




























































































































































































































































































Текст
В. С. ГУБАНОВ
А.М. ФИНКЕЛЬШТЕЙН
П.А. ФРИДМАН
ВВЕДЕНИЕ
В РАДИОАСТРОМЕТРИЮ
Под редакцией А.Ф. Дравских
н
МОСКВА ’’НАУКА”
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ
ЛИТЕРАТУРЫ
1983
22.64
Г 93
УДК 522
Г у б а н о в В. С., Финкельштейн А. М., Фри д-м ан П. А. Введе¬
ние в радиоастрометрию. - М.: Наука. Главная редакция физико-математиче¬
ской литературы, 1983. - 280 с.
Книга представляет собой первую в мировой литературе монографию,
посвященную, проблемам новой отрасли науки - радиоастрометрии, возник¬
шей на стыке радиофизики и астрометрии. В книге рассматриваются новые
пути решения фундаментальных проблем астрометрии и смежных с ней наук
(геодезии, геодинамики и небесной механики) в основном на базе нового
высокоточного метода угломерных измерений - радиоинтерферометрии
со сверхдлинными базами. Подробно рассматриваются технические пробле¬
мы нового метода, перспективы их решения, пути достижения предельной
точности измерений, а также ряд других проблем.
Для астрометристов и радиоастрономов — специалистов, аспирантов и
студентов.
Ил.111,табл. 27, библ. 246 назв.
1705020000-141
053(02)-83
159-83
©Издательство ’’Наука”
Главная редакция
физико-математической
литературы, 1983.
ОГЛАВЛЕНИЕ
Предисловие 6
ЧАСТЬ I
ОСНОВНЫЕ ПРОБЛЕМЫ СОВРЕМЕННОЙ АСТРОМЕТРИИ 9
Глава 1.
Роль радиоинтерферометрического метода в современной астрометрии 9
§ 1. Метод радиоинтерферометрии - основные результаты и перспективы 9
§. 2. Научные задачи, требующие высокого углового разрешения 12
§ 3. Принципы создания инерциальной системы координат методами назем¬
ной оптической астрономии 16
§ 4. Роль новых методов измерений в создании инерциальной системы коор¬
динат 20
§ 5. Использование инерциальной системы координат радиоисточников
для улучшения фундаментальных систем координат звезд 24
Глава 2.
Особенности вращательного движения Земли и возможности их изучения
методом РСДБ 25
§ I. Свободное вращение абсолютно твердой Земли 25
§ 2. Возмущенное вращение абсолютно твердой Земли 29
§ 3. Приливные деформации Земли 35
§ 4. Влияние приливных деформаций Земли на длину и проекции базы ин¬
терферометра 38
§ 5. Приливная неравномерность вращения Земли 39
§ 6. Движение полюсов упругой Земли 41
§ 7. Динамический эффект жидкого ядра Земли 43
§ 8. Резонансная нутация оболочки Земли 44
§ 9. О выборе оси эфемеридной нутации Земли 45
§ 10. Точные формулы учета прецессии и нутации 47
§ 11. Основные особенности изучения вращения Земли методом РСДБ 50
ЧАСТЬ II
МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ В РАДИОИНТЕРФЕРОМЕТРИИ СО
СВЕРХДЛИННЫМИ БАЗАМИ 51
Глава 3
Основные наблюдаемые величины и редукционные вычисления 51
§ 1. База интерферометра 51
§ 2. Временная задержка и частота интерференции 54
§ 3. Время рассинхронизации 56
§ 4. Прсдвычисляемые поправки к наблюдаемым величинам 59
Гпава 4
Методы и программы координатных измерений 77
§ 1 - Абсолютный метод измерения координат. Общий алгоритм 77
§ 2. Групповые наблюдения при постоянных часовых углах 81
3
§ 3. Методы определения склонений близэкЬаториальных источников 86
§ 4. Определение угловых расстояний между источниками 89
§ 5. Дифференциальный метод измерения координат 93
§ 6. Условия разрешимости уравнений дифференциального метода 95
§ 7. Определение параметров базы дифференциальным методом 97
§ 8. Метод дуг 98
§ 9. Оптимальные программы и оптимальные ориентации баз в методе дуг 103
§10. Использование каталога угловьу< расстояний 109
§11. Многоэлементны'е интерферометры 111
§12. Радиоинтерферометрические наблюдения искусственных спутников
Земли 114
§13. Независимое сличение шкал времени из синхронных дальнометриче-
ских и радиоинтерферометрических наблюдений ИСЗ . . . 118
Глава 5
Источники радиоизлучения. Механизмы, статистика, наблюдения 119
§ 1. Механизмы генерации радиоизлучения 119
§ 2. Радиообзоры и радио каталоги дискретных источников 125
§ 3. Радиокаталоги высокого углового разрешения 127
§ 4. Статистика радиоисточников малых угловых размеров 132
ЧАСТЬ III
ТЕХНИКА РАДИОИНТЕРФЕРОМЕТРИЧЕСКИХ НАБЛЮДЕНИЙ 136
Глава 6
Радиоинтерферометры - общее описание 136
§ 1. Основные понятия наблюдательной радиоастрономии 136
§ 2. Основные типы радиоинтерферометров. Радиоинтерферометр как угло,-
мерный инструмент 140
§ 3. Радиоинтерферометр как пространственный фильтр 143
§ 4. Радиоинтерферометр как радиотехническое устройство 147
§ 5. Радиоинтерферометр со сверхдлинной базой 152
Глава 7
Технические особенности радио интерферометров с электрической связью 156
§ 1. Проблема фазовой стабильности . 156
§ 2. Кембриджский 5-километровый радиотелескоп 157
§ 3. Интерферометр HP АО 158
§ 4. Решетка VLA . . . 160
§ 5. Радиоинтерферометр с ретрансляцией в обсерватории Джодрелл Бэнк 161
Глава 8
Техника РСДБ. Проблемы когерентности и синхронизации 164
§ 1. Основные характеристики стандартов частоты 164
§ 2. Технические особенности основных типов стандартов частоты 166
§ 3. Влияние нестабильности стандартов на точность РСДБ-измерений 172
§ 4. Преобразование спектра в, РСДБ 175
§ 5. Синхронизация часов в системе РСДБ 184
Глава 9
Техника РСДБ: передача сигналов 188.
§ 1. Цифровые системы с магнитной записью 189
§ 2. Аналоговая система магнитной записи .• 198
§ 3. РСДБ с ретрансляцией через ИСЗ 201
§ 4. Узкополосные системы РСДБ для работы с космическими радиомаяками 202
Глава 10
Техника РСДБ: обработка данных 205
§ 1. Первичная обработка сигнала РСДБ 205
§ 2. Отношение сигнала к шуму в радиоинтерферометре 211
4
§ 3. Факторы, влияющие на отношение сигнала к шуму в РСДБ 216
§ 4. Оценка параметров сигнала РСДБ 221
§ 5. Обработка данных при синтезе широкой полосы 226
Глава 11
Флуктуационные эффекты атмосферы 229
§ 1. Турбулентная модель тропосферы 230
§ 2. Тропосферные ограничения при абсолютных координатных измерениях 234
§ 3. Влияние числа сеансов при координатных измерениях 238
§ 4. Тропосферные ограничения при дифференциальных координатных
измерениях • 239
§ 5. Радиометрические измерения электрической толщины тропосферы 242
§ 6. Ионосфера, межпланетная и межзвездная среда 243
Глава 12
Глобальные радио интерферометрические системы 244
§ 1. Оптимальные базы радиоинтерферометрической сети 246
§ 2. Число и размер элементов радиоинтерферометрической сети 247
§ 3. Геометрия радиоинтерферометрической сети 252
§ 4. Проекты глобальных радиоинтерферометрических систем 253
Приложение 1. Алгоритм вычисления общей зоны видимости 257
Приложение 2. Предвычисление проекций базы интерферометра 259
Приложение 3. Каталог координат радиоисточников (эпоха 1950,0), полу¬
ченный в Лаборатории реактивного движения США (JPL) .... 261
Приложение 4. Список внегалактических радиоисточников, наблюдавшихся
на радиоинтерферометрах со сверхдлинными базами 264
Литература 274
ПРЕДИСЛОВИЕ
В середине 60-х годов сложилось весьма распространенное мнение
о наступлении глубокого кризиса в астрометрии. Действительно, к этому
времени стало ясно, что классические астрометрические инструменты
и традиционные методы наблюдений, а также технические средства ре¬
гистрации и обработки данных практически полностью исчерпали свои
возможности и уже не способны обеспечить необходимую точность астро¬
метрических данных.
Однако спустя всего 10 лет стало возможным говорить уже не о кри¬
зисе, а о ’’революции в астрометрии”. Это кардинальное изменение во
взгляде на будущее астрометрии и ее роли в естествознании было обу¬
словлено внедрением в астрометрическую практику принципиально новых
методов измерений, имеющих невиданные до тех пор возможности. Среди
них, вне всякого сомнения, выдающееся место занимает радиоинтерферо¬
метрия со сверхдлинными базами (PCДБ). Несмотря на определенные
трудности, встречающиеся на пути реализации потенциальных возмож¬
ностей метода PC ДБ, с его помощью за короткое время были получены
впечатляющие результаты.
К настоящему времени точность единичных измерений координат радио¬
источников методом РСДБ по крайней мере на полтора порядка превыша¬
ет точность лучших определений координат звезд классическими методами
меридианной астрометрии, а лучшие радиокаталоги существенно точнее
фундаментальных каталогов звезд. В отдельных экспериментах межкон¬
тинентальные расстояния и координаты полюса определились из суточной
серии наблюдений с точностью до нескольких сантиметров, а всемирное
время — до 1-^2 мс, что существенно превышает точность соответствующих
данных всех оптических служб времени и широты. Метод РСДБ представля¬
ет собой непревзойденное по точности средство сличения разнесенных
на глобальные расстояния шкал атомного времени с реальной, погреш¬
ностью до 1СГ8 с и, таким образом, имеет непосредственный выход в важную
техническую проблему синхронизации времени. Наконец, метод РСДБ
может применяться для наблюдений искусственных радиоисточников
в ближнем космосе, т.е. использоваться для решения задач геодинамики,
динамики системы Земля — Луна, а в перспективе и динамики тел Солнеч¬
ной системы.
Все это позволяет говорить о возникновении в 70-х годах нового научного
направления — радиоастромстрии, которое образует замкнутую методичес¬
кую систему, охватывающую практически всю совокупность проблем клас¬
сической астрометрии, а также ряд новых, ранее даже не ставившихся задач.
6
В настоящее время трудно дать бесспорный прогноз дальнейшего раз¬
вития оптической наземной астрометрии. Надо сказать, что в последние
годы и в ней наметился определенный прогресс. Повсеместно внедряются
фотоэлектрические методы регистрации, оптимизируются конструкции
инструментов, совершенствуется технология их изготовления, создаются
полностью автоматические высокопроизводительные инструменты, со¬
вершенствуются математические методы обработки данных. Поэтому
результаты оптических определений координат звезд будут продолжать
использоваться, например, в звездной динамике, а также в тех областях
науки и практики, где другие методы наблюдений, кроме оптических,
неудобны или невозможны. Однако кажется совершенно бесспорным,
что качественно новые наблюдательные данные, необходимые для изу¬
чения тонких особенностей вращения Земли, движения тектонических
плит, динамики Солнечной системы в максимально устойчивой системе
отсчета, следует ожидать в основном от радиоастрометрии.
Строго говоря, в понятие радиоастрометрии необходимо включать
все радиотехнические средства астрометрических наблюдений: радио¬
локацию, доплеровские измерения, радиоастрономические наблюдения
планет и т. д. Однако, хотя метод РСДБ и не перекрывает полностью все
’’поле радио астрометрии”, мы ограничились рассмотрением применения
только этого метода, так как именно с ним связаны основные перспекти¬
вы астрометрии. Действительно, радиоинтерферометрический метод явля¬
ется наиболее универсальным из всех известных радиоастрометрических
методов. В частности, ему доступны объекты, расположенные в гигантском
диапазоне расстояний, — от ИСЗ до внегалактических радиоисточников
(108 -1028 см). Кроме того, он обладает наиболее высоким угловым
разрешением при позиционных определениях (в перспективе до 0",0001).
Именно благодаря этим качествам метода РСДБ была ликвидирована
монополия в астрометрии оптических средств измерений.
С методической и технической точек зрения радиоинтерферометрия
представляет собой комплексную научную проблему, находящуюся на
стыке астрометрии, астрофизики, радиофизики и вычислительной техники.
Это обстоятельство потребовало такого же комплексного подхода к из¬
ложению материала в книге.
Прежде всего представляется важным ответить на вопрос: существует
ли достаточно большой круг научных задач, для решения которых требует¬
ся столь высокое, пространственно-временное разрешение, которое свой¬
ственно методу РСДБ. Ответу на этот вопрос посвящена часть I книги,
в которую, помимо обзора задач фундаментальной астрометрии (гл. 1),
включен раздел, посвященный современной теории вращения Земли
(гл. 2). Этим подчеркивается все возрастающая роль изучения вращения
Земли при использовании современных высокоточных наземных средств
измерений, таких как РСДБ, а также то обстоятельство, что эта проблема
является основным полем приложения этих методов.
Часть II посвящена рассмотрению основных методов координатных
измерений с помощью РСДБ (гл. 3—4). В гл. 5 содержатся необходимые
сведения-о наблюдаемых методом РСДБ компактных радиоисточниках
галактического и внегалактического происхождения. Таким образом,
в части II освещаются методы реализации возможностей РСДБ-измерений.
7
Наконец, часть III посвящена техническим средствам, используемым
в PC ДБ-измерениях. Несмотря на то, что максимальное угловое разрешение
можно получить только на больших базах, тем не менее до сих пор за¬
метную роль в радиоастрометрии играют короткобазовые радибинтерферо-
метры с электрической или радиорелейной связью. По этой причине метод
РСДБ рассматривается как естественное продолжение общей идеи радио¬
интерферометрии (гл. 6), и дается описание некоторых действующих ко¬
роткобазовых интерферометров (гл. 7). Главы 8—10 посвящены обсужде¬
нию технических особенностей радиоинтерферометров со сверхдлинными
базами, включая проблемы когерентности и синхронизации (гл. 8), пере¬
дачи сигналов (гл. 9) и первичной обработки данных (гл. 10). Глава 11
посвящена обсуждению роли флуктуационных эффектов среды распростра¬
нения (в основном — тропосферы) при координатных РСДБ-измерениях
и возможностям их подавления. Наконец, в гл. 12 обсуждается вопрос
о создании глобальных фазостабильных радиоинтерферометрических систем,
проекты которых были разработаны в конце 70-х годов и ждут своей
реализации.
Практические и теоретические работы в области радиоинтерферометрии
со сверхдлинными базами ведутся у нас в стране в ряде научно-исследо¬
вательских учреждений: Институте космических исследований АН СССР,
Научно-исследовательском радиофизическом институте, Ленинградском
филиале Специальной астрофизической обсерватории АН СССР, Главной
астрономической обсерватории АН СССР, Бюраканской астрофизической
обсерватории АН Арм.С.СР, Государственном астрономическом институте
им. П.К. Штернберга, Институте теоретической астрономии АН СССР.
Опыт этих работ и результаты обмена мнениями с сотрудниками этих
институтов были, по возможности, учтены при написании книги. Особую
благодарность авторы хотели бы выразить А.Ф. Дравских, выполнившему
большую работу по редактированию книги и, таким образом, способство¬
вавшему ее улучшению.
В.С. Губанов, А.М. Финкельштейн, П.А.Фридман
ЧАСТЬ I
ОСНОВНЫЕ ПРОБЛЕМЫ
СОВРЕМЕННОЙ АСТРОМЕТРИИ
Глава 1
РОЛЬ РАДИОИНТЕРФЕРОМЕТРИЧЕСКОГО МЕТОДА
В СОВРЕМЕННОЙ АСТРОМЕТРИИ
§1. МЕТОД РАДИОИНТЕРФЕРОМЕТРИИ - ОСНОВНЫЕ РЕЗУЛЬТАТЫ
И ПЕРСПЕКТИВЫ
Для наблюдательной радиоастрономии с момента ее возникновения
в 1931 г., когда К. Янский в США впервые обнаружил внеземное радио¬
излучение в декаметровом диапазоне длин волн, было характерно стремле¬
ние к получению высококачественных изображений небесных тел с мак¬
симально высоким угловым разрешением. Поскольку чувствительность
радиотелескопа определяется его площадью, а разрешение, согласно кри¬
терию Рэлея, его максимальным размером, то очевидный путь достижения
максимального разрешения на первых порах состоял в создании радио¬
телескопов все больших и больших размеров. Однако из-за конечной
жесткости конструкций размеры полноповоротных параболических зеркал
имеют предел (по-видимому, порядка 100—150 м), так что разрешающая
способность одиночных зеркал вряд ли может превысить 0*,5—1 * в санти¬
метровом диапазоне длин волн. С позиций оптической астрометрии
такая точность является очень низкой. Именно этим объясняется тот факт,
что до недавнего времени все радиоастрономические исследования, в
которых требовалось точное знание положений радиоисточников, опирались
лишь на оптические наблюдения.
Очевидно, что для повышения разрешающей способности радиотеле¬
скопов и точности определения положения радиоисточников необходимо
привлечение более тонких идей и методов. В частности, ограничения по
жесткости конструкций удалось преодолеть после введения в радиоастро¬
номическую практику антенн переменного профиля типа РАТАН-600
[1]. Они позволяют реализовать угловое разрешение вплоть до несколь¬
ких угловых секунд, что уже дает возможность ставить и решать само¬
стоятельные астрометрические задачи на таких инструментах [2].
Однако наиболее радикальный шаг в направлении увеличения разрешаю¬
щей способности радиотелескопов был связан с внедрением в практику
радиоастрономии радиоинтерферометров. Первый радиоинтерферометр
появился в 1948 г. в Австралии. Это был морской аддитивный интерферо¬
метр, представляющий собой радиоаналог зеркального интерферометра
Ллойда, который использовался для определения размеров и положений
9
источников радиоизлучения на Солнце. В 1950 г. М. Райлом в Англии был
введен в действие первый радиоинтерферометр, представляющий собой
радиочастотный эквивалент оптического интерферометра Майкельсона.
В последующие годы, главным образом благодаря работам М. Райла,
Э. Хьюища и Р. Миллса, многоэлементные радиоинтерферометры заняли
доминирующее положение в наблюдательной радиоастрономии. С их по¬
мощью были составлены первые каталоги координат радиоисточников.
В частности, на 5-километровом радиоинтерферометре в Кембридже 13, 4]
точность определения координат сравнялась с точностью оптических оп¬
ределений.
Применение интерферометров в радиоастрономии привело в.60-х годах
к установлению того чрезвычайно важного факта, что угловые размеры
некоторых радиоисточников значительно меньше разрешающей способ¬
ности существовавших в то время радиоинтерферометров. Изучение
спектров излучения этих источников и их переменности приводило к
заключению, что угловые размеры многих радиоисточников (в основном
квазаров) должны составлять миллисекунды дуги и менее. Это обстоятель¬
ство послужило побудительным стимулом для увеличения размеров базы
интерферометров. Однако препятствием к увеличению базы явились тех¬
нические трудности в создании фазостабильных линий передач. В настоящее
время интерферометр MTRLI, (Англия) с радиорелейной связью между
антеннами имеет максимальную базу около 134 км [5].
Принципиально новые возможности резкого повышения углового
разрешения радиоинтерферометров открылись в 1965 г., когда в СССР
была предложена идея интерферометра с независимой регистрацией и
базами, предельная длина которых ограничена лишь диаметром Земли
[6, 7, 8] . Предлагалось поля излучения, принятые двумя разнесенными
антеннами, после соответствующего преобразования записывать на маг¬
нитные ленты, а взаимно корреляционную функцию, несущую, в частности,
координатную информацию, получать вычислением на ЭВМ. В 1967 г.
эта идея была впервые экспериментально реализована в Канаде [9] и США
110], и уже в 1968 г. радиоинтерферометр с независимой записью был
успешно использован как геодезический инструмент. Его база длиной около
2150 км была измерена с очень высокой по тем временам точностью ±20 м
( 1(Р) [ 1 1 ]. К настоящему времени в отдельных радиоингерферометри-
ческих сеансах принимали участие радиотелескопы, расположенные на
всех, за исключением Антарктиды, континентах земного шара.
В 70-х годах метод радиоинтерферометрии со сверхдлинными базами
(PCДБ) распространился практически на все объекты, имеющие достаточно
малые угловые размеры, — квазары, ядра галактик, пульсары, ОН- и
И? О-источники, искусственные источники излучения. Этот метод нашел
применение не только для задач построения изображений источников,
но и для определения их координат, а также для сличения часов, измерения
длин баз, всемирного времени и координат полюса. Таким образом, 70-е
годы можно рассматривать как рубеж, на котором было поколеблено
монопольное положение оптических методов в решении астрометрических
и смежных с ними задач, рубеж, начиная с которого можно говорить о
возникновении нового направления в наблюдательной астрономии — радио-
ас гр оме трии.
10
Таблица 1
Основные достижения радиоинтерферометрии со сверхдлинными базами к середи¬
не 70-х годов
Задачи |
1-
Точность определений
1
Построение изображений радио источник а [12]
Определение абсолютных координат [13, 14]
Определение относительных координат [15]
Точность радиокаталогов [16]
Определение длины глобальной базы [17]
Всемирное время [17]
Координаты полюса [17]
Сличение часов [22]
Гравитационное отклонение лучей в поле
Солнца [25,27]
Числа Лява h, 1 [18]
Определение положения астронавтов на Луне [19, 20]
Скорость ветра на Венере по наблюдениям спускаемого ап¬
парата [21 ]
Скорость движения геостационарного ИСЗ [23]
Навигация космических кораблей по отношению к кваза¬
рам [24]
Собственное движение пульсара [238]
о",0003
0",01 4-0",05
0",003
0",01
4 6 см
0,07 мс
3 см
10 нс
О",ОО23
10%
1-3 м
30 см/с
0,002 см/с
0",01
0",08/год
Основные достижения РСДБ к концу 80-х годов представлены в табл. 1.
Если взглянуть на эти достижения с самой общей точки зрения, то наиболее
впечатляющими являются успехи РСДБ по точности координатных опре¬
делений и угловому разрешению. За почти полувековую историю радио¬
астрономии разрешение выросло более чем в 108 раз (разрешение первого
в истории радиоастрономии радиотелескопа К. Янского было около 30°),
причем за последнее десятилетие, благодаря введению в строй РСДБ-систем,
более чем в 105 раз.
Если же оценивать перспективу, то прежде всего необходимо отметить,
что потенциальные возможности РСДБ-измерений пока еще не реализова¬
ны в полном объеме по следующим трем причинам. Во-первых, не су¬
ществует специализированных РСДБ-комплексов, способных вести ком¬
плексные долговременные наблюдательные программы. Во-вторых, обработ¬
ка данных в интерферометрии с магнитной записью происходит не в реальном
масштабе времени., что ограничивает ее оперативные возможности. Нако¬
нец, в-третьих., самым важным недостатком современной радиоинтер¬
ферометрии со сверхдлинными базами является невозможность осущест¬
вления фазовых измерений. Последнее обстоятельство ограничивает
точность координатных радиоинтерферометрических измерений по край¬
ней мере на порядок. Причины этих трудностей и методы их преодоления
будут рассмотрены в части III. Сейчас же нам достаточно иметь в виду,
что в ближайшее десятилетие можно рассчитывать на создание постоянно
действующих фазостабильных радиоинтерферометрических сетей с об¬
работкой данных в реальном времени, которые позволят реализовать
точность координатных измерений до малых долей миллисекунды
Дуги (гл. 12).
11
§2. НАУЧНЫЕ ЗАДАЧИ, ТРЕБУЮЩИЕ ВЫСОКОГО
УГЛОВОГО РАЗРЕШЕНИЯ
Как и в классической астрометрии, определение координат радио¬
источников методом РСДБ сопровождается определением и исключением
так называемой ’’системы инструмента”, под которой понимаются пара¬
метры, характеризующие ориентацию в пространстве и во времени вектора
базы интерферометра и рассинхронизацию шкал времени и частот гетеро¬
динов на пунктах РСДБ. Однако, в отличие от классической астрометрии,
эти ’’инструментальные параметры” несут содержательную информацию,
имеющую большую ценность для изучения вращения Земли и метрологии.
Важнейшими проблемами, требующими координатных измерений с
максимально высокой точностью (вплоть до 0”,0001), являются:
а) построение инерцйальной системы координат, опорными объектами
которой будут точечные детали квазаров и ядер галактик, а также уста¬
новление связи между оптической и радио системами координат;
б) измерение параллаксов и собственных движений источников, по
крайней мере тех, которые находятся в пределах Галактики;
в) измерение длин и параметров ориентации больших баз интерферо¬
метров с целью изучения трехмерных движений точек земной коры;
г) изучение движения вектора угловой скорости вращения Земли в
инерциальной системе координат и в теле Земли.
Перейдем теперь к более детальному описанию научных задач, требую¬
щих для своего решения позиционных определений с высокой угловой
точностью.
2.1. Астрометрия
а) Построение инерциальной системы координат (ИСК) традиционно
рассматривается как главная задача астрометрии (§ §3, 4). По-видимому,
только РСДБ-наблюдения способны создать такую систему с требуемой
точностью (^ 0",001). Действительно, во-первых, в радиоинтерферометрии
имеется возможность построить систему координат радиоисточников,
ле зависящую от направления оси вращения Земли. Во-вторых, РСДБ-
наблюдениям доступны предельно удаленные, объекты, большая часть
которых в пространстве изображений неподвижна на миллисекундном
уровне в течение сотен лет. В-третьих, из наземных средств в принципе
только радиоинтерферометрия способна обеспечить требуемое угловое раз¬
решение. Уже сейчас абсолютные координаты более ста радиоисточников
измерены с точностью 0",01, что выше точности системы FK4.
Необходимо подчеркнуть, что для современной науки инерциальная
система координат нужна не сама по себе, а лишь в качестве опорной систе¬
мы отсчета, обеспечивающей (прежде всего в методическом отношении)
решение различных астрофизических, геофизических и геодинамических
задач. В частности, при построении изображений радиоисточников методом
опорного объекта [26] ИСК выступает просто как сеть стандартных опор¬
ных источников, положения которых известны с высокой точностью.
В общем же случае ИСК является своего рода фундаментальным эталоном,
с помощью которого можно изучать тонкие эффекты различных динами¬
ческих и феноменологических физических теорий.
б) Даже такая первичная координатная информация, как видимые
относительные положения радиоисточников, может иметь прямой выход
12
в фундаментальную науку. В качестве наиболее впечатляющего примера
достаточно вспомнить радиоинтерферо метрическую проверку с рекордной
(1%) точностью одного из классических эффектов линейного приближе¬
ния общей теории относительности (ОТО) — эффекта отклонения луча
света в гравитационном поле Солнца [25, 27]. Отметим, что наша уверен¬
ность в правильности нелинейного приближения ОТО базируется факти¬
чески лишь на одном высокоточном тесте, связанном с обработкой длин¬
ных рядов наблюдений, в основном оптических, одной внутренней планеты
Солнечной системы — Меркурия. По этой причине любая возможность
дополнительной проверки нелинейного приближения ОТО, в особенности
если она не требует гигантских затрат времени и средств, является чрез¬
вычайно важной. Уникальные угломерные возможности фазостабильной
радиоинтерферометрии со св^рхдлинными базами открывают реальные
перспективы для осуществления таких проверок с помощью измерения
взаимных угловых расстояний между квазарами, а также квазарами и
планетами и между планетами [28] (в последних двух случаях необходи¬
ма установка на планетах ’’радиомаяков”, например, типа ’’ALSEP” [29]).
в) Качественно новой возможностью, связанной с высоким угловым
разрешением радиоинтерферометрических сис!ем, является возможность
определения расстояний до некоторых галактических источников путем
измерения параллактических смещений этих источников на фоне опорных
внегалактических источников. При разрешении 0м,0001 возможны парал¬
лактические измерения до расстояний порядка 20 кпс. Такая возмож¬
ность весьма удобна для прямой проверки космологической природы
красного смещения квазаров.
Параллактические измерения позволяют определять расстояния до
1 кпс с точностью до 1%. В области с такими размерами находятся по
крайней мере 60 пульсаров, для которых измерения расстояний, допол¬
ненные измерениями фарадеевского вращения, меры эмиссии и
поглощения на волне 21 см дают информацию о концентрации и темпера¬
туре электронного газа и магнитных полях на луче зрения, что важно
для понимания физических условий, имеющих место в межзвездной
среде.
В принципе, имеется возможность измерять параллактические смещения
внегалактических объектов, используя тот факт, что Земля движется
относительно реликтового фона со скоростью 400 км/с. Система с раз¬
решением 0" ,0001 способна обнаружить изменение положения радио¬
источника, находящегося на расстоянии до 6 Мпс от Земли, относитель¬
но более далекого источника по наблюдениям с интервалом в 10 лет. Если
же в радиоинтерферометрическую наземную сеть включить космические
элементы, то при достаточно больших базах ’’Земля—Космос” возникает
принципиальная возможность измерения расстояний во Вселенной по
’кривизне фронта” [30]. При выносе двух-трех космических радиотеле¬
скопов на несколько астрономических единиц от Земли все объекты види¬
мой части Вселенной оказываются в ’’ближней зоне” такого интерферо¬
метра. При длине базы b « 10 а.е., длине волны X = 10 см предельное из-
2я J2
меряемое расстояние равно R ~ «10 см = 300 Мпс, что сравнимо
X
с радиусом кривизны Вселенной.
13
г) Из задач, требующих высокоточных позиционных измерений, следует
упомянуть о возможности измерения собственных движений галактиче¬
ских радиоисточников. Измерение собственных движений с точностью
О",001—0",0001 позволяет по наблюдениям в течение 5 лет локализовать
первоначальное положение источника на расстояниях по крайней мере
до 1 кпс. Применительно к пульсарам это означает возможность локализо¬
вать места их образования и определения их возрастов, что важно для
теории эволюции нейтронных звезд и остатков сверхновых.
Близкой по смыслу и важной в астрофизическом аспекте является
задача поиска планет вблизи радиоизлучающих звезд по возмущениям
их положения относительно одиночных опорных объектов. Спутник с
массой Мр, находящийся на расстоянии rps от звезды с массой Ms, вызы¬
вает угловое смещение положения радиозвезды, достигающее величин
~~ (MplMs) (rps/R). В частности, спутник с массой MpjMs ~ 1СГ3, находящий¬
ся на расстоянии rps « 30 а.е., может быть обнаружен системой с разреше¬
нием 0",0001 по измерениям дифференциальных положений звезды, рас¬
положенной на расстоянии до R 300 пс от Земли.
2.2. Геофизика, геодинамика
а) Земля представляет собой чрезвычайно сложную термодинамическую
систему, в которой реология ее вещества и физика взаимодействия коры,
мантии и ядра до конца не поняты. С позиций такой центральной геофизи¬
ческой проблемы, как изучение внутреннего строения Земли, наряду
с данными гравиметрии и сейсмологии важную роль играют радиоинтер-
ферометрические измерения величины и направления вектора угловой
скорости вращения Земли Й, которое изменяется как в пространстве
(прецессия и нутация), так и в теле Земли (движение полюсов). За вариа¬
ции Q ответственны различные физические процессы — приливообразую¬
щие силы, сезонная циркуляция атмосферы, изменения уровня мирового
океана, приливное трение, динамическое взаимодействие жидкого ядра
и оболочки (мантии) Земли, землетрясения и др. Для каждого из этих
механизмов, в том числе и ныне неизвестных, типичны свои характерные
времена — от миллионов лет до долей суток. Поэтому необходимы дли¬
тельные определения Г2 с высоким пространственно-временным разреше¬
нием. Скорость осевого вращения Земли (длительность суток Т) определя¬
ется сейчас с точностью 1^2 мс по осредненным за пять суток данным
наблюдений около 80 служб времени, оснащенных классическими ин¬
струментами. Радиоинтерферометрическая глобальная сеть позволит из¬
мерять Т с точностью 50—100 микросекунд и, что особенно важно, изучить
не только низкочастотные (3 • 1СГ10—2 • 10"6 Гц), но и высокочастотные
(1СГ5 —3 • 10"4 Гц) спектральные компоненты угловой скорости вращения
Земли, о которых до сих пор не было практически никакой наблюдатель¬
ной информации.
б) Большой геофизический интерес представляет изучение движения
полюсов (свободного чайдлеровского с периодом около 14 месяцев,
свободного квазисуточного, вынужденных колебаний годового, полугодо¬
вого и квазисуточного периодов, векового движения и, т. д.), так как
эти явления обусловлены физическими свойствами Земли как планеты
и динамическими процессами, протекающими в ее недрах и на ее поверх¬
ности. Современные международные службы движения полюсов позволяют
14
определять их координаты классическими инструментами с внутренней
точностью около 0,5 м (абсолютная точность несколько ниже, 1-2 м)
в результате осреднения циклов наблюдений недельной длительности
на нескольких десятках классических инструментов. Потенциальное раз¬
решение фазостабильной радиоинтерферометрической сети может достигать
1 см с существенно большим разрешением по времени (вплоть до часа).
Сравнимая точность может быть достигнута лишь по лазерным наблюдени¬
ям ИСЗ и Луны (1 4- 10 см). Однако радиоинтерферометрические наблю¬
дения имеют то несомненное преимущество, что они носят чисто гео¬
метрический характер. Лазерным же и доплеровским наблюдениям доступ¬
ны лишь близкие объекты, движущиеся в нерегулярном и недостаточно
изученном гравитационном поле Земли. Здесь задача определения коор¬
динат полюса решается динамическими средствами, что может приводить
к большим трудностям при интерпретации результатов наблюдений.
в) Фазостабильная радиоинтерферометрическая система позволяет
с точностью до доли длины волны измерять расстояния между пунктами,
разнесенными на тысячи километров (вплоть до 2Re) друг от друга. Из¬
мерение больших баз и их горизонтальных и вертикальных движений
и вращений представляет принципиальный интерес при решении задач
глобальной тектоники литосферных плит и, возможно, для предсказания
землетрясений в сейсмически активных районах. Радиоинтерферометри-
ческий метод измерения взаимных расстояний между пунктами являет¬
ся чисто геометрическим, не требующим знания положения центра масс
Земли, что выгодно отличает его от динамических методов доплеровских
и лазерных наблюдений ИСЗ.
2.3. Геодезия и прикладные задачи
а) Систему баз многоэлементного интерферометрического комплекса,
измеренных с высокой точностью, можно рассматривать как основу для
создания автономной системы земных координат. К этой автономной
системе может быть привязана любая точка земной поверхности с помощью
подключенных к системе малых транспортируемых антенн. Точность такой
привязки (не хуже 10 см) будет определяться величиной малой базы и
диаметром антенны транспортируемого элемента.
б) Возможности радиоинтерферометрических систем для космической
навигации уже успешно опробованы [23, 24, 25], так что эффективность
использования фазостабильной радиоинтерферометрической системы для
этих целей не вызывает сомнений. По-видимому, метод РСДБ найдет при¬
менение и в наземной навигации [110]. Особенно эффективным его приме¬
нение в этой области будет после создания глобальной системы обмена дан¬
ными путем их ретрансляции через специальный спутник связи (см. § 3 гл. 9).
в) Радиоинтерферометрические координатные наблюдения любого типа
позволяют одновременно осуществлять синхронизацию локальных шкал
времени с точностью до долей наносекунды. Следовательно, результаты
радиоинтерферометрических измерений могут использоваться не только
фундаментальной наукой, но и прикладными отраслями науки и техники.
2.4. Астрофизика
Как показано в гл. 6, измерение отклика радиоинтерферометра на про¬
тяженный источник позволяет восстановить его двумерное распределение
радиояркости. Построение изображений, т.е. изучение структуры косми-
15
ческих источников, представляет собой важнейшую задачу наблюдательной
астрофизики. Центральной теоретической проблемой, связанной с наблю¬
дениями протяженных источников со сверхвысоким разрешением, яв¬
ляется проблема обнаружения первичного источника энергии таких об¬
разований и понимание механизма, по которому эта энергия, составляю¬
щая значительную часть массы покоя всей галактики, превращается в
релятивистские частицы и хорошо упорядоченные магнитные поля, так
чтобы на интервалах по кр&иЦей мере порядка 108 лет обеспечивать на¬
блюдаемую энергетику галактики или квазара.
Однако помимо собственно астрофизического значения, высокока¬
чественные изображения внегалактических радиоисточников необходимы
и для обеспечения астрометрических и связанных с ними задач. Во-первых,
для использования радиоисточников в астрометрических целях необходи¬
мо иметь информацию об их угловых размерах и переменности. Во-вторых,
ряд источников имеет достаточно сложную внутреннюю структуру и облада¬
ет внутренней динамикой, что может приводить к проблеме, аналогичной
проблеме собственных движений в оптической астрометрии.
Вообще говоря, проблема собственных движений для внегалактических
радиоисточников, образующих инерциальную систему координат, не стоит
так остро, как в оптической астрономии. Действительно, если внегалакти¬
ческие источники, например, квазары, находятся на космологических
расстояниях Q> 1027 см), то вероятнее всего их собственными движения¬
ми, связанными с пекулярной скоростью источника как целого, можно
пренебречь. Если принять, что эти скорости порядка галактических
(<С 104 км/с), то видимые движения, связанные с этими скоростями, будут
порядка сотых долей миллисекунды дуги в год. В таких условиях
инерциальная система координат, опирающаяся на эти источники, будет
обладать миллисекундной вековой стабильностью. Несколько более свое¬
образна ситуация при использовании источников, содержащих компоненты,
которые движутся с видимыми сверхсветовыми скоростями относитель¬
но друг друга (от Зе до 20с) [3*1]. Видимые собственные движения этих
деталей будут порядка 0",005—0",0005 в год, так что учет этих движений
будет совершенно необходим.
§3. ПРИНЦИПЫ СОЗДАНИЯ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ КООРДИНАТ
МЕТОДАМИ НАЗЕМНОЙ ОПТИЧЕСКОЙ АСТРОНОМИИ
Для того чтобы понять, какую роль может играть радиоинтерферометрия
со сверхдлинными базами при построении инерциальной системы коорди¬
нат, рассмотрим основные принципы, используемые для решения этой
проблемы в оптической астрономии.
Всякая астрономическая система сферических координат может быть
задана положением основной плоскости и лежащим в ней некоторым
основным направлением, которое служит началом отсчета одной из ко¬
ординат. Вторая координата определяется угловым расстоянием данного
объекта от основной плоскости. Положение основной плоскости выбира¬
ют, исходя из назначения координатной системы и характера движения
наблюдаемых объектов.
Употребляемые в астрономии системы координат являются условными
и никак на небесной сфере не отмечены. На практике они реализуются
16
путем наблюдений некоторых объектов (реперов), координаты которых
в рассматриваемой системе известны. Иначе говоря, как ’’построение”,
так и использование астрономической системы координат возможно лишь
через посредство астрометрических наблюдений некоторой совокупности
космических объектов, на которые данная координатная система ’’опира¬
ется”.
Самым общим свойством опорных объектов является характер их
движения в пространстве изображений. Это свойство и определяет три
основных принципа создания невращающихся систем координат.
Геометрический принцип. Применяется, когда опорные объекты практи¬
чески не движутся. Примером таких объектов могут служить внегалакти¬
ческие источники (квазары, ядра галактик). Для построения практически
инерциальной системы координат достаточно организовать точные из¬
мерения дуг между объектами. Основная плоскость такой системы ко¬
ординат может быть ориентирована произвольно. Неподвижность этой
плоскости в пространстве изображений обеспечивается автоматически.
Практически этот принцип, по-видимому, может быть реализован только
методами радиоинтерферометрии.
Кинематический принцип. Применяется, когда опорные объекты на
достаточно большом интервале времени можно считать движущимися
прямолинейно и равномерно. Примером таких объектов могут служить
звезды. Система координат, опирающаяся на эти объекты, будет инерциаль¬
ной (невращающейся), если собственные движения объектов определены
абсолютным образом, т.е. по отношению к практически неподвижным
реперам (галактикам).
Динамический принцип. Применяется, когда опорные объекты движут¬
ся в нерегулярном гравитационном поле. Примером таких объектов служат
планеты Солнечной системы и искусственные спутники Земли. Для созда¬
ния инерциальной системы координат, опирающейся на такие объекты,
необходимо знатьпространственно-временное распределение масс Солнечной
системы. При использовании же искусственных спутников Земли, кроме
того, нужно подробно знать аномалии внешнего гравитационного поля
Земли, его приливные вариации, плотность верхних слоев атмосферы
и ряд других эффектов, влияющих на движение ИСЗ.
Таким образом, последние два принципа невыгодно отличаются от
первого тем, что требуют или выполнения неочевидных условий, или точно¬
го знания слишком большого количества физических данных. Более того,
по сложившейся в оптической астрометрии практике координаты опорных
объектов определяются из так называемых абсолютных наблюдений с
поверхности Земли, так что точность и устойчивость получаемой системы
небесных координат существенно зависит от знания законов и геофизи¬
ческих особенностей вращательного движения Земли.
В настоящее время общепринятой в астрономии является экваториаль¬
ная система координат, основная плоскость которой совпадает с плоско¬
стью мгновенного экватора Земли, а основное направление — с направлени¬
ем на точку весеннего равноденствия. Опорными реперами этой системы
в оптической астрометрии являются звезды.
Ясно, что мгновенная экваториальная система, начало которой совмеща¬
ется с центром масс Земли, не является инерциальной, поскольку ее начало
17
совершает сложное движение вокруг Солнца, которое, в свою очередь,
вместе с окружающим его звездным потоком движется вокруг центра
Галактики. Эта система не является и невращающейся, так как ее основная
плоскость совершает прецессионное движение в пространстве, на которое
накладываются сложные нутационные колебания. По этой причине роль
инерциальной системы координат в оптической астрометрии играют фунда¬
ментальные каталоги экваториальных гелиоцентрических координат звезд,
отнесенных к положению экваториальной плоскости в определенную
эпоху.
На создание фундаментальных каталогов затрачен большой труд не¬
скольких поколений астрономов многих стран мира, выполнено огромное
количество наблюдений. Квинтэссенцией этих усилий в настоящее время
является фундаментальный каталог FK4, выпущенный Астрономиче¬
ским вычислительным институтом в Гейдельберге (ФРГ) в 1963 г. [32].
Известно, что точность фундаментальных каталогов, созданных в XX в.,
непрерывно повышается. Есть основания ожидать, что и новый фунда¬
ментальный каталог FK5 будет точнее FK4, по крайней мере для звезд
южной полусферы. И тем не менее, приходится констатировать, что про¬
гресс в точности звездных каталогов не отвечает современным требованиям
как фундаментальной, так и прикладной науки и не соответствует труду,
затрачиваемому на их создание. Объясняется это, на наш взгляд, наличием
целого ряда нерешенных, а иногда принципиально непреодолимых техни¬
ческих и методических проблем и противоречий наземной оптической
астрометрии. Рассмотрим коротко некоторые из них.
1. Поскольку основная плоскость экваториальной системы координат
физически связана с плоскостью земного экватора, проблема установления
инерциальной (невращающейся) системы координат не является, строго
говоря, самостоятельной, а связана с изучением прецессионно-нутацион¬
ного движения оси вращения Земли в пространстве. Это обстоятельство
создает одно из основных методических противоречий оптической астро¬
метрии, которое заключается в том, что, не имея инерциальной системы
отсчета, мы пытаемся изучать вращательное движение Земли, а полученную
в результате этого не совсем адекватную информацию используем для
стабилизации системы отсчета.
Такой метод иногда приводит к серьезным недоразумениям в интерпре¬
тации наблюдений. Например, скачки в траектории векового движения
полюсов явно коррелируют со сменой программ широтных станций [33].
Более того, двусмысленна интерпретация самой природы этого явления,
поскольку наблюдаемое вековое движение полюсов можно объяснить
и постепенным смещением направлений отвесных линий одной или не¬
скольких широтных станций [34] . В этом факте ярко проявляется еще
один недостаток методики традиционной оптической астрометрии в области
вращения Земли, заключающийся в том, что результаты наблюдений широ¬
ты и времени связаны не только с мгновенным положением экваториаль¬
ной плоскости в пространстве, но и с направлением местных отвесных
линий. Между тем форма геоида не только сложна, но и меняется вслед¬
ствие приливных и, возможно, тектонических деформаций Земли.
Указанное противоречие более или менее успешно разрешалось до сих
пор путем использования метода последовательных приближений, однако
18
применение его в дальнейшем неизбежно натолкнется на серьезные труд¬
ности. Дело в том, что с повышением точности наблюдений придется изу¬
чать и учитывать все большее количество сложных геофизических явлений,
сопровождающих вращательное движение Земли.
2. Оптическая астрометрия пока не имеет способов прямого измерения
лунно-солнечной прецессии и прецессии от планет. Поскольку объекты ее
абсолютных наблюдений — звезды — имеют значительные собственные
движения, ”из наблюдений одних только звезд, входящих в состав нашей
Галактики, в принципе невозможно создать систему координат, свободную
от эффекта вращения в пространстве” [35, с. 192]. Именно поэтому для
уточнения постоянной прецессии необходимо привлекать наблюдения
далеких внегалактических объектов.
Однако абсолютные позиционные наблюдения галактик, а тем более
квазаров, в оптическом диапазоне излучения практически невозможны
из-за их сложной структуры и чрезвычайно малой яркости, требующей
больших периодов накопления сигнала. Фотографические же наблюдения
этих объектов на фоне звезд являются сугубо относительными и не по¬
зволяют определять их абсолютные положения в прецессирующей эк¬
ваториальной системе координат, т.е. тоже не могут служить доя непосред¬
ственного определения постоянной прецессии.
Правда, из фотографических наблюдений галактик или квазаров можно
получить абсолютные собственные движения звезд, расположенных вблизи
этих объектов в пространстве изображений. Если д есть абсолютное соб¬
ственное движение звезды относительно галактики, а д* — собственное
движение той же звезды из какого-либо фундаментального каталога,
то разность Да = д — д* можно интерпретировать как эффект неточности
принятого в каталоге значения постоянной прецессии, поскольку пеку¬
лярная, галактическая и параллактическая составляющие собственного
движения в разности Дд исключаются. Однако и этот метод не дает строго
абсолютного значения постоянной прецессии, так как разности Дд зави¬
сят от систематических ошибок собственных движений д* исходного ка¬
талога. То, что эти ошибки все еще весьма значительны даже для лучших
из современных фундаментальных систем, подтверждается довольно
быстрым ухудшением точности этих систем с течением времени от их
средней эпохи.
Другим свидетельством нестрогости всех косвенных методов опреде¬
ления постоянной прецессии является несогласованность результатов,
получаемых из анализа изменений прямых восхождений и склонений
звезд. Для частичного устранения этой несогласованности неизбежно при¬
ходится вводить гипотетическое движение точки весеннего равноденствия
по экватору, природа которого совершенно неясна.
3. Точность оптических наблюдений с поверхности Земли имеет предел,
обусловленный турбулентностью атмосферы. Для единичного измерения
этот предел считается равным 0",1 -г 0",2. Эта оценка характеризует об¬
щую неопределенность места звезды в проекции на небесную сферу, но
процесс наблюдений сопровождают и другие ошибки (регистрации, опре¬
деления ориентировки инструмента, рефракции и прочее). Часть ошибок
действует на коротких интервалах времени и их можно считать случай¬
ными, другие искажают результаты наблюдений систематическим образом,
19
плохо компенсируются и поэтому являются наиболее опасными. Этим
обстоятельством и объясняется довольно медленный прогресс повышения
точности фундаментальных каталогов.
По этой же причине имеющиеся фундаментальные системы координат
звезд внутренне неоднородны. Обычно характер их ошибок в северном
и южном полушариях существенно различен, так как до сих пор, по су¬
ществу, не принималось никаких специальных мер по обеспечению одно¬
родности фундаментальных каталогов по всей небесной сфере. Все вы¬
сказанные до сих пор идеи по организации наблюдений по особым или
обычным программам в специальных, оптимальных с геометрической
точки зрения, пунктах северного и южного полушарий Земли, а не хао¬
тически, как это было до сих пор, практически еще не реализованы. Из
резервов наземной оптической астрометрии следует также отметить ор¬
ганизацию наблюдений в местах с наилучшим астроклиматом и, в особен¬
ности, создание высокопроизводительных автоматических инструментов.
От того, в какой мере удастся в будущем использовать эти резервы, за¬
висит роль наземной оптической астрометрии в науке будущего.
§4. РОЛЬ НОВЫХ МЕТОДОВ ИЗМЕРЕНИЙ
В СОЗДАНИИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ КООРДЙНАТ
Доплеровские измерения и лазерная локация ИСЗ сейчас используют¬
ся главным образом для изучения вращения Земли, определения пара¬
метров ее гравитационного поля, а также для целей геодезии и навигации.
В этом отношении уже достигнуты весьма существенные результаты.
Точность координат полюса по доплеровским данным возросла с. ± 0,8 м
в 1967 г. до ±0,2 м в 1977 г. в пересчете на 5-суточные средние значения
[36]. Потенциальные возможности развертываемой программы лазерных
наблюдений ИСЗ типа LAGEOS еще выше [37]. Такие высокие точности
определения координат полюса удается получить, несмотря на еще зна¬
чительную долговременную неустойчивость орбит ИСЗ, потому, что эти
координаты определяются из суточных вариаций истинных элементов
орбиты относительно предвычисленных в системе координат, жестко
связанной с телом Земли. Если орбита вычисляется по данным наблюдений
за целое число суток, то вариации средних за этот интервал времени эле¬
ментов будут равны нулю и информацию о положении полюса вращения
можно получить по уклонениям мгновенных значений элементов от
средних.
Что же касается проблемы создания динамической невращающейся
системы координат, то для этой цели требуется обеспечить общую устой¬
чивость орбиты ИСЗ с высокой точностью на значительно более длительных
интервалах времени. Следует признать, что в этом отношении имеющие¬
ся возможности пока совершенно недостаточны. Иллюстрацией могут
служить приведенные в табл. 2 данные о стабильности орбиты спутника
LAGEOS, выраженные в виде ошибок предвычисления двух основных
элементов в зависимости от неопределенности некоторых возмущающих
факторов.
Из этой таблицы видно, что наибольшие ошибки предвычисления имеет
долгота восходящего узла из-за неопределенностей в динамической модели
20
Неопределенности
Долгота узла
(град.)
Наклон орбиты
(град.)
Таблица 2
Неопределенности элементов орбиты спутника LAGEOS
10% в модели солнечной радиации
3 • 10-’
(3 см)
4 • 1(Г7
(4 см)
100% в модели земного альбедо
4 • 1СГ’
(4 см)
6 • 10"7
(7 см)
10% в модели приливов в Земле и
8 ■ КГ7
(9 см)
2 • 1(Г5
(220 см)
океанах
В модели геопотенциала
3 ■ 1СГ’
(3 см)
1,5 • 1СГ6 (17 см)
(GEM 9 - GEM 10)
Пренебрежение членами разложения
1 • КГ’
(1 см)
6 - 1СГ5
(660 см)
геопотенциала выше 10-го порядка
океанических приливов и пренебрежения гармониками геопотенциала
высших порядков, что делает практически невозможным в настоящее
время использование наблюдений ИСЗ для точного определения Всемир¬
ного времени.
Космическая астрометрия — метод определения координат звезд по
наблюдениям в открытом космосе с борта ИСЗ — берет свое начало от
предложения П. Лякрута [38, 39], вылившегося в итоге в проект
HIPPARCOS (High Precision Parallax Collecting Satellite) Европейского
космического агентства (ESA) [40,41]. Согласно этому проекту предпо¬
лагается установить на борту астрометрического искусственного спутника
Земли специальный инструмент с оптическим отверстием в 40 см, пред¬
ставляющий собой сканирующую систему, снабженную высокостабиль¬
ным эталоном угла. Ожидается, что относительные положения около ста
тысяч звезд с яркостью по крайней мере вплоть до 11-й звездной величины
могут быть измерены с точностью 0",001 + 0",002. С такой же точностью
предполагается получить их параллаксы и годичные собственные движения
при общей продолжительности измерений в 2,5 года.
Аналогичные задачи и с той же точностью предполагается решать и в
другом проекте — LST (Large Space Telescope) [41],который разрабаты¬
вается в США под эгидой NASA (National Aeronautic and Space Admi¬
nistration). В этом проекте предусмотрена установка на борту ИСЗ теле¬
скопа с диаметром зеркала 2,4 м, что позволит наблюдать очень слабые
объекты вплоть до 20-й звездной величины.
Высокая, почти предельная точность относительных измерении, реализуе¬
мая в космосе благодаря отсутствию атмосферы и сопутствующих ей яв¬
лений рефракции и турбулентности, огромная производительность измере¬
ний при полной их автоматизации, а также ряд других преимуществ делают
методы космической астрометрии исключительно перспективными,
несмотря на их техническую сложность и высокую стоимость.
Однако оптическая космическая астрометрия имеет два существенных
методических недостатка.
Во-первых, объектами наблюдений оптических космических средств
по-прежнему являются только звезды, и для закрепления с их помощью
невращающейся системы отсчета необходимо определять с высокой точно¬
21
стью их абсолютные собственные движения. Запланированной точности изме¬
рений даже относительных собственных движений, равной 0',002/год при
двухлетнем эксперименте, явно недостаточно. Чтобы сохранить точность по¬
ложений звезд, равную 0 ",001 -^0",002, на интервалах времени около 100 лет
(а именно такие требования предъявляет современная наука к координат¬
ным системам), их собственные движения необходимо знать с точностью
около 0",002/100 лет, что требует повторения таких дорогостоящих
экспериментов в течение многих десятилетий. Это, в сущности, означает,
что даже при использовании космических средств в нашем распоряжении
еще весьма длительное время не будет устойчивого каталога звезд, аб¬
солютные координаты которых были бы известны с точностью, су¬
щественно лучшей, чем 0",01. Обойти эту трудность, очевидно, можно
лишь единственным образом — опорными реперами координатной системы
следует выбирать практически неподвижные объекты. В оптическом диапа¬
зоне, как известно, такими реперами могут быть только ядра галактик.
Однако как фотографические, так и фотоэлектрические наблюдения га¬
лактик сопряжены с большими трудностями, поскольку их изображения
очень размыты и имеют весьма сложную структуру, а светимость квазаров
в оптическом диапазоне в основной массе очень низка. Иначе говоря,
эти объекты вряд ли можно будет использовать для высокоточных
оптических наблюдении даже средствами космической астрометрии.
Вторым принципиальным недостатком методов космической астро¬
метрии является невозможность использовать полную точность ее резуль¬
татов для изучения вращения Земли. Объясняется это тем, что изучение
вращения Земли возможно только с помощью наземных наблюдений,
низкая точность которых в оптическом диапазоне будет по-прежнему
ограничивать точность конечных результатов. Кроме того, нетрудно по¬
казать [42], что, например, для определения Всемирного времени необ¬
ходимо знать в любой момент точное положение плоскости мгновенного
экватора Земли среда звезд, которое может быть найдено опять-таки
только из наземных наблюдений склонений звезд или планет. Иначе говоря,
при изучении вращения Земли нельзя обойтись без использования экватори¬
альной системы координат, построение которой возможно только с по¬
мощью наземных измерений.
Таким образом, следует признать, что методы космической астрометрии
предназначены в основном для решения задач звездной динамики — важной
отрасли астрономии, далекой, однако, от современных проблем астро¬
метрии, геодезии, геодинамики и небесной механики.
Перейдем теперь к анализу возможностей радиоинтерферометрического
метода. Объектами наземных наблюдений методом РСДБ в первую очередь
являются компактные внегалактические радио источники (квазары и
ядра некоторых галактик), собственные движения которых в пространстве
изображений практически отсутствуют, поэтому эти объекты являются
идеальными реперами для закрепления инерциальной системы небесных
координат. При этом для создания такой системы координат в радио¬
астрометрии открываются две принципиально разные возможности.
а) Инерциальную систему координат можно пытаться создавать
обычным, опробованным в оптической астрометрии способом в виде
каталога экваториальных координат радио источников на определенную
22
эпоху. Этот способ требует организации абсолютных определений методом
РСДБ прямых восхождений и склонений радиоисточников, тщательного
изучения вращения Земли, в частности, определения постоянной прецессии.
Существенным методическим упрощением традиционного метода при¬
менительно к радиоастрометрии, как уже отмечалось, является от¬
сутствие проблемы определения собственных движений опорных реперов.
С другой стороны, этот метод в радиоастрометрии имеет и существенный
недостаток — неопределенность начала счета прямых восхождений, что
затрудняет не только однозначную ориентацию координатной системы,
но и определение постоянной прецессии.
Для устранения этой неопределенности обычно в пространстве изобра¬
жений фиксируют некоторый неподвижный большой круг, точку пере¬
сечения которого с экватором каталога и принимают в качестве начала
отсчета прямых восхождений. В оптической астрометрии таким началом
является точка весеннего равноденствия — место пересечения экватора
каталога с эклиптикой той же эпохи. Плоскость такой эклиптики счита¬
ется, в сущности, неподвижной, точнее говоря, ее медленный поворот
(планетная прецессия) предвычисляется по законам небесной механики
без привлечения прямых наблюдений. Практическое же определение вза¬
имной ориентации экватора каталога и эклиптики производится по диф¬
ференциальным наблюдениям больших и малых планет относительно
звезд, координаты которых заданы системой фундаментального каталога.
Однако высокоточные РСДБ-наблюдения естественных тел Солнечной
системы из-за их протяженности и слабой радиояркости невозможны, поэто¬
му в настоящее время нельзя определить ни точку весеннего равноден¬
ствия каталога радиоисточников, ни наклона его экватора к плоскос¬
ти эклиптики. Возможно, в будущем вместо самих планет методом
РСДБ можно будет наблюдать их искусственные спутники — радиомая¬
ки, но пока до практической реализации этой возможности еще
далеко.
Точку весеннего равноденствия принято называть динамическим нуль-
пунктом фундаментальных каталогов, так как ее мгновенное положение
в пространстве неподвижных изображений зависит как от динамики вра¬
щательного движения Земли, так и от ее движения вокруг центра масс
Солнечной системы. Использование такого нуль-пункта в экваториальной
системе координат естественно, но не обязательно. В качестве такового
можно, например, принять какой-нибудь радиоисточник. В некоторых
опубликованных уже каталогах (гл. 5, §3) прямые восхождения радио¬
источников отсчитываются от квазаров NRAO-J40, или ЗС 273В, коор¬
динаты которых в системе FK4 известны по данным фотографической
привязки.
б) Метод РСДБ впервые открывает практическую возможность путем
специальной организации наблюдений измерять дуги между радио¬
источниками (гл. 4, §§9, 10) и избежать, таким образом, необходимости
учета сложных и неопределенных законов вращательного движения Земли
при создании ИСЗ. Если допустить возможность реализации подобного
метода измерений, то его значение для улучшения методологии астро¬
метрии трудно переоценить, поскольку как построение инерциальной
системы координат, так и изучение вращения Земли становятся, наконец,
23
независимыми проблемами со своими самостоятельными методами ре¬
шения, что оправдано с методической и физической точек зрения.
Многочисленные идеи наземных дуговых измерений в оптической астро¬
метрии не реализованы до сих пор с достаточной точностью главным об¬
разом из-за различного влияния рефракции в направлениях на наблюдае¬
мые объекты. Метод PC ДБ ’’просветляет” атмосферу.
Измеренные дуги между совокупностью радиоисточников, расположен¬
ных более или менее равномерно по всей небесной сфере, могут быть
затем уравнены в единой автономной системе координат подобно тому,
как это делается при уравнивании трилатерационных геодезических
сетей.
Основная плоскость такой системы может быть выбрана произвольно
или на основании каких-либо статистических критериев. Положение этой
плоскости, или соответствующего ей большого круга в пространстве изо¬
бражений, будет содержать неопределенность, обусловленную ошибками
измерений дуг, но в целом она будет неподвижной, поскольку измерен¬
ные дуги инвариантны относительно вращательного движения Земли.
§5. ИСПОЛЬЗОВАНИЕ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ КООРДИНАТ
РАДИОИСТОЧНИКОВ ДЛЯ УЛУЧШЕНИЯ ФУНДАМЕНТАЛЬНЫХ СИСТЕМ
КООРДИНАТ ЗВЕЗД
Радиоинтерферометрические и фотографические наблюдения оптически
отождествленных квазаров на фоне звезд позволяют сравнить их коорди¬
наты в инерциальной системе координат радиоисточников и в какой-либо
фундаментальной системе координат звезд. Такое сравнение для объ¬
ектов, достаточно равномерно расположенных на небесной сфере, позволя¬
ет определить не только углы взаимной ориентации указанных координат¬
ных систем, но и систематические ошибки менее точных звездных ка¬
талогов.
В таком общем Виде проблема была впервые поставлена в работе [43].
Математическое моделирование этой задачи на 132 наиболее ярких ква¬
зарах [44] показало, что при точности фотографической привязки поло¬
жений квазаров к фундаментальной системе, равной ± 0", 1, углы взаим¬
ной ориентации системы могут быть найдены с точностью ± 0",01. Это дает
возможность рассчитывать на определение поправки к принятой постоян¬
ной столетней прецессии с ошибкой ±0",1 при разности эпох всего
в 10 лет.
Что касается систематических ошибок фундаментального каталога, то
коэффициенты их нормированного ‘разложения по ортогональным сфери¬
ческим функциям могут быть найдены с ошибками ±0",05. С увеличе¬
нием количества радиоисточников все оценки ошибок, естественно,
улучшаются.
При этом, однако, выяснилось, что некоторые гармоники разложения
систематических ошибок звездного каталога сильно коррелируют с па¬
раметрами взаимной ориентировки координатных систем, например,
первая гармоника ошибок вида в экваториальной зоне имеет
100%-ную корреляцию с углом наклона экватора фундаментального ка¬
талога к основной плоскости радиоастрометрической системы коор¬
динат.
24
Анализ этого явления показал, что для устранения подобных корреляций
должно быть известно точное положение плоскости экватора Земли в
инерциальной радиоастрометрической системе координат независимо
от того, каким образом эта система строится, — то ли путем абсолютных
определений прямых восхождений и склонений, то ли путем измерения
дуг между ними.
Глава 2
ОСОБЕННОСТИ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ ЗЕМЛИ
И ВОЗМОЖНОСТИ ИХ ИЗУЧЕНИЯ МЕТОДОМ РСДБ
§ 1. СВОБОДНОЕ ВРАЩЕНИЕ АБСОЛЮТНО ТВЕРДОЙ ЗЕМЛИ
В классической астрометрии инерциальная невращающаяся система от¬
счета реализуется в виде гелиоцентрической экваториальной системы коор¬
динат на стандартную эпоху, задаваемой некоторым фундаментальным ка¬
талогом положений, собственных движений и параллаксов определенной
совокупности звезд.
Поскольку плоскость экватора непрерывно движется в пространстве до¬
вольно сложным образом, построение и использование фундаментальной
экваториальной системы координат возможно только на основе тщательно¬
го изучения вращения Земли.
Возникновение строгой теории вращения Земли как абсолютно твердо¬
го тела относится ко второй половине XVIII в., а ее дальнейшее совершен¬
ствование происходило в отношении уточнения астрономических постоян¬
ных, увеличения числа членов разложений нутации и корректировки их
коэффициентов. С 1960 г. по настоящее время в качестве международного
стандарта используется теория Э.Вуларда [45], созданная им в 1953 г.
В 1977 г. X. Киношита [46] разработал новую уточненную теорию, опи¬
рающуюся на современную систему астрономических постоянных, которая
положена в основу теории вращения у пру го-дефо рмируемой Земли с
жидким ядром. Эту систему предполагается ввести в 1984 г. в качестве но¬
вого международного стандарта вращательного движения Земли.
Особенность теории вращения абсолютно твердой Земли заключается в
том, что последняя рассматривается как тело, внутренние, силы которого
уравновешиваются реакцией связи между его частицами. Иначе говоря,
предполагается, что несмотря на наличие внешнего переменного силового
поля, внутри тела Земли не происходит какого-либо перераспределения
масс, которое могло бы повлиять на ее вращательное движение. Сейчас мы
знаем, что перераспределение масс в теле реальной Земли и в ее атмосфере
происходит, но оно настолько мало, что модель абсолютно твердой Земли
вполне подходит для описания ее вращательного движения в первом при¬
ближении.
Вращение абсолютно твердой Земли относительно ее центра масс опи¬
сывается системой шести обыкновенных дифференциальных уравнений
Эйлера, которые в системе координат (х, у, z), жестко связанной с телом
25
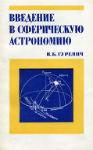
Рис. 1. Углы Эйлера. Ось ОХ направлена в среднюю точку весеннего равноденствия
принятой эпохи; угол прецессии ф отсчитывается в плоскости эклиптики, а угол соб¬
ственного вращения «р - в плоскости экватора; вектор 0 направлен в точку осеннего
равноденствия №.
Рис. 2. Свободное и вынужденное лунно-солнечное движение полюсов по поверхнос¬
ти Зехмли. С - полюс инерции, Р - мгновенный полюс вращения, Ро - ’’средний” по¬
люс вращения, СА - гринвичский меридиан.
Земли и совпадающей с ее главными центральными осями инерции, име¬
ют вид
р = — 9 cos — ф sin 9 sin
q =В sin <р — ф sin 9 cos
г = -ф cos О -I-
Ар + (С- B)qr = Lx.
Bq + (А - C)rp = Lv,
Cr + (В--А) pq = Lz,
(2.1)
(2-2)
где р, q, г — проекция вектора угловой скорости вращения Земли Й на
оси х, у, z; А, В, С — моменты инерции относительно этих осей; £у,
Lz — проекции момента внешних сил; ф, 0, у — углы Эйлера (рис. 1), оп¬
ределяющие ориентацию системы координат х, у, z относительно невращаю-
щейся системы X, Y, Z, связанной с положением плоскости эклиптики на
определенную эпоху.
Функции p(t), q(t), r(t), <p(t), ^(f) и 9(f) являются искомыми, а мо¬
менты Lx,Ly,Lz могут быть вычислены через известную силовую функ¬
цию гравитационного взаимодействия Земли и возмущающего светила
(Луны или Солнца).
Рассмотрим случай вращения Земли по инерции при отсутствии момента
внешних сил (L =0). Условие L = 0 означает, что внешние силы, действую¬
щие на Землю, можно заменить одной равнодействующей, приложенной
к центру масс. При А = В из динамических уравнений Эйлера (2.2)
26
получаем интегралы
р - ho cos (pt - tq\
q =hQ sin (pt - t0),
r = rQ = const,
в которых hQ, r0, To — постоянные интегрирования, a
C - A
M = rQ —— •
A
Формулы (2.3) показывают, что проекция конца вектора Q на плоскость
экватора фигуры движется по кругу радиуса h0 с периодом .
2я 2я А
р Го С - А
(2.4)
Поскольку г0 = 2я радиан в звездные сутки, а А /(С - А) ~ЗО5, то т0 ~ 305
звездных суток. Эта величина называется периодом Эйлера. По поверхности
Земли полюс вращения Ро движется вокруг полюса инерции С (рис. 2) с
тем же периодом по кругу с угловым радиусом у0 =
Согласно (2.3) имеем
Q = \/р2 + Q2 + ''2 - \/ho + Го" = Г20,
т.е. при L - 0 угловая скорость постоянна (по величине, но не по направ¬
лению!) .
Кинематические уравнения (2.3) дают еще три интеграла для углов
Эйлера (рис. 3) :
А
&Ф sin во = (Ф " Фо) sin 0о = 7о — cos (<р + Го),
А
М=в _0О =_7о— sin (^ + го),
= — <Ро = rot - ф cos 0О, ’
(2.5)
где Го = pt - т0, а Фо,0о,^Ро — новые постоянные интегрирования.
Формулы (2.5) описывают движение оси фигуры Земли, под которой
понимается ось наибольшего момента инерции ОС = Oz, относительно не¬
подвижной эклиптикальной системы координат X, Y, Z (см. рис. 1). Со¬
гласно этим формулам ось инерции Земли испытывает в указанной системе
А С-А
координат круговые колебания с амплитудой То — = То ~ То =То - ^о
С С
и с периодом равным litA/Cr^ ~ А/С = 0,996731 звездны^ суток.
Что касается оси вращения, то ее сводобное движение в системе X, Y, Z
описывается уравнениями
6^! sin6>0 = (фх - o)sin0o =-Pq cos(^ + r0),
6ej =(ej - elj0) = + Po sin (<p + Го),
где ф] - долгота нисходящего узла мгновенного экватора на эклиптике
эпохи, ej — угол наклона мгновенного экватора к эклиптике эпохи (см.
(2.6)
27
с
Рис. 3. Геометрическая картина прецессии. Т 0 - точка весеннего равноденствия эпо¬
хи; ф =~Т0Т/; фх =^тот1.
С-А
рис.- 3). Амплитуда этого колебания р0 =
у о = 0,003269 у о 0",0016,
так как у0 не превосходит 0",5.
Заметим еще, что динамические уравнения Эйлера (2.2) являются част¬
ным видом более общего векторного уравнения вида
dH -
=А,
dt
(2.7)
в котором Н представляет собой вектор кинетического момента Земли. Из
этого уравнения следует, что при L - 0 вектор Я будет постоянным по вели¬
чине и направлению в любой инерциальной системе координат*.
Таким образом, свободное вращение Земли характеризуется следующи¬
ми явлениями:
1) Вектор кинетического момента Земли// остается постоянным до ве¬
личине и направлению в невращающейся системе отсчета.
2) . Вектор мгновенной угловой скорости вращения ft,оставаясь постоян¬
ным по величине, совершает в пространстве оборот относительно вектора
Н по круговому конусу с постоянным телесным углом с раствором
С-А
2р0 = 2у0 —— ^0 ,003
и с периодом, равным Л/С = 0,996726 звездных суток.
3) Вектор мгновенной угловой скорости Q совершает в теле Земли обо¬
рот относительно оси наибольшего момента инерции по круговому конусу
с постоянным телесным углом с раствором 2у0 и с периодом, равным т0 =
= А /(С - А) ~ 305 звездным суткам.
* Плоскость, перпендикулярная вектору Я, называется плоскостью Лапласа.
28
Все описанные выше явления свободного вращения Земли являются не¬
обходимым следствием того, что по условиям формирования Земли вектор
Н не совпадает с осью фигуры ОС. При постоянной угловой скорости вра¬
щения Земли оси ОС, CL и Я могут совпасть лишь одновременно. После этого
регулярная прецессия вновь возникнуть не может, она лишь поддерживает¬
ся, если возникла раньше.
§ 2. ВОЗМУЩЕННОЕ ВРАЩЕНИЕ АБСОЛЮТНО ТВЕРДОЙ ЗЕМЛИ
При регулярная прецессия, описываемая интегралами (2.3), (2.5)
и (2.6), может протекать только в том случае, если весь момент внешних
сил L постоянно направлен по линии пересечения плоскости мгновенного
экватора с плоскостью Лапласа, а его величина строго удовлетворяет опре¬
деленному условию. В действительности эти условия не выполняются, по¬
этому описанная выше прецессия вектора CL относительно вектора Я стано¬
вится псевдорегулярной, т.е. на нее накладываются слабые нутационные
колебания, а кроме того, вектор Я сам начинает совершать псевдорегуляр-
ное прецессионное движение относительно вектора Oz, перпендикулярного
к плоскости эклиптики (см. рис. 1) .
Раствор конуса, по образующей которого вектор £2 движется вокруг
вектора Я (рис. 4), равнявшийся при L = 0 величине 2р0 (см. формулу
(2.6)), в действительности испытывает очень слабые колебания. По вычисле¬
ниям X. Киношиты [46, с. 314] и Э. Вуларда [45, с. 112] вместо (2.6) имеем
<5 ф j sin 0О = — р0 cos ((/> + Го ) —
- 0м,00002 sin (2F + 2tfb)-
- 0м,00001 sin (2F - 2D + 2Л)+ . . . ,
6в! = +р0 sin (<р + Го) +0",00003 -
- 0" ,00002 cos (2F + 2Л)-
- 0",00001 cos (2F — 2Z) + 2Л)+ ...
Здесь (и в дальнейшем) F, D, Л - фундаментальные аргументы теории
движения Луны, численные выражения которых
в виде полиномов по степеням времени Тприво¬
дятся в астрономических ежегодниках.
Формулы (2.8) выражают псевдорегулярную
прецессию оси вращения Земли относительно
—>
вектора Я в системе координат, связанной с
плоскостью эклиптики эпохи. Что касается дви¬
жения в этой же системе координат оси фигуры,
Р и с. 4. Геометрическая интерпретация свободного
вращения. Круговой конус с осью ОН неподвижен в про¬
странстве. По его внешней поверхности катится подвиж¬
ный конус с осью ОС. Ось вращения П направлена по
общей образующей ОР.
(2-8)
29
то при Л Ф 0 вместо (2.5) имеем [45, с. 111], [46, с. 314]
Д
Ьф sin б?о = 7о “ cos (*Р + Го) + 0 ,000177 + Д(6ф sin 0О),
Д
Ьв = — уо — sin (<£ + Го ) — 0 ,00868 + А (50).
(2.9)
Малые члены разложений А(йф sin 0О) и А(60), вычисленные Х.Киношитой
[46, с. 314|, представлены в табл. 3. _
Движение оси вращения относительно оси фигуры при L / 0 определяет¬
ся формулами [45, с. 135]
— = у cos Г = [(60) sin — (Ъф sin 0) cos (/7],
£2 А
q С
— = у sin Г = [(60) cos + (6ф sin 0) sin ^],
£2 А
(2.Ю)
в которых 5ф sin 0 и 60 определяются формулами (2.9) .
Координаты полюса удобно представлять в двумерной координатной
системе, лежащей в плоскости, касательной к земному сфероиду в полюсе
Таблица 3
Нутация оси фигуры абсолютно твердой Земли
Коэффициенты в
О",0001 при
Множители при
Период в
сутках
sin в
Д(6 ф sin fl)
cos в
Д(6А)
/
F
D
ЛЬ
+69
+ 64
0
0
2
0
2
13,7
+ 30
+28
0
0
2
_2
2
182,6
+ 14
+ 13
1
0
2
0
2
9,1
+ 14
+ 1 1
0
0
2
0
1
13,6
-13
-10
0
0
0
0
1
6798,4
+3
+2
1
0
2
0
1
9,1
+3
+2
-1
0
2
2
2
9,6
--2
-2
-1
0
2
0
2
27,1
+?
+2
2
0
э
0
7
6,9
+2
+2
0
0
2
2
7,1
+2
+2
0
1
2
_7
2
121,7
-1
-I
-1
0
0
0
1
27.4
- 1
-1
1
0
0
0
1
27,7
+ 1
+ 1
1
0
2
2
2
5,6
+ 1
-
-1
0
2
2
1
9,5
-
--1 0
1
0
0
0
0
2 7,5
- 2
1
0
0
_2
0
31,8
-2
0
0
0
0
14,8
-
-1
2
0
0
0
0
1 3,8
-
-1
0
0
7
0
О
13,6
-1
0
1
0
0
0
365,3
-
-1
1
0
2
_2
2
23,9
30
Таблица 4
Вынужденное лунно-солнечное движение полюсов
Коэффициент
при sin в и
при cos в у j в
0",0001
Множители при
5
1
/'
F
I)
XX
+87
+1
0
0
0
0
0
-67
+1
0
0
_2
0
_2
-29
+ 1
0
0
_2
4-2
- 2
-13
+1
-1
0
0
_2
_2
-13
+1
0
0
_2
0
-1
+ 12
+ 1
0
0
0
0
-1
+5
+1
-1
0
0
0 ‘
0
+5
+1
+1
0
0
0
9
+2
+1
0
0
4-2
0
+2
+2
+1
0
0
4-2
0
+ 1
_2
+ 1
0
0
0
0
+ 1
+ 1
+1
0
0
+2
_2
4-2
+ 1
+1
+1
0
0
4-2
4-2
инерции С и параллельной экватору фигуры. Начало этой системы совмес¬
тим с точкой С, ось Сх направим по гринвичскому географическому мери¬
диану, а ось Су - на 90° к западу от него. Тогда формулы (2.10) можно
представить в виде
х - у cos Г = То cos Го + у1 cos Tj = х0 +xi ,
у = - Т sin Г = - То sin Го - Ti sin П =у0 + У\,
где хь у! представляют собой малые вынужденные колебания, называемые
часто членами Оппольцера. Разложения этих колебаний, полученные X. Ки-
ношитой [46, с. 302 - 303], даны в табл. 4. Аргумент 5 этих разложений
представляет собой звездное время на меридиане Гринвича, поэтому перио¬
ды всех членов близки к звездным суткам. Первые члены формул (2.11)
соответствуют свободному эйлеровскому движению полюсов, определенно¬
му формулами (2.3), а вторые обусловлены действием лунно-солнеч¬
ных сил.
Геометрически возмущенное лунно-солнечными силами движение полю¬
сов абсолютно твердой Земли можно представить так (см. рис. 2), что не¬
который средний полюс Ро движется с периодом Эйлера вокруг полюса
инерции С по кругу радиуса у0, а истинный полюс вращения Р движется
вокруг Р(} по эпициклу переменного радиуса Ti, причем фаза этого движе¬
ния Ti также меняется довольно сложным образом, хотя в целом движе¬
ние Р вокруг Ро происходит по часовой стрелке, т-.е. в направлении, про¬
тивоположном эйлеровскому движению Ро вокруг С.
Вызываемые движением полюсов вариации широты и долготы произволь¬
ного пункта земной поверхности с координатами </?,Хравны [233, с. 41.349]
Д^ = ^ - = х cos X + у sin X,
ДХ = X - Хо = (х sin X - у cos X) tg <р.
31
При L ^0 угловая скорость вращения Земли уже не. остается постоян¬
ной по величине. Ее изменения можно представить в виде [45, с. 139]
4f2 = Q -ft0 = 2(7о)"10'6 [+0,0087 sin(5 + r0)-
— 0,0067 sin (S + Го - 2F —2£Ъ)—
- 0,0029 sin (S + Го - 2F + 2D - 2Л)+ . . . ].
