




















































































































































































































Автор: Давыдкин Б.И. Козлов И.Я. Асатурьян Т.Б.
Теги: авиационное оборудование аэронавигация
Год: 1947


Текст
Москва
Б. И. ДА ВЫДРИН, и. я. яозлоп Т Б. АС АТУ РЬЯН
ЭРОНЛВНГ1Д
К ДВИДЦ/.ОН!
ГЛАВНОЕ УПРАВЛЕНИЕ ГРАЖДАНСКОГО ВОЗДУШНОГО ФЛОТА _
Б. И. ДАВЫДКИН, И. Я. КОЗЛОВ u Т. Б. АС АТУ РЬЯН г I Ъ
J061 г/
АЭРОНАВИГАЦИЯ
И
АВИАЦИОННЫЕ ПРИБОРЫ
О
| ' i,’ui
РЕДАКЦИОННО-ИЗДАТЕЛЬСКИЙ ОТДЕЛ АЭРОФЛОТА
МОСКВА
Редактор М. Гуревич. . Техи. ред. И. А. Петров.
Подписано к печати 6.10.47 г. РИО 1107»
Печ л. 29+2 вчлейки. Уч.-изд. л. 36. ч Тир 2500 эк’.
1+2342. Тип. РИО Аэрофлота. Москва, Старопаискйй, 5. Зак. 814/1107
Прежде чем начать читать книгу, внесите следующие поправки и исправьте обнаруженные опечатки:
। Стр. 1 Строка Напечатана Следует
14 12 и 13-я <р=49°, N— широта северная. ^=49°ЛГ—широта северная,
сверху <р==60°, S—широта южная. <f=60°S—широта южная.
38 4н5-я свер- =+33°19'37", т. е. Хгр= = 4-33°19'38", т. е. \гР=
ху =33°19'37"Е или 33°2'Е. =33°19'38"Е, нли 33°20'Е.
49 1-я снизу Нцст~ 2 С2 + 1 . 1 .
50 72 19-я снизу! 3-я снизу I 1,226 кг/мг. 1,226 кг/м2.
76 12-я сверху УС=200, УС=600,
96 5-я снизу жидкостью Комитаса, жидкостью компаса,
131 12-я снизу Да этого Для этого
140 Подпись под 7--арретир. 7—ушко.
рис. НО
141 Подпись под Конец подписи, начиная с
рис. 111 поз. 8, зачеркнуть.
199 8-я сверху Остаток секунд меньше 8'. . . Остаток секунд меньше 8 . ..
больше 8' больше 8
208 4-я снизу Часы имеют две заводные Часы имеют две головки:
головки:
210 7-я сверху Поправка часов, обычно обо- Поправка часов обычно обоз-
зиачается буквой ш — начается буквой И, а буквой ш—изменение хода часов за один час илн одни сутки
14-я снизу И1=И2+(Тч2-7ч1),
5-я снизу Поправка часов Изменение поправки хода ча-
сов
228 5-я сверху на точку А. на точку а.
269 14-я снизу 3) На курсе МК = 158° угол 3) На курсе МК=156° угол
сноса оказался равным +3°. сноса оказалси равным — 6*.
ФМПУ=153°. ФМПУ=150°.
311 23-я сверху Приборы радиоведеиия Приборы радиовидения
335 8-я снизу находятся э. д. с., наводятся э« д. с.,
342 7-я снизу радиостанции самолета радиостанции и самолета
343 Подпись под меридиана. меридианов.
рис. 232
354 7-я снизу на карте (на схеме,? у ориен- на карте (на схеме) у ориен-
361 тира). тира.
3-я снизу уклонения самолета, поворота самолета,
405 Подпись под Индикатор высоты. Индикатор ограничения вы-
рис. 265Е 1 СОТЫ.
Подпись под ’ Индикатор ограничения вы- Индикатор высоты.
рис. 265Ж соты.
424 21-я сверху табличные nlag и А. табличные hmag и А.
27-я сверху широтой tf„p = 50°N, широтой <р„р=56° N,
428 4-я сверху ДЛ = &hacm = hmn6 Д/г = Нгпаа
ОТ СОСТАВИТЕЛЕЙ
Книга «Аэронавигация и авиационные приборы» предназначена для летного состава Гражданского воздушного флота и может быть использована в качестве пособия как при подготовке пилотов и штурманов, так и для проведения специальной учебы летного состава в подразделениях ГВФ и при переподготовке их в учебно-тренировочных подразделениях. (Книга составлена с учетом некоторых особенностей летной работы на воздушных линиях ГВФ, разнообразия эксплоатируемой материальной части, уровня подготовки летного состава и опыта работы Гражданского воздушного флота в Великую Отечественную войну.
Главы: I, II, III (от § 35 по § 70 и от § 88 по § 92), IV, V, VI, VII, VIII, IX, X, XI, XIII и XIV составлены подполковником Б. И. Давыдкиным, глава III от § 70 по § 88 составлена инженер-капитаном И. Я Козловым, глава XII—майором Т. Б. Асатурь-яном.
При составлении отдельных глав книги авторы основывались на имеющейся литературе по вопросам аэронавигации и авиационным приборам, личном практическом опыте летной работы в Гражданском воздушном флоте, опыте педагогической работы с летно-подъемным составом, проведенных наблюдениях, а также советах и пожеланиях наиболее опытных работников Гражданского воздушного флота. Книга написана в основном в годы Вели кой Отечественной войны. Своевременный выпуск ее задержался по техническим причинам.
Просьба ко всем, кто пользуется этой книгой, направлять свол замечания, советы и пожелания по ней в Редиздат Аэрс флота.
ВВЕДЕНИЕ
Аэронавигация как наука, ее развитие и значение в авиации
Аэронавигацией называется .наука, в которой изучаются методы и правила самолетовождения, а также, авиационные приборы и инструменты, предназначенные для целей совершения полетов.
Весь комплекс работ экипажа самолета, направленных на то, чтобы сохранить в полете ориентировку, выдержать намеченное направление и заданный режим полета, называется самолетовождением.
Основной задачей аэронавигации является изучение методов и правил самолетовождения, а также приборов ,и инструментов, с помощью которых экипаж определяет элементы полета и направляет самолет по заданному маршруту.
При помощи авиационных приборов и инструментов экипаж самолета имеет возможность определять высоту полета относительно земной поверхности, горизонтальную скорость его передвижения относительно окружающего воздуха и земной поверхности, скорость подъема и спуска, направление полета относительно стран света и, наконец, положение самолета в пространстве относительно горизонта, а также контролировать работу моторов и агрегатов самолета.
Аэронавигация как наука возникла вслед за появлением управляемых воздушных судов—самолетов и дирижаблей. Она развивалась вместе с развитием воздушного флота.
Некоторые методы аэронавигации были заимствованы из морской навигации, накопившей многовековой опыт и имеющей много общего с воздушной навигацией.
Особенно быстро аэронавигация стала развиваться со времени первой мировой войны, когда по мере усовершенствования воздушных судов все острее возникала необходимость перехода от полетов в дневное время суток и при хорошей погоде к полетам в более сложных метеорологических условиях (в плохую погоду)
и ночью, к полетам на больших высотах, больших скоростях и н» большие расстояния.
Наибольшего же развития аэронавигация как наука достигла в последние годы, когда стали широко применяться дальние » скоростные перелеты, полеты на больших высотах и в сложных метеорологических условиях, полеты в разное время суток и года.
В настоящее время методы аэронавигации полностью обеспечивают надежность самолетовождения в сложных метеорологических условиях, днем и ночью, на разных .высотах, скоростях расстояниях.
ГЛАВА I
ОСНОВНЫЕ ГЕОГРАФИЧЕСКИЕ ПОНЯТИЙ И СВЕДЕНИЯ О ЗЕМЛЕ
§ 1. Земля — шар
Земля — одно из небесных тел, входящих в нашу солнечную систему. В давние времена относительно формы и размеров земли существовало много разнообразных предположений. Только начиная с середины XVII столетия, благодаря трудам французских геометров вопрос о размерах и форме земли получил более правильное научное освещение.
Произведенные ими в 1720 г. и позднее измерения показали, что земля в своем сечении по оси вращения представляет не правильный, а приплюснутый к центру земли по оси вращения шар, т. е. имеет эллипсовидную форму, а земной шар имеет вид сфероида — эллипсоида вращения (рис. 1).
Рис. 1. Вид земного шара (сфероида— эллипсоида вращения).
в—малая полуось; в—'большая полуось (полуось а меньше полуоси в); С — центр земного сфероида; РР'—ось вращения эллипсоида; АА'—наименьший диаметр;
ВВ'—наибольший диаметр.
Позднее более точные измерения, произведенные Кларком в 1880 г., показали, что наибольший и наименьший диаметры земного сфероида имеют следующие величины: наибольший &В' — 12 757 км, наименьший АА' — 12714 км.
Однако отклонение форм!,! земли от формы правильного шара весьма невелико: разность между наибольшим и .наименьшим диаметрами составляет:
ВВ’ - АА’ = 12 757—12 714 = 43 км.
Сжатие земли, определяемое отношением разности ее диаметров к наибольшему диаметру, составляет:
ВВ' — А А' 43 11
ВВ' = 12 757 = 296^7 — 297 ’ т. е. весьма незначительно. ,
Практически отклонение действительной формы земли от формы правильного шара настолько незначительно, что в аэронавигации при решении всех навигационных вопросов землю принимают за правильный шар, ’объем которого равен объему сфероида.
Диаметр земного шара D принято считать равным 12 742 км. а радиус /?=-6371 км.
§ 2. Видимый горизонт, его дальность
На открытой ровной местности у наблюдателя создается представление, что небо сходится с землей по кругу, в центре которого находится его (наблюдателя)
Рис. 2. Видимый горизонт.
глаз.
Над этим кругом, который называется видимым горизонтом (кругозором), как бы опираясь на него краями, простирается небесный свод, представляющийся наблюдателю в виде приплюснутого полушария. Линия пересечения небесного свона с видимым горизонтом называется линией видимого горизонта
Линия видимого горизонта есть не что иное, как кривая линия, соединяющая точки ка-
сания зрительных лучей наблюдателя к земной поверхности (рис. 2).
На рис. 2 изображены земной шар и наблюдатель, находящийся в точке О на некоторой высоте h над земной поверхностью от точки а\ точка
С — центр земли, а кривая а'> б, в, г, д и т. д. — линия видалого г р и з о и т а. Расстояние на земной поверхности от места наблюдателя до каждой точки линии видимого горизонта (а—а', а—б и т. д.) называется теоретической дальностью видимого горизонта d.
Теоретическая дальность видимого горизонта, как это видно из рис. 3, будет тем больше, чем выше окажется наблюдатель над земной поверхностью.
Увеличение видимого горизонта по мере возвышения наблюдательной точки или места наблюдателя называется расширением видимого горизонта.
Дальность видимого горизонта d (в километрах) для любой
высоты места наблюдателя над земной поверхностью h (в метрах) определяется следующей формулой:
rf = 3,57/A,
где 3,57 является переводным коэфициентом.
Рис. 3. Расширение видимого горизонта с yet личением высоты mi ста наблюдателя.
h и К— высоты наблюдателей О и О' над земной поверхностью.
§ 3. Вертикаль и плоскость истинного горизонта
Гибкая нить, на которой подвешен груз (отвес), указывает всегда постоянное направление — направление силы тяжести,
Рис. 4. Вертикаль и плоскости истинных горизонтов наблюдателей, находящихся в двух разных точках на земной ' поверхности. в
т. е. к центру земли. Направление силы тяжести принято считать вертикалью или отвесной линией. Так как все вертикальные линии проходят через центр земли, то они, естественно, являются продолжением ее радиусов.
Всображаемая плоскость, перпендикулярная к вертикали и проходящая на уровне глаза наблюдателя, называется плоскостью истинного горизонта наблюдателя.
Для каждого наблюдателя, находящегося в какой-либо точке на земной поверхности, существуют своя вертикаль (отвесная линиям и СБОЯ плоскость истинного горизонта.
На рис. 4 изображены вертикаль и плоскость истинного горизонта наблюдателей, находящихся в двух разных точках—в точке А и точке Б.
§ 4. Понижение видимого горизонта
Видимый горизонт лежит всегда ниже плоскости истинного горизонта на угол, который образуется плоскостью истинного горизонта и касательной зрительного луча наблюдателя к земной поверхности; этот угол называется понижением видимого горизонта (рис. б).
Рис. 5. Понижение видимого горизонта.
Величина понижения видимого горизонта зависит от высоты места наблюдателя над земной поверхностью, а также от искажения зрительных лучей при прохождении их через земную атмосферу, т. е. от состояния последней (температуры, влажности, барометрического давления и т. д.)
Теоретическую величину понижения видимого горизонта определяют по графику (рис. 6). Например, на высоте полета 1400 м понижение горизонта равно 1°06'.
Высота полета МО», , ; , то» ! ЫОызт» ?500» 3000»
Оп'чисение Ш| 111 и 1111J 11 *11.11 в 1111| । ililili/Hifii'n'iPifi/ДД
'оризонта ^0 M 1°00 ‘ 10' ffl tn'
vns'
Рис. 6. График определения понижения видимого горизонта с изменением высоты полета.
§ 5. Окружности большого и малого кругов
Если рассечь земной шар какой-либо воображаемой плоскостью, проходящей через его центр, например АА' (рис. 7), то в сечении получится окружность с диаметром ВВ', которая назы
вается большим кругом.
Если воображаемая секущая плоскость ДД1 не проходит через центр земли, то в сечении получается окружность с диаметром аа', которая называется малым кругом. На поверхности земного шара можно 'провести бесчисленное количество больших и малых кругов.
§ 6. Координаты на земной поверхности
Для определения расположения точек (пунктов) и линий на земной поверхности служат географические (земные) координаты.
Географическими координатами называются такие условные величины (числа), кото-
Рис. 7. Окружности большого и малого кругов.
АА' и ДД'—секущие плоскости; act и ВВ'—диаметры окружностей сечения.
рйе полностью определяют положение любой точки (пункта) или
линии на земной псверхности относительно некоторых постоянных, заранее выбранных точек и линий.
Земля непрерывно вращается вокруг воображаемой оси, проходящей через ее центр; эта ось называется земной осью (рис. 8) и принята за основную линию в географических координатах.
Земная ось пересекает земной шар в двух противоположных точках, условно называемых полюсами. Точка земной поверхности, на которой вращение земного шара наблюдается в сторону, противоположную ходу часовой стрелки, называется северным полюсом (Nord, N), а та точка, на кото
рой вращение земли наблюдается по ходу часовой стрелки, назы вается южным полюсом (Sud, S).
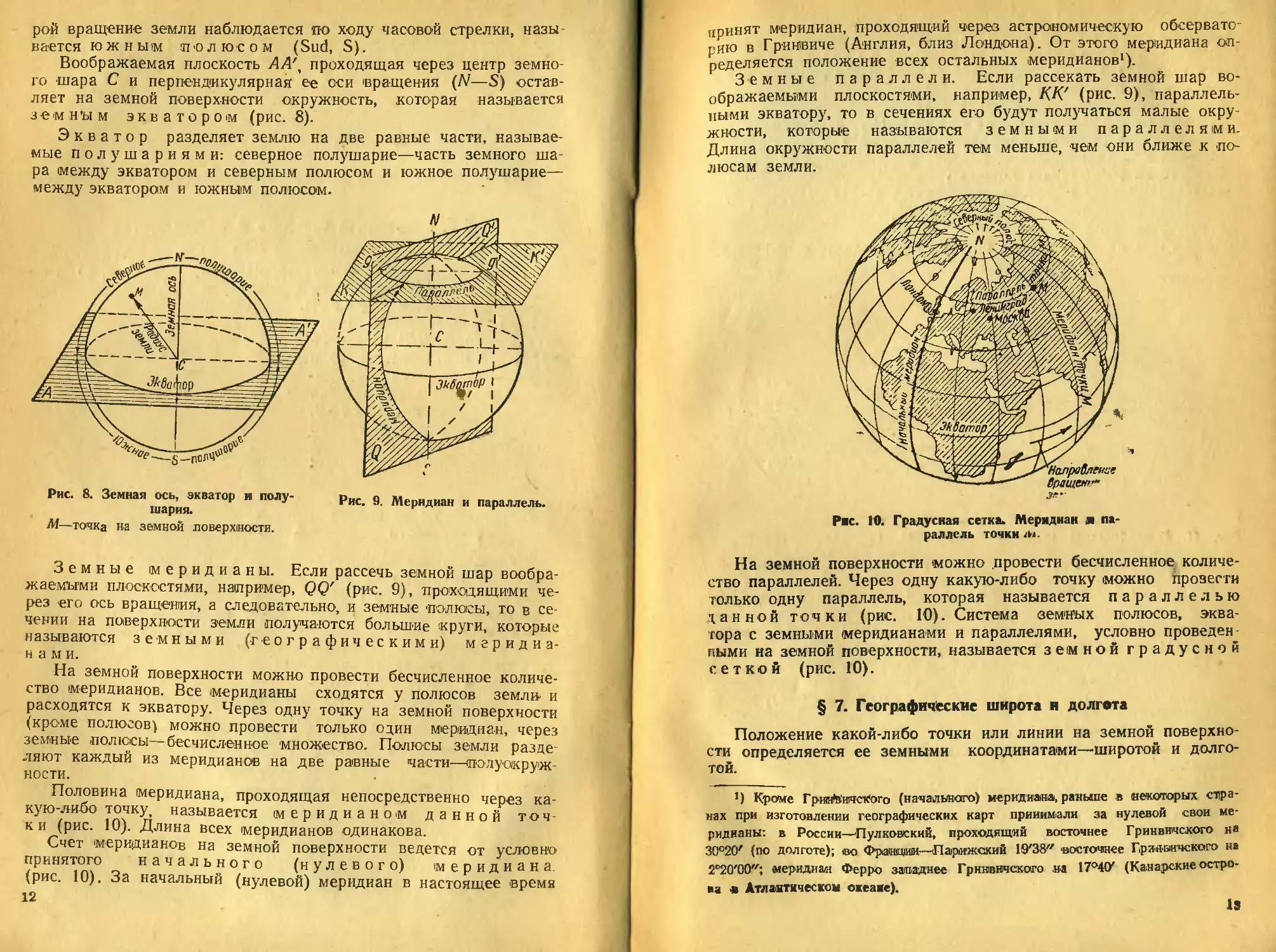
Воображаемая плоскость AA't проходящая через центр земного шара С и перпендикулярная ее оси 'вращения (N—S) оставляет на земной поверхности окружность, которая называется земным экватором (рис. 8).
Экватор разделяет землю на две равные части, называемые полушариями: северное полушарие—часть земного шара между экватором и северным полюсом и южное полушарие— между экватором и южным полюсом.
Рис. 8. Земная ось, экватор и полушария.
Af—точка на земной поверхности.
Рис. 9. Меридиан и параллель.
Земные меридианы. Если рассечь земной шар воображаемыми плоскостями, например, QQ' (рис. 9), проходящими через его ось вращения, а следовательно, и земные полюсы, то в сечении на поверхности земли получаются большие «руги, которые называются земными (географическими) меридианами.
На земной поверхности можно провести бесчисленное количество меридианов. Все меридианы сходятся у полюсов земли- и расходятся к экватору. Через одну точку на земной поверхности (кроме полюсов) можно провести только один меридиан, через земные полюсы—бесчисленное множество. Полюсы земли разделяют каждый из меридианов на две равные части—полуокружности.
Половина меридиана, проходящая непосредственно через какую-либо точку, называется меридианом данной точки (рис. 10). Длина всех меридианов одинакова.
Счет меридианов на земной поверхности ведется от условно принятого начального (нулевого) меридиана, (рис. 10). За начальный (нулевой) меридиан в настоящее время 12
принят меридиан, проходящий через астрономическую обсерваторию в Гринвиче (Англия, близ Лондона). От этого меридиана определяется положение всех остальных меридианов1).
Земные параллели. Если рассекать земной шар воображаемыми плоскостями, например, КК' (рис. 9), параллельными экватору, то в сечениях его будут получаться малые окружности, которые называются земными параллелями. Длина окружности параллелей тем меньше, чем они ближе к полюсам земли.
Рже. 10. Градусная сетка. Меридиан я параллель ТОЧКИ /И.
На земной поверхности можно провести бесчисленное количество параллелей. Через одну какую-либо точку можно провести только одну параллель, которая называется параллелью данной точки (рис. 10). Система земных полюсов, экватора с земными меридианами и параллелями, условно проведен пыми на земной поверхности, называется земной градусной сеткой (рис. 10).
§ 7. Географические широта и долгота
Положение какой-либо точки или линии на земной поверхности определяется ее земными координатами—широтой и долготой.
0 Кроме ГривЛ'ичст«>го (начального) меридиана, раньше в некоторых странах при изготовлении географических карт принимали за нулевой свои меридианы: в России—Пулковский, проходящий восточнее Гринвичского н« 30°20' (по долготе); ®о Франций—Парижский Ю'ЗЗ" ‘восточнее Гринвичского на 2°20'00"; меридиан Ферро западнее Гринвичского на 17°40' (Канарские острова « Атлантическом океаже).
О in р ед еле н и е широты и долготы
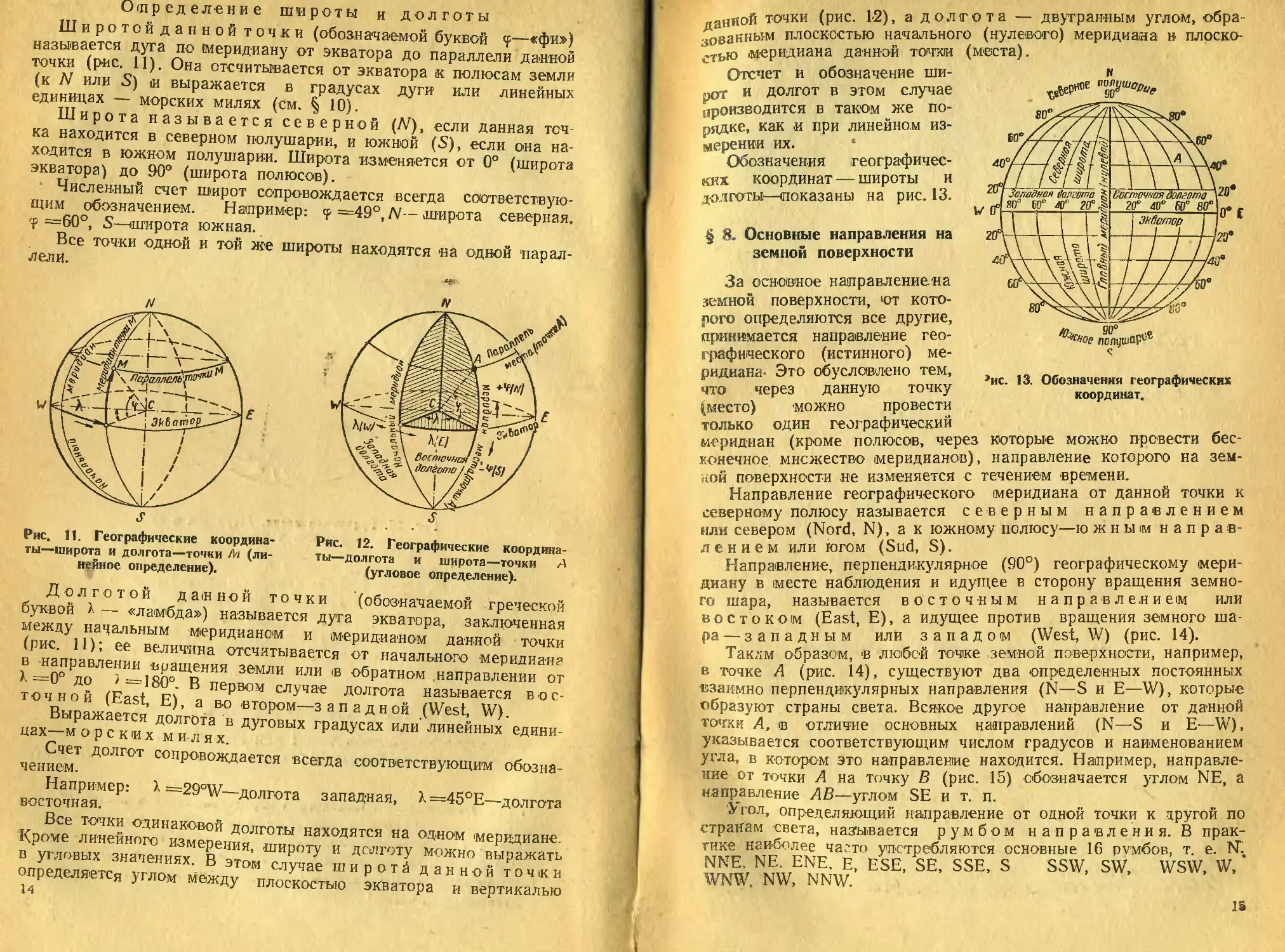
Широтойданной точки (обозначаемой буквой —«фи») называется дута по (меридиану от экватора до параллели данной точки (рис. 11). Она отсчитывается от экватора к полюсам земли (к N или S) и выражается в градусах дуги или линейных единицах — морских милях (см. § 10).
Широта называется северной (N), если данная тсч ка находится в северном полушарии, и южной (S), если она находится в южном полушарии. Широта изменяется от 0° (широта экватора) до 90° (широта полюсов).
Численный счет широт сопровождается всегда соответствующим обозначением. Например: tp=49°,/V—широта северная, •f =60°, S—широта южная.
Все точки одной и той же широты находятся «а одной параллели.
««'
Рис, 11. Географические коор; ты—широта и долгота—точки Л1 нейное определение).
Долготой дав ной точки (обозначаемой греческой буквой А — «ламбда») называется дуга экватора, заключенная между начальным меридианом и меридианом данной точки (рис. 11); ее величина отсчитывается от начального меридиан? в направлении вращения земли или в обратном направлении от ><=0° до >=180°. В первом случае долгота называется восточной (East, Е), а во втором—западной (West, W).
Выражается долгота в дуговых градусах или линейных единицах—м орских милях.
Счет долгот сопровождается всегда соответствующим обозначением.
Например: X =29°W—долгота западная, Х=45°Е—долгота восточная.
Все точки одинаковой долготы находятся на одном меридиане. Кроме линейного измерения, широту и долготу можно выражать в угловых значениях. В этом случае широтй данной точки определяется углом между плоскостью экватора и вертикалью 14
данной точки (рис. 12), а долгота — двугранным углом, образованным плоскостью начального (нулевого) меридиана и плоско-етью меридиана данной точки (места).
Отсчет и обозначение широт и долгот в этом случае производится в таком же порядке, как и при линейном измерении их.
Обозначения географических координат — широты и долготы—(показаны на рис. 13.
§ 8. Основные направления на земной поверхности
За основное направлениена земной поверхности, ют которого определяются все другие, принимается направление географического (истинного) ме-
эис. 13. Обозначения географических координат.
ридиана- Это обусловлено тем, что через данную точку (место) можно провести только один географический меридиан (кроме полюсов, через
конечное множество меридианов), направление которого на зем-
которые можно провести бес-
ной поверхности не изменяется с течением времени.
Направление географического меридиана от данной точки к северному полюсу называется северным направлением или севером (Nord, N), а к южному полюсу—ю ж н ы м направлением или югом (Sud, S).
Направление, перпендикулярное (90°) географическому меридиану в месте наблюдения и идущее в сторону вращения земного шара, называется восточным направлением или востоком (East, Е), а идущее против вращения земного шара— западным или западом (West, W) (рис. 14).
Таким образом, в любой точке земной поверхности, например, в точке А (рис. 14), существуют два определенных постоянных взаимно перпендикулярных направления (N—S и Е—W), которые образуют страны света. Всякое другое направление от данной точки А, в отличие основных направлений (N—S и Е—W), указывается соответствующим числом градусов и наименованием угла, в котором это направление находится. Например, направление от точки А на точку В (рис. 15) обозначается углом NE, а направление АВ—углом SE и т. п.
5<гол, определяющий направление от одной точки к другой по странам света, называется румбом направления. В практике наиболее часто употребляются основные 16 румбов, т. е. № NNE. NE. ENE. Е, ESE, SE, SSE, S SSW, SW, WSW, W, * WNW, NW, NNW.
Гораздо реже 'применяются 32 румба.
Румбы направления отсчитываются к востоку и западу; считая
за начало северное и южное
Ряс. 14. Страны света.
направления.
(Кроме определения направлений по румбам, различают еще направления по азимута м.
Рис. 15 Направления на земной поверхности.
Азимутом называется угол между направлением на север к направлением от данной точки на заданный пункт.
5
Рис. 16. Азимуты направлений и tax обозначения.
При определении направлений по азимутам, основным направлениям—северному и южному—(присваивается значение 0° и счет углов ведется к западу и востоку от 0° до 180° (рис. 16); при этом все отсчеты необходимо сопровождать соответствующим наименованием направления, в котором отсчитываются азимуты, т. е. к западу или востоку. Например, азимут направления ОА (рис. 16, а) при отсчете от 2V ‘будет 56°Е, а при отсчете от S — 124CW. Кроме этого способа, азимуты направлений можно отсчитывать и от севера .по ходу часовой стрелйи непрерывно от 0° до 360°; в этом случае 'направление отсчета не обозначается. Например, направление ОА (рис. 16, б) имеет азимут 31,2°, а напра1вле-ние ОС—азимут 100°.
Счет азимутов от 0° до 360е имеет в практике наибольшее распространение.
1*
В аэронавигации азимут направления из одного пункта в другой называется 'истинным пеленгом (ИП) или истинным нутевым углом (ИПУ). Он отсчитывается от северного направления меридиана по ходу часовой стрелки в градусах (от 0 до 360).
§ 9. Ортодромия и локсодромия
Кратчайшим путем из одного пункта А в другой В на земной поверхности (рис. 17) является проведенная через эти пункты (точки) дуга большого круга, которая называется ортодромией.
86
Рис. 17. Ортодромия и локсодромия.
Рис. 18. Вид локсодромии, проведенной на земном шаре.
Ортодромия представляет собой кривую линию и пересекает меридианы под разными углами (а меньше а1, а1 меньше а2, а3 меньше а3 и т. д., рис. 17).
Чтобы перелететь по ортодромии из одного пункта в другой, следует в полете часто изменять начальный истинный путевой угол. Это создает определенные неудобства.
В практике для удобства выполнения полета между двумя пунктами часто прибегают к другой линии пути, называемой локсодромией.
Локсодромия между пунктами отбытия А и прибытия В представляет собой ..кривую линию, которая пересекает все меридианы под одним постоянным углом р (рис. 17 и рис. 18). При
полете по локсодромии путевой угол остается постоянным во все время пути. Локсодромия не является кратчайшим расстоянием между двумя пунктами на земной поверхности: путь по локсодромии длиннее пути по ортодромии. Однако, если пункты полета удалены друг от друга на небольшое расстояние, то разница между этими двумя путями весьма незначительна, и практически их принимают равными.
Разница в длине пути по ортодромии и локсодромии незначительна и при больших расстояниях, если линия полета, лало-ожло-няется от направлений географических" Меридианов или экйЙТг ра.
К
'Л .
Путь по географическим меридианам и экватору—это частные случаи ортодромии, а путь по географическим меридианам, экватору и параллелям—'частные случаи пути по локсодромии.
В полетах на значительные расстояния отри (выборе основного пути необходимо сначала определить разность длины путей между данными пунктами по ортодромии и локсодромии, а затем уже наметить и основной путь по одной из этих основных линий или но определенной их комбинации.
'При полете на значительные расстояния для выигрыша в пути и удобства полета прибегают к комбинации ортодромии и локсодромии, т. е. весь ортодромический путь между пунктами вылета и посадки разбивают на этапы, я полет совершают по локсодромии этих этапов, как наиболее удобному пули (рис. 19) при совершении полета с постоянным истинным путевым углом (ИПУ). О картах и картографических проекциях см. гл. II.
Рис. 19. Комбинация ортодромиче- Рис. 20. Определение истинного пу-ского и локсодромического Ъутей. тевого угла локсодромии (ИПУ).
При разбивке ортодромического пути на локсодромические этапы долготы X промежуточных точек выбираются на линии ортодромического пути, а их широты вычисляются по формуле:
tgcp = , ч sin (Х2 — X) ] sin (X — XJ,
sin(X2-X1) '2 71 sin(X2 — XJ J
А В
где: tg<f—широта искомой 'промежуточной точки; X—долгота искомой промежуточной точки;
Xi и Х2—долгота начального и конечного пунктов маршрута (вылета и (Прилета);
и —'широта начального и конечного пунктов маршрута;
Л и В — коэфициенты.
Путевей угол локсодромического пути на картах определяется как средний из суммы путевых углов начального и конечного пунктов или по среднему меридиану между данными пунктами (рис. 20). В первом случае его определяют по формуле:
а14- а2
а~Т~’
де:
а — путевой угол, который необходимо выдерживать для полета по локсодромическому пути;
а1 и а2—путевые углы соответственно у пунктов вылета и фнбытия.
18
Во втором случае путевой угол измеряется транспортиром непосредственно на карте по среднему меридиану между пунктами вылета и прилета.
Длина пути по локсодромии между пунктами вылета и прилета измеряется на карте с помощью масштабной линейки или высчитывается по формуле:
5Локс=———-1,852 км,
cos а
где:
Saokc — путь по локсодромии в километрах,
<Рр <р2—широты мест отбытия и прибытия, а — путевой угол.
Длина пути по ортодромии между пунктами отбытия « прибытия определяется по формуле:
cos Sopm = lsin eft- s n cos • cos <f2-cos (X2 — XJJ • 1,852 km, где: Sopm — путь по ортодромии в километрах,
?i и широты начального и конечного пунктов, Хх и Х2 — долготы этих пунктов.
§ 10. Единицы измерения расстояния
В аэронавигации за основную единицу измерения расстояния в метрической системе мер принят километр (ЮОО м)1).
При полетах в средних широтах (? = ч0° -=—если пользуются картами в конических проекциях (см. 20, 21), применение этой меры длины более удобно; при полетах же в более высоких широтах )°) 1 над морем, где приходится преимущественно пользоваться картами цилиндрических проекций (см. § 22), за единицу длины более удобно принимать морскую милю, г. е. длину дуги большого круга, равную одной минуте дуги или 1,852 км.
Пример. Если самолет пролетел'по ортодромическому пути 73 морс-их. мили, то это значит, что он переместился на 73х (1С13') дуги большого круга, и наоборот, если он переместился «а 73' дуги (1°13'), «го это соответствует 73 морским милям, или 73 • 1 .S52 = 135,2 »м.
1ри передвижении по меридиану или экватору изменение широты и долготы происходит на столько минут дуги, сколько пройдено морских миль.
§ 11. Длина земной параллели
Длина окружности земных параллелей уменьшается с приближением их к полюсам земли, т. е. с увеличением широты места.
В зависимости от широты <f данной параллели длину ее окружности определяют по формуле:
$паралл = 2^R cos <р = 40 000 • cos <f км, где: SnapajiA — длина параллели.
? — широта параллели в градусах, длина окружности экватора.
’) Метром называется величина, которая составляет одну сорокамиллвов*
долю длины земного меридиана. Точный размер этого отрез к»
был становлеи во Фраицвв в 1790 г. J,
ГЛАВА II
ГЕОГРАФИЧЕСКИЕ КАРТЫ И КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
§ 12. Общие понятия о картах
Для успешного и 'безопасного выполнения всякого внеаэро-дромного полета, независимо от его дальности, экипажу самолета ('пилоту, штурману) необходимо всегда иметь на борту специальные или обыкновенные географические карты.
Чтобы выбрать более удобный и безопасный путь и выдерживать его при перелетах из одного пункта на земной поверхности в другой, необходимо знать точное взаимное расположение предметов земной поверхности относительно друг друга и стран света, а также и их характер. Поэтому необходимо иметь перед собой условное изображение поверхности земного шара на плоскости: очертания и характер суши, морей, озер, рек, болот, лесов, направление и характер путей сообщения, границы, населенные пункты и их характер и т. д. С этой целью поверхность земного шара, целиком или отдельными участками, изображают на бумаге, т. е. изготовляют географические карты.
§ 13. Географическая карта
Географической картой называется условно уменьшенное в определенном масштабе1) и произведенное в определенной картографической проекции2) изображение поверхности земного шара на плоскости, т. е. листах бумаги. Масштаб карты указывает величину (степень) уменьшения линейных размеров предметов земной поверхности при изображении их на карте.
Поверхность земного шара невозможно изобразить (развернуть) «а плоскости без искажений, т. е. уложить без складок и разрывов, а следовательно, невозможно точно сохранить подобие фигур предметов земной поверхности при изображении их на карте. Поэтому для уменьшения искажений контуров и размерен предметов земной поверхности при изготовлении карт пользуются определенными способами, которые называются картографическими проекциями.
*) О масштабах см. § ,16.
2) О .картографических проекциях см. § '19.
Картографические проекции — это чисто условные пособь! изображения на плоскости (листах бумаги) поверхности, земного шара и, в .первую оче,редь, ее географической сетки — меридианов и параллелей.
* В практике составления географических карт применяют несколько видов картографических проекций (см. §19).
В каждой, проекции поверхность земного шара изображают на плоскости ео определенному, свойственному данной проекции, закону. Знание этого закона позволяет учитывать допускаемые проекцией искажения и по изготовленной карте определять линейные и площадные размеры, а также различные направления с достаточной для практических целей точностью.
На географических картах различных проекций градусная сетка земного шара изображается по-разному: на одних—меридианы и параллели представлены прямыми линиями, на других—кривыми; некоторые проекции имеют прямые меридианы, но кривые параллели и т. п.
Характер искажений контуров предметов земной поверхности в разных проекциях также различен. Обычно для изображения части земной поверхности на географической карте выбирают такую картографическую проекцию, которая наиболее удачно передает очертания изображаемой поверхности с наименьшим искажением контуров предметов земли или обладает наилучшими свойствами для решения данной задачи или достижения определенной цели.
Населенные пункты, железные, шоссейные и грунтовые дороги, реки, озера, моря, болота, леса, рельеф местности и т. п. изображаются на географических картах соответствующими условными обозначениями—знаками; последние иногда имеют вид предмета в плане или условную геометрическую фигуру.
Наука, объединяющая ряд научно-технических дисциплин, изучающих вопросы составления и издания географических карт, называется картографией.
§ 14. Значение географических карт в самолетовождении
Географическая карта дает возможность экипажам воздушных судов правильно осуществлять полет, т. е. правильно выбирать и прокладывать маршрут полета, изучать его особенности и рельеф местности вдоль линии пути; позволяет вести ориентировку в полете (контролировать правильность направления полета) и, наконец, исправлять направление полета в случае уклонения от намеченного пути и т. д.
§ 15. Классификация карт
Все карты по своему назначению разделяются на общегеографические и специальные.
Общегеографические карты (генеральные, частные) в основном предназначены для ознакомления с поверхностью земного шара.
На г е in е р а л ын ы х (общих) картах (изображаются отдельные страны или 1 Руппы стран, на ч а с т н ы х—небольшие пространства земной поверхности (об-части. отдельные площади земной поверхности, моря и т. д.).
Как правило, общегеографические карты содержат основные элементы географического ландшафта, т. е. естественно-природный ландшафт (очертания суши и водных пространств—морей и озер, горы, низменности, плоскогорья, реки, болота, леса и т.д.), а также и культурный ландшафт (населенные пункты, железные, шоссейные и грунтовые дороги, линейные и площадные сооружения, средства связи, границы как государственного, так и территориального внутригосударственного деления —республиканские, краевые, областные, районные и др.).
Специальные карты предназначены для специального использования, т. е. только для определенных целей; они изготовляются на основе общегеографических карт и по другим материалам. IK специальным картам относятся карты железных и грунтовых дорог, водных путей, лесных массивов, морские карты, карты геологического строения местности, карты авиационные и т. д.
В авиации применяются специальные авиационные к а о т Ы:
маршрутно-полетные и бортовые (площадные), которые используются для полетов в желаемых направлениях и по определенным воздушным линиям; магнитные — дающие представления о распределении на поверхности земли элементов земного магнетизма;
карты распределения действия гооподстиующих ветров, изобарические—указывающие распределение атмосферного давления на земной поверхности за определенный .промежуток времени и т. д.
На с п е .ц и а л ын ы х картах некоторые общегеографические элеманты изображаются наиболее (подробно и отчетливо, другие—менее 'подробно, .а потому являются вспомогательными к основным элементам. Так, например, на маршрутно-полетных картах ярко выражен рельеф местности, подробно изображены населенные пункты, дороги, реки, и все то, что облегчает ориентировку в полете и необходимо при выборе маршрута (направления) полета.
Географические карты, кроме разделения в зависимости от назначения, содержания и охватываемой территории, подразделяются еще и по масштабам (§ 16).
По масштабам карты .подразделяются на следующие:
1) крупномасштабные1)—масштаба от 1:200 000 (1 см=2 км) и крупнее;
2) среднемасштабные’—масштаба от 1:200 000 до 1:1 000 000 (1 см=10 км) и
3) мелкомасштабные—’масштаба мельче 1:1000000.
Кроме карт, применяются также план ы, представляющие собой уменьшенное изображение небольших участков земной поверхности на плоскости с наибольшей точностью графического пост роения.
I) Масштаб считается тем (мельче, чем 'больше число линейных единиц (ючл.-мегров, метров) на 'Местности 'Соответствует одной единице длины на карте, и тем (крупнее, чем это число 'меньше.
Планы составляются без всяких картографических проекций я являются копиями со съемочных и графических планшетов. Населенные пункты, рельеф местности, реки и т. п. изображаются на плане со всеми подробностями (детально).
Планы составляются в крупных масштабах—порядка 1 : 20 000, т е. в 1 см 200 м и крупнее.
По виду планы отличаются от карт только тем, что их рамки не разбиваются на градусы и минуты дуги и не имеют меридианов и параллелей. Каждый план имеет только масштабы: ш и-ротный—для снятия широты и измерения расстояний и долготный— для снятия долготы. Правила пользования масштабами планов такие же, как и масштабами карт.
§16. Масштаб карты
При изображении участков земли и предметов земной поверхности на географических картах действительные их размеры всегда приходится уменьшать по всем направлениям (по определенному правилу). Это необходимо для того, чтобы изображения предметов земли в уменьшенном .виде на карте соответствовали действительному их виду на местности. Степень уменьшения линейных размеров предметов при изображении их на карте определяется масштабом.
'Масштабом карты называется отношение бесконечно малой длины, взятой при определенной точке в заданном направ-линии, к соответствующей ей длине на земной поверхности.
Различают численный и линейный масштабы.
Численный масштаб — это дробь, в числителе которой всегда единица, а в знаменателе—число, показывающее, сколько единиц длины на местности соответствует одной единице длины этой же линии, взятой на карте.
Пример. Численный масштаб (отношение) 200 000 означает, что длине 1 см между данными точками на карте соответствует 200 000 см (2 км) длины действительного расстояния между этими же точками на местности.
Численный масштаб для удобства пользования и во избежание пересчетов при измерении расстояний на картах изображают более крупными единицами длины—линейным масштабом.
Линейным масштабом называется прямая линия, разделенная на равные, помеченные числами, отрезки, которые показывают, сколько единиц на местности содержится в одной единице на карте, например: 10 км в 1 см, 25 км в 1 см, 5 миль в I см и т. д.
Перевод численного масштаба в линейный и наоборот очень
прост; например, численному масштабу
ЦМЮ ("-О200 000)
соответствует линейный — 200 000 см в 1 см, или 2 км .в 1 см, а
'численному масштабу соответствует линейный—10 км в
J. UUu UUv
1 см, и, наоборот, линейному масштабу 10 км в 1 см соответству-
ет численный (или 1 :1 ООО 000) и т. д.
1 иии иии
Для перехода от численного масштаба к линейному необходимо знаменатель отношения численного масштаба перевести в более крупные единицы длины (в километры или мили), а при 'переходе от линейного к численному, наоборот, от крупных единиц длины перейти к более мелким—к сантиметрам или дюймам.
Численный и линейный масштабы показаны на рис. 21.
Ы Т ,,,,, f Tn,..........• А ....Л ..ПП.У**
(1'1000000; 1 см на карте соответствует Юкм на местности)
Рис. 21. Численный и линейный масштабы.
В авиации для целей самолетовождения применяются карты, построенные в масштабе метрической системы мер (в сантиметрах и километрах).
'Масштаб не является постоянной величиной для всей карты. Как увидим ниже, на картах различных проекций и особенно на цилиндрической проекции масштаб изменяется с изменением широты места на значительную величину; менее ощутимо изменение масштаба с изменением широты происходит на картах, составленных в конической или многранной проекциях.
. (Масштаб карты (численный и линейный) всегда указывается на листах карты в их заголовке или у нижнего обреза. Масштаб, указанный ша листах карты, называется главным; он определяет отношение длины линий, изображенных на карте, к действительным размерам этих же линий на местности, только в некоторых, определенных для каждой проекции, частях карты; масштабы для остальных частей карты, большие или меньшие, чем главный, называются частными масштабами.
Частный масштаб может изменяться не только при переходе от одной точки к другой, но и при данной точке .по разным направлениям.
Частные масштабы, если они применены на какой-либо карте, указываются особо. § *
§ 17. Предельная точность масштаба
Принято считать, что предельной длиной линии, которую можно определить на карте невооруженным глазом, является 0,1 мм. Линейное расстояние на местности, соответствующее длине в 0,1 мм на карте, и называется предельной точностью масштаба.
Предельная точность масштаба на картах разных масштабов различна. На картах масштаба 1 : 1 000 000 предельной точностью масштаба считают величину, равную 0,01 мм, что на местности соответствует длине 0,01 • 10 км=100 м, а для масштаба 1 : 200 000 __величину 0,01 - 2 км =0,02 км = 20 м и т. д.
Величина предельной точности масштаба всецело зависит от предъявляемых к картам требований и тщательности их изготовления.
КАРТОГРАФИЧЕСКИЕ ПРОЕКЦИИ
§ 18. Общие замечания
Как сказано выше, положение любой точки на земной 'поверхности определяется ее географическими координатами—долготой и широтой.
Если на плоскости (листах бумаги) условно изобразить меридианы и параллели соответствующими линиями, то, следовательно, по ним можно нанести линейные и площадные предметы земной поверхности по их действительным земным координатам.
Сущность картографических проекций и заключается в том, чтобы наилучшим способом изобразить на плоскости, в первую очередь, меридианы и параллели, т. е. градусную сетку земли (координатную систему). Поэтому в последующем изложении вопроса о картографических проекциях речь будет итти только о способах, при помощи которых координатная система земного шара изображается на плоскости (листах бумаги).
Всех проекций много. Однако достоинство каждой проекции определяется характером и величиной искажений земной поверхности при изображении на бумаге.
§ 19. Виды картографических проекций
Проекции, применяемые для построения географических каст, подразделяются по двум основным признакам: 1) по свойству изображения ц 2) по способу построения.
По свойству изображения проекции делятся на равноугольные, равновеликие и произвольные.
Равноугольные проекции — это такие проекции, в которых подобие фигур земной поверхности сохраняется при изображении их на карте; при этом масштаб в бесконечно малых частях карты остается неизменным по всем направлениям из данной точки и не искажаются углы между различными направлениями. Так, например, круг на поверхности земного шара изображается на карте также кругом в соответствующем масштабе. Это свойство данной проекции очень важно для целей самолетовождения.
Равновеликие проекции сохраняют только пропорциональность площадей участков земной поверхности с однозначащими на проекции, но не сохраняют ни подобия фигур, ни по-
сгоянства масштаба в разных направлениях от данной точки и в различных точках, ни равенства углов между направлениями. Карты, составленные в этих проекциях, менее пригодны для целей самолетовождения.
Произвольные проекции не сохраняют ни подобия фигур, ни равновеликости их, ни равноугольности. Зато они просты при построении градусной сетки и удобны для пользования в определенных целях.
По способу построения проекции делятся на следующие виды: 1) конические (Ламберта—Гаусса), 2) поликоническис и многогранные, 3) цилиндрические, 4) центральные (перспективные), 5) условные и др.
Выбор типа проекции ио 'характеру искажений определяется назначением карты.
Проекции наиболее распространенных в авиации географических карт рассматриваются ниже.
§ 20. Коническая проекция Ламберта—Гаусса
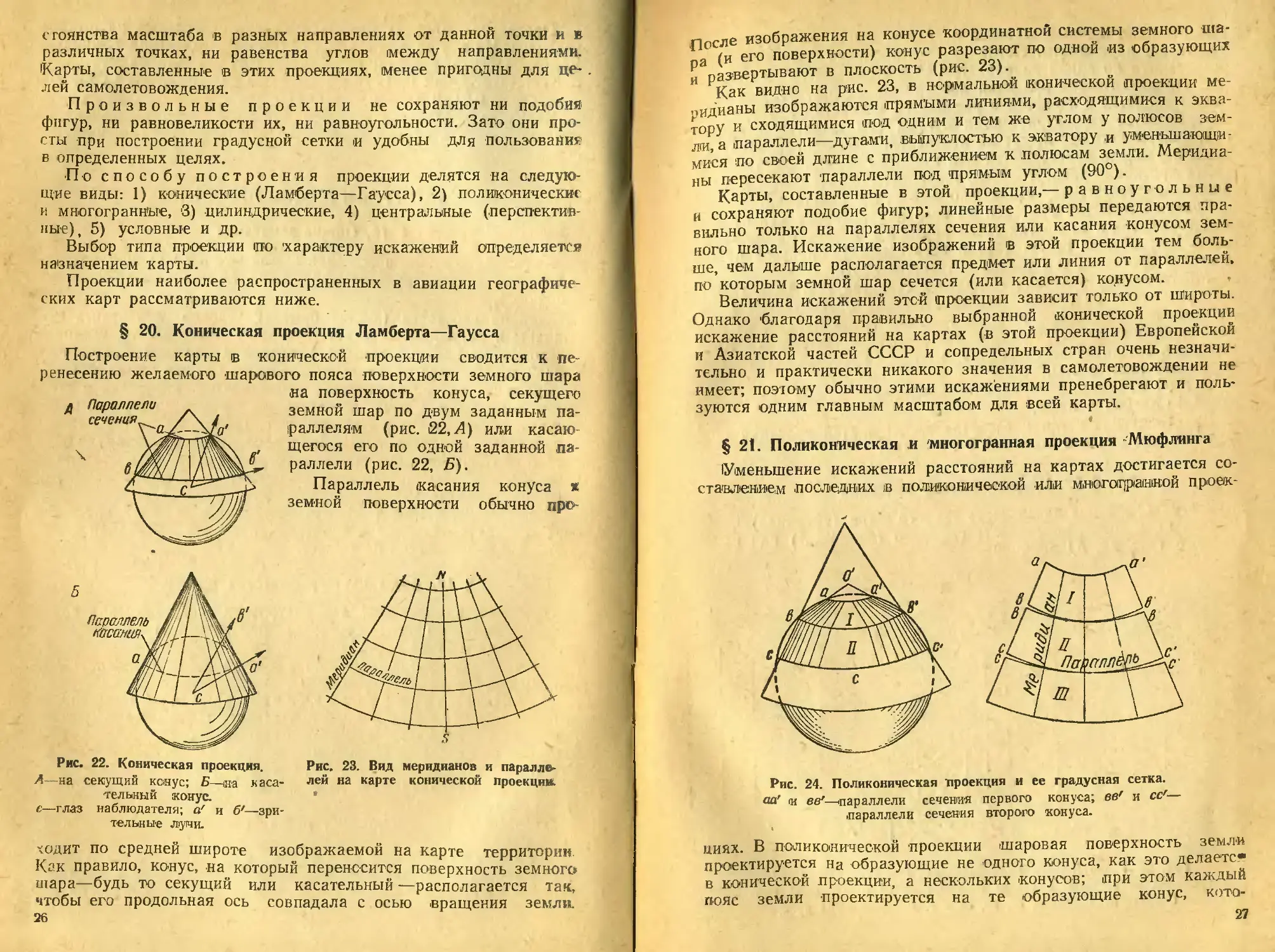
Построение карты в конической проекции сводится к перенесению желаемого шарового пояса поверхности земного шара
на поверхность конуса, секущего земной шар по двум заданным параллелям (рис. 22, А) или касающегося его по одной заданной параллели (рис. 22, Б).
Параллель касания конуса ж земной поверхности обычно про-
Рис. 22. Коническая проекция.
А—на секущий конус; Б—иа касательный конус.
с—глаз наблюдателя; а' и б'—зрительные лучи.
Рис. 23. Вид меридианов и параллелей на карте конической проекции.
ходит по средней широте изображаемой на карте территории. Как правило, конус, на который переносится поверхность земного шара—будь то секущий или касательный —располагается так, чтобы его продольная ось совпадала с осью вращения земли. 26
После изображения на конусе координатной системы земного ata-(и его поверхности) конус разрезают по одной из образующих и развертывают в плоскость (рис. 23).
Как видно на рис. 23, в нормальной конической проекции меридианы изображаются прямыми линиями, расходящимися к экватору и сходящимися под одним и тем же углом у полюсов земли, а параллели—дугами, выпуклостью к экватору .и уменьшающимися по своей длине с приближением к полюсам земли. Меридианы пересекают параллели под прямым углом (90°).
Карты, составленные в этой проекции,— равноугольные и сохраняют подобие фигур; линейные размеры передаются правильно только на параллелях сечения или касания конусом земного шара. Искажение изображений в этой проекции тем больше, чем дальше располагается предмет или линия от параллелей, по которым земной шар сечется (или касается) конусом.
Величина искажений этой проекции зависит только от широты. Однако 'благодаря правильно выбранной конической проекции искажение расстояний на картах (в этой проекции) Европейской и Азиатской частей СССР и сопредельных стран очень незначительно и практически никакого значения в самолетовождении не имеет; поэтому обычно этими искажениями пренебрегают и пользуются одним главным масштабом для всей карты.
§ 21. Поликоническая и многогранная проекция Мюфлннга
(Уменьшение искажений расстояний на картах достигается составлением последних в поликонической или многогранной проек-
Рис. 24. Поликоническая проекция и ее градусная сетка.
оо! 'И ев’—.параллели сечения первого конуса; ев' и сс'— .параллели сечения второго конуса.
циях. В поликонической проекции шаровая поверхность земли проектируется на образующие не одного конуса, как это делаете" в конической проекции, а нескольких конусов; при этом каждый пояс земли проектируется на те образующие конус, кото
рые отсекают данный шаровой иояс земли или касаются его по некоторым параллелям. После спроектирования пояса конусов разрезаются по одной из образующей и склеиваются в одно целое. Поликоническая проекция изображена на рис. 24. Все меридианы сходятся у полюсов и расходятся к экватору. Параллели изображаются эксцентрическими дугами (выпуклостью к экватору), центры которых лежат на центральном меридиане. Меридианы и параллели пересекаются под прямыми углами (90°).
Эта проекция—равноугольная, сохраняет подобие фигур и имеет небольшие искажения, что важно для целей навигации.
Главный масштаб пригоден во всех направлениях как от данной точки, так и от других точек карты и в различных направлениях. Чем больше секущих (или касательных)- конусов применяется в проекции, тем точнее получается карта.
• Многогранная проекция Мюфлинга строится так. Весь земной шар разделяют на сфероидические трапеции, ограниченные меридианами и параллелями. Каждая трапеция проектируется на плоскость, которая касается земной поверхности в центральной точке трапеции. После спроектирования каждая трапеция составляет отдельный лист карты.
В этой проекции составляются крупномасштабные карты порядка 1 : 200 000 и ниже. »
Вид градусной сетки и свойства карты в этой проекции почти, такие же, как и в конической проекции.
!§ 22. Цилиндрические проекции
В этих проекциях поверхность земного шара (сфероида) переносится на боковую поверхность секущего (рис. 25, Л) или касательного (рис. 25, Б) цилиндра.
Рис. 25. Равноугольная цилиндрическая проекция Меркатора.
А—проекция на секущий цилиндр; Б—проекция на касательный цилиндр. О—глаз наблюдателя; оа, об, ов и т. д.—зрительные лучи.
аа
Рис. 26. Центральная проекция (полярная).
А—плоскость касания; Б—градусная сетка; О—точка касания.
После спроектирования цилиндр разрезается по образующей и развертывается в плоскость. Положение цилиндра относительно оси земли подбирается так, чтобы его ось совпадала с осью земли (в других случаях при необходимости он может располагаться и по иному направлению).
На рис. 25, Б показана равноугольная цилиндрическая проекция Меркатора.
Меридианы и параллели на этой проекции изображаются прямыми взаимно перпендикулярными линиями, поэтому данную проекцию называют прямоугольной. На картах в этой проекции отрезки параллелей между меридианами имеют одинаковую длину; На местности этим отрезкам соответствуют равные расстояния и тем меньшие, чем дальше параллели находятся от экватора; отрезки же меридианов между параллелями различны—наименьшие у экватора и постепенно увеличивающиеся ближе к полюсам. Растяжение проекции в меридиа-нальном направлении от экватора сделано искусственным путем по определенному закону для того, чтобы добиться равенства искажений во всех направлениях от данной точки, так как совершенно избежать их невозможно. В прямоугольной проекции искажение рас. стояний на разных широтах — различное.
Карты, изготовленные в меркаторской проекции, име-
ют следующие свойства: 1) на данной параллели масштаб от какой-либо точки одинаков по всем направлениям и различен для точек, находящихся на других параллелях (имеющих различные широты); по мере удаления от экватора к полюсам масштаб проекции растет очень быстро: для а =60° длины вдвое больше экваториальных, и площади — вчетверо; 2) проекция — равноугольная.
§ 23. Центральная проекция (полярная)
Центральная проекция получается проектированием поверхности земли на плоскость, расположенную параллельно экватору в касающуюся одного из полюсов земли (рис. 26). В других слу-2»
чаях она может касаться и экватора, давая экваториальную центральную проекцию, «ли в произвольной точке, давая горизонтальную центральную проекцию, и т. п.
Центральная полярная проекция имеет прямые меридианы, радиально расходящиеся от точки касания плоскости—географического полюса, и параллели в виде концентрических кругов, центры которых находятся в точке схождения меридианов (в точке касания).
Вид проекции показан на рис. 26. Эта проекция не равноугольная и не равновеликая.
На экваториальной и горизонтальной проекциях параллели изображаются гиперболами и эллипсами, а меридианы—'прямыми' линиями.
КАРТЫ, ПРИМЕНЯЕМЫЕ В САМОЛЕТОВОЖДЕНИИ
В авиации применяются сухопутные, морские и специальные авиационные (аэронавигационные) карты различных масштабов в метрической системе мер длины, а именно:
1 : 50000 ИЛИ В 1 см 0,5 КМ
1: 100 000 1 я 1 W
1: 200000 — 1 2 п
1 : 500000 1 99 5
1:1000000 1 Я 10 99
1 :150 »U00 1 15
1:2 000 000 я 1 п 20
1: 2500000 1 25
1 :5 000 000 99 1 я 50 Я
Для самолетовождения над суппей и морем основными картами являются карты в многогранной цилиндрической и конической проекциях следующих масштабов:
1) 1 .-500 000 и 1 : 1000 000 — прим-еняем'ые три визуально!! ориентировке, т. е. при ориентировке по земным объектам и самолетовождении по компасу, а также радионавигации.
2) 1:1 500 000 и 1:2 000 000 (или 1 :2 500 000) —применяемые при полетах на дальние расстояния с использованием средств радиоориентировки и воздушной астрономии.
'Карты более крупных масштабов (1 : 100 000, 1 : 200 000 и т. п.) находят применение для детальной ориентировки в районе посадки и для специальных целей: сельскохозяйственных работ, фотографирования, разведки, сбрасывания грузов и т. п.
§ 24. Карта масштаба 1 : 1 000 000 («миллионная»)
«Миллионная» карта составлена в многогранной проекции (видоизмененной поликонической).
Эта карта издается в различных вариантах. В настоящее время издается государственная карта СССР, в которой учтены требования авиации и которая является основной полетной (картой тля тяжелых типов самолетов.
Градусная сетка—меридианы и параллели—нанесена через кажДый градус (1°) дуги; градусы нанесены на рамке каждого листа карты. Кроме того, для удобства и более точного определения широты и долготы данной точки на рамке каждого листа имеется дополнительная разбивка градусной сетки через каждые 5'.
Главным меридианом является Гринвичский меридиан, от которого и ведется счет всех долгот.
Предметы земной поверхности изображаются условными знаками (рис. 27) и в красках. Раскраска карты называется иллю-ыинировкой.
Масштаб
1Ю00000
ОИюму сантиметру на нарте соответствует ТО Км на местности ТО 0 10 20 30 W 50 № ТО 80 90 ТОО к»
IhhhmU .. - —J
ТЬеизонтали проведены через 200метров
Условные знаки
Населённые пункты
*»ча* -------- ~
Столичный
Ъ.
«5
Центры ССР краевые и областные Центры авт обл Прочие города
Села, деревни... / млйпроч факт рыб.
Судоходные I
(Каналы Несудоходные}
*Пос •пент
Фактории
Рыбные промысл/
ПротслоВо-охотн сп
Стойбища, чумы
Реки судоходные Отмели до Реки несудоходные
(пресн) оз Км-Энтор Ъ Пристани
<~^з0з(гсол)
_.'~’3'Пересьаапцие печки иоз&о
Многоколейная
Одноколейная
Узкоколейная
Строящаяся
Шоссе
Тронсп и почт.
Проселочная
Трапа и вьючн.
Зимняя
Государственная
Союзных ССР
Железные дороги
Грунгтвы^.. дороги '*
Краевые и областные
Окружные
Районные
Границы
болото
Камни/
Солончаки болота. Луга
Лес
Пески
Редколесье
Тдризонтали
Изобары
-«-»— Телеграф
------Телефон
—~— Подводный кабель
£ Радиостанция
X Телеграфе почт.телегест
<ым Почтовая станция Аэродром
д Фабрики и заводы
е Рудники и шахты ич Тригонометеическ. пункт ft Астрономический пункт 4 Церковь
Ъ Таможней пост
Д Памятник
*й Курганы и могилы
Е” Развалины
'о—о- Керизы
о Колодезь или хл
•== Мосты
А Пристани
ш. Порт
А Военно-морские базы
—.«ь. Пароходные рейсы Пороги и водопады Пором и перевоз
J Маяк
257 Высоты В метлах
—> Изогоны
"х Места поверхнсстн. разработок полезных ископаемых
е Рудники и шахты
Рис. 27. Условные обозначения «миллионной» карты.
«Миллионная» карта иллюминирована в 5 красках: населенные пункты, железные и грунтовые дороги, а также наименования и
мелкие реки изображены черным цветом, шоссейные дороги—красным, леса—зеленым, водные пространства и крупные реки—голубым, рельеф местности—коричневым.
'Масштаб этой карты одинаков во всех направлениях от данной и разных точек.
Карта состоит из нескольких десятков листов и охватывает всю территорию СССР и часть прилегающих к нему иностранных государств. Для удобства и быстрого подбора нужных листов карты на них имеются номера (номенклатура).
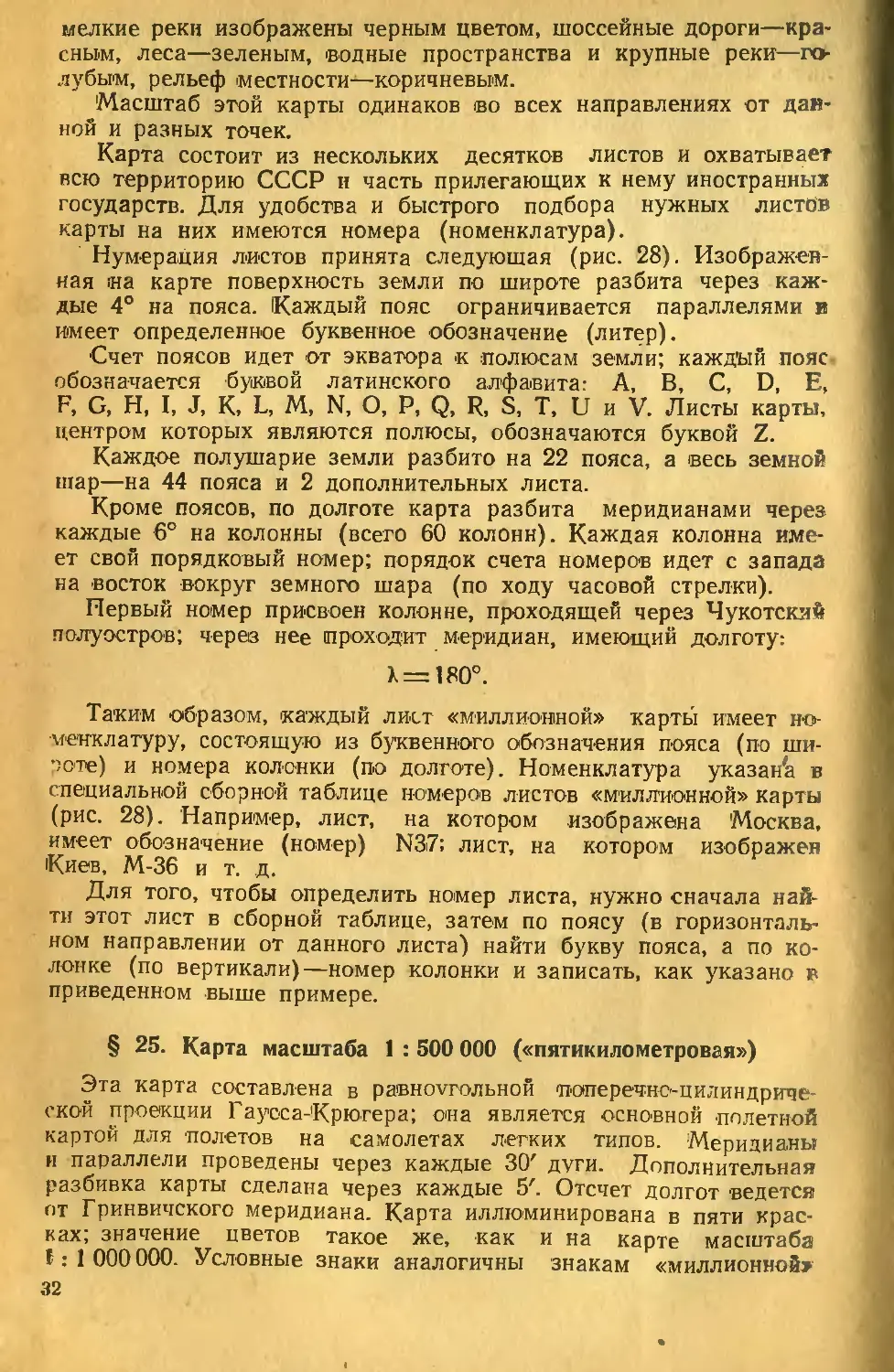
Нумерация листов принята следующая (рис. 28). Изображенная иа карте поверхность земли по широте разбита через каждые 4° на пояса. Каждый пояс ограничивается параллелями и имеет определенное буквенное обозначение (литер).
Счет поясов идет от экватора к полюсам земли; каждый пояс обозначается буквой латинского алфавита: А, В, С, D, Е, F, G, Н, I, J, К, L, М, N, О, Р, Q, R, S, Т, U и V. Листы карты, центром которых являются полюсы, обозначаются буквой Z.
Каждое полушарие земли разбито на 22 пояса, а весь земной шар—на 44 пояса и 2 дополнительных листа.
Кроме поясов, по долготе карта разбита меридианами через каждые 6° на колонны (всего 60 колонн). Каждая колонна имеет свой порядковый номер; порядок счета номеров идет с запада на восток вокруг земного шара (по ходу часовой стрелки).
Первый номер присвоен колонне, проходящей через Чукотский полуостров; через нее проходит меридиан, имеющий долготу:
Х = 180°.
Таким образом, каждый лист «миллионной» карты имеет номенклатуру, состоящую из буквенного обозначения пояса (по ши-поте) и номера коленки (по долготе). Номенклатура указанна в специальной сборной таблице номеров листов «миллионной» карты (рис. 28). Например, лист, на котором изображена 'Москва, имеет обозначение (номер) N37; лист, на котором изображен Киев, М-36 и т. д.
Для того, чтобы определить номер листа, нужно сначала найти этот лист в сборной таблице, затем по поясу (в горизонтальном направлении от данного листа) найти букву пояса, а по колонке (по вертикали)—номер колонки и записать, как указано в приведенном выше примере.
§ 25. Карта масштаба 1 : 500 000 («пятикилометровая»)
Эта карта составлена в равноугольной поперечно-цилиндрической проекции Гаусса-Крюгера; она является основной полетной картой для полетов на самолетах легких типов. Меридианы и параллели проведены через каждые 30' дуги. Дополнительная разбивка карты сделана через каждые 5'. Отсчет долгот ведется от Гринвичского меридиана. Карта иллюминирована в пяти красках; значение цветов такое же, как и на карте масштаба 1:1 000000. Условные знаки аналогичны знакам «миллионной»
Рис. 28. Сборная таблица номенклатуры листов карт масштабов 1 :1 090 000 и , > 500 000,
карты, за исключением населенных пунктов, которые даны в плане. Масштаб карты—один для всех направлений. Она более подробно передает изображаемую поверхность земли, чем «миллионная» карта.
Как видно на рис. 28 и 29, каждый лист «миллионной» карты средним меридианом и средней параллелью делится иа четыре части, каждая из которых соответствует листу «пятикилометровой» карты и обозначается буквой русского алфавита: А, Б, В, Г; при этом буква А присвоена левой верхней части, Б—правой верх ней части, В—левой нижней и Г—правей нижней. Номера листов
«пятикилометровой» карты состоят из двух букв и цифры; первая
буква с цифрой составляет номер листа «миллионной» карты в целом, а буква в конце номера ту часть его, которая изображена на данном листе карты масштаба 1 : 500 000.
Например, лист карты масштаба 1 : 1 000 000, на котором обозначен Ленинград (0-36), имеет четыре листа карты в масштабе 1: 500 000 с соответствующими обозначениями: 0-36-А, 0-36-Б, 0-36-В и 0-36-Г.
§ 26. Карта масштаба 1 :200 000 («двухкилометровая»)
Карта составлена в многогран-
ной проекции. Меридианы проведе- Рис 29. Номенклатура листов
НЫ через каждые 15 дуги, а па- карты масштаба 1 : 500 000.
раллели — через каждые 10'.
Счет долгот ведется от Гринвичского меридиана. Иллюминирсвка
произведена в пяти красках, назначение которых такое же, как и на карте миллионного масштаба. Масштаб одинаков во всех направлениях от данной точки.
Карта подробно передает все предметы изображенного на ней участка земной поверхности.
Номенклатура листов карты показана на рис. 30, А.
6
1-бис Л. 1 ЖШ,
3-бис л.З Л.4
5-бис л. 5 лВ
Рмс. 30. Схема расположения листов карты.
Л—масштаб 1 : 200 000; Б—масштаб 1 : 2 000 000.
Каждый лист «милионной» карты заключает в себе 18 листов карты масштаба I : 200 000, ограниченных по широте 0° 40', а по долготе 2°. Каждый лист имеет свой порядковый номео, обозначенный римской цифрой. Счет ведется с левой верхней части по горизонтали. Например, лист «миллионной» карты, где находится Минск, обозначается N-35-I, далее N-35-II, N-35-III и так д» N-35-XVIII.
На картах южных районов, где расстояния между меридиа нами велики, 1 лист «миллионной» карты разбивается не на 18, а на 36 листов «двухкилометровой» карты; при этом их номенклатура остается прежней, но каждый лист разделяется на две части: западную и восточную половины.
Эта карта предназначена для ведения детальной ориентировки.
§ 27. Карты масштабов 1 : 2 500 000 и 1 : 2 000 000
Удобный масштаб и незагруженность этой карты специальными обозначениями делают ее вполне пригодной для целей ра-диона)В1И1гации и ведения общей ориентировки. Карта составлена в конической проекции. Меридианы и параллели проведены через 2°.. Отсчет долгот ведется от Гринвичского меридиана. На карте особенно отчетливо изображены пути сообщения, реки и (условными знаками) более крупные населенные пункты. Карта состоит аз 6 листов, порядок расположения которых показан на рис. 30, Б; в последнее время нумерация листов изменена до 12. Она охватывает территорию Восточной Европы и Урала (по г. Свердловск включительно). В настоящее время издаются листы и восточной части СССР с сопредельными странами. Карта иллюминируется гремя цветами.
В настоящее время издается специальная бортовая карта масштаба 1 : 2 000 000, которая заменяет карту масштаба 1 : 2 500 000.
§ 28. Изображение рельефа местности на картах
На картах различных изданий рельеф местности изображается по-разному: или горизонталями, или штрихами, или гипсометрически, или отмывкой.
В практике наибольшее применение имеет способ изображения рельефа горизонталями. Этот способ состоит в том, что рельеф местности изображается кривыми непрерывными замкнутыми линиями, которые соединяют точки местности, имеющие одинаковую высоту над уровнем моря. Эти кривые, называемые горизонталями, проводятся через определенные промежутки и оцифровываются соответственно значениям высот. Расстояние по высоте между горизонталями называется высотой сечения, которая в зависимости от масштаба карты колеблется от нескольких метров до десятков и даже сотен метров.
Чем ближе располагаются горизонтали одна к другой, тем
местность круче я чем они дальше друг от друга, тем она более -ллогая. Изображения рельефа местности горизонталями показало На рис. 31, А,
Способ штриховки заключается в изображении рельефа короткими черточками различной толщины, проводимыми по направлению наибольшей крутизны скатов. Степень крутизны покатостей определяется отношением толщины штриховки к величине промежутка между ними. Чем больше крутизна ската, тем толще штрихи и тем меньше промежутки между ними; горизонтальные площадки не заштриховываются. Вершины гор, хребты, лощины, уступы и т. п. обозначаются соответствующими начальными буквами, у которых .цифрами указывается их высота над уровнем моря в метра» (футах).
Изображение рельефа штрихами показано на рис. 31, Б.
Рис. 31. Изображение рельефа местности.
А—горизонталями: Б—штрихами;
ла', вв', сс\ dd', ее’, tut', kk', //'—горизонтальные секущие плоскости,
й—вершина, У—уступ, X—хребет, Л—лощима.
С—седловина.
6,
°' /ч Да t *
Изображение рельефа гипсометрией состоит • том, что различные высоты покрываются красками различного тома в сочетании с горизонталями. Для определения высоты по тонам краски каждая карта, на которой рельеф изображен гипсометрией, имеет специальную шкалу высот по тонам краски.
Способ отмывки заключается в том, что изображаемый на карте рельеф покрывается тенью, которая сгушается • тех местах, где скаты круче, и делается светлее там, где окаты •ложе.
§ 29. Определение на картах долготы и широты данной точки (пункта)
Для того, чтобы определить по карте долготу желаемой точки (пункта), необходимо сперва найти ее на карте, затем раствором циркуля или (масштабной линейкой измерить вдоль параллели расстояние от точки до ближайшего меридиана. Полученное расстояние отложить на рамке карты от меридиана, к которому это расстояние измерялось—в сторону расположения точки (внизу или вверху рамки на той стороне ее, к которой ближе расположена данная точка—пункт). Искомое значение долготы читается в полученной точке на рамке карты (рис. 3'2).
Рис. 32. Определение долготы и широты точки (пункта) на карте.
Ивкомые координаты дер. Нижняя Слобода: ? = 53° 15'сев. широты; X = 34°22' вост. ДОЛЮ1Ы. тккомь.е координаты мест. Ровно: <с = 52°17‘ сев. широты X = 35°08' вош. долготы.
Определение широты производится аналогичным порядком, т. е. сначала вдоль .меридианов измеряется расстояние от данной точки до ближайшей параллели, которое откладывается затем на одной из боковых рамок карты от этой параллели в направлении расположения течки. Искомая широта читается в полученной точке на рамке карты.
Отсчет широты и долготы ведется в следующем порядке: сначала читаются градусы и десятки минут, стоящие у параллели или меридиана; затем определяются минуты по дополнительной разбивке градусной сетки карты, которые прибавляются к отсчитанным ранее величинам, если данная точка расположена севернее (выше) параллели или восточнее (правее) меридиана, от ко-36
ыХ ведется отсчет минут, или вычитаются, если она лежит (Ожиее (ниже) данной параллели и западнее (левее) данного меридиана.
Отсчитанные величины необходимо обязательно сопровождать соответствующим наименованием: северной широты (с. ш.), юж ной широты (ю. ш.), восточной долготы (в. д. или -)-), западной долготы (з. д. или —).
Кроме указанного выше способа, широту и долготу желаемого пункта можно определять и другим путем, а именно: при помощи линейки от данной точки к рамкам карты проводятся линии, параллельные ближайшей параллели или меридиану; в точках пересечения этих линий с рамками карты читают искомые величины широты и долготы.
Если найденная долгота отсчитана от Пулковского или другого первоначального меридиана, то ее следует перевести в долготу от Гринвичского меридиана.
В табл. 1 указаны величины со знаками, которые необходимо учитывать при переводе долгот, отсчитанных от других первоначальных 'меридианов, к долготе от Гринвичского меридиана. Знаки (+) или (—) указывают на расположение начальных меридианов относительно друг друга т. е. знак (+) обозначает, что начальный меридиан расположен восточнее данного, а знак (—) — западнее. Правило перевода долгот следующее: если долгота данной точки от Пулкова восточная, то для перевода ее* от Гринвича необходимо прибавить к ней 30°2СГ (долготу Пулковского меридиана от Гринвичского), а если западная, то из 30°20' необходимо вычесть эту долготу, в результате чего получается восточная гринвичская долгота.
Таблица 1
Наименование искомых меридианов s' Наименование начальных , меридиано* Гринвич- ский Пулков- ский Парижский Ферро
Гринвичский 0°00'00" -}-30о19'38" + 2°20'13" —17°39'46'
Пулковский —30°19'38" O'WOO" —27°59'24" —47°50'24'
Парижский . - 2°20'13'' —27°59'24" 0°00'00" —20°00'00'
Ферро +17°39’46" + 47°50'24" 4-20°00'03" — 0°00'00'
В общем случае правило будет гласить так: для перевода долготы точки, отсчитанной от какого-либо начального меридиана, < долготе от Гринвичского, необходимо к восточной долготе этой
точки прибавить долготу начального меридиана от Гринвичского или от данной западной долготы — отнять ее.
Пример I. Дано: X от Пулк. 3°Е; требуется определить Хг/>.
Решение: \гр = + (+ 30° 19* 38") =3 + 30° 19' 38"= -р 33° 19' 37",
т. е. Хгр = 33° 19’37"Е или 33°2 'Е.
П о и мер 2. (ано: долгота точки от меридиана Ферро 3°Е, т. е. -}-Зе требуется пер веси в долготу от Гринвйчско о м' ридиана.
Решение: Хгр = \ферро + ( - 17° 39' 46") = ( + 3°) + ( - 17° 39' 46") = = 3° - 17° 39' 46" = — 14° 39' 46'', т. е. Хгр = 14° 39' 46"W.
Пример 3. Дано: X от Пагнж. 3°Е; требуепн определить Хгр.
Ре ше ни. : Хгр = ХпарижД-(+ 2° 20' 13")= 3° + 2е 30' 13"= ~г5°30' 13" т. е. Хгр = 5° 30' 13"Е или 5°ЗЭ'Е
Перевод долгот, отсчитанных от Гринвичского меридиана ж долготам других начальных меридианов, производится в обратном порядке, т. е. к восточной долготе от Гринвичского меридиана следует прибавить западную или вычесть восточную долготу данного начального меридиана от Гринвичского, а из данной западной долготы вычесть западную или прибавить восточную долготу данного начального меридиана, отсчитанную от Гринвичского меридиана.
§ 30. Измерение расстояний на картах
Измерение расстояний на картах производится специальной аэронавигационной или обыкновенной масштабней линейкой, циркулем или курвиметром. На картах, употребляемых при полетах над сушей (конических проекций), расстояние может измеряться любым из перечисленных инструментом, а на морских картах (в проекции Меркатора) — только циркулем или линейкой.
СерокаВерсткп
81
йимиг, а а а й й аж sgssss&s ТТТК
Рис. 33. Масштабная аэронавигационная линейка.
Масштабная аэронавигационная линейка, как видно на оис. 33, имеет 5 шкал соответственно масштабам наиболее употребительных карт: 1 : 420 000, 1 :200 000, 1 .- 500 000, 1 : 1 000 000, 1:2 500 000. Шкалы построены таким образом, что независимо от системы мер длины масштаба карты все расстояния получаются в метрической системе мер — в километрах. Измерение расстояний на карте производится той шкалой линейки, которая соответствует масштабу данной карты.
Длина измеряемой прямой линии получается при непосредственном приложении к этой линии масштабной линейки; длина же ломаной линии может быть получена только суммированием 88
зин прямых участков, составляющих ломаную линию. Измерение кривых линий можно производить масштабной линейкой или курвиметром (рис. S4). При измерении линейкой ее поворачивают вдоль кривой линии, как показано на рис. 35; однако при этом необходимо следить, чтобы линейка всегда оставалась касатель-
ной к измеряемой линии
Рис. 34. Курвиметр.
и не скользила вдоль ее.
Чтобы измерить длину кривой линии курвиметром, последний нужно прокатить колесиком вдоль данной линии и искомую длину прочесть на шкале прибора. При этом необходимо следить, чтобы колесико не скользило, а сам прибор сохранял вертикальное положение и двигался плавно вдоль измеряемой линии.
Рис. 35. Измерение длины кривых линий масштабной линейкой.
а. б, в— различное положение масштабной линейка..
При пользовании циркулем измеряют его раствором расстояния между точками (пунктами) на карте с последующим определением по масштабной линейке (рис. 36).
Во всех случаях для большей точности измерения расстояния рекомендуется проделывать измерения несколько раз (два-три) и брать среднюю длину из получившихся отсчетов.
Измерение расстояний на морских картах (в проекции Меркатора) производится циркулем в градусах дуги с последующим переводом в морские мили и километры. Необходимо всегда помнить, что на картах в проекции Меркатора вследствие изменения масштаба в зависимости от широты места «величину» морских миль надо брать в той же широте, в которой находится измеряе мое расстояние. Измерение расстояний производится по делениям градусной сетки, которые имеются на боковых рамках карты.
Для того чтобы измерить длину линии (пути) на карте в цилиндрической проекции, необходимо взять ее раствором циркуля или линейкой на карте и затем перенести на боковую рамку кар-
ты таким образом, чтобы середина взятого расстояния пришлась i на средней широте данной линии (данного пути); после этого I читают градусы и минуты дуги у меток измеренного расстояния и переводят их в морские мили, а при надобности и в километры. /
Рис. 36. Измерение расстояния раствором циркуля.
Одна минута дуги равна 1 морской миле, или 1,852 км. Таким образом, п' дуги = п морских миль = п морских миль X 1,852 км, т. е. чтобы перевести морские мили в километры, необходимо число морских миль умножить на 1,852, а чтобы перевести километры в морские мили, число километров разделить на 1,852.
Рис. 37. Измерение расстояний на карте прямоугольной проекции.
Практически широту средней точки измеряемой линии удобнее всего находить делением этой линии циркулем на две равные ча-ч:)
я, с последующим сносом ее середины на боковую рамку карты/затем от полученной точки вниз и вверх отложить циркулем половины отрезков измеряемой линии и найти минуты дуги, заключенные между крайними точками (рис. 37).
Длину линий на картах в цилиндрической проекции можно определять также по формуле:
5 -------— морских (МИЛЬ,
»_us а
тле: „
S — длина искомой линии в морских милях;
и ?2 — широты концов линии в минутах дуги;
а — угол между меридианом и данной линией, отсчитываемый от северного направления меридиана по ходу часовой стрелки.
Это выражение, умноженное на 1,852 км, дает длину измеряемой линии в километрах, т. е.
------------- ф, ’ 5=1,852 —-----------------------l1 км.
cos а
§ 31. Определение направлений на картах
Для совершения полета между двумя какими-либо пунктами необходимо знать его направление относительно стран света. Это направление определяется углом (азимутом), заключенным между меридианом начального пункта (точки вылета) и направлением от него на другой пункт (точку прилета), называемым линией пути.
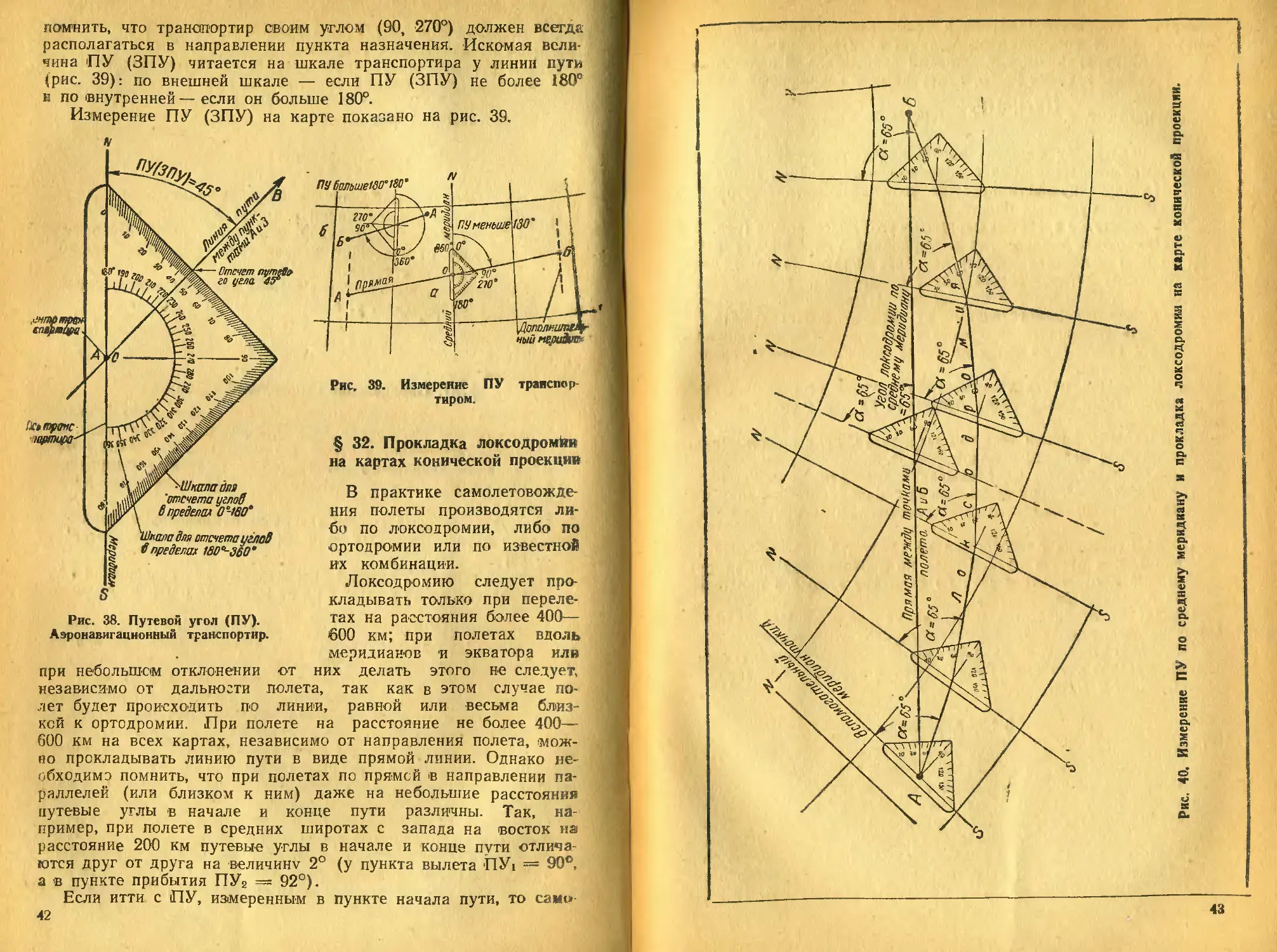
Угол, заключенный между северным направлением меридиана ц линией пути, называется путевым утлом и обозначается ПУ (рис. 38).
Путевой угол ПУ, заранее рассчитанный для совершения поле та, называется заданным путевым углом и обозначается ЗПУ.
Измерение ПУ (или ЗПУ) на карте производится с помощью специальных аэронавигационных или обыкновенных транспортиров. Специальный аэронавигационный транспортир показан на рис. 38. Этим транспортиром измеряются углы от 0 до 360°.
Как видно на рис. 38, транспортир имеет вид равнобедренного треугольника с двумя угловыми шкалами. Внешняя шкала (oi 0 до 180°) предназначена для измерения углов, имеющих величину в пределах 0—180°, а внутренняя (180—360°)—для измерения углов, имеющих величину в пределах 180—360°.
Для измерения путевого угла (ПУ и ЗПУ) на карте необходимо сперва соединить пункты отбытия и прибытия прямой линией, а затем в точке пересечения этой линии с географическим (истинным) меридианом наложить транспортир так, чтобы его центр совпал с этой точкой, а линия, соединяющая обозначения О—180°, 180 — 360° и проходяшая через его центр (диаметральная линия), совпала с направлением меридиана; при этом следует
помнить, что транспортир своим углом (90, 270°) должен всегда располагаться в направлении пункта назначения. Искомая величина ПУ (ЗПУ) читается на шкале транспортира у линии пути (рис. 39): по внешней шкале — если ПУ (ЗПУ) не более 180° и по внутренней—если он больше 180°.
Измерение ПУ (ЗПУ) на карте показано на рис. 39.
и
Рис. 38. Путевой угол (ПУ). Аэронавигационный транспортир.
при небольшом отклонении от
§ 32. Прокладка локсодромии на картах конической проекции
В практике самолетовождения полеты производятся либо по локсодромии, либо по ортодромии или по известной их комбинации.
Локсодромию следует прокладывать только при перелетах на расстояния более 400— 600 км; при полетах вдоль меридианов -и экватора или них делать этого не следует.
независимо от дальности полета, так как в этом случае полет будет происходить по линии, равней или весьма близкой к ортодромии. При полете на расстояние не более 400— 300 км на всех картах, независимо от направления полета, можно прокладывать линию пути в виде прямой линии. Однако необходимо помнить, что при полетах по прямей в направлении параллелей (или близком к ним) даже на небольшие расстояния путевые углы в начале и конце пути различны. Так, например, при полете в средних широтах с запада на восток на расстояние 200 км путевые углы в начале и конце пути отличаются друг от друга на величину 2° (у пункта вылета ПУ1 — 90°, а в пункте прибытия ПУ2 — 92°).
Если итти с ПУ, измеренным в пункте начала пути, то само
Рис. 40. Измерение ПУ по среднему меридиану и прокладка локсодромии на карте i яической проекции.
лет будет отклоняться вправо и не попадет в конечный пункт. Поэтому полет необходимо выполнять по ПУ, измеренному по среднему меридиану между данными пунктами, или получить его из полусуммы путевых углов, измеренных у начального и конеч
ПУ. + ПУ2 него пунктов, т. е.-----------
= ПУ.
При полетах на большие расстояния (больше 400 — 600 км) прокладывать локсодромию необходимо в следующем порядке:
1. На карте провести простым карандашом тонкую прямую линию между пунктами полета.
2. Измерить по среднему меридиану угол локсодромии (рис. 40).
3. Приложить транспортир к меридиану точки вылета (центром на нее) и поставить точку на карте против того деления транспортира, которое соответствует измеренному среднему углу локсодромии. Если через точку вылета меридиан не проходит, нужно провести вспомогательный, от которого и откладывать ПУ.
4. Снять транспортир и провести тонкую линию от точки вылета через нанесенную точку на карте до пересечения со следующим меридианом.
5. Приложить центр транспортира к точке пересечения этой линии с меридианом и снова поставить на карте точку так, как сказано в п. 3.
6. Соединить линией точку на меридиане, куда прикладывался транспортир, с найденной новой точкой.
7. Последовательно прикладывая транспортир к каждому новому пересечению линии локсодромии с меридианом и проводя ее .дальше до другого, нанести всю локсодромию до конечной точки полета.
После нанесения локсодромии ее следует четко обвести карандашом, как линию пути. Полет по проложенной линии пути необходимо производить с ПУ, по величине которого проложена данная локсодромия.
Прокладка локсодромии показана на рис. 40. Как видно из этого рисунка, локсодромия имеет выпуклость к экватору.
Если локсодромию и ортодромию проложить на картах различных проекций, то они будут иметь вид, как показано на рис. 41, А, Б и В
§ 33. Аэролоции
Для детального и всестороннего изучения воздушных трасс составляются аэролоции воздушных линий.
«Аэролоция данной воздушной линии является аэронавигаци онным пособием, в котором даются описание воздушной линии или района полета, аэропортов и аэродромов, их оборудования и другие необходимые сведения с теми специфическими подробностями, которые необходимы экипажу самолета (летчику, штурману) для обеспечения безопасного и регулярного самолетовождения на воздушных линиях» (Ч редин. Аэролоция, изд. 1940 г.). 44
В аэролоциях подробно указываются естественно-природный и ультурный ландшафты: общая характеристика участков маршрута или района полета, характерные ориентиры по линии полета и рельеф местности, условия навигации в различное время года
Рис. 41. Вид ортодромии и локсодромии на картах различных проекций.
А—конической; Б—прямоугольной; В—центральной.
и суток, описание и кроки ’) аэродромов, аэропортов и посадочных площадок; условия подхода к ним (препятствия), магнитные явления, климатологические сведения (характеристика температуры, туманов, облачности, гроз, ветров, снегового покрова и т. п.) и организация метеорологического обслуживания полетов, места расположения средств земного обеспечения самолетовождения (ЗОС) — (приводных радиостанций, радиопеленгаторов, радиомаяков, светомаяков и т. п.) данные их работы, описание районов благоприятных и неблагоприятных для производства вынужденных посадок и т. п.
Аэролоция дает возможность экипажам самолета при подготовке к полету изучать все особенности самолетовождения на различных этапах маршрута или района полета.
Кроки — набросок плане местности.
§ 34. Полетно-маршрутные карты
Для удобства работы .в полете при следовании по определенным трассам составляются специальные полетно-маршрутные карты. Эти карты являются хорошим аэронавигационным материалом для экипажа как при подготовке к полету (изучении маршрута, составлении плана полета), так и при выполнении его для выхода >на путь следования, для контроля пути >и ведения ориентировки в полете, а также для производства разного рода аэронавигационных расчетов.
Полетно-маршрутные карты, составляемые по подробным и достоверным источникам, состоят из следующих частей:
1) собственно полетно-маршрутной карты, на которой, кроме специальной аэронавигационной нагрузки (линии пути, путевых углов, магнитного склонения, расстояний и т. д.), наносятся данные о наземном аэронавигационном оборудовании (светомаяках и радиосредствах), аэродромная сеть и посадочные площадки;
2) карт окрестностей конечных портов данной воздушной линии в крупном масштабе;
3) профиля трассы. ; ।
Ло сш ниШ /• / ООО 000
Для облегчения ведения радиосрентировки во время полета на этих картах, как и на других, можно наносить предвычисленные радиопеленги и другие сведения, которые могут понадобиться в полете.
Полетно-маршрутные карты обычно изготовляются в специальной проекции Крюгера в масштабе 1 : 1 000 000 или 1:500 000 (последний масштаб наибольшее распространение получил только в последние годы), а районы конечных пунктов — в более крупном масштабе.
Ширина полосы охватываемой территории вдоль линии пути берется от 100 до 200 км в обе стороны. Карты обычно иллюминированы несколькими цветами.
Образец полетно-маршрутной карты показан на рис. 42.
Полетно-маршрутные карты, как и другие карты, применяемые в авиации, в виду происходящего изменения культурного и естественного ландшафтов, подлежат периодической пооверке, уточнению и дополнению путем организации специальных воздушных облетов и наземных изысканий по соответствующим воздушным линиям.
ГЛАВА III
АВИАЦИОННЫЕ ПРИБОРЫ И ИНСТРУМЕНТЫ
Для успешного и безопасного выполнения всякого полета, независимо от его дальности и условий ориентировки, экипажу самолета всегда необходимо знать высоту самолета над земной поверхностью, его горизонтальную и вертикальную скорость передвижения относительно окружающего воздуха и земли, направление полета, местонахождение самолета относительно пунктов взлета и предполагаемой посадки, положение осей самолета относительно плоскости горизонта, а также режим работы моторов и исправность агрегатов самолета.
Перечисленные элементы называются аэронавигационными элементами полета и определяются или высчитываются в полете авиационными приборами и инструментами.
Авиационные приборы и инструменты по своему назначению подразделяются на две группы: 1) пилотажно-навигационные приборы и штурманские инструменты (собственно аэронавигационные) и 2) кснтрольно-моторные.
Пилотажно-навигационные приборы и инструменты предназначены для определения с достаточной для практических целей точностью основных аэронавигационных элементов полета самолета, а именно: высоты самолета над земной поверхностью, его горизонтальной и вертикальной (подъема и спуска) скорости передвижения относительно окружающего воздуха и земли, направления полета (курса) относительно стран света и положения осей самолета относительно плоскости горизонта, а также характеристики атмосферных условий, в которых осуществляется полет.
Контрольн о-м оторные приборы предназначены для контроля работы винтомоторной группы и агрегатов самолета и для облегчения или механизации работ, которые экипажу поихо дится производить во время полета.
Ко всем авиационным приборам и инструментам предъявляются следующие основные требования:
1) надежность работы (под надежностью работы приборов подразумевается правильность их показаний с желаемой точностью при всех могущих встретиться в полете положениях вла
сотрясениях самолета и других факторах — изменениях температуры, влажности и т. д.);
2) точность показаний;
3) небольшие габарит и вес.
§ 35. Пилотажно-навигационные приборы и инструменты
К пилотажно-навигационным приборам и инструментам отмо-сятся:
1) высотомеры, указывающие высоту полета;
2) указатели воздушной скорости;
3) вариометры — указатели скорости подъема и спуска самолета; X
4) компасы, указывающие курс самолета, т. е. направление полета относительно стран света;
5) визиры для определения ветра в полете, углов сноса самолета, вертикальных углов, а также других специальных целей: для сбрасывания парашютов с грузом, аэрофотосъемки и т. п.;
6) авиачасы для контроля времени полета и ведения ориентировки определением пройденного самолетом пути;
7) аэротермометры для определения температуры окружающего самолет воздуха, знание которой необходимо при определении поправок к показаниям приборов и характеристики окружающей атмосферы (возможности обледенения и т. п.);
8) авиасекстанты для измерения высот светил;
9) радиоприборы: связные радиостанции ,и радиокомпасы (радиополукомпасы) — для ведения ориентировки по радио;
10) приборы гироскопической группы: указатель поворота и скольжения (УП), авиагооизэнт (АГ), гиромагнитный компас (ГМК), гирополукомпас (ГПК), которые облегчают работу экипажа самолета в воздухе и позволяют совершать полеты в сложных метеорологических условиях (при отсутствии или плохой видимости земных объектов);
11) счетные аэронавигационные инструменты и приборы: ветрочет, аэронавигационная линейка, масштабная линейка, транспортир, специальные номограммы для учета ветра в полете, расчета радиопеленгов и т. д.
Ниже дается описание принципа работы и устройства, а также пользование основными аэронавигационными приборами и инструментами.
Для удобства эксплоатации все авиационные приборы, в том числе и высотомеры, принято изготовлять по стандартным образцам >и в стандартных (одинаковых размеров) корпусах.
Стандартизация значительно упрощает и удешевляет изготовление приборов, а также облегчает их эксплоатацию.
§ 36. Измерение высоты полета
Высота полета самолета измеряется приборами, которые называются высотомерами.
Принцип устройства высотомеров зависит от метода, который положен в основу измерения высоты. Различают четыре метода измерения высоты: 1) барометрический, 2) акустический (эхолоты), '3) отраженных радиоволн (радиовысотомеры) и 4) электрический.
В настоящее время в практике самолетовождения наибольшее распространение получил барометрический метод измерения высоты полета как наиболее простой и доступный (он подробно рассмотрен в § 37).
Акустический (звуковой) метод измерения высоты полета основан ив способности звука отражаться от земной поверхности. Чтобы понять приицин работы высотомеров, основанных на этом методе, представим себе на самолете такое устройство, один из приборов которого через определенные промежутки времени издает звук (например, сирена), а другой — улавливает его (звукоулавливатель). Звук, издаваемый первым прибором, отойдет от самолета, дойдет до земной поверхности ,в месте пролета, отразится от нее > через нексторый промежуток времени дойдет до летящего самолета, где ов будет принят вторым прибором — звукоулавливателем.
Средняя скорость распространения звука в земной атмосфере считается равной 332 м/сек; поэтому нетрудно ‘ спреде лить, что промежуток .времени с момента отправления звука от самолета до его принятия звукоулавливателем будет тем больше, чем выше находится самолет над земиой поверхностью, ,и тем меньше, чем меньше (высота (полета. Тамим образом т» промежутку времени между моментами отправления звука от самолета и его улавливания звукоулавливателем и по скорости распространения звука в земной атмосфере можно определять высоту полета (рис. 43).
Л Рас. 43. Принцип измерения высоты эхолотом.
А—точка момента отправления звука от самолета; Б—точка момента улавливания звука звукоулавливателем самолета; С—скорость распространения звука в земной атмосфере; I —время, прошедшее от момента отправления до момента приема звука иа самолете; / —путь самоле-; та относительно земли за время t W —скорость самолета относительно земли; . —путь прохождения звука t за время ! Н—высота полета самолета (искомая).
Из рассмотрения прямоугольного треугольника Л8Б следует, что:
^«ст = 4]^С2 + 1-
*' Приборы для измерения истинной высоты полета самолета, основанные «а акустическом методе, называются эхолотами. В практике эти приборы уже применяются, го в виду несовершенства и громоздкости широкого распростра-•нения не имеют. •
Измерение высоты полета самолета методом отраженных радиоволн производится так же, как и акустическим методом, t той лишь разницей, что в этом случае отправляются и принимаются не Звуковые волны, а радиоволны (электромагнитные)
Основной, частью прибора является гтриемо-;излучающая радиоаппаратура Высотомеры, основанные на этом принципе, называются радиоальтиметрами, или просто радиовысотомерами.
-В настоящее время радиовысотомеры начинают широко внедряться на современных типах самолете®.
Высотомеры, основамкые на электрическом прин ците измерения высоты щри весовой его ялотщюсти 1,226 себя tut оправдали и забракованы. Этот метод заключается в измерении электрической емкости .между землей и самолетом, величии которой изменяется в зависимости от высоты самолета над земиой 1поверхиостью.
§ 37. Высотомеры барометрические
Атмосферное давление воздуха на какую-либо поверхность Определяется весом его столба над площадью, для которой
определяется давление.
tf”t13.7*
100м-0^5"
Ct- -^14,35а
100м-0,65°
d-J- f- 15—
Рис. 44. Изменение атмосферного давления и температуры с высотою.
Разность высот, при которой
В общем случае на уровне моря давление воздуха на площадь в 1 см2 считается равным 1033,3 г (1 кг 0,33 г), что соответствует высоте ртутного столба 760 мм, .поддерживаемой этим давлением в барометрической трубк^ при температуре +15°С и весовой плотности воздуха 1,226 кг/м2.
Такое состояние атмосферы называется одной физической атмосферой нормального дня (Международной стандартной атмосферой) .
С увеличением высоты над уровнем моря атмосферное давление уменьшается, и, наоборот, с уменьшением высоты давление увеличивается. Изменение давления в -зависимости от высоты происходит на величину веса столба воздуха, заключенное® между первоначальной и данной высотой (рис. 44).
давление изменяется на 1 мм
рт. -ст., называется барометрической ступенью. Барометрическая •тупень у земли равна примерно 11 мм. С увеличением выс-в*уы
би
барометрическая ступень» увеличивается. Кроме того, с изменением высоты понижается и температура на величину—0,65° на каждые 10'0 м. Это величина понижения температуры (—0,65°) на каждые 100 м высоты называется т ем-це р а т у р н ы м градиентом и обозначается знаком t*. Однако необходимо помнить, что независимо от высоты изменение атмосферного давления может происходить и под влиянием изменения плотности воздуха, которая находится в непосредственной зависимости от его температуры, влажности и других факторов.
Чем больше плотность воздуха, тем быстрее (резче) происходит изменение атмосферного давления с высотою и, наоборот, чем она меньше, тем медленнее это изменение.
Так как плотность воздуха при равных прочих условиях зависит от его температуры, то, следовательно, в холодном воздухе (зимой) уменьшение давления с высотой происходит быстрее, чем в более теплом воздухе (летом).
Зависимость изменения атмосферного давления с изменением высоты и температуры выражается следующей формулой:
/ t,, 4- *ч\ Р„
Н= 18 400 114- 0,0037 1 1g м.
, где:
Н — высота в метрах; i
Ро—атмосферное давление у земли;
Р — атмосферное давление на высоте Н;
18 400 — переводной (постоянный) коэфициент;
tn — температура воздуха у земли;
tn— температура воздуха на высоте Н;
14- 0,0037 — поправка на температуру (температурный
бином).
Поправки другого рода могут учитываться по мере необходимости, когда требуется более точное вычисление высоты.
По этой формуле можно определять высоту п-о известным Ро и Р и давление иа какой-либо высоте, если известно давление у земли. Практически зависимость величины атмосферного давления <>т высоты не высчитывается >по формуле, а находится по специальной таблице, которая называется гипсометрической таблицей.
Из приведенных основных положений можно сделать следующее заключение: в виду существования определенной загаиаим'остм (между величиной атмосферного давления воздуха и высотой для 'определения данной высоты достаточно измерить атмосферное давление на ней, по величине которого и судить о высоте, т. е. величину атмосферного давления выразить в единицах измерения высоты—в метрах.
Этот способ определения высоты с помощью измерения атмосферного давления на высоте называется барометрическим способом, а высотомеры, основанные на барометрическом принципе, — барометрическими высотомерами, илы ал ь т и м е т р а м и.
Барометрические высотомеры, непосредственно измеряющие «е высоту, а атмосферное давление на высоте, основаны на следующих предположениях:
1) прибор достаточно точно измеряет атмосферное давление на высоте полета;
2) давление у земной поверхности (относительно 'места взлета) остается постоянным или изменяется незначительно во все время полета.
