







































































































































































































































Текст
МЕТОДЫ ОПТИМИЗАЦИИ
В СТАТИСТИЧЕСКИХ
ЗАДАЧАХ УПРАВЛЕНИЯ
Москва «МАШИНОСТРОЕНИЕ» 197 4
M4i
УДК 62.505
W**
I Щ
Методы оптимизации в статистических задачах управления.
Батков А. М. и др. М., «Машиностроение», 1974, 240 с.
Книга посвящена вопросам проектирования систем
автоматического управления в условиях случайных воздействий. Изложены
методы расчета показателей точности нелинейных стохастических
систем управления. Рассмотрены также задачи анализа
специального класса автоматических систем, описываемых линейными
дифференциальными уравнениями со случайными коэффициентами.
В книге представлены современные методы параметрической
оптимизации, позволяющие выбрать оптимальные значения
параметров системы управления при заданной структуре. Приведены
основные методы расчета оптимального управления стохастическим
объектом: динамическое программирование и стохастический
принцип максимума.
Книга рассчитана на инженеров, работающих в области
проектирования систем автоматического управления, научных
работников, преподавателей и аспирантов.
Табл. 2. Ил. 49. Список лит. 157 назв.
Автор,ы книги:
А. М. Батков, д-р техн. наук (п. 1—5 гл. V); В. М. Александров, канд. техн.
наук (п. 5 гл. I, гл. III, приложение); А. О. Мишулина, канд. техн. наук
(п. 4 гл. I, гл. II, п. 1—-6 гл. IV, п. 6 гл. V); А. Н. Староверов, канд. техн. наук
(п. 1—3 гл. 1); Б, Л. Щукин, канд. техн. наук (п. 7, 8 гл. IV).
Рецензент д-р техн. наук проф. Н*-#.Андреев -~™~?гГ
30501 74 ^- *
М 038(01)-74 270-74 ^ Ц £^ -$/) ~"V4
© Издательство «Машиностроение», 1974
, ПРЕДИСЛОВИЕ
Проблема проектирования системы управления в значительной степени
сводится к проблеме оптимизации. Эта проблема охватывает широкий круг задач,
некоторые из которых, как, например, принципы формирования критерия
оптимальности системы или выбора совокупности параметров, подлежащих настройке,
решаются в настоящее время на неформальном уровне. Проблема оптимизации
включает в себя также^расчет заданных показателей функционирования системы
в условиях случайных возмущений, выбор оптимальных значений параметров
системы, определение оптимального управления динамическими объектами, для
которых разработаны аналитические методы.
Современный этап развития теории оптимизации систем, автоматического
управления характеризуется совершенствованием и широким внедрением
аналитических й численных методов расчета систем. Дальнейшее развитие получили
теория аналитического конструирования регуляторов, динамическое
программирование, стохастический принцип максимума. Все более широкое применение
находят методы оптимизации, основанные на использовании возможностей
цифровых вычислительных машин.
Предлагаемая читателю работа содержит описание ряда методов решения
статистических задач оптимизации, развитых в последние годы и нашедших
применение в инженерной практике. Авторы не ставили перед собой задачи
обобщения и описания всех методов оптимизации в статистических задачах и
основное внимание обргатили на наименее освещенные в монографиях приемы и
методы расчета оптимальных систем управления.
В теории оптимизации могут быть выделены два класса задач:
задачи параметрической оптимизации, в которых производится выбор
конечного числа параметров в системе управления при заданной ее структуре;
задачи вариационного исчисления, в которых производится выбор конечного
числа операторов или функций.
Оба класса задач характеризуются определенным видом функции или
функционала, подлежащего оптимизации. Для вычисления функционала необходимо
решить задачу анализа системы управления. Щйрокий класс систем управления
описывается системой обыкновенных дифференциальных уравнений конечного
порядка. Этот класс систем управления и является предметом исследования в
настоящей книге. Решение задачи анализа детерминированных сиетем управления
не вызывает принципиальных затруднений и может быть сведено к численному
решению системы обыкновенных диф<ференциальных уравнений на
вычислительной машине. Проведение анализа стохастических систем управления представляет
сложную задачу. Строгое решение этой задачи получено только для линейных
систем при гауссовых воздействиях. Если система содержит нелинейные
безынерционные преобразования, то в общем случае возможен лишь приближенный
расчет статистических характеристик фазовых координат этой системы.
Изложенный в работе приближенный метод, эквивалентный методу статистической
линеаризации, позволяет составить конечную систему обыкновенных
дифференциальных уравнений относительно моментных функций выходных координат
"анализируемой системы. Кроме того, эффективным является подход, основанный
1* 3
на теории процессов Маркова и приближенном решении уравнения А. Н.
Колмогорова.
Из класса нелинейных систем управления можно выделить класс систем,
которые содержат мультипликативные помехи. К этому классу относятся, 'в
частности, системы, описываемые линейными дифференциальными уравнениями
со случайными коэффициентами. Для систем управления данного класса
разработаны специальные методы анализа, позволяющие рассчитать статистические
характеристики выходных координат при различных статистических свойствах
случайных коэффициентов.
Указанные методы анализа стохастических систем управления позволяют
рассчитать статистические характеристики выходных координат путем
однократного решения на вычислительной машине конечной системы обыкновенных
дифференциальных уравнений и тем самым существенно сократить время
анализа.
В инженерной практике широко применяется также метод статистических
испытаний (метод Монте-Карло), требующий проведения многократного
моделирования исследуемой системы управления на вычислительной машине. Ряд
приемов, изложенных в работе, позволяет более эффективно организовать процедуру
статистических испытаний на вычислительной машине.
Изложенные методы анализа систем управления используются в задачах
параметрической оптимизации. Методы параметрической оптимизации систем
управления могут быть разделены на три группы:
методы безусловной минимизации;
методы оптимизации при наличии ограничений на переменные (задачи
нелинейного программирования);
методы оптимизации в статистическом случае (стохастическая
аппроксимация).
Если структура стохастической системы управления объектном не задана,
то оптимизация системы производится методами, основанными на достижениях
современного вариационного исчисления. Широкое применение нашли метод
динамического программирования и стохастический принцип максимума.
В работе рассматриваются не только теоретические положения, но и вопросы
практического применения методов.
Авторы надеются, что книга окажет помощь инженерам в деле внедрения
в практику современных методов оптимизации систем управления.
ГЛАВА I
МЕТОДЫ ВЫЧИСЛЕНИЯ ХАРАКТЕРИСТИК
ТОЧНОСТИ НЕЛИНЕЙНЫХ ДИНАМИЧЕСКИХ СИСТЕМ
1. Применение метода статистической линеаризации
в нелинейных статистических задачах
Современные автоматические системы, как правило, работают
в условиях помех. Поэтому для анализа точности работы таких
систем широко используются теоретико-вероятностные и
статистические методы исследования. Задача анализа точности работы
динамической системы состоит в определении статистических
характеристик выходных координат системы по известным
характеристикам входного сигнала. При анализе точности сложных
динамических систем иногда достаточно определить первые два
момента выходных координат системы.
Практически все современные системы управления являются
нелинейными, поэтому наибольший интерес представляют методы
исследования именно таких систем. Существуют точные и
приближенные методы исследования нелинейных систем. Однако задача
точного исследования нелинейной системы чрезвычайно сложна,
и применение точных методов ограничено простейшими системами.
Поэтому для исследования точности нелинейных систем широкое
применение в инженерной практике находят приближенные
методы, из которых наибольшее распространение получил метод
статистической линеаризации [39].
Сущность метода статистической линеаризации заключается
в том, что нелинейная зависимость между случайными функциями
*Ю = ф {*(<)} (1)
приближенно заменяется линейной
**(0«Фо + *1*Ю. (2)
где ф0—математическое ожидание нелинейной функции (1);
ki — эквивалентный коэффициент усиления нелинейного эле-
о
мента по случайной составляющей процесса на входе; х (t) —
случайная составляющая процесса на входе нелинейного элемента.
Существуют различные способы.определения, ф0 и &х. Первый
способ основан на том, что эти величины определяются из условия
равенства математических ожиданий и дисперсий нелинейной
5
функции и приближенной линейной [40]. При таком подходе
имеем:
Фв = ль ==М №(*)]; .ЛР>=:±*
где (т2 и ох — среднеквадратические отклонения случайных
функций z (t) и х (t) соответственно.
Второй способ определения <р0 и kt основан на том, что
приближенная зависимость между случайными функциями
определяется из условия минимума среднего кавдрата отклонения
нелинейной функции и приближенной линейной [40], т. е.
M[{<p(x) — q>0-ki2)Ox(t)}2]==min. (3)
Выражение (3) достигает минимума, если
А|2) = К (4)
"дне J
где dzx — корреляционный момент случайных функций z (f) и
* (f)\ dxx — дисперсия случайной функции х (/).
Числовые значения ф0 и kx для определенного вида нелинейной
функции (1) можно вычислить, если известен закон
распределения х (/). При анализе точности сложных нелинейных систем
с использованием метода статистически линеаризации
предполагают нормальным закон распределения процесса на входе
нелинейного элемента. Методы анализа стационарных нелинейных
систем хорошо разработаны и описаны в литературе [39, 74, 82].
Рассмотрим применение метода статистической линеаризации
к анализу точности нестационарных систем.
Пусть нестационарная система содержит в своей структуре
безынерционный нелинейный элемент. Широкий класс таких
нелинейных систем с использованием метода формирующих фильтров
[10, 62] можно описать дифференциальным управлением в
векторной форме:
§- = A(t) х (t) + //V<P (**, t) + Bx (t) r(t) + B (t) I (/);
*(0) = *o, (5)
где r (t) — неслучайное воздействие! I (t) — распределенный
нормально белый шум с интесивностью Q; x (t) — вектор фазовых
координат системы; х0—нормально распределенный вектор
начальных условий, некоррелированный с возмущающим
воздействием g (t); A (t) — квадратная матрица переменных
коэффициентов размерности In, п]; В (t) и Вг (t) — прямоугольные
матрицы переменных коэффициентов системы размерности [п> 1 ];
Ф (xv, t) — характеристика безынерционного нелинейного
элемента; liv — вектор-столбец размерности п с компонентами
(1. *' = v,
//v — 10, i + v.
Определим приближенно математическое ожидание и
дисперсионную матрицу вектора х (t) нелинейной системы:
Dx(t) = M[x(t)°x*(t)]9 (6)
о о
где х (t) — центрированный вектор-столбец; я* (/) —
транспонированный вектор или вектор-строка.
Усредняя уравнение (5), получим дифференциальное уравнение
относительно математического ожидания вектора х (/):
^ = A (t) тх (/) + l£vM [<p (*v, /)] + В± (t) r (0;
тх(0) = тХо, (7)
где тх = М [х (/)] — математическбе ожидание вектора х (f).
Вычитая почленно из уравнения (5) 'уравнение (7), получим
дифференциальное уравнение относительно центрированной
составляющей вектору выходных координат:
о
^^A(t)x(t) + lJ(xVft) + B(tn(ty,
°х(0) = °Хо. Ч (8)
Дифференцируя левую и правую части равенства (6) по / и
используя уравнение (8), получим дифференциальное уравнение
относительно дисперсионной матрицы вектора фазовых кординат
исследуемой системы:
*g- = A(f)Dx{f) + Dx(f)A*(f) +
+ М [ltJp (ху, t)x (*)] +М[х(t) ф (xv, t) Q +
+ В (t) M Ц (t) > (О] + M [x it) | (t)]B* (t); -
Dx(0) = M.lxo0xo]. (9)
Для вычисления математических ожиданий двух последних
слагаемых выражения (9) проинтегрируем уравнение (8):
о о ' ' ' ' ' '
*(0 = *о + lA(n)x(t)dx + llv J »р(*„, t)dx+ \B(x)t(x)dx. (10)
Тогда, принимая во внимание некоррелированность вектора
начальных условий с возмущающим воздействием и используя
выражение (10), получим
t
M[x(t)l(t)]= JA(x)M[x(T)l(t)]dx +
t t
+ //v J M[y(xV9 %)l{t)\dx+ JB(x)M[l(x)l(t)]dx. (11)
о о
Выполняя интегрирование выражения (11) с использованием
свойств «белого» шума и умножая обе части этого равенства справа
на В* (/), имеем
М [х(t) I (/)] В* (t) = -i~ В (t) QS* (0. (12)
Транспортированием равенства (12) получим
В (t) М Ц (0 > (0] = ±В (t) Q5* (0. (13)
В процессе решения уравнений (7) и (9) необходимо вычислять
средние значения
Ml<p(xv, 01 = Фо; (14)
//v М [ф (*v, t) > (0J; М [х (t) i (xv, t)] 1%. (15)
Среднее значение (14) можно вычислить, если известен
одномерный закон распределения xv (t). Для вычисления средних
значений (15) необходимо располагать совместным законам
распределения каждой выходной координаты х{ (t) с _xv (t).
Если предположить нормальными совместные распределения
xv (t) и xt (t) (i =1, 2, . . ., ri), то можно считать, что совместные
плотности распределения р2 (t, xv, xt) (i = 1, 2, . . ., n)
известны для каждого момента времени tf так как в процессе
решения уравнений (7) и (9) определяются все необходимые параметры,
от которых зависят плотности распределения.
Вычислим средние значения (15), предполагая нормальными
совместные распределения xv (t) со всеми xt (t) и используя
выражение совместной плотности распределения через ортогональные
полиномы Чебышева-Эрмита [50, 741:
*<«.«. ч -кд «р {--J- K^f)'+('^ Л} х
х|]тгАя«(5Ч;ь)й-(й^)- (16>
/=1, 2,.,.,я
8
где р^ — коэффициент корреляции случайных процессов xt (t)
их {t)\ Hs (A,) — ортогональные полиномы Че^бышева—Эрмита,
определяемые соотношением
Введя новые переменные
*/ —mi \ ХУ — ^У \
и используя формулу (16), получим
00
М [xi (t) ф (xVi t)] = S bisa8p*V9
s=0
i = 1, 2, . . ., n,
где as и 6/s — коэффициенты, которые определяются
выражениями [83, 74]
(17)
]/"2яЛ
(Vv + ™v)#s(4)e 2A,;
oo
CO
f --i
■„ = -* J Х,Я.(Я,)е 2 dX„
V2ns\ _
i = 1, 2,
., n.
(18)
Для вычисления коэффициентов bis воспользуемся свойством
я*
ортогональности полиномов #s (X) с весом е 2 на прямой
—оо <^Х <2оо:
J Я.(*)Я.
.-■т-л-//2"*'. * = s;
*(А,)е 2 <ft =
0.
&=f s.
(19)
Принимая во внимание, что %t = Ht (%t), и используя
свойство (19), получим
\at, s = 1, i = 1, 2, . . ., п.
b's=W s+l.
(20)
С учетом формул (18) и (20) выражение (17) принимает вид
М Ixi (t) ф (jcv, 01 = or/aip/v = k[2)dtv, (21)
где div — корреляционный момент связи xi (t) и xv (t)\ fe[2) — эк-
вийалентный коэффициент усиления нелинейного элемента по
случайной составляющей процесса на входе, вычисленный вторым
способом по формуле (4).
Принимая во внимание выражения (12) и (13) и используя
формулу (21) при совместном нормальном распределении xt (t) и
xv (t), получим линеаризованное дифференциальное уравнение
относительно дисперсионной матрицы вектора
. " " ^ = А (0 Dx(t) + Dx (t) Л* (*) +
+ k[2)llvt%Dx (t) + k[2)Dx (t) Wjv + В (t) QBl (t),
Dx (0) = M [xoxl], (22)
так как
hvM [ф (xv, t) x (t)] = k[2)liv M lxv (t) x (t)] =
M [x (t) ф (*v, t)] 1% = k[2) M [x (t) xv (t) ] 1% =
= k[2)Dj£vi;v.
Дифференциальное уравнение (22) имеет порядок п2, но только
2 уравнений являются линейно независимыми, так как
При нормальном или близком к нормальному совместном
законе распределения xv (t) со всеми xt \t) математическое
ожидание фо и коэффициент статистической линеаризации k{2),
входящие в уравнения (7) и (22), являются функциями
математического ожидания и дисперсии процесса на входе нелинейного
элемента
Фо = Фо (wv dvv); |
*P-tfW«w,i (23)
которые для различных типов нелинейных функций можно
определить заранее [39].
Уравнения (7) и (22) необходимо решать совместно, так как
для определения выражений (23) в каждый момент времени
необходимо иметь соответствующие значения тх и dvv. Таким
образом, задача сводится к решению уравнений (7) и (22), связанных
зависимостями (23), которые можно проинтегрировать только
с помощью вычислительных машин. При этом однократным
решением этих уравнений определяются математическое ожидание и
дисперсионная матрица вектора фазовых координат.
В общем случае решение уравнений (7) и (22) может быть
выполнено только на цифровых вычислительных машинах (ЦВМ),
что обусловлено трудностями реализации на аналоговых вычисли-
10
тельйых машийах нелинейных зависимостей (23), (так как при этом
требуются нелинейные блоки двух переменных) и высоким
порядком решаемой системы уравнений. В частном случае, когда
порядок исходной системы невысок и математическое ожидание
процесса на входе нелинейного элемента равно нулю, эти
уравнения можно решить на аналоговых вычислительных машинах, так
как реализация зависимостей (23) в этом случае осуществляется
на обычных нелинейных блоках.
При численном интегрировании уравнений (7), (22) на ЦВМ
значения фо и k[2) вычисляются по определяемым на каждом шаге
интегрирования значениям тх и dvv.
Заметим, что векторная форма не только позволяет сделать
запись уравнений более компактной, но и упрощает алгоритм
решения задачи на ЦВМ, так как правая часть уравнения (22) в
процессе его решения определяется ца каждом шаге интегрирования
с использованием стандартных программ сложения и умножения
матриц.
Изложенный выше метод можно применять для анализа
точности систем с постоянными параметрами. При исследовании
точности установившихся режимов стационарных систем
дифференциальные уравнения (7) и (22) сводятся к алгебраическим. Если
в системе (5) матрицы Л, fi, Bx и неслучайное воздействие
постоянны, а система устойчива, то. в установившемся режиме тх и
Dx — постоянны и дифференциальные уравнения (7) и (22)
превращаются в алгебраические:' —
Атх + liv(p0 (тх , dvv) + Вгг = 0;
"V'
ADX + DXA* + M2) (mv <*w) /jv&D* +
+ M2) («. , dvv)DJ(vl% + QBB\
(24)
Система уравнений (24) может быть решена методом
последовательных приближений на ЦВМ.
Рассмотрим примеры составления уравнений, определяющих
математические ожидания и элементы дисперсионной матрицы
выходных координат систем управления.
Пример 1. Нелинейная система, изображенная на-рис. 1,а, в момент
времени t — 0 возмущается распределенным нормально [стационарным случайным
процессом z (t) и неслучайным воздействием г (t). Предполагается, что среднее
значение z (t) равно нулю, а спектральная плотность мощности имеет вид
* . s*(№>=^' (25>
где dz — дисперсия процесса г (t).
Построим систему дифференциальных уравнений для приближенного
определения математического ожидания и дисперсии процесса на выходе системы
в переходном режиме.
Используя метод формирующих фильтров, сведем исследуемую систему к
эквивалентной, которая в момент времени t = 0 возмущается стационарным белым
11
шумом £ (/) с интенсивностью Q = dz. Передаточная функция формирующего
фильтра W2 (p) при этих условиях на основании формулы (25) имеет вид
Г,(р).
'Ttf+l'
(26)
где
'.Ч. •>-(-§■)'"
С учетом принятых на рис. 1 б, обозначений и передаточной функции (26)
эквивалентную систему можно описать следующими уравнениями:
Лу 1 О
•^-2 = ^ [-*2 (о + *а| (01; ч (0) = х02,
(27)
где ф (xt) — характеристика безынерционного нелинейного элемента; х02 —
центрированная случайная величина с дисперсией, равной d2.
z(t)
ф-
r(t)
k<-)
JP + 1
x(t) B(t)
<P(x)
Tzp+I
r(t)
*г($Тх-)
T,p+i
9CX,)
a) 6)
Рис. 1. Структурные схемы нелинейной системы:
а — исходная; б — эквивалентная
Jf/ft)
Предполагая совместный закон распределения хг (t) и хг (t) близким к
нормальному и используя формулу (27), получим уравнения для определения
математического ожидания и дисперсии процесса на выходе исследуемой системы
в переходном режиме:
1
mi = j~ [—Щ (t) — ф0 (ml9 dn) + r(t)];
in = Y[ {- il +k™ (ть *n)] dn (0 + ^12 (0};
hu = ~ {к + ТГ t1 + ^2) К *n)]) rfi2 (0 + ^ 4и (0;
Qk\ 2
d22 = -Zv—-T~ d™ Wt ^22 (0) = dz.
I ~ * 9.
(28)
12
" Последнее уравнение системы (28) решается независимо от других и при
заданных начальных условиях имеет постоянное решение d22 = d2> что позволяет
упростить систему • уравнений (28), которая в окончательной форме имеет вид:
"*i = уг [—т1 (0 — ф0 (mb dn) + г (/)];
5ц = -^ {— [1 + М2) (^ь ^ii)] ^1 (0 + rfi2 (0};
Пример 2. Нелинейная стационарная система, приведенная на рис. 2,
возмущается стационарным белым шумом £ (t) с интенсивностью Q. Предполагается,
' что нелинейный элемент имеет нечетную характеристику.
Определим приближенно дисперсию
процесса на выходе системы в установившемся £/$ ^„ч^ Г
состоянии. l_iy+y_J
Исследуемая нелинейная система описы- ^ч-< I
вается дифференциальным уравнением
x(t) = -r-lUt)-x(t)-iMx)]. (29)
!(->
Тр+1
xft)
ЧМ
Так как среднее значение процесса на
входе равно нулю, а нелинейный элемент Рис. 2. Структурная схема ста-
имеет нечетную характеристику, то среднее ционарной нелинейной системы
значение процесса на выходе также равно '
нулю. Предполагая закон распределения х (t) близким к нормальному и
используя формулу (24), получим уравнение для приближенного определения
дисперсии процесса на выходе системы в установившемся состоянии:
Пусть характеристика нелинейного элемента
ф (я) = ах3 (t)
при нормальном распределении х (t) и среднем его значении, равном нулю, имеет
коэффициент &{2), выражаемый через дисперсию
k^ = Шх.
(31)
Подставляя выражение (31) в формулу (30), получим квадратное уравнение
относительно dx:
решая которое, определим значение дисперсии процесса на выходе в
установившемся состоянии:
-1 + |Л
6aQ
6a
13
2. Метод определения характеристик
многомерных нелинейных систем
Рассмотрим многомерную нелинейную систему, которая в
векторной форме описывается уравнением
§• = Ф (*, t) + В, (t) r(t)+B (t) I (0, x (0) = xo, (32)
где x (t) — вектор фазовых координат системы размерности п\
Ф (ху t) — векторная нелинейная функция размерности п\ \ (tY—
распределенный нормально векторный белый шум размерности т;
г (f) — векторное неслучайное воздействие размерности /; х0 —
распределенный нормально вектор начальных условий,
некоррелированный с возмущающим воздействием; Вг (t) —
прямоугольная матрица переменных коэффициентов размерности [я, /];
В (t) — прямоугольная матрица переменных коэффициентов
размерности [п, т].
Используя метод статистической линеаризации, определим
приближенно математическое ожидание вектора
mx(t) == М lx(t)] {33)
и матрицу корреляционных функций этого вектора
Кх (*ь *,) = М [*(*!> ** (*,)]. (34)
Рассмотрим статистическую линеаризацию векторных
нелинейных функций, которую будем использовать пры определении
характеристик нелинейной системы (32). Нелинейное
преобразование между векторными случайными функциями z (t) и х (t)
задано в форме
z (t) = Ф (х, 0, (35)
где z (t) — векторная случайная функция размерности п\ х (t) —
вектор случайных аргументов размерности п\ ф (х, t) — вектор
нелинейных функций. ] »
Аппроксимируем векторное нелинейное преобразование (35)
приближенной линейной зависимостью между случайными
векторами z (t) и х (t), которую представим в форме
*л W = Фо + Кг х (0, (36)
где ф0 — математическое ожидание нелинейной функции (35);
Кг — прямоугольная матрица эквивалентных коэффициентов
усиления нелинейного элемента по случайной составляющей вектора
х (t) размерности [п, п].
При аппроксимации нелинейной функции (35) линейной
функцией (36) будем исходить из минимума среднего квадрата откло-
. нения векторов z (t) и гл ^)» т- е- потребуем минимума выражения
Е = М 1\г (0 — Фо — КгХ (01* {* (0 — Фо~
— КгхЩ] = min. (37)
14
ж = — 2 [M[z (t)x* (t)] — KtMlx (t) x* (*)]} = 0
Значение (37) будет минимальным, если выполняются условия:
-i£ = o ™_ = о
где оператор -g— представляет вектор-столбец размерности п,
компонентами которого являются _-§г—» / = 1, 2, . . ., /г,
оператор -jH7- является прямоугольной матрицей размерности [л, п\
с элементами д^—, /, ] = 1, 2, . . ., п.
Дифференцируя выражение (37)-по <р0 и приравнивая
производную нулю, получим
Ц.=-2М[2(*)Г-ср0] = 0,
откуда имеем
фо = М [г (01 = М [<р (*, t)]. (38)
Выполняя дифференцирование выражения (37) по Кг и
приравнивая производную нулю, получим <
<г
или
KiDx = M [Ф(х, f)x* (01 (39)
где D*— дисперсионная матрица вектора х (f)> кот9рая
определяется выражением
Dx = M [x(t)x* (t)].
Из равенства (39) получаем выражение для матрицы
эквивалентных коэффициентов усиления нелинейной функции (35) по
случайной составляющей вектора х (t):
Ki = М [Ф (*, 0 > (t)]DJl. (40)
Выражения (38) и (40) для определенного вида нелинейной
функции можно вычислить, если известен закон распределения
вектора х (/). Особый практический интерес представляет
статистическая линеаризация нелинейной функции (35) при
нормальном распределении вектора х (0, плотность распределения
которого выражется формулой [59]
p{tt x)= (2</w/8 exp [--т^-т^в^^-тА • <41>
где | Dx | — определитель дисперсионной матрицы вектора х (t)\
тх—математическое ожидание вектора х (/); (х—тх) —
центрированный вектор х (/).
15
Используя выражение (41), математическое ожидание
векторной нелинейной функции можно определить по формуле
00
Фо = J ф (*> t) P {U x) dx, (42)
i —ОЭ
где интегрирование осуществляется по всем составляющим
вектора л:.
Матрицы эквивалентных коэффициентов усиления (40) можно
вычислить, используя плотность распределения (41), но если
математическое ожидание (38) уже определено, то его можно
использовать для вычисления матрицы эквивалентных
коэффициентов усиления. Дифференцируя равенство (42) по тх и используя
формальное тождество
о
dtp (x -f mx, t) __ ду(х, t)
дтх ~~ дх '
получим
£_*р£а]-/Й£Я„<Ь,)А. (43)
— 00
Интегрируя правую часть равенства по частям и используя
выражение плотности распределения (41), запишем
— 00
со
= j Ф (*» О (х — *Пх)* D~XP (К x)dx =
— 00
= M[^{Xit)°x{t)]D7\ (44)
Сравнивая выражения (40) с (43) и (44), получим формулы для
определения матрицы Кг-
«> = %;'. <45>
. К1 = М[ЩЬЛ]. (46)
Формула (45) оказывается очень удобной, так как элементы
матрицы /Ci определяются достаточно просто [4, 41]:
**/«тЭ^.и-1.2,...,я. (47)
Выражение (46) целесообразно использовать для вычисления
элементов матрицы К\ в случае, когда нелинейная функция (35)
является полиномом,
1§
Пусть, например, двумерная нелинейная функция имеет вид
z (t) = х\ (О Х2 (О, (48)
линейное приближение которой имеет форму
2Л (t) = Фо + &i*i (0 + k2x2 (t).
Предполагая нормальным совместное распределение хх {t)
и х2 (t)> математическое ожидание нелинейной функции (48)
получаем в форме
фо = М [г (/)] = тХхтХг + mXidXl + 2mXldXiX2, (49)
где mXl и тХг — математические ожидания хг (t) и х2 (/)
соответственно; dXl — дисперсия хг (/); dXtXz — корреляционный
момент хг (0 и х2 (/).
У Используя формулу (47) и выражение (49), имеем:
дтХг
Аналогичные выражения для kx и k2 получим, используя
формулу (46):
kl==M [&&] = 2тХ1тХг + 2dXlXl;
*-*W]-< + '*■
Определим теперь характеристики (33) и (34) нелинейной
системы (32). Усредняя уравнение (32) по совокупности, получим
дифференциальное уравнение относительно математического
ожидания вектора х (t):
^ = Фо (t) + Вг (t) г (0, тх (0) = /по, (50)
где т0 — математическое ожидание вектора начальных условий*
Вычитая почленно из уравнения (32) уравнение (50), получим.
4■ = ф (*, t) + B (t) I (0, х (0) = °х0. (51)
at
Дифференцируя левую и правую части равенства (34) по tx
и принимая во внимание формулу (51), получим дифференциальное
уравнение относительно матрицы корреляционных функций
вектора х (t):
дКх(£ h) = М [ф(х9 tx)>(t2)] + B(t)M [Ift)>(t2)]. (52)
A. M. Батков jrr— - — __ , 17
2::.:. Гор.л(сгэ
Так как автокорреляционные функции составляющих вектора
х (t) симметричны относительно плоскости, проходящей через
биссектрису координатного угла и ось ординат, а их взаимные
корреляционные функции обладают свойством
kxtxf (tb U) == kXjXi (t2, tx)t
то для определения матрицы корреляционных функций Кх (tlf t2)
достаточно решить уравнение (52) в области, где t^ t2. Но при
tx 5> t2 второе слагаемое в правой части уравнения (52) равно
нулю на основании свойств белого шума. Следовательно, при
^i 5> t2 имеет уравнение
дКх(£ h) = М [{(*, tx) > &)], (53)
tx>t2.
Для решения уравнения (53) необходимо вычислить среднее
значение правой части уравнения и задать значения
корреляционной матрицы вектора х (t) на границе области
интегрирования при tx =
Заграничные условия уравнения (53) определяются
дисперсионной матрицей вектора х (t):
Dx (t) = М lx (t) x*(t) ], Dx (0) = M [xjfo. (54)
Дифференцируя левую и правую части равенства (54) по t и
используя уравнение (51) и выражения (12) и (13), получим
дифференциальное уравнение:
//D о о о о
^■ = ЛПф(*, f)**(t>] + Mlx(f)<p*(x, t)] + B(t)QB*(t),
Dx(0) = Mlxjft9 (55)
где Q — квадратная матрица интенсивностей векторного балого
шума размерности [m, ml.
Для определения математических ожиданий в уравнениях (53)
и (55) предположим нормальным двумерный закон распределения
вектора х (t). Тогда, используя выражение (39), уравнение (55)
запишем в следующей форме:
-4g*. = Kl (щху Dx)Dx + DxK\ (щХ9 Dx) + B(t)QB*(t)y
Dx(0) = M[x0x;i (56)
где Кг — матрица эквивалентных коэффициентов усиления
векторного нелинейного элемента (35) по случайной составляющей
вектора на входе, которая при нормальном распределении
вектора х (t) зависит от вектора тх и дисперсионной матрицы Dx.
18
dt
г
Нетрудно показать, что при двумерном нормальном
распределении вектора х (t) матрицы-взаимных корреляционных функций
векторов на входе и выходе нелинейного элемента (35)
определяются равенствами:
Kzx(tu h) = М [ф(*, tx)j<* (t2)] =
K„(tl9 t2) = M [*(<!> ф*(*. *,)] -
= Kx(tl, fe)tfl(fc).
(57)
Для доказательства справедливости равенств (57) рассмотрим
векторную нелинейную функцию размерности п, которая имеет вид
Ф1 (") = Ф (X, h) + <р (х, t2),
(58)
где ф (х, tx) и ф (х, t2) — одинаковые векторные нелинейные
функции типа выражения (35); и — вектор размерности 2я,
компонентами которого являются векторы х $г) и х (t2):
1 vi;" (59)
и = \
x(t2)\\
При совместном нормальном распределении векторов х (/i)
и х (f£) плотность распределения вектора и имеет вид
Р^^И) = (2я)В[1/Сц|,/,ехрх
X [ 5~ (и — тиУ Кй1 (и — т„)] ,
(60)
где \Ки\ — определитель корреляционной матрицы вектора и;
IQ — обратная корреляционная матрица того же
вектора.,Заметим, что корреляционная матрица вектора и на оснований
формулы (59) выражается через матрицу корреляционных моментов
и корреляционных функций вектора х (t). В самом деле,
так как
к _ м г°°*, _ I вЛк) KxVi, Щ
Ки = М[ии ] = . I,
Ц Ajc (?1, 12) L>x\tl) I
Kx{t2,h) = Kx{h, t2).
(61)
Дифференцируя по ти математическое ожидание нелинейной
функции (58), выраженное через плотность распределения (60),
по аналогии с формулой (44) получим матрицу эквивалентных
2* 19
статистических коэффициентов усиления этой нелинейной
функции по случайной составляющей вектора и:
Кх = М[^{и)и]Ки\ (62)
которая на основании формулы (58) имеет вид
Кг^ХКЛЫКгШ (63)
где Кг (tt) и /Ci (t2) — матрицы эквивалентных статистических
коэффициентов усиления нелинейного элемента (35) по
случайным составляющим векторов х (tx) и х (t2) соответственно.
Запишем матричное равнество (62) в следующей форме:
КгКи = М [Ф (и) и*]. (64)
Предположим теперь, что нелинейная функция (58) зависит
только от вектора х (ti), тогда Ki (t2) в равенстве (63) равна нулю.
Принимая во внимание формулу (61) и используя выражение (64),
получим
l*i(*i)Ar('i) КгМКхУг, Ш =
= \\М[Ф (х9 h) > (tx)] M [Ф (*, tx)> (t2)]\\. (65)
Но при нормальном распределении вектора х (/х)
следовательно, матричное равенство (65) выполняется, если
* 1 (h) Kx (tu t2) = М [Ф (х, h) х* (*,)],
что доказывает справедливость первого равенства формулы (57).
Транспонируя равенство (64) и предполагая, что нелинейная
функция (58) зависит только от вектора х (t2), получим
lKx(tu fe)tfl(fe)
I Dx{t2)Kl(t2)
На основании транспонированного равенства (39) матричное
равенство (66) выполняется, если
Кх (tu *2) К\ (t2) = М [х (tt) Ф* (х, *,)],
что доказывает справедливость второго равенства формулы (57).
Принимая во внимание выражение (57), уравнение (53)
запишем в виде
дКх1£ h) = KAQКх(/lf h), ь>и. (61)
' В отличие от линейных систем, для которых математическое
ожидание и дисперсионная матрица вектора фазовых координат
определяются из независимых уравнений, уравнения (50) и (56)
20
M[x(ti)(p (x, fe)
M[x(t2) <р*(х, t2)
(66)
при нормальном распределении вектора х (t) оказываются
связанными функциональными зависимостями
Фо = Фо (тХ9 Dx)y Кх = /Ci (mx, Dx), (68)
вместе с которыми образуют единую систему уравнений порядка
п + п(п+ 1)/2.
Совместное интегрирование уравнений (50) и (56) с
использованием зависимостей (68) может быть выполнено только с помощью
ЦВМ. Причем, однократным решением этой системы определяются
математическое ожидание и дисперсионная матрица вектора
фазовых координат систем (32). Помимо этого, в процессе
решения этих уравнений определяется матрица эквивалентных
коэффициентов усиления векторного нелинейного элемента /Ci, которая
вместе с матрицей Dx может быть исползована для решения
дифференциального уравнения (67): При этом однократным решением
дифференциального уравнения (67) определяется сечение
корреляционной матрицы вектора х (t) как функция tx при
фиксированном значении t2. Общее число решений уравнения (67) для
определения всей поверхности корреляционной матрицы зависит
от того, насколько быстро она изменяется с ростом аргумента t2.
Если же исследуемая система стационарна и устойчива, то
для установившегося состояния уравнение (67) превращается
в обыкновенное дифференциальное уравнение относительно
корреляционной матрицы вектора фазовых координат
-^- = /Ci/Ut), t>0, (69)
которое решается при начальных условиях, определяемых
системой алгебраических уравнений:
Фо (тх> £>х) + Вхг = 0;
Кг {тХу Dx) Dx + DXK\ (mXf Dx) + BQS*=0;
Фо (mX9 Dx) = M [<p (*)];
Ki fax, Dx) = -g£ Фо fax, Dx).
(70)
Решение системы уравнений (70) может быть выполнено на ЦВМ
методом последовательных приближений. В процессе решения
этой системы уравнений определяются Кг и Dx, которые
используются для решения уравнения (69). г „__
Рассмотрим пример составления дифференциальных уравнений
для определения элементов матрицы корреляционных функций
выходных координат системы.
Пример. Нелинейная система, изображенная на рис. 3, возмущается в
момент времени t = 0 стационарным белым шумом |(/) с интенсивностью Q,
21
,равной единице, и неслучайным воздействием г (t). Нелинейная система
описывается дифференциальными уравнениями
■^—i-fe(i)-*,(0].
(71)
где ф (*1э д:2) — двумерная нелинейная функция выходных координат системы,
имеющая вид:
<Р (х19 х2) = хх (t) х2 (t) + kx2 (t). (72)
Предполагая совместный двумерный закон распределения хг (t) и х2 (t)
близким к нормальному, построим систему уравнений для определения элементов
матрицы корреляционных функций выходных координат системы (71) в
переходном режиме.
Принимая во внимание формулу (67) и используя выражения (71) и (72)
прихдвумерном нормальном векторе х (/), получим уравнения относительно эле-
щ)
1
r(ty
1
1 >
г
1
Т,р+1
1 *i(*l\
'
(D(Xt X~\
У\л1
/
Т2р + 1
h(t)
Рис. 3. Структурная схема
нелинейной системы,
содержащей двумерный
нелинейный элемент
ментов матрицы корреляционных функций выходных координат системы в об-^
ласти, где ^> t2:
— y~ [£+"*! ('i)J "22 ('i> t2);
^ — у «11 \ll> l2) ^T-«21 1*1» Г2;»
d&22^1> *2) __ 1 fc // /\ _!_/% // /V
g/ ~y"«12lrl» l2) — ^r-K22{rlf I2),
kij(t, t) = di;(t), /,/=1, 2,
где mx (J) n m2 (0 — математические ожидания выходных координат системы,
которые определяются решением системы дифференциальных уравнений
dmt
dt
= 4r-lr it) -щ О) - km2 {f) - щ (t) m%{t) - dl2 (*)];
dm2
dt
71,
т?-^ I'M')-*•(')]
22
совместно с системой уравнений, определяющих значения корреляционных
функций на границе области при tx = <2 = t,
4i (0 = js - Yi I1 + m* Wl rfn - y-% t* + щ (t)} d12 (0; -
i12 (0 = y: du (0 ~ Ьт[1 + m2 (/)1 + т~}dli {t) ~ J~{k+щ {t)] dii (0*
2 2
^2 (0 = y~ rf12 (0 - у <*22 (О-
3. Интегральный метод анализа точности
нелинейных систем
В предыдущем параграфе рассмотрен метод анализа
нелинейных многомерных систем, основанный на предположении, что
закон распределения вектора фазовых координат известен с
точностью до двух параметров. В настоящем параграфе проводится
анализ многомерных нелинейных систем при известном законе
распределения вектора на входе нелинейного элемента.
Рассмотрим многомерную нелинейную систему порядка п
(рис. 4). Обозначим через х (t)
вектор фазовых координат
системы размерности т на входе
нелинейного элемента ф (х, t)
той же размерности. Введем
матрицу размерности [т, т]
импульсных переходных функций
W (t, т) линейной, части
системы. Тогда вектор х (t)
выразится следующим образом:
mt
1 Л ^1
г J *1
w(t,%)
•
J <r(*,t)
x(t)
■С ■■■
Рис. 4. Структурная схема
многомерной нелинейной системы
x(t) = \W (U т) [В (т) z (т) — ф (х, t)]Jt,
(73)
где В (т) — матрица переменных коэффициентов размерности
Г/я, /]; z (т) — нормально распределенный вектор случайных
воздействий размерности / с известными статистическими
характеристиками. Начальные условия вектора х (t) предполагаются
нулевыми.
Принимая нормальным двумерный "закон распределения
вектора х (t), определим приближенно математическое ожидание и
матрицу корреляционных функций этого вектора. '
Используя формулу (73), определим математическое ожида-
о
ние тх (t) и центрированный вектор х (t) через матрицу
импульсных переходных функций линейных звеньев:
23
mx (t) = JW (t, т) [В (т) тг (т) - Ф„ (т)] dx;. (74)
x (t) = j W (t, x) [B (t) z (t) — ф (л;, т)] dx. (75)
Используя равенство (34) и выражение (75), получим
уравнение относительно матрицы корреляционных функций вектора
x(t) [2]:
Кх (tlt t%) + \ J W(tlt x) M [ф (*, т) ф* (х, Я)] W* (t2, К) dxd% +
+ \W (tlt x) M [Ф (xt x) x* (t2)] dx +
0
U
+ j M [x (tx) ф* (x, Я)] Г* (t2,\) dX =
о
и и
= 11 W Vi* *) 5 (t) /C2 (t, Я) Я* (Л) Г* (*2, Я) dr Л, (76)
где Кг (t, Я) — матрица корреляционных функций входного
вектора z (t).
Используя выражение (57), представим уравнение (76) в форме
и и
Кх (tl9 t2) =JJW (tiS) IB (т) Kz (г, Я) Я* (Я) -
и
— /Сф (т, Я)] Г* (*„ Я) Л Л — \ W (tl9 т) /Ci (т) Кх (т, /,) -
и
-\кх Ни X) К\ (Я) V (fe, Я) Л, (77)
о
где
/Сф (т, X) = М [ф (л:, т) }* (*, Я)]. (78)
Корреляционную функцию (78) векторного нелинейного
элемента ф (л:, f) при двумерном нормальном законе распределения
вектора х (t) можно представить в виде суммы двух составляющих:
#Ф (т, Я) = Кг (т) Кх (т, %)'К\ (Я) + V (т, Я), (79)
где УР (т, Я) — известная функция,^ которая для определенного
вида нелинейного элемента при двумерном нормальном
распределении вектора на входе выражается через математическое
ожидание и элементы матрицы корреляционных функций этого вектора.
24
Первое слагаемое равенства (79) представляет собой
корреляционную функцию векторного нелинейного преобразования,
пропорциональную корреляционной функции вектора х (f), которая
получена с помощью статистической линеаризации нелинейного
элемента.
Второе слагаемое этого равенства выражает нелинейные
искажения вида корреляционной функции вектора х (/). Это слагаемое
представляется разложением в ряд по степеням элементов матрицы
корреляционной функции вектора х (0, начиная со вторых
степеней. При этом используется разложение 2я-мерного
нормального закона распределения по ортогональным полиномам Чебы-
шева—Эрмита. В частном случае, когда нелинейный элемент
имеет полиноминальные характеристики, функция УР может быть
определена непосредственно.
В интегральное уравнение (77) входят матрицы коэффициентов"
статистической линеаризации /Ci (т) и /Ci (Я) векторного
нелинейного элемента по случайной составляющей, а также функция
^(т, Я), которые при двумерном нормальном законе
распределения вектора х (t) являются функциями математического ожидания
и матрицы корреляционных функций этого вектора, т. е.
Кг(г) = Кг{тХ1 Кх (х, *)}; 1
*(т, X)=W{mXiKx(t, *)}. f (Щ
В силу этого интегральное уравнение (77) и уравнение (74)
необходимо решать совместно с зависимостями (80).
Систему уравнений (74) и (77) можно решить методом
последовательных приближений или проинтегрировать методом
квадратурных формул на цифровых вычислительных машинах.
Используя метод прямоугольников, представим систему уравнений (74) и
(77) в следующем виде [2]:
mx(i + 1) = Д 2 W (/А + Д, vА) [В (vA) m2 (vA) - Фо (vА)];
Kx(i+U /+1) = A2S £г(*Д + Д, vA)x
v=0 /=0
X IB (vA) K2 (vA, IA) В* (1&) —
—/Cv(vA, /A)] W* (/A + А; Щ — \ (81)
i
— Д 2 W (/A + A, vA) /Ci (vA) Kx (vA, /A + A) —
v=0
/
- A 2 Kx (/A + A, /A) Ki (/А) Г* (/А + А, /Д),
/, / = —1, 0, 1, 2, . . .,
где A — шаг интегрирования по переменным т и X.
25
В системе уравнений (81) vA соответствует t; /А — Я; /А +
+ А — tt на / + 1-м шаге интегрирования; /А + А — t2 на
/ + 1-м шаге интегрирования.
При составлении системы уравнений (81) предполагается
выполнение следующих условий:
-1 , —i
Ъ * - 0; 2 */ = о.
s=0
/=0
Если предположить, что математическое ожидание т* (/)
известно на интервале /А = яД, а [корреляционная функция
Кх (ti, t2) определены в квадрате 0 ^ tx ^ «А, 0 ^ £2 ^ пА
(п = 0, 1, 2, . . .), то, используя систему (81), можно найти
значение тх (t) на п + 1-м шаге интегрирования и /С* (*ь *2)
для значений переменных tx = 0, /2 = (я + 1) Д (см- Рис- 5).
Аналогично определяются значения корреляционной матрицы
в точках:
(*х = A, t2 = пАЛ А), (^ - 2Д, /а = яД + Д), . . .,
(/х = пА + А, *2 = /|Д + Д).
Воспользовавшись известным свойством матрицы
корреляционных функций
Kx(tu fe) = /£(fc, tl), ,
всегда можно найти значение матрицы Кх (tu t2) вйутри всего
квадрата {(п + I) А, (п + 1) А}.
Совершенно аналогично определяется /С* ('ь Л) в квадрате
{(п + 2) А, (я + 2) Д}. Продолжая этот процесс, можно
вычислить искомую матрицу Кх (tu t2) в произвольной точке /А, /А.
Чтобы начать вычислительный процесс, достаточно знать
значение матрицы Кх (tlt t2) в точке (0, 0). Поскольку в уравнении
(73) начальные условия равны нулю, то Кх (0,. 0) = 0. Наличие
случайных начальных условий в системе (73) не приведет к
возникновению дополнительных трудностей
при определении матрицы,
корреляционных функций предлагаемым
методом.
В рассмотренном' методе
определения математического ожидания и
матрицы корреляционных функций
число решаемых уравнений зависит
не от порядка дифференциальных
уравнений исходной системы, а от
числа переменных, входящих в не-
Рис. 5. Последовательность вы- линейные элементы. Кроме того,
числения значений корреля- предлагаемый метод не требует, чтобы
ционной функции распределение всего вектора фазовых-
26
координат системы было нормальным; он основан на
предположении о совместном нормальном распределении только тех
координат, которые поступают на входы нелинейных элементов.
В случае, когда исследуемая система (73) стационарна и
устойчива, для установившегося режима работы системы уравнения (74)
и (77) принимают вид: \.
тх= W (0) {Втг — Фо [тХУ Кх-(0)]}\ (82)
00 СО
Кх(т) = J J W (I) [ВКг (т + £ - к) В* -
- KiKx (т + 6 -Я) К\ -Т(т+ t-Щ W* (К) d\dk-
оо со
— \w(l)KiKx(x+l)db—\kxb-b)*№(b)i&\
о о
Кг = К1[т„ Кхф)];
У(г + 1-Х)=у [тх, кх (т + £ - Щ,
где W (0) — значение матрицы передаточных функций линейных
звеньев системы в нуле. , / -
Взяв преобразование Фурье от левой и правой частей
уравнения (83), получим:
(83)
Sx (со) = W (- /со) [BSZ (со) В* - KiSx (со) К\ — ■
- V (о))] W* (/со) - W (- MKiSx (со) - S, (о)) К\ W* (/со);
*i = Кг [тх, Кх (0)], ¥ (со) = W [mx, Sx (со)],
:(84)
где Sx (со) и Sz (со) — матрицы спектральных плотностей
мощности векторов х (t) и z (t) соответственно; W (/со) — матрица
частотных характеристик линейных звеньев системы.
После несложных преобразований формулы (84) получим
уравнение: ..
Sx (со) = [Е+ W (-/со) /CJ-1 W (-/со) [BS2(<*) В* —
где
/Ci = /Сх lm„-/C»(0)]; . -,
У(<й)=У1тх, Sx(©)];
£ — единичная матрица.
Обозначив
[£ + Г (—/со) /Сх] -1 W (—/со) = Ф (—/со);
Г (/со) [J5 + К\ W (/со)]-1 = ф* (/со),
27
получим уравнение для определения'матрицы спектральных
плотностей мощности вектора х (t) в компактной форме:
Sx (со) = Ф (—/со) [BS2 (со) Я* — ¥ (со)] Ф* (/со), (85)
где
*i = *i 1тХ9 Кх (0)]; V (со) = У [mXi Sx (со)].
Для определения матрицы корреляционных моментов, от
которой зависят ф0, Кг и ¥, можно воспользоваться формулой
00
K*(0) = Dx=± J Sx(*>)d<*. (86)
—00
Уравнения (82) и (85) вместе с формулой (86) можно решать
на ЭВМ методом последовательных приближений, определяя
в качестве нулевого приближения математическое ожидание
тх0) спектральную плотность Sx0) (со) и мощности вектора х (t)
системы, в которой нелинейные элементы заменены линейными.
После этого вычисляются первые приближения фо1*, Кг1) и Ч?{1) (со),
а затем первые приближения тх1) и Sxl) (со). Процесс вычислений
продолжается до тех пор, пока ф0 и /Ci нового приближения будут
отличаться от значений предыдущего вычисления на величины,
меньше заданных.
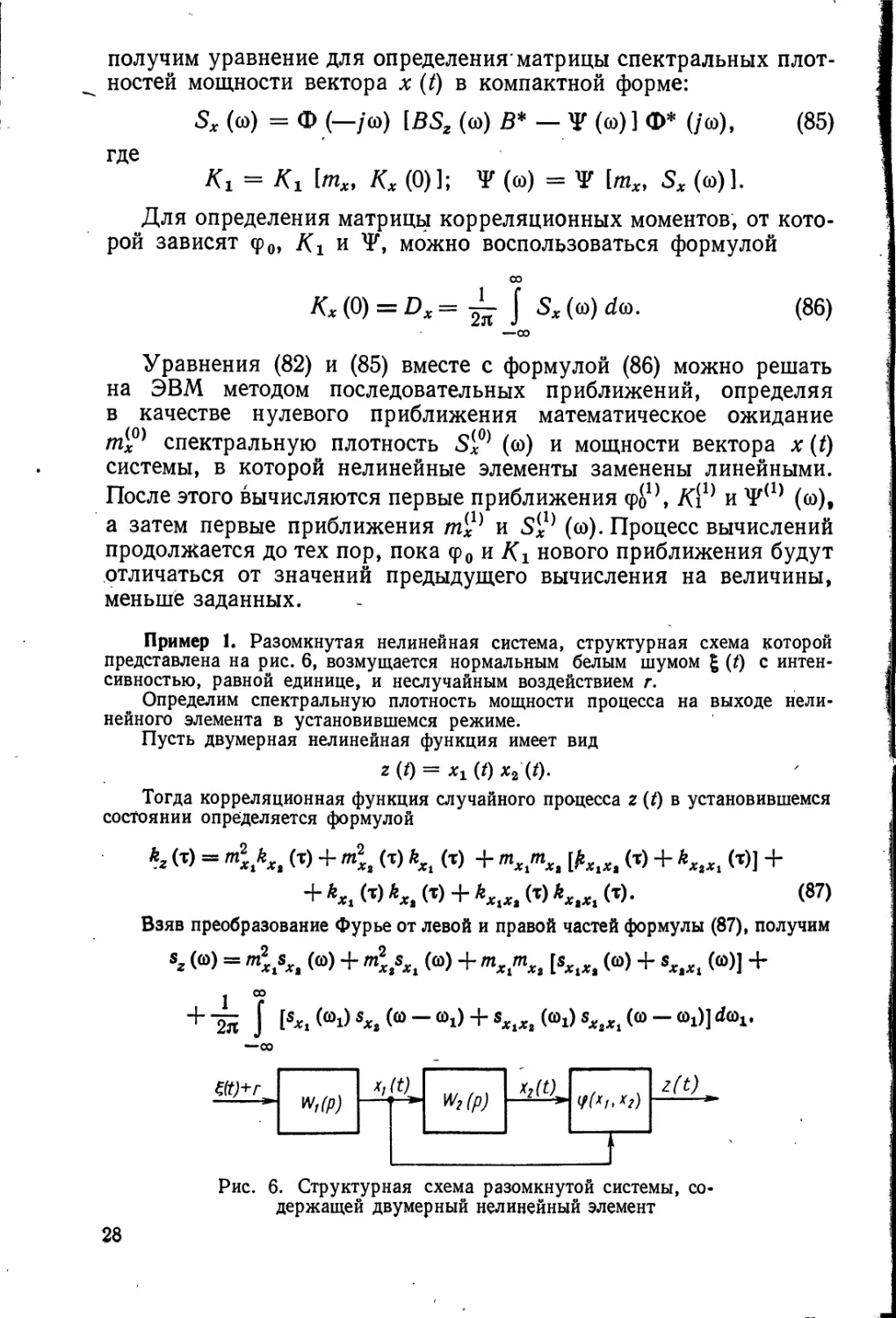
Пример 1. Разомкнутая нелинейная система, структурная схема которой
представлена на рис. 6, возмущается нормальным белым шумом £ (t) с
интенсивностью, равной единице, и неслучайным воздействием г.
Определим спектральную плотность мощности процесса на выходе
нелинейного элемента в установившемся режиме.
Пусть двумерная нелинейная функция имеет вид
г (0 - хг (0 x2(t).
Тогда корреляционная функция случайного процесса г (t) в установившемся
состоянии определяется формулой
kz (т) = m2xkXt (т) + т\г (т) kXi (т) + msmSt [^^ (т) + **,„ (t)J +
+ **, W *„. (т) + kXtXt (т) kXtXi (т). (87)
Взяв преобразование Фурье от левой и правой частей формулы (87), получим
sz (<d) = ml sXt (<o) + m2XtsXi (<o) + mxmXt [sXiX> (©) + sx>Xt (<*)] +
—00
ед+л
■ЗД
*/
w
ад
**w„
V(*i,"/)
i
z(t)
Рис. 6. Структурная схема разомкнутой системы,
содержащей двумерный нелинейный элемент
2Ь
Выразим спектральные
плотности мощности процессов на входе
блока произведения через
частотные характеристики линейных
звеньев:
' 5г(С0)= |^(/С0)|2К2 +
+ m2Xi\w2(M\2 +
+ mxtmx2 [w2 (/*>) + w2 (- /©)]} +
GO
—oo
-<^>]1М1<М/(©--©1>]|*+'
+ W2 (MW2 [—/ (0 — (Oi)]} d©i.
Рис. 7. Спектральная плотность
мощности процесса на выходе двумерного
нелинейного элемента
Предположим, что передаточные функции линейных звеньев имеют вид
1
Щ (Р) = Щ (р) =
Тр+1
Тогда спектральная плотность мощности процесса на выходе нелинейного
элемента будет определяться выражением
Мю)
_г2(4 + Т2со2) , 20 + Т*а>*
(88)
Т2ш2+1 г47(72со2 + 4)'
На рис. 7 приведены графики спектральных плотностей процесса на выходе
нелинейного элемента, полученные с помощью формулы (88) (кривые 1, 3) и
метода статистической линеаризации (кривые 2, 4) для различных значений
дисперсий сомножителей при фиксированных средних значениях.
Пример 2. Определим математическое ожидание и корреляционную
функцию процесса хг (t) системы, которая рассмотрена в примере предыдущего
параграфа (рис. 3).
Принимая во внимание формулы (74) и (76), запишем уравнения относительно
математических ожиданий и корреляционных функций выходных координат
исследуемой системы:
t
Щ (0 = J wx (т) [г — ф0 (t — х) — km2 (t — т)] dx\
t
mz (t) = J w2 (к) mx (t — к) dK\
*u Vi> U) + \wx (т) {kk21 ft - т, t2) + M [ф (tx - x) °Xl (t2)]} dx +
и
+ J щ(к) {kk12(tv *,_-Л) + Л1& ft) $(*,-«]} Л +
0
и и
(89)
+ ^W^W^tiift-t, t2-X) +
(90)
29
+ kM [<p (tx _ т) x2 (t2 - I)] + kM [x2 ft _ т) q> (t2 - X)] +
+ M [Ф ft - т) ф ft - Я)] dx<a =
- и и
= J J щ (т) Ш1 (Я) *& ('«— '1 — * +*) <*тЛ,;
«22 (']
• и и
*ъ)=\ J Щ (т) ay (W «ц ft — т, *2 — Я) <*т dX\
00 ^
- *i2-&. *2) = J «Ъ (т) «и ft, Л - Я) Л;
^21 ('ъ 'а) = ^2 W *п d — *> h) Л.