Остальные члены в квадратных скобках даются в табл. 2. Эта формула дает
вариации угла поворота Земли за сутки. Так как (у0)" 0",5, то AQ <С
10“8 с/сутки.
Как уже отмечалось, при L ^0 вектор Н в силу уравнения (2.7) также
меняет свое направление в пространстве, причем, поскольку условия регу¬
лярной прецессии не выполняются, движение вектора Н относительно эк-
липтикальной системы координат X, У, Z также будет псевдорегулярным.
Это движение вектора Нв системе X, У, Z и называют обычно лунно-солнеч¬
ной прецессией и нутацией Земли.
В настоящее время в астрономических эфемеридах используется теория
этого движения, построенная в 1953 г. Э. Вулардом [45]. Прецессионно¬
нутационное движение оси вращения Земли (точнее — вектора Н, отождест¬
вленного Вулардом с вектором Q ввиду малости коэффициентов разложе¬
ния (2.8)) получено в виде функций ф(г) и О (/). При этом постоянными
интегрирования являются получаемые из астрономических наблюдений
постоянные прецессии р\ (исправленная релятивистской поправкой лунно¬
солнечная прецессия в эклиптике за тропический год) и нутации N (коэф¬
фициент главного члена нутации в наклонности мгновенного экватора к
подвижной эклиптике). Эти величины входят в число фундаментальных
астрономических постоянных. Их значения, для эпохи 1900,0 равные
р\ = 50",39, 7V = 9",210, (2.12)
положены в основу теории Вуларда и используются вплоть до настоящего
времени, хотя получены Ньюкомбом по наблюдениям еще прошлого века.
Между тем постоянную нутации ТУдля абсолютно твердой Земли можно
просто вычислйть, если известна постоянная прецессии р\ и отношение масс
Луны и Земли р. Величина р определена сейчас с весьма высокой точностью
и равна р = 1/81,3007 = 0,01230002, поэтому, исключая из формул для р\ и
N, полученных X. Киношитой [46, с. 312 - 313], динамическое сжатие Зем¬
ли И = (С - А)/С, получаем
N = 0,18308585/?;. (2.13)
Однако непосредственной проверкой убеждаемся, что принятые в настоя¬
щее время значения р\ и N (2.12) полученному соотношению не удовлетво¬
ряют. Это обстоятельство является основным противоречием использую¬
щейся системы астрономических постоянных и указывает на то, что Земля
вращается не как абсолютно твердое тело. Е.П. Федоров [47] показал, что
внутреннее строение Земли не может существенно влиять на прецессионное
движение, поэтому наблюдаемая прецессия характерна и для твердой Земли.
Для использующегося и уточненного в настоящее время значений
32
(2.14)
постоянной прецессии по (2.13) имеем
р\ = 50", 3900, 50",4010, 1
N = 9", 2257, 9",2277. J
Отсюда видно, что согласующееся с определениями других постоянных зна¬
чение N существенно больше наблюденной величины N = 9",210. Не имея
удовлетворительного объяснения этому обстоятельству, Вулард был вы¬
нужден принять величину N = 9",210. По ней он вычислил масштабирующий
множитель и ввел его в коэффициенты всех лунных членов нутации. Таким
образом, эфемеридная нутация Вуларда оказалась неоднородной — ее глав¬
ный член соответствует реальной Земле, солнечные члены — абсолютно
твердой, а оставшиеся лунные члены — ни той, ни другой.
Отмеченные выше недостатки теории Вуларда, а также ее приближен¬
ность, связанная с ручным способом вычислений и невысокой точностью
использованных астрономических постоянных, побудила ряд исследовате¬
лей в 70-х годах к созданию новой, более строгой теории вращения абсо¬
лютно твердой Земли. Однако этой теории уже отводилась другая роль —
она должна была использоваться не для эфемеридного обеспечения наблю¬
дений, а Дослужить отправным пунктом для разрабатываемых теорий вра¬
щения упруго-деформируемой Земли с жидким ядром.
Во-первых, следует отметить теорию вращения Земли, разработанную
П. Мельхиором [48], который доказал, что поскольку между приливооб¬
разующим потенциалом (см. гл. 2, § 3) и моментом сил А существует
функциональная связь, так как оба они возникают вследствие действия на
Землю одних и тех же гравитационных сил со стороны Солнца и Луны, то
такая связь должна существовать и между приливами и нутацией. Эту
связь Мельхиор сформулировал в виде следующей теоремы:
Две волны приливообразующего потенциала с частотами со,- и сим¬
метричными относительно звездной суточной частоты £2 (Q = 2 л радиан в
звездные сутки) , вызывают одну и ту же нутационную волну с частотой
Дсо/ = со, — £2 = £2 — со _ у. Сумма амплитуд этих приливных волн (А, + А _ ,)
определяет нутацию в долготе, а разность (Л, -А..,) — нутацию в наклоне.
Согласно этой теореме, в принципе, все нутационные колебания являют¬
ся эллиптическими с отношением осей, равным (Л/ + Л_,)/(Л/ - Л-/), и
наоборот, любая эллиптическая нутация эквивалентна двум приливным вол¬
нам с частотами, симметричными относительно звездной частоты £2 (рис. 5).
Рис. 5. Схема спектра суточных приливов. П - звездная частота (2я радиан в звезд¬
ные сутки), о>0 — резонансная частота.
33
Кроме того, амплитуды нутационных колебаний существенно зависят от
частоты соответствующих им приливных волн, так как содержат множите¬
лем величину £2/Дсоу. В результате слабые приливные волны, периоды кото¬
рых близки к звездным суткам, могут вызывать большие нутации, так как
для них А со, 0, и, наоборот, большие приливные волны, но с частотой,
существенно отличной от звездной, дают малые нутации. Таким обра-
—>
зом, нутация вектора Н в пространстве вызывается только суточной (тес-
серальной) частью приливообразующего потенциала (см. форму¬
лу (2.16)).
Прилив с частотой, равной £2 (а такой есть — это лунно-солнечная волна
Кг), вызывает вековую нутацию с нулевой частотой, которая представляет
собой не что иное, как прецессию вектора Н, на 2/3 обязанную своим про¬
исхождением Луне и на 1/3 — Солнцу.
Главная нутация с аргументом и периодом 18,6 года вызывается па¬
рой безымянных волн приливообразующего потенциала с частотами Q + Аи
Q - А. Амплитуда этой нутации, таким образом, может быть вычислена
еще одним способом, а именно с использованием значений коэффициентов
разложения приливообразующего потенциала, < полученного Р. Тейлером и
Д. Картрайтом [49]. Непосредственными вычислениями легко убедиться,
что для значений постоянной прецессии, использованных в (2.14), полу¬
чаются в точности те же значения постоянной нутации А.
Теория Мельхиора будет использована нами в дальнейшем для интерпре¬
тации динамического эффекта жидкого ядра Земли.
Между тем рабочая группа по нутации, подготовившая новую эфемерид¬
ную нутацию, принятую Генеральной ассамблеей МАС 1979 г. в Монреале,
использовала еще более строгую теорию вращения абсолютно твердой Зем¬
ли, разработанную в 1977 г. X. Киношитой [46J. Основные особенности
этой теории заключаются в следующем:
1. Использована новая система астрономических постоянных, принятая
Генеральной ассамблеей МАС 1976 г. в Гренобле (кроме постоянных пре¬
цессии и нутации).
2. Использовано принятое Генеральной ассамблеей МАС 1979 г. в Мон¬
реале новое значение постоянной прецессии, которое больше прежнего на
Г', 10 в тропическое столетие, т.е. р\ = 50'\401 вместо 50”,390.
3. Вычисленное на основании этих данных значение постоянной нутации
для вектора Н равно N - 9",2277 (эпоха 1900,0).
4. Нутационные коэффициенты по рекомендации Генеральной ассамблеи
МАС 1976 г. вычислены не для вектора Н, а для некоторой эфемеридной
оси, условно называемой осью фигуры F, путем добавления к нутации век¬
тора// членов вынужденной нутации оси фигуры, приведенных в табл. 1.
В этой связи необходимо сделать следующие важные замечания.
Во-первых, эфемеридная ось F не является осью фигуры ОС (см. рис. 4),
а есть не что иное, как ось среднего полюса вращения ОР0, которая совпада¬
ла бы с действительной осью фигуры только при отсутствии свободного
эйлеровского движения полюса вращения.
Во-вторых, относить эфемеридную нутацию к условной оси фигуры F, на
наш взгляд, нецелесообразно. Хотя, как показано в § 3 настоящей главы,
34
ось фигуры Земли действительно совершает колебательное движение в
пространстве, которое должно проявляться в наблюдениях и которое до
сих пор обычно не учитывалось, но наиболее естественно это явление интер¬
претировать. как движение полюсов по поверхности Земли, а нутацию Зем¬
ли в пространстве вычислять для вектора мгновенной угловой скорости
£1 (или, что практически то же самое, для вектора кинематического момен-
—>
та Н), как это и сделал Вулард.
Идея вычислять эфемеридную нутацию для оси F возникла в связи с за¬
мечанием Г. Джеффриса [50] о том, что при наблюдениях широты в мери¬
диане безразлично, как учитывать указанное движение оси фигуры Земли -
то ли путем включения нутации оси фигуры в нутацию вектора Q (//), то
ли путем учета членов Оппольцера (см. табл. 2) в колебаниях широты. К со¬
жалению, в дальнейшем это заключение необоснованно было обобщено на
все виды астрометрических наблюдений, и по предложению Р. Аткинсона
Генеральная ассамблея МАС 1976г. в Гренобле приняла рекомендацию (4в):
”. . . включить в эфемеридную нутацию вынужденные члены нутации оси
фигуры . . .”. И хотя Симпозиум № 78 МАС в 1977 г. в Киеве рекомендовал
отменить это решение, Генеральная ассамблея МАС 1979 г. в Монреале его
снова подтвердила.
§ 3. ПРИЛИВНЫЕ ДЕФОРМАЦИИ ЗЕМЛИ
К концу XIX в. Дж. Дарвином и др. было обнаружено, что приливообра¬
зующие силы Луны и Солнца вызывают не только приливы в морях и океа¬
нах, но приводят и к деформации всего тела Земли, ведущего себя при
этом как упругое тело, подобное стальному шару. Позднее А. Ляв [51]
построил теорию этих деформаций, введя для их описания безразмерные па¬
раметры, называемые теперь числами Лява. Он же обогатил научную терми¬
нологию понятием ’’геодинамика”, подчеркнув тем самым динамический
характер вращательного движения деформируемой Земли в переменном
силовом поле.
Дальнейшее уточнение теории вращения Земли шло по пути все более
полного учета особенностей ее внутреннего строения по данным сейсми¬
ческих наблюдений. Г. Джеффрис и Р. Висенте [52], М.С. Молоденский
[53], Дж. Вар [54] и некоторые другие исследователи выполнили деталь¬
ные расчеты как параметров приливных деформаций Земли (чисел Лява),
так и коэффициентов основных членов нутации в пространстве вектора
кинетического момента Н для большого числа моделей внутреннего строе¬
ния Земли, многие из которых (за исключением экстремальных), по-ви-
димому, весьма близки к реальности. Наиболее надежными в настоящее
время считаются результаты, полученные М.С. Молоденским [53] и Дж.Ва¬
ром [54, 55] на основе близких моделей Земли с жидким ядром, в центре
которого предполагается наличие тяжелого твердого ядра.
Замечательными достижениями теории вращения и деформаций упругой
Земли являются открытия связи суточных приливов с нутацией в простран¬
стве вектора Н, а также динамического эффекта жидкого ядра Земли, вы¬
зывающего резонансные явления в области суточных приливов и дополни¬
тельную квазисуточную нутацию оболочки Земли. Все эти эффекты, хотя и
35
малы, но в принципе могут быть обнаружены из высокоточных астрономи¬
ческих наблюдений, таких как PC ДБ.
Рассмотрим структуру потенциала приливообразующих сил. Если в раз¬
ложении по сферическим функциям гравитационного потенциала в произ¬
вольной точке А (г, ip, X) тела Земли, обусловленного притяжением возму¬
щающего светила единичной массы, отбросить первые два члена, то остаток
Gm * / г \п
V=— S - Pn(cosz) (2.15)
d n=z\d /
будет представлять собой потенциал приливообразующих сил.. Здесь G -
гравитационная постоянная, т — масса возмущающего светила, d — его
радиус-вектор, г — радиус-вектор точки A, z — топоцентрическое зенитное
расстояние светила, Рп — полиномы Лежандра степени п. Поскольку г/d <
< 1/60, на практике обычно ограничиваются только одним членом ряда
(2.15), т.е. полагают V =V2.
Используя теорему сложения для полиномов Лежандра, находим
г2 Г 1 * *
V = Gm — | Р2 (sin <р) Р2 (sin S) + — Р2 (sin <р) Р2 (sin 5) cos t +
l,o
+ — P2 (sin ^p)P2 (sin 6) cos 2t ,
12
(2.16)
где P„ (x) — присоединенные функции Лежандра первого рода.
В соответствии с названиями присоединенных функций при к = 0, 0 <
<к<п и к = п первый (долгопериодический) член формулы (2.16) назы¬
вается зональным приливом, второй (суточный) — тессеральным и третий
(полусуточный) - секториальным.
Для предвычисления приливов в данной точке поверхности Земли удоб¬
нее пользоваться формулой
И2 =62(r)(^ ) P2(cosz), (2.17)
где
G2(r) = G2(s)^ , G2(s) = Gm-^ , (2.18)
s — средний радиус Земли, d0 — среднее расстояние между Землей и возму¬
щающим светилом. Для внешней поверхности Земли в выражениях (2.18)
для так называемых геодезических коэффициентов Gn (г ) нужно положить
г =R — геоцентрическому радиусу-вектору рассматриваемой точки.
В системе астрономических постоянных МАС-1976г. имеем(в см2 •с-2) :
для Луны для Солнца
G2 (s) = 35036,09 G2(s)= 16090,05.
Зенитное расстояние z и радиус-вектор d возмущающего светила меня¬
ются во времени неравномерно, поэтому при гармоническом анализе наблю¬
дений приливов необходимо иметь выражение потенциала в виде тригоно¬
метрического ряда с аргументами, практически линейно зависящими от
36
времени (такие аргументы носят название фундаментальных) . Кроме того,
как будет показано в дальнейшем, такое представление потенциала оказы¬
вается очень удобным при расчетах эффекта резонанса суточных приливов.
Первое подробное разложение приливообразующего потенциала в ряд по
фундаментальным аргументам дано в 1924 г. А. Дудсоном [56], а уточ¬
ненное - Д. Картрайтом и Р. Тейлером [49] в 1971 г.
Если .приливообразующий потенциал представлен в виде ряда по шаро¬
вым функциям V- X Vn, то радиальные и тангенциальные смещения в
п-2
произвольной точке Л (г, X) тела Земли будут равны
от центра
S Нп(г) — ,
п = 2 g
на север
1 оо
Ди = — 2 L„(г) -— ,
g ,1=2
на запад
1 - ЭИ„
Ди= — S А„(г) — ,
g п =2 COS <рдх
а собственный потенциал после деформации
U=UQ+ S Kn(r)Vn.
п =2
(2.19)
(2.20)
Формулы (2.19) и (2.20) представляют собой теорему Лява. В них//„(г),
Ln(f),Kn(r) — некоторые функции, значения которых на поверхности Зем¬
ли (г = R) называют числами Лява
hn=Hn(R\ kn=Kn(R\ ln=Ln(R).
В частном случае (и = 2) обозначают
h = h2, к = к2, I = 12 .
Приращение сферических координат наземного пункта A (R, , X) со¬
гласно (2.19) равно
h
&R = - V,
g
I dV
R — ,
g
(2.21)
37
§ 4. ВЛИЯНИЕ ПРИЛИВНЫХ ДЕФОРМАЦИЙ ЗЕМЛИ НА ДЛИНУ
И ПРОЕКЦИИ БАЗЫ ИНТЕРФЕРОМЕТРА
Обозначим длину базы интерферометра через Ь, а ее проекции на ось вра¬
щения Земли и на плоскость экватора соответственно через р и е. Требуется
найти приращение этих величин Д6, Др и Дс вследствие приливных дефор¬
маций Земли.
Если координаты к*
щов базы равны
= Rl cos <Pi cos Xj
, х2 - R2 cos cosX2,
yt = Ri cos sin X!,
у2 = R2 cos tp2 sin X2 ,
(2-22)
Zi = Ri sin <pi,
z2 =R2 sin <p2 ,
TO
p = Zi - z2 = b sin 6d,
e= x/Ui -x2)2 +(.r
1 -У2)2 = b cos 8b,
(2.23)
ь= УТТТ',
где — склонение базы интерферометра, т.е. угол ее наклона к плоскости
экватора. Приращения базы и ее проекций легко получаются по формулам
(2.22) — (2.23) с использованием (2.21). Опуская элементарные выклад¬
ки, получаем
h I / ЭИ2
Др = — (Kj sin - V2 sin <р2) + — I cos — cos <p2
g g \ fyi dc2
(2.24)
/ b
1 дк \
еДе = I — К, cos sPi sin | (R, cos c, - R2 cos c2 cos ДХ) +
X g
g J
/ h
/ ЭИ2 \
+ ( — V2 cos <p2
sin 1(^2 cos ^2 - «1 cos cos ДЛ) —
X g
g /
I /
ЭИ2 \
- -- —
R2cos^2 R! cos tfi ) sin ДХ, (2.25)
g \ cos <P1 ЭХ,
t cos <p2 6X2 /
где обозначено ДХ = Х2 — Xj.
Входящие в (2.24) и (2.25) производные потенциала V согласно (2.16)
равны
Э V 3 R2
— = — Gm —- [sin 2(/?(3 sin2 6 — 1) + 2 cos 2^ cos 26 cos t -
r)0 4 J3
sin 2c cos2 6 cos 2z],
ЭЕ 3 R2 n
•— - — Gm— [sin 2<, cos 26 sin z + 2 cos26 cos2^ sin 2z]. (2.26)
ЭХ 4 cr
Поскольку зональные, тессеральные и секториальные.члены приливооб¬
разующего потенциала и его производных различным образом зависят от
широты, следует ожидать, что из анализа соответственно долгопериодичес¬
ких, суточных и полусуточных приливных вариаций проекций базы будут
38
ДА
cos 26 sin T +
2
Дс = —
2
получаться различные комбинации чисел h и /. Покажем это на примере
интерферометра с базой, параллельной плоскости экватора. При = ^2 ~
= по (2.24) - (2.26) получаем
3 Gm R2
&р =— — — [(2h sin2ip + 21 cos 2<р) cos sin
2 g d3
+ {h - 2/) sin cos2 sin ДХ cos2 6 sin2T],
3 Gm R2 Г 2
— h cos i^(3 sin — 1) —
ДХ
- 21 sin sin 2<p sin — (3 sin 6 - 1) +
+ (h cos sin 2<p — 4/ sin3 <p) sin ДХ cos 26 cos T +
о AX
+ 2((Л - 2/) cos p; cos ДХ -21) cos sin cos 5
g d3
cos 2Т ,
1
где T = S-a, S = — (sj + s2); slf s2 - местное звездное время на первом
2
и втором пунктах интерферометра соответственно. Таким образом, Т есть
часовой угол светила с координата,ми а, 6 на меридиане с долготой X =
= — (Xi + Х2). В более частном случае = <р2 ~ 45°, ДХ = 90° имеем
3
Др=-
Gm R2 Г h
— cos 26 sin Т + (h - 2/)
g d3 I 2
4
cos2 6 sin 2T
3
Дс = —
Gm R2
~ ~3
- 21 cos26 cos 2T .
(2.27)
Из последних формул видно, что числа Лява h и I могут быть определе¬
ны раздельно: h — из суточных вариаций Др, / - из полусуточных вариаций
Де, а их комбинация (h - 21) - из полусуточных вариаций Др и суточных
h
вариаций Де. Так как — то долгопериодические вариации Де будут
6
практически отсутствовать.
§ 5. ПРИЛИВНАЯ НЕРАВНОМЕРНОСТЬ ВРАЩЕНИЯ ЗЕМЛИ
Приливные деформации Земли вызывают перераспределение масс, что ве¬
дет к вариациям моментов инерции, которые, в свою очередь, вызывают
изменения величины угловой скорости вращения Земли. Поскольку ось
главного момента инерции Земли составляет с вектором мгновенной
39
угловой скорости П угол всего около 0м,5, то согласно (2.2) при Л
имеем
CQ =? const,
что дает
AQ _ АС
П~С
Относительное изменение длины звездных суток равно
А/ AQ АС
Г Q С
а вариации определяемого из астрономических наблюдений звездного вре¬
мени будут
A5=/ArJr, (2.28)
где tQ - произвольная начальная эпоха.
Для определения приращения АС воспользуемся методом Г. Джеффри¬
са [57]. Собственный гравитационный потенциал на поверхности Земли
[58, с. 289]
и = и0 + с, + и2 + . . . ,
где
GE С - А
Со = — , С, = 0, U2 = - С — P2(sin у).
R R
Отсюда приращение потенциала U вследствие деформации, очевидно, будет
равно
АС - АЛ
АС = - SRg0 + ----- С2 .
С другой стороны, по формулам Лява (2.20) и (2.21) имеем
И2
АС = (к - h) V2, SR = h — ,
go
поэтому
AC- SA
Щ ~kV2. (2.29)
C - A
Г. Джеффрис [57] показал, что для несжимаемой Земли перераспределение
масс под действием зональных гармоник приливообразующего потенциала
V2 происходит таким образом, что
3
AC - SA = — АС. (2.30)
Н.Н. Парийский и Б.П. Перцев [59] доказали справедливость этой форму¬
лы и для сжимаемой Земли. Подставляя (2.30) в (2.29) и ограничиваясь в
приливообразующем потенциале И2 зональным членом (см. (2.16)),
40
Таблица 5
Приливные вариации продолжительности суток Аг и звездного времени AS в О5,001
Ssa
-2
_2
-2
_2
+2
О
+2
0
0
О
-0,0012
0,141
-0,0035
0,0083
0,0307
0,160
0,0266
0,304
0,126
0,05 82
0
0
0
О
-1
+ 1
О
о
о
+1
+2
+2
+2
+2
О
О
О
+2
+2
+2
+2
+2
+1
+2
О
О
О
+2
+ 1
+2
-1
О
О
+1
О '
о •
о
о
о
о
Мт
Mf
получим
АС = - — к Р2 (sin 6).
3d3
Приливные вариации продолжительности суток Аг и звездного времени AS
вычислялись неоднократно [59], [60]. В табл. 5 приведены результаты,
полученные Дж. Варом в 1979 г. [61] для модели Земли с жидким ядром.
Коэффициенты вычислены им при к = 0,299.
§ 6. ДВИЖЕНИЕ ПОЛЮСОВ УПРУГОЙ ЗЕМЛИ
При деформации Земли под действием приливообразующих сил происхо¬
дит перераспределение масс, из-за которого появляются добавочные произ¬
ведения инерции и меняется ориентация эллипсоида инерции в теле Земли.
Иначе говоря, по поверхности Земли движется не только полюс вращения,
но и полюс инерции относительно его невозмущенного положения.
На вращательное движение Земли оказывают влияние ее деформации
вследствие суммарного действия потенциала центробежной силы, возни¬
кающей из-за несовпадения полюса вращения с полюсом инерции, и прили¬
вообразующего потенциала, который не равен нулю даже ъ случае свобод¬
ного вращения Земли, т.е. при L - 0.
Добавочные произведения инерции преобразуют динамические уравне¬
ния Эйлера (2.2) таким образом, что их интегрирование при L = 0 приводит
к круговому свободному движению полюса с периодом т, который может
быть вычислен по следующей формуле, называемой формулой Лява - Лар¬
мора [51 ], [62]:
т = т0(1 - W)"1, (2.31)
41
где
^2a/2go
e - £l2a/2gQ
ъ 1,057.
w =
Здесь к — число Лява, Q — угловая скорость вращения-Земли, а — ее эква¬
ториальный радиус, g0 - ускорение силы тяжести на экваторе, е — геомет¬
рическое сжатие земного сфероида, т0 — период Эйлера, равный 305 звезд¬
ным суткам. Величина т называется периодом Чандлера.
Изменение моментов инерции реальной Земли происходит не только из-
за ее приливных деформаций, но также вследствие перераспределения ат¬
мосферы, вариации уровня грунтовых вод и множества других геофизичес¬
ких явлений сезонного характера, причем именно сезонные возмущения
имеют максимальную энергию.*
В общем случае колебания полюса инерции носят эллиптический харак¬
тер и содержатся в довольно широкой спектральной области. Обозначим
через а и b' большую и малую полуоси элементарного гармонического ко¬
лебания из этой области, имеющего период I. Тогда можно показать [58,
с. 169], что полюс вращения должен двигаться вокруг невозмущенного
полюса инерции тоже по эллипсу с осями
ta + тЬ' та + tb'
а t, b = — t. (2.32)
(г - 0 (т + г) (т - Г) (г + 0
Из этих формул видно, что когда период вынужденного движения полюса
инерции t близок к периоду свободного чандлеровского движения полюса
вращения т, в движении последнего наблюдается резонанс. Так как т ~
~430 сут. ~ 1,178 года, то для t = 1 год по формулам (2.32) получаем, что
эффект сезонного движения полюса инерции проявляется в движении полю¬
са вращения увеличенным более чем в 5 раз.
Из формулы (2.31) находим для числа Лява к выражение
т -То
TW
(2.33)
которое можно использовать для вычисления к по наблюденному значению
периода движения полюсов. Для т0 = 305 суток значения числа Лява к при¬
ведены в табл. 6.
Анализ астрономических данных дает т ~430 4-435 средних суток, чему
соответствует из (2.33) к ~ 0,275 4-0,280. В то же время современные тео¬
рии вращения Земли (М.С. Молоденский [53], Дж. Вар [61 ]), а также боль¬
шинство прямых и косвенных геофизических измерений указывают, что
к %0,30. Это расхождение говорит о том, что предположения о простой уп¬
ругости Земли недостаточно для описания ее наблюдаемого вращения и тре¬
буется привлекать более сложные геофизические модели.
Таблица 6
Значение числа Лява к при 70 = 305 суток
7 (Ср.СУТКИ)
409
414
421
427
433
439
447
к 1
0,24
0,25
0,26
0,27
0,28
0,29
0,30
42
Однако, согласно тем же расчетам Молоденского и Вара, выполненным
для современных моделей Земли с учетом динамического эффекта жидко¬
го ядра, период свободного движения полюсов должен быть равен т — 401 ч-
402 ср. суток. Разница между этой величиной и наблюдаемой (т^433сут.)
объясняется в основном динамическим эффектом водной оболочки Земли.
Первая успешная попытка учета этого эффекта сделана М.С. Молоденским
[53], [64].
Вынужденное лунно-солнечное движение полюсов уп ру го-дефо рмируе-
мой Земли отличается от аналогичного движения для абсолютно твердой
Земли, представленного в табл. 3 в виде тригонометрических рядов, только
значениями коэффициентов этих рядов. Впервые П.Мельхиор [65], [48,
с. 321] указал на возможность вычисления этих коэффициентов, выразив
их через амплитуды соответствующих суточных волн приливообразующего
потенциала.
Однако в современных теориях вращения Земли разложения вынужден¬
ных лунно-солнечных колебаний полюса не вычисляются за ненадобностью,
так как эфемеридная нутация Земли в пространстве относится не к оси вра¬
щения, а к оси фигуры (см. § § 2,7,8 этой главы).
§ 7. ДИНАМИЧЕСКИЙ ЭФФЕКТ ЖИДКОГО ЯДРА ЗЕМЛИ
Под действием тессеральной части приливообразующего потенциала
возникает момент сил, стремящийся уменьшить угол наклона экватора к
эклиптике. Поскольку жидкое ядро Земли имеет способность к большей
деформации, чем твердая оболочка, на их границе возникает взаимодейст¬
вие, которое стремится заставить ядро двигаться относительно мантии Зем¬
ли. Это явление, называемое обычно динамическим эффектом жидкого
ядра, влияет на вращательное движение оболочки, а значит, может быть
обнаружено из астрономических наблюдений.
Согласно гидродинамической теории жидкого ядра, заключенного в уп¬
ругую оболочку, динамическое взаимодействие между ними должно иметь
резонансную частоту со0, близкую к звездной частоте £2 и лежащую, таким
образом, в области частот тессеральных суточных приливов. Поскольку ре¬
зонансная частота соо лежит в стороне от , амплитуды приливов Af и A h
симметричных относительно Q, искажаются резонансом по-разному (см.
рис. 5). В результате оси нутационных эллипсов (Л,- + Л _,) и (Лг - Л _ z)
также будут искажены неодинаково и их отношение уже не будет равно
теоретическому.
Само значение резонансной частоты со0 и резонансный фактор как функ¬
ция частоты нутации зависят от моделей внутреннего строения Земли и ме¬
ханических свойств вещества. До недавнего времени наиболее авторитетной
теорией нутации и приливов Земли считалась теория М.С. Молоденского
[53], основанная на распределении плотности и параметров упругости, по¬
лученных в 1942 г. К. Булленом [63] (модель М II). Эта теория показала,
что нутация упругодеформируемой Земли существенно отличается от нута¬
ции Э. Вуларда (различия в коэффициентах достигают нескольких сотых
долей секунды дуги) и последняя, таким образом, уже не может играть
роль международного стандарта.
В 1979 г. специальная рабочая группа представила на рассмотрение XVII
Генеральной ассамблеи МАС в Монреале новые разложения нутации, осно-
43
Таблица 7
Значения постоянной нутации
МАС-1979
Вар
Ньюкомб
('наблюдения)
Киношита
(твердая Земля)
9",2044
9",2025
9",2109
9",2278
ванные на наиболее совершенной теории вращения абсолютно твердой Зем¬
ли Киношиты [46] и на теории Молоденского (МН). Принятая нутация
(Нутация МАС-1979) рекомендована для использования в качестве стандар¬
та нутации с 1984 г.
Однако вскоре Генеральная ассамблея МГГС (Канберра, 1979) рекомен¬
довала пересмотреть это решение и принять нутацию, основывающуюся на
более современных данных о внутреннем строении Земли. Хотя стандарт¬
ная модель Земли еще не создана, американские ученые А.Смит и Дж.Вар
предложили [55] принять в качестве международного стандарта нутацию,
вычисленную Варом для модели внутреннего строения Земли Гильберта -
Дзивонского 1066А [66], которая считается наиболее совершенной в на¬
стоящее время. Подробности по этому вопросу можно найти в препринте
Я.С. Яцкива [67]. Там же приведены разложения нутаций Вара и МАС-1979.
Здесь же уместно отметить, что, как показал Вар, значения нутационных ко¬
эффициентов малочувствительны к изменениям характеристик моделей
внутреннего строения Земли в пределах их неопределенности. Расхожде¬
ния между коэффициентами нутаций Вара и МАС-1979 достигают лишь
О" ,002, хотя различия между соответствующими моделями Земли весьма
существенны [67]. Отсюда следует, что определения нутации из класси¬
ческих наблюдений не могут служить критерием при выборе наиболее
достоверной модели Земли из-за их недостаточной точности. По-видимому,
только принципиально новые высокоточные методы наблюдений, такие как
РСДБ и лазерная локация высоких ИСЗ и Луны, способны будут указать,
какая из теорий лучше соответствует действительности.
Что касается постоянной нутации N, то учет резонанса приводит к прак¬
тически согласующимся с наблюдениями значениям, приведенным в табл. 7
для эпохи 2000,0.
§ 8. РЕЗОНАНСНАЯ НУТАЦИЯ ОБОЛОЧКИ ЗЕМЛИ
Одним из важнейших результатов теории вращения у пру го деформируе¬
мой Земли с жидким ядром является предсказание наличия совершенно но¬
вой нутации оболочки Земли с резонансной частотой обо¬
значение этой частоты, зависящее от принятой модели внутреннего строе¬
ния Земли, вычисляется из теоретических выражений для резонансного
фактора 0 при условии полного резонанса (3 = °°. Значения со0 для моделей
Молоденского (М II) и Вара (W) приведены в табл. 8.
В этой таблице Го - истинный период резонансной нутации оболочки.
Он будет проявляться только в круглосуточных наблюдениях широты и
долготы, которые возможны в радиоастрометрии. В оптической же астро-
44
Таблица 8
Параметры свободной квазисуточной нутации Земли
Модель
^0
Т9,
зв.время
Л,
зв.су тки
Л.
ср.сутки
М II
- 1,002159
23h56m53s8
463,2
204,9
W
- 1,0021714
23b56m52s8
460,5
203,4
метрии резонансная нутация определялась до сих пор из наблюдений на
зенит-телескопах немногих ярких зенитных звезд, видных как ночью,
так и днем, или из наблюдений многих звезд в ночное время по обычным
групповым программам. В первом случае наблюдения ведутся в постоян¬
ные моменты звездного времени, а во втором — среднего, поэтому квази-
суточная резонансная нутация проявляется в наблюдениях этих типов с су¬
щественно разными периодами 1\ и Г2. Следует, однако, заметить, что
частотная область, куда попадают значения 7\ иТ2, весьма богата довольно
энергичными полярными и неполярными колебаниями широты, в основном
сезонного происхождения, поэтому выделение из них слабой резонансной
нутации представляет собой весьма сложную задачу. Наиболее надежные
результаты должны получаться из анализа круглосуточных наблюдений, ко¬
торые возможны в оптической астрометрии лишь в условиях полярной
ночи [68]. Однако точность традиционных наблюдений, даже если бы они
были организованы специально, явно недостаточна, так как по имеющимся
данным амплитуда резонансной нутации составляет несколько тысячных
долей угловой секунды^поэтому в будущем проблема определения истин¬
ных параметров резонансной нутации будет решаться в основном мето¬
дом PC ДБ.
§ 9. О ВЫБОРЕ ОСИ ЭФЕМЕРИДНОЙ НУТАЦИИ ЗЕМЛИ
Основной особенностью теории Вара (кроме использования более совре¬
менной модели эллипсоидально стратифицированной Земли) является
учет крутильных колебаний, т.е. дифференциальных вращений и деформа¬
ций оболочек Земли. Это создало не возникавшие ранее трудности принци¬
пиального характера, касающиеся определения понятий оси вращения (/),
оси фигуры (F) и оси кинетического момента Земли (Я) . Для внешней по¬
верхности (5), мантии (М) и всей Земли в целом (Е) направления этих
осей различаются. Вар обозначил их соответственно: /5, 1м, Ie'> Fs> Fm> Fe\
Hs, Нм, HE.
Наблюдатель находится на внешней поверхности Земли (5), поэтому
эфемеридную нутацию естественно вычислять именно для нее, а не для всей
Земли.
Устойчивость оси фигуры мантии Земли F м определяется множителем
1/(С - А), т.е. эта ось очень чувствительна к приливным деформациям Зем¬
ли, изменяющим ориентацию и форму эллипсоида инерций.
В то же время ось вращения мантии от этого большого множителя
не зависит и, значит, более устойчива. В связи с этим Дж. Вар ввел понятие
45
средней мантии по Тиссерану. Средняя мантия по Тиссерану определяется
как мантия, вращающаяся наподобие твердого тела, находящегося в со¬
стоянии равновесия, с мгновенной угловой скоростью 1м. Таким образом,
чтобы получить закон вращения средней мантии по Тиссерану, необходимо
из наблюдаемого вращения реальной мантии исключить эффекты, связан¬
ные с ее приливными деформациями. Вследствие этого ось фигуры средней
мантии по Тиссерану, обозначаемая уже является более устойчивой.
Однако полностью исключить приливные эффекты из вращения реальной
мантии не удается из-за эллиптичности распределения плотности с глуби¬
ной.
По аналогии с предыдущим можно ввести понятия средней поверхности
Земли по Тиссерану и оси ее фигуры F J. Эта ось также не полностью сво¬
бодна от влияния приливных деформаций и по той же причине. Только чис¬
ленным интегрированием уравнений вращения эллипсоидально стратифици¬
рованной Земли можно получить направление в пространстве оси фигуры
внешней поверхности Земли, полностью не зависящее от приливных дефор¬
маций всего тела Земли. Эту ось Вар обозначил буквой В и именно для нее
вычислил эфемеридную нутацию в пространстве. Он же показал, что в пре¬
делах практической точности вычислений можно считать В ^FJS ^FJM.
Эфемеридная нутация оси В вычислена Варом по формулам
Ai//Z sin е = Дфо i sin е • — (ft- + £_/) + Де0 / • — (ft - ft. /),
где Д|//0/> Лео / — нутация условной оси фигуры абсолютно твердой Земли,
полученная X. Киношитой [46] ;ft,ft_z —резонансныекоэффициенты, соот¬
ветствующие частотам приливообразующего потенциала и о).../, симмет¬
ричным относительно звездной частоты £1 = 2тг радиан в звездные сутки.
Резонансные коэффициенты представляют собой отношение амплитуд тессе-
ральных членов приливообразующего потенциала, вычисленных для реаль¬
ной Земли с жидким ядром и для абсолютно твердой Земли, т.е. они равны
отношению амплитуд динамических приливов на поверхности тела Земли к
статическим приливам в той же области. Резонансные коэффициенты изме¬
няются не только в зависимости от частоты нутации 0 - Дсс, = — £2,
но и зависят от того, для какой оси вычисляется нутация. Их значения по
данным Дж. Вара [61] для разных частот и осей приведены в табл. 9. В по¬
следнем столбце таблицы приведены резонансные коэффициенты, вычис¬
ленные М.С. Молоденским [53] для второй модели Земли, обозначенной
нами М II.
Из рассмотрения данных табл. 9 можно сделать следующие выводы:
а) Резонансные коэффициенты для осей В и 1М в пределах принятой точ¬
ности вычислений совершенно одинаковы, поэтому нутация оси вращения
мантии Земли будете точности такой же, как нутация оси.В, если из послед¬
ней исключить вынужденную лунно-солнечную нутацию оси фигуры, вклю¬
ченную туда по предложению Р. Аткинсона (см. § 2 гл. 2).
б) Вращение мантии существенно отличается от вращения всей Земли в
целом. То же можно сказать и о движении вектора кинетического момента,
46
Таблица 9
Резонансные коэффициенты
Да>/
В
7М
7/Г
нм
FM
FE
/м(М11)
1/13,7
1,0283
1,0283
0,9770
1,0488
1,00021
6,74
5,62
1,022
1/183
1,0344
1,0344
0,9985
1,0359
1,00025
1,478
1,394
1,0316
1/365
1,0273
1,0273
0,9993
1,0280
1,00020
1,245
1,205
1,0251
1/6800
1,00314
1,00314
0,99997
1,00318
1,000023
1,0141
1,0123
1,00291
-1/6800 0,99640
0,99640
1,00002
0,99636
0,999974
0,9856
0,9874
0,99666
-1/365
1,246
1,246
1,002
1,245
1,0018
0,9023
0,99517
1,225
-1/183
1,0850
1,0850
1,0023
1,0833
1,00063
0,582
0,689
1,0786
-1/13,7
1,0724
1,0724
1,02 37
1,0517
1,00055
-5,58
-4,27
1,071
причем направления осей, относящихся ко всей Земле (4;, Нк), менее чув¬
ствительны к динамическому эффекту жидкого ядра Земли.
в) Сильнее всего динамический эффект ядра сказывается на ориентации
главной оси динамической фигуры Земли (полярной оси инерции), в осо¬
бенности для двухнедельной нутации, вызываемой главной суточной при¬
ливной волной, обозначаемой Ох.
г) Результаты, полученные М.С. Молоденским для оси вращения мантии
, весьма близки к результатам Дж. Вара для этой же оси. Различия между
ними в основном объясняются различием исходных данных о внутреннем
строении Земли.
§ 10. ТОЧНЫЕ ФОРМУЛЫ УЧЕТА ПРЕЦЕССИИ И НУТАЦИИ
Астрономические наблюдения, в том числе методом РСДБ, производятся
с поверхности Земли, совершающей сложное поступательно-вращательное
движение в пространстве. В связи с этим возникает задача редукции резуль¬
татов наблюдений, выполненных в различные моменты времени, т.е. пред¬
ставления их в единой системе отсчета, чтобы сделать их сопоставимыми и
пригодными для однозначной интерпретации. Наземные наблюдения под¬
вержены еще атмосферным, аберрационным и прочим эффектам, поэтому
задача редукционных вычислений, если ее понимать в полном объеме, яв¬
ляется весьма сложной и физически многоплановой. В настоящем парагра¬
фе мы ограничимся только учетом вращательного движения Земли.
Пусть ос |, 6! — сферические координаты радиоисточника в прямоуголь¬
ной геоцентрической экваториальной системе координат Х{, Y}, Zj, отне¬
сенной к среднему экватору и равноденствию эпохи =2000,0+ 7\, где
7\ выражено в юлианских столетиях по 36 525 средних солнечных суток.
Средним экватором называется плоскость, перпендикулярная некоторому
вектору, который совершает в пространстве лишь лунно-солнечное прецес¬
сионное движение без нутации, что соответствует регулярной части прецес¬
сии Ньюкомба. Линия пересечения этой плоскости с плоскостью мгновен¬
ной эклиптики называется линией средних равноденствий, а соответствую¬
щие ей точки на небесной сфере — точками средних равноденствий эпохи.
Вследствие непрерывного прецессионного движения среднего экватора
и, частично, мгновенной эклиптики координатная система Х}, Kj,Zj в дру-
47
Рис. 6. Прецессионные величины Ньюком¬
ба. О = ^PlP2, =~NBltz =~B2N.
гой момент времени t2 = 2000,0+ 7;
займет в пространстве другое положе¬
ние Х2, Y2,Z2i а сферические коорди¬
наты того же источника в этой систе¬
ме будут а2, 62. Требуется получить
формулы перехода от Sj к а2, 62
и обратно, используя закон прецес¬
сионного изменения эйлеровых углов
между осями систем Xl9 и Х2,
Y2, Z2. Однако вместо обычных эйле¬
ровых углов ф, 0, принято использо¬
вать так называемые прецессионные параметры Ньюкомба — Андуайе
fo, 0, z (рис. 6). Разложения этих величин в степенные ряды имеют вид
[69, с. 43]:
f0 = (2306",2181 + 1",39656 Л - 0",000139Г?) т +
+ (0",30188 - 0",000345 7;) т2 + 0",017998т3,
z = (2306",2181 + 1",396567; - 0",000139Г?) т +
+ (1 ",09468 + 0",0000661\) т2 + 0",018203т3,
в = (2004",3109-0",853307; - 0",000217Т?) т -
— (0",42665 + 0",0002177\ ) т2 - 0",041833т3,
где т = Т2 - 7\.
Из треугольника Р\Р2 S (рис. 6) можно получить
cos 62 sin (а2 - z) = cos sin (c^ + f0),
cos <5 2 cos (a2 - z) = cos 5 j cos (a i + f0 ) cos 0 — sin 6 , sin 0,
sin 52 = cos 6 j cos (aj + ) sin 0 + sin 5 ! cos в.
Эти формулы называются тригонометрической редукцией. Их следует
использовать всегда, когда требуется наивысшая точность вычислений.
Для внегалактических источников необходимость редукций за их собст¬
венные движения и параллаксы, естественно, отпадает.
Нутационные колебания вектора мгновенной угловой скорости враще¬
ния П приводят к периодическим смещениям Дф истинной точки весеннего
равноденствия относительно ее некоторого среднего положения, движуще¬
гося поступательно вдоль эклиптики только вследствие общей прецессии,
и к периодическим изменениям Де мгновенного угла наклона истинного
экватора к эклиптике. Вследствие этого координаты неб сного объекта в
пространстве изображений, отнесенные к истинному мгновенному экватору
и к истинному равноденствию, называемые поэтому обычно истинными,
будут также испытывать периодические изменения. Имея разложения нута¬
ции в долготе Дф и в наклонности Де, содержащиеся в Астрономических
48
ежегодниках, получаем с точностью до членов второго порядка
А^ аист аср
da da
— Ai/z + — Ae +
dX de
1 d2<*
+ 2 dX2
(Д^)2 1
d2a , 1
— (Ai//) (Ae) + —
dXde . 2
А5=Зист-Зср
db db
— Ai// + — Ae +
dX de
1 —
2 dX2
(Ai//)2 1
d2b 1
— (Ai//) (Ae) + —’
dXde 2
d2b
de2
(ДЮ2,
где
da da
— - cos e + sin e tg 6 sin a, = — cos a tg 3,
dX de
JS J5
— = cos a sin e, — = sin a,
dX de
= - sin e (cos2a — ctg e sin a tg 3 + cos 2a tg2 5),
dX de
—— = - (sin a cos a + sin 2a tg2 5 ),
de
J23
JX2
= — sin2 e sin a (ctg e + sin a tg 3),
J23
= sin e cos a (ctg e + sin a tg 3),
dXde
d2b
—— - — cos a tg 5.
de2
Во всех предыдущих формулах e — средний наклон мгновенного эквато¬
ра к мгновенной эклиптике, равный '
в = 23°2б'21",448 -46".8150Г- 0",0059Г2 + 0",001813Г3,
где Т должно быть выражено в юлианских столетиях от эпохи 2000,0.
49
§ 11. ОСНОВНЫЕ ОСОБЕННОСТИ ИЗУЧЕНИЯ ВРАЩЕНИЯ ЗЕМЛИ
МЕТОДОМ РСДБ
Практическое изучение вращения Земли имеет уже почти столетнюю исто¬
рию. За это время с помощью средств оптической астрбметрии получено
множество данных, касающихся всех аспектов этого явления. Здесь нет не¬
обходимости останавливаться на их анализе, так как он уже выполнен [70].
Рассмотрим лишь те проблемы изучения вращения Земли, для решения ко¬
торых применение метода РСДБ может внести наибольший вклад.
1. Основная особенность метода РСДБ заключается в том, что он позво¬
ляет получать данные о вращательном движении Земли относительно невра-
щающейся системы отсчета, которая связана с положениями далеких вне¬
галактических радиоисточников. Это важно при изучении таких низко¬
частотных явлений, как прецессия и вековое движение полюсов.
2. Не менее важным является независимость РСДБ-измерений от направ¬
ления отвесных линий, которые неустойчивы как на коротких интервалах
времени- порядка суток (суточные и полусуточные приливы), так и на боль¬
ших интервалах порядка десятков и сотен лет (долгопериодические прили¬
вы, вековые изменения формы геоида вследствие конвекции вещества в
теле Земли). Это обстоятельство будет иметь существенное значение для
устранения имеющейся неоднозначности в интерпретации получаемых из на¬
блюдений данных, относящихся к короткопериодическим мутациям оси вра¬
щения в пространствен к вековому движению полюса по поверхности Земли.
3. Непосредственное измерение длины базы интерферометра дает воз¬
можность прямо изучать тектонические движения плит земной коры, что име¬
ет не только фундаментальное геофизическое значение, но и позволяет устра¬
нить еще одну неоднозначность в интерпретации векового движения полюса.
4. РСДБ-наблюдения можно вести круглосуточно. Это дает возможность
изучить более тщательно высокочастотный участок спектра флуктуаций
скорости вращения Земли и движения полюсов и получить, наконец, объек¬
тивные данные о ’’передаточной функции” Земли, т.е. о ее реакции на мгно¬
венные возмущения типа землетрясений.
Кроме того, представляется возможность непосредственного изучения
различного рода квазисуточных колебаний, например, вынужденного лун¬
но-солнечного движения полюсов или свободной квазисуточной нутации
оболочки Земли, так как в обычных оптических наблюдениях эти колеба¬
ния трансформируются в область низких частот, богатую сильными возму¬
щениями, имеющими совершенно другую природу.
5. Наконец, уже в ближайшее время точность информации о вращатель¬
ном движении Земли, получаемой из РСДБ-измерений, будет на 1 4-2 поряд¬
ка превосходить точность данных классической оптической астрометрии.
Такое резкое повышение качества информации, во-первых, позволит опять
восстановить роль наблюдений в качестве критерия истинности теорий вра¬
щения Земли, а, во-вторых, неизбежно приведет к открытиям новых явле¬
ний и закономерностей и будет служить новым стимулом для теорий.
6. Для изучения вращения Земли в историческом аспекте необходимо
осуществление взаимной привязки системы координат звезд, наблюдав¬
шихся в прошлом, с системой координат внегалактических радиоисточни¬
ков, которые будут наблюдаться в будущем. Думается, что по мере внедре¬
ния метода РСДБ эта проблема станет одной из центральных.
ЧАСТЬ II
МЕТОДЫ ОПРЕДЕЛЕНИЯ КООРДИНАТ
В РАДИОИНТЕРФЕРОМЕТРИИ
СО СВЕРХДЛИННЫМИ БАЗАМИ
Глава 3
ОСНОВНЫЕ НАБЛЮДАЕМЫЕ ВЕЛИЧИНЫ
И РЕДУКЦИОННЫЕ ВЫЧИСЛЕНИЯ
§ 1.БАЗА ИНТЕРФЕРОМЕТРА
Введем систему координат х0, у о, z0 с началом в центре масс Земли
и жестко связанную с ее телом (в первом приближении будем считать
Землю абсолютно твердой). Ось OzQ направим в точку, называемую ус¬
ловным международным началом (Conventional International Origin —
CIO).
Положение этой точки определяется средними широтами пяти стан¬
ций Международной службы движения полюса (Мицузава, Китаб, Карло-
форте, Гейдельсберг, Юкайя), полученными из наблюдений на этих стан¬
циях в 1900-1905 гг.
Плоскость,.перпендикулярную оси OzQ, будем называть условным эква¬
тором Земли. Ось OxQ направим по линии пересечения условного экватора
с плоскостью начального первого меридиана, проходящего через центр
Гринвичской обсерватории, а ось Оу0 — на 90° к западу от него (рис. 7).
Введем также систему координат х, у, z, ось Oz которой направлена
по вектору мгновенной угловой скорости вращения Земли £2 = Г2 со.
Так как этот вектор движется в теле Земли, то систему х, yf z будем называть
подвижной, или мгновенной. Начальным меридианом этой системы принято
считать плоскость Oxz, проходящую через вектор угловой скорости Q и на¬
правление оси OxQ (на поверхности Земли этот меридиан проходит через
точку Go условного экватора, являющегося началом отсчета долгот в непод¬
вижной системе х0, yQ, z0).
Координаты радиуса-вектора г : (х, у, z) = г (cos ip cos X, cos sin X sin <р)у
где </?, X — геоцентрические широта и долгота произвольной точки
земной поверхности. В определенных таким образом системах координат
х0, Уо> zq и х, у, z координаты г, X связаны между собой следующими
соотношениями
Дг = r -rQ = 0,
Д _ <р0 = х cos X + у sin X ,
ДХ = X — Хо = (х sin X — у cos X) tg <р,
(3.1)
51
Рис. 7. Вектор базы в условной и мгновенной системах координат.АпЛ2 - пункты
РСДБ на поверхности Земли, G - Гринвичская обсерватория; х, у - координаты
мгновенного полюса относительно условного международного начала Ро (СЮ).
или
Ах = х х0 = х z ,
Лу=у-у0 = yz,
Az -z - zQ =x x + yy ,
(3-2)
гдеx, у — координаты мгновенного полюсаР в системе (х0, z0), выра¬
женные в радианной мере.
Определим базу интерферометра как вектор b = АГА2, равный Ь = гх -
- г2 • Тогда
K = (xj -у2.?1 -z2) = (X, Y,Z).
Векторы e' - (X, У, 0), p = (0, 0, Z) длиной
e = y/X2 + У2, p=Z
(33)
представляют собой экваториальную и полярную проекции базы интерфе¬
рометра соответственно. Эти проекции в рассматриваемых системах ко¬
ординат различны, в то время как длина самой базы, естественно, инва¬
риантна.
Принимая во внимание (3.2) и (3.3) , имеем
Р-
Ае = е - eQ = - ;— (х X + у Y),
е
Ар=р -pQ= х X + у Y.
(3.4)
Из этих соотношений видно, что движение полюса влияет на обе проек¬
ции базы интерферометра с точностью до постоянного множителя одина¬
ковым образом. Поэтому для независимого определения координат полюса
52
необходимо использовать многоэлементные (как минимум трехэлемент¬
ные) радиоинтерферометрические системы.
Перенесем вектор базы b параллельно самому себе до пересечения с
центром масс Земли (началом координат). Плоскость, проходящую через
такую базу и ось вращения Земли Oz, будем называть меридианом базы,
а западную долготу этого меридиана будем обозначать через Л. Если угол
наклона вектора базы к плоскости Оху — склонение базы — обозначить
через то
X = хх - х2 = b cos 8Ь cos А* '
У = У1 -y2=b cos 8 b sin Л,
(3.5)
Z = 2 х — z2 -b sin 8^,
откуда
е =b cos86, p = b sin 8Ь. (3.6)
Используя (3.4) — (3.6), легко получить формулы, аналогичные (3.1) :
Sb = Ъ - Ьо = О,
St>b =&ь- (^)о =х cos Л +у sin Л ,
(3.7)
ДА = А - Ао = (х sin А - у cos Л) tg 8д •
Ниже будет показано, что непосредственным измерениям поддаются
лишь величины е и р, с помощью которых можно вычислить правую часть
только второго из уравнений (3.7),
Др
А5Ь= —
Де
Р
(3.8)
в то время как величину ДА по этим данным вычислить невозможно.
§ 2. ВРЕМЕННАЯ ЗАДЕРЖКА И ЧАСТОТА ИНТЕРФЕРЕНЦИИ
Обозначим через 7\ показания местных часов пункта в момент при¬
хода в точку A J волнового фронта, распространяющегося в направлении,
определяемом единичным вектором к, а через Т2 — показания тех же
часов в момент прихода этого фронта в точку А 2.
Величина
Tg = т2 - Г, (3.9)
/ -
называется геометрической временной задержкои, которая, как нетрудно
видеть (рис. 8), равна
Ъ
Tg = — cos 0 , (3.10)
с
где b — дДйна базы интерферометра, 0 — угол между направлением базы,
определяемым единичным вектором^, и направлением на источник 1с ,с —
скорость света.
53
Рис. 8. Геометрическая задержка. 4Г, Л2 — пункты интерферометра с геоцентричес¬
кими расстояниями г\ 2» — единичный вектор направления на источник.
Р и с. 9. Небесная сфера. О - центр масс Земли, Оху - вращающаяся экваториальная
система координат, b - вектор базы, к - единичный вектор направления на источник,
ОТ - направление на точку весеннего равноденствия; а, 6 - экваториальные коорди¬
наты источника, Л, 6^ — экваториальные координаты базы, 50 - гринвичское звездное
время.
На рис. 9 представлен вид вспомогательной сферы,
Здесь
описанной в § 1.
к, = (cos 8 cos(50 - cos S sin(50 - a), sin 8)
(3.11)
— единичный вектор направления на источник,
b = bi = 8(cos Ьь cos Л, cos 8Й sin Л, sin 86)
(3.12)
— вектор базы,
Н = £2 J = 17(0,0, 1)
(3.13)
— вектор угловой скорости вращения Земли; 8, а — склонение и прямое
восхождение источника, S = So - Л — звездное время на меридиане базы,
So — гринвичское звездное время,
h = S — а = So — а— Л
(3.14)
— часовой угол источника относительно меридиана базы.
Так как
cos в = к i = sin 86 sin 8 + cos 8Ь cos 8 cos h,
(3.15)
TO
1 1
(3.16)
Tg = — p sin 8 + — e cos 8 cos /?,
c c
и так как
S - a ~ (5 - tt)° + Qr,
(3-17)
54
где (S - а)0 - значение (S - а) в момент t = 0, то
h = hQ + Ш .
Следовательно, (3.16) можно представить в виде
rg(t) = - A sin £21 + В cos Qr + С,
где
1 п 1
А = — е cos 6 sin Л 0,
с
В = — е cos 6 cos hQ, *
с
1
С-— р sin 6 .
с
(3.18)
(3.19)
(3.20)
Частота интерференции F по определению равна
(3.21)
где f - частота принимаемого сигнала. Тогда геометрическая часть F сог¬
ласно (3.16) может быть представлена в виде
JVL
Fg(t) = е cos 5 sin h, (3.22)
или согласно (3.19)
Fg(t) = — Af £2 cos П t - BfFL sin Q t.
(3.23)
В ряде случаев нам будет полезно опираться на следующую простую
геометрическую интерпретацию основных наблюдаемых величин rg и Fg.
Так как
1 _ ... 1 - ->
Tg = —(b • к) = — b(i - к),
с с
то согласно определению (3.22)
d ... _ _ ->
— От - r2 ) = b X £2 , то
dt
(3.24)
Поскольку
f
Fg(t)= — btt(i X со)£ . (3.25)
с
Таким образом, измерение временной задержки Tg определяет угол
6 между направлением базы и направлением на источник, а частота интер¬
ференции Fg - угол между перпендикуляром к базе, лежащим в эквато¬
риальной плоскости, и направлением на источник.
Заметим, что для баз, параллельных оси вращения Земли (6Ь = 90°), так
/ Ь
называемых ’’полярных” баз, временная задержка Tg = — sin 6 не меняется
с
55
со временем, а частота интерференции Fg = 0. Очевидно, что максимальное
значение временной задержки достигается при 5b = 5 и для земных баз
не может превышать 0,04 с; при этом максимальное значение частоты
интерференции — 1,5 • 104/Х (Гц), где X — длина волны принимаемого из¬
лучения в сантиметрах.
В дальнейшем для rg и Fg мы будем использовать в основном выраже¬
ния (3.16) и (3.22).
Априорные значения проекций базы, звездного времени и координат
источников дают возможность предвычислить на каждый момент наблюде¬
ний t величины т0 и Fo. Соответствующие разности наблюденных значений
г nF и их предвычисленных значений т0 и Fo можно представить в качест¬
ве свободных членов условных уравнений погрешностей, получаемых
дифференцированием уравнений (3.16) и (3.22) . которые будут иметь вид
/,(т) = Др sin 5/ + А е cos 8Z cos hf -
— ASe cos 5/ sin ht - t A £2 e cos 8, sin ht + pz- , (3.26)
li(F) = — Ле cos 8,- sin hj — A Secos 8Z- cos hj —
AQ
- e cos 8z(sin 8Z + £2 t cos + vt, (3.27)
£2
c
где Zz(r) = c(t - r0), li(F) = (F - Fo) — измеренные свободные члены
уравнений, включающие в себя всю совокупность измеренных поправок и
редукций (см § 4), i - индекс источника, AS = A(S0 - A) — поправка
звездного времени на меридиане базы интерферометра, Де, Лр — поправки
к проекциям базы интерферометра, А£2 — поправка к угловой скорости
АП ЛТ
вращения Земли ( —— = где Г — число атомных секунд в сутках, а
ЛТ — соответствующая поправка) и pz — комбинации неизвестных
поправок координат радиоисточников:
Pi = Да, е cos 8,- sin + A8,-(p cos 8, — e sin 8,- cos /?,-), (3.28)
Vt = Да,- e cos 8,- cos hj + Д8,- e sin 8,- sin . (3.29)
§ 3. ВРЕМЯ РАССИНХРОНИЗАЦИИ
Система времени радиоинтерферометра является автономной и задается
независимыми атомными стандартами частоты. Вследствие нестабильности
этих стандартов возникает дополнительная к rg временная задержка Ат(Г) ,
которая складывается из начальной рассинхронизации часов, представляю¬
щей собой разность их показаний в начальный момент, и их относительного
хода на интервале радиоинтерферометрического сеанса Т.
Для того чтобы определить поправки к координатам и параметрам
ориентации интерферометра, необходимо задаться представлением Дт(г) в
некотором множестве функций. Это множество удобно выбирать в виде
линейного пространства
Дт(Г)= S ткек(!) + п> (3.30)
к= 1
56
где ek(t) — известный базис (e^(0) = О),ад??^ — неизвестные коэффициен¬
ты, подлежащие определению. Такое представление не нарушает линейности
условных уравнений (3.26) — (3.29). Очевидно, что увеличение умень¬
шает погрешность представления Дт(г) , однако при больших s (большом
числе определяемых параметров ак} ухудшается обусловленность системы
(3.26) — (3.29). Найдем оптимум, фиксирующий ли ек.
Множество функций [ек (t)} при фиксированном 5 в случае, когда
измеряется только временна'я задержка т, естественно выбирать так,
чтобы квадрат погрешности представления Дт(Г) был минимален:
о2 = < min f [Дт(г)- п - S mkek(f)]2 dt). (3.31)
at ,..., as к = 1
Тогда искомые функции ек являются собственными функциями опе¬
ратора
я(г)->/([Дт(О-Дт(0)] [Дт(5)~ Дт(0)] a(S)> dS, (3.32)
соответствующими его наибольшим собственным числам Хк; при этом
<4in = S [107].
s= т + 1
Случайный процесс p(t) для реальных стандартов является стационар¬
ным с < Дт(г) > - 0 и структурной функцией
< [ Дт(Г + Г) - Дт(г)] 2?/2 = Тоу(Т) =
[ сху/Т\ Т<103с (белый частотный шум), (3.33)
с2 Т, Т>103с (’’фликкерный потолок”), (3.34)
где оу — дисперсия Аллена (гл. 8, § 1).
1. В случае, когда требуется представить Дт(/) на длительном интервале
времени, основную роль играет длительная нестабильность стандарта (3.34) .
Вычисляя (3.32) для гауссовского процесса (3.34) и анализируя его,
оо
получим С] = t, ек>х =0, при этом а2 = S Хк = 0. Таким образом,
k = s + I
представление (индекс ”1” в дальнейшем опускаем)
Дт(/) = п + mt (3.35)
является оптимальным для стандарта со статистическими характеристиками
(3.34).
Этот результат можно получить более непосредственным путем, рас¬
сматривая случайную функцию
^) = дт(о - дт(ги дг(л.)_2^2. =
tk 0 tk ti
= [Дт(0 -Дт(Л)1 +——~ [Дт(0- Дт(г,)], (3.36)
tk - ti tk - tj
где tj k — некоторые фиксированные моменты времени, в которые ведут¬
ся радиоинтерфсрометрические измерения. Квадрат этой функции может
57
быть представлен в виде
£2(t) = ( ——) [Дт(О- Дт(гЛ2 +
\ fk - h /
/ t - tk \ 2-
+ ( J [Ar(/)- Дт(О)]2 +
\ rk ~ ti) ’
+
(Г - rf) (tk - t)
(tk - ti)2
[(Дт(О- Дт(Л-))2 +
+ (Дт(Г)- Дт(гЛ))2 - (Дг(г, )- Дт(О2],
Тогда, принимая во внимание (3.34), будем иметь
<£2(/)>=0. (3.37)
Так как £2(г) > 0, то, согласно (3.37), £(t) ~ 0 и, следовательно, любая
реализация Дт(г) является линейной функцией.
2. В случае, когда общий интервал наблюдений Т разбивается на отдель¬
ные отрезки длиной L < 103 с, на каждом из них можно использовать
свою аппроксимацию Дт(Г) (’’сплайн”). Для винеровского процесса
1 я t 8с2
^ = —=;sin~ (2Л-- 1)- и^ = —
у 2 2 L я2
(3.33)
/(2Л - 1) , так что
О 00 - / 1 -У \ m > I
имин“ S \к ^С1(1 ~ S Хк )
Л = 5+1 \ С\ к=1 /
/п > I 2с 1 2с 1
~ — (2s+3)/(s +l)(2s + 1)°с—— .
Я Я S
(3.38)
Результаты вычислений о/сг различных значений 5 приведены
в табл. 10, из которой видно, что наибольшее увеличение точности пред¬
ставления Дт(Г) наступает при s = I (в 2,3 раза). Однако введение до¬
полнительного неизвестного в уравнения типа (3.26) — (3.29) увеличивает
погрешность в определении координат источников и параметров интер-
/ s "Ь 2 «у 1
ферометра (гл. 4, § 5) (как можно показать, в у —-— L (С£+1)2
раз), так что брать S > 0 не имеет смысла и достаточно ^ограничиться ап¬
проксимацией Дт(г) = п на каждом интервале длиной L.
Таблица 10
Уменьшение ошибки представления Д т(г) с увеличением
числа членов аппроксимирующего ряда
5’
0
1
2
3
4
5
6
а/с;
1
0,43
0,31
0,26
0,22
0,20
0,18
58
В случае, когда временная задержка т измеряется совместно с частотой
интерференции F, естественно потребовать, чтобы было справедливо ра¬
венство
S’
а2 = ( min {/[Дт(г)— п- S mk ek(t)]2 dt +
°i as *='
+ уу f [Дт(0-
S 4(г)]2 dt}).
к= 1
(3.39)
Так как Дт(/) - винеровский процесс, то Дт(т) — нормальный белый
шум и < Дт(т) Дт(5) ) = 2 с2 8 (г - S'). В этом случае a(t) -» f (st(t)Ar(S)) X
оо
Z ХА.
к - s + 1
X a(S)dS = 2с\ a(t) и ХЛ = const, так что = 1.
оо
S Хд
к = 1
Следовательно, при выборе оптимальногб базиса {q ] о2 уменьшается
только за счет первого члена в (3.39), и, таким образом, и в этом случае
верно доказанное выше утверждение.
В дальнейшем мы будем считать, что т и п малы, так что в правые части
условных уравнений (3.26), (3.27) они будут входить как аддитивные
добавки.
§ 4. ПРЕДВЫЧИСЛЯЕМЫЕ ПОПРАВКИ К НАБЛЮДАЕМЫМ ВЕЛИЧИНАМ
Определенные выше величины и имеют чисто геометрическое
происхождение и не учитывают ряд факторов, сопутствующих, в частности,
реальному распространению плоской волны от источника до фокуса те¬
лескопа. Ниже будут рассмотрены основные предвычисляемые поправки к
и Fg, позволяющие сделать модели наблюдаемых величин т(7) и F(t) бо¬
лее реалистическими.
4.1. Эффекты, связанные с реальной геометрией антенн.
Геометрические выражения для Tg и Fg включают представление о базе
интерферометра b как о расстоянии между неподвижными точками радио¬
телескопов. Однако реальная антенна не может быть заменена точкой на
земной поверхности, а потому в наблюдаемых значениях тк и Fg необхо¬
димо принять во внимание члены, учитывающие времена распространения
плоской волны в реальной системе.
Пусть антенны на пунктах представляют собой полноповоротные пара¬
болоиды разных размеров. Рассмотрим два типичных случая: 1) подвижные
оси антенн пересекаются (рис. 10) , 2) подвижные оси антенн не пересекаются
(рис. 11).
В обоих случаях за вектор базы интерферометра удобно принять вектор,
соединяющий центры вращения антенн (а не их фазовые центры), чтобы
этот вектор не зависел от координат наблюдаемых источников [71].
В первом случае, как нетрудно видеть,
Т(0= Т?(Г) + ТЛ,
59
Рис. 10. Антенная система с пересекающимися подвижными осями.
где
Та ~(.Та2-та1) + (т^ -ТЭ1). (3.40)
Здесь cTd. — расстояние между фокусом и вершиной параболоида и стЭ/ _
расстояние между вершиной параболоида, и точкой пересечения подвижных
осей телескопа. Очевидно, что в этом случае F(r) = Fg(t).
Величина тА может быть предвычисЛена с необходимой точностью;
в частности, если антенны идентичны,то тА = 0.
Во втором случае полярная ось и ось склонений телескопа разнесены на
—>
вектор L , ортогональный к полярной оси инструмента.
Тогда, как нетрудно видеть,
т(1) = Tg(t) + (Тд2 - Тв1 ) + Тэ + TL ,
где
Г,= 7Э2-7Э1) I
т£ = 7l2 -TLi, )
(3-41)
и Tg — задержка, отнесенная к точке К (см. рис. 11).
Задержка тэ определяемая расстоянием от вершины параболоида до
оси склонений, постоянна, а задержка
tl. (к Ld (3.42)
с
переменна и зависит от взаимной ориентации инструмента и источника.
Обе эти задержки могут быть пред-
вычислены с необходимой точностью.
Рассмотрим для примера телескоп
с параллактической установкой [72].
В этом случае удобно ввести единич-
Р и с. 11. Антенная система с непересека-
ющимися подвижными осями.
60
ный вектор / вдоль полярной оси инструмента. Тогда направление вектора
L можно связать с направлениями I и к. Так как вектор// ортогонален/ и
векторы L, I и к лежат в одной плоскости, когда антенна направлена на
источник, то направление вектора L совпадает с направлением вектора
(/ X к )Х / =к - / (/ - к). Следовательно,
-> к -7 (I -к)
L = L —-Г” =г
л/1-(7Г)2
(3.43)
и, согласно (3.42),
=± Vl_(7 .£)< (3.44)
С
* —>• -J
В экваториальной системе координат / = (1х,1у, Iz), причем 1Х, /у =€1СГ,
a Iz « 1, и, следовательно,
tl. = —[ cos 6 - /£^sin 6 cos(50 - a) - /^ sin 5 sin(50 — a)] •
1 c y
Отсюда
rL=k cos 6 - / sin 8 cos(£0 - a) - zn sin 8 sin(50 - a),
где
к = — (L2-//J,
c
l = —
c
m = — (L2Iy2^ - Zi /^l)).
c
Очевидно, что
1 d к
£ = Fg-f~ (L2-L^) —
c at
и для инструмента с параллактической установкой
1
F = Fg - Fl sin 8 (/ sin(50 — -a) - m cos(50 - a)).
c
4.2. Аберрационные эффекты и гравитационная рефракция.
(3.45)
(3.46)
(3-47)
(3.48)
(3.49)
Для того чтобы проанализировать эту группу предвычисляемых попра¬
вок, которое обусловлены конечностью скорости распространения света
и влиянием гравитационного поля Солнца на скорость его распространения
[73] , рассмотрим выражение для временной задержки в гелиоцентрических
координатах (рис. 12).
Координатное время распространения фронта волны между радиоисточ¬
ником и пунктами наблюдений, имеющими соответственно координаты
61
^Источник
Солнце
Рис. 12. К выводу аберрационных попра¬
вок. г*] 2 и ^1,2С “ геоцентрические и ге¬
лиоцентрические координаты пунктов;
Rq - гелиоцентрический радиус-вектор ба¬
рицентра Земли.
Рис. 13. К выводу поправки за ’’гравита¬
ционную рефракцию". Bq, в - углы между
—>
вектором базы Ь и направлениями на Солн¬
це (SE) и источник (Л).
(Я/С, tiC) и (Яос. ^ос)> с учетом влияния гравитационного поля Солнца
равно
c(fic ~ *ос) “ ос(/ос) ~ (^c)l +
RiC - RiC
+ rg In =5—=5—,
*0C - AoC ki
(3.50)
где последний член [74, с. 183] связан с эффектом гравитационного ис¬
кривления лучей света в поле тяготения Солнца (’’гравитационная рефрак-
2GMc
ция”), rg = —-— — гравитационный радиус Солнца, Мс — масса Солнца,
с
G — гравитационная постоянная и к i — единичный вектор направления на
источник с z-ro телескопа. ,
Следовательно, временная задержка, выраженная в координатном вре¬
мени (г2С > Г] с), может быть представлена в форме
тнабл~ Г2С~Г1С- I^OC Оос) “ ^2c(Gc)I~
с
1 -* -> z*% [ R2C ~ RoCk2
-- I Кос (Л>с) - /?1C(f,c)l+— In 7^ +
с с t Rtc - А,с ki
^ос _ ^ос ^11
+ 1 П =5 =7- <
^ОС ” *ОС к2 I
62
Так как наблюдаемые источники находятся на галактических или вне¬
галактических расстояниях, где Я0с т0 имеют место соотношения
l^oc(^oc)- ^oc(roc)- Rtc(ti c)k ,*0 -- ^O^z =Я0(1 ~
£ £+_!_ {(flfc k)k -RiC}-
^OC
1 U _ _ (4c)2 3 - -> J
*0C - *0C fcl _ 1 C )2 (^ 1 C ^ )2
^OC - Дос к 2 (Д2С)2 _(Я2С к)2 ’
где к = Rq/Rq. Используя эти соотношения, будем иметь
тнабл = GC“Gc = {Я1с(Лс)~ Я2с(г2с)}£ +тгр > (3.51)
с
где поправка тгр, связанная с гравитационной рефракцией, может быть
представлена в виде (здесь и далее в членах порядка 1 /с3 индекс ”С”
опускается)
+ Rx к
In —-—=A-=f-
R 2 + R 2 'к
(3.52)
Нетрудно видеть, что когда источник находится ”в верхнем соединении”
с одним из телескопов интерферометра, то тгр Если же единичный
вектор не параллелен к , то
rg (b -k) + (b R/R)
cR 1 +Rk/R
(3.53)
В случае, когда источник лежит в плоскости эклиптики, выражение (3.53)
можно представить в виде
rg cos 6 — cos 0с
гр~ ~cRq 1 --cos(0- 0С) ’
(3.53а)
где 0 , в с — углы между базой и направлениями на источник и Солнце
соответственно (рис. 13).
Так как
^2 с (G) ~ ^2 с (G с) + ^2 с (ri с)(/и2с - Gc) +
1 и
+ у ^cOtc)(Gc - ric) + .. • ,
то, рассматривая это уравнение как уравнение относительно r2c - fic и
63
разрешая его с точностью до членов порядка 1/с2, можно представить
(3.51) в виде
Гнабл = - (ЬС -к)-2- (R2C .k}(bc -1) + -^ (О)2(^- *)"
с с2 с
-*)2+ггр’
где
Ьс = Aic (Gc)~^2c(Gc)
— вектор базы, записанный в гелиоцентрических координатах:
Принимая во внимание, что
Rte = + Пс ,
преобразуем выражение (3.55) к геоцентрическим координатам (систе¬
ма Se). Для этого необходимо преобразовать вектор базы Ьс , который
определен как разность А/с в момент гелиоцентрического времени, когда
фронт волны достигает первого телескопа, к геоцентрическим координатам:
b =Г1(Г1)-г2(Г1).
Используя пространственные компоненты преобразований
будем иметь
(3.54)
(3.55)
(3.56)
Лоренца,
Bc vc _
т ~ — Gc)
(ис)2
C Vl-(Hc/c)2
где Bc = Л1С(г1С) - /?2c(G c)> Gc — момент времени для второго телес¬
копа, который одновременен в Se с моментом времени tXQ и Vc=^i-По¬
скольку, согласно временной компоненте преобразований Лоренца,
1
Gc - Gc - G>c • Ис),
с1
легко видеть, чТо
bQ - b -^(Ь .Ис)-—Lyc(?^c)-
с 2с
Подставляя (3.59) в (3.54) и принимая во внимание тот факт, что с
рассматриваемой точностью KzC = rzC V f = , будем иметь
^набл = ^{1 - у [(ИС + И2)* -^rg(Wc.k)-2-Tg(W2.k)] +
-> -► Bq Vq
b =Bq -----
(Ис)2
(3.57)
(3.58)
(3.59)
-A (b . Vc)(V2.k)--L (Кс .Г)(ГС *) + тгр,
с 2сл
64
(3.60)
где
rg = — (b ■ к ) = — (Г1(П)-г2(Г1))*
с с
и й/с = .
(3.61)
Полученное выражение т^дбл представляет временную задержку в коор¬
динатном времени Г, которое связано с собственным временем S извест-
/ б'ТИг
ным соотношением =— ■ — ньютоновский потенциал
\ RiC
(3.62)
Используя это соотношение, нетрудно видеть, что наблюдаемая времен¬
ная задержка может быть представлена в виде
Gc
тнабл ~ $2 ~
GC
ДГ, (3.63)
где
дг {*2 +у (ис)2 + у Ъ + Vi- ис)-.. (З.64)
Окончательно, если ограничиться членами порядка не ниже 5 * 1О"10, бу¬
дем иметь
THa6n=rJl--(Kc М +-Т [(^С’М2 -
(с 2с с
+ - (Ис)2 + и2 • Ус ] - — (Ус ■ к) (ь- ис) + тгр. (3.65)
/<с 2 J 2с
В выражении (3.65) члены порядка 1/с являются точными аналогами
годичной и суточной аберраций. Они отражают тот очевидный факт, что
фронт плоской волны, достигающий
первого телескопа в момент времени
Г1, достигает второго телескопа в мо¬
мент времени t2 - + т > tx. Таким
образом, измерения относятся к базе
~~^2 (h) (’’запаздываю¬
щая база” [75]), в то время как
Tg определяется по отношению к
’’синхронной базе” b =~rx (fi)— ~r2 (G)
(рис. 14).
Согласно определению наблюдае¬
мая частота интерференции может быть
Рис. 14. К определению ’’запаздывающей
базы”.
представлена в виде
гпабл=/-^$2-Ы=Г
aS 1
где, согласно (3.62),
Л.С _ , ' I
1 +7Г'
Следовательно,
dr набп
^набл = f ' +
d dtx с
— $2_SX}—~ ,
dt\Q dS\
, (* 1С)21
(3.66)
(3.67)
и
Fg=flT
ati
—[Vi (fl)- K2(g)] к .
с
Прямое дифференцирование (3.54) дает
dT на б л
(3.68)
<^ic
= — (И1С(/1С)-К2(Лс)) ((Ис + И2С)Г] X
С с
dt\c
X [(K1C - К2С)Г] - \ [(IVC + iv2C)M (be k) +
c
+ “T [(He + W]2 [(И, - V2yt] +
+ Л" КИС + K2) *] [(И/с + ИШ] (Г Г)-
c
(b k)l(Wc + W2)H КП - И2)‘Г]-
- <* ’ *)2 + W1) • M + rrp,
где, для того чтобы преобразовать К1С (г1С) — И2 (r2G), воспользуемся
преобразованиями Лоренца (3.57), (3.58), согласно которым будем иметь
( ■* -* 1 / Ис\2 1 и2 ис - v2 vc -+
+
W, -> -►
+ — {b • и/с),
c
->
vt.
66
Следовательно,
сГг'набл ( 1
f . = М 1 - - И^с + V2)k + Tg (Wc + JM- *] +
dtlC I c
+ “Г К(ИС + И2)Г)2 - I- (Ис)2] 1 -^-{(IVc + W2)k +
c2 2 J c
J
+ v- (WC + i?2) к - — [(£ + v2)k] [(^c + ЙШП -
2 c
{(Й • ИС)(И, • k)-(V2 ■ VC)(V2 • k) +
c3
+ y К?1 - И2)ГС] (Vck) + (Г- Kcm •*)} + /rrp.