§ 38. Принцип устройства высотомеров
Чувствительной частью (приемником) барометрических высотомеров является тонкостенная анероидная *) (барометрическая^ короб ха Види (рис. 45, I, II и III).
Анероидная коробка состоит из двух спаянных между собой колукоробок, поверхность которых делается волнистой (гофрированной) для двух целей: во-первых, для увеличения поверхности коробки и, во-вторых, для приобретения ею большей гибкости, т. е. способности к быстрому расширению и сжатию.
Материалом для изготовления коробки служит специальный металл—нейзильбер, обладающий способностью долго сохранять свои упругие свойства и достаточно прочный. В последнее время начали применять другой металл, состоящий из специального сплава (фосфористая бронза), преимущество которого заключается в том, что наряду с указанными выше качествами он мало подвержен влиянию изменения температуры.
Воздух из внутренней полости анероидной коробки выкачивается; для того чтобы противодействовать силам атмосферного давления и предохранить коробку от сплющивания, ей придают упругие свойства: либо снаружи или внутри ее помещают специальную пружину, или сама коробка делается упругой. Упругие свойства коробки (или пружины) противодействуют силе атмосферного давления и расширяют или сплющивают коробку до тех пор, пока не уравновесятся с силой атмосферного давления воздуха, действующего на коробку.
Центры анероидной коробки крепятся таким образом, что дается возможность одному из них А (рис. 45, /) перемещаться вверх или вниз, т. е. имеется возможность центрам сходиться при увеличении атмосферного давления и расходиться при его уменьшении.
Таким образом, анероидная коробка, помещенная в свободной атмосфере, находится под действием двух сил: 1) силы атмосферного давления окружающего коробку воздуха и 2) упругих сил пружины или самой коробки. При равенстве этих сил анероидная коробка будет находиться в состоянии равновесия; при уменыне-жии же атмосферного давления анероидная коробка будет рас-
1) От греческих слов: яп—отрицательная частица н иёг —-воздух; аи(а)ероид—'безвоздушный. Барометр-анероид с пустотелой коробкой изобретен французским инженером Л. Види » 1848 г. .
ширяться, а при его увеличении — сжиматься. Это свойстве анероидной коробки и используется в барометрических высотомерах. Из сказанного нетрудно понять принцип работы высотоме-
Ряс. 45. Действие на анероидную коробку сил атмосферного давления.
I—положение коробки в нормальных условиях; //—расширение коробки е жодонятием на высоту;///—принцип устройства высотомера; С—у "руги> силы пружины (или коробки); Рн—давление на высоте; Р,—давление у земл”
При поднятии анероидной коробки на высоту атмосферное давление на ее поверхность будет уменьшаться соответственно изменению высоты. Вследствие этого под действием упругих свойств коробка будет расширяться, а ее подвижной центр А относительно центра В (который укреплен неподвижно к основанию прибора) будет подниматься; наоборот, при опускании под действием увеличивающегося атмосферного давления коробка будет сжиматься, а ее подвижный центр А приближаться к неподвижному центру В.
При подъеме и спуске расширение и сжатие анероидной колобки происходит в определенном соответствии с изменением атмосферного давления (при учете прочих условий), которое в свою очередь изменяется соответственно изменению высоты (рис. 45, //).
Если к подвижному центру коробки приделать стрелку и наблюдать за ее перемещением по шкале, имеющей деления высоты в метрах, то можно судить и о высоте, на которой находится прибор. В практике так и делается (рис. 45, III).
В высотомерах современных конструкций незначительное пб4 ступательное перемещение подвижного центра анероидной коробки, происходящее при изменении атмосферного давления в результате изменения высоты полета, превращается посредством специального механизма в плавное значительное вращательное» движение оси стрелки и самой стрелки. По шкале высот стрелка указывает высоту самолета в метрах, т. е. высоту полета. Устройство ' высотомеров современных конструкций рассматривается ниже.
§ 39. Описание барометрических высотомеров
Однострелочный высотомер на 12 000 м. Устройство высотомера показано на рис. 46, А, Б. Анероидная коробка 1 (рис. 46, А) имеет один неподвижный центр 26, которым она
Рис. 46. Однострелочный высотомер № 12000 м.
А—устройство; Б—вид со стороны шкалы 1— анероидная коробка; 2а— подвижный центр коробки; 26—.неподвижный центр коробки; 3 — валик с биметаллической пластинкой; 4—биметаллическая 'пластинка; 5—переходная ось; 6—тяга; 7— регулировочный винт; 8—сектор; 9—триб-ка; 10—волосок; 11—основание механизма; 12—стойка; 13—стрелка; 14—колодоч. ка; 15—кремальера; 16—крепящее кольцо прибора; 17—ось стрелки; 18—шкала.
прикрепляется с помощью колодочки 14 к основанию механизма//, и второй подвижный 2а; последним ход коробки передается-!
Ы
^средством 'валика с 'биметаллической (пластинкой 3, тяги б и биметаллической пластинки 4 к переходной оси 5 с сектором 8, Этот сектор постоянно сцеплен с трибкой 9 и, следовательно,; передает свое движение на ось стрелки 17. Стрелка перемещается по равномерной шкале 18 (рис. 46, Б), имеющей градуировку ,Бцсот в метрах, и показывает высоту.
Для уменьшения влияния изменений температуры на точность показаний высотомера механизм имеет две температурных компенсации: одну—в виде валика с биметаллической пластинкой 3, а Другую — в виде простой биметаллической пластинки 4. Каждая биметаллическая пластинка состоит из двух сваренных между собой металлов (стали и инвара), которые обладают различ: ными температурными коэфициентами расширения.
Биметаллические пластинки изменяют показание прибора в обратном направлении тому (и на такую же практически величину), которое вызывается в изменении показаний прибора влия. нием температуры, т. е. компенсируют (уничтожают) температурные ошибки высотомера. Биметаллическая пластинка 3, расположенная у жесткого подвижного центра анероидной коробки, служит для компенсации температурных ошибок при нахождении прибора у земли (при начальном давлении), а вторая 4, которая прикреплена к переходной оси 5, — для компенсации гем-лературных ошибок по высоте.
Регулировочный винт 7 предназначен для изменения длины рычага поворота переходной оси 8 от биметаллической пластин* ки 4. Волосок 10 устраняет в механизме люфты и затирания.
Механизм прибора монтируется на основании 11 и помещает-, ся в стандартном корпусе, диаметр которого 80 мм и длина (без кремальеры и штуцера) 85 мм. Корпус с лицевой стороны имеет укрепленное пружинящим кольцом и герметически заделанное (спецзамазкэй) стекло, а в дне—специальный штуцер.
Во избежание неточности показаний высотомера в полете (под влиянием изменения давления окружающего прибор воздуха вследствие завихрений, от выхлопных газов и т. п.) штуцер прибора соединяется трубопроводом со статической проводкой приемника Пито (рис. 47, см. § 47).
*ис. 47. Присоединение высотомера W статической проводке приемника Пито.
/—корпус высотомера; 2—•динамический и статический трубопроводы к указателю воздушной скорости; 3— трубка Пито; 4—статический трубопровод к высотомер'; 5—штуцер; 6— высотомер.
Статическая проводка уравнивает давление в корпусе прибси ра с атмосферным давлением, окружающим самолет, и увеличивает точность показаний высотомера.
1 Шкала прибора имеет деления через каждые 100 м высоты; «ерез каждые 1000 м (каждые 10 делений) деления удлинены относительно других и сответственно обозначены: 0—нуль высоты;
1—высота 1000 м; 2—высота 2000 м, 3—высота 3000 м и так д» 11 — 11 000 м и 0— 12 000 м. Вес прибора 400 г.
Двухстрелочный высотомер. Существенным недостатком описанного выше однострелочного высотомера является сравнительно невысокая его чувствительность к незначительным изменениям атмосферного давления при небольшом изменении высоты полета, а также то, что мелким делениям шкалы ответствует большая высота. Отсчет высоты по таким приборам возможен только с точностью до 50 м. Недостаточная точность мешает использованию этих приборов при посадке и отсчете малых высот вообще.
В конструкции двухстрелочного высотомера указанные недостатки устранены. Двухстрелочный высотомер предназначен для определения с большей точностью барометрической высо.ты полета относительно места взлета и посадки самолета, а также эшелонирования по высотам.
Прибор имеет две стрелки—-болидную /Он малую// (рис. 48А). Первая дает отсчёт высоты в сотнях, десятках и единицах метрав й делает один оборот на каждые 1000 м, а вторая дает отсчет в сотнях и тысячах метров, делая один оборот на 10 000 м, что составляет 10 оборотов большой стрелки. 'Механизм рассчитан для показания до 12 000 м.
Для введения поправок в показания прибора при изменении атмосферного давления на земле против давления, соответствующего нормальному дню, прибор снабжен барометрической шкалой. Наличие второй стрелки и барометрической шкалы дает возможность определять высоту полета с большей точностью, чем по простому однострелочному высотомеру.
Принцип действия двухстрелочного высотомера такой же, как й однострелочного, т. е. основан на измерении с помощью анероидных коробок атмосферного давления на высоте полета. Противодействие анероидных коробок влиянию на них атмосферног* давления происходит за счет упругих сил самих коробок; добавочной пружины нет. Перемещение подвижного центра анероидных коробок, которое происходит при изменении атмосферного давления в зависимости от высоты, посредством системы рычагов и вращающихся валиков передается на стрелка, которые перемещаются по шкале, -имеющей деления высоты в метрах.
Устройство прибора: общий вид, кинематическая схема и вид в разрезе показаны на рис’. '48 А -и Б. Как .видно из рисунков; основной и чувствительной частью прибора являются две анероидных коробки 1, у которых соседние центры соединены между собой неподвижно и внутренние полости не сообщаются. С изменением высоты анероидные коробки изменяют свой объем, и ах свободные центры получают движение.
ера; /8—шкала барометрического' дазления;_ 19—основание; 20— регулировочный винт; 21—противовес; 22—.пружина противовеса; 23—шкала л«сот.
Рис. 48Б, Вад двухстрелочного высотомера в разрезе.
Так как анероидных коробок две, то система имеет ход, при мерно, в два раза больший, чем при одной анероидной коробке! применяемой в обычных высотомерах. Передача прямолинейного хода коробок к стрелкам осуществляется при помощи шатуннокривошипной передачи, состоящей из валика с биметаллической пластинкой 2, тяги 3 и стойки 4, расклепанной в биметаллической пластинке 5 и переходной оси 6 к сектору S, сидящего жестко на Переходной оси. От сектора через ось мультипликатора 7 и большую шестерню 8 движение передается на ось 9 большой стрелки 10.
'Малая стрелка 11 получает вращательное движение от оси большой стрелки посредством перебора, состоящего из трибок 12 и 13 и шестерни 14, расклепанной на полой оси 15 малой стрелки.
Сквозь полую ось малой стрелки преходит, не касаясь ее стенок, ось большой стрелки 9. Перебор и полая ось малой стрелки смонтированы на неподвижной пластинке.
Вращение шкалы барометрического давления находится в определенной зависимости от перемещения стрелок.
Это достигается тем, что шестерня 16 кремальеры 17 одно1 временно вращает шкалу барометрического давления 18 и осно* вание 19, на которой смонтирован механизм передачи на большую стрелку.
Все оси прибора посажены на камнях и смазаны специальным маслом для точных механизмов.
Прибор имеет две температурных компенсации в виде биметаллических пластинок, состоящих из инвара и антимагнитной стали. .
Биметаллическая пластинка 2 находится над коробками и служит для компенсации температурных ошибок при начальном дав лении (у земли); регулировка этой компенсации достигается поворотом валика, в который впаяна биметаллическая пластинка.
Другая плоская биметаллическая пластинка 5 прикрепляется к переходной оси 6, назначение ее — компенсировать ошибки при изменении температуры по высоте.
Регулировка второго компенсационного устройства осуществляется -изменением активной длины биметаллической пластинки 5 путем перемещения регулировочного винта 20.
Для выравнивания хода коробок с целью получения равномерного вращения стрелок с высотой пользуются противовесам? 21, который упругостью пружины 22 задерживает или ускоряет ход коробок с изменением высоты.
На шкале высот 23 обозначены цифры с 1 по 9.
Для указания высоты выше 10 км стрелки имеют дополни тельный ход 2 км. При 12 км большая стрелка делает 12 оборотов, малая 1,2 оборота. Таким образом, одно маленькое деление для большой стрелки соответствует 10 м, а для маленькой — !00м; это дает возможность измерять высоту полета с точностью до 5 м. Против малой стрелки отсчитываются сотни и тысячи
<метров высоты, а против большой — сотни, десятки и единицы метров.
Поправки в показаниях высоты в зависимости от изменения нормального атмосферного давления на земле учитываются при помощи шкалы давления.
Шкала барометрического давления 18 устанавливается кремальерой 17 на давление, наблюдаемое в момент отсчета на месте взлета или посадки; стрелки всегда указывают нуль высоты, если отсчет по прибору производится на том месте -и уровне, на котором замерено барометрическое давление. Данные барометри ческого давления на месте взлета или посадки каждый раз сообщаются экипажу самолета метеостанцией по радио или непосредственно перед взлетом.
Шкала давления учитывает поправки в показаниях высоты в пределах изменения атмосферного давления от 670 до 790 мм рт. ст. Оцифровка шкалы произведена через 10 делений, одно деление соответствует 1 мм рт. ст.
Как виадню из рмс. 48 Б; весь механизм прибора помещен в стандартный герметический корпус 24 (стандарт № 2, диаметр $0мм). На дне корпуса имеется штуцер 25, который соединяется со статической проводкой приемника Пито. Поэтому давление внутри корпуса зависит только от высоты полета, и поэтому исключаются ошибки в показаниях прибора от изменения давления внутри кабины, происходящего по каким либо причинам,-
§ 40. Высотописец (барограф)
Для получения непрерывной записи высоты полета применяются высотописцы (барографы).
Эти приборы основаны на том же принципе, что и барометрические высотомеры, с той лишь разницей, что вместо стрелки они имеют перо, которое чертит кривую высот на специальном бланке, навернутом на барабане; последний вращается специально приспособленным часовым механизмом. Скорость вращения барабана в зависимости от времени полета может быть установлена специальным шестеренчатым механизмом на желаемое время одного оборота, т. е. на 2, 4 или 6 часов.
Как правило, высотописец (барограф) устанавливается на самолетах с целью контроля соблюдения экипажем установленной планом высоты полета и заданного режима или при испытательных полетах.
Устройство высотописца показано на рис. 49.
§ 41. Установка высотомеров и высотописцев на самолете
Высотомеры устанавливаются на приборной доске в кабинах пилота и штурмана в месте, предусмотренном схемой оборудования для данного типа самолета.
Высотомеры старых образцов укрепляются болтами с гайками, а приборы, имеющие стандартные корпусы, — при помощи 40
сяециального монтажного алюминиевого кольца (рис. 50, Л, Б} Кольцо укрепляется заранее при помощи трех винтов на обрат* мой стороне приборной доски. Для того чтобы закрепить в нем ирибор, вращением винта стягивающего устройства (в виде «лас*
Рис. 49. Высотописец (барограф).
1—анероидная коробка; 2—передающий механизм; 5—перо прибора; 4—часовой механизм; 5—барабан с блатом высотописца; 6—основание прибора; 7—отметчик времени работы прибора; 8—регулировочный винт; 9—пусковой рычаг высотописца.
гочкиного хвоста») кольцо расширяют, затем вставляют прибор к
•братным вращением винта кольцо затягивают. Удобство этого
Рис. 50. Крепежное кольцо.
А—общий вид; Б—.крепление 'прибора к .приборной доске.
крепления заключается в легкости и быстроте монтажа, а также в демонтировании приборов.
t
I Высотописец подвешивается на пружинящих амортизаторах в кабине или другом удобном для наблюдения месте фюзеля-рка самолета (но так, чтобы не мешал работе экипажа) на спе-диально ввернутых для этой цели металлических кольцах и амортизирующих пружинах.
При установке на самолет высотописец обычно пломбируется для того, чтобы экипаж самолета не имел к нему доступа.
Трубопровод от высотомера к приемнику Пито нельзя изгибать по дуге радиусом менее, чем 50 мм, перекручивать и гнуть в одном и том же месте несколько раз.
Высотомеры и высотописцы, как всякие точные приборы, требуют аккуратного обращения как в процессе перевозки, так и во •время монтажа и эксплуатации. Не допускаются резкие удары и сотрясения во избежание разрегулирования механизма.
§ 42. Ошибки барометрических высотомеров
Определение высоты полета с помощью измерения высотомером атмосферного давления производится неточно вследствие ряда ошибок, которые присущи как данной конструкции высотомеров, так и самому барометрическому методу измерения высоты полета.
Поэтому для определения точной высоты полета надо уметь .пределять ошибки и учитывать их в показаниях высотомеров.
В практике различают инструментальные, и методические ошибки барометрических высотомеров.
Инструментальные ошибки
Инструментальные ошибки происходят от йесовершенства изготовления приборов, а также от качества материала, из которо го они делаются, и от условий их эксплоатации.
Ошибки этой группы могут определяться заранее для разных шысот и учитываться в показаниях прибора по специально составленным графикам инструментальных ошибок.
К числу инструментальных относятся следующие ошибки:
1) Шкаловая ошибка, которая происходит из-за непра вильной регулировки механизма прибора и неточности изготовления шкалы; она выражается в несоответствии показаний прибора на различных делениях шкалы действительному атмосферному „давлению на данной высоте.
2) Запаздывание показаний прибора вследствие явления упругого последействия и гистерезиса анероидной коробки, которое происходит от способности материала механизма изменять свои упругие свойства после того, как эти материалы находились в состоянии напряжения.
Упругое последействие заключается в том, что приложенное атмосферное давление анероидная коробка воспринимает не мгновенно, а с некоторым опозданием: с уменьшением нагрузки сна нее она возвращается в первоначальное положение не сразу, 52 •
t с запаздыванием. Явление упругого гистерезиса состоит в том, чТ0 величины прогиба коробки при увеличении и уменьшении давления на одну и ту же величину неодинаковы, т. е. не совпадают.
в) Температурные ошибки, заключающиеся >в раз яости показаний высотомера при различных температурах, даже яри одном и том же атмосферном давлении. Причиной этой ошибки является изменение упругости анероидной коробки и некоторое изменение длин рычагов механизма под действием тем-
Рис. 51. Прибор Гарфа.
I—'металлический сосуд; 2—ртутный манометр; 3—насос для 'выкачивания воздуха; 4—поверяемый прибор (.высотомер); 5—окна; 6—крышка; 7—прижимной винт; 8—перекрывающий жран; 9—кран впуска воздуха в верхнюю камеру; п—перегородка, разделяющая внутреннюю полость сосуда на камеры а (верхняя) и б (нижняя).
«ературы. Как сказано выше, влияние температуры на точность показаний высотомеров в современных конструкциях' до некоторой степени уменьшается благодаря применению специальных температурных компенсаторов (биметаллических пластин&к) или изготовлению деталей механизма прибора из материала, который мало подвержен влиянию температуры.
Высотомеры необходимо проверять не реже одя*г<»
ъз
раза в три месяца и, кроме того, во всех случаях, когда возникает сомнение в правильности их показаний. Поверка высотомеров заключается в определении их инструментальных поправок.
Для поверки применяется прибор Гарфа или подобная ему установка. Прибор Гарфа (рис. 51), применяемый для поверки высотомеров и высотописцев, состоит из металлического сосуда f цилиндрической формы, ртутного манометра 2 и насоса для выкачивания воздуха 3. Внутренняя полость сосуда имеет перегородку п, которая разделяет его на две части — верхнюю а № нижнюю б камеры.
Нижняя часть является камерой разреженного воздуха, а в верхнюю помещаются поверяемые высотомеры 4. Для того, чтобы во время поверки были видны показания приборов, в стенки верхней камеры вделаны четыре окна 5 (для одновременной поверки четырех высотомеров).
Прибор в верхней камере располагается на подставке, называемой стеллажей; последний устроен таким образом, что шкалы приборов приходятся против окон. После установки приборов верхняя камера закрывается массивной крышкой 6 с резиновой прокладкой. Сверху крышка прижимается винтом 7. Эта камера посредством резинового шланга соединяется с ртутным манометром. Нижняя камера соединяется с насосом. Обе камеры а и б сообщаются между собой трубкой, проходящей внутри сосуда, е перекрывающим краном 8. Б верхней камере имеется специальный кран 9 для впуска наружного воздуха.
Ртутный манометр служит для измерения давления в верхней оверочной камере. Шкала манометра разделена на миллиметры, жричем нуль поставлен посредине шкалы на уровне ртути.
Инструментальные ошибки высотомера при проверке выявляются сравнением показаний высотомера с соответствующими ни истинными высотами. Если истинная высота больше показываемой высотомером, знак поправки обозначается плюсом, если меньше — минусом.
Для удобства учета инструментальных ошибок в показание •высотомеров в полете составляют график инструментальных поправок (рис. 52), который укрепляется возле прибора.
По горизонтали графика нанесены высоты по прибору, а по вертикали — величины его инструментальных поправок; эти величины наносятся в метрах высоты. Чтобы найти исправленную высоту, необходимо сначала по прибору отсчитать высоту, затем соответственно ей найти по графику поправку и учесть ее с тем знаком, с каким она определена по графику. Например: Н„р = ^4000 iM, поправка по графику: Д Н = -р 60 м; Ншпр~Нпр-\-
(-Г Д/У) = ^OJO -р- 60 — 4'>60 м.
Поправку по графику находят таким образом: сначала находится высота соответственно показанию высотомера, от котовой по горизонтали следует дойти до кривой поправок данного прибора, а затем по вертикали от этой точки на кривой (вверху или внизу) прочесть инструментальную поправку для данной высоты.
Кривая для прибора летчика наносится синим цветом, а для штурмана — красным.
Кроме описанного прибора для проверки высотомеров, применяют установки,в которых выкачивание воздуха производится не вручную, а с помощью насоса Геде, приводимого в движение электромотором; проверяемые высотомеры помещаются под стеклянным колпаком. Существуют также комбинированные приборы, представляющие агрегат УПА (универсальная поверочная установка для проверки различных приборов, в том числе и высотомеров) .
Рис. S3. Принципиальная схема проверки высотомеров непосредственно на самолете.
1—проверяемые высотомеры; 2—эталонный высотомер; 3—резиновые трубки; 4—резервуар; 5—тройники, 6—зажимы; 7—насос.
Проверка высотомеров со статическим штуцером может производиться непосредственно и на самолете с помощью эталонного (хорошо выверенного) высотомера. Сущность этой проверки заключается в сравнении показаний эталонного и испытуемых высотомеров; порядок проверки аналогичен проверке по прибору Гарфа.
На рис. 53 показана принципиальная схема проверки высотомеров на самолете.
'Методические ошибки
Ошибки этой группы вытекают из несовершенства метода, положенного в основу измерения высоты . с помощью измерения
атмосферного давления на высоте. Эти ошибки разделяются на следующие.
1. ошибки от несовпадения расчетных данных высотомера с фактическим состоянием атмосферы (давления, температуры и т. д.);
2. ошибки от изменения давления ® пункте .вылета за время полета;
3. ошибки, вызываемые изменением барического рельефа;
4. ошибки от изменения температуры;
5. ошибки, возникающие вследствие изменения топографического рельефа пролетаемой местности.
1) Ошибки от изменения атмосферного давления относительно расчетного (начального — 760 >М'М рт. ст. при ф- 15°С) в пункте вылета учитываются установкой (перед вылетом) нуля шкалы высотомера против стрелки, а на двухстрелочном высотомере — установкой барометрической шкалы на величину атмосферного давления у земли, что дает также нуль высоты.
2) Ошибки от изменения давления в пункте вылета вследствие изменения метеорологических условий за время полета могут быть учтены лишь при условии, что в момент отсчета относительной высоты по прибору давление в пункте вылета известно; эти сведения всегда можно получить по радио, запросив метеорологическую станцию. При отсчете высоты относительно какого-либо пункта необходимо знать атмосферное давление у земли в этом пункте.
Перед отсчетом относительной высоты по двухстрелочному вьь сотомеру сначала необходимо установить барометрическую шкалу прибора на полученное на борт атмосферное давление, а затем уже отсчитывать высоту полета; полученная таким образом высота будет относительно того пункта, с которого получено и установлено по барометрической шкале атмосферное давление у земли.
Если во время полета при отсчете высоты давление в данном пункте неизвестно и нельзя получить сведений о нем, то эту ошибку точно учесть невозможно.
Практически при непродолжительном полете барометрическую высоту по прибору считают относительной, так как давление в пункте вылета за время полета изменяется на незначительную величину.
3) Ошибки от изменения температуры в зависимости от высоты достигают значительных размеров и их необходимо учитывать в показаниях высотомеров при определении высоты полета. Температурные ошибки происходят вследствие изменения температуры с поднятием на высоту, при чем температурный градиент может изменяться не только по величине, но и по знаку.
При расчетах приборов принимается средний равный
—0,65°С, в то время как летом он может достигать величины —0,8°С, а зимой — 0,4°С и т. д. Неравномерно^ изменение тем-68
пературы и температурного градиента с высотой влияет на характер распределения давления по высоте, а следовательно, вызывает ошибки в показаниях высотомеров.
На рис. 54 показана температурная методическая ошибка высотомера. Из рисунка видно, что с охлаждением воздуха атмосферное давление падает по высоте быстрее, чем при более теплом воздухе, что вызывает понижение самолета при одних и тех же показаниях высотомера. Учет температурных поправок в полете производится расчетом высот при помощи специальной счетной аэронавигационной линейки (см. 88 и НО).
Показание высотомера
Рис. 54. Температурная методическая ошибка высотомера.
Ро и „—давление и температура у земли; Р —давление на вв-соте; чр —средняя температура.
4) Ошибки от изменения барического релье-ф а. Барическим рельефом называется распределение барометрического давления (атмосферного) в плоскости горизонта. В разных пунктах земной поверхности в одно и то же время атмосферное давление чаще всего бывает различно.
Вследствие этого изобарические поверхности, т. е. плоскости равных атмосферных давлений, располагаются не всегда в линии горизонта, а под некоторым углом к нему.
Величина угла наклона изобарических поверхностей к плоскости горизонта зависит от величины разности давлений в различных пунктах земной поверхности. Так как высотомер измеряет не высоту, а барометрическое давление, то при выполнении полета, выдерживая по прибору постоянную высоту, самолет будет следовать по изобарической поверхности (линии), давление которой соответствует показанию высотомера.
’Предположим, что для определенного времени суток, в течение которого совершается полет, изобарические поверхности располагаются так, как показано на рис. 55.
В этом случае для того, чтобы безопасно совершить полет через точку С из точки А в точку В, расположенные на одной высоте относительно уровня моря, необходимо в точке А набрать истинную высоту, равную 400 м, >и полет совершить по изобарической поверхности bb' (по прибытии в точку В, ввиду наклона изобарической поверхности bb' в сторону этой точки, истинная высота будет не 400 м, а значительно меньше—300 м). Если же совершать полет по нижерасположенной изобарической поверхности аа', то, несмотря на то, что в точке А истинная высота будет больше превышения точки С, самолет при подходе к точке С ударится о землю.
Рис. 55. Влияние изобарического рельефа на высоту полета. аа' и вв'—изобарические (поверхности.
Чтобы избежать этого, необходимо перед вылетом изучать расположение изобарических поверхностей по маршруту полета и учитывать это при выборе высоты полета или знать атмосферное давление в тех точках; над которыми совершается полет.
Ошибки от изменения изобарического рельефа перед каждым полетом следует всегда учитывать по синоптическим картам (картам погоды), которые составляются на метеорологических станциях, или запрашивать по радио о барометрическом давлении в желаемых пунктах.
В двухстрелочном высотомере эта ошибка учитывается автоматически после установления полученного давления с уровня земли на барометрической шкале прибора. В однострелочном высотомере ее можно учесть при помощи отметки начального давления и соответствующих расчетов.
’5) Ошибки от изменения топографического рельефа местности. Эти ошибки происходят исключительно' от того, что пролетаемые пункты находятся выше или ниже места взлета или посадки. В показаниях высотомера эта ошибка учитывается прибавлением или вычитанием повышения или понижения пролетаемого рельефа местности к относительной высоте».
отсчитываемой по высотомеру и исправленной с учетом других ошибок. Показания же барометрического высотомера от изменения топографического рельефа, конечно, не зависят.
Поправка топографического рельефа считается положительной, если пролетаемый пункт расположен ниже пункта вылета /__др) и отрицательной, если выше (-ЬДР)
Высота по прибору с учетом инструментальных и методических поправок, а также поправок на топографический рельеф местности есть истинная высота.
Решение задач по определению высоты полета см. в 108 и 109.
УКАЗАТЕЛИ ВОЗДУШНОЙ СКОРОСТИ
§ 43. Скорость полета
В практике самолетовождения различают воздушную и путевую скорости.
Воздушной скоростью называется скорость передвижения самолета относительно окружающих его воздушных масс (воздуха). Она развивается винтомоторной группой и всецело зависит от ее мощности и аэродинамических качеств самолета; чем мощнее винтомоторная группа и чем выше аэродинамические качества самолета, тем больше воздушная скорость, и тем она меньше, чем несовершеннее самолет и меньше мощность его винтомоторной группы.
Воздушная скорость по своему направлению практически совпадает с продольной осью симметрии самолета и измеряется в километрах в час; она обозначается знаком V.
Путевая скорость является скоростью передвижения самолета относительно земной поверхности. Она получается в результате сложения воздушной скорости и скорости ветра.
Путевая скорость может быть больше (при попутном ветре) или меньше (при встречном ветре) воздушной скорости в зависимости от величины и направления ветра; при безветрии (штиле) на небольшой высоте практически ее считают равной воздушной скорости. Направление этой скорости противоположно видимому .перемещению земных предметов относительно самолета.
Путевая скорость, так же как и воздушная, измеряется в километрах в час и обозначается знаком W.
На рис. 56 схематически показана путевая скорость как результат геометрического сложения воздушной скорости и скорости ветра.
Воздушная скорость имеет несколько режимов, к которым относятся:
1) экономическая воздушная скорость — горизонтальная скорость полета, при которой самолет данной конструкции с данным запасом горючего может продержаться в воздухе большее время, чем при других скоростях; при этой скорости происходит наименьший расход горючего на единицу времени полета;
2) наивыгоднейшая воздушная скорость при которой самолет данной конструкции с данным запасом горючего может пролететь большее расстояние, чем при других воздушных скоростях.
При наивыгоднейшей скорости происходит наименьший расход горючего на 1 км пути.
Рис. 56. Путевая скорость как результат геометрического сложения векторов воздушной скорости и скорости ветра. V—вектор скорости ветра; V—вектор воздушной скорости;
W—вектор путевой скорости.
К диапазону (возможному изменению в горизонтальном полете) воздушной скорости самолета относятся:
1) максимальная скорость, т. е наибольшая скорость, при которой единицу длины пути самолет пролетает в меньшее время, чем при других воздушных скоростях; эта скорость получается вследствие наибольшего использования мощности винтомоторной группы самолета;
2) посадочная скорость — скорость самолета при посадке (наименьшая).
Режимы скоростей для каждого данного типа самолета •устанавливаются его испытанием, т. е. экспериментальным путем.
Знание режима воздушных скоростей необходимо для выполнения целого ряда различных тактических и оперативных задач:, аэрофотосъемки, бомбардировки, проведения специальных работ, выполнения рейсов и т. п.
Режимы воздушных скоростей и вообще воздушная скорость определяются приборами, которые называются указателями воздушной скорости, а путевая скорость —расчетным путем и наблюдением за земной 1повёрхнсстью и др. способами.
§ 44. Принцип работы указателя воздушной скорости
В основу измерения воздушной скорости положено измерение давления, производимого воздушным потоком на поверхность двигающегося к нему тела (самолета), поставленного перпендикулярно к данному потоку, т. е. измерение скоростного напора (аэродинамического давления).
Зависимость между скоростью воздушного .потока и давлением, которое создает на поверхность, поставленную к нему под углом 90°, установлена 2-м законом Бернулли и выражается ® следующем:
SV»
—g-----pi + = const,
где: Р, Р> н Л—статическое давление в разных сечениях трубки; V, Vi и Vt— схорости воздушного потока в разных сечениях трубки, т. е. для каждой точки в движущемся потоке воздуха сумма статического (окружающего воздуха) и динамического (скоростного напора) давлений есть величина посто-Я1ная.
Для того чтобы понять принцип работы указателя воздушной скорости, сначала разберем измерение воздушной скорости про-шшим прибором, изображен-на рис. 57. Прибор со-эит из двух трубок Л и В, сообщающийся
Рис. 57. Простейший прибор для измерения воздушной скорости.
ст нь!м ст образующих сдсуд и концы которых уста-нсвлены навстречу воздушному потоку. Трубка А, открытая в направлении потока, воспринимает скоростной напор встречного воздуха V и называется динамической трубкой. Трубка В, закрытая спереди, изолирована от встречного воздушного .напора, но имеет небольшого диаметра боковые отверстия для сообщения с окружающим воздухом. Она называется трубкой статического давления. Боковые отверстия в статической трубке предназначены для уравнивания давления внутри ее с давлением воздуха Р, окружающего самолета. Через эти отверстия воздух выходит из трубки, когда в колене В жидкость поднимается и увеличивается давление, и .входит, когда она опускается, т. е. давление уменьшается.
Динамическая и статическая манометром q. Сочетание динамической называется приемником Пито (по имени изобретателя и конструктора приемника).
Когда воздух, окружающий прибор, находится в спокойном состоянии (без горизонтального перемещения), атмосферное дав-
трубки соединены с жидкостным и статической трубок
ление в трубке Лив трубке В одинако и равно Р. Поэтом у-в .манометре q уровня жидкости в трубках сообщающегося сссуУ да находятся на одинаковой высоте, т. е. манометр будет пока), зывать нуль. I
При горизонтальном перемещении воздуха, окружающего прибор, или при движении данного прибора относительно этого воздуха со скоростью V, в динамической трубке А создается некоторое давление, которое состоит из статического (Р— атмосферного давления окружающего прибор воздуха) и динамическою (SV2 к
| —— — давления, создаваемого скоростным напором воздуха) давлений; в статической трубке вследствие обтекания ее воздушным потоком будет только статическое давление Р.
Из-за получающейся разности давлений в динамической и статической трубках жидкость в колене А манометра q опустится на величину Л, а в колене В поднимется на эту же высоту, манометр покажет разность давлений
Как следует из закона Бернулли, чем больше скорость набегающего воздушного потока на площадку, поставленную под прямым углом к его направлению, тем больше и давление, которое создается на эту площадку, и тем оно меньше, чем меньше скорость набегающего потока.
Таким образом, для нашего прибора (рис. 57) имеем: д,
SV2
динамической трубки давление Ру= Р + —» а для статиче-j
и
'IЯ
ской трубки только Р. Так как Р\ больше Р, то манометр q rio-
SV2
кажет разность давлений Pt— Р = ——
Отсюда:
Следовательно, измеряя разность давлений в динамической и статической трубках приемника, можно определять и скорость передвижения данного прибора относительно окружающего воздуха (или воздушного потока относительно прибора), т. е. его воздушную скорость.
На этом принципе и основаны приборы-указатели воздушной скорости. Необходимо иметь в виду, что изготовление всех приборов и тарировка их шкал производятся при следующих данных окружающей атмосферы: давлении 760 мм рт. ст., температуре -|-15°С и весовой плотности воздуха 1,226 кг/м2.
Принципиальная схема современных указателей воздушной скорости показана на рис. 58.
Главной частью указателя воздушной скорости является манометрическая коробка Види 1 (динамическая камера), внутренняя полость которой соединена с динамической трубкой 2 приемника Пито.
Манометрическая коробка помещается в плотно закупоренный (герметический) корпус прибора 3, внутренняя полость которого посредством штуцера 4 и трубопровода соединяется со статической трубкой 5 приемника Пито. При перемещении прибора .в воздушной среде возникающая .при этом разность давлений в манометрической коробке (динамической камере) и корпусе прибора вызывает расширение или суживание коробки Види. Величина расширения или сжатия коробки зависит от величины разности давлений и пропорциональна ей.
Рис. 58. Принцип работы указателя воздушной скорости.
1—манометрическая коробка Види; 2—динамическая трубка приемника Пито; 3—корпус прибора; 4—штуцер; 5—статическая трубка; 6—система передачи; 7—* сектор; 8—стрелка; 9—шкала.
Колебания верхней поверхности анероидной коробки чере» систему рычагов 6 с сектором 7 передаются на стрелку 8. По положению стрелки на шкале 9 с делениями воздушной скорости « км/час судят о величине воздушной скорости.
§ 45. Указатель воздушной скорости У С-600 (УС-450) в (стандартном корпусе
Общий вид и механизм указателя воздушной скорости показам на рис. 59, А, Б.
Механизм УС-600 так же, как и механизм УС-450, состоит из:
71
чувствительной коробки Вида /, укрепленной на основании механизма 2, причем внутренняя полость коробки Ввди посредством динамического шцувдра 3 и трубопровода соединена с динамической т|рубкюй приемника Пито; валика 4 с укрепленными на нем поводками—горизонта лыпьим 5 и вертикальным 6, трибок 7 и сектора 13. Расширения и сжатия коробки Види под действием ив-менегаия динамического давления в за1ви1аимости от воздушной скорости самолета передаются на ось стрелки 8. Вследствие этого
Рис. 59. Указатель воздушной скорости УС-600.
А—механизм; Б—общий вид.
1—(коробка Види; 2—основаине прибора; 3—данамгчедкй штуцер; 4— валик; 5—горизонталы»ый поводок; б—'вертикальный поводок; 7—трибка; 8—ось стрелки; 9—стрелка; 10—(ко-ион1юи центровочиых винтов валика-; 11—шротитовес ®алика; 12—центровочные 'винты валика; 13—сектор; 14—волосок; 15—шкала; 16—стекло; 17—Kopimyic; 18—«крепежное кольцо;
19—верхняя пластинка.
стрелка 9, перемещаясь по шкале 10, укажет величину приборной воздушной скорости полета самолета.
Противовес валика 11 уравновешивает валик 4 относительно его оси вращения, которая образуется центровочными винтами 12.
Волосок 14 предназначен для устранения люфтов и затираний механизма.
С лицевой стороны корпус прибора 17 закрывается стеклом 16, которое для герметичности укладывается на специальную прокладку и затем укрепляется крепежным кольцом 18.
Шкала 15, по которой против стрелки отсчитывают величинj ' воздушной скорости ,в км/час, имеет цену деления, равную 74
10 км/час. Нулевого деления шкала не имеет. Фон шкалы—чер-ный, а деления и цифры покрыты светящейся массой.
Опи^-ювка шкалы УС-600 произведена через каждые 40 км/час значения воздушной скорости, а УС-450—через каждые 50 км/час.
Деления—неравномерные и увеличиваются с увеличением значения воздушной скорости.
Указатели УС-600 и УС-450 выпуска последних лет имеют механизмы, конструктивно весьма похожие на механизм УС-800 (см. § 46). Принцип работы один и тот же.
§ 46. Указатель воздушной скорости УС-800
Общий вид указателя А, Б.
скорости 1УС-8О0 показан на рис. 60»
Рис. в0. Указатель воздушной скорости УС-800.
А—устройство; Б—общий вид. 1—коробка Види; 2—стрелка; 3— волосок; 4—передаточный механизм; 5—основание механизма; 6—штуцер динамический.
Основное отличие УС-800 от других указателей воздушной скорости состоит в том, что его манометрическая (динамическая) коробка состоит не из двух мембран, как обычно, а из трех. Одна из мембран (третья) находится внутри коробки и обладает повышенной чувствительностью; к этой мембране припаян жесткий подвижный центр коробки, который посредством тяги и передаточного механизма свои движения передает на стрелку.
Внутренняя мембрана воспринимает изменение динамического давления только до определенной величины, после чего она доходит до второй мембраны и действует уже вместе с ней. Две другие — внешние мембраны имеют большую жесткость и выдерживают большую нагрузку, чем внутренняя (третья) мембрана.
Благодаря такому устройству при небольших скоростях работает только более чувствительная мембрана (внутренняя;. При больших скоростях, когда создается большое аэродинамическое давление и чувствительная мембрана доходит до внешней, более жесткой мембраны, работает главным образом последняя.
Шкала прибора неравномерная и проградуирована по возра-станию скорости. Деления от 70 до 300 км/час крупнее последующих, что дает возможность более точно отсчитывать малые и посадочные скорости. Кроме того, по ней можно отсчитывать и скорости 800, 900 и 1000 км/час.
Остальные детали механизма УС-800 и взаимодействие их такие же, как и у описанного выше прибора УС-200, за исключением небольших изменений в передаточном механизме.
Особенности указателя скорости УС-800 дают возможность использовать его для измерений как малых, так и больших скоростей.
Прибор гарантирует необходимую практическую точность показаний до У=750—800 км/час.
§ 47. Приемник указателя воздушной скорости (трубка Пито с Элекгрообогревом)
Трубка Пите предназначена для того, чтобы воспринимать аэродинамическое давление (скоростной напор), создающееся встречным потоком воздуха при движении самолета, и передавать его посредством трубопровода к манометрической коробке указателя скорости. Кроме того, трубка Пито выравнивает давление в корпусе указателя скорости с изменяющимся статическим давлением окружающей самолет атмосферы. Поэтому приемник Пито имеет две трубки: динамическую и статическую. Каждая из них соединена с указателем скорости соответствую щим трубопроводом
Приемник Пито (рис. 61, А, Б, Б) состоит из двух частей: динамической и статической.
Динамическая часть состоит из динамический камеры 1 и динамической трубки 2.
Динамическая трубка 2 представляет собой латунную трубку, имеющую в своей передней части впаянное донышко 3, а сбоку — выфрезерованный паз или круглые отверстия. Это сделано для того, чтобы предохранить трубку от засорения. Динамическая трубка проходит вдоль приемника Пито и имеет на выходящем из кожуха конце напаянный штуцер 4, который при помощи трубопровода соединяется с динамической камерой указателя скорости.
Статическая часть приемника Пито состоит из статической камеры 5 и статической трубки 6. Статическая камера имеет две шел и 9, предназначенные для уравнивания статического давления окружающей атмосферы с воздухом, находящимся внутри корпуса указателя скорости.
Рис. 61. Трубка Пито.
А—устройство; Б—-общий рид; В—схема электрообогрева. 1—динамическая камера; 2—динамическая трубка; 3—.донышко; 4—динамический штуцер; 5—статическая камера; 6—статическая трубка; 7, 8—контактные кольца; S—щель; 10—штуцер статической камеры; 11—отверстие на кожухе.
Статическая трубка впаяна в дно статической камеры и имеет «а выходящем конце впаянный штуцер 10 для присоединения трубопровода, идущего от корпуса указателя скорости.
Трубка Пито снабжена обогревательным приспособлением, предохраняющим прибор от обледенения в условиях полета при низкой температуре.
Медные (токоведущие) провода, припаянные к контактным кольцам 7 и 8, изолированы от замыкания на корпус хлопчатобумажной изоляцией, пропитанной жаростойким лаком.
Обогревательное приспособление состоит из высокоомной (нихром) электрической проводки и имеет латунные кольца для присоединения элемента обогрева к источнику питания электрическим током. Питание обогревательного приспособления происходит от батареи или сети самолета в 24 в.
В передней части трубки Пито имеется наконечник с накаткой для удобного отвинчивания его с кожуха и три отверстия 11 на кожухе, связанные с динамической камерой. Назначение их— давать выход наружу парам и каплям воды, попадающим вместе с воздухом в динамическую часть трубки Пито из окружающей атмосферы.
Для того чтобы указатели воздушной скорости давали правильные показания, приемник Пито на бипланах следует устанавливать на стойках самолета приблизительно на одну треть расстояния от верхней плоскости; на монопланах он устанавливается впереди фюзеляжа или крыла в таком месте, где нет искажения набегающей на самолет струи воздуха.
Передний конец трубки должен быть направлен всегда вперед строго параллельно линии полета и оси симметрии самолета. От приемника в кабину самолета проводят два трубопровода из алюминиевых трубок: один—от динамической трубки, а другой— от статической. Отдельные части трубопровода соединяются кусками резиновой трубки с полотняной прокладкой (дюритом). Соединения трубок должны быть воздухонепроницаемыми; поэтому резиновые трубки надо плотно надевать на трубопровод, а с наружной стороны резиновые соединения закреплять специальными зажимными кольцами.
Присоединять трубопровод от приемника Пито с указателем воздушной скорости надо осторожно, чтобы не перепутать проводку, т. е. динамическую проводку необходимо «присоединять к динамическому штуцеру указателя скорости, а статическую — к статическому штуцеру.
Указатели скорости, помещенные в разных кабинах (летчика и штурмана), работают от одного приемника Пито. Для этого трубопроводы имеют ответвления (тройники).
В нижней точке трубопровода устанавливают отстойники с выпускным краном для периодического удаления воды, скопившейся в трубопроводе. Во время стоянки самолета трубка Пито закрывается чехлом из материи.
Для проверки правильности соединения пооводки и ее герметичности натевают на динамическую tov6k'« приемник0 пезино-78
8ую грушу с зажимом и производят давление на нее. Если при нажатии груши стрелка показывает увеличение скорости, то со единение сделано правильно. Чтобы проверить герметичность проводки, доводят стрелку поибора до максимального показания и закрывают зажим груши. Если в течение 2—3 минут стрелка остается на месте, значит проводка герметична. Если стрелка движется, следует просмотреть все соединения и добиться полной герметичности трубопроводов.
Для поверки статической проводки на приемник надевают резиновый шланг, предварительно поместив в него проволочный каркас, чтобы шланг не закрыл отверстий статической трубки. Динамическую проводку при этом можно разъединить. Поверку следует производить посредством разрежения, а не давления. Вес трубки 250 г.
§ 48. Ошибки указателя воздушной скорости
Указатель воздушной скорости имеет ошибки, которые необходимо учитывать длю определения истинной величины воздушной скорости. Ошибки указателя воздушной скорости разделяются на две основные группы: инструментальные ошибки, обусловленные несовершенством конструкции прибора, и методические, возникающие из несовершенства самого метода измерения скорости полета самолета посредством измерения аэродинамического давления.
Инструментальные ошибки .происходят, главным образом, из-за несовершенства изготовления механизма прибора: люфтов, затираний, неправильной регулировки, изменения упругих свойств коробки Види (гистерезиса) и влияния изменения температуры воздуха, окружающего прибор. Кроме того, ошибки указателя скорости происходят и от неправильной установки приемника Пито на самолете, создавая так называемую аэродинамическую ошибку.
'Методические ошибки состоят в том, что указатель скорости измеряет собственно не скорость, а скоростной напор. Скоростной напор, как известно, зависит не только от скорости воздушного потока, но и от плотности воздуха; поэтому (показания указателя скорости верны лишь при той плотности, для которой рассчитана шкала. На выЛте полета В1следствие уменьшения атмосферного давления и понижения температуры плотность воздуха бывает обычно меньше, чем у земли; так как скоростной напор пропорционален плотности окружающего прибор воздуха, то одним и тем же показаниям указателя скорости на высоте будет соответствовать большая воздушная скорость, чем у земли.
Например, в полете летом иа высоте 100 м указатель скорости показывает 220 км/час: одновременно и истинная скорость будет равна примерно 220 ’км/час. Зимой в сильные морозы иа этой же высоте истинная скорость может быть меньше показываемой прибором. На высоте 1000 м при пока-
зании прибора 220 км/час истинная скорость равна приблизительно 230 км/час; на высоте 2000 м при том же показании прибора она значительно больше. Кроме того, показания указателей скорости запаздывают при изменении режима полета. Это следует отнести не за счет недостатков указателей скорости как таковых, а за счет инерции самолета.
При полетах в строю нередки случаи, когда указатели скорости на отдельных самолетах дают совершенно различные показания, отличающиеся друг от друга в ту или другую сторону на 10—15 км/час и более, несмотря ла то, что фактически воздушная скорость у других самолетов такая же, как у ведущего. Это объясняется влиянием на точность показаний указателя скорости завихрений воздуха, которые возникают от близости полета самолетов друг с другом или от Неверной установки приемника Пито.
Для большей уверенности в правильности показаний ® полете указателей скорости (определения аэродинамической ошибки) .необходимо их проверять непосредственно в воздухе; проверку следует производить на всех эксплоата-диониых -скоростях самолета.
Инструментальные ошибки и аэродинамическая поправка могут быть заранее определены и учитываться в полете по графику поправок указателя воздушной скорости. Методические ошибки учитываются расчетом на специальной аэронавигационной линейке.
§ 49. Проверка указателя воздушной скорости
Определение инструментальных ошибок. Для проверки точности показаний указатели воздушной скорости снимаются с самолета или поверяются на нем. В том и другом случае для проверки необходимо иметь: 1) жидкостный манометр (спиртовой или водяной, специально приспособленный для поверки); 2) термометр; 6) таблицу для поверки указателей скорости (аэродинамическую).
Прибор для проверки указателей воздушной скорости показан ан рис. 62. Процесс проверки происходит следующим образом. Манометр соединяют посредством тройника 1 с грушей и динамическим штуцером 2 указателя скорости; затем производят давление на грушу, вращая нажимной винт 3. Давление, созданное грушей, сейчас же передается прибору и манометру. Увеличивая давление, а затем уменьшая его в обратном порядке, записывают отсчеты по манометру через каждые 50 км/час показаний прибора. Сравнивая показания прибора с найденными скоростями по ^аэродинамической таблице, находят инструментальные ошибки указателя воздушной скорости. Поправки определяются разницей между истинными скоростями и показаниями прибора. Если истинная скорость больше показания прибора, то поправка обозначается значком плюс (+? V7). если меньше - знаком минус (—ДУ).
Необходимо, чтобы во время проверки указатель скорости находился в том же положении, как и на самолете, т. е. циферблат должен быть расположен вертикально.
В тех случаях, когда желают проверить указатель скорости, установленный на самолете, манометр соединяют не с дина-80
этическим штуцером прибора, а прямо с динамической трубкой приемника Пито. В остальном поверка ничем не отличается от обычной. Для быстрой поверки приборов на самолете иногда применяют поверочный прибор с эталоном (контрольным указателем скорости).
Рис. .62. Прибор для поверки указателя воздушной скорости.
/—тройник; 2—динамический штуцер; 3—нажимной винт; 4—поверяемый прибор; 5—манометр.
'Поверку указателей скорости необходимо производить периодически, не реже одного раза в 3 месяца, и тогда, когда точность их показаний вызывает сомнение.
Рис. 63. График инструментальных поправок указателя воздушной скорости.
После поверки указателя скорости составляют график инструментальных поправок (рис. 63). По 'горизонтали графика нанесены показания указателя воздушной скорости, а по вертикали — величины поправок. График поправок помещается на самолете рядом с указателем скорости.
Поверка указателя воздушной скорости в полете способом мерного километра. Для нахождения ошибок показаний указателей скорости в полете применяется способ мерного километра.
Этот способ 'заключается в следующем. Вблизи аэродрома или на аэродроме в плоскости ветра выбирается ровная площадка, на которой отмеряется расстояние в 1 км для тихоходных самолетов и в 2 км для скоростных. На концах этого расстояния вертикально устанавливаются визирные ворота (рис. 64) шириной 10 м и высотой 3—4 м; шесты ворот должны стоять строго по отвесу. Работа производится тремя наблюдателями: одним на самолете я двумя у ворот.
Рис. 64. Поверка указателя воздушной скорости в полете способом мерного километра.
Определение истинной 'воздушной скорости самолета производится таким порядком. После набора высоты 100—150 м самолет заходит на ворота № 1 <и № 2; за 1—3 к»: от ворот пилот устанавливает ,по указателю воздушной скорости заранее выбранный режим воздушной скорости и ведет самолет точно на ворота по курсу.
При пролете мерного километра наблюдатель, находящийся на самолете, производит отсчеты по поверяемому указателю скорости и по секундомеру моменты пролета ворот, записывая данные наблюдения на бумаге. Наблюдатели у ворот № 1 и № 2 также делают отсчеты пролета самолетом ворот в тот момент, когда втулка его винта появляется в плоскости ворот; если самолет пролетает в стороне от визирных ворот, т0 момент начала и ко.»ца пролета самолетом мерного километра визируется сбоку по шестам ворот Для получения достаточно хороших результатов испытания необходимо, чтобы самолет пролетел над «базой не менее 5—8 раз.
Для определения истинной воздушной скорости делят расстояние базы (1 или 2 км) на 'время пролета мерного километра (среднее из всех заходов туда и обратно). Полученная скорость выражается в км/час
Сравнивая высчитанную таким образом воздушную скорость с показанием указателя воздушной скорости (средней из всех заходов) с учетом инструментальной :и методической ошибок, определяют его ошибку.
82
§ 50. Вариометры
Вариометры служат для указания вертикальной скорость подъема или снижения самолета. Знание пилотом вертикальной скорости значительно облегчает его действия, направленные к сохранению постоянства желаемого режима полета, и дает возможность использовать лучшие условия набора высоты или снижения. Кроме того, в слепом полете можно более точно выдерживать продольное положение самолета, используя вариометр как статоскоп (прибор, показывающий незначительные отклонения самолета от данной высоты полета).
Вариометры показывают вертикальную скорость (подъем1 и спуска), выраженную в метрах в секунду (м/сек).
Безбачковый вариометр. В последнее время в экс-плоатацию внедрены вариометры без дополнительного бачка-термоса со шкалами от 0 до 10 м/сек и от 0 до 30 м/сек.
Рис. 65. Схема работы безбач-кового вариометра.
I— манометрическая коробка види; 2—капилляр; 3—трубо-яровод; 4—передаточный меха, иизм; 5—стрелка; 6—шкала;
.7—корпус прибора; 8—стекло; 9—кремальера.
Безбачковые вариометры представляют собой усовершенствованную конструкцию общеизвестных, но устаревших вариометров с сосудом Дюара, и их преимущества заключаются в том, что они облегчают монтаж и эксплоатацию приборов и повышают на-. дежность их работы.
Принцип действия вариометров основан на измерении разно-ти, образующейся между давлением внутри замкнутого сосуда (корпуса) прибора и давлением окружающей его атмосферы в результате запаздывания их уравнивания.
Эта разность появляется при изменении давления окружающей прибор атмосферы (т. е. при подъеме или спуске самолета) благодаря наличию в приборе капиллярной трубсчки (трубочки маленьким отверстием), через которую внутренняя полость корпуса прибора сообщается с наружным воздухом.
Принципиальная схема действия прибора показана на рис. 65.
Чувствительной частью вариометра является манометрическая коробка Види 1, внутрь которой внешнее атмосферное давление попадает свободно через специальный трубопровод 3, в то .тремя как внутреннее пространство корпуса 7 сообщается с внешним давлением через узкий капилляр 2.
оо
Благодаря такому устройству при нахождении вариометра на одной и той же высоте в течение продолжительного времени давление воздуха, заключенного в манометрической коробке Види и полости корпуса, будет одинаково, и стрелка 5 будет стоять на нуле шкалы 6. 'При изменении высоты полета, т. е. при подъеме или спуске самолета, давление воздуха, находящегося внутри корпуса, благодаря наличию капилляра будет медленно сравниваться с давлением окружающей атмосферы и отличаться от него на определенную величину; при спуске самолета оно будет меньше давления окружающего воздуха, а при подъеме—больше.
Под действием создавшейся разности давлений манометрическая коробка Види будет или сужаться (при подъеме — наборе высоты самолетом) или расширяться (при спуске) и тем на большую величину, чем больше будет вертикальная скорость перемещения самолета.
Зависимость между вертикальней скоростью самолета и создаваемой при этом разностью давлений внутри корпуса пр?тбора и манометрической коробки Види, а также отдельными деталями прибора выражается следующей формулой:
128 -<1 • I V а-сР
или
где:
(Рс-Р)-а-(Р
128 • т; I • V ’
Рс—давление внутри корпуса прибора в кг/м2;
Р— атмосферное давление (давление внутри коробки Види) в кг/м2;
С — вертикальная скорость подъема или спуска самолета в м/сек;
rt — коэфициент вязкости воздуха (кг • сек/м2);
I—длина капилляра;
d — внутренний диаметр капилляра;
V—объем полости корпуса (замкнутого пространства) в м3; а—переводной коэфициент;
128 — постоянная величина.
Колебания подвижного центра манометрической коробки Види в случае ее сжатия или расширения от изменения разности давлений Pf — Р при подъеме или спуске самолета передаются посредством механизма 4 на стрелку; положение стрелки фиксируется по шкале прибора, имеющей градуировку вертикальной скорости в м/сек. ,
Таким образом в каждый данный момент полета по показанию вариометра можно знать величину скорости подъема или '-пуска самолета.
Вариометр со шкалой от 0 до 10 м/сек. Устройство вариометра со шкалой от 0 до 10 м/сек показано на рис 66, А, .Б.
Конструкция вариометра очень проста. Механизм прибора, состоящий из чувствительной части — манометрической коробки Види 1 и передаточного приспособления 2, помещен в корпусе 3. Последний с лицевой стороны закрывается стеклом 4, промазан
ным замазкой для герметичности; с другой стороны имеется капиллярная трубочка 5, посредством которой внутренняя полость корпуса сообщается с наружным воздухом через штуцер 6. Полость коробки Види свободно сообщается с окружающей атмосферой посредством специального трубопровода и штуцера 6.
Рис. 66. Вариометр со шкалой на 10 м/сек.
А—устройство; Б—.общий вид.
/—трубка Види; 2—(передающий механизм; 3—корпус прибора; 4—стекло; 5—.капилляр; 6—штуцер; 7—
стрелка; 8—шкала; 9—юстировочный винт; 10—'кре-
мальера.
Благодаря такому устройству внешнее давление на коробку Види всегда равно давлению внутри корпуса прибора, а внутрен нее — равно давлению окружающего прибор воздуха, т. е. атмосферному давлению. Поэтому при подъеме самолета коробка Ви ди сжимается, а при спуске, наоборот, расширяется.
Незначительное поступательное перемещение подвижного центра коробки Види превращается передаточным механизмом ,во вращательное движение и передается на стрелку прибора 7, которая по шкале 8 указывает скорость подъема или спуска самолета.
Передаточный механизм состоит из шарнирной передачи, поводков, тяг, сектора с трибкой и осью, на которой насажена стрелка.
Для установки (перед взлетом) стрелки в нулевое положение имеется ^юстировочный винт 9, который приводится во вращение головкой кремальеры 10 (после ее вывинчивания и вытягивания на себя доотказа); после установки стрелки на нуль головка кремальеры вдвигается и завинчивается доотказа.
Шкала прибора равномерная Цена одного деления соответ
ствует 1 м/сек вертикальней скорости самолета. Положение стрелки при отсутствии вертикальной скорости обозначено нулем, а через каждые пять делений — соответственно 5 и 10 м/сек. Кроме того, на шкале имеются две надписи «подъем» и «спуск». Когда стрелка от нуля отклонится в направлении «подъем», самолет набирает высоту, при обратном положении—снижается.
Вариометр со шкалой от 0 до 30 м/сек. Принцип работы и устройство этого вариометра такие же, как и вариометра со шкалой от 0 до 10 м/сек.
Вариометры со шкалой до 30 м/сек устанавливаются на скоростных самолетах, а со шкалой до 10 м/сек на более тихоходных.
Вариометры изготовляются в стандартных корпусах с внешним диаметром 80 мм. Вес их 550 г.
АВИАЦИОННЫЕ МАГНИТНЫЕ КОМПАСЫ >
§ 51. Сведения о магнетизме
Свойство некоторых тел притягивать 'железные ’Предметы называете? магнетизмом, а сами эти тела — магнитами.
Различают естественные магниты (естественный магнетизм), т. е -акне, которые обладают магнитными свойствами от природы (магнитные ру ты и предметы, изготовленные из них), и искусственные (искусственный магнетизм), которым придаются магнитные свойства искусственным путем — намагничиванием.
Кроме того, различают постоянные и переменные магниты (постоянный и переменный магнетизм).
Постоянными магнитами называются такие магниты, магнитные свойства которых практически не изменяются с течением времени илн изменяются незначительно; магнитные свойства переменных магнитов со. временем изменяются значительно’ или исчезают совсем.
Пространство вокруг магнита, на которое распространяется действие маг-гетизма, называется магнитным полем.
Если положить на магнит лист бумаги и насыпать на него железных ятилок, а потом встряхгцть, то железные опилки расположатся в определен, том порядке в виде линий, идущих от одного конца магнита к другому; линии расположения железных опилок называются магнитными силовыми линиями (рис. 67).
При исследовании магнитных свойств магнита выяснено, что наибольшие магнитные свойства проявляются на его концах, которые называются магнитными полюсами; один из них носит название северного полюса (северный магнетизм), а другой — южного (южный магнетизм). Северный полюс магнетизма обозначается буквой N. а южиой—буквой S (названия «северный» .и «южный» приняты это аиалогии с .полюсами земли).
Середина каждого магнита не обладает магнитными свойствами и является как бы перегородкой—границей между северным и южным магнет! иами каждого магнита. Эта линия называется нейтральной линие (рис. 67).
Северный И южный магнетизмы неотделимы; если перерезать магнит по нейтральной линии, то получатся два магнита с магнитными полюсами и ней-
Южный полюс $
Нейтральная • линия
/ /
Рис. 67. Магнит и его свойство.
тральными линиями; если же эти 'магниты снова разрезать по нейтральной винин, получатся четыре магнита и т. д. (рис. 68).
Свойство некоторых предметов приобретать магнитные свойства при по-• ещении их в магнитном поле какого-либо Магнита называется намагни-1 и в а н и е м.
Различные металлы (мягкое железо разных сортов, никель, кобальт, <галь и др.) имеют разную способность к намагничиванию.
Рис. 68. Неразрывность северного и южного магнетизма.
В практике в основном различают три степени способности к намагничиванию металлических предметов.
1. Мягкое (ковкое) железо обладает способностью немедленного и наибольшего намагничивания при расположении его в магнитном поле магнита. Магнитные свойства в мягком железе исчезают мгновенно и практически полностью при удалении его из магнитного поля.
2. Полумягкое железо намагничивается медленнее мягкого железа и медленнее теряет магнитные свойства при удалении его из .магнитного поля
3. Твердое железо (стали различного рода) обладает наименьшей степенью намагничивания и при удалении его из магнитного поля удерживает приобретенные магнитные свойства в течение длительного времени почти бее изменений.
Степень намагничивания предметов зависит от «х положения в магнит-ном поле относительно направлений его магнитных силовых лиинй. Наибольшее намагничивание происходит в том случае, когда продольная ось предметов совпадает с направлением магнитных силовых линий магнитного ноля, а .наименьшее—.когда она .перпендикулярна, т. е. располагается под углом 90° к ним (рис. 69).
Рис. 69. Намагничивание предметов в магнитном поле.
« —угол, составленный продольной осью предмета и направлением магнитных силовых линий.
Сила намагничивания Fa в случае а (рис. 69) будет Fa=FM cos а°; в случ е b будет Fe = FM cos 0° — FM I = FM, т. e. сила намагничивания равна сн о магнИ1ного поля магнита; в случае с будет FC = FM • cos 90° = 7^ • 0 = ), т. е. нама. ничивания не будет.
Это свойство намагничивания необходимо помнить, так как оно понада -бится при рассмотрении девиации компасов.
Явления притягивания железных предметов друг « другу посредство» передачи магнитных свойств при приближении к ним магнита и потеря эти с свойств при его удалении называются магнитной индукцией (рис. 70).
Если два небольших магнита, подвешенных свободно на оси, приближая > друг к другу одноименными полюсами (рнс. 71, А), то они будут отталю-ваться друг от друга; если приближать их разноименными полюсами (северный одного и южный—другого рис. 71, Б), то они будут притягиваться.
Отсюда следует, что одноименные полюса магнитов отталкиваются, а равноименные притягиваются. Это свойство магнитов очень важно и положен > в основу .изготовления магнитных компасов.
Сила взаимодействия полюсов магнитов определяется законом Кулон;, который выражается формулой:
F = тп< ' т‘2 р /2 ’
г. е. сила взаимодействия 'магнитов F прямо пропорциональна массам магнитов и т> (н зависит от их величины) и обратно пропорциональна квадрату расстояния I между этими магнитами, а так <же коэфициенту магнитной проводимости р среды, находящейся между взаимодействующими магнитами. >
Чем больше масса магнитов при данном расстоянии между ними, тем больше сила их взаимодействия; и наоборот, тем меньше сила их взавмо-
Рис. 70. Явление магнитной индукции.
действия, чем больше три данных магнитах расстояния между ними, считая три этом и постоянным.
Величина рдля мягкого железа достигает большого значения (неакольюих тысяч); для твердого железа иг стали она незначительна, ио больше единицы, а для некоторых металлов равна единице или нескольк» меньше (медь, серебро).
г
Рис. 71. Взаимодействие свободно подвешенных двух магнитов.
А—одноименных тол юсов; Б—(разноименных полюсов.
Тела с большим р называются сильномагнитными, с небольшим — ела бомагнитными, ас р = 1 (или немного меньшим) — диамагнитными, т. е. немагнитными.
Рис. 72. Расположение свободно подвешенной магнитной стрелки в магнитном поле.
Благодаря описанным выше свойствам взаимодействия магнитов при помещении свободно подвешенной магнитной стрелки в любом магнитном поле она Л>оей -продольной осью располагается вдоль магнитных силовых лини; этого -поля таким образом, что -ее северный полюс будет обращен всегда к южному полюсу магнитного толя, а южный—к северному (рис. 72).
§ 52, Земной магнетизм
Если взять небольшой кусок мягкого железа в виде проволоки и распо дожить его 'вдали от металлических предметов то направлению географического меридиана, то при исследовании его магнитных свойств обнаружится, что он обладает магнетизмом, а если расположить его перпендикулярно (под углом 90°) к направлению этого меридиана, магнитных свойств не обнаружится.
Каково происхождение магнетизма в этом кусочке мягкого железа? Объяснение этого явления может быть только одно: от намагничивания магнетизмом земли.
Свободно подвешенная магнитная стрелка, удаленная от влияния магнит- ’ пых и железных масс, всегда принимает определенное для данной точки положение относительно горизонтальной плоскости и (направления географического меридиана.
Кроме этого, на экваторе практически она располагается горизонтально, а по мере приближения к полюсам земли наклоняется одним из концов х линии горизонта « на тем больший угол, чем ближе к полюсам. Вблизи географических полюсов свободно подвешенная магнитная стрелка оказывается всегда почти вертикальной.
Такое поведение магнитной стрелки можно объяснить только тем, что ее магнитное поле находится во взаимодействии с каким-то другим магнитным полем, т. е. магнитным полем земли.
Магнитные свойства земли называются земным магне-Т И 3 М О IM.
Как и всякому магниту, земному шару, представляющему собой большой магнит, присуще магнитное поле с магнитными силовыми линиями и магнитными полюсами (рис. 73).
'Магнитные полюсы земли .располагаются вблизи от географических полюсов и соответственно называются: магнитный полюс, расположенный вблизи Северного географического полюса, — северным магнитным полюсом (Мн). а вблизи Южного — южным магнитным полюсом (S,„).
Северный магнитный полюс находится в точке, широта которой 'д=70° N и долгота k = 9>° W (полуостров Бутия, Ка ia-да), а южный магнитный полюс — в точке, широта которой <Р = 72° 28' S и долгота Z = 154 Е (остров Виктории).
Направление, в котором всегда устанавливается продольная ось свободно подвешенной магнитной стрелки, находящейся под действием силы земного магнетизма, называется магнитным и е р и д и а н о м.
В каждой точке на земной поверхности (в общем случае) направление магнитного меридиана не совпадает с направлением географического меридиана на некоторый угол. Угол межд^ направлением географического и магнитного меридианов в какой-либо точке на земной поверхности называется магнитным
ВО
склонением (рис. 74) и обозначается знаком Дт. Магнитное склонение называется восточным Е (+, положительным), если северный конец магнитной стрелки (северное направление магнитного меридиана) отклоняется от северного направления географического (истинного) меридиана вправо, по ходу часовой
Рис. 73. Магнитное поле и магнитные полюса земли.
N— север..ыи ho.ii> с зс-noio шара; S—южный полюс земно и шара.
Рис. 74. Магнитный меридиан и магнитное склонение.
NS—ось земли: ДМ — магнитное склонение.
стрелки, т. е. к востоку. 'Магнитное склонение называется западным W (—, отрицательным), если северный конец магнитной стрелки отклоняется от северного направления истинного меридиана влево, против хода часовой стрелки, т. е. к западу (рис. 75).
В разных точках земной поверхности величина магнитного склонения различна и зависит от следующих факторов: 1) географического положения данной точки, 2) от изменения магнитного поля данной точки с течением времени
Величина магнитного склонения может колебаться в пределах от 0° до + 180°.
Кроме магнитного склонения, наблюдается еще и магнитное наклонение £ т. е. наклоненние одного из концов магнитной срелки под действием земного магнетизма относительно, плоскости горизонта данной точки (рис. 76).
Величина магнитного наклонения, так же как и магнитного склонения, в различных точках на земной поверхности различна; чем ближе к магнитным полюсам земли, тем она больше. На магнитных полюсах магнитное наклонение очень велико и достигает 90°. На экваторе магнитного наклонения не наблюдается; практически оно равно нулю.
Магнитные склонения и наклонения полностью определяют на. правление силы земного магнетизма в любой точке на земной поверхности.
Рис. 75. Положительное + ДЛ4 (восточное) н отрицательное —ДЛ4 (западное) магнитное склонение.
JVS —географический м’пиднан; $м—магнитный меридиан.
Рис. 76. Магнитное наклонение.
ДИ—угол 'Магнитного наклонения; а—б—плоскость горизонта.
Рис. 77. Разложение силы земного магнетизма иа горизонтальную /У и вертикальную z* составляющие.
Поскольку существует магнитное склонение и наклонение, то очевидно, что полное напряжение поля земного магнетизма F раскладывается на две составляющие: на горизонтальную Н и вертикальную Z (рис. 77).
Из рисунка видно, что горизонтальная составляющая поля земного магнетизма Н всегда направляет магнитную стрелку в направлении магнитного меридиана, а вертикальная слагающая Z стремится наклонить магнитную стрелку к горизонту.
В применяемых на практике в авиации магнитных компасах используется только горизонтальная слагающая силы земного магнетизма Н.
§ 53. Магнитные карты
Элементы 'земного магнетизма: магнитное склонение Д/n и магнитное наклонение Д Н изменяются пэ величине и характеру при переходе из одного пункта земной поверхности в другой, а также и с течением времени.
Для определения характера и величины этих магнитных элементов на земной поверхности, а также и изменения их с тече-92
нием времени применяются специальные «магнитные» карты. Эти карты составляются для каждого элемента в отдельности.
Магнитные карты представляют собой обыкновенные географические карты, на которых, помимо очертаний материков, водных пространств, рек, озер и доугих ориентиров, имеется и специальная нагрузка, соответственно назначению карты.
Магнитные карты подразделяются на:
1) карты магнитного склонения (карты изогон);
2) карты годового изменения магнитного склонения;
3) карты магнитного наклонения (карты изоклин).
На картах магнитных склонений проведены линии, которые соединяют точки на земной поверхности, имеющие одинаковое магнитное склонение (линии равного магнитного склонения), называемые изогонами.
Рис. 78. Карта магнитных склонении эпохи 1943 г.
Карты изогон составляются на какой-либо определенный момент времени, который называется эпохой карты (рис. 78). Так как величина магнитного склонения с течением времени не остается постоянной, а непрерывно изменяется вследствие векового его изменения и в течение года достигает значительной величины (ло + 7н-У минут дуги), то для учета этого изменения составляются карты годового изменения магнитного склонения; карты годового изменения магнитного склонения по своему устройству и виду не отличаются от карт изогон.
(Кроме годового изменения магнитного склонения, наблюдается еще суточное изменение магнитного склонения и резкое часовое изменение (магнитные бури).
Очагом магнитных бурь являются полярные области. Наибо лее сильные магнитные возмущения охватывают обычно весь зем ной шар. Более слабые магнитные бури охватывают преимущественно полярные области и прилегающие к ним. Причины, вызывающие магнитные бури, находятся вне земного шара и свя заны с пятнообразовательнэй деятельностью солнца. Исследования показали, что момент начала магнитной бури совпадает с моментом появления «факелов» в области солнечных пятен. Магнитные бури обычно продолжаются несколько часов или суток. В это время стрелка компаса ведет себя очень беспокойно. Наблюдались магнитные бури, во время которых отклонение магнит-
ной стрелки от нормального положения достигало+10 20" Кроме изогон, на магнитных картах указываются магнитные аномалии, т. е. районы с резким и значительным (до +45—50°) изменением магнитного склонения. В СССР имеется несколько аномалий, которые занимают большие площади длиною -в несколько сотен километров. Примером наибольшей аномалии служит Курская аномалия, которая показана на рис. 79. Кроме того, из наиболее известных аномалий являются Криворожская, Магнитогорская, Никопольская и др.
Рис. 79. Курская магнитная Действие силы земного
аномалия. магнетизма наблюдается не
только на поверхности земли, но и в глубоких местах и на любых достигнутых когда-либо человеком высотах1).
§ 54, Назначение магнитных компасов. Курсы
Магнитные компасы применяются для определения направления полета самолета относительно стран света, т. е. для определения его компасного курса.
Курсом самолета называется угол, заключенный между северным направлением меридиана и продольной осью самолета (рис. 80, А). Курс всегда отсчитывается от северного направления меридиана до продольной оси самолета (в направлении но-
1) В районах магнитных аномалий влияние резкого •изменения магнитного склонения на показания магнитных компасов, установленных на самолете, значительно сказывается только на малых высотах.
са самолета) по ходу часовой стрелки (вправо) и измеряется в градусах от 0 до 360°.
Рис. 80. Курс самолета.
А—ояраделение; Б—кмрсы;
ИК—истинный к.рс; МК—магнитный курс; КК— компасный курс; Д/С—девиация компаса.
Курс может быть истинным (ИК), если он отсчитывается от истинного (географического) меридиана, магнитным (МК). если отсчитывается от магнитного меридиана, и компасным (КК) ст компасного меридиана (рис. 80, Б).
(Компасным меридианом называется направление, в котором устанавливается магнитная стрелка компаса, помещенного на самолете. В общем случае он не совпадает с направлением (магнитного и истинного меридианов. Это происходит потому, что на компас^ установленный на самолете, кроме сил земного магнетизма, действует еще самолетный магнетизм, т. е. железные и стальные части самолета, обладающие магнитными свойствами. Под действием самолетного магнетизма стрелка компаса уходит от направления магнитного меридиана и образует с ним угол.
Угол между северными направлениями магнитного и компасного меридианов называется девиацией компаса (обозначается знаком КД К (рис. 80, Б).
Девиация на разных самолетах, даже одного типа, различна и меняется с изменением курса, течением времени и в связи с изменением оборудования самолета.
§ 55. Принцип действия и устройство магнитных компасов
Принцип действия магнитных компасов основан на свойстве свободно подвешенной магнитной стрелки всегда устанавливаться в направлении магнитного или компасного меридианов места.
Основными частями всякого магнитного авиационного компа-ся являются (рис. 81, Д, Бу. картушка 15, состоящая из магнитиков 1, поплавка 2, затухателей 3, шпильки 4 и кольца 5; котелок 6 с отверстием 7 для заливки жидкостью; колонка 8 с топкой 9, укрепленная пластинкой на дне котелка; курсовая черта 10; угловая шкали 11 или азимутальный круг 12 для отсчета курсов самолета; компенсационная (уводящая) камера /3; мембрана 14.
Назначение и работа перечисленных деталей рассмотрены ниже при разборе устройства компасов.
В зависимости от устройства магнитные и авиационные компасы подразделяются на периодические и апериодические. Картушка периодических компасов, в отличие от апериодических, имеет лимб (круг с градусами) и поплавок; она неустойчива в полете. После отклонения от компасного (магнитного) .меридиана картушка приходит в колебательное движение и возвращается в первоначальное свое положение (в направление компасного меридиана) не сразу, а после того, как несколько раз пересечет этот меридиан, т. е. постепенно, по затухании колебаний. Картушка апериодического компаса (рис. 81, Б) не имеет лимба и снабжается затухателями—тонкими медными проволочками круглого сечения. При движении картушки происходит обтекание затухателей жидкостью Комитаса, которое сопровождается завихрениями, тормозящими движение картушки.
Апериодическое колебание состоит в том, что картушка, будучи выведенной из своего первоначального положения (направления компасного меридиана), приходит к нему, оставаясь все 96
время по одну сторону этого меридиана или пересекая его незначительное число раз. Это качество весьма ценно и потому используется в самолетных компасах. Наиболее употребительны компасы .периодические. В настоящее время для самолетовождения
Рис. 81. Устройство магнитного авиационного компаса.
А—вид в разрезе; Б—вид сверху.
1—магнитики; 2—.поплавок, 3—затухатели; 4—шпилька; 5— кольцо; 6—котелок; 7—заливное отверстие; 8—колонка; 9— то,п‘'а: Ю—курсовая черта; //—шкала; /2—.азимутальный круг; 13—.компенсационная камера; 14—мембрана; 15_______кар-
тушка.
применяются компасы типе® КИ-6, КИ-10, А-3 и АН-4, а также специальные дистанционные компасы типа ПДК-45 (см. § 61).
На самолетах, где имеется штурман, устанавливают два 'Компаса: у пилота (путевой компас) и у штурмана (главный компас). В качестве путевого компаса применяются компасы КИ-6, КИ-10, ПД*К-45, К-5, А-4, а в качестве главного — К-5, АН-4, А-4 и ПД'К’45. На самолетах с двумя пилотскими местами устанавливают два и более компасов.
§ 56. Компас К-5
Главной частью компаса является картушка (рис. 82, А, Б). Она имеет пару прямолинейных магнитов 1, изготовленных из высоколегированной стали, расположенных параллельно друг другу по обе стороны шпильки 2 и прикрепленье к поплавку 3. Поплавок служит для уменьшения силы тяжести картушки в жидкости, а следовательно, и для уменьшения трения между шпилькой 2 и топкой 4. Это увеличивает чувствительность прибора и уменьшает его ошибки.
К поплавку прикреплен демпфер 5, который увеличивает устойчивость картушки при колебаниях компаса в вертикальной плоскости. В верхней части картушки имеются четыре успокоителя 6 (затухателя), расположенные по отношению друг к другу под углом 90°. На концах трех из них нанесены буквы S, W, Е, обозначающие юг, запад, восток, а на конце четвертого, показывающего север, нанесена* стрелка.
В центре картушки, снизу укреплена шпилька 2, которая спирается на топку 4 и служит осью вращения картушки. Для уменьшения трения шпильки о топку последняя сделана из агата и запрессована на вершине колонки 7. Топка с колонкой амортизирована при помощи спиральной пружины 8 на стойке 9. Поэтому сам компас амортизации не имеет.
При кренах самолета картушка удерживается от соскакивания пружинящей шайбой 10, которая заделана во втулку кар тушки. Колонка 7 со вделанной в ней топкой в верхней своей части проточена по сфере, благодаря чему картушка может давать свободный крен до 20°.
Стойка 9 неподвижно укреплена на дне алюминиевого котелка 11. Котелок представляет собой цилиндрический сосуд, наполненный жидкостью—лигроином, который служит для придани I картушки апериодичности и устраняет другие резкие колебания картушки .в полете.
Для герметичности котелок сверху закрывается стеклом 12. Кроме того, для отсчета курсов самолета он имеет кольцеобразный азимутальный круг 13, разбитый по окружности на градусы с ценой деления 2° и покрытый, в свою очередь, стеклом 14. На азимутальном круге, на основных делениях (главных румбах), т. е. 0°, 90°, 180° и 270°, нанесены буквы N, Е, S и W, обозначающие север, восток, юг и запад.
Оцифровка на азимутальном круге выполнена через 10°, нрн чем обозначены только десятки градусов. 9s
Рис. 82. Компас К-5.
А—устройство; Б—вид сверху; В—общий вид.
t магниты; 2~шпилька; 3—поплавок; 4—топка; 5—демпфер; 6—успокоители; —колонка, 8 пружина; 9—стойка; 10—шайба; 11—котелок; 12—стекло котелка; 1о азимутальный круг; 14—стекло азимутального круга; 15—зажим азимутального круга; 16—мембрана; 17—герметическая камера; 18—путевые нити; IV курсовая черта; 20—девиационный прибор.
Для того чтобы можно было точнее отсчитывать курс и удобнее выдерживать в полете желаемое направление, на стекле ази' мутального круга (лимба) на одинаковом расстоянии от центра вращения картушки нанесены путевые нити 18 параллельно друг другу и основному направлению N—S.
Лимб вращается по кольцевому пазу в верхней части котелка и удерживается от случайных поворотов зажимом 15. Чтобы повернуть лимб, необходимо сначала отвернуть зажим, после чего поворачивать свободно в любую сторону.
Компас имеет курсовую черту 19, прикрепленную к котелку внутри его полости.
Концы затухателей с буквами, буквы, цифры и большие деления азимутального круга, а также курсовая черта и путевые нити покрыты светящейся фосфористой массой. Это дает возможность читать показания компаса в темноте.
Снизу к котелку прикрепляется мембранная коробка 16 (уво-дящая камера), состоящая из четырех диафрагм; она сообщается с внутренней полостью котелка и служит для компенсации изменения объема жидкости, т. е. не допускает появления пузырей в котелке по мере уменьшения атмосферного давления и понижения температуры с увеличением высоты полета.
Мембранная коробка 16 помещается в герметической камере 17. Эта камера является составной частью котелка и предназначена для сохранения постоянного давления на мембрану на разных высотах и при различных температурах. При этом для большей интенсивности действия мембраны на изменение объема жидкости в результате изменения атмосферного давления и повышения или понижения температуры внутри герметической камеры создается давление на 300 — 400 мм рт. ст. больше нормального атмосферного. Таким образом, на мембранную коробку действует постоянно не 1 ат, а 1,3—1,4 ат. Поэтому компас ’К-5 безотказно работает на всех высотах до 10 000 м и при температурах от + 50° до — 60°.
Девиационный прибор 20 (рис. 82, А и 83) является составной частью компаса и служит для уменьшения его девиации. Он состоит из корпуса 1, двух поперечных и четырех продольных валиков 2 с зубчатками для передачи вращения. Два крайних продольных валика 3 удлинены, выведены наружу и обозначены буквами N — S и Е — W. На концах удлиненных валиков сделаны гнезда для их поворачивания.
В два продольные средние валика и поперечные перпендикулярно к осям вставлены магниты, которые называются поперечными и продольными магнитами-уничтожителями.
Вращательное движение удлиненного валика N — S передается продольным валикам, а вращение валика Е—W воспринимается поперечными валиками. Таким образом, при помощи удлиненного валика N—S можно поворачивать поперечные девиационные магниты, продольные же девиационные магниты поворачиваются посредством удлиненного валика Е — W. Разные положения магнитов создают различное по направлению и силе магнитное мю
поле, вследствие чего можно изменять положение картушки компаса и устанавливать ее в желаемом направлении
При пользовании компасом в полете— для установления самолета на желаемый курс сначала необходимо установить азимутальный круг так, чтобы против курсовой черты находилось деление, соответствующее заданному курсу; затем
Рис. 83. Девиационный прибор компаса.
Д—обший вид; Б—различное -положение магнитов.
1—корпус; 2—-валики; 3—удлинительные валики; 4— магниты.
уже следует разворачивать самолет до тех пор, пока стрелка ос новного успокоителя картушки не станет против N азимуталь ного круга и параллельно путевым нитям. После этого для выдерживания заданного курса необходимо следить, чтобы сохранялась параллельность между путевыми нитями и основным за-тухателем картушки N — S. Параллельность достигается подво рачиванием самолета в соответствующую сторону.
Для определения курса самолета при различном положении картушки необходимо- сначала установить азимутальный круг с таким расчетом, чтобы его N совпал со стрелкой основного затухателя картушки и путевые нити были параллельны ему; затем против курсовой черты на азимутальном круге прочесть искомый курс самолета.
В виду неизбежного непрерывного «рыскания» самолета в полете и его разворотов отсчет курса следует производить после успокоения картушки, а дл-я большей точности делать не один, а несколько отсчетов и брать среднее арифметическое.
Отсчет курса после разворота (особенно — длительного) следует производить по истечении 1—2 минут, т. е. после того, как окончится увлечение картушки жидкостью и она успокоится.
Вес прибора 1500 г.
§ 57. Компас АН-4
Компас АН-4 применяется как главный компас штурманз (наблюдателя) в полетах по заданному курсу и при проведениа аэронавигационных расчетов в воздухе.
Устройство компаса АН-4 показано на рис. 84, А, Б.
Рис. 84. Компас АН-4.
А—'устройство; Б—вид сверху.
I—затухатели; 2—основные затухатели; 3—шкала; 4—осветительное устройство.
Картушка АН-4 по устройству аналогична картушке компаса К-5, с той лишь разницей, что в верхней части ее имеется не четыре, а шесть успокоителей /, четыре из которых окрашены в черный цвет и имеют на своих концах цифры белого цвета 0, 1, 2т 3. Угол между успокоителями с цифрой 0 и с цифрой 3 равен 60°, а каждый из трех углов между соседними успокоителями равен 100°.
Остальные два затухателя 2 укорочены относительно других ч расположены параллельно магнитам картушки; они указывают направление компасного (магнитного) меридиана места. Коней укороченного- успокоителя, направленный на сев-ер, имеет вид стрелки и выкрашен -в красный -цвет, а конец, направленный на юг,— в синий.
Красный и синий успокоители показывают всегда направление Север—Юг (красный N, синий S). Черные успокоители указывают число сотен градусов при отсчете курса по стоградусной шкале.
Внутри котелка укреплена стоградусная шкала 3 с белыми делениями и цифрами. Одно деление шкалы равно- 1°; цифры нанесены через каждые 10°.
Шкала укреплена в передней части котелка с таким расчетом, что деление 50° заменяет собой курсовую черту компаса при установке его на самолете.
К кольцу над шкалой прикреплен патрон 4 с электролампочкой на 12 в для освещения делений шкалы.
Наименование и назначение других деталей компаса такие же, как и в компасе К"5.
Курс по компасу АН-4 отсчитывается по стоградусной шкале у того затухателя, который будет находиться против шкалы в момент отсчета курса; единицы и десятки градусов читаются по шкале, а сотни берутся соответственно цифре на данном затуха-теле.
Пример. Против затухателя с цифрой 2 по шкале компаса будет 35°, а величина курса 35° + 200° = 235°; если курс в 35° будет прочтен -по шкале против затухателя с цифрой 3, то его величина будет 335° и т. п.
§ 58. Компас А-4
Компас А-4 применяется в качестве главного и является дальнейшим усовершенствованием компаса АН-4. Поэтому принцип его действия и детали конструкции -в основном не отличаются от компаса АН-4. Разница между этими компасами -состоит лишь в устройстве компенсационных камер.
Устройство компаса А-4 показано на рис. 85, А, Б. Из этого рисунка видно, что компенсационная (уводящая) камера располагается в верхней части прибора и выполнена в виде полого кольца. Уводящая камера сообщается с полостью котелка прибора через кольцевой вырез. Котелок заполняется жидкостью таким образом, что уровень ее всегда выше нижней поверхности смотрового стекла.
Для того чтобы появляющиеся в жидкости (лигроине) пузырьки воздуха отводились в незаполненную часть уводящей камеры, нижняя поверхность смотрового стекла делается выпуклой в сторону дна котелка: при изменении температуры изменение
Рис. 85. Компас А-4.
А—устройство; Б—вид сверху.
1—затухатели; 2—кзртушка с демпфером-успокоителем; 3—уводящая камера; 4—заливное отверстие; 5—девиационный прибор; 6—осветительный прибор.
объема жидкости (увеличение или уменьшение) компенсируется жидкостью уводящей камеры. Это возможно лишь потому, что изменение атмосферного давления в зависимости от высоты не влияет на изменение объема жидкости внутри котелка; поэтому компас может работать на любых высотах и при любой температуре без обычной компенсационной камеры с повышенным давлением, как у компасов IK-5 и АН-4.
Такое устройство компаса А-4 улучшает его эксплоатацию и уменьшает вес.
§ 59. Компас КИ-6
Компас КИ-6 устанавливается преимущественно на одномест-ных самолетах. Картушка компаса (рис. 86, В) имеет два магнита 1, расположенных параллельно друг другу и прикреплен НЫХ к поплавку 2. Посредством четырех пистонов к поплавку прикреплена латунная шкала 3 с делениями и цифрами. Деления нанесены через 5°, а оцифровка—через 30°.
Главные румбы обозначены буквами N, Е, S, W.
Рис. 86. Компас КИ-6.
Л—(устройство; Б—вид спереди; В—картушка.
7—магниты; 2—поплавок; 3—шкала; 4— курсоэая черта; 5—ввшптальный круг. 6—девиационный прибор; 7—компенсационная камера; 8—колонка ю амортизацией;
9—стекло.
С лицевой стороны компаса под смотровым стеклом (внутри котелка; рис. 86, А, Б) имеется вертикальная изогнутая курсовая черта 4, окрашенная в белый цвет; передняя часть этой черты покрыта светящейся массой.
Смотровое стекло 9 имеет выпуклую форму и не допускает явлений параллакса (искажения) при отсчете. В передней части компаса укреплен азимутальный круг '5; деления и оцифровка круга такие же, как и на шкале картушки.
Азимутальный круг (отметчик) предназначен для установки заданного курса. Курс устанавливается подведением соответствующего деления шкалы под нижний конец курсовой черты. Такое приспособление освобождает летчика от необходимости держать в памяти числовое значение заданного курса.
Котелок заполняется лигроином. В верхней части компаса прикреплен девиационный прибор б. Устройство его точно такое же, как и у компаса К-5. Компас КИ-6 устанавливается на приборной доске летчика, к которой прикрепляется при помощи
106
стандартного крепежного кольца. Остальные детали такого же назначения, как и у других компасов.
Для снятия прибора достаточно только отвернуть винт замка крепежного кольца: после этого прибор легко вынимается
Вес компаса околю 1000 г.
§ 60. Компас КИ-10
Этот компас отличается от описанного выше компаса КИ-б только устройством компенсационной камеры и внешним видом. Компас КИ-10 вместо обычной компенсационной камеры имеет уводящую камеру, как и у компаса А-4.
Вид компаса КИ-10 показан на рис. 87.
Рис. 87. Компас КИ-10 (вид спереди).
Ч—корпус; 2—заливное
отверстие; 3—приборная доска; 4—уводящая камера; 5—девиационный
прибор.
§ 61. Дистанционный компас ПДК-45 (потенциометрический)
Потенциометрический дистанционный компас ПДК-45 это магнитный компас, датчик которого (собственно чувствительная магнитная часть) устанавливается в таких местах самолета, где меньше всего сказывается влияние магнитных масс самолета на точность показания компаса, т. е. девиация компаса сводится к минимуму. Показания магнитного компаса-датчика передаются на некоторое расстояние нескольким указателям (повторителям), которые устанавливаются на приборной доске самолета и в кабине штурмана.
ПДК-45—пилотажно-навигационный прибор. Он устанавли-. вается и на многомоторных и на одномоторных самолетах и используется как в качестве компаса пилота, так и в качестве компаса штурмана (главного).
Принципиальная схема, общий вид датчика-повторителя и схема установки ПДК-45 на самолете показаны на рис. 87, А.
Передача на расстояние положения магнитной системы датчика к указателю (повторителю) осуществляется электрическим способом по потенциометрической схеме (рис. 87, Б). 106
Магнитная картушка 1 датчика имеет на сврв® оси три ща-тки 2, расположенные под углом 120° друг к другу. Щетки перемещаются по кольцевому .потенциометру 3. К потенциометру подводится напряжение бортовой самолетной электросети постоянного тока 27 в. Потенциометр жестко связан с котелком датчика и вместе с ним при разворотах самолета меняет свое положение относительно плоскости магнитного меридиана, а следовательно, и относительно щеток.
Таким образом, разность потенциалов между щетками датчика изменяется в зависимости от компасного курса самолета.
|Угол поворота потенциометра-датчика передается дистанционно на указатель. В указателе напряжение, снимаемое с потенциометра-датчика, подводится к трем обмоткам статора указателя. Обмотки выполнены таким образом, что образуют из шести сек
Рис. 87. А.
А—схема. расположения в самолете; Б—‘Цриицигюпаль.чая схема ПДК-45 и общий вид датчика (7) и указателя (II).
7—кожух котелка датчика; S—нактоуз; 9—девиационные пенолы;- 10-штептельные вывода; И—индекс отметчика; /2—лремааер.ка.
ций три обмотки, которые расположены под углом 120° друг к другу.
Подвижная часть указателя состоит из (постоянного магнита <5, закрепленного на оси 'прибора и свободного вращающегося в пределах полной окружности.
Вращение подвижной системы указателя происходит благодаря взаимодействию магнитного поля, постоянного магнита и магнитных полей, созданных током в обмотке. При повороте самолета щетки датчика перемещаются по его потенциометру и перераспределяют токи в рамках указателя, благодаря чему постоянный магнит указатели поворачивается; угол поворота магнита указателя строго соответствует углу поворота потенциометра-датчика.
Поворот оси магнита датчика указывается по шкале стрелкой 6 (диск с самолетиком), которая жестко укреплена на оси постоянного магнита-указателя.
§ 62. Установка компасов на самолете
Компасы устанавливаются на самолетах в месте, которое предусматривается схемой оборудования самолета данного типа. Вообще же при установке компаса стремятся найти для него место, выгодное в магнитном отношении, т. е. в месте наименьшего влияния самолетного магнетизма на точность его показаний: компас должен быть по возможности удален от стальных и желез-ных масс (Спецоборудования и т. п.).
Компас нельзя ставить в одной горизонтальной плоскости с рабочим магнето и вблизи радиостанции.
'Место установки компаса должно удовлетворять и удобству отсчета курса, т. е. необходимо, чтобы летчик мог' легко отсчитывать курс со своего места, не наклоняя ни головы, ни туловища. Кроме того, летчик должен иметь доступ к компасу, чтобы ставить на нем заданный курс.
Рис. 88. Установка компаса на самолете, вд-арямая, проходящая через курсовую черту и центр картушки; вв'—продольная ось самолета; аа' и вв'—обе линии параллельны.
lOd
Компас укрепляется на самолете с помощью медных болтов или шурупов; применение железных или стальных креплений не допускается. Он должен быть установлен так, чтобы вертикальная плоскость, проходящая через курсовую черту (в компасах д-4 и АН-4 курсовую черту обозначает деление 50° стоградусной шкалы) и центр картушки (ось ее вращения) — аа', была параллельна продольной оси самолета вв' (рис. 88). Практически это достигается прочерчиванием на полочке (на которой устанавливается компас) линии, параллельной плоскости симметрии самолета вв'. Компас ставят на палочку так, чтобы курсовая черта и центр котелка совпали с прочерченной линией.
§ 63. Ошибки показаний компасов
Ошибки показаний компасов происходят от различных причин. Ошибки могут быть инструментальные, установочные, обусловливаться изменением температуры и эволюциями самолета и, наконец, девиацией от действия на компас самолетного магнетизма (см. § 65).
1. Инструментальные ошибки вызываются несовершенством конструкции и качества изготовления -компасов, т. е. неточностью градусного деления шкалы, неточностью изготовления деталей, наличием эксцентриситетов, застоя картушки (нечувствительностью к небольшим изменениям курса самолета) и т. п.
Средняя точность показаний рассмотренных выше компасов при соблюдении правил эксплоатации равна приблизительно +2°.
Застой картушки является следствием трения шпильки о топку. Поэтому картушка, будучи отведена от начального положения на угол Ю—20°, >ке возвратится в плоскость магнитного меридиана, а будет составлять с ним некоторый угол. В исправных компасах этот угол .не должен превышать 1—2°.
2. Установочная ошибка происходит от неправильной установки компасов на самолетах; она заключается в том, что очень часто линия, проходящая через центр картушки и курсовую черту компаса, не параллельна продольной оси симметрии самолета и составляет с ней некоторый угол. Ясно, что в таком случае в показаниях компаса всегда будет ошибка, равная по величине этому углу. Установочная ошибка может быть исправлена поворотом котелка компаса в соответствующую сторону.
3. Влияние изменения температуры сказывается главным образом на компасной жидкости. При понижении температуры плотность и вязкость жидкости увеличиваются; при этом картушка, будучи выведена из своего нормального положения, медленнее возвращается к нему и сильнее увлекается жидкостью при разворотах самолета.
При повышении температуры происходит обратное явление: плотность и вязкость жидкости понижаются, а картушка становится менее устойчивой, и увлечение ее жидкостью уменьшается
109
Следует иметь в виду, что при температуре ниже — 35°С. компасы дают показания с погрешностью, а при температуре в пределах — 15°С до + 20°С больших ошибок в показаниях не бывает.
4. Эволюции (развороты, вибрация, трены) самолета вызывают в компасе четыре нежелательных явления: увлечение картушки жидкостью, поворотную девиацию (северную поворотную ошибку), кремовую девиацию и, наконец, ошибки от вибрации.
Увлечение картушки жидкостью происходит потому, что при разворотах самолета жидкость в котелке вследствие своей вязкости приходит во вращение в сторону разворота самолета (котелка) и увлекает за собой картушку, создавая ошибку в отсче тах курса во все время развооота и некоторое время после его прекращения. После окончания разворота картушка приходит в плоскость меридиана через 2—3 минуты (вместо 15—20 сек. при спокойной жидкости). Во избежание этих ошибок отсчет по компасу после разворота самолета следует производить только то^ра, когда прекратится перемещение жидкости в котелке, а картушка вернется в нормальное положение, т. е. через 2 или 3 минуты после окончания развооота.
а) Северная по воротная ошибка (поворотная девиация) заключается в следующем: при разворотах самолета картушка компаса под действием возникающих центробежных и других сил отклоняется от своего нормального положения, и, следовательно, компас дает неправильные показания. Эта ошибка достигает наибольшей величины на курсах, близких к северному курсу, а потому и называется северной поворотной ошибкой. На курсах самолета, близких к западному или восточному курсам, такие ошибки имеют незначительную величину. Это объясняется следующим: в компасах, применяемых для пользования в наших широтах (Северном полушарии), для того чтобы создать противодействие действующей на картушку вертикальной слагающей силы земного магнетизма и устранить наклонение северной части картушки к плоскости горизонта, центр тяжести последней не совмещен с центром подвеса, а несколько отнесен к южному ее концу, образуя небольшое .плечо I (рис. 89).
Рис. 89. Смещение центра тяжести относительно центра подвеса магнитной стрелки.
I —плечо.
Некоторое смещение цента тяжести к южному концу относительно центра подвеса дает возможность приложить равнодействующую всех сил, действующих на картушку, таким образам, НО
чтобы центр приложения этой равнодействующей находился ниже й проходил через точку опоры, т. е. чтобы картушка приобрела свойства вертикального маятника.
Вследствие этого, как видно из рис. 90, А и Б, при разворотах самолета на курсах, близких к северному и южному курсам, .возникающие при этом центробежные силы q действуют на
Рис. 90. Северная поворотная девиация.
Л—ПрИ разворотах самолета иа северных курсах; Б—на южных курсах; В—иа западных и восточных курсах.
картушку компаса и создают вращательный момент и уводят ее от нормального положения, т. е. от направления магнитного (компасного) меридиана.
При разворотах самолета на курсах, близких к северному курсу, северный конец картушки компаса 'Всегда уходит в направлении разворотов, а близких к южному — в сторону, обратную разворотам самолета.
При разворотах на курсах, близких к северному, для того, чтобы взять желаемый курс без последующих доворотов самолета, его следует не доворачивать на некоторый угол, а на курсах, близких к южному, соответственно добавлять к углу разворота.
Практически установлено, что эта поправка примерно равна крену самолета; если разворот производится на курсах, близких к северному, с креном в 10—15°, то самолет следует не довора-чивать до желаемого курса на величину этого крена, а на южных—добавлять величину крена. Если же разворот производится с креном, близким к 20 — 25°, следует производить то же на величину угла крена плюс 5°. Из рисунка 90, В видно, что поворотной девиации на западных и восточных курсах не наблюдается.
б) Креповая девиация получается при кренах самолета и болтанке вследствие того, что дед действием возникающих различных добавочных сил на картушку компаса, которая, будучи маятником, сохранит горизонтальное положение, начинают; действовать не только горизонтальная, но и вертикальная составляющая силы земного магнетизма, а также изменяющееся действие самолетного магнетизма от отдельных железных и стальных частей самолета. Эта ошибка по величине и своему характеру непостоянна, и так как особо большого влияния на пилотирование самолета не оказывает, в настоящее время практически не учитывается.
в) Девиация от вибрации с а м о л е т а происходит от неточного уравновешивания винта и двигающихся частей мотора, от «бросков» самолета и порывов ветра, которые вызывают беспорядочные ускорения, влияющие на устойчивость картушки. Колебания картушки около некоторого положения равновесия вследствие этих причин достигают иногда нескольких десятков градусов и оказывают значительное влияние на точность вождения самолета по курсу. Эта девиация может быть уменьшена правильной установкой компаса на самолете и хорошей его амортизацией, а также особенно внимательным отношением пилота к правильному пилотированию самолета.
5. Девиация от влияния самолетного магнетизма на картуш; ку возникает при установке компаса на самолете.
§ 64. Осмотр и проверка компасов перед полетом
Степень исправности работы компасов выясняется путем его осмотра и проверки.
При осмотре следует установить:
1) отсутствие наружных изъянов компаса: повреждений котелка, стекла или других внешних деталей;
2) чистоту компасной жидкости и отсутствие в котелке пузырьков воздуха и осадков;
3) исправность освещения;
4) действие девиационного .приспособления и степень уменьшения девиации;
5) последний срок поверки компаса и наличие графика его поправок (девиации);
6) правильность установки компаса на самолете.
§ 65. Девиация магнитных компасов
На картушку компасов, установленных на самолете, помимо сил земного магнетизма, действует еще и самолетный магне-1изм; последний возникает от магнитов, находящихся на самом самолете, т. е. от действия стальных и железных предметов — органов управления, частей мотора, частей самолета, спецобору-дования и т. п. Под влиянием самолетного магнетизма ось картушки компаса, в общем случае, ycTaiHaiBniMBaencH не в направлении плоскости магнитного меридиана, а отклоняется от него и образует с ним некоторый угол, который называется девиацией к о м п а са (Л К). Направление же оси картушки компаса, установленного на самолете, называется компасным меридианом и обозначается Nk—SK.
Следовательно, девиация представляет собой угол, заключенный между магнитным и компасным меридианами.
Девиация компаса называется положительной (Д- Z' Ю, если •еверное направление оси картушки отклоняется вправо (по ходу (зсовой стрелки — к востоку) от северного направления магнитного меридиана (рис. 91, А, Б), и отрицательной ( — ДЮ, если она отклоняется влево ('против хода часовой стрелки—к запасу) от него. Девиация всегда отсчитывается от северного направления магнитного меридиана к северному направлению компасного меридиана.
Как будет видно ниже, величина и знак девиации меняются с изменением курса самолета и зависят от силы и направления действия на картушку компаса самолетного магнетизма.
Причины, вызывающие девиацию магнитных компасов, установленных на самолете, заключаются в следующем. Картушка компаса находится всегда под действием двух магнитных полей: земного и самолетного магнетизмов. Сила земного магнетизма всегда устанавливает
юь картушки в направлении магнитного меридиана, а сила самолетного магнетизма уводит ее от этого направления на некоторый угол. Рассмотрим, каким образом это получается.
Самолетное магнитное поле подразделяется на: постоянное и переменное поля.
Постоянное поле образуется частями самолета, которые обладают постоянным магнетизмом (состоят из твердого же-из
Рис. 91. Девиация компаса.
4—положительная (-|-ДК); Б—отрицательная (— ДД).
Nm
NK
-ЛК
.юза—стали) и сохраняют постоячи'ое направление действия относительно направления продольной оси самолета. Переменное поле образуется частями, которые изготовлены из мягкого железа и приобретают магнитные свойства посредством намагничивания от земного магнетизма и постоянного самолетного. В зависимости от курса самолета направление магнитных силовых линий и напряжение этого поля изменяются вследствие перемагничивания железных частей.
Рис. 92. Действие иа картушку компаса, установленного на самолете, сил самолетного магнетизма (от отдельных металлических частей самолета).
А—(расположение отдельных сил; Б—геометрическое сложение сил.
Л» /з и т. д. магнитные силы отдельных деталей самолета.
Сила земного магнетизма устанавливает картушку компаса в направлении магнитного меридиана и никакой девиации не производит. Сила же, порождаемая постоянным самолетным магне тизмом, создает так называемую полукруге в ую девиацию, т. е. такую, которая при изменении курса полета от 0° до 860° изменяет свой знак и величину два раза, приходя при этом два раза к нулю и достигая два раза наибольшей своей величины. Полукруговая девиация составляет большую часть девиации, наблюдаемой у компасов, установленных на самолете. Это объясняется тем, что детали конструкции самолетов обычно почти исключительно изготовляются из твердого железа (стали), маг нетизм которого гораздо больше магнетизма мягкого железа.
Чтобы понять сущность явления полукруговой девиации, разберем следующий пример (рис. 92, А, Б).
Предположим, что на картушку компаса, установленного на самолете, действует несколько магнитных сил от отдельных дета1-114
лей самолета, изготовленных из твердого железа и обладающих более или менее постоянным магнетизмом, т. е. силы Js... fu ы т. Д- (Рис- 92, Л).
Картушка компаса под действием всех этих магнитных сил отклонится от направления магнитного меридиана в сторону равнодействующей этих сил /"о (рис. 92, Б), т. е. в направлении си-гы, которая заменяет по величине и направлению действие всех магнитных сил от отдельных деталей самолета, и примет положение II, образуя девиацию + ДА. Исходя из этого, при выяснении полукруговой девиации в дальнейшем будем рассматривать действие на картушку компаса только силы f0, создаваемой одним условно взятым стальным предметом.
Для этого вблизи компаса поместим и закрепим на самолете чеподвижно условный магнит N — S (стальной предмет), который создает магнитную силу, равную по величине и направлению силе fo (рис. 93, А).
В этом случае на картушку компаса будут действовать две силы: сила земно,го магнетизма Н, которая будет удерживать хартушку в направлении магнитного меридиана и сила магнита /о, которая будет уводить ее от него. Действие силы f0 на картушку компаса на разных курсах самолета, как видно из рис. 93, А, различно, и создаваемая ею девиация изменяется по знаку а величине два раза при изменении курса самолета от 0° до 360°.
На курсе С° северное направление картушки под действием ‘магнита (благодаря притягиванию южным магнетизмом магнита северного конца стрелки компаса) отклоняется от северного направления магнитного меридиана по ходу часовой стрелки (вправо—к востоку), создавая положительную девиацию '4^^); подобное явление получается и на курсах, близких к 45°, 90е и 315°.