7
(90)
Математические ожидания, входящие в уравнения (89) и (90), при
совместном нормальном распределении выхадных координат для нелинейной функции
(72) имеют вид:
* Фо (0 = тг (t) т2 (0 + d12 (0;
(91)
1
(92)
М\хг ft) ф ft)] = т2 (t2) ktl ft, t2) + тг (t2) k1% ft, t2)\
M [ф ft) xx(t2)] = тг ft) k2l ft, t2) + m2 ft) ku ft, t2);
о о
M [x2 ft) ф ft)] = mx (t2) «22 ft, t2) + m2 ft) k21 ft, t2);
M [ф ft) x2 (t2)] = тг ft) «22 (tv t2) + m2 ft) k12 ft, t2)\
M [ф ft) ф (t2) ] = mx ft) mt (t2) k22 ft, t2) +
+ m2 ft) m2 ft) kxl ft, t2) +
+ m2 ft) m± (t2) k12 ft, t2) + mx ft) m2 ft) k21 ft, t2) +
+ ^11 (*i> *г) k22 (h> h) + Кг (h> h) b2\ (h> **).
Уравнения (89), (90) с учетом выражений (91) и (92) были проинтегрированы
методом квадратурных формул на ЦВМ с шагом А = 0,1 для следующих
параметров системы: Тг = 0,5, Т2 = 1,
k = 2, г = 1, Q = 0,58. Результаты
решения для kn ft, t2), mXi и D.Xt
приводятся на рис. 8, 9, 10. На
рис. 9 и 10 для сравнения показаны
математическое ожидание и
дисперсия выходной координаты хг (/)»
определенные методом
статистических испытаний по тысяче
реализаций (кривые 2).
Рис. 8. Поверхность
корреляционной функции процесса *! (0
нелинейной системы, содержащей
двумерный нелинейный элемент
Рис. 9. Математическое ожидание про- Рис. 10. Дисперсия процесса хг (t)
цесса хх (t) нелинейной системы: нелинейной системы:
1 - метод квадратных формул; 2 — метод / — метод квадратурных формул; 2 —
статистических испытаний метод статистических испытаний
4. Применение теории процессов Маркова
к анализу непрерывных систем управления
Широкий класс систем управления описывается
дифференциальным уравнением
i =*/('. *) + Gfc-*J6W, (93)
где вектор-столбец фазовых координат системы х имеет
размерность п\ f (t9 х) — вектор-функция п измерений; G (t, x) —
матрица размерности [/г, т]. Случайные возмущения, действующие
на систему, представлены в формуле (94) в виде вектора-столбца
I (t) m измерений. Случайный векторный процесс g (t) является
нормально распределенным белым шумом со следующими
статистическими характеристиками:
А* [6 (01=0;
A*[6(<i)6*(<i)] = Q(<i)e(/1-/JI). (94)"
Анализ системы, отписываемый уравнением (93), предполагает
вычисление некоторых показателей точности. Достаточно общей
формой такого псказателя является
т
I = М\<р [*(*), t] dU
где Ф [х (t)y /] —скалярная функция фазовых координат
системы. ^ Обозначим через р (t, x) плотность распределения
вероятностей случайного процесса х (/). Тогда
т
1 = J dt I dx Ф (x, f) p (/, x)9 (95)
31-
где j dx означает n-кратный интеграл по всем компонентам
вектора х в пределах от —оо до +оо, т. е.
.00 00 00
J ^л: = J dxx J dx2. , . J dxn.
— 00 —00 —00
В частном случае
Ф [*(/), t] = х* (t) V(t)x(t) +
+ x* (t)Ax(t)8(T — t),
где V (t) и Л — положительно определенные матрицы
размерности [/г, п], а б (Г— /) — дельта-функция Дирака.
Тогда показатель точности системы / равен
/ = М И х* (t) V (t) x (t)dt +
И;
+ x* (T) Ax (T)\ = J tr [Г (t) V (t)] dt + tr [Г (Т) A]. (96)
В формуле (96) матрица Г (f) размерности In, n ] определяется
выражением
Г(/) = М [x(t)x* (t)],
а
п
trc = 2 °и
является следом матрицы С размерности [я, п] с элементами сГп
i, j = 1, 2, . . ., /г.
-^ Показатель точности, определяемый выражением (96), зависит
только от второй начальной моментной функции Г (t) случайного
процесса в то время, как в общем случае [см. формулу (95)]
показатель / зависит от закона распределения случайного
процесса. Расчет плотности распределения вероятностей р (t, х)
случайного процесса х (t) может быть проведен с применением
теории процессов Маркова.
Случайный процесс х (t) называется процессом без
последействия, или процессом Маркова, если для любых tx <* t2 <!
• • '• <C.tk при произвольном k -
F (*л» xk\ ^i> *i» *2> ^2» • ♦ • » h-i* ^A-i) ==
= F(tk, Xk\tk-b *a-i)> (97)
где
P (hi Xk\ *1* #1» ^2*2» • • •» *k-ii Xk-l) ==
= pi* (tk)'<*k\x (ti) = xi% i = 1, 2, .« M k— 1].
32
Условная плотность распределения вероятностей марковского
процесса х (f) обладает свойством, аналогичным выраженному
формулой (97):
Р (4> xk\ ti> xi\ ^2» хъ "• • •'» 4-i) =
= Р(4, xk\tk-i, *h-i)- (98)
Приведенное определение марковского векторного процесса
х (t) означает, что если производится предсказание поведения х (t)
в момент 4 на основании известных значений х (^), i = 1,
2 ., k— 1, то точность предсказания будет такой же, как
в* случае известного измерения только в последний момент
времени 4-1- Иначе говоря, вся информация о марковском процессе
сосредоточена в последнем' его измерении. Можно сказать и так:
будущее марковского процесса независит от его прошлого при
известном настоящем значении.
Для марковских процессов
Р (t, xt | х (т), т < s < t) = р (tf xt | s, xs)f
где под р (/, xt\x (т), т <: s < f) понимается плотность
распределения вероятностей в момент t при известной реализации
процесса х (т), т < s < *.
Согласно известным свойствам многомерного
дифференциального закона распределения х (t) [82]
Р \ti> xi\ ^2» *2> • • Л 4> #&) ^
— Р (4» ^| *1> Х\\ *2> Х2.\ • * •"* 4-1>
*A-i) Р (4-i> xk-i I 'i'i *i'> *2>
*2; . •.; 4-2» **-i)-- • • p (<2. ^2 Mi. *i) p, (*i, *i).- (99)
Применяя к выражению (99) свойство (98) марковского
процесса, получим при tx << t2 < ... <: tk
Р (^1> -^1» ^2» ^2» • • -i 4> #&) =
= Р (4> *л| 4-1, **-i) р (4-х, ^-i|;
4-2» Xk^) • • • Р (^2» ХА ^1» *l) Р Ul> *l)-
Таким образом, многомерный дифференциальный закон
распределения вероятностей произвольного порядка k полностью
определяется одномерными условными законами распределения
Р (/, х) и р (/, л: | т, у), которые содержат, следовательно, полное
статистическое описание марковского процесса.
Важное значение в теории марковских процессов имеет
обобщенное уравнение Маркова [8, 23]
Р (U х\%, у) =
= J dzp (f, x\s, z) p (s, z|t, #), t<s< t.
3 A. M. Батков 33
Случайный процесс х (t) является непрерывным, если за малые
интервалы времени он с малой вероятностью получает заметные
по-величине приращения. Дадим, следующее определение
непрерывности случайного процесса: случайный процесс является
непрерывным, если для любого n-мерного вектора 8, все компоненты
которого положительны,
lim ±rP[\-x(t + At) — x(t)\>e\x(t) = х] -О,
что означает
lim -J- f dyp(t + At, y\t, x) = 0.
Другое, более жесткое, определение непрерывности случайного
процесса состоит в следующем: случайный процесс непрерывен,
если для любого я-мерного вектора е, все компоненты которого
положительны,
lim ^т J (у' — х)2 p(t + M, y\ t, x) dy = 0.
Непрерывные марковские случайные векторные процессы х (t),
или процессы диффузионного типа, характеризуются д-мерным
вектором коэффициентов сноса с (tf x) и матрицей коэффициентов
диффузии 8 (t, x) размерности [п> п]9 которые определяются
выражениями:
c(t,x)^\\m ^-M[x(t-\-At)--x{t)\x (t) = x] =
Af->0 Af "
\
= \\m±:\{y-x)p(t+M, y\t, x)dy; (100)
9 (t, x) = lim-Jr M [(x (t + At)—x (/)) (x) (t + At)—
- x (t))* \ x(t) = x} = lim± I (y~x)(y-x)*p(t +At, y\t, x) dy.
(101)
Таким образом, математическое ожидание и дисперсия
приращения процесса х (t) за время At при условии х (t) = x являются
бесконечно малыми величинами порядка АЛ В дальнейшем будут
рассматриваться такие процессы, для которых моменты
приращения- порядка выше второго являются бесконечно малыми более
высокого порядка малости, чем At.
Процесс х (t), описываемый дифференциальным уравнением
(93), обладает марковским свойством и является непрерывным [8,
34 ^
74 88]. Рассчитаем коэффициенты сноса и диффузии этого
процесса в следующем частном случае:
f{t, х) = А (t)x + r(t), (102)
G (*, х) = В (*),
где A (t) — матрица переменных коэффициентов размерности
[л, п\\ г (t) — известная вектор-функция времени размерности п\
В \t) — матрица переменных коэффициентов размерности [я, ml.
В рассматриваемом случае исследуемая система '
управления (93) является линейной.
Для расчета с (t, x) и 0 (t, x) представим приращение
процесса за время А^ согласно формулам (93) и (102) в виде
t+At
x(t+At) — x (t) = J (A (x) x (т) +
t
+ r(x) + В (t) I (t)) dx. (103)
Тогда согласно определению вектора коэффициентов сноса
выражение (100) примет вид
t+At
\ (А(х)х(х) +
c(t, x) = Нт-дтМ
Д*-*0
Д*
+ r(x)+B(x)t(x))dx\x(t) = x
= A(t)x + r(t).
(104)
Матрица коэффициентов диффузии 0 (t, x) рассчитывается по
формуле (101) с использованием выражения (103) и
характеристиками (94) процесса g (t):
П+At
Q(t, *) = lim -JtM
At+0
J (A(x)x(x)+r(x) +
L t
t+At
+ B(x)l(x))dx J (A(l)x(X) + r(l) + B(k)t(X))*dk\x(t) = x\ =
rt+At t+At
' 1
t
+ o(M)\x(t) = x\
t
= lim -L M
At+0 &
j-At t-\-At
J dx J <&В (T)g(T)|* (Л) В* (*,)+•
It+At t+At
\ dx \ dkx
t t
o(A0J =
х.В№(х)¥(ЦВ*(%) + <
t+At t-\-At
= limi J dx J dXiS(T)Q(t)B*^)6(T — Я),
д*-»о
3*
35
где о (А/) является величиной более высокого порядка малости,
чем А*.
Выполняя операции интегрирования и перехода к пределу
при А*—> 0, получим
9 (*, х) = В (О Q (t) В* (/). . (105)
В выводе формул (104), (105) было использовано свойство
независимости значений нормально распределенного «белого» шума
I (/). Из этого свойства вытекает отсутствие статистической связи
I (т), t < т < t + А* и условия х (t) = х. Поэтому
j В(т) | (т) dx|^ (0 = x = M\ \ В(т)6(т)Л
J dr J' dX В (т) £(т)£* (Л) Я* (Я)|х (*) = * =
= JH )Л) ЛВ(т)| (т) £* (Я) S* (Я) =
= В (t)Q (t) B* (t) At + o (АО-
Расчетами, аналогичными приведенным в формулах (104), (105),
можно показать, что для нелинейной системы, описываемой
уравнением (93) при G (/, х) = В (/) коэффициенты сноса и диффузии
определяются соответственно выражениями
c(t, х) = /(*, x)\ \
0 (*, х) = В (t) Q (t) В* (0. J ( '
Случай, когда матрица G зависит не только от времени t> но
и фазовых координат объекта х, будет рассмотрен в п. 3 гл. II.
Пусть диффузионный процесс х (t) удовлетворяет следующим
условиям:
1) существует р (t, х|т, и), и непрерывные по переменным
х, у, / ит</ частные прсшзводные
dp (i,x |т, у) д2р (t, x\ т, у) .
. ■» ду ' дуду* '
2) существуют коэффициенты сноса с (/, *) и диффузии 0(tf, л:);
3) существуют непрерывные по переменным х, у, t и т < t
частные производные
-^p[Q(t,x)p(t,x\r, у)];
36
4)~моменты приращения процесса выше второго порядка
являются бескончено малыми более высокого порядка малости, чем Д£.
Здесь оператор -д- является вектором-столбцом размерности п
д
с элементами
dyi
, i = 1, 2,
д*
вектора у\ оператор щ^* -
а2 . . * о
ментами jurats Ь / = I, ^
. ., п, где уь — одна из координат
матрица размерности [п, п] с эле-
. ., п.
дшду> а а*
Аналогичное содержание имеют операторы -^ и gjcg »
В частности,
д2р д2р
d2p(t, x\%ty)
дуду*
д2р
духдУх духду2
д2р д*р
дУхдуп
д*р
духдУх ду2ду2
д*р д2р
ду2дуп
д*р
дУпдУх дупду2
дупдуп
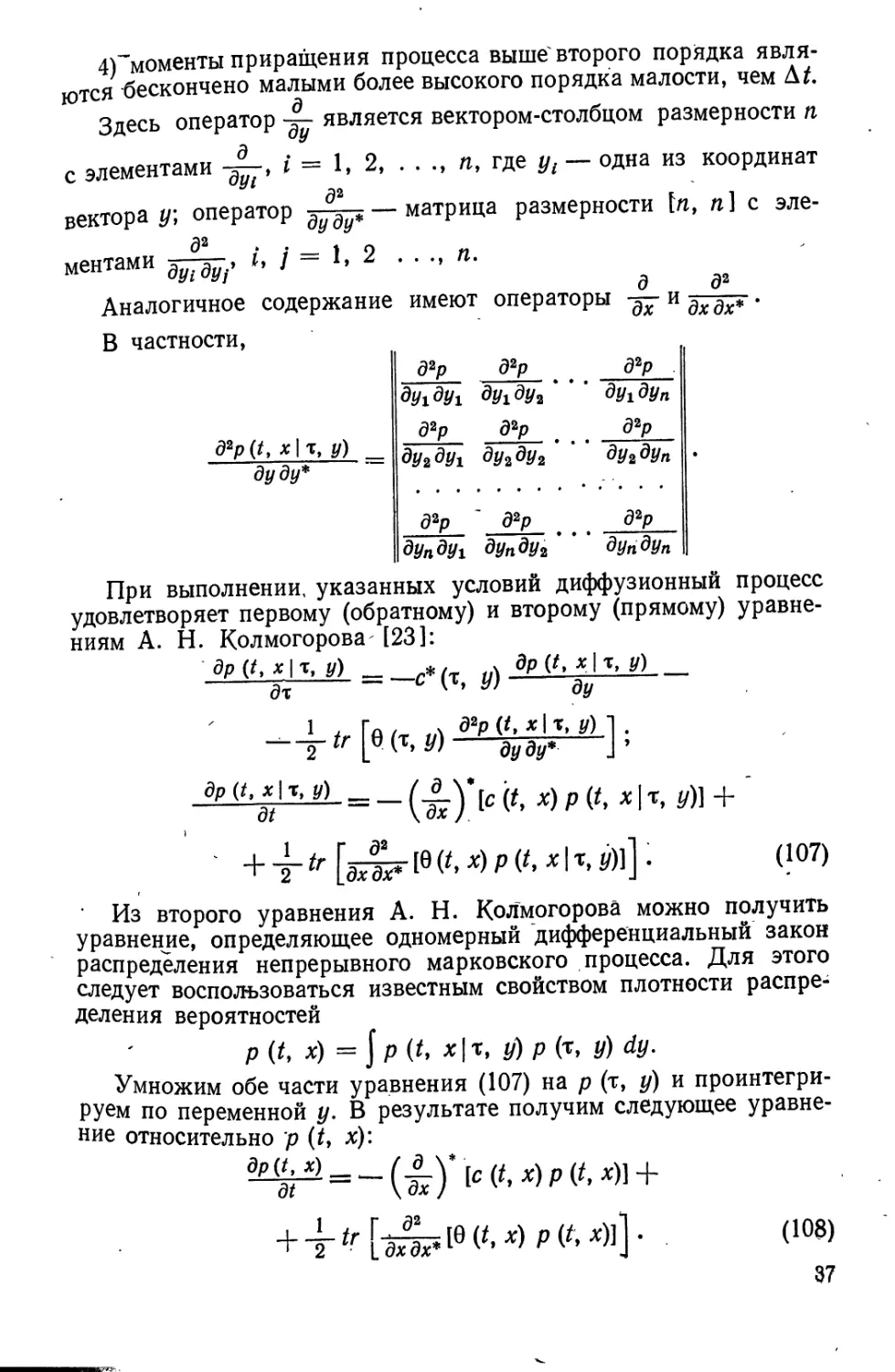
При выполнении, указанных условий диффузионный процесс
удовлетворяет первому (обратному) и второму (прямому)
уравнениям А. Н. Колмогорова [23]:
др (*, х\т, у) __
at ~"
-с*(т, у)
др V, х\т,у)
ду
а'<'■„','*■»> = - (А)',, ((, х) „(,,,, г, й| + -
* +-г^[зг&-[в('.*)Р('»*1т»й1]; (107)
Из второго уравнения А. Н. Колмогорова можно получить
уравнение, определяющее одномерный дифференциальный закон
распределения непрерывного марковского процесса. Для этого
следует воспользоваться известным свойством плотности
распределения вероятностей
р (t, х) = f р (*, х\%, у) р (т, t/) dj/.
Умножим обе части уравнения (107) на р (т, у) и
проинтегрируем по переменной у. В результате получим следующее
уравнение относительно р {t, x):
9ESLA^^y[e{t,X)pittx)] +
dt
+ x4a^ie(<'*)^*)1]
(108)
37
Как правило, при исследовании системы управления (93)
бывает известен закон распределения начального значения
процесса х (0) = х0 :
ГР (0, х) = р0 (х). (109)
Тогда уравнение (108) должно решаться при начальном
условии (109). Исходя из свойства плотности распределения, решение
уравнения (108) должно быть нормировано:
J p (t, x) dx = 1.
Рассмотрим частный случай линейной системы, когда
коэффициенты сноса и диффузии определяются выражениями (104),
(105). Уравнение А. Н. Колмогорова (108) в этом случае
принимает вид
др (Л х) __ ( д
dt
(i;)*W{t)x + r{t))p(t,x)] +
+ irtr [шг*в О « W 5* W р (<• *)] ■
Учитывая, что
(~y[(A(t)x + r(t))p(t,x)] =
= 2 ^ и« w*/+г*>+2л"w р (^ *>=
= [тг] * IA W л: + г] + Кг Л (01 р (/, *),
получим
^И = -I'M (*)1/>(*,*)-
_[Щ*у1Ау)х + г{т +
Характеристическая функция g (/, Я), где А.— n-мерный вектор-
столбец, связана с плотностью распределения соотношением
g (/, 'Я,) = М №** «>J = J е/*'* /> (*, х) dx.
за
Для получения уравнения относительно характеристической
функции следует левую и правую части уравнения (ПО) умножить
на е'^** и проинтегрировать по х. Тогда, применяя правило
интегрирования по частям, получим
EiStJL = х*А {t) Ei^L + Av {t) g {tf k) -
-±WB(t)Q(t)B*(t)Xg(t9K)- (HI)
Пусть начальное распределение р0 (х) (109) нормально, так что
g (0, X) = exp [jmll- -±-k'Dok] , (112)
где
m0 = M [x(0)]\
D0 = M [{x (0) — m0) (x (0) —m0) * ].
Тогда решением уравнения (111) является
g (U Я) ^exp [jm(t) X- i- X*D (*) Jt] . (113)
Таким образом, закон распределения случайного процесса х (t)
нормальный с математическим ожиданием т (f) = М [х (f)] и
дисперсионной матрицей D (/) = М [{х {t) — т (t) (x (t) — m (/))].
Для определения т (t) и D (t) выражение (113) подставим в
формулу (111) и из условия тождественного выполнения уравнения
получим:
т (t) = A (t) m{t) + г (0; |
D(f) = A (0 D{t) +D (t) A* (t) + J (114)
+ В (t) Q (t) В* (i). , )
Согласно выражению (112) находятся начальные значения
т (t) и D (t):
т (0) = т0;
D(0) =D0.
Обыкновенные дифференциальные уравнения (114)
определяют поведение вектора математического ожидания и
дисперсионной матрицы фазовых координат системы в произвольный момент
времени. Эти уравнения впервые получены Дунканом [1261.
Для произвольной нелинейной системы (93) найти
аналитическое решение уравнения А. Н. Колмогорова (108) не удается.
Однако можно использовать выражения (108) для вычисления
некоторых частных характеристик случайного процесса,
например его математического ожидания и дисперсионной матрицы.
Для нахождения уравнений, которым удовлетворяют момент-
ые функции, удобно воспользоваться описанным выше методом
39
характеристической функции. Аналогично тому, как было
получено уравнение (111) для характеристической функции линейного
марковского процесса, можно получить уравнение относительно
g (/, Я) для марковского процесса с произвольными известными
характеристиками с (t, х) и 0 (t, х) [27, 29]:
Щ^ = М ЦК*с (/, х) ехр (/Л**)] +
• + 4-А* [(/Я*) 0 (*, х) (А) ехр (А**)].
Используя известное свойство характеристической функции
[82], состоящее в том, что
' 1 А П
Ч"*1—-^w-°
»«)ri+r'+",+r"'AfK^«-..*a,
можно получить уравнение относительно любой моментной
функции исследуемого процесса. Для этого в уравнении в частных
производных относительно g (t, Я) необходимо представить g (/, Я)
рядом Маклорена:
х=о^"
= 1 + /Vm + -^ (А*) (Я + ™"*) (А) + о
где || Я || — норма вектора Я.
Приравнивая коэффициенты полиномов по переменной Я в
левой и правой частях уравнения, получим обыкновенные
дифференциальные уравнения, которым удовлетворяют моментные функции.
В частности, рассмотрение линейных членов дает уравнение
относительно математического ожидания
, т = М \c(U х)]9 (115)
а квадратичных членов— уравнение относительно дисперсионной
матрицы
Ь = М Ixc* (*, х) + с (/, х) х* + 9 (*, х)1 (116)
о
где х = х — т является центрированным вектором фазовых коо р-
динат.
40
Для линейной системы управления система уравнений для
т (t), D {t) не содержит других моментных функций случайного
процесса. При исследовании нелинейной системы правые части
уравнений (115), (116) не являются функциями только т {t) и
р (t)j поэтому из этой системы т (t) и D (/) не могут быть
однозначно определены. Действительно, пусть исследуются
статистические характеристики процесса х (/) на выходе нелинейной
системы (93) при G (t, х) = В (t)r
x = f(t,x) + B (t) I (0.
Непрерывный марковский процесс х (t) характеризуется
значениями с (t, x) и 0 (/, х), определяемыми формулой (106).
Используя выражение (106), запишем на основании формул (115), (116)
систему уравнений для математического ожидания и
дисперсионной матрицы рассматриваемого процесса:
m(t) = M [/(*, x(t))]\ (117)
D (t) = М ix (t) f* (t9 x (0) +
+ f(t,x (0) > (t)] + B (t) Q (t) B* (/)• (П8)
В силу нелинейного характера зависимости f (t, x (/)) от
фазовых координат х (t) правые части уравнений (И1-?) зависят не
только от т (0 и D (/), но и от старших моментных функций.
Поэтому система уравнений (117), (118) должна быть дополнена
уравнениями относительно моментных функций выше второго
порядка. Эти уравнения могут быть получены из уравнения
А. Н. Колмогорова с помощью того же приема [29], который был
использован при выводе формул (115)г (116). При решении
практических задач необходимо в бесконечной системе уравнений
относительно моментных функций ограничиться конечным числом
уравнений. При этом относительно старших моментов, для
которых уравнения отбрасываются, делаются некоторые
предположения, позволяющие замкнуть систему уравнений для моментов.
Отметим, что при возрастании порядка моментные функции могут
существенно возрастать и потому предположение о равенстве
нулю моментных функций выше некоторого порядка является
грубым. Практически следует связать старшие моментные
функции с младшими в соответствии с некоторым законом'распределения
фазовых координат. Такой подход означает аппроксимацию
истинного закона распределения фазовых координат некоторым
заданным законом. Усечение бесконечной системы уравнений для.
моментных функций дает один из возможных способов такой
аппроксимации.
Векторное уравнение (117) содержит п скалярных уравнений,
матричное уравнение^ (118) содержит п2 скалярных уравнений,
из которых • ^ ' линейно независимы. Число уравнений,
41
определяющих старшие моментные функции, быстро нарастает.
Так, для моментных функций третьего порядка следует решать
систему из п ^п > (п~т~ ) линейно независимых уравнений.
В связи со столь быстрым нарастанием объема вычислений при
увеличении точности результата в ряде случаев можно считать
обоснованным ограничение рассмотрения уравнений для первых
двух моментных функций (117) и (118). Как указывалось выше,
для замыкания этой системы уравнений. необходимо сделать
предположение о поведении старших моментных функций.
Если есть основание считать одномерный закон распределения
случайного процесса х (t) близким к нормальному, то старшие
моментные функции легко могут быть выражены через т (t) и
D (t). Предположение о нормальности закона распределения поз^
воляет рассчитать выражения [3, 4]
Vilt,m(t),D(t)]=Mlf(t,x(f))] =
= [ \ dxf (t, х) ехр Г-4- (x-m(t))*D-i(t)(x-m(t))] .
. V(2n)n\D(t)\ J L z J
(П9)
^2 It, m (*), D (/)] = M [x (t) /* (*, x (t))] =
= l \dx(x- m(t)) f (t, x) x
X exp ]—±.(x-m (t)f D-1 (t) (x-m (/))] ,
где W2 связано с у¥1 соотношением
Ъ'«.т.В> = в[п*<'£-°>]\ (120)
*
Теперь использование формул (119), (120) в выражениях (117),
(118) позволяет записать замкнутую систему .уравнений
относительно т (t), D (t):
m — W^t, т, D)\ )
D=^^D)p + D[^^Z))]*+ (121)
+ B(t)Q(t)B*(t). )
Система обыкновенных дифференциальных уравнений (121)
должна решаться при начальных условиях
т (0) = т0;
0.(0) = D0,
связанных с известным начальным распределением вероятностей
фазовых координат.
Решение системы (121) дает приближенные значения
математического ожидания и дисперсионной матрицы процесса х (t).
42
Точность результата зависит от возможности аппроксимации
истинного закона распределения р (t, х) нормальным.
Выше указывалось, что одним из наиболее сложных вопросов
в процедуре замыкания конечной системы уравнений для момент-
ных функций является предположение о характере поведения
старших моментных функций. Эта трудность практически не
возникает, если в качестве характеристик закона распределения
выбрать не моментные функции, а семиинварианты [27]. Известно,
что первые два семиинварианта совпадают с математическим
ожиданием и дисперсионной матрицей процесса х (t). Семиинварианты
более высокого порядка имеют тенденцию стремиться к нулю при
увеличении порядка, а для нормального закона распределения
семиинварианты, начиная с третьего, тождественно равны нулю.
Поэтому для замыкания бесконечной системы уравнений
относительно семиинвариантов естественно положить равными нулю
семиинварианты выше &-го порядка. Если k = 2, то система
уравнений относительно первых двух семиинвариантов совпадает
с системой (121). Увеличение точности,, связанное с рассмотрением
семиинвариантов выше второго порядка, как и при рассмотрении
моментных функций, требует существенного увеличения объема
вычислений.
5. Основы метода статистических испытаний
В предыдущих параграфах были рассмотрены методы анализа
стохастических систем автоматического управления, основанные
на сведении исходной статистической задачи к задаче решения
некоторой детерминированной системы уравнений. Эти методы
обычно оказываются эффективными только для определенных
классов систем, где требуется или линейность системы, или
ограниченное число нелинейностей, или ограниченность порядка
дифференциальных уравнений системы. Подобные методы полезно
применять на предварительном этапе проектирования, когда
можно ограничиться относительно простой моделью системы.
Наиболее- общим методом анализа систем управления и
поэтому обычно наиболее дорогим в смысле использования
машинного времени является метод статистического
моделирования.
Метод Монте-Карло состоит в последовательном многократном
решении уравнений, описывающих работу системы при
различных реализациях случайных входных сигналов. Для каждого
решения вычисляется значение критерия качества системы.
Окончательное среднее значение показателя качества работы системы
обычно определяется как среднее арифметическое значений
критерия для всех проведенных решений.
оПри практической реализации метода статистических
испытании на ЦВМ необходимо построить дискретную модель системы,
ТоРУю было бы удобно реализовать на вычислительной
43
машине. Чаще всего эта модель строится в виде дискретных
уравнений вида
х (*Д + А) = / (х ((/А), 0 + Б (/А); (122)
х (0) = х°
или в более общем случае
х (/А + А) = / (х (/А), /, £ (/А));
* (0) = *°,
где х = (хг, x2i . . ., хп) — вектор фазовых координат системы;
хР — в общем случае случайный вектор начального состояния
системы; g (£Д) — случайное возмущение на /-шаге.
Обычно исходная анализируемая система управления задается
системой дифференциальных уравнений. В этом случае переход
к дискретной модели осуществляется на основании
использования численных методов решения систем дифференциальных
уравнений. Теория точности численного интегрирования заданной
системы дифференциальных уравнений довольно Хорошо
разработана [14, 68, 114].
"Следующим этапом применения метода Монте-Карло является
задача генерации случайных параметров хР и возмущений \ (/А)
(i = 1, 2, 3, . . .) в полученной дискретной модели (122).
Совместней закон распределения *° й £ (/А) обычно нетрудно получить
на основании анализа статистических характеристик случайных
воздействий в исходной системе и метода построения дискретной
модели. Существует два принципиально различных подхода к
генерации случайных воздействий при статистическом
моделировании, на ЦВМ.
Первый подход основан на применении специальных устройств-
датчиков случайных величин, в которых используются случайные
физические явления (радиоактивный распад, тепловые шумы
в лампах и др.). Такие датчики дают последовательность истинно
случайных чисел, которые не могут быть предсказаны или повторно
воспроизведены.
Во втором подходе используются программные методы
получения реализаций случайных чисел, с помощью которых
происходит непосредственная генерация случайных чисел в ЦВМ. Строго
говоря, эти числа не являются истинно случайными, так как
всегда можно предсказать будущее случайное число и повторно
воспроизвести всю последовательность. Поэтому такие
последовательности чисел называются квази- или псевдослучайными.
Однако, как показывают теория и эксперимент, к результатам
моделирования при использовании псевдослучайных чисел можно
применять те же самые формулы оценок, что и при использовании
истинно случайных чисел. Причем возможность повторного
воспроизведения псевдослучайной последовательности упрощает
процедуру отладки и проверки используемых алгоритмов.
44 -
Обычно моделирование случайных или псевдослучайных
возмущений разделяется на две подзадачи. Сначала вырабатывается
последовательность независимых равномерно распределенных на
отрезке [0, 1 ] чисел. Затем путем математических преобразований
из последовательности равномерно распределенных чисел
генерируются случайные возмущения х° и I (/А) с заданными
статистическими характеристиками. .
Подробный анализ методов получения равномерно
распределенных случайных чисел приведен в ряде работ. [18, 24, 76].
Вопрос выбора математического преобразования для решения
второй подзадачи приведен в работах [18, 76, 34].
После генерации случайных возмущений х? и £ (/А)
производится решение системы дискретных уравнений (122).
Предположим, что в результате анализа требуется определить
математическое ожидание значения функции <р (х (тД)). Обозначим через <р*
значение функции <р для f-й реализации решения системы (122).
Тогда оценка искомого математического ожидания т после
проведения N реализаций будет определяться выражением
N
Дисперсия оценки математического ожидания имеет вид
В основе применения метода Монте-Карло лежит закон
больших чисел. В форме Чебышева этот закон формулируется
следующим образом: пусть случайная величина имеет математическое
ожидание т и дисперсию а2. Тогда для оценки математического
ожидания т, полученной после проведения N испытаний,
справедливо следующее неравенство:
Р (|т-т|^8)<^, (123)
где 8 — любое положительное число.
В случае, когда случайная величина имеет конечный
центральный момент третьего порядка рз, неравенство (123) может быть
заменено [38] более жестким условием вида:
Р (т — m > e)
1
V2n
СоРз *
J
eVN
G
45
где константа с0 удовлетворяет условию
0,3989 < с о < 0,9051.
Применение неравенства (124) требует знания второго и
третьего центральных моментов случайной величины ср, что
практически создает неудобства. При достаточно большом зна^-
чении числа испытаний N на основании центральной предельной
теоремы можно считать, что оценка т имеет нормальный закон
распределения. В качестве значения дисперсии а2 в этом случае
можно принять оценку дисперсии D вида
б=дМ1ф''2-^2)
Тогда вероятность того, что погрешность метода превышает
величину е, определяется выражением
со
P(|m —/n|>e)==-7=- J e 2 du. (125)
W
Формула (125) чаще всего используется для оценки точности
вычислений по методу Монте-Карло. Задаваясь допустимой
погрешностью вычислений е* и допустимой вероятностью
превышения этой погрешности /?*, по формуле (125) можно рассчитать
необходимое число статистических испытаний N. В частности,
подставляя заданные значения р* и 8* в уравнение (125), получим
уравнение относительно параметра N:
со
р* = -±=- \ ё"^du. (126)
Vs
Из соотношений (123), (124) или (126) следует, что при
фиксированной вероятности р превышения допуска 8 величина допуска
прямо пропорциональна среднему квадратическому отклонению
случайной величины <р и обратно пропорциональна квадратному
корню из числа проведенных испытаний ]/iV:
.в = к(р)-±г.. (127)
Заметим, что в соотношении (127) коэффициент
пропорциональности, k зависит только от вероятности р превышения погрешности
уровня е и не зависит конкретно от существа решаемой задачи
анализа. Это общее соотношение справедливо для любой
реализации метода Монте-Карло.
46
Равенство (127) показывает, что точность метода
статистического моделирования относительно медленно возрастает с
увеличением числа испытаний N. В частности, если необходимо
увеличить точность вычислений на порядок, то число испытаний
следует увеличить на два порядка. Поэтому при использовании
этого метода ограничиваются относительно невысокой точностью.
Однако вероятностный характер сходимости метода Монте-Карло
и ограниченная точность не вызывают особых сложностей в йри-
менении метода к анализу сложных стохастических систем,
во-первых, из-за их случайной природы и, во-вторых, из-за того,
что применительно к этим системам обычно бывает вполне
достаточно невысокой точности. Для реализации метода необходимо
иметь только возможность проведения моделирования работы
системы на ЦВМ. Поэтому указанным методом можно
анализировать многие сложные системы, которые не поддаются анализу
другими методами^ Анализ можно проводить одновременно на
нескольких ЦВМ или в несколько этапов на одной машине, если
не имеется возможности использовать вычислительную машину
в течение достаточно длительного времени.
ГЛАВА II
СТАТИСТИЧЕСКИЕ ХАРАКТЕРИСТИКИ
ДИНАМИЧЕСКИХ СИСТЕМ
СО СЛУЧАЙНЫМИ КОЭФФИЦИЕНТАМИ
1. Линейные стационарные системы
со случайными параметрами
В этой главе будут рассмотрены некоторые подходы к анализу
систем управления, содержащих случайные параметры и
случайно изменяющиеся во времени коэффициенты.
Точное аналитическое решение задачи анализа автоматических
систем со случайными параметрами найдено лишь для простейшей
параметрической систему, описываемой линейным
дифференциальным уравнением первого порядка [95, 145]. В других случаях
известны лишь приближенные методы анализа. Некоторые из
авторов пошли по пути изыскания возможностей сокращения числа
испытаний, необходимых для анализа систем со случайными
параметрами методом Монте-Карло. Один из подобных алгоритмов
определения статистических характеристик выходных координат
динамических систем со случайными параметрами предложен
Б. Г. Доступовым [30, 39]. В отличие от случайного выбора
значений параметров для проведения статистических испытаний
Б. Г. Доступовым предлагается проводить испытания в заранее
рассчитанных точках, выбор которых связан со статистическими
характеристиками случайных параметров. Один из способов
выбора расчетных точек для проведения нестатистических
испытаний был предложен А. И. Авербухом [1]. Увеличение точности
результата, возможная корреляция параметров, а также
возрастание их числа значительно затрудняют определение расчетных
точек и существенно увеличивают объем вычислительной работы.
Еще один метод анализа систем управления со случайными
параметрами, основанный на проведении нестатистических
испытаний, предложен В. Л Чернецким [ПО, 111].
Все перечисленные методы могут быть применены к широкому
классу нелинейных автоматических систем со случайными
параметрами. _
В последние годы широкое развитие получила теория
чувствительности [112, 47]. Рядом авторов разработан удобный метод
моделирования функции чувствительности для линейных систем
со случайными параметрами [48, 19]. Дальнейшее развитие теории
чувствительности применительно к системам со случайными
параметрами дано в работах Л. Г. Евланова [31, 32]. Следует отметить,
что разложение реакции системы в ряд Тейлора по параметрам и
48
ограничение линецной или квадратичной его частью возможно
только при малых отклонениях параметров и поэтому при
решении практических задач не всегда дает удовлетворительную
точность. Увеличение же точности за счет старших членов ряда
Тейлора приводит к существенному увеличению объема
вычислений.
Изложенные методы анализа линейных систем управления
со случайными коэффициентами позволяют построить конечную
систему дифференциальных уравнений относительно
математического ожидания, дисперсии и других моментных функций
выходных координат системы. Дальнейшее применение средств
вычислительной техники дает возможность рассчитать численные
значения этих статистических характеристик.
В этом параграфе будут рассмотрены автоматические системы,
математической моделью которых являются линейные
дифференциальные уравнения с постоянными коэффициентами. Вследствие
неточности реализации систем некоторые параметры не строго
фиксированы, а принимают значения из заданной области с
определенным распределением вероятностей. В этом случае параметры,
имеющие разброс возможных значений, рассматриваются как
случайные величины с известным законом
распределения.вероятностей. Причиной разброса значений параметров могут быть и
непостоянные условия внешней среды, которые неодинаковы
в разных реализациях.
Во всех работах, посвященных анализу динамических систем
со случайными параметрами, для определения статистических
характеристик выходных координат проводится непосредственное
усреднение функции случайных аргументов. Пусть, например,
выходной процесс системы управления х (£, аъ ос2, . . ., ak)
зависит от случайных параметров а1э а2, . . ., ak с совместным
законом распределения / (ах, ос2, . . ., ak). Тогда математическое
ожидание произвольной функции ф [л: (/, аь а2, . . ., а^)] может
быть найдено путем вычисления интеграла
М [ф [х (t, аи ос2, . . .,.а*)]] =
J . . . jcp [x(t, au a2, . . ., ak)]f(aXi а2, . . ., ak)
X
Qk
Xdaxda2. . .dak, " (128)
где Qk -_ область возможных значений случайных параметров.
Метод Монте-Карло, методы Доступова Б. Г., Чернецкого В. И.,
з также метод функций чувствительности представляют собой
различные способы приближенного численного интегрирования
х |Ражения (128). Эти способы не связаны со свойствами функций
нос' аь ^ " ' "' а^ и * ^ и П0Т0МУ обладают универсаль-.
4 А- М. Батков 49
В работах Самуэльса и Эрингена [148, 149] предлагаются
приближенные методы исследования линейных систем со случай- ■]
ными свойствами, учитывающие специфику этого класса систем. |
В данном параграфе излагается метод анализа линейных ста- \
ционарных систем управления со случайными параметрами при •
•различных предположениях относительно закона распределения
параметров [69]. Учет особенностей стационарных линейных
систем и закона распределения случайных параметров позволил .
установить дифференциальное уравнение, которому
удовлетворяет математическое ожидание выходной координаты исследуемой
системы. Таким образом, однократное решение полученного
дифференциального уравнения является достаточным для
определения математического ожидания выходной координаты как функции
времени. Корреляционная функция выходной координаты
удовлетворяет интегро-дифференциальному уравнению.
Перейдем к постановке задачи анализа линейной стационарной
системы управления со случайными параметрами. Пусть
движение выходной координаты исследуемой системы описывается
дифференциальным уравнением в операторной форме
L (р) х (0 + J} atRt (р) х (0 = М (р) z (J), (129)
где z (f) — неслучайное внешнее воздействие на систему; "X (t) —
выходная координата; Р ~ ~ат\ <fy, / = 1, 2, . . ., k — случайные
величины с известным законом распределения; L (р), Rt (p),
i = 1, 2, . . ., k\ M (р) — линейные дифференциальные
операторы, определяемые выражениями:
п
L{p) = £аур/;
/=о
Riip) = S bupl, i= 1, 2, . . ., k\
m
Начальное состояние исследуемой системы при t = 0
предполагается невозмущенным.
На порядки дифференциальных операторов п\ ni9 i = 1,
2, . . ., k\ m не наложено ограничений. В частности для
некоторых индексов / порядок операторов R{ (p) может быть выше
порядка оператора L (р). В этом случае присутствие случайных
параметров at увеличивает порядок исследуемой динамической
системы.
Рассмотрим вначале случай, когда исследуемая система (129)
. содержит один (k = 1) случайный параметр а:
L (р) х (t) + aR (p) x(t) = M (p) г (t). (130)
50
Плотность распределения вероятностей случайного параметра
предполагается принадлежащей следующему классу
дифференциальных законов распределения:
[ 0, а <сг;
/(а) = Л ехр[Р,(а)], сг < а < с2\ (131)
1 0, а>с2у
где сг, с2 — произвольные постоянные; А — нормирующий
множитель; Pq (а) — полином по а степени q. Классу
дифференциальных законов распределения (131) принадлежат: нормальный
закон распределения
/н(а)=^ехр[-й
(сх == —оо, с2 = оо, А = , q = 2); «усеченный» нормальный
закон распределения
| , О, а <£?!;
fy(a)= Лехр[— -gr], с<а<с2; (132)
| 0, а > с2
(—со <ic1 <с2 <оо, (7 = 2); экспоненциальное распределение
( 0, a < 0;
/»= г 1 п (133)
(c?i = 0, c2 = оо, А = у, (7 = 1); равномерное распределение
[0, a < сu a > c2;
' fp(«)= l _ _ (134)
Произвольная функция ф (а) случайного параметра а,
распределенного по закону (131), обладает следующим свойством;
М [Рд (а) Ф (а)] - Лф (с2) ехр [Ря (с2) ] —
— ЛФ (сг) ехр [Pq (cJ] — M W (а)1. (135)
Свойство (135) может быть установлено путем
непосредственного вычисления М [Р'д (a) <р (а)]:
М [Рд (а) Ф (а)] = Л J P'q (а) <р (а) ехр [Рд (a)] da =
с2
= Л J ф (a) d ехр [Я, (а) ] = Лср (а) ехр [Я, (а)] |£ —
4* 51
c2
— A \ <p' (a) exp [Pq (a)] фа = Лф (са) ехр [P, {сг)\ —
— Лф fci) exp [/% (cj] — M [q/ (a)].
Поскольку начальное состояние системы (130) предполагается
невозмущенным, преобразование Лапласа выходной координаты
X (р, а) связано с"преобразованием Лапласа входного
воздействия Z (р) следующим соотношением:
где Ф0 (р) = L ^p) является передаточной функцией исследуемой
системы при нулевом значении случайного параметра а и V (р) =
_ Мр)
~~ £(р) '
Переход от функции-оригинала х (t> а) в частотную область
X (р, а) позволил представить зависимость выходной координаты
от случайного параметра в явной форме. Математическое
ожидание X (р, а) представляет собой преобразование Лапласа
математического ожидания выходной координаты М [х (t, a)] = x(t)
(предполагаются выполненными условия,Ч1ри которых операторы
усреднения и преобразования Лапласа коммутативны):
Х(р) = М\Х(р9а)] = L lx(t)l
Непосредственное вычисление М [X (р, а)\ — Х (р) возможно
с использованием формул (131) и (136):
Х£р) = ЛФ0(р) V{p)Z(p) J K(p)1 + a ехр[Рщ(a)]da.
Однако такой способ определения X (р) привел бы к
чрезвычайно громоздким и неудобным в практике результатам.
Выражение (135) позволяет установить уравнение, которому
удовлетворяет X (р). Положим в формуле (135) ф (а) = X (р, а).
Тогда
М [P'q (a) X (р, а)) = АХ (р, с2) ехр [Рд (с2)) —
— АХ (р, Cl) exp [Pq (сг) ] — М1Х'а (р, а) ]. (137)
Для того чтобы уравнение (137), могло рассматриваться_как
уравнение относительно X (р), необходимо установить связь X (р)
с М [Х«(р, а)]. Эта связь устанавливается на основании
очевидного тождества, следующего из формулы (136):
у (п п\- Фо(Р)^(Р)^(Р) д г Х(Р,а) ] пш
52
Применяй к выражению (138) операцию усреднений по
случайному параметру аТи пользуясь коммутативностью этого
оператора и оператора дифференцирования по переменной р,
получим следующее выражение для М [Х« (р, а)]:
М [Ха(р, а)] ^ -^ [Фо{р)1(р)У{р)\ • (139)
Подставляя выражение (139) в формулу (137), получим
М [P'q (а) X (р, а) ] = АХ (р, с2) ехр [Р, (с2) ] —
— АХ (р, Cl) ехр [Р9 (сО ] —
%{p)Z{P)V(p) d Г Х(р) ] пш
F'(p) * 1Фо(р)2(р)У(р) J" V4"'
Учитывая формулу (136) и выражение
Л ехр lPq(c)]=f(c),
уравнение (140) может быть записано в форме
М [Р'„{а)Х{р,а)\ = •
= O0(p)Z(p)V(p){T^/(c2)-T^f(cl)-
L__l[ Ш 11 (141)
V'(p) dp L<Mp)Z(p)V(p)Jj\ V*1'
Рассмотрим частные случаи закона распределения
вероятностей случайного параметра а, определяемые формулой (131).
Для «усеченного» нормального закона распределения
аа г,,, ч а
Л(а) = —25Г, ^(«) = — ■&>
поэтому
М IP', (а) X (р, а) ] = - -1- М [аХ (/>, а) ]. (142)
Учитывая выражение (136) для X (р, а), формулу (142) после
простых преобразований можно представить в виде
М [Р'„ (а) X (р, а)] = --^-Фо (Р) 2 (р) V (р) X
XМ [V(p*+a] = ^V(р)[X(р)-Ф0(р)Z(р)]. (143)
Теперь на основании (141), (143) можно записать следующее^
Уравнение относительно X (Р):
^(р) = Фо(р)2(р){1+а%(са)тт^Т7Г-
~ а^у (Cl) V(P) + Cl ~ o2TTpT "Зр" [o0(p)/(p)Z(p)J ) • <144)
53
*fA
1
m+cf
|-—(7^3^ff)—-[]£^
m+fy
№
L\Up1
v'(P)
fr^V(p)Z(p)\
%(p)
t(t)
Рис. 11. Блок-схема моделирования x(t) при «усеченном»
нормальном распределении а
Уравнению (144) соответствует структурная схема
моделирования x{t)y представленная на рис. 11, где показаны
передаточные функции всех стационарных линейных блоков. При
построении структурной схемы было учтено, что функции-оригиналу
ft|) (/), где ty (t) имеет изображение Ч? (р), соответствует
изображу (р)
жение -т-
dp
Структурная схема, показанная на рис. 11, соответствует
нестационарной системе, содержащей переменный коэффициент t.
Эта система нелинейна, так как передаточные функции бло-
Z(p) 1 „ „
ков у(р\ и у (Р) z (р) зависят от преобразования Лапласа
входного процесса. При определении математического ожидания
импульсной переходной функции следует положить Z (р) = 1.
Может оказаться, что в передаточных функциях Vt(\
и„. )Z( ^ степень полинома числителя больше степени
полинома знаменателя, что соответствует практически нереализуемым
блокам. Это возможно при определенном виде входного
процесса z (/), а также когда порядок оператора R (р) превышает
Рис. 12. Эквивалентные преобразования структурной схемы
представленной на рис. 11:
а — для случая инерционных операторов 1/V (р) и \/V (р); б — для
случая инерционных операторов V (р) и V (р)
54
рис. 13. Блок-схема
моделирования х (t)
при нормальном
законе распределения а
т*(7\
1
1
\У'(р)\
-ffl/F71-<
/ 1
_U X , 1
xft)
порядок Z (р), т. е. при п± > п. Последнее, как отмечалось выше,
означает, что отличие от нуля параметра а приводит к
увеличению порядка исследуемой системы. В этих случаях для удобства
реализации модели х {t) на вычислительной машине необходимо
провести эквивалентные структурные преобразования, очевидные
в каждом конкретном случае. Эти преобразования, в частности,
могут быть связаны с промежуточным переходом к обратной
системе. На рис. 12 представлены структурные схемы
моделирования "х (t), эквивалентные схеме,^показанной на рис. 11.
Математическое ожидание х (t) является реакцией систем
на б (t). Характер входного воздействия z (t) на исследуемую
систему учтен в блоке с оператором Z (р).
Если распределение случайного параметра а нормально, то
X (р) удовлетворяет уравнению (144), в котором следует
положить сх = —сю, с2 = сю. Поскольку при j*tom /н (с^ = /н (с2) =
= 0, структурная схема моделирования х (0 может быть
представлена в виде, изображенном на рис. 13.
Перейдем к другому частному случаю распределения
случайного параметра а — экспоненциальному распределению (133). При
/•(*i)=Y; /.(c,) = 0; Pq (a)=—W Р'д(*)=—у
и уравнение для X (р) (141) преобразуется к виду
Y*(P) = 00(P)Z(P)V(P)[-
1 d
dP\ Ф0(
Х(р)
-)] • (145)
V(p) ' V'(p)JP\<3>0(p)Z(p)V(p)
Уравнению (145) соответствует структурная схема
моделирования х (/), представленная на рис. 14.
Рассмотрим теперь случай равномерного распределения
случайного параметра (134). Поскольку P'q (а) =0, а /р (сг) =
= /р (ся) =
то уравнение (141) для X (р) примет вид
1 __ У'(Р) Г
J ~ с2-сх [V
1
1
(р) + с2 V(p) + c
-] . (Н6)
i-. Л-
У
т
1
V'(P)
-из-
%№Р)щ
m
Рис. 14. Блок-схема
моделирования х (t)
при экспоненциальном
распределении а
55
-
V'fp)
V(p)+c,
V'fp)
У(Р)+сг
\
(}
Hf
ГТ-
1 Сг—С/
t
%(p)V(p)Z(p)
i(t)
Рис. 15. Блок-схема моделирования х (t) при равномерном
законе распределения а
Операторному уравнению в (146) соответствует структурная
схема моделирования х (/), представленная на рис. 15.
Таким образом, уравнение (141) позволяет построить алгоритм
моделирования математического ожидания выходной координаты
линейной системы с одним случайным параметром,
распределенным по закону (131).
Теперь передйем к моделированию корреляционной функции.
Составим уравнение относительно второй начальной моментной
функции выходной координаты М [х (tx) x (t2)] = rxx (tly t2),
которая связана с корреляционной функцией известным
соотношением
kxx (tu h) = ''xx (<i. '2) — * Ci) x (**)-
Для составления уравнения воспользуемся двумерным
преобразованием Лапласа функции х (tt) x (t2):
Х2 (Р> q,a) = X (р, а) X (q, а) =
^%(p)V(p)Z(p)O0(g)V(q)Z(q) _
/ V(p) + a V(q) + a ~
= V{q)-V{p) [Ф°^ VМZWX<P. a)-фо(p) V (p) Z (p)X (</, a)].
(147)
Применим к выражению (147) оператор усреднения по
параметру а и после простейших преобразований получим уравнение
относительно изображения Rxx (p, q) = М [Х2 (р, ?, а)],
которому соответствует функция-оригинал rxx (tu t2):
lV(q)~V(p)]Rxx(p,q) =
= Ф0 (q) V(q) Z (q) Xjp) - Ф0 (p) V (p) Z (p) X (q). (148)
Полагая, что изображению V (p) соответствует
функция-оригинал v (/), а Ф0 (р) Z (р) соответствует х0 (t) (выходная
координата при нулевом значении параметра а), и применяя к выраже-
56
нию (148) обратное преобразование Лапласа, получим следующее
интегральное уравнение относительно rxx (tu t2)'-
и Н
\ v (т) rxx (tlf t2 — х) dx — J v (х) rxx (t! — т, 12) dx =
- * (*i) [ ^ (т) *0 (t% — x)dx—x (t2) J у (т) xQ (t± — x) dx. (149)
Уравнение (149) должно решаться совместно с уравнением
относительно [х (0 при граничных ^условиях
г« С 0) = r« (0f t) =x(t)x(0). (150)
При получении уравнения (149) для rxx (tlt t2) не было
необходимости учитывать закон распределения случайного
параметра а. Отсюда следует вывод: при известном математическом
ожидании х (t) системы (130) корреляционная функция выходной
координаты kxx (tl9 t2) не зависит от закона распределения
случайного параметра.
Если закон распределения случайного параметра является
равномерным, то вторая начальная моментная функция rxx (tu t2)
может быть определена и из другого интегрального уравнения.
Для вывода этого уравнения применим к Х2 (р, <7, а) свойство,
записываемое формулой (135). После "несложных преобразований
приходим к следующему уравнению относительно Rxx (р, q)\
Oo(p)V(p)Z(p) д г Rxx(p,q) 1
V'{p) dp [Фо (p)V(p)Z(p)\ "Г
, *oto)Vto)Zto) д Г Rxx{p,q) 1 _
^ V'{q) dq [Ф0 (Я) V(q)Z(g)\ ""
Здесь X (p, cx) и X (p, c2) являются преобразованиями
Лапласа выходной координаты при значениях параметра сг и с2\
^(Ot^(p^i); \ п-~
*.«)? X(p,*i). I . { '
Применяя обратное преобразование Лапласа к выражению
(151), можно установить интегральное уравнение относительно
rxx (tu t2). В частном случае, когда исследуется импульсная
переходная функция системы Z (р) = 1, а передаточная функция
представляется в форме
1
V(p) + af
57
уравнение (151) упрощается:
1Пй~дрЯхх{р'q) + vhti)~df Rxx fa Я) -
^-Z^lXfacJX^cJ-XiptCjXiq,^)]. (153)
Обозначая через k (t) функцию-оригинал, соответствующую
изображению у1, . , путем обратного преобразования Лапласа
выражения (153) получим следующее интегральное уравнение
относительно rxx (tly /2):
и t2
J ft (<i — т) %гхк (*, t2) d% + J k (t2 — т) xrxx (tu т) &% =
о о
которое должно решаться при граничных условиях (150).
Рассмотрим способ моделирования математического ожидания
линейной стационарной системы при наличии нескольких
нормально распределенных параметров. Предположим, что
случайные параметры ah i = 1, 2, * * ., k в системе (129) распределены
нормально с нулевыми средними значениями и корреляционными
моментами М [ар,]] = oih /, / = 1, 2, . . ., k. Тогда
преобразование Лапласа выходного процесса системы можно представить
в следующей форме:
k
где Р = S а* Л/ (р) является нормально распределенным
случайным параметром с нулевым средним значением и дисперсией
k k
Ир)|2=£ 2>,;#,(p)#Hp),
с — знак комплексного сопряжения; о (р) — рациональная
дробь, нули и полюса которой расположены в левой
полуплоскости комплексной переменной р, Нормируя случайный
параметр Р: '
Р = Рн<? (Р) .
преобразуем выражение (154) к виду
AW~ L(p) + pHa(P) "
58
На основании формулы (144) для «неусеченного» нормального
закона распределения нормированного параметра (JH (сг = —сю,
Со = оо) получим
X(p) = Oo(p)Z(p)(l-V(rtri[-^
Х(р)
(p)W(p)Z(p)
]}•
где
ф (D) - М(Р) • wto)- L{p)
^о(Р)~ L(p) > WW- а(р)
В заключение рассмотрим пример, иллюстрирующий
применение изложенного метода к анализу системы со случайным
параметром.
Пример. Рассмотрим динамическую систему, структурная схема которой
представлена на рис. 16. -Передаточная: функция системы
Ф(Р)<
1
V (р) + а '
где
V(p):
Тр + \ >
зависит от случайного параметра а, распределенного равномерно в интервале
[съ с2]. При исследовании импульсной переходной функции системы необходимо
положить г (0 = б (О, Z (р) = 1.