Таким образом, если ограничиться членами порядка 5 ’ 10"10, то наблю
даемую частоту интерференции FHa6jl можно представить в виде
^набл =Fg { 1 - 2- [(Ис + VJk + Tg (Wc ’ Г)] +
+ —[(Ис *)2 (Ис)2] (И/с + ^)* -
с2 2 ) с
-4-<(П- ^с)(И1 *)-(И2 КС)(И2 к) +
сл
+ у[(И[-К2) Гс](Гс*)} +Frp,
(3.69)
где, согласно (3.53), член Frp, связанный с влиянием гравитационного поля
Солнца, равен
Ис + У,
R\ + Ri к
(3.70)
Очевидно, что в том случае, когда источник находится ” в верхнем соеди¬
нении” с одим из телескопов интерферометра, Frp Однако, если еди¬
ничный вектор r;/rz не параллелен к, тогда
(3.71)
Согласно рекомендации Международного астрономического союза,
годичную аберрацию следует вычислять по полной скорости движения Зем¬
ли вокруг барицентра Солнечной системы, поэтому в качестве Rc следует
брать барицентрический радиус-вектор центра масс Земли. Соответст¬
вующий вектор скорости Rq = (х, у, z) в прямоугольной экваториальной
67
системе координат имеет составляющие
S mt xt
1 + S mi
У =
^тгу1
1 + 2т{-
z
S гщ Zi
1 +
где Xy Yy Z — производные прямоугольных экваториальных координат
Солнца, Xi, yiy Zi — аналогичные производные координат z-й планеты и mf —
ее масса в единицах массы Солнца.
Производные х, у, z проще всего вычислять непосредственно по их раз¬
ложениям [76] в тригонометрические ряды
... п f sin 1 12
(x,y,z) = S (a, b, с) T *1 S
i= 1 (cOS j j= 1
где a,b, с — численные коэффициенты членов ряда соответственно для х, у,
z, Т —время в юлианских столетиях, а, — целый показатель степени, причем
О < < 3, — набор фундаментальных аргументов, используемых в теори¬
ях движения Земли и планет, fy — целочисленные множители (0, < 13).
Точность этих разложений равна 0,5 * 1СГ8 а.е./сутки ^1 см/с. Однако в
рассматриваемом приближении достаточно ограничиться членами порядка
1СГ7 а.е./сутки ~15 см/с. Сокращенные таким образом разложения пред¬
ставлены в табл. 11. Для удобства вычислений аргументы преобразованы к
линейной форме, в которой Т должно быть в юлианских столетиях от мо¬
мента 1900, январь 0,12 ь ЕТ.
Вычисленные таким образом составляющие скорости движения Земли
относятся к мгновенной экваториальной системе координат, что и требует¬
ся по рекомендации XII Генеральной ассамблеи МАС (Гренобль, 1976).
Однако, согласно той же рекомендации, при вычислении аберрационных
поправок необходимо по традиции включать вековой член, зависящий от
эксцентриситета земной орбиты е и долготы солнечного перигелия Г, поэто¬
му окончательные составляющие вектора (х, у, z) должны вычисляться по
формулам [76]
х' ^х + 0,000283 - 0,00002 Т, у у + 0,000051 + 0,000008 Г,
z ъ z + 0,000022 + 0,000003 Т.
Интересно отметить, что указанные вековые члены входят в выражение
для Rc через истинную долготу Солнца Хс, имеющее вид [77, с . 325]
па
R с = {(sin Хс + е sin Г), (cos Хс + е cos Г) cos е ,
у1 - е
(cos Хс + ecosT) sine},
где п — среднее движение Земли, а — большая полуось ее орбиты, е — нак¬
лонение экватора к эклиптике, но их нет в производных х, у, z, представ-
68
Таблица И
Проекции скорости орбитального движения Земли
Коэффициенты при sin (s)
(X 107 а.е./сутки)
или cos (c)
Аргумент (доли оборота)
Период
(сутки)
X
J
У
z
-171997 s
-157789 c
-68452 c
0,7 7 6 9 35 21 + 100,00 21 36 T
365,2
(2881 —7,2 Г) s
(-2643 +
(-1147 +
0,77270142 + 199,999497 Т
182,6
71,5 s
+ 6,3 n c
-65,6 c
+ 3,5 7) c
-28,5c.
0,751206011 + 1336,855231 Т
27,3
70,1 s
-64,2 c
-28,0 c
0,625780556 + 8,4293972 Т
4333
54,3 s
-49,8 c
-21,6 c
0,768467624 + 299,996857 Т
121,8
15,9 c
14,7 s
6,1 c
0,487766667 + 3,393872 Т
10762
(15,8 +
(15,2 +
(4,8 + 8 T) s
0,825780556 + 8,429397 Т
4333
+ 207) c
-6,0 s
+ 187) s
5,5 c
2,4 c
0,785402808 - 99,992585 Т
365,3
3,8 s
-3,5 c
-1,5 c
0,57371881 + 2662,407590 7
13,7
3,4 s
-3,1 c
-1,4 c
0,251561111 + 16,358794 7
2166
-3,1 c
2,8 c
1,2 c
0,853079136 - 191,570099 7
190,7
-
2,6 c
-5,9 c
0,031252469 + 1342,227848 7 27,2
-2,6 s
2,4 c
1 c
0,122765201 - 2485,009063 7
14,7
-2,2 s
-2,0c
-0,9 c
0,628705988 - 162,553368 7
224,7
2,2 s
-2,0c
-0,9 c
0,535519478 + 99,946947 7
365,4
-2,2 s
2,0 c
0,9 c
0,018350956 + 100,057325 7
365,0
-1,8 c
1,7 s
-
0,034347192 - 225,104594 7
162,3
-1,7 s
1,6 c
-
0,201158333 + 1,189942 7
30695
1,6 s
1,5 c
-
0,963036081 + 83,133790 7
439,4
1,6 c
1,4 s
-
0,018350956 + 100,057325 7
365,0
1,6 c
1,4 s
-
0,535519478 + 99,946947 7
365,4
1,2 c
-1,1 s
-
0,628705988 - 162,5533675 7 224,7
-1,2 s
1,1 c
-
0,402715772 + 108,431533 7
336,8
1,2 c
1,1s
-
0,104808333 + 0,606836 7
60189
1,1 s
1 c
-
0,34347192 - 225,104599 7
162,3
1,1 s
-1,0c
-
0,699747600 + 3810,561422 7
9,6
-1,1 s
-1,0 c
-
0,235766173 - 399,994218 7
91,3
1,1 s
-1,0 c
-
0,104808333 + 0,606836 7
60189
-1,0s
-0,9 c
-
0,597284228 - 91,572739 7
398,9
-1,0s
0,9 c
-
0,5169065137 + 283,138063 7
129,0
0,9 c
-
-
0,97533333 + 6,787744 7
5381
ленных в табл. 11. Происходит это потому, что функции sin Хс и cos Хс, бу¬
дучи разложенными в ряды по фундаментальным аргументам, сами содер¬
жат члены - ё sin Г и - е cos Г [45], которые взаимно уничтожаются с та¬
кими же членами в Rc. ц/с т
Главный по порядку член в FHa6n, содержащий Wc, имеет вид / • .
с
Поэтому для предвычисления релятивистских поправок к FHa6n с точностью
69
Таблица 12
Проекции ускорения орбитального движения Земли
Коэффициенты при sin (s)
(X 107 а.е/су тки2)
и cos (с)
Аргумент (доли оборота)
Период
X
У
Z
(сутки)
2959 с
2715 s
1178 s
0,77693521
1- 100,002136 T
365,2
99 с
91 s
39 s
0,77270142 •
4- 199,999497 7
182,6
16 с
15 s
7 s
0,751206011
+ 1336,855231 T
27,3
Зс
3s
1 s
0,768467624
+ 299,996857 T
121,8
2 с
2 s
1 s
0,57371881
4- 2662,407590 T
13,7
-
-1 S
1 s
0,031252469
+ 1342,227848 T
27,2
-1 с
-1 S
-
0,122765201
- 2485,009063 T
14,7
1 с
1 S
-
0,699747600
+ 3810,561422 T
9,6
5 • 1СГ10 необходимо знать Wc с точностью 1СГ7 а.е./сутки2 2 • 10"4 см/с2.
Удовлетворяющее такой точности разложение вектора = (х, у, z) приве¬
дено в табл. 12.
Знание вектора Rc необходимо только для предвычисления тгри Frp.
Очевидно, что для источников, находящихся вне плоскости эклиптики или
на достаточно больших угловых расстояниях от Солнца, при предвычисле-
нии тгриГгр достаточно полагать е = 0, так что
Rc Rc {-cosXc> — sin cos е> ~sin sin е}-
4.3. Тропосферная и ионосферная рефракция
Время распространения фронта волны от источника к приемнику в пре¬
ломляющей среде атмосферы отличается от соответствующего промежутка
времени в вакууме по двум причинам. Во-первых, неоднородное распреде¬
ление показателя преломления п (г) по высоте приводит к повороту волно¬
вого вектора п = — к, в результате чего траектория распространения оказы¬
вается криволинейной. Этот эффект представляет собой не что иное, как
обычную атмосферную рефракцию. Во-вторых, время распространения ме¬
няется из-за изменения фазовой скорости света в среде с отличным от еди¬
ницы показателем преломления. Это факт специфичен для радиоинтерфёро-
метрических измерений и, как будет показано, именно он является домини¬
рующим.
Дифференциальная электрическая длина dL, как нетрудно видеть из
рис. 15, будет равна
dL = и(г)с?г/со8Ф, (3.72)
где Ф — угол между направлением нормали к сферической поверхности г =
= const и касательной к траектории распространения луча. Принимая во
внимание тот общеизвестный факт, что для стратифицированной сферичес-
70
Рис. 15. Модель сферической стратифи¬
цированной атмосферы.
кой атмосферы выполняется закон
Снеллиуса, имеем
n(r)r sin Ф = noRe sinz, (3.73)
где п0 — приземное значение пока¬
зателя преломления, z — видимый
зенитный угол радиолуча в точке
приема и Re — радиус Земли.
Так как со8Ф=х/1 - (и0Яе/иг )2 sin2
h n2rdh
о (и2г2 - sin2z)^2.
(3.74)
где r=Re^hnh— геометрическая высота атмосферы.
Для анализа выражения (3.74) и приведения его к более удобной форме
введем индекс рефракции 7V= п — 1 (7V0 = и0 — 1) и угол рефракции Az =
= z0 — z (z0 — истинный зенитный угол радиолуча в точке приема). Так
как АГ, Az < 1, то в линейном приближении относительно A/и Az имеем
L=f F(/ir1/2(Xe+h)dh + f F(h)~1,2N(h)(Re+h)dh. (3.75)
0 о
где
F(h) = (Re + h)2 - R2 sin2 z0.
Нетрудно видеть, что первый член в этом выражении представляет собой
геометрическую длину пути луча в атмосфере, а поправка в линейном приб¬
лижении связана с изменением фазовой скорости света.
Таким образом, в линейном приближении поправка к временной задерж¬
ке будет иметь вид
’■(1а)тм= — (А^2(1) (3-76)
. с
где
AL(/>=f F,(h)~1/2 N(h)(Re + h)dh. (3.77)
Поправку второго порядка к £, а, следовательно,и к Tg, можно получить,
сохранив в разложении (3.74) члены, квадратичные по Az и N, No [78]:
Д£(2) = 1 R2 sin2 Zo J- лу0 _ ДГ) (2/v0 _ ДГ) (Re + h)F(hy1/2 dh +
2 и
+ — R2 cos2 z0 (Az)2 J (Re + h) F (h)~ll2 dh, (3.78)
2 о
где угол рефракции Az определяется выражениями
Az = tg z о (No-N) (3.79)
и
N = f N(Re + h)F(h)~112 dh / f (Re + h)F(h)~112 dh. (3.80)
0 0
71
(3.82)
Второй член в (3.78) учитывает эффект искривления траектории луча и
при больших зенитных углах он может быть сравним с поправками первого
порядка, в особенности при учете эффектов тропосферы, поскольку угол
рефракции в тропосфере значителен.
Поправка за рефракцию к частоте интерференции будет равна, как не¬
трудно видеть,
^атм =— — (^2-М), (3-81)
с dt
где индексы 1,2 обозначают разные пункты. Согласно (3.74) имеем
d 2 h sin 2zn2 г dh dz
dt 2 e ° о (н2г2-/7о^е sin2 z)3/2 dt
и
dz cos cos 6 sin (SQ - a — A)
— = - — (3.83)
dt sin z
Полученные выражения (3.76) — (3.83) не зависят от характера меха¬
низма, определяющего зависимость N (h), и в равной степени применимы
для предвычисления эффектов рефракции как в нейтральной тропосфере,
так и в ионосфере.
4.3.1. Тропосферная рефракция. Значение индекса рефракции в тропос¬
фере для частот f < 50 ГГц может быть вычислено по формуле [79]
, 77,607 (Р-1) 77,61 3,747.105/
Ю6/у = - - + —— + , (3.84)
у у у2 v
где Р — атмосферное давление воздуха, / — парциальное давление водяного
пара (оба в миллибарах) иТ — температура в кельвинах. Если значения Р, I
и Т определяются метеорологическими методами, то ошибка в вычислении
N не превышает 1%.
Средний профиль N (h) в тропосфере может быть задан экспоненциаль¬
ной моделью
N(h) = No e*p(-0h), (3.85)
где /Vo можно вычислить, согласно (3.84), по данным приземных метеоиз¬
мерений. Так как на высоте h = 10 км индекс рефракции испытывает наи¬
меньшие изменения и по измерениям в различных точках земного шара N =
, 1 93
= 93 • 10 , то /3 = - — In и его значение меняется от 0,120 до
10 Nq
0,150 км 1 (Рср =0,13 км1).
В табл. 13 [80] приведены стандартные профили N (И), полученные по
результатам многочисленных радиозондовых измерений.
В табл. 14 [81] приведены численные значения тропосферной поправки к
электрической длине АЛ для средних метеорологических условий (NQ =
= 3,28 • 10Г4, /3 = 0,1265 км"1).
Из сравнения значений для А//1) и AL из табл. 13 видно, что для
зенитных углов z<C 80° влияние искривления траектории распространения
пренебрежимо мало, так что вполне достаточно пользоваться приближения¬
ми (3.76).
72
Таблица 13
Стандартная радиоатмосфера
h, км
Р, мб
т, К
N ■ 10’6
h, км
Р, мб
Т, К
N • 1СГ'
0,0
1013,2
288,2
335,3
4,0
616,2
262,2
193,8
0,5
954,6
285,0
313,8
5,0
540,0
255,7
170,5
1,0
900,0
281,7
293,1
6,0
471,7
249,2
150,2
1,5
845,5
278,5
273,1
7,0
410,3
242,7
133,0
2,0
794,9
275,2
254,6
8,0
355,9
236,2
117,8
2,5
746,7
272,0
237,5
9,0
307,3
229,7
104,4
3,0
701,0
268,7
221,9
10,0
264,3
223,2
92,3
В некоторых случаях в нижних слоях -атмосферы толщиной 100 — 200 м
поведение N (/?) может сильно отличаться от стандартного (3.85) . Последнее,
в частности, может быть связано с эффектом темперагурной инверсии на
границе дня и ночи, появление которого препятствует тепло- и влагообмену
и приводит к тому, что водяные пары начинают скапливаться в приземном
слое, создавая большой градиент влажности. В таких случаях N (Л) может
быть восстановлен прямым зондированием с вышек или радиозондов.
4.3.2. Ионосферная рефракция.
Ионосфера, в отличие от тропосферы, представляет собой частотно зави¬
сящую среду. В ней фазовая скорость распространения электромагнитной
волны всегда больше скорости света и, следовательно, ионосферные поправ¬
ки к временной задержке и частоте интерференции имеют знак, противопо¬
ложный соответствующим тропосферным поправкам.
Коэффициент преломления радиоволн’в плазме ионосферы определяется
в ыражением
П = 71 У <1, (3-86)
где плазменная частота сор, если пренебречь частотой столкновения электро-
Таблицам
Электрическая длина в тропосфере в зависимости от зенитного угла
Z
д;/1), м
Д L, м
Z
Д//1) , м
ДЛ(2) , м
0°
2,60
2,60
81°
16,71
16,71
10
2,64
2,64
82
17,80
17,75
20
2,75
2,75
83
20,02
19,95
30
2,99
2,99
84
22,97
22,85
40
3,38
3,38
85
27,14
26,92
50
4,04
4,04
86
32,32
31,93
60
5,21
5,21
87
40,42
24,35
70
7,59
7,59
88
52,82
51,70
80
15,04
15,04
89
76,52
72,0
73
Рис. 16. Профили электронной концентрации [81]. а) Полученные методом верти¬
кального зондирования; 1 -4h,2-5h,3 — 6h,4-13h,6) полученные радиозонди¬
рованием с ИСЗ; 1 - 4h, 2 - 12h.
6)
Атг tv;1
нов с атомами и ионами по сравнению с /, примерно равна е у '—, где
- ♦
е — масса и заряд электрона, 7ve — электронная концентрация.
Для радиочастот индекс рефракции в ионосфере
уу*
N = - 4,04 • 107 , (3.87)
где Ne - в см-3 и f - в Гц.
Электронная концентрация 7Ve имеет поведение, близкое к представ¬
ленному на рис. 16, а, и на больших высотах монотонно убывает (рис.16, б),
так что на высоте h 103 км 7Ve* 104 см"3 [82, 83].
Ионосфера по сравнению с тропосферой является значительно более из¬
менчивой средой. Как следует из рис. 17 [84], электронная концентрация
Ne в течение дня может меняться в десятки раз, изменяясь ото дня ко дню
на 10 — 20% и сезонно в 2 — 3 раза. Поэтому трудно аппроксимировать
какой-либо простой универсальной функцией. Обычно нижнюю ионосферу
Таблица 15
Электрическая длина в ионосфере в зависимости от зенитного угла
Z
AL, м для f, МГц
50
100
500
1000
3000
0°
-4,84 • 10э
-1,21 ■ 10’
-48,4
-12,1
-1,35
10
-4,92 ■ 103
-1,23 • 10’
-49,2
-12,3
-1,37
20
-5,12 • 10’
-1,28 ■ 10’
-51,2
-12,8
-1,42
30
-5,62 • 10’
-1,38 • 10’
-56,2
-13,8
-1,53
40
-6,12 • 10’
-1,53 • 10’
-61,2
-15,3
-1,70
50
-7,08 • 10’
-1,77 • 10’
-70,8
-17,7
-1,97
60
-8,60 • 10’
-2,15 • 10’
-86,0
-21,5
-2,39
70
-10,90 ■ 10’
-2,73 • 10’
-109
-27,3
-3,04
80
-16,10 • 10’
-4,03 • 10’
-161
-40,3
-4,42
74
h
Рис. 17. Зависимость интегральной электронной концентрации = f N(h) dh от вре-
0
мени суток [81]. 1,3- зимние месяцы, 2 - летние месяцы.
Р ис. 18. Транспортировка часов.
(ниже слоя/*^, высота h 200 — 300 км) аппроксимируют параболической
зависимостью
(^) ~ ^макс
М „”)]■ <з-88)
где максимальное значение электронной концентрации в ионосфере и тол¬
щину нижней ионосферы и определяют методами вертикального зондиро¬
вания; hm — высота, на которой электронная концентрация в ионосфере
максимальна.
Верхнюю ионосферу можно удовлетворительно аппроксимировать экс
поненциальным распределением
Ne (h) = Аймаке exp (-0 (h - hm)} ,
(3.89)
где ориентировочное значение 0 = (3,9 — 3,2) • 10”3 км"1.
Тогда, используя (3.76) — (3.83) (nQ = 1,NQ = 0), можно предвычислить
поправки за ионосферную рефракцию (табл. 15) [81].
е2 JV
~ с пмакс ,
В диапазоне зенитных углов cos zQ > - соответствующие фор-
я/ те
мулы могут быть существенно упрощены [81] :
е2 Re + h h
ДА = ;— , , (й)dh.
^■nf2me \/{Re + й) - Rj sin2 z0 0
Полагая hm = 300 км, получаем
4, 07.107 TV*
AL =- ——=====7 .
f2 >/l - 0,91sin2zo
♦ h
Интегральную электронную концентрацию 7Ve = f Ne (Zz) dh можно оце-
13-0 0
нить величиной ~ 2,1 • 10 см , так что для оценок можно пользоваться
простым приближением
1,21 • 1021
AL^- ====;
/2 - 0,91 sin2z0
(3.90)
(3-91)
(3.92)
75
Поскольку тропосферные и ионосферные поправки в сантиметровом
диапазоне длин волн равны по порядку величины, но различны по знаку,
они в значительной степени компенсируют друг друга [85], в результате че¬
го для не слишком больших зенитных углов Источника предвычисляемое
значение общей атмосферной поправки не сильно зависит от моделей тро¬
посферы и ионосферы.
4.4. Эффекты, связанные с синхронизацией локальных шкал времени
Пусть в некотором пункте осуществлена взаимная привязка атомных
часов, а затем одни из часов транспортируются в другой пункт по траекто¬
рии г (г) со скоростью 7(/) (рис. 18) . Эта операция приводит к рассинхрони-
низации часов, поправку за которую можно предвычислить.
Так как собственное время tc часов, движущихся со скоростью W в гра¬
витационном поле с потенциалом Ф, связано с координатным временем t
соотношением
/ Ф W2 \
(3.93)
то разность показаний неподвижных и движущихся часов будет определять¬
ся по формуле
Т’оас
1 T^GMe
70; йГ
, (QX7)2_[>+ (Jf Х7)р] j
h + — dt,
2 J
(3-94)
где T — время транспортировки, Me, Re - масса и радиус Земли, h — высо¬
та над поверхностью Земли, на которой движутся транспортируемые часы;
h, ~г,7 являются функциями времени вдоль реальной траектории. Например,
в том частном случае, когда неподвижные часы расположены на экваторе, а
вторые часы переносятся по большому экваториальному кругу,
трас = — f h - Re г SI - — г2 j dt, (3.95)
GMe
rj\QgQ =—— - Re£l2 — ускорение силы тяжести на экваторе.
&е
Нужно иметь в виду, что синхронизация разнесенных часов представляет
собой одну из тех задач, которая решается средствами интерферометрии.
Поэтому предвычисление трас имеет смысл проводить с точностью не лучше
той, которая характерна для локальной привязки часов (1СГ6 — 10-8 с).
Поскольку при транспортировке характерные параметры — г= 1000 км/ч,
h 10 км и Т = 6 часов, для представления трас с точностью 10"7- 1 СТ8 с дос¬
таточно использовать приближение
где главный вклад дает первый член
1 т I GMe г2 - _ 1
Трас = — f —у - — + (^ х Г ) Г \dt, (3.96)
С о ' R-e 2 '
GMe 7 \
—— Th ~ 10 с I, при этом ошибка
с Re /
определения г не должна превышать 1 км/ч, а углового положения — 0°, 5.
В заключение сделаем несколько замечаний относительно хода часов на
пунктах интерферометра. В первом приближении, если часы находятся на
76
GMe
уровенной поверхности —— + SI Re = const, их относительный ход будет
отсутствовать. Однако в реальных условиях, согласно (3.93), взаимный
Дг
ход часов — , расположенных на высотах hi и h2 над уровнем моря и на
t
широтах </ди <р2 > равен [86]
At
t
и для Ah = h2 - hi = 104 - 10s см — = 1СГ14 — 1СГ13. Эта разность хода
t
сравнима с нестабильностью лучших водородных стандартов, и при больших
временах накопления ее следует учитывать.
Все остальные эффекты, связанные с возмущениями формы геоида, дают
At
существенно меньшие оценки величины . В частности, суммарное лун¬
но-солнечное влияние дает максимальное колебание уровня геоида около
50 см, что приводит к пренебрежимо малому взаимному ходу часов
— = 5 • 10Г17.
t
Глава 4
МЕТОДЫ И ПРОГРАММЫ КООРДИНАТНЫХ ИЗМЕРЕНИЙ
§ 1. АБСОЛЮТНЫЙ МЕТОД ИЗМЕРЕНИЯ КООРДИНАТ. ОБЩИЙ АЛГОРИТМ
Условные уравнения погрешностей измерений временной задержки т и
частоты интерференции Fимеют вид (см. (3.26)-(3.29) и (3.35))
/ (т) = Др sin 5 + Ае cos 6 cos h - AS cos 5 sin h - t ASle cos 6 sin h +
+ 7??! +7?! t + Д , (4.1)
/ (F) = — Ae cos 6 sin h - ASe cos 6 cos h -
- £2_1 ASle cos 5 (sin h + Sit cos h) + fl-1 nx + p, (4.2)
где £2 — угловая скорость вращения Земли, равная 2я радиан в сутки,
ASI — ее поправка, Ае, Ар — поправки к принятым значениям проекций ба¬
зы в сантиметрах, AS — поправка звездного времени на меридиане базы в
радианах, гаj = ст — поправка за начальную рассинхронизацию часов, выра¬
женная в сантиметрах, п] = сп — поправка за относительный ход часов в
см/сутки, t — время от произвольного начала tQ в долях суток, h — часовой
угол источника, д, v — комбинации неизвестных поправок координат наб¬
людаемых радиоисточников, также выраженные в линейной мере,
д = Аае cos 5 sin h + Д5 (р cos 6 - е sin 5 cos h), (4.3)
p = Aae cos S cos h + Д5 e sin 5 sin h. (4.4)
77
Сезонные и приливные вариации скорости вращения Земли обычно не
превышают 5 • 1СГ10 рад/сутки, что дает Д£2е<5 • 10"2см/сутки,
^10“2 см, поэтому члены уравнений (4.1) и (4.2), содержащие Д£2, можно
в большинстве случаев опустить, а функцию £2 (г) определять в дальней-
dS (Г)
шем как производную = £2 (г). Однако следует иметь в виду, что
dt
внезапные скачки в скорости вращения Земли могут достигать 1СГ7рад/сут-
ки, что дает уже заметные величины Д£2е<С 10 см/сутки, M2ST1 е<С2 см
(см. § 8).
Определяемые параметры, входящие в уравнения (4.1)-(4.2), можно
разбить на три группы:
1) Де, Др, Д5, Д£2 - параметры ориентировки инструмента в простран¬
стве и во времени,
2) , пх — инструментальные поправки,
3) Да, Д8 - поправки к координатам наблюдаемых источников.
Прямые восхождения и звездное время могут определяться только с точ¬
ностью до одной и той же неизвестной постоянной, поэтому при обработке
короткой серии наблюдений удобно говорить об определении разности
Д (5 - а).
Нетрудно видеть, что в общем случае число независимо определяемых
параметров при наблюдении одного источника по измерениям временной
задержки т равно семи,
Де, Др, Д£2, Д (5 - a), (4.5 а)
а по измерениям частоты интерференции - пяти,
Де, Д£2, Д (5-а),ДбЛ!. (4.5 б)
Отличительной особенностью радиоинтерферометрических измерений явля¬
ется возможность наблюдать источник несколько раз в течение суточного
сеанса в разных часовых углах/?. Согласно (4.1) —(4.5) для фиксирован¬
ного источника можно сделать только пять независимых отсчетов времен¬
ной задержки и четыре независимых отсчета частоты интерференции. Этим
определяется объем минимальной группы источников, наблюдения кото¬
рых необходимы для совместного нахождения поправок (4.5).
Действительно, измерения т, проведенные в пять различных моментов
времени для одного источника, определяют помимо п! (коэффициент при
Г) и Д£2 (коэффициент при t sin h) следующие комбинации искомых поп¬
равок:
Др sin 8 + ДЗр cos 8 + ди 1 — постоянный член,
Д (5 - а) е cos 8 — коэффициент при sin h,
Де cos 8 - Д8 е sin 8 — коэффициент при cos h.
(4.6)
Для того чтобы эта система была разрешима относительно поправок Де, Др,
Д (S - а), Д8, /я t, необходимо выполнение условия 3 /V > 27V + 3, где N —
число наблюдаемых источников. Таким образом, минимальная группа ис¬
точников, позволяющая при измерениях временной задержки определить
все искомые поправки, 3. При этом один из источников в течение су¬
78
точной серии должен наблюдаться не менее пяти раз, а два — не менее трех
раз. Обратим внимание на тот факт, что, если бы время рассинхронизации
mi = 0, то для решения задачи достаточно было бы наблюдений всего двух
источников (один не менее пяти раз, а другой — не менее двух раз в течение
сеанса).
Нетрудно видеть, что измерения частоты интерференции позволяют оп¬
ределить поправки AQ, пх, Д (S - а) и поправку Д (е cos 6). Поэтому пол¬
ное решение задачи по измерениям F невозможно.
Отметим, что, если бы мы ограничивали задачу определением только поп¬
равки к угловой скорости вращения Земли ДГ2, поправки за взаимный ход
часов Hi и относительного прямого восхождения Д (S - а), то достаточно
было бы наблюдать один источник как при измерениях временной задерж¬
ки, так и при измерениях частоты интерференции.
Изложенный выше подход к организации и обработке наблюдений, когда
все неизвестные, входящие в условные уравнения (4.1) —(4.4), определя¬
ются совместно из обработки по методу наименьших квадратов суточных
серий наблюдений, является в настоящее время наиболее распространенным
в радиоинтерферометрии [87—88] (результаты численного моделирования
и анализ см. в [89—92]).
Обратим внимание на следующие недостатки этого метода. Во-первых,
в нем требуется вести наблюдения источников на максимально больших
зенитных расстояниях z, так как необходимо иметь наибольший диапазон
изменения часовых углов, чтобы повысить степень обусловленности систе¬
мы условных уравнений. Это не может не сказываться отрицательно на ве¬
личине случайных ошибок измерений т и F, поскольку, в частности, их
флуктуационные тропосферные ошибки растут как sec z (см. гл. 11, § 2,3).
Во-вторых, и это самое главное, несмотря на то, что получаемые системы
условных уравнений формально разрешимы, в них неизбежны сильные кор¬
реляционные связи между неизвестными, которые затрудняют правильную
интерпретацию результатов вычислений.
В астрометрии наблюдения и результаты их обработки, оформляемые
в виде каталогов координат небесных объектов, принято называть абсо¬
лютными, если новые, уточненные координаты получены без использования
их предварительных значений или координат других объектов в качестве
истинных. В этом отношении изложенный метод является абсолютным.
Однако конечной целью абсолютных наблюдений является получение коор¬
динат, не только независимых от прежних каталогов, но и свободных от си¬
стематических ошибок, т.е. статистически истинных.
Представим условные уравнения (4.1) —(4.2) в обобщенном виде
F (а, 5, г) + G (а, 5, f) + Я (а, 6 ) = £ (а, 5, г), (4.7)
где£ — вектор измеренных свободных членов,/7,Я— линейные функции
поправок инструментальных параметров и поправок координат источников
соответственно, G — неизвестная функция систематических ошибок измере¬
ний, которую, однако, по необходимости будем предполагать тоже линей¬
ной. Эти функции можно представить в виде
I m п
Лхкак, G = 'L &ykbk, Н=Ъ Azkck ,
к = 1 к- 1 к = 1
где Ах*;, Дук, Azfr — неизвестные поправки параметров и координат;
79
ak (a,b,t),bk (a,8,r),Q (a, 6)-квазипериодическиефункции,причемak,bk
определены программой наблюдений, а функция Ьк в общем случае неиз¬
вестна.
Как отмечалось выше, цель абсолютных определений координат состоит
в том, чтобы, имея вектор измеренных величин L (а, 6, г), определить функ¬
цию Н (а, 5), свободную от влияния функций Fh G. Очевидно, что при ре¬
шении систем условных уравнений вида (4.7) по способу наименьших квад¬
ратов этого можно достигнуть, если система уравнений избыточна и функ¬
ции F,H и G, Н попарно ортогональны на всем множестве своих значений,
определяемом программой наблюдений.
Функцию Я можно представить как сумму двумерной функций Н' (а, 6) =
= Z Ъгкс систематических ошибок исходного каталога координат радио-
*=1 „ ""
источников и двумерной случайной функции Я" (а, 6 ) = S &кСк индиви¬
да = 1
дуальных поправок координат тех же источников. Функции ск (а, 6 ) можно
задать заранее, поэтому обеспечение ортогональности функций Я' и F пред¬
ставляет собой задачу оптимизации программы наблюдений. К сожалению,
до сих пор, насколько нам известно, такая задача даже не ставилась, а осно¬
вное внимание уделялось обеспечению лишь формальной разрешимости сис¬
тем уравнений (4.1) —(4.2). Еще хуже дело обстоит с обеспечением ортого¬
нальности функцийHuG, так как вид функции G априори обычно неизвес¬
тен.
Если предположить, что систематические ошибки в наблюдениях отсут¬
ствуют, как это обычно и делают, то формальное решение систем уравне¬
ний, конечно, может быть получено, но оно будет искажено этими ошибка¬
ми, причем степень влияния неизвестной функции Gh^FhH будет опреде¬
ляться степенью ее корреляции с этими функциями. Однако если функция
G коррелирует в основном только с F, т.е. ее главное значение Go по форме
близко к F, то, пренебрегая остаточными систематическими ошибками
&G = G - Go, условное уравнение (4.7) можно записать в виде
Я'(а,8,г) + Я(а,8) = £ (a, 8, г), (4.8)
где
i
F,=F + Gq=% Ахкак .
к = 1
Если программа наблюдений составлена так. что функции Fh Н не кор¬
релируют, то из решения системы условных уравнений вида (4.8) будут
получаться статистически истинные и независимые значения параметров
функции Я (а, 8), т.е. абсолютные координаты радиоисточников, и иска¬
женные систематическими ошибками инструментальные параметры хк =
= хк + (ук)о, которые в дальнейшем будем называть обобщенными.
Таким образом, при обработке суточных серий наблюдений по спосо¬
бу наименьших квадратов координаты радиоисточников будут получаться
строго абсолютными только в том случае, если:
а) влияние инструментальных параметров и систематических ошибок
исходного каталога координат радиоисточников на измеряемые величи¬
ны взаимно независимо,
80
б) систематические ошибки наблюдений отсутствуют или их влияние
описывается той же функцией, что и влияние инструментальных парамет¬
ров,
в) обобщенные инструментальные параметры постоянны на протяжении
всей серии наблюдений, т.е. на интервале не менее суток.
§ 2. ГРУППОВЫЕ НАБЛЮДЕНИЯ ПРИ ПОСТОЯННЫХ ЧАСОВЫХ УГЛАХ
Один из главных источников систематических ошибок радиоинтерфе-
рометрических измерений связан с нестабильностью опорных генерато¬
ров времени и частоты на пунктах радиоинтерферометра. Для того что¬
бы разность показаний локальных часов в суточном сеансе удерживалась
с точностью 0,1 нс, необходимо, чтобы относительная нестабильность стан¬
дартов не превышала 10Г15. Поскольку реальная нестабильность исполь¬
зуемых в настоящее время водородных стандартов порядка 10Г12 - 1СГ14,
представление разности показаний часов в виде линейной функции т + nt
оказывается недостаточным.
Нестабильной является и геометрическая ориентировка радиоинтер¬
ферометра в пространстве, так как параметры Де, Др, Д5 не строго посто¬
янны на интервале времени в одни сутки. Их неучитываемые внутрисуточ-
ные вариации могут достигать 0п,01 в угловой мере или 0,3 м в линей¬
ной. Наконец, недостаточно стабильными являются и условия наблюдений
из-за неустойчивости среды распространения и прежде всего тропосферы.
Особенно сильно эта нестабильность проявляется при измерениях частоты
интерференции (гл. 11,§ 2).
Одна из возможностей исключить влияние нестабильности обобщенных
инструментальных параметров на определяемые координаты радиоисточ¬
ников состоит в организации наблюдений .по специальной групповой прог¬
рамме, как это часто делается в оптической астрометрии. Изложим корот¬
ко суть Этого метода.
Программу наблюдений суточной серии представим в виде списка наб¬
людаемых радиоисточников, упорядоченного по возрастанию, например,
гринвичского звездного времени наблюдений этих источников. В програм¬
му могут быть включены наблюдения некоторых источников при несколь¬
ких значениях их часового утла относительно меридиана базы, однако прин¬
ципиально важно, чтобы эти источники наблюдались в разные дни именно
при этих постоянных значениях часовых углов. Программа наблюдений
разбивается обычно на 12 двухчасовых групп, имеющих фиксированное на¬
чало по шкале гринвичского звездного времени. За единичную серию наб¬
людений в дальнейшей обработке принимается обычно совокупность наб¬
людений двух групп продолжительностью 4 часа, называемая иногда ’’свя¬
зью” [93]. Связи нумеруются от 1 до 12 так же, как и группы, поэтому на¬
чало каждой последующей связи сдвинуто относительно начала предыду¬
щей на интервал группы, т.е. на 2 часа, и две соседние связи имеют одну
общую группу. Последнее обстоятельство имеет принципиальное значение,
так как позволяет в результате применения специальной вычислительной
процедуры, называемой ценным уравниванием, получить редукции значений
обобщенных инструментальных параметров каждой отдельной связи к не¬
которым средним значениям этих параметров за весь цикл наблюдений
данной программы, например, год или более. Иначе говоря, цепной метод
81
позволяет устранить скачки значений инструментальных параметров между
отдельными короткими сериями наблюдений и представить все эти наблю¬
дения в виде систем уравнений *
/ (т) = Ар sin 6 + Де cos 6 cos h - ASe cos 6 sin h + mx + p, (4.9)
/ (F) = Ae cos 6 sin h - ASe cos 6 cos h + £2_1 nj + v, (4.10)
где p,v — линейные комбинации искомых поправок координат источни¬
ков, определяемые формулами (4.3), (4.4), а Ар, Ae, AS, mY,nx — неиз¬
вестные средние значения обобщенных инструментальных параметров. Вес
каждого уравнения определяется числом наблюдений данного источника в
данном часовом угле за весь цикл наблюдений программы.
Процедура цепного уравнивания может быть построена двумя разными
способами. Если есть веские основания считать, что обобщенные инстру¬
ментальные параметры каждой единичной серии наблюдений связи явля¬
ются постоянными величинами, то проще воспользоваться процедурой
классического цепного метода ([35], с. 356), в обратном случае следует
применять более общий абсолютный цепной метод [93].
При применении последнего метода строго абсолютно определяются
и исключаются все линейные изменения инструментальных параметров
внутри каждой связи, поэтому уравнение (4.9) в отличие от (4.1) записано
без членам^. Однако параметрпх оставлен в уравнении (4.10), так как
систематические ошибки т и F могут существенно различаться, и поэтому
одни и те же обобщенные параметры ориентировки инструмента (в том чис¬
ле и щ), входящие в уравнения (4.9) и (4.10), могут иметь существенно
различные значения. По этой причине представляется нецелесообразным
прибегать к совместному решению уравнений (4.9) и (4.10), даже если в
случайном отношении точности измерений г и F близки.
После редукции всех наблюдений на общую систему вида (4.9) или
(4.10) ее остается разрешить относительно неизвестных параметров Ар, Ае,
AS,mi, и поправок координат Да, Д6 всех источников, включенных в
программу наблюдений. При этом можно применить метод, изложенный
в § 1 настоящей главы, в особенности если база интерферометра не слиш¬
ком велика и большинство источников наблюдается в большом диапазоне
часовых углов. Однако при больших базах зона общей видимости источ¬
ников сужается, что приводит к возрастанию корреляционных связей меж¬
ду неизвестными и уменьшению обусловленности системы. Поэтому ниже
рассматривается несколько специальных методов решения систем урав¬
нений (4.9), (4.10) для подобных случаев наблюдений.
Уравнения типа (4.9) и (4.10) разделяются наиболее полно, когда они
вовсе не содержат общих неизвестных. Это достигается при наблюдениях
на интерферометре, у которого база параллельна плоскости экватора
(р = 0), а часовой угол принимает одно из значений h = 0°, 90°, 180°, 270°.
Наибольший интерес для абсолютных наблюдений с территории СССР,
имеющей преимущественно долготную протяженность, представляет собой
случай р = 0 и h = 90°, 270°. В этом случае общая зона видимости симмет¬
рична относительно меридиана h = 90°, 270? и максимально вытянута вдоль
* В этом и следующем параграфах мы будем полагать, что величина угловой скорости
вращения Земли известна, т.е. ДП = 0 (см. § 1).
82
него, поэтому на этом меридиане доступны наблюдениям наибольшее число
радиоисточников. Кроме того, именно на меридиане h = 90° все источники
достигают одинаковых и наименьших топоцентрических зенитных расстоя¬
нии, что создает оптимальные условия для наблюдений.
Условимся наблюдения при h = 90° называть наблюдениями источника
в верхней кульминации, а при h - 270° — в нижней, и будем обозначать их,
соответственно, индексами и ”и”. Некоторые близполюсные источники
могут оказаться незаходящими, и их можно наблюдать, кроме того, при
h = 0° (при восходе) и h = 180° (при заходе). Эти наблюдения будем обоз¬
начать соответственно индексами ”е” и ”w”.
Таким образом, полный набор типов условных уравнений, встречаю¬
щихся в системах (4.9) и (4.10), имеет вид
а) для верхней кульминации всех источников (р = 0, h = 90°)
I (т)^ = Др sin 6 + ASecos 6 + тх + Дае cos 6, (4.11)
I (F)s = Ле cos 5 + + Дбе sin 6, (4.12)
б) для нижней кульминации полярных источников (р = 0, h = 270°)
/(т)„ = Др sin 5 + Д5есо8б - Да е cos 5, (4.13)
/ (F)n = Де cos 6 + S2_1 пх — Дбе sin 6, (4.14)
в) для наблюдений близполюсных источников при восходе (р = 0, h = 0°)
/ (т)е = Др sin 6 + Де cos 5 + ап! - Дбе sin 6, (4.15)
/ (F)e = — Д5е cos 6 + Q-1 + Дае cos 5, (4.16)
г) для наблюдений близполюсных источников при заходе (р = 0, h =
= 180°)
/ (r)w = Др sin 6 - Де cos 6 + т\ + Дбе sin 6, (4.17)
/ (F)w = Д5е cos 6 + £2_1 - Дае cos 6. (4.18)
На первом этапе уравнивания необходимо определить обобщенные пара¬
метры ориентировки инструмента, а затем вычислить поправки координат
Да и Д6.
Прежде всего заметим, что поправки Дай Д6 входят во все типы ус¬
ловных уравнений при р = 0 с множителями е cos 6 и е sin 6 соответственно,
поэтому речь может идти лишь об определении величин
Да = Дае cos 6, Дб? = Д6е8ш6. (4.19)
Строго абсолютным способом может быть найден лишь обобщенный
параметрпх. Из (4.12) и (4.14) имеем
= у S2[/(n-/(F)J,
аиз (4.16) и (4. 18) —
«1 = j Q.[Z(F)e+Z(F)wJ. (4.20)
83
К сожалению, для определения остальных параметров необходимо на ис¬
комые поправки координат Да и Д6 накладывать некоторые, хотя и не
очень сильные, условия, а величину вообще необходимо измерять
независимым способом.
Заметим, что если выражения для временной задержки?в верхней и
нижней кульминациях источника записать согласно (4.11) и (4.13) в виде
одного уравнения
/ (т)5 п = Ар sin 6 + ASe cos 5 + тх ± Aote cos 6, (4.21)
то это выражение по форме полностью совпадает с известной формулой
Бесселя для наблюдений прямых восхождений звезд на меридианном
круге
Z (Т)5 п = п sin 6 ± (и + т) cos 5 + с + Да cos 6, (4.22)
гдел,т— параметры Бесселя ориентировки инструмента относительно
плоскости астрономического меридиана, и — поправка часов относительно
истинного звездного времени, с — коллимация инструмента и Да — поправ¬
ка прямого восхождения звезды.
I &Р
Из сопоставления уравнений (4.21) и (4.22) видно, что - — соответст-
е
ТП1
вует п, AS ~(w + т), а - — Аналогия рассматриваемого радиоинтер-
е
ферометра (р ~ 0, h = 90°, 270°) с меридианным кругом становится еще бо¬
лее полной, если учесть, что оба инструмента позволяют измерять обе коор¬
динаты небесных объектов совместно, но независимым друг от друга спо¬
собом. Из этой аналогии следует, что для определения параметров Ар, AS,
т! в радиоинтерферометрии можно воспользоваться методами классической
меридианной астрометрии для определения параметров п, и + т, с.
Для определения коллимации меридианного круга существуют три ос¬
новных способа: 1) установка инструмента вблизи полюсов Земли [93],
2) перекладка инструмента в лагерах, 3) непосредственное измерение кол¬
лимации лабораторным способом.
Первый способ применительно к радиоинтерферометрии означает, что
интерферометр должен располагаться в высоких широтах. Действительно,
складывая попарно уравнения (4.11), (4.13) и (4.15), (4.17), получим
Др sin 5 +mi = — {Z(т\ + Z (т)„ + Z (т)е + Z (t)w}. (4.23)
4
Отсюда видно, что, если близполюсная зона узкая, то j sin 5 | « 1 и парамет¬
ры Ар и т! не разделяются вовсе, а если широкая, то формально их раз¬
делить можно, но между ними сохранится сильная корреляция. Идеальным
был бы случай, когда в двух кульминациях наблюдались бы источники с
6=0°, однако он практически не реализуется, поскольку требует наблю¬
дений при z = 90° с пунктов, расположенных на одном меридиане по раз¬
ные стороны от полюса.
Применительно к РСДБ перекладка инструмента в лагерах соответствует
обмену между пунктами радиоинтерферометра стандартами времени и час¬
тоты. Однако для сохранения системы инструмента при транспортировке ча-
соб должна быть сохранена разность показаний и разность хода часов с точ¬
84
ностью порядка 1СГ10 си 1О”10 с/сутки соответственно, что с практической
точки зрения выглядит нереальным. Остается искать независимые пути не¬
посредственного сличения разнесенных на большие расстояния стандартов
времени и частоты с точностью порядка 1О"10 с. Имеющиеся в этом направ¬
лении возможности связаны с использованием искусственных спутников
Земли. Одна из них рассматривается в § 13 настоящей главы.
Если определено из независимых измерений, то поправку к полярной
проекции базы Др можно найти по формуле (4.23) из комбинации верхних
и нижних кульминаций или восточных и западных прохождений.
Величина AS может быть найдена по наблюдениям близэкваториальных
источников в верхней кульминации по формуле
ASe cos 5ЭКВ= Ар sin 6экв + ал1 + Але cos 6ЭКВ- I (t)s, (4.24)
получающейся осреднением условных уравнений вида (4.11) для источни¬
ков, расположенных в зоне - 60 < S < §о- В оптической астрометрии обыч¬
но принимают 6о 30°. Источники подбирают таким образом, чтобы
sin 6ЭКВ = 0, и, кроме того, используется условие
. Аа cos 6ЭКВ = 0, (4.25)
которое означает, что при абсолютных наблюдениях только внегалактичес¬
ких источников невозможно определить положение на экваторе точки ве¬
сеннего равноденствия. В связи с этим звездное время и прямые восхож¬
дения источников определяются только с точностью до неизвестной посто¬
янной. Тогда вместо (4.24) на практике можно пользоваться формулой
ASe cos 6ЭКВ = тх - I (т). (4.26)
Из параметров ориентировки инструмента остается определить только
поправку к экваториальной проекции базы Ае. Ее можно найти по измере¬
ниям частоты интерференции для тех же близэкваториальных источников.
Согласно (4.12) имеем
Де cos 6ЭКВ= Q’1 - / (т\ (4.27)
при условии, что
Абе sin 5ЭКВ= 0. (4.28)
В отличие от (4.25) это условие уже не выполняется автоматически, а
требует некоторых предположений о характере ошибок исходного каталога
в экваториальной зоне. Правда, наиболее существенные ошибки (обычно
это наклон и смещение на некоторую величину экватора каталога относи¬
тельно истинного) не влияют на выполнение условия (4.28). Однако если
ошибки каталога в экваториальной зоне [— б0,6] имеют линейный ход ви-
да А6 = &б, то условие (4.28) в точности не выполняется, поскольку в этом
случае, как легко показать для равномерного распределения источников в
зоне, имеет место соотношение
2 б02
Абе sin 6 ^ — тгке ^0. (4.29)
кв 3 360
Здесь е выражено в радиусах Земли, 5 — в градусах, к — в секундах дуги на
85
градус. Если на краях зоны [-30°, 30°] ошибка каталога |Д6| = 0",1, то
при е = 1 получаем Abe sin 6ЭКВ ^0",02, что для первого приближения
вполне приемлемо.
Определив все инструментальные параметры, получим, наконец, иско¬
мые координаты радиоисточников по приведенным выше формулам
(4.11)-(4.18).
Для источников, наблюдавшихся только в верхней кульминации, имеем
Да-l (т)5 + ASe cos 6 - Др - mx,
Дс1 = I (F)s + Де cos 5 - Q_1 ,
для источников, наблюдавшихся в двух кульминациях, —
1
Да= — [I (t)s - I (т)п] + A5ecos6,
(4.31)
а для близполюсных источников, наблюдавшихся, кроме того, еще и в точ¬
ках восхода и захода, —
Дя= +l(F)e-l(F)w] +ASecos6,
(4.32)
Ad = i [/ (F\ - / (F)„ - / (r)e + / (t)w] + Ae cos 6.
Серьезным недостатком интерферометра с базой, параллельной плоскости
земного экватора, является невозможность определения склонений близ-
экваториальных источников. В следующем параграфе мы рассмотрим
некоторые схемы наблюдений, которые позволяют преодолеть этот не¬
достаток.
§ 3. МЕТОДЫ ОПРЕДЕЛЕНИЯ СКЛОНЕНИЙ БЛИЗЭКВАТОРИАЛЬНЫХ
ИСТОЧНИКОВ
Из (4.3)‘Видно, что склонения близэкваториальных источников можно
пытаться определить, если р > 0. Будем в дальнейшем называть базы, у ко¬
торых р = 0,экваториальными,е = 0 — полярными, а базы, у которых р Ф 0,
е ^0, — наклонными. Таким образом, для нашей цели подходят все тийы
баз, кроме экваториальных.
Рассмотрим наклонные базы в том частном случае, когда Xj = Х2. Нет¬
рудно видеть, что в этом случае общая зона видимости будет вытянута
с востока на запад, однако максимальное количество источников будет пе¬
ресекать меридиан Xi = Х2 когда часовой угол принимает значение h = 180°.
Источники экваториальной зоны - 60 <6 <60 будут иметь при этом макси¬
мальные зенитные расстояния. Роль нижней кульминации будет играть по¬
ложение источников при h = 0°.
86
Уравнения (4.11) —(4.18) в рассматриваемом случае примут следующий
вид:
а) для верхней кульминации всех источников (h = 180°)
I (t)s = Др sin 6 - Де cos 5 + + Д6 (р cos 6 + е sin 5), (4.33)
/ (F)^ = Д5е cos 6 + Q_1 пх - Дае cos 6, (4.34)
б) для нижней кульминации полярных источников (h = 0°)
/ (т)п = Др sin 5 + Де cos 5 + тх + Д6 (р cos 6 - е sin 6), (4.35)
I (F)n = — Д5е cos 5 + Г2"1 + Дае cos 5, (4.36)
в) для наблюдений близполюсных источников при восходе (h = 90°)
/ (т) = Др sin 5 - Д5е cos 6 + + Дае cos 5 + Д5р cos 6, (4.37)
/ (F)e = - Де cos 5 + Q_1 пх + Д5е sin 5, (4.38)
г) для наблюдений близполюсных источников при заходе (h = 270°)
/ (г) = Др sin 5 + Д5е cos 5 + тх - Дае cos 5 + Дбр sin6 , (4.39)
/ (F)w = Де cos 6 + Q'1 - Д5е sin 6 . (4.40)
Из этих уравнений видно, что параметры пх и Д5 определяются строго
абсолютно
"г = у Я[1 (F)s+l(F)n] + у ^[/(F)e+/(F)w], (4.41)
Д5е cos 6ЭКВ~/ (F)s - Q-1 , (4.42)
причем последняя формула справедлива при очевидном условии
Дасо8бэкв = 0.
Что же касается остальных инструментальных параметров, то возмож¬
ность определения их абсолютных значений хуже, чем в случае экваториаль¬
ного интерферометра. Во-первых, для определения Др уже недостаточно не¬
зависимых измерений так как для близполюсных источников вместо
(4.23) имеем
1
~ + / (т)п + / (т)е + / (i-)w ] = Др sin 6 + т1 + Д5р cos 5, (4.43)
в связи с чем требуется введение нового условия
Д5р cos 6ПОЛ= 0, (4.44)
выполнение которого неочевидно. Во-вторых, и это самое главное, посколь¬
ку склонения экваториальных радиоисточников могут определяться только
по (4.33), так как именно в верхней кульминации экваториальная зона
видна целиком, то, кроме Др и , нужно знать величину Де, которую тре¬
буется определить независимо от Д<5 по наблюдениям источников других
зон склонений. Однако из уравнений (4.33) - (4.40) видно, что это невоз¬
можно.
Таким образом, рассмотренные базы оказываются непригодными не
только для решения узкой задачи определения склонений близэкватори-
альных источников, но й вообще для абсолютных измерений. В настоя¬
щее время склонения близэкваториальных источников определяются на
87
наклонных базах, когда X! =#Х2, однако надежность этих результатов сом¬
нительна, так как вследствие асимметричного расположения на небесной
сфере общей зоны видимости усиливаются корреляционные связи между
неизвестными. Ухудшается и качество наблюдений из-за нарушения опти¬
мальных условий видимости радиоисточников.
Рассмотрим теперь случай полярной базы (е = 0,р = b Ф 0). В этом слу¬
чае условные уравнения (4.9) и (4.10) существенно упрощаются и при¬
нимают вид
I (г) = Др sin 8 + Де cos 6 cos h + тх + ДЗр cos 8, (4.45)
Z(F) = - Де cos 6 sin h + £2 1 nx .
(4.46)
В этих уравнениях часовой угол h теряет смысл, если база всегда точно
параллельна оси вращения Земли. На практике это невозможно, по край¬
ней мере из-за движения полюсов по поверхности Земли. Поэтому угол h
по-прежнему будем отсчитывать от меридиана точки, в которой поверх¬
ность Земли пересекается с продолжением на север вектора базы, перене¬
сенного параллельно самому себе в центр масс Земли.
Согласно (4.46) измерения частоты интерференции не зависят от коор¬
динат источников и поэтому могут быть использованы для строго абсо¬
лютного определения Де и пх. Если Xj ~ Х2, т.е. база является слегка нак¬
лонной, то угол Л будет меняться в общей зоне видимости в симметрич¬
ном относительно 0° интервале [— ho,ho], и тогда неизвестные ДеиИ1
уравнения (4.46) будут разделяться полностью. Если же диапазон измене¬
ния h не симметричен относительно 0°, то между Де и пх возникает нежела¬
тельная корреляция. В этом случае остается прибегнуть к независимому
сличению шкал времени, которое также необходимо для определения пара¬
метра тх. Зная величины Де и тх, из (4.45) находим
Др sin 8 + Д8р cos 8 = [/ (т) - Де cos 8 cos h] = I (т)0 . (4.47)
Если список наблюдаемых источников составить так, чтобы sin 8ЭКВ = 0,
то, осредняя уравнение (4.47), получим
Д80р - Дйр cos 5ЭКВ= / (т)0 ,
(4.48)
т.е. нуль-пункт экватора исходного каталога определяется строго абсог
лютно.
Строго независимо определяется и наклон принятого экватора исходно¬
го каталога, так как ошибки определяемых склонений вида Д8 (а) исклю¬
чаются процедурой цепного уравнивания. Не определяются лишь ошибки
вида Д8(8) = fcsinS. Действительно, хотя систему уравнений (4.47) можно
формально решить методом неопределенных множителей Лагранжа (корре¬
лят) при условии (4.48), однако если в исходном каталоге имеются ошиб¬
ки вида Д8 (8) = fcsin8, то коэффициент к нельзя найти независимо от пара¬
метра Др и наоборот.
Таким образом, строго абсолютное (в смысле § 1) определение склоне¬
ний близэкваториальных источников на двухэлементном интерферометре
невозможно.
88
§ 4. ОПРЕДЕЛЕНИЕ УГЛОВЫХ РАССТОЯНИЙ МЕЖДУ ИСТОЧНИКАМИ
Зная абсолютные координаты источников az,6z (или (5 — а,)0 — A, 6Z),
можно вычислить относительные угловые расстояния между ними:
cos Ф/у = kj kj = sin6z sin 6y- + cos 5,- cos cos (az - az). (4.49)
В частности, угловое расстояние между источниками можно опреде¬
лить, если известны обобщенные параметры А, В, С (3.20) [89], которые
входят в выражение для rg:
^4/ ^4/ Bi Bj + Q ^-7
cos Ф,-> = + — ,
(-У
(Я
Р Y - д
(-Y-
’ \ с / (в2 + с/) - (в/+ с2)
\ с ] А] + А]
(4.50)
(4.51)
В^+С? А]
в] + с/ л2
Хранить такую координатную информацию в виде взаимных угло¬
вых расстояний (дуг) представляется весьма удобным приемом, по¬
скольку дуги, будучи инвариантами вращения, не зависят от поступатель¬
но-вращательного движения Земли. В дальнейшем (§§ 8—10) преиму¬
щества каталога на дугах будут рассмотрены весьма подробно. В этом
параграфе мы ограничимся рассмотрением такого алгоритма обработки
радиоинтерферометрических наблюдений, который позволяет по од¬
новременным измерениям временной задержки и частоты интерфе¬
ренции определять взаимные угловые расстояния непосредственно
[95].
Как уже упоминалось (гл.4, § 2), rg и Fg определяют направляющие
косинусы источника относительно направлений, заданных базой и пер¬
пендикуляром к базе, лежащим в экваториальной плоскости. Введем
Рис. 19. Вспомогательная система
координат, заданная ортами = i ,
- (/ X cj)/C0S6b, = /, X /2.
89
систему координат, заданную тройкой ортогональных единичных векторов
(рис. 19):
it ~ i = (cos bb cos A, cos bb sin A, sin bb} ,
—> /X co / \
12 = i sin A, - cos A, 0) ,
cos 8b
13 = z’jX i2 =\sin 8b cos A, sin bb sin A, — cos bbj .
(4.52)
Тогда направляющие косинусы источника в этой системе координат будут
иметь вид
д = (z*! к ) = sin 5 sin &b + cos 6 cos Sb cos (50 — a — A),
—> —>
v = (z2 к ) = — cos 6 sin (50 - a - A),
у = (z3 к ) = cos 6 sin bb cos (50 — a — A) — sin 6 cos bb .
(4.53)
Очевидно, что взаимное угловое расстояние между двумя источниками
выражается формулой
cos Ф/у= М, д,- + Vj Vj + у,- у/, (4.54)
а наблюдаемые значения thF связаны с направляющими косинусами соот¬
ношениями
т =— Ьц + m+nt, F= — и + fn, (4.55)
с X
где Sl5b =£1 cos 8Ь — проекция вектора угловой скорости вращения Земли
на направление, задаваемое базой интерферометра.
Введем наблюдаемые значения направляющих косинусов (индекс ”н”)
соотношениями
Дн = -7" т’ = L \о F’ "Ун = V1 - Мн - Хн , (4.56)
0О Ьо.Щь
где индекс ”0” фиксирует приближенное значение соответствующей вели¬
чины.
Линеаризируя (4.5 6) по АЬ = b - bQ и (тип считают¬
ся достаточно малыми, так что по ним нет необходимости проводить лине¬
аризацию), будем иметь с учетом (4.55)
/ AZ? \ с
Мн =д11 + — I + — (m+nt),
\ Ьо / Dq
(4-57)
90
Подставляя (4.57) в (4.54) и линеаризируя по ДФ = Ф - Фо, получим
Д6 Д^бм
со5Фн — cos Фр =Zd— +Zn —-A+^H+^w+ДфДФ,
По *
где
, (Д/7/-Pili? +(Vi7j-Vjli)2 7/ + 72
Lb = - : = 2 cos4<0 - ,
(4.58)
L„
с
bo
7/7/
(^•7/ - »/7/)2
7/7/
(7/ -7,) (Д/7/-Д/7/)
5
7/7/
7/ 7/
(4.59)
Ln4
c
bo 7/7/ .
1
Lm
,, w x . (7/ -7/)(”/7.-«V7/)
(7; -7/)(Д;7/ -Д(-7;) +
5
Lyy = — sin^0
и
cos^H = /4Ян + 1’Х + 7н7^
(4.60)
Уравнение (4.58) записано в такой форме, что может возникнуть впе¬
чатление, будто за счет накопления синхронных наблюдений двух источ¬
ников в пять моментов времени можно определить поправки к взаимно¬
му угловому расстоянию между ними ДФ, к гео динамическим Д6, Д^5& и
инструментальным mi п параметрам. Очевидно, что такая точка зрения невер¬
на, согласно следующему простому раесуждению. Действительно, если бы,
наблюдая два источника, можно было определить ДЬ, ДГ25^, га, д? и ДФ,
то, согласно алгоритму, приведенному в § 1, можно было бы определить
Д6д, Де, Др, Д£2 и, как следствие, Д6 и Д (а-а£), что находится в проти¬
воречии с общим анализом условий разрешимости системы условных
уравнений (4.1), (4.2).
В действительности в уравнении (4.58) между переменными имеют мес¬
то прямые корреляционные связи, которые можно снять попарными синх¬
ронными наблюдениями как минимум трех источников. В качестве приме¬
ра, иллюстрирующего такую возможность, рассмотрим частный случай
интерферометра с6ь =45°, синхронно наблюдающего источники с одина¬
ковыми прямыми восхождениями. В этом случае, согласно (4.53), уравне¬
ние (4.57) можно записать в виде, явно фиксирующем те комбинации поп¬
равок, Которые определяются независимо,
cos Фн - cos Фо = {л + В cos h + С cos 2h} + Lnn , (4.61)
1
1
sin Фо (cos Фо + sin 6Z sin 5Z) ДФ + —
1 о
[(cos Фо + sin <5Z sin
Д/?
91
(4.62)
1
С = — sin Фо cos 5, cos bj ДФ +
1
— cos Фо cos 81 cos 8J —
(4.64)
Отсюда видно, что накопление значений cos Фн,— cos Фо Для одной пары ис¬
точников в четыре независимых момента времени позволяет определить
п, Л, В и С и, следовательно, следующую-комбинацию неизвестных по¬
правок:
5,- + 5;-
cos
2
AZ? с
sin Фо —
Z?o Z?o
^0 т . *0 .
— COS Фо — sin —sin
2 2
Таким образом, для того чтобы разделить неизвестные AZ? и т, необходимо
наблюдать по крайней мере две пары источников. Очевидно, если бы было
т = 0, то задача определения дуги совместно с определением геодинами-
ческих и инструментальных параметров могла бы быть решена по наблюде¬
ниям двух источников, что соответствует общему анализу.
Обратим внимание на тот факт, что наблюдения на экваториальной
(8Ь =0°) и полярной (8Ь = 90°)базах не позволяют определить взаимные
угловые расстояния между источниками при попарных наблюдениях любо¬
го числа источников. Например, при 8Ь =0° накопление четырех незави¬
симых уравнений (4.58) позволяет определить т, и, АГ2б^ = AQ и комби¬
нацию поправок вида
(sin 5,- sin 5Z \ AZ?
-н — 2 cos Фо )— . (4.66)
sin 8j sin 8j / Z?o
Отсюда следует,что в условиях отсутствия априорной информации о длине
базы невозможно определить поправку к взаимному угловому расстоянию
между источниками.
Для численного моделирования обсуждаемого здесь алгоритма необ¬
ходимо знать оценку дисперсии левой части уравнения (4.58). Полагая
Ат = тн - т0, AF = FH - Fq ,
(4.67)
92
нетрудно видеть, что
(4.68)
и, следовательно, согласно (4.60),
L = cos Фн - cos Фо = — !(Д/ - — Д/) Дт/ + (д, - — Д?) АтД +
М Т/ У, J
+ —| (р,- - — Vj) ^Fj + (vf - — р.) AF,| . (4.69)
&0Пвь I 7/ * >
Если для простоты положить, что определения временной задержки и
с X
частоты интерференции равноточны — j = — дисперсия ле-
bQ ’ bQsi8b
вой части условных уравнений (4.58) будет
Численное моделирование рассмотренного алгоритма проведено в работе
[97].
В заключение обратим внимание на тот важный факт, что величины,
входящие в условное уравнение (4.58) в качестве определяемых пара¬
метров, не зависят от положения полюса в теле Земли и положения сред¬
него и мгновенного экватогра Земли. С этой точки зрения рассмотренный
алгоритм обработки и организации наблюдений выгодно отличается от
алгоритма § 1, в котором величины Де, Др, Д£2, Д(а — а°) и Д5 из-за
движения полюса в теле Земли и земного экватора в пространстве не
являются постоянными в течение суточного сеанса. Очевидно, что это
преимущество достигается за счет частичной потери координатной ин¬
формации — положения источников и пунктов определяются с точностью
до трехмерного вращения. Однако для целого ряда физически содержа¬
тельных задач это обстоятельство не является существенным.
§5. ДИФФЕРЕНЦИАЛЬНЫЙ МЕТОД ИЗМЕРЕНИЯ КООРДИНАТ
В абсолютном методе, алгоритмы которого рассматривались в преды¬
дущих параграфах, для того, чтобы сформировать разрешимую систему
условных уравйений, необходимо было сделать ряд весьма существенных
предположений, которые ограничивают принципиальную точность этого
метода.
Во-первых, необходимо считать, что хорошо известны эффекты среды
распространения электромагнитных волн на трассах к антеннам. Поскольку
регулярные составляющие тропосферной и ионосферной рефракций до-
93
о
т
Рис. 20. Погрешности определения
астрометрических параметров в зависи¬
мости от числа членов ряда, представ¬
ляющих £(/) =
X 10"9с;2 - 6
Е ^Г.7-6
Ц р sin «+/?„)
•10-’с;^ -
6П • 2 ■ 10’7рад_1 ; 4 - 6 {1п(а-а£)10“’}.
I ~ Wt+l = 6, II - вк1&к<л = 8-
Рис. 21. К идее дифференциального ме¬
тода. V - средняя скорость ветра, L -
высота тропосферы.
статочно хорошо предвычисляются по результатам косвенных измерений
(гл. 3, §4), основную неопределенность здесь будет вносить нерегуляр¬
ная составляющая прежде всего со случайными колебаниями электриче¬
ской толщины тропосферы.
Во-вторых, необходимо считать, что расхождение локальных шкал
времени £ (О > связанное с нестабильностью стандартов частоты, можно
моделировать каким-либо априорным разложением, например,
t (г) = т + nt, (4-70)
которое учитывает начальную рассинхронизацию шкал и их постоянный
относительный ход.
Для разрешения системы условных уравнений абсолютного метода
относительно семи параметров р, е, Q, 8, (50 — а)0 — А, т и п, как было
показано, необходимы, как минимум, наблюдения трех источников в
пяти часовых углах. Точность определения этих параметров (по отноше¬
нию к потенциальному разрешению интерферометра) ограничена двумя
причинами. Во-первых, точностью принятой модели стандартов частоты
и, во-вторых, выбором программы наблюдений. Оптимальная програм¬
ма, которая обеспечивает наилучшее разрешение системы условных урав¬
нений, зависит, главным образом, от ориентации интерферометра и време¬
ни пребывания источников, участвующих в программе, в общей зоне ан¬
тенн, т.е., в конечном счете, от общей длительности сеанса. Для того чтобы
наиболее эффективно разделить все переменные и добиться максимальной
точности их определения, необходимо, чтобы общая длительность сеанса
была не менее 12—24 часов. К сожалению, это требование антагонистично
94
представлению (4.70), которое при таких интервалах времени уже недо¬
статочно. Действительно, нерегулярное расхождение двух временных
шкал на интервале Т по порядку величины равно от « —, где -у- —
относительная нестабильность стандарта частоты. При Т ~ 5 • 104 с и неста-
Д/
бильности -у- = 1СГ13 — 10"14, которая характерна для водородных стан¬
дартов, от = 5 • 10"9 — 5 • 1СГ10 с (с от = 150 - 15 см).
Ошибку представления функции, моделирующей расхождение локаль¬
ных шкал времени, можно уменьшить, увеличив число членов аппрокси-
мирующего ее ряда £ (t) = S (f). В этом случае среднее отклонение
л ,= 1
£(О от уменьшается как \/т. Однако при этом возникает
/=1
необходимость увеличить число условных уравнений для определения
новых неизвестных параметров. В связи с этим, как можно показать,
увеличивается погрешность определения координат и геодинамических
параметров, причем быстрее, чем \/т. В результате увеличение числа членов,
представляющих £ (г), приводит к уменьшению точности определения
искомых параметров (рис. 20) [98].
При уменьшении нестабильности стандартов основным фактором, огра¬
ничивающим точность абсолютного метода, являются флуктуационные
шумы тропосферы, которые даже при умеренных зенитных углах на боль¬
ших базах могут вносить неопределенность порядка 5 - 10 см.
Влияние флуктуационных шумов тропосферы и аппаратурных ошибок
можно существенно ослабить, если использовать дифференциальные на¬
блюдения источников. Суть этого метода заключается в том, что ведется
синхронный или квазисинхронный прием сигналов от двух источников,
находящихся на угловом расстоянии друг от друга. В качестве основ¬
ных наблюдаемых величин, используемых в астрометрических и геодина¬
мических приложениях, формируются разности временных задержек
Ту или частот интерференции Fy (рис. 21).
В этом случае, если дифференциальные величины т,у, Fy формируются в
течение достаточно короткого промежутка времени (порядка нескольких
минут), можно полагать = const, так что влияние эффектов
нестабильности стандартов частоты полностью подавляется. Остаточные
флуктуационные набеги тропосферы будут определяться угловыми рас¬
стояниями между источниками и зенитными углами, под которыми ис¬
точники наблюдаются. При относительно небольших эти флуктуации
можно сделать пренебрежимо малыми.
§6. УСЛОВИЯ РАЗРЕШИМОСТИ УРАВНЕНИЙ ДИФФЕРЕНЦИАЛЬНОГО МЕТОДА
Выясним, какую астрометрическую и гео динамическую информацию
можно извлечь из анализа дифференциальных значений временной задерж¬
ки и частоты интерференции [98, 99]. Ответ на этот вопрос может по¬
казаться на первый взгляд неожиданным: ту же самую, что при анализе
абсолютных значений т и F. Действительно, дифференциальные значения
95
Tg и Fjj, так же как и их абсолютные значения, инвариантны относитель¬
но вращений в экваториальной плоскости, так что единственной ’’потерян¬
ной” информацией является информация о начале отсчета долгот. Однако,
поскольку, формируя дифференциальную фазу, мы теряем для каждой
пары источника одно уравнение, минимальное число источников 7V, необ¬
ходимых для разрешения полученной системы относительно координат
источников и параметров ориентировки интерферометра во времени и
пространстве, оказывается большим, нежели при решении системы, со¬
держащей абсолютные значения т и F.
Если сформировать дифференциальную временную задержку rZy.=
= Tj—Tj для двух источников, которые наблюдаются одновременно,
то, согласно (3.15), будем иметь
-Гц (О = А а + В a cos (£2 Г + S 0 - Л - уД (4.71)
где
1 1
Aij = — р (sin - sin 67), Вц = — e(cos 5Z +cos 5y -
c c
— 2 cos 6Z cos бу cos (az — ay))1/2 (4.72)
и
cos 5,- sin az — cos 5Z sin at-
Уц = arctg . (4.73)
cos 5Z cos az — cos o; cos ay
Для того чтобы сделать эту систему инвариантной относительно поворота
в экваториальной плоскости, будем отсчитывать долготы источников
от первого (опорного источника). Тогда будем иметь
71/ = arctg
COS бу sin (tty — Q1 )
COS бу COS (tty — ОС! ) — COS 5 !
(4-74)
Очевидно, что инвариантно относительно этого преобразования.
Накопление четырех независимых отсчетов rZy позволяет определить
три обобщенных параметра А1;, В1;, Г1у = 71;- + S0 — Ли угловую ско¬
рость вращения Земли Г2.
В дальнейшем алгоритм дифференциального метода удобно построить
так, чтобы устранить необходимость непосредственного определения
5° — Л. Для этого необходимо попарно пронаблюдать три источника и
сформировать соответствующие разности Г17-:
Г1у - Г1к “71/ -ylk = arctg
COS бу sin (tty — Oil )
cos 5y cos (ay — az) — cos 61
— arctg
cos 8k sin (ak — Qj)
cos 8k cos (ak — — cos 5! ’
(4.75)
которые не будут зависеть от ориентации вектора базы интерферометра
в экваториальной плоскости.
Если пронаблюдать N источников, образующих N — 1 независимую
пару по отношению, например, к первому источнику, то для решения
системы уравнений (4.71)— (4.75) относительно неизвестных е, р, 8j,
96
OLj-ax необходимо, чтобы выполнялось условие 2(7V — 1) + (N — 2) >
> 2N + 1. Отсюда видно, что минимальная группа источников, необходи¬
мая для реализации общей задачи дифференциального метода, 5. Эти
источники должны наблюдаться попарно, причем одна из пар должна на¬
блюдаться по крайней мере в четыре независимых момента времени, а
остальные три — в три момента времени, при этом опорный источник
(в рассматриваемом примере — первый) должен входить в каждую из
этих пар.
Если сформировать дифференциальную частоту интерференции
Fy = —fByFl sin (Ш + 5 0 - Л - yz/), (4.76)
то накопление значений FZ/ в три независимых момента времени позволя¬
ет определить £2, BZ/ и Г/у, откуда следует, что полное решение задачи оп¬
ределения неизвестных е, р, — al9 только по наблюдениям FZy не¬
возможно, так что использование Fy (без т/у) адекватно только задаче
определения Г2 (или длительности суток Т). Совместная же обработка
данных о Ту и Fy (при условии, что точность их определения близка)
позволяет в общем случае улучшить обусловленность системы условных
уравнений.
§7. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ БАЗЫ ДИФФЕРЕНЦИАЛЬНЫМ МЕТОДОМ
В случае, когда мы имеем предварительную координатную информацию
об источниках, закрепленную в виде взаимных угловых расстояний между
ними, можно указать на очень простой алгоритм определения параметров
базы [89].
Так как дифференциальная временная задержка rZ;- согласно (3.19)
имеет вид
TZ/- =(CZ - Q)+ (Bt - Bj) cos Fit + (A; - Af) sin Fit, (4.77)
где
1 n 1 n 1
Aj = — e cos 5Z sin hf, В,= — e cos 5Z cos hf, C = —p sin 5Z, (4.78)
c c c
то обобщенные параметры At - Aj, Bj - Bj, Ct - Cj и угловая скорость
вращения Земли Fl определяются с помощью четырех независимых от¬
счетов Ту ъ четыре момента времени для двух источников, наблюдаемых
синхронно, и они не зависят от инструментальных параметров
Очевидно, что взаимное угловое расстояние между источниками
связано с обобщенными параметрами соотношением
2 (G--Q)2 +(Л,~Л/)2
— (1 - cos Ф/7 ) = j-L- +
с р е
Таким образом, если известна координатная информация о трех источни¬
ках (три дуги), то соотношение (4.79) позволяет просто определить эк¬
ваториальную и полярную проекции базы и расстояние между пунктами.
Для этого необходимо пронаблюдать две пары источников в четырех часо¬
вых углах.
97
§8. МЕТОД ДУГ
Формально внутренняя точность дифференциального метода измерения
координат очень высока и при не слишком сильных ограничениях на ори¬
ентацию базы интерферометра может составлять доли миллисекунд дуги.
При этом важное достоинство этого метода заключается в том, что координа¬
ты источников получаются в системе, практически не зависящей от моделей
атмосферы и атомных стандартов. Однако, как было показано, алгоритм
дифференциального метода построен так, что в общем случае требуется
суточное или полусуточное накопление информации о дифференциальных
величинах Тц и F/y. При этом полагается, что параметры, характеризующие
ориентировку интерферометра, угловая скорость вращения Земли и по¬
ложение экваториальной плоскости в пространстве стационарны на таких
интервалах времени. Эти предположения принципиально ограничивают
точность дифференциального метода. Точность, с^ которой могут быть
учтены эффекты нестационарности векторов b и J2, зависит от того, на¬
сколько детально известны прецессионно-нутационное движение Земли,
движение полюса в теле Земли и движение точек земной коры. Большая
часть параметров, которая характеризует эти эффекты, не может быть
получена из независимых наблюдений, а их предвычисленные значения
зависят от априорных физических моделей внутренней структуры Земли.
В связи с этим результаты радцоинтерферометрических определений
координат оказываются модельно-зависимыми, что затрудняет их шь
терпретацию.
Кроме того, при РСДБ-измерениях предельной точности .уже нельзя
игнорировать возможные короткопериодические и случайные эффекты
в движении земной оси и вектора базы, связанные с взаимодействием
земной поверхности, атмосферы, океана, землетрясениями, технологи¬
ческой деятельностью людей и т. д., предвыЧисление которых принципиаль¬
но невозможно.
Таким образом, в дифференциальном методе, так же как и в абсолют¬
ном, чисто координатная задача становится принципиально неотделимой
от геофизической и геодинамической задач. Выход из этой ситуации был
предложен еще в оптической астрометрии [100, 101], а именно: необ¬
ходимо отказаться от экваториальной системы координат и перейти к
системе координат, опирающейся на взаимные угловые расстояния между
радиоисточниками — дуги. Дуги по своему геометрическому смыслу яв¬
ляются инвариантами вращения и не зависят от движения Земли, положе¬
ния земного экватора и эклиптики и поведения вектора базы интерферо¬
метра — движения полюса в теле Земли и движения точек земной поверх¬
ности.
Очевидно, что система координат, опирающаяся на дуги, может обла¬
дать всеми теми общими свойствами, которые в настоящее время предъ¬
являются к инерциальной системе координат [102] : 1) ее определение
максимально просто и понятно потенциальному пользователю; 2) в основе
этой системы лежит минимум негеометрических предположений, и она
не зависит от астрономических и геофизических теорий; 3) она стабильна
в той степени, в которой стабильны формирующие ее объекты, и реализует
потенциальные угломерные возможности существующих технических
средств координатных измерений (не хуже миллисекунды дуги).
98
В целом дуги можно рассматривать как некоторый универсальный
физический эталон, неизменный в той степени, в которой можно пренебре¬
гать собственными движениями его хранителей — точечных деталей ква¬
заров и ядер галактик. Этот эталон не зависит от поступательно-вращатель¬
ного движения Земли (с точностью до поправок специальной и общей
теории относительности, которые можно предвычислить с высокой точно¬
стью), и его в свою очередь можно использовать для изучения враща¬
тельного движения Земли и решения целого ряда прикладных задач
[103].
По существу решение сформулированной выше проблемы сводится
к тому, чтобы построить такую разрешимую систему уравнений, которая
позволила бы решать координатную задачу — определять взаимные угло¬
вые расстояния между источниками, — независимо от знания мгновенной
ориентации вектора базы и вектора угловой скорости вращения Земли,
т.е., в конечном счете, чисто геометрическим способом. Задачи, связанные
с изучением поведения вектора базы и вектора угловой скорости вращения
Земли, с которыми связаны все содержательные геодинамические и гео¬
физические проблемы, решаемые методами интерферометрии, должны
решаться как обратные задачи к чисто геометрической задаче определения
дуг. Если говорить еще более конкретно, то необходимо построить такую
систему условных уравнений, в которую входят поправки только к не
зависящим от времени и инвариантным относительно трехмерных вра¬
щений величинам.