На курсах самолета 135°, 180°, 225°, 270° и близких к ним северное направление картушки отклоняется против хода часовой стрелки (влево—к западу) и вызывает отрицательную девиацию компаса (- ДЮ. Если это изменение девиации по величине и знаку при изменении курса самолета изобразить в виде графика (кривой), то получается кривая, изображенная на рис. 93, Б. Эта кривая называется кривой девиации, а график в мелом—г рафиком полукруговой девиации.
На этом графике видно, что при изменении курса самолета jt 0 до 360° девиация два раза приходит к нулю и два раза достигает наибольшей величины. Поэтому такая девиация называется полукруговой.
Если подобным образом изобразить действие на компас мяг-4 го самолетного железа (в виде одного бруска правильной геометрической формы, укрепленного также неподвижно в каком-либо месте самолета), то влияние этого железа на компас будет отличаться от действия твердого железа, т. е. постоянного магнита. Это происходит вследствие перемагничивания мягкого же-
леза, а следовательно, и изменения создаваемого им магнитного поля ® зависимости от курса самолета.
Рис. 93. Полукруговая девиация и ее график (от частей самолета, изготовленных из твердого железа).
А—девиация на различных курсах самолета; Б—график девиации.
Явление девиации от мягкого самолетного железа рассмотрено на рис. 94, А, Б. 1Как видно на этом рисунке, на курсах самолета, близких к 0°, 45°, 180° и 225°, девиация, создаваемая мягким 116
железом, положительная, а на курсах, близких к 90°, 135°, 270° и 315°, — отрицательная; при изменении курса
Рис. 94. Четвертная девиация и ее график (от частей самолета, изготовленных из мягкого железа).
А—девиация на различных курсах; Б—.график девиации.
от 0 до 360° она четыре раза изменяет свой знак и величину (Рис. 94, Б). Поэтому девиация от мягкого железа называется четвертной девиацией.
Помимо девиации полукруговой и четвертной, различают еще а так называемую постоянную девиацию. Она происходит от симметричного расположения (кругового или в виде диска) деталей, изготовленных из мягкого железа, вокруг картушки ком паса. В этом случае создаваемое магнитное поле будет постоянным, независимо от направления полета. Отсюда следует, что создаваемая при этом девиация будет также постоянной, т. е иметь постоянные величину и знак на всех курсах самолета Полная девиация магнитных компасов, установленных на самолете, складывается из трех как бы отдельных девиаций: полукруговой девиации, четвертной и ino-стоянной.
Обозначая полукруговую девиацию через Ъ.КЛОЛуКр, чет> вертную—через bl\tlrntri,p и постоянную — через ЬКпост. получим, что общая девиация компаса ДА, установленного на самолете, будет равна:
Д А - Д АПолукр I ^'четяер -Г Д А пост-
График полной девиации изображается кривой, которая является суммарной отдельных кривых полукруговой и четвертной девиации (см. рис. 100).
Так как девиация сильно искажает показания компасов, а с другой стороны, вызывает колебания картушки с изменением курса самолета, стремятся насколько возможно уменьшить ее.
'Уменьшение девиации может быть произведено установкой компасов на самолете в месте наименьшего влияния на картушку самолетного магнетизма, т. е. применением дистанционных компасов; при неудачно выбранном месте установки девиация компасов может быть весьма большой; например, были случаи, когда она превышала 100°. Возможно также уменьшение девиации искусственным путем.
В настоящее время производится уменьшение только полу круговой девиаций, как наибольшей и легко уменьшаемой; четвертная и постоянная девиации оказывают сравнительно небольшое влияние на точность показаний компаса и уменьшению не поддаются или представляют значительную трудность.
Уменьшение девиации искусственным путем производится специальными магнитиками-уничтожителями или специальными девиационными приборами, помещенными под компасом. Это? способ уменьшения девиации называется устранением девиации.
Метод устранения девиации заключается в том, что она сначала определяется, а затем уменьшается до возможно меньшей величины.
Устранение девиации (собственно ее уменьшение, так как устранить ее совсем практически не представляется возможным) производится путем подбора такого положения магнитиков-уничтожителей девиационного прибора, которое создает магнитное поле, по силе равное (или близкое) той силе, которая создает де 118
виацию компаса на данном курсе, но обратное по направлению этому ПОЛЮ.
Девиация, которая остается после ее уменьшения, называется остаточной девиацией (Д/О; практически на всех курсах самолета она не должна превышать величины + 8°-s-loo.
Для учета остаточной девиации в показаниях компаса после ее определения составляется график девиации, который укрепляется вблизи компаса в месте, удобном для пользования.
Устранение девиации и снятие остаточной девиации необходимо производить не реже, чем рае в три месяца, и *во всех случаях, когда точность показаний компасов сомнительна, а также перед дальними и ответственными полетами, после ремонта са молета, после смены мотора и т. п.
§ 66. Определение и уменьшение девиации
Определение и уменьшение девиации компасов производится на сухопутных легких самолетах на земле, на тяжелых—в полете и на земле, а на морских — на воде.
Для определения девиации самолет устанавливается определенными способами, но без помощи компасов, установленных на самолете, на тот магнитный курс, на котором желают определить девиацию, затем сличением показаний компаса с этим магнитным курсом определяют величину девиации на данном магнитном курсе (каждого компаса в отдельности). Зависимость между МК. КК и А К, как видно из рис. 95, А, Б, В, выражается формулой:
КК+(±ДК) = МК, следовательно: — МК — КК.
Для установки самолета на желаемый магнитный курс пользуются девиационным пеленгатором (рис. 97). Он предназначен для снятия на местности магнитных пеленгов и установки самолета на желаемый курсовой угол.
На рис. 96 видно, что магнитный пеленг ('МП) есть угол между северным направлением магнитного меридиана наблюдателя и линией пеленга (направлением), идущей от глаза наблюдателя к предмету, а курсовой угол КУ (бортовой пеленг БП) — угол между продольной осью самолета и линией пеленга.
Магнитный пеленг МП и курсовой угол КУ всегда отсчитываются по ходу часовой стрелки от 0° до 360°; при этом первый отсчитывается от северного направления магнитного меридиана, а второй — от продольной оси самолета (носа).
Соотношение между магнитным курсом, магнитным пеленгом и курсовым углом выражается следующей формулой:
МК = МП — КУ,
отсюда: КУ = МП — МК-
Девиационный пеленгатор, с помощью которого берут магнитные пеленги, показан на рис. 97. Он состоит из азимутального
круга (лимба) с градусными делениями от 0 до 360°, небольшой буссоли, помещенной в центре лимб?, алидады с визирным приспособлением, кронштейна и треноги.
%,
Круг может 'вращаться ма своей оси. Для придания кругу горизонтального положения на нем имеется пузырьковый урсвенй* и шаровой шарнир. -Визирное приспособление алидады состоит из двух подъемных диоптров а — глазного, представляющего собой планку с 'визирной щелью, и предметного б— имеющего вид рамки с предметной нитью. Для грубой наводки глаз •ной диоптр снабжен прорезью, а предметный—мушкой. На концах алидады имеются риски для от счета пеленгов .по лимбу.
Кронштейн пеленгатора устроен таким образом, что прибор можно устанавливать на треноге, на борту самолета или в другом месте.
Для определения девиации компаса самолета на земле сначала
Рис. 95. Курсы самолета при различном (Л, Б, В).
выбирают ровную площадку, удаленную 'от влияния стальных и железных предметов (ангаров, мастерских и пр.) по меньшей 120
ре на ЮОм и, кроме того, такую, с которой можно было бы *зять несколько магнитных пеленгов удаленных предметов.
Определение пеленгов производится следующим образом. Сначала пеленгатор укрепляют на треноге или на иной подставке, не содержащей стали и железа, и устанавливают его в центре выбранной площадки. Лимб пеленгатора приводят в горизонтальное положе-ние и ориентируют его по магнитной
МК'МП-КУ КУ1 мп -мм
Глаз иаГмнвдателя
Рис. 97. 1—мушка;
4—зажим шарнира;" 5—диоптры; 6—
Девиационный пеленгатор.
2—'Прорез; 3—алидада;
Рис, 96. Магнитный пеленг (МП) и курсовой угол самолета (КУ).
визирная нить: 7—лимб; 8—буссоль; 9—зажим лимба; 10—шаровой шарнир; 11—кронштейн; 12—тренога.
стрелке, т. е. совмещают метки на кольце буссоли с концами магнитной ^стрелки—устанавливают 0° азимутального круга на Nord, а 180° на Sud и закрепляют. Затем давюдят диоптры алидады .на какой-либо предмет, удаленный от площадки не менее, чем на 1000 м, « производят отсчет магнитного пеленга этого предмета. Таким же образом берут еще один-два пеленга других предметов. Несколько пеленгов берется на случай, если во время работ по уменьшению девиации какой-либо предмет окажется закрытым (например, стойкой самолета) и визировать его не представится возможным. В качестве пеленгуемых предметов следует выбирать каменные здания, фабричные трубы, мачты, вышки, отдельные деревья, опушки леса, отдельные возвышенности и им подобные,
хорошо видимые предметы (рис. 98). Для пеленгации надо -вы. бирать объекты, которые лежат в различных направлениях под взаимным углом не менее 45°. После этого место взятия пелен-гов (место стоянки пеленгатора) отмечается, например, забиванием в уровень с землей колышка; затем на приготовленной таким образом площадке производят все работы по определению к уменьшению девиации.
Рис. 98. Снятие магнитных пеленгов ориентиров.
После снятия магнитных пеленгов высчитывают курсовые углы для желаемых магнитных курсов и составляют специальную таблицу (табл. 2).
Таблица 2
Таблица курсовых углов
Пеленги Магнитные курсы
0° 45° 90° 135° 180° 225° 270° 315°
1-й пеленг — фабричная труба; Mnj=85D . . . 2-й пеленг — отдельно 85° 40° 355° 310° 265° 220° 175° 130°
стоящий дом; Ml 1а=300° 300° 255° 210° 165° 120° 75° 30° 345°
Пример. Определить курсовые углы для магнитных курсов 0°, 45°. №. 135°, 180°, 225° и т. д., если магнитный пеленг первого ориентира (фабричной трубы) МП! = 85°, а отдельно стоящего дома МП2 = 300° (рис. 98).
Решение. Зная, что КУ = МП—МК, подставляем соответствующие значения МП и МК и сводим все в табл. 1.
Курсовые углы для МП = 85° будут:
для MKi == 0°; КУ| = 85° — 0° = 85°;
> МК2 = 45°; КУ2 = 85° — 45° = 40°;
» МКз = 90°; КУ3 = 85° — 90°-—5°
t что означает 360° — 5° = 355°);
» МК4 = 135°; КУ4 = 85° -135° + 360° = 310°.
» МКб = 180°; КУб = 85° - 180° + 360° = 265° и <г. д.
Курсовые углы этих же магнитных курсов для !МПз=300° рассчитываются аналогичным порядком, т. е.:
MKi = 0°; КУ| = 300° — 0° = 300°;
МК2 = 45°; КУ2 = 300р — 45° = 255°;
МК3 = 90°; КУз = 300° — 90° = 210°;
МК<=135°; КУ4 = 300° — 135° =165°;
МКб=180°; КУ6=300° — 180° =120° и т. д.
Перед выводом самолета на поверочную площадку следует осмотреть компасы и убедиться, что они исправны. После этого самолет выводят на выбранную и подготовленную площадку и устанавливают таким образом, чтобы отмеченное место пеленгатора было между колесами шасси, а продольная ось—.параллельна горизонту, т. е. в линию полета. Далее все предметы специального оборудования самолета следует разместить в таком положении и местах, где они обычно находятся в полете; подвижным металлическим частям (органам управления и др.) необходимо придать среднее их положение. В таком положении следует держать все оборудование и органы управления до конца работы по ’ меныпению девиации и снятию остаточной девиации.
Перед снятием девиации девиационный пеленгатор укрепляют на фюзеляже самолета в таком месте, чтобы при установке самолета на желаемые магнитные курсы были видны выбранные ориентиры; затем его азимутальный круг ориентируют так, чтобы линия 0°—180° совпала с продольной осью самолета или была ей параллельна; цифра 180° была направлена к носу самолета, а 0° — к его хвосту. Определение девиации производится следующим образом. Сначала самолет ставят на магнитный курс 0, для чего на шкале пеленгатора устанавливают курсовой угол для магнитного курса 0° (в нашем примере берут его из табл. 2) и вращают самолет до тех пор, пока желаемый -ориентир (для которого взят данный КУ) не попадет в плоскость визирования (рис. 99). Затем дают компасам успокоиться, после чего отсчитывают компасные курсы. Разность между магнитным и компасным курсами является девиацией, т. е. МК—КК = (+ Д К) Если КК меньше МК, девиация имеет знак плюс (+Д 'К), а если КК больше МК—знак минус (—ДА')-
Это же самое проделывают на всех -восьми главных курсах и в результате получают таблицу девиации для проверяемых компа-123
сов. Уменьшение девиации производится только в том случае* ко-•гда она больше +8 :- 10°.
‘Рис. 99. Установка самолета на девиационной площадке иа желаемый магнитный курс для определения и уменьшения девиации.
П—пеленгатор; К—«проверяемый компас.
Способов уменьшения девиации несколько, но принцип у них один и тот же. Ниже рассмотрим только основной из них — способ Эри, как наиболее распространенный в практике.
§ 67. Уменьшение девиации способом Эри
Уменьшение девиации по способу Эри производится в следующем порядке:
I. Сначала самолет устанавливают на магнитный курс, равный 0° (NOT>. Затем посредством антимагнитного ключа (из меди) поворачиванием удлинителя девиационного прибора с обозначением N—S девиация доводится до 0°, т. е. до показания компаса магнитного курса МК-
2. Затем самолет разворачивают и устанавливают на магнитный курс 90°, после чего посредством поворачивания удлинителя 124
девиационного прибора с обозначением Е—W девиацию снова до водят до 0°.
3. Далее самолет устанавливают на магнитный курс 180°, № при помощи удлинителя N—S девиация уменьшается до половины
ДК своего значения, т. е. до •
4. Самолет устанавливают на магнитный курс 1270° и удлинителями Е — W доводят девиацию до половины ее значения.
На этом процесс уменьшения девиации заканчивается, а девиационные приборы законтриваются.
5. Затем последовательной установкой самолета на магнитные курсы 0° (Nm-. 4о° 9<>° (Е_1, 13.° (S1J, 18(>° (SJ, 225°
(SWmh 270° iWm) и 315° (NNm) (или близких к ним) определяют остаточную девиацию Л /С и записывают в специальный бланк (табл. 3).
Таблица 3
Самолет № 579
Компас АН-4 (штурмана)
мк Показания компаса (КК) к
0° 2° — 2°
45° 38° + 7°
90° 80° +10°
135° 130° + 5°
180° 180° 0°
225° 230° — 5°
270° 278° - 8°
315° 320° — 5°
Отсчеты по компасам на каждом курсе следует производить после того, как уничтожится увлечение картушки жидкостью, т. е. через 2—3 минуты после окончания разворота; для уничтожения застоя необходимо постукивать пальцами по стенке компаса.
Для использования девиации в полете при отсчете показаний компасов для каждого из них на основании записей остаточной девиации (табл. 3) составляется график девиации (рис. 100). График укрепляется возле компаса в месте, удобном для пользования.
Кривые девиации компасов, установленных в кабинах летчика и штурмана, для удобства могут быть нанесены на одном бланке; в этом случае их следует изображать равными цветами В практике принято кривую девиации компаса летчика изображать красным цветом, а штурмана (наблюдателя) — синим или пунктиром.
Для построения кривой девиации сначала на графике наносятся точки величин девиации на основных магнитных курсах или близких к ним 0°, 45°, 90°, 135°, 180° и т. д., а затем через них проводится кривая девиации.
Если почему-либо возникает сомнение, что девиация изменяет
свою величину в зависимости от того, работает мотор или нет,
проверку производят при работающем моторе. Для этой цели са ополет устанавливают на какой-либо
самолет Л-...
Девиация
ДдоВерил.......Дщпа^...
Рчс. 100. График остаточной девиации компаса.
компасный курс в линию полета и, укрепив ею, запускают мотор (мотор должен работать на режиме нормального полета); если при этом показание компаса не изменяется или изменяется на угол, не превышающий величины застоя картушки (примерно 2—3°), то 'можно считать, что “показания компаса от работы мотора не зависят. Если же окажется, что девиация зависит от работы мотора, то в таком случае необходимо определить остаточную девиацию на всех восьми курсах при работающем мо торе.
§ 68. Определение и устранение установочной ошибки
После уменьшения девиации и опре деления остаточной девиации может быть произведено определение и устранение установочной ошибки компаса.
Установочная ошибка компаса является следствием неточного расположения его курсовой черты относительно про дольной оси самолета. При правильном положении курссвой черты линия, про ходящая через нее и центр компаса, должна быть параллельна оси снимет рии самолета. Установочная ошибка
устраняется путем поворота компаса во круг его оси. Величина установочной ошибки определяется путем алюбраи-ческого сложения всей остаточной 'девиации и деления полученной суммы на 8 (число курсов, на которых определена остаточная девиация).
Полученный результат является искомой установочной ошибкой. Если установочная ошибка имеет знак плюс (+), то для устранения ее котелок компаса следует повернуть по ходу часовой стрелки на угол, равный установочной ошибке; если она имеет знак минус (—), то котелок компаса поворачивают против хо
да часовой стрелки. Оценку угла поворота котелка следует производить наблюдением за показанием компаса.
При устранении установочной ошибки необходимо помнить, что при повороте котелка на какой-либо угол значение остаточ-лой девиации изменяется на величину этого угла поворота; по-
этому после устранения установочной ошибки в таблицу остаточной девиации необходимо вносить соответствующие исправления.
Пример. Остаточная девиация на восьми курсах получена следующая: - 2°, + 7°+ 10°, +5°, - 4°, -1-2°, +8° ,4*4°.
Требуется определить установочную ошибку.
Решение:
— 2°+ 7°+ 10° 4- 5°— 4°, 4- 2° 4- 8° + 4° _ 4- 30°
8 8 =+3-7°.
т. е. компас -необходимо повернуть по ходу часовой стрелки на 3,7°.
§ 69. Различные способы определения девиации
Сличение показаний компасов. Сличение компасов производят с целью проверки правильности их показаний в двух случаях: 1) для определения девиации (в тяжелой авиации) и 2) при осмотре аэронавигационного оборудования самолетов для определения пригодности графиков девиации. Для этого самолет устанавливается в линию полета на земле или на воде последовательно на курсы 0° и 180°, на которых отсчитываются .показания компасов. Затем компасные курсы переводят в магнитные; если разность между полученными 'М'К по компасам летчика и штурмана больше -2° в тяжелой авиации и до 5° в остальной авиации, то девиацию надо проверить .заново и графики девиации считать устаревшими.
Определение девиации на воде. Определение девиации на воде производится в бухте, хорошо защищенной от наката и мертвой зыби. Самолет устанавливается на нужный МК на канатах с берега и шлюпки. Иногда в центре выбранного места опускается мертвый якорь (бетонный) с поплавком. Самолет швартуется к мертвому якорю носовой частью. Развороты на нужный курс необходимо производить медленно. Отсчеты по компасам производятся по команде визирующего в момент попадания ориентира в плоскость визирования. Порядок работы по определению и устранению девиации в общем остается таким же, так и на суше.
Определение девиации в полете. Трудность производства работ по установке самолетов на различные курсы на земле заставляет перенести определение девиации на тяжелых самолетах в воздух. Девиация в полете может быть определена способом пеленгования земных линейных ориентиров.
Способ пеленгования земных линейных ори ей тиров заключается в следующем (рис. 101). Перед полетом штурман выбирает какой-либо прямолинейный, отчетливо видимый с воздуха ориентир, расположенный недалеко от аэродрома, и транспортиром по карте определяет его истинное направление 'ИП (истинный пеленг), затем магнитное МП (магнитный пеленг).
Далее в полете последовательными заходами на восьми основных курсах (по компасу 0°, 45°, 90°, 135°, 180°, 225°, 270° и 315°) пересекают этот ориентир, измеряя одновременно бортовым виз#-127
ром его курсовой угол ( КУ) на каждом курсе; при определении КУ необходимо производить несколько отсчетов .курса самолета по компасу и выводить средний из полученных.
Рис. 101. Определение девиация в полете по линейному ориентиру.
При измерении КУ и отсчетах курсов надо стремиться самолет •выдерживать в горизонтальном полете как можно правильнее.
Затем, сличая магнитный пеленг ориентира, снятый с карты, с курсовыми углами, полученными в полете на разных компасных курсах, рассчитывают магнитные курсы самолета по формуле:
МК='МП—КУ, а затем и девиацию по формуле:
Д /<=МК — КК.
Пример. Истинный пеленг линейного ориентира 95° (по карте). Магнитное склонение + 6°; (при следовании с курсом 45° (по компасу пилота) линейный ориентир был пересечен с курсовым углом 39°. Средний отсчет по компасу штурмана оказался равным 5.2°. Найти девиацию компасов летчика и штурмана.
Решение.
1) МП = И О — Д Af = 95° — 6° =89°.
2) МК = МП — КУ = 89° — 39° = 50°.
3) Девиация компаса летчика;
Д К.,= МК — КК,. = 50 45° = + 5°.
Девиация компаса штурмана:
Д Кш - МК - ККШ = 50° - 52° = — 2°.
Кроме описанных выше, наиболее употребляемых в практике способов определения девиации компасов, ее можно вычислять и по формулам. Однако в виду сложности расчетов практически этим способом не пользуются или пользуются в редких случаях. 128
пилотажно-навигационные приборы
ГИРОСКОПИЧЕСКОЙ ГРУППЫ
§ 70. Гироскоп «1 его свойства
Всякое вращающееся тело может быть названо гироскопом, но -обычно принято называть гироскопом только те ‘быстро ‘вращающиеся тела, которые проявляют присущие гироскопу свойства. Чтобы изучить свойство гироскопов, познакомимся ближе с особенностями и свойствами вращающихся тел. Рассмотрим тела, которые быстро (вращаются вокруг своей оси симметрии (телом вращения называется тело, полученное от вращения какой-либо плоской фигуры около некоторой оси, являющейся осью симметрии тела и проходящей через его центр тяжести).
Ротор
Горизонтальная ось
Вертикальная ос
Рис. 102. Гироскоп с тремя степенями свободы.
ЗаНсим для уничто-yfteHLV свободы Вращения Вокруг осиу-у
Запоим ной Винт для у ничто-экения свободы Вращения Вокруг Z.-Z
Главная ось х
Первое кольцо
Представим себе массивный ротор, вращающийся с достаточно большой скоростью в подшипниках рамы. Если мы попытаемся наклонить ось ротора (или вообще изменить направление его оси в пространстве), то почувствуем значительное сопротивление такой попытке. С другой стороны, всякое движение вращающегося тела, при котором его ось вращения будет оставаться параллельной самой себе, сопротивления не вызовет. Это свойство является общим для всех вращающихся тел, будь то самолетный пропеллер, пароходный винт, маховик пароходной машины, ротор электромотора или какое-либо другое тело.
Вернемся снова к нашему вращающемуся ротору. При попытке изменить ось вращения этого тела мы «заметим, что оно, сопротивляясь, отклонится не в том направлении, в каком мы прилагаем силу, а в направлении, перпендикулярном к нему. Из наблюдения мы могли бы заключить, что если направление вращения такое, какое указано на рис. 102, то при действии силы на ротор -вправо (с точки зрения наблюдателя, смотрящего на ротор вдоль его оси) ось его отклонится вверх, пр,' отклонении вверх — налево, при отклонении вниз — направо, при отклонении влево — вниз.
Теперь поместим ротор в такую конструкцию, в которой ось ротора могла бы занимать любое положение в пространстве, и таким образом, чтобы ротор при этом постоянно находился в бег различном положении, т. е. чтобы действие силы тяжести быж устранено. Этого можно достигнуть, поместив точку опоры рото ра в центре его тяжести или же поместив ротор в такую конст рукцию, которая позволяла бы ему вращаться около трех взаим но перпендикулярных осей, пересекающихся в его центре тяжести.
Подобный подвес называется карданным (правильнее — иод весом кардана). Подвешенное таким образом тело имеет три степени свободы. В дальнейшем мы будем называть свободным гироскопом или просто гироскопом такое вращающееся тело, ось которого благодаря карданному подвесу может занимать любое положение в пространстве. Если вращающийся в карданном подвесе ротор будет поступательно перемещаться в пространстве, то ось вращения ротора не изменит своего направления, так как ось свободного гироскопа не реагирует на поступательное движение. Наоборот, если мы попытаемся повернуть всю систему ротора около любой оси, не совпадающей с направлением оси вращения, ротор тотчас же изменит свое положение.
Ответное движение вращающегося ротора на попытку измс нить его ось вращения называется прецессией. Направление прецессии вполне определенно. Связь между направлением вращения ротора и прецессией можно сформулировать следующим образом: направление прецессии всегда такое, как будто бы ротор стремится совместить свою ось вращения с той осью, вокруг которой его повернули. Иначе говоря, если заставить ось вертящегося тела вращаться, то оно стремится поставить свою ось параллельно той оси, вокруг которой происходит его поворачивание. Если вращение производится, например, около оси, не совпадающей с осью, проходящей через центр тяжести ротора, но параллельной ей, то эффект будет тот же: ось ротора будет стремиться запять положение, при котором она будет параллельна оси, около которой произведено вращение. В самом деле, такое вращение можно рассматривать как два движения: вращение около оси, проходящей через центр тяжести, и поступательное перемещение вместе с этой осью. Первое движение производит эффект, аналогичный рассмотренному выше, а второе, как известно, совершенно нс влияет на гироскоп.
Попробуем, например, толкнуть ось ротора сверху вниз, г. е. около оси у—у (рис. 102). В связи с этим ось х—х получи' стремление занять положение оси у—у. Для этого ось ротора должна повернуться около оси z—z, но этот поворот вызовет стремление оси ротора занять положение оси z—z, т. е. пов<;р нуться противоположно направлению толчка. Таким образом, каг мы видим, ось вращения ротора обладает хорошей устойчивостью. Она всегда стремится сохранить свое направление. Если мы будем действовать на ось рото-130
из постоянной силой, например, нарушим балансировку внутрен ней рамы ротора, то убедимся, что под действием постоянной (-или ось ротора, вместо того, чтобы .наклоняться, начнет прецес-
сировать около вертикальной оси z—z.
Если у гироскопа с тремя степенями свободы отнять одну из степеней, то он потеряет способность сохранять направление оси своего вращения. В таком гироскопе явление прецессии сохраняется при некоторых движениях гироскопа, и прецессия будет появляться внешне тогда, как при других движениях (рис. 103), когда для прецессии требуется отнятая степень свободы, сила прецессии будет уничтожена реакцией соответствующих подшипников. Именно такой гироскоп использован в гироскопическом указателе поворотов.
Рис. 103. Гироскоп с (двумя степенями свободы.
Рассмотрим, что будет происходить со свободным гироскопом, совершающим вместе с землей вращение вокруг земной оси.
Свободный гироскоп, как мы видим, обладает устойчивостью оси своего вращения. Поэтому, если начальное направление оси гироскопа будет совпадать с направлением меридиана в данной точке земной поверхности, то через некоторое время вследствие
вращения земли вокруг своей оси и, следовательно, изменения
положения отмеченного нами меридиана в пространстве направление оси гироскопа выйдет из плоскости меридиана в данном месте земной поверхности. При повороте земли на 360° (т. е. че-рез 24 часа от начала отсчета) ось гироскопа опишет конус около оси, параллельной земной оси и проходящей через центр тяжести ротора. В северном полушарии северный конец оси гироскопа, установленного горизонтально в плоскости меридиана, будет отклоняться к востоку, в южном полушарии — наоборот.
Для того чтобы свободный гироскоп мог служить .в качествс wnaca, необходимо создать условие, при котором ось гиросло а непрерывно приводилась бы в плоскость меридиана. Да это-‘ ’ вертикальная плоскость, в которой лежит ось гироскопа, должна непрерывно поворачиваться около вертикали.
Таким образом, если действовать на ротор постоянной си-, лой, гироскоп будет прецессировать в определенном направлении । с постоянной скоростью прецессии. В качестве такой силы мож-нэ воспользоваться действием силы тяжести, стремящейся повер ауть ротор в вертикальной плоскости и вызывающей прецессию в плоскости горизонтальной, т. е. около вертикальной оси. Пусть центр тяжести гироскопа лежит ниже точки его подвеса; тогда °ри отклонениях вертикальной оси гироскопа, меняющих направление оси ротора, возникает момент силы тяжести, стремящийся
восстановить вертикаль, а это вызовет прецессию. Именно это явление в маятниковом гироскопе может быть использовано для удержания оси ротора гироскопа в плоскости меридиана. Деист- ' вительно, при вращении земли северный конец оси гироскопа отклоняется к востоку и поднимается над плоскостью горизонта. Это создает момент силы тяжести, действующий на ротор и заставляющий его вернуться в плоскость горизонта.
При этом, как нетрудно видеть из предыдущих рассуждений, возникает прецессия, заставляющая гироскоп вернуться в плоскость меридиана; практически же подобная коррекция гироскопа в авиационных компасах осуществлена быть не может.
§ 71. Указатель поворота и скольжения (УП)
(Указатель поворота. Для сохранения поперечной устойчивости самолета непосредственно применяется указатель поперечного крена (шариковый или жидкостный уклономер), но этот прибор скорее является указателем скольжения самолета, чем крена. При сохранении поперечной устойчивости только с помощью одного уклономера (или относительно креномера) летчик не всегда может определить, летит ли он по прямой или совершает вираж, так как и в том и в другом 'Случаях шарик уклономера при правильном крене будет находиться в центре.
Установка на самолете компаса также не обеспечивает решения этой задачи, так как при разворотах самолета у компаса появляется поворотная девиация, которая приводит картушку к неопределенным движениям, мешающим определить направление виража.
В настоящее время сохранение поперечной устойчивости самолета осуществляется с помощью или указателя поворота и уклономера (рис. 104, Л и Б) или авиагоризонта.
Принцип действия указателя поворота заключается в следующем. Массивный волчок-ротор вращается в подшипниках (рис. 104, Б). Подшипники вделаны в раму, которая сама может поворачиваться в подшипниках, находящихся в корпусе прибора. Оси волчка-ротора и рамы взаимно перпендикулярны и проходят через центр тяжести волчка-ротора, совпадающий с центром тяжести самой рамы.
Гироскопический указатель поворота устанавливается на приборной доске таким образом, чтобы его ось была параллельна продольной оси. Для того чтобы прибор работал, ротор должен быть приведен в быстрое вращение вокруг своей оси. С рамкой гироскопа через ее конец связана стрелка указателя поворота. Рамка соединена через пружину-успокоитель с корпусом. Эта пружина, помимо других ее функций, удерживает диаки и рамку в определенном положении по отношению к корпусу прибора.
Предположим, что самолет производит поперечный крен без поворота. (В этом случае корпус указателя поворота также поверяется о,коло оси, параллельной продольной оси самолета, а чру-
жина-успокоитель заставит повернуться раму вместе с ротором и « охранит начальное положение по отношению к корпусу. Таким образом, стрелка указателя поворота при простом крене самолета остается на нуле (сила прецессии гироскопа, «возникающая при повороте в подшипниках ротора). При продольном крене самолета ось гироскопа остается все вцемя параллельной себе и не вызывает движения стрелки.
Совсем иное произойдет, если самолет будет делать вираж с креном. Как только корпус прибора начнет поворачиваться вместе с самолетом, сила прецессии гироскопа повернет в ту или иную сторону ротор и рамку в подшипниках рамы. При левом вираже конец оси ротора поднимется, при правом вираже — опустится. Та особенность, что при разворотах самолета ось, около которой поворачивают гироскоп, не совпадает с вертикальной <'сью самого гироскопа, не должна нас смущать. Мы уже гово рили, что такое движение всегда можно разложить на составляющие движения, одним из которых является вращательное движение гироскопа около его вертикальной оси. Как только кончится вираж и исчезнет сила прецессии, спиральная пружина 'спокоитель возвратит гироскоп в обычное положение по отношению к корпусу, и стрелка встанет на нуль. Чем больше будет скорость поворота, тем больше будет сила прецессии и тем на больший угол повернется стрелка прибора. Натяжением пружины-успокоителя можно регулировать угол поворота ротора, а следовательно, регулировать и положение стрелки при вираже. Чтобы движение стрелки было более плавным и медленным, в приборе устраивается демпфер в виде небольшого цилиндра, в котором ходит поршень, связанный с рамкой ротора. В цилиндре имеется отверстие. При резких движениях рамки воздух в цилиндре тормозит движение поршня, а также, следовательно, рам ки и стрелки.
Указатель поворота состоит из двух приборов.- собственно указателя поворота и указателя скольжения.
В указатель поворота входят следующие части:
Ротор, представляющий собой тяжелый металлический волчок, снабженный шариковыми подшипниками для уменьшения трения, возникающего при вращении ротора. На ободе ротора имеются лунки, необходимые для приведения его во вращение под действием струи воздушного потока. Воздушный поток идет через сопло в корпус прибора на место воздуха, высасываемого трубкой Вентури или другим источником разрежения (рис. 105).
Рамка, снабженная осями (конусами), на которые опираег ся ротор своими шариковыми подшипниками. В рамку также вделаны шариковые подшипники, предназначенные для уменьшения трения, возникающего при вращении рамки.
Д и ск, жестко скрепленный с рамкой. На диске смонтированы упорная стейка со штифтом, необходимая для поиведения вс «ращение стрелки прибора, и коленчатый рычаг. Последний соединяется с корпусом прибора пружиной-успокоителем.
Успокоитель колебания стрелки, представляющий собой полый цилиндр, в дне которого имеется отверстие. Внутри цилиндра ходит поршень, скрепленный при помощи шарнирного приспособления с коленчатым рычагом.
Рычажная передача, передающая вращение диска с рамкой на стрелку прибора, представляющая собой двузубую вилку, насаженную на ось стрелки, между зубьями которой входит штифт упорной стойки, скрепленной с диском.
Винт, укрепленный в корпусе прибора и предназначенный для изменения натяжения пружины успокоителя, соединяющей коленчатый рычаг с корпусом прибора.
Шкала прибора, имеющая три деления, покрытых светящейся массой.
Рис. 105. Схема питания УП.
Рис. 106. Указатель скольжения. 1—стеклянная трубка, 2—шарик; 3—уводящая камера.
Указатель скольжения (рис. 106) представляет собой трубку, согнутую по дуге крута радиусом в 10—20 см. В трубке находится стеклянный шарик, свободно катающийся в ней. Для демпфирования колебаний шарика стеклянную трубку заполняют жидкостью с низкой точкой замерзания (обычно—толуол). Чем больше диаметр шарика подходит к внутреннему диаметру трубки, тем сильнее будет происходить демпфирование. Для- предохранения стеклянной трубки от разрыва при температурном расширении жидкости в момент заполнения трубки в последней оставляют пузырек воздуха.
Шарик, катающийся по изогнутой трубке, с точки зрения действия на него внешних сил представляет полную аналогию с обычным маятником. Но так как поведение маятника, подвешен-135
кого на нити, более наглядно и ясно, то мы и разберем поведе-
ние шарика указателя скольжения на примере с маятником. (Представим себе, что на самоле.
f 2
те подвешен тяжелый груз, находящийся 'вдобавок 1в вязкой среде. При 'всех изменениях положения самолета во (время прямолинейного полета с постоянной скоростью маятник, 'как (известно, должен совпадать с истинной вертикалью. Однако маятник, помещенный в
вязкую среду, связанную с самолетом, 'будет запаздывать >в своих показаниях (истинной вертикали, вследствие увлечения его жидкостью, совершающей вместе с самолетом относительное движение вокруг маятника. Таким образом, маятник, находящийся в вязкой среде, при крене самолета будет показывать уменьшенный крен.
Мы (рассмотрим поведение маятника (шарика скольжения) при кренах в прямолинейных полетах. Во время криволинейного движения, например, при вираже, на маятник, помимо силы тяжести, будет действовать центробежная сила. Под действ'ием этих двух сил маятник будет устанавливаться по на-
Рис. 107. Показания указателя поворота в совокупности с указателем скольжения при различном положении самолета в полете. 1—щравилнный 'Правый в'И'раж; 2—лтоавиль-ный левый вираж; 3—разворот вправо с заносом хвоста; 4—разворот влево с заносом хвоста; 5—разворот вправо со скольжением на (правое крыло; 6—'разворот влево со скольжением на ле=ое крыло; 7—(правый мрен «при прямолинейном полете; в—левый «реи при прямолинейном полете; 9—(прямолинейный полет.
правлению .их результирующей. 'Маятник (и 1в этом случае будет запаздывать по только что объясненной причине. Поэтому «не демпфировать маятник нельзя, так как при (всяком «изменении его равновесия он будет долго колебаться, прежде чем установится; но и чрезмерно демпфировать тоже нельзя, так как от этого маятник будет сильно опаздывать, не успевая за изменени-136
ими положения самолета относительно горизонта. Шарик укава-хеля скольжения, we (показывает абсолютного поперечного крена самолета, т. е. отклонения итлсскости симметрии самолета от вертикали; он ’показывает только отклонение этой плоскости от на правления равнодействующей силы, раввивающейся при повороте самолета.
Прибор, имеющий описанную конструкцию, но без шкалы, дозволяющей измерять в градусах величину углов, называется указателем скольжения или уклономером.
Пользование указателем поворота в совокупности с указателем скольжения при различном состоянии самолета показано на рис 107.
§ 72. Авиагоризонт (АГ)
В полете при видимости земли, а также и в полете над облаками пилот почти не нуждается в приборах для определения положения самолета относительно горизонта. В слепом же полете, логда горизонт исчезает, непосредственные ощущения пилота и, в частности, присущее человеку чувство равновесия не только не дают возможности определить положение самолета, но могут даже привести к совершенно ложным выводам. В этом случае на ж>мощь пилоту приходят /приборы и главным образом те, которые специально предназначены для слепого полета.
К числу приборов, облегчающих слепой полет, принадлежит искусственный горизонт — авиагоризонт (рис. 108, А, Б).
При пользовании авиагоризонтом в полете, чтобы облегчить восприятие показания прибора, следует помнить, что стрелка в яем как бы представляет (видимый в окне прибора естественный горизонт, которому эта стрелка должна оставаться параллельной При наклоне носа самолета вниз «горизонт» пойдет вверх отно сительно самолета, изображенного в окне прибора. Наоборот, при поднятии носа самолета «горизонт» опустится, и изображение са молета в приборе окажется .выше «горизонта». При сочетании предельного и поперечного крена самолета «горизонт» наклонится относительно изображения самолета и в то же время буде выше или ниже центра изображенного самолета, в зависимости от того, поднят или опущен нос действительного самолета. Прн горизонтальном полете стрелка «грризонт» должна совпадать с треугольными индексами на окружности окна только при гори юнтальном положении самолета. На рис. 109 изображены показания авиагоризонта при различных эволюциях самолета.
Основной частью авиагоризонта является гироскоп с тремя степенями свободы (рис. 108, А). Ось ротора гироскопа при его «ращении имеет вертикальное положение.
Авиагоризонт, как было сказано выше, имеет стрелку, совпадающую с естественным горизонтом при всех обычных маневрах самолета; основными из них являются продольный и поперечный крены самолета.
Делать поперечный крен больше, чем на 90°, и продольный более, чем на 60—65°, не рекомендуется. Поэтому нельзя пользоваться прибором после указанных кренов, после мертвых петель, бочек и других фигур вывшего пилотажа раньше, чем через 15— 20 минут; это время необходимо для того, чтобы ось вращения гироскопа снова установилась в вертикальном направлении.
Рис. 109. Сравнение показаний авиагоризонтов
при различных эволюциях
самолета.
А—пикирующего АГП; Б—авиагоризонта в стандартном корпусе.
Стрелка прибора устойчиво указывает линию горизонта только после того, как ротор наберет достаточное число оборотов. Поэтому при работе прибора от трубки Вентури пользоваться им можно только через '3—5 минут после взлета.
При создании в приборе разрежения от вакуумпомпы прибор дает правильные показания уже к моменту взлета.
В случае набора или уменьшения скорости самолета при виражах прибор вследствие действующих на него ускорений может давать ошибку в показаниях до 1—3°, которая по прекращении эволюций через 1-—2 минуты автоматически уничтожается. Однако летчику это необходимо учитывать. При наборе скорости стрелка «горизонт» несколько опускается, показывая несуществующий подъем самолета, а при уменьшении скорости, наоборот, указывает спуск самолета.
При нормальной работе прибора необходимо разрежение .в трубопроводе не менее 90 — 100 мм рт. ст. Поэтому при полете со скоростью до 140 км/час, т. е. медленном планировании и посадке, разрежение у штуцера прибора может быть меньше указанного. Это обычно приводит к нарушению устойчивости гироскопа.
На самолетах со скоростями до 140 км/час авиагоризонт должен питаться от двух трубок Вентури с соответствующей регулировкой вакуума.
|§ 73. Авиагоризонт АГП — пикирующий
Рис. 110. Общий вид пикирующего авиагоризонта АГП.
1—шкала уклона; 2—фон; 3— лвдеюс; 4 — самолет; 5 — планка; 6—динамический штуцер; 7—арретир.
В эксплоатации встречается авиагоризонт типа АГП (рис. ПО). Преимущество этого авиагоризонта по сравнению с обычным заключается в том, что он фиксирует продольные крены более 60°.
Авиагоризонтом АГП всегда можно замерить продольный угол самолета, тогда как обычным авиа горизонтом этого сделать нельзя.
По принципу действия прибор 1 АГП не отличается от нормаль-
$ ного авиагоризонта, но существенно видоизменен по конструкции. f На шкале прибора поперечная планка представляет собой условную линию горизонта, не связанную с гироскопом, как .в обычном авиагоризонте, и при всех положениях самолета сохраняет неизменное положение относительно корпуса. Подвижным индексом здесь служит изображение самолета, за нимающее относительно планки горизонта положение, полностью соответствующее действительным положениям самолета.
Для сравнения на рис. 109, А приведены показания обычного авиагоризонта и авиагоризонта типа АГП. При наборе высоты и снижении изображение самолета соответственно поднимается выше или ниже планки горизонта. При левом вираже изображение самолета наклоняется относительно планки горизонта влево, а при правом вираже — вправо.
С правой стороны прибора расположена подвижная шкала углов пикирования с делениями через 5° и с оцифровкой через 10°, причем цифра 1 соответствует 10°, цифра 2 — 20° и т. д.
Шкала углов пикирования перемещается вместе с изображением самолета, и отсчет производится относительно стрелки, представляющей собой продолжение планки горизонта.
Пользование обычным авиагоризонтом затрудняется вследствие того, что планка горизонта в горизонтальном полете не всегда совпадает с изображением самолета, а, как правило, смещена на величину, соответствующую углу тангажа (углом тангажа
называется угол, составленный продольной осью самолета и плоскостью горизонта). Для устранения таких смещений в приборе АГП с правой стороны имеется ручка, вращением которой планка горизонта на любой скорости и при любой центровке может быть совмещена с изображением самолета; при этом на шкале слева стрелка покажет величину смещения планки, т. е. угол тангажа самолета.
ГИРОСКОПИЧЕСКИЕ КОМПАСЫ
|§ 74. Гирополукомпас (ГПК) •
Гирополукомпас (рис. 111) предназначен для выдерживания курса следования самолета и определения уклонения самолета от
Рис 111. Гирополукомпас ГПК
1.—ротор гироскопа; 2— внутренняя рамка; <7— внешняя рама с картушкой; 4 — арретирующее «риоисоблемие; б—руч ка арретира; в, 7—шве' терпи для вращелия гм-рескопического узла.
направления цюлета. Прибор имеет устойчивое (показание курса в прямолинейном полете и обеспечивает точный поворот на (заданный угол.
Перед тем, как (пользоваться прибором, его необходимо ставить по магнитному компасу. Прибор за 15 минут полета постепенно увеличивает ошибку в показаниях до 3°. Следовательно, через 15—20 минут показания гирополукомпаса необходимо сверять и, если нужно, вводить поправку или же вновь ставить по .магнитному компасу.
Работа прибора основана на свойстве свободного гироскопа сохранять неизменным направление своей оси вращения в пространстве. Основной частью прибора является гироскоп, ось которо-141
гм расположена горизонтально. Внешняя рама гироскопа имеет вертикальную ось вращения и несет на себе картушку, равтра'ду-нрованную на '360° с ценой деления в 5° и оцифрованную через 30°. По ней и производится отсчет курса. Гироскоп имеет аррети рующее приспособление для установки его по магнитному компасу и специальной коррекцией, поддерживающей ось гироскопа в положении, перпендикулярном внешней раме.
Пользоваться прибором в полете надо следующим образом.
'Картушку установить по магнитному компасу. Для этого нужно дослать ручку арретирующего механизма от себя дооткава. Плавным поворотом ручки совместить деление картушки с курсовой чертой прибора. Далее прибор надо разарретировать, оттянув ручку на себя. При разрарретировании не поворачивать ручку, гак как это может исказить показания прибора. После этого прибором можно пользоваться как устойчивым указателем курса в течение 15—20 мин.
Прибором, работающим от вакуумпомпы можно пользоваться через 3—5 минут с момента запуска мотора. Чтобы обеспечить нормальную работу, вакуум у штуцера прибора должен быть не меньше 80—100 мм рт. ст.
§ 75. Гиромагнитный компас (ГМК-2)
Гиромагнитный компас (рис. 112) указывает компасный курс самолета. По этому прибору можно установить и сохранять куре самолета (т. е. угол, заключен-
Рис. 112. Гиромагнитный компас ГМК-2.
1—корпус; 2—кремальера; 3—• указатель 'скольжения; 4— штуцер ва шумный; 5—'девиационный 1П‘Р'Иборс
ный (механизм, установленный при малейшем отклонении оси U2
ный между плоскостью магнитного меридиана места и плоскостью симметрии самолета) в любых условиях полета. С помощью прибора ГМК-2 можно производить вираж на заданный угол. Наличие указателя скольжения на приборе позволяет производить правильный вираж без указателя поворота.
Выполнение некоторых фигур высшего пилотажа не вызывает ошибок в показаниях прибора.
Работа гиромагнитного компаса основана на взанмодействи1 магнитной стрелки и пироскопа имеющего три степени свободы (рис. 113).
Гиромагнитный узел компаса имеет магнитный коррекцисн-на кожухе ротора; этот механизм гироскопа относительно плоскости
управления магнитного меридиана места создает направляющую силу, вызывающую прецессию гироскопа.
•8 результате магнитной коррекции ось ротора всегда автоматически устанавливается в плоскости магнитного меридиана места; поэтому не требуется установки курса по обыкновенному магнитному компасу.
Рис. 113, Принципиальная схема действия ГМК-2. 1—рютор; 2—-кожух ротора; 3—здешняя рама; 4—картушка; 5—магнитная система; €—эксцентрик; 7—сопла пневматической коррекции; S— резиновые шланги; 9—пневматическое реле; 10— резиновая мембрана; 11—азимутальная заслонка; 12—реактивные окна; 13—маятниковая заслонка; 14—вторая пара реактивных окон; 15— ось с каналом.
Прибор показывает компасный курс самолета, и пользоваться им надо так же, как и магнитным компасом. При определении курса по гиромагнитному компасу необходимо учитывать девиацию; прибор допускает поперечные и продольные крены самолета до 75°, причем на курсе N можно давать поперечный крен ни неограниченный угол, а на курсе Е—неограниченный продольный. После выполнения фигур высшего пилотажа прибор сбивается с курса до 20°, но через 1—2 минуты автоматически возвращается на курс. Пикирование с углом, не превышающим 15°, не вызывает большой ошибки в показаниях прибора.
Ло прибору можно производить точный разворот на заданный
угол. Однако необходимо учитывать, что при этом картушка прибора несколько отходит от курса. Максимальную ошибку до 5° прибор дает при развороте в 180°. Эта ошибка по окончании разворота автоматически устраняется через 0,5—1 минуту.
При работе прибора от трубки 'Вентури им можно пользоваться после взлета только через 3—5 минут. Если прибор работает от вакуумпомпы, то через 3—5 минут после запуска мотора им можно уже пользоваться.
Для нормальной работы прибора необходимо поддерживать вакуум 90—ПО мм пт. ст.
Наличие железных и стальных деталей на самолете может вызвать отклонение (девиацию) магнитной картушки прибора. Поэтому для уменьшения девиации на верхней стенке прибора, лад центровым винтом, крепится девиационный прибор (рис. 112).
§ 76. Трубка Вентури
Схемы питания гироприборов зависят .от типа самолета и количества установленных на нем гироприборов.
поправление полета
Рис. 114. Трубка Вентури.
1—корпус; 2—заборный конус; 3—раструб; 4—штуцер; 5—заглушка.
Наиболее (проста (рис. 105) индивидуальная схема (питания приборов от трубки Вентури. Она применяется на самолетах, обладающих небольшой крейсерской скоростью, при которой трубка Вентури не имеет запаса производительности, т. е. когда разрежение у приборов авиагоризонта, гиромагнитного компаса не превышает Г00 —120 мм рт. ст., а у указателя поворота — 50 мм рт. ст.
Трубка Вентури (рис. 114) представляет собой два круглых усеченных конуса, соединенных вместе своими вершинами. Передний конус обычно делается более коротким. В узком сечении конусов имеется щель, которая посредством трубопровода соединяется с корпусом прибора. Трубка (Вентури помещается на крыле или фюзеляже самолета. Короткий конус расположен впереди 144
(по направлению полета). Встречный поток воздуха, поступающий внутрь переднего конуса, по мере сужения конуса увеличивает свою скорость. По закону Бернулли давление в конусе уменьшается и достигает своего минимума в наиболее узком месте трубки, т. е. около щели. Воздух из прибора устремится по трубопроводу туда, где давление наименьшее и, выходя из щели, будет увлекаться воздушным потоком, проходящим через трубку. Благодаря этому в корпусе прибора во время полета будет поддерживаться вакуум.
Производительность трубки Вентури растет с увеличением скорости самолета. С другой стороны, поскольку удельный вес воздуха зависит от высоты полета и уменьшается с увеличением высоты, производительность трубки Вентури с увеличением высоты будет также падать.
Однодиффузорная трубка Вентури применяется для питания указателя поворота, двухдиффузорная трубка -— для питания авиагоризонта и гиромагнитного компаса.
Однодиффузорная трубка состоит из корпуса (заборного переднего и заднего конусов) и штуцера, соединенного каналом со щелью и предназначенного для присоединения ее к прибору. Трубка крепится к фюзежяжу или крылу самолета двумя болтами.
Благодаря большому наличию гироскопических приборов на приборной доске самолета требуется большое количество трубок Вентури, приводящих йх в действие, которые, как известно, устанавливаются на борту самолета, а это увеличивает лобовое сопротивление самолета, вследствие чего снижается его скорость. Поэтому на современных скоростных самолетах, несмотря на исключительную надежность трубки Вентури, она вытесняется ва-куумпомпой.
КОНТРОЛЬНО-МОТОРНЫЕ ПРИБОРЫ
§ 77. Указатели оборотов (тахометры)
Тахометры предназначаются для показания числа оборотов главного вала мотора самолета с передачей в кабину летчика и бортмеханика. По принципу работы они различны. Ниже рассматриваются наиболее употребительные конструкции
Центробежный тахометр. Центробежный тахометр устанавливается обычно на легких одномоторных самолетах для измерения числа оборотов в минуту главного вала мотора.
Прибор построен на принципе использования центробежной силы, развиваемой вращающимся грузом (рис. 115).
Если некоторое тело с массой т вращается около оси а — а на расстоянии, равном R, то, как известно, на тело будет действовать центробежная сила, величина которой определяется следующим выражением:
f - т • IF2 R,
где W — угловая скорость вращения тела около оси а — а.
Если подвесить тело т, как показано на рис. 115, то при вращении механизма вокруг вертикальной оси а а центробежная си ла, перпендикулярная к этой оси а—а, действуя на массу т в плоскости, проходящей через а—а и т, заставит тело т повернуться около точки О на некоторый угол а. При повороте на этот угол направление равнодействующей двух сил — силы веса тела, массы т центробежной силы — должно проходить через точку О. При различных угловых скоростях W углы будут неодинаковы.
Рис. 115. Принцип действия центробежного тахометра.
Таким образом а является некоторой функцией от W. Зная эту фхнкцию, по значению а можно определить и W. Иначе говоря, определение числа оборотов вала мотора в единицу времени можно свести к определению некоторой, легко доступной для наблюдения, величины.
Прибор, в котором противодействующей силой служит вес груза т, был бы непостоянен в показаниях угловой скорости вала мотора при различных положениях самолета и вследствие ускорений в полете (например, при виражах). В качестве противодействующей силы в авиационных тахометрах обычно используют упругую силу пружины.
В центробежных механических тахометрах грузом, развивающим центробежные силы, служит толстостенный цилиндр, а восстанавливающая сила создается упругостью спиральной пружины,
1 >5
В авиации применяются центробежные тахометры двух типов: тахометр типа А-2 и тахометр в стандартном корпусе. Устройство тахометра типа А-2 представлено на рис. 116. Гибкий вал, соединенный с распределительным валом мотора и тахометром, приводит во вращение ось 1. Вместе с осью 1 вращается груз-баланс 2, который, в свою очередь, может поворачиваться около оси, перпендикулярной оси 1. При вращении оси 1 груз-баланс под действием центробежных сил стремится занять горизонтальное положение.
Вращение пруза-балан'са 9 около оси парализуется действием момента упругой силы, создаваемого винтовой пружиной 10, которая помещается в трубке на оси и соединена с балансом. Чем больше угловая скорость баланса, тем больше момент центробежных сил и тем, естественно, на больший угол повернется баланс вокруг оси. Таким образом, каждой скорости вращающегося вала мотора и, следовательно, оси 1 соответствует определенное положение баланса.
Движение баланса передается через тяги 3 на муфту 4. С муфтой связан скользящий по ней рычаг 5, передающий свое движение на сектор 6. Сектор, в свою очередь, свя
Рис. 116. Устройство центробежного тахометра.
1—ось; 2—груз-баланс; 3—тяги; 4— скользящая муфта; 5—рычаг-иово-цок; 6—сектор; 7—трибка; 8—стрелка; 9—груз-баланс; /0—винтовая
пружина в кожухе.
зан через трибку 7 со стрелкой 8 прибора, ходящей по шкале.
В эксплоатации в последнее время встречается центробежные тахометры в несколько измененном виде. Все части такого тахо
метра смонтированы в алюминиевом стандартном корпусе диаметром 80 мм.
Конструкция этого тахометра показана на рис. 117. Передающий валик 1 связан с осью 3 центробежного узла косозубчатыми шестернями 2 с передаточным числом 3,5: 1. Косозубчатое зацепление позволяет вывести наконечник валика тахометра под углом 45° относительно центробежного узла; этим устраняются большие углы изгиба гибкого .вала. Большие углы изгиба гибкого вала недопустимы, так как вызывают вибрацию стрелки и нарушают плавность хода прибора.
На многомоторных больших самолетах центробежный тахометр вытеснен электрическими тахометрами, обладающими преимуществом дистанционности. К недостаткам работы центробеж-
ных тахометров следует отнести частый отказ в работе гибких валов.
Как известно, гибкий вал является связующим звеном между «моторами и тахометром. Он состоит из двух главных частей: собственно вала (или боуденовского троса) и оболочки. Неправильно смонтированный на самолете гибкий вал (излишнее количество изгибов, незакрепленность вала, неправильная сборка) вызывает большую вибрацию стрелки тахометра, скачкообразное движение стрелки по шкале прибора и в результате—обрыв гибкого вала.
Рис. 117. Принципиальная схема устройства центробежного тахометра в стандартном корпусе.
1—передающий садик тахометра; 2—шестерчя;
3—ось .центробежного узла; 4—неподвижная
муфта; 5—подвижная муфта; 6—пружина; 7—
грузики; 8—пружина.; 9—«стрелка; 10—«волосок.
Не менее важно также запомнить, что по вине летного состава «может произойти отказ тахометра из-за обрыва гибкого вала, а именно:
1) при запуске мотора во время дачи опережения на «малом газе вал мотора вращается в обратную сторону;
2) пилот, перекрыв бензиновые баки и не дав выработаться бензину, оставшемуся в карбюраторе и системе, останавливает «мотор; вследствие этого создается обратное вращение.
В обоих случаях при «3—4 оборотах винта в обратную сторону гибкий вал рвется, так как о-н работает против установленного «вращения проволочной навивки для данного мотора.
§ 78. Электрический тахометр ТЭ
Этот тахометр устанавливается на самолетах всех типов, где мотор расположен далеко* от приборной доски летчика, где установка обычного центробежного тахометра требует длинного гибкого (вала, при котором прибор работает плохо.
5
Рис. 118. Принцип работы электрического тахометра ТЭ.
А—генератор тахометра.
1—штуцер кулачкового вала мотора; 2—дисковый фрикцион;
3—ротор генератора (постоянный магнит); 4—статор генератора; 5—штепсельное соединение; 6—трехжальный кабель.
Б—Указатель тахометра.
Реактивный синхронный мотор.
1—ротор; 2—статор; 3—магнит; 4—чувствительный элемент; 5—-шкала тахометра; 6—зубчатая передача 1 : 10; 7— большая стрелка; 8—малая стрелка.
Электротахометр переменного тока типа ТЭ действует пэ принципу магнитного тахометра, заключающемуся в следующем.
Магнит указателя (рис. 118), вращаясь со скоростью, задаваемой валом авиационного мотора, индуктирует в чувствительном
элементе токи Фуко. Взаимодействие этих токов с магнитным потоком магнита вызывает вращающий момент, величина которого пропорциональна числу оборотов магнита, а следовательно, и вала авиационного мотора. Передача вращения от кулачкового вала авиационного мотора осуществляется при помощи генератора тахометра и синхронного мотора, помещенного в корпусе указателя.
В комплект электрического тахометра входят:
1. Генератор тахометра, представляющий собой трехфазную синхронную машину с постоянным магнитом в качестве ротора. Передача вращения ротору от кулачкового вала авиационного мотора осуществляется через зубчатую передачу с фрикционом, помещенную в корпусе генератора. Генератор тахометра крепится с помощью накидной гайки к соответствующему штуцеру кулачкового вала авиационного мотора. Закрепленный генератор находится по отношению к задней крышке мотора под углом примерно в 45°.
2. Указатель тахометра, состоящий из двух частей: трехфазного синхронного мотора и магнита с чувствительным элементом (индукционного указателя).
1Указатель представляет собой вибрационно устойчивый прибор. Обе части указателя заключены в бакелитовый корпус. Указатель имеет равномерную шкалу с оцифровкой от '0 до 10. На приборе смонтированы две стрелки: большая — для отсчета сотен и десятков оборотов с точностью до 20 об/мин и малая—для отсчета тысяч оборотов.
Недостатком работы электрического тахометра типа ТЭ является преждевременный отказ в работе генератора и указателя вследствие износа (сгорания) подшипников.
Для предупреждения этого дефекта необходимо комплект электрического тахометра (генератор и указатель) через 150 часов подвергать разборке и смазывать шарикоподшипники маслом костяным или МВП.
Указанный дефект отражается на правильности показаний прибора («затирание» в приборе и недопоказывание). Поэтому для точности показаний важно соблюдать рекомендуемый регламент осмотра и смазки прибора.
§ 79. Манометры масла и бензина
Манометры необходимы для определения давления .в системе питания мотора маслом и бензином.
Действие манометра основано на свойстве трубки Бурдона изменять свою форму под влиянием изменения разности давлений вне и внутри ее. Если давление вне трубки и внутри одинаково, то трубка сохраняет свою форму; если же внутреннее давление больше наружного, то вследствие разности давлений эллиптическое поперечное сечение стремится измениться, приближаясь к окружности (см. пунктирную линию на рис. 119, А). При этом внутренняя стенка А трубки должна сократиться, а внеш-150
няя В—удлиниться. Но этому будут противодействовать силы упругости материала трубки. В результате трубка несколько выпрямится. Так как один конец С трубки неподвижно закреплен, то другой конец D переместится и опишет кривую, указанную на рис. П9, А стрелкой. Конец трубки D, в зависимости ог приложенного внутри ее давления, передает движение этого конца через передаточный механизм на стрелку. Таким образом, можно непосредственно отсчитывать величину приложенного в каждый данный момент давления.
Рис. 119. Принципиальная схема работы манометра.
А—схема работы манометра; Б—внешний вид манометра масла; В—внешний вид манометра бензина.
Трубка Бурдона должна быть запаяна с обоих концов совершенно герметично; в ней остается лишь одно отверстие для прохода измеряемого давления внутри трубки. Один конец трубки припаивается к металлической отливке, являющейся основанием манометра, а другой—к наконечнику, при помощи которого бур-доновская трубка соединяется с передаточным механизмом. В основании манометра имеется канал; через этот канал трубка Бурдона соединяется с системой, давление в которой необходимо измерить. ♦ z
Передаточный механизм манометра устроен следующим образом: к свободному концу трубки шарнирно присоединена тяга; другой конец тяги также шарнирно соединен с рычагом сектора; последний в свою очередь сцеплен с трибкой, несущей на оси стрелку прибора, которая указывает на циферблате степень давления.
На самолетах устанавливаются манометры для измерения давления масла со шкалой от 0 до 15 кг/см2 и манометры для измерения давления бензина со шкалой от 0 до 1 кг/см2.
Из сказанного следует, что исправная работа манометров зависит в первую очередь от сохранности и состояния трубки Бур; дона. Поэтому, для того, чтобы манометр давал точные показа"-' ния, нужно, чтобы пружина не изменяла своей упругости.
Точность показаний манометра зависит в основном от передаточного механизма, т. е. от тщательной сборки и регулировки его.
Следует заметить, что конструкция авиационных манометров не претерпела каких-либо существенных изменений с момента их появления.
В последнее время ib эксплоатации появились манометры масла с приемниками. В этих приемниках трубопровод разделяется переходной мембраной на две части. Одна часть — трубка Бурдона и трубопровод до мембраны — заполняется жидкостью с малым коэфициентом температурного расширения и с низкой температурой замерзания (толуол); другая часть непосредственно присоединяется к маслопроводу и заполняется, как обычно, маслом.
Масляные манометры подобной конструкции могут работать весьма исправно даже при очень низких температурах, когда обычные масляные манометры часто отказывают в работе вследствие замерзания масла в приборе и в подводящем трубопроводе. В этом заключается их значительное преимущество' перед манометрами обычной конструкции.
Некоторое изменение произошло в манометре бензина. Внутренняя часть корпуса прибора через штуцер сообщается со статической проводкой указателя скорости. Благодаря этому давление в корпусе прибора уравновешивается с давлением окружающей самолет атмосферы, и разность между .измеряемым давлением и давлением внутри корпуса зависит только от высоты. Таким образом, исключаются ошибки в показаниях прибора от разрежений внутри кабины, зависящих от скорости полета. Общий вид манометров масла и бензина показан на рис. 119, Б, В.
§ 80. Аэротермометры (дистанционные)
Аэротермометры или дистанционные термометры (рис. 120, А, Б) измеряют температуру воды или масла в пределах от 0 до 125°С и могут передавать показания на расстояние до 14 м.
Действие аэротермометра основано, на том, что упругость насыщенных паров, находящихся над свободной поверхностью 52
LI 81
хлорметила и заключенных в закрытый сосуд (давление), зависит исключительно от окружающей температуры.
Хлорметил — жидкость, обладающая следующими свойствами: точка замерзания — 97°С, точка кипения — 24°С, критическая температура -j- 143,2°С и критическое давление 65,8 ат.
Изменение давления насыщенных паров хлорметила деформирует стенки трубки Бурдона (см. раздел «Манометры», свойство трубки Бурдона).
Аэротермометр состоит из приемника, трубопровода и измерителя. Приемник 1 представляет собой узкий цилиндр с полукруглым дном. Открытый конец цилиндра имеет утолщение, головку с гайкой 2, предназначенной для крепления приемника в системе охлаждения или маслопроводов. Сквозь головку проходит конец трубопровода 3.
Трубопровод 3, соединяющий приемник с измерителем, представляет собой капиллярную трубку с внутренним диаметром около 0,35 мм. От внешних механических повреждений трубопровод защищен двойной медной оплеткой 4. Для защиты от поломки в местах соединения с измерителем и с. приемником трубопровод имеет добавочную оплетку 5 (броню).
Измеритель — это обыкновенный манометр с трубкой Бурдона 6.
Приемник, трубопровод и трубка Бурдона наливаются жидким хлорметилом примерно в количестве 4 см3 при комнатной температуре через отросток (аппендикс) у трубки Бурдона.
Давление насыщенных паров хлорметила в системе восприни мается трубкой Бурдона и через посредство механизма передается на стрелку, которая показывает по шкале температуру масла пли воды в системе мотора.
Основным дефектом аэротермометра является возможность его повреждения из-за потертости и обрыва трубопровода; в результате—‘Отказ в работе прибора. Этот недостаток, главным образом, возникает из-за небрежного монтажа на самолете аэротермометра. Поэтому трубопровод от приемника к измерителю необходимо прокладывать по фюзеляжу самолета в наиболее безопасных от повреждений местах и по ®озможности без крутых изгибов. Перегибать трубопровод в одном и том же месте категорически воспрещается. Во избежание излишней вибрации трубопровод прикрепляется к фюзеляжу скобками с резиновыми прокладками. Расстояние между этими скобками не должно превышать 300 мм.
§ 81. Трехстрелочный индикатор
На многомоторных самолетах в целях сокращения количества приборов на приборной доске применяются комбинированные приборы.
Одним из таких прибооов является трехстрелочный индикатор (рис. 121).
Трехстрелочный индикатор предназначается для контроля ра-154
боты мотора и состоит из следующих частей: 1) термометра от О до 125°С для измерения температуры масла, идущего в качестве смазки для трущихся частей мотора; 2) манометра масла на 15 ат, определяющего давление, под которым масло поступает в мотор; 3 ) манометра бензина на 0,8 ат, измеряющего давление, под которым горючее поступает в мотор.
Рис. 121. Общий вид трехстрелочного индикатора.
Все три механизма приборов (аэротермометра, манометра масла и манометра бензина) смонтированы на общем основании индикатора так, что в случае необходимости каждый механизм может быть вынут отдельно' и заменен новым. Все три механизма регулируются независимо друг от друга. Индикатор имеет один общий для трех приборов циферблат, причем для каждого прибора на циферблате имеется своя шкала. Шкалы нанесены таким образом, что при нормальной работе мотора стрелки приборов располагаются в виде опрокинутой буквы Т. Нарушение конфигурации взаимного расположения стрелок во время работы мотора может в известной степени служить для летчика или бортмеханика сигналом о неправильной работе мотора.
Необходимо отметить как конструктивное улучшение прибора, что манометры масла в некоторых индикаторах снабжаются приемником с трубопроводами. Приемник и трубопровод наполнены толуолом. В этом случае давление воспринимается приемником и при помощи толуола передается во внутреннюю полость трубки Бурдона.
Трехстрелочному индикатору присущи дефекты, свойственные дистанционному прибору, т. е. потертость и обрыв трубопроводов, возникающие от небрежности монтажа.
§ 82. Газоанализатор (альфометр)
Авиационный газоанализатор предназначен для определения состава поступающей из карбюратора смеси топлива и воздуха путем электрического измерения теплопроводности выхлопного газа мотора (рис. 122, А, Б).
Рис. 122. Газоанализатор.
А—принципиальная схема: Б—прохождение анализируемых газов.
1—'сравнительные камеры; 2—пробка увлажнителя; 3—вход воздуха в камеры; 4—фитиль увлажнителя; 5—диск; 6—вход газов в фильтр; 7—сетка; 8—корпус филыгра; 9—выход газов; 10—'измерительные камеры; 11—газоотсасы'ваю-щая трубка; 12—выход газов; 13—.газозаборная трубка; 14—тепловая изоляция (асбест).
Правильное регулирование смеси топлива и воздуха по показаниям газоанализатора позволяет экономить топливо, сохраняя необходимую в полете мощность мотора. Благодаря этому увеличивается срок службы мотора.
Работа газоанализатора основана на принципе неуравновешенного моста Уитстона.
Комплект одномоторного авиационного электрического газоанализатора состоит из следующих элементов: 1) приемника; 2) указателя; 3) комплекта монтажных деталей газовой схемы.
Электрическая схема газоанализатора состоит из двух основных частей: схемы приемника и схемы показывающего прибора (указателя).
Схема приемника состоит из моста Уитстона с активными плечами из платиновых спиралей Ri, R?, R3 и Rit при помощи 156
которых измеряется изменение теплопроводности выхлопного газа.
Указателем газоанализатора служит вибрационно устойчивый магнито-электрический милливольтметр. Шкала газоанализатора (указателя) отградуирована вас пределом измерения от 0,6 до 1,0; она показывает отношение фактически поданного воздуха к теоретически необходимому для полного сгорания топлива.
Для забора части газа из выхлопной трубы мотора устанавливается газозаборная трубка, соединенная газопроводом с фильтром приемника. Фильтр наполнен металлической стружкой и предназначен для очистки газа от механических примесей. Из фильтра газ путем диффузии поступает в измерительные камеры с плечами Ri и моста Уитстона и изменяет условия теплопередачи от спиралей к стенкам этих камер. Выходная трубка фильтра соединена также с выхлопным коллектором мотора при помощи газоотсасывающей трубки. За счет перепада давления между газозаборной и газоотсасывающей трубками и определенного расположения их входных отверстий к потоку газа создается необходимое движение газа через приемник газоанализатора. Сравнительные (воздушные) камеры с расположенными в них плечами R2 и R3 моста Уитстона соединены с окружающей воздушной атмосферой. Для необходимого увлажнения воздуха, поступающего в эти камеры из атмосферы, имеется пробка с фитилем, увлажняемым водой.
§ 83. Электрические термометры сопротивления
Электрические термометры сопротивления применяются для контроля за работой авиационного мотора и для измерения температуры окружающего воздуха.
Термометры сопротивления находят широкое применение на многомоторных самолетах.
Термометры сопротивления бывают следующих типов: 1) ТМЭ-6 — для измерения температуры масла и воды в авиационных моторах в пределах ют 0 до 125°С; 2) ТКЭ-6— для измерения температуры воздуха в карбюраторе авиационных моторов в пределах от — 30° до -f- 70°С; 3) ТВЭ-6 — для измерения температуры окружающего самолет воздуха в пределах от — 70° до + 70°С.
Приборы работают по принципу неуравновешенного моста Уитстона.
В комплект каждого прибора входит измеритель и приемник с бронированным соединительным проводом (рис. 123).
Измеритель представляет собой магнито-электрический прибор, смонтированный в бакелитовом корпусе вместе с сопротивлениями, составляющими схему моста Уитстона. Измеритель устанавливают на приборной доске в кабине самолета.
Приемник содержит сопротивление, являющееся одним из плеч моста Уитстона, и вносится в среду, температуру которой требуется измерит^. Измеритель связан с приемником соединительными проводами. Измеритель имеет температурную компен-157
сацию, почти полностью устраняющую влияние температуры окружающего воздуха. Для уменьшения магнитного влияния на
Рис. 123. Схема соединения электрического термометра.
1—измеритель; 2— электропровода;
3—разъемная коробка; 4—бронированный шланг; 5—.приемник.
компас измеритель заключен в магнитный экран.
Приемник сделан в виде латунной трубки, внутри которой заключен теплочувствительный элемент (сопротивление) из медной проволоки. К приемнику подключается бронированный соединительный провод.
Недостатком термометров сопротивления является разрушение самого приемника (латунной трубки) и теплочувствительного эле мента (сопротивления).
В виду того что бывают случаи отказа электроприемников в работе, за последнее время вместо термометров сопротивления ТМЭ-6, ТКЭ-6, ТВЭ-6 появились в эксплоата ции термометры сопротивления типа ТМЭ-41. ТКЭ-41, ТВЭ-41.
Электроприемники этих термометров имеют разъемные головки и позволяют заменять теплочув'ствителыный элемент.
Электроприемники с разъемной головкой типа ТМЭ-41 и ТКЭ-41 по своему сопротивлению и условиям работы полностью удовлетворяют всем предъявляемым требованиям. Они взаимозаменяемы со старыми приемниками для одной и той же среды. Электроприемники ТМЭ-41 и ТКЭ-41 реагируют быстрее на изменение температуры измеряемой среды.
Для измерения температуры воды и масла применяется приемник типа ТМЭ-41, а для измерения температуры воздуха карбюратора—'приемник ТКЭ-41.
Приемник ТМЭ-41 имеет длину: /=156 мм и Zi=100 мм; приемник ТКЭ-41—/=126 мм и /1=70 мм.
Для замены теплочувствительного элемен-
та приемника следует произвести следующее:
1) отвернуть накидную гайку и вынуть штепсельную розетку;
2) вынуть кар'болитовую втулочку, резиновое кольцо (если оно осталось в арматуре) и пружинящее кольцо, запирающее элемент (при поддевании отверткой отогнутого края 'кольца последнее легко вынимается из арматуры):
3) взявшись за вилку, вынуть теплочувствительный элемент;
4) надев на новый элемент паранитовую прокладку, вставать
его в арматуру и запереть пружинящим кольцом;
5) вставить карболитовую втулку (проточенным кольцом к элементу) ;
6) надеть на колодку резиновое кольцо (если юно соскочило), присоединить штепсельную розетку к вилке элемента и завернуть накидную гайку доотказа.
После этого приемник термометра сопротивления снова пригоден к работе.
§ 84. Термоэлектрический термометр цилиндра
Термоэлектрический термометр определения температуры головок го охлаждения (рис. 124, А, Б).
6
цилиндров применяется для цилиндров моторов воздушно
Принцип действия прибора заключается в следующем. Если подогревать место спайки двух проводов из разнородных металлов, то в этих проводах возникает электродвижущая сила, величина которой зависит от материала и разницы температур спая и холодных концов проводов.
Если па холодном конце поддерживать постоянную темпе-
Рис. 124. Термоэлектрический термометр цилиндра.
А—принципиальная схема; Б—приемник термометра.
1- кольцо-теплоприемник; 2—термюпроводиые провода; 3—соединения; 4—
соединительные (компейсащионные) провода; 5—наконечник подключения к прибору.
ратуру, то, измеряя гальванометром величину термоэлектродвижу -щей силы, можно судить о температуре той среды, в которую помещен горячий конец. Такой способ измерения температуры среды называется термоэлектрическим способом, а цепь, составленная из двух разнородных металлов, называется термопарой.
Действие термометра цилиндра основано на принципе измерения температуры термоэлектрическим способом. Для точности ноказаний гальванометра необходимо, чтобы на свободных кон-
цах термопары температура была постоянной, или нужно учитывать изменение этой температуры при отсчете по прибору.
Для поддержания постоянной температуры холодного конца термопары его относят при помощи так называемых компенсационных проводов в зону с небольшими колебаниями температуры.
Компенсационные провода подбирают с такой характеристикой, чтобы развиваемая ими в паре между, собой термоэлектродвижущая сила была примерно такой же, как и у термоэлектродных проводов.
Возрастание или убывание температуры горячего спая вызывает соответствующее изменение величины термоэлектродвижущей силы, которая приводит к изменению силы тока в термоэлектрической цепи и, следовательно, в гальванометре.
Основным измерительным прибором для термопар, так же как и для термометра сопротивления, служит магнито-электрический гальванометр.
Приемник — термопара, являющаяся приемником температуры, представляет собой кольцо из красной меди со впаянными в нее двумя проводниками; плюсовой провод изготовлен из хроме-ля, минусовый—из копеля (рис. 124, Б).
Кольцо из красной меди выполняет роль теплоприемника. Этот конец термопары является «рабочим концом», противоположные концы образуют «свободный конец».
Приемная шайба термопары с отключенным специальным проводом зажимается под свечой. Выходные концы термопары крепятся к головке цилиндра или к специальной державке. Соединительные провода присоединяют к термопаре, которые, в свою очередь, подключаются к 'прибору (магнито-электрическому гальванометру) .
Основным недостатком термоэлектрического термометра является перегорание термоэлектродных проводов у приемной шайбы.
§ 85. Бензином еры
На самолетах современных конструкций применяются бензи-номеры двух типов: гидростатические и электрические.
Гидростатический бензиномер. Гидростатический бензиномер является прибором непостоянного действия. Перед тем как сделать отсчет по этому прибору, следует привести его в действие. Бензиномер состоит из измерителя, приемников, насоса, переключателя и соединительного провода.
Измеритель встречается в эксплоатации двух типов: в стандартном корпусе и в корпусе старого образца. Измеритель состоит из двух камер — динамической 1 и статической 2 (рис. 125, А, Б).
Динамическая камера представляет собой манометр с гофрированной коробкой Види, воспринимающей давление на дно бака; движение стенки коробки Види передается через горизонтальный поводок 4 валика 3 и вертикальный поводок 5, укрепленный на том же валике 3, сектору 6, который поворачивает 160
Рис. 125. Гидростатический бензиномер.
А—схема устройства; Б—внешний вид.
1—динамическая камера; 2—статическая камера; 3—валик; 4—поводок; 5— вертикальный поводок; 6—сектор; 7—трибка; 8—волосок; 9—.штуцер динамический; 10—штуцер статический; 11—латунный цилиндр; 12—-фланец; 13— колпачок; 14—шток .поршня; 15—1голов1ка; 16—спиральная пружина; 17—
упорная шайба; 18—тройниковый наконечник; 19—втулка; 20—клапан; 21—
кран-переключатель; 22, 23—штуцеры; 24—медная трубка; 25—штуцер; 26— головка приемника; 27—Приемный бачок; 28—кожух.
трибку 7 с надетой на оси стрелкой; на оси трибки 7 имеется волосок 8, заставляющий горизонтальный поводок 4 прижиматься к пластинке на коробке 1 и уничтожающий люфт между деталями механизма. Шкала бензиномера нанесена в весовых единицах—килограммах. На шкале указан тип самолета, для которого данный бензиномер предназначен, и удельный вес горючего. Весь передающий механизм с коробкой Види помещается в корпусе, герметично закрытом стеклом с резиновой прокладкой.
Коробка Види через штуцер 9 соединена трубкой с приемником. Второй штуцер 10 обеспечивает посредством соединительного трубопровода давление в корпусе прибора, равное давлению воздуха над бензином в баке.
Насос бензиномера состоит из полого латунного цилиндра 11, заканчивающегося с одной стороны конусом, в который ввинчен тройниковый наконечник 18 для соединения насоса с остальной системой бензиномера; с другой стороны насоса навинчиваются фланец 12 и колпак 13 с отверстием для прохода штока поршня 14. С наружной стороны штока укреплена головка 15 для оттягивания поршня рукой.
Обратный ход поршня осуществляется под действием стальной спиральной пружины 16, упирающейся одним концом в колпак 13, а другим — в упорную шайбу 17 трубки штока. (Конус на конце штока при движении штока под действием пружины закрывает коническое отверстие во втулке поршня. (При оттягива нии штока за головку это отверстие открывается, и воздух свободно поступает в увеличивающееся пространство за поршнями. В коническом дне корпуса насоса помещен клапан 20 с втулкой 19, замедляющий прохождение нагнетаемого поршеньком воздуха и запирающий отверстие, сообщающее приемник бензиномера с насосом. При нерабочем состоянии штуцер 22 соединяет ша сое с приемником через переключатель и штуцер 23 с измерителем.
Длина приемника подбирается по высоте бензобака. 'Основной частью приемника является медная трубка 24 малого диаметра, впаянная в ниппель в головке приемника 26. Через штуцер 25 и соединительный трубопровод медная трубка 24 соединяется с системой бензиномера. На конец трубки напаивается приемный бачок 27, в который трубка пропускается примерно до дча. На дне приемного бачке для сообщения с дном бензобака имеются четыре ответ стия малого диаметра. Головка приемника и бачок укреплены в кожухе 28 с вырезами, предохраняющем медную трубку 24 от повреждений и изгибов.
(Кран-переключатель служит для включения в систему бензиномера одного или другого приемника, установленного в бензобак. (Кран помещается между приемниками и насосом.
Работа 'бензиномера протекает следующим образом. Для производства отсчета сначала необходимо оттянуть* поршень. Под действием пружины насоса при обратном ходе стрелка измерителя начинает медленно двигаться от начального положения до 162
деления шкалы, указывающего количество бензина в баке (в килограммах); на этом показании стрелка задерживается и стоит на нем некоторое время, достаточное для отсчета.
Сообщение с приемником перекрывается пробкой клапана. Когда поршень возвратится в обратное положение, он нажмет на клапан 20, сдавливая его слабую пружину, и запрет пробкой отверстие, сообщающее насос с приемником, чтобы горючее не проникало из бака к насосу во время полета; стрелка прибора при этом возвратится в первоначальное положение.
В нагосе в это время коническое отверстие во втулке поршня закрывается давлением воздуха, сжимаемого поршнем, бензин выгоняется из медной трубки в приемнике, а избыточный воздух из трубки 24 выходит пузырьками.
Гидростатический бензиномер имеет ряд характерных недостатков, которые в основном возникают из-за плохого знания материальной части и правил монтажа прибора на самолете.
Иногда после оттягивания ручки насоса и при возвращении поршня стрелка прибора или сходит с нулевого деления или медленно движется вверх, но не доходит до нужного деления шкалы, в то время как поршень насоса уже дошел до исходного яоложения. Этот дефект образуется от негерметичности системы.
В эксплоатации попадание бензина в насос.и частично в измеритель может также иметь место. При заполнении бака до-отказа (до пробки) уровень бензина, в особенности на стоянке самолета, несколько выше смонтированного насоса и измерителя. Вследствие этого бензин проникает в проводку и через насос зросачивается в кабину пилота. Поэтому следует динамическую проводку от головки приемника выводить вверх с таким расчетом, чтобы бензин не затекал в проводку и не попадал в насос и измеритель.
Следует иметь в виду, что при хорошем знании и своевременном устранении всех дефектов правильная и надежная работа гидростатического бензиномера вполне возможна.
За последнее время на многомоторных самолетах появились электрические поплавковые бензиномеры, В отличие ют гидростатического бензиномера непостоянного действия поплавковый электрический бензиномер является прибором постоянного действия, т. е. дает показания постоянно.
Электрический бензиномер. Электрические бензиномеры предназначены для определения количества бензина в ба-как самолета.
На многомоторных самолетах ставятся электрические дистанционные бензиномеры рычажно-поплавкового типа (рис. 126, Д). В комплект бензиномера входят датчик, указатель, переключатель и провода.
Измерение количества бензина в баке основано на принципе иреобразования измеряемой неэлектрической величины, т. е. Уровня бензина, в электрическую величину, воспринимаемую электроизмерительным прибором.
Преобразование измеряемой неэлектрической величины осуществляется реостатным датчиком рычажно-поплавкового типа, устанавливаемым на бензиновом баке. Для измерения применяется магнито-электрический логометр (измеритель). Схема включения датчика и логометра изображена на рис. 126, Б.
F' Логиметр (америтель) Затиик
Рис. 126. Электрический беизиномер БЭ-09.
А—общий вид; Б—электрическая схема.
При измерении уровня бензина в баке поплавок, находящийся на поверхности бензина, через механическую передачу (систему рычагов) перемещает ползунок реостата, помещенного в корпусе датчика. Ползунок делит общее сопротивление реостата нз 164
два сопротивления — Rt и Д2. При перемещении ползунка одно из сопротивлений убывает, а другое—возрастает и соответственно меняется величина токов Л и г2, протекающих по рамкам лого-метра.
Отклонение подвижной части логометра, как известно, зависит от отношений токов, протекающих по рамкам, т. е. от вели
Ч ЧИНЫ V- . г2
В нашем случае отношение токов является функцией изменения уровня бензина в баке.
Шкала логометра отградуирована в литрах бензина. Показания по шкале измерителя верны только в случае горизонтального полета самолета. При различных эволюциях самолета отсчитывать показания не следует, так как погрешность их может значительно превышать предельные величины.
При стоянке самолета на земле «на трех трчках» по шкале измерителя -верный отсчет возможен только в двух крайних точках: при пустом и полном баке.
Для проверки бензиномера способом мерного слива или налива баков самолет необходимо установить на козлах в линию полета. В этом случае показания измерителя по всей шкале будут совпадать с количеством горючего в баках.
§ 86. Автопилот
Назначение автопилота — заменять на некоторое время летчика в управлении самолетом.
Этот прибоо представляет собой весьма чувствительную и сложную установку, состоящую из ряда самостоятельных агрегатов. Автопилот автоматически стабилизирует самолет относительно продольной х—х, поперечной у—у и вертикальной z—z осей (рис. 127). Таким образом, автопилот устойчиво ведет самолет без вмешательства летчика, парализуя действия сбивающих самолет сил.
Автопилот автоматизирует процесс управления поперечными, процельными и боковыми движениями самолета. Поворачивая соответствующие кнопки, можно при помощи автопилота планировать, изменять высоту, делать виражи и переводить самолет из одного режима полета в другой.
В плохих метеорологических условиях автопилот ведет самолет более спокойно и точно, чем пилот.
Главной, так называемой чувствительной, Частью автопилота являются приборы—гирополукомпас (рис. 128, Л) и авиагоризонт (рис. 128, Б).
Чувствительные элементы (рис. 128, А, Б), предназначенные для автоматизации управления самолетом, используются еще как аэронавигационные приборы, поэтому они монтируются на -приборной доске.
Рассмотрим работу автопилота. Так как работа автоматов продольной, поперечной и курсовой устойчивости одинакова, разберем лишь работу автомата поперечной устойчивости.
Рис. 127. Главные оси устойчивости самолета.
Принципиальная схема действия автопилота в прямолинейном полете. При горизонтальном полете самолета корпус автомата будет также расположен горизонтально, а вместе с ним горизонтально располагаются и сопла следящей системы (рис. 129, А).
Заслонка 1, сидящая на внешней раме авиагоризонта, прк работе последнего всегда распЬложена горизонтально; поэтому она перекроет щели сопла наполовину. Благодаря вакууму, поддерживаемому в корпусе прибора помпой, воздух через капиллярные отверстия в пневматическом реле 3 будет засасываться в камеры реле, разделенные диафрагмой, а из камер по трубопроводам через щели сопла 2—в корпус прибора. Так как щели перекрыты заслонкой наполовину, количество воздуха, проходящего через каждую щель, будет одинаково; поэтому давление воздуха в обеих камерах реле будет тоже одинаково. Центрированный пружинный шток масляного золотника 4 и диафрагма реле будут находиться в нейтральном положении. Штапиики штока перекрывают отверстия трубопроводов, идущих к рулевой машинке 5. Масло в рулевой машинке 5 заперто, поэтому шток ее, а следовательно, и руль перемещаться не могут и находятся в нейтральном положении. Самолет продолжает горизонтальный полет.
Предположим, что вследствие выходящего или нисходящего потока воздуха или других причин самолет получил крен напра-166
Рис. 128.
—агр'еган курсовой устойчивости (гирополукомпас); Б—агрегат продольяо! и (поперечной устойчивости (авиагоризонт). 16
во (рис. 129, Б). Тогда сопло следящей системы вместе с самолетом тоже выйдет из горизонтального положения и наклонится вправо, заслонки не останутся лежать в горизонтальной плоскости. Поэтому левая прорезь сопла подойдет под заслонку и в какой-то части закроется последней, а правая — выйдет из-под заслонки и откроется в такой же части. Но так как левая прорези
Рис. 129. Принципиальная схема работы автопилота.
А—в нормальней 'Полете; Б—при крене самолета.
1—заслонка; 2—сопла; 3—пнеюмати Лесков реле; 4—-шток масляного золотника; 5—рулевая машинка; 6—нагнетающая линия; 7—обратная линия.
сопла посредством шланга и выходного отверстия задней крышки соединена с передней камерой пневматического реле, а правая таким же образом — с задней камерой этого реле, то в передней части давление воздуха будет больше, чем в задней, поскольку через нее воздуха будет проходить меньше. Благодаря разности давления воздуха в камерах диафрагма реле начнет прогибаться и потянет сврю ось в заднее положение.
Движение оси реле 'передается на шток масляного золотника и перекладывает его в заднее положение. При этом передний штаппик штока откроет отверстие одного из трубопроводов, соединенных с рулевой машинкой, и соединит его с обратной линией, а второй штампик откроет отверстие второго трубопровода и соединит его с нагнетающей линией. Масло через открытое отверстие по трубопроводу устремится в соответствующую часть рабочего цилиндра рулевой машинки. Шток рулевой машинки, приняв на себя давление масла, придет в движение в осевом направлении. Наконечники штока посредством ушка и стального пальца связаны с тросами управления (с соответствующими элеронами).
Таким образом, элероны переложатся в нужное положение и будут зафиксированы в этом положении, так как при движении 168
своем шток рулевой машинки потянет за собой тросик 12 следящей системы (рис. 130). Тросик, сматываясь с ролика И, приведет последний во вращательное движение. Это движение посредством передачи сообщается на сопло 9. Сопло, повернувшись на своей оси в сторону, противоположную наклону самолета, восстановится .в горизонтальное шоложение, и прорези его- равномерно перекроются заслонкой. Разность давлений в камерах реле уничтожится. Шток золотника, став в нейтральное положение, запрет масло в рулевой машинке. Элероны остались в зафиксированном положении. Первая часть работы автопилота закончилась. Благодаря тому, что следящая система переложит рули, самолет начнет выравниваться. Вместе с ним опять изменит свое положение сопло следящей системы, отклонившись в противоположную сторону.
Тогда левая щель сопла выйдет из-под заслонки, а правая подойдет под нее, «причем первая откроется, а последняя закроется. Таким образом создастся разность давлений воздуха в камерах реле, но в передней камере давление будет меньше, а в задней—больше; у диафрагмы будет прогиб в переднее положение. Через ось реле движение передается на шток золотника. Работа золотника совершится в обратном направлении. Масло устремится уже в левую часть рулевой машинки, и шток ее поэтому будет передвигаться в положение, обратное первоначальному. Элероны, по мере движения штока рулевой машинки, начнут убираться в нейтральное положение.
При движении штока рулевой машинки в нейтральное положение тросик следящей системы освобождается, но слабина его уничтожается достаточно сильной спиральной пружиной, навитой в выточке ролика. Эта же пружина, поворачивая ось ролика, приведет в движение сопло так, чтобы оно при горизонтальном положении самолета также располагалось горизонтально. Щели его равномерно перекроются заслонкой.
Шток золотника займет нейтральное положение, запрет масло в рулевой машинке. Элероны вернутся в нейтральное положение. Самолет .вновь будет продолжать горизонтальный полет.
Перед включением автопилота во время полета летчик должен выполнить следующее:
1. Проверить по вакуумметру, расположенному на приборе, вакуум. Нормальный вакуум должен быть 100 мм рт. ст. Пределы колебаний вакуума-—от 80 до 120 мм рт. ст.
2. Проверить давление масла в гидравлической системе автопилота по манометру, стоящему на приборной доске. Давление масла автопилота на самолете Ли-2 устанавливается в 10—11 ат.
3. Открыть краны на панели регулятора скорости срабатывания рулевых машинок (если они закрыты). Закрытый регулятор скорости при включенном автопилоте неподвижно запирает штурвал и педали ножного управления.
4. Установить гироскоп курса (гирополукомпас) по магнитному компасу на нужный румб. Для этого необходимо нажать и
шмшоип МНМВЯ
повернуть (в соответствующую сторону кнопку арретира прибора до тех пор, пока цифры, указывающие необходимый румб, не окажутся против курсовой черты, после чего кнопку вытянуть на себя доотказа; затем поставить арретир автомата крена и высоты (авиагоризонт) в положение «включен».
б. При помощи триммеров сбалансировать самолет так, чтобы на нужном режиме он совершал прямолинейный горизонтальный полет.
6. Совместить индексы следящей системы с индексами, связанными с гироскопами, поворачивая соответствующие арретиры: «крен», «подъем—спуск», «поворот».
Румбы верхней картушки автомата курса должны совпадать с румбами нижней картушки. У автомата кренов индекс следящей системы поперечного крена должен совпадать с отметкой в верхней части внутренней круглой шкалы. Индекс продольносо крена должен совпадать с правым концом индекса-самолетика.
7. (Медленно включать автопилот, не бросая штурвала и ножных педалей до тех пор, пока автопилот не возьмет управление.
Если при включенном автопилоте появятся колебания штурвала и ножных педалей (что может быть при полностью открытых кранах регулятора скорости рулевых машинок), то необходимо медленно закрывать соответствующий кран до тех пор, пока колебания не прекратятся. При этом нельзя закрывать кран доотказа, чтобы не прекратить подачи масла в рулевые машинки. После устранения колебаний необходимо краны повернуть немного в обе стороны и убедиться, что пропускающие масло отверстия закрыты неполностью. Установку кранов не следует менять до тех пор, пока не потребуется ускорить отклонение реле. Это может быть во время «болтанки», а также при изменении центровки самолета.
Курсовое управление в автопилоте осуществляется гирополукомпасом, который должен быть установлен с помощью магнитного компаса и проверяться через определенные интервалы- Средний уход гирополукомпаса не должен превышать 3° в течение 15 минут. Уход в 5° в течение 15 минут допустим при одном направлении, при условии, если средний по четырем основным направляемым не превышает '3° за 15 минут. Поскольку автопилот управляет самолетом, то уход вызывает соответствующее изменение в показаниях магнитного компаса. Если самолет отклонился на два или три градуса ют заданного направления по магнитному компасу, небольшая регулировка кнопки руля поворота исправит направление. Если имеется существенное различие в показаниях между магнитным компасом и гирополукомпасом, автопилот нужно выключить на момент регулировки гирополукомпаса.
Регулировку гирополукомпаса необходимо производить при полете по прямой.
После горизонтального полета по прямой с автоматическим Управлением в течение примерно 10 минут нужно заметить раз-вицу в показаниях между гирополуком1пасом и магнитным компа-
сом. Средняя .погрешность в 3° за 16 минут считается небольшой. Если уход по гирополукомпасу более 3°, то он может быть 'вызван чрезмерной вибрацией; поэтому следует осмотреть и исправить амортизационную монтажную .раму. Амплитуда вибрации не должна превышать 0,004 дюйма в любом направлении, если замерить виброметром на автомате управления-
Поперечное управление автопилота осуществляется гироскопическим продольно-поперечным автоматом. Кнопка включения продольно-поперечного автомата может быть отрегулирована на любой горизонтальный полет относительно поперечной оси или на любой угол крена до 30°, где разворот управления осуществляется непрерывно вручную кнопкой руля поворота.
Заданное продольное положение самолета может регулироваться вверх или вниз посредством кнопки руля высоты в верхнем правом углу гироскопического продольно-поперечного автомата.
Появившиеся за последнее время модернизированные автопилоты типа АП-42 по своему принципу работы ничем не отличаются от автопилота более раннего выпуска, описанного выше.
Основные отличия автопилота типа АП-42 сводятся к следующему:
а) Уменьшены габариты и вес.
б) Агрегаты курсовой и поперечно-продольной стабилизация могут работать на давление и на вакуум.
в) В агрегате поперечно-продольной стабилизации применена шкала пикирующего авиагоризонта.
г) Введены гидравлический агрегат, который объединяет ряд узлов гидравлической системы, и пневматические реле (масляные золотники и пневмореле на автопилотах ранних выпусков помещались на раме-кронштейне)-
д) Обеспечена возможность введения дополнительных коррекционных агрегатов для курсовой стабилизации автопилота с целью работы в сочетании с дистанционным магнитным компасом и радиополукомпасом.
•е) Обеспечена возможность применения электрического дистанционного управления, с помощью которого самолет может автоматически разворачиваться под действием курсмотора, управляющегося при помощи кнопки летчика.
§ 87. Приборные доски самолетов
Приборная доска самолета По-2 изготовляется либо из дерева, либо из дюраля. Центр приборной доски съемный и крепите^ на резиновых амортизаторах в передней части кабины.
На доске летчика размещены следующие приборы: высотомер, компас магнитный, указатель скорости, указатель поворота, вариометр, аэротермометр, манометр масла, центробежный тахометр, гидростатический бензиномер, насос бензиномера, авиационные часы, переключатель и заливной насос (рис. 131а).
Конструкция и амортизация приборной доски ученика сходны е приборной доской летчика. На доске размещены следующие приборы: высотомер, магнитный компас, указатель скорости, указатель поворота, ‘вариометр, масляный манометр-
Рис. 131а. Приборная доска самолета типа По-2
Все приборы, размещенные на приборных досках, разделяются на две группы: 1) группу пилотажно-навигационных приборов, при помощи которых летчик ведет самолет, сохраняя заданные высоту, скорость, курс, и пилотирует самолет вслепую; 2) группу контрольных приборов, (посредством которых летчик контролирует работу мотора.
Приборы располагаются на приборной доске таким образом, чтобы летчик имел возможность вести самолет в любых условиях погоды с наибольшими удобствами, не утомляясь и не делая лишних движений головой и корпусом.
Правильное расположение приборов имеет большое значение при пилотировании самолетов в слепом полете; в особенности важно расположение их по группам.
В настоящий момент в оборудовании приборной доски принят определенный стандарт. Основным в этом стандарте является расположение приборов слепого полета в центре доски. К этим приборам на самолетах легкого типа относятся: указатель скорости, указатель поворота, вариометр и магнитный компас. Остальные приборы размещаются в зависимости от формы доски, по бокам основной группы; при этом как можно ближе к центральной группе приборов устанавливаются часы, высотомер и тахометр.
На самолетах тяжелого типа (Дуглас) к основной группепри-боров добавляются еще авиагоризонт и гирополукомпас, но принцип раюположения их остается прежним (рис. 1316).
Рис. 1316. Приборная доска самолета типа Дуглас.
1—высотомер; 2—авиагоризонт; 3—указатель поворота; 4—указатель 'воздушной скорости; 5—вариометр; 6—индикатор радиокомпаса; 7—электротахометр; 8—мановакуумметр; Р—манометр масла автопилота; 10—индикатор кислородного потока; 11—часы; 12—манометр бензина, 13—манометр масла; 14—термометр головок цилиндров мотора; 15—термометр входящего масла; 16—термометр карбюратора; 17—термометр наружного воздуха; 18—манометр антиобледенителя; 19—эл-ектробензиномер; 20—кран переключения мановакуум-метров; 21—кран включения указателя скорости, высотомера н вариометра статическую проводку Пито или в кабину; 22—гирополукомпас АВП; 23—арретирующая кнопка ГПК АВП; 24—кнопка задатчика курса ГПК АВП; 25— авиагоризонт АВП; 26—арретирующая кнопка АГ АВП; 97—кнопка управления элеронами; 28—кнопка управления рулем высоты; 29—'вакуумметр АВП; 30—сигнальные лампы .падения давления бензина; 31—сигнальные лампы падения давления масла; 32—сигнальные лампы положения шасси; 33— маркер радиомаяка; 34—регулятор скорости масла АВП; 35—край включения АВП; 36—амортизаторы компаса; 37— компас; 38—сигнальная лампа положения входных дверей; 39—реостат сигнальных ламп положения шасси; 40—края включения снегоочистителя -стекол кабины; 41-—кран включения антиобледенителя стекол кабины пилота; 42—тумблер включения электромоторов антиобледенителя.
ШТУРМАНСКОЕ СНАРЯЖЕНИЕ
§ 88. Счетная аэронавигационная линейка НЛ-7 (НЛ-8)
Счетная аэронавигационная линейка НЛ-7 (навигационная линейка-7) 'предназначена для расчетов в воздухе и на земле аэронавигационных элементов полета — высоты, скорости, времени полета, определения расстояний, для перевода скоростей из км/час в м/сек и, наоборот, определения угловых и тригонометрических величин sin a, tg а, cos а и ctg а, а также умножения и деления чисел. Общий вид линейки показан на рис. 132, А, Б\ она устроена по принципу обычной счетной логарифмической линейки. Линейка (рис. 132, А, Б) состоит из основания 1, движка 2 и визирной рамки 3 с риской 4; последняя обеспечивает удобство в работе и более точный отсчет искомых величин по шкалам линейки-
НЛ-7 имеет 13 шкал. Шкалы /, II и III служат для определения и введения в показание высотомера температурной поправки, т. е. для нахождения исправленной высоты полета.
|По шкалам IV, V, VI, VII и VIII определяются и вводятся в показания указателя воздушной скорости температурные ошибки и ошибки, происходящие от изменения плотности воздуха с высотой; по этим шкалам определяется истинная воздушная скорость. Кроме того, по шкалам VII и VIII производятся умножение, деление, возведение в степень извлечение квадратного корня ,и т. д.
Шкалы IX и X позволяют определять по времени полета и пройденному расстоянию путевую скорость самолета, по известной путевой скорости и длине участка—время пролета данного участка пути, по путевой скорости и времени полета — пройденный путь, переводить скорости из км/час в м/сек и рассчитывать необходимый на полет запас горючего.
Шкалы XI и XII дают возможность определять боковые уклонения самолета от намеченной линии пути, находить поправки в курс для следования по прямой в желаемый пункт из данной точки, определять вертикальные углы и дистанции; по шкале XIII можно определять значение синусов и тангенсов (а также косинусов и котангенсов) заданных углов и производить умножение и деление чисел на синусы и тангенсы.
Аэронавигационная счетная линейка НЛ-8 (выпуска 1943 г.) имеет такое же назначение и принцип устройства, как и линейка НЛ-7. Основное их различие заключается в том, что в НЛ-8 шкалы определения высоты и воздушной скорости (шкалы НЛ-7 — I, II, III, IV, V, VI, VII, VIII) объединены и изготовлены в более удобном виде для пользования; кроме того, НЛ-8 имеет добавочную .шкалу для решения некоторых задач навигационного треугольника скоростей и сложения и вычитания угловых величин.
Расположение и нумерация шкал линейки НЛ-8 показаны на рис. 133, А, Б.
Рис. 132. Счетная навигационная линейка НЛ-7. Д—лицевая сторона;. Б—обратная сторона,
С помощью линейки НЛ-8 можно производить следующие расчеты, наиболее часто встречающиеся в воздушной навигации:
I. Находить путевую скорость по пройденному расстоянию и времени полета.
2. Находить пройденное расстояние по известной путевой скорости и времени полета.
3. Определять время полета по расстоянию и путевой скорости.
4. Определять путевую скорость по времени пролета базы, равной высоте полета.
5. Находить поправку в курс по пройденному расстоянию и боковому уклонению.
6. Определять расстояние (дистанцию) по высоте полета и вертикальному углу.
7. Определять угол прицеливания по линейному относу и высоте полета.
8. Производить умножение деление чисел на синус и гангес.
9. Определять значение синусов и тангенсов заданного угла.
10. Производить расчет исправленной высоты полета по показанию высотомера.
11. Производить расчет исправленной воздушной скорости по иоказанию указателя скорости.
12. Производить расчет угла сноса и путевой скорости по воздушной скорости, скорости ветра и угла ветра.
13. Умножение и деление простых чисел.
14. Определять пеленги по курсу и курсовому углу.
15. Определять углы ветра по направлению ветра и путевому углу.
16. Производить перевод морских миль в километры и обратно; перевод английских миль в километры и обратно.
17. Производить перевод футов в метры и обратно, а также переводить скорости, выраженные в м/сек, в км/час и обратно.
В главе V на примерах рассмотрено пользование аэронавигационными линейками НЛ-7 и НЛ-8.
§ 89. Ветрочет АНО1)
Навигационные задачи решаются путем определения элементов аэронавигационного треугольника скоростей (рис. 134).
Основными элементами этого треугольника являются воздушная скорость V, курс самолета КС, угол сноса УС ( ), путевая скорость W, путевой угол ПУ, скорость ветра U, направление ветра ч и угол ветра г.
Определение этих элементов можно производить путем математических вычислений или графическим построением треугольника скоростей с помощью транспортира и линейки. Так как навигационные задачи в большинстве случаев! решаются в полете, поэтому ни математический способ, ни графическое решение неудоб-
1) Заводское обозначение АС-28.
ны, а в некоторых случаях и невозможны. Поэтому tB практике наибольшее распространение получил механический способ решена навигационного треугольника скоростей, т. е. с помощью вет-
рочета АНО (рис. 135).
Посредством ветрочета навига-циойный треугольник скоростей решается механически, что значительно упрощает и ускоряет работу по определению элементов полета.
Прибор обеспечивает решение задач bi пределах: угла сноса—от 0° до +35°, курса, направления ветра и путевого угла — от 0° до 360°, скорости ветра от 0 до 160 км/час, путевой скорости — от 50 до >60 км/час и воздушной скорости—-от 100 до 400 км/час.
На рис. 135 показана лицевая сторона ветрочета и его детали. Ветрочет состоит из следующих деталей; сектора /, азимутального круга 2 с указателем 3 и линейки 4.
Рис. 134. Элементы навигационного треугольника скоростей.
На его дуге нанесена
Сектор служит основанием прибора, якала сноса от 0 до +35°.
Рис. 135. Устройство ветрочета АНО.
Нулевое деление шкалы совпадает с осью симметрии сектора. Вправо от нулевого деления расположена шкала правых сносов ( |-), а влево — левых сносов (—). 179
Цена одного деления шкалы 1°, оцифровка произведена через каждые 10°.
В прорези сектора укреплен азимутальный круг 2; на его оси имеется указатель с риской 3, который совпадает с нулевым штрихом шкалы сносов на секторе; риска служит для точной установки путевого угла или курса по шкале азимутального круга.
Азимутальный крут имеет вращательное движение во-круг своей оси и поступательное—вдоль прорези сектора.
При вращательном движении азимутального круга указатель остается неподвижным, а при поступательном перемещается вместе с ним. Для закрепления азимутального круга в желаемом положении в прорези сектора с обратной его стороны имеется тормозная гайка. Когда азимутальный круг закреплен в прорези, он не имеет поступательного движения и сохраняет только вращательное движение.
На круге нанесена азимутальная шкала от 0 до '360°. Цена одного деления 1°; оцифровка произведена через каждые 10° соответственно: цифрой 1 —10°, цифрой 2—20°, цифрой 3—30° и так до цифры 34 — 340° и цифры 35 — 350°.
Основные ру-м'бы—север, юг, восток, запад—помечены буквами.
Вокруг центра круга нанесены семь концентрических окружностей на некотором расстоянии друг от друга в определенном масштабе, а именно: 10 км/час — для линейки скоростей до 280 км/час и 20 км/час — для линейки скоростей до 560 км/час.
Угол сноса
Рис. 136. Элементы подвижного треугольника скоростей (АНО).