Математическое ожидание и корреляционная функция импульсной реакции
исследуемой системы определяются путем совместного ^решения операторных
уравнений (146), (153), где
1
V'{p)
:Т +
1
2р(0,57> + 1)
; ф0(рШр) = 1.
(155)
Изображению
■V'(p)
где
соответствует оригинал k (t):
* (о = га (о-мм.
1
л(0~
2р(0,5Гр+1)
(156)
(157)
Рис. 16. Блок-схема системы со
случайным параметром
zjtb
г> »
Гн'
\ '
Тр + 1
Р2
(X
щ
59
*A
\x
\xCi
. ■■
Ф
tc
0 1 2 J Httc
Рис. 17. Статистические
характеристики процесса
x(t) приСх = 1; С2= 5:
a-!c(t); 6-ox(t)
Рис. 18. Поверхность kxx (tlf t2)
при Ci = 1, C2 = 5
. ♦ . Обратное преобразование Лапласа выражений (146) и (153) с учетом
принятых обозначений (152), (155) — (157) приводит к следующей системе уравнений
относительно х (t) и rxx (tl9 /2):
1 Г
Ttx (t)s= т—г [хс> (0 - xCi Щ - J 1) (< - т) т* (т) dx; (158)
*1
■J
О
~ J Л d — *) *»«(х, /2) dx— J т| (*2 — т) хг** (*ь x) dx
.}■■
при граничных условиях
5(0) = Г;
.'«(0. 0«г«('.0) = Й(0
(159)
(160)
Моделирование системы уравнений (158)-—(160) проводилось на цифровой
вычислительной машине. Реализация на ЦВМ уравнения Вольтерра второго
рода (158), эквивалентного системе обыкновенных дифференциальных
уравнений, не представляет затруднений. Моделирование функции двух переменных
гхх (hj t%) согласно уравнению (159) может быть проведено более экономичным
методом, чем метод сеток. Симметрия функции г^ (*1э /2):
rxx Wv *г) ^ гхх (*2> ^а)»
позволяет проводить моделирование в области tx ^ t2- Для каждого
фиксированного значения tx при определении -r^ (tv tz) согласно выражению (159) прово-
60 ,
дится решение уравнения по переменной t2. При этом необходимо, чтобы в
памяти машины запоминалось
Ь &. h) = J Л & - т) тг„ (т, /2) <*т
для каждого фиксированного значения tx как функция переменной t2.
Запоминать же значения г^ (t/, xj) во всех уже пройденных узлах сетки т;^ т/ < *,
(т/ = *Ж т/ = /Л, /i — интервал дискретности) нет необходимости, так как
X (tv t2) можно представить как результат прохождения воздействия trxx (t, t2)
(для любого фиксированного значения t2) через линейную систему с импульсной
переходной функцией т] (Q. Таким образом, при определении X (tv t2) проводится
интегрирование по переменной tx при каждом фиксированном значении t2 = ]h9
/ = 1, 2, . . ., N. Расчет г^ (tl9 t2) согласно выражению (159) будет состоять
тогда в интегрировании по переменной t2 при каждом фиксированном
значении tx = ih, t2 < tv
При решении задачи на ЦВМ было принято Т = 4. Анализ системы был
проведен для различных интервалов распределения случайного параметра а:
1. ^ = 2,5; с2 = 3,5
2. ^ = 2,0; с2 = 4,0
3. сх= 1,5; с2 = 4,5
4. сх= 1,0; с2 = 5,0.
(161)
Во всех этих вариантах математическое ожидание параметра неизменно и
равно 3,0, а стандартное отклонение а меняется от 0,29 (в первом варианте) до
1,16 (в последнем варианте).
в На рис. 17, а показано математическое ожидание x(f) импульсной
переходной функции при сх = 1,0; с2 = 0,5, а также ее значения на границах
распределения случайного параметра хСх (/), хс& (t). Стандартное отклонение импульсной
переходной функции ох (t) показано на рис. 17, б. Поверхность корреляционной
функции импульсной реакции исследуемой системы kxx(tlt /2) представлена
на рис. 18. u r
На рис. 19, 20 показаны математические ожидания и стандартные
отклонения импульсной переходной функции исследуемой системы для вариантов (161).
Обозначения на графиках соответствуют номерам вариантов.
ом
о.з
0,2
0J
~0,1
Рис. 19. Графики х (t) для
вариантов представленных
в формуле (161)
1 /'
1
щ$
л
ы
i
ё
\ZffTi
'у%с
0,20\
0,15
0,10
0,05\
Ш
Ж
I
ч t,c
Рис. 20. Графики ох (t) для
вариантов, представленых
в формуле (161)
61
2. Линейные системы управления
со случайным скачкообразным изменением коэффициентов
Изучение влияния мультипликативной помехи на процесс
управления, исследование динамики ненадежных систем
автоматического управления, а также дискретных автоматических
систем со случайным временем съема данных и ряд других задач
инженерной практики при их математической формализации
сводятся к исследованию статистических свойств решения системы
линейных дифференциальных уравнений со случайными
коэффициентами. В этом параграфе проводится анализ решения системы
линейных дифференциальных уравнений, коэффициенты
которой в случайные моменты времени переходят в одно из множества
возможных состояний [57, 70, 71, 85].
Рассмотрим случайный процесс х (t), являющийся решением
стохастического дифференциального уравнения
* х = А (0 х + В (0 /; х (0) = 0, (162)
где х — вектор п измерений; A (t) — матрица переменных
коэффициентов размерности [п, п\\ В (t) — матрица переменных
коэффициентов размерности [я, т\\ f (t) — m-мерный случайный
процесс типа «белый» шум с известными математическим ожиданием _
и корреляционной матрицей:
мут-Н* \
Kff(t,x) = M[f(t)f*(T)) = N(t)8(t-T). )
Предполагается, что матрица A (t) и В (t) могут находиться
в любом из k возможных состояний, каждое из которых
описывается известными матрицами переменных коэффициентов At (t),
Bt (t)> i = 1, 2, . . ., k. Переход из состояния i в момент
времени t в состояние / в момент времени т является случайным и
характеризуется следующими свойствами:
1. Если в момент t система находилась в состоянии /, то
вероятность того, что в течение интервала времени (t, t + А) она
перейдет в состояние / (/ Ф /), определяется выражением
Р [/, t+ Д|/, t] =ku(t) А +о(Д), 1Ф] (164)
и не зависит от поведения системы, предшествующего моменту t.
Под о (А) понимается величина более высокого порядка малости,
чем А, так что
lim-°£i- = 0.
д->о А
2. Вероятность нескольких переключений состояния системы
за время А является бесконечно малой более высокого порядка,
6»
чем А. Следовательно, вероятность сохранения /-го состояния
в течение .интервала времени (t, t +* A)
k
P[l9mt + b\i, t] = 1- 2)М')Д + o(A) =
= 1 + *,„ (t) A + о (A).
Таким образом, случайный процесс изменения состояния
системы является чисто разрывным марковским процессом с
непрерывным временем и конечным числом возможных значений.
Обозначим через р}- (t) вероятность пребывания исследуемой
системы в /-м состоянии в момент времени /. Известно [99], что
при сформулированных выше свойствах процесса переключений
состояния системы вероятности р;- (0, /=1,2, . . ., k
удовлетворяют системе дифференциальных уравнений
•р/(0= ЕлОМО, / = 1, 2, . . ., ft, (165)
i—l
при заданных начальных значениях вероятностей состояний
Pi (0) = Р/„. •
Систему уравнений (165) удобно представить в векторно-матрич-
ной форме:
р (0 = Л* (t) р (0, (166)
Р (0) = Ро,
где р (t) — вектор-столбец ft измерений с элементами р/ (0, / =
= 1, 2, . . ., ft; Л (t) — матрица интенсивностей переходов
размерности [ft, ft] с элементами кц, i, j = i, 2, . . ., ft, Я,, =
—|v
Предполагается, что случайный процесс переключений
состояния системы не связан статистически со случайным внешним
воздействием.
Случайный процесс х (t) с непрерывным временем может быть
рассмотрен как предел случайного процесса х (/А) с дискретным
временем. Изменения значения процесса х (t) происходят в
дискретные моменты времени 0, А, 2А, . . ., /А, . . .:
х(1А + Д) = * (/Д) + [А (/А) х (/А) + В (/А) Ф (/А)] А;
*(0) = 0. (167)
В выражении (167) под ф (/Д) понимается дискретный «белый»
шум, являющийся допредельной моделью «белого» шума f (t).
статистические характеристики дискретного «белого» шума ф (/А)
63
связаны со статистическими характеристиками (163)
соотношениями:
М[ф(*Д)] = 7(/Д); ]
1 } (168)
M[4>№4>*(qA)] = -LN№blg, J '
где 8ig — дельта-функция Кронекера:
1, l = q;
Матрицы А (/А) и В (/А), I = О, 1, 2, . . ., являются
дискретными аналогами матриц переменных коэффициентов A (t) и В (t).
Матрицы А (/А), В (/А) могут принимать любое из k возможных
значений. В i-м состоянии (*" = 1, 2, . . ., k) в момент времени /А
матрицы Л (/А) и В (/А) принимают соответственно значения
At (/А) и В; (/А):
ЛД/Д^Л^/Д); |
. (169)
i5,(/A) = ^(/A). J
Процесс переключения состояний матриц Л (/А), В (/А)
является цепью Маркова с конечным числом состояний. Вероятность
перехода матриц А (/А), В (/А) из состояния i в момент
времени /А в состояние / (i ф /) через один интервал дискретности Д
определяется выражением
?[/|/Д + А|/|/А]" = Х|/(/Д)А, i + U
которое связано со статистическими свойствами (164) матриц
A (t), В (t). Вероятность сохранения состояния i матриц А (/А)
и В (/А) через один такт определяется выражением
k
Р [i, /Д + А | /, /А] = 1 — S Xu (/А) А = 1 + Хи (/А) Д.
Обозначим вероятность пребывания матриц А (/А), В (1А)
в /-м состоянии в момент времени /Д через ру- (/А), / = Г, 2, . . ., k.
Для ру (/А), / = 1, 2, . . ., k можно записать следующую систему
разностных уравнений:
pj (ZA + А) = Pi № + Д} Pi № К' (/А) А;
Р/ (0) = р/о, /=1,2,.. ., к. (170)
Путем введения вектора-столбца k измерений р (/А) с
элементами ру (/А), / = 1, 2, . . ., &, и стохастической матрицы Л (/А)
с элементами %ц (/А), ь / = 1, 2, . . ., &, можно, как и в выра-
64
J
жении (166), перейти к более компактной матричной форме записи
системы уравнений (170):
р (/А + А) - р (/А) + Л* (/А) р (/А) А; р (0) = р0. (171)
Таким образом, построен дискретный во времени случайный
процесс х (/А), / = 0, 1, 2, . . ., который может рассматриваться
как допредельная форма исследуемого случайного процесса х (t).
Изучение статистических характеристик случайного процесса
^ (/д)? / = 0, 1, 2 и последующий переход к пределу при А —* 0
даст решение поставленной задачи определения статистических
характеристик х {t).
В момент времени /А (/ = 0, 1,2....) система разностных
уравнений (167), определяющая процесс х (ZA), может находиться
в любом из k возможных состояний, поэтому математическое
ожидание х (/А) определяется на основании формулы полной
вероятности:
k
М [х (/А)] = S Pi (/д) М [х (/А) | U /А],
/=1,2,..., (172)
где М [х (/А) | i, /А 1 — математическое ожидание процесса х (/А)
при условии, что в момент /А система находится в состоянии L
Выведем разностное уравнение, которому удовлетворяет
М [х (/А) | i, /А]. С этой целью представим М [х (/А + А)|/,
/А + А] согласно формуле полной вероятности:
Af [*(/Д + Д)|/,/Д-fA] =
k
= ^МИ/Д + Д)| /, /А + А; *\ /А] Р [/, /А | /, /А + А],
/ = 0, 1, 2,... _ (173)
Из формулы (167) следует, что значение х (ZA + А)
определяется состоянием системы в момент времени /А и не зависит от ее
состояния в момент /А + А. Это означает, что
М [х (/А +-Д) | /, /А + A; *, /A] =
= М[х(1к + Д)|*,/Д], I = 0, 1, 2, . . . (174)
Подставляя выражение (174) в формулу (173), получим:
М [х (/А + А) | /, /А + А] =
= Е ЛП* (/А + А) | /, /А ] Р U, /А | /, /А + А],
/ = 0, 1, 2, ... (175)
5 А. М. Батков 65
Вероятности Р U,/Д|/,/Д + Д] могут быть рассчитаны по
формуле Байеса:
p[i, /а|/,/д + Д]= rii.*+wuhm _
М'Д)-
Р,- (/А)
Р/ОД + Д)
Р/(/Д + Д)
А при t =f /;
[1 + Я;/(/А)А] , PJ(<A) при » = /.
Р/(/Д + Д)
(176)
Для расчета М [х {1А. + А) | i, /A ] в формуле (175) обратимся
к разностному уравнению (167) и проведем его усреднение при
условии, что в момент времени /А система находилась в t'-м
состоянии. Воспользуемся при этом соотношениями (168), (169):
М [х (/А + А) 11, /А] = М [х (/А) | i, /A] +
+ \At (/А) М [х (/Д)|/, /А] + Bt (/A)/ (/А)) А,
/ = 0, 1, 2, ...
Подставим выражения (176), (177) в формулу (175):
М 1х (/А + А) | /, /А + А] =
= £ {7W [х (/А) 11, /А] + Л, (/А) М [х (/А) 11, Щ А +
(177)
+ В, (W ('A) A} M'A)
Рг(^)
Д + {М[х(/Д)|/ЛД] +
Р/(/Д + Д)
+ А, (/А) М [х (/А) | /, /А] А + В, (/А) / (/А) А} [1 +
+ Ы*Д)Д]-
,Р/(^)
(178)
Pi № + Д)
После очевидных преобразований формула (178) приводится
к следующему виду:
М [~х (/А + Д)|/, /А + A] "Pi (IA + А) =
= Alf;c(/A)|/,/A]p/(/A) +
+ А (А} (/А) М [* (/А) | /, /Д] ^ (/A) +
+ Вг('АЖ/Д)р/(/Д) +
+ S^l* (/A)| i, /A] ~pt (/А) Я,у (И)} + о (А). ' (179)
66
В выражении (179) о (Д) объединяет все слагаемые правой
части уравнения (178), зависящие от Д2.
Путем введения векторов У/(/Д),-/ = 1, 2, . . ., ft,
размерности п
v. (/Д) = М[~х (/Д) | ЦЩ р} (/Д) (180)
можно представить выражение (179) в следующей форме:
Vj (/Д + Д) = vj (/Д) + Д [А, (/Д) vj (/Д) +
+ Вf (US) J (/Д) ^ № + Jj Щ № hi (Щ + о (А). (181)
I = 0, 1, 2, . . .;
/=1,2,.. ., ft.
Выражение (181) является системой векторных разностных
уравнений относительно Vj (/Д), / = 1,2, . . ., ft при начальных
значениях
, Vj(0) =0, / - 1, 2, . . ., ft.
Система (181) должна решаться совместно с системой
уравнений (171), определяющей вектор вероятностей состояний р (/Д).
Согласно формулам (172) и (180)
k
. м [х(Щ] = S М^)- (182)
Таким образом, системы разностных уравнений (171), (181)
совместно с выражением (182) определяют математическое
ожидание векторной функции х (/Д), Г= 0, 1, 2, . . ., которая является
допредельной моделью исследуемого случайного процесса х (t).
Предельным переходом при Д —> 0 в выражении (181) получим
систему обыкновенных дифференциальных уравнений
и} = Aj (t) щ + 2j иЛ/ (0 +
+ Я, (0 / (0 Р/ (0, /= 1, 2, . ... ft, (183)
где а,- (/) является предельной формой случайного процесса
с дискретным временем vi (/Д) при Д -> 0, a pf (/), / = 1, 2, . . ., ft
удовлетворяют системе уравнений (166). Системы уравнений (166)
и (183) совместно с выражением
к
М [x(t)] = 2 М0> (184)
/«=1
полученным предельным переходом в формуле (182) при Д->0,
определяют математическое ожидание процесса x(t). Для
определения М [х (/)] достаточно однократного решения на вычисли-
U1
BiPiH^
1ыС|
h?2 H
UfA2U2+r2
u2
uz\
••• I
g<r
N*G
1 to Hn
pw^M'fr
[ Сумматор
Рис. 21. Блок-схема моделирования УИ 1*(/)]
тельной машине полученной системы уравнений при нулевых
начальных условиях.
На рис. 21 представлена графическая интерпретация решения
уравнений. В основе структурной схемы лежат блоки 1\ 2,
. . ., &, каждый из которых отражает поведение исследуемой
динамической системы в соответствующем состоянии. Между
указанными блоками существуют связи через переменные
коэффициенты кцУ)*9 отражающие интенсивности перехода системы
из состояния i в состояние /. Детерминированное входное
воздействие f (t)- распределяется по блокам 1,2, . . ., k с помощью пере-
менных коэффициентов Bt (t) p{ (t), i — 1, 2, . . ., k, учитывают
щих вероятности пребывания системы в каждом из возможных
состояний. Математическое ожидание М lx (t) ] является суммой
выходных процессов ui (f) блоков 1,2, . . ., k.
Изложенный выше подход к определению математического
ожидания выходного процесса х (t) может быть применен и к
определению моментов вектора х (t) более высокого порядка. Пусть
Ф U (0Г— известная функция случайного вектора х (t).
Случайный характер х (f), а следовательно, и г|) [л: (ОЬ вызван
случайным, воздействием f (t) на исследуемую динамическую систему и
случайными переключениями состояния системы. Вследствие
отсутствия статистической связи случайного процесса f (t) и
процесса переключения матриц A (t) и В (t) можно при вычислении
М 1/ф] последовательно применить операторы усреднения по
каждому из случайных процессов:.
-'-/-- "- V< МЦ] ^MA\sMf [ф1^Г :: \
На рис.. 21—23, м, 25 для. простоты изображения опущен аргумент. /._
68
Вычисление М [ty] возможно в том случае, если существует
линейная система дифференциальных уравнений, которой удов?
летворяет М/ Ы>] = %« В частности, если г|) [х (/)] = х (t) х* (*),
т0 % совместно с Mf [x (t)] = ^ (t) удовлетворяют следующей
матричной дифференциальной системе уравнений (см. гл. 1):
-J- % = Л% + фгЛ* + BNB* +
..^■xf = Axf.+ Bj\ .
. (185)
%(0) = 0; xf{0)=0.
Таким образом, % удовлетворяет системе линейных
дифференциальных уравнений со случайными скачкообразно изменяю;
, щимися коэффициентами. Математическое ожидание .Аа,.вЪЩ
может быть найдено изложенным выше методом. Например';
усреднение выражения (185) с целью определения дисперсионной
матрицы вектора х (t) приводит к следующей системе
дифференциальных уравнений:
- < k * " _ ' " -1'
% - Л/% + ^А] + ^iKij (t) + Bifuj + л
+ ujTb) + B;NB*jPj (0;
k - -
щ - AjUj + £ и fa (t) + Bjfp, (0, / -1,2,,. ., k\ *
k
м ty] - м [x(t) x* (t)] = e =: 2 ♦/;
/=i
/г
Л1 [x (it) ] = m = У ay. ;
Полученный результат будет проиллюстрирован в дальнейшем
на примерах.
Изложенная выше математическая модель может быть
применена для описания ненадежных автоматических систем. В
процессе работы системы возможен внезапный отказ некоторых
элементов или резкое изменение внешних условий, что может
привести к скачкообразному изменению параметров,рассматриваемой
системы. К подобным системам относятся электронные схемы,
содержащие ненадежные элементы. Другим примером являются
системы, содержащие механические контакты и работающие в
условиях сильных вибраций. Вследствие вибраций в случайные
моменты времени возможен обрыв замкнутых контактов или замы-
ание. контактов, которые по условиям работы должны быть
Р зомкнуты. Изменение уровня вибраций может привести к вос-
69
становлению механических контактов. Такие отказы являются
обратимыми и могут быть отражены в математической модели
системы с помощью случайных, скачкообразно изменяющихся
коэффициентов.
Отказы в системах управления могут быть и необратимыми,
когда восстановление нормального режима работы невозможно.
При этом система может сохранить работоспособность при
ухудшенных динамических свойствах. Покажем, как полученный
в этом параграфе алгоритм расчета моментных функций вектора
выходных координат системы х (t) может быть применен для
анализа системы управления с возможными необратимыми отказами.
Допустим, в линейной системе возможны k отказов (k ^ 1).
Каждый из отказов приводит к скачкообразному изменению
коэффициентов дифференциального уравнения (162),
описывающего поведение выходных координат системы. Обозначим моменты
скачков в системе tl9 t2, . . ., tk. Предположим, что скачки
определенным образом упорядочены:
0<<1<*»<---</А<7\ (186)
Моменты скачков в системе случайны и имеют плотность
распределения вероятностей р (tl9 t2i . . ., tk) в области,
описываемой неравенствами (186).
В момент включения системы матрицы переменных
коэффициентов А (/), В (/) в формуле (162) имеют значения Аг (/), Вх (t).
После первого скачка эти значения изменяются и становятся
равными Л 2 (0» 52 (/), после /-го скачка (/ = 1, 2, . . ., &)
матрицы переменных коэффициентов принимают значения Л/+1 (/),
Bhl (0.
Допустим, что к моменту времени t (0 < / < Т) в системе
произошло /— 1 (1 < / < £) скачкообразных изменений, и
матрицы переменных коэффициентов приняли значения Л7-, Bf.
Определим интенсивность KIt I+1 перехода из состояния / в
состояние / + 1. Согласно выражению (154)
Р [j + 1, t + А|/, t) = X/i/+1 (/) А + о (А). (187)
Величина Р [/ + 1, / + А|/, t] может быть вычислена на
основании известной плотности распределения вероятностей скачков
Р (^i> t2> . . ., 4) и неравенств (186):
pii+i,t+^i,t]=P[i+^'it] =
t t t t+A T T
\ dt^dt2. .. J dthl j dtj J dtUl. . . J dtkP{tv t2 tk)
~ t i t T T T.
J dtx J dt2. . . | dt,-.! | dtj | dtUv . . | dtkp(tlt t2 tk)
0 U //., t t} tk_t
70
it t т т
[ dtA dt2. . . J #/-1 \dtI+v . . J Ллр (/lf t2t. . ., //_i, f, f/+1
о tt */_2 * ^-1 __
t
?■
= —< < * i i r.
' dtAdtr . . j <tt/-i J Л/J dtj+1. . . j Лар(<!, tt tk)
tt '/-2 ' '/ 'ft-l
+ 0(A).
— Д+
Сравнивая полученное выражение с формулой (187), получаем,
что при 1 «s / =^ k
tk)
j" dtx J Л, • • • J Л/-1 J dtl+v . . J dtkp (tv t% t}.b t, thl ,
о и U-i * ^l
: t t t f f T
I dtx Jd^a ... J dtj-г j dtt j dti+l ... J dtkp (tv t„ . . .. tk)
(188)
Отметим, что в знаменателе полученного выражения стоит
величина
РЦ, t) = p,(t) =
it t Т Т Т
= J dtx \ dt2. . . J dthl\ dtt \ dtj+1. . . j dtkp(tl9 tt9 . . .f tk). (189)
Так как было принято предположение об упорядоченности
моментов скачков, то из состояния / возможен переход только
в состояние / + 1, поэтому
lh ДО = 0 при -1 < / < ky i + /, i ф j + I. (190)
Тогда на основании определений
buW"£hiW=-hhi' (191)
1 <; j ^ k>
Если в системе произошло k скачкообразных* изменений
параметров и матрицы переменных коэффициентов приняли
значения Ak+X (t), Bk+1 (t), то система сохраняет это состояние, и
дальнейшие изменения в ней невозможны. Поэтому интенсивность
перехода из состояния HI в любое другое состояние равна
**+iwO =0, « = 1, 2, . . ., k+ U (192)
71
\
BiPi(t).
1
НМ/«/+г/
Bgpg(t)
l-|*-« • • •-*AA
^-*\ВкРМ
tf;tM /'
k + 1
h.7 Акч"к.1+Гк:
_W*r
I Сумматор
Рис. 22. Блок-схема моделирования М [#(*)] при необратимых
изменениях структуры системы
Вероятность нахождения системы в (к + 1)-м состоянии в мо*
мент времени / определяется выражением
t t
, - - Я [й + 1, f] = рЛ+1 (Q =, J dtx\ dt2 . . . X
X J dtkp(tl9 t2l . . ., 4).
Учитывая особенности матрицы интенсивностей переходов
| —Я12(0 k12(t) 6 ' .-. О О
О, ->2з(0 ^23 (0 ••• 0 - О
О 0 — l34i(t) . ... 0. . 0
М*) =
о о о... о о
полученной на основании формул (190)—(192), моделирование
математического ожидания выходьых .координат в линейной
системе йри наличии необратимых отказов элементов может быть
выполнено по схеме, изображенной на рис. 22. Эта структурная
схема является частным случаем схемы рис. 21.
. Схеме, показанной на рис. 22, соответствует система
дифференциальных уравнений, являющаяся частным случаем
уравнений (183); (184); : " ■
иг = A1:(tjut - игКЛ\+Вх (t) f (t) Pl (0;
uf = Aj (t) ~Uj-+ uhfa.lt / (0 — и fa, /+i (0 +
+ */(*)?№ P/M../ = 2, 3, . .,, k\ .
72
«*+i = Ak+i (0 «*+i + "A.A+i (0 +
+ flw(0/(0Pw'W;
Af '[x (0) = £ "/- "/ (0) = 0, / = 1, 2, . . ., k + 1.
(193)
/=i
Предположим, что плотность распределения вероятностей
р (tlt -ti, ■ ■ •, 4) моментов скачкообразных изменений в системе
удовлетворяет условию
Р (*i, f», • • -, 4) = <Pi (*i) Ф2 (*«)• • • Ф* (**). =
k
= П Ф/ (*,), 0 < tx < t2 <• • •< tk < Г.
В этом случае согласно формулам (188), (189)
где
Р/ (0 = ^(0^ (0, 1^/</г+1,
t ■ t t
сi (0 = f Ф1 (*i) dtt | (p2 (/2) Л, • • • J ф;- (/,-) Л,;
^/(0 = |ф/(^/)^/|ф/+1(^+1)Л/+г-- J <pk(tk)dtb 1 </'<£;
4+1(0 = 1-
Подставляя выражение (194) в формулу (193), получим:
и1 = А(0«1-"1-|-ф1 + адК;
d,
(194)
"/ = А, (0 и, + «,_i -J- фМ- -
7-1
d/.
-"/-£-Ф/ +Я/(Ofa-xd,, / = 2, 3, . . ., k;
di
dk+
иш = Ak+1 (t) uk+1 + uk ^±i- 9ft + B,+1 (0 /Cft 4+ii
*+l
M l* (01 = £ «,-; M/ (0) = 0, / = 1, 2, . . ., k + 1.
/=1
(195)
Замена переменных в формуле (195)
И/
-^ = о/, /= 1, 2, . . ., *+ 1,
73
приводит к системе уравнений .
( bi = A1(f)v1 + Bl(f)J;
bt = Aj (0 о/ + омфм + В, (0 /cy.i, / = 2, 3, .... А;
(О yft+i + ОД>* + Bk+1 (t) fck;
M [x (01 = S oyrf/; o, (0) = 0, / = 1, 2, . . ., k+ 1.
Этот результат может быть получен иным способом [70].
Ему соответствует структурная схема моделирования М [х {t)\,
представленная на рис. 23. Блоки /, 2, . . ., k + 1, как и на
рис. 22, являются моделями системы для каждого из k + 1
возможных состояний.
Полученные результаты исследования систем со случайным
скачкообразным изменением параметров могут быть применены
не только к системам с обратимыми и необратимыми отказами,
но и к системам, подвергающимся воздействию
мультипликативной помехи. Допустим, что линейная система управления
описывается дифференциальным уравнением
х = Ах + А0х + Bf,
(196)
где
Ао =
0
a(t)
0
AqX
о
a{t)xt
О
HSKfD-—-*
: »
Рис. 23. Частный случай моделирования М [х (t)\ при необратимых
изменениях структуры системы
74
\<t(t)
*i(t)-
6Л0Х
умножения
-^aft)xi(t)
Рис. 24. Приближенная
математическая модель
случайного процесса:
а — схема формирования
мультипликативной помехи; б —
математическая модель процесса
а (*); * — схема реализации
мультипликативной помехи
У a it) *, (t)
а)
+ *°—тъ2 a(t)
+/v
Н о-
s»r
0
-/У U
<№/ДО
Процесс a (t) является случайным, стационарным с равным
нулю математическим ожиданием М [а (/)] и корреляционной
функцией
#.ш(0 = ЛРе-2»*т. (197)
Таким образом, система (196) содержит мультипликативную
помеху а (/) xt (t) (рис. 24, а) по *-й координате выходного
процесса. Для случайного процесса a (f) может быть построена
следующая модель (рис. 24, б). Реле в случайные моменты времени
переключается из положения / в положение 2 и обратно.
Предположим, что положения 1 и 2 равновероятны, а распределение
моментов переключений подчиняется закону Пуассона со средней
частотой jr.
р(п9 0 =
№)п —I
п\
e-i**f
где р (n, t) — вероятность того, что в течение интервала времени t
произойдет точно п переключений. Построенный таким способом
процесс имеет корреляционную функцию (197) и математическое
ожидание, равное нулю, что доказывает возможность
представления процесса a (t) моделью рис. 24, б. Это позволяет заменить
СХе^нк ^ИС* ^4' а схем°й Рйс- 24, в, содержащей блоки постоянных
коэффициентов +N и —JV, а также контакты случайным образом
переключающегося реле. Таким образом, система управления
с мультипликативной помехой заменена системой со случайным
аркообразным изменением состояний. В первом состоянии она
описывается дифференциальным уравнением
x = A0x + Atx + Bf,
75
где
Л-
.0
— N
t A\X —
о
— Nx,
О
во втором — уравнением
х = А 0х + А 2х + Bf,
где
А,=
+ N
О
у А-%Х
Nxt
О
Поскольку интенсивности переходов из первого состояния
во второе и обратно одинаковы и равны fx, матрица Л (/) имеет
следующее выражение:
A(t):
(X — (X
Математическое ожидание и дисперсионная матрица выходных
координат рассматриваемой системы могут быть определены
изложенным выше методом. На рис. 25 представлена схема
моделирования М [х (/)].
Заметим, что представление процесса a(t) моделью рис. 24, б
основано лишь на совпадении математического, ожидания и
корреляционной функции модели4 и процесса и не учитывает старших
моментов мультипликативной помехи a (t). Поэтому изложенный
выше подход может быть применен при несущественной зависи-
76
о i
J
f-*l Bpi
*•
»■
\ H | -
1
UfAufAfUfr,
—J Bdo \-
^\ url \
Г7/ 1 —
—i
-Н^П—*■
Ui{ fui
LiU
г
U2=AU2+A2U2+r2
j^m
\Сумматор]
\ MM
Рис. 25. Схема моделирования М [х (t) ] в системе с
мультипликативной помехой
мости статистических характеристик выходных координат
системы от старших моментов мультипликативной помехи. Для учета
старших моментов мультипликативной помехи следует применить
более сложные модели.
3. Линейные системы со случайными коэффициентами
типа «белый» шум
В предыдущих параграфах было проведено исследование
линейных динамических систем со случайными возмущениями
коэффициентов, когда эти возмущения представляют собой случайные
величины или марковские чисто разрывные процессы (например,
телеграфный сигнал). В первом случае вся мощность процесса
отклонения параметра сосредоточена на нулевой частоте его
спектральной характеристики, во втором случае случайный
процесс имеет более богатый спектральный состав. В этом параграфе
будут рассмотрены возмущения параметров, имеющие равную
интенсивность всех гармоник, или процессы типа «белый» шум.
Статистическому анализу линейных динамических систем со
случайными коэффициентами типа «белый» шум посвящен ряд работ
1118, 121, 123, 131 ], в которых для решения задачи анализа
применен аппарат теории процессов Маркова и уравнения Колмогорова.
Рассмотрим линейную динамическую систему, вектор
выходных координат которой х (t) удовлетворяет системе уравнений
в векторно-матричной форме
х = A (t) х + / (О,
где х — вектор-столбец п измерений; матрица A (t) размерности
1!1ЭЛементами аа №• *» / = 1. 2, . . ., л,
характеризующимися статистическими свойствами
М lau(t)] = au(ty,
М \aif (t) akl (т) ] = Ru% kl (t) б (t - r);
(198)
77
/ (t) — n-мерное входное возмущение со статистическими
характеристиками
JHVM1-7M: )
М [/в(0^(т)] =-N(t)8(t — т). J
Случайные процессы Л (t) и / (/) коррелированы:
М lau (t) h (т) ] = Gf/i * (0 8 (/ - т). (200)
При принятых предположениях относительно свойств
случайных процессов A (t) и / (tf) [см. формулы (198)—(200)1 случайный
вектор х (t) является марковским и его одномерная плотность
.распределения вероятностей р (t, x) удовлетворяет уравнению
Колмогорова (108):
%«-(£)V<*.*)] + 4-<' [ет^М- (201>
Если известно начальное распределение вероятностей вектора
выходных координат х (/):
Р (0, х) =* ро (*), (202)
то уравнение (201) также имеет начальное условие (202). .
Определим вектор коэффициентов сноса с (/, х) и матрицу
коэффициентов диффузии 0 (t, х) рассматриваемого процесса х (/):
c\t, x)=: lim-^Af [А* (0И0 ==*>==
= iiT1o4-M{ I lA(r)x(r) + f(T)]dr\x(t)=x^ =
t*+A
Й4-М \dx \A(T)\x{t) + ldk[A(X)x(X)+f(X)}
+
+ /W
x(t) = x\ =\im-L[[A(t)x +-f + -^DAA(t)x +
+ ±-dAf(t)] A + 0(A)}=:[A(t) + -LDAA(t)] x+} + ±-dAf(t).
(203)
В формуле (203) для вектора коэффициентов сноса с (t, x)
матрица A (t) имеет элементы a{j (t), i, / = 1, 2, . . ., я; матрица
DAA (t) и вектор dAf (t) определяются выражениями
Daa (0 = lim 4" м \ dxl <&А (т)А (*);
д+о
<+д
4»/ (0 = Пт -т- М [ dt f dXA (т) / (Л),
78
так что п
п
{dAf(t))t= %plkik(t)
Аналогично определяется матрица коэффициентов диффузии
процесса х (t):
О,, /(t, x) = Пт±-М[Ах,(0 Д*у (О| *(0 = х] =
А->0
{f-f-Д *+Д я л
|л /г
п п
+ S °л / w ** + S °/i. i w *<+^/ w- <204)
л=1 /==1
Решение уравнения (201) связано со значительными
трудностями, однако в большинстве практических задач представляет
интерес поведение моментных функций вектора х (t).
В гл. I было показано, что математическое ожидание
марковского процесса является решением дифференциального
уравнения (115). Подставляя в формулу (115) выражение (203) для
вектора коэффициентов сноса, получим:
т
= (Л + \ DAA ) т + / + 4"d^ (205)
Дисперсионная матрица марковского процесса D (t)
удовлетворяет дифференциальному уравнению (116). Введем обозначение:
п п
Ти = Е Да и Фы + awn,) + S G<*f /m* +
+ SG/*.^»"+^w. (206)
Тогда используя в формуле (116) выражения (203), (204) и
обозначение (206), получим следующее дифференциальное урав-
нение: *
b=(A + ±-DAA)D + D(A + -LDAA)* +T. (207)
Аналогичный прием позволяет найти обыкновенное
дифференциальное уравнение, определяющее моментную функцию выходных
координат xt (*), i = 1, 2, . . ., п произвольного порядка. Суще-
79
ственной особенностью дифференциального уравнения относи-
х\гХ22. . . хпп\ порядка Н = k\ +
+ k2 + • • •+ kn является возможность применения рекурсивной
процедуры вычисления моментной функции. Это связано с тем,
что правая часть дифференциального уравнения, разрешенного
относительно -тт М [xi1^2. . . хпп\ зависит только от моментных
функций порядков N и N.— 1. Уравнения (205), (207) наглядно
демонстрируют это свойство.
Пример. Рассмотрим простейшую параметрическую систему первого порядка
i=-a(*)* + /(0.
где стационарные случайные процессы а (/) и / (t) определяются следующими,
статистическими характеристиками:
М [а (/)] = а= const;
М [a(t)a(x)] = Rd(t—xy,
М [f(t)] = /= const;
М lf(t)f°(T)]= N8(t-T);
M[a(f}f(T)] = G6(t—%).
Коэффициенты сноса и диффузии процесса х (t) согласно формулам (203)
и (204) определяются выражениями
с(*,*)=(-«+4-*) х + 1 + ^Г°>
9 (t, х) = Rx2 + 2Gx + N,
а уравнение Колмогорова (201) принимает вид:
1 --i[{-'ax+^Rx+^+TG)p^x)] +
+ -Y^[^2 + ^x + N)p(ttx)].
Математическое ожидание рассматриваемого процесса m (t) и его дисперсия
D (t) согласно выражениям (205) и (207) удовлетворяют уравнениям
m=(--5 + -i-*)m+7 + ^-G;
fi _ 2 (—а'+ R) D + Rm2 + 2Gm + N
при начальных условиях
m (0) = m0;
D (0) - D0. '
На основании формулы (208) могут быть установлены допустимые вариации
случайных параметров для обеспечения устойчивости системы в среднем и в сред-
80
(208)
\SQ
-ftJ0-Aul
-w0+Ao
U)q -AcjI
[u)o+Aa
-(Oo 0 G)0
Рис. 27. График 5 (©)
Рис. 26. Схема корреляционного
компенсатора
нем квадрате. Очевидно, что для устойчивости системы в среднем должно
выполняться условие
~а>-т*>
а для устойчивости в среднем квадрате — условие
а> R.
Вопросы устойчивости линейных систем, параметры которых возмущены
«белыми» шумами, подробно рассмотрены Р. 3. Хасьминскими [107].
К исследованию линейных систем со случайными коэффициентами типа
«белый» шум сводится анализ некоторых радиотехнических схем. Рассмотрим
следующий пример.
Пример. ИсслеДуем фильтр, построенный на корреляционном принципе.
Структурная схема подобного филь-гра представлена на рис. 26. Схеме
соответствует система дифференциальных ^равнений
(209)
T1il + zl=v1[v0 + ylvlzl + y±v±z±]y |
т±г± + z±=^x [v0 + Yi»A + Т±у±2±]. J
После простейших преобразований выражения (209) приводится к виду
= h (- jr + -ЗМ) + Zj.jr-W'i + 1\^Ь
z± = ziT^v№± + z±
У± 2
■«=-0 1
Т7^'
(210)
Входные процессы корреляционного фильтра v0 (/), vx (t) и vx (t) являются
коррелированными узкополосными стационарными гауссовыми процессами.
г^1Гальная плотн°сть мощности процесса v0 (t), представленная на рис. 27,
определяется выражением
5(0) = /5° ПРИ l®-®ol<A«. |со + о)0|<Д(о; (2И)
I 0 при |© —©0|^Affl, |0 + 0о|^до),
где со0-несущая частота процесса; <*0 = -?*..
Процесс Vl (t) связан с v0 (t) зависимостью'
6 А. М. Батков
М') = kv0(t — e),
81
что отражает прием сигнала с задержкой во времени и изменением амплитуды.
Процесс v± (t) сдвинут по времени относительно vx (t) на 1/i периода несущей
частоты:
0j>(0 = 0l (*-•£.).
Процессы Vi (t) и vx (t) являются ортогональными [55]. Необходимость
двух трактов компенсации vx (t) и v± (t) вызвана наличием двух независимых
параметров фильтруемого узкополосного гауссова процесса v0 (t): амплитуды и
фазы.
В связи с тем, что входные процессы системы (210) являются случайными,
она описывается линейной системой дифференциальных уравнений со
случайными коэффициентами. Система (210) может быть записана в векторно-матричной
форме:
i=A(t)z + f(t),
где
2 =
-f-O-Yi*?) TYj^j.
Тг
t-yi<vj. —r-O-vi)
JL *
/ =
1
т,1
¥i
Введем обозначение
K[j= M [V[Vj],
так что, например, Klx = M [vtv±]. Тогда
(212)
82
1
-ТтГ К<>1
^0Х
Матрица А и вектор /"составлены из средних значений элементов A (t) и f (i)
тветственно. Тогда центрированные отклонения элементов матриц A (t) и
fa) могут быть представлены в виде:
A(t) =
Тх In -jt-Iu
71 »1Х Т "XX
УХ УХ
(213)
/№ =
"т~ Soi
~Т ^0-L
где
Вычислим А~я J, определяемые выражениями (212). Нетрудно установить, что
кп=м [v\ (о] = k2M [vi (t - г)] = k2M де (о]=*Ч,;
Ku = М [»! (О в± (0] = *аЛ* [о0(f - е) v0 (< - е--^-)] =
Хц = л[^(0] = ^;
% = *М [»0 (01-0 (* - 8)] = kDVt cos <о0е sl^>e ;
K0x=kM[v0{t)v0(t-z—&)]- .
= *°0„со80>о(е + х)
д<*(*+^)
Здесь было использовано выражение (211) для спектральной плотности
мощности стационарного случайного процесса v0 (t). Таким образом, можно
А =
-^(1-Yi*2^)
-Tj-0-Yj.W.J
/-
1 tn sin Att8
■sr- &£„ COS G)n8 г 2—
77*°*. cosco0(e+^L)
sin A
.(•+■?)
Ч8+т)
(214)
83
Изучим теперь случайные отклонения элементов матрицы A (/) и вектора / (f)
от их средних значений Ли/, которые определяются выражениями (213).
Рассмотрим статистические характеристики процесса -~ £n (t). Корреляционная
функция этого процесса
К1ЪцЮ = М
Yi
11
2
где
t„W=AfK(<)o1(< + t)] =
= k*M [v0(t-s)vo(t + T;-s)]= k*Koo (t).
,Таким образом,
(215)
В соответствии со спектральной плотностью мощности процесса у0 (0,
вычисляемой по формуле (211), его корреляционная функция определяется
выражением
ts / \ л sin Дтт
Коо (т) = Z)0 cos co0 т -
где
D0=Af[t^(0]«
Д«т
23дАю
Теперь "нетрудна определить спектральную плотность 5U, n (©) мощности
продесса ~^- £п (/) как преобразование Фурье его корреляционной функции
/1
Kllt п (т). График Sllt u (0) представлен на рис. 28. В ряде практических
задач ширина спектра Sllt 11 (со) много больше полосы пропускания системы при
средних.значениях параметров, определяемых выражением (214). Это означает,
что на динамику^ системы оказывают влияние только низкие гармоники спектра
Slb ц (©), интенсивность которых близка к Slb п (0). Иначе говоря, случайные
отклонения —^ £u (t) воспринимаются системой как «белый» шум интенсивности
Sn, ц (0). В соответствии с принятым обозначением [см. формулу (198) ] 51Ь п(0)=
= Rllt n. Величина RUt n легко подсчитывается по формуле
2-оо 2 оо
П = S„;„(0) = 2 ^ k\ ■ | 4) (т) dx = 2 А *4 ^_ J s (ю) s (_ ю)
1 —оэ * —оо
с(ш =
= 8
1
V?
?2*,4
5^4Д0.
Рис. 28. График Slbll (со)
84
2я yf
Свойствами, аналогичными указанным вы-
для процесса -^ |xl (f), характеризуются
о о
и другие элементы A it) и />(/). Таким образом,
все процессы случайных отклонений
параметров могут рассматриваться как «белые» шумы,
ше
нсявность которых равна значению спектральной плотности мощности при
~ 0 Взиамные интенсивности случайных отклонений коэффициентов пола-
^ются равными значению взаимной спектральной плотности мощности при
rwa=o.
В частности, процесс %lx (t) характеризуется интенсивностью
Yjl •
М2, 12 :
2я Т2 ° <°
sin2A0^
2А JjL
Ниже приведены все статистические характеристики случайных
отклонений коэффициентов, необходимые для проведения анализа системы:
. ... тп
1 . Yi
\21, 21
2Я J2
5-^Аю
1
sin 2Att -JL
2А,
^
% = 4
Я - Я Г -*±- S2£4A •
*22, 22 — в ^ ^2^ 0 »>
1 1
2л. т\
1 1
^22~4"2я"Т2"°°,с"Д(0
•S^A,
-Sq^A^ |1 +cos2co0&
1+COS20O(8+^)
sin 2 Atts
sin 2Aft
.(•+*) J'
^11. i2 — ^n. 2i~0;
Ml, 22
= 8-
1 VlV± ^д
2я TjT^
^19 91 = 4
M2, 21
1 YiYj.
s№am
0* ^0),
sin 2Att ^
2к ТгТ± ~° ~«>
°12. 22
2Af,
£ J'
°12. 22 — °21. 22 — 0;
1 1
x
XS2*2A(0coso>0(28+^)
2я T^
GU(2 = 8 J__JVi
2я T^ ° a»
Дсо(2е+^)
G11>i=8-i--Y1 «2ь3
S^3A
, COS (Df
.<•+*)
sin Af,
{•+*)'
85
^.1=4-55-^*5*4
COSCDq
(-■30
sin A,
■(-*)
+ cos co0
(•+*)
sin Д„
[•
ttJ'
v , sin Д^е ,
X I COS(D08 т SL. -j_ Cos 0
T sinA(a(e + ^)"|
*( +t) Ч.+*) J'
^.i-^T^Xx
X
cosco0(e-A) V_4i+ / +^4 lij
[
G21t2^4-L-JfSlk\x
X cos0ne
Sin АцВ
Дсо^
-COS©
,(«+£)
sin Д
}
OJS
0
-0,5
-1,0
-#>
86
I .
1
.5 i
~^2
'
' £,/v/cc I
"^
^5
-^r5 J
^7
_^0
-^9
7.0
0.J
ftf1
sTe
5 1
0 1,
5 2
ТГ1
Г--5
~^5
■^-Z
—Л
^9 ]
..«--?
^
Рис. 29. Результаты
моделирования mx (/), /га± (*)
Г - ft l Vl SV A rnc frt P Sln A0)g
G22, i - 8-2Й" T^7 5°* Л«>C0S ^ Д^е
t л, / r \ sin д«
G22>2 = 8-^^S«*XCOS№°(8+t)
IS"72-^- "a1
(■+*)
-(•+£)
Теперь можно воспользоваться уравнениями (205), (207), которым
удовлетворяют математическое ожидание вектора z (t) и его матрица вторых начальных
моментов Г (t), связанная с дисперсионной матрицей известным соотношением
D (/) = Г (0 — т (t) m* (/).
Результаты моделирования на вычислительной машине уравнений (205)
и (207) представлены на рис. 29 и 30. При моделировании было принято Эщ —
_ до-af Yi = Yj. = —106» Tl:=z Тх== 10 мкс» Д© = 9 МГц> * = °»5- Задержка
-0,(75
Рис. 30. Результаты моделирования Dn (t), D±x (t),
Di±
87
ч
1.0
0,5
О
mL
0,1
0,05
-jwi--
-0,7- W5
Ю5
0,5
1 , 1,5
2Кмкс
0,050
0,025;
0
^fi-7i-
\r,:
-w5
■Г2- -0,7
w5
Г
L=
0,5
1.0
1,5 2,0 t,MKC
fr=h=
-~~~~*rJ^
-0 7-105
h- -w5
-\
0 0,5 1 1,5 2t,MKc
Рис. 31. Графики mx (/), m± (t) при
различных значениях у , у±
Рис. 32. Графики Dn (t), Dx ± (t) при
различных значениях у , y_l
£0 f.wc
в приеме сигнала в компенсационном канале 8 варьировалась в диапазоне от
0,001 до 0,025 мкс. На рис. 29 показаны графики изменения математического
ожидания компонент вектора z (t) во времени:
m1(t)= М [гх(0];
т± (t) = М [г± Щ
(216)
Кривые на графиках соответствуют определенным величинам задержки 8
(в мкс):
1 — 0,025; 4 — 0,010; 7 — 0,003;
2 — 0,20; 5 — 0,007; 8 — 0,002;
3 — 0,15; 6 — 0,005; 9 — 0,001.
На рис. 30 показаны графики элементов дисперсионной матрицы вектора
z (t) для тех же величин 8, что и на рис. 29.
Величина ух = у± оказывает незначительное влияние на математическое
ожидание вектора z (t), но существенно влияет на разброс его значений. На
рис. 31 представлены графики математических ожиданий гг (t) и z± (t) при е =
= 0,02 мкс,и значениях уг = Y_l = —1Q5 и Yi = Yj_ = —0,7- Ю5. Графики
дисперсий zx (t) и zx (t) при тех же значениях параметров показаны на рис. 32.
Моделирование уравнений (205) и (207) позволяет выяснить влияние
несимметрии трактов на фильтрацию узкополосного гауссова процесса, а также
влияние параметров уг, у±, Тг, Тх и мощности входного процесса на устойчивость
системы в среднем и среднеквадратическом смысле, а также ряд других
инженерных характеристик системы.
ГЛАВА Ш
ПАРАМЕТРИЧЕСКИЕ МЕТОДЫ ОПТИМИЗАЦИИ
СИСТЕМ УПРАВЛЕНИЯ
1. Градиентные методы
При проектировании систем автоматического управления часто
приходится сталкиваться с задачей выбора некоторых
параметров х+ из условия минимума некоторого критерия качества
функционирования системы F. В соответствии с этим рассмотрим задачу
нахождения вектора х+ = (xf, xt> . . ., xt) из условия
F (х+) = min F{y),
у
где F (у) - F {у1У у2, . . ., уп) — функция векторного
переменного у, определяющая связь минимизируемого критерия F с
управляемыми параметрами у = (у1У уъ . . ., уп).
Исторически первым подходом к решению этой задачи является -
аналитический подход, основанный на использовании необходимых
условий минимума. Как известно, эти условия
*Lgl = 0(/=lf 2, .... я), (217)
сводят исходную задачу к решению системы п нелинейных
уравнений-относительно п компонент вектора х+ = (л^, х$у . . ., х+).
Эти уравнения могут иметь сложный вид и допускать не
единственное решение. После нахождения корней уравнения (217)
необходимо исследовать характер поверхности функции в окрестности
точки х+, чтобы выделить локальные точки минимума.
Аналитический метод минимизации оказывается эффективным обычно только
в тех случаях, когда известно аналитическое выражение
минимизируемой функции F (у). Практически при оптимизации систем
автоматического управления более целесообразно применять
численные методы минимизации.
Старейшим численным методом решения этой задачи является
градиентный метод, алгоритм которого имеет вид
^ = *«-_а,:^, * = 0,1,2,..., (218)
где^с. _ значение шага на *-й итерации.
очка х° называется начальным приближением метода.
нейныхДИеНьТНЫ^ мет°Д является типичным представителем ли-
методов. Как следует из равенства (218), очередное
89
приближение х(+г получается из предыдущего х{ путем движения
в направлении антиградиента. Это направление наиболее быстрого
убывания функции в окрестности точки х*> если предположить,
что здесь функция достаточно точно аппроксимируется линейной
функцией.
Одним из недостатков всех линейных методов, в том числе и
градиентных, является зависимость итерационной
последовательности от выбранной системы координат и, в частности, от
масштабов переменных функции. Пусть, например, при использовании
формулы градиентного метода (218) была получена итерационная
последовательность \х1). Затем была введена новая система
координат, причем координаты новой системы у и старой системы х
связаны соотношением
Ау = *,
где А — неособенная матрица размерности [п, п]. В пространстве
переменных у градиентный метод минимизации функции
F(x) = F (Ay) = Ф (у)
будет иметь вид
^^у'-^Щр-. (219)
Предположим, что в пространстве у градиентный метод
осуществляется с теми же значениями шага ос,, что и в пространстве *,
причем начальное приближение у0 естественным образом
согласуется с приближением х°:
х° = Ау°,
Произведем пересчет последовательности точек {у1} в
пространство параметров х. Соответствующие точки обозначим х1\
? = Ау1, (220)
Подставляя в равенство (219) выражение для производной
функции Ф (у):
дФ(у) _ л* dF(Ay)
ду дх
я учитывая формулу (220), получим рекуррентное соотношение
для последовательности \х1\ в следующем виде:
y+iey-«,Al'^f г = о,1, 2,
дх
х°
= А
(221)
где знак * означает операцию транспонирования матрицы.
Сравнивая формулы (218) и (221), получаем, что в^бщем
случае изменение системы координат изменяет итерационную после-
90
повательность, получаемую в процессе применения градиентного
метода. В частности, из соотношения (221) видно существенное
влияние масштабов для оптимизируемых параметров.
Итерационная последовательность {*'} будет полностью,совпадать с
последовательностью [х1] только в том случае, если
ЛЛ* = £, (222)
где Е — единичная матрица. Как известно из линейной алгебры
[98], матрица Л, удовлетворяющая условию (222), называется
ортогональной, а соответствующее преобразование —
ортогональным. Геометрически ортогональное преобразование
соответствует повороту системы координат в пространстве.
Из равенства (222) видно, что процедура вычисления обратной
матрицы для ортогональной матрицы сводится просто к операции
транспонирования:
А-1 = Л*.
Из формулы (221) следует, что применение градиентного
метода имеет столько же оснований, что и использование метода,
основанного на соотношении
дН-i = xi_щВ W&1 $ {i = 0f ,f 2, ...), (223)
где В — произвольная симметричная положительно определенная
матрица. Действительно, так как для такой матрицы всегда можно
найти [98] неособенную матрицу С, удовлетворяющую условию
СС* = Я,
то итерационную процедуру (223) можно рассматривать как
обычный градиентный метод в пространстве параметров г, связанных
с параметрами х посредством соотношения
х = Сг.
Наиболее широко распространены две модификации
градиентного метода:
1. Простой градиентный метод, или метод простой итерации,
где размер шага остается постоянным в течение всей итерационной
процедуры:
ai = а = const. (224)
2. Метод наискорейшего спуска, в котором на каждой
итерации размер шага выбирается из условия минимума функции в на-
равлении антиградиента. Иначе говоря, at выбирается из условия
F i^^ai^D^rr.^pfri ~ ММ
-НИ*1-^)- '-•■'•
УсловийеСТВуеТ общиРная литература, посвященная исследованию
и скорости сходимости градиентных методов [43, 79,
91
80]. Для простоты изложения проанализируем скорость
сходимости градиентных методов на примере квадратичной функции.
Этот анализ имеет практический интерес, так как функции в
окрестности точки экстремума с достаточной точностью обычно могут
быть аппроксимированы квадратичной функцией. Рассмотрим
вначале скорость сходимости простого градиентного метода. Пусть
минимизируемая функция имеет вид
: п п
f (*) = Т" **<?* = v 2 Е *i*flib (225)
где Q — симметричная положительно определенная матрица.
Введем новую систему переменных у = (у1У y2i . . ., уп),
связанных с исходными переменными л: посредством ортогонального
преобразования А: ;„
х = Ау\ АА* = Е.
В новой системе координат функция F (х), выраженная через
переменные у, имеет вид: • . -'.
'0(y) = F(Ay) = -Ly*A*QAy. /- v
Выберем ортогональное преобразование А из условия приве- -
дения матрицы A*QA к диагональйому виду. В линейной алгебре
доказывается возможность и предлагаются методы решения
подобной задачи. Полученную таким образом диагональную матрицу
обозначим Л. Диагональные элементы матрицы Л будем
обозначать Кг, Х2, . .'., ХЛ. Как известно,.эти параметры называются
собственными значениями матрицы Q.
Особый интерес представляют минимальное собственное зна*
чение т = min \kl9 k2, . . t, Jin} и максимальное собственное
значение М = max {Kl9 Х2, ... ., in\ [98]. Вследствие
положительной определенности матрицы Q значения /пи М должны быть
положительными:
a?qa=a:
В этом случае функция Ф' (у) имеет существенно более простой
вид
В соответствии с этим простой градиентный метод примени-
тельцо к этой функций Ф ft/) определит следующую итерационную,
последовательность точек {У1): ...: -
№l=yh-aXA, '/ = <>, 1, 2, ,...; *=1, 2t ..., л. (226)
Как было показано выше, если матрица А ортогональная и
имеет место равенство я0 = Дг/°, то точки итерационной
последовательности {У1 \ ^находятся в^ простом соответствии 6 точкам»-!'rfft-
92
анионной последовательности {х[}\ полученной применением
Простого градиентного метода к функции (225):
х1 = Ау[:
Отсюда следует, что модуль вектора х[ совпадает с модулем
вектора у1'.
х'*х1 =у1*А*Ау1 =УУ. (227)
Из равенства (226) легко получить выражение компонент
вектора у*+1 через компоненты у0: * , ...
