k отрицательно
ik инцидентна узлу / •
О, если дуга k не инцидентна
_________ узлу /
') Разумеется, возможны и другие определения, См., напри«
мер, работу [3, гл, XVII].
Модели условной экстремизации
105
Здесь k—коэффициент, приписанный переменной
такие коэффициенты записаны в столбцах таблицы
под парами цифр l — j, которые указывают номера
узлов, в действительности соединяемых данной ветвью
на рис. 1. Используемое здесь соглашение состоит в
том, что дуга считается положительно инцидентной
узлу, если стрелка дуги обращена к этому узлу опере-
нием. Так, например, для дуги 1—2, обозначенной че-
рез это соглашение приводит к таким значениям
элементов в столбце под символом (что со-
ответствует узлу 1) и а21=—1 (что соответствует уз-
лу 2). Поскольку эта дуга инцидентна только двум
указанным узлам, все остальные элементы этого
столбца равны нулю (в табл. 1 соответствующие ме-
ста оставлены пустыми).
Теперь мы легко можем образовать с помощью
этой матрицы следующую модель, где входящие и вы-
ходящие транспортные потоки в узлах 1, 5, 7 и 9 свя-
заны с ограничениями, имеющими положительные и
отрицательные знаки соответственно, а с остальными
узлами — нулевые ограничения ’)
mln g=5^| 4- 2<?а 4~ 3<7з 4~ 4~ 2<у5 4-
4- 4- 3^7 4- 3?8 4- 4- 2<7ю 4~ 4~ 3</i2 4- 4</13
при ограничениях
Ю — + ч
+ +
0= — <7э + ?,
О-
”2“ — (19)
С'= ~(h +?» 4-9п
—5— — <7ц —
0е —+^и + ф|
—3" -Qi
При создании модели часто желательно учитывать
алгоритмы и соответствующие машинные програм-
мы, которыми можно воспользоваться для решения
’) В соответствии с используемыми экстремальными прин-
ципами эти нулевые ограничения отражают сохранение величины
потока в узлах (закон Кирхгофа для токов в узлах). См. работу
106 Чарнс А., Купер У.
сформулированной задачи. Так, например, интерпре-
тация модели, описываемой соотношениями (19), как
задачи линейного программирования немедленно при-
водит к возможности применения симплекс-метода,
после того как явно или неявно ’) к соотношениям (19)
добавлено неравенство
7 4 'С 4, (20)
что позволяет учесть нелинейность потока посред-
ством соответствующего участка пути.
При этом, однако, требуются дальнейшие преоб-
разования модели, либо симплекс-алгоритм должен
быть видоизменен, прежде чем он будет использован
для решения этой задачи. Причина здесь в том, что
симплекс-алгоритм оперирует только с неотрицатель-
ными переменными, так что при применении его без
каких-либо изменений к решению задачи, сформули-
рованной с помощью соотношений (19), этот алго-
ритм даст решение <7*^0, которое соответствует на-
правлениям потоков, совпадающим с направлениями
стрелок на рис. 1. Однако направления этих стрелок
были выбраны произвольно, и переменные qj в зада-
че (19) не обязаны подчиняться условию неотрица-
тельности, так что должны допускаться и обратные
потоки, соответствующие неравенствам <7?<0, если это
приводит к улучшению показателя качества g.
'Справедливо, что желаемая цель достигается не-
сложными изменениями симплекс-алгоритма. Тем не
менее, чтобы провести четкую границу между «фор-
мальной моделью» и ее «алгоритмическим заверше-
нием», мы предположим, что соответствующие изме-
нения недопустимы* 2) или неизвестны. Под формаль-
ной моделью мы подразумеваем модель, описываемую
с помощью соотношений типа (19). Алгоритмическим
’) См., например, обсуждение «метода ограниченных пере-
менных» как модификации симплекс-метода в работе 13, гл. XV],
который может быть применен в тех случаях, когда желательно
избежать введения условий типа соотношения (20) в явном виде.
2) Поступая таким образом, мы мало что теряем, поскольку
формальная модель, к которой мы придем, согласуется с теми
изменениями, которые следовало бы произвести в симплекс-алгр-
ритмс.
Модели условной экстремизации 107
завершением формальной модели мы называем опре-
деленную процедуру решения и ее соответствующие
математические свойства. Более точно мы говорим,
что достигнуто алгоритмическое завершение, если
формальная модель и соответствующий ей вычисли-
тельный алгоритм в совокупности обеспечивают тре-
буемое решение.
Для того чтобы модифицировать формальную мо-
дель, представленную в форме (19), удобно рассмо-
треть сначала более общий класс моделей
min2fy(?y).
Для любой модели, описываемой соотношениями
типа (21), переменные которой не обязательно неот-
рицательны, справедливо следующее: переменные, на
знак которых не наложено ограничений, могут быть
представлены как разность неотрицательных перемен-
ных. Другими словами, если некоторая переменная qj
не связана ограничением на знак, то ей можно сопо-
ставить две новые переменные qj и qj посредством
соотношений
<?7 >о, (22)
так что любая переменная qjt положительная или от-
рицательная, выражается как разность двух неотри-
цательных переменных. Далее, если используется
симплекс-алгоритм, то при та^ом разложении не воз-
никает неоднозначности, поскольку векторы, соответ-
ствующие переменным qj и qjt линейно зависимы,
а в случае применения симплекс-метода используются
только системы линейно независимых векторов. Сле-
довательно, при применении симплекс-алгоритма мы
всегда будем иметь q^q^ = 0» что означает, что по
крайней мере одна из этих переменных равна нулю.
С помощью предложенного преобразования мы мо-
жем сохранить применимость симплекс-метода, но
только по отношению к формальной модели, в кото-
I
108 Чарнс A.t Купер У.
*"^eee ♦ /ч
рой число переменных в принципе удвоено по сравне-
нию с задачей, формулируемой с помощью соотноше-
ний (19). Кроме того, если в задаче встречаются не-
линейности типа той, которая связана с участком 2—5,
оказывается необходимым вновь увеличить число пе- J
ременных, а также число условий. В этом случае нуж-
но рассматривать систему вида1)
min S(p;4?;»+p7^;»)
при ограничениях
> 1 ‘ (23)
где
?7 = S ?7* (24)
выражает величину положительного потока в ветви j
как сумму линейных частичных потоков каждый ,
из которых ограничен величиной Ajf, и
?7 = ?^* <25) :
представляет собой сумму отрицательных частичных
потоков, ограниченных величинами соответствен*
но2). Наконец, коэффициентам р^ и р”Л, которые
---------- !
’) При тех целях, которые мы здесь рассматриваем, можно
считать, что такие методы, как метод ограниченных переменных
и т. д. (см. предыдущую сноску), также являются обобщениями
обычного симплекс-метода.
2) Простой иллюстрацией такого случая служат условия (20);
теперь их можно представить в таком виде:
Я А = 74 4- 7э = 7<П — 741 “Ь 742 — 742»
0 ^41-С = 4, 0 Aj =4.
В этом простом примере нелинейности используется только одна
параллельная ветвь, но, конечно, для более общего класса слу-
чаев, охватываемого соотношениями (23), потребовалось бы боль-
шее число дополнительных линейных ветвей.
Модели условной экстремиэации
109
служат коэффициентами стоимости в модели, описы-
ваемой соотношениями (23), могут быть приданы,
если нужно, различные числовые значения, чтобы
охватить случай потоков различных направлений, до-
пустимых в разных ветвях1).
Как мы видели, формальная модель может быть
подготовлена к применению симплекс-алгоритма по-
средством преобразования ее к виду, описываемому
соотношениями (23). Может быть использован, ко-
нечно, и альтернативный путь — создание алгоритма,
применимого для завершения формальной модели в
форме, описываемой соотношениями (19), или даже
в еще более простой формальной форме. В реальных
приложениях, однако, следованию по второму пути
обычно предшествует (или его сопровождает) некото-
рое дополнительное рассмотрение, которое может
быть необходимым для синтеза как алгоритма, так и
анализа некоторых его свойств, позволяющих полу-
чать дополнительную информацию (например, на
основании решения двойственной задачи). Это озна-
чает в свою очередь, что желательно рассматривать
«характеристики замены» для перехода от некоторой
буквенной модели к ее модификации с точки зрения
требуемых свойств алгоритма. Разумеется, наиболее
благоприятная ситуация возникает в том случае, ко-
гда уже имеются другие алгоритмы, обладающие же-
лательными свойствами2).
Исследования последних лет привели к созданию
ряда специальных алгоритмов как в линейном про-
граммировании, так и в других областях, так что в
действительности существует алгоритм, пригодный
для завершения формальной модели, описываемой
непосредственно соотношениями (19)3). Более того, в
этом случае упомянутый алгоритм обладает всеми
1) Могут быть также рассмотрены и другие более общие
типы неоднородных потоков. См., например [3, гл. XVII и XX].
2) Можно также, конечно, рассматривать несколько различ-
ных алгоритмов, используемых на Сдельных этапах анализа, так
же как можно рассматривать различные формальные модели при
нслользовании одного алгоритма.
3) См. [3, гл. XVII].
I
110 Чарнс А, Купер У.
нужными свойствами, причем соблюдаются допуще-
ния, принятые при аппроксимации, и сохраняется воз-
можность вычисления значений двойственных пере-
менных. Таким образом, нет необходимости повторять
наше предыдущее обсуждение методов изменения по-
казателя качества и т. д.; заметим только, что задачи,
такого рода могут возникать и при использовании
процедуры алгоритмического завершения.
МУЛЬТИСЕТИ
Рис. 1 иллюстрирует крайне простой случай, когда
движение транспорта начинается только из одного
узла. В более общем случае следует ожидать, что
транспорт выходит более чем из одного узла, и кроме
того, эти различные части общего транспортного потока
не обязаны находиться под управлением одного диспет-
чера, действующего в соответствии с известной целью.
При таких обстоятельствах перед нами встает
весьма общая задача — как это происходит, например,
при попытках моделирования движения транспорта
по сети городских улиц. Один из подходов к задачам
такого рода может быть сформулирован на базе прин-
ципа устойчивого состояния (равновесия), впервые
сформулированного Уордропом [15]1). Этот прин-
цип может быть сформулирован достаточно строго,
что позволяет использовать аналитические методы для
описания определенных экстремальных характери-
стик2). Один такой подход заключается в рассмотре-
нии полиэкстремальных характеристик, названных
так потому, что они описывают целый комплекс взаи-
мосвязанных минимизаций, которые могут быть обус-
ловлены тем фактом, что индивидуальное время про-
бега транспортной единицы но некоторому участку
пути может изменяться в зависимости от величины
*) Этот принцип также использовался Прагером, но в на-
правлении, отличном от того, которое мы будем рассматривать,
см. [3, стр. 785].
Тесная математическая связь между понятием «равнове-
сия» к идеей «оптимизации» может иногда использоваться как
часть общей стратегии построения моделей.
Модели условной экстремизации
111
и направления транспортного потока через этот уча-
сток. В частности, эти минимизации используются для
моделирования уличного движения, причем при равно-
весии все маршруты, которые действительно исполь-
зуются транспортом, курсирующим между двумя дан-
ными пунктами, должны характеризоваться: а) одним
и тем же временем для проезда отдельной транспорт-
ной единицы и б) меныпими затратами времени, чем
любой неиспользуемый путь.
Этот результат можно интерпретировать по ана-
логии с концепцией «замещения» в экономическом
анализе; в этом смысле изменение времен пробега
может сравниваться с такими явлениями, как измене-
ние цен вследствие колебаний предложения и спроса
в общей модели равновесия конкурентном эконо-
мики1). При этом ситуация становится подобной той,
которая обсуждалась в связи с мерами функциональ-
ной эффективности в разделе «Некоторые векторные
меры качества систем». С другой стороны, если не ка-
саться вопроса функциональной эффективности, вре-
мена пробега транспортных единиц сами по себе яв-
ляются важными величинами и при соответствующем
подходе ими можно руководствоваться при выборе
решения в случае исследования возможностей пере-
стройки сети.
Для практического использования такого полиэкс-
тремального описания, например для целей моделиро-
вания, можно прибегнуть к теории игр п лиц. При та-
кой интерпретации с каждым пунктом отправления
транспорта связывается один игрок. Считается, что
каждый такой игрок стремится выполнить свои зада-
ния по доставке груза за минимальное время, воз-
можное в условиях транспортной сети с характеристи-
ками проводимости (например, временами пробега по
каждой ветви), которые частично определяются дейст-
виями других игроков. Иначе говоря, характеристики
’) Конечно, оптимизация при наличии дополнительных пред-
положений, таких, как максимизация прибыли и т. д.. является
только искусственным приемом; она применяется в экономике
в ряде случаев при исследовании типов замещения вблизи поло-
жения равновесия,
112
Чарнс А., Купер У.
проводимости заданы для каждого данного игрока
полностью лишь после того, как заданы действия дру-
гих игроков.
В такой модели транспортных потоков для различ-
ных игроков в общем случае не существует возмож-
ности образовывать коалиции. Следовательно, разум-
но допустить, что в данной ситуации применимо по-
нятие «равновесия по Нэшу» из теории некоалицион-
ных игр п лиц. Это понятие базируется на предполо-
жении о том, что игроки не станут объединяться в
коалиции. При таком предположении равновесие счи-
тается достигнутым, если удовлетворяется следующий
критерий оптимальности. Ни один игрок не может
отойти от достигнутого положения равновесия так,
что в результате этого улучшится относящееся к нему
суммарное время пробега. (В противном случае такое
отклонение соответствовало бы нарушению принципа
Уордропа.)
При таком подходе рассматривается одна сеть и
используется кратная минимизация, т. е. полиэкстре-
мальное описание. Другой подход использует муль-
тисети, но лишь одну экстремизацию.
Этот последний подход будет сейчас проиллюстри-
рован с помощью так называемой блочной модели се-
ти из идентичных блоков. С этой целью мы обратимся
сначала к рис. 2 и предположим, что каждый прямо-
угольник содержит алгебраическое описание одного
блока сети—например сети, изображенной на рис. 1 —
и копии этого описания1) повторяются в других пря-
моугольниках, показанных здесь. Для каждого та-
кого экземпляра сети заданы времена отправления и
прибытия транспорта; эти ограничения символизи-
руются вертикальной колонкой прямоугольников в
правой части схемы. Наконец, диагональные линии
под прямоугольниками в левой части • рисунка указы-
вают нелинейную (но кусочно-линейную) реакцию
времен пробега при введении в такую многоблочную
систему различных потоков.
*) Могут быть также введены обобщения на случай таких
сетей, где различные прямоугольники связаны с различными се-
тями; см. работу [7].
•<
Модели условной экстремизации
113
Чтобы передать эту мысль более точно, обратимся
к аналитическому представлению, имеющему следую-
щую форму. Для a-блока запишем
S а, = £7, (26)
где а<)—коэффициенты инцидентности, а £?— вход-
иые или выходные потоки для a-блока сети.
Рис. 2. Схема транспортной мультисети.
Поскольку направление каждого транспортного
потока может быть любым по отношению к ориента-
ции соответствующей ветви сети, которая указана
стрелкой, то на величины требование неотрицатель-
ности не накладывается. Фактический знак потока, по-
лученный в результате вычислений, как раз и опре-
деляет направление потока в /-й ветви для данной
доли суммарного транспортного потока*
8 Зак. 2(И
114
Чарнс А., Купер У.
Функция, характеризующая обратную величину
полной проводимости участка сети, запишется в виде
<27)
\ а /
Она является выпуклой и непрерывной. Таким обра-
зом, комбинируя два предыдущих выражения, полу-
чаем следующую модель:
min 2
при ограничениях
Saz/y; = £?, а = 1.......N. (28)
В этой модели предполагается, что величины
Rj — фиксированные постоянные. Однако, поступая
как и прежде, мы можем провести обобщение на слу-
чай кусочной линейности и использовать некоторые
фиктивные показатели при описании законов прово-
димости сети. Это может быть формализовано по-
средством следующей модели:
min 2 Rrf
a j 1 J
при ограничениях
(29)
где последний набор неравенств связан с долями сум-
марного потока через /-ю ветвь, которые наблюдаются
в каждом из а=1, ..., N блоков сети. Эти последние
условия представлены диагональными линиями, на-
черченными на рис. 2 под каждым из «блоков сети»,
на что указывают ограничения Aj в правой части.
Предположим теперь, что алгоритмическое завер-
шение должно быть достигнуто симплекс-методом.
С ?той целью мы заменим построенную выше фор-
4
Модели условной экстремизации
115
мальную модель следующей:
min$=2 S/?/*%.+*;_)
при ограничениях
. (30)
для всех a, j.
Поскольку здесь используется набор неравенств с
измененным знаком, мы без труда можем сформу-
лировать соответствующую двойственную задачу ма-
ксимизации, а именно:
max z = 2 2 — 2
при ограничениях
22ч>?а“-ф </?., ф.>0. (31)
' t а ' ' *
Заметим теперь, что переменные <р“ и ф;. есть
«оценки» и, следовательно, могут быть использованы
как множество (или вектор) мер, которыми можно
руководствоваться при внесении изменений в систему.