Прибор имеет две, отличающиеся лишь шкалами, сменные металлические линейки, которые с помощью винта одним концом крепятся в вершине угла сектора, другим — ходят по дуге сектора, перемещаясь над поверхностью азимутального круга. 18о
На линейках нанесены шкалы путевых скоростей: первая — от 50 до 280 км/час и вторая — от 100 до 560 км/час. Цена ма дых делений первой шкалы — 2 км/час, второй — 5 км/час; числа уменьшены в 10 раз, т. е. число 5 читается как 50 км/час. число 21 — как 210 км/час и т. п.
В зависимости от того, какова воздушная скорость самолета, ставят соответствующую линейку. С помощью первой линейки на приборе можно определить воздушную скорость от 100 до 200 км/час, с помощью второй — от 200 до 400 км/час.
Правая сторона линейки несколько скошена и является рабочей гранью; по ней производятся все отсчеты и наносятся линии на азимутальный круг.
Линейка предназначена для отсчета воздушных и путевых скоростей самолета, углов сноса на дуге сектора, проведения линий я дуг на азимутальном круге.
На рис. 136 показаны элементы подвижного треугольника скоростей (ветрочета АНО).
Работа с ветрочетом при решении навигационных задач по дробно излагается в § 116.
§ 90. Авиационные визиры
Визиры предназначены для измерения в полете: угла сноса, вертикальных углов, курсовых углов, определения дистанций, s также для аэрофотосъемки, спецприменения и других работ.
Пэ своему назначению авиационные визиры разделяются на (пилотские и штурманские, по конструкции—на механические (простые) и оптические, а по месту установки— на бортовые и кабинные.
Бортовой визир НВ-5бис. Визир НВ-5бис (навигацион ный визир ббис) — механический, бортовой, устанавливается с внешней стороны борта самолета у кабины штурмана; крепле ние—жесткое. Применяется на легких типах самолетов с откоы тыми кабинами (По-2) при проведении специальных работ (ле-сотаксации, аэрофотосъемки и т. п.).
Устройство визира показано на рис. 137, А, Б.
Визир НВ-5бис состоит из прицельной рамки 1, двух крон штейнов 2 и двух колодок <3. (Колодки представляют собой отлив ки, которые имеют прорезь 5 в виде ласточкина хвоста для установки и закрепления в них кронштейнов и отверстий 6 для прикрепления к борту самолета; они крепятся с обоих бортов кабины штурмана с внешней ее стороны в месте, удобном для работы с визиром.
Кронштейны 2 имеют ползунки для установки в колодках надписи «правая» и «левая» (соответственно стороне их установки на самолете), шкалы углов сноса 7, курсовых углов и по два зажима 8 для установки прицельной рамки по пузырьковому уровню.
Поицельная (визирная) рамка 1 изготовлена в виде сектора и состоит из двух полос, скрепленных между собой на раостоя-
1Н
нии 10 мм; между этими полосами протянута визирная нита * (из тонкой проволоки).
Для отсчета вертикальных углов и производства вертикального визирования на полосах и скрепах .имеются деления верти кальных углов и специальные метки, а для отсчета углов ено са — индекс 10 в виде стрелки.
Рис. 137. Бортовой визир НВ-5бис.
А—детали визира, Б—установка визира на борту самолета, г—прицельная рамка; 2—кронштейны; 3—колодки; 4—пузырьковый уровень; —прорезь; б—крепежные отверстия; 7—шкала углов сноса; 8—зажимьь 9—визирная нить; 10—индекс.
Кроме того, для установки рамки в горизонтальное положение на ней имеется пузырьковый уровень 4, а для удобства работы в темное время — лампочка, освещающая шкалы.
Перед полетом кронштейны вставляются и укрепляются в колодках, причем с надписью «правая» — с правого борта, а с надписью «левая»—с левого. Прицельная рамка укрепляется в кронштейне того борта, из-под которого наблюдается выбегание земных предметов.
Кабинный оптический визир ОПБ-1. Визир ОПБ-1 -оптический, кабинный, штурманский, в основном предназначается для бомбометания и аэрофотосъемки. Этот визир представляет собой оптическую трубу с системой линз и призмы (рис 138, Л, £>)' Поле зрения (вертикальное) находится в пределах 30° вертикального угла; увеличение видимых предметов полуторакратное, т. е в 1,5 раза.
Благодаря подвижней призме 25 (рис. 138, Г) можно визировать на предметы, находящиеся как вертикально под самолете^, так и расположенные на 15° назад от вертикали и на 75° вперед 182
«т нее. При развороте визирной трубы на 180° можно производить визирование на предметы, находящиеся на 75’ назад от вертикали и на 15° вперед.
Для получения резкого изображения предметов земли в верхней части трубы имеется подвижный окуляр 1:
Для отсчета вертикальных углов в поле зрения трубы на стекле по диаметру (по обе стороны от центра) нанесена шкала вертикальных углов от 0 до 15°. Для пользования визиром в темное время имеется электроосвещение пузырька уровня и внутренней шкалы.
Визир ОПБ-1 устанавливается пальцем на пятку (рис. 138, Б),
Рис. 138 А, Б, Г. Кабинный оптический визир ОПБ-1.
А—общий вид; Б—щятка визира; Г—оптическая система.
1—окуляр; 2—часы; 3—счетный прибор; 4—палец (для установки трубы на вятку); о— шхала курсовых углов; 6—ножной тормоз; 7—неподвижный круг; 8—•подвижный .круг; 9—шкала углов .сноса; 10—индекс; 22—окуляр; 23—
тризмы, 24—уровень; 25—'подвижное зеркало (призма); 26—неподвижное зеркало (иризма); 27—подвижной указатель; 28—курсовая черта (шкала курсовых углов); 29—неполная круговая шкала.
которая укрепляется на полу кабины штурмана над отверстием, служащим для выпуска наружу нижней части визира.
Пятка состоит из внешнего неподвижного круга с отверстиями, посредством которых она крепится к самолету, и внутренне го подвижного круга с приспособлением для установки визирной трубы. На неподвижном круге имеется шкала сносов и индекс (курсовая черта) в виде стрелки для отсчетов курсовых углов, а на подвижном—шкала с делениями на 360°. Для закрепления подвижного кольца в желаемом положении имеется ножной тормоз; при нажатии на него кольцо освобождается, а при освобождении — закрепляется.
Пятка, правильно установленная на самолете, должна иметь шкалу сносов, обращенную к хвосту самолета, а диаметр 0—180°—параллельно продольной его оси.
При измерении аэронавигационных элементов полета визирную трубу необходимо всегда держать так, чтобы пузырек уровня находился в центре поля зрения, т. е. чтобы труба занимала вертикальное положение.
Отсчет курсовых углов производится по делениям шкалы подвижного кольца против индекса пятки, а углов сноса — по шкале сносов на ее неподвижном кольце- Этот визир в настоящее время выходит из употребления в связи с появлением более совершенных.
Кабинный визир В-5. Визир типа В-5 (рис. 138, В, Д), устанавливаемый на самолетах Дуглас, позволяет измерять в полете углы сноса и определять путевую скорость, если известна истинная высота полета. С помощью визира можно также в полете определять и уменьшать девиацию компасов. Он устанавливается в кабине штурмана с левого борта самолета.
Визир состоит из оптической системы, механизма пантографа и счетного приспособления.
Оптическая система состоит из объектива, двух зеркал, двух про-межуточных линз, сетки и окуляра.
Объектив, зеркала и .промежуточные линзы смонтированы ® металлической трубе перископа, являющейся частью металлического основания (рис. 138, Д). Линза окуляра смонтирована на металлическом остове на крышке, прикрепленной на петлях к'металлическому основанию визира. Над окуляром помещается подушка из губчатой резины.
Четыре параллельные линии сетки, видимые через окуляр (рис. 138, Д), называются «линиями сноса». Две пересекающие их линии называются «линиями времени».
Механизм пантографа служит для прочерчивания «линии сноса» на приборе.
Примечание. Особого внимания заслуживает разметка шкали сноса: Как известно, во всех визирах и приборах отечественного изготовления правый снос .помечается знаком плюс, а левый — знаком минус. В этом приборе снос .влево помечен .знаком плюс (+), а .вправо—знаком минус (—). Поэтому целесообразно для .однообразия в обозначениях изменить знаки на та-184
ких визирах В-5 на обратные. В противном случае надо твердо помнить, что занесенные на приборе знаки имеют противоположное значение по сравнению с общепринятым у нас обозначением.
Рис. 138 В, Д. Кабинныр визир В-5.
В—общий вид; Д—оптическая система.
11—держатель для карандаша; /2—указатель пантографа; 13—линия времени; 14—путевые нити; 15—крепежное кольцо; J6—шкала сносов; 17—рычаг пантографа; /6'—рычаг, соединяющий путевые нити с линиями сноса; 19—линия сноса; 20—арретир диска линий сноса; 21—диск линий .сноса 30—окуляр;
31—итантопраф; 32—плоско-.выпрклое стекло; 34—ЕН'упр'Ышее зеркало; 35—объектив; 36—наружное .зеркало.
Счетное приспособление, находящееся на крышке прибора, состоит из двух круглых логарифмических шкал; непо>-движной шкалы высот (в сотнях футов) и подвижной шкалы времени (в секундах). Это приспособление используется для вычисления путевой скорости полета, когда определены истинная высота полета и промежуток времени, в течение которого наземный объект, видимый через оптическую систему визира, пройдет расстояние от одной «линии времени» до другой.
На каждой стороне основания прибора находятся рельсообразные металлические полосы с пазами, служащие для передвижения прибора по соответствующим направляющим, укрепленным на самолете.
Определение угла сноса в полете. Определять угол сноса можно с использованием видимых в окуляре параллельных линий сетки («линий сноса») и без их использования.
Первый способ — с использованием «линий сноса» сетки — применяется в дневных полетах при видимости земли. Состоит этот способ в следующем. Наблюдая в окуляр прибора за дви
жением поверхности земли и вращая белый диск, установить его гак, чтобы «линии сноса», видимые через окуляр, стали параллельно кажущемуся движению наземных 'Объектов. Тогда индекс белого диска покажет снос самолета по шкале сноса. Левый снос помечен знаком плюс, а правый—знаком минус (с?л. выше примечание).
Второй способ определения угла сноса без использования параллельных линий сетки при наблюдении поверхности земли применяется преимущественно в ночных полетах. Он состоит в следующем:
1) Передвигая механизм пантографа, все время держат индекс-стрелку, видимую в оптической системе, совмещенной с видимым наземным объектом, попавшим в поле зрения прибора (рис. 138, D',. Тогда карандаш, находящийся на другом конце пантографа, прочертит на прозрачном диске линию, соответствующую направлению путевой скорости. Для достижения большей точности можно прочертйть несколько таких линий.
2) Установить белый диск так, чтобы параллельные линии, нанесенные на нем, совпали по направлению с линией (или линиями), прочерченной карандашом на прозрачном диске. Тогда указатель белого диска покажет на шкале сноса величину и направление сноса.
Примечание. При полете над местностью, имеющей мало отличительных объектов, снос самолета может быть определен по общему направлению относительного движения земной поверхности, наблюдаемого через визир.
Определение путевой скорости полета. Для нахождения путевой скорости должна быть определена истинная высота полета над местностью. Когда с помощью визира и секундомера измеряют путевую скорость, самолет должен находиться в строго горизонтальнсм полете. В основном для определения путевой скорости следует действовать так:
1) Измерить описанным выше способом угол сноса самолета.
2) Установить «линии сноса» по имеющемуся сносу и спреде*-лить секундомером время прохождения объекта на земной поверхности от одной линии времени до другой (рис. 138, Д). Для достижения большей точности лучше, если наземные предметы будут проходить ближе к центру поля зрения визира.
* 3) Поставить в счетном приспособлении деление, соответствующее измеренному времени (в секундах), против деления шкалы высот, соответствующего истинной высоте полета. Тогда можно прочесть значение путевой скорости на внешней шкале против белой черты с буквами «МРН» в милях в час, а против красной черты с надписью «KNOTS» — путевую скорость в узлах (морских милях в час).
Проверка девиации компаса в воздухе. Визир позволяет также определить в полете магнитные курсы самолета и, следовательно, проверить показания магнитного компаса.
Для выполнения этого надо в горизонтальном полете взять курсовые углы линейного ориентира, над которым пролетает 186
самолет. Для этого следует совместить направление параллельных линий («линий сноса»), видимых в оптической системе визира, с направлением линейного ориентира (например, железнодорожный путь, шоссе), магнитный пеленг которого известен или может быть определен по карте. Тогда .индекс белого диска при правом его отклонении покажет на шкале сноса курсовой угол г 0 до 30° (или от 180 до 210°); при левом отклонении индекса белого диска показываемый им угол будет дополнением курсового угла до 360° (или до 180°). Зная курсовой угол (КУ) и магнитный пеленг (МП) линейного ориентира, получаем магнитный курс самолета из уравнения:
МК = МП — КУ.
Девиация компаса на данном магнитном курсе определится из равенства:
ДМ = МК—КК,
где КК — компасный курс самолета, МК — магнитный курс.
Примечание, При проверке девиации на отдельных курсах, когда линейные ориентиры почти совпадают с направлением полета, курсовые углы их не выходят за пределы измерения визира В-5. Но при необходимости полной проверки девиации на всех курсах надо иметь по крайней мере три направления линейных ориентиров, позволяющих определить по курсовым углам л.обые магнитные курсы.
§91. Летно-полевая сумка и картодержатель целлулоидный (планшет)
Для удобного пользования в полете картами и бортжурналом, а также размещения штурманских принадлежностей (счетной, аэронавигационной и масштабной линеек, транспортира, ветрочета, карандашей и блокнота) применяется летно-полевая сумка с металлической кассетой, вкладываемой в сумку.
Рис. 139. Летно-полевая сумка.
Летно-пилевая сумка (рис. 139) изготовляется из кожи или зкерзы. Она входит в компл!ект личного штурманского снаряжения пилота и штурмана.
Рис. 140. Картодержатель целлулоидный.
При полетах на значительные расстояния, особенно на самолетах с открытой кабиной, для удобного пользования картами и лучшего сохранения их применяютсй складывающиеся целлулоид ные плаишеты-картодержатели (рис. 140).
§ 92. Переговорные приборы
Надежная и хорошая связь в полете между пилотом и штурманом, а также между другими членами экипажа самолета и значительной степени облегчает самолетовождение и способствует исключению возможности потери ориентировки Внутри самолета связь между членами экипажа осуществляется с помощью переговорных приборов. На тяжелых типах самолетов эти приборы, как правило, основаны на принципе телефонирования и очень сложны; на легких типах они могут быть пре отыми и удобными для пользования. Переговорный прибор простейшего типа показан на рис. 141. Он состоит из двух резиновых трубок (шлангов), на концах которых с одной стороны укрепляется рупор, а с другой — слуховая пневматическая подушка (ухо). Рупоры подвешиваются в кабинах пилота и штурмана, в месте, удобном для пользования при разговоре. Слуховые подушки закладываются под шлем. Длина трубок, идущих от уха, должна быть достаточней, чтобы не стеснять свободы движений пользующихся ими При вставании слуховая трубка должна отключаться.
Для того чтобы прибор действовал хорошо, необходимо тщательно пригонять слуховую подушку к шлему. Слуховое отверстие шлема должно приходиться 'против отверстия ушной раковины.
Самолетно-переговорное устройство (СПУ), которое устанавливается на более совершенных типах самолетов 188
(например, Дуглас), представляет собою более сложное устройство, которое позволяет при необходимости каждому члену экипажа держась связь не только между собой, .но и пользоваться связной радиостанцией и радиокомпасом со своего рабочего' места. Комплект СПУ состоит из абонементных аппаратов, усили геля умформера, фильтра, соединительных кабелей, телефонов и ларингофонов (микрофонов).
фюзеляжа
Рис. 141. Переговорный прибор.
Абонентские аппараты размещены (вблизи рабочих мест членов экипажа; абонентский аппарат пилотов имеет дополнительный радиомаячный фильтр.
Питание переговорного устройства осуществляется от бортовой сети напряжением 22—28 в через добавочное сопротивление. Вес комплекта около 2,5 кг.
Все управление СПУ при работе с различного рода оборудованием связи самолета производится с помощью селекторного переключателя абонентного аппарата и индивидуального регулятора громкости. Переключатель имеет следующие положения:
«Сощр» (компас) — включение на радиополукомпас;
«Liason» (связь) — работа по связной радиостанции;•
«Со.-nmand» (командная рация) — работа через командную радиостанцию.
ГЛАВА IV
СЧИСЛЕНИЕ ВРЕМЕНИ
§ 93. Вращение земли, как мера времени
Обращение земного шара вокруг своей оси и относительно небесных тел практически является постоянным и равномерным. Поэтому это движение положено в основу общей системы счисления времени.
Счисление времени приводится к измерению скорости углового обращения земли вокруг своей оси и солнца.
Измерение скорости углового движения земли производится по видимому движению на небесной сфере светил, которое является следствием вращения земли вокруг своей оси.
Продолжительность полного оборота земли вокруг своей оси определяется промежутком времени, которое протекает между двумя последовательными прохождениями какой-либо «неподвижной» звезды на небесной сфере через меридиан (место) наблюдателя.
Это время называется звездными сутками и принимается за единицу измерения времени.
§ 94. Обращение земли вокруг солнца
Путь, который описывает центр земного шара при обращении земли вокруг солнца, представляет собой большой сплюснуты;1 круг (в виде эллипса) и называется эклиптикой (рис. 142)
Плоскость земного экватора не совпадает с плоскостью эклиптики, а наклонена к ней на угол, равный 23°27' (рис. 143); пет этим же углом наклонена и земная ось относительно «вертикальной» оси эклиптики.
Движение земного шара по эклиптике вокруг солнца совершается гораздо медленнее, а следовательно, и в больший промежуток времени, чем обращение вокруг своей оси.
Время полного оборота земли вокруг солнца по эклиптике, т. е. промежуток времени между двумя последовательными одинаковыми положениями земного шара относительно небесных светил—«неподвижных» звезд называется звездным годом-19)
§ 95. Равноденствия
Как видно из рис. 143, земной экватор пересекается с эклиптикой в двух противоположных точках 7 (UBi-ai и^= (, е(ов), .которые называются точками равноденствия, а линия, их с,(уединяющая, — линией р а в ,н о д е .н с т в и я.
Рис. 142. Движение земли вокруг солнца.
Точки 7 ( Овна ) и =s= i Весов называются точками равноденствия потому, что при прохождении через них солнца светлое время суток (от восхода до захода солнца) равно темному времени суток, т. е. продолжительность дня равна продолжительно Сти ночи.
Р 23°27‘
Тонна весеннего равноденствия 21 нарта
Точна летнего (северного) л солнцестояния 22 июня
Р,
| Линия V-— назмнией -----равноденствий.
Точна зимнего v ( ю>нного)солнце-стояния
22 йена вря Л
Инна осеннего равноденствия 23 сентября
Рис. 143. Равноденствия солнцестояния.
Точка, обозначенная знаком 7 (Овна), в которой солнце бы вает при переходе из южного полушария неба в северное, называется точкой весеннего равноденствия, а другая, обозначенная знаком — (Весов), .в которой солнце бывает при лере-
ходе из северного в южное полушарие -неба, — точкой о се fl-него равноденствия. День весеннего равноденствия бывает 21 марта, день осеннего равноденствия—23 сентября.
§ 96. Солнцестояния
Точки, расположенные под углом 90° по отношению к линии равноденствия Л и 3, называются точками солнцестояния (рис. 143).
Точка Л называется летним солнцестоянием, а точка 3—зимним солнцестоянием.
В точке летнего солнцестояния Л солнце бывает 22 июня. В это время в средних широтах солнце занимает самое высокое положение над горизонтом и дни бывают самыми длинными, а ночи—самыми короткими.
В точке зимнего солнцестояния 3 солнце бывает 22 декабря. В это время в северном полушарии солнце занимает самое низкое положение над горизонтом и дни бывают самыми короткими, а ночи—самыми длинными.
§ 97. Тропический год
Промежуток времени между двумя последовательными прохождениями солнца через точку весеннего равноденствия называется тропическим годом.
Тропический год содержит 365,2422 звездных суток.
- § 98. Времена года
Промежуток времени между прохождениями солнца через точки весеннего равноденствия и летнего солнцестояния (21 марта— 22 июня) называется весной. Промежуток времени между прохождением солнца через точки летнего солнцестояния и осеннего равноденствия (22 июня—23 сентября) называется летом.
Промежуток времени между последовательным прохождением солнца через течки осеннего равноденствия и зимним солнцестоянием (23 сентября—22 декабря) называется осенью, а между точками зимнего солнцестояния и весеннего равноденствия (22 декабря—21 марта) — зимой.
Смена времен года показана на рис. 144.
Данное определение и последовательность смены времен года справедливо только для северного полушария, так как смена времен года .в южном полушарии происходит в обратном порядке.
§ 99. Явление зари и сумерек
Явление зари и сумерек есть следствие существовавания атмосферы (воздуха) вокруг земного шара.
192
При восходах и заходах солнца свет, идущий от основного источника—солнца, рассеивается атмосферой и освещает земную доверхность (видимый горизонт) даже в том случае, когда солнце находится ниже горизонта.
Наблюдениями установлено, что солнце не освещает верхние слои атмосферы тогда, когда оно находится ниже горизонта »а 18°.
Рис. 144. Времена года.
Промежуток времени, в течение которого центр солнца при заходе опускается от уровня горизонта до точки, находящейся ниже горизонта на 18°, называется вечерними астрономическими сумерками, а при восходе, когда центр солнца поднимается от точки, находящейся на 18° ниже горизонта, до его уровня называется утренними астрономическими сумерками или зарею (рис. 145).
Момент при заходе, когда центр солнца находится на уровне горизонта, называется моментом захода солнца, а при восходе — моментом восхода солнца.
Момент при заходе, когда солнце опускается до точки, лежащей на 18° ниже горизонта, называется моментом наступления темноты, а при восходе, когда солнце поднимается до этой точки, называется концом темноты и наступлением рассвета.
В действительности темнота наступает гораздо раньше, а рассвет позднее; это явление обусловлено рассеиванием света, засоренностью окружающей землю атмосферы, наличием облачности и пыли и другими природными явлениями.
Поэтому в обыденной жизни промежуток времени, в течение которого центр солнца при заходе опускается от уровня гори-193
зонта до точки, лежащей ниже горизонта на бУг° (или лри восходе поднимается от этой точки до уровня горизонта), называет-
ЯСиа с - продолжительность астрономическая вумерен вйавф- продолжительность гражданская сужгрвк
Рис. 145. Явления зари и сумерек.
ся гражданскими сумерками (рис. 145) (в это время газетный текст читается с трудом).
§ 100. Время
За основную единицу измерения времени приняты звездные сутки. Звездные сутки содержат 24 звездных часа, час содержит 60 минут, минута содержит 60 секунд.
В каждой точке земной поверхности звездные сутки начинаются в момент верхнего прохождения точки весеннего равноденствия .через меридиан данной точки, т. е. в момент верхней кульминации точки весеннего равноденствия.
В момент начала звездных суток звездное время считается равным 00 час. 60 мин. 00 сек.
Вследствие неравномерного обращения земного шара вокруг солнца (что объясняется элЛипсовидностью эклиптики и наклоном к ней плоскости экватора) ® разное время года на одно и то же время суток приходятся разные часы звездного времени. Кроме того, распорядок жизни на земле в основном зависит не от звезд, а от солнца. Поэтому пользоваться звездным временем неудобно.
В обыденной жизни применяется время, исчисляемое по солнцу: истинное солнечное и .среднее солнечное время, которое называется средним гражданским временем.
Солнечное время. В основу измерения времени по солнцу принимается видимое суточное обращение солнца вокруг земного шара, ,т. е. истинное солнечное время.
Истинными солнечными сутками называется промежуток вре-
яени между двумя последовательными верхними прохождениями солнца через4 меридиан данной точки, т. е. между двумя последовательными верхними кульминациями солнца в данной точке на земной поверхности.
Из-за неравномерности обращения видимого солнца вокруг земного шара продолжительность солнечных суток в точке наблюдателя в разное время года различна. Это затрудняет его практическое .использование.
Для того чтобы избежать неудобств, связанных со счетом времени по истинному солнцу, счет солнечного времени производят по так 'называемому среднему солнцу.
Под средним солнцем подразумевается такая точка на небесной сфере, которая, выходя одновременно с истинным солнцем из точки весеннего равноденствия, движется по небесному экватору равномерно и заканчивает свой годичный путь вместе с истинным солнцем.
Промежуток времени между двумя последовательными верхними кульминациями среднего солнца называется средними солнечными сутками.
За начало средних солнечных суток (среднего времени) в любом пункте на земной поверхности принимается момент верхнего прохождения среднего солнца через меридиан этого пункта (в момент верхней кульминации среднего солнца). Этот момент называется средним полднем. В любой точке меридиана полдень (полуночь) наступает в один и тот же физический момент; на меридианах, расположенных к западу от данного, полдень (полуночь) наступает позже, а к востоку раньше.
С 1925 г. среднее время условились отсчитывать от средней полуночи (от момента нижней кульминации среднего солнца) и называть его гражданским временем.
'Местное время (Тм). В один и тот же физический момент для наблюдателей, находящихся на разных земных меридианах, счет местного времени различен. Для каждого меридиана существует свой счет времени.
Время на меридиане наблюдателя, будет ли оно звездное или солнечное, называется местным временем—соответственно звездным или солнечным; время, исчисляемое по суточному движению среднего солнца, называется местным средним временем.
Пункты, которые лежат на одном географическом меридиане, но на различных параллелях (с одинаковой долготой и различием широтой), в один и тот же момент имеют 'одинаковое местное время, а на равных меридианах—различное.
При передвижении по географическим параллелям к востоку местное время увеличивается, а к западу — уменьшается, т. е. часы, идущие по местному времени, показывают больше в том Пункте, который расположен к востоку относительно другого.
'Местное время пунктов, лежащих на разных меридианах и
«меющих одинаковые или различные широты, отличается друг от друга на разность долгот этих пунктов.
По местному времени одного меридиана можно определять местное время и на других меридианах. Для этого необходимо делать следующее: если меридианы, для которых определяется местное время, лежат к востоку относительно данного, то разность их долгот (выраженную в часах) нужно прибавить к местному времени данного меридиана, а если к западу—вычесть ее.
По местному среднему времени в астрономических календарях указываются моменты восхода и захода солнца и моменты наступления темноты и рассвета.
Пример. На сколько местное время г. Казани впереди г. Ленинграда, •слн долгота Казани 49°05'Е, Ленинграда 30°15'Е.
Разность долгот между этими пунктами составляет 18°50'Е, следовательно, местное время в Казани опереди левинпрадакого на 18° X 4 мин. + 50Х Х4 сек.=72 МИН. + 200 сек.=1 час. 15 мин. 20 сек.
Если по часам Ленинграда время 14 час. 22 мин. 09 сек., то в это црвмж в Казани часы будут показывать: 14 час. 22 мни. 09 сек. + 1 час 15 миа 30 сек.= 15 час. 37 мин. 29 сек.
Гринвичское время <Тгр) Местное время на меридиане, проходящем через Гринвичскую обсерваторию (Англия), называется гринвичским временем, или мировым временем. ;
Поясное время (Т„\ Как указано выше, при передвижении на земной поверхности из одного пункта в другой, находящийся на другом меридиане, местное время непрерывно изменяется. Непрерывнее изменение местного времени при передвижении на восток или запад (с изменением долготы пунктов) представляет ряд практических неудобств и затрудняет регулярность движения транспорта, работы связи, установление и контроль местного времени в различных пунктах на земной поверхности и т. п.
Поэтому условно весь земной шар разделен на 24 пояса; ширина каждого пояса составляет 15° тю долготе, что соответствует 1 часу по времени- Эти пояса навываются часовыми поясами. В каждом часовом поясе поясное время принято одинаковым во всех точках, расположенных в границах данного пояса, и равно среднему местному времени, измеренному на центральном меридиане данного пояса.
Центральными (или средними) меридианами поясов называются меридианы, которые отстоят от границ поясов на 7%° (по долготе) и имеют долготу от Гринвичского меридиана, измеряемую целыми градусами.
Таким образом среднее местное время центрального меридиана пояса и называется поясным временем данного пояса.
Счет времени по поясам (поясное время) в СССР был принят постановлением Совнаркома от 8 февраля 1919 г. и проведен в жизнь в 1923 г.
границы часовых поясов проходят точно по географическим ерцдианам только на море, а на суше они обычно приурочивался к государственным, административным и естественным грантам и устанавливаются соответствующими постановлениями правительственных органов.
В СССР точные границы часовых поясов были установлены постановлением Совета Народных Комиссаров Союза ССР 9 февраля 1931 года по представлению материалов Комитета службы времени при Пулковской обсерватории (под Ленинградом).
За начальный (нулевой) часовой пояс принят пояс, средним меридианом которого является Гринвичский меридиан (начальный); за 1-й часовой пояс принят пояс, средний меридиан которого проходит на 15° (по долготе) восточнее начального Гринвич-ского меридиана, за 2-й пояс—средний меридиан которого проходит на 30° восточнее начального меридиана, за В-й пояс — на 45° и т. д.
Нумерация часовых поясов произведена от начального (нулевого) пояса с запада на восток от 0 до 23 (рис. 146).
Средний меридиан 12-го пояса, имеющий долготу 180°, называется демаркационной линией.
Демаркационной линией времени, т. е. линией смены дат, называется такая условно проведенная линия, на которой раньше всего на земном шаре в полночь по местному вре
мени происходит смена даты суток на следующую дату.
Эта линия проходит по 180-му меридиану от северного до южного полюса земли, огибая на воде острова и мысы, которые
отнесены к различным часовым поясам.
При пересечении линии смены даты в случае следования с запада на восток с полночи, следующей за переходом этой линии, дата повторяется (календарь два дня показывает одно и то же число), а при пересечении этой же линии при следовании с востока на запад в полночь за переходом линии дата изменяется сразу на 2 единицы (одно число выпадает из календаря).
Разность поясных времен каких-либо двух поясов равна разности номеров этих поясов. Напоимер, если часы, идущие по 3-му поясу, показывают 15 час. 30 мин., то в 5-м поясе в это же время местное время будет 15 час. 60 мин. + (5—3) — 17 час. 30 мин.
на 1 час, назы-
Декретное время (Тд' Для экономии электроэнергии и удобства работы по постановлению Совнаркома СССР в 1930 г. все часы переведены на час вперед, так что каждый пункт на территории СССР имеет время не своего пояса, а время смежного восточного пояса.
вРемя, увеличенное таким образом вается декретнь/м временем.
тором нахо1ВмСКОе вРемя Время
вается м ДИТСя г- 'Москва, с прибавкой декретного часа назы-сксе декпа С К ° В С к и м вРеменем' Таким образом мссков-р тное время фактически равно времени 3-го часового
2-го пояса, в ко-
пояса. В СССР основные виды транспорта, связи и т. п. работаю» по единому московскому времени. Это .время передается сигналами московскими радиостанциями.
Оперативное время Топг,рУ. Единое условно принятое •время для выполнения определенного задания называется опера-ти®,ным в ip е и е «е м. Ойо применяется для совместного одновременного действия различных подразделений или на различных территориях, а также при необходимости и в других случаях.
Путевоедер ем я, время полета (Л™™). Время, в течение которого совершается полет между какими-либо определенными пунктами, называется путевым временем. Время пребывания самолета >в воздухе от момента •взлета до момента посадки называется полетным временем.
§ 101. Перевод долготы из градусов в часы и обратно
Из суточного обращения земного шара вокруг своей оси следует, что полный его оборот совершается за одни сутки, т. е. за
360°
24 часа на 360°; следовательно, за 1 час на„, =15°; за 1 мин.
24 час.
15° 15'
ка —-------=15 мин. дуги: за 1 сек. на ----------= 15 сек. дуги
би мин. J 60 сек.
24
или 360° за 24 часа; 1° за =4 мин. времени; Г дуги за
4 мин. 4 сек. 1
-тог— = 4 сек. времени; 1" дуги за „п„ сек. времени.
Ou t)v 1 □
часы
3 4 5 6 7 8 9 10 1! 12 13 14 >5 16 17 18 19 20 2122 2324 часы
1|||1|||||||||||| |i| t-|+|+H-H44M 6
120°' 150°- 180° 210°- 240°l.2'70°' 300Ч330°; 360° ОраОуСЫ
> 135° I656 1550 г25° 855° 285° 3/5° 345°
25 30 35 40 45 50 55 60\свнинд.ВреМ
часы—с, { 2
в I Н Ч * 1 2 I 1 I 1 Р i г 1 1 i * I
Muh.8dp.m~4 4 'Р 'Р гР
Рис. 147. График перевода времени в единицы дуги и обратно.
Перевод времени в единицы дуги (градусы) и обратно можно производить и по графику (рис. 147).
Для перевода долготы, выраженной в градусах, в единицы времени необходимо:
1. Перевести градусы в часы, для чего разделить их на 15; полученные целые числа будут часами.
2. Минуты дуги перевести в минуты во времени, для чего их в сумме с остатками градусов (переведенных в минуты дуги) раз-198
делить на 15. Полученные целые числа являются минутами времени-
3. Остаток минут дуги умножить на 4, в результате получатся секунды времени.
4. Секунды дуги разделить на 15 и получить секунды времени, которые сложить с секундами, получившимися в результате перевода минут дуги во время.
Остаток секунд (меньше 8' следует отбросить, а больше 8' — взять за секунду и прибавить к общему числу секунд.
Примеры: 1. Восточную долготу к = 46°30'15"Е перевести в единицы времени:
1) — = 3 час. и 1° в остатке;
10
2) 30'4-60'(1°)=90'; или = 6 мин.;
3) = 1 сек.
1а
Восточная долгота в часах будет к=3 часа 6 мин. 1 сек.
2. Дана восточная долгота к=127®53'29" Е; перевести ее в единицы времени.
197°
]) _ _ = 8 час. и 7° в остатке;
* 15
473'
2) 53'4-7® • 60’= 53’4-420'= 473'; — - = 31 мин. и 8' в остатке;
15
3) 8'- 4 = 32 сек.;
4) — = 1 сек. и 14" в остатке (можно взять 1 сек.); 15
5) 32 сек. 4- 2 сек = 34 сек.
Таким образом долгота, выраженная в единицах времени, будет:
X = 8 час. 31 мнн. 34 сек. Е.
Для перевода долготы, выраженной в единицах времени, в градусы необходимо:
1. Для получения градусов умножить часы на 15.
2. ’Минуты времени разделить на 4 и выделить градусы.
3. Остаток минут времени умножить на 15 и получить (минуты дуги.
4. Разделить секунды времени на 4 и выделить минуты дуги.
5. Остаток секунд времени умножить на 15 и получить секунды дуги.
Примеры: 1. Восточную долготу X = 18 час. 24 мин. 12 сек. Е перевести в градусы:
1) 18 час.Х 15 = 270°;
2) 24 мин. _ 6о.
4
3) Остатка минут времени нет;
4) 12 сек- =3,;
4
5) Остаткэ секунд бремени нет.
Льгота в луговых градусах будет: X = 276°03’00* Е.
2. Х = 7 час. 41 мин. 38 сек. Е Эгу д»люту выразить в градусах дуги.
1) 7 чаг. X 15 = 105°;
2) 41 ^мин. _ jqo и в остатке 1 мин.;
3) 1 мин. X 15 = 15';
4) 3& се^~ = 9*; в остатке 2 сек.;
' 4
о) 2 сек. X 15 = 30".
Таким образом долгота в градусах дуги будет:
115° 24'30" Е.
§ 102. Соотношение между гринвичским, поясным и местным временем
1. Поясное время связано с гринвичским простым соотношением, а именно: в первом часовом поясе, расположенном к востоку от нулевого (гринвичского), поясное время впереди гринвичского на один час, во втором—на два часа, в третьем — на три часа и т. д.
Следовательно, поясное время какого-либо пояса Ng , распв-ложенного к востоку от гринвичского, будет впереди гринвичского времени на количество часов, равное номеру данного пояса, т. е. на Ne; наоборот, поясное время пояса расположенного к западу от гринвичского, будет позади гринвичского времени на количество часов, равное номеру этого пояса, т. е. Nw.
Эта зависимость выражается общей формулой:
Т = 7' + NE
1 гр * п I W
отсюда:
Т —Т -4- Ne
1 п л гр
Для СССР:
Тгр = Тп-№
и соответственно:
где: Тгр — среднее гринвичское время;
Т„— поясное время;
Ne — номер часового пояса в часах.
Таким образом, гринвичское время равно поясному времени минус номер часового пояса, взятого в часах, а поясное равно гринвичскому времени плюс номер пояса, выраженного в часах. 200
2. Местное время с гринвичским связано соотношением: Т„=ТМ^, а Тм = Тгр±)^, где: Тм — местное время; — долгота пункта от ГринвЖ* скогэ меридиана.
•3. Местное время через поясное выражается:
^ = ?;±>4 + N‘. « 7>=7;+^±N’.
Для СССР Тм = 7 ЬГ 4- Х'е, т. е. местное время какого-либо лункта равно поясному времени пояса, в котором расположен этот пункт, минус номер этого же пояса, выраженного в часах, и плюс долгота данного пункта в часах.
4. Декретное время Ти любого пункта определяется: Т„ = Т„-|- 1 или Т„ = Тм + N- — ХЕ + 1 час, где: 1—декретный час.
Примеры;! । >аЙ1И местное время пункта, который расш лмкен в 7-м поясе и имеет долилу 135°Оо'ч5’* Е, при Т„ = 12 час. 30 мин.
1) Тм = Тп — N4 + л'1Е =12 час. 30 мии. 7 час.+9 час. 03 мин. 15 сек. = = 14 ас. 30 мин. 15 сек.
2) 7"й = 7"п 4-1 = 12 час 30 мин 4* 1 час = 13 час. 30 мин.
2. Найти Тп тсли 7’2р = 4 ч. 15 мин.; пункт находится и 3-м поясе.
Тп = Тгр + N4 Е> = 4 часа 15 мин.+ 3 часа — 7 час. 10 мин.
§ 103. Таблицы восхода и захода солнца, наступления темноты рассвета и продолжительности сумерек, дня и ночи
Таблиц моментов времени восхода и захода солнца, наступле-«ия рассвета и темноты, а также продолжительности сумерек имеется много. Однако принцип их построения одинаков, он дает возможность составлять такие таблицы, по которым можно быстро и с достаточной для практических целей точностью определять нужное время: местное или московское декретное.
В настоящее время имеются в пользовании «Таблицы для расчета полетов», изд. 1938 г. (см. табл. 4).
В этих таблицах момент захода и восхода солнца, а также продолжительность гражданских сумерек даны для главнейших населенных пунктов СССР и сопредельных стран по московскому времени.
В заголовке помещены наименования населенных пунктов, их координаты, номера часовых поясов, к которым отнесены данные населенные пункты, и поправки, которые необходимо учитывать при определении восхода и захода солнца не по московскому времени, а по времени того пояса, в котором расположен данный пункт.
Московское время в таблицах дано не на каждый день, а с интервалом через 10 дней. Для промежуточных дат моменты восхода и захода солнца и продолжительность сумерек определяются интерполированием.
Таблица 4
Актюбинск
Широта 50°17'
Долгота 57°15'
Александрове к н/С Широта 50°54' Долгота 142е 15'
Александровское
Широта 65°25/
Долгота 77°54'
V
№ часового пояса
IV
Поправка для перехода к поясу пункта 4-2 ч. +7 я. 4-з ч.
Время московское »сло 1 Восход солнца .= | Заход а соли ia ? 1 Продолж. £ । сумерек Число Восход солнца Заход солнца ,•= Продолж. s j С' мерек ч * Восход солн а 3<:ХОД солнца Продолж. сумерек
Месяц
f"7" ч м. ч м. Ч. М Ч М я м ч М.
Январь 1 07.11 15.18 0.45 1 01.34 0°.35 0.47 1 07.59 1.37
11 07.08 15.30 0.44 И 01.31 19.47 0.45 И 07.43 12.10 1.29
21 1)7.00 15.44 0.43 21 01.23 10.01 0.44 21 07.16 12.43 1.20
31 06.49 16.01 0.42 31 01.11 10.19 0.43 31 06.45 13.19 I 1.12
Февраль 10 06.34 16.18 0.41 10 00.55 10.37 0.42 10 06.17 13.56 1.06
!0 06.J5 16.36 0.40 20 00.36 10.55 0.41 20 1 05.35 14. .01 1.02
Март 2 05.55 16.53 0.39 2 00.16 11.12 0.40 2 04.59 15.03 1 00
12 05.34 17.09 0.39 12 23.55 11.28 0.40 12 04.22 15.36 0. У
22 05.12 17.25 0.39 22 23.32 11.45 0.40 22 1 03.44 16.08 0.59
Апрель 1 04.50 17.41 0.40 1 23.09 12.02 0.40 1 03.06 6.40 1.02
11 4.‘>8 17.57 0.41 11 2?.47 12.0 0.42 11 02.23 17.12 1.08
21 J4.07 18.13 0.42 21 22.26 12.34 0.43 21 01.52 17.441 1.17
Пример. Определить моменты восхода и захода солнца, наступления темноты и наступления рассвета по московскому времени в г. Актюбинске 15 апреля. Из табл. 4 находим:
Восход солнца Заход солнца
11 апреля.......................: 4 часа 28 мин. 17 час. 57 мин.
21 апреля . : . ................. 4 часа 07 мин. 18 час. 13 мня
Изменение за 10 дней............. —21 мин. +16 мии.
Изменение за 4 дня (И апреля — 15 апреля):
—2- X 4 = — 8 мин.; j J® X 4 = -|- 6 мин.
Следовательно, 15 апреля восход солнца 'будет: 4 часа 28 мин—8 мин.=»= =4 часа 20 .мин.; заход солнца: 17 час. 57 мин. + 06 мин. = 18 час. 03 миж
Для определения момента наступления рассвета необходимо от временя восхода солнца отнять продолжительность сумерек: 15 апреля рассвет наступит в 4 часа 20 мин—0 час. 41 мин.=3 часа 39 мин.
Для нахождения момента наступления темноты необходимо к времени захода , слнца прибавить продолжительность вечерних сумерек.
,15 апреля наступление темноты будет:
18 час. 03 мин, + 11 час. 41 мин. = 18 час. 44 мин.
Во всех случаях время московское декретное.
Для определения моментов восхода и захода солнца, а также наступления темноты и рассвета не по московскому, а по поясному времени определяемого пункта необходимо к полученным результатам прибавить поправку для перехода к часовому поясу пункта, найденную из табл. 5.
Таким образом ® Актюбинске 15 апреля будет:
Таблица 5
Моменты По москов- скому времени Поправка для перехода к времени 4-го пояса По времени 4-го пояса (поясного)
Восхода солнца .... Захода солнца . . . Наступления рассвета . Наступления темноты . 4 часа 20 мин. 18 , (3 , 3 . 39 . 18 . 44 . -|- 2 чага + 2 „ + 2 . 6 час. 20 мин. 20 „ 03 . 5 ,. .9 . 20 „ 44 .
Имеющаяся в книге табл. 2 предназначена для вычисления времени восхода и захода солнца и наступления темноты и рассвета для пунктов, не помещенных в табл. 1. По табл. 2 для определения нужного времени необходимо знать широту и долготу (гринвичскую) данного пункта.
Табл. 2 в указанной книге составлена по местному времени (для широт от 30° до 69е) с включением декретного часа.
Таблицы восхода и захода солнца-и продолжительности сумерек практически годны для любого года.
Если координаты пункта даны не от Гринвичского меридиана, а от других, то для приведения их к Гринвичскому необходимо учесть поправки (табл. 6).
Таблица 6
Наименование начальных I По"равка для приведения
I долгот к Гринвичскому
меридишив М’риди н*'
Гринвичский Пулковский Парижский Ферро
0°0 '0.Г + 30°2О'ОО" -+2°2jW' -17°40'00"
Кроме того, в 1944 г. Астрономическим институтом Академии (наук СССР выпущена таблица для определения моментов восхода и захода солнца, моментов наступления рассвета и темноты, Продолжительности светлого времени и азимутов точек восхода и ‘захода солнца на период с 1944 по 1980 гг.
Таблица предназначена для пользования во всей западной части СССР (до 90° меридиана от Гринвича) и сопредельных с ним к западу стран в поясе, ограниченном с юга параллелью 30° северной широты, а с севера — параллелью 70° северной широты, на каждый день как простого, так и високосного года.
Все приведенные в таблице моменты времени выражены в часах и минутах московского декретного времени, т. е. по времени 3-го пояса, и рассчитаны для явлений, происходящих на меридиане 30°Е от Гринвича.
Каждая таблица посвящена одному дню года; страницы таблицы для января и февраля в заголовке имеют две даты, отличающиеся на сутки. Верхняя дата относится к простому году, а нижняя—к високосному году. Високосными являются 1944, 1948, 1952, 1956, 1960, 1964, 1968 гг. и т- д.
' Внизу каждой таблицы для нахождения поправок на высоту полета по вспомогательным табл. 1 и 2 (которые помещены в начале таблиц) указана средняя величина склонения солнца S с точностью до 1°.
Поправки на высоту полета из моментов восхода солнца и наступления рассвета всегда вычитаются, а к моментам захода и наступления темноты прибавляются.
Для того чтобы найти моменты восхода и захода солнца, наступления рассвета или темноты для желаемого пункта и даты текущего года, необходимо:
1. По прилагаемым в конце таблиц картам найти данный пункт и определить его широту места и поправку во времени, представляющую разность долгот меридианов 30°Е (Пулковского) и данного пункта.
2. В таблице найти лист с нужной датой желаемого месяца, на котором по широте пункта в горизонтальной строке прочесть искомые величины по московскому декретному времени для меридиана на 30°Е.
3. Для определения московского декретного времени наступления явлений в заданном пункте к найденным табличным значениям прибавить со своим знаком найденную по карте раз-лесть долгот меридиана 30°Е и данного пункта.
Продолжительность светлого времени и азимуты восхода я захода солнца берутся из таблиц без изменения.
Если необходимо учесть поправку на высоту полета, то одновременно с нахождением интересующих моментов времени явлений выписывается величина среднего склонения солнца о По этой величине и высоте полета в табл. 1 находится нужная поправка времени.
§ 104. График восхода и захода солнца, наступления темноты и рассвета
Как .показывает рис. 148, на графике восхода и захода солнца, а также наступления темноты и рассвета имеется ряд кривых; каждая кривая соответствует определенной широте места. На
Рис. 148. График для определения моментов начала наступления темноты и рассвета.
верхней и нижней рамках графика имеется шкала месяцев и дней; на боковых краях указано время восхода и захода солнца и наступления темноты и рассвета.
Для определения моментэз восхода и захода солнца или наступления темноты и рассвета отыскивают в верхней (или нижней) части графика месяц и день, для которого следует произвести расчет, и по вертикальной линии от него идут вниз (или вверх) до пересечения с одной из кривых, соответствующих широте данного места.
Далее от точки пересечения идут в горизонтальном направле
нии по прямой (влево или вправо) до шкалы времени, где и читают искомое время. Г^фик дает среднее местное время.
Для того чтобы перевести местное время в поясное, необходимо произвести действия по правилу: поясное время Т„ равно (местному времени 1 и ( по графику плюс номер часового пояса, в котором находится данный пункт, минус долгота данного пункта Xя (выраженная во времени).
Пример. Найти местное и поясное время III пояса наступления темноты 11 ’марта для ме>ста, имеющего координаты; восточную долготу от Гринвича 35° (т. е. 2 часа 20 мин.) и северную широту 50°.
Решение: 1) По графику находим 7^=18 час. 35 мин.
2) Т„= Xя =18 час. 35 мнн-|-3 часа—2 часа 20 мин.= 19 час. 15 мин.
В настоящее время приложением к авиационному штурманскому справочнику ВВС издания 1944 г., часть 1-я (АШС-44) изготовлен другой график, пользование которым изложено на самом графике.
§ 105. График (дня и ночи
Определение моментов восхода и захода солнца, наступления темноты и рассвета, а также продолжительности светлого и тем-
месяцы
Un¥n 1 11 Ш .W V Y1 ИП УШ Я X XI ХИ Vnlm
UnVn I п Ш ZF V И VH W Я X XI ХП ГпПл Vо- Пятый пояс (время местное}
On- Второй пояс ( время московское) й*
Рис. 149. График дня и ночи.
яого времени, кроме того, продолжительности утренних и вечер-жих сумерек можно производить и по специальным графикам, составленным для определенных пунктов (рис. 149).
Подобные графики составляются для аэропортов воздушных магистралей и воздушных линий.
Рис. 150. Авиачасы системы АЧО.
§ (106. Авиационные часы
В обычной жизни время измеряется обыкновенными часами, я в авиации — специальными, которые называются авиационными часами.
Летчику часы необходимы главным образом для счисления пути и определения времени полета, а также для учета расхода горючего.
Штурман использует часы для производства навигационных расчетов.
В авиации применяются в основном два типа часов: часы штурмана — главные, имеющие большую точность хода, устанавливаемые на самолете в кабине штурмана, часы летчика — бортовые, укрепляемые на приборной доске самолета, и хронометры.
В качестве главных часов приняты часы АЧХО (авиационные часы-хронометр с электрообогревом) государственного часового завода (рис. 151), а в качестве бортовых—часы АЧО (авиационные часы с электросбогревом), .выпускаемые тем же заводом (рис. 150).
Бортовые авиачасы с электрообогревом (АЧО) '(рис. 150). Часы АЧО представляют собой механизм типа карманных часов на 15 камнях. Они смонтированы в бакелитовом корпусе и приспособлены для закрепления на приборной доске самолета.
. На внутренней стороне задней крышки корпуса смонтирован электрообогреватель, позволяющий часам бесперебойно работать при низких температурах (до —60°С).
Завод часов производится вращением заводной головки в правую сторону доотказа; однако слишком сильно затягивать заводную пружину во избежание обрыва замка не рекомендуется.
' Вращение заводной головки влево — холостое.
Рекомендуется заводить часы ежедневно и в определенное время суток.
Для перевода стрелок часов нужно вытянуть заводную головку вниз до упора, после чего ее вращением поставить стрелки в необходимое положение. После перевода стрелок головку необходимо вернуть в прежнее положение путем нажима на нее снизу вверх.
Точность хода часов при нормальной температуре (от 10 до — 15°С) достигает + 1 минута в сутки. Изменение хода (вариация) при температурах от — 15°С до нормальной и от нормальной до + 45°С не превышает + 2 минуты в сутки.
Показания по точности хода каждых часов АЧО даются в рилагаемом к часам аттестате.
Часы АЧО рекомендуется проверять на точность
хода (по хронометру или сигналам точного времени по радчо) не реже двух раз в месяц и,(перед каждым ответственным поле* том.
Как всякий точный прибор, часы АЧО требуют аккуратного обращения во время монтажа и эксплоатации. а также прч хранении; не допускаются удары и резкие сотрясения во избежание порчи механизма часов.
Электрообогреватель на напряжение 12 или 24 в включается ю постоянное действие при температуре порядка — 20°С.
Включать электрообогреватель при температуре выше, чем —20°С, не следует, так как это может привести к порче механизма часов; частое включение и выключение электрообогревателя также не рекомендуется, так как это может вызвать отпотевание и образование осадков влаги на деталях механизма и его порчу.
Часы АЧО должны храниться при нормальной температуре, в мягкой упаковке, при отсутствии магнитных полей, которые могут привести к намагничиванию деталей механизма, а следовательно, и к неточности хода часов.
Рис. 151. Авиачасы системы АЧуО.
1—головка включения механизма времени полета; 2—головка включения секунломе-ра; 3—сигнальное окошечко; 4—шкала; 5— шкала времени полета; 6 и 7—стрелки секундомера.
Вес часов 180 г.
В полный комплект часов входят: часы, электрообогреватель, •монтированный на задней крышке корпуса, упаковочная картонная коробка, аттестат, инструкция о пользовании часами и электрообогревателем.
Авиачасы АЧХО (главные) (рис. 151). Механизм авиачасов АЧХО состоит из трех отдельных механизмов: 1) механизма обыкновенных часов для отсчета времени суток; 2) механизма для показания времени нахождения самолета в пути (путевого времени) и 3) секундомера для замера и отсчета небольших промежутков времени с точностью до 0,2 секунды.
Часы имеют две заводные головки: головка 1 предназначена для завода пружины механизма часов, перевода стрелок, пуска <в ход и остановки механизма времени полета; головка 2 — для пуска в ход и остановки секундомера. 208
Завод пружины механизма часов производится поворачиванием головки 1 (выкрашенной в красный цвет) слева направо, причем заводить необходимо осторожно во избежание обрыва пружины.
Для перевода стрелок головку 1 необходимо вытянуть на себя доупора, а затем уже перевести стрелки в желаемое положение. Определение путевого времени производится стрелками и жткалой 5 в следующем порядке.
В момент взлета необходимо нажать на головку 1 (в сигнальном окошечке 3 появится белый цвет из светящейся массы), в результате чего придут в действие стрелки шкалы 5. При вторичном нажатии на эту головку—в момент посадки (в сигнальном окошечке 3 появится белый и красный цвета), стрелки шкалы 5 останавливаются; время полета в часах и минутах находится против стрелок по шкале 5. При нажатии головки 1 в третий раз (в сигнальном окошечке появится красный цвет) стрелки шкалы 5 иримут нулевое положение.
При нажатии головки 2 в работу включается механизм секундомера 6 и 7, при вторичном нажатии он останавливается; третьим нажатием на головку 2 стрелки 6 и 7 секундомера приводятся в нулевое положение. Отсчет минут секундомера производится по шкале 7, а секунд—по большой шкале 4\ отсчет времени суток—против больших стрелок по шкале 4.
Полный завод пружины обеспечивает нормальную работу механизма в течение 7 суток.
Электрообогреватель, рассчитанный на 12- или 24-вольтную сеть самолета рекомендуется включать только при низких температурах порядка — 20°.
Хронометры. Для проверки бортовых часов применяются особо точные часы, называемые хронометрами.
Хронометры — это пружинные часы, отличающиеся от обыкновенных особой тщательностью изготовления механизма и введением в него различного рода приспособлений, обеспечивающих наибольшую равномерность хода.
§ 107. Точность хода часов и Служба времени
Точность контроля пути исчислением пройденного расстояния, радио- и астрономической ориентировкой зависит от точности хода часов, по которым замечаются моменты измерения времени пролета расстояния, радиопеленгов и высоты наблюдаемого светила.
Поэтому каждый штурман и пилот обязан систематически следить за правильностью показаний и точностью хода своих часов и знать перед полетом их ошибку.
Верность показаний часов должна быть с ошибкой не более 6 секунд.
Ошибку можно определять по сигналам точного времени, которые передаются 'широковещательными радиостанциями с точностью до 0,1 секунды в 7, 12 и 19 часов по московскому времени каждые сутки.
Поправка часов — это то число минут и секунд, которое необходимо прибавить (или вычесть) к показанию часов, чтобы получить верное время.
Положительная поправка означает, что часы отстают от верного времени, а отрицательная—что часы идут вперед от верно, го времени.
Поправка часов, обычно обозначается буквой сч — изменение хода часов за один час или одни сутки (поправка указывает уход часов вперед или их отставание от верного времени за один час или одни сутки). Если поправка хода часов положительная, то для получения верного времени ее необходимо прибавить к показанию часов, а если отрицательная — вычесть из показаний часов.
В общем случае верное время высчитывается по следующей формуле:
или
/7 = Т~Т„
где: Г — верное время,
Тч —показание часов,
И — поправка хода часов.
Пример. Часы, идущие по московскому времени, в момент подачи сигнала точного времени (Т) в 12 час. показывают 11 час. 59 мин. 35 сек* (Т ч) Требуется определить поправку часов (И).
Решение: И—Т— Тч = 12 час.—11 час. 59 мин. 35 сек.= + 00 час 00 мин. 25 сек., т. е. часы отстают иа 25 секунд.
При невозможности проверить правильность хода часов то сигналам точного времени можно сверять ход часов сравниванием их показаний с часам», поправка которых известна.
В этом случае поправка хода часов определяется по следующей формуле:
Иг = Иг (Гч2 - Тч1),
где: И\—поправка хода сверяемых часов;
Hi—известная поправка вторых часов;
Тч1 — показание сверяемых часов;
Тч2—показание вторых часов.
Пример. Даио: И2 = 00 час. 00 мин. 25 сек.; Ти=19 час. 35 мин. 51 <ек = 19 час. 35 мин. 19 сек.
Решение И у = И2 + (Т\2 — ТчА) = 00 час. 00 мим. 25 сек.-}-(19 час 36 мин. 19 сек. — 19 час. 35 мин. 51 сек.) =4-00 час. 00 мин. 03 сек.
Поправка часов вычисляется 1по следующей ^формуле:
Вычисление поправки часов во время полета для какого-либо момента времени производится по формуле:
где: И — поправка хода часов для данного момента времени;
Ио— поправка часов, определяемая перед полетом;
То — показание часов пере^ полетом;
Т — время, для которого вычисляется (поправка.
Поправка часов, вычисленная перед полетом, вполне достаточна, если она известна с точностью до 1 сек. при разности Г — То, округленной до целых часов.
В виду влияния на точность хода часов температуры, правильность их хода необходимо проверять перед полетом при температуре, близкой к той, при которой предполагается совершить полет.
Для систематической проверки правильности показаний часов части или подразделения, т. е. бортовых часов самолетов и личных часов командиров, начальствующего и летно-подъемного состава в целом, организуется служба времени. Она предназначена для того, чтобы все часы, имеющиеся в подразделении, показывали одно и то же время.
Ответственность за состояние службы времени возлагается на штурманов подразделений.
Точность хода бортовых и личных часов допускается до полминуты, а штурманских, применяемых для выполнения более точных работ и астрономической ориентировки, — не более 6 секунд.
Проверка и установка часов на точное время должна производиться по сигналам времени, подаваемым широковещательными радиостанциями.
При невозможности проверить часы по сигналам времени широковещательных радиостанций в подразделении должны быть установлены звуковые или зрительные сигналы, подаваемые один-два раза в течение рабочего времени или перед вылетом-
Установленные сигналы должны состоять из предварительного и исполнительного и подаваться определенным лицом в установленное время.
По сигналу времени личный состав должен проверить и уста-яовить точное время на своих часах; техники самолетов (штурманы, бортрадисты, пилоты) должны установить точное время на бортовых часах; кроме того, штурманы должны записать поправку своих часов, необходимую для астрономической ориентировки.
Проверка часов является повседневной обязанностью личного состава и в первую очередь — штурманов подразделений и экипажей.
ГЛАВА V
ОПРЕДЕЛЕНИЕ АЭРОНАВИГАЦИОННЫХ ЭЛЕМЕНТОВ ПОЛЕТА ___________________________
§ 108. Виды высот
Высота есть расстояние ко вертикали (отвесной линии) от земной поверхности до самолета. Ее принято измерять в метрах.
В практике самолетовождения различают относительную высоту полета, истинную высоту, высоту абсолютную и условную высоту. Виды высот (показаны да рис. 152.
Рис. 152. Виды высот.
Относительной высотой называется высота полета самолета относительно аэродрома вылета (или другого какого-либо пункта в случае установления барометрической шкалы высотомера на величину атмосферного давления, полученного на борт самолета с этого пункта). Она обозначается знаком Нотн.
Истинная высота — это высота самолета над пролетаемой местностью (земной поверхностью) и обозначается Нист.
Абсолютной высотой —haCc называется высота самолета, относительно уровня моря.
Условной высотой Нуво называется высота по высотомеру, барометрическая шкала которого установлена на давление 760 мм рт. ст.
31S
Превышение рельефа местности по линии полета относительно аэродрома вылета обозначается -f- Д р, а его п о-нижение — Др и определяется при подготовке карты к полету.
Как видно на рис. 152, соотношение между относительной, истинной высотами и рельефом местности выражается:
для точки С: Нотн = Нист + (+ Др);
для точки D: "О1ПН = Н11Гт~\-( - к р).
Слетоватрльно в общем случае Нотн = Нвст-\-(+ Дл), т. е. для того, чтобы определить относительную высоту полета самолета в каком-либо пункте пролетаемой местности, необходимо к истинной высоте (rincm) прибавить превышение (Н-Др1 или вычесть понижение (- Д f) оельефа пролетаемой местности относительно аэродрома (пункта) вылета.
Если истинная высота неизвестна, а относительная дана, то первую можно определить по формуле:
Нигт=Нотн-(±кр),
т. е. для того, чтобы по известной относительной высоте определить истинную высоту самолета в желаемом пункте по маршруту полета, необходимо из последней вычесть превышение i-j- Д л) или прибавить понижение (—Дд) данного пункта относительно аэродрома (пункта) вылета.
Аналогичным порядком находится и абсолютная высота: абс Чотн “Ь (— ^Раэробр}»
где: +Длалоо^,— превышение (понижение) аэродрома относительно уровня моря.
Как частный случай, при взлете с поверхности моря и полете над ним .высоты относительная, истинная и абсолютная равны между собой, т. е.:
‘‘отн п ист 1 ‘ абс-
При полете над местностью, которая не имеет превышения относительно аэродрома (пункта) вылета, т. е. (ztp)=0 относительная высота равна истинной:
LT ___ ГТ
отн ' ‘ист’
Для нахождения условной высоты (//7со) достаточно барометрическую шкалу высотомера установить на давление 760 мм рт. ст. (29, 92 дюйма).
§ 109. Определение высоты полета
Определение относительной высоты по показанию высотомера. Относительную высоту полета с достаточной для практических целей точностью показывает высотомер, установленный на аэродроме вылета на «0» высоты после введения в показания инструментальной поправки и поправки на температуру (см. § 42).
Приборная высота обозначается Нпр .
Инструментальная поправка высотомера (± Д Н) находится по графику инструментальных поправок данного высотомера; она учитывается алгебраически, т. е. прибавляется к показанию высотомера, если поправка положительная (4-Д//). и вычитается, если отрицательная (— Д Н).
Температурная ошибка вводится в показания высотомера по счетной аэронавигационной линейке НЛ-7 или НЛ-8-
Порядок нахождения относительной исправленной высоты Н„тя состоит в следующем. Предположим, что в полете высотомер показывает Нпп = 1000 im; инструментальная поправка по графику инструментальных поправок соответственно показанию высотомера А Н= —50 ад; температура воздуха у земли /о=+7& (из «Бюллетеня погоды для пилота»), а на высоте полета^ = —21* (по наружному термометру).
Следовательно, высота по прибору Н'пр с учетом инструментальной поправки будет:
АГЧР = ЯПР + (±ДЯ) = 1000+ (—50) = 1000 — 50 = 950 м.
Для нахождения и введения температурной поправки по НЛ-7 необходимо:
1) Определить среднюю температуру по формуле:
t + (+1°)Ч-(-21°) -20° . о
ср ~ 2 “ 2 — 2 ~
2) Найти высоту с учетом температурной поправки, для чего (рис. 153): рабочий (ромбический) индекс на движке линейки установить на tcp =—10° (по шкале 1 «Средняя температура»);
Ср темп
-60*4(rz0e0°20*40e«
tllllllili|ilililill|j|_
t^-ЛГ1 I
НиепрвКм
as
.пр « SSOm
Высота по приБору
пить Визирной ранни
Исправленная Высота
Рис. 153. Исправление приборной высоты на температурную ошибку по линейке НЛ-7.
затем нить визирной рамки установить на высоту по прибору, иС' правленную на инструментальную поправку, т. е. на Н'„„== =950 м (по шкале 3 «Высота по прибору»); искомую исправлен вую высоту прочесть на шкале 2 «Исправленная высота», протия ити визирной рамки, т. е. /Уоти = 875 м.
Определение истинной высоты. Истинная высота определяется для целей безопасности полета, бомбометания, аэрофотосъемки .и выполнения других работ. Она получается из исправленной приборной (относительной) высоты после введения в нее поправки на рельеф местности с обратным знаком.
Для определения истинной высоты полета необходимо знать: 1) температуру воздуха у земли ta, 2) температуру воздуха на высоте полета t„. 3) приборную высоту Н„р (показания высотомера), 4) инструментальную поправку +ДН -высотомера, 5) температурную поправку, 6) превышение или понижение рельефа пролетаемой местности + Д относительно аэродрома взлета. Порядок нахождение дан ниже примером.
Пример. Дано: Нпр = 1700 м; Д 77 = 4-40 м (из графика); 1о = + ЗОс; Др = + 300 м (по карте); 7и = +8°. Требуется найти
Решение: 1, Исправленная приборная высота находится в таком же порядке, как указано выше.
г __70 + tH_(-4- 30°) + (4- 8°)_+38° .по.
Шер- 2--------------2---------2 b ’
б) Н’„р =Н„Р + (± Д 77) = 1700 +(+40)= 1740 м;
в) По навигационной линейке Нптн = 1795 м ~ 1800 м.
2. Ншт = Нотн — (+ Дд) = 1800 - (f 300) = 1800 — 300 = 1500 и.
Определение приборной высоты при полете на заданной истинной высоте. Показания высотомера (Я ср) для полета на заданной истинной высоте определяются так же, как истинная высота, но в обратном порядке.
Поправку на рельеф местности учитывают с прямым знаком до расчета на линейке Н„тн.
Порядок нахождения Н„р заключается в следующем:
1. Сначала к заданной истинной высоте прибавляется наибольшая по маршруту (или на участке) поправка на рельеф-местности с ее знаком, в результате чего получается относительная высота Нотн.
2. Для учета температурной поправки находится trp. против которой по шкале «Средняя температура» линейки НЛ-7 устанавливается ромбический индекс; затем на шкале «Исправленная высота» отыскивается величина Нптн. на которую устанавливается нить визирной рамки, и на шкале «Высота по прибору» чи-та-ется искомая приборная высота с учетом инструментальной поправки h'„p.
3. По найденной таким образом высоте H'„v по графику инструментальных поправок данного высотомера определяется инструментальная поправка + Д/7, которая учитывается в Н'пр (снятой с линейки) с обратным знаком.
В результате вычислений получается искомая приборная вы-сита, т. е.
Няр = Н'пр-(+ЬН).
Пример. Дано: Наст = 200 м; йр = 4-500 м; f0=«-|-15o; tH = + 6е.
Требуется найти Нпр.
Решение: 1) Нотн = Нист 4- (+ Д р) = 200 4* (+ 500) = 200 + 500 = 700 и
2) t _»о+^_(+150)-Н±51) = ±2£: = + 100.
' ср 2~ 2 2
3) По счетной линейке Н'пр = 710 м; этой высоте по графику соответствует Д Н = — чО м.
4) Нпр = Н'пр - (± Д Н) = 710 - (- 40) = 750 м.
Если неизвестна, то ее высчитывают по температурному градиенту, который или задан, или берется стандартным, <т. е. = — 0,65°.
Определение 1Н по температурному градиенту производится следующем образом:
1, Находится изменение температуры с высотой:
2) — *о4" *изж-
Пример. Дано: Нпр = 1500 м; l0 = -f-12°; tgr — — 0,6°. Требуется найти tH.
Решение: 1) tu3M = igr^=- 0,6° Р™ = - 9°;
2) tH = t0 4- tU3M -= (4- 12) 4- (- 9°) = 3°.
Неизвестная температура у земли по известной температур? на высоте определяется аналогично, т. е-
^0 ^изя-
При решении задач на линейке НЛ-7 во избежание ошибок необходимо всегда помнить, что цена делений шкал неодинакова с увеличением высоты. До высоты .2000 м одно маленькое деление равно 50 м высоты, а после 2000 м оно равно 100 м. Тысячи метров обозначаются единицами: 1 соответствует 1000 м, 2 — 2000 м и т. д.
Пользование линейкой НЛ-8 (рис. 133, А, Б). Решение задач по определению высоты полета на линейке НЛ-8 производится проще, чем на линейке НЛ-7. Для того чтобы определить относительную высоту по показанию высотомера, необходимо сначала температуру на высоте <7,1 по шкале 8 (с надписью «Температура на высоте для Н») установить по шкале 9 (с надписью «Высота в км для Н»), против деления, .которое сответствует показанию высотомера, после чего на шкале 12 против приборной высоты по шкале 13 (с надписью «Высота и скорость по прибору») отсчитать искомую относительную высоту.
Пример. Дано: Нпр = 3200 м, Д Н = 4- 50 и, tH = — 20°. Найти Нот/(. Ответ: Н ,тн — 2990 м.
Определение приборной высоты по известной относительной производится в таком же порядке, как и относительной высоты, 216
с той лишь разницей, что tH устанавливается не против Нпр. а на известную /7„„н и искомая Нпр отсчитывается на шкале 1Я против значения по.„м, которая берется на шкале 12.
Порядок нахождения истинной высоты остается таким же, как описано выше в этом параграфе.
§ ПО. Определение воздушной скорости
Определение ис1правленной и истинной воздушной скорости по показанию указателя скорости. Исправленная воздушная скорость, т. е. скорость по прибору, исправленная на инструментальную, температурную и барометрическую поправки, определяется по шкалам 4, 5, 6, 7 и 8 аэронавигационной линейки НЛ-7. Для определения исправленной воздушной скорости необходимо знать: 1) показания прибора (приборную скорость) V пр 2) инструментальную поправку указателя воздушной скорости ± Д к; 3) исправленную высоту по высотомеру 14шпр ; 4) атмосферное давление у земли Во', 5) температуру воздуха на высоте полета tH.
4 j
-J Во-740 риспр,- 1000м
lunep. t% у | | Высота В нм (/Д Скорость по прибору
60 0-60 \д 1/4 34 i 6 7 89 10 11 12 100 150 ©
IulilIiiiiIii rrlil 11111 1111 li-h-| г l-ri-rl hTiilmrfrniliiiiliiniiiiil
UHiiiiuiil
MMMMIIIIIIIIIIIIIHflllllllllllltllllllllllllllllllllil
5
\ У земли и но высоте Вн=6Ч0
0
tn=-rt° Высота В KM емлер. гн/ \У)
60е 0°-60 0 I 2 3 4 5 6 7 8 3 » П 12
wo
7
150 гоо
Истинная спор ост»'
Скорость no прибору
100
llllllltfllllllliuillltll iiiimiiiiiiimiiiiiiiia
II1IIHI1
fiobl 700l. 500 400 300 200 140 100 Д 150 (С)
7601600 /
* I Давление у земли и на Высоте / Истинная скорость
Вц--6ЧО Уист- П8 *"/vac
Рис. 134. Нахождение исправленной воздушной скорости по линейке НЛ-7. А—введение поправки на изменение давления; Б—введение температурной поправки.
Порядок определения заключается в следующем (рис. 154, Д, Б):
1. Исправить показания указателя воздушной скорости на инструментальную ошибку, для чего к Vnp прибавить АI/ с прямым знаком, т. е. V„P4-(± Д I/).
2. Для того чтобы ввести поправку на неточность показания указателя воздушной скорости от изменения барометрического давления с изменением высоты, необходимо найти давление на высоте (рис. 154, А). Для этого нуль шкалы 6 («Высота в километрах») необходимо поставить на давление у земли Во по шкале 5 («Давление у земли и на высоте»). Затем нить визирной рамки установить на исправленную высоту по шкале 6 («Высота в километрах»).
После этого искомое давление на высоте прочесть у нити визирной рамки на шкале 5 («Давление у земли и на высоте»).
3. Для введения температурной поправки (рис. 154, Б) следует к найденной величине давления на высоте Ви подвести температуру на высоте по шкале («Температура th»); нить визирной рамки установить на найденную исправленную скорость по шкале 7 («Скорость по прибору в км/час»); после этого (искомую исправленную скорость прочесть у визирной нити рамки по шкале 8 («Истинная скорость в км/час»).
Пример. Дано V„p = 109 км/час; Д V = 4- 5 км/час; Нотн = 1000 м Во = 720 мм рт. ст.; tH — —10°. Требуется найти Vucnp.
Решение: 1) Давление на высоте по линейке Вн =640 мм рт. ст.
2) После установки tH =—10° против найденного давления на высоте Вн = 640 мм рт. ст. и установки нити визирной рамки на приборную скорость, исправленную на инструментальную поправку V„p = Vnp+<± д V) = = 109-f- (4- 5) = 114 км/час; искомая исправленная воздушная скорооь читается на шкале 8 („Истинная скорость*): Ци.Лр= 118 км/час.
Истинная скорость определяется прибавлением (или вычитанием) аэродинамической поправки к исправленной скорости- Аэродинамическую поправку указателя воздушной скорости определяют при испытаниях самолета в полете. Она колеблется в пределах 2—5 км/час.
Ввиду небольшого ее значения можно ею .пренебрегать, считая исправленную высоту равной истинной, т. е.
Vacnp — Каст-
Определение показаний указателя скорости для полета на заданной истинной воздушной-скорости. Расчет показаний указателя скорости для полета на заданной истинной воздушной скорости производится в следующем порядке. После нахождения давления на высоте Вн по линейке НЛ-7 и подведения к нему температуры на высоте кая было указано выше, нить визирной рамки устанавливают на заданную истинную скорость 1'„,„ по шкале «Истинная скорость»; затем на шкале «Скорость по прибору» у визирной нити читают скорость; по графику инструментальных поправок данного прибора для V„p; находят 4- A V, которую учитывают с обратным1 знаком в значении скорости, снятой с линейки:
= V испр - (i Д р).
Пример. Дано: Vucm = 120 км/час; Нотн — 2000 м; Во = 750 мм рт. ст. /н == — 20°. Требуется найти Vnp.
Решение: 1) По линейке Vnp = 112 км/час.
2) Пэ графику для У»р=112 км/час. ДИ =4.
3) Vnp =VnP (± Д V) = 112 - (+ 4) = 108 км, час.
Пользование линейкой НЛ-8. Определение истинной воздушной скорости по линейке НЛ-8 производится следующим образом: температура на высоте (по шкале 10, ,рис. 133, Б) подводится к высоте по прибору Нптг< (на шкале 11), затем визирная вить рамки по шкале 13 устанавливается на исправленную скорость V пр по прибору (с учетом инструментальной поправки указателя скорости) и искомая истинная скорость Уист читается на шкале 13 .против визирной нити.
Пример. Дано: tH — — 20°; Нотн = 4000 м; Vnp = 220 км/час; Д V = + 4- 5 км/час.
Решение: Упр = Vnp + (+ Д V) ~ 220 4- 5 = 225 км/час.
По линейке Vucnp = 270 км/час.
Определение показаний указателя скорости для полета иа заданной истинной воздушной скорости производится аналогичным порядком, с той лишь разницей, что визирная нить рамки устанавливается не на исправленную скорость по шкале 13, а на данную истинную скорость по шкаде 12; искомая исправленная скорость читается против визирной нити на шкале с последующим учетом инструментальной поправки с обратным знаком.
Пример: Дано: tH = — 30°; Нотн = — 400 м; Vucm = 280 км/час.
Решение: По линейке Упр = 238 км/час; по графику инструментальных равок для этой скорости соответствует Д V= + 5 км/ч?с.
Следовательно Vnp = Упр— (+ Д V) = 238 — 5 = 233 км/час.
Истинную воздушную скооость можно рассчитывать и по специальным, заранее изготовленным графикам-
§ 111. Определение курса в полете по компасу
В полете картушка компаса вследствие его ошибок (от тряски самолета, креновой и поворотной ошибок) и трудности выдержи-®а-ния строго прямолинейного .полета находится в непрерывном движении около направления компасного меридиана; поэтому отсчет компасного курса без ошибок затруднителен. В этом случае необходимо определять компасный курс не по одному отсчету по компасу, а делать это 3—5 раз; искомый курс следует брать как средний между отсчитанными курсами.
Необходимо всегда помнить, что при отсчете компасного курса по компасу следует стараться точно выдерживать самолет в направлении полета, т. е. с наименьшим «рысканием».
Пример. Для определения компасного курса произведены отсчеты: KKt«124°, КК2=128°, KKs=122°, КК4=126°. Искомый компасный курс как средний будет:
К1<1 4- КК2 + КК34-КК4 124 4-1^4- 1224-196 = 125<> 4 “ 4
Этот курс записывается в аэрона(В'И|гационный бортжурнал и выдерживается <в полете.
§ 112. Перевод курсов
Курсы истинный ИК, магнитный МК и компасный КК, а также магнитное склонение А/И и девиация компаса ДА связаны
между собой определенным соотношением.
Каждый пилот и штурман должны уметь быстро и точно переводить курсы из одного в другой и определять по ним ДА/ и ДА.
Истинный курс равен магнитному курсу плюс магнитное склонение со своим знаком, т. е ИК = МК + (+ ДМ); в свою очередь магнитный курс равен компасному курсу плюс девиация с ее знаком, т. е. МК — КК + (+ Д К).
Подставляя значение МК в выражение ИК, получим, что ИК — КК + (+ Л К) -4- (+ Д 411. т. е. и с т и н н ы й курс равен компасному курсу плюс девиация компаса и магнитное склонение с их знаками. Отсюда КК = ИК — (+ Д М) — (+ Л А), т. е. к о м п а с н ы й курс равен истинному курсу минус магнитное склонение и девиация компаса с их знаками.
Выражение магнитного Kvpca через истинный курс и магнитное склонение будет: МК — ИК — (+ Д М), т. е. м а г н и т н ы й
курс равен истинному минус магнитное скло-нение, а через компасный курс и девиацию: МК—КК-Ь 4-(+ДЛ, т. е. магнитный курс равен компасному курсу плюс девиация с ее знаком.
Компасный курс через магнитный курс и девиацию определяется таким образом: КК = МК — (± ДА), т. е. компасный курс равен магнитному курсу минус , девиация.
Таким образом получаем:
1) ИК = МК+ (+ ДМ).
2) ИК = КК+(+Д А) + (+ДМ).
3) КК = ИК—(+ДМ)—(+ДА).
4) МК = ИК— (+ДМ).
5) МК = КК 4~ (4- д А).
6) КК = МК— (+ДА).
7) д К = МК — КК.
8) Д М = ИК — МК.
Величина магнитного склонения определяется по картам магнитного склонения, а девиация—по графикам девиации.
Задачи на перевод курсов
* 1. Дано: МК = 49°; Д М = 4-7°; найти ИК.
Решение: ИК = МК + (± Д М) = 49 4- (+ 7°) = 56°.
2. Дано: КК = 215°; Д М = - 5°; Д К = 4- 5°; найти ИК и МК.
Решение: ИК = КК 4- (± Д/Q 4- (+ Д М) = 215° + (4-5°) 4- (-5°)== = 215°; МК = КК 4- (± Д К) = 215° 4- (4- 5°) = 220°.
3. Дано: КК = 350°; Д К = 4- 7°; ДМ = 1-8°; найти ИК и МК.
Решение: ИК = 350° 4-7 4- 8 = 365° — 360° = 5°; МК = 350° 4- 7 = 357°
4. Дано: ИК = 93°; Д К = — 4°; Д М = 4- 2°; найги КК и МК.
Решение: КК = ИК — (+ Д М) - (+ Д К) = 93 - (4- 2°) — (-4°) = 93°-— 2° 4- 4° = 95°; МК = ИК — (+ ДМ) = 93 — 2° = 91°.
5. Дано: ККН = 177° (по компасу наблюдателя); ДАН = — 6°; ДКЛ = —4° (компас летчика); найти ККЛ (курс по компасу летчика).
Решение: 1) магнитный курс МК — КК„ 4- (±ЛКН) — ККЛ 4- (+ Д Кл) — ]77° —6° = 171°.
2) ККД = МК - (+ Д Кл) = 171° -(— 4°) = 171° 4- 4° = 175°.
§ 113. «Метеорологический» и «аэронавигационный» ветер
Воздушное пространство, в котором обычно совершается полет, почти никогда не находится в состоянии покоя, а непрерывно перемещается с различными скоростями и в разных направлениях относительно земной поверхности. Перемещение воздушных масс относительно земли называется ветром.
Ветер как по величине, так и по направлению не является постоянным; он меняется с изменением расстояния, высоты полета и времени.
Поэтому учет скорости и направления ветра для определения направления полета и скорости передвижения самолета относительно земли (дутевой скорости) является одной из основных задач аэронавигации; без разрешения этой задачи точное по направлению ,и времени и безопасное самолетовождение невозможно.
В аэронавигации скорость ветра измеряется в километрах в час (И км/час), а его направление 8—в градусах от 0° до 360° (от северного направления меридиана по ходу часовой стрелки).
При навигационных расчетах принято брать направление ветра «куда дует», т. е. направление (точка на горизонте), в котором дует ветер, в отличие от метеорологического «откуда дует» (рис. 155). Если говорят, что аэронавигационный ветер '270°, то
221
это значит, что воздушные массы перемещаются с востока на запад; метеорологи называют такой ветер восточным.
Направление аэронавигационного ветра отличается от направления метеорологического на угол, равный 180°.
Для того чтобы перевести направление метеорологического ветра в аэронавигационный или наоборот, необходимо к известному направлению прибавить (или вычесть из него) 180°.
Как правило, метеорологические станции направление ветра дают от истинного меридиана, т. е. истинное его направление. Поэтому при решении аэронавигационных задач необходимо учитывать магнитное склонение места.
Примеры. 1. Метеорологическая станция дает направление метеорологического ветра 135°; аэронавигационное направление (аэронавигационный ветер) будет:
Ъаэр = Ъмет -р 180° = 135° + 180° = 315°.
2. Дано метеорологическое направление ветра 8л«ч» = :270°; аэронавигационное направление будет Ъаяр — 270° — 180° = 90° или оОЭр — 270° + 380° = = 450° — 360° = 90°.
В этом случае берется —180° (минус) потому, что сумма получается больше 360°; практически это означает 90°.
N
О'
180'
Рис. 155. «Метеорологический» и «аэронавигационный» ветер.
§ 114. Влияние ветра на полет самолета. Навигационным треугольник скоростей
Обычным явлением в атмосфере является наличие воздушных течений — ветра; безветрие (штиль) составляет редкие случаи
Ветер влияет на скорость и направление полета самолета относительно земли. Если бы не было ветра, перемещение самолета относительно окружающей его воздушной массы и относитель-222
но земли происходило бы всегда с воздушной скоростью самолета в направлении его оси симметрии. При наличии ветра перемещение самолета относительно окружающей его воздушной массы остается неизменным, а относительно земли изменяется. В этом случае перемещение самолета относительно земли слагается из двух движений: одного движения в направлении оси симметрии самолета с его воздушной скоростью и другого—в на правлении и со скоростью перемещения воздушной среды, в которой совершается полет, т. е. так, как если бы в ней самолет находился неподвижно (рис. 156).
Скорость перемещения самолета относительно земли называется путевой скоростью.
Путевая скорость самолета обозначается буквой W; она яв ляется геометрической суммой векторов воздушной скорости самолета V и скорости ветра U и зависит от их величины и направления.
При отсутствии ветра (при штиле) путевая скорость равна воздушной скорости; при попутном или попутно-боковом ветре она будет больше воздушной, а при встречном или встречнобоковом — меньше.
Рис. 156. Влияние ветра на полет самолета (путевая скорость как результат геометрического сложения воздушной скорости и скорости ветра).
При попутном или встречном ветре изменяется только величина путевой скорости и не оказывается никакого влияния на боковое смещение самолета. Попутно-боковой или встречно-боковом ветер не только изменяет величину путевой скорости, но и вызывает боковое смещение самолета, т. е. его снос от направления полета.
Пр'И меры 1. Воздушная скорость самолета V=110 км/час; скорость смутного ветра С = 40 км/час; путевая скорость равна U/=V £7=110+40= = 150 км/час.
2. Воздушная скорость У = 110 км/час; скорость встречного ветра U = -Йв км/час; путевая скорость равна 1У = V— U = 110 — 40 = 70 км/час.
Определение путевой скорости, направления и величины перемещения самолета относительно земной поверхности (сноса) для случаев бокового ветра производится составлением и решением навигационного треугольника скоростей (рис. 157).
Навигационный треугольник скоростей состоит из векторов:
1) вектора воздушной скорости V;
2) вектора ветра U-,
8) вектора путевой скорости W.
Эти векторы и утлы между ними образуют следующие аэронавигационные элементы полета: курс самолета, воздушную скорость, скорость и направление ветра, путевую скорость, путевой угол ПУ, угол сноса УС и угол ветра е
Конец вектора путевой скорости изображает местоположение самолета в конце какого-либо поомежутка времени полета относительно первоначального его положения (точка О на рис. 157, в которой он был в начале взятого момента); углы (курс, путевой угол, направление ветра, угол сноса и угол ветра) дают элементы направления полета самолета относительно стран света (меридиана места) и его перемещение относительно земной поверхности.
Рис. 157. Навигационный треугольник скоростей.
Векторы скоростей откладываются масштабной линейкой всегда в каком-либо одном масштабе, который выражается в километрах в час, а углы—транспортиром, в градусах.
Чтобы пролететь в заданном направлении из одной точки в другую, необходимо всегда учитывать влияние ветра на полет самолета и направлять последний таким образом, чтобы его фактический путевой угол следования (ФПУ) был по величине равен заданному путевому углу (ЗПУ), т. е. фактический путь следования совпадал по направлению с заданным путем.
Как правило, данные о ветре на различных высотах (скорость направление) дает авиаметеорологическая станция по шаропилотным наблюдениям. Эти данные являются достаточно точными
ми только для небольшого района расположения данной метеорологической станции и на небольшой срок; следовательно, они не достаточно точны для расчета курса следования самолета н его путевой скорости по всему участку пути, если он значителен. Это объясняется тем, что ветер часто изменяется по скорости и направлению даже на небольших расстояниях, разных высотах и по времени.
Поэтому для правильного вождения самолета необходимо пользоваться (прогнозами ветра до высотам, уметь определять и учитывать ветер в самом полете.
Скорость и направление ветра в полете определяются составлением и решением навигационного треугольника скоростей по следующим данным; курсу самлета, его воздушной скорости углу сноса и путевой скорости.
Навигационный треугольник скоростей решается либо математическим путем, либо графическим построением на бумаге, либо механическим путем при помощи специального прибора— ветрочета (см. § 116).
Принцип устройства ветрочета основан на механическом со-етавлении навигационного треугольника скоростей.
Рис. 158. Определение
угла сноса в полете.
Угол сноса и его определение в полете. Угол сноса (+УС) есть угол, заключенный между векторами воздушной и путевой скоростей, т. е. между продельной осью самолета и фактической линией его пути (рис. 158).
В полете этот угол легко обнаружить и определить его величину наблюдением за перемещением видимых под самолетом предметов земной поверхности относительно продольной оси.
При полете без ветра, строго по ветру или против него зем ные предметы перемещаются обратно направлению полета и вдоль продольной оси (фюзеляжа) самолета. При ветре встречно-боковом или попутно-боковом земные предметы уходят от направления продольной оси самолета (фюзеляжа) назад и в сторону ел ев о—при ветре, дующем в левый борт самолета, и вп р а в о— при ветре, дующем в правый борт.
Видимое боковое перемещение земных предметов относитель ио продольной оси самолета называется сносом самолета Снос вправо относительно направления пслета (при выбега нии предметов земной поверхности из-под левого борта самолета) называется сносом положительным (-f-УС), а снос влево (при выбегании предметов земли из-под правого борта)—отрицатель ным (—УС).
Из треугольников скоростей видно, что чем больше скорость бокового ветра при постоянной воздушной скорости самолета, тем больше угол сноса и, наоборот, при меньшей скорости ветра он меньше. Угол сноса при данной скорости самолета также бу дет тем большим, чем больше угол ветра ( ), т. е. чем ближе к 90° будет приближаться направление ветра относительно линии пути, и тем меньше, чем этот угол будет меньше, т. е. приближаться к 0°.
При определенных скорости ветра и его направлении угол сноса будет тем меньше, чем больше воздушная скорость самолета, и тем больше, чем она меньше.
В по чете угол сноса определяется бортовыми визирами (ом. § 90).
Измерение угла сноса состоит в определении угла между продольной осью самолета и видимым под самолетом направлением перемещения земных предметов.
Практически точное измерение угла сноса в полете является довольно сложной задачей. Это объясняется тем, что самолет на курсе следования по ряду причин непрерывно «рыскает», т. е. не выдерживается прямолинейность полета. Поэтому угол сноса необходимо измерять очень внимательно и (выбирать моменты, когда самолет следует более спокойно. Для большей точности угол скоса следует измерять 3 5 раз и брать средним.
Точность измерений должна быть в пределах +2°. Запись .кур. са самолета при измерении угла сноса обязательна ibo всех случаях.
1. Измерение угла сноса визиром НВ-5бис. Измерение угла сноса визиром НВ-5бис в полете может производиться тремя способами: I) по способу видимого бега под самолетом предметов земли; 2) бега отдельного, хорошо видимого предмета и 3) обратного визирования.
Первый и второй способы заключаются в том, что штурман (или лицо, определяющее угол сноса), установив на-глаз направление сноса, вставляет визирную рамку НВ-5бис в гнездо то- » борта самолета, из-под которого наблюдается выбегание земиых
предметов; затем визирную нить рамки устанавливает в направление бега земных предметов, проверяет несколько раз правиль ность установки и отсчитывает угол сноса по делениям шкалы н: колодке.
Эти способы измерения угла сноса дают хорошие результаты только на низких и ниже средних высотах полета самолета (д<-1000 — 1500 м).
Способ обратного визирования дает наилучшие результаты при измерении угла сноса на средних и больших высотах. Or заключается в следующем: штурман или пилот, измеряющий уга сноса, приготовив визир, ожидает момента, когда под самолетом на линии вертикального визирования появится хорошо заметны:' предмет (визирная точка); затем, выждав, когда этот предм-е' уйдет от самолета, примерно на вертикальный угол 45°, быстро поворачивает визирную нить рамки и -наводит на визирную точ ку, после чего производит отсчет угла сноса. При визировали] необходимо следить, чтобы верхняя визирная -нить рамки в'сегд.. совпадала с .нижней.
2. Измерение угла сноса оптическим визиром ОПБ-1. Измерение угла сноса визиром ОПБ-1 производится в следующем порядке. После установки визирной трубы в пятке визи ра призму следует поставить на вертикальное визирование и вра щением окуляра добиться резкой видимости поверхности земли Затем видимую в трубе диаметральную нить поворотом этой тру бы установить в направлении видимого перемещения предметов земли. После этого угол сноса отсчитывается по шкале на пятке визира у указателя. Во избежание ошибок отсчет угла сноса еле дует делать очень внимательно.
3. Измерение угла сноса визиром В-5. Измерении угла сноса визиром В-5 производится путем установки путевых нитей вдоль перемещения земных предметов, видимых в окуляр визира.
Угол сноса отсчитывается на шкале сносов пантографа; npi этом необходимо помнить, что УС на шкале сносов даны с об ратными знаками (для удобства их учета при расчете курса са мюлета).
4. Определение угла сноса по меткам на пле скостях самолета. На самолетах типа По-2 или П-5 уго. сноса можно определять по нанесенным специальным меткам на плоскостях самолета. Как видно из рис. 159, эти метки наносятся на хорошо обозреваемой части нижней плоскости (слева и справа) самолета; метки наносятся — одна на передней кромке и несколько на задней. Метки на задней кромке имеют цифры соот ветственно величине сноса, т. е. 0°, 5°, 10°, 1-5° и 20°. На право)! плоскости метки дают всегда отрицательные углы сноса, а на ле пой—положительные.
5. Нанесение меток на плоскости самолет: для определения угла сноса в полете (рис. 159) Метки на крыльях самолета наносятся на земле следующим об
разом: сначала самолет устанавливается в линию полета, затем на передней кромке крыла наносится метка, обычно красной краткой, а можно и белой. После этого летчик, находясь в своей кабине и держа голову в нормальном для полета положении, визирует на точку А. Полученная визированием на земле точка А замечается колышком или флажком.
От полученной таким образом точки А, параллельно продольной оси самолета, протягивается шнур (ЛД), который визи» руется на заднюю кромку крыла, на котором ставится метка и помечается О.
Далее из точки А шнуром А А, в сторону от самолета через каждые 5° откладываются прямые АА1г АА2, АА3 и т. д.; визированием на эти прямые делаются метки на задней кромке коыла и надписываются значения углов сноса 5°, 10°, 15° и т. д. Нанесение меток на плоскости с другого борта производится аналогичным порядком.
Рис. 159. Метки на крыле для определения угла сноса в полете.
00'—продольная ось самолета; А—предмет, который визирует наблюдатель Н; AAi—линия на земле параллельная продольной оси самолета; АА>, АА<, АА,— линии на земле, проведенные ст AAi через каждые о°; Н. 1, Ни На1, На? и На?—линии визирования.
6. Измерения угла сноса над водной поверх-ностью. Для того чтобы измерить угол сноса над водной поверхностью, необходимо иметь на ней хорошо заметный .с воздуха предмет или пятно. Это достигается сбрасыванием с самолета по мере надобности специальной аэронавигационной бомбы. Ударяясь о воду, бомба разбивается, а ее содержимое—маслянистая цветная жидкость—разливается и оставляет на поверхности воды темные пятна днем и светящиеся ночью.
Визированием этого пятна одним из указанных выше способом и определяется угол сноса.
Рис. 160. Графическое построение навигационного треугольника скоростей для нахождения курса следования и путевой скорости самолета.
§ 115 Построение и решение навигационного треугольника скоростей
Для совершения полета по заданному маршруту необходимо знать курс следования.
Курсом следования самолета называется такой курс, при котором самолет при данном ветре следует по заданному пути. Он определяется решением треугольника скоростей. Для построения треугольника скоростей необходимо знать:
1) воздушную скорость;
2) заданный путевой угол ЗПУ (измеренный по карте между пунктами вылета и назначения);
3) направление и скорость ветра (по данным авиаметеостанции: оПф„к и Uh
По этим данным построение треугольника скоростей произво дится в следующем порядке (рис. 160).
Сначала проводится меридиан; затем из точки О, произвольно взятой на этом меридиане, транспортиром откладывается величина ЗПУ и проводится заданная линия пути. Далее из этой же точки откладываются направление и величина вектора ветра. После этого раствором циркуля берут вектор воздушней скорости в том же масштабе, что и вектор .ветра; с конца вектора ветра делают засечку на заданной линии пути.
Найденная таким образом точка А является концом вектора путевой скорости О А. После построения па-раллелограма скоростей курс следования ‘(угол между северным направлением меридиана и вектором воздушной скорости с вершиной в точке О) измеряется транспортиром, а величина путевой скорости—масштабной линейкой.
При построении треугольника скоростей векторы путевой и воздушней скоростей и скорости ветра всегда берутся в одном масштабе.
§ 116. Определение ветра в полете
Знание скорости и направления ветра необходимо для нахож дения курса следования и путевой скорости самолета. В полеге скорость и направление ветра определяются бортовым визиром в ветрочетом.
Точность определения ветра в полете составляет около 5 -г ь ки/час по скорости и 10-^15° по направлению.
Найденный ветер можно принимать в расчет только для вы соты полета, на которой он измерен.
Ветер может быть определен следующими способами:
1) по углу сноса и путевой скорости на курсе следования пр» чанной воздушной скорости;
2) по двум и трем углам сноса на двух и трех курсах при данной воздушной скорости;
в) по двум путевым скоростям на двух курсах при данной воздушной скорости.
Из перечисленных способов наиболее точные результаты дает способ определения ветра по двум и трем углам сноса соответственно на двух и трех курсах при данной воздушной скорости (третий угол сноса на третьем курсе берется для контроля отра>-вильности определения ветра по двум углам сноса).
Однако этот способ требует изменения курса следования, а следовательно, и дополнительного расхода времени на полет» что не всегда возможно; в этом отношении наиболее удобен первый способ.
1. Определение ветра по углу сноса и путево! скорости на курсе следования при данной воздушной скорости на ветрочете АНО. Дано МК, УС, W, Vucm- Требуется найти U. и
Рис. 161. Определение скорости и направления ветра в полете по углу сноса и путевой скорости на курсе следования на ветрочете АНО.
Для нахождения величины и направления ветра по ветрочету (описание ветрочета см. § 89) этим способом необходимо (рис. 161):
1) подвижную линейку скоростей установить по оси ветрочета;
2) центр азимутального круга установить на значение данной воздушной скорости V„rm;
3) азимутальным кругом против курсовой черты (оси ветрочета) установить -магнитный курс следования;
4) рабочий обрез линейки скоростей установить по шкале сносов на измеренный в полете на курсе следования угол сноса;
б) против величины путевой скорости пэ линейке скоростей на азимутальном круге нанести карандашом точку ветра и прочесть ист^мые скорость и направление ветра.
Направление ветра читается на азимутальном круге от центра круга в направлении к точке ветра, а величина скорости—от центра круга до нанесенной точки.
Пример. Дано; МК=326°; 1У=121 км/час; УС= —13°; Удсл1~10° км/час; гребуется найти U и 8.
Ответ: U = 50 км'час; 8 = 265°.
2. Определение ветра по двум углам сноса на двух курсах при данной воздушной скорости. Дано: 'MKi, УСи MKi, УС2, Vu.m. Требуется найти U и 8.
Углы сноса следует определять на курсах, отличающихся друг от друга не -менее, чем на 40 — 50°.
После измерения углов сноса необходимо (рис. 162):
1) установить центр азимутального крута иа -величину воздушной скорости V,rm);
2) азимутальным кругам установить первый магнитный куре (МК:);
Рис. Т62. Определение скорости и направления ветра по двум (трем) углам сноса на двух (трех) курсах и воздушной скорости.
в) установить линейку на угол сноса (УС(), измеренный на первом курсе, и простым карандашом вдоль рабочего ее обреза провести прямую;
4) азимутальный круг установить на второй магнитный курс (МК2);
5) установить линейку «а угол сноса (УС2), измеренный .«а втором курсе, и вдоль ее рабочего обреза провести карандашом вторую прямую.
Точка пересечения проведенных таким образом прямых будет искомой точкой ветра.
Если подобным образом установить азимутальный круг на третий магнитный курс, а линейку—на угол сноса (УС3), изме ценный на этом курсе, и провести третью линию, то от пересечения трех линий должен получаться треугольник. Если измерен® * углов сноса в полете было произведено достаточно точно, тре угольник должен получаться небольшим. Большой треугольник указывает, что измерение углей сноса произведено неточно. В последнем случае промер углов сноса следует повторить.
Точка ветра, определяемая по трем углам сноса на трех кур сах, берется средней в полученном треугольнике (рис. 162).
По ветрочету определяется аэронавигационный магнитный в -тер—при установлении азимутальным кругом магнитных курсов, аэронавигационный истинный — при установлении истинных курсов и аэронавигационный компасный — компасных курсоз.
3. Определение ветра по двум путевым скоростям на двух курсах и воздушной скорости. Дано: MKi, М'Кг. V Требуется найти U и о.
Измерение путевых скоростей следует производить на курсах, отличающихся друг от друга примерно на 60 : 90°.
Рис. 163. Определение ветра по двум путевым скоростям на двух курсах и воздушной ско-рости.
Порядок работы с ветрочетом состоит в следующем:
1) устанавливают центр азимутального круга на данную воздушную скорость; •
2) устанавливают первый магнитный курс (MKi);
3) линейку отводят в одно из крайних положений;
4) острие карандаша устанавливают на величину путевой скорости, измеренной на первом курсе (R^i), и передвижением линейки проводят на азимутальном круге дугу;
5) устанавливают второй магнитный курс (МКг);
6) проводят Дугу соответственно путевой скорости, измеренной на втором курсе (№г)-
Точка пересечения дуг будет искомой точкой ветра (рис. 163).
Пример. Дано: MKj=47°, U7|=350 км/час, МК_>= 359°, IV j = з20 км,час, i/orm — 350 км/час. Определить U и 6.
Ответ: С'= 36 км/час. 8 = 110°.
4. Определение ветра на малых высотах п« его направлению и углу сноса. Для определения ветра на малых высотах по ветрочету необходимо еще на земле установить на ветрочете воздушную скорость и нанести направ ление ветра; затем после взлета взять курс, перпендикулярный к направлению ветра, и измерить на нем угол сноса; далее установить азимутальным кругом магнитный курс следования, а линейку — на измеренный в полете угол сноса.
Точка ветра получается в месте пересечения линии направления ветра с рабочим обрезом линейки.
Этот способ применяется в основном при полетах на высотах до 100 ад.
5. Глазомерное определение ветра. О скорости л направлении ветра на небольших высотах можно судить по направлению дыма и .пыли (поземки—зимой), .путем наблюдения за поверхностью воды, а в летнее время — по поверхности хлебных посевов, леса и т. д.
На средних высотах о силе и направлении ветра можно судить по величине и направлению сноса самолета при данной воздушной скорости, наблюдением за перемещением по земле тени кучевых облаков; кроме того, направление ветра легко определить и выходом в плоскость ветра.
§(117. Определение ветрочетом курса следования, путевой скорости я угла-сноса по заданным путевому углу, воздушной скорости ( и известному ветру
Расчет курса следования, путевой скорости и угла сноса по заданному'МП У, Vurm, скироси U> и нано вленни (о; ветра вроизводится в следующем порядке (рис. 164, Л):
1) устанавливают центр азимутного круга на известную истинную воздушную скорость;
2) азимутальный круг устанавливают на заданный магнитный путевой угол и проводят карандашом диаметральную линию -сурсовую черту;
3) наносят вектор ветра;
4) подвижную линейку рабочим обрезом устанавливают у «овца вектора ветра; затем, удерживая ее у конца вектора ветра,
J з
путем поворачивания азимутального круга и передвижения линейки добиваются параллельности ее рабочего обреза с диаметральной проведенной линией, как показано на рис. 164; после этого, искомый курс читают на азимутальном круге против курсовой черты ветрочета, путевую скорость—по масштабной линейка у конца вектора ветра, а угол сноса—у рабочего обреза линейки по шкале углов сноса.
Примеры. 1. Дано: Vист — 145 км/час; И 1У=97°;6л = 182°; 17=36 км/час; магнитное склонение А М — + 6°; девиация компаса ДК = — 8°. Требуете» найти КК сл дования. W и УС.
Решение: ЗМПУ = ЗПУ — (+ А М) = 97° - (+ 6°) = 91° и далее на ветрочете в указанном «ыше порядке.
Ответ: КК = 85°; W = 127 км/час; УС = + 14°.
2. Пано: Vucm = 130 км/час; ЗПУ = 225°; ьаяр= 105°; U = 43 км/'.ас; АЛ4 = — 2°; Д/С= + 5°. Требуется найти ИК, КК, UZ и УС.
Ответ: ИК = 243°; КК = 210; W = 102 км час; УС = - 18°.
§ 118. Определение наивыгоднейшей высоты полета
Наивыгоднейшей высотой полета называется такая высота, на которой путевая скорость полета в данном направлении при известном ветре получается наибольшей. Наивыгоднейшая высота олета определяется с целью увеличить дальность полета при ограниченном запасе горючего, а также сокращения общей продол-
Рис. 164.
А—определение курса следования, путевой скорости и угла сноса по заданному путевому углу воздушной скорости на ветрочете АНО н скорости н направлению ветра; Б—определение наивыгоднейшей высоты полета по ветрочету
жительности полета в тех случаях, когда высота полета не ограничена заданием. Эта высота выбирается по наибольшей путевой скорости в направлении полета после решения по ветрочету задач определения курса следования, путевой скорости и угла сноса по известному ветру на разных высотах, заданному магнитному путевому углу и воздушной скорости (рис. 164, Б).
Решаются эти задачи в следующем порядке: сначала уста навливают на ветрочете истинную воздушную скорость; затем износят точки ветра на разных высотах (пользуясь прогнозом ветра по высотам или шаропилотными данными), которые обоз начают соответствующими высотами,: далее, после установки заданного 'МПУ, поступают так же, как и при расчете .курса следования, т е. устанавливая линейки скоростей на точки ветра для каждой высоты, определяют соответствующие путевые скорости.
ГЛАВА VI
РЕШЕНИЕ ТАКТИЧЕСКИХ ЗАДАЧ
§ 119. Определений запаса горючего на полет и дальности полета
Расчет запаса горючего, необходимого на полет, производят в следующем порядке: продолжительность полета умножают на часовой расход горючего моторами (или умножают путь на километровый расход горючегс); к полученному запасу горючего прибавляют аэронавигационный запас, установленный для дан ного самолета и периода года.
Дальность полета D определяется по времени Т, на которое хватает горючего, и путевой скорости полета по следующей формуле:
D = W T км.
Пример. Дано: IV = 230 км/час; Т = 6 час. Решение: D = 23) • 6 = 1380 км.
В тех случаях, когда нельзя определить путевую скорость из за отсутствия данных о ветре по маршруту, для определения 'D берется истинная воздушная скорость самолета, т. е. скорость полета при штиле.
Дальность полета может быть также определена по счетной аэронавигационной линейке НЛ-7 (или НЛ-8) в порядке, изложенном в § 122, т. е. нахождением D по известным времени полета и путевой скорости.
§ 120. Определение радиуса полета
Радиус действия определяется делением произведения путевых скоростей (туда и обратно) на их сумму и умножением результата на запас горючего Т, выраженного во времени, т. е.:
р Wm •
где: 1Гт— путевая скорость при слетовании к цели (туда); Wo — путевая скорость при следовании обратно.
Пример- Дано: Wm = 100 жм/час: Wo — 120 «м/час; запас горюч'та Г ==5 час.
п 100 • 120 с 12000 е о,0
Решение: « = —-----— • 5 — —„„г— ' 5 = 273 км.
к 100 4-120 220
Продолжительность полета туда tp (время до поворота обратно) определяется делением дальности полета D на путевую скорость туда Wт, т. е.:
t=D-' wm
Пример. Дано: D = 273 км; Wm — 100 км. Определить tp.
Решение: tp~ ~ = 2 часа мин-
§ 121. Определение фактического путевого угла в полете (ФПУ)
Полет совершается правильно, если фактический путевой угол следования равен заданному путевому углу, т. е. ФПУ = ЗПУ; если они не равны, то величина расхождений указывает, насколько самолет уклоняется от заданного направления.
Если фактический путевой угол больше заданного, то самолет уходит от заданной линии пути вправо, а если меньше, то влево.
В полете фактический путевой угол может быть определен: I) по измеренному углу сноса; 2) путем измерения транспортиром на карте по фактически пройденным пунктам; 3) по боковому уклонению и т. п.
В общем случае всегда:
ФПУ =• курсу самолета + (i угол сноса), т. е. ФПУ=КС 4~
+ (± ус).
Примеры. 1. Дано: Ма<нитный курс самолета МК = 1Ь5°; измеренный к полете угол сноса иа этом курсе оказался УС = -|-9о. Определить ФМПУ-
Р е ш е н и е: ФМ 1У = МК + (± У С) = 135° + ( + 9°) = 135 4- 9 = 144°.
2. Дано: МК = 285°; УС = — 12°. Определить ФМЛУ.
Решение: ФМ1У = 285 + (—12) = 273°.
3. Дано: ФМПУ = 100°; УС = 4- 7°. Определить МК.
