




































































































































Текст
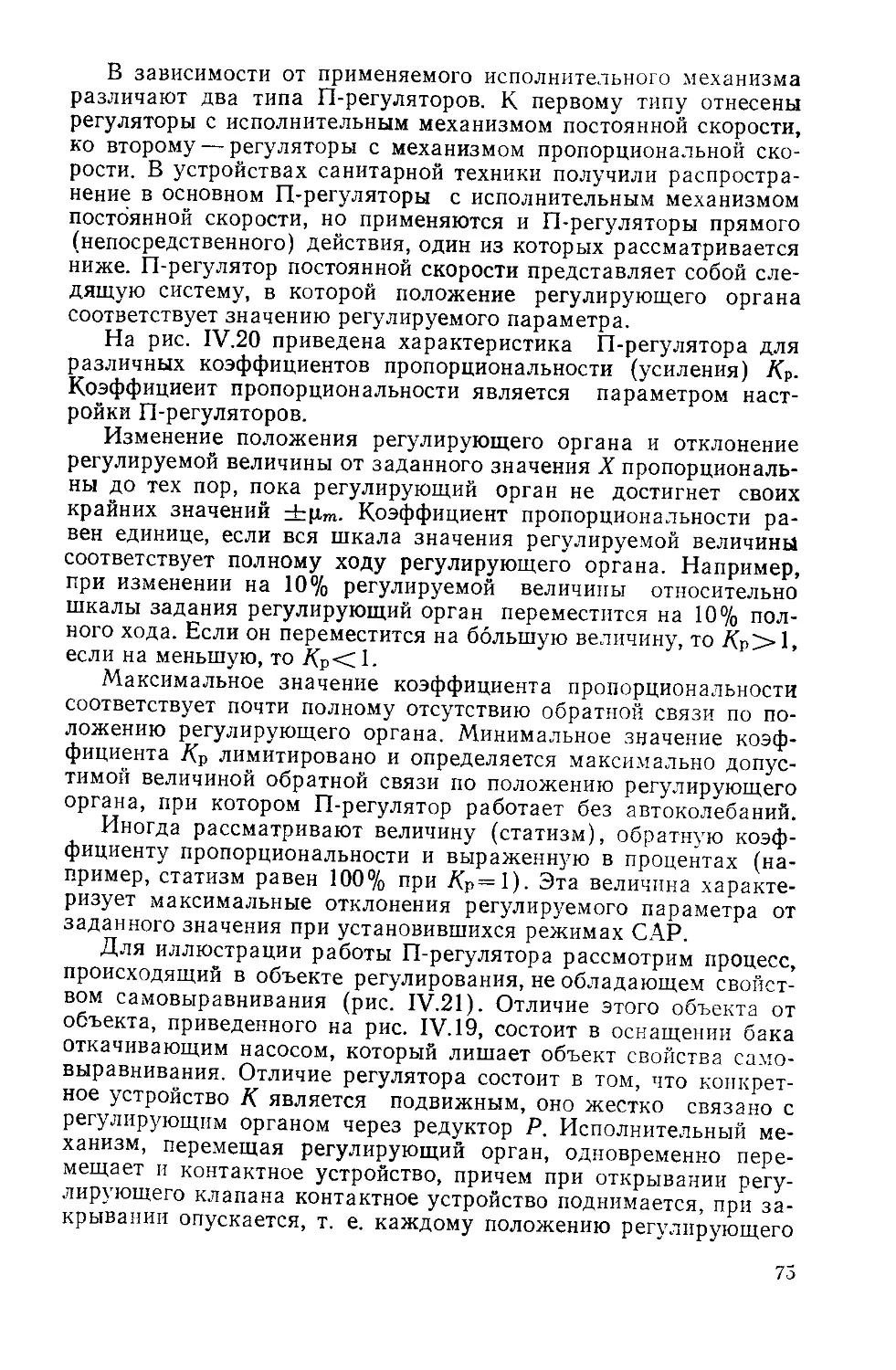
МЕКЛЕР В. Я.. РАВВИН Л. С.
С: .
frf- ч g
АВТОМАТИЧЕСКОЕ
РЕГУЛИРОВАНИЕ
САНИТАРНО-
ТЕХНИЧЕСКИХ
И ВЕНТИЛЯЦИОННЫХ
СИСТЕМ
Издание второе, переработанное и дополненное
Допущено Главным управлением кадров и учебных заведений
Министерства монтажных и специальных строительных работ СССР
з качестве учебника для техникумов
МОСКВА СТРОЙ ИЗ ДАТ 1982
Г Г V ОО *7в
UU1\ UU.IU
М 46
УДК 696—52(075.31 + 697.9—52(075.3)
Рецензент — инж. В. П. Шкроботов
Меклер В. Я., Раввин Л. С.
М. 46 Автоматическое регулирование санитарно-тех-
нических и вентиляционных систем: Учебник для
техникумов. — 2-е изд., перераб. и доп. — М.: Строй-
издат, 1982.—224 с., ил. — Изд. 1-е вышло в 1974 г.
под загл.: Основы автоматизации санитарно-техни-
ческих устройств.
Освещены вопросы измерения технологических параметров, управ-
ления санитарно-техническимн системами н системами автоматического
регулирования. Рассмотрена автоматизация систем теплоснабжения,
водоснабжения н канализации, вентиляции и кондиционирования воз-
духа. Приведены основы проектирования, монтажа и наладки систем
автоматизации. Материал второго издания обновлен в соответствии с
новыми техническими решениями.
Для учащихся строительных техникумов, обучающихся по специ-
альности «Санитарно-технические устройства и газоснабжение зданий>.
3206000000—335
М------------------181—82.
047(01)—82
ББК 38.76
6С9
© Стройиздат, 1974
© Стройиздат, 1982, с изменениями
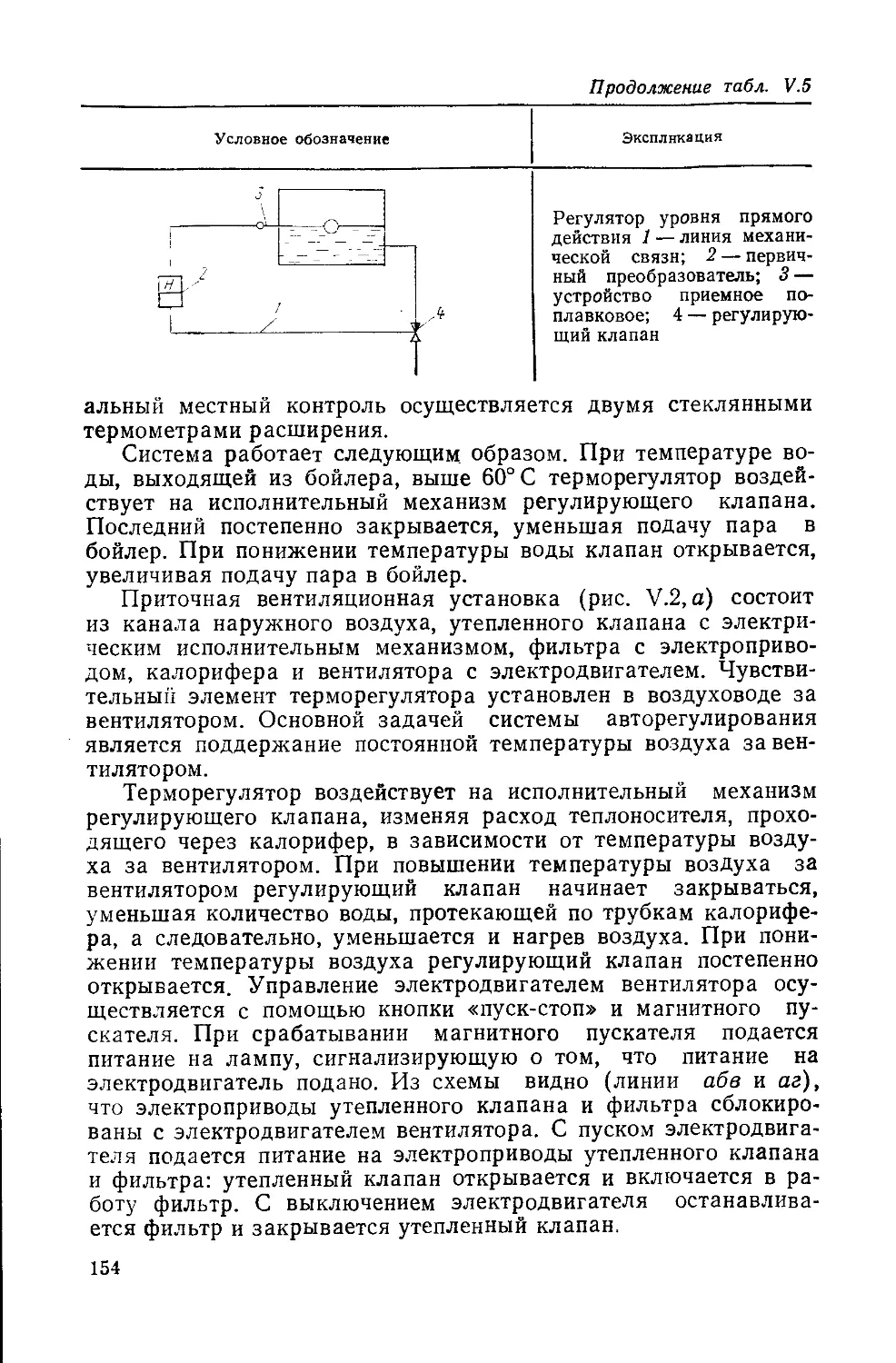
ПРЕДИСЛОВИЕ
В «Основных направлениях экономического и социального
развития СССР на 1981—1985 годы и на период до 1990 года»,
принятых XXVI съездом КПСС, одной из основных задач даль-
нейшего ускорения научно-технического прогресса является по-
следовательное проведение курса на более быстрое техническое
перевооружение производства, создание и выпуск машин и обо-
рудования, позволяющих улучшить условия труда и повысить
его производительность, на увеличение производства приборов,
оборудования и средств автоматизации. В Конституции СССР
(статья 21) подчеркивается важность комплексной механизации
и автоматизации производственных процессов в целях улучше-
ния условий и охраны труда, его научной организации.
Облегчая труд человека, повышая культуру человеческого
труда, помогая устранить различие между физическим и умст-
венным трудом, автоматизация позволяет значительно повысить
производительность труда, полнее удовлетворить потребности
человека. Современные промышленные и общественные здания
оборудуются сложными санитарно-техническими системами, на-
дежная безаварийная и экономичная работа которых немысли-
ма без их автоматизации.
В наше время трудно представить себе хорошего специалис-
та-сантехника, который сумел бы обойтись без основательных
знаний в области автоматизации. По мере развития техники от
каждого специалиста потребуется еще больше творческого мыш-
ления и достаточно прочных знаний в этой области.
Для правильного решения вопросов автоматизации санитар-
но-технических устройств необходимо знать основные теорети-
ческие положения, а также существующие методы и средства
проектирования, монтажа, наладки и эксплуатации систем ав-
томатического регулирования.
Учебник написан в соответствии с программой курса «Ав-
томатическое регулирование санитарно-технических и вентиля-
ционных систем» для специальности «Санитарно-технические
устройства и газоснабжение зданий».
При изложении теории автоматического регулирования ав-
торы стремились раскрыть физическую сущность процессов и
проиллюстрировать их на примерах простых систем регулирова-
ния без привлечения сложного математического аппарата и
электронных схем, осуществляющих те или иные частные функ-
ции в системах регулирования. Такой подход представляется
наиболее рациональным для понимания и усвоения материала,
тем более что перед специалистами-сантехниками не ставится
задача математического анализа проблем регулирования и соз-
дания средств регулирования.
1*
3
В связи с большим разнообразием методов автоматизации
санитарно-технических устройств в учебнике рассмотрены толь-
ко самые распространенные и широко применяемые в санитар-
ной технике средства и схемы автоматизации, а также принци-
пы работы измерительных приборов и регуляторов.
Развитие научно-технической революции, последние дости-
жения науки и техники, появление и начавшееся распростране-
ние интегральных схем, автоматических манипуляторов и встро-
енных систем автоматического управления с использованием
микропроцессов значительно расширяет внедрение автоматики
во все отрасли народного хозяйства, заменяет элементную базу
средств автоматизации. Однако основные положения теории ав-
томатического регулирования, свойства объектов регулирования,
параметры настройки регуляторов, принципы автоматизации
санитарно-технического оборудования и требования к средствам
автоматизации, изложенные в учебнике, дадут представление
о правильной оценке тех или иных схем автоматизации сани-
тарно-технического оборудования, построенных на использова-
нии этих новейших достижений.
Второе издание учебника дополнено и переработано с уче-
том происшедших изменений в технике автоматизации санитар-
но-технических устройств.
Авторы приносят благодарность рецензенту инж. В. П. Шкрс »
ботову за ценные советы и указания, сделанные при рецензирс -
вании рукописи.
Раздел первый
СРЕДСТВА И МЕТОДЫ АВТОМАТИЗАЦИИ
САНИТАРНО-ТЕХНИЧЕСКИХ СИСТЕМ
Глава I
ОБЩИЕ СВЕДЕНИЯ
§ 1. ПОНЯТИЕ ОБ АВТОМАТИЗАЦИИ
Термин «автоматика» происходит от греческого слова «ау-
тос», которое означает «сам» и указывает на то, что устройство
(механизм) действует самостоятельно.
Автоматикой или автоматизацией называют отрасль науки
и техники, охватывающую теорию автоматического регулирова-
ния и совокупность технических средств, высвобождающих че-
ловека от непосредственного управления производственными
процессами. Термин автоматизация обобщает ряд самостоятель-
ных понятий:
автоматический контроль, к которому относятся все виды из-
мерений с помощью контрольно-измерительных приборов
(КИП) —местных, дистанционных и автоматических с регистра-
цией контролируемых параметров;
местное, дистанционное и автоматическое управление, вклю-
чающее все виды управления производственными механизмами
и приводами рабочих органов, участвующих в процессе регули-
рования;
технологическая и защитная блокировка, исключающая оши-
бочные неправильные действия обслуживающего персонала и
обеспечивающая защиту технологического оборудования от ава-
рий;
световая и звуковая сигнализация, информирующая обслу-
живающий персонал о состоянии технологического оборудова-
ния и о возникновении аварий;
автоматическое регулирование, позволяющее осуществлять
технологический процесс на заданном уровне или по заданно-
му закону без непосредственного участия человека.
Отдельные элементы средств автоматизации сравнительно
немногочисленны, однако число комбинаций из этих элементов
для определенного количества технологических процессов мо-
жет быть практически безгранично. Поэтому для понимания
схем автоматизации технологических процессов сначала следу-
ет уделить внимание общим принципам работы элементов авто-
матизации, а затем построению схем из этих элементов.
Системы теплоснабжения, водоснабжения, канализации, ото-
пления, вентиляции и кондиционирования воздуха представля-
5
ют собой сложный комплекс устройств, работа которых взаи-
мосвязана. Ручное управление такими системами весьма затруд-
нительно и требует большого числа обслуживающего персонала.
Для крупных зданий, оснащенных современным санитарно-
техническим оборудованием, такое управление просто невоз-
можно. Этим и объясняется внедрение средств автоматизации
инженерного оборудования во вновь строящихся и реконструи-
руемых зданиях.
§ 2. КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЕ
И РЕГУЛИРУЮЩИЕ ПРИБОРЫ
Во всяком технологическом процессе имеются физические
величины, характеризующие его качество или производитель-
ность, так называемые параметры процесса. Для санитарно-
технических систем такими параметрами являются температура,
давление, расход, уровень и относительная влажность воздуха.
Без точного знания параметров процесса невозможно правиль-
но, т. е. с учетом величины и знака отклонения этой величины от
заданного значения, воздействовать на технологический процесс.
Наблюдение за параметрами в санитарно-технических системах
осуществляется с помощью измерительных приборов.
По своему устройству и назначению приборы могут быть по-
казывающие, регистрирующие (самопишущие), интегрирующие,
регулирующие, сигнализирующие, а также совмещающие ряд
функций (например, показывающий, самопишущий с сигнализи-
рующим устройством или показывающий, интегрирующий и ре-
гулирующий и т. д.).
Показывающие приборы дают возможность судить об изме-
ряемой величине по положению стрелки или другого указате-
ля на шкале прибора.
Регистрирующие приборы систематически ведут запись пока-
заний в принятых единицах измеряемой величины. Самопишу-
щие приборы регистрируют показания в форме диаграммы, как
правило, в функции времени. Дисковые диаграммы рассчитаны
на запись измеряемой величины пером за сутки, а ленточные —
пером или печатающим устройством за более продолжительное
время (например, месяц). Другие регистрирующие приборы за-
писывают показания в цифровой форме.
Интегрирующие приборы (счетчики) автоматически сумми-
руют значения измеряемой величины за какой-либо промежу-
ток времени.
Регулирующие приборы предназначены для автоматического
регулирования параметров (например, температуры), когда без
участия человека требуется поддержание постоянного значения
этого параметра или его изменение в определенной зависимости
(например, в зависимости от значения другого параметра). Ре-
гулирующие приборы нередко совмещают несколько функций
(показание, регистрация и т.п.).
6
Сигнализирующие приборы при достижении заданного зна-
чения измеряемой величины дают световой или звуковой сиг-
нал.
Измерительные приборы могут быть с дистанционной пере-
дачей показаний и без нее.
Для оперативного контроля параметров технологического
процесса измерительные приборы располагают на технологиче-
ском оборудовании в местах, где требуется производить изме-
рения. Такие приборы, как правило, имеют чувствительные и
преобразовательные элементы, измерительный механизм и от-
счетное устройство, совмещенные в одном корпусе (например,
технический ртутный термометр или манометр). Приборы с ди-
станционной передачей показаний имеют в своем составе изме-
рительный преобразователь, вырабатывающий сигнал измери-
тельной информации, удобный для передачи на значительные
расстояния (до сотен метров), и вторичный измерительный при-
бор (показывающий, самопишущий и т.п.). Вторичные приборы
устанавливают на центральных щитах, что позволяет сосредо-
точить контроль основных параметров санитарно-технического
оборудования в одном месте и тем самым значительно облегчить
условия эксплуатации зданий.
В настоящее время в нашей стране разработана и внедряет-
ся Государственная система приборов (ГСП), согласно которой
выпускаются датчики, преобразователи, вторичные приборы,
регуляторы, исполнительные устройства и другие средства ав-
томатизации. В основе построения ГСП лежат определенные
технические принципы, а именно: стандартизация функциональ-
ной структуры систем автоматического контроля, регулирова-
ния, управления и защиты; унификация входных и выходных
сигналов, параметров источников питания, соединительных и
монтажных размеров, конструктивных форм.
Приборостроительная промышленность выпускает еще зна-
чительное количество приборов и средств автоматизации, не во-
шедших в ГСП, но широко применяемых в отдельных отраслях
промышленности, в том числе и приборов для автоматизации
санитарно-технических устройств. Постепенно эти приборы за-
меняются новыми.
§ 3. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
Чтобы пояснить основной принцип действия всякой системы
автоматического регулирования, рассмотрим систему регулиро-
вания температуры воды, приготовляемой в водоводяном теп-
лообменнике (например, в бойлере горячего водоснабжения).
Для измерения температуры воды, подогреваемой в тепло-
обменнике, устанавливается термометр сопротивления, дающий
электрический сигнал логометру — прибору, с помощью кото-
рого измеряется температура. Шкала логометра имеет деления
7
в градусах. Человек, обслуживающий теплообменник, следя гла-
зами за отклонением стрелки логометра, читает на его шкале
значение температуры воды. В зависимости от того, в какую
сторону температура отклонилась от требуемого значения, че-
ловек вращает маховик вентиля, который установлен иа трубо-
проводе подаваемого в теплообменник теплоносителя (рис. 1.1),
и тем самым изменяет количество тепла, отдаваемого подогре-
ваемой воде. При открывании вентиля количество теплоносите-
ля увеличивается и температура подогреваемой воды возраста-
ет, при закрывании — температура уменьшается. Так выглядит
ручное регулирование температуры воды, приготовляемой в во-
доводяном подогревателе.
Если в самых грубых чертах определить функции человека
в этом процессе, то можно сказать, что человек только вращает
маховик вентиля в зависимости от наблюдаемого им отклоне-
ния температуры. Следовательно, возникает необходимость в
том, чтобы маховик вентиля вращался при отклонении темпе-
ратуры без помощи человека, т. е. выполнение функций чело-
века следует возложить на автоматический регулятор. Чтобы
автоматический регулятор мог справиться с этой задачей, он
должен иметь в своем составе устройства, сравнивающие зна-
чения температуры приготовляемой воды с заданным значени-
ем, отрабатывающие регулирующий сигнал и усиливающие его
для управления приводом вентиля. В качестве привода вентиля
можно использовать реверсивный электродвигатель.
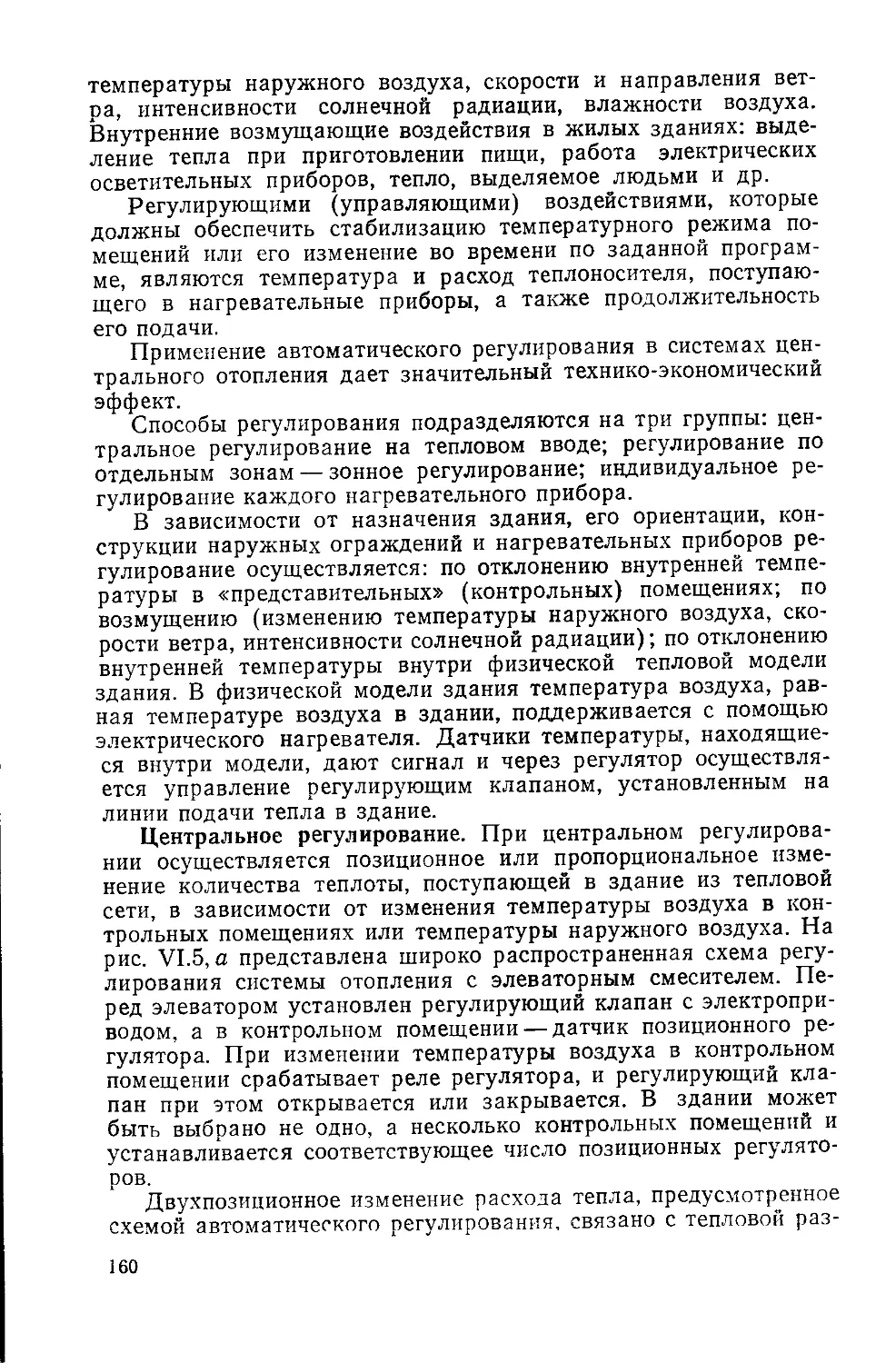
Термометр сопротивления (чувствительный элемент
дает электрический сигнал, соответствующий температуре
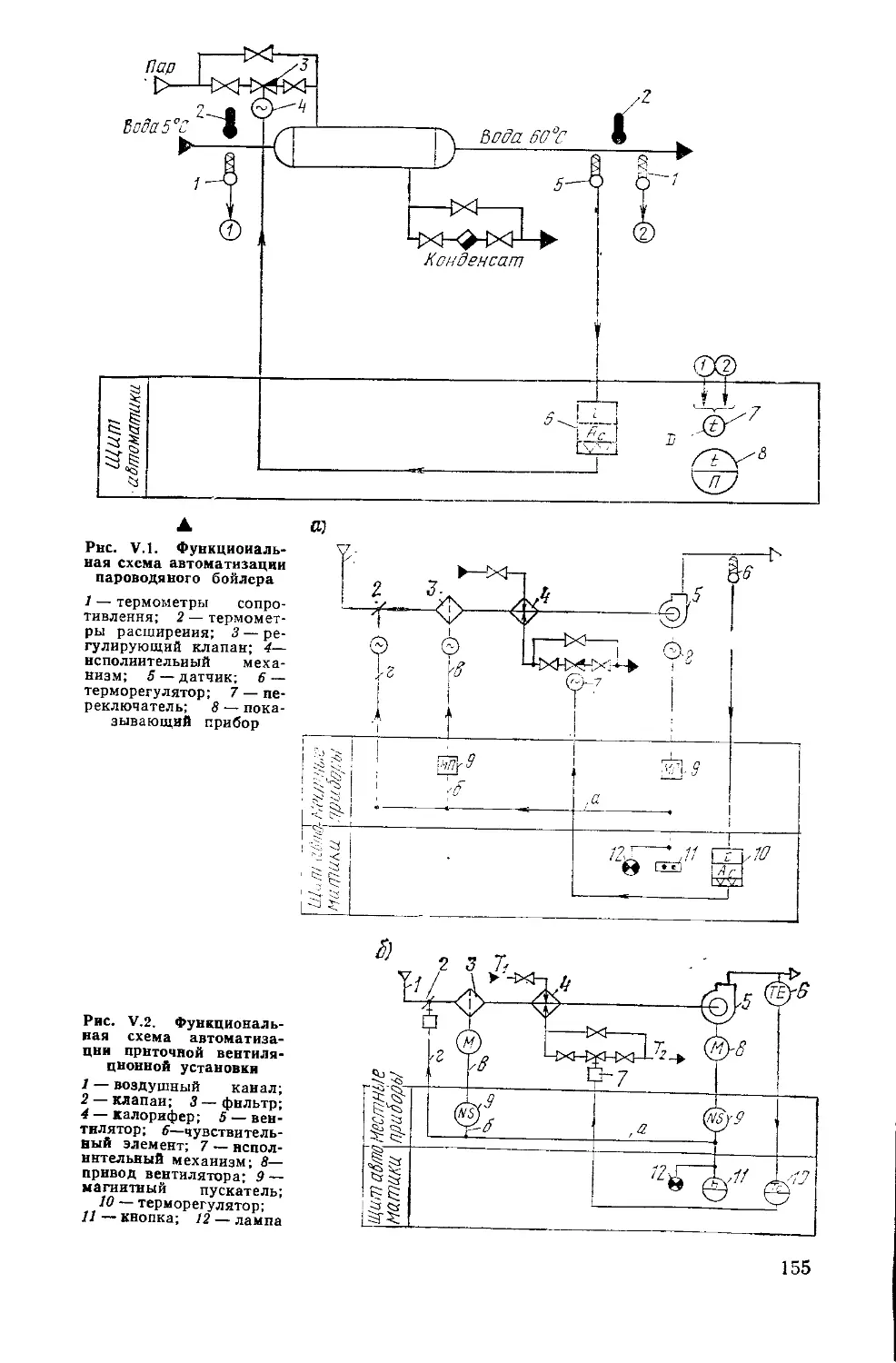
Рис. 1.1. Функциональная
схема ручного регулирова-
ния
ЧЭ)
при-
готовляемой воды, на эле-
мент сравнения ЭС (рис.
1.2). На ЭС поступает так-
же сигнал от задатчика Зд,
эквивалентный заданному
значению температуры. ЭС
сравнивает эти значения и
дает сигнал, соответствую-
щий отклонению температу-
ры воды от требуемого ее
Рис. 1.2. Функциональная
схема системы автоматиче-
ского регулирования
ОР — объект регулирования?
ЧЭ — чувствительный эле-
мент; .ЭС — элемент сравне-
ния; Зд — задатчик; РУУ—
регулирующее устройство с
-усилителем; ИМ — исполни-
тельный механизм; РО — ре-
гулирующий орган; АР—ав-
томатический регулятор
значения, на регулирующее устройство с усилителем РУУ. С уче-
том величины и знака этого отклонения РУУ формирует элек-
трический сигнал, который используется для управления приво-
дом (исполнительным механизмом ИМ) вентиля — регулирую-
щего органа РО, изменяющего количество теплоносителя (регу-
лирующей среды), подводимого к водоводяному теплообменни-
ку (объекту регулирования ОР).
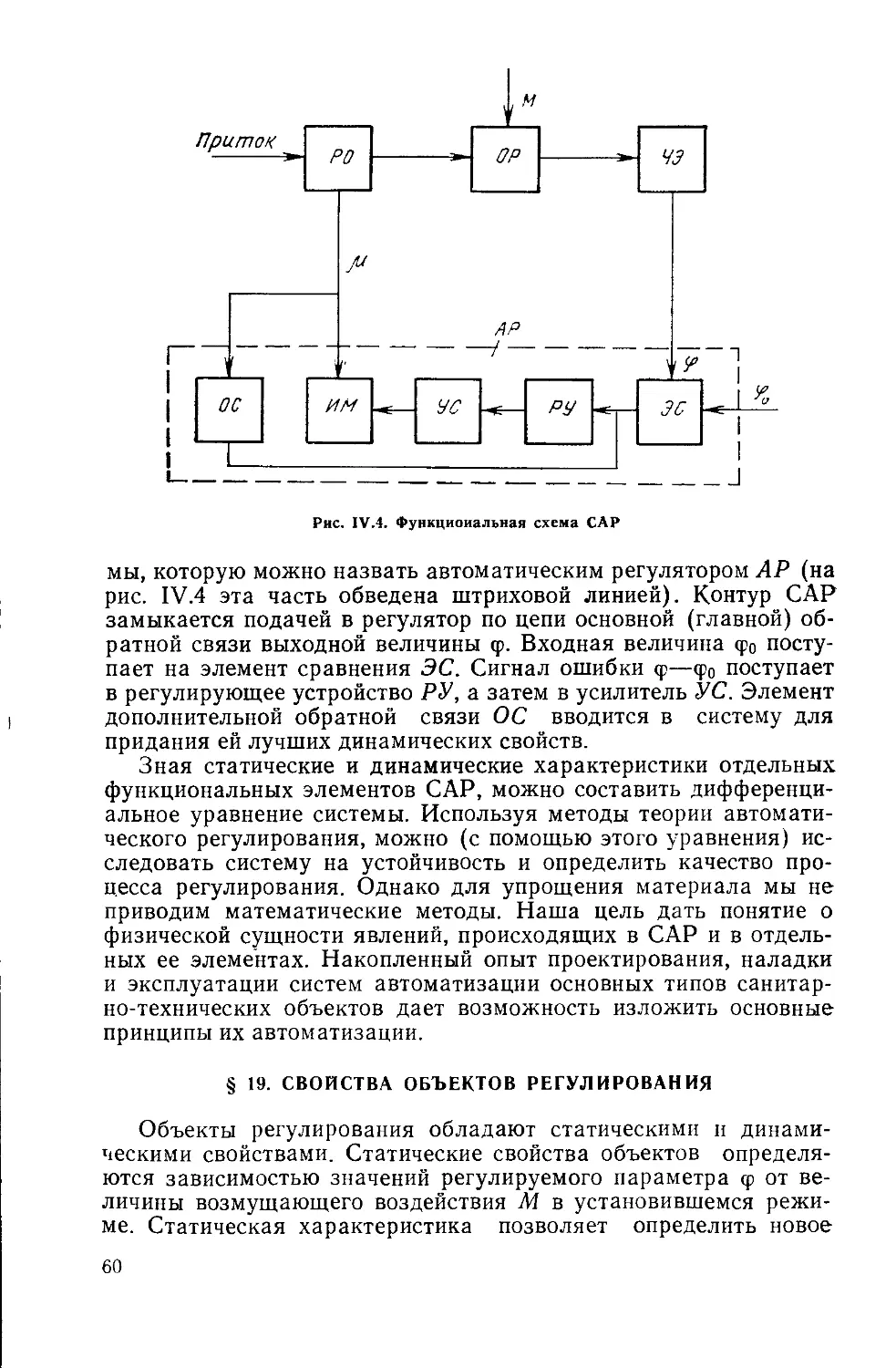
Для общего случая автоматизации процесса регулирования
независимо от объекта и принципа действия автоматического ре-
гулятора функциональная схема системы автоматического ре-
гулирования САР аналогична рассмотренной выше. Основной
задачей автоматического регулятора является компенсация воз-
мущающих воздействий с целью поддержания заданного значе-
ния регулируемого параметра (в данном случае температуры
воды). В рассмотренном примере возмущающими воздействия-
ми являются изменения количества и температуры проходящей
через теплообменник подогреваемой воды.
Как видно из функциональной схемы, показанной на рис.
1.2, система автоматического регулирования представляет собой
сочетание следующих неразрывно связанных элементов:
объекта регулирования, в котором необходимо поддержи-
вать в заданных пределах значение регулируемого параметра
либо изменять его значение по определенной программе или
в зависимости от изменения другого независимого параметра;
автоматического регулятора АР, который вырабатывает ре-
гулирующее воздействие, обеспечивающее через регулирующий
орган поддержание параметра в пределах установленных от-
клонений;
регулирующего органа, который, получая команду от авто-
матического регулятора через исполнительный механизм, изме-
няет количество или потенциал регулирующей среды (или энер-
гии), подводимой к ОР и вызывающей изменение регулируемо-
го параметра.
Система автоматического регулирования может обеспечить
требуемые параметры процесса регулирования только в том
случае, если статические и динамические характеристики ее от-
дельных элементов будут взаимно увязаны. Большие различия
в характеристиках ОР вызвали необходимость создания значи-
тельного числа автоматических регуляторов, которые отличают-
ся друг от друга способом формирования того или иного зако-
на регулирования, видом энергии, степенью усиления управля-
ющего сигнала, чувствительностью и параметрами настройки’,.
1 Подробному рассмотрению систем автоматического регулирования по-
священа глава IV.
9
§ 4. УПРАВЛЕНИЕ САНИТАРНО-ТЕХНИЧЕСКИМИ
СИСТЕМАМИ
Неотъемлемыми элементами автоматизации являются ди-
станционное и автоматическое управление силовыми электро-
приводами санитарно-технического оборудования и исполни-
тельными механизмами регулирующих органов, технологичес-
кая и защитная блокировка, а также световая и звуковая
сигнализация. Все эти элементы позволяют централизовать уп-
равление автоматизированными устройствами и контроль их
состояния.
Управление силовыми приводами и электрическими испол-
нительными механизмами, контроль и сигнализация выполня-
ются с помощью электроаппаратуры, применяемой во всех от-
раслях промышленности (аппаратура общепромышленного
назначения). Наиболее распространенными элементами схем уп-
равления и сигнализации являются контакторы, реле разных
типов, усилители, переключатели, кнопки управления, концевые
выключатели, сигнальные лампы и табло, блинкеры, звонки,
гудки и сирены.
Следует заметить, что при применении пневматических или
гидравлических регуляторов и исполнительных механизмов мо-
жно использовать аппаратуру дистанционного, местного управ-
ления и сигнализации, а также линии связи, пневматические
или гидравлические. Однако часто для этого используют элек-
троаппаратуру и электрические линии связи, так как по надеж-
ности, дальности действия, удобству монтажа и стоимости они
значительно выгоднее, чем пневматические и гидравлические.
При применении пневматических и гидравлических регулирую-
щих устройств в сочетании с электрической аппаратурой управ-
ления и сигнализации используют преобразователи, позволяю-
щие осуществлять переход от пневматического и гидравличес-
кого сигнала к электрическому, или наоборот.
Управление санитарно-техническими системами можно ус-
ловно разделить на местное, дистанционное и автоматическое.
Местное управление предполагает управление приводами с по-
мощью аппаратуры, которая располагается в непосредственной
близости от механизма. Дистанционное управление обеспечива-
ет управление технологическим оборудованием на расстоянии
(например, с центрального щита управления). Автоматическое
управление позволяет управлять технологическим оборудовани-
ем в зависимости от протекания технологического процесса или
по заданной программе.
При автоматизации санитарно-техническдго оборудования
силовые приводы и исполнительные механизмы оснащаются,
как правило, местным и автоматическим или местным и дистан-
ционным управлением.
В автоматизированном технологическом процессе силовые
10
приводы и исполнительные механизмы имеют так называемые
блокировочные связи (блокировки), которые по своему назна-
чению делятся на технологические и аварийные, или защитные.
Технологическая блокировка обеспечивает согласованность и
определенную последовательность в работе отдельных приво-
дов. Аварийная (защитная) блокировка исключает поломку или
выход из строя оборудования (при ошибочных действиях обслу-
живающего персонала либо при возникновении аварийных си-
туаций) воздействием на соответствующие приводы вплоть до
их отключения. Блокировочные связи позволяют исключить ава-
рийные режимы работы автоматизированного санитарно-техни-
ческого оборудования, значительно увеличить его надежность и
долговечность.
При автоматизации различного санитарно-технического обо-
рудования зданий, создании систем централизованного контро-
ля и управления, а также при организации службы диспетчер-
ского управления большое внимание уделяется устройствам си-
гнализации, предназначенным для извещения обслуживающего
персонала о состоянии контролируемого оборудования. Для си-
гнализации используются различные электромеханические и
световые указатели, а также звуковые сигналы. По назначению
сигнализацию можно классифицировать следующим образом:
1) сигнализация положения — оповещение о состоянии кон-
тролируемых объектов (включены или отключены контакторы,
выключатели; открыты или закрыты задвижки, заслонки и т. д.);
2) технологическая — сигнализация о нарушении нормаль-
ного хода технологических процессов (об отклонении от уста-
новленного значения таких параметров, как температура, дав-
ление, уровень и т. д.); технологическая сигнализация может
быть двух видов:
предупредительная — сигнализация о ненормальных, но пока
еще допустимых значениях параметров процесса, о нарушении
нормального режима работы оборудования;
аварийная — сигнализация о недопустимых значениях кон-
тролируемых параметров, об аварийном состоянии оборудова-
ния или об аварийном его отключении; появление аварийных
сигналов, как правило, сопровождается включением аварийной
или защитной блокировки; аварийная сигнализация, требующая
обычно немедленного вмешательства обслуживающего персона-
ла, осуществляется в отличие от предупредительной мигающим
светом и звуком резкого тона;
3) командная сигнализация — передача заранее определен-
ных команд из одного помещения в другое различными свето-
выми и звуковыми сигналами.
Для надежной и бесперебойной работы автоматизированно-
го санитарно-технического оборудования крупных зданий и со-
оружений требуется четкая координация взаимодействия от-
дельных элементов оборудования, что может быть достигнуто
введением единого централизованного управления и контроля.
Такое централизованное управление осуществляется диспетчер-
ской службой. Диспетчеризация позволяет не только организо-
вать надежную эксплуатацию оборудования, но и значительно
сократить численность обслуживающего это оборудование пер-
сонала.
Для организации диспетчерского пункта обычно выбирают
отдельное помещение, располагаемое, как правило, вблизи ос-
новного наиболее сложного оборудования. В этом помещении
размещают щиты и пульты, на которых установлены аппарату-
ра дистанционного управления основным санитарно-техническим
оборудованием, сигнализационная аппаратура, а также прибо-
ры контроля технологических параметров.
Объем информации, получаемой диспетчером с помощью
сигнализации и контрольно-измерительных приборов, должен
быть достаточным для правильной эксплуатации автоматизиро-
ванного оборудования, а аппаратура дистанционного управле-
ния должна обеспечить диспетчеру возможность быстро вмеши-
ваться в работу оборудования. Однако структура управления
всем обслуживаемым оборудованием строится таким образом,
чтобы объем информации и управления был экономически це-
лесообразным и не превышал физических возможностей диспет-
чера.
§ 5. ОСНОВНЫЕ ТЕРМИНЫ
И ОПРЕДЕЛЕНИЯ
Автоматизация технологических процессов тесно связана с
техникой измерения физических величин, и для правильного по-
нимания материала необходимо знать основные термины и оп-
ределения метрологии — науки об измерениях.
Процесс измерения любой физической величины (темпера-
туры, давления, уровня), как правило, заключается в сопостав-
лении измеряемой величины с величиной, принятой за единицу.
При таком сопоставлении неизбежно возникают неточности.
Погрешностью измерения называют отклонение результата из-
мерения (показания средства измерения — прибора) А от ис-
тинного значения измеряемой величины Ао. Измерительным
прибором называют устройство, способов так реагировать на
измеряемую физическую величину и па ее изменения, что в ре-
зультате наблюдатель получает сведения о числовом значении
измеряемой величины в установленньТх единицах.
Основные категории погрешностей измерения — это система-
тические, случайные и грубые. К систематическим относятся
инструментальная погрешность и погрешность метода измере-
ния, которые подчиняются определенным законам и, в принци-
пе, могут быть исключены из результата измерения; к случай-
ным — погрешности, связанные с воздействием окружающей сре-
12
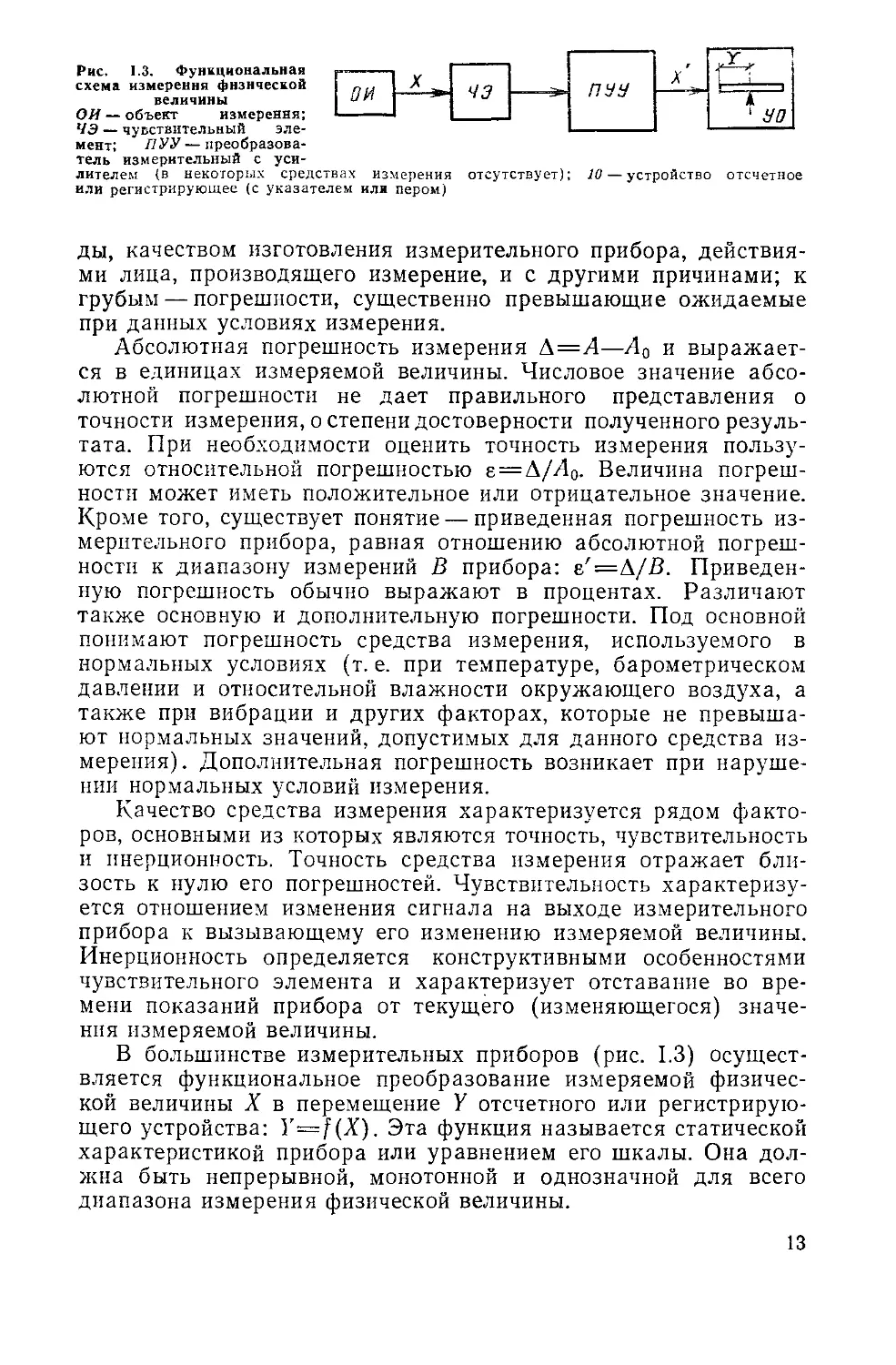
Рис. 1.3. Функциональная
схема измерения физической
величины
ОИ — объект измерения;
ЧЭ — чувствительный эле-
мент; ПУУ — преобразова-
тель измерительный с уси-
лителем (в некоторых средствах измерения отсутствует); 10— устройство отсчетное
или регистрирующее (с указателем или пером)
ды, качеством изготовления измерительного прибора, действия-
ми лица, производящего измерение, и с другими причинами; к
грубым — погрешности, существенно превышающие ожидаемые
при данных условиях измерения.
Абсолютная погрешность измерения Д=А—Ао и выражает-
ся в единицах измеряемой величины. Числовое значение абсо-
лютной погрешности не дает правильного представления о
точности измерения,о степени достоверности полученного резуль-
тата. При необходимости оценить точность измерения пользу-
ются относительной погрешностью е = Д/А0- Величина погреш-
ности может иметь положительное или отрицательное значение.
Кроме того, существует понятие — приведенная погрешность из-
мерительного прибора, равная отношению абсолютной погреш-
ности к диапазону измерений В прибора: г'—Х/В. Приведен-
ную погрешность обычно выражают в процентах. Различают
также основную и дополнительную погрешности. Под основной
понимают погрешность средства измерения, используемого в
нормальных условиях (т. е. при температуре, барометрическом
давлении и относительной влажности окружающего воздуха, а
также при вибрации и других факторах, которые не превыша-
ют нормальных значений, допустимых для данного средства из-
мерения). Дополнительная погрешность возникает при наруше-
нии нормальных условий измерения.
Качество средства измерения характеризуется рядом факто-
ров, основными из которых являются точность, чувствительность
и инерционность. Точность средства измерения отражает бли-
зость к нулю его погрешностей. Чувствительность характеризу-
ется отношением изменения сигнала на выходе измерительного
прибора к вызывающему его изменению измеряемой величины.
Инерционность определяется конструктивными особенностями
чувствительного элемента и характеризует отставание во вре-
мени показаний прибора от текущего (изменяющегося) значе-
ния измеряемой величины.
В большинстве измерительных приборов (рис. 1.3) осущест-
вляется функциональное преобразование измеряемой физичес-
кой величины X в перемещение У отсчетного или регистрирую-
щего устройства: У=Д(Х). Эта функция называется статической
характеристикой прибора или уравнением его шкалы. Она дол-
жна быть непрерывной, монотонной и однозначной для всего
диапазона измерения физической величины.
13
§ 6. ЕДИНИЦЫ ФИЗИЧЕСКИХ ВЕЛИЧИН.
ТОЧНОСТЬ ИЗМЕРЕНИЯ
В соответствии с Государственной системой измерения
(ГСИ) во всех областях науки, техники и народного хозяйства
должна применяться как предпочтительная Международная си-
стема единиц (СИ).
Основными единицами СИ являются: длина — метр (м);
масса — килограмм (кг)); время — секунда (с); сила электри-
ческого тока — ампер (А); термодинамическая температура —
градус Кельвина (К).
Основными параметрами в санитарно-технических установ-
ках, как известно, являются температура, давление, расход, уро-
вень и относительная влажность воздуха. Эти параметры в си-
стеме СИ измеряются основными и производными единицами:
температура в градусах Кельвина — К или Цельсия—°C; дав-
ление в паскалях — Па; расход в килограммах массы в секун-
ду— кг/с; уровень в метрах — м.
Отсутствие справочных таблиц (в единицах СИ) физических
свойств рабочих тел (воды, газов, пара и т. д.) зарудняет поль-
зование Международной системой единиц при тепловых и гид-
равлических расчетах. По мере появления справочных данных
и внедрения в промышленность системы СИ в науке и технике
будет применяться только эта система единиц.
Для измерения температуры наряду с применением термо-
динамической шкалы допускается пользование международной
практической. При применении термодинамической шкалы аб-
солютную температуру обозначают буквой Г, а в качестве еди-
ницы измерения принимают градус Кельвина (К). При приме-
нении международной практической температурной шкалы
температуру обозначают буквой /, а за единицу измерения при-
нимают градус Цельсия (°C).
Давление, измеряемое прибором (например, манометром),
называют избыточным или манометрическим. Сумму избыточ-
ного и атмосферного давлений называют абсолютным давлени-
ем. При абсолютном давлении, меньшем атмосферного, разность
между ними называют разрежением (вакуумом). За единицу
давления в СИ принят паскаль (Па), который равен давлению,
вызванному силой в 1 Н, равномерно распределенной по нор-
мальной к ней поверхности площадью 1 м2. В практике неред-
ко пользуются временно допущенными единицами: килограмм-
сила на квадратный сантиметр (кгс/см2); миллиметр водяного
столба (мм вод. ст.); миллиметр ртутного столба (мм рт. ст.).
Расход вещества (воздуха, газов, жидкостей, пара) измеря-
ют в единицах, определяющих количество вещества, равномер-
но перемещаемого через определенное сечение за единицу вре-
мени. Различают массовый и объемный расход. В СИ массовый
расход измеряют в килограммах в секунду (кг/с), а объем-
14
ный— в кубических метрах в секунду (м3/с). Наряду с этим до-
пускается пользоваться единицами: килограмм в час (кг/ч);
тонна в час (т/ч); кубический метр в час (м3/ч); килограмм в
минуту (кг/мин). Все измерители расхода, или расходомеры,
учитывают мгновенный расход вещества, т. е. расход, характер-
ный только в данный момент. Часто расходомеры дополняют
так называемым интегрирующим устройством (интегратором),
которое учитывает количество проходящего по трубопроводу
вещества. Приборы, именуемые счетчиками (водомеры, газовые
счетчики), измеряют количество вещества, проходящего через
данный канал, в единицах объема.
Для измерения уровня жидкости используют единицы дли-
ны: метр (м) и миллиметр (мм).
Влажный воздух можно рассматривать как смесь, состоящую
из водяного пара и сухой части атмосферного воздуха. Влаго-
содержание, или абсолютная влажность, воздуха, г/кг, пред-
ставляет собой отношение
d =— 1000,
где тп и mв — соответственно масса пара и масса сухого воздуха.
Относительная влажность воздуха (паровоздушной смеси)
представляет собой отношение массы водяного пара, фактичес-
ки содержащегося в 1 м3 воздуха, к максимально возможной
массе водяного пара в 1 м3 воздуха при одинаковых температу-
ре и давлении. Относительная влажность воздуха определяет
степень насыщения воздуха водяным паром в процентах.
Метрологическая служба СССР обеспечивает единство изме-
рений в стране и единообразие средств измерений, т. е. резуль-
таты измерений выражаются в узаконенных единицах, погреш-
ности измерений известны с заданной вероятностью, а метро-
логические свойства средств измерения соответствуют нормам.
Одной из определяющих норм для средств измерений явля-
ется класс точности. Класс точности —это обобщенная харак-
теристика, определяемая пределами основных и дополнитель-
ных погрешностей, а также другими свойствами, влияющими
на точность. По классу точности средства измерения можно ус-
ловно разделить на эталоны, образцовые, контрольные и техни-
ческие. Эталоны служат для воспроизведения единицы величины
с наивысшей точностью. Образцовые средства измерения (меры,
приборы, измерительные преобразователи) применяются для по-
верки других, т. е. контрольных, а в некоторых случаях и тех-
нических средств измерения. Контрольные средства измерения
применяются для периодической и ведомственной поверки при-
боров, находящихся в эксплуатации. Техническими называют
приборы, постоянно используемые для практических измерений.
Класс точности этих приборов, как правило, 1; 1,5; 2,5 и 4. На-
пример, основная допустимая погрешность манометра класса
15
точности 1,5 с диапазоном измерений 0—10 кгс/см2 (0—1 МПа)
составляет ±1,5% от 10 кгс/см2 (1 МПа), т. е. ±0,15 кгс/см2
(±0,015 МПа). Чем больше числовое значение класса точности
прибора, тем менее точен прибор. Класс точности прибора обыч-
но указывается на его шкале.
Глава II
ИЗМЕРЕНИЕ ТЕПЛОТЕХНИЧЕСКИХ ПАРАМЕТРОВ
§ 7. ИЗМЕРЕНИЕ ТЕМПЕРАТУРЫ
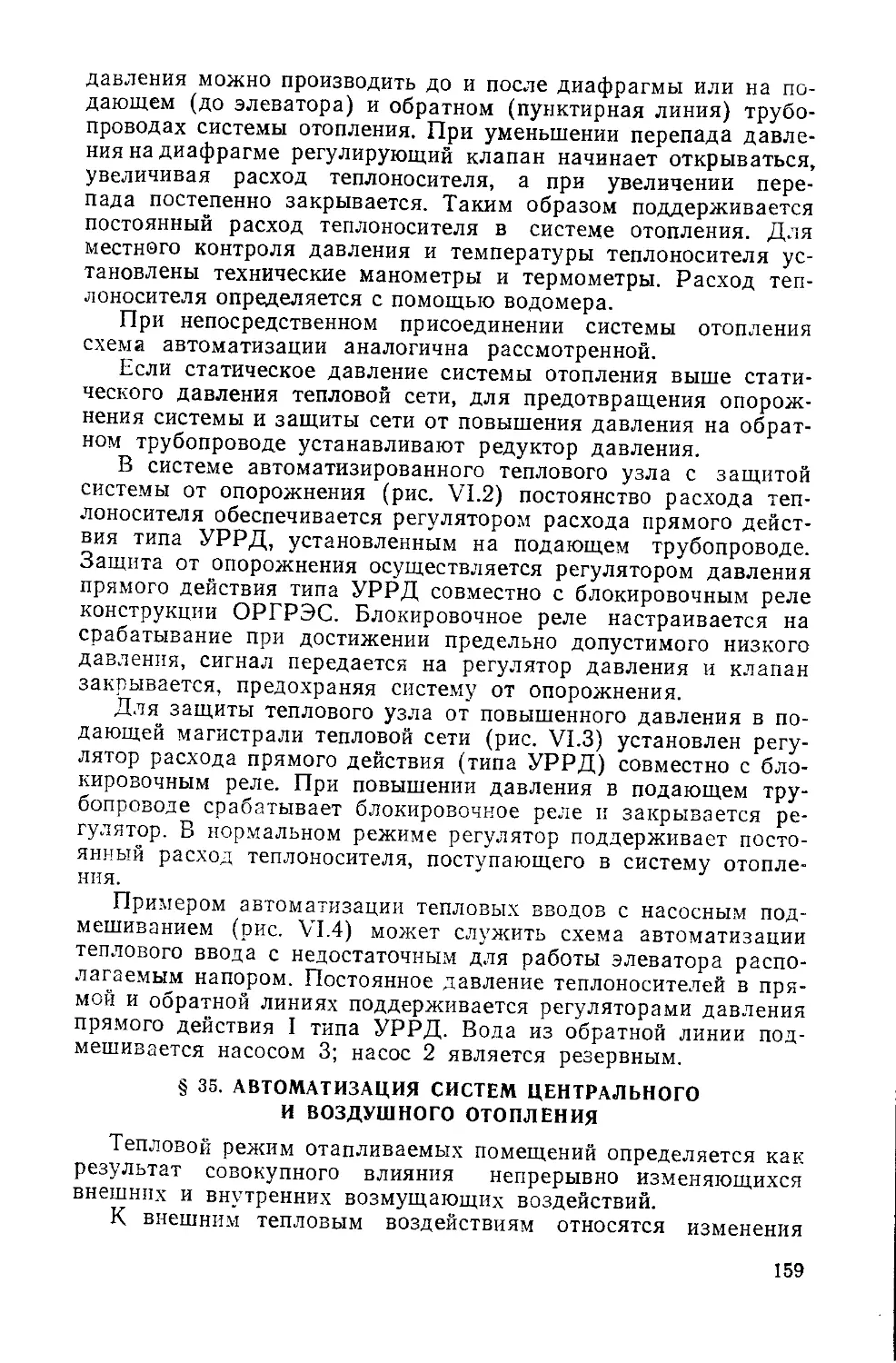
Рис. П.1. Термометры расширения
н — палочный термометр; б — термометр с
вложенной шкалой; и — угловой термо-
метр; 1 — капилляр; 3 — резервуар для
жидкости; 3 —- якала; 4— защитная обо-
лочка
Приборы для измерения температуры — степени нагретости
тела — называются термометрами. Принцип действия термомет-
ров основан на тепловом обмене между телами с различной
степенью нагретости, а также на изменении физических свойств
при нагревании. Наиболее широко используются происходящие
при колебаниях температуры изменения: размеров тел (тепло-
вое расширение); давления газов, паров и жидкостей; электри-
ческого сопротивления проводников; термоэлектродвижущей си-
лы; энергии излучения раскаленных тел.
Термометры расширения. К термометрам этой группы отно-
сятся жидкостные стеклянные и механические термометры.
Принцип действия жидкостных стеклянных термометров ос-
нован на свойстве заполняющего
вещества изменять свой объем
при изменении температуры.
В зависимости от величины изме-
ряемой температуры в качестве
рабочего вещества применяется
ртуть или спирт. Ртутные термо-
метры предназначены для изме-
рения температуры от —30 до
±500° С, а спиртовые — для из-
мерения температуры от —130 до
±60° С.
Жидкостные стеклянные тер-
мометры выпускают в двух основ-
ных модификациях: палочные
(рис. II.1, а) и с вложенной шка-
лой (рис. II.1,6). Палочные тер-
мометры имеют толстостенный
капилляр наружным диаметром
6—8 мм, нижний конец которого
образует резервуар для жидко-
сти. Отметки шкалы нанесены на
наружной поверхности капилляр-
ной трубки. Термометр с вложен-
ной шкалой имеет тонкостенный капилляр с расширенным резер-
вуаром для ртути, позади которого расположена шкала из мо-
лочного стекла. Капилляр вместе со шкалой заключен в защит-
ную стеклянную оболочку.