Покажем, что такая программа может быть полностью реализована в
радиоинтерферометрии, хотя она в общем случае и требует значительно
больших усилий, нежели задача определения абсолютных координат
источников в абсолютном и дифференциальном методах [104, 105,
106].
Как уже неоднократно говорилось, основная астрометрическая, гео¬
физическая и геодинамическая информации, получаемые средствами радио¬
интерферометрии, вытекают из анализа соотношений для временной за¬
держки и частоты интерференции
1 - 1 - -
т(г) = — b(ix М + НО =~(Ьх Лг) + ^(Г), (4.80)
с с
а -+ -+ -+
F (г) = f — b (z х со) к + т? (f) = (F х к) + т] (г), (4.81)
с
где £(г), ??(г) — инструментальные поправки, модель которых здесь нет
_ /П
необходимости конкретизировать, и F = (дХ со) — вектор, лежащий в
с
экваториальной плоскости.
Кроме того, очевидно, что между нестационарными векторами b и F
имеет место соотношение ортогональности
d-F=0. (4.82)
Рассмотрим случай, когда для получения координатной информации
используются ^анные только о временной задержке т. Пусть проводится
99
серия одновременных наблюдений N источников и так же, как в дифферен¬
циальном методе, формируются разности Ту = Т( — Tj, в результате чего
исключаются инструментальные поправки (предполагается, что функция
$ (Г) на интервале, требуемом для получения т/;, постоянна) и частично
подавляются флуктуационные шумы тропосферы
сДт! =cTi - ст0 = b(kx - kQ) = bAki,
(4.83)
сДт/v-i =crN_i - ctq =b k0)=bMN_r
Используя, например, первые три уравнения системы, будем иметь следую¬
щее выражение для нестационарного вектора базы:
с~1Ь = { ДТ! (дГ2 X М3) + Дт2 (Д^з х Mj) + Дт3 (Д^ X М2)}/К, (4.84)
где
V = Д?! (ДА2 X Д?3), (4.85)
и с его помощью исключим b из оставшихся N — 4 уравнений системы
(4.83). В результате будем иметь систему, содержащую только стационар¬
ные и инвариантные относительно трехмернь/х вращений величины
да7 (д*! х да2) дГ7- (Д*! X ДЛ3) Д (ДА2 X Д£3)
V ’ V ’ V ;
/ = 4, 5,.. .,N - 1, (4.86)
которые представляют собой разложение вектора Д&7 по базису, образо¬
ванному векторами ДА:!, Д&2, ДА:3.
Каждое уравнение системы
дГ„ (Д*! X Д£2) Дт3) , и = 4, 5,.. .,N - 1,
может независимо накапливаться в три момента времени, в результате
чего определяются три обобщенных неизвестных параметра (4.86).
Очевидно, для того чтобы система (4.87), содержащая, таким образом,
3(7У — 4) независимых уравнения, была разрешима относительно (4.86)
и позволила определить координаты участвующих в программе источников
с точностью до произвольного трехмерного вращения, т.е. 2N — 3 дуги,-
необходимо выполнение условия 3 (N — 4) > 2N — 3.
Таким образом, для определения координат источников чисто геометри¬
ческим методом при Использовании данных только о временной задержке
минимальная группа должна состоять из десяти источников, которые
необходимо наблюдать по одной из следующих двух программ:
1) девять источников с единичными векторами в три незави¬
симых момента времени; 2) всевозможные пятерки источников, образо¬
ванные путем добавления к четырем опорным источникам (с единичными
векторами Ао &3) одного из источников+ к8 в три независимых мо¬
мента времени.
100
Обобщенные параметры (4.86) очевидным образом связаны с дугами
cos Ф/у = (kikjY если учесть, что
ДА,- (ДАу X ДА/) =
(ДА/)2 (ДА/ ДАу)
= (ДАуДА,.) (да,)2^
(ДА/ ДА,) (ДА/ ДАу)
(дл,- дм
(^z Afcz)
(Afcz)2
И
(ДА,- ДАу) = 1 + cos Ф/у — cos Ф0/ — cos Ф0/.
(4.88)
(4.89)
Очевидно, что разрешимость системы в-геометрическом методе дости¬
гается за счет значительного увеличения числа наблюдаемых источников:
в абсолютном методе — три, в дифференциальном методе — пять, в методе
дуг — девять.
Покажем теперь, что при использовании информации только о частоте
интерференции F нельзя однозначано восстановить дуги. Согласно (4.82)
вектор лежит в экваториальной плоскости, так что
F10 = ?ДА?,
(4.90)
F/v^i>0 =^ДАЛг_1 - ^ДА^_15
где ДА/ — экваториальная проекция вектора ДА/. Поскольку ДА? и ДАз
линейно-независимы, они образуют базис экваториальной плоскости.
Введем взаимный базис, образованный векторами и А2, определенны¬
ми соотношениями
A j ДА 1 = 1, Л2ДА| = 0, j
= Л2д£?=1./
Тогда из первых двух уравнений (4.90) будем иметь следующее выражение
для нестационарного вектора F :
F = AF10 +A2F2Q. (4.92)
Исключая F из оставшихся N — 3 уравнений системы (4.90), получим
систему
^зо = о (А 1 ДАз) + F20 (И2ДА3),
(4.93)
Fn- 1 ,о ~ F\o (А 1 AkN._ i) + F2о (A2kkN_ j),
содержащую только инвариантные относительно трехмерных вращений
величины Л,- ДАу (Z = 1, 2,/ = 3, 4, . . ., N — 1). Каждое из уравнений этой
системы можно независимым образом накапливать в два момента време¬
ни, что позволяет определить 2(N — 3) скалярных произведений Л/ДАу,
которые, как очевидно, не позволяют однозначно определить 2N — 3 дуги.
Используя аналогичные рассуждения, нетрудно показать, что нельзя реали¬
зовать геохметрическую процедуру определения взаимных угловых рас¬
101
стояний между источниками, используя измерения временной задержки,
полученные на интерферометре с базой, параллельной экваториальной
плоскости Земли.
Необходимое для определения дуг минимальное число источников
можно существенно уменьшить, если совместно с дифференциальными
значениями временной задержки обрабатывать дифференциальные
значения частоты интерференции Измерения частоты интерференции
позволяют построить систему, по структуре аналогичную системе (4.83),
с решением для вектора Е^ аналогичным по структуре (4.84)-(4.85).
Подставляя решения для b и Т в условие ортогональности (4.82),
получим уравнение, содержащее инвариантные обобщенные параметры
(ДА:, X ДАу) (Му X Д&/), 7, /,7=1,2, 3. Покажем, что это уравнение можно
независимым образом накапливать в четыре момента времени.
Имея выражение для векторов b и F в косоугольных координатах,
заданных Акх, М2, Д^з, произведем линейное преобразование, после
которого при всех t условие ортогональности bF = 0 имеет стандартный
з ’ _> _>
вид ^bsFs = 0, где bs, Fv — координаты b и F в этой системе. В системе
5=1
координат, в которой источники неподвижны, а база вращается, векторы
bn F можно представить в виде
b = {е cos (Sq - Л), е sin (So - Л), р) ,
1
F = /П — e(sin(S0 - Л), -cos (50 - Л), 0},
(4.94)
где So — гринвичское звездное время. Система координат определяется
однозначно с точностью до трехмерного вращения метрическим тензором
asp. Тогда, согласно (4.94), имеет место следующее соотношение:
S bsFs = L aspbs (t) Fs (г) = -fl32pF'cos (So - A) +
5=1 5,p=l
+ a3xpF' sin (So — A) — ax 2eF' cos 2 (So — A) +
+ — (fl!! - a22) eF’ sin 2 (So -A) = 0, (4.95)
2
где F* = . Поскольку (4.95) представляет собой разложение в ряд
с
Фурье функции, тождественно равной нулю, тоа32 = fl3i = fli2 ~ 0, i =
= а22. Таким образом, система координат фиксируется четырьмя условиями
и, как следствие, только в четыре момента времени уравнения bF = 0
независимы.
Следовательно, условие разрешимости системы уравнений для и
Fjj относительно 2 А — 3 неизвестных дуг имеет вид 3 (А — 4) + 4 > 2 А — 3.
Таким образом, для определения относительных положений источников
геометрическим методом при использовании совместной информации о
временной задержке и частоте интерференции необходимо наблюдать пять
источников в четыре момента времени вместо девяти источников или
пяти пятерок источников при использовании измерений только времен-
102
нбй задержки. Нетрудно понять, что при наблюдении в три момента време¬
ни минимальная группа источников, необходимая для решения такой
задачи, равна шести (3(7V — 4) + 3 > 2AZ — 3), а в два момента времени —
семи (2(7V - 4) + (N - 4) + 2 > 2 TV - 3). Эти же результаты можно полу¬
чить, анализируя уравнение (4.58), в.котором за счет последовательного
исключения нестационарных поправок Д6, формируется систе¬
ма, содержащая поправки только к стационарным и инвариантным отно¬
сительно трехмерных вращений взаимным угловым расстояниям между
источниками [95,96].
Выше был рассмотрен идеализированный случай синхронных наблюде¬
ний источников. Реально же для наблюдения 5—9 источников, требуемых
для реализации геометрического метода, на современных полноповорот¬
ных антеннах необходимая длительность сеанса Т = 30 минут — 1 час.
На этом интервале времени в пределах точности не хуже одной милли¬
секунды дуги можно учитывать неодновременность в рамках* модели
равномерно вращающейся Земли [95], а изменения векторов b и —
с помощью соответствующих теорий первого порядка. Таким образом,
интервал, в течение которого можцо квази синхронно наблюдать необходи¬
мое для разрешения системы условных уравнений число источников,
определяет временное разрешение рассматриваемого метода.
В заключение общего анализа геометрического метода определения
координат отметим, что объем минимальной группы источников, необ¬
ходимый для его реализации, можно очень сильно уменьшить, если времен¬
ную привязку пунктов интерферометра и корректировку тропосферных
эффектов осуществлять независимыми аппаратурными средствами
(гл. 11, §5). Такую возможность, в принципе, представляет система радио¬
телескопов, объединенная в единую интерферометрическую сеть с помощью
геостационарного спутника связи, каждый пункт которой снабжен си¬
стемами измерения электрической толщины тропосферы. В этом случае
для реализации геометрического метода можно использовать абсолютные
значения т и F. Тогда, как нетрудно видеть, для полного решения задачи
достаточно квазисинхронных наблюдений шести источников при измерени¬
ях временной задержки и трех источников при совместных измерениях
временной задержки и частоты интерференции.
§ 9. ОПТИМАЛЬНЫЕ ПРОГРАММЫ
И ОПТИМАЛЬНЫЕ ОРИЕНТАЦИИ БАЗ В МЕТОДЕ ДУГ
При реализации алгоритма, изложенного в §8, погрешность определения
координат 61 kj I = 61 кк; I будет равна [105]
6\kj I~ з/l +Л'2(Д*/)^йЗл, (4.96)
где
„ (Д&! X ДЛ2)2 +(ДА( X Д^з)2 +(Д*2 X дТз)2
К* = i U —--L——• LL (4.97)
3 (ДА-^ДЛг X Д£3))2
и — соответствующим образом нормированная флуктуационная ошибка
измерения временной задержки — = cbrjb или частоты интерферен¬
ции — дА =cbF{£lfb, которая определяется чувствительностью радиоинтер-
103
ферометрической системы, а Кь — коэффициент, определяемый геомет¬
рией радиоинтерферометра и временем пребывания источников в общей
зоне видимости антенн.
Из (4.96) видно, что минимизация 51 Ayl достигается независимой
минимизацией Ks и Кь. Минимизация Ks осуществляется прямым пере¬
бором опорных источников к0 + к3 из числа наблюдаемых на данной базе,
а Кь - за счет выбора оптимальной программы наблюдений и ориентации
базы. В этом, собственно, и состоит основная особенность алгоритма,
рассмотренного в общем виде в §8, который позволяет разбить задачу
на два относительно независимых этапа: 1) выбор оптимального набора
опорных источников kQ 4- к3 и 2) выбор оптимальной программы наблюде¬
ний и оптимальной ориентации _базы^интерферо метра. Очевидно, что с
выбором опорных источников к0 + к3 связана процедура исключения
нестационарных векторов b и F из соответствующих условных уравнений.
Выбор опорных источников произволен, и формулы (4.96), (4.97) по¬
казывают, как зависит случайная ошибка в измерении координат от этого
произвола.
Исследуем вопрос о минимизации коэффициента Кь. Прежде всего
рассмотрим тот случай, когда измеряется только временная задержка
и, следовательно, необходимо наблюдать источники, как минимум, в
три независимых момента времени. В этом случае, согласно (4.83),
_ 01 х?2)2 +0з *0)2 + (6 х73)2
Kj, = — _ ■_ , — , (4.98)
3(ii(/2 X /3))2
где I — единичный вектор базы (Ь =Ы).
В системе координат, закрепленной удаленными источниками, каждая
точка земной поверхности вращается по окружности, а область видимости
образует дугу АВ = Ф на этой окружности (рис. 22). Предположим, что
Рх и Р3 — точки, при которых минимальна величина коэффициента Кь.
Пусть точка Р — середина дуги Р\Р3, и будем отсчитывать углы относи¬
тельно этой точки:
Р = Р>3, -Р = РР1? -у = РР2. (4.99)
Единичный вектор базы i можно представить в виде
ik = со sin 8b + fk cos 5ft, (4.100)
где 5Ь - склонение базы, fk - единичный вектор в экваториальной плоскос¬
ти,^совпадающий по направлению с проекцией вектора ik на эту плоскость,
и со — едршичный вектор угловой скорости й ращения Земли (Й = £2 со).
Векторы fk получаются друг из друга поворотами на углы
^2 = Р-7, Р>з = 0 + 7, Р^Р3=20. (4.101)
Тогда после непосредственных вычислений получаем
2 sin25ь [3 - cos (3 - у) — cos (Р + 7) - cos 2Р ]
b 3 sin256 со525ь [sin.(P - 7) + sin (0 + 7) - sin 20]2
cos2 5b [sin2 (P - 7) + sin2 (p + 7) + sin2 2P]
3 sin25/, cos256 [sin (P - y) + sin (P + y) — sin 2p] 2
(4.102)
104
Рис. 22. К выводу выражений для Кь. Ф - АВ - общая зона видимости источника.
Р и с. 23. Зависимость Кь от 6^ и t при измерениях т.
При заданном /3 минимум этой функции достигается при у = 0, когда
„ 2 shi26a(3 - 2 cos fi - cos 2/3) + cos25b(2 sin2 /3 + sin2 2/3)
K2b = - — - . (4.103)
3 sin25b cos2 5£(2 sin /3 — sin 2/3)2
Отсюда следует, что оптимальной программой при трех наблюдениях яв¬
ляется такая, при которой одно из наблюдений делается в момент времени,
симметричный относительно двух других.
Из (4.103) следует, что на полярной (дь = 90°) и экваториальной
(6ъ = 0°) базах невозможно определить дуги, что соответствует общему
анализу § 8.
Из условий симметрии ясно, что оптимальными значениями являются
f Ф/2,
/3 = (4.104)
I 2я/3, если источник незаходящий для данной базы.
Рассмотрим несколько частных случаев, при исследовании которых
вместо Ф будем использовать время t пребывания источника в общей
t
зоне видимости антенн — Ф = 2тт —, где Т — длительность суток.
Г
Если Г > 16 часов (в частности, источник является незаходящим на
данной базе), то оптимальный режим наблюдений достигается в моменты
Го, Го + , Го + 16Л и, согласно (4.103) и (4.104),
4
9 cos26fc
1
+ — ■ .
9 sin25d
(4.105)
2 _
Ь ~
Нетрудно видеть, что оптимальная ориентация базы в этом режиме, при
которой Kb = 1, соответствует Ьь 35° 16' . При 20° 8b <Z 60° 1 <С Кь <С
1,2 (рис. 23).
Если t < 16 часов, то для анализа этого случая удобно представить
(4.103) в следующем виде:
4sin2 5ft А I — j + cos2 5b A (г)
= — — ; , , (4.106)
7ГГ 7ГГ
3sin bb cos 4sin-' — 4sin
T 2T
105
где
A (t) = 2 sin2
nt 2nt
— + sin2 ——.
T T
(4.107)
Оптимальный режим наблюдений достигается здесь в моменты 70,
Го +-\ Го + Г, И при 30° £ 8Ь ^60°и6а^Г^ 16h ,1,2^КЬ< 6 (рис. 23).
Поскольку (4.106) монотонно зависит от 5Ь, минимум Кь достигается
при заданном t, если
(4.108)
так что оптимальное склонение базы
35° <(56)ОПТ = arctg Л/ - <40°, 6h <t<16h.
\2/
. о 1
При малых t < 1 , (6Й)ОПТ « 45 при этом Кь <*—,
t2
(4.109)
так что при малых
временах пребывания источников в общей зоне видимости антенн ошибка
в определении координат нарастает весьма значительно.
Теперь рассмотрим ситуацию, когда проводятся одновременные измере¬
ния временной задержки т и частоты интерференции F. Будем для просто¬
ты считать, что определения т и F равноточны (в радианной мере); в
протйвном случае для верхних оценок следует брать max — 6Fl .
Как было показано в §8, при совместных измерениях т и F достаточно
наблюдений в два независимых момента времени. Именно этот предельный
случай будет рассмотрен ниже. Случай, когда используется большое число
отсчетов (при меньшем числе источников), качественно не будет отличать¬
ся от.этого предельного случая.
Заметим, что при ’’TF-измерениях” возможны два существенно различ¬
ных режима обработки наблюдений: а) случай, когда используются два
независимых отсчета т и один отсчет F — ”(т -г tF) -серия”, и
б) случай, когда используются два независимых отсчета F и один
отсчет т — ”(F Ft)-серия”.
Рассмотрим прежде всего (т + tF)-серию. В этом случае коэффициент
, (i) 2 = 02 X (coXfi))2 +(7i X (o X 7,))2 + (7i XZ2)2
( b } 3(7(72 X(wx7i)))2
После вычислений получаем
(4.110)
(4!))2 =
2 1 — sin26b^sin2Sb + cos26b cos
, / 2ттГ\2
3sin 8b cos 6 J1 — cos
(4.1И)
106
Очевидно, что, как и в рассмотренном ранее случае измерения толь¬
ко временной Задержки, совместные измерения т и F на экваториальной
(8Ь =0°) и полярной (66 =90°) базах не позволяют определить коорди¬
наты источников. Нетрудно видеть также, что при заданном склонении
базы Ьь является монотонной функцией времени t, возрастающей
в промежутке
2irt
- 1 <cos <+1.
Т
В случае ( F -г Fr)-cepHH
((<*> X z?) X (£ X z^ ))2 + ((£ ХТ2 ) X z?)2 + ОТ X (£ X z?))2
307 ((« х zT) X (£ х z?)))2
2
3 0 г». 7 о о t
Siu Оb COS2 6 b Sin2 —jT
(4.112)
Выясним, в каких ситуациях каждая из серий оказывается оптималь¬
ной.
Если t > 12h, то, сравнивая (4.111) при t = 12h и (4.112) при r = 6h,
получим
sin2 bb < 1 (4.113)
и, следовательно, оптимальной является (т т т/О-серня, для которой,
по (4.111),
1
2 cos2 Ьь
1
6 sin2 Ьь
(4.114)
+
Минимальное значение Kty = 1,12 достигается при — 37°23х. В опти¬
мальном режиме tQ, tQ + 12 h, если 20°^6ft^60°, 1,1 1,4 (см.
рис. 24).
Если 6h < r <12h,T0
4° <
V1 + sin2 6Ь (1 + | cos "У" | )
(4.115)
кф
27Tt
1 + cos
и при
Т
у/4 + sin4 - 2 + sin2 8b
2
(4.116)
_ Т
*ко ~ — arccos
r о
оптимальной является (т -г т 79-серия в режиме to, to + F причем,
получим
(^°)2 =
3sin26d cos2 Ьь
2 яг
1 + I cos |
Т
упрощая,
(4.U7)
(
107
Рис.24. Зависимость Хйот 6йи t при
совместных измерениях т и F при t > 6^.
Р и с. 25. Зависимость от 6^ и t в (т4- tF)-
серии (сплошная линия) и в (F-? Ft) -серии
(прерывистая линия).
Р и с. 26. Зависимость Кь от 6 ь и t в (F-ь Ft) -
серии при t < 6^.
При t < гкр оптимальной является (F -г Fr)-cepwi в режиме tQ, tQ + 6h, для
которой
)Д ■ . 2 / 2 s - (4.118)
3 an ob cos оь
Если 30°60°, то (рис. 25).
Наконец, если t < 6h, то
>1, (4.И9)
и, следовательно, оптимальной является (F + Ft)-серия в режиме
t0 + t, для которого
(К^)2=- — . (4.120)
27ГГ
3 sin &b cos дь sin
Т
Если t > 3h, то при 30° ^60° 1,5 (рис. 26) .
Таким образом, видно, что имеются не слишком сильные ограничения
на ориентацию базы интерферометра, при которой реализуется точность
радиоинтерферометрических наблюдений, близкая к потенциальной точ¬
ности, определяемой флуктуационной чувствительностью интерферометра
и максимальной длиной его базы. Эти требования для простоты можно
сформулировать в следующей форме: базы не должны быть близкими
к полярным или экваториальным.
108
§ 1(к ИСПОЛЬЗОВАНИЕ КАТАЛОГА УГЛОВЫХ РАССТОЯНИЙ
Как следует из приведенного в § § 8,9 анализа, решение координатной
задачи — построение системы эталонных дуг чисто геометрическим ме¬
тодом — требует значительно больших усилий, нежели при координатных
измерениях абсолютным и дифференциальным методами, и прежде все¬
го из-за того, что необходимо квазисинхронно наблюдать относительно
большое число источников (табл. 16). Эксплуатация же этой системы
достигается значительно более простыми средствами.
Действительно, зная дуги между четырьмя опорными источниками
можно, согласно (4.84) и аналогичной формуле для F, по квази-
синхронным радиоинтерферометрическим наблюдениям этих опорных источ¬
ников восстановить ’’мгновенные’* значения (с точностью_до длительнос¬
ти сеанса Т =15—20 минут) нестационарных векторов b и F, удовлетворя¬
ющих условиям (4.81) — (4.82), и, следовательно, определить b = | ь | ,
i = ~b/b c(b\F}lfb2 + pb, где р- произвольная постоянная и
—> —>
= Qcos56 = с I F\ jbf. Очевидно, что для восстановления U необходимы наблю¬
дения эталонных источников с помощью, как минимум, трех элементного
интерферометра.
Таким образом, при поэтапном решении координатной задачи, связан¬
ной с определением дуг, и геофизическими геодинамических задач, свя¬
занных с изучением поведения векторов b и F, появляется возможность
не только повышения потенциальной точности измерения этих величин,
но и ’’временного разрешения”, что позволяет изучать высокочастотные
компоненты их спектров.
Удобный алгоритм, позволяющий при совместных измерениях времен¬
ной задержки и частоты интерференции определять поправки к длийе
базы ЛЬ, проекции угловой скорости вращения Земли на направление,
перпендикулярное к базе и аппаратурные поправки тип, связан
с использованием условного уравнения (4.61). В нем, используя четыре
стандартные дуги между опорными источниками, можно исключить все
переменные, кроме исследуемой.
Приведем некоторые оценки эффективности решения обратных задач
применительно к алгоритму, описанному в § § 8,9 (детали см. в работах
[105, 106]).
Наблюдая синхронно или квазисинхронно четыре опорных источника,
взаимные угловые положения которых известны, можно определить ’’мгно¬
венные” значения векторов F и F. Тогда, согласно (4.84), ошибка в изме¬
рении длины базы интерферометра ЬЬ связана с флуктуационной ошиб¬
кой определения временной задержки 6Т соотношением
bb=KscbT, (4.121)
где Ks определяется по (4.97).
Далее, так как - £1 cos bb = с | F | Jbf, то
J\F\2c2 (6т)2 + 62(6г)2', (4.122)
и, если определения т и F равноточны (Ьр то, принимая
109
Таблица 16
Сравнение методов координатных измерений с помощью двухэлементного радио¬
интерферометра
Метод
Определяемые величины
Принятые допущения
Абсолютный
ai~6/, р, е, Я
тапп» татм
(2N + 5) -переменных
татм и Гатм известны или
представляются рядом, b и
Я стационарны за 24 часа
Дифференциальный
а/—оу, Оу р, е, Я
(2N 4- 2) -переменных
? и Г? стационарны за 24
часа
Дуг
OLf-Ct], или
(27V-3) -переменных
F и Й стационара! за вре¬
мя накопления в сеансе
(30-60мин).
во внимание, что \F\=f£l — b cos 8;,, имеем
с
8nSb=Ks -
D
£1 \/\ + cos286' • от .
(4.123)
Как уже отмечалось, с помощью двухэлементного интерферометра
нельзя определить ’’мгновенное” значение вектора угловой скорости вра¬
щения Земли £2, а также склонение базы Ъь. Для того чтобы разделить
Г2и6й, необходимы синхронные или квазисинхронные наблюдения одних
и тех же опорных источников с помощью, как минимум, трехэлементного
интерферометра. Они позволяют определить соответствующие значения
Б] где 1=1,2 - индекс, нумерующий базы интерферометрической
системы. Тогда из системы уравнений
f
с
(4.124)
можно найти . При этом погрешность определения будет
6Q с
— = —= 5Т
1
1 + cos28ft
+ L
(4.125)
(4.126)
Зная £2 и £26 , можно найти склонение базы
s 1^1с
Q bSlf
причем соответствующая ошибка будет равна
■
(4.127)
110
Факторы, ограничивающие
точность метода
Потенциальная
точность
Минимальная группа
источников
Стандарты, тропосфера.
0",05-0”1 '
3 источника в 5 часовых углах
при измерениях т.
Нестационарность вра¬
щения Земли, движения
полюса, приливы и дру¬
гие движения коры.
0",01-0",005
5 источников в 4 часовых
углах при измерениях т.
Нестационарность век¬
торов ^и Пв сеансе.
Не хуже 0",001
9 источников в 3 часовых
углах при измерениях т
или 5 источников в 4 ча¬
совых углах при измерениях т и F.
Наконец, если известны векторы b и Р, то можно определить разность
частот гетеродинов х] и время рассинхронизации £ в момент /0> которые,
согласно (4.80) и (4.81), равны
1 1
H=F-Fk, $ = т-_(Ь к)-- (4.128)
с f
а соответствующие погрешности в определении этих величин будут
5т? = «F + Х2',
(4.129)
6? = V (М2 + (М2 (t - То)2 л/1 +*/, (4.130)
и, если определения т и F равноточны, то
5? = 5Т V1 + К? V1 + П2 (г - г0)2‘. (4.131)
§ 11. МНОГОЭЛЕМЕНТНЫЕ ИНТЕРФЕРОМЕТРЫ
До сих пор мы рассматривали возможности применения только двух¬
элементных интерферометров при координатных, геодинамических и гео¬
физических определениях. Теперь обсудим возможности применения для
решения аналогичных задач многоэлементных интерферометрических сис¬
тем, работающих в режиме сети.
Прежде всего отметим, что много элементные интерферометры необ¬
ходимы для построения качественных изображений космических источ¬
ников, ибо только TV-элементные интерферометры (7V — число антенн)
обеспечивают достаточно плотное заполнение плоскости пространственных
частот. Действительно, число баз TV-элементного интерферометра растет
как N (7V - 1)/2, так что эффективное заполнение плоскости достигает¬
ся лишь при относительно большом числе телескопов, что позволяет стро¬
111
ить ’’истинные” изображения космических источников путем прямого
фурье-преобразования (при наличии фазовой информации) или ’’гибрид¬
ными” методами (при наличии совместной амплитудной информации и
информации о комбинациях фаз).
Однако многоэлементная радиоинтерферометрическая сеть чрезвы¬
чайно полезна и при решении чисто координатных задач. Совершенно
очевидным аспектом ее применения является возможность закрепления
большим числом баз сети относительной системы координат на земной
поверхности, что обеспечивает решение ряда важных задач глобальной
тектоники и прикладной геодезии.
Как уже отмечалось, двухэлементный интерферометр не способен фикси¬
ровать положение полюса в теле Земли в рамках абсолютного и дифферен¬
циального методов, поскольку его движение одинаковым образом вли¬
яет на экваториальную и полярную проекции базы интерферометра, и оп¬
ределять положение вектора угловой скорости вращения Земли в рамках
метода дуг (§ 10). Для решения этих задач необходимо иметь, по край¬
ней мере, две независимые базы (трехэлементный интерферометр) .
Уже трехэлементный интерферометр позволяет в рамках абсолютного
и дифференциального методов улучшить разрешимость систем соответ¬
ствующих условных уравнений за счет использования ’’избыточной” ба¬
зы [108]. Каждая из баз трехэлементного комплекса в рамках абсолют¬
ного метода дает, согласно (3.19) и (3.20), следующие уравнения:
Tik = Qk ~ Aik sin + fyk COS (4.132)
Fik = — Aik f£2cos Sit - Bik sin Q t + frit ,
где индекс i относится к базе, а индекс к — к источнику,
Cfk Pi sin $kl Bik &i cos &k cos hik 4
c c
Aik = — e, cos.6fc sin /?,£,
c
(4.133)
(4.134)
a
hik “ (*$0 — ак)° ~ \ .
(4.135)
Параметр hfk удобно представить в виде
hik “ h \к — Оц ,
где
(4.136)
hQ\k~ ($о ~ ак)* — Л1, Оц = Л,- — Л1,
(4.137)
для того чтобы явно подчеркнуть тот факт, что число независимых значе¬
ний hk равно &*+ 2.
Кроме основных уравнений (4.132) — (4.134), имеют место пять уравне¬
ний связи. Три из них отражают то очевидное свойство трехэлементного ин-
112
терферометра, что Z?1+Z>2 + 63 = 0 и, следовательно, в проекциях получим
ei + е2 cos и21 + е3 cos о31 = О,
е2 sin о21 + е3 sin о3 х =0,
Pl +Р2 +РЗ =0.
(4.138)
Еще два уравнения связи очевидным образом вытекают из смысла аппа¬
ратурных поправок тл, и rij:
S mt= Z ni = 0. (4.139)
i= 1 1
Таким образом, если решать систему условных уравнений методом
неопределенных множителей Лагранжа (коррелятное уравнивание), то
в рассматриваемом случае имеется 20 + 2Nпараметров, подлежащих опре¬
делению: П, о21, о31 \bi9bb.\ щ, дк + пять неопределенных множи¬
телей Лагранжа (коррелят). В рамках дифференциального метода, как не¬
трудно понять, имеют место только уравнения сцязи (4.138) .
Коррелятное уравнивание особенно эффективно по отношению к тем
переменным, которые плохо определяются или вообшэ не определяют¬
ся на двухэлементном интерферометре (например, полярная проекция
базы при измерениях на интерферометре с базой, близкой к экватори¬
альной) . Уравнения связи позволяют улучшить значения этих параметров,
естественно, при том условии, что на остальных базах комплекса соответ¬
ствующие параметры определены с более высокой точностью.
Отметим, что применение много элементных интерферометров не толь¬
ко уменьшает влияние корреляционных связей между неизвестными,
но и уменьшает случайную ошибку, с которой они определяются. Легко
дать верхнюю асимптотическую оценку для этого эффекта. В TV-элемент-
ном комплексе, если корреляция между сигналами ищется для всех воз¬
можных баз, то число наблюдаемых т или F пропорционально общему
числу баз, N (N — 1)/2, в то время как независимое число их значений
пропорционально числу независимых баз, (7V—1). Таким образом, об¬
щий выигрыш оказывается пропорциональным (7V/2)"1/2.
В рамках геометрического метода применение многоэлементных ин¬
терферометров, работающих в режиме сети, представляет качественно
новую возможность при координатных измерениях, которые можно опре¬
делить как ’’мгновенный синтез” координат источников. Действительно,
как следует из анализа § 8, накопление уравнений (4.87) при измене¬
нии временной задержки т в трех часовых углах или уравнений (4.87)
и (4.82) при совместных измерениях временной задержки т и частоты
интерференции F в четырех часовых углах эквивалентно наблюдениям
в один момент времени нескольких источников (девяти при измерениях т
или пяти при совместных измерениях т и F) с нескольких независимых
баз (трех — в первом случае и четырех — во втором). Использование мно¬
гоэлементного интерферометра позволяет обойти те трудности с общей
зоной видимости нескольких источников, которые, в общем случае, харак¬
терны для двухэлементного интерферометра. Минимальное число неза¬
висимых баз, с помощью которых можно реализовать процедуру метода
113
дуг, равно двум (трехэлементный интерферометр), при этом число син¬
хронно наблюдаемых источников при совместных измерениях т и F рав¬
но семи.
В заключение отметим, что много элементный интерферометр может
легко адаптироваться к разным задачам. Например, если при решении
координатных задач в методе дуг экваториальные базы не несут полез¬
ной информации (§ 8), то при решении обратных задач (§ 10) они могут
быть эффективно использованы при работе системы в режиме сети.
§ 12. РАДИОИНТЕРФЕРОМЕТРИЧЕСКИЕ НАБЛЮДЕНИЯ
ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ
Рассмотрим задачу о наблюдениях искусственных спутников Земли,
излучающих шумовой или монохроматический сигнал (’’радиомаяк”),
с помощью радиоинтерферометра со сверхдлинной базой [109,110].
Основная особенность наблюдений PC ДБ-методом радиомаяков, рас¬
положенных в ближнем космосе, состоит в том, что приходится учитывать
сферичность фронта падающей волны, в то время как при наблюдениях
квазаров этот фронт можно считать плоским. Кроме того, необходимо
учитывать движение наблюдаемого объекта в инерциальной системе
отсчета.
Рис. 27. Элементы орбиты ИСЗ. Т - точка
весеннего равноденствия, = TjV, и = NS,
i= 180° -L&VT.
В этом случае удобно рассматривать выражения для основных наблю¬
даемых радиоинтерферометрических величин в геоцентрической эквато¬
риальной системе координат, вращающейся относительно неподвижной
инерциальной системы координат. В ней положения пунктов Al = A1 (R х) =
-Ai (xi,yi,Zi)n А2 = А2 (R2) = A2 (x2,y2,z2) определяются соотноше¬
ниями
Xi=Ri cos^x cos (50 — Xi), х2 = R2 cosv?2 cos (50 -X2),
у I =Ri cos^x sin (50 - Xx), y2 = F2 cos^2 sin (So - X2),
Zi - Ri sin <pi,
z2 = A2 sin <p2 ,
(4.140)
а координаты ’’радиомаяка” P =P(x,y, z) — соотношениями
x = r (cos и coscQj- sin и sincfbcos i),
у ~r (cos и sincTb + sin и cvsSbcos z),
(4.141)
z = r sin и sin z,
где 50 — гринвичское звездное время, г — длина радиуса-вектора ИСЗ,
Л — долгота восходящего узла ИСЗ, z — наклонность его орбиты, и —
аргумент широты (рис. 27) .
114
Р и с. 28. Геометрическая схема РСДБ-на-
блюдений ИСЗ. О - центр масс Земли; Ах,
А2 - пункты РСДБ, S - ИСЗ-радиомаяк,
b - база интерферометра, г - радиус-век¬
тор ИСЗ.
Временная задержка в рассматри¬
ваемом случае (рис. 28) имеет вид
1
Т = — (/2 — /1) + ™ + nt,
с
а соответствующее выражение для при¬
ращений
1
Д т = — (Д/2 — A/i) + Am + A«Z.
с (4.142)
Так как
lj=Rj+r2 - 2 (xf х +у/у + zyz), / = 1,2,
то, согласно (4.140) и (4.143),
= — ДЯу cosfy + Д^у Rj sin fy cos Ay + Ar cos Pj +
+ (A50 - - ДЛ- Дм cos i) (xyj -yxj)ljl+
+ (Дisin Jb - Аи sinz cos Jb) (xzy - zxj) lj 1 -
— (Д/cos сП>+ Дм sin i sin3~b) (yzy- zyy) /у"1,
(4.144)
где fy и Aj — топоцентрическое зенитное расстояние и азимут радиомая¬
ка, а Ру — его параллактический угол.
Подставляя выражения для Д/х и Д/2 в (4.142) , приходим к основному
условному уравнению вида
Др =сДт = ДЯХ cos fi - sin cosAi -
— ^R2cos f2 + Д <p2P2 sin f2 cos A 2 -
- A? (xV-yU) + (A50 - АЛ- AX - Amcosz) (xY -yX) +
+ (Az sin Jb — А м sin z cos Jb) (xZ - zX) -
-(* z cos<Tb + А м sin z sin cTb ) (yZ - zY) -
- Ar • r"1 (xX +yY + zZ + r2D) + A/nc + AncZ,
(4.145)
где
X = (X2Z! -X1/2)(/1/2y1>
r = (y2/! -j'iZ2)(Z1Z2)-1,
Z = (z2Zi — ZjZ2) (ZjZ2)1,
t/ = (x2Zt +x1Z2)(Z1Z2)'1,
r = (y2Z! +>’1Z2)(Z1Z2)-1,
D = (i2
(4.146)
115
и
(4.147)
Обратим внимание на тот факт, что условное уравнение (4.144) явля¬
ется уравнением для поправок при лазерной локации ИСЗ из пункта Л7-.
Таким образом, измерение временной задержки т с помощью РСДБ экви¬
валентно определению разности синхронно измеренных путем локации
мгновенных расстояний от ИСЗ до пунктов А19А2. Условное уравнение
(4.145) представлено в таком виде, чтобы устранить явные корреляци¬
онные связи между переменными, за счет их подходящего комбинирова¬
ния. 1
В отличие от ситуации, когда наблюдаются внегалактические радиоис¬
точники, при наблюдениях ИСЗ частота интерференции будет содержать
члены, связанные не только с вращением Земли, но и с движением са¬
мого ИСЗ относительно базы интерферометра. Так как
(4.148)
то, согласно (4.145), основное условное уравнение для обработки наблю¬
дений, использующих частоту интерференции, имеет вид
Др = — Д7?1£1 sin fi - AiPi-Ki (fi cos ft cos Ar - л\ sin fx sin Л1) +
• •
+ AA2f2 sin f2 + A<p2A2(f2cosf2 cos?l2 - A2 sin f2 sinH2) —
— Ду (xV -yU + xV -yU) +
+ (Д50 — ДЛ- AX - Дм cos Z) (xY - yX + xY-yX) +
+ (Д/sin Л - Дм sin i cvsSb) (xZ - zX + xZ - zX) —
— (Д/ coscTb+ Дм sin ZsincTb) (yZ - zY + yZ — zY) —
- Дг [(xX+>y + zZ + xX+yy + z± + 2rrD+r2D)r —
- (xX + у Y + zZ + r2Z>) r] r2 +
+ (Д*50 - ДсГЬ - Дм cos Z) (xY — yX) +
+ (Д/ sin Jb + Дм sin Z cos <Q>) (xZ - zX) —
— (Д/ cosJTj + Д м sin i sin<Tb) (yZ - zY) —
- Д/ (xX + yY + zZ + r2D)r~l + bn-c. (4.149)
Коэффициенты в условных уравнениях (4.145), (4.149) являются слож¬
ными функциями времени, которые за недостатком места выписывать
здесь не будем.
Для того случая, когда можно положить <Л i ~ г ~ 0 (круговая ор¬
бита) , производные в (4.149) существенно упрощаются и могут быть
116
выражены в функции только двух независимых параметров 50'и й:
х = — й (у cosz + z sin i coseTb),
у =й (х cos i - z sin i sincVb),
z-ufy coscfb+y sincfb) sin z,
= — soyh yf = Soxh 2/ = 0,
и
ij = - /f1 [(**/ +УУ/) + (xXj +yyf + zz,)],
где So =0,0042 град/с и м = 0,0716 r3/2 град/с. (Здесь г измеряется в еди-
ницах среднего радиуса Земли R =6371 км.)
Численное моделирование изложенных выше алгоритмов приводит
к следующим основным заключениям [110]. которые носят общий ха¬
рактер.
1. Для низких ИСЗ наиболее эффективны измерения, использующие
частоту интерференции. Даже при небольшом количестве наблюдений
ИСЗ в суточной серии можно получать результаты с точностью до нес¬
кольких сантиметров, Для высоких ИСЗ предпочтительнее использование
совместной информации о временной задержке и частоте интерференции.
2. Системы уравнений (4.145), (4.149) получаются наиболее обуслов¬
ленными, если задачи улучшения параметров орбиты и определения ко¬
ординат пунктов решаются раздельно: орбита улучшается по наблюдениям
с хорошо определенного наземного комплекса, а геодезические коорди¬
наты пунктов определяются по наблюдениям ИСЗ с хорошо известной
эфемеридой. Для низких ИСЗ обе задачи в ограниченном объеме могут
решаться и совместно, что важно на начальном этапе наблюдений.
3. Так как метод РСДБ является разностным, то для определения ли¬
нейного масштаба одна из величин , г должна быть задана. В общем
случае целесообразно один из пунктов измерительного комплекса прини¬
мать за опорный. Дополнение РСДБ-наблюдений ИСЗ лазерной локацией
дает возможность получать одновременно как трехмерные координаты
ИСЗ, так и все принципиально определяемые параметры интерферометри¬
ческого комплекса.
4. Для низких ИСЗ достаточно использовать двухэлементные интерфе¬
рометры, в то время как для ИСЗ с высокими орбитами выгодно исполь¬
зовать много элементные системы.
Учитывая чрезвычайно высокую потенциальную точность PC ДБ-изме¬
рений, ни один из параметров, входящих в уравнения (4.145), (4.147),
нельзя считать постоянным даже на интервале продолжительностью в од*
ни сутки. В связи с этим эффективное применение метода РСДБ к наблю¬
дениям ИСЗ невозможно без использования наиболее точных теорий вра¬
щения и придивных деформаций Земли, а также движения ИСЗ в гра¬
витационном поле. С помощью таких теорий поправки уравнений (4.145),
(4.147) должны быть приведены к малым величинам и, кроме того, дол¬
жны быть устранены их изменения на возможно более длительных интер¬
валах времени. В этом случае все переменные, входящие в условные урав¬
нения, можно будет считать постоянными и отнесенными к определенной
эпохе.
117
§ 13. НЕЗАВИСИМОЕ СЛИЧЕНИЕ ШКАЛ ВРЕМЕНИ ИЗ СИНХРОННЫХ
ДАЛЬНОМЕТРИЧЕСКИХ И РАДИОИНТЕРФЕРОМЕТРИЧЕСКИХ
НАБЛЮДЕНИЙ ИСЗ
В настоящее время практически используется уже несколько спосо¬
бов сличения разнесенных на большие расстояния часов — обмен импуль¬
сами через отражение от метеорных следов, передача синхроимпульсов
по каналам телевидения и радиосвязи, а также с борта самолета или ИСЗ.
В экспериментальном порядке применяются и другие методы. Наивыс¬
шая точность порядка 1 (Г8 секунды достигнута пока путем использования
синхроимпульсов с борта ИСЗ, однако для достижения точности порядка
1СГ1<У секунды требуется преодолеть целый ряд серьезных трудностей,
главными из которых являются повышение стабильности бортовых стан¬
дартов до 1(Г15 и определение координат ИСЗ относительно тела Земли
с точностью нескольких сантиметров.
Как нам представляется, имеется еще одна реальная возможность не¬
зависимого высокочастотного сличения разнесенных на большие рассто¬
яния часов путем проведения синхронных (или квазисинхронных) на¬
блюдений одного и того же объекта в ближнем космосе, например ИСЗ,
методами РСДБ и дальнометрии. Суть этой идеи очень проста и состоит в
следующем.
Пусть показания сравниваемых часов на пунктах Hi иЛ2в один и тот
же физический момент равны Т\ и Г2, а их искомая разность ДГ = Т2 - 7\.
Пусть также т есть измеренная методом РСДБ временная задержка, пред¬
ставляющая собой разность показаний тех же часов в моменты прихода
на облучатели антенн, установленных в пунктах А{ иЛ2, одного и того же
фронта волны излучения радиоисточника, установленного на борту ИСЗ.
Тогда уравнение для линейной задержки р = ст с точностью до аберраци¬
онных и релятивистских поправок будет иметь вид (см. § 12)
Р=(/2 -7!) + (а2 -аО + сД Т, (4.150)
где с — скорость света,/ь/2 — мгновенные расстояния до пунктов и
А2 соответственно, иа2 — неизвестные задержки сигнала в атмосфере
над этими пунктами.
Искомая разность показаний часов Д7'не может быть найдена из од¬
ного акта РСДБ-наблюдений ИСЗ, так как величина Д/ = (/2 - К) неизвестна
и быстро меняется во времени. Необходимо или накапливать большое
количество наблюдений и идти по пути динамического метода спутниковой
геодезии, или одновременно с РСДБ-наблюдениями из двух пунктов про¬
изводить независимые измерения дальностей и /2 методом локации.
Локационные наблюдения с обоих пунктов, проведенные синхронно
между собой и с РСДБ-наблюдениями, дают два уравнения
Pi
СТ2 = 12 + «2 ,
(4.151)
(4.152)
гдеа'1Иа2— неизвестные задержки локационного сигнала в атмосфере.
118
Образуя разность выражений (4.152) и (4.151) и вычитая ее из (4.150) ,
находим
сДГ=(р + Р1 -р2) + (Д1 -a'i)-(a2 -а'2). (4.153)
Если локация и РСДБ-наблюдения проводятся в одном и том же диа¬
пазоне длин волн, то ах а2 = а2 и формула (4.153) принимает прос¬
тейший вид
сДТ=р + р! -р2.
В этом случае, очевидно, реализуется максимальная точность сличения
часов, так как результат не зависит ни от движения ИСЗ, ни от вращения
Земли, ни от координат пунктов, ни от параметров атмосферы. Если же
локация производится с помощью лазерных дальномеров, то из-за раз¬
ности длин волн результат будет искажен разностным набегом сигналов
в атмосфере. Однако с учетом метеорологических параметров в призем¬
ном слое воздуха этот эффект может быть уменьшен до нескольких сан¬
тиметров. Более серьезным недостатком использования лазерной лока¬
ции является невсепогодность этого метода измерений, а также зависимость
от освещенности неба, что неизбежно будет приводить к значительным
перерывам между наблюдениями. По-видимому, имеет смысл сочетать
регулярное использование менее точной радиолокации с эпизодическими,
но более точными светолокационными измерениями.
Глава 5
ИСТОЧНИКИ РАДИОИЗЛУЧЕНИЯ.
МЕХАНИЗМЫ, СТАТИСТИКА, НАБЛЮДЕНИЯ
§ 1. МЕХАНИЗМЫ ГЕНЕРАЦИИ РАДИОИЗЛУЧЕНИЯ
Как известно, неподвижные и движущиеся с постоянной скоростью
в вакууме электрические заряды не излучают (в последнем случае в силу
принципа относительности *). Однако если заряды движутся с переменной
скоростью, то они генерируют переменные электромагнитные поля —
излучают электромагнитные волны. Существуют различные физические
причины, по которым заряды начинают двигаться с ускорением или за¬
медлением. Именно они определяют тип механизма радиоизлучения кос¬
мических тел. Изучение спектра излучения позволяет составить хотя бы
качественное представление о его механизме, угловых размерах и возмож¬
ности использования источника для координатных радиоинтерферометри¬
ческих измерений.
1.1. Тепловое тормозное излучение
В сильно ионизованной плазме свободный электрон при рассеянии
в поле более тяжелого иона движется ускоренно по гиперболе (рис. 29),
излучая электромагнитные волны. Поскольку в рассматриваемой карти¬
не электрон не связан с ионом, он дает излучение со сплошным спектром,
♦ Если заряд движется в среде с меняющимся показателем преломления, то равно¬
мерное движение приводит к переходному излучению.
119
Внешний
/
/
Ион
Рис. 29. Траектория электрона в поле
nOUQ г = п tn2 — 11(1 — л A) —
параметр столкновения, q — эксцентри¬
ситет, ve - скорость электрона, Z -
зарядовое число иона.
причем максимум излучаемой энергии приходится на частоты
Р
р Ро -я2’’
ZZe2
где Ро г — минимальное расстояние между электроном и ионом,
v2e
me,e,ve— соответственно масса, заряд и тепловая скорость электрона,
Z — заряд иона. Низкочастотное радиоизлучение генерируется лишь при
далеких столкновениях, когда ускорение электрона относительно неве¬
лико, а его траектория близка к прямолинейной (при ve = 1000 км/с и
/-1011 Гц,д~104). Очевидно, что такая простая картина парных вза¬
имодействий верна лишь для сильно разреженной плазмы; в плотной
же плазме начинают играть значительную роль коллективные эффекты.
Излучение электронов, которое связано с их ускоренным гиперболи¬
ческим движением в кулоновском поле иона, называется тормозным.
Когда энергия электронов определяется только тепловыми источниками,
говорят, что генерируемое тормозное излучение носит тепловой характер.
В ионизованном газе свободные электроны, двигаясь в поле ионов
(по преимуществу протонов, так как водород является наиболее распрос¬
траненным в космосе элементом), излучают случайным образом, так что
полная интенсивность излучения определяется суммой интенсивностей
элементарных излучателей. Если число элементарных излучателей вели¬
ко, то полная интенсивность будет ограничиваться процессами поглощения
фотонов, которые связаны с электронными столкновениями.
Важной характеристикой свойств радиоисточников является зависи¬
мость спектральной плотности потока излучения S (/) (Вт/(м2 Гц)) от
частоты /, поскольку характер спектра радиоисточника тесно связан с ме¬
ханизмом генерации радиоизлучения. При тормозном механизме излучения*
а =+2, если среда оптичес¬
ки толстая, Tf > 1,
а =0, если среда оптически
тонкая, Tf< 1.
(5.1)
♦Оптическая толщина среды трсвязана с коэффициентом затухания х (0 соотноше¬
нием drp = x(l) dl и измеряется в неперах (1 непер соответствует затуханию в е раз).
120
Отсюда видно, что на коротких волнах спектральный индекс а = 0,на
длинных а = + 2.
1.2. Магнитотормозное излучение
Магнитное поле также может играть роль фактора, приводящего к
изменению скорости движения заряженных частиц из-за действия на них
сил Лоренца. Возникающее в результате этого излучение называется маг¬
нитотормозным. Характер и спектр магнитотормозного излучения за¬
висят от скорости движения частиц в магнитном поле. Если скорость
движения частиц нерелятивистская, v<c (с — скорость света), то излу¬
чение называют циклотронным, если же скорости — релятивистская, v^c,
то генерируемое излучение называют синхротронным.
При циклотронном механизме, в отличие от теплового тормозного,
электрон излучает вполне определенную частоту. Однако, поскольку в
реальных космических условиях магнитное поле среды не является одно¬
родным, различные ее участки будут излучать радиоволны с различными
частотами, соответствующими локальному значению напряженности маг¬
нитного поля Я, в результате чего общее излучение будет иметь непре¬
рывный спектр.
При нерелятивистских скоростях электрон излучает как диполь, а
угловое распределение интенсивности оказывается весьма близким к
изотропному (рис. 30). Характер магнитотормозного излучения резко
меняется, когда скорости заряженных частиц становятся ультрареляти-
вистскими, и^с, и, следовательно, энергия Е становится существенно
mQc2
большей энергии покоя Е ""===5 (w0 — масса покоя частицы). Хо-
5/1 - и2/с
тя ультрарелятивистский электрон, так же как и нерелятивистский, дви¬
жется по окружности или спирали, генерируемое им синхротронное из¬
лучение, в отличие от циклотронного, является резко анизотропным, при¬
чем основная часть излучаемой энергии концентрируется в конусе, направ-
т0с2
ленном вдоль его мгновенной скорости, с угловым раствором ф = =
= 2у1 —- < 1, и излучается в направлении движения электрона — эф-
с2
фект ’’прожектора” (рис. 31). Этот эффект есть прямое следствие эф¬
фекта релятивистской аберрации. Для электрона, например, с Е = 103 МэВ
ф = Зп.
Наблюдаемый спектр космических источников синхротронного радио¬
излучения определяется не только свойствами излучения индивидуально¬
го электрона, но и формой энергетического спектра электронов Ne(E),
определяющего число электронов с данной энергией, лежащих в единич¬
ном объеме на луче зрения в единичном телесном угле. В большинстве
случаев для ограниченного интервала энергий Ег <Е<Е2 распределение
электронов можно считать однородным и аппроксимировать степенной
функцией Ne (Е) = КеЕ~п, где Ке и п - постоянные.
Кроме того, поскольку в реальных астрофизических ситуациях син¬
хронное излучение релятивистских электронов собирается из больших
областей пространства, необходимо учитывать распределение магнит¬
ного поля. В частности, если поле ориентировано хаотически, то для вы-
121
числения спектра необходимо производить усреднение по всем направ
пениям магнитного поля.
Одним из важнейших результатов теории синхротронного излучения
является доказательство степенного характера спектра:
7
где
1
а = — (1 - п),
а = + 2,5,
если ту < 1,
если Tf > 1.
(5.2)
Спектральный индекс оптически тонкого источника зависит от показателя
1
энергетического спектра релятивистских электронов а = — (1 — и) и ме¬
няется от источника к источнику. Обычно значение а лежит в пределах
от — 0,3 до - 2 (и =1,6 - 5) (для большинства источников а= — 0,8, п=2,6) .
В отличие от плоских спектров оптически тонких источников теплового
тормозного излучения, источники синхротронного излучения имеют спект-
dS
ры с — < 0 (рис. 32) .
dv
Излом синхротронного спектра, связанный с эффектом синхротронного
самопоглощения (рис. 33), приходится на частоту /кр, зависящую от
свойств среды и величины магнитного поля. Эта частота несет важную
астрофизическую и астрометрическую информацию, поскольку прибли¬
женно характеризует угловой размер Ф излучающей области [111] :
1,4- Ю^С/крИкр’25 ^25(1 +z)0’25, (5.3)
где S (/кр) — спектральная плотность потока на критической частоте,
к наблюдателю
Рис. 30. Зависимость интенсивности циклотронного излучения электрона, движуще¬
гося по окружности, от частоты. Н - напряженность поля, к - волновой вектор.
Рис. 31. Анизотропный характер синхротронного излучения электрона. Электрон
с у е [
движется по орбите радиуса г « —— с частотой v = -- — В\/ 1 - , излучая в ко-
! » 2лг 2л /у?е с
/ у2
нусе 1// = 2 у 1 - —- < 1 (В — магнитная индукция).
с2
122
Рис. 32. Спектры типичных источников синхротронного излучения. 1 - ЗС 123, 2 -
ЗС 2.
Р и с. 33. Спектр источника Кассиопея А. Перелом в спектре на частоте/ ~ 107 Гц свя¬
зан с эффектом синхротронного самопоглощения.
измеренная в Вт/ (м2 • Гц), Я — напряженность магнитного поля в эрсте¬
дах, f — частота в гигагерцах, Ф — в секундах дуги и z — красное смещение.
Поскольку Ф слабо зависит от Я, требуется не слишком точное значение
величины Н, чтобы оценить Ф. Например, если в спектре объекта имеется
перегиб на частоте/кр = 10 ГГц, то при 5 = 1СГ26 Вт/(м2 • Гц) Н= 10"4 Э,
Z < 1,Ф~0",0001.
1.3. Коллективные механизмы
Тормозной и магнитотормозной механизмы излучения не исчерпывают
все возможности генерации радиоизлучения космических источников.
Последнее стало ясно после открытия пульсаров, имеющих чрезвычайно
высокие яркостные температуры, не достижимые в традиционных меха¬
низмах генерации.
В источниках теплового и синхротронного излучения излучение элемен¬
тарных излучателей складывается не в фазе, так что суммарная мощность
излучения ансамбля оказывается пропорциональной числу элементарных
излучателей. В том случае, когда поля, генерируемые элементарными из¬
лучателями, складываются когерентно (в фазе), суммарная мощность
определяется квадратом числа заряженных частиц (а не просто их числом),
что дает существенный выигрыш в потоке радиоизлучения из данного
объема по сравнению с некогерентными механизмами. Такая ситуация
возможна, в частности, при условии, что система элементарных излуча¬
телей по каким-либо причинам движется как целое (’’антенный” меха¬
низм). Длина волны, излучаемая в таком процессе, имеет порядок разме¬
ра системы частиц, движущихся как целое.
Еще одним классом коллективных механизмов генерации радиоизлу¬
чения являются механизмы, связанные с многочисленными типами неустой¬
чивости плазмы, которые могут встречаться в космических условиях.
Плазма оказывается неустойчивой, если хотя бы для одного из семи
типов плазменных волн коэффициент поглощения становится отрица¬
тельным. В этом случае из-за отрицательного поглощения плазменные ко¬
лебания преобразуются в электромагнитные волны. Такого рода механиз¬
мы оказались особенно эффективными при объяснении некоторых особен¬
ностей радиоизлучения Солнца.
123
1.4. Линейчатое излучение
Этот тип излучения хорошо известен в оптике. Он связан с переходом
электронов с возбужденных уровней на основной. В настоящее время от¬
крыто около 500 радиолиний, которые излучаются 32 соединениями [112].
Наиболее известными радиолиниями являются линии водорода (X = 21 см),
гидроксила (X = 18 см) и водяного пара (X = 1,35 см). В последних двух
случаях механизм является мазерным.
Надо иметь в виду, что дискретные источники радиоизлучения имеют
весьма разные угловые размеры. Ясно, что для целей астрометрии наиболее
удобны источники малых угловых размеров, и прежде всего из-за специ¬
фики радиоинтерферометрических измерений (гл. 6). Используя связь
между яркостной температурой Тя и спектром, можно сформулировать
полезный для оценок критерий обнаружимости дискретных радиоисточ¬
ников. Если Q — средний телесный угол, стягиваемый радиоисточником,
то (2кТя/Х2) Г2. Естественно определить угловой диаметр Ф дискретно¬
го (Ф < 1) радиоисточника соотношением П ~ Ф2. Если 5МИН — мини¬
мальная плотность потока, которая может быть зафиксирована приемным
устройством интерферометра, то источник может быть обнаружен лишь
при выполнении неравенства
ТяФг ^4 • 1СГ8Х2 5МИН( (5.4)
где 5 измеряется в единицах потока (1 е.п. = 10"26 Вт/(м2 • Гц)), Ф — в
радианах, Тя — в кельвинах, а X — в сантиметрах. Отсюда следует, что
для обнаружения радиоисточника малых угловых размеров необходимо,
чтобы он имел высокую яркостную температуру (рис. 34).
Рассмотренные выше механизмы генерации радиоизлучения идут прибли¬
зительно в порядке возрастания их яркостных температур. Очевидно, что
излучение от холодных облаков нейтрального водорода HI может быть
зарегистрировано только от весьма протяженных областей, имеющих угло-
1
104
Угловой
диаметр
(секунды
Дуги) 60
,«10
10
Рис. 34. Соотношение между угловым размером и яркостной температурой источни¬
ков различных типов (5 = 1 е.п., А. = 5 см) .
124
вые размеры 1Аналргичная ситуация имеет место и для облаков ионизо¬
ванного водорода НИ в Галактике (газовые туманности, наблюдающиеся
в оптическом диапазоне спектра). Даже компактные Н II области оказы¬
ваются недоступными для радиоинтерферометрических методов. Таким
образом, источники теплового излучения, вообще говоря, непригодны для
задач радиоастрометрии высокого углового разрешения.
Источники синхротронного радиоизлучения (квазары, ядра галактик)
имеют широкий спектр яркостных температур, хотя их угловые размеры,
по-видимому, не могут быть меньше 0м,0001* Излом в синхротронном
спектре свидетельствует о наличии в источнике компактной детали.
Весьма удобны для решения некоторых задач радиоастрометрии источ¬
ники когерентного радиоизлучения. Для них характерны очень высокие
яркостные температуры и они могут иметь исключительно малые угловые
размеры (вплоть до 1СГ10 секунды дуги). Конечно, необходимо иметь в
виду, что указанная оценка не учитывает условия распространения радио¬
волн в среде от источника к наблюдателю. Межзвездная среда, в частности,
накладывает сильные ограничения на видимый размер источника, и в
плоскости Галактики вряд ли можно обнаружить источники когерентного
радиоизлучения, угловые размеры которых меньше 0”,0001.
§ 2. РАДИООБЗОРЫ И РАДИОКАТАЛОГИ ДИСКРЕТНЫХ ИСТОЧНИКОВ
Среди множества источников космического радиоизлучения главную
роль для астрометрии играют^дискретные радиоисточники, которые имеют
четко очерченные границы. Дискретные источники несколько условно
можно разделить на три класса: протяженные с угловыми размерами
Ф > 1°, локализованные Ф < 1° и точечные Ф 0",01.
Дискретные источники радиоизлучения были выделены из общего га¬
лактического фона еще в 40-е годы по мерцанию их яркости. В 1948 г.
был составлен первый каталог, который содержал всего четыре радио¬
источника, координаты которых были измерены с помощью морского ра¬
диоинтерферометра (Австралия) на волне 3 м [113]. В 1950 г. на этом
же интерферометре был составлен каталог 18 радиоисточников (X = 7,5; 3 и
1,9 м) [114]. Через год в Кембридже (Англия) был составлен первый
достаточно обширный каталог, содержащий 50 источников с потоками
30 е.п. (X = 3,7 м). Этот каталог, получивший название 1С (Первый Кем¬
бриджский), имел весьма низкую координатную точность — Г по 5 и
10тпо а и хуже. В 1954 г. в Австралии был получен каталог 104 источников
[115] (X = 3 м), охватывающих область неба по склонению от -50° до+ 50°.
Первые радиокаталоги составлялись на основе обзоров, проводившихся
в основном на длинных волнах. В связи с этим они имели невысокую ко¬
ординатную точность и содержали в ряде случаев большое число нереальных
источников, существование которых не было подтверждено дальнейшими
наблюдениями. По мере развития коротковолновой техники начинают про¬
водиться обзоры на коротких волнах, вплоть до нескольких сантиметров.
♦ Яркостная температура источника синхротронного (некогерентного) излучения не
может превышать 1012 К на любых длинах волн, так как при Тя > 1012 К существен¬
ными становятся потери из-за обратного комптоновского рассеяния.
125
Такие коротковолновые обзоры особенно интересны для радиоастро¬
метрии, поскольку позволяют обнаружить наиболее компактные источ¬
ники. В настоящее время имеется около сотни в разной степени полных
обзоров, выполненных в диапазоне длин волн от 3 м до 3 см. В некоторых
обзорах (например, таких как 4С и 5С) плотность наблюденных источ¬
ников (правда, в ограниченной области неба) достигает 105 на стерадиан.
Сводка практически всех наиболее полных радио каталогов, полученных
к 1970 г., была составлена Диксоном [116], который объединил их в боль¬
шом каталоге, носящем название MASTERLIST (ML). В ML объединены
результаты 46 обзоров, которые включают в себя 12 тысяч радиоисточни¬
ков (из-за частичного дублирования для них имеется 25 тысяч, названий).
Включенные в каталог источники расположены в порядке возрастания их
прямого восхождения, и для каждого на них, помимо координат, Цриведе-
ны значения потоков на соответствующей наблюдениям частоте. Эклип¬
тические координаты радиоисточников даны в ML на эпоху 1950,0. Каталог
ML непрерывно пополняется (к 1976 г. в нем насчитывалось уже 20 ты¬
сяч источников), и по заявке может быть выслан потребителю записанным
на магнитную ленту.
Остановимся вкратце на характеристике трех основных обзоров, вклю¬
ченных в ML : Кембриджском (ЗС, 3CR, 4С и 5С), Парксском и Огайском.
2.1. Кембриджские обзоры
Кембриджские каталоги ЗС и 3CR являются последовательными поколе¬
ниями уже упомянутого каталога 1С и более позднего каталога 2С. Послед¬
ний каталог содержал 1936 источников в зоне склонений от — 38° до + 8°,
которые наблюдались на частоте 81 МГц (X = 3,7 м) с невысоким раз¬
решением по обеим координатам. Из-за попадания двух или более источни¬
ков в диаграмму антенны большинство источников каталога 2С оказались
фиктивными.
Каталог ЗС содержит 471 источник, которые расположены в зоне скло¬
нений — 22° ^6 ^71° и наблюдались на кембриджском интерферометре
на частоте 159 МГц (X = 2 м) при полном обзоре неба (0h < а < 24h). Ми¬
нимальный поток источников, включенных в каталог ЗС, S = 8 е.п. Для
того чтобы уменьшить координатные погрешности каталога ЗС, были
сделаны дополнительные наблюдения на другой антенне - большом пара¬
болическом цилиндре на частоте 187 МГц (X «1,1 м). Узкая диаграмма
направленности этой антенны позволила исключить ошибки каталога ЗС,
связанные в основном с неопределенностью в номере лепестков интерфе¬
ренционной картины. В результате этих наблюдений был составлен реви¬
зованный каталог 3CR, содержащий 328 источников в зоне - 5° ^<5 ^90° с
потоками, большими 9 е.п. Эта же антенна, но уже в интерференционной
схеме вместе с другой антенной, была использована в режиме апертурного
синтеза для полного обзора неба в области - 7° ^5 ^80°. Эти наблюдения,
включающие 4834 источника с S > 2 е.п., были объединены в каталоге 4С.
Наконец, на частоте 408 МГц (X « 0,075 м) был проведен тщательный обзор
двух малых участков неба (круги диаметром 4*). Результаты этого обзора,
содержащие 313 источников с S > 0,009 е.п., включены в каталог 5С.
2.2. Парксский обзор
Обзор источников южного неба был выполнен с помощью 64-метрового
радиотелескопа в Парксе (Австралия). Этот обзор выполнен в зоне —90° <
126
< 5 < 20° на частоте 408 МГц (X = 0,75 м) и в зоне 20° ^8 27° на частоте
635 МГц (X = 0,5 м). Он содержит 2223 источника с 5 > 0,6 е.п., точность
измерения координатных положений которых порядка 5"- 10". В нас¬
тоящее время этот обзор является практически единственным источником
информации о плотностях потока радиоисточников южного неба на низких
частотах.
2.3. Огайский обзор
Этот обзор выполнен на телескопе системы Крауса в Огайском универ-
сисете (США) на довольно высокой частоте / = 1415 МГц (X = 21 см). Он
почти полностью (92%) перекрывает область неба с — 36° ^8 $63°. Остав¬
шиеся 8% площади, не перекрытые обзором, расположены в плоскости Га¬
лактики, где измерения затруднены.
Огайский обзор содержит около 20 тысяч радиоисточников с потоками,
большими 0,18 е.п. (2260 источников на стерадиан), и является в ряде
отношений уникальным каталогом. Он сделан на высокой частоте, пере¬
крывает большую часть неба (около 70%) и содержит подробные радио¬
карты всех исследованных областей неба. Однако огайский обзор имеет
невысокую координатную точность: 2тпо а и 8' по 8 для источников с
0,2 е.п. ^5 1,0 е.п. и 5т по а и 3' по 8 для источников с S > 1 е.п.
§ 3. РАДИОКАТАЛОГИ ВЫСОКОГО УГЛОВОГО РАЗРЕШЕНИЯ
В течение последних десяти лет были получены точные положения радио-
исгочников на интерферометрах с базами от нескольких километров до
нескольких тысяч километров (табл. 17). Наиболее точные координатные
Таблица 17
Радиокаталоги высокой угловой точности
Год
Количе¬
ство
объектов
Средняя
точность
по обеим ко¬
ординатам
Инструмент
Ссылка
1971
35
Г' - 3м
РСДБ; X = 31 см
(75)
1972
11
О", 2
РСДБ; Л. =3,8 см
[117)
1973
605
1"- 1", 5
5-элементный интерферо¬
метр UTRAO;X = 82 см
[1181
1973
59
0", 1 - 0", 8
3-элементный интерферо¬
метр NRAO;X=3,8; 11 см
[88]
1973
12
0",1
РСДБ; X =3,8 см
[И9]
1976
55
0", 03
5-километровый интерфе¬
рометр (Кембридж) ;
X = 6см
(131
1976
18
0", 06
РСДБ; X = 3,8 см
[14)
1977
36
0", 02
35-километровый ин¬
терферометр (Грин
Бэнк) ; X = 11 см
[120]
1977
538
2"
425-метровый интерферо¬
метр (Джодрелл Бэнк);
X = 31 см
(121)
1978
62
0",6
РСДБ; X = 13 см
[122)
1980
109
0я, 01
РСДБ; X = 3,6; 1 3 см
■ )16]
127
определения относятся к последним пяти годам, что, в частности, связано с
внедрением в практику РСДБ-наблюдений новых систем записи на видео¬
магнитофоны (MARK-II) и с активным подключением к астрометрическим
задачам фазостабйльных короткобазовых интерферометров. Ниже будет
дано краткое описание радио катал о го в, обладающих точностью луч¬
ше 0", 1.
Б. Эльсмор и М. Райл [13] на 5-километровом фазостабильном интер¬
ферометре в Кембридже получили положения 53 внегалактических и
двух галактических радиоисточников в области неба с + 7° <8 < + 71° с
потоками 5 > 0,2 а.п. со среднеквадратичными ошибками для источников
с умеренными склонениями — a (a) —0s, 003 и а (8) ~ 0”,03.. Наблюдения
велись на частоте f - 5 ГГц, и после калибровки инструмента каждый ис¬
точник наблюдался от восхода до захода. Основным фактором, ограничи¬
вающим угловое разрешение, являлись флуктуационные эффекты тропо¬
сферы, вызываемые изменением содержания водяных паров с характерны¬
ми временами от нескольких минут до многих часов и амплитудой в не¬
сколько миллиметров. Для фиксирования нуль-пункта системы прямых
восхождений относительно FK4 был выбран радиоисточник & Персея
(FK-111), что обеспечило точность привязки по а порядка + 0s ,0015. Срав¬
нение этих результатов с менее точным каталогом [119], полученным на
радиоинтерферометре со сверхдлинной базой, обнаружило систематическое
расхождение в прямых восхождениях ~ 0s ,005, что, вероятно, было связа¬
но с тем, что в [119] для фиксирования нуль-пункта была выбрана радио¬
компонента квазара ЗС 273 В.
Т. Кларк и др. [14] наблюдали на 5-элементном интерферометре со
сверхдлинными базами 18 внегалактических источников с потоками
5 > 0,25 е.п. на частоте / 7850 МГц в области - 5° ^8 51°, исполь¬
зуя систему записи MARK-I (Г= 3 мин). Сравнение этого каталога с кем¬
бриджским каталогом показало заметное расхождение в координатах
источников:
Да (РСДБ - Кембридж) — + 0s ,00^, Д8 (РСДБ — Кембридж)
- 0”,02. Разность в прямых восхождениях связана, по-видимому, с
разным определением нуль-пункта, а расхождение в склонениях не имеет
убедительного объяснения.
К. Вэйд и К. Джонстон [120] на 35-километровом интерферометре с
ретрансляцией (Грин Бэнк) определили положения 36 источников (каж¬
дый наблюдался в пяти часовых углах) в области -19° ^8 70° на
частоте / = 2720 МГц с точностью а (а) 0s,003 и о (8) 0”,03 для источ¬
ников с умеренными склонениями. Этот каталог включает 17 источников,
общих с каталогами [14] и [119], причем средние разности показывают
хорошее совпадение с результатами РСДБ-измерений (GB — Грин Бэнк),
Да (GB - РСДБ) ~ - 0s ,0001, Д8 ( GB - РСДБ) ~ 0",032
и довольно сильное расхождение с кембриджским каталогом Д a(GB—Кем¬
бридж) -—0s,006, Д8 (GB — Кембридж) % +0”,049.
В лаборатории реактивного движения (JPL) [240] на трехэлемент¬
ном интерферометре со сверхдлинными базами (Мадрид — Канберра —
Голдстоун; максимальная база около 10 600 км) составили каталог коор¬
динат с точностью а(а) — 0s,003, а(8) — 0м,03 67 источников в зоне
128
Рис. 35. Ошибки каталогов
Д6(6): черные кружки - ка¬
талога [14], светлые квадра¬
тики — каталога [13], черные
квадратики - каталога [120],
светлые кружки — катало¬
га [240].
о
70
Склонение,град.
90
-44° 5 70 , наблюдавшихся на X — 13,1 и 3,6 см. На каждом пункте
этого интерферометра имелись по крайней мере две 26-метровые антенны
и одна 64-метровая и в течение одного часа наблюдалось в среднем 10 ис¬
точников. Аналитическая модель для обработки 1300 наблюдений (1971 —
1978 гг.) включала 384 свободных параметра, из них 133 параметра описы¬
вали координаты источников, 129 описывали часы, 64 — тропосферу,
41 — UTI и движение полюса и 14 — положение станций. Нуль-пункт систе¬
мы прямых восхождений был фиксирован относительно FK4 по источнику
NRAO 140 (03h 33m 22s, 403) с точностью 0",1. В дальнейшем [16] этот
каталог был расширен и к настоящему времени содержит 109 источников,
положения которых по обеим координатам определены с точностью
а(а, <5)~0",01 (Приложение 3). В каталог включены источники которые
наблюдались не менее трех раз (для большинства источников имеется
10—40 наблюдений).
На рис. 35 [239] приведены ошибки Д6(6) каталогов [13, 14, 120, 240].
Видно, что точность координатных определений уменьшается на малых
склонениях. Заметно также, что средняя точность каталогов растет со вре¬
менем.
Каталоги, сведенные в табл. 17, могут служить основой для построения
фундаментального каталога радиоисточников — первая подобная попытка
была принята недавно Г. Вальтером [123]. Для реализации этого плана в
полном объеме необходимо выполнение, по крайней мере, трех условий.
Во-первых, увеличение числа радиоисточников с хорошо определенными
положениями (напомним для сравнения, что FK4 содержит 1535 звезд),
в том числе и для южной части неба. Во-вторых, увеличение числа незави¬
симых наблюдений каждого из объектов, входящих в фундаментальный ка¬
талог. В-третьих, для фиксирования системы прямых восхождений относи¬
тельно фундаментальных каталогов FK4 или FK5 необходимы максималь¬
но точные оптические и радионаблюдения общих объектов, таких, напри¬
мер, как радиозвезды 0 Лиры и /3 Персея или радиоисточники ЗС 273 В и
129
А
сч
о
В
*0
«п
я-Н СЧ
Г- i-l
о
<74
Мн
О
О
о
Л
сч
сч
4
сч
С"
Мн
сч
о
4
о
О чо чо or-
©©юсчсч4осп»/>©4ОО4
^ЮСПг-1тН1ЛМг-1Мг-11Л
о о © ©
00 «П «П 04 in ©
«л m if m гч гн
©
©
©
40
40 i-H
Tfr 1—<
©
Л
СП
сч
Таблица 18
Список галактических объектов, излучающих в оптическом и радиодиапазонах
. «п г*
Ю О^ СЧ 40 оож СП
40 «П 40 4 40 1-1 тГ тГ
спспсп^-спспспсп^сч
я
Uh
ю
СО
00 к 40
ТГ СП 30 Ю °0
-и 40 СЧ 1-71—t С" СП
cncni—ic44Ocn»—(спсчспспспю
©00 ^2 °0
V0 4O I <л
СП СП тГ СП
^■4
1—<
© «п
©
©°-
4П
о"
г °
©
«п
1
1
©
«п
40 40
04
40
о
1“Н
© 1
О 1—< 1—1 «Л 1-1
СП О
сч
©
г»И
Q© о
о ©
^1©Л
© ©
©ж© © ©жож
°.°ж
©
©ж
©
© © ©
4 О*
© 1-Н
© V
о о © © ©
©* <э
©
©
о"
СП
©
СП
о ьс
с
<2>>>а
Лл Н
Я N О О
я
о © о
© © © О © ©
© ©
© ©
©
СЧ О
О СП Н о in о
ОО 40
© ©
W © СП 04
in гН Г) N Г) N
СЧ «Л
Ш г-1 г-( N N
»л
К " СЧ О
сч
«—I < 04 СО «—I 00 Г* Г** w—<
тгттт.-чтГ4О4©сП’ча-
сч
00’“100<ЭГ^Г^01и1
оо 40 оо «л г*^ СП
спспиэ^чспспспсп
Таблица 18 (окончание)
ч—1
40
сч
г-
©
4fr
©
СП
00
00
00
т-1
00
сч
Г*
04
СП
оо
-СП
»л
г*
«л
40
40
04
’’Г
•л
40
©
©
сч
00
ч-Ч
оо
40
40
40
00
04
«л
04
©
40
04
сч
Tf
т-<
сч
сч
т—<
•Л
’’$■
СП
сч
СП
©
СП
СП
«л
©
сч
40
сч
00
04
40
©
»л
00
сч
04
40
сч
хГ
©
©
Ш
сч
сч
сч
©
•л
ч
»-ч
ч4-
*Л
©
тГ
»л
>—<
СП
«л
40
00
00
04
04
©
©
©
(
СЧ
СЧ
СЧ
сч
СП
СП
сп
v-H
«—1
’—I
»—ч
V—<
сч
сч
сч
сч
сч
сч
сч
СЧ
сч
сч
сч
(Ч
1 — вспыхивающая звезда; 2 — нормальная одиночная звезда; 3 — двойная или кратная звезда; 4 — рентгеновская звезда; 5 — пекулярная
звезда; 6 — оболочка звезды.
NRAO 140. В табл. 18 [239] приведен список галактических объектов,
имеющих радио-и оптическую светимость, которые можно использовать
для фиксирования начала отсчета долгот.
§ 4. СТАТИСТИКА РАДИОИСТОЧНИКОВ МАЛЫХ УГЛОВЫХ РАЗМЕРОВ
Как уже неоднократно отмечалось, одной из важнейших проблем радио¬
астрометрии является задача создация инерциальной системы координат
с точностью не хуже 0”, 001. Для решения этой задачи в наибольшей степе¬
ни пригодны внегалактические радиоисточники малых угловых размеров,
положение большинства из которых в пространстве изображений характе¬
ризуется вековой стабильностью. Система такого качества может быть реа¬
лизована лишь при относительно высокой поверхностной плотности источ¬
ников на небесной сфере. К настоящему времени методом радиоинтерфе¬
рометрии со сверхдлинными базами выполнены наблюдения около 150
компактных источников (<^ 0м, 1) с потоками S > 0,5 е.п. (рис. 36). К
сожалению, пока не существует полных обзоров внегалактических источ¬
ников, полученных с высоким разрешением в радиоинтерферометрическом
режиме. Поэтому для оценки ожидаемого числа компактных внегалакти¬
ческих источников, пригодных для. координатных измерений методами
радиоинтерферометрии, приходится использовать косвенные соображения.