Решение: МК = ФМГ1У - (+ УС) = 100° - (+ 7°) = 1С0 - 7 = 93°.
Определение ФПУ измерением с помощью транспортира на карте производится по отметкам ДМ — действительных точек местонахождения самолета, через которые проводится прямая; расстояние между отметками должно быть не менее 8—10 см, независимо ол' масштаба карты.
Определение ФПУ по боковому уклонению (БУ) производится введением поправки бокового уклонения в заданный путевой угол следования^ эта поправка определяется счетной аэронавигационной линейкой по расстояниям между пунктом отбытия, контрольным ориентиром и боковым уклонением от заданной линии
237
пути. Поправка (в градусах) на боковое уклонение определяется после прохода 'Контрольного ориентира.
В общем случае:
ФПУ=ЗПУ-|- (+ боковое уклонение), т. е. ФПУ—ЗПУ-f-Ь (± БУ).
Боковое уклонение принято считать положительным, если самолет проходит правее контрольного ориентира, расположенного на заданной линии пути, и отрицательным—'если левее его.
При расчетах ФПУ необходимо помнить, что он может быть истинным, магнитным и компасным в зависимости от того, от какого меридиана он отсчитывается (измеряется).
§ 122. Определение путевой скорости, расстояния и .времени полета
Путевую скорость в полете можно определять: 1) по пройден ному пути и времени полета (с помощью линеек НЛ-7 и НЛ-8), 2) по ветрочету (решением навигационного треугольника скоростей) и 3) бортевым визиром.
Наиболее простыми являются первые два способа, которые мы и .рассмотрим.
Для определения путевой скорости по пройденному пути и времени полета необходимо на карте по линии пути заметить хорошо опознаваемые с воздуха ориентиры, измерить между ними расстояние и заметить время их пролета. Затем на аэронавигационной линейке НЛ-7 по шкалам 9 («Пройденное расстояние в километрах — путевая скорость в км/час») и 10 («Время в ми нутах и секундах, время в часах и минутах») найти путевую ско рость в следующем порядке (рис. 165):
1) время пролета участка (по шкале 10) установить против танного пройденного расстояния за это время по шкале 9;
Рис. 165. Определение путевой скорости W по пройденному расстоянию и времени полета (на НЛ-7 н НЛ-8).
2) искомую путевую скорость прочесть на шкале 9 против треугольного индекса.
Примеры. 1. Расстояние в £ = 70 км пройдено за 1 = 35 мин. Какова путевая скорость Щ?
Ответ: IV = 120 км/час.
2- Пройтено за t ~ 1 час. 10 мин. расстояние L = 140 км. Какова ’путевая ск >рость IV?
Ответ: 1У=:128 км/ч: с.
Путевая скорость определяется по НЛ-8 по шкалам 6 » 7 точно так же, как и по НЛ-7.
Путевую скорость по данным L и t можно определить также ио формуле:
1F= км/час.
ЪЧПС
Определение пройденного расстояния по известной путевой скорости и времени полета или времени полета по известной путевой скорости и прейденному расстоянию производится аналогичным путем и по тем же шкалам, что и определение W.
Для того чтобы определить L по известным W и t, необходимо (рис. 166):
1) треугольный индекс установить против известной путевой скорости;
Рис. 166. Определение L по известным W > t (по НЛ-7 и НЛ-8).
2) искомое расстояние прочесть против данного времени.
Искомое время пролета t известного расстояния L с путевой скоростью W читается после установки треугольного индекса на известную W против известного расстояния (рис. 167).
п/г-7
Рис. 167. Определение t по известным W и Д (по НЛ-7 и НЛ-8).
Примеры 1. Дтно: IV = ПО км/час; время полета 1=30 мин. Определить пройденное расстояние L.
Ответ: L = 55 км.
2. Дано; IV=J17 км/час; время полета 1=41 мин. Определить пройденное расстояние L
Ответ: L — 80 Им.
3. Дано: Ц7= 120 км/час; требуется определить время пролета t участка пути длиной L = ПО км.
Ответ: t = 55 мин.
4- Дано: W— 145 км/час. Определить время пролета расстояния L = 230 км Ответ: 1 = 1 час 36 мин.
§ 123. Расчет времени нагона при опоздании в пути
Расчет времени нагона при опоздании в пути производится аэронавигационной линейкой НЛ-7 или НЛ-8 по тем же шкалам, что и Vucm- Порядок расчета ясен из следующего примера.
Пример. Идя с воздушной скоростью Vurm =110 км/час, самолет опаздывает на 6 мин. При этом имеется запас скорости 15 км/час, т. е. она может быть доведена до Уц-„ =135 км/час.
Решение: 1) Установить треугольный индекс против дайной истинной воздушной скорости Vurm. т. е. на 120 км/час.
2) Против времени опоздания прочесть дистанцию опоздания, в наше» примере она равна 12 км (рис. 168—--положение с).
3) Установить треугольный индекс на избыток воздушной скорости Кт. е «а 15 км/час.
4) Искомое время нагона прочесть против дистанции опоздания d> т. «-48 мин. (рис. 168, положение о)
а
Рнс. 168. Расчет времени нагона при опоздании в пути (на НЛ-7 и НЛ-8).
§ 124. Расчет времени прибытия в назначенный срок
Для расчета времени прибытия в назначенный срок необходимо знать ветер и оставшееся расстояние, а также время полета до места прибытия: по этим данным находя? путевую скорость и по полученным результатам подбирают нужную воздушную скорость.
Расчет производят по ветрочету и счетной аэронавигационной линейке (НЛ-7 или НЛ-8) в следующем порядке:
1) на азимутальном круге ветрочета прокладывают диаметральную линию соответственно путевому углу следования;
2) наносят точку ветра;
3) добиваются параллельности диаметральной линии с рабочим обрезом линейки при приложении последней к точке ветра;
4) сохраняя достигнутую параллельность, подводят точку ветра (передвижением азимутального круга) к значению путевой ciKQpoc™ (на линейке), которую необходимо вычислить ранее;
5) искомую истинную воздушную скорость читают по линейке скоростей после установления ее на курсовую черту, против центра азимутального круга.
Погашение опоздания рассчитывается по счетной линейке (по шкалам 9 и 10—линейки НЛ-7 и по шкалам 6 и 7—линейки НЛ-8) в следующем порядке: 249
1, Сначала треугольный индекс устанавливают на 'воздушную скорость полета и против времени опоздания в минутах читают дистанцию (расстояние) нагона (рис. 169, положение а).
Рис, 1в9. Расчет времени прибытия в на"» каченный срок.
2) Этот же треугольный индекс устанавливают ч? величина возможного увеличения воздушной скорости и против найденной дистанции нагона читают искомое время, необходимое для погашения опоздания (рис. 169, положение б).
§ 125. Погашение избытка времени на петле
Если самолет подходит к какому-нибудь пункту раньше желаемого времени, то избыток его можно погасить петлеобразным полетом. Пребывание на петле должно равняться избытку времени Чтобы пробыть на петле точно желаемый промежуток времени, момент поворота обратно рассчитывается по следующей формуле:
W
где: Тр — промежуток времени полета туда (до момента разворота на петлю);
р — продолжительность разворота;
— избыток времени;
Wm — путевая скорость туда;
Wo — путевая скорость обратно
Время .выполнения едкого виража для по1ашения времени определяется по формуле:
. о 3G0
где: R — радиус разворота.
— истинная скорость полета на (петле.
Пример. На последний контрольный пункт самолет прибыл ва 7 мил. раньше оасчетн< то времени.
Определить время разворота на петле для •погашения избытка времевч 7 мни., если 1^о=120 км/час, Wm=100 км/час 1 =1 мин.
W *20
Решение: Тр = (7п,б - р) Wm+°W~O = (7“П 120 -Г ТО?- = 30 мин’ 18 сеГ-
Расчет времени разворота на петле для пога шения избытка времени производится на счетной навигационной линейке НЛ-7 по шкалам 7 и 8 (НЛ-8—по шкалам 12 и 13) в следующем порядке (рис. 170):
1) на шкале 8 (НЛ-8 — шкала 12) отыскивается W,, к кото рой подводится сумма W„ -{-117 на шкале 7 (НЛ-8 —шкала /3);
2) движком устанавливается разность (t — о) на шкале 7 щд-8 — шкала 12), а на шкале 8 (НЛ-8 — шкала 13) читается искомое время до начала разворота Тр.
tml-P zjs
НЛ-7
НЛ-9
Рис. 170. Расчет времени до начала разворота обратно при погашении избытка временя на петле (на НЛ-7 и НЛ-8).
Для расчета времени разворота на 860° необходимо знать: I) заданный радиус разворота, 2) угол разворота и В) истлнную воздушную скорость.
Расчет производится по счетней линейке (НЛ-7 или НЛ-8 со ответственно по шкалам 9 и 10, 6 и 7) в следующем порядке квадратный индекс (рис. 171, положение а) устанавливают против деления 63 км, затем претив величины радиуса разворота на этой же шкале читают пройденный путь при развороте на 360°
а
вОнм
Путь при развороте I на 360° б------' ----
Путь пои развороте на 360°
нм
Оодиус разворот»
Истинная воздушная | ашраапя
время разворота на 360'
Рис. 171. Расчет времени разворота на 360° (по НЛ-7 и НЛ-8).
Для определения 560° круглый индекс истинную воздушную ти за время разворота на 360° на шкале «Время» читают лек -ыое время разворота на 360°. мя
пути за время разворот^ и (рис. 171, положение б) устанавливают нл скорость, после чего против найденног» ву-
§ 126. Перевод скоростей, выраженных в метрах в секунду, в скорости, выраженные в километрах в час, и обратно
Эти расчеты производятся при помощи счетной линейки (НЛ-7 или НЛ-8 по шкалам соответственно 9 и 10, 6 и 7) следующим образом.
Чтобы скорость, выраженную в метрах в секунду (м/сек), перевести в скорость, выраженную в километрах в час (км/час), необходимо прямоугольный индекс шкалы 10 (7) поставить против скорости «м/сек» на шкале 9 (6) и искомую величину в км/час прочесть на этой же шкале против круглого индекса (рис. 172).
Рис. 172. Перевод скорости, выраженной в м/сек, в км/час и наоборот (по НЛ-7 НЛ-8).
Чтобы скорость, выраженную в км/час, перевести в м/сек делают то же в обратном порядке, т. е. сначала круглый индекс устанавливают против скорости в км/час, и искомую скорость в м/сек читают против прямоугольного индекса.
§ 127. Определение времени догона впереди идущего самолета
Время догона впереди идущего самолета определяют делением известной начальной дистанции на возможный избыток своей скорости.
ГЛАВА VII
СПОСОБЫ САМОЛЕТОВОЖДЕНИЯ
§ 128. Основные способы самолетовождения!, применяемые в ГВФ
В зависимости от выполняемой задачи и аэронавигационной обстановки полета по линии пути и в районе цели самолетовождение осуществляется различными способами.
Аэронавигационная обстановка полета определяется:
1) характером местности, над которой предполагается или производится полет: над 'Водным (пространством, сушей—равниной, горной местностью, лесом, над местностью, богатой или бедной ориентирами, и т. д.;
2) временем суток года—днем, ночью, весной, летом, осенью зимой;
6) высотой полета—на малой, средней или большой высоте;
4) видимостью или невидимостью земли (визуальный или" полет по приборам);
5) дальностью полета;
6) метеорологической обстановкой: полет в нормальных метеорологических условиях, в усложненной или сложной метеорологической обстановке (полет в облаках, над облаками, при низкой или другого характера облачности, при грозовых явлениях, в тумане, при явлениях обледенения, вихревых или шквалистых явлениях, плохой видимости и т. п.);
7) при полете ночью при лунном освещении — видимостью или невидимостью небесных светил;
8) наличием и характером средств земного обеспечения самолетовождения в направлении полета: приводных радиостанций, радиомаяков, радиопеленгаторов, широковещательных радиостанций, световых маяков и других сигнальных средств или отсутствием их;
9) навигационно-пилотажным оборудованием самолета: наличием оборудования для полетов в светлое и темное время суток с визуальной ориентировкой или осуществлением полета по приборам «слепого полета»; наличием на самолете радионавига-ционынх средств и приборов для ведения астрономической ориентировки и т. п.;
10) исправностью навигационно-пилотажного и специального оборудования;
11) задачей полета; рейс, санитарное задание, аэрофотосъемка, разведка, лесотаксация, сельскохозяйственные и другие работы;
1'2 ) характером действия — в одиночку, звеном, отрядом, группой, соединением.
В зависимости от перечисленных условий в практике применяются следующие способы самолетовождения:
1) визуальное самолетовождение — по земным1 ориентирам:
2) по компасу со счислением пути — компасное самолетоввж дейие; 1
3) радионавигация — ориентировка с помощью радиосредств;
4) астронавигация — по небесным светилам (звездам, планетам, луне, солнцу);
5) визуальная пеленгация.
Основным способом1 является компасное самолетовождение. Остальные виды — визуальное самолетовождение, радионавигация, астронавигация и визуальная пеленгация— являются дополнительными способами к основному и используются для его контроля в зависимости от аэронавигационной обстановки полета.
Визуальное самолетовождение применяется при наличии й видимости земных ориентиров, радионавигация — при плохой видимости или невидимости 'земных ориентиров, а также над местностью, трудной для ведения визуальной ориентировки, при полете над водной поверхностью, над местностью, бедной ориентирами (тайгой, степью, пустыней), в плохую погоду, ночью. Радионавигация применима только при наличии наземных действующих радиосредств обеспечения самолетовождения в направлении или в районе полета и специального радиооборудования самолета.
Астронавигация применяется при дальних полетах в дневное и ночное время только при видимости небесных светил.
Визуальная пеленгация находит применение при наличии и видимости удаленных от самолета земных ориентиров! и невидимости ориентиров под самолетом: при полете над водной поверхностью вблйзи берега, ночью и т. п.
Способы самолетовождения, при которых используются специальные инструменты для ведения ориентировки, называются инструментальными способами; компасное самолетовождение, радионавигация, астронавигация и визуальная пеленгация.
Целью применения «всех инструментальных способов самолетовождения является определение расчетного места (РМ) самолета, дающего <5б1йую ориентировку (не точку, а некоторый район местонахождения самолета) для последующего определения с помощью виз\альной ориентировки или точным пролетом над радионавигационным средством (радиоориентировочной точкой) действительного местонахождения самолета (ДМ).
Кроме того, ДМ самолета в слепом полете может быть опреде-л но с достаточной для практических целей точностью и специаль. н 1ми радиолокационными устройствами (см. гл. «Радионавигация»), и е н и е определять расчетное место самолета (сохранять общую его ориентировке) «всеми
ияструмешальяыми способами самолетовождения в любых условиях полета, быстрое и точное восстановление действительного места детальной визуальной ориентировкой являются основной задачей каждого пилота, каждого штурмана.
§ 129. Визуальное самолетовождение (визуальная ориентировка)
Визуальная ориентировка разделяется на общую и детальную
Общей визуальной ориентировкой называется уверенное знание экипажем некоторого района местонахождения самолета на основе сличения с картой пролетаемой местности и нахождение на карте крупных опознанных ориентиров в пределах видимого горизонта.
Непрерывное ведение и знание общей ориентировки во все время полета является основной обязанностью экипажа. Эта ориентировка может вестись и сохраняться с помощью карт мелкого и среднего масштабов.
Д'е т а л ьн о й ориентировкой называется совершенно точное знание экипажем своего местонахождения на основе опознавания на местности и сличения с картой мелких ориентиров и дрхгих подробностей местности под самолетом.
В полете экипаж может перио дпчески и не знать детальной ориентир <зки, но обязан быть тверди уверенным в знании общей ориеп тировки. Детальная ориентировка периодически или по мере необходимости восстанавливается на основе общей ориентировки или по расчетному месту самолета (РМ).
Основным правилом ведения визуальной ориентировки является ориентировка карты по компасу и сличение ее с пролетаемой местностью, а при перерывах в ведении ее — согласование района возможного местона.хожтения самолета по карте с расчетным местом.
Ориентировка арты по компасу
Рис. 173. Ориентировка карты означает г споте,жепие ее относило к мпасу. тельно напвавления север- юг та-
ким образом. чтобы меридианы карты были расположены параллельно продольной оси картушки компаса, т. е. основному затухателю, указывающему направление север—юг, и так, чтобы северное направление меридианов карты гнало обращено к северу, а южное -к югу (рис. 173).
Визуальное < амп щтовождение (по земным ориентирам) яв-.р-етея нанботое простым из всех способов! самолетовождения но Z16
допустимо только при полете .над местностью, имеющей хорошо опознаваемые ориентиры, и видимости земли; во всех остальных случаях—при 'полете на малых и больших высотах, ночью, при плохой видимости и т. п-, оно> должно применяться как вспомогательное и контрольное средство в дополнение к компасному самолетовождению.
. § 130. Самолетовождение по компасу
Самолетовождение по компасу лежит в основе всех маршрутных полетов в самых разнообразных условиях пилотирования и ориентировки. Оно заключается в совершении полета по компасу с контролем пути по времени полета и другими способами: визуальной ориентировкой, радио- и астроориентировкой, т. е. ведение самолета по компасу по заданному пути от пункта отхода (исходного пункта маршрута—ИПМ) до пункта прихода (конечного пункта маршрута — КПМ). Определение местонахождения самолета производится счислением пути, т. е. расчетом пройденного расстояния в направлении полета (фактического или 'вероятного пути самолета) за истекшее время полета по известной путевой скорости.
Правильность расчетных элементов полета в пути следования уточняется другими способами—визуальной ориентировкой, визуальной пеленгацией, радионавигацией или астроориентировкой; при обнаружении несоответствия расчетных данных с фактическими первые исправляются.
Точность самолетовождения по компасу зависит от:.
1) умения пилота сохранять заданные компасный курс следования, скорость и высоту полета;
2) умения пилота (штурмана) точно измерять угол сноса, путевую скорость, определять средний курс и производите необходимые аэронавигационные расчеты по штурманским инструментам;
3) исправности пилотажно-навигационных приборов, правильности их показаний, точности графиков поправок (девиации компасов, инструментальных поправок указателя воздушной скорости и высотомера и др);
4) постоянства ветра на высоте полета как по скорости, так и по направлению или своевременного обнаружения его изменения и внесения поправки в курс следования и скорость полета.
При ш е н н о курса и хождение по кривым без всякого курса, этом случае должен быть осуществлен немедленный переход на визуальную ориентировку, и только после ее достоверного сомСТН1<=>-'ЗЛбеНИЯ Мэ>кно пэекратить движение определенным кур-опиёнтиСС Юденне этого правила неизбежно влечет потерю „Р R D -ОВлИ и невозможность ее восстановления прокладкой пройденного пути.
самолетовождении по компасу север-недопустимо произвольное изменение
Наиболее удобными картами для компасного самолетовождения являются карты масштабов 1 : 1 000000 (10 км в 1 см) « 1 :500 000 (5 км в 1 см).
§ 131. Самолетовождение по радиосредствам (радионавигация)
Радионавигацией (см. главу XII) называется способ ориентировки с помощью радиосредств, установленных как на са молете, так и на земле. Радиосредствами, которые применяются <в) самолетовождении, являются: радиополукомпасы и радиокомпасы, связные радиостанции, широковещательные и приводные радиостанции, радиомаяки, радиопеленгаторы, локаторные установки я другие специальные радиосредства.
Этот способ самолетовождения является вспомогательным к основному компасному способу и требует сложного и дорогостоящего специального оборудования на самолете н на земле. Однако он дает возможность экипажу самолета при полете по приборам или при полете с ограниченной видимостью с практически достаточной точностью вести общую ориентировку и определять расчетное место самолета (РМ), а также определять ДМ точным пролетом над радиосриентирным средством или по специальным локаторным устройствам.
§ 132. Ориентировка по небесным светилам (астронавигация)
С помощью астронавигации при видимости небесных светил, экипаж самолета имеет возможность вести общую ориентировку прокладкой 'Позиционных Сомнерсвых линий, т. е. линий местоиа хождения самолета. В этом случае измеряется авиасекстантом уч левая высота видимых небесных светил над горизонтом с одно временным отсчетом времени. Расчетное место самолета атреде ляется местом пересечения двух или нескольких позиционных ли ний (см- § 204).
। § 133. Безопасность самолетовождения
Безопасность самолетовождения означает:
I) исключение причин, могущих вызвать вынужденную по садку вследствие потери экипажем ориентировки;
2) исключение возможности попадания самолета в угрожающие атмосферные явления (грозу, ливень, град, шквал, сильное рему, область сильного обледенения и т. п.) и запретные зоны;
3) исключение возможности столкновения самолета с наземными препятствиями и с другими самолетами в полете.
Современные способы и средства самолетовождения и земного обеспечения самочетовождения (ЗОС) в полной мере гарантируют полную безопасность полетов при условии точного выполнения всех действующих правил и положений.
Безопасность самолетовождения обеспечивается, во-первых, ори подготовке к полету и, во-вторых, в самом полете.
При выпуске самолета в рейс необходимо помнить, что ни один экипаж самолета не может быть выпущен в полет без тщательной всесторонней предварительной подготовки и без контроля его навигационной готовности к каждому полету. Контроль штурманской подготовки экипажей к полету должен производиться командирами в штурманами подразделений, которые от вечают за успешность полета.
Контроль навигационной готовности экипажа к полету состо нт в проверке:
1) правильности составленного аэронавигационного и раднэ-вавигациэнного плана полета и его усвоения экипажем;
2) правильности подготовки карт и знания маршрута полета в отношении ориентировки; знания рельефа местности по маршруту и безопасной высоты полета на каждом участке;
3) знания экипажем аэродромов и посадочных площадок, их характера и превышения над уровнем моря, особых зон пэ маршруту полета, входных и выходных ворот, а также установленных высот эшелонирования самолетов по высотам;
4) знания метеорологической обстановки по маршруту и в районе цели или посадки;
5) наличия и подготовленности к полету навигационного оборудования самолета и личного штурманского снаряжения экипажа; наличия у экипажа сборника со схемами пробивания облачности в аэропортах;
6) точности хода и показаний бортовых и личных часов;
7) знания экипажем времени восхода и захода солнца и луны, а также наступления темноты и рассвета для основных пунктов в направлении полета;
8) достаточности взятого запаса горючего и смазочного с учетом аэронавигационного запаса.
В полете экипаж обязан:
1) выполнять полет в строгом соответствии с намеченным планом: выдерживать расчетные высоту (заданный эшелон), воздушную скорость, курс и т. д.;
2) непрерывно вести общую и детальную ориентировку;
•3) отмечать время прохода опознанных характерных или заранее намеченных ориентиров;
4) при вынужденном изменении курса следования (из-за встречи с неблагоприятными метеорологическими явлениями или с противником) немедленно отмечать время и место изменения курса и записать в аэронавигационный бортжурнал новый курс и .выдерживать -его в дальнейшем;
5) для уверенности в правильности ведения ориентировки периодически сверять ее сохранение у тех членов экипажа, которые ее ведут;
6) при полете в сложных метеорологических условиях вести самолет строго на заданной высоте эшелонирования, а на малой высоте выбирать направление полета таким образом, чтобы в
районе цели полета знать тье>рдо 'свое положение относительно этой цели при выходе на линейные или крупные, хорошо опозна ваемые ориентиры.
Для того чтобы избежать столкновения в воздухе с другими самолетами, экипаж обязан знать следующее:
1) при полете вдоль крупного линейного ориентира на основных направлениях и гражданских воздушных линиях следует вести самолет правее этого ориентира;
2) при встречных курсах на маршруте и на одной .высоте самолеты расходятся левыми бортами (с отворотом вправо);
6) при встрече на пересекающихся курсах и одинаковой высоте снижается тот самолет, экипаж которого видит другой самолет с левого борта; самолет набирает высоту, если экипаж видит другой самолет с правого борта;
4) безопасность от столкновения в групповом полете, в тумане, в облаках и ночью обеспечивается точным сохранением каждым экипажем заданных курса, скорости и высоты полета;
5) в случае встречи с угрожающими для безопасности полета атмосферными явлениями при горизонтальной видимости и высоте нижней границы облаков менее установленного минимума для аэропорта посадки или по маршруту полета экипаж самолета обязан прервать полет и вернуться в аэропорт вылета или произвести посадку на ближайший от местонахождения самолета аэродром; только дождавшись благоприятных метеорологических условий, экипаж может с разрешения начальника соответствующего подразделения продолжать прерванный полет, если не будет дано какое-либо его изменение, вызванное задержкой выполнения задания или другими обстоятельствами;
6) при полете по приборам (в слепом полете) пробивать облачность на маршруте запрещается; пробивать облачность разрешается только в районе аэропорта посадки ло установленной для него схеме и порядку.
ГЛАВА VIII
АЭРОНАВИГАЦИОННАЯ ПОДГОТОВКА К ПОЛЕТУ
§ 134. Сущность аэронавигационной подготовки к полету
Аэронавигационная подготовка к полету производится для того, чтобы обеспечить безопасность и точное выполнение летного задания, а также облегчить работу экипажа в воздухе при выполнении полета- Она подразделяется на предварительную и предполетную.
Предварительная подготовка производится в базовых, конечных и стыковых аэропортах и включает в себя все работы, которые можно выполнить, чтобы максимально сократить время предполетной подготовки. Она выполняется всеми лицами, которые ответственны за обеспечение и выполнение полета.
Предварительная подготовка складывается из:
1) подготовки навигационного оборудования самолета;
2) подготовки к работе наземных радионавигационных средств, обеспечивающих полет;
3) сбора сведений о .погоде по маршруту;
4) подготовки штурманского снаряжения экипажа;
5) навигационной подготовки экипажа; выбора и подбора листов карты, их склейки, подбора необходимых на полет справочных материалов и т. п.;
6) выбора маршрута полета, прокладке и разметке линии пути; определении МПУ и расчета путевого времени между ориентирами для штилевых условий полета, расчета предвычисле<йн'ых радиопеленгов Я т. л.;
7) сборе необходимых сведений на полет и изучении района вдоль маршруту полета; изучения выбранных ориентиров и рельефа местности по маршруту.
Предполетная подготовка производится во всех «аэропортах перед вылетом и производится самим экипажем.
Она состоит из:
1) изучения метеорологической обстановки по маршруту;
2) получения от рукозодителя полетами (диспетчера) высоты ^шелона для полета по маршруту и высоты полета в районе аэропорта, указания о полете в районе аэропорта и порядке набора высоты до заданного эшелона на маршруте;
3) составления плана полета, расчета элементов полета с уч-е-
том прогноза ветра по 'высотам для лслета на 'высоте заданного эшелона (компасных курсов по этапам маршрута, путевой скорости, времени, режиме работы мотора !И т. п.) и заполнения аэронавигационного и радионавигационного бортжурналов;
4) осмотра состояния навигационного оборудования самолета я его подготовки к полету;
5) подготовки к полету личного штурманского снаряжения « размещения его на самолете;
6) изучения правил полета в каждом аэропорту по маршруту и схем пробивания облачности в них;
7) контроля готовности экипажа к полету штурманом аэропорта.
От качества подготовки экипажа к каждому полету зависит успешность выполнения задания и безопасность полета.
Предполетную подготовку производит пилот, а при наличии в экипаже штурмана — вместе с последним.
§ 135. Подбор карт на полет
Масштаб карты подбирается в зависимости от характера задания, дальности и маршрута полета.
При полете без посадки на расстояние до 600 км и метеорологической обстановке, позволяющей вести визуальную ориентировку (по земным ориентирам), применяется карта масштаба 1 :500 000 (5 км в 1 см) или 1 : 1 000 000 (10 км в 1 см), а для нахождения цели полета на район цели берется карта более крупного масштаба — 1 : 200 000 (2 км в 1 см) или так называемая «километровка» (1 : 100 000).
Для полетов на расстояние свыше 600 км и для случаев, когда ориентировка по земным объектам затруднена, следует пользоваться картами более мелкого масштаба, т. е. 1:1 000 000 (10 км в 1 см) или 1 : 1 500 000 (15 км в 1 см).
Для ведения общей и радиоориентировки при возможном значительном отклонении от маршрута полета и восстановления ориентировки в случае ее потери необходимо всегда брать на борт карту масштаба 1:2500 000 (25 км в 1 см) или специальные бортовые карты масштаба 1 : 2000 000 (20 км в 1 см).
При полете по гражданским воздушным линиям берутся маршрутно-полетные карты, а над морем и вдоль псбережья генеральные морские карты в соответствующем масштабе.
Листы выбранных карт подбираются по сборным таблицам в направлении полета таким образом, чтобы маршрут переходил из одного листа на другой. После подбора листы склеиваются гуммиарабиком или специальным фотоклеем.
Перед склеиванием листов одну из сторон их необходимо обрезать по краю рамки, покрыть клеем и наложить на одноименную сторону другого листа, чтобы меридианы, параллели и линейные ориентиры (реки, дороги) одного листа точно совпали с 'меридианами, параллелями и линейными ориентирами другого. 252
I § 136. Выбор и прокладка маршрута полета
При выборе маршрута полета в заданном направлении необходимо учитывать: 1) обеспечение безопасности полета; 2) возможность ведения надежной ориентировки; 3) возможность прокладки линии пути с наименьшим количеством изломов, если это не связано с тактическими или другими соображениями; 4) наибольшую скрытность полета, если он совершается над территорией противника или линией фронта; 5) наивыгоднейший и наиболее точный выход к цели; 6) рельеф местности и состояние погоды; 17) совершение экономичного полета с наивыгоднейшими режимами.
В выбранном направлении производится прокладка маршрута, которая состоит в следующем: 1) проведении линии пути; 2) разметке расстояний, измерения путевых углов и расчете времени .пролета участков маршрута; 3) выборе и отметке контрольных ориентиров и составлении профиля рельефа местности по маршруту.
Линия пути проводится цветным карандашом (отличным от цвета карты) сплошной чертой от исходного пункта маошрута (ИПМ) до конечного пункта маршрута (КПМ). Между контрольными ориентирами линия пути проводится прямой линией (локсодромия или ортодромия). Изломы линии пути необходимо производить у наиболее характерных ориентиров.
ИПМ и КПМ выбираются на некотором расстоянии от аэродромов взлета и посадки (10—20 км) в целях скрытия их местонахождения от противника. Как правило, ИПМ и КПМ должны быть хорошо опознаваемым.и, характерными и легко находимыми ориентирами (озера, населенные пункты, железнодорожные узловые станции, пристани, скрещивания шоссейных и других дорог, леса и т. п), от которых можно безошибочно выходить к аэродрому посадки.
От аэродромов др ИПМ и КПМ линия пути не прокладывается; ИПМ может быть и КПМ. и наоборот,—в случае полета без посадки с возвращением на базу по одному пути.
После прокладки линии пути через каждые 50 км размечают на ней расстояния, начиная ст КПМ до ИПМ и от ИПМ до !КПМ. Расстояния через каждые 50 км отмечаются короткими штрихами (справа от линии пути в направлении полета), которые через каждые 100 км оцифровываются числами, обращенными своими основаниями в обратную стерону направления полета, т. е. 1, 2, 3 и т. д„ что соответствует 100 км, 200 км, 300 км и т. ц.
Расстояние и время пролета (путевое время) между контрольными ориентирами в направлении полета, рассчитанные по воздушной скорости при условии отсутствия ветра (т. е. штиля), наносятся справа от линии пути, между контрольными ориентирами, и у изломов маршрута в’ виде дроби: в числителе пишется расстояние (в километрах) между данными ориентирами, а в знаменателе — штилевое время (в часах и минутах). Магнитные путевые углы данных участков записываются справа от линии
пути (В месте, свободном от ориентиров, а также в местах записи расстояния и штилевого времени в виде множителя, т. е.:
расстояние -мл
------------------- МПУ, например:
штил. время 1ч. м )
125 км
'Магнитный путевой угол, кроме записей после изломов маршрута, следует указывать еше через каждые 15—20 см (независимо ют масштаба карты) и на прямолинейных участках пути, а также при изменении магнитного склонения больше, чем на 1°.
Рельеф -местности отмечается цифрами, обведенными прямоугольником. Цифры означают превышение рельефа над уровнем моря в метрах. Для облегчения расчета истинной высоты полета у цели (или аэродромов посадки) следует отмечать превышение или понижение местности относительно аэродрома взлета.
При полете к цели, если она не является характерным ориентиром, -маршрут полета следует прокладывать на ближайший к цели ориентир, чтобы после выхода на него можно было легко находить и самую цель при помощи детальной ориентировки.
После прокладки и разметки маршрута полета карту, не ил люминирэванную типографским способом, следует иллюминировать, т. е. раскрасить ее цветными карандашами; итлюминиров-ка производится вдоль линии пути по 50—100 км по обе его стороны.
Рис. 174. Прокладка линии пути иа карте.
ЯМ
Государственные границы и линия фронта «поднимаются» (закрашиваются) двойным красно-синим цветом; железные дороги и населенные пункты — черным; шоссе — красным (оранжевым); реки — синим (голубым); озера и моря — голубым; леса—зеле* ным; рельеф — коричневым; высоты отмечаются цифрами черного цвета с точкой впереди (в метрах от уровня моря). Магнитное склонение, если оно не дано на карте, отмечается цифрой оо знаком красного цвета, обведенным кружком.
Для того чтобы избежать на карте искажений контуров ориентиров, последние необходимо иллюминировать очень внимательно.
Прокладка маршрута и разметка линии пути показаны на рис. 174.
Подготовленную карту свертывают в полосу по размерам планшета так, чтобы линия пути проходила примерно посредине (рис. 175); затем карта заправляется в планшет или складывается «гармошкой» для удобного пользования в полете.
Рис. 175. Сворачивание карты для удобного пользования в полете.
Карты крупных масштабов подготавливаются таким же образом с той лишь разницей, что линия пути до .пели прокладывается только от последнего контрольного ориентира.
* § 137. Изучение маршрута полета
Маршрут полета изучается одновременно с прокладкой его на карте или после прокладки. Он должен быть изучен так, чтобы для сохранения общей ориентировки в полете не прибегать ч пользованию картой.
При изучении маршрута экипаж самолета (пилот, штурман) обязан:
1) наметить по линии пути или в районе полета систему хорошо опознаваемых характерных ориентиров, исключающих возможность потери ориентировки;
2) наметить линейные или площадные ориентиры для восстановления ориентировки на случай ее потери;
3) выяснить местонахождение аэродромов, посадочных площадок и районов особых зон;
4) изучить рельеф по маршруту полета и определить наименьшую безопасную высоту полета яа случай встречи с низкой облачностью или невозможности следовать на заданном эшелане (ив-за сильного обледенения и других причин);
5) особо тщательно и со всеми лэдробчосгями изучить ею картам крупного масштаба местность района расположения аэропорта посадки, .подхода к аэродрому или к цели и цель,
6) изучить метеорологическую обстановку по маршруту полета и в районе аэропорта посадки; на авиам'етео1рологичес.кой станции получить прогноз погоды по маршруту «а все время полета ,на район аэропорта посадки ко времени прибытия к нему самолета и выслушать устную консультацию синоптика-
7) выяснить места, благоприятные и явно непригодные на случай необходимости произвести вынужденную посадку.
Изучение маршрута производится экипажем под руководством штурмана подразделения по картам различных масштабов, аэролоциям, аэрографическим опиЪаниям и другим материалам. Для лучшего ознакомления с маршрутом полета следует опрашивать лиц, ранее летавших в данном направлении или знающих местность пл маршруту и в районе аэропорта посадки.
При изучении маршрута особое внимание следует обращать на характер расположения и вид ориентиров.
Ориентирами называются все земные объекты, по которым в полете можно определять местоположение само пета. Различают следующие виды ориентиров: линейные, площадные и точечные.
Линейными ориентирами являются дороги, каналы, реки, горные цепи, берега больших озер и морей; плошадными — большие озера, леса, крупные города и группы точечных ориентиров; точечными ориентирами служат все селения, перекрестки дорог, железнодорожные станции, пристани, небольшие озера, рощи, отдельные сопки, вершины гоэ и т. п. Не все ориентиры равноценны для -ведения ориентировки. Качество ориентиров определяется возможностью быстрого их нахождения с воздуха на местности и опознавания. Это зависит от формы, размера и окраски ориентиров, от характера близлежащей к ним местности, от времени года и суток и степени видимости.
Существует деление ориентиров на главные (основные) и вспомогательные (детальные).
К главным ориентирам относятся: города, шоссейные дороги, большие с-зера и реки, крупные железнодорожные станции, высокие горы, леса в степных местностях, берега морей и больших озер и тому подобные объекты, видимые в ясную погоду на далекое расстояние и легко опознаваемые.
Детальными ориентирами являются железные и грунтовые дороги, селения, небольшие реки, речки и озера, железнодорожные станции, пристани, отдельные сопки, леса и рощи в степных местах и другие объекты, видимые с более близкой дистанции и несколько труднее опознаваемые.
Некоторые ориентиры изменяют свое качество в зависимости от времени года и расположения относительно направления полета; например, зимой озера и реки замерзают, покрываются снегом и уже не могут быть хорошими ориентирами Другие 256
ьриентиры, как, например, железные и шоссейные дороги, являются главными ориентирами в том случае, если они совпадают с направлением маршрута; если же они проходят поперек маршрута, то они могут служить только вспомогательными ориентирами.
(К ночному полету данная классификация не подходит. Ночь совершенно изменяет сравнительную ценность ориентиров. В ночном полете главными ориентирами являются крупные электрифицированные города, большие станции железных дорог, пристани, крупные электрифицированные селения. Вспомогательными ориентирами служат шоссе, озера и большие реки.
Дальность видимости ориентиров зависит от качества ориентира, характера освещения, условий погоды и высоты полета. Теоретически с высоты 2000 м дальность видимого горизонта достигает 160 км. Нормально с высоты 2000 м в ясную погоду не-котооые земные объекты действительно видны нэ далеком рас-
Условные обозначения'
“И Отличная Видимость
Хорошая Видимость
Удовлетворительная видимость
&£ Плохая видимость
ЦЦ Совсем не видно
Рнс. 176. Сравнительная таблица видимости с самолета при нормальных условиях полета.
^тоянии; например, большие города и озера видны за 50—60 км *е же объекты в пасмурную погоду видны на удалении только с 30 — 40 км. В случае неблагоприятных метеорологических ус-
ловий, при наличии дымки и тумана, видимость ориентиров понижается до нескольких километров и даже сотен метров. Считают, что радиус зоны, в которой распознаются вспомогательные ориентиры— дороги, селения, реки, — приблизительно равен 8-кратной высоте полета, при условии, если полет происходит при хорошей видимости и на средних высотах. Детальные ориентирй при .тех же условиях хорошо различаются в зоне, равной удвоенной высоте полета.
В облачную погоду, в утренние и вечерние часы в летнее время и днем в зимнее время видимость ослабляется вследствие дымки и тумана на горизонте.
Сравнительная видимость ориентиров с самолета при нормальных условиях полета дана в виде таблицы, которая показана на рис. 176; данные этой таблицы указывают, на какие ориентиры следует обращать внимание при изучении маршрута полета.
§ 138. Расчет полета
Перед полетом экипаж обязан определить:
1) длину участков маршрута между основными ориентирами (по карте);
2) общую длину маршрута;
3) МПУ, курс следования и путевую скорость полета,
4) путевое время (штилевое или ino известному ветру—прогнозу ветра по высотам) по участкам маршрута;
5) общую продолжительность полета;
6) время вылета и прохода ИПМ для прибытия к цели в указанный в задании срок.
Расчет времени полета производится по путевым скоростям, рассчитанным по известному ветру для заданной высоты эшелонирования по маршруту (по шаропилотным данным или прогнозу ветра по высотам); если данные о ветре отсутствуют, то по выбранной на полет воздушной скорости, считая, что скорость ветра равна нулю (т. е- при штиле).
Помимо этого, экипаж обязан найти МПУ и рассчитать компасные курсы следования и необходимый на полет запас горючего; при этом аэронавигационный запас не принимается в расчет дальности полета и используется только в случае увеличения времени полета из-за потери и восстановления ориентировки, вынужденного отклонения от заданного (намеченного) направления полета при встрече с угрожающими метеорологическими условиями или неверного прогноза ветра по высотам и т. п.
Аэронавигационный запас горючего берется сверх потребного на полет, согласно произведенному расчету, в соответствии с условиями полета и его дальностью; он должен составлять от но-требного количества: для одиночных — двух, и многоместных самолетов около 10%, для группы—двух- и многоместных самолетов — около 15%, для одноместных самолетов — около 20% (ли на время, которое устанавливается положением, инструкжн-Ж1
ей или приказом: на летний период времени — для тяжелых типов самолетов — на 1 час, а для легких —на 45 мин.; на зимний период—для тяжелых типов самолетов—на 1 ч. 30 м., а для легких — на 1 час полета).
В случае полета при отсутствии данных о ветре по маршруту к указанному запасу горючего необходимо прибавлять 5%, а для тихоходных самолетов — 10%. При полете в сложной метеорологической обстановке нац безлюдной местностью аэронавигационный запас можно, по усмотрению лица, ответственного за полет, увеличить.
Затем по графикам или таблицам восхода и захода солнца п луны, а также наступления темноты и рассвета экипаж должен найти время восхода и захода солнца и луны (для ночого полета) и наступления темноты и рассвета для района цели полета и пункта посадки.
Результаты расчетов и выбранные аэронавигационные элементы полета заносятся в аэронавигационный бортжурнал.
Высота полета обычно указывается в задании в соответствии с условиям,и полета, рельефом местности и метеорологической обстановкой по маршруту, а также установленными правилами эшелонирования полетов самолетов по высотам; если она не задана, то ее выбирает экипаж самолета. В последнем случае высота полета выбирается, исходя из безопасности полета и характера рельефа местности по маршруту, а также метеорологической обстановки и наивыгоднейшего режима полета- При визуальном полете высота может быть различной, но не менее 100 м (истинная) над равнинной местностью ,и не ниже 300 м вад горами!—nip i пролете наивысшей точки по маршруту полета и не менее 600 м в слепом полете. Для разведывательных полетов наиболее выгодной является высота ют 2000 дю 3000 м.
При полете над местностью, не пригодной для посадки, высоту следуем набирать такую, чтобы в случае вынужденной посадки иметь время для выбора посадочной площадки и планирования на нее.
Длр сокращения времени, экономии горючего и самолето-чоторных ресурсов при перелете из одного пункта в другой при известном ветре на разных высотах, если этому не препятствуют Другие обстоятельства, высоту полета следует выбирать такой, чтобы по маршруту полета была наибольшая путевая скорость, т. е. нанвыгоднейшую (Высоту с наибольшим попутным (попутно боковым) иди наименьшим встречным (встречно-боковым) ветром.
Воздушная скорость полета выбирается в зависимости от типа самолета и высоты полета, запаса горючего и заданного срока прибытия к цели или времени выполнения задания.
Продолжительность полета рассчитывается по тайне маршрута, выбранной воздушной скорости и режиму ветра на высоте полета по маршруту. Общая продолжительность полета по маршруту определяется сложением времен пролета отдельных его участков.
Длина маршрута замеряется по карте масштабной линейкой-Необходимый запас горючего на полет оп-педеляют, исходя из общей продолжительности полета с прибавлением аэронавигационного запаса, следующим образом: предполагаемое время полета умножается на часовой расход горючего моторами данного типа самолета с учетом его загрузки, к которому прибавляется аэронавигационный запас в количестве, как указано выше.
Пример. Предполагаемая продолжительность полета составляет 3 час» 30 мин; часовой расход горючего моторами самолета выражается 240 кг/ч»с. Требуется определить необходимый запас горючего на полет.
Решение. Потребное количество горючего на полет в течение 3 ««. 30 мин. будет: 3 часа 30 мин.Х240=840 кг.
Аэронавигационный запас <2О°/о потребного количества) -составляет:
840 кг.......100%
X кг........20%
х = *Л22_=168кг.
100
Следовательно, общий запас должен быть:
840 + 168 = 1008 кг.
Если же аэронавигационный запас установлен часовой, то к потребному количеству горючего на полет прибавляется часовой расход горючего, который установлен для данного типа самолета.
Допустимая дальность полета в километрах при данном запасе горючего рассчитывается на основании путевых скоростей туда и обратно и запаса горючего, выраженного во времени.
Пример Путевая скорость туда (к цели): Wm = 220 км/час; путевая скорость обратно: Wo — 260 км/час. Запас горючего на 5 час. Требуется определить дальность полета с возвратом на аэродром вылета, т. е. радиуя действия R.
Решение: RKM^^!L1^ ,т
W m Wo
R = 220^260.5 = 57 200 -_5 595 км
220 + 260 480
Аэронавигационный запас горючего в расчет дальности полета не принимается.
Время полета туда (поворота обратно) определяется делением радиуса действия на путевую скорость туда, т. е. (в нашем примере):
R 595 о ло Ж = 22б=2’аСа42 МИН'
Срок прибытия к назначенному месту рассчитывается на основании срока вылета плюс время, потребное на совершение налета.
2оО
Примеры. I. Самолету необходимо (прибыть в пункт назначения к 11 часам. Длина пути 240 км. Путевая скорость, вычисленная по известном »етру, составляет 120 км/час. Требуется определить «роки вылета.
Решение. Расстояние в 240 км самолет с путевой скоростью ib 120 км/час <пройдет За 2 часа, а с надбавкой 20% времени—за 2 часа 24 маш. Следовательно, вылетать необходимо не позже 8 час. 36 минут, т. к 1 ( час.—2 часа 24 мин.= 8 час. 36 мин.
2. Самолет вылетает ib 17 часов. Путевая скорость Ц7= 240 им/час. Длина пути L = 360 км. Требуется определить время прибытия к месту (назначения.
Решет не; Путь 7. =360 км самолет со скоростью, 240 им/час оройдет за 1 час 30 мин., а с надбавкой 20%—за 1'час 48 мин. Прибытие к месту шданачения будет: 17 час.+4 час 48 мин. =,18 час. 48 мим.
Иногда в задании указываются срок вылета и срок прибытия; в таких случаях приходится рассчитывать необходимую истинную, а затем приборную воздушные скорости полета.
Расчет истинной воздушной скорости производится по ветрочету ib порядке, как указано было выше.
Пример. Экипажу самолета приказано вылететь в 5 часов с целью прибыть к цели к 7 часам. Длина пути 480 км. Заданный путевой угол 115°. Ветер по данным шаропилотных наблюдений: направление—220° (откуда дует), скорость—30 км/час. Необходимо определить воздушную скорость, с которой должен следовать самолет для того, чтобы прибыть к месту назначения а сказанный срок.
Решен не: Самолет должен пролететь 480 км в 2 часа; следовательно, его путевая скорость должна быть не менее 240 км/час (480: 2=240). П» ветрочету находим, что истинная воздушная скорость (которую надо держать s полете, чтобы путевая скорость была равна 240 км/час) должна быт. 233 км/час.
*§ 139. Составление навигационного плана полета
После прокладки на карте и изучения маршрута полета экипаж самолета (пилот, штурман) самостоятельно или под руководством штурмана подразделения (аэропорта вылета) обязан •составить навигационный план полета.
Навигационный план разрабатывается на основании изучения маршрута и предстоящей метеорологической обстановки по маршруту полета ют ИПМ до посадки, а также заданной высоты эшелонирования.
Навигационный план составляется по установленному образцу и должен содержать:
) предварительные навигационные расчетные данные полетД и использования радионавигационных средств ЗОС;
) порядок и способы выхода на ИПМ;
) способ выхода на курс следования и набора высоты до заданного эшелона;
4) способ самолетовождения — ведение ориентировки по маршруту и контроль пути;
5) порядок работы на контрольных этапах;
6) способ выхода на цель;
7) способ самолетовождения при следовании от цели к КИМ; 8) способ восстановления ориентировки в случае ее потери;
9) установление запасных вариантов маршрута в случае вынужденного изменения основного.
Составленный навигационный план должен быть усвоен экипажем и расчетные данные занесены на бланк «аэро- и радионавигационный бортжурнал № ...» стандартного образна (си-рис. 283), а мри отсутствии его изложен на бумаге-
§ 140. Подготовка пилотажно-навнгационного оборудования и штурманского снаряжения к полету
Перед каждым полетом необходимо проверять наличие и исправность пилотажно-навигационного оборудования самолета и штурманского снаряжения экипажа.
Пилотажно-навигационное оборудование должно находиться в исправном состоянии и соответствовать данному типу самолета и условиям полета.
Осмотр пилотажно-навигационного оборудования производится:
1) техником .по авиаприборам — перед полетом и после каждого полета;
2) экипажем самолета —• перед каждым полетом;
6) специалистами — периодически и в установленные дни и сроки эксплоатации оборудования;
4) штурманом подразделения — не реже двух раз в месяц.
При осмотре проверяются наличие оборудования, правильность его расположения и крепления, внешняя 'исправность, наличие графиков поправок авиаприборов—высотомера, указателя скорости, магнитного компаса, радиополукомпаса, радиокомпаса и т. п. и их пригодность (сроки проверки).
Запрещается выпуск в воздух самолетов с неполным или неисправным пилотажнонавигационным оборудованием и штурманским снаряжением экипажа.
Штурманское снаряжение экипажа должно всегда находиться в исправном состоянии. Это снаряжение состоит из следующего: I) летно-полевой сумки с подготовленными для полета картами; 2) с аэро- и радионавигационным бортжурналами; 3) листа графленой бумаги для производства в полете заметок; 4) масштабной линейки; 5) транспортира; 6) счетной аэронавигационной линейки; 7) ветрочета; 8) карманного компаса; 9) штурманского справочника; 10) таблиц восхода и захода солнца и луны, наступления рассвета и темноты и другие данные; 11) набора цветных карандашей; 12) специально (тупо) заостренного простого карандаша и резинки; 13) личных часов с секундной стрелкой или хронометра; 14) сборника схем пробивания облачности в аэропортах по маршруту полета.
§ 141. Обеспечение полета средствами ЗОС
Обеспечение полета средствами ЗОС (земное обеспечение самолетовождения) заключается в следующем:
1) в обеспечении наличия радионавигационных и световых (при ночных полетах) средств ЗОС по маршруту полета;
2) в своевременном заказе их работы (согласно намеченному п1ану);
3) в получении подтверждения, что эти средства будут работать в назначенное время;
4) в доведении до экипажа данных и характера работы радионавигационных и световых средств ЗОС (местоположение, позывные, волны, характер и время работы).
Радионавигационные средства ЗОС заказываются через штурманов (начальников аэронавигационной службы — АНС) подразделений или заместителей начальников АНС то радионавигации, а также через диспетчеров аэропортов.
§ 142. Подготовка перед взлетом
Перед взлетом экипаж (пилот, штурман) обязан получить на зиаметеоролопической станвди (или измерить высотомером с барометрической шкалой и термометром наружного воздуха) и записать в бортжурнал атмосферное давление и температуру воздуха у земли; тостаюить на нулевое показание высотомер', разместить штурманское снаряжение; убедиться в снятии чехла с трубки Пито (приемника указателя воздушной скорости); проверить завод часов и правильность их показаний; произвести внешний осмотр «самолета и оборудования; еше раз проверить, все ли взято в полет; пустить в ход высотописец (барограф), если ои взят в полет; занять рабочее место и запросить установленными знаками или по командной радиостанции у диспетчера командной вышки разрешение на выруливание и взлет.
ГЛАВА IX
ВЫПОЛНЕНИЕ ПОЛЕТА
Выполнение полета должно строго соответствовать составленному навигационному плану полета. Отступление от намеченного плана приводит к усложнению полета, потере ориентировки и невыполнению задания в срок, не обеспечивает безопасности полета..
Основным способом самолетовождения по маршруту полета является полет по компасу с контролем пути посредством .расчета пройденного расстояния и вспомогательными способами: визуальным самолетовождением, радионавигацией и астронавигацией.
§ 143. Основной порядок самолетовождения по маршруту
В полете по компасу экипаж обязан:
I. Отметить в аэронавигационном бортжурнале время взлета, набрать заданную «высоту и подойти точно к исходному пункту маршрута (ИПМ), согласно намеченному плану полета.
2. Одновременно с подходом к ИПМ взять и выдерживать компасный курс следования, рассчитанный на земле с учетом маг. нитного склонения, девиации и угла сноса, или подобрать его ди подхода к ИПМ по линейным ориентирам или створу ориентироз.
3. Точно пройти над ИПМ со взятым компасным курсом и отметить время отхода от него.
4. Выдерживая взятый курс и сохраняя ориентировку по фактическому пролету контрольных ориентиров, ввести поправки в курс следования и добиться того, чтобы фактический путевой угол был равен заданному; окончательно проверенный и исправленный курс записать в аэронавигационный бланк и выдерживать его в дальнейшем.
5. На контрольном этапе определить фактическую путевую скорость и рассчитать время подхода к первому контрольному ориентиру.
6. Сохранять ориентировку и отмечать по карте (простым карандашом, крестиками) фактический путь самолета (отметкой действительного «места—ДМ) с указанием времени пролета контрольных ориентиров.
«7. По данному «месту и пролету контрольных ориентиров находить и вводить поправки в курс следования —• по боковому 264
; клонению, ио путевой скорости; по оставшемуся расстоянию рассчитывать время подхода к следующим ориентирам.
8. По путевой скорости на контрольном этапе рассчитать время подхода к цели.
9. Соблюдать принятый в .расчет режим полета (скорость, высоту, курс).
Все измеренные и рассчитанные аэронавигационные элементы полета по фактическим данным должны записываться в аэронам гаиионный бланк в разделе «Работа в воздухе».
В случае невозможности вести визуальную ориентировку (плохие метеорологические условия, полет над местностью, бед ной ориентирами, водной поверхностью) контроль пути следует вести определением расчетного места (РМ) самолета. Для этого необходимо:
1) определять РМ самолета счислением пройденного пути по времени полета и путевой скорости и откладыванием его в наира влении курса следования самолета;
2) определять РМ визуальной пеленгацией по видимым вдали и опознанным ориентирам;
3) определять РМ пеленгацией радиостанций или по радиомаякам, запросом пеленгов наземных радиопеленгаторов или астронавигацией.
При полете по компасу совершенно недопустимо произвола ное изменение курса или хождение по кривым без всякого курса
Прекратить движение с определенным курсом можно только после перехода на ориентировку по земным ориентирам, выхода на радионавигационное средство и достоверного определения сво его местонахождения доступными- способами.
§ 144. (Ориентировка
Ориентироваться — значит определять местонахождение самолета (ДМ или РМ) сличением карты с пролетаемой местностью—визуальной ориентировкой—находить ДМ и РМ радиорр1иел тировкой, расчетом пройденного .пути и астронавигацией.
Каждый пилот и штурман должен в совершенстве владеть практикой ориентировки, так как недостаточное умение ориентироваться в полете приводит к потере ориентировки и летным происшествиям.
Вести визуальную ориентировку при хорошей видимости удобнее всего на средних высотах, т. е. от 600 до 3000 м; с этой высоты хорошо различаются земные предметы: населенные пунк-
Реки> Дороги и все другие объекты, изображенные на карте.
Основное правило визуальной ориентировки — держать каргу при сличении ее с местностью, ориентированной по компасу, и соо разовываться с районом возможного местонахождения по карте, согласно расчетному месту.
В полете на карте рекомендуется отмечать: 1) действительное место самолета (ДМ) с указанием времени, 2) время прохода над контрольными ориентирами.
При подходе к району цели при видимости земли пилот (штурман) должен перейти на детальную ориентировку по карте крупного масштаба и вести расчет времени полета до цели от последнего пройденного контрольного ориентира.
При ведении ориентировки по карте, в первую очередь, необходимо следить за крупными ориентирами: большими населенными пунктами, реками, дорогами, лесом.
Смотреть вниз под самолет при полете на небольшой высоте не рекомендуется, так как ограниченное поле зрения и быстрое перемещение предметов земли затрудняет опознавание ориентиров. Для увеличения поля зрения нужно смотреть вперед и по сторонам самолета, что значительно облегчает ведение ориентировки.
При невозможности определить местонахождение самолета по ориентирам, находящимся вблизи самолета или под ним (особенно на местности, бедной ориентирами), необходимо ориентировку вести по боковым, хорошо опознаваемым ориентирам, находящимся на некотором удалении от самолета.
Для нахождения какого-либо ориентира на местности и карте необходимо:
1) ориентировать карту по компасу;
2) наметить на карте примерное местонахождение самолета в данный момент;
Рис. 177. Распознавание похожих ориентиров по вторичным их признакам.
3) от местонахождения самолета в направлении к ориентиру найти район расположения ориентира и потом искомый ориентир.
Следует помнить, что на местности очень часто встречаются ориентиры, очень похожие друг на друга. В этом случае распознавать ориентиры нужно по вторичным (детальным) их признакам, т. е. отдельным деталям; у населенных пунктов по расположению различных объектов — домов, улиц, церквей; у линейных ориентиров — по характерным изгибам, наличию оврагов, скатов, озер, рощ и т. п. Например, на рис. 177 Передельцы отличаются от Городища озером, церковью и конфигурацией дороги.
В слепом полете или полете над облачностью следует дести ориентировку расчетом пройденного расстояния (по времени и -кррости в направлении полета), определением РМ, 'радионавигацией (см. гл. XII) или астронавигацией (см. гл. XII):
§ 145. Нахождение курса следования в полете (вывод самолета на заданный путь)
При визуальном полете курс ’Следования для полета по заданному маршруту можно определить: 1) по линейному ориентиру, 2) по створу ориентиров, 3) подбором угла сноса, 4) расчетом по ветру, определенному в полете.
При полете 'вслепую курс следования определяется по радионавигационным средствам (см. главу «Радионавигация»).
Вывод самолета на путь следования может быть осуществлен гакже по курсу, рассчитанному по шаропилотным данным.
Эти способы применяются в зависимости от обстановки полета и наличия ориентиров по линии полета, а также от наличия или отсутствия на борту штурмана.
Нахождение курса следования по линейному ориентиру. Этот способ применим только в случае наличия по линии пути или параллельно ей линейного ориентира— шоссе, железной дороги, грейдерной дороги (большака), реки и т. п.
Рис. 178. Нахождевие курса следования по линейному ориентиру.
Курс следования находят в следующем порядке: после взлета и набора высоты самолет ведут в направлении линейного ориентира без отклонений вправо или 'влево, контролируя правильность взятого направления по рассчитанному курсу (рис. 178).
Если самолет уклоняется от направления линейного ориентира, его следует подворачивать в сторону, обратную сносу, до тех пор, пока он не пойдет точно в направлении ориентира.
После этого надо заметить и записать курс, который и будет искомым курсом следования.
Во избежание ошибки, идя найденным таким образом курсом, следует проверять его правильность по другим линейным ориентирам, лежащим на линии пути, или другими способами.
Этот способ нахождения курса следования дает хорошие результаты при полете на малых и средних высотах.
Нахождение курса следования по створу ориентиров. Створом ориентиров называется прямая линия, проходящая через какие-либо точечные ориентиры (рис. 179).
(Курс следования по створу определяется таким образом-.
1. На карте и местности по линии пути намечаются два точечных, хорошо заметных с воздуха ориентира (пересечение дорог, вышки, селения, небольшие озера); расстояние между ними должно быть не менее 3—<10 км, т. е. такое, чтобы они были хорошо видны с самолета.
При подходе к первому ориентиру выводят самолет на линию створа и, выдерживая взятое направление, подворачиванием самолета в обратную сторону уклонения от створа, добиваются следования по створу.
Рис. 179. Нахождение (курса ^следования но створу ориентиров.
Показание компаса при следовании самолета вдоль створ* и будет искомым курсом следования. Для более точного определения курса следования отсчет по компасу следует произвести несколько раз и взять средний из них.
Проверка правильности подобранного курса производится по створу других впереди лежащих ориентиров, по линейным ориентирам или другими способами. Нахождение курса следования по линейному ориентиру и створу ориентиров — простые и быстрые способы, которые дают хорошие результаты.
При пролете створа ориентиров или линейных ориентиров можно, кроме нахождения курса следования, определить путевую скорость и угол сноса засечкой времени пролета расстояния между ориентирами или имеющимися на карте объектами.
Путевая скорость может быть определена по счетной линейке или формуле: W а угол сноса по формуле: УС==|МПУ—-МК-
Пример. Дано еМЧУ = 100°; А К = +5°; найденный в полете курс следовании КК = П0° Требуется найти УС.
Решение. МК = КК-|-(+Д/<)= 110 У(4-5) = 115°. УС = МПУ—МК 100— 115 = -- 1 т. е. омолет сносит влево от линии пути.
Нахождение курса следования по сносу самолета. Этот способ применяется в случае отсутствия на ли-268
нии пути линейных или хорошо видимых с воздуха точечных ориентиров, но при наличии на борту самолета визира.
Сущность его заключается в следующем:
1. От исходного пункта маршрута берется курс, равный заданному магнитному путевому углу, т. е. (КК = ЗМПУ—(4-ДА)
2. Выдерживая этот курс по компасу, визиром измеряют угол сноса, который складывают с компасным курсом с обратным знаком. Полученный таким образом новый курс является курсом следования.
3. Найденный курс следования устанавливается по компасу и правильность его проверяется сравнением ФМПУ с ЗМПУ; если ФМПУ равен ЗМПУ, то курс следования взят правильно; если ФМПУ не равен ЗМПУ, то самолет необходимо подворачивать до тех пор, пока не будет достигнуто их равенство, т. е. фактический путь самолета не совпадет с заданным.
Пример. При измерении угла сноса на !МК=ЗМПУ=150° он оказался равным — 7°. Подобрать курс следования, т. е. чтобы Ф'МПУ был равеч ЗМПУ.
Решение. 1) ФМПУ=МК4-(4-<р) = 150° - 7°= 143°, т. е ЗМПУ больше ФМПУ ил 7°. В этом случае курс следует увеличить на 7°, т. е. взять МК = = 150° + 7° = 157°.
2) Угол сноса на МК=157° оказался равным — 6°; ФМПУ=157°—6° = 151°; ЗМПУ — ФМПУ = 150° —151° = — 1°, т. е. курс надо уменьшить на 1° и взять МК= 157° —1°= 156°.
3) На курсе МК = 158° угол сноса оказался равным + 3°. ФМПУ = 153°-Это означает, что курс следования подобран правил! но и равен 156°.
Нахождение курса следования по ветру, определенному в полете. Этим способом определяют скорость и направление ветра в полете маневром при подходе к ИПМ с последующим нахождением курса следования по ветрочету. Найденный курс следования берется от ИПМ, и правильность его проверяется в полете по маршруту (рис. 180).
Рис. 180. Нахождение курса следования по ветру, определенному в полете до подхода к ИПМ.
Выход на путь следования по курсу, рассчитанному по шаро-иилотным данным, будет достаточно точным лишь при наличии данных о ветре на высоте полета, полученных непосредственно леред вылетом.
В слепом полете нахождение курса следования производится с помощью радионавигационных средств.
§ 146. Сохранение режима полета
Для получения более точных результатов при измерении н вигационных элементов полета, а также для облегчения контри ля пути по маршруту пилот обязан сохранять заданный или выбранный режим полета — скорость, высоту, курс. Точность ве дения самолета по компасу должна быть в пределах 3—5°; отклонение от намеченной и взятой по прибору скорости допускается в пределах 3—5 км/час (отклонение в 2—3 км/час для сохранения режима воздушной скорости значения не имеет). а отклонение высоты от взятой по высотомеру — в пределах 20—30 и.
Сохранение режима полета требует от пилота внимательного ведения самолета по 1пилотаж1но-навига1ционным приборам (компасу, высотомеру, указателю воздушной скорости, указателю поворота, авиагоризонту, индикатору РПК или РК и др.),
§ 147. Ведение контроля пути
В каждый данный момент полета пилот (штурман) должен знать свое местонахождение и правильность полета по выбранному маршруту. С этой целью он обязан непрерывно вести контроль пути и при обнаружении отклонения от нето уметь вводить исправления.
Контроль пути осуществляется:
1) визуальной ориентировкой, т. е. сличением карты с местностью;
2) расчетом пройденного расстояния по времени и путевой скорости полета;
3) наблюдением за изменением утла сноса в палете;
4) наблюдением за изменением направления и скорости ветра’
5) радионавигацией;
6) астронавигацией.
Первый способ дает действительное местонахождение самоле-т, (ДМ), а все остальные—расчетное место (РМ.).
Контроль пути визуальной ориентировкой. Как указывалось выше, различают общую и детальную ориентировки по земным ориентирам.
Общая ориентировка применяется в основном при маршрутных полетах, а детальная—по маршруту и при прибытии в район цели и выполнении задания: аэрофотосъемки, бомбометания, разведки, корректирования стрельбы, производства посадки и др.
Для успешности ориентировки по карте и земным ориент ч-рач необходимо уметь:
1) «читать» карту и представлять себе объект, изображе ч ный на карте, в его виде на местности;
2) ориентировать карту по компасу;
3) различать похожие земные объекты по вторичным прида ч кам;
4) находить обнаруженный ориентир на карте и, наоборот, замеченный на карте ориентир находить на местности.
Местность, изображенная на карте в условных знаках, мало похожа на действительный вид земли с высоты полета. Это весьма затрудняет сличение карты с пролетаемой местностью. Поэтому нужны предварительное изучение вида местных предметов с воздуха, а также систематическая летная тренировка в ведении ориентировки.
Контроль пути по пройденному расстоянию (времени полета). Расчетное место самолета может быть определено расчетом пройденного самолетом расстояния по путевой скорости и времени полета. Это расстояние откладывается в нашравлении полета (ФИПУ) или курса следования от пункта, точно опознанного на местности, от которого замечены время и пчтевая скорость полета.
Пример. Пункт А (рис. 181) пройден в 10 час. 30 мин.; путевая скорость следования 240 км/час; курс следования: КК = 100°, Д К = 5°, Д М = 4°.
угол сноса УС = -|-7о. Требуется найти расчетное место самолета для времен i 11 час. 15 мин.
Решение. 1) Путевое время fnj,m = ll час. 15 мин,—10 час, 30 мин. 45 мин.
2) За это время с путевой скоростью W = 240 км/час пройдено расстояние (по счетной линейке НЛ-7): L — 240 • 0 час. 45 мин. = 180 км.
3) Фактический истинный путевой угол будет: ФИПУ = КК 4-(+Д К) + (± Д М) + (± УС) = 100° + 5° + 4° + 7° = 116°.
Рис. 181. Определение РМ самолета по времени и пройденному расстоянию.
Отложив на карте от пункта А в направлении полета под углом ФИПУ f расстояние 180 км, получают расчетное местонахождение самолета, т е. пункт В.
Контроль пути наблюдением за изменением .угла сноса в полете. Этот способ контроля пути заключается в периодическом (но не реже, чем через 15—20 минут полета) измерении угла сноса.
Если угол сноса не изменяется, то, следовательно, самолет идет по заданной линии пути. Если угол сноса изменяется, то в курс следования 'вводятся иоправки, причем это делается лишь в том случае, если последовательно измеренные углы сноса отличаются друг от друга на величину больше 4- 2° ~~ 3°.
Этот способ следует применять при полете над местностью, бедной ориентирами.- степью, лесом, пустыней, водной поверхностью.
Контроль пути наблюдением за изменением скорости и направления ветра. Контроль пути наблюдением за изменением скорости и направления ветра в полете состоит в периодическом измерении ветра и расчете курса следования по ветрочету.
Как установлено практически, скорость и направление ветра сохраняются постоянными лишь на небольшом расстоянии (100 — 200 км) и в течение 1 — 1 час. 30 мин.; однако бывают случаи и более резкого изменения режима ветра и на меньших расстояниях (порядка 50 км). Ветер на высотах бывает более постоянен по времени. Однако для получения более точного курса следования измерение ветра необходимо производить не реже, чем через каждый час полета. «.
Способы контроля пути радионавигацией и астронавигацией изложены ниже.
§ 148. Исправление курса следования в полете
Курс следования необходимо исправлять во всех случаях, когда достоверно установлено его несоответствие с заданным н»-яравлением полета, т. е. если ФПУ не равен ЗПУ.
При небольших отклонениях от линии пути курс следования нужно исправлять соответственным подворотом самолета в сторону, обратную отклонению, а в остальных случаях — на угол, определенный по боковому уклонению самолета от заданной (намеченной) линии пути.
§ 149. Исправление курса следования по известному боковому уклонению от линии пути
Исправление курса следования по боковому уклонению от линии пути возможно только при ведении детальной ориентировки, а вне видимости земли — по радиоориентирам. Рассмотрим лример (рис. 182).
Самолет, идя от пункта Л курсом КК= 10°, попал в тумак. Когда самолет вышел из тумана, после восстановления экипажем детальной ориентировки оказалось, что самолет .находится в пунх .те С на (расстоянии 10 км от контрольного ориентира В, находящегося на линии пути.
272
Расстояние от пункта А до пункта В пунктами В и D—150 км. Экипаж решил а непосредственно с пункта С выйти к курса следования bi пункте С.
Угловые поправки для исправления
боковому уклонению в пункте С вычисляются на счетной аэронавигационной линейке по данным: 1) расстоянию бокового уклонения между пунктом С (ДМ) и контрольным ориентиром В на линии пути; 2) пройденному расстоянию от пункта А до контрольного ориентира В на линии пути; 3) расстоянию между контролъ-и пунктом D или тем пунктом, на который ре-
равно 100 км, а между не выходить на пункт В, пункту D исправлением
курса следования по аэро-
ным ориентирам В 1HCHO выйти.
О о » '
. \/я поправка
С:
i $
\ \
-tA
5 \ \
Боковое
Контрольный ориентир
Г / \
л* поправке
A
Рис. • 182. Исправление
урса следования по боковому уклонению.
Поправка в курс следования до боковому уклонению для выхода от ДМ на желаемый пункт состоит из двух углов: угла у пункта А, от которого началось боковое уклонение от заданной линии пути (утла между заданной и фактической линиями пути) и угла у пункта D, на который экипаж решил 'вывести самолет (угла между заданной линией пути и предполагаемой от ДМ до намеченного пункта).
(J) 1-й у70л поправки НО-7
©
7\ ~ 'боковое уклонение /Оки
YZ © 1 4J
।м-я
Пройденное (Z расстояние
WOhm
в ?~р угол поправки
W-7 .
©
/I * (5)
/ Боковое Ос/оовиеееся^
уклонение расстояние
Юнм 150км
183. Определение на НЛ-7
Рис.
(НЛ-8) по боковому уклонению угловой поправки в курс следования. А—по пройденному расстоянию и боковому уклонению (1-я поправка); Б—по оставшемуся расстоянию и боковому уклонению (2-я поправка).
Первый угол находят по пройденному расстоянию и боковому уклонению, а второй — по оставшемуся расстоянию и боковому уклонению. Эти расстояния измеряются по заданной линии пути на карте.
Нахождение поправки производится на счетной аэронавигационной линейке в следующем посадке (рис. 183, А, Б).
Треугольный индекс шкалы НЛ-7—11 (НЛ-8—4) «Тангенсы»
шкале НЛ-7—12 (НЛ-8—5), т.
Рис. 184. Разметка карты для исправления курса по боковому уклонению.
устанавливается против пройденного расстояния по шкале НЛ-7—12 (НЛ-8-5) «Расстояния .высоты»; в нашем примере на 100 км.
После этого против расстояния бокового уклонения на шкале НЛ-7—12 (НЛ-8-5), на шкале НЛ-7—// (НЛ-8-4) читается первый поправочный угол у пункта А (против 10 км угол 6°).
При введении этого угла в курс следования самолет из точки С не пойдет к пункту D (желаемому), а будет следовать параллельно заданному пути.
Для того чтобы самолет из точки С следовал не параллельна заданному пути, а в желаемый пункт, необходимо найти и учесть второй поправочный угол, т. е. угол у пункта D. Этот угол определяется так же, .как и первый, т. е. сначала треугольный индекс шкалы НЛ-7—// (НЛ-8—4} устанавливается против оставшегося расстояния по шкале НЛ-7—12 (НЛ-7—5); в нашем примере на 150 км; искомая угловая поправка читается на шкале НЛ-7—// (НЛ-8—4) против расстояния бокового уклонения по е. против 10 км — угол 4°.
Полная поправка в курс еле дования равняется сумме поправочных углов, т. е. 6°-|-4о==10о. Исправленный курс следования будет: КК ЧГ’Пр - КК + (+ пол-
ная угловая поправка) =10°— —10° =0°. С этим курсом самолет из точки С выйдет на точкуD
Угловые поправки можно не рассчитывать .по аэронавигационной линейке, а измерять их транспортиром на карте после прокладки заданной, фактической и намечаемой линии пути.
Следует помнить правило учета поправки в курс следования если самолет отклонился от линии пути вправо, то поправка вы читается из курса следования, а если влево, то прибавляется к нему.
Для того чтобы не усложнять работу экипажа в полете и быстро исправлять курс следование по боковому уклонению, можно угловые поправки определить заранее при подготовке к полету и пометить их на карте.
Разметка карты для исправления курса следования по боковому уклонению производится в следующем порядке (рис. 1&4): 27*
1) от контрольного ориентира на маршруте, по обе его стороны, через каждые 5—10 км (в зависимости от дальности этого ориентира от ИПМ) делаются 3—5 (меток;
2) по расстояниям от ИПМ до данного ориентира и от последнего до 'цели (или следующего контрольного) ориентира, а также по расстоянию бокового уклонения, соответственно произведенным отметкам на карте, на счетной линейке высчитываются угловые поправки;
3) против каждой метки указывается соответствующая поправка и ее знак: плюс ставится с левой стороны маршрута (в направлении полета), а минус — с правой.
§ 150. Работа с картой и планом полета в воздухе
Умение пилота и штурмана быстро и четко работато с картой в значительной степени обеспечивает успешное и безопасное самолетовождение. Однако при этом необходимо избегать загромождения карты данными и пометками, которые могут быть записаны в аэро- и радионавигационном бортжурналах в разделе «Работа в воздухе».
В полете для пометок на карте следует пользоваться только простым карандашом средней твердости; карандаш следует заострять с обоих концов. Делать расчеты и подсчеты на карте воспрещается.
На карте, кроме разметки пути, можно наносить:
1) отметки данного места самолета с указанием времени (ДМ-крестиком, размером около 1 см);
2) отметки расчетного места (РМ — треугольником, размером около 5 мм);
3) расчетное и фактическое время прохода контрольных ориентиров (справа от линии пути);
4) линии фактического или нового заданного пути;
5) линии пеленгов — чертой со стрелкой от ориентира на се бя (самолет).
При необходимости на карте можно наносить курс и углы сноса — справа от линии пути, путевую и воздушную скорости а также высоту полета — слева от линии пути.
Раздел в аэрс- и радионавигационном бортжурналах «Работа в воздухе» .предназначен в первую очередь для записи расчетных и фактических ' элементов полета, записи справочных данных, а также для производства подсчетов! в полете. В бланках указываются;
1) расчетное и фактическое время прохода ориентиров и изменение курса;
2) курсы, углы сноса и путевые углы;
3) путевая и воздушная скорости и высота полета;
4) температура воздуха у земли и на высоте, скорость и па правление ветра, давление у земли, радиопеленги, режим работы моторов (обороты, наддув) и другие сведения.
Кроме того, в бланк можно заносить и другие замечания, облегчающие составление донесения экипажа.
§ 151. Потеря ориентировки
Общая ориентировка считается потерянной, когда экипаж не .знает района местонахождения самолета, не находит на местности ожидаемых по его расчетам времени ориентиров и не может определить .направления полета для .продолжения выполнения поставленной задачи или следования на аэродром посадки.
Детальная ориентировка считается потерянной в том случае, если экипажу (пилоту, штурману) неизвестно точное местонахождение самолета над пролетаемой местностью и он не может узнать на карте видимые под самолетом земные объекты.
Причины потери ориентировки. Основными причинами потери экипажем ориентировки являются:
1) вылет без аэронавигационной подготовки или с неудовте-творительной подготовкой, т. е. без соответствующего подбора и подготовки карт, без расчета полета и составления его навигационного плана, без контроля готовности экипажа к полету;
2) плохое знание маршрута или района полета;
3) несоблюдение экипажем в полете основных правил самолетовождения и намеченного плана: полет без систематического контроля пути и ведения ориентировки, невыполнение намеченного режима полета—курса, скорости, высоты;
4) неисправное состояние пилотажно-навигационных приборов и штурманского снаряжения;
5) неправильное пользование приборами, инструментами, картами;
6) неподготовленность экипажа к полетам .в сложных метеорологических условиях;
7) необеспеченность полета радионавигационными средствами ЗОС (земного обеспечения самолетовождения), особенно в плохую погоду;
8) отсутствие у экипажа навыков ориентировки по радионавигационным средствам ЗОС;
9) отсутствие у экипажа выдержки и обдуманных действий при попадании в плохие метеорологические условия.
Установив, что ориентировка потеряна, экипаж немедленно должен приступить к ее восстановлению.
'Меры предотвращения случаев потери ориентировки. Для того чтобы избежать потери ориентировки, необходимо:
1) хорошо подготовиться к полету, правильно подобрать карты и провести их разметку, хорошо изучить маршрут или район полета (напамять знать основные ориентиры и уметь опознавать их), произвести все необходимые расчеты: курс, скорость, высоту, время прохода контрольных ориентиров и прихода в район цели, предвычисленные радиопеленги на контрольные ориентиры;
2) совершать полет строго по намеченному навигационному плану полета;
3) соблюдать правила ведения ориентировки и контроля пути;
4) всегда держать в исправности пилотажно-навигационное оборудование самолета и штурманское снаряжение;
5) хорошо знать метеорологическую обстановку по маршруту Л району полета;
6) обеспечить полет радионавигационными и 'световыми (ночью) средствами ЗОС;
7) постоянно повышать штурманские знания и практические навыки в самолетовождении, а также умение пользоваться средствами ЗОС;
8) после каждого полета тщательно разбирать допущенные ошибки и добиваться их устранения в следующих полетах.
Действия экипажа при обнаружении потерн ориентировки. При обнаружении потери ориентировки экипаж должен немедленно приступить к ее восстановлению.
Для этого экипаж (пилот, штурман) обязан;
1) не допуская паники и спешки, обдумать создавшееся положение, выяснить оставшийся запас горючего и наметить пл и восстановления ориентировки;
2) до принятия окончательного решения движение по курсу" следования не прекращать до нахождения характерного ориентира; найдя ориентир, привязаться к нему, т. е. войти в круговое движение около него, записав время входа в круг .и курс подхода к этому ориентиру;
3) при потере ориентировки на малой высоте набрать высоту до средней (600—3000 м) для увеличения обозреваемого пространства;
4} в случае потери ориентировки на большой высоте снизиться до средней высоты для лучшей видимости ориентиров и наблюдения земной поверхности;
5) при потере ориентировки вблизи линии фронта, над противником или вблизи государственной границы немедленно взять курс, заведомо ведущий в сторону расположения своих частей или в глубь своей территории (перпендикулярно линии фронта или государственной границе), отметив время отхода и взятый курс> взятым -курсом итти до тех пор, пока не будет восстановлена ориентировка или не будет твердой уверенности, что самолет -находится над своей территорией; маневрировать в этом слу чае в районе потери с-риентировки для ее восстановления категорически запрещено;
6) при потере ориентировки в плохих метеорологических условиях необходимо восстанавливать ее по радионавигационным средствам или выходом в район хорошей -погоды.
Сохранение самолета. Если экипажу долго не удается восстановить ориентировку и имеется возможность, необходимо принять меры к сохранению самолета. С этой целью следует производить посадку на выбранной с воздуха площадке или ближайшем аэродроме до полного израсходования горючего и до наступления темноты. В случае полета ночью, при достаточном запасе горючего, необходимо продержаться в воздухе до рассвета.
Ответственность за потерю и невосстановле-ние ориентировки. Потеря и невосстановление ориентировки приводит к летным происшествиям; поэтому виновные в потере и невосстановлении ориентировки вследствие халатности или недисциплинированности должны подвергаться дисциплинарным взысканиям.
Четкая и умелая работа экипажа по восстановлению потерянной ориентировки и благополучное возвращение на своей аэродром должны поощряться.
Каждый случай потери ориентировки необходимо разбирать и изучать с летным составом, намечая меры для того, чтобы в дальнейшем такие случаи не повторялись.
§ 152. Восстановление ориентировки
Восстановление ориентировки следует начинать с восстановления общей ориентировки, а затем уже — детальной.
Общая ориентировка считается восстановленной, если экипаж знает район местонахождения самолета в радиусе 10—15 км, а детальная ориентировка — если экипаж (пилот, штурман) находит и опознает на карте видимые под самолетом земные объекты.
Восстанавливать потерянную ориентировку можно следующими способами:
1) поиском характерного ориентира, т. е. «хождением по коробочке» для увеличения обследуемой площади;
2) выходом на линейный или большой площадный ориентир, видимый или невидимый с самолета;
3) определением расчетного места (РМ.) самолета прокладкой пути от последнего достоверно (Пройденного в известное время ориентира по штилевой точке и среднему ветру;
4) определением расчетного места радиопеленгацией или астроориентировкой;
5) выходом на радионавигационное средство;
6) в темное время суток—выходом на крупный световой ориентир (населенный пункт) или светомаячную установку.
Восстановление ориентировки «хождением по коробочке». Этот способ заключается в следующем. После потери ориентировки необходимо привязаться к какому-либо видимому ориентиру. Затем, если данный ориентир не опознан на карте, для поисков более характерных ориентиров взять какой-либо курс, например 0° (для удобства лучше всего брать последовательно 0°, 90°, 180° или 270°), с которым следовать 2—3 минуты (рис. 185); затем курс изменить на 90° и итти с ним также 3—4 минуты; после этого опять изменить курс на 180 с которым следовать 5—6 минут, потом снова изменить на 270° и следовать 8—-9 минут и так до тех пор пока не будет най ден характерный ориентир, по которому можно восстановить ориентировку. При этом необходимо помнить, что уходить на большое 278
расстояние от ориентира-привязки нельзя, — эго может привести к окончательному запутыванию и полной безориентировки экипажа.
Восстановление ориентировки выходом на л «и-нейныйориентир. Этот способ может быть применен вдвух вариантах: 1) выход на линейный ориентир, видимый с самолета, и 2) выход на линейный ориентир, не видимый с самолета.
Лучшим способом является восстановление ориентировки вых од ом на линейный ориентир, видимый с самолета. Этот способ наиболее прост и надежен. Он заключается в следующем: при видимости линейного ориентира в районе потери ориентировки (шоссейной или железной дороги, реки) необходимо подвести к нему самолет, затем развернуться в одну из сторон и следовать вдоль него до тех пор. пока не будет восстановлена ориентировка выходом на какой-либо крупный, хорошо опознаваемый ориентир.
Рис. 185. Поиски ориентира для восстановления ориентировки — способ схождения по коробочке*.
Рис. 186 Восстановление ориентировки выходом на линейный ориентир, не видимый с самолета.
Бреста.н орление ориентировки выходом на линейный ориентир, не видимый с самолета. Если линейный ориентир не виден с самолета, но, судя по карте, он находится недалеко от района потери ориентировки, то поступают следующим образом:
1) после ориентировки карты по компасу самолет устанавливают в сторону предполагаемого расположения линейного ориентира с курсом, перпендикулярным к направлению этого ориентира;
2) дойдя до линейного ориентира, разворачиваются и следуют вдоль него до тех пор, пока не восстановят ориентировку по характерным ориентирам.
Направление разворота самолета и следования вдоль линейного ориентира выбирается в, зависимости от обстановки полета и характера летного задания; как правило, разворачиваться нужно в ’79
ту сторону, где уверенно можно найти характерные ориентиры, но которым и восстановить ориентировку.
Восстановление ориентировки выходом на линейный ориентир, не видимый с самолета, показано на рис. 186.
Пример 1. При полете из Омска в Барабинск на высоте 1000 м, не дойдя до станции Тебисская, мотор сдал обороты, и летчик был вынужден снижаться, описывая круги. Подыскивая площадку для посадки, он не вел ориентировку и отклонился к юру от станции Тебисская, потеряв ее из вида.
Когда самолет снизился до высоты 150 м, после исправления повреждения мотор заработал нормально, и летчик решил лететь до Барабинска. Однако вследствие кружения и малой высоты детальная ориентировка не была им восстановлена; летчик не знал направления на Барабинск. Для восстановления потерянной детальной ориентировки и увеличения района обзора ле”’ ччк набрал высоту 800 м, восстановил по озерам детальную ориентировку и прибыл в пункт назначения (рис. 187),
Пример 2. При следовании по маршруту Тамбов—Камышин из-за ухудшения видимости в районе Балашова экипаж не встретил в расчетное время контрольного ориентира—станцию Мучкап—и, пройдя некоторое время дальше, потерял ориентировку. Сличением карты с местностью восстановить ориентировку не удалось.
Рис. 187, Восстановление ориентировки с поднятием на высоту для увеличения района обзора.
Рис. 188. Восстановление ориентировки выходом на крупный пункт при «хождении по коробочке» и следовании вдоль железной дороги.
Экипаж решил произвести маневр для нахождения характерного ориентира, для чего начал «хождение по коробочке» от пункта Мзлашовка (им не опознанного). Через 10 минут полета «по коробочке» летчик заметил вдали дым от идущего поезда и направил самолет на него; дойдя до железной дороги, развернул самолет в сторону заданного направления полета и пошел вдоль железной дороги. Через 1.2 минут (полета вышел к Балашову и восстановил ориентировку (рис. 188).
Пример 3. При полете Москва—Серпухов летчиком была допущена ошибка при установке курса по компасу. Когда было пройдено расчетное время, справа появился город. Думая, что это и есть Серпухов, летчик свернул вправо .и вышел на город. Однако при сличении карты с местностью оказалось, что это не Серпухов. Полагая, что это Кашира (в действительности это был Малоярославец), летчик повернул на запад и через некоторое время 280
»бедился, что ориентировка потеряна. Для восстановления ориентировки взял курс на север (чтобы выйти на Москву). В дальнейшем, сличая карту с местностью, вышел на железную дорогу Москва—Можайск и восстановил ориентировку по станции Кубинка (рис. 189).
Пример 4. Экипаж самолета в составе пилота и штурмана был назначен ведомым для выполнения ночного задания в составе звена. Согласие
алану полет до цели и заход на цель — звеном, а выполнение задания — пос ледовательными одиночными заходами. Маршрут полета от аэродрома взлета— ломаный, т. е. требовалось изменить курс четыре раза.
Командир звена (пилот ведущего цели и начал заход на цель первым Экипаж ведомого самолета при выходе на цель маневром потерял из вида ведущий самолет. Не пайдя дели и не выполнив задания, он реши-! BepHjTTbcfl на аэродром вылета, При этом командир самолета всецело доверил ведение ориентировки штурману.
При полете на аэродром посадки штурман бессистемно несколько раз изменял курс самолета, не вел контроля пути по времени м через некоторое время потерял ориентировку.
Командир решил восстановить ориентировку опросом местных жителей, для него совершил посадку «а выбранное с воздуха поле вбли-
самолета) маневром вывел звено в район (согласно плану).
Рис. 189. Потеря ориентировки из-за неверно взятого курса и ее восстановление.
зи деревии.
Установив местонахождение и определив количество горючего, командир решил дойти до аэродрома вылета и повел самолет рассчитанным на земле курсом.
Не имея часов (часы были только у штурмана) и, следовательно, не будучи в свстоянии вести контроль пути по времени, командир самолета проше' иад аэродромом посадки. На аэродроме отсутствовали опознавательные спето вые сигналы, и он поэтому ие был замечен экипажем.
Пройдя некоторое время дальше, экипаж был вынужден по израсходова яял горюч-его произвести посадку ла лес, <в результате чего самолет потерне.! зварию.
Причина невыполнения задания: находясь в районе цели, экипаж не нашел ее, так как считал, что на цель наведет ведущий самолет, сам экипаж не вел систематического контроля пути и детальной ориентировки
Причина происшествия: дважды потерянная ориентировка из-зз яедостаточной подготовленности экипажа к полету (отсутствие часов у пилота, отсутствие крупномасштабной карты на район цели) и переоценка штурманом есоих знаний района полета.
Виновники; 1) штурман, дважды терявший ориентировку из-за несистематического контроля пути и проявивший излишнюю самонадеянность;
2) командир' экипажа (пилот), который всецело доверил штурману ведение самолета к цели и обратно, не контролировал знание штурманом ориев тироаки, не вел ориентировки и не контролировал пути сам;
3) лицо, ответственное за своевременное выкладывание на аэродроме ус-ювного светового сигнала и не поставившее в известность экипаж самолета изменении сигнала.
Восстановление ориентировки по штилевой точке и среднему ветру (прокладкой пройденного пути на карте по записям в аэронавигационном бортжурнале). При восстановлении ориентиров^ ки в случае отсутствия хорошо опознаваемых и больших линейных ориентиров в районе полета, а также при значительных отклонениях от линий пути следует прокладывать на карте пройденный самолетом путь по записям в аэронавигационном бортжурнале, т. е. определять его расчетное место. В этом случае линия пути прокладывается от последнего правильно опознанного ориентира до момента потери ориентировки; путь отдельных участков высчитывается по времени пролета этих участков и воздушной скорости (считая скорость ветра равной нулю, т. е. при штиле) и откладывается на карте по истинным курсам.
После прокладки пути получают «штилевую точку», в которой должен находиться самолет в случае полного отсутствия ветра, т. е. при штиле.
С целью учесть влияние ветра на возможное отклонение самолета от «штилевой точки» определяют величину вероятного его смещения относительно «штилевой точки» за все время полета от контрольного ориентира др момента потери ориентировки. Для получения возможно меньшей ошибки смещение определяют по «среднему ветру».
«Средний ветер» есть не что иное, как вектор полусуммы векторов скоростей ветра, взятых у ориентира, от которого отложен штилевой путь, и у местонахождения самолета в данный момент (в районе потери ориентировки), умноженной на время полета от этого ориентира до момента потери ориентировки. Величина «среднего ветра» (собственно пройденного пути самолета за .время полета от ориентира до момента потери ориентировки со скоростью и в ’направлении «среднего ветра») откладывается от штилевой точки в направлении геометрической суммы направлений ветра у ориентира и в месте нахождения самолета в момент обнаружения потери ориентировки. Конец отложенного «среднего ветра» от «штилевой точки» на карте дает расчетное место са молета, т. е. вероятное его местонахождение.
Сличая найденное таким образом расчетное место самолета на карте с местностью под самолетом, восстанавливают ориентировку.
При невосстановлении ориентировки этим способом ее следует .восстановить другими, описанными выше способами.
Пример. Экипаж, ведя самолет от одного пункта в другой (рис. 190), встретил на пути грозу и решил ее обойти маневром: от хорошо опознанного 282
ориентира С «а линия пути взял курс, равный 206°, и прошел с ним 20 минут, затем взял курс, равный 273°, с которым прошел еще 10 минут; потом взял курс, .равный 300°, и выдерживал его в течение последующих 12 минут
В конце 12-й минуты экипаж потерял ориентировку и принял решение восстановить ее по «шпилевой «точке» т. е. по записям в бортжурнале.
Рнс. 190. Восстановление ориентировки прокладкой на карте пути следования по элементам полета, записанным в плане полета, н «среднему еетру».
В бланке значилось:
КК] = 206°, 1] = 20 мин., Д К\ — + 3°;
КК2 = 273°, 12 = 10 мин., Д К2 = 4- 4°;
КК3 = 300°, 13 = 12 мин., Д Ка = + 2°;
V <= 120 км/час, Д М = 4- 3°.
Ветер: у ориентира CUc= 30 км/час., В = 225°; в районе потерн ориентировки Un. „.= 20 км/час, ь„. о.= 175°.
Произведя расчеты, экипаж получил:
1) ИК1 = 212°, ИК2 = 280°, ИК3 = 305°;
2) G = 40 км, 12 = 20 км. /3 = 24 км;
3) «средний ветер» (приближенно): Ucp —^с ^п' ° = 20 — 25 км/час:
4) направление «среднего ветра» Ъср = 225 + 175 = 200°;
5) путь, пройденный самолетом со скоростью «среднего ветра », за время полета 1полета = 6 » t2 + /3 = 20 мин.+ 10 мин. I- 12 мин = 42 мин.
Lcp ветра = Ucp- ,по.гета = 25 км/час X 42 мин = 17,5 км. После прокладке линии пути по рассчитанным данным экипаж нашел РМ самолета и восстановил ориентировку.
§ 153. Штурманский Глазомер и приближенные расчеты в уме
В сложной и быстро изменяющейся обстановке полета .не вс« -гда имеется время и возможность производить те или иные измерения на карте штурманскими инструментами или рассчитывать их на бумаге. Поэтому очень существенное значение имеют штурманский глазомер и приближенное вычисление в уме основных аэронавигационных элементов полета (направления полета, скорости и т. п.).
Здравый смысл, хороший глазомер и быстрый приближенный расчет в уме предохраняет экипаж от ошибок в инструментальных измерениях и расчетах на бумаге, значительно облегчая самолетовождение.
Развитие штурманского глазомера и способности выполнять приближенные расчеты в уме особенно важно у пилотов- одноместных самолетов (самолетов легкого типа и истребителей), которые лишены возможности в должной мере пользоваться в полете штурманскими принадлежностями и производить расчеты на бумаге.
Хороший штурманский глазомер, смекалка, умение производить расчеты в> уме и постоянная тренировка в этом отношении на земле и в полете необходимы для каждого летчика и штурмана. Нужно уметь:
1) определять на-глаз расстояние на земле и на -карте всех масштабов с точностью до + 5— 10%;
2) устанавливать на-глаз направление на земле и на карте всех масштабов с точностью до 5—10°;
ЗЪ отмечать в уме пройденное расстояние по часам за 1, 5, 10 и более минут с точностью до + Ю% от пройденного расстояния и рассчитывать в уме время прохода контрольных ориентиров;
4) уметь вести счет секунд в уме с точностью до 1—2 секунд за лолминуты:
5) оценивать, на-глаз снос самолета и его величину с точностью до 3—5°;
6) быстро и безошибочно переводить компасные курсы в магнитные и истинные и наоборот;
7) быстро и точно вводить поправку в показания приборов,
8) определять в уме и отмечать на карте скорость и направление ветра по данным пролета отрезка пути (по сносу, времени пролета данного расстояния, курсу, ПУ и т. п.).
Развивать штурманский глазомер и расчеты в уме необходимо одновременно с овладением инструментальными способами определения аэронавигационных элементов полета.
Уверенный и безошибочный штурманский глазомер и счет ь ме развиваются и закрепляются систематической тренировкой в полетах и на земле с поверкой результатов инструментальными способами и расчетом на бумаге.
Неуверенный штурманский глазомер, плохой расчет в уме, ра-2S4
бота «на-глазок» приносят только вред и не должны иметь места среди летно-подъемного состава.
Для облегчения тренировки в штурманском глазомере и расчетах в уме, а также для быстрого усвоения основных правил расчета рекомендуется разметить на краях планшета (карты) расстояния в 5, 10, 50 и 100 км; обозначить отрезки пути, проходимые самолетом при крейсерской скорости за 5, 10 и 30 минут; отметить величину угла в 5, 10 и 15°; твердо запомнить, правила расчета в уме основных аэронавигационных элементов; регулярно тренироваться в их определении, причем лучше всего вдвоем, задавая друг другу вопросы.
ГЛАВА X
ВИЗУАЛЬНАЯ ПЕЛЕНГАЦИЯ
Визуальной пеленгацией называется определение направления движения и расчетного места самолета по пеленгам, створам и вертикальным углам земных (предметов (ориентиров). Она осуществляется экипажем самолета и позволяет ему в полете решать /следующие задачи самолетс(вождения:
1) выход на заданную линию пути по линейному ориентиру и створу ориентиров, расположенных по линии пути;
2) следование в заданном направлении переходом от одного к другому видимым ориентирам, лежащим по линии пути;
3) определение места самолета снятием (измерением) пеленгов двух (трех) ориентиров или двух створов или одного створа и одного пеленга ориентиров;
4) определение места самолета по пеленгу одного бокового ориентира и дистанции (вертикальному углу);
5) определение места самолета последовательным пеленгованием одного бокового ориентира.
Использование створов -в визуальной пеленгации дает наиболее точные результаты.
Визуальная пеленгация имеет очень важное значение при полетах над морем и местностью, трудной для ведения детальной ориентировки (лесом, степью и т. д), при полете над районом местного тумана, а также ночью. Визуальная пеленгация особенно важна при отсутствии видимости ориентиров и визирных точек, находящихся в непосредственной близости или под самолетом и при видимости и опознаваемости их в стороне от самолета.
При полете в темное время суток использование пеленгов и створов световых' ориентиров (освещенных населенных пунктов, еветомаяков, прожекторов) позволяет экипажу выходить на неосвещенные цели и контролировать правильность полета по маршруту.
§ 154. Определение местонахождения самолета
Определение местонахождения самолета визуальной пеленгацией заключается в определении курсовых углов КУ (бортовых пеленгов БП) с последующим расчетом и прокладкой на карте 286
обратных истинных пеленгов ОИП, видимых и опознанных с самолета ориентиров, находящихся в стороне от него.
Расчетное место самолета определяется пересечением линий пеленгов, отложенных на карте от пеленгуемых ориентиров'.
Из рис. 191 видно, что курсовой угол КУ (бортовой пеленг БП) — это угол, заключенный между продольной осью самолета и линией пеленга, т. е. линией, идущей от глаза наблюдателя (самолета) на видимый предмет (ориентир).
Курсовой угол отсчитывается вбегда от направления полета (носа самолета) в направлении хода часовой стрелки (слева на-яраво) и по величине может быть в пределах 0—360°.
Рис 191. Курсовой угол — КУ (бортовой пеленг — БП) и пеленг ориентира — П.
Рис. 192. Обратный пеленг ОП ориентира.
Пеленг предмета (ориентира). Пеленгом предметаП (рис. 191) называется угол, заключенный между северным направлением меридиана наблюдателя (самолета) и линией пеленга; он всегда отсчитывается в направлении хода часовой стрелки и по величине может быть в пределах 0—360 .
Пеленг предмета (ориентира) в зависимости от меридиана, эт которого он отсчитывается, может быть: истинным (ИП) — при отсчете от истинного (географического) меридиана, магнитным (МП) — при отсчете от магнитного меридиана и компасным ,(КП) — при отсчете от компасного меридиана.
Пеленг 'предмета связан с курсовым углом и курсом самолета следующим соотношением:
ИК = ИП — КУ;
мк = мп —КУ; КК = КП —КУ.
(рис. 192) называется угол, за-направлением меридиана предмета
ОП
Пеленг = курсовой угол + курс, т. е. ИП = КУ4-ИК = КУ4-КК+ (±ДК) 4- (±ДМД 1Мп = ку-4 мк = ку + кк+ КП = КУ + КК-
Отсюда:
КУ = ип — ИК;
КУ = мп — МК;
КУ = |КП —КК;
Обратным пеленгом
ключенный между северным (ориентира) и линией пеленга от него на наблюдателя (самолет).
Обратный пеленг, так же как и прямой, отсчитывается от северного направления меридиана в направлении хода часовой стрелки и по величине может быть в пределах 0—360°. Обратный пеленг в зависимости от меридиана, от которого он отсчитывается, может быть истинным (ОИП), магнитным (ОМП) или компасным (ОКП).
Определение расчетного места самолета по пеленгу и дистанции бокового ориентира. Этот способ определения места самолета наиболее прост. Он заключается в одновременном измерении бортовым визиром курсового утла и дистанции от самолета до ориентира (предмета);при этом необходима запись курса самолета и времени измерения.
Для определения расчетного места самолета сначала по меренному курсовому углу рассчитывают обратный истинный ленг по формуле:
ОИП = КУ + КК + (± Д К) + (+ ДМ) + 180°.
из-пе-
Затем по счетной линейке (НЛ-7 или НЛ-8) на основании измеренного вертикального угла и высоты полета определяют дистанцию самолета от ориентира, т. е. расстояние по земной поверхности.
После этого на карте от ориентира откладывается обратный истинный пеленг и проводится линия пеленга, на которой откладывается рассчитанная дистанция Д. Полученная точка и будет расчетным место самолета (РМ).
Дистанция, т. е. расстояние по земле от визируемого ориентира до места самолета, рассчитывается таким образом: сначала бсртовым визиром определяется вертикальный угол ориентира, т е. угол, заключенный между вертикалью места самолета и линией визирования на ориентир (рис. 193); затем по счетной аэронавигационной линейке треугольный индекс шкалы 11 НЛ-7 (4 НЛ-8) (рис. 194) устанавливается на истинную высоту полета (по шкале соответственно 11 и 5); после этого на шкале 12 НЛ-7 2-8
(5 НЛ-8) против данного вертикального угла по шкале 11 НЛ-7 (4 НЛ-8) читают дистанцию в километрах.
Рис. 193. Вертикальный угол (ВУ) и дистанция (Д) ориентира.
Рис. 194. Определение дистанции до ориентира по НЛ-7 и НЛ-8.
Для определения места самолета строят и откладывают на карте обратный пеленг и дистанцию (рис. 195).
Пример (рис. 195). В 12.00 на КК = 85° с истинной высоты 1200 м. нри измерении КУ и вертикального угла ВУ оказалось, что КУ = 50°, а ЬУ =7о° Определить местонахождение самолета, если & К — + о° а Д М = 4- 3°
Решение: 1) ОИ.1 = КУ + КК + (±ДК) + (+ДЛ1) + 180о = 50о4-85о+ Ь(+5°1 + f 4. 3°i + 1&)°= 143°+ 180°= 323°;
2) По счетной линейке Д = 4,5 км.
Определение расчетного места самолета по двум пеленгам. Этот способ состоит в пеленговании двух боковых ориентиров, расчете и откладывании двух обратных пеленгов от ориентиров.
Пример. На компасном курсе КК = 140°; ДК = — 7°; ДЛ4 = +5°; в 12 час. 40 мин. измерены КУ. = 40° н КУг — 90°. Требуется определить РМ самолета.
Решение:
ИК = КК + (+ Д К) + (4- ДМ) = 140° + (— 7°) + (+ 5°) — По"*;
ОИП. = КУ. + ИК ± 180° = 40° + 138° + 180° = 358°;
ОИПг = КУ» + ИК ц. 180° = 90° + 138° — 180 = 48°.
» —
Далее построением на карте находят РМ ой пересечения линией пеленгов (рис. 196).
самолета. РМ определяется точ-
Ряс. 195. Определение РМ самолета измерением ВУ ориентира до расчетом дистанции (Д) до него.
N
Ряс. 196. Определение РМ самолета пелеигованием двух ориентиров.
Если при откладывании обратных пеленгов (ОИП1 и ОИП2) «а карте меридианы не проходят через ориентиры, то проводят ю»
вспомогательные меридианы, от которых и откладывают обратные истинные пеленги. Точка пересечения обратных пеленгов дает РМ самолета.
На рис. 196 в точке РМ для наглядности изображены самолет, его истинный курс и курсовые углы ориентиров.
Определение расчетного места последовательным пеленгованием одного бокового ориентира (крюйспеленг). Определение расчетного места самолета последовательным пеленгованием одного и того же ориентира производится в следующем порядке (рис. 197, А, Б). В момент измерения первого курсового угла ориентира замечают время и курс, с которым следуют дальше, выдерживая его возможно точнее.
^с. 197. Определение РМ самолета последовательным пеленгованием одного бокового ориентира.
А—построение по расчетным даиным; Б—виц после построения.
Через 5 10 минут полета снова измеряют курсовой угол этого же ориентира и замечают время. После этого рассчитывают обратные истинные пеленги (ОИПт и ОИПг), которые откладываются на карте от меридиана ориентира.
Далее по счетной линейке определяют по времени и путевой скорости полета, путь, пройденный самолетом за время, прошедшее от момента измерения первого курсового угла до момента лмерения второго курсового угла. Найденный путь берется по масштабной линейке и откладывается между проложенными на
карте линиями обратных истинных пеленгов параллельно курсу самолета (рис. 197, Л). Расчетное место самолета определяется течкой пересечения откладываемого расстояния с линией второго пеленга ОИП2.
Пример. В 15 час. 00 мин. на КК = 90°, КУ< = 45; через 10 мин wo-
лета, т. е. в 15 час. 10 мин., измеренный КУ2 оказался равным 90°. Требуется найти РМ самолета в 15 час. 10 мин., если ДК = + 4°; ДМ + 5°; УС“ + 5Р.
Решение: V = 120 км/час;
ПК = КК -К (+ А К> +(± А М) = 90 ’ + (+ 4) + (+ 5) = 99°;
ОИП1 = КУ + ИК + 180° = 45 + 99 + 180 = 324°;
ОИПг КУг + ИК ± 180° = 90° + 99° — 180° = 9°.
Откладываем ОИП1 и ОИПг на карте; ИПУ = ИК + УС = 99-|-(+ 5) -= 104э; путь L=W- / = 120 км/час. X Ю мин. = 20 им.
ГЛАВА XI
ОСОБЕННОСТИ САМОЛЕТОВОЖДЕНИЯ В РАЗЛИЧНЫХ УСЛОВИЯХ
Под различными условиями полета подразумевается полет в различной навигационной обстановке, т. е. полет над местностью, бедной ориентирами, «пестрой», над водной ловерхно-стыо, на малой и большой высотах, в различных метеорологических условиях, в разное время суток и года.
Какая бы ни была действительная навигационная обстановка, при подготовке к полету необходимо предусмотреть возможное ее изменение за время полета и в соответствии с этим наметить действия экипажа.
При полете в различных условиях следует выбирать такие наивыгоднейшие способы самолетовождения, которые в данной обстановке полета позволили бы выполнить задание в срок и обеспечили безопасность.
Перед каждым полетом отдельные экипажи и группы должны готовиться к самолетовождению всеми доступными способами в различных условиях полета вплоть до самых трудных, несмотря на кажущуюся ясность и простоту навигационной обстановки.
Недостаточная подготовка экипажа к полету или подготовка в излишней спешке может привести к невыполнению задания и ве обеспечить безопасность полета. Поэтому подготавливаться к иолету всегда следует внимательно и без спешки.
§ 155. Полет вад местностью, бедной ориентирами
Местностью, бедной ориентирами, являются лесные массивы, тайга, степь, тундра, пустыня, а также малонаселенные районы, для которых нет точных карт. При полете над такси местностью затрудняется ведение визуальной ориентировки вследствие отсутствия характерных и хорошо опознаваемых ориентиров.
При полете над местностью, бедной ориентирами, необходимо тщательно изучать ее малейшие особенности, которые могут облегчить ведение общей и детальной ориентировки; ,к таким ocoi бедностям относятся: рельеф местности и его характер (отдель-29i
•ные, хорошо опознаваемые -возвышенности, вершины гор, оврагв и балки), мелкие населенные пункты и даже отдельные дворы, дороги, тропы, заросли, берег моря, озера, линейные ориентиры — реки, железные и шоссейные дороги и т. л.