По назначению жидкостные стеклянные термометры под-
разделяются на лабораторные и технические. Лабораторные
термометры могут быть как палочные, так и с вложенной шка-
лой. Технические термометры изготовляют только с вложенной
шкалой. Верхняя часть технических термометров более широ-
кая, так как в ней расположена шкала. Нижняя часть термо-
метров может быть прямой (рис. 11.1,6) или изогнутой (рис.
II.1, в)—угловой термометр. Для предохранения технических
термометров от повреждений применяются защитные оправы —
изолирующие (исключающие возможность непосредственного
соприкосновения термометра с измеряемой средой) и открытые
(допускающие соприкосновение).
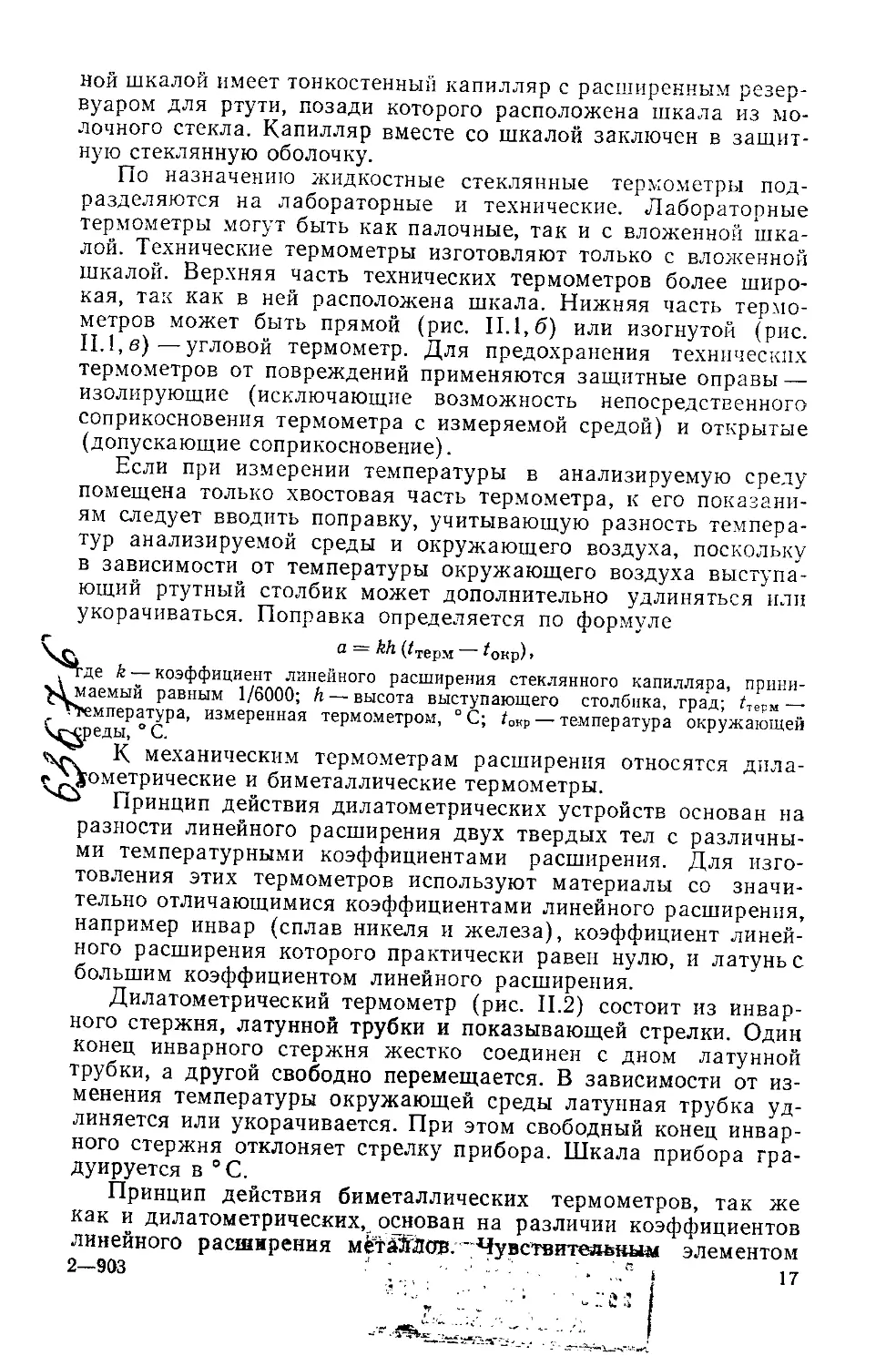
Если при измерении температуры в анализируемую среду
помещена только хвостовая часть термометра, к его показани-
ям следует вводить поправку, учитывающую разность темпера-
тур анализируемой среды и окружающего воздуха, поскольку
в зависимости от температуры окружающего воздуха выступа-
ющий ртутный столбик может дополнительно удлиняться или
укорачиваться. Поправка определяется по формуле
а = kh (/терм /окр) >
де k — коэффициент линейного расширения стеклянного капилляра, прини-
гемый равным 1/6000; h—высота выступающего столбика, град; /терм —
мпература, измеренная термометром, ° С; /0Кр — температура окружающей
еды, ° С.
К механическим термометрам расширения относятся дила-
ометрические и биметаллические термометры.
Принцип действия дилатометрических устройств основан на
разности линейного расширения двух твердых тел с различны-
ми температурными коэффициентами расширения. Для изго-
товления этих термометров используют материалы со значи-
тельно отличающимися коэффициентами линейного расширения,
например инвар (сплав никеля и железа), коэффициент линей-
ного расширения которого практически равен нулю, и латунь с
большим коэффициентом линейного расширения.
Дилатометрический термометр (рис. II.2) состоит из инвар-
ного стержня, латунной трубки и показывающей стрелки. Один
конец инварного стержня жестко соединен с дном латунной
трубки, а другой свободно перемещается. В зависимости от из-
менения температуры окружающей среды латунная трубка уд-
линяется или укорачивается. При этом свободный конец инвар-
ного стержня отклоняет стрелку прибора. Шкала прибора гра-
дуируется в °C.
Принцип действия биметаллических термометров, так же
как и дилатометрических, основан на различии коэффициентов
линейного расширения мётЙЙОТ. Чувствительным элементом
2—903 ' .‘..е i 17
1
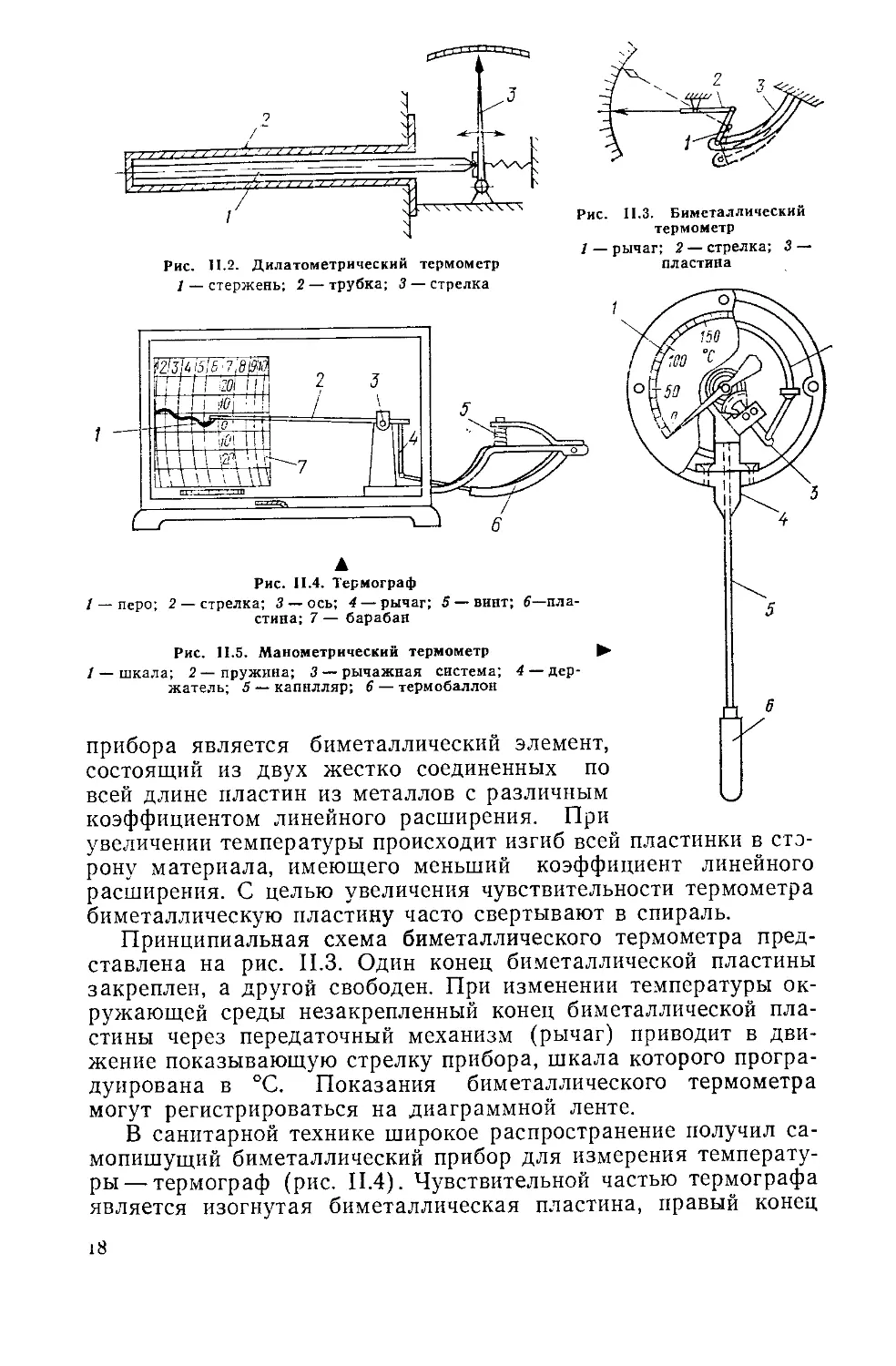
Рис. II.4. Термограф
/ — перо; 2 — стрелка; 3 — ось; 4— рычаг; 5 — винт; 6—пла-
стина; 7 — барабан
Рис. П.5. Манометрический термометр ►
/ — шкала; 2—пружина; 3 — рычажная система; 4— дер-
жатель; 5 — капилляр; 6 — термобаллон
прибора является биметаллический элемент,
состоящий из двух жестко соединенных по
всей длине пластин из металлов с различным
коэффициентом линейного расширения. При
увеличении температуры происходит изгиб всей
пластинки в сто-
рону материала, имеющего меньший коэффициент линейного
расширения. С целью увеличения чувствительности термометра
биметаллическую пластину часто свертывают в спираль.
Принципиальная схема биметаллического термометра пред-
ставлена на рис. II.3. Один конец биметаллической пластины
закреплен, а другой свободен. При изменении температуры ок-
ружающей среды незакрепленный конец биметаллической пла-
стины через передаточный механизм (рычаг) приводит в дви-
жение показывающую стрелку прибора, шкала которого програ-
дуирована в °C. Показания биметаллического термометра
могут регистрироваться на диаграммной ленте.
В санитарной технике широкое распространение получил са-
мопишущий биметаллический прибор для измерения температу-
ры— термограф (рис. II.4). Чувствительной частью термографа
является изогнутая биметаллическая пластина, правый конец
18
которой закреплен, а левый свободен. К левому концу пласти-
ны присоединен коленчатый рычаг со стрелкой. При изменении
температуры воздуха пластина изменяет свою кривизну, и ры-
чажок поворачивает стрелку относительно оси. Стрелка закан-
чивается пером в виде ковшика с медленно сохнущими чернила-
ми. На специальной бумажной ленте, надетой на барабан, перо
вычерчивает кривую изменения температуры. Барабан враща-
ется под действием часового механизма, помещенного внутри
барабана.
Принцип действия манометрических термометров основан на
изменении давления жидкости или газа, находящихся в замкну-
той системе, под действием температуры. Манометрический тер-
мометр (рис. II.5) представляет собой замкнутую систему, в
которую входят термобаллон, погружаемый в измеряемую сре-
ду, капилляр, упругая манометрическая пружина, держатель,
рычажная система и шкала, градуированная в °C.
В зависимости от вида среды, находящейся в замкнутой си-
стеме, манометрические термометры разделяются на жидкост-
ные, газовые и паровые. В качестве рабочего вещества в жид-
костных термометрах чаще всего используют ртуть. Систему га-
зовых термометров заполняют инертным газом (например,
азотом), а паровых — жидкостью с низкой температурой кипе-
ния (например, этиловым спиртом).
При погружении термобаллона в измеряемую среду с повы-
шающейся температурой вследствие различия коэффициентов
теплового расширения металла и рабочего тела увеличивается
давление в замкнутой системе, что вызывает деформацию ма-
нометрической пружины (она несколько выпрямляется), один
конец которой неподвижно закреплен, а второй при выпрямле-
нии поворачивает стрелку прибора. У самопишущих манометри-
ческих термометров пружина перемещает перо, которое запи-
сывает показания на диаграммной ленте, вращающейся с
помощью либо синхронного двигателя, либо часового меха-
низма.
Манометрические термометры выпускают с различной дли-
ной соединительного капилляра (наибольшая длина 60 м). Дли-
на капилляра определяет расстояние, на которое можно отнести
прибор от места установки термобаллона. Капилляр прибора
защищен от механических повреждений медной или стальной
оплеткой.
При определении температуры манометрическим термомет-
ром следует учитывать, что на точность измерения большое вли-
яние оказывает отклонение температуры внешней среды, где
находится соединительный капилляр, от температуры, при ко-
торой производилась градуировка прибора (20° С).
Термометры сопротивления. Принцип действия термометров
сопротивления основан на свойстве металлов изменять свое
электрическое сопротивление при изменении температуры. Тер-
2*
19
Рис. II.6. Тер-
мометр сопро-
тивления
/—каркас; 2—
проволока;
3 — кожух
Рис. II.7. Принципиальная схе-
ма логометра
/ — магнит; 2 — рамки; 3 — ис-
точник питания
Рис. II.8. Принципиальная
схема уравновешенного мо-
ста
/ — источник питания;
2 — нуль-прибор
мометр сопротивления (рис. II.6) представляет собой каркас,
на который намотана тонкая проволока — медь или платина.
Для предохранения от механических воздействий термочувстви-
тельный элемент защищен сплошным или перфорированным ко-
жухом.
Установка для измерения температуры состоит из термомет-
ра сопротивления (датчика), измерительного прибора для из-
мерения сопротивления чувствительного элемента (датчика) со
шкалой, градуированной в °C, и источника питания. Датчик при-
соединяют к измерительному прибору соединительными прово-
дами. В качестве измерительных приборов чаще всего исполь-
зуют логометры и уравновешенные мосты.
Наряду с термометрами сопротивления для измерения тем-
пературы применяются также термосопротивления (термисто-
ры), изготовляемые из окислов металлов-полупроводников.
Термосопротивления, представляющие собой объемные нелиней-
ные электрические сопротивления, в отличие от металлов, при
нагревании уменьшают свое сопротивление. В настоящее время
термосопротивления используют в качестве чувствительного
элемента полупроводникового реле типа ПТР.
Логометр. Магнитоэлектрический прибор постоянного тока
(рис. II.7) в комплекте с термометром сопротивления применя-
ют в качестве вторичного прибора. Подвижная система лого-
метра состоит из двух рамок, расположенных под углом друг к
другу и вращающихся на одной оси в магнитном поле постоян-
ного магнита. Рамки изготовлены из тонкой медной проволоки и
20
подсоединены к источнику питания, ток от которого проходит по
двум цепям: через постоянное сопротивление R и обмотку од-
ной рамки, через термометр сопротивления Rt и обмотку другой
рамки. Ток, проходящий по рамкам, создает вращающие мо-
менты, действующие в противоположные стороны.
При увеличении измеряемой температуры среды увеличива-
ется сопротивление обмотки термометра Rt, уменьшается ток
и рамки начинают поворачиваться по часовой стрелке. Различ-
ным температурам измеряемой среды будут соответствовать
различные углы поворота рамок и укрепленной на них стрелки.
Логометры изготовляют показывающими и самопишущими.
С помощью самопишущих логометров регистрация температуры
производится на диаграммной ленте.
Автоматический электронный уравновешенный мост приме-
няется так же, как и логометр, в качестве вторичного прибора.
В основу этого прибора (рис. II.8) положен принцип измерения
сопротивлений уравновешенным мостом. Мостовая схема состо-
ит из двух плеч с постоянными сопротивлениями ц и г2, в третье
плечо включено переменное сопротивление г3 (реохорд), а в
четвертое — термометр сопротивления г4- Питание осуществля-
ется от источника питания по одной из диагоналей моста, в дру-
гую измерительную диагональ включен нуль-прибор (милли-
вольтметр).
Допустим, что при положении подвижного контакта сопро-
тивления Гз в точке а и температуре термометра г4, равной 0° С,
стрелка нуль-прибора установилась на нулевом делении, т. е. в
схеме моста наступило равновесие (баланс). При повышении
температуры термометра сопротивления г4 баланс в схеме мос-
та наступит в том случае, если подвижный контакт установить
.в точке б. Таким образом, каждому значению температуры сре-
ды, измеряемой термометром сопротивления, будет соответство-
вать определенное положение подвижного контакта, при кото-
ром мост окажется уравновешенным. Если подвижный контакт
соединить с показывающей стрелкой, то по шкале прибора мож-
но определить соответствующую положению контакта темпера-
туру. В автоматических уравновешенных мостах подвижный
контакт и показывающая стрелка перемещаются с помощью
электродвигателя, управляемого электронным устройством.
Термоэлектрические пирометры. Из курса физики известно,
что если спаять концы двух проводников из разных металлов,
то при нагревании спая возникает термоэлектродвижущая сила
и по проводникам пойдет ток. На использовании этого эффекта
построен термоэлектрический пирометр (рис. II.9). Термоэлект-
рическая пара (термопара) состоит из двух термоэлектродов А
и Б, концы которых, соединенные на сварке, образуют рабо-
чий спай. Свободные концы термоэлектродов компенсационны-
ми проводами соединены с милливольтметром или с электрон-
ным потенциометром, шкала которого проградуирована в ° С.
21
Принцип действия милливольтметра (рис. 11.10) основан на
взаимодействии магнитного потока, создаваемого постоянным
магнитом, и проводника, по которому протекает электрический
ток. При нагревании рабочего спая термопары ток, протекая
по рамке, взаимодействует с магнитным полем, вследствие чего
создается магнитоэлектрический момент, который поворачивает
рамку и закрепленную на ней стрелку. Угол поворота пропор-
ционален силе тока в термоэлектрической цепи.
Принцип действия потенциометра (рис. 11.11) основан на
уравнивании электродвижущей силы (создаваемой термопарой
и разностью потенциалов постороннего источника тока. Термо-
пара одним концом через нуль-прибор присоединена к началу
реохорда в точке А, а другим — к подвижному контакту в точ-
ке С. Источник тока замкнут на сопротивление АВ, называемое
в потенциометрах реохордом R. Если электродвижущая сила,
развиваемая термопарой, не равна разности потенциалов на
сопротивлении, то стрелка нуль-прибора отклонится от нулевого
положения. При равенстве указанных величин стрелка нуль-
прибора установится на нулевой отметке.
Рис. 11.10. Схема работы милливольтметра
совместно с термопарой
/ — рабочий спай; 2 —рамка; 3 — стрелка
Измерение температуры
производится следующим об-
разом: подвижный контакт в
точке С устанавливается в та-
кое положение, чтобы стрелка
нуль-прибора остановилась на
нулевой отметке, тогда указа-
тель, связанный с контактом в
точке С, покажет на шкале
прибора значение измеряемой
Рис. II.9. Термоэлектрический пиро-
метр
1 — рабочий спай; 2 — провода; 3—по-
тенциометр
рис. 11.11. Принципиальная схема по-
тенциометра
1 — термопара; 2 — нуль-прибор; 3 ис-
точник тока; 4 — указатель
22
температуры. В некоторых потенциометрах подвижный контакт
перемещается вручную (лабораторные), в других — автоматиче-
ски с помощью электродвигателя (автоматические). Измерение
температуры потенциометрами производится со значительно
большей точностью, чем милливольтметрами, так как показания
потенциометра не зависят от изменения сопротивления внешней
цепи.
§ 8. ИЗМЕРЕНИЕ ДАВЛЕНИЯ
Приборы, служащие для измерения давления выше атмо-
сферного, называются манометрами, а для измерения давления
ниже атмосферного — вакуумметрами. Для измерения малых
давлений (до 500 кгс/м2, или 5 кПа) используют микромано-
метры.
В зависимости от устройства приборы для измерения давле-
ния подразделяются на следующие группы:
жидкостные — измеряемое давление определяется давлением
столба жидкости соответствующей высоты;
пружинные — давление измеряется силой упругой деформа-
ции различного вида;
сильфонные и мембранные — давление измеряется силой уп-
ругой деформации сильфона или мембраны.
Если с помощью прибора можно измерять разность давле-
ний, то такой прибор называется дифференциальным маномет-
ром (дифманометром). Дифманометры применяются главным
образом для измерения расхода жидкости и газа по методу пе-
ременного перепада давления. Дифманометры также использу-
ются и для измерения давления — для фиксации избыточного
давления как разницы между абсолютным и атмосферным дав-
лением.
Жидкостные манометры. С помощью почти всех жидкостных
манометров можно измерять разность давлений и рассматри-
вать их как дифференциальные манометры.
Простейший жидкостный манометр (дифманометр) представ-
ляет собой U-образную стеклянную трубку, снабженную шка-
лой (рис. II.12, а). Трубка заполняется рабочей жидкостью (во-
дой, маслом и т.п.), которая по закону сообщающихся сосудов
устанавливается на одинаковом уровне в обоих коленах труб-
ки. Один конец трубки манометра соединяется резиновым шлан-
гом с емкостью, в которой измеряется давление, другой сооб-
щается с атмосферой. При давлении измеряемой среды больше
атмосферного уровень жидкости в трубке, находящейся под по-
вышенным давлением, опускается, а в трубке, находящейся под
атмосферным давлением, поднимается. Если давление измеряе-
мой среды меньше атмосферного, то уровень жидкости в трубке,
находящейся под разрежением, поднимается, а в другой опуска-
ется. Разность уровней жидкости h в обеих трубках есть величина
23
измеряемого давления. U-образные манометры применяются для
измерения небольших давлений (разрежений и разностей дав-
лений) .
При частых колебаниях измеряемого давления отсчет по
U-образному манометру производить крайне трудно. В этом
случае наиболее удобным прибором является однотрубный ча-
шечный жидкостный манометр (рис. 11.12,б), одна из трубок
которого представляет собой чашу, имеющую диаметр, во много
раз больший диаметра трубки.
Жидкость заливают в мано-
метр с таким расчетом, чтобы
уровень ее в трубке находился
против нулевого деления шка-
лы. При увеличении давления
р' уровень жидкости в трубке
поднимается в зависимости от
величины изменения давления,
а в чаше опустится. Так как
я)
Рис. П.12. Манометры
а — U-образный; б— чашечный
Рис. ПЛЗ. Чашечный^
микроманометр
1 — регулировочные вин-
ты; 2 — резервуар; 3 —
трехходовой кран; 4 —
регулятор нулевого по-
ложения; 5 — фиксатор
положения трубки; 6 —
измерительная трубка
Рнс. П.14. Кольцевой
манометр
1 — кольцевая трубка;
2 — стрелка; 3 — перего-
родка; 4 — штуцера; 5 —
опора
Рнс. 11.15. Жидкостные манометры
а— колокольный; 1, 3 — трубки; 2 — сосуд; 4 — коло-
кол; 5 — груз; 6 — стрелка; б — поплавковый: /, 4 —
сосуды; 2, 3 — трубки
24
понижение уровня в чаше вследствие ее большего диаметра не-
значительно, им можно пренебречь, и отсчет вести только по
уровню жидкости в трубке, что значительно упрощает процесс
измерения.
Для измерения давления в вентиляционной технике широко
применяется чашечный микроманометр — дифманометр (рис.
11.13), состоящий из резервуара (чаши), измерительной трубки,
которая может устанавливаться под определенным углом к го-
ризонту, фиксатора положения трубки, трехходового крана, ре-
гулятора нулевого положения рабочей жидкости и регулировоч-
ных винтов для установки прибора в горизонтальном положе-
нии. Прибор работает вместе с устройством для отбора
давления воздуха (трубки ПИТО), которое присоединяется
резиновыми шлангами к двум штуцерам трехходового крана.
На принципе кольцевых весов основано действие манометров
(дифманометров), в которых измерительный элемент выполнен
из кольцевой трубки (рис. 11.14), разделенной перегородкой.
С обеих сторон перегородки имеются два присоединительных
штуцера. Кольцо до половины заливается рабочей жидкостью.
Если уровень рабочей жидкости в левой половине кольца по-
низится, а следовательно, в правой повысится, кольцо начнет
поворачиваться по часовой стрелке до тех пор, пока масса
столба жидкости не уравновесится грузом-противовесом. Стрел-
ка прибора покажет на шкале величину измеряемого давления.
При использовании кольцевых манометров для измерения раз-
ности давления (в качестве дифманометров) на левую половину
кольца подается большее, а на правую меньшее давление.
Колокольные манометры (дифманометры) предназначены
для измерения давления неагрессивных газов. Манометр (рис.
11.15, п) состоит из сосуда с рабочей жидкостью и колокола, со-
единенного через систему рычагов со стрелкой. Внутрь колокола
введена трубка 1, соединенная со средой, давление которой сле-
дует измерить. При изменении давления в подколокольном про-
странстве колокол либо поднимается, приводя в движение стрел-
ку прибора, либо опускается. Этим прибором можно измерять
разность давлений, т. е. использовать его в качестве дифмано-
метра. В этом случае сосуд оборудуется трубкой 3 для соеди-
нения подколокольного пространства с измеряемой средой.
Поплавковые манометры по принципу действия аналогичны
чашечным. Манометр (рис. 11.15, б) состоит из двух сообщаю-
щихся сосудов 1 и 4, заполненных ртутью- На поверхности рту-
ти в сосуде 4 находится чугунный поплавок, соединенный через
передающее устройство со стрелкой прибора. Если с помощью
трубки 3 сосуд 4 соединить со средой с избыточным давлением,
уровень ртути в нем опустится, а в сосуде 1 поднимется. По-
плавок, опускаясь, приведет в движение стрелку, которая по-
кажет величину избыточного давления. В том случае, когда
нужно определить разность давлений, к измеряемой среде под-
ключают одновременно две трубки 2 и 3.
25
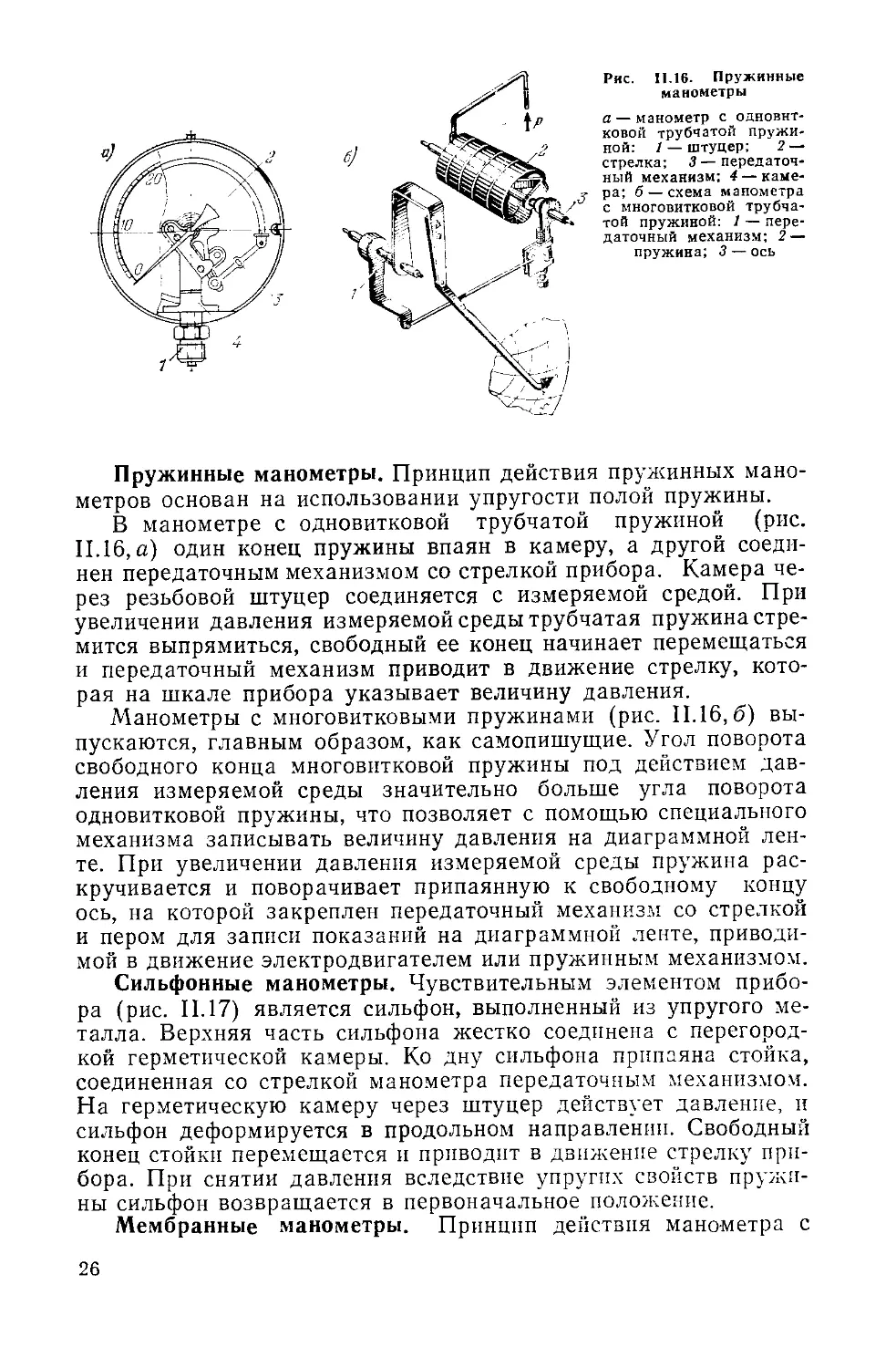
Рис. 11.16. Пружинные
манометры
а—манометр с одновнт-
ковой трубчатой пружи-
ной: 1 — штуцер; 2 —
стрелка; 3 — передаточ-
ный механизм; 4 — каме-
ра; б — схема манометра
с многовитковой трубча-
той пружиной: 1 — пере-
даточный механизм; 2 —
пружина; 3 — ось
Пружинные манометры. Принцип действия пружинных мано-
метров основан на использовании упругости полой пружины.
В манометре с одновитковой трубчатой пружиной (рис.
11.16, а) один конец пружины впаян в камеру, а другой соеди-
нен передаточным механизмом со стрелкой прибора. Камера че-
рез резьбовой штуцер соединяется с измеряемой средой. При
увеличении давления измеряемой среды трубчатая пружина стре-
мится выпрямиться, свободный ее конец начинает перемещаться
и передаточный механизм приводит в движение стрелку, кото-
рая на шкале прибора указывает величину давления.
Манометры с многовитковыми пружинами (рис. 11.16, б) вы-
пускаются, главным образом, как самопишущие. Угол поворота
свободного конца многовитковой пружины под действием дав-
ления измеряемой среды значительно больше угла поворота
одновитковой пружины, что позволяет с помощью специального
механизма записывать величину давления на диаграммной лен-
те. При увеличении давления измеряемой среды пружина рас-
кручивается и поворачивает припаянную к свободному концу
ось, на которой закреплен передаточный механизм со стрелкой
и пером для записи показаний на диаграммной ленте, приводи-
мой в движение электродвигателем или пружинным механизмом.
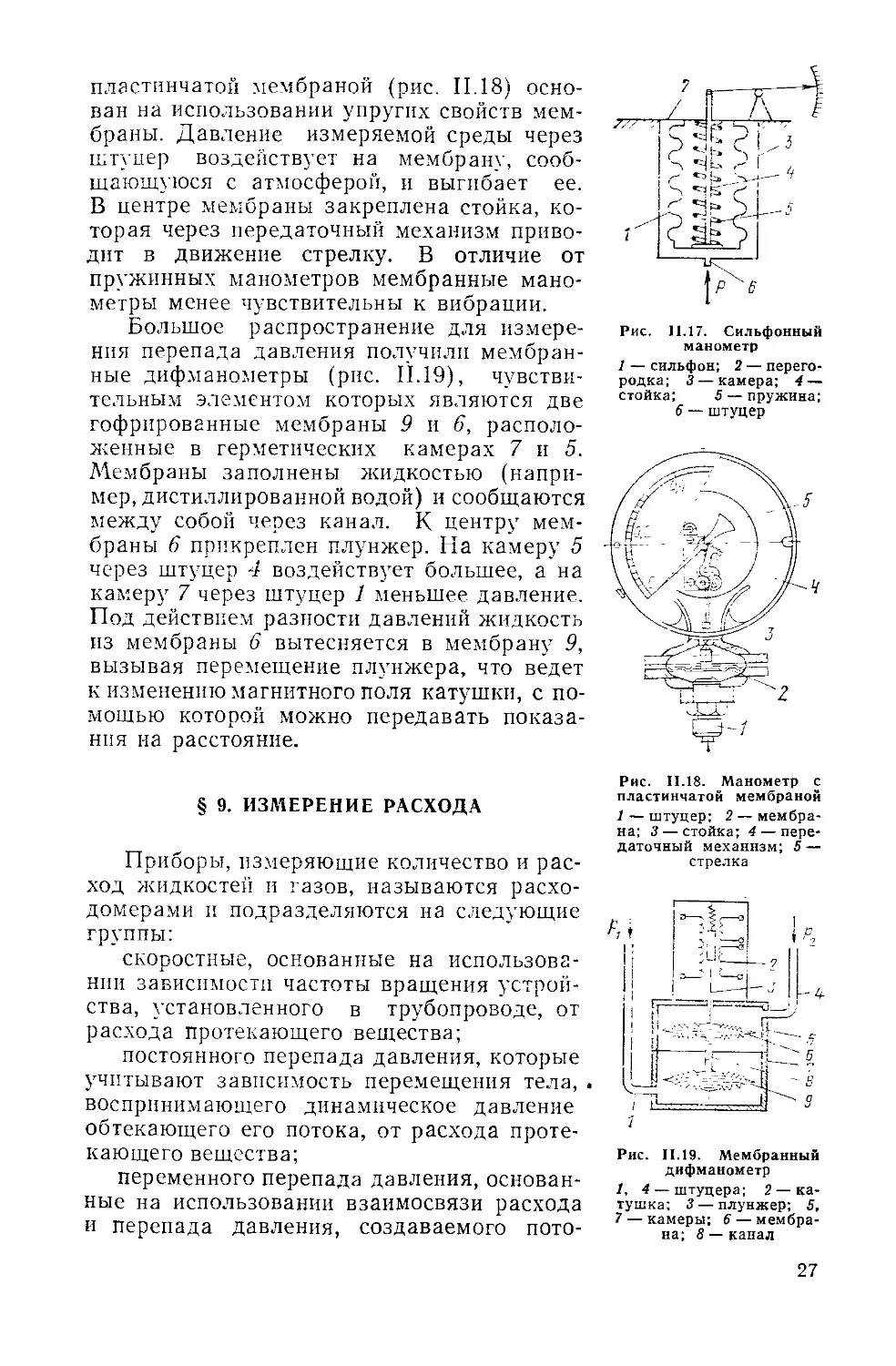
Сильфонные манометры. Чувствительным элементом прибо-
ра (рис. II. 17) является сильфон, выполненный из упругого ме-
талла. Верхняя часть сильфона жестко соединена с перегород-
кой герметической камеры. Ко дну сильфона припаяна стойка,
соединенная со стрелкой манометра передаточным механизмом.
На герметическую камеру через штуцер действует давление, и
сильфон деформируется в продольном направлении. Свободный
конец стойки перемещается и приводит в движение стрелку при-
бора. При снятии давления вследствие упругих свойств пружи-
ны сильфон возвращается в первоначальное положение.
Мембранные манометры. Принцип действия манометра с
26
пластинчатой мембраной (рис. 11.18) осно-
ван на использовании упругих свойств мем-
браны. Давление измеряемой среды через
штуцер воздействует на мембрану, сооб-
щающуюся с атмосферой, и выгибает ее.
В центре мембраны закреплена стойка, ко-
торая через передаточный механизм приво-
дит в движение стрелку. В отличие от
пружинных манометров мембранные мано-
метры менее чувствительны к вибрации.
Большое распространение для измере-
ния перепада давления получили мембран-
ные дифманометры (рис. 11.19), чувстви-
тельным элементом которых являются две
гофрированные мембраны 9 и 6, располо-
женные в герметических камерах 7 и 5.
Мембраны заполнены жидкостью (напри-
мер, дистиллированной водой) и сообщаются
между собой через канал. К центру мем-
браны 6 прикреплен плунжер. На камеру 5
через штуцер 4 воздействует большее, а на
камеру 7 через штуцер 1 меньшее давление.
Под действием разности давлений жидкость
из мембраны 6 вытесняется в мембрану 9,
вызывая перемещение плунжера, что ведет
к изменению магнитного поля катушки, с по-
мощью которой можно передавать показа-
ния на расстояние.
§ 9. ИЗМЕРЕНИЕ РАСХОДА
Приборы, измеряющие количество и рас-
ход жидкостей и газов, называются расхо-
домерами и подразделяются на следующие
группы:
скоростные, основанные на использова-
нии зависимости частоты вращения устрой-
ства, установленного в трубопроводе, от
расхода протекающего вещества;
постоянного перепада давления, которые
учитывают зависимость перемещения тела, .
воспринимающего динамическое давление
обтекающего его потока, от расхода проте-
кающего вещества;
переменного перепада давления, основан-
ные на использовании взаимосвязи расхода
и перепада давления, создаваемого пото-
Рис. 11.17. Сильфонный
манометр
1 — сильфон; 2 — перего-
родка; 3 — камера; 4 —
стойка; 5 — пружина;
6 — штуцер
Рис. 11.18. Манометр с
пластинчатой мембраной
1 — штуцер; 2— мембра-
на; 3 — стойка; 4 — пере-
даточный механизм; 5 —
стрелка
Рис. II.19. Мембранный
дифманометр
1, 4 — штуцера; 2 — ка-
тушка; 3 — плунжер; 5»
7 — камеры; 6 — мембра-
на; 8— канал
27
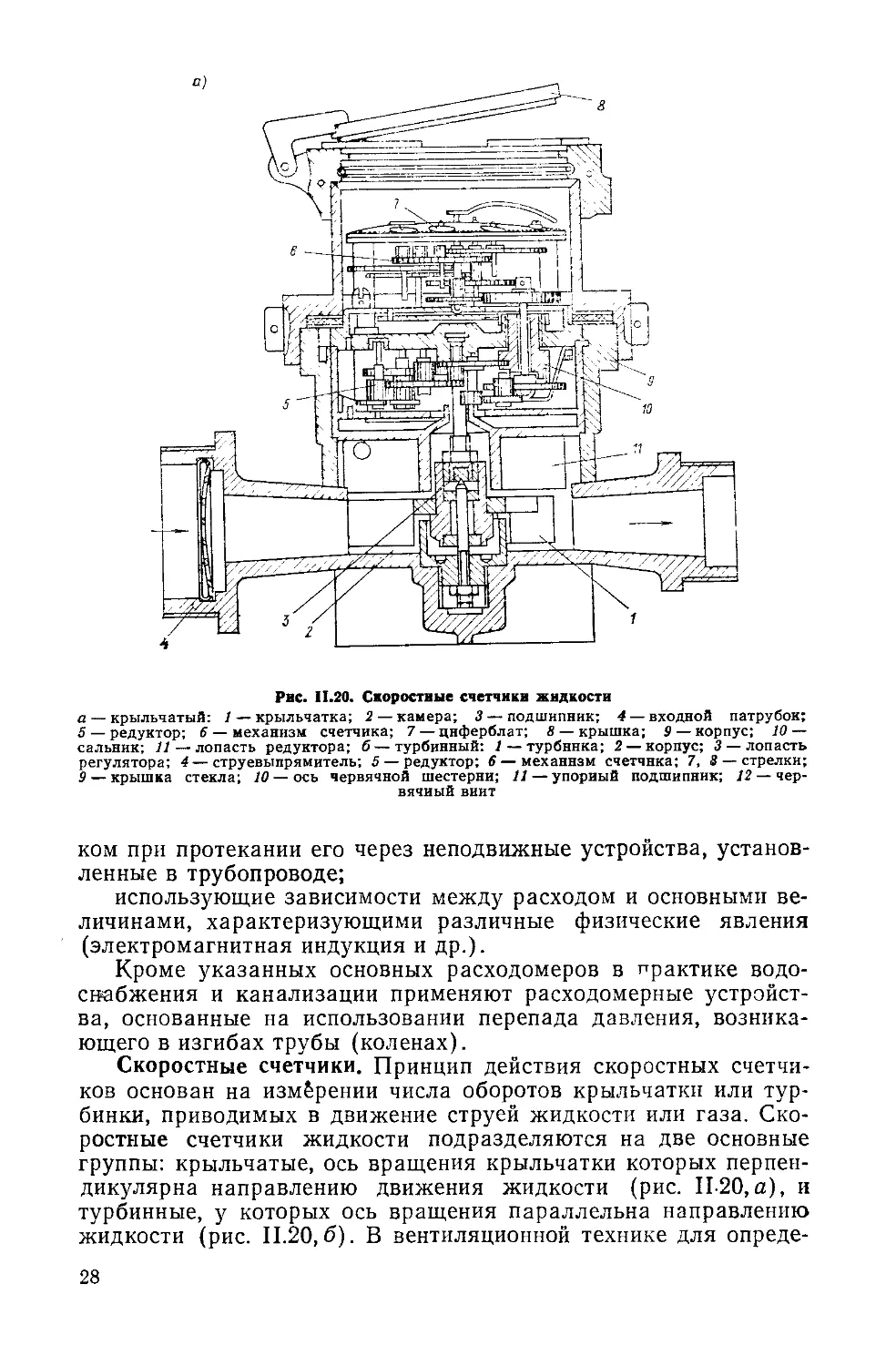
Рве. 11.20. Скороствые счетчика жидкости
а — крыльчатый: / — крыльчатка; 2 — камера; 3 —подшипник; 4 — входной патрубок;
5— редуктор; 6 — механизм счетчика; 7 — циферблат; 8 — крышка; 9— корпус; 10 —
сальник; //—лопасть редуктора; б — турбинный: 1 — турбинка; 2— корпус; 3 — лопасть
регулятора; 4 — струевыпрямитель; 5 — редуктор; 6 — механизм счетчика; 7, 8 — стрелки;
9 — крышка стекла; 10 — ось червячной шестерни; // — упорный подшипник; 12— чер-
вячный винт
ком при протекании его через неподвижные устройства, уставов-
ленные в трубопроводе;
использующие зависимости между расходом и основными ве-
личинами, характеризующими различные физические явления
(электромагнитная индукция и др.).
Кроме указанных основных расходомеров в практике водо-
снабжения и канализации применяют расходомерные устройст-
ва, основанные на использовании перепада давления, возника-
ющего в изгибах трубы (коленах).
Скоростные счетчики. Принцип действия скоростных счетчи-
ков основан на измерении числа оборотов крыльчатки или тур-
бинки, приводимых в движение струей жидкости или газа. Ско-
ростные счетчики жидкости подразделяются на две основные
группы: крыльчатые, ось вращения крыльчатки которых перпен-
дикулярна направлению движения жидкости (рис. П-20,а), и
турбинные, у которых ось вращения параллельна направлению
жидкости (рис. 11.20,б). В вентиляционной технике для опреде-
28
ления скорости и расхода воздуха используют крыльчатые и
чашечные счетчики, называемые анемометрами.
Крыльчатый анемометр (рис. 11.21, а) устанавливается в
воздушный поток, таким образом, чтобы его ось была направ-
лена вдоль потока, навстречу ему. Поток воздуха вращает
крыльчатку и с помощью передаточного механизма приводит в
движение стрелки счетного механизма, которые на шкалах по-
казывают значение параметра в единицах, сотнях и тысячах.
Счетный механизм включают пусковым рычажком на 50—100 с.
Разделив разность конечного и начального показания счетчика
на время работы счетного механизма, определяют число деле-
ний в 1 с, а по графику, прилагаемому к прибору, находят ско-
рость движения воздуха. Расход воздуха, м3/ч, вычисляют по
формуле
L = 3600 Го,
где F — площадь воздуховода или проема, где производилось измерение, м2;
v — скорость воздушного потока, м/с.
29
С помощью крыльчатого анемометра можно измерять ско-
рость потока воздуха от 0,3 до 5 м/с.
Для измерения скорости воздушного потока от 1 до 20 м/с
применяют чашечный анемометр (рис. 11.21, б). Метод измере-
ния скорости воздуха чашечным анемометром аналогичен ме-
тоду измерения крыльчатым анемометром.
Парциальные расходомеры позволяют измерять большие
расходы жидкости с помощью малогабаритных приборов.
Действие парциальных расходомеров основано на измерении не
всего расхода, а лишь части его.
На рис. 11.22 представлена схема парциального водомера, яв-
ляющегося комбинацией скоростного крыльчатого водомера и
колена, выполняющего функцию сужающего органа. Расход
воды через ответвление трубопровода пропорционален расходу
основного потока, поэтому количество воды, протекающей по
трубопроводу, можно определить путем умножения показаний
скоростного водомера на постоянный
коэффициент. Колено создает перепад
давлений, необходимый для преодоле-
ния сопротивлений ответвления. Диа-
метр обводной трубки и перепад на
колене подбирают так, чтобы через
обводную трубку протекало около 1%
всей массы воды. На обводной трубке
устанавливают пробковые краны для
отключения водомера.
Расходомеры постоянного перепада
Рис. 11.22. Парциальный расхо-
домер
1 — водомер; 2 — муфта; 3 —
контргайка; 4—верхняя трубка;
5 — накидные гайки; 6—штуцер;
7 — пробочные краны; 8— верх-
няя седелка: 9 — стяжные бол-
ты; 10— нижняя седелка; 11—
нижняя трубка
F
U
Рис. 11.21. Анемомет-
ры
а — крыльчатый; б—
чашечный; /—крыль-
чатка; 2— обечайка;
3 — пусковой рыча-
жок; 4 — счетный ме-
ханизм; 5 — кресто-
вина: 6 — винт
Рнс. 11.23. Ротометр со стек-
лянной трубкой
1 — ниппели для присоеди-
нения шлангов; 2—кониче-
ская трубка; 3 — поплавок
30
давления. Эти расходомеры относятся к группе расходомеров
обтекания, т. е. приборов, основанных на зависимости перемеще-
ния тела, воспринимающего динамическое давление обтекающе-
го его потока, от расхода измеряемой среды. Измерительный ор-
ган— вертикально перемещающееся тело (поплавок, клапан) —
в зависимости от расхода изменяет площадь проходного отвер-
стия таким образом, что перепад давления по обе его стороны
остается постоянным.
Наиболее распространенными расходомерами постоянного
перепада являются ротаметры, в которых измерительным орга-
ном служит поплавок, перемещающийся внутри конической
трубки (рис. 11.23). Отдельные типы ротаметров выпускают с
устройствами, обеспечивающими передачу показаний на раз-
личные расстояния.
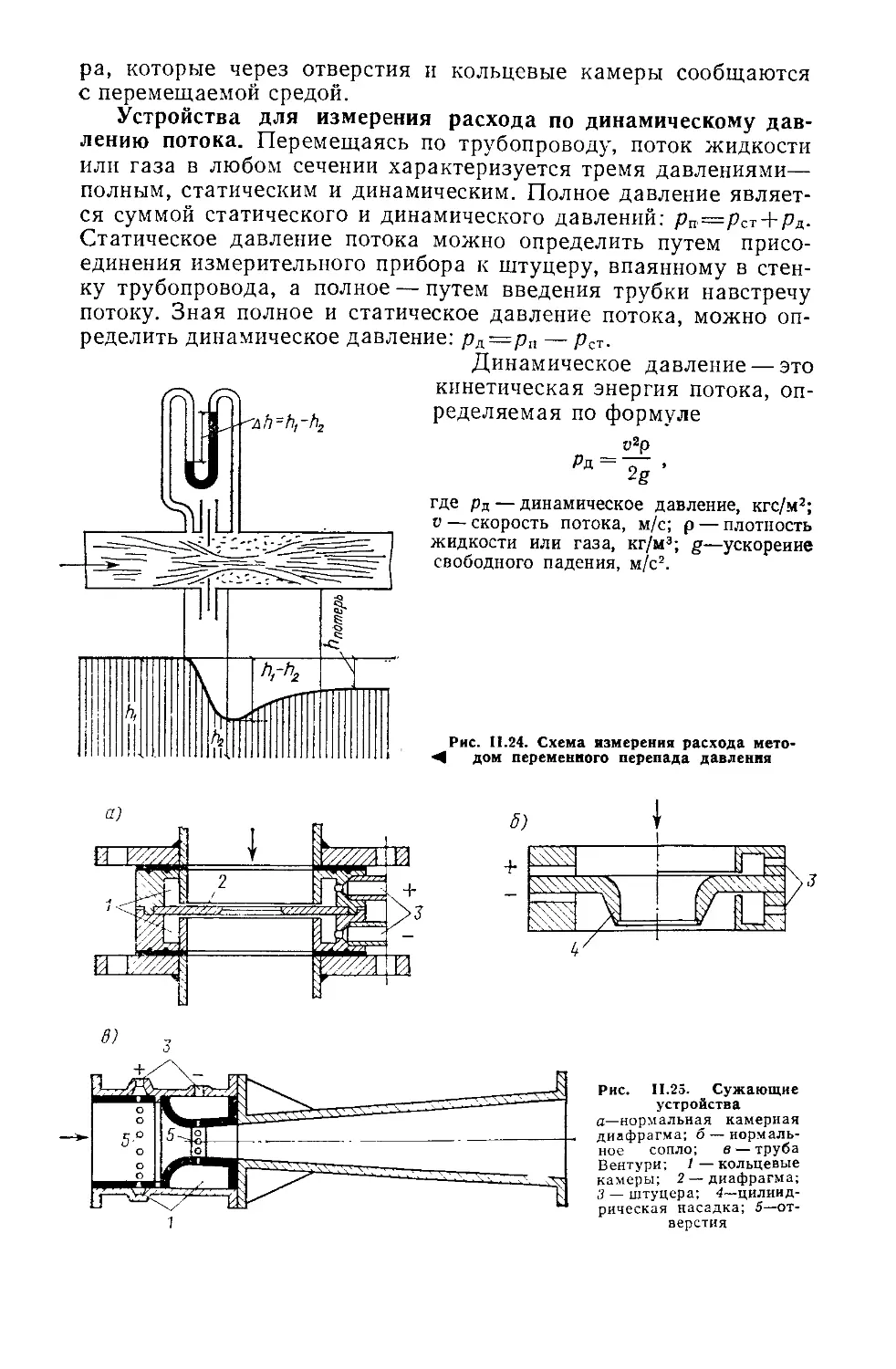
Устройства для измерения расхода методом переменного пе-
репада давления. Сущность метода заключается в том, что при
течении жидкости или газа через сужение в трубопроводе часть
потенциальной энергии переходит в кинетическую -— статичес-
кое давление потока уменьшается, а динамическое увеличива-
ется. Разница давлений до сужающего устройства и после него
называется перепадом давления. Перепад давления изменяется
при колебании расхода жидкости или газа, протекающего через
сужение, а следовательно, может служить мерой расхода.
Сужение струи начинается до сужающего устройства (рис.
11.24), по выходе из него на некотором расстоянии струя имеет
наименьшее сечение, затем она расширяется до тех пор, пока
ее сечение не станет равным сечению трубопровода. Установив
дифференциальные манометры до и после сужающего устройст-
ва, можно измерить перепад давления и определить расход
жидкости или газа, кг/ч, по формуле
G = 0,0125 aed2 Кд/г/р ,
где a — коэффициент расхода, зависящий от отношения диаметра отверстия
сужающего устройства к диаметру трубопровода, чистоты изготовления
кромки отверстия, шероховатости трубы и температуры, е — коэффициент,
учитывающий расширение жидкости или газа; d — диаметр отверстия сужа-
ющего устройства, мм; Д/г—-перепад давления в сужающем устройстве,
кгс/м2 (9,8 Па); р — плотность жидкости или газа, кг/м3.
В качестве сужающих устройств применяются нормальные
диафрагмы, сопла и трубы Вентури. Нормальная камерная диа-
фрагма (рис. 11.25, а) состоит из двух кольцевых камер, диа-
фрагмы и штуцеров для присоединения дифференциального ма-
нометра. Отверстие в диафрагме со стороны входа потока имеет
острую кромку с углом 90°, а на выходе — расточку с углом
45°- Нормальное сопло (рис. 11.25, б) обеспечивает гораздо
меньшие потери давления, чем диафрагма. Давление замеряет-
ся до сужения потока и в начале цилиндрической насадки. Наи-
меньшие потери давления потока при его сужении обеспечивает
труба Вентури (рис. 11.25,в). Давления замеряют через штуце-
31
ра, которые через отверстия и кольцевые камеры сообщаются
с перемещаемой средой.
Устройства для измерения расхода по динамическому дав-
лению потока. Перемещаясь по трубопроводу, поток жидкости
или газа в любом сечении характеризуется тремя давлениями—
полным, статическим и динамическим. Полное давление являет-
ся суммой статического и динамического давлений: ра=рст+рл.
Статическое давление потока можно определить путем присо-
единения измерительного прибора к штуцеру, впаянному в стен-
ку трубопровода, а полное — путем введения трубки навстречу
потоку. Зная полное и статическое давление потока, можно оп-
ределить динамическое давление: Рд=рп — Рст.
Динамическое давление — это
кинетическая энергия потока, оп-
ределяемая по формуле
в)
г2Р
Pa = ^g ’
где рд — динамическое давление, кгс/м2;
v — скорость потока, м/с; р — плотность
жидкости или газа, кг/м3; g—ускорение
свободного падения, м/с2.
Рис. 11.24. Схема измерения расхода мето-
дом переменного перепада давления
Рис. 11.25. Сужающие
устройства
а_НОрмальная камерная
диафрагма; б —нормаль-
ное сопло; в — труба
Вентури; 1 — кольцевые
камеры; 2 — диафрагма;
3 — штуцера; 4—цилинд-
рическая насадка; 5—от-
верстия
Из этой формулы можно опре-
делить скорость потока
v = VrpJl-2g/p.
Скорость потока воздуха при
температуре, близкой к 20° С,
можно___определять по формуле
4,04 р^Рд. Зная скорость потока,
по уравнению L=3600 Fv, можно
определить расход жидкости или
газа.
В вентиляционной технике ста-
тическое И полное дэвление ОПре~ Рнс. 11.26. Пневмометрнческая трубка,
деляют с помощью пневмометри-
ческой трубки (рис. 11.26).
Отверстие 1 нижней трубки направлено против потока и служит
для определения полного давления, а отверстие 2 верхней труб-
ки служит для измерения статического давления.
Пневмометрнческая трубка присоединяется к дифференци-
альному манометру (U-образному манометру или микромано-
метру), который показывает величину динамического давления
в том месте трубопровода, где расположены отборные отверстия
трубки. Учитывая неравномерность скорости потока (наиболь-
шая в центре, наименьшая у стенок канала), для получения
расхода с достаточной достоверностью измерения необходимо
производить в нескольких точках сечения воздуховода.
Устройства для измерения электропроводных жидкостей и
растворов. В последние годы получил распространение метод
измерения расхода электропроводных жидкостей и растворов,
основанный на явлении электромагнитной индукции. При про-
хождении электропроводной жидкости через однородное маг-
нитное поле в жидкости, как и в движущемся проводнике, воз-
никает электродвижущая сила (э.д-с.), пропорциональная сред-
ней скорости потока жидкости; э. д. с., образующаяся в жидкости,
измеряется посредством двух диаметрально противоположных
электродов.
Расходомер состоит из датчика и измерительного блока, ко-
торый имеет выход по постоянному току 0—5 мА, позволяющий
применять вторичные приборы и другие устройства аналоговой
ветви Государственной системы приборов (ГСП). В измери-
тельный блок расходомера встроен показывающий прибор со
100%-ной шкалой. Измерительный комплект индукционного
расходомера обеспечивает точность показаний, соответствующую
классу 1,5 во всем диапазоне шкалы.
Индукционный метод выгодно отличается от метода пере-
менного перепада давлений тем, что последний обеспечивает точ-
ность показаний, соответствующую классу 1,5, только в диапа-
зоне от 30 до 100% шкалы прибора.
3—903
33
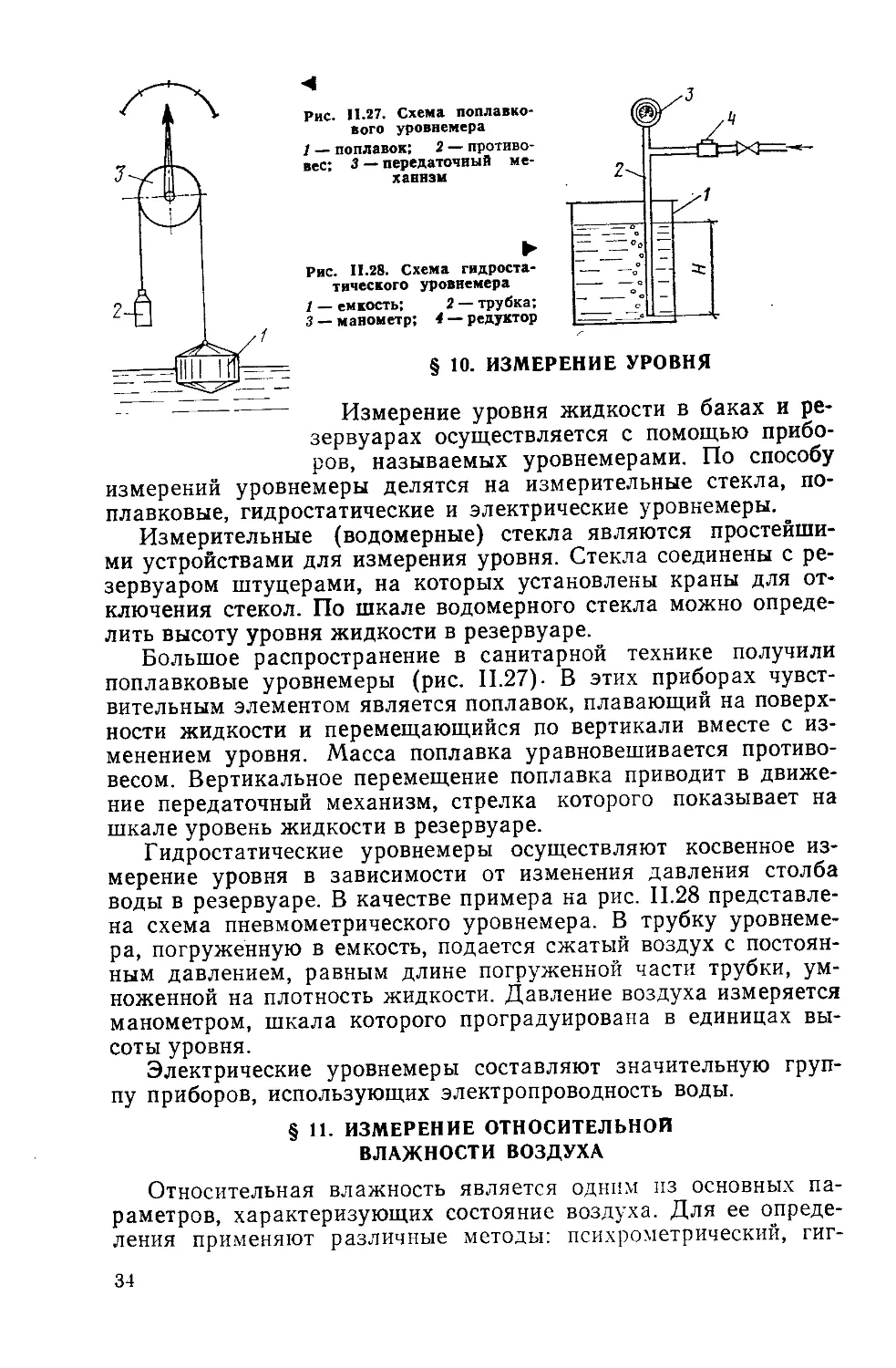
Рис. 11.27. Схема поплавко-
вого уровнемера
1 — поплавок: 2 — противо-
вес: 3 — передаточный ме-
ханизм
Рис. П.28. Схема гидроста-
тического уровнемера
1 — емкость; 2 — трубка:
3 — манометр; 4 — редуктор
§ 10. ИЗМЕРЕНИЕ УРОВНЯ
---------------Измерение уровня жидкости в баках и ре-
зервуарах осуществляется с помощью прибо-
ров, называемых уровнемерами. По способу
измерений уровнемеры делятся на измерительные стекла, по-
плавковые, гидростатические и электрические уровнемеры.