й+1 = уЦ(1-оЛ*)'+1; i = 0y 1, 2, ...; ft=l", 2, ...; я. (228)
Анализируя равенство (228), можно заключить, что когда о
значении начального приближения у° ничего неизвестно, естественно
выбирать значение шага градиентного метода из условия
тах| 1 — а°А,Л| = minmax) l — akk\.
k ОС k '
Решая это уравнение, получим
2
min [%i\ ~f- max {К{} т + М '
i i
м . лл -I М — til
max 1 — a°Xb = ■
(229)
х«Л , W'VA I — М + т • -'
Используя равенства (227), (228) и решение (229), нетрудно
получить оценки скорости сходимости:
Заметим, что так как для рассматриваемого случая функция
F (х) достигает своего минимума в точке х+ = О и минимальное
значение F (0) = 0, то окончательные оценки скорости сходимости
простого градиентного метода при оптимальном способе выбора
шага имеют следующий вид:
(230)
ТРУДН0 показать, что оценки скорости сходимости, получен-
лив для кваДратичной функции специального вида (295), справед*
и М И ДЛЯ ПР0ИЗВ0ЛЬН0И квадратичной функции. В этом случае гй
имеют смысл минимального и максимального собственных
93
значений для матрицы вторых производных минимизируемой
квадратичной функции.
Из оценок (230) следует, что для квадратичной функции F (х),
определяемой формулой (225), итерационная последовательность
{*'), построенная на основе простого градиентного метода с
оптимальным значением величины шага, сходится к истинной точке
минимума х+ = 0 по закону геометрической прогрессии с
знаменателем k = м 7"т • Соответствующее значение функции при этом
убывает также по закону геометрической прогрессии с
знаменателем ( длТ"2 ) • Это означает, что простой градиентный метод
сходится тем быстрее, чем меньше отличаются величины
максимального и минимального собственных значений.
Отношение р = М/т называют коэффициентом
обусловленности матрицы Q. Если значение р велико, то матрица считается
плохо обусловленной, если р «=* 1, матрица хорошо обусловлена.
Подставляя выражение для р в формулу для знаменателя
геометрической прогрессии &, получим связь к и р:
R ~ 1 + Up '
Отсюда для плохо обусловленных матриц имеет место
приближенное равенство
Р
Сравнивая алгоритмы простого градиентного метода и метода
наискорейшего спуска, можно увидеть, что реализация первого
метода проще, так как в процессе реализации метода
наискорейшего спуска на каждой итерации необходимо решать задачу
минимизации функции в направлении антиградиента. Однако, как
показывает теоретическое исследование, скорость сходимости
метода наискорейшего спуска оказывается приблизительно такой же,
как и простого градиентного метода. В частности, были получены
следующие, оценки для метода наискорейшего спуска
применительно к квадратичной функции [43]:
\Х1 *+l ^ l/S^t*0)-/7^*)) (М-т\ .
F (*') _ F (*+) ^ (F (Jfi) - F (*+)) (М^У.
(231)
Сравнение формул (230) и (231) показывает, что оценка скорости
сходимости обоих методов практически совпадает. Наблюдается
полное совпадение по скорости убывания значения функции, а
скорость убывания модуля вектора ошибки \х* — х+1 в простом гра-
94
ентном методе даже несколько выше, так как имеет место
неравенство
/2(f(*V(*+))>i*°-*+i-
Однако в тех случаях, когда отсутствует априорная информация
относительно минимизируемой функции F (х), метод
наискорейшего спуска может оказаться предпочтительным, так как он
гарантирует всегда ту же скорость сходимости, что и простой
градиентный метод с оптимальным выбором шага ос°, зависящего от
параметров т и М.
2. Практическая реализация градиентных методов
Как было отмечено в предыдущем параграфе, скорость
сходимости градиентных методов при минимизации квадратичной
функции определяется значением коэффициента обусловленности
матрицы вторых производных Q. Если рассмотреть случай функции
двух переменных (п = 2), то геометрическое изображение линий
уровня минимизируемой функции имеет вид эллипсов. Причем
эллипсы оказываются тем более вытянутыми, чем больше
коэффициент обусловленности матрицы Q. Поверхность, изображающая
функцию такого типа, имеет вид оврага. При практическом
применении градиентного метода к подобным функциям точка х*
достаточно быстро спускается на дно оврага. Причем в процессе
этого спуска траектория движения имеет прямолинейный
характер, а значение функции достаточно резко убывает. При
достижении дна оврага траектория движения приобретает вид «зигзага»
(рис. 33). Значение функции при этом убывает очень
медленно.
Если коэффициент обусловленности матрицы Q близок к
единице, то линии уровня имеют вид окружности, и градиентный
метод быстро сходится к точке минимума О (рис. 34).
м
• Минимизация «овражной» функции
ростым градиентным методом
Рис. 34. Минимизация
функции с круговыми линиями
уровня простым градиентным
методом
9,5
Как показывает теоретическое и экспериментальное
исследование, это свойство квадратичных функций остается справедливым
и для общего класса функций. В случае многомерного
пространства, если поверхности уровня функции близки к гиперсфере, то
градиентный метод имеет быструю сходимость. Если поверхности
уровня имеют вид вытянутых эллипсоидов (функции овражного
типа), скорость сходимости градиентного метода резко
уменьшается. Учитывая это, естественно постараться изменить систему
координат таким образом, чтобы уменьшить степень вытянутости
гиперповерхностей уровня функции. Эта идея используется в
градиентном методе с подбором масштабов [78, 79]. Рассмотрим
конкретные случаи реализации градиентного метода.
Градиентный метод с подбором масштабов. Предлагается
осуществлять минимизацию исходной функции F (х) в пространстве
переменных z = (zlt z2, . . ., гп), связанных с х соотношением
z* = ТЛ> f = 1, 2, . . ., м,
где параметр yt определяется выражением
i= 1, 2, ..., п. (232)
В качестве s рационально выбирать точку, «подозреваемую»
на экстремум. Заметим, что для квадратичной функции значение у(
не зависит от s. При таком преобразовании поверхности уровня
функции
F(x) = ^ri(xi-bi)\ r,>0
преобразуются в гиперсферы. Для минимизируемой функции
общего вида степень вытянутости (значение коэффициента
обусловленности матрицы вторых производных) уменьшится, а поэтому
скорость сходимости градиентного метода возрастет.
В старых координатах х градиентный метод будет иметь вид
*Г =*i-a
ч\ дх*
Практически оказывается рациональным перед
осуществлением градиентного метода производить покоординатную
оптимизацию, при которой последующее приближение получается из
предыдущего варьированием одноТй из компонент векторной
переменной х при фиксированном значении всех остальных компонент.
Затем по очереди варьируются все остальные координаты. В
процессе осуществления покоординатной оптимизации по трем
замерам функции в окрестности точки минимума-удобно получать
оценки второй производной —^s k= 1, 2, . . ., п. Покоординат-
96
я оптимизация осуществляется~до стабилизации значений
множителей 7л- л „ „.
Метод Л. А. Люстерника. Вначале оптимизация производится
простым градиентным методом. В процессе его осуществления
вычисляется значение коэффициента
dF (xk)
дх
в* =
dF(xk~l)
дх
После замедления скорости убывания функции и при
стабилизации значения параметра б^ вблизи' некоторого значения б < 1
предлагается совершить большой шаг по градиенту
г*+х — Yk ° dF (**)
хк'г" = хг
1—6 дх
не обращая внимания на возможное возрастание функции. Затем
.из точки xk+1 снова производится спуск простым градиентным
методом до стабилизации параметра б. Далее этот процесс
повторяется.
Метод «тяжелого шарика» [80, 25]. В этом методе каждый ч
следующий шаг делается по направлению, являющемуся
линейной комбинацией антиградиента в очередной точке и предыдущего
направления движения:
х^1 = я*' _ a dFd{f] + Р (*' - *1~1)- (233)
Этот метод получил название «метода тяжелого шарика», так
как уравнение (233) можно рассматривать как дискретную
интерпретацию непрерывного движения шарика в вязкой жидкости,
если на него действует поле с силой а~*
Действительно, непрерывное уравнение движения имеет вид
•• , • . dF(x) п
тх + гх + —±± = 0. >
Соответствующее дискретное уравнение можно записать
следующим образом
*'+1 - 2х1 + х1-1 + -L (*'+* - х?) + - дрУ] = 0
1 ' т ч ' ' т дх
или
*'"+' = х' _ _L_ ЭРУ) + _J}_(xl -xiL\' (234)
равнение (234) совпадает с уравнением (233), если положить
7 А' М. Батко
1 т о
г + /я —а; r + m ~Р'
97
Заметим, что если в выражении (234) положить т = 0, то
будет получено уравнение простого градиентного метода. Таким
образом, разница между методом «тяжелого шарика» и простым
градиентным методом состоит в наличии инерционности движения
итерационной точки х1 в первом методе.
Предлагается [80] в методе «тяжелого шарика» выбирать
константы аир следующим образом. Сначала принимается р = 0 и
выбирается а, как это делается в градиентном методе, когда
скорость сходимости метода уменьшится, р следует увеличить до
значения 0,8—0,99. Одновременно .целесообразно увеличить а.
Метод «тяжелого шарика» является двухшаговым и
немонотонным. Он дает возможность не останавливаться итерационной
точке х1 в локальных неглубоких минимумах.
В процессе реализации метода нужно переходить к уменьшению
значений аир только при устойчивом росте функции. Отдельные
случаи роста функции закономерны, и их можно игнорировать.
Как показывает аналитическое исследование, метод «тяжелого
шарика» обладает повышенной скоростью сходимости по
отношению к градиентному методу. Так, хорошо организованный метод
«тяжелого шарика», примененный к функциям овражного типа
с большим значением коэффициента обусловленности р матрицы
вторых производных, сокращает приблизительно в ]/р раз
число итераций по сравнению простым градиентным методом при
оптимальном выборе размера шага.
Ускорение сходимости метода наискорейшего спуска. Из
основных соотношений, определяющих метод наискорейшего спуска,
следует, что при точной реализации метода всегда будет
выполняться условие
(*<+i _ /у у _ ^-i) = о, i = 1, 2, 3, . . .
Это означает ортогональность смещения итерационной точки л:?
на двух соседних шагах. Данное обстоятельство приводит к тому,
что траектория движения точки х1 имеет «зигзагообразный»,
характер, что в конечном счете замедляет сходимость.
Для ускорения сходимости метода наискрейшего спуска Бут
[122, 86] предложил следующую модификацию метода:
где параметр а{ определяется, как и обычно, из соотношения
г / i dF (xl) \ • г( i dF (*Q \ •
а параметр б выбирается постоянным в интервале 0<б<1.
В частности, рекомендуется выбирать б = 0,9.
98
3 Специальные методы поиска экстремума
рассмотрим некоторые другие методы поиска экстремума,
которые связаны с линейными методами. Начнем с метода симплекс-
планирования, предложенного в 1962 г. [151].
В основе этого метода лежит построение и последовательное
перемещение симплекса в д-мерном пространстве переменной х.
Под симплексом я-мерного пространства понимается выпуклая ■
правильная фигура, задаваемая системой п + 1 точек.
Алгоритм метода симплекс-планирования состоит в следующем.
Задаемся системой п + 1 точек л;0, х1, . . ., хп, образующих
исходный симплекс S0, и вычисляем в этих точках значения функции
F (х). Выбираем вершину симплекса, соответствующую
максимальному значению функции. Обозначим эту вершину хг. Строится
новая точка #r, которая получается зеркальным отражением точки
У от грани симплекса, лежащей против нее (рис. 35):
~х = -=- 2.
*=0
1фг
*ч
V 1фГ J 1фГ
S+1
Точки х\ х , . . ., хг~ , /, /+ , . . .., хп образуют новый
симплекс. Вычисляем значение функции в хг. Возможны
следующие варианты:
1. Среди вершин нового симплекса максимум функции
достигается в некоторой точке, отличной от точки лЛ Тогда на этом
заканчивается первая итерация и производится следующая итерация
с новым симплексом.
2. В новом симплексе максимум достигается в хг. Тогда
возвращаемся к исходному симплексу и очередной симплекс получаем
отображением вершины, в которой Значение функции максимально
среди оставшихся вершин. Если в/2+ 1 последовательном
симплексе какая-либо точка сохраняется, то вокруг этой точки
строится новый симплекс с вдвое меньшим ребром,
Известны некоторые модификации.метода, в которых симплекс
может быть правильным или неправильным и в которых
используются другие правила дробления симплекса.
Одним из правильных д-мерных симплексов с ребром, равным
единице,^ и вершиной в начале координат является симплекс,
задаваемый следующей матрицей:
S =
7*
о,
р,
я,
о,
я,
р,
<7. q,
х'
Рис. 35. Схема метода
симплекс-планирования
99'
1
/ Aojs
/ Jr A
\у \
У V Sr-**"'
У^ .У^ У <У^
А&У/
А<^^ ^У
V'
■■■- ' ■ —— *»
*1
Рис. 36. Овражный метод минимизации
каждая строка которой
соответствует координатам
вершин. Параметры р и q
определяются
размерностью пространства п:
Овражный метод
минимизации. В "п. 1 гл. III
было показано, что линейные
методы оптимизации
характеризуются медленной
сходимостью при большом значении коэффициента
обусловленности р для матрицы вторых производных минимизируемой
функции. Такие функции часто называются «овражными», так^как для
случая двух переменных (п = 2) поверхность, изображающая
подобные функции, имеет вид вытянутого оврага. Одним из методов
ускорения, линейных методов является овражный метод
минимизации [20, 22], который сводится к следующему. Задаемся
начальным приближением х° (рис. 36) и градиентным или каким-либо
другим линейным методом производим оптимизацию. Обычно через
несколько итераций применение линейного метода становится
малоэффективным, так как итерационная точка достигает «дна оврага».
Тогда предлагается прекратить применение линейного метода.
Конечную точку обозначим А 0. Далее в окрестности точки хь на
расстоянии, превышающем шаг линейного метода, выбирается
точка я1 и аналогичным образом производится оптимизация
линейным методом. Результирующую точку обозначим Av Для
овражных функций точки Л о и Ах обычно находятся на дне оврага.
Затем по дну оврага по прямой, соединяющей Л0 и А19 в сторону
точки с меньшим значением функции делается iter в точку х2.
Размер шага обычно больше размера шага градиентного метода и
выбирается экспериментально. Затем из точки х2 осуществляется
спуск ЕГточку А 2 путем очередного применения линейного
градиентного метода, и по линии, соединяющей точки Ах и Л2, делается
новый шаг по дну оврага в точку л:3.
При разумном выборе размера овражного шага применение
описанного метода значительно снижает затраты машинного
времени по сравнению с использованием^чисто градиентных методов
для минимизации овражных функций.
4. Квадратичные методы минимизации
Основная идея квадратичных методов минимизации состоит
в квадратичной аппроксимации минимизируемой функции F (х)
в окрестности итерационной точки х{ и выбор следующего при-
100
ближения xi+1 в качестве точки минимума квадратичного
приближения. По-видимому, исторически первым квадратичным
методом является метод Ньютона, в котором аппроксимация функции
строится на основе разложения в ряд Тейлора:
+ (*_^*^+4(*-*Т^(*-*') = g(K Л
где ?*F w _ обозначает матрицу вторых производных функций
II d2F (х) H d2F (х)
F (х) с элементами ^' =±= дх ^ . В соответствии с
вышесказанным определим следующее приближение х1+* как точку
минимума квадратичной аппроксимации q (#', я). Предполагая
d*F (x)
положительную определенность матрицы —здг~» получим
^■ = ,'_(^М-Г'^, (235)
Сравнивая выражения (235) и (223), можно увидеть связь
расчетных формул градиентных методов и метода Ньютона. Различие
методов, с одной стороны, состоит в том, что в методе Ньютона
отпадает проблема выбора шага, но, с другой стороны, требуется
вычислять, а затем обращать матрицу вторых производных, что
связано с значительной затратой труда. Заметим, что обратную
матрицу для матрицы вторых производных рационально
вычислять по методу квадратного корня [14, 78], так как в процессе
обращения матрицы таким способом одновременно производится
проверка матрицы —^Д^- на положительную определенность.
Осуществление этой проверки очень важно, так как соотношение
(235) имеет смысл только для положительно определенных матриц.
В противном случае точка х1^1 может оказаться или точкой
максимума, или седловой точкой квадратичной аппроксимации
Я (*, х1).
В отличие от градиентных методов итерационная последова-
нельность» полученная при использовании метода Ньютона,
ависит от линейных (в частности, масштабных) преобразований
ременных. Так, если последовательность {**•} найдена при мит
имизации F (х), а последовательность {У1} — при минимизации
101
Ф (у) = F (Ах), где А — невырожденное преобразование, то из
условия х° == Ау° следует равенство
** = Ау1. (236)
Однако практически, если преобразование А близко к
особенному (| А | » 0), то за счет ошибок округления вычисление
(—]мг~) будет сопровождаться погрешностями и равенство
(236) может нарушиться,
Естественно, что скорость сходимости метода Ньютона
значительно выше скорости линейных методов. Так, если функция F (х)
дважды непрерывно дифференцируема, выпукла и имеет точку
минимума #+, то при выполнении некоторых других естественных
условий метод Ньютона дает квадратичную скорость сходимости
[44], т. е.
\У+г^х+\^у\х'-х+\\
где коэффициент у зависит от вида минимизируемой функции F (х).
Очевидно, что для чисто квадратичных функций метод Ньютона
дает точное решение за одну итерацию.
В то же время метод Ньютона, как правило, обладает более
узкой ^областью сходимости, чем градиентные методы. Поэтому
часто вначале минимизируют функцию одним из линейных методов,
в процессе реализации которых время от времени производится
d*F (x)
проверка матрицы вторых производных —^— на
положительную определенность. При достижении положительной определен-
d2F (х)
ности матрицы - \ ' следующие итерации производятся по
методу Ньютона.
Существуют модификации метода Ньютона, направленные или
на упрощение его реализации, или на расширение области
сходимости. Например, в модифицированном методе Ньютона предла-
гается вычислять (—g-VM только для одной точки х = х°.
Таким образом, алгоритм метода имеет вид '
^ = *-{^)-1Щ^, /=1.2,... (237)
/ d2F (х) \ —1
В некоторых случаях производится вычисление (—§"VM
один раз на несколько итераций.
Для расширения области сходимости метода Ньютона в работе
Л. В. Канторовича [43] предложен алгоритм
^ = ,'_«(JWL)-1 а£0, t = i, 2 (238)
где параметр а выбирается в интервале 0 <а ^ 1,
102
Наряду с этим был предложен алгоритм [143]
: *» = V _ («,£ + ^М-)- *j&. I = 1, 2, . . ., (239)
где £ — единичная матрица.
Доказано, что алгоритмы (237)—(239) сходятся со скоростью
геометрической прогрессии, т. е. аналогично градиентному методу.
Перечисленные в настоящем параграфе методы являются
методами минимизации второго порядка, так как они предполагают
использование матрицы —gjjs"^ Применение этих методов
оказывается рациональной только в случае, когда вычисление
матрицы —^2" не связано с большими трудностями, например,
когда известно аналитическое выражение функции F (х).
Рассмотрим квадратичный метод минимизации, предложенный
Ф. Вольфом [152], в котором предполагается возможность
вычисления значения функции и ее градиента в любой точке.
Алгоритм метода состоит в следующем. Выбирается п + 1 базисная
точка ^°, л:1, . . ., хп и в этих точках вычисляется градиент
. dF (х°) dF (*1) dF (хп)
дх ' дх > • • * ' дх *
Далее определяются параметры Ji0, A,lf . . ., %п из условия
£я,, = 1. (240)
1=0
По полученным значениям параметров определяется точка
хп+1= ^%х\ (241)
1=0
После этого хп+1 вводится в систему базисных точек, а одна
из старых базисных точек (обычно в этой точке F {х) максимальна)
выводится. Далее расчеты повторяются для полученной вновь
системы базисных точек.
Нетрудно показать, что приведенный алгоритм за~один шаг
решает задачу минимизации квадратичной формы вида"
Р(х)=*-т(х-а)*(Цх-а), . (242)
д^й ^ симметричная положительно определенная матрица.
имeeCтBИTeЛЬH0, систем3 УРавнений (240) для указанного случая
Д hQ (х* - а) = 0; £ К = 1 • (243)
.103
Используя уравнения (243) и.(241), получим
S KQ (х* -°) - ° = Q £ b/—Qa £ ^ = Q(^+1 -a).
Следовательно, лгл+1 = а, так как матрица Q положительно
определенная и поэтому неособенная. Таким образом, показано,
что точка хп+1 совпадает с точкой минимума квадратичной формы
(242).
Как следует из алгоритма метода Вольфа, перед началом его
применения требуется провести п + 1 вычисление градиента
функции. Если предварительно использовался градиентный метод,
то за систему базисных точек можно взять последние итерационные
точки этого- метода. При совершении каждого нового шага
требуется вычислить градиент и значение функции всего в одной
точке, т. е. существенно меньше, чем в конечно-разностном
варианте метода Ньютона.
Для расширения области сходимости метода Вольфа
рекомендуется применять следующие меры:
1. Предотвращать слишком большие шаги. Если параметры Xi
велики (| Я,. | 5^ 20), то делается неполный шаг по направлению
хп+1. Результирующая точка хп+1 определяется соотношением
?+1=я^г2д;'+(1-я^я+1=2д;г(^т+(1-Я)^)'
Параметр X выбирается как наименьшее значение, при котором
удовлетворяется система неравенств:
0<Я<1, ' >
1Г*т + (1_Л)Х/|<20| / = 0, 1, 2, ..., п.
2. Во вновь полученной точке л/1*1 всегда проверять
условие F (л^+1)^ max F (*')• Если это условие не выполнено, то из
j
точки лгп+1 производится спуск градиентным методом до
выполнения этого условия. Конечная точка и вводится в систему
базисных точек.
Теоретически при использовании метода Вольфа может
возникнуть, затруднение, связанное с отсутствием решения системы
уравнений (240). Такое положение, например, может возникнуть
при минимизации квадратичной функции (242), когда .базовые
точки х°у л:1, . . ., хп находятся в подпространстве размерности,
меньшей п. Практический опыт применения метода Вольфа не
оправдывает 3tojo опасения, однако при появлении трудностей
104
го типа естественно определять параметры Ji0, Я1Э
из условия (240), а из условия минимума выражения
*=0
а/ф')
ад:
= min
п
£ »,■
S*
dF(xl)
дх
i=0
Изложенный метод является квадратичным методом первого
порядка. В работе Лаврова [54] предлагается сходный по идее
метод барицентрических координат, который не требует вычисления
производных функции F (х) и ограничивается только
вычислением функции F (х) в некоторых точках. Разумеется, метод Вольфа
легко свести к методу нулевого порядка, используя замену частных
производных функции F (х) отношением конечных разностей,
однако метод Лаврова требует примерно в 2 раза меньшее количе^-
ство вычислений значения функции для осуществления первой
итерации, чём метод Вольфа.
Аналогично предыдущему при использовании метода Лаврова
выбирается система п + 1 базисных точек лг°, л;1, . . ., хп и вы-
0,1,2,
х1 4- х^
числяются значения функции в точках —~—, (*', /'
. . ., п). Обозначим
Далее на основании решения системы (п + 2) уравнений
относительно параметров Я, Я0, %19 Я2, . . ., %п вида]
4|/,A + b = ^> '.= 0f 1, 2, .
■£х7=г
7=0 '
строится точка хп+г = 2 \-*'> которая затем вводится в систему
базисных точек аналогично методу Вольфа. Легко показать, что
для случая чисто квадратичных функций метод Лаврова дает
точное решение за один шаг.
Все рекомендации по практическому осуществлению метода
Вольфа непосредственно переносятся на метод барицентрических
координат.
5. Метод сопряженных градиентов
Шти)ьТ0Д сопР^женных градиентов, предложенный Хестеном и
воемеЛеМ в 1952 г- П32], является одним из эффективнейших со-
v иных методов безусловной минимизации функций. Как бу-
105
дет показано ниже, этот метод можно рассматривать как
оптимальную реализацию градиентного метода применительно к
квадратичной функции. Метод сопряженных градиентов дает точное решение
задачи минимизации произвольной квадратичной функции за п
или меньшее число шагов, где п — число переменных. При этом
метод сводит исходную задачу к последовательности задач
минимизации функций одной переменной и в процессе его применения
необходимо вычислять только значение градиента исходной
функции. Реализация этого метода практически не сложнее реализации
метода наискорейшего спуска.
Выведем основные расчетные соотношения метода сопряженных
градиентов. Пусть требуется найти точку минимума х+ для
квадратичной формы q (x), определяемой выражением
q(x) = -LjfAx + b*x + ct . (244)
где А — положительно определенная симметричная матрица.
Зададимся точкой начального приближения х° и построим первое
приближение вида
xi = xo-a0-?^=:x<>-a0s\
где а0 — выбирается из равенства
q (x° — а^1) = min q (x° — is*1),
t
Обозначим через sl вектор, определяющий направление
движения на j-м шаге. В общем случае, если dq(xl)/dx Ф О, то
_(i + l)-e приближение будем, строить следующим образом:
*^в*_«, (Л£1 +SPJS') '«*_«/* (245)
где параметры а{ и Ц (/ = 1, 2, . . ., i; i = О, 1,2, . . .)
определяются из условия минимума:
fy (*') , V at J
~ш~ + few
(246)
Если * = 0, то в соответствии с положительной
определенностью матрицы А точка доесть точка минимума функции
х1 = х+ и итерационная процедура считается законченной,
106
Из равенств (244) и (245) легко вывести рекуррентное
соотношение для градиентов функции -£- в последующих итерациях:
dgjxW = д^+i + bssAjf + b- а(Аз1+х « Д£1 - atAsi+\
дх 0х
(247)
Учитывая выражение функции q (x) и положительную
определенность матрицы А, преобразуем условие (246) к виду
(з^У (Ах1 + Ь - «Hs'+1) = (st+1Y ЩР- = 0.
Очевидно, что из условия q~f Ф 0 следует ai Ф 0. Поэтому
вышеприведенное условие можно представить в виде
(s/T^^- = 0, / = 1, 2, . . ., I + 1; г = 0, 1, 2, . . . (248)
Сопоставляя равенство (248) и тождество
д?(*0 _ J+i
/*
которое следует из формулы (245), получим
^* а? («О
m
5д:
о, **/.
Иначе говоря, при реализации итерационной процедуры (245)
векторы градиентов в различных итерациях взаимно ортогональны.
Это указывает на конечность данной процедуры, так как в д-мер-
ном пространстве не может существовать более чем п взаимно
ортогональных векторов, т. е. итерационная процедура должна
закончиться не более, чем за п шагов. Условие (248) при / = 1,
2, • . ., i можно также представить в виде
(5>УЫР_ = (eT ( W. _а^+1) = __а, (я>). ^+1 = 0;
/==1,2,.. ., /.
Следовательно,
(J)*AJ = 0; i+ j. (249)
нио ° ?значает> что направления движения в различных
итерациях процедуры (245) взаимно Л-ортогональны [98].
107
s'+1:
Используя равенство (249), определим параметры Р/ и вектор
was»- (so^(^+siPV) =
= (Я0^Д^ + р}(в/)'А/-О; /в1, 2, . . ., /.
Отсюда, используя формулу (247), получим выражение для
искомых параметров:
(:,ул дд(х<) fdgjxl) dg(Xl-l)Y fr(«0
ni dx \ dx dx ) Ъх
P/~ (s'Yas' ^WaP *
Принимая во внимание условие ортогональности, окончательно
получим:
Р} = 0, /=1, 2 , <-1;
Й=1 dX ' iL? '-Р- (250)
Выражение для параметра at можно получить, подставляя
формулы (245) и (247) в условие (248):
dq (xl-
^ + |prV)*^^-a/_1(S')*^ =
dx
Следовательно,
Из формул (250) и (251) следует
(дд(х')\*(дд(х<)\
а _ \ дх ) \ дх ) ,9t-m
1Q8
Подставляя выражения (250), (251), (252) в формулу. (245),
лучим окончательные соотношения для метода сопряженных
градиентов:
xi+l = х1 — см'
Ж ;• =
0, 1, 2, .
где
J+^JsgL + tf;
а,-
дд(х')
дх
(s^fAs1*1
; h=
dqW)
дх
dqix'Z1!
дх
l — 1, Л • • •• s — gx
(253)
Расчетные формулы (253) могут оказаться неудобными, так как
для их использования требуется знание матрицы вторых
производных А при вычислении а,. Учитывая выражение (246), можно
представить формулы (253) в виде:
л*+1 = .
' = *<-a/S'+1
t = 0, l, 2,
л-i _ ag(*0 .
3* "т"
sl^ =
М;
ft-
М*0
дх
dqjx1-1)
!2 '
5д:
^ (** -а^+1) = min q(x{ -as<+1)-
a
В эти формулы матрица А не входит, но при реализации
рекуррентной последовательности требуется вычисление градиента
функции q (х) и определение точки минимума функции q (x) в
направлении s/+1.
Из последних соотношений следует, что рассматриваемый метод
может быть применен к функции произвольного типа [129].
Анализ сходимости показывает» что метод сопряженных градиентов
имеет примерно такую же широкую область сходимости, что и
метод наискорейшего спуска, но скорость сходимости
квадратичная. В случае применения метода к неквадратичным функциям
целесообразно время от времени производить «обновление», метода
т. е. после ряда итераций (порядка п) в точке хк вновь выбирать
Метод сопряженных градиентов относится к группе методов
°пряженных направлений. Другие методы этой группы являются
109
более сложными в реализации, но имеют повышенную скорость
сходимости [124, 119].
Все перечисленные методы характеризуются одним
существенным недостатком: они позволяют найти только локальный минимум.
Легко показать," что если функция выпуклая, т. е. для любых
точек х1 и х2 и произвольного 0 ^ Я ^ 1 имеет место неравенство
F (Хх1 + (1-Х) х2) < XF (х1) + Ц — К) F (х2), (254)
то любой локальный минимум одновременно является и
глобальным. Однако часто на практике бывает трудно проверить
справедливость выполнения условий (254), так как аналитический вид
функции может быть очень сложным или вообще неизвестным.
Единственная возможность нахождения глобального
экстремума заключается в применении вышеизложенных локальных
методов при различных точках начального приближения х°. .После
проведения достаточного числа процедур поиска локальных
минимумов следует выбрать точку с минимальным значением
функции.
6. Минимизация функций при наличии ограничений.
Условия оптимальности
В практике проектирования систем автоматического
управления минимизация функции при наличии ограничений является
широко распространенной задачей, так как в реальной системе
всегда имеются определенные ограничения на управляющие
параметры, связанные с ограниченностью прочностных характеристик,
затрат энергии, возможной фиксацией фазовых координат объекта
в начальный или конечный момент времени и т. д. В общем случае
задача нелинейного программирования формулируется следующим
образом: требуется выбрать вектор-параметр х+ = {xt, xf, . . .
* . ., xt) из условий минимума заданной функции F0 (x) при
наличии ограничений:
Ft (х) ^ О, /=1,2,.. ., т.". (255)
Обозначив через D множество точек я-мерного евклидова
пространства ЕП9 для которых удовлетворяется условие (255),
представим задачу нелинейного программирования в виде
F0(x+) = minFQ(y). (256)
Задача (256) оказывается качественно более трудной по
сравнению с задачей безусловной минимизации, в соответствии с чем
условия оптимальности для задачи (256) имеют более сложную
формулировку, чем условия (217).
Ограничение (255) в виде системы неравенств является общим
случаем ограничений. В частности, ограничение типа равенства
h (х) = 0
ПО
всегда может быть представлено в виде двух ограничений типа не-
равенств: *<*)«>,•
—h (x) ^ 0.
Одним из простейших по своей идее методов решения задачи
нелинейного программирования является метод штрафных
функций или метод нагружения [56], предложенный Курантом для
решения некоторых специальных экстремальных задач.
Метод штрафных функций, примененный для решения задач
(255) и (256), состоит в сведении исходной задачи к безусловной
минимизации нагруженной функции Ф (дс, а):
т
Ф (*, а) = F0 (х) + Jj Ф К Ft (*)), (257)
где ф (а, г) — произвольная непрерывно дифференцируемая функг
ция, удовлетворяющая условию
limq>(a, *)=( °> г^°>
' а^°° \ сю, z > 0.
Одним из возможных вариантов функции ф (а, г) является
ф к z)=-~геаг-
Тогда выражение для нагруженной функции Ф (л;, а) будет
иметь вид
т
Ф (х, а) = F0 (х) + ^ 4" e"F''(X)' <258>
Естественно ожидать, что при достаточно больших значениях
параметра а наличие в формуле (257) нагрузочный слагаемых
Ф (a, Ft (x)) приводит к тому, что точка минимума х+ должна
выбираться внутри области D. Действие нагрузочных слагаемых
будет соответствовать штрафу, накладываемому за нарушение
наложенных ограничений.
Рассмотрим параметрическую задачу безусловной
минимизации функции Ф (х, а), определяемой формулой (257), по
параметру х в функции параметра а. Точка минимума х (а) этой
функции будет зависеть от а. Предположим, что, существует такая
последовательность {а/}, что lim а' = оо. При этом
последовательность {X(ai)\ имеет предел"*"
lim*(aO = jrf (259)
/->оо
причем " ' ■
ПтФ(л;(аО, а')<оо.
111
Тогда в соответствии с теоремой а методе штрафных функций
[56] точка х" принадлежит множеству (255) и является решением
задачи (256). При этом
F0 (дг) = limФ (х(а'), а/); (260)
у->оо
V+
Сформулированная теорема позволяет получить решение
исходной задачи нелинейного программирования в виде предела
решения задачи безусловной минимизации функции (257). Для
определения минимума функции (257) можно применить один из
численных методов, изложенных в п. 1—5 настоящей главы.
Используя метод штрафных функций в наглядной, но не совсем
строгой форме, получим необходимое условие оптимальности для
задачи нелинейного программирования. Построим функцию Ф (х,
а) в виде выражения (258).
Тогда очевидно, что для точки минимума этой функции должно
выполняться условие
дФ(х'\ of) __ dF0 (*Q , VI afFi (*/) dF (*Q _ n
дх """ дх "Т~ Zj дх ■ "" '
где для краткости обозначено х* — х (а'). Предположим, что
функции —g4^- (/ = 0, 1, 2, . . ., т) непрерывны. Тогда,
переходя к пределу в равенстве (260) и учитывая формулу (259),
получим
М0(х+)
Обозначим
т
%fi + £ lim (еа"< &)) д%^ = 0. (261)
limea/><{xi) = Xt, (262)
тогда легко видеть, что
Л^ = 0, если /7/(^+)<0;
Я^^О, если F, (*+) = ().
Можно показать, что предел (262) существует, если множество D,
задаваемое системой ограничений (255), содержит хотя бы одну
внутреннюю точку (условие Слейтера). С учетом принятых
обозначений равенство (261) может быть представлено в следующем
виде:
т
Л!^1+2^-^.-0. (263)
По теореме о методе штрафных функций точка х+ удовлетворяет
ограничениям (255). Поэтому условие для Х+ можно представить
в более компактном виде:
т
*=1
Л^5*0, *'= 1, 2, . . ., т>
(264)
Это условие принято называть «условием дополняющей
нежесткости».
Таким образом, необходимым условием оптимальности точки х+
в задачах (255), (256) в предположении наличия хотя бы одной
внутренней точки в области D является существование системы
неотрицательных параметров %t* %t$ <■ » •» Jwt/для которых
удовлетворяются условия (263), (264). Это утверждение составляет
содержание основной теоремы нелинейного программирования —
теоремы Куна-Таккера в дифференциальной форме [115, 138].
Легко увидеть, что теорема Куна-Таккера является
обобщением необходимого условия безусловного минимума. В самом
деле, если точка х+ содержится внутри области £>, т. е. Ft (х+) <0,
(/ = 1, 2, . . ., т), то из условий (263), (264) автоматически
следует
№qW -о
дх ~"и'
Поясним математический смысл параметров А,+, h£9 . . ., А,+.
Рассмотрим некоторое обобщение задачи (255), (256). Пусть
требуется определить х+ из условия
F0(*+)= min F0(x),
xczD(&)
где область D (б) задана системой ограничений
Ft М + «, <0, (i= 1, 2, . . ., т).
Очевидно, что точка минимума х+ и соответствующее значение
функции будут зависеть от вектор-параметра б — (бь б2, . . .
• • •» Sm):
х+ = х+ (б), F0 (х>) = F0 (x+ (б)).
Оказывается, имеет место равенство
А+- dF0(*+(6))
«ta— |а=о' (*-l. 2,...,m), (265)
оторое означает, что параметр Xf характеризует чувствитель-
^с^ь^инимального значения функции к ограничению Fk (x) +
соотве~ П*)И ^ = ^' ^то вполне согласуется с условием (264),
к огпанСТВуЮЩИм нУлевой чувствительности значения F (х+)
Р ичениям, которые удовлетворяются с некоторым запасом.
8 А. м. Батков ИЗ
Действительно, построим нагруженную функцию Ф (х, а, б)
в виде
т
Ф (х, а, б) = F0 (х) + J] it e*^ ">+6')- <266)
Точка минимума этой функции z+ зависит от параметров а и б:
z* = z+ (а, б).
В соответствии с теоремой о методе штрафных функций имеем
НтФ (z+ (а/, б), а') = F0 (x+ (б)).
/->со
Дифференцируя это равенство по параметру б^ и учитывая,
что z+ минимизирует Ф (х, а, б), получим
= lim f \дФ{z+ (а/' б)> а/' б)1 * ^* (а/> б) I
0Ф(г+(а/, б), а/, б) у= 1}т е«/ (^ (*+ (а/, 6)+^
Положив б = 0 и учитывая принятое обозначение (262),
окончательно получим
ЗМ**(Д))
%
б=0=^, *=1, 2,..., m,
что и требовалось доказать.
Для задачи выпуклого нелинейного программирования, т. е.
в предположении, что функции Ft (х) (i = О, 1, 2, . . ., т)
выпуклы, необходимое условие оптимальности (263) или (264) можно
представить в более симметричном виде. Построим функцию Лаг-
ранжа:
т
L (х, к) = F0 (х) + Jj V, (x). (267)
Так как по предположению F( (х), (i = О, 1, 2, ,. . ., т) —
выпуклые функции, то при %t ^0 (f =1, 2, . . ., m) функция L (х, Я)
также выпукла по л;. Из условия (263) следует, что
дЬ (*+, А,+)
дх
114
Поэтому в соответствии с тем, что L (#, X) выпукла по х, имеет
меСто условие
L(*+, Х+) <L(x, Х+), (268)
причем это условие удовлетворяется для любой точки /г-мерногс
пространства Еп. С другой стороны, так как точка х+ принадлежит
области/), т. е. для нее удовлетворяется система ограничений (255),
то для совокупности неотрицательных параметров Xt (i = 1,
2 ., т) выполняется условие
L(x\ X) <L(x\ Х+)/ J^O, /= 1, 2, . . ., т. (269)
Объединяя формулы (268) и (269), получаем, что если при
решении задачи выпуклого программирования окажется, что в
области D содержится хотя бы одна внутренняя точка, то для
оптимального решения х+ можно найти такую совокупность
неотрицательных параметров Х' = Xt,Xf, . . ., Х£> при которой
выполняется неравенство
L (*+, X) < L {х\ Х+) < L (х, Х+), (270)
%i ^0, i = 1, 2, . . ., т.
Это означает, что функция Лагранжа L (х, X) в точке (х+, Х+)
имеет седловую трчку.
Условие (270) может быть представлено в виде
min max L (x, X) == L (х+, X+) = max min L (x, X). (271)
x X>0 Я>0 x
Соотношения (270) или (271) представляют собой необходимое
условие оптимальности для задачи выпуклого нелинейного
программирования (теорема Куна-Таккера). Легко показать, что эти
соотношения одновременно являются достаточным условием
оптимальности для задачи нелинейного программирования (255),
(256) общего вида при отсутствии требований выпулкости
функций F. (x) (i = 0, 1, 2 . . ., т) и выполнения условия Слейтера
[46]. Действительно, из неравенства (270) следует ~
т
т т
+ 2 tfFt (*+) < F0 (x) + 2 XfFt (x). (272)
Гак как левое неравенство справедливо для любого X ^ 0,
°' очевВДно, должны выполняться условия
F£(x+) <0, /= 1, 2, . . ., т\
т
(273)
п l=al
областСК°пЬК^ ДЛЯ лю^ого допустимого вектора х, принадлежащего
и D> определяемой условием (255), имеет место условие
8*
115
m
S %t F (x) <0, to из правой части неравенства (272) и условия
(273) следует:
т
F0 (х) ^ F0 (*+) - Jj xtFi (х) ^ F0 (*+).
Для любой точки х d D. Это неравенство и доказывает
достаточность условия (270) для оптимальности точки х+ в общей задаче
нелинейного программирования.
7. Градиентные методы решения задач
нелинейного программирования
В предыдущем параграфе были выведены необходимые условия
оптимальности (263), (264) илиг (270), для задачи нелинейного
программирования. Используя эти условия, в очень редких случаях
удается получить аналитическим методом решение реальных
задач. Однако, анализируя условия оптимальности, можно
построить некоторые итерационные процедуры, которые дают
возможность найти численное приближенное решение. .
В частности, Эрроу и Гурвиц [115] предложили определять
оптимальное решение задачи (255), (256) как седловую точку
функции Лагранжа (267) в соответствии с необходимым и
достаточным условием (270). Для случая строгой выпуклости [109]
функций F; (x), (i = 0, 1, 2, . . .,. т) и в предположении
выполнения условия Слейтера ими было доказано, что решение системы
дифференциальных уравнений
т
dx _ dL (х, К) = dF0 (х) \р ^ dFt (х)
dt дх , дх Zj ' дх
^=Uh)*k^=4Wi(*). /=1,2,...,
т
сходится к точному решению задачи нелинейного
программирования при t —> оо: .
limx(t) = x*
t-±co
независимо от выбранных начальных условий х (to), Xj (t0) з?
^ 0, / ^= 1, 2, . . ., /п, где 1 (у)— обозначает единичную функцию
скалярной переменной у. На основании этого предлагается
итерационная процедура следующего вида:
^+1 = max (0, Kli + pFj(x1)},
/=1, 2, ..., т; 1 = 0, 1, 2
116
(274)
ле параметр р>0 характеризует размер шага. Значение шага
выбирается экспериментально. В алгоритме (274) существенное
значение имеет выпуклость функций Ft (x), i = О, 1, 2, . . ., т.
В общем случае метод может не иметь сходимости. Иногда удается
задачу с невыуклыми функциями Ft (х) свести к задаче с
выпуклыми функциями путем эквивалентной замены исходных
ограничений:
Ft\x) <0, i=l,2 /я
системой ограничений
Ф, (/>,(*))< О,
если для скалярной функции <pt (у) удовлетворяются условия:
ф (у) < 0 при у < 0; ф, (у) = 0 при у = 0; ф, (у) > 0 при у >
-> о, i = 1, 2, . . ., т. Функции ф{- (у) выбираются из условия
выпуклости F'i (х) = ф; (Ft (x)).
Другой вариант градиентного метода был предложен Удзава
[115]. В этом методе используется условие оптимальности (271),
исходя из которого можно определять оптимальное решение как
решение максиминной задачи:
L (х (Я), К) = min L (х, X);
X
L (хХ+), Х+) = max L (х (Я), X) = max min L (x, X);
х+ = х(Х+).
^ Метод Удзава удобно применять, когда с помощью
аналитических методов нетрудно вычислить минимум значения L (х, X)
по л: в функции параметра Я, т. е. функцию
L (х (Я), X) = minL (x9 X).
X
Значение Х+ определяется как предел решения системы
дифференциальных уравнений:
%j(t0) >0, / = 1, 2, . . ., т;
к+ = lim % {t).
Соответствующая итерационная процедура имеет вид:
>4+1 = max (0, Xli+1 + pF/ (* (к1))};
%°,^0, /=1, 2 т-
L(x{%%U) = m\nL{xt%1); \ (275)
X+ = limV; х+ = х(Х+).
t->oo
117
Реализация метода по указанной процедуре оказывается
сложнее, чем по процедуре (274), так как в методе Удзава на каждом
шаге необходимо решать задачу максимизации функции L (x, W)
по х. Однако этот метод не требует условия выпуклости функций
Ft(x) (i = О, 1, 2, . . ., т). Аналогичный метод предлагался [84].
Следует обратить внимание, что в работе Удзава [115]
доказывается сходимость дискретных методов только при достаточно
малом значении параметра^р.
Метод Эрроу-Гурвица и метод Удзава являются по существу
градиентными методами определения седловой точки для функции
Лагранжа L (х, Я).
В работе Розена [144] предлагается метод проектирования
градиентов, который обобщает градиентный кетод на случай
минимизации функций при наличии ограничений. При изложении
метода мы будем следовать в основном работам [67, 72].
Рассмотрим вначале случай ограничения типа равенства. Пусть требуется
минимизировать F0 (x):
F0 (х+) = min Fd (#),
xciD *
где область D задана системой нелинейных соотношений
<р, (х) = 0; i = 1, 2, . . ., т\ т < п. (276)
Зададимся точкой начального приближения х°, причем вполне
возможно, что ф (л;0) Ф 0. Обозначим через Ьх приращение
аргумента. Линейная часть приращения функций F0 (x) и ф (х) будет
иметь вид:
п
FQ(x° + 8x)-F0(x°)~%^P-8xj;
п
Ф, (х? + 8х) - Ф, (х°) « J ТГ S^
i = 1, 2, . . ., m.
Наложим ограничения на квадрат модуля вектора 6л; и
определим вектор 8х из условия минимума линейного приращения
функции F0 (x) при ограничении в виде заданной линейной'части
приращения вектора ф:
Л6* = 6Ф, - (277)
где через А обозначена матрица [/я, п] с элементами (А)ц =
= % (х ) g качестве величины бф можно выбрать —ф (х°) или
dxj
118
J
/д.о\ где 0<^Y < 1- Итак, будем определять вектор бл: из
условия
(«&-)'ь-
mm;
(бл:)* бл: = с\
АЬх = бф.
Применяя метод множителей Лагранжа, получим решение этой
экстремальной задачи в виде
bx = 81x + b2x = t(E-A*(AA*)-1A)-?Z^ +
+ Л*(ЛЛ*)~1бф, (278)
где
8гх = t(E — A* (АА*)'1 А) др*£р ; (279)
Ь2х = А* (АА*)-1 бФ; (280)
Е — единичная матрица.
Параметр / в выражении (278) определяется из условия
фиксированной длины вектора бл::
(бл:)* бл: = с.
Приращение 8гх называется градиентной составляющей
приращения, б2л:— компенсационной составляющей приращения.
Эти названия объясняются тем, что справедливы равенства:
А8гх = 0, Лб2л: = бф.
Пользуясь выражениями (279) и.(280), легко показать, что
составляющие приращения бл: взаимно ортогональны:
(82х)* 8гх = (бФ)* (АА*)-1 At {E - Л* (АА*)'1 А) дР^] =
= (бф)* t [(АА*)-1 А - (АА*)-1 АА* (АА*)'1 А] дРод[х0) = 0.
• Приращение б2л: направлено на уменьшение расхождения
в выполнении ограничений (276), а 8гх смещает точку в сторону
уменьшения функции F0 (x). Наличие составляющей 62# может
ч^вести к увеличению значения фуйкции F0 при конечных зна-
моноЯХ паРаметРа U так что в общем случае метод не является
чениям^°?еССе вьшолнения итерации необходимо задаваться зна-
зиться И И 6ср' Вначале рекомендуется [72] при t = 0 прибли-
к ограничению ф (х) = 0, не добиваясь точного его выпол-
119
нения, если функция <р (х) нелинейная, так как в последующих
итерациях это равенство будет нарушаться из-за
криволинейное™ поверхности ср (д:) = 0. Затем совершается несколько шагов
при бф = 0 в направлении проекции градиента -на плоскость,
касательную к ограничениям. Параметр t может выбираться по
аналогии с методом наискорейшего спуска. По-видимому, здесь может
оказаться также рациональным использование метода
сопряженных градиентов, реализация которого практически (не сложнее
реализации метода наискорейшего спуска.
Если наряду с ограничениями типа равенства (276) имеются
ограничения в виде системы неравенств
Fs(x) <0, s= 1, 2, . . ., /, (281)
то реализация метода проектирования градиентов несколько
усложняется. В этом случае, задавшись, как и прежде, точкой
начального приближения х°, вычисляем градиентную
составляющую 8гх:
8г (х) = (Е — Л* (АА*)-1 А) дР°д(хх0) .
Далее по очереди анализируем все / ограничений (281). Для
этого вычисляем
«-.-2-^«*
Если 8FS < 0, то в результате итерации точка xL9 вероятно,
будет стремиться приблизиться или еще более углубиться в область
Ф5 (х) < 0. Поэтому на этом шаге итерации ограничение s будем
пока игнорировать. Если 8FS > 0, то, исключая s-e ограничение
из системы (281), необходимо подключить к системе (276)
ограничение
Fs (x) = 0.
После того как будут проанализированы все неравенства,
необходимо сделать шаг, ориентируясь на новую дополненную
систему ограничений (276) без учета оставшихся ограничений типа
неравенства.
Аналогичным образом проводятся следующие итерации.
Несколько последних итераций нужно осуществлять, ориентируясь
только на выполнение всех требуемых ограничений (276) и (281).
8. Метод возможных направлений
Метод ^проектирования градиентов хорошо приспособлен для
ограничений типа равенств, но его реализация усложняется при
наличии рграничений в виде неравенств. В 1959 г. Г. Зойтендейком
был разработан метод возможных направлений, который^близок
120
по идее к градиентному методу, но лучше приспособлен к случаю
наличия ограничений типа равенства [36]: Независимо этот метод
был разработан С. .И. Зуховицким [37].
Метод возможных направлений будет изложен применительно
канонической форме задачи нелинейного программирования,
которая состоит в минимизации линейной функции
• ' F0(x)= 2РЛ (282)
при наличии системы нелинейных ограничений
Ft(x) <09 i = 1, 2, . . ., m. (283)
Нетрудно показать, что общая задача нелинейного
программирования (255), (256) легко может быть сведена к канонической
форме (282), (283). Действительно, згадача (255), (256)
эквивалентна задаче
*++!== min^+i, (284)
где через х обозначен (п + 1)-мерный вектор с координатами
х — (х, хп+1), а область Dx задается системой ограничений
Ft(x) <0, i = 1, 2, . . ., т\
F0(x)-xn+1<0. j (285)
Пусть решение экстремальной задачи (284), (285) есть точка
х+ = (*+, ^tj-i). Тогда точка *+ есть решение задачи (255), (256).
Действительно, предположим противное, т. е. что существует
точка x++cz D такая, что F0 (x++) < F0 (*+). В этом случае
для точки х++ = (*++, F0 (#++)) будут выполнены все условия
(285), и так как
F0 (x++) < F0 (*+),
то точка х+ не есть оптимальная для задачи (284), (285). Это
противоречит исходному предположению об оптимальности #+ для
задачи (284), (285). Противоречие доказывает факт
оптимальности х+ для задачи (255), (256).
Совершенно аналогичным способом доказывается, что если Х+
есть решение задачи (255), (256), то точка *+ = (*+, F0 (*+))
есть решение задачи (284), (285).
нпи ° заДача (284), (285) является частным случаем задачи jb ка-
нелиЧе-К°Й Ф°рме (282)' (283)' Следовательно, любая задача
скойн^иного программирования может быть сведена к канониче-
симпй рме пУтем увеличения размерности пространства
независимой переменной на единицу.
в следуВН0Й алгоРи™ метода возможных направлений состоит
дующем. Задаемся точкой начального приближения л:0,
121
которая лежит внутри области D, определяемой системой
ограничений (283)
Ft (х°) <0, i = 1, 2, . . ., m, (286)
и выбираем некоторое положительное число 8и с помощью
которого разобьем всю систему ограничений (286) на две группы.
К первой группе относятся ограничения, удовлетворяющие
условию
M*°)+«i<o,
и ко второй группе относятся ограничения
М*°) +si >°-
Ограничения первой группы выполняются с достаточным
запасом и поэтому не будут учитываться в выборе направления
движения на первом шаге.
Задаемся далее положительным значением К1 и выбираем на-,
правление движения |+ = (it, it, . . ., it) из условия минимума
приращения функции
bF0=bpAt (287)
при наличии ограничения нормировки
|Б,| <1, i = 1, 2, . . ., п (288)
и системы неравенств для ограничений второй группы
п
Введение положительного параметра Хг объясняется
нелинейностью системы ограничений (283). За счет введения Хг точка
х° + |+/ с большей вероятностью будет удовлетворять условию
Fj (х° -fc 6+0 < 0
для ограничений второй группы при произвольном
положительном /.
Из условий (287)—(289) видно, что задача выбора
направления движения |+ является задачей линейного программирования
й может быть решена одним из разработанных алгоритмов,
например симплекс-методом [26, 116]. После ее решения могут
представиться три случая:
1) 6F0<-6i;
2) —6Х <: 6F0 < 0;
3) 0 < 8F0.
В первом случае точка xL9 получаемая в результате
осуществления итерации, определяется выражением
xi = хо + * g+f , (290)
122
положительный скаляр / вычисляется из условия принадлеж-
гД и ТОЧки хх границе области /. Иначе говоря, скаляр t выби-
Нается как максимальное значение, при котором еще х1
удовлетворяет системе ограничений (283).
Во втором случае, как и в первом, строится точка я1, но при
осуществлении следующей итерации вместо значений бх и Хг
используются параметры бх/2 и XJ2. Это означает, что точка х°
находится недалеко от точки минимума.
Третий случай указывает на отсутствие направления £,
удовлетворяющего условиям (288) и (289), при которых функция 6F0
убывает. Из этого следует, что если значения бх и Хг достаточно
малы, то точка х° оптимальна. В противном случае необходимо
параметр кг уменьшить. При этом вместо параметра К1
вводится параметр -KJ2 или, если этого недостаточно, Ях/4
и т. д.
Все последующие итерации осуществляются аналогично
первой. Итерационная процедура заканчивается при достижении
определенных достаточно малых значений параметров б
и Я.
При изложении метода было сделано предположение, что
х° £ D, т. е. для л:0 удовлетворяются все ограничения из системы
неравенств (283). Это предположение не вызывает существенных
затруднений, так как обычно, вникнув в сущность решаемой
экстремальной задачи, бывает нетрудно найти точку л:0.6 D.
В то же время эта задача может быть решена и формальным
математическим методом, например на основе использования того же
метода возможных направлений.
Действительно, предположим, *гго для точки у°> которая была
выбрана в качестве начального приближения, не удовлетворяется
некоторое k-e ограничение из системы
Fk(y°)>0.
Тогда рассмотрим задачу минимизации Fk (x) при условии
выполнения тех неравенств из системы (283), для которых Fi (y°) <с 0.
Эта задача может решаться, например, методом возможных
направлений при сведении ее к каноническому виду общим примером,
изложенному в настоящем параграфе, или методом линеаризации
функции. Процедура минимизации продолжается до тех пор,
пока значение Fk (у) не станет отрицательным. Далее
аналогичном приемом добиваемся выполнения и всех других неравенств
из системы (283).
ляетЗК видно из изложения, метод возможных направлений яв-
"казьщ1 достаточно сложным в реализации. В то же время, как по-
мостьЭеТ пРактика» он во многих случаях дает хорошую сходи-
метода** П0ЭТ0МУ широко используется. Одним из недостатков
ничений*ВЛЯется невозм°жность его применения для случая
огради типа равенств.
123
9. Методы решения задачи нелинейного программирования,
основанные на использовании линейного программирования
Рассмотрение этой группы методов начнем с метода
отсекающих плоскостей [135]. Пусть требуется решить задачу выпуклого
нелинейного программирования, записанную в канонической
форме:
п
Л>(*) = Е рл;
F{(x) < О, i = 1, 2, . . ., т\
F0 (x+) = min F0 (л:),
(291)
где Ft (x) (i = 1, 2, . . ., т) — выпуклые функции.
Метод отсекающих плоскостей основан на следующем свойстве
выпуклых функций [109]:
п
ф(У) + 2^(**-У|)<ф(*). (292)
Из этого неравенства следует, что область Sr, задаваемая
системой линейных неравенств
:(*'')+£
dFt (*Q
dxs
s=i
(*s — х{)<0, ^ (293)
/ = 1, 2, . . ., Г; Г= 1, 2, . . ., m,
построенной на основе линеаризации неравенств (291) области D
в произвольной системе точек я1, х2, . ,., л:7 содержит область
D a ST.
Действительно, используя неравенство (292), а также тот факт,
что функция Ft (x) выпукла, легко показать, что если точка z
принадлежит области Z), т. е. удовлетворяет системе
ограничений (291), то 2 также удовлетворяет системе ограничений (293).
Алгоритм метода заключается в следующем. Задаемся
некоторой совокупностью точек л;1, л:2, . . ., хТ и строим систему
ограничений (293). Далее решаем задачу линейного программирования,
которая состоит в минимизации F0 (x) на области ST. .При этом
в процессе выбора точек я1, #2, ♦ . ., хт необходимо позаботиться
о том, чтобы задача линейного программирования имела бы
конечное решение. Пусть решением задачи линейного
программирования является точка хт+гш
Если хт+г 6 D> то очевидно, что я7*1 является точным
оптимальным решением исходной задачи (291). Если xT+l $D, т. е.
124
ели некоторые неравенства в (291) не удовлетворяются, то к
системе ограничений (293) добавляются ограничения
Pi (xT+1)+2 Щр- (*< - *<+1) < ° w
для всех значений /, при которых Ff (х7*1) > 0. На следующей
итерации определяется точка лгг+2 как точка минимума F0 (х)
в области ST+i> задаваемой системой ограничений (291) и (294).