Полет следует осуществлять на средних высотах по компасу и вести контроль пути прокладкой на карте пройденного расстояния, с учетом среднего ветра (в случае отсутствия более точных данных о ветре), а также визуальной пеленгацией лежащих в стороне ориентиров.
Исправление курса можно производить только в том случае, если полученный ФПУ отличается от ЗПУ более, чем н>а 3—б°. Отыскивать цель лучше всего выходом на -ближайший к ней, хорошо опознаваемый ориентир, от которого и осуществлять выход на цель по расчетным данным и 'путем детальной ориентировки.
Полет над местностью, бедной ориентирами, облегчается, если самолет имеет специальное радионавигационное оборудование и обеспечивается наземными радионавигационными средствами ЗОС.
Ввиду того, что при полете над местностью, бедной ориенти-рами, трудно обнаружить факт потери ориентировки до выхода на контрольный ориентир на этапе, ориентировку надо считать потерянной только в том случае, если в расчетное время и 5—10 минут спустя не обнаружен ожидаемый контрольный ориентир.
Ориентировка восстанавливается следующими способами:
I) прокладкой штилевой точки и среднего ветра;
2) выходом на линейный ориентир, заведомо находящийся на своей территории;
3) радиопеленгацией и астроориентировкой.
§ 156. Полет над местностью, изобилующей мелкими или похожими ориентирами («пестрой» местностью)
Полет над «пестрой» местностью представляет определенные трудности. Чем больше скорость и высота полета, тем больше эти трудности.
Во избежание ошибки при опознавании ориентиров во время полета над «пестрой» местностью необходимо пользоваться картами более крупного масштаба, а самолетовождение осуществлять по компасу и контролировать путь прокладкой на карте пройденного расстояния и радиоориентировкой.
При ведении визуальной ориентировки особое внимание следует обращать на взаимное расположение мелких ориентиров. Восстановление потерянной ориентировки необходимо производить после прокладки штилевой точки, выходом на хорошо осюзна’вае-мый линейный или площадной ориентир и радиоориенгирэвкив. Только после восстановления общей ориентировки можно переходить к восстановлению детальной.
§ 157. Полет над !водной поверхностью
Полет над водной поверхностью осуществляется по тем же правилам, что и над безориентирной местностью, с той лишь разницей, что в этом случае определение угла сноса и ветра, а следовательно, и контроль правильности полета по этим величинам осуществляются с помощью аэронавигационной бомбы.
При полете вблизи и вдоль берега РМ определяется визуальной пеленгацией ориентиров, находящихся на берегу.
При полете в открытом море контроль пути производится прокладкой пути, радиопеленгацией, астроориентировкой или выходом к берегу, если он находится на недалеком расстоянии.
(§ 158. Полет в горах
Самолетовождение в горах зависит от состояния погоды (высоты и характера облачности) и высоты полета относительно гор. При полете в горах всегда следует иметь в виду влияние горного рельефа на изменение направления и скорости ветра (воздушного потока), а также создание сильных рему (болтанок). Поэтому во избежание грубых ошибок состояние воздушного потока необходимо уточнять систематическим контролем угла сноса.
Правильность полета надо проверять постоянным контролем пути по отдельным вершинам гор, направлению долин, горных рек и хребтов!, а также визуальной пеленгацией, прокладкой на карте штилевой точки и радиоориентировкой.
Переваливать через вершины и гребни гор в, облаках, а также пробивать облачность в горном районе опасно и .можно делать это только с особого разрешения и на безопасной высоте полета.
В случае попадания в облачность или туман необходимо немедленно набирать высоту (истинную) не менее 600 м над вершинами гор или выходить на верх облаков, после чего продолжать полет или же выходить в равнинную местность. Восстанавливать ориентировку в этом случае нужно выходом из облачности или возвращением на свой аэродром по радносредствам.
§ 159. Полет на малой и большой высотах
Полет на малой высоте. Полетом на 'малой высоте (бреющим полетом) называется полет па высоте в пределах от 5 до 50 м. Он может быть намеренным—при выполнении спецработ (сельскохозяйственные работы, штурмовые действия) и вынужденным—при низкой облачности. Полет над горами или сильно пересеченной местностью на малой высоте недопустим.
Полет на малых высотах характеризуется:
1) ограниченным обзором земной поверхности (т. е. отсутствием видимости с самолета близлежащих к нему, иногда крупных ориентиров, закрытых рельефом или дымкой), что затрудняет ведение общей ориентировки;
й) большой угловой скоростью перемещения земных объектов относительно самолета, что затрудняет опознавание видимых ориентиров, а следовательно, и ведение детальной ориентировки.
Во избежание потери ориентировки при полете на малой высоте от летного состава требуются отличное знание правил самолетовождения на малой высоте и внимательная подготовка к каждому полету.
Для полета на малой высоте следует брать карты более крупного масштаба—не мельче 1 : 500 000 (1 см = 5 км).
Прокладка линии пути должна производиться в соответствии с 1навигациоиной обстановкой через контрольные, хорошо опознаваемые ориентиры, поблизости от них или вдоль линейных ориентиров; отрезки пути между контрольными ориентирами не должны превышать 40—80 км, а расстояние от ИПМ до первого контрольного ориентира должно быть не более 20—50 км.
Изучать маршрут надо с особей тщательностью; необходимо знать напамять характерные ориентиры по линии пути и уметь их быстро распознавать, а также по местным признакам определять пролет правее или левее их.
Предварительный расчет полета следует производить по данным ветра на высоте до 100 м, полученным непосредственно перед вылетом.
Выход на линию .пути осуществляется подбором курса следования или по курсу, рассчитанному на земле перед полетом. Правильность курса проверяется по углу сноса и ведением детальной ориентировки. Полет на контрольном этапе необходимо производить очень внимательно, так как от точности прохода этого этапа во многом зависит правильность дальнейшего полета по маршруту.
Ориентировку не следует вести опознаванием уже появившегося под самолетом или возле него ориентира, который вследствие большой скорости перемещения самолета быстро скроется; нужно наметить лежащий впереди ориентир и ожидать его появления, т. е. незадолго (за 3—5 минут) до появления этого ориентира подготовиться к тому, чтобы опознать его.
Для облегчения ведения ориентировки по времени следует разбить линию пути на десятиминутные отрезки и no ним контролировать правильность полета.
Путевая скорость определяется по времени пролета участков маршрута, воздушная — по прибору, а высота'—на-глаз или по чувствительному высотомеру.
Определять направление ветра (и приближенно его скорость) можно наблюдением за водной поверхностью, верхушками деревьев, колосовых посевов, по дыму и пыли по дорогам.
В полете на малой высоте ориентировка весьма затруднительна, а сличение карт с местностью возможно лишь по небольшому району на пути полета. Величина этого района зависит от высоты полета и рельефа местности.
Факт потери ориентировки определяется расхождением пролетаемой местности с картой.
296
Восстановление ориентировки производится по общим правилам, с той лишь разницей, что сначала, если позволяет обстановка, набирается высота порядка 500—1000 м и сличается карта с местностью; только после этого, если ориентировка не будет восстановлена, используются описанные выше методы.
Полет на большой высоте. Высотным полетом называется полет на высоте от 3000 м и выше.
Способы самолетовождения применяются в> зависимости от навигационной обстановки полета.
Навигационная обстановка полета па большой высоте характеризуется:
1) прозрачностью воздуха и видимостью поверхности земли;
2) трудностью опознавания с большой высоты мелких ориентиров;
3) состоянием облачности (неполная или полная);
4) увеличением скорости ветра в среднем вдвое больше, чем а средних высотах;
5) возрастанием ошибок показаний пилотажно-навигационных приборов из-за низких температур и малых давлений;
6) недостаточной точностью расчетных предполетных данных вследствие влияния промежуточных ветров на высотах при подъеме и спуске;
7) физическим состоянием экипажа, влияющим на точность быстроту расчета навигационных элементов в полете.
При такой обстановке точность самолетовождения меньше, чем при полете на средних высотах.
Основным способом самолетовождения на больших высотах является компасное самолетовождение с контролем пути другими способами.
Подготовка к полету производится так же, как и для полетов на средних высотах, с той лишь разницей, что в этом случае особое внимание обращается на изучение метеорологической обстановки, в частности, на количество и характер облачности ниже высоты полета, на возможное ее изменение за время полета, на работу пнлотажно-навигапионного оборудования и точность показаний приборов на больших высотах.
Для облегчения ведения общей ориентировки, помимо карт средних масштабов (1 : 500 000, 1 : 1 000 000), в полет надо брать карту более мелкого масштаба — порядка 1:2500 000 (1 см == «=25 км) или 1:2000000 (1 см=20км). Прокладывать линию пути необходимо с наименьшими издомами, ориентируясь исключительно на более крупные и хорошо опознаваемые с воздуха объекты.
Выходить на линию пути нужно от контрольного' ориентира, к которому следовать с набором высоты по данным, рассчитанным по штилевой точке и средней скорости, увеличенной на 15—20% или рассчитанным по прогнозу ветра; при этом надо обязательно учитывать увеличение расхода горючего за время подъема.
Способ контроля пути выбирается в зависимости от количе
ства облачности—промером угла сноса и путевой скорости, отметками ДМ, радиоориентировкой и т. д.
Потерянная ориентировка может быть восстановлена:
1) выходом из облачности (или уменьшением высоты полетЪ для опознавания ориентиров, находящихся в пределах видимости), а также выходом па линейный или площадный ориентир;
2) радиопеленгацией и астроэриентировкой.
При значительной облачности или сплошных облаках поле? рекомендуется осуществлять по правилам полета над облакамж и туманом, т. е. вне видимости поверхности земли.
§ 160. Полет за облаками и над туманом
Особенность полета за облаками и над туманом заключается в невозможности наблюдать с самолета земную поверхность * вести визуальную ориентировку.
Полет за облаками или над туманом может быть намеренным (маскировка) или вынужденным (сложная метеорологическая обстановка), особенно при полетах на больших высотах.
Основными способами самолетовождения за облаками и над туманом являются: 1) компасное самолетовождение, дающее хорошую точность при полете над облаками (туманом) не свыше В часов; 2) использование средств радионавигации и 3) астроориентировка.
IK вспомогательным способам относятся: 1) приближенная прокладка пути по известному ветру над облаками (туманом); 2) контрольные выходы под облачность при достаточной высоте нижнего .их края (рис.198).
Рис. 198. Уточнение местонахождения самолета периодическим ’выходом из
зкм
Осуществление длительных полетов за облаками и над тума ном допускается исключительно при полной подготовленности этих полетов для применения радио- и астроориентировки.
Контроль пути и восстановление ориентировки необходимо производить проходом над радиоориентирными точками или определением Р'М самолета радиопеленгацией.
Пробивать облачность и туман в гористой или другой местности по маршруту, если неизвестны высота ее рельефа и нижняя граница облаков (приподнятого тумана), категорически запрещается.
t§ 161. Ночной полет
Основной трудностью полета в темное время суток (ночью) является усложненная ориентировка, вызываемая плохой видимостью или невидимостью поверхности земли. Ориентиры, хорошо видимые днем, в ночных условиях бывают не видны совсем или плохо видны и только тогда, когда находятся непосредственно под самолетом. Кроме того, при полете ночью большую опасность представляет внезапное попадание самолета в тяжелые метеорологические условия, которые трудно своевременно заметить и принять необходимые меры предосторожности.
Ввиду этого полеты ночью должны выполняться только при хорошей тренировке летного состава в полете по приборам и при полной уверенности в безопасности полета.
Ночной полет может происходить: 1) в светлую (лунную) ночь, 2) в темную (безлунную) ночь, 3) при наличии дымки и в сложных метеорологических условиях. В зависимости от навигационной обстановки должны применяться и соответствующие способы самолетовождения.
Основными способами самолетовождения являются:
1) компасный способ с прокладкой пути,
2) полет по световым ориентирам (освещенным населенным пунктам, светомаякам и т. п.) и
3) радиоориентировка и астроориентировка.
При подготовке к полету в ночное время особое внимание следует обращать на подготовку кабинного освещения и аэронавигационных огней.
Контроль пути можно осуществлять прокладкой пути, визуальной пеленгацией находящихся в стороне световых ориентиров, радиопеленгацией и астроориентировкой.
Для нахождения цели необходимо сперва выходить на хорошо опознаваемый ориентир, находящийся вблизи цели, и лишь после этого выходить на цель.
Основными правилами ориентировки ночью по земным ориентирам являются: быстрое 'Опознавание напамять характерных ориентиров по маршруту, достаточно точное определение штурманским глазомером и расчетами в уме основных аэронавигационных элементов полета, непрерывное наблюдение за показания
ми приборов и часов', строгое выдерживание взятого курса и режима полета.
Для лучшего наблюдения объектов земли свет в кабине следует выключить или уменьшить до возможного предела.
§ 162. Полет по приборам («слепой полет»)
Полетом по приборам («вслепую») называется полет по пилотажно-навигационным приборам самолета без видимости земли, горизонта, звездного неба и других неподвижных объектов, по которым можно определять положение самолета в пространспве и его расчетное местонахождение.
Такие условия встречаются при полете в облаках и тумане, а также в темную ночь при сплошной облачности (в случае полета под облаками).
Самолетовождение в «слепом» полете осуществляется исключительно по пилотажно-навигационным приборам и специальному оборудованию. Летный состав должен быть хорошо тренирован в длительном полете и точном сохранении по авиаприборам курса, высоты, воздушной скорости, выбранных режимов работы моторов и в производстве подъема, снижения и разворотов.
Полет по приборам (в облаках или тумане) может быть преднамеренным—с целью маскировки и тренировки, и вынужденным—при встрече с плохими метеорологическими услсвями и темной ночью.
При подготовке к полету по приборам особое внимание необходимо уделять действию пилотажно-навигационного и специального оборудования самолета (компаса, высотомера, указателя воздушной скорости, указателя поворота и скольжения, авиагоризонта, вариометра, радиополукомпаса или радиокомпаса, связной радиостанции и т. д.), а также и земных радиосредств обеспечения самолетовождения (ЗОС). При изучении метеорологической обстановки особое внимание должно быть обращено на характер облачности, видимости, температуру, наличие обледенения, вероятное изменение облачности за время полета, распределение атмосферного давления у земли и другие метеорологические явления.
'Маршрут полета прокладывается через характерные ориентиры, по которым можно легко восстанавливать детальную ориентировку и отмечать ДМ.
Для нахождения цели необходимо наметить и тщательно изучить последний перед целью контрольный ориентир, а уже от него с проверенными данными элементов полета выходить на цель.
Для облегчения восстановления ориентировки при выходе из облаков район предполагаемого местонахождения самолета следует очертить на карте и изучить его более тщательно как в отношении отдельных ориентиров, так и общего характера местности в этом районе (леса, рельефа и т. п.).
Способы самолетовождения в «слепом» полете выбираются в зависимости от оборудования самолета пилотажно-навигационны-300
м.и приборами и аппаратами от оборудования воздушных линий для обеспечения безопасности полетов по приборам, а также и от .подготовленности экипажа к такому полету.
Выход на путь следования и проверка правильности взятого курса производятся пролетом контрольного этапа, начиная от ИПМ до какого-либо ориентира, лежащего на линии пути, до входа в облака или по радиопелеигаторным точкам (приводной радиостанции, ШВРС, радиопеленгатора, радиомаяка, маркера и т. п.). Па контрольном этапе полет следует осуществлять под самыми облаками, устанавливая курс следования и путевую скорость. Длина контрольного этапа должна быть не менее 20 км.
Входить в облачность (туман) нужно от контрольного ориенти. ра, у которого отмечается время начала полета «вслепую». Перед выходом следует отметить высоту нижней границы облачности и записать ее в бортовой журнал.
Следование в облаках осуществляется по курсу, уточненному на контрольном этапе, а контроль пути—прокладкой пройденного расстояния по измеренной путевой скорости под облаками.
Для восстановления ориентировки (или уточнения правильности следования по заданному маршруту) необходимо определять РМ самолета радиопеленгацией или уточнением местонахождения самолета через «окна» облаков.
Восстанавливать ориентировку нужно в таком же порядке и таким же способом, как и при полетах в других условиях, или выходом на свой аэродром по радиосредствам.
Выход из облаков (тумана) и их пробивание следует производить только до безопасной высоты, только в районе аэропортов по установленном схемам и правилам пробивания облаков (см. § 165).
Наиболее благоприятен полет в слоистых и слоисто-кучевых облаках. При полете в кучевых облаках очень трудно выдерживать заданное направление ввиду непрерывного перемещения в них воздуха; поэтому входить в кучевые облака допустимо только на короткое время. Полет в мощно-кучевой облачности, в случае если она более 7 баллов,—запрещается.
Полет вблизи грозовых облаков или вход в них совершенно недопустимы ввиду возможной большой «болтанки» самолета резкими восходящими и нисходящими потоками воздуха. Грозовые облака надо обходить стороной.
Полет щ облаках при температуре от -j-2° до —15° опасен, так как возможно обледенение самолета.
§ 163. Эшелонирование полетов самолетов по высотам
Эшелонированием самолетов по высотам называется такая организация движения самолетов в воздухе, при которой полеты осуществляются на заранее установленных высотах для определенных направлений (воздушных линий).
Эшелонирование по высотам вводится с целью предотвратить столкновения самолетов .в воздухе при «слепых» полетах по при-301
борам—в облаках, тумане, три ограниченной горизонтальной видимости и ночью.
'Установление высот эшелонирования. Эшело. нирование осуществляется по барометрическим высотам, которые условно устанавливаются от уровня моря через определенные про межутки. В принятых правилах для полетов по воздушным линиям ГВФ эшелоны установлены через каждые 300 м (1000 фут.) высоты. При этом барометрические высоты эшелонирования с числом кратным 600 м (2000 фут.), т. е. 600 м (2000 фут.), 1200 м (4000 фут.), 1800 м (6000 фут.), 2400 м (8000 фут.), 3000 м (10 000 фут.) и т. д., используются только для полетев с направлением в пределах от 0° до 179° истинного путевого угла (0° и 179° включительно); для полетов в противоположных направлениях, т. е. с истинным путевым углом в пределах от 179° до 360° (179° и 360° исключительно) *), используют все эшелоны через каждые 600м (2000 фут.), начиная с 900м (3000 фут.) высоты. Следовательно, для направлений от 179° до 360° полеты совершаются на высотах: 900 м (3000 фут.), 1500 м (5000 фут.), 2100 м (7000 фут.), 2700 м (9000 фут.), 3300 м (11 000 фут.) и т. д.
Таким образом, высоты встречных эшелонов устанавливаются через каждые 300 м (1000 фут.) барометрической высоты, а попутные (в' одном направлении) — через каждые 600 м (2000 фут.) высоты.
Однако на каждом участке маршрута, в зависимости от рельефа местности над уровнем моря, используются не все установлен ные высоты эшелонирования, а лишь те, которце расположены выше безопасного эшелона, устраняющего возможность столкновения самолета с землей.
Этот эшелон называется начальным.
Высоту начального эшелона определяют для каждого участка маршрута в отдельности. Она равна наивысшей точке рельефа местности над уровнем моря (считая все высоты, которые расположены в полосе по 25 км в обе стороны от линии пути) плюс 600 м высоты. При этом, если полученная сумма не совпадает с одной из установленных высот эшелонирования, то за начальный берется всегда ближайший эшелон, превышающий полученную высоту.
Пример. На участке Казань—Янаул воздушной магистрали Москва— Хабаровск наивысшая точка рельефа местности в полосе по 25 км в обе стороны от линии пути имеет высоту над уровнем моря 250 м. Следовательно, начальным (безопасным) эшелоном должна быть высота: 250 + 600 = 850 .м. Так как ближайший эшелон, превышающий 850 м, лежит на высоте 900 м (3000 фут.), то она и будет начальным на этом участке (рнс. 199а). Однако
) Пределы направления от 0° до 179° и от 179° до 360° отсчитываются от географического меридиана аэродрома (пункта) вылета или ИПМ независимо от их местонахождения, т. е. их географических координат — широты и долготы.
аа этом начальном эшелоне можно совершать полет только в направлении Янаул—Казань, т. е. в западном направлении. Для полетов в направлении Казань—Янаул (в восточном направлении) необходимо пользоваться эшелонами с числом сотен метров, кратным 600, начиная от 1200 м (4000 фут.) и выше.
Высотой начального эшелона может быть любая из установленных высот эшелонирования, которая расположена на высоте не ниже 600 м (2000 фут.) вад высшей точкой каждого участка маршрута полета. Полеты на начальных эшелонах могут совершаться только в одном направлении в строгом соответствии с установленными правилами эшелонирования, г. е. на эшелонах с числом сотен метров, кратным 600 м,—в восточных направлениях, а с числами через 600 м, начиная с 900 м,—в западных направлениях.
Рис. 199а. Эшелонирование полетов самолетов по высотам.
Полет на начальном эшелоне допускается лишь при условии, что на данном участке маршрута атмосферное давление, приведенное к уровню моря, не ниже 745 mim рт. ст. Это давление определяют перед каждым полетом по кольцевым синоптическим картам, которые составляются авиаметеорологическими станциями аэропортов через каждые 2 часа.
Начальный эшелон 600 м (2000 фут.) применяется только при иолете над морем и равнинной местностью, высота которой не превышает 100 м над уровнем моря.
Определение высот эшелонирования в п о л е-т е. Высоты эшелонирования определяются барометрическими высотомерами обычного пользования (установленными на самолетах), которые имеют шкалы барометрического давления (2-стре-лочные и З-стрелочные высотомеры).
Для определения заданной высоты эшелонирования и выдерживания ее в полете необходимо барометрическую шкалу высотомера, независимо от высоты аэродрома взлета и посадки «гад
уровнем моря, устанавливать на деление 760 (мм) или 29,92 (дюйма), затем набрать по высотомеру заданную высоту и удерживать иа ней самолет.
На самолетах, оборудованных для полетов в сложных метеорологических условиях («вслепую») должны быть установлены два высотомера, в тем числе один обязательно с барометрической шкалой. Один из высотомеров (например, расположенный слева от приборной доски) может быть использован для определения высоты полета относительно аэродромов взлета или посадки, а также над местностью, если его барометрическая шкала установлена на атмосферное давление, полученное с уровня этой местности, а второй (расположенный справа от приборной дооки)—для определения высоты эшелонирования (если его барометрическая шкала установлена на деление 760 или на 29,92).
При .наличии на самолете только одного высотомера с барометрической шкалой он может быть использован одновременно для двух целей:
1) как обычный высотомер — для определения высоты полета относительно аэродромов взлета и посадки и 2) для определения барометрических высот эшелонирования.
Пользоваться одним двухстрелочным высотомером при полете по приборам необходимо в следующем порядке:
1) Перед взлетом установить стрелки прибора (поворачивая кремальерку) па нуль высоты.
2) После взлета набирать высоту, на которой разрешается совершать развороты при полетах по приборам.
3) После этого установить барометрическую шкалу давлений на деление 760 (29,92), набрать по этому высотомеру высоту заданного эшелона и выдерживать ее до прибытия в пункт назначения или выхода в район хорошей видимости (погоды).
4) Прибыв в пункт назначения и получив от диспетчера (руководителя полетов) аэропорта посадки разрешение снижаться, пробивать облачность и совершать посадку, — установить барометрическую шкалу высотомера на величину атмосферного давления аэродрома посадки, сообщенную на борт самолета (по командной или связной радиостанции). После этого пробивать облачность чк> схеме и правилам, которые установлены для данного аэропорта.
В показания высотомера всегда необходимо вводить инструментальные поправки, определяемые по особым графикам.
Высоты эшелонирования для полета по маршруту даются каждому командиру корабля в отдельности диспетчером аэропорта перед выпуском самолета в рейс. Они выбираются с учетом аэронавигационной обстановки полета по маршруту (в том числе обязательно с учетом ожидаемой погоды), а также с учетом наличия в воздухе других самолетов.
Навигационный «План полета» для следования на заданном эшелоне составляется по обычным правилам.
При полетах по приборам пересечение воздушных линий допускается лишь с разрешения диспетчера ближайшего к самолету аэропорта и обязательно на промежуточных высотах между эше-4
юнами. При этом самолет, летящий в северном или западном направлении, должен набрать высоту на 150 м больше пересекае мото эшелона, а самолет, летящий в южном или восточном направлении,—уменьшить высоту на 150 м.
В разрешении на пересечение воздушной линии, которое передается на борт самолета, должны быть указаны: участок пересечения, время (интервал от и до) и высота полета.
Соблюдение этих указаний для пилота обязательно.
В настоящее время эшелонирование полетов самолетов по высотам распространенно на авиацию всех ведомств и включено в общие правила полетов самолетов на территории СССР.
§ 164. Пробивание /облаков и туманов
Пробивать облака или туман вниз разрешается только в аэропортах посадки по установленным схемам пробивания облачности с использованием радионавигационных средств аэропорта в качестве радиоориентирных точек.
Пробивание облаков или тумана на маршруте полета запрещается.
С целью обеспечить безопасность полета при пробивании облачности в пунктах посадки для всех основных аэропортов ГВФ составлены и изданы специальные «Схемы пробивания облачно сти» с использованием одного из радионавигационных средств аэропорта, т. е. приводной радиостанции, ШВРС, радиомаяка или радиопеленгатора.
Схемы эти составлены с учетом имеющихся вокруг каждого данного аэропорта естественных и искусственных препятствий, направления его взлетно-посадочных полос, направления господствующих ветров, а также установленного минимума погоды для этого аэропорта, т. е. всех элементов, которые обеспечивают безопасность полета.
Каждая схема пробивания облачности содержит следующие части:
а) Вид аэропорта в плане, на котором схематично указаны площадные и линейные ориентиры, естественные и искусственные препятствия, места расположения радионавигационных средств относительно центра летного поля.
б) Креки аэродрома, наличие и направление взлетно-посадочных полос, а также схема маневров самолета при пробивании облачности с указанием времени и курсов полета.
в) Профиль полета с указанием высот полета, мест расположения аэродрома и радионавигационных средств, а также высоты естественных и искусственных препятствий относительно уровня летного поля.
г) Краткие указания по пробиванию облачности в данном аэропорту.
Образец такой схемы показан на рис. 1996.
За исходную точку схемы пробивания облачности берется без-
ПРИНЦИПИАЛЬНАЯ СХЕМА
пробивания облачности в аэропорту по PotfttD-навигационным средствам
Рис. 1996. Примерная схема пробивания облачности (тумана) в аэропорту садки по радиомаяку и приводной радиостанции.
отказно действующее радионавигационное средство (приводная радиостанция, ШВРС, радиопеленгатор или радиомаяк), которо( находится от центра летного толя в пределах 3—5 км или далее, т. е. на таком расстоянии, которое обеспечивает нормальное снижение самолета до аэродрома посадки после его пролета радио-ориентирной точки па заранее рассчитанной высоте.
Пробивать облачность (по установленным схемам) перед посадкой на аэродром можно только после получения .на борт самолета соответствующего разрешения от диспетчера аэропорта посадки.
При пользовании схемами необходимо помнить, что снижение производится со скоростью не выше 2 м/сек (по вариометру); маг яитные курсы (MKi, IM1K2) есть не что иное, как ЗМПУ] и З'МПУ». следовательно, для полета на радионавигационное средство необ ходимо всегда вводить в, показание компаса соответствующую по правку на упреждение сноса самолета ветром и добиваться, чтобы полет производился по установленному пути до момента пролет радионавигационного средства. В случае отклонения от уставов ленного пути ошибку необходимо исправлять доворотами самолет., в соответствующую сторону до момента пролета радиоориенти] ной точки.
Стандартный разворот можно выполнять по гирополукомпас;. (перед началом разворота необходимо установить ГПК на нуль показаний) двумя способами:
1-й способ. Развернуть самолет в правую сторону от направления полета на 45° (по показаниям ГПК), следовать в этом на правлении в течение 45 секунд, затем развернуть самолет влев • в течение минуты, пока ГПК не покажет 180° (фактический ра.. ворот на 225°), т. е. до направления, когда нос самолета будет направлен на радионавигационное средство.
2-й способ. Развернуть самолет в правую сторону от направления полета до показаний ГПК=бО°; затем^не задерживая сэ .молет на этом направлении, развернуться в левую сторону до по «сазаний ГПК= 180° (фактический разворот на 240°).
Указанные стандартные развороты осуществлять с креном (п авиагоризонту) не менее и не более 10—15°.
Схемы пробивания облачности в настоящее .время являютс обязательными для каждого аэропорта, в котором имеется ради< навигационное средство'; они распространены на авиацию всех bi омств и включены в общие правила полетов самолетов на территории СССР.
Установленные схемы пробивания облачности (пригодны для всех эксплоатируемых в настоящее время в ГВФ радиофицированных самолетов, включая и самолет Ил-12 с некоторыми ограничениями. н 1
При этом необходимо .помнить, что вследствие большой скорости полета самолет Ил-12 за указанное в схеме время будет уходить от радионавигационного средства значительно дальше, чем самолеты Ли-2. С-47 и им подобные; больше будет и радиус н азворота.
Вследствие этогр в аэропортах, расположенных в горных районах, шробивать облачность на самолете Ил-12 по существу ютц им схемам пока не рекомендуется.
§ 165. Особенности вождения одноместного самолета
Особенности вождения одноместного самолета заключаются в том, что пилоту одновременно с пилотированием самолета приходится вести ориентировку, наблюдать за показанием пилотажнонавигационных и контрольных приборов, за воздухом и выполнять другие работы.
Поэтому вождение одноместного самолета происходит менее точно и больше зависит от навигационной обстановки. Здесь имеется большая опасность потерять ориентировку из-за невозможности 'применять более сложные способы ориентировки, ка.. па двух или на .многоместных самолетах (радиоориентировку, астроориентировку и т. п.).
В практике применяются наиболее простые и надежные спо-с »бы вождения одноместных самолетов, основанные, главным образом, на визуальной ориентировке.
Подготовка к полету на одноместном самолете производится по тем же правилам, как и к полету на двух- и многоместны самолетах, но со следующими особенностями:
1) контрольные ориентиры по линии “пути выбираются через к 1ждые 50—75 км, у которых «наносятся боковые уклонения через 5°;
2) для облегчения полета и исправления его направления полет по линии пути контролируется отметками ДМ через каждые 10 минут;
3) предварительные данные расчета полета по каждому пр -молинейному участку пути (компасный курс, путевая скорость, высота и путевое время) наносятся непосредственно на карту (справа от линии пути);
4) направление ветра отмечается на карте стрелкой, а скорость— оперением ее конца (каждым длинным пером отмечают скорость ветра в 10 км/час, а коротким — 5 км/час);
5) наступление темноты отмечается на карте в конце маршрута словами «Темнота . . . час. . . . мин.».
Подготовленная карта должна быть особо тщательно подогнана в планшет, чтобы в полете можно были делать на ней необходимые пометки.
Основным способом вывода одноместного самолета на путь следования является применение компасного курса, рассчитанного по шаропилотным данным перед вылетом; пилот обязан точно пройти над ИПМ с рассчитанными компасным курсом и скоростью и отметить на карте время его прохода.
При срочных вылетах и в случае отсутствия шаропилотных данных, а также при высотном полете курс следования нужно подбирать по створу ориентиров на линии пути при подходе к И’1М с таким расчетом, чтобы к моменту подхода к ИПМ быть .08
уже на курсе следования; при отсутствии створа необходимо сначала брать курс, равный заданному путевому углу, и, определив на-глаз снос, исправлять курс.
Во всех случаях полета правильность взятого курса следования при проходе ИП'М необходимо проверять по общей и летальной визуальной ориентировке.
При полете по компасному курсу летчик обязан строго соблюдать принятый в расчет режим полета—скорость и высоту
Пилотируя самолет по компасу, летчик обязан непрерывно контролировать правильность полета ведением визуальной ориентировки и счислением проходимого пути по (времени.
ГЛАВА XII
РАДИОНАВИГАЦИЯ
ОБЩИЕ СВЕДЕНИЯ
§ 166. Средства радионавигации
Радионавигацией называется вождение самолета с использс аанием наземных -и самолетных радиосредств.
К средствам радионавигации относятся радиомаяки, привод-ые радиостанции, широковещательные радиостанции (ШВРС), радиополукомпасы (РПК), радиокомпасы (РК), наземные радио-дленгаторы и радиолокационные станции.
Р а д>ио м а я к представляет собой установленный на земле радиопередатчик с направленным излучением (радиосигналов. Радиомаяки могут работать «зоной» и «пеленгом». В первом случае радиомаяк дает возможность вести самолет по определенной узкой полосе, где слышимость двух сигналов радиомаяка одинакова, т. е. по так 'называемой «равносигнальной зоне», совпадающей с участком воздушной трассы, оборудованной маяками. Радиомаяки, работающие пеленгом, дают 32 или 36 направлений от радиомаяка (и 'к радиомаяку), в которых пропадает слышимость одного из сигналов, передаваемых радиомаяком. Такой радиомаяк позволяет вести ориентировку и контроль пути при полете в произвольном направлении в районе слышимости радиомаяка. Самолет для вождения по радиомаякам должен быть оборудован приемной радиостанцией.
Радиополукомпас (РПК) дает (возможность экипажу са. молета определять Направление на наземную (передающую) ра-(иостанцпю, производить полет на радиостанцию и от нее и определять местоположение самолета. С помощью РПК применимо самолетовождение не только при полете по определенной трассе, ио и при внетрассовых полетах, так как требуется лишь наличие н«д земле радиостанций, работающих в диапазоне волн РПК. Для полета по РП'К могут быть пспользо’ваны широковещательные станции, радиомаяки и 'специальные приводные радиостанции.
Радиокомпас (РК) является более усовершенствованным редством радионавигации, чем радиополукомпас, и решает те же задачи, причем с 'большей простотой и удобством для экипажа.
Наземные радиопеленгаторы по запросу 'с самолетг сами пеленгуют самолет, т. е. определяют направление на само-
.‘1чую радиопередающую станцию и результаты пеленгования передают по радию на самолет. Следовательно, на самолете должна 'быть установлена связная приемошередающая радиостанция.
Вождение самолетов по наземным пеленгаторам может осуществляться «курсовым методом» и «методом засечек». .В первом случае пеленгаторы должны находиться на линии пути, т. е. на трассе, и сообщать на самолет лишь направление ют пеленгатора или на пеленгатор. При так называемом «методе засечек» радиопеленгатор сообщает на борт местонахождение самолета. Для этого пеленгаторы располагаются и и стороне ют трассы п объединяются в группы. Связь с самолетом ведет главный пеленгатор группы.
Радиолокационные станции, предназначенные для целей навигации, подразделяются на наземные и самолетные. К наземным установкам можно отнести специальные радиомаяки, которые, будучи установлены на земле, дают возможность с помощью самолетных приборов определять расчетное место самолета с большой точностью или совершать полет на радиомаяк с (постоянным определением расстояния до радиомаяка.
К самолетным установкам можно отнести:
а) Приборы для дальней и ближней навигации с использованием специальных наземных радиомаяков.
<б) Приборы радиоведения, дающие возможность экипажу, независимо от условий видимости земли, видеть на специальном экране своеобразное изображение местности, над которой пролетает самолет.
в) Приборы, предупреждающие самолет от столкновения с наземными препятствиями и находящимися в воздухе самолетами.
г) Радиовысотомеры больших и малых высот,—определяющие с большой точностью истинную высоту полета.
§ 167. Электромагнитные волны и их распространение
Радиосвязь и, в частности, радионавигация осуществляются посредством электромагнитных волн, излучаемых в пространство антеннами передающих радиостанций и принимаемых антеннами приемных радиостанций.
Электромагнитная волна представляет собой периодическое колебательное изменение электрического и магнитного полей, перемещающихся в пространстве со скоростью света.
Время, в течение которого электромагнитная волна совершает полный цикл своего изменения, после чего опять повторяются те значения в той же последовательности, называется периодом, а число периодов в единицу времени—частотой колебаний или просто частотой.
Частота измеряется в герцах и килогерцах; герц (гц) равен одному полному циклу или полному периоду в одну секунду, а килогерц (кгц) равен тысяче герц.
Расстояние, проходимое волной за время одного полного колебания в данной точке, называется длиной волны.
Для целей радиосвязи и радионавигации применяются электромагнитные колебания с частотой ют нескольких сот тысяч до десятков миллионов в секунду. Практически для получения та-к ix колебаний используются проводники (антенны), в которых при помощи особых генераторов высокой частоты возбуждается переменный электрический ток, меняющий направление и силу с ответственно выбранной частоте.
Между частотой и длиной волны существует зависимость, еы-гжаемая уравнением:
300000 ' ~ X
где: f—частота, выраженная в килогерцах;
X— длина волны в (метрах;
ЗоОООО— скорость распространения света в км/сек.
Пользуясь приведенным уравнением, (можно определить, какая частота соответствует определенной длине волны, и, наоб рот, по длине волны определить частоту.
и лю 300000
Например, частота 410 кгц соответствует длине
410
701 9ПА ЗООООО
/31 (м; длина 300 м соответствует частоте —=1000 ki ц 300
В проводнике, попавшем в сферу действия электромагнитных волн (электромагнитное поле), возникает переменный ток с чг стотой, соответствующей частоте колебаний электромагнитного поля. После усиления и преобразования этот ток используется в приемных устройствах для получения сигналов.
Рис. 200. Распространение радиоволн.
Электромагнитные волны, излучаемые антеннами передающе! радиостанции, по характеру распространения подразделяются на поверхностные и пространственные (рис. 200).
312
Поверхностная волна идет от передатчика к приемнику вдоль земной поверхности по кратчайшему расстоянию (ортодромии). Пространственная волна идет от антенны передатчика под некоторым углом вверх, встречает на своем пути ионизированный слой, или, как его принято называть, слой Хивисайда1), и, преломляясь в нем, отражается на земле; таким образом пространственная волна, проделав более длинный путь, чем поверхностная волна, принимается антенной (приемного устройства.
Характер распространения электромагнитных волн зависит в большей степени от длины волны. Длинные и средние волны, в диапазоне которых работают РПК и радиомаяки (300 -2000 м), распространяются и поверхностно, и пространственно. Днем средние и дл1И.нны(е пространственные ватины, (попадая <в слой Хивисайда, полностью поглощаются, поэтому прием л р о и-сход,ит только за. счет поверхностной волны. Ночью (Прост;ра1нств1енн1ые волны, попадай в 'слой Хивисайда, преломляются и возвращаются на землю; таким образом .п.'ри е м ночью происходит за счет поверхм остиой и про-с т.р а нс твемн ой 1вол.н.
Короткие волны, на которых осуществляются радисвязь и наземная пеленгация, также распространяются и поверхностно, и пространственно. Однако вследствие распространения таких поверхностных волн на небольшое расстояние и значительного поглощения их—прием на коротких волнах происходит как днем, так и ночью, главным образом, за счет пространственных волн.
Прием ночью поверхностных и пространственных волн при работе на длинных и средних волнах, а также прием, главны я образом, пространственных волн при работе на коротких волнах создает ночную ошибку, которую принято называть ночным эффектом.
«Ночной эффект» проявляется не с одинаковой силой в различное время года и суток и зависит от колебания слоя Хивп-сайда. Наибольшее значение он приобретает в сумерки и после восхода солнца, т. е. тогда, когда слой Хивисайда резко меняет свою высоту. При наличии ночного эффекта отмечаются резки? колебания в силе приема и значительное искажение приема. Например, при полете точно по зоне маяка прослушиваемые сигналы будут указывать на уклонение от зоны; пеленги, полученные из одной и той же точки, .в различное время неодинаковы и отличаются от действительного значения на некоторую величину. Проявление ночного эффекта зависит в большой мере от удаления приемной станции от ‘передающей: чем меньше это .расстояние, тем меньше сказывается ночной эффект.
Передающие и приемные антенны могут быть ненаправленного и направленного действия.
>) Слоем Хивисайда называют слой атмосферы, получивший под действием солнечного излучения электропроводящие свойства. Свойства, мощность, а (также распределение по высотам слоя Хивисайда непрерывно меняются и зависят •т времени года, суток и других причин.
Типичным образцом ненаправленной антенны является вертикальный провод, присоединенный к передающему или приемному устройству. При излучении радиоволны через такую антенну громкость приема сигналов во всех направлениях в равном уда-- ении от антенны будет одинакова; точно так же при приеме на такую антенну радиоволн, излучаемых антеннами передатчиков, расположенных в разных направлениях и на равном удалении, ромкость будет одинаковой. Таким образом, диаграмма излучения или приема на такую антенну будет иметь вид окружности (рис. 201).
Рис. 201. Диаграмма излучения и приема антенны ненаправленного действия.
Рис. 202. Диаграмма излучения и приема рамки (замкнутой антенны).
Типичной антенной направленного действия является рамка, которая принимает (излучает) радиоволны в различных направлениях неодинаково; наилучший прием, т. е. прием с наибольшей громкостью, совпадает с плоскостью рамки, в направлении же, перпендикулярном к плоскости рамки, прием отсутствует.
Диаграмма приема (передачи) на такую антенну будет иметь вид восьмерки (рис. 202). Из этой диаграммы 'видно, что сила приема при перемещении передатчика вокруг рамки за един оборот два раза дойдет до максимума и два раза до минимума (нуль приема), причем всякий раз после прохода нуля направление тока меняется на 180° (это отмечено на рис. 202 плюсом или минусом). С помощью такой рамки можно определит' направление на передающую радиостанцию. Для этого необходимо повернуть рамку так, чтобы был получен «нуль приема». В результате направления перпендикулярные плоскости рамки и будут направлениями на радиостанцию, но поскольку таких направлений два и расположены они под углом 180°, то определить истинное направление на радиостанцию не всегда возможно. R радиотехнике нередко, в частности для ликвидации этой неопределенности, пользуются комбинированным приемом (перета-чей) на рамку и открытую антенну.
При равенстве токов в рамке и открытой антенне диаграмма комбинированного приема (передачи) имеет вид, показанный не оЛ
рис. 203, и называется «кардиоидой». При неравенстве токог. в рамке и открытой антенне (в открытой антенне — меньше) диаграмма комбинированного приема (передачи) имеет несколь.о иной вид и называется улиткой Паскаля (рис. 204).
Все виды антенного устройства, характеризуемые этими диаграммами (восьмерка, кардиоида, улитка Паскаля), положены в основу работы радионавигационных средств, а именно; для четырехзонных маяков и маяков, работающих на пеленг, используется восьмерка, для двухзонных маяков—улитка Паскаля, для наземных пеленгаторов и РПК—кардиоида.
САМОЛЕТОВОЖДЕНИЕ ПО РАДИОМАЯКАМ
§ 168. Радиомаяки
Радиомаяки предназначены для обеспечения вождения само летов в заданном направлении. В Гражданском воздушном флоте применяются зонные маяки, которые дают возможность производить полет по трассе, вдоль которой и располагаются зоны маяка. Кроме этого, радиомаяки используются для передачи на самолет сведений о погоде и для диспетчерской связи.
Радиомаяк представляет собой передатчик со специальным антенным и коммутационным устройствами. Антенное устройство служит для излучения электромагнитных волн в пространл-в, < и состоит чаще всего из двух рамок. Коммутационное устройство маяка обеспечивает передачу через каждую рамку определенного сигнала по азбуке Морзе. Маяки Гражданского воздушного флота обычно передают через одну рамку букву А (.—), через вторую Н (— .).
Диаграмма излучения зонных маяков может быть различной, но при любой диаграмме маяк дает зону, которую пилот и должен уметь использовать для полета по трассе. JHa наших воздушных линиях применяются четырехзонные и двухзонные маяки.
Антенное устройство четырехзонного маяка состоит из двуг. рамок, расположенных под углом (примерно 135°). Так как диаграмма излучения одной ,рамки7 имеет форму восьмерки (рис. 202)-* то диаграмма излучения маяка будет иметь вид, покаэанньп на рис. 205. Антенное устройство двухзонного маяка состоит и одной рамки и одной открытой антенны и имеет диаграмму излучения в виде улитки Паскаля (рис. 204).
Для создания двух зон специальное устройство маяка меняе направление тока в открытой антенне, а следовательно, меня' »нак плюс на знак минус и тем самым опрокидывает «улитку в другую сторону; в результате получается диаграмма излучс -пия в виде двух улиток Паскаля. При опрокидывании улитк с повременно меняется и сигнал, излучаемый маяком (рис. 205).
Рис. 205. Диаграмма излучения четырехзонного маяка.
Рис. 206. Диаграмма излучения двухзонного маяка.
Из приведенных рисунков видно, что у четырехзонного и двухзонного маяков обе диаграммы (т. е. диаграмма с сигналом А к диаграмма с сигналом Н) перекрываются и тем самым создается площадь перекрытия, где с помощью приемника можно слышать оба эти сигнала. На всей этой площади громкость обоих сигналов будет различна, и только по линии, идущей от центра к пересечению диаграмм, громкость сигналов будет одинакова.
Практически вследствие несовершенства нашего слухового аппарата эта линия равной слышимости сигналов восприн г мается нами как зона, причем ширина этой зоны, которую называют равносигнальной (рис. 207), зависит от степени перекрытия двух диаграмм. Во всех случаях путем изменения угла между рамками и другими способами стараются добиться, чтобы угловая ширина рабочей зоны (т. е. зоны, совпадающей по направлению с трассой) была равна 3°. При большей или меньшей ширине зоны вождение самолета значительно затрудняется. Поэтому четырехзонные маяки имеют, кроме рабочих, еще нерабочие зоны, которые значительно шире рабочих зон. Линейная ширина зоны при одной и той же угловой ширине зависит от расстояния до маяка. Практически линейную ширину зоны мож ю определить с помощью навигационной линейки. Для этого необходимо на шкале тангенсов треугольный индекс совместить с 316
Рис. 207. Равносигнальная, двухснгнальная и односигнальная зоны.
(рис. 207); при выходе из двух-
расстоянием до маяка, а против угловой ширины прочесть линейную; например, при расстоянии 150 км и угловой ширине 8° линейная ширина будет около 8 нм.
Радиомаяки устанавливаются в аэропортах, а рабочие равно-сигнальные зоны располагаются вдоль воздушной линии. По рабочей равносигнальной зоне и производится полет.
При полете По маяку надо ясно представлять себе где, какие и с какой громкостью 'будут слышны сигналы маяка.
В большинстве случаев у -’аяков Гражданского воздушного флота при полете по ра-очей равносигнальой зоне от маяка справа будет сигнал А, а слева-—-сигнал Н, при полете же на маяк справа будет Ьиг-.:ал Н, а слева—сигнал А. В равносигнальной зоне, как было уже указано,, слышны оба сигнала—А и Н—с одинако-1 й -громкостью.
При .выходе из равносиг-нальной зоны вправо и влево самолет попадает в двухсигнальную зону, где слышны два сигнала с различной громкостью
сигнальной зоны самолет попадает в односигнальную зону, где-слышен один сигнал—или А или Н.
При полете на маяк, независимо от того, в какой зоне летит самолет, громкость сигналов маяка возрастает и чем ближе к маяку, тем с большей интенсивностью.
Почти все маяки Гражданского воздушного флота имеют коммутацию, при которой сигналы А (. —) и Н (—.) в равносигнальной зоне слышны раздельно, по, однако, не исключена возможность встретить маяк с коммутацией по так называемой переплетающейся системе, при которой в равносигнальной зоне будет сл1шшо длинное сплошное тире, а при выходе из нее будут прослушиваться и точки и тире.
Для распознавания маяков каждый маяк передает через ! 5 минут свой позывной сигнал, состоящий из двух букв, входящих в наименование порта; например: НС— Новосибирск, КЗ— Казань и т. д. Кроме этого, соседние маяки работают на разных волнах, имеют различный тон и передают сигналы с разной скоростью.
Для диспетчерской связи, т. е. для передачи на борт циркулярных распоряжений, маяки используются по мере необходимости. Каждые 30 минут, в начале каждого часа и в начале каждого получаса (т. е. от 00 до 05 мин. и от 30 до 35 мин.), маяк дает погоду всем находящимся в воздухе самолетам.
Маяки Гражданского воздушного флота работают в диапазоне волн от 600 до 1100 м. Практически надежная дальность действия маяка для приемника В-3 150—200 им.
Радиомаяки также могут работать на пеленг. В Гражданско" воздушном флоте маяки, работающие на пеленг, не имеют применения, так как зонные маяки с большим успехом обеспечив?-, ют линейную работу, т. е. полеты ПО' трассе. (Маяки же, рабе тающие на пеленг, предназначены для обеспечения внетрассовыч полетов, полетов в любом направлении от места установки мая ка и из любого пункта к месту установки маяка. Работа маяка па пеленг по существу мало отличается от работы маяка зоной: здесь также использовано свойство рамочной антенны, заклю чающееся в направленном излучении электромагнитных волн. (Как уже известно, диаграмма излучения рамочной антенны представляется в виде восьмерки; его значит, что сигнал, излучаемый через такую антенну, будет в двух направлениях (в плоскости рамки) слышен с максимальной громкостью и в двух напра ьлениях (перпендикулярно плоскости рамки) с минимальней громкостью.
Если такую рамочную антенну ориентировать вдоль меридиана, то направление луча наименьшей слышимости будет совершенно определенным; в данном направлении по этому лучу можно производить полет, удерживая все время самолет в таком положении, чтобы громкость сигнала не возрастала. Для обеспечения полетов в любом направлении и вместе с тем для облегчения самолетовождения маяк, работающий на пеленг, имеет или 16 рамочных антенн, расположенных через 11°15', или 18 рамочных антенн, расположенных через 10°; при этом через каждую рамку излучается присвоенный только ей сигнал.
Так как одна рамочная антенна имеет два максимума и два минимума, то маяк, состоящий из 16 антенн, будет иметь 32 направления с минимальной громкостью сигналов, а маяк, состоящий из 18 антенн,—36 направлений.
При полете по маяку, работающему на пеленг, используются направления с наименьшей громкостью сигналов (лучи молчания); поэтому во всех случаях важно знать, как расположены сигналы и какой сигнал соответствует направлению север—юг с тем, чтобы можно было нанести на карту лучи пропадающих сигналов (лучи молчания) оцифровать их и в дальнейшем использовать для самолетовождения.
Передача сигналов производится по очереди через каждую рамку в порядке нумерации, со скоростью 16 сигналов в 30 секунд для 16-рамсчного маяка и 18 сигналов в 30 секунд для 18-рамочного маяка. Таким образом в 1 минуту через каждую рамку дважды передается сигнал (рис. 208).
При использовании маяка для полета в заданном направл нии надо стремиться вести самолет так, чтобы пропадающий сигнал этого направления был слышен с наименьшей громкостью сравнительно с остальными сигналами, зв
i§ 169. Полет по зонным радиомаякам
Порядок полета по зонным маякам состоит в следующем:
1. После взлета следует лечь на курс, равный залеганию зоны, и, продолжая полет с этим курсом, включить приемник, настроиться на маяк и определить, в какой стороне находится равносигнальная зона.
Рис. 208. Схема сигналов маяка, работающего на пеленг. •
а—^б-рамочный маяк; б—18-рамочный маяк.
2. Через 10—15 минут нужно изменить курс в сторону зоны примерно на 45° и войти в равносигнальную зону; вход в зону определяется равной громкостью обоих сигналов. Не следует входить в зону сразу же после взлета, так как вход в нее в непосредственной близости от маяка затрудняется вследствие малой линейной ее ширины. Кроме этого, в непосредственной близости от маяка затруднен подбор курса следования.
3. Войдя в равносигнальную зону, необходимо лечь на курс, равный залеганию зоны, и продолжать полет, прослушивая сигнал маяка.
4. Если громкость одного из сигналов возрастает, то самолет вследствие сноса уклоняется от зоны. В этом случае необходимо возвратиться в зону и исправить курс. Так как известно только направление сноса, а величина сноса неизвестна, то рекомендуется при значительном сносе для возвращения в зону изменить курс в сторону зоны на 20° и итти с новым курсом до входа в равносигнальную зону.
б. Войдя в равносигнальн^ю зону, нужно уменьшить поправку наполовину, т. е. продолжать полет с поправкой 10°.
6. Если в этом случае самолет будет держаться в равносиг-
альной зоне, то следует считать курс следования подобранным. I ели же самолет будет выходить из зоны, то внесением половин ных поправок (5—3е) уточнить курс следования (рис. 209).
При полете по маяку контроль пути осуществляется наблюдением за скоростью, временем, курсом и прослушиванием сиг-г’плов маяка. Равносигнальная зона полностью обеспечивает контроль пути по направлению; для этого необходимо периодически через 15—20 минут) прослушивать сигналы маяка. Если оба сигнала слышны с равной громкостью, то самолет находится в зоне, а следовательно, перемещается вдоль заданной линии пути.
Ряс. 209. Выход на линию пути при полете по зонному маяку.
Если громкость одного сигнала возрастает, то самолет уходи г из зоны и, значит, уклоняется от заданной линии пути.
Контроль пути по дальности осуществляют чаще всего наблю дением за скоростью и временем, т. е. по пройденному расстоянию; однако в открытом полете наблюдение за местностью, т. е. за контрольными ориентирами, также обеспечивает 'контроль пути.
В слепом полете для контроля пути по дальности целесооб разно использовать РПК и наземные радиостанции, с помощью которых можно получить линию пеленга, а также контроль по иредвычисленным пеленгам (см. «Самолетовождение по РПК», тр. 327). Кроме того, (наличие пеленгаторов пли маяков в стороне от трассы может обеспечить контроль пути, так как они дают вторую позиционную линию.
К исправлению пути прибегают в том случае, если при прослушивании сигналов обнаружено уклонение, т. е. выход из равносигнальной зоны.
Если уклонение значительно, то исправление пути производится в том же порядке, что и подбор курса следования, т. е. самолет должен возвратиться в зону и вновь приступить , к подбору курса следования, начиная с 10-градусной поправки. Бела 320
уклонение незначительно, то исправление курса производится внесением небольших поправок е) Kvpc. При исправлении курса следует различать два положения, а именно: выход из зоны за счет сноса и выход из зоны за счет точности пилотирования. Все сказанное выше относится к первому случаю; что касается второго случая, то здесь достаточно возвратиться в зону и продолжать полет со старым курсом.
Для обеспечения перехода из зоны провожающего маяка в зону встречающего маяка на стыке зон устанавливают маркеры. Маркер представляет собой передающее устройство небольшого радиуса действия, который работает на волнах провожающего и встречающего маяков и коммутирует точки. Маркеры установлены не на всех стыках зон, поэтому следует разобрать два случая перехода из зоны провожающего в зону встречающего маяка, а именно: при наличии и при отсутствии маркера.
При наличии маркера переход осуществляется в следующем порядке. Производя полет по зоне, необходимо вести контроль пути по дальности и с приближением к стыку зон чаще прослушивать сигналы маяка. Как только начнут прослушиваться сигналы маркера, следует перестроиться на встречающий маяк и продолжать полет по компасу со старым курсом, прослушивая сигнал маяка. Войдя в равносигнальную зону встречающего маяка, нужно развернуться и лечь на курс, равный залеганию зоны. Затем следует в общем порядке подобрать курс следования и продолжать полет.
При отсутствии маркера переход из зоны провожающего в зону встречающего маяка осуществляется в несколько ином порядке: при полете в зоне посвожающего маяка необходимо периодически настраиваться на встречающий маяк и прослушивать сигналы встречающего маяка; как только прослушиванием будет установлено, что самолет находится в двухснгнальнэй зоне, следует перестроиться окончательно на .встречающий маяк и продолжать полет по, компасу со старым курсом следования; войдя в равнэсигнальную зону встречающего маяка, нужно лечь на курс, равный залеганию зоны, и в общем порядке подобрать курс следования.
Для обеспечения выхода на аэродром назначения экипаж самолета обязан определить момент лротета маяка. При приближении к маяку, вследствие того, что линейная ширина равносиг-нальнои зоны становится узкой, очень трудно удержать самолет в зоне; кроме этого, вблизи маяка прослушивается характерное пощелкивание. По этим признакам всегда можно судить о том, что маяк где-то близко, и следует приготовиться определять момент пролета (маяка. Основной признак, по которому можно определить момент пролета маяка,—это нарастание громкости до |маяка и затухание после пролета его. Следует помнить, что чем ближе находится самолет к маяку, тем интенсивнее нарастает громкость, достигая максимума у маяка; .после пролета Наяка громкость сигналов с той же интенсивностью (начинает
уменьшаться. Кроме этого, вследствие обычного несовпадения направления равносигнальной зоны, идущей на маяк, с зоной, идущей от маяка, пролет точно над маяком сопровождается выходом из равногигнальной зоны.
Для четырехзонных «маяков можно рекомендовать определять момент пролета по смене сигналов, так как самолет, идя на маяк несколько в стороне от зоны, пересечет боковую зону и попадет из сектора с одним сигналом в сектор с другим сигна лом (рис. 210). *
Рис. 210. Определение момента пролета маяка по смене сигналов.
ОРК 90 ’ ОРК-уо°
Рис. 211. Определение момента пролета маяка с помощью РПК.
На самолетах, на которых имеется РПК, очень удобно и целесообразно определять момент пролета маяка с помощью РПК. В этом случае поступают так: приемник связной радиостанции настраивают на маяк и на слух удерживают самолет в равносигнальной зоне. РПК настраивают также на маяк и ставят рамку на ОРК=90°; в этом случае стрелка индикатора курса ляжет в крайне правое положение, а при пролете маяка—в крайне левое положение (рис. 211).
При определении момента пролета маяка особо важное зна чение имеет регулировка громкости. Нельзя беспорядочно, бесси стемно регулировать громкость приема; нужно уменьшить громкость приема до минимума и не трогать ручки до тех пор, пока громкость не возрастет до такой степени, что начнет беспокоить слух; после этого опять довести громкость до минимума.
Восстановление ориентировки по зонным ра ди ом а я кам. В случае потери ориентировки в районе маякл необходимо немедленно приступить к ее восстановлению пл маяку.
Ориентировку по четырехзонному маяку следует восстанавливать в таком порядке:
1. Настроиться на маяк и, прослушивая его сигналы, установить, в каких двух секторах может находиться самолет.
2. Определить, в каком из этих двух секторов находится самолет; для этого необходимо лечь на курс, равный средней бжс-222
сектрисе1)» и продолжать .полет с этим курсом, прослушивая сигнал маяка д<> тех пор, пека не будет выяснено по нарастанию громкости, где маяк—впереди или сзади. Если громкость сигналов нарастает, то маяк впереди.
3. Изменить курс с таким расчетом, чтобы войти в равносигнальную зону под углом 90°, и продолжать полет до входа в дьухсигнальную зону.
4. Войдя в двухсигнальную зону, уменьшить угол входа в равносигнальную зону до 40 — 45°.
5. Войдя в равнссигнальную зону, лечь на курс, равный залеганию зоны, и продолжать полет до определения момента пролета маяка (рис. 212).
Рис. 212. Восстановление ориентировки по четы-рехзоииому маяку.
Для восстановления ориентировки по двухзонному маяку необходимо:
1. Настроиться на маяк и прослушиванием сигналов установить, где маяк — правее или левее.
2. Лечь на курс, равный среднему залеганию зон, и продолжать полет до того, как можно будет определить, где маяк — впереди или сзади.
3. Под углом 90° итти в равносигнальную зону; при входе ® двухсигнальную зону уменьшить угол входа до 40 — 45°.
4. Войдя в зону, лечь на курс, равный залеганию зоны, и про-
') Биссектрисой называется линия, делящая угол пополам. Средней биссектрисой условимся называть среднюю линию, делящую два противоположных сектора пополам. Это название неточно, но оно сохранено вследствие того, что летный состав к нему привык и хорошо представляет себе эту ливню. Чтобы найти среднюю биссектрису, необходимо сложить биссектрисы Двух противоположных секторов (предварительно бдну из них изменив на "80°) и разделить на два.
должать полет до момента определения пролета маяка (рис. 213).
Рис. 213. Восстановление ориентировки по двух* зонному маяку.
§ 170. Полет по радиомаякам, работающим на пеленг
Выход на линию пути при полете по маяку, работающему «а «сленг, отличается от выхода на линию пути по зонному маяку только тем, что вместо равносигнальнол зоны используется луч молчания, по которому и подбирается курс следования в том же порядке:
1. После взлета, пройдя над маяком, следует лечь на курс, равный заданному путевому углу, и, настроившись на маяк, прослушивать сигналы маяка.
2. Установить, в какую сторону сносит — вправо или влево. Если громкость сигнала правого луча молчания уменьшается, то снсс вправо, если уменьшается громкость левого луча молчания, то снос влево.
Рис. 214. Выход на линию пути при полете по маяку, работающему на пеленг. I
0. Возвратиться на заданную линию пути; для этого изменить курс в сторону, обратную сносу, на 20° и продолжать полет с этим курсом до тех пор, пока громкость сигнала луча молчания, совпадающего с заданной линией пути, не станет минимальной.
4. Всввратившись на линию пути, уменьшить поправку в курс наполовину, т. е. продолжать полет с 10-градусной поправкой.
324
5. Если громкость сигнала правого или левого луча молчания <5удет уменьшаться сравннтельн.) с громкостью сигнала луча молчания, совпадающего с заданной линией пути со внесением половинных поправок, уточнить курс следования (рис. 214).
Контроль пути по направлению при полете; пэ маяку, работающему на пеленг, осуществляется периодическим прослушиванием через 10—15 минут сигналов маяка; в результате в случае необходимости вносят небольшую поправку в курс, исходя ив следующих правил:
1. Если сравнительная громкость сигнала того луча молчания, по которому производится полет, не возрастает, т. е. остается минимально"!, то самолет перемещается вдоль заданной линии пути; .следовательно, нужно прсдотжать полет со старым курсом.'
2. Если сравнительная громкость сигнала того луча молчания, по которому производится полет, возрастает, а громкость сигнала правого луча молчания уменьшается, то самолет уклоняется вправе; следовательно, необходимо внести поправку, т. е. курс уменьшить.
• 3. Если сравнительная громкость сигнала того луча молчания, по которому производится полет, увеличивается, а громкость сигнала левого луча молчания уменьшается, то самолет уклоняется влево; следсвательно, нужно внести поправку, т. е. курс увеличить.
Что касается контроля пути по дальности, то наблюдение за скоростью и временем во всех полетах здесь также является основным способ >м контроля. В открытом полете визуальная ориентировка при наличии ориентиров полностью обеспечит контроль пути по дальности.
В слепом полете, дополнительно к контролю по прейденному расстолнию, используются имеющиеся в районе полетэз и на самолете радионавигационные средства для получения позиционной линии; эта линия, проложенная на карте, определяет положение самолета.
Переход от провожающего на встречающий маяк, а также полет на маяк при выходе в радиус его действия производятся в следующем порядке:
1. При выходе в радиус действия маяка следует настроиться на маяк и прослушать сигналы маяка.
2. Установить, какой сигнал слышен с минимальной громкостью, и прочесть на карте угол залегания луча молчания этого сигнала.
3. Лечь на курс, равный залеганию (направлению) этого луча (если на карте оцифровка направления лучей дана ст маяка, то учесть предварительно 189е), и, подобрав курс следования, продолжать полет в общем пооядке.
Для определения момента пролета маяка следует учитывать, что при приближение! к маяку громкость сигналоз непрерывно .увеличивается, причем чем ближе к маяку, том с большей интенсивностью; кроме этого, о приближении к маяку можно судить по трудности удерживать самолет В' положении минималь
вой слышимости сигнала заданного луча молчания вследствие линейной близости соседних лучей молчания.
'Момент пролета маяка характеризуется интенсивным нарастанием громкости сигналов до маяка и интенсивным уменьшением ее после пролета маяка. Хорошим признаком, определяющим момент пролета, является также смена сигналов; если, например, до маяка оправа был луч Молчания сигнала А, а слева—еигнала Н, то после пролета маяка справа будет луч молчания сигнала Н, а слева—сигнала А.
Восстановление ориентировки по радиомаякам, работающим на пеленг. Для восстановления ориентировки в случае потери ее в районе радиуса действия маяка необходимо:
1. Настроиться на маяк и, прослушав сигналы, определить, на каком луче молчания находится самолет.
Рис. 215. Восстановление ориентировки по маяку, работающему на пеленг.
2. Лечь на курс, равный залеганию луча молчания маяка, и, продолжая полет, определить, где маяк — впереди или сзади. Для этого следует поворотом самолета вправо установить, какого сигнала луч молчания находится правее самолета. Напримео, если маяк впереди, то правее самолета будет находиться луч молчания сигнала А; если маяк сзади, то луч молчания сигнала А будет находиться левей самолета (рис. 215). Можно также прослушиванием сигналов установить, затухает или нарастает общая промлссть сипналоз; если маяк виеоези, громкость сигналов будет нарастать, а если сзади, то громкость сигналов будет затухать.
3. Если 'маяк сзади, то развернувшись на 180°, а если впереди, то со старым курсом продолжать полет до определения момента пролета маяка.
Кроме этого, при потере ориентировки может быть такое положение, .когда нет необходимости выходить на маяк, а район потери ориентировки покрывается работой двух маяков. В этом случае, поочередно настроившись на маяки и прослушав сигналы, можно установить, на каких лучах молчания находится самолет. •-'26
Пересечение этих двух лучей молчания даст расчетное место самолета (рис. 216).
Рис. 216. Восстановление ориентировки определением РМ по двум радиомаякам, работающим на пеленг.
САМОЛЕТОВОЖДЕНИЕ ПО РАДИОПОЛУКОМПАСУ
§ 171. Назначение и устройство РПХ-2
РПК является радионавигационным прибором и предназначается главным образом для вождения самолета при отсутствии види-
Рис. 217. Радиополукомпас РПК-2.
t—приемник; 2—щиток управления; 3—механизм настройки приемника;
#—механизм повес от а рамки (датчик); 5—индикатор курса; 6—индикатор настройки; 7—рамка; 8—открытая антенна, 9—умформер.
мости земли (слепой полет). С помощью РПК можно производить полет на радиостанцию и от радиостанции. Кроме этого, РПК дает возможность определить местоположение самолета по наземным (радиостанциям и может быть кслользоз',н .как обу^ >очинный приемник при полете по маяку на слух. Таким образом РПК позволяет вести ориентировку в слепом полете не только по (определенной трассе, но и пои полете в любом направлении.
Оси > । ,ыми эламсятамд РПК’2 (:<ис. 217) являются:
1. Приемник, собранный по схеме супергетеродина и перекрывающий диапазон волн в пределах от ЗОЭ до 1786 м, что соответствует диапазону частот от 1000 до 168 кгц. Этот диапазон разбит на два псддиапазна:
а) длинные волны 1786—732 м (168—410 кгп),
б) средние волны 732—300 м (410—1000 кгц).
Рис. 218. Щиток управления РПК-2.
2. Щиток управления, предназначенный для управления радиоприемником. На передней панели его (рис. 218) расположены: 823
а) ручка чувствительности индикатора курса, которая одновременно является главным выключателем;
б) две кнопки для перехода с одного поддиапазона на другой;
в) две сигнальные лампочки (красная и зеленая), показывающие, в каком поддиапазоне работает РПК;
г) переключатель рода работ, имеющий три положения: ММ—прием «маяка модулирозанясго» или вещательных радио ставший (РПК работает, как обыкновенный приемник, и дает возможность принимать телефонную передачу); МН—прием «маяка немс'Дулир-ззанного или радиостанций (телефонную передачу нельзя принимать—слышен звук низкого тона, в этом положении пролзонится настройка и прослушивание позывных); К—компасная работа, т. е. работа с индикатором курса (работает индикатор курса, и можно принимать телефонную передачу);
д) ручка регулятора громкости для регулирэзки громкости принимаемых на телефон сигналов;
е) тумблер для включения и выключения второго индикатора курса;
ж) две пары гнезд для включения телефонэз;
з) предохранитель в цепи бортовой сети.
Рис. 219. Механизм па-тройки приемника РПК-2.
Рис. 220. Механизм поворота рамки РПК-2.
3. 'Механизм настройки приемника, в корпусе которого помещены шкала и передача от ручки к указателю идеалы. Циферблат настройки имеет две концентрически раололоженспые шкалы: внешняя шкала с оцифровкой от 400 до 1000 кгц относится
32У
к средневолновому диапазону, внутренняя шкала с делениями о? 168 до 410 кгц относится к длинноволновому диапазону (рис. 219),
4. Механизм поворота рамки, при помощи которого можно по ворачивать рамку вокруг ее вертикальней оси. В корпусе механизма помещены шкала и передача от ручки к указателю шкалы. Шкала имеет 50 делений по 2° каждое. Показания на шкале читаются так же, как на магнитных компасах АН-4 и А-3 (рис. 220).
5. Индикатор курса для ведения самолета на радиостанцию и от нее и для пеленгации (рис. 221).
точной настрсики на волну при-
приема электромагнитных волн
6. Индикатор настройки для нимаемей станции (рис. 222).
7. Рамка для направленного передающей радиостанции.
Рис. 221. Индикатор курса РПК-2.
Рис. 222. Индикатор настройки РПК-2.
8. Открытая антенна для ненаправленного приема электромагнитных волн передающей радиостанции.
9. Умфсрмер РУН-10 А, работающий от бортовой сети напряжением 26 в и рассчитанный на получение напряжения 220 в при силе тока 50 ма.
Л
§ 172. Принцип работы РПК-2
В принцип работы РПК положен комбинированный прием на рамку и открытую антенну, при кото-ром получается диаграмма приема, называемая кардиоидой. Кардиоида имеет один максимум и один минимум приема, лежащие во взаимно пр-отивэдолежных направлениях.
Благодаря наличию в РПК специального коммутационного устройства, которое с частотой 40 пер/сек изменяет направление тока, а следовательно, и знаки в восьмерке (диаграмма приема на рамку),—кардиоида непрерывно (40 раз в 1 секунду) опрокидывается; таким образом комбинированный прием на рамку и открытую антенну можно изобразить в виде двух накла--30
дывающихся кардиоид, расположенных под углом 180° и имеющих различные знаки (рис. 223).
Если принимаемая радиостанция находится в направлении оси рамки, то стрелка индикатора курса будет стоять на нуле, так как оба вектора, характеризующие силу приема и принадлежащие кардиоидам с различными знаками, дают результирующее значение лека на выходе приемника, равное нулю. При отклонении оси рамки от направления на радиостанцию вектор силы приема, соответствующий одной кардиоиде, не будет равен .вектору, соответствующему другой кардиоиде и имеющему противоположный знак; поэтому в результате слежения обоих векторов получится некоторая величина тока через прибор, которая заставит стрелку индикатора курса отклониться от нуля в одну сторону. При отклонении оси рамки от направления на радиостанцию в другую сторону и стрелка индикатора курса отклонится от нуля в противоположную сторону.
ф
Рис. 223. Диаграмма приема РПК.
Нужно отметить, что кардиоиды всегда располагаются своим максимумом и минимумом вдоль плоскости рамки, а следовательно, поворот самолета или рамки изменяет положение кардиоид в пространстве.
При нулевом положении рамки, т. е. когда плоскость рамки располагается перпендикулярно продольной оси самолета, кардиоиды своим максимумом и минимумом также располагаются перпендикулярно оси самолета. В этом случае можно назвать их правой и левой, ориентируя кардиоиды относительно сидящего в самолете пилота.
Рассматривая показания индикатора курса в зависимости от «сложения радиостанции относительно кардиоид, можно вывеет» следующие правила: если, выражаясь образно, принимает сигналы передающей радиостанции правая -кардиоида (ссь рамки левее
радиостанции), то стрелка индикатора курса отклонится влево^ если принимает сигналы левая кардиоида (ось рамки правее радиостанции), то стрелка уйдет вправо; если сигналы радиостанции принимают обе кардиоиды равномерно (радиостанция в направлении оси) то стрелка индикатора курса будет находиться на нуле (рис. 224).
Таким образом стрелка индикатора курса при нулевом положении раджи всегда указывает—правее или лессе самолета на
ходится радиостанция; если стоелка отклонилась вправо, то, сле-
довательно, радиостанция находится левее во, то радиостанция находится правее самолета; наконец, если стрелка стоит на куле, то продольная ось самолета совпадает с направлением на радиостанцию.
самолета, а если вле-
Рис. 225. Показание и-лдикатора курса при поворотах самолета.
Ряс. 224. Показание индикатора курса при различном взаимоположении самолета и радиостанции.
Этет вывод действителен для любого случая и для любого взаимсположения радиостанции и самолета; это нужно постоянно помнить и читать показания индикатора курса, исходя из это^ го вывода.
Часто ошибочно утверждают, что этот вывод верен только тегда, когда радиостанция впереди, упуская из виду следующее положение: если радиостанция впереди, то поворот сам лета вправо подставляет левую кардиоиду под радиостанцию и стрелка уходит вправо, т. е. указывает, что радиостанция находится 332
левее самолета; если же радиостанция сзади, то поворот самолета вправо подставляет правую кардиоиду под радиостанцию и стрелка уходит влево, т. е. указывает, что радиостанция находится правее самолета.
Отсюда может быть выведено правило, которое фзрмулиоует-ся так: если при повороте самолета или рамки вправо (влево) стрелка индикатора курса уйдет вправо (влепо), то рад останция впереди; если при повороте самолета или рамки вправо (влево) стрелка индикатора курса уйдет влево (вправо), то радиостанция сзади (рис. 225).
Это правило широко используется для того, чтобы установить в полете, где радиостанция — впереди или сзади, а также для определения пролета радиостанции.
Полезно запомнить:
1. Если при нулевом положении рамки стрелка -индикатора -курса слушается ноги (правая нога—стрелка вправо, левая нога— стрелка влево), то радиостанция впереди; наоборот, если стрелка индикатора курса не слушается ноги (правая нота—стрелка влево, левая нога—стрелка вправо), то радиостанция сзади.
2. Если при нулевом положении рамки стрелка индикатора курса -идет за ручкой поворота рамки (если ручку вращают вправе—стрелка идет вправо, если ручку вращают влево—стрелка идет (влево), то радиостанция сзади; наоборот, если стрелка индикатора курса 'не идет за ручкой (если ручку вращают вправо—стрелка идет влево, если ручку вращают влево—стрелка идет вправо),
Рис. 226. Курсовой угол радиостанции.
то радиостанция впереди.
Рамка РПК благодаря специальному устройству может вращаться с помощью ручки поворота рамки на 360°; это, в свою очередь, дает возможность определить направление на радиостанцию. Так как РПК, установленный на самолет, ориентирован вдоль продольной оси, то и направление на радиостанцию определяется от продольной оси самолета по ходу часовой стрелки от нуля до 360°.
Для того чтобы определить этот утол, необходимо после
настройки РПК на радиостанцию вращением ручки поворота рамки привести стрелку индикатора к нулю и прочесть его на лимбе рамки (щиток управления пс-воротом рамки).
Если предположить, что РПК, установленный на самолет, не имеет ошибок (радиодевиации), т. е. ось рамки направлена строго на радиостанцию, то этот угол (образованный продольной осью самолета и направлением на радиостанцию) будет курсовым углом радиостанции—КУР (рис. 226).
Для того чтобы определите КУР без ошибки на 180°, нужно во всех случаях при определении КУР вращать ручку поворота рамки в ту сторону, куда ушла стрелка индикатора курса, до прихода ее к нулю; тогда на лимбе можно прочесть прямой бортовой пеленг, т. е. то, что тоебуется.
Мы предполагали, что РПК, установленный на самолет, ошибок не имеет, однако это не так. Вследствие влияния метал ти-ческих частей самолета ось рамки при нулевом положении стрелки индикатора курса не устанавливается стрсго в направлении на радиостанцию; поэтому читаемый на лимбе рамки угол является не КУР, а отсчетом радиокомпаса (ОРК), который отличается от КУР на величину ошибки радиод-ев.иации:
кур = орк + (±др;.
§ 173. Включение и настройка РПК-2
1При включении и настройке РПК-2 необходимо:
1. Ручку с надписью «Чувствительность индикатора» повернуть по часовой стрелке до упора.
2. Пеоеключатель рода работ поставить в положение 'ММ.
3. Указатель настройки РПК вращением ручки установить на частоту данной радиостанции (в килогерцах).
4. Включить нужный поддиапазон; для этого нажать на кнопку поддиапазона, после чего загорится соответствующая лампочка (табл. 7).
Таблица 7
Поддиапазоны Частота, КП1 Длина во 1НЫ, м Цвет сигнальной лампочки
Длинноволновый . . . 168 - 410 1786 732 Красный
Средневолновый .... 410-100J 732-300 Зеленый
5. Ручку с надписью «Регулятор громкости» повернуть по часовой стрелке до упора.
6. Убедиться в работе радиостанции, прослушав ее в телефонные наушники.
7. Переключатель рода работ поставить в положение МН.
8. Точно настроиться на принимаемую радиостанцию, для чего легким вращением ручки настройки РПК добиться максимального уклонения влево стрелки индикатора настройки.
9. Переключатель рода работ поставить в положение К.
Регулировку чувствительности индикатора курса при шолете на радиостанцию или от нее необходимо выполнять в следующем порядке.-
1. Доворотом самолета привести стрелку индикатора курса к нулю.
2. Вращением ручки (механизма поворота рамки повернуто рамку на 30°.
334
3. Ручкой регулятора чувствительности добиться такого положения, при котором стрелка индикатора курса находилась бы в крайнем положении с тенденцией вернуться к нулевому положению.
4. Вращением ручки механизма поворота рамки возвратить рамку в нулевое положение и продолжать полет.
При пеленгации следует поступить таким образом:
1. Вращением ручки механизма поворота рамки привести стрелку индикатора курса к нулю.
2. Заметить отсчет на лимбе рамки и от этого отсчета повернуть рамку на 30°.
3. Ручкой регулятора чувствительности добиться такого положения, при котором стрелка индикатора курса находилась бы в крайнем положении с тенденцией вернуться к нулю.
4. Возвратить рамку в нулевое положение, после чего можнэ приступить к пеленгации.
§ 174'. Радио девиация
При нулевом положении стрелки индикатора курса ось рамки не устанавливается строго в направлении на радиостанцию и образует с действительным направлением на радиостанцию какой-т» угол, который называется радиодевиацией (рис. 227).
Рис. 227. Радиодевнация.
Это происходит вследствие того, что во всех металлических частях самолета при воздействии на них приходящей электромагнитной .волны передающей радиостанции находятся э. д. с., вузы вающие токи; последние, в свою очередь, становятся источникам» излучения вторичного электромагнитного поля и искажают действие приходящей электромагнитной «волны передающей радиостанции. Радиодевнация является величиной переменней как по знаку, так и пэ абсолютному значению и зависит от курсового угла радиостанции, а не от курса самолета, как девиация магнит-
I чего компаса.
Обычно .вследствие значительной сложности радиодевиация из самолетах не уничтожается, а лишь снимается и заносится в график. Кривая радиодевиации длт РПК, установленного на сама* .лете, будет иметь вид, показанный на рис. 228.
Как видно из этого графика, кривая радиодевиации четыре раза проходит через нулевое значение и имеет дза положительных и два отрицательных максимальных значения, по абсолютной величине достигающих 15 и более градусов.
Поэтому на самолете обязательно нужно иметь график и учитывать радио девиацию при рабе те с РПК, иначе результа гы •пеленгования 'Могут быть очень неточны. Радиодевиация За учитывается так же, как и девиация магнитного компаса, а именно: если необходимо найти КУР, то LP учитывается со своим знаком: КУР = ОРК+ (+ - Р если же, зная КУР, необходимо найти ОРК, то 3 Р учитывается с обратным знаком (алгебраическое вычитание): ОРК=КУР—(+-^* Для получения более точных 'результатов часто строят кривые для КУР и ОРК ® отдельности.
Снятие кривой радиодевиации чаще производят на земле по видимой радиостанции. При снятии кривой необходимо, чтобы радиостанция находилась от самолета не ближе трех длин вол-,гы. на кото :ой определяет я ради ''девиация; например, если радиостанция работает на волне 1500 м, то самолет при снятии девиации должен находиться от радиостанции не 'менее 4,5—5 км. Следует избегать определять радисдевиацию по близким мощным радиостанциям от 10 квт и выше во избежание неверных результатов определения. В крайнем случае, определяя рапиодевиацию по таким станциям, надо находиться от них на расстоянии не менее 40—50 км. ,
Вблизи площадки, на которой снимается кривая, .в радиусе не менее 300—400 м, не должно быть построек, самолетов, тракторов, проводов, железных дорог и т. д.
Работу по снятию кривой радиодевиации необходимо выполнить в следующем порядке:
1. Выкатить с помощью трактора самолет на площадку и удалить трактор.
2. Установить девиационный пеленгатор (на самолете Ли-2— на ребре переднего люка), тщательно проверив совладение линии лимба пеленгатора 0°—180° с продольной осью самолета (0° к хвосту).
3. Установив пеленгатор на курсовой угол 0°, развернуть самолет так, чтобы визирная нить пеленгатора совпала сэ снижением антенны радиостанции или со средней точкой между двумя мачтами.
4. Включив и настроив РПК, вращением ручки поворота рамки привести стрелку индикатора курса к нулю (слегка постукивая >по индикатору).
5. Прочесть на лимбе рамки ОРК (отсчет радиокомпаса); если он больше или меньше 360°, то, о гъедичгив валик от рамки, поставить лимб раглки на 0° и вновь соединить валик с рамкой. 3.6
гплнщ двопдва снпынгэд
Рис. 228. Графин рьдиодевиапии РПК-
6. Поворачивая самолет влево на 10—15°, отсчитывать с по мощью пеленгатора КУР и определять ОРК, занося эти данные в бланк такой формы (табл. 8):
Таблица 8
№ КУР ОРК ДР
7. По записям в бланке высчитать Д Р: ЬР== КУР —ОРК.
Например (табл. 9):
Таблица 9
№ КУР ОРК ДР
1 0 0 0.
2 13 10 + 3
3 28 22 + 6
5 6J 50 +10
13 145 152 — 7
8. На основе полученных данных ДР построить кривую девиации, нанеся на бланк графика все точки и соединив их пла вной кривой (рис. 228).
При отсутствии видимой радиостанции кривую «радиодевйации можно снять по невидимой радиостанции. Это делается несколько иным способом. Если мы примем условные обозначения:
МРП—магнитный радиопеленг, т. е. радиопеленг, отсчитанный от магнитного меридиана,
'МК—магнитный курс,
-КУР—курсовой угол радиостанции,
то ДР определится на основании следующей формулы:
ДР= КУР —ОРК,
КУР = МРП - МК.
1МРП является величиной постоянной для данного места и мс жет быть измерен на карте; для этого необходимо данное место я карте соединить с радиостанцией прямой линией и с помощью транспортира измерить на меридиане ИРП; далее, учтя АЛ1 (магнитное склонение) с обратным знаком, получим МРП»
МРП = ИРП — (+ ДМ).
лл
Если по каким-либо причинам измерить МРП на карте нельзя, его можно определить по формуле:
ctg |МРП+(+ ДЛ4)| dill */>
где: Хг и %—долтста и широта радиостанции,
X и <f —долгота и широта данного места.
МК определяют в обычном порядке по курсовым углам види пых ориентиров, исходя из формулы: .магнитный курс (МК) равен магнитному пеленгу ориентира ('МПО) минус курсе вой угол ориентира (КУО), т. е.:
МК='МПО—КУО.
МП видимых ориентиров (фабричные трубы, башни, вышки) измеряется девиационным пеленгатором на площадке до установки самолета, а КУ ориентира измеряется с помощью того же пеленгатора при снятии кривой девиации. Рекомендуется определять МК по трем ориентирам, расположенным под углом примерно 120°.
ОРК читаем на щитке управления поворотом рамки, предва рительно приведя стрелку индикатора курса к нулю. Записи и вычисления удобно производить на бланке следующей формы:
Радиостанция ... ...
Частота..........
МРП
MnOj= МПО2= МПО.=
КУО МК=МПО-К/О КУР=МРП—МК ОРК ЛР—КУР—ОРК
По вычисленным значениям ДР в обычном порядке строится н 'бланке кривая.
В полете радиодевиацию снимают способом, подобным тому, .аким определяют в полете девиацию магнитного компаса. Поэтому, как правило, проверку показаний радиокомпаса и магнитного компаса производят одновременно.
Для снятия девиации н полете необходимо, чтобы на самолете ыл визир, позволяющий определять магнитные курсы самолета *“ линейному ориентиру.
В процессе подготовки к полету с определением радиодевиацчм |ддо выполнить следующее: выбрать на расстоянии (по возмож-н сти) и 1о0 км ют радиостанции линейный ориентир, в полете
над которым можно определять магнитные курсы самолета. Удобнее, если направление этого ориентира будет совпадать с направлением на радиостанцию или будет близко к нему; в этом случае можно будет использовать больший участок линейного ориентира, не меняя пеленга радиостанции.
Затем определить магнитный пеленг радиостанции от того места, где предполагается проверять радиокомпас в полете.
Рассчитать курсовые углы линейного ориентира и ’МК для различных КУР через 10—15°.
Подготовить таблицу для записи намеченных и фактических МК и курсовых углов линейного ориентира -и радиостанции, а также ОРК. ‘При этом надо наметить план и последовательность заходов на линейный ориентир. Для полета с определением рз-диодевиации в воздухе выбирают день, когда нет большого ветра и легко выдерживать самолет на курсе. Следует также избегать периодов суток, начинающихся за час до восхода и захода солнца и кончающихся через час после восхода и захода солнца.
В (полете над 'выбранным местом линейного ориентира надо зести самолет с намеченными магнитными курсами и в намеченной последовательности заходов на ориентир, записывая в момент пересечения его ОРК и фактические курсовые углы линейного ориентира. Затем на основании этих данных надо вычислить фактические курсовые углы радиостанции и радиодевиацию, соответствующую различным ОРК- Можно также вести самолет через линейный ориентир с определенными, заранее рассчитанными ОРК. Последний способ облегчает задачу, так как над линейным ориентиром остается определить и записывать только его курсовые углы.
Если на самолете имеется ГПК, то снять радиодевиацию в полете можно также следующим, более простым, но менее точным способом:
I. На земле или в воздухе с помощью специально выбранного ориентира установить самолет в положение, при котором КУР равен нулю (направить продольную ось самолета на радиостанцию). Если ОРК будет больше или меньше КУР, устранить установочную ошибку рамки в том же порядке, как указано выше.
2. После этого в полете приведением стрелки индикатора курса к нулю направить продольную ось самолета на радиостанцию и установить ГПК на нуль (КУР=0°).
3. Далее, поочередно поворачивая самолет по ГПК вправо и влево от нуля на 15°, 30°, 45е, 60° и т. д., записать соответствующий КУР и прочитанный для каждого курсового угла ОРК.
4. По записям КУР и ОРК вычислить радиодевиацию ДР(ДР~ —КУР—ОРК) и в обычном порядке составить график.
Для получения более точных результатов рекомендуется чаще (через 4—6 отсчетов) устанавливать самолет по индикатору курса на КУР=0° или 180° и корректировать отсчет ГПК (устанавливать на 0°).
§ 175. Расчет радиопеленгов и прокладка их на карте
С помощью РПК 'можно определить курсовой угол радиостанции, т. е. угол, образованный продольной осью самолета и направлением на радиостанцию. Для этого необходимо точно настроиться на радиостанцию и вращением ручки рамки в сторону стрелки индикатора курса привести последнюю к нулю; после этого па лимбе рамки прочесть ОРК. Для того чтобы, зная ОРК, определить КУР, нужно учесть со своим знаком радиодевиацию; таким образом:
КУР = ОРК + (± ДР).
Практически КуР чаще всего бывает нужен для расчета (ОРП) обратного истинного радиопеленга, т. е. для определения направления от радиостанции на самолет, отчитываемого от истинного меридиана радиостанции. ОРП может быть определен в том случае, если в момент пеленгования был прочитан на компасе курс самолета. Таким образом, зная курс и курсовой угол, можно определить пеленг радиостанции, так как П = К+1КУ (рис. 229).
Рис 22Э П<*л₽нг радио* станции.
Рис. 230. Истинный радиопеленг.
Пеленг необходим для прокладки его на карте, а на картах «еридианы — истинные; поэтому и пеленг рассчитывается истинный. Таким образом, прочитанный на компасе компасный курс следует перевес.ти в истинный:
ик = кк+(±д/0 + (±ДМ).
Отсюда истинный радиопеленг будет равен ИРП = ИК4-КУР (рис. 230).
Если же исходить из начальных величин, то эта формула бу дет выглядеть так:
__ИК_________________KVP
ирп +(± а М) орк 4- (± a pf
МК
Из формулы видно, что А К, ЬМ и ДР при расчете ИРП учитываются со своими знаками, т. е. если минус,—они -вычита ются, если плюс,—прибавляются.
Истинный радиопеленг очень легко (перевести в обратный (рис. 231); для этого необходимо изменить его на 180°. Таким -образом обратный истинный радиопеленг (ОРП) будет равен:
ОРП = КК 4* (± Л Я) + (± 4- ОРК 4- (± А Р) ± 180°
Рис. 231. Поправка на угол схождения меридианов.
ОРП рассчитывается для того, чтобы проложить его на карте и тем самым определить положение самолета. ОРП прокладывается от запеленгованной радиостанции, поэтому прежде всего необходимо нанести на карту радиостанцию или по координатам, или же путем «привязки» к имеющимся на карте местным предметам.
На радиостанцию, нанесенную на карту, накладывается транспортир (центром) так, чтобы диаметральная линия транспортира 0°—180° была
параллельна ближайшему меридиану и против цифры, соответствующей ОРП, на карте ставится точка. Пос-
ле этого 'Необходимо приложить линейку к течке местонахожде-
ния радиостанций и найресеиной точке и провести карандашом на карте линию, которая и будет линией пеленга.
Для более точного определения расчетного места самолета при значительной разности долгот самолета и радиостанции необходимо при прокладке пеленгов на карте учитывать поправ-
ку на угол схождения меридианов е.
Ввиду того, что на картах конической проекции меридианы не •параллельны, обратный пеленг отличается от прямого не на 180п, а на 180°4-поправка на угол схождения меридианов (рис. 231). Величина этой поправки зависит от разности долгот радиостанции самолета и определяется по формуле:
а = (Х2 - X,) 0,8, .
где: (21 \
s.— поправка ,на угол схождения меридианов;
(Ха— к,) — разность долгот радиостанции и самолета:
0,8—постоянный коэфициент для наших карт в конической проекции.
(Кроме этого, 'величину поправки на угол схождения меридианов можно определить графически на карте с помощью транспортира. Делается это так: транспортир накладывается на меридиан самолета так, чтобы центр круга и 90° совпали с меридианом, а к неоцифрованной части транспортира вплотную прикладывается линейка; удерживая линейку, необходимо переместить по ней транспортир к меридиану радиостанции, остановив центр на последнем, и после этого прочесть на транспортире, на сколько градусов меридиан радиостанции ушел от цифры 90°. Это и будет поправкой на угол схождения меридианов.
Учитывается эта поправка так: если 'радиостанция восточнее самолета, то поправка имеет знак плюс и, следовательно, прибавляется к обратному истинному радиопеленгу; если радиостанция западнее самолета, то поправка имеет знак минус и вычитается из обратного истинного радиопеленга.
Рис. 232. Учет поправки на угол схождения меридиана.
Практически, поскольку в момент пеленгования местоположение самолета неизвестно, прокладывают обратный истинный радиопеленг без учета поправки на угол схсждения меридианов и определяют примерное место самолета, потом рассчитывают величину поправки и учитывают ее путем прокладки дополнительных линий от уже проложенных пеленгов. Дополнительные линии всегда ложатся севернее проложенных пеленгов вследствие loro, что знак поправки, в зависимости от положений радиостанции по отношению к самолету, меняется (рис. 232).
Пересечение вновь проложенных линий даст расчетное место самолета. Эту поправку следует учитывать во всех случаях, когда разность долгот более 3°.
§ 176. Наземные радиостанции
РПК может быть использован в полете при наличии на зем щ передающих радиостанций, широковещательных и приводных ipa диостанций и радиомаяков.
Широковещательные радиостанции работают и > расписанию вещания; в случае необходимости по предварителч ному заказу через диспетчера порта они работают вне расписа ния для обеспечения самолетовождения. Почти все вещательны'* станции работают в диапазоне волн РПК и имеют различную мощность от 1 и до 200 квт и выше. Дальность действия вещательной станции для целей навигации определяется длиной волн и мощностью: чем мощнее радиостанция и чем длиннее волна, тем больше дальность действия.
В табл. 10 указана дальность действия (в километрах) при приеме на РПК-
Таблица 10
Частота ноты, КГЦ Мгцчкть, квт 1000 500 300 200 150
Дальность действия, км
1 10 100 250 300 400 450 550 7.0 650 850 1050 800 Ю5о 1300 900 Г,50 1600
Настройка РПК на вещательные станции производится при установке переключател1Я рода работ в положении ММ.
Настроившись на неизвестную радиостанцию, можно опознать ее по передаваемым псзывным, характеру передачи, длине волны и курсовому углу.
Для использования радиостанции необходимо иметь следующие сведения о ней: местонахождение, мощность, длину полны и время работы.
Приводные радиостанции предназначены для обеспечения самолетовождения по РПК. Они могут быть стацихтз©-ного типа и передвижные. Приводная радиостанция представляет собой сравнительно маломощный передатчик, работающий преимущественно в средневолновом диапазоне РПК. Приводные радиостанции действуют для целей радионавигации круглосуточно или по маре необходимости.
Каждой радиостанции присвоены длина волны и позывной, по которому опознается радиостанция. Настройка на приагдную радиостанцию производится при установке переключателя рода работы в положение МН. Практическая дальность действия приводных станций для РПК 200—300 км.
Радиомаяки также могут быть использованы для полета по РПК. в этом случае их нужно рассматривать как приводные радиостанции.
«
Если радиомаяк работает на открытую антенну, то он не отличается от приводной радиостанции. При работе зонсй по пеэе-нлетаюшейся системе он также незначительно отличается от приводной станции; что касается поочередной системы, т. е. раздельной передачи сигналов, то здесь стрелка индикатора курса ведет себя несколько иначе, а именно: при передаче сигнала она отклоняется в соответствующую сторону; в промежутки между передачей сигналов она возвращается к нулю; это положение надо учи гывать и не смущаться скачкообразным поведением стрелки. На стройка на маяк производится при установке переключателя рода работы в положение !ММ. Практическая дальность действия 100— 150 км.
§ 177. Полет от радиостанции по ,РПК-2
Производить чтслет ст радиостанции только по РПК, удерживая стрелку индикатора курса на нуле без учета влияния ветра,— нельзя; в этом случае самолет станет в плоскость ветра и будет уходить от радиостанции не в -заданном направлении, а в плоокс-сти ветра (по ветру)
Рис. 233. Полет от радиостанции по РПК-2.
Полет от радиостанции — это полет, прежде всего, по компа Су, а РПК очень выгодно используется для подбора курса следования и контроля пути.
Выходить на линию пути при полете от радиостанции необ < од им о в следующем порядке (рис. 233):
I. После взлета и набора заданной высоты лечь на курс, равный заданному путевому углу, и, пройдя над радиостанцией, продолжать полет. ,
2. Через некоторый промежуток времени (10— 15 минут) за-«еленглвать радиостанцию и определить курсовой угол КУР = — ОРК i (дг А Р).
При пеленговании радиостанции следует брать средний ОРК за промежуток времени 2 — 3 минуты. После отсчета ОРК рамку поставить в нулевое положение.
3. Определить угол снсса; для этого необходимо из курсового угла отнять 180°:
* УС —КУР — 180°.
Если сноса нет и самолет находится на линии пути, то курсовой угол будет равен 180°; следовательно,
УС = 180° — 180° —0°.
Если снос вправо, то курсовой угол будет больше 180° Например, если юн равен 195°, то:
УС = 195° — 180° = + 15°.
Если скос влево, то курсовой угол будет меньше 180°. Например, -если он .-равняется 170°, то
VC= 170° — 180°= — 10°.
4. Возвратиться на линию пути. Для этого следует развернуть самолет в сторону линии пути на два угла сноса, а рамку РПК повернуть в обратную сторону на курсовой угол, равный двум угла! i сноса; следовательно, ОРК, на который устанавливается рамка по лимбу, будет равен: при повороте вправо ОРК=2УС— (+ 4- А Р) и при повороте влево ОРК = (360° — 2УС) — (+ ДН).
После разворота на двойной угол сноса примерно через тот же промежуток времени, который прошел между пролетом радиостанции и определением угла сноса, самолет возвратится ла линию пути, это будет зафиксировано приходом стрелки индикз тора курса к нулю.
5. Уменьшить поправку в курс наполовину, т. е. оставить нс правку, равную одному углу снсса, и одновременно изменить поворот рамки, т. е. поставить на отсчет по лимбу:
ОРК=УС— (+ ДЛ) или ОРК -(360° — УС) - (4-ДР) и продолжать полет по компасу.
Расчет ОРК, указанный в пп. 4 и 5, возможен в том случае, когда кривая радиодевиации симметрична, например д-^я самолета Ли-2. В противном случае рамку РПК для возвращения на линию пути ставят на ОРК = (180°4-2УС) —(4-ДР), а после возвращения на ОРК= (180°4-УС) — (+Д/). Здесь >гол сноса прибавляется к 180° со своим знаком, а др в данном случае учитывается с обратным знаком.
Контроль пути по направлению полностью обеспечивает РПК Для этого необходимо периодически включать РПК и следить за положением стрелки индикатора курса. Если стрелка индикатора курса стоит на нуле, то самолет находится на линии пути; если 346
стрелка индикатора курса отклонится вправо’;, то, значит, самолет уклонился вправо; если стрелка индикатора курса отклонит:» влево, то и самолет уклонился влево. Установив, в какую сторону уклоняется самолет, необходимо внести поправку в к>рс, предварительно возвратившись на линию пути. Внося поправку в курс, не следует забывать соответственно изменять положение рамки.
Контроль пути по дальности при полете от радиостанции также осуществляется наблюдением за скоростью и временем. Однако ограничиваться только этим способом контроля недостаточно и следует использовать для этой цели имеющиеся бок >вые радиостанции и другие наземные радионавигационные средства.
Полет от радиостанции не обеспечивает полностью выхода на цель, т. е. не дает возможности определить момента пролета цели; однако тщательный контроль пути по дальности может ликвидировать этот пробел. В условиях слепого полета чрезвычайно удобно использовать для этой цели заранее вычисленные пеленги, если имеются боковые радиостанции.
При отсутствии дополнительных наземных радионавигационных средств как в пункте назначения, так и в стороне от наго выходить на цель (аэродром) следует с помощью визуальной ориентировки, причем целесообразно выходить из облачности заблаговременно, т. е. заведомо зная, что пункт назначения впереди.
§ 178. Полет на радиостанцию по РПК-2
Полет на радиостанцию с помощью РПК может осуществляться двумя методами—пассивным и активным.
Пассивный метод полета очень прост и удобен. Отнако к его недостаткам можно отнести то, что самолет перемещается нс вдоль заданной линии пути, а в стороне от нее, причем это отклонение от линии пути может достигнуть больших значений в зависимости от удаления радиостанции, направления и скорости ветра. Поэтому данный способ должен быть использован тотько в том случае, если разрешен и возможен полет вне заданной линии пути. Чаще всего препятствуют применению этого способа наличие «ворот», рельеф местности и пр. Активный метод полета предусматривает перемещение самолета вдоль заданной линии пути; это несколько усложняет работу экипажа, так как необходимо учитывать влияние ветра на полет.
При выполнении полета на радиостанцию пассивным методом исключается 'необходимость в учете ветра. Сущность этого способа состоит в том, что продольная ось самолета все время устанавливается в 'направлении на радиостанцию; в результате самолет, •перемещаясь по кривой в стороне от линии -пути, выходит на .радиостанцию. 1
*) При установке рамки «а ОРК=(180°+УС1 —. ( + \Р) отклонение стрелки вправо укажет на уклонение самолета влево, отклонение стрелки плево- укажет >на уклонение самолета вправо.
Кривая перемещения самолета при пассивном методе полете называется радиодрС'Мией; ее форма зависит от величины отношения воздушной скорости к скорости «ветра и от угла ветра. Боковое отклонение ют заданной линии пути и увеличение времени на полет по радиодромии можно определить с помощью табл. II Она построена для полета исключительно по нулевому поло женино стрелки индикатора курса, и цифпы будут несколько увеличены при периодическом включении РПК.
Таблица 11
Углы ветра С>тнои’*ние роргушрой сисрсс^и к скорости Петра 0 30 60 90 120 150 180
0 7 12 13 10 6 ' 0
3 0 1 6 5 2 0
0 4 7 7 6 4 0
Э 0 0,4 1.5 2 1,7 0.6 0
0 3 5 5 5 3 0
7 0 0,2 0.7 1 0,8 0,3 0
В первой строке горизонтальных граф указано боковое отклонение в проценте от длины полета, во второй строке — увеличение времени в процентах от времени полета.
Как видно из табл. 11, потеря времени за счет удлинения пути незначительна, поэтому при допустимости боковых отклонений предпочитают вести самолет пассивным методом, как наиболее простым и не требующим никаких, даже простейших, вычислений курса следования.
Выход на линию пути при полете этим способом производит ся после выхода по компасу и времени к исходнсТПу пункту маршрута.
Настроившись на радиостанцию и подобрав с наибольшей тщательностью чувствительность индикатора курса, следует поставить рамку РПК на нуль, а «переключатель рода работ—в положение К; затем от ИПМ в течение нескольких минут доворотом самолета вправо или влево удерживать стрелку индикатора курса на нуле и заметить показание компаса. После этого вы ключить РПК и продолжать полет по компасу с замеченным компасным курсом (рис. 234).
Контроль и исправление пути осуществляются периодически 18
(через 10—15 минут) включением РПК и поиведением стрелки индикатора курса к нулю (доворотом самолета); заметив новый компасный курс, продолжают полет с ним до следующего включения РПК- Кроме этого, для контроля пути необходимо вести непрерывное наблюдение за ксмпасным курсом и за работой радиостанции. В случае если радиостанция прекратит свою работу, следует продолжать полет с последним компасным курсом.
Контроль пути по дальности производится наблюдением за скоростью и временем, а также за изменением компасного курса гак как чем 'ближе к радиостанции, тем больше меняется компасный курс. При наличии боковой радиостанции ее также можно использовать для контроля пути по дальности.
Выход на радиостанцию производится ведением самолета по индикатору курса РПК, который при приближении к радиостанции не выключается.
Ведя самолет по индикатору курса и наблюдая за поведена ем стрелки, можно определить момент пролета радиостанции, так как стрелка над радиостанцией ведет себя очень беспокойно. Кроме этого, как уже указывалось выше, если радиостанция впереди, то при установке рамки на нуль поворот самолета вправо вызовет отклонение стрелки индикатора курса от нулевого положения вправо, а когда радиостанция окажется позади, поворот самолета вправо заставит стрелку отклониться влево.
Более наглядно показывает пролет радиостанции стрелка индикатора курса при положении рамки 90°. В этом случае в непосредственной близости от радиостанции необходимо поставить рамку на ОРК 90° и вести самолет по компасу; до радиостанции стрелка индикатора курса будет находиться в крайне правом положении, а и момент пролета перейдет е левое положение. Если рамка будет поставлена на ОРК 90° при значительном удалении от радиостанции, то тогда необходимо периодически ставить рамку на нуль и приводить стрелку индикатора курса доворотом самолета к нулю.
Активный метод. Этот метод полета предусматривает полет самолета по заданной линии пути, а поэтому главная задача экипажа состоит в тем, чтобы учесть снес, т. е. подобрать курс следования.
Выход на линию пути следует производить в таком порядке (рис. 235) ’
1. После взлета настроить РПК на радиостанцию, установить рамку на нуль и выйти по компасу на ИПМ.
2. Над ИПМ доворотом самолета привести стрелку индикатора курса к нулю, заметить показание компаса и, выключив РПК, продолжать полет по компасу с замеченным курсом.
Примечание. При полетах на относительно небольшом расстоянии- с разностью долгот самолета и радиостанции не 'более 3—4° можно производить полет на радиостанцию, исходя из среднего ЗПУ, т. е. от ИПМ не искать курс .приведением стрелки индикатора курса к нулю, а производить полет с курсом, равным ЗПУ. При больших расстояниях определение уклонения само лета таким способом -не дает верных иретогавлений о «ветре. Поэтому 'ре комендуется при полете на радиостанцию устанавливать вначале самолет На курс, при котором стрелка индикатора курса будет находиться на нуле (КУР=0°); в дальнейшем ведут самолет так, чтобы сумма курса и КУР всегда равнялась пеленгу радиостанции с данного участка шути (з общем случае меняющемуся радиопеленгу по мере перемещения самолета по заданной линии пути).
3. Через некоторый промежуток времени (10—15 минут) включить РПК и по положению стрелки индикатора спределить, в какую сторону снос—вправо или влево (стрелка ушла вправо— снос вправо, стрелка ушла влево—снос влево).
Направление сноса можно также определить, приведя доворотом самолета стрелку индикатора курса к нулю и заметив показание компаса на этом курсе. Если МК, соответствующий показанию компаса над ИПМ, будет равен МК, соответствующему показанию компаса при втором приведении стрелки индикатора курса к нулю, то сноса нет; если МКг < МКл, то снос впоаво; если !MK2>MKi, то снос влево. Например: МК2 = 355°, MKi = 5° — снос вправо; МК2=10°, MKi=5° —снос влево.
4. Развернуть самолет на 20" в сторону лин^и пути, рамку установить при развороте влево на курсовой угол 20°, а при развороте вправо-—на курсовой угол 340° и продолжать полет до прихода стрелки индикатора к нулю (стрелка индикатора курса в этом случае придет к нулю при возвращении самолета на заданную линию пути).
5. Уменьшить поправку в курс и поворот рамки наполовин} ;КУР=10° или 3'50°) и продолжать 'полет по компасу.
6. Если стрелка индикатора курса при полете по компасу будет находиться на нуле, это значит, что курс подобран правильно, а если стрелка не находится на нуле, то внесением половинных поправок подобрать курс следования.
Практически активный метод полета несколько упрощался 350
и при незначительном уклонении самолета от линии пути, -В этом случае самолет на линию пути не выводят, а продолжают полет на радиостанцию с "постепенным приближением к линии пути.
В этом случае порядок работы состоит в следующем:
1. После взлета настроить РПК на радиостанцию, установить рамку на нуль и выйти по компасу на ИПМ.
2. Над ИПМ доворотом самолета привести стрелку индикатора курса к нулю, заметить показание компаса и, выключив РПК. продолжать полет по компасу с замеченным курсом.
3. Через некоторый промежуток времени (10—15 — 20 минут) включить РПК и по положению стрелки индикатора опре-телить, в какую сторону снос—вправо или влево (рис. 236).
4. Разворотом самолета привести стрелку индикатора курса к нулю и заметить курс.