Для примера рассмотрим какое-нибудь оптимальное
значение Ф,- Если оно положительно, то любое дей-
ствие, которое может привести к увеличению соответ-
ствующей величины Л,, уменьшит оптимальное значе-
ние z, а следовательно, и оптимальное значение g. Та-
кая вариация величины Aj может быть произведена,
например, за счет расширения улицы, соответствую-
щей /-ft ветви сети. Полученный в результате этого
эффект может быть подсчитан для сравнения с дру-
гими возможными изменениями с учетом не только
одного движения по данной ветви, но и изменения ве-4
личины z, которая тем самым становится скалярной
мерой качества функционирования всей системы.
Следует отметить, что такое изменение, по-види-
мому, может быть достигнуто без ухудшения положе-
ния для какой бы то ни было транспортной единицы
8*
116
Чарке Л., Купер У.
в системе1), хотя, конечно, при таком изменении мно-
гие из транспортных единиц и не улучшат своего вре-
мени пробега. Однако для оценок ситуация более
сложна. Эти оценки относятся к входным и выходным
потокам, связанным с узлом i в a-блоке и представ-
ленным соответствующими ограничениями £?. Фор-
мально мы можем вызвать снижение времен пробега
(что выразится новыми величинами z* и g*) путем
увеличения значений соответствующих отрица-
тельным^0, и уменьшения значений £‘а, соответствую-
щих положительным <р)“2). Практически это потребо-
вало бы обращения к таким мерам, как изменение
рядности движения в одном направлении за счет дру-
гого, система штрафов и т. д.; однако, едва ли можно
рассматривать эти меры в исследовании, посвящен-
ном одному только движению транспорта.
Конечно, меры типа штрафов и т. д. часто связы-
ваются с различными схемами компенсации для ин-
дивидуумов, подпадающих под действие такой систе-
мы. В таком случае указанные изменения величин £?
могут изучаться одновременно с изменениями вели-
чин Д;, скажем, методами, предложенными в первых
двух разделах. Вспомним, что тогда рассматривались
пути, обеспечивающие максимальное улучшение одно-
мерного (оптимального) показателя качества3). Ко-
*) Или, если необходимо, для гарантии можно ввести специ-
альные ограничения, например, в исходной модели. Мы не ка-
саемся аспектов, которые являются внешними по отношению
к исследованию собственно транспортных потоков. Такие «внеш-
ние эффекты» могут наблюдаться, например, в тех случаях, когда
результирующие изменения транспортных потоков приводят
к ущербу для соседей, к изменениям конъюнктурных условий в
различных пунктах и т. д.
2) Двойственные переменные, соответствующие ограничениям
в виде равенств в системе (29), не связаны с требованием неот-
рицательности. См., например, (3, стр. 191).
’) На уровне общенациональной политики в качестве такого
скаляра мог бы выступать показатель вроде суммарного нацио-
нального продукта или какой-либо аналогичной величины, «при-
рост» которой должен быть повышен,
Модели условной экстремизации
117
нечно, такая скалярная мера качества не будет в об-
щем случае удовлетворительной, если не введены
жесткие предположения, касающиеся справедливости
и дальнейших свойств компенсационной схемы. Разу-
меется, даже при использовании векторных мер вроде
тех, которые обсуждались в разд. 3, такие проблемы
не всегда могут быть полностью разрешены. Трудно-
сти, возникающие здесь, хорошо известны и широко
обсуждались в экономической литературе, посвящен-
ной экономике благосостояния1). Таким образом,
здесь нет необходимости останавливаться на деталях
вопроса — стоит только лишний раз подчеркнуть, что
одна скалярная мера, вообще говоря, не будет доста-
точна в любом случае, когда преследуются многие
цели.
ЗАКЛЮЧИТЕЛЬНЫЕ ЗАМЕЧАНИЯ
Приведенные выше построения осветили некоторые
из путей, по которым может идти использование мо-
делей условной экстремизации для получения опреде-
ленных мер оценки качества систем. Теперь, следова-
тельно, уместно завершить изложение некоторыми
общими резюмирующими и предостерегающими заме-
чаниями. С этой целью мы сначала определим некото-
рые общие аспекты, предложенные Моррисом [11] для
«семиотики» как общей «науки о символах». Итак,
введем следующие термины.
1. Семантические, характеризующие отношение ме-
жду символами и объектами, к которым они относятся.
2. Прагматические, характеризующие отношение,
символов к их интерпретаторам.
3. Синтаксические, характеризующие отношение
символов к другим символам.
Эти три различные категории Моррис предложил
с целью осуществления эффективного исследования
при наличии любого набора символов; следовательно,
при соответствующей терминологической договорен-
*) См., например, работы [11, [121 или [13], а также [3, гл. IX
и приложение D], Современные взгляды на некоторые аспекты
этих проблем в области городского планирования и реконструк-
ции можно найти в [8],
118
Чарнс А., Купер У.
кости мы, пользуясь этими категориями, можем при-
дать нашему заключительному обсуждению весьма
компактную форму.
Конечно, когда применяются такие приемы, как из-
менение цен или изменение функционирования систе-
мы, семантические аспекты получаемой модели можно
рассматривать лишь косвенно. Прагматические аспек-
ты также могут потребовать усиленного внимания,
скажем, в том случае, когда модель, двойственная мо-
дели с изменением цен, используется не только для
управления децентрализованными операциями, но так-
же и для того, чтобы произвести изменения в модели,
помимо тех, которые уже были сделаны на основании
теоремы об изменении цен или функционирования.
Синтаксический аспект может трактоваться наибо-
лее удобным образом в контексте такого приложения,
которое допускает моделирование с помощью элек-
тронной вычислительной машины. Исходя из этого,
можно отметить, что вычисления будут направляться
программой для некоторой подходящей машины, а
сама модель становится «метапрограммой» в том смы-
сле, что она устанавливает общие правила для со-
ставления вычислительных алгоритмов, которыми мо-
жет воспользоваться программист. Предупредим, од-
нако, что представления, порождаемые одной только
«формальной моделью», могут оказаться неадекват-
ными для получения необходимых синтаксических
правил. Например, некоторая конкретная формальная
модель может быть отождествлена с задачей линей-
ного программирования и, следовательно, может рас-
сматриваться как кандидат для решения при помощи
обычного симплекс-алгоритма, в то время как пра-
вильное решение получится только с помощью моди-
фицированного симплекс-метода ’) или для «заверше-
ния модели» может потребоваться какой-либо другой
*) Конечно, нужно обратить некоторое внимание на характер
математического аппарата, который может быть привлечен для
моделирования. Например, как хорошо известно, любая задача
линейного программирования, сформулированная алгебраически,
соответствует определенной нелинейной задаче. См., например,
работу [3, гл. XVIII] и указанные там ссылки.
Модели условной зкстремизации 119
алгоритм. Наоборот, простая констатация того, что
данная задача — нелинейная, не исключает возмож-
ности использования линейной модели. В конце кон-
цов, между задачей и способом ее моделирования
можно проводить разграничение, особенно тогда, ко-
гда для обеспечения желаемых решений привлекается
оптимизация — возможно, и как искусственный
прием’)- Однако, находясь в этих рамках и учиты-
вая условия, на которые мы указывали в связи с вы-
шеизложенными приемами, создатель математической
модели с необходимостью вовлекается в синтез мета-
программы, чьи синтаксические свойства могут быть
использованы не только для получения оптимальных
результатов, но и для конструирования новых мер и
оценок. А это в свою очередь дает возможность усмо-
треть желаемые изменения в модели и в системе, к
которой она приложена* 2). Модели часто использова-
лись для выявления путей улучшения и даже иссле-
дования других моделей. Однако что касается исполь-
зования мер оценки качества при синтезе систем, то
этот вопрос должен быть изучен тщательным и после-
довательным образом, особенно в тех случаях, когда
это связано с рассмотрением сложных систем.
ЛИТЕРАТУРА
1. В a u m о I W., Welfare Economics and the Theory of the
State, Longmans-Green, Lnd., 1952.
2. Charnes A., Cooper W. W., Deterministic Equivalents for
Optimizing and Satisficing under Chance Constraints, Opera-
tions Research, 11, № 1, 18—39 (Jan.-Feb. 1963).
3. Charnes A., Cooper W. W., Management Models and In-
dustrial Applications of Linear Programming, Wiley, N. Y.,
1961.
4. Charnes A., Cooper W. W., Systems Evaluation and Re-
pricing Theorems, Management Science, 9, № 1, 33 49 (Oct.
1962).
5. Charnes A., Cooper W. W., Henderson A., An In-
troduction to Linear Programming. Wiley, N. Y.. 1953.
*) Например, чтобы получить доступ к нелинейным обобще-
ниям симплекс-метода, см. например, (3, гл. X}.
2) Обсуждение построения моделей как новой ветви матема-
тики см. в работе [14] и в указанной там же литературе.
120 ч. Чарнс А., Купер У.
6. Charnes A., Cooper W. W., Thompson G. L., Cri-
tical Path Analysis via Chance Constrained and Stochastic
Programming, Operations Research (готовится к печати).
7. Charnes A., Lemke С. E., Multi-Сору Generalized Ne-
tworks (Abstract), Notices of the American Mathematical So-
ciety, 5, p. 525.
8. Davis O., W h i n s t о n A., Economics and Urban Renewal,
Law and Contemporary Problems, Winter Issue, 1961.
9. Koop ma ns T. C. (ed), Activity Analysis of Production and
Allocation, Cowles Commission Monograph № 13, Wiley, N. Y.,
1951.
9a. Gate D., Kuhn H. W., Tucker A. W„ Linear Program-
ming and the Theory of Games.
9b. Koop ma ns T. C., Analysis of Production as an Efficient
Combination of Activities.
10. Koopmans T. C. (ed.), Three Essays on the State of Eco-
nomic Science, McGraw-Hill, N. Y„ 1957.
IL Morris, Ch. W., Foundations of the Theory of Signs, In-
ternational Encyclopedia of Unified Science I, Part I, The
Univ, of Chicago Press, Chicago, 1955, pp. 79—137.
12. R e d e r M. W., Studies in the Theory of Welfare Economics,
Columbia Univ. Press, N. Y., 1947.
13. Samuelson P. A., Foundations of Economic Analysis, Har-
vard Univ. Press, Cambridge, 1947.
14. Tarski A., Contibutions to the Theory of Models I, II, III,
Indagationes Mathematics XVI, Proc, of the Section of Sci-
ences, LXI1, Series A, pp. 573—588 and XVII, Fasciculus I,
Proc, of the Section of the Sciences, Series A, Ms I, pp. 56—64.
15. Wardrop J. G., Some Theoretical Aspects of Road Traffic
Research, Proc. Inst, of Civil Eng. (Lnd.)t Part II, 325—378
(June 1952).
й**Е*ИЬй*
абстрактная теория самовоспроизведения
Дж. Майхилл ’)
Насколько я понимаю смысл словосочетания «об-
щая теория систем», используемое в нем понятие
«системы» должно охватывать как биологические си-
стемы, так и системы, искусственно созданные челове-
ком, а прилагательное «общая» подразумевает опре-
деленную степень абстрагирования от анатомических
или технических деталей. Если исходить именно из
этого довольно расплывчатого толкования, то мне ка-
жется, что исследование общих вопросов, связанных
с моделированием жизнеподобных процессов, и в част-
ности принципов самовоспроизведения автоматов, ис-
кусственно созданных человеком, вполне можно отне-
сти к общей теории систем. В этой статье я собираюсь
рассмотреть некоторые основные принципы, на кото-
рых основывается моделирование процессов самовос-
произведения. Эти принципы представляют значитель-
ный интерес, во-первых, в силу своей общности и
абстрактности и, во-вторых, ввиду того, что они пока-
зывают, что существование самовоспроизводящихся
автоматов есть всего лишь весьма частный случай го-
раздо более широкого явления, теорию которого мож-
но предположительно использовать в ситуациях, рез-
ко отличающихся от тех, с которыми мы сталкиваемся
при моделировании биологических процессов. В об-
щих чертах мы хотим показать, что если рассматри-
ваемые «автоматы» обладают определенными очень
простыми свойствами, то существуют автоматы,
') Myhill J., The Abstract Theory of Self-Reproduction.
12*2 Майхилл Дж.
«потомство» которых находится в любом требуемом Я
отношении к ним; например, потомок такого автомата 1
может быть зеркальным отображением родителя, I
двумя связанными между собой копиями родителя, и
синькой конструкции родителя и т. п. (Точное) само-
воспроизведение, т. е. воспроизведение потомка, иден-
тичного родителю, представляет собой всего лишь
простейший частный случай этого процесса. Наконец, i
опираясь на некоторые простые идеализированные
представления об автоматах, мы наметим основные
контуры доказательства существования автоматов,
производящих автоматы, последовательные поколения I
которых становятся в определенном смысле все более ;
и более разумными. ?
Перейдем теперь к некоторым историческим справ-
кам. Истоки идеи о самовоспроизводящем автомате, j
как и большинство других идей, связанных с модели-
рованием жизнеподобных процессов, лежат в глубо- и
кой древности. Я ничего не слышал о том, были ли -?
дети у Пигмалионовой Галатеи, но трудно поверить, I
чтобы такой вопрос не возникал у греков. Что же ка- |
сается обратного направления (оплодотворение чело- |
века автоматом), то мне кажется, что я слышал упо- I
минания о сыне и о невесте чудовища Франкенштей- j
на. Роботы, о которых пойдет речь в настоящей J
статье, не вступают с людьми в такие взаимоотноше- ’
ния и целомудренны даже по отношению друг к другу.
Тем не менее я был бы искренне удивлен, если бы ;
мои методы не дали бы некоторого представления о
возможностях полового воспроизведения автоматов.
Как хорошо известно, первая строгая работа, свя-
занная с идеями механического самовоспроизведения,
принадлежит фон Нейману. У его автомата было две
формы, отличавшиеся степенью идеализации. Менсе
идеализированный робот плавал по озеру, в котором
плавала его «пища», т. е. неисчерпаемый запас (по- 1
видимому, электронных) элементов. Робот вылавли- Я
вал эти элементы и составлял из них точную копию Я
самого себя. Подобный процесс отличается, конечно, 1
от того, что обычно принято понимать под воспроиз- I
ведением. Во-первых, здесь образование потомка про- J
Абстрактная теория самовоспроизведения
123
исходит вне тела робота-родителя, что скорее всего
несущественно. Но, во-вторых, перед сборкой и во вре-
мя нее получаемая роботом пища не претерпевает ни-
каких химических изменений, а это может быть весь-
ма существенным, поскольку учет таких изменений
придал бы процессу, имеющему в исходной модели
чисто дискретный характер, некоторые свойства не-
прерывности.
Более абстрактный вид воспроизведения, находя-
щийся где-то посредине между плавающим роботом
фон Неймана и его второй, очень жесткой, мозаичной
моделью, о которой речь пойдет ниже, рассматривал-
ся мною (после 1958—1959 гг.). Я пользовался беско-
нечной полуплоскостью, разбитой на квадраты по
принципу шахматной доски. По этой доске в дискрет-
ные моменты времени передвигались электронные и
механические элементы. Другими словами, между мо-
ментами времени t и /4-1 (в секундах, отсчитываемых
после начала работы автомата) элемент С, занимав-
ший любую клетку, мог либо остаться на этой же
клетке, либо передвинуться лишь на одну клетку впра-
во, влево, вверх или вниз. В системе используется ко-
нечное число типов элементов и каждый из элементов
может находиться лишь в конечном числе состояний.
Какое из пяти возможных движений совершает ка-
ждый элемент за время от / до /+1 и в какое состоя-
ние он переходит за этот промежуток времени, все это
определяется состояниями этого элемента и его четы-
рех соседей (сверху, снизу, справа и слева) в момент
времени / (правда,- по техническим соображениям в
некоторых ситуациях допускалась возможность мгно-
венного или, точнее, практически мгновенного воздей-
ствия на ограниченном расстоянии). Таким образом,
отдельные элементы автомата могли воздействовать
Друг на друга и на окружающую среду, изменяя свои
состояния и осуществляя перемещения, причем можно
представить себе любое движение элемента как след-
ствие отталкивания или притягивания этого элемента
другим, в результате чего эти элементы оказываются
спаянными друг с другом, либо временно связанными
между собой магнитным взаимодействием. Окружаю-
124
Майхилл Дж.
щая среда, о которой уже упоминалось выше, состоит
из непрерывного потока элементов, движущихся со
скоростью одна клетка в единицу времени по конвейе-
ру, проходящему по верхнему ряду клеток доски.
В таком виде самовоспроизводящий автомат пред-
ставляет собой некоторую конечную структуру, обра-
зованную из определенных элементов; он захватывает
такие элементы с конвейера и собирает из них точную
копию самого себя.
Во втором идеализированном варианте фон Нейман
сохраняет пространственное решение в виде шахмат-
ной доски, но полностью абстрагируется от какого-
либо кинематического аспекта поведения автомата.
В этой модели передвижения элементов заменены рас-
пространением состояний; более того, все различные
типы элементов объединены в один (разомкнутый граф).
В модели не используются мгновенные воздействия
даже на ограниченных расстояниях, и вместо захвата
элемента из окружающей среды в ней предусмотрена
возможность передачи некоторого состояния в клетку,
которая до этого была свободной. Незанятость клет-
ки, между прочим, рассматривается как одно из воз-
можных состояний. Поэтому вводится условие, тре-
бующее, чтобы в любой момент времени было бы
занято лишь конечное число клеток. Таким образом,
модель представляет собой бесконечную плоскость в
виде шахматной доски, каждая клетка которой может
находиться в одном из конечного (и одинакового для
всех клеток) числа состояний. При этом состояние
клетки в момент /-+-1 определяется ее состоянием и
состоянием ее соседей в момент t. В этой весьма эле-
гантной математической формулировке самовоспроиз-
ведение означает просто-напросто то, что мы начи-
наем с одного экземпляра определенной структуры на
шахматной доске, а кончаем через некоторое время
двумя такими же экземплярами.