Очевидно, что хт+г $ Sr-j-ь Задачу линейного программирования
на каждом шаге удобно решать двойственным симплекс-методом,
так как этот метод хорошо приспособлен к решению задачи
линейного программирования с растущим числом ограничений
[26, 1161.
В процессе реализации метода бывает полезно с целью
экономии памяти ЦВМ предусмотреть процедуру отбрасывания
некоторых неравенств, которые добавлялись на предыдущих шагах.
Метод допускает простое обобщение в тех случаях, когда
функции Ft (x) не дифференцируемые, однако требование
выпуклости является необходимым.
Недостатком метода отсекающих плоскостей является то, что
практически для любой итерации результирующая точка не
принадлежит требуемой области D. Кроме того, отсутствует правило
окончания итерационной процедуры.
Близким по идее, но свободным от указанных недостатков
является метод аппроксимации границ области, предложенной
В. П. Булатовым [72]. Алгоритм метода состоит в следующем.
Предположим, что требуется решить задачу нелинейного
выпуклого программирования в канонической форме. Пусть х° точка
есть внутренняя точка в области D. Построим некоторый
многогранник Sl9 включающий в себя множество D. Простейшим
многогранником может оказаться параллелепипед
. щ <: xt < bt. (295)
На первом шаге решим задачу минимизации функции F0 (x)
на многограннике S±. Решение задачи обозначим ф. Это решение,
как и. в предыдущем методе, удобно определять двойственным
симплекс-методом. Затем соединим точки д:0 и q1 отрезом прямой
линии и определим точку х1 пересечения этого отрезка с границей
х1 =х° + t1(q1 — x°).
РаметР 'i выбирается как наименьшая положительная ве-
чина, для которой удовлетворяется одно из уравнений
^(^+/i(9i_^o)) = 0.
и вeDxBИДH0, ЧТ0 ^° ^^ и ^° ^ дают соответственно нижнюю
Р нюю оценку истинного значения минимума функции
^о (ft < F0 (x+) « F0 (**).
125
На следующем шаге строится новый многогранник S2, который
задается совместно системой неравенств (295) и неравенством,
определяемым касательной плоскостью к границе области 1
в точке л:1. Это неравенство имеет вид
п
2^ (*,-,!) «о, (296)
s=l
где значение i выбирается из условия
Ft (x1) = 0. (297) |
Очевидно, что к системе неравенств (295) нужно добавить
несколько неравенств (296), если равенство (297) выполняется
одновременно для нескольких значений L При определении точки л;2,
как и в первой итерации, будет использоваться та же внутренняя
точка х°.
В процессе реализации итерационной процедуры будут
получены последовательности точек [q1] и {#'}. Очевидно, что
последовательность {F0 (q*)} монотонно убывает, так как 5/+1cz
cz Sif i = 1, 2, . . . В результате совершения k итераций будет
получена следующая оценка:
где
ak = min FQ (xs).
Таким образом, при использовании метода аппроксимации
границ области удается получить последовательность точек
х1 6 D и последовательность нижких оценок минимального
значения F0 (л:+), благодаря чему можно обоснованно решать вопрос
о выборе числа итераций.
Недостатком метода аппроксимации границ области является
необходимость определения внутренней точки л;0, а также
необходимость решения на каждой итерации уравнений (297).
10. Задача минимизации функций в условиях помех
Раньше при изложении численных методов минимизации
предполагалось, что в процессе вычисления или измерения значений
функции, градиента и т. д. ошибки отсутствуют. Однако в
некоторых случаях, например, когда значение минимизируемой функции
вычисляется методом статистического моделирования или
определяется путем прямых измерений, ошибки измерения оказываются
значительными и их необходимо учитывать. К настоящему времени
имеется значительное число работ, посвященных анализу влияния
случайных возмущений на сходимость и точность
детерминированных методов оптимизации [66, 100, 102]. С другой стороны,
126
лучила развитие собственно математическая теория оптимиза-
Пии в условиях помех. Центральное место в ней занимает группа
методов стохастической аппроксимации [137, 147, 60]. Изложим
основные положения этой теории.
Предположим, что требуется определить точку х+ минимума
функции F (х) = F (#!, *2, . . ., хп). При этом имеется
возможность вычислять значение F (х) в любой точке х с ошибкой rj:
у(х) = F (х) +ц (х).
Ошибки вычисления ц (х) являются центрированными
случайными величинами с ограниченной дисперсией:
М [г] (х)] = 0, М [г]2 (х)] = а2 (х) < а2.
Предполагается независимость значений т] (х) при различных
вычислениях функции у (х) в одной и той же или разных точках х.
Для случая унимодальной функции F (х), т. е. функции, не
имеющей локальных минимумов и при удовлетворении некоторых
других естественных ограничений на F (х) итерационная
процедура вида
*+i =£-щ у(*' + с*5)-у(*') t (298)
s = 1, 2, . . ., п\ i = 0, 1, . . .,
сходится в среднеквадратическом смысле и с вероятностью 1
к точке минимума х+, если для положительных параметров at
и С; удовлетворяются условия:
со
2 а, = оо; (299)
СО
1=1
00
v S «Л < оо, (301)
где через es обозначен л-мерный вектор, S-я компонента которого
равна 1, а все остальные нулю [120]. Сходимость в среднеквадра-
ическом смысле и с вероятностью 1 выражается соответственно
равенствами:
. HmAf [\x+ — xl\2] = 0;
*->со
Р Штх1 = х+] = 1.
/->оо
мостьМ«ТИМ' ЧТ0 из сх°Аим°сти с вероятностью 1 следует сходи-
среднеквадратическом смысле.
127
Из выражения (298) следует, что при наличии дополнительных,
ограничений (299)—(301) итерационная процедура метода
стохастической аппроксимации является по существу процедурой
градиентного метода. Смысл условия (299) состоит в том, чтобы
обеспечить сходимость итерационной процедуры при отсутствии
случайных возмущений. Обратим внимание, что в простом
градиентном методе шаг остается постоянным и поэтому
со со
Zj af = S а =: °°-
i=l 1=1
Условие (301) вводится для исключения регулярных
составляющих при вычислении оценки частных производных в
рекуррентном соотношении (298). Действительно, сопоставляя фор-
мульг (299) и (301)д можно заключить, что
0. (302)
Поэтому
lim d
i->co
м
y(x + ctc?) — y(x)'\ =
im " N ' "'_'—^-Л =
/-►со ci dxs
Наличие ошибок измерения т] приводит к тому, что в
градиентном методе при использовании постоянного шага а итерационная
точка х1 совершает случайное блуждание в окрестности точки
минимума х+. Для ^сглаживания этих блужданий в методе
стохастической аппроксимации вводится дополнительное условие (300).
Анализируя это условие совместно с условием (302), можно
заключить о необходимости выполнения равенства
lima/ = 0.
Очевидно, что ограничения (299)—(301) однозначно не
определяют выбора последовательностей {а/}' и {с,-}. Одним из
возможных, вариантов выбора этих последовательностей являются
соотношения:
1
а,=
а + Ы
ct =
1
0<р<0,5,
где a, b, g, f— произвольные, положительные константы.
Определенная свобода в выборе параметров at и ct является естественным
отражением произвола в выборе размера шага в градиентном
методе. Изложенный алгоритм называется методом Кифера—
Вольфовица.
128 . ' ^
Саксом [147] было показано, что при проведении
экспериментов наличие асимметрии в выборе точек в формуле (298) приводит
появлению некоторых дополнительных погрешностей в вычисле-
к оценки градиента и в конечном счете понижает скорость
сходимости метода стохастической аппроксимации. Для
исключения этой погрешности была предложена процедура
*.'+' = xi-а, У(х1 + с^)-у^-с^) 9 (303)
s= 1, 2, . . ., л; i = 0, 1, 2, . . .
Саксу удалось доказать сходимость этого метода при тех же
ограничениях (299)—(301) на последовательности {а,} и {с,}
и приблизительно при тех же требованиях к минимизируемой
функции F (х), что и в методе Кифера—Вольфовица.
Необходимо заметить, что повышенная скорость сходимости
метода Сакса достигается ценой увеличения числа точек
проведения измерений функции. В методе Кифера—Вольфовица их
было п + 1» а в методе Сакса 2п. Как развитие идеи Сакса было
предложено [891 определять оценку градиента функции на основе
проведения полного или дробного факторного эксперимента.
При анализе скорости сходимости градиентных методов было-
показано, что для случая квадратичной функции при отсутствии
помех итерационная точка х1 стремится к точке минимума х*
со скоростью геометрической прогрессии, причем при плохо
обусловленной матрице вторых производных знаменатель
геометрической прогрессии k = j 7" ^ близок к единице, так что
сходимость метода оказывается медленной. Естественно, что
ситуация только ухудшается с появлением ошибок измерения т).
Некоторые экспериментальные результаты применения метода
стохастической аппроксимации для случая квадратичной
функции F (х) и соответствующие рекомендации по выбору
последовательностей {а,} и {ci} даны в п. 11 данной главы.
Существует несколько подходов к увеличению скорости
сходимости методов стохастической аппроксимации. Исторически
первым появился метод Кестена [136]. В этом методе
предполагается, что аргумент минимизируемой функции F (х) является
скаляром. Ускорение сходимости достигается путем введения
зависимости параметров at от характера изменения приращений
&х1 = х1 — х1'-"1. Естественно, что когда точка х1 находится
Далеко от х+, то нерационально использовать малый размер
шага а,. Вблизи же точки х+ для подавления дрейфа за счет
случайных ошибок т] разумно брать малые значения щ. Кестен пред-
^ жил использовать число перемен знака разности (х1 — х1"1)
от ^е°оВе пРизнака, характеризующего степень удаленности х1
• оа^ основу берется соотношение (298) или (303) с учетом
TDPfin » "^"j ^^pci^ji ^uui лишение \avoj шш \o\joj l.
шагрВаН*ИЙ (2")—(301), причем значение параметра cL и at
на i-м
выбирается равным соответственно с^г и а/_1э если напри-
9 А- М. Батков - 129
мер, на двух предыдущих шагах приращение Ах1 имело
одинаковый знак. В противном случае производится некоторое
уменьшение параметров по сравнению с с^г и а^г.
В работе Фабиана [128] для ускорения процедуры Сакса
предложен метод, основанный на соотношении '
*'+1 = *' + ^-sign W + ъ) -у(х'-сд].
Для сходимости этого алгоритма необходимо, чтобы плотность
вероятности р (г\) ошибки вычисления функции F (х) была
симметрична относительно точки т] = 0.
Другим вариантом схемы ускорения сходимости является
использование стохастического аналога метода наискорейшего
спуска. При этом для выбора размера шага предлагается
применять обычный метод сканирования, игнорируя факт наличия
шумов. Сканирование проводится последовательно в направлении
оценки вектора антиградиента с некоторым выбранным шагом
дискретности Л и заканчивается в первой попавшейся точке
локального минимума. Возможно, что более эффективной схемой
будет использование стохастического аналога'метода сопряженных
градиентов.
Вопросу ускорения сходимости методов стохастической
аппроксимации посвящен ряд работ [127, 89].
11. Применение метода стохастической аппроксимации
к задаче минимизации квадратичной функции
с неизвестными параметрами
Рассмотрим практические результаты применения метода Сакса
к минимизации квадратичной функции. Пусть минимизируемая
функция F (х) представляется в виде
п п п
F до=4* **Q*+b*x+с=4* 2 2qijXiXi+2bixt "tСу
где Q — положительно определенная симметричная матрица.
Очевидно, что изменив начало системы координат и исключив
постоянную составляющую, не влияющую на положение
минимума, функцию F (х) можно 'записать:
F(x) = ~yX*Qx.
Применительно к этой функции итерационная процедура
метода Сакса (303) в векторной форме будет иметь вид
x° = t,
130
гяе через £\ l2 и I обозначены независимые случайные векторы
ошибок измерения и начального приближения соответственно.
Компоненты lll и lll представляют собой ошибки измерения
функции F (х) в точках х1 + cfi* и х1 — с{&. Учитывая
статистическую независимость этих ошибок и предполагаяг что
дисперсия ошибок не зависит от х и равна а?, можно представить
разность
в виде случайного вектора £' с статистическими характеристиками
Af[6'] = 0; M[lT]=2o2xE.
Будем предполагать, что статистические характеристики
вектора начального приближения I имеют вид
М Ц] = 0; М [£g*] =DE9
где е — единичная матрица, D — положительный скалярный
параметр.
Рассмотрим итерационную последовательность \х1\ в новой
системе координат, координаты у в которой связаны с
координатами х старой системы посредством ортогонального
преобразования
х = Ау,
где А — ортогональная матрица (А"1 = А*). Тогда
последовательность точек {у1}у соответствующая {х1}
х1 = Ау1,,
может быть получена на основе рекуррентного соотношения
уШ = yt-at [A*QAy' + AT -щ] • (304)
Способом, аналогичным описанному в п. 1 данной главы,
выберем ортогональную матрицу А из условия приведения
матрицы A*QA к диагональному виду:
Ik
к
A*QA = Л =
Обозначим
. Л*£< = г). (305)
чевидно, что для вектора rf справедливы условия:
^ М [ч'} = 0tM [4yj = M [aWa] = 2o\E.
131
К
Учитывая диагональность матрицы Л и обозначение (305),
полечим рекуррентное соотношение (304) в форме
Й+1 = ^-а*(^ + ^т^) = ^(1-аЛ)--^-, (306)
s = 1, 2, . . ., п\ i = 0, 1, 2, . . .
Из свойства ортогональности матрицы А и характеристик
вектора начального приближения | следует, что статистические
характеристики вектора начального приближения у0 в
пространстве переменных у имеют вид:
М 1у°] = А*М [|] - 0; М [у°у°*]= DAA* = DE.
Поставим задачу определения наилучших параметров {с^}
и {ct} в зависимости от характера F (х), дисперсии а2 и числа
итераций N. С этой целью выведем уравнение для определения
М [F(xN)l
Учитывая рекуррентные соотношения (306),
некоррелированность компонент векторов tj' и у0, легко доказать
некоррелированность компонент вектора у1. Рекуррентное соотношение для
М [(У1*)2] = 9s можно получить, возведя равенство (306) в квадрат
и усредняя по совокупности:
9^ = еН1-аЛ)2 + ^-, (307)
s = 1, 2, . . ., я; / = 0, 1, 2, . . ,
Очевидно, что математическое ожидание значения функции
F (xN) = F (AyN) после совершения N итерации запишется в виде
М [F (**)] = М [4-^Q*"] = М [±-у"*Ау»] = ±-% W- (308)
Таким образом, задача определения наилучших
последовательностей {а,-} и {ct} свелась к минимизации функции (308)
при наличии связей (307).
Из соотношений (307) и (308) можно увидеть, что уменьшение
параметров с{ приводит к увеличению 9f и, следовательно, к
возрастанию М [F (xN)]. Однако обычно не имеется возможности
увеличивать ct до бесконечности, так как минимизируемая
функция F (х) только в некоторой локальной области может быть
представлена квадратичной. Поэтому в дальнейшем примем d в виде
постоянной величины:
С[ == Су I == 1) Z/y . « •> /2.
Так как минимизируемая функция F (х) предварительно
неизвестна, то естественно рассматривать параметры %s (s = 1,
2, . . ., п) в виде случайных параметров. Предположим, что закон
распределения этих параметров одинаков для всех Л/^'и^равен
132
(%) Тогда из соотношений (307), (308) следует, что задача выбора
птимальной последовательности {а/} в рассматриваемой много-
° ой задаче может быть сведена к выбору оптимальной
последовательности {а/} в одномерной задаче минимизации
математического ожидания функционала
I = ± ^ XQN (X) р (X) dX, (309)
где 0^ (X) определяется в результате решения системы
рекуррентных соотношений
2 2
в'+1 = в' (1 -а<Я)1+ -^, О0 = D, (310)
i = 0, 1, 2, . . ., N— 1.
К сожалению, аналитическое решение этой задачи имеет
относительно простой вид только для неслучайного и известного
значения X = Х0.
Дифференцируя в этом случае уравнение (309) по ait получим
уравнение связи at и 0':
i|il=o=-2e<„-a,»,,lo+igL •
Отсюда
а, = ^-2-- (311)
Подставляя выражение (311) в формулу (310) и решая
рекуррентное соотношение, получим
о?
9'=: 2/ 22с 2 . (312)
Следовательно, дисперсия после совершения конечной N-&
итерации выразится соотношением
■**= °f2C\ ■ (313)
о\/2с2 + NX2QD
опт Равенств (311) и (312) следует выражение для элементов
птимальной последовательности {а,}
а, =
РЪ>0
133
Это выражение было принято за основу для определения
квазиоптимальной последовательности {«/} в задаче (309), (310),
когда параметр Я случаен и равномерно распределен в интервале
(m, M). Легко показать, что эта задача сводится к определению
оптимальной последовательности {а,-} из условия минимума
функционала
2-t
W-
где pN (к) определяется на основании решения уравнений
рЧ-i =р'(1— а,Я)2 + а2,
100,
0, 1,
N— 1.
Характерной особенностью постановки задачи (314) является
условие р° = 100, также то, что параметр К равномерно
распределен на отрезке (t, 2— /), и, следовательно, М [Я] = 1. Между
параметрами исходной задачи и задачи (314) существует
следующая связь:
2а/ .
e^p'D/lOO;
2т
t =
т2_^
т + М »
о\\00
2c2D •
(315)
Оптимальная последовательность {at} в соответствии с
выражением (312) может быть записана в виде
а,=
a2 + (r-|-l)x2 '
где параметр х определяется методом сканирования на отрезке
(t\ 2— t) с интервалом А = 17 , т. е. всего просматривается
101 точка. При этом в процессе вычисления функционала (314)
интеграл заменялся суммой
1 •
1U k=l
где %k = t -\ s— k\ k
1, 2, . . ., 5. Такое представление
интеграла соответствует. замене исходного непрерывного
равномерного распределения дискретным, распределением.
134
С помощью прямых расчетов получена зависимость оптималь-
ого параметра и в зависимости от N, t и а2. Естественно, что при
^ = 1 оптимальное значение х = 1. При этом в соответствии
с формулой (313) конечное значение
\ 4у и',* \ М " 100(Т2 1ЛЛ aW /otC4
ХД^(^)==Р P==^+100^=100aW+100' <316>
Отсюда следует, что при t = 1 значение р зависит только
от отношения о2 IN = г2. В таблице приложения приведена
зависимость параметра х от iV и / при фиксированном значении е2 =
= o2/N и, следовательно, при фиксированном значении
R— 1UU o*/N+ 100 е
Параметр k характеризует то значение pN9 которое можно
было бы достичь при условии t = 1, т. е. при условии точного
знания второй производной минимизируемой квадратичной
функции. Указанные таблицы приведены для следующих значений k:
50; 20; 10; 50; 10; 0,1; 0,05; 0,01; 0,005; 0,001. Такой способ
представления данных объясняется, тем, что в некоторых случаях,
изменяя дисперсию ошибки вычисления значения функции Ои
например методом дополнительного усреднения, можно
варьировать число итераций N, так что общее число измерений
минимизируемой функции остается постоянным:
е2 = q2 IN = const.
При этом возникает вопрос о том, что более рационально:
совершить значительное число итераций с неточной оценкой
градиента или небольшое число итераций с уточненными оценками
градиента. На рис. 37 приведены графики зависимости значения р
от параметров t и N при различных значениях е2 при оптимальном
выборе параметра х. Параметр г на рис. 37, а, б, в'соответственно
принимает значения 11,1; 1,01; 0,1.
Из этих графиков видно, что уменьшение параметра t> т. е.
увеличение степени неопределенности второй производной
функции, приводит к снижению точности метода стохастической
аппроксимации. С другой стороны, не рационально выбирать
слишком большое значение N, так как это не снижает существенно
дисперсии р, но увеличивает сложность реализации численной
роцедуры из-за возрастания числа итерации.
Из графиков видно, что при t = 1 точность минимизации р
^висит от N. Это вполне согласуется с формулой (316).
постРгтЛЬЗуясь та^л- 1—Ю» легко получить оптимальный вид
ложениВаТеЛЬНОСТИ ta') для общей заДачи (307)> (308) в пРеДпо-
иии равномерности распределения параметра %t {i = 1, 2, . . .,
135
1
. г 3 Ч 5 6 8 10 20 30 50
1 2 3 Ч 56 8 10 20 50 Н
6)
Рис. 37. Зависимость р от N:
а — при k = 10; е2 = 11,1; б — при k = 1; е? = 1,01; в — при k = 0,1; е2 = 0,1
. ., л) на отрезке (m, M), Для этого, задаваясь значениями D,
с, ai и ДО, определим параметр
100of
aV^V+ 100 - a? + 2iVc2D '
Параметр k характеризует степень уменьшения дисперсии Of
по отношению к 9/ в предположении, что значение к фиксировано
и равно -^i— . Действительно, из формул (315), (310) и (307)
следует
а^ а^
А =100А-=100-^-, (*=1, 2,..., п).
В соответствии со значением k определяется номер таблицы
От
в приложении и затем по значениям N и t = —цтм определяется
оптимальное значение х. Отсюда можно найти оптимальный вид
последовательности {а,-} :
а/==
2и
/ ЪЩ \
136
12. Определение градиента в условиях помех
При применении метода стохастической аппроксимации или
юбого другого метода минимизации функции в условиях помех
обычно возникает потребность вычисления оценки градиента
минимизируемой функции F (х) или бо#ее старших производных
в точке очередного приближения х1. Причем, так как обычно
аналитическое выражение функций неизвестно, то оценки градиента
или вторых частных производных получаются в виде отношения
конечных разностей. Рассмотрим случай вычисления первых
частных производных функции F (х). Предположим, что
функция F (х) вычисляется на ЦВМ методом Монте-Карло на основе
определения среднего значения некоторой функции Ф (х, |),
где i случайный вектор с известным распределением
F(x) = M [Ф(х, 6)].
функция Ф (х, £), К£к и F (х), неизвестна, однако в результате
моделирования ее значение можно определить для любой
совокупности (х, I). Будем предполагать, что оценка среднего
значения функции Ф (х, £) производится по т испытаниям. Тогда
оценка s-й частной производной функции F (х) будет иметь
следующий вид
dF (х) _F(x + Aes) — F {x — Aes) __
dxs ~~ 2Л ~
m m
£Ф(* + Де\ |0- £ф(*-Де5, ч1)
= - ШГ : > . (317>
где ll и r\l — значения случайных векторов в статистических
испытаниях.
Предположим, что £' и tj' (i = 1, 2, . . ., т) попарно
независимы. Тогда дисперсия оценки - будет иметь вид
D \<*1Щ - D [ф <* - AeS> ^ + Р[®(х- Aes, г])]
L dxs J 4Д2т
Предполагая, что величина Л достаточно мала, так что
D [Ф (х + Де*, £)] « D [Ф(х— Aes, rj)] « D [Ф (х, I) ],
получим выражение для дисперсии
П [др(хЦ D [ф (*» 5)1 (<*]R\
IdxVl = 2Д2/п ' (СЦЬ)
пnoи^eAOBaтeльнo, с Уменьшением А дисперсия оценки частной
у «водной возрастает до бесконечности.
137
Другим, подходом [76] вычисления >w является
использование в выражении (317) одних и тех же реализаций векторов
£' = т)' (/ = 1,2, . . ., т). Очевидно, что такой способ
статистического моделирования не повлияет на математическое ожидание
оценки. Дисперсия оценки будет выражаться равенством
т
D Тд£Щ _ D ГФ (х + Aes, g) - Ф {х - Aes, £)1
д[-^1]. ,3,9,
/га
Сравнивая формулы (318) и (319), можно заключить, что при
достаточно малом значении А второй метод, называемый методом
зависимых испытаний, оказывается более экономичным. В
частности, если влияние вектора £ в функции Ф (х, |) можно
представить в виде аддитивного слагаемого
Ф(*. 1У=Фг(х) +Ф2(£),
то, как видно из формулы (319), метод зависимых испытаний дает
точную оценку частной производной. В монографии Ю. Г. Пол-
ляка [76] приведены примеры, иллюстрирующие эффективность
применения зависимых испытаний в процессе оптимизации
систем.
Для некоторого частного класса задач [6] можно получить
еще более экономичное ег смысле объема вычислений выражение
для градиента функции и матрицы вторых производных, чем метод
зависимых испытаний.
Предположим, что минимизируемая функция F (#), как и
ранее, вычисляется в виде среднего значения некоторой функции
Ф (Е, Л):
F(x) = M [Ф(|, г))], (320)
где плотность вероятности р (£, х) вектора | зависит от вектора х>
а плотность вероятности вектора у\ равна / (г)). Относительно
функции р (£, х) предполагается выполнение следующих
условий:
1) функция должна быть дифференцируема по всем
компонентам вектора х при любом значении |;
% при произвольных значениях х и I функция р (£, х) ф 0.
Конечно, такие предположения относительно функции
Р (Е, х) удовлетворяются не во всех задачах, но практически для
всех интересных случаев можно сколь угодно точно
аппроксимировать истинный закон распределения некоторым другим законом,
для которого указанные условия выполняются. Заметим, что
требуемые условия оказываются выполненными, если вектор £ рас-
138
поеделен по нормальному закону, а вектор х характеризует его
математическое ожидание:
р С. х) = (2п)„/2' е |V. ехР {- 4- (6 - *)* е-1 (5 - *)} -
= ("i^W77 ехр Ь ^~ It 19^(ii~*г) (|/" Х1))' (321)
где 0т:1 — элементы матрицы 0~" , которая является обратной
матрицей по отношению к дисперсионной матрице Э; | 0 | —
определитель матрицы 0.
Подобная задача возникает, например, при выборе
оптимальных средних значений случайных параметров системы
регулирования, находящейся под воздействием случайного полезного
сигнала и помехи. В этом случае вектор £ представляет истинные
значения случайных параметров в системе. С помощью вектора ц
можно представить полезный сигнал и помеху, если
воспользоваться методом канонического разложения случайного
процесса [82]. Показателем качества работы системы может служить
квадрат ошибки в некоторый фиксированный момент времени:
Из соотношения (320) следует, что функция F (х) может быть
представлена в виде
F(x) = \\o (£, г)) р (g, х) f (т,) dl dq. (322)
Для получения частной производной функции F {х)
продифференцируем выражение (322) по xt и, учитывая сделанные
относительно р (£, х) предположения, получим
^ = ^П'ф(6.ч)р(6.*)/(ч)4А|-
= J j ф (|, ц) °Щ£^- p (I, x) f{4) d\ d4 =
= М[ф(Ьгй°1Ц^Л](1=1, 2,. ..,„).- (323)
векторной форме это равенство имеет вид
фун°РмУ£а (323) дает возможность свести вычисление градиента
ии ^ (х) к вычислению математического ожидания некото-
139
рой вектор-функции. Это обстоятельство позволяет определять
dF (x\
одновременно F (х) и ,* на основании метода Монте-Карло:
дх
Р(х) = ±ЪФ{Ъ\ i\kY, (324)
^-ij><^-*^ (325)
где N—число испытаний; %k, цк — значения случайных
векторов \ и т] в k-м испытании.
При проведении расчетов по формулам (324), (325) на ЦВМ
основное машинное время, как правило, тратится на
формирование случайных векторов \k и цк с заданными законами
распределения и на вычисление функции Ф (£А, г]*), так как для этого
необходимо провести моделирование работы всей системы.
Следовательно, совместное вычисление F (х) и д по формулам
(324), (325) не намного увеличивает объем расчетов по сравнению
с вычислением только функции F (х).
В некоторых случаях для ускорения сходимости итерационных
методов нахождения минимума функции оказывается целесообраз-
d2F
ным использовать матрицу вторых производных -^. Выражение
для элементов этой матрицы можно получить
дифференцированием выражения (323) по xf:
d*F (x) ^ д_
дх.дх. дх
t ]
- j|ф (6, л) д]прд^'х) р (5, х) f (ti) dg A, =
+ amp(6.«)3inpJ6,x)|jt t- /=1>2>...)П.
Матричная форма этого равенства имеет вид
+ а»° р(б> *> (а1п^ *>)*}], (326)
где
/ d2F (л;) \ _ d*F(x)
\ дх2 )ij ~~ дх.дх.
Таким образом, как и при нахождении градиента функции
д , вычисление матрицы вторых производных сводится к вы-
140
числению математического ожидания некоторой функции и может
производиться параллельно с вычислением F (х).
При нормальном законе распределения (321) вектора I
формулы (323) и (326) принимают соответственно вид:
§ = М[Ф(ъ т,)е-Ц6-*)];'
^ = Л«[ф(Ьл){-в-1 +
+ e-1(i-^)(i-^)*9-1}]. .
(327)
При использовании формул (327) иногда бывает целесообразно
ввести случайный вектор " £ таким образом, чтобы матрица 9
стала бы диагональной.
13. Статистический подход к задаче формирования
оптимального метода минимизации функции
с учетом ограничения числа измерений
минимизируемой функции
В предыдущих параграфах сделан обзор известных* методов
минимизации функции конечного числа переменных.
Значительное число перечисленных методов и тенденция к дальнейшему
увеличению числа методов минимизации говорит о том, что
существующие методы не всегда удовлетворяют практиков.
По мнению авторов, недостатки существующих методов
состоят в следующем:
1. Как правило, не учитывается априорная информация о
характере исследуемой функции.
2. Значительная часть существующих методов не учитывает
наличия случайных ошибок в измерениях функции. Исключение
составляет лишь группа методов стохастической аппроксимации.
Как показывает практика, методы характеризуются слишком
низкой скоростью сходимости.
Эти недостатки приводят к увеличению числа итераций в
процессе оптимизации. В тех случаях, когда измерения или
вычисления значений функции не связаны со значительными затратами,
применение существующих методов оптимизации дает вполне
удовлетворительный результат. В тех же случаях, когда всякие
эксперименты над оптимизируемыми процессами приводят к
значительным затратам, целесообразно применять методы,
обладающие максимальной скоростью сходимости и не требующие про-
дения большого числа измерений функции,
опт СБЯЗИ с вышесказанным представляет интерес исследование
роваМаЛЬНОГ° метода нахождения минимума функции при фикси-
настоН°М оЧисле измерений функции. Этому вопросу и посвящен
141
Задана некоторая система, эффективность функционирования
которой определяется скалярным параметром F. Указанный
параметр зависит от некоторой совокупности управляющих
параметров Хц х2, . . ., %ПУ образующих вектор х. На управляющие
параметры наложено ограничение x(iD, где D — некоторое
ограниченное множество.
Точный вид функции F (х) неизвестен, так как обычно с
помощью аналитических методов не удается провести анализ
качества функционирования системы. Однако из априорных
соображений известна структура функции F (х):
т
F (х) = ]£ CiU (х) = c*f (*), (328)
где / (х) = (/х (х), /2 (лг)г . . ., fm (x)) — известная
вектор-функция, определенная на множестве D; с = (сг, с2, . . ., ст) —
случайный нормально распределенный вектор, математическое
ожидание которого равно т° и дисперсионная матрица равна 8°:
М [ct] = m?; i = 1, 2, . . :, т\
М [{ct - m?) (с, - m?) = в?,; i9 /=1,2,.. ., т.
Соответствующий подбор вектор-функции / (х) и
статистических характеристик вектора с дает возможность использовать
предварительные знания о природе исследуемой системы.
С целью уточнения вида функции F проводятся эксперименты
с системой. Каждый эксперимент состоит в измерении значения
функции F (х) в любой точке х области D с некоторыми
ошибками т]. В частности, в результате *'-го измерения в точке х*
получается скаляр yt:
У1=с*!(х<) +Т]/> (329)
где % — нормально распределенная центрированная случайная
величина, дисперсия которой равна а2. В общем случае
дисперсия а2 может зависеть от точки х1, в которой проводился i-й
эксперимент:
Db\t\ -а2 (У).
Будем предполагать, что ошибки измерения 4\t в различных
экспериментах статистически независимы.
Пусть имеется возможность проведения N экспериментов с
системой, после чего будет получена совокупность величин у19
У2* • • •> !/n> образующих вектор у. В результате обработки
полученных результатов можно уточнить распределение случайного
вектора с и, следовательно, функцию F (х).
142
Основной задачей оптимизации является определение точки
+ с /)} при которой апостериорное математическое ожидание S
некоторой заданной функции Ф (F) достигало бы минимума:
S = М [Ф (F(x+))] - min M [Ф (F (*))],
xaD
где Ф (И — некоторая заданная функция критерия.
В частности, если Ф (F) = F, то х+ минимизирует
апостериорное математическое ожидание функции F (х)\ если Ф (F) =
__ J (f — m), то х+ минимизирует вероятность того, что значение
функции больше некоторого заданного порога т.
Величина М [Ф (F (х+))] однозначно определяется
апостериорными статистическими характеристиками вектора с. В
рассматриваемой постановке задачи вектор с апорстериорно будет
распределен по нормальному закону, так как в формуле (329) yt
линейно зависит от с, а вектор с и ошибки измерения г\ априорно
распределены по нормальному закону [82]. Поэтому в данном
случае величина М [Ф (F (х+))} одназначно определяется
апостериорным математическим ожиданием mN вектора с и
апостериорной дисперсионной матрицей 9^:
М [Ф (F {x+))] =ty("iN> в").
Очевидно, что успех оптимизации, т. е. экстремальное
значение критерия зависит от последовательности точек х1л в которых
производятся измерения функции, и от результатов измерения у1.
Рассмотрим задачу выбора Последовательности точек #', при
которой среднее по возможным результатам измерения значение
успеха, оптимизации г|) (mN, QN) достигает минимума. При этом
возможны два варианта постановки задачи: /
1. Точки Проведения эксперимента л:1, л:2, . . ., л;^ выбираются
все сразу, и после проведения экспериментов определяется
точка х+.
2. Точки приведения экспериментов определяются
последовательно, причем выбор хь+1 зависит от предыдущих результатов
экспериментов *\ у1у х2, у2, . . ., х1, у1.
Для вывода уравнения оптимальности воспользуемся методом
динамического программирования.
Предварительно заметим, что так как апостериорное
распределение вектора с после проведения произвольного числа
экспериментов является нормальным., то вся информация о предыдущих
измерениях заключена в значении апостериорного
математического ожидания вектора с и апостериорной дисперсионной ма-
рице. Апостериорное математическое ожидание вектора с и
остериорную дисперсионную матрицу при проведении k
измерении обозначим mk и 0* соответственно (k = 0, 1, 2, . . ., N).
мате ЛЯ полУчения связи результатов k измерений с апостериорным
и диМатическимоожиДанием (оптимальной оценкой) mk вектора с
сперсионной матрицей Qk можно воспользоваться соотноше-
143
ниями теории оптимальной фильтрации. В данном случае
целесообразно использовать результат Калмана [42] в дискретной
форме [58]:
mt = mt-\ + Qi f (Xt) yi-f(*l)m1-1 .
/=1,2,.. ., #.
Введем в рассмотрение семейство функций S, (m, Э) (i = 1,
2, . . ., iV), соответствующих среднему значению показателя
качества 5 при оптимальном способе выбора точек эксперимента,
если осталось провести / экспериментов, а апостериорные
характеристики вектора с после проведения предыдущих измерений
равны т и Э. Очевидно, что S0 (т> 0) = г£> (/я, 6).
Выведем рекуррентные соотношения для определения
семейства Siim, 0). Предположим, что уже были проведены N—i
экспериментов (i = 1, 2, . . ., N) и требуется выбрать точку
проведения (N—/ + 1)-го эксперимента. Пусть после проведения
N — i экспериментов статистические апостериорные
характеристики вектора с были ты~* и 0^-', a (N— * + 1)-й эксперимент
производится в точке х £ D. Тогда апостериорные характеристики
вектора с будут:
тлг-/+г _ тлг-/ _f- Дт*-' = т*-* +
Среднее значение критерия 5 при оптимальном способе выбора
точек проведения оставшихся i — 1 экспериментов будет:
„N-i
S = M
/*we*-'/(*) + ■
Очевидно, что для того, чтобы точка хм-£+1 была оптимальной
точкой проведения эксперимента, необходимо и достаточно
выполнение равенства:
yy-f+1-/,(«y-|+1)«*-'
Л*
S,_i 1т"~' +Э^-'+1/(л;Л'-'+1)
еУ-,-м^-,-+1)Г(^-,-+1)9^
/* (**-'+') елг-'/(*лг-'+1)+о2
az
144
= min M U-i (m»~* + в"-Ж/ (х) ^Ww*1""' ,
f (x) б""' / W + a2
9^ ' — .* , v fttf-i * /v\ л_ „2
= S,(m^-?,e^-'), (331)
где математическое ожидание берется по возможным случайным
результатом измерений г/лг-г+ь
Для вычисления математического ожидания в формуле (331)
рассмотрим статистические характеристики разности
Длм+1 = Уы-i+i — f* (x) mN-1.
Подставляя в выражение Адг-г+i равенство (329), получим:
Длг-i+i = (с— mN~l)* / (х) + цм-i+i =
= 5WW + tw-h-i- (332)
В выражении (332) случайный вектор ^_f- представляет собой
ошибку определения вектора с после N — i измерений. Это
центрированный, нормально распределенный вектор с дисперсионной
матрицей 0^-'. Естественно, что вектор lN_{ и скаляр v\N-i+i
статистически независимы. Из уравнения (332) следует, что при
вычислении математического ожидания в формуле (331)
случайную величину разности A^/+i следует рассматривать как
случайную центрированную нормально определенную величину,
дисперсия которой
D [Atf-,+i] = /* (*"-/+1) 9^"7 (*"-/+1) + a2.
Таким образом, Ая_/+1 допускает следующее представление:
^ч+1 = УГ(х"-1+1)в"-Ч(*"-*+1) + * «лг-м. (333)
где &нч+1 — центрированная нормально распределенная вели-
чина с единичной дисперсией
D 18N4+1] = 1.
Для упрощения системы рекуррентных соотношений (331)
преобразуем выражение Дт^4, используя соотношения (330)
и (333):
Дт"-' = 8*-<+i/ (х) yN-i+i-t^x)mN ' :
Юа.
5, *»-м = ^л..:„1,н-'+. ,- (334)
м- Батков 145
Подставляя выражение (334) в. формулу (331), получим:
L i_1 \ Vr/,(^-'+1)eJV-'/(*JV-,+I) + o2'
_ е*-</(;^+у(*ЛГ-'+1)е"-'
/* (*"-'+l) e"-'7 (^-'+») + a2
= minM
s,_, !,„«-.+--^o <»-<+•-
9"-' -f>)e^ww)] =S'(m"'' e"')' ,335)
Система уравнений (335) и (330) представляет собой
рекуррентные соотношения, с помощью которых можно последовательно
определить все функции St (m, 0), начиная с Si (т, 0), и точки
проведения каждого k-то эксперимента в зависимости от
статистических характеристик mk~x, 0*-1 (k = 1, 2, . . ., N).
Основная трудность в вычислении, возникающая при
решении задачи указанным способом, состоит в необходимости на
каждом шаге решать задачу максимизации по х- и запоминать
систему функции S{ (m, 0).
Анализируя систему рекуррентных соотношений (335), (330),
можно увидеть, что- задача выбора оптимальных точек
наблюдения х1 эквивалента [101] следующей задаче стохастического
оптимального управления:
l/>*U'+1)e'/(^+1) + o2
ei+i - у е*/(д^)/У+1)е' /ада
где m°, 0° — заданные величины.
Требуется выбрать оптимальное управление xl+1^Di i = 0,
1, . . ., N— 1 как функцию /л', 8' из условия минимума
М ty (mN, 0*0, где 6/.J-1 (/ = 0, 1, . . ., N — 1) — система
независимых центрированных нормально распределенных чисел с
единичной дисперсией.
Таким образом, показано, что задача выбора оптимальных
точек измерений сводится к задаче решения системы
рекуррентных соотношений (335) или к решению эквивалентной задачи
стохастического оптимального управления (336).
В настоящем параграфе был рассмотрен случай, когда число
экспериментов под оптимизируемой системой фиксировано и
равно N. Не представляет большого труда вывести аналогичные
соотношения для случая, когда число экспериментов случайно
или является функцией гарантированного значения критерия 5.
146
14 Пример построения оптимальной последовательной
процедуры определения экстремума функции
Рассмотрим пример выбора точек проведения экспериментов.
Пусть имеется два тела, веса которых сг и с2 случайны,
распределены по нормальному закону и имеют следующие
параметры распределения: m?, m2, 9ц, 0i2, 022. Имеется возможность
производить дополнительные взвешивания тел с целью
уточнения значений веса. Требуется определить последовательность
проведения взвешиваний из условия максимума среднего веса
выбранного тела, если разрешено провести всего N взвешиваний.
Поставленная задача может приобрести больший
практический интерес, если весам тел поставить в соответствие размеры
месторождений, а операциям взвешивания — процедуру дораз-
ведки.
Рассматриваемая задача является частным случаем задачи
предыдущего параграфа. Максимизация производится на
двухточечном множестве D = {1, 2}.
Функция
F (х) = cjx (х) + c2f2 (x),
где /i (x) и /2 (х) задаются следующим образом:
7i(l) = 1, М2)=0;
/•(!)= О, /,(2) = 1.
Пусть ошибка взвешивания тела I имеет дисперсию а?,
а тела II — о|.
В рассматриваемом случае
Ф«. m2v, ей,. 9.Й, 9$) = max К, tr$)=So(m, 0).
Используя соотношения (335) для / = 1, определим Sx (mN~\
Sl(tnN-\ e^-i) = maxMrmax{mi + Am^1, m.2 + Am"-l\l (337)
где
*-- *ПХ)Ь^
Vf(x)Wf(x)+°2(x)
читывая то, что bk — центрированная случайная величина,
p °РазУем выражение (337) следующим образом:
Si (m"-1, e"-1) = max М [т?~1 + Am?'1 +
*С{1;2}
+ max {тГ1 _ тГ1 + ЛтГ1 - ЛтГ\ 0}] =
147
= m? l + max M [max {m? г —
xCZ{l;2}
- m?~l + АтГ1 - Am?*1, 0}]. (33s7
_ Анализируя соотношение (338), нетрудно увидеть, что точка
xN, максимизирующая функцию Sx (тм~1, Э^-1), не зависит
от mN-1 и определяется однозначно 0^-1. Причем максимум
достигается при условии максимума дисперсий случайной
величины Am?-1 — Am?-1. Совершенно аналогично можно
получить выражение для функции S2 (mN~2, QN-2):
S2 {mN~\ 9^-2) = max M [m?~2 +
atCZ{1; 2}
+ Am?~2 + M [max {m?~2 - m?~2 +
+ Am?'1 _ ДтЛ^-1 _]_ ДтЛ^~2 _ Д7^-2| 0)]] =r
= тЛГ-2 + ^ Jmax jmV-2 _ m^2 +
+ Amf-1 — Am^-1 + Am?~2 — Am?-2, 0}].
Как и при нахождении Slf точка л;^-1, максимизирующая 52,
определяется матрицей 6^-2, причем максимум достигается при
условии максимума дисперсии случайной величины
Д/иЛГ-1 _ Дт^1 + ДтЛГ-2 _ Дт^2#
Проводя далее аналогичные рассуждения, можно показать,
что оптимальные точки проведения эксперимента х1, х2, . . ., xN
могут быть получены из условия максимума дисперсии
случайной величины
Am? — Am? -f Am?-1 — Am?-1 H \-Am\ — Am\.
Таким образом, задача выбора оптимальных точек
экспериментов свелась к выбору оптимального управления в следующей
детерминированной задаче:
е/+1 = а' - е*/(*'+1)Л(^+1)е'
/•(*'+1)e'/(*/+1) + a2W '
/У+1 = Dl + Ul~l11 - J . (339)
^ /V+1)6'/(*'+1) + a2(*) *
Требуется выбрать последовательность точек х1 из условия
максимума параметра DN. Характерной особенностью этой задачи
является неоднозначность решения, которая обусловлена тем,
что параметр DN определяется только числом точек х1, при
которых х1 = 1, но не зависит от последовательности чередования
148
очек х* = 1 и х* = 2- Однако, исследуя оптимальную за-
т у (339), можно показать, что одно из оптимальных решений
будет получено, если на каждом k-м шаге выбирать точку
наблюдения xk из условия максимума величины
Это свойство дает достаточно простой способ определения
оптимальной точки наблюдения xk.
Такому способу выбора точки xk соответствует следующее
толкование. На каждом шаге точка наблюдения xk выбирается
так же, как она выбиралась бы, если k-e измерение было бы
последним. В этом случае, как было показано выше, хк
определяется из условия максимума дисперсии
DfAmf-1 — Д/я*-1] =
e?rVi (*) + в^Уг (*) - efrVi (*) - е^У2 (*)
~~ /i (*> Off1 + 2/! (х) f2 (x) efe"1 + б^/К*) + a2 (*) '
В рассмотренном примере оптимальная стратегия такова,
что планирование каждого эксперимента производится в
предположении, что данный эксперимент последний. Это
обстоятельство существенно упростило реализацию оптимального правила.
Приведенный пример позволяет надеяться, что и в общей
задаче (335) предположение о том, что настоящий эксперимент
является последним, не приведет к большой потере эффективности
метода. В соответствии с этим предлагается следующий квази*
оптимальный алгоритм минимизации функции в постановке
задачи (335):
1. На основании априорных статистических характеристик
вектора с определяем / «перспективных» точек, т. е. точек,
подозреваемых на экстремум (/—целочисленный параметр метода).
Выбор перспективных точек z1, z2, . . ., zl производится
эвристическим или каким-либо формализованным методом. Например,
возможен метод случайного сканирования, т. е. замена
случайного вектора с детерминированным вектором математического
ожидания т°. Перспективные точки вводятся для упрощения
алгоритма. С их помощью процедуру минимизации
равенства (335) по вектору х £ D предлагается свести к процедуре
минимизации на дискретном множестве z\ z2, . . ., г1.
мин ы^иРаем точку эксперимента на первом шаге из условия
нимума по точке эксперимента х1 £ D выражения
min М\(т»+ ео/^б, у 1 340)
149
Таким образом, выбор точки х1 сводится к решению сложной
задачи стохастического нелинейного программирования.
Существенно, что для ее решения не требуется производить
экспериментов с системой, т. е. вычислять значение F (х).
Эта задача существенно упрощается, если / = 2. В этом
случае, аналогично примеру, рассмотренному в настоящем
параграфе, точка х1, минимизирующая выражение (340), может быть
определена из условия максимума дисперсии разности
апостериорных средних значений функции в точках г1 и г2. Отсюда
следует, что точка х1 может быть определена из условия
максимума по х1 6 D выражения дисперсии
Максимизация выражения (341) существенно проще, так как
в нем отсутствует операция вычисления математического
ожидания.
3. После проведения первого эксперимента (выбора точки х1)
производится уточнение статистических характеристик вектора с
и в соответствии с ним выбор новой системы / перспективных
точек. Далее этот процесс повторяется.
Приведенный алгоритм был применен для минимизации
квадратичной функции одной переменной при различных
дисперсиях ее параметров. В процессе применения алгоритма было
принято / = 2. Перспективные точки г1 и z2 определялись из
условия
21в—St + Л 2'вв—at-"*
где т2 и т3 — средние значения коэффициентов при х1 и х2 для
минимизируемой квадратичной 'функции; р — параметр,
определяющий смещение перспективных точек относительно точки
экстремума (в данном случае было принято р = 1).
Эффективность метода определялась по методу Монте-Карло.
Сравнение полученных результатов метода с результатами
применения стохастической аппроксимации при оптимальном выборе
размера шага (см. п. 11, гл. III) показали, что квазиоптимальный
метод оказывается более эффективным, чем метод стохастической
аппроксимации, причем разница тем более заметна, чем больше
степень неопределенности относительно второй производной
минимизируемой квадратичной функции.
ГЛАВА IV
ПРИМЕНЕНИЕ МЕТОДА
ДИНАМИЧЕСКОГО ПРОГРАММИРОВАНИЯ
В ЗАДАЧАХ СТОХАСТИЧЕСКОГО УПРАВЛЕНИЯ
1. Оптимизация управления при точном измерении
фазовых координат объекта
В предыдущих главах изложены методы приближенного
расчета стохастических систем управления. .Применение этих
методов позволяет выбрать близкие к оптимальным значения
некоторых свободных параметров в системе при жестком задании ее
структуры. Систему управления с обратной связью, работающую
в условиях случайных воздействий и помех, можно представить
в виде блок-схемы, показанной на рис. 38. Объект управления
с выходными координатами, объединенными в вектор х,
подвергается внешнему воздействию г, шумовым возмущениям | и
управляющему воздействию и. Управление и вырабатывается на
основании располагаемой информации о состоянии объекта
управления х. Эта информация содержится в измерениях у, которые
в общем случае проводятся на фоне помех т]. Это означает; что
устройство управления должно вырабатывать управляющее
воздействие совместно с обработкой данных о состоянии объекта.
Задание структуры системы. управления здесь понимается
как задание аналитического описания всех блоков с точностью'
до значений параметров. При проектировании системы такие
параметры могут быть не конкретизированы в уравнениях
измерителя, блока обработки данных и регулятора.
Возможен иной подход к проблеме расчета оптимальной
стохастической системы управления. Здесь изложен один из
методов аналитического проектирования, который позволяет
определить структуру системы управления, а именно — стохастическое
динамическое программирование.
Кроме того, в этой главе
рассмотрен вопрос об оптимальной
обработке данных, тесно связанный
с задачей аналитического
проектирования стохастического
управления. J r
Метод динамического
программирования развит Беллманом и
cMaтDивИягтtBTOpaMИ, кот°Рые Рас" Рис-38. Блок-схемЛисгемы управ-
*ривали математическое обо- лениЙ
f I
Объект
управления
X
—»>
i
1
Измеритель
Обработка данных
и регул.
чтор
JL
151
снование метода, его приложение к решению задач дуального
управления и ряд других вопросов [12, 13, 17, 91, 101].
Изложим постановку задачи стохастического оптимального
управления в случае точного измерения фазовых координат
объекта. Объект управления задан системой дифференциальных
уравнений:
к = / (/, х, и) + G (t) I (0, (342)
где х—вектор выходных координат объекта п измерений; и —
вектор управляющих воздействий q измерений; / (t, xy и) —-
вектор-функция п измерения; G (f) — матрица переменных
коэффициентов размерности In, m\\ \ (t) — вектор т измерений
возмущающих воздействий на объект, представляющий собой
нормально распределенный «белый» шум с характеристиками
Ml (t) = 0;
Л« (*i) Б* (*•) = Q(^)6 (h—U).
Задача состоит в выборе такого управления и (т), т£ [0, Т]
из множества допустимых управлений V, которое минимизирует
показатель /, определяемый выражением
I = М J ф [т, х (т), и (%)] dx + X [Г, х (Т)]\. (344)
Рассмотренный здесь нелинейный объект управления является
наиболее типичным для практических задач. Однако в дласс
объектов, описываемых уравнением (342), не включены объекты,
в которых интенсивность шумовых возмущений зависит от
состояния объекта, в частности, объекты с мультипликативной помехой.
Одна из задач этого типа будет рассмотрена в гл. V. Кроме того,
в рассматриваемый класс объектов не включены объекты, у
которых некоторые из фазовых координат представляют собой
разрывные случайные процессы [156]. Такие объекты представляют
интерес, например, в задачах надежности.
Характер возмущений g (f) [см. формулу (343)], действующих
на объект, таков, что вектор фазовых координат х (t) образует
марковский процесс диффузионного типа (см. п. 4 гл. I).
Управление, как правило, реализуется в схеме с обратной
связью. Это означает, что желательно найти управление как
функцию текущих фазовых координат объекта:
и = и (/, х (0)< (345)
Отсутствие в выражении (345) зависимости от значений
вектора х (т) при т < /, т. е. безынерционный характер регулятора,
следует из марковского свойства вектора х (t). Метод
динамического программирования позволяет определить оптимальное
управление в виде функции фазового состояния объекта, что
чрезвычайно удобно при реализации проектируемой системы.
(343)
152
Перейдем к изложению метода динамического
программировалась в момент времени t система находится в состоянии
НИ/а = х. Составляющая критерия оптимальности (344),
связанная с процессом управления на интервале времени U, T] при
некотором управлении и (т, х (т)), т £ U, Т] оцениваются
величиной
Wt = MНф[т, х(т), и(т)]с1т + К [Г, x(T)]\x(t)=x , (346)
которую в дальнейшем будем называть оставшимися потерями.
Выражение (346) представляет собой условное математическое
ожидание относительно текущего состояния вектора х (t).
Оставшиеся потери (346) зависят от момента времени /, состояния
объекта х и принятого закона управления и (т), т£ [/, Г], т. е.
Wt=W U, х, и(т), %elt, T]]. (347)
Минимальное значение Wt, достигаемое при оптимальном
управлении, будет называться функцией Беллмана W0:
W0(t, x) = min W[t, x, и (т), T6[*f T]] =
"(х)^С/
= minMi f ф[t, x(т), и (т)]dx + X[Ty x(T)] \x(t) = x\. (348)
u(x)£U [J J
В соответствии с принципом Беллмана в произвольный
момент времени / управление должно выбираться таким, чтобы
минимизировать оставшиеся потери. Оно не зависит от
предшествующих моменту t управлений и от пути достижения
вектором х (т), т £ [0, /] состояния х в момент t. Этот принцип
положен в основу вывода уравнения, которому удовлетворяет функция
Беллмана W0 (t, x).
Предполагая кусочную непрерывность функции ф (т, #, и)
по аргументам т, х, и и управления а (т, х) по аргументам т, х,
представим функцию Беллмана (348) в следующей форме:
W0(t, #) = min Ml f Ф[т, х(т) и (x)]dt +
«<т)£С/ I J
Т л
+ J ф[т, *(т), u(T)]dT]dT + X[T, x(T)]\x(t) = x =
*+A J
%?>£, №*>И0]Л + о(Д) + М J Ф[т, *(т), u(T)]dx +
153
+ X[T, x(T)]\x(t) = x = min |ф[/, х, и (/)]Д + о(Д) +
-fmin All f Ф[т, х (т), и (т)]<Ь + Х[Т, x(T)\x(t)= x\ 1,
(349)
i> o(A) л
где hm-^-^ — O.
Процесс усреднения в выражении (349) можно производить
в два этапа:
Ml J Ф{т, *(т), u(x)]dx + X[T9 x(T)]\x(t) = x\ =
[t+A J
-МШ J <p[xtx(x),u(x)]dx + MT,x(T)]\x(t + A) =
'•У\\х (f)=x\ = M[Wlt + b,y9u(x)txe[t+A9 T]]\x(t) = x].
(350)
Это соответствует применению обобщенного уравнения
Маркова для процесса х (t):
СО
Р (т, z| U х) = J d#p (т, г| if + А, у) p(t + А, у| *, *)
—со
для f <J ^ + A <J т.
Применяя соотношения (348), (350) к формуле (349), а также
полагая и (t) = и, получим следующее выражение для функции
Беллмана:
WQ(t, x) = minU(ty х, и)Д + о(Д) +
+ min M{W[t + A, у, и (т), %e[t +
u{x)£U
х£[Н-Д.П
+ Д, Tn\x(t) = x)} = min{<p(t, x, u)A +
+ о(Д) + M [Wo(t +'A, y)\x(t) = x}}. (351)
154
Для расчета а = М {WQ (t + A, у)\х (t) = х) воспользуемся
разложением функции W0 (t + А, у) в ряд Тейлора в
окрестности точки х:
+ ^\т[(у-х)(у-хГ^^
где \\У— х\\— н°Рма вектора (у — х).
Согласно определению вектора коэффициентов сноса и
матрицы коэффициентов диффузии для марковского процесса можно
записать:
М [(у — х)\х (0 = х] = с (t, x) A + о (А);
М \{у — х) (y — x)*\x(i) = х] = 0(/, *) А + о(А).
Поскольку для рассматриваемого здесь объекта управления,
системой уравнений описываемого (342), справедливы
соотношения
с (/, х) = f (t, ху и)у
6 (t, x) = G (t) Q (t) G* (0,
TO
a = W0(t + A,x) + f*(t,x,u) a*.(< + A.*) д +
< + 1 tr [G (0 Q (0 G* (0 ^аУ,ДС)] А + о (А). (352)
После подстановки выражения (352) в формулу (351) и
простейших преобразований получим
-^-^— ol ^ ; =ппп <p(f, *, и) +
+ rft^«)ar'(^A><) +
в пределе при А -> 0 получим уравнение Беллмана:
4f—L = min <р(<, л:, и) +
+ i- tr [О(0Q(/)G*(0 dWd°xo;*X)] }• (353)
155
Уравнение Беллмана имеет очевидное граничное условие:
W0 (7\ х) = Ь (7\ х). (354)
Обозначим через и0 оптимальное управление в поставленной
задаче, тогда согласно формуле, (353) минимальные потери
Wo (^> х) удовлетворяют уравнению
+ ytr[G(f)Q(Q6*(Qy^/)]. (355)
Поставим задачу определения уравнения, которому
удовлетворяют потери при произвольном, не обязательно оптимальном
управлении. Вывод, который приводится ниже, наглядно
показывает связь уравнения Беллмана с уравнением Колмогорова для
марковского процесса х (t).