Измерительные (водомерные) стекла являются простейши-
ми устройствами для измерения уровня. Стекла соединены с ре-
зервуаром штуцерами, на которых установлены краны для от-
ключения стекол. По шкале водомерного стекла можно опреде-
лить высоту уровня жидкости в резервуаре.
Большое распространение в санитарной технике получили
поплавковые уровнемеры (рис. П.27). В этих приборах чувст-
вительным элементом является поплавок, плавающий на поверх-
ности жидкости и перемещающийся по вертикали вместе с из-
менением уровня. Масса поплавка уравновешивается противо-
весом. Вертикальное перемещение поплавка приводит в движе-
ние передаточный механизм, стрелка которого показывает на
шкале уровень жидкости в резервуаре.
Гидростатические уровнемеры осуществляют косвенное из-
мерение уровня в зависимости от изменения давления столба
воды в резервуаре. В качестве примера на рис. П.28 представле-
на схема пневмометрического уровнемера. В трубку уровнеме-
ра, погруженную в емкость, подается сжатый воздух с постоян-
ным давлением, равным длине погруженной части трубки, ум-
ноженной на плотность жидкости. Давление воздуха измеряется
манометром, шкала которого проградуирована в единицах вы-
соты уровня.
Электрические уровнемеры составляют значительную груп-
пу приборов, использующих электропроводность воды.
§ 11. ИЗМЕРЕНИЕ ОТНОСИТЕЛЬНОЙ
ВЛАЖНОСТИ ВОЗДУХА
Относительная влажность является одним из основных па-
раметров, характеризующих состояние воздуха. Для ее опреде-
ления применяют различные методы: психрометрический, гиг-
34
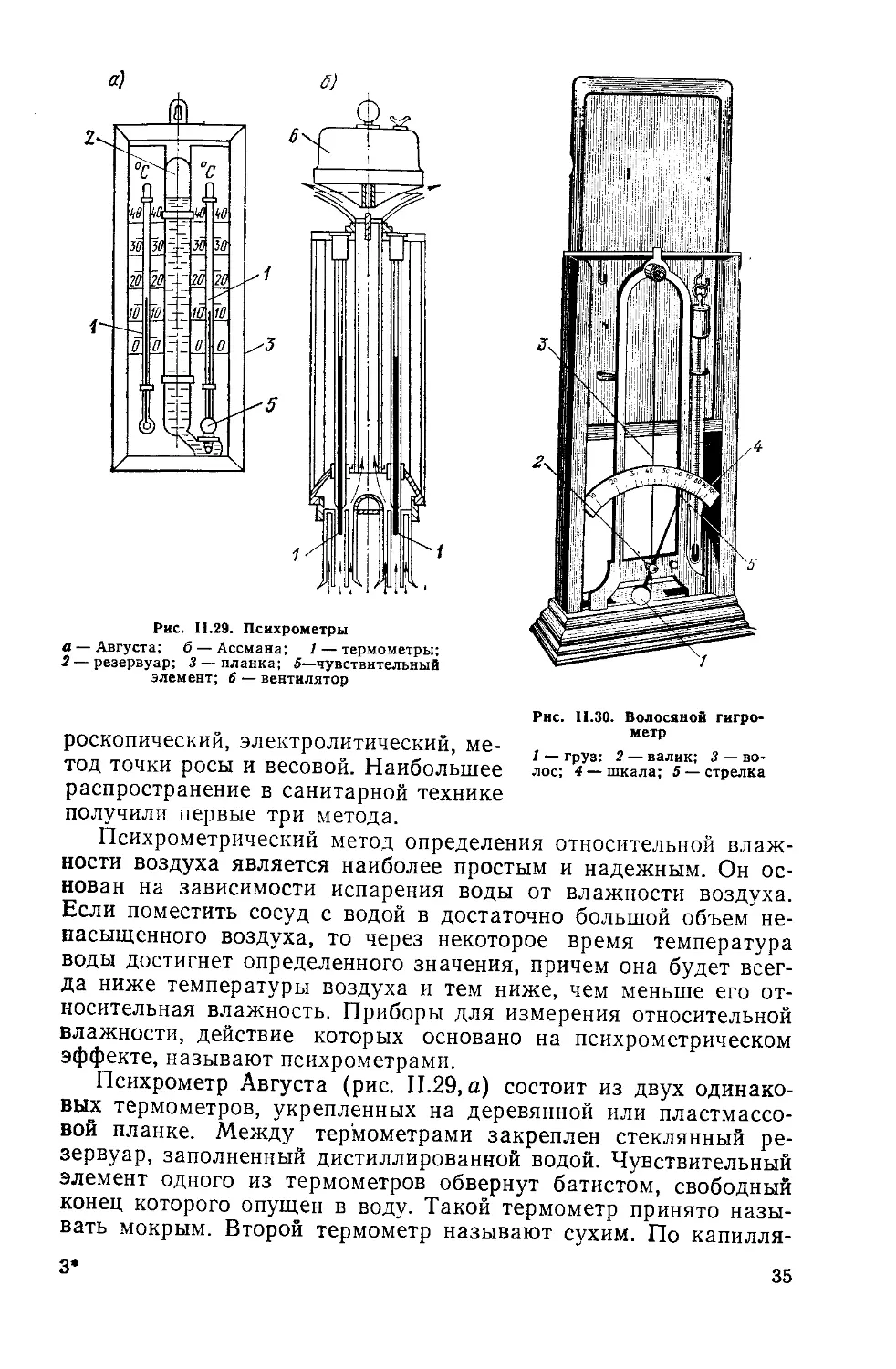
Рис. 11.29. Психрометры
а — Августа; б — Ассмана; 1 — термометры;
2—резервуар; 3 — планка; 5—чувствительный
элемент; 6 — вентилятор
роскопический, электролитический, ме-
тод точки росы и весовой. Наибольшее
распространение в санитарной технике
Рис. 11.30. Волосиной гигро-
метр
Z — груз: 2 — валик; 3 — во-
лос; 4 — шкала; 5 — стрелка
получили первые три метода.
Психрометрический метод определения относительной влаж-
ности воздуха является наиболее простым и надежным. Он ос-
нован на зависимости испарения воды от влажности воздуха.
Если поместить сосуд с водой в достаточно большой объем не-
насыщенного воздуха, то через некоторое время температура
воды достигнет определенного значения, причем она будет всег-
да ниже температуры воздуха и тем ниже, чем меньше его от-
носительная влажность. Приборы для измерения относительной
влажности, действие которых основано на психрометрическом
эффекте, называют психрометрами.
Психрометр Августа (рис. П.29, а) состоит из двух одинако-
вых термометров, укрепленных на деревянной или пластмассо-
вой планке. Между термометрами закреплен стеклянный ре-
зервуар, заполненный дистиллированной водой. Чувствительный
элемент одного из термометров обвернут батистом, свободный
конец которого опущен в воду. Такой термометр принято назы-
вать мокрым. Второй термометр называют сухим. По капилля-
35
рам батиста вода поднимается вверх и весь батист, окружаю-
щий чувствительный элемент термометра, пропитывается водой.
Показания мокрого термометра за счет испарения воды с по-
верхности батиста всегда ниже показаний сухого. Разность по-
казаний сухого и мокрого термометров, называется психромет-
рической разностью. Она тем больше, чем суше воздух, т. е. ни-
же его относительная влажность. Величина относительной
влажности находится с помощью психрометрических таблиц по
показаниям сухого и мокрого термометров. По психрометру
Августа невозможно получить точные значения относительной
влажности воздуха, так как чувствительные элементы термо-
метров не защищены от лучистого тепла.
Более совершенным прибором для определения относитель-
ной влажности воздуха является аспирационный психрометр
Ассмана (рис. П.29,б). Оба термометра прибора заключены в
металлические трубки, через которые просасывается воздух со
скоростью 2,5—3 м/с. Для создания движения воздуха в корпус
психрометра вмонтирован вентилятор, приводимый в движение
пружиной или электродвигателем. Поверхность трубок для за-
щиты термометров от лучистого тепла никелирована. В осталь-
ном устройство аспирационного психрометра не отличается от
устройства психрометра Августа-
Гигроскопический метод основан на способности некоторых
материалов приводить свою влажность в равновесное состояние
с влажностью воздуха. Изменение влажности гигроскопических
материалов сопровождается изменением их размеров. Из при-
боров для измерения относительной влажности воздуха, дейст-
вие которых основано на гигроскопическом методе, наиболее
распространенным является волосяной гигрометр (рис. II.30).
Чувствительным элементом этого прибора является обезжирен-
ный человеческий волос, один конец которого закреплен непод-
вижно, а другой обвернут вокруг нижнего валика и натянут
грузом. При изменении относительной влажности воздуха пучок
волос удлиняется или укорачивается, приводя в движение стрел-
ку, которая указывает на шкале значение относительной влаж-
ности.
В санитарной технике широкое распространение получил са-
мопишущий прибор для измерения относительной влажности
воздуха — гигрограф. Устройство гигрографа аналогично устрой-
ству термографа, за исключением чувствительной части. Чув-
ствительная часть гигрографа представляет' собой пучок обезжи-
ренных человеческих волос или круглую мембрану, изготовлен-
ную из специально обработанной гигроскопической пленки.
Изменение длины пучка волос или прогиба мембраны, вызван-
ное изменением относительной влажности воздуха, преобразу-
ется с помощью передаточного механизма в перемещение стрел-
ки с пером по диаграммной ленте.
В последнее время для измерения относительной влажности
36
воздуха стали широко использовать электро-
литические гигрометры. Принцип действия
электролитических датчиков влажности осно-
ван на зависимости электрических свойств
чувствительного элемента от влажности воз-
духа. Датчики по принципу действия и конст-
руктивному исполнению подразделяются на
подогревные и неподогревные (наиболее рас-
пространенные) .
На рис. 11.31 приведен неподогревный эле-
ктролитический датчик, представляющий со-
бой полый цилиндр из органического стекла
или полистирола, на котором намотан элек-
трод— провод из платины, никеля или сереб-
ра, покрытый горячим раствором солей, со-
держащих литий. При изменении относитель-
ной влажности окружающего датчик воздуха
меняется межвитковое сопротивление элек-
тролитической пленки между электродами-
датчиками, что и воспринимается измеритель-
Рис. 11.31. Электриче-
ский датчик ЭВЧ
ным мостом.
Кроме электролитических датчиков для измерения относи-
тельной влажности воздуха применяются пьезосорбционные дат-
чики. Влагочувствительным элементом такого датчика служит
калиброванный кварц, покрытый полиамидной пленкой- При из-
менении относительной влажности изменяется напряжение дат-
чика, которое и воспринимается измерительным прибором.
Глава III
УПРАВЛЕНИЕ САНИТАРНО-ТЕХНИЧЕСКИМИ
СИСТЕМАМИ
§ 12. ВИДЫ УПРАВЛЕНИЯ.
ИСТОЧНИКИ ЭНЕРГИИ
Для привода механизмов санитарно-технического оборудо-
вания (вентиляторов, насосов, компрессоров, воздушных фильт-
ров, воздуходувок и др.) применяются различные по устройству
и назначению электродвигатели. Наибольшее распространение
получили трехфазные асинхронные двигатели с короткозамкну-
тым ротором. Находят применение также двух- и четырехско-
ростные асинхронные двигатели, асинхронные двигатели с фаз-
ным ротором и реже синхронные двигатели.
В качестве электрических приводов регулирующих и запор-
ных органов (клапанов, заслонок, задвижек, вентилей и направ-
ляющих аппаратов) используют трехфазные асинхронные дви-
37
гатели с короткозамкнутым ротором, однофазные конденсатор-
ные асинхронные двигатели и электромагниты.
При составлении схем управления автоматизированными са-
нитарно-техническими устройствами учитывают электромехани-
ческие свойства электрических машин, которыми оборудуют ме-
ханизмы и регулирующие органы. Кроме того, к схемам управ-
ления предъявляют специфические требования, связанные с
реализацией технологических принципов автоматизации сани-
тарно-технического оборудования (например, определенная по-
следовательность включения электродвигателей механизмов
кондиционера, защитная блокировка по технологическим пара-
метрам — температуре, давлению и т. д.).
В общем случае под управлением понимается процесс пус-
ка, остановки и переключения, а также поддержание режима
работы приводов механизмов и регулирующих органов в соот-
ветствии с требованиями технологического процесса.
Для управления электроприводами санитарно-технического
оборудования применяется большое число различных схем, от-
ражающих все многообразие предъявляемых к ним требований.
Однако, учитывая относительно малое количество принципов
управления и блокировки, даже самые сложные схемы пред-
ставляют собой сочетание некоторого ограниченного числа ти-
повых схем управления, стандартных узлов и простейших це-
пей, связывающих эти схемы в узлы. Основными требованиями,
предъявляемыми к схемам управления электроприводами, явля-
ются: наибольшее соответствие схемы технологическому за-
данию; простота, надежность, гибкость и удобство управления;
четкость действия при нормальных и аварийных режимах ра-
боты; удобство монтажа, эксплуатации и ремонта; минималь-
ные габариты и экономичность; безопасность обслуживания.
Всю аппаратуру, с помощью которой реализуются многочис-
ленные требования, предъявляемые к схемам управления, мож-
но разделить на релейно-контактную и бесконтактную. Наиболее
широкое распространение в настоящее время получили схемы
управления, построенные на релейно-контактной аппаратуре.
Это связано с наличием большого числа разнообразной релей-
но-контактной аппаратуры, выпускаемой отечественной про-
мышленностью. Однако недостаточные надежность и долговеч-
ность этой аппаратуры, а также ограниченное применение ее в
условиях вредного воздействия окружающей среды вызывают
необходимость более широкого использования бесконтактной
аппаратуры. В практике часто применяются комплектные уст-
ройства, в частности, станции и блоки управления электропри-
водами различных типов. Применение комплектных устройств,
в основу которых положены типовые схемы управления, весьма
целесообразно, так как при этом уменьшаются затраты времени
на проектирование, повышается степень индустриализации мон-
тажа и его качество, облегчается эксплуатация.
58
Рассмотрим самые общие требования, предъявляемые к по-
давляющему большинству приводов механизмов и регулирую-
щих санитарно-технических систем
Прежде всего — это защита электроприводов, которая долж-
на обеспечить режимы работы, исключающие повреждение-
электрической изоляции машин и аппаратов, а также механиче-
ские поломки электрооборудования и исполнительных механиз-
мов. Применяются следующие основные виды защиты:
защита от токов короткого замыкания, которые могут при-
вести к повреждению изоляции обмоток и проводов и к меха-
ническим повреждениям двигателей;
тепловая защита от длительных перегрузок, которые вызы-
вают нагрев обмоток двигателей до температуры, превышающей
допустимую для электрической изоляции;
максимальная токовая защита от больших кратковременных
перегрузок, недопустимых для электродвигателей и вызывающих,
поломку кинематических звеньев системы;
нулевая или минимальная защита, срабатывающая при сни-
жении или исчезновении напряжения в сети и не допускающая
самопроизвольного включения двигателей при восстановлении
напряжения; самопроизвольное включение в большинстве случа-
ев недопустимо, так как может привести к поломке механизма
и создать опасность для (. бслуживающего персонала; кроме то-
го, при самопроизвольном включении большого числа приводов
после восстановления напряжения может произойти отключение
питания сети из-за пусковых токов, которые для асинхронных,
короткозамкнутых двигателей превышают номинальные в 5—
7 раз.
Для зашиты от токов короткого замыкания применяют плав-
кие предохранители, реле максимального тока и воздушные ав-
томаты, которые при превышении тока уставок отключают си-
ловую цепь.
При тепловой защите от длительных перегрузок обычно ис-
пользуют тепловые реле. Поскольку тепловые реле не могут за-
щищать от токов короткого замыкания и сами нуждаются в этой
защите, в схемах управления наряду с ними, как правило, пре-
дусматривают аппараты защиты от токов короткого замыкания.
В трехфазных системах тепловые реле обычно включаются в.
две фазы и действуют на одну или две пары выключающих кон-
тактов в цепях управления.
Максимальная токовая защита призвана быстро отключать,
систему от питающей сети при кратковременных перегрузках,,
связанных с чрезмерными токами. В тепловом отношении такие-
кратковременные перегрузки, даже с токами большей величины,
совершенно безопасны. Для максимальной токовой защиты при-
меняют электромагнитные реле максимального тока (например,,
для защиты асинхронных двигателей с фазным ротором). При
защите асинхронных короткозамкнутых двигателей, работаю-
39
щих в длительных режимах, к применению этих реле не прибе-
гают, а ограничиваются тепловыми реле.
Нулевая или минимальная защита осуществляется электро-
магнитными реле (реле напряжения) или контакторами, кото-
рые своими контактами удерживают цепь управления замкну-
той до тех пор, пока напряжение сети не снизится ниже нор-
мального. Повторное включение привода после восстановления
напряжения сети может произойти только после подачи ручного
или автоматического командного сигнала.
Электроснабжение зданий и сооружений, как правило, осу-
ществляется от электрических сетей через трансформаторные
подстанции. Для большинства зданий и комплексов применяется
энергоснабжение от двух независимых источников, как прави-
ло, с автоматическим включением секционного автомата при
самопроизвольном отключении одного из вводов. Основным ви-
дом энергии является трехфазный переменный ток 380/220 В,
50 Гц. В редких случаях для двигателей крупных агрегатов (бо-
лее 100—150 кВт) применяется так называемый глубокий ввод,
т. е. ввод электроэнергии напряжением 6—10 кВ непосредствен-
но от высоковольтной сети.
§ 13. АППАРАТУРА ЗАЩИТЫ, УПРАВЛЕНИЯ
И СИГНАЛИЗАЦИИ
Аппаратура защиты и управления. Всю аппаратуру, с по-
мощью которой осуществляется распределение электроэнергии,
защита и управление электроприводами, можно классифициро-
вать следующим образом:
аппаратура распределения энергии напряжением до 1000 В;
аппаратура защиты;
релейно-контактная аппаратура автоматического и неавто-
матического управления;
бесконтактная аппаратура автоматического управления.
Кратко рассмотрим назначение и принцип действия аппара-
туры, наиболее часто применяемой в схемах управления приво-
дами санитарно-технических систем.
Аппаратура распределения энергии напряжением, до 1000 В.
Рубильники (коммутационные аппараты с ручным приводом)
предназначены для сравнительно редких включений и отклю-
чений электрических цепей напряжением до 1000 В, а также
для переключения участков цепей с одного источника питания на
другой. Рубильник (рис. III.1, а) состоит из отрывного и раз-
рывного ножей, двух контактных стоек (верхней и нижней),
объединенных в жесткую конструкцию с помощью изолирую-
щей плиты и рукоятки. Рубильники бывают одно-, двух-, трех-
и многополюсные.
Пакетные выключатели и переключатели применяются в це-
пях постоянного и переменного тока напряжением до 500 В и
40
Рис. 111.1. Электрические аппараты
а — рубильник: 1 — отрывной нож; 2 — плита; 3 — кон-
тактные стойки; 4 — рукоять; 5 — разрывной нож; б—
плавкий предохранитель: 1 — основание; 2 — вставка; в-~
контактор; 1 — плита; 2 — обмотка; 3 — дугогаснтельное
устройство; 4 — контакты; 5 — магнитная система; 6 —
блок-коитакты; г — кнопочный элемент; д — путевой вы-
ключатель
•служат для довольно сложных переключений. Их используют в
силовых цепях и цепях управления. Пакетные выключатели п
переключатели бывают одно-, двух-, трех- и многополюсные.
Изготовляют их в виде пакетов-колец, представляющих собой
один полюс-фазу. Многополюсные выключатели и переключате-
ли составляют из отдельных пакетов по числу полюсов. Пакетные
выключатели изготовляются на номинальный ток от 6 до 400 А
и не приспособлены для отключения токов короткого замыка-
ния.
Кнопочные выключатели, предназначенные для управления
.двигателями малой мощности (до 3—4 кВт), работающими на
переменном токе напряжением до 500 В, представляют собой
механические выключатели, снабженные кнопками «Пуск» и
«Стоп».
Аппаратура защиты. Плавкий предохранитель — это комму-
тационный аппарат однократного действия, который при вели-
чине тока больше заданной размыкает электрическую цепь пу-
тем расплавления плавкой вставки, нагреваемой током. Этот
аппарат служит для защиты участка цепи или электрических
установок от разрушающего действия токов короткого замыка-
ния или от длительных перегрузок. Предохранитель состоит из
корпуса-основания и плавкой вставки (рис. III.1,6). Плавкая
вставка, включенная в цепь последовательно с нагрузкой, явля-
ется самым слабым в тепловом отношении участком в этой це-
пи. Если по цепи потечет аварийный ток, плавкая вставка пере-
горит ранее других частей цепи и прекратит протекание тока-
Плавкие вставки изготовляют из свинца, сплавов свинца и оло-
ва, цинка, меди или серебра. Промышленность изготовляет
большое число разных по конструкции и техническим характе-
ристикам предохранителей, которые находят широкое примене-
ние в устройствах защиты.
Автоматический воздушный выключатель — коммутацион-
ный аппарат, как правило, ручного включения, предназначен-
ный для автоматического отключения цепей при возникновении
в них недопустимых перегрузок и токов короткого замыкания,
для нечастых включений и отключений тех же цепей при нор-
мальных условиях, для ручного пуска и отключения асинхрон-
ных двигателей с короткозамкнутым ротором и защиты их от
недопустимой перегрузки. Воздушными эти выключатели на-
званы потому, что возникающая на их контактах дуга гасится
в воздушной среде. Применяются они в сетях переменного то-
ка напряжением до 500 В и постоянного тока напряжением до
3000 В. Выключатели снабжены автоматическими средствами
отключения и защиты. По выполняемым функциям защиты ав-
томатические выключатели разделяются на автоматы макси-
мального тока, понижения напряжения и др. Чаще всего их вы-
полняют комбинированными для различных защит, т. е. автомат
максимального тока с тепловыми реле или автомат максималь-
42
кого тока с реле минимального напряжения. Автоматы бывают
одно-, двух- и трехфазными и выпускаются на номинальные то-
ки до 800 А и более при напряжении до 500 В.
Тепловое реле — это коммутационный аппарат, который от-
ключает цепь управления электродвигателя или автоматический
воздушный выключатель при достижении элементом реле за-
данной температуры, характеризующей величину и длительность
перегрузки. Весьма широкое распространение получили меха-
низмы, состоящие из биметаллического элемента, который из-
меняет свои физические свойства под действием температуры и
системы рычагов.
Электрические тепловые реле могут иметь непосредственный
подогрев (когда ток проходит через биметаллический элемент
и подогревает его) и косвенный подогрев (когда они подогре-
ваются не током, а спиралью-подогревателем).
Реле максимального тока является вторичным реле и ис-
пользуется для защиты электрических установок от токов пере-
грузки и короткого замыкания. Реле состоит из сердечника с
обмотками, по которым проходит контролируемый ток (или ток,
уменьшенный в токовом трансформаторе). На поворотной оси
укреплен стальной якорь, повороту которого препятствует пру-
жина, натягиваемая поводком. Положение поводка определяет
уставку, т. е- ток срабатывания реле. При прохождении по об-
моткам тока, превышающего уставку, якорь поворачивается и
замыкает контакты, связанные с его осью. Контакты могут ра-
зорвать цепь управления электроприводом.
Реле напряжения — это электромагнитное реле мгновенного
действия, которое применяется в качестве вторичного реле повы-
шения и понижения напряжения. У реле напряжения в отличие
от реле тока обмотка имеет большое число витков и рассчитана
на включение ее на напряжение сети. Часто в качестве реле на-
пряжения применяют промежуточные реле.
Релейно-контактная аппаратура автоматического и неавто-
матического управления. Контактор — коммутационный аппарат,
предназначенный для частых замыканий и размыканий элект-
рических цепей под нагрузкой. В пусковых устройствах контак-
торы служат для включения и отключения цепи двигателя, а
также для шунтирования и расшунтирования в цепи якоря или
ротора пусковых или нагрузочных сопротивлений. Контакторы
управляются либо дистанционно (вручную), либо автоматичес-
ски. Они обеспечивают до 1500 включений и отключений в час.
Наиболее часто их применяют для управления двигателями по-
стоянного и переменного тока напряжением до 500 В. Контакт-
ные системы контакторов могут приводиться в действие элект-
ромагнитами (электромагнитные), сжатым воздухом (пневма-
тические) и жидкостью (гидравлические). Наибольшее
распространение получили электромагнитные контакторы. Раз-
личают контакторы постоянного тока (одно- и двухполюсные)
и переменного тока (трех- и многополюсные).
43
Контактор (рис. Ш.1,в) состоит из изолирующей плиты, на
которой собраны все части контактора, из главных или рабочих
контактов, дугогасительного устройства, втягивающей обмотки,
магнитной системы и блок-контактов. Изолирующая плита слу-
жит остовом конструкции контактора, а также главной изоля-
цией токоведущих частей- В настоящее время такие плиты изго-
товляют главным образом из асбестоцемента. Главные контак-
ты отключают номинальные токи с большой частотой, поэтому
они должны быть твердыми и дугостойкими, создавать хороший
электрический контакт и быть износоустойчивыми. Блок-контак-
ты выполняют вспомогательные функции, например шунтиро-
вание разрыва кнопки управления (самоудержание), которое
необходимо при отпускании кнопки «Пуск», для сигнализации
о положении контактора.
Магнитные пускатели состоят из одного или двух контакто-
ров и тепловых реле, смонтированных на общей панели. Маг-
нитный пускатель с одним контактором называется нереверсив-
ным. Он пускает, отключает и защищает электродвигатель от
самопроизвольных включений при появлении напряжения после
его исчезновения и от тепловых перегрузок. Пускатель с двумя
контакторами называется реверсивным и кроме перечисленных
функций управляет реверсом. Пускатели предназначены для
дистанционного или автоматического управления двигателями
напряжением до 500 В. Современные магнитные пускатели
представляют собой то же, что и контакторы, с той лишь раз-
ницей, что они снабжаются тепловыми реле, которые защищают
двигатель от перегрузок. Однако наличие тепловых реле ограни-
чивает частоту включения этих пускателей, и поэтому их нельзя
применять для частых включений. В настоящее время имеются
десятки типов магнитных пускателей, как реверсивных, так и
нереверсивных, переменного и постоянного тока и различных
исполнений: закрытые в кожухах, взрывобезопасные, а также в
тропическом исполнении.
Электромагниты служат для превращения магнитной энергии
в механическую. Используются они для привода плунжеров со-
леноидных запорных клапанов, при торможении различных ме-
ханизмов и в качестве приводов-защелок в клапанах с так на-
зываемым ручным взводом.
Электрические командоаппараты — это аппараты, включа-
ющие и отключающие цепи управления пускателей, контакто-
ров, воздушных автоматических выключателей, реле, обмоток и
других аппаратов, включенных в электрическую схему. К коман-
доаппаратам относятся кнопки управления, ключи управления,
универсальные переключатели, путевые выключатели.
Кнопки управления (электрические аппараты ручного управ-
ления) служат для включения и отключения цепей управления
постоянного и переменного тока напряжением до 500 В. Основ-
ной частью кнопки управления является элемент, состоящий из
44
контактного устройства и механически связанного с ним штиф-
та-кнопки (рис. II 1.1,г). Штифт после нажатия возвращается в
исходное положение с помощью пружины. По числу кнопочных
элементов различают кнопки одноштифтовые и многоштифтовые,
называемые кнопочными постами управления. Посты могут
снабжаться сигнальными лампами. Промышленность выпускает
большое количество кнопок управления щитового и настенного
монтажа, различающихся числом замыкающих и размыкающих
контактов, размерами, внешним видом, разрывной мощностью
контактов и напряжением, на которое они рассчитаны.
Ключи управления и универсальные переключатели — это
командоаппараты, применяемые для одновременной коммутации
сравнительно большого числа цепей управления и сигнализа-
ции. Переключатели могут иметь от 2 до 16 секций. Отдельные
переключатели исполняются с самовозвратом рукоятки в нуле-
вое положение (без фиксации) и с фиксацией рукоятки в каж-
дом положении. Кроме того, универсальные переключатели раз-
личаются по схемам электрических соединений.
Путевые выключатели (рис. III.1,^) предназначены для
включения и отключения цепей управления электрических при-
водов в функции пути и приводятся в действие движущимися
частями механизмов. Их применяют для автоматического управ-
ления механизмами и для аварийного ограничения хода.
Реле—аппараты, осуществляющие прерывистое скачкооб-
разное (дискретное) управление. Классифицируют их по раз-
личным признакам: по назначению, принципу действия, конст-
рукции. Здесь мы ограничимся описанием тех реле, которые
применяются для управления и автоматизации санитарно-техни-
ческих систем.
Промежуточное реле—коммутационный аппарат мгновенно-
го действия, с электромагнитным приводом, воздействующим на
контактную группу (рис. III.2,а). По принципу действия эти ре-
ле не отличаются от контакторов. Контактные группы промежу-
точных реле состоят из сравнительно большого числа (до 10)
замыкающих и размыкающих контактов. Это позволяет комму-
тировать с помощью одного командного импульса малой мощ-
ности (от 3 до 10 В А) несколько независимых друг от друга
цепей различной мощности (до 500 ВА).
Реле времени — реле, часть контактов (или все) которого
срабатывает с выдержкой времени после подачи или снятия ко-
мандного импульса. Применяют маятниковые, пневматические,
моторные, электронные реле. Методы создания выдержек време-
ни могут быть различными. Пневматическое реле времени
(рис. III.2, б) состоит из приводного механизма, регулируемого
механизма замедления срабатывания контактов реле, контакт-
ной системы реле и стальной панели, на которой смонтированы
все основные узлы.
Поляризованное реле — это реле, срабатывание которого за-
45
Рис. III.2. Электромагнитные реле
а—промежуточное реле типа РКН; б — пневматическое реле времени: 1 — приводной
механизм; 2 — панель; 3 — регулируемый механизм; 4 — контактная система
висит от полярности тока его обмотки. Следовательно, оно мо-
жет работать только на постоянном токе. Применяются двух-
и трехпозиционные реле. У двухпозиционного реле один контакт
всегда замкнут, а другой — разомкнут. Якорь трехпозиционного
реле может находиться и в нейтральном положении, когда ни
один контакт реле не замкнут. Поляризованные реле находят
широкое применение в схемах слежения и регулирования, по-
строенных на реостатных датчиках (см. далее § 28, рис. IV.46).
Бесконтактная аппаратура автоматического управления.
Бесконтактные элементы в обусловленных режимах имеют очень
продолжительный срок службы, особенно при большой частоте
срабатывания. Этого не могут обеспечить контактные элементы,
срок службы которых всегда ограничен. Бесконтактные элемен-
ты не требуют ухода, им нужны лишь определенные условия,
которые не должны нарушаться-
Полупроводниковые приборы — это диоды, транзисторы, ти-
ристоры, терморезисторы и варисторы.
Диоды (германиевые, кремниевые, селеновые и меднозакис-
ные) используют для выпрямления тока (преобразования пе-
ременного тока в постоянный), а также в схемах сигнализации
и управления.
Триоды (транзисторы) применяют в схемах усилителей на-
46
пряжения и мощности низкой частоты
для приборов и регуляторов.
Тиристоры (управляемые диоды)
используют в схемах управления элек-
троприводом для бесконтактного из-
менения мощности и напряжения. На
основе тиристоров создана современ-
ная силовая техника.
Терморезисторы (термисторы) при-
меняют в качестве датчиков темпера-
туры для полупроводниковых термо-
регуляторов.
Варисторы (полупроводниковые не-
линейные сопротивления) используют
для защиты от перенапряжений и в
качестве устройств, шунтирующих
контакты реле.
Магнитный усилитель представля-
ет собой статическое устройство с
большим коэффициентом усиления.
В этом устройстве управление выходной мощностью осуществ-
ляется изменением магнитного потока. Магнитные усилители
успешно используют в измерительной технике, следящих систе-
мах, в регулируемых приводах переменного и постоянного тока,
в качестве преобразователей и бесконтактных элементов управ-
ления. Основными элементами магнитного усилителя (рис. III.3)
являются дроссели насыщения (подмагничиваемые управляю-
щим постоянным током), выпрямители, резисторы и трансфор-
маторы. Магнитные усилители изготовляют серийно мощностью
до нескольких десятков киловатт.
Бесконтактное магнитное реле — это магнитный усилитель с
сильной положительной обратной связью, в котором выходной
ток изменяется скачком при определенном значении тока управ-
ления. При высокой надежности, длительном сроке службы, ста-
бильности характеристик и нетребовательности в уходе эти ре-
ле обладают недостатками, ограничивающими их применение,—
сложностью получения нескольких «контактов» и сравнительно
большими габаритами.
Бесконтактные логические элементы преобразуют входные
сигналы в команды исполнительным органам. Дискретное дей-
ствие этих элементов характеризуется двумя уровнями входно-
го и выходного напряжения, которым отвечают элементарные
логические операции «ДА» и «НЕТ». В однофункциональных
элементах реализуются простейшие логические функции: «И»,
«ИЛИ», «НЕ», в более сложных добавляются такие звенья, как
«ПАМЯТЬ» и «ВЫДЕРЖКА ВРЕМЕНИ». Из всех этих эле-
ментов можно составить разнообразные сложные схемы авто-
матического управления.
Рис. III.3. Магнитный усили-
тель
7Н — напряжение н ток на>
грузки; Uy, 1у — напряжение и
ток управления; шв—вспомога-
тельная обмотка
47
Большое распространение получили магнитные логические
элементы (ЭЛМ), состоящие из магнитных сердечников с об-
мотками и полупроводниковых вентилей. Наиболее современны-
ми и перспективными являются полупроводниковые логические
и функциональные элементы. Входными и выходными сигнала-
ми этих элементов служат электрические потенциалы.
Комплектные устройства с магнитными усилителями выпус-
каются в настоящее время отечественными заводами на мощ-
ность примерно до 50 кВт. Эти устройства комплектуются всеми
необходимыми элементами для выполнения функций регулиро-
вания и преобразования энергии.
Аппаратура сигнализации. Для отражения состояния от-
дельных элементов оборудования или для оповещения о нару-
шениях его нормальной работы обычно используют различного
рода электромеханические и световые указатели, а также зву-
ковые сигналы.
Электромеханические указатели (блинкеры) и световые ука-
затели (сигнальные лампы, табло и транспаранты) устанавлива-
ют на щитах и пультах.
Блинкеры часто группируют в блоки по 2—4 шт. При сраба-
тывании блинкера его электромагнитная система притягивает
якорь и в окошке появляется сигнализирующий флажок яркого
цвета.
Сигнальные лампы заключены в арматуру, закрываемую
колпачком с линзами разного цвета (красный, зеленый, желтый,
молочный). Изготовляют для сигнализации также и газонапол-
ненные лампы с различным цветом свечения (оранжевым, го-
лубым, желтым, зеленым). Под лампой в табличке приводится
поясняющая надпись.
Табло и транспаранты представляют собой арматуру для
одной или двух ламп, которые освещают прозрачную рамку.
В поле рамки приводится требуемая надпись.
Иногда для световой сигнализации используют лампу, встра-
иваемую в рукоятку ключа управления или в корпус кнопочно-
го поста.
Для звуковой сигнализации применяют гудки, сирены, звон-
ки и трещотки.
§ 14. ИЗОБРАЖЕНИЕ ЭЛЕКТРИЧЕСКИХ
СХЕМ УПРАВЛЕНИЯ
Графические условные изображения элементов являются аз-
букой электрических схем и существенно облегчают изучение
схем управления и автоматизации. Они принимаются в полном
соответствии с ГОСТами, входящими в единую систему конструк-
торской документации (ЕСКД).
В схемах управления все обозначения элементов и аппара-
тов изображаются в «нормальном» положении, т. е. в положе-
48
нии, которое соответствует невозбужденному аппарату или уст-
ройству при отсутствии внешнего воздействия на него. Напри-
мер, для реле нормальным положением является отсутствие
тока в катушках, для кнопок — когда они не нажаты.
Отдельные аппараты, входящие в автоматизированную си-
стему, их части и элементы соединяют в схему, начертание ко-
торой обеспечивает наиболее легкое и правильное ее чтение. По
назначению электрические схемы разделяют на монтажные и
принципиальные (элементные).
В монтажной схеме расположение аппаратов и проводки со-
ответствует действительному расположению их на панелях,
щитах и другом оборудовании. Монтажные схемы являются рабо-
чими чертежами, по которым монтируют систему, но они неудоб-
ны при ознакомлении с принципами действия системы и затруд-
няют анализ взаимодействия отдельных элементов электрообо-
рудования.
Принципиальные (элементные) схемы изображают, как пра-
вило, развернутыми. В этих схемах отдельные элементы каждо-
го устройства и аппарата показывают исходя из удобства чте-
ния схемы и по возможности в тех ее местах, где они выполня-
ют определенные функции. При этом элементы одного и того
же аппарата или прибора, несмотря на то, что они располага-
ются в разных местах схемы, получают общие обозначения. От-
дельные ветви схемы изображают в виде параллельных цепей,
расположенных в соответствии с последовательностью действия
аппаратов, включенных в эти схемы. Схемы управления удобнее
и легче изучать по принципиальным (элементным) развернутым
схемам, так как они в простой и наглядной форме показывают
взаимную связь элементов и легко позволяют понять структуру
и принцип работы схемы.
При составлении элементных схем отдельные элементы ма-
шин, аппаратов и приборов соединяют в электрические цепи,
которые изображают на чертеже в виде горизонтальных парал-
лельных цепей в соответствии с последовательностью работы
схемы. Перпендикулярно им с двух сторон размещают шины
питания.
Каждый элемент схемы изображают определенным симво-
лом (табл. III.1) и дают ему буквенное обозначение. Для обо-
значения аппаратов, выполняющих однородные функции, перед
буквами ставят цифры, а иногда добавляют индексы. Принятое
для того или иного аппарата обозначение распространяется на
все его элементы: катушки, блок-контакты и т. д.
В электрических схемах применяется цифровая маркировка
цепей для определения проводников, характеризующая положе-
ние отдельных участков цепи в схеме. Разные участки цепей,
разделенные замыкающими 3 и размыкающими Р контактами
аппаратов, катушками реле, обмотками машин, резисторами,
полупроводниковыми приборами, должны иметь различную мар-
4—903
49
Таблица III.1. Изображения условные графические в электрических
схемах
Наименование Условное изображение Наименование Условное изображение
Трехфазный асин- хронный двигатель с короткозамкнутым ротором д Сирена электрическая £
Гудок
Трехфазный асин- хронный двигатель с фазным ротором
Ревун
Трансформатор одно- фазный с ферромаг- нитным сердечником Предохранитель плавкий i Резистор: а) постоян- ный; б) переменный; в) регулируемый 1 i О (1 3£
Линия электрической связи. Провод, кабель, шина II 'Il- li
Заземление
Линия электрической связи экранирован- ная
Контакт коммутаци- онного устройства: а) замыкающий; б) размыкающий; в) переключающий; г) переключающий без размыкания цепи _2L
Терморезнстор (тер- мистор)
Конденсатор HF Контакт замыкающий с замедлителем, дей- ствующим: а) при срабатывании; б) при возврате; в) при сра- батывании и возврате •' ।" । л л ’ 1
Днод —М""*
Лампа накаливания осветительная или сигнальная 0
Контакт размыкаю- щий с замедлителем, действующим: а) при срабатывании; б) при возврате; в) при сра- батывании и возврате » •>
Звонок электриче- ский: а) общее обо- значение; б) постоян- ного тока; в) переменного тока 1 CJ=j3= Ф
Контакт с автомати- ческим возвратом при перегрузке
50
Продолжение табл. III.1
Наименование
Условное
изображение
Наименование
Условное
изображение
Контакт с механиче-
ской связью (общее
обозначение): а) за-
мыкающий; б) раз-
мыкающий
Контакт электротеп-
лового реле при раз-
несенном способе изо-
бражения реле
Выключатель кно-
почный нажимной:
а) с замыкающим
контактом; б) с раз-
мыкающим контактом
Переключатель одно-
полюсный многопо-
зиционный, напри-
мер четырехпозици-
оиный
Контакт: а) разъем-
ного соединения
(штырь, гнездо);
б) разборного соеди-
нения; в) неразборно-
го соединения
Соединение контакт-
ное разъемное
Катушка электроме-
ханического устрой-
ства, работающего с
замедлением при сра-
батывании
Воспринимающая
часть электротепло-
вого реле
Катушка электроме-
ханического устрой-
ства
кировку; при этом общие точки соединений нескольких контак-
тов или элементов получают один и тот же номер.
Для иллюстрации сказанного на рис. III.4 дана принципиаль-
ная (элементная) развернутая схема местного и дистанционно-
•ЗВОВ
ППтание
-22ОВ
Местное
упрабление
Дистанционное
упрабление
Питание -220 В
Сигна- лизация Двигатель
Д багатель
Рве. III.4. Прввцивиальвая элехтрвчесхая схема мествого в двставцвоввого управления
трехфазяым асинхронным двигателем
4
51
го управления нереверсивным трехфазньш асинхронным двига-
телем с короткозамкнутым ротором при прямом пуске от пол-
ного напряжения сети с помощью кнопок и универсального пе-
реключателя. Схемой предусматривается максимальная токовая
защита и тепловая защита, которые осуществляются автоматом
А, являющимся одновременно и разъединителем главной цепи.
Для защиты двигателя от длительных перегрузок применяются
тепловые реле РТ. Схема обеспечивает также минимальную
защиту магнитным пускателем ПМ, который отключает двига-
тель при исчезновении или значительном снижении напряжения
сети и предохраняет его от повторного самопроизвольного вклю-
чения при восстановлении напряжения. Для переключения с ме-
стного управления двигателем на дистанционное в схеме ис-
пользован универсальный переключатель КВР, имеющий три
фиксированных положения: «Местное», «Отключено» и «Дис-
танционное». Местное управление осуществляется кнопками
КПМ и КСМ, а дистанционное — КПД и КСД. Сигнализация
о состоянии двигателя представлена двумя сигнальными лампа-
ми ЛЗ и ЛК. Участки цепей промаркированы цифрами, про-
ставленными над соответствующими линиями.
§ 15. ДИСТАНЦИОННОЕ
И АВТОМАТИЧЕСКОЕ УПРАВЛЕНИЕ
В зависимости от степени участия обслуживающего персо-
нала (операторов) в процессе управления различают режимы:
1) автоматического управления — все операции осуществля-
ются без участия оператора, но под его контролем и по его
заданию;
2) полуавтоматического управления — основные командные
операции (пуск, изменение режима и др.) производятся опера-
тором, а все вспомогательные осуществляются автоматически;
3) ручного управления — все операции осуществляются опе-
ратором.
В зависимости от места расположения командоаппаратов
управление в полуавтоматическом и ручном режимах может
быть местным (командоаппараты устанавливаются непосред-
ственно рядом с оборудованием) либо дистанционным.
Местное управление применяют для всех электроприводов
при выводе их из автоматического режима, при проверочных,
наладочных и ремонтных работах. Блокировочные связи и сиг-
нализация, необходимые для защиты устройства, должны быть
сохранены в местном режиме.
Дистанционное управление применяют в тех случаях, когда
для удобства управления, его централизации либо по другим
причинам командоаппараты устанавливают на определенном
расстоянии от управляемого объекта или в другом помещении.
Каждый привод, участвующий в технологическом процессе,
S2
за редким исключением, имеет два и более вида управления.
Это, как. правило, местное и дистанционное управление или ме-
стное и автоматическое управление. Для выбора режима работы
приводов используют пакетные переключатели различных типов.
При реализации схем управления обязательным является тре-
бование Правил устройства электроустановок (ПУЭ), согласно
которым при переводе схемы в режим местного управления
должна исключаться возможность пуска механизма в любом
другом режиме.
Понятие «автоматическое управление» является довольно
общим и охватывает большой круг представлений, включая ав-
томатическое регулирование, автоматическое переключение ре-
жимов работы различных систем в зависимости от внешних ус-
ловий и др.
Автоматическое управление осуществляется без непосредст-
венного участия человека и направлено на выполнение алгорит-
ма (закона) управления. Следует отметить, что участие чело-
века в операциях включения автоматической системы в работу
и ее наладки при этом не учитывается.
Алгоритм управления представляет собой совокупность пред-
писаний, которые определяют характер внешних воздействий и
ведут к правильному выполнению технического процесса.
Система автоматического управления санитарным оборудо-
ванием является составной частью автоматизированных систем
управления производством (АСУП) на нижней ступени управ-
ления.
Для автоматического управления отдельными санитарно-тех-
ническими установками или их комплексами используют систе-
мы автоматического регулирования, усложненные устройствами
программирования и переключения (в зависимости от измене-
ния внешних факторов и заданий), а также аппаратурой связи
с ЭВМ (электронной вычислительной машиной), являющейся
основным звеном АСУП на верхней ступени управления.
Примером автоматической системы управления может слу-
жить система автоматического регулирования установок конди-
ционирования воздуха (см. далее § 46). В этой системе стаби-
лизация параметров воздуха, защита оборудования от аварий-
ных и нежелательных режимов работы, переключение режимов
работы системы в зависимости от параметров наружного воз-
духа, выбор наиболее экономичной схемы обработки воздуха,
а иногда и изменение заданного значения одного параметра в
зависимости от значения другого производятся автоматически.
Автоматическим управлением оборудуются также и неболь-
шие объекты и даже отдельные агрегаты, например системы во-
дяного пожаротушения, приточной вентиляции, холодильные ус-
тановки и др.
Современные крупные здания и сооружения, а также про-
мышленные комплексы оснащены большим числом сложных са-
53
нитарно-технических устройств. К этим устройствам относятся
тепловые вводы, системы кондиционирования воздуха, холодиль-
ные, насосно-фильтровальные и воздушно-компрессорные стан-
ции, системы приточной и вытяжной вентиляции, отопления,
противопожарного, хозяйственно-питьевого и оборотного водо-
снабжения, внутренней канализации. Построение рациональной
системы управления этим оборудованием является результатом
подробного анализа всего объекта, разработки вариантов систем
управления и их сравнительной оценки по удобству эксплуата-
ции и технико-экономической эффективности требуемых затрат.
В крупных зданиях и сооружениях, где основное санитарно-
техническое оборудование сосредоточено в нескольких машин-
ных залах, как правило, применяется двухступенчатая струк-
тура управления. На нижней ступени обеспечивается управле-
ние отдельными агрегатами и установками с помощью систем
местного управления и авторегулирования. Перед верхней сту-
пенью управления стоят задачи координации работы, обеспече-
ния дистанционного и автоматического управления отдельными
системами и установками объекта, получение и анализ инфор-
мации об отклонении от заданных режимов работы установок.
В машинных залах и вентиляционных камерах устанавлива-
ют щиты местного управления (щиты операторов), на которых
размещается аппаратура местного управления, автоматического
регулирования, технологической и аварийной блокировки. Щи-
ты местного управления (нижняя ступень), как правило, не тре-
буют постоянного присутствия обслуживающего персонала, так
как управление основным оборудованием осуществляется со
щита диспетчера (верхняя ступень), а вспомогательное обору-
дование либо сблокировано с основным, либо управляется ав-
томатически.
Глава IV
АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ
§ 16. ОСНОВНЫЕ понятия
И ОПРЕДЕЛЕНИЯ
Задачей автоматического регулирования является обеспече-
ние заданного технологического режима работы системы без
непосредственного участия человека.
Системой автоматического регулирования (САР) называется
замкнутая динамическая система, состоящая из объекта регу-
лирования ОР и взаимодействующего с ним автоматического ре-
гулятора АР (рис. IV.1).
Объектом регулирования называют технологический агрегат
или устройство, в котором происходит изменение параметров
54
<р в результате колебаний нагрузки М или воз-
действия ц автоматического регулятора.
Автоматическим регулятором или просто ре-
гулятором называют устройство, с помощью ко>(
торого регулируемый параметр либо поддержи-
вается в объекте регулирования на заданном
уровне, либо изменяется по заранее заданному
закону или в зависимости от другого параметра.
Большое разнообразие систем автоматичес-
кого регулирования, различающихся как прин-
ципами построения, так и методами реализации
своих функциональных возможностей, не позво- ₽*<=. iv.i. струк-
л. гл туриая схема
ляет привести полную их классификацию. Оста- cap
новимся на наиболее характерных классифика-
ционных признаках САР.
По назначению различают следующие виды САР: а) стаби-
лизирующего регулирования; б) следящего регулирования;
в) программного регулирования.
Системы стабилизирующего регулирования призваны поддер-
живать регулируемые параметры (величины, характеризующие
процесс, происходящий в объекте регулирования) постоянными,
стабильными. Эти системы получили наибольшее распростране-
ние в санитарно-технических устройствах.
Системы следящего регулирования обеспечивают измене-
ние регулируемого параметра в зависимости от изменения какой-
либо другой величины: например, изменение регулируемой тем-
пературы теплоносителя, подаваемого в систему отопления зда-
ния, в зависимости от колебаний температуры наружного воз-
духа.
В системах программного регулирования значение регулиру-
емого параметра изменяется во времени по заранее заданной
программе. Примером могут служить системы, автоматически
уменьшающие температуру теплоносителя, подаваемого на отоп-
ление зданий в ночной период, или системы, включающие и от-
ключающие приточные и вытяжные установки зданий по зара-
нее заданной программе.
Следует заметить, что указанное разделение функций САР
в известной мере условно, так как иногда одна система выполня-
ет функции и следящей системы, и стабилизирующей.
По принципу регулирования различают следующие виды
САР: а) с воздействием по отклонению регулируемого параметра
(принцип Ползунова); б) с воздействием по возмущению, т. е.
по изменению нагрузки (принцип Понселе); в) комбинирован-
ные.
Принцип Ползунова используется при построении почти всех
САР и заключается в определении воздействия на объект регу-
лирования по величине изменения регулируемого параметра. На-
пример, при увеличении температуры воздуха в помещении ав-
55
тематический регулятор уменьшает температуру теплоносителя
в системе отопления.
Принцип регулирования по величине возмущающего воздей-
ствия (принцип Понселе) заключается в том, что воздействие
регулятора на объект регулирования начинается еще до того, как
произойдет отклонение регулируемой величины от заданного зна-
чения. Этот принцип регулирования самостоятельно, как прави-
ло, не применяется.
Комбинированные САР используют оба принципа.
По свойствам в установившемся режиме различают статичес-
кие и астатические САР. Статической называют систему, в ко-
торой регулируемый параметр в различных установившихся ре-
жимах может принимать различные значения. Остаточную ошиб-
ку в такой системе называют статизмом. Астатической называют
систему, в которой регулируемый параметр в различных устано-
вившихся режимах принимает одно и то же значение независи-
мо от величины возмущающего воздействия на объект регулиро-
вания. Статизм такой системы всегда равен нулю.
По характеру регулирования во времени САР делятся на си-
стемы непрерывного и дискретного (прерывистого) действия (ре-
лейные или импульсные). В САР непрерывного действия моно-
тонному изменению входных величин соответствует непрерывное
изменение выходных величин всех элементов системы. В САР
дискретного (прерывистого) действия непрерывному изменению
входной величины хотя бы одного элемента системы соответст-
вует прерывистое изменение выходной величины этого элемента.
Системы автоматического регулирования делятся также на
системы прямого (непосредственного) и непрямого действия. Си-
стемы прямого действия для регулирования используют энер-
гию регулируемой среды. Регуляторы таких САР иногда называ-
ют регуляторами без использования вспомогательной энергии.
Системы непрямого действия используют энергию постороннего
источника (электрическую, пневматическую или гидравличес-
кую).
Наиболее распространенными являются, как указывалось
выше, стабилизирующие САР, назначением которых является
поддержание значения регулируемого параметра на заданном
уровне фо. В автоматическом регуляторе величина регулируемо-
го параметра ф сравнивается с заданным значением фв. Если эти
величины равны (ф = фо), автоматический регулятор не оказыва-
ет воздействия на объект регулирования. Такое состояние САР
называется установившимся и может быть нарушено появлением
возмущающего воздействия (или возмущения).
Возмущающим воздействием называют влияние внешних фак-
торов на САР, вызывающее отклонение регулируемого парамет-
ра от заданного значения. Появление возмущений, являющееся
следствием воздействия на объект регулирования изменений на-
грузки М, нарушает нормальный ход процесса регулирования и
56
приводит САР в неустановившееся состояние. В этом случае ре-
гулируемый параметр ф отклоняется от заданного значения ф0,
и на входе в регулятор появляется сигнал ф—фо, называемый
сигналом рассогласования (или ошибкой регулирования). Регу-
лятор принимает сигнал рассогласования и преобразует его, т. е.
вырабатывает сигнал, определяющий регулирующее воздейст-
вие [Л.
Таким образом, регулятор, воздействуя на объект регулиро-
вания, призван привести САР в новое установившееся состояние.
Если рассматривать САР, описанную в § 3, можно заметить
одну важную закономерность. Когда регулируемый параметр
ср (температура) меньше заданного <р0 (ошибка отрицательная)
<р—ф0<0, увеличивается регулирующее воздействие (расход
теплоносителя через бойлер), т. е. приращение расхода тепло-
носителя Дб>0. И, наоборот, если ср—ф0>0, обязательно
AG<0, т. е. расход теплоносителя через бойлер уменьшается.
Таким образом, при отклонении регулируемого параметра <р от
заданного <р0 регулирующее воздействие получает приращение,
противоположное по знаку этому отклонению. Такой тип связи
называется отрицательной обратной связью.
Из сказанного можно сделать вывод, что САР — это замкну-
тая динамическая система с обратной связью. Такая связь на-
зывается основной в отличие от дополнительных, применяемых
для улучшения характеристик автоматического регулятора.
На первый взгляд может показаться, что создать САР чрез-
вычайно просто. Для этого достаточно только реализовать отри-
цательную обратную связь. Полученная таким образом система
будет автоматически стремиться свести ошибку регулирования
к нулю. Но оказывается, что при введении обратной связи (да-
же отрицательной) ошибка ф—<ро=/(т) в системе со временем
может не только уменьшиться, а, наоборот, неограниченно воз-
расти, т. е. САР окажется неустойчивой. Поэтому большое вни-
мание в теории автоматического регулирования уделено исследо-
ванию условий, при которых САР будет устойчивой, а также
качеству переходного процесса — процесса перехода САР от од-
ного установившегося состояния к другому. Здесь важно вы-
явить, как быстро САР восстанавливает равновесие системы
после действия возмущения и какой характер носит сам пере-
ходный процесс [например, меняет ли знак ошибка регулирова-
ния <р—ф0=[(т), монотонно ли уменьшается ошибка и т.д.].
§ 17. ПЕРЕХОДНЫЕ ПРОЦЕССЫ В САР
Переходные процессы изображаются в виде кривых, которые
отражают зависимость значения регулируемого параметра в
функции времени ф=/(т) (рис. IV.2). Время т0 соответствует
началу переходного процесса, значение ф0 — заданной величине
регулируемого параметра. Переходный процесс может быть раз-
личным: апериодическим, затухающим, колебательным, расходя-
57
Рис. IV.2. Кривые переходных процессов САР
а — апериодического; б — затухающего; в — колебательного; г — расходящегося
5)
Ъ)
Рис. VI.3. Типовые возмущающие воздействия
а — единичный скачок; б — единичный импульс; в — гармоническое колебание
щимся. Кривые переходного процесса САР показывают, насколь-
ко эффективно регулятор приводит систему в новое установивше-
еся состояние после нанесения возмущающего воздействия.
Внешние воздействия на САР практически могут непрерыв-
но изменяться как по величине, так и по знаку. Действительный
характер изменения возмущений фактически учесть невозможно.
Чтобы судить по различным графикам переходных процессов
о качестве регулирования, принято задаваться типовым возму-
щением, которое выбирается как наиболее частое или наиболее
неблагоприятное для рассматриваемых конкретных условий.
Таким типовым возмущающим воздействием (рис. IV.3) может
быть единичный скачок, единичный импульс, гармоническое (си-
нусоидальное) колебание и др. При исследовании САР санитар-
но-технических систем, как правило, принимают единичный ска-
чок, что соответствует одномоментному изменению нагрузки. Ти-
повое возмущающее воздействие вызывает в САР некоторый
переходный процесс, по окончании которого система (при усло-
вии, что она устойчива) переходит в установившееся состояние.
В идеальной САР регулируемая величина ср при изменении
задания должна измениться так, чтобы отклонение ее от задан-
ной величины было равно нулю ср—сро = О (что возможно только
58
в системах без запаздывания). При изменении нагрузки М в иде-
альной САР регулируемая величина не должна изменяться. Од-
нако вследствие инерции, свойственной любой физической систе-
ме, элементы и блоки системы не сразу реагируют на пришедшие
к их входу сигналы, следовательно, осуществление идеальной
САР на практике невозможно. Реальные системы в большей или
меньшей степени могут приближаться к идеальной. Чем ближе
система к идеальной, тем, как правило, сложнее регулятор. По-
этому одной из важнейших задач при выборе регулятора явля-
ется нахождение разумного компромисса между качеством регу-
лирования и сложностью САР.
Таким образом, кривые переходного процесса отражают ди-
намику взаимодействия регулятора и объекта регулирования.
Если переходный процесс апериодический (см. рис. IV.2, а) или
затухающий (см. рис. IV.2, б), процесс регулирования является
устойчивым. Устойчивой САР называется система, которая че-
рез некоторое время после возмущения приходит в установивше-
еся состояние.