Именно для такой (мозаичной) модели и разрабо-
тал фон Нейман подробный план процесса воспроиз-
ведения, т. е. начальное распределение состояний и
вид функций перехода. Построенный процесс слиш-
ком сложен с квазиинженерной точки зрения (необхо-
Абстрактная теория самовоспроизведения
125
димость синхронизации и поиска потомка), однако его
суть —в простом рекуррентном методе рассуждений.
Задача настоящей статьи состоит в том, чтобы опи-
сать и обобщить этот метод. Все, что следует ниже,
можно по большей части рассматривать с точки зре-
ния такой идеализации процесса самовоспроизве-
дения, которая будет ближе читателю, причем мы
воспользуемся терминами, близкими к тем, кото-
рые используются в цифровой вычислительной тех-
нике.
Для того чтобы разобраться в дальнейшем, необ-
ходимо иметь по крайней мере интуитивное представ-
ление о таком понятии, как рекурсивная (вычисли-
мая) функция. Грубо говоря, рекурсивной функцией
мы называем любую арифметическую функцию (ото-
бражение множества неотрицательных целых чисел в
само себя), которую можно вычислить с помощью не-
которой (цифровой) вычислительной машины. При
этом в машину вводится одно или несколько значений
аргумента этой функции (например, с помощью пер-
фоленты), а с ее выхода (скажем, с другой перфо-
ленты) считываются результаты, соответствующие
введенным значениям аргумента. Конечно, если пони-
мать это определение буквально, то даже такая про-
стая функция, как произведение, окажется нерекур-
сивной, поскольку для умножения двух произвольно
больших чисел потребовался бы бесконечно большой
объем запоминающего устройства. Поэтому под ре-
курсивными функциями мы понимаем функции, вы-
числимые на цифровых машинах в предположении о
потенциально бесконечном объеме запоминающих
устройств этих машин. Цифровую вычислительную
машину с таким запоминающим устройством, число-
вые данные в которую вводятся с помощью одной
или нескольких перфолент и выводятся с помощью
одной перфоленты, называют машиной Тьюринга.
Для понимания большей части материала этой
статьи нам понадобятся лишь несколько простейших
свойств рекурсивных (вычислимых) функций. Все они
очевидны с точки зрения приведенного выше нестро-
гого определения.
126
Майхилл Дж.
Свойство 1. Если функция f(x,y) вычислима, то
вычислима и функция /(х, х), являющаяся функцией
одного аргумента (числовые значения х просто запи-
сываются на обе ленты и вводятся в машину, имею-
щую два входа и предназначенную для вычисления
функции I).
Свойство 2. Если функции f(x) и g(x) вычислимы,
то вычислима и функция fg(x). (Последовательное со-
единение двух машин.)
Свойство 3. Тождественная функция f(x)=x вы-
числима.
Свойство 4. Если функция f (х, у) вычислима, то
вычислима и функция f(x,a) при любом фиксирован-
ном а (как функция одного аргумента х).
В рассматриваемой теории машины Тьюринга вы-
ступают как блоки автоматов, которыми мы интере-
суемся в первую очередь как автоматами, производя-
щими автоматы. В типичном случае у таких автоматов
всегда один вход, на который подается команда, опре-
деляющая, какой автомат необходимо построить. Эта
команда рассматривается как некоторый физический
объект (скажем, лента, на которую в закодированной
форме нанесена закодированная схема воспроизводи-
мого автомата), а не как последовательность импуль-
сов. Поскольку любую схему можно закодировать
единственным неотрицательным числом, самовоспро-
изводящий автомат можно рассматривать как отобра-
жение множества неотрицательных целых чисел на
пространство строительных операций (отбор элемен-
тов и сборка из них умозрительной кинематической
модели). После того как составлен фиксированный
список элементов, перечислены их функции перехода
из одного состояния в другое и принято соглашение
о фиксированном правиле кодирования схем с по-
мощью целых неотрицательных чисел, нетрудно по-
строить автомат, способный «выполнять» любую
команду, т. е. автомат, который сразу начнет строить
автомат, соответствующий предъявленной схеме.
Такой автомат мы станем называть универсаль-
ным производящим автоматом, а его существование
(или, вернее, нечто более общее) будет постулиро-
Абстрактная теория самовоспроизведения
127
ваться ниже в качестве аксиомы формального иссле-
дования.
Здесь полезно сделать два предупреждения. Если
автомат ЭЯ может построить по получении соответ-
ствующей команды любой автомат, то он может
построить и копию автомата ЭЯ. Почему же тогда ав-
томат ЗЯ совместно с командой /, требующей по-
строения автомата ЭЯ, нельзя считать самовоспроиз-
водящим? Ответ становится сразу очевидным, если
точно сформулировать вопрос, поставленный выше.
Автомат ЭХ, рассматриваемый совместно с входной
командой /, строит автомат ЭХ без воспроизведения
входного сигнала и, следовательно, здесь нет само-
воспроизведения. В последнем случае нам нужно было
бы, чтобы автомат ЭЯ с входной командой / строил
бы автомат ЗЯ с той же входной командой.
Второе предостережение — более тонкого свойства.
Эдвард Мур (Moore), фирма Bell Telephone Laborato-
ries, весьма изящно доказал так называемую теорему
райского сада, утверждающую, что существуют авто-
маты, которые нельзя построить. Если говорить точ-
нее и придерживаться контекста мозаичной модели,
то утверждение теоремы сводится к тому, что есть
конфигурации, которые существуют лишь в момент
t—О. Здесь под конфигурацией понимается распреде-
ление элементов между клетками (число таких клеток
конечно). Если же автоматом считать просто конфи-
гурацию, то согласиться со справедливостью такой
теоремы мы не можем, поскольку предполагается, что
существует автомат, который может построить любой
автомат. (В теореме Мура предполагается, что функ-
ции перехода из одного состояния в другое удовлетво-
ряют определенным условиям, но эти условия, по-ви-
димому, выполняются во всех интересных случаях.)
Однако если обратиться к моей гибридной модели,
допускающей существование элементов различных ти-
пов, то трудность, связанную с теоремой райского
сада, удается преодолеть следующим совершенно есте-
ственным способом. Для элементов каждого типа на-
зовем одно из состояний невозбужденным и пусть все
элементы на конвейере находятся в невозбужденном
128
Майхилл Дж.
состоянии по крайней мере до того, как они отобраны
производящим автоматом. Пусть, кроме того, все
функции перехода из одного состояния в другое та-
ковы, что если в момент времени t некоторая клетка
С и все ее четыре ближайших соседа находятся в не-
возбужденном состоянии, то элемент в клетке С ока-
зывается невозбужденным и в момент времени /4-1.
Станем рассматривать теперь только такие автоматы,
у которых все элементы находятся в невозбужденном
состоянии, и предусмотрим для каждого такого авто-
мата (в качестве части его описания) определенный
метод запуска (с помощью возбуждения одного или
нескольких периферийных элементов — так сказать, с
помощью «подключения к сети»). В этом случае лю-
бой автомат описывается упорядоченной парой, со-
стоящей из конфигурации элементов, находящихся в
невозбужденном состоянии, и команды относительно
процесса запуска, т. е. информации о том, какие пери-
ферийные элементы нужно возбуждать и в какое со-
стояние они должны быть переведены на первом шаге.
Теперь мы будем говорить, что автомат строи?
автомат если в некоторый момент t после на-
чала работы автомата оказывается завершенной
сборка автомата из невозбужденных элементов и
если сразу же после этого, т. е. в следующий момент
времени /4-1, этот автомат будет запущен соответ-
ствующим образом. Короче говоря, мы будем истол-
ковывать глагол «построить» как «построить и запу-
стить». Пользуясь таким определением и достаточно
разнообразным запасом элементов, мы без особого
труда сможем построить универсальный производя-
щий автомат. Не трудно видеть, что такое изменение
определения понятия «универсального производящего
автомата», направленное на преодоление противоре-
чия, связанного с теоремой райского сада, не ограни-
чивает область применения доказываемой ниже тео-
ремы о самовоспроизведении одним лишь случаем
гибридной модели. Действительно, если, например,
автомат ЭЯ (с невозбужденными элементами в ис-
ходном состоянии) строит и запускает свою точную
копию в смысле гибридной модели, то на языке мо-
Абстрактная теория самовоспроизведения
129
заичной модели (типа шахматной доски), это просто
означает, что автомат построил свою точную ко-
пию, где 2R' является автоматом 2W, соответствую-
щие периферийные элементы которого возбуждены.
Для того чтобы завершить определение понятия
производящего автомата, допустим возможность су-
шествования автономных производящих автоматов
[т. е. автоматов без лент с входными данными (вхо-
дов)], а также производящих автоматов с несколь-
кими входами (для нижеследующего нам достаточно
ограничиться случаем двух входов). Потребуем, на-
конец, чтобы речь всегда шла о построении комплект-
ных автоматов, т. е. автоматов вместе с соответствую-
щим числом лент с входными данными.
После всех этих предварительных замечаний мы
в состоянии начать формальное исследование вопро-
са. Обозначим через {ЭД'/’)) (л = 0, 1, 2) определенным
образом пронумерованное множество автоматов с п
входами, а через {Д} — множество входных команд.
Будем обозначать через ЭД/0) автомат, построенный
некоторым фиксированным универсальным произво-
дящим автоматом SWL? в ответ на Z-ю команду. Сим-
волически мы будем записывать эту операцию таким
образом:
/(: -► Ш!1,01.
Вообще говоря, символ Л: ЗЯ. ’ соответствует авто-
номному автомату, который мы получаем в результате
«присоединения» команды Д к одновходовому автома-
ту ЗЯд1, а соотношение означает, что авто-
мат строит автомат Точно так же, символ
[Л//;]: соответствует автономному автомату, ко-
торый мы получаем из автомата Эйа' с двумя вхо-
дами в результате «присоединения» команд Д и Д к
первому и второму входам этого автомата соответ-
ственно; в то же время символ [0///]: ЗТД2' соответ-
ствует автомату с одним входом, образованному из ав-
томата ЯЯ'а' в результате «присоединения» команды
Д ко второму входу этого автомата, причем первый
9 Зак. 264
130
Майхилл Дж.
вход этого автомата остается свободным. Тогда, по
определению,
Теперь мы можем сформулировать несколько аксиом,
из которых вытекает существование самовоспроизво-
дящих автоматов.
А1. Пусть f — некоторая вычислимая функция. То-
гда существует такой автомат ЗЛа), что всегда имеет
место
Автомат состоит из двух частей: специализи-
рованного вычислителя, печатающего команду /дп) в
ответ на команду /п, и универсального производящего
автомата который строит ЭД}°(д) при подаче на
его вход //д. Если f — тождественны, то из А1 выте-
кает существование универсального производящего
автомата.
В1. Существует такая рекурсивная функция ^,что
Последнее соотношение показывает всего лишь то,
что мы разумно пронумеровали автоматы и команды,
т. е. то, что, зная команду (ее числовой код), запи-
санную на ленте, и схему (ее числовой код) некоторого
одновходового автомата, мы можем вычислить число-
вой код схемы автомата, получаемого в результате
«присоединения» к исходному автомату ленты с за-
писанной на ней командой. Это свойство оказывается
тривиальным при любой системе кодирования, кото-
рую только можно придумать.
Из аксиом А1 и В1 вытекает справедливость сле-
дующей теоремы фон Неймана.
Т1. Существует самовоспроизводящий автомат,
т. е. автомат ЗЯ*?’, для которого
Bli”.
Абстрактная теория самовоспроизведения
131
Доказательство. Пусть Ц удовлетворяет аксиоме
В1 и пусть
s(x) = ti(x, х).
Тогда
3»'% = /,:!^
и функция s оказывается рекурсивной (в силу пер-
вого свойства вычислимых функций). Следовательно,
в силу аксиомы А1 существует такой автомат что
!„•. 7. :®й’.
Если теперь положить п=Ь, то
и автомат 7»: как раз и оказывается искомым са«
мовоспроизводящим автоматом.
Обобщение этой теоремы, о котором уже упоми-
налось в начале статьи (для случая автоматов, спо-
собных строить свои зеркальные отображения, свою
собственную принципиальную схему и т. п.), дости-
гается чисто формальным путем.
Т2. Для любой рекурсивной функции h найдется
автомат такой, что
Доказательство. Пусть, как и раньше, 5 такая ре-
курсивная функция, что всегда имеет место
3»'% = /,:<».
В силу свойства 2 рекурсивных функций рекур-
сивна и функция hs(x), а отсюда как следствие ак-
сиомы А1 существует автомат ЭДс0, для которого всег-
да имеет место
<’(»>•
Полагая теперь п — с, получим, что
и как раз и является искомым автоматом.
132
Майхилл Дж.
Для того чтобы построить автомат, каждое поко-
ление потомков которого «умнее» предыдущего, нам
понадобится следующее обобщение теоремы Т2.
ТЗ. Пусть h(x, у) — некоторая рекурсивная функ-
ция двух аргументов. Тогда существует автомат SHIP,
для которого всегда имеет место
Доказательство этой теоремы совершенно аналогич-
но доказательству теоремы Т2, но только оно опи-
рается не на аксиому А1, а на аксиому А2: для ка-
ждой рекурсивной функции / двух аргументов най-
дется такой автомат что
L * Л J
а вместо BI используется аксиома В2: существует та-
кая рекурсивная функция 6. что всегда имеет место
Обе эти аксиомы совершенно тривиальны и мотиви-
руются точно так же, как и аксиомы AI и В1.
Доказательство теоремы ТЗ. Не трудно видеть, что
искомым автоматом является
где выбрано в соответствии с аксиомой А2, аг— (в
силу аксиомы В2) так, чтобы всегда имело место
L *п J
Действительно, в этом случае
а • -"Иг (г, г) =
6 (г. г».
L Т •
что и требовалось доказать.
Прежде чем приступить к построению «самосовер-
шенствующегося» автомата, необходимо выяснить, в
каком смысле мы хотим говорить о самоусовершенст-
вовании, а для этого в свою очередь нужно вспомнить
Абстрактная теория самовоспроизведения 133
некоторые данные из теории формальных систем и
теории рекурсивных функций. В математике систе-
мой называют множество правильно построенных
(т. е. в соответствии с определенной грамматикой)
предложений, образованных из букв некоторого за-
данного (конечного) алфавита; причем буквы здесь
рассматриваются лишь как символы, а предложе-
ния— лишь как (определенные) цепочки символов.
Система называется формальной, если все входящие
в нее предложения (и только они) могут быть напеча-
таны (последовательно с пробелами) некоторой ма-
шиной Тьюринга (без входа). Так как формулы можно
закодировать с помощью неотрицательных целых чи-
сел, то нет принципиальной разницы между рекурсив-
ными функциями предложений (цепочек символов за-
данного алфавита), с одной стороны, и рекурсивными
функциями чисел, с другой. Приведенные ниже опре-
деления 1 и 2 играют для чисел такую же роль, как
определения I и II соответственно для предложений.
Определение /. Числовое множество М называется
разрешимым или рекурсивным, если существует такая
машина Тьюринга, на выходе которой появляется от-"
вет «да», если в нее вводится элемент, принадлежа-
щий М, и ответ «нет», если в нее вводится элемент, не
принадлежащий М; другими словами, множество М
называется рекурсивным, если рекурсивна его харак-
теристическая функция.
Определение 2. Про числовое множество М гово-
рят, что оно генерируется эффективно, если имеется
такая машина Тьюринга без входа, которая печатает
(последовательно с пробелами) все элементы М (и
только их), другими словами, если оно (пусто или)
имеет вид {/(0), f(l), 1(2), ...}, где функция f рекур-
сивна.
Определение /. Множество Q цепочек символов из
алфавита А называется разрешимым (и при условии,
что это соответствует действительности, разрешимой
формальной системой), если найдется такая машина
Тьюринга, на выходе которой появляется ответ «да»,
если в нее вводится элемент, принадлежащий Q, и
«нет» —в противном случае.
134
Майхилл Дж.
Определение II. Множество Q цепочек символов .
из некоторого алфавита Д называется рекурсивно ну- ’
меруемым или формальной системой (ее множеством
теорем), если имеется машина Тьюринга без входа, ]
печатающая (последовательно с пробелами) все эле-
менты Q (и никакие другие).
В случае любого множества Q цепочек (симво-
лов некоторого заданного алфавита Л) можно обо-
значить через n(Q) множество номеров, приписанных
элементам Q, или, другими словами, любую систему
кодирования множества Q. В этом случае Q разре*
шимо (рекурсивно нумеруемо) тогда и только тогда,
когда это справедливо для n(Q). В частности, множе-»
ство правильно построенных формул некоторой фор-
мальной системы (в обычном смысле этого термина)
разрешимо (мы можем, конечно, простой проверкой,
даже не прибегая к помощи вычислительных машин,
установить, составлена ли любая относительно корот-
кая цепочка символов по правилам грамматики или
нет), а множество теорем любой обычной полуформа-
лизованной аксиоматической системы рекурсивно ну-
меруемо (последнее вытекает из того факта, что мы
всегда узнаем доказательство, когда нам таковое
представляют, и обычно обходимся в этих случаях
без помощи вычислительных машин).