Как уже отмечалось в § 1, спектр источников, содержащих компактные
детали, является плоским (а = 0) или имеет изломы. Многие компактные
источники обнаруживают существенные и быстрые изменения интенсив¬
ности. И, наконец, для компактных источников характерны мерцания ра¬
диояркости на неоднородностях межпланетной плазмы. Именно эти сооб¬
ражения могут быть положены в основу оценок возможного числа источ¬
ников с угловыми размерами 0",001 [124].
Обзоры, проведенные в HP АО [125] на волне X = 6 см для внегалакти¬
ческих источников с потоками 5 > 0,05 е.п., показали, что поверхностная
плотность источников (число источников на стерадиан) и « 5000, что со¬
ответствует 6 • 104 источников с потоками 5 > 0,05 е.п. для всего неба
Рис. 36. Положение на небе внегалактических источников, имеющих точечные детали.
132
Рис. 37. Кривая lgп — lg5 для внегалак¬
тических источников (X = 6 см).
(рис. 37). Эта величина сравнима с
оценкой, опирающейся на Кембридж¬
ский обзор [126], полученный на вол¬
не X = 75 см. Статистическое иссле¬
дование спектральных индексов для
источников обзора НРАО показало,
что около 30% из них имеют плос¬
кие спектры [127], так что, вероят¬
но, плотность компактных источни¬
ков или источников, имеющих ком¬
пактные детали, п (S 0,05 е.п.)
1500, а общее число этих источни¬
ков для всего неба — 2 • 104. Анало¬
гичная* оценка может быть получена,
если воспользоваться данными по переменности источников, приведенными
в работе [128] для источников с потоками 5 > 1 е.п. на длине волны X = 4 см
и распространить их на более слабые источники.
Очевидно, что далеко не все из этих 2 • 104 источников имеют детали
с угловыми размерами, меньшими 0”,001, и получение достоверной оценки
для их поверхностной плотности п связано с наибольшими проблемами,
прежде всего из-за того, что с высоким угловым разрешейием наблюда¬
лось небольшое число источников. Однако верхнюю и нижнюю оценки
для п можно, по-видимому, дать. Если опираться на тот факт, что из об¬
щего числа наблюдаемых РСДБ-методом источников только у 30% обнару¬
жены детали с угловыми размерами 0",001, то п (S > 0,05 е.п.) ^500.
Если же принять во внимание общее число самых ярких точечных для ра¬
диоинтерферометра со сверхдлинной базой источников и экстраполировать
это число в предположении однородного пространственного распределения
источников, то п (S 0,05 е.п.) « 150. Поэтому зависимость ’’число источ¬
ников - поток” для источников с угловыми размерами в миллисекунды
дуги можно представить в виде
л = ло(5/5о)3/2,
(5-5)
где nQ = (5 (Н 150)/стерадиан и So = 0,1 е.п. Эту зависимость, несмотря
на ее оценочный характер, можно использовать для анализа эффективности
разностных методов измерения координат (дифференциального и метода
ДУГ) •
Внегалактические источники — не единственный пример радиоисточни*
ков, которые можно использовать в астрометрических целях. Среди галак¬
тических источников для целого ряда задач удобно использовать такие
галактические объекты, как пульсары, радиозвезды и источники мазерного
радиоизлучения.
Пульсары обладают измеримыми параллактическими смещениями,
что в сочетании с импульсной природой их излучения позволяет довольно
точно определить параметры земной орбиты. Поэтому наблюдения пуль-
133
Рис. 38. Положение на небе пульсаров (в галактических координатах).
саров, в принципе, позволяют фиксировать систему прямых восхождений
радиоисточников, что, как было показано, невозможно по радиоинтерфе-
рометрическим наблюдениям бесконечно удаленных радиоисточников.
Кроме того, позиционные наблюдения пульсаров и остатков сверхновых
представляют интерес для физики сверхновых звезд, а двойных пульсаров —
для гравитационной физики.
В настоящее время обнаружено около 300 пульсаров (рис. 38), около
шестидесяти из которых лежат на расстояниях менее 1 кпс и, следователь¬
но, имеют параллакс более 0”,001. Общее число пульсаров в Галактике
должно быть порядка 106, если принять, что время жизни пульсара порядка
108 лет.
Для ряда задач, в том числе и для фиксирования нуль-пункта инерциаль¬
ной системы координат, необходимо иметь возможность привязать радио¬
астрономическую систему координат к оптической. Самым очевидным
способом является наблюдение одних и тех же звезд в оптическом и радио¬
диапазонах. К настоящему времени выполнены радионаблюдения около
трехсот звезд, у семидесяти из которых было обнаружено радиоизлучение
Рис. 39. Положение на небе радиозвезд (в экваториальных координатах).
134
(рис. 39). Из сорока пяти достоверно зарегистрированных радиозвезд
двадцать содержатся хотя бы в одном каталоге (FK4, AGK3, SAO, SRS).
Галактические источники мазерного типа, например, ОН, Н2О, SiO,
СН3ОН, имеют сильное радиоизлучение, высокие яркостные температуры
и компоненты с очень малыми угловыми размерами. В настоящее время
известно более ста источников ОН и СН3ОН и около семидесяти Н2О.
Общее число Н2О-мазёров в Галактике, по-видимому, около 2000, если
принять во внимание скорости образования массивных галактических
звезд и длительность свечения Н2 О-мазеров. Для фундаментальных пози¬
ционных измерений мазерные источники непригодны из-за их значитель¬
ных собственных движений, сильной переменности интенсивности и весьма
неоднородного распределения по небесной сфере. Однако они могут быть
эффективно использованы для частных астрометрических задач, таких
как синхронизация часов, определение вариаций угловой скорости враще¬
ния Земли, а также для определения параметров базы интерферометра.
ЧАСТЬ III
ТЕХНИКА РАДИОИНТЕРФЕРОМЕТРИЧЕСКИХ
НАБЛЮДЕНИЙ
Глава 6
РАДИОИНТЕРФЕРОМЕТРЫ - ОБЩЕЕ ОПИСАНИЕ
§ 1. ОСНОВНЫЕ ПОНЯТИЯ НАБЛЮДАТЕЛЬНОЙ РАДИОАСТРОНОМИИ
В этом параграфе будут введены основные понятия, используемые
в практике радиоастрономических наблюдений (подробности см. в [129 —
132, 144]). На рис. 40, а изображена упрощенная схема приема площад¬
кой А излучения, приходящего из области неба под средним углом 0 от¬
носительно нормали к плоскости А. Мощность Л№ электромагнитного
поля, собираемая элементом площади АЛ в полосе частот Д/из телесного
угла Aft, равна
Д W = I(0,<p,f) ЛА Aft Д/cos 0 . (6.1)
Величина 7(0, /) характеризует спектрально-угловое распределение ин¬
тенсивности радиоизлучения и называется радиояркостью ( [/ ] =
= Вт/ (м2 • Гц • ср) ). Интегрируя радиояркость по телесному углу, охваты¬
ваемому источником ft, получим полную спектральную плотность потока
радиоизлучения от источника
(6-2)
В радиоастрономии принята единица потока 1 янский (1 Ян) = 1е.п. =
= 1СГ26 Вт/(м2 Гц).
Наряду с радиояркостью общепринятой в радиоастрономии характерис¬
тикой углового распределения интенсивности радиоизлучения является
так называемая яркостная температура Тя. Согласно закону излучения План¬
ка для черного тела, яркость для радиочастот пропорциональна температу¬
ре, В - 2кТ/\2, где к — постоянная Больцмана. Хотя реальные источники
могут иметь и нетепловой спектр и обладают конечной оптической толщи¬
ной (гл. 5), тем не менее удобно характеризовать принимаемое радио¬
излучение эффективной или яркостной температурой
где I н — наблюдаемая яркость. Для источника теплового излучения Тя
стремится к истинной температуре источника по мере роста оптической
толщины излучающей оболочки.
136
Рис. 40. Прием излучения: а) элементарной площадкой, б) антенной с направленны¬
ми свойствами; в) одномерная диаграмма направленности антенны, г) эквивалентная
схема антенны радиотелескопа как источника шумового напряжения.
Полная мощность, собираемая площадкой ЛА от источника в телесном
угле £2 и полосе частот /, согласно (6.1), равна
№=ЛА/ f I(a,f)cos0dadf. (6.4)
п д/
Однако реальные радиотелескопы представляют собой сложные поверх¬
ности, обладающие угловой избирательностью, характеристикой которой
является диаграмма направленности Р(0, ф) (рис. 40, б). В распределении
Р(в, у) выделяют так называемый главный лепесток и боковые лепестки
(рис. 40, в). Учет диаграммы направленности уменьшает интеграл (6.4),
так что
^=~Лэфф f f /(^f)Pn(6,^K(f)d^df, (6.5)
2 п Д/
где Рп = Р/РМакс — нормированная диаграмма направленности. В формуле
(6.5) также принято во внимание, что приемная площадь антенны всегда
меньше геометрической (Лэфф = г}А, гдет? — коэффициент использования),
и телескоп обычно принимает только одну поляризационную компоненту
сигнала (коэффициент 1/2), а также то, что телескоп обладает спектраль¬
ной избирательностью K(f)y поскольку усиливает только часть спектра
137
(6.6)
сигнала. Если /(£2, /) = const и K(f) = const в полосе приема Д/, то
= у Лэфф Д//Пл ,
где = / Pnd£l — телесный угол диаграммы направленности.
4тг
Плотность потока, собираемого антенной с диаграммой Рп, равна
sa = f /(£2)Р„(ЩсШ. (6.7)
^ИСТ
Если источник точечный, т.е. его Угловая структура более тонкая, чем
телесный угол диаграммы антенны — £2ИСТ а , то Рп 1 и5л = 5ИСТ,
так что
W= — Д^фф ^ист А/ • (6-8)
Если же £2ИСТ > Г2Л, т.е. источник протяженный, то яркость источника мо¬
жно считать постоянной в пределах главного лепестка и плотность потока,
принимаемого антенной, становится функцией углового распределения
радиояркости
SA=t(P,& f Pnda*Z(0,<p)nM, (6.9)
гл. леп.
где Пм — телесный угол главного лепестка антенны.
Мощность Р, принимаемая на входе радиотелескопа, — это мощность
шумового сигнала. В радиотехнике мощность шумов принято характери-
Р
зовать шумовой температурой. Шумовая температура Тш = — это тем-
k^f
пература активного сопротивления, флуктуационная мощность шумов
на концах которого в согласованном режиме в полосе Д/ равна Р
(рис. 40, г). По аналогии с шумовой температурой можно ввести поня¬
тие антенной температуры Та. Для точечного источника, согласно (6.7),
1
Р = — Яист^эфф
так что
Т
1 а
‘S'hct ^эфф
2к
(6.10)
В более общей форме связь между антенной температурой и яркостью мо¬
жет быть записана в виде
^а=—77^эфф f f I(^)Pn(^)K(f)d^df. (6.11)
2k&J п А/
Подставляя сюда яркостную температуру и интегрируя по = 1 в по¬
лосе Д/ и K(f)- 0 при других f, получим зависимость антенной темпера¬
туры от яркостной (рис. 41, а)
Л = Л Тя(в , ¥>) Р„(в,^ d0 d*. (6.12)
138
о
Р и с. 41. Антенна как пространственный фильтр, а) Сглаживание диаграммой направ¬
ленности Рп распределения яркостной температуры Тя; б) Т$ и Т$ - одномерное рас¬
пределение и пространственный спектр яркостной температуры источника, А и А —
диаграмма направленности и пространственный спектр антенны, Та и Та - сглажен¬
ное антенной распределение и его спектр яркостной температуры источника.
В уравнении (6.12) отсчет Тя и Рп ведется от начала координат. Если
сместить диаграмму Рп в точку с координатами 0О, i/?0, то будем иметь
FaCWo) = Л тя(в, ^p^o-o^-^ded*. (6.13)
А П
Это уравнение называется уравнением антенного сглаживания. Оно связы¬
вает радиоизображение источника Тл с исходным распределением Тя.
Применим двумерное преобразование Фурье к правой и левой частям
(6.13)
ТА (u,v)=A(u,v)-Тя(и,и). (6.14)
Здесь Тя — пространственный спектр источника, Л—пространственный
спектр диаграммы, который по аналогии с радиотехникой называют про¬
странственной частотной характеристикой радиотелескопа. На рис. 41
показаны источник, диаграмма, изображение и их пространственные спек¬
тры в одномерном случае. Реальные радиотелескопы обладают диаграмма¬
ми, спектры которых представляют собой финитные функции частоты, т.е.
Л (и, и) = 0 при и > мгр, v > и гр, где мгр, игр —граничные частоты. Это
означает, что пространственные частоты объекта, лежащие за пределами
цгр» v гр > не могут быть пропущены радиотелескопом, и поэтому радио¬
телескоп является фильтром пространственных частот, в частном случае,
показанном на рис. 41, — низкочастотным фильтром.
С помощью уравнения антенного сглаживания (6.13) рассмотрим пре¬
дельный случай точечного источника: Тя = Го 5 (0, (/?) — дельта-функция
4^* л Т0&(в,>р)Р„(е-9^-^ded*, (6.15)
А П
Та (0о, <Ро) -
139
т.е.
Га(0,Ч>) =
-^Эфф
X2
Л,(0,<р) =
^эфф $0
2к
Рп(Р,^,
(6.16)
X2
где То = SQ и Sq — плотность потока точечного источника. Таким обра- ’
2 к
зом, отклик на точечный источник определяется формой диаграммы нап-
Д э ф ф 5 о
равленности (повторяет ее). В точке максимума Рп = 1 и7А = .
2к
Для источника малых угловых размеров Г2ИСТ < £2Л
?я ^ист
7л
(6.17)
где Г2Л = $ Рп d£l. Если диаграмма очень узкая по сравнению с источни-
4 7Г
ком, то уравнение сглаживания имеет вид
^л(0о^о)= Л Тя (0,<р)8(0 - 00,<р - tp0)de d<p= Тя(6,<р), (6.18)
п
т.е. антенная температура равна яркостной (при отсутствии каких-либо
потерь в антенной системе) .
§ 2. ОСНОВНЫЕ ТИПЫ РАДИОИНТЕРФЕРОМЕТРОВ.
РАДИОИНТЕРФЕРОМЕТР КАК УГЛОМЕРНЫЙ ИНСТРУМЕНТ
2.1. Суммирующий радиоинтерферометр
На рис. 42, а изображен простейший радиоинтерферометр суммирую¬
щего типа. Сигнал от источника излучения собирается антеннами A t и Л2,
сигналы с антенн складываются , их сумма возводится в квадрат и осред-
няется фильтром нижних частот в течение времени Т.
Будем для простоты полагать, что источник точечный, сигнал — монохро¬
матический, а антенны одинаковые. Кроме того, будем рассматривать слу¬
чай одномерного источника, расположенного на бесконечности, чтобы
считать фронт волны плоским. Тогда сигнал от первого плеча интерфе¬
рометра можно записать в виде
= So ^(^) s*n , (6.19)
а от второго плеча — в виде
s2 = So A(ip) sin(co0r +.0) . (6.20)
Здесь So — амплитуда сигнала, А(ф) — диаграмма антенны по полю, со0 —
частота сигнала, в - сдвиг фазы между сигналами в антеннах, возникаю¬
щий из-за запаздывания при наклонном падении волны,
2тгЬ со0
О = — sin {р = b sin ,
X c
b — длина базы интерферометра, X — длина волны, с — скорость света.
140
(6.21)
I
I
Рис. 42. Суммирующий радиоинтерферометр, а) Блок-схема, б) диаграмма направ¬
ленности по мощности каждой антенны, в) высокочастотное заполнение, г) результи¬
рующая диаграмма направленности.
После возведения суммы Sj и s2 в квадрат и осреднения (время осред-
2 я
нения Т > ) получим отклик суммирующего радиоинтерферометра
COq
на точечный источник
(6.22)
Отклик состоит из постоянной составляющей Sq А2 (<р) и осциллирующего
о>о
слагаемого Sq А (<р) cos( b sin <р), которое в случае меняющегося во
времени у (из-за движения источника относительно базы) определяет ин¬
терферометрическую картину (рис. 42, г), похожую на оптическую для
интерферометра Майкельсона.
Размерность выходного сигнала квадратична по полю, т.е, пропорцио¬
нальна интенсивности. Множитель А2 (<р) представляет огибающую — диа¬
грамму одиночной антенны радиоинтерферометра по мощности (рис. 42,5) .
Из формулы (6.22) видно, что фаза высокочастотного заполнения (мно-
житель cos в, 0 = — b sin <р) зависит от угла прихода волны от источника,
с
т.е. от угловой координаты р.
На практике простой суммирующий радиоинтерферометр не применяет¬
ся из-за того, что интерференционная структура наблюдается на фоне боль¬
шой постоянной составляющей, и из-за нестабильности усиления приемни¬
ков [129].
2.2 Радиоинтерферометр с переключением фазы
Недостатки аддитивного радиоинтерферометра устраняются в схеме, по¬
казанной на рис. 43, а, впервые предложенной М. Райлом. Фаза сигнала пос¬
ле одного из приемников Периодически модулируется — вводится сдвиг на
141
Рис. 43. Радиоинтерферометр с пере¬
ключением фазы, а) Блок-схема, б) ди¬
аграммы направленности в отдельные
полупериоды фазовой модуляции, в) ре¬
зультирующая диаграмма направлен¬
ности.
180°. Обычно это делается подключением дополнительного отрезка длин¬
ной линии в одном из плеч интерферометра. После суммирования и возве¬
дения в квадрат сигнал проходит через избирательный усилитель, синхрон¬
ный детектор. Во время одного полупериода модуляции после квадратично¬
го детектора получается сигнал (рис. 43, б, сплошная линия)
во время другого полупериода (рис. 43, бу прерывистая линия)
(6.23)
(6.24)
Последующие ступени выделяют разность
(6.25)
Отклик радиоинтерферометра показан на рис. 43, в. Модуляционный прин¬
цип, примененный в этой схеме, позволяет исключить флуктуации коэффи¬
циента усиления и устранить низкочастотную часгь пространственной частот¬
ной характеристики.
2.3 Корреляционный радиоинтерферометр
Отклик, показанный на рис. 43, в, может быть получен и в схеме радиоин¬
терферометра с умножением (корреляционного, рис. 44). Сигналы после
приемников перемножаются, и их произведение осредняется. Сигналы на
входах перемножителя
$1 = So A (<р) sin cj0 t, s2 = Sq A (<p) sin (co0 t + 0), (6.26)
на выходе перемножителя имеем
5 = - 5q A2 GO [cos д — cos (2 соо t + 0)j. (6.27)
142
Рис. 44. Блок-схема корреляционного радиоинтер¬
ферометра.
Фильтр нижних частот устраняет высокочас¬
тотный член, и отклик интерферометра стано¬
вится аналогичным отклику интерферометра с
переключением фазы (см. рис. 43, в) ;
(6.28)
Последние два типа радиоинтерферометра на¬
зываются мультипликативными, и они в настоящее время получили наи¬
большее распространение, особенно корреляционный.
Запишем теперь в общем виде формулу для отклика корреляционного
радиоинтерферометра на точечный источник
Я (к) = So А2 (к ) cos ( к (6.29)
b к
где b — вектор базы, к — направление на источник. Величина т = — пред-
с
ставляет собой временную задержку между когерентными фронтами плос¬
ких волн, приходящими на антенны радиоинтерферометра. Измерение этой
величины дает возможность найти 'угол падения, т.е направление на источ¬
ник, что позволяет использовать радиоинтерферометр как угломерный инс¬
трумент.
§ 3. РАДИОИНТЕРФЕРОМЕТР КАК ПРОСТРАНСТВЕННЫЙ ФИЛЬТР
Отклик вида (6.25) был получен с учетом двух упрощающих предполо¬
жений: сигнал монохроматический и источник точечный. Пусть теперь сиг-
А/
нал занимает спектр частот в полосе /0 ± — • Напомним, что реальный
2
сигнал от источника — шумовой, и в полосе частот, где нет спектральных
линий, интенсивность спектральных составляющих Si (f) можно счи-
А/
тать постоянной. Усредним отклик (6.25) по полосе /0 252 — (с учетом
того, что Si (/) = Si = const):
(6.30)
143
Рис. 45. Влияние ширины полосы прини¬
маемого сигнала на диаграмму направлен¬
ности корреляционного радиоинтерферо¬
метра. а) Блок-схема, K(f) амплитудно-
частотная характеристика приемника,
б) компоненты диаграммы направленности.
Рис. 46. Пространственные спектры радио¬
интерферометров: а) суммирующего, б) с
переключением фазы и корреляционного;
d - диаметр антенны, b — длина базы, X. -
длина волны.
Р и с. 46
Теперь отклик радиоинтерферометра на точечный источник содержит три
множителя: диаграмму направленности одиночной антенны по мощности
2 sin х
А (<Д множитель типа , определяемый прямоугольной формой
X /2лЬ \
спектра сигнала, и высокочастотное заполнение cos I /0 sin 1(рис. 45).
Зависимость (6.30) от можно рассматривать как диаграмму направ¬
ленности по мощности корреляционного радиоинтерферометра. Применим
теперь спектральный подход из предыдущего параграфа. Преобразование
Фурье от отклика на точечный источник дает пространственную частотную
характеристику радиоинтерферометра. На рис. 46 показаны пространствен¬
ные спектры суммирующего интерферометра» интерферометра с переключе¬
нием фазы и корреляционного интерферометра. Для всех трех типов радио¬
интерферометров характерна область спектральной чувствительности во¬
круг пространственной частоты b/Х, ширина которой определяется диаграм¬
мой одиночной антенны A 2(у) и шириной полосы приема Д/. Таким образом,
радиоинтерферометр можно уподобить узкополосному фильтру простран¬
ственных частот, ’’настроенному” на частоту b/Х. Меняя длину базы b или
длину волны X, можно перестраивать ’’частоту” этого фильтра. Чем шире
144
Рис. 47. Геометрия приема радио¬
интерферометром сигнала от протя¬
женного источника, х, у\~z — эквато¬
риальная система координат, b - век¬
тор базы, - ортогональный
репер, связанный с источником, £0 -
направление на опорную точку в ис¬
точнике, к = к 0 +<р — направление на
произвольную точку в источнике, h и
6 - часовой угол и склонение источ¬
ника.
диаграмма и уже полоса, тем меньше пространственная полоса пропускания
Tib
фильтра. Когда размер антенны d < b и— 1, пространственный
с
фильтр интерферометра настроен на одну гармонику пространственного
спектра источника. Если источник протяженный со сложной структурой, то
амплитуда этой гармоники может быть очень малой и, как следствие, сиг¬
нал на выходе интерферометра мал.
Это обстоятельство необходимо учитывать при выборе объектов для
угломерных измерений.
Рассмотрим теперь более общий, двумерный случай [133, 134]. Пусть
I (к) — двумерное распределение радиояркости по источнику, к0— опорное
направление на выбранную, ’’нулевую” точку на источнике, b — вектор базы,
А (к) — диаграмма антенны по мощности, К (f) — спектральная характерис¬
тика приемника. Отклик радиоинтерферометра на элемент изображения
(точечный источник в направлении к) можно записать в виде
- +« _> / 2тгЬ к \
R(k} = До 1(к)Л(/с)К(Псов jdf, (6.31)
или в более компактной форме
. 2л b к
R(jc) = R0°f К df, (6.31а)
— со
гдеЯ0 — коэффициент пропорциональности.
Интегрируя (6.31 а) по телесному углу источника и полагая пределы
интегрирования бесконечными, что означает, что рассматривается одиноч¬
ный объект малых угловых размеров по сравнению с небесной сферой,
^ист ^4л, получим выражение для отклика радиоинтерферометра на про¬
тяженный источник
2л b 1с
R=R0+f°° х dfdl. (6.32)
— оо — оо
При малых угловых размерах источника вектор к можно записать в виде
Тс = kQ + р , при этом вектор р почти перпендикулярен kQ. Учитывая это
145
упрощающее предположение, R можно переписать в следующем виде:
—► —►
2 л Ъ к а -► ->
/ 'Т -- “ “ -2*Ьр
R=e f f J (р)А (p)K(f)e' х df dp =
яв> оо — оо
2 л Ь к0
= е х K(F), (6.33)
где V (?) — так называемая функция видимости.
Введем систему координат (еи, ev, ew), связанную с источником (рис.47).
Здесь вектор ~е w направлен вдоль вектора £0, лежит в плоскости
(?, к0 ), ось F направлена в лолюс мира, а лежит в плоскости экватора и
дополняет орты*?и, до правой системы. В экваториальной системе коор¬
динат (часть II, гл. 3, § 1) проекции ортов ~eu,~ev,^ew на оси x,y,'z суть
~еи = (sin h0\
—cos hQ,
0},
= { — sin 60 cos h0 i
— sin 80 sin h0,
cos60),
(6.34)
~ew = { cos 80 cos 7z0,
cos 60 sin h0,
sin 60},
где 60 и hQ = (S - а0) — склонение и часовой угол ’’нулевой” точки источни¬
ка. Тогда интеграл в (6.33) можно переписать в виде
2я(Ьиа + ду/3)
оо оо оо j
V(bu,bv) = SSI I(a,P)A x dfdadp,
— OO—OO — oo
(6.35)
где bu и bv и a, j3 — проекции базы и вектора р на орты ~еи n~eUf причем
a (hQ — h) cos 60, j3~S-30. (6.36)
Обычно в радиоинтерферометре множитель А (а, /3) постоянен по исследуе¬
мому источнику и антенны сопровождают источник в течение нескольких
часов. Тогда, если пренебречь конечной полосой частот (Д/ ->0), смысл вы¬
ражения (635) состоит в том, что V (Ь ) является двумерным фурьё-преоб-
разованием от распределения радиояркости / (а, 0). Фиксированные Ьи и bv
определяют пространственные частоты, на которых измеряется двумерный
спектр I (bu, bv). Вращение Земли приводит к изменению проекций базы Ьи
и bv в течение суток. Если проекции базы на осй х, ~у, ”z равны bx, by, bz, то,
учитывая (6.34),имеем
bu = (1>еи) = bx sin h0 - by cos/?0,
bv - (b e y) = — bx sin So cos й0 - by sin 30 sin Ло + bz cos 60 •
Введем обозначение bz cos 80 ~ Ио,(& eu) = U, (P €v)~ и найдем величину
U2 sin80 + (И- Ио)2. После несложных преобразований получим равен¬
ство
U2 sin 80 + (И- Го)2 ={b2 + 32)sinS0. (6.38)
Исключая часовой угол Ло, получим уравнение для траектории двумерной
(6.37)
146
частоты (Ut V) ’’настройки” радиоинтерферометра как пространственного
фильтра
и2 + (V- Ир)2
Ь2 + by (b2 + by) sin 6о
(6.39)
Таким образом, эта траектория представляет собой эллипс с полуосями
A -\/b2 + by, B=y/(bx + by) sin80k и смещением центра на Ко =
= bz cos 6 р по оси V,
В соответствии с тем, что сказано в § 1 гл. 3, имеем
Ьх = \Ь | cos Ьь cosHb,
by= I & I cos t>b sin Hb,
bt = | IT | sin
(6.40)
где bb и Hb = S - Л — склонение и часовой угол базы. Подставляя (6.40) в
(6.39), получим другую форму записи этого эллипса:
U2
(V - b sin 60 cos 6О)2
b2 cos2 Ьь
b2 cos2 bb sin2 50
= 1.
(6.41)
Уравнения (6.35) и (6.41) являются основными в теории апертурного син
теза.
Меняя длину базы и наблюдая источник в течение суток, получают набор
величин V (b j (tj)), которые определяют собой отсчеты двумерного прос¬
транственного спектра распределения радиояркости источника. Для астро¬
метрических задач дажно уметь вычислить нормированную функцию види¬
мости данного источника
7(Г) =
V&)
(6.42)
для того, чтобы оценить отношение сигнала к шуму при конкретной геомет¬
рии ’’источник — база”.
§ 4. РАДИОИНТЕРФЕРОМЕТР КАК РАДИОТЕХНИЧЕСКОЕ УСТРОЙСТВО
В предыдущих параграфах радиоинтерферометр рассматривался с общей
точки зрения и без каких-либо технических подробностей, теперь перейдем
к изучению работы реального радиоинтерферометра как радиотехнического
устройства.
Начнем изложение с описания радиоинтерферометра с электрической
связью между антеннами (коротко базов ого радиоинтерферометра, Short¬
baseline interferometer, SBI [135,136]). Все преобразования сигнала, кото¬
рые происходят в такой системе, являются общими для всех типов фазо¬
стабильных радиоинтерферометров. На их примере станет понятным, какие
необходимые операции по трансформации принимаемого от источника сиг¬
нала и по корреляционной обработке делаются в реальном радиоинтерферо¬
метре.
Основной тип современного радиоинтерферометра — корреляционный с
преобразованием принимаемого сигнала к промежуточной частоте. На рис. 48
147
нескольким десяткам мегагерц,
Рис. 48. Блок-схема радиоинтерферо¬
метра. 1,2— усилители высокой часто¬
ты; 3, 4 - смесители; 5 — гетеродин;
6, 7 - усилители промежуточной час¬
тоты; 8, 9 — компенсаторы задержки;
10, 11 - умножители; 12, 13 — фильт¬
ры низких частот; 14 — фазосдви¬
гающая цепь на у, - управляемые
фазовращатели сигналов гетеро¬
дина.
промежуточной часто-
Гетеродинная система
для обоих плеч интер-
но имеется возмож-
вводить управляемые
сдвиги в
i на частоте
на смесители
преобразования
усиливаются
(низкой по
сигналы
ссг, по-
3 и 4.
сигна-
частоте
с
равной
изображена блок-схема двухэле¬
ментного интерферометра, рас¬
стояние между антеннами кото¬
рого достаточно мало (до 20 -г
-г 40 км) для того, чтобы осу¬
ществить электрическую кабель¬
ную связь между ними. Сигнал,
принятый антеннами на частоте
со0, усиливается усилителями
частоты 1 и 2, шумы которых
определяют чувствительность при¬
емной системы. Далее сигналы
преобразуются в смесителях
3 и 4 к
те сопр.
5 — общая
ферометра,
ность 1
фазовые
гетеродина
даваемые
После ]
лы
частотой сигнала со0),
усилителями промежуточной часто¬
ты 6 и 7. Затем по длинной линии (коаксиальным кабелям, волново¬
дам) сигналы промежуточной частоты поступают на центральный пункт
корреляционной обработки.
Таким образом, основной путь сигналов — от антенн до кор¬
релятора проходит на низкой промежуточной частоте. Это позво¬
ляет решить главную проблему в радиоинтерферометре — передать
сигналы с минимальными фазовыми искажениями. Перед умножением в
корреляторе в каждой линии передачи имеются программно-управляемые
линии задержки 8 и 9. Они представляют собой набор отрезков линий дли¬
ной £ХПр и предназначены для компенсации геометрической задержки тг,
непрерывно меняющейся во времени из-за относительного движения базы
интерферометра и радиоисточника. После умножителей 10 и 11 фильтры
нижних частот 12 и 13 выделяют низкочастотную часть спектра. На умножи-
148
на
сравнению
тель 11 сигнал с одного плеча радиоинтерферометра подается со сдвигом по
7Г ^пр
фазе — (вводится дополнительный отрезок линии —— ). Таким образом,
на выходе фильтров формируются величины Re (И) и Im (К) — веществен¬
ная и мнимая части функции видимости.
Рассмотрим прохождение сигналов через все вышеупомянутые цепи. Для
того чтобы не усложнять анализ, не будем учитывать шумы приемников, и
сигналы , $2, приходящие на входы интерферометра, в случае точечного
источника будем считать полностью когерентными, так что
= S2 (/) = s(r- Tr),
(6.43)
где тг — геометрическая задержка.
Преобразование частоты соответствует умножению на cos (соо )
для первого канала и на cos (t + <р2) для второго (^ и — управляе¬
мые и неуправляемые фазовые сдвиги гетеродинов) :
sj (Z) = s(r)cos(co0r + <Pi), s2r (t) = s (t■- Tr)cos(cj0r + ^2)- (6.44)
Перейдем теперь к преобразованию Фурье этих сигналов,
St (со) = J s(r)cos(co0^ + dt =
= 5 (со + coi)e“/**’1 + S (co — coi)^^1, (6.45)
S2 (co) = f s (t - rr) cos (сод, t + <p2) e f dt-
= 5(co + w0)r^ e-/(“ +“о)тг + s^_ coo)^7^ e-/(w-wo)Tr,
(6.46)
o°
Здесь5 (co) = / dt - спектр сигнала s (t). Два слагаемых в каж-
— оо
дом спектре соответствуют верхней и нижней боковой полосе при гетероди¬
нировании.
Введем теперь дополнительную компенсирующую задержку тк в ’’опере¬
жающий” канал по сигналу s{ (t) (блок 9 на рис. 48) :
Si (со) = S (со + co0)e“^i +S(co-co0)e^i (6АТ)
Рассмотрим два случая преобразования частоты: без одной боковой по¬
лосы, например, нижней, и с сохранением обеих боковых полос.
1. Однополосный режим. Сигнал после коррелятора (перемножение и
осреднение) представляет собой оценку взаимной корреляционной фун¬
кции (ВКФ) 7?!2, которая связана с взаимным спектром сигналов sj и s2
преобразованием Фурье
1 °°
Я12 (т)= — J S12 (cc)e/GJTdco. (6.48)
2я - оо
Взаимный спектр равен
512 (<х>) = 51 (со) S* (со) =
149
= S(g> + w0) S*(w + Wo)^*1 е+”>* (“ + “») Tr
= |5(w + w0) I2 ~v’*Ok-Tr) e'“o Ti,
где ♦— знак комплексного сопряжения.
Подставляя (6.49) в (6.48), получим выражение для выходного сигнала
радиоинтерферометра в однополосном режиме
(Тг - Тк) =
S0 До? sin я Д/ (тг — тк)
=■ — ~ — 7 cos [а>0 тг + О)пр (тг - тк) + (</>х - <р2)1.
27Г 7ГД/(тг - тк)
(6.50)
Здесь учтено, что спектральная плотность сигнала | S (со) |2 отлична от нуля
в ограниченной полосе частот; например, 15 (со) |2 = So при | со - соо | <
Дсо
< , 15 (со) |=0 при других со.
2. Двухполосный режим. Если сделать аналогичные преобразования обе¬
их полос в (6.49), то выходной сигнал в этом случае равен
^12 (^г Тк)
Дсо sin яД/(тг — тк)
= 250 — — -COS (О)0 Гг + G>1 -(p2))coso>np (тг -Тк).
2тт яД/(тг-тк)
(6.51)
Анализируя формулы (6.50) и (6.51), можно сделать следующие выводы:
1) При однополосном режиме выходной сигнал радиоинтерферометра
зависит от величины Дт = тг - тк- степени компенсации геометрической
задержки. Первый множитель вида sin х/х (рис. 49, а) определен формой
частотной характеристики усилителя промежуточной полосы (УПЧ) — в
данном случае прямоугольной. В общем случае этот множитель является
автокорреляционной функцией огибающей шума Аш(Дт), энергетический
спектр которого сформирован УПЧ. При полной компенсации тг = тксигнал
имеет максимальную амплитуду.
2) Второй косинусоидальный множитель при тг = тк представляет собой
колебания с частотой
F
1 ИНТ
t + 1 dQpj
° dt 2 я dt
(6.52)
Первое слагаемое зависит от геометрии ’’база — источник” и частоты гетеро¬
дина. Для радиоинтерферометра с малой базой (< 2 к гл) эта величина неве¬
лика, и тогда принимают меры для того, чтобы увеличить частоту интер-
1 d(<pi - </>2)
ференции за счет второго слагаемого, (управляемых
2 я dt
фазовых сдвигов, вводимых в сигналы гетеродинов) ,т.е. поднимают FHHT до
величины, равной нескольким герцам или десяткам герц, удобной для даль¬
нейшего усиления. В случае радиоинтерферометра с большой базой
(>100 км) частота интерференции становится слишком большой (кило-
150
sinflrjrfo-TK?
/ГЛ^Гг-Гк)
a)
Рис. 49. Однополосный {а) и двухполосный (б) режимы работы радиоинтерферомет¬
ра; /0 - центральная частота приема, Д/ - ширина полосы, /пр - величина централь¬
ной частоты усилителя промежуточной частоты, тг и тк - геометрическая и компенси¬
рующая задержки.
герцы), и ее необходимо понизить с целью уменьшения объема массива дан¬
ных после коррелятора. Для этого при наблюдениях с РСДБ вводят рас-
1 d (у?! - „
стройку частот гетеродинов на пунктах и понижают гинт
27г dt
до нескольких герц.
3) В случае двухполосного приема появляется дополнительный множи¬
тель огибающей cos (сопр (тг — тк)) [130, 138, 139]; который накладывает
более жесткие ограничения на точность компенсации Дт = тг — тк (рис. 49,
б) . В то же время ’’высокочастотное заполнение” cos (cj0 тг + Gh — ^2))
не содержит фазового сдвига сопр (тг — т*). Это означает, что все фазовые
сдвиги, которые появляются в радиоинтерферометре после смесителей при
двухполосном приеме, не оказывают влияния на фазу интерференционной
картины.
Полный отклик радиоинтерферометра на точечный источник, приведен¬
ный в § 3, справедлив для режима прохождения — антенны интерферометра
неподвижны, и источник за счет вращения Земли проходит через его диаг¬
рамму направленности. Такой режим работы на практике не применяется,
так как время прохождения очень мало для того, чтобы обеспечить необхо¬
димое отношение сигнал/шум. Поэтому надо сопровождать источник по уг¬
ловой координате. Исходя из формы отклика необходимо обеспечить сле¬
дующие три вида сопровождения:
а) Сопровождение механическое — антенны радиоинтерферометра следят
за положением объекта, все время удерживая его в главном лепестке диаг¬
раммы направленности. Поэтому первый множитель (6.30) можно иск¬
лючить.
151
б) Сопровождение по задержке. Из формулы (6.50) видно, что если ком¬
пенсирующая задержка тк отсутствует или неточно равна тг, то это приводит
к уменьшению амплитуды отклика, для прямоугольной частотной характе¬
ристики УПЧ (тг— тк) должно быть меньше 1/4 Д/, чтобы уменьшение ампли¬
туды было < 0,92. В случае двухполосного приема это требование стано¬
вится более жестким из-за множителя xos сопр (тг — (формула (6.51)).
Таким образом, необходимо точное отслеживание геометрической задерж¬
ки тг(0 с помощью компенсирующей задержки тк(/). Непрерывное изме¬
нение tk(Z) невозможно на высоких частотах (десятки мегагерц на проме¬
жуточной частоте), поэтому в определенные предвычисленные моменты
времени вводятся дискретные изменения Дтк, т.е. непрерывный закон
изменения тк(г) заменяют на ступенчатый. В узкополосных системах, Д/<
</пр, величину ступеньки Дтквыбирают такой, чтобы на промежуточной
частоте /пр это приводило к скачку фазы, кратному 27т: сспр Дтк= п • 2я.
Кроме того, величина ступеньки должна быть малой, чтобы не было значи¬
тельного уменьшения амплитуды отклика. При прямоугольной форме час¬
тотной характеристики с шириной полосы Д/потери в однополосном режи¬
ме оцениваются множителем
^оп
sin я Д/Дт
лД/Дт
(6.53)
При двухполосном режиме потери примерно оцениваются по формуле
^дп
+ 2я2(упр + )(Д.т)2.
(6.54)
Следует учесть, что если скачки Дтк, с помощью которых производится
1
компенсация, не кратны или полоса Д/ не слишком узкая по сравне-
/пр
нию с/пр, то возможны дополнительные потери за счет фазовых частотноза¬
висимых скачков (подробнее см. гл. 10, § 3).
в) Сопровождение по частоте интерференции. Так как от геометрии ’’ис¬
точник — база” зависит частота интерференции и эта частота меняется во
время наблюдений, то применяют искусственное поддержание частоты, рав¬
ной заданной величине (несколько герц). Это делается расстройкой гетеро¬
динов с помощью управляющего фазового члена — <р2). В РСДБ эта рас¬
стройка вводится частично аппаратурным, частично программным способом.
§5. РАДИОИНТЕРФЕРОМЕТР СО СВЕРХДЛИННОЙ БАЗОЙ
Увеличение размеров базы радиоинтерферометра усложняет две основ¬
ные системы передачи сигналов: линии передачи от антенн к корреляторам
(включая компенсирующие отрезки) и линии передачи и системы распре¬
деления и формирования сигналов гетеродинов (от центра управления к
антеннам). Радиотелескопы с проводной связью типа VLA [141] являются
на сегодняшний день, по-видимому, предельными по своим размерам. Даль¬
нейшее увеличение баз возможно при использовании двух идей: ретрансля¬
ции упомянутых выше сигналов или независимой синхронной регистрации
сигналов на пунктах радиоинтерферометра. Рассмотрим последний принцип,
который лежит в основе радиоинтерферометра со сверхдлинной базой
152
Стандарт
частоты
УВЧ
УВЧ
Ста ндарт
частоты
- ♦
1
Смеситель
Смеситель
УПЧ
УПЧ
Смеситель
Смеситель
1
Часы
Видео¬
усилитель
Видео¬
усилитель
Часы
■-L
Система уп¬
Магнитофон
Магнитофон
Система уп-
равления
равления
записью
\
7
/
записью
\ , /
\ Коррелятор (
' и устройство
обработки
Рис. 50. Блок-схема радиоинтерферометра со сверхдлинной базой.
(РСДБ) [137, 154] .На рис. 50 представлена блок-схема РСДБ. На каждом
пункте имеется высокостабильный генератор — стандарт частоты. Сигнал
этого стандарта является опорным для гетеродинной системы и для элек¬
тронных часов. Часы на обоих пунктах сверяются с минимально возможной
ошибкой. В один и тот же момент времени (по часам на каждом пункте)
включается система регистрации сигналов промежуточной частоты на маг¬
нитную ленту.
В отличие от обычных радиоинтерферометров, где промежуточная часто¬
та достаточно высокая (несколько десятков МГц), в РСДБ спектр шумово¬
го сигнала переносится в область видеочастот (0 Д/), где граничная часто¬
та определяется возможностями регистрации на магнитную ленту и дости¬
гает 100 МГц для наиболее совершенных магнитофонов. Запись длится нес¬
колько минут (до получаса). Магнитные ленты привозят в центр обработки,
где записанные на магнитные ленты сигналы подвергаются обработке, ана¬
логичной той, которая была описана в §-4. Таким образом, основным отли¬
чием РСДБ от коротко базовых интерферометров является применение не¬
зависимых гетеродинных систем, запись сигналов на магнитную ленту и тот
факт, что корреляционная обработка делается после наблюдений (off-line).
Возможность применения независимых гетеродинов связана с прогрессом в
области создания высокостабильных стандартов частоты. Кратковременная
нестабильность этих стандартов по частоте — менее 10"1 Это означает, на¬
пример, что при наблюдении на частоте 5 ГГц два генератора, работающие с
такой нестабильностью, за 100 секунд разойдутся за 1 период (речь идет о
случайных изменениях частоты, так как постоянная разница в частотах дает
биения постоянной частоты и может быть скомпенсирована).
Начиная с 1967 г. и по настоящее время проводятся наблюдения на РСДБ.
Первые эксперименты были редкие и включали в себя 2^3 антенны, распо¬
ложенные На одном континенте. Затем география РСДБ стала глобальной, и
153
Таблица 19
Радиотелескопы, способные работать в режиме РСДБ
Местоположение
Диаметр,
м
Длина
волны
^мин>см
Координаты
Оборудование РСД]
Евпатория, СССР
Медвежьи Озера, СССР
Зеленчукская, СССР
70
64
600
(45 экв)
2
2
1,35
Симеиз, СССР
22
1,35
MARK-I, MARK-II
Пу щино-на-Оке, СССР
22
1,35
MARK-I
Грин Бэнк, США (2)
43,94
1,35
38°26'08"N
79°49'42"W
MARK-I, MARK-II
MARK-III
Хэйстек, США
37
1,35
42°37'23"N
71°29'19"W
MARK-I, MARK-II,
MARK-III
Оуэнс Велли, США
40
1,35
37°13',9N
118°16',9W
MARK-I, MARK-II
Голдстоун, США (2)
26,64
2
35°20' 30"N
116°52'40"W
MARK-II
Мидпойнт, США
26
1,35
38°22'26"N
77°14',0 W
MARK-II
Форт Дэвис, США
26
2,8
30°38'08"N
103°56'42"W
MARK-II
Хэт Крик, США
26
6
40°49'03”N
121°28',4W
Дэнвилл, США
36,6
6
40°03'38"N
87°33'49" W
MARK-II
Дэкстер, США
26
2
42°23'35",9 N
83°56'10",5 W
Магдалена, США
25
1,35
34°04'44" N
107°37'04>',3 W
Аресибо, Пуэрто-Рико
305
13
18°21T3"N
66°45T1" W
MARK-II
Лейк Трэверс, Канада
46
1,35
45°57',3 N
78°04;4W
Аналог, си ст.
MARK-II
Пентиктон, Канада
26
1,35
49°19',3N
119°37',1 W
Аналог, си ст.
Паркс, Австралия
Тидбинбил, Австра¬
64
6
33°OO',O s
148°15',7E
MARK-I
лия (2)
64,26
3,8
35°24'08"S
148°58'48"E
MARK-II
Вумера, Австралия
26
3,8
31°22'59''S
136°53T0" E
MARK-II
Мадрид, Испания
64
3,8
40°25'N
3°U'E
MARK-II
Робледо, Испания
26
10
40°25'48" N
4° 14',52" W
MARK-II
Цеберос, Испания
26
10
40°27T5" N
4°21'59" w
MARK-II
154
Таблица 19 (окончание)
Местоположение
Диа¬
метр, м
Длина
волны
^мин» см
Координаты
Оборудование РСДБ
Эффельсберг, ФРГ
100
1,35
50°31'32" N
6°52'59" Е
MARK-II
. Онсала, Швеция (2)
26,20
1,35
57°23',6 N
11°55',2 Е
MARK-I, MARK-II
Джодрелл Бэнк,
76,26,26 18
53°14',2 N
MARK-II
Великобритания (3)
2°18',4W
Чилболтон,
26
1,35
51°08'40"N
MARK-II
Великобритания
01°26'13"W
Вестерборк,
93,5
6
52°55',0N
MARK-II
Нидерланды
6°36',25 Е
Двингелоо,
25
6
52°48',8.N
MARK-II
Нидерланды
Хельсинки,
15
1,35
6°23',8 Е
Финляндия
Торунь, Польша
15
6
53°05'N
18°33'Е
MARK-II
Итапетинга,
14
1,35
23O11'8"S
MARK-I
Бразилия
46°33'30” W
Катима?
26, 30
6
35°57',2 N
MARK-II
Япония (2)
Йокосука, Япония
13
6
140°40',0Е
MARK-II
Йоханнесбург, ЮАР
26
3,8
25°53'21"S
27°4Г09"Е
MARK-II
все крупнейшие радиотелескопы мира на всех континентах работали в ре¬
жиме РСДБ, причем на большинстве из них установлена однотипная аппара¬
тура записи MARK-II (см. гл. 9). Обработка данных производится в НРАО
(США) и в Институте им. М. Планка (ФРГ). В табл. 19 приведены координа¬
ты крупных полноповоротных антенн, способных работать в сантиметровом
диапазоне волн. Уже эта густая сеть позволяет ставить задачу объединения
всех этих антенн в единый глобальный многоэлементный радиоинтерферо¬
метр. Однако организация синхронных наблюдений на радиотелескопах, уда¬
ленных на тысячи километров и, кроме того, сильно загруженных собствен¬
ными программами, является очень сложной задачей. Поэтому сегодня на
повестку дня поставлен вопрос о создании специализированной сети антенн,
работающей исключительно в режиме РСДБ. Подробнее об этих проектах
см. в гл. 12.
Исходя из основной блок-схемы РСДБ, можно сделать вывод о том, что
главными подсистемами этого инструмента являются:
1) гетеродины;
2) система преобразования сигнала к видеочастоте;
155
3) средства сличения и точной установки часов на пунктах;
4) устройства записи на магнитную ленту;
5) устройство корреляционной обработки записанных на пунктах сигна¬
лов.
В главах 8, 9 будет рассмотрена каждая из этих подсистем.
Глава 7
ТЕХНИЧЕСКИЕ ОСОБЕННОСТИ РАДИОИНТЕРФЕРОМЕТРОВ
С ЭЛЕКТРИЧЕСКОЙ СВЯЗЬЮ
§ 1. ПРОБЛЕМА ФАЗОВОЙ СТАБИЛЬНОСТИ
В короткобазовых радиоинтерферометрах с электрической связью меж¬
ду антеннами для проведения точных координатных измерений необходимо
измерять фазу интерференционного отклика, и вопросу фазовой стабиль¬
ности в этих системах уделяется самое большое внимание. Главными источ¬
никами фазовых ошибок являются нестабильная база (геометрические раз¬
меры радиоинтерферометра), линии передачи и электрические узлы, пред¬
назначенные для распределения опорного сигнала задающего генератора для
гетеродинов (от центра к антеннам), и линии>передачи и электронные узлы,
передающие сигналы от антенн к центру на промежуточной частоте.
Параметры базы стабилизируются и измеряются в процессе изготовления
радиотелескопов (бетонные основания повышенной прочности, тщательные
геодезические измерения, включая лазерные). В дальнейшем они уточняют¬
ся во время калибровочных наблюдений. В результате на базах в несколько
километров достигается точность порядка 1 мм на интервалах времени в
несколько месяцев.
Для стабилизации фазы при формировании гетеродинных сигналов пред¬
ложено несколько методов [145 — 147], которые используются в коротко¬
базовых радиоинтерферометрах [148 — 153]. Фазовые ошибки в этих цепях
являются наиболее опасными.
Случайные набеги фазы после преобразователей частоты обычно легко
поддаются устранению, так как все радиоинтерферометры используют низ¬
кую промежуточную частоту — 30 4- 50 МГц, и иногда применяется двух¬
полосный режим. Именно на этих частотах работают линии передачи от
антенн к центру и схемы компенсации геометрической задержки.
Фазовые набеги в различных узлах каждого радиоинтерферометра долж¬
ны быть тщательно изучены. С этой целью через каждые 24-4 часа делается
калибровка. Калибровка производится при наблюдениях точечных источни¬
ков с известными координатами. Задержка, частота и фаза лепестков явля¬
ются функциями геометрии ’’источник —-база” и электрических параметров
интерферометра. Проводя ряд наблюдений и сравнивания измеренные значе¬
ния T,ip,F с предвычисленными, вводят поправки за ошибки в ориентации
вектора базы и фазовые сдвиги в аппаратуре.
В последующих параграфах будет приведено краткое описание некото¬
рых действующих радиоинтерферометров, которые использованы или мо¬
гут быть использованы в астрометрических программах (часть II, гл. 5).
Основное внимание будет уделено вопросам их фазовой стабильности.
156
§ 2. КЕМБРИДЖСКИЙ 5-КИЛОМЕТРОВЫЙ РАДИОТЕЛЕСКОП
Радиотелескоп работает с 1971 г. и состоит из 8 антенн диаметром 13 м,
расположенных по линии восток — запад (рис. 51), максимальное расстоя¬
ние между крайними элементами равно 4,8 км [3,4, 13].. Элементы 1-4
подвижные на рельсовых путях, элементы 5-8 неподвижные, расстояние
между ними 1,2 км. Рабочая Частота приема — 5 ГГц, промежуточная часто¬
та — 45 МГц, полоса — 8 Мгц. Сигналы промежуточной частоты и опорной
частоты для гетеродинов (247,5 МГц) разводятся с помощью системы
коаксиальных кабелей одинаковой длины для каждой антенны, закопанных
на глубину 1 м. Там же проложена система компенсирующих отрезков для
сопровождения по задержке. Компенсация по задержке осуществляется на
промежуточной частоте. Фаза каждбго гетеродинного сигнала непрерывно
меняется для компенсации частоты интерференции. Сигналы от четырех не¬
подвижных и четырех подвижных антенн попарно перемножаются, и любой
из полученных 16 сигналов может использоваться для измерения положе¬
ния источников.
Радиотелескоп управляется с помощью ЭВМ (MARCONI MYRIAD II),
которая выполняет следующие функции: 1) пересчет координат от эпохи
1950, 0 к моменту наблюдения; 2) расчет рефракции и ее влияния на раз¬
ность фаз между сигналами антенн; 3) расчет мгновенной разности фаз для
данного источника для каждой пары антенн и управление компенсацией гео¬
метрической задержки (переключение каждые 5 с), частоты и фазы (через
5 мс); 4) расчет эффекта рефракции для наведения антенн и обеспечение
сопровождения источника; 5) преобразование в цифровую форму 16 си¬
нусных и косинусных выходов корреляторов и запись отсчетов на магнит¬
ный диск; 6) фурье-анализ накопленных данных; 7) вывод результатов на
графопостроитель, в том числе изменение фазы в течение 24 часов для каж¬
дой из 16 пар антенн по наблюдаемому источнику.
Точность инструмента зависит от стабильности установки антенн и от
электрической стабильности приемников и кабельной сети. Первичная гео¬
дезическая юстировка (включая лазерный дальномер) дала точность поло¬
жения точки пересечения полярной оси и оси склонений каждой антенны
±10 мм по каждой из трех координат по отношению к точке, астрономичес¬
кие координаты которой известны с точностью ± 0м, 2. Затем калибровоч¬
ные наблюдения радиоисточников позволили уменьшить ошибки до ± 1 мм
(Х/60). Температурные изменения для удаленных элементов Приводят к
годовому дрейфу и достигают 4 мм в месяц, но они медленные и предвы-
числяются. Изменения длины кабелей, разводящих опорный сигнал гетеро¬
дина, в течение года составляют 75 мм, но эти изменения (в силу одинако-
1 Север
Рис. 51. Кембриджский 5-километровый радиотелескоп, Великобритания.
157
Таблица 20
Сводные данные по точности Кембриджского радиотелескопа
Склонение
10°
15°
20°
30°
40°
60°
80°
Ошибки по '
Систематические
1,5
1,5
1,5
1,5
1,5
1,5
1,5
прямому вос¬
Случайные
2,5
2
1,5
1,2
1,2
2
5,7
хождению (мс)
Полная ошибка
3,2
3
2,5
2,3
2,3
3
6
Ошибки по
Систематические
0,13
0,06
0,04
0,03
0,02.
0,01
склонению (")
Случайные
0,14
0,07
0,04
0,02
0,02
0,01
0,01
Полная ошибка
0,19
0,09
0,06
0,04
0,03
0,02
0,01
вой длины) примерно равны для всех антенн. Наибольшие относительные
изменения длины в кабельной сети дают отрезки, компенсирующие геомет¬
рическую задержку, сезонные изменения достигают 150 мм на длине 4,8 км,
что приводит к экваториальной ошибке на частоте сигнала 1,4 мм. Эти
вариации были исследованы на промежуточной частоте 45 МГц, и затем раз¬
работана методика введения поправок с использованием показаний термо¬
метров, закопанных вместе с кабелями. Общая ошибка по инструменталь¬
ной фазе после введения всех поправок составляет 0,2 мм.
В табл. 20 из [4] приводится полная точность инструмента (включая
влияние тропосферы при шести осреднениях для источника с плотностью
потока больше 2 янских).
§ 3. ИНТЕРФЕРОМЕТР НРАО
Радиоинтерферометр Национальной радиоастрономической обсерватории
в Грин Бэнке, США, состоит из трех антенн диаметром 26 м [72, 120, 148,
149] (рис. 52). Радиотелескоп работает с 1970 г. Длина базы равна 2700 м,
две антенны неподвижные. База ориентирована под углом 28° к линии вос¬
ток — запад. Инструмент работает на частотах 2695 МГп и 8085 МГц одно¬
временно. Дополнительным четвертым элементом является 12,7-метровая
антенна, удаленная на 35 км и работающая только на частоте 2,7 ГГц. Сигнал с
каждой антенны усиливается вырожденным параметрическим усилителем
(ПУ), после которого установлен преобразователь частоты. Для всего
интерферометра имеется общий задающий генератор на частоте 1347,5 МГц,
напряжение которого распределяется по антеннам (максимальное расстоя¬
ние 1600 м). Сигнал гетеродина на частоте 2695 МГц получается умножени¬
ем частоты на 2, а часть сигнала с частотой 1347,5 МГц поступает на умножи¬
тель частоты на 4; затем он усиливается и служит сигналом накачки для
ПУ. Необходимые частоты для другого канала приема 8 ГГц получаются в
результате умножения частоты сигнала 2695 МГц на 3 (сигнал гетеродина) —
8085 МГц и еще раз на 2 — накачка для ПУ на частоте 16 170 МГц. Линии
передачи представляют собой полужесткий подземный кабель, проложен¬
ный на глубине 1 м. Кабель герметизирован и заполнен сухим воздухом под
158
2700
Рис. 52. Интерферометр НРАО, США.
постоянным давлением. Изменение электрической длины этого кабеля с
температурой равно 1,5 • 1СГ5 / °C. Часть кабеля (около 60 м) проходит
над землей перед фокусом антенны, здесь суточные изменения длины дости¬
гают 2-^-3 см. Для сохранения постоянства фазы имеется автоматическая
система фазовой коррекции. Задающий генератор передает к аппаратуре на
антеннах сигналы с частотами 1317,5 и 30 МГц. По этим двум сигналам на
каждой антенне синхронизируется генератор с фазовой автоподстройкой на
частоте 1347,5 МГц. Часть сигнала 1347,5 МГц передается обратно, и его фа¬
за сравнивается с фазой задающего генератора. Сигнал ошибки управляет
удлинителем линии, который автоматически поддерживает постоянство фа¬
зового сдвига при прохождении сигнала в прямом и обратном направлени-
ях.Такая система автоматической коррекции фазы поддерживает величину
изменений электрической длины линии с точностью, лучшей 0,03 см, что на
длине волны 1,85 см дает уход фазы 0,3 рад. Изменения фазы в умножите¬
лях частоты и других вспомогательных цепях — менее 0,2 рад в сутки, т.е.
полная погрешность фазы в одном плече радиоинтерферометра — менее
0,5 рад. Для того чтобы работать с меньшими значениями фазовых ошибок,
каждые 4 часа система калибруется путем наблюдения точечных источников
с известными положениями. Максимальные фазовые ошибки за 4 часа рав¬
ны 0° ,8 на частоте 2695 МГц и 2° ,4 на частоте 8085 МГц.
Радиоинтерферометр работает в двухполосном режиме; обе боковые
полосы выше и ниже частоты гетеродина усиливаются вырожденным
ПУ. Это облегчает ’’фазовый” режим интерферометра, так как изменения
фазы в электронных узлах и кабелях после преобразователей не влияют на
фазу выходного сигнала. Ширина полосы радиоинтерферометра равна
30 МГц, и при максимально допустимом ослаблении сигнала 4% необходим
минимальный шаг по компенсирующей задержке 2 нс. Устройство задерж¬
ки радиоинтерферометра НРАО состоит из 14 элементов, наименьший дает
задержку 1,9 нс, наибольший — 16 мкс. Длины элементов наращиваются
последовательно в 2 раза. Из них можно ’’собрать” общую задержку от 0 до
31,998 мкс с шагом 1,9 нс, что более чем достаточно для базы 2700 м (мак¬
симальное тг равно 18 мкс). В качестве 9 малых элементов линии использо¬
ваны отрезки кабелей, 5 элементов с наибольшей задержкой выполнены на
ультразвуковых стеклянных линиях задержки. Фазовые ошибки при таком
дискретном способе сопровождения по задержке менее 0,2 рад. Дополни¬
тельная четвертая антенна связана с основным радиоинтерферометром через
фазостабильный ретранслятор.
159
§ 4. РЕШЕТКА V LA
В 1972 г. было начато и в 1980 г. закончено строительство крупнейшего
радиотелескопа в мире VLA (Very Large Array) — Очень большая решетка
[140, 141]. Проект VLA был создан в НРАО (США). Радиотелескоп распо¬
ложен в пустынной местности штата Нью-Мексико и представляет собой
много элементный интерферометр из 27 полноповоротных 25-метровых ан¬
тенн (на альтазимутальной установке). Расположение антенн соответствует
равностороннему символу Y, длина каждой ’’ветви” — 21 км (рис. 53) . Гео¬
дезический центр решетки 34°04'43",447 северной широты, 107°37'03'’,819
западной, долготы, высота 2124 м над уровнем моря. Антенны передви¬
гаются по рельсовым путям и образуют при наблюдениях 4 фиксирован¬
ные конфигурации с набором отношений баз в пределах 35:1. VLA работает
на волнах 21^18 см, 6 см, 2 см и 1,3 см. На входах приемников установлен
базовый охлажденный гелием до 18 К параметрический усилитель (ПУ),
работающий на волне 6 см. На волнах 21 4-18 см перед ПУ имеются парамет¬
рические преобразователи вверх, на волнах 2-^ 1,3 см — преобразователи
вниз [140, 143]. В высокочастотных блоках выполняется преобразование к
промежуточной частоте в диапазоне 1-^2 ГГц (в полосе 50 МГц).
Гетеродинные сигналы в VLA формируются на каждой антенне генерато¬
ром, привязанным по фазе к опорному генератору в центре. Необходимая
стабильность фазы в сигнале менее 1°/ГГц, и она должна поддерживаться в
течение 2 часов (интервал между калибровочными наблюдениями). Гетеро¬
дины управляются по фазе в соответствии с тремя алгоритмами. Первое из¬
менение фазы является непрерывным (управление идет от ЭВМ) и служит
для сопровождения по частоте интерференции. Второе изменение фазы про¬
исходит в замкнутой цепи контроля за электрической длиной линии переда¬
чи от центрального опорного генератора к данной антенне. Так же, как и в
интерферометре НРАО, в VLA использован принцип передачи опорного
сигнала ’’туда и обратно”, и фаза вторичного генератора на антенне под¬
страивается гак, чтобы скомпенсировать изменения электрической длины
линии. Наконец, производится дискретное изменение фазы на 180° каждого
вторичного генератора в соответствии со специальной последовательностью
(набор ортогональных функций Уолша) [140, 142]. Этот тип фазовой мо¬
дуляции, по существу, развивает идею интерферометра Райла с фазовой мо-
многоэлементной системе типа VLA
возникают импульсные помехи ап¬
паратурного происхождения, кото¬
рые могут быть коррелированы в
различных каналах интерферометра,
что приводит к дополнительным по¬
мехам на выходе умножителей кор¬
реляционного радиоинтерферомет¬
ра, каким является VLA. Здесь
следует отметить рекордную чув¬
ствительность VLA — при времени
наблюдения за источником от 6 до
дуляцией (гл. 1, § 2). В
f ”р I
VIA
Рис. 53. Радиотелескоп VLA, США.
160
10 часов обнаруживаются сигналы на 77 дБ ниже уровня шумов прием¬
ников. Поэтому для подавления дополнительных помех использован фазо¬
во-модуляционный принцип. Синхронно с фазовой модуляцией сигнала
гетеродина приходит смена полярности основного сигнала в схеме времен¬
ной дискретизации, все это приводит к ослаблению помех в соответствии
с ортогональностью модулирующих функций в каждом канале. В VLA
все сигналы между антеннами и центральным пунктом обработки и
управления передаются по волноводной линии передачи.
Каждая ветвь Y-конфигурации имеет свой волновод связи с девятью от¬
ветвлениями к антеннам. Применен круглый волновод с внутренним диа¬
метром 60 мм, заполненный сухим азотом под давлением 14 кПа и закопан¬
ный на глубине 1 м в специальной траншее, радиус кривизны волновода
~ 1000 м. Передача по волноводу ведется в диапазоне миллиметровых волн
(27 4? 53 ГГц), тип волны TEq , потери сигнала составляют 1,0 4-1,4 дБГ/км,
что позволяет не включать никаких промежуточных усилителей. Для каж¬
дой из девяти антенн в ветви выделена своя несущая частота, модуляция
амплитудная с одной боковой полосой. По линии передаются основные сиг¬
налы (от антенн к центру), опорные сигналы для гетеродина (в обе стороны) и
цифровые сигналы управления. Для разделения сигналов применяется вре¬
менное мультиплексирование: сигналы от антенн к центру передаются в тече¬
ние 51 мс,и в течение последующей 1 мс идет передача от центра к антеннам.
В центре сигналы на промежуточной частоте преобразуются к видеопо¬
лосе 0 4-50 МГц. После преобразования сигналы проходят фазосдвигающие
цепи на 90° для формирования синусных и косинусных компонент. Затем
сигналы подвергаются амплитудному квантованию (3 уровня) и временно¬
му — с частотой 100 МГц.
Сопровождение по задержке проводится в 2 этапа: сдвиговые регистры
вводят от 0 до 164 мкс с шагом 10 нс и, кроме того, есть возможность до¬
полнительно сдвигать на 16 дискретных шагов в пределах 10 нс. Корреля¬
тор — цифровой, трехуровневый и многоканальный (16 каналов с полоса¬
ми 50 МГц могут обрабатываться одновременно). Основная задача VLA —
формирование радиоизображения методом апертурного синтеза, однако
предполагается использование этого инструмента в астрометрических за¬
дачах. В комплекс VLA входят несколько ЭВМ, предназначенных для сбо¬
ра данных и построения изображения. Кроме того,имеется несколько ЭВМ
для управления всем комплексом в реальном времени.
§ 5. РАДИОИНТЕРФЕРОМЕТР С РЕТРАНСЛЯЦИЕЙ
В ОБСЕРВАТОРИИ ДЖОДРЕЛЛ БЭНК
В 1980 г. вступил в строй многоэлементный радиоинтерферометр в об¬
серватории Наффилд, Великобритания, — MTRLI (Multi Telescope Radio
Link Interferometer) [5, 154]. Инструмент состоит из 6 антенн: 76 м или
25,9 X 38 м в Джодрелл Бэнк, 25,9 X 38 м в Уордле (Wardle) и 4 антенн
диаметром 25 м — в Деффорде (Defford), Нокине (Knockin) , Дарнхолле
(Darnhall) и Тэбли (Tabley) (рис. 54). Три последние антенны принадлежат
к так называемому Е-типу, т.е. представляют собой копии антенн VLA. Все¬
го в MTRLI 15 баз, максимальная база — 134 км, минимальная — 6 км.
Диапазон волн — 1,35 4- 73 см (но не все антенны могут работать на коротких
161
Таблица 21
Основные параметры радиоинтерферометров с электрической связью
Интерферометры
Количество и
диаметр антенн
Расположение,
максимальная
база
Рабочие
частоты,
ГГц
Кембриджский
радиотелескоп,
Великобритания
8 ант., 13 м
восток-запад
4 подвижн.,
4 неподвижн.,
b - 4,8 км
5
Интерферометр НРАО,
3 ант., 26 м
1 неподвижн.,
8,085
Грин Бэнк, США
1 ант., 12,7 м
2 подвижн.,
b = 2700 м,
выносной
пункт -
35 км
2,695
VLA, Магдалена,
США
27 ант., 25 м
Y - подвиж¬
ная конфигу¬
рация, длина
ветви - 21 км
1,344-1,73
4,54-5,0
14,44-15,4
224-24
MTRLI, Джодрелл
Всего 6 ант.,
двумерная
0,408
Бэнк, Великобритания
1 ант., 76 м
или 38 X 25,9 м
1 ант., 38 X 25,9 м
4 ант. по 25 м
решетка
^тах =
= 134 км
1,666
сантиметровых волнах). Решетка, как видно из рис. 54, двумерная,
разрешение по линии север — юг и восток — запад сравнимо. Это самый
большой фазостабильный радиоинтерферометр в мире. При создании
MTRLI был использован большой опыт радио¬
интерферометрических наблюдений с ретранс¬
ляцией, накопленный в Джодрелл Бэнк
[155,156].
Для связи удаленных антен с центром
(Джодрелл Бэнк) использованы радиорелей¬
ные линии связи. Сигналы гетеродина пе¬
редаются на частоте 1500 МГц на пункты и
возвращаются обратно в центр. После сравне¬
ния фазы опорного и обратного сигналов
компенсируется электрическая длина на каж¬
дой линии. Точность отслеживания изменений
длины линии составляет 1 мм на трассе
150 км. На каждой антенне опорный сигнал из
центра синхронизирует высокостабильный
Рис. 54. Радиоинтерферометр с ретрансляцией,
обсерватория Наффилд, Великобритания.
162
Полоса,
МГц
Шумовая
температура,К
Чувствитель-:
ность по по¬
току, Ян
Ширина
луча
Фазовая
нестабильность
i о л
8 0,1 2" 1°,2
10, двух- 120
полосный 100
0,05 0",55X0",25 2°,4 1за4
0,03 0",18X0",08 0°,8 J часа
режим
за 8 часов
осреднения
50
2,2-10"s
2",0
50
1,7 10"5
0",6
240
1,0 Ю"4
0",2
290
1,4 Ю"4
0 ",13
2•IO'3
0",9
0",2
1°/ГГц за 2 часа
2°
кварцевый генератор, при этом используется принцип фазовой автоподстрой¬
ки частоты. На каждой антенне имеется управляющая ЭВМ, связанная
с центром.
Сигналы от антенн по тем же линиям связи (в полосе 10 МГц) в цифро¬
вом виде передаются в центр. Для компенсации геометрической задержки
применены аналоговые линии задержки (от 0 до 75 нс) и цифровые — до
1 мс с шагом 50 нс, кроме того, сигналы проходят через управляемые фазо¬
вращатели — сопровождение по частоте. Двухуровневый коррелятор вы¬
числяет 16 комплексных величин для 32 задержек. Накопленные в течение
1 секунды данные передаются в ЭВМ для дальнейшей обработки.
Большие размеры MTRLI заставляют учитывать при обработке фазовые
флуктуации в тропосфере и ионосфере: применяются метод опорного объ¬
екта и метод амплитудно-фазового замыкания.
В табл. 21 приведены основные параметры четырех рассмотренных в
этой главе радиоинтерферометрических систем.
163
Глава 8
ТЕХНИКА РСДБ.
ПРОБЛЕМЫ КОГЕРЕНТНОСТИ И СИНХРОНИЗАЦИИ
Появление стабильных атомных стандартов частоты явилось решающим
стимулом для разработки РСДБ. Это видно уже из того, что во времена
первых наблюдений долго удерживалось название ’’радиоинтерферомет¬
рия с независимыми гетеродинами”.
В предыдущей главе было показано, какие большие технические труд¬
ности создает необходимость поддержания стабильной фазы гетеродинов
на каждом элементе радиоинтерферометра, несмотря на то, что опорный
генератор один для всего инструмента. В случае же РСДБ число опорных
генераторов равно числу антенн, участвующих в сеансе наблюдений с
РСДБ, поэтому на каждом пункте должен быть установлен высокоста¬
бильный атомный опорный генератор. Этот генератор выполняет три основ¬
ные функции:
1. Формирование опорного напряжения для системы преобразования
частоты входного сигнала от радиочастоты до видеополосы.
2. Формирование опорного напряжение для системы регистрации —
записанный на магнитную ленту сигнал должен сопровождаться точными
временными метками с одинаковым и стабильным периодом на всех
пунктах.
3. Хранение точного времени, для того чтобы запись сигнала от источ¬
ника на всех пунктах началась строго одновременно - с точностью до
нескольких микросекунд.
Таким образом, стабильный генератор необходим для гетеродинной
системы, системы регистрации и электронных часов.
§ 1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ СТАНДАРТОВ ЧАСТОТЫ
Основными величинами, которые характеризуют стандарты частоты,
являются точность, воспроизводимость и стабильность [157 + 163,178].
Точность — это величина, равная отклонению реальной частоты генера¬
тора от номинальной (некоторой заранее установленной величины). Вос¬
производимость — это отклонение частоты от номинальной при перехо¬
де от одного образца генератора к другому или при различных включе¬
ниях стандарта. Стабильность характеризует постоянство частоты стан¬
дарта во времени. Первые две характеристики говорят об усредненных
значениях частоты за большой промежуток времени, стабильность же
(особенно кратковременная, до 100 с) необходима для оценки когерент¬
ности одновременной работы нескольких генераторов. Для определения
стабильности пользуются двумя относительными мерами: временной и
частотной.
Для колебания s (t) = s0 sin [27г/ог + 0(r)], где - случайная функция
времени (фазовые флуктуации), введем относительное мгновенное откло¬
нение частоты от средней /0:
dO
~t *
(8.1)
164
Случайная величина y(f) характеризуется своей спектральной плотностью
Sy (/)([£ (01 = Гц 1 ) или функцией автокорреляции Ry (т), которые свя¬
заны между собой обычным соотношением Винера — Хинчина. Многолет¬
ние измерения показывают, что спектр Sy. (f) может быть представлен
как суперпозиция некоррелированных друг с другом шумов с различными
спектральными свойствами,
s haf,
а= — 2
Sy(t) =
о, f>fh,
(8.2)
где а = —2— частотный шум случайных блужданий, а =—1—фликкер-шум
Рис. 55. Типичная зависимость оу(т)
для стандартов частоты, ау(т) - диспер¬
сия Аллена.
по частоте, а = 0 — белый частотный шум, а = 1 — фликкер-шум фазовый,
а = 2— белый фазовый шум, коэффициенты ha характеризуют интенсив¬
ность шумов, fh — граничная частота.
Спектральная плотность фазовых флуктуаций Se (f) связана со спект¬
ральной плотностью частоты зависимостью
МП (8.3)
Другой мерой флуктуаций частоты является дисперсия оу (г) (дисперсия
Аллена)
°у О) = < ” >> (8-4)
_ 1 tk+r
где ук = — J I(t)dt- среднее значение частоты на fc-м интервале дли-
т
ной т. Между дисперсией и спектральной плотностью имеется связь
о 4 / Sin 77/т\ 4
^(т) = 2 / Sy (f) i \ df (8.5)
0 \ 7Т/Т /
Типичная зависимость оу (т)ддя. стандартов представлена на рис. 55. Учас¬
ток I обычно имеет ход оу (белый фазовый шум) или оу ~ т~1/2
(белый частотный шум). На участке II достигается так называемый ”флик-
керный потолок” — оу перестает зависеть от времени осреднения. Учас¬
ток ZZZ соответствует ухудшению стабильности (от часов до суток) —
165
это дрейф частоты. Обычно это линейный дрейф, который можно измерить,
и он не оказывает влияния на практическую стабильность стандарта. Пе¬
рейдем теперь к краткому описанию трех типов стандартов частоты, кото¬
рые наиболее часто применяются в службах времени и частоты и в РСДБ.
§ 2. ТЕХНИЧЕСКИЕ ОСОБЕННОСТИ ОСНОВНЫХ ТИПОВ
СТАНДАРТОВ ЧАСТОТЫ
Атомные стандарты частоты могут быть разделены на два типа: актив¬
ные (квантовые генераторы или мазеры) и пассивные (квантовые дискри¬
минаторы) . Стандарт первого типа (водородный) содержит атомный
генератор, который генерирует сигнал, соответствующий переходу атомов
с одного энергетического уровня на другой. В стандартах второго типа
(цезиевый , рубидиевый) атомный резонанс используется для удержания
в узких пределах частоты вспомогательного генератора, т.е. квантовый
переход используется как высоко добротный колебательный контур. Спект¬
ральные линии исходных материалов стандартов имеют очень высокую
частоту (тысячи МГц), поэтому в состав каждого стандарта входит квар¬
цевый генератор, который связан петлей автоподстройки (фазовой или
частотной) с соответствующей схемой, определяющей частоту атомного
стандарта.
2.1. Водородный мазер
Блок-схема на рис. 56, а поясняет принцип действия прибора. В мазе¬
ре используется энергетический переход в сверхтонкой структуре основ¬
ного состояния водорода (F = 1, rhp = 0 F = 0, тр ~ 0), которому соот¬
ветствует частота = 1 420 405 751, 768 ± 0,002 Гц. Это была первая спект¬
ральная радиолиния, открытая в космическом пространстве. Атомы во¬
дорода, получаемые в результате диссоциации в высокочастотном разря¬
де, направляются в коллиматор. Для разделения атомов с различными
энергетическими состояниями используется шестиполюсный магнит, атомы
с состоянием F= 1, mF = 0 фокусируются в накопительную колбу. Колба
помещена в центре высокодобротного СВЧ-резонатора, промежуточное
пространство заполнено тефлоном. Когда настройка резонатора близка
к частоте перехода и интенсивность пучка атомов достигает 1012 атомов/с,
возникают колебания, во время которых атомы из состояния F = 1, Trip = 0
Селектор
гексагональный
Источник
■Накопительная колба
Магнитный экран
Резонатор СВЧ
Выход СВЧ сигнала
атомов
Рис. 56. Схемы, поясняющие принципы
действия стандартов частоты: а) водород¬
ного, б) цезиевого, в) рубидиевого.
166
Рис. 57. Принцип фазовой автоподстройки частоты кварца по сигналу мазера.
переходят в состояние F = 0, mF = 0. Мощность сигнала на выходе
резонатора достигает Ю”13-ИСТ12 Вт. Сигнал мазера далее служит для
стабилизации вторичного кварцевого генератора (рис. 57). Используется
принцип фазовой автоподстройки частоты. Сигнал от кварцевого генера¬
тора умножается на пи смешивается с сигналом мазера, усиливается
и подается на фазовый детектор. Одновременно другой сигнал кварце¬
вого генератора, умноженный на п", тоже подается на фазовый детектор.
Напряжение на выходе фазового детектора после фильтра нижних частот
служит управляющим для кварцевого генератора (варакторное управле¬
ние). Пример зависимости ’’стабильность — время” показан на рис. 59.
2.2. Пассивные стандарты частоты
2.2.1. Цезиевый стандарт (рис. 56, б). В нагревательной печи (темпе¬
ратура 100 °C) содержится жидкий цезий 133 Сs. Магниты А служат се¬
лекторами состояний, которые выделяют атомы с состоянием F = 4, mF~
= 0. Пучок атомов проходит в резонатор, в который вводится СВЧ-сиг¬
нал 9 192 631 770 Гц, 1 мВт от вспомогательного генератора (сигнал
от кварцевого генератора, умноженный на п). Этот СВЧ-сигнал индуци-
Р и с. 58. Принцип частотной автоподстройки кварца по атомному резонансу.
167
Рис. 59. Относительная нестабильность
зарубежных стандартов частоты в зави¬
симости от интервала наблюдения.