Если переходный процесс колебательный (см. рис. IV. 2, в)
или расходящийся (см. рис. IV. 2,г), процесс регулирования яв-
ляется неустойчивым. Неустойчивая САР в установившееся со-
стояние не приходит. Отклонение ее от состояния равновесия бу-
дет иметь форму незатухающих или расходящихся колебаний.
Устойчивость — это основная динамическая характеристика
САР. Соблюдение условий устойчивости является необходимым
для нормального функционирования САР.
§ 18. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ САР
В теории автоматического регулирования основное внимание
уделяется не техническим свойствам отдельных элементов САР,
а функциям, которые эти элементы выполняют в системе, и ха-
рактеру связей между ними. Функциональные системы САР от-
ражают физический смысл взаимодействия устройств, узлов и
элементов автоматики в процессе их работы. Графически от-
дельные элементы систем изображаются прямоугольниками, а
существующие между ними связи — стрелками, соответствующи-
ми направлению прохождения сигнала. Все элементы САР об-
ладают направленностью действия. Внутреннее содержание каж-
дого элемента или блока не конкретизируется, а функциональ-
ное назначение указывается буквенными символами.
Все многообразие элементов САР можно свести к ограничен-
ному числу основных типов функциональных элементов. Рас-
сматривая взаимодействие этих элементов и блоков, можно выя-
вить основные закономерности и составить типовую или обоб-
щенную функциональную схему (рис. IV.4).
На объект регулирования ОР, находящийся под влиянием
внешнего возмущения М, поступает регулирующее воздействие
р, являющееся выходной величиной управляющей части систе-
59
Рис. IV.4. Функциональная схема САР
мы, которую можно назвать автоматическим регулятором АР (на
рис. IV.4 эта часть обведена штриховой линией). Контур САР
замыкается подачей в регулятор по цепи основной (главной) об-
ратной связи выходной величины ср. Входная величина <р0 посту-
пает на элемент сравнения ЭС. Сигнал ошибки <р—<р0 поступает
в регулирующее устройство РУ, а затем в усилитель УС. Элемент
дополнительной обратной связи ОС вводится в систему для
придания ей лучших динамических свойств.
Зная статические и динамические характеристики отдельных
функциональных элементов САР, можно составить дифференци-
альное уравнение системы. Используя методы теории автомати-
ческого регулирования, можно (с помощью этого уравнения) ис-
следовать систему на устойчивость и определить качество про-
цесса регулирования. Однако для упрощения материала мы не
приводим математические методы. Наша цель дать понятие о
физической сущности явлений, происходящих в САР и в отдель-
ных ее элементах. Накопленный опыт проектирования, наладки
и эксплуатации систем автоматизации основных типов санитар-
но-технических объектов дает возможность изложить основные
принципы их автоматизации.
§ 19. СВОЙСТВА ОБЪЕКТОВ РЕГУЛИРОВАНИЯ
Объекты регулирования обладают статическими и динами-
ческими свойствами. Статические свойства объектов определя-
ются зависимостью значений регулируемого параметра <р от ве-
личины возмущающего воздействия М в установившемся режи-
ме. Статическая характеристика позволяет определить новое
60
установившееся значение регулируемого параметра ф после при-
ложения к объекту регулирования возмущающего воздейст-
вия М и окончания переходного процесса в объекте (без уча-
стия регулятора). Динамические свойства объекта регулирова-
ния характеризуют изменения его параметров во времени после
приложения к объекту возмущающего воздействия, т. е. во вре-
мя переходного процесса.
Объекты регулирования, с которыми приходится встречаться
при автоматизации санитарно-технических устройств, как пра-
вило, обладают способностью аккумулировать в себе вещество
или тепловую энергию. Количество накопленной в объекте регу-
лирования энергии или вещества зависит от емкости объекта и
величины регулируемого параметра.
Емкостью объекта называют его способность накапливать
или отдавать вещество или энергию, что объясняется наличием
у объекта сопротивления отдаче некоторой величины энергии или
вещества; емкость объекта равна произведению значения регу-
лируемого параметра и коэффициента емкости объекта.
Коэффициентом емкости объекта регулирования называется
количество вещества или энергии, которое необходимо подвести
к объекту (приток) или отвести от него (сток), чтобы изменить
регулируемый параметр на единицу физической величины (на-
пример, на 1 м, на 1°, на 1 Дж и т. д.).
Достаточно наглядно можно продемонстрировать свойства
объекта регулирования на примере объектов с регулированием
уровня жидкости. При регулировании уровня воды в баке (рис.
IV.5) емкость объекта определяется количеством воды, находя-
щейся в баке при заданном уровне ф0- Коэффициентом емкости
в этом случае будет количество воды, которое необходимо подать
в бак для изменения уровня воды в нем на 1 м. В одноемкостном
объекте регулирования накопление вещества или энергии про-
исходит одновременно во всем объеме, а в многоемкостном—
в различных частях объекта не одновременно.
Примером трехъемкостного объекта может служить емкость,
состоящая из трех баков, соединенных между собой трубами
(рис. IV.6). Если в первый бак подают жидкость, наполнение
второго и третьего баков будет происходить с некоторым отста-
ванием во времени. Причем это время будет зависеть от разности
уровня в баках, диаметров соединяющих их трубопроводов, вяз-
кости жидкости и др.
Существенной характеристикой объекта регулирования явля-
ется самовыравнивание — способность объекта при нанесении
внешнего возмущения самостоятельно (без регулятора) восста-
навливать состояние статического равновесия (равенство прито-
ка и стока) при новом значении параметра. Самовыравнивание
может быть в объекте на стороне притока и на стороне стока,
а также на стороне притока и стока одновременно.
Примером объекта с самовыравниванием на стороне стока
61
Приток
Рис. IV.5. Одноемкостный объект ре-
гулирования
Рис. IV.7. Объект с самовыравниваиием на стоке
62
Рис. IV.8. Объект с самовыравниваиием иа притоке
Рис. IV.9. Объект с самовыравниваиием на притоке и стоке
Рис. IV.10. Плотина
I — уровень воды за
плотиной; II — уро-
вень воды до плоти-
ны; III — то же, в
половодье; а — пло-
щадь отверстия сбро-
са; б — то же, в по-
ловодье
может служить бак, из которого свободно вытекает вода, а при-
ток является постоянным (рис. IV.7). При скачкообразном уве-
личении притока воды в бак уровень воды начинает возрастать.
Он будет стремиться к новому значению <рк, которое наступит
при равенстве притока и стока, в связи с увеличением стока, выз-
ванным повышением давления столба воды.
В объекте с самовыравниваиием на стороне притока (рис.
IV.8) скачкообразное уменьшение подачи насоса приведет к по-
вышению уровня воды в баке, что в свою очередь, уменьшит раз-
ность уровней АН, за счет которой происходит перетекание воды
в бак, и повлияет на уменьшение притока.
Влияние самовыравнивания на притоке и стоке объекта ре-
гулирования при скачкообразном уменьшении стока достаточно
наглядно показано на рис. IV. 9. В переходном процессе за счет
63
: Приток,
Рис. IV.11. Объект без самовыравнивания
Рис. IV.12. Кривая разгона одноемкостного
объекта с самовыравииванием
повышения уровня воды в баке увеличивается сток и за счет
понижения уменьшается приток.
Свойство самовыравнивания в одном и том же объекте мо-
жет проявляться в различной степени, что определяется физичес-
кими особенностями объекта и характеризует отклонение регули-
руемого параметра в процессе самовыравнивания при данном
начальном возмущающем воздействии. Так, уровень воды перед
плотиной изменяется в зависимости от колебаний притока. Сте-
пень самовыравнивания на стороне стока определяется не толь-
ко увеличением перепада уровней до и после плотины, но и уве-
личением площади отверстия сброса а (рис. IV. 10). При резком
увеличении притока (в половодье) и достижении уровнем воды
верха плотины степень самовыравнивания резко возрастает
в связи со значительным увеличением площади отверстия сбро-
са б.
Степень самовыравнивания можно представить как ослабле-
ние возмущения на единицу отклонения параметра в процессе
самовыравнивания.
Рассмотрим изменение уровня жидкости в баке при условии,
что приток может изменяться, а на стоке установлен насос, име-
64
юстояниую подачу (рис. IV.11). При равенстве притока
уровень жидкости в баке сохраняется постоянным. До-
чгТтггочно изменить величину притока или стока в этом объекте
(например, увеличить приток или выключить насос), как уровень
начнет изменяться. Поскольку уровень воды в баке не оказыва-
ет влияния на приток или на сток, рассматриваемый объект не
обладает свойством самовыравнивания.
В переходном процессе объекта регулирования без самовы-
равнивания скачкообразное нарушение равновесия объекта при-
водит к изменению регулируемого параметра, которое происхо-
дит с постоянной скоростью. Если объекту регулирования сооб-
щить возмущение в виде единичного скачка, то в нем начнет
изменяться регулируемый параметр. Для бесконечно малого
отрезка времени можно считать, что изменение параметра <р бу-
дет происходить с начальной скоростью dy/dr. В объекте регу-
лирования без самовыравнивания начальная скорость изменения
регулируемого параметра остается постоянной и равно: dq>]dx=
=tga, (где a — угол наклона характеристики изменения пара-
метра ср во времени; см. рис. IV.11).
У объекта с самовыравниванием начальная скорость измене-
ния регулируемого параметра будет уменьшаться с течением
времени и теоретически через бесконечное время станет равна
нулю.
Кривая переходного процесса объекта регулирования после
нанесения скачкообразного возмущения носит название кривой
разгона и достаточно полно отражает некоторые основные дина-
мические характеристики объекта.
Кривая разгона одноемкостных объектов регулирования с са-
мовыравниванием представляет собой экспоненту (рис. IV.12).
Если к экспоненте (в начальной ее точке) провести касательную,
характеризующую скорость изменения параметра в начальный
момент, то эта касательная отсечет на линии нового установивше-
гося значения ф2 отрезок Та. Время, соответствующее этому от-
резку, является постоянной времени объекта.
Постоянной времени объекта регулирования с самовыравни-
ванием называют промежуток времени, необходимый для изме-
нения параметра от первоначального уровня до нового устано-
вившегося значения, при условии, что скорость изменения па-
раметра сохранится максимальной и равной начальной скорости
r^/dr=tga. Иначе, постоянная времени Та представляет собой
промежуток времени, необходимый для достижения нового пре-
дельного значения параметра при сохранении начальной скоро-
сти его изменения. Следует заметить, что касательная, проведен^
ная к любой точке экспоненты, имеет одну и ту же величину под-
касательной1. Причем линия ф2 = const является асимптотой
1 Подкасательная — отрезок линии па оси абсцисс между координатами
точки касания и точки пересечения касательной с асимптотой.
5—903
65
экспоненты. Следовательно, постоянная времени Та одноемкост
ного объекта с самовыравниванием равна подкасательной для
любой точки кривой разгона объекта регулирования.
Постоянная времени зависит не только от свойств объекта,
но и от величины возмущающего воздействия. Если объекту со-
общить возмущающее воздействие, равное наибольшей нагрузке
этого объекта, то регулируемый параметр достигнет максималь-
ного значения (при сохранении максимальной скорости измене-
ния) за промежуток времени Та, называемый временем разгона
объекта.
Время разгона представляет собой постоянную времени, оп-
ределенную по кривой разгона объекта, которая построена для
условий достижения объектом полной нагрузки при сообщении
ему максимального возмущающего воздействия. При прочих рав-
ных условиях время разгона зависит от коэффициента емкости
объекта. Чем больше коэффициент емкости, тем длительнее про-
цесс разгона и, следовательно, больше время разгона Та.
Вместо времени разгона иногда применяют обратную вели-
чину, называемую скоростью разгона, е=\1Та с-1. Скорость разго-
на называют также чувствительностью объекта к возмущению.
Физически скорость разгона можно представить как скорость
изменения регулируемого параметра для случая, когда приток
достигает максимума, а сток равен нулю.
На рис. IV.13, а приведено семейство кривых разгона для
объектов регулирования, обладающих одним и тем же коэффи-
циентом самовыравнивания р, характеризующим степень само-
выравнивания, но различными скоростями разгона е, т. е. раз-
личными аккумулирующими способностями. При одинаковых ве-
личине возмущения М и коэффициенте самовыравнивания р ко-
нечное отклонение регулируемого параметра будет одинаково
для всех значений скорости разгона 0<е<°о. Анализ кривых
позволяет сделать вывод: чем меньше скорость разгона, тем
медленнее выравнивается процесс.
Семейство кривых разгона для объектов, обладающих одина-
ковой скоростью разгона е, но разными коэффициентами само-
выравнивания р, приведено на рис. IV. 13, б. При одинаковых ве-
личине возмущения М и скорости разгона е первоначальный на-
клон всех кривых постоянен. Анализ семейства кривых разгона
позволяет сделать вывод: чем меньше коэффициент самовырав-
нивания р, тем большее отклонение в конце процесса получает
регулируемая величина.
Постоянная времени Т, время разгона Та, скорость самовы-
равнивания е и степень самовыравнивания р определяют динами-
ческие свойства объекта регулирования. Чем меньше Та, тем
быстрее объект будет реагировать на внешние возмущения и на
регулирующие воздействия. Чем больше р, тем устойчивее объ-
ект и тем легче его регулировать. Объект без самовыравнивания
(р = 0) регулировать значительно труднее. Если Та очень велико,
66
Рис. IV. 13. Кривые раз-
гона для различных од-
ноемкостных объектов
регулирования с само-
выравннваннем
а—объект с одним коэф-
фициентом самовыравни-
вания н различными ско-
ростями разгона; б —
объект с одной скоро-
стью разгона н различ-
ными коэффициентами
самовыравннвания
Рис. IV.14. Тепловооб объект регулирования
с самовыравниваиием на притоке и стоке
Рис. IV.15. Запаздывание в двухъемкостном объекте
5*
67
то объект практически не будет реагировать ни на внешние воз-
мущения, ни на регулирующие воздействия. Объект будет не-
управляемым.
Все сказанное об объектах с регулированием уровня жидко-
сти справедливо для объектов с регулированием других физи-
ческих параметров, в том числе и для тепловых объектов с ре-
гулированием температуры, объектов с регулированием давления
и др.
Примером теплового объекта с самовыравниванием на сто-
роне притока и стока может служить помещение, отапливаемое
электронагревательным прибором. В установившемся режиме
Qn = Qc [Qn —количество теплоты, отдаваемой электронагрева-
тельным прибором (приток); Qc — теплопотери помещения
(сток)]. Если в момент времени то включить нагревательный при-
бор НП (рис. IV.14) на полную мощность, то количество тепло-
ты, отдаваемой прибором в помещение, возрастет до Qmax. В ре-
зультате повышается температура поверхности прибора, возду-
ха в помещении tB, поверхности наружных ограждений и, следо-
вательно, увеличивается количество отдаваемой помещением
теплоты Qc. Сравнивая рис. IV.14 с рис. IV.9, видим, что переход-
ные процессы в обоих объектах протекают одинаково. Оба объ-
екта регулирования одноемкостные с самовыравниванием на
притоке и стоке.
Приведенный пример показывает, что, несмотря на различ-
ную физическую природу объектов, они имеют много общих
свойств, существенных для автоматического регулирования па-
раметров этих объектов.
Еще одним весьма важным свойством объекта регулирования
является запаздывание процесса — задержка или замедление
изменения регулируемого параметра в объекте регулирования
после нанесения возмущения.
Чтобы наглядно представить характер изменения кривой раз-
гона в двухъемкостном объекте с запаздыванием, обратимся
снова к гидравлической модели (рис. IV.15).
Рассмотрим изменение уровня воды во втором баке при скач-
кообразном увеличении притока. В установившемся состоянии
приток равен стоку, и уровень воды во втором баке несколько
ниже, чем в первом. Сразу после увеличения притока начинает
увеличиваться уровень воды в первом баке, однако, прежде чем
это возмущающее воздействие начнет оказывать влияние на вто-
рой бак, определенная часть воды должна дойти от первого до
второго бака и чем длиннее трубопровод, соединяющий эти баки,
тем больше промежуток времени между нанесением возмущения
и началом изменения уровня воды во втором баке. Этот проме-
жуток времени называют транспортным (пли чистым) запазды-
ванием Тт.
При скачкообразном увеличении притока в первый бак уро-
вень воды в нем начнет изменяться по экспоненте, т. е. не скачко-
68
образно, а плавно. Возмущающим воздействием для второго ба-
ка является изменение уровня воды в первом баке, а поэтому
уровень воды во втором баке будет изменяться медленнее, чем
в первом, что и скажется на форме кривой разгона, особенно в
начальный период. Замедление изменения регулируемого пара-
метра при переходном процессе в объекте регулирования, выз-
ванное наличием в объекте двух или более емкостей, носит наз-
вание емкостного запаздывания, определяемого временем, за-
трачиваемым на перенос вещества или энергии из одной емкости
в другую. Явление емкостного запаздывания может наблюдать-
ся только у многоемкостных объектов.
На рис. IV. 15 приведена кривая разгона двухъемкостного объ-
екта. Касательная к кривой разгона в точке перегиба отсекает
на оси абсцисс (от момента начала изменения регулируемого па-
раметра) отрезок Те, характеризующий емкостное запаздывание
объекта регулирования. Сумма транспортного (чистого) и ем-
костного запаздывания носит название полного запаздывания,
т. е. т=тт+те-
Запаздывание отрицательно сказывается на характере и ка-
честве процессов регулирования, поэтому при построении САР
стремятся к его снижению. Наибольшим емкостным запаздыва-
нием при прочих равных условиях обладают тепловые объекты,
наименьшим — объекты, в которых регулируется расход
жидкости.
§ 20. ЗАКОНЫ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
В санитарно-технических устройствах объектами регулирова-
ния являются помещения, а также установки кондиционирования
воздуха и их элементы, различные теплообменники, баки и ре-
зервуары, насосы, компрессоры, вентиляторы и другое оборудо-
вание. Статические и динамические свойства этих объектов зна-
чительно отличаются друг от друга. Кроме того, в зависимости
от назначения объектов предъявляются различные требования к
качеству регулирования параметров (температуры, давления,
уровня и др.). Для обеспечения этих требований создается срав-
нительно много автоматических регуляторов. Некоторые из них
предназначены для регулирования одного или нескольких пара-
метров только в определенных объектах, другие являются уни-
версальными. Однако все регуляторы используют ограниченное
число принципов регулирования, которые называются законами
регулирования.
Законом (или алгоритмом) автоматического регулирования
принято называть зависимость относительного перемещения ре-
гулирующего органа от относительного отклонения регулируемо-
го параметра p=f(q>).
Наибольшее распространение в устройствах санитарной тех-
ники получили регуляторы, использующие законы регулирова-
69
ния: позиционный, пропорциональный (статический), интеграль-
ный (астатический) и пропорционально-интегральный (изодром-
ный).
В § 16 была приведена классификация САР. Классификация
регуляторов в основном ее повторяет, поэтому отдельно не при-
водится. Так, САР дискретного (прерывистого) действия содер-
жит в своем составе дискретный автоматический регулятор, САР
прямого действия — регулятор прямого (непосредственного)
действия без использования вспомогательной энергии.
Позиционное регулирование характеризуется скачкообразной
функциональной зависимостью между отклонением регулируемо-
го параметра от заданного значения и перемещением регулиру-
ющего органа. При позиционном регулировании регулирующий
орган может иметь несколько фиксированных положений (пози-
ций). Каждая позиция соответствует определенной области зна-
чений регулируемого параметра. По числу позиций различают
двух-, трех- и многопозиционные регуляторы. В практике наи-
большее распространение получили двух- и трехпозиционные.
Примером двухпозиционного регулирования может служить
электрическая печь с регулятором температуры, который дает
сигнал на включение нагревательных элементов при понижении
температуры в печи ниже некоторого значения ^min и на отклю-
чение при повышении температуры выше £тах. Объект регулиро-
вания в данном случае является одноемкостным с самовыравни-
ванием на притоке и стоке (аналогичный пример приведен на
рис. IV.14).
Предположим, что до момента времени ti (рис. IV.16) в САР
был установившийся режим, тогда при открывании дверцы печи
(или другом подобном возмущении) скачкообразно увеличива-
ется сток Qc и регулируемый параметр t начинает уменьшаться
по экспоненте 1. При достижении значения £min автоматический
регулятор АР дает сигнал на включение нагревательных элемен-
тов и тем самым на увеличение притока Q„. Температура в печи
начнет увеличиваться по экспоненте 2. При достижении значения
*тах (в момент времени тз) АР даст сигнал на отключение нагре-
вательных элементов.
В системах двухпозиционного регулирования регулирующее
воздействие на объект принимает только два значения 4-Цт (со-
ответствующее включению НЭ) и —цт (соответствующее его
отключению). Эти значения характеризуются двумя крайними по-
ложениями регулирующего органа (например, «Открыто» и «За-
крыто»). САР с двухпозиционными регуляторами свойственны
автоколебательные режимы, природа которых заложена в свой-
ствах регулятора (рис. IV. 17).
Срабатывание регулятора на включение и отключение регу-
лирующего органа происходит при различных значениях регули-
руемого параметра, несмотря на то что настройка заданного
значения регулируемой величины имеет одно значение (при Х=
70
Рис. 1V.16. Двухпозиционное регулирова-
ние температуры
Тр — терморегулятор двухпозициоиный;
БУ — блок управления; НЭ — нагреватель-
ный элемент
Рнс. IV.17. Характеристика реального
двухпозиционного регулятора
= 0, где X — отклонение регулируемой величины от заданного
значения). Это свойство является общим для всех двухпозици-
онных релейных элементов и объясняется наличием гистерезис-
ной петли (например, разностью тока срабатывания и тока от-
пускания электромагнитного реле). Зону гистерезисной петли
2е двухпозиционных регуляторов часто называют дифференциа-
лом или зоной неравномерности.
Двухпозиционными регуляторами оснащаются, как правило,
объекты регулирования, обладающие значительной постоянной
времени, т. е. большой емкостью и самовыравниванием: напри-
мер, помещения, отапливаемые электронагревательными прибо-
рами, при регулировании температуры воздуха; резервуары срав-
нительно большой емкости с нагнетательными или откачивающи-
ми насосами при регулировании уровня жидкости и др.
Для повышения точности регулирования обычно стараются
уменьшить дифференциал. Однако при малом значении постоян-
ной времени объекта регулирования уменьшение дифференциа-
ла приводит к увеличению частоты срабатываний регулятора,
что является существенным недостатком процесса регулирова-
ния. Единственным параметром настройки двухпозиционных ре-
гуляторов является зона нечувствительности.
Трехпозиционные регуляторы в САР санитарно-технических
устройств, как правило, самостоятельно не применяются. Однако
они получили большое распространение в составе так называе-
мых регуляторов постоянной скорости. В регуляторах постоянной
скорости сочетаются исполнительный механизм постоянной ско-
рости (например, асинхронный реверсивный электродвигатель с
редуктором) и трехпозиционное регулирующее устройство. Ис-
полнительный механизм сочленен с регулирующим органом объ-
екта регулирования, а трехпозиционное регулирующее устрой-
ство обеспечивает три позиции управления этим механизмом:
1) механизм включен на перемещение регулирующего органа в
одном направлении; 2) механизм отключен; 3) механизм включен
на перемещение регулирующего органа в обратном направлении.
Регулирующее воздействие на объект определяется скоростью
перемещения регулирующего органа (рис. IV. 18). Отклонение зна-
чения регулируемого параметра более чем на половину величины
зоны нечувствительности б от заданного значения (Х=0) визы-
вает срабатывание трехпозиционного устройства и включение ис-
полнительного механизма. Скорость исполнительного механизма,
а следовательно, и скорость перемещения регулирующего орга-
на определяется значением 1/Тс, где Тс — время, в течение кото-
рого регулирующий орган делает полный ход (например, от от-
крытия до закрытия). Если же значение регулируемого парамет-
ра находится в пределах зоны нечувствительности, то исполни-
тельный механизм отключен. Из статической характеристики ре-
гулятора видно, что он состоит из двух двухпозиционных (релей-
ных) регуляторов, каждый из которых имеет зону гистерезисной
петли е. В случае если е<Сб, этой зоной можно пренебречь.
В дальнейших рассуждениях мы ее не будем принимать во вни-
мание.
Для иллюстрации работы регулятора постоянной скорости
рассмотрим регулирование уровня воды в баке с самовыравни-
ванием на стороне стока (рис. IV. 19). Датчиком служит попла-
вок, который с помощью рычага передает изменения уровня во-
ды на регулирующее устройство РУ. Трехпозиционное РУ имеет
две пары контактов, которые замыкаются при отклонении уровня
воды на величину 6 от заданного значения, т. е. при уровне вы-"
ше Т/+6 замыкается нижняя пара контактов, а при уровне ниже
Н—б — верхняя. Реверсивный электродвигатель с редуктором
(ИМ) перемещает плунжер регулирующего клапана (РО), кото-
рый, в свою очередь, изменяет количество поступающей в бак
воды.
В момент времени Т] вентилем уменьшили сток Qc. Уровень
воды стал возрастать и к моменту т2 превысил значение Н-)-8.
Замкнулась нижняя пара контактов РУ, и ИМ стал перемещать
РО в сторону уменьшения Qn. Скорость повышения уровня во-
ды dH/dx при этом регулирующем воздействии начала резко па-
дать и в момент времени гз стала равна нулю. Так как приток
Qn продолжает уменьшаться и Qn<Qc, уровень воды начинает
понижаться. При уровне, равном Я+б, в момент времени т4 РУ
отключит ИМ. Однако уровень воды продолжает понижаться,
так как Qn<Qc и к моменту Т5 достигнет значения Н—б. Тогда
сработает верхний контакт РУ, и ИМ начнет перемещать РО в
сторону увеличения притока. Воздействие регулятора на РО бу-
дет продолжаться до тех пор, пока приток Qn не сравняется со
стоком Qc, и одновременно значение регулируемого параметра
не окажется в пределах зоны нечувствительности 26 регулятора.
Скорость перестановки регулирующего органа 1/Тс и зона
нечувствительности 26 являются параметрами настройки регу-
ляторов постоянной скорости. Величина 1/Тс может изменяться
ступенчато — либо путем смены шестерен редуктора, либо под-
бором импульсного механизма. Изменение зоны нечувствитель-
ности производится плавно и, как правило, в достаточно широких
пределах. Увеличение зоны нечувствительности уменьшает точ-
ность регулирования и может привести к тому, что в процессе ре-
73
гулирования РО будет перемещаться без отключения от одного
крайнего положения до другого. В этом случае процесс регули-
рования не будет отличаться от двухпозиционного. К тому же
результату приводит значительное увеличение скорости пере-
мещения РО.
Когда время перемещения регулирующего органа Тс много
меньше постоянной времени объекта регулирования Т, регуля-
тор постоянной скорости работает в режиме двухпозиционного
регулирования.
Сравнительная простота регуляторов, использующих трехпо-
зиционные регулирующие устройства и исполнительные механиз-
мы постоянной скорости, обусловила довольно широкое их рас-
пространение в устройствах санитарной техники.
Для приведения в соответствие постоянной времени объекта
регулирования Т с временем перемещения регулирующего орга-
на используются некоторые корректирующие устройства, которые
существенно улучшают качество регулирования. Таким устрой-
ством является импульсный прерыватель, ограничивающий вре-
мя включения исполнительного механизма при поступлении сиг-
• нала рассогласования от регулирующего устройства и тем самым
как бы уменьшающий его скорость. Импульсный прерыватель
формирует периоды времени, которые состоят из импульсов и
пауз.
Во время импульса регулирующее воздействие передается от
регулирующего устройства к исполнительному механизму, а во
время пауз механизм отключается. Причем при наладке САР
можно достаточно легко изменять как период, так и время им-
пульса.
Значительное улучшение динамических свойств САР с им-
пульсными прерывателями достигается за счет введения пара-
метров настройки (период и время импульса), которые могут
изменяться в очень широких пределах, т. е. один и тот же регу-
лятор может быть успешно использован для объектов регулиро-
вания, имеющих различные динамические характеристики.
Регуляторы, реализующие пропорциональный закон регули-
рования, называют пропорциональными или сокращению П-ре-
гуляторами.
Пропорциональные регуляторы (статические) характеризу-
ются тем, что относительное перемещение регулирующего органа
ц пропорционально относительному отклонению регулируемого
параметра <р, т. е. ц==—КР<р (Кр— коэффициент пропорциональ-
ности). Знак минус означает, что регулирующее воздействие на-
правлено в сторону, противоположную отклонению регулируемо-
го параметра. Особенностью П-регуляторов является наличие
жесткой обратной связи, сигнал которой передается от датчика
положения исполнительного механизма, суммируется с сигналом
рассогласования и поступает на вход в регулирующее устрой-
ство.
74
В зависимости от применяемого исполнительного механизма
различают два типа П-регуляторов. К первому типу отнесены
регуляторы с исполнительным механизмом постоянной скорости,
ко второму — регуляторы с механизмом пропорциональной ско-
рости. В устройствах санитарной техники получили распростра-
нение в основном П-регуляторы с исполнительным механизмом
постоянной скорости, но применяются и П-регуляторы прямого
(непосредственного) действия, один из которых рассматривается
ниже. П-регулятор постоянной скорости представляет собой сле-
дящую систему, в которой положение регулирующего органа
соответствует значению регулируемого параметра.
На рис. IV.20 приведена характеристика П-регулятора для
различных коэффициентов пропорциональности (усиления) Кр.
Коэффициент пропорциональности является параметром наст-
ройки П-регуляторов.
Изменение положения регулирующего органа и отклонение
регулируемой величины от заданного значения X пропорциональ-
ны до тех пор, пока регулирующий орган не достигнет своих
крайних значений ±цт. Коэффициент пропорциональности ра-
вен единице, если вся шкала значения регулируемой величины
соответствует полному ходу регулирующего органа. Например,
при изменении на 10% регулируемой величины относительно
шкалы задания регулирующий орган переместится на 10% пол-
ного хода. Если он переместится на большую величину, то КР>1,
если на меньшую, то Кр<1.
Максимальное значение коэффициента пропорциональности
соответствует почти полному отсутствию обратной связи по по-
ложению регулирующего органа. Минимальное значение коэф-
фициента Кр лимитировано и определяется максимально допус-
тимой величиной обратной связи по положению регулирующего
органа, при котором П-регулятор работает без автоколебаний.
Иногда рассматривают величину (статизм), обратную коэф-
фициенту пропорциональности и выраженную в процентах (на-
пример, статизм равен 100% при КР=1). Эта величина характе-
ризует максимальные отклонения регулируемого параметра от
заданного значения при установившихся режимах САР.
Для иллюстрации работы П-регулятора рассмотрим процесс,
происходящий в объекте регулирования, не обладающем свойст-
вом самовыравнивания (рис. IV.21). Отличие этого объекта от
объекта, приведенного на рис. IV.19, состоит в оснащении бака
откачивающим насосом, который лишает объект свойства само-
выравнивания. Отличие регулятора состоит в том, что конкрет-
ное устройство К является подвижным, оно жестко связано с
регулирующим органом через редуктор Р. Исполнительный ме-
ханизм, перемещая регулирующий орган, одновременно пере-
мещает и контактное устройство, причем при открывании регу-
лирующего клапана контактное устройство поднимается, при за-
крывании опускается, т. е. каждому положению регулирующего
75
Рис. IV.20. Характеристики П-регуляторов
Рис. IV.21. Регулирование уровня П-регу-
лятором
Р — редуктор; К — контактное устройство;
ЖОС— жесткая обратная связь; А— кри-
вая перемещения контактного устройства;
Н' — кривая изменения уровня для И-ре-
гулятора без обратной связи
органа соответствует определенное положение контактного уст-
ройства. Это и есть жесткая обратная связь.
При скачкообразном уменьшении стока (например, при из-
менении скорости вращения двигателя насоса) уровень воды в
баке начнет возрастать. П-регулятор уменьшит приток и кон-
тактное устройство переместится вверх (линия Д). При Qn =
= Qc в момент Т2 уровень воды в баке перестанет повышаться—
в этот момент он достигнет своего наибольшего значения. Одна-
ко исполнительный механизм будет закрывать регулирующий
орган до тех пор, пока уровень воды не опустится ниже нового
положения контактного устройства (линия Д). На графике регу-
лирования (см. рис. IV.21) не отражена зона нечувствительности
76
регулирующего устройства ввиду ее малости и для того, чтобы
не загромождать график несущественными подробностями, В мо-
мент тз в результате размыкания верхних контактов исполни-
тельный механизм отключится, но продолжающееся снижение
уровня воды вызовет замыкание нижних контактов и включение
исполнительного механизма на открывание регулирующего орга-
на, т. е. на увеличение Qn. Одновременно с началом увеличения
притока (момент тз) контактное устройство начнет перемещать-
ся вниз, и в момент т4 приток сравняется со стоком — уровень
воды будет иметь минимальное значение. Увеличение притока и
перемещение контактного устройства продолжается до момента
т5, когда уровень воды будет выше положения контактного уст-
ройства. В следующий момент регулятор начнет уменьшать при-
ток.
Процесс регулирования будет продолжаться до тех пор, пока
уровень воды и положение контактного устройства не окажутся
на одной высоте (с точностью до ширины зоны нечувствительно-
сти регулирующего устройства) при одновременном равенстве
притока и стока. Новый установившийся режим будет наблю-
даться при новом установившемся значении уровня воды, кото-
рый в данном случае стал выше первоначального на величину
АН.
Разность между максимальным и минимальным значением
регулируемого параметра в установившемся режиме называется
(остаточной) неравномерностью регулятора, определяемой его
статизмом.
Новое положение уровня воды определяется изменившимся
положением регулирующего органа и жестко связанного с ним
контактного устройства. При увеличении скорости перемещения
контактного устройства по сравнению со скоростью регулирую-
щего органа, т. е. при уменьшении Кр, колебания уровня воды
затухают быстрее, но неравномерность (и статизм) регулирова-
ния увеличивается.
Примером П-регулятора прямого (непосредственного) дейст-
вия может служить поплавковый регулятор уровня воды (рис.
IV.22). Датчиком регулятора служит поплавок, который пере-
дает изменения уровня воды на регулирующий клапан посредст-
вом рычага. При Qn=Qc уровень воды в баке сохраняется посто-
янным. Уменьшение стока вызовет повышение уровня воды и уве-
личение степени закрытия регулирующего органа. Процесс ре-
гулирования закончится при новом, более высоком уровне воды,
которому будет соответствовать уменьшенный приток. Увеличе-
ние стока вызовет понижение уровня воды, соответствующее
положению регулирующего органа при большем стоке. При мак-
симальном стоке будет минимальный уровень воды, а при отсут-
ствии стока — максимальный. Аналогично описанному регулято-
ру работают простейшие регуляторы уровня воды, так называе-
мые шаровые клапаны.
77
Рис. IV.22. Поплавковый регу-
лятор уровня
Регуляторы непосредственного действия просты по устройству,
не нуждаются во вспомогательной энергии, надежны, почти не
требуют ухода. Однако они обладают невысокой чувствитель-
ностью, и поэтому их применяют только для грубого регулирова-
ния или в малоответственных установках.
В САР с П-регуляторами может быть получено достаточно
высокое качество процесса регулирования. Для этого нужно,
чтобы П-регуляторы обладали большим коэффициентом пропор-
циональности Др и соответственно малым статизмом.
Интегральные регуляторы, или сокращенно И-регуляторы,
осуществляют регулирование со скоростью перестановки регу-
лирующего органа, пропорциональной степени отклонения регу-
лируемого параметра от заданного значения. Регулирующее
воздействие И-регулятора пропорционально интегралу отклоне-
ния регулируемого параметра ц = —KQjqdx (где До — коэффици-
ент усиления регулятора).
У И-регуляторов положение регулирующего органа зависит
не от степени отклонения регулируемого параметра от заданно-
го значения, а от продолжительности этого отклонения с момента
отклонения регулируемого параметра за зону нечувствительно-
сти автоматического регулятора. Скорость (вращения) исполни-
тельного механизма d\xjdx должна быть пропорциональна откло-
нению регулируемого параметра от заданного значения X.
Характеристика идеализированного И-регулятора (рис.
IV.23, кривая 1) показывает, что скорость исполнительного ме-
ханизма при увеличении отклонения регулируемого параметра <р
от заданного значения <р0 может возрастать, т. е. <р—ф0=Х и
dn/dx-^oo при Х->-оо. Однако известно, что реальные исполни-
тельные механизмы имеют конечную максимальную скорость, а
потому характеристика реального И-регулятора представлена
78
кривой 2. В устройствах санитарной техники, как правило, при-
меняются механизмы с постоянной скоростью перемещения ре-
гулирующего органа. Для И-регуляторов с исполнительным ме-
ханизмом постоянной скорости характеристика представлена
кривой 3.
Из приведенной характеристики (рис. IV.23, кривая 3) мож-
но сделать вывод (при сравнении ее с характеристикой, приве-
денной на рис. IV.18), что И-регуляторы с исполнительными ме-
ханизмами постоянной скорости представляют собой регуляторы
постоянной скорости, которые были рассмотрены выше (см. рис.
IV.19).
Обратная связь у И-регуляторов отсутствует. И-регулятор
стремится переместить регулирующий орган в такое положение,
чтобы независимо от нагрузки на объект регулирования вер-
нуть регулируемую величину к заданному значению без стати-
ческой ошибки регулирования (остаточной неравномерности).
Поэтому И-регуляторы и получили название астатических.
Применение И-регуляторов для объектов регулирования с ма-
лой постоянной времени Т или имеющих запаздывание приводит
к колебательному характеру переходного процесса, а в некоторых
случаях даже к неустойчивым процессам регулирования, т. е.
такие объекты регулирования с И-регуляторами являются
структурно неустойчивыми САР.
Для лучшего представления о процессе регулирования уров-
ня воды в баке с помощью И-регулятора, использующего испол-
нительный механизм постоянной скорости, рассмотрим объект
регулирования, приведенный на рис. IV.21. П-регулятор лишим
жесткой обратной связи и таким образом превратим его в И-ре-
гулятор с исполнительным механизмом постоянной скорости. Ес-
ли нанести значения Qn и Н (штриховые линии), подобно тому
как это сделано для П-регулятора, то получим требуемую кри-
вую процесса (линия Н') с И-регулятором. Эта кривая представ-
ляет собой неустойчивый колебательный расходящийся переход-
ный процесс.
Анализируя характеристики П- и И-регуляторов, можно сде-
лать вывод, что П-регуляторы обеспечивают лучший переходный
процесс регулирования, т. е. имеют хорошие динамические
свойства, а И-регуляторы не имеют статизма, т. е. имеют лучшие
статические свойства.
Пропорционально-интегральный регулятор, или сокращен-
но ПИ-регулятор, работает по пропорционально-интегральному
закону регулирования и представляет собой комбинированный
регулятор, сочетающий в себе свойства П- и И-регуляторов. Ско-
рость перемещения регулирующего органа у ПИ-регуляторов
пропорциональна отклонению регулируемого параметра и ин-
тегралу во времени от этого отклонения, т. е.
\ * и J /
79
где К-p — коэффициент усиления регулятора; Т„ — постоянная времени, кото-
рая характеризует степень воздействия интегральной составляющей и носнт
название времени изодрома.
Скорость перемещения регулирующего органа ПИ-регулято-
ром пропорциональна величине и скорости изменения регулируе-
мого параметра, т. е. при отклонении регулируемой величины
<р от заданного значения <p0 регулятор сначала, действуя как про-
порциональный, перемещает регулирующий орган в зависимости
от величины и знака Х—ср—<р0, а затем, действуя как И-регуля-
тор, перемещает орган в зависимости от скорости изменения X
и тем самым ликвидирует остаточную неравномерность (ста-
тизм).
Такое воздействие ПИ-регуляторов на регулирующий орган
объясняется наличием в них так называемой гибкой (или упру-
гой) обратной связи, которая оказывает влияние не по величине
регулирующего воздействия ц, а по скорости его изменения
d^fd-t.
Упругая обратная связь по скорости перемещения исполни-
тельного механизма воздействует на автоматический регулятор
только во время переходного процесса регулирования. В устано-
вившемся режиме эта обратная связь снимается (пропадает) и
регулятор приводит параметр <р к заданному значению <р0 без
остаточной неравномерности (статизма). ПЙ-регуляторы назы-
вают изодромными.
Параметрами настройки ПИ-регуляторов являются остаточ-
ная неравномерность (статизм) и время изодрома. Неравномер-
ность (статизм) характеризует свойства П-регулятора и опреде-
ляется коэффициентом пропорциональности. Время изодрома
Ги характеризует степень воздействия упругой обратной связи.
Для иллюстрации работы ПИ-регулятора рассмотрим процесс
регулирования объекта без самовыравнивания, который мы ис-
пользовали в качестве примера при описании работы П- и И-ре-
гуляторов. Для этого в приведенном на рис. IV.21 П-регуляторе
заменим жесткую обратную связь ЖОС упругой обратной
связью УОС и тем самым превратим его в ПИ-регулятор (рис.
IV.24). Конструктивно УОС в данном случае выполняется как
гидравлический изодром. Это устройство представляет собой ци-
линдр, заполненный маслом, с поршнем, перемещающимся в нем,
и дроссельным вентилем на линии, соединяющей верхнюю и
нижнюю полости цилиндра, разделенные поршнем. Цилиндр
жестко соединен с редуктором и перемещается пропорционально
отклонению регулирующего органа. Контактное устройство К
соединено со штоком поршня изодрома и опирается на пру-
жину.
При перемещении регулирующего органа на поршне цилинд-
ра возникает усилие, заставляющее масло перетекать из полости
с большим давлением в полость с меньшим давлением через
дроссельный вентиль до тех пор, пока не снимется усилие с пор-
80
Рис. IV.24. Регулирование уровня ПИ-регулятором
А — кривая перемещения контактного устройства; Б — кривая неравномерности; 1 — ци-
линдр, заполненный маслом; 2— поршень; 3 — вентиль; 4— пружина
шня, а время перетекания будет тем большим, чем меньше от-
крыт вентиль.
Если вентиль закрыть, то Ти=<х> и регулятор превратится в
П-регулятор с жесткой обратной связью. Если вентиль открыть,
то Ти=0 и регулятор превратится в И-регулятор с исполнитель-
ным механизмом постоянной скорости (без обратной связи).
На рис. IV.24 приведен упрощенный график регулирования
уровня ПИ-регулятором при скачкообразном уменьшении стока
Qc. В первый момент после нанесения возмущающего воздейст-
вия повышение уровня вызовет включение исполнительного ме-
ханизма, который начнет закрывать регулирующий орган и од-
новременно перемещать цилиндр с поршнем и контактное уст-
ройство, как и в примере с П-регулятором. Однако контактное
устройство будет перемещаться не с постоянной скоростью, как
в примере с П-регулятором, а с замедлением (см. рис. IV.24, кри-
вая А) за счет наличия упругой обратной связи. Затем под воз-
действием пружины контактное устройство возвращается к сво-
ему первоначальному положению, соответствующему заданному
значению уровня.
Таким образом, при одном и том же положении контактного
устройства в установившемся режиме работы регулирующий
орган может иметь любое положение, соответствующее нагрузке
на объект регулирования, так как поршень даже при отсутствии
6—903
81
усилия на штоке может занимать различные по высоте поло-
жения в цилиндре гидравлического изодрома.
Колебания уровня, значительные вначале переходного про-
цесса, постепенно уменьшаются и уровень принимает заданное
значение. Влияние неравномерности (см. рис. IV.24, кривая Б)
в процессе регулирования проявляется временно. Оно необходи-
мо для обеспечения устойчивости регулирования. Конечная не-
равномерность регулирования равна нулю.
В устройствах санитарной техники ПИ-регуляторы применя-
ют для наиболее ответственных объектов регулирования с быст-
ро и резко изменяющимися нагрузками (как с самовыравнивани-
ем, так и без него), а также для объектов регулирования с малой
емкостью и со значительным временем полного запаздывания.
Следует заметить, что перечисленные законы регулирования
не исчерпывают всего многообразия принципов, которые исполь-
зуются в созданных регуляторах, а лишь дают представление
об основных законах, применяемых при автоматизации санитар-
но-технических устройств.
§ 21. ЭЛЕКТРИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ
СИСТЕМЫ РЕГУЛИРОВАНИЯ
Системы автоматизации, применяемые в технике, используют
различные виды энергии (электрическую, пневматическую, гид-
равлическую) для перемещения регулирующего органа и форми-
рования алгоритма регулирования. Отдельный класс составляют
регуляторы прямого (непосредственного) действия или, как их
еще называют, регуляторы без использования вспомогательной
энергии, т. е. использующие энергию регулируемой среды.
Гидравлические системы регулирования с маслонасосными
установками в санитарной технике не применяются из-за слож-
ности и относительной дороговизны устройства и эксплуатации
маслонасосного хозяйства. Гидравлические системы, использую-
щие в качестве рабочей жидкости воду, применяются редко (см.
далее § 24—регулятор РД-ЗА) и, как правило, только при ре-
гулировании установок теплоснабжения зданий наряду с регу-
ляторами прямого действия. Причинами редкого использования
этих систем являются: коррозия внутренней рабочей поверхности
регуляторов и регулирующих органов, отказы в работе при от-
рицательных температурах, большие габариты и вес, низкое дав-
ление энергоносителя, ограниченность расстояния передачи ре-
гулирующего воздействия, необходимость отвода воды и др.
Устройства, питающиеся при эксплуатации энергией одного
рода, образуют единую структурную группу в Государственной
системе промышленных приборов и средств автоматизации пли
«ветвь ГСП».
Системы, комплектуемые из приборов электрической ветви
ГСП, имеют следующие преимущества. Электроника придает
82
системе высокую чувствительность, точность, быстродействие,
дальность связей и обеспечивает высокую схемную и конструк-
тивную унификацию приборов. Повсеместное наличие источников
электроэнергии, а также возможность применения интегральных
схем, увеличивающих надежность и существенно сокращающих
габариты и вес установок и расход электроэнергии, обеспечили
широкое применение этой ветви ГСП. Однако наличие в ряде
элементов контактов, ухудшающих показатели надежности, труд-
ность изменения скорости хода исполнительных механизмов и
опасность применения электрических устройств во взрывоопас-
ных условиях ограничивают использование таких систем.
Приборы пневматической ветви ГСП характеризуются безо-
пасностью применения в легковоспламеняющихся и взрывоопас-
ных средах, простотой устройства, безопасностью для обслужи-
вающего персонала, большими функциональными возможностя-
ми, высокой надежностью в тяжелых условиях работы и
сравнительно малой стоимостью исполнительных механизмов.
Для устройств санитарной техники, особенно при большом числе
автоматизированных установок, сосредоточенных в крупных ма-
шинных залах, такая система особенно удобна, так как требует
менее квалифицированного обслуживания, чем электриче-
ская.
В нашей стране разработана и освоена универсальная систе-
ма элементов промышленной пневмоавтоматики (УСЭППА).
Эта система состоит из пневмосопротивлений, пневмоемкостей,
пневмоусилителей, пневмореле и других элементов, выполняю-
щих простейшую функцию в общей цепи (усиление или переклю-
чение сигналов, дросселирование и т. д.). Элементы просты по
устройству, имеют небольшие размеры и объединяются в единую
схему с помощью платы с внутренними коммутационными кана-
лами.
В настоящее время на базе УСЭППА разработана и серийно
выпускается система пневматических устройств автоматизации
«Старт». Эта система включает в себя разнообразные пневма-
тические приборы общепромышленного назначения —от простей-
ших повторителей сигналов до сложных вычислительных уст-
ройств. В эту систему входят позиционные регуляторы ПР 1.5,
пропорциональные регуляторы ПР2.5, изодромные (ПИ-регуля-
торы) ПР3.21, различные функциональные приборы, осуществля-
ющие алгебраическое сложение, умножение и деление (на два)
пневматических сигналов (ПФ1.1), усиление (П1.5), ограниче-
ние (ПФ11.1), переключение и многие другие функции. Элемен-
ты УСЭППА используют в различных измерительных и регули-
рующих приборах для создания аналогового или дискретного
пневматического сигнала и его усиления. Применяя пневмати-
ческие измерительные, функциональные и регулирующие прибо-
ры, а также приборы системы «Старт», можно создать любые
по сложности выполняемых функций регулирующие системы с
6*
83
пневматическими исполнительными устройствами, вошедшими в
ГСП (см. далее § 28).
Пневматическую систему можно применять для регулирова-
ния температуры, давления, уровня и других теплотехнических
параметров.
В некоторых автоматизированных системах довольно успеш-
но используется комбинированное применение ветвей ГСП или
их отдельных устройств в различных сочетаниях.
Как упоминалось ранее, самостоятельную ветвь ГСП состав-
ляют регуляторы, работающие без использования вспомогатель-
ной энергии. Преимущества этих регуляторов заключаются в ав-
тономности (не требуют источников питания), повышенной на-
дежности (имеют небольшое число элементов), простоте изготов-
ления, монтажа и ремонта.
Несмотря на то что наиболее перспективной и широко раз-
вивающейся является электрическая ветвь ГСП, приборы пнев-
матической ветви еще длительное время будут успешно конкури-
ровать с нею.
§ 22. ЭЛЕМЕНТЫ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Как уже говорилось ранее (см. § 16), САР состоят из отдель-
ных элементов, воздействующих друг на друга в определенной
последовательности. Каждую САР можно с определенной сте-
пенью подробности схематически изобразить в виде отдельных
функциональных элементов, связанных между собой стрелками,
показывающими направление воздействия этих элементов (см.
рис. IV.4).
Составная часть автоматического устройства, выполняющая
самостоятельную функцию, называется элементом САР. Каждый
элемент преобразует одну физическую величину в другую, при-
чем это преобразование идет в определенном направлении. Для
каждого элемента можно установить математическую зависи-
мость между этими величинами. Одна физическая величина яв-
ляется причиной, и ее называют входной величиной, а другая—
следствием, ее называют выходной величиной. Например, для
датчика температуры входной величиной будет температура из-
меряемой среды, а выходной — изменение давления в термобал-
лоне (при манометрическом датчике) или омического сопротив-
ления (при термометре сопротивления).
Основными функциональными элементами САР являются
чувствительные элементы (датчики), нормирующие преобразова-
тели, задающие элементы (задатчики), элементы сравнения, ре-
гулирующие устройства, усилители, исполнительные механиз-
мы, регулирующие органы и объекты регулирования.
С некоторыми из этих элементов мы уже познакомились (объ-
екты регулирования, регулирующие устройства, датчики), с дру-
84
гимн познакомимся позже. Часто несколько элементов САР вы-
полняют конструктивно в виде одного устройства; например, ав-
матический регулятор может состоять из задатчика, элемента
сравнения, регулирующего устройства и усилителя.
При описании регуляторов мы встретимся с различными фи-
зическими принципами, использованными в элементах САР, и
многообразием конструктивных исполнений этих элементов.
Знание функционального назначения и характеристик элементов
САР позволяет определить требования к отдельным элементам.
Выполнение этих требований дает возможность обеспечить необ-
ходимое качество процессов регулирования.
Чувствительный элемент (датчик) преобразует измеряемую
величину (температуру, давление, уровень и т. д.) в величину,
удобную для дальнейшего использования. Если выходной пара-
метр датчика не может быть использован непосредственно в ка-
честве входной величины в элементе сравнения (см. рис. IV.4), то
между этими элементами устанавливается так называемый нор-
мирующий преобразователь, который преобразует выходной па-
раметр датчика в нормализованный сигнал.
Основными характеристиками датчиков являются чувстви-
тельность и инерционность. Чувствительность датчика определя-
ется зависимостью изменения выходной величины датчика от
входной, инерционность—постоянной времени и запаздыванием,
т. е. динамическими свойствами.
От выбора характеристики чувствительных элементов регу-
ляторов зависят характер и качество переходных процессов САР.
Нельзя получить удовлетворительный процесс автоматического
регулирования, если постоянные времени датчика и объекта ре-
гулирования являются величинами одного порядка. Самый со-
вершенный закон регулирования не позволит в этом случае по-
лучить удовлетворительное качество процесса регулирования. На
практике стремятся к тому, чтобы постоянная времени датчика
была много меньше постоянной времени объекта регулирования,
т. е. чтобы датчики были малоинерционными.
В санитарно-технических устройствах инерционность датчи-
ков имеет большое значение при регулировании тепловых объ-
ектов, обладающих малой емкостью, и объектов с большим за-
паздыванием. Очень важен также выбор места установки темпе-
ратурных датчиков, так как на их инерционность оказывают
влияние линейные размеры, теплоемкость материала и условия
теплообмена между датчиками и средой (в частности, скорость
перемещения среды относительно датчика).
В Государственную систему приборов и средств автоматиза-
ции (ГСП) составной частью входит унифицированная система
пневматических и электрических датчиков теплоэнергетических
параметров. Датчики этой системы используются в комплекте с
вторичными приборами, регуляторами и другими устройствами
автоматики, машинами централизованного контроля и система-
85
ми управления и предназначены для непрерывного преобразова-
ния избыточного, вакуумметрического и абсолютного давления,
перепада давления, расхода, уровня, плотности, температуры и
некоторых других параметров в стандартные пневматический и
электрический токовый выходные сигналы.
Принцип действия датчиков, основанный на силовой компен-
сации, обеспечивает высокую точность, метрологическую надеж-
ность, простоту перенастройки в большом диапазоне пределов
измерений. Датчики состоят из унифицированных блоков: элек-
трического или пневматического преобразователя, измерительно-
го блока и усилительного блока. Из 600 деталей можно сконст-
руировать более 120 типов приборов, рассчитанных на 500 пре-
делов измерения.
Силовая компенсация — это воздействие измеряемого пара-
метра на чувствительный элемент измерительного блока, преоб-
разованное в усилие, которое автоматически уравновешивается
усилием, развиваемым силовым механизмом обратной связи пре-
образователя. Сигнал обратной связи преобразователя в момент
измерения соответствует выходному сигналу датчика.
Во всех датчиках с одним и тем же видом выходного сигна-
ла используется один и тот же преобразователь. В электрических
и пневматических датчиках на одинаковые пределы измерений
используются одинаковые измерительные блоки. Выходные сиг-
налы датчиков: пневматический — давление 0,2—1 кгс/см2*;
электрический—постоянный ток 0—20 и 0—5 мА.
Необходимыми элементами САР являются усилители и пре-
образователи-усилители, как правило, входящие в регуляторы
или в исполнительные механизмы. Усилителем называют устрой-
ство, в котором увеличивается мощность сигнала.
Магнитные усилители применяют в регуляторах и для бескон-
тактного управления исполнительными механизмами. Магнитные
усилители (см. рис. III.3) позволяют управлять мощной систе-
мой переменного тока путем изменения постоянного тока в ма-
ломощной катушке подмагничивания, дают возможность сумми-
ровать несколько независимых входных сигналов и получать
большие коэффициенты усиления (до сотен и тысяч). Они просты
по устройству и надежны.
Электронные усилители используют, как правило, в измери-
тельных и регулирующих приборах для усиления напряжения и
мощности. Полупроводниковые транзисторные усилители имеют
меньшие размеры, безынерционность при включении, относитель-
но высокий к. п. д., достаточно большой коэффициент усиления.
Переход от полупроводниковой техники к применению инте-
гральных схем позволил уменьшить габариты и массу установок,
* В пневматической ветви ГСП для измерения давления в пневматических
измерительных, импульсных и питающих линиях принята единица кгс/см2, вре-
менно допускаемая к применению.
86
снизить потери электроэнергии, повысить надежность и расши-
рить функциональные возможности усилителей и преобразова-
телей.
Пневматические усилители применяют для усиления мощно-
сти выходных сигналов регуляторов. Они входят в состав регуля-
торов или выполняются в виде отдельного элемента. Усилитель
(рис. IV.25) состоит из измерительной, питающей и выход-
ной камер, камеры сброса сжатого воздуха в атмосферу и мем-
бранного блока. Выходной пневматический сигнал, изменяющий-
ся от 0 до 1 кгс/см2, поступает в камеру Г и создает усилие на
мембранном блоке. Шарики перемещаются вниз, и поток сжа-
того воздуха попадает из камеры А (куда он поступает из линии
питания с постоянным давлением ртп= 1,4 кгс/см2) в камеру Б
и далее на выход усилителя. Сжатый воздух будет перетекать из
камеры А в камеру Б до тех пор, пока давление в камере Б не
станет равным давлению в камере Г. Таким образом, давление
в камере Б является выходным сигналом усилителя рВых и пов-
торяет значение входного сигнала рвх, однако если расход воз-
духа на входе усилителя равен нулю, то на выходе он является
достаточным для управления исполнительным механизмом и за-
полнения воздухом командной линии.
Гидравлические усилители применяют для управления мем-
бранными и поршневыми исполнительными механизмами.
Преобразователи-усилители используют для преобразования
и усиления выходных сигналов регуляторов. Эти элементы пре-
образуют входной сигнал одного вида (или рода энергии) в бо-
лее мощный сигнал другого вида (или рода энергии).
Наиболее распространенными являются преобразователи ли-
нейного перемещения в электрический, пневматический или гид-
равлический выходной сигнал. Коэффициенты усиления этих
устройств могут быть значительными. Простейшим преобразова-
телем с электрическим выходным сигналом является концевой
выключатель (рис. IV.26). На этом же принципе основано дейст-
вие двухпозиционных датчиков — регуляторов температуры, дав-
ления, уровня и др. Линейное перемещение подвижного контакта
осуществляется мембранами, сильфонами и другими чувстви-
тельными устройствами. Разрывная мощность контактов может
достигать 0,5—1 кВА.
Примером преобразователя-усилителя с пневматическим вы-
ходом служит сопло-заслонка (рис. IV.27). Через дроссель по-
дается питание сжатым воздухом (рШ1т~1,4 кгс/см2). Из сопла
вытекает струя воздуха. Гидравлическое сопротивление на выхо-
де из сопла (рВЫх=0,24-1 кгс/см2) изменяется в зависимости от
положения заслонки: если она прижата к соплу, то сопротивле-
ние очень велико и давление сжатого воздуха на выходе близко
к давлению питания; если заслонка находится на некотором рас-
стоянии от сопла, то давление на выходе из сопла, а следователь-
но, и давление на выходе из усилителя близко к атмосферному.
87
Рис. IV.25. Усилитель
п-поо
И — питающая камера;
Б— выходная камера;
В — камера сброса воз-
духа; Г — измерительная
камера; / — мембранный
блок; 2 — шарики
Рис. IV.26. Микропереключатель
а — контакт замкнут; б — контакт разомкнут
Рис. IV.27. Сопло-заслонка
/ — дроссель; 2 — сопло; 3 — заслонка
Рис. IV.28. Управление поршневыми испол-
нительными механизмами с помощью зо-
лотиика
Таким образом, небольшое усилие, затрачиваемое на перемеще-
ние заслонки, вызывает значительное изменение выходного дав-
ления.
Примером преобразователя-усилителя с гидравлическим вы-
ходом может служить золотник (рис. IV.28), который используют
для управления поршневыми исполнительными механизмами.
Применение профилированных окон золотника обеспечивает поч-
ти прямолинейную зависимость между величиной входного сиг-
нала (перемещение штока золотника) и усилием, действующим
на шток поршня исполнительного механизма.
Задающие элементы —-это устройства, применяемые для на-
стройки регулятора на заданное значение регулируемой вели-
чины. Эти элементы являются обязательной принадлежностью
каждой САР.
В электрических и электронных регуляторах задатчики пред-
ставляют собой регулируемое вручную омическое, индуктивное
сопротивление или устройства, формирующие электрические ве-
личины.