5. Развернуть самолет от замеченного курса в сторону, обратную сносу, в зависимости от влияния ветра на 5—10°, а рамку установить соответственно (поворотом в сторону, обратную повороту самолета) на курсовой угол 5—10° или 355—350° .и, продолжать полет по компасу с этим новым курсом. В дальнейшем следует наблюдать, чтобы сумма МК + КУР была равна ЗМПУ.
При полете активным методом на радиостанцию контроль пути по направлению обеспечивается наблюдением за индикатором курса. В этом случае самолет следует вести по компасу, периодически включая РПК; если стрелка индикатора курса будет находиться на нуле, ©то значит, что самолет перемещается юдоль заданной линии пути; если стрелка ушла вправо, то самолет уклоняется вправо; если стрелка ушла влево, самолет уклоняется влево. Таким образом можно установить направление сноса и уточнить курс эмпирическим путем. При исправлении курса не следует забывать соответственно повооачивать рамку.
Основной способ контроля пути по дальности — это наблюдение за скоростью и временем; однако очень часто путевая скорость бывает неизвестна, поэтому результаты контроля будут очень неточны. Во всех случаях для повышения точности контроля необходимо дублировать его получением линии пеленга другой радиостанции.
Момент пролета радиостанции можно определить при нулевом положении рамки. Стрелка индикатора курса при поолете радиостанции будет вести себя беспокойно, причем движения ее будут энергичными. Следует помнить, что уже при приближении к радиостанции стрелка начинает «беспокоиться», но резких движений не дает.
Очень часто по ряду обстоятельств стрелка индикатора курса своим поведением не указывает момента пролета, т. е. ее поведение при пролете незначительно отличается от поведения при приближении к радиостанции. Поэтому целесообразнее пролет радиостанции определять не при нулевом положении рамки, а повернув ее на 90°, т. е установив ее по лимбу на отсчет 90°. В этом случае стрелка индикатора курса до радиостанции будет •'62
Рис. 236. Полет на радиостанцию без выхода иа линию путл.
находиться ® крайнем (правом положении, а в момент пролета ра диостанции займет крайнее левое положение. Это и определит момент пролета радиостанции.
Нужно отметить, что если даже самолет пройдет не над ра диоетанцией, а в стороне от нее, то и в этом случае стрелка ин дикатора курса при нахождении самолета на траверсе радио станции перейдет 'влево; при этсм чем больше расстояние от ра диостанции до пролетающего в стороне от нее самолета, тем медленнее стрелка будет переходить из правого в левое поле жение.
(Кроме этого, не следует забывать правило поведения стрелки индикатора курса при повороте самолета (рамки) до и после радиостанции; оно во многих случаях окажет помощь при определении пролета радиостанции.
э
§ 179. Контроль пути по боковой радиостанции
Если радиостанция находится в стороне от линии пути, целесообразно использовать ее для контроля пути. Боковая радиостан ция при наличии РПК во всех случаях обеспечивает контроль пути по дальности.
Такой способ контроля пути очень эффективен, удобен и преет. Сущность его заключается в том, что с помощью РПК определяется КУР боковой радиостанции, далее рассчитывается ОРП и прокладывается на карте. Проложенная на карте лини-! пеленга определяет положение самолета. Таким образом, зна-f фактическую линию пути, можно определить местоположение са молета и тем самым осуществить полный контроль пути.
Если фактическая линия пути неизвестна, то тогда обеспечи дается только контроль пути по дальности, так как второй пози ционной линии нет. В этсм случае самолет будет находиться нi этой линии — на отрезке, ограниченном справа и слева линиями отходящими от заданной линии пути на угловую величину, рав ную возможному углу сноса.
Работу по контролю можно значительно упростить, если провести некоторую предварительную подготовку на земле. Тако упрощенный способ контроля пути принято называть контролем пути по предвычисленным (предварительно вычисленным) пелен гам. Этот способ освобождает от прокладки пеленгов на карт-* во время полета и заключается в следующем. На земле перед вылетом на заданной линии пути намечаются контрольные ориеи тиры, от которых измеряется транспортиром пеленг радиостап ции, предназначенной для контроля пути. Значение магнитного пеленга записывается на карте (на схеме 3 v ориентира). <В во; тухе после того, как будет подобран курс следования, вычисляет ся для первого (а потом и для последующих) ориентиоа ОРК ра диостанции и на рассчитанный ОРК ставится рамка РПК- В это» случае как только самолет выйдет к ориентиру, для которого был рассчитан ОРК, стрелка индикатора курса придет к нулю, что и укажет в слепом полете на пролет ориентира. В случае уклоне
ния самолета от заданной линии пути стрелка индикатора курса придет к нулю при выходе самолета на линию пеленга (рис. 237)
После прихода стрелки индикатора курса к нулю продели зают то же самое для следующего ориентира и таким образом непрерывно ведут контроль пути.
Порядок работы для контроля пути этим способом состоит в следующем:
На земле. 1. Наметить на заданной линии шути контрольные ориентиры.
Рис. 237. Контроль пути по предвычисленным пеленгам.
2, Нанести на карту радиостанцию, предназначенную для использования в полете.
3. Соединить на карте прямой линией контрольные ориентиры с радиостанцией.
4. С помощью транспортира измерить истинные пеленги от ориентиров на радиостанцию. Для этого необходимо наложить транспортир на ориентир, совместив диаметральную линию транспортира с меридианом. Если меридиан, нанесенный на карту, про ходит не через ориентир, а вблизи него, то транспортир можно наложить на меридиан, поставить центр транспортира на Пересе чение меридиана с линией пеленга, после этого прочесть истинный .пеленг на транспортире против линии пеленга.
5. Измеренные истинные пеленги перевести в магнитные и за писать их у ориентиров.
Для перевода истинного пеленга в магнитный нужно учесть магнитное склонение с обратным знаком (алгебраическое вычитание) :
МП = ИП— (+ AAf).
В воздухе. 1. Подобрать курс следования, а если курс рассчитан, предварительно проверить его и продолжать полет, строго выдерживая курс.
2. Прочесть на компасе компасный курс и перевести его *
магнитный; для этого нужно учесть девиацию компаса со своим знаком:
МК = КК + (±Д К).
3. Определить КУР. для чего необходимо из магнитного пеленга отнять магнитный курс (пеленг равен курсу плюс курсовой угол). Если магнитный пеленг меньше магнитного курса, то к -пеленгу надо прибавить 360°:
кур=мрп—МК.
4. Перевести КУР в ОРК, Для чего следует учесть радиодевиацию с обратным знаком (алгебраическое вычитание);
ОРК == КУР — (+ Д Р) . ’
5. Включить РПК и настроиться на радиостанцию, на которую рассчитывается ОРК.
6. Поставить рамку радиополукомпаса на рассчитанный OPKi т. е. на лимбе дистанционного управления рамкой установить цифру, соответствующую ОРК-
7. Продолжать полет, строго выдерживая курс, который взят при расчете ОРК, и наблюдать за стрелкой индикатора курса.
При выходе самолета на ориентир, а в случае уклонения от линии пути — при выходе на линию пеленга стрелка индикатора курса придет к нулю.
Для последующих контрольных ориентиров работа в воздухе проводится в том же порядке.
Рассчитать ОРК можно также заблаговременно на земле; в этом случае для расчета надо брать курс, равный заданному путевому углу, или рассчитанный курс следования по шаропилот-пым данным. В воздухе для получения хороших результатов необходимо, подлетая к ориентиру, лечь на курс, взятый при расчете на земле, и строго его выдерживать. При осуществлении контроля пути по предвычисленным пеленгам нужно следить, чтобы установка рамки РПК на рассчитанный ОРК и включение РПК производилось до подлета к контрольному ориентиру. Следует помнить: если контрольный ориентир впереди, стрелка индикатора отклонится 'В сторону радиостанции, а если контрольный ориентир пройден,— то в противоположную сторону.
§ 180. Восстановление ориентировки ।
При наличии на борту самолета РПК, а на земле—радиостан-жий, работающих © диапазоне волн РПК, можно восстановить по* терянную ориентировку.
Восстановление ориентировки с помощью РПК производите! •познаванием прослушиваемых радиостанций и выходом на одну из них или определением РМ по ним. Лучший способ восстановления ориентировки — это выход на опознанную радиостанцию; ♦днако это не всегда возможно вследствие значительного удале-жм
ния радиостанции от места потери ориентировки, поэтому прих« титей прибегать к определению РМ (расчетного места).
РМ определяется пеленгованием с помощью РПК наземных радиостанций, причем определить РМ можно по одной или двум радиостанциям. При пеленговании всегда следует помнить: чем
РМ
Рис. 238. ючность определения РМ в зависимости от удаления радиостанций от самолета.
ближе радиостанция к самолету, тем выше точность пеленгова «ия, и наЬборот. Эго происходит вследствие того, что рассчитан-иые и проложенные пеленги фактически не являются линией, а представляют собсй зсны с отклонением от линии пеленга на + 2,5°. Ошибка эта накапливается за счет неточности всех эле ментов, входящих в расчет ОРП (рис. 238).
Рис. 239. Точность определения РМ в зависимости от угла пересечения радиопеленгов, взятых от разных радиостанций.
Кроме этого, следует помнить, что РМ определяется тем точ яее, чем ближе пересечение пеленгов к углу 90°, и наоборот (рис. 239).
При определении РМ по двум радиостанциям необходимо:
1. Выбрать для пеленгования две радиостанции и убедиться н «х работе.
2. Настроиться на первую радиостанцию и вращением ручки рамки в сторону стрелки индикатора курса привести стрелку к нулю.
3. Отсчитать сначала компасный курс, потом ОРК. Записать время.
4. Настроиться на вторую радиостанцию и вращением ручки рамки в сторону стрелки индикатора курса привести стрелку в нулевое положение.
5. Отсчитать сначала компасный курс, затем ОРК. Записать ремя.
6. Через промежуток времени, прошедший между взятием пер-юго и второго пеленгов, вновь запеленговать первую радиостанцию, отсчитать компасный курс и ОРК-
7. Рассчитать ОРП (обратные истинные радиопеленги) для .ервой и второй радиостанций. Для второй радиостанции расчет (роизвэдится в общем порядке; для первой радиостанции ОРП рассчитывается по среднему курсовому углу, т. е. берется курсовой угол первого пеленгования и курсовой угол второго пеленгования первой радиостанции, складываются и делятся пополам; по полученному среднему рассчитывается ОРП:
vvd _|ОРК1 + (±ДР)] + [ОРК2 + (±ДР)] 1\ «у г средний--------------“------ --------— “
Такой расчет среднего КУР можно делать тогда, когда КУР близок к 90° или к 270°, и во всяком случае он должен находиться в пределах 40—140° или 220—230°. При КУР, находящихся не в этих пределах, целесообразнее приводить пеленги к одному времени несколько иным способом: проложив первый и второй ОРП на карте, уложить между ними прямолинейный отрезок, соответствующий (по величине и направлению) пути, .пройденному самолетом между моментами пеленгования.
8. Рассчитанные ОРП проложить на карте (ри<^ 240).
места пеленгованием двух PC.
35В
Рис. 241. Определение расчетного места пеленгованием одной PC.
9. Внести поправку на угол схождения меридиана.
При определении РМ пеленгованием одной радиостанции необходимо:
1. Настроиться на радиостанцию и вращением ручки рамки в сторону стрелки индикатора курса привести стрелку индикатора курса к нулю.
2. Отсчитать компасный курс, записать время и ОРК.
в. Через некоторый промежуток времени вновь запеленговать гу же радиостанцию, записать компасный курс, время и ОРК.
4. Рассчитать два ОРП и преложить их на карте (рис. 241).
5. Первый пеленг перенести параллельно ему самому в направлении полета на отрезок, равный пройденному расстоянию за гремя между взятием первого и второго пеленгов.
Пересечение перенесенного пеленга со вторым даст РМ.
§ 181. Радиополукомпас-отметчик РПКО-ЮМ
Радиополукомпас-отметчик РПКО-ЮМ предназначен для вождения самолетов на приводную радиостанцию (ШВРС). Благодаря наличию отметчика прибор отмечает момент пролета над радиостанцией или траверсу радиостанции.
РПКО-ЮМ можно использовать и для слепого расчета на посадку, а также в качестве •приемника для выполнения полета по радиомаякам.
РПКО-ЮМ имеет следующие основные элементы:
1. Приемник.
2. Щиток управления.
. 3. Индикатор курса-отметки и сигнализатор. ।
4. Механизм-управления настройкой.
б. Тумблер для перехода с РПК на РО (радиоотметка).
Рис. 241а. РПКО-ЮМ
6. Комбинированная неповоротная рамка.
7. Умформер РУ-ПА.
Приемник имеет непрерывный диапазон частот от 275 д» 725 кгц. Дальность его действия при работе с приводными ради< станциями составляет 100—250 км, а при работе на отметку -около 50 км.
Щиток управления предназначен для управления р. диоприемником. Щитки управления изготовляются в двух вариан гах, а именно: первый—для индивидуальной работы РПКО-10М. независимо от связной радиостанции; второй для совместной ра боты (с одного щитка) с приемно-передающей .радиостанцией.
Рис. 2416. Щиток управления^
На щитке управления расположены:
а) Переключатель рода работ, имеющий в первом варианте четыре положения: «Выкл», «К», «ММ» и «МН», а во втором варианте пять положений: «ПРД», «ПРМ», «К», «ММ» и «МН»
Рабочими положениями РПКО являются: «К», «ММ» и «МН», в положениях «Выкл», «ПРД» и «ПРМ» прибор выключен.
В положении «К» прибор работает либо как компас—для по лета по индикатору на радиостанцию, либо как отметчик—для определения момента пролета радиостанции, причем последнее достигается с помощью специального тумблера, который имес. два положения: «РПК» (компас) и РО (отметчик)*. Когда переключатель рода работ находится в положениях «ММ» и «МН», производится слуховой прием радиостанций и радиомаяков, при чем в положении «ММ» можно принимать телефонную передачу 4 в положении «МН»—немодулированную передачу.
<б) Ручка регулятора громкости и угловой чувствительности, предназначенная для увеличения или уменьшения громкости при ема, когда переключатель рода работ находится в положении «'ММ» или «МН», и для увеличения или уменьшения чувствитель ности индикатора курса, когда переключатель рода работ нахо дится в положении «К»-
в) Индикатор настройки, служащий для точной настройки на принимаемую радиостанцию. Точная настройка достигается мак симальным отклонением стрелки индикатора влево, когда пере ключатель рода работ находится в положении «К».
г) Телефонные гнезда, предназначенные для включения вилки телефонов в любые из трех пар. На щитках второго варианта гнезда имеют надпись: «Прием», «ТЛФ» и «Ларине» и соответ стввнно предназначены для включения вилок: телефонов, ларии гофонов и выхода .приемника.
Рис. 241г. Датчик настройки,
Рис. 241в. Индикатор курса-отметки.
Индикатор курса-отметки предназначен для выполнения полета на радиостанцию, а также для определения момента пролета радиостанции, когда тумблер находится в поло жении «РО».
На шкале индикатора нанесены: слева—буква «Л» и силуэ. самолета, направленный к центру шкалы; справа—буква «П» и силуэт самолета, направленный от центра шкалы, посредине шка лы—«О».
По шкале движется стрелка; при выключенном приборе стрелка находится в среднем (нулевом) положении. При полете на' радиостанцию (тумблер в положении «РПК») стрелка индикатора отклоняется от нуля в сторону уклонения самолета, а при полете от радиостанции стрелка отклоняется в противоположную сторону.
При работе индикатора на отметку (тумблер в 'положении «РО») горит красная лампочка сигнализатора, и стрелка находится соответственно на одном из силуэтов самолета; если радиостанция впереди, стрелка находится на силуэте, направленном .к центру шкалы, если—(позади, то на силуэте, направленном от яентра. В момент пролета над радиостанцией стрелка переходит из крайнего левого в крайнее правое положение.
Механизм управления настройкой предназначен для дистанционной настройки приемника на радиостанцию.
Датчик настройки имеет ручку, подвижную шкалу, отградуированную в килогерцах (с ценой деления 10 кгц) и стекло с визирной риской, против которой отсчитывается частота на подвижной шкале.
Расхождения показаний шкалы с действительной частотой настройки приемника могут быть .2.5—5 кгц.
Тумблер перехода с РПК н а РО заключен в отдельную коробку, на которой возле ручки тумблера имеются надписи: «РПК» и «РО». Тумблер работает только тогда, когда переключатель рода работ находится в положении «К».
При установке тумблера в положение «РПК» включается вид работы «компас». Тогда с помощью индикатора курса можно совершать полет на радиостанцию; при установке тумблера в положение «РО» включается вид работы «отметка», и загорается сигнальная лампочка. В этом случае индикатор отмечает момент пролета над радиостанцией.
РПКО-ЮМ в отличие от РПК-2 имеет невращаюшуюся рамку. Но работа его основана на том же принципе, что и работа РПК-2; поэтому индикатор курса РПКО-ЮМ при компасной работе дает те же показания, что и индикатор курса РПК-2 при нулевом положении рамки.
Включение и настройку РПКО-ЮМ производить в следующем порядке:
1. Переключатель рода работ установить в положение «К».
•2. Установить на шкале датчика заданную частоту радиостанции.
3. Медленным вращением ручки настройки добиться максимально! о отклонения стрелки индикатора настройки.
4. Поставить переключатель рода работ в положение «ММ* дли «МН» и по позывным убедиться в правильности настрсйки. Если радиостанция находится на большом расстоянии, точная настройка производится по максимальной слышимости звука в наушниках при положении переключателя рода работ «МН».
§ 182. Полет на радиостанцию дто РПКО-ЮМ
Полет на радиостанцию по РПКО-ЮМ можно производить нассивным и активным методами.
При полете на радиостанцию пассивным методом так же, как и по РПК-2, следует стрелку индикатора курса удерживать (доворотом самолета) на нуле. Если стрелка индикатора кур-362
га уходит вправо, самолет надо доворачивать влево; если стрелка уходит влево—самолет поворачивать вправо.
При таком удерживании стрелки индикатора курса на нуле самолет будет перемешаться по кривой (радиодромии) и выйдет на радиостанцию (гм. пассивный полет ото РПК-2).
Момент пролета над радиостанцией определяется в следую щем порядке :
В 1непоорелствен1ной близости от радиостанции (20—50 км) поставить тумблер в положение «РО»; при этом загорается сигнальная лампочка. Переключатель рода работ должен находиться в положении «К».
Если стрелка индикатора укажет на силуэт, направленный к центру шкалы, то радиостанция находится впереди, если же укажет на силуэт, направленный от центра, то радиостанция—позади самолета. В момент -пролета над радиостанцией стрелка из крайнего левого положения перейдет в крайнее правое.
При полете на радиостанцию активным методом следует с помощью РПКО-ЮМ определить направление скоса и далее продолжать полет по компасу с поправкой на снес. С приближением к радиостанции целесообразно для обеспечения более точного выхода на нее перейти на полет пассивным методом.
Порядок полета следующий:
1. Настроиться на радиостанцию и доворотом самолета привести стрелку индикатора курса к нулю.
2. Удерживая стрелку индикатора на нуле, продолжать полет пс индикатору курса, заметив курс самолета и наблюдая за его изменением.
-3. Определить направление сноса: если курс уменьшается, то снос происходит вправе, если курс увеличивается, то снос—влево.
4 Внести поправку на снос; для этого необходимо развернуть самолет на 5—10° в сторону, противоположную сносу, заметить компасный курс и продолжать полет с этим курсом по компасу
5. Периодически, через каждые 20—25 мин., приведением стрелки индикатора курса к нулю и сопоставлением курсов—контролировать полет.
6. С приближением радиостанции перейти на пассивный метод полета.
7. В непосредственной близости от радиостанции включить •тметчяк (поставить тумблер в положение «РО») и определить момент пролета над радиостанцией.
САМОЛЕТОВОЖДЕНИЕ ПО РАДИОКОМПАСУ SCR-269-G (БЕНДИКС)
§ 183. Назначение и устройство радиокомпаса
Радиокомпас (РК) (рис. 242) является радионавигационным, более усовершенствованным, чем РПК> прибором и так же, как РПК, предназначается главным образом для вождения самолетов в условиях отсутствия видимости земли и .над безориентирной местностью (морем). С помощью РК можно производить полег от радиостанции и на радиостанцию, а также определить расчет ное место самолета путем прокладки на карте полученных с по мощью РК радиопеленгов. При полете по маяку РК может быть использован, как обыкновенный приемник для прослушивания сш налов маяка. Производить пслет на радиостанцию или от радио станции и пеленговать радиостанции можно или на слух по мини «пуму ручным вращением рамки или автоматически с использова нием зрительного индикатора курса.
Основными элементами РК являются: 1) приемник, 2) щите управления, 3) индикатор курса летчика, 4) индикатор курса штурмана, 5) распределительная коробка, 6) рамка, 7) открытая антенна, 8) инвертер.
Приемник (рис. 243) собран по схеме супергетеродина и перекрывает диапазон волн в пределах от 171 м до 1500 м, чтч соответствует диапазону частот от 1750 кгц до 200 кгц. Диапа зон приемника разбит ка три поддиапазона:
первый поддиапазон от 1500 м до 732 м (200—410 кгц);
второй поддиапазон от 732 м до 353 м (410—850 кгц): третий поддиапазон от 353 м до 171 м (850—1750 кгц).
В последних сериях РК добавлен еще один поддиапазон от 100 до 200 кгц (3000—1500 м), что дает возможность использовать для целей радионавигации мощные длинноволновые радио станции
На передней панели приемника расположены:
1. Рукоятка с надписью «Release» (освободить), предназначенная для крепления шасси приемника к кожуху. Для того что бы вынуть шасси из кожуха, надо прежде рукоятку повернут» против часовой стрелки.
2. Головка регулировочного винта с надписью «Thres sens» (порог чувствительности), предназначенная для уменьшения влияния местных помех, т. е. для уменьшения шума на выходе прием ника.
3. Головка регулировочного винта с надписью «Auto sens» (чувствительность автомата), предназначенная для регулировки чувствительности компаса, т. е. увеличения чувствительности ав тематического управления к малым изменениям направления вл ^радиостанцию.
Рис. 242. Радиокомпас М В/О -G.
1—приемник; 2— щиток управления; 3—«индикатор курса летчика; 4— индикатор курса штурмана;
5—распределительная коробка; б—рамка а обтекателе; 7—открытая алтеива; 8—инвертер
4. Переключатель с надписью «CW—voice» (незатухающий телефон), предназначенный для приема на слух немодулированных колебаний.
Примечание. Этого переключателя на приемниках радиокомпаса старых выпусков iScu- t»’А) не На самолетах последней серии этот переключатель вынесен на щиток управления.
Рис. 243. Приемник.
5. Клемма с надписью «Antenna» (антенна), предназначения» для присоединения ввода антенны.
6. Клемма с надписью «Shield» (экран), предназначенная для присоединения противовеса.
7. Клемма t надписью «Ground» (земля), предназначенная для соединения с корпусом самолета.
Кроме этого, на передней панели имеется штуцер 8 для при соединения гибкого валика настройки приемника, цоколь 9 с над писыо «Loop» (рамка) для подсоединения фишки кабеля рамки и цоколь 10 для подсоединения многожильного кабеля, идущего от распределительной коробки.
Щиток управления (рис. 244) предназначен для ди станционного управления радиокомпасом. На некоторых самоле тах имеется два дистанционных управления (штурмана и летчи ка), а следовательно, два щитка управления.
На панели щитка управления расположены:
1—переключатель рода работ, имеющий четыре положения «Off» (выключено), «Сотр» (компас), «Ant» (антенна) и «Loop» (рамка).
J 6
В положении переключателя рода работ «Off» радиокомпас выключен; в положении «Сотр» радиокомпас включен и индикатор курса работает; в положении «Ant» радиокомпас включен,
индикатор курса не работает, прием происходит на открытую ан тенну; в положении «Loop» радиокомпас включен, индикатор курса работает, прием происходит на рамку, причем выключается устройство автоматического управления вращением рамки и вклю чается ручное управление вращением рамки.
В этом положении индикатор курса фиксирует только поворот .рамки, которая вращается от руки. Если плоскость рамки направить 'перпендикулярно направлению на радиостанцию, тогда только индикатор укажет курсовой угол радиостанции (КУР),
2 — кнопка с надписью «Control» (контроль), служащая для переключения управления радиокомпасом с одного щитка управ-.ения на другой (при наличии двух щитков управления).
3—переключатель поддиапазонов, предназначенный для «переключения радиокомпаса на соответствующий поддиапазон; переключатель имеет три положения: первое положение—от 200 Д* 41.0 кгц, второе положение—от 410 до 850 кгц и тр°тье лоложе чие—от 850 до 1750 кгц (последние выпуски радиокомпаса имеют еще четвертое положение—от 100 до 200 кгц).
4 — шкала настройки, указывающая частоту, на которую настраивается приемник; кроме этого, здесь имеется указатель поддиапазонов, который показывает, на какой поддиапазон переключен приемник. Для каждого поддиапазона имеется своя шкала настройки, которая проградуирована в килогерцах со следующей ценой деления:
тля первого поддиапазона (200— 410 кгц) цена деления 5 кгц.
» второго » (410— 850 » ) » » 10 »
» третьего » (850—1750 » ) » » 10 »
5 — ручка настройки с надписью «Tuning» (настройка), предназначенная для настройки приемника на заданную радиостанцию.
6 — индикатор настройки, предназначенный для точной на-тройки на передающую радиостанцию, что определяется максимальным отклонением стрелки индикатора вправо.
7—ручка с надписью «Loop L—R» (рамка влево—вправо), предназначенная для ручного управления рамкой. При повороте ручки влево и рамка пойдет влево, при повороте вправо и рамка пойдет вправо.
8 — ручка с надписью «Audio» (звук), предназначенная для регулировки громкости приема.
Р— ручка с надписью «Lights» (свет), предназначенная для регулировки подсвета шкалы.
10—запасные лампочки.
11 — сигнальная зеленая лампочка; при включенном радиокомпасе лампочка горит, при выключенном — не горит.
Индикатор курса летчика (рис. 245) представляет собой прибор, имеющий стрелку и шкалу, разбитую на 360°, с ценой деления 5°. Стрелка указывает курсовой угол радиостанции (КУР), т. е. угол, образованный продольной осью самолета и направлением на радиостанцию.
Индикатор курса штурмана (рис. 246) представляет собой прибор, имеющий стрелку и подвижную шкалу, разбитую на 360е, е ценой деления 1°. Креме этого, прибор имеет ручку с надписью «Var», которая предназначена для вращения шкалы. На ручке «Var» нанесены стрелки Е (восток) и W (запад), показывающие, куда надо вращать ручку при учете магнитного склонения и девиации компаса; если магнитное склонение или девиация компаса имеет знак +, то ручка вращается в направлении стрелки Е, а если—(минус), то в направлении стрелки W. На приборе иже подвижной шкалы имеется неподвижный индекс. Если про-ив индекса стоит 0° шкалы, то прибор дает те же показания,что и индикатор курса летчика, т. е. КУР (курсовой угол радиостанции).
Вращающаяся шкала и ручка для вращения шкалы «Var» да-т возможность прочесть на шкале ИРП (истинный радиопеленг), 11я этого необходимо с помощью ручки «Var» против неподвиж-8
кого индекса установить по шкале истинный ’курс, тогда стрелка укажет не КУР, а ИРП; противоположный же конец стрелки (хвостовой) укажет ОРП (обратный истинный радиопеленг).
Ряс, 245. Индикатор курса
летчика.
Рис. 246. Индикатор курса штурмана.
Рамка предназначена для направленного приема электромагнитных волн передающей радиостанции. Вращение рамки осуществляется двухфазным асинхронным электромотором переменного тока. Посредством специальной синхронной электрической пе-'оедачи (сельсинная система) угол поворота рамки передается на индикаторы летчика и штурмана. Рамка в специальном обтекате ie крепится на фюзеляже.
Открытая антенна предназначена для ненаправленного приема электромагнитных волн.
Инвертер преобразует ток, получаемый от сети, в ток высокого напряжения для .питания анодной цепи 'приемника.
§ 184. Принцип .'работы радиокомпаса
Работа радиокомпаса основана на том же принципе, что и работа РПК-2, а,именно— комбинированный прием на рамку и открытую антенну. Основными отличиями радиокомпаса от РПК являются:
1) Наличие у первого специального устройства (электромотор), предназначенного для автоматического вращения рамки; в результате этого устройства рамка автоматически непрерывно устанав ливается своей плоскостью перпендикулярно к передающей радиостанции и, будучи синхронно электрически связана с индикатором
369
курса, передает угол поворота (от продольной оси самолета) на индикатор курса.
2) Наличие у радиокомпаса специального компенсатора радио девиации, в результате чего радиокомпас дает яе ОРК, а КУР. т. е- курсовой угол радиостанции. Таким образом, благодаря наличию компенсатора радиокомпас дает правильное (с учетом ра диодевиации) направление от продольной оси самолета на передающую радиостанцию.
3) Иное устройство индикатора курса, а именно: индикатор курса, имея шкалу, разбитую на 360°, показывает не только, где самолет—правей или левей радиостанции, уо и указывает в градусах направление ст продольной оси самолета на радиостанцию с учетом радиодевиации, т. е. сразу в каждый отдельный момент дает без каких-либо дополнительных манипуляций курсовой угол радиостанции (КУР).
Таким образом, радиокомпас, работая на том же принципе, что и РПК, и имея перечисленные выше отличительные конструктивные особенности, будучи включен и настроен на определенную радиостанцию, дает возможность знать в каждый отдельный момент курсовой угол радиостанции, который можно прочесть на шкале индикатора курса летчика или штурмана (рис. 247).
Для того чтобы иметь ясное пространственное представление о взаимопэложении самолета и радиостанции, следует мысленно индикатор курса привести в горизонтальное положение, помня, что диаметральная линия, проходящая через 0° и 180° шкалы индика тора курса, располагается вдоль продольной оси самолета, Тогда стрелка индикатора курса будет указывать на радиостанцию, а цифра против стрелки на шкале укажет курсовой угол радиостан ции (КУР).
Так, например: 1. Если стрелка индикатора курса показывает 0° (КУР = 0°), то радиостанция находится «впереди самолета в направлении его продольной оси.
2. Если стрелка индикатора курса показывает 90° (КУР = 90°), го радиостанция находится вправо от самолета.
3. Если стрелка индикатора курса показывает 180° (КУР =-180°), то радиостанция находится позади самолета в направлении его продольной оси.
4. Если стрелка индикатора курса показывает 270° (КУР — = 270°), то радиостанция находится влево от самолета (рис. 248).
При полете на радиостанцию, если продольная ось самолета строго совпадает с направлением на радиостанцию, стрелка инди катера курса будет стоять на нуле, т. е. покажет, что курсовой егол радиостанции равен нулю; в этом же случае при уклонении самолета вправо или же при развороте самолета вправо стрелка будет уходить влево (КУР уменьшается) и покажет курсовой угол меньше 360’ , наприм-ер 350°. Уклонение самолета влево или же разворот его влево заставит стрелку уйти от нуля вправо (КУР .увеличивается) и «показать курсовой угол больше 0°, например 10*. 370
. 847 Показания индикатора курса при различном взаимоположеиин самолета а радиостанции.
При полете от радиостанции, если продольная ось самолета строго совпадает с направлением на радиостанцию, стрелка индикатора курса будет стоять на 180°, т. е. покажет, что курсовой
Рис, 248. Курсовые углы радиостанций.
угол равен 180°; в этом же случае при уклонении самолета впра во или же при развороте самолета влево (КУР увеличивается) стрелка покажет курсовой угол больше 180°, например 190°.
Уклонение самолета влево или же разворот его вправо (КУР уменьшается) заставляет стрелку показать курсовой угол меньше 180°, например 170°.
Э72
Радиокомпас, будучи включен и настроен на боковую радиостанцию, непрерывно будет показывать курсовой угол этой радио, станции, причем вследствие того, что по мере движения самолета вперед курсовой угол радиостанции изменяется, то и показания индикатора курса не будут оставаться постоянными.
Рис. 249. Изменение курсовых углов при полете самолета слева от радиостанции.
Следует запомнить, что если радиостанция правей самолета, курсовой угол по мере движения самолета будет увеличиваться (рис. 249) и, наоборот, если радиостанция левей самолета, курсовой угол по мере движения самолета будет уменьшаться (рис. 250).
Быстрота, с которой будет изменяться курсовой угол при всех прочих равных условиях, зависит от удаления самолета от радиостанции, а именно: чем ближе радиостанция, тем быстрей изменяется курсовой угол, и, наоборот, чем дальше радиостанция, тем он изменяется медленней.
§ 185. Включение и настройка радиокомпаса
Включение и настройку производить в следующем порядке:
1. Включить бортовую сеть; для этого необходимо включить аккумуляторные батареи и инвертер.
2. На щитке управления (рис. 244) установить переключатель рода работ в положение «Ссгпр» (компас); если сигнальная лампочка не загорелась, необходимо нажать на кнопку «Control*.
Рис. 250. Изменение курсовых углов при полете самолета справа от радиостанции.
В. С помощью ручки 9 с надписью «Lights» добиться нормальной освещенности шкал прибора.
4. Переключатель поддиапазона 3 поставить в соответствующее положение в зависимости от частоты принимаемой радиостанции:
1) 200 — 410 кгц (1500 — 732 м),
2) 410 — 850 кгц (732 —353 м).
3) 850 — 1750 кгц (353— 171 м)
(для радиокомпасов, имеющих четыре поддиапазона)
4) 100—200 кгц (3000—1500 м).
5. С помощью ручки 5 с надписью «Tuning» на шкале настрой ки устансвить против визирной черты частоту заданной радио-станции.
6. Точно настроиться на принимаемую радиостанцию; для этого легким вращением ручки настройки 5 добиться максимального отклонения вправо стрелки индикатора настройки.
7. Прослушать в наушники передачу и по позывным убедиться, что настрсйка произведена на требуемую радиостанцию (если наушники включены через СПУ, то переключатель СПУ поставить в положение «Ссгпр»).
8. Прочесть показание индикатора курса и по прочитанному курсовому углу радиостанции еще раз убедиться в правильности настройки.
Радиокомпас может быть использован как обыкновенный приемник для полета по маяку на слух. В этсм случае переключатель рода работ должен находиться в положении »r<Ant» (антенна) или «Loop» (рамка), так как в положении «Сотр» (компас) работает автоматический регулятор громкости. Регулировка громкости принимаемых сигналов производится с помощью ручки регулятора громкости с надписью «Audio».
При наличии статических помех целесообразно производить прием на рамку (переключатель рода работ в 'положении «Loop»).
Для приема на рамку или антенну телеграфных станций, работающих незатухающими колебаниями, тумблер «CW—voice» (телеграф—телефон), находящийся на приемнике радиокомпаса, необходимо поставить в положение «CW».
§ 186. Расчет радиопеленгов
Определить курсовой угол радиостанции с помощью радиокомпаса значительно проще, чем с помощью РПК- Для этого достаточно включить радиокомпас, точно настроиться на заданную радиостанцию и прочесть ее курсовой угол на шкале индикатора курса против стрелки.
Пользуясь индикатором курса летчика (рис. 245), расчет радиопеленгов производить в следующем порядке:
1. Включить радиокомпас и настроиться на заданную радиостанцию.
2. Прочесть на шкале индикатора курса против стрелки курсовой vren радиостанции (КУР).
3. Прочесть на магнит’- > < < мпасе компасный курс.
4. Перевести компасный курс в истинный—для этого необходимо учесть девиацию компаса и магнитное склонение со своим знаком:
ИК = МК + (± Д Ю + (±4 М).
5. Рассчитать истинный радиопеленг (ИРП), для чего нужно сложить истинный курс и курсовой угол радиостанции:
ИРП = ПК + КУР.
6. Для прокладки ИРП на карте перевести его в обратный, учтя 180°:
ОРП = ИРП + 180°.
Примечание. Если ИРП больше 180°, то 180° вычитается, если меньше, то прибавляется.
Таким образом, обратный истинный радиопеленг равен:
ОРП = КК + (±А А) + (± А7И) + КУР + 180°.
Пользуясь индикатором курса штурмана, расчет радиопеленгов производить в следующем (Порядке:
1. Включить радиокомпас и настроиться на заданную радиостанцию.
2. С помощью ручки «Var» установить шкалу индикатора на компасный курс.
3. С помощью тсй же ручки исправить установленный курс на величину девиации компаса и магнитного склонения; если девиация или склонение имеет знак плюс, ручку вращать в сторону стрелки Е, если минус—в сторону стрелки W.
4. Прочесть обратный истинный радиопеленг (ОРП) на шкале индикатсра курса против хвостового конца стрелки.
Радиокомпас, кроме этого, дает возможность пеленговать ра диостанцию на слух, для этого необходимо переключатель рода работ на щиткЬ управления поставить в положение «Loop» (рамка), настроить радиокомпас на заданную радиостанцию и ручкой «Loop L—R» вращать рамку до получения минимальной слышимости в телефоне. Если минимум очень расплывчатый, то необходимо ручку регулятора громкости с надписью «Audio» повернуть доотказа вправо и установить минимум по пропаданию слы шимости или по наименьшей величине показания индикатора настройки.
После этого в том же порядке, как было указано выше, можно прочесть КУР на шкале индикатора курса летчика или ОРП на шкале индикатора курса штурмана.
Прокладка пеленгов, полученных с помощью радиокомпаса, на карту ничем не отличается от прокладки пеленгов, полученных с помошью РПК; поэтому особо на этом вопросе останавливаться нет необходимости.
§ 187. Полет от радиостанции по радиокомпасу
Порядок полета от радиостанции по радиокомпасу остается тем же, что и при полете по РПК, и заключается в следующем:
1. Включить радиокомпас, настроить его на радиостанцию и, пройдя над радиостанцией с курсом, равным заданному путевому углу, продолжать полет по компасу, строго выдерживая курс.
251. Полет от радиостанции.
2. Через некоторый промежуток времени прочесть на индикаторе курса курсовой угол радиостанции и определить угол сноса; для этого необходимо ст КУР отнять 180°. Если результат будет ктэжительный, то снос вправо, если отрицательный, то снос влево.
УС = КУР — 180°.
3. Развернуться в сторону, противоположную скосу, на 2 угла скоса и возвратиться на заданную линию пути: момент выхода на линию пути будет отмечен показанием индикатора курса курсового угла, равного 180° + 2УС (при сносе вправо 180°-)-2УС, при сносе влево 180° — 2УС).
4. По выходе на линию пути уменьшить поправку наполовину, т. е. продолжать полет по компасу с поправкой, равной одному углу сноса.
5. Продолжая полет по компасу, строго выдерживая курс, контролировать его наблюдением за индикатором курса; если курсовой угол остается неизменным, то самолет перемещается вдоль заданной линии пути; если курсовой угол увеличивается, то самолет отклоняется вправо; если курсовой угол уменьшается, то самолет отклоняется влево (рис. 251).
При полете от радиостанции контроль пути по направлению целесообразно осуществлять сравнением ЗМПУ (заданного магнитного путевого угла) с МРП (магнитным радиопеленгом).
Если самолет находится на заданной линии пути, то:
МРП= (ЗМПУ + 180°).
Если самолет уклонился вправо, то:
МРП > (ЗМПУ + 180°).
Если самолет уклонился влево, то:
МРП< (ЗМПУ + 180°).
'Магнитный радиопеленг (МРП) равен магнитному курсу
Примечание.
(МК) плюс курсовой угол радиостанции (КУР):
МРП = МК + КУР.
§ 188. Полет на радиостанцию по радиокомпасу
Пассивный «метод «полета на радиостанцию с помощью радиокомпаса не отличается от «полета пассивным методом «по РПК (стр. 347).
Включив радиокомпас и настроив его на радиостанцию, необ ходимо вести самолет так, чтобы стрелка индикатора курса находилась на нуле. Если стрелка индикатора курса уйдет от нулевого положения в одну из сторон, то для приведения ее к нулю необходимо повернуть самолет в сторону ее ухода. Таким образом, 378
если удерживать стрелку 'индикатора курса на нуле (доворотами самолета вправо или влево), то самолет, перемещаясь в стороне от линии пути по кривой, которую пжяято называть радисдоомной, выйдет на радиостанцию (рис. 252).
Момент пролета над радиостанцией будет отмечен быстрым поворотом стрелки индикатора курса на 180°; если до радиостанции стрелка стояла на 0° (КУР == 0°), то после пролета радиостанции стрелка станет на 180° (КУР = 180°), что и укажет на пролет радиостанции.
Активный метод полета на радиостанцию с помощью радиокомпаса осуществляется в следующем порядке:
1. После взлета включить радиокомпас, настроиться на радиостанцию и, выйдя к исходному пункту маршрута (ИПМ), доворотом самолета привести стрелку индикатора курса к нулю и, удерживая ее на нуле, продолжать полет по индикатору курса.
2. Заметить курс самолета и, продолжая полет, наблюдать за его изменением.
3. Наблюдая за изменением компасного курса, определить направление сноса; если курс уменьшается, то снос вправо, если курс увеличивается, то снос влево.
Примечание. Примерную величину сноса можно определить -по разности магнитных курсов первого и второго, а именно: угол сноса во столько <раз 'больше разности курсов (МКз—MKi), во сколько раз оставшееся время полета больше времени, затраченного на полет от ИПМ до момента отсчета МКг-
4. Внести поправку на снос; для этого необходимо развернуть самолет в сторону, противоположную сносу, на 5—10° и привести стрелку индикатора курса в зависимости от направления и интенсивности сноса к курсовому углу 5—10° или 355—350° (при сносе вправо 5—10°, при сносе влево 355—350°); заметить компасный курс и продолжать полет с этим курсом по компасу, кэнтро. лируя его по индикатору курса.
5. Если при полете с этим курсом курсовой угол радиостанции (показание индикатора курса) остается неизменным, то снос учтен верно, и полет следует продолжать с тем же курсом; если курсовой угол радиостанции уменьшается, го самолет уклоняется вправо; если курсовой угол радиостанции увеличивается, то самолет уклоняется влево; в этом случае следует уменьшить или увеличить поправку в курс, для чего необходимо вновь доворотом самолета привести стрелку индикатора курса сначала к нулю, а потом к курсовому углу, уменьшенному или увеличенному против первоначального соответственно уклонению самолета (рис. 253).
6. Продолжать полет по комшасу. пэриодичеоки контролируя по индикатору курса; в непосредственной близости к радиостанции вести самолет по индикатору курса, удерживая стрелку индикатора на курсовом угле, соответствующем поправке в курс.
7. Определить момент пролета радиостанции по резкому изменению курсового угла; в момент пролета радиостанции стрелка развернется на 180° и станет на отсчет, близкий к 180°.
Рис. 253. Полет активным методом на радиостанцию.
Иногда нельзя пренебрегать даже незначительным уклонением самолета от заданной линии пути (наличие гор, ворот и т. п.). В этом случае необходимо, определив направление сноса, возвратиться на заданную линию пути и прополжать полет вдоль нее в том же порядке, что и при полете по РПК.
САМОЛЕТОВОЖДЕНИЕ ПО НАЗЕМНЫМ РАДИОПЕЛЕНГАТОРАМ
<§ 189. Наземные радиопеленгаторы
Наземные радиопеленгаторы предназначены для вождения самолетов 'вдоль заданной линии пути, а также для контроля пути и восстановления ориентировки.
'Метод наземного пеленгования появился раньше всех других способов радиоориентировки. Недостаток этого метода — сравнительно небольшая пропускная способность, т. е. пеленгатор не может обслуживать одновременно много самолетов, находящихся в воздухе. Кроме этого, возможность самолетовождения с помощью их в значительной степени зависит от качества связи самолета с землей (условия обмена), а также от квалификации наземного персонала (радиопеленгаторщика).
Наземным пеленгатором называется радиоприемное устройство направленного действия, позволяющее определить направление на передающую радиостанцию, находящуюся на самолете.
Допустим, если установить на земле РПК, ориентировав его вдоль меридиана, а .передающую радиостанцию, наоборот, поместить на самолет, то с помощью этого, установленного на земле РПК, можно пеленговать радиостанцию, находящуюся на самолете, и определять направление от РПК на радиостанцию, отсчитываемое от меридиана (истинного, магнитного).
Устройство наземных пеленгаторов, конечно, иное, чем устройство РПК, но, принципиально, работа их аналогична; здесь также используется антенна направленного приема.
Современные пеленгаторы Гражданского воздушного флота работают в диапазоне волн самолетной передающей радиостанции обычно в пределах 120—60 м и обеспечивают дальность пеленгования порядка 600—500 км. Точность пеленгования зависит от расстояния, т. е. удаления самолета от пеленгатора, и составляет днем 2—3°. 'Ночью точность пеленгования несколько 'понижается, однако результаты его вполне могут 'быть использованы для самолетовождения.
Применяемые на линиях Гражданского воздушного флота пеленгаторы состоят из следующих основных частей:
1) приемной части, в которую входят гониометрическое устройство и супергетеродинный приемник;
2) антенной сети типа Эдкок;
3) источников ‘питания прием-ника в виде аккумуляторных, батарей.
Пеленгование самолетов производится на слух по минимуму Для передачи результатов пеленгования на борт самолета пе-384
ленгатору придается передающая радиостанция, которая и под держивает связь с самолетом.
Манипуляция передатчиком производится непосредственно с •пеленгатора; передатчик и пеленгатор, значительно удаленные друг от друга (для недопущения помех), связаны между собой телефоном. При установке пеленгаторы должны быть ориентиро-•ваны вдоль (магнитного или истинного меридиана, от которого и производится отсчет при пеленговании. На линиях Гражданского ' -воздушного флота принято давать на борт мапнитные пеленги; это облегчает работу пилота « воздухе, так как рейсовый полег । по наземным пеленгаторам требует сравнения магнитного пеленга, полученного с пеленгатора, с .заданным магнитным путевым углом. ' В условиях внетрассовых полетов принято запрашивать и давать на борт истинные пеленги. Благодаря этому значительно упрощается прокладка пеленгов на карте, так как не требуется переводить магнитный .пеленг в истинный.
I
§ 190. Основные методы полета по наземным радиопеленгаторам
Существует два основных метода полета по наземным пелен-, гаторам — курсовой и по засечкам.
Курсовой метод предусматривает установку пеленгаторов вдоль воздушной линии во всех портах, где самолет производит посад ку. Таким образом, пеленгаторы имеют своим назначением при вести самолет из пункта вылета в пункт назначения. Это осуще ствляется передачей на борт (по запросу самолета) пеленга, по 1 которому пилот и подбирает соответствующий курс для прибытия самолета в пункт назначения. Кроме этого, пеленгатор, установленный в порту прилета, цежет сообщить самолету момент пролета над пеленгатором и обеспечить слепой заход на .посадку.
1 Метод полета по засечкам требует расположения пеленгато ров vf в стороне от трассы таким образом, чтобы группа пеленгаторов, обслуживающая какой-то участок трассы, могла запеленговать самолет, находящийся в любой точке на трассе. Результаты пеленгования пеленгаторы этой группы передают на командный । пеленгатор, на котором оператор обрабатывает результаты пеленгования (прокладывает пеленги на карте) и, определив местопо-
। ложение самолета, передает его на борт. Следовательно, при полете этим методом по запросу самолет получает на борт свое ме-1 стоположение и таким образом осуществляет самолетовождение.
В ГВФ применяется -курсовой метод наземной пеленгации.
' Полет по наземным радиопеленгаторам очень удобен и прост. При самолетовождении этим способом работа пилота сводится к ' минимуму, что особенно важно при отсутствии в составе экипажа штурмана.
191. Курсовая пеленгация
' При самолетовождении по .наземным радиопеленгаторам ме-। годом курсовой пеленгации .необходимо, чтобы в портах вылета я
назначения имелись радиопеленгаторы, а на борту самолета — приемо-передающая радиостанция. Пеленгатор, установленный в порту вылета, провожает «самолет и на запрос самолета «Сообщите магнитный пеленг с пеленгатора на самолет» сообщает самолету магнитный пеленг. Самолет в этом случае для запроса пользуется международным кодовым выражением qdr (щдр) и получает ответ: qdr такой-то, например qdr=45° (рис. 254).
Пеленгатор, установленный в порту назначения, встречает самолет и на запрос самолета «Сообщите магнитный курс, с которым я приду на пеленгатор в штиль», сообщает магнитный курс. Этот запрос самолет делает международным кодовым выражением qdm (щдм) ,и получает ответ: qdm такой-то, например, qdm=225° (рис. 255).
Чтобы легко осуществлять самолетовождение этим способом, необходимо правильно использовать получаемые на борт qdr и qdm. Для этого следует во всех случаях сравнивать их с заданным магнитным путевым углем и принимать решение, исходя из следующих правил:
I. Если qdr больше заданного магнитного путевого угла, то самолет уклонился вправо, и поэтому для выхода на заданную линию пути курс надо уменьшить.
2. Если qdr меньше заданного магнитного путевого угла, то самолет уклонился влево, и поэтому для выхода на заданную линию пути курс должен быть увеличен.
3. Если qdm больше заданного магнитного путевого угла, то самолет уклонился влево; следовательно, чтобы выйти на заданную линию пути, курс надо увеличить.
4. Если qdm меньше заданного магнитного путевого угла, то самолет уклонился вправо; поэтому для выхода на заданную линию пути курс надо уменьшить.
зяз
5. Если qdr м qdm равны заданному магнитному .путевому ут лу, то самолет находится на заданной линии пути (рис. 256).
Таким образом передаваемые на борт qdr и qdm дают линию сложения самолета и пилот, зная заданный магнитный путевой угол, всегда может определить положение самолета относительно-заданной линии пути и принять нужное решение.
Рис. 256. Сопоставление пеленгов с ЗМПУ.
При необходимости совершать полет вдоль заданной линии пути надо всегда добиваться соответствующим изменением курса, чтобы qdr или qdm были равны заданному магнитному путевому углу. Qdm и qdr отсчитываются от магнитного меридиана, проходящего через пеленгатор, а так как величина магнитного склонения с изменением места не остается .постоянной, то может ока-затьф, что величина магнитного склонения в районе 'нахождения самолета будет значительно отличаться от величины магнитного склонения 'в месте расположения пеленгатора; тогда .при сравнении qdm и qdr с З'МПУ надо учитывать эту разницу.
§ 192. Полет от пеленгатора
При полете от пеленгатора пилот запрашивает у него магнитный пеленг на самолет кодовым выражением qdr.
С помощью получаемых на борт самолета qdr пилот выполняет полет, используя эти сведения для подбора ftypca следовз-•ния и контроля пути по направлению.
Полет от пеленгатора осуществляется in о обычной схеме (рис. 257):
1. После взлета, набрав высоту, лечь на курс, равный заданному путевому углу, и, пройдя над пеленгатором, продолжать полет.
2. Через 10—15 минут 2—3 раза запросить qdr и по этим данным определить угол сноса. Для этого необходимо из получея яого qdr отнять заданный магнитный путевой угол:
УС = qdr— ЗМПУ.
ЗМ
0. Изменить курс в сторону линии пути на два угла сноса и, периодически запрашивая qdr, возвратиться на заданную линию пути (когда qdr станет равен З'МПУ).
4. Вернувшись на линию пути, уменьшить поправку в курс наполовину, т. е. продолжать полет с поправкой, равной величине угла сноса.
Контроль пути по направлению при полете от пеленгатора осуществляется периодическим (через 10—15 минут) запросом qdr.
Если получаемый на борт qdr равен заданному магнитному путевому углу, то самолет находится на линии пути и должен 'продолжать полет со старым курсом; если этого равенства нет, то необходимо внести исправление с таким расчетом, чтобы возвратиться на линию пути и далее продолжать полет вдоль нее. Курс исправляется внесением поправок порядка 5—3°.
Контроль пути по дальности провожающий пеленгатор не обеспечивает, поэтому основной способ контроля пути—это наблюдение за скоростью и временем, т. е. по пройденному расстоянию. Путевая скорость не всегда бывает известна, поэтому ограничиваться только контролем по счислению пути нельзя, а следует максимально использовать имеющиеся другие радионавигационные средства и способы: предвычисленные пеленги вещательных станций, находящихся в стороне от линии пути; пеленги, полученные с бокового наземного пеленгатора; зону маяка; луч молчания маяка и т. д.
§ 193. Полет на пеленгатор ।
Выполняя ‘полет на пеленгатор, самолет запрашивает у пеленгатора магнитный курс, который в штиль приведет самолет на пеленгатор (или, что то же самое, магнитный пеленг с самолета на пеленгатор). Запрос производится кодовым выражением qdm.
з«5
Получаемые на борт qdm используются пилогом для подбора курса,-контроля пути и для выхода на пеленгатор.
Полет на пеленгатор может производиться пассивным и активным -методами. Наиболее распространен, удобен и прост пас сивный метод полета на пеленгатор; к его недостаткам следует отнести то, что самолет перемешается в стороне от заданной л.и нии пути. Что касается активного метода, то он несколько сложнее, но зато обеспечивает полет вдоль заданной линии пути, что особенно важно при наличии ворот или препятствий в стороне от тпассы.
Рис. 258. Полет на пеленгатор пассивным методом.
'Пассивный метод. 'Сущность полета этим методом на пеленгатор заключается в том, что пилот периодически запрашивает qdm и ложится на магнитный курс, равный получаемому qdm, и таким образом 1выходит на пеленгатор (рис. 258).
Порядок полета пассивным методом на пеленгатор состоит в следующем. Войдя в сферу действия встречающего пеленгатора, нужно запросить 2—3 раза qdm и лечь на курс, равный получен ным qdm. В процессе всего полета, вплоть до выхода на пелен гатор, периодически запрашивать и устанавливать самолет на курс, равный получаемым qdm.
Следует отметить, что кривая перемещения самолета при п<> лете .пассивным методом на пеленгатор аналогична кривой полета нассивным методом на радиостанцию по РПК; поэтому чем блт же к пеленгатору, тем с большей интенсивностью меняется курс-«амолета и, следовательно, чем чаще будет запрашиваться qd ч с приближением к пеленгатору, тем точнее будет выход на п ленгатср. Таким -обрааом, частота запросов зависит от удален? пеленгатора и лежит в диапазоне 10—0,5 минуты, т. е. сначал : <dm запрашивается через каждые 10 минут, далее с приближе->4
днем к пеленгатору — через 5 минут, потом через 3 минуты, че рез 2 минуты, через 1 минуту и, наконец, в непосредственном близости (10—15 км) — через 0,5 минуты.
Не следует, находясь в непосредственной близости от пелен гатора, смущаться значительным изменением qdm и медлить с «зменением курса. Наоборот, нужно энергичнее реагировать на получаемые qdm и ждать сообщения о пролете пеленгатора.
Активный метод. Этот метод 'полета на пеленгатор прежде всего требует перемещения самолета вдоль заданной ли нии пути; поэтому экипаж по получаемым на борт qdm обязан подобрать курс следования и далее производить полет вдоль ли яии пути до выхода на пеленгатор.
Порядок выхода на линию пути при полете на пеленгатор очень сходен с выходом на линию пути при полете на радиостан дню с помощью РПК и заключается в следующем (рис. 259):
1. Продолжая полет с ранее подобранным кмрсом, запросить дважды qdm и, сравнив их с заданным путевым углом, установить, в какую сторону уклонился самолет.
2. В случае уклонения возвратиться на линию пути, изменив хурс в сторону линии пути на 20° и запрашивая периодически qdm.
3. Возвратившись на линию пути, уменьшить двадцатиградус и/ю поправку наполовину и продолжать полет с поправкой 10°.
4. Через 10 минут вновь запросить qdm и проверить, правило н-з ли подобран курс следования. Если qdm равен заданному маг дивному .путевому углу, то кугсс следования 'Подобран, и подал нужно продолжать с тем же курсом, если же qdm больше или «еньше заданного магнитного угла, то необходимо десятиградус *ую поправку в курс увеличить или уменьшить наполовину.
Практически активный метод полета на пеленгатор несколько упрощается, а именно: самолет не 'возвращается на заданную ли илю пути, а, учтя снос, проезжает полет на пеленгатор. 'В это» случае полет следует осуществлять в таком порядке:
1. Запросить и получить у наземного пеленгатора qdm.
2. Лечь на магнитный курс, равный полученному qdm, и продолжать полет с этим курсом.
в. Через 10 минут вновь запросить и получить qdm.
4. Определить, куда сносит—вправо или влево. Для этого необходимо второй qdm (вновь полученный) сравнить с первым qdm; если второй qdm больше первого, то снос влево, если второй qdm меньше первого, то снос вправо.
5. Лечь на курс, равный второму qdm, уменьшенному или увеличенному (в зависимости от направления сноса) на 5°. Например: второй qdm =100°, снос влево — лечь на курс 105°; второй qdm =100°, снос вправо — лечь на курс 95°.
6. Продолжая полет с новым курсом через 10 минут, вновь запросить и получить qdm.
7. Вновь полученный qdm сравнить со вторым qdm и, если он гзменился, то необходимо лечь на курс, равный вновь полученному qdm с внесением соответственно увеличенной или уменьшенной поправки на снос.
8. Продолжать полет в том же порядке, добиваясь получения таким путем устойчивых qdm.
При полете активным методом, так же как и при полете пассивным методом, qdm запрашивается тем чаще, чем ближе пеленгатор. Если в небольшом удалении от пеленгатора (30—40 км) получаемые qdm не будут равны заданному магнитному путевому углу, следует тут же перейти от активного к пассивному методу полета с частым запросом qdm и таким образом выйти на пеленгатор. При полете на пеленгатор целесообразно вести самолет по ГПК, что обеспечит 'белее точное выдерживание самолета на курсе.
При полете на пеленгатор как активным, так и пассивным методом контроль пути по направлению полностью обеспечивается пеленгатором, который на запрос самолета сообщает qdm, т. е. дает позиционную линию, определяющую положение самолета. Что касается контроля пути по дальности, то, так же как при полете от пеленгатора, нужно считать основным способом наблюдение за скоростью и временем, т. е. по пройденному расстоянию
При наличии дополнительных наземных радиссредств, расположенных в стороне от линии пути, контроль пути по пройденному расстоянию дополняется использованием этих радионавигационных средств. Если обнаружатся уклонения, исправление пути производят внесением ^частных поправок в курс порядка 3—5° при активном методе полета и установлением самолета на курс, равный полученному qdm при пассивном методе.
Выход на пеленгатор, независимо от того, каким методом, производится пол-ет—-пассивным исии активным—обеспечивается частым запросом qdm в непосредственной близости от пеленгатора и энергичным установлением самолета на курс, равный получаемым qdm. Чем чаще при выходе на пеленгатор запрашивается qdm, тем точнее будет выход на пеленгатор. Практически следует брать до двух qdm в 1 минуту, в особенности .при полете в слож» мой обстановке. Определить момент пролета пеленгатора пилцт
может по полученным qdm, а именно,- после пролета пеленгатора пилот получит qdm, отличный от ранее полученного на 180°. Если пеленгатор выполняет работу по выводу самолета на аэродром, то пилот получит на борт при пролете пеленгатора команду «пролет».
§ 194. Вывод самолета на аэродром
Вывод самолета на аэродром с помощью наземного пеленгатора -производится в тех случаях, когда вертикальная видимость не дает возможности пилоту выйти на аэродром переходом к визуальной ориентировке; при этом, если вертикальная видимость не меньше 100 м, то по окончании вывода само чета на аэродром работа пеленгатора заканчивается. При видимости ниже 100 м пеленгатор продолжает работу и обеспечивает слепую посадку. Порядок вывода самолета на аэродром состоит в следующем:
1. Самолет не позднее, чем за 20 минут до прибытия на аэродром, получает от диспетчера распоряжение о выводе самолета на аэродром и метесинформацию.
2. Получив распоряжение и метеэинформацию, бортрадист запрашивает qdm два раза в минуту для обеспечения более точного прохода над пеленгатором.
3. Лицо, руководящее выводом самолета, услышав шум моторов приближающегося самолета, передает на борт команду: «Шум моторов». По этой команде запрос пеленгов .прекращается, и бортрадист переходит только на прием, ожидая команды с пролете.
4. Услышав пролет самолета над пеленгатором, лицо, руководящее выводом самолета, передает на борт команду «пролет»; по этой команде пилот пробивает облачность и идет на посадку в соответствии с инструкцией, которая составляется для каждого пор та применительно к местным условиям.
§ 195. Контроль пути с помощью наземных радиопеленгаторов
При внетрагсовых полетах пеленгатор может быть широко использован для контроля пути и для полета от пеленгатора и на него. Полет на пеленгатор и от него проводится в том же порядке, что и при полете на трассе, поэтому мы подробно не останавливаемся на этом вопросе.
Следует только отметить, что при внетрассс-вых полетах часто приходится получаемые -пеленги прокладывать на карте; поэтому принято» запрашивать у пеленгатора истинные, а не магнитные пеленги, так как их легче проложить на карте.
Таким образом, при внетрассэвых полетах с использованием наземных пеленгаторов самолет запрашивает и получает истин ные пеленги. В этом случае при полете от пеленгатора самолет вапрашивает и получает не qdr, a qte — истинный пеленг от пе ленгатора на самолет (рис. 260), который отличается от qdr на величину магнитного склонения.
зка
При полете на пеленгатор самолет вместо qdm запрашивает а получает quj, т. е. истинный пеленг от самолета на пеленгатор> «ли, что то же, истинный курс, с которым самолет придет иа пеленгатор в штиль. Quj также отличается от qdm на величину маг нитного склонения (рис. 260).
Истинные пеленги запрашиваются при необходимости проложить их на карте, а для ш>Д'бота Kvpca следования и дальнейшего контроля значительно удобнее пользоваться магнитными пеленгами, которые и нужно запрашивать.
Контроль пути с •помощью йазем’ного пеленгатора, расположенного в стороне от заданной линии пути, .производится запросом qte, т. е. истинного пеленга от пеленгатора на самолет, и прокладкой получен-
Рхс. 260. qte.
«ого qte на карте. В этом слу-
чае пеленгатор, обеспечивая контроль 'пути по дальности, не обе*-
спечивает контроль пи направлению.
При подготовке к полету с использованием пеленгатора для контроля пути необходимо преложить на карте и оцифровать истинные пеленги qte через ориентиры, заранее намеченные нэ линии пути. Это значительно облегчит работу в воздухе.
В полете периодически запрашивают qte и, получив qte на борт, или прокладывают его на карте, или глазомером, сравнивая с нанесенными и оцифрованными линиями пеленгов, определяют положение самолета. Если необходимо определить момент пролета намеченного ориентира, то с приближением к линии пе ленга этого ориентира надо чаще запрашивать qte. При глазомерном сравнении полученного пеленга с нанесенными на карту следует учитывать направление движения самолета относительно пеленгатора, т. е. положение ^пеленгатора по отношению к самолету.
Если пеленгатор правее самолета, то с продвижением самоле га пеленги увеличиваются и, наобсрст, если пеленгатор левее самолета, то пеленги уменьшаются (рис. 261).
Если боковой наземный радиопеленгатор является единственным радионавигационным средством, используемым в данном полете, то необходимо особенно тщательно подготовить карту для •полета и нанести истинные радиопеленги qte не только для 1вьгб-раиных контрольных ориентиров, но и в промежутке между ними, через каждые 5°. В полете следует точнее выдерживать рассчитанный курс и воздушную скорость, не допуская случайных изменений, а также внимательно следить за временем, записывая не только время пролета контрольных ориентиров, но и время-по-
лучения qte (вернее -нажатия -ключа для пеленгации). Таким образом, имея хорошо подготовленную карту и строго выдерживая курс и скорость по .получаемым qte, которые дают линию положения самолета, легко и престо осуществляют контроль пути по дальности.
Для ведения полного контроля пути, что очень важно в таком ьолете, желательно иметь второй -пеленгатор (или другое радионавигационное средство), с помощью которого и нужна получить вторую позиционную линию; пересечение двух -позиционных линий дает расчетное место самолета; определив таким образом 2—3 раза расчетное место (РМ) самолета, следует рассчитать .путевую скорость и фактический путевой угол.
Рис. 261. Увеличение и уменьшение пеленгов в зависимости от положения пеленгатора.
В случае отсутствия второго пеленгатора или другого радионавигационного средства, то же самое -можно получить (при меньшей точности результатов) по трем пеленгам одного пеленгатора (см. определение РМ с -помощью радиопеленгатора).
Однако надо учесть, что при боковой пеленгации точность пеленга несколько ниже, чем при полете на пеленгатор и -от пеленгатора.
§ 196. Восстановление ориентировки по наземным радиопеленгаторам
Восстановление потерянной ориентировки при наличии пеленгатора производится запросом пеленгов у пеленгатора. Если и районе потери ориентировки есть пеленгатор и необходимо выйти из него, то следует заппосить дважды qdm и лечь на курс, равный полученным qdm. После этого, так же как и при полете на пеленгатор пассивным метопом, периодически запрашивается qdm и самолет устанавливается на курс, равный получаемым qdm. С приближением к пеленгатору пеленги необходимо запрашивать чаще, доведя частоту запроса до двух пеленгов в минуту, что обеспечит более точный выход на пеленгатор.
В случае, если самолет не должен выходить на пеленгатоо, т. е. после восстановления ориентировки необходимо продолжать полет, то целесообразно использовать пеленгатор или пеленгаторы для определения РМ самолета. Определив РМ, пилот должен рассчитать новый курс, обеспечивающий прибытие в пункт назначения, и продолжать полет с новым курсом, уточняя положенье самолета и определяя фактическую линию пути.
Для определения расчетного места с помощью одного назем ного радиопеленгатора необходимо:
1. Строго выдерживая курс и скорость, запросить и получить у наземного радиопеленгатора пеленг и заметить время нажатия ключа для пеленгации.
2. Продолжая полет с тем же курсом и с той же скоростью, через некоторое время вновь запросить и получить пеленг и также заметить время нажатия ключа для пеленгации.
Рис. 262. Определение расчетного места по одному пеленгатору.
Рис. 263. Определение расчетного места самолета по двум радиопеленгаторам.
S. Проложить полученные пеленги на карте (от пеленгатора). Если получены магнитные .пеленги, то их надо предварительно перевести в истинные путем учета магнитного склонения со своим знаком.
4. Первый пеленг, проложенный на карте, перенести в направлении полета на отрезок, равный пройденному расстоянию за время, прошедшее между получением первого и второго пеленгов.
5. Пересечение перенесенного пеленга со вторым даст расчетное место в момент нажатия ключа для второго пеленга (рис. 262).
Для определения расчетного места с помощью двух наземных радиопеленгаторов необходимо:
1. Выдерживая скорость и курс, запросить и получить пеленг у первого пеленгатора и заметить время нажатия ключа для пеленгации.
2. Запросить и получить пеленг у второго пеленгатора и заметить время нажатия ключа для пеленгации.
3. Если между запросом пеленгов у первого и второго пеленгаторов прошло более 2 минут, то через промежуток времени, прошедший между взятием их, вновь запросить и получить пеленг у первого пеленгатора.
4. По двум пеленгам, полученным с первого пеленгатора, рас считать средний пеленг:
5. Средний пеленг первого пеленгатора и пеленг, полученный со второго пеленгатора, проложить на карте (если пеленги магнитные, то предварительно перевести их в истинные).
6. Пересечение 'проложенных пеленгов даст расчетное место самолета в момент запроса пеленга у второго пеленгатора (рис. 263).
§ 197. Пеленгация по засечкам
Для того чтобы обеспечить самолетовождение по засечкам, необходимо установить пеленгаторы, кроме аэродромов, и в стороне от трассы, с таким расчетом, чтобы 2—3 пеленгатора могли одновременно запеленговать самолет и пеленги пересекались под углом, близким к 90°. Из двух-трех пеленгаторов, предназначенных для пеленгации самолетов на данном участке трассы, один является командным, который непосредственно и связан с самолетом.
Порядок работы самолета и пеленгаторов -при способе пеленгации по засечкам состоит в следующем: самолет запрашивает у командного пеленгатора свое местонахождение кодовой фразой qtf и дает для пеленгации нажатие ключа. Пеленгаторы, обслуживающие этот участок трассы, пеленгуют самолет и результат пеленгации передают на командный пеленгатор. Последний, получив пеленги от вспомогательных пеленгаторов, прокладывает пеленги на карте и определяет местоположение, самолета.
Обработав пеленги, оператор командного пеленгатора передает результаты на борт самолета. В зависимости от предварительных указаний командный пеленгатор может передать: 1) координаты самолета; 2) квадрат, в котором находится самолет; 3) местоположение по ближайшему ориентиру; 4) курс для прибытия в пункт назначения в штиль и расстояние до этого пункта.
Точность определения местоположения этим способом невелика, в луч>шем случае — порядка 10 км. Точность зависит от расстояния пеленгаторов от местонахождения самолета.
В Гражданском воздушном флоте этот способ не имеет распространения, однако он частично применяется на одной из воздушных линий. Ввиду того, что не исключена возможность осуществлять самолетовождение этим способом, нужно запомнить следующее:
1. Перед вылетом произвести подготовку карты; нанести на карту пеленгаторы и собрать сведения о них: позывные, длину волны, порядок работы и обмена, сведения, которые дает команд ный пеленгатор, участок, обслуживаемый пеленгаторами.
2. Запрашивать у командного пеленгатора свое местонахожде-иие кодовой фразой qtf.
3. Получив с командного пеленгатора qtf (местонахождение), немедлен,но нанести его «а каоту.
4. Для определения фактической линии пути запросить через 10 минут 3—4 qtf и нанести их на карту.
б. Прежде чем приступить к исправлению курса, необходимо вторым запросом убедиться в правильности полученного qtf.
6. Для выхода в пункт назначения использовать ил-и пеленгатор, установленный 1 пункте назначения, или другое наземное радионавигационное средство.
’ 7. В случае отказа в работе
командного пеленгатора запросить ₽ис- 264- П(^'ЧСКН.,^ЦИЙ "° м*
в том же порядке у вспомогатель-
ных пеленгаторов qte (истинный пеленг): затем полученные на болт истинные пеленги проложить на касте и определить таким образом свое местонахождение (рис. 264).
САМОЛЕТОВОЖДЕНИЕ С ПОМОЩЬЮ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ
§ 198. Назначение и устройство радиолокационных станций
Радиолокация получила широкое развитие и применение в период второй мировой войны.
В Америке и Англии радиолокационные установки обычно именуются «Радар» (Radar — начальные б\квы английской фразы «радиообнаружение и определение расстояния»).
В настоящее время для целей навигации применяются наоем яые и самолетные радиолокационные станции, позволяющие с большой точностью определять: расстояние до объекта, направление на объект, наличие препятствий и истинную высоту по тега, а также получать на специальном экране изображение местно сти, над которой пролетает самолет. Все это пэлнсстыо обеспеаи вает безопасность и точность самолетовождения в любых условиях полета: нсчью, в тумане, в облачности и т. п.
В простейшем случае радиэюхациэнная станция состоит из передатчика, приемника, антенны, индикатора и источника писания.
1) Передатчик имеет своим назначением через антенну направленного действия излучать в пространство радиоволны. Передатчик работает очень короткими, но мощными импульсами, т. е. передатчик включается и выключается на очень короткое
время, которое может длиться миллионную долю секунды, и за это время в нем успевают возникнуть сотни или тысячи мощных колебаний. Обычно -в радиолокации применяют частоты от ста миллионов до десяти миллиардов колебаний в секунду, что соответствует длинам волн от трех метров до трех сантиметров.
2) Приемник имеет своим назначением принимать через антенну излучаемые передатчиком станции радиоволны. Приемник располагается рядсм с передатчиком и принимает как прямые радиоимпульсы, т. е. идущие непосредственно от передатчика станции к приемнику, так и отраженные от различных объектов радиоимпульсы, которые поступают в приемник через промежуток времени, потребный для того, чтобы радиоволна прошла расстояние от передатчика до предмета, от которого она отражается, т от предмета до приемника.
в) Антенна направленного действия предназначена для направленного излучения и приема радиоволн.
Обычно передатчик и приемник имеют общую вращающуюся антенну направленного действия, полярная диаграмма которой позволяет определять направление на объект по максимуму силы приема. Применяются также направленные антенны, полярная щаграмма которых дает равносигнальную зону, напоминающую равнссигнальную зону обычных радиомаяков.
4) Индикатор предназначен воспроизводить на экране ре зультаты приема.
Индикатором радиолокатора является особая электроннолучевая (катодная) трубка, представляющая собою вакуумный прибор, на одном конце которого расположен катод, излучающий электроны, а на другом—экран, покрытый светящимся химическим составом. На экране тонкий электронный пучок вычерчивает различные светящиеся фигуры.
5) Источники питания предназначены для питания пе редатчика и приемника электроэнергией.
Некоторые радиолокаторы, кооме этого, имеют прибор со шкалой и стрелкой, который механически отсчитывает и показывает результаты приема.
§ 199. Принцип работы радиолокационных станций
Радиоволны в отношении отражения обладают теми же свойствами, что и звуковые волны; как известно, если мы возбудим звуковые колебания и на пути их распространения встретится препятствие в виде леса, гор и т. п., то звуковые волны отразятся и вернутся к нам обратно в виде эхо. Радиоволны (радиоимпульсы), так же как и звуксвые волны, если достигают какого-шбудь предмета, то отражаются от него во всех направлениях, н часть отраженной энергии попадает к месту излучения. Этот отраженный импульс называется «радиоэхо». Именно на явлении радиоэхо и основан принцип работы современных радиолокаторов
Передатчик радиолокатора через направленную антенну излучает в пространство отдельными сжатыми порциями (импульса ми) очень короткие радиоволны. Радиоволны, распространяясь в определенном направлении (направленно) и встречая на своем пути какой-либо объект, способный отразить радиоволны, частично отражаются и возвращаются к месту излучения, т. е. к радиолокатору. Приемник радиолокатора с помощью антенны принимает радиоволны, идущие непосредственно от передатчика к приемки ку, и радиоволны, отраженные от объекта. В результате проме жуток времени, прошедший между приемом импульса, идущего непосредственно ст передатчика, и приемом отраженного импульса, определяет время, затраченное радиоволной на покрытие расстояния от передатчика до объекта и обратно.
Рис. 265. ‘Принцип работы радиолокатора.
Так как известно, что скорость распространения радиоволн равна 300 000 км/сек, то по времени, затраченному водной на покрытие этого расстояния, можно определить расстояние до объекта. Например: радиоимпульс затратил на покрытие этого расстояния 0,001 сек, следовательно, общее пройденное волной расстояние будет равно: 300 000 км/секХ0,О01 сек.= 300 км; а так как радиоимпульс прошел за это время путь дэ объекта г обратно, то расстояние до объекта будет равно подовине общего расстояния: 300 км:2=150 км. Следовательно, в данном слу д чае объект находится в 150 км от радиолокатора (рис. 265).
Время, затраченное отраженной волной, а следовательно, и расстояние до объекта, индикатор (катодная трубка) радиэлокг тора измеряет следующим образом: прямой радиоимпульс, т. е радиоимпульс, идущий непосредственно из передатчика в прием ник, попадает в индикатор, и на экране появляется изображени импульса. Через некоторое время приходит отраженный импульс и на экране индикатора, на некотором удалении от изображена прямого сигнала, появляется изображение отраженного сигнал: Чем больше запаздывает отраженный импульс, тем больше будет расстояние между прямым и отраженным импульсом на экране На экране индикатора имеется шкала, оцифрованная в киломег-«6
pax. Изображение прямого импульса всегда располагается против нлля шкалы расстояний, изображение отраженного импульса — против соответствующего расстояния (рис. 265А).
Определение направления на объект в радиолокаторах обеспечивается применением антенн направленного действия, которые дают излучение в виде узкого пучка радиоволн. Чтобы определить направление на объект, необходимо луч радиоволн направить на объект. При попадании луча на объект на экране появится отраженный импульс. Для точного попадания луча на объект, вращая антенну, добиваются такого положения, чтобы величина отраженного импульса была максимальной; после этого по положению антенны определяют направление на объект.
При применении антенн, полярная диаграмма которых дает равносигнальную зону, па экране индикатора будут видны 2 отраженных импульса. В том случае, когда объект находится строго в направлении линии, делящей равносигнальную зону пополам, оба отраженных сигнала на экране индикатора будут равны. При нахождении объекта в стороне от этого направления сигналы будут различной величины.
Рис. 265Б. Экран панорамного индикатора.
Рис. 265А. Экран индикатора расстояний.
Чтобы получить на экране индикатора радиолокатора изображение местности, применяют непрерывно вращающиеся (со скоростью примерно 50 об/мин) узконаправленные антенны. Радиолуч, исходящий от такой антенны, непрерывно «осматривает» местность, над которой пролетает самолет, и на экране индикатора появляется изображение соответствующего участка земной поверхности. Благодаря тому, что светящаяся поверхность экрана обладает свойством послесвечения, изображение за время одного оборота (1—1,5 сек.) не исчезает, чем и достигается достаточная четкость изображения. Изображение местности на экоане получается в виде светлых пятен различной интенсивности на более темном общем фоне экрана.
Интенсивность светлых пятен на экране зависит от свойств к07
отражающей поверхности; так, например, водная поверхность дает так называемое зеркальное отражение радиоволн: если на такую поверхность падает луч, то он не отражается во все стороны угод его отражения равен углу падения, поэтому таков отра женный радиолуч обычно обратно в радиолокатор не попадает, следовательно, на экране водные поверхности будут выглядеть -в виде темных пятен.
При падении радиолуча на земную поверхность, а также нт городские здания, правильнсго отражения не будет, лучи отра зятся вэ все стороны (рассеянное отражение) и часть отражен ной энергии попадет в приемник радиолокатора, поэтому земная •поверхность, а также города будут изображаться на экране в ви де светлых пятен.
Экран такого индикатора .имеет масштабные окружности, а также светящуюся визирную линию север—юг, которая ставили зуется гирокомпасом (рис. 265Б).
§ 200. Гиперболическая система самолетовождения
В период второй мировой войны были разработаны и применялись гиперболические системы «ДЖИ», «Лоран» и «Декка».
Гиперболическая система «ДЖИ» обеспечивает самолетовождение на расстоянии до 500 км. Для осуществления самолетовождения по этой системе необходимо, чтобы на самолете было установлено специальное приемное устройство с индика тором в виде катодной трубки, а на земле—три импульсных пере дающих радиостанции с базой 300—600 км. Сущность этой системы заключается в том, что три наземные станции работают не прерывно двумя парами (одна работает в двух парах), а импуль сы парно работающих наземных станмий принимаются на само лете и фиксируются на экране индикатора, причем шкала индика тора градуирована не в величине абсолютного расстояния до на земных станций, а в разности этих расстояний.
Для использования этих данных на карту наносятся три на земные радиостанции и для каждой из двух пар радиостанций строится специальная сетка, где каждая кривая является гипер болой, и ей соответствует определенная разность расстояний. Дл?' удобства использования этой сетки гиперболы каждой пары радиостанций наносятся разным цветом и оцифровываются (рис. 265В)
В полете экипаж самолета определяет разность расстояний для одной и другой пары радиостанций и находит на карте соот ветствующие гиперболы, а так как найденная гипербэча является позиционной линией самолета, то пересечение двух гипербол (для одной и другой пары) дает расчетное место самолета.
Самолетовождение по этой системе осуществляют, определяя и нанося на карту отметки РМ. Так как отметки РМ соответст «уют большей точности, то по этим отметкам можно в любой момент определить фактический путевой угол и путевую скорость самолета, что обеспечивает выполнение полета с контролем пудиках по дальности, так и по направлению.
Гиперболическая система «ДЖИ» имеет применение для осу дгствления ближней навигации.
Ближняя навигация, т. е. навигация на расстоянии 400—500 км чп» этой системе отличается очень большой точностью, которая в некоторых случаях значительно превосходит точность навигации « условиях видимости земли.
Рис. 265В. Гиперболическая сетка.
Гиперболическая система «Лоран» обеспечивает самолетовождение на расстояние до 2500 км. В системе «Лоран» попользуется тот же принцип измерения интервала времени ме ясну импульсами, принятыми от двух синхронно работающих передатчиков, и определения гиперболической позиционной линии, шютветствуюшей тому же измеренному интервалу времени, что и в системе «ДЖИ».
Для обеспечения самолетовождения по этой системе на земле устанавливаются четыре передающих станции, которые работают и «парно, с .постоянной частотой посылки импульсов, причем одна из станций является двойной управляющей станцией, т. е. в этом пункте находятся два передатчика. С помощью самолетного приемисто устройства с визуальным индикатором (электрэнно-луче ван трубка) измеряется разность интервала времени между приходом импульсов от синхронно работающих двух пар станций.
Как уже известно, разность интервала времени будет созгвет--,вовать определенной разности расстояний, а линии равной раз-«сети расстояний будут гиперболами, которые в свою очередь яв яяются позиционными линиями самолета. На карте для каждой пары станций строится гиперболическая сетка (рис. 265В), кото зая и используется в полете.
Экипаж самолета также, как и 'при полете посистеме «ДЖИ>, с помощью самолетной установки измеряет разницу во времени прихода обеих сигналов и находит на карте соответствующую гиперболу, которая, как уже было сказано выше, является позиционной линией самолета. В том же порядке экипаж находит соответствующую гиперболу и для второй пары станций, а пересечение найденных гипербол даст расчетное 'место самолета.
Гиперболическая система «Лоран» применяется для целей дальней навигации и обладает высокой точностью самолетовождения.
Гиперболическая система «Декка» обеспечивает самолетовождение на расстояние порядка 2CU0 км. Эта система отличается от систем «ДЖИ» и «Лоран» тем, что излучение радиоволн происходит непрерывно, а не импульсами. В системах «ДЖИ» и «Лсран» измеряется разность времени прихода импульсов от двух наземных станций, а в этой системе измеряется разность фаз между волнами, излучаемыми двумя передатчиками, которые работают незатухающими колебаниями.
Величина сдвига фазы принятых сигналов от двух синхронных передатчиков будет пропорциональна разнице расстояний от обо их наземных пеоедатчиков до самолетного' приемника; поэтому здесь линия равного сдвига фазы и будет гиперболой.
Наземное оборудование системы «Декка» состоит из трех наземных передающих станций, причем излучение их синхронизируется последовательно так, что попеременно создаются позиционные линии то от одной пары передающих станций, то от другой.
Самолетное оборудование системы состоит из трех приемных устройств с двумя стрелочными индикаторами. Каждый из двух индикаторов измеряет сдвиг фазы между частотами двух наземных станций, т. е. указывает на шкале гиперболу, на которой находится самолет. Таким образом отсчет по двум индикаторам определяет две гиперболы (позиционные линии), на которых находится самолет. Следовательно, пересечение этих гипербол даст расчетное место самолета.
Так как гиперболические сетки для каждой из двух пар нанесены на карту, то, читая показания индикаторов и находя соответствующие гиперболы на карте, можно в течение всего полета получать расчетное место самолета и по получаемым отметкам РМ осуществлять самолетовождение. Точность самолетовождения но системе «Декка» значительно выше точности по системам «ДЖИ» и «Лоран».
Вообще же точность самолетовождения по гиперболической системе зависит от дальности полета. Объясняется это тем, что гиперболы наиболее густо ложатся на прямой линии, соединяющей обе радиостанции, а по мере удаления от этой линии гиперболы расходятся; следовательно, наибольшая точность будет в том случае, когда самолет находится на прямой, соединяющей обе радиостанции. Точность определения расчетного места также 4QQ
зависит и от величины угла, поя которым пересекаются гипербЛ лы, а именно: чем ближе пересечение гилербсл к углу 90°, тем выше точнссть определения.
Гиперболическая система навигации, 'наряду с преимущества-аги (точность, дальность), имеет и большой недостаток: она сложна, и это требует, чтобы на борту самолета обязательно находился штурман.
Наиболее целесообразно применение этой системы для вне-трассовых полетов на большие расстояния.
Для полета в определенном направлении, например по трассе, пара наземных станций мсжет быть установлена так, что гиперболы будут располагаться ндсль трассы, тогда полет по трассе осуществляется путем выдерживания самолета по индикатору на определенной гиперболе.
§ 201. Приводная система самолетовождения
Приводная система обеспечивает самолетовождение в определенном направлении на расстояние до 300—400 км. Для огуще( твления самолетовождения по этой системе необходимо, чтобы на самолете была установлена специальная радиолокационная станция-запросчик, а на земле — азимутально-дистанцио-метрический импульсный (маяк автомат-ответчик, даюший направленную зону. Сущность этой системы самолетовождения заключается в том, что установленный на земле непрерывно работающий маяк дает зону шириной примерно 0,25--1,0°, причем зспа располагается вдоль трассы. Экипаж, .выполняя полет по трассе, выдерживает самолет по визуальному индикатору в зоне и одновременно на шкале индикатора может в каждый отдельный момент прочесть расстояние до маяка. Таким образом, экипаж, выполняя полет, одновременно непрерывно ведет контроль пути и по направлению и по дальности
Возможен и другой вариант этой системы: самолет оборудуется радиолокатором-запросчиком, имеющим специальную направленную антенну (последняя обеспечивает полет на радиомаяк), а на земле устанавливается импульсный радиомаяк ответчик, не дающий, как в первсм случае, зоны для полета. При этси варианте самолетный радиолокатор обеспечивает полет на маяк с любого направления (нечто похожее на полет по РПК или РК), а на шкале индикатора, как и в первом случае, в любой момент можно прочесть расстояние до маяка.
Примечание. Самолетные радиолокаторы-запросчики посылают запрос ^импульс) на радиомаяк-ответчик, а последний автоматически отвечает; по времени, прошедшему с момента посылки запроса на маяк и до получения ответа от маяка, самолетный радиолокатор определяет расстояние до маяка (см. принцип работы).
Выполнение полета по этой системе отличается большой простотой и удобством.
Если «маяк этой системы дает зону, то выход на линию пути
осуществляется в том же порядке, что и при полете по обычным радиомаякам; если же маяк не дает этой зоны, а самолетное устройство имеет наплавленную антенну, то выход «на линию пути осуществляют аналогично полету по РПК или РК на радиостанцию.
Благодаря тому, что эга система в любой момент дает экипажу расстояние до маяка с большой точностью,—экипаж самолета постоянно может знать свою путевую скорость, а следовательно, непрерывно вести контроль пути пэ дальности. Путевая скорость может быть определена по двум отсчетам расстояния через какой-то промежуток времени; например, при первом отсчете расстояние до маяка сказалось равным 390 км; при втором отсчете спустя 6 минут расстояние Сказалось равным 358 км; следова тельно, самолет за 6 минут покрыл расстояние 32 км (390— 358 км). Зная время и пройденное расстояние, с помощью НЛ-7 на шкале расстояний определяем путевую скорость, которая в данном случае равна 320 км.
Эта система может также i беспечить внетрассовый полет на расстояние до 400 км. Сущность внетрассового полета заключается в следующем: экипаж самолета с помощью самолетной радиолокационной станции определяет расстояние до двух маяков, удаленных один от другого на расстояние 100--400 км. Определив расстояние до маяков и зная их местоположение, необходимо с
помощью циркуля на карте провести из точек местоположения
маяков две окружности радиусом, равным расстоянию до соответствующего маяка. В данном слу
чае каждой окружность является позиционной линией самолета, а точка пересечения окружностей дает расчетное место самолета (рис. 265Г). Практически нет необходимости приводить полные ок-руж1Уссти, а можно ограничиться проведением дуги через район предполагаемого местоположения самолета, тогда точка пересечения двух дуг даст расчетное место самолета. Следует иметь в виду, что окружности, а в некоторых случаях и
по расстоян по до двух маяков.
лроведенные дуги, пересекутся в
двух течках. Поэтому необходимо критически'подходить к .выбору одной из них как РМ самолета. Самолетовождение в этом случае •существляют, нанося на карту ряд отметок РМ и определяя по «им фактический путевей угол и путевую скорость самолета, что •беспечивает выполнение полета и выход в пункт назначения.
Для выполнения полетов по трассе приводная система навигации имеет значительное преимущество перед другими радио-лскационными системами, так как обеспечивает точный выход на
аэродром, а также посадку з плохих метеорологических условиях •ри наличии на борту радиовысотомера.
§ 202. Радиовысотомеры
Существуют радиовысотомеры двух ®и,доз: больших высот и -малых высот, В ГВФ имеют применение радиовысотомеры малых высот.
Радиовысотомер малых высот (предназначен для определения истинной высоты полета над местностью. Прибор используется, главным образом, при слепом самолетовождении, при пробивании низкой облачности, а также для производства посадки в условиях ограниченной видимости земли.
Радиовысотомеры малых высот дают возможность измерять истинную высоту полета в пределах от 0 до 4000 футов (О-1220 м) с точностью до + 1,5 м.
(Прибор состоит из следующих оснсэных элементов:
1) приемо-передающего устройства;
2) приемной и передающей антенн;
3) индикатора высоты;
4) индикатора •ограничения высоты-
Передатчик непрерывно излучает через (передающую антенну электромагнитные волны ультразысэхо-й частоты, которые «а правляют-ся с самолета к земной или водной поверхности. Достигнув земной или водной поверхности, радиоволны отражаются от нее и возвращаются на самолет, где принимаются приемником радиовысотомера (рис. 265Д).
Передатчик
Приемник
Рис. 265Д. Схема работа- радиовь-coi змера.
Л — антенна передатчика; В — антенна приемник*
Таким образам, радиоволна, (посланная с самолета к (земной поверхности, затрачивает ’некоторое время Т, необходимое на покрытие расстояния от самолета до .земной (поверхности и обратно
Это время Т равно удвоенной высоте полета, деленной на скорость распространения радиозолн в пространстве:
_ 300(РО км/сек.
2Н км
где: Н — истинная высота в .километрах,
300 000 км/сек — скорость распространения радиоволн.
Частота излучаемых .передатчиком радигвотн непостоянна; она непрерывно изменяется с какой-то определенной скоростью. Следовательно, в течение этого времени частота излучаемых передатчиком радиоволн изменится на некоторую величину, котррля будет зависеть от скорости изменения частоты и от времени Т, т. е. от удвоенной высоты полета.
Одновременно с радиоволной, направленной к земной поверхности, подается от передатчика сигнал непосредственно на приемник. Поэтому приемник радиовысотомера в каждый отдельный момент принимает два сигнала (прямой и отраженный) разной частоты; что создает биения в контуре детектора.
Радиовысотомер устроен таким образом, что эта разность пустот 'биений на всех высотах лежит .в области звуковых частот-После детектора сигналы звуковой частоты усиливаются и преобразуются .в постояиный ток, напряжение которого прямо про-' порционально разности частот 'биений, т. е. пропорционально вы соте. Этот ток приводит в движение стрелку индикатора радиовысотомера, представляющего собой обыкновенный миллиамперметр, шкала которого градуирована в футах (метрах) высоты.
Таким образом, чем больше «высота полета, гем больше частота биений; следовательно, больше тока проходит через индикатор, заставляя стрелку индикатора высоты отклониться на больший угол.
Индикатор высоты радиовысотомера малых высот (рис. 265Е)— двухдиапазснный; при переключении диапазонов меняется сц.иф ровка на шкале.
Индикатор устанавливается на приборной доске пилота и имеет на лицевой стороне:
1. Двух диапазонную меняющуюся шкалу:
шкалу первого диапазона — от 0 до 400 фут; шкалу второго диапазона — от 400 до 4000 фут.
2. Ручку включения и выключения: при .п >вороте ручки вправо до упора радиовысотомер включается; при повороте влево — выключается. i
3. Ручку переключения диапазонов: при повороте ручки вправо меняется шкала, и радиовысотомер отсчитывает высоту по второму диапазону, т. е. до 4000 фут.
Индикатор ограничения /высоты (рис. 265Ж) ’состоит из /переключателя ограничения высоты и патоона с тремя сигнальными лампочками: белой, зеленой и красной.
Индикатор ограничения облегчает выдерживание заданной •высоты полета; пс-сле установления переключателя на заданную высоту полета до тех inop, пока самолет макодится на этой высоте (с точносюю+8—10 фут. на первом диапазоне и +80— .00 фут. на втором), будет гореть белая лампочка. Если истин пая вьгсота полета уменьшится .против заданной более, чем на 8—10 (80—100) фут., загорится красная ла.мпрчка. При увеличении высоты белее, чем на 8—10 (80—100) фут., загорится зеленая лампочка.
Рис. 265Ж- Индикатор ограничения высоты.
Рис. 265Е. Индикатор высоты.
Радиовысотомер очень 'чувствителен к изменению истинной вы соты полета. Стрелка индикатора моментально реагирует на встречающиеся даже незначительные неровности местности (хелмы, овра/и). Поэтому при то лете над пересеченной местностью стрелка все время находится в движении. 'При полете над водой или над ровной местностью стрелка ведет себя спокойно.
Следует отметить, что при полете в горной местности радиовысотомер может показ/ /вать высоту полета .не от отдельных вершим гор, а от .их склонов; кроме этого, надо учитывать, чго радиовысотомер не показывает возвЫ|ШекиС'рти, находящиеся впереди самолета.
§ 203. Панорамная система самолетовождения
Панорамная система или, что то же самое, •рациов/иде-ние обеспечивает самолетовождение по земным ориентирам при отсутствии видимости земли. Для самолетовождения по этой системе необходимо только, чтобы самолет был < бсрудован специальным радиолокатором. Большим преимуществом этой системы является то, что сна не требует каких-либо вспомогательных наземных радиостанций и потому может быть использована в лю бом месте и при полетах на любое расстояние.
Сущность панорамной системы навигации заключается в следующем: на экране индикатора самолетной радиолокационной станции, благодаря 'наличию специальной, вращающейся на 360°, антенны, появляется изображение местности, над которой пролетает самолет, в виде светлых пятен различной интенсивности. Реки, озера и другие водные пространства на экране изображаются в виде резко очерченных темных пятен. Города 1пс-я‘вля1ются в виде светлых пятен. Заводские строения дают более яркие т.ят-на, чем •окружающая местность.
На экране индикатора одновременно появляются концентрические окружности, которые дают масштаб изображения (каждая окружность является линией равного расстояния).
Кроме этого, экран индикатора связан с гирокомпасом, благодаря чему на экране появляется прямая линия, указывающая север—юг. Центр экрана всегда соответствует положению самолета в любой момент.
Таким образом, по мере продвижения самолета меняется в изображение местности на экране, т. е. экран дает как бы подвижную «карту» местности определенною масштаба.
Самолетовождение по этой системе осуществляют -примерно так же, как и по земным -ориентирам. т. е. сличением карты с изображением местности на экране. Наличие на экране масштабных окружностей позволяет определять расстояние до изображенных объектов, а стабилизация от гирокомпаса линии север—юг позволяет определить направление на объект, что значительно облегчает и повышает точность самолетовождения. Радиус действия этой -системы доходит до 80 км. При уменьшении радиуса действия увеличивается масштаб изображения.
К недостаткам этой системы следует отнести сложность радиолокационной установки.
РАДИОНАВИГАЦИОННАЯ ПОДГОТОВКА К ПОЛЕТУ
Успех выполнения полета вне видимости земли в большей степени зависит от качества подготовки к нему, от умения -выбрать и использовать наиболее соответствующие при данной обстановке наземные и самолетные радионавигационные средства.
Поэтому подготовка к использованию радионавигационных средств должна явиться одним из важнейших элементов подго товки к полету. Радионавигационная подготовка слагается и? следующих элементов:
1. Выбор радионавигационных средств.
2. Составление радионавигационного плана.
3. Радионавигационная подготовка карт.
§ 204. Выбор радионавигационных средств
Радиснавигацис1н-ные средства, находящиеся в районе полетов, можно с точки зрения их использования подразделить на:
1) обеспечивающие контроль пути по направлению и
2) обеспечивающие контроль пути по дальности.
40Ь
Первые, как правило, находятся на линии пути и .в свою очередь подразделяются на встречающие, если они находятся иа линии пути впереди самолета, .и провожающие, если они находятся позади самолета.
Встречающие радионавигационные средства имеют своей задачей — привести самолет в пункт назначения или к контротьному промежуточному ориентиру, а провожающие — привести самолет по заданной линии пути в район действия встречающих средств или в район назначения.
Задача радиоиавигаци.нных средств, обеспечивающих контроль пути по дальности, состоит в том, чтобы дать возможность в любой момент определить расчетное место самолета. Поэтому такие средства могут располагаться как вдоль заданной линии пути, так и в стороне от нее, иногда иа значительном удалении.
При выборе радионавигационных средств для полета и нужно стремиться к тому, чтобы обеспечить подбор кусса следования, надежный привод в пункт назначения, постоянный контроль пути по дальности и направлению и, тем самым, возможность в любой момент'определить расчетное место самолета.
При выборе радионавигационных средств для полета следует отдавать предпочтение работающим надежно и без переоывэв, а выбрав эти средства, нужно получить точные сведения об их местоположении, времени работы, позывных, частоте и пр.
§ 205. Составление радионавигационного плана
Еще на земле экипаж обязан составить план использования радионавигационных средств в полете и произвести предварительные расчеты для облегчения работы ,в воздухе. Радионавигационный план должен содержать:
а) Сведения о радионавигационных средствах (местоположение, частота, позывные, время работы и пр.).
б) Сведения о том, как и где используются радионавигационные средства.
в) Результаты предварительных расчетов.
Все эти данные заносятся в принятый в >ГВФ радионавигационный бортжурнал (приведенной формы на стр. 407.
§ 206. Радионавигационная подготовка карт
На борту самолета, кроме полетной карты масштаба 1 : 1 000000, должна находиться карта масштаба 1 : 2500000 или 1:2 000 000. Полетную карту нужно .подготовить не только для целей общена-вигациои:ых, но'и для целей радионавигации. А именно: нанести все радионавигационные средства, попадающие в пределы полоса карты, с необходимыми данными. Через все радионэвигатиоя1-ные средства провести вспомогательные меридианы.
Кроме этого, для зонных маяков наносят рабочие зоны и сигналы; для маяксв, работающих на пеленг,— лучи молчания; для пеленгаторов, находящихся на линии пути и в пунктах вылета и прилета,—путевые пеленги qdr и qdm; для боковых пеленгаторов
ров — контрольные пеленги (qte) или для определенных контрольных ориентиров или через каждые 5—15°; для боковых радиостанций — предвычисленные пеленги. Полетную карту следует считать и основной радионавигационной картой, поэтому к ее подготовке нужно подходить особенно тщательно.
Карта масштаба 1 : 2 500 000 является радиспеленгациснной каргой и предназначается главным образом для целей восстанов ления потерянной ориентировки. Соответственно этому она и дол жна быть подготовлена. Подготовка карты заключается в тем, чтобы 'нанести на нее все радионавигационные средства, записать все данные этих средств и, наконец (для упрощения работы в воздухе), .нанести вокруг каждой рад|Иоста1Н<ции орт-гем тиров очный по меридиану крут с оцифровкой через 10°.
ГЛАВА Х1П
АСТРОНОМИЧЕСКАЯ ОРИЕНТИРОВКА
, § 207. Общие сведения
Астрономическая ориентировка производится по видимым небесным светилам: солнцу, луне, планетам и звездам. Она применяется для ведения контроля пути и определения расчетного места самолета'во всех случаях полета,- когда земные ориентиры невидимы или отсутствуют и другие способы восстановления ориентировки не приводят к желаемым результатам.
Ведение астрономической ориентировки возможно только при видимости небесных светил и наличии на борту самолета (у штурмана) авиасекстанта, авиационного астрономического ежегодника на текущий год, специальных таблиц высот и азимутов солнца, луны, планет и звезд (ТВА), таблицы рефракции, точных часов или хронометра и карты звездного неба.
Основное преимущество астрономической ориентировки перед другими способами (например радионавигацией)—это полная независимость от наземных средств, а также сохранение секретности местонахождения самолета и направления полета. Последнее очень важно в условиях войны при дальних полетах в тыл врага.
В настоящее время упрощенные спэ-обы астрономической ориентировки могут быть применены во всех полетах (при видимости небесных светил) и с достаточней для практических целей точностью; при этом точность ориентировки не зависит от дальности и высоты полета.
Однако хорошие результаты могут быть получены только в том случае, если наблюдатель имеет опыт в астрономических наблюдениях и умеет быстго и безошибочно выполнять необходимые расчеты на земле и в воздухе.
Наилучшей первоначальной тренировкой является производство наблюдений и расчетов на земле до тех пор, пока не будет достигнуто определение расчетного места наблюдателя (самолета) с уклонением от действительного местонахождения не более, чем ла 8—10 км.
После тренировки на земле необходимо переходить к тренировке в полете. Последнюю сначала производят над известной местностью до тех пор, пока не будет достигнута точность расчетов с уклонением от действительного местонахождения самолета ч момент наблюдения за светилам-и не более, чем на 10—15 км.
§ 208. Основные астрономические понятия и определения
Наблюдателю, находящемуся на земной поверхности в какой' либо точке, кажется, что над ним небо, 'как бы опираясь краимм на видимый горизонт, образует купол, на котором расположены небесные светила.
Ряс. 266. Небесная сфера я ее элементы.
С—центр земли (место наблюдателя);
Л/uS /- з₽мной шар;
Рн Z Q'Spj QN— чебесная сфера;
Ps — ое. мира;
QWQ Е—небесный экватоэ;
аа'—земной зкватор;
М и М - свс<г>'’,-> на небесной сфере;
Pn Л.Р ; РяМ'Рз —меридан светила М (ЛИ) (круг склонений);
P Hrt'V —меридиан наблюдателя И;
AHR—истинный горизонт наблюдателя;
ЧМК'—небесная параллель светила М (параллель суточного движения светила);
z —зенит наблюдателя;
г—надир наблюдателя;
гНС— вертикаль наблюдателя Н;
N S —точки севера и юга;
Е. w—точки востока и запада;
/\v 1 s —северный и южный пслюсы мира;
N, S'—земные север и юг (северный и южный полюсы);
NS—.полуденная линия.
Если наблюдателя мысленно поместить в центре земли, то ему небесный купол представится <в виде -правильной сферы с поверхностью шара огромных размеров, на котором неподвижно относительно друг друга «прикреплены» небесные светила (рис. 266), 411
Эта воображаемая сфера произвольного радиуса, центром кото рой является или место наблюдателя или центр земли, называется небесной сферой.
При наблюдении за небесной сферой в ясную погоду легко за метить, что положение на ней небесных светил относительно земли непрерывно изменяется, при этом движение их происходит равномерно в направлении с востока на запад, т. е. в обратную сторону вращения земли вокруг своей оси. Светила «восходят» в восточной части видимого горизонта,г движутся по небесной сфере к западу и «заходят» в западной части горизонта. В действительности явление восхода и захода, а также движение небесных све. тил по небу происходят не потому, что небесная сфера движется вокруг земли, а потому, что земной шар вращается вокруг своей оси с запада на восток; небесная сфера в пространстве находится как бы неподвижно. Поэтому движение небесных светил относи тельно земли—это только видимо? явление. Видимее движение небесной сферы вокруг земного шара происходит аналогично су точному видимому движению солнца и луны.
Точки на небесной сфере, через которые проходит воображаемая ось ее видимого суточного вращения, называются полюсами м и р а, а сама ось — осью мира. Ось мира совпадает с земной осью и является ее продолжением в пространстве, поэтому пслюсы мира аналогично земным полюсам называются соответственно северным (Pn) и южным (/-s) полюсами мира.
Большой круг на небесной сфере, плоскость которого проходит через ее центр и перпендикулярно оси мира, называется небесным экватором. Небесный экватор совпадает с земным экватором и является его продолжением в пространстве. Аналогично разделению земным экватором земного шара на северное и южное полушария небесный экватор разделяет небесную сферу на север, ное и южное полушария неба.
Точка на небесной сфере, расположенная вертикально нац головой наблюдателя, называется зенитом (z); противоположная точка, находящаяся на небесной сфере вертикально под наблюдателем, носит название надира (л).
Большой круг на небесной сфеое, приходящий через полюсы мира, и наблюдаемое светило называется меридианом светила или кругом склонений, а круг, проходящий через полюс и зенит наблюдателя, — меридианом наблюдателя.
'Малые круги на небесной сфере, параллельные небесному экватору, называются небесными параллелями или па-раллелями суточного движения светила.
Известно, что если на нитке подвесить грузик, то где бы ни находился наблюдатель на земной поверхности она принимает всегда определенное направление, совпадающее с направлением силы тяжести; это направление называется отвесной линией или вертикалью. Плоскость, проведенная в месте наблюдателя перпендикулярно к вертикали, называется истинным горизонтом.
Точки пересечения небесного меридиана с истинным горизонтом называются точками севера (N) и юга (S) а точки пересечения истинного горизонта с небесным экватором — точками востока (Е) и запада (W).
Линия пересечения плоскости меридиана наблюдателя с плоскостью истинного горизонта носит название полуденной ли-н и и. Эта линия называется полуденной, потому что в полдень тени от вертикальных предметов падают вдоль ее направления Полуночным меридианом земли называется меридиан, на котором в данный момент полночь, т. е. считается 00 час. 00 мин. 00 сек. по местному гражданскому времени; его положение зависит только от положения меридиана географического места солнца. Полуночный меридиан не участвует во вращательном движении земли и перемещается относительно земной поверхности с востока на запад. Полуночный меридиан только четыре дня в году прямо противоположен меридиану, преходящему через географическое место солнца (15 апреля, 15 июня, 1 сентября и 25 декабря).
В остальные дни он составляет угол с меридианом географического места солнца в пределах от 176 до 184° (рис. 270).
§ 209. Направление на светила
'Прямая, соединяющая глаз наблюдателя (находящег'сся на земле или в полете) со светилом, называется истинным направлением на светило, или топоцентрическим (рис. 266А, I, II). Вследствие преломления зрительных лучей при прохождении ими земной атмосферы различают еще видимое направление на светило, которое отличается от истинного на угол астрономической рефракции (г).
Рефракция это искривление направления идущих от светила видимых лучей от истинного направления. Она определяется углом, заключенным между видимым и истинным направлениями на светило. Наибольшее искривление происходит тогда, когда наблюдаемое светило находится вблизи горизонта, т. е. когда светило наблюдается через наибольшую толщу атмосферы. В этом случае угол рефракции доходит иногда до 0,5° и даже больше.
Рефракция уменьшается с увеличением высоты полета. При астрономической ориентировке рефракция находится по специальной таблице и вычитается всегда из измеренной высоты светила.
Направление на светило, проведенное из центра земли, назы взется геоцентрическим направлением.
Угол, образованный геоцентрическим и топоцентрическим направлениями на светило, называется параллаксом светила (р). Наибольшую величину параллакс имеет для светил, наиболее близко расположенных к земле. Для луны сн доходит до 1°, для солнца — порядка 8,8". Незначительность параллакса для других светил на точность астрономической ориентировки практически не влияет, а потому и не учитывается.
Точка пересечения земной поверхности геоцентрическим напра
413
влением на светило .называется географическим местом светила, Мо.
Рис. 266А. Направления на светила.
I—три наблюдении с земли; II—три наблюдении с самолет».