Обозначим теперь через Z теорию относительно не-
отрицательных целых чисел с определенными для них
операциями сложения и умножения. Формулы этой
теории образуются в результате установления то-
ждеств между полиномами с помощью логических
операторов «и», «или», «если..., то», «для любого числа
х», «для некоторого числа х» и т. п. Например, сле-
дующие формулы содержат утверждение, что х—
простое число:
^(х = 0)&^(х = 0+)&(у//)(уг)С/Х2= i
= x->y = 0+ Vz=0+)
(здесь через О* обозначено число, следующее за О,
т. е. 1). Запишем приведенную выше формулу сокра- <
Абстрактная теория самовоспроизведения 135
щенно как Р(х). Тогда формула
О ; (V*) <ЯУ) (Я-г) (Л + У = z & Р (z) & P(z4-0++))
эквивалентна утверждению знаменитой (недоказан-
ной) гипотезы Гольдбаха, утверждающей, что суще-
ствует бесконечное множество пар простых чисел,
различающихся друг от друга на два. Отсюда видно,
что, несмотря на ограниченность словаря Z, на этом
языке можно формулировать трудные вопросы отно-
сительно z. В действительности можно считать, что
этот словарь состоит из следующих 17 символов
( )уз*^'о+4-х &
среди которых символ ' дает возможность пользовать-
ся неисчерпаемым запасом переменных
У7 у" У,п
Д > Д > Л 9 • • •
у', У", у"', ...
z', z", z"', ....
Для того чтобы завершить предложенное описание Z,
нужно сформулировать аксиомы этой теоремы [на-
пример, аксиому
(ух)~(х+=0),
утверждающую, что нет числа, которое предшест-
вует 0, или аксиому
(Vх) (V!/) (*+ — У+ -> X = у),
в силу которой за любыми двумя числами не может
следовать одно и то же число] и ее правила (напри-
мер, правило modus ponens), с помощью которых из
аксиом теории и уже доказанных теорем генерируют-
ся новые теоремы. Перечисление всех этих аксиом и
правил, естественно, не входит в нашу задачу; их мо-
жно найти, скажем, в книге Клини «Введение в мета-
математику» (стр. 92).
Теперь займемся непосредственно теорией само-
совершенствующихся автоматов. Пусть Z есть некото-
рая формальная система, т. е. мы можем запрограм-
мировать некоторую машину Тьюринга ЭДд1 так, что
136
Майхилл Дж.
она напечатает все теоремы Z и ничего больше. Мы
не можем быть уверенными в том, что такая машина
сможет «ответить на все арифметические вопросы»,
т. е. напечатать для каждой формулы / из Z (либо
само /, либо его отрицание). В частности, никто не
знает, как доказать и как опровергнуть, скажем, фор-
мулу G, приведенную выше, даже используя всю
мощь аналитической теории чисел, что заведомо боль-
ше довольно скромных ресурсов, заложенных в Z.
В соответствии со знаменитой теоремой Геделя о не-
полноте неизбежное отсутствие в Z некоторых необ-
ходимых аксиом совсем не случайно. Эта теорема
утверждает, что не существует формальной системы,
содержащей в качестве теорем все арифметически ис-
тинные высказывания и ни одного ложного. Действи-
тельно, если нам задана некоторая формальная
система арифметики (т. е. некоторая система S с сим-
волами из Z, все теоремы которой истинны), то мы на-
верняка сможем эффективно найти «лучшую» систе-
му, т. е. систему S', использующую ту же символику,
и такую, что все ее теоремы истинны и некоторые из
них не встречаются среди теорем S. Если перевести
этот результат на язык автоматов, то он будет зву-
чать следующим образом: существует вычислимая
функция g, такая, что если ЭД(°’— некоторая машина
Тьюринга, печатающая лишь арифметически истинные
высказывания, то — такая машина Тьюринга,
которая печатает все истинные арифметические пред-
ложения. печатаемые машиной ЭД(а’, а, кроме того,
еще и некоторые другие. Поэтому, если — какая-
то конкретная машина, доказывающая арифметиче-
ские теоремы, скажем, если это автомат, предназна-
ченный для печатания всех теорем Z и только их, то
бесконечная последовательность
зС S’» (flfl)* • • •
такова, что каждый ее последующий член представ-
ляет собой более совершенную машину для доказа-
тельства арифметических теорем. Символически мы
Абстрактная теория самовоспроизведения
137
станем записывать это так:
где неравенство ж™ < означает, во-первых, что
автомат 2^°' печатает все цепочки, которые печа-
таются автоматом ^0), а, кроме того, еще и некото-
рые другие, и что, во-вторых, каждая из цепочек, ко-
торые печатаются автоматом ЭД4»0), представляет собой
истинное предложение арифметики.
Теперь я нестрого опишу обещанный процесс по-
строения автомата, каждое следующее поколение по-
томков которого будет все более и более разумным в
том смысле, что оно сможет печатать больше истин-
ных высказываний арифметики (одновременно не пе-
чатая ложных), чем предыдущее поколение. Такой
автомат состоит из трех частей: команды 1а, произво-
дящего автомата , на вход которого поступает
команда 7а, и машины Тьюринга 9Яс0), механически свя-
занной с автоматом /в:ВД\ причем между последни-
ми двумя автоматами не происходит никакого одно-
стороннего или двустороннего обмена информацией.
Символически это записывается следующим образом:
/„ : Ki” 4- S№t0),
где + означает «инертное» соединение двух автома-
тов.
Пусть теперь а0 и g определяются так, как это уже
делалось выше, т. е. пусть функция g— рекурсивна и
пусть
aC«.>....
есть некоторая последовательность «все более и более
совершенных» автоматов для доказательства теорем.
Положим с = а0 и попробуем выбрать х и b так, чтобы
после момента запуска автомата : про-
исходило следующее. Прежде всего !а «даст команду»
автомату построить три объекта: сначала
затем копию самого а затем команду /а, которая
138
Майхилл Дж.
«прикажет» автомату 2$' построить три объекта:
прежде всего затем вторую копию Ш1* и
наконец, команду /а, которая «прикажет» новому
автомату Л’1 построить три объекта, и т. д. В симво-
лической записи это выражается следующим образом:
Таким образом, нам нужно найти автомат обла-
дающий следующими свойствами. Каждый раз, когда
на его вход поступает команда 1а, этот автомат про-
изводит автомат
Действительно, в этом случае
/о. = + <’ -* I' (а.) : <’ + к, W
Существование такого автомата М»* вытекает из ут-
верждения теоремы ТЗ, если выбрать функцию h так,
чтобы h(x, у) могла служить индексом автомата
/fW = OT<'’ + 2>li%
в нумерации множества (®J|0>). Для того чтобы пол-
ностью формализовать этот процесс, необходимо толь-
ко добавить несколько дополнительных аксиом, из ко-
торых аксиома ВЗ тривиальна, аксиома С определяет
Абстрактная теория самовоспроизведения
139
выбор оборудования (которое необходимо подбирать
так, чтобы строительные и вычислительные блоки вы-
числительно-производящего автомата не слишком
сильно мешали работе друг друга: в этом нет, по-ви-
димому, каких-либо принципиальных трудностей), а
аксиома D представляет собой формулировку теоремы
неполноты Геделя на языке автоматов.
ВЗ. Существует такая рекурсивная функция ts, что
с. Если яг!?->аС, то ая!?+ая?> -► aty”.
D. Существует такой автомат и такая рекур-
сивиая функция g, что для любой последовательности
автоматов (ЭД,1) справедливы отношения
<a^>+£w„w
Опираясь на эти аксиомы, можно следующим образом
сформулировать и строго доказать теорему о суще-
ствовании автоматов, каждое последующее поколение
потомков которых совершеннее предыдущего.
Т4. Существует такая бесконечная последователь-
ность автоматов что одновременно
< з^’+1
И
I » г I
Мы не пытаемся, конечно, утверждать, что теоре-
мой Т4 можно будет воспользоваться (по крайней ме-
ре без новых весьма значительных усилий) для по-
строения реальных самосовершенствующихся автома-
тов для доказательства теорем. Достаточно сказать,
что последовательность формальных систем Z, Z', Z",
Z"'t in представляет собой бесконечно примитивную
140
Майхилл Дж,
идеализацию и грубую пародию на процесс совершен-
ствования в любом практически полезном смысле это-
го слова. С другой стороны, мне кажется, что возмож.
ность получить бесконечное разнообразие потомства
с помощью единственной программы представляет
значительный методологический интерес и может за-
интересовать биологов даже больше, чем специали-
стов по эвристическим программам. Такая программа
указывает на возможность закодировать потенциаль-
но бесконечное число направлений развития потом-
ства на одной бесконечно длинной хромосомной лен-
те — возможность, которая до сих пор, по-видимому,
ускользала из поля зрения биологов.
ИНВАРИАНТНОЕ ПОГРУЖЕНИЕ И АНАЛИЗ ПРОЦЕССОВ
Р. Калаба9
Изучение многих процессов современной физики и
теории автоматического управления с математической
точки зрения сводится к решению нелинейных задач
с граничными условиями, заданными в двух различ-
ных точках. Такие задачи трудно решать как анали-
тически, так и численно. Цель теории инвариантного
погружения состоит в создании методики преобразо-
вания этих краевых задач в задачи Коши (т. е. за-
дачи с заданными начальными условиями) с помощью
подходящего выбора переменных и метода функцио-
нальных уравнений.
В качестве иллюстрации рассматривается процесс
размножения частиц. Выводятся классические уравне-
ния этого процесса и уравнения инвариантного погру-
жения.
ВВЕДЕНИЕ
Одна из наиболее важных особенностей систем со-
стоит в том, что в них протекают процессы. В связи
с этим любая общая теория систем должна занимать-
ся в первую очередь теорией процессов. Цель настоя-
щей статьи состоит в том, чтобы познакомить чита-
теля с некоторыми последними достижениями этой
теории.
Обычно при изучении любых процессов, происхо-
- дящих с частицами, внимание исследователя сосредо-
точивается на одном процессе, в котором он пытается
•) К а 1 a b a R., Invariant Imbedding and the Analysis of
Processes.
142
Калаба Р.
разглядеть интересные для себя особенности. Напри-
мер, можно описать состояние системы S вектором р,
рассматривая его как точку в фазовом пространстве.
Локальные свойства такого процесса можно опреде-
лить, приняв, что система, находившаяся в некотором
состоянии р в момент времени п, окажется в состоя-
нии q в момент времени п+1. Последнее утверждение
можно записать символически
q=T(p, П). (1)
Здесь мы предполагаем, что рассматриваемый про-
цесс детерминирован и что причинно-следственные от-
ношения в нем известны. Если обозначить начальное
состояние системы через с, а состояние в момент вре-
мени п — через рп, то рассматриваемый процесс опи-
сывается уравнениями
Ро = С, (2)
P»+i = Т(р„, п), п = 0, 1, 2.......... (3)
Наконец, может, например, потребоваться узнать,
останется ли система в некоторой области фазового
пространства на протяжении всего времени ее работы
или нет.
Для изучения таких процессов, рассматриваемых
как последовательности преобразований состояния си-
стемы, чрезвычайно важно с принципиальной точки
зрения понять, что состояние системы в момент вре-
мени п есть некоторая функция начального состояния
с и времени п, т. е. что
p„ = f(c, п). (4)
Более того, нетрудно видеть, что эта функция f(c,n)
обладает полугрупповым [1] свойством, что выражает-
ся уравнением
f (с, тп + п) = f (f (с, n), т), (5)
Последнее уравнение в символической форме отра*
жает тот факт, что процесс попадания в некоторое со-
стояние за время m+n из начального состояния с мо-
жно рассматривать как переход системы из состояния
с в состояние 1(с,п) за п единиц времени с последую-
Инвариантное погружение и анализ процессов 143
шим движением из состояния f(c,n) как начального
в течение m единиц времени. Заметим, что использо-
вание этого принципа наталкивает нас на мысль рас-
сматривать не только изолированный процесс дли-
тельностью m+n с начальным состоянием с, но и це-
лый класс процессов произвольной продолжительно-
сти и с произвольными начальными условиями.
По существу инвариантное погружение является
обобщением этих идей. Для того чтобы изучать кон-
кретный процесс, мы погружаем его в подходящий
класс процессов. Затем мы определяем отношения ме-
жду свойствами элементов этого класса. Эти отноше-
ния и представляют собой аналитическое описание
рассматриваемых процессов. Такой подход часто по-
зволяет прийти к новым методам аналитического и
численного исследования процессов. Как правило, при
этом в качестве полугрупповых переменных прихо-
дится, кроме классической переменной — времени,
вводить новые, такие, как длина или энергия.
Обсуждение математического аппарата предлагае-
мого подхода применительно к вопросам статистиче-
ской динамики, адаптации и управления содержится
в работе [2]. Вопросы инвариантного погружения и его
применения в теории нейтронного переноса, много-
кратного рассеяния, диффузии и т. п. рассматривают-
ся в работе [3]. Основные ссылки на основополагаю-
щие работы Чандрасекара можно найти в работе {4].'
Задача настоящей статьи заключается в том, чтобы
показать, как преобразовать краевую задачу в задачу
Коши, к чему нас побуждает среди прочего желание
облегчить использование современных вычислитель-
ных машин при решении важных классов задач.
В последующих разделах мы проиллюстрируем эти
общие замечания на примере процесса размножения
частиц.
КЛАССИЧЕСКИЕ УРАВНЕНИЯ ПЕРЕНОСА [3]
Рассмотрим процессы, происходящие в тонкой труб-
ке. Трубка с постоянным сечением расположена вдоль
оси /; координатой одного ее торца является /=0, а
144
Калаба Р.
другого t = T. Через правый торец трубки t=T в нее
вводится стационарный поток, равный с частицам за
единицу времени, а через левый / = 0 — другой стацио-
нарный поток, равный w частицам в единицу времени.
Внутри трубки частицы взаимодействуют между со-
бой и с веществом, из которого сделана трубка. По-
ток внутри трубки описывается двумя функциями
и (0 и и (/), где
ы(/) = Число частиц, проходящих через
сечение t вправо за единицу времени (6)
и
х»(/) = Число частиц, проходящих за единицу
времени через то же сечение, но влево, (7)
(8)
Происходящие в трубке взаимодействия, по предпо-
ложению, таковы, что если на первый торец секции
трубки длины А падает поток и, а на левый торец той
же секции — поток и, то на соответственно противо-
положных торцах поток вправо увеличивается на
F(u, о)ДЧ-о(А), а поток влево — на G(u, v)A + o(A) и,
следовательно, справедливы следующие уравнения:
и(/Ч-Д) — = v (/)) А -р о (А), (9)
«ц(/) —ф(/ + А) = О(а(/), т>(0)Д-Но(А), (10)
где, как обычно, о (А) — некоторая функция от А, удо-
влетворяющая следующему условию:
litn-^ = O. (И)
Д-ФО а
Разделив правые и левые части уравнений (9) и (10)
на А и устремляя А к нулю, получим, что
-^ = 5(и, о),
— •^- = G(a, в).
(12)
(13)
Инвариантное погружение и анализ процессов 145
Кроме того, в силу сделанных предположений о по-
токах, вводимых в трубку, получаем следующие крае-
вые условия:
v(T) = c. ' (14)
u(0) = w. . (15)
Таким образом, следуя классическому подходу, мы
вынуждены рассматривать двухточечную краевую за-
дачу, описываемую уравнениями (12) — (15). Извест-
но, что двухточечные нелинейные краевые задачи
практически не поддаются решению ни аналитическо-
му, ни численному [5].
ПРЯМОЙ И ОТРАЖЕННЫЙ ПОТОКИ [6]
Для того чтобы применить идеи инвариантного по-
гружения к только что описанному процессу, рассмо-
трим целый класс процессов, протекающих в трубках
с постоянным сечением длиной ТХ), в которые спра-
ва вводятся стационарные потоки, характеризуемые
плотностью сХ). Поток, вводимый в трубку слева,
предполагается одинаковым для всех трубок и рав-
ным w. Такая физическая ситуация наталкивает нас
на мысль определить потоки, выходящие из различ-
ных трубок справа и слева. Эти потоки мы станем
называть «отраженными» и «прямыми». Заметим, что
отраженный поток в трубке длиной Г, вызванный
входным потоком справа с плотностью с, представ-
ляет собой некоторую функцию параметров с и Т. По-
скольку слева в трубку вводится другой стационар-
ный поток естественно, что потоки, выходящие из
трубки, зависят и от w. Однако эту зависимость мы
не принимаем во внимание, так как она не играет ни-
какой роли в последующих рассуждениях. Обозначим
отраженный поток через
. г = г(с, Г). (16)
Аналогично обозначим прямой поток через-
т = т(с, Г). (17)
10 Зак. 264
146
Калаба Р.