88
В пневматических и гидравлических регуляторах задатчик
выполняют обычно в виде пружинного элемента с винтовой на-
стройкой, компенсирующего давление или перемещение, выраба-
тываемое датчиком. В регуляторах прямого (непосредственного)
действия в качестве задающего элемента кроме пружин с вин-
тами используют также рычажные устройства с грузом.
Элемент сравнения воспринимает сигнал от датчика и задат-
чика и формирует сигнал отклонения регулируемого параметра
от заданного значения. Сигнал на выходе элемента сравнения
может быть механический, электрический, пневматический и
др. Он передается на регулирующее устройство, которое отраба-
тывает тот или иной закон регулирования, затем усиливается,
подается на исполнительный механизм, перемещающий регули-
рующий орган, и тем самым изменяет величину регулирующего
воздействия на объект регулирования.
Дать описание даже наиболее часто используемых в санитар-
ной технике автоматических регуляторов на страницах учебника
невозможно и вряд ли необходимо, поскольку выпускаемые в
настоящее время приборы и средства автоматизации постоянно
модернизируются. Поэтому при знакомстве с регуляторами бу-
дем уделять основное внимание принципам работы отдельных
элементов и только в общих чертах говорить об их конструктив-
ном оформлении.
§ 23. РЕГУЛЯТОРЫ ТЕМПЕРАТУРЫ
Регулирование температуры в устройствах санитарной техни-
ки производится значительно чаще, чем регулирование каких-
либо других параметров. Диапазон регулируемых температур
относительно невелик. Нижний предел этого диапазона ограни-
чен минимальным значением температуры наружного воздуха
(—40°С), а верхний — максимальной температурой теплоноси-
теля (+150° С).
Каждый регулятор создается, как правило, для определенной
цели (например, для регулирования температуры теплоносите-
ля, холодоносителя или воздуха в помещениях) и, следовательно,
может быть применен для регулирования температуры в очень
небольшом диапазоне. Чем меньше диапазон настройки регуля-
тора, тем при прочих равных условиях меньше абсолютная ве-
личина его погрешности (меньше, в частности, зона нечувстви-
тельности регулятора). Специфика применения того или иного
регулятора определяет устройство и конструктивное оформление
термочувствительного элемента (датчика) и всего регулятора.
В санитарно-технических устройствах широко применяют ре-
гуляторы температуры прямого (непосредственного) действия,
использующие манометрические измерительные устройства.
Для регулирования температуры воздуха в помещениях адми-
нистративных и других общественных зданий при применении
89
Рис. IV.29. Регулятор температуры типа РТК
а —регулятор РТК-5215; б — регулирующий клапан ТК-15; в — термосистема; X —шту-
цер холодной воды; Г—штуцер горячей воды; 1 — сильфон; 2— задатчик; 3 — ручка
настройки; 4 — корпус; 5, 6 — регулирующие органы соответственно горячей и холодной
воды; 7 — шток; 8 — исполнительный механизм; 9 — чувствительный элемент
Рис. IV.30. Регулятор температуры
типа РТ
1 — термобаллон; 2 — задатчик
Рис. IV.31. Схема пневматического П-ре-
гулятора температуры с манометрической
термосистемой
1 — шток пневмореле; 2 — узел неравно-
мерности; 3, 9 — рычаги; 4, 7 — внвты; 5—
шкала; 6 — гайка; 8 — пружина; 10 — силь-
фон; 11— мембрана; 12— пневмореле; 13—
термобаллон; 14— питающий клапан; 15—
стравливающий клапан
эжекционных или вентиляторных доводчиков трехтрубной схе-
мы тепло- и холодоснабжения используют регулятор прямого
действия типа РТК (рис. IV.29).
90
Регулятор состоит из термосистемы и регулирующего клапа-
на. Термосистема служит для пропорционального перемещения
штока регулирующего клапана при изменении температуры ре-
циркуляционного воздуха на входе в доводчик. В нее входят три
узла: чувствительный элемент, задатчик и исполнительный меха-
низм. Их полости соединены капиллярной трубкой и составляют
единый герметичный объем, заполненный термочувствительной
жидкостью. Трехходовой регулирующий клапан регулирует по-
дачу горячей или холодной воды к теплообменнику эжекционно-
го доводчика и состоит из корпуса и регулирующих органов.
При повышении температуры воздуха среда термосистемы
увеличивает свой объем, и сильфон клапана перемещает шток и
регулирующий орган 5, закрывая проход горячей воды через
клапан. Повышение температуры на 0,5—1° не вызывает переме-
щения регулирующих органов — проходы горячей и холодной во-
ды закрыты. При дальнейшем повышении температуры переме-
щается регулирующий орган 6 и открывает проход холодной во-
ды. Проход горячей воды остается закрытым.
Регулятор настраивается на заданную температуру вращени-
ем ручки настройки, связанной с сильфоном, который изменяет
внутренний объем термосистемы. Диапазон настройки темпера-
туры 15—30° С.
Для регулирования температуры в водо- и пароводяных по-
догревателях и охладителях применяются регуляторы типа РТ
(рис. IV.30). Принципиально этот регулятор не отличается от
регулятора типа РТК. Особенностью его является совмещенное
исполнение термобаллона с задатчиком, а также использование
в качестве регулирующего органа двухседельного (разгруженно-
го) клапана (см. далее § 29). В этих манометрических регуля-
торах положение штока регулирующего клапана определяется
температурой среды, в которую помещен термобаллон, причем
шток перемещается в зависимости от изменения температуры.
Указанное свойство, как известно (см. § 20), является характер-
ным признаком П-регулятора.
Статические регуляторы типа РТ выпускают на несколько со-
рокаградусных диапазонов в пределах от 20 до 180° С, диамет-
ром условного прохода от 15 до 80 мм. Наличие значительной
(10°) зоны неравномерности (статической ошибки), свойствен-
ной этим регуляторам, не позволяет применять их в тех случа-
ях, когда необходима большая точность поддержания темпера-
туры.
Манометрическую термосистему используют в пневматичес-
ких П-регуляторах, которые широко применяются для регулиро-
вания температуры в установках кондиционирования воздуха и
вентиляции.
При изменении температуры контролируемой среды изменя-
ется давление в термосистеме (рис. IV.31), состоящей из термо-
баллона и сильфона, соединенных капиллярной трубкой. Давле-
91
ние через сильфон, преодолевая сопротивление пружины диапа-
зона, действует на главный рычаг 9, который через узел нерав-
номерности и рычаг 3 передает усилие на шток пневмореле и
мембрану. При совпадении заданной температуры с действитель-
ной (равновесный режим) вся система находится в равновесии,
оба клапана пневмореле, питающий и стравливающий, закрыты.
С увеличением давления на шток начинает открываться питаю-
щий клапан, к которому подведено рабочее давление от сети пи-
тания сжатым воздухом, в пневмореле появляется давление уп-
равления, возрастающее от 0,2 до 1 кгс/см2 пропорционально
увеличению температуры контролируемой среды. Это давление
передается на исполнительный механизм.
Узел настройки диапазона состоит из пружины, регулировоч-
ного винта 4, регулировочной гайки, которая одновременно яв-
ляется опорой пружины, винта 7 и шкалы. Диапазон настройки
регулятора в зависимости от модификации может быть 20, 25 или
30° С. Узел неравномерности состоит из рычага и ползунка, ко-
торый может перемещаться вдоль рычага при вращении руко-
ятки настройки неравномерности.
Эти приборы выпускаются на несколько диапазонов регули-
рования в интервале температур от —5 до +120° С. Каждый
прибор может быть настроен на прямое (повышение давления
сжатого воздуха на выходе при повышении температуры контро-
лируемой среды) и обратное (понижение давления при повыше-
нии температуры) действие. Переход с прямого на обратное дей-
ствие осуществляется перестановкой узла неравномерности. Не-
равномерность у приборов прямого действия регулируется от 1,4
до 8° С, а обратного — от 1,3 до 1,6° С. Регуляторы изготовляют
дистанционного исполнения с капилляром длиной 2,5 и 6 м и ка-
мерного для регулирования температуры воздуха в помещениях.
Рассмотренные пневматические терморегуляторы выгодно от-
личаются от других пневматических регуляторов (например, ре-
гуляторов, использующих усилитель-преобразователь типа соп-
ло-заслонка) тем, что не потребляют энергию сжатого воздуха
в равновесном режиме, когда регулируемая температура соот-
ветствует заданной, а потому имеют очень малый расход сжатого
воздуха.
Манометрическую термосистему используют также в прибо-
рах с пневматическим аналоговым выходным сигналом (0,2—
1 кгс/см2). Давление сжатого воздуха на выходе такого прибора
соответствует измеряемой температуре. Применяют ее в двух-
позиционных электроконтактных термореле (в качестве выход-
ных элементов таких реле используют различные микропереклю-
чатели), а также в показывающих приборах с трехпозиционным
контактным устройством. Это устройство имеет два электричес-
ких контакта, замыкающихся через поводок показывающей
стрелки прибора. Каждый контакт с помощью ключа может быть
установлен на срабатывание при любой температуре в пределах
92
Рис. IV.32. Биметаллические терморегуляторы
а — электрический двухпозиционный; б — пневматический пропорциональный
шкалы прибора. Контакты имеют разрывную мощность всего
10 ВА. Терморегуляторы, оснащенные релейными усилителями,
позволяют использовать встроенное в прибор трехпозиционное
регулирующее устройство для непосредственного управления ис-
полнительными механизмами.
Большое распространение получили биметаллические и ди-
латометрические терморегуляторы, например электрический
двухпозиционный и пневматический пропорциональный.
Электрический биметаллический датчик температуры (рис.
IV.32,a) предназначен в основном для двухпозиционного регу-
лирования температуры воздуха в помещениях. Чувствительным
элементом этого прибора является биметаллическая спираль,
один конец которой закреплен в держателе, а другой конец сво-
боден и управляет подвижным контактом, замыкающимся или
размыкающимся с неподвижным контактом в зависимости от
действительного и заданного значений температуры. Для созда-
ния дифференциала (разности температур между замыканием и
размыканием контактов), а также для увеличения разрывной
мощности контактов предусмотрены ускорительные магниты.
Датчик устанавливают на заданную температуру поворотом
шкалы настройки.
93
В зависимости от диапазона настройки и характера работы
контактов (замыкание при повышении или при понижении тем-
пературы) терморегуляторы выпускаются в 16 модификациях с
общим диапазоном настройки от —30 до +35° С, причем каж-
дый регулятор имеет диапазон 10, 20 и 30°. Дифференциал тер-
морегулятора может устанавливаться от 2 до 8°. Погрешность
срабатывания ±1° на средней отметке шкалы и до +2,5° на
крайних отметках. Разрывная мощность контактов 50 ВА при
переменном токе 220 В частотой 50 Гц.
Пневматический биметаллический регулятор температуры
(рис. IV.32, б) в качестве усилителя-преобразователя имеет соп-
ло-заслонку, на которую действует усилие биметаллического
измерительного элемента. Такие терморегуляторы используют
только для регулирования температуры воздуха в помещениях.
Выпускаются они восьми модификаций, прямого и обратного
действия с общим диапазоном настройки от 4-5 до 4*30° С (ди-
апазон настройки каждой модификации 10°). Дифференциал это-
го терморегулятора 1°.
Дилатометрические регуляторы температуры построены на
использовании разности коэффициентов линейного расширения
инварного (железоникелевый сплав) стержня и латунной или
стальной трубки. Одни терморегуляторы имеют двухпозицион-
ное электрическое регулирующее устройство, а другие —пропор-
циональное пневматическое. Эти терморегуляторы по принципу
действия регулирующих устройств не отличаются от подобных
регуляторов, использующих манометрическую измерительную
систему. Основное отличие дилатометрических терморегуляторов
от манометрических заключается в возможности их настройки
на значения температур от —30 до 4-1100°С (терморегуляторы
ТУДЭ и ТУДП). В силу своих конструктивных особенностей —
наличие трубки и стержня сравнительно большой длины (мини-
мум 265 мм) —эти терморегуляторы предназначаются для регу-
лирования температуры жидкостей и газов, транспортируемых
по воздуховодам и трубопроводам, а также находящихся в емко-
стях и агрегатах.
Для автоматизации установок кондиционирования воздуха,
вентиляции и теплоснабжения применяют полупроводниковые
терморегуляторы типа ПТР. В качестве датчика используется
полупроводниковый термистор. Регулирующее устройство —
электрическое двухпозиционное в регуляторах ПТР-2, электри-
ческое трехпозиционное в регуляторах ПТР-3 и электрическое
пропорциональное в регуляторах ПТР-П.
Измерительная схема этих терморегуляторов (рис. IV.33)
представляет собой четырехплечий мост сопротивления, питаю-
щая диагональ которого подключена к обмотке переменного тока
блока питания, а измерительная диагональ—к электронному уси-
лителю на транзисторах. В одно плечо моста включен термистор,
в другое плечо, прилежащее к первому, — реостат выбора за-
94
данного значения темпе-
ратуры. Реостат выбора
значения дифференциала
для ПТР-2 и ПТР-3 или
выбора значения нерав-
номерности для ПТР-П
включен последователь-
но в диагональ питания
моста. Уменьшение нап-
ряжения питания снижа-
ет чувствительность мос-
товой измерительной
схемы.
Сигнал разбаланса
моста подается на выход
усилителя, собранного на
полупроводниковых при-
борах. Усилитель имеет
два каскада усиления на-
пряжения и один фазо-
чувствительный каскад
усиления мощности, слу-
жащий для определения
направления разбаланса
моста в зависимости от
отклонения температуры
от ее заданного значения.
У ПТР-2 в зависимо-
сти от направления изме-
нения температуры на
выходе усилителя вклю-
чается или отключается
выходное реле Р, которое
замыкает или размыкает
контакты на выходе ре-
гулятора.
Терморегулятор ПТР-
3 имеет на выходе два
фазочувствительных кас-
када, каждый из которых
управляет своим выход-
Рис. IV.33. Блок-схема терморегулятора типа ПТР
а — двухпозиционный; б — трехпозиционный; в —
пропорциональный: ЧЭ — чувствительный элемент
(термистор); МНС — мостовая измерительная схе-
ма; ПФУ — полупроводниковый фазочувствитель-
ный усилитель; ВП — блок питания; ИМ — испол-
нительный механизм; РОС — реостат обратной
связи
ным реле. Схема построе-
на таким образом, что-
бы катушка реле Р1
обесточивалась при повышении температуры выше заданной (с
учетом половины дифференциала), а катушка реле Р2 обесточи-
валась при понижении температуры ниже заданной. Причем тем-
пература срабатывания реле Р2 на величину дифференциала.
95
Рис. IV.34. Терморегулятор типа ПТР
а — общий вид; б — термосистема для агрессив-
ных сред; в — термосистема для жидких и газо-
образных сред; г — термосистема для помещений
Если контролируемая
температура находится в
зоне «норма», то оба ре-
ле обесточены.
Измерительная схе-
ма терморегулятора ПТР-
П отличается от схемы
ПТР-3 тем, что парал-
лельно реостату диффе-
ренциала в ее измери-
тельную диагональ вве-
ден реостат обратной свя-
зи электрического испол-
нительного механизма.
Сигнал разбаланса моста
при отклонении темпера-
туры от заданного значе-
ния включает выходное
реле, соответствующее на-
правлению разбаланса,
и исполнительному меха-
низму подается сигнал
на перемещение регулиру-
ющего органа. Вместе с
исполнительным механиз-
мом перемещается ползу-
нок реостата обратной
связи. В результате это-
го в измерительную схе-
му подается сигнал об-
ратной связи, обратный
по значению сигналу из-
мерительного моста.
Электрический сигнал об-
ратной связи в данном
случае действует подоб-
но пружине пропорцио-
нального регулятора
прямого (непосред-
ственного) действия, отключая выходные реле (Р1 или Р2) в мо-
мент, когда регулирующий орган придет в положение, соответ-
ствующее отклонению температуры от заданного значения.
Каждый тип терморегулятора имеет пять модификаций, отли-
чающихся диапазонами регулируемых температур: от —30 до
—5° С; от —10 до +15° С; от +5 до +35°С; от +30 до +60° С
и от +50 до +100° С. Дифференциал ПТР-2 и ПТР-3 —от 0,5 до
5°. Зона неравномерности ПТР-П— от 1,4 до 4°. Погрешность
настройки по шкале заданного значения температуры не превы-
96
шает ±0,5°. Разрывная мощность контактов 500 ВА при пере-
менном токе 380 В, частотой 50 Гц. Датчики полупроводниковых
регуляторов выпускаются в защитных кожухах, исполненных для
работы в агрессивных и неагрессивных жидких и газообразных
средах, с различной глубиной погружения (от 170 до 770 мм), а
также в камерном исполнении для установки в помещениях. Об-
щий вид терморегулятора типа ПТР и его термосистемы приве-
дены на рис. IV.34.
Существенным недостатком терморегуляторов ПТР является
отсутствие взаимозаменяемости датчиков-термисторов. В настоя-
щее время начат выпуск усовершенствованных приборов типа
РТ, имеющих улучшенные технические характеристики и лишен-
ных указанного недостатка. Блок-схема регуляторов РТ анало-
гична схеме, приведенной на рис. IV.33.
В рамках Государственной системы приборов и средств авто-
матизации (ГСП) выпускаются автоматические уравновешен-
ные мосты четырех базовых моделей: миниатюрные КСМ1, мало-
габаритные КСМ2, с круглой шкалой КСМЗ и большие КСМ4.
Каждая базовая модель имеет много модификаций, которые от-
личаются градуировкой (21, 22, 23 и 24), диапазоном измерения,
различными регулирующими, сигнализирующими и другими уст-
ройствами, а модели КСМ1, КСМ2 и КСМ4 изготовляются на
различное число точек измерения и каналов регулирования.
Регулирующие устройства мостов приводятся в действие дви-
гателями реохордов, которые являются неотъемлемой частью из-
мерительной системы. Мосты могут быть оснащены также токо-
выми (0—5; 0—20 мА) или пневматическими (0,2—1 кгс/см2)
аналоговыми выходными устройствами. В этом случае весь диа-
пазон измерения температуры моста пропорционален токовому
или пневматическому сигналу выходного устройства.
Электронные автоматические уравновешенные показывающие
и самопишущие мосты с регулирующими устройствами являются
сложными приборами и требуют весьма квалифицированного
обслуживания, поэтому в санитарно-технических устройствах их
применяют сравнительно редко (когда необходимо регулировать
параметры воздуха с высокой точностью, регистрировать регули-
руемую температуру или контролировать сравнительно большое
число точек измерения), в основном для регулирования темпера-
туры в больших помещениях, зрительных залах, лабораториях
и т. п. Преимуществом мостов, по сравнению с другими рассмот-
ренными приборами, является возможность записи температуры,
измеряемой в 1, 3, 6, 12, 24 и 48 точках, на одной диаграмме, а
также возможность регулирования температуры одним прибо-
ром (попеременно — методом обегания) в 1, 3, 6 и 12 точках (по
12 независимым каналам регулирования). Самый большой мост
К.СМ4 имеет габариты 367X400X400 мм.
7—903
97
§ 24. РЕГУЛЯТОРЫ ДАВЛЕНИЯ
В санитарно-технических устройствах приходится регулиро-
вать давление в весьма широких пределах: от 1—5 мм вод. ст.
(10—50 Па) в камерах смесительных клапанов двухканальных
систем кондиционирования воздуха до 30—100 мм. вод.ст. (300—
1000 Па) и более в воздуховодах и камерах статического давле-
ния систем вентиляции и до 60 кгс/см2 (6 МПа), т. е. единиц,
в 10 000 раз больших, в устройствах водо-, холодо- и теплоснаб-
жения, а также в установках снабжения сжатым воздухом. Та-
кие большие диапазоны регулируемых давлений обусловливают
разнообразие типов применяемых регуляторов.
Наиболее простыми регуляторами давления непосредственно-
го действия являются так называемые грузовые регуляторы
давления «до себя» 25ч10нж и «после себя» 25ч12нж. Регулятор
давления «до себя» стабилизирует давление в трубопроводе до
регулирующего клапана (по направлению потока), а регулятор
«после себя» — после клапана.
Регулятор давления «после себя» (рис. IV.35) состоит из
регулирующего клапана с двухседельным разгруженным та-
рельчатым плунжером, закрывающим проход при перемещении
вниз головки с резиновой мембраной, являющейся чувствитель-
ным элементом регулятора, и колонки с грузовым устройством.
Мембрана, закрытая сверху крышкой, представляет собой ка-
меру давления. Регулируемая среда через импульсную трубку
оказывает на мембрану давление, вследствие чего создается
усилие Flt которое через шток передается плунжеру. На шток в
противоположном силе Fy направлении действует усилие f2,
создаваемое грузом, насаженным на рычажное устройство. Ес-
ли давление в трубопроводе за клапаном возрастет, то усилие,
передаваемое мембраной на шток, увеличится, шток начнет
опускаться, а клапан будет прикрываться. В результате расход
регулирующей среды уменьшится, давление за клапаном сни-
зится, и система придет в равновесное состояние в тот момент,
когда силы, действующие на шток от мембраны и от груза, бу-
дут равны. Плунжер регулирующего клапана займет новое по-
ложение, но сила, создаваемая грузом (а именно эта сила и
соответствует данному значению регулируемого давления),оста-
нется практически прежней. Следовательно, этот регулятор
является астатическим, так как возвращает регулируемый па-
раметр к заданному значению, а его регулирующий орган мо-
жет при этом занимать любое положение.
Настраивают такой регулятор на заданное значение давле-
ния подбором сменных грузов и перемещением постоянного гру-
за вдоль длинного плеча рычага. Заданное значение давления
контролируют манометром, который присоединяют к импуль-
сной трубке. Эти регуляторы имеют сравнительно большую зону
нечувствительности (от 6 до 12% верхнего предела настройки),
98
Рис. IV.35. Грузовой регулятор давления
«после себя»
1 — клапан; 2 — плунжер; 3 — вентиль; 4—
шток; 5 — импульсная трубка; б — резино-
вая мемрбана; 7— груз
Рис. IV.36. Принципиальные схемы вклю-
_____чения регулятора типа УРРД_
а—регулирование давления «до себя»;
б — регулирование давления «после себя»;
в — регулирование перепада давления или
расхода; / — ввит; 2 10 — пружины; 3 —
импульсная трубка; 4 — мембрана; 5, 9—
камеры; б — исполнительный механизм;
7 — регулирующий орган; 8 — стакан;
11 — шток
а потому могут привести процесс регулирования к колебатель-
ному расходящемуся. Чтобы сгладить пульсирующие изменения
давления, в импульсную трубку врезают игольчатый вентиль,
сглаживающий пульсацию.
Регулятор давления «до себя» отличается от рассмотренно-
го только расположением плунжера клапана относительно сед-
ла, что при увеличении давления в импульсной трубке увеличи-
вает проход регулируемой среды.
Регуляторы давления 25ч10нж и 25ч12нж выпускают с
условным проходом от 50 до 250 мм и диапазоном возможных
настроек от 0,15 до 13 кгс/см2 (от 0,015 до 1,3 МПа) с опреде-
ленным ограниченным пределом настройки для каждой моди-
фикации.
Большое распространение в последние годы, особенно в уста-
новках теплоснабжения, получили регулирующие клапаны пря-
мого (непосредственного) действия типа УРРД (рис. IV.36).
Этот регулятор состоит из односедельного разгруженного силь-
фонным узлом запорно-регулирующего органа, который соеди-
нен с мембранно-пружинным исполнительным механизмом,
состоящим из эластичной мембраны и противодействующей пру-
жины 10. На нижней крышке корпуса установлен узел настрой-
ки, включающий в себя стакан, настроечную пружину 2 и винт.
Импульс регулируемого параметра подводится по импуль-
7* 99
сным трубкам непосредственно в камеру 5 или 9 мембранно-пру-
жинного исполнительного механизма. Возникающее при этом
импульсе усилие (или разность усилий при регулировании рас-
хода; см. рис. IV.36, в) на мембрану уравновешивается натяже-
нием настроечной пружины 2.
Отклонение регулируемого параметра в ту или другую сто-
рону от заданного значения нарушает равновесие действующих
сил, что вызывает перемещение регулирующего органа и изме-
нение расхода. В результате этого заданное значение регулиру-
емого параметра будет восстанавливаться. При колебании вели-
чины регулируемого давления изменится усилие на мембрану
и, следовательно, уравновешивающее это усилие натяжение
настроечной пружины. Другими словами, у этого регулятора ве-
личина регулируемого давления зависит от положения регули-
рующего органа, т. е. зависит от расхода. Такая зависимость
является характерным признаком, свойственным статическому
регулятору.
В статическом регуляторе скорость перемещения регулиру-
ющего органа пропорциональна скорости изменения параметра,
но не зависит от величины его отклонения. Этот регулятор не
способен вернуть регулируемый параметр точно к заданному
значению. Величина регулируемого давления будет зависеть от
положения клапана, т. е. от степени сжатия пружины. Статиче-
ские регуляторы, как правило, лучше и надежнее в установках
теплоснабжения, чем астатические 25ч10нж и 25ч12нж.
Регуляторы УРРД выпускают с условным проходом 25, 50 и
80 мм и диапазоном возможных настроек от 0,4 до 6 кгс/см2 (от
0,04 до 0,6 МПа). При необходимости регулировать давление от
6 до 16 кгс/см2 (от 0,6 до 1,6 МПа) применяют гидравлический
регулятор РД-За в комплекте с УРРД.
Регулятор РД-За является универсальным, т. е. в зависимо-
сти от вида сборки может поддерживать заданное давление, пе-
репад давления, уровень воды и расход регулируемой среды.
Этот регулятор имеет усилитель-преобразователь типа сопла-
заслонки, основанный на принципе дросселирования заслонкой
потока рабочей жидкости, вытекающей из сопла. Рабочая жид-
кость является источником вспомогательной энергии. Заслонка
находится под воздействием чувствительного элемента, воспри-
нимающего регулируемую величину.
Рассмотрим принцип действия РД-За в комплекте с УРРД в
схеме регулирования давления «до себя» (рис. IV.37). Вода из
водопровода давлением рв (рабочая жидкость — вспомогатель-
ная энергия) сначала пропускается через дроссель постоянного
сечения, а затем попадает в камеру, соединенную с дросселем
переменного сечения и с импульсной линией 3, соединяющей
РД-За с мембранно-пружинным исполнительным механизмом
регулятора УРРД. Рабочая жидкость через дроссель перемен-
ного сечения (сопло-заслонку) сливается в дренаж а. Заслонка
100
Рис. IV.37. Принци-
пиальная схема
включения регулято-
ра РД-За и УРРД
при регулировании
давления «до себя»
2—дроссель постоян-
ного сечения; 2—ка-
мера; 3. 4 — импульс-
ные линии; 5 — винт;
б — пружина; / —
снльфон; 8 — дрос-
сель переменного се-
чения; 9—водопро-
вод
связана с чувствительным элементом (сильфоном) регулятора.
Увеличение давления щ в импульсной линии 4 регулятора
РД-За приводит к увеличению давления в камере над сильфо-
ном и приближает заслонку к соплу. Давление рх в камере уве-
личивается и регулятор УРРД увеличивает расход регулируе-
мой среды через клапан, что приводит к уменьшению давления
в трубопроводе перед УРРД. Регулятор РД-За устанавливается
на заданное значение натяжением настроечной пружины с по-
мощью винта. РД-За выполняет роль П-регулятора. В некоторых
случаях, при оснащении регулятора приставкой, можно превра-
тить его в изодромный ПИ-регулятор.
Гидравлический регулятор РД-За может иметь одно-, двух-
и трехсильфонную сборку, а узел его управляющего клапана
может собираться по одно- и двухсопловой системе. Эта особен-
ность позволяет широко использовать его при регулировании
различных параметров в установках теплоснабжения зданий и
сооружений.
Для регулирования давления используются также общепро-
мышленные регуляторы электрической и пневматической ветви
ГСП, некоторые особенности которых (в частности, системы
«Старт») описаны в § 21.
Широко используются реле и регуляторы давления с двух- и
трехпозиционными устройствами. В качестве чувствительных
элементов этих регуляторов применяют одновитковые трубча-
тые пружины (ЭКМ-IV), многовитковые (геликоидальные) пру-
жины (МГ), сильфоны (РД) и мембраны. Таким образом, из-
мерительные элементы и регулирующие устройства почти ничем
не отличаются от описанных выше терморегуляторов с мано-
метрической термосистемой. Контактные регулирующие уст-
101
ройства регуляторов давления имеют такие же характеристики,
как и устройства терморегуляторов.
Для регулирования давления воздуха в камерах смеситель-
ных воздушных клапанов или в камерах статического давления
применяют колокольные (от 0—4 до 0—16 мм вод. ст., т. е. от
О—40 до 0—160 Па) или мембранные (от 0—10 до 0—630 мм
вод. ст., т. е. от 0—100 до 0—6300 Па) дифманометры. Чувст-
вительная часть этих дифманометров (колокол или мембрана)
связана с пневматическими или электрическими нормирующими
преобразователями (система ГСП), с дифференциально-транс-
форматорными, ферродинамическими или струнными (частот-
ными) преобразователями, позволяющими подключать к ним
вторичные приборы. Вторичные приборы (ДС, КС и др.) могут
комплектоваться различными устройствами (показывающими,
самопишущими, сигнализирующими и т. д.), в том числе и ре-
гулирующими, которые могут быть использованы для управле-
ния электрическими или пневматическими исполнительными ме-
ханизмами.
§ 25. РЕГУЛЯТОРЫ РАСХОДА
Регулирование расхода в санитарно-технических устройствах
встречается реже, чем регулирование температуры и давления.
Однако сравнительно часто возникает необходимость в аварий-
ной и предупредительной сигнализации о наличии потока воз-
духа, протока воды, рассола или в сигнализации о предельных
значениях расхода тех или иных рабочих сред.
В тепловых пунктах зданий регулируют расход теплоноси-
теля, подаваемого в систему отопления. Для этой цели часто
используют рассмотренный ранее гидравлический регулятор
прямого (непосредственного) действия типа УРРД (иногда в
комплекте с РД-За), включенный по схеме, приведенной на рис.
IV.36, в.
Для регулирования, сигнализации или переключения с од-
ного расходомера на другой применяют различные сильфонные,
мембранные или поплавковые дифманометры с регулирующими
или сигнальными устройствами. Например, расход теплоносите-
ля на вводе в здание измеряется комплектом приборов, в состав
которого входят диафрагма и сильфонный показывающий диф-
манометр с интегратором. Известно, что такой комплект явля-
ется коммерческим (по показателям интегратора производится
финансовый расчет) и может производить измерения с требуе-
мой точностью только при расходе от 30 до 100% максимально-
го диапазона шкалы дифманометра. Если длительное время
ожидается минимальный расход, значение которого находится
ниже 30% максимального (измеряемого дифманометром), то
приходится устанавливать второй комплект расходомера с мак-
102
Рис. IV.38. Схема реле перепада давлений
1 — сильфонные системы; 2 — передаточный
механизм; 3 — ось; 4 — шкала; 5 — пружина;
6 — узел настройки; 7 — узел размыкания;
8 и 9 — контакты
симальным пределом изме-
рений, несколько большим
30%-ного предела первого
комплекта. Каждый ком-
плект устанавливают на
один из двух параллельных
участков трубопровода, обо-
рудованных запорными мо-
торными задвижками. В за-
висимости от величины рас-
хода теплоносителя сиг-
нальные устройства дифма-
нометров, воздействуя на
моторные приводы запорных
задвижек, открывают для
измерения только один уча-
сток трубопровода. Общий
расход теплоносителя равен
сумме показаний интеграто-
ров обоих комплектов .
Для контроля расхода
смазки, подаваемой шесте-
ренчатым насосом, в ком-
прессорах холодильных ма-
шин используют дифферен-
циальное реле давления (реле контроля смазки), предназна-
ченное для контроля, сигнализации и двухпозиционного ре-
гулирования давления жидких и газообразных сред. Принцип
его действия основан на сравнении сил, создаваемых перепа-
дом давлений в чувствительных системах прибора, и силы упру-
гой деформации пружины. Реле (рис. IV.38) состоит из Двух
чувствительных сильфонных систем, узла настройки перепада
давлений, передаточного механизма и узла размыкания 7. На
сильфоны действуют давления pi и рг, перепад (разность) ко-
торых контролируется. Если перепад давлений больше установ-
ленного на шкале, то контакты 8 и 9 замкнуты. При понижении
перепада давлений до величины, установленной на шкале, пру-
жина поворачивает рычаг против часовой стрелки вокруг оси
и контакты размыкаются. Диапазон настройки перепада давле-
ний реле от 0,2 до 1,8 кгс/см2 (от 0,02 до 0,18 МПа), разрывная
мощность контактов 300 ВА при переменном токе 220 В часто-
той 50 Гц.
Для контроля потока воздуха в воздуховодах применяют ре-
ле (рис. IV.39, а) с двухпозиционным (контактным) регулирую-
щим устройством, представляющее собой укрепленную на стен-
ке воздуховода плату-основание. В воздуховод вводится жестко
закрепленный на оси флажок. Ось имеет две опоры — в корпусе
и в кронштейне флажка. Конец оси через плату-основание вве-
103
d) Вид co снятой крышкой
1 2
Рис. IV.39. Реле расхода
а — реле потока воздуха: /—ролик;
2 — рычаг; 3 — ртутно-стеклянный
контакт; 4 — контргруз; 5 — фла-
жок; 6 — ось; 7 — кронштейн; 8 —
корпус; 9— крышка; 10— кулачок;
б — реле потока жидкости: 1 — кор-
пус; 2—плунжер; 3 — сильфон; 4—
пружина; 5 — клеммы; 6 — шкала;
7 — диск; 8 — микропереключатели;
9 — стрелка
ден в корпус реле и соединен с кулачком, который в зависимо-
сти от положения флажка в потоке воздуха воздействует на
ролик рычага с ртутно-стеклянным контактом. Контргрузы слу-
жат для уравновешивания флажка и создания усилия, противо-
действующего давлению воздуха. Для ввода электрической про-
водки в корпусе предусмотрен сальник. Реле может быть на-
строено на замыкание или размыкание контакта при скорости
воздуха 4—10 м/с. Дифференциал реле от 0,5 до 2 м/с. Реле
можно устанавливать на горизонтальных и вертикальных участ-
ках воздуховодов при скорости воздуха в них не более 25 м/с.
Реле расхода жидкости или газа состоит из дифференциаль-
ного реле давления и сужающего устройства — камерной диаф-
рагмы. Дифференциальные реле давления выпускают несколь-
104
ких модификаций, которые отличаются друг от друга наличием
того или иного устройства — двухпозиционного регулирующего,
показывающего, дифференциально-трансформаторного преоб-
разователя для дистанционной передачи показаний расхода на
вторичный прибор. Чувствительным элементом реле является
мембранный блок, состоящий из двух камер, к которым присое-
диняются импульсные линии сужающего устройства. Выход
чувствительного элемента (мембранного блока) соединен с
приводом двухпозиционного устройства стрелки или с плунже-
ром дифференциально-трансформаторного преобразователя.
Реле расхода применяют для контроля расхода жидкостей или
газа в трубопроводах диаметром, как правило, более 80 мм.
Для контроля протока жидкостей по трубопроводам мень-
шего диаметра (20, 40 и 50 мм) применяют реле протока для
установки на горизонтальных участках трубопроводов и в
местах перехода с вертикальных участков трубопроводов на го-
ризонтальные. Основным элементом прибора (рис. IV.39, б) яв-
ляется клапан с возвратной пружиной. При протекании воды
через корпус тарельчатый плунжер клапана под действием дав-
ления воды перемещается вверх, преодолевая сопротивление
пружины. На штоке укреплен диск, который при подъеме и
опускании штока обеспечивает переключение двух микропере-
ключателей. Стрелка и безразмерная шкала служат для опре-
деления степени подъема плунжера. Уставка реле на заданное
значение потока производится натяжением пружины с помощью
вращающегося винта. Для создания герметичности штока слу-
жит сильфон, припаянный нижним концом к штоку, а верхним
к штуцеру, герметично соединенному с корпусом. Верхняя часть
реле закрыта кожухом с застекленным окном для наблюдения
за стрелкой. Реле имеет трехпозиционный двухконтактный вы-
ход. Разрывная мощность контактов—600 ВА при переменном
токе 200 В частотой 50 Гц.
Все, что было сказано в § 24 об общепромышленных прибо-
рах и регуляторах, а тем более о регуляторах ГСП, в полной
мере можно отнести к регуляторам расхода и других теплотех-
нических параметров. Применяя дифманометры различных
систем в комплекте с сужающими устройствами и вторичными
приборами, которые могут быть оснащены регулирующими, сиг-
нализирующими и другими устройствами, можно создать узлы
регулирования, удовлетворяющие решению практически всех
задач по регулированию расхода различных сред.
§ 26. РЕГУЛЯТОРЫ УРОВНЯ
Регуляторы уровня в санитарно-технических устройствах
применяют для автоматизации водонапорных, подпиточных, рас-
ширительных, пневмогидравлических и других баков и резерву-
аров, а также для предупредительной и аварийной сигнализа-
ции переполнения или опорожнения различных емкостей.
105
Наиболее простым регулято-
ром уровня является шаровой
клапан, принцип действия кото-
рого достаточно полно приведен
в § 20 при описании П-регулято-
ров прямого (непосредственного)
действия. Примером такого же
П-регулятора может служить по-
плавковый камерный регулятор
уровня, состоящий из поплавко-
вой камеры и регулирующего кла-
пана, соединенных тягой (рис.
IV.40). Поплавковая камера сое-
динена с емкостью, находящейся
под давлением до 16 кгс/см2
(1,6 МПа). Шаровой пустотелый
поплавок жестко связан с осью,
выведенной через сальник, уста-
новленный в корпусе камеры. На
этой же оси снаружи закреплен
рычаг 2 с контргрузом и тягой,
соединенной с рычагом 4 регу-
лирующего клапана. Полный ход
поплавка составляет 160 мм.
Длину рычагов поплавкового
устройства и клапана можно ре-
гулировать в больших пределах
и тем самым изменять зону не-
равномерности регулятора (статизм) от 10 до 500%.
Поплавковые камерные регуляторы уровня жидкости можно
комплектовать пневматическими или электрическими регулиру-
ющими и сигнализирующими устройствами, которые крепят к
корпусу поплавковой камеры (см. рис. IV.40) и соединяют с
рычагом. Пневматические регулирующие устройства представ-
ляют собой П-регуляторы, а электрические — трехпозиционные
контактные.
В качестве регуляторов уровня могут применяться дифмано-
метры (§ 25), оснащенные различными регулирующими уст-
ройствами.
Получили распространение также пневматические регулято-
ры уровня, которые по принципу действия близки к поплавко-
вым камерным регуляторам. Их выпускают на условные давле-
ния 16, 40 и 64 кгс/см2 (1,6, 4 и 6,4 МПа); пределы измерения —
400 и 800 мм. Эти регуляторы оснащены указателями положе-
ния уровня и могут иметь две пневмосистемы, одна из которых
служит для дистанционной передачи (до 300 м) показаний
уровня (класс точности 2,5), а другая — для регулирования.
Чувствительный элемент представляет собой полый цилпндри-
Рис. IV.40. Поплавковый камерный ре-
гулятор уровня
1 — камера; 2, 4— рычаг; 3— тяга;
5 — регулирующий клапан
ЮС
Рис. IV.41. Поплавковое реле
уровня
а — бессальниковое с электро-
магнитной связью: 1 — попла-
вок; 2 — контактная колодка;
3 — камера; 4 —ведущий маг-
нит; 5 — ось; 6 — ведомый маг-
нит; 7 — ртутно-стеклянный
контакт; б — для открытых ре-
зервуаров: 1 — поплавок; 2 —
противовес; 3, 6 — кольцо; 4—
рычаг; 5 — трос; 7 — блок
ческий буек, соединенный рычагами и осью с заслонкой пневма-
тического усилителя-преобразователя типа сопла-заслонки.
Для автоматизации откачивающих или нагнетающих насо-
сов и для сигнализации используются различные реле уровня.
Реле уровня бессальниковое (рис. IV.41,a) имеет поплавко-
вую камеру, в которой вместе с уровнем жидкости перемещает-
ся шаровой поплавок, связанный штоком с осью. При перемеще-
нии поплавок поворачивает ведущий магнит муфты. Ведомый
магнит поворачивается за ведущим магнитом и приводит в дви-
жение связанные с ним два ртутно-стеклянных контакта, кото-
рые срабатывают в крайних (верхнем и нижнем) положениях
поплавка. Пределы срабатывания реле можно настроить от 20
до 150 мм, при этом один контакт будет срабатывать при мак-
107
симальном уровне, а другой — при минимальном. Разрывная
мощность контактов 600 В А при переменном токе 220 В, 50 Гц.
Электрическая проводка вводится через сальник корпуса кон-
тактного устройства. Провода подключены к контактной колод-
ке. Реле можно использовать для резервуаров, находящихся под
давлением. Его отличительной особенностью является бессаль-
никовое устройство с электромагнитной связью.
Для открытых резервуаров большой высоты (до нескольких
метров) применяется реле уровня (рис. IV.41,6), у которого
поплавок соединен с контактным устройством с помощью троса.
Поплавок и противовес укреплены на тросе, перекинутом через
блок. При перемещении поплавка вверх до максимального зна-
чения уровня кольцо 3, укрепленное на тросе, подходит к рыча-
гу контактного устройства и поднимает его. Контактное устрой-
ство срабатывает. При понижении уровня жидкости кольцо 6,
укрепленное на другом конце троса, перемещает рычаг в обрат-
ном направлении до нового срабатывания контактного устройст-
ва. Прямое и обратное срабатывание контактного устройства
настраивается перемещением колец 3 и 6 вдоль троса. Разрыв-
ная мощность контактов составляет до 2 кВА при переменном
токе 220 В частотой 50 Гц.
Описанные поплавковые реле и регуляторы уровня не могут
быть применены для регулирования или сигнализации бытовых
сточных вод, так как поплавковые устройства теряют плаву-
честь, а механизмы передачи выходят из строя. Для применения
в таких условиях создано реле уровня колодцев (рис. IV.42).
Корпус реле состоит из цилиндра, верхняя часть которого за-
крыта крышкой с плотно соединенным с ней сильфоном. В до-
нышко сильфона упирается шток, который управляет двумя
ртутно-стеклянными контактами. Механизм контактов гермети-
чески закрыт крышкой. Электрическая проводка подсоединя-
ется к зажимам и выводится через сальник. Срабатывание
контактного устройства регулируют установочным винтом. Реле
устанавливается таким образом, чтобы нижний конец цилинд-
ра (цилиндр можно удлинить отрезком трубопровода, который
присоединяют к фланцу) находился на 275 мм ниже уровня,
при котором должно срабатывать контактное устройство. При
подъеме контролируемого уровня жидкости в цилиндре возрас-
тает давление, сильфон сжимается и включает контактное уст-
ройство.
В последние годы большое распространение получили элек-
трические и электронные реле уровня, использующие в качестве
датчиков электроды, с помощью которых измеряется электро-
проводность или электрическая емкость. Эти реле не имеют
подвижных устройств, поплавков, передаточных механизмов,
их датчики хорошо работают в агрессивных средах (при соот-
ветствующем выборе материалов электродов), могут применять-
ся для регулирования уровня сыпучих веществ (например, уг-
108
ных растворов. В основу раб
Рис. IV.43. Принципиальная схема работы
регулятора — сигнализатора уровня
Рис. IV.42. Реле уровня колодцев
1 — фланец; 2 — цилиндр; 3 — сильфон;
4 — шток; 5 — контакты; 6 — винт; 7 —
крышка; 8 — зажимы; 9 — сальник
ля), для регулирования уровня
в емкостях, находящихся под
большим давлением, и т. д.
Электрический регулятор-сиг-
нализатор уровня предназначен
для воды и неагрессивных вод-
ны положен принцип замыкания
электрической цепи при резком изменении электропроводности.
Электрическая цепь составлена источником питания, блоком
релейным, датчиком и средой, уровень которой контролируется
(рис. IV.43). При достижении средой электродного датчика
электрическая цепь замыкается через заземление на источник
питания. Блок релейный БР состоит из трех транзисторных ре-
лейных каскадов и трех выпрямительных элементов, питаю-
щихся от понижающего трансформатора. Каждый транзистор-
ный каскад работает от своего датчика и собран по схеме уси-
лителя, имеющего нагрузкой электромагнитное реле. Контакты
этих реле используются для регулирования или сигнализации
Каждый датчик состоит из двух частей — электрода и шту-
цера, электрически изолированных Друг от друга фторопласто-
вым уплотнением. Датчики можно устанавливать в среду с ра-
бочим давлением до 25 кгс/см3 (2,5 МПа) и температурой до
200° С. Возможное удаление блока релейного от места установ-
ки датчиков определяется электрическим сопротивлением про-
водов (которое не должно превышать 10 Ом), соединяющих
датчик с блоком. Питание комплекта производится переменным
током 220 В, частотой 50 Гц. Разрывная мощность контактов
500 ВА при том же переменном токе. Потребляемая мощность
реле не превышает 15 ВА.
Другие реле с электродными датчиками можно использовать
для измерения уровня агрессивных сред или сыпучих веществ.
Цепи некоторых реле искробезопасны. Выходное контактное
устройство этих реле, как правило, двухпозиционное. Количест-
109
во уровней, регулируемых и контактируемых одним комплек-
том, колеблется от одного до трех.
§ 27. РЕГУЛЯТОРЫ ОТНОСИТЕЛЬНОЙ
ВЛАЖНОСТИ ВОЗДУХА
Регулирование и сигнализация относительной влажности
воздуха в санитарно-технических устройствах производится в
помещениях, оборудованных комфортным или технологическим
кондиционированием воздуха, а также в помещениях и камерах,
где хранится или эксплуатируется оборудование, требующее
поддержания относительной влажности в определенных преде-
лах.
Диапазон значений относительной влажности воздуха, кото-
рый используется в санитарно-технических устройствах, находит-
ся в пределах от 30 до 90% при температуре от +5 до +45° С.
В качестве регулятора может быть использовано регулиру-
ющее устройство (электрическое или пневматическое) элект-
ронного автоматического уравновешенного моста с психромет-
ром типа ПЭ. Косвенный метод измерения относительной влаж-
ности воздуха путем сравнения температур «сухого» и «мокрого»
термометров сопротивлений (см. §11) дает точность измерения
относительной влажности ±8%. Датчик такого психрометра со-
стоит из двух термометров сопротивления, смачивающего уст-
ройства и вентилятора и подсоединяется к бачку с дистиллиро-
ванной водой. Такой датчик имеет большие размеры, плохое
оформление и требует достаточно частого и квалифицированно-
го обслуживания. Все это резко ограничивает применение пси-
хрометра типа ПЭ в качестве регулятора.
Для регулирования и контроля относительной влажности
применяют комплекты УДРОВ (в основном в текстильном про-
изводстве), состоящие из калиево-натриевого датчика с термо-
резистором для коррекции по температуре, преобразовательной
приставки и стандартного автоматического уравновешенного
моста, отградуированного в процентах относительной влажно-
сти воздуха. Мост может быть оснащен любым регулирующим
или сигнальным устройством. Датчик такого комплекта имеет
хорошее оформление и вполне приемлемые размеры. Погреш-
ность комплекта составляет ±3% относительной влажности
воздуха.
Применяются также датчики ДИВТ1, использующие гигро-
скопический принцип измерения электропроводности хлористо-
го лития, но имеющие лучшее оформление и более стабильные
характеристики. Датчики имеют два термометра сопротивления
стандартной градуировки для возможности измерения темпе-
ратуры воздуха по «сухому» термометру. В комплект психро-
метров с датчиками ДИВТ1 входят мосты КСМ4, отградуиро-
ванные в единицах относительной влажности воздуха. Для
ПО
%
измерения и регулирования
могут быть применены мно-
готочечные мосты (на 1, 3,
6 и 12 точек измерения),
оснащенные регулирующи-
ми или сигнальными уст-
ройствами. Основная до-
пустимая погрешность этого
комплекта не превышает
±3% относительной влаж-
ности воздуха.
Перечисленные психро-
метры пока еще не получи-
Рис. IV.44. Хлористолитиевый чувствительный
элемент для измерения температуры точки
росы
1 — прибор; 2 — трансформатор; 3 — электро-
ды; 4 — стекловолокно; 5 — датчик; 6 — гильза
ли широкого распростране-
ния в практике автоматизации санитарно-технических устройств
из-за высокой стоимости комплектов.
В настоящее время наиболее распространенными методами
регулирования параметров паровоздушной смеси в кондициони-
руемых помещениях являются регулирование температуры по
«сухому» термометру и регулирование температуры за промыв-
ной камерой (метод «точки росы»; с. далее § 45).
Более прогрессивным считается метод регулирования отно-
сительной влажности воздуха в помещении с помощью психро-
метра. Этот метод позволяет учитывать изменение влаговыде-
лений в помещении, но точность стабилизации относительной
влажности воздуха невелика и составляет 14% (±7%), если
учесть, что общая погрешность датчика и регулятора примерно
вдвое больше погрешности измерения. Для датчиков и регуля-
торов температуры общая точность стабилизации параметра
равна примерно 2° (±Г).
Предпочтительнее пользоваться методом регулирования па-
раметров воздуха, когда стабилизируется температура по «су-
хому» термометру и температура точки росы воздуха в помеще-
нии. В этом случае точность стабилизации относительной влаж-
ности воздуха составляет 12% (±6%).
Температура точки росы может быть измерена с помощью
датчика абсолютной влажности (например, хлористо-литиевым
ДВ-2М). Принцип работы датчика (рис. IV.44) основан на ис-
пользовании зависимости максимальной упругости паров воды
над поверхностью насыщенного раствора соли хлористого ли-
тия от температуры.
Чувствительный элемент состоит из изоляционной гильзы,
покрытой стекловолокном, пропитанным водным раствором со-
ли хлористого лития. При действии датчика хлористый литий
интенсивно поглощает влагу из воздуха, проводимость соли при
этом возрастает, ток от трансформатора между электродами
увеличивается, вызывая повышение температуры раствора и
образование кристаллов соли. При кристаллизации проводи-
111
мость соли резко снижается, что, в свою очередь, вызывает
уменьшение тока и понижение температуры. Таким образом,
происходит процесс автоматического регулирования температу-
ры (на границе кристаллообразования в концентрированном
растворе соли), при котором наступает динамическое равнове-
сие давлений паров воды над раствором и в контролируемом
воздухе. Температура равновесия фиксируется прибором по
сопротивлению датчика термометра сопротивления. Эта темпе-
ратура соответствует температуре точки росы контролируемого
воздуха. Прибор может быть укомплектован регулирующим
устройством любого типа. В качестве измерительного и регули-
рующего прибора можно использовать автоматический уравно-
вешенный мост.
§ 28. ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Исполнительным механизмом в САР называется устройство,
перемещающее регулирующий орган в соответствии с сигнала-
ми, которые поступают от регулирующего устройства (регуля-
тора). Исполнительный механизм должен обеспечить это пере-
мещение с возможно меньшими искажениями законов регули-
рования, формируемых регулирующим устройством. Кроме
того, к нему предъявляется ряд конструктивных и эксплуата-
ционных требований.
1) простота конструкции, минимальные размеры и масса,
высокая надежность и устойчивость к воздействию внешней
среды;
2) безопасность в эксплуатации и устойчивость в работе;
3) наличие защиты для предохранения регулирующего ор-
гана от перегрузок и поломок; дублера для ручного управления
в случае отказа схемы управления или нарушения энергоснаб-
жения; дистанционного контроля положения регулирующего
органа.
Исполнительные механизмы, применяемые в санитарно-тех-
нических устройствах, можно классифицировать по виду по-
, требляемой энергии на электрические, пневматические, гидрав-
лические, грузовые и пружинные. Каждый тип, в свою очередь,
можно классифицировать по конструкции и принципу действия
применяемого двигателя (например, электромоторные, солено-
идные, мембранные, поршневые), по виду усилителя, исполне-
нию (нормальное, тропическое, взрывобезопасное). Классифи-
кацию можно вести и по другим признакам, однако в санитар-
но-технических устройствах используется сравнительно
небольшое число принципов и конструктивных исполнений этих
механизмов, которые мы и рассмотрим.
Электрические исполнительные механизмы обладают следу-
ющими преимуществами: практически неограниченным радиу-
112
сом действия и управления; возможность применения при
отрицательной температуре окружающей среды; отсутствием
системы импульсных линий, требующих герметизации.
Электрические механизмы можно разделить на моторные, в
которых силовым элементом является электродвигатель, как
правило, однофазный короткозамкнутый или трехфазный корот-
козамкнутый, и на соленоидные (часто называемые электро-
магнитными приводами), в которых силовым элементом являет-
ся соленоид либо электромагнит постоянного или переменного
тока.
Моторные механизмы представляют собой приводы посто-
янной скорости, используемые для перемещения регулирующего
органа при применении регулятора постоянной скорости, пропор-
ционального, астатического и изодромного.
Наибольшее распространение в санитарно-технических уст-
ройствах получили механизмы типа ПР и МЭО.
Исполнительные механизмы пропорционального регулирова-
ния ПР-М и ПР-1М предназначены для перемещения регулиру-
ющих органов в САР, использующих любой закон регулирова-
ния, и в системах ручного дистанционного управления. Механизм
ПР-1М (рис. 1V.45) состоит из реверсивного однофазного кон-
денсаторного электродвигателя, редуктора, конечных выключа-
телей и реостата обратной связи. Все эти элементы заключены
в пыленепроницаемый корпус из алюминиевого сплава. Кон-
денсаторный двигатель питается от сети переменного тока на-
пряжением 220 В и частотой 50 Гц. Частота вращения электро-
двигателя около 3000 мин-1, потребляемая мощность около
50 В-А. Редуктор состоит из шести пар сменных шестерен. Кон-
струкция конечных выключателей, отключающих статорные
обмотки электродвигателя и ограничивающих угол поворота
выходного вала механизма, позволяет устанавливать вручную
величину этого угла от 0 до 180°. Реостат обратной связи име-
ет сопротивление 185-J-5 Ом. Движок реостата кинематически
связан с выходным валом механизма.
Исполнительный механизм ПР-М снабжен штоком и диском,
поэтому он может быть применен для одновременного управле-
ния регулирующими органами с поступательным и поворотным
движением. Этот механизм используют для привода регулиру-
ющих клапанов, плунжер которых совершает поступательное
движение на величину хода штока 20 мм. Механизм ПР-1М
имеет на выходном валу только диск и предназначен для воз-
действия на поворотные регулирующие органы (например, воз-
душные клапаны).
Схема пропорциональной системы регулирования, применяе-
мая для исполнительных механизмов ПР-1М, кроме командного
прибора (реостат датчика) и исполнительного механизма имеет
пропорциональное балансное реле БР-3 (рис. IV.46). В основу
положена мостовая схема, в которой два плеча составляют рео-
8—903
113
Рис. IV.45. Исполнительный меха*
низм ПРИМ
1— конечные выключатели; 2 — ре-
дуктор; 3 — электродвигатель
Рис. IV.46. Принципиальная схема
пропорциональной системы регули-
рования
1—11 — номера клемм
стат датчика РД и два
других плеча — реостат
обратной связи РОС ис-
полнительного механизма.
В качестве индикатора
разбаланса применено по-
ляризованное трехпози-
ционное реле РП-5, вклю-
ченное в диагональ моста
последовательно с ползу-
нами реостатов. Реле РП-5
управляет двумя вторич-
ными более мощными спа-
ренными электромагнит-
114
ними реле. Балансное реле БР-3 в комплекте с датчиком и
исполнительным механизмом действует следующим образом.
При равновесии регулирующей системы мост также находится
в равновесии. Низкоомная катушка реле РП-5, включенная в
измерительную диагональ моста, в этом случае обесточена. При
отклонении регулируемого параметра от заданного значения
движок реохорда датчика переместится в ту или иную сторону,
равновесие моста нарушится, и по обмотке первичного реле
потечет ток определенного направления. В зависимости от
направления тока разбаланса контакты первичного реле вклю-
чают соответствующие контакты вторичного реле, в результате
чего исполнительный механизм приводится в действие, которое
продолжается до тех пор, пока связанный с механизмом движок
реохорда обратной связи не приведет мостовую схему в равно-
весие. Тогда контакты первичного и вторичного реле разомк-
нутся и исполнительный механизм остановится.
Величину сопротивления /?2 подбирают таким образом, что-
бы блокировочный ток составлял 40—80% тока срабатывания
реле. Механизм блокировки следующий: при замыкании одного
из контактов поляризованного реле подается напряжение на
соответствующую обмотку вторичного реле и одновременно на
вторичную обмотку поляризованного реле, которая надежно
удерживает контакт в замкнутом состоянии, что равноценно
дополнительному разбалансу мостовой схемы. Это не только
улучшает четкость работы контактов, но и повышает качество
синхронизации исполнительного механизма, т. е. уменьшает
степень рассогласованности датчика с исполнительным меха-
низмом. Последнее обстоятельство позволяет применять ба-
лансное реле БР-3 также и для синхронизации двух исполни-
тельных механизмов, имеющих реостат обратной связи.
Электродвигатель через систему зубчатых колес приводит
в движение главный валик редуктора, на котором жестко уста-
новлен скользящий контакт предельного выключателя. Пре-
дельный выключатель служит для автоматического отключения
электродвигателя, когда главный валик редуктора находится
в крайних положениях. Главный валик исполнительного меха-
низма Д несет на себе ползун К реохорда обратной связи. Та-
ким образом механизмы ПР-М. и ПР-1М при автоматических
пропорциональных схемах регулирования включаются в мосто-
вую схему. При равновесии мостовой схемы моторный механизм
находится в покое. Электрическая разбалансировка схемы за-
ставляет включаться в работу электродвигатель исполнительно-
го механизма и перемещать регулирующий орган. При незначи-
тельной разбалансировке мостовой схемы равновесие может на-
ступить раньше, чем сработают концевые выключатели ДВ1 и
КВ2 и электродвигатель механизма придет в состояние покоя.
Если же произойдет запаздывание срабатывания балансового
реле, включенного в схему, то электродвигатель отключится ав-
8*
115
тематически с помощью концевых выключателей, что исключит
поломку механизма.
В последние годы создана и успешно применяется серия
электрических однооборотных исполнительных механизмов:
МЭО-1,6/40, МЭО-4/ЮО и др. В числителе условного обозначе-
ния типа привода указан номинальный вращающий момент на
выходном валу (1,6 и 4 кге-м, т. е. 16 и 40 Н-м), а в знамена-
теле — номинальное время одного оборота выходного вала (40
и 100 с). Назначение этих механизмов—управление регулиру-
ющим органом в бесконтактных и контактных схемах автома-
тического регулирования и дистанционное управление по сиг-
налам командного устройства. Выходной электрический сигнал
(от магнитного усилителя или магнитного пускателя) управля-
ет однофазным конденсаторным двигателем с малоинерцион-
ным ротором, который связан с редуктором, создающим враща-
ющий момент на выходном валу. Положение выходного вала,
вращающегося с постоянной скоростью, может контролировать-
ся датчиками обратной связи (реостатными или индуктивны-
ми). При бесконтактном управлении применяют магнитные
усилители КМД-4 и УМД-4А, а при контактном — реверсивные
магнитные пускатели МКР-0-58 и др.