рует переход F =4, mF = 0 F = 3,
тр~ 0. Магнит В является селекто¬
ром для атомов с этим послед¬
ним состоянием F = 3, mF = 0, ко¬
торые выходят из резонатора и по¬
падают на детектор — горячую ме¬
таллическую ленту, на которой они
вызывают поверхностную иониза¬
цию. Затем этот ионный ток усили¬
вается, при этом зависимость выходного тока от частоты СВЧ-
сигнала, вводимого в резонатор, носит острый резонансный харак¬
тер. Вспомогательный генератор подстраивается сигналом после детектора
по принципу частотной авто подстройки (рис. 58). Для выделения сигнала
ошибки используется вспомогательная модуляция: СВЧ-поле в резонато¬
ре модулировано, демодулятор (фазовый детектор) выделяет эту моду¬
ляционную компоненту после детектора, и после низкочастотной фильтра¬
ции она служит управляющим сигналом для кварцевого генератора, ра¬
ботающего на частоте 5 МГц. На рис. 59 показана кривая стабильности це¬
зиевого стандарта. Цезиевый стандарт определяет одну из фундаменталь¬
ных единиц СИ — секунду (наиболее точную из всех фундаментальных
единиц).
2.2.2. Рубидиевый стандарт (рис. 56, в). Основой этого стандарта явля¬
ется ячейка с парами 87 ИЬ.Свет от рубидиевой лампы проходит через
фильтр (газ с парами 85 Rb), который удаляет одну из сверхтонких ком¬
понент спектра лампы. Этот свет поглощается атомами 8 7 Rb в состоянии
F= 1 в накопительной колбе, благодаря чему создается разница в насе¬
ленности уровней F= 1 и F= 2 сверхтонкой структуры. Ячейка становится
прозрачной для света лампы. СВЧ-поле, введенное в резонатор, индуци¬
рует переходы на уровень F= 1 и прозрачность ячейки уменьшается (на
несколько десятых процента), что регистрируется фотоэлементом. Цен¬
тральная частота линии 6 834 682 612,8 ± 0,5 Гц, ширина линии ^100 Гц.
Электронная цепь подстройки вспомогательного кварцевого генератора
построена по тому же принципу, что и в цезиевом стандарте (см.
рис. 58).
Типичная зависимость оДт) =3,6 • 10-12т-1/2 в области 0,2< т < 100 с.
Нижний предел стабильности 3,6 • 10Г13. Серийно выпускаемые промыш¬
ленные образцы рубидиевого стандарта этого типа являются наиболее
экономичными и малогабаритными. Именно эти стандарты использова¬
лись в первых наблюдениях РСДБ.
Рубидиевые стандарты не могут служить первичными эталонами, пос¬
кольку неточность частоты 1СГ1°, но могут использоваться как перенос¬
чики частоты и времени в методе транспортируемых часов.
В табл. 22 содержатся обобщенные параметры трех основных стандар¬
тов частоты, которые нашли широкое применение в науке и технике, в
168
О О vn
<-n cn r-t
о о
m сП гч
о о
ГЧ СЧ ГЧ
Ъ о
ь ь
Ю ’—1 ’-I
Ои'*
С Ki
ь
V)
О
Таблица 22
о
Г"
г~-
со
40
rj
о\
04
<D
S
я
00
сч
чО
гч
оо
40
4t
ел
ОО
40
х>
Di
5Л
О
том числе и в РСДБ. Приведем также спектральные характеристики этих
стандартов:
Водородный мазер
5^ (/) = 3 • ПГ30/"1 + 1(Г24/2, КГ4 </< 103 Гц.
Серийный цезиевый
Sy (/) = 3 • ПГ26/"1 +5 • 1СГ21 /2, КГ6 </< 103 Гц.
Лабораторный цезиевый
Sy (/) = 7 • ЮГ29/’1 +2 • 10"24/2,1СГ5 </< 103 Гц.
Серийный рубидиевый
Sy (/)= 10"25/’1 +3 • 1(Г23/2, ПГ4 </< 103 Гц.
Малогабаритный рубидиевый
Sy (f) = 2 • ПГ25/-1 + 2-1СГ22/2, 1(Г* <f< 103 Гц.
Рубидиевый стандарт обладает наихудшими данными по стабильности и,
особенно, Точности. Дрейф этих стандартов также значительно хуже, чем
у других стандартов. Основным преимуществом являются их малые габа¬
риты, дешевизна, надежность. Их можно применять в качестве возимых
стандартов, их кратковременная стабильность (до 10 с) немного хуже,
чем у водородных и промышленных цезиевых. Нужно иметь в виду, что
характеристики рубидиевых стандартов в последние годы улучшаются.
Цезиевые стандарты наименее распространены в технике РСДБ. Кратко¬
временная стабильность у них хуже, чем у рубидиевых, долговременная
стабильность лучше, чем у рубидиевых, но хуже, чем у водородных. Прог¬
ресс в области цезиевых стандартов приводит к тому, что они становятся
относительно дешевыми, надежными и малогабаритными.
Точность водородного стандарта хуже точности цезиевого, но стабиль¬
ность самая хорошая; у них наивысшая спектральная чистота. Стабильность
водородных стандартов новейших разработок достигает 1СГ15. Это оз¬
начает, например, что на волне 1 см (30 ГГц) длительность наблюдений
с РСДБ (когерентное накопление) возможна до 104 с (~ 3 часа), за это
время стандарты на двух пунктах разойдутся на один период. Водородные
стандарты - дорогие стационарные приборы, которые целесообразно
применять в качестве основных хранителей точного времени и частоты.
Именно эти стандарты применяются в настоящее время практически во
всех наблюдениях с РСДБ.
Среди новых типов приборов, пригодных для использования в тех¬
нике РСДБ, следует отметить как перспективные генераторы со сверх¬
проводящим резонатором (до 1,4 К), которые имеют очень хорошую
кратковременную стабильность, надежность и относительно невысокую
стоимость. Пока эти приборы еще не вышли из стадии лабораторных ис¬
пытаний.
На рис. 59 приведены зависимости оу (т) для зарубежных атомных
стандартов частоты, там же показана зависимость оу (т) для генератора
со сверхпроводящим резонатором (кривая ”СПР”). В табл. 23 приве¬
дены характеристики отечественных стандартов [157].
170
Основные данные советских стандартов
41-46
41-44
41-47
41-50
41-48
5
з
X
I
ь 2 * *
7 Ь Ь Ь
СП <л г-
в
3
о
ь
Ь
Ь
S
’■ч
S
«п
сч
<12
■н
-н
-н
Д
1 V
ь
МП
о
+1
о
о
ь
сч
еч
сч
+1
+4
-н
V
1 V
+1
I
I
I
налов,МГц 1;5;0,1 1; 5; 0,1 1;5;0,1 1;5;0,1 1;5;0,1 1;5;0,1
Габаритные размеры, мм 240X480x420 160x480x420 160x480X420 240X480X420 1140x572x1900 596X900X1985
Масса, кг 35 25 21 35 1000 330
§ 3. ВЛИЯНИЕ НЕСТАБИЛЬНОСТИ СТАНДАРТОВ
НА ТОЧНОСТЬ РСДБ-ИЗМЕРЕНИЙ
Рассмотрим, как влияет нестабильность частот стандартов (и, следо¬
вательно, гетеродинов) РСДБ на выходной сигнал коррелометра. Запи¬
шем интерференционный сигнал в следующем упрощенном виде:
S ( t) = S0 COS (ctf0^ + <£-), (8-6)
drr
где со0 - частота интерференции, соо = - ^2 + <^>i , <^1, ^2 - час-
dt
тоты гетеродинов, тг геометрическая задержка. Будем считать частоту соо
и разность частот гетеродинов gjj — со2 постоянными, флуктуации же этих
частот вынесены в случайный фазовый член, разность случайных фаз гете¬
родинов • В дальнейшем будем считать нормальной слу¬
чайной величиной с нулевым средним и структурной функцией a J~(r) .
Как показано в § 2, зависимость оу (т) на разных участках осреднения но¬
сит степенной характер (рис. 59),
1
оу(т) - Кт~а, <* = 0; 1; —. (8.7)
Дисперсия базы ^_ на интервале времени т (структурная функция) свя-
172
зана с Оу (т) соотношением
< W = <1 + <2 = 255 <Т) ^1Т)2 ’ <8’8)
где со 1 — частота гетеродина.
Найдем средний спектр усеченной реализации s (г) на интервале 0 + Т,
осреднение делается по (используем нормальный закон распределения
<s(0> = <“ f s (t)e~/cvt dt) =
T 0
S. T is. T
= — f e 2 cos (w0 — a>) tdt f e sin (w0 — co) tdt. (8.9)
l<s>l
2 4 6 8 ^-ы)Т
Рис. 60. Амплитудные спектры интерференционного сигнала в зависимости от обоб¬
щенной расстройки гетеродина, стабилизованного кварцем (я), рубидиевым (б),
цезиевым (в) и водородным (г) стандартами; длина волны X =5 см.
173
Для а = 0
— а2 (Г) = со2! Ki t-al. t,
2
(8.10)
для а = 1
= *1=*2з.
Зависимости оу (т), приведенные на рис. 59, носят кусочно-непрерывный
характер, и поэтому интегралы в (8.9) распадаются на отдельные интегра¬
лы, в каждом из которых пределы интегрирования определяют отрезок
постоянства а. Таким образом, полный спектр интерференционного сиг¬
нала можно записать в виде суммы
(
< $ (г) > = - (cos Ы - j sin bt) dt +
(8.И)
где b = (coo - co), Tf, T2, T3, T4 - точки излома зависимости оу(т).
Для каждого типа стандарта частоты построен амплитудный спектр
сигнала |<s>| в зависимости от обобщенной-расстройки ЬТ, В отсутствие
флуктуаций фазы (а,- = 0) амплитудный спектр представляет собой функ-
sin ЬТ
цию . При at Ф 0 вследствие фазовой нестабильности стандарта про-
исходит расширение профиля линии ] <$>| и ослабление амплитуды по
sin ЬТ
сравнению с . На рис. 60 показаны амплитудные спектры в функции
от ЬТдля различных времен усреднений для четырех типов стандартов:
кварцевого, рубидиевого, цезиевого и водородного. Сравнивая эти кри¬
вые, можно сделать вывод, что водородный стандарт наиболее подходит
для задач РСДБ. При малых временах осреднения можно применять и
рубидиевый стандарт (Г< 30 с). Для рубидиевого стандарта амплитудный
спектр при Т < 100 с определяется следующей формулой:
(8.12)
При b = 0
(8-13)
Примерное значение а2 = 6,3 • 10-4/2,/— частота в ГГц. В случае водород¬
ного стандарта амплитудный спектр в основном определяется двумя участ¬
ками: а = 1 и а = 0. При этом амплитудный спектр может быть рассчитан
174
Рис. 61. Ослабление амплитуды интер¬
ференционного сигнала для рубидиевого
и водородного стандартов в зависимости
от времени осреднения; длина волны
Л. - 5 см.
по формуле
(8.14)
где Ф (х) — функция ошибок и Т2 — временная точка, при которой сте¬
пенной закон с а = 1 меняется на закон с а = 0. Примерные значения для
Т2 = 63с: аг = 1,4я • 10"14 / а3 = тг • 1СГ12 / На рис. 61 построены зави¬
симости амплитудных потерь от времени осреднения для рубидиевого
и водородного стандартов (для длины волны X =5 см). По этим графикам
можно оценить максимально возможное время накопления для этих
типов стандартов при допустимом ослаблении амплитуды интерференцион¬
ной картины. Более подробно этот вопрос рассмотрен в § 3 гл.5.
§ 4. ПРЕОБРАЗОВАНИЕ СПЕКТРА В РСДБ
В РСДБ сигнал, принятый антенной, проходит цепь сложных преобра¬
зований, прежде чем записывается на магнитную ленту: предварительное
усиление малошумящим усилителем (мазер,параметрический усилитель),
перенос спектра (первый гетеродин) на промежуточную частоту (ПЧ), основ¬
ное усиление на ПЧ и преобразование к видеополосе 0 -г Д/, где А/- мак¬
симально возможная частота записи на применяемый в данном РСДБ маг¬
нитофон. На всех этих этапах необходимо поддерживать стабильность ам¬
плитудно-фазовых характеристик, чтобы заметно не ухудшить исходную
стабильность квантовых стандартов частоты, определяющую потенциаль¬
ные возможности’РСДБ. Рассмотрим ступени преобразования по порядку.
4.1. Первый гетеродин; радиометрический канал
Стандарты частоты на своих выходах имеют сравнительно низкочас¬
тотный сигнал — 5 МГц. В то же время для первого преобразования не¬
обходимо сформировать высокочастотный сигнал гетеродина на частоте,
равной нескольким тысячам мегагерц, отличающейся от частоты принима¬
емого сигнала на величину первой ПЧ,/Пр=40 4- 80 МГц. Чтобы не поте¬
рять фазовую стабильность опорного 5 МГц-сигнала стандарта, необходимо
тщательно сконструировать схему формирования гетеродинного СВЧ-сиг-
175
Рис. 62. Блок-схема гетеродинной системы, использующей принцип фазовой автопод¬
стройки частоты.
I ступень
Рис. 63. Блок-схема гетеродинной системы, использующей принцип умножения час¬
тоты стандарта.
нала. В РСДБ применяют два способа: фазовую автоподстройку частоты
(ФАПЧ) по опорному сигналу стандарта и прямое умножение частоты
стандарта до СВЧ. На рис. 62 приведена блок-схема современной гете¬
родинной системы, использующей принцип ФАПЧ. В качестве синхрони¬
зирующего генератора применен генератор на диоде Ганна, работающий
на частоте около 6000 МГц [164]. Опорный сигнал 5 МГц от стандарта
проходит каскад умножителя на 24 и после дополнительного усиления
подается на смеситель. На другой вход смесителя подается сигнал от СВЧ -
генератора. В смесителе за счет нелинейного преобразования появляются
дополнительные гармоники опорного сигнала (частота 48-й гармоники
равна 120 X 48 =5760 МГц). Взаимодействие этой гармоники и сигнала
от СВЧ-генератора приводит к появлению сигнала промежуточной частоты.
Этот сигнал усиливается, частота его еще раз понижается с помощью дели¬
теля, и затем фазовый детектор производит сравнение сигнала ПЧ и опор¬
ного сигнала, специально сформированного из 5 МГц-сигнала стандарта.
Сигнал ошибки с выхода фазового детектора усиливается, фильтруется
и поступает на управляющую цепь СВЧ-генератора. Эта обратная связь
поддерживает частоту и фазу стабильными в пределах полосы синхрони-
5/
зации, относительная нестабильность частоты— = 4 • КГ15 при времени
176
усреднения 1 с. В последнее время' качество умножителей частоты улуч¬
шилось настолько, что для получения сигнала первого гетеродина приме¬
няется прямое умножение частоты стандарта до радиочастот [165]. На
рис. 63 дана блок-схема формирователя сигнала первого гетеродина, ис¬
пользующего принцип умножения.
Как правило, в комплексах, предназначенных для астрометрических
наблюдений, делается трехкратное преобразование частоты (рис. 64).
При вычислении фазы отклика в случае многократного преобразования
частоты необходимо учитывать относительное расположение частот гете¬
родинов и сигналов и складывать частоты алгебраически. После первого
преобразования сигнал ПЧ отводится в специальный радиометрический
канал для того, чтобы можно было измерить антенную температуру от
От антенны
^гетШ
а)
Рис. 64. Высокочастотная часть радиоинтерферометра со сверхдлинной базой: а) пре¬
образователи частоты и радиометрический канал, б) квадратурный (однополосный)
третий смеситель.
177
д/
Рис. 65. Прием сигнала: а) в сплошной полосе ши¬
риной AF, б) в нескольких узких полосах шири¬
ной А/, перекрывающих AF, в) в двух узких по¬
лосах, разнесенных на ~ AF.
наблюдаемого источника на каждой антенне
РСДБ. Это необходимо для точного наведе¬
ния на источник, а также для приведения
амплитуды пространственной гармоники,
фиксируемой РСДБ, к абсолютным величи¬
нам (градусам), так как в результате кор¬
реляционной обработки вычисляется норми¬
рованный коэффициент корреляции (гл. 10,
§ 1).
Основной режим работы радиотелескопа —
радиоинтерферометрический, и введение меж¬
ду облучателем и первым каскадом мало¬
шумящего усилителя модулятора нежела¬
тельно, так как это вносит потери, ухудшающие отношение сигнала к шу¬
му. Поэтому целесообразно применение схемы с пилот-сигналом [129], в
которой входной тракт остается ’’чистым”.
Сигналы второго и третьего гетеродинов обычно формируются с по¬
мощью умножения опорного сигнала стандарта.
4.2. Синтез широкой полосы при измерении задержки
Исходным материалом при угломерных измерениях в интерферометрии
является разность хода путей когерентных фронтов волн, приходящих
на антенны РСДБ. Наиболее точно можно измерить эту разность хода,
найдя разность фаз между сигналами, регистрируемыми на пунктах при¬
ема. Однако нестабильность фазовых характеристик аппаратуры не поз¬
воляет это сделать из-за неопределецности в 2я радиан, типичной для фа-
d<p
зовых измерений. Измерение временной задержки т = — лишено этого
du
недостатка, но точность-при этом обратно пропорциональна ширине полосы
регистрации, точнее, второму моменту частотной характеристики прием¬
ника. Поскольку ширина полосы ограничена техническими возмож¬
ностями устройства магнитной записи, был предложен метод синтеза поло¬
сы, аналогичной методу синтеза диаграммы направленности в теории антен¬
ных решеток [99, 167, 168]. Вместо того, чтобы принимать сигнал в одной
широкой полосе (рис. 65, а), прием ведется в нескольких узких по¬
лосах шириной Д/, распределенных внутри частотной области Д/
(рис. 65, б). При обработке каждая пара сигналов, принятых в z-м ка¬
нале, подвергается обычной корреляционной процедуре, включая компен¬
сацию геометрической задержки. При такой компенсации отклик радио¬
интерферометра записывается в форме
S,- = р (Дт) cos (oj, тг + <р, ),
(8.15)
где Дт = тг -тк,тг— геометрическая, тк — компенсирующая задержки.
178
Затем образуется сумма всех откликов в п каналах
п п
SZ = S Sj = S ,р (Дт) cos (со/Тг + (ft).
1=1 1=1
(8.16)
n
Важно, чтобы тогда = р(Дт) S cos(cuz-Tr + <p). Отклик многочас¬
тотного радиоинтерферометра для случая равномерного распределения ка¬
налов внутри синтезируемой полосы имеет вид
п
sin — Дсотг
sin
2
(8-17)
Форма синтезированного сигнала напоминает диаграмму многоэлементно¬
го радиоинтерферометра [130, 167, 168] (рис. 66). Так же, как и в теории
антенных решеток, можно поставить задачу оптимального расположения
каналов с целью получить ’’диаграмму” с минимальным уровнем боко¬
вых лепестков. Так, в системе [166] в полосе от 30 до 76 МГц (по ПЧ)
имеются 8 каналов,смещенных на 2, 8, 20, 32, 36,42 и 46 МГц относительно
’’нулевой” частоты, что определяет ширину главного лепестка функции
корреляции 20 нс на уровне 3 дБ. Ширина синтезируемой полосы зависит
теперь уже не от полосы записи магнитофона, а от входной полосы уси¬
лителя высокой частоты, которая достигает в случае параметрических
усилителей сотен мегагерц.
Для оценки точности измерения задержки с помощью радиоинтерфе¬
рометра с синтезированной полосой надо подсчитать эффективную ши¬
рину полосы принимаемого сигнала
(8.18)
где 5S(/)— спектр синтезированного сигнала. Для равномерного рас¬
пределения каналов
эфф
(8.19)
где AF — половина расстояния между полосами, Д/ — ширина полосы,
2п — число полос.
Максимального значения ДГЭфф достигает при двухчастотном приеме
[176,177] (рис. 65, в)
(8.20)
отклик дается формулой
ДсоДт
= 2р (Дт) cos cos (сОоЛ- + <р)
(8.21)
и представлен на рис. 66, б. В этом случае наиболее велика вероятность
179
Рис. 66. Отклик РСДБ при синтезе широкой полосы: а) многочастотный синтез,
б) двухчастотный синтез.
аномальных ошибок (спутать лепесток), однако зависимость вероятности
этих ошибок от ДЛэфф слабая (гл. 10, § 5).
Рассмотрим технические способы реализации многочастотного приема.
Регистрация нескольких каналов может быть сделана параллельным или
последовательным способом. При параллельном способе сигналы отдель¬
ных каналов записываются одновременно на один многодорожечный
магнитофон или на несколько магнитофонов сразу. При этом суммарная
180
полоса, определяющая отношение сигнал/шум, равна общей полосе ре¬
гистрации, ье. чувствительность радиоинтерферометра прямо пропорци¬
ональна yCV= где N — число записанных бит информации, Д/—
полоса регистрации и Т — время регистрации. При последовательном спосо¬
бе на магнитофон поочередно записываются отрезки (зоны), соответству¬
ющие приему в одном канале, те. применяется циклический опрос каналов.
В настоящее время применяется преимущественно последовательный спо¬
соб записи [165,166,169].
. Если количество бит, записанных на магнитофон в параллельном и
последовательном методе, одно и то же, то чувствительность обоих мето¬
дов одинакова, но в последовательной схеме огибающая много лепестко¬
вой структуры уже, чем при параллельном способе, так как определяется
при записи отдельного канала всей шириной полосы регистрации. В рам¬
ках последовательного способа записи также возможны два способа форми¬
рования частотных каналов: параллельный [165, 184] и последовательный
[169]. При первом способе (рис. 67, а) имеется 2п гетеродинов, настроен¬
ных на различные частоты в полосе синтеза, 2п фильтров промежуточной
часто ты и специальный коммутатор, поочередно подключающий выходы
фильтров к системе регистрации. При втором способе (рис. 67, б) форми¬
рования многочастотного приема частота гетеродина периодически пере¬
ключается (по заданной программе) [169], при этом предъявляются повы¬
шенные требования к непрерывности фазы при переходе от одной частоты
к другой. В каждом способе требуется стабильность и одинаковость фазо¬
вых характеристик всех каналов (от входной части приемника до систе¬
мы регистрации).
В работе [169] подробно описана система РСДБ с многочастотным
приемом (синтезом полосы), специально предназначенная для радиоастро¬
номического 5фименения (рис. 68). Применен последовательный прин¬
цип формирования каналов: с помощью программно-управляемого син¬
тезатора частот Hewlett-Packard 5100А сигналы второго и третьего гетеро¬
динов могут принимать фиксированные 16 значений в полосе синтеза
200 МГц. В каждом конкретном сеансе наблюдений выбирается опреде¬
ленное число каналов (обычно пять), которые последовательно записы¬
ваются зонами длиной 0,2 с на магнитофон в полосе 360 кГц. В системе
предусмотрена непрерывная фазовая калибровка (рис. 68). На вход при¬
емника через направленный ответвитель подается периодическая последо¬
вательность импульсов от вспомогательного генератора, частота которо¬
го задается от стандарта, используемого в системе. Частота импульсов —
1 импульс в микросекунду. Образуется сетка спектральных линий, от¬
стоящих на 1 МГц. Частота гетеродина выбрана такой, что калибровочный
сигнал в видеополосе появляется на частоте 1 кГц. Калибровочный сиг¬
нал все время присутствует в общем сигнале и выделяется^ помощью
синхронного детектора, его мощность составляет около 1% общей мощ¬
ности видеосигнала. Показания фазового детектора позволяют контроли¬
ровать стабильность фазовой характеристики приемнцка с точностью
±3°. Эта система позволяет измерять задержки со среднеквадратичной
точностью 0,3 нс.
В работе [170] предложен еще один способ синтезирования — много¬
кратное ’’свертывание” полосы принимаемого сигнала. Блок-схема ап-
181
от стандарта
частоты
Синте¬
затор
Р и с. 67. Последовательный способ синтеза широкой полосы: а) 2п каналов преобра¬
зования частоты, б) переключение частоты гетеродина одного преобразователя по за¬
данной программе.
1й
Рис. 68. Блок-схема аппаратуры пункта РСДБ с последовательным синтезом.
паратуры представлена на рис. 69, а. Частота первого гетеродина /гет0
выбирается в середине полосы пропускания приемника (рис. 69,’6), т.е.
производится двухполосный прием (принимаются обе зеркальные поло¬
сы) . При этом происходит ’’свертывание” и спектр частот сигнала пере¬
до
носится в область видеочастот 0 -г . Частота второго гетеродина равна
2
ДР af
Лет1 ~ —ь при этом ширина спектра сокращается еще в 2 раза, до .
4 4
182
6)
Рис. 69. Синтез широкой полосы методом ’’свертывания”, а) Блок-схема аппарату¬
ры пункта РСДБ, 1 — усилитель высокой частоты, 2/ — Ай смеситель, 5/ - /-й фильтр
видеочастоты, 4 - блок гетеродинов, 5 - стандарт частоты, 6 - ограничитель по нуле¬
вому уровню, 7 - устройство временного квантования, 8 - магнитофон, б) преобразо¬
вания спектра при ’’свертывании”.
At
Рис. 70. Отклик РСДБ с синтезом широкой полосы, методом ’’свертывания”.
183
Рис. 69, б иллюстрирует такое последовательное гетеродирование с сокра¬
щением полосы в 24 раз (4 гетеродина). Операции после последнего пре¬
образования частоты такие же, как и в обычном РСДБ, — ограничение
по нулевому уровню, временное квантование и запись на магнитную ленту.
Отклик РСДБ на точечный источник дается следующим выражением:
2 sin 2яД f Ат sin 2 “1 2яД f тг
/ = 1° Л Л О Л~7 cos(wr0 Тг). (8.22)
27ТД/Дт 81п2яД/тг
sin х
Первый множитель вида определяется прямоугольной формой частот-
х
ной характеристики выходного видеофильтра, имеющего полосу пропуска-
sin2 _1 у
ния Д/. Второй множитель вида —— представляет собой резуль¬
тат синтезирования широкой полосы 2ЛГг Д/(7УГ - количество преобра¬
зований частоты); именно он формирует узкий импульс внутри интерва¬
ла времени Го, на котором компенсирующая задержка тк= const (рис. 70) .
Максимальной амплитуды импульс достигает в момент At (при отсчете
1
от начала f-го интервала Го), т.е. в этот момент iTQ + Дг, тк= тг = i .
4Д f
Высокочастотное заполнение отклика cos (сог0 тг) не содержит фазового
члена типа яД f (т? - тк), присутствующего при однополосном приеме
(с подавлением зеркальной) и вынуждающего делать коррекцию фазовых,
скачков, происходящих при ступенчатой компенсации с помощью rK(t)
геометрической задержки тг (0 (гл. 10, § 1).
Почти такого же вида, как в (8.22), амплитуда отклика получится в
РСДБ, построенном по обычной схеме синтеза (см. рис. 67, а), если ко¬
личество гетеродинов сделать равным 2Nt и установить частоты их настро¬
ек так, чтобы узкие полосы приема в смежных каналах ’’прилегали” друг
к другу, полностью заполняя сплошную полосу приема шириной Д/7.
Метод синтеза широкой полосы ’’свертыванием” дает следующие пре¬
имущества:
1. Синтезированный отклик РСДБ имеет ’’идеальную” форму, практи¬
чески без боковых лепестков, что уменьшает влияние аномальных ошибок
по сравнению с обычными методами синтеза (гл. 10, § 5).
2. Одновременный прием зеркальных полос позволяет избавиться от
влияния дискретности компенсации по задержке на фазу интерференцион¬
ного отклика.
3. Принцип формирования гетеродинных сигналов для схемы на рис. 69, а
(умножение от одного опорного источника) позволяет упростить контроль
за стабильностью фазы в системе.
§ 5. СИНХРОНИЗАЦИЯ ЧАСОВ В СИСТЕМЕ РСДБ
На каждом пункте РСДБ имеются электронные часы, которые управля¬
ют процессом регистрации на магнитную ленту: фиксируют начало записи
и периодически включают временные метки в поток данных. Опорный
сигнал для часов поступает от стандарта частоты. Показания часов на раз¬
ных пунктах расходятся. Причина этого — различный ход часов, обуслов-
184
ленный различием частот стандартов, и кроме того, ошибка начальной
привязки часов. Перед началом регистрации желательно минимизировать
разницу показаний часов на пунктах РСДБ, так как при корреляционной
обработке ошибка в начале регистрации приводит к длительным поискам
максимума корреляции и существенно увеличивает время обработки.
, 1
Если интервал временной дискретизации Дг=—-,то приемлемой ошиб¬
кой в привязке часов можно считать 6т = ±5Дг. Например, для системы
с полосой Д/=2 МГц 6т = ± 1,25 мкс. Основные методы сличения часов,
применяемые в практике наблюдений на РСДБ, следующие.
5.1. Метод транспортируемых часов
Небольшие габариты современных рубидиевых стандартов частоты
(HP 5065) позволяют перевозить их вместе с электронными часами во
включенном состоянии на самолетах; питание обеспечивается от аккуму¬
ляторов. Вначале стандарты и часы сверяются в одном пункте (прове¬
ряется разность частот и устанавливается минимально возможная разность
показаний часов, Ът <0,1 мкс), затем’’горячие” стандарты и часы разво¬
зятся на пункты. При наличии на пунктах более точных стандартов (во¬
дородных) возможна привязка их с помощью привезенных стандартов
по частоте и начальному моменту. После окончания наблюдений транспор¬
тируемые стандарты и часы снова свозятся в центральный пункт обработки
и делается вторичное сличение частот и времени. Полученные разности
используются для расчета ошибки синхронизации внутри интервала вре¬
мени между двумя сличениями часов. При длительных наблюдениях руби¬
диевые стандарты могут быть использованы только как ’’переносчики”
частоты и начального момента. Точность этого метода может быть не ху¬
же 1 мкс, но сама перевозка работающей аппаратуры сопряжена с больши¬
ми неудобствами.
5.2. Использование телевизионных сигналов
Когда пункты РСДБ находятся в пределах радиовидимости телеви¬
зионной передающей антенны, для сличения часов возможно использование
телевизионного сигнала [171, 172, 192]. С этой целью выделяют опорные
синхроимпульсы, например, уравнивающие строчные импульсы в кадро¬
вом гасящем импульсе. На рис. 71 показана схема привязки времени
на двух пунктах. На выходах телевизионных приемников имеются блоки
выделения синхроимпульсов. Электронные часы на каждом пункте за¬
пускают счетчик в моменты Щ и П2. Синхросигнал излучается передающей
телевизионной станцией в момент CQ и в моменты G и С2 останавливает
счетчики на пунктах приема. Счетчики на пунктах показывают отсчеты
Т\ иГ2. Разность начальной синхронизации 51 находится следующим об¬
разом:
6Г = (Л - Г2)-(Г1пр - Г2пр) — (Г1ап - Г2ап),
(8.23)
где Т1пр и Г2пр — предварительно вычисленные времена распространения
сигналов от передатчика до приемников, rian иТ2ап — предварительно
измеренные аппаратурные задержки.
Точность метода зависит от величины флуктуаций Т1пр иГ2пр и вре¬
менного разрешения счетчика. На практике достигают точности в 40—90 нс
[192].
185
©
©
Рис. 71. Принцип сличения часов с использованием телевизионного сигнала.
t
t
t
5.3. Синхронизация с помощью сигналов системы LORAN-C
Эта система предназначена для навигационных целей, но может быть
использована для передачи сигналов точного времени. Имеется 8 цепей
станций LORAN-С, каждая цепь состоит из ведущей и двух-четырех ведо¬
мых станций. Станции излучают серии радиоимпульсов на несущей час¬
тоте 100 кГц. Период повторения серий импульсов для каждой цепи от¬
личен от всех остальных. Количество импульсов в серии 8 (ведущая стан¬
ция для идентификации излучает 9-й), расстояние между импульсами
1 мс, форма импульса описывается выражением s (t) = (kt)2 e~2^kt ~ ,
где к = (1/72,5) • 10"6 и максимум импульса соответствует t = 72,5 мкс.
Радиоимпульсы могут достигать приемника пользователя с помощью
пространственной волны (отражение от ионосферы) или поверхностной
волны. Наиболее точно делается временная привязка по поверхностной
волне на расстояниях до 3000 км по морю и 1500 км по суше, при этом
стабильность времени распространения составляет соответственно 0,1 и
0.5 мкс.
Несущая частота радиоимпульсов 100 кГц синхронизирована со шкалой
UTC. На каждой передающей станции имеются цезиевые стандарты частоты,
186
Рис. 72. Принцип сличения часов
через искусственный спутник Земли.
Станция
1
Станция
2
ТР
определяющие стабильность
временных параметров импуль¬
сов. Существуют два способа
временной привязки по сигна¬
лам LORAN-C. Первый способ,
грубый, использует секундные
импульсы, излучаемые станция¬
ми в промежутках между серия¬
ми. Развертка осциллографа
синхронизуется секундными
импульсами местных часов, и
на экране визуально отмеряет¬
ся задержка между принимае¬
мым секундным импульсом
станции LORAN-C и началом луча. Точность при таком способе ± 20 мкс.
Второй способ, точный, использует тонкую структуру радиоимпульсов се¬
рий, и для этого требуется применение специального приемника, включаю¬
щего в себя устройство стробирования импульсов и фазовой автоподстрой¬
ки местного генератора под несущую частоту принимаемых радиоимпуль¬
сов. В приемнике генерируется серия импульсов, аналогичная серии пере¬
дающих станций LORAN-C, и с помощью измерителя интервала времени
делается привязка к первым трем периодам несущей частоты внутри им¬
пульса. При таком способе может быть достигнута точность в несколько де¬
сятых микросекунды. Начальная привязка при этом должна быть не хуже
± 20 мкс. Более подробные сведения о системе LORAN-C как средстве
сличения часов содержатся в [173].
5.4. Синхронизация с помощью искусственных спутников Земли
5.4.1. Сличение времени через спутник-ретранслятор. В системах РСДБ ре¬
ального времени (гл. 12) для передачи основных широкополосных сигна¬
лов от источника используется геостационарный спутник связи — ретранс¬
лятор. Перед началом наблюдений этот же спутник может быть использо¬
ван и для ’’сличения” электронных часов [174]. На рис. 72 показана прос¬
тейшая схема взаимной синхронизации через спутник. Обе станции в момен¬
ты То 1 и То 2 по своим часам передают друг другу импульсные сигналы, ко¬
торые принимают в моменты и Т2 по часам этих станций: 7\ = Т02 + Тр и
Т2 = TOi * Тр, где Тр — время распространения плюс задержка ретрансля¬
ции. Обменявшись отсчетами Ту пТ2, обе станции могут найти первоначаль¬
ную рассинхронизацию То 1 - TQ2 = Ту - 12. Точность метода зависит от
формы импульсов; с учетом ширины полосы телевизионных стволов спут¬
ников-ретрансляторов (до 5-^10 МГц) возможна точность до 0,1 мкс, что
вполне достаточно для первоначальной привязки часов, необходимой
в РСДБ.
5.4.2. Глобальные спутниковые навигационные системы. В конце 70-х го¬
дов началось развертывание глобальной навигационной системы NAVSTAR
[175]. В полном объеме NAVSTAR должна войти в строй к 1987 г., система
187
включает в себя 24 спутника на высотах 20 тыс. км. Одновременно в зоне
видимости будет не менее 6 спутников.
На спутниках установлены квантовые стандарты (рубидиевые и цезие¬
вые) и производится постоянная корректировка спутниковых часов из цент¬
ра управления. Использование сигналов этих спутников различными пунк¬
тами РСДБ позволит быстро произвести ’’привязку” показаний часов с точ¬
ностью до нескольких микросекунд. Для этого необходимо иметь специаль¬
ные приемники, согласованные с сигналами NAVSTAR, расшифровав кото¬
рые, можно наряду с большим объемом различной навигационной информа¬
ции, получить и спутниковое время.
Глава 9
ТЕХНИКА РСДБ: ПЕРЕДАЧА СИГНАЛОВ
Передача сигналов от приемников к коррелятору является основной
проблемой в РСДБ. От первых наблюдений 1967 г. до настоящего вре¬
мени (1981 г.) единственный широко применяемый способ передачи сиг¬
налов — это запись их на магнитную ленту в пунктах, где находятся антен¬
ны, и последующая пересылка лент в центр обработки. В различных орга¬
низациях имеется по крайней мере семь типов систем магнитной записи.
Описания четырех из них будут приведены в настоящей главе. По способу
записи эти системы можно разделить на цифровые и аналоговые.
Основная задача, стоящая перед конструкторами систем магнитной запи¬
си в РСДБ, — это повышение плотности записи и увеличение количества бит
на единицу площади магнитной ленты. Если первые системы имели очень
низкую плотность записи (2,5 бит/мм2), то последние разработки дос¬
тигли плотности, близкой к оптической регистрации на фотопленку
(2500 бит/мм2). Прогресс в области записи телевизионных сигналов на
магнитную ленту, в частности, внедрение цифрового телевидения, дает
возможность использовать в РСДБ видеомагнитофоны со скоростями
Рис. 73. Классификация систем передачи сигналов РСДБ.
188
записи 100 Мбит/с при ’’оптической” плотности регистрации на магнит¬
ной ленте.
Эксплуатационные трудности систем с магнитной записью (ограничен¬
ность полосы записи, невозможность обработки данных в реальном време¬
ни) заставили обратиться к другому способу передачи сигналов — исполь¬
зованию спутников связи. Современные геостационарные ИСЗ связи имеют
широкую общую полосу передачи сигналов (более 1000 МГц) и могут обес¬
печить одновременную работу 10 антенн в режиме РСДБ. Сдерживающим
фактором является высокая цена аренды каналов связи. Таким образом,
еще один способ классификации систем передачи сигналов — это возмож¬
ность или невозможность обработки данных в реальном времени. Следует
заметить, что при наблюдении сильных источников радиосигналов (большое
отношение сигнала к шуму) достаточно использования узкополосных кана¬
лов, например, телефонных линий (полоса несколько килогерц). Развитие
кабельного телевидения, по-видимому, сделает возможным применение ка¬
бельных, волноводных; оптических (волоконных) линий, имеющих ско¬
рость передачи от 5 до 1000 Мбит/с. На рис. 73 приведена схема классифи¬
кации систем передачи сигналов, которая учитывает как достигнутые ре¬
зультаты, так и возможные перспективы.
Перейдем теперь к более подробному описанию некоторых систем.
§ 1. ЦИФРОВЫЕ СИСТЕМЫ С МАГНИТНОЙ ЗАПИСЬЮ
1.1. Знаковая корреляционная функция
В результате последнего преобразования частоты, после видеоконверто¬
ра (гл. 8, § 4), спектр шумового сигнала ограничен полосой 0 + Af, т.е. при¬
обретает вид спектра так называемого видеосигнала. В цифровых системах
магнитной записи видеосигналы х (г) и у (г) на пунктах проходят следую¬
щие ступени дальнейшего преобразования: ограничение по нулевому уров¬
ню (клиппирование) (рис. 74, а, 6) и временное квантование с частотой
fs = 2 (рис. 74, в, г). В процессе клиппирования вместо исходных про¬
цессов х (t) и у (г) получаются их знаковые функции sgn [х (г)] и sgn fy (г)]:
( 1 при х (Г) > 0,
sgn [х(г)] = | 0 при* (Г) = 0, (9.1)
—1прих(г)<0.
Имея сигналы sgn [х (г)] и sgn fy (г)], можно вычислить их знаковую взаим¬
ную корреляционную функцию — ВКФ, для стационарных и эргодических
процессов х (г) и у (г) будем иметь
Рху(т)= s8n (0] sgn [у (t - ’■)] dt ■ (9.2)
Для нормальных стационарных эргодических случайных процессов су¬
ществует связь между знаковой ВКФ Рху(т) и обычной нормированной
ВКФрху (т) [179, 180]:
Рху(т) =— arcsin рху(т) или рху(т) = sin Г — р*ху (т)]. (9.3)
л L 2 J
189
t
z(t)
sgn[x]
“1 I II
СИ
6)г
IIIIIIIIIIIIIIIIIIIIIIIIIIIIII
ф
lllll IIIIIIIHI IIIIII
ф
t
t
t
Рис. 74. Преобразования сигнала в
РСДБ: а) исходный шумовой видео¬
сигнал, б) клиппированный сигнал, в)
синхроимпульсы (СИ), г) сигнал после
амплитудного и временного кванто¬
вания.
(9-4)
При малых значениях рху(т)
2
0*ху(т)^ Рху (т).
7Г
В силу стационарности и эргодич¬
ности х (г) и у (t) временное осред¬
нение на интервале Т в соответствии
с формулой (9.2), по существу, означает подсчет вероятности совпадения
знаков рХу процессов x(f) и y(t) минус вероятность несовпадений знаков
Яху, т.е. р$у(т) = рху(т) - qXy(r). Так как р +q = 1, то
Рху(?)~ 2рХу (т) — 1. (9.5)
Величина р (т), в свою очередь, равна сумме вероятности совпадений только
положительных и только отрицательных знаков:
Рху (т) = рГу(т) +piy(T) • (9-6)
Для случайных процессов с нормальным распределением и нулевым сред¬
ним рху = р~хУ , и тогда
Рху(т) = 4Рху О’) - 1 = 4р ” (т) - 1.
(9.7)
Таким образом, знаковую ВКФ можно вычислить, используя только те ин¬
тервалы, где знаки х (t) и у (?) или только положительны, или только отри¬
цательны. Это обстоятельство удобно примените на практике, так как ре¬
альные клиппирующие устройства (двухуровневые) работают в соответст¬
вии с таким соотношением:
( 1 при х (t) >0,
sgn[x(z)]= (9.8)
[ 0при х (г)<0,
т.е. происходит не трехуровневое (формула (9.1)), а двухуровневое кван¬
тование сигнала. Связь между нормированной ВКФ и знаковой ВКФ, учи¬
тывающей только совпадения знаков, дается следующей формулой:
Рху (Т) = - C0S 21ТРху (т) = - cos 27ГРХу (т).
(9.9)
Вычисление знаковой ВКФ по формуле (9.2) соответствует аналоговой тех¬
нике корреляции. В цифровых же системах необходимо выполнить времен¬
ной квантование, т.е. с помощью сетки синхроимпульсов (рис. 74, в) полу¬
чить временные выборки клиппированного сигнала (рис. 74, г). В результа¬
те получается случайная последовательность единиц и нулей, которая вмес¬
те с сопутствующей синхропоследовательностью записывается на магнит-
190
ную ленту. Период синхроимпульсов Д t определяется граничной частотой
видеосигнала Д/:
Дг =
1
2Д/
(9.Ю)
Следует отметить, что утверждение о том, что временное квантование
с таким периодом сделано в соответствии с теоремой отсчетов, не совсем
верно, так как клиппированный сигнал sgn [х (/)], в отличие от х (г), уже не
ограничен полосой Д/. Это обстоятельство необходимо учитывать при рас¬
чете отношения сигнала к шуму на выходе коррелятора (гл. 10, § 3).
Знаковая ВКФ после временного квантования на интервале времени
NAt = Т для сдвига т = &Дг, т < Г, вычисляется следующим образом:
— S sgn [х (/ДГ)] sgn [х (/ДГ - А;ДZ1)] .
N i = 1
(9.11)
1.2. Система MARK-I
Основной особенностью системы MARK-I является применение маг¬
нитофонов от универсальных цифровых ЭВМ, что позволяет обрабатывать
записи на этих машинах, причем и корреляция и все остальные операции,
необходимые для реализации интерферометрического режима, осуществ¬
ляются программным способом. Уже первые наблюдения с РСДБ провоз
дались с устройствами этого типа [181]. Существуют несколько описаний
систем типа MARK-I [181 — 184]. На рис. 75 изображена блок-схема уст¬
ройства регистрации такой системы, размещаемого непосредственно на
пункте РСДБ. Шумовой сигнал после видеоусилителя в полосе 0 -г Д/(Д/=
= 360 или 250 кГц, в зависимости от типа магнитофона и ЭВМ) клиппиру¬
ется и квантуется во времени с помощью синхроимпульсов с частотой
Fs~2 сформированных от опорного сигнала стандарта частоты (обыч¬
но 5 МГц). Выборки клиппированного сигнала вводятся последовательно
в 8-разрядный регистр сдвига (количество разрядов равно количеству
дорожек магнитофона, предназначенных для записи основной информа¬
ции).
Одновременно формируется контрольный бит четности для записи
на дополнительную дорожку. Такая форма записи на магнитную ленту при¬
нята в ЭВМ типов IBM, ЕС и является международным стандартом
(рис. 76, а). За несколько секунд до начала записи на пунктах включаются
лентопротяжные механизмы магнитофонов. Запись сигналов на различных
пунктах начинается по ’’одноименному” минутному импульсу от электрон¬
ных часов, которые перед регистрацией сверены с минимально возможной
ошибкой (меньше 3^-5 мкс). После ввода каждых 8 бит информации
в сдвиговый регистр эти 8 бит (байт) и контрольный бит четности записы¬
ваются параллельно на 9-дорожечный магнитофон. Запись ведется зонами
длительностью 0,1 -г 0,2 с, состоящими из определенного числа байтов. Дли¬
на зон определяется, как правило, объемом оперативной памяти той ЭВМ,
на которой будет производиться корреляционная обработка. Зоны разделя¬
ются межзонными промежутками (отсутствием записи на магнитной лен¬
те) , в конце каждой зоны записываются контрольные байты. Возможна за¬
пись вспомогательной информации (например, код времени) в начале каж-
191
От приемника
Рис. 75. Блок-схема устрой¬
ства записи в системе MARK-L
Рис. 76. Форматы записи на
магнитную ленту: а) система
MARK-I,^) система MARK-II;
нк - начало полукадра, кк -
конец полукадра.
дой зоны. Длина магнитной ленты равна 500 + 750 м, и при скорости 2 м/с
можно непрерывно записывать сигналы в течение 4^6 минут.
Цифровая форма записи, применяемая в системе MARK-I, удобна для
корреляционной обработки, так как на магнитной ленте постоянно содер¬
жится информация о текущем времени при регистрации на каждом пунк¬
те: деление всего потока йа биты, байты, зоны позволяет просто произво¬
дить совмещение двух потоков, записанных на разных пунктах, и в случае
сбоев и выпадений отдельных бит выравнивать снова сигналы во времени,
пользуясь такой дискретной (по времени) формой записи. Возможность
проводить обработку на универсальной ЭВМ программным способом — это
одновременно и достоинство и недостаток системы MARK-I; достоинство,
поскольку программная реализация алгоритма обработки — наиболее гиб¬
кая форма; недостаток, поскольку от ЭВМтребуются повышенные характе¬
192
ристики по быстродействию — на одной ленте умещается в среднем 10 8 бит,
и для того чтобы обработка занимала умеренное машинное время (менее
1 часа на пару лент), целесообразно применять ЭВМ типа ЕС-1040 и более
мощные модели. Дело осложняется еще и тем, что ЭВМ не имеют в своей
системе команд операции подсчета совпадающих бит в паре байт или слов,
поэтому побитное сравнение 108 бит отнимает основное время при обра¬
ботке (см. [186], где содержатся рекомендации по оптимизации алгорит¬
мов вычисления знаковой корреляционной функции).
Таким образом, основными достоинствами системы типа MARK-I яв¬
ляются: а) гибкость обработки на универсальной ЭВМ и б) простота систе¬
мы записи. Недостаток — узкая полоса регистрации, так как магнитофоны
от ЭВМ, применяемые в системе MARK-I, не предназначены для регистра¬
ции с максимальной плотностью, допускаемой магнитной лентой; задача
этих магнитофонов — запись с высокой надежностью; в то время как для
целей РСДБ вполне допустимы 1%-ные потери информации. Необходимо
заметить, что система MARK-I применяется и в настоящее время в радио¬
астрономических наблюдениях в режиме синтеза широкой полосы (гл. 8,
§2,4). Для ускорения процесса корреляции в обсерватории Хэйстэк соз¬
дан спецпроцессор, работающий совместно с ЭВМ CDC 3300.
1.3. Система MARK-II
Основными факторами, определяющими чувствительность РСДБ, явля¬
ются полоса и время регистрации (гл. 10, § 2). Для увеличения этих пара¬
метров в НРАО (США) была разработана более совершенная, чем MARK-I,
система, основанная на применении видеомагнитофона и получившая наз¬
вание MARK-II. Эта система является наиболее распространенной; в мире
имеется более 20 комплектов регистрирующей аппаратуры MARK-II [182,
185,191,192].
От приемника
Рис. 77. Блок-схема устройства записи в системе MARK-II.
193
На рис. 77 показана блок-схема устройства записи. Сигнал от приемника
в видеополосе 0^-2 МГц клиппируется и квантуется по времени синхросиг¬
налами с частотой 4 МГц. В отличие от многодорожечных накопителей на
магнитной ленте от ЭВМ, видеомагнитофон имеет одну основную дорожку,
информация на которой записывается под углом к направлению движения
ленты (см. рис. 76, б). В первом варианте системы MARK-I1 в магнитофо¬
не АМРЕХ VR 660 С диск с диаметрально расположенными двумя головка¬
ми записи-воспроизведения (блок головок) вращается с частотой 30 об/с
(в советских магнитофонах эта частота равна 25 об/с). Лента охватывает
диск по спирали одним витком, и в течение каждой половины оборота од¬
на из головок соприкасается с лентой, движущейся со скоростью 9,4 см/с.
Относительная скорость блока ’’головка - лента” равна 1650 см/с. Налей¬
те при записи получаются последовательности треков, расположенных нак¬
лонно, при этом достигается высокая плотность записи — 800 бит/мм2.
Данные о видеомагнитофонах содержатся в табл. 24. Каждый бит инфор¬
мации должен записываться вместе с сопутствующим синхроимпульсом.
Поскольку дорожка одна, применяется специальный самосинхронизирую-
Таблица 24
Параметры систем регистрации РСДБ
Система
Марка
магнито¬
фона
Тип
Ширина
ленты
(мм)
Плотность записи
Максималь-
ная частота
СИ
линейная
(бит/мм)
на ед. пло¬
щади
(бит/мм2 )
MARK-1
(США)
АМРЕХ
ТМ-16
(США)
ВУ
ЭВМ
12,7
32
2,5
720 кГц
Советский
аналог
НМЛ-67
(СССР),
ЕС5012
(Болга¬
рия)
12,7
32
2,5
512 кГц
MARK-II
(США)
АМРЕХ
VR 660 С
TV
50,8
240
800
4 Мбит/с
IVC 825 А
TV
25,4
670
2060
4 Мбит/с
MARK-1II
НО NEY-
WELL-96
25,4
1,3 • 103
1,44 • 103
8 Мбит/с
на дорож¬
ку
8 X 28 =
=224 Мбит/с
Канадская
(аналого¬
вая
IVC800-
-900
Кассетный
TV
TV
25,4
1800
8 МГц
3,5 МГц
194
щийся код, позволяющий восстановить синхроимпульсы из потока инфор¬
мационных сигналов. Модулятор, на который подаются основной поток
информационных бит и синхроимпульсы, формирует бифазный цифровой
код (’’манчестерский”). При частоте повторения синхроимпульсов 4 МГц
эффективная полоса, занимаемая сигналом, кодированным по принципу
бифазного кодирования, занимает примерно полосу 2^4 МГц, что хорошо
вписывается в частотную характеристику записи-воспроизведения видео¬
магнитофона.
Для обеспечения высокой надежности сохранения информации о теку¬
щем времени в основной поток сигнала замешиваются вспомогательные
метки — синхрослова, которые можно надежно выделить при воспроизве¬
дении. Сам формат записи на видеомагнитофон (разбиения на поля дли¬
тельностью 1/60 с) подсказывает принцип введения этих меток. На рис. 78
показан формат записи на видеодорожке магнитофона. В начале каждого
поля (полукадра), соответствующего 1 треку на магнитной ленте, запи¬
сывается 24-битовое стартслово (для выделения последующей вспомога¬
тельной информации) и затем двоичный код номера поля внутри интервала
Максималь¬
ное время
записи
Способ
записи
Нали¬
чие
пере¬
мен¬
ной
ско¬
рости
Коли¬
чество
доро¬
жек
Скорость
движения
ленты
Цена
магни¬
тофона
Длительность
обработки
Количество
систем
3.4-5
БВН
нгг
8
2 м/с
1ч
мин
IBM 360/50
МИТ
3 мин IBM
HP АО (20
360/95
сист.)
7 мин
8
2 м/с
4000 р
. 1 ч ЕС-1033
ИКИ, САО,
(100 с записи)
НИРФИ,
ГАО, БАО
Зч
Бифаз¬
1
16,5 м/с
8000 Реальное время
НРАО
ная
(относ.
ДОЛ.
(19 систем
коди¬
ровка
головок)
записи)
1 ч
” 1
5500 дол.
7 ч при
БВНМ
есть 28
6,1 м/с
350 000 дол.
НРАО
4 Мбит/с
и 15 мин
(макс, м)
при
112 Мбит/с
3.5 ч
анало¬
нет
6,91 дюйм/с
говый
4 4-6 ч
900 дол., цена
кассеты 20 дол.
195
1 с. Кроме того, само поле разбито на группы по 512 мкс с помощью специ¬
альной повторяющейся комбинации единиц и нулей. На звуковой дорожке
•каждые 1/60 с записываются код номера поля, секунд, минут, часов, суток
(всего 16 бит). Таким образом, применяемый формат записи (иерархия
временных меток: синхроимпульсы, группы, поля, секунды, минуты) обес¬
печивает надежное хранение времени, необходимое для точного и непрерыв¬
ного совмещения лент при воспроизведении даже при наличии сбоев, выпа¬
дений импульсов из-за дефектов лент и прочих помех в течение всего интер¬
вала обработки, — до нескольких десятков минут.
Воспроизведение и обработка сигналов, записанных на видеомагнитофо¬
нах, производится на специальном процессоре, представляющем собой слож¬
ный комплекс, управляемый мини-ЭВМ (рис. 79). Системы управления
движением блока головок и ленты магнитофонов имеют возможность синх¬
ронизации от внешнего источника синхросигналов. Два видеомагнитофона
можно привести в режим более или менее синхронного считывания с неко¬
торой случайной относительной задержкой, определяемой нестабильностью
блока головок — для VR 660 С ± 100 мкс. Из потока цифровых сигналов,
считанных с магнитофонов, в демодуляторах восстанавливается основной
информационный сигнал и синхроимпульсы. Дешифратор синхросигналов
выделяет метки времени и управляет процессом совмещения сигналов.
Для компенсации относительной нестабильности магнитофонов имеется
буферная память, емкость которой достаточна для того, чтобы ’’выбрать”
эту нестабильность. Перед тем как ввести данные с магнитофонов в бу¬
ферную память, один из потоков дополнительно задерживается, для того
чтобы скомпенсировать геометрическую задержку (сопровождение по
задержке) . Величина этой задержки задается от управляющей ЭВМ, в кото¬
рой производится ее расчет в реальном масштабе времени. Таким образом,
после вывода сигналов из буферной памяти между ними в идеальном слу¬
чае (в отсутствие временных ошибок из-за неточности расчета) должна быть
максимальная корреляция, так как они соответствуют одному волново¬
му фронту, приходящему на антенны радиоинтерферометра. В реальных
условиях, однако, приходится делать перебор задержек и применять мно¬
гоканальный коррелятор. В системе MARK-П HP АО использован прин¬
цип знакового коррелятора, который применяется в радиоспектроско-
Старт-
слово
Номер
поля
Секунды
Минуты
Часы
Р и с. 78. Организация данных на магнитной ленте в системе MARK-II.
196
Рис. 79. Блок-схема спецпроцессора обработки сигналов в системе MARK-II.
пии [187, 195]. Перед вводом сигналов в коррелятор производится аппа¬
ратная компенсация частоты интерференции (сопровождение по частоте) .
Специальный генератор интерференционной функции, управляемый от
ЭВМ (частота и фаза вычисляются в реальном времени), вырабатывает два
квадратурных сигнала — меандра, которые вместе с основным информаци¬
онным сигналом подаются на логические схемы ’’ИСКЛЮЧЕННОЕ ИЛИ”,
где происходит цифровое гетеродинирование (гл. 10, § 1). Поэтому кор¬
релятор разделен на две части, по 31 каналу каждая, в которых отдельно
вычисляются синусная и косинусная составляющие взаимной корреляци¬
онной функции (ВКФ). Через каждые 0,2 с значения ВКФ (31 канал по
двум квадратурным составляющим) с помощью ЭВМ записываются на
магнитную ленту в формате, позволяющем дальнейшую обработку на
более мощной ЭВМ. Одновременно часть массива (12 каналов) выводится
на экран дисплея с запоминанием. В случае сильного источника оператор
может визуально обнаружить присутствие сигнала (интерференционной си¬
нусоиды остаточной частоты из-за неточной компенсации по частоте) в ка¬
ком-либо канале коррелятора. Более подробно процедура обработки будет
рассмотрена в гл. 10, § 1.
Для обеспечения работы комплекса обработки создан большой объем
программного обеспечения, включающий в себя алгоритмы управления
аппаратурой и первичной обработки сигналов.
197
В настоящее время имеется три процессора MARK-II (в НРАО и в Ка¬
лифорнийском технологическом институте) , а также в Эффельсберге(ФРГ).
Сделаны дальнейшие усовершенствования в системе: переход на более на¬
дежный видеомагнитофон IV С825А (826Р), введение режима одновремен¬
ной обработки магнитных лент по 228 каналам, аппаратная реализация ал¬
горитма преобразования Фурье, возможность обработки сигналов одновре¬
менно с трех и более видеомагнитофонов. В последние годы делается пере¬
ход на бытовые видеокассетные магнитофоны, что позволит резко умень¬
шить габариты и стоимость аппаратуры записи и магнитных лент.
1.4 Система MARK-III
Самая совершенная на сегодняшний день система регистрации MARK-II1
разработана в НРАО и в обсерватории Хэйстэк [188]. В основу положен
28-дорожечный магнитофон Honeywell-96. На каждой дорожке можно запи¬
сывать поток данных со скоростью 4 Мбит/с, запись продольная. Запись
сигналов ведется параллельно по 28 частотным каналам, необходимо
иметь 28 видеоконверторов и, таким образом, можно проводить наблюде¬
ния в общей полосе 56 МГц (112 Мбит/с). Предполагается в дальнейшем
расширить эту полосу в 2 раза — до 112 МГц (224 Мбит/с). При наблю¬
дении спектральных линий имеется возможность с помощью набора фильт¬
ров уменьшить полосу сигнала, записываемого на каждую дорожку, при
этом пропорционально снижают и скорость движения ленты, что позволя¬
ет увеличить время наблюдений. Магнитофон имеет набор скоростей от
45,2 см/с (время записи 21 ч) до 609 см/с (время записи 10 мин). При
записи в целях контроля можно одновременно делать считывание по од¬
ной выбранной дорожке. Всем комплексом аппаратуры регистрации управ¬
ляет мини-ЭВМ НР21МХ. В системе MARK-III разработан и новый много¬
канальный коррелятор, позволяющий обрабатывать данные одновремен¬
но по трем базам (8 задержек по каждой) и по всем 28 каналам одновре¬
менно. Наличие переменной скорости ленты позволяет в тех случаях, ког¬
да записывалась узкая полоса (менее 4 Мбит/с), производить считывание
и обработку быстрее реального времени наблюдений. Система MARK-II1
увеличивает на порядок чувствительность РСДБ-наблюдений, и ее предпо¬
лагается положить в основу при создании VLBA - Very Long Baseline Array
(’’Глобальная антенная решетка”) (гл. 12, § 4).
§ 2. АНАЛОГОВАЯ СИСТЕМА МАГНИТНОЙ ЗАПИСИ
В Канаде в 1967 г. совместными усилиями нескольких организаций
(радиообсерватория в Доминионе, Торонтский университет, университет
Куине)1 была разработана система записи и обработки для РСДБ, основан¬
ная на принципах аналоговой техники [190]. В дальнейшем эта система бы¬
ла значительно усовершенствована [182, 189].
В качестве устройства регистрации применяется видеомагнитофон
I VC 800 или 1 VC 900. Данные этого прибора приведены в табл. 22. Времен¬
ная ошибка (несохранение временных соотношений) равна 1 мкс. На
рис. 80 представлена блок-схема системы записи. Из сигнала атомного стан¬
дарта частоты формируется вспомогательный синхронизующий сигнал с
частотой 1,008 МГц, который служит для выработки синхроимпульсов за-
198
от антенны
Рис. 80. Блок-схема устройства записи аналоговой системы РСДБ.
писи: строчных и кадровых. Формат записи на видеомагнитофоне такой же,
как и при обычной записи телевизионных изображений. Видеосигнал в по¬
лосе 0-^4 МГц после второго смесителя в обычном аналоговом виде сме¬
шивается с кадровыми (частота 60 Гц) импульсами и строчными (частота
15 750 Гц) импульсами и после обычного в видеозаписи переноса спектра
с помощью частотной модуляции (частота несущей 5,5 МГц) записывается
на видеомагнитофон. Качество записи контролируется одновременно в про¬
цессе регистрации по каналу чтения. Через каждые 4 кадра на звуковую до¬
рожку записывается 42-разрядный код времени (период импульсов 1,6 мс),
который содержит часы, минуты, секунды и номера кадров. Использование
этой информации при обработке позволяет сделать первичное ’’выравнива¬
ние” лент на двух видеомагнитофонах в пределах 1 мс.
Сопровождение по задержке и частоте интерференции осуществляется
на одном из пунктов. Специальная управляющая ЭВМ непрерывно рас¬
считывает, исходя из геометрии наблюдения, необходимые поправки и пос¬
ле цифроаналогового преобразования управляет частотой второго гетеро¬
дина (компенсация частоты интерференции) и, кроме того, подстраивает
частоту синхрогенератора основной частоты 1,008 МГц в небольших преде¬
лах для изменения временного масштаба записи на этом пункте, т.е. изме¬
няет частоту кадровых и строчных синхроимпульсов (компенсация задерж¬
ки) . Начальная задержка вводится вручную. Преобразование частоты видео¬
сигнала до записи производится обычными неквадратурными смесителя¬
ми, и РСДБ работает в двухполосном режиме.
199
Рис. 81. Блок-схема спецпроцессора обработки сигналов в аналоговой системе РСДБ.
На рис. 81 дана блок-схема системы обработки. Вспомогательный опор¬
ный генератор на частоте 1,008 МГц служит для выравнивания скоростей
двух видеомагнитофонов при воспроизведении. Скорость головок и лент
определяется частотой внешних генераторов синхроимпульсов, работаю¬
щих от общего опорного генератора, причем перед формирователем синхро¬
импульсов в одном из каналов введена фазосдвигающая цепь, которая поз¬
воляет замедлять или ускорять поток данных с соответствующего магни¬
тофона. Как уже говорилось, временная ошибка 1\С 900 равна 1 мкс. Для
уменьшения этой величины после воспроизведения в оба канала введены
корректоры временной шкалы (выпускаемые промышленностью), кото¬
рые уменьшают ошибку рассогласования по времени до ± 20 нс. Начальное
200
выравнивание сигналов с магнитофонов делается вручную путем
изменения фазового сдвига синхросигнала с помощью визуального
контроля.
Перед проведением операции корреляции синхроимпульсы исключаются
из видеосигнала. Для переноса интерференционного сигнала .надостаточ¬
но высокую частоту (несколько сотен герц) один из видеосигналов модули¬
руется по амплитуде с частотой 500 Гц и подается на линию задержки с отво¬
дами. 24-канальный аналоговый коррелятор используется для поиска мак¬
симальной корреляции; после коррелятора сигналы демодулируются (вы¬
деляются сигналы на частоте 500 Гц), осредняются, преобразуются в циф¬
ровую форму и вводятся в ЭВМ для вторичного накопления и обработки.
В такой аналоговой системе отношение сигнала к шуму в 2 раза выше, чем
в системе MARK-П, так как полоса записи в 2 раза больше и отсутствуют
потери на клиппирование. В то же время остаточные флуктуации,задержки
± 20 нс оказывают мешающее действие при точных измерениях задержки.
§ 3. РСДБ С РЕТРАНСЛЯЦИЕЙ ЧЕРЕЗ ИСЗ
Все описанные выше системы записи и обработки для РСДБ имели
существенные недостатки, связанные с принципом независимой записи
на магнитную ленту:
1) для проведения непрерывных наблюдений необходимо большое коли¬
чество магнитной ленты, которая долго обрабатывается;
2) невозможно работать в реальном времени, процесс обработки отделен
от процесса записи неделями и месяцами;
3) магнитофоны ограничивают полосу пропускания системы, что
снижает отношение сигнал/шум и точность измерения по задержке;
4) применение независимых гетеродинов ограничивает возможности сис¬
темы по точности из-за фазовой взаимной нестабильности.
Применение систем типа MARK-III и улучшение стабильности водород¬
ных стандартов до 10-15 улучшает положение по пунктам 3 и 4, но остает¬
ся невозможность работы в реальном времени.
Большие перспективы открываются при использовании связных искус¬
ственных спутников Земли (ИСЗ) для ретрансляции необходимых сигна¬
лов. В ноябре 1976 г. были проведены первые наблюдения с РСДБ с гео¬
стационарным спутником связи ’’Гермес”, связавшим два радиотелескопа
в Грин Бэнк (США) и Алгонкуине (Канада) [193]. Блок-схема на рис. 82
показывает примерный состав оборудования. Гетеродины при этих наблюде¬
ниях были независимы, применялись водородные стандарты. Клиппирован¬
ный сигнал в полосе 0-^10 МГц, квантованный по времени с частотой
20 МГц, передавался через спутник из Грин Бэнк в Алгонкуин. Для компен¬
сации задержки ретрансляции (~0,25 с) была разработана специальная
цифровая линия задержки, работающая на тактовой частоте 20 МГц (5500
регистров сдвига по 1024 бит каждый). Применялась обычная для РСДБ
корреляционная обработка — 64 канала с компенсацией частоты и геомет¬
рической задержки. За 45 часов были проведены наблюдения 18 источни¬
ков, в реальном времени была видна интерференционная картина от 10 из
них. Эти наблюдения ярко продемонстрировали возможности создания се¬
ти радиотелескопов, связанных через геостационарный ИСЗ, причём переда¬
ча сигналов гетеродинов и точного времени позволяет создать уникальную
201
Рис. 82. Блок-схема эксперимента с передачей сигнала РСДБ через геостационарный
спутник связи.
РСДБ-систему, позволяющую решать много фундаментальных и приклад¬
ных проблем (гл. 12).
Для компенсации задержек, имеющихся в спутниковой системе переда¬
чи данных, наиболее предпочтительным является использование цифровых
принципов — передача данных в дискретной форме вместе с иерархией син¬
хросигналов. Это позволяет устранить сбои из-за помех и компенсировать
переменные во времени задержки распространения (атмосфера, движе¬
ние ИСЗ).
§ 4. УЗКОПОЛОСНЫЕ СИСТЕМЫ РСДБ
ДЛЯ РАБОТЫ С КОСМИЧЕСКИМИ РАДИОМАЯКАМИ
Возможность использования РСДБ для наблюдений искусственных ис¬
точников радиоизлучения была показана в работах [110,194]. Рассмотрены
были и потенциальные перспективы этого метода [110] . Все эти работы го¬
ворят о том, что использование радиомаяков вместо слабых естественных
202
Рис. 83. Блок-схема аппарату¬
ры пункта РСДБ при использо¬
вании многочастотного синусои¬
дального сигнала.
Рис. 84. Блок-схема аппарату¬
ры пункта РСДБ при использо¬
вании случайного шумового сиг¬
нала.
Рис. 85. Блок-схема аппарату¬
ры пункта РСДБ при использо¬
вании детерминированного сиг¬
нала сложной формы.
Рис. 83
Рис. 84
На центр обработки
Рис. 85
космических источников поможет решить важнейшие прикладные и фунда¬
ментальные задачи. В настоящее время целесообразно ставить вопрос о соз¬
дании специализированных (’’малых”) РСДБ-систем, включающих в себя
и специальные активные источники сигналов, и наземную аппаратуру.
В [110] показано, что с ’’энергетической” точки зрения (отношения сигнала
к шуму) достаточно устанавливать на радиомаяке (ИСЗ) маломощные
передатчики (порядка 1 Вт), излучающие сигналы следующих трех типов:
1) многочастотный синусоидальный,
2) случайный шумовой,
3) детерминированный шумоподобный.
Для каждого из этих сигналов необходимо разработать наземную аппара¬
туру на пунктах, учитывая два обстоятельства: а) требование оперативнос¬
ти, т.е. работа в реальном масштабе времени; б) простота регистрирую¬
щей техники благодаря узкополосности или малой базе сигналов (произве¬
дения полосы Д/ на длительность Т) . Рассмотрим три возможные блок-схе¬
мы аппаратуры пункта ’’малого” РСДБ.
1. Многочастотный синусоидальный сигнал (рис. 83).
Приемник имеет достаточно широкую полосу для предварительного уси¬
ления и преобразования всех составляющих сложного спектра входного
сигнала. Набор смесителей, число которых равно числу синусоидальных
компонент, служит для последнего преобразования спектра к низкой часто¬
те (менее 1 кГц). Гетеродинные сигналы на всех ступенях преобразова¬
ния формируются от опорного сигнала стандарта частоты. Сигналы с пони¬
женной частотой с выходов смесителей (СМ) через коммутатор поданы на
аналогоцифровой преобразователь (АЦП), который ’’оцифровывает” сину¬
соидальные сигналы. Отсчеты вводятся в измеритель частот и фаз, который
может быть выполнен как специальный процессор или как универсаль¬
ная микро ЭВМ, в которой ’’зашита” программа обработки. Отсчеты
частоты и фазы • передаются в центр обработки по телефонным кана¬
лам связи.
2. Случайный шумовой сигнал (рис. 84). В этом случае ап¬
паратура мало отличается от обычного РСДБ, сигнал подвергается жестко¬
му амплитудному ограничению (клиппированию) и временной дискретиза¬
ции. Опорный сигнал от стандарта частоты используется для формирования
гетеродинных сигналов и синхропоследовательности при временном кван¬
тований. Требуемый сигнал имеет небольшую базу, порядка 106 4-107 бит,
и, несмотря на полосу « 10 МГц, может быть записан в буферную память —
полупроводниковое ОЗУ. В промежутке между сеансами приема, при необ¬
ходимости, делается перезапись данных на узкополосный кассетный магни¬
тофон, а также возможна немедленная передача данных в центр обработки
с помощью модема. Современные телефонные цифровые линии связи рабо¬
тают со скоростями 4800 4-9600 бит/с, что позволяет передать пакет дан¬
ных объемом 107 бит за 5 • 103 с (скорость передачи 4800 бит/с) . В центре
обработки производится корреляция нескольких потоков данных с пунк¬
тов наблюдений, т.е. благодаря применению простой линии связи обработка
может быть сделана с небольшим запаздыванием.
3. Детерминированный шумоподобный сигнал
(рис. 85). В этом случае радиомаяк излучает сигнал сложной, но известной
формы, и копия этого сигнала формируется в генераторе опорного сигнала,
204
который синхронизирован стандартом частоты. В состав аппаратуры пункта
РСДБ входит коррелятор и измеритель задержки т и частоты F — сложные
устройства, которые, в отличие от случая централизованной обработки, дол¬
жны быть на каждом пункте. Отсчеты т и F передаются по телефонным ли¬
ниям связи в центр.
Глава 10
ТЕХНИКА РСДБ: ОБРАБОТКА ДАННЫХ
§ 1. ПЕРВИЧНАЯ ОБРАБОТКА СИГНАЛА РСДБ
В настоящее время обработка данных РСДБ, в отличие от коротко¬
базовых интерферометров, делается не в реальном времени. Магнитные
ленты привозят на центральный пункт обработки, где на универсальных
ЭВМ или в спецпроцессорах реализуются операции, которые, в конечном
счете, приводят к оценкам основных параметров радиоинтерферометри¬
ческого сигнала: амплитуды, фазы, задержки, частоты. В целом вся эта
обработка может быть разделена на два этапа.
Вначале осуществляется первичная или корреляционная обработка,
во время которой вычисляется функция взаимной корреляции между
сигналами принятыми на различных антеннах РСДБ. По существу, выпол¬
няются все те операции, которые в обычном, коротко базовом радиоинтер¬
ферометре совершаются аппаратным способом и приводят к появлению
интерференционного сигнала.
Затем осуществляется вторичная обработка, при которой делается ана¬
лиз параметров интерференционного сигнала, их статистическая оценка.
Эта часть имеет много общего с процедурами обработки сигналов в радио¬
связи, радиолокации.
Основные операции, которые необходимо выполнить в процессе пер¬
вичной обработки, следующие:
1) сопровождение по задержке;
2) вычисление знаковой взаимной корреляционной функции (ВКФ)
сигналов;
3) сопровождение по частоте;
4) корреляция неполной компенсации по задержке;
5) когерентное осреднение и фурье-анализ;
6) некогерентное осреднение (при необходимости повысить отноше¬
ние сигнала к шуму).
Блок-схема первичной обработки дана на рис. 86. Отдельные блоки,
указанные на этой схеме, могут быть реализованы программными или
аппаратными средствами в зависимости от конкретной системы.
1. Сопровождение по задержке. Напомним, что в циф¬
ровых системах РСДБ (гл. 9, § 1) шумовые сигналы перед записью на
магнитную ленту клиппируются и затем делается временная дискрети¬
зация, обычно с частотой 2 А/, где Д/ — ширина видеополосы. В РСДБ
имеются дополнительные сдвиги по времени (фазе) по сравнению с ко¬
роткобазовыми радиоинтерферометрами:
205
Р и с. 86. Блок-схема алгоритма первичной обработки сигналов РСДБ.
а) ошибка синхронизации часов на пунктах
$ТС ~ — 1 >
где тс1 2 — моменты начала записи;
б) различная задержка в тропосфере
“ ^а1 “ ^а2 ?
в) разность фаз независимых гетеродинов; сигнал гетеродина на пер¬
вом пункте имеет текущую фазу со1г t + Фх (г), на втором — со2г t + Фг (0;
г) эффект ’’запаздывающей базы” тг (часть II, гл. 1, § 3).
При сопровождении по задержке потоки единиц и нулей, считывае¬
мые с магнитных лент, необходимо задерживать на величину, тк (г), кото¬
рая компенсирует все указанные задержки и, конечно, в первую очередь —
геометрическую тг (г). Эта компенсация ^возможна только дискретны-
1
ми шагами ДГу = , равными интервалу временной дискретизации,
т.е. непрерывная кривая тк (г) заменяется ступенчатой тк'(г) (см. рис. 88).
Для РСДБ, расположенной на Земле, тг не может превосходить 40 милли¬
секунд.
2. Вычисление знаковой В К Ф. Обе записи делят на времен¬
ные отрезки длиной Т\ (7\ = NX Дг)> внутри которых вычисляется норми¬
рованная знаковая ВКФ. Исходя из априорных сведений о параметрах ба¬
206
зы и координатах источника, вычисляется начальная геометрическая за¬
держка тг0. Вводится сдвиг по времени тк = тЫ5, компенсирующий это
расчетное значение тг0 с точностью, допускаемой элементарным интервалом
&ts. Так как задержка тг0 известна с некоторой ошибкой, то необходимо
выполнить несколько сдвигов в пределах ±2Д/^, и, таким образом, одно¬
временно корреляция производится для 2L + 1 задержек:
Я(/)= S [Х1 (п)~х2 (п - т -/)] - 1, / = 0,± 1,. .. ,±L , (10.1)
и = 1
где Xi (и), х2 (п) — потоки двоичных символов (единиц и нулей) и п — соот¬
ветствует последовательной нумерации бит в потоках данных, символ
логической операции ’’эквивалентность”. После вычисления Н (!) делается
переход от Я (Z) к р (7) — обычному ’’аналоговому” коэффициенту корреля¬
ции по формуле
(Ю.2)
Здесь р(1) — нормированная величина, и если необходимо перейти к
градусам, т.е. к абсолютным величинам, то надо умножить р (/) на
V(Tai'+ Л2) (Лг + ^2)', где Та1 и Та2 - антенная температура от источ¬
ника, Гл и Ts2 — шумовые температуры систем, которые должны быть из¬
вестны из радиометрических измерений.
3. Со провожде ни е по частоте. Интервал первичного осредне¬
ния Tj =Ni Ats выбирается из следующих соображений. Фаза со0 тг, присут¬
ствующая в аргументе косинусоидального члена, меняется со скоростью, ко¬
торая приводит к результирующей частоте интерференции, достигающей в
РСДБ десятков килогерц. Интервал 7\ по этому надо выбрать таким, чтобы не
2я
было ’’замывания интерференционной синусоиды”, Т\ < ТТГ ° При
dt
таком небольшом Т\ (100 4-1000 мкс) вторичный массив чисел (после кор¬
реляции и осреднения) был бы очень велик для интервала наблюдения Т.
Чтобы сократить объем вторичного массива, применяют цифровое гетеро¬
динирование — снижение частоты интерференции до малой величины. Так
же, как и задержку, частоту интерференции FHHT вычисляют, исходя из гео¬
метрии конкретного наблюдения, поскольку FHHT меняется на интервале
наблюдения, и необходимо непрерывно ’’отслеживать” FHHT (г). Частичная
компенсация Яинт делается перед началом сеанса записи на магнитную лен¬
ту сдвигом частоты гетеродина на одном из пунктов РСДБ. Таким спосо¬
бом понижают начальное значение FHHT до нескольких десятков герц. Даль¬
нейшую компенсацию вводят во время обработки. Возможны два способа
гетеродинирования.
а) Первый способ — перед вычислением ВКФ (см. рис. 86). Програм¬
мным или аппаратным путем генерирует функции S (г) и С (г), имитирую¬
щие сигнал гетеродина (рис. 87, а, б).
При программной реализации эти функции имеют три уровня (— 1,0, 1),
и операция гетеродинирования состоит в умножении одного из массивов
данных на 5 (г) и С (г). При этом вычисление ВКФ можно делать не с по-
207
Цифровое гетероди ни рование
г
а)
-J — —
L
и LT 1J
ц
р-
Рис. 87. Сопровождение по частоте методом цифрового гетеродинирования: а) ко¬
синусные и синусные гетеродинные функции типа ’’меандр”, б) гетеродинные функции
типа ’’меандр с нулевыми участками”, в) блок-схема гетеродинирования; кружок с
крестиком - операция ’’ИСКЛЮЧЕННОЕ ИЛИ”, кружок с тильдой - операция ’’ЭК¬
ВИВАЛЕНТНОСТЬ ”.
мощью логической операции, а с помощью арифметических, если битам с
нулевыми значениями приписать значения 1”:
ясо$ (0= —— S’ *1 («)*2 (п - т - Г) С [(и - 1)27tFhht Д/J , ]
/Vi п — 1
TV,
(Ю.З)
Я,1п(/) = — s’ Xi (п)х2 (л - т - l)S [(« - 1)2ttFhht AzJ
TVx n=l
После вычисления ВКФ на интервале TV] Ats имеется 2 (2£ + 1) чисел — по
две квадратурные составляющие для 2L + 1 сдвигов.