Прежде всего заметим, что потоки, выходящие из
трубки нулевой длины, известны и равны соответ*
ственно
г (с, 0)=w, (18)
т(с, 0) = с. (19)
Установим затем связь между отраженными и пря-
мыми потоками двух трубок, длины которых мало от-
личаются друг от друга. Точнее, выразим отраженный
поток в трубке длиной Т + Д через отраженный поток
в трубке длиной Т. Наше основное отношение имеет
вид
r(c, T+b)=r(c + G(r, <?)Д, Г) + 5(г, c)A-f-o(A). (20)
Это уравнение выражает то, что отраженный поток в
трубке длиной Г+Д, вызванный входным потоком с,
распадается на три составляющие.
1. Отраженный поток в трубке длиной Г, вызван-
ный входным потоком с, который преобразуется в ре-
зультате распространения по отрезку длиной Д так,
что входной поток на самом деле оказывается рав-
ным с+(?(г, с) Д + о(Д).
2. Дополнительный поток вправо за счет входных
потоков г и с в трубке длиной Д.
3. Потоки, которые пропорциональны второй и бо-
лее высоким степеням Д.
Устремляя Д в уравнении (20) к нулю, получим
искомое уравнение
гг=С(г, c)rr-|-F(r, с), (21)
где буквы с индексами соответствуют частным про-
изводным.
Вообще говоря, уравнение (21) представляет со-
бой нелинейное уравнение в частных производных пер-
вого порядка. Поскольку это уравнение является ли-
нейным относительно частных производных гт и гс,
его называют квазилинейным [7]. Из этого уравнения
нужно определить отраженный поток
Г = г (с, Г) (22)
Инвариантное погружение и анализ процессов 147
при начальных условиях, определяемых уравне-
нием (3).
Аналогичным образом можно убедиться в том, что
прямой поток т(с, Т) удовлетворяет соотношению
т(с, 7’H-A) = T(c-hG(r, с)Д, Г) + о(Д). (23)
В пределе, при бесконечно малом А, отсюда получим,
что
тг = О(г, с)тг (24)
Наконец, прямой поток т=т(с, Т) должен удовлетво-
рять начальному условию, определяемому уравне-
нием (19).
Таким образом, нам удалось связать между собой
характеристики отражения и пропускания трубок, ко-
торые мало отличаются по длине и по входному по-
току. Кроме того, характеристики отражения и про-
пускания для трубки нулевой длины нам известны.
Это позволяет определить по крайней мере численно
значения функций г (с. Т) и т(с. Г) на интересующем
нас множестве значений переменных с и Т.
ОПРЕДЕЛЕНИЕ ПОТОКОВ ВНУТРИ ТРУБКИ ЧЕРЕЗ
ОТРАЖЕННЫЕ И ПРЯМЫЕ ПОТОКИ
Прежде всего отметим, что если функция r(c, Т)
известна, то поставленная ранее краевая задача пре-
образуется в задачу Коши, т. е. задачу с начальными
условиями. Действительно, теперь для правого торца
трубки известны и поток влево
v(T) = c (25)
и поток вправо
ц(Т) = г(с,Т). (26)
Однако сейчас можно утверждать и большее.
Рассмотрим произвольную внутреннюю точку t и
соответствующие потоки u(t) и v(t). Можно считать,
что поток v(t) поступает на вход трубки длиной t и
вызывает отраженный поток другими словами,
a (t) = r (»(«). t). (27)
10’
148 Калаба Р.
Кроме того, используя понятие прямого потока, заме- 1
тим, что при этих условиях поток, выходящий из ле- я
вого конца трубки и(0)=6, удовлетворяет равенству ]
i = 1(^(0. 0. (28)
Если теперь уравнения (27) и (28) разрешить отно-
сительно и и v как функции t, Ъ и w, то нам удалось
бы получить общее решение исходной системы нели-
нейных дифференциальных уравнений. Хотя эти сооб-
ражения и очевидны с физической точки зрения, не-
трудно убедиться в том, что если u(t) и v(t) есть две
функции, удовлетворяющие уравнениям (27) и (28),
где г(с,Т) и т(с, Т) —отраженный и прямой потоки J
соответственно, удовлетворяющие в свою очередь ура- |
внениям (21) и (24), то функции u(t) и о(/) удовле- I
творяют исходным нелинейным уравнениям переноса.
Или, другими словами, знание прямого и отраженного
потоков позволяет определить потоки в любом сече-
нии трубки.
Дифференцируя уравнение (28) по /, получим
°=Tv-^-t-V <29> j
Сравнив этот результат с уравнением (24), заметим, i
что
-^- = О(и, v), (30) J
если только тг и xt конечны и
(31)
Дифференцируя затем уравнение (27) по t, получим,
что
Сравнение с уравнением (21) показывает теперь, что
-^ = Л (».»). (33)
что и завершает доказательство нашего утверждения.
Инвариантное погружение и анализ процессов
149
Заметим еще, что предположение
(34)
т, е. что прямой поток зависит от входного, представ-
ляется вполне обоснованным. Наконец, постоянные b
и w имеют простую физическую интерпретацию
w(0) = r('u(0), 0) = w, (35)
д = т(г>(0), 0) = -о(0). (36)
ПРИМЕР
В качестве иллюстрации рассмотрим процесс раз-
множения нейтронов, в котором частица, проходя от*
резок однородной трубки длиной А, с вероятностью
ай + о(Л) поглощается средой. В результате поглоще-
ния исходная частица исчезает и вместо нее возни*
кают две дочерние, движущиеся в противоположных
направлениях. Полная длина трубки — Г, через ее
правый торец поступает поток средней величины с, а
поток через левый торец равен нулю. В этом случае
легко видеть, что уравнения для средних величин по-
токов внутри трубки имеют следующий вид [8]:
и(/4-Л) = и(/)4-^А'п(^)-|-о(А), (37)
v (/) = v (/ + А) 4- лйа (/) 4- о (Л). (38)
Если h устремить к нулю, то эти уравнения преобра-
зуются в уравнения
£ = (39)
-^ = ач. (40)
Граничные условия для этих уравнений имеют вид
я(0) = 0, ®(Г) = с. (41)
Поскольку
F (и, = (42)
и
О (и, v) = aat (43)
11 Звк. 284 ’
150 Калаба Р.
уравнения отраженного и прямого потоков имеют
следующий вид:
гт=*ас+агге (44)
и
тг = агхе. (45)
Учитывая линейность уравнений (39) и (40) и осно-
вываясь на физических соображениях, можно ожи-
дать, что отраженный поток должен быть прямо
пропорционален входному потоку с» т. е. #
г (с, T) = R(T)c. (46) .*
Если это уравнение подставить в уравнение (44),
то окажется, что ;
$с = ас + афс (47) ’
ИЛИ
^ = а(1+^. (48)
Последнее уравнение является обыкновенным диффе- 1
ренциальным уравнением относительно коэффициента* =
отражения R(T). Начальное условие для него имеет
вид
/?(0) = 0. (49)'
Это позволяет найти выражение для R(T) в явном j
виде !
R(T) = igaT, (50) i
откуда для функции отражения r(c, Т) находим, что ;
г (с, Т) = с tg аТ. (51) I
Последняя формула интересна сама по себе и пока- |
зывает, что если длина трубки достаточно велика или, !
точнее, равна л/2а, то отраженный поток становится 1
бесконечно большим. Это определяет «критическую ,
длину» трубки
= (52)
Инвариантное погружение и анализ процессов 151
Аналогичным образом можно найти, что
т(г, Г) —csecaF. (53)
Для определения потоков внутри трубки восполь-
зуемся интегральными методами, вкратце изложен*
ними выше. Прежде всего запишем, что
и, = v tg at, (54)
6 «а-и sec а/. (55)
Разрешив эти уравнения относительно и и v, найдем
= b cos at, (56)
и (t) = b sin at, (57)
которые удовлетворяют уравнениям (39) — (41)«
СТРОГИЙ ВЫВОД УРАВНЕНИЙ ДЛЯ ПРЯМЫХ
’ И ОТРАЖЕННЫХ ПОТОКОВ [9]
В предыдущих разделах мы показали, как выво-
дить уравнения для прямых и отраженных потоков на
основе физических соображений. Однако важно под-
вести под эти рассуждения строгий математический
фундамент. Действительно, как показано в работе [10],
«применение этих принципов (инвариантного погру-
жения) не просто и до тех пор, пока строго не сфор-
мулированы физические условия, при которых эти
принципы справедливы, любое решение, полученное
в результате их применения, нужно проверять другим
методом».
В настоящем разделе мы покажем, как выводить
уравнения для прямого и отраженного потоков из
уравнений для потоков внутри трубки без привлече-
ния физических соображений. Мы увидим, что основ-
ным здесь окажется вопрос о единственности решения
линейных уравнений в возмущениях, полученных из
уравнений потоков внутри трубки. Основная идея
здесь связана с тем, что независимо от того, что
варьируется, имеется в принципе всего лишь одна си-
стема уравнений в возмущениях.
И*
152
Калаба Р.
Рассмотрим уравнения
1S
V). а(0) = 0, (58) |
-*L = G(a.v). v(T)=c. (59) |
-
Кроме того, рассмотрим аналогичные уравнения отно- j
сительно функций (/(/) и V(/) с такими же гранич- t
ными условиями, но на интервале от /=>0 до /=Т4-й
£L = F(U, V), 4/(0) = 0. (60) *
-^ = 0(4/. V). V(T+h) = c. (61) 5
f
4
' Последние уравнения можно отнести вновь к интер- %
валу от /=0 до / = Т, заметив, что Ъ
У(Г) = г — V'(T)h = c + G(U(T), V(T))h = [
= с+О(а(Г). v(T))h. (62) }
_ j
В последних уравнениях мы пренебрегли всеми чле- V
нами, содержащими вторые и более высокие степе- |
ни h. Для упрощения выкладок мы будем поступать |
так и в дальнейшем. Введем теперь функции возму-
щений w(t) и x(t) с помощью соотношений g
U (0 = «(0 + Л (63) I
и - I
7(/) = ^) + х(/)й, (64)
справедливых на интервале
Если теперь записать, что '
4/(Г4-А) = ^(Г)Ч-г/'(Г)й=
= a(r)+w(7)A + F(tt(T), v(T))h (65)
и
У(0)=«о(0)-ьх(0)л, (66) ;
то станет ясно, что w(F) и х(0) нужно исследовать •
более подробно. <
Инвариантное погружение и анализ процессов 153
Известно, что функции w(t) их(0 удовлетворяют
линейным уравнениям в возмущениях
4г = ,Г«(“’ '»)•“’+ ^(“- •)*. (67)
— -^-=О,(и, t>)®-f-G.(u, ч>)х. (68)
4
В качестве граничных условий для этих уравнений
имеем
^(0) = 0 (69)
и
х(Г) = О(«(Т), ^(Г)). (70)
Второе условие является следствием уравнения (62).
Кроме того, мы видим, что если рассматривать функ-
ции u(t) и v(t) зависимыми от параметра с, то
-Ji “<• =* Ft (“• «) “с+ Л. (“• ») (71)
И
— Jt Ъ = (“• «) ис+О, (и, t>) -ие. (72)
Более того, функции ис и ve удовлетворяют гранич-
ным условиям
М0) = 0, (73)
^(7^ = 1. (74)
Если теперь предположить, что имеется единственное
решение уравнений (67) и (68), удовлетворяющее
граничным условиям (69) и (70) на интервале [0, 7],
то мы получим искомый результат
w = 0(a(T), v(T))ue (75)
и
x = G(u(T), о(Г))'°с- (76)
Для достаточно малого Т это предположение наверх
няка оправдано.
Уравнение (65) теперь можно переписать в сле-
дующем виде:
4/(74-Л) =
“«(Г)+ «/?(«(Г), г-(7’))й-ЬА(«(Г)> v(T))h. (77)
154 . Колоба К.
Обозначая л
а(7") = г(с, 7) (78) >
и устремляя А к нулю, получим, что »
& = O(r.c)%+F(r.c), (79) j
а это как раз и есть искомое уравнение для отражен-
ного потока. В свою очередь уравнение (66) можно
переписать в виде
V (0) = у (0) + а (и (Г), t> (Г)) •оЛЬ.о (80)
и получить отсюда наше уравнение для прямого по-
тока
£-=»б(г,с)*. (81) .
Таким образом, мы увидели, как возникает мате-
матическая взаимосвязь между уравнениями прямых
и отраженных потоков и уравнениями потоков внутри
трубки. Как показано в работе [II], эту взаимосвязь
можно рассматривать с различных математических то-
чек зрения. Например, для линейных систем можно
считать, что уравнения потоков внутри трубки играют
роль уравнений Эйлера для некоторой вариационной
задачи с квадратичным критерием качества. В той же
самой вариационной задаче мы пришли бы к уравне-
- ниям для прямого и отраженного потоков, если бы
воспользовались принципом оптимальности [5]. Нако-
нец, отметим, что результаты описанного выше типа
содержат вариационные формулы для одномерных
функций Грина, а также характеристических функций
и характеристических чисел [12]. Изложенный метод
приложим также к задачам исследования нестацио- I
парных и других процессов переноса.
1
4
ВЫВОДЫ ;
Любой заданный физический процесс можно рас-
сматривать с различных математических точек зрения.
Можно ожидать при этом, что некоторые свойства ’
Инвариантное погружение и анализ процессов
155
этого процесса окажутся более очевидными при од-
ном математическом подходе, чем при всех прочих.
Чате всего классический подход приводит к формули-
ровке краевой задачи, которую трудно исследовать с
вычислительной точки зрения. Один из способов прео-
доления этих трудностей состоит, как мы видели, в
использовании функциональных уравнений инвариант-
ного погружения.
Многие классические уравнения • математической
физики [7], а также современной теории автоматиче-
ского управления [13] выводятся как уравнения Эйле-
ра, связанные с задачей минимизации некоторого
функционала. Как правило, граничные условия для
этих уравнений либо заданы, либо имеют вид свобод-
ных граничных условий. В связи с этим одна из основ-
ных задач всей современной физики и теории упра-
вления связана с решением краевых задач. Приложе-
ния методов инвариантного погружения к задачам
динамики описаны в работах [14] и [15]. В них содер-
жится альтернативный вариант обычной теории Га-
мильтона — Я коби.
Выводы настоящей работы легко обобщить на слу-
чай систем уравнений более высокого порядка [6]. Они
также применимы к интегро-дифференциальным урав-
нениям, возникающим в теории нейтронного переноса
[16] и теории излучения [18].
С принципиальной точки зрения отметим, что во-'
прос о существовании и единственности решения не-
линейной двухточечной краевой задачи весьма сло-
жен. Метод инвариантного погружения предлагает
один из возможных подходов к исследованию этого
вопроса [18]. Тесная и принципиальная связь методов
инвариантного погружения с методами динамического
программирования представляется нам вполне очевид-
ной [5].
Наконец, отметим, что использование методов
квазилинеаризации нелинейных двухточечных крае-
вых задач позволяет испробовать прямой путь ре-
шения.
IM
Калаба Р.
Л ИТЕРАТУРА
1. Hille £., Phillips R., Functional Analysis and Semi-Gro-
ups, American Mathematical Society, Providence, R. I., 1957;
имеется русский перевод: Хилле Э., Филлипс Р., Функ-
циональный анализ и полугруппы, ИЛ, М., 1962.
2. В е 11 m a n R., К а 1 a b a R., Dynamic Programming and Adap-
tive Processes, /RE Trans, on Automatic Control. AC-5, 5—10
• (I960).
3. Bellman R., Kai aba R., Wing G. M., Invariant Imbed-
ding and Mathematical Physics —I: Particle Processes,/. Math,
Phys., 1, 280—308 (1960).
4, Chandrasekhar S., Radiative Transfer, Dover Publica-
tions, N. Y., I960; имеется русский перевод; Чандрасе-
кар С., Перенос лучистой энергии, ИЛ, М., 1953.
Б. В е 11 m a n R., Adaptive Control Processes: A Guided Tour,
Princeton Univ. Press. Princeton, N. J., 1961; имеется русский
перевод: Белл май Р.. Процессы регулирования с адапта-
цией, изд-во «Наука», 1964.
б. Bellman R., К al aba R., Wing G. M., Invariant Imbed-
ding and the Reduction of Two-Point Boundary-Value Problems
to Initial-Value Problems, Proc. Nat. Acad. Sci. USA, 46,
1646-1649 (1960).
7. С о u r a n t R., Hilbert D., Methods of Mathematical Phy-
sics Vol. 2, Interscience Publ., N. Y., 1962; имеется русский
перевод: Курант Р., Гильберт Д., Методы математи-
ческой физики, т. 2, Уравнения с частными производными,
изд-во «Мир», М., 1964.
8. Bellman R., К а 1 a b a R., Transport Theory and Invariant
Imbedding, in Nuclear Reactor Theory, American Mathemati-
cal Society, Providence, R. I., 1961.
9. Bellman R., К a 1 a b a R., On the Fundamental Equations of
Invariant Imbedding, Proc. Nat. Acad. Sci. USA, 47, 336—338
(1961).
10. Busorldgel., The Mathematics of Radiative Transfer, Cam-
bridge Univ. Press, Lnd., 1960.
11. Bellman R., К al aba R., Wing G. M., Invariant Imbed-
ding and Variational Princepies In Transport Theory, Bull,
Amer. Math. Soc., 67, 396—399 (1961).
12. Bellman R., Lehman R. S., Functional Equations in the
Theory of Dynamic Programming — X: Resolvents, Characte-
ristic Functions and Values, Duke Math. J., 27, 55—70 (I960).
13. Понтрягин Л. С. и др.. Математическая теория оптималь-
ных процессов, Физматгиз, М., 1961.