В исполнительных механизмах, показанных на рис. IV.47,
электродвигатель приводит в действие редуктор, являющийся
основным узлом, на котором смонтированы все элементы ис-
полнительного механизма. Для осуществления (в случае необ-
ходимости) ручного управления исполнительным механизмом
предусмотрен ручной привод. Для уменьшения выбега выходно-
го вала в процессе регулирования и для фиксации выходного
вала в любом положении после исчезновения управляющего
сигнала предусмотрен электромагнитный тормоз, который сра-
батывает при отключении электропитания. Благодаря этому
выбег выходного вала не превышает 0,5—1°. Механизм имеет
блок датчиков (БДР или БДИ-6), узел упоров, рычаг, шту-
церный ввод, конденсатор и штепсельный разъем. Редуктор ме-
ханизма состоит из четырех прямозубых и одной планетарной
ступени. Передаточное число редуктора для МЭО-1,6/40 состав-
ляет 1623, для МЭО-4/ЮО —4100.
Для привода исполнительного механизма используется мало-
инерционный однофазный асинхронный электродвигатель
ДАУ-4, который обладает хорошими динамическими качества-
ми, так как имеет уменьшенный момент инерции. Этот электро-
двигатель допускает длительную (до 1000 ч) работу в стопор-
ном режиме, т. е. в режиме, когда выходной вал не движется
(момент на регулирующем органе превосходит момент, разви-
ваемый механизмом), а обмотки ДАУ-4 находятся под напря-
жением. Напряжение питания 220 В с частотой 50 Гц, макси-
мальная потребляемая мощность (в стопорном режиме) 24 Вт,
вращающий момент на выходном валу (в стопорном режиме) —
116
Рис. IV.47. Исполнительные механизмы МЭО-1,6/40 и МЭО-4/ЮО
/ — рычаг; 2 — редуктор; .3 — электродвигатель; 4 — блок датчиков; .5 — узел упоров; б — штепсельный разъем; /—штуцерный ввод; 8 — руч-
ной привод; .9 — конденсатор; 10 — тормоз
5 кгс-м (50 Н-м) для МЭО-1,6/40 и 12 кгс-м (120 Н-м) для
МЭО-4/100. Реверсирование электродвигателя осуществляется
переключением обмотки управления.
Для осуществления обратной связи и дистанционного конт-
роля положения регулирующего органа в санитарно-техничес-
ких устройствах исполнительный механизм типа МЭО оснаща-
ется блоком, который состоит из двух реостатных датчиков (по
120 Ом каждый) и четырех микропереключателей, выполняю-
щих роль конечных выключателей электродвигателя. Реостат-
ные датчики используют в схемах с регуляторами, имеющими
реостатную обратную связь, в установках, где два исполнитель-
ных механизма связаны схемой слежения, и для подключения
дистанционных указателей положения типа ДУП-М. Микропе-
реключатели применяют для сигнализации конечных и любых
промежуточных положений регулирующего органа, так как они
допускают настройку на срабатывание в пределах хода выход-
ного вала исполнительного механизма.
Для ограничения предельных положений выходного вала и
предохранения от поломок регулирующего органа в механизме
предусмотрены упоры, снабженные амортизаторами. Упоры
могут быть установлены на любой угол от 45 до 240° с шагом
3°. При снятых упорах угол поворота выходного вала не огра-
ничен, и вал осуществляет полный поворот. Штепсельный разъ-
ем и штуцер позволяют быстро и герметично присоединять
исполнительный механизм к схеме управления. Рычаг служит
для присоединения механизма к регулирующему органу. Опи-
санные механизмы нормально работают в условиях внешней
среды, характеризуемых температурой от —30 до +60° С и от-
носительной влажностью 30—80%.
Исполнительные механизмы типа МЭО вполне соответству-
ют современному уровню состояния техники и позволяют осу-
ществлять практически любые схемы регулирования, управле-
ния и защиты, выполняемые как на контактных, так и на бес-
контактных элементах (рис. IV.48).
Иногда в качестве исполнительного механизма используют
электромоторные приводы с трехфазными асинхронными элект-
родвигателями и реверсивными магнитными пускателями. Для
ограничения хода приводы оснащают узлом концевых выключа-
телей, а для защиты от перегрузки — муфтами максимального
вращающего момента, которые отключают питание, если вра-
щающий момент на выходном валу превышает максимальное
заданное значение. Для защиты иногда применяют токовое ре-
ле типа ЭТ, отключающее привод при значениях тока в силовой
цепи выше допустимых. Указанные приводы предназначены для
управления запорными задвижками на трубопроводах с услов-
ным проходом от 50 до 250 мм, а также регулирующими венти-
лями с условным проходом от 10 до 125 мм.
В электромагнитных (соленоидных) исполнительных меха-
118
2°-
4 о-
6 °-
8 &
Ю»
72о-
/4о-
16 о-
18 °-
20°-
22°-
2ko-
28е-
ЭМ
Рис. IV.48. Принципиальная
электрическая схема МЭО
В — обмотка возбуждения;
У — обмотка управления;
М — электродвигатель ДАУ;
ЭМ — электротормоз; ДР1 и
ДР2 — реостатные датчики;
К.В1—КВ4 — микропереклю-
чатели; БДР—блок реостат-
ных датчиков
низмах двигателем является электромагнит постоянного или
переменного тока, притягивающий якорь при поступлении элек-
трического сигнала в обмотку. Электромагнитные механизмы
применяют только для двухпозиционного регулирования: одна
позиция соответствует включенному электромагниту, другая —
отключенному.
В санитарной технике используют, как правило, однофазные
(однокатушечные) электромагнитные механизмы, которые
удерживают регулирующий орган в открытом или закрытом
состоянии и, следовательно, работают в комплекте с двухпози-
ционными регуляторами, оснащенными электроконтактным
выходом. У однофазных электромагнитов переменного тока
магнитный поток пульсирует от нуля до максимума с удвоен-
119
ной частотой и на якорь действует результирующее (среднее)
тяговое усилие, которое в электромагните постоянного тока зна-
чительно меньше, чем в электромагните постоянного тока тех
же размеров. Несмотря на это, электромагнитные приводы пе-
ременного тока применяются чаще, чем постоянного, так как
они не требуют установки дополнительных трансформаторов и
выпрямителей.
Большое распространение получили клапаны с однофазным
электромагнитным исполнительным механизмом переменного
тока типов CBM, СВА и СВФ, которые применяют как регули-
рующие и запорные органы для неагрессивных жидкостей и
газов, имеющих давление до 16 кгс/см2 (1,6 МПа) и температу-
ру до 35° С. Их выпускают с условным проходом от 6 до 70 мм.
Когда электромагнитный привод находится под напряжением,
проход клапана открыт.
В схемах управления пневмоприводами и в системах пнев-
матического и электропневматического регулирования исполь-
зуют пневматические четырехходовые распределители с магни-
том переменного тока на напряжение 36, 127, 220 и 380 В (рис.
IV.49, а). Электрическая часть распределителя представляет
собой толкающий электромагнит защищенного исполнения со
штангой-толкателем и ручным дублером с предохранительным
колпачком. Механическая часть распределителя состоит из двух
золотников, штока, двух втулок, закрепленных на резьбовых
концах штока и застопоренных пружинными шайбами и гайка-
ми, пружины и гайки. Эта конструкция плотно вмонтирована в
корпус, который имеет пять штуцеров с диаметром условного
прохода 6 мм. Рабочее давление сжатого воздуха, подводимого
к распределителю, не должно превышать 10 кгс/см2 (1 МПа).
При обесточенном магните шток с золотниками под действи-
ем пружины удерживается в верхнем положении и с помощью
резиновых уплотнителей (создающих необходимую герметич-
ность) соединяет полость штуцера А с полостью штуцера Г
(полость штуцера Б при этом соединена с полостью штуце-
ра В).
После подачи тока в катушку электромагнита втягивается
сердечник, и штанга-толкатель нажимает на шток, который
устанавливается в нижнее положение, сжимая пружину. Втулки
занимают относительно золотников такое положение, при ко-
тором полость штуцера Б соединяется с полостью штуцера Г, а
полость штуцера А —-с полостью штуцера Д. Используя раз-
личные схемы подключения штуцеров распределителя, можно
создать надежную блокировку электрической схемы управления
с пневматической системой регулирования.
Недостатками однофазных электромагнитных исполнительных
механизмов являются значительное потребление электроэнергии
и возможность перегрева обмотки электромагнита при продол-
жительных включениях. Этих недостатков лишен привод с. дву-
120
Рис.
IV.49. Клапаны с электромагнитными
приводами
а — четырехходовой пневматический распре-
делитель: 1 — корпус; 2 — золотники; 3 — кол-
пачок; 4— электромагнит; 5 — штанга- толка-
тель; 6 — кабельный ввод; 7—втулки; 8—шток;
9 — пружина; 10 — гайка; б — электромагнит-
ный с защелкой: 1 — возвратная пружина; 2—
выпрямитель; 3 — толкатель ручного закрыва-
ния; 4— крышка; 5 — шарикн-защелкн; б—об-
мотка защелки; 7 — обмотка главного элект-
ромагнита; 8 — блок-контакты; 9— поводок
блок-контактов; 10— рычаг ручного открыва-
ния
мя электромагнитами, называемый электромагнитным исполни-
тельным механизмом с защелкой (рис. IV.49, б). Один электро-
магнит (главный) поднимает плунжер вверх, т. е. открывает
проход клапана; другой (электромагнитная защелка) приводит
в действие механизм защелки, удерживающей плунжер клапа-
на в верхнем положении. При включении главного электромаг-
121
нита плунжер поднимается, освобождая проход клапана и одно-
временно действуя на систему блокировочных контактов, кото-
рые отключают главный электромагнит и подготавливают
электрическую цепь включения электромагнитной защелки.
Однако после отключения главного электромагнита плунжер
не закроет проход клапана до тех пор, пока не включится элек-
тромагнит защелки. После этого плунжер под тяжестью собст-
венного веса и усилием возвратной пружины займет свое пер-
воначальное положение, т. е. закроет проходное сечение клапа-
на. Тогда система блокировочных контактов отключит электро-
магнит защелки и подготовит к включению цепь главного
электромагнита. Эта же система контактов позволяет осущест-
вить сигнализацию положения плунжера.
Электромагниты этого исполнительного механизма потреб-
ляют электрическую энергию только в момент перехода плун-
жера клапана из одного положения в другое. Питание осущест-
вляется от сети постоянного тока ПО—220 В или от сети пере-
менного тока 220 В частотой 50 Гц через выпрямительное уст-
ройство, вмонтированное в кожух клапана. Условный проход
таких клапанов 15—100 мм; они рассчитаны на давление 6—
16 кгс/см2 (0,6—1,6 МПа) в зависимости от условного прохода.
Клапаны имеют ручной дублер для механической перестановки
плунжера в любое крайнее положение.
Промышленность выпускает и другие механизмы с электро-
магнитным приводом, однако они принципиально не отличаются
от описанных выше.
Пневматические исполнительные механизмы значительно
проще и надежнее электрических, обладают минимальным чис-
лом подвижных и трущихся деталей и незаменимы при приме-
нении во взрыве- и пожароопасных средах. В санитарной тех-
нике они применяются достаточно часто, особенно при значи-
тельном числе и большой подаче установок приточной
вентиляции, кондиционирования воздуха и теплоснабжения,
сосредоточенных в одном здании или в комплексе рядом стоя-
щих зданий. Наиболее распространены механизмы, называемые
мембранным пневмоприводом, с резиновыми или металлически-
ми сильфонными мембранами.
Мембранные исполнительные механизмы предназначены для
перемещения регулирующих органов САР с поступательно-
возвратным движением штока (толкающего типа; рис. IV.50, а)
или поворота рычага (рычажного типа; рис. IV.50,б). Их при-
меняют для привода воздушных и регулирующих клапанов.
Если требуются длинноходовые пневмоприводы, применяют
поршневые пневматические механизмы (ход поршня 300 мм и
более), но в санитарно-технических устройствах они не получи-
ли широкого распространения и поэтому здесь не рассматрива-
ются.
Силовым элементом мембранных пневмоприводов является
122
уравновешиваемая пружиной резиновая мембрана, на которую
действует сжатый воздух.
Мембранные пневмоприводы имеют несколько модификаций,
которые отличаются диаметром заделки мембраны—160, 200 и
250 мм; ходом штока—30 мм для толкающих и 85 мм для ры-
чажных, а также давлением воздуха в надмембранной полости,
под действием которого начинается и заканчивается движение
штока.
В настоящее время выпускаются мембранные пневматиче-
ские пружинные исполнительные механизмы типом МИМ и
МИМП. МИМ изготовляют в двух модификациях: прямоходные
(толкающие ПХ) и колебательные (рычажные К). МИМП из-
готовляют только прямоходными. МИМ и МИМП бывают пря-
мого действия (П) — при повышении давления воздуха в мем-
бранной камере (над мембраной) выходное звено перемещает-
ся вниз, и обратного действия (О) — при повышении давления
123
воздуха в мембранной камере (под мембраной) выходное звено
перемещается вверх.
Пневматические исполнительные механизмы имеют следую-
щие недостатки: запаздывание действия, которое вызвано на-
личием емкости импульсных пневматических линий и рабочих
камер пневмоприводов; вредное влияние сил трения в клапане,
которое проявляется в отставании положения штока или рыча-
га от соответствующего давления командного сигнала в им-
пульсной линии. Для ослабления этих факторов применяют по-
зиционеры (позиционное поле), представляющее собой пнев-
матические пропорциональные регуляторы с жесткой обратной
связью (рис. IV.51).
Позиционер изменяет давление подаваемого в мембранный
привод сжатого воздуха, приводя тем самым в соответствие
положение штока или рычага механизма командному давлению
в импульсной линии. Действует он следующим образом. При
установившемся давлении в импульсной линии (командный сиг-
нал) 8 на выходе из реле устанавливается постоянное давление,
которое передается по линии 6 мембранному приводу клапана.
При увеличении командного давления увеличивается подача
воздуха на мембранный привод позиционера 77. Если перемеще-
нию штока и мембраны механизма будут препятствовать силы
трения, то обратная связь 5 не сработает и над мембраной
начнет быстро возрастать давление. Когда оно достигнет зна-
чения, при котором силы трения будут преодолены, шток и
мембрана переместятся вниз, начнет действовать обратная
связь 4 и 5 и управляющий клапан позиционера прекратит
повышение давления сжатого воздуха в линии 6, поступающего
в надмембранное пространство. Аналогично действует позицио-
нер и при понижении командного сигнала.
Позиционеры питаются по линии 7 сжатым воздухом давле-
нием 2,5—3,5 кгс/см2, т. е. несколько большим, чем давление
воздуха, которым питаются обычные регуляторы (1,4 кгс/см2).
Это позволяет мембране привода развивать силу, достаточную
для преодоления сил в подвижной системе клапана. Позиционе-
ры увеличивают скорость срабатывания пневматических испол-
нительных механизмов, повышают его чувствительность и уве-
личивают линейность характеристики «ход плунжера — давление
в мембранном механизме». С помощью позиционеров, которые
позволяют в широких пределах изменять коэффициент жестко-
сти обратной связи, можно осуществить последовательное дей-
ствие пневмоприводов, работающих от одного регулятора. В
этом случае позиционеры настраивают так, чтобы при измене-
нии давления командного сигнала от 0 до 0,5 кгс/см2 совершал
полный ход один пневмопривод, а от 0,6 до 1 кгс/см2—другой.
Составной частью Государственной системы приборов явля-
ется система исполнительных устройств (СИУ). Эти устройства
состоят из регулирующего органа и исполнительного механизма,
124
который оснащается дополнительными приборами (ручными
дублерами, позиционерами, сигнализаторами положения и т. д.),
обеспечивающими его работу в САР.
Система СИУ предусматривает построение унифицирован-
ных исполнительных устройств по блочно-модульному принци-
пу, т. е. создание исполнительных устройств системы из не-
скольких унифицированных блоков и деталей, что позволяет
расширить их номенклатуру без больших производственных
затрат на внедрение. Основой для разработки пневматических
исполнительных механизмов, вошедших в СИУ, послужили вы-
пускаемые промышленностью механизмы типов МИМ и МИМП.
Система исполнительных устройств предусматривает ком-
плектование регулирующих органов исполнительными механиз-
мами следующих видов: пневматическими мембранными пру-
жинами, мембранными беспружинными, поршневыми, электри-
ческими и механизмами со смешанным видом энергии. В по-
следнем случае на регулирующем органе устанавливается пнев-
матический механизм с электропневматическим позиционером —
электрический командный сигнал преобразуется в пневматиче-
ский сигнал давления.
По мере внедрения исполнительных устройств СИУ, имею-
щих более высокие качественные показатели, механизмы, не
отвечающие требованиям ГСП, будут сниматься с производства.
Гидравлические, грузовые и пружинные исполнительные
механизмы не получили широкого распространения в санитар-
но-технических устройствах, кроме тех случаев, когда элементы
этих механизмов используют только в регуляторах прямого
(непосредственного) действия.
§ 29. РЕГУЛИРУЮЩИЕ ОРГАНЫ .
Технологические процессы в санитарно-технических устрой-
ствах регулируют главным образом изменением количества
подводимого к объекту или отводимого из него вещества. Как
правило, для этого включают в систему подвода (или отвода)
среды переменное гидравлическое сопротивление, которое соз-
дается регулирующим органом. Изменение количества вещества
с помощью регулирующего органа называется регулированием
расхода вещества путем дросселирования. Такое регулирование
неэкономично, так как часть энергии (насоса, вентилятора, ком-
прессора) расходуется на преодоление сопротивления регули-
рующего органа. Более экономичным является регулирование
напора рабочей среды путем воздействия на режим работы ис-
точника напора (например, изменением напряжения питания
электродвигателя насоса, компрессора и т. п.). Однако широкое
применение дросселирования объясняется простотой этого спо-
соба.
Всякий регулирующий орган состоит из двух основных ча-
125
стей: неподвижного корпуса и перемещаемого относительно
корпуса затвора. Пропускная способность органа зависит от
положения затвора в корпусе. По роду движения затвора раз-
личают органы с вращательным движением (заслонки, воздуш-
ные поворотные клапаны, запорные задвижки, пробковые кра-
ны, игольчатые вентили) и с поступательным (одно- и двухсе-
дельные регулирующие клапаны). Управляют регулирующими
органами через сочлененные с ними исполнительные механизмы.
Тип регулирующего органа выбирается в зависимости от
возможности получения требуемой формы расходной характе-
ристики и параметров и свойств рабочей (регулирующей) сре-
ды. Диаметр условного прохода определяется необходимой про-
пускной способностью.
В санитарно-технических устройствах применяют в основном
регулирующие клапаны и регулирующие заслонки. Клапаны
используют для дросселирования потока различных жидкостей,
газов и водяного пара. Заслонки (воздушные створчатые кла-
паны) устанавливают на воздуховодах для дросселирования
воздуха, подаваемого в помещения или выбрасываемого из
них.
Для регулирования потоков жидкостей, водяного пара и га-
зов применяют регулирующие клапаны различных типов. Наи-
более распространенными являются односедельные, двухсе-
дельные проходные, трехходовые смесительные и несмешиваю-
щие клапаны.
Односедельные клапаны (рис. IV.52) имеют диаметр услов-
ного прохода от 6 до 50 мм (по СИУ будут изготовляться от
15 до 200 мм). Положительное качество этих клапанов — плот-
ный притвор (запорные). Недостаток — влияние давления регу-
лирующей среды на плунжер, которое создает дополнительные
усилия, противодействующие усилиям исполнительного механиз-
ма или увеличивающие их. При значительных давлениях регу-
лируемой среды и большом диаметре условного прохода сильно
искажается действие пневматических исполнительных механиз-
мов.
Двухседельные клапаны (рис. IV.53) лишены этого недостат-
ка, так как давление регулирующей среды воздействует на
верхнее и нижнее седло плунжера одновременно. Площади по-
верхностей седел плунжера примерно равны, а противоположно
направленные усилия, создаваемые регулирующей средой, урав-
новешивают друг друга. Эти регулирующие органы не могут,
как правило, обеспечить плотный притвор и, следовательно, их
нельзя применять в качестве запорных устройств. Двухседель-
ные клапаны выпускаются с диаметром условного прохода от
15 до 300 мм.
Одно- и двухседельные клапаны могут иметь линейную или
равнопроцентную (логарифмическую) пропускную характери-
стику, которая в основном зависит от профиля плунжера. Кроме
126
Рис. IV.52. Односедельный проходной клапан с унифицированным ИМ
127
Рис. IV.53. Двухседельный запорно-регулирующий клапан с боковым ручным дублером
и позиционером
128
Рис. IV.54. Пропускная характе-
ристика регулирующего органа
а — линейная; б — равнопроцент-
ная; / — конструктивная; 2 —
реальная
Рис. 55. Схема расчетного участка трубопровода
того, регулирующие клапаны характеризуются условной про-
пускной способностью, определяемой диаметром условного про-
хода и условным рабочим давлением регулирующей среды, на
которое рассчитан клапан.
Пропускной характеристикой регулирующего органа назы-
вается зависимость между ходом затвора и расходом через ор-
ган регулирующей среды при постоянном перепаде давления
(рис. IV.54).
В реальных условиях перепады на регулирующих органах
непостоянны. Зависимость между расходом и ходом затвора
при непостоянном перепаде называется расходной характерис-
тикой. Для конкретных условий работы эту характеристику
определяют по нескольким точкам, соответствующим минималь-
ному, максимальному и нескольким промежуточным расходам.
Для нормального функционирования САР необходимо, что-
бы характеристика регулирующего органа соответствовала ха-
рактеристикам объекта регулирования и регулятора.
Как правило, регулирующие клапаны в санитарно-техниче-
ских устройствах используют для регулирования различных
теплообменников. Опыт показал, что в этом случае следует при-
менять регулирующие органы с равнопроцентной пропускной
характеристикой: расходная характеристика получается наибо-
лее благоприятной для регулирования, т. е. перемещение регу-
9—903
129
лирующего органа изменяет расход регулирующей среды так,
что теплообмен (регулирующее воздействие на объект регули-
рования) во всем диапазоне рабочего хода органа примерно
одинаково влияет на изменение регулируемого параметра.
Методы расчета пропускной способности регулирующего ор-
гана, выбор условного прохода и пропускной характеристики
изложены в нормативных документах. Здесь остановимся толь-
ко на физических основах выбора условного прохода органа
для потока жидкости и водяного пара.
Регулирующий орган устанавливают на участке трубопрово-
да (рис. IV.55), примыкающего к теплообменнику или к друго-
му регулируемому объекту (например, к емкости для воды) и
присоединенного к коллекторам или другим участкам сети
тепло-, холодо- и водоснабжения. Для определения условного
прохода органа необходимо прежде всего знать максимальный
расход среды (объемный Qmax или массовый Gmax), давление в
начале и в конце участка трубопровода (р0, Рк), потери давле-
ния в трубопроводе и технологических аппаратах (ДрТтах),
свойства регулирующей среды (температуру, вязкость), а также
УСЛОВНУЮ ПрОПуСКНуЮ СПОСОбНОСТЬ (/Cry).
Сначала определяют перепад давления на регулирующем
органе при максимальном расходе среды:
Apmin = АРс &Рт max>
где Д,ос=Ро—рк — перепад давления на расчетном участке трубопровода,
кгс/см2; Apr max — максимальные потери давления в трубопроводах и техно-
логических аппаратах, кгс/см2 (на рис. IV.55 Дрт max^Api —Арз + Арз-рАр^—
+ АрО-
Высокое качество регулирования можно получить только в
том случае, если перепад давления в регулирующем органе
больше максимальных потерь давления в трубопроводах и тех-
нологических аппаратах, т. е. Дрт1п>Дрт max*
Затем определяют максимальную расчетную пропускную
способность:
1) для потока жидкостей
Р
max — Qmax . (IV. 1)
-^Pmin
или
KB max ~ . , (IV. 2)
1000 г Apmin Р
где Qmax — максимальный объемный расход, м3/ч; р — плотность жидкости,
г/см3; Арт1п — перепад давления на регулирующем органе, кгс/см2; Стах —
максимальный массовый расход, кг/ч;
2) для потока водяного пара (перегретого или сухого на-
сыщенного) :
для докритического режима течения, когда ДртщСДркр
К, max = G-^ 1 ; (IV.3)
33 |
130
для критического режима течения, когда Дрпнп^Аркр
(IV.4)
2d,4 V Р1
где У2— удельный объем пара, м3/кг, при t, и р2 (здесь tx — температура пара
перед регулирующим органом; р2— давление пара после регулирующего ор-
гана); Vi — то же, при ti и pi (здесь р,—давление пара перед регулирующим
органом).
Критическим называется режим течения пара, при котором
скорость в дроссельной щели регулирующего органа имеет мак-
симальную величину и расход пара не зависит от Ар, а прямо
пропорционален пропускной способности регулирующего орга-
на. Такая скорость пара может быть при перепаде давления на
органе Дркр=Ар/р1^0,5.
Из приведенных выражений можно сделать вывод, что про-
пускная способность регулирующего органа численно равна
расходу жидкости с плотностью 1 г/см3 (вода), протекающей
через регулирующий орган и создающей в нем перепад давле-
ния. равный 1 кгс/см2.
Пропускная способность полностью открытого органа назы-
вается условной пропускной способностью.
Выбор регулирующего органа производят таким образом,
чтобы было справедливо выражение
KOy^T]KPmax> (IV. 5)
где т) — коэффициент запаса, принимаемый равным не менее 1,2.
Для учета влияния вязкости жидкости в формулу (IV.5)
вводят коэффициент ф:
у Л- Цф^Ср max- (IV .6)
Для каждого условного прохода регулирующего органа пре-
дусмотрена пропускная способность дсу, обеспечивающая мак-
симальный расход среды. Однако в некоторых случаях жела-
тельно иметь устройство с тем же диаметром условного прохо-
да, но с меньшей пропускной способностью (например, чтобы
избежать применения дорогостоящих переходных соединений на
трубопроводах, а также для замены регулирующего органа при
выведении установки на расчетный режим). Поэтому в системе
исполнительных устройств (СИУ) ГСП предусматривается вы-
полнение регулирующих клапанов одного и того же условного
прохода с разной пропускной способностью (100, 60 и 40% мак-
симальной, табл. IV.1).
Исполнительный механизм регулирующего клапана (см.
рис. IV.53) оснащен боковым ручным дублером и позиционером.
Наличие ручного дублера позволяет применять в отдельных
случаях такие клапаны без байпаса. В настоящее время регули-
рующие клапаны устанавливают с байпасом (рис. IV.56), кото-
рый позволяет производить дросселирование ручной трубопро-
водной арматурой в случае выхода регулирующего органа из
строя.
9* 131
\7 Двухседельные (незапор-
j-jXj---—(Xj ► ные) клапаны СИУ имеют не-
I регулируемую протечку 0,03%
I ______IX}________ максимальной пропускной спо-
собности, т. е. в 100 раз мень-
Рис. IV.se. Типовая обвязка регулирующе- ШУЮ> ЧеМ У КЛЭПЭНОВ 25ч30нЖ,
го клапана которые имеют нерегулируемую
протечку 3%.
Для смешивания двух потоков жидкости с целью изменения
температуры смеси применяют трехходовые смесительные кла-
паны (рис. IV.57). Такие клапаны изготовляют с электрически-
ми (типа ПР-М) и мембранными пневматическими (типа
МИМППХ) исполнительными механизмами с присоединитель-
ными размерами, соответствующими Dy=50, 80 и 100 мм. Ус-
ловная пропускная способность этих клапанов для каждого
условного прохода имеет три значения (три типа плунжера I,
II, III). Выбор типоразмера трехходовых смесительных клапа-
нов производится по тому же методу, что и выбор проходных,
причем каждый проход выбирается отдельно (у трехходового
клапана два прохода). Плунжер трехходового клапана выпол-
няется пустотелым с профилированными неравновеликими окна-
ми, что позволяет создать разные пропускные характеристики
на каждом из двух проходов клапана.
Таблица IV. 1. Пропускная способность двухседельного регулирующего
клапана
£>у Значения Кву прн'пропускной способности, %
40 60 120
25 4 6,3 10
50 16 25 40
80 40 63 100
100 63 100 160
125 100 160 250
150 160 250 400
200 250 400 630
250 400 630 1000
300 630 1000 1600
В СИУ предусмотрено изготовление не только смесительных,
но и трехходовых разделительных клапанов, позволяющих де-
лить поток жидкости на два потока.
В установках кондиционирования воздуха для регулирова-
ния температуры в помещениях при трехтрубной системе под-
ключения эжекционных доводчиков применяют регуляторы тем-
пературы прямого действия типа РТК (см. рис. IV.29), исполь-
зующие трехходовой несмешивающий регулирующий орган, ко-
торый сначала дросселирует подачу в теплообменник холодоно-
132
133
сителя, а после полного перекрытия сечения на холодоноснтеле
начинает дросселировать теплоноситель.
В системах вентиляции и кондиционирования воздуха для
дросселирования и перекрытия потоков воздуха применяют ре-
гулирующие заслонки, которые часто называют воздушными
клапанами. В зависимости от назначения воздушные клапаны
бывают утепленными, проходными и распределительными. Для
привода этих клапанов используют электрические или пневма-
тические исполнительные механизмы (как правило, рычажные)
и ручные приводы.
Утепленные воздушные клапаны можно выполнять с элек-
трообогревом. Конструкция этих клапанов обеспечивает плот-
ный притвор створок, что предотвращает проникание холодного
воздуха в помещения и установки воздухоприготовления. Элек-
трообогрев производится с помощью нагревательных элементов,
встраиваемых в неподвижные перемычки, к которым примыка-
ют края створок в закрытом положении клапана. Нагреватель-
ные элементы включают на определенное время (10—20 мин),
в течение которого тает лед, образовавшийся на створах вслед-
ствие выделения влаги на охлажденной поверхности; это позво-
ляет исполнительному механизму легко открывать клапан.
Проходные воздушные клапаны выполняются с теми же
исполнительными механизмами. Более благоприятные пропуск-
ные характеристики имеют получившие в последнее время (на-
пример, в кондиционерах КТЦ) распространение оппозитные
клапаны со створками, направленными навстречу друг другу.
Распределительные воздушные клапаны применяют для рас-
пределения потоков воздуха, направляемых через теплообмен-
ник и в обвод его. Распределительный клапан представляет со-
бой два скомпонованных проходных клапана, соединенных с
одним исполнительным механизмом и действующих в противо-
положных направлениях.
Воздушные клапаны всех типов с исполнительными механиз-
мами выпускаются промышленностью, как правило, для приме-
нения в воздуховодах и установках прямоугольного сечения.
§ 30. КАЧЕСТВО ПРОЦЕССОВ РЕГУЛИРОВАНИЯ
Кривая переходного процесса позволяет составить полное
представление о качестве процесса регулирования в данной си-
стеме.
К переходным процессам САР предъявляются различные
требования. В зависимости от условий регулируемого процесса
могут быть признаны наилучшими или желательными различ-
ные по своему характеру переходные процессы. Для одних
объектов регулирования нужно, чтобы процесс регулирования
происходил в возможно короткий промежуток времени; для
других — чтобы величина отклонения регулируемого параметра
!34
Рис. IV.58. Качество переходного процесса
а — в статических САР; б — в астатических САР
в процессе регулирования не превышала заранее заданных зна-
чений и т. д. Универсального критерия для оценки качества про-
цессов регулирования не существует. Практически использует-
ся несколько показателей качества, которые характеризуют
процесс регулирования в отношении выполнения отдельных оп-
ределенных требований.
Показателями качества функционирования системы регули-
рования называют величины, характеризующие поведение си-
стемы в переходном процессе при поступлении на ее вход еди-
ничного ступенчатого воздействия. Прежде всего к САР предъ-
является требование к ее устойчивости. Другими наиболее су-
щественными показателями качества процессов регулирования
являются:
а) длительность переходного процесса тР;
б) перерегулирование Афтах (динамическая погрешность ре-
гулирования) ;
в) статическая неравномерность (ошибка) регулирования
Афст:
г) частота колебания переходного процесса;
д) степень затухания переходного процесса.
Длительностью переходного процесса тр называется интер-
вал времени между подачей на САР внешнего возмущающего
воздействия и окончанием переходного процесса (рис. IV.58),
который считается законченным, если величина регулирующего
параметра отличается от заданного значения ф0 не более чем
на 5% от зоны неравномерности регулятора для статических
САР и не превышает зоны нечувствительности регулятора для
астатических САР.
135
Перерегулированием или динамической погрешностью регу-
лирования называется максимальное отклонение Афтах регули-
руемого параметра от нового установившегося значения для
статических САР или от заданного значения для астатических,
выраженное в процентах от этого значения:
а= Афтах 10()_
Фо
Статической неравномерностью (ошибкой) регулирования
Дфст называется разность между заданным и новым установив-
шимся значением регулируемого параметра (см. рис. IV.58):
Афст = Фо Фуст — 6СТ.
Эта величина может принимать положительные и отрица-
тельные значения и характеризует точность регулирования в
установившемся режиме. Статическая неравномерность являет-
ся показателем качества процессов регулирования только ста-
тической САР.
Частотой колебаний переходного процесса принято считать
число колебаний регулируемой величины за время переходного
процесса тр. Этот показатель очень важен, если требуется, что-
бы число колебаний за время переходного процесса не превы-
шало заданного.
Степенью затухания переходного процесса называется вели-
чина, характеризующая затухание переходного процесса регу-
лирования и равная отношению разности двух соседних ампли-
туд колебаний одного знака к первой из них:
Аф1 —Дф2
Ф =--------.
АФ1
Степень затухания апериодического процесса равна 1, так
как второй полупериод колебания отсутствует.
Кроме того, существуют еще обобщенные интегральные кри-
терии качества процессов регулирования, которые можно полу-
чить путем вычисления площади, заключенной между кривой
переходного процесса и линией установившегося режима. Ка-
чество системы устанавливается по минимуму интегральной
оценки. Для сравнения качества процессов регулирования при
использовании различных регуляторов пользуются теми показа-
телями, которые для данного процесса являются наиболее су-
щественными.
Получение требуемого качества процессов регулирования
осуществляется не только выбором закона регулирования, но и
параметрами настройки регулятора.
136
Раздел второй
АВТОМАТИЗАЦИЯ САНИТАРНО-ТЕХНИЧЕСКИХ
УСТРОЙСТВ
Глава V
СХЕМЫ АВТОМАТИЗАЦИИ
§ 31. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
САНИТАРНО-ТЕХНИЧЕСКОГО ОБОРУДОВАНИЯ
И СРЕДСТВ АВТОМАТИЗАЦИИ
При разработке схем автоматизации в целях сокращения
чертежных работ и обеспечения идентичности в изображении
санитарно-технического оборудования и приборов автоматики
следует пользоваться условными графическими изображениями,
приведенными в соответстующих ГОСТах.
В схемах автоматизации приборы обычно изображались в
соответствии с ГОСТ 3925—59. Однако срок действия этого
ГОСТа закончился в 1979 г. и в настоящее время действует
ОСТ 36-27-77 «Обозначения условные в схемах автоматизации
технологических процессов».
В связи с тем что специалистам в процессе монтажа и эк-
сплуатации систем авторегулирования, еще долго придется ра-
ботать по чертежам, выполненным в соответствии с ГОСТ
3925—59, в настоящем разделе приводятся условные изображе-
ния приборов в двух вариантах: по ГОСТ 3925—59 (табл. V.1)
и ОСТ 36-27-77 (табл. V.2).
По ГОСТ 3925—59 приняты следующие обозначения основ-
ных контролируемых и регулируемых величин: температура t,
давление р, расход G, уровень Н, влажность т, скорость линей-
ная v, частота вращения п, положение (перемещение) регули-
рующего органа S, разность значений двух величин (прираще-
ние) А.
Функциональные признаки приборов на схемах обозначены:
показывающий П, самопишущий С, интегрирующий И, сумми-
рующий См, позиционный Пз, астатический Ас, изодромный Из,
программный Пг, следящий Сл,
В качестве базовых изображений приборов приняты: круг с
горизонтальной чертой — измерительные приборы; квадрат с
горизонтальной чертой — регулирующие (сигнализирующие)
приборы; круг, вписанный в квадрат,— измерительный и регу-
лирующий прибор в одном корпусе.
Над горизонтальной чертой внутри изображения прибора
(круга, квадрата) вписывается буквенное обозначение измеря-
137
Таблица V.l. Основные условные обозначения элементов схем
автоматизации по ГОСТ 3925—59
Наименование Условное обозначение
Измерительные и регулирующие прибо ры
Прибор измерительный
Прибор регулирующий
Прибор измерительный и регулирующий в одном кор-
пусе
Виды передачи дистанционного воздейс твия
Электрическая передача ! WJ
Пневматическая передача LLU
Гидравлическая передача НИ 1
Механическая передача L_=U
Приемные устройства
Термометр расширения стеклянный 1
Термометр расширения стеклянный электроконтактный F
Термобаллон манометрического термометра 0
Термометр сопротивления &
Термопара 0
Термометр дилатометрический или биметаллический 0
138
Продолжение табл. V.7
Наименование Условное обозначение
Отборное устройство давления, уровня, состава газа и жидкости
Счетчик жидкости, газа ® 1
Расходомер постоянного перепада *!
Сужающее устройство для измерения расхода по пере- паду давления (острие изображения направляется про- тив потока)
Приемное устройство измерителя потока 0
Приемное устройство поплавковое
Приемное устройство влажности ш
Исполнительные механизмы и регулирующи органы
Исполнительный механизм поршневой $
Исполнительный механизм мембранный
Привод ручной
Исполнительный механизм электромагнитный ©
Исполнительный механизм с электродвигателем пере- менного тока
Исполнительный механизм с электродвигателем посто- янного тока
Клапан регулирующий проходной
Клапан регулирующий трехходовой
139
Таблица V.2. Основные условные обозначения элементов схем
автоматизации по ОСТ 36-27-77
Наименование Условное обозначение
Первичный измерительный преобразователь (датчик). Прибор, устанавливаемый по месту: на технологическом трубопроводе, аппарате, стене, полу, колонне, металло- конструкции О CZ)
Прибор, устанавливаемый на щите, пульте е о
Отборное устройство без постоянно подключенного при- бора, служащее для эпизодического подключения при- боров во время наладки, снятия характеристик и т. п. i
Исполнительный механизм (общее обозначение); поло- жение регулирующего органа при прекращении подачи энергии или управляющего сигнала не регламентируется Y
Исполнительный механизм, открывающий регулирую- щий орган при прекращении подачи энергии или управ- ляющего сигнала 9
Исполнительный механизм, закрывающий регулирующий орган при прекращении подачи энергии или управляю- щего сигнала 9
Исполнительный механизм, который при прекращении подачи энергии или управляющего сигнала оставляет ре- гулирующий орган в неизменном положении
Исполнительный механизм с дополнительным ручным приводом (обозначение может применяться в сочетании с любым из дополнительных знаков, характеризующих положение регулирующего органа при прекращении по- дачи энергии или управляющего сигнала)
Регулирующий орган
Линия связи
Пересечение линий связи без соединения друг с другом
Пересечение линий связи с соединением между собой
140
Таблица V.3. Условные обозначения приборов
Наименование Условное обозначение
Первичный измерительный преобразователь (чув- ствительный элемент) для измерения температу- ры, установленный по месту. Например: термо- метр термоэлектрический (термопара), термометр сопротивления, термобаллон манометрического термометра, датчик пирометра и т. п.
Прибор для измерения температуры показываю- щий, установленный по месту. Например: термо- метр ртутный, термометр манометрический и т. п.
Прибор для измерения температуры показываю- щий, установленный на щите. Например: милли- вольтметр, логометр, потенциометр, мост автома- тический и т. п.
Прибор для измерения температуры бесшкальный с дистанционной передачей показаний, установ- /тт\
ленный по месту. Например: термометр маноме- трический (или любой другой датчик температу- ры) бесшкальный с пневмо- или электропередачей
Прибор для измерения температуры одноточеч- ный, регистрирующий, установленный на щите.. Например: самопишущий милливольтметр, лого- метр, потенпиометр, мост автоматический и т. п. Прибор для измерения температуры с автомати- ческим обегающим устройством, регистрирующий,
установленный на щите. Например: многоточеч- ный самопишущий потенциометр, мост автомати- ческий и т. п. fIJR\
Прибор для измерения температуры регистрирую- щий, регулирующий, установленный на щите. На- пример: любой самопишущий регулятор темпера- туры (термометр манометрический, милливольт- метр, логометр, потенциометр, мост автоматиче- ский и т. п.)
Регулятор температуры бесшкальный, установлен- ный по месту. Например: дилатометрический ре- гулятор температуры CD
Прибор для измерения температуры бесшкальный с контактным устройством, установленный по ме- сту. Например: реле температурное CD
Байпасная панель дистанционного управления, установленная на щите (HC\
141
Продолжение табл. V. 3
Наименование Условное обозначение
Переключатель электрических цепей измерения (управления), переключатель для газовых (воз- душных) линий, установленные на щите
Прибор для измерения (разрежения) показываю- щий, установленный по месту. Например: любой показывающий манометр, дифманометр, тягомер, напоромер, вакуумметр и т. п. CD
Прибор для измерения перепада давления пока- зывающий, установленный по месту. Например: дифманометр показывающий
Прибор для измерения давления (разрежения) бесшкальный, с дистанционной передачей показа- ний, установленный по месту. Например: мано- метр (дифманометр) бесшкальный с пневмо- или электропередачей CD
Прибор для измерения давления (разрежения) ре- гистрирующий, установленный на щите. Напри- мер: самопишущий манометр или любой вторич- ный прибор для регистрации давления
Прибор для измерения давления с контактным устройством, установленный по месту. Например: реле давления (PS^
Прибор для измерения давления (разрежения) по- казывающий, с контактным устройством, установ- ленный по месту. Например: электроконтактный манометр, вакуумметр и т. п.
Регулятор давления, работающий без использова- ния постороннего источника энергии (регулятор давления прямого действия) «до себя» J-©
Первичный измерительный преобразователь (чув- ствительный элемент) для измерения расхода, установленный по месту. Например: диафрагма, сопло, труба Вентури, датчик индукционного рас- ходомера И т. п. CD
Прибор для измерения расхода бесшкальный, с дистанционной передачей показаний, установлен- ный по месту. Например: дифманометр (рота- метр) бесшкальный, с пневмо- или электропере- дачей CD
142
Продолжение табл. V.3
Наименование Условное обозначение
Прибор для измерения соотношения расходов ре- гистрирующий, установленный на щите. Напри- мер: любой вторичный прибор для регистрации соотношения расходов
Прибор для измерения расхода показывающий, установленный по месту. Например: дифманометр (ротаметр) показывающий CD
Прибор для измерения расхода интегрирующий, установленный по месту. Например: любой бес- шкальный счетчик-расходомер с интегратором
Прибор для измерения расхода показывающий, интегрирующий, установленный по месту. Напри- мер: показывающий дифманометр с интегратором
Прибор для измерения расхода интегрирующий, с устройством для выдачи сигнала после прохож- дения заданного количества вещества, установ- ленный по месту. Например: счетчик-дозатор
Первичный измерительный преобразователь (чув- ствительный элемент) для измерения уровня, установленный по месту. Например: датчик элек- трического или емкостного уровнемера ©
Прибор для измерения уровня показывающий, установленный по месту. Например: манометр (дифманометр), используемый для измерения уровня CD
Прибор для измерения уровня с контактным уст- ройством, установленный по месту. Например: ре- ле уровня
Прибор для измерения уровня бесшкальный, с ди- станционной передачей показаний, установленный по месту. Н 'пример: уровнемер бесшкальный с пневмо- или электропередачей CD
Прибор для измерения уровня, бесшкальный, ре- гулирующий. с контактным устройством, установ- ленный по месту. Например: электрический регу- лятор-сигнализатор уровня. Буква И в данном примере означает блокировку по верхнему уровню (Lcb
Прибор для измерения уровня показывающий, с контактным устройством, установленный на щи- те. Например: вторичный показывающий прибор с сигнальным устройством. Буквы И и L означа- ют сигнализацию верхнего и нижнего уровней 4
143
Продолжение табл. V.3
Наименование Условное обозначение
Прибор для измерения любой электрической вели- чины показывающий, установленный по месту. Например: напряжение, сила тока, мощность 1 (fD
Прибор для управления процессом по временной программе, установленный на щите. Например: командный электропневматический прибор (КЭП), многоцепное реле времени
Прибор для измерения влажности регистрирую- щий, установленный на щите. Например: вторич- ный прибор влагомера (HR)
Первичный измерительный преобразователь (чув- ствительный элемент) для измерения качества продукта, установленный по месту. Например: датчик рН-метра pH (qe\ r
Прибор для измерения качества продукта пока- зывающий, установленный по месту. Например: газоанализатор показывающий для контроля со- держания кислорода в дымовых газах /ОП
Прибор для измерения скорости вращения приво- да регистрирующий, установленный на щите. На- пример: вторичный прибор тахогенератора
Прибор для измерения нескольких разнородных величин регистрирующий, установленный по ме- сту. Например: самопишущий, дифманометр-рас- ходомер с дополнительной записью давления. Надпись, расшифровывающая измеряемые вели- чины, наносится справа от прибора
Прибор для измерения массы продукта показы- вающий, контактным устройством, установлен- ный по месту. Например: устройство электронно- тензометрическое, сигнализирующее (w/A)
Преобразоаатель сигнала, установленный по ме- сту. Входной сигнал пневматический, выходной электрический Z-X pl£ (PY)
Вычислительное устройство, выполняющее функ- цию умножения. Например: множитель на посто- янный коэффициент К К /fy\
Пусковая аппаратура для управления электро- двигателем (включение, выключение насоса; от- крывание, закрывание задвижки и т. д.). Напри- мер: магнитный пускатель, контактор и т. п. При- менение резервной буквы 2V должно быть огово- । рено на поле схемы | 144
Продолжение табл. V.3
Наименование
Условное обозначение
Аппаратура, предназначенная для ручного дистан- ционного управления (включение, выключение двигателя: открывание, закрывание запорного органа, изменение задания регулятору), установ- ленная на щите. Например: кнопка, ключ управ- ления, задатчик ^77^
Аппаратура, предназначенная для ручного дистан- ционного управления, снабженная устройством для сигнализации, установленная на щите. На- пример: кнопка со встроенной лампочкой, ключ управления с подсветкой и т. п.
Ключ управления, предназначенный для выбора управления, установленный на щите. Пример при- веден для иллюстрации случая, когда позиционное обозначение велико и поэтому наносится вне ок- ружности /Й~5\
1 Надписи, расшифровывающие конкретную измеряемую электрическую иеличину,
располагаются либо рядом с прибором, либо в виде таблицы ва поле чертежа.
Таблица V.4. Основные условные обозначения оборудования,
систем водоснабжения, канализации, отопления и вентиляции
Наименование Условное обозначение
Трубопровод —'
Соединения трубопроводов
Перекрещивание трубопроводов (без соединения)
Шайба дроссельная, сужающее устройство расхо- домерное (диафрагма) >
Подвод жидкости под давлением (без указания источника питания)
10—903
145
Продолжение табл. V.4
Наименование Условное обозначение
Слив жидкости из системы
Подвод воздуха (газа) под давлением (без ука- зания источника питания) >
Выпуск воздуха (газа) в атмосферу
Вентиль проходной
Клапан обратный (движение рабочей среды через клапан должно быть направлено от белого тре- угольника к черному) ^^4
Клапан предохранительный
Клапан редукционный (вершина треугольника должна быть направлена в сторону повышенного давления) он
Задвижка Вид cbepxy Вид спереди
Скважина артезианская
Радиатор г 1
Л ефлектор ©
Устройство аспирационное, местная вытяжка (отсос, укрытие) 146 й А
Продолжение табл. V.4
Наименование Условное обозначение
Насадок приточный — воздухораспределитель
Шахта для забора воздуха >□< у
Шахта для выброса воздуха <□> у
Грязевик © 0
Агрегат воздушно-отопительный 1 1
Нагреватель и охладитель воздуха ТУ
Нагреватель воздуха X. i/
Воздухоохладитель —ф—
Фильтр для очистки воздуха ——
Заслонка вентиляционная -—
Камера вентиляционная приточная й 1—
Кондиционер
Водонагреватель емкий (UZD
Водонагреватель скоростной rzi
10*
147
Продолжение табл. V.4
Наименование Условнее обозначение
Конденсатоотводчик
Увлажнитель
Насос лопастный центробежный
Вентилятор центробежный (ср
Вентилятор осевой
Элеватор
Влаго- или маслоотделитель ——
емой или регулируемой величины, а под чертой — буквенное
обозначение основных функций, выполняемых прибором. На-
пример, если внутри круга над чертой написано t, а под чер-
той— П, нужно читать так: прибор для измерения температуры,
показывающий.
ОСТом предусматриваются следующие буквенные обозначе-
ния измеряемых величин и функций, выполняемых приборами:
А — сигнализация; С — регулирование, управление; D — раз-
ность, перепад; Е — любая электрическая величина; F — рас-
ход; G — размер, положение перемещения; Н — ручное воздей-
ствие (дополнительное значение — верхний предел измеряемой
величины); I — показание; J — автоматическое переключение,
обегание; К — время; L — уровень (дополнительное значение —
нижний предел измеряемой величины); М — влажность; Р —
давление; Q — состав, концентрация; Д— радиоактивность; S —
скорость, частота; Т— температура; U — несколько разнородных
измеряемых величин; V — вязкость; W— масса.
Для обозначения величин, не предусмотренных настоящим
ОСТом, могут быть использованы буквы В, N, О, У, Z, X. При
этом указанные буквенные обозначения должны быть расшиф-
рованы на схеме.
148
В табл. V.3 приведены примеры построения условных обоз-
начений приборов по ОСТ 36-27-77.
Для построения и чтения схем санитарно-технических уст-
ройств кроме условных обозначений приборов и средств автома-
тизации необходимо знать и условные графические обозначения
элементов санитарно-технических систем (табл. V.4) по дейст-
вующим стандартам.
§ 32. ТИПЫ СХЕМ АВТОМАТИЗАЦИИ
При разработке схем автоматики применяют различные при-
боры, соединяемые с объектом управления и между собой по
различным схемам. Приборы и средства автоматизации исполь-
зуют электрическую энергию, энергию жидких сред (масла и
воды) и энергию сжатого воздуха. Схемы автоматизации под-
разделяются на следующие виды: электрические, пневматиче-
ские, гидравлические и комбинированные.
Наибольшее распространение в практике автоматизации по-
лучили электрические приборы, что объясняется большим вы-
бором разнообразной аппаратуры, гибкостью и легкостью соче-
тания ее в различных схемах, а также наличием на объектах
источников электропитания. В связи с этим наиболее широко
используются электрические схемы. В специфических условиях,
например во взрывоопасных производствах, применяют пневма-
тические приборы и средства автоматизации с разработкой пнев-
матических схем. Из-за громоздкости гидравлической аппарату-
ры и трудностей передачи гидравлических командных импуль-
сов на большие расстояния гидравлические схемы не нашли
широкого распространения. В ряде случаев в проектах применя-
ют комбинированные электропневматические схемы.
По типам схемы автоматизации делятся на структурные,
функциональные, принципиальные, монтажные и схемы соеди-
нений.
Структурная схема представляет собой укрупненную струк-
туру системы управления и взаимосвязь между пунктами кон-
троля и управления объектом и отдельными должностными ли-
цами. Функциональная схема отражает функционально-блочную
структуру отдельных узлов автоматического контроля, сигна-
лизации, управления и регулирования, определяет оснащение
объекта управления приборами и средствами автоматизации.
Принципиальная схема определяет полный состав элементов,
модулей, вспомогательной аппаратуры и связей между ними.
Принципиальная схема служит основанием для разработки
схем внешних соединений электрических и трубных проводок,
общих видов и монтажных схем щитов и пультов автоматиза-
ции. Монтажная схема отражает соединения электрических и
трубных проводок в пределах комплектных устройств (щитов,
пультов и т. п.). Схема соединений представляет собой внешние
электрические и трубные связи между измерительными устрой-
149
ствами и средствами получения первичной информации; с одной
стороны, щитами и пультами автоматизации, с другой.
Схемы автоматизации, как правило, выполняют без соблюде-
ния масштаба. В монтажных схемах соблюдается действитель-
ное пространственное расположение отдельных средств автома-
тизации и монтажных изделий.
§ 33. ФУНКЦИОНАЛЬНЫЕ СХЕМЫ АВТОМАТИЗАЦИИ
Функциональные схемы —один из основных способов изо-
бражения принятых принципиальных решений автоматизации
санитарно-технических устройств. Умение составлять схемы по-
зволяет специалисту-сантехнику дать квалифицированное зада-
ние на разработку проекта автоматики. Умение читать схемы
позволяет определить, какие санитарно-технические системы и
устройства автоматизированы, оценить правильность принятых
решений и в случае необходимости внести соответствующие из-
менения и дополнения.
Функциональная схема представляет собой чертеж, на кото-
ром схематически условными обозначениями изображены: тех-
нологическое оборудование, трубопроводы, органы управления
и средства автоматизации (приборы, регуляторы) с указанием
связей между технологическим оборудованием и элементами
автоматики, а также связей между отдельными элементами ав-
томатики.
Вспомогательные устройства, такие как регуляторы и филь-
тры для воздуха, источники питания, реле, автоматы, предохра-
нители и монтажные элементы, на функциональных схемах не
показывают.
Примеры применения условных обозначений элементов ав-
томатики в функциональных схемах представлены в табл. V.5.
В качестве примера рассмотрим, как построены функцио-
нальные схемы автоматизации бойлера и приточной вентиляци-
онной установки.
Пароводяная бойлерная установка (рис. V.1) предназначе-
на для приготовления горячей воды требуемой температуры.
Поддержание постоянной температуры воды осуществляется
путем изменения расхода пара, поступающего в бойлер.
С этой целью на паропроводе устанавливается регулирую-
щий клапан с электрическим исполнительным механизмом, а
на трубопроводе горячей воды датчик терморегулятора, уста-
новленного на щите автоматики и воздействующего на исполни-
тельный механизм регулирующего клапана. Обозначение «Ас»
говорит о том, что используется астатический терморегулятор.
Для дистанционного контроля температуры входящей в бойлер
и выходящей из него воды на трубопроводе установлены два
термометра сопротивления, а на щите автоматики — показыва-
ющий прибор (например, логометр) с переключателем. Визу-
150
Условное обозначение
Экспликация
Таблица V.5. Условные обозначения в функциональных схемах автоматики
Контроль температуры
Кондиционируемое
помещение
1 — термометр сопротивле-
ния двойной; 2 — прибор
измерительный, показываю-
щий; 3 — то же, самопишу-
щий; 4 — трубопровод; 5 —
калорифер
1 — термометры сопротив-
ления; 2 — переключатель
измерительных цепей; 3 —
прибор измерительный, по-
казывающий
1 — вентилятор; 2 — термо-
метр манометрический; 3—
термобаллон манометриче-
ского термометра
Контроль давления
1 — отборное устройство
давления; 2 — прибор изме-
рительный, показывающий;
3 — фильтр
151
Продолжение табл. V.5
Условное обозначение
Экспликация
1 — отборное устройство;
2 — прибор измерительный,
показывающий, самопишу-
щий; 3— трубопровод
1 — прибор бесшкальный с
электропередачей; 2 — при-
бор измерительный, самопи-
шущий; 3 — отборное уст-
ройство давления
Контроль расхода
1 — прибор измерительный,
показывающий; 2 — прибор
измерительный, бесшкаль-
ный с электропередачей;
3 — трубопровод; 4 — уст-
ройство сужающее
1 — счетчик жидкости; 2 —
трубопровод
Контроль уровня
1 — прибор измерительный,
показывающий; 2 — прибор
измерительный с пневмопе-
редачей; 3 — устройство
приемное поплавковое
152
Продолжение табл, V.5
Условное обозначение
Экспликация
1 — сигнальная лампа; 2—
сигнализатор уровня; 3 —
устройство приемное емко-
стное
Контроль различных параметров
1 — лампа сигнальная; 2—
устройство приемное для
измерения скорости потока
воздуха
Кондиционируемое
помещение
£
1 — прибор измерительный,
показывающий, самопишу-
щий; 2 — устройство прием-
ное для измерения относи-
тельной влажности
Регуляторы прямого действия
Регулятор температуры
прямого действия
1 — первичный иреобразо-
ватель; 2 — термобаллон;
3 — калорифер; 4 — регули-
рующий клапан; 5 — линия
механической связи
Регулятор давления прямо-
го действия 1 — регулирую-
щий клапан; 2 — линия ме-
ханической связи; 3 — пер-
вичный преобразователь;
4 — отборное устройство
давления
153
Продолжение табл. V.5
Условное обозначение
Экспликация
Регулятор уровня прямого
действия 1 — линия механи-
ческой связи; 2 — первич-
ный преобразователь; 3 —
устройство приемное по-
плавковое; 4 — регулирую-
щий клапан
альный местный контроль осуществляется двумя стеклянными
термометрами расширения.
Система работает следующим образом. При температуре во-
ды, выходящей из бойлера, выше 60° С терморегулятор воздей-
ствует на исполнительный механизм регулирующего клапана.
Последний постепенно закрывается, уменьшая подачу пара в
бойлер. При понижении температуры воды клапан открывается,
увеличивая подачу пара в бойлер.
Приточная вентиляционная установка (рис. V.2, а) состоит
из канала наружного воздуха, утепленного клапана с электри-
ческим исполнительным механизмом, фильтра с электроприво-
дом, калорифера и вентилятора с электродвигателем. Чувстви-
тельный элемент терморегулятора установлен в воздуховоде за
вентилятором. Основной задачей системы авторегулирования
является поддержание постоянной температуры воздуха за вен-
тилятором.
Терморегулятор воздействует на исполнительный механизм
регулирующего клапана, изменяя расход теплоносителя, прохо-
дящего через калорифер, в зависимости от температуры возду-
ха за вентилятором. При повышении температуры воздуха за
вентилятором регулирующий клапан начинает закрываться,
уменьшая количество воды, протекающей по трубкам калорифе-
ра, а следовательно, уменьшается и нагрев воздуха. При пони-
жении температуры воздуха регулирующий клапан постепенно
открывается. Управление электродвигателем вентилятора осу-
ществляется с помощью кнопки «пуск-стоп» и магнитного пу-
скателя. При срабатывании магнитного пускателя подается
питание на лампу, сигнализирующую о том, что питание на
электродвигатель подано. Из схемы видно (линии абв и аг),
что электроприводы утепленного клапана и фильтра сблокиро-
ваны с электродвигателем вентилятора. С пуском электродвига-
теля подается питание на электроприводы утепленного клапана
и фильтра: утепленный клапан открывается и включается в ра-
боту фильтр. С выключением электродвигателя останавлива-
ется фильтр и закрывается утепленный клапан.
154
Рнс. V.l. Функциональ-
ная схема автоматизации
пароводяного бойлера
1 — термометры сопро-
тивления; 2 — термомет-
ры расширения; 3 — ре-
гулирующий клапан; 4—
исполнительный меха-
низм; 5 — датчик; 6 —
терморегулятор; 7 — пе-
реключатель; 8 — пока-
зывающий прибор
Рис. V.2. Функциональ-
ная схема автоматиза-
ции приточной вентиля-
ционной установки
1 — воздушный канал;
2 — клапан; 3 — фильтр;
4 — калорифер; 5 — вен-
тилятор; 6—чувствитель-
ный элемент; 7 — испол-
нительный механизм; 8—
привод вентилятора; 9 —
магнитный пускатель;
10 — терморегулятор;
11—кнопка; 12— лампа
155
На рис. V.2, б, в качестве примера, представлена функцио-
нальная схема автоматизации этой же приточной системы, вы-
полненная в соответствии с ОСТ 36-27-77.