Согласно формулам (346), (347) можно записать:
W U, х, и(%), t(EU, T]] =
= М | J ф [т, х (т), u(r)]dr +X [Г, х (Т)] | х (0 = х 1 =
т •
'= J dxM {ф [т, д: (т), и (т) ] | х (t) =
t
= х) + М [X [7\ x(T)]\x(t) = х) =
Г со
= J dt J dyq> [т, (/, w (т) ] p (т, (/11, #) +
* —00
00
+ I d«A [T, y]p(T, y\t, x). (356)
— 00
Дифференцируем полученное выражение для оставшихся
потерь по переменной t:
dt
= — \dy<p[t9 у, u(t)]p(t, y\t, x) +
* — CD
oo
+ ] ^ir.yl^f'^ (357>
156
Поскольку
Р (t, y\U х) = б (у — х),
то
,\dy<p U> У> u{t)\ p (*, y\'t, х) = ф [*, л:, и (t)]. (358)
—00
Согласно обратному уравнению Колмогорова для
марковского процесса х (t) (см. п. 4 гл. I) запишем:
др(т, y\t,x) __ ,*,, „\др(т, y\t,x)
di Г (l> x" щ дх
Подставляя последнее уравнение и уравнение (358) в
формулу (357), после несложных преобразований, связанных с
изменением порядка дифференцирования по переменной х и
интегрирования по переменным т, у, получим
{Т со
\dx \ dyx
. t -оо
X ф[т, у, и (т)]р(т, y\t, *) + J dyk[T, у] X
Хр(Т, y\t, х) +|tr \G(f)Q(f)G*(t)x
ГГ со
X
д2
дхдх*
\dx Jdy<p[T, у, и(т)].р(т, y\t9 x) +
t -оо
со 1
+ J dyX[T,y]p(T,y\t, x)\
Используя выражение (356), получим уравнение
~~§Г = <1>^' *• ") + f ('> *> ")
+ T"[W--Sr].
(359)
Д аргументы функций W, G, Q для краткости опущены,
на и КИМ °^Разом» потери W, которые имеют место в системе
УдовлрТ6рВале вРемени It, Т] при произвольном управлении,
■отворяют уравнению (359), а потери W0 в оптимальной
157
системе—уравнению (353). Сравнивая формулы (353) с (359)
устанавливаем, что
+ ltr [GQ&4J^]^<f(t9 х, u) + f*(t9 x9 и)
dW
дх
+ TtrhG*ro] Обо).
при произвольном допустимом законе управления и£ U.
Неравенство (360) представляет собой достаточное условие
оптимальности управления и0.
2. Оптимальное линейное управление
Рассмотрим применение метода динамического
программирования на примере управления линейным объектом при
квадратичном критерии качества.
Пусть объект управления описывается линейным
дифференциальным уравнением
х = А (0 х + В (0 и + G (0 £, (361)
где х — вектор выходных координат п измерений; и — вектор
управлений q измерений; \ — вектор возмущающих
воздействий т измерений со статистическими характеристиками,
описываемыми формулой (343); А (/),В (0, G (f) — матрицы
переменных коэффициентов соответствующих размерностей.
Требуется минимизировать квадратичный функционал '
/ = М f [** (т) V (т) х (т) +
+ и* (т) J (т) и (т) ] dx + х* (Г) Л* (Т) , (362)
где V (т), J (т) — симметричные положительно определенные
матрицы переменных коэффициентов размерностей [/г, п] и [q, q]
соответственно; Л—симметричная положительно определенная
матрица постоянных коэффициентов размерности [п, п].
В п. 1 данной главы показано, что минимальные потери
W0 (t, x) на интервале управления U, Т] удовлетворяют
уравнению Беллмана (353), (354), где в соответствии с
формулами (361) и (362)
Ф (/, х, и) = x*V (t) х + и*J (0 и\
% (7\ х) = х*Ах\
f (t, х, и) = A (t) x + В (t) и.
158
Таким образом, оптимальное управление должно быть
определено решением уравнения Беллмана
— дИМ*. *)-_ mjn (^у /л х , „*J m „ _|_
+ -i- tr [G (t) Q (t) G* (t) *%%.*> } } (363)
при граничном условии
W0 (Г, х) = х*Лх. (364)
Предположим, что на управление не наложено жестких
ограничений, так что любая из компонент вектора и удовлетворяет
условию —оо <£/, <оо, I = 1, 2, . . ., (7- При этом
предположении условие минимума по и произвольной функции a (t> x> и)
запишется в виде системы q алгебраических уравнений:
да (t, х, и)
да
= 0.
И=«0
Применительно к уравнению (363) эта система принимает
следующий вид:
[J (t) + У* (0] и0 + Я* (0 ^^ = 0. (365)
Учитывая симметричность матрицы J (t) и умножая
выражение (385) на -у J"1 (f) слева, получим следующее выражение для
оптимального управления: ,
u0 = —Lj-^(t)B*(t)d-^£^. (366)
Уравнение (366) дает функциональную связь оптимального
управления с функцией Беллмана W0 (/, х). После подстановки
аналитического выражения для W0 (t, x) в формулу (366)
оптимальное управление будет представлено функцией времени t
и фазовых координат объекта л;, что, как отмечалось выше, удобно
при реализации управления в структуре с обратной связью.
Для нахождения W0 (t, x) подставим выражение (366) в
формулу (363). Получим уравнение в частных производных:
х в (t) у-» (л в* (t) (т»£ *}) + х*А* (о dw*df х) +
+ i- tr [G (t) Q (t) G* (0 *%£;x) ] . (367)
159
ж
Будем искать решение уравнения (367) в виде квадратичной
формы:
Wo (t, x) = kQ (t) + k\ (t) x + XK2 (t) x, (368)
где k0 (t) — скалярная функция, a kx (t) и K2 (0 — соответственно
вектор и матрица. После подстановки решения (368) в
уравнение (367) и приравнивая в обеих частях уравнения членов,
не зависящих от х9 линейных по х и квадратично зависящих от х\
получим следующую систему обыкновенных дифференциальных
уравнений относительно функций k0 (/), кх (0> ^2 (0:
k0 (0 = — 4" k\ (t) В (t) Г1 (t) S* (t) h (t) +
+ tr[G(t)Q(t)G*(t)K2(№
— k (t) = -K2 (t) В (t) J"1 (t) B* (0 kx (t) +
+ Л* (t) kx (0;
~K2 (t) = V(t) + A*(t)K2 (t) + K2 (t)A(t) —
— K2 (t) В (t) J-1 (t) B* (0 K2 (t).
Начальные условия для полученной системы могут быть
записаны на основании формулы (364):
k0 (Т) = 0; кг (Т) = 0; К2 (Т) = Л.
Нетрудно видеть, что функция kx (0> удовлетворяющая
линейному однородному дифференциальному уравнению при нулевом
на(чальном условии, тождественно равна нулю. Отсюда
следует, что
W0 (/, х) = k0 (t) + х*К2 (t) x, (369)
где k0 (t) и элементы симметричной матрицы К2 (t) удовлетворяют
системе обыкновенных дифференциальных уравнений
Щ
, —k0 = tv [GQG*K2h
— К2 = V + A^K2 + K2A-K2BJ^B*K,
(370)
при начальных условиях
ко (Т) = 0; К2 (Т) = Л. (371)
Теперь в соответствии с формулой (366) оптимальное
управление
Uo = _j-xB*K2X% (372)
Таким образом, оптимальная стратегия является линейной
функцией фазовых координат объекта, что характерно для задач
оптимизации управления линейным объектом при квадратичном
критерии качества.
160
Если случайные возмущения на входе объекта отсутствуют,
педует положить Q (t) = 0. Заметим, что это не отразится на
значении оптимального управления (372). Следовательно, опти-
альный регулятор в стохастической задаче не отличается от
оегулятора соответствующей детерминированной задачи
оптимального управления. Возмущения на входе объекта £ (f) влияют
лишь на значение функции потерь, ко1чэрая при наличии помех
имеет нерегулируемую составляющую £0 (*).
Если матрицы Л, Я, V, J постоянны, то матрица К2 (t)
согласно формуле (370) является решением матричного уравнения
Риккати [142, 154]. Путем замены переменных матричное
уравнение Риккати может быть сведено к линейному
дифференциальному уравнению второго порядка.
Поскольку начальное условие для системы уравнений (370)
задано на правом конце, целесообразно ее решать в «обратном
времени», сделав замену независимой переменной:
т = Т — U
Тогда при условии постоянства матриц Л, fi, V, J система (370)
принимает вид
й(т) = tr [GQG*/C2(t)];
К2 (т) = V + А*К2 (т) +
+ К2 (т) А — Ко (т) BJ-*B*K2 (т); (373)
ko (0) = 0; ■
*,(<>)= А,
где
k0 (т) = k0 (T - т), К2 (т) *=К2(Т— т).
Если у —» оо, то при решении в обратном времени для
определения К2 следует устремить т —» оо. При этом К2 стремится
к решению алгебраического уравнения
0 - V + А*К2 + К2А — K2BJ-*B*K2.
Таким образом, оптимальный регулятор
и0 = — /"1В*^ах
является стационарным.
Сог никает вопрос об устойчивости оптимальной системы.
Устп°аСН° второмУ мет°ДУ Ляпунова [64] система асимптотически
Функ ЧИВиа' пСЛИ сУществУет такая Функция /ф (*), называемая
минимИеИ ЛяпУнова> которая положительна и имеет строгий
имум в начале координат -ф (0) = 0, а также существует
11
А. М. Батко
161
полная производная по времени, вычисленная вдоль траекторий
системы,
# / d$ \* rf*
отрицательная вне сколь угодно малой окрестности начала
координат.
Проверим на устойчивость оптимальную стационарную
систему управления при отсутствии возмущающих воздействий на
объект 1(f). В этом случае Q = 0 и согласно формуле (373)
k0 (t) = 0. Поэтому согласно выражению (369)
WQ (x) = х*К2х. (374)
Отметим, что в рассматриваемом случае функция Беллмана не
зависит от времени.
Функция Беллмана (374) удовлетворяет всем условиям
теоремы об асимптотической устойчивости и потому является
функцией Ляпунова. Действительно, W0 (0) = 0 и при любом х ф 0
W0 (х) > 0» так как ^о (х) характеризует оставшиеся потери,
которые при х =/= 0 отличны от нуля и положительны вследствие
положительной определенности критерия качества (362). Таким
образом, W0 (x) имеет строгий минимум в начале координат.
Полная производная по времени функции Беллмайа на фазовых
траекториях системы
^ = {АХ + Вио)*™±
и согласно формуле (363) в рассматриваемом случае, когда
_°_ = о и Q = 0, удовлетворяет уравнению
-^8- = (Ах + ВиоГ -^ = - [*Ух + и2/«о]. (375)
Поскольку квадратичная форма в правой части
уравнения (375) положительно определена, то ~-д~ <0 при х ф 0.
Существование функции Ляпунова для оптимальной
стационарной системы в отсутствие помех доказывает ее
асимптотическую устойчивость.
Безусловно, не всегда функция Беллмана является функцией
Ляпунова оптимальной системы (при Г —* оо), так что проверка
системы на устойчивость оказывается значительно более сложной
задачей, чем рассмотренная выше. При наличии в системе
случайных возмущений необходимо пользоваться статистическими
критериями устойчивости систем [107]. Нетрудно показать, что при
наличии случайных возмущений £ (/) в рассмотренном выше
примере система асимптотически устойчива в среднем.
162
* Оптимизация управления при неточных измерениях.
Апостериорное распределение вероятностей вектора
фазовых координат системы
До сих пор рассматривалась задача управления объектом
предположении наличия идеального измерителя в блок-схеме
системы, показанной на рис. 38, т. е. когда фазовые координаты
объекта' точно известны в процессе управления. Более близок
к задачам практики случай неполной информации о состоянии
объекта управления. Предположим, что в процессе управления
измеряется значение процесса
у (0 = h (f, х) + ц (0, (376)
где у и h — векторы г измерений; х\ (f) —*
нормально-распределенный белый шум, являющийся вектором г измерений с
характеристиками
Мц (0 - 0; 1
Мц (h) ч* (t2) = R (tt) б (*!-*,).} (377)
Объект управления задан дифференциальным уравнением (342),
где возмущающие воздействия имеют характеристики (343).
Предполагается, что случайные процессы 1 (/) и ц (t) некорре-
лированы.
Начальное состояние объекта управления считается
случайным и заданным плотностью распределения вероятностей
вектора х в момент / = 0:
P(U *)|*=о = Ро(*). (378)
Задача состоит в выборе управления, минимизирующего
показатель (344). В отличие от рассмотренных в п. 1 и 2 гл. IV
задач оптимального управления при точном измерении фазовых
координат объекта х, когда управление и (/, х) является функцией
времени t и текущего состояния объекта х, в случае измерений
на фоне помех управление является функционалом относительно
всех проведенных измерений до текущего момента времени:
и - и It, у(х)% те [0,-Л]. (379)
Соотношение (379) отражает тот факт, что оптимальное
управление должно вырабатываться на основании всей располагаемой
информации о состоянии объекта к моменту t. Поэтому блок
устройства управления (см. рис. 39) должен быть инерционным
устройством, учитывающим не только текущие, но и прошлые
мерения. Вся располагаемая информация о текущем состоянии
Т£ЪроТа/1МОЖет быть пРеДставлена не только в измерениях у (т),
вероя ' н? и в виДе апостериорной плотности распределения
fXU х) = р (t, x\y(x)9 т 6 [0, *]). (380)
и*
163
y(t)
Обработка
данных
gfr<>.
Регулятор
u(t).
Рис. 39. Блок-схема
устройства управления
При таком представлении информации о состоянии объекта
управляющее воздействие может рассматриваться как функционал
относительно q (/, х):
и = и U, q (t, *), —сю <* <оо]. (381)
Тогда блок выработки управления естественно разбивается
на устройство обработки информации, вырабатывающее
апостериорную плотность вероятностей q (t, x), —оо О <оо, и
регулятор, формирующий управление по закону (381) (рис. 39).
Таким образом, задача обработки данных является
неотъемлемой частью задачи оптимального управления при неточных,
наблюдениях.
Вопросам расчета апостериорного распределения вероятностей
для непрерывного марковского процесса, линейной и нелинейной
фильтрации посвящен ряд работ [9, 53, 60, 93, 103, 105, 113,
139, 140]. Однако в ранних работах были допущены ошибки
вследствие пренебрежения членами второго порядка малости.
Позднее результаты были уточнены и обобщены на более широкий
класЪ марковских процессов. Здесь будет приведен вывод
уравнения в частных производных для апострериорнои плотности
вероятностей q (t, х) марковского процесса х (/), при
наблюдениях у (*), заданных формулой (376). Как частный случай, будет
получен результат Калмана по оптимальной линейной фильтрации.
Рассмотрим допредельную дискретную модель объекта
управления и измерителя. Для этого вводится дискретное время tk =
= 4-i + Д> гДе А — малая величина, которая позднее будет
устремлена к нулю. Согласно уравнению объекта (342) можно
записать
h h
-*('*) = *(k-i)+ Jf[*,*(T)fa(t)]tfr+ \G(x)l(x)dx.
ч В соответствии со свойствами нормально распределенного
«белого» шума £ (/), описываемого уравнения2(343), процесс
Н0= J G(x)l(x)dx
t
распределен также нормально и имеет характеристики
Ml (t) = 0.
Ml (t) £* (0 = \ G (t) Q (t) G* (t) dx; .} (382)
Ж (*,K* ('/) = 0 при />/.
164
Таким образом,
х (tk) = х (4-i) + ( f bi * (T)> и (T)l dr + £ (^-i).
Рассмотрим процесс z с дискретным временем, который
описывается разностным уравнением
zk = 4-х + f (tk-i> *k-i> uk-i) Д + Хл-i. (383)
где индекс означает отсчет времени. Случайный процесс x$-i
нормально распределен и имеет независимые значения.
Плотность распределения процесса % в момент времени tk_x зададим
выражением
РVk-ъ X) = jr п. . . X
х
ехР [~ Ж" X* (Ga-A-iGUi)-^] , (384)
где Gk.x = G (^i); ^ = Q (4_i). Нетрудно видеть/ что
процесс с дискретным временем %k является допредельной моделью
процесса £ (t), а процесс z^— процесса х (0, так что
1. i. m. %k = С (У;
Д-*0
1. i. m. zk = а; (4),
(385)
где 1. i. m. означает предел в среднем квадратическом.
Для построения дискретной модели измерений перейдем от
процесса у (t). к sk, где
sh = h (th, zk) + v„. (386)
Здесь v^ — нормально распределенный дискретный белый
шум с одномерной плотностью распределения вероятностей:
"^■^"тшт^-^'^Я <387)
где Rk = # (у Таким образом, характеристики процесса v^
связаны с соответствующими характеристиками (377) предельного
процесса y\(t).
Поставим задачу расчета апостериорной плотности распре-
^ ^ения вероятностей процесса z в момент времени" tk при усло-
и известных наблюдений процесса st9 0 < i < k
Р Ok* zk\*i, 0 < i < k) =
= q(tk,zk). (388)
165
Рассмотрим п + r-мерный вектор (z, s), составленный из
вектора состояния объекта z и вектора измерений s. Этот вектор
является марковским. Доказательство данного утверждения
сводится к проверке равенства
Р (4» zk> saJ4-i» zk-i> sk-i>
4-2» Zk-2> Sk-2i • • •) ==
= P (4, *k, sk | 4_i, z^, sk_x)
для любых 4 > 4-i > 4-2 >• • • Здесь и в дальнейшем под
Р (4/ гл» s*|4-i» z*-i. s*-i» 4-2» ^-2» sA5-2; • • •) понимается
условная плотность распределения вероятностей вектора (z (4),
s (4) относительно событий z (tt) = zit s (tt) = sif. i = k— 1,
k — 2, ...
v Согласно формуле условных вероятностей
Р (4» zk> sJ4-i» 2/5-i» s/5-з.;
4-2» 2fc_2» ^-2» • • •) ~ P (4» Zk\ 4-1» ^-1» S/fe-l'»
4-2» 2/,_2, sk-2> • • •) P (sk\ 4» ^; 4-1» zk-l> %-Ъ
4-2» ^-2» -%-a; • • •)• (389)
Поскольку вектор выходных координат объекта д: является
марковским процессом, то можно записать:
Р (4» ^|4-i> sk-*, %-Г»
4-2» 2*_2, s^2; . . .) = р (4, ^|4-i» zk-i)- (390)
В соответствии с формулой (386) распределение вероятностей
вектора s (4) при известном значении z (tk) = zk связано только
с яаконом распределения шума измерений для абсолютно
случайного процесса v (4) и не зависит от знания z (tt) = ziy s (t() = sif
i.*= k—.U k—2, ...
Таким образом,
P (sk I 4» zk\ 4-i» z/5-i> %-i»
4-2» 2^2, sk_2\ . . .) = p(sk\tk9 zk). (391)
Подставляя выражения (390), (391) в формулу (389), получим:
Р (4» zk> sk\ 4-i» zk-v sk-i>
4-2» 2/j_2> Sk_2\ • • •) ==
V = P ('*» 2* I 4-1» 2£_x) P (s*| 4, Z*) =
= P (4» **. %| 4-i» **-!• s^), (392)
что ичдоказывает марковское свойство вектора (z, s).
166
Согласно известным свойствам плотности распределения
вероятностей искомая апостериорная плотность вероятностей (388)
может быть представлена в следующем виде:
q (4» *k) = р (4» zk | si9 0 < i < k) =
= P (4» 41 sk9 si9 0 < i < k — 1) =
__ p(tk, *k, sk\sh 0<$t<c& — 1) _
P(tk, sk/si9 Q^i^k — 1)
(393)
_ P(tk,zk, Sk\Sj,Q^i^k— 1)
^dzkp(tk, zk, sk | sl9 Q^i^k—l)
Входящая в выражение (393) плотность вероятностей р (tk9
Zk> Vs*» 0 < i < k — 1) может рассчитываться по формуле
р (tk9, zk, sk | si9 0 < i < k — 1) =
= J dz^p {tk9 zk\ 4_1э Zb-i; sk\sl9 0 < i < k— 1) -
= J dzk-ip {tk9 zk9sk\ 4_i, zk-i,
si9 0 <: i < k — 1) p | tk_l9 zk-!| si9 0 <: { <: k — 1).
Учитывая доказанное выше марковское свойство вектора
(г, s), а также формулы (390) и (392), последнее выражение может
быть преобразовано следующим образом
Р (4> zk> sk\si9 0 <i <k—l) =
= J dzk_xp (tk9 zk9 sk\ 4-i» 2k-i>
s*-i).p (4-i» ^-i|st-» о < ; < £— l) =
= J d^-iP (4» z*l 4_i» zk^) p x
X (Sk\tk> *k) ?(4-l» *A-i)-*
После подстановки полученного результата в формулу (393)
оудем иметь следующее выражение для q (4, zk):
? V*. **) = -f~— . (394)
J dzk J dz^p (*Л, гЛ | tk_l9 Zk-х) p (Sk I **, zk) q (tk-i, Zk-i)
q (/ ^ ^™°шение (394) дает рекуррентную процедуру вычисления
*» *;• Здесь р (^, г^|4-1, «Vi) легко рассчитывается на
167
основании формул (383), (384), а р (sk/tk9 zk) — на основании,
"выражений (386), (387):
Р (?ь гк | ^ь гк_г) = '* х
Х еХР [~ Ж &* ~~ **-i — ^ ^-i» Z*-i» Uk^ Л)* Х
X (G/k-iQfc-iG^i)""1 (z* — **-i —/(*л-ь «л-ь "л-i) А)] ; (395) .
PfeUb ^) =-t=XL=- X
fv*i *, a; V{2*y\Rk\
X ехр [— -|- (sk - h (tk9 zk))* Rix (sk - h (tky **))] . (396) -
Для расчета числителя в формуле (394) необходимо взять
интеграл
Р (**. *k) = J d2*-lP (4, *Л I 4-1, Z^x)^ (^_!, Z^i),
который с учетом соотношения (395) может быть представлен
в виде
• " Р (tk, *k) =ч г - - f dz^.tf (tk_u zk_x) x
^ x exP [— "й" (** — z*-i - f (4-ь zk-i, w*-i) A*) X (397)
X (Ga-iQfc-iGlUi)""1 (z* — zfe_i — f(tk-b *k-i, uk_i) A)] .
Проведем в подынтегральном выражении (397) некоторые
преобразования. Апостериорную плотность вероятностей q (4-i»
zk-i) представим рядом Тейлора в окрестности точки zk:
Я dk-ъ zt-i) = Я (h-u zk) + (z^ - zkf dq (%\ Zk) + ,
+ -y(zk-l-zk)* W^y fa-x-^ + od^-^l2), (398) ,
где о^г^.!—zA||a) означает величину более высокого порядка
малости, чем квадрат нормы вектора (гк_г—zk). Аналогичным
разложением можно представить вектор / (4-i. zk-i> uk-iY-
+ ^Н^-)(г,.1- ^+0(1^-^1). (399) |
168
В отличие от формулы (398) здесь достаточно ограничиться
йнейными членами в разложении в связи с тем, что в
выражение (397) вектор /(**_!, гк^ и^) входит с множителем; Д.
Разложение (399) позволяет провести преобразование в выражении
zk — Zk-i ~~ f Wk-ъ гь-ъ uk-i) Д = zk — zk-i — f (h-u zk, uk-i) Д —
- дт'19<£ **~1} fa-i - **) A+° (I z*-i -z* id A =
= [д + A gL(^ ^>] fc - [д + A * ^> "*-*>]"' x
X f (^-ь z*. ^) A - zM} +0(1 z*_i - zkI) A. (400)
Воспользовавшись в соотношении (400) разложением
обратной матрицы
Ге + А dfV^k'Uk-Jyl=E — A дН*ь-ьд*ьи*-Л + о (А)
и принимая обозначение
Uk \гь-ъ zk, uk-i) — щ у (Wi)
получим
zk — zk_x — f {tk_ly zk_ly ик_г) А =
= [£ + Mzk (4-1, 2Л> Uh_j] [Zk—f{tk_x, Zk, Uk^) A — Zkmml] +
+.o(A)+ 0(12^-2,1) A. > (402)
Теперь, используя выражение (402), показатель экспоненты
в соотношении (397) представим в следующей форме:
— -^~ (Zft-l — Ч + / (*ft-i, 2ft, Mft_i) Л)* X
X [Е + Л/;Л (**_,, 2А, и^,)]' (Gft_!Qft_ iG;_i)_1 x
х(Е + Д/^ (tk_u гк, ы^!)) fe^ - Zft + / {tk.ly 2ft, «ft_!) Д) +
+ o(A) + o(|Zft_1-2ft|)A. ■ (403)
Экспонента с показателем (403), рассматриваемая как функция
переменной zk_ly представляет собой гауссовую плотность
распределения вероятностей при математическом ожидании
Mzk_t =zk-f (4-i, гк, Uft_i) A' - (404)
и Дисперсионной матрице
*>**_! = А (Е + AfZk (**_„ zk, «й .О)"1 (Gft_b Q*_iG;_,) X .
x (£ + Д^('*-ь z*. «ft-Or-^A^-A/;,^-!, 2ft, «*_,)) x
X (Gft^Qft^G^) (£ _ д^ {tk_u 2ft, «ft_!))* + о (A). (405)
169
Нормирующий множитель при экспоненте с точностью д0
членов порядка о (Д) должен быть равен
]/"(2я)лА] (Е - AQ (G^Q^Gl^) (Е - Af'zJ |
Учитывая, что, определитель произведения матриц равен
произведению определителей множителей, и раскрывая \Е — Д/' I
|(£ — &fzk)*\' по формулам
|£-Д4| = 1-А1г4 + о(А);
. |(£-Д4П = 1-Д1г(4)* +
+ o(A) = l-Atr4 + o(A),
получим следующее выражение для нормирующего множителя:
1
Y (2я)"А | G^Q^Gl^ | [1 - 2 Л tr/;ft + о (Д)]
I
~ ]/'(2n)^\Gk_1Qk_1Gl_1\(l - Л tvf4 + о (Д))
(406)
Теперь снова обратимся к вычислению интеграла В (tk, zk)
[(см. формулу (397)]. Если для плотности распределения
вероятностей случайного вектора v с параметрами Mv = mv и Dv = d0
принять обозначение Nv (mv, dv), то согласно формулам (403) —
(406) можно записать:
Р (4, г,) = (1 -- A tr fZk (4-х, zk, %_x) + о (А)) X
xjdz^N^iZb-fV^, zk, uk.r) A), (Gk.1Qk_lGl-lA +o(A))] x
X q(tk-i, 4-i)-
Учитывая разложение (398), можно записать
Р (4, г*) = [ 1 - A tr fZk (4-i, zk, щ.г) + о (А) ] x
х
Ц (4-ъ Ч) - Г ('*-ь г*, Ч-г) dq(tk£kZk) A +
+ ±- A tr (OwQ^,OUi ^^ \ + о (А)
= <7 (4-ь «*) - /* (4-1, г*. "*-i) ^^'^ Д +
+ ^Atr(Gk.1Qk.1Gk.1)^f^-
1 дЧдгн
— Д<7 (4-1, Ч) tr /*4 (4-1, 2*. «ft-i) + О (А).
(407)
170
Теперь на основании соотношений (396), (407) и разложения
кспоненты можно записать выражение для числителя в
формуле (394)
J dzk_ip (tk, zk | tk_u zk_i) p (sk | tk, zk) q {tk.lt zk_j) =
_ __i^ (i - 4- Is* -h ('*♦z^ R^ ^ -h v*> г*]+° ^} x
X UVb-г, zk) -Г (<*-ь Ч, «*-i) dq(fzl'Zk) A +
+ -1- A tr /GwQ4_iOL, **<'*-'•.»> \ -
2 \ a2fcaZft
— Atfftw, 2*Иг£4(**_1, «*, «*-i) + o(A)j
l/79<rrV I J?t I V иг*
1Л2ЯГ I Лл I
2 \ Й2А
— Л?(**-ь г*) jtr/it (/*_!, гь u^) —
~4 Л? K^-i. z*) (s* - h Vk, z*)l* ЯГ11** - W*. г*)] + о (А)}. (408)
Знаменатель в формуле (394) представляет собой
проинтегрированный по переменной zk числитель. Проводя указанную
операцию над выражением (408) и учитывая правила
интегрирования по частям, получим
j dzk \ dzk_xp (tk, zk | tk.lt z*_!) p (sk | tk, zk) q &_!, zft_a) =
1^(2яПЛ*| L 2
Х(8,-Л(4, г,)) + o(A)], (409)
где Mfc.j означает апостериорное математическое ожидание при
условии проведенных измерений до момента tk_x.
Теперь в результате деления выражения (408) на (409) и
несложных преобразований получим
Я (**, г„) = q (tk_lt Zk) _ f {tk_lt Zk, uk_x) dq{tkgz^k) A +
1 \ <>zkdzk J
171
— kq (tk_u zk) tr fZk (tk_u -zk, uk_x) —
1
-4- Aq(tb-l9 zk) [sk- h(4, zk)f Rbl [sk-h(tk, zk)] +
+ -f &q Vk-i, zk) M*-i \4 - h (tb zk)f RJ1 x
X [sk — h{tk, zk)]«+o(A). (410)
Замечая, что
fVk-ъ zk, Uk-i) *%£гк) — g(**-i. *k) trfZk(tk_u zk% uk_x) =
и устремляя в выражении (410) А к нулю, так что t^—* tk = tt
а векторы z и s стремятся к своим предельным значениям х и у
соответственно, получим уравнение в частных производных для
апостериорной плотности распределения вероятностей:
+ 4-tr(G(o;QWG*w^^) +
+ 4-9С. *) Miy-ftC, л)]*/?"1/')[у-лС, *)]-
-\У-HU x)fR-1(t)[y-h(ti х)]}. (411)
В соответствии с известным априорным законом
распределения вероятностей (378) уравнение (411) должно решаться при
условии
q{0,x)=pQ(x). (412)
, Если интенсивность шума измерений бесконечно велика,
что практически соответствует отсутствию измерений фазовых
координат объекта, то в выражении (411) следует положить
R~l (f) = 0. Тогда соотношение (411) вырождается в уравнение
Колмогорова (108) для диффузионного процесса.
4. Оптимальная линейная фильтрация. Фильтр Калмана
Рассмотрим частный случай уравнения (411), когда объект
управления является линейным и описывается уравнением (361)»
„т. е. когда 1
f(t, xy u) = A {t)x + В (t) u. (413)
172
Измеритель также предполагается линейным N
h (t, x) = С (t) хг (414)
где С (t) — матрица переменных коэффициентов размерности
[г п]. Допустим, что начальное распределение вероятностей
вектора х нормально, т. е.
р<>ы=7штех* b^{x~m°wl(*~"Ч1-(415)
При сформулированных условиях уравнение (411)
принимает вид
Mk^L = -{i)*l(A(t)x + B(t)u)q(t,x)] +
+ 4-tr(O(0Q(0O*(ft-2^-) +
+ ±q(t,x) [Mt (у - C(t) х)* R-1 (t) (у-С (t) x) -
-(у-С (t) xf R-1 (t) (у-С (t) x)]. (416)
Нетрудно убедиться, что уравнению (416) при выполнении
условия (415) удовлетворяет решение
<*' x)=7mWW\eXV [-^^-m(t)rD'4t)(x-m(t))l
(417)
где функции т (/), D (t) удовлетворяют^ системе обыкновенных
дифференциальных уравнений
т = Ani + Bu + DCR'1 {у —Cm); (418)
D = AE)+DA*+-GQG*—DC*R-1CD (419)
при начальных условиях
т (0) = т0;
D (0) = DQ.
Этот результат можно получить с помощью перехода в
выражении (416) от q (t, x) к характеристической функции g (/, X),
как это было сделано в п. 4 гл. I.
Апостериорная характеристическая функция g (/, К)
удовлетворяет следующему уравнению в частных производных:
~~^-G(t)Q(t)G*(t)Xg(t,X) +
173
+ ±-g(t, Ц Mt [(у - С (t) xf R-1 (t) (y-C (t) x)\ - j
—Y8(t, b)y*K-l(t)y-i(-^)*g(t, %)C*(t)R-4t)y +
+ 4-tr(c*(0^(0C(0^|^). (420)
При отсутствии измерений фазовых координат объекта, что - I
равносильно условию R (t) —> оо или R~x (t) —» 0, уравнение (420)
совпадает с полученным ранее уравнением (111).
Таким образом, в рассматриваемом частном случае апосте- I
риорный закон распределения фазовых координат объекта х (t) I
является нормальным. Согласно формуле (419) апостериорная I
дисперсионная матрица D (t) не зависит от измерений у (t) и
может быть рассчитана априорно. Тогда вектор апостериорного
математического ожидания т (t) является решением линейного
нестационарного дифференциального уравнения (418). Этот ре- .
зультат, впервые полученный Калманом [133], был развит
другими авторами [5, 15, 58, 91, 134, 155].
Решение уравнения (411) для апостериорных вероятностей
в общем случае нелинейного объекта и нелинейного измерителя
возможно лишь приближенными численными методами. Один из
таких методов [28] дает возможность составить систему
обыкновенных дифференциальных уравнений для семиинвариантов
закона распределения q (t, x)> Эта система не замкнута. Однако
учитывая быструю сходимость к нулю семиинвариантов при
возрастании их порядка, можно положить равными нулю
семиинварианты порядка выше k (выбор k связан с условиями задачи).
Это дает замкнутую систему обыкновенных дифференциальных
уравнений, приближенно определяющих семиинварианты до &-го
порядка. Если положить k = 2, то описываемый подход будет
равносилен проведению статистической линеаризации.
5. Достаточные координаты
В п. 3 настоящей главы указывалось, что при наличии шумов
в канале измерения фазовых координат объекта управление
является функционалом относительно апостериорной плотности
вероятностей q (/, х) фазовых координат объекта (381). То же
можно сказать и о функции Беллмана W0, которая является
текущей оценкой минимальных потерь на интервале времени [/, Г]: <
№0= min М Ф[т, x(T)9u(x)]dT + b[T,x(T)]\q(t\ х) = \
= W0(t,q(t,x)). (421) 1
Апостериорная плотность распределения вероятностей q (t, x)
является случайной, так как в соответствии с формулой (411)
зависит от случайных наблюдений у (/). Однако значения q (t, х)
измеряются точно. Таким образом, путем перехода от х (t)
к q (t, x) задача сведена к случаю точного наблюдения координат,
но при этом размерность наблюдаемого вектора возросла от п
до бесконечности. Это обстоятельство и объясняет сложность
решения задачи оптимального управления при неточных
измерениях. Функция Беллмана (421) должна определяться из
функционального уравнения, которое несложно получить, повторяя
рассуждения, приведенные в п. 1 данной главы:
W0 {t, q (t, x) = min (a f dxq (t, x) cp (/, x, и) + о (Л) +
uCU
+ M [W0 (f + Д, q(t + A, x)) | q (ty *)]}. (422)
Математическое ожидание в формуле (422) должно вычисляться
в соответствии с выражением (411). Решение уравнения (422)
должно удовлетворять очевидному условию
W0 (Г, q (7\ х)) = \ dxq (7\ х) X (7\ х). (423)
Решение задачи существенно упрощается, если удается опре"
делить конечное число достаточных координаг [94]. К
достаточным координатам предъявляются следующие требования. Прежде
всего они должны быть достаточны для вычисления текущих
потерь. Обозначим через у (t) вектор достаточных координат.
Сформулированное требование означает, что в формулах (422),
(423)
J dxq (t, х) ф (U х, и) =а {t, у {t))\
I dxq (Г, х) X (Г, х) = р (Г, у (Г)).
Другое требование к достаточным координатам состоит в том
что они должны полностью определять будущую эволюцию
фазовых координат объекта. И, наконец, они должны быть достаточны
Для указания ограничений выбора управления на любом
интервале времени.
Если удается определить конечное число достаточных
координат у (£), то оптимальное управление и функция Беллмана
могут быть представлены в форме и0 (/, у (0), W0 (*, У (0)-
Соответственно поскольку достаточные координаты точно
наблюдаемы, задача расчета оптимального управления сводится к
рассмотренной в п. 1 настоящей главы.
В качестве примера применения идеи достаточных координат
ненШСП?ИМ УпРавление линейным объектом, описываемым урав-
в Ием (361), при критерии оптимальности (362), когда измеряется
y = C(t)x + r\(t).
175
• й
Предполагается, что на управление и (t) не наложено жесткого
ограничения, а начальное распределение х нормально.
Выше было показано, что при сформулированных условиях
апостериорный закон распределения х (t) является нормальным.
Следовательно, апостериорные математическое ожидание in (t)
и дисперсионная матрица D (t) являются достаточными
статистиками закона распределения и полностью определяют будущую
эволюцию поведения фазовых координат объекта. Нетрудно
видеть, что т (t) и D (t) удовлетворяют всем требованиям,
предъявляемым к достаточным координатам. Координаты D (t) могут быть
рассчитаны априорно согласно формуле (419), так как не связаны
с управлением и (t) и измерениями у (t). Поэтому D (f)> как
известная априорно функцця времени, может быть исключена из числа
достаточных координат. Таким образом;, управление и функция
Беллмана являются функциями времени t и т (/).
Вывод уравнения в частных производных для функции
Беллмана
W0(t, т) = т\пм\\[х*(%)У(г)х(т) +
+ и* (т) J (x)u(x)]dx + х*(Т) Ax(T)\m(t) == ml
проводится с использованием уравнения (418) методом,
изложенным в п. I данной главы. При этом необходимо учесть, что
наличие в формуле (418) члена DC*/?"1 (у — Cm) означает воздействие
«белого» шума интенсивности DC* R~XCD. В результате получим
уравнение
— dW(';m) = mm lm*V(t)m + tr[D(t)V(t)] +
01 и £ U \
+ и* J {t) и + [A (t)m + B (t) и]* dW^ m) +
• + -L tr [D (O'C* (t) Я"1 (t) С (t) D (t) dJm{td^] },
W0 (T, m) - m*Am + tr[D (T) A].
Как и при решении задачи управления линейным объектом
при точном измерении фазовых, координат (см. п. 2 гл. IV),
функция Беллмана ищется в виде квадратичной формы:
Wo (/, m) = k0 (t) + k\ (t) m + m*K2 (t) m.
Здесь k0 (/); kx{f) и K2 (О имеют то же содержание, что и
в формуле (363). Повторяя тот же ход решения уравнения
Беллмана, что и в п. 2, гл. IV, получим
Uo (/) = _/-i 5*/C2m, (424)
176
гяе #2 (0 определяется тем же дифференциальным уравнением
(370), (371), которое было получено в аналогичной задаче с
точными измерениями фазовых координат.
Таким образом, для выработки оптимального управления
необходимо сначала получить оценку фазовых координат объекта т (t)
согласно формуле (418), а затем в соответствии с выражением (422)
сформировать и о {t). Иначе говоря, блок управления разделился
на блок оптимальной обработки результатов измерений и
оптимальный линейный регулятор, совпадающий с оптимальным
линейным регулятором в соответствующей детерминированной
задаче. Этот результат является содержанием теоремы
разделения' [156].
6. Оптимальное управление линейным объектом
при неточном знании времени управления
Рассмотрим управление линейным объектом, описываемым
уравнением (361), при квадратичном показателе качества (362).
В процессе управления измеряется вектор
y(t) = C(t)x + y\(t).
Начальное распределение вектора фазовых координат объекта
предполагается нормальным. Особенностью рассматриваемой
задачи является отсутствие точной информации о моменте
окончания управления Т. Имеются лишь априорные сведения о моменте
окончания управления, которые уточняются в процессе
управления путем наблюдения процесса
z(0 = T + v(ff,. (425)
где v (f) является нормально распределенным «белым» шумом
с характеристиками j
Mv (t) = 0;
MvitJvVJ-SiWbiti-tj.] (426)
Задача решается в предположении, что Т является случайной
величиной с априорным распределением
Ро (Т) = /х1 (Т - а) 1 (Ь - Т) ехр [- ^=^~] • 1427)
Закон, распределения (427) будет в дальнейшем называться
«усеченным» нормальным законом распределения. Заметим, что
араметры |х0 и d0 усеченного нормального закона не являются
атематическим ожиданием и дисперсией случайной величины 7\
сожитель 1г является нормирующим.
Случайные процессы | (/), ц (0> v (0> а также случайная
личина Т считаются независимыми.
12 А. м. Батков 177
Предполагается, что момент окончания управления Г,
принимающий случайное значение в интервале [а, й], фиксируется
в системе, т. е. для t^>T процесс управления прекращается.
В п. 4 настоящей главы было показано, что апостериорное
распределение вектора х (t) является нормальным с
характеристиками т (t) hD (/), удовлетворяющими уравнениям (418), (419).
Апостериорная плотность распределения Т определяется
выражением
q (t, Т) = 12\(Т-а)\(Ь- Т) ехр {- ± {Т^)Ш}, (428)
где /2—нормирующий множитель, а параметры \i (t) и d(t)
удовлетворяют следующей системе дифференциальных уравнений:
И* = —\id~-g- + zd -J-;
fx (0) = (x0; d(0) = d0. ]
(429)
Таким образом, апостериорный закон распределения Т
является усеченным нормальным. Этот результат получен из
уравнения для апостериорных вероятностей (411) при соответствующих
задаче значениях параметров.
Поскольку «динамика» случайной величины Т отражается
дифференциальным уравнением
f = 0W
то в формуле (411) следует положить / = О, G = 0. Тогда,
учитывая формулу (425), на основании выражения (411) получим
следующее уравнение относительно апостериорной плотности
распределения q (/, Т):
■ MW1=-Y('^ Т)[М<(г-ТГ^-(г-ТГ^]- (4Щ
Можно убедиться в том, что закон распределения (428)
удовлетворяет уравнению (430).
уПри выводе формулы (428) не было учтено, что, кроме
выражения (425), есть еще один источник информации относительно Т.
Как указывалось выше, в каждый момент времени / известно,
закончен ли в данный момент процесс управления. Условие, что
процесс управления не закончен к моменту времени t (t > а),
означает, что Т > t. Следовательно, нижняя граница усечения
случайной величины Т равна t. Это означает, что соотношение
(428) справедливо при t < а, а при произвольном моменте управ-
178
ления 0 <: t < b можно записать следующее выражение для
q (U Т):
q(i9 T) = l(t)l(T — a)l (T — t)\(b-T) x
J_(r-MO)4
X
exp [-
d(t)
(431)
где р (t) я d (t) удовлетворяют уравнениям (429).
Поскольку апостериорная дисперсионная матрица D (t)
фазовых координат объекта и параметр d (t) закона распределения Т
(431) могут быть рассчитаны априори согласно уравнениям (419),
(429), то достаточными координатами в рассматриваемой задаче
управления являются вектор m (t) и скаляр fx (ty. Таким образом,
оптимальное управление и функция Беллмана зависят от
аргументов U ™, \i : и0 (/, т, |х) и W0 (/, т, \i).
В связи с тем, что момент окончания управления Т является
случайной величиной, уравнение Беллмана имеет
определенные особенности. Рассматривая полную группу несовместных
событий г<Т<:* + Ди/ + Д<Т,<:&, представим WQ (t, m, .|х)
согласно формуле полной вероятности:
W0 (*. т, (х) = min \Pt [t < Т< t + А] X
u(T)fU{
т
J (x* (т) V (t) x (t) + w* (t) J (x) и (т)) dx +
t
+ x* (T) Ax (T) 11 < T< t + A, m (t) = m,
x M
(X (0 = jX
X M I
+ />,[<+A <T< 6] X
J (x*(t)V(t)x(t) +
t
+ и* (т) / (т) и (т)) dx +
г
+ j (** (T) V (T) X (T) + «* (T) J (t) « (T)) dt+
t+b
+ x* (T) AX(T) 11 + Д < T< ft, m (0 = m, |i (9 = I*
•. (432)
В соотношении (432) под Pt [t < Г< t + А] понимается
апостериорная вероятность события * < Т < * + Д, которая с точ-
г^СТЬЮ Д0 о(А> Равна A4(t, T)\T=t = kq(t, t). Аналогичный
:>мысл вкладывается вР<[<+Д<Г<6]. Указанные апосте-
Р орные вероятности согласно формуле (431) полностью
определяются значением ц (t), причем при t < a, q (/, 0 = 0.
12* 179
V:;^-:?
Несложные преобразования выражения (432) приводят к
следующему соотношению:
W0 (/, mf fx) = min {Aq (t,% t) [т*Лт + tr (D (t) A)] -f
• w£ c/
+ Д [m*V (ft m + tr (D (ft, V (ft) + u*J (ft u] +
+ [1 — Aq (t, ft] MlW0(t + A, m(t + A),
p(t+ A)\m(t) = m, |i(0'= Hi}.
Теперь, применяя описанную в п. I гл. IV процедуру
разложения W0 (t + A, m (t + Д), (i (t + Д)) в окрестности точки
* + Д, т, (л, получим с использованием уравнений (418), (429)
в пределе при, Д —» 0 следующее уравнение Беллмана:
— Ш° У'"1' р) = min [q (t, ft [т*Лт -f- tr (В (ft Л)] -f ' "
+. [m*F (ft /и + tr (D (ft V (ft)'+' и*/ (ft «J —
. - q(t, ft W0 (t, m, & + [A(t)m + B(t) u]*dW°{t>™' ^ +
+ -f tr [D®C*(1)R-4f)C(t)D(t) dWod^: V ] +
1 (<P(Q dWa(t,m,ii)
+ T" S(ft Ф* ~ • f («^
Уравнение (433) должно решаться при условии
Г0 (Ь, т, и) - т*Л/и + tr[D (Ь) Л]. (434)
В связи со сложным характером, зависимости q (t, ft от
координаты Ц общего решения уравнения (433) найти не удается.
Рассмотрим частный случай, когда отсутствуют измерения z (ft,
что равносильно S —* оо. При этом ц (ft — ц0 = const, d (ft —
= d0 — const и согласно формуле (431)
q(t, /) = /(/) 1 (*-а) 1 (6-0 exp [-^.SLzJbtt] (435)
может, быть рассчитано априорно. Величина ц. (ft исключается
из числа достаточных координат и уравнение Беллмана (433)
принимает следующий вид:
dW0 (t, m)
* ,€
*= min iq (/, ft [m*Am + tr (D (ft Л)]
uC D I
+
+ [m*V (ft m + «V (ft u] — q (t, ft W0 (t, m) +
dm
+ -f tr [D (ft С* (О *-* (ftC (ft В (О^У] }.
180
При отсутствии жесткого ограничения на управление
процедура решения уравнения Беллмана не отличается от описанной
в п. 2 гл. IV. При этом функция Беллмана W0 (/, т)
представляется квадратичной формой по переменной т\
Wo (f, m) = h (t) + k\ (t) m + m*K2 (t) m,
где k0 (t)9 kt (t) и K2 (t) удовлетворяют системе уравнений
—k0 = — ±k\Bj-lB*kl +
(436)
+ tr (DC*R-1CDK2) + tr (DV) —
— q(t;t)(k0 — tr(DA))i n
_fe1 = Л* kx — K2BJ~1Bk1 — q (t, t) kx\
—K2= V + A*K2 + K2A —
—KtBJ-WK* + q (t, t) (Л- /С,).
Поскольку фуйкция Беллмана удовлетворяет условию (434^, то
коэффициенты &0, kl9 К2 имеют следующие значения при / = Ь\
k0 (Ь) = tr (D (b) Л); )
кг (Ь) = 0;
К2 (6) = Л,
(437)
Из формул (436), (437) следует, что kx (t) = 0.
"| Согласно уравнению Беллмана оптимальное управление
связано с функцией Беллмана следующим соотношением:
Подставляя выражение для №0 (£, т) в виде квадратичной
формы и учитывая, что kx (t) = 0, получим:
а0 = —J'1B:¥K2m.
Пример. Рассмотрим задачу оптимального управления объектом второго
порядка, описываемым дифференциальным уравнением
0 1
0 1
, 0 gi I
"г* . и .
II 1 II 1 1ъ I
на *аРаметРы критерия оптимальности (362) матрицы V, J, Л предполагаются
не зависящими от времени:
V =
*11 »12
»«1 We
; / = 1; Л:
"21 "22
181
Согласно приведенному выше выражению оптимальное управление
запишется:
u0(t, m) = —J-iB*K2m =
= -10.1 I
Кл\ Ко
m1
m2
= — (k12m1 + k22m2).
Здесь k12 (t)t k22 (t) определяются согласно формулам (436), (437) из
решения системы обыкновенных дифференциальных уравнений
klx k12
«21 ^22
ku k12
«21 *22
»11 У12
^21 ^22
0 0
0 1
+
0 0
1 0
kn k12r
«21 ^22
+
klx k12
«21 ^22
+ q(t;t)
.. ^21 ^22 II I
^11 — «4l» ^12
0 1
о о II
при условии
11 (Ь) «12 W
21 V) «22 (Ь)
Хц ^12
™2l ™22
На рис. 40 показаны результаты моделирования на ЦВМ этой системы
уравнений при следующих исходных данных:
V =
b =
о о
о о
10 с:
. Л = 11
1 0
о о
На рисунках приводятся серии графиков, соответствующие разным
значениям а. Параметры jli0 и d0 априорного закона распределения величины Т
выбраны такими, что этот закон близок равномерному в интервале [а, Ь].
Выделенная кривая соответствует значениям коэффициентов kn (t), kl2 (/), k22 (t) при
a= 7.
Рис. 40. Результаты модели*
рования Kij (t) при различи
ных значениях а для А,п =
= 1, Л12 — A2i == л22 == "•
а — графики k\\ {t)\ б —
графики k\2 (t); в — графики &22 (*)
182
л =
Рис. 41. Результат моделирования k{\ (t) при различных значениях а
для ХХ1 = 0,1; Я12 == Я21 = Я22 = 0:
а — графики klt (t); б — графики k12 (t); в — графики k22 (t)
Цифрой / на рисунках отмечены графики коэффициентов при а = 10, т. е.
в случае точно известного момента окончания процесса управления Т = 10 с;
цифрой 2 — графики коэффициентов при а — 0, когда момент окончания
управления равновероятен в интервале [0, 10] с.
Графики коэффициентов kn (t), k12 (t)t k12 (t) при
0,1 0 II
0 0 1
для тех же условий, при которых построены графики рис. 40, представлены на
рис. 41.
Изучение представленных на рис. 42—47 результатов показывает
существенную зависимость оптимального управления от априорных данных о моменте
окончания управления.
7. Оптимальное по быстродействию управление
линейным объектом при точном измерении
фазовых координат
Рассмотрим управление линейным объектом, который
описывается уравнением (361), с точки зрения оптимально быстрого
достижения некоторой заданной цели. К условиям, наложенным на
объект, следует добавить, что вектор управления и принимает
начения из некоторой замкнутой области U. В отличие от детер-
инированной задачи оптимального быстродействия, где конеч-
^°и целью является достижение некоторой заданной области
фазовом пространстве объекта, в стохастической задаче опти-
льного быстродействия возможны следующие два варианта.
183
Во-первых, можно говорить о минимальном интервале
времени, за которое априорное математическое ожидание заданной
функции фазовых координат объекта достигнет заданной величины. -
Например, требуется выбрать управление и таким, чтобы за
минимальный интервал времени
Т = tk-t (438)
перевести объект из состояния х, занимаемого в момент / и
характеризуемого неравенством
- х* WAWxit^C^t), (439) !
в состояние х (4), которое описывается равенством
Mt {jt* (4) Л (4) x {tk)\ = Сг (4), (440) ,
где Л (t) — симметричная положительно определенная матрица
размерности [п, п]\ С (t) — заданная функция времени.
Во вторых, можно говорить о минимуме математического
ожидания времени, за которое фазовые координаты объекта достигнут
некоторой заданной области. При этом, если рассматривать
вариант, аналогичный только что описанному, то необходимо вы- -■'*
-брать управление и таким, чтобы априорное математическое
ожидание времени
f = Mt\T\t (441) \.
за которое объект из состояния х, характеризуемого неравенством
(439), достигнет состояния х (4)> описываемого равенством
х* (4) Л (4) х (4) = С (4), (442)
было минимальным.
| В. Н. Новосельцевым г бщло высказано предположение о том,
что минимальный интервал, определяемый в первом варианте, и
минимум математического ожидания времени, вычисляемый во
втором варианте, совпадают. Доказательство этого факта было бы
весьма желательно, так как это дает определенные преимущества
при решении этих задач. Однако уравнения Беллмана, записанные
для Т и Г, Оказываются разными. Рассмотрим этот вопрос более
подробно.
• Решение задачи, определенной условиями (438)—(440), тесно
связано с решением задачи минимизации математического
ожидания ют квадратичной формы (440) в фиксированный момент 4».
когда требуется обеспечить
minM, {**(4)Л(4)*(4)Ь (443)
1 Новосельцев В. Н. «Оптимальные по быстродействию системы управления
при наличии случайных помех». Труды ИФАК, II конгресс, т. 2, М., «Наука»,
1965.
184
Введя функцию Беллмана
W (х, t\ tk) = min Mt {** (tk) A (tk) x (tk)\Xtt\, (444)
запишем уравнение (363) в следующем виде:
с конечным условием: W = л:* Л х при t = tk.
Очевидно, что время оптимального быстродействия будет
найдено, если из наименьшего tk> определяемого из уравнения
W (xf *; tk) = С (tk), (446).
вычесть текущий момент t:
Т = U*. 0- '*, . (447)
что проиллюстрировано на рис. 42.
При таком подходе оптимальное управление Uk (x, t\ tk),
найденное по критерию (443) при замене параметра tk на значение,
полученное из уравнения (446), дает решение задачи
оптимального стохастического быстродействия первого типа:
• и(ху t) = uk[x, t\ tk{x, /)]• (448)
Чтобы записать уравнение Беллмана для времени 7\ заметим,
что
_дГ_д/*_1 dT_dtk
dt ~ dt , ; дх ~~ дх *
Функция tk задается неявным образом уравнением (446).
Введем для удобства функцию
Wt (я, t- tk) = W (x9 t\ tk) - С (tk)
и разделим уравнение (445) на производную—^~-.
Учитывая, что
dW dW
дх JWy a/ + dWx f
dtk Ж
запишем уравнение
W(xft,t)=x*Ax
i дТ . \дТ /л
+ ~tv
u£U
GQG*
Bu) +
d2W
дхдх*
с граничным
x Л* = С (t).
dWy
dtk
условием Т = 0,
(449)
если
tK(x,t) tK
Рис. 42. Определение
минимального времени, при
котором априорное
математическое ожидание
достигает заданной величины
185
Соотношение (449) не имеет вид замкнутого уравнения для Т
так как матрица '
дх дх*
д2Т
не равна матрице дхд *• Записью соотношения (449) ограничим
пока разбор задачи первого типа.
Для решения задачи второго типа, определенной условиями
(441), (442), введем величину
f(x, t) = minMt{T\Xtt}, (450)
иСИ
дающую минимальное среднее время попадания в область (442)
из точки л:, занимаемой в момент t. Легко показать, что эта
величина удовлетворяет уравнению
-1-%- =wmin{g (Ах + Bu) + 4 tr[gQG
дхдх*
(451)
с граничным условием f = 0, если х* А х = С (/).
Сравнивая соотношение (449) с уравнением (451), приходится
сделать вывод, что Т и Т не абсолютно идентичны. Однако оба
уравнения одинаково определяют управление в зависимости от
-а— и В. В частности, если допустимая область U задается
неравенствами | щ |< 1, то из уравнений следует, что
и =-sign g В, (452)
где sign относится к каждой компоненте вектора.
Однотипность функциональной зависимости управления от
функций -^ъ Дает возможность применить одинаковую процедуру
получения решений в обоих случаях.
Рассмотрим^ последовательный процесс нахождения
оптимального управления.
В том случае, когда управление определяется формулой (452),
что представляет наиболее часто встречающийся случай, задача
сводится к нахождению гиперплоскости переключения в фазовом
пространстве объекта, описываемого уравнением (361). Эту задачу
целесообразно решать методом последовательных приближений.
За нулевое приближение к оптимальному решению примем
гиперповерхность переключения соответствующей задачи оптимального
186
быстродействия в детерминированном варианте (при отсутствии
шума 5 (0:
с граничным условием Т = О, если х* Л х — С (t).
Первое приближение к оптимальной гиперповерхности,
получаемое как геометрическое место точек в фазовом пространстве х>
дает решение уравнение
&В = 0, №4)
дх
в котором Т0 определяется при использовании гиперповерхности
переключения, полученной из решения задачи (453). Процесс
последовательных приближений заканчивается в том случае, когда
при решении уравнения
Шв==0 <455>
получается (i + 1)-ая гиперповерхность, которая совпадает (в
пределах заданной точности) с гиперповерхностью, найденной на
предыдущем t-м шаге.
Определение функций Т{ возможно -только в отдельных точках
фазового пространства х приближенными методами.
Для получения Т{ при решении задачи первого типа
необходимо, чтобы математическое ожидание Mt [х* Л д:} было
непрерывным во времени. Поэтому целесообразно -использовать метод
статистической линеаризазции.