14. В е 11 m a n R., К a I a b a R., А • Note on Hamilton’s
Equations and Invariant Imbedding. Quart, of Appl. Math.,
Vol. 21, 166-168 (1963).
15. В e 11 m a n R., К a I a b a R., Invariant Imbedding and the
Integration of Hamilton’s Equations, The RAND Corporation,
RM-3538-PR, Feb. 1963.
Литература
157
16 Wing G. M., An Introduction to Transport Theory, Wiley,
N. Y., 1962.
17 . Bellman R.. Kai a ba R., Prestrud M., Invariant Im-
bedding and Radiative Transfer in Slabs of Finite Thickness,
Elsevier Publ., N. Y., 1963.
18 . Bellman R., Kai aba R., Wing G. M., Dissipation Fun-
ctions and Invariant Imbedding, I, Proc. Nat. Acad. Sci. USA,
46, 1145-1147 (1960).
19 К a 1 a b a R., On Nonlinear Differential Equations, The Maxi-
mum Operation and Monotone Convergence, J. Math, and
Meeh., 8, 519-574 (1959),
12 Зак. 264
ПРИНЦИП ПРИЧИННОСТИ И ПРОГНОЗИРУЕМОСТЬ
СИГНАЛОВ
Р. Дреник ’)
ВВЕДЕНИЕ
В этой статье речь пойдет о задаче теории физи-
ческих систем, которая по всем признакам является
одной из самых фундаментальных. Основное внима-
ние в ней уделяется одному свойству, общему для
всех физических систем, а именно свойству, выражаю-
щемуся в том, что для таких систем справедлив прин-
цип причинности. Ввиду этого полученные здесь ре-
зультаты являются, по-видимому, настолько общими,
насколько это возможно для всей совокупности физи-
ческих систем и только для них. Будучи общими, эти
результаты по необходимости оказываются довольно
слабыми и их непосредственная ценность заключается
скорее в их принципиальном, а не практическом зна-
чении. Однако дело не должно ограничиваться только
этим. Напротив, насколько об этом можно судить уже
сейчас, рассматриваемая задача позволит прийти к
важным выводам в различных смежных областях, та«
ких, как теория автоматического управления или тео-
рия связи. Однако эта задача пока еще не решена.
Цель настоящей статьи состоит в том, чтобы дать
краткое качественное описание задачи, описать вид
решения, который можно для нее ожидать, и набро-
сать схему одного из возможных использований этого
результата, а именно в теории прогнозирования.
Основная цель настоящей статьи — привлечь внима-
ние к рассматриваемой задаче. До сих пор она не вы-
’) Dre nick R. F., System Causality and Signal Predicta-
bility.
Принцип причинности и прогнозируемость сигналов 159
зывала того интереса, которого, по нашему глубокому
убеждению, она заслуживает. А если бы за решение
этой задачи взялись всерьез, то, возможно, она была
бы уже решена, а вместе с тем было бы устранено
одно из самых серьезных препятствий на пути разви-
тия общей теории физических систем.
ПОСТАНОВКА
Я собираюсь говорить об общей теории физиче-
ских систем, вкладывая в этот термин тот же смысл,
что и Заде1). Как уже отмечалось выше, речь пойдет,
в частности, об одном свойстве, общем для всех та-
ких систем, а именно о принципе причинности. Этот
принцип утверждает, что выходной сигнал системы
в любой момент времени может зависеть лишь от тех
входных сигналов, которые поступали на вход систе-
мы до этого момента включительно, и не может зави-
сеть от сигналов, поступающих на вход системы после
этого момента. Свойство это считается настолько
важным, что зачастую между прилагательными «фи-
зический» и «причинный» ставят знак равенства. Та-
кая точка зрения на практике может быть и слишком
радикальна, но в любом случае принцип причинности
является одной из важнейших составляющих задачи,
рассматриваемой ниже.
Другая сторона интересующего нас вопроса со-
стоит в следующем. У Заде1) также отмечено, что
выходной сигнал многих физических систехМ остается
неопределенным даже при полной информации о вход-
ном сигнале до тех пор, пока не становится известной
некоторая дополнительная информация о состоянии
систем в начальный момент ее работы. Эту информа-
цию часто называют информацией о «начальном со-
стоянии» системы. При этом часто из виду упускается
следующий любопытный факт: для некоторых систем
их начальное состояние становится все менее и менее
существенным по мере того, как отодвигается в про-
шлое момент начала работы системы, в то время как
1) См. стр. 49 настоящего сборника.
12*
160
Дреник Р.
для других систем это не так. Иными словами, в не-
которых системах начальное состояние, так сказать,
«асимптотически несущественно», а в других — нет.
Типичным примером систем второго типа может
служить конечный автомат. Влияние, оказываемое на-
чальным состоянием на выходной сигнал такого
устройства, вообще говоря, одинаково в любой мо-
мент времени независимо от того, как далеко он от-
стоит от начала работы автомата. С другой стороны,
начальные состояния большинства систем с непрерыв-
ными пространствами состояний, таких, как линейные
сети или самые обычные системы управления и связи,
оказываются асимптотически несущественными. Такие
системы имеют тенденцию «забывать» свое начальное
состояние. Это очень важное свойство рассматривае-
мых систем, поскольку они обычно предназначены
для взаимно однозначного преобразования входного
сигнала в выходной по крайней мере за достаточно
длительный период. Преобразование, при котором на
выходной сигнал влияет не только вид входного сиг-
нала, но и начальное состояние системы, безусловно
нежелательно, и чем быстрее забывается начальное
состояние, тем это лучше для дела. (В действитель-
ности отсутствие такого свойства указывает на другое,
еще более нежелательное свойство системы, а именно
на ее неустойчивость. Неустойчивые же системы яв-
ляются бесполезными для любых приложений.)
Таким образом, асимптотическая несущественность
начального состояния оказывается важной чертой
однозначного преобразования входного сигнала в вы-
ходной. Поэтому это свойство заслуживает того, что-
бы его исследовали. Более того, кажется, что это
свойство довольно тесно связано с принципом причин-
ности, причем настолько, что исследование последнего
до настоящего времени всегда затрагивало и первое.
В связи с отмеченными выше свойствами остано-
вимся кратко на исследованиях, которые проводились
до настоящего времени. Исходя из сказанного можно
ожидать, что преобразование некоторого множества
сигналов системой, для которой несправедлив прин-
цип причинности, обнаружит некоторые характерные
Принцип причинности и прогнозируемость сигналов 161
симптомы, указывающие на то, что такое преобразо-
вание нереально, причем такие симптомы не удается
наблюдать в противном случае. Можно предположить,
что этот синдром окажется еще более сложным, если
начальное состояние исследуемой системы не являет-
ся асимптотически несущественным. Поиск таких
симптомов и доказательство их безотказности и зани-
мали центральное место в этих исследованиях. Тем
же вопросам посвящена и эта статья.
Некоторый дополнительный интерес может пред-
ставлять тот факт, что до настоящего времени эта
задача решалась в основном в рамках теории вероят-
ностей. Возможно, что поступать так не обязательно,
но поскольку именно так обстоит дело в настоящее
время, разумно, по-видимому, объяснить вкратце, ка-
кой вид приобретает исследуемая задача в вероятно-
стной трактовке, учитывая к тому же, что в этом слу-
чае она характеризуется некоторыми интересными
чертами, отсутствующими при других постановках.
ВЕРОЯТНОСТНЫЙ ПОДХОД
При вероятностном подходе к решению любых за-
дач, связанных с исследованием систем, обычно на-
чинают (среди прочего) с определения вероятностной,
меры на множестве всех допустимых входных сигна-
лов, образуя таким путем то, что мы будем здесь на-
зывать «случайным сигналом». Затем исследуется из-
менение этой меры в ходе преобразования рассматри-
ваемой системой входного случайного сигнала в вы-
ходной. Оказывается, что это дает почти столь же хо-
рошие результаты, как и изучение самой системы. Это
можно объяснить тем, что данные о характере изме-
нения вероятностной меры несут большое количество
информации о системе, вызывающей это изменение.
В действительности во многих случаях эти данные со-
держат всю необходимую на практике информацию.
В задаче, которая рассматривается здесь, нам
нужно в первую очередь получить весьма специфиче-
скую информацию о системе, а именно нам нужно
узнать, справедлив ли для нее принцип причинности
162
Дреник Р.
или нет. Разумно предположить, что вероятностная
мера выходного сигнала системы, для которой неспра-
ведлив принцип причинности или которая не обладает
самым важным свойством физических систем, должна
иметь некоторые ярко выраженные черты, указываю-
щие на то, что такая мера была получена в результа-
те некоторой неказуальной операции. Именно так, по-
видимому, и обстоит дело в действительности. Если
говорить конкретнее, то такой чертой оказывается на-
личие в выходном сигнале точно (идеально) прогно-
зируемой составляющей в ситуации, когда во входном
сигнале такой составляющей не было.
Идеально прогнозируемой составляющей называет-
ся некоторый сигнал, обладающий некоторыми до-
вольно редкими свойствами. Это сигнал, характер из-
менения которого в будущем можно точно экстрапо-
лировать по характеру его изменения в прошлом, и
поэтому такой сигнал с некоторой точки зрения даже
не является случайным в полном смысле этого слова.
В действительности, если принять точку зрения шен-
ноновской теории информации, это сигнал, не несу-
щий никакой полезной информации. Экстраполяцию
идеально прогнозируемого сигнала можно осущест-
вить в любой момент времени в настоящем, прошлом
или будущем и, в частности, ее можно осуществить в
весьма далеком прошлом. Поэтому можно сказать (и
так и говорят), что начало идеально предсказуемого
сигнала лежит вне времени.
Как отмечалось выше, наличие идеально прогнози-
руемой составляющей, «по-видимому», является при-
знаком операции, не удовлетворяющей принципу при-
чинности. Однако, по сути дела, пока еще не известно,
во всех ли случаях это так. Сейчас можно с уверен-
ностью утверждать, что все указывает на то, что ме-
жду неказуальностью системы и идеальной предска-
зуемостью некоторого ее выходного сигнала имеется
тесная связь и что одно из этих свойств может слу-
жить необходимым и достаточным признаком другого.
Для большей конкретности предположим, что за-
даны два случайных сигнала, один из которых мы ста-
нем называть входным для некоторой системы, с при-
Принцип причинности и прогнозируемость сигналов 163
чинной связью или нет, а другой — выходным. Отно-
сительно обоих сигналов предположим, что они про-
стираются в прошлое до (—оо), так что начальное
состояние системы оказывается несущественным при
условии, что оно вообще асимптотически несуществен-
но. Также предположим, что входной сигнал не содер-
жит идеально предсказуемых составляющих, а в вы-
ходном сигнале такая составляющая может и быть.
Задача ставится тогда следующим образом справед-
ливо ли утверждать, что сигнал, названный входным,
всегда можно однозначным образом преобразовать в
заданный выходной сигнал с помощью некоторой си-
стемы, для которой справедлив принцип причинности,
если выходной сигнал не содержит идеально пред-
сказуемой составляющей, и что такое преобразование
невозможно, если такая составляющая в выходном
сигнале есть?
Ответ на этот вопрос, очевидно, являлся бы теоре-
мой с нетривиальными следствиями К сожалению,
как уже отмечалось выше, доказательство этой теоре-
мы пока наталкивается на существенные трудности.
Однако доказательства этой теоремы получены для
достаточно широких классов систем, на самом деле
настолько широких, что очертания общей теоремы
вполне различимы уже сейчас и могут быть угаданы
с высокой степенью достоверности. В частности, ока-
зывается, что ситуация в действительности сложнее,
чем поставленный выше вопрос.
Как станет ясно из дальнейшего, при решении по-
ставленной задачи стандартизация входного сигнала
не сужает общности постановки задачи. В качестве
стандартного входного сигнала принято использовать
один случайный сигнал, называемый белым шумом,
различные мгновенные значения которого статисти-
чески независимы друг от друга. Белый шум, по опре-
делению, не содержит идеально прогнозируемых со-
ставляющих. Оказывается также, что нужно разли-
чать сигналы — будь это белый шум или нет, — мгно-
венные значения которых могут принимать лишь одно
из множества дискретных значений (таких, как 0 или
1 или десятичные цифры, или любые целые числа), и
164
Дреник Р.
сигналы, мгновенные значения которых выбираются
из несчетного множества (скажем, числа между 0 и 1
или между —оо и -Too). Сигналы первого типа ста-
нем называть дискретными, а совокупность их воз-
можных значений, следуя терминологии Шеннона,—
их «алфавитом». Сигналы второго типа станем назы-
вать непрерывными. Конечно, и среди дискретных, и
среди непрерывных нам придется в дальнейшем раз-
личать сигналы, содержащие или не содержащие
идеально прогнозируемую составляющую.
Пользуясь этой терминологией, можно указать, из
каких утверждений будет, по-видимому, состоять упо-
мянутая выше теорема. Эти утверждения будут фор-
мулироваться приблизительно так.
1. Каждый случайный сигнал можно представить
в виде комбинации двух: одного, который может быть
получен в результате преобразования белого шума
системой, для которой справедлив принцип причин-
ности, и другого, который нельзя получить таким
путем. Вторая из составляющих, однако, является
идеально прогнозируемой.
2. Белый шум, о котором говорилось в п. 1, обя-
зательно должен быть непрерывным, даже если нуж-
ный выходной сигнал оказывается дискретным.
3. Преобразование белого шума в нужный выход-
ной сигнал взаимно однозначно, если только послед-
ний не содержит дискретной составляющей. В послед-
нем случае однозначно только прямое преобразование.
В любом случае начальное состояние системы, осуще-
ствляющей преобразование, должно быть асимптоти-
чески несущественным.
Из этого результата, хотя и предположительного,
вытекают два основных и несколько второстепенных
следствий. С качественной точки зрения он показы-
вает прежде всего, что белый шум такого типа, кото-
рый описан в п. 2, может служить в качестве некото-
рого универсального сырья для формирования других
сигналов. Более того, для этой цели можно восполь-
зоваться системами с асимптотически несущественны-
ми состояниями, для которых справедлив принцип
причинности. Такие системы будут взаимно однознач-
Принцип причинности и прогнозируемость сигналов 165
ным образом преобразовывать белый шум в любой
наперед заданный сигнал, за исключением его идеаль.
но прогнозируемой составляющей (если таковая по-
требуется). Другими словами, по терминологии Шен-
нона, системы, для которых справедлив принцип
причинности, преобразуют белый шум в сигнал, несу-
щий информацию, и не могут преобразовать его в сиг-
нал, не содержащий информации.
Другой вывод из приведенной теоремы (в предпо-
ложении, что она верна) сводится к тому, что если
исключить из рассмотрения дискретные и идеально
предсказуемые сигналы, то не только любой заданный
сигнал можно получить из белого шума, но и любой
заданный сигнал можно вновь преобразовать в белый
шум, причем обе эти операции осуществимы взаимно
однозначным образом с помощью систем, для кото-
рых справедлив принцип причинности и у которых на-
чальное состояние асимптотически несущественно. По-
этому белый шум, описанный выше в п. 2, служит не
только сырьем для формирования, разных сигналов, но
может быть использован и как конечный продукт и, сле-
довательно, как универсальный промежуточный сигнал
для задачи преобразования одного сигнала в другой.
Поэтому упомянутая теорема (мы по-прежнему
предполагаем, что она верна) содержит некоторые до-
вольно исчерпывающие утверждения относительно
преобразуемости одних информационных сигналов в
другие с помощью физических систем, что, по моему
мнению, предопределяет ее основополагающую роль
в общей теории систем. В связи с этим полезно, по-
видимому, вкратце рассказать о том, насколько дале-
ко удалось продвинуть доказательство этой теоремы
на сегодня.
Уже в течение некоторого времени известно, что
эта теорема справедлива в частном случае, а именно,
когда класс рассматриваемых сигналов ограничен
случайными гауссовыми сигналами. Это было дока-
зано Вольдом [8], а процедура разложения таких сиг-
налов на информационную и идеально прогнозируе-
мую составляющие стала известна как разложение
Вольда. Имеется исключительно соблазнительное
166
Дреник Р.
обобщение этого результата на случай негауссовых ?
сигналов, использующее одно замечание, высказанное 5
Леви [4] в совершенно другом контексте. К сожале-
нию, однако, это обобщение не верно, что было обна-
ружено Розенблатом [5], построившим замысловатый
опровергающий пример. О наиболее общем на сего-
дняшний день разложении нам сообщил Хансен [2].
Необходимые и достаточные условия существования
решения этой задачи также известны [1].
Утверждение 3 нашего недосказанного «основ-
ного результата» выделяет дискретные сигналы в осо-
бый своеобразный класс. На самом деле, при более
пристальном изучении оказывается, что к этому же -
сводится и утверждение 2, поскольку в нем указы-
вается, что дискретный белый шум не может, вообще
говоря, служить подходящим сырьем для формирова-
ния произвольных сигналов, а в неявном виде также
подразумевается и то, что машины с дискретным про- ?
странством состояний не пригодны, вообще говоря,
для преобразования дискретного белого шума в дру-
гие дискретные сигналы, и обратно. Именно так об-
стоит дело и в действительности.