Глава VI
АВТОМАТИЗАЦИЯ СИСТЕМ
ТЕПЛОСНАБЖЕНИЯ
§ 34. АВТОМАТИЗАЦИЯ ТЕПЛОВЫХ ВВОДОВ
Выбор той или иной схемы автоматизации теплового ввода
зависит от принятой схемы присоединения его к тепловой сети.
При зависимой схеме присоединение осуществляется через эле-
ватор, через подмешивающие насосные установки или непо-
средственным присоединением к тепловой сети. При независи-
мой схеме присоединение систем отопления осуществляется че-
рез пароводяные или водоводяные подогреватели.
Системы отопления зданий, на тепловом вводе которых раз-
ность напоров достаточна для нормальной работы элеватора,
присоединяют по элеваторной схеме.
Присоединение систем отопления по схемам с насосным под-
мешиванием производится:
а) при недостаточном для работы элеватора располагаемом
напоре на тепловом вводе (насос устанавливают на перемычке
между подающим и обратным трубопроводами);
б) при необходимости увеличения располагаемого напора
(насос устанавливают на подающем трубопроводе после под-
мешивающей перемычки);
в) при давлении в обратном трубопроводе, превышающем
допустимое для данной системы (насос устанавливают на об-
ратном трубопроводе от системы отопления).
Системы отопления присоединяются по независимой схеме
при необходимости изоляции систем от тепловой сети.
При автоматическом регулировании тепловых вводов основ-
ным является: поддержание постоянного расхода и давления
теплоносителя, регулирование температуры теплоносителя при
присоединении системы отопления по независимой схеме и за-
щита системы отопления от повышения давления и опорожне-
ния.
Наиболее широкое распространение получили системы ав-
томатического регулирования тепловых вводов с использовани-
ем регуляторов конструкции ОРГРЭС.
Рассмотрим функциональную схему автоматизированного
теплового узла с элеваторным присоединением системы отопле-
ния к тепловым сетям (рис. VI. 1). Для поддержания постоянно-
го расхода теплоносителя на подающем трубопроводе установ-
лен регулятор расхода прямого действия типа УРРД. Отбор
156
Рис. VI.1. Функциональная схема автоматизации теплового узла с элеваторным присо-
единением к тепловым сетям
/ — термометры; 2— диафрагма; 3— водомер; 4 — технические манометры; 5 — регулятор
расхода
Рис. VI.2. Функциональная схема автоматизации теплового узла с защитой системы
отопления от опорожнения
1—регулятор расхода; 2—блокировочное реле; 3— регулятор давления
157
Рис. VI.3. Функциональная схема автоматизации теплового узла с защитой от повыше-
ния давления
1 — регулятор расхода; 2 — блокировочное реле
Рис. VI.4. Функциональная схема автоматизации теплового ввода с насосным под.мешн-
ванием
158
давления можно производить до и после диафрагмы или на по-
дающем (до элеватора) и обратном (пунктирная линия) трубо-
проводах системы отопления. При уменьшении перепада давле-
ния на диафрагме регулирующий клапан начинает открываться,
увеличивая расход теплоносителя, а при увеличении пере-
пада постепенно закрывается. Таким образом поддерживается
постоянный расход теплоносителя в системе отопления. Для
местного контроля давления и температуры теплоносителя ус-
тановлены технические манометры и термометры. Расход теп-
лоносителя определяется с помощью водомера.
При непосредственном присоединении системы отопления
схема автоматизации аналогична рассмотренной.
Если статическое давление системы отопления выше стати-
ческого давления тепловой сети, для предотвращения опорож-
нения системы и защиты сети от повышения давления на обрат-
ном трубопроводе устанавливают редуктор давления.
В системе автоматизированного теплового узла с защитой
системы от опорожнения (рис. VI.2) постоянство расхода теп-
лоносителя обеспечивается регулятором расхода прямого дейст-
вия типа УРРД, установленным на подающем трубопроводе.
Защита от опорожнения осуществляется регулятором давления
прямого действия типа УРРД совместно с блокировочным реле
конструкции ОРГРЭС. Блокировочное реле настраивается на
срабатывание при достижении предельно допустимого низкого
давления, сигнал передается на регулятор давления и клапан
закрывается, предохраняя систему от опорожнения.
Для защиты теплового узла от повышенного давления в по-
дающей магистрали тепловой сети (рис. VI.3) установлен регу-
лятор расхода прямого действия (типа УРРД) совместно с бло-
кировочным реле. При повышении давления в подающем тру-
бопроводе срабатывает блокировочное реле и закрывается ре-
гулятор. В нормальном режиме регулятор поддерживает посто-
янный расход теплоносителя, поступающего в систему отопле-
ния.
Примером автоматизации тепловых вводов с насосным под-
мешиванием (рис. VI.4) может служить схема автоматизации
теплового ввода с недостаточным для работы элеватора распо-
лагаемым напором. Постоянное давление теплоносителей в пря-
мой и обратной линиях поддерживается регуляторами давления
прямого действия I типа УРРД. Вода из обратной линии под-
мешивается насосом 3; насос 2 является резервным.
§ 35. АВТОМАТИЗАЦИЯ СИСТЕМ ЦЕНТРАЛЬНОГО
И ВОЗДУШНОГО ОТОПЛЕНИЯ
Тепловой режим отапливаемых помещений определяется как
результат совокупного влияния непрерывно изменяющихся
внешних и внутренних возмущающих воздействий.
К внешним тепловым воздействиям относятся изменения
159
температуры наружного воздуха, скорости и направления вет-
ра, интенсивности солнечной радиации, влажности воздуха.
Внутренние возмущающие воздействия в жилых зданиях: выде-
ление тепла при приготовлении пищи, работа электрических
осветительных приборов, тепло, выделяемое людьми и др.
Регулирующими (управляющими) воздействиями, которые
должны обеспечить стабилизацию температурного режима по-
мещений или его изменение во времени по заданной програм-
ме, являются температура и расход теплоносителя, поступаю-
щего в нагревательные приборы, а также продолжительность
его подачи.
Применение автоматического регулирования в системах цен-
трального отопления дает значительный технико-экономический
эффект.
Способы регулирования подразделяются на три группы: цен-
тральное регулирование на тепловом вводе; регулирование по
отдельным зонам — зонное регулирование; индивидуальное ре-
гулирование каждого нагревательного прибора.
В зависимости от назначения здания, его ориентации, кон-
струкции наружных ограждений и нагревательных приборов ре-
гулирование осуществляется: по отклонению внутренней темпе-
ратуры в «представительных» (контрольных) помещениях; по
возмущению (изменению температуры наружного воздуха, ско-
рости ветра, интенсивности солнечной радиации); по отклонению
внутренней температуры внутри физической тепловой модели
здания. В физической модели здания температура воздуха, рав-
ная температуре воздуха в здании, поддерживается с помощью
электрического нагревателя. Датчики температуры, находящие-
ся внутри модели, дают сигнал и через регулятор осуществля-
ется управление регулирующим клапаном, установленным на
линии подачи тепла в здание.
Центральное регулирование. При центральном регулирова-
нии осуществляется позиционное или пропорциональное изме-
нение количества теплоты, поступающей в здание из тепловой
сети, в зависимости от изменения температуры воздуха в кон-
трольных помещениях или температуры наружного воздуха. На
рис. VI.5, а представлена широко распространенная схема регу-
лирования системы отопления с элеваторным смесителем. Пе-
ред элеватором установлен регулирующий клапан с электропри-
водом, а в контрольном помещении — датчик позиционного ре-
гулятора. При изменении температуры воздуха в контрольном
помещении срабатывает реле регулятора, и регулирующий кла-
пан при этом открывается или закрывается. В здании может
быть выбрано не одно, а несколько контрольных помещений и
устанавливается соответствующее число позиционных регулято-
ров.
Двухпозиционное изменение расхода тепла, предусмотренное
схемой автоматического регулирования, связано с тепловой раз-
160
Рис. VI.5. Функциональная схема автома-
тизации элеваторной системы отопления
а — система с одним элеватором: / — регу-
лирующий клапан: 2 —датчик; 3 — регуля-
тор; б — система с двумя элеваторами
Рис. VI.6. Функциональная схема автома-
тизации системы отопления с независимым
присоединением
/__пропорционально-интегральный блок;
2, 3 — показывающие приборы; 4 — регули-
рующий клапан
регулировкой системы отопления: при периодических отключе-
ниях системы отдаленные (по ходу воды) приборы получают
в среднем за сутки меньшее количество теплоты, чем располо-
женные близко. Поскольку с повышением частоты отключений
тепловая разрегулировка увеличивается, рассмотренная схема
регулирования применяется или для малопротяженных систем
отопления или при условии отключения подачи теплоносителя
в здание не более 3—4 раз в сутки.
Более высокое качество регулирования температуры возду-
ха в отапливаемых помещениях достигается при установке на
вводе двух элеваторов (рис. VI.5,б). Один из элеваторов яв-
ляется нерегулируемым и обеспечивает пропуск в систему ото-
пления минимально заданного расхода воды из тепловой сети.
Регулирующий клапан устанавливается перед вторым элевато-
11—903
161
ром. Схема автоматизации узла с двумя элеваторами аналогич-
на схеме автоматизации узла с одним элеватором.
На рис. VI.6 представлена схема автоматизации системы
отопления с независимым подключением (через бойлер). Схема
построена на элементах унифицированной системы промышлен-
ной пневмоавтоматики (УСЭППА) системы «Старт».
Основной задачей системы автоматики является поддержа-
ние температуры теплоносителя в соответствии с отопительным
графиком. Регулируемое значение температуры воды, поступа-
ющей в систему отопления, изменяется в зависимости от тем-
пературы наружного воздуха. Регулирование производится ма-
нометрическими показывающими приборами 2 и 3 с пневмати-
ческим выходным сигналом, контролирующими температуру
наружного воздуха и теплоносителя.
Температура теплоносителя регулируется следующим обра-
зом. При температуре наружного воздуха t\ на пневмопривод
регулирующего клапана поступает управляющее воздействие от
пропорционально-интегрального блока, обеспечивающее под-
держание температуры теплоносителя Т согласно отопительно-
му графику. При отклонении температуры теплоносителя при-
бор 3 изменяет давление сжатого воздуха, поступающего на
блок, в результате чего изменяется давление выходного сигна-
ла блока, воздействующего на пневмопривод регулирующего
клапана. Регулирующий клапан в зависимости от изменения
температуры теплоносителя увеличивает или уменьшает подачу
воды из тепловой сети.
Зонное регулирование. В том случае, когда с помощью цен-
трального регулирования невозможно поддерживать темпера-
туру воздуха в отапливаемых помещениях с достаточной точ-
ностью, применяется зонное регулирование.
Зонное автоматическое регулирование позволяет учитывать
влияние изменений условий погоды (ветра, солнечной радиа-
ции) на различные зоны здания по высоте и по странам света.
Зонное деление систем отопления может быть пофасадным (вер-
тикальным) или поэтажным (горизонтальным).
Наибольшее распространение получили схемы с пофасадным
регулированием. Все отапливаемые помещения разделяются на
зоны, одинаково ориентированные относительно стран света.
В каждой зоне выбираются контрольные помещения, в которых
устанавливаются датчики регуляторов температуры, соединен-
ных по схеме (рис. VI.7), аналогичной схеме центрального ре-
гулирования.
При повышении температуры воздуха в отапливаемых поме-
щениях от регуляторов 1 и 2 поступает сигнал на исполнитель-
ные механизмы регулирующих клапанов 3 и 4, и клапаны за-
крываются. При понижении температуры воздуха в помещениях
ниже нормы регулирующие клапаны открываются.
Зонное регулирование в зависимости от аккумуляционной
162
Рис. VI.7. Функциональная схема автоматизации системы отопле-
ния с пофасадиым регулированием
Рис. VI.8. Функциональная схема регулирования отопительного аг-
регата
1— регулятор температуры; 2 — соленоидный вентиль
11*
163
способности отапливаемых помещений может быть двухпози-
ционным или пропорциональным.
Индивидуальное регулирование. Регулирование каждого на-
гревательного прибора позволяет учитывать специфические ус-
ловия различных помещений и менять режим отопления в соот-
ветствии с индивидуальными запросами.
Индивидуальное регулирование мощности нагревательных
приборов может быть осуществлено путем изменения количе-
ства воды, поступающей в прибор, либо путем изменения кон-
вективного или лучистого потока, поступающего от нагреватель-
ного прибора.
Наиболее распространенным способом является регулирова-
ние путем изменения количества воды, поступающей в прибор.
С этой целью используются регуляторы прямого действия, ус-
танавливаемые на каждом нагревательном приборе.
Автоматизация систем воздушного отопления. Для производ-
ственных помещений широко применяют системы воздушного
отопления. Как правило, в помещениях устанавливают отопи-
тельные агрегаты, состоящие из вентилятора и калорифера.
В качестве примера можно привести принципиальную схе-
му автоматизации отопительного агрегата (рис. VI.8). В отап-
ливаемом помещении установлен позиционный регулятор тем-
пературы, а на трубопроводе перед калорифером — соленоид-
ный вентиль. При повышении температуры воздуха в помеще-
нии с помощью регулятора температуры выключается электро-
двигатель и закрывается соленоидный вентиль, прекращая по-
дачу теплоносителя в калорифер. При понижении температуры
воздуха включается электродвигатель вентилятора и соленоид-
ный вентиль открывается.
§ 36. АВТОМАТИЗАЦИЯ НАСОСНЫХ
И СМЕСИТЕЛЬНЫХ УСТАНОВОК СИСТЕМ
ОТОПЛЕНИЯ
В зависимости от назначения насосной установки система
автоматического регулирования должна обеспечить поддержа-
ние в требуемых пределах: давления, расхода и температуры
теплоносителя. Кроме того, при аварийной остановке рабочего
насоса должен автоматически включаться резервный. Для ди-
станционного контроля за работой насосной установки преду-
сматривается соответствующая сигнализация и при необходи-
мости автоматическая запись температуры, расхода и давления
теплоносителя.
Рассмотрим схему автоматизации, обеспечивающую включе-
ние резервного насоса при аварийной остановке рабочего (рис.
VI.9). При внезапной остановке рабочего насоса давление теп-
лоносителя на линии нагнетания резко падает. Эта зависимость
и положена в основу работы системы автоматики.
164
Рис. VI.9. Функциональная схема автоматического включения ре-
зервного насоса
1 — регулятор давления; 2 — магнитный пускатель; 3, 5 — сигналь-
ные лампы; 4 — ключ; 6 — диафрагма
Рис. V.10. Функциональная схема автоматического поддержания
постоянного давления теплоносителя
165
Рис. VI.11. Функциональная схема автоматизации насосной смесительной установки
На нагнетательной линии после насосов устанавливают по-
зиционный регулятор давления, настроенный на рабочее дав-
ление системы отопления. При остановке рабочего насоса А
давление теплоносителя снижается, срабатывает регулятор дав-
ления, выключается магнитный пускатель электродвигателя на-
соса и сигнальная лампа 3. Одновременно с помощью того же
регулятора давления включается в работу резервный насос Б
и загорается сигнальная лампа 5. С помощью ключа осущест-
вляется выбор режима управления работой установки.
При автоматизации насосов бывают случаи, когда разность
давления теплоносителя при включенном и выключенном насо-
се меньше чувствительности регулятора давления. В этом слу-
чае искусственно увеличивают гидравлическое сопротивление
сети путем установки диафрагмы.
Для автоматического поддержания постоянного давления
теплоносителя на нагнетательной линии насосов установлен ре-
гулятор давления прямого действия 2 (рис. VI. 10). В зависи-
мости от изменения давления в системе регулирующий клапан
открывается или закрывается, поддерживая постоянное давле-
ние в точке А. Постоянное давление в системе может поддер-
живаться и передачей части теплоносителя в обратную линию.
Для этого между прямой и обратной линией теплоносителя мон-
тируют перемычку, на которой устанавливают регулятор давле-
166
ния прямого действия 1 (пунктирная линия). При повышении
давления в точке А клапан открывается, часть теплоносителя
из прямой линии поступает в обратную и тем самым поддержи-
вается постоянное давление в системе.
Рассмотренный способ регулирования давления в системе
может быть применен только в том случае, если перепуск горя-
чей воды в обратную линию не вызывает нарушения установ-
ленного температурного графика теплоносителя в обратной ли-
нии.
Для теплоснабжения зональных подогревателей систем кон-
диционирования воздуха большое распространение получили на-
сосные смесительные установки (рис. VI.11), с помощью кото-
рых поддерживается постоянная температура теплоносителя не
зависимо от графика теплосети. Требуемая температура тепло-
носителя регулируется терморегулятором прямого действия 2,
установленным на трубопроводе горячей воды. Термочувстви-
тельный элемент регулятора устанавливают на трубопроводе за
насосом. При изменении температуры теплоносителя регулиру-
ющий клапан постепенно изменяет расход горячей воды, по-
ступающей из теплоносителя. При этом изменяется и расход
теплоносителя, забираемого насосом из обратной линии. Таким
образом, обеспечивается постоянная температура теплоносите-
ля. Постоянное давление на нагнетательной линии насоса под-
держивается регулятором прямого действия 1.
Глава VII
АВТОМАТИЗАЦИЯ СИСТЕМ ВОДОСНАБЖЕНИЯ
И КАНАЛИЗАЦИИ
§ 37. АВТОМАТИЗАЦИЯ СИСТЕМ
ГОРЯЧЕГО ВОДОСНАБЖЕНИЯ
Системы горячего водоснабжения промышленных и граж-
данских зданий присоединяются к тепловым сетям по двум схе-
мам: с непосредственным водоразбором; через водяные или па-
роводяные подогреватели.
При схеме с непосредственным водоразбором вода в систе-
му подается из прямой и обратной линий тепловой сети в соот-
ношениях, обеспечивающих температуру смеси 60° С. Регулиро-
вание постоянной температуры смеси осуществляется терморе-
гулятором ТРД, работающим в комплекте со смесительным
регулирующим клапаном РКС (конструкция ОРГРЭС). Регули-
рующий клапан имеет два подводящих патрубка и один патру-
бок на выходе. К подводящим патрубкам присоединяются трубо-
проводы от прямой и обратной линий тепловой сети, а выход-
ной патрубок соединен с трубопроводом систем горячего водо-
снабжения. При повышении температуры воды, поступающей в
167
Рис. VII.1. Функциональная схема автоматизации системы горячего водоснабжения,
присоединенной к теплосети через водоводяной подогреватель
1 — регулятор прямого действия; 2 — насос; 3 — двухпозицнониый регулятор
Рис. VI 1.2. Функциональная схема автоматизации системы водоснабжения с насосами
периодического действия
1, 2 — регуляторы давления; 3 — рабочий насос; 4 — резервный насос
систему горячего водоснабжения, увеличивается подача воды в
систему из обратной линии тепловой сети, а при понижении —
из прямой линии тепловой сети.
При автоматизации системы горячего водоснабжения, при-
соединенной к тепловой сети с помощью водоводяного подогре-
168
вателя (рис. VII.1), регулирование температуры воды, подавае-
мой в систему, осуществляется регулятором прямого действия
типа РТ. При повышении температуры воды в системе горячего
водоснабжения прикрывается клапан регулятора, уменьшая по-
дачу горячей воды цз теплосети в бойлер, а при понижении от-,
крывается.
Системы горячего водоснабжения в зависимости от назначе-
ния объекта бывают с циркуляцией воды только при ее разбо-
ре (тупиковая система) и с циркуляцией воды при отсутствии
водоразбора или при незначительном водоразборе.
При отсутствии водоразбора или при незначительном водо-
разборе вода в системе горячего водоснабжения может значи-
тельно охладиться. Чтобы избежать этого, устанавливают цен-
тробежный насос (см. рис. VII. 1) и монтируют циркуляционную
линию трубопроводов (пунктирные линии). Датчик манометри-
ческого двухпозиционного регулятора устанавливают на цирку-
ляционной линии. При понижении температуры воды в системе
горячего водоснабжения примерно до 45° С срабатывает двухпо-
зиционный регулятор и включается электродвигатель центробеж-
ного насоса, начинается принудительная циркуляция воды в си-
стеме и подогрев ее в бойлере. При достижении температуры
воды в циркуляционной линии 60—65° С регулятор срабатывает
и отключает электродвигатель насоса.
§ 38. АВТОМАТИЗАЦИЯ ХОЗЯЙСТВЕННО-ПИТЬЕВОГО
И ПРОТИВОПОЖАРНОГО ВОДОСНАБЖЕНИЯ
В зависимости от располагаемого напора в точке присоеди-
нения к наружной сети внутренняя водопроводная система мо-
жет быть выполнена по следующим схемам:
а) непосредственное присоединение без насосов и резервуа-
ров, если напор в наружной сети достаточен для подачи воды
ко всем водоразборным точкам внутри здания;
б) с насосами постоянного или периодического действия, ес-
ли напора в наружной сети постоянно или периодически не хва-
тает для подачи воды ко всем водоразборным точкам;
в) с напорным резервуаром и периодически действующими
насосами.
Система непосредственного присоединения оборудуется лишь
измерителем расхода — водомером.
В системе водоснабжения с насосами периодического дейст-
вия (рис. VI 1.2) рабочий насос включается с помощью позици-
онного регулятора давления 1 при понижении расчетного давле-
ния воды, поступающей из городской сети. При повышении дав-
ления воды в городской сети насос выключается с помощью
того же регулятора. Автоматическое включение резервного на-
соса при аварийном состоянии рабочего осуществляется позици-
онным регулятором давления 2 (см. § 36).
169
При автоматическом регулировании системы водоснабжения
с напорным резервуаром и периодически действующими насо-
сами (рис. VI 1.3) включение и выключение насоса осуществля-
ется регулятором уровня, датчики которого установлены в на-
.порном резервуаре. При опускании воды в баке до нижнего
уровня (линия б) включается насос, и вода начинает поступать
в бак. Когда вода в баке достигнет верхнего уровня (линия а),
насос отключится. При выходе из строя рабочего насоса вклю-
чается резервный с помощью регулятора давления. Ручное или
автоматическое управление насосами выбирается ключом.
В промышленных зданиях широкое распространение полу-
чили автоматические (спринклерные) и полуавтоматические
дренчерные системы. Трубопроводы автоматических противо-
пожарных систем прокладывают под потолком помещения. На
трубопроводах устанавливают спринклеры (рис. VII.4), закры-
тые стеклянным колпаком, который удерживается в закрытом
положении замком из пластинок, соединяемых между собой
легкоплавким сплавом. При возникновении пожара и повыше-
нии температуры в помещении до 72—93° С припой расплавля-
ется, распадается замок и вода через отверстия спринклера по-
ступает в помещение. Спринклерные системы постоянно нахо-
дятся под давлением воды либо воздуха (при отрицательной
температуре помещения).
Полуавтоматические противопожарные дренчерные системы
оборудованы разбрызгивателями, имеющими всегда открытые
отверстия. Сеть полуавтоматической установки включают при
пожаре вручную.
Кроме этих систем в промышленных, жилых и общественных
зданиях применяют противопожарные системы с установкой в
определенных местах пожарных кранов. Если давление воды
в городской сети недостаточно для обеспечения нормальной ра-
боты противопожарных устройств, устанавливают противопожар-
ные насосы или пневматические установки.
У каждого пожарного крана (рис. VII.5) установлена кнопка
включения рабочего насоса. При нажатии кнопки «Пуск» вклю-
чается рабочий насос, одновременно с пуском насоса открыва-
ется задвижка с электроприводом на байпасе водомера. Блоки-
рование электродвигателя насоса и задвижки исключает вывод
из строя водомера при большом расходе воды в случае пожара.
Резервный насос включается автоматически при отказе рабо-
чего (см. § 36).
Принцип действия пневматической установки для повыше-
ния напора воды заключается в следующем (рис. VII.6). В од-
ном герметически закрытом резервуаре 3 находится вода, а в
другом 5 — воздух. Необходимое давление воздуха в резервуа-
ре 5 поддерживается небольшим компрессором, который вклю-
чается и выключается с помощью позиционного регулятора дав-
ления. Воздушный резервуар соединен трубопроводом с водя-
170
Ряс. VI 1.3. Функциональная схема автоматизации
системы водоснабжения с напорным резервуаром
1 — ключ; 2 — регулятор давления; 3 — регулятор
уровня; 4 — напорный резервуар
Рис. VII.4. Спринклерные головки
1—замок с припоем; 2 — колпак; 3 — диафрагма;
4 — бронзовое кольцо с рамой; 5 — разбрызгива-
ющая розетка; 6 — спринклер в действии
Рис. VII.5. Функциональная схема автоматизации пожарных насосов
1— кнопка; 2— задвижка; 3 —рабочий иасос; 4 — резервный насос
171
Рис. VH.6. Функциональная схема автома-
тизации пневматической установки
/ — рабочий насос; 2 — резервный насос;
3, 5 — резервуары; 4 — редуктор; 6 — ком-
прессор; 7—регулятор давления; 8 — регу-
лятор уровня; 9 — реле расхода
Рис. VII.7. Умывальник с фотоэлектриче-
ским пуском воды
1 — усилитель; 2 — осветлитель; 3 — фото-
сопротивление; 4— запорный клапан; 5 —
термосмеситель
ным, постоянное давление воздуха в котором поддерживается
редуктором. Под давлением воздуха вода поступает в противо-
пожарную систему и поднимается на высоту, соответствующую
давлению в резервуаре 3. Когда уровень воды в резервуаре до-
стигнет нижнего предела, регулятор уровня включит рабочий
насос, уровень воды в резервуаре поднимется до верхнего пре-
дела, и насос остановится. Резервный насос включается авто-
матически при отказе рабочего по сигналу реле расхода.
В некоторых случаях необходима автоматизация работы раз-
личного санитарно-технического оборудования (умывальники,
душевые кабины и др.). Так, например, в умывальниках, уста-
навливаемых в операционных блоках больниц, необходим ав-
томатический пуск воды, так как в них не допускается устрой-
ство ручных кранов, а локтевые и ножные включатели услож-
172
няют конструкцию водоразборных устройств и не способствуют
повышению гигиеничности. На рис. VII.7 представлен умываль-
ник с фотоэлектрическим пуском воды. Дополнительное обору-
дование такого умывальника состоит из усилителя (фотореле),
осветителя (лампы), фотосопротивления и электромагнитного
запорного клапана СВМ-15. Перед электромагнитным клапаном
обычно устанавливается термосмеситель; температура подава-
емой им воды задается заранее обслуживающим персоналом.
При протягивании рук под излив пересекается луч света, кото-
рый освещает фотосопротивление. Срабатывая, фотореле вклю-
чает электромагнитный клапан, который поднимается, и вода
подается в излив. При выведении рук из зоны луча света сопро-
тивление цепи в фотореле восстанавливается, происходит от-
ключение питания электромагнитного клапана и прекращение
истечения воды.
Фотоэлектрическое оборудование умывальника кроме абсо-
лютной гигиеничности дает существенную экономию в расходе
воды.
§ 39. АВТОМАТИЗАЦИЯ ОБОРОТНОГО ВОДОСНАБЖЕНИЯ
Для охлаждения технологического оборудования (компрес-
соров, конденсаторов холодильных машине и др.) требуется
большое количество воды. Поэтому с целью экономии водопро-
т' Рис. VI 1.8. Функциональная схема автоматизации оборотного водоснабжения
1 —компрессоры; 2 — насосы; 3, 4 — вентиляторы; 5 — градирни; 6 — сборный бак; 7,
S — регуляторы; 9 — переключатель
173
В канализационную сеть
Рис. VII.9. Функциональная схема автома-
тизации насосов дренажных приямков
Рис. VII.10. Функциональная схема защи-
ты подвальных помещений от затопления
/__световой сигнал; 2— звуковой сигнал;
3 —реле уровни; 4— задвижка; 5—датчик
водной воды устраивают системы оборотного водоснабжения,
в которых нагретая технологическим оборудованием вода ох-
лаждается в градирнях. Система оборотного водоснабжения
(рис. VII.8) состоит из вентиляторных градирен, сборного бака,
циркуляционных насосов и охлаждаемого оборудования (ком-
прессоров). Требуемая температура воды в сборном баке под-
174
держивается за счет включения определенного числа вентиля-
торов; электродвигатели технологического оборудования сбло-
кированы с электродвигателями оборудования гра-
дирни.
При включении электродвигателя компрессора автоматиче-
ски включается электродвигатель насоса. Если температура во-
ды в баке ниже температуры настройки регулятора, то ни один
из осевых вентиляторов градирни не включится. Когда темпе-
ратура воды в баке превысит температуру настройки регулято-
ра 8, включится осевой вентилятор 3. При дальнейшем повы-
шении температуры до величины, превышающей значение на-
стройки регулятора 7, включится вентилятор 4. Если темпера-
тура воды в баке понизится, сначала отключится вентилятор 4,
а затем вентилятор 3. После выключения электродвигателя ком-
прессоров отключаются электродвигатели насоса и вентилято-
ров. Режим работы (ручной или автоматический) выбирается
с помощью переключателя.
§ 40. АВТОМАТИЗАЦИЯ ВНУТРЕННЕЙ КАНАЛИЗАЦИИ
При автоматизации внутренней канализации решаются за-
дачи автоматического удаления сточных вод из дренажных при-
ямков и защиты подвальных помещений от затопления при за-
сорении канализационных сетей.
При автоматизации насосов дренажных приямков (рис.
VII.9) датчики регулятора уровня устанавливаются в приямке
на отметке верхнего и нижнего уровня. По мере заполнения
приямка и достижения водой верхнего уровня срабатывает ре-
гулятор и включается дренажный насос. Когда уровень воды в
дренажном приямке опустится ниже нижнего датчика, насос
выключится. В случае необходимости предусматривается систе-
ма автоматического включения резервного насоса при выходе
из строя рабочего.
Для защиты подвальных помещений от затопления (рис.
VII.10) в канализационном колодце на высоте 50—100 мм от
верхней отметки лотка устанавливают датчик реле уровня. При
засорении канализационной сети уровень сточных вод в колод-
це поднимется, сработает реле и закроется задвижка с электро-
приводом. Реле уровня срабатывает также и при затоплении
подвала по сигналу датчика, установленного на 5 см выше ниж-
ней отметки пола подвала. Световой или звуковой сигнал о за-
топлении подается на щит диспетчера.
175
Глава VIII
АВТОМАТИЗАЦИЯ ВЕНТИЛЯЦИОННЫХ СИСТЕМ
§ 41. АВТОМАТИЗАЦИЯ ПРИТОЧНЫХ СИСТЕМ
Автоматизация приточных вентиляционных систем обеспечи-
вает поддержание санитарно-гигиенических условий воздушной
среды в вентилируемых помещениях с минимальной затратой
ручного труда. В зависимости от используемого теплоносителя,
принятых расчетных параметров наружного воздуха и назначе-
ния приточной системы применяют различные схемы автомати-
зации. Рассмотрим, как автоматизируются приточные вентиля-
ционные системы в зависимости от вида теплоносителя.
В системе автоматического регулирования приточной систе-
мы с калорифером, питаемым горячей водой (рис. VIII.1), ре-
гулятор температуры 2, чувствительный элемент которого уста-
новлен либо в канале приточного воздуха, либо в вентилируе-
мом помещении, при отклонении температуры воздуха от задан-
ной воздействует на исполнительный механизм регулирующего
клапана. Регулирующий клапан изменяет расход воды, проте-
кающей через калорифер, и соответственно степень нагрева воз-
духа.
Калорифер от замораживания защищают следующим обра-
зом. На трубопроводе после калорифера установлен датчик 7
позиционного регулятора температуры 3, настроенного на 20—
30° С, а в воздуховоде—датчик 6 позиционного регулятора 4, на-
строенного на температуру 3—4° С. Если температура воды
после калорифера понизится до 20—30° С, а температура на-
ружного воздуха будет ниже 3—4° С, позиционный регулятор
температуры 3 сработает, автоматически выключится вентиля-
тор, закроется утепленный клапан, установленный в воздухо-
воде, и откроется регулирующий клапан. При отключенном вен-
тиляторе защита калориферов от замораживания осуществля-
ется периодическим их прогревом с помощью регулятора 3, уп-
равляющего исполнительным механизмом.
Иногда, при большой тепловой инерционности вентилируе-
мого помещения, возможно значительное снижение температу-
ры приточного воздуха, что влечет за собой создание диском-
фортных условий в отдельных зонах помещения (ветер, резкое
снижение температуры). В отдельных случаях регулирующий
клапан 8 по сигналу регулятора температуры 2 полностью за-
крывается, что приводит к срабатыванию защиты калорифера
от замораживания и остановке системы. Чтобы избежать этого,
в воздуховоде за вентилятором устанавливается датчик позици-
онного регулятора 1, настроенный на минимально допустимую
температуру приточного воздуха. Если по команде регулятора
2 регулирующий клапан закрывается и температура приточно-
176
A
Рис. VIII.1. Функциональ-
ная схема автоматизации
приточной системы при теп-
лоносителе воде
1—4 — регуляторы; 5 — утеп-
ленный клапан; 6,7 — дат-
чики; 8 — регулирующий
клапан: 9 — исполнительный
механизм; 10 — чувствитель-
ный элемент
Рис. VIII.2. Функциональная
схема автоматизации при-
точной системы при тепло-
носителе паре
1 — регулятор; 2 — исполни-
тельный механизм; 3—вен-
тиль
Рис. VIII.3. Функциональная
схема автоматизации приточной
системы с электрокалорифером
12—903
177
го воздуха понижается до минимально допустимой, срабатыва-
ет регулятор 1 и управляющий сигнал на исполнительный ме-
ханизм прерывается.
При теплоносителе паре наиболее распространена схема ре-
гулирования теплопроизводительности калориферов путем из-
менения соотношений количества воздуха, проходящего через
основной проход и обвод калорифера (рис. VIII.2). Регулятор
температуры при отклонении температуры воздуха за вентиля-
тором от заданной воздействует на исполнительный механизм
сдвоенного клапана перед калорифером. Поворачиваясь, створ-
ки клапана изменяют количество воздуха, проходящего через
калорифер и обводной канал, и поддерживают на требуемом
уровне температуру воздуха за вентилятором. После того как
створчатый клапан полностью закроет основной проход кало-
рифера, закроется соленоидный вентиль, установленный на па-
ропроводе, и прекратит подачу пара в калорифер. Это необхо-
димо для предотвращения перегрева воздуха, так как из-за не-
плотностей между створками клапана, даже если он полностью
•закрыт, часть воздуха будет нагреваться калорифером .
Защита калорифера от замерзания при теплоносителе паре
аналогична его защите при теплоносителе воде.
Одним из существенных недостатков приведенной выше схе-
мы регулирования является необходимость установки большого
числа створчатых клапанов при большой площади калорифе-
ров.
Способ регулирования теплопроизводительности калорифе-
ров путем изменения расхода пара наиболее простой, однако
применяется он редко в связи с повышенной опасностью замер-
зания калориферов.
Автоматическое регулирование электрокалорифера (рис.
VIII.3), разделенного на четыре секции равной мощности, про-
изводится двумя позиционными терморегуляторами 1 и 2, кото-
рые имеют по два задатчика. Каждый терморегулятор управ-
ляет работой двух секций калорифера. При температуре возду-
ха за вентилятором ниже 16° С включаются все четыре секции
электрокалорифера, при 17° С — три, при 18° С — две, при
19° С — одна, выше 19° С калорифер отключается.
Рассмотрим схему авторегулирования приточной вентиляци-
онной системы, совмещенной с воздушным отоплением (рис.
VIII.4). Особенностью таких систем является калориферная
группа (несколько калориферов по ходу воздуха), обеспечива-
ющая подогрев воздуха до 40—50° С. Требуемая температура
воздуха в вентилируемом помещении поддерживается с по-
мощью терморегулятора 1, воздействующего на исполнительные
механизмы 4 и 6 регулирующих клапанов 5 и 7. Регулирующие
клапаны работают последовательно. При повышении темпера-
туры воздуха в помещении сначала закрывается регулирующий
клапан 7 второго по ходу воздуха калорифера, а потом первого.
178
Рис. VIII.4. Функциональная схема автоматизации приточной системы, совмещенной с
воздушным отоплением
При понижении температуры воздуха в помещении сначала от-
крывается регулирующий клапан 5 первого по ходу воздуха ка-
лорифера, а затем второго. От замораживания защищается толь-
ко первый калорифер с помощью регуляторов 2 и 3 по принци-
пу, изложенному выше.
Схема автоматизации приточной вентиляционной системы
(рис. VIII.5), калориферы которой рассчитаны на наружную
Рис. VIII.5. Функциональная схема автоматизации приточной системы с изменением
подачи вентилятора
I — регулятор; 2 — исполнительный механизм
12:
179
Рис. VIII.6. Функциональная схема автоматизации приточной системы с переменной
рециркуляцией
1 — регулятор; 2 — балансное реле; 3—5 — клапаны
температуру воздуха по параметрам А (расчетная температура
для вентиляции), обеспечивает не только поддержание требуе-
мой температуры приточного воздуха, но и экономию тепла.
При понижении температуры наружного воздуха ниже расчет-
ной по параметрам А регулятор, воздействуя на исполнитель-
ный механизм, пропорционально понижению температуры умень-
шает количество приточного воздуха. При повышении темпера-
туры происходит, обратный процесс: направляющий аппарат
открывается, увеличивая подачу воздуха в вентилируемое поме-
щение. В остальном схема автоматического регулирования си-
стемы аналогична представленной на рис. VIII. 1. Подача вен-
тилятора изменяется с помощью направляющего аппарата, гид-
ромуфты или индукторной муфты.
В некоторых случаях с целью экономии тепла приточные ус-
тановки проектируются с частичным подмешиванием воздуха
помещения к наружному воздуху. В этом случае воздух, посту-
пающий из помещения, называют рециркуляционным. При ав-
томатизации приточной системы с переменной рециркуляцией
(рис. VIII.6) регулирование температуры приточного воздуха
осуществляется регулятором, воздействующим на створчатые
клапаны 3 и 4, установленные в каналах наружного и рецирку-
ляционного воздуха.
При понижении температуры приточного воздуха клапан 3
постепенно закрывается, а клапан 4 открывается. Исполнитель-
ные механизмы клапанов работают синхронно с помощью ба-
180
Рис. VIII.7. Функциональная схема автоматизации приточной системы с местным и
диспетчерским щитом
1 — логометр; 2, 4 — сигнальные лампы; 3 — пусковая кнопка; 5 6, 8 — регуляторы;
7 — переключатель; 9 — реле
лансного реле. Если клапан 3 закроется до положения, соот-
ветствующего пропуску санитарной нор^ы наружного воздуха,
и температура приточного воздуха будет ниже нормы, начнет
открываться регулирующий клапан 5 теплоносителя. При повы-
шении температуры наружного воздуха процесс происходит в
обратной последовательности — закрывается клапан теплоноси-
теля, открывается створчатый клапан канала наружного возду-
ха и закрывается синхронно с ним рециркуляционный клапан.
Если температура смеси наружного и рециркуляционного
воздуха положительна во всем диапазоне работы установки, за-
щита калорифера от замораживания не предусматривается.
При отрицательной температуре смеси защита осуществляется
по схеме, приведенной на рис. VIII.1.
При большом числе вентиляционных систем для облегчения
их обслужвания устанавливают диспетчерский щит, на который
выводят всю необходимую сигнализационную и измерительную
аппаратуру (рис. VIII.7). На местном щите автоматики уста-
новлены: регулятор температуры подаваемого в помещение воз-
духа 8, регуляторы температуры 5 и 6 для защиты калорифера
от замораживания, реле потока воздуха, переключатель режи-
мов работы вентиляционной установки, с помощью которого
можно перейти с ручного на автоматическое управление рабо-
той элементов вентиляционной установки. На щите диспетчера
установлены сигнальная арматура, пусковая кнопка дистанци-
181
онного включения оборудования вентиляционной установки и
логометр.
При установке переключателя в положение «Автоматика» с
помощью пусковой кнопки можно дистанционно управлять элек-
тродвигателем вентилятора и сблокированным с ним электро-
двигателем фильтра. После включения вентилятора при нали-
чии потока воздуха срабатывает реле и включается лампа 2,
сигнализирующая с подаче воздуха в помещение. В случае ава-
рийного отключения вентилятора (сработала защита калори-
фера от замораживания) включается лампа 4, сигнализирую-
щая об отключениях в работе калорифера. При этом прекра-
щается подача воздуха в помещение, срабатывает реле потока
воздуха и гаснет лампа 2. Для дистанционного контроля тем-
пературы наружного воздуха, воздуха в помещении и за венти-
лятором установлен логометр. Диспетчер может периодически,
не заходя в вентилируемое помещение, контролировать темпе-
ратуру воздуха в нем и в случае ее отклонения от заданной
принимать соответствующие меры.
Для всех приведенных выше схем автоматического регули-
рования общим является блокировка клапана наружного воз-
духа с электродвигателем вентилятора и предварительный про-
грев калорифера.
§ 42. АВТОМАТИЗАЦИЯ ВЫТЯЖНЫХ СИСТЕМ
В предыдущем параграфе рассмотрена принципиальная схе-
ма автоматического регулирования приточной системы, обеспечи-
вающая изменение подачи вентилятора при температуре на-
ружного воздуха ниже расчетной. Одновременно с изменением
подачи приточного вентилятора должна изменяться и подача
вытяжного вентилятора.
При автоматизации вытяжной системы (рис. VIII.8) подача
вытяжного вентилятора изменяется с помощью направляющего
аппарата 5. При повороте исполнительного механизма 2 на-
правляющего аппарата 3 приточного вентилятора, синхронно, на
такой же угол, с помощью балансного реле поворачивается ис-
полнительный механизм 6 направляющего аппарата 5 вытяж-
ного вентилятора. Исполнительные механизмы поворачивают ло-
патки направляющих аппаратов на одинаковый угол, обеспечи-
вая тем самым изменение подачи приточного и вытяжного
вентиляторов.
При вентиляции особо опасных производств, не допускаю-
щих даже временного выключения вытяжного вентилятора, пре-
дусматривается резервная вентиляционная установка.
Рассмотрим схему автоматического включения вытяжного
аварийного вентилятора (рис. VIII.9). При включении электро-
двигателя вентилятора 7 открывается сблокированный с ним
привод клапана 6, срабатывает реле 3 потока воздуха и заго-
182
Рис. VIII.8. Функциональная схема автомати-
зации вытяжной системы с переменной произ-
водительностью
/ — реле; 2, 6 — исполнительные механизмы;
3, 5 — направляющие аппараты; 4 — приточ-
ный вентилятор; 7 — вытяжной вентилятор
Рис. VIII.9. Функциональная схема автома-
тизации вытяжной системы с резервным вен-
тилятором
Рис. VIII.10. Функциональная схема дистан-
ционного управления вытяжной вентиляцион-
ной установкой
/ — переключатель; 2 — реле; 3 — сигнальная
лампа
рается сигнальная лампа 4. В случае аварийного выхода из
строя вентилятора 7 прекращается движение воздуха, срабаты-
вает реле 3, выключается магнитный пускатель 5, закрывается
створчатый клапан 6 и гаснет сигнальная лампа 4. Одновре-
менно с помощью реле 3 потока воздуха включается в работу
вентилятор 9, открывается створчатый клапан 8, срабатывает
реле потока 1 и загорается сигнальная лампа 2.
Особое значение в автоматизации вытяжных систем имеет
дистанционное управление и сигнализация.
Дистанционное управление очень эффективно при большом
числе вентиляционных систем и значительном их удалении друг
от друга. Как правило, в этом случае устанавливают диспетчер-
ский щит, куда выводят все управление и сигнализацию. Такое
решение позволяет значительно сократить затраты труда на об-
служивание вентиляционных установок. Один диспетчер может
пускать и останавливать большое число вентиляционных систем,
а также контролировать их работу.
Схема дистанционного управления с сигнализацией работы
вытяжной вентиляционной установки представлена на рис.
VIII. 10. Вентиляционную установку можно пускать или останав-
ливать либо со щита, находящегося непосредственно у вентиля-
ционной установки, либо со щита диспетчера дистанционно в
зависимости от положения переключателя. Если переключатель
находится в положении «Ручное», система управляется с ме-
стного щита, если ключ переводится в положение «Автоматика»,
система управляется дистанционно. При нормальной работе
системы контакты реле потока воздуха замкнуты и сигнальная
лампа включена. При отсутствии потока воздуха в воздуховоде
сигнальная лампа гаснет.
§ 43. АВТОМАТИЗАЦИЯ ВОЗДУШНО-ТЕПЛОВЫХ ЗАВЕС
Воздушно-тепловые завесы нашли широкое применение в
промышленных и гражданских зданиях. Завесы дают возмож-
ность поддерживать в холодный период года в производствен-
ных помещениях требуемые санитарными нормами параметры
воздушной среды и при этом значительно сокращать расход
тепла.
При автоматизации воздушно-тепловых завес решаются сле-
дующие задачи:
1) пуск и останов завесы соответственно при открывании
и закрывании ворот;
2) изменение подачи вентилятора воздушной завесы в зави-
симости от температуры наружного воздуха;
3) изменение теплоотдачи калориферов завесы в зависимо-
сти от температуры наружного воздуха или температуры возду-
ха в помещении около ворот;
184
3
Рис. VIII.11. Функциональная схема автоматизации воздушно-тепловой завесы
1 — регулятор; 2 — исполнительный механизм; 3 — выключатель
4) останов завесы и одновременное автоматическое отклю-
чение подачи теплоносителя в калориферы.
Автоматический пуск и останов воздушной завесы в зависи-
мости от положения ворот производится следующим образом:
при открывании ворот срабатывает концевой выключатель, по-
дается питание на катушку магнитного пускателя электродвига-
теля вентилятора и завеса начинает работать; при закрывании
ворот с помощью того же концевого выключателя останавлива-
ется электродвигатель вентилятора завесы.
Автоматическое регулирование подачи вентилятора воздуш-
ной завесы при изменении температуры наружного воздуха не-
обходимо по следующей причине: воздушные завесы рассчиты-
ваются на минимальную температуру наружного воздуха, при
более высокой температуре расчетный расход воздуха намного
превышает необходимый; при этом, если не уменьшить подачу
вентилятора воздушной завесы, наружу будет выброшено боль-
шое количество теплого воздуха, что приведет к переохлажде-
нию помещения и нарушению работы естественной вытяжки.
Регулирование подачи вентилятора воздушной завесы не толь-
ко позволяет улучшить состояние воздушной среды помещения,
но и дает экономию электроэнергии и тепла.
Регулирование по разности давления внутри и снаружи зда-
ния наиболее полно отражает условия, определяющие работу
воздушной завесы, но такое регулирование крайне сложно. Го-
раздо проще регулировать теплоотдачу воздушной завесы по
разности температур. Поскольку температура воздуха в здании
поддерживается в течение отопительного периода на одном уров-
185
не, регулирование можно вести по температуре наружного воз-
духа.
Схема регулирования подачи вентилятора воздушной завесы
аналогична представленной на рис. VIII.5.
При регулировании температуры воздуха в помещении око-
ло ворот (рис. VIII.11) включение и выключение завесы осуще-
ствляется с помощью концевого выключателя ворот. Регуля-
тор при повышении температуры воздуха в зоне ворот воздей-
ствует на исполнительный механизм регулирующего клапана,
уменьшая подачу теплоносителя в калорифер. При понижении
температуры воздуха в зоне ворот регулирующий клапан по-
степенно открывается, увеличивая подачу теплоносителя в ка-
Рис. VIII.12. Функциональная схема автоматизации
системы дымоудаления
1 — прибор пожарной сигнализации; 2 — вытяжной
вентилятор; 3— приточный вентилятор
лорифер. При закры-
тых воротах, в случае
понижения температу-
ры воздуха в помеще-
нии, с помощью термо-
регулятора включается
в работу завеса. При
останове электродви-
гателя вентилятора
завесы автоматически
срабатывает исполни-
тельный механизм ре-
гулирующего клапана,
прекращая подачу теп-
лоносителя в калори-
фер.
§ 44. АВТОМАТИЗАЦИЯ
СИСТЕМ
ДЫМОУДАЛЕНИЯ
Для быстрого уда-
ления дыма из коридо-
ра и производствен-
ных помещений при
возникновении пожа-
ра, а также для пода-
чи свежего воздуха в
пути эвакуации (лест-
ничные клетки и лест-
ничные шахты) устраи-
вается система дымо-
удаления. Включение
системы дымоудале-
ния при пожаре произ-
водится либо вручную
кнопками у пожарных
186
кранов, либо автоматически с помощью системы автомати-
ческой пожарной сигнализации, состоящей из станции пожар-
ной сигнализации, которая устанавливается в помещении по-
жарного поста, и подключенных к ней датчиков.
Срабатывание датчиков фиксируется на приемной станции
звуковым и световым сигналами, оповещающими о зоне пожа-
ра. Одновременно с подачей сигнала о пожаре автоматически
включаются приточные и вытяжные вентиляционные установки.
В качестве примера приведем схему автоматизации систем
дымоудаления многоэтажного административного здания (рис.
VIII. 12). Приточный и вытяжной вентиляторы установлены на
техническом этаже здания. От вентиляционного стояка вытяж-
ного вентилятора в коридор каждого этажа выведен отвод, обо-
рудованный створчатым клапаном с электроприводом. На каж-
дом этаже установлены тепловые датчики пожарной сигнализа-
ции.
При возникновении пожара на каком-либо этаже срабатыва-
ет прибор пожарной сигнализации, включается вытяжной вен-
тилятор и открывается створчатый клапан этого этажа. Начи-
нается интенсивное удаление дыма из коридора. Одновременно
с вытяжным включается приточный вентилятор, и свежий воз-
дух начинает поступать в лестничную клетку и лифтовую шах-
ту, обеспечивая возможность эвакуации людей из здания.
Глава IX
АВТОМАТИЗАЦИЯ СИСТЕМ
КОНДИЦИОНИРОВАНИЯ ВОЗДУХА
§ 45. ТЕХНОЛОГИЧЕСКИЕ ОСНОВЫ АВТОМАТИЗАЦИИ
СИСТЕМ КОНДИЦИОНИРОВАНИЯ ВОЗДУХА
Системы кондиционирования воздуха предназначены для
создания и автоматического поддержания необходимых пара-
метров воздуха (температуры, относительной влажности, чис-
тоты, скорости движения и др.) в помещениях. В зависимости
от назначения системы кондиционирования разделяются на тех-
нологические, обеспечивающие состояние воздушной среды,
удовлетворяющее требованиям технологического процесса, и
комфортные, создающие благоприятные условия для человека.
В зависимости от конструкции кондиционеры подразделяются
на секционные и агрегатные.
По оснащенности кондиционеров устройствами для получе-
ния тепла и холода кондиционеры делят на автономные и неав-
тономные. Автономные кондиционеры снабжаются извне только
электроэнергией. Для работы неавтономных кондиционеров не-
обходима подача извне тепло- и холодоносителя, а также элек-
троэнергии для привода двигателей вентиляторов и насосов.
187
I
Рис. IX.1. /-^-диаграмма. Процесс регулирования
по методу точки росы
Рис. IX.2. Функциональная схема управления электроприводами кондиционера
Системы кондиционирования воздуха весьма разнообразны:
они бывают прямоточными и с частичной рециркуляцией, одно-
зональные и многозональные, одноканальные и многоканальные,
с эжекционными доводчиками и др. Здесь рассмотрим только
основные виды систем.
В кондиционируемых помещениях с помощью системы авто-
матического регулирования поддерживаются требуемые значе-
ния температуры и относительной влажности воздуха. Наиболее
распространенным методом поддержания этих параметров яв-
ляется метод регулирования по температуре точки росы.
Независимо от изменения параметров наружного воздуха
(рис. IX. 1, точки 1, 2, 3) при нагреве и увлажнении или охлаж-
дении и осушении его, с помощью системы авторегулирования
поддерживается постоянная температура точки росы (точка 4).
Относительная влажность воздуха в точке 4 близка к 100% и
188
зависит от эффективности работы оросительной камеры или по-
верхностного воздухоохладителя. Таким образом, если задана
какая-либо температура точки росы, то на поле I—d-диаграм-
мы этой температуре будет соответствовать одна единственная
точка, лежащая на пересечении линий, проведенных из точек
3 и 7, с кривой насыщения <р=100%.
Если воздух с параметрами, характеризуемыми точкой 4, по-
догреть до температуры и выпустить в помещение, то в поме-
щении будет достигнута требуемая температура и относитель-
ная влажность воздуха (точка 6). Степень нагрева воздуха за-
висит от величины тепловыделений в помещении и регулирует-
ся автоматически. Таким образом, для достижения требуемой
температуры и относительной влажности воздуха в кондицио-
нируемом помещении регулирование достаточно осуществлять
по двум точкам 4 и 6.
Недостатком изложенного метода регулирования являются
его низкие экономические показатели. Действительно, если па-
раметры наружного воздуха (см. рис. IX. 1) будут характери-
зоваться точкой 5, вместо того чтобы выпустить воздух без об-
работки в помещение, мы вынуждены его охлаждать до темпе-
ратуры точки росы (точка 4), а затем нагревать до начальных
'параметров (точка 5).
Канд. техн, наук А. Я. Креслинем разработан новый метод
регулирования системы кондиционирования воздуха — метод
оптимальных режимов, обеспечивающий минимальные затраты
тепла и холода на обработку воздуха. Принципиальным отли-
чием этого метода является то, что с помощью датчиков тем-
пературы и относительной влажности, установленных в конди-
ционируемом помещении, осуществляется прямое регулирование
параметров воздействием на определенные агрегаты кондиционе-
ра. При этом нет необходимости поддерживать температуру
точки росы.
При устройстве автоматического регулирования систем кон-
диционирования воздуха большое значение имеет правильный
выбор последовательности работы отдельных электроприводов
кондиционера.
В качестве примера приведем принципиальную схему управ-
ления электроприводами кондиционера (рис. IX.2). Ддя пуска
электродвигателя вентилятора нажимают кнопку 3 при уста-
новке ключа 1 в положение «Автоматика». Одновременно пус-
кают сблокированные с электродвигателем вентилятора элек-
троприводы насоса 13, фильтра 11, утепленного клапана 10 и
регулирующего клапана 12 калорифера первого подогрева. При
этом утепленный и регулирующий клапаны полностью открыва-
ются. Иногда с помощью реле времени 2 регулирующий клапан
открывается на 3—5 мин для прогрева калорифера. При оста-
новке электродвигателя вентилятора останавливаются двигате-
ли насоса 13 и фильтра 11, закрываются утепленный клапан 10
189
и клапаны калориферов первого 12, второго 15 подогревов и
холодоносителя 14. Если ключ установлен в положение «Руч-
ное», то все электроприводы управляются с помощью кнопок
3—9.
§ 46. АВТОМАТИЗАЦИЯ ПРЯМОТОЧНЫХ СИСТЕМ
КОНДИЦИОНИРОВАНИЯ ВОЗДУХА
Прямоточные системы кондиционирования воздуха применя-
ют для помещений, в которых технологическому процессу со-
путствует выделение вредных для здоровья человека веществ.
При автоматизации такой системы (рис. IX.3, а) регулято-
ром температуры 2, чувствительный элемент которого установ-
лен в потоке воздуха за оросительной камерой, поддерживается
постоянная температура точки росы. В холодный период года
регулятор воздействует на исполнительный механизм 4 регули-
рующего клапана и изменяет теплопроизводительность калори-
фера первого подогрева. Защита калорифера от замораживания
аналогична защите, применяемой для калориферов приточных
вентиляционных систем (см. § 41).
В теплый период года постоянная температура точки росы
поддерживается регулятором 2, воздействующим на исполни-
тельный механизм 3 регулирующего клапана. При повышении
температуры точки росы клапан открывается, увеличивая пода-
чу на форсунки холодной воды, что обеспечивает более глубо-
кое охлаждение воздуха. При понижении температуры клапан
закрывается, уменьшая подачу холодной воды. Требуемая тем-
пература воздуха в кондиционируемом помещении поддержи-
вается регулятором 1, воздействующим на исполнительный ме-
ханизм 5 регулирующего клапана калорифера второго подо-
грева.
На I—3-диаграмме (рис. IX.3, б) представлена схема обра-
ботки воздуха. Наружный воздух (точка 1) в холодный период
года подогревается калорифером первого подогрева до дости-
жения параметров, характеризуемых точкой 2. Затем воздух
адиабатически увлажняется и охлаждается в оросительной ка-
мере, достигая температуры точки росы (точка 3), подогрева-
ется в калорифере второго подогрева (точка 4) и поступает в
помещение. Ассимилировав тепло, выделяющееся в помещении,
воздух принимает параметры, характеризуемые точкой 5,—
требуемую температуру и относительную влажность в помеще-
нии. Регулятором 2 (см. рис. IX.3, а) поддерживается постоян-
ная температура точки росы (точка 3), а регулятором 1 — тем-
пература в помещении (точка 5). В теплый период года наруж-
ный воздух (точка Г) охлаждается до температуры точки росы
в оросительной камере.
Применение рассмотренной схемы регулирования холодо-
производительности оросительной камеры одним регулирующим
190
Рис. IX.3. Функциональная схема автоматизации прямоточного конди-
ционера
Рис. 1Х.4. Функциональная схема автоматизации оросительных камер
Рис. IX.5. Функциональная схема автоматизации теплообменников
клапаном, установленным на трубопроводе холодной воды, воз-
можно только в том случае, когда холодоноситель поступает с
достаточно высоким давлением. Если давление холодоносителя
недостаточно для обеспечения нормальной работы регулирую-
щего клапана, применяются схемы регулирования с двумя про-
ходными или одним трехходовым клапаном.
Терморегулятор 1 (рис. IX.4, а) при повышении температуры
воздуха закрывает регулирующий клапан 4, установленный на
трубопроводе отепленной воды. Синхронно с ним с помощью
балансного реле 2 открывается регулирующий клапан 3, уста-
новленный на трубопроводе холодной воды. При понижении тем-
пературы воздуха процесс протекает в обратном порядке.
Холодопроизводительность оросительной камеры (рис.
IX.4, б) регулируется с помощью трехходового клапана 2. Регу-
лятор 1 при изменении температуры точки росы воздействует на
исполнительный механизм клапана, а последний изменяет со-
отношение холодной и нагретой воды, подаваемой на форсунки
оросительной камеры.
Для обработки воздуха часто вместо оросительных камер
используют поверхностные орошаемые и неорошаемые возду-
хоохладители, питаемые холодной водой. Как правило, эти же
воздухоохладители в холодный период года выполняют функ-
ции нагревателей.
Обычно устанавливают несколько теплообменников, при
этом желательно первым по ходу воздуха установить теплооб-
менник, обеспечивающий необходимый нагрев воздуха в холод-
ный период года (рис. IX.5). Теплопроизводительность тепло-
обменника регулируется терморегулятором 1, который воздей-
ствует на исполнительный механизм 3 регулирующего клапана
теплоносителя. Защита теплообменника от замораживания ана-
логична описанной в § 41.
В теплый период года холодопроизводительность теплооб-
менников регулируется также терморегулятором 1, воздейству-
ющим на исполнительный механизм 8 регулирующего клапана
холодоносителя. При этом задвижки 2 и 7 открыты, а 4—6 за-
крыты, и холодоноситель поступает во все три теплообмен-
ника.
В переходный период года, когда разница между утренней
и дневной температурой значительна, следует в утренние часы
нагревать воздух, а в дневные охлаждать. В этом случае к теп-
лообменникам одновременно подается тепло- и холодоноситель.