При аппаратной реализации работают с двумя уровнями: 0 и 1. В этом
случае операция умножения на 5 (г) и С (t) при гетеродинировании заменя¬
ется на логическую — ’’ИСКЛЮЧЕННОЕ ИЛИ”, (рис. 87,в), которая пери¬
одически перебрасывает на 180° фазу однобитового сигнала с частотой сиг-
208
/>>
1
'1T,V,V
t
Рис. 88. Сопровождение по задержке: а) геометрическая расчетная задержка тг(г )
(прерывистые линии) и компенсирующая задержка тк (t) (ступенчатая линия),
’’наилучший случай” симметричного расположения тк(г) относительно тг (t); б) то
же для ’’наихудшего” случая; в) и г) вариации амплитуды интерференционного сигна¬
ла при ступенчатом сопровождении по задержке для случаев а) и 6); б) фазовые
искажения интерференционного сигнала при ступенчатом сопровождении по задержке.
нала ’’гетеродина”. Нулевой участок функций S (t) и С (t) реализуется путем
прекращения корреляции на этом интервале. Когда проведено гетеродини¬
рование, интервал осреднения после корреляции можно выбрать гораздо
большим, т.е. таким, чтобы на нем заметно не менялся интерференционный
сигнал уже пониженной частоты. При этом надо учитывать то, что расчетная
величина частоты интерференции отличается от истинной Ha6FHHT, полной
компенсации не происходит и поэтому интервал Т2 не должен превосходить
0,l/6FHHT, где 6FHHT — максимально возможная ошибка по частоте (обыч¬
но десятые доли герца).
б) Второй способ — гетеродинирование после корреляции. Каждый мас¬
сив чисел Pi (/), i = 0, 1,. . . ,N2, соответствующий /-му каналу по задержке,
умножается на cos (2я Ринт i 7\), после чего осредняется на интервале
Т2 - N27\, где 7\ — интервал первичного осреднения. Таким образом, в ре¬
зультате получается 2 двумерных массива чисел р (IJ)
7V 2
Pcos (А /) = s р(1, о cos (27tFhht iTi),
z = 0
Psin (A /) ~ P (А О (2^rFHHT iT\),
i=0
Лз, JV3~,
T2
(10.4)
209
где Т — полная длительность сеанса записи. Объем всего массива равен
2(2Л + 1)7У3 чисел.
4. Коррекция неполной компенсации по задержке.
Как было указано выше, точно компенсировать геометрическую задержку
невозможно, так как для этой цели имеются только элементарные интерва¬
лы Д(у и возможна лишь ступенчатая компенсация (рис. 88, а). Это приво¬
дит к двум эффектам: амплитудному ослаблению и периодическим фазо¬
вым скачкам интерференционного сигнала (рис. 88,6- 6). Возможна кор¬
рекция этой неполной компенсации, выполняемая в три этапа:
а) вычисляется дискретное преобразование Фурье по 2L + 1 точкам
корреляционной функции р (Z) по задержкам для каждого интервала Т2
1 Z=£ —1 —
p^s’m)~2L i=^l г (Ю.5)
где индекс ди соответствует компенсирующей задержке тк = m At, вокруг
которой сделан перебор ±LAts; pcos и pSjn — косинусная и синусная состав¬
ляющие ВКФ, $ — дискретная частота;
б) затем дискретный спектр умножается на корректирующий множитель
•/2 я <тг, т
е 2L s , (10.6)
где тг> т — расчетная геометрическая задержка в начале интервала пос¬
тоянства Tk = m&ts\
в) делается обратное преобразование
2 its z ах- 2snl
р (I, т)= Z р ($, т) е е
j=i
(10. 7)
5.Когерентноеосреднение и фурье-анализ. После
коррекции неполной временной компенсации находится последний раз
фурье-преобразование на самом большом интервале времени Т3 = к3т2
для каждого значения Z:
2irkj
~ 1 N* i N
РтЛ1Л) = — 3 (10.8)
3 N3 1
Длина интервала Т3 определяется возможностями регистрирующей аппа¬
ратуры и временем когерентности гетеродинов, на пунктах регистрации.
Теперь имеется комплексный двумерный массив/7 (Z, к) ’’задержка— час-
1
тота”; разрешение по частоте —, по задержке Ats. Как правило, наблю-
Т3
даемые источники слабые, и до этого этапа сигнал не виден на фоне шумов.
Необходимо сначала решить задачу обнаружения сигнала в N3 (2L + 1)
ячейках т 4- F плоскости, т.е. зафиксировать такие значения т, F, при кото¬
рых имеется превышение сигнала над средним уровнем флуктуаций.
Обычно это делается путем вычисления модулей комплексных отсчетов
спектра в каждой ячейке (Z, к) и сравнения с порогом, который выби¬
рается из условия минимизации вероятностей ошибок обнаружения (ошиб¬
240
ка 1-го рода — пропуск сигнала, когда он есть, ошибка 2-го рода — принятие
решения о присутствии сигнала, когда его на самом деле нет, ’’ложная тре¬
вога”) Рпр и Рлт. Для малых Рпр и Рлт < 0,1 известно приближенное
соотношение, связывающее требуемое отношение сигнал/шум Q с вероят¬
ностями ошибок [196],
Q = In \ZjV3 (2£ + l) +f\/ln + \Zn • 1,4
\ Рпт РПр
Величина порога выбирается равной А = о
где
— стандартное
о
отклонение шумов на плоскости т + F. Если сигнал достаточно большой,
то обнаружение производится без особых трудностей. После обнаружения
можно перейти к оценке параметров: амплитуды, задержки, частоты, фазы.
По оси задержек и по оси частот огибающая сигнала задается функциями
sin х
вида :
х
sin n fT3
KT(t) =
sin nAft
irAft
(10.10)
С учетом этих весовых коэффициентов делается статистическая обработка
отсчетов в области наличия сигнала на плоскости с целью оптимальной
оценки параметров интерференционного сигнала (§4).
6. Некогерентное осреднение. При недостаточном отноше¬
нии сигнала к шуму проводится дополнительное осреднение — некогерент-
ное. Вся запись делится на TV4 отрезков длиной Т3 =N3T2, на каждом вы¬
полняется когерентное осреднение и получаются 2L + 1 спектров смеси
сигнала с шумом. Затем для каждого из 2L + 1 спектров находят модули и
фазы (рис. 86)
I / GЛ)I = VRe2 (fiT} (I, fc)) + Im (рГз (/, kJ),
^T3 J (!> “
arcctg
Re (руз (/, £))
Im (рГз (/, fc))
(10.11)
И, наконец, делается последнее осреднение по всей записи
Pz(t> =
N4
1
2 (/Л)= — 2
j=l ^4 ;=1
(10.12)
Эффективность такого способа рассмотрена в следующем параграфе.
§ 2. ОТНОШЕНИЕ СИГНАЛА К ШУМУ В РАДИОШЦЕРФЕРОМЕТРЕ
На рис. 89 изображена блок-схема, с помощью которой производятся
вычисления отношения сигнала к шуму в радиоинтерферометре. С радио¬
технической точки зрения радиоинтерферометр можно представить в
виде коррелятора, на входы которого поданы сигналы промежуточной
частоты; задержка определяется комбинацией геометрической и аппара¬
турной задержек, умножение и последующее осреднение производится
211
Рис. 89. Блок-схема РСДБ как коррелятора, с помощью которой вычисляется отно¬
шение сигнала к шуму после первичной обработки.
аппаратными или программными средствами. На входы коррелятора
поданы нормальные случайные процессы с нулевым средним
х(0 = 51(0 +«1(0. 1
^(0 = 52(0 + «2(0. 1
(10.13)
где и s2 — полезные сигналы» коррелированные составляющие, соответ¬
ствующие сигналам от источника, пх и п2 - шумы. Дисперсии величин
и s2 (без учета усиления приемников) есть
1
Di - kTai Д/= —5Лэфф1 Д/{
1
^2 ~кТа2 &4эфф2 Д/я
(10.14)
где к — постоянная Больцмана, S — спектральная плотность потока ис¬
точника, Л>фф1, и Лдфф2 - эффективные площади антенн, Та\ и Та2-
антенные температуры источника, Д/ — полоса пропускания приемных
систем, форма частотной характеристики считается прямоугольной. Шу¬
мовые составляющие пг и п2 имеют дисперсии
=kTsX Д/, 1
n2 - kTs2 bf, )
(10.15)
где Tsi и Ts2 — шумовые температуры антенно-приемных систем. Прямо¬
угольная форма частотной характеристики определяет вид нормированной
корреляционной функции сигналов и шумов
sin яД/т
р(т) = —cos27T/07, (10.16)
7Г Д/т
где/0 — центральная частота приема. Напряжение на выходе коррелятора
представляет собой среднее за интервал времениТ величины х (t - т) у (т),
т.е. оценку взаимно-корреляционной функции Rxy(т) процессов х и у.
Среднее значение Rxy (т) равно у V^i Р (г), где 7 — коэффициент
корреляции сигналов и s2, который называется видимостью интерферен¬
212
ционной картины. Величина 0 < 7 < 1 зависит от соотношения между
пространственным распределением радиояркости источника и вектором
базы (гл. 6, § 3). Для точечного источника 7=1.
Вычислив дисперсию флуктуаций на выходе коррелятора о2 (т, Г), опре¬
делим отношение сигнала к шуму на выходе осреднителя на интервале Т
как отношение среднего значения к стандартному отклонению:
а2 (г, Г)
у^Р1Р'ЛЫГГр(т)
/ sin(27rA/r) . ~’
V (£>i + ^)(Р2 + jV2)+D1D2 —“ cos(47г/о О.
2 я Д/т
Подставляя вместо дисперсий Dr >2 и JVj >2 их значения из (10.14) и
(10.15) , получим окончательную формулу
7P(t)vW
. (10.18)
Анализируя формулу (10.18) , можно сделать следующие выводы:
/ Та\ Та2 \
1) При малом входном отношении сигнал/шум I < 1, < II и
при малом т ~ 0 (что обычно соответствует режиму сопровождения по
задержке)
Q
(10.19)
Для практических расчетов формулу (10.19) целесообразно перепи¬
сать, указав в явном виде параметры антенн и величину потока источника
(используя (10.14)):
(10.20)
ЗдесьЯЭфф1 и ЛЭфф2 — в квадратных метрах, TsX и Ts2 — в кельвинах,S —
в Вт/ (м2 • Гц), А/’ - в герцах, Т - в секундах, к = 1,38 • 10-23 Вт/ (град • Гц) -
постоянная Больцмана. Это основная формула для оценки Q, так
как, как правило, приходится работать в режиме слабых сигналов. Для
7И-элементного радиоинтерферометра с одинаковыми эффективными пло¬
щадями антенн ЛЭфф
/———I
при т ~ 0
е=7<д7т.
(10.22)
213
Это так называемый режим насыщения, когда антенная температура источ¬
ника настолько велика, что уменьшение шумов приемника и увеличение
эффективной площади антенн не приводит к росту отношения сигнала
к шуму и только увеличение радиометрического выигрыша \/AfT может
увеличить Q.
Обратимся теперь снова к рис. 89.
Чувствительность радиоинтерферометра, расчитанная по формулам
(10.19), (10.22), соответствует интерферометру с нулевой частотой интер¬
ференции. Напомним, что в реальном радиоинтерферометре задержка т рав¬
на разности геометрической задержки тг и аппаратурной компенсирующей
задержки тк, т = тг — тк. В зависимости от точности компенсации выход¬
ной сигнал радиоинтерферометра в общем случае представляет собой
функцию времени — синусоидальное колебание, модулированное низко¬
частотной огибающей
. sin(7TA/(Tr -тк))
и(0= Уу/DiD-^ cos [wr тг + о>пр(тг - тк)], (10.23)
яД/(тг - Тк)
где сог — угловая частота гетеродина, сопр — центральная частота УПЧ. При
полной компенсации тг = тк частота выходного сигнала равна
drr
£2 = а?г —. (10.24)
2п
Интервал осреднения Т не может быть выбран больше-^- , чтобы не
’’замыть” интерференционные лепестки. На практике осреднение делается в
два этапа (см. рис. 89). Сначала сигнал после умножителя в корреляторе
сглаживается (осредняется) на интервале времени Т, затем пропускается
через фильтр, настроенный на частоту интерференции Q. Сама операция
фильтрации делается аппаратным или программным способом, в последнем
случае применяется преобразование Фурье на интервале 7\ . Эта операция
характерна для радиоинтерферометрической обработки: производится
умножение на опорные сигналы sin Sit и cos Q t и вычисляются величины
1 71
А= — f и (Г) cos (£2 г) dr,
Л 0
1 Л
B = — f u(r)sin(£2r) dr.
(10.25)
Далее вычисляются квадрат модуля I2 и фаза ip:
I2 = А2 +В\
А
- arctg — .
(10.26)
Затем производится вторичное осреднение величин I2 и у на интервале
Т2. Заметим, что осреднение на интервалах 1\ и Т2 эквивалентно прохож-
* Индексация при интервалах осреднения 7/ отличается от индексации в §• 1.
214
дению сигнала через фильтр нижних частот с граничными частотами
1 1
ДУ7! = — и ДГ2 = — .
тх 2 т2
Отношение сигнал/шум на выходе такой системы (отношение У2 = А2 +
+ В2 к стандартному отклонению шумов) в приближении слабого сигнала
на входе интерферометра будет
С =
72 Д1 Р2
У2 Dt Р2
J
У2 PjP2 Af
N2N2 &F2
(10.27)
Операции возведения в квадрат и низкочастотная фильтрация соответ¬
ствуют в радиотехнике выделению квадрата огибающей. При программной
реализации такой двухступенчатой фильтрации (что характерно для РСДБ)
первый этап состоит в разбиении всего массива чисел после корреляции на
N интервалов длиной Т\, вычислении дискретного преобразования Фурье
1
(с частотным разрешением — ); второй этап состоит в осреднении моду-
Л
лей (накопление на интервале Т2 = N7\ (§ 1)). Формула (10.27) в этом
случае преобразуется следующим образом:
72D2D2
(10.28)
Q 2N'N* / 2 D'D* . 1 '
N\N2 2
Формула (10.28) позволяет сделать следующие выводы:
1. При малом отношении сигнал/шум после первого фильтра с полосой
D^D2 Af
т.е. при < 1, отношение сигнал/шум после возведения
ДУ7!
в квадрат и вторичного фильтра с полосой AF2 будет
п= у2 Р1Р2
Q ^n2n2 <дл дг;
У/|УУ2
При большом отношении сигнал/шум, т.е. при
N2N2
Q 2 7 N^N2
2
д/
— > 1,
Д£,
(10.29)
(10.30)
1
+ —
2
Рассмотренный вариант обработки (корреляция — фильтр — детектор —
фильтр) является наиболее общим случаем первичной обработки радио-
интерферометрического сигнала. Конкретное соотношение полос фильтров
ДУ7! и ДР2 зависит от возможности когерентного осреднения синусоидаль¬
ного интерференционного Сигнала v(t) = у. \/DXD2 соб(Ш + ^), т.е. от пос-
1
тоянства фазы в течение времени осреднения Т\ = . Трудности со
ДУ7!
стабильностью фазы возникают при работе на больших базах, когда прояв¬
215
ляется воздействие атмосферы (случайные фазовые набеги в сигналах на
пути к антеннам радиоинтерферометра), а также в РСДБ при флуктуациях
относительной фазы независимых гетеродинов из-за нестабильности стандар¬
тов. При этом невозможно проводить первичное (когерентное) осреднение
на интервале 7\ большем, чем Тког — время когерентности гетеродинов
(подробнее см. в § 3). В случае слабого сигнала (формула (10.29)) это
приводит к резкому ухудшению чувствительности, так как после вторично¬
го (некогерентного) осреднения отношение сигнал/шум растет гораздо
медленнее при увеличении времени накопления Т2 = /VTj (сужение полосы
фильтра AF2) . Действительно, если порогом обнаружения слабого сигнала
считать Q, то необходимый для этого входной сигнал равен.
. > > . 4\/2AF1AF2
jQNtt - n-r > (1031)
v Д/
т.е. пропорционален корню четвертой степени из произведения полос
4F2.
Проведенное рассмотрение соответствует трем типам радиоинтерфе¬
рометров, известным в радиоастрономии (в зависимости от способа фильт¬
рации до и после коррелятора) :
1) Радиоинтерферометр с когерентным осреднением в течение всего
времени измерения Т, Д .
1
2) Радио интерферометр промежуточного типа, AF2 = — , Д/> >
> Д^ (интерферометр Кларка) [201].
3) Радиоинтерферометр с некогерентным осреднением в течение всего
1
времени измерения, Д^ = Д/, Д^2 =— (интерферометр Брауна — Твис-
са) [199].
По выходному отношению сигнал/шум радиоинтерферометры 2-го
типа являются промежуточными, непрерывно заполняя ’’интервал” между
радиоинтерферометрами 1-го и 3-го типов, причем чувствительность убы-
Д^1
вает от первого к третьему типу по мере увеличения отношения . От-
ДР2
метим, что возможно также произвести и извлечение корня в (10.26) с
целью получить величину модуля (амплитуды) интерференционной ’’сину¬
соиды”, т.е. выделить среднее значение огибающей, что соответствует
линейному, а не квадратичному детектированию. Отношение сигнала к шуму
при этом немного ниже (меньше в 1,04 раза).
§ 3. ФАКТОРЫ, ВЛИЯЮЩИЕ НА ОТНОШЕНИЕ СИГНАЛА К ШУМУ В РСДБ
При подсчете отношения сигнал/шум в РСДБ формулу (10.20) необхо¬
димо использовать с дополнительными коэффициентами, которые учиты¬
вают ухудшение чувствительности РСДБ по сравнению с обычным радио¬
интерферометром. Величина этих коэффициентов зависит от применяемого
способа обработки сигналов РСДБ. Определим их так, чтобы выполнялось
216
Рис. 90. Блок-схема РСДБ с указанием источников дополнительных потерь в отно¬
шении сигнала к шуму; 1, 2 - преобразователи частоты; 3, 4 — стандарты частоты;
5, 6 - клиппирующие устройства; 7, 8 - временные квантователи; 9 - компенсатор
задержки; 10 — компенсатор частоты интерференции; 11 - коррелятор; 12 - анали¬
затор спектра; 13 — блок некогерентного накопления.
соотношение
Срсдб ~
к\ к2 кЗк4к5к6
(10.32)
На рис. 90 дана упрощенная схема РСДБ, на которой показаны те блоки
обработки сигналов, которые вносят дополнительные потери. Рассмотрим
по порядку эти коэффициенты кг • -г к6.
1. Случайные шумовые сигналы в РСДБ подвергаются клиппированию
(ограничению по нулевому уровню). Вычисление взаимной корреляцион¬
ной функции сигналов, записанных на магнитную ленту на пунктах РСДБ,
делается в 2 этапа: сначала вычисляется знаковая взаимная корреляцион¬
ная функция клиппированных сигналов, а затем по ней находится исход¬
ный коэффициент корреляции. Такая процедура дает дисперсию оценки
217
коэффициента корреляции рху [180]
Орху =
я2 (1-Р2)
4N
arcsin
(10.33)
где р — коэффициент.корреляции сигналов х и y,N— количество независи¬
мых выборок. При малом р
(10.34)
71
т.е. точность измерения в — раз хуже, чем при корреляции без клип¬
пирования. Однако формула (1033) справедлива для независимых выбо¬
рок. Поскольку клиппированный сигнал имеет, строго говоря, бесконеч¬
ную ширину полосы даже при ограниченной полосе исходного сигнала,
необходимо учесть частоту временного квантования. В работе [200] под¬
робно обсуждается этот вопрос для различных спектров сигналов (до
клиппирования). Согласно [200] потери при конечной частоте квантования
=
(10.35)
Л
— для прямо-
AZ
определяются следующей формулой:
со
f [arcsin р(т)]2 dr
дК °° ’
. S [arcsin р(к&fj] *
2 к-
На рис. 91 изображен график зависимости кх от отношения
угольной формы спектра исходного шумового сигнала, А/— граничная
fs я
частота. При — =2 , при удвоении частоты квантования потери
Д/ 2
уменьшаются до £1=1,35 и в пределе достигают величины 1,25.
2. к2 и к3 определяются процедурой сопровождения по задержке. Вы¬
ходной сигнал РСДБ в упрощенном виде можно записать в следующем
виде:
sin ттА/Дт
v = cos(cor тг - яД/Дт) ,
яД/Дт
(10.36)
где Д/ — ширина полосы сигнала (прямо¬
угольная форма спектра), Дт = тг — тк —
погрешность компенсации геометрической
задержки тг с помощью искусственно вво¬
димой в процессе обработки задержки
тК, сот — частота гетеродина. В идеаль¬
ном случае постоянного равенства
тт = тК в течение всего времени
Рис. 91. Зависимость коэффициентакг (потери
за счет клиппирования) от отношения fs/ —
частота временного квантования, Д/ - ширина
видеополосы сигнала до клиппирования.
218
осреднения выходной сигнал коррелятора представлял бы собой
чисто синусоидальное колебание. Однако при конечном интервале вре-
z 1
мённого квантования Д ts отслеживание геометрической
задержки возможно только такими же дискретами. Ступенчатый
характер компенсирующей задержки тк (Г) приводит к двойному эффекту:
sin тгД/Ат
амплитудной модуляции множителем М = (см. рис. 88, в, г)
nAfAr
и фазовой модуляции из-за периодической фазовой ошибки Д<р = тгА/Лт
(рис. 88, д). Поскольку начальное значение тг неизвестно, поиск корреля¬
ции ведется сразу при нескольких сдвигах, в зависимости от ожидаемого
начального рассогласования между тг и тк.Ми Д^ могут меняться в наи¬
лучшем ’’симметричном случае” так, как показано на рис. 88, в, в наихуд¬
шем случае так, как на рис. 88, г. При обработке сигнала после коррелятора
производится спектральный анализ для отыскания спектральной детали
d(co г тг (0)
на частоте £1 = . Амплитудная и фазовая скачкообразная
dt
модуляция, изображенная на рис. 88, размывает эту спектральную деталь,
ослабляя амплитуду ’’линии” на частоте П.
Для учета этого ослабления за счет амплитудной модуляции восполь-
sinx х2
зуемся приближением функции ~ 1 , х = яД/Дт и оценку
X 6
потерь будем делать по формуле
— -
1
1
Л2_ 1
Дт
sinx
/ яД/Дт\2
■
f
dx
1 -1
Дт
0
X
\ 18 /
(10.37)
1
При интервале временного квантования Д^ = и симметричном рас-
2 Д/
положении тк относительно тг (см. рис. 88, а) к2 = 1,04. При смещении
тк относительно тГ (рис. 88, б) к2 =1,16. В среднем к2 = 1,1. При удвоении
частоты квантования средний к2 = 1,03.
Фазовые скачки в интерференционном сигнале определяют коэффициент
Д0
=, (10.38)
Д(£
2 sin
2
где Д<р = я Д/Д т — амплитуда фазовых скачков (рис. 88, д), Д/— ширина
1
полосы видеосигнала, Дт = тг - тК. При Дт (’’наилучший случай”,
4Д/
рис. 88, а) к3 = 1,03, при Дт = (’’наихудший случай”, рис. 88, 6}
2Af
к3 = 1,11. В среднем к3 = 1,06. При удвоении частоты квантования сред¬
ний к3 = 1,04.
219
3. Коэффициент к4 связан с ’’сопровождением по частоте”, которое в
РСДБ применяют для снижения частоты интерференции ^ сигнала с целью
уменьшения вторичного массива при корреляционной обработке. Для
этого делается цифровое гетеродинирование (программным ил и аппаратным
способом) одного из сигналов РСДБ перед корреляцией. Используют при¬
ближение синусоидального сигнала гетеродина в виде меандра с перио-
2я
дом « (рис. 87, а) или более близкое к синусоидальному колебание
с пропусками (рис. 87, б). Аппаратная реализация операции гетеродиниро¬
вания одйобитового сигнала осуществляется на схемах ’’ИСКЛЮЧЕННОЕ
ИЛИ”. Потери при этих способах гетеродинирования определяются коэф¬
фициентом к4 (по сравнению с синусоидальным сигналом гетеродина),
7га
к4 , (10.39)
—, ая
2 \Z2sin —
2
где 1 — а — доля пропусков в сигнале гетеродина (см. рис. 87, б); в течение
(1 — а) Т корреляция не производится. При а = 1 к4 = 1,04 (случай меанд¬
ра) ,при а < 1 к4 становится меньше, но необходимо учесть тот факт, что
эффективность осреднения обратно пропорциональна \/1 - а’ и поэтому
существует оптимальное значение а = 0,75, при котором к4 = 0,9, т.е. имеет
место даже некоторое улучшение по сравнению с применением идеального
синусоидального гетеродинирующего сигнала.
4. Коэффициент к$ зависит от фазовой стабильности независимых
гетеродинов РСДБ, т.е., в основном, от применяемых Опорных стандартов
частоты. В аргумент синусоидального отклика РСДБ в формуле (10.36)
следует ввести случайную фазу При спектральной обработке наличие
приведет к ослаблению амплитуды ’’линии интерференции” в к$ раз
(гл. 8, § 3):
£5 = — f Ю dt, (10.40)
Т о
На рис. 92, а приведены зависимости среднеквадратичного Отклонения
(в градусах) от времени накопления для трех стандартов - рубидиево¬
го/ водородного и со сверхпроводящим резонатором (СПР). На рис. 92, б
даны графики к5 как функция времени накопления, рассчитанные по фор¬
муле (10.40) и с помощью кривых рис. 59 для длины волны X = 5 см. Оцен¬
ки для рубидиевого стандарта могут быть сделаны по формуле
fc5Rb= аТ~=, (10.41)
1 - е т
где а = 6,3 • 10-4/2, f — частота в ГГц для Т < 100 с (время накопления), а
для водородного стандарта (Г> 100 с)
Т'
Ьн = - , (10.42)
5 2 • 104
63 + [Ф(1,4я • 10-5/Т) - Ф(1,4тг • 1O-SP 63)]
/•
Ф(х) — функция ошибок.
220
Рис. 92. Влияние фазовых флуктуаций в атмосфере и в сигналах гетеродинов (неста¬
бильность стандартов) на Отношение сигнала к шуму: а) среднеквадратичное отклоне¬
ние случайной фазы в зависимости от длины интервала наблюдения, б) зависимость
коэффициентов к5, к6 от времени осреднения.
Поскольку к5 зависит от Г и отношение сигнал/шум растет как yfF, мож¬
но найти оптимальное время осреднения при использовании того или иного
стандарта. Для X = 5см = 60 с, ГоПТ = 5 • 103 с, = 104 с.
Коэффициент к6 связан с флуктуациями фазы сигналов, принимаемых
РСДБ, в тропосфере [202]. На рис. 92, а и б представлены зависимости
о*™ и к6 (Т). Из этих графиков видно, что флуктуации фазы в тропосфе¬
ре не позволяют проводить непрерывное накопление сигнала в течение,ин¬
тервала времени, допускаемого стабильностью водородного и СПР стан¬
дартов.
Важность учета всех этих коэффициентов можно показать на примере.
При оптимальном времени когерентного накопления с рубидиевым стандар¬
том 60 с к5 = 1,83 и полный поправочный коэффициент к = кг к2к3к4к5к6 =
= — • 1,1 • 1,06-0,9-1,83 • 1,08 = 3,26.
2
При переходе к двойной частоте квантования (рубидиевый стандарт)
кл =1,35 и к = 1,35 • 1,03 • 1,04-0,9 • 1,83 • 1,08 = 2,57. Если при этом ширина
полосы приема уменьшается в 2 раза, то общий проигрыш в OCUI равен
2,57 V? = 3,63, т.е. ухудшение в 1,11 раза по сравнению с общепринятым в
практике РСДБ наблюдений с временным квантованием в соответствии с
теоремой отсчетов (к - 3,26) .
§ 4. ОЦЕНКА ПАРАМЕТРОВ СИГНАЛА РСДБ
После проведения первичной обработки (корреляции, накопления и
обнаружения) в распоряжении имеется интерференционный сигнал, пред¬
ставляющий собой сумму полезного сигнала s (г) и помехи и (Г)
v(t) = s(t, Х1,...,Х*) + л(О,
(10.43)
221
причем сигнал зависит от ряда параметров X/. В нашем случае такими пара¬
метрами являются амплитуда So, частота £2 = 27rFHHT, задержка тг и фа¬
за Форма s(7) известна и задается в виде
х(0=>£оЯ1(Х- тг)Л2(Г- тг)А3(Г- Tr)cos [Щг- тг) +vo], (10.44)
т.е. s (7) представляет собой ’’радиоимпульс” (рис. 93) с огибающей, опре¬
деляемой в общем случае тремя множителями: Ах (t) — диаграммой на¬
правленности антенны, А2 (0 — огибающей, определяемой конечной поло¬
сой пропускания приемника, А3 (t) — огибающей, определяемой случайны¬
ми фазовыми сдвигами (атмосфера, нестабильности стандартов часто¬
ты РСДБ).
Статистические характеристики шума известны: нормальный (в силу
центральной предельной теоремы, так как 2Д/Т> 1)1 с дисперсией, опреде¬
ляемой формулами § 2. Задача состоит в том, чтобы по реализации v (t)
оценить параметры X/. Подобные проблемы решаются в теории оценок па¬
раметров сигналов, принимаемых на фоне случайных помех [196, 203].
С откликом (10.44) работают в радиолокации, радиосвязи с кодо-импульс¬
ной модуляцией. Существуют различные способы оценки параметров сиг¬
нала X/, но наиболее распространенными являются методы максимального
правдоподобия и максимальной апостериорной вероятности. При помехе с
нормальным распределением и равномерной априорной плотностью распре¬
деления вероятностей параметров Р(Х/) оба метода приводят к одной и той
же оптимальной процедуре - корреляционной обработке принимаемого
сигнала. Согласно этой обработке вычисляется степень корреляции сигнала
с его копией, в которой неизвестные параметры перебираются в пределах
зоны неопределенности [— X?, X/]. При каком-то наборе [Aj, . . ., АЛ]
получается максимальная степень корреляции, которая служит признаком
получения наилучшей оценки параметров.
Упомянутые выше методы оценки параметров используют в качестве
исходного пункта функцию правдоподобия P\(v) = P(Xt, ... , Xk/v) -
многомерное условное распределение вероятностей того, что имеющаяся
выборка и (f) является суммой помехи и сигнала с параметрами Xi,..., X*.
При статистической независимости сигнала и шума
Р„(Х)=Р(Х)Рг(и),
Р(Х) - априорное распределение
(10.45)
вероятностей вектора X параметров,
—►
Pv (X ) — апостериорное распределение
вектора параметров при данной вы¬
борке v (г). Если Р(Х) = const, то
Pv (X) = const • P-^(v) и максимизация
функции правдоподобия и апостериор¬
ной вероятности приводит к одинако¬
вой процедуре. В случае, когда шум
имеет равномерную одностороннюю
спектральную плотность N в полосе
Рис. 93. Отклик радиоинтерферометра в
виде ’’радиоимпульса”.
222
сигнала AF, дисперсия шума равна = NAF, и функция правдоподобия
Р\(у) записывается следующим образом (с точностью до постоянного
коэффициента):
- / [и(0 -
Px(v)~e 0 , (10.46)
где Т — длительность сигнала (рассмотрен случай одного параметра). Для
сигнала с неизвестной и равновероятной начальной фазой
Pu(X)=P(X)e-S2/0[<7(X)], (10.47)
I s2(t)dt ?
где ^(X) = V+<72,' Q2 = <71>2 = ~£ КО «1,2 (\ t)dt, si,2(X)-
квадратурные составляющие опорного сигнала. Таким образом, из форму¬
лы (10.47) видно, что основная операция при обработке - это вычисление
функции взаимной корреляции q(\) между принятым сигналом и (г) и
ожидаемым сигналом s (X, t) для всех возможных значений X.
Экспоненциальная функция и функция Бесселя /0 (*) меняются моно¬
тонно в зависимости от своего аргумента; поэтому, если требуется опреде¬
лить наиболее вероятное X, когда Р(Х) = const, то достаточно вычислить
q (X). Проанализируем структуру q (X ),
Q= 77 SКО «(X, 0 dt = [s(Xo, t) s(X, t) dt +
N о N о
2 т
+ — / n(t)s(\,t)dt =/С(Х)+Я(Х). (10.48)
N о
Здесь К (X) — функция корреляции между принятым сигналом s(Xo, t) и
всеми возможными вариантами $(Х, г):
F(X) = 262Fs(AX), (10.49)
— т
где Q - отношение энергии сигнала s2 = f s2(t) dt к спектральной плотнос-
о
ти шума N и
Я5(ДХ)~ 5 s(Xo,O^(Xo + AX,r)dr- (10.50)
S2 о
нормированная корреляционная функция сигнала по параметру X (функ¬
ция неопределенности, в соответствии с терминологией теории связи, радио¬
локации, или сигнальная функция), ДХ = X — Хо — приращение параметра X,
Rs (ДХ) - симметричная по ДХ функция, равная 1 в максимуме и убываю¬
щая (не обязательно монотонно) при отклонении параметров. Если сигнал
записан в комплексном виде, то в случае двух параметров F и т (частота,
задержка)
Fj(71,F1,72,F2) =
= “V I (10.51)
s о
223
Для большинства сигналов зависит от разности Дт = т2 — , AF = F2 -
- Ft, поэтому
Rs(At, AF) = 4" I AF) s* (t, 0,0) dt |. (10.52)
s2 о
Ширина главного пика сигнальной функции примерно равна удвоенному
значению интервала корреляции:
Хс = / (10.53)
° 2т.
Второе главного в формуле (10.48): Я(Х) = -— f n(t)s(\ t)dt характери-
N о
зует вклад помехи, среднее Н (X) = 0, а дисперсия о2н = 2Q2. Для описывае¬
мого метода получения оценок Л можно вывести формулы для дисперсии
(IX — Хо 12>, которые позволяют до поиска оптимального X оценить потен¬
циальные возможности по точности при заданной форме сигнала и отноше¬
нии сигнала к шуму Q. При оценке параметра X существуют два вида
ошибок.
Нормальные ошибки: при анализе отсчетов корреляционной функции
сигнала согласно блок-схеме обработки (см. рис. 89) правильно выбран
главный пик, и влияние помех сказывается на отклонении от точки макси¬
мума главного пика, шумы создают зону неопределенности вокруг точки
максимума главного пика.
Аномальные ошибки: сигнальная функция имеет много вторичных мак¬
симумов (’’боковых лепестков”), и при наличии шумов может быть выб¬
ран в качестве пика выброс, отстоящий от главного пика на интервал,
гораздо больший по сравнению с шириной интервала корреляции Хс. Такой
вид ошибок характерен при оценке так называемых неэнергетических пара¬
метров (частота, задержка) при сложной форме сигнала.
4.1. Нормальные ошибки
Функция Pv (X) является монотонной функцией К (X) , и поиск максиму¬
ма Pv (X) можно заменить поиском максимума К (X) из условия
2-[К(Х)]=0, (10.54)
оХ
где X — наивероятнейшее значение параметра. Если Pv (X) разложить в ряд
Тейлора около точки X и ограничиться тремя членами разложения, то
F„(*) = 2Q2R?- е-1С2«7(А-Мг1 (Ю.55)
727
Это нормальное распределение с дисперсией
2Q2R's' ’
(10.56)
где
<(Х)=-1-Л(Ао. О
S2 о
224
а тогда для дисперсии
1 N
N
2
dt
(10.58)
Более точная формула для дисперсии может быть получена, если ограни¬
читься пятью членами ряда в районе сигнального пика
2<?2Я" L 2С2Л".
(10.59)
При Q > 3 нецелесообразно использовать более высокое приближение. При¬
ведем формулы для среднеквадратичных отклонений при измерении фазы
(10.60)
частоты.
5 = х/ 1 + —z ДЛЯ сигнала длительностью
QttT 9Q2
(10.61)
задержки
(10.62)
для сигнала с прямоугольной формой полосы пропускания шириной AF.
4.2. Аномальные ошибки
Влияние аномальных ошибок на точность оценок многократно обсужда¬
лось в специальной литературе [197, 198]. Рассмотрим один из возможных
подходов к этой задаче. Неизвестный параметр X находится обычно в неко¬
тором интервале неопределенности [—Х°,Х°]. Если ширина главного пика
сигнальной функции
, то весь интервал можно разбить на W
участков длиной Хс. Ошибка при выборе главного пика заключается в не¬
верном выборе одного из N элементарных интервалов. Можно рассчитать
вероятность такого неправильного выбора - вероятность аномальной ошиб¬
ки Ран. Для сигнала с неизвестной начальной фазой она равна [198]
о
(10.63)
ПриРан <0,1, 1
(10.64)
Сравнивая формулы (10.56) и (10.64) для нормальной и аномальной оши¬
бок, можно отметить различный характер зависимости величины ошибок от
225
Rs, характеризующей узость главного пика сигнальной функции: про-
1
порциональна —а вероятность аномальных ошибок растет с увеличе-
Rs
нием R's . Такая противоположная тенденция ошибок приводит к порогово¬
му эффекту при недостаточно высоком отношении сигнал/шум. Если
ввести понятие суммарной ошибки 52, то в предположении о независимос¬
ти нормальной и аномальной ошибок и считая, что аномальные ошибки име¬
ют равномерный закон распределения на интервале неопределенности,
получим выражение для полной ошибки измерент,ст
Х° „
+ — Rse
12 5
Q2
2
1
1 + —г
2Q2R’s J
1
2Q2R"
(10.65)
В следующем параграфе будет продемонстрировано взаимодействие этих
двух видов ошибок при синтезе широкой полосы методом многочастотно¬
го приема.
§ 5. ОБРАБОТКА ДАННЫХ ПРИ СИНТЕЗЕ ШИРОКОЙ ПОЛОСЫ
Для угломерных измерений с помощью радиоинтерферометра необходи¬
мо измерять фазу интерференционного сигнала, однако в случае РСДБ из-
за нестабильностей фазы в аппаратуре и в атмосфере абсолютное значение
фазы получить не удается, остается ”27г-неопределенность”. В гл. 8, § 4,
пункт 4.2 приведено описание систем, позволяющих измерить групповую
задержку между сигналами, приходящими на пункты РСДБ, с гораздо
1
большей точностью, чем (Д/ — полоса регистрации на магнитную лен-
дг
ту). За счет многочастотного приема формируется широкая эффективная
полоса Д£эфф > Д/, и в формулу точности по задержке (10.62) надо под¬
ставлять именно эту величину.
Обработка данных с целью получить оценку задержки при синтезе широ¬
кой полосы происходит в два этапа.
а) Сначала делается грубая оценка задержки и частоты в каждом частот¬
ном канале методом поиска максимума двумерной функции неопределен¬
ности Rs(&r, Д/7) (см. § 4) на т + F плоскости, размерность которой
1
L ХМ, где L - количество сдвигов по задержке на величину Дг5 = - у- ,
М — количество отсчетов по оси частот, отстоящих на —, где Т — интервал
когерентного осреднения. Обычно эти LM отсчетов получают путем приме¬
нения алгоритма быстрого преобразования Фурье (БПФ) к каждой реали¬
зации интерференционного сигнала st в /-м канале коррелятора. После на¬
хождения максимума Rs для каждого канала выделяется область тк ± Дт,
Fi ± AF, в которой затем проводится точная оценка задержки.
б) При нахождении точной оценки задержки необходимо теперь восполь¬
зоваться наличием многочастотных данных. С этой целью формируется
многочастотная (синтезированная) функция неопределенности по задержке
£>2(^г,тк,тК1) (тг - геометрическая задержка, которую надо точно от-
226
слеживать с помощью компенсирующей задержки тк j).
i - 1
(10.66)
где Nr — число гетеродинов, сог , — частота гетеродина z-го канала, тк —
грубая оценка задержки, при выборе которой получены отклики отдель-
drK
ных каналов sz(rr ,тк) ,тк1 + t — более точная оценка задержки и ее
dt
производной. Поиск этой новой оценки состоит в максимизации функции
неопределенности по задержке перебором т1<1 в пределах тк± Дт сша-
2 я dt
жение более высокого порядка, чем линейного, для тк1 (г) обычно не тре¬
буется. В результате такого перебора тк1 (г) находится единственная для
всех частотных каналов точная оценка тк1 (г), отслеживающая тг (г) с точ-
1
ностью, определяемой шагом . Функция неопределенности
А^эф ф
(тг ,тк, тк1), кроме основного максимума, соответствующего точной
компенсации, имеет много побочных максимумов, меньших по амплитуде,
чем основной, но в присутствии помех, приводящих к аномальным ошиб¬
кам (§ 4). Это объясняется неполным заполнением широкой синтезируе¬
мой полосы частотными каналами — число их обычно не превышает 5^-6
Д^эфф
при отношении = 50 + 200. Ситуация такая же, как в многоэле-
Д/
ментном интерферометре с редко расставленными элементами при боль¬
шой общей базе. За счет подбора оптимального расположения частотных
каналов можно снизить уровень лепестков до 0,5 4-0,6.
Дисперсия оценки задержки для равномерного распределения каналов
при учете аномальных ошибок равна
3(^г- I)2
§2 = 17
т ttQ2AF2(N2 - 1)
+
дг
48 Д/3(7УГ - 1)
с2(1 - я2)
2
’ (10.67)
где Q — отношение сигнала к шуму, Nr — количество частотных каналов
(число гетеродинов), AF — ширина синтезируемой полосы, Д/ — ширина
полосы регистрации, R — средний уровень боковых лепестков. Предпола¬
гается, что информация с каналов записывается поочередно на магнитофон
(см. рис. 67, а).
Перейдем теперь к обработке сигнала при синтезе методом ’’свертыва¬
ния”. В этом случае сопровождение по задержке точнее, чем шагами
227
cos сОрр су (t)
Рис. 94. Блок-схема обработки сигнала при синтезе широкой полосы методом "свер¬
тывания".
Рис. 95. Зависимость среднеквадратичной ошибки определения задержки 6Т от отно¬
шения сигнала к шуму Q: а) для синтеза методом многочастотного приема, б) для
синтеза методом "свертывания"; Nr - число гетеродинов, А/ - ширина полосы ре¬
гистрируемого на магнитофоне сигнала, AF - ширина синтезируемой полосы.
щая задержка тк постоянна, сопровождения по существу нет, и работа ве¬
дется как бы в режиме ’’прохождения” по задержке, что и приводит к об¬
разованию серии импульсов (см. рис. 70), амплитуда которых в 2Nr ~ 1 раз
больше амплитуды сигнала, принимаемого в каждой парциальной полосе
шириной Д/ (гл. 8,§ 4, пункт 4.2). Для измерения задержки Дг (рис. 70)
необходимо провести накопление серии импульсов в течение интервала ко¬
герентного накопления Г. Оптимальный алгоритм обработки последова¬
тельности радиоимпульсов со случайной фазой высокочастотного заполнения
известен из теории приема сигналов на фоне шума [196] и изображен на
рис. 94. Он включает в себя блоки умножения на квадратурные сигналы
cosojr0rr Hsincororr, блок выделения квадрата огибающей (квадра¬
тичный детектор), согласованный фильтр с коэффициентом передачи
K(jсо) = S*(/co), где S*(jgj) — сопряженный спектр огибающей импульса,
блок накопления, представляющий собой набор линий задержек на iTQi и
(1тг
сумматор. Частота интерференции согО известна, как обычно, неточно,
dt
й программа, соответствующая блок-схеме на рис. 94, должна включать в
себя дополнительный перебор квадратурных сигналов с различными часто¬
тами в пределах интервала неопределенности частоты интерференции.
Можно показать, что отношение сигнала к шуму при методе свертывания
такое же, как и при обычном синтезе при том же числе гетеродинов. Для
сплошной полосы шириной AF, синтезированной методом ’’свертывания”,
AF 2Nr Af
Л/?эфФ = 2^Т = 2^3 ’
(10.68)
Дисперсия полной ошибки в методе ’’свертывания”
2 _ 3 0,03782ЛГг - Я1
6г" + ~ ‘ 2 ' (10.69)
По формулам (10.67) и (10.69) построены графики на рис. 95. Анализируя
ход кривых, можно сделать вывод о наличии порогового эффекта, свя¬
занного с аномальными ошибками, причем для метода ’’свертывания”
этот эффект появляется при отношении сигнал/шум примерно в 5 раз
меньшем, чем при синтезе с разносом узких полос. При неравномерном
распределении полос эта разница меньше.
Глава 11
ФЛУКТУАЦИОННЫЕ ЭФФЕКТЫ АТМОСФЕРЫ
При наличии широкополосных систем регистрации и высокостабильных
стандартов частоты влияние среды распространения (тропосфера, ионо¬
сфера, межпланетная и межзвездная среды) представляет собой тот основ¬
ной фактор, который ограничивает возможность реализации полной угло¬
мерной точности радиоинтерферометра со сверхдлинной базой. Для сан¬
тиметрового диапазона длин волн доминируют тропосферные эффекты,
рассмотрению которых в основном будет посвящена эта глава.
229
§ 1. ТУРБУЛЕНТНАЯ МОДЕЛЬ ТРОПОСФЕРЫ
Разность электрической и геометрической длин тропосферы (эйконал)
в зените достигает приблизительно двух метров. Около 75% этой величи¬
ны определяется ’’сухой” компонентой воздуха, а 25% — в основном
парами воды (’’мокрая” компонента). Вследствие турбулентного пере¬
мешивания атмосферы возникают флуктуации температуры, давления,
влажности, которые приводят к беспорядочным пульсациям коэффициента
преломления среды n(h) и, как следствие, к флуктуациям эйконала тропо-
L
сферы le = f{n(h) — 1} dh (L — геометрическая высота атмосферы),
о
Флуктуации эйконала в свою очередь ведут к неконтролируемым набегам
фазы сигнала при распространении фронта волны в тропосфере от источника
к антеннам интерферометра или краям апертуры телескопа. В результате
изображение источника размывается, а центр тяжести изображения сме¬
щается.
В качестве удобной характеристики флуктуационных свойств эйконала
можно использовать пространственные и временные структурные функции
(знак < > — среднее по ансамблю)
Z)z(b) = <[Z(x+?; r)-Z(J, г)]2>, П/(7) = ([7(х; г+ 7)-Z(x, r)]2>. (11.1)
Наиболее простыми в экспериментальном отношении являются измере¬
ния временных статистических характеристик тропосферы, однако в теоре¬
тическом отношении наиболее важными являются пространственные ста¬
тистические характеристики. Для того чтобы переходить от временных
характеристик к пространственным, удобно использовать гипотезу ’’за¬
мороженной” турбулентности Г. Тейлора [204], в соответствии с которой
Dz(F, T) = Dz(F-Vt,0), (И.2)
где v — характерная скорость переноса тропосферных неоднородностей,
скорость ветра.
Гипотеза Г. Тейлора для свободной тропосферы подтверждена непо¬
средственными измерениями метеопараметров на масштабах порядка ки¬
лометра [205]. Однако поскольку средняя скорость ветра меняется с
высотой, в общем случае гипотеза ’’замороженной” турбулентности пред¬
ставляет собой лишь полезное приближение.
Для построения структурной функции электрической толщины тропо¬
сферы Di (b) = <[Z(x + b) — Z(x)]2>, как сейчас принято, принимают
модель локально однородной изотропной турбулентности [206]. В соот¬
ветствии с этой моделью естественно рассматривать три физически вы¬
деленные области изменения структурной функции эйконала:
( C}bs/3, Lo <b<Lt,
Dt(b) =
(Н.З)
cIlV3, l2 <ь,
где Lo и — внутренний и внешний масштабы изотропной трехмерной
турбулентности, L2 — введенный впервые в работе [207] внешний масштаб
двумерной турбулентности и Cz, CL — интегральные структурные коэф¬
фициенты показателя преломления (рис. 96). В приближении геометричес¬
кой оптики структурная функция фазы отличается от структурной
230
Рис. 96. Степенная модель структурной
функции эйконала тропосферы. -
внешний масштаб трехмерной турбу¬
лентности, L2 — внешний масштаб дву¬
мерной турбулентности.
функции Dt только квадратом
, 2 я
волнового числа к = — (X — дли¬
на волны излучения):
ЗД) = А;2П/(/>). (11.4)
Это соотношение верно лишь при
пренебрежении дифракционными
эффектами и выполняется всег¬
да, если b
Инерционный интервал £0 < b < L2, в котором кинетическая энергия
турбулентного движения значительно больше энергий диссипации и при¬
тока, разбивается на два промежутка характерным масштабом L!, который
по порядку величины совпадает с высотой тропосферы L. Качественное
различие в поведении структурной функции в этих промежутках связано
с тем, что при b > Li мы имеем дело с задачей о распространении воЛны
сквозь тонкий, а при b < Lx — сквозь толстый слой турбулентной тропо¬
сферы. При этом предполагается, что во всем инерциальном интервале
справедлив известный ’’закон 2/3” Колмогорова — Обухова [208, 209]
для структурной функции показателя преломления Dn(b) = С„Ь*'3,в основе
которого лежат чисто энергетические соображения.
Поведение (b) в инерционном интервале имеет простое качествен¬
ное истолкование. Пусть два параллельных луча длиной L проходят в
тропосфере на расстоянии b друг от друга. Если то на каждом луче
укладывается N = L/b неоднородностей размерами порядка Ь. Тогда раз¬
ность фаз, возникающая при прохождении пары таких неоднородностей,
будет » кЬДп(Ь), где Дп(Ь) — разность показателей преломления
в точках, находящихся на расстоянии Ь. Следовательно, средний квадрат
разности фаз <[Д<р]2) « к2b2Dn(b). Полное же значение среднего квадрата
разности фаз после прохождения всех N неоднородностей будет (Ь) «
к2LbDn(b) bs13. Если же b >£, то каждый луч проходит в пределах
одной неоднородности масштаба L, которая и определяет основной вклад
в фазовый набег. Тогда Д<р «kLЬп(Ь); <[Д<р]2> - D^(b) « kL2Dn(b) &
ОС ^/3 , так что структурная функция фазы (или эйконала) следует тому
же ’’закону 2/3”, что и структурная функция показателей преломления
[207].
Нижняя граница инерционного интервала £0, определяемая скоростью
дисперсии энергии турбулентности е и кинематической вязкостью и, Lo =
= р3^4€~^4,оценивается довольно уверенно : Lo = 0,1 — 1 см . Также достаточ-
* В области b < Lo, где энергия, перекачиваемая от крупномасштабных к мелко¬
масштабным неоднородностям, переходит за счет вязкости в тепло, D^(b) « b2.
Эта область не представляет практического интереса для оптического и радио¬
диапазона.
231
но надежно можно оценить внешний масштаб изотропной турбулентности
L!. Согласно (11.3)
- (/ Cn(h)dh )2
О
(Н.5)
2,91 f C*(h) dh
о
и, если считать, что СЛ(Л) = Соехр(—Л/Z), то Lx « 0,74. Таким образом,
если принять эффективную высоту тропосферы £ ~ 8 км, то Lx =5,6 км
[202]. Значительно менее уверенно можно определить вторую границу
действия ’’закона 2/3” — внешний масштаб двумерной турбулентности
L2. В качестве этой границы, по-видимому, следует рассматривать размеры
наиболее мощных из наблюдаемых в тропосфере образований — циклонов,
средний размер которых колеблется в пределах 2000—3000 км. Эта ве¬
личина близка к типичному масштабу длины для синоптических процес¬
сов [210]. По этой причине при b > £2(энеРгетический интервал) наступает
насыщение структурной функции.
Структурная функция (11.3) хорошо представляет экспериментальное
значение флуктуаций электрической толщи тропосферы при следующем
выборе структурных коэффициентов и характерных масштабов [202]:
Q = 1,7 • 10”5 см1/6, CL = 1,3 • 1СГ2 см2/3, Lx =5,6 км и L2 = 3000 км
(см. рис. 96). Очевидно, что
см определяет максимальное
значение флуктуаций электрической толщи тропосферы. Степенная модель
структурной функции (11.3) хотя и приближенно описывает поведение
эйконала, тем не менее отражает основные черты тропосферной турбу¬
лентности.
Описание флуктуационных свойств тропосферы в ряде случаев удобно
проводить на ’’спектральном языке”, используя тот факт, что структур¬
ная функция Dj (х) связана со спектральной плотностью флуктуаций
электрической толщи И) (со) преобразованием
Z)/(x) = 2 / (1 - cos gjx) (go) Jgo.
о
(И.6)
Следовательно, спектр флуктуаций разности электрических длин 6Z =
= l2 - Z! в двух точках, находящихся на расстоянии Ь, будет
cob
^8/ (w) = 4 sin2 — H>(gj),
(П.7)
где со — циклическая частота и v — скорость переноса тропосферных не¬
однородностей — скорость ветра. Периодический множитель в (11.7)
характеризует пространственную фильтрацию тропосферных неоднород¬
ностей с размерами, большими Ь. Частота, на которой происходит про¬
странственная фильтрация, со « v/b, существенно зависит от средней
скорости ветра v, существующие оценки для которой весьма неопределен¬
ны [211]. В качестве компромиссной оценки обычно выбирают значение
v =10 м/с, которое совпадает с типичной скоростью ветра при синопти-
232
Рис. 97. Спектр флуктуаций
эйконала в тропосфере [212].
Рис. 98. Спектры флуктуаций
разности эйконалов и ее
производной , соответству¬
ющие степенной модели струк¬
турной функции.
Г=Ос
/
/
/
i л
Г-Ос
/
Z
/X
/ >
Z
/ь-ю’км
/
4
/
/
/
г
\\
\ \
\ \
\
\
7-Юс\
/!
\ V
V
\
\
\
>
\\
\\
\ \
/ib-b-wiM
' ■ /
/ /ь-МГ’км
i—i
г-
fA
А
\
ческих процессах (Г2 = L2/v « 3,5 суток — характерное время изменения
погоды).
Структурной функции степенного вида Dj (b) ос отвечает, как не¬
трудно видеть, спектр W{ (со) ос Таким образом, очевидно, что
в модели структурной функции (11.3) спектр должен иметь излом при
со v/L J, переходя от И7/ ос qJ^/3 На высоких частотах к И7, occJ5/3 на низ¬
ких частотах. Такой излом можно обнаружить на рис. 97, заимствованном
из работы [212], в котором измерялся спектр флуктуаций электрической
толщи в приземном слое тропосферы. Формула (11.7) позволяет оценить
ошибки, которые вносит тропосфера при координатных измерениях,
использующих информацию о временной задержке или геометрически
эквивалентную ей — фазовую информацию.
Для оценок же тропосферных ограничений при частотных измерениях
необходимо знать спектральную плотность флуктуаций скорости измене¬
ния эйконала И*, (со) = И7/(со). Поскольку случайный процесс 67 = 12 - 1\
является стационарным, в соответствии с общей теорией [203] спектраль-
d
ная плотность процесса— 6/ = Ы (рис. 98) будет равна
dt
H's j (со) = со2 1 (и) = 4со2 sin2 И7/ (со). (11.8)
2и
233
§2. ТРОПОСФЕРНЫЕ ОГРАНИЧЕНИЯ
ПРИ АБСОЛЮТНЫХ КООРДИНАТНЫХ ИЗМЕРЕНИЯХ
Тропосферные угломерные ошибки при измерении т — 6ФТ и F — 6Ф/г
будут представляться по порядку величины соотношениями
СО- 01
5ФТ«—; 5ФТ=6Ф^,
b b
(П.9)
Хо F
6ФР« = —Ц
Ь£1 ЬП
(11.10)
где ог и Ор — средне квадратические тропосферные ошибки в измерении
временной задержки и частоты интерференции соответственно, b — база
инструмента и £2 = 7,3 • 1СГ5 рад/с — угловая скорость вращения Земли.
Формулы (11.9) и (11.10) дают нижнюю границу оценки тропосферных
эффектов. Поскольку при обработке координатных измерений ЗФТ (ЗФ^)
и 5 Фр входят в правые части условных уравнений с соответствующими
весами, то точечные оценки получаемых поправок к определяемым пара¬
метрам будут зависеть отвесовых коэффициентов, которые в свою очередь
зависят от взаимной геометрии ’’база — источник”.
Очевидно, что тропосферную ошибку углового измерения можно су¬
щественно уменьшить, используя временное накопление. На первый взгляд
кажется, что характер временного осреднения определяется лишь характер¬
ным для базы Ъ периодом флуктуаций тропосферных неоднородностей
tb « bjv. Так что в течение времени Т > tb можно сделать N= Tjtb незави¬
симых отсчетов и, следовательно, уменьшить тропосферную ошибку в
где ЗФ0 — ошибка мгновенного измерения.
Однако, если встать на такую точку зрения, то для фазовых измерений,
например, неизбежно следующее парадоксальное заключение: в инерцион¬
ном интервале в области изотропной трехмерной турбулентности (b < L!)
тропосферная угловая ошибка тем меньше, чем меньше база инструмента.
Действительно, согласно (11.3), ЗФ0 x/Di (b)'lb = Ctb~^6 ->00 при b -> 0.
При осреднении же ЗФГ « Cibll3l\/п, так что ЗФг-> 0 при b -+ 0. В дей¬
ствительности же, как будет показано ниже, tb в общем случае не определя¬
ет интервала корреляции, который при'Ь < Ь2 всегда больше tb. Посколь¬
ку уменьшению тропосферной ошибки углового измерения способству¬
ют и временная и пространственная фильтрация, характер временного
осреднения существенно зависит от взаимного соотношения Т и характер¬
ных времен t0 = Lo/и, t х = L4lv,t2 -L2Jv. Очевидно, что временное осред¬
нение при измерениях координат, использующих временную задержку
(или фазовую информацию) и частоту интерференции, будет происходить
по различным законам.
Временное осреднение на интервале Т можно представить как фильтра¬
цию (подавление) флуктуаций с частотами со>, 1/Г (см. рис. 98)
(11.11)
234
Отсюда следует, что временное накопление фильтрует высокочастотные
флуктуации, в то время как пространственная фильтрация (11.7). подавля¬
ет лишь низкочастотные флуктуации. Выражение для спектральной плот¬
ности (11.11) позволяет определить дисперсию разности электрических
длин трасс Oi (Т, Ь) пдя инструмента с базой b в единичном сеансе дли¬
тельностью Т
Oi — 2 f Wj/(со) <7со.
о
(11.12)
Принимая во внимание (11.11), (11.12) и (11.6), будем иметь [213]
ol(T,b)=^s(r + +$( Г 25^-25(Г)}, (П-13)
где
S (х) = f (х - О D (0 dt.
о
(11,14)
Очевидно, что
а?(Т(6) =
D(b) - 2S(T)/T2,
tb>T,
tb<T,
(П-15)
и, следовательно, согласно (11.9) и (11.3) .тропосферная ошибка при
измерении направления на источник по фазе или временной задержке
будет иметь следующие асимптотические выражения:
Ci/b1^,
Lq <b<Lx,
CL/b213,
Zj <b<L2,
cLiA>3lb,
Lx <b, T<t2,
j2CLL\l3J^lb,
L2 <b, T>t2
CtKvT)1!6,
tQ <T <C Zj,
CL/(yT)2V
G <T<t2r
cllH3Ivt,
t2 <T,b <L2
t2 <T, b > L2
(11.16)
Таким образом, временное осреднение начинает сказываться лишь при
Т > причем процесс осреднения идет значительно медленнее, чем это
следует из ’’наивной” теории.
Вид зависимостей о/ и 5ФТ для разных баз и разных времен накопления
представлен на рис. 99, 100. Очевидно, что временное осреднение в
инерционном интервале начинает играть роль лишь в тех случаях, когда
время накопления Т становится значительно больше характерного для
базы Ъ периода флуктуаций тропосферных неоднородностей tb = b/v. Хотя
235
Р и с. 99. Значения о/ для разных баз и времен накопления (t t = L t/u « 9 мин, t2 =
= Z2/u — 3,5 дня).
Рис. 100. Тропосферные ограничения при позиционных наблюдениях, использующих
временную задержку.
при увеличении базы в о? вносят вклад тропосферные неоднородности
все больших масштабов, тем не менее ошибка в измерении координат
оказывается не зависящей от базы, поскольку при T>tb ц b. Такое
своеобразное поведение связано с влиянием членов, характеризующих
’’взаимодействие” между пространственной и временной фильтрациями
тропосферных неоднородностей. На базах, меньших внешнего масштаба
трехмерной турбулентности (эффективной толщины тропосферы —
L ~ Z j), которые типичны для оптических телескопов и радиотелескопов
с заполненными апертурами* уменьшение флуктуационных шумов тропо¬
сферы может быть достигнуто лишь при достаточно больших временах
накопления. Очевидно, что осреднение становится особенно эффективным,
когда Т> = Ljv. Однако даже в этом случае при разумных временных
накоплениях Т 104 с тропосфера ограничивает точность углового из¬
мерения в сеансе сотыми долями секунды дуги.
Для баз, величина которых больще Ах, но меньше внешнего масштаба
двумерной турбулентности Z2, которые типичны для радиоинтерферо¬
метров с электрической связью и интерферометров со сверхдлинными
базами, тропосферные ошибки накоплением существенно не уменьша¬
ются, особенно если учесть, что здесь имеются более жесткие аппаратур¬
ные ограничения на Т. Таким образом, дальнейшее уменьшение тропосфер¬
ной ошибки может быть достигнуто только за счет перехода к базам,
♦Несмотря на то, что в качестве модели инструмента, измеряющего положения
источника, рассматривается двухэлементный интерферометр, тем не менее полу¬
ченные оценки применимы и к инструментам с заполненными апертурами [214].
236
Рис. 101. Значения а/ для разных баз и времен накопления.
Рис. 102. Тропосферные ограничения при позиционных наблюдениях, использующих
частоту интерференции.
размер которых больше внешнего масштаба двумерной турбулентности
Z2. В энергетическом интервале время накопления практически не играет
никакой роли в уменьшении флуктуационных эффектов тропосферы, по¬
скольку для РСДБ оно всегда существенно меньше t2 из-за нестабильности
стандартов времени и частоты. Уменьшение тропосферной ошибки з^есь
идет только за счет эффекта ’’насыщения” структурной функции, который
’’просветляет” тропосферу. Благодаря этому на базах, больших L2} тро¬
посферную ошибку единичного измерения координат можно уменьшить
до нескольких миллисекунд дуги.
Используя (11.8), (11.11) и (11.6), нетрудно найти выражение для
дисперсии скорости вращения разности электрических длин трасс [215]
o/(T,Z?)= {2D(b)+2D(vT)-D(b + vT)-D(\b - vT I)} «
2Z)(u7) 1 2rV,_ _
T2
2Z)(Z>)
T2
(П-17)
Принимая во внимание (11.10), можно оценить тропосферную ошибку
в определении направления на источник по частоте интерференции:
Cju5ie> /ЬТ1/6,
t0<T<ti, -
CLv1/3/bT213,
CLL\l3lbT,
t2<T,
Ct/b^T,
L0<b<Li,
CL/b2!3T,
Lt <b<L2,
. CLL^3/bT,
L2<b,
при tb > Т,
(11.18)
при tb < Т.
Вид зависимостей а/ и приведен на рис. 101,102.
237
Как следует из (11.18), при малых временах накопления Т тропосфер¬
ная ошибка может быть уменьшена в основном за счет увеличения
базы. Однако даже на сверхдлинных базах (Ь > Ь2) тропосферные огра¬
ничения будут составлять сотые доли секунды дуги. Этот более жесткий
по сравнению с фазовыми измерениями или измерениями временной
задержки предел объясняется тем, что спектр флуктуаций частоты интер-
1
ференции —у всегда более высокочастотен, чем спектр флуктуаций
X
разности электрических длин — W5l (см. рис. 98), так как вклад мелко¬
масштабных (высокочастотных) тропосферных неоднородностей оказыва¬
ется весьма значительным.
Надо иметь в виду, что полученные оценки существенно зависят от
выбора характерных линейных масштабов и Z2, а также от величины
скорости ветра v(CL = Q y/v/t^). В частности, если внешний масштаб
двумерной турбулентности окажется существенно меньшим, нежели
тот, который принят в модели структурной функции (11.3), то в этом
случае тропосферные ошибки 5ФТ и 5Ф/? существенно уменьшаются.
§ 3. ВЛИЯНИЕ ЧИСЛА СЕАНСОВ ПРИ КООРДИНАТНЫХ ИЗМЕРЕНИЯХ
Как было показано в гл. 4, при определении координат радиоисточников
абсолютным методом необходимо наблюдать группу источников неко¬
торого минимального объема в разных часовых углах. Таким образом,
реальная программа радиоинтерферометрических измерений представляет
собой серию некоторого числа N отсчетов т или F относительно короткой
длительности Т, разделенных относительно большим промежутком времени
ДТ. Рассмотрим, какую роль играет накопление N отсчетов т и F в умень¬
шении их случайных ошибок, вызванных флуктуационными эффектами
тропосферы [216,217].
Пусть проводится N наблюдений источника длительностью Т, которые
повторяются через постоянный интервал д. Сдвиг сигнала во времени
на величину ц (ц > Г) эквивалентен умножению его спектра на величину
ехр(—/дсо). Таким образом, суммарная спектральная плотность при N
отсчетах длительностью Т каждый — (со) — будет равна спектральной
плотности единичного отсчета длительности Т - WT (со), умноженной на
множитель вида
Д- I 1+e"/gQJ + . . . + e-/(7V “ 1)MU) I2 =-Д(А^+2ЛХ \cosQV-fc) fico).
N N k=o
(11.18)
b
Для радиоинтерферометров co сверхдлинными базами (b > L2)—
v
даже для незаходящих источников. Поэтому, принимая во внимание (11.18)
и (11.6), (11.7), (11.11), будем иметь
°т = {-2S(T)+NT2D(b) -lVfc[5(T + MM-fc)) +
с NT N k=i
+ 5(1Т-д(7У-£) \) — 2S(jjl(N - к))]} (11.19)
238
и, поскольку у. > Т, то
= 5(D_-i— WD(n(N-k)). (11.20)
с2 c2NT2 cN
Примем для оценок модель структурной функции (11.3) и Т = 2 мин,
д = 0,5 часа,7У=2О и b = L2 = 3000 км. Тогда сот «8,2 см, в то время, как
VDi (ЬУ «8,7 см. Отсюда видно, что увеличение числа отсчетов при из¬
мерении временной задержки на базах, больших внешнего масштаба дву¬
мерной турбулентности, не ведет к уменьшению тропосферной ошибки, так
как отдельные сеансы оказываются сильно скоррелированными. Именно
этим объясняется тот факт, что при координатных определениях, использую¬
щих временн^ло задержку, временное накопление не проявляется при b>L2.
Отдельные сеансы становятся статистически независимыми, если
д > th > Т, и тогда
(11.21)
Эта ситуация соответствует тому случаю, когда период становится больше
характерного времени корреляции тропосферных неоднородностей
масштаба L 2, которое составляет t2 «3,5 суток.
Переходим теперь к оценке измерения частоты интерференции. Нетруд¬
но видеть, что при b> L2
и при д > Г
(11.22)
Отсюда видно, что увеличение числа отсчетов на базах b >Ь2 эффектив¬
но уменьшает тропосферную ошибку, поскольку уже при д > Т отдель¬
ные отсчеты становятся практически статистически независимыми. В част¬
ности, для рассмотренного выше примера gf (Т, д) « 1,5 • 104 Гц для
X = 5 см, в то время как aF (Т) « 6,8 • 104 Гц. В результате ошибки опре¬
деления углового положения источника по временной задержке и частоте
интерференции оказываются одного порядка, 6ФТ « 6Фр « 0",007 для
b = L2. Это означает, что программы,использующие совместные измерения
т и F, могут быть столь же эффективны, как и программы, использующие
только измерения г.
§4. ТРОПОСФЕРНЫЕ ОГРАНИЧЕНИЯ
ПРИ ДИФФЕРЕНЦИАЛЬНЫХ КООРДИНАТНЫХ ИЗМЕРЕНИЯХ
Тропосферные ограничения, о которых шла.речь в §2, можно существен¬
но ослабить, если использовать дифференциальные измерения временной
задержки т/7 или частоты интерференции FZ/, которые, как было показа¬
но в гл. 4 части II, позволяют восстановить координаты источников и
определить пространственно-временную ориентацию интерферометра.
239
1
2
1
2
Рис. 103. Геометрия дифференци¬
альных измерений.
волны в
h = 11,
Рассмотрим случай, когда
источники, с помощью которых
формируются дифференциаль¬
ные значения и Гц, наблю¬
даются под одинаковыми зе¬
нитными углами на каждом
пункте интерферометра. В этом
случае (рис. 103) геометри-
тропосфере от обоих источников до
Zi= 1'2 , и, как понятно из качествен-
ческие пути фронта
антенны одинаков ы:
ных соображений, тропосферные флуктуации, вызываемые крупно¬
масштабными неоднородностями (большими &эфф = ЬЪ + иДГ, где L —
геометрическая толщина тропосферы, ДТ — время переброса антенны
с опорного источника на исследуемый и Ф - угловое расстояние между
источниками), будут вычитаться и, таким образом, основной вклад в
тропосферную ошибку будут вносить неоднородности с масштаба
b < £эфф. Это же заключение нетрудно подтвердить строгим анализом,
если принять во внимание, что учет рассматриваемого эффекта достига¬
ется за счет введения в
2со/>эфф
жителя 4 sin .
2и
параграфах, приводит к
спектральные плотности (11.11) и (11.18) мно-
Анализ, подобный проведенному в предыдущих
параграфах, приводит к следующим асимптотическим выражениям для
тропосферных набегов в дифференциальной временной задержке [218]:
1
COS2Zj
X
+
] T<t,
(11.23)
°т (^эфф, Т)* 2с2 (
С^э'фф,
С/2^фф/(иП1/3,
С2/>2Эфф/(иГ)4/3,
и частоте интерференции
^эфф,Л
х ( С^ф/Т2, Ти>ЬЭфф,
{ С? v5'3/!'1'3, Ти<ЬЭфф.
+
At) Х
COS Zi /
Т - любое,
(И-24)
Очевидно, что подавление флуктуационных эффектов тропосферы
оказывается тем эффективнее, чем меньше угловое расстояние Ф между
( ийТ\
источниками I вплоть до Ф —/’ и в интеРФеР°метРии со сверхдлин¬
ными базами позволяет реализовать потенциальное разрешение интер¬
ферометра со сверхдлинной базой при соответствующем выборе углов
Ф (рис. 104).
240
Рис. 104. Тропосферные ограничения при дифференциальных позиционных наблю¬
дениях источников под одинаковыми зенитными углами: а) измерения т, б) изме¬
рения F- 1 - Ь= 3000 км, 2 - b - 6000 км.
Рис. 105. Тропосферные ограничения при дифференциальных позиционных наблю¬
дениях под разными зенитными углами: 1 - zx - 60° , z\ = 33° , b = 3000 км, 2 - z, =
= 60° ,z\ = 5°,d =6000 км.
Однако ясно, что ситуация, когда оба источника наблюдаются под одина¬
ковыми зенитными углами, весьма редка в интерферометрии со сверх¬
длинными базами, а в некоторых случаях она вообще нереализуема. Дей¬
ствительно, как нетрудно понять, в каждый данный момент можно найти
только два источника, зенитные углы которых одинаковы на обеих антен¬
нах, образующих интерферометр. Однако такой алгоритм, как, например,
алгоритм метода дуг, требует синхронных или квазисинхронных наблюде¬
ний по крайней мере пяти источников.
В том случае, когда источники наблюдаются под разными зенитными
углами, ситуация существенно меняется по сравнению со случаем, рас¬
смотренным в предыдущем параграфе. Здесь среднеквадратичный набег
разностного эйконала при наблюдениях двух источников будет равен
(см. рис. 103).
о] = <[(Л --Z2>-(/;-/2) + </l-Zi>]2>. (11.25)
Поскольку на базах b > Ь2 набеги на отдельных антеннах статистически
независимы, то
—У + (—
COSZ2/ \COSZi
(sin2 Z !
COS4Zi
sin2zj\
|ф2
cos4zj /
(11.26)
при Ф < 1.
Существенная особенность этой оценки заключается в том, что в отличие
от оценок (11.23), (11.24) здесь тропосферный набег определяется неодно¬
родностями с самыми большими масштабами, в результате чего тропо¬
сферные ограничения становятся существенно более жесткими (рис. 105).
241
Таким образом, эффективность дифференциального метода при на¬
блюдениях источников, находящихся под разными зенитными углами,
значительно падает по сравнению со случаем, когда источники наблюдают¬
ся под одинаковыми зенитными углами. Поэтому для фильтрации тропо¬
сферных неоднородностей необходимо наблюдать источники, находящие¬
ся на малых угловых расстояниях друг от друга. Это ведет к более
жестким требованиям к флуктуационной чувствительности интерферо¬
метра по потоку (см. гл. 12).
§5. РАДИОМЕТРИЧЕСКИЕ ИЗМЕРЕНИЯ
ЭЛЕКТРИЧЕСКОЙ ТОЛЩИНЫ ТРОПОСФЕРЫ
Как отмечалось в гл. 3, по данным приземных измерений температуры
Г, давления р и парциального давления водяного пара I можно оценить
L
эйконал тропосферы I = f (n(h) — l)dh. Среднее значение I связано в
о
основном с сухой компонентой воздуха, а его изменения — в основном
с наличием водяных паров на луче зрения, распределение которых по
высоте плохо коррелирует с приземным значением влажности. По этой
причине интегрирование по h вносит заметную ошибку при определении
I (до 4% — для сантиметрового диапазона длин волн).
Значительно более точно можно определить Z, если, как это было пред¬
ложено в работе [219], измерять тепловое излучение вблизи резонансной
линии паров воды (f = 22,235 ГГц, X = 1,35 см) с помощью наземных
СВЧ-радиометров. Яркостная температура неба Тя в линии паров воды
определяется метеоусловиями на пути распространения луча L и может
быть найдена теоретически путем интегрирования уравнения переноса
Тя = fT(h) {exp (—/ Xf(h')dh')} xf(h)dh,
(11.27)
L 0
где T(h) — температура атмосферы и Xf — коэффициент поглощения
в атмосфере*. Поскольку яркостная температура теплового излучения
зависит от распределения давления, влажности и температуры, то уравне¬
ние (11.27), будучи обращено, может быть использовано для получения
информации об этих метеоданных. Они, в свою очередь, согласно (3.84),
определяют значение показателя преломления и электрической толщины
тропосферы.
Эта идея была промоделирована в работе [221] , где эйконал искался
в виде многомерного линейного регрессионного соотношения
(11.28)
где а - «-мерный вектор регрессионных коэффициентов и Тя — «-мерный
вектор данных Тя. Помимо данных о яркостной температуре на склонах
линии X = 1,35 см включались данные о Тя вблизи линии поглощения
♦Резонансная линия X = 1,35 см соответствует квантовому переходу 5-6_ . Вра¬
щательный спектр молекулы Н2О содержит около 900 линий с квантовыми числами
полного момента количества движения J < 12. Значения х/ Для X <0,15 см при¬
ведены в [220].
242
Таблица 25
Среднеквадратические ошибки прогноза / по данным
радиометрических измерений
Зенитный угол
10°
30°
45°
60°
80°
21,5 ГГц
0,4
0,45
0,6
0,9
4,5
19; 22,2; 23,5;
52; 54; 170;
180 ГГц
0,08
0,10
0,15
0,25
1,5
кислорода — X = 0,5 см и роды — X = 0,164 см, что позволило значительно
уменьшить погрешность определения I.
Результаты моделирования приведены в табл. 25 для различных зенит¬
ных углов наблюдения и различных наборов частот вблизи резонансных
линий воды (X = 1,35; 0,164 см) и кислорода (X = 0,5 см). Улучшение
прогноза при включении О2 -данных связано с тем, что радиометрические
измерения в линиях кислорода дают информацию о температурном про¬
филе атмосферы.
На практике коэффициенты регрессии (11.28) должны определять¬
ся из опытных данных в месте наблюдения.
§6. ИОНОСФЕРА, МЕЖПЛАНЕТНАЯ И МЕЖЗВЕЗДНАЯ СРЕДА
Как уже отмечалось, ионосфера представляет собой частотно зависимую
среду, фазовый набег от которой противоположен по знаку тропосферному
набегу и обратно пропорционален квадрату частоты (гл. 3, §4). Для частот
выше 5 ГГц ионосферный вклад в эйконал мал по сравнению с тропо¬
сферным, а для частот ниже 1 ГГц - доминирует и при / = 1 ГГц составля¬
ет 10—20 м в зените. Эта регулярная составляющая ионосферного набега
может быть предвычислена, и на частотах выше 5 ГГц остаточная неопре¬
деленность может составлять менее 5—10 см. Это достаточно значительная
величина для измерений с высоким угловым разрешением. Однако, по¬
скольку характерное время изменения электронной концентрации на
луче зрения Nei в том числе с турбулентными движениями, около 0,5 часа
(характерный масштаб неоднородностей « 400 км), применение диффе¬
ренциальных методов позволяет исключить регулярные вклады и в зна¬
чительной мере подавить нерегулярные вклады ионосферы. Влияние ионо¬
сферы может быть практически полностью исключено, если использовать
многочастотные наблюдения (имея в виду закон /~2). Этот метод
успешно используется, например, в спутниковой навигационной системе
’’NAVSTAR”.
Межпланетная среда заполнена сильно неоднородной высоколонизован¬
ной плазмой — солнечным ветром, и флуктуации ее параметров простира¬
ются от масштабов 10 км до 1 а.е., а структурная функция эйконала,
по-видимому, степенная [222]. Основной масштаб турбулентности равен
106 км, а соответствующее характерное время t = 4 • 105 с совпадает со
временем, за которое солнечный ветер достигает орбиты Земли
243
(у = 400 км/с). Последнее означает, что дифференциальные методы ис¬
ключают влияние межпланетной среды. Абсолютное влияние неоднород¬
ностей межпланетной среды существенно на метровых волнах и на срав¬
нительно небольших расстояниях от Солнца(< 50 радиусов Солнца), по¬
скольку плотность шГазмы падает как ТГ2. На сантиметровых волнах
влияние межпланетной среды пренебрежимо мало.
Межзвездная среда еще плохо изучена, однако наблюдения мерцаний
радиоисточников на неоднородностях межпланетной среды показывают,
что набег фазы много меньше периода для X < 10 см даже в плоскости
Галактики [231].
Глав а 12
ГЛОБАЛЬНЫЕ РАДИОИНТЕРФЕРОМЕТРИЧЕСКИЕ СИСТЕМЫ
В конце 70-х годов в ряде радиоастрономических коллективов США
[223, 232], Европы [224], СССР [225] и Канады [226] были выдвинуты
развернутые предложения о создании многоцелевых фазостабильных
радиоинтерферометрических сетей глобальных размеров, работающих в
реальном масштабе времени. В СССР этот проект получил название ’’Поли-
гам”. Практическая реализация этих проектов, как сейчас представляет¬
ся, позволит преодолеть многие трудности существующей в настоящее
время независимой интерферометрии, из которых наиболее существенной
является невозможность осуществления фазовых измерений. Действитель¬
но, фаза реального интерферюметрического отклика содержит случай¬
ные фазовые набеги из-за нестабильности стандартов и флуктуаций
электрической толщины атмосферы. Это обстоятельство ведет к далеко
идущим следствиям для эффективного использования интерферометра
в качестве инструмента, строящего изображения и определяющего по¬
ложения космических источников.