Применение метода статистической линеаризации показывает,
что первого приближения достаточно для получения практически
неразличающихся результатов. При этом решение
детерминированной задачи (453) целесообразно проводить аналитически, так
как использование метода статистической линеаризации
предполагает задание нелинеиностей в аналитической форме. Кроме
этого, гиперповерхности переключения стохастической и
детерминированной задач сближаются при удалении от начала фазового
пространства и отличаются, по существу, только в окрестности
начала, где шумы оказывают значительное влияние. Поэтому
приближения к оптимальному решению сводятся к изменению
гиперповерхности переключения детерминированной задачи в
окрестности начала координат.
При решении задачи второго типа необходимо определить
математическое ожидание времени попадания в область.
Производя статистическое моделирование уравнений (361) при законах
управления, определяемых по следовательными приближениями,
олучаем математическое ожидание времени попадания, которое
пользуем для нахождения следующего приближения,
зада Я иллюстРаЦии предлагаемого метода решения указанных
- оптимального быстродействия рассмотрим пример.
187
Пример. Предположим, что объект управления описывается системой диА.т"
ференциальных уравнений: ^
*i = н + 6i. н (0) = *ю;
л:2 = #w + £2, *2 (0) = х,20, | и | ^ 1,
где I (t) = ||£х, g2 II — вектор белых шумов с известной матрицей интенсивностей
Л II 0,5 0,15
1 0,15 0,05
Требуется выбрать управление и таким, чтобы математическое ожидание
[х2 х2
за минимальное время достигло единицы, т. е. С (t) — 1.
Задача второго типа сформулируется следующим образом: требуется выбрать
управление и таким, чтобы минимизировать математическое ожидание времени
достижения области, ограниченной эллипсоидом:
Согласно предлагаемой методике решим предварительно соответствующую
детерминированную задачу:
. { аг , дт _ )
+
Управление и находится по формуле
Г = 0, если^+-р-=1.
■sign
дТ
дх2
Для решения уравнения Беллмана предварительно фиксируем управление.
Пусть и = —1. Определим функцию Т из уравнения
дТ дт о- 1
1х7Х1~~~дъН~~~ 1;
2 2
Г = 0, если^ + ^1.
Необходимая характеристическая система запишется следующим образом:
*2 Я
Первые интегралы рассматриваемого уравнения следующие:
л:2 — /?/ = С2.
188
Рис. 43. Фазовая плоскость с оптимальной линией переключения
детерминированной задачи
Если хх и х2 лежат на эллипсе,, то Т — 0. Воспользовавшись этим, запишем:
Ci-
г2 12
L2
2R
]
Г2
с2
+ -йЬ = '-.
или
С2 - ± |/2i?C1-2^-|i±2i?|/^^-2^C1+aV '
Подставляя в полученное выражение значения первых интегралов, получим
функцию Т:
г- %-\ yr2RXl+4-2R2 £ + 2JLRyR^ + *-2RXl-4.
Для управления и = + 1 находим Г по приведенной формуле, заменяя хг
на —л^ и х2 на —*2.
Полученные формулы определяют область в фазовом пространстве xv x2,
характеризующуюся тем, что из нее без переключения знака управления можно
оптимально быстро попасть в область, ограниченную эллипсом. Для а — о—
= R = 1 эта область показана на рис. 43. Однако функция Т\ полученная выше,
не "будет решением уравнения Беллмана во всей указанной области. Для этого
Должны выполняться условия:
дТ
-^—^0 для л:2^>0,
дТ
дх*
:0 для *2<^0.
189
Знаки равенства в этих формулах определяют линию переключения:
-/■
.да + б. + иг^,-- Ь2 —аХ
R2 + b2 + 2RlXil
X sign хх\ если | хх | ^ а;
у 0; если |хх |<а.
Полученная линия переключения для конкретных значений параметров
показана на рис. 43. '
Запишем кратко уравнение линии переключения как
Ъо (*i> х2) = Н + f (xi) = °»
а управление и определим формулой
и = —sign g0 (xv x2).
После того как детерминированная задача решена, необходимо
проанализировать нелинейную систему (для дальнейшего примем R =* а = Ъ = 1):
Х1 ~ Х2 Т" Ь1>
*2 = —sign £0 (*х, *2) + £а.
Для этого воспользуемся методом статистической линеаризации и запишем
систему уравнений для математических ожиданий и дисперсий в виде:
т1 = т2\
т2= —М {sign Е0 (xv x2)}\
Dxl =-= 2D12 + 6U;
t>12 = D22 + 612 — M [(xx — /i^) sign l0 (xv x2)}\
t>22 = 022 — 2M {(*2 — m2) sign g0 (*i> *г)};
Щ (0) = *i<>;
^2 (0) = ^20;
Du(0) = 0; D12(0) = 0; D22 (0) = 0.
Написанную систему следует решать до тех пор, пока сумма тх + Иц +
2
+ Ш2 + D22 не станет равной единице. Фиксация этого момента определяет
функцию Т для начальных условий и составляет цель решения уравнений.
Наиболее сложным моментом при решении уравнений является вычисление
математических ожиданий от нелинейных функций многих переменных:
Ф = М {sign lQ [(х°г + mx\ (x°2 + щ)]};
* = М {х\ sign [х°2 + пг2 + /0 (х{ + тх)]}.
J90
Опустив промежуточные выкладки, запишем выражения для вычисления
функций ф и -ф:
ф * +Ы|> *L- +m, *EL +
+ •
— 00
^- Л> («i + И К5П)| ехр —^- ф;
K2|D|
^ I' ^
♦-AJ
Мм») 1
1 1/2TDI
ехр--^гф,
где
F(*) = — Jexp —/2^;
- /я.
+/.
Известно, что
М
■УЩ Du-,-""4/fef + S"
|х20 sign go [(*? + т,), (*2° + щ)] = D22-Д + D12 ^-}
_5f_\.
♦-»»£+*.£
дф
Производную -д-3- вычислим непосредственно:
0/72 о
дф
dm2
ехр-х
+и2
ф,
дф ^
a -j-1- определим по формуле
amx~ Du Г 12дт2\
Таким образом, окончательно получим систему уравнений, пригодную для
моделирования на цифровой машине:
т1 = /га2;
т\ = —ф'»
Du - 2D12 + Gn;
^12 = ^22— ty + 012;
^22 — D22 —^ТГ~^ ^ПТГ^ Л^, '
^11 Y * ^11 ^m2
«i (°)= *к>; щ (0) = ^20;
^u(0)=0; Dia(0) = 0; D22 (0) = 0.
191
0,8
ОМ
X^ \
i
1
/П
A
) 4 5, t
-OH
Рис. 44. Изменение элементов
дисперсионной матрицы во времени
/
О
-\
~1
-3
-Ч
~-5
^v
1/
к_
\
'
/
/
/
чч
? /3 к
//77,
^^^
*
Рис. 45. Изменение математических
ожиданий во времени
Моделирование уравнейий будем проводить с начальными условиями х10,
аг20, которые изображаются точками; расположенными на прямых,
параллельных оси х\ — 0. Этим определим сечения функции Т (xv х2)х ^zons{ в районе :
линии переключения. Если минимум Т будет достигаться над линией
переключения, то наш алгоритм управления оптимален, в противном случае координаты
точек перегиба можно принять за новое приближение к линии переключения
стохастической задачи оптимального быстродействия. Кривые, показывающие те-'
чение процессов в системе, приведены на рис. 44 и 45.
В момент /=бс выполняется равенство М {х*Ах} = 1, и решение задачи
на этом заканчивается.
На рис. 46 показано сечение функции Т (xv х2) при х2 = —2. Здесь видна
разница между координатой принятой линии переключения при хх = —2, и
координатой перегиба функции Г0, где теоретически должно происходить
переключение согласно виду управления, получаемого из уравнения Беллмана.
1,5
1,0
^Оприхг-
N=4
I
^^llo^iM-
*0 |
I
1
1,2 1,4 1,6 1,8
2,0
-X/ -ц -3 -2
Рис. 46. Сдвиг координаты
минимального значения функции
по сравнению с положением
детерминированной линии
переключения (х2 = 1,8)
Рис. 47. Первое приближение
к линии переключения
стохастической задачи. При \х1\->оо
сливается с линией
переключения детерминированной задачи
19?
Координаты минимума функции 7\ получаемой с помощью детерминироЕан-
ого алгоритма оптимального быстродействия, в первом приближении можно
расположить на кривой - *
li (*i> x2) = x2+.f1 (xj = О,
показанной на рис. 47. Кривую, задаваемую этим выражением, можно считать
первым приближением к оптимальной линии переключения стохастической
задачи оптимального быстродействия. Она значительно отличается от линии
t (xlf x2) = О В окрестности начала координат и приближается к ней при
?х I -* оо. Моделирование системы уравнений с новой линией переключения
показывает, что в пределах точности применяемых вычислительных методов
кривую gx = 0 можно принять за линию переключения стохастической задачи
оптимального быстродействия. Результаты моделирования сведены в таблицу.
Значения первых двух итераций решения примера
*2
1,2
1,4
1,6
1,8
2,0
2,1
х2
2,0
2,5
2,9
3,2
3,5
Хх =
То
1,52
1,47
i 1,46
1,47
1,58
1,85
*i =
■
То
5,84
5,78
i 5,77
5,80
5,88
"~2
Тг
1,46
1,42
1,40
1,43
1,50
| 1,78
= -6
7-1
4,86
4,63
4,40
4,40
5,40
хг
1,2
1,4
1,6
1 1,8
2,0
2,2
2,4
х2
2,5
1 3,0
3,4
3,7
4,0
Хх =
То
2,21
-2,15
2,11
1 2,10
! 2,12
2,16
2,38
Хх =
Го
6,50
6,44
6,43
6,45"
6,49
—3
Тх
2,11
2,06
2,02
2,00
2,01
2,05
2,26
= —8
Тх
5,60
5,31
1 5,15
5,24
5,83
Хг
1,2 *
1,4
1,6
1,8
2,0
2,2
2,4
Хг
3,0
3,5
3,9
4,2
4,5
*i=
То
2,84
2,77 !
2,74
2,74
2,79
4,75
4,95
*i =
То
7,03
6,99
6,98
7,00
7,05
:_4
Тх
2,64
2,54
2,46
2,46
2,65
4,51
4,72
: -10 \
Тх
5,75
5,51
5,30
5,46
6,15
8. Оптимальное быстродействие при неточном
измерении фазовых координат
Если принять, что координаты объекта, описываемого
уравнением (361), вычисляются на основе измерения вектора:
У = Ск + т], (456)-
то формулировки задач оптимального быстродействия следует
сколько изменить, а в блок управления ввести блок обработки
Данных (см. рис. 38), . - .. ■
13 А. М. Батков 193
Рассмотрим несколько формулировок стохастических задач
оптимального быстродействия при неточном измерении фазовых
координат объекта.
| Задачу оптимального быстродействия первого типа для объекта,
задаваемого уравнением (361), сформулируем следующим образом:
на основе измерения вектора у требуется выбрать управление иу
которое за минимальное время
Г = 4- t
переводит объект из состояния х, соответствующего моменту t
и характеризуемого неравенством
Mt{x*Ax\ > Сг (0, (457)
в состояние х (tk) к моменту tk, которое характеризуется
равенством
Mt {х* (tk) Ax (tk)\ = Сг (4), (458)
т. е. априорное математическое ожидание равно заданной функции.
Задача оптимального быстродействия второго типа
формулируется следующим образом: на основе измерения вектора у
требуется так выбрать управление и, чтобы- априорное
математическое ожидание
f = М [Л, Т = tk—U
времени перехода из состояния х в момент /, характеризуемого
неравенством
Mt{x*Ax}>C1{t)f (459)
в состояние х (tk) к моменту tk9 характеризуемому равенством
Mtk {х* (tk) Ax {tk)\ = Сг (tk) (460)
было минимально.
В условии (460) подразумевается апостериорное
математическое ожидание.
При уравнениях объекта (361) и при условии, что априорное
распределение начального состояния х0 нормально, обработка
измерений (см. п. 5 гл. IV) сводится к определению
математического ожидания и дисперсионной матрицы фазовых координат.
Так как дисперсионная матрица вычисляется априорно и не
зависит от измерений, то воспользовавшись равенством
М \х*Ах] = х*Ах + М {е*Ле},
где х — апостериорное математическое ожидание, а е — ошибка
измерений,- поставленные задачи сведем к сформулированным
-ранее задачам (438)—(440) и (441)-т-(442) соответственно.
Эквивалентный объект, определяющий изменение апостериорных
математических ожиданий задается уравнением (418):
x = Ax + Bu+r(t); x(0)=x0, (461)
194
где г-(О— «белый» шум с интенсивностью DC*R~1CD. Матрицы
^ й£) вычисляются по формулам (337) и (419).
Вместо функции Сх (t), определенной в выражении (439),
следует поставить функцию
С» (0 = C±(t) — M {е*Ле},
которая известна априорно.
В условиях неточного измерения фазовых координат объекта
управления можно поставить задачу определения минимума
математического ожидания времени, за которое апостериорная
вероятность попадания объекта в некоторую область L достигает
заданной величины рг.
В этом случае равенство
J р (Ху ху D) dx = рх, (462)
L
где р (х, х, D) — апостериорная плотность распределения, опре-
деляет контур в пространстве оценок #, на котором вероятность
попадания вектора фазовых координат объекта в область L равна
рг. Задача сводится к определению управления, минимизирующего
среднее время попадания фазовых координат объекта (461) в
область (462).
13*
. m
ГЛАВА V f
ПРИМЕНЕНИЕ СТОХАСТИЧЕСКОГО ПРИНЦИПА I
МАКСИМУМА К ОПТИМИЗАЦИИ СИСТЕМ УПРАВЛЕНИЯ I
1. Условия оптимальности управления I
в форме стохастического принципа максимума
Как указывалось выше, общая задача оптимального
управления сводится к определению вектора управления и размерности
[<7, 11 объектом
xi = ft(x9 и, Б, t), xi (0) = x°t, i = 1, 2, . . ., /z, (463)
на интервале (0, T), тле х = \х19 хг> . . ., хп\ — n-мерный
вектор; g (t) — случайный процесс размерности п с известными ста- •
тистическими характеристиками; х? — вектор, подчиняющийся
известному закону распределения; ft — ограниченные,
непрерывные вектор-функции, дважды дифференцируемые по л: и а.
Управление и предполагается физически осуществимым оператором от
измеряемого вектора у размерности [г, 1]:
и = u(t, у (т)), т ^ U
где у = у (*, т|, t); v\ — случайный процесс размерности г с
известными статистическими характеристиками.
Предполагается, что и принадлежит множеству U (и 6 U)
для каждой реализации вектора у (t) и является оптимальным,
если имеет место минимум функционала /:
Г = М }/„(*, и, t)dt + F [Т. х(Т)]L (464)
где операция "математического ожидания М берется по начальным
условиям х? и случайным воздействиям т] (t) и g (/).
В этой главе мы применим к решению описанной задачи прин-
цип максимума Л. С. Понтрягина в стохастическом, варианте [81, "
141].
Введем [81] координату х0 уравнением
*о = М*. и, 0. *о(0) = 0- (465);
и обозначим через X расширенный вектор фазовых координат
\x9i х\ размерности [п + 1, 1]. ' |
Тогда из выражения (464) следует
/ = М {х0 (Т) + F(T, х (Т)]\. (466)
196
ч|1
Для определения условий оптимальности'управления и
придадим вектору и вариацию би.
Поскольку и является оператором от вектора измерений у,
вариация бм представляет изменение этого оператора, который
в дальнейшем предполагается детерминированным.
Вариация функционала б/, заданного формулой (466), при
изменении и определяется выражением.
8/ = М [бх0 (Т) + Ё1^Ш8х(Т)\.
Введём вектор-функцию i|> (t) размерности п -f 1 такую, что
_ 6/ .= - (б*0 (Т) + дП1Х(Ту)] Ь* (Г)] = *• (Т) 6Х (Г). (467)
Из формулы (467) следует, что
♦•(T)=-i; |
*(»—*ё#и.«-1.» .-.) m
и, поскольку при заданном значении лГ(0) вариация 6х (0) = 0,
то
_<$/= J [d^bx(t) + r{t)l^] dt. (469)
о
Далее, из уравнений (463) и (465) следует, что
^Ц^ = f {х + дх, u + би, |, t) — f{x, и, I, t) =
■ =a/(*'ax6'°8* + H*. " + S", 6, t)~f(x, и, 1, 0 + e, (470)
где / = (/„, /i, ...,/„), e — вектор-столбец с элементами:
e<-°* aFan °""г
+ б** Wi(* + W*.» + «Mt,t) 8x. (471)
о< е1( е,< 1, t = о, 1, 2, ..., п.
Определим на интервале (0, Т) вектор г|> (t) дифференциальным
Уравнением
^)=_(^ААО)%(0 (472)
с начальными условиями (468).
197
Подставляя далее выражение (470) в формулу (469) и учитывая -
уравнение (472), получим:
г
_8/ = JV (t) [/(*, и + 8 и, Б, t)—f(x, и, Б, *) + e]d*.
о
Зафиксируем управление и на интервале (0, т) и рассмотрим
игольчатую вариацию управления [81 ], такую, что Ьи = 0 вне
интервала (т, т + Дт), где Ат—бесконечно малая величина, и
и + 8ие U.
Тогда
{Гт+Дт
М If V (0 [/ (х, и + 8и, h 0 —
— f(x,u,l, t)]dt+\edt\x • (473)
о ^° J ]
Здесь через М Г-| т1 обозначено условное математическое.
ожидание величины при фиксированных наблюдениях вектора
у (t) на интервале (0, т), а через М \ •} — безусловное
математическое ожидание. *
Для объекта управления
x = f(x, и, f) + o (t) I (0,
где о (t) функция только времени, значение е, определяемое
выражением (471), является бесконечно малой величиной более
высокого порядка малости, чем первый член в уравнении (473),
и им можно пренебречь [141].
Для объекта управления
X = / (х, U, t) + О (*, 0 I (t)
известен аналогичный результат для локального экстремума
функционала при малых вариациях управления и (t).
Отсюда с точностью до бесконечно малых величин первого
порядка малости можем записать:
— 81 = М \М\ ■ ф* (0 \f (x, u + 8u, t) — f (х, и, t)) dt\ x •
.1 \ % . УЧ)
Воспользуемся понятием стохастического гамильтониана
Н (х, и, ф, t):
Н (х, и, i|>, t) = V (0 / (х, и, £, t). (474)
Окончательно получим
— Ы = м\м\ J" [Н (х, и + 8и, t) — H(x, и, t)]dt\yx\\.
198
Основываясь на методе оптимизации нелинейных систем,
отметим, что неравенство
будет выполнено, если условное математическое ожидание при
заданной реализации г/о будет меньше нуля (по крайней мере,
для всех реализаций yl, вероятность появления которых4 отлична
от нуля), т. е.
М
{ [Н {х, и + Ьиу t)—H{x, и, t)]dt\A^0. (475)
Применяя теорему о среднем значении интеграла при Ат *> 0,
получим:
М\Н(х, и + 6а, т + ссДт) — Н (*, и, т + аДт)| Л<0,
где 0 <: а ^ 1.
Устремляя далее Дт к 0, получаем окончательно
М Г Я (хг и + Ьи, t) \Л <МГ# {х, и, t) Щ. (476)
Существенной особенностью условия оптимальности (476)
является зависимость функции Н от случайных функций *ф (t),
I (t), x (t)9 что обусловливает трудности решения стохастической
задачи оптимального управления. Частные случаи решения этой
задачи будут рассмотрены в последующих параграфах.
В общем случае для определения и (r/o, t) из условия (476)
необходимо представить функции х (t), -ф (t) в виде, позволяющем
вычислить условное математическое ожидание от этих функций
при известных значениях наблюдаемых функций на интервале
времени (0, t).
Условие (476) выражает необходимое условие оптимального
управления и и является основным содержанием стохастического
принципа максимума: оптимальное управление обеспечивает
максимум условного математического ожидания функции Гамильтона
при фиксированных наблюдениях.
Из формулы (472) следует, что, как и в детерминированной
задаче оптимального управления, г|) (t) определяется из системы
Уравнений
-3—тг . <W7>
при конечных условиях (468). Рассмотрим частные случаи
условия оптимальности (476).
Отметим прежде всего, что при свободном правом конце Т
max М \Н (х, и, г|), /) I Л = 0.
u£U [ \у*0\
199
Действительно, для оптимального управления вариация
координат за счет вариации времени 8Т может быть представлена
в виде
ux(T) = -£r6T=:f(x9 и, 6, Т)ЬТ.
Поскольку при управлении, обеспечивающем минимум /
б/ = м I—ф* (Т) 8х (Т) ] ^ О,
то
М IV (Т) f(x, и, 6, Т)]ЬТ <0, (478)
и при произвольной вариации ЬТ условие (478) может быть
выполнено только при
М IV (T)f(x, и, Б, Т)) = 0.
Более того, поскольку уравнения для г|> (/) и 8х сопряженные,
то
г|э* (t) 8x (t) = const.
Поэтому предыдущее условие выполняется для любого t
Используя определение Н (х9 ф, и, /), получаем
max Af ГЯ (*, и, ф, 01 Л = 0. (479)
Установим связь между стохастическим принципом максимума
и уравнением Беллмана, выражающим условия оптимальности
в статистических задачах.
На основании формулы (479) условие (475) может быть
записано в виде:
"х+Дх I
J Я (а:, и, г|?, t) dt\
max M
„х+Дх
0.
Введем функцию текущих фазовых координат и времени
<р [х (t), t], определяемую уравнением
дф __
dxt
% (0, i = U 2, . . ., п. (480)
Тогда, используя выражение (474) для функции Я, получим
{т-ЬДт )
X
Отсюда
ых
max М \ — ф [х (т + Дт), т + Дт] + <р [х (т), т]
Гх+Ах
ХТ ' I I
— J /о (*. «. 0 Л |ут I = О
200
или
x-fAx
mm
M I Ф [x (t + At), t + At] + j f0{x, «,' t) dt —
— Ф [x(t), t]
^h°-
Так как ф [х (т), т! не зависит от управления на интервале
(Т, т + Ат), то
М U [х (т), т]1х} — min М (ф [х (т + Ат), т + Дт] +
х+Дх \
+ \ fo(x, и, t)dt\yA==0.
Обозначим
№(*/;, т) = м {Ф [х (т), т]|,х};
Далее используем свойство условных математических
ожиданий, состоящее в том4, что предварительное усреднение при
расширенном числе наблюдений не изменяет результата следующего
усреднения, т. е.
М[у\уЪ] = М{М[у\у^Ы-
Из последних трех равенств следует условие:
W ((/J, т) = min M \w (*/J+A\ т + Дт) +
х+Дх ]
+ J U*. ", 0<»Ы- (481)
Поскольку на основании формулы (480)
Ф lx(T), T] = F [T, х(Т)]
и конечное значение для выражения (481) имеет вид
W (ут, Т) = min Ml{F [Т, х (Т)] \ут),
т
"о
то Уравнение (481) совпадает с уравнениями Беллмана [93].
201
2. Оптимизация управления линейным объектом
по квадратичному критерию
Рассмотрим применение стохастического принципа
максимума к задаче определения оптимального закона управления ли-
лейным объектом:
Ну
^=Ах + Ви + 19х (0) = х\ (482)
где х, и, I — векторы размерности п, q и п соответственно; -
А и В — зависящие от времени матрицы размерности [п, п] и
In, q].
Процесс | (/) является белым шумом, т. е.
М 11(f)] = 0;
М Eg (*!) Б* (*«) 1 =
где Q (ti) — матрица размерности [п, п].
Предположим, что управление и (/) осуществляется на основе
наблюдения вектора у (t) размерности г вида
у (t) = Сх (0 + ч (/),
где С—матрица размерности [г, п].
Процесс т] (f) является белым шумом, т. е.
М МО! = 0;
м M*i)ti*('i)] = R(ti)b(t1-t2).
Управление и (t) определено на интервале (0, Т) и оптимально,
если оно минимизирует квадратичный функционал
I = М
х* (Т) Ах (Т) + ] и* (0 / (0 и (t) dt
(483)
где^Л— положительная матрица размерности [ri, n], J (t) —
положительно определенная матрица размерности [qf q].
Согласно выражению (479) управление, обеспечивающее
минимум функционала (483), определяется из условия
max М \Н (х, ф, и, t) Ь1 = 0. (484)
U(t) L I °
На основании определения функции Н для объекта (482) и
функционала (479) имеем
#<*, ф, и, t) = гр* (0 U* +
+ Bu + g(0]+*oaVu. • (485)
:202
Система уравнений для^вектор-функции ty(t) из системы (477)
я условий (468) запишется:
*£ = — А * ф; ф (Г) = — 2Лх (Г). (486)
Рассмотрим случай, когда на и (t) не наложено ограничений.,
Покажем, что при этом максимум, определяемый формулой (484),
является стационарной точкой условного математического
ожидания функции Н (г|), х, а, /). Для этого найдем управление
Из условия равенства нулю частной производной по вектор-
функции и (t):
±М{Н(х,Ъ и, 0|4 = 0- (48?)
Поскольку и (t) является физически осуществимым
управлением, т. е, зависит только от прошлых значений у (/), оно является
не случайным по отношению к операции условного усреднения
в формуле (487) и может быть вынесено за знак математического
ожидания. Отсюда, выполняя дифференцирование выражения
(487) при условии (485), получаем, что и {t) определяется
соотношением
и (t) =4ijB*A1[*W|^]- (488)
Решение системы (486) при заданных конечных условиях if> (T)
может быть представлено в виде *
г|> (0 = W* (Г, 0 ф (Г),
где W (/, т) — матрица импульсных переходных функций
системы (486), удовлетворяющая системе дифференциальных
уравнений
W (т, т) = £,
гДе Е—единичная матрица размерности [п9 п].
Следовательно, с учетом уравнений (486), можно записать:
и (0 = J-*B*W* (Г, t) AM \х (Т)\УЛ. (489)
Отсюда следует, что оптимальное управление определяется
в ка>ВДый момент времени оценкой значений фазовых координат
в момент окончания управления.
Оценка конечного значения фазовой координаты может быть
выражена для линейного объекта (482) через оценку текущего
/г?а1АНИЯ вектоРа х (t) на основе наблюдения у (t) на интервале
203
Обозначая для сокращения записи
G (T, t) = J^B*W* (T- t) Л;
M[x(t)\vtQ]=x(i) f (490)
и учитывая, что
г
x(T) = W (Т, t) x(t) + \ W (T, т) х
t
х [Ви (т) + g' (т)] Л;
М[|(т)Ц]'=0, т>*;
М[«(т)|,<] = 0(7,'т)М[дс(л|^].
получаем
м
[x(T)\uto]=W(T, t)x(t) +
1
+ J>(7\ x)BG (T, т) dxM [x(T) Ц].
Решение этой системы линейных алгебраических уравнений
может быть представлено в виде
М [х (Т) Ц] = г1 (Т, t) W(T, t) x (t), (491).
где q~l— матрица, обратная матрице4
т
q (Г, 0 = Е— \ W (Г, т) BG (7, т) dr. .
Подставляя выражение (491) в формулу (489) и учитывая
соотношение (490), получаем окончательно:
и (t) = G (7\ t) q"1 (7\ t) W (7, t) x (t). (492)
Связь и (t) с х {t) может .быть представлена в виде
и (t) = 'j'1B*a(()x(t)9 (493>
где матрица a (t) размерности [я, п] является решением
дифференциального уравнения типа Риккати.
Действительно, сравнивая выражения (493) и (492) и
учитывая формулы (489) и (490), получим'
а (/) = W* (7, t) Aq~* (7, 0 W (7, t). (494)
204
Преобразуем формулу (494). Для этого умножим выражение
(494) на а (О» W*~l, W*, q (7\ t). А"1 к, используя выражение
(490), получим
W (7\ t) a"1 (t) W* (7\ t) =
т
= Л-1 — J W (7\ т) BJW* (Г, т) d%.
t
Дифференцируя обе части этого выражения по t и умножая
на a (t) слева и справа, получим
-*-а (0 = — аА — Aba—aBJ-^a. (495)
Граничное условие для уравнения (494) определяется при t = Т:
а (Т) = Л.
При выводе уравнения (495) были использованы соотношения
dW(T,t) =_даг(Г> t)A{t)\ W{T,T) = E\
dW*(Ttt) ==_д*(^*(7, /), W{T, Г)=£.
Оценка текущих фазовых координат х (f) может быть
определена решением уравнений Калмана, вывод которых приведен
в предыдущей главе:
dx = Ах + Ви + DC*!*-1 [у (t) — Сх)\ I
dt
(496)
= AD + DA* — D&R-iCD + Q; (497)
dt
lc (0) = M [x°]\
dD
D (0) = M {[x* — x (t0)] lx° — x (t0)]*},
где D (t) — дисперсионная матрица оценки х (t).
3. Задача оптимизации при жестком
ограничении управления
Рассмотрим применение стохастического принципа максимума
к задаче определения оптимального управления и (t) линейным
объектом
-J- = Ах + Ви + £; х (0) = х° (498)
205
в случае, когда управление в каждой реализации принадлежит
к замкнутой области U с фиксированной границей
и (*) 6 U0. (499>
Например, для скалярного управления условие (499) имеет вид
\u(f)\ <U (t), где U>0. (500)
Пусть, как и ранее, управление, минимизирующее функционал
I = М [х* (Т)Ах(Т)],
осущестэляется на основе измерения вектора у (t) размерности г
у = Сх + у\.
Поскольку
Н (х, ф, и, t) = ф* (t) [Ax+ Ви + Б]; |
|£ = —Л*ф; ф(Г) = —2Ajc(T), (501>
управление должно обеспечивать максимум
М[ф*(0В«(0Ц]
при выполнении условия (500).
Очевидно, что максимум этой функции достигается на
физически осуществимом управлении
u(t) = и (у*0, t)
вида
u(t) = U (0 sign В* $ (0, (502>
где
$(0 = Af[iK0|^];
• „•?/« f+1, если В*$(*)>0.
sign В*ф (0 = {
(—1, если £*ф(0<0.
Для определения г|) (/) применим метод дифференциальных
уравнений типа Калмана. /
Введем вектор z (t) размерности 2/г:
/А II * W I
удовлетворяющий векторному уравнению
dz
dt
206
= аг+Ьи+1г (t),
включающему уравнения объекта (498) и систему уравнений (501)„
при условиях:
- z,(0) = x», i = n+l, я + 2, .... 2n;
г,(Т) =—2Ax(tk), j = 1, 2, .... п.
При этом
II — А* О
а(Н О Л
J; ii(0 = L
# lis
Ha основании формул (496), (497), получаем уравнения для*
оценки г (t) на основе наблюдения вектора
у = CiZ + r\,
где
в виде
Сх =
О С||
о о Г
-J- = аг + Ьи + £>С^-1 [у (t) - ЗД;
zf (0) = х), i = n+\, п + 2, . . ., 2л;
г, (Т) = —2Л£ (Г), /= 1, 2, . . ., п
(503>
где
-^ = aD +Da- DC'iR^CiD + Qi,
Qi =
0 0
0 Qf
D==
В соответствии с принятыми обозначениями система (503>
может быть представлена в виде
^•~ -А*$ + D^C'R'1 (у-Сх);
fR'1
Ч>(Г) = _2Л*(Г);
dx
dt = Ах+Ви + DXXC'R-X (у — Сх);
х (0) = М [х°].
Прежде всего отметим, что решение задачи в виде
* (0 = — 2W* (Т, 0 Ах (Т),
(504)*
(505)»
20Г
которое удовлетворяет уравнению (501), не может быть непосред.
-ственно использовано для решения задачи, поскольку при этом
необходимо в каждый момент времени вычислять конечное
значение фазовой координаты х (Т) при оптимальном законе управления.'
Поэтому нас интересует, только физически осуществимое
решение системы (504). Будем искать его в виде
$ (0 = -S (Г, t) [х (t) + В (/)]. (506)
Подавляя выражения (506), (502) в формулу (504) и учитывая,
что для решения (506)
D^x = — SDXX
м используя уравнение (505), получим:
[^ + SA + A*s][x + B] +
+ S[~^ — AB + BU sign B<p(t)] =0.
Для произвольного значения х (t)
— + SA + A*S -0.
Конечное значение S (Г, Т) для этого уравнения определяется
шз сравнения выражения (506) и уравнения (504): .
S (7, Т) = 2Л.
Отсюда
S (7\ t) = 2W* (7\ t) AW (Г, /).
Пусть далее Д£—интервал времени, на котором B*t|> (f)
яе меняет знака. Тогда, приравнивая второе слагаемое в уравне-
- нии для В (t) нулю и решая дифференциальное уравнение
относительно В (t) при В (t + А/) = 0, получим:
^ t+At
B(t)= j W(t, x) BUdx sign B*^{f). (507)
t
Подставляя выражение (507) в формулу (506) и далее в фор-
:мулу (502), получим:
-В*$(0 =— B*S(T, t) U(0+ J W (t, x)BUdxsign £*$
(t)
(508)
sign 5*^(0=— sign5*S(7\ t)
t+At
x(t) +
+ ] W (t, t) BU dx sign B*$ (t)
:208
Отсюда следует, что при
|Н-Д*
|fi*S(7\ 0*(01>
справедливо
а при
\B*S(T9 t)x(t)\<
справедливо
J B*S (Г, t) W (/, т) BU dz
sign 5*г|> (0 = —sign B*S (7\ /) x (*),
t+At
J S*S (7, 0 IF (*, т) S£/ dt
sign 5*я|; = —sign 5*S (7, f) x
t+At
X J №(*, т) BUdrsignB*^ (/).
Отсюда следует, что
5*ф (0 = О
при
t+At
fi*Q J №(*. T)iSf/dT>0
и согласно выражению (508)
г+д*
х (t) + \ W (U *) Яи W dx = 0.
Таким образом получаем, что при А/ —* 0
и (*) = — £/ (0 sign S*S (Г, t) x (0; (509)
при Л/ = 7— /, а (/) определяется выражением (509) при
I T
| S*S (7, /) х (0 | > И B*S (7, 0 W (t, т) В£/ dt
II
и Удовлетворяет условию
г
х (0 + J W (/, т) Яи (т) dx = 0
при
14
b*s (г, о;(о|<
J В*5 (Г, 0 Г (f, т) Я£/ dx
А. М. Батков
209
4. Задача оптимизации управления
при изопериметрическом ограничении типа неравенства
В п. 1 гл. V были получены условия оптимальности в случае
когда управление и (t) принадлежит замкнутой области.
Рассмотрим некоторое обобщение этой задачи. Предположим ■
что управление и (t) должно минимизировать функционал
I = M\F [Х(Т)]\ (510)
при условиях и (t) £ U и дополнительном изопериметрическом
ограничении, выражаемом неравенством
М\ f/0(*f и, t) dt\
<см (511)
или
т
I
/о (*,.«, 0 dt <сс, (512)
где см и с — заданные постоянные. Математическое ожидание
в формуле (511) берется по начальным условиям вектора фазовых
координат л:0, случайным возмущениям и ошибкам измерений.
Функция /0 (#, и, t) предполагается дважды дифференцируемой
по аргументам.
Вводя, как и в формуле (465), фазовую координату х0 (О
уравнением
*о = fcf<*. и, 0. *о (0) = 0, (513)
преобразуем неравенства (511) и (512) к виду
М1х0(Т)]<си\ (514)
. • *о (Т) < с. (515)
Для учета этих ограничений в условиях оптимальности
применим метод перехода от замкнутой области изменения
координаты л;0 (Г), определяемой неравенствами (514) или (515), к
открытой области [96 L Для этого введем координату х'о и функцию
X [*о {Т)] такую, что при изменении х'о в неограниченной области
функция х обеспечивает выполнение условий (514) или (515)
при любых допустимых значениях х'о (Т). '
В частности, для ограничения (514) функция % определяется
условиями:
М [х0 (Т)] и А Ф 0 при М [хо (Т)] < см;
*' (516)
см и -г^ = 0 при [М[х0{Т)]^см
дх0
хК(0] =
в неограниченной области изменения х0(Т).
210
Предполагая, что для учета ограничений рассматриваемого
типа применим метод множителей Лагранжа, приведем задачу
минимизации функционала (510) для ограничения (511) к задаче
минимизации: , - -
Гг = М {F 1х(Т))} +г[)0М [xQ (Т)]9
где г|)о — неопределенный постоянный коэффициент. Вариация
функционала 1г может быть представлена в виде
где использовано определение (516).
Так как на вариацию бх'о (Т) не наложено ограничений, она
является произвольной и условие 81 л > 0 может быть обеспечено
при
М'о^р <- . (517)
х 'Фо
дх0(Т)
Для рассматриваемой задачи выражение для стохастической
функции Гамильтона остается аналогичным формуле (474), т. е.
п
Н (ф, х, и, t) = г|)*/ (х, и, .£, t) = Е^М*. а> 6, <).
/=0
где х0 удовлетворяет уравнению (513), и условие оптимальности
для рассматриваемой задачи определяется выражением
max M
Н (*, ij), и, t)\
Уо
= 0. (518)
Из условия (517) следует, что если условие (514) не
нарушается и —Ц-—=L согласно формуле (516) не равно нулю,
дх0 (Т)
то г|)0 = 0. Поэтому в этом случае при решении задачи ограничение
(514) не должно приниматься во внимание.
Если же условие (514) нарушается, то в соответствии с
формулой (516) М—L = 0 и ф 0 в выражении (517) является про-
дх0 (Т)
извольной величиной. В этом случае в функцию Н (#, ф, и, f)
Добавляется слагаемое ф0/о (*> и, t).
Таким образом, решение задачи минимизации функционала
(510) с ограничением типа неравенства (511) сводится к решению
задачи без ограничения и проверки условия (511). Если оно не
нарушается, * по полученное управление и является решением
задачи. Если условие (511) нарушается, задача решается снова
14* 211
с введенным в функцию Н (х, и> -ф, /) слагаемым -ф0 /0 (х> u,t)
и i|)0 определяется из условия
М 1х0(Т)] =см.
Применим изложенную методику к определению оптимального
управления линейным объектом
^ = Ах + Ви+ £, х (0) = л:0,
обеспечивающего минимум функционала
/ = М [х* (Г) Ах (Т) ]
при ограничениях на управление и (t) £ U и
•т
М
J и* (t) J (t) и (0 dt
< CMj
(519)
где Л— положительная, а. У (t) — положительно определенная
матрица.
Заметим, что без учета ограничения (519) оптимальное
управление, определенное в предыдущем параграфе, является
релейным и в одномерном непрерывном случае равно
и (t) = —U (t) sign S*S (Г, t) x (/)
в соответствии с формулой (509).
При этом
М
ГТ 1 Т
\ и* (t) J (t) и (t) dt\ = \j (0 U2 (t) dt.
(520)
Очевидно, что если
J* J (t) U2 (t) dt <*cM,
условие (519) может не учитываться, поскольку уравнение (520)
определяет максимальный «расход» управления на
интервале (0, Т). Более того, рассматриваемая задача с учетом
ограничения (519) не имеет физического смысла, так как оно никогда
не нарушается.
Поэтому поставленная задача имеет смысл только в том случае,
когда
-т
f J (t) U2 (t) dt > см.
212
При этом в соответствии с изложенной методикой
ограничение (519) может быть заменено изопериметрическим ограничением
со знаком равенства:
М
И и* (t)J (t)u(t) dt\ = см.
функция Н (*, г|), и> t) в рассматриваемой задаче имеет вид
Я (*, ф, w, t) = ^0u*Ju + ф* (Ах + Ви+ £ (0)
или
#(*, г|>, a, O^^+^fW^Jx
Х У [и + 2^ J~lfi^ W] + ^Ах ~ 4^ **Д/"1Д**- (521)
Подставляя выражение (521) в формулу (518) и замечая, что
а|з0 < 0 при /0 (#, a, t) > 0, получим, что оптимальное
управление должно обеспечивать максимум квадратичной формы
гаахЛ1{г|;0 [и* +±-<b*BJ->]j [и + -±-^В*ъ}Щ. (522)
При условии, что область U представляет собой ^-мерный
параллелепипед, такой, что
\щ\<* Ui> t = 1, 2, . . ., ?,
составляющие вектора и размерности [q, 1] определяются
независимо одна от другой. Введем формальное представление
нелинейного преобразования векторов аир размерности lq, 1 к
а - sg р, (523)'
которое означает, что
| р\ при | р, | < £/,;
С учетом представления (523) управление и (*), обеспечивающее
максимум (522), определяется выражением
где, как и ранее обозначено:
Ф(0 = Л1[ч>(0К].
213
Для определения оценки а|> (t) запишем систему дифферен-4
циальных уравнений, аналогичную уравнениям (504) и (505):
§ = -A*$+D^C*R-1(y-cxy, 1
dt (525)
$ (Т) = -2 Лх (T); I
^ = Ax-Bsg^ J~*B* $ (t) + D^R'1 (у - «);
*(0) = ЛГ [л:0]. ^ (526)
Применим к решению этой системы уравнений приближенный
способ, основанный на методе статистической линеаризации..
Для этого при решении системы уравнений (525) и (526)
примем, что
u(t)=-K^J~1B*$(t), ^
где К — диагональная матрица размерности [q, q]
коэффициентов статистической линеаризации
ft, = ft,(m/f £>-)
для элементов (524) типа линеной зоны с насыщением, где m{, D~ —
математическое ожидание и дисперсия оценки л:. При этом система
уравнений (525), 526) линеаризуется, и ее решение имеет вид
$(*) =-S(T, t)x(t),
где
^ + SA + A*S + SB^lB*S = 0
с конечными условиями
S (7\ Т) = 2Л.
* При этом оценка х (t) удовлетворяет уравнению
§ = (А + В Ц^ S*S ) х + DxxC*R~i (у - Сх)9 (527)
1с (0) = Мх\
Для определения дисперсии оценки D* при нулевом
математическом ожидании
М lx(t)] = 0
214
имеем
£>- = м [x(t)x* (*)]. (528)
Дифференцируя уравнение (528) по t и используя формулу (527),
получим
+ D7 (О (Л + В Ц^- B*S)* + DC*R-iCD, (529)ч
где D = М [(л:— #) (#— л:)*] определяется уравнением (497).
При получении уравнения (529) было использовано свойство
оптимальных оценок х, по которому
М 1{х—х)х*] = 0;
М [х{х— х)*\ = 0,
равенство
у = Сх + т|,
где л (0 — белый шум, а также
Л1 {[С(х— х) + ч! jc*} = 4~CD'
Таким образом, приближенно закон оптимального управления
определяется выражением
uW=+s2WoB*S{T' °*(0'
где "ф0 << 0 определяется из ограничения на интеграл от
квадратичной формы управления (519).
5. Условия оптимальности в игровой задаче
с неточными измерениями
Предположим, что объект управления описывается векторным
дифференциальным уравнением
dx
~df
= / (*, и, v, g, 0» х {t0) = a:0,
где х — вектор фазовых координат размерности п\ | — вектор
случайных возмущений размерности я; и и v —векторы
управлений объектом, имеющие различные цели управления^
Пусть управление и (t) стремится минимизировать функционал
/ = м [J [ut v]} (530)
215
на основе измерений вектора
' Уи = У и (х, r\uh
а управление v (t) стремится максимизировать функционал (530)
на основе измерений
У и = Уи (х, r\v),
гДе *!«> Ло — случайные векторы ошибок измерений с
известными статистическими характеристиками.
Рассматриваемая задача является задачей игры двух лиц
с неполной информацией. Существенно, что в общем случае игроки
используют для управления различную информацию. В связи
с этим даже при противоположных интересах игроки различным
. образом оценивают результат игры, и поэтому в общем случае
игра имеет ненулевую сумму.
Будем считать, что управление
и==и (С 0
оптимально и равно и0, если для оптимального управления v =
= »о» гДе
v = v «, /),
другого игрока для всех t интервала управления справедливо
неравенство
М [J [ио, vo] | <} < М {J [a, vo] | $/£.}• (531)
Аналогично для управления v (f), максимизирующего
функционал (530), можно записать:
- М [J [«о, v]\yfVo] ^M\J [uo, vo] \уЦ. (532)
Из выражений (531) и (532) следует, что условия
оптимальности для каждого управления могут быть выражены аналогично
выражению (463) в форме стохастического принципа максимума
при имеющейся в его распоряжении информации.
Таким образом, для управления и в соответствии с формулой
(479) имеем:
max М [Н (*, ф, и, vQ, t) \ У10] = 0. • (533)
Аналогично для управления v
min М [Н (х, ф, и0у v, t)\yi0] = 0. (534)
Уравнения (533) и (534) образуют систему уравнений,
совместное решение которых определяет оптимальные законы управления
(стратегии) и0 и v0.
216
Рассмотрим более подробно случай линейного объекта,
описываемого уравнением
х = Ах + Вии + Bvv + |, х (0) = *0, ' (535)
где А у Bui Bv—известные матрицы; g (t) — случайные
возмущения, представляющие векторный «белый» шум.
Критерий игры примем в виде
I = М \х* {Т) Ах (Т) + \ {u*Juii + v*Jvv) dtu
I to J
где Л и Ju— положительно определенные матрицы; Jv—
отрицательно определенная матрица.
Управление и основано на измерении
Уи = Сих + Чв (/), (536)
а управление v — на измерении
yv = Cvx + x\v {t).
Статические характеристики л:0, g{£), v\u{t) и r\v (f)
предполагаются известными обоим игрокам.
В рассматриваемом случае в соответствии с формулой (474)
можно записать:
Н (^ х, и, v, t) = \|>0 (u*Juii + v*Jvv) +
+ ф* (Ах + Вии + Bvv + 6);
^.«-Л**, ф (Т) = -2Л* (Г),
Подставляя уравнение (536) в формулу (533) и дифференцируя
полученное выражение по и (t), получим по аналогии с
выражением (488) "
u(t) |-В«*« (0,
где tyu (t) означает оценку вектора -ф (/) на основании
информации yu(f).
Аналогично из уравнений (534) получаем
v{t) = \- B%v (/),
гДе "Фу (0 —оценка г|) (/) по информации yv (t).
Для объекта, описываемого уравнения (535), и системы
уравнений для вектора -ф (t) аналогично формулам (504) и (505) полу-
217
•••71
S^ /*S S\ S*b
чаем систему уравнений для оценок г|эц, %9 xur xV9 где индексы
и, v обозначают наблюдаем&е процессы уи и yvy по которым
определяются оценки:
^ = Ахи + Вии + Вл + А^С^1^ - C„*J;
^= Axv + Buu0 + Bjo + D„xClR? [yv -СЯ ];
i§£ = - Л*$н + А^С^1 [</„ -СиХи},
Здесь через аи и uv обозначены оценки управлений v и и при
наблюдениях гм и zv соответственно, а через Z)a^, DvXX, Du^x,
Dvtyx — дисперсионные матрицы оценок по информации уш yv. I
Трудности в решении этой задачи заключаются в
предварительном определении оценок управлений противника vu и uv.
Иногда виды этих оценок могут определяться в условиях
задачи [7].
6, Оптимальное управление линейным объектом
со случайными коэффициентами типа «белый» шум
Вопросам оптимального управления объектами со случайными
свойствами посвящены работы ряда авторов [7, 49, 52, 65, 125, ?
130, 146, 150, 157]. В этих работах принимаются различные
предположения относительно свойств стохастического объекта
и применяются различные методы сицтеза системы управления.
В этом параграфе рассматривается задача оптимального
управления линейным объектом со случайными коэффициентами типа ■
«белый» шум:
х = Агх + А2и + fl9
где х — вектор п измерений; А г и А 2 — матрицы случайных коэф- |
фициентов типа «белый» шум размерности [я, п] и [п, q] coot- [
ветственно; и — вектор управляющего воздействия q измерений, *
зависящий от t и х\ fx — д-мерное входное воздействие, содержа- ^
щее неслучайную составляющую и случайные отклонения типа
«белый» шум. Наличие мультипликативной помехи в канале уп- |;
равления может быть вызвано неточностью реализации блока ^
управления, особенностями канала связи и другими факторами. i
Предполагается, что фазовые координаты объекта измеряются
точно, поэтому управляющее воздействие зависит от перемен-
218
ных t и х. Оно является оптимальным, если достигается минимум
функционала
{т
J U* (т) V (т) х (т) + ы* (т) J (т) а (т) dx -f
о
+ **(ЛЛх(Г), (537)
где J (т), V (т) и Л—симметричные положительно
определенные матрицы.
Используя обозначение для второй начальной моментной
функции Г (t) = М [х (t) a:* (/)] фазовых координат, функционал
(537) можно записать в следующем виде:
т
I = J ttr (Г (т) V (т)) + и* (т) J (т) и (т)] dx.+ tr (Г (Г). Л). (538)
Если удается построить дифференциальное уравнение
конечного порядка, которому удовлетворяет матрица Г (/), 0 < f < 7\
то исходная стохастическая задача оптимального управления
может быть сведена к эквивалентной детерминированной задаче.
Существенно, что дифференциальное уравнение должно однозначно
определять АГ (t) = Г (t + А) — Г (t) при фиксированных
значениях Г (0 = Г и и (/, х) = и. Для нахождения
дифференциального уравнения относительно Г (f) воспользуемся приемом,
описанным в п. 3 гл. II. Вектор коэффициентов сноса марковского
процесса х (f), который нетрудно рассчитать по формуле (203),
оказывается зависящим от переменных t> #, и, и*х, где матрица их
имеет элементы -^f , i = 1, 2, . . ., q> j = 1, 2, . . ., п.
Матрица коэффициентов диффузии зависит от f, я, а.
Вычисления показывают, что дифференциальные уравнения для Г (t)
содержат, кроме текущего значения управляющего воздействия и,
его производные v = их. Таким образом, известные значения и и Г
в момент времени t не определяют однозначно АГ (tf). Величина
АГ (t) вычисляется при известных значениях и, v> Г в момент t.
Это означает, что должны оптимизироваться совместно функции
и {t, x) и v (t, x), которые взаимозависимы, что влечет
существенные трудности при решении задачи оптимизации.
В поставленной выше задаче оптимального управления на
и (/, х) не наложено ограничений. Сузим класс возможных управ-,
лений, ограничивая их линейными управлениями вида
u(t, х) = Po(0 + Pi(0*, (539)
гДе Ро (0 — вектор переменных коэффициентов q измерений;
Pi (t) — матрица переменных коэффициентов размерности [q> n\.
Тогда синтез оптимальной системы сводится к определению
РоК0> Рх(0.
219
Подставим управление (539) в исходную формулу:
х = (A1 + A^1)x + A2^0 + f1.
Обозначая
Л1 + Л2р1 = Л;
Л,Ро+/1=Л
получим, что фазовые координаты х удовлетворяют уравнению
х = Ах + /,
где матрица А и вектор / состоят из коэффициентов типа «белый»
шум с известными характеристиками (198)—(200). Как показано
в п. 3 гл. II матрица Г (/) определяется совместным решением
уравнений (205), (207) при начальных условиях
т (0) = т0; Г (0) = Г0. (540)
Теперь задача сведена к оптимизации функционала (538)
при неголономных связях (205) и~(207). Эта задача может решаться
с помощью принципа максимума. Указанный подход
иллюстрируется ниже на примерах.
Пример. Рассмотрим управление простейшим объектом первого порядка
со случайным коэффициентом усиления:
х = ах + 1и, х (0) = х0, (541)
где g (/) — белый шум со средним значением £ = const и интенсивностью S.
Требуется найти управление в классе линейных функций фазовой координаты х
и (/, х) = р0 (0 + Рх (0 х, (542)
оптимизирующее квадратичный функционал
/ = М jj [vx2 (т) + и2 (т)] dx + кх2 (Т)\ (543)
Подставляя уравнение (542) в формулу (543), получим
/ = м J J [vx2 (т) + Pg (т) + 2Р0 (т) рх (т) х (т) + р^ (т) *2 (т)] dr +
+ 1х2 (тЛ = J [(* + Р? (т)) Г (т) + 2Р0 (т) Pi (т) m (т) + Pg (т)] </т+ЯГ(7>
После подстановки уравнения (542) в выражение (541) уравнение объекта
управления принимает вид
х = [а + рх (/) § (if)] а: (0 + I (t) Po (О-
Приводя параметры рассматриваемого объекта в соответствие с принятой
в п. 3 гл. II системой обозначений, получим:
а (0 = а + рх (0 Е (/);
/« = Е (0 Ро (0;
220
[ (544)
М [а (01 = а (0 = а + Рх (0 f;
М/ (0 = f р, (0;
М [а (0 а°(т)] = i? (0 6 (< — т) = pf"(f) 56 (* — т);
М [/ (0 /°(t)] = N (0 6 (f - т) = Р^ (0 S6 (t-%);
М [а (0 /°(т)] = G (0 б (* - х) = р0 (0 рх (0 S6 (< - т).
Тогда согласно формулам (205), (207) /п (<) и Г (t) удовлетворяют следующей
системе дифференциальных уравнений:
к = [а + pi (01 + -J- Pi (0 s] «+lPo (0 + 4" Po (0 Pi (0 s; J
f = 2 [o + p1(/)I+pf(0S]r +
+ 2[ip0(0+-|-Po(OPi(Os]m+pg(OS,
m(0)=«b; Г(0)=Д&
Функция Гамильтона определяется выражением
Н (t, m, Г, H»lt t2) = (f + р?) Г + 2p0p,m + tf0 +
+ tj [(a + p,I + -L p*s) т + 1р0 + 4- PoPi5] +
+ % [2 (а + p,f+ pJS) Г + 2 (fp0 + -§- PoPi5) т + pgs] ,
где я|5х (t) и я|52 (/) удовлетворяют дифференциальным уравнениям (472):
- +1 = 2p0pt + +! (о + p,I + -i- Pfs) + П2 (fPo + "т PoPis);
I (545)
-^ = f + P?+2^(o + p,i+pfs).
*i (T) = 0; *, (T) = -%.
Алгебраические уравнения
- -||- = 2p1m + 2p0 + t|)1(l+-i-PiS)+ '
+ +i[(2| + 3p1S)m + 2p^]=0;
—■ = 2рхГ + 2p0m + ti [(I + PXS) m + i- Po^] +
+ *, [2 (I + 2pxS) Г + 3P0Sm] = 0
совместно с краевой задачей (544), (545) определяют оптимальные значения
коэффициентов р0 (t), рх (/).
221
(546)
Решение краевой задачи упрощается, если сузить класс управлений,,
положив Р0 (t) = 0. В этом случае т (t) и Г (/) удовлетворяют уравнениям
m=(o+p,E+.-l-p?s)m;
f = 2(a + plf+p2s)r,
m(0)=x0; Г(0)=*§.
Сопряженные уравнения (545) принимают вид
-ti=ti(a+PiI + -f p?s); •
- Ь = » + Pi + Щ (« + Pi£+ P?S),
(547)
(548)
Второе из алгебраических уравнений (546) дает выражение для оптимального
коэффициента Рх (t)
Pi'
E+i
1+2^5'
(549)
Уравнения (547), (548) для переменных т, Г, я^, я|э2 разделились. Таким
образом, для определения оптимального управления
и (t, х) = рх (0 х
необходимо решение уравнения (548) для ty2 (0 и использование формулы (549).
Пример. Рассмотрим задачу оптимального управления объектом второго
порядка:
Xi== ЛГ2, Xi (0) = Хщ\
х2 = — (о~+ £ (*)) #2 + 6а, *2 (0) = лг20,
где £ (0 — центрированный стационарный «белый» шум интенсивности S.
Как и в предыдущем примере, оптимальное управление ищется в классе
линейных управлений
«fc.*)="Pi(0*i+Pi(0*r (55°)
Оптимизируется функционал
Т
/ = М J (»n*f (т) + о1Л (т) х2 (х) + ^ (х) + и2 (х)) Л. (551)
OJfoeKjm управления
i t
qW
3l|7N^»I
W
-geh
На рис. 48 показана структурная схема
рассматриваемой системы управления. Объект
управления выделен штриховой линией.
Применение результатов п. 3 гл. II и
уравнения (550) дает следующие
дифференциальные уравнения для статистических
характеристик выходных координат объекта
управления:/
0
*Pi
1
\mi\
a+b$2 + -yS m2|
Рис. 48. Блок-схема системы со
случайным коэффициентом g (t)
222
II щ (0)1
№(0)1
^20 II
Yu
1.
LYl2
1.
|Y22
1 =
0
bh
0
2
0
-a+&p2 + -^-S 1
2&px — 2 (a — 6P2-
•
Y11 (0)
Yi2(0)
iY22^)
=
- *10
*io*2o
x2
*20
.
-S)
|Yii
Y12
IIY22
С учетом формулы (550) квадратичный функционал (551) преобразуется
к виду
т
* = J [(*п + Pi) Y11 + (»12 + 2P1P2) Y12 + ("22 + P2) Y22] rft.
Максимизация функции Гамильтона
И = (уп + Pi) Yu + К + 2PiP2) Y12 + (»22 + Р2) Y22 +
+ ЪРиУгг + Фи [*PiYu + (~ « + *>Р2 + 4" 5) Yu + Y22] +
+ Ф22 [26plYi2 + 2 (-1 + &Р2 + 5) Y22]
приводит к следующим выражениям для оптимальных значений
коэффициентов Рх и р2:
Функции я|),/, i, i == 1,
—
*u
Ф12
Ф22
=
0
2 —
0
.