Задвижки 2 и 7 закрыты и в зависимости от наружной темпера-
туры осуществляется подогрев в первом по ходу воздуха тепло-
обменнике или охлаждение в последующих. Все три теплооб-
менника включаются в работу при параметрах наружного воз-
духа, близких к расчетным для теплого периода года.
Регулирование температуры воздуха в кондиционируемых
помещениях осуществляется с помощью одного из трех мето-
592
дов: качественного, количественного или количественно-качест-
венного.
Регулирование температуры воздуха в помещении путем из-
менения параметров приточного воздуха называется качествен-
ным. Изменение параметров приточного воздуха, как правило,
осуществляется за счет изменения теплопроизводительности ка-
лорифера второго подогрева кондиционера.
Регулирование температуры путем изменения количества воз-
духа, подаваемого кондиционером в помещение, называется ко-
личественным. Изменение количества подаваемого в помещение
воздуха осуществляется изменением подачи вентилятора кон-
диционера с помощью направляющего аппарата, гидромуфты
или индукторной муфты скольжения.
Количественно-качественный метод регулирования применя-
ют в тех случаях, когда с помощью одного количественного ме-
тода невозможно обеспечить поддержание требуемых парамет-
ров воздуха в помещении. Процесс регулирования осуществля-
ется в следующем порядке: при понижении температуры воздуха
в помещении сначала уменьшается количество приточного воз-
духа до предела, определенного расчетом; при дальнейшем по-
нижении температуры воздуха в помещении начинает открывать-
ся регулирующий клапан калорифера второго подогрева,
увеличивая температуру приточного воздуха; при повышении
температуры воздуха в помещении сначала закрывается регу-
лирующий клапан калорифера второго подогрева, а затем повы-
шается подача вентилятора кондиционера.
Нами рассмотрены различные методы регулирования темпе-
ратуры точки росы и температуры воздуха в помещениях. Одна-
ко в дальнейшем для улучшения усвоения материала будут
рассматриваться только методы регулирования температуры
точки росы одним клапаном, установленным на трубопроводе
холодной воды, и метод качественного регулирования темпера-
туры воздуха в помещении.
Схема регулирования прямоточного кондиционера по методу
оптимальных режимов (рис. IX.6, а) отличается от схемы, пред-
ставленной на рис. IX.3, тем, что перед оросительной камерой
дополнительно установлен створчатый клапан с приводом 5, в
помещении — регулятор относительной влажности 1, а в канале
наружного воздуха — регулятор энтальпии 7. Регулятор энталь-
пии определяет зону параметров наружного воздуха.
На I — d-диаграмме (рис. IX.6, б) нанесен криволинейный
четырехугольник, в пределах которого должны поддерживаться
параметры воздуха в помещении. Четырехугольник ограничен
линиями tmin и tmax (предельно допустимые значения темпера-
туры) и <рт!п и <ртах (предельно допустимые значения относитель-
ной влажности воздуха). Кривой ограничена область парамет-
ров наружного воздуха.
При параметрах наружного воздуха, характеризуемых уча-
13—903
193
Рис. IX.6. Функциональная схема авто-
матизации кондиционера по методу оп-
тимальных режимов
стком I, температура в помещении поддерживается регулято-
ром 2 путем изменения теплопроизводительности калорифера
первого подогрева (клапан 6). Если регулирующий клапан ка-
лорифера первого подогрева полностью откроется, а температура
воздуха в помещении будет понижаться, начнет открываться
регулирующий клапан калорифера второго подогрева. При по-
нижении температуры воздуха в помещении сначала закроется
регулирующий клапан калорифера второго подогрева, а затем
калорифера первого подогрева. Обвод оросительной камеры
закрыт, а основной проход полностью открыт.
При параметрах наружного воздуха, характеризуемых участ-
ком П, требуемая температура воздуха в помещении поддержи-
вается регулятором 2, воздействующим на исполнительный ме-
ханизм 3 регулирующего клапана калорифера второго подогре-
ва. Относительная влажность воздуха поддерживается
регулятором 1, воздействующим на исполнительный механизм 5
сдвоенного клапана. При повышении относительной влажности
воздуха в помещении клапан основного прохода оросительной
камеры закрывается, а клапан обводного канала открывается.
При понижении относительной влажности клапан обводного ка-
194
нала закрывается, а основной проход оросительной камеры от-
крывается.
Когда параметры наружного воздуха характеризуются участ-
ком Ill, регулирующие клапаны калориферов первого и второго
подогрева закрыты, регулирование осуществляется регулятором
1 путем воздействия на исполнительный механизм 5 сдвоенного
клапана.
При параметрах наружного воздуха, характеризуемых участ-
ком IV, регулирование осуществляется регулятором 2 путем
воздействия на исполнительный механизм 3 регулирующего кла-
пана калорифера второго подогрева. Насос оросительной каме-
ры выключен.
Если параметры наружного воздуха характеризуются участ-
ком V, требуемая температура воздуха в помещении поддержи-
вается регулятором 2, воздействующим на исполнительный ме-
ханизм 4 регулирующего клапана холодоносителя. Относитель-
ная влажность воздуха поддерживается регулятором 1,
воздействующим на исполнительный механизм 5 сдвоенного
клапана.
При параметрах наружного воздуха, характеризуемых участ-
ком VI, клапан холодоносителя открыт, регулирование темпе-
ратуры воздуха в помещении осуществляется регулятором 2,
воздействующим на исполнительный механизм 3 регулирующего
клапана второго подогрева.
§ 47. АВТОМАТИЗАЦИЯ СИСТЕМ КОНДИЦИОНИРОВАНИЯ
ВОЗДУХА С РЕЦИРКУЛЯЦИЕЙ
Система кондиционирования воздуха с частичной рециркуля-
цией применяют в тех случаях, когда в кондиционируемых по-
мещениях выделяются вредные для здоровья человека вещест-
ва. Применение рециркуляции позволяет сократить расход
тепла и холода на нагревание воздуха в холодный период года
и охлаждение его в теплый период.
Системы кондиционирования воздуха с рециркуляцией под-
разделяются на следующие виды:
система с постоянной рециркуляцией (в кондиционер посту-
пает постоянное количество рециркуляционного воздуха);
система с переменной рециркуляцией (количество рецирку-
ляционного воздуха изменяется);
система с первой рециркуляцией (рециркуляционный воздух
поступает в кондиционер до воздухоохладителя);
система со второй рециркуляцией (рециркуляционный воздух
поступает в кондиционер после воздухоохладителя);
одновентиляторная (рециркуляционный воздух забирается из
помещения одним приточным вентилятором);
двухвентиляторная (рециркуляционный воздух забирается
отдельным вентилятором).
13* 195
Рис. IX.7. Функциональная схема автоматизации одновентиляторной системы кондицио-
нирования воздуха с первой рециркуляцией
При регулировании одновентиляторной системы кондициони-
рования воздуха с переменной первой рециркуляцией
(рис. IX.7, а) постоянная температура точки росы поддержива-
ется регулятором 1, воздействующим в холодный период года на
исполнительные механизмы 5 и 6 створчатых клапанов наруж-
ного и рециркуляционного воздуха.
При повышении температуры точки росы наружный клапан
открывается, синхронно с ним закрывается рециркуляционный
клапан. Синхронизация работы исполнительных механизмов
клапанов наружного и рециркуляционного воздуха осуществля-
ется балансным реле 2. Для предотвращения образования в кон-
диционируемом помещении разрежения или излишнего подпора
автоматизирована работа вытяжного вентилятора 8. Синхронно
с исполнительным механизмом 6 рециркуляционного клапана
вращается исполнительный механизм 7 створчатого клапана,
установленного в канале вытяжного воздуха.
При уменьшении потребления кондиционером рециркуляци-
онного воздуха увеличивается количество воздуха, выбрасывае-
мого вытяжным вентилятором, т. е. когда створки рециркуляци-
онного клапана закрываются, створки клапана вытяжного воз-
духа открываются.
В теплый период года постоянная температура точки росы
поддерживается регулятором 1, воздействующим на исполни-
196
тельный механизм 4, регулирующего клапана холодоносителя.
Кондиционер работает на одном наружном воздухе — рецирку-
ляционный клапан закрыт, а клапан наружного воздуха открыт.
Для экономии холода в канале наружного воздуха установлен
терморегулятор 3, который при энтальпии наружного воздуха,
превышающей энтальпию воздуха в помещении, открывает ре-
циркуляционный клапан и закрывает наружный до определен-
ного предела, обеспечивающего пропуск санитарной нормы на-
ружного воздуха.
Регулятор 3 настраивают на температуру мокрого термомет-
ра воздуха в кондиционируемом помещении, а датчик оборудуют
смачивающим устройством. Схема регулирования температуры
воздуха в помещении аналогична схеме, представленной на
рис. IX.3.
На I — d-диаграмме (рис. IX.7, б) показана схема обработки
воздуха в кондиционере. Наружный воздух (точка 7) в холод-
ный период года смешивается с рециркуляционным (точка 5),
смесь (точка 2) адиабатически увлажняется и охлаждается в
оросительной камере до температуры точки росы (точка 3). За-
тем воздух подогревается в калорифере второго подогрева и
поступает в помещение (точка 4). Параметры воздуха в поме-
щении характеризуются точкой 5.
В переходный период года при энтальпии наружного возду-
ха, равной энтальпии воздуха с температурой точки росы
(4шп), полностью открывается клапан наружного воздуха и за-
крывается рециркуляционный клапан. В таком положении кла-
паны находятся при энтальпии наружного воздуха от Imin до
Imax- Наружный воздух охлаждается до температуры точки ро-
сы в оросительной камере холодной водой, подаваемой к фор-
сункам. Когда энтальпия наружного воздуха превысит энтальпию
воздуха помещения (1тах), чему будет соответствовать темпера-
тура /в в точке пересечения энтальпии воздуха помещения с кри-
вой насыщения <р-1ОО°/о (точка 6), кондиционер начнет потреб-
лять максимальное количество рециркуляционного воздуха. При
расчетной температуре теплого периода года наружный воздух
(точка /') смешивается с рециркуляционным (точка 5) и смесь
(точка 2')охлаждается до температуры точки росы в ороситель-
ной камере. Далее процесс обработки воздуха аналогичен про-
цессу, происходящему в холодный период года.
Схема регулирования температуры точки росы двухвенти-
ляторной системы кондиционирования воздуха с переменной
первой рециркуляцией приведена на рис. IX.8, а. Схема регули-
рования температуры воздуха в помещении аналогична схеме,
представленной на рис. IX.3, и здесь не рассматривается.
В холодный период года постоянная температура точки росы
поддерживается регулятором 1, воздействующим на исполни-
тельные механизмы воздушных клапанов 5 — 7, установленных в
каналах наружного, рециркуляционного и выбрасываемого воз-
197
Рис. IX.8. Функциональная схема автоматизации двухвентиляторной системы кондицио-
нирования воздуха с первой рециркуляцией
духа. Синхронизация работы исполнительных механизмов осу-
ществляется балансным реле 2.
При повышении температуры точки росы открываются кла-
паны наружного и выбрасываемого воздуха, а рециркуляцион-
ный клапан закрывается. При понижении температуры точки
росы клапаны работают в обратном порядке.
В теплый период года температура точки росы регулируется
регулятором 1, воздействующим на исполнительный механизм
4 регулирующего клапана холодоносителя. При энтальпии на-
ружного воздуха выше энтальпии воздуха в помещении сраба-
198
гывает регулятор 3, закрываются клапаны наружного и выбра-
сываемого воздуха, открывается рециркуляционный клапан,
обеспечивая подачу в кондиционер максимального количества
рециркуляционного воздуха.
Следует отметить, что регулирование соотношений количест-
ва наружного, рециркуляционного и выбрасываемого воздуха
тремя клапанами, установленными в соответствующих каналах,
не позволяет поддерживать температуру точки росы воздуха с
достаточно высокой точностью, поскольку практически очень
сложно получить и согласовать требуемые расходные характе-
ристики всех трех клапанов.
Кроме того, регулирование тремя клапанами приводит к
увеличению капитальных затрат и снижению надежности систе-
мы кондиционирования воздуха в целом.
В настоящее время разработана система регулирования тем-
пературы точки росы одним створчатым клапаном, установлен-
ным в канале выбрасываемого воздуха (рис. IX.8, б). Перед
рециркуляционным каналом 6 установлена шарнирно закреплен-
ная пластина 9. При открытом створчатом клапане 8 за счет
пластины перераспределяются статическое и динамическое дав-
ления потока, и весь воздух, не попадая в рециркуляционный
канал, выбрасывается наружу. Когда клапан 8 начинает закры-
ваться, воздух поступает в рециркуляционный канал. В холод-
ный период года постоянная температура точки росы поддержи-
вается регулятором 1, который воздействует на исполнительный
механизм 7 регулирующего клапана 8. При этом регулирующий
клапан 5 наружного воздуха полностью открыт. В теплый пери-
од года постоянная температура точки росы поддерживается
регулятором 1, воздействующим на исполнительный механизм 3
регулирующего клапана холодоносителя. При энтальпии наруж-
ного воздуха выше энтальпии воздуха кондиционируемого поме-
щения срабатывает регулятор 2 и закрывается утепленный кла-
пан 8, обеспечивая подачу в кондиционер максимального коли-
чества рециркуляционного воздуха.
В том случае когда на работу кондиционера значительное
влияние оказывает гравитационное и ветровое давление, необ-
ходимо предусматривать последовательную работу исполнитель-
ных механизмов 7 и 4. Осуществляется это следующим образом.
Если после того, как закроется клапан 8 и в кондиционер будет
поступать максимальное количество рециркуляционного возду-
ха, температура точки росы начнет понижаться, регулятор 1
даст сигнал на исполнительный механизм 4 регулирующего кла-
пана 5 и последний начнет закрываться. При повышении темпе-
ратуры точки росы сначала откроется клапан 5, а затем начнет
открываться клапан 8.
Изложенный способ регулирования позволяет снизить капи-
тальные затраты, уменьшить объем автоматизации, повысить
надежность работы системы кондиционирования воздуха и уве-
личить точность регулирования параметров воздуха.
199
§ 48. АВТОМАТИЗАЦИЯ МНОГОЗОНАЛЬНЫХ СИСТЕМ
КОНДИЦИОНИРОВАНИЯ ВОЗДУХА
Многозональные системы кондиционирования воздуха пред-
назначены для обслуживания больших помещений, в которых
находятся люди и размещено технологическое оборудование, а
также значительного числа сравнительно небольших помеще-
ний. Система кондиционирования может быть прямоточной или
с рециркуляцией.
Как видно из схемы автоматизации прямоточной многозо-
нальной системы кондиционирования воздуха (рис. IX.9, а), в
кондиционере отсутствует калорифер второго подогрева, а вмес-
то него для каждого кондиционируемого помещения установлен
индивидуальный зональный подогреватель. Температура точки
росы поддерживается регулятором 4, который в холодный пери-
од года управляет регулирующим клапаном 6 калорифера пер-
вого подогрева, а в теплый период — регулирующим клапаном 5
холодоносителя. Температура воздуха в каждом кондиционируе-
мом помещении поддерживается своим терморегулятором 1 — 3,
воздействующим на исполнительный механизм регулирующего
клапана зонального подогревателя.
На J — d-диаграмме (рис. IX.9, б) показана схема обработки
воздуха. Наружный воздух (точка 1) подогревается в калори-
фере первого подогрева (точка 2), адиабатически увлажняется
и охлаждается до температуры точки росы (точка 3), подогре-
вается зональными подогревателями (точка 4) и подается в по-
мещение. Точки 5 — 7 характеризуют параметры воздуха в по-
мещениях. Как видно из J — d-диаграммы, многозональная сис-
тема кондиционирования не может обеспечить поддержание
одинаковой относительной влажности воздуха в помещениях
при различных влаговыделениях в них.
В теплый период года наружный воздух (точка /') охлаж-
дается в оросительной камере до температуры точки росы, а за-
тем процесс обработки воздуха протекает аналогично процессу,
происходящему в холодный период года.
§ 49. АВТОМАТИЗАЦИЯ ДВУХКАНАЛЬНЫХ СИСТЕМ
КОНДИЦИОНИРОВАНИЯ ВОЗДУХА
Двухканальные системы кондиционирования воздуха по эф-
фекту действия равнозначны многозональным. Преимуществом
их является отсутствие в обслуживаемых помещениях или вбли-
зи них зональных подогревателей и трубопроводов теплоносите-
ля. Воздух в кондиционируемые помещения подается по двум
параллельным каналам: по одному — горячий, а по другому —
холодный. Перед каждым помещением устанавливается смеси-
тельный клапан, который изменяет соотношения количеств го-
200
Рис. IX.9. Функциональная схема автоматизации многозональной системы кондиционирования воздуха
202
Рис. IX.10. Функциональная схема автоматизации двухканальной системы кондиционирования воздуха
а) "/7//77//7////////////7//77/7/7/7777
Рис. IX.И. Функциональная схема автоматизации системы кондиционирования впадут»-
с эжекционными доводчиками
рячего и холодного воздуха. Двухканальные системы могут
быть прямоточными или с рециркуляцией.
При автоматическом регулировании двухканальной системы
кондиционирования воздуха (рис. IX.10, а) требуемая темпера-
тура точки росы в холодный период года поддерживается регу-
лятором 5, воздействующим на исполнительный механизм регу-
лирующего клапана калорифера первого подогрева. В теплый
203
период года регулятор воздействует на исполнительный меха-
низм регулирующего клапана, установленного на линии холод-
ной воды. В теплом канале после вентилятора установлен кало-
рифер второго подогрева. Постоянная температура воздуха в
канале поддерживается регулятором 1, воздействующим на ис-
полнительный механизм 13 клапана теплоносителя.
Температура воздуха в кондиционируемых помещениях
поддерживается на заданном уровне терморегуляторами 4, 6 и
7, воздействующими на исполнительные механизмы 8, 9 и 10
смесительных клапанов. Для обеспечения постоянства расхода
воздуха через смесительные клапаны в обоих каналах регули-
руется статическое давление регуляторами 2 и 3, воздействую-
щими на исполнительные механизмы 11 и 12 створчатых клапа-
нов. При повышении давления в каналах эти клапаны постепен-
но закрываются, а при понижении открываются.
На J—d-диаграмме (рис. IX. 11,6) представлен процесс об-
работки воздуха. В холодный период года наружный воздух
(точка 1) подогревается в калорифере первого подогрева (точ-
ка 2), увлажняется и охлаждается в оросительной камере до
температуры точки росы (точка 3) и вентилятором нагнетается
в каналы теплого и холодного воздуха. Воздух теплого канала
подогревается в калорифере второго подогрева (точка 4). В сме-
сительных клапанах теплый и холодный воздух смешивается
(точка 5) и смесь поступает в помещение. Параметры воздуха
в помещении характеризуются точкой 6.
В теплый период года наружный воздух (точка 1') охлажда-
ется в оросительной камере до температуры точки росы, а затем
процесс обработки воздуха протекает аналогично процессу, про-
исходящему в холодный период года.
§ 50. АВТОМАТИЗАЦИЯ СИСТЕМ КОНДИЦИОНИРОВАНИЯ
ВОЗДУХА С эжекционными ДОВОДЧИКАМИ
Системы кондиционирования воздуха с эжекционными до-
водчиками получили широкое распространение при строитель-
стве многоэтажных и многокомнатных зданий. Система состоит
из центрального кондиционера и эжекционных доводчиков, ус-
тановленных непосредственно в обслуживаемых помещениях,
как правило, под окнами. В зависимости от назначения конди-
ционируемых помещений и предъявляемых к ним требований
применяют зональное или индивидуальное регулирование тем-
пературы воздуха.
При зональной схеме автоматического регулирования систе-
мы кондиционирования воздуха с эжекционными доводчиками
(рис. IX.11, а) теплоноситель и холодоноситель к теплообменни-
кам доводчиков подается соответственно насосами 5 и 8. По-
стоянное давление тепло- и холодоносителя поддерживается ре-
гуляторами давления прямого действия 4 и 9. В зависимости от
204
температуры воздуха в кондиционируемом помещении к тепло-
обменникам подается холодная или горячая вода.
Регулирование температуры воздуха в помещениях первого,
второго и третьего этажей осуществляется регуляторами 1, 2, 3,
датчики которых установлены в помещениях, характерных по
тепловым нагрузкам и ориентации. На схеме показано регули-
рование температуры воздуха только в помещениях первого
этажа, поскольку на всех этажах оно аналогично.
Регулятор 3 при повышении температуры воздуха в помеще-
нии постепенно закрывает регулирующий клапан 6 теплоноси-
теля. Как только регулирующий клапан 6 полностью закроется,
сразу же закроется и соленоидный вентиль И, установленный
на трубопроводе обратного теплоносителя. При дальнейшем по-
вышении температуры воздуха в помещении начнет открываться
регулирующий клапан 7 холодоносителя, одновременно с нача-
лом его работы откроется соленоидный вентиль 10, установлен-
ный на трубопроводе обратного холодоносителя, и холодная во-
да начнет поступать в теплообменники эжекционных доводчиков.
При понижении температуры воздуха в помещении закроется
клапан 7 и соленоидный вентиль 10, после чего начнет откры-
ваться клапан 6 и соленоидный вентиль 11.
Схема автоматизации центрального кондиционера аналогич-
на ранее рассмотренным (рис. IX.3).
На J—d-диаграмме (рис. Х1.11,б) представлен процесс об-
работки воздуха в холодный период года. Наружный воздух
(точка 1) подогревается в калорифере первого подогрева (точ-
ка 2), адиабатически охлаждается и увлажняется (точка 3), по-
догревается в калорифере второго подогрева (точка 4) и с этими
параметрами выходит через сопла эжекционного доводчика.
Эжектируемый воздух помещения (точка 5) нагревается в теп-
лообменнике доводчика (точка 6) и смешивается с воздухом,
выходящим из сопл. Смесь воздуха (точка 7) поступает в поме-
щение, охлаждается и принимает параметры воздуха помещения.
В теплый период года (рис. IX. 11, в) наружный воздух (точ-
ка /) охлаждается до температуры точки росы (точка 2) и пос-
тупает к соплам доводчика (точка 3). Линия 2—3 — нагрев воз-
духа в вентиляторе и воздуховодах. Эжектируемый воздух поме-
щения (точка 4) охлаждается в теплообменнике доводчика
(точка 5) и смешивается с воздухом, выходящим из сопл. Смесь
воздуха (точка 6) поступает в помещение, нагревается и прини-
мает параметры воздуха помещения.
Основной недостаток изложенного метода регулирования —
возможность отклонения сверх допустимых пределов темпера-
туры воздуха в неконтролируемых помещениях зоны в связи с
различием теплового баланса помещений (различная инфильтра-
ция через неплотности оконных притворов, солнечная радиация
и др.).
Индивидуальное регулирование температуры воздуха позво-
205
Рис. IX.12. Индивидуальное регулирование эжекционного доводчика
1 — эжекционный доводчик; 2 — термобаллон
ляет наилучшим образом учесть широкие пределы изменения
тепловых нагрузок каждого кондиционируемого помещения. При
индивидуальном регулировании (рис. IX. 12) эжекционного до-
водчика с помощью терморегулятора прямого действия типа
РТК к клапану регулятора подводятся трубопроводы холодной
и горячей воды. Если температура воздуха в зоне установки тер-
мобаллона выше заданной, постепенно открывается канал прохо-
да холодной воды. Холодная вода начинает поступать в теплооб-
менник доводчика. Если температура воздуха начнет понижать-
ся, закроется канал холодной воды. При этом теплообменник
доводчика полностью отключается от тепло- и холодоносителя.
При дальнейшем понижении температуры воздуха в помещении
начинает открываться канал горячей воды.
§ 51. АВТОМАТИЗАЦИЯ АГРЕГАТНЫХ АВТОНОМНЫХ
И НЕАВТОНОМНЫХ КОНДИЦИОНЕРОВ
Как правило, выпускаемые отечественной промышленностью
агрегатные автономные кондиционеры комплектуются холодиль-
ными установками с поверхностными воздухоохладителями,
вентиляторами, электродвигателями и иногда электрокалорифе-
рами.
Автономный кондиционер (рис. IX. 13) состоит из компрес-
сора, электродвигателя 5, двух конденсаторов, фреоновых филь-
тров, теплообменника, воздухоохладителя непосредственного
испарения, воздушного фильтра, электрокалорифера и вентиля-
тора с электродвигателем 12. Температура воздуха в помещении
регулируется позиционным терморегулятором. В холодный пе-
риод года с помощью терморегулятора включается электрокало-
рифер. В теплый период года при повышении температуры воз-
духа в помещении включается холодильная установка и откры-
206
Местные
приборы
Рис. IX.13. Функциональная схема автоматизации автономного кондиционера КС-35
/ —терморегулятор; 2, 3 — реле давления; 4—вентиль; 5, /2—электродвигатели; 6’— компрессор; 7 — конденсаторы; S, // — соленоидный вен-
тиль* 5 —хладоновые фильтры; 10 — теплообменник; 13 — электрокалорпфер; /4 — воздухоохладитель; 15 — воздушный фильтр
ьо
о
ваются сблокированные с электродвигателем компрессора
соленоидный вентиль на фреоновом трубопроводе. При пониже-
нии температуры воздуха в помещении выключается холодиль-
ная установка и закрываются соленоидные вентили.
Защита компрессора от повышенного давления на стороне
нагнетания осуществляется с помощью реле давления 3. При
превышении давления фреона на нагнетании контакты реле 3
размыкаются и компрессор останавливается. От пониженного
давления компрессор защищает реле давления 2, которое при
падении давления во всасывающей линии ниже установленного
уровня также выключает компрессор. На всасывающем трубо-
проводе испарителя закреплен термобаллон терморегулирующе-
го вентиля, с помощью которого поддерживается требуемая
температура испарения фреона в трубках воздухоохладителя.
При повышении температуры испарения терморегулирующий
вентиль открывается, увеличивая подачу фреона в воздухоохла-
дитель, а при понижении закрывается, уменьшая подачу фре-
она.
Автоматизация агрегатных неавтономных кондиционеров
принципиально ничем не отличается от автоматизации секцион-
ных кондиционеров. Серийно выпускаемые неавтономные конди-
ционеры в основном комплектуются пневматической системой
авторегулирования.
В качестве примера рассмотрим схему автоматизации неав-
тономного кондиционера КНУ-18 (рис. IX. 14). Автоматическое
регулирование обеспечивает поддержание постоянно заданной
температуры точки росы и температуры воздуха в помещении.
Температура точки росы контролируется дилатометрическим
терморегулятором 10, сигнал с которого поступает на пропорци-
онально-интегральные блоки 2—4. Задатчики блоков настроены
на разные диапазоны давлений сжатого воздуха, в результате
чего обеспечивается последовательная работа пневмоприводов
12. 13 и 14.
Процесс автоматического регулирования температуры точки
росы протекает следующим образом. При понижении темпера-
туры точки росы в первую очередь срабатывает пневмопривод
12, увеличивая подачу в кондиционер рециркуляционного возду-
ха и уменьшая поступление наружного. При дальнейшем пони-
жении температуры входной сигнал небаланса с терморегулято-
ра увеличивается и при достижении диапазона настройки регу-
лирующего блока 3 поступает управляющее воздействие на
открытие пневмопривода 13 регулирующего клапана теплоноси-
теля. При понижении температуры точки росы процесс автома-
тического регулирования протекает в обратном порядке, т. е. в
первую очередь срабатывают пневмоприводы 12 и 13, а затем
пневмопривод 14.
При энтальпии наружного воздуха выше энтальпии воздуха
помещения терморегулятор 7 через электропневматический кла-
208
co
о
Рис. IX.14. Функциональная схема автоматизации кондиционера КНУ-18
пан 6 и суммирующий блок 5 реверсирует пневмопривод 12, в
результате чего в кондиционер поступает максимум рециркуля-
ционного воздуха.
Защита калориферов первого подогрева от замерзания осу-
ществляется по температуре воды на выходе из калориферов с
коррекцией по температуре наружного воздуха терморегулято-
рами 8 и 9.
Температура воздуха в помещении регулируется воздействи-
ем манометрического терморегулятора 11 пропорционального
действия на пневмопривод 15 регулирующего клапана на кало-
рифере второго подогрева.
Для контроля за работой регулятора и для местного опробо-
вания пневмоприводов на щите автоматики установлены байпас-
ные панели дистанционного управления 1.
§ 52. АВТОМАТИЗАЦИЯ ХОЛОДИЛЬНЫХ УСТАНОВОК
Для обеспечения неавтономных кондиционеров холодом при-
меняются холодильные станции различной холодопроизводи-
тельности. Холодильные станции обычно комплектуются двумя
и более холодильными установками, работающими с промежу-
точным холодоносителем,— как правило, водой.
Рассмотрим, как автоматизируются отдельные элементы хо-
лодильных установок и холодильные станции в целом. Защита
компрессора от повышенного давления на нагнетании и понижен-
ного на всасывании осуществляется реле давления (рис. IX.
15, а). Работу системы контролирует реле контроля смазки. Ком-
прессоры большой холодопроизводительности охлаждаются во-
дой. Для защиты их от перегрева, в случае прекращения протока
охлаждающей воды, устанавливают реле расхода. При отклоне-
нии какого-либо из параметров срабатывает соответствующее
реле защиты и компрессор останавливается. При остановке
электродвигателя компрессора закрывается сблокированный с
ним соленоидный вентиль трубопровода охлаждающей воды.
Защита испарителя холодильной установки (рис. IX. 15, б)
осуществляется для предотвращения замерзания воды в трубах
испарителя. На трубопроводе выходящей из испарителя воды
установлен датчик позиционного терморегулятора, настроен-
ный на 1—3° С. При температуре воды, ниже установленной,
размыкаются контакты регулятора и останавливается электро-
двигатель компрессора. Но если внезапно прекратится приток
воды через испаритель, регулятор вследствие инертности систе-
мы может не сработать даже при замораживании испарителя.
Чтобы этого не случилось, устанавливают реле расхода, которое
при уменьшении протока воды до критического значения сраба-
тывает и останавливает электродвигатель компрессора.
Схема авторегулирования холодильной станции приведена
на рис. IX. 16. Для упрощения на схеме показана одна холодиль-
210
Рис. IX.15. Функциональная схема защиты компрессора и испарителя холодильной уста-
новки
1 — реле контроля смазки; 2, 3 — реле давления; 4 — регулятор расхода; 5 — соленоид-
ный вентиль; 6 — реле расхода; 7 — терморегулятор
ная машина. Из бака 1 насосы подают воду на испарители хо-
лодильных машин, охлажденная вода сливается в бак 2 и насо-
сами подается к кондиционерам, а затем снова сливается в бак
1. На охлаждение конденсаторов вода подается из градирни.
Защита компрессора осуществляется реле 3—5, а испарите-
ля — реле 6 и 7. Если какой-либо параметр отклонится от за-
данной величины, сработает соответствующее реле, остановится
компрессор, а через небольшой промежуток времени остановят-
ся и насосы оборотного водоснабжения. На щите автоматики
включится сигнальная лампа того узла, в котором произошла
авария, и начнет подаваться звуковой сигнал (ревун 9).
Температура воды в баке 2 регулируется терморегулятором
10, настроенным на максимальную и минимальную температуру
(например, 8 и 6° С). При температуре воды 8° С последова-
тельно через определенный промежуток времени с помощью ко-
14* 211
212
fpeou
конденсатор [Х> >-
| Ресивер | 1
из градирни
04
ff
-С] Испаритель^
tj 'j
5
о
e $
.s §
Sr *
Рис. IX.16. Функ-
циональная схема
автоматизации
холодильной
станции
мандного прибора 11 включаются холодильные установки. При-
чем компрессор холодильной установки включается только в
том случае, если работают насосы, подающие воду в испаритель
и конденсатор, и если все параметры, контролируемые прибора-
ми защиты, находятся в пределах нормы. При снижении темпе-
ратуры холодной воды до 6° С установки отключаются в той
же последовательности.
Для поддержания постоянного давления воды, подаваемой
к кондиционерам, установлен регулятор давления прямого дей-
ствия 8.
Глава X
ОСНОВЫ ПРОЕКТИРОВАНИЯ.
МОНТАЖА. НАЛАДКИ И ЭКСПЛУАТАЦИИ
СИСТЕМ АВТОМАТИЗАЦИИ
§ 53. ПРОЕКТНАЯ ДОКУМЕНТАЦИЯ
Проекты автоматизации производственных процессов выпол-
няются в соответствии с требованиями «Указаний по проектиро-
ванию автоматизации технологических процессов». Проект ав-
томатизации санитарно-технических устройств разрабатывается
на основании задания, в котором, как правило, указываются ос-
новные технологические требования:
а) величины параметров и необходимая точность их поддер-
жания;
б) узлы, которые должны быть автоматизированы;
в) последовательность работы отдельных элементов санитар-
но-технических устройств;
г) необходимая блокировка и сигнализация;
д) желательный объем диспетчеризации.
Для большинства санитарно-технических устройств в насто-
ящее время разработаны типовые решения по автоматизации.
Если требования задания по автоматизации могут быть удовлет-
ворены с помощью типовых решений, то задача проектировщика
состоит в привязке этих решений к конкретному объекту. Если
же проектируется система автоматизации сложного санитарно-
технического устройства, к которому неприменимы типовые ре-
шения, приходится полностью разрабатывать проект.
При проектировании следует добиваться решения системы
автоматического регулирования с наименьшим числом приборов,
реле и др., так как с увеличением общего числа входящих в си-
стему элементов эксплуатационная надежность ее снижается.
Объем рабочих чертежей системы авторегулирования дол-
жен быть достаточным для монтажа, наладки и последующей
эксплуатации. В проекте следует дать краткие указания по осо-
бенностям наладки и эксплуатации системы, а также расчет не-
обходимого числа обслуживающего персонала.
213
§ 54. ТРЕБОВАНИЯ К МОНТАЖУ ПРИБОРОВ
И СРЕДСТВ АВТОМАТИЗАЦИИ
Монтаж приборов и средств автоматизации должен осущест-
вляться в соответствии с требованиями СНиП Ш-34-74. Перед
производством монтажных работ выполняют соответствующие
организационные мероприятия, включающие инженерно-техни-
ческую, материально-техническую и организационную подго-
товку.
Инженерно-техническая подготовка •— обеспечение необхо-
димой технической документацией (проектом, сметами, инструк-
циями, техническими условиями). На крупные или технически
сложные объекты кроме рабочих чертежей проектов автомати-
зации должны быть составлены проекты производства работ
(ППР), содержащие: календарный план выполнения работ; гра-
фик использования рабочей силы; график эксплуатации основ-
ных механизмов; график поступления на объект блоков, узлов,
конструкций, оборудования, приборов и средств автоматизации;
задание строительной организации на временные сооруже-
ния.
Материально-техническая подготовка — обеспечение необхо-
димыми материалами, оборудованием, монтажными изделиями,
конструкциями, инструментом и механизмами.
Организационная подготовка — обеспечение монтируемых
объектов рабочей силой и инженерно-техническими работника-
ми; организация приобъектных мастерских и складских помеще-
ний; обеспечение последовательности работ в соответствии с ка-
лендарным планом или сетевым графиком.
Монтаж трубных проводок. Трубные проводки разделяются
на импульсные, командные, питающие, выбросные, обогреваю-
щие, охлаждающие и вспомогательные. Для систем автоматиза-
ции санитарно-технических устройств в основном монтируются
импульсные, командные и питающие трубные проводки. Основ-
ными функциями трубных проводок этих видов являются:
а) импульсных — передача от отборных или приемных уст-
ройств к чувствительным элементам приборов и средств авто-
матизации;
б) командных — передача командных импульсов к приборам
и средствам автоматизации;
в) питающих — подача жидкости или газа для питания при-
боров и средств автоматизации вспомогательной энергией.
Выбор материала труб, из которых изготовляется та или
иная трубная линия, производится проектной организацией в
зависимости от назначения трубопровода. Для трубных прово-
док систем автоматизации санитарно-технических устройств на-
иболее часто используются стальные водогазопроводные неоцин-
кованные и оцинкованные трубы с условным проходом 8, 15, 20
и 25 мм, медные с наружным диаметром 6, 8 и 10 мм и толщиной
214
стенки не менее 1 мм и поливинилхлоридные сечениями 6X1,
9\2 и 11X2 мм.
В настоящее время помимо труб в системах пневмоавтома-
тики применяют трубный кабель (пневмокабель), представля-
ющий собой пучок пластмассовых труб, уложенных концентри-
ческими окружностями, свитых спирально и заключенных в
общую оболочку. Наиболее распространены семитрубные и две-
иадцатитрубные пневмокабели из полиэтиленовых труб сечени-
ем 6Х1 мм.
При монтаже трубных проводок следует обеспечивать проч-
ность и плотность проводок, соединений труб между собой и
присоединений их к арматуре, приборам и средствам автомати-
зации, а также надежность закрепления труб на опорных кон-
струкциях и самих конструкций на строительных основаниях.
Для разъемных соединений металлических и пластмассовых
труб необходимо применять стандартизированные и нормализо-
ванные соединения. Трубные проводки прокладывают по крат-
чайшему расстоянию между соединяемыми приборами, парал-
лельно стенам и на расстоянии 25—30 мм от них. Трубные про-
водки из пластмассовых труб, как правило, монтируют в
коробах. Для подвода к приборам допускается прокладывать
пластмассовые трубные проводки в стальных защитных трубо-
проводах или в гибких металлических рукавах.
Прокладывать трубные проводки необходимо с уклоном,
обеспечивающим сток конденсата и отвод воздуха из труб.
В низких точках трубных проводок, заполняемых паром или
воздухом, устанавливаются устройства для спуска конденсата.
После окончания монтажа все трубные проводки должны
быть замаркированы. Маркировочные знаки, наносимые на бир-
ки, должны точно соответствовать маркировке трубных прово-
док проекта. Маркировочные бирки прочно прикрепляются к
концам труб во всех местах, где заканчивается непрерывная ли-
ния трубной проводки в пределах помещения.
Монтаж электропроводок. Электропроводкой называется
совокупность проводов и кабелей с относящимися к ним крепле-
ниями, поддерживающими и защитными конструкциями.
Электропроводка может быть наружной (проложенной по
наружным стенам зданий и сооружений, между ними и под на-
весами) и внутренней (проложенной в закрытом помещении).
По способу выполнения электропроводка разделяется на откры-
тую (проложенную по поверхности стен и потолков, по фермам
и т. п) и скрытую (проложенную в конструктивных элементах
зданий или кабелем в земле).
Внутри помещений измерительные линии и линии автомати-
зации выполняются в открыто проложенных защитных трубах,
коробах или защитных устройствах (гибкие шланги и др.).
Защищенные проводки выполняются в нормальном, пылевла-
гонепроницаемом или взрывобезопасном исполнении. В первом
215
случае провода защищают от механических повреждении сталь-
ными трубами или коробами с открывающимися крышками. Во
втором случае для защиты электропроводки от пыли и влаги
провода прокладывают в стальных трубах с помощью соедини-
тельных и переходных фитингов.
Во взрывобезопасном исполнении провода монтируют в
стальных трубах, соединяемых фитингами, и испытывают на
герметичность под давлением 0,5—2,5 кгс/см2 (0,05—0,25 МПа)
в зависимости от категории помещений.
Применять те или иные типы проводов и кабелей следует в
соответствии с требованиями проекта. Контрольные кабели и
провода с медными жилами используют в измерительных цепях
при напряжении в цепи 4,5 В и ниже, во взрывоопасных поме-
щениях классов В-I и В-Ia, в установках, подверженных вибра-
ции, а также в передвижных установках и элементах, где требу-
ется применение гибких жил. Во всех остальных случаях можно
применять кабели и провода с алюминиевыми жилами площа-
дью сечения 2,5 мм2 и более.
При присоединении кабелей или проводов к приборам и сред-
ствам автоматизации, имеющим штепсельные разъемы, устана-
вливают соединительные коробки, от которых проводка выпол-
няется проводами с гибкими жилами.
В электропроводках при напряжении выше 36 В переменного
тока и НО В постоянного тока, проложенных в помещениях с
повышенной опасностью и особо опасных, необходимо заземлять
металлические части, которые могут оказаться под напряжени-
ем при нарушении изоляции. Заземляющие проводники должны
быть, как правило, выполнены из стали и защищены от механи-
ческих и химических воздействий. Открыто проложенные зазем-
ляющие проводники, а также все конструкции сети заземления,
за исключением нулевых проводок, окрашивают в черный цвет.
При монтаже электропроводок в соответствии с проектом
маркируют кабели, защитные трубы и короба, пучки проводов,
прокладываемых в коробах и лотках, жилы кабелей и проводов,
соединительные и протяжные коробки. На кабелях маркировоч-
ные бирки устанавливают с обеих сторон проходов через стены
и перекрытия, у соединительных коробок и у кольцевых заде-
лок. Защитные трубопроводы и короба должны иметь маркиров-
ку в местах, где заканчивается непрерывная линия защитных
трубопроводов или коробов в пределах каждого помещения.
Пучки проводов в коробах и лотках маркируют в местах, где
пучок проводов разветвляется или проходит в другое помещение,
а на жилах кабелей и проводов маркировку выполняют у кон-
тактов в щитах, пультах, соединительных коробках и у контак-
тов приборов и средств автоматизации.
Особое внимание при прокладке электропроводок во взры-
во-и пожароопасных установках следует уделять соответствию
выполняемых работ требованиям «Правил устройства электро-
23 6
установок», «Правил изготовления взрывозащищенного обору-
дования» и СНиП Ш-34-74.
Монтаж щитов и пультов. Приборы, управляющие ходом тех-
нологического процесса, обычно размещаются на щитах и пуль-
тах.
Щиты в зависимости от назначения разделяются на местные,
агрегатные и центральные. Местными называют щиты, установ-
ленные в непосредственной близости от места измерения или
регулирования одного или нескольких параметров. Агрегатные —
это щиты, на которых смонтированы приборы контроля и управ-
ления технологическим процессом какого-либо агрегата. Эти
щиты располагают в непосредственной близости от агрегата.
Центральными называют щиты, на которых установлены прибо-
ры контроля и управления несколькими агрегатами. Эти щиты,
как правило, устанавливают в отдельных помещениях. По по-
казателям контрольных приборов, установленных на щите, дис-
петчер наблюдает за работой санитарно-технических устройств.
По конструкции щиты разделяют на панельные (открытые)
и шкафные (закрытые). Панельные щиты устанавливают в цехах
и в отдельных щитовых помещениях, в воздухе которых отсут-
ствуют повышенные концентрации пыли, влаги и других вредных
веществ. Щиты шкафного типа обычно устанавливают в поме-
щениях с большим содержанием пыли и влаги, а также в слу-
чаях, когда возможны механические повреждения приборов.
Малогабаритные щиты подвешиваются на стены или на ко-
лонны. Большие щиты устанавливают на стальных или бетон-
ных рамах, при этом вводы трубных и электрических проводок,
как правило, выполняют снизу. Все щиты и пульты, к которым
подведен переменный ток напряжением более 36 В или постоян-
ный ток напряжением более 110 В, в помещениях с повышенной
опасностью и особо опасных должны быть заземлены.
Во взрывоопасных помещениях необходимо заземлять все
щиты и пульты, к которым подведен переменный или постоян-
ный ток независимо от его напряжения.
Монтаж приборов и средств автоматизации. Перед монта-
жом все приборы и средства автоматизации должны пройти стен-
довую проверку, представляющую собой комплекс проверок от-
дельных характеристик и элементов приборов и средств автома-
тизации, необходимых для обнаружения возможных неисправ-
ностей, вызванных условиями хранения и транспортирования.
Размещение приборов и средств автоматизации производится в
соответствии с требованиями проекта. Их монтаж должен обес-
печить получение точности измерений, предусмотренной проек-
том, а также свободный доступ к приборам и их запорным и на-
строечным устройствам (кранам, вентилям, переключателям,
рукояткам настройки и т. п.).
При монтаже особое внимание следует уделять правильной
установке чувствительных элементов приборов для измерения и
217
регулирования температуры и давления. Чувствительные эле-
менты жидкостных термометров, манометрических термометров
и термометров сопротивления следует располагать в центре по-
тока измеряемой среды. Термометры сопротивления для изме-
рения температуры воздуха помещений необходимо устанавли-
вать на скобах или на щитах. При горизонтальной и наклонной
установке термометров сопротивления штуцера для ввода элек-
тропроводок в головки должны быть направлены вниз. Не допу-
скается прокладка капилляров манометрических термометров
по поверхностям, температура которых выше или ниже темпе-
ратуры окружающего воздуха.
Отборные устройства для измерения давления и разрежения
не должны иметь выступов внутрь технологического оборудова-
ния и трубопроводов. При измерении давления горячей жидко-
сти (/>70° С) и пара отборное устройство необходимо монтиро-
вать так, чтобы исключить попадание горячей среды к измери-
тельному устройству. Приборы для измерения давления пара
или жидкости по возможности следует устанавливать на одном
уровне с местом отбора давления.
Сужающие устройства в трубопроводах устанавливают со-
гласно рабочим чертежам с соблюдением правил 28—64 Госу-
дарственного комитета стандартов, мер и измерительных прибо-
ров при Совете Министров СССР. Отборы для измерения дав-
ления и отборы от сужающих устройств на горизонтальных и
наклонных трубопроводах располагаются на газопроводах свер-
ху, а на трубопроводах жидкости и пара — сбоку. Измерители
расхода (счетчики, ротаметры и др.) устанавливают после окон-
чания монтажа и тщательной очистки трубопроводов.
Трубопроводы в местах установки ротаметров, объемных и
скоростных счетчиков должны иметь отводные линии с соответ-
ствующей запорной арматурой. Если диаметр условного прохо-
да счетчика меньше диаметра трубопровода, счетчик устанавли-
вают между двумя конусными переходными патрубками. При
установке поплавковых уровнемеров всех типов следует обра-
щать внимание на то, чтобы поплавок и трос перемещались сво-
бодно. Ход поплавка должен быть равным или несколько боль-
шим максимального изменения уровня.
§ 55. ДОКУМЕНТАЦИЯ ПРИ ПРОИЗВОДСТВЕ
МОНТАЖНЫХ РАБОТ
При производстве монтажных работ основная проектная до-
кументация состоит из пояснительной записки; принципиальных
схем контроля п авторегулирования; принципиальных электри-
ческих, гидравлических и пневматических схем; монтажных
схем трасс прокладки проводов, кабелей и труб; схем питания;
чертежей щитов и пультов; чертежей для установки аппаратуры,
вспомогательных устройств и закладных деталей, а также прое-
218
кта производства работ. Кроме ППР в процессе монтажа необ-
ходимо строго придерживаться СНиП Ш-34-74 «Монтаж прибо-
ров и средств автоматизации». При производстве монтажных
работ всю отчетную документацию необходимо оформлять в со-
ответствии с требованиями СНиП.
Приборы перед монтажом подвергают стендовой проверке,
при которой проверяют целостность электрических и трубных
проводок, сопротивление изоляции, основную приведенную по-
грешность, срабатывание регулирующей части и переключате-
лей, работу механизма передвижения диаграммной бумаги и
качество записи. По окончании проведения стендовой поверки
составляют протокол поверки.
Приборы и средства автоматизации могут быть установлены
только после письменного разрешения заказчика, гарантирую-
щего их сохранность. По окончании монтажа трубных и элект-
рических проводок необходимо провести их испытание (табл.
X. 1) и составить соответствующие протоколы.
Тавлица Х.1. Испытания электропроводок
Электропроводки Характер испытания
Все проводки Силовых цепей и цепей питания В защитных трубопроводах во взры- воопасных помещениях класса В-1 То же, классов B-Ia, В-П, В-Па Измерение омического сопротивления и изоляции электрических цепей Проверка фазпровки и полярности силовых цепей и цепей питания Испытание на плотность защитных трубопроводов давлением 2,5 кгс/см2 (0,25 МПа) Испытание на плотность защитных трубопроводов давлением 0,5 кгс/см2 (0,05 МПа)
При испытании трубных проводок проверяют их прочность
и плотность. Трубные проводки считаются годными к эксплуа-
тации, если при пневматических испытаниях не обнаружится па-
дения давления и не будет выявлено выпучин и трещин.
После окончания монтажа полностью смонтированные прибо-
ры и средства автоматизации, щиты, пульты, трубные и электри-
ческие соединительные проводки предъявляют к сдаче. Оконча-
ние работ оформляется актом, который служит основанием для
составления акта приемки оборудования, составляемого рабочей
комиссией согласно СНиП Ш-34-74 после проведения пускона-
ладочных работ.
К акту окончания работ прилагается:
а) рабочие чертежи проекта с изменениями, внесенными в
процессе монтажа;
б) перечень документов, разрешающих отступления от про-
екта;
219
в) акты на скрытые работы;
г) протоколы испытаний на прочность и плотность трубных
проводок;
д) протоколы испытаний на плотность защитных трубопро-
водов электропроводок во взрывоопасных помещениях и уста-
новках;
е) протоколы измерения сопротивления изоляции проводов
и кабелей электропроводок;
ж) протоколы стендовых проверок приборов и средств авто-
матизации;
з) паспорта, инструкции и чертежи заводов — изготовителей
приборов и средств автоматизации;
и) ведомость смонтированных приборов и средств автомати-
зации.
§ 56. СВЕДЕНИЯ О НАЛАДКЕ И ЭКСПЛУАТАЦИИ
СИСТЕМ АВТОМАТИЗАЦИИ
Испытание и наладка систем автоматизации производятся с
целью достижения требуемых проектом параметров работы са-
нитарно-технических устройств. В объем работ по подготовке к
испытанию и наладке систем автоматизации входит:
а) ознакомление с проектной документацией;
б) ознакомление с актом сдачи монтажных работ;
в) предварительное обследование объекта и смонтированных
устройств автоматизации для проверки соответствия этих уст-
ройств проекту и выявления дефектов монтажа;
г) ознакомление с расположением пусковой защитной аппа-
ратуры силового оборудования.
При обследовании устройств автоматизации проверяют:
а) соответствие устройств автоматизации требованиям СНиП
Ш-34-74;
б) правильность установки чувствительных элементов регу-
ляторов, сигнализаторов и измерительных приборов с точки
зрения обеспечения нормальных условий их работы (защита от
посторонних воздействий, правильность размещения в измеряе-
мой среде и др.);
в) правильность установки сужающих устройств и регулиру-
ющих органов;
г) соответствие маркировки и надписей на панелях щитов
монтажно-коммутационным схемам.
Выявленные предварительным обследованием недоделки и
дефекты монтажа сводят в единую ведомость, которую переда-
ют заказчику и организации, выполнившей монтаж.
После устранения всех недоделок по системе автоматичес-
кого регулирования производят ее испытание и наладку.
При испытаниях производят:
а) опробование работы регуляторов, исполнительных ме-
ханизмов п других устройств автоматики;
220
6) экспериментальное определение параметров объекта;
в) определение статических характеристик отдельных звень-
ев системы авторегулирования;
г) определение допустимых отклонений параметров для дан-
ного технологического процесса;
д) определение возможности использования установленного
регулятора по параметрам настройки и закону регулирования
исходя из параметров объекта и принятых условий качества ре-
гулирования.
При производстве наладочных работ выполняют:
а) опробование регуляторов, приборов управления, защиты,
блокировки и сигнализации; при опробовании искусственно со-
здают все предусмотренные проектом режимы работы указан-
ных приборов;
б) наладку соединяющих регулирующий орган с исполни-
тельным механизмом устройств с тем, чтобы их совместная ста-
тическая характеристика соответствовала заданной; прн этом
максимальная разница между прямым и обратным перемещени-
ем штока или изменением угла поворота регулирующего органа
(гистерезис) не должна превышать 5—10% его полного переме-
щения;
в) наладку измерительных приборов по инструкциям заво-
дов-изготовителей.
После выполнения всех изложенных работ производят ком-
плексную проверку эффективности работы системы авторегули-
рования и точности поддержания требуемых параметров. Систе-
ма считается налаженной, если при комплексной проверке коле-
бания значений регулируемых параметров не выходят за преде-
лы, установленные проектом.
Следует отметить, что надежная работа системы автоматики
зависит от регулярного наблюдения, своевременного устранения
неполадок и периодической проверки приборов. Конкретные
профилактические мероприятия должны выполняться в соответ-
ствии с инструкциями заводов-изготовителей.
СПИСОК ЛИТЕРАТУРЫ
Архипов Г. В. Автоматическое регулирование поверхностных теплообмен-
ников. М., Энергия, 1971.
Аршанский Я. Н., Яновский С. И. Монтаж и эксплуатация приборов авто-
матики холодильных установок. М., Пищевая промышленность, 1972.
Баркалов Б. В., Карпис Е. Е. Кондиционирование воздуха в промышлен-
ных, общественных и жилых зданиях. М., Стройиздат, 1971.
Глазов Б. В. Монтаж н наладка средств контроля температуры. М., Энер-
гия, 1978.
Давыдов Ю. С., Нефедов С. В. Применение электронной автоматики в са-
нитарной технике. М.. Стройиздат, 1973.
Инструкция по эксплуатации тепловых сетей. М., Энергия, 1972.
Клюев А. С., Глазов В. В., Миндии М. Б. Техника чтения схем автомати-
ческого управления и технологического контроля М., Энергия, 1977.
Кокории О. Я Установки кондиционирования воздуха. М., Машинострое-
ние, 1978.
Красин В. П. Электрические аппараты автоматического управления. М.,
Высшая школа, 1970.
Круг Е. К., Минина О. М. Электрические регуляторы промышленной ав-
томатики. М., Энергия, 1972.
Попкович Г. С. Основы автоматизации систем водоснабжения и канали-
зации. М., Стройиздат, 1978.
Рубчинский В. М., Шкроботов В. П. Электрооборудование кондиционеров
общего назначения. М., Энергия, 1978.
Рымкевич А. А., Халамейзер М. Г. Управление системами кондициониро-
вания воздуха. М., Машиностроение, 1977.
Свириденко П. А., Шмелев А. Н. Основы автоматизированного электро-
привода. М., Высшая школа, 1970.
Техника проектирования систем автоматизации. Справочные материалы.
М., Машиностроение. 1975.
Чистович С. А. Автоматическое регулирование расхода тепла в системах
теплоснабжения и отопления. Л., Стройиздат, 1975.
ОГЛАВЛЕНИЕ
Стр.
Предисловие 3
Раздел первый. Средства и методы автоматизации санитарно-техничес-
ких систем .......................................................... 5
Глава I. Общие сведения . 5
§ 1. Понятие об автоматизации.................................... 5
§ 2. Контрольно-измерительные и регулирующие приборы 6
§ 3. Автоматическое регулирование............................
§ 4. Управление санитарно-техническими системами .... 10
§ 5. Основные термины и определения............................. 12
§ 6. Единицы физических величин. Точность измерения ... 14
Глава II. Измерение теплотехнических параметров ...... 16
§ 7. Измерение температуры............................. . 16
§ 8. Измерение давления..........................................23
§ 9. Измерение расхода ..........................................27
§ 10. Измерение уровня...........................................34
§ 11. Измерение относительной влажности воздуха .... 34
Глава III. Управление санитарно-техническими системами .... 37
§ 12. Виды управления. Источники энергии...............37
§ 13. Аппаратура защиты, управления и сигнализации .... 40
§ 14. Изображение электрических схем управления .... 48
§ 15. Дистанционное и автоматическое управление .... 52
Глава IV. Автоматическое регулирование ..............................54
§ 16. Основные понятия и определения...................54
§ 17. Переходные процессы в САР........................57
§ 18. Функциональные схемы САР.........................59
§ 19. Свойства объектов регулирования..................60
§ 20. Законы автоматического регулирования.............69
§ 21. Электрические и пневматические системы регулирования . 82
§ 22. Элементы систем автоматического регулирования ... 84
§ 23. Регуляторы температуры...........................89
§ 24. Регуляторы давления..............................98
§ 25. Регуляторы расхода . . 102
§ 26. Регуляторы уровня...............................105
§ 27. Регуляторы относительной влажности воздуха . . ПО
§ 28. Исполнительные механизмы .................................112
§ 29. Регулирующие органы.............................125
§ 30. Качество процессов регулирования................134
Раздел второй. Автоматизация санитарио-технических устройств 137
Глава V. Схемы автоматизации........................................137
§ 31. Условные обозначения санитарно-технического оборудования
и средств автоматизации . ..................................137
§ 32. Типы схем автоматизации...................................149
§ 33. Функциональные схемы автоматизации........................150
Глава VI. Автоматизация систем теплоснабжения.......................156
§ 34. Автоматизация тепловых вводов.............................156
§ 35. Автоматизация систем центрального и воздушного отопления 159
§ 36. Автоматизация насосных и смесительных установок систем
отопления.......................................................164
Глава VII. Автоматизация систем водоснабжения и канализации . . 167
§ 37. Автоматизация систем горячего водоснабжения .... 167
223
§ 38. Автоматизация хозяйственно-питьевого и противопожарного
водоснабжения.................................................169
§ 39. Автоматизация оборотного водоснабжения...................173
§ 40. Автоматизация внутренней канализации.....................174
Глава VIII. Автоматизация вентиляционных систем....................176
§ 41. Автоматизация приточных систем...........................176
§ 42. Автоматизация вытяжных систем ...........................182
§ 43. Автоматизация воздушно-тепловых завес....................184
§ 44. Автоматизация систем дымоудаления........................186
Глава IX. Автоматизация систем кондиционирования воздуха . . 187
§ 45. Технологические основы автоматизации систем кондициони-
рования воздуха................................................187
§ 46. Автоматизация прямоточных систем кондиционирования воз-
духа ..........................................................190
§ 47. Автоматизация систем кондиционирования воздуха с рецир-
куляцией ......................................................195
§ 48. Автоматизация многозональных систем кондиционирования
воздуха........................................................200
§ 49. Автоматизация двухканальных систем кондиционирования
воздуха........................................................200
§ 50. Автоматизация систем кондиционирования воздуха с эжекци-
оинымн доводчиками.............................................204
§ 51. Автоматизация агрегатных автономных и неавтономных
кондиционеров................................................. 206
§ 52. Автоматизация холодильных установок.....................210
Глава X. Основы проектирования, монтажа, наладки и эксплуатации
систем автоматизации...............................................213
§ 53. Проектная документация...................................213
§ 54. Требования к монтажу приборов и средств автоматизации . 214
§ 55. Документация при производстве монтажных работ . . 218
§ 56. Сведения о наладке и эксплуатации систем автоматизации . 220
Список литературы ................................................ 222
ВЛАДИМИР ЯКОВЛЕВИЧ МЕКЛЕР
ЛЕОНИД СЕМЕНОВИЧ РАВВИН
Автоматическое регулирование санитарно-технических
и вентиляционных систем
Редакция литературы по инженерному оборудованию
Зав. редакцией И. П. Скворцова
Редактор Г. А. Лебедева
Мл. редактор А. А. Минаева
Внешнее оформление художника В. В. Максимова
Технический редактор И. Б. Скакальская
Корректор Т. М. Бочагова
И Б № 2237
Сдано в набор 23.10.81, Подписано в печать 7.03.82. Т-06319. Формат 60X90!/ie д. л
Бумага тип. № 1. Гарнитура <Литературная». Печать высокая. Печ. л. 14. Усл. печ. л
14. Усл. кр.-отт. 14,25. Уч.-изд. л. 14,75. Тираж 20 000 экз. Изд. № АП 1-7909. Зак. № 90;
Цена 45 коп.
Владимирская типография <Союзполиграфпрома> при Государственном комитете СССР
по делам издательств, полиграфии и книжной торговли
600000, г. Владимир, Октябрьский проспект, д. 7