Если говорить об этой ситуации подробнее, то, на-
сколько это можно утверждать сейчас, она выглядит
следующим образом: j
а) Дискретный сигнал, вообще говоря, нельзя
сформировать из дискретного белого шума, а белый
шум нельзя взаимно однозначным образом получить
путем преобразования дискретного сигнала каузаль-
ным автоматом с дискретным пространством состоя- |
ний даже в том случае, если алфавиты обоих сигна-
лов одинаковы и в обоих нет идеально прогнозируе-
мых составляющих. На самом деле возможно, что
такое преобразование не удастся осуществить даже
с помощью автомата, для которого несправедлив
принцип причинности.
б) Если относительно некоторого дискретного сиг-
нала известно, что он сформирован из дискретного бе-
лого шума с помощью некоторого автомата, для кото-
рого справедлив принцип причинности, то этот сигнал
с помощью другого каузального автомата можно
Принцип причинности и прогнозируемость сигналов 167
вновь преобразовать в белый шум, только в том слу-
чае, если начальное состояние первого автомата асим-
птотически несущественно.
Утверждение «а» известно уже в течение некото-
рого времени. В действительности это утверждение
(если пренебречь некоторыми техническими тонко-
стями) в неявном виде содержится в одной из знаме-
нитых шенноновских теорем теории кодирования, а
именно в теореме о канале без помех. Эта теорема
утверждает, что преобразование одних заданных ди-
скретных сигналов в другие удается осуществить в
общем случае лишь с помощью автоматов, для кото-
рых несправедлив принцип причинности, и, во всяком
случае, только тогда, когда энтропия входного сигна-
ла одинакова с энтропией выходного сигнала.
Теперь становится ясным, что между дискретными
и непрерывными сигналами, а также системами с
дискретным и непрерывным пространствами состоя-
ний существует весьма глубокое различие. Не ясно,
на чем еще может сказаться это различие. Возможно,
что рассмотренные здесь явления имеют определен-
ную связь с некоторыми фактами математической
логики [7].
ОДНО ПРИМЕНЕНИЕ
Надеюсь, что мне удалось доказать свое исходное
утверждение, что поставленная задача и различные
возможные следствия ее решения представляют зна-
чительный интерес сами по себе. Однако имеются ука-
зания и на то, что результаты решения этой задачи
удастся использовать и в некоторых других областях,
возможно, с этой задачей непосредственно и не свя-
занных. Для того чтобы проиллюстрировать эту
мысль, посмотрим, какое влияние может оказать ре-
шение нашей задачи на статистическую теорию про-
гнозирования.
Задача этой теории состоит в том, чтобы развить
методы синтеза систем каузального типа, для кото-
рых входным сигналом служит некоторый заданный
случайный процесс, не содержащий идеально прогно-
зируемой составляющей, а выходным сигналом дол-
168
Дреник Р.
жен быть результат экстраполяции входного сигнала.
Другими словами, выходным сигналом такой системы .
в момент времени t должна быть наилучшая оценка
некоторого будущего значения входного сигнала, на-
пример, в момент времени /-Н. Синтез подобных си-
стем сам по себе не представляет особенного интере-
са. Основная ценность теории прогнозирования за-
ключается в том, что она решает простейшую задачу
статистической теории автоматического управления и
связи. Поэтому успешное решение задачи прогнозиро-
вания должно логически предшествовать попыткам
решения других задач в той же области.
Для так называемой задачи линейного прогнози-
рования известно исчерпывающее решение. К нему не-
зависимо пришли Винер [7] и Колмогоров [3]. Оно
распространяется по существу только на один класс
случайных сигналов, а именно на гауссовые сигналы,
о которых мы уже говорили ранее. В этом случае тео-
рия приводит к синтезу устройства, которое в макси-
мальной степени использует идеи Вольдовского раз-
ложения. По сути дела, это устройство осуществляет
прогнозирование следующим образом. Прежде всего
оно выделяет во входном сигнале его идеально про-
гнозируемую часть, если таковая в нем содержится, и
экстраполирует ее. Это можно сделать абсолютно
точно без каких-либо ошибок, что вытекает из самой
природы этой составляющей.
Остается экстраполировать информационную со-
ставляющую входного сигнала. Однако сделать это
без ошибки нельзя. Прогнозирующее устройство де-
лает самое лучшее, что только можно сделать, а имен-
но следующее. Прежде всего информационная соста-
вляющая преобразуется в белый шум. Такое преобра-
зование всегда возможно. В действительности, по-
скольку гауссов случайный сигнал не может содер-;
жать дискретной составляющей, это можно осуще-
ствить с помощью устройства, для которого справед-
лив принцип причинности. Одно из свойств белого
шума, как уже отмечалось выше, заключается в том,
что все его мгновенные значения статистически пеза- -
висимы. Поэтому, в частности, неизвестное будущее
Принцип причинности и прогнозируемость сигналов 169
белого шума статистически не зависит от его изве-
стного прошлого и не может быть использовано для
прогнозирования. Поэтому устройство пренебрегает
им и основывает свой прогноз целиком и полностью
на предыстории белого шума. А это, как выясняется,
не только целесообразный, но на самом деле и наи-
лучший метод прогнозирования.
Теперь можно сказать, что, если предложенная
теорема окажется верной, каждый этап описанной
процедуры можно будет осуществить и для негауссо-
вых сигналов, если только они не содержат дискрет-
ной составляющей. Поэтому можно с полным основа-
нием ожидать, что нам удастся обобщить теорию про-
гнозирования Винера — Колмогорова на гораздо бо-
лее широкий класс случайных сигналов, чем гауссо-
вые. Более того, можно также предположить, что эту
теорию не удастся распространить на случай дискрет-
ных сигналов или сигналов с дискретными составляю-
щими. В действительности уже и сейчас есть некото-
рые признаки того, что построить подобную теорию
для этого частного случая не удастся.
Итак, если речь идет о теории прогнозирования, то
с достаточным основанием можно утверждать, что
доказательство предложенной теоремы приведет к не-
медленным широким обобщениям уже существующих
результатов. То же самое, по-видимому, верно и от-
носительно теории фильтрации, а также относительно
по крайней мере некоторых разделов теории автома-
тического управления. Более того, можно надеяться,
что доказательство этой теоремы существенно улуч-
шит наше понимание теории связи в целом.
ЛИТЕРАТУРА
1 . Dre nick R. F., On the Wold Decomposition of Non-Gaussian
Random Processes (реферат), Notices of the Am. Math, Soc.,
8, 202 (1961).
2 . Hansen D. L., On the Representation Problem for Stationary
Stochastic Processes with Trivial Field (реферат), Bull. Am.
Math. Soc., 68, 115 (1962).
3 . Колмогоров A. H., Интерполирование и экстраполирова-
ние стационарных случайных последовательностей, Изв. АН
СССР, сер. матем., 5, № 12 1941,
170
Дреник Р.
4 Levy Р., Th£orie de I'addition des variables aleatoires, Paris,
1937
5 Rosenblatt M., Stationary Processes as Shifts of Functions
of Independent Variables, J. Math, Meeh., 8, 665 (1965k
6 Shannon С. E.. The Mathematical Theory of Communication,
Univ, of Illinois Press. Urbana, 1949; имеется русский перевод:
Шеннон К., Математическая теория связи, в сб. «Работы
по теории информации и кибернетике», ИЛ, Москва, 1963,
стр. 243—332.
7 Stegmueller W., Unvollstandigkeit, Vienna, 1959.
8 Wiener N., Extrapolation and Interpolation of Stationary
Time Series, N. Y., 1949.
9 . Wold H, A Study in the Analysis of Stationary Time Series
(Diss ), Stockholm, 1938,
НЕСКОЛЬКО ЗАМЕЧАНИИ
У. Эшби ')
Что такое теория систем? В наши дни ответ на
этот вопрос становится достаточно определенным.
В этой связи я хотел бы изложить свое представление
о том, в какую форму облекается теория систем и
как развивается ее логическая база.
Первые весточки о зарождении этого направления
относятся примерно к 1940 г., когда Говард Айкен
закончил работу по созданию вычислительной маши-
ны МАРК-1 и доказал всему миру, что непи причин-
но-следственных связей, в которых каждое следствие
становится следующей причиной, могут иметь неогра-
ниченную длину. Такая «траектория» может содер-
жать неограниченное количество сложных операций _
по переработке информации. К концу ЗО-х годов
специалистам по радиотехнике удалось приручить
«обратную связь», в результате чего они смогли уяс-
нить сущность неограниченных регенеративных или
циркулирующих по замкнутому KOHTypv причинно-
следственных воздействий, а также научились упра-
влять ими. Несколько позднее в теории информации
был разработан метод счета большого числа причин
и следствий, закодированных в такой форме, которая
прежде считалась недоступной для точного подсчета.
В 40-х годах изучение систем, содержащих множество
разнообразных причинно-следственных связей, достиг-
ло совершенно нового уровня.
Изучение взаимодействующих элементов очевич-
но, началось еще во времена Ньютона, нбп
l) Ashby W. R., Introductory Remarks at Panel Discussion.
172
Эшби У.
системы обыкновенных дифференциальных уравнений
вида
& fl (*^1» • • •» •*•/»)> / = 1» • • •» Л
описывает, в некотором смысле исчерпывающе, взаи-
модействия между п переменными Однако по су-
ществу такие уравнения решались только тогда, ко-
гда п было очень мало (практически максимальное
значение п не превышало пяти), так что теории боль-
ших систем, характеризующихся богатыми взаимо-
действиями, стремились не касаться вообще. По сути
дела, в течение двухсот лет наука одерживала побе-
ды главным образом благодаря тому, что она иссле-
довала многие представляющие большой практиче-
ский интерес системы, взаимодействие отдельных
частей в которых было довольно слабым. Это молеку-
лы газа, находящегося под низким давлением, когда
столкновения молекул происходят сравнительно ред- -
ко, это кристаллические структуры, атомы в которых
подвергаются столь незначительным возмущениям,
что их колебания почти независимы, это та область
нейрофизиологии, которая изучает почти полностью
автономные рефлексы, не оказывающие заметного
влияния друг на друга. Однако, начиная с сороковых
годов, предпринимаются серьезные попытки исследо- -
вания динамических систем, отличающихся большими
размерами и наличием богатых внутренних связей.
Этим попыткам способствовало появление новых мощ-
ных методов исследования, так что теперь влияния,
обусловленные взаимодействиями, уже не исключа-
лись из рассмотрения, а по сути дела часто станови-
лись главным объектом изучения. Нейрофизиолог
более не исследует набор независимых рефлексов.
Экономист стремится строить модели, обладающие
чем-то похожим на разнообразие взаимосвязей, про-
являющихся в реальном мире. Специалист по транс-
портным проблемам более не удовлетворяется изуче-
нием перекрестков с редким движением автомашин.
Так возникла теория систем — попытка объедине-
ния научных принципов, которые могли бы служить
Несколько замечаний
173
ориентиром в нашем стремлении овладеть динамиче-
скими системами, отличающимися тесными и богаты-
ми взаимосвязями компонентов.
Однако, «развивая научные принципы», следует
соблюдать осторожность и быть весьма осмотритель-
ными. Используя научное наследие, мы не должны
бездумно следовать одному давно сложившемуся пра-
вилу, которое по существу в новых условиях безна-
дежно устарело. Я считаю, что такая опасность суще-
ствует и хотел бы кратко на ней остановиться.
Если изучать «взаимодействия» в самом общем
виде и дать предварительную количественную оценку
величин, с которыми придется оперировать, то часто
обнаруживается, что эти величины очень велики. В та-
ких случаях мы склонны называть их «астрономиче-
скими» и заявлять следующее: «Мы не можем сейчас
решить задачу такой размерности, но вот разрабаты-
ваемый диод будет обладать вдвое большим быстро-
действием и тогда мы сумеем справиться с этой зада-
чей». Я хочу выразить мнение, что такой подход яв-
ляется глубоким заблуждением.
Разберемся прежде всего в том, что такое «астро-
номическое» число. Так, например, время, прошедшее
с момента образования земной коры, если измерять
его в микросекундах, составляет 1023, а число атомов
по всей видимой вселенной равно примерно 1073. По
сути дела, все реально известные астрономические
числа меньше 10100. Если взять предельные величины и
считать, что событие на атомном уровне совершается
за 10“’° сек, а затем поставить вопрос о том, сколько
таких «атомных» событий произошло во всей вселен-
ной с момента образования земной коры, то это число
оказывается равным примерно 10’00.
Рассуждая таким образом, Бремерманн [1] показал,
что если принять различимые состояния атомов за
представления чисел, используемых в вычислениях, то
в силу самых общих законов физики любая матери-
альная вычислительная машина не может перерабо-
тать за секунду объем информации, превышающий
Ю47 двоичных разрядов на грамм своей массы. Если бы
такая машина имела массу, равную массе земного
13 Зак. 26|
174
Эшби У.
шара, и работала в течение всех геологических эпох,
то она не смогла бы переработать больше 1073 двоич-
ных разрядов информации. В связи с этим я позволю
себе высказать следующее утверждение:
Все материальное не может характеризоваться
числом, превышающим 10100
Это число обычно признается большим, но в на-
шей области нужно более точно представлять себе
количественные оценки величин. Указанное число по-
лучено из рассмотрения существенно мультиплика-
тивных процессов, а в теории систем многие важные
величины возрастают комбинаторно, т. е. гораздо бы-
стрее. Рассмотрим простой пример, поясняющий это
обстоятельство.
Предположим, что имеется квадратная матрица
размером 20x20 из лампочек, предназначенная для
представления зрительных образов, и предположим,
что каждая лампа может быть только либо включена,
либо выключена. Очевидно, что в таком наборе эле-
ментов нет ничего необычного. Поскольку каждая
лампа может находиться во включенном или выклю-
ченном состоянии, с помощью этой матрицы можно
представить 2400 или около 10120 образов. Пpeдпoлoi
жим теперь, что мы хотим, пользуясь некоторым кри-
терием, разделить эти образы на два подмножества
так, чтобы можно было утверждать: «Данное множе-
ство обладает свойством Р, а второе им не обладает*.
Тогда возникает вопрос о том, из скольких свойств
выбирается свойство Р. Поскольку каждый образ
может обладать или не обладать свойством Р, то это
число равно
2(ю120)
X
Это соответствует 10<1°119,5) или приближенно
1О(ю120) е
Насколько же велико это число? Назвать его «астро-
номическим»— значит допустить грубую ошибку, ибо
этот термин относится к числам, характеризующим
Несколько замечаний
175
реальные физические системы, а наше число принад-
лежит к числам совершенно иного рода. Интуитивное
представление о нем можно получить из следующих
соображений.
Прежде всего отметим, что разность 1010— 107 со-
ставляет около 1010, так как она равна 9 990 000000.
Следовательно, числа вида 10к по существу не ме-
няются при вычитании, если только показатель степе-
ни вычитаемого отличается от К менее чем на 2 или
3 единицы. Рассмотрим теперь число 10<ю8°). Если
выписать его полностью, то оно будет представлять
собой 1, за которой следует 1080 нулей. Так как во
вселенной имеется всего I073 атомов, то их не хватит,
чтобы разместить все эти нули. Следовательно, число
ЮОо80) настолько велико, что его невозможно полно-
стью записать в нашей вселенной.
Что же представляет собой, наконец, частное
Ю(>о,2О)-=- Ю<1о8б>? Его показатель равен 10,а0—1О80.
а, как мы уже видели, это практически равно 10,2°.
Следовательно, число Ю^10’20), т. е. число свойств,
определимых на нашей матрице из 20x20 лампочек,
настолько велико, что на него по существу не влияет
даже деление на число, которое невозможно полно-
стью выписать в нашей вселенной. Вот уж поистине
большое число! По сравнению с таким числом соб-
ственно «астрономические» числа едва ли отличимы
от бесконечно малых. В частности, число 1010°, указан-
ное выше как абсолютный предел для числовых ха-
рактеристик реальных физических систем, как теперь
видно, является весьма жестким ограничением.
Что же все это означает? Для меня вывод пред-
ставляется совершенно очевидным. Такие числа ком-
бинаторного «размера» начинают появляться, как
только мы приступаем к исследованию задач, относя
Щихся к таким областям , как
Комбинации Отношения
Упорядочение Образы
Подмножества Ограничения
Свойства Разбиения
Классы Структуры связей.
13’
176
Эшби У.
Каждый шаг от первичного множества элементов
в любой из этих областей приводит к тому, что исход-
ная величина возрастает как экспоненциальная функ-
ция или факториал, причем функции этого класса ра-
стут значительно быстрее, чем линейные или квадра-
тичные. Рассматривая, например, упорядочение отно-
шений между всеми возможными отношениями на
множестве, мы наблюдаем скачок значения функции
порядка (е^)1 Если исходное множество тривиально
мало, скажем насчитывает 5 типов облаков, то полу-
чающееся число уже намного превосходит предел,
равный 10100.
Даже элементарный вопрос: «Что может сделать
эта машина?»— таит в себе большую угрозу. Если
машина состоит из п элементов, каждый из которых
может находиться только в одном из двух состояний,
то число возможных состояний для всей машины со-
ставляет 2п. Определение траектории такой машины
(при условии, что начальное состояние задано) сво-
дится к выяснению того, в какое из 2П — 1 состояний
она перейдет в следующий момент, затем в какое из
оставшихся 2п— 2 состояний и т. д. Разнообразие, с
которым мы сталкиваемся, имеет порядок (еп)1, и эта
функция растет значительно быстрее, чем экспонен-
та, которую в свою очередь характеризует лавинооб-
разный процесс.