CQ.
2
b*u\
p2 = —ь^22.
)
2 удовлетворяют системе уравнений
*Pi 0 1
s+^2+4-5 2^Pi
1 — 2(a — 6P2 — S) J
;+u
1^X2
|^22
1+
"11 + Pi 1
|w12 + Э1Р2
1 "22 +Pi 1
1*11(7)
ituCT)
it
22(5
n)
=
0
0
0
»
.
(552)
(553)
На рис. 49 показаны графики коэффициентов Рх (t)t P2 (0» полученные пу"
тем моделирования уравнений (552), (553) на вычислительной машине. При мо'
Делировании были приняты следующие значения параметров: а— 1, 6=1,
vn= v22 = 0, v12= l.
223
-P/
0,3
0,2
о,'
1 J>
Ж,
У/ s-
1 1
'0,5
^'°%
0,25 j|
= 0 |
J 1
-h
0,6
1 0,4
\ 0,2
0 1 4 t,C 0 2 4 t,C
Рис. 49. Графики оптимальных коэффициентов рх (/), Р2 (f)
в канале управления
Интенсивность мультипликативной помехи S варьировалась в пределах от О
до 1, что отмечено на графиках. Сочетание параметров vn = v22 = 0, v12 = l
практически означает, что требуется минимизировать конечное состояние объекта
при интегральном ограничении на управляющее воздействие
•М
1
0,5*f (Г) + J и2 (т) dx
Время управления Т полагалось равным 5 с.
Пример. Рассмотрим систему управления, содержащую мультипликативную
помеху в канале управления:
х2 = —ах2 + (b + l (t))u, х2 (0) = х20,
где £ (t) — центрированный стационарный «белый» шум интенсивности S.
Как и в предыдущем примере, поставим задачу оптимизации конечного
состояния при интегральном квадратичном ограничении на управление:
т
• М
\*
U\ (Т) + [ и2 (т) d%
(554)
При управлении конечным состоянием объекта целесообразно [16] ввести
новые переменные
г (0 = Ф (Г, t) х (t). (555)
Здесь матрица Ф (Т, t) является решением дифференциального уравнения
Ф (Г, *)=* — Ф(7\ t)A\
Ф (7\ Г) = £, (556)
224
где А — матрица управляемого объекта; в данном примере
О 1
А =
О —а
(557)
Поскольку в соответствии с формулами (555), (556) z (Т) = х (Г), то
критерий оптимальности (554) можно представить в форме
/ » М Ш\ (Т) + J а2 (т) di |
где z (0 удовлетворяет дифференциальному уравнению
2 = ф (7, t) Bu\
II ° I
в = L
1* + 6(01
В рассматриваемом примере уравнения для z (f) в скалярной форме
принимают следующий вид:
•Zl(0=l±m[i_e-Mr-o]u.
а
2i(0)=z10; z2(0) = z20.
(558)
Задача минимизации (557) при условии (558) рассматривалась в первом из
примеров (541)—(543) при более общих предположениях. Оптимальное
управление в классе линейных однородных управлений
и = Рх (0 ъ
определяется из уравнений
bk (О
Pi = - +
_г|5 =
1 + 2tySk*(t)
1 +2^2(0>
* (Т) = -Я,,
где
*(0 =
1_в-5<г-'>
15 А. М. Батков
{g ПРИЛОЖЕНИЕ
ТАБЛИЦА ЗНАЧЕНИЙ ПАРАМЕТРА х ПРИ РАЗЛИЧНЫХ k И &
Значение
параметра
t
Величина параметра и при значении N
1
2
3
4
5
6
7
8
9
10
20
50
100
k = 50; е2 = 100
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0,0
1,000 |
1,072
0,868
0,814
1,312 |
1,390
0,676
1,546
1,624
1,702
1,760
1,000
0,996
0,988
0,970
0,944
0,920
0,892
0,874
1,752
1,792
1,800
1,000
0,998
0,988
0,976
0,960
0,940
0,928
0,916
0,9040
0,928
1,74
1,000
0,998
0,988
0,976
0,960
0,950
0,928
0,930
0,920
0,964
1,060
1,000.
0,998
0,988
0,976
0,960
0,950
0,940
0,930
0,936
0,964
1,060
1,000
0,998
0,988
0,976
0,968
0,950
0,9401
0,930
0,936
0,964
1,060
1,000
0,998
0,992
0,976.,
0,968
0,950
0,940
0,930
0,936
0,964
1,060
1,000
0,998
0,992
0,976
0,968
0,950
0,940
0,930
0,936
0,964
1,060
1,000
0,998
0,992
0,976
0,968
0,950
0,940
0,93
0,936
0,982
1,060
1,000
0,998
0,992
0,976
0,968.
0,950
0,940
0,930
0,936
0,982с
1,060
i
1,000
0,998
0,992
0,976
0,968
0,950
0,940
0,930
4 0,936
0,982
1,060
j
1,000
0,998
0,992
0,976
0,968
0,950
0,940
0,930
0,952
0,982
1,080
1
1,000
0,998
* 0,992
0,976
0,968
0,950
0,940
0,930
0,952
0,982
1,080
«
53
Я
I
§
Си
К .
<У
Я
X
%
I
о
Си
С
OOOMlNcDOO^OO^O
0050500Ь-СОтртрсОЮОО
00)0)0)050505050)0^-^
—Г о* о*4 о" о* о*4 о*4 о" о" —Г -Г
OOOINOOCOO^OOOOO
О050500Г-.Г-.С010О05О
О05050505050505ООСЧ
—Г о" о"4 о" о" о*4 о" о" —Г —Г -Г
OOtO-^WOOOOCDOO
OOO50505O5O<N0500^
<Э О^0)^05^05^05^0^0 O-mW
-Г —Г о*4 о"4 о* о" —Г —Г ~" ~~ ~"
О05обь-10со-
005050)050)050505 0^<
_Г о* о" о* о" о о" о" о* -f -*~
осооооеяоооооосоо
oo5oot^-io^(Ncococooo
О 0)0)050)050)050500
—Г о" о" о* о* о" о* о" о* -^ —Г
O0000C000O<NC0<NC0O
O0500t^C0l0l000C0(N(N
00)050)050)0)0)0'-^'-^
—Г о" о" о* о*4 о* о" о" —Г —** —Г
OOTt<C£COO(NOTt<COO
OOO0-«TfN^(NOW
OOOOOOO«(NC0C0
O00(N(NC0O00W(NOO
0050500^0000"^—« 00 CO
0050)050505050«-*'-«'-«
—Г о" о" о* о о*4 о" -Г —Г ~Г —Г
ООтрС^'^О'^'^О'^О
ООО-<^Ю00Ю^^^
OOOOOOO^<NC0C0
OOOC^<NCOOO(NOOCOO
00)05COt^COO^(N05CO
О 0)050)0)0)00'-^'-^'-^
"иГ о" о" о*4 о* о*4 *ч~ -? —«* -^ —Г
OOO^OOCOOOON^^
ОООООО*-**-.(N0000
OCO<N<Nt1«OOCOOOCOO
ОО)0)С0С0 00ОЮСЧ0)С0
00)0)0)050)00 1-^—< —^
—Г о*4 о* о" о* о* —Г -Г —Г -Г —Г
I со
O<M00 00(NOOCD00OO
OOO-hCONC^OJOOCOCO
оооооо~^<мсосо
ooo<Noorj«o<Ncoooooo
0 0505COCOO)'-'IOCVJO)CO
00)0)0)050)00»-*'-«»—•
*S о* о" о" о" о* —* —Г -? -? -Г
о
см
ОС^ООт^ОООт^г^С
OOOM^00Tf*OJC
5 00 О
,__,_,_! t^OO
oooooo*-«<ncoooco
000<NOO^O(NCOOOOOO
O050500000)'-^lO(NO5C0
00)0)0)0)0)00«-^ ,-^ч^
—Г о" о" о* о" о" ~ -Г -Г ~ ~?
О О О О О —^ -* <N СО СО
8
O00<N00^O<NO00OO
Tqpo^t^c^ooco
^-н'ООООО'-
O^COCD^fOOCOC
>о~• coco »
> О О О О ~ — <N С
000<NOOTt*0<NtO(N<NO
0050)000005—.lO-^CO^f
00)050)0)0)00'—1"-**-«
~Г о*4 о" о4 о" о*4 ~~ -Г ~~ -Г ~~
Tt<CO(NOO<NCOCOCOO
О^^00С00)С0С00)О
O00C000<NO<NC0C0tj«O
О0505об0)0)-^юа>^(м
00)0)0)050)000*-*'—'
—Г о" О* О* ОО'^н^мн
ОСО^ООООО^ОСЯт^О
OO(N^00^O00iO'H'4*
ООООО—<CS|OJCOTt<Tt<
OOrjHCOCOOO^OOCOO
OOOO*-.C0C000<N<NCD
ОООООООО—<"^0
ОС^т^СООООт^ОСЧ^О
O—«Tt<0)C0Tt<0J<N^0)00
0000*-<<МСОП«ЮЮСО
0000<NO^tD(0-tO
0^^051000^0050500
OOOO-hINCO^^iOCO
—Г о" о" о" о" о" o~ o" o~ o~ o*
О О) «^^^^"^^C^^p
-^o4o~o">o">o">o~o"'oo*o'
15*
527
X
%
о
5 СО СО "*■ О
)00ЮО^
„ , _>N- COt . .
00)0)0500N.COlOlOl
ОсОООс
СО Г- 00 <М С
>о
IS.
~ооооооооо©
о*
К
К
О)
I
о.
с
O^COCOCNO^OOOOOO
005N.rt<^N.Tt<—«"tfCNCO
00)0)0)05000000^00^0*0)^
~S о* о" о* о" о" о"4 о* о*4 о" о*4
O^COCNOOCOOtFGOO
О0)Г--Ю<М00ЮС0О~00
0050)050)000000^05^0^05
*-Г о* о" о" о" о* о* о" о" ~* о*4
OOOiOOCOCONOJC.
О OS 05 05 СО N«Jiq Ю СО N.
~ о*4 о" о*4 о" о" о" о* о*4 о" о"
!5°3888
—Г о* о" о" о" о" о" о" о" <э о*
OTfCOCOOOOGOCNCOO
O05N-Tt<tNO5G000mC0G0
О 05 05^0)^05 СО 00 00 О^О С>
~~ о" о" о" о" о* о*4 о*4 о" ~ о"
OCNCNCNOIOOOCOCOO
O0000C0O)CN^G0C0N.C4
O^05^0)^00^N^N^C0^iO LOCO^N.
—Г о* о" о" о* о* о" о" о" о* о"
O^fCOCOOOOOOOJCOO
OO5f-Tt<CN05C000lOC0cp
00)0)0)050000000500)
~~ о" о" о" о* о" о" о" о" ~ <$
OCNCNCOThOOOOOCOO
ОООСОЮОО—«"tf<00CON.<N
0<Л O)^C0N. N- СО^Ю^ЮСО N.
~~ о" о* о" о* о" о" о" о" о" о*
CN
00
со
см
OtTCOCOCNOOCOCNcOO
O0)N.^~05C000L0~C0
00)0)050)0000000)00)
-Г о" о* о* о" о*4 о* о* о* ~ о*
OrjHC4COCNO00C0CNC0O
О05Г-т^^0)С0С0Ю-^С0
00)05050)0000000500)
-Г о" о" о" о" о" о" о" о" -Г о"
I»
OCN00C0C0OOO00C0O
OOOCnJiON-Ot^OOCON.0
О О) О) 00 N. N- CO lO LO СО N.
—Г о" о" о* о" о" о" о" о" о*4 о"
OCNOO^OOOOOOOOCOO
ососч^соосмоосоюо
О 05^05 OON-N-COIlOlOCON.
~? ол о* о" о" о" о" о* о" о*4 о"
ow
OCNOJOCNOOOCOCOOO
O05N-Tt<~G0C000C0O00
О05О)л0)О>000000О5ОО5
~ о" о" о" о" о* о* о* о" -Г ол
OCNCNOr^OCO^fOCNO
O0)N.Tt*O00C0N.CN00C0
00)0)0)050000000)0505
-Г о" о" о*4 о" о" о* о* о*4 о" о"
ocntfoooocococoooo
о00счс0с005-*с0с0ю00
O05O500N.COC0lOlOC0C0
~ о* о* о" о" о" о* о* о" о" о"
OCNCOCO^OCOCOCOOOO
ОООСЧСМт^ОО^СОСОЮОО
оо5лО)лсол^сосоююсосо
-Г о" о* о*4 о" о" о*4 о*4 о" о" о
STfrifNOCOOCOO^f^O
0)N.^0)N.L0C0OC0C0
00)0)05000000000)0505
~? о" о* о" о*4 о*4 о" о" о" о" о"
O^WOOO^WOOOO
OOOOOCNC4N.OmcOTt<CO
0^05^0)^ CON- СО СО ЮЮ СО СО
—Го* о" о*4 о* о*4 о* о* о" о* о*
O^fCOCOCOOOJCOGOCOO
OO5N-"tf<0)iO00'«tf<C0CN'^
О О^О^Ф СО 00 СО 00 СО О) О)
~* о* о* о* о"4 о"4 о" о* о" о о*4
OCOoO^COOr^CNlT^CNO
О00^^0)^тГЮС0СЧС0
О0)0)С0С0С0ЮЮЮС0С0
O00<NCD^O^00(NOO
00505N-Tf^OO^N.^CO
0 05 О) O^OS^OON. СО СО 05 О)
—Г 0- 0~ 0* 0* 0" 0- 0~ 0~ 0" 0-
ОСООСООООО-^сООО
О0500СЧ00СМС0ОЮ-НСО
0^05^0)^05^CO^N^N^CXD 00^05 О)
—Г о" о* о* о* о* ©л о" о* о" о*
OOOOOJOOKNCOCOO
0-^Tt*05LOCO-^0505N.OO
ОООО^МСОСО^ЮСО
OOOtJ«<NOO<NOcOO
O-^^00L0<MO0500N.C0
OOOO-^CSICOCOtMOCO
О 05 ОО^СО^Ю tJ^CO <M^-* О
—Г о* о* о* о* о" о* о* о* о* о*
О О) 00 N. СО Ю т^ ОО^»-* О
S о" о* о* о" о* о* о* о* о* о"
228
о?
X
X
о
ocNcotNcooco^coooo
оорсосо^оосоюоюоо
© ФО^ОО f- tO Ю ^* СО CN СО
~ о*4 о* о" о" о" о" о" о" о* о*
OoOtj«OOOtj«cO<NOO
Ot-CNlOCOCO-JftN—«ОЭСО
—Г о" о" о*4 о* о" о*4 о" о* о* о*
к
OCOOT^CNOCOOOQCOO
Oh-C^Tt*iOCOLO-^o5(N«4f
OOOOOt^COiOT^COCNCO
—Г о*4 о*4 о*4 о* о" о*4 о* о" о*4 о"
00^0000(N(NtOOO
Of^OCNCNCOCO—< О О CN
о о^о^оо t^ со^ю rt< <м ~ со
-*" о" о" о" о* о" о*4 о" о" о* о"
ОООт^СО-^ОООКМСОО
OC0 00 0)O-(N^-• CN О
о о> оо f- t^ со ю тр со cn со
~ ол о* о" о" о*4 о" о* о" о* о*
0<NTt<<NOOTt<TJ«000
OC0C0h-.00000000000500
~Г о* о" о" о" о" о*4 о*4 о" о" о"
ООО^ОО^Отр^СО^О
OC0C0Tt<C0t-«.000005Tt<C0
О0500Г-.С0ЮтрС0СЧСЧЮ
— оооооооооо
O000000CNO00C0O00O
о со тр —^со^^юооо^
О05001-«.С0ЮтрС0 <NJM Ю
—Г о" о" о" о" о* о*4 о" о* о" о"
ООт^СЧСООСЯт^СОг^О
O£^C0Tt<i0f^f^000>^CO
O0500t^C0iO^C0CNC4iO
—Г о4 о*4 о" о" о* о" о*4 о" о" о"
00<N<N(NO00C0Tt<00O
О 05 00 t^ СО^Ю Пн СО CN CN Ю
-^ о4 о* о" о" о" о*4 о" о* о* о"
о
о
о
о
ocnoooooocntfcocno
ог-".сосо"*«сог-«.000>сосо
© с^оо t>- <о ю тр со cn cn ю
-^ о* о*4 о*4 о"4 о" о" о" о" о*4 о*
О 05 00 t-- СО^Ю tJ< СО CN CN Ю
-^ ©" ©* o~ ©" o" ©" ©" ©* ©~ ©"
OThCNOOOOOOCOOO
©t-«.t-«.—«Tt<iOCOt--.O>00rt<
O O^CXD t-^COiC^ С0СЧ CNiO
^ ©" о~ ©" ©" о" о" о" ©" o" ©"
OCNOCOCOOCOCOOOO
Of^coo~-<NcomcococN
«Г о" о" о*4 о*4 о*4 о" о" о*4 о" о"
о
II
OCOCOCOCNOCOOCOCOO
©h-t-«.©C0Tt<Tt<t-«.O5—«Tt<
©^ а^ сю t^ со^ io ^ со^ cn со^ ю
-^ о" о*4 о*4 о* о" о*4 о" о" о" сэ
OOOOOCOrjHOCOCNOOO
Of-.COOCNCNCOT^COr-.CN
О О) «N СО Ю Tf* СО СО СО Ю
—Г о* о* о" о*4 о" о" о" о* о" о*4
OT^CNCOOOOrJ^CNCOCOO
О f^ t^ О О ~ CN тр 05 —• CN
IO © О) СО t--СО Ю тр СО CN СО Ю
о^ ^_Г о4 о" о*4 о" о" о" о" о" о~ о"
OCO^COCOOCNCNOOO
ON00OO-"h Tt^COt^O
О 05 COt--. СО ЮтрСО СО СОЮ
—Г о*4 о*4 о" о" о" о* о* о* о" о*
OCNOOCOrjHOCNcoOOOO
OC0OOCN~~CN^I>.O
0 0)05 NCOlO Tt< т*< rj« тр Ю
—Г о* о*4 о* о" о*4 о" о* о" о* о"
OCNC0C000OCNC0OC0O
O00OOO —— CNTt^t^O
оооь-соют^г^т^г^ю
-Г о" о" о4 о" о" о" о*4 о" о" о"
OOOCOCOCOOCNCNt^CNO
©COCO©Tt<~COiOOOCNCO
oo^o^t^co юююю со со
-^ о" о" о* о" о*4 о*4 о" о* о" о"
ococococoocncntfcno
OCOCOO^^COiOCOCNCO
ООС)К(ОЮЮЮЮ ^^
~Г о* о" о*4 о* о4 о* о" о* о" о*
OrjHCOCOOOOTjHCOOO
005t^OCOCNCOOlO^CO
оозО) t^^t*- r-^со со о а>
~~ о" ©" ©" ©" о" о" ©" ©~ о" o"
o^cocoooo^cooo
O05t^O00CNC0OiO—CO
ол о>л <?i t^ cq^ t^ t^ сю ад о^ ел
-Г о* о* о" о" о о о" о" о" о
OOOTt<CNOO(NOCOO
о^"3<ооюемоо5оог-«.со
ОООО — CNC0C0Tt<LOCO
OOO^CNOOCNOCOO
O^^OOlOCNOOSOOt^CO
OOOO^CNCOCOtFiOCO
О 05 00 ^СО^Ю ^f CO CN ~ О
~* о" о*4 о" о* о* о" о" о" о" о~
OOOOh-COiOrjHCOCN—«О
~ о* о" о" о" о" о" о* о* о" о"
229
a,
E
О
Я
я
I
Он
О^СОСМеМОсОСООт^О
ОСОСОО^^ОСЛСОЮО
О СЛ 00 00 t--. СО^Ю СО С^—^СО^
~-Г о* о" о* о" о" о* о* о* о" о*4
Ort<OCOCMOCMOTJ«Tt<0
ОСЛООЬ-СОЮтрСОСМ—«Ю
~*о" о" о" о" о*4 р о" о" о" ©
ОСОООО^О CO^CM CO Tt< О
ОЮСМ —. CM CO CO rt< Tt< Ю •<*«
ОеЛООГ'-СОЮтрСО^СМ—«Ю
~* о*4 о" о* сГ о" о' о" о" о о*
O(DOCD00O(N00<NOO
OtO<NOO^-<WCOO)(N
ОСЛООГ^СОЮтрСОСМ^Ю
-? <э о* о* о" о* о" о*4 о" о" о
ОСОт^СОСООСМСОСМСОО
OCO<NOO-h-hWCOO(N
о ел со г*- со^ю rh со см см ю
-^ о*4 о* о* о*4 о" о*4 о*4 о~ о" о"
ООС0С0С0ОеМС000т1«О
ONC0OO-H^(NtTt*O
0^<Л СО^^СОЮ^ сОСМ СМЮ
2 ~ О* О* О" О* О" О" О* О" О" О"
О
I СО
О
о
ОеМСОСООООСМсО^ОО
ONTt*OO^-H(NCD00O
0^<Л СО Г^СО^Ю rj« CO CM СМ Ю
Otj«tj«COCOOCMCOCOCOO
о ел оэ t^ со io ^ со см^ со^ io
—Г о" о" о" о" о oto" о* о" о"
ОСООСОСООСМСМООО
ONOOOO^'H^inNO
о^сл^ос) t-«. со^ю rjH со со со ю
—«'«э'о осГсГсГсГсГоо
OCNrjHCOCOOCNCOOCOO
ОООООО—<—<CMrj«f^O
О СЛ^СЛ ЬЮЮ^^т1*т}*Ю
—Г о о*4 о сГ о* о" о* о" о"4 о"
^оооооооооо
OrJ^cOCOOOO^fCOOO
ОСЛГ^ОСОСМСООЮ—«СО
о^о^сл^г^со^г^оо со ел ел
~ о о" о* о" о" о" о о" сГ о"
OOO^fCMOOCMOCOO
о-*"*союсмослоог-«.со
ОООО-^СМСОСОтРЮСО
о^сл со г-, со ю тр со см ~ о
^оо'сГооо'о'сГсГсГ
OcOCN^cOOrjH^rjH^O
оюг--оооослоососоюсо
о ел со t- со "^ ^l^c^—i1^
-<* о о" о* о" о о о" о оЪ*
о о о со со о о со со со о
О Ю rt* тр Ю СО СО Ю Tt* СО СО
оо> ад^соютр со^см^ю
-ч* О* СО О* сГ О* СО О" О" О* О*
о со-^ со со о ^f со cn со о
ОЮО О О СМ СМ СМ СО СОСМ
о ел со f^ со ю ^со см ~^ю
—Г о" о* о* о* о4 о* о* о* о* о*
о со со со со о см ^ со о о
о со о о о — —* —•-* ел о
о ел со i>-со lo т^со^см ^ю
—Г о" со о* со о4 о4 о* о? о* о"
OCOOCOCOOCMrjHCMCOO
OCO(NOO«««COOO
о ел оо t>. о ю ^ сож см^ см to
—Г о* со о* о* со ео со* о* о* о*
S
о
ооемсосоосм^со^о
о сл^ со ^ со^ ю Tt^ со^ см см^ ю
-*ооооо"ожо"оожо
ОСМт^СОСООСЧтрт^ОО
ON^OO«.'H«C0 00C)
ослсоь-сою^сосмсмю
—Г о" о* о* о* о* о" о* о" о* о*
ю
о
о
о^ососоосмоососоо
C0t-«.CO©0—«*-*СМСЛ-нО
оелсог-.сою^сосмсою
—Г о* о" о~ о о* о" о" о* о* сГ
осоососоосмсмооо
Ot^COOO^^Tt^COt^O
ОСЛООЬ-СОЮт^СОСОСОЮ
—Г сГ о* о" о" о* о* о" о* о4 о
ОСМг^СОСООСМСООСОО
O00OOO-H^(NTt*NO
О^СЛ^СЛ f^^O ^^ "tf< tJ< rj« Ю
—Г о* о* о* о* сГ о* о* о" о* о*
осососооосмсоосмо
ОООСООтр—«СОСООСМСО
оо^елг^союююсососо
«do"do''do*o,>dd6'
OrjHCOCOOOOrJ^COOO
осл^ососмсоою^со
о сл^сл^со^г^со со ел сл^
~ о~ о о"4 о* о* о* о4 о сГ со"
ОООт^СМООСМОСОО
О—.т^СОЮСМОСЛСО^СО
ОООО^СМСОСОг^ЮСО
о ел со t^ сою^со^см — со
~~сГсГо о*о о*o*o*o о4
230
к
4
о
к
к
я
%
I
Он
8
О
*""'
О
о
о
'""'
о
о
о
*■"*
о
о
о
*"■*
о
о
о
"■"*
о
о
о
~~*
о
о
о
*■"■'
о
о
о
—*
о
о
о
*-*
о
о
о
*—1
о
о
о
*—1
о
о
о
~*
о
о
о
о
о
^
05
о
см
Tt*
СЛ
о
^
ю
ел
о
CD
со
СЛ
о
2
ел
О '
о
f^
СЛ
CD
CM
t^
ел
о
""*
|>-
°1
о*
00
!>.
ел
о"
CN
сю
ел
о"
СО
00
ел
Q*
^
ел
ел
о
о
о
ел.
о
см
со
00
о
Tt«
о
оо
о
Tt*
о
00
о
^
о
оо
о
00
о
оо
о
оо
см
оо
о
rjH
Tt<
00
о
о
со
00
о
о
00
оо
о
^
я
ел .
о
8
ел •
о
со
f^
ел
о
о
Tf«
о
00
о"
СО
со
г-
о
со
о
|>-
о
СО
о
f^
о
со
о
|>-
о
со
о
1^
о
со
о
!>•
©~
со
о
!>-
о
со
о
t^
о
8
!>■
о
СО
о
|>-
о
8
f^
о
8
t^
о
Tf*
00
о
f^
о
о
^
со
о
со
со
о
' со
о
со
о
00
о
СО
о
00
о
со
о
§
со
о
00
о
<о .
о
00
о
со
о
8
со
о
S
СО
о
о
3
о
<г>
00
со
о
СМ
ю
СО
о
о
ю
ю
©
о
см
ю
о
о
Го
о
о
Го
о
о
ю
о
о
Го
о
о
ю
о
о
ю
о
о
ю
о
о
ю
о
о
ю
о
о
см
t^
о
о
СМ
СМ
ю
о
00
•<*«
•<*«
о
•<*«
см
Tt<
о
см
Tt<
о
см
Tt<
о
см
Tt<
о
<м
Tt<
о
СМ
Tt<
о
см
"*
о
СМ
TJ*
о
см
Tt<
о
£3
со
ю
о
о
со
t^
о
о
3
rjH
о
см
•<*«
со
о
00
см
со
о
Tt<
со
о
rjH
со
о
rjH
со
о
rjH
со
о
rj«
со
. о
со
см
со
о
<м
4f
со
о
СО
см
rh
о
со
со
ю
о
rjH
о
00
сЬ
см
ел
со
со
о
00
•<*«
см
о
см
со
см
о
со
см
о
со
см
о
см
со
см
о
'
Tt<
см
о
3
см
о
со
ел
<м
о
о
СО
со
о
S
Tt<
"о
о
о
со
о
со
ю
00
о
о
$
СМ
о
со
со
—^
о
00
—^
о
00
1—4
о
о
ел
о
00
о
см
о
rjH
rjH
см
о
о
я
о
со
СО
о
о
|>-
со
о
00
t^
«^
о
см
см
со
о
о
ел
о
со
f^
ю
о
о
Tf
ю 1
о
о
см
ю
о
о
о
ю
о
о
о
ю
о
о
о
ю
о
о
о
ю
о
о
о
ю
о
о 1
о
ю
о
о
S
о
о
о
ю
о
о
со
со
о
о
со
ел
о
S
со
о
о
231
СПИСОК ЛИТЕРАТУРЫ
1. Авербух А. И. О выборе расчетных случаев при анализе систем,
содержащих случайные параметры. — «Автоматика и телемеханика», т. XXIII, № 4,
1962, с. 497—502.
2. Александров В. М. и др. Интегральный метод анализа точности
нелинейных систем. — В кн.: «Некоторые вопросы кибернетики». Труды МИФИ, вып. 1,
1970, с. 101-109.
3. Александров В. М. и др. Определение математического ожидания и
дисперсии реакции многомерной нелинейной нестационарной системы на основе
применения вычислительных машин. — «Известия АН СССР. Техническая
кибернетика», 1965, № 2, с. 123—128.
4. Александров В. М. и др. Исследование точности нелинейных
нестационарных систем при помощи метода статистической линеаризации. — «Автоматика
и телемеханика», т. XXVI, 1965, № 3, с. 492—499.
5. Александров В. М., Скрипкин В. А. Применение принципа максимума
для решения* задачи линейной оптимальной фильтрации. — «Известия АН СССР.
Техническая кибернетика», 1969, № 4, с. 153—158.
6. Александров В. М., Сысоев В. И., Шеменева В. В. Стохастическая
оптимизация систем. — «Известия АН СССР. Техническая кибернетика», 1968, № 5,
с. 11—17.
7. Аоки М. Оптимизация стохастических систем. М., «Наука», 1971, 350 с.
8. Баруча-Рид А. Т. Элементы теории марковских процессов и их
приложения. М., «Наука», 1969, 512 с.
9. Батков А. М., Тарханов И. Б. Системы телеуправления. М.,
«Машиностроение», 1972, 193 с.
10. Батков А. М. Обобщение метода формирующих фильтров на
нестационарные случайные процессы. —«Автоматика и телемеханика», т. XX, 1959, № 8,
с. 1081—1094.
11. Батков А. М., Баусин Е. М. Метод определения оптимального
управления с учетом случайных возмущений и ограничений. Труды III Всесоюзного
совещания по автоматическому управлению. М., «Наука», 1967.
12. Беллман Р. Динамическое программирование. М., Изд-во иностр. лит.,
1960, 400 с.
13. Беллман Р. Процессы регулирования с адаптацией. М., «Наука», 1964,
360 с.
14. Березин И. С, Жидков Н. М. Методы вычислений. Т. I, II, изд. 2-е.
М., Физматгиз, 1962, 464 с, 620 с.
15. Богуславский И. А. Методы навигации и управления по неполной
статистической информации. М., «Машиностроение», 1970, 256 с.
16. Богуславский И. А. О статистически оптимальном управлении конечным
состоянием. — «Автоматика и телемеханика», 1966, № 5, с. 15—27.
17. Болтянский В. Г. Достаточные условия оптимальности и обоснование
метода динамического программирования. — «Известия АН СССР. «Серия
математическая», т. 28, 1964, № 3, с. 481—514.
18. Бусленко Н. П. и др. Метод статистических испытаний (метод Монте-
Карло), М., Физматгиз, 1962, 332 с.
232
19. Быховский М. Л. Основы динамической точности электрических и
механических цепей. М., Изд. АН СССР, 1958, 118 с.
20. Гельфанд И. М. и др. Метод оврагов в задачах рентгеноструктурного
анализа. М., «Наука», 1966, 214 с.
21. Гельфанд И. М., Фомин С. В. Вариационное исчисление. М., Физмат -
гиз, 1961, 228'с.
22. Гельфанд И. М., Цетлин М. Л. Принцип нелокального поиска в системах
автоматической оптимизации, — «Доклады АН СССР», т. 137, 1961, № 2, с. 295-—
298.
23. Гнеденко Б. В. Курс теории вероятностей М., Физматгиз, 1961, 406 с.
24. Голенко Д. И., Моделирование и статистический анализ
псевдослучайных чисел на электронных вычислительных машинах. М., «Наука», 1965, 227 с.
25. Турин Л. С., Дымарскмй Я. С., Меркулов А. Д. Задачи и методы
оптимального распределения ресурсов. М., «Советское радио», 1968, 464 с.
26. Данциг Г. Б. Линейное программирование, его применения и обобщения.
М., «Прогресс», 1966, 600 с.
27. Дашевский М. Л. Приближенный анализ точности нестационарных
нелинейных систем методом семиинвариантов. — «Автоматика и телемеханика», 1967,
М> 11, с. 62—81.
28. Дашевский М. Л., Липцер Р. Ш. Применение условных семиинвариантов
в задачах нелинейной фильтрации марковских процессов. — «Автоматика и
телемеханика», 1967, № 6, с. 63—74.
29. Демух В. И. Приближенный метод анализа точности нелинейных
систем. «Автоматика и телемеханика», 1965, т. XXVI, № 6, с. 1021—1025.
30. Доступов Б. Г. Приближенное определение вероятностных
характеристик выходных координат нелинейных систем автоматического регулирова- •
ния. — «Автоматика и телемеханика», т. XVIII, 1957, № 11, с. 999—-1009.
31. Евланов Л. Г. Оценка точности линейных систем со случайными
параметрами.— «Автоматика и телемеханика», т. XXVIII, 1967, № 3, с. 31—40.
32. Евланов Л. Г. Приближенный метод оценки точности нелинейных систем,
содержащих случайные параметры. — «Автоматика и телемеханика», т. XXVIII,
1967, №> 10, с. 72—81.
33. Евланов Л. Г. Самонастраивающаяся система с поиском градиента
методом вспомогательного оператора. —- «Известия АН СССР». Техническая
кибернетика», 1963, № 1, с. 113—120.
34. Ермаков Е. М. Метод Монте-Карло и смежные вопросы. М., «Наука»,
1971, 328 с.
35. Ермольев Ю. М. Методы решения нелинейных экспериментальных
задач. — «Кибернетика», 1966, № 4, с. 1—17.
36. Зойтендейк Г. Методы возможных направлений. М., Изд-во иностр.
лит., 1963, 176 с.
37. Зуховицкий С. И., Авдеева Л. И. Линейное и выпуклое
программирование. А\,, «Наука», 1964, 348 с.
38. Ибрагимов И. А., Линник Ю. В. Независимые и стационарно связанные
величины. М., «Наука», 1965, 524 с.
39. Казаков И. Е., Доступов Б. Г. Статистическая динамика не линейных
автоматических систем. М., Физматгиз, 1962, 332 с
40. Казаков И. Е., Приближенный вероятностный анализ точности работы
существенно нелинейных систем. — «Автоматика и телемеханика», т. XVII, 1956,
№ 5, с. 385—409.
41. Казаков И. Е. Обобщение метода статистической линеаризации на
многомерные системы. — «Автоматика и телемеханика», т. XXVI, 1965, № 7, с. 1210—
1215.
42. Калман Р., Бтюси Р. Новые результаты в линейной фильтрации и теории
предсказания. Труды американского общества инженеров-механиков, серия Д,
т. 33, Изд-во иностр. лит., 1961, № 1.
43. Канторович Л. В. О методе наискорейшего спуска. — «Доклады АН
СССР», 56, 1947, №> 3, с. 104—144.
44. Канторович Л. В., Акилов Г. П. Функциональный анализ в
нормированных пространствах. М., Физматгиз, 1959, 684 с.
233 f
45 Канторович Л. В. О методе Ньютона. Труды математического института
им. В. *А. Стеклова АН СССР, т. 28, 1949.
46. Каолин С. Математические методы в теории игр, программирования
и экономике. М., «Мир», 1964, 838 с.
47. Кокотович П. В., Рутман Р. С. Чувствительность систем
автоматического управления (обзор). «Автоматика и телемеханика», т. XXVI, 1965, № 4,
с. 730—750.
48. Кокотович П. В. Метод точек чувствительности в исследовании и
оптимизации линейных систем управления. «Автоматика и телемеханика», т. XXV,
1964, № 12, с. 1670—1676.
49. Кожевников Ю. В. К оптимизации управляемых систем со случайными
свойствами. — «Прикладная математика и механика», 1964, вып. 3, с. 537—541.
50. Крамер Г. Математические методы статистики. М., Изд-во иностр. лит.,
1948, 548 с.
51. Красовский Н. Н. О приближенном вычислении оптимального
управления прямым методом. — «Прикладная математика и механика», т. 24, 1960, № 2,
с. 217—276.
524Красовский Н. Н., Лидский Э. А. Аналитическое конструирование
регуляторов в системах со случайными свойствами. — «Автоматика и телемеханика»,
т. XXII, 1961, № 9—11, с. 1145—1150, 1273—1278, 1425—1431.
53. Кушнер Г. Дж. Стохастическая устойчивость и управление. М., «Мир»,
1969, 198 с.
54. Лавров С. С. Применение барицентрических координат для решения
некоторых вычислительных задач. «Журнал вычислительной математики
и математической физики», т. 4, 1964, № 5, с. 905—911.
55. Левин Б. Р. Теоретические основы статистической радиотехники. М.,
«Советское радио», 1969, 1, 752 с.
56. Левитин Е. С, Поляк Б. Т. Методы минимизации при наличии
ограничений. «Журнал вычислительной математики и математической физики», т. 6,
1966, № 5, с. 787—823.
57. Лейбович В. С, Дарховский Б. С. Статистический анализ импульсных
систем с конечным временем счета данных. — «Известия АН СССР. Техническая
кибернетика», 1969, № 5, с. 171—181.
58. Ли Р. Оптимальные оценки. Определение характеристик и управление.
М., «Наука», 1966, 176 с.
59. Линник Ю. В. Метод наименьших квадратов и основы теории обработки
наблюдений. М., Физматгиз, 1962, 350 с.
60. Липцер Р. Ш., Тиме И. В. О решении задач дуального управления с
непрерывным временем. — «Автоматика и телемеханика», 1966, № 9, с. 40—47.
61. Логинов Н. В. Методы стохастической аппроксимации. — «Автоматика
и телемеханика», 1966, № 4, с. 185—204.
62. Лэнинг Дж. X., Беэттин Р. Г. Случайные процессы в задачах
автоматического управления. М., Изд-во иностр. лит., 1958ч, 388 с.
63. Майстровский Г. Д. О сходимости метода сопряженных градиентов. —
«Журнал вычислительной математики и математической физики», т; 11, 1971,
№ 5, с. 1291—1293. ' ,
64. Малкин И. Г. Теория устойчивости движения. М., «Наука», 1966, 532 с.
65. Матвеев П. С, Синицын А. С. Динамическая точность систем
автоматического управления со случайными параметрами. В кн.: «Автоматическое
управление и вычислительная техника», вып. 6. М., «Машиностроение», 1964,
с. 232—305.
66. Медведев Г. А., Тарасенко В. П. Вероятностные методы исследования
экспериментальных систем. М., «Наука», 1967^ 457 с.
67. Мельц И О. Применение методов нелинейного программирования для
оптимизации динамических систем в функциональном пространстве. —
«Автоматика и телемеханика», 1968, № 1, с. 79—85.
68. Михлин С. Г., Смолицкий X. Л. Приближенные методы решений
дифференциальных и интегральных уравнений. М., «Наука», 1965, 384 с.
69. Мишулина О. А. Влияние разброса параметров на точность
автоматических систем. —«Автоматики и телемеханика», т. XXXII, 1971, № 9, с. 48—57.
234
70. Мишулина О. А. Анализ линейных систем управления со случайным
скачкообразным изменением параметров с применением ЭВМ. — «Известия АН
СССР. Техническая кибернетика», 1968, № 3, с. 128—139.
71. Мишулина О. А. Исследование точности линейных систем
автоматического управления со случайным изменением структуры. — «Известия АН СССР.
Техническая кибернетика», 1970, № 1, с. 195—206.
72. Моисеев Н. Н. Методы оптимизации. Изд. ВЦ АН СССР, М., 1969, 96 с.
73. Нейман Дж., Моргенштерн О. Теория игр и экономическое поведение.
М., «Наука», 1970, 708 с.
74. Первозванский А. А. Случайные процессы ,в нелинейных
автоматических системах. М., Физматгиз, 1962, 352 с.
75. Плужников Л. Н., Андреев В. О., Клименко Э. С. Применение метода
случайного поиска при промышленном проектировании. — «Известия АН СССР.
Техническая кибернетика», 1971, № 2, с. 26—33.
76. Полляк Ю. Г. Вероятностное моделирование на электронных
вычислительных машинах. М., «Советское радио», 1971, 400 с.
77. Поляк Б. Т. Метод сопряженных градиентов в задачах на эктремум.
Журнал вычислительной математики и математической физики, т. 9, 1969, № 4,
с. 807—82г2.
78. Поляк Б. Т. Методы минимизации функций многих переменных. —
«Экономика и математические методы», т. III. вып. 6, 1967, с. 881—902.
79. Поляк Б. Т. Градиентные методы минимизации функционалов. —
«Журнал вычислительной математики и математической физики», т. 3, 1963, № 4,
с. 812—825.
80. Поляк Б. Т. О некоторых способах ускорения сходимости
итерационных методов. — «Журнал вычислительной математики и математической физики»,
т. 4, 1964, № 5, С/791—803.
81. Понтрягин Л. С. и др. Математическая теория оптимальных процессов,
М., Физматгиз, 1961, 392 с.
82. Пугачев В. С. Теория случайных функций и ее применение к задачам
автоматического управления. М., Физматгиз, 1962, 884 с.
83. Пупков К. А. Метод исследования точности существенно нелинейных
систем автоматического управления при помощи эквивалентной передаточной
функции. —«Автоматика и телемеханика», т. XXI, 1960, № 2, с. 191—200.
84. Пшеничный Б. Н. Принцип двойственности в задачах выпуклого
программирования. — «Журнал вычислительной математики и математической
физики», 1965, № 1, с. 98—106.
85. Репин В. Г. Анализ одного класса систем со случайно изменяющимися
параметрами. — «Автоматика и телемеханика», 1970, № 6, с. 21—28.
86. Розенброк X., Стори С. Вычислительные методы для
инженеров-химиков. М., «Мир», 1968, 444 с.
87. Розоноэр Л. И. Принцип максимума Л. С. Понтрягина в теории
оптимальных систем, ч. I, II, III. —«Автоматика и телемеханика», т. XX, 1959,
№ 10—12, с. 1320—1334, 1441—1458, 1561—1578.
88. Свешников А. А. Прикладные методы теории случайных функций. М.,
«Наука», 1968, 464 с.
89. Сергиевский Г. М. Об асимптотически оптимальной процедуре
стохастической аппроксимации для одного частного случая. — В кн.:
«Инженерно-математические методы в физике и кибернетике». М., Атомиздат, 1971, с. 92—100.
90. Сергиевский Г. М., Тер-Сааков А. П. Об использовании факторного
эксперимента в задачах многомерной стохастической аппроксимации точки
экстремума. — «Известия АН СССР. Техническая кибернетика», 1970, № 5,
с, 134—139.
91. Современная теория систем управления. Под ред. Леондеса. М., «Наука»,
1970, 510 с.
92. Солодов А. В. Линейные системы автоматического управления с
переменными параметрами. М., Физматгиз, 1962, 324 с.
93. Стратонович Р. Л. Условные марковские процессы и их применение
к теории оптимального управления. М., Изд. МГУ, 1966, 240 с.
235
94. Стратонович Р. Л. К теории оптимального управления. Достаточные
координаты. —«Автоматика и телемеханика», т. XXIII, 1962, № 7, с. 910—917.
95. Тихонов В. И. Воздействие флоктуаций на простейшие
параметрические системы.—«Автоматика и телемеханика», т. XIX, 1958, № 8, с.
717—724.
96. Троицкий В. А. Вариационные задачи оптимизации процессов
управления.— «Прикладная математика и механика», 1962, № 6, с. 1003—1011.
97. Уайлд Д. Дж. Методы поиска экстремума. М., «Наука», 1967, 267 с.
98. Фадеев Д. К., Фадеева В. Н. Вычислительные методы линейной алгебры.
М., Физматгиз, 1960, 656 с.
99. Феллер В. Введение в теорию вероятностей и приложения. М., «Мир»,
1967, т. I, 498 с, т. 2, 752 с.
100. Фельдбаум А. А. Вычислительные устройства в автоматических
системах. М., Физматгиз, 1959, 800 с.
101. Фельдбаум А. А. Основы теории оптимальных автоматических систем.
М., Физматгиз, 1966, 552 с.
102. Фельдбаум А. А. Статистическая теория градиентных систем
автоматической оптимизации при квадратичной характеристике объекта. — «Автоматика
и телемеханика», т. XXI, 1960, № 2, с. 167—179.
103. Фельдбаум А. А. О применении теории статистических решений к
разомкнутым и замкнытым системам автоматического управления. — «Известия
АН СССР. Техническая кибернетика», 1963, № 1, с. 13—24.
104. Фу К. Последовательные методы в распознавании образцов и обучении
машин. М., «Наука», 1971, 255 с.
105. Хазен Э. М. Методы оптимальных статистических решений и задачи
оптимального управления. М., «Советское радио», 1968, 256 с.
106. Хазен Э. М. Определение одномерной плотности распределения и
моментов случайного процесса на выходе существенно нелинейной системы. — «Теория
вероятностей и ее применения», 1961, т. VI, вып. 1, с. 130—137.
107. Хасьминский Р. 3. Устойчивость систем дифференциальных уравнений
при случайных возмущениях их параметров. М., «Наука», 1969, 368 с,
108. Харкевич А. А. Спектры и анализ. М., Физматгиз, 1962, 236 с.
109. Хедли Д. Нелинейное и динамическое программирование. М., «Мир»,
1967, 508 с.
ПО. Чернецкий В. И. Методы вычисления вероятностных характеристик
систем автоматического управления. — В кн.: «Автоматическое управление и
вычислительная техника», вып. 5. М., «Машиностроение», 1962, с. 5—54.
111. Чернецкий В. И. Анализ точности нелинейных систем управления
М., «Машиностроение», 1968, 248 с.
112. Чувствительность автоматических систем. Труды Международного
симпозиума по чувствительным системам автоматического управления (Дубровник,
1964), М., «Наука», 254 с.
ИЗ. Ширяев А. Н. Исследования по статистическому последовательному
анализу. — «Математические заметки АН СССР», т. 3, вып. 6, 1968, с. 739—754.
114. Шура-Бура М. Р. Оценка ошибок численного интегрирования
обыкновенных дифференциальных уравнений. — «Прикладная математика и механика»,
т. 16, 1952, № 5, с. 712—721.
115. Эрроу К. Дж., Гурвиц Л., Удзава X. Исследования по линейному и
нелинейному программированию. М., Изд-во иностр. лит. 1962, 334 с.
116. Июин Д. Б., Голь штейн Е. Г. Линейное программирование. М.,
Физматгиз, 1963, 776 с.
117. Aoki M., Introduction to Optimization Techniques Fundamentals and
Application of Nonlinear Programming. Wiley, New York,J971, 335 p.
118. Ariaratman S. Т., Graefe P. W. U. Linear Systems with Stochastic
Coefficients, I. II, III. Intern. J. Control, 1965, 1, № 3, p. 232—248; 1965, 2, № 2,
p. 161—169; 1965, 2, № 3, p. 205—211.
119. Bard Y. On a Numerical Instability of Davidon-like Method, Math.
Сотр., 22 July, 1968), p. 665—666.
120. Bum J. R. Multidimensional Stochastic Approximation Methods., Ann.
of Math. Stat., 25, 1954, p. 737—744,
236
121. Bogdanoff J. L., Kozin F. Moments of the Output of Linear Rand om
Systems. Journal of Acoustical Society of America, vol. 34, n. 8, 1962, p.
1063—1066.
122. Booth A. D. Numerical Methods, London. Butterworths, 1957, 195 p.
123. Caughey Т. К-, Dienes J. K. The Behavior of Linear Systems with
Random Parametric Excitation. Journal of Math, and Physics, vol. 41, N 4, 1962,
p. 300—318.
124. DavidonW. С Variance Algorithm for Minimization, Comput. J.,10 1968,
p. 406—412.
125. Drenick R. F., Shaw L. Optimal Control of Linear Plants with Random
Parameters. IEEE. Transactions on Automatic Control, vol. AC-9, № 3, July,
1964, p. 355—360.
126. Duncun D. B. Response of Linear Time-dependent Systems to Random
Inputs. J. Appl. Phys., 1953, 24, № 5, p. 609—611.
127. Fabian V. Stochastic Approximation of Minima with Improved
Asymptotic Speed., Ana. Math. Statist., № 1, 38, 1967, p. 191—200. "
128. Fabian V. Stochastic Approximation Methods, Chechoslovak Math., J.,
№ 1, 10, 1960, p. 123—159.
129. Fletcher R., Reevs С. М. Function Minimization by Conjugate Gradients.,
Computer J., v. 7, № 2, 1964, p. 149—154.
130. Florentin J. J. Optimal, Probing, Adaptive Control of a Simple Baye-
sian System. Journal of Electronics and Control, First Series, vol. XIII, № 2,
Aug. 1962, p. 165—177.
131. Gray A. H. Behavior of Linear Systems with Random Parametric
Excitation. Journal of Acoustical Society of America, vol. 37, n. 2, 1965, p. 288—296.
132. Hestenes M. R., Stiefel E. Methods of Conjugate Gradient for Solving
Linear Systems., J. Res. Nat. Bur. Standards, 49, 1952, p. 409—436.
133. Kalman R. E. A New Approach to Linear Filtering and Prediction Theory,
Trans, of the ASME, Series D. J. of Basic Eng., 1960, vol. 82,- № 1, p. 35—45.
134. Kalman R. E., Bucy R. S. New Results in Linear Filtering and
Prediction Theory. Trans, of the ASME, J. of Basic Eng. Ser. D., 1961, March, vol. 83,
p. 95—108.
135. Kelley J. E. The Cutting—Plane Method for Solving Convex Programms,
J. Soc. Inductr. and Appl. Math., vol. 8, № 4, Dec. 1960, p. 703—713.
136. Kesten H. Accelerated .Stochastic Approximation, Ann. Math. Statist.,
29, № 1, 1958, p. 41—59.
137. Kiefer J. Wolfowitz J. Stochastic Estimation of the Maximum of a
Regression Function, Ann. f Math. Statist, 29, 1952, p. 462—466.
138. Kyhn H. W., Tycker A. W. Nonlinear Programming, Proceeding of the
Second Berkeley Symposium on Mathematical Statistics and Probability,
University of California Press, 1951, p. 481—492.
139. Kyshner H. J. Dynamical Equations for Optimum Nonlinear Filtering.
J. Diff. Equations, 1967, vol. 3, p. 179—190.
140. Kushner H. J. On the Dynamical Equations of Conditional Probability
Density Functions with Applications to Optimal Stochastic Control Theory, J.
of Math. An. and Appl., vol. 8, № 2, 1964, p. 354—367.
141. Kushner H. J., Schweppe F. C. The Maximum Principle for the Stochastic
Control System, J. of Math. An. and Appl., vol. 8, № 2, 1964, p. 287—305.
142. Levin J. J. On the Matrix Riccati Equation. Proceeding of Amer.
Math. Society, vol. 10, 1959, p. 519—524.
143. Marquardt D. W. An algorithm for Least Square Estimation of
Nonlinear Parameters, J. SIAM, v. 11, № 2, 1963, p. 431-^-437.
144. Rosen J. B. The Gradient Projection Method for Nonlinear Programming.
Parts I. II. J. Soc. Indust. and Appl. Math. v. 8, № 1, 1960, v. 9, № 4, 1961,
p. 181—217; p. 414—443.
145. Rosenbloom A., Heiofron J., Trautman D. L. Analysis of Linear Systems
with Randomly Varying Inputs and Parameters, Convention Record IRE, pt. IV,
March, 1955, p. 106—113.
146. Rosenbrock H. H. An Example of Optimal Adaptive Control. J.
Electronics and Control, 13, 1964, p. 148—159.
237
147. Sacks J. Asymptotic Distribution of Stochastic Approximation
Procedures. Ann. of Math. St., v. 29, 1958, p. 373—405.
148. Samuels J. C. On the Mean Square Stability of Random Linear Systems.
IRE Trans, on Circuit Theory, CT-6, Special Suppl., May, 1959, p. 248—259.
149. Samuels J. C. Eringen A. C. On Stochastic Linear Systems, Journal
of Math, and Physics, July, 1959, v. 38. № 2, p. 83—103.
150. Sawaragi Y., Sunahara Y., Ono Т., Inoue K. A study of Statistical
Synthesis of Optimal Final-value Control Systems under the Random Environment.
Proceedings of the Fourteenth Japan National Congress for Applied Mechanics,
1964, p. 263—268.
151. Spendley W., Hextand G. R., Himsworth F.R. Sequential Application*
of Simplex Designs in Optimization and Evolutionary Operation. Mechnometrics,
4, 1962, p. 441—459.
152. Wolfe P. The Secant Method for Simultaneous Non-linear Equations,
Comm. ACM, v. 2, № 12, 1959, p. 382—398.
153. Wolfe P. Methods of Nonlinear Programming, in book «Recent.
Advances in Mathematical Programming», Edited by Graves R. I. Wolfe P., McGraw-Hill
Book Company, Inc. 1963, p. 67—86.
154. Wonham W. M. On a Matrix Riccati Equation on Stochastic Control.
SI AM J. Control, 6, 1968, p. 681—697.
155. Wonham W. M. Stochastic Problems in Optimal Control., IEEE, Int.
Convent Record, n. 2, 1963, p. 114—124.
156. Wonham W. M. Random Differential EquationsJn Control Theory,
Probabilistic Methods in Applied Mathematics, ed. by Bharucha-Reid, v. 2, 1970,
p. 131—212.
157. Zadicaric, Sivan R. The Optimal Control of Linear Systems with Unknow
parameters. IEEE Trans. Aut. Control, 1966, 11, № 3, p. 423—426 (перевод
экспресс-информация, САУ, № 4, 1967).
ОГЛАВЛЕНИЕ
Предисловие 3
Глава I. Методы вычисления характеристик точности нелинейных
динамических систем 5
1. Применение'метода статистической линеаризации в нелинейных
статистических задачах 5
2. Метод определения характеристик «многомерных нелинейных
систем ,14
3. Интегральный метод анализа точности- нелинейных систем . . 23
4.-Применение теории процессов Маркова к анализу непрерывных
систем управления 31
5., Основы метода статистических .испытаний 43
Г л а в а II. Статистические характеристики динамических систем со
случайными коэффициентами 48
1.'Линейные стационарные'системы со случайными параметрами 48
2. Линейные системы управления со случайным .скачкообразным
изменением коэффициентов 62
3. Линейные системы со случайными коэффициентами типа «белый»
шум 77
Глава III. Параметрические методы оптимизации систем управления 89
1. Градиентные методы 89
2. Практическая реализация градиентных методов 95
>3. Специальные методы поиска экстремума 99
4. Квадратичные методы минимизации 100
5. Метод сопряженных градиентов 105
6. Минимизация функций при наличии ограничений. Условия
оптимальности ПО
7. Градиентные методы решения задач нелинейного
программирования ; 116
8. Метод возможных направлений 120
9. Методы решения задачи нелинейного программирования,
основанные на использовании линейного» программирования .... 124
10. Задача минимизации функции в условиях помех 126
11. Применение метода стохастической аппроксимации к задаче
минимизации квадратичной функции, с неизвестными
параметрами . . 130
12* Определение градиента в условиях помех 137
13. Статистический подход к задаче формирования оптимального
метода минимизации функции с учетом ограничения числа
измерений минимизируемой функции 141
14. Пример построения оптимальной последовательной процедуры
определения экстремума функции 147
239
Глава IV. Применение метода динамического программирования в
задачах стохастического управления 151
1. Оптимизация управления при точном измерении фазовых
координат объекта 151
2. Оптимальное линейное управление 158
3. Оптимизация управления при неточных измерениях.
Апостериорное распределение вероятностей вектора фазовых координат
системы 163
4. Оптимальная линейная фильтрация. Фильтр Калмана .... 172
5. Достаточные координаты ' 174
6. Оптимальное управление линейным объектом при неточном
знании времени управления 177
7. Оптимальное по быстродействию управление линейным объектом
при точном измерении фазовых координат 183
8. Оптимальное быстродействие при неточном измерении фазовых
координат 193
Глава V. Применение стохастического принцина максимума к
оптимизации систем управления 196
1. Условия оптимальности управления в форме стохастического
принципа максимума 196
2. Оптимизация управления линейным объектом по квадратичному
критерию 202
3. Задача оптимизации при жестком ограничении управления . . 205
4. Задача оптимизации управления при изопериметрическом
ограничении типа неравенства 210
5. Условия оптимальности в игровой задаче с неточными
измерениями '..... 215
6. Оптимальное управление линейным объектом со случайными
коэффициентами типа «белый» шум 218
Приложение 226
Список литературы 232
Методы оптимизации в статистических задачах управления
Редактор инж. Е. В. Григории-Рябова
Технический редактор Е. П. Смирнова Корректор А. М. Усачева
Переплет художника Е. Н. Волкова
Сдано в набор 8/Х 1973 г. Подписано к печати 24/1 1974 г. Т-03271.
Формат 60X907i«. Бумага Кя 2. Печ. л. 15,0. Уч.-изд. л. 14,7.
Тираж 7000 экз. Заказ 593. Цена 1 р. 29 к.
Издательство «Машиностроение», 107885, Москва Б-78, 1-й Басманный пер., 3
Ленинградская типография № 6 Союзполиграфпрома
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли
1 193144, Ленинград, С-144, ул. Моисеенко, 10