§ 210. Координаты светила
Небесными координатами светил называются такие величины, которые полностью определяют положение светила на нобесжой •форе.
*14
В практике авиационной астрономии приняты две основные системы координат: горизонтальная и экваториальная системы.
Горизонтальная система координат (рис. 267) Положение светила на небесной сфере в горизонтальной системе координат определяется двумя координатами — азимутом и высотой светила.
Азимутом светила А называется угол на поверхности земли, образованный линией пересечения земли плоскостью не бесного меридиана (меридиана наблюдателя И) и плоскостью вертикали данного светила (дугой большого круга, проведенной от места наблюдателя через географическое место светила).
Азимут всегда отсчитывается от южного направления геогра фнческого меридиана наблюдателя до 180и к востоку че или к западу z4w, в зависимости от географического местонахождения наблюдаемого светила относительно меридиана наблюдателя.
Высотой светила Л называется угол, образованный плоскостью истинного горизонта кк' наблюдателя с направлением на светило. Она измеряется дугой вертикали от истинного горизонта наблюдателя до светила — от 0 до 90°.
Угол, дополняющий высоту светила до 90°, образованный вер гикалью наблюдателя (HZ') и линией, проведенной от наблюдателя в направлении на светило, называется зенитным расстоянием Z.
Зенитное расстояние связано с высотой светила следующим соотношением:
h -F- z = 90°; ft = 90е — z; z = 90° —ft.
В зависимости от того, какое берется направление на светило, высота светила и зенитное расстояние могут быть: истинные, видимые, топоцентрические или геоцентрические.
Экваториальная система координат (рис. 268). В этой системе координат основными кругами, относительно которых определяется положение светил на небесной сфере, являются небесный экватор и начальный круг склонений, проходящий через точку весеннего равноденствия д ’Координатами светил являются склонение и прямое восхож дение а, а также часовой угол светила t.
Склонением светила 6 называется широта географического места светила, т. е. угол, заключенный между плоскостью небесного экватора и направлением на светило М'М или Она отсчитывается по дуге круга склонений (меридиана геогра фического места светила) от 0 до 90°.
Для светил, лежащих в северном полушарии небесной сферы, склонение называется положительным (+), а в южном — отрица гельным (—).
Дуга экватора, отсчитываемая от точки весеннего равноденствия -у до круга склонений светила (меридиана географического места светила), называется прямым восхождением све * и л a (i).
Прямое восхождение светила отсчитывается всегда против хода часовой стрелки (если смотреть с северного полюса) от 0 д о 360° или от 0 до 24
Часовым углом светила t называется долгота географического места светила, т. е. угол, заключенный между пло^ скостью меридиана наблюдателя и плоскостью круга склонений светила. Часовой угол светила отсчитывается по дуге экватора от меридиана наблюдателя до меридиана географического места светила или к западу (западный часовой угол Zw), или к востоку (восточный часовой угол Ze).
Рис. 267. Горизонтальная система координат.
i —высота светила М; h0 —высот» светила Afj z—зенитное расстояние светила М: г —зенитное расстояние светила Af0.
Рис. 268. Экваториальная систем* координат:
~ —Towwa весеннего равноденствия; ам и <.мз—поямое восхождение светца М и М : 6 “ и 61,0 сю о ениг свети т М -и Мс\ М' и Мо—географическое место светил М и Мо.
Часовой угол светила может быть гринвичским или местным tM. Гринвичский часовой угол отсчитывается с-т Гринвичского меридиана до меридиана географического места светила, а местный— от меридиана наблюдателя. В практике астрономической ориентировки часовые углы выражают в градусах.
§ 211. Сущность астрономической ориентировки. Сомнерова линия
Контроль пути и определение расчетного места самолета в полете наблюдением за небесными светилами производятся путем расчета и прокладки на карте одной или нескольких сомнеровых линий.
Сомнеровой линией или крутом равных высот (рис. 269) называется малый крут на земной (поверхности, с которого наблюдаемое светило в момент наблюдения видно под *’6
одним и тем же углом (а, б, Ht, в, г). Центром этого круга является географическое место наблюдаемого светила (рис. 269).
Положение ссмнеровых линий разных светил в каждый данный момент времени наблюдения—различно; положение сомнеровой линии одного какого-либо светила с течением времени изменяется.
Рис. 269. Круг равных высот или сомнерова линия
О' и О—географические места светил М1 и М\ Hi, Hi, Нг и т. д.—места наблюдателей; углы а = а1=а2=а„.
Наблюдатель, измеряющий в какой-либо момент высоту светила, находится на сомнеровой линии этого светила и может определить по карте линию своего местонахождения, а при прокладке нескольких сомнеровых линий (от различных светил) —и свое расчетное место (Р'М), т. е. широту и долготу (Я(, рис. 269). Местонахождение наблюдателя определяется точкой пересечения сомнеровых линий при прокладке их на карте.
На практике ввиду трудностей прокладки на карте крутов равных высот (полных сомнеровых линий) и отсутствия в этом необходимости обычно проводится лишь небольшой отрезок их в виде прямой.
Прокладкой сомнеровой линии на карте перпендикулярно линии пути (при нахождении наблюдаемого светила впереди или позади носа самолета) можно вести контроль по дальности полета, а прокладкой ее параллельно линии пути (при нахождении наблюдаемого светила сбоку самолета) — контроль отклонения самолета от заданного направления.
Сомнерова линия, проходящая через какой-либо ориентир, ука зывает З'МПУ; следуя с ним, самолет выйдет на этот ориентир
Астрономическая ориентировка может производиться как з дневное (по солнцу), так и в ночное время суток (по звездам, планетам и луне) при видимости небесных светил.
Для того чтобы определить данные для нанесения сэмнерово.) линии на карту, необходимо иметь: 1) проверенный авиасекстант; 2) проверенные часы или хронометр; 3) лист из астрономического ежегодника на день полета; 4) таблицы высот и азимутов светила (ТВА) для широт места полета; 5) таблицу поправок иа рефракцию; 6) карту звездного неба (для быстрого нахождения нужных светил на видимом звездном небе); 7) лист бумаги (лли спеииальный бланк и карандаш.
При астрономической ориентировке необходимо: 1) подготовиться к наблюдениям перед пэтетом; 2) выбрать светила для наблюдений и отыскать их на небесной сфере; 3) измерить высоту светил; 4) обработать (рассчитать) результаты наблюдений; 5) ягдэложить сс'мнеровы линии на карте
Подготовка к астрономическим наблюдениям перед полетом заключается в следующем: 1) проверке исправности авиасекстанта и наличия его инструментальных поправок; 2) проверке точности хода часов и выписке их поправок; 3) выборе необходимых таблиц и данных из астрономического ежегодника для расчетов; 4) подготовке карты для нанесения сом-неровых линий.
Выбор светил для наблюдения производится по карте звездного неба (см. § 216).
Высота светила h измеряется авиасекстантом (ом. § 215).
§ 212. Расчет элементов сомнеровой линии и прокладка ее на карте
Для того чтобы проложить на карте сомнерову линию при на блюдении за каким-либо светилом, необходимо:
1) Измерить авиасекстантом высоту светила h rKtm и заметить момент измерения по часам; исправить показания часов на их сшибку и найти истинную высоту h ,т исправлением измеренной высоты на инструментальную ошибку авиасекстанта С, рефрак цию г, параллакс р и понижение видимого горизонта п в случае измерения высоты светила .по видимому (естественному) .горизонту.
2) Вычислить гринвичский часовой угол этого светила /%.
3) Выбрать координаты (географические: широту и долготу *пр) предполагаемого местонахождения самолета (наблюдателя).
4) Вычислить местный часовой угол
5) По местному часовому углу и географической широте пред полагаемого местонахождения самолета с помощью «Таблиц высот и азимутов» (ТВА) найти табличные высоту и азимут наблюдаемого светила А.
6) Найти разность между истинной и табличной высотами по 18
формуле:
Д Л. — h ист А тафл
и результат перевести в линейные меры.
7) На карте от точки предполагаемого местонахождения самолета отложить азимут и по его линии в масштабе карты отло жить величину A h', выраженную в километрах. Если величина получается положительной (-J-- h ), то ее необходимо откладывать от точки предполагаемого местонахождения самолета в направлении на светило, а если отрицательная (— A/t J — в направлении от светила.
8) В найденной таким образом точке перпендикулярно линии азимута проложить сомнерозу линию.
Расчет местного часового угла tM и гринвичского часового угла t.p светила. Местный часовой угол светила tM для предполагаемого местонахождения самолета получается в результате алгебраического слежения гринвичского часового угла этого светила и географической долготы предполагаемого местонахождения самолета, т. е.:
/ ° -----Г -4- >Е
1 ж — гр zt Л W
Если долгота предполагаемого местонахождения самолета восточная, то она прибавляется к гринвичскому часовому углу, а если западная, то вычитается из нее (вычисление гринвичского часового угла солнца, планет, луны и звезд рассмотрено ниже).
Предполагаемое местонахождение самолета — его географическая широта и долгота — выбирается для момента наблю, дения за светилом на основании данных о местонахождении само, лета по элементам полета (скорости, времени); при этом минуты долготы берутся всегда как дополнение до целого градуса к мину, там гринвичского часового угла; .широта выбирается в целых градусах.
Гринвичский и местный часовые углы выражаются в градусах.
Примеры. 1. Д«но: tip = 53°03'; долгота предполагаемого местонахождения самолета ХПр = 37°57'Е. Н|йги tM.
Решение: (м — (гр + = 58°03' 37°57 = 96° W.
2. Дано: tip = 13J°45'; = С4°45' W. Найти tM.
Решение tM= Ю9°45' - 04°45’ = 105® W.
3. Дано: tip — 178°35'. /пр — 74°25'. Н >йгн tM.
Решение: tM = 178°35' + 7 4° 25' = 253° W или 360° - 253° = 107° Е.
Местный часовой угол будет всегда западным, если его величина не превышает 180°; если величина местного часового угла получается больше 180°, то берется доп о л н е н и е к 360°, которое считается восточным м е с г ны и часовым углом.
Гринвичский часовой угол может быть вычислен при наблюдении за солнцем (гринвичский часовой угол солнца), планетой (гринвичский часовой угол планеты), луной (гринвичский часовой угол луны) и звездами (гринвичский часовой угол звезды).
Во всех этих случаях необходимо замечать среднее солнечное время (гринвичское), которое отсчитывается в. момент измерения авиасекстантом высоты светила.
Время наблюдения, отчитанное по часам, которые идут по какому-Либэ поясу, следует переводить в гринвичское. Такой пересчет нужен потому, что величины, необходимые для расчета гринвичского часового угла, в «Авиационном астрономическом ежегоднике» даны для моментов гринвичского времени.
Рис. 270. Полуночный меридиан и координата 7?.
т, —уравнение времени; С—истинное солнце; С ,— среднее солнце; Ти m —истинное солнечное время: ' „ —среднее от-щечное время; со', С\гр, со—географические места солнца.
Чтобы найти гринвичский часовой угол светила, необходимо иметь «Авиационный астрономический ежегодник» для времен» наблюдения и знать точно гринвичское время, в .момент которого авиасекстантсм измерена высота светила.
Гринвичский часовой угол солнца вычисляется по следующей формуле:
etp=T°tp + R°,
где: —гринвичский часовой угол солнца;
Т3?р—гринвичское среднее солнечное время, выраженное в градусах;
/? ’—координата (дополнение уравнения времени до 12 часов-см. рис. 270), которая берется из «Авиационного астрономического ежегодника».
4/'
Порядок вычисления следующий:
1. В момент снятия авиасекстантом высоты солнца по точным часам замечается время, которое исправляется на ошибку хода данных часов, затем это время переводится в гринвичское по следующей формуле.
Тч = Тч - N4,
,де: —поясное среднее солнечное время в часах;
— номер часового пояса, по которому идут часы.
2. По «Авиационному астрономическому ежегоднику» для даты « часа наблюдения за солнцем (по 1 ,-pi находят координату /? (ксордината R с течением времени изменяется очень незначительно, поэтому в «Авиационном астрономическом ежегоднике» она дана на каждый четный час Тгр .
3. 'Г‘‘р, выраженное в часах, переводится в градусы и алгебраически складывается с найденной величиной R.
В результате сложения получается искомый гринвичский ча совой угол tp
Пример. Найти Ьр солнца 12 июня 1943 г. для момента времена Гп — 14 час. 36 мин. 25 сек по 3-му поясу (N = 3).
Решение: 1) Среднегринвичское время будет:
ТЧ=ТЧ — 7V4=14 час. 36 мин 25 сек. — 3 час. = 11 час. 36 мин.
zp п сек,
2) Для даты 12 июня 1943 г и Tip = 11 час. 36 мин. 25 сек по «Авиа-явочному астрономическому ежегоднику» находим /? — 1Ьи°и/' и о=+23°=07'.
3) Гринвичское время час. 36 мин 25 сек., выраженное в мера»
дуги, будет:
Т>гр = 174°06'15".
Гринвичский часовой угол равен:
t°ip = Т°гр + /?’ = 174°06'15" + 180°07' = 354°13'15".
Если в результате сложения Т‘\р ” R сумма получается больше 360°, то из нее необходимо вычесть 360°.
Гринвичский часовой угол планеты определяется в таком же порядке, как и гринвичский часозой угол солнца. При этом необходимо помнить, что в «Авиационном астрономическом ежегоднике» координата R дается только для четырех основных планет: Венеры, Марса, Юпитера и Сатурна; для Венеры координата R дается через каждые 2 часа, для (Марса через 4 часа, для Юпитера и Сатурна — через каждые 8 часов гринвичского времени.
Величина R для промежуточных значений времени получается интерполированием в уме
Пример. Вычислять гринвичский часовой угол Венеры для 12 июн» 1943 г. и Тга = 23 час. 30 мин.; М=3.
Решение:
1) Т„— N4 = 23 час 32 мин. — 3 часа = 20 час. 32 мин
•b fl
2) Из «Авиационного астрономического ежегодника» для 12 июня 1943 г. и 7", = 20 час. 32 мин., величина /?=131°41'
3) Т'‘р = 20 час. 32 мин в мерах дуги будет:
Т°гр = 308.
4) Искомый гринвичский часовой угол Венеры равен:
= т°гр + #° = 303° + 131 °41' = 439°41', или t°lp = 439°41'— 360° = 79°41'.
Гринвичский часовой угол луны высчитывается ® таком же порядке, как и гринвичский часовой угол солнца и планет.
Величина координаты R для луны в «Авиационном астрономическом ежегоднике» дается на каждое число’ месяца через каждые 10 минут времени.
Пример. Вычислить гринвичский часовой угол луны для 12 июля 1943 г г момента тп = 23 час. 39 мин. 30 сек.; N = 3.
Решение:
I) Т^р — 7"— N'1 = 23 час. 39 мин. 30 сек.— 3 часа = 20 час. 39 мин. 30 сен.
2) Для 12 июля 1943 г. и Тгр = 20 час. 39 мин. 30 сек. из «Авиациов-яого астрономического ежегодника? R — 68°22'_
3) 7 *р — 20 час. 39 мин. 30 сек. в мерах дуги будет:
Т°гр = ЗС9°52'ЗО"
4) Искомый гринвичский часовой угол дуги равен:
t°rp = Т°гр + R° = ЗЭ9°52'ЗО” 4-68°22' = 378°11'30" нли tip = 378°14'30"-
- 360° = 18°]4'30”.
Гринвичский часовой угол звезды в общем случае определяется по следующей формуле;
^гр=^ + (/?о+«с)-«0
или t\ip = Гп - № + (/?°+ а) - а,
где: t-гр — гринвичский часовой угол звезды;
Т‘гр — гринвичское среднее солнечное время, выраженное е градусах;
492
(R + a) — звездное время в гринвичскую полночь с поправкой на изменение звездного времени (эта величина дается для исех звезд в «Авиационном астрономическом ежегоднике» иа каждые сутки и каждый час гринвичского времени);
а—прямое восхождение наблюдаемой звезды, которое берется кз таблицы «Средние координаты звезд» на текущий год; эти таблицы являются обязательным приложением к «Авиационному астроном идее кому еж егодн и«у»;
f —поясное время.
Гринвичский часовой угол основных звезд (в астрономической навигации л --звезд): Альфарагд, созвездия Андромеды, Альдеба-ран созвездия Тельца, Капелла созвездия Возничего, Порциэи созвездия Малого Пса, Регул созвездия Льва, Арктур созвездия Волопаса, Вега созвездия Лиры и Альтаир созвездия Орла, для которых в «Авиационном астрономическом ежегоднике» дается не R + I, а непосредственно величина координаты R,—можно высчитывать по следующей формуле:
R0.
В «Авиационном астрономическом ежегоднике» величина R для указанных выше основных звезд, так же как и для солнца, дается на каждое число месяца и каждый час текущих суток; для промежуточных моментов времени величины R или R + а находятся интерполированием с точностью до 1 минуты.
Порядок нахождения ti гр звезды такой же, как и hP солнца
Пример. Вычислить гринвичский часовой угол звезды Регул (созвездия Льва) для 12 июня 1943 г. и момента времени по третьему поясу <А»=3) Т„ = 23 час. 36 мин. 24 сек.
Решение: Тгр -Тп- N = 23 час. 36 мни. 24 сек. — 3 часа = 20 час. 36 мин. 24 сек
Из «Авиационного астрономического ежегодника» на 12 июня 1943 г. для Тгр = 20 час. 36 мин. 24 сек. величина R будет: для Тгр = >0 час /?=i0o°b'. дл । Тгр = 2\ час. R = 108°5У, для Тгр = 20 час. 36 мин. 24 сек R = 108с57'.
В общем случае из «Авиационного астрономического .ежегодника» (графы «Для всех звезд») для врем1 ни Т2р = >20 час. 36 мин. 24 сек. находим: R 4-a = :бо°|7'.
Из таблицы «Средние координаты звезд на 1943 г.» для звезды Регул находим =151°17/.
Зиачеиие В будет:
R = (R 4- а) - а == 260°17'— 151°20'= 108°57'.
Тгр = 2d час. 30 мин. 21 сек. в мерах дуги будет:
Т°кр =. 309°06
Искомый гринвичский часовой угол звезды Регул:
=Т°гр 4- R = 3u9°l6'-|- 108о57'=418о0./, или (%гр= 418°03'-360° = 53°03'.
Нахождение табличных высот и азимутов светила по «Таблицам высот и азимутов с о л н-
на, луны, планет и звезд» (ТВА). Для тога чтобы найти по «Таблицам высот и азимутов» (ТВА) искомые высоту ЛтаЛ и(азимут А светила, необходимо знать местный часовой угол светила и географическую широту <рпр предполагаемого местонахож-дания самолета для времени, когда авиасекстантом измерена вы рога этого светила.
Нахождение hm,6 и А производится в следующем порядке:
В «Таблице высот и азимутов» отыскивается лист, в котором находятся искомые значения высоты и азимут данного светила.
Номер листа для солнца, луны и планет находится по величине склонения светила <•. которое обозначает номер листа; скло некие выписывается из «Авиационного астрономического ежегодника» при нахождении координаты R для момента гринвичского времени наблюдения за светилом.
Листы для основных звезд (Капелла, Регул, Арктур, Вега, Альтаир, Альдебаран) находятся по наименованию этих звезд.
Нахождение табличных высот и азимута солнца, луны и планет поясним следующим примером:
Дано: Склонение светила 5=4- 23°—|-14х местный часовой угол Гч = 75о\У; широта предполагаемого местонахождения самолета <fnp = 56‘N. Определить табличные т^б и А.
Решение. 1. По склонению видно, что нужно открыть лист таблицы, обозначенный —23; знак плюс указывает, что пользоваться таблицей надо сверху, прячем местный часовой угол отыскивать в крайнем левом столбце страницы.
2. Из строчки, соответствующей =75°, и столбц-, сбэтначырного сверху широтой tfnp = 53°N, выписываются значения высоты и азимута (табл. 12).
Далее, по индексу 7=8 и минутам склонения _|_14' из дано л нательной таблички на толях листов находится поправка к табличной высоте, т. е. -4-11': эта поправка прибавляется к l.-n.ut со знаком, который имеет ыи-иуты склонения.
3. Искомая табличная высота будет hmafi =36°05'+1Г=36°16', а азимут А = 78°)Г.
Нахождение табличных высоты и азимута звезд поясним следующим примером.
Д а н о: естный часовой угол звезды Регул (созвездие Льва) '•* — 49°Е; широта предполагаемого местонахождения самолета ?я/ ==57°. Найти и А
Решение. 1. Соответственно названию звезды находят нужный лист таблицы л разворачивают его так, чтобы иа лицевой стороне оказался 424
Iм — 49°Е (в левом столбце на левой стороне, если его величина не более •0° и в левом столбце на правой стороне, если более 90°).
В строчке, соответствующей .. ==49°, в столбце, обозначенном сверху f=57°, находят искомые 1тис> и т. е:
tmo6 = 31°19'. А = 60°Е.
§ 213. Исправления измерений авиасекстантом высоты светила
Для того чтобы найти истинную высоту светила hurm по высоте, измеренной авиасекстантом пГРРГт, последнюю необходимо исправить, учтя следующее: 1) инструментальную ошибку авиасекстанта (+ С); 2) рефракцию светила (—г); 3) параллакс светила (+ р) и 4) понижение видимого горизонта (—л).
Инструментальная ошибка авчасекстанта и поправка на рефракцию являются поправками систематическими и должны учитываться при наблюдении .всех светил. Параллакс светила учитывается только при наблюдении луны, а поправка на понижение видимого горизонта—при наблюдении всех светил только в гом случае, когда измерение их высот производится от плоскости видимого (естественного) горизонта. При измерении высот светил по искусственному горизонту (пузырьковому уровню) поправки на понижение видимого горизонта не вводятся.
Инструментальная поправка авиасекстанта (+С) учитывается всегда со своим знаком. Ее значение в минутах дуги указывается в аттестате каждого прибора; величина этой поправки зависит только от качества изготовления авиасекстанта.
Величина поправки за рефракцию (—г) зависит в основном от высоты светила над горизонтом в момент наблюдения; ее значение определяется в минутах дуги по специальным таблицам или графикам. Практически ошибку на рефракцию необходимо учитывать только в том случае, если измеренная высота светила не больше 63°; при высоте светил больше 63° ошибка на рефракцию незначительна и ею можно пренебрегать.
Ввиду того, что рефракция всегда увеличивает измеренную .авиасекстантом высоту светила, ее следует вычитать из измеренной высоты. Поправку на рефракцию определяют по табл. 13.
Таблица 13
Высота полета, км Изм< ре г на я авнасекстантсм i ысота светили, rpaayiы — 0—1 2-3 4-5 6-7 СО 1
63 Г 1' 1' О' 0'
33 2' 2' Г 1' 1'
21 3' 2' 2* 2' 2
15 4’ 3' 3' 2' 2‘
12
Параллакс светила (+р) уменьшает измеряемую высоту светила и поэтому всегда прибавляется к измеренной авиасекстан
том высоте (для получения геоцентрической высоты). В практике астрономической ориентировки параллакс учитывается только при наблюдении луны; при наблюдении других светил он незначителен и не учитывается.
Величина угловой поправки параллакса для луны дается в «Авиационном астрономическом ежегоднике» на отрывных таблицах на каждый день текущего месяца, соответственно' высотам луны над горизонтом.
Поправка на понижение видимого горизонта (—л), так же как и поправка на рефракцию, всегда вычитается из измеренной авиасекстантом высоты светила; она находится по специальной таблице (см. табл. 14) в зависимости от высоты полета или может быть высчитана по следующей .формуле:
п = 1,77 Н,
где: п — поправка на понижение видимого горизонта, выраженная в минутах дуги;
Н — высота полета в метрах;
1,77 — постоянный переводный коэфициент.
Таким образом значение истинной высоты светила hист через измеренную авиасекстаптом высоту h№K<m может быть выражено следующей формулой:
hucm hceKCm ~(i С) — Г -|- р — П.
Таблица 14
Высота полета, м л, углов, мин. Высота полета, м Л, углов, мин. Высота пол *та, м П, углов, мин.
497 0°40' Г 27 1°00’ 2011 20
522 41 1165 01 2062 21
548 42 1201 02 2114 21
575 *3 1213 03 2166 23
602 44 1283 04 2219 24
630 45 1325 05 2272 25
650 46 13 5 06 2326 26
6*8 47 1407 07 2381 27
718 48 1450 08 2437 28
74) 49 1193 (9 2493 29
780 50 1537 10 2550 30
812 51 1582 11 1607 31
844 52 1627 12 2665 32
877 53 ’ь73 ’3 17 3 ЗН
911 54 1719 14 27 2 34
945 55 1766 15 2842 3-5
980 56 1414 16 29 3 86
10 6 57 186; 17 2964 37
1052 58 1912 ’8 30 6 38
1089 59 1961 1.9 3088 >9
3151 1°40'
3215
Пример. Измеренная авиасекстантом высота луны 7 февраля 1944 г. оказалась равной 58°21*, параллакс р — 28*. Измерение производилось
по искусственному горизонту на высоте полета Н = 2500 м. Поправка на понижение горизонта А = 0; рефракция < = 1'; инструментальная поправка авиа-секстаита С = 4- 2'.
Следовательно, искомая истинная высота будет:
hucm — hcnccm 4~ (+ С - г -|- р — Л) = 58°24’ 4- (-f- 2 ) — 1* Ч- 28* — О — 58 >3
§ 214. Прокладка сомноровой линии на карте
Как указывалось выше, для того чтсбы проложить сомнерову линию на карте, необходимо найти азимут наблюдаемого светила А°, его табличную высоту п„.„г к величину разности ДА между измеренной (истинной) и табличной высотами, т. е.:
i Д А = hucm ктаб
Поокладка сомнеровой линии прсизводится в следующем порядке:
1. На карте по координатам предполагаемого местонахождения самолета фп/> и а„р в момент измерения высоты светила наносится точка, через которую проводится географический меридиан.
2. От южного направления этого меридиана откладывается найденный азимут светила к востоку, если азимут восточный Л-, и к западу, если он западный Ziw. и проводится линия азимута
3. От точки предполагаемого местонахождения самолета по линии азимута откладывается величина разности высот+ ДЛ = — hmm — hnnn, выраженная в мерах длины (в километрах или морских милях).
Величина Д А откладывается всегда по линии азимута в направлении на светило, если она положительная (Ч-ДА), и в обратном направлении от светила, если она отрицательная (— Д А).
4. После этого в конце отложенного отрезка перпендикулярно линии азимута проводится прямая, которая и является сомиеро вой линией (рис. 271).
Пример. Проложить сомнерову линию на карте по данным: 1) координату предполагаемого местонахождения самолета:
<f ip — /CN и Лпр = >0 Е; 2) пи;.п — з/ 'ЗУ; я,пат — 3,035'; А = 69° Е.
Решение: Д Л = Д Лист = hma/! — 3?°3J’ - 37° .5' = 4-04', что составляет 4 морские мили, или \4 к и. В лтииа Д Л откладывания в направлении на С1Ч1ИЛО, так как она положительная.
'§ 215. Авиасекстант АС и работа с ним
Авиасекстант АС ’) предназначен для измерения высоты светил при ведении в полете астрономической ориентировки.
Особенность авиасекстанта как угломерного инструмента за ключается в том, что точность измерений углоз (высот светил) между истинным горизонтом и направлениями на светила не зависит от величины наклона его в руках наблюдателя. Это явление очень важно при наблюдениях с самолета в полете.
Комплект авиасекстанта состоит из следующих частей: секстанта в футляре, шнура для электроосвещения, четырех запас ных электрических лампочек (две из них матовые), таблицы поправок (инструментальных ошибок), свидетельства, описания и фланели 100X ЮО мм для протирки деталей секстанта.
Вес прибора в футляре 3,2 кг, а без футляра 1,5 кг.
Рис. 272. Схема оптическом системы авиа-секстанта АС.
Схема оптической системы. Оптическая система (рис. 272) состоит из следующих деталей: объектива 1, прямоугольной призмы 2, пузырькового уровня 3, пятигранной призмы 4, окуляра 5, плоско-параллельной пластинки 6 и светофильтров 7.
*) Название «секстант» происходит от латинского слова «секстус», что означает шестой. Такое ^название было дано инструменту потому, что в первых приборах этого типа основная подвижная деталь (зеркало) могла смещаться на угол 60°, т. е. на */« часть окружности. Приставка «авиа» обозна чает, что «секстант» приспособлен для работы в авиации.
Объектив 1 служит для получения изображения видимого горизонта и для усиления освещения пузырькового уровня 3 (заменяющего истинный горизонт) дневным светом.
Прямоугольная призма 2 совмещает направление на горизонт с отвесной линией. Пятигранная призма 4 совмещает направление на горизонт с отвесной линией. Пятигранная призма 4 направляет ход лучей в приборе под углом 45° к горизонту, удобным для измерения углов возвышения от 0 до 90°.
Окуляр 5 вместе с объективом отъюстирован на беско1нечиость и дает возможность видеть без .параллакса изображение горизонта (сквозь 'пластинку 6 вместе с наблюдаемым светилом, отраженным пластинкой). При наблюдении яркого светила, как, например, солнца, применяются светофильтры.
Фокусные расстояния объектива и окуляра равны 77,9 мм. Радиус кривизны уровня равен фокусному расстоянию объектива. Таким образом, при наклоне всего прибора пузырек уровня передвигается как раз на то место, куда переходит изображение линии горизонта, поэтому при измерении высот светил нет необхо димости держать пузырек на риске.
Описание конструкции. Авиасекстант состоит из металлического корпуса, оптической системы и отсчетного (угломерного) 'механизма.
Оптическая система размещена и закреплена внутри корпуса, а отсчетный механизм смонтирован снаружи, с правой его стороны. Вид прибора в разрезе показан на рис. 273, вид с правой стороны — на рис. 274, А, а вид с левой — на рис. 274, Б.
Как видно из рис. 273 и 274, А и Б, в передней части корпуса выступает патрубок 1, в который вста’влен объектив 2. За объективом помещена прямоугольная призма 3 с двумя регулировочными винтами 4, закрытыми крышкой. Ниже трубки с объективом в корпусе имеется цилиндрическое отверстие 5, в которое вставлен патрончик 6 с лампочкой. Лампочка освещает уровень при ночных наблюдениях (в дальнейшем лампочка названа «лампочкой уровня»). Ниже лампочки уровня в корпусе прибора ук реплен пузырьковый уровень 7 с приспособлением, регулирующим величину его пузырька.
Механизм регулировки пузырька устроен следующим образом. В боковой стенке уровня имеется трубочка 8, которая ссединяет ампулу уровня с наружной камерой 9, имеющей гофрированн¥Ю тонкую стенку-мембрану 10. К этой стенке припаян полый внутри винт И, на котором имеются дне гайки: большая 12 и малая 13.
Завинчивая большую гайку, вдавливают мембрану внутрь, выжимают пентан (жидкость, которой заполнены уровень и камера) в ампулу и этим уменьшают пузырек. Слегка отвинчивая большую гайку и завинчивая малую, выгибают мембрану наружу, что вызывает увеличение пузырька.
Отверстие в винте 11 предназначено для доливки уровня пентаном полости мембраны. Это отверстие снаружи завинчивается винтом 14 со свинцовой прокладкой 15.
Внутри корпуса находится пятигранная отражательная приз wa 16. а над ней, ближе к заднему концу корпуса, окуляр 17.
Бсксвые стенки корпуса несколько вытянуты назад, и края их обтянуты кожей 18. Над окуляром в отверстиях боковых стенок корпуса помещена ось 19 вместе с прикрепленной к ней плоско параллельной пластинкой 20. К наружному концу оси приделан
Рис. 273. Вид авиасекстаита АС в разрезе.
/—патрубок; 2—объектна; 3—прямоугольная призма; 4— регулировочные винты; 5—цилиндрическое отверстие; 7— уровень: 8—трлбка; 9—наружная камера; 10—мембрана; 11— винт; 12, /3—большая и матя гайки: 14—гслозка в^нта;
15—свинцовая прокладка; 16—шит игралка я отражательная призма; 17—окуляр; 18—амортивац-^иная кожа; 19—ось плоскочпараллельисй пластинки; 20—плоско-параллельная
лластин'ка; 26—светофильтры.
рычажок, оканчивающийся закругленным выступом. Этот рычажок связывает вращение пластинки с вращением барабана 21, поме «ценного с правей стороны прибора.
Деления на барабане нанесены через 10'и оцифрованы через 1°; углы от 2 то 39° нанесены на левой, а от 39 до 80° — на пра й части барабана. Дтя отсчитывания углоз по шкале на кор нусе укреплена целлулоидная пластинка 22 с индексом. Полный оборот барабана от 0 до 39° отмечается легким щелчком при помощи специальной защелки. На торцевой части барабана укреп лена пластинка белого целлулоида с графлениями для записи карандашом результатов наблюдений.
Для графического определения среднего отсчета по барабану к прибору привернут отметчик высот (углов) 24, с помощью которого на белой целлулоидной пластинке при каждом наблюдении 430
прочерчивается карандашом линия. Около отсчетного индекса помещен патрон 25 с лампочкой 25 в, освещающей место отсчета при работе ночью. В верхней части прибора на подвижном рычажке помещены два светофильтра 26 для наблюдения солнца.
Рис. 274. Общий вид авиасекстаита АС.
А — вид с правой стороны и опереди; Б—вид с левой стороны. I—птатр 'бок; 2—объектив; 6—патрон электролампы; 9—наружная камера; 11— en.iT; 12, 13—большая и малая гайкл; 15—голоэха винта; 16—пятигранная
отражательная призма; 18—амортизационная кожа; 21—барабан; 22—индекс;
23пластинка для записи; 24—отметчик; 25—патрон электролампы; 26—светофильтры; 27—рукоятка реостата; 28—реостат; 29—выключатель; 30—контактная йнлка.
С левой стороны к корпусу прикреплены рукоятка 27 с рео статом 28, регулирующим освещение пузырькового уровня. Вы ключатель освещения прибора 29 и контактная вилка 30 смонтированы в одном месте — в корпусе реостата.
Провод для подвода тока от бортовой сети самолета к при бору снабжен розеткой со специальным резьбовым кольцом для надежного крепления розетки к контактным клеммам на самолете Дпугая розетка имеет удлиненную форму и удерживается на (при боре пружинкой, входящей в специальные канавки в розетке.
Система освещения прибора — двухпроводная. Провода постав ле, ы с кембриковой изоляцией. Корпус патрончиков 25 и 6 для ла .сточек накаливания сделан из iпластической массы (карболита) .
Электросхема прибора допускает применение лампочек напря жечием 25 в и ниже при соответствующих напряжениях источив ка питания.
В случае напряжения реостат работает на погашение лампочек при неполном введенном сопротивлении.
Рис. 275. Регулировка величины пузырька уровня для наблюдения солнца и луны.
Для наблюдения солнца непосредственно над горизонтом объ ектив трубы снабжен откидным темным светофильтром 26, ослабляющим яркость прямых солнечных лучей, пс падающих в этом случае в объектив.
Подготовка прибора к работе. Прежде чем пользоваться авиасекстантом, его следует тщательно выверить.
Перед измерением высоты светила необходимо:
1. Достать секстант из яшика, протереть мягкой фланелевой тряпочкой все наружные стеклянные части (объектив, окуляр, плоско-параллельную пластинку и светофильтры).
2. Отвернуть первую малую гайку и, освободив вторую гайку на 2—3 оборота, постепенно ввертъ* вать первую гайку до тех пор. пока вращение не станет тугим. Наклонив прибор вперед и слегка истряхнув, наблюдать за появлением пузырька. Если пузырек уровня не появился, повторить операцию.
3. Отрегулировать величину пузырька уровня. Для наблюдений пс солнцу внутренний просвет пузырька должен приблизительно равняться диску солнца, а при наблю
дении звезд быть в два раза меньше. При наблюдениях луны наружный неушербленый край ее устанавливается кснцентричнэотносительно наружной или внутренней окружности пузырька.
Пузырек по размерам нужно отрегулировать так, чтобы его внутренний диаметр примерно соответствовал диаметру наблюдаемого светила (луны или солнца), а для звезд и планет — был больше их диаметра в 2—3 раза (рис. 275). Регулировка производится вращением гаек. При завинчивании малой гайки пузырек увеличивается, а при отвинчивании—уменьшается. Если одной малой гайкой не удается уменьшить диаметр пузырька, то несколько подвинчивают большую гайку. При наблюдениях по естественному горизонту пузырьковый уровень не применяется.
4. Приготовить часы.
’ 5. При ночных наблюдениях включить штепсель секстанта и,
вращая реостат, просмотреть исправность работы освещения, заменить неисправные лампочки.
6. При наблюдениях солнца, на пути лучей установить один или два светофильтра так, чтобы диск солнца и пузырек уровня были одинаково хорошо -видны.
Измерение высоты светила. Измерение высоты светила может быть произведено по искусственному (по пузырьковому) уровню или естественному -горизонту. При наблюдении по искусственному горизонту нужно стараться вести самолет строго прямолинейно, по возможности без ускорений и замедлений.
Измерение высоты светила по искусственному горизонту (пс пузырьковому уровню).- Взять авиагек-432
стант левой рукой за рукоятку и правой—за отсчетный 'барабан. •Повернуться лицом к наблюдаемому светилу и, смотря сквозь плоско-параллельную пластинку, найти изображение пузырька уровня и, наклоняя авиасекстант в ту или другую сторону, поместить его в середине поля зрения окуляра.
При наблюдении за солнцем (или ярких «.ветил) азиасекстант следует держать несколько ниже глаза, а при наблюдении за звездами, планетами и луней (менее ярких светил) лучше всего держатп его выше глаз; в последнем случае пузырек уровня надо наблюдать отраженным от плоско-параллельной пластинки, а светило— через пластинку. В таком положении легче ориентировать, ся на звездном небе, и можно избежать ошибки наблюдения за другими светилами. В обоих случаях следует соблюдать горизонтальное положение трубки с объективом. Удерживая изображение пузырька в середине поля зрения окуляра, находящегося в одной вертикальной плоскости с наблюдаемым светилом, изменением положения плоско-параллельной пластинки (вращением барабана) совместить изображение светила с центром пузырька; только после этого против черты на целлулоидной пластинке по шкале барабана произвести отсчет измеренной высоты светила.
На целлулоидной пластинке барабана, в соответствующих гра. фах, записать отсчитанную высоту светила и точное время окончания наблюдения.
Для получения более точного измерения наблюдение за светилом необходимо произвести несколько раз (3—6) и окон ia-тельную высоту взять ка^ среднее арифметическое из всех наблю. дений. При выводе среднего арифметического удобнее отбросить целое (наименьшее) число градусов, вывести среднее арифметическое в минутах и прибавить его к отброшенному ранее числу градусов.
Пример.
Измерены высоты 47°45' 47°45' 47°5?' 47°52' 47°S9V „„„ 47с59' 48°10' и 4 47°70' 48° 17' 47' 77' 48°24' 47°84' 47° -f- 387' :6 = 64',5 что составляет 1°О4',5.
Средний отсчет будет: 4?°-|-1о04',5 — 48°04',5.
Для быстрого определения среднего отсчета по барабану миж. но пользоваться графическим отметчиком высот, с помощью которого на белой целлулоидной пластинке при каждом наблюдении прочерчивается карандашом линия. По окончании наблюдения отметчик ставится в среднее положение относительно крайних прочерченных линий и по индексу ппибора и барабана снимается средний отсчет высоты. Если наблюдение производится без промедления, то записывается время первого и последнего моментов.
При наличии часов с секундомером можно включать секундомер при первом наблюдении и выключать при последнем, записывая показания часов и секундомера для моментов включения и выключения.
Среднее время наблюдения получается как среднее из двух моментов или как разность времен последнего момента без половины первого.
При замедленных наблюдениях следует записывать время каждого наблюдения и брать среднее. Время необходимо отмечать, начиная с секунд, и .заканчивать минутами и часами.
В настоящее время авиасвкстанты для большей точности измерения высоты светила имеют специальное устройство — осеред-нигель. Он 'позволяет механически 'высчитывать из серии измерений среднее значение высоты светила.
Измеренная высота светила должна быть исправлена на инструментальную поправку авиасекстанта и рефракцию (если высота не больше 63°), а для луны — и на параллакс. Поправки берутся из специальных таблиц и графиков.
Измерение высоты светила по естественному (видимому) горизонту. Высота светила по естественному горизонту измеряется обычно днем при видимости горизонта. В этом случае необходимо сначала установить .авиасекстант в одной вертикальной плоскости со светилом, расположив его ниже глаз; затем сквозь плоско-параллельную пластинку в окуляре найти изображение линии видимого горизонта и вращением барабана совместить изображение светила (солнца), видимого через светофильтры, с линией горизонта так, чтобы оно разделялось линией видимого горизонта на две равные части; после этого заметить .время наблюдения и по шкале барабана прочесть высоту светила.
Измеренная высота светила по естественному горизонту, кроме исправлений на инструментальную поправку и .на рефракцию, должна исправляться и на понижение видимого горизонта.
В случае плохой видимости наблюдение звезд и планет по естественному горизонту не производится.
Следует отметить, что наблюдения по естественному горизонту требуют меньше времени и обеспечивают большую точность, чем наблюдение по искусственному горизонту.
Точность среднего из шести наблюдений по искусственному горизонту составляет + 5'; точность одного наблюдения по естественному горизонту + 2'.
Измерение по искусственному горизонту целесообразно производить в верхних, более устойчивых слоях атмосферы. При измерениях по естественному горизонту, наоборот, выгоднее спускаться ниже, так как в этом случае лучше видна линия горизонта и поправка на понижение горизонта, зависящая от высоты полета, может быть определена точнее.
Уход за авиасекстантом и его хранение. При пользовании авиасекстантом необходимо соблюдать следующие правила
1. Предохранять прибор от ударов о твердые предметы.
2. Не применять силы при работе с прибором и при укладке его в ящик (особенно это относится к плеско-параллельной пла стинке, светофильтрам и мембране уровня).
3. Не оставлять мембрану уровня после работы в натянутом состоянии (отпустить гайку).
4. Не оставлять секстант на солнце, возле печей или в сыром месте.
5. Наружные оптические детали осторожно протирать чистой батистовой тряпочкой.
6. Весь секстант обтирать после работы замшей или чистой тряпкой.
7. Откидные цветные стекла при уборке секстанта в ящик складывать так, чтобы они не выступали за стенки прибора.
8. Хранить приборы на складе в ящиках, на стеллажах. Помещение склада должно быть сухим и иметь нормальную комнатную температуру.
9. При продолжительном хранении на складе приборы необхо. димо периодически просматривать и в случае обнаружения ржав чины, зелени и т. п. тщательно исследовать причины их появле иия, устранить их и изменить условия хранения.
10. На самолете секстант надо хранить в специальном футляре, сделанном по форме секстанта и обитым изнутри кожей с мягкой набивкой. Крышка футляра должна хорошо закрываться. Футляр следует укреплять «а самолете неподвижно.
§ 216. Бортовая карта з1вездного неба
Подобно топографической карте, карта звездного неба представляет собой проекцию небесной сферы (звездного неба) на плоскость.
В практике самолетовождения для целей астрономической Ориентировки применяется подвижная карта звездного неба. Эта карта состоит из двух основных частей: 1) основания, представляющего собой квадрат со стороной 22 см, склеенный из двух картонных пластинок, и 2) подвижной части, которая помещается внутри основания и вращается вокруг оси (рис. 276, А к Б).
С лицевой стороны основание имеет два выреза: овальный и дугообразный (рис. 276, Л). Овальный вырез представляет собой видимую над горизонтом небесную сферу (звездное небо) в каждый момент времени суток года (для наблюдателя, находящегося в центре свала) с обозначениями по краям в кружках со стрелками N, S, Е и W. Эти буквы указывают стороны горизонта соответственно: N—север, S—юг, Е—восток и W—запад. Звездное жебо изображено на темносинем фэне; более яркие звезды, которые образуют очертания основных созвездий, изображены белыми кружочками и обозначены я [1 и у соответственно величинам
2 и 3, а звезды, которые входят в созвездия и используются 1ля ведения астрономической ориентировки,—белыми окружност»
Рис. 276. Бортовая карта звездного неба.
лид с лицевой стороны; Б—с обратной стороны.
ми. Млечный Путь изображен -в виде -белой туманности. Планеты •на карте не указаны.
В центре подвижной части, -на оси ее вращения, находится полюс мира, вблизи которого расположена Полярная Звезда. Круги склонений даны только для прямых восхождений, выраженных в часах (00 часов, 06 часов, 12 часов, 18 часов). Небесных параллелей нет, есть лишь небесный экватор, который обозначен кругом с радиусом 6,3 см. Дугообразный вырез с делениями по краям предназначен для определения видимого звездного неба в данные сутки года и в желаемое время. Деления эти соответствуют часам темного времени суток от 18 час. 00 мин. до 24 час. 00 мин. и далее—до 06 час. 00 мин. «Часы» имеют деления через каждые 10 минут и соответствуют местному гражданскому времени.
На обратной стороне основания (рис. 276, Б) помещены краткое описание и способ пользования картой; там же имеется вырез, предназначенный для облегчения вращения подвижной части и для выбора звезды при ведении астрономической ориентировки, а также для получения поправки к высоте Псляэной Звезды при определении широты места. В середине этого выреза с обеих сторон имеется ш» черте с черными кружочками на концах, против которых написано: сверху—«Широта от 50° до 60°», снизу—«Широта от 30° до 50°».
Края подвижной части круга внутри дугообразного выреза с лицевой стороны сснования разбиты на 365 делений; каждое де ление соответствует одним суткам. Все деления разбиты по месяцам гопа и соответственно обозначены: январь, февраль, март и т. д. Каждый месяц разделен на три части, которые обозначены цифрами 10, 20 и 30 (числа месяца).
На обратной стороне подвижной части, по окружности, в вырезе основания имеются номера астро-графиков и наименования восьми основных звезд, которые используются в астрономической навигации, а в нижней части —деления с цифрами и знаками: отО до +61, от + 62. до 0 и от 0 до —62 и ст — 62 до 0, которые определяют величину поправки «к Полярной Звезде при определении широты места. Бортовая карта звездного неба построена для 55° северной широты, т. е. средней широты СССР.
Звездная карта описанного устройства (рис. 276) позволяет решать основные задачи при ведении астрономической ориентировки с самолета во время полета.
Для того чтобы определить вид звездного неба над горизонтом на любое число каждого месяца в определенный момент по местному времени, необходимо вращением подвижной части карты установить против желаемого момента времени, найденного на лицевой стороне дугообразного выреза сснования, число данного месяца; после этого в овальном вырезе получится искомая карта на видимого над горизонтом звездного неба.
При рассмотрении картины звездного неба необходимо иметь в виду следующее:
I) центр овального круга представляет собой зенит наблюдателя;
2) дугообразная кривая, мысленно проведенная через зенит наблюдателя к точкам Е и W, является первой вертикалью;
3) линия, соединяющая точки N и S, есть меридиан наблюдателя;
4) при изучении отдельных участков неба по сторонам горизонта необходимо поворачиваться лицом в соответствующую сторону и карту держать прямо перед собой так, чтобы стрелка у одной из букв N, S, Е и W, которые обозначают стороны горизонта, была направлена вниз.
При определении момента (часа) местного времени Для данного числа года по видимому над горизонтом звездному небу необходимо в овале лицевой стороны карты, вращая подвижную часть, установить видимую над горизонтом картину звездного неба; затем на обрезе дугообразного выреза против данного числа прочесть искомое время.
Для определения моментов (поместному времени) восхода и захода светила, выбранного для ведения астрономической ориентировки, необходимо сначала найти светило на карте звездного неба, а затем, вращая подвижную часть карты, следить за светилом; когда она будет у сбреза свала, против нужной даты прочесть искомый момент времени.
При вращении подвижной части карты против хода часовой стрелки (во время наблюдения карты с лицевой стороны) заход светила определяется в тот момент, когда оно находится у обреза овала в западной части горизонта и уходит за основание; восход светила определяется в тот момент, когда оно появляется у края овала в восточной части горизонта и выходит из-за основания.
Рис. 277. Участок звездного неба с указанием пути и положения планеты Юпитер на первое число каждого месяца 1944 г.
Для определения моментов по местному времени верхней ил» нижней кульминаций светила необходимо установить подвижную часть карты так, чтобы светило располагалось на линии, соединяющей точки горизонта N—S; после этого искомый момент вре-438
Рже. 278. Звездное ж«0»
меня прочесть по делениям дугообразного выреза против интере сующей даты.
При выборе звезд для ведения в полете астрономической ориентировки в желаемый час данной даты необходимо определять .моменты восхода и захода основных звезд (или светил) и выбрать те из них, которые во время полета будут видны и занимать положение относительно направления полета, выгодное для ведения астрономической ориентировки.
Для того чтобы использовать в астрономической ориентировке планеты и легко их отыскивать на звездном небе, в астрономических ежегодниках (на вкладных листах) приводятся карты участков звездного неба с изображением пути и положения планет среди основных созвездий на текущий год. Путь планет в течение года изображен сплпщной линией, а местонахождение их на первые дни месяцев—полыми кружочками (рис. 277).
С помощью таких карт легко отыскивать на звездном небе для любого часа данного дня года нужные планеты и отмечать их положение на бортовой карте звездного неба.
§ 217. Звездное небо
На звездном небе (рис. 278), видимом над горизонтом невооруженным глазом, легко выделяются наиболее яркие группы звезд определенного сочетания, которые >в обыденной жизни называются созвездиями. На самом же деле созвездиями называют не группы этих звезд, а те участки неба, в пределах которых эти группы находятся.
Большинство созвездий еще в давние времена получили названия различных птиц, животных, сказочных героев и т. п., которые остались за ними до настоящего времени.
Всех созвездий очень много, но в астрономической навигации в основном применяются только те из них, которые по сочетанию наиблее ярких звезд безошибочно, и легко отыскиваются на видимом небе и звезды которых более удобны для наблюдений. Таких звезд и созвездий десяты Альфарац (созвездия Андромеды), Аль. дебаран (созвездия Тельца), Капелла (созвезтия Возничего), Порцион (созвездия Малого Пса), Альтаир (созвездия Орла), Регул (созвездия Льва), Арктур (созвездия Водспаса), Вега (созвездия Лиры) и Полярная Звезда (созвездия Малой Медведицы)
Кроме того, для астрономической -навигации используются так же следуюш.ие звезды и созвездия: Дубхэ (созвездия Большой Медведицы), Кастор и Поллукс (созвездия Близнецов), Сириус (созвездия Большего Пса), Региль и Бетельгейзе (из красивого и характерного созвездия Орион) и ряд других.
Астрономическая ориентировка ведется также по небесным светилам—солнцу и луне и по планетам Венере, Марсу, Юпитеру и Сатурну.
Если можно быстро и безошибочно находить на небе нужные звезды, то отыскание планет представляет некоторые трудности. Это объясняется тем, что планеты по своему внешнему виду име-439
ют некоторое сходство с наиболее яркими звездами. Отыскивать планеты на звездном небе следует по характерным признакам; такими признаками планет являются полное отсутствие их мерцания и сравнительно быстрое неправильное передвижение относительно видимых звезд, т. е. по зигзагообразному (или петлеобразному) пути.
Для определения положения планет на звездном небе в же лаемое время щ «Авиационном астрономическом ежегоднике» (в конце отрывных таблиц, на отдельных листах) даются специальные графики петлеобразного движения планет и их положение на первое число каждого месяца в течение года (рис. 277).
Для успешного ведения астрономической ориентировки в полете необходимо уметь быстро и безошибочно находить нужные со звездия и опознавать звезды, выбранные для наблюдения.
Штурман должен уметь быстро и безошибочно находить во время полета звезды и светила, выбранные для наблюдения (аэронавигационные), даже в тех случаях, когда ему видны только небольшие участки неба. Этого можно добиться только систематической тренировкой, изучением 'звездного неба и законов движения звезд и планет.
Звезды и планеты легче всего опознавать, находя созвездия или определенные группы звезд, вблизи которых они находятся.
Начинать изучение звездного неба следует с опознавания созвездия Большой Медведицы и Полярной Звезды (созвездия Малой Медведицы), а затем уже находить другие созвездия и звезды.
Созвездие Большой Медведицы состоит из семи ярких звезд, которые расположены в виде ковша со спускающимся вниз дугообразным хвостом; началом ковша является звезда Дубхэ.
Если мысленно провести вверх прямую линию через звезды, образующие край ковша (Дубхэ — а и р), и отложить на ней 5 отрезков, равных расстоянию между этими звездами, то конец пятого отрезка ляжет на Полярную Звезду созвездия Малой Медведицы.
Полярная Звезда характерна тем, что она находится от полюса мира на расстоянии всего лишь около 1° дуги.
Наблюдатель, смотрящий на Полярную Звезду, независимо от своего местонахождения, всегда оказывается обращенным лицом на север; следовательно, справа от наблюдателя будет всегда восток, слева — запад, а позади — юг.
Созвездие Малой Медведицы, так же как и созвездие Большой Медведицы, представляет собой ковш, но только небольших размеров, состоящий из менее ярких звезд.
Линия, проведенная от ковша Большой Медведицы вниз по ее дугообразному хвосту, пройдет через звезду Арктур созвездия Волопаса, которая находится от последней звезды созвездия Большой Медведицы примерно на таком расстоянии, как и Полярная Звезда от .звезды Дубхэ.
На биссектрисе угла, мысленно проведенной от звезды ₽ ков ша Большой Медведицы, на границе Млечного Пути находится
звезда Вега созвездия Лиры и далее, за 'Млечным Путем — звезда Альтаир созвездия Орла. Созвездие Лиры легко узнается по параллелограмму, который образуется четырьмя менее яркими, чем Вега, звездами созвездия Лиры.
Около прямой, проведенной по верху ковша Большой 'Медве дицы, лежит яркая звезда Капелла созвездия Возничего; она легко опознается по характерному расположению вблизи нее трех звезд небольшой яркости: две — рядом и одна — в промежутке между этими звездами и Капеллой.
За звездой Капелла расположена звезда Альфарац созвездия Андромеды и недалеко от нее — яркая звезда Регилъ созвездия Орион. Это созвездие состоит из ярких звезд, из которых три расположены в один ряд и находятся в середине созвездия.
Немного ниже и в стороне от созвездия Орион находится очень яркая звезда Сириус созвездия Большого Пса.
Недалеко от звезды Сириус в направлении к Большой Медве-тице расположена звезда Порцион созвездия Малого Пса и затем дае яркие звезды Поллукс и Кастор созвездия Близнецов.
Созвездие Льва быстро отыскивается по расположению звезд в виде серпа; замыкает их более яркая звезда Регул (на ручке серпа).
Планеты на карте звездного неба не показаны; наносить их необходимо перед полетом, используя для этого графики движения планет, которые имеются в «Авиационном астрономическом ежегоднике».
§ 218. «Авиационный астрономический ежегодник»
«Авиационный астрономический ежегодник» издается на каждый год и день в виде отрывных таблиц.
В ежегоднике координата R — звездное время в гринвичскую полночь с поправкой на изменение звездного времени (для солнца, луны, планет и основных звезд) и о указываются на каждые сутки и час по гринвичскому времени каждого месяца года
Кроме того, в ежегоднике указываются фазы луны и ее па рал лаке.
Кроме того, >в виде таблиц даются средние координаты звезд на текущий год, прямое восхождение а и склонение 6.
'§ 219. Таблицы высот и азимутов солнца, луны, планет и звезд (ТВА)
Эти таблицы применяются для быстрого вычисления высоты! и азимутов светил, имеющих склонение в пределах от—29°30' до -}-29о30'. Высота и азимут находятся по данным наблюдений за светилами и служат для прокладки сомнеровой линии на карте.
Имеются таблицы для солнца, луны, планет и звезд; ими можно пользоваться в пределах северных широт ют 30° до 75°.
Таблицы состоят из трех отдельных частей: 1-я часть—для ши-
441
рот от 30 до 45°, 2-я часть — для широт от 45 до 60° и 3-я часть — для широт от 60 до 75° северной широты.
Для удобства пользования каждая часть состоит из 30 отдель ных таблиц, составленных для каждого целого градуса склонения в пределах от 0 до + 29°. Нумерация ведется по градусам склонения: 0, 1, 2, 3 и так до 29°.
Заданное значение склонения светила определяет номер таб лицы, которой надо пользоваться при определении высот и ази мута светила.
Для пользования таблицами необходимо знать: склонение светила о, его местный часовой угол 6, и широту ср„7, «предположи-тельного местонахождения наблюдателя (самолета).
Склонение с плюсом напечатано в верхней части таблицы, а с минусом — в нижней.
Если склонение наблюдаемого светила положительное, то местный часовой угол tM следует брать из левого столбца таблиц, а если с минусом — из правого.
В таблицах, креме высоты светила hn,nn и его азимута А, дан индекс f, который представляет собой некоторое целое число, не превышающее 10.
Индекс f служит для определения поправки к табличной высоте на разность между склонением светила и склонением, для которого составлена таблица; эта поправка дана в специальных табличках, «напечатанных на пэтях общих таблиц. Входом в таблицу являются индекс f и величина алгебраической разности склонения светила 5св,,„ и склонения, взятого из таблиц отоб, т. е:
Д О 1=3 ^свет fjma6-
Поправка берется со знаком + и алгебраически прибавляется к табличной высоте.
Искомые величины h„.nf: А и f находят в таблице на одной строке с заданным t.„ , в столбце данной <ряр.
Этими таблицами можно пользоваться для солнца, луны и планет. Таблицы для звезд даны отдельно. Названия звезд указаны да верху каждой таблицы. Всех таблиц 'восемь Входами в таблицы являются: название звезды, часовой угол и
Кроме высоты и азимутов, каждая таблица имеет поправку для нахождения широты места «по Полярной Звезде; поправка представляет собой алгебраическую разность между широтой места наблюдателя и высотой Полярной Звезды, г. е. (tp— Поправка берется в строке часового угла наблюдаемого светила, на звание которого указано вверху таблицы.
Таблица поправок на рефракцию и перевод минут дуги большого круга в километры применяются для исправления измерен ной высоты светила на рефракцию и для перевода минут дуги в километры. В таблице приняты обозначения;
<р — широта, t — часовой угол, А — высота светила, А — азимут, f — индекс, До—минуты склонения светила, (<р — A^) — •поправка к высоте Полярной Звезды, W — запад, Е — восток.
§ 220. Ведение астрономической ориентировки в полете
Подготовка к полету. Для успешного ведения астрономической ориентировки в полете необходимо непосредственно перед полетом выполнить следующее:
При дневном полете. 1. По специальным таблицам определить моменты восхода и захода солнца и луны.
2. Пэ «Авиационному астрономическому ежегоднику» для солнца и луны найти их склонение на день полета.
3. Выбрать соответствующие таблицы высот и азимутов.
При ночном полете. 1. По графикам положения планет на (первое число текущего года, .которые имеются в «Авиационном астрономическом ежегоднике», определить положение планет на небе в ночь полета и нанести их на карту звездного неба.
2. По подвижней карте звездного неба определить, какими звездами можно пользоваться для ведения астрономической ориентировки в данном полете; для намеченных звезд и кланет определить их моменты восхода и захода.
3. В «Авиационном астрономическом ежегоднике» найти склонения для выбранных планет и по ним отобрать необходимые таблицы высот и азимутов; отобрать таблицы высот и азимутов и для намеченных звезд.
4. По таблицам луны определить ее четверть; если ночь лунная, определить склонение луны, отобрать таблицы высот и азимутов.
Для ведения астрономической ориентировки в полете можно пользоваться полетной картой, предназначенной для ведения общей огиентировки (масштаба 1:2 500000, 1:2000 000 или 1 .- 1 000 000).
Для того чтобы выбранной картой для ведения астрономической ориентировки удобнее пользоваться во время полета (в районе или по маршруту), необходимо ее заранее подготовить, т. е. (разбить по параллелям и меридианам на более мелкие отрезки широты и долготы (через каждые 10' дуги долготы от Гринвичского меридиана).
Кроме того, перед полетом, задаваясь временем возможного прибытия самолета в намеченные пункты (приближенную точку с 'fnjs и k„pi, соответственно этим моментам (времени измерения высоты выбранных светил) рассчитывают высоты и азимуты.
Необходимо помнить, что наблюдать выбранные светила надо точно в моменты времени, для которых произведены предварительные вычисления; изменять их нельзя.
Результат предварительных вычислений обычно сводится в таблицу (табл. 15).
Для облегчения прокладки на карте сомнеровой линии в полете рекомендуется подготовить карту одновременно с составлением таблицы предварительно вычисленных высот и азимутов светил.
Наиболее простой способ подготовки карты заключается в следующем: из точки предполагаемого местонахождения наблюдателя 443
Таблица 15
в какое-либо время, для которой высчитаны табличные высоты и азимут светила, проводятся окружности с помощью циркуля радиусом 10', 20' и т. д. до I — 2° в масштабе карты; кроме того, от меридиана данной точки к западу и востоку через каждые 5— 10° проводят ряд прямых линий.
В полете, измерив в намеченное время высоту светила при нахождении вблизи точки, для которой высчитаны табличные высоты, необходимо найти истинную высоту светила, т. е. показание авиасекстанта исправить на инструментальную ошибку и рефракцию; найти разность между измеренной высотой и высотой, взятой из таблицы предварительных вычислений для момента времени наблюдения за данным светилом; затем по линии азимута отложить значение А Л и обычным путем пролсжить сомнеро-, •ву линию.
Расчет элементов и прокладка и а карте сомнеровой линии в полете. Для расчета элементов и прокладки на карте сомнеровой линии при наблюдении звезды необходимо выполнить следующее:
1. Снять авиасекстантом высоту наблюдаемой звезды и заметить момент наблюдения по часам (Г„— поясное время, по ко торому идут часы); записать их.
2. Из времени наблюдения вычесть номер часового пояса, по которому идут часы, и получить гринвичское время наблюдения, т. е.:
г* = К- к4-гр п
3. Перевести Тгр наблюдения, выраженное в часах, в градусное измерение — Т~р
4. По таблице текущего дня «Авиационного астрономического ежегодника» для момента наблюдения Т*р найти и выписать зна чение координаты R.
5. Получить гринвичский часовой угол звезды 1\гр, для чего сложить градусное выражение Т-р и
6. Задаться координатами приближенного местонахождения самолета и Хчр и определить местный часовой угол звезды t°M; для этого к полученному t~p прибавить долготу (приближенного 444
местонахождения самолета в момент наблюдения и установить, какой это часовой угол — западный или восточный; минуты в дуговом измерении всегда должны дополнять минуты t\v до целого градуса:
/с — Е — 1гр —
Если в результате сложения С получается меньше 180°, то он считается всегда западным часовым углом Cw; если G больше 180°, то берется дополнение его до 360°, которое считается восточным часовым углом Гмг- Далее, по и широте приближенного местонахождения самолета в таблице для данной звезды найти табличную высоту Л,ЛО(5 и азимут А.
Необходимо помнить, что азимут отсчитывается всегда от юж него направления географического меридиана к западу или востоку, в полном соответствии с наименованием местного часового угла.
7. Измеренную высоту звезды исправить на инструментальную ошибку авиасекстаита (+ С) и рефракцию (— г) и получить истинную (исправленную) высоту hUCm-
huem == Ьеекст + (±С)-г.
8. По таблице высот и азимутов для звезды, по данным и <р°, найти табличные hma6 и А
9. Из истинной (исправленной) высоты вычесть найденную табличную высоту и 'получить их разность (т. е. ДА' — huem которую перевести в единицы длины (километры).
10. В точке выбранного приближенного местонахождения самолета в момент наблюдения отложить линию азимута.
11. По линии азимута отложить в масштабе карты значение + ДА— в направлении на светило, если Д h положительная (+ ДА), и в направлении от светила, если ДА отрицательная (—ДА).
12. В конце отложенного отрезка ДА перпендикулярно к линии азимута провести прямую линию, которая и будет искомой сомнеровой линией.
Пример. 22 июня 1943 г. по времени 3-го пояса в Т„ = 23 час. 41 мин. 37 сек на высоте полета Н — 3000 м измерена высота звезды Капелла созвездия Возничего, которая оказалась:/1«>лс?п= 13°24'. Поправка часов + 00 мин. 47 сек. Координаты приближенного местонахождения: fnp = 57° N Х»р= 29° Е; инструментальная поправка авиасекстанта С = + 2'. Требуется рассчитать элементы и проложить на карте сомнерову линию.
Решение: 1) Ьескет — 13°24', 7,,= 23 час. 41 мин. 37 сек.
2) Тгг> = Т„ — N = 23 час. 41 мин 37 сек. — 3 час. = 20 час. 41 мин. 37 сек.+ (+00 мин. 47 сек.) =20 час. 42 мин 24 сек.
3) Тгр— 20 час 42 мни. 24 сек. в дуговых единицах будет:
Т°, = 20 час. X 15° = 300°
42 мин-Х 1б' = 630'= 10°30'
24 сек. X 15"=00с’06', т. е. Т.-р = 310°36'
4) Из «Авиационного астрономического ежегодника» на 22 июня 1943 г. для /'<,= 20 час. 42 мин. 24 сек., координата /?° = 192°03'.
5) t°p = Пр -|- RJ = 310°36' + 192°03' = 502°39' — 360° = 142°39' W.
61 Для <?,p = 57°N Хп;> = 2)°Е, /’ = t?p ± Х^ w - 142%У' + 29°21' Е = =172° W (дополнение минут долготы до целого градуса минут 1°р равно 21').
7) hucm — tlceKcm — Г + Р — Л = 13° 2') - -У О -г О = 13Qz3'.
8) Из та липы IBA дли /° — 172° и <fnp = 57° N, /1>паД= 1 °21 и А=172° W.
9) Ml = hucm — hma6 = lo°23’ —13°2i'= + 02’ и и 3,7 км.
Прокладка сомнеровой лнннн на карте по наблюдению ввезды (к (приведенному примеру) показана на рис. 279.
Рис. 279. Прокладка сомнеровой линии по данным наблюдения за звездой.
Для удобства расчета элементов сомнеровой линии можно применить специальный бланк (табл. 16).
Таблица 16
Дата наблюдения Светило
Глч= —час мин сек. N4 (часовой почс) Полярная Звезта
+ (+ с') -
^-сепсгп' — + (+с') — Л =
V — L / — г = + р = (зля луны) — /2=
R°=—час. мин. сек. Т°г.р—
*°гР= Е Х°п= W <%= W И1и Е (понижение горн юнга) ь — h°ucm = [±(?-ЛПОл >]= (поправка)
lLucm
или
± АЛ = Км Л°ЯОл = <Р°=
5 ДЕ Л»в
Расчет элементов сомнеровой линии по солнцу, планетам и луне производится в указанной выше псследователоности с очень незначительными изменениями. В этом случае необходимо:
1) Измерить авиасекстантом высоту светила и заметить момент времени по часам; результат наблюдения записать.
2) Исправить измеренную высоту светила на поправки + С и — г, а для луны и на параллакс + р.
3) Из записанного времени момента наблюдения вычесть номер часового пояса, по которому идут часы, и получить гринвичское время.
4) Гринвичское время, выраженное в часах, перевести в градусное измерение.
5) Из «Авиационного астрономического ежегодника» для даты .ч времени наблюдения Тгр найти величину (для солнца или планеты, или луны) и выписать значение склонения.
6) Величину /?° сложить с Пр и получить гринвичский часовой угол светила t,p
7) Задаться и ~>.пр и найти местный часовой угол светила по формуле:
р _ /о +1° Е
«'Л — чр _L
Если местный часовой угол меньше 180°, то он всегда считается западным /„w. а если больше 180°, то берется к нему дополнение до 360°, которое считается восточным JSe-
8) В таблице высот и азимутов, номер которой соответствует величине склонения данного светила (+Д, по величине t°M и уПр найти табличные hmae и А.
9) Найти разность высот:
A h = fl vcm h таб-
10) От точки предполагаемого местонахождения самолета (координат и на карте проложить линию азимутов под углом Лина ней в масштабе карты величину + А/г, выраженную в линейных единицах.
11) Через конец отложенного отрезка провести сомнерову линию.
В настоящее время расчеты местного часового угла светила (t*) несколько упрощенны. В астроежегоднике (изд. 1947 г.) даны гринвичские часовые углы светил через каждый час гринвичского времени. Для получения местного часового угла светила выбирают сначала гринвичский часовой угол для момента измерения высоты, а затем прибавляют приближенную долготу местонахождения самолета в момент измерения. Весь остальной растет остается таким же.
Пример. В полете 27 марта 1943 г. в момент Тп = 15 час. 28 мне. 16 сек. по времени 5-го пояса измерена высота солнца Ьсекет = 3б°37'. Координаты предполагаемого местонахождения самолета cf«p = 54oN, Апр = 4О°В-Пояравка хода часов равна 0. Высота полета /7 = 2000 м.
Требуется рассчитать элементы и проложить на карте сомнерову лжник».
Решение: см табл. 17 ркс 280.
Таблица 17
Дата наблюдения 27.3.1943 г. Светило Солнце
Тпч — 15 час. 28 мии. 1 сек.
AT< = 5
, Л°«*™-36°37' (+С') =00*00'
Тчгр = 10 час. 28 нин. 1 сек.
7?° = 178°35'
+ Т,р - 157°0 ’
1°гр = 335°39' ±- \пр = 40°21'
- г= 00°02'
+р =
— п =
Л«т = 36°39'
Ьшабл = 36°43'
+ ДЛ = 04' илн 7 км
Тир54° N | j4w = 20°W
Рис. 280. Прокладка сомнеровой линии по данным наблюдения за солнцем.
§ 221. Определение широты места по Полярной Звезде
Как указывалось выше, для Полярной Звезды характерно то. что она находится в непосредственной близости от северного полюса (около 1°) и равна его высоте, т. е. практически почти равна широте места.
Высота Пслярной Звезды (с учетом небольшой (поправки <по специальным таблицам) для наблюдателя, находящегося .вдали от северного (географического) полюса, всегда является широтой его местоположения.
Широту места наблюдателя по высоте Полярной Звезды удобнее всего определять одновременно с измерением высоты какой-либо звезды, выбранной для наблюдений при астрономической ориентировке. При этом необходимо:
I) Одновременно с наблюдением за какой-либо звездой измерить -высоту Полярной Звезды t„0J, и исправить ее, внеся инструментальную поправку и поправку на рефракцию, т. е.:
Лист полярн — hcaKcm полярн “Ь (it О Г.
2) При нахождении табличных высоты и азимута наблюдаемой звезды пс ТВА в графе, ”де указана разность <р Л„,и, прочесть поправку к измененной высоте Полярной Звезды; прй этом поправку следует брать с ее знаком из того столбца, который имеет наименование местного часового угла звезда, и строки соответственно его величине.
3} Найденную поправку с ее знаком прибавить к измеренной .высоте Полярной Звезды и получить широту места наблюдателя .в момент наблюдения за Полярной Звездой.
§ 222. Применение астрономической ориентировки в полете
Астрономическая ориентировка применяется для контроля правильности полета и для восстановления потерянной ориентировки.
Для того чтобы пенять ее значение, достаточно привести следующий пример
Если в полете на значительнее расстояние, независимо от его условий, ведется ориентировка, то можно всегда указать на карте вероятное отклонение самолета ст линии пути, допуская при этом некоторую ошибку. В практике принято определять район вероятного местонахождения самолета кругом, радиусом которого служит наибольшее возможное отклонение самолета от центра этого круга. Если же .. этом случае измерить высоту какого-либо светила и по рассчитанным элементам проложить на карте сом-нерову линию, т) вероятнее местонахождение самолета ограничится только некоторой полосой, идущей вдоль сомнеровой линии. Если проложить симнерову линию другого светила, то линии пересекутся в какой-либо точке и дадут РМ самолета.
Прокладка на карте нескольких сомнеровых линий (2 и 3) Лает расчетное место самолета с практически хорошей точностью п районе от 1 до 15 км (считая это расстояние от точки лересе-чВДия сомнеровых линий).
Для ведения астрономической ориентировки в полете необходимо выбирать такие светила, чтобы разность их азимутов была ’Лизкой к 90° и не менее 45° или 135°.
Контроль пути по дальности лучше всего вести наблюдением за светилами, которые расположены в направлении полета (на •осу самолета) или позади самолета; контроль по направлению
449
следует вести по светилам, которые находятся под углом, близким к 90° к направлению полета.
Для определения расчетной» местонахождения самолета необходимо одновременное наблюдение за несколькими светилами, которые расположены в равных частях неба.
Контролировать правильность полета или определять местонахождение самолета можно также комбинированием астрономической ориентировки с радиопеленгацией (рис. 281). Этот способ применяется только в том случае, когда имеется 'возможность использовать наземные радионавигационные средства.
Расчетное место самолета в этом случае определяется районом определенного радиуса, в котором пересекутся сомнерова линия и линия радиопеленга, проложенные на карте.
Необходимо всегда помнить: для того чтобы обеспечить правильное самолетовождение и точно соблюсти маршрут, необхо-
Рис. 281. Определение РМ самолета прокладкой линии радиопеленга и сомнеровой линии.
димо применять в полете все способы контроля пути, которые могут быть использованы при данной навигационной обстановке.
§ 223. Упрощенный способ расчета элементов сомнеровой линии в полете
Профессором Р. В Куницким предложен способ расчета элементов сомнеровой линии в полете с помощью специальных таблиц высот и азимутов звезд, предвычисленных на текущий год.
Такие таблицы освобождают от необходимости делать расчеты высот и азимутов звезд непосредственно при астрономических на блюдениях. Значения высот и азимутов берутся в готовом виде из таблиц для одного из табличных моментов времени наблюдения за звездой.
В этом случае прокладка сомнеровой линии на карте значительно упрощается, так как широта и долгота предполагаемого местонахождения наблюдателя выпажаются в целых градусах.
4 •
Образец таблицы № 1 иа 15—16 мая 1944 г.
вега 1 Азимуты восточные
е + « =( + 1'-4-(+3’> = + 4'
т Долгота— X Строка
23 17 40° 1
23 33 36 40° 2
23-49 32 36 40° 3
00 05 28 32 36 40° 4
00-21 24 28 32 Зо 49° 5
00-37 24 28 32 36 4Э° 6
00-53 24 23 32 36 40° 7
01 09 - 24 28 32 36 40° 8
01-25 24 28 32 36 40° 9
01-41 24 28 32 36 4G«J 10
01 — 57 24 28 32 36 11
02-.3 24 28 32 12
02-29 24 28 13
02-45 24 14
03-01 25
03 -17 16
8° 25°50' 121° 28°41' 118° 30°35' 32°31' 34°ЗГ 36°32' 33° $6' 40° 10' 42° 16' 44°53' 97° | 94°
115° 112° 109° 106° юз° 100°
66 25°48' 27°44' 29°чЗ' 31°41' 33°5Э' 35 '5и' 38°о6' 40°16' 42°28' 44°42'
’21° 119° 116° 114° 1 1° 108° 105' 102° 99° | 96°
64 24°44' 26°^5' 28'49' 30°65' лЗ'об' 3>° In' 37°33' 39°4»' 42°О7'44°27'
122° 120° 117° 115° I 112° 109° 106° 104° 101° | 98°
62 23°38' 25°44' 27°53' 30°05' 33°20' 34%7' 36°58' 39° 19' 41° 43' 44°08'
123° 120° 118° 115° 113° 110° 108° 105° 102° | 10j°
22°ЗГ 24°42' 26°55' 29°12' 31°32' З3°54' 36° 19' 38° 4 >' 41°14' 43°45'
’123° 121° 119° 116° 114° 111° h 9° 106° '04° 1 102°
<3 21°24' 23°39' 25°56' 28°17' 30°4 Зз°О8' 35°38' 38°09' 40°43'43° 9'
121° 122° 1:9° 111° 115° 113° 111° 10^° 106° | 104°
2J°15' 22°34' 24°55' 2/°20' 29° 49' 32°20' 34°54' 37°30' 40°0 ' 42°48'
126° 123° 120° 118° 116° 114° 112° 110° 108° 1'16°
««•лох ( 4-53’ | +55’ | +57' ( +58', +59' | +60’ | +60' | +6t' | +60' .+60^
Ад
+8'
+8'
4-8'
4-9'
4-У
4-9Г
4-9'
Образец таблицы № 2 Мяй 19М г.
Число 81 82 Ар Сгро-к? Число В1 В2 Ар Строка
11-12 ч. м. 23 13 23 33 0 53 ч. м. 2j 33 0 53 2 13 3 33 ч м. 2 14 3 34 4 54 1 6 11 16 16-17 ч. м. 21 54 23 14 0 34 ч. и. 23 13 0 33 1 53 3 13 ' ч. м. 1 55 3 15 4 35 I 6 11 16
Ч~ 2* -3' -4' ч -4' 1 г J- 3' а
12-13 ч. м. 22 09 23 29 0 49 23 29 0 49 2 09 3 29 «. м. 2 10 3 30 4 50 1 6 11 16 17-18 ч м. 21 50 23 10 0 30 «. м. 23 09 0 24 1 49 3 09 ч. м. 1 51 3 И 4 31 1 б 12 16
+ 3' - 2' - 4' '9 — 4' + 1' + 2' 9
13-14 ч- м. 22 05 23 25 0 45 ч. м. 23 25 0 4а 2 05 3 25 ч. м. 2 07 3 27 447 1 6 11 16 18-19 ч. м. 21 46 23 06 0 26 ч. м 23 05 0 25 1 45 3 05 ч. м. ’ 47 3 07 4 27 1 6 11 16
+ 3' - 1' + 4' Ч -3' -г 2' + 1' 9
14-15 ч. м 2> 01 23 21 0 41 ч. м. 23 21 0 41 2 01 3 21 ч. м. 2 03 3 23 4 43 1 6 11 16 19-20 ч. м 21 42 23 02 0 22 ч. м. 23 01 0 21 1 41 3 01 ч. м 1 43 3 03 4 23 1 В 11 16
+ 4' -Г +• 4' 9 -з- + 3' 4- Г 9
15-16 ч. м 21 57 23 17 0 7 м. 23 17 0 37 1 57 3 17 ч. и. 1 f-9 3 19 4 39 1 6 И 16 20-21 ч. м. 21 38 22 58 0 18 ч. м. 22 57 0 17 1 37 2 57 ч. м. 1 39 2 59 4 19 1 6 11 16
+ 4' 0' + 3' 9 -2' + 3' О' Ч
Ошибка высот звезд в таблицах дана с точностью до 2 мин. дуги, а в среднем она составляет меньше 1 -минуты.
Таблицы предвычиСленных высот и азимутов составляются на каждый год для различных восточных долгот и северных широт. В различные месяцы таблицы охватывают разные промежутки времени суток, например: в январе и феврале — с 21 часа до 4 час. (по -московскому времени), в-марте и апреле — с 22 час. до 4 час. 30 -мин., в -мае, июне и июле — с 22 час. до наступления рассвета, в августе, сентябре и октябре — с 22 часов до 4 час. 30 мин., в ноябре и декабре — с 21 часа до 4 часов.
•Комплект состоит из 9 -вкладных таблиц № 1 (табл. 18), которые берутся в полет, и -и-з 36 таблиц № 2 (табл. 19).
Четыре таблицы № 1 составлены для звезды Капелла (созвездия Возничего), три —для звезды Вега (созвездия Лиры), одна — для звезды Арктур (созвездия Волопаса) и одна _____ для
звезды Альфарац (созвездия Андромеды). Сокращенно эти звезды обозначаются соответственно К, В, Ар и Альф.
Каждая из таблиц № 1 имеет верхнюю и нижнюю части. В первую, шестую, одиннадцатую и шестнадцатую строки первого слева столбца верхней части, которые выделены жирными вертикальными линиями, записываются на заданное число моменты времени Т\ 'последние берутся из таблицы № 2 из столбца соответственно названиям данной звезды (табл. 19). Остальные строки этого столбца заполняются последовательным прибавлением к моментам вышерасположенной смежней строки по 16 минут.
Второй, третий и т. д. столбцы верхней части содержат долготы 40°, 36°, 32°, 28°, 24° и т. д. В последнем столбце дана .нумерация горизонтальных строк.
После окончания срока действия таблица № 1 может быть использована для других дат. Для этого вписанное время необходимо стереть резинкей или заклеить чистой бумагой, после чего ее снова подготовить для желаемой даты.
В нижней части таблицы № 1 даются для широт 46°, 48°, 50°, 62°, 54° и 58° и т. д. и для данных верхней части таблицы значение высот и азимутов звезды, название которой указано вверху таблицы. Под каждым из столбцов постоянной части дана величина .поправки к Полярной Звезде для вычисления широты места. В крайнем справа столбце указаны значения минутных изменений высоты звезды ДА
При подготовке для пользования таблицы № 1 в верхней ее части вписываются месяц и число, а также сумма поправок c-\~q, т. е. поправки секстанта с и поправки q к измеренной высоте звезды на данное числю, значение которой берется из таблицы № 2.
В таблице № 2 указаны двойные даты петому, что таблицы охватывают как вечерние, так и утренние часы других суток.
Для того чтобы определить расчетное место самолета в полете с применением таблицы № 1, необходимо:
1) Задаться координатами предполагаемой! местонахождения самолета (широтой и долготой ?>>.г); широта и долгота должны быть выбраны такие, которые имеются в таблице.
2) В верхней части, в столбце, обозначенном Т, выбрать момент времени для измерения высоты данной звезды.
3) В выбранный момент времени сначала измерить высоту данной звезды затем—высоту Полярной Звезды heeKc. пол-
4) Исправить измеренную высоту звезды:
huenp = hcerc. + (с + ?) — Г-
где: с — поправка секстанта;
q— поправка к измеренной высоте звезды на данное число;
г — рефракция.
5) Из постоянной нижней части таблицы выписать значение табличной высоты л„п- и азимута А звезды; табличные высота и азимут берутся из того прямоугольника нижней части таблицы, в котором пересекаются вертикальный столбец верхней части (где находится долгота предполагаемого местонахождения самолета в строке взятого момента времени наблюдения звезды) и горизонтальная строка нижней части (где указана широта предполагаемого местонахождения самолета). Из столбца долготы выписывается и поправка к Полярной Звезде, т. е. ® — hnoj.
6) Найти разность + Д/г между исправленной измеренной высотой светила пас„р и табличной высотой .imuS, т. е.:
± Д Л = tluem hma6-
7) Найги широту места по, измеренной высоте Полярной Звезды:
<р = hnOji сек + ( ± г) — г + (? — А„ол).
8) Проложить на карте сомнерову линию звезды и параллель (согласно вычисленной широте места in о Полярной Звезде) и отметить точку их (район) пересечения, т. е. РМ самолета.
Пример. 15—16 мая 1944 г. измерена высота звезд Вега и Полярной.
Т = СО час. 37 мин.
Дано: h секст C-Yg 33°37' С >04' ЛпО4 С 49°09' + 01'
7 пр Чпр Н 36°00' 5 °.Ю' 4.00 м — Г —01' -- г —01'
hum tmaS 4- АЛ 33°40' 33°50' - 10' f — hnoA 4° -г 51' 50°09'
А 1П°
Если момент времени действительного измерения высоты звезды несколько отличается от выбранного табличного (на 1—2 мин.), то в табличную высоту необходимо внести поправку минутного изменения высоты Д h, которая дается в нижней части таблицы № 1 (в правом крайнем столбце).
Если момент времени измерения высоты звезды больше табличного момента, поправка табличной высоты равна произведению ДЛ на разность моментов (в минутах времени), взятому со своим знаком.
Если момент времени измерения высоты звезды меньше табличного, поправка табличной высоты равна произведению на разность моментов, взятых с обратным знаком.
На пример. Момент измерения высоты 2 час. 41,8 мин., табличный Mt* мент 2 часа 41 мин. и -АЛ=+9'; тдравда табличной высоты звезды йцдет + 9 X 0,8' = + 7'.
Помимо табличных долгот, можно задаваться и другими промежуточными (между строк) долготами, увеличивая табличные моменты на 4 мин. при увеличении долготы на 1°, например, долготе 25°, взятой в четвертом столбце между 7-й и 8-й 'строкам» таблицы № 1, соответствует момент времени 01 час 05 мин.
ГЛАВА XIV
РОЗЫГРЫШ ПОЛЕТА
§ 224. Задание на полет
Приказываю командиру самолета По-2, опознавательный знак Ш-5, пилоту Гайворонскому А. 15 февраля 1943 г. произвести тренировочный полет с курсантом Городным И. по следующему ломаному маршругу: место базирования—ИПМ д. Курина—Нел-жа—ст. Хворостянка—ст. Дсбринка—КПМ (Красно Свобэдскэе). Цель—пункт Нелжа. Над целью в центре селения сбоосить вымпел. У ст. Хворостянка сделать два круга на высоте 100 м. Вылет с базы произвести в 09—00 час. по московскому времени. О выполнении задания доложить мне по возвращении на базу.
Командир отряда Сироткин.
15.11.1943 г.
06.00 ч.
§ 225. Выполнение задания
Предполетная подготовка. Подготовку к полету экипаж провел в следующей последовательности:
1. Выбор и склейка карты. Наилучшей картой для полета на самолете По-2 по заданному маршруту является карта в многогранной проекции масштаба 1 : 200 000.
2. Прокладка и разметка маршрута.
Выбор контрольных ориентиров и прокладка боковых уклонений (см. карту, рис. 282).
3. Изучение маршрута почета и контрольных ориентиров, изучение пели, рельефа местности.
4. Сбор необходимых сведений о маршруте полета:
а) наличие и расположение аэродромов и посадочных площадок, их превышение над уровнем моря;
б) изучение метеорологической сбстановки.
5. Составление аэронавигационного плана полета и заполнение бланка «План полета» (рис. 283):
а) выбор безопасной высоты полета,
б) расчет истинной воздушной скорости,
в) расчет путевой скорости и путевого времени по известному
4 >5
ветру на высоте полета по участкам маршрута, расчет магнитных курсов,
г) расчет необходимого запаса горючего на полет (с учетом аэронавигационного запаса),
д) выбор способов самолетовождения по участкам маршрута с учетом их особенностей,
е) выбор способа выхода на заданную линию пути и подбор курса следования,
ж) намечение порядка выполнения задания над целью, ее отыскание,
з) намечение способов восстановления ориентировки в случае ее потери.
6. Проверка штурманом подразделения предполетной подготовки и подписание «Плана полета».
7. Получение «Бюллетеня погоды для пилота»—маршрутного прогноза погоды на время полета и прогноза на район посадки к моменту прибытия к нему самолета.
8. Получение ст диспетчера аэропорта разрешения на вылет.
§ 226. Работа экипажа в полете
'1 . Взлет 9.00 15.11.43 г. До ИПМ набор высоты Нпр =200 м, 2. Отход от ИПМ 9 10.
3. Подбор курса следования по ж. д. на участке Избердей— Грязи КК = 235°. Грязи прошли в 9.23. Путевая скорость оказалась 105 км/час.
4. Полет с курсом КК=235°. Проход ориентира Кривка в 9.40.
5. Выход на реку Воронеж севернее окраины села Вертячье е 9.54. Взят КК = 80°.
6. Подход к селу Нелжа со снижением по реке Воронеж в 10.02 W=120 км/час. КК = 190°. Вымпел сброшен на развороте с высоты 100 м в центре села у перекрестка дорог.
7. Полет Нелжа—ст. Хворостинка. На участке Нелжа—Никольское полет с набором высоты до Н — 200 м. Никольское поойдено в 10.17 южнее на 4 км W=102 кг/час; КК = 45° МП У = 59°.
По боковому уклонению рассчитана поправка в курсе 9°-{ 4-2° =11°; курс взят КК = 34°.
8. Полет до ст. Хворостинка со снижением с курсом КК=34° К ст. Хворостинка пото пли вдоль ж. д. в 10.39, на 2 круга затрачено 9 мин., отход в 10.42, КК=131°. Н = 50 м.
9. Полет до ст. Добринка с набором высоты до Н = 200 м, КК —47°. Проход 10."9. В 11.09 подошли к селению Ходерка, что ь 5 км на юго-всстох от линии пути (селения Ивановка).
Разворотом на 90° влево вышли на заданную линию пути в курсом КК = 44°.
В 11 час. 18 мин. вышли на 'пересечение грунтовых дорог, что восточнее 4 км П'крово-Маефино:
10. Курсом КК — 19° в 11.34 прошли КПМ.
11. Посадка в 11.40.
Рис. 282. Подготовка карты для полета по ломаному маршруту,
I
12. Доложено командиру отрада о выполнении полета 15.11 в 19.00 час.
Всего затрачено на выполнение задания 2 часа 40 мин.
'Произведенным разбором полета подтверждена правильность действий экипажа в полете.
Послеполетный разбор произвел командир отряда в присутствии обучающихся, который, указав на отдельные недостатки, дал отличную оценку выполненному заданию.
ЛИТЕРАТУРА, ИСПОЛЬЗОВАННАЯ ПРИ СОСТАВЛЕНИИ УЧЕБНИКА
1. Ширмам о в П. М., Аэродинамика, 1939 г.
2. В и н о г р а до в-Н. В., Карты и атласы. 1941 г,-
З. 'Стейне Я. Я. Практическая картография, 1937 г.
4. Сак келари Н„ Навигация, 1938 г.
Б. Сергеев Л-. Руководство по воздушной навигации, 1934 Г.
в. Поляк В. Ю.. Теория самолетовождения, 1939 г.
7. Чей мэн С., Земной магнетизм, перевод Т. Н. Розе, 1937 г.
8. Молчанов П. А., Куре аэронавигации, 1937 г.
9. Хлюст ин Б. И., Девиация магнитного компаса, 1933 г.
10. С п и р н н И. Т., Полеты в Арктику, 1940 г.
11. Данилин С. А., Аэронавигация, 1938 г н 1942 г.
12. Поль Р В., Введение в механику и акустику, 1932 г.
13. Дэй С. К, Полет по приборам и радио. РИО Аэрофлота, 1940 т.
14. Щипаное Г. В., Гироскопические приборы слепого полета, 1938 г.
15. Авиационные приборы, части 2-я, 3-я й 4-я. Воениздат, 1939 г.
16, Джорданов А с сен, Полеты в облаках, 1940 г.
17. К р и во н о с о в Н. К., Задачник по астрономической ориентировке, 1939 г.
18. Пособие для летчика-наблюдателя запаса, Воениздат, 1939 г.
19. Кудрявцев Н. Ф., Аэронавигация, 1938 и 1939 гг.
20. Авиационный штурманский справочник АШС-39 и АШС-41 гг.
21. Ш а р к е в и ч Н. и Ц и м. Таблицы для расчета полета, 1933 г.
22. Ч редин Е. В., Аэролоция, 1940 г.
23. Таблицы восхода и захода солнца и луны, Воениздат, 1942 г-
24. Стерлингов Б., Рукозодство -по воздушной навигации, изд. 1930 г.
25, Ку ниц кий Р. В., Авиационная астрономия, изд. 1943 г.
26. Гуревич М. И., Астрономическая назии-ания, изд. РИО Аэрофлота, 1940 т.
27, Аса ту рьян Т. Б., Радионавигация, изд. РИО Аэрофолота, 1945 г.
ОГЛАВЛЕНИЕ
Стр.
От составителей . . ; . i..................:........................... 3
Введение. Аэронавигация как наука, ее развитие и значение в авиации . 6
Глава I. Основные географические понятия и сведения о земле ... 7
§ 1. Земля — шар . . ..................................... 7
§ 2 Видимый горизонт, его дальность............................. 3
§ 3. Вертикаль и плоскость истинного горизонта 9
§ 4. Понижение видимого горизонта.......................... ... 10
* § 5. Окружности большого и малого коугов..................... 11
§ 6 Координаты на земной поверхности .......... 11
§ 7. Географические широта и долгота . 13
§ 8. Основные направления на земной поверхности................ 15
§ 9. Ортодромия и локсодромия . . ;............................. 17
§ 10. Единицы измерения расстояния 19
§ 11. Длина земной параллели...............:.................... 19
Глава II. Географические карпы и картографические проекции ... 20
§ 12. О'шие понятия о картах........................ . . : 20
§ 13. Географическая карта...................................... 20
§ 14. Значение географических карт в самолетовождении . ; . 21
§ 15. Классификация карт . ..................................... 21
§ 16. Масштаб карты........................ ... .... 23
§ 17. Предельная точность масштаба............................. 24
Картографические проекции ............................................ 25
§ 18 Обшие замечания............................................ 25
§ 19. Виды картографических проекций ........................... 25
§ 20. Коническая проекция Ламберта—Гаусса •..................... 26
§ 21. Поликоническая и многогранная проекция Мюфлинга 27
§ 22. Цилиндрические проекции................................... 2V
§ 23. Центральная проекция (полярная) . ............. 2)
Карты, применяемые в самолетовождении................................. 30
§ 24. Карта масштаба 1:1 000 000 («миллионная») . . . 30
§ 25 Карта 1.500000 («пятикилометровая»)...................... 32
§26. Карта масштаба 1:200000 («двухкилометровая») 33
§ 27. Карты масштабов 1 : 2 500 000 и 1 : 2 000 000 .... 34
§ 28 Изображение рельефа местности на картах...............' 34
§ 29 Определение на картах долготы и широты данной почки
(пхнкта) ... ...... ................................. 36
§ 30. Измерение расстояний на картах....................... 38
§ 31. Определение направлений на картах......................... 4!
§ 32 Прокладка локсодромии на картах конической проекции : . 42
§ 33. Аэролоции . . .............: . .... . • 44
§ 34. Полетно-маршрутные карты ................................. 46
§ 35. Пилотажно-навигационные приборы и инструменты ....
$ 36. Измерение высоты полета .............................
§ 37. Высотомеры барометрические..............................
§ 38. Принцип устройства высотомеров .........................
> 39. Описание барометрических высотомеров...................
§ 40. Высотописец (барограф)...............................
§ 41. Установка высотомеров и высотописцев на самолете . .
§ 42. Ошибки барометрических высотомеров . . • ’..............
Указатели воздушной скорости ......................................
§ 43. Скорость полета.........................................
§ 44. Принцип работы указателя воздушней скорости.............
§ 45. Указатель воздушной скорости УС-600 (УС-450) в стандартном корпусе ..............................................
§ 46. Указатель воздушной скорости УС-800 : : : :.............
§ 47. Приемник указателя бездушной скорости (трубка Пито с электрообогревом) ...................................... •
§ 48. Ошибки указателя воздушной скорости . ..............
§ 49. Проверка указателя воздушной скорости...................
§ 50. Вариометры................................................
Авиационные магнитные компасы .............................
§ 51. Сведения о магнетизме...................................
§ 52. Земной магнетизм..........................................
§ 53. Магнитные карты.......................................
§ 54. Назначение магнитных компасов. Курсы....................
§ 55. Принцип действия и устройство магнитных компасов. . .
» 56 Компас К-5................................................
§ 57. Компас АН-4.............................................
§ 58 Компас А 4..............................................
§ 59 Компас КИ-6.............................................
§ 60. Компас КИ-10 ... .......................• • •
§ 61. Дистанционный компас ПДК-45 (потенциометрический)
§ 62. Установка компасов на самолете..........................
§ 63 Ошибки показаний компасов . '...........................
§ 64. Осмотр и проверка компасов перед полетом...............
§ 65. Девиация магнитных компасов.............................
§ 66. Определение и уменьшение девиации.......................
67. Уменьшение девиации способом Эри ......................
§ 63. Определение и устранение установочной ошибки............
§ 69. Различные способы определения девиации...............
Пилотажно-навигационные приборы гироскопической группы . ...
§ 70. Гироскоп и его сзойства.................................
§ 71. Указатель поворота и скольжения (УП)....................
§ 72. Авиагоризонт (АГ)................................. . . .
§ 73. Авиагоризонт АГП — пикирующий.........................
Гироскопические компасы......................................... :
§ 74. Гирополуксмпас (ГПК) . ...............
§ 75. Гиромагнитный компас (ГМК-2) .... •
§ 76. Трубка Вентуои............... ..........................
Контрольно-моторные приборы........................................
§ 77. Указатели оборотов (тахометры) ................... . .
§ 78. Электрический тахометр ТЭ............................
§ 79. Манометры масла и бензина .............................
§ 80. Аэротермометры (дистанционные)..........................
§ 81. Трехстрелочный индикатор................................
§ 82. Газоанализатор (альфометр)..............................
§ 83. Электрические термометры сопротивления...............;
§ 84. Термоэлектрический «термометр цилиндра ..............
§ 85. Бензиномеры . : .......................
§ 86. Автопилот . ...........................................
§ 87. Приборные доски самолетов.............................-
Штурманское снаряжение • •
48 48 50 52 54
60 6» 62 69 69 70
73 75
76 79 80 83 86 85 90 91 94 96 98
101 ЮЗ 1(5 106 106 103 109 112 ИЗ 1'9 124 126 12г 129 129 132 137 140 141 141 142 144 145 145 14) 150 152 154 156 1.э7 159 160 165 172 175
§ 88. Счетная аэронавигационная линейка НЛ-7 (НЛ-8) ... 175
§ 89. Ветрочет АНО..............................................177
§ 90. Авиационные визиры........................................181
§ 91. Летно-полевая сумка и картодержатель целлулоидный (планшет) ................................................. • 187
§ 92. Переговорные приборы..................................., 188
Глава IV. Счисление времени . ............190
§ 93. Вращение земли, как мера времени . . -............................ 190
§ 94. Обращение земли вокруг солнца...................................... К®
§ 95. Равноденствия................................................. - *91
§ 95. Солннестэлния................................... . . . 192
§ 97. Тропический год............-.................... . : . 1“2
§ 98. Времена года..................................................... 192
§ 99. Явление зари и сумерек-................................... 1S2
€ 100. Воемя .. •...................... .... 194
§ 101. Перевод долготы из градусов в часы и обратно . . . ; 198
§ 102. Соотношение между гринвичским, поясным и местным временем 200
§ 103. Таблицы восхода и захода солнца, наступления темноты и рассвета и продолжительности сумерек, дня и ночи : . . 201
§ 104. График восхода и захода солнца-, наступления темноты . . и рассвета .................................................... 205
§ 105. График дня и ночи.................................................206
§ 105 Авиационные часы ............................................ . 207
§ 107 Точность хода часов и служба времени.............................. 209
Глава V. Определение аэронавигационных элементов полета .... 212
§ 108. Виды высот......................................................: 212
§ 109. Определение высоты полета ..... :.................................213
§ ПО Определение воздушной скорости............................... .... 217
§ 111. Определение курса в полете по компасу.............................219
§ 112 Перевод курсэв .................................. . . 220
§ 113. «Метеорологический» и «аэронавигацио'ный» ветер . . 221
§ 114. Влияние ветра на полет самолета. Навигационный треугольник скоростей ................................................. 222
§ 115. Построение и решение навигационного треугольника скоростей 229
§ 116. Определение ветра в полете.......................................229
§ 117. Определение ветрочетом курса следования, путевой скорости и угла сноса по заданным путевому углу, воздушной скорости и известному ветру............................... .... 23.3
§ 118. Определение наивыгоднейшей высоты полета ..... 234
Гл(ава VI Решение тактических задач .... ...........236
§ 119. Определение запаса горючего на полет и дальности полета 236
§ 120. Определение радиуса полета ... ................. 226
§ 121. Определение фактического П'тевого угла в полете (ФПУ) . 237
§ 122. Определение путевой скорости, расстояния и времени полета 238
§ 123. Расчет времени нагона при опоздании в пути . . : . . 239
§ 124 Расчет времени прибытия в назначенный срок .... 240
§ 125. Погашение избытка времени на петле................................241
§ 126. Перевод скоростей, выраженных в метрах в секунду, в скорости, выраженные в километрах в час, и обратно 243
§ 127. Определение времени догона впереди идущего самолета 243
Г лава VII. Способы самолетовождения .... .... 244
§ 198. Основные способы самолетовождения, .применяемые в ГВФ 244
§ 129 Визуальное самолетовождение (визуальная ориентировка) . 245
§ 130. Самолетовождение по компасу..................................247
§ 131. Самолетовождение по радиосредствам (радионавигация) . 248
§ 132 Ориентировка по небесным светилам (астронавигация) 248
€ 133. Безопасность самолетовождения ... 243
Гл ава VIII..Аэронавигационная подготовка к полету . . , . . 251
§ 134. Сущность аэронавигационной подготовки . . ... ‘.51
§ 135. Подбор карт на полет * 252
<i 136. Выбор н прокладка маршрута полета.................... ’ 253
§ 137. Изучение маршрута полета . 255
§ 138. Расчет полета....................................... ... 253
§ 139. Составление навигационного плана полета..................261
§ 140. Подготовка пилотажно-навигационного оборудования и штурманского снаряжения к помету............................. ... 262
§ 141. Обеспечение полета средствами ЗОС....................... 263
§ 142. Подготовка перед взлетом ............................. . 263
Глава IX. Выполнение полета...................................; . 264
§ 143. Основной порядок самолетовождения по маршруту : : : 261
§ 144 Ориентировка ........................................... 265
§ 145. Нахождение курса следования в полете (вывод самолета
на заданный пуп).............................: . . . . 267
§ 146. Сохранение режима полета............... .... 270
§ 147. Ведение контроля пути.................... ... 270
§ 148. Исправление курса следования в полете . . ... 272
§ 149. Исправление курса следования по известному боковому
у-клоненню от линии пути.................................272
§ 150. Работа с картой и планом полета в воздухе ... • 275
§ 151. Потеря ориентировки . . ............................. 276
§ 152. Восстановление ориентировки................... . . 278
§ 153. Штурманский глазомер и приближенные расчеты в уме . 283
Глава X. Визуальная пеленгация........................................286
§ 154. Определение местнахождения самолета................... 236
Глава XI. Особенности самолетовождения в различных условиях . . 293
§ 155. Полет над местностью, бедной ориентирами............................................ 293
§ 156. Полет игл местностью, изобилующей мелкими или похожими ориентирами («пестрой» местностью) .... . 294
§ 157. Полет над водной поверхностью ........ 295
§ 158. Полет в горах.................................... .... 295
§ 159. Полет на малой и большой высотах................... 295
§ 160. Полет за облаками и над туманом ... 298
§ 161. Ноч ой полет ........... 299
§ 162. Полет по приборам («слепой полет») .... 300
§ 163 Эшелонирование полетов самолетов rtc высотам . . . 301
§ 164. Пробивание облаков и тумянов. 305
§ 165. Особенности вождения однЛтесгного самолета....... 318
Глава XII. Радионавигация . ......................................
Общие сведения...............................................::::::
§ 166. Средства рамюнавигац'чи..............................
§ 167. Электромагнитные волны и их распространение .........
Самолетовождение ло радиомаякам......................................
§ 168. Радиомаяки..................................: : : :
§ 169. Полет ио зонным радиомаякам..........................
§ 170. Полет |до радиомаякам, работающим та пеленг Самолетовождение по радиополукомпасу...............................
§ 171. Назначение и устройство РПК-2..........................
§ 172. Принцип работы РПК-2........................... : :
§ 173. Включение и настройка РПК-2 ...................... •
§ 174. Радиодевнация................................... : :
§ 175. Расчет радиопеленгов и прокладка их на карте
§ 176. Наземные радиостанции............. ................
§ 177. Полет от радиостанции 'По РПК-2......................
§ 178. Полет «а оадтоспан'цию по РПК-2......................
310 310 МО 311 315 315 319 324
327 3x7 330 334 435 341 344
345 347
§ 179. Контроль агути по боковой радиостанции................... 854
§ 180. Восстановление ориентировки ............................. 856
* * § 181. Радиополукомпас-отметчик РПКО-ЮМ . . .... 359
§ 182. Полет ни. радиостанцию по РПКО-ЮМ ... ... Зб2
Самолетовождение по радиокомпасу 8CR-: оя G (Бевдикс) .... 364
§ 183. Назначение и устройство радиокомпаса ....... ; 64
§ 184. Принцип работы радиокомпаса . . ... 869
§ 185. Включение и настройка радиокомпаса ...................... 374
§ 186. Расчет радиопеленгов.................................... 375
§ 187. Полет от радиостанции по радиокомпасу.................... 376
§ 188. Полет на радиостанцию по радиокомпасу.................... 378
Самолетовождение по наземным радиопеленгаторам ........ ?81
§ 189. Наземные радиопеленгаторы................................ 381
§ 190. Основные методы полета по наземным радиопеленгаторам 3'2
§ 191. Курсовая пеленгация ...... 382
§ 192 Полет от пеленгатора .... .... . 384
§ 193. Полет на пеленгатор ..................................3 5
§ 194. Вывод самолета на аэродром............................... 389
§ 195. Контроль пути с помощью наземных радиопеленгаторов . 389
§ 196. Восстановление ориентировки по наземным радиопеленгаторам 391
§ 197. Пеленгация по засечкам ... 393
Самолетовождение с помощью радио локационных станций ..... 394
§ 198 Назначение и устройство радиолокационных станций 394
§ 199. Принцип работы радиолокационных станций . . .... 395
§ 200. Гиперболическая система самолетовождения . . . . 398
§ 201. Прнводная система самолетовождения....................... 401
§ 202 Радиовысотомеры.......................................... 4(3
§ 203. Панорамная система самолетовождения . . ... 405
Радионавигационная подготовка к полету . .............. 406
§ 204. Выбор радионавигационных средств......................... 4С6
§ 205 Составление радионавигационного плана.................... 408
§ 206 Радионавигационная подготовка карт....................... 408
Глава XIII. Астрономическая ориентировка ............................. 410
§ 207. Общие сведения........................................... 410
§ 208. Основные астрономические понятия и определения . 411
§ 209. Направление на светила . 413
§ 210 Координаты светила....................................... 414
§ 211. Сущность астро омической ориентировки. Сомнерова линия -ч 16
§ 212. Расчет элементов сомнерогсй линии и прокладка ее на карте 418
§ 213. Исправления измерений авиасекстантом высоты светила 42b
§ 214. Прокладка сомнеровой линии на карте . . < . 42/
§ 215. Авиасексгант АС и работа с ним ... . . . 428
§ 216. Бортозая карта звездного не5а..................... . 4 5
§ 217. Звездное небо .... ......................... 439
§ 218 «Авиационный астрономический ежегодник».................. 441
§ 219. Таблицы высот и азимутов солнца, луны, планет и звезд (ТВА) . . . . . . ................. 441
§ 220. Ведение астрономической ориентировки в полете . . . . 413
§ 221. Определение широты места по Полярной Звезде . • 448
§ 222. Применение астрономической ориентировки в полете . . 449
§ 223. Упрощенный способ расчета элементов сомнеровой линии
в полете................................................. 4'0
Глава XIV Розыгрыш полета ........................................., 456
§ 224. Задание на полет......................................... 455
§ 225. Выполнение задания..................................... 455
§ 226. Работа экипажа в полете . . 456
Литература, использованная при осставлетппГ[ учебника................... 459