Таким образом, возможности теоретика систем не
превосходят 10’00, в то время как ему приходится
сталкиваться с задачами и процессами, в которых фи-
гурируют числа, намного превосходящие этот предел.
Как же ему надлежит поступать?
Я полагаю, что, столкнувшись с этой проблемой,
необходимо решить, признать ли указанное ограни-
чение или нет. Если его не признавать, то это огра-
ничение следует попытаться преодолеть, отыскав со-
ответствующий путь. Если же признать его, то нужно
делать это открыто и последовательно. Я лично убе-
жден, что возможность устранения этого ограничения
менее вероятна, чем, например, возможность устране-
ния ограничения, которое накладывается законом со-
хранения энергии. Закон сохранения энергии в основе
Несколько замечаний
177
своей эмпирический и он может быть опровергнут в
течение одного дня, как это случилось с законом со-
хранения массы. Однако ограничение, не позволяю-
щее человеку, обладающему ресурсами в 10100, реали-
зовать процесс, требующий переработки большего ко-
личества информации, основано на принципиальных
особенностях нашего анализа причинно-следственных
связей и совершенно не зависит от конкретного мате-
риала, на котором оно проявляется.
Если эта точка зрения справедлива, то теория си-
стем должна строиться на методах упрощения и по
сути дела представлять собой науку упрощения. Ко-
нечно, многие науки прибегали к упрощениям, и не-
даром. Фишер [2] заявил: «...целью статистических ме-
тодов является сокращение объема данных». Однако
в наши дни упрощения часто используют с оговорка-
ми, из опасения, что упрощения могут квалифициро-
вать как «сверх»-упрощения, хотя никому не ясно,
когда упрощение переходит в сверхупрощение.
Я считаю, что начало науки упрощения положено
математиками, исследующими гомоморфизмы, но в
этом направлении предстоит еще многое сделать, а
также дать ответы на многие вопросы прикладного
характера. К числу таких вопросов принадлежат, на-
пример, следующие. Всегда ли связано каждое упро-
щение, к которому прибегает ученый в своей повсе-.
дневной работе, с применением отношения эквива-
лентности к исходному множеству или существуют
другие методы упрощения? Всегда ли соответствует
данное Бурбаки [3] определение свойства «совмести-
мости» (с отношением эквивалентности) утверждению,
что «это не сверхупрощение»? Можно ли предложить
методы классификации упрощений и их систематиче-
ского изучения (здесь, конечно, следует напомнить,
что сами «способы классификации» имеют тенденцию
возрастать с комбинаторной скоростью). Не подлежит
сомнению, что наука упрощения обладает своими соб-
ственными методами и тонкостями. Я убежден, что
в будущем теоретик систем должен стать экспертом
по упрощению.
178
Эшби У.
ЛИТЕРАТУРА
I. Bremermann Н. J., Optimization Through Evolution and
Re-combination in Self-Organizing Systems (Yovits M. C.,
Jacobi G. T., Goldstein G. D. eds), Spartan Books, Washington,
D. С.» 1962.
2. Fisher R. A., On the Mathematical Foundations of Theore-
tical Statistics, Phil. Trans. Roy. Soc. Lond., A222, 309—368
(1922).
3. В о u r b a к i N., Th^orie des ensembles; fascicule de r£sultats,
ASEI 1141, Hermann and Cie, Paris, 1958 (3rd ed.); имеется
русский перевод: Бурбаки Н., Теория множеств (Сводка
результатов), изд-во «Мир», М., 1965.
ЗАМЕЧАНИЯ ПО ПОВОДУ ОБЩЕЙ ТЕОРИИ СИСТЕМ
А, Рапопорт 1)
Замечания Рассела Акофа относительно общей
теории систем и исследования систем затрагивают не-
которые важные методологические проблемы. Однако
я убежден, что эти проблемы можно поставить так,
чтобы не касаться вопросов, на которые нельзя дать
обоснованных ответов, скажем, вопросов о том, какой
подход гарантирует «успех» в объединении науки. По
моему мнению, ни один подход и ни одна программа,
предложенные смертными, не в состоянии достичь
успеха в «объединении наук», однако определенные •
методологические установки в большей степени спо-
собствуют объединению знаний, чем все прочие. Так,
например, сейчас мы уже твердо знаем, что рассмо-
трение Фрэнсисом Бэконом некоторого перечня фак-
тов является бесплодным подходом с точки зрения
объединения знаний, ибо следующий его шаг — «обоб-
щение на основе сопоставления фактов» бесполезен
при отсутствии некоторой концептуальной теоретиче-
ской схемы, определяющей эти обобщения, а также, к
слову сказать, и принцип отбора самих регистрируе-
мых фактов.
По сути дела, любая теоретическая схема пред-
ставляет собой шаг на пути объединения фактов в
некоторую область знания, так что и обычные науч-
ные «дисциплины» являются схемами объединения.
Акоф прав, критикуя чисто формальное обобщение
этого подхода («теперь, когда мы объединили факты
*) Rapoport Au Remarks on General Systems Theory»
180
Рапопорт А.
в области знания и построили отдельные научные дис-
циплины, давайте объединим сами дисциплины»). Та-
кой лишенный творческого духа подход уже приводил
неоднократно к совершенно бесплодным попыткам, но
я считаю, что сторонники общей теории систем ни-
когда не придерживались подобных взглядов, кото-
рые характерны скорее для административных, чем
научных идей.
Те ученые, работающие в области общей теории
систем, которые занимались составлением прогнозов
«объединения науки», действительно повинны в уто-
пических мечтаниях. Однако конкретные шаги, пред-
принятые с целью объединения некоторых понятий,
представляют собой существенный вклад в развитие
науки. В частности, я считаю, что конкретное дости-
жение самого Берталанфи заключается в том, что он
привлек внимание к свойствам динамического равно-
весия открытых систем и указал на сходство этих
свойств с некоторыми особенностями процессов, про-
исходящих в живых организмах. Он был одним из
первых ученых, подметивших это сходство. С тех
пор была проделана большая работа по исследова-
нию термодинамики необратимых процессов и роль
этих процессов в биологии стала совершенно оче-
видной.
Р. У. Джерард распространил открытия, сделан-
ные в общей биологии, на системные понятия. От фор.
мирования некоторых концепций до получения кон-
кретных теоретических результатов нужно пройти
большой путь, однако эти результаты невозможно по-
лучить в концептуальном вакууме. Связь между кон-
цептуальной схемой и плодотворным направлением
конкретных исследований, как правило, далеко не
очевидна. Задача философа, особенно ученого, зани-
мающегося философией науки,— обнаружить эту
связь, роль которой нельзя недооценивать.
Внимание к математическому изоморфизму также
проистекает из общей теории систем. Теоретическое
значение этих изоморфизмов истолковывается весьма
превратно. Высказывания Джонаса, Гемпела и Берта-
ланфи, которые приводил Акоф, отнюдь не вносят яс-
Замечания по поводу общей теории систем 181
ности в этот вопрос. Это сложная проблема, и я могу
только предложить тем, кто этим интересуется, обра-
титься к довольно обширной литературе, посвященной
данной проблеме. Установленный изоморфизм матрич-
ного подхода Гейзенберга и волнового подхода Шрё-
дингера к квантовой механике никак нельзя расце-
нить словами: «Ну и что ж из этого?» Некоторые изо-
морфизмы могут представляться тривиальными, но
существуют также изоморфизмы глубоко поучитель-
ные. И даже те изоморфизмы, которые сегодня ка-
жутся тривиальными, подобно указанным Гемпелом и
Берталанфи, были когда-то далеко не очевидными.
Обнаружение математического изоморфизма имеет
важнейшее значение для объединения различных об-
ластей знания в единые структурно-теоретические по-
строения.
Из всех проблем, затронутых Акофом, я целиком
разделяю его взгляд на науку как на некоторый вид
деятельности, а не на собрание фактов, законов и тео-
рий. Генри Моргенау высказал следующее утвержде-
ние: «Все факты, обнаруженные человеком, превра-
тились в действия». Но что же такое «деятельность»?
Несомненно, в любом виде деятельности всегда при-
ходится сталкиваться с некоторыми «задачами», но
что же такое подлинная «задача»? Действительно ли
все за'дачи непременно возникают в связи с «прак-
тической» потребностью, подобной потребности оты-
скания эффективной стратегии управления запасами?
Безусловно, практические запросы способствовали
развитию такого вида деятельности, который привел
к появлению того, что мы называем наукой. Очень
давно это были задачи навигации и баллистики, за-
тем возникли задачи преобразования одного вида
энергии в другой и борьбы с болезнями, а в послед-
нее время появились задачи, связанные с организа-
ционным управлением крупных коллективов, задачи,
для решения которых применяется исследование опе-
раций. Но что же сказать тогда о больном Декарте,
лежавшем в постели и наблюдавшем движение точки
по дереву в рамке окна? Разве он не был занят «дея-
тельностью», результатом которой явилось объединен
182
Рапопорт А.
ние алгебры и геометрии (появление первой «гибрид-
ной дисциплины»)?
Я прекрасно осознаю различие между решением
подлинно важной задачи и формалистическими бес-
плодными упражнениями в систематизации. Однако
я убежден, что это различие не имеет ничего общего
с различием между конкретными задачами, которые
ставит «сама жизнь», и абстрактными задачами фор-
мирования понятий и построения теорий. Это разли-
чие определяется тем, стоит ли перед исследователем
вообще какая-либо задача. Формалист-систематиза-
тор бесплоден потому, что он вовсе не решает ника-
кой задачи. Он уже знает все ответы, так что его
«деятельность» сводится лишь к тому, что этими «от-
ветами» он морочит голову людям, перед которыми
стоят подлинные сложные задачи.
Но ведь каждый может оказаться надоедливым
схоластом независимо от того, является ли его «от-
вет» редукционизмом, общей теорией систем или тех-
нократией (являющейся догматическим переосмыс-
лением идей, вдохновляющих исследование операций).
В то же время не менее справедливо и то, что плодо-
творные идеи и замыслы появляются у людей самых
различных взглядов.
ОДИН ПОДХОД К ОБЩЕЙ ТЕОРИИ СИСТЕМ
Ч. Черчмен ')
Я хотел бы изложить аксиоматический подход к об-
щей теории систем. Я вовсе не претендую на то, что
этот подход приемлем для всех, работающих в этой
области, а также на то, что приведенные ниже аксио-
мы являются самоочевидными, если не считать того,
что, следуя Амбруазу Бирсу, я могу сказать, что они
очевидны для меня самого.
Однако я полагаю, что все интересующиеся общей
теорией систем стремятся рассмотреть все возможные
подходы к этому направлению, ибо в противном слу-
чае это увлекательное теоретическое начинание поро-
дило бы лишь ничтожный замкнутый кружок бес-
плодных схоластов.
Цель предлагаемых аксиом заключается в посту-
лировании следующих утверждений: 1) системы пред-
ставляют собой комплексы, которые можно синтези-
ровать и оценивать; 2) прилагательное «общая» в
выражении «общая теория систем» относится как
к «теории», так и к самим «системам». Аксиомы фор-
мулируются следующим образом.
1. Системы синтезируются и конструируются. Не-
обходимым условием синтеза является способность к
оценке. Следовательно, системы можно оценивать и
предлагаемые альтернативные варианты можно срав-
нивать с исходным с точки зрения того, являются ли
они лучше или хуже этого варианта. Если выразить
эту мысль более точно, то можно задать целевую
’) Churchman С. W., An Approach to General Systems
Theory,
i
184
Черчмен Ч.
функцию для оценки качества альтернативных систем,
на которую наложена система ограничений, предста-
вляющих в свою очередь определенные цели, которых
стремится достичь конструктор.
«Конструирование» включает практическую реа-
лизацию синтезированной системы, а также измене-
ние структуры и параметров на основе накопленного
опыта.
Совершенно очевидно, что при такой интерпрета-
ции систем из рассмотрения исключаются астрономи-
ческие, механические и тому подобные системы, если
только не считать их, как предлагает проф. Месаро-
вич, набором утверждений. В таком случае системы
синтезируются для описания событий и эти системы
отвечают первой аксиоме, так как их можно синтези-
ровать и конструировать.
2. Системы синтезируются по частям. Конструктор
разбивает общую задачу синтеза на множество част-
ных задач, решение каждой из которых определяет
составную часть (компонент) более крупной системы.
3. Компоненты систем также являются системами.
Это означает, что каждый компонент можно оцени-
вать и разрабатывать в указанном выше смысле. Это
означает также, что каждый компонент можно рас-
сматривать как состоящий из более мелких компонен-
тов и что процесс такого расчленения логически бес-
конечен, хотя на практике конструктор останавливает-
ся по своему усмотрению на каком-то уровне, считая
компоненты, соответствующие этому уровню, «эле-
ментарными блоками системы».
4. Система замкнута, если ее оценка не зависит
от характеристик окружающей ее среды, которая от-
носится к определенному классу сред. Смысл этой
аксиомы сводится к тому, что конструктор стремится
получить некоторую устойчивую систему, сохраняю-
щую свои свойства даже при изменении условий окру-
жающей среды. Если конструктор считает, что воз-
можные изменения в окружающей среде способны
ухудшить функционирование системы, то в ходе раз-
работки он будет стремиться синтезировать такую си-
стему, которая устойчива к этим возмущениям. Ко-
Один подход к общей теории систем
185
гда можно полагать, что все возможности такого рода
в достаточной мере учтены, конструктор считает со-
зданную систему замкнутой. Как правило, он и не
пытается учесть все возможные изменения в окру-
жающей среде. Если же он встал бы на эту точку
зрения, то в таком случае справедлива аксиома:
5. Обобщенная система есть замкнутая система,
остающаяся замкнутой во всех возможных средах.
Иными словами, обобщенная система характеризует-
ся абсолютной устойчивостью к изменениям окружаю-
щей среды.
Вопросы, возникающие в связи с обобщенными
системами, напоминают известные философские про-
блемы. Прежде всего, сколько элементов содержится
в классе обобщенных систем? Если ответить на этот
вопрос — «ни одного», мы приходим к философскому
анархизму. При ответе — «один» приходим к фило-
софскому монизму, соответствующему, например, уче-
нию стоиков, Спинозы, Лейбница и некоторых других
философов. Если же ответ гласит — «много», то мы
сталкиваемся с философским плюрализмом. Далее
возникает вопрос, является ли обобщенная система
добром или злом. Вообще говоря, я считаю, что кон-
структоры систем должны четко высказаться в том
смысле, что системы можно создавать как во имя
добра, так и во имя зла. Нет никаких разумных осно-
ваний проводить различия между задачами построе-
ния систем, отвечающих научным критериям совер-
шенства, и задачами создания систем, несущих в себе
добро и зло. При построении систем на их создателя
в равной мере возложена ответственность за исполь-
зование всего арсенала научных знаний и технических
средств, а также приемлемых этических критериев
при построении системы. Тем не менее могут возник-
нуть опасения, что если человеку когда-либо удастся
создать некоторую подлинно замкнутую обобщенную
систему, то в итоге она явится не добром, а злом.
Следующие две аксиомы выражают мои убеждения
по этим вопросам.
6. Существует одна и только одна обобщенная си-
стема (монизм).
186
Черчмен Ч.
7. Эта обобщенная система оптимальна («опти-
мизм»).
Наиболее общей задачей синтеза систем является
приближение к некоторой обобщенной системе. Ины-
ми словами:
8. Общая теория систем есть методология поиска
обобщенной системы. И в заключение приведу аксио-
му, которую вряд ли кто будет отрицать.
9. Поиск обобщенной системы становится все бо-
лее затруднительным с течением времени и никогда
не завершится (реализм).
СОДЕРЖАВ И Е
Предисловие...............................................5
Месароеич М. Основания общей теории систем...............15
Заде Л. Понятие состояния в теории систем...............49
Акоф Р. Общая теория систем и исследование систем как
противоположные концепции науки о системах .... 66
Чарнс А., Купер У., Модели условной экстремизации и их
использование для оценки качества систем ........... 81
Майхилл Дж. Абстрактная теория самовоспроизведения . . 121
Калаба Р. Инвариантное погружение к анализ процессов . . 141
Дреник Р. Принцип причинности и прогнозируемость сигналов 153
Эшби У. Несколько замечаний.............................171
Рапопорт А. Замечания по поводу общей теории систем . . 179
Черчмен Ч. Один подход к общей теории систем .... 183
ОБЩАЯ ТЕОРИЯ СИСТЕМ
Редактор М. Б. Беликовский
Художник В. М. Новоселова
Художественный редактор
И. Л. Фильчагина
Технический редактор А. П. Кондюкова
Корректор А. Я- Шехтер
Сдано в производство 9/VII 1966 г.
Подписано к печати* 10/XI 1966 г.
Бумага 84х10в*/р«2.94 бум. л.
9,87 усл. печ. л. Уч.-изд. л. 8,31
Изд. М 20/3731
Цена 57 коп. Зак. 264
(Темплам 1966 г. изд-ва «Мир»,
пор. М 201)
I
ИЗДАТЕЛЬСТВО «МИР».
Москва, 1-й Рижский пер., 2
Ленинградская типография № 2
имени Евгении Соколовой .
Главполигра.фпрома Комитета 'по печати
при Совете Министров СССР
Измайловский проспект, 29