Прежде всего, измерение только амплитуды функции видимости позво¬
ляет получать лишь некоторые представления о структуре и размерах
исследуемого источника, и то лишь в тех случаях, когда имеется какая-
либо априорная информация о его приближенной модели.
Далее, случайные фазовые набеги ограничивают время когерентного
накопления, что уменьшает предельную чувствительность системы по
потоку и не позволяет исследовать слабые источники.
Наконец, отсутствие фазовой информации позволяет определять поло¬
жение источника лишь с точностью до сотен лепестков диаграммы, в то
время как современные радиотелескопы с заполненными апертурами
и фазостабильные решетки с малыми базами определяют положение объ¬
екта до сотых долей диаграммы.
Действительно, среднеквадратические ошибки в измерении фазы 6^,
временной задержки 6Т и частоты интерференции 5F, связанные с аддитив¬
ными шумами аппаратуры, равны (часть III, гл. 5, § 4).
1 л/т у/з1
Q i^fQ irTQ
244
где для TV-элементного интерферометра отношение сигнала к шуму
Здесь d — диаметр антенны с коэффициентом использования 0,5, 5 —
спектральная плотность потока, Д/ — полоса регистрации, Т — время на¬
копления, Гш — шумовая температура системы, к — постоянная Больцма¬
на. Тогда ошибки в определении углового положения 5Ф при измерени¬
ях, использующих фазу </>, равны 54^ = —5^/6, а временную задержку
к
сдт
. Эти оценки ошибок связаны соотношением
b
(т) -6ФТ
6*7 ~ Д/
В существующих радиоинтерферометрических системах регистрации
Д/ < 100 МГц, так что для длин волн X = 1 ч- 5 см « 1000 -г 200.
В системах с синтезированной полосой регистрации этот контраст несколько
уменьшается.
Перечисленные выше недостатки существующей радиоинтерферометрии
со сверхдлинными базами, как сейчас представляется, можно преодолеть,
если отказаться от варианта с независимой записью СВЧ-сигналов и связать
радиотелескопы сети через геостационарный спутник-ретранслятор [223 —
225]. Огромные полосы цифровой связи (более 1 ГГц) позволяют резко
повысить чувствительность системы за счет увеличения полосы регистра¬
ции и числа элементов сети. Связь гетеродинов через ИСЗ снижает требо¬
вания к их долговременной стабильности, что позволяет увеличить время
когерентного накопления. Все это, вместе взятое, ведет к тому что ста¬
новится возможным создать широкую сеть опорных источников, необ¬
ходимую для эффективной фильтрации фазовых шумов тропосферы. На¬
конец, передача основных сигналов через спутник и обработка их в едином
центре позволяет получать информацию об источнике в реальном масштабе
времени.
Несмотря на некоторые различия в технических решениях и деталях
идеологии, национальные проекты [224—226] представляют, по существу,
весьма близкие взгляды радиоастрономов различных стран на будущее
наблюдательной радиоастрономии и, в частности, радиоастрономии высоко¬
го углового разрешения (см. обзор [227]).
Перед тем как дать краткую характеристику этих проектов (§4), рас¬
смотрим некоторые общие вопросы (§§ 1—3) , решение которых позволяет
составить общее представление о структуре таких глобальных радиоинтер¬
ферометрических систем.
245
§ 1. ОПТИМАЛЬНЫЕ БАЗЫ РАДИОИНТЕРФЕРОМЕТРИЧЕСКОЙ СЕТИ
Обсудим еще раз вопрос, почему при получении координат источников
с высокой точностью необходимы наблюдения на больших базах. На первый
взгляд может показаться, что на двухэлементном интерферометре с малой
базой (b <Z 100 км) также можно реализовать высокое координатное
разрешение при определении положений (по крайней мере до миллисе¬
кунды дуги), если использовать дифференциальный метод.{Действительно,
для малых баз проблема фазовой привязки пунктов (во всяком случае,
для сантиметрового диапазона длин волн) не стоит так остро, как в интер¬
ферометрии со сверхдлинны^ии базами. Во-первых, на малых базах имеет¬
ся возможность прямой связи пунктов (волноводами, радиорелейными
линиями, волоконной оптикой), во-вторых, тропосферный набег эйко¬
нала на этих базах y/Dj (b)' <2,5 см. Таким образом, возможность прямых
фазовых измерений для сантиметрового диапазона длин волн на малых
базах не вызывает принципиальных трудностей. Измерение же фазы до
градуса (до малых долей Х/b) может быть реализована с помощью диф¬
ференциальных наблюдений. К сожалению, такая привлекательная возмож¬
ность практически нереализуема, ибо требует чрезвычайно высокой
чувствительности системы по потоку и, как следствие, антенн чудовищных
размеров. Приведем оценки, подтверждающие эту точку зрения.
Рассмотрим тот идеальный случай, когда исследуемый и опорный
источники наблюдаются двухэлементным интерферометром под одинако¬
выми зенитными углами на обоих пунктах, а время накопления Т < .
Тогда, согласно (10.60) и (11.23), дисперсия угломерной ошибки, опре¬
деляемая шумами тропосферы и аппаратуры при фазовых наблюдениях
источников с одинаковыми потоками, равна
С^Ф2
+
(5Ф)2 =
где Q = тг
Ь2
(12.1)
Q £
и ст =
(иГ)2/3 cos z
Очевидно,
стояниях Ф друг от друга 5Ф определяется (при заданной чувствительности
по потоку) тропосферными эффектами, а при малых Ф — аддитивными
шумами аппаратуры. Используя соотношение ’’поток — число” (см. (5.5)),
можно найти угловое расстояние Ф между источниками с потоками S
1 / S \3/4
= “7=; 7“ •
п V n0\SQ/
2Х2
4я26222
<2Д/Т' „
— d2S
кТш
что при наблюдении источников на больших взаимных рас-
(12.2)
Тогда, принимая во внимание (12.1), (12.2), имеем следующее выраже¬
ние для минимальной ошибки углового измерения:
где
Q’ « о,1 02/7<У6/7,
(12.3)
^У2Д/Г\3/2
< 32кТш /
р =
246
Рис. 106. Зависимость предельного угло¬
вого разрешения двухэлементного интер¬
ферометра (д = 40 км) от диаметра антенн.
1 - диаметр антенны, 2 - поток источника,
истользуемого в качестве опорного.
Для числовых оценок примем сле¬
дующие параметры системы: b =
= 40 км, Д/ = 50 МГц, Тш = 50 К,
Т = 1 час, X = 5 см и z = 60°. Тогда
2,5 • 10‘7
5*мин * (12Л)
Таким образом, даже в оптималь¬
ном случае координатное разрешение порядка миллисекунды дуги может
быть достигнуто на рассматриваемой базе лишь тогда, когда диаметры
антенн, образующих интерферометр, близки к предельным (<7 ~ 100 м),
поскольку для фильтрации тропосферных неоднородностей необходимо
наблюдать источники с весьма малыми потоками S 0,01 е.п. (Ф 2°)
(рис. 106). Поэтому для эффективного подавления тропосферных эф¬
фектов необходимо переходить к базам b > Ь2.
Если же говорить о верхней границе характерного размера базы сети,
то необходимо прежде всего отметить, что радиотелескопы системы нецеле¬
сообразно размещать в предельно удаленных по долготе точках, так как
в этом случае становится невозможным длительное слежение даже за
объектами с умеренными склонениями. Эта ситуация особенно характерна
для двумерной много элементной решетки, работающей в режиме сети.
В задачах построения изображений уменьшение общей зоны видимости
означает, что невозможно плотное заполнение £/И-плоскости, т.е. получе¬
ние качественного изображения в суточном синтезе. В координатных за¬
дачах это приводит к резкому ухудшению разрешимости соответствую¬
щих систем условных уравнений. Кроме того, малая общая зона видимо¬
сти системы означает уменьшение ее чувствительности по потоку из-за
уменьшения общего времени накопления. Можно показать, что оптималь¬
ное расположение элементов, одновременно обеспечивающее интересы
координатных задач и задач по построению изображений, достигается
при расположении их на расстояниях ^Re (а не 2Re), так что максималь¬
ное долготное разнесение не должно превышать 80—100°.
§ 2. ЧИСЛО И РАЗМЕР ЭЛЕМЕНТОВ РАДИОИНТЕРФЕРОМЕТРИЧЕСКОЙ СЕТИ
Для того чтобы составить представление об оптимальной структуре
интерферометрического комплекса, воспользуемся ’’полигамной идео¬
логией” [227, 219], которая требует за счет набора определенного числа
элементов сформировать такую суммарную собирающую площадь системы,
которая обеспечивала бы достаточную ее чувствительность по потоку,
необходимую для эффективного применения дифференциальных методов
измерения координат и метода опорного объекта при построении изо¬
бражений. Центральным вопросом, который необходимо решить при вы¬
боре оптимальной структуры TV-элементной сети, является определение
247
минимального числа и размера антенн, образующих фазостабильную систе¬
му. Рассмотрим этот вопрос, исходя из требования, чтобы система с
7щ = 50 К имела разрешение 6Ф = 0",0001 на длине волны Л = 5 см. Прежде
всего определим ту минимальную общую площадь системы, которая может
обеспечить такое разрешение с применением метода опорного объекта.
Используя рассуждения, аналогичные приведенным в §1, получим,
что минимальная ошибка единичного измерения положения по диффе¬
ренциальной фазе равна
2
Q'b
(d 2 \/N(N- lj)3'7 T3114
5^ii ’
(12.5)
где a — тропосферный набег, величина которого зависит от процедуры
наблюдения опорных источников. В соответствии с замечаниями § 1 при¬
мем в качестве характерного размера базы b = 5000 км. Тогда при
8Ф=0",0001 2'= 43 и
3 • 104а4/3
d2 VMJV-1)' « —— . (12.
Поскольку на больших базах типичным является режим, когда источни¬
ки наблюдаются под разными зенитными углами, то, согласно (11.26)
для z < 60°, можно принять
22 см, если измерения эйконала не ведутся,
5 см, если измерения эйконала ведутся.
(12.7)
Время накопления Т, в течение которого необходимо сформировать диф¬
ференциальную фазу, ограничено по двум причинам. Во-первых, на этом
интервале необходимо гарантировать стационарность всех гео динами¬
ческих и инструментальных параметров при наблюдении минимальной
группы источников. Во-вторых, время Т должно быть меньше характер¬
ного периода флуктуаций эйконала. Оба эти требования привбдят к близ¬
кой оценке для времени накопления Т - 600 с, в течение которого форми¬
руется дифференциальная фаза. Тогда ’’эффективная площадь” системы,
обеспечивающая предельное угловое разрешение 6Ф = 0м,0001, равна
d2\/N(N- 1)‘ «
7,5 •104 м2, если измерения эйконала не ведутся,
. 7,8 • 103 м2, если измерения эйконала ведутся.
Отсюда видна та значительная роль, которую играют радиометрические
измерения электрической толщины тропосферы.
Очевидно, имеется множество вариантов формирования такой синтези¬
рованной площади (рис. 107). Из них предельными являются вариант
’’вавилонской башни” (большие d, малые N) и вариант ’’большого скачка”
(большие N, малые d), границы между которыми мы пытаемся установить
ниже.
Для того чтобы выбрать оптимальную комбинацию d и N, необходимо
составить хотя бы качественно представление о стоимости системы, ко¬
торая складывается из стоимости антенн и стоимости аппаратуры, разным
образом зависящих от d и N. Поскольку обычно принимается, что стои-
248
120
Рис. 107. Зависимость ’’диаметр - число антенн” для системы с предельным угловым
разрешением О" ,0001. 7 - не ведутся измерения эйконала, 2 - ведутся измерения
эйконала.
Рис. 108. Зависимость стоимости системы (миллионы условных рублей) от диаметра
антенн (метры).
мость антенны « J2*8 [129], при заданной эффективной площади системы
d2N стоимость ее антенной части 7VJ2»8 ос tv _0’4 убываете ростом N.
С другой стороны, стоимость аппаратурной части системы растет с рос¬
том N, так что между вариантами ’’большого скачка” и ’’вавилонской
башни” должен существовать оптимум по стоимости.
Рассмотрим эту ситуацию подробнее, представив стоимость системы
в виде (S — в миллионах условных рублей, d — в метрах)
/ d\2,s M7V-1) /d\
S = N45 1 — 1 + N(1 + 0,1 + 0,5 + 0,05) + — 0,05 + Nl — 1.
(12:9)
Здесь первый член представляет стоимость антенн, включая амортизацион¬
ные расходы за 10 лет, второй — стоимость аппаратуры (приемники, линии
задержки, пункты связи с ИСЗ, пункты измерения эйконала), третий —.
стоимость корреляторов и четвёртый — эксплуатационные расходы за
10 лет.
Принимая во внимание (12.9) для случая, когда ведутся измерения
эйконала, нетрудно видеть, что система с минимальной стоимостью может
быть образована из 9—12 антенн с диаметрами d = 30 — 25 м (рис. 108).
Нетрудно видеть, что оптимальная по стоимости структура системы соот¬
ветствует ситуации, когда экономические затраты на антенны сравнива¬
ются с затратами на аппаратуру (рис. 109). Как видно из рис. 110, системы,
сформированные из антенн относительно небольших размеров, являются
оптимальными и по стоимости единицы информации, в качестве которой
можно выбрать число обнаруживаемых на стерадиан источников. В табл. 26
249
приведены наиболее важные параметры, характеризующие оптимальную
систему, а на рис. 111 — зависимость ее углового разрешения от взаимных
угловых расстояний между наблюдаемыми источниками.
Обратим внимание на ту важную роль, которую в системе играют радио¬
метрические измерения толщины тропосферы. Они позволяют:
1) существенно уменьшить затраты на строительство системы (стоимо¬
сти систем при наличии аппаратуры, измеряющей эйконал, и без нее
отличаются на порядок, причем стоимость радиометров на линии паров
воды равна 1% общей стоимости) ;
2) уменьшить число элементов системы до 9, что важно, если учесть
ограниченные возможности канала связи с ИСЗ;
3) увеличить минимальные угловые расстояния между опорными
источниками, что весьма существенно при решении обратных (геодина-
мических и геофизических) координатных задач.
Последнее замечание требует некоторых коментариев. Как было по¬
казано в части II, гл. 4, § 10, точность определения геодинамических и
где Ф — угловое расстояние между
109. Соотношение затрат на антенны
Рис.
5! и аппаратуру 5 2 для различных систем.
Рис. 110. Зависимость стоимости единицы
информации от диаметра антенн.
Рис. 111. Зависимость разрешающей спо¬
собности системы от углового расстояния
Ф между источниками.
250
Таблица 26
Основные параметры оптимальной системы
Диаметр антенн
Число антенн
Отношение стоимости айтенн к стоимости аппаратуры
Минимальный обнаружимый поток источника (Q = 5, Т= 600 с)
Число видимых источников на стерадиан
Угловое расстояние между источниками (Q= 5)
Число источников на стерадиан, положение которых можно
определить с точностью 0",0001
30 м
9
1,3
2,6 мЯн
10000
0°,5
480
эталонными источниками. Поэтому восстановление геодинамических
и геофизических параметров необходимо проводить по эталонным источни¬
кам с Ф ~ 1 радиан. Однако координатные измерения проводятся для
источников, отстоящих друг от друга на существенно меньшие расстояния.
Ошибка формирования дуги порядка радиана из малых дуг по порядку
величины равна 6Ф(1рад)
выше системах точность решения обратных координатных задач ЗФгеод =
= 0",0004, если радиометрические измерения электрической толщины
тропосферы проводятся, и 6Фгеод = 0",0008, если такие измерения не
проводятся. Таким образом, измерения эйконала улучшают точность
определения параметров инструмента и вектора угловой скорости враще¬
ния Земли в два раза.
Отметим, что идея формирования больших интерферометрических
систем из относительно малых элементов воспринимается психологиче¬
ски с большим трудом. Такая реакция связана с тем, что почти полувеко¬
вой опыт радиоастрономических наблюдений в радиометрическом режиме
определил тенденцию на строительство антенн все больших и больших
размеров (примером предельной ситуации в рамках этой тенденции яв¬
ляется недостроенный параболоид диаметром 180 м в США [228]). Одна¬
ко по мере появления и успешной работы систем апертурного син¬
теза становится все более очевидным тот факт, что достаточно видеть
источники в режиме сети и совсем не обязательно видеть их на одиночных
антеннах.
В заключение отметим, что формирование больших интерферометри¬
ческих систем из малых элементов является оптимальным и в организа¬
ционном смысле, поскольку каждый элемент системы не может играть
сколько-нибудь существенную радиоастрономическую роль при работе
вне сети. Объективная необходимость ’’кооперации по собирающей по¬
верхности” может оказаться весьма существенным фактором для успеш¬
ной работы системы, если учесть, что ее элементы разделены тысячами
километров, обслуживаются независимыми научными коллективами
и вступают в контакт только через спутниковый канал.
251
§3. ГЕОМЕТРИЯ РАДИОИНТЕРФЕРОМЕТРИЧЕСКОЙ СЕТИ
Очевидно, что оптимальное расположение элементов сети определяет¬
ся ее возможностями решать как чисто координатные задачи, так и задачи
по построению изображений (см. [227, 229, 230]). Качество изображения
определяется степенью заполнения плоскости пространственных частот
(i/И-плоскости) и отношением сигнала к шуму Q в каждой из ее дискрет¬
ных ячеек. Очевидно, что только многоэлементная система, работающая
в режиме сети, способна достаточно плотно заполнить t/K-плоскость при
относительно небольшом числе телескопов 7V, т.е. сформировать диаграм¬
му с низким уровнем боковых лепестков.
В jV-элемейтной системе общее число баз равно ДГ(У — 1)72, часть из
которых не является независимыми (избыточность системы).
Ясно, что оптимальной является система с минимальной избыточностью
при заданном числе элементов, которая обеспечивает наилучшее заполнение
«У-плоскости, а, следовательно, наибольшую чувствительность к деталям
изображений с широким спектром линейных масштабов. Однако избыточ¬
ность системы сама по себе не является отрицательным свойством, посколь¬
ку позволяет увеличить Q в соответствующей дискретной ячейке [/У-плос¬
кости, что важно при синтезе изображений источников с малыми потоками.
Вазимное расположение элементов системы определяет ее возможно¬
сти при построении изображений радиоисточников с различными склоне¬
ниями. Наиболее универсальной системой является двумерная решетка,
которая требует, вообще говоря, большего числа антенн при заданном
уровне боковых лепестков синтезированной диаграммы, нежели одно¬
мерная, так как она позволяет формировать двумерные изображения
источников с произвольными склонениями (в том числе и с 6 = 0° ).
Весьма близкая ситуация имеет место при решении координатных задач,
поскольку одномерная экваториальная решетка полностью адекватна
только задачам службы времени и не способна, в частности, определять
координаты источников геометрическим методом.
Поэтому кажется, что наиболее гибкой по отношению к различным
задачам является двумерная решетка,. которую можно адаптировать по
разрешению и избыточности к тем или иным проблемам или объектам.
В частности, используя все элементы системы в режиме сети при опреде¬
лении координат источников, в дальнейшем можно использовать только
ее часть, например, экваториальную компоненту, для решения обратных
координатных задач: определения параметров интерферометра, угловой
скорости вращения Земли и синхронизации часов.
С этой точки зрения минимальную многоцелевую систему представляет
собой ’’двумерный” (ДА = 80 — 100°, Д<р = 20 —30°) трехэлементный интер¬
ферометр, с помощью которого можно:
1) строить методом ’’фазы замыкания” изображения радиоисточников;
2) добиться более или менее плотного заполнения плоскости простран¬
ственных частот для источников с произвольными склонениями;
3) осуществлять ’’мгновенный синтез” для ряда координатных задач;
4) определять положение полюса Земли и восстанавливать значение
вектора угловой скорости вращения Земли;
5) улучшать разрешимость условных уравнений за счет использования
’’избыточной” базы при координатных измерениях.
252
§ 4. ПРОЕКТЫ ГЛОБАЛЬНЫХ РАДИОИНТЕРФЕРОМЕТРИЧЕСКИХ СИСТЕМ
Все проекты объединяет одна главная цель — создать радиоинтерферо-
метрическую сеть глобальных размеров, предназначенную для решения
широкого круга фундаментальных и прикладных задач. Несмотря на то,
что отдельные технические решения в национальных проектах и конфигу¬
рации проектируемых национальных сетей отличаются друг от друга (в
табл. 27 приведены основные параметры проектируемых национальных
сетей), тем не менее можно указать на ряд требований, которые являют¬
ся общими для различных предложений и которые позволяют составить
представление об ’’идеальной структуре” радиоинтерферометрической сети.
1. Универсальность. Сеть должна быть в одинаковой степени ориенти¬
рована на решение как астрономических, так и астрофизических задач.
С позиций классической оптической наблюдательной астрономии такое
требование выглядит совершенно нереалистическим, однако, в радиоин¬
терферометрии оно естественным образом вытекает из характера про¬
цедуры радиоинтерферометрических измеренйй. Действительно, радио-
интерферометр измеряет'функцию взаимной когерентности и тем самым
автоматически поставляет первичную наблюдательную информацию как
для астрофизических (функция видимости), так и для астрометрических
(задержка и частота интерференции) задач. Однако это не означает, что
в радиоинтерферометрии не возникает конкуренция между этими зада¬
чами. Действительно, астрофизические и астрометрические задачи требуют
для своего решения наблюдений, как правило, различных источников.
В частности, первые решаются по наблюдениям протяженных, а вторые —
точечных источников. То обстоятельство, что наблюдения этих источни¬
ков идут по различным программам — построение изображений требует
суточного синтеза, а координатные задачи требуют наблюдений группы
точечных источников по нескольку раз в течение суток — еще более обост-'
ряет эту конкуренцию. Однако с методической точки зрения эта конкурен¬
ция не является йринципиальной и прежде всего с позиции задач построения
изображений. Действительно, ддя формирования фазостабильной системы
необходимы регулярные (по крайней мере раз в два часа) наблюдения
опорных точечных источников с хорошо определенными положениями, что
позволяет калибровать радиоинтерферометр и, в частности, определять па¬
раметры его ориентировки во времени и пространстве. С другой стороны,
с точки зрения интересов астрометрии построение изображений некото¬
рых источников, входящих в каталог, играет роль аналога классической
службы собственных движений — службы изображений источников.
Следовательно, совмещение координатных задач и задач построения
изображений в рамках одной наблюдательной программы объективно
необходимо и вопрос об их совместимости должен решаться на уровне
системного математического обеспечения сети.
2. Фундаментальность. Сеть должна быть ориентирована на решение
прежде всего фундаментальных научных задач, для которых ’’инфляцион¬
ные” тенденции со временем выражены значительно слабее, чем для прик¬
ладных. К таким задачам прежде всего относятся задачи фундаментальной
астрометрии (построение инерциальной системы координат), геодина¬
мики (определение параметров вращения Земли) и радиоастрофизики
(построение изображений галактических и внегалактических источников).
253
Хорошо известно, что радиоинтерферометрический метод может эффек¬
тивно применяться к решению ряда прикладных задач, таких в частности,
как задачи координатно-временного обеспечения космических аппаратов
в ближнем и дальнем космосе, а также задач геодезии и картографии.
Однако, имея в виду наличие многочисленных и в ряде случаев более
простых средств (таких, в частности, как лазерные доплеровские и спут¬
никовые системы), сеть необходимо использовать прежде всего как этало¬
нирующую систему высшего класса для этих более подвижных, но менее
точных, средств координатно-временных измерений.
3. Фазостабильность. Сеть должна обеспечивать измерения не только
амплитуды, но и фазы интерференционного отклика, ибо только в этом
случае полностью реализуются потенциальные возможности радиоинтер-
ферометрического метода по разрешению. С технической точки зрения
это наиболее сильное требование к системе (оно присутствует в Европей¬
ском проекте и проекте ”. Полигам”) . Оно предполагает возможность связи
гетеродинов через геостационарный спутник связи, наличие широких полос
регистрации и многоволновосш приема для устранения неоднозначности
в целое число периодов фазы, а также ионосферных набегов фазы, наличие
систем измерения электрической толщины тропосферы и, наконец^ доста¬
точно высокого потенциала сети по потоку (т.е. большой суммарной гео¬
метрической площади антенн), необходимого для эффективного примене¬
ния метода опорного объекта.
4. Оперативнссть. Возможность обработки данных в реальном масштабе
времени (этому требованию уделяется особое внимание в Европейском про¬
екте и проекте ’’Полигам”) предполагает наличие широкополосного специа¬
лизированного спутника связи, объединяющего отдельные телескопы сис¬
темы в единую глобальную сеть. В такой схеме работы сети устраняется
ряд трудностей традиционной независимой интерферометрии — необхо¬
димость гигантских организационных усилий при проведении даже единич¬
ных экспериментов, медленность первичной редукции данных, приводящая
к тому, что результаты наблюдений становятся известными только через
длительное время после их проведения, когда повторить наблюдения в ря¬
де случаев принципиально невозможно. Огромные полосы цифровой связи
(более 1 ГГц сейчас, а при необходимости — много больше), в принципе
снимают ограничения по полосе регистрации, характерные для систем магнит¬
ной записи, что позволяет резко повысить чувствительность системы по по¬
току даже при относительно небольших временах когерентного накопления.
Однако создание специализированного широкополосного радиоастро¬
номического спутника связи представляет собой сложную техническую
проблему, решение которой требует больших инженерных и экономических
усилий. Поэтому на первых этапах функционирования сети естественно
использовать каналы связи уже существующих спутников, таких как
’’Интелсат” (США) или’’Горизонт” (СССР), для работы в реальном време¬
ни по отдельным ярким источникам, что позволяет хотя бы эпизодически,
но оперативно, контролировать дееспособность сети.
5. Автоматизированное^. Радиотелескопы сети должны управляться
центральной ЭВМ, из центра управления, сбора и обработки данных, так что
вмешательство человека в работу отдельного радиотелескопа может проис¬
ходить только в период наладочных, профилактических или ремонтных
254
работ. Такой режим работы инструментов позволяет решить большой
комплекс организационных и эксплуатационных проблем. В частности,
отпадает необходимость в наличии высококвалифицированных кадров в
местах расположения радиотелескопов, острый дефицит которых в пунк¬
тах, расположенных далеко от основных научных центров, является типич¬
ной проблемой.
6. Модульность, наращиваемость. Сеть должна состоять из однотипных
элементов (особый акцент на это делается в Американском и Канадском
проектах), что сильно упрощает возможность практической реализации
такой системы средствами промышленности. С наблюдательной точки зре¬
ния использование однотипных элементов уменьшает влияние систематичес¬
ких ошибок и упрощает процедуру их учета. Модульный принцип построе¬
ния сети упрощает также решение проблемы повышения, если это необхо¬
димо, ее потенциала со временем за счет наращивания однотипных элемен¬
тов (антенн, радиометров, обеспечивающих систем).
7. Полнота. Для того, чтобы иметь возможность наиболее полно редуци¬
ровать данные первичной обработки наблюдений, непротиворечиво их
интерпретировать и передавать различным пользователям, необходимо,
чтобы все элементы сети, или хотя бы их часть, была совмещена с нерадио¬
астрономическими средствами координатно-временных измерений и дру¬
гими, обеспечивающими радиоинтерферометрические измерения систе¬
мами. В частности, на каждом из пунктов сети должны быть расположены
геофизические и метеорологические станции и, по крайней мере, на части
из них — геодинамические станции, включающие лазерные дальномеры и
доплеровские системы для наблюдений ИСЗ и Луны.
8. Специализированность. Отдельные радиотелескопы, входящие в систе¬
му, должны быть предназначены только для работы в режиме сети. Только
в этом случае сеть будет иметь возможность решать крупные и долговре¬
менные наблюдательные программы и в некоторых случаях обеспечивать
интересы различных служб (таких, в частности, как служба полюса, широ¬
ты и времени).
9. Двумерность и многоэлементность. Эти свойства сети обеспечивают ее
гибкость и возможность адаптирования ее отдельных частей для решения
различных задач. В много элементной сети легко создать избыточность за
счет большего, чем это необходимо методически, числа баз, что помимо
улучшения качества изображений и повышения точности определения поло¬
жений радиоисточников автоматически обеспечивает возможность резер¬
вирования системы в целом.
В какой степени эти общие требования к ’’идеальной структуре” сети
будут реализованы на практике покажет будущее. Однако несомненно,
что появление проектов глобальных постоянно действующих РСДБ-сетей
в конце 70-х годов отражает объективную потребность наблюдательной аст¬
рономии в качественно новой наблюдательной технике и указывает пер¬
спективу ее развития на ближайшие десятилетия. Не вызывает никаких сом¬
нений, что реализация идей, заложенных в национальных проектах, приве¬
дет к новым фундаментальным открытиям во многих разделах фундамен¬
тального и прикладного естествознания, а также стимулирует технический
прогресс в соответствующих областях радиофизики и радиоэлектроники.
255
Таблица 27
Основные параметры проектов глобальных радиоинтерферометрических систем
£
о
Z
Ь
3?
о
О
o'
СП
о
,—1
in
СП
о
СП
чО
•1’
•1’
II
II
о
СП
о
О
<Ъ
<
сп
СП
тГ
<1
О
£
о
04
.|. 2
О о
О\
•С tJ- О
_( ю
Si
(-н
И
Z
3
тГ
СП
О
ю
<п о
Ь si
•1-
£
’!•
II II S *
О
< о ю о
СП
Tt
<1 -н Ш Ш
£ Z
Приложение 1
АЛГОРИТМ ВЫЧИСЛЕНИЯ ОБЩЕЙ ЗОНЫ ВИДИМОСТИ
Будем считать, что наблюдения методом РСДБ возможны, если топо-
центрические зенитные расстояния наблюдаемых радиоисточников в обоих
пунктах интерферометра не превышают предельной величины f0- Область
небесной сферы, удовлетворяющая этому условию, называется общей
зоной видимости интерферометра. На практике под вычислением общей
зоны видимости понимается определение моментов гринвичского звездно¬
го времени входа (s*) в нее и выхода (№) произвольного источника,
имеющего как постоянные, так и переменные во времени геоцентриче¬
ские координаты. Первый случай относится к наблюдениям удаленных
источников (квазары, ядра галактик и др.), второй — к объектам ближне¬
го космоса (ИСЗ — радиомаяки и др.).
1. РСДБ-наблюдения удаленных радиоисточников
В этом случае объект наблюдения с координатами а, 6 движется отно¬
сительно общей зоны видимости только вследствие суточного вращения
небесной сферы.
Обозначим пункты РСДБ через (ipb Xi) и Л2(^2,Х2). Долготы
пунктов будем считать положительными к западу от гринвичского мери¬
диана, причем примем, что Xj > Х2.
Для каждого пункта вычисляем величину
tY t2 = arccos TVi >2, 0 < >2 < я,
где
cos Jo — sin 6 sin 2
j2 = — — — .
COS 0 COS >2
Затем находим 4 значения гринвичского звездного времени, соответ¬
ствующие моментам восхода и захода источника в обоих пунктах, по
формуле
S?,2 = ,2 + а + G ,2, 0 <S?;23 <2тг,
где минус соответствует восходу (в), а плюс - заходу (з).
Полученные значения необходимо затем расположить в порядке
возрастания величины и в качестве моментов восхода (5В) и захода (53)
источника в общей зоне видимости взять такую пару соседних значений,
которая имеет ту же последовательность индексов (в) и (з).
257
Например, если S® < S® <S3 <Sf, то SB = SB, S3 = S2; еаш S® < S® <
< S3 < S3, то 5® =SB, S3 = Si; если S® <5? < S® < Si, то данный источ¬
ник дважды появляется в общей зоне видимости (в верхней и нижней
кульминациях),поэтому для первого появления 5® = S®,S3 = S3 , для вто¬
рого — S® = S®, S3 = S3 и т.д. ЕслиЛ^! XN2 > 1, то источник незаходящий.
2. PC ДБ-наблюдения объектов ближнего космоса
Аналитическое определение моментов восхода и захода ИСЗ в общей
зоне видимости, двух пунктов (х19 yl9 Zj), А2 (х2, у2, z2) является
весьма громоздкой задачей, поэтому ниже предлагается алгоритм ее числен¬
ного решения с помощью ЭВМ.
Для последовательности моментов звездного гринвичского времени
Sj с шагом AS вычисляются прямоугольные координаты ИСЗ
х7 = r7(cos Uj cos Q — sin Uj sin П cos i),
yj = r7(cos Uj sin П + sin Uj cos П cos z),
Zj = r7 sin Uj sin z,
a(l —e2)
где rj радиус-вектор ИСЗ, Uj - Vj + co-аргумент широты,
1 + e cos Vj
Vj — истинная аномалия, a, e, П, z, co — элементы орбиты ИСЗ, а так¬
же координаты пунктов Я j и А2:
(^1,2)/ = ^1,2 COS<^1>2 COS (Sj - Xj >2 ),
(У1,2)/ = Л1)2 cos ^1>2 sin (Sj - x1)2),
(*1,2)/=^!,2 sin <p1)2.
На те же моменты Sj вычисляем наклонные топоцентрические дально¬
сти/^ = г -Я1>2, равные
ll,i = V (* -Xi)} + (у- yi)f + (z - )f,
l2,j= V (x - x2 )j +(у- уг )j + (z - z2)/;
а затем — топоцентрические зенитные расстояния ИСЗ
(fi ,2)/ = arccos
-(/1,2)J -Rl,2
2Л1>2(/1,2)
Очевидно, что, если fx и f2 одновременно удовлетворяют условию
0<fi,
то ИСЗ находится в общей зоне видимости.
Для определения момента пересечения изображением ИСЗ общей зоны
видимости необходимо отметить то значение S7, для которого одна из
величин fi, f2, например f 1, меньше f0, а другая (f2) переходит через
это значение или ему равна. Такой момент S7 будет являться моментом
восхода, т.е. S7 - S®, если при следующем шаге S7+1 = S7 + AS величина
f2 будет уменьшаться. Наоборот, если она при Sj + l увеличивается, то
Sj является моментом захода, т.е. S7 =S3.
Следует отметить, что в течение суток ИСЗ может пересекать общую
зону видимости несколько раз или не появляться в ней вовсе.
258
Приложение 2
ПРЕДВЫЧИСЛЕНИЕ ПРОЕКЦИЙ БАЗЫ ИНТЕРФЕРОМЕТРА
Предположим, что для обоих пунктов интерферометра известны астроно¬
мические широты <р1>2 и долготы Х1>2, а также высоты над уровнем моря
/?! >2 • Требуется вычислить проекции базы интерферометра на оси прямо¬
угольной геоцентрической системы координат (х, у, z), ось z которой
совпадает с направлением оси вращения Земли на определенную эпоху,
ось х лежит в плоскости нулевого астрономического меридиана, ось у —
на 90° к западу от нее.
Введем промежуточную геодезическую систему координат (X, У, Z),
связанную с референц-эллипсоидом. Оси этой системы будем считать па¬
раллельными осям (х, j>, z) . Тогда искомые координаты одного из пунктов
будут равны
x = y + w, y=Y + v, z = Z + w, (1)
где w, у, w— координаты центра референц-эллипсоида в системе (х, у, z).
Координаты того же пункта в геодезической системе можно представить
в виде [234,124]
(2)
X = (N + Н) cos В cos L,
Y = (N + Н) cos В sin L,
где
N =
а/a2 cos2 В + b2 sin2 В*
а, b — большая и малая полуоси эллипсоида (а = 6378140 м, b = 6356755 м)
(b/а = 0,996647), Н — высота пункта над эллипсоидом, В, L — геодези¬
ческие широта и долгота пункта, связанные с их известными астрономи¬
ческими значениями X формулами [234, с. 97]
В = ,
L = X - г? sec
(3)
Здесь ?, 1? — составляющие уклонения отвеса от нормали к поверхности
эллипсоида соответственно в плоскости меридиана и первого вертикала.
Величина Н выражается через высоту h над уровнем моря (квазигеои¬
да) и высоту f последнего над референц-эллипсоидом формулой
Я = /г + Г (4)
По теореме Брунса [235, с. 303] имеем
Т
f = —, (5)
где g — ускорение силы тяжести, а Т представляет собой так называемый
’’возмущающий потенциал”, равный разности потенциалов силы тяжести
И7 на поверхности квазигеоида и нормального потенциала U на поверх¬
ности эллипсоида, т.е. Т = W — U.
259
Для приближенного вычисления потенциала Т в настоящее время можно
воспользоваться его разложением по сферическим функциям [235, с. 344},
которое определяется по результатам глобальной наземной гравиметри¬
ческой съемки и данным наблюдений ИСЗ. Используя такое представле¬
ние Т, получаем вместо (5)
оо п
f = S S (апк cos kX + Рпк sinkX)P„fc(sin(p). (6)
п-2 к=0
Здесь Рпк (sin <р) - обыкновенные присоединенные функции Лежандра,
а коэффициенты апк, 0пк легко вычисляются через нормированные коэф¬
фициенты разложения геопотенциала ~cnm, Tnm по формулам
/(п- ГП)1(2п + 1)* f Спт
в . } (л + /и)! [ ? ’
(Рпк v snm
где R & 6371 • 103 м — средний радиус Земли.
Значения коэффициентов anki &пк в метрах, вычисленные нами по дан¬
ным модели геопотенциала GEM = 10 [236, с. 31], представлены в ниже¬
следующей таблице:
п
2
3
4
5
к
0
1
2
0
1
2
3
0 1
2
3
4
0
<*пк
-
0
+7
+16
+10
+1
0
+10 -2
0
0
0
+1
Рпк
0
-4
-
+1
-1
+1
-2
+1
0
0
-
Зная f, можно вычислить и уклонения отвеса, так как [234, с. 376]
R Ъу
sec Э f
11 ~Их'
(7)
Что касается координат центра референц-эллипсоида в системе (x,y,z),
то, например, для Международного эллипсоида Хейфорда они по опреде¬
лениям М. Бурша [237] оказались равны
и 80м, v ъ —101 м, 119 м. (8)
Подставляя (6) в (4) и (7) в (3), а (3) и (4) в (2) и используя (8),
находим искомые координаты пунктов РСДБ х1>2, >ч,2> z 1,2, а затем
полярную (р) и экваториальную (е) проекции базы:
p=Zt - z2, е = y/(xt -х2)2 +0, -у2)2’.
Точность предвычисления величин р и е по указанному алгоритму состав¬
ляет ±10 м, так как в нем не учитывается высокочастотная часть потен¬
циала Г, эффект которой может достигать нескольких метров, особенно
в горных районах. Для повышения точности вычислений необходимо
производить детальное астрономо-геодезическое и гравиметрическое изуче¬
ние районов расположения пунктов PC ДБ-наблюдений.
260
Приложение 3
КАТАЛОГ КООРДИНАТ РАДИОИСТОЧНИКОВ (ЭПОХА 1950,0),
ПОЛУЧЕННЫЙ В ЛАБОРАТОРИИ РЕАКТИВНОГО ДВИЖЕНИЯ США (JPL) [16]
№ п/п
№ JPL
Прямое восхожде¬
ние
Ошибка в
0s,00001
Склонение
Ошибка в
0",0001
1
Р 0008-264
00h08m28s,89062
074
-26° 29' 14",7068
098
2
Р 0104 - 408
01 04 27,57593
053
-40 50 21,4313
066
3
Р 0106+01
01 06 04,51802
028
01 19 01,0517
051
4
Р0111 +021
01 11 08,57066
204
02 06 24,7017
313
5
Р0113 - 118
01 13 43,21948
074
-11 52 04,5578
118
6
DA55
01 33 55,09519
028
47 36 12,5292
028
7
Р 0202+ 14
02 02 07,38976
027
14 59 50,7876
056
8
DW 0224 + 67
02 24 41,13548
050
67 07 39,3413
031
9
СТО 20
02 34 55,57744
027
28 35 11,1996
050
10
GC 0235 + 16
02 35 52,62012
027
16 24 03,8667
066
11
Р0237 -23
02 37 52,77814
115
-23 22 06,2887
157
12
ОЕ400
03 00 10,08884
060
47 04 33,4153
055
13
ЗС 84
03 16 29,54633
033
41 19 51,6859
040
14
Р0332 -403
03 32 25,21858
091
—40 18 23,9515
099
15
NRAO 140
03 33 22,38543
000
32 08 36,4807
036
16
СТА 26
03 36 58,93966
034
-01 56 16,9227
068
17
NRAO150
03 55 45,22857
058
50 49 20,0966
038
18
Р 0402 - 362
04 02 02,57565
094
-36 13 11,7743
107
19
GC 0406 + 12
04 06 35,45953
029
12 09 49,2242
084
20
VRO 41.04.01
04 20 27,90873
035
41 43 07,8786
053
21
Р 0420 - 01
04 20 43,52420
059
-01 27 28,7187
085
22
ЗС120
04 30 31,58567
064
05 14 59,5673
091
23
Р0434 - 188
04 34 48,94761
091
-18 50 48,1149
126
24
Р 0438 -43
04 38 43,16141
092
-43 38 53,4625
098
25
NRAO190
04 40 05,27323
071
-00 23 20,5961
126
26
Р 0451 - 28
04 51 15,10887
081
-28 12 29,3160
100
27
Р0528 + 134
05 28 06,73759
027
13 29 42,2652
053
28
Р0537 -441
05 37 21,05095
063
-44 06 44,6034
065
29
DA193
05 52 01,37457
058
39 48 21,9227
048 '
30
Р 0605 - 08
06 05 36,01023
164
-08 34 20,2896
216
31
Р0607 -15
06 07 25,96313
052
-15 42* 03,2793
079
32
DW 0723 - 00
07 23 17,81774
042
-00 48 55,0426
076
33
Р0727 - 11
07 27 58,07964
074
-11 34 52,5369
106
34
Р 0735+ 17
07 35 14,10394
061
17 49 09,3584
082
35
OJ 363
t)7 38 00,15143
077
31 19 02,1767
087
36
DW 0742 + 10
07 42 48,44300
029
10 18 32,7510
043
37
Р 0748+ 126
07 48 05,03818
035
12 38 45,5747
061
38
OJ 425
08 14 51,63812
057
42 32 07,9250
043
39
Р 0823+ 033
08 23 13,52100
038
03 19 15,5035
065
40
В2 0827+ 24
08 27 54,37577
051
24 21 07,8035
068
41
4С 55,16
08 31 04,33624
147
55 44 41,5632
287
42
4С 71,07
08 36 21,48266
066
71 04 22,6662
032
43
OJ 287
08 51 57,23118
048
20 17 58,5891
046
44
ОГ 499
08 59 39,95317
093
47 02 57,0712
139
45
Р0859 - 14
08 59 54,93147
100
-14 03 38,8076
143
261
Приложение 3 (продолжение)
№ п/п
№ JPL
Прямое восхожде¬
ние
Ошибка 1
0s,00001
46
4С 39.25
09h23m55s^9490
024
47
АО 0952 + 17
09 52 11,78721
092
48
GC 1004+ 14
10 04 59,77021
068
49
Р 1034 -293
10 34 55,81427
065
50
OL 064.5
10 38 40,87423
041
51
ЗС 245
10 40 05,98969
056
52
Р 1055 +01
10 55 55,30470
033
53
Р 1104 -445
11 04 50,35912
091
54
GC1111 + 14
11 11 21,30050
069
55
Р1116 + 12
11 16 20,76764
050
56
Р1123 + 26
11 23 14,86160
034
57
Р 1127 -14
11 27 35,66118
037
58
GC 1128+ 38
11 28 1 2,505 8 7
074
59
Р 1144 - 379
11 44 30,85450
046
60
Р 1148 -00
11 48 10,12252
065
61
Р 1222 +037
12 22 19,09700
042
62
3C273
12 26 '33,24591
030
63
ЗС274 .
12 28 17,56987
054
64
Р 1244 -255
12 44 06,71495
056
65
ЗС279
12 53 35,83516
080
66
В2 1308 + 32
13 08 07,56619
030
67
ОР - 322
13 13 20,04572
076
68
DW 1335 - 12
13 34 59,81113
065
69
GC 1342 + 663 13 42 41,06705
117
70
Р 1349 -439
13 49 52,53598
132
71
Р 1354 + 19
13 54 42,09628
035
72
GC 1418+54
14 18 06,21090
053
73
OQ151
14 30 10,65791
089
74
OR 103
15 02 00,17377
030
75
Р1510 -08
15 10 08,91683
072
76
Р 1519 -273
15 19 37,25585
057
77
DW 1555 +00
15 55 17,71303
061
78
DA 406
16 11 47,94478
057
79
GC 1633 + 38
16 33 30,65680
027
80
NRAO512
16 38 48,20296
026
81
ЗС 345
16 41 17,63965
024
82
DW 1656 + 05
16 56 05,64376
132
83
GC1717 + 17
17 17 00,35082
043
84
NRAO530
17 30 13,55741
045
85
ОТ 465
17 38 36,35562
118
86
Р 1741 -038
17 41 20,64125
067
87
1749 + 701
17 49 03,47807
087
88
3C371
18 07 18,63145
043
89
Р 1821 + 10
18 21 41,68538
033
90
OV - 236
19 21 42,25872
121
91
Р 1933 -400
19 33 51,14815
099
92
ОР - 198
19 58 04,63144
065
Склонение
Ошибка в
О",0001
39° 15'23",8158
024
17 57 44,7993
149
14 11 11,0960
092
-29 18 26,9805
084
06 25 58,6886
575
12 19 15,1695
077
01 50 03,6896
057
-44 32 53,0777
093
14 58 47,8907
085
12 51 06,9046
118
26 26 50,2673
042
-14 32 54,3755
057
38 31 51,9262
252
-37 55 30,7109
058
-00 07 13,0260
089
03 47 27,2259
070
02 19 43,4662
045
12 40 01,9607
072
-25 31 26,6764
076
-05 31 07,8978
119
32 36 40,5509
037
-33 23 09,7439
087
-12 42 09,6906
091
66 21 13,5572
054
-43 57 54,2530
127
19 33 44,1912
051
54 36 58,4161
056
-17 48 24,2834
131
10 41 17,9005
048
-08 54 47,5743
103
-27 19 30,3141
079
00 06 43,6138
087
34 20 20,0350
060
38 14 10,2645
033
39 52 30,2680
032
39 54 10,9820
026
05 19 47,1145
208
17 48 08,6088
068
-13 02 45,8174
077
47 39 28,8671
083
-03 48 48,8811
100
70 06 39,7254
045
69 48 57,1646
019
10 42 43,9245
103
-29 20 26,3558
132
-40 04 47,4408
107
-17 57 16,9631
095
262
Приложение 3 (окончание)
№ п/п
№ JPL
Прямое восхожде¬
ние
Ошибка в
0s,00001
Склонение
Ошибка в
0",0001
93
OV 637
20h21ml 3s,36085
104
61° 27'17",9739
071
94
Р 2029 + 121
20 2 9 32,70544
038
12 09 28,6943
067
95
OW 551
20 30 29,14186
057
54 44 49,0654
056
96
В2 2113 +29В
21 13 20,60309
029
29 21 06,5346
046
97
Р 2134 +004
21 34 05,22698
052
00 28 24,9999
084
98
Р 2145 +06
21 45 36,09733
028
06 43 40,8124
049
99
ОХ 082
21 49 07,71970
036
05 38 06,7847
069
•100
ОХ 192
21 55 23,25930
081
-15 15 30,1166
ГЗО
101
VRO 42.22.01
22 00 39,38807
026
42 02 08,3514
029
102
СТА 102
22 30 07,82046
079
11 28 22,6653
102
103
GC 2234 + 2&
22 34 01,74630
027
28 13 23,0082
042
104
OY 172.6
22 43 39,80604
036
-12 22 40,3085
064
105
Р2245 - 328
22 45 51,51834
056
-32 51 44,3630
072
106
ЗС 454.3
22 51 29,53403
047
15 52 54,1807’■
061
107
GC 2253 + 41
22 53 19,86196
036
41 46 50,9891
065
108
Р 2320 - 035
23 20 57,53518
050
-03 33 33,6885
091
109
Р2345 - 16
23 45 27,69119
068
-16 47 52,6153
102
Приложение 4
СПИСОК ВНЕГАЛАКТИЧЕСКИХ РАДИОИСТОЧНИКОВ,
НАБЛЮДАВШИХСЯ НА РАДИО ИНТЕРФЕРОМЕТРАХ СО СВЕРХДЛИННЫМИ БАЗАМИ
Г-1
о
00 _
•rt- Os о
Os
о
<
SO
CQ
\£>
СП
О
<
\О
SO
sO
и и е
&
и
и
О
СП СП Q
Z
СП
СП
<4 СП О —1
еч
СП СП
<—<
Tt
+ + 1 +
+ 1
+
264
н
л
'Ч. Чк Я о\
—7 г7 ci о
Л ©
сп © —<_ rj
—7 сп о* гч
Я
СМ
СП
см
04 СП
00 Г-^ СП
© © г-7
СП 04 Tf
"Чч 'Як
*-н СМ »—< ©
оо
сп
<о
& & 04 04
04
о
о
04 04
04 04 04 04
Ъ4 Ь* и. 1-н
U Ъ4 U и
« Ъ4
Си и
О -н СП 1Л СП
г- 1Л см о О
© 00 СМ © О
см © см © ©
04
оо
ОО
г-
СМ
©
©
©
©
©
о"
00 см
л л
СМ 00
-7 ©
40
©
—I тг 40
г- г- ©
Л Л СП
© ©" о"
00
г~7
СП
л
04
о~
’'Г
04
©
СП
СМ 04 40 Г- тГ
»чСНч±\©©СП00»Л’-7
-ЧОООСПСП^СПТГ
1Л СЧ X СП <л, Tt Г'
СПСМСМСМ»-ч©ЛЛ’--1
00 40 СП 00 © Г- СП 40 40
СМ~нСМ©©^Г©.-н»-ч
I I I
л
04
© л
Tfr \о
СМ СП
40
04 л
40 ^7 сп o'
СМ © СМ
ОО ОО 40
© Л
© см
СП
I.
оо оо os
тГ СП Tfr
^3- ©
О -I »л
I
Г~~- 00 СП см
—I © СП Os 04
СМ СП ТГ СМ ”3*
СП 40 04 04
—1 I —< © л ©
40 СП СМ см см
СП —I —I СМ
I I I
л
4О~
40
00
”3-_
см
Як
см
Чк
04
л
”3;
см
л
©
оо
Чк
см
СП
см
*л
см
см
г~7
г-
©
00
—7
о?
о7
л
см
оо
_7
о7
л
см
4о"
л
М-
тГ
©
л
«л
л
СП
©
’’3-
©
см
см
см
л
л
©
Tt
©
см
СП
•3-
Л
04
тг
л
Г'
00
о
S
л
г-
40
40
см
сн
40
©
04
л
см
СП
л
40
S
©
см
m
сп
СП
сн
’З-
©
©
сн
сн
СП
'З-
л
©
©
©
©
—«
см
см
см
см
см
СМ
сн
СП
сп
си
сн
'СП
сн
СП
СП
сн
СП
”3-
тг
^г
тг
’’З’
3
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
TJ-
СП
©
см
сп
40
л
©
©
©
00
04
см
©
ТГ
ТГ
о
40
см
сп
л
л
о
оо
©
04
©
1—1
Q
см
и
г-
■’3'
г-
г-
СН
оо
<
<
04
04
<
о
Н
Q
0
0
Ш
и
0
н
0
0
04
н
и
0
04
0
0
■’З’
0
о
Z
сн
О
СП
СП
о
СП
Z
0
сн
сп
Z
СП
сп
сП
оо
40
СП
оо
40
40
©
см
Tfr
©
СП
см
см
—ч
см
см
©
©
ТГ
СП
©
©
л
Ч-
+
+
1
1
1
+
+
+
1
+
1
+
1
+
1
1
+
04
’’З’
л
г—
оо
1
с-~
40
40
см
СП
40
©
04
л
см
СП
л
40
см
СП
СП
СП
СП
тг
о
,—1
,—(
СП
СП
си
ТГ
Tf
л
©
©
©
©
см
см
см
см
см
СМ
СП
СП
СП
сп
сн
СП
сн
сп
сн
’З’
тг
”3-
©
©
о
о
©
О
©
©
©
©
©
©
©
©
©
©
©
©
©
”3-
л
40
г-
00
04
о
см
СП
Tfr
л
40
г-
оо
04
©
см
СН
И"
л
40
С^-
см
СМ
см
см
см
см
СП
сп
СП
СП
СП
сп
СП
СП
СН
сн
’’З-
’’З"
■’З-
’З-
<3-
-’З-
'З'
265
г-
О
©
о
CQ
7,9
o4
ОТ
u
N
r1
0,049
СП
Р4
in
©
© СП xt^ IQ
^ч СЧ СП 00
Н U
СП
СП
©
©
© © СЧ СЧ СЧ
Г- сП т-7 СП Xt 00 00
о
P4 04 04 04
U
oo
©
©
m СЧ СП
04 P4 04
© ©
t- ©
© ©
in
xt
•П
©
Приложение 4 (продолжение)
CD
оо
оо г-
40 00
О СЧ
СП г-
xt СЧ
xt ©
I
oh »n
СП
ГЧ xt
© ©
сч сч
xt xt
© О
©
I
©
СЧ
xt
О
© ©~ © ©~
© О ш
I СЧ СЧ ₽ч
in 40 40
СП
Ox
©
00
©
04
Ш
04
-4
сч
xt
СЧ
cn
сп
©
©
1П
©
сч
©
in 04 04 4©
СЧ ©
~ч ©
СЧ оо о\ ©
сч сч СЧ СП
3333
Ох ©
сч
О U
СП СП
©
©
in
©
сч
Xt
©
+
+
+
+
СЧ
оо
04
©
сч
сч
сч
сп
xt
Xt
Xt
SxT Xt xt
© © ©
in os
in 40
©~
Г"-"
00 Ох ©
х± xt in
Г-Ч СЧ СП xt
in in m »n
сп
4©
СП
4©
оо
4©
©"
04
Г-"
in
Xt
in
сч
сч
сч
сч
СП
©
00
СП
сч
04
in
©
in
сп
сч
сч
СП
СП
00
СП
©
00
сп
4©
4©
-Ч
Xt
©
сч
сч
«—1
сп
I I I I I I
СП oo
сч" <4 сч
Xt xt xt
xt
Ox
СЧ
СП ”t Ox
~T*
ОЧ 00 in
CH © r-1
I I
04
сч
сч
^ч
СЧ
in
00
CQ
тЧ
m
xt
04
©
оо
СП
in
in
4©
m
4©
,_7
cn
w4
in
4©
Xt
xf
©
*—1
•n
—•
©
СЧ
xt
©
cn
СЧ
xt
оо
©
xt
00
00
r-~
00
СЧ
in
Г-
сп
СП
Xt
«п
in
*-ч
СЧ
СЧ
СП
cn
in
©
©
xt
Xt
3
xt
xt
in
in
in
in
»n
in
4©
4©
©
©
©
О
©
©
©
©
©
©
©
©
©
04
^4
о
<
C4
z
СЧ
04
СЧ
о
oo
cn
С»
cn
r-
Xt
О
cn
cn
04
Q
oo
00
cn
©
00
4©
4©
xt
cn
Xt
04
00
in
*4
xt
©
СЧ
cn
Xt
Xt
©
1
1
1
1
1
+
1
+
1
+
1
1
xt
00
©
_(
oo
00
r-r
oo
m
r-
cn
cn
xt
m
СЧ
СЧ
СП
cn
©
©
xt
Xt
Xt
Xt
in
in
»n
in
m
©
©
©
©
©
©
©
©
©
©
©
©
©
•n
©
00
04
о
-ч СЧ
СП
xt
in ©
r~-
in
m
m
in
•n
©
© ©
©
©
© ©
©
266
О 40 40 -ч
О © о © © о о
о о Ъ о о
V/ V/ Л\ о V V/ V/
1П ОО 1П
оо еч еч еч^ ₽ч 443 тг оо in
4© чо ri сП (S ^ч сч еч сп*
©
чэ ©,
О щ
г- in m
С— Tj- in~ 40
-7 тг о*
ч 40 —ч 40 Ш
»П 4Ct' °® *”1
О О М ^ч —7 оо ,—< ~ч
о
СЙ ре! ей Рй ей
О
ей ей ей
ей ей
О
ей ей ей
о г—
40 СЧ
40 —<
o' о’
04 СП
—< 40
© о"
г-
00
©
Xf 04
ОО ©
4О~ ^ч
©" W
Г- О 04
СЧ Г- 04
сП 40 40
o' ©
о^ о ©^ о
С-7 О ОО ОС?
^ч еч ч ^ч
»п
in
4±
О4~
’<3-
СП
Ш
СП
04
©
гч
ш
СЧ
сп
Ш
in
О
©
©
о
сп
_Н
сп
ОО
Tf
04
Tf
04
сП
00
Ш
»-ч
чЗ-
СП
xf
тГ
сч
Ш
Ш
О
Г-
40
О
©
Г-
©
^-ч
©
сп
о
ч
Illi I
СП'©т3^00©©©О00,^40т^ 1П^ о СП
in»nc-7c-7i©cnc-7in^4»4C4in©ooc-7ooo4©
(П’З’ОО'ПчСгЧ'З'СПеЧОчт^Пич^
4000еЧСЧГ~-04чСЧтГ
cncncNcnin^CNTfrTfr
40 ’t IT) 't > (N
© © СЧ © -ч ©
©ечоосчг-спт^оощ
I
4©
сП Tf-
СЧ СЧ
с-^
г- тГ
СП »П 40 in О СП
О О тГ —t © сп
O^cnTtCt-rtcn
СЧ Г- -< г-н сч -н Tt
I I
Г—
in
О4О4тГтСГ-
СП СП <—I 1—ч
I
»-ч
in
00
~-t
—<
in
-ч
in
о
•’3’
4О~
4О~
<п
СП
in
СП
4©
тг
г-
4©^
гч^
04
сч
сп
оо
СП
o'
с-7
00
’’З’"
еч"
©
"З^
ОО
_7
in
04
сч
СП
'З-
■’З’"
тг
Tt
,_7
пГ
с-7
04
тГ
с-7
оо
ш
»п
4©
тГ
еч
in
’’З'
©
in
о
ш
ш
ш
1—ч
•п
СЧ
©
СЧ
СЧ
©
сч
in
СП
in
тг
«п
СП
сч
м-
с—
СП
r-
in
40
00
сч
СП
ОО
8
Tt
00
СП
г-
04
_Ч
40
00
©
_Н
04
04
4©
©
СП
04
г-
сч
еч
СП
СЧ
СЧ
сп
СП
СП
Tf
’’З’
тГ
’’3-
еч
сч
СЧ
сп
СП
СП
СП
in
ш
»п
in
©
сч
сч
сп
^3-
in
40
40
Г—-
г-
Г-
Г—
г-
г-
г-
с^
с^
оо
00
00
00
00
оо
00
oo
oo
00
00
00
оо
00
04
04
04
04
04
8
О
О
О
©
©
о
О
о
©
о
о
о
о
о
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
1
СП
о
’’З*
40
r-
ш
40
еч
с-
о
_!
СП
40
еч
40
04
ш
сч
с-
in
©
с—
©
оо
©
г-
оо
сч
04
04
40
еч
04
in
сч
оо
сч
—<
40
СП
W
—(
—<
in
r-
гч
гч
сч
СП
сч
еч
и
1—1
1—1
К
QJ
(J
и
и
»—»
•—»
QJ
и
и
сп
Q
О
©
сп
о
•’3-
’’З-
сп
сп
о
о
СП
СП
СП
in
ш
00
©
С—
с—
О
о
40
еч
00
г-
СП
м-
00
in
©
TJ-
о
Tt
04
О\
TJ-
^3"
г-
©
с—-
О
^ч
о
о
О
ХГ
~ч
©
еч
in
СЧ
сч
СП
СП
1
1
1
1
+
+
1
+
1
+
+
+
+
+
+
+
1
4-
+
1
1
+
+
+
+
xfr
г-
сп
г—
ш
40
сч
СЧ
СП
00
04
00
СП
г-
04
—t
’’3-
©
04
©
СП
04
г—
сч
еч
сп
СЧ
СЧ
сп
СП
тГ
’’3'
тГ
тг
©
—(
сч
еч
сч
СП
СП
ш
ш
m
сч
сч
СП
"3-
ш
40
40
Г-
Г-
г-
С—■
Г—
Г-
С—-
г-
ОО
00
00
оо
00
00
oo
оо
оо
оо
04
04
04
04
04
©
©
о
О
о
о
о
О
О
О
©
©
©
©
©
©
©
©
©
©
©
©
©
©
©
00
04
©
^ч СЧ
СП
Tf-
Ш 4©
г—
00
04
©
ч еч
СП
■'3-
•п
40
г—
00
04
© —1
сч
СП
■*3-
«п
40
г-
оо
4©
4©
г-
г- г-
г-
с-~
г— г-
г-
с—■
г-
оо
00 00
оо
оо
оо
оо
оо
00
оо
04 04
04
04
04
04
04
04
04
267
Приложение 4 (продолжение)
тГ
о
г-
со
CN
сп
со
’’Т
40
С*
О
сч,
40
О
(N
сч
О
<
О
и
О
О
Q
т$-
со
268
о
•1'
04
6
С °
s 2
ж ©
,—I 1 О»
3 о 5 3
О
<э
о
2
5
к о Ч
о °~ о о
о
О
о
о V о
V © V V
А
X к V
о
<э
сп
О иэ
СП
о
40
оо
40
о
СП
©"
о?
2*2
н.
04
<4
41
40
о^
•п
©
«П
41
О'
т—(
СП
О'"
оГ
оГ
СП
40
О
о
с£
Р4
&
& Р4
о
р£
р<
t-ч a
u u й йи
U
3
о
©
*-ч 00
O' СП
оо
o' о
оо
О
40 00
<*1 04
©
оС
40 О'"
04 ^Ч
04
>—t
-Ч Т—1
о о
о-" оо
•н
чо
о
о?
О
»л
»п
©
04
04
40^
о^
40
Q0
©
04
СП
40
О-"
©
00
^1
41
О
©
04
4П
04
©
3
04
о
04
04
О'
41
СП
СП
41
•О)
СП
сп
04
04
40
Ю)
04
»п
«—<
О
«—I
Т-1
04
*-ч
©
МЭ оо О 00 41 © сп 40 41 ©
гч © г- ~ О^ 00 04 СП © 00 -ч <-Г о? СП
4©4©©_т1Ю)04^ч040'СП04^ч 40
04
Г- 04 04 СП «Z) О 04 40 04 СП 04 Ш 00 04
Ttcno4mo4Cn^440^M^T^₽-i04 «О
40
04
04
04
04
04
04
04
04
04
04
СП
СП
СП
сп
СП
СП
сп
СП
сп
СП
СП
41
41
»“Ч
»“Ч
w
w
о
04
СП
41
V)
О'
04
©
СП
04
О'
4£>
«/}
04
©
<Л
О-
г-
О-
О'
ОО
О'
00
оо
04
оо
ОО
04
04
04
04
04
04
04
04
04
04
04
сп
04
04
Т—t
04
и
и
О
U
Z
U
и
рц
О
о
СУ
О
сп
сп
СП
СП
О
СП
сп
сп
О
СП
СП
41
О
о
СП
»П
СП
04
04
04
04
40
•О)
04
и->
о-
04
04
•О)
©
04
4©
04
СП
04
Ю
оо
©
^ч
04
©
41
СП
04
04
СП
40
»—t
41
04
+
+
+
1
1
+
1
+
+
1
+
+
1
+
• +
1
+
1
+
40
00
,_|
41
»О)
04
СП
41
00
04
оо
оо
04
U-)
04
41
41
41
04
04
чГ
41
41
«Л
«л
©
©
04
04
сп
41
41
41
«Л
•Л
©
04
04
04
04
04
04
04
04
СП
СП
СП
сп
СП
СП
СП
СП
СП
сп
41
*—1
<
«-Ч
•—<
*-ч
т-Ч
^ч
г
—•
«-Ч
’—<
ТЧ
’-Ч
^ч
’”4
41 Ш
04 04
269
CQ
н
о
N
40
4f
04
СП
ч±
ОО
40
40
сч
О СП
СП 04 00
4П ОО ГЧ
гч —< гч"
СЧ О О
СП СЧ 04
40^ оо О сч
ci О Tt (N
40 Г" 04
1П ОО 1П 40
-н гГ o' о
&
1-н «
—ч Tfr
5t СП О
-Н п 04
О сп О*
00 оо
40
Ч^ Tfr СЧ~
00 О СЧ* ’-<
Ш СЧ —< т-4
40 —-ч СЧ
СП —ч —ч 1П
4fr СЧ О —<
1П 1П *-ч Г~
СЧ 4t 4f 40
40 СП О 40
О СЧ in Ш
00 -ч ГЧ 00
—I тГ ю
чГ чГ чГ Tt
о
ой & с*
& &
-н in Г"
О щ сч
чГ 1П 04
—Г О* О*
о
ч±
4t~
СП
ЧГ
СЧ
Г-
о
СП
04
40
СЧ
ОС
сч
О4~
40
04
О
СЧ
о*
СЧ
с-
4fr
ОО
о”
04
o'
о"
40
o'
in
чГ
тг
»п
.О
СЧ
СП
'Ч
ч±
СЧ
СЧ
О
чГ
СП
о
чГ
40
04
40
о
ш
40
04
О
СП
СЧ
ч±
04
4f
чГ
чГ
сп
in
ГЧ
СП
ш
о
О
4f
СЧ
чГ
ш
чГ
СП
*-<
О
40
>п
ОО
г-
о
чГ
С'
in
СЧ
04
о
40
чГ
С-
СП
04
04
ОО
о
О
о
О
СЧ
СЧ
о
40
С-
о
СЧ
сП
Т-1
СЧ
СЧ
СП
СП
II I II
—
04
04
^ч
СЧ
04
Г"^
4О~
СП
04
00
-ч
чГ
СП
40
О
in
чТ
00
04*
ш
«п
40*
СП
С-*
Г~-'
04
С^
40
СЧ
40*
in
о*
О
о
о
чГ
СП
о
—•
СЧ
О
чГ
О
СП
ш
in
СП
СЧ
чГ
00
о
чГ
ч±
чГ
04
00
04
04
«п
Г"
_<
оо
СЧ
СЧ
40
СП
О
О
О
т_|
1
4fr
чГ
ЧГ
ш
О
СЧ
СЧ
СЧ
СП
in
in
in
»П
Ш
»п
in
in
in
in
ш
in
40
40
40
40
40
40
40
—1
•—1
—1
—-ч
•—i
—н
•—1
—i
•—<
»-н
’-н
—<
—(
—■
—ч
Приложение 4 (продолжение)
оо
04
гч
О
сп
СП
О
СП
и
сП
» Я
Z к
40 Tf
О 1П
4- +
40 00
чГ чГ
40
ч±
Г- ОО
чГ 4t
04
чГ
о
ш
4t
4fr
1—ч
СП
40
г-
40
п
СП
СП
40
4t
40
00
4fr
о
ш
in
СЧ
04
04
о
СП
СП
СП
об
«—Ч
о
СП
о
СП
СП
Q
ЧТ
СП
СП
СП
СП
и
и
и
и
н
и
и
и
о
Ч±
СП
чГ
СП
Q
и
Q
СП
СП
СП
чГ
СП
о
40
in
оо
о
4f
с-
ш
04
$о
40
4f
Г'
СП
04
00
о
о
о
сч
сч
о
Г~~
о
СЧ
СП
—<
СЧ
СЧ
СП
+
1
1
1
+
1
1
+
1
+
+
+
+
+
1
+
СЧ
ЧГ
оо
о
чГ
”3-
04
00
04
in
оо
СЧ
СЧ
СП
о
о
о
”3-
чГ
in
о
СЧ
СЧ
СП
»п
in
»п
in
•п
ш
ш
*п
in
in
40
40
40
40
г-Ч
40
40
in
СЧ
in
СП
ш
in 40
г-
ш »п ш
ОО 04
Ш in
40
СЧ
40
СП
40
in
40
40
40
с-
40
00
40
270
170 1634 + 62 3C 343 16 34 01,1 62 51 42,0 22,0 0,938 К 1,49 <0",02
171 1637 + 62 ЗС 343.1 16 37 55,3 62 40 34,7 22,5 Г 1,20 < 0",1
172 1638 + 39 NRAO512 1 6 38 4 8,1 39 5 2 30,9 1 8,5 К R 1,41 ~ 0",0013
173 1641 + 39 3C345 16 41 17,6 39 54 11,0 16,0 0,595 К R, О' 5,5 Состоит из компонент
тГ тГ сП тГ
04 О 4© ГЧ чо Г-
6 (N О О'
* С* С*
in
Tfr
О
О СП
О
4©
40 ь7
&
04
Г4
СП
гч
U
[-4 U
еч ©
04 1П
© <э
о o'
in О in О О in
оо © оо оо
(М
00 я»
тг 4©
ОО in О тГ О in ®
4© ОО оо О > оо >
С') —< —I
»п
оС
еч
04
4©
©^
CD
04
4©
г-"
©*~
00
«п
00
оС
оС
Г-’'
o'
сч
еч
тГ
О
тГ
т
ТГ
сп
«п
О
ТГ
»п
04
ОО
О’
04
00
4©
00
Г-
гч
(N
Г-Н
Tfr
.о
СП
Tt
О
тГ
Tf
тГ
с-
»п
г-
сП
Г'-
СП
о
04
СП
о
О
Tfr
О
Г-
4©
4©
I I I
04
4©
Ч, Ч
сп
4©~ ТГ
*п
«п
•П
8 2
40
О сП
оо
4©
_7
гч
О
сп
Гх) О
тГ
ТГ
in
4©
Г- О
оо
—1 04
г-
тг
in
СП
СП
Tfr ТГ
о
сч
40
4©
г- г-
Г'
Г- Г-
00
ОО
00
—*
-Ч
•П
О
г-
+
о
СП
т
40
04
О
<
•п
4©
—1
(N О
<
т
4©
тГ
г-
СП
&
£
К*
н
Z
Q
О Z
О
СП
с-
г-
о
04
сп
о
«-Ч
о- р:
4©
©
+
+ 1
.1 +
+
1
+
•П
Г- о
-Н 04
Г-
тГ
ТГ
СП
•
тГ
о
Гх)
40
г- г-
Г- г-
ОО
ОО
оо
«п
г-
4©
г-
Г'
г~
0С 04
г- г-
C4J
оо оо
сп
00
•п еч сч тг о 4© сп сп
О 04 тГ 40 г-" СП е7 О О сП
тгтшсчтгсптг^осх)^
■^■тГ^гчО'^-cnincn
оо оо
—( гч
> О С4 > <2>
in О сп т о
0004О04ОСП1П00ОГ-СП04^чГЧ
тГГ-С4)Г4)тГ4О^чСП-^-^+СПгЧ4О^-(
I I I I I I II
in 4©
04 04
Г'
04
271
см
©
©
о
Л\
г-
кН
оо
©
40
О О оч
04 00 кг> 40
с © ©
© оС е^
Приложение 4 (окончание)
©
40
О О
—< о\
ем
04
гм
СП
гп
ем
О
см
гм
7
04 ем 04
04 кГ) сП 04
СП ГМ кГ) СП
40 00 40 СП
© ГМ ТГ ЧТ
ем © тг 40
© © -Н ©
00
40 кГ) 40 00
кГ) кГ) О ГМ
Г' in оо ко
-Н СП СП I
СП Tfr кГ) W)
кг>
ко
£
О
00
CH
so чо
© гм
см О
ел оо
см
см ем
04 тГ
ГМ О
+ +
СП Г"
I см
ем ем
ОО 04 О —I
04 04 © О
гЧ fM (N
г-
ем
кГ)
00
ем
ем
ем
I.
оо
гм
ем
ем
©
гм
ГМ СП
кГ? кГ? 04 40
сп © ко сн
—I Tfr тг кГ)
СП СП СП Tf
ГМ ГМ ГМ гм
Г-
сп
сп
кГ)
г-
сП
тГ
©
©
ГМ
40
оо
04
кГ)
Tt
”'3'
кГ)
_Н
ем
гм
ГМ
гм
—I 04
00 40
ГМ 40
© ©
о О
’’t
гм сг^
© © -<
40
©
I + I +
с~~
40
40
О
<
С*
Z
ем
60
©
X
О
СП
Tj-
гм
кГ)
1
+
1
40
Г-
кГ)
тГ
тГ
1Г)
гм
ГМ
ем
сП ТГ 1Г) 40
© © © ©
гм ем ем гм
Г~- ОО 04 ©
© © © —<
см гм гм ем
211 2200 + 42 VR0 42.22.01 22 00 39,4 42 02 08,6 14,0 К R 6,5 0",0004
212 2201 +04 22 01 43,5 04 25 54 16,0 0,028 К >0",002
213 2203 - 18 22 03 25,7 -18 50 17,4 19,5 К 4,3 ~ 0",05
214 2210 + 01 DA575 22 10 05,2 01 37 59,4 1,1 0",001+0",12
215 2223 -05 ЗС 446 22 23 11,0 -05 12 17,5 18,4 1,403 К R.0 5,2 Источник сложный,
ОО
оо
мп
мп
00
мп
04
сч
о\
_7
04
оС
00
о
О
СП
мп
сч
мп
мп
сч
о
тГ
СП
МП
сп
о
мп
мп
сп
СП
■'S-
■’S-
мп
мп
сч
СП
тг
СЧ
сч
гм
см
сч
гч
СП
сп
СП
сч
см
сч
сч
сч
сч
сч
сч
сч
сч
40
СП
о
СП
Tt
мп
мп
40
тг
И
о
и
и
о
СП
СП
СП
оо
мп
оо
сч
сч
МП
сп
40
см
СП
■*г
о
+
+
1
1
+
+
1
1
О
сП
мп
СП
о
мп
СП
сП
’ф
тг
мп
мп
сч
■’S-
гм
Г-1
см
сч
сч
сч
СП
СП
сч
см
сч
сч
сч
сч
сч
см
чо
г^
оо
04
о
сч
СП
■’S-
сч
сч
сч
сч
СЧ
см
см
сч
сч
сч
сч
сч
сч
сч
ЛИТЕРАТУРА
\.Хайкин С.Э., Кайдановский Н.Л., Парийский Ю.Н., Есепкина Н.А. - Изв.
ГАО АН СССР, 1972, т. 188, с. 3.
2. Фомин В.А., Афанасьева П.М. Астрометрические исследования. - Киев:Наукова
думка, 1981, с. 66.
3. Ryle М. - Nature, 1972, v. 239, р. 435.
4. RyleM., Elsmore В. - Month. Not. Roy> Astron. Soc.,1973, v. 164, p. 223.
5. Davies J., Anderson B., Morison I. - Nature, 1980, v. 288, p. 64.
6. Матвеенко Л.И., Кардашев H.C., Шоломицкий Г.Б. - Изв. вузов, сер. ’’Радио¬
физика”, 1965, т. 8, с. 651.
7. Кайдановский Н.Л. - Радиотехника и электроника, 1966, т. 10, с. 1741.
8. Чихачев В.М. - там же, 1966, т. 11, с. 2072.
9. Broten N. et al. - Nature, 1967, v. 216, p. 4.
10. Clark В. et al. - Astrophys. J., 1969 v. 153, p. 705.
11. Jones H.E. - Canadian Surveyor, 1969, v. 23, p. 377.
12. Readhead A. et al. - Astrophys. J., 1979, v. 231, p. 299.
13. Elsmore B., Ryle M. - Month. Not. Roy. Astron. Soc., 1976, v. 174, p. 411.
14. Clark T. et al. - Astron. J., 1976, v. 81, p. 599.
15. Shapiro I. et al. - In: Reference Coordinate System. - Astrophys. and Space Science
Library, 1981, v. 86, p. 351.
16. Shapiro I. et al. - Astron. J., 1979, v. 84, p. 1459.
17. Robertson D. S., Garter W.E. - In: High-Precision ELarth Rotation and Earth-Moon Dyna¬
mics: Laser Distances and Rotation Observations. - France: Grasse, 1981.
18. Johnston K.J. - In: Time and Earth’s Rotation. - Proc, of IAU Symp., No 78', Dord¬
recht, 1980,p.183.
19. Counselman C.C. et al. - Moon, 1973, v. 8, p. 484.
20. Counselman C.C. et al. - Science, 1973, v. 181, p. 772.
21. Counselman C.C.etal. - Science, 1979, v. 203, p. 805.
22. Clark T.A. et al. - IEEE Trans. Instr, and Measurement, 1979, v. IM-28, No. 3, p. 184.
23. Preston R.A. et al. - Science, 1972, v. 178, p. 407.
24. Christiansen C.S. et al. - AIAA/AAS 80-1648. Astrodynamics Conf. Dauvers, Mass.,
1980.
25. Counselftian C.C. etal. - Phys. Rev. Letts., 1974, v. 33, p. 1621.
26. Парийский Ю.Н., Стоцкий A.A. - Изв. ГАО АН СССР, 1972, т. 188, с. 195.
27. Fomalont Е.В., Sramek R.A. - Astrophys. J., 1975, v. 199, p. 749.
28. Брумберг B.A., Финкельштейн A.M. - ЖЭТФ, 1979, t. 76, c. 1474.
29. Counselman C., Hinteregger H., Shapiro I. - Science, 1972, v. 178, p. 607.
30. Кардашев H.C., Парийский Ю.Н., Умарбаева Н.Д. - Изв. CAO АН СССР, 1973,
т. 5, с. 16.
31. Robertson D.S. - In: Reference Coordinate System. - Astrophys. and Space Science
Library, 1981, v. 86, p. 205.
32. Veroff Astron.Rech. Inst. Heidelberg, 1963, №10.
33. Манк У., Макдональд В. Вращение Земли. - М.: Мир, 1964.
34. Федоров Е.П., Корсунь А.А., Майор С.П., Панченко Н.Н., Тарадий В.К, Яцкив Я.С.
Движение полюса Земли с 1980,0 по 1969,0. — Киев: Наукова думка, 1972.
35. Подобед В.В., Нестеров В.В. Общая астрометрия. - М.: Наука, 1981.
274
36. О st er winter C. - In: Time and Earth’s Rotation. - Proc, of IAU Symp.,№78, Dord¬
recht, 1980,p.263.
37. Smith D.E. - Ibid., p. 231.
38. Lacroute P. - Eldq-Cecles/Esro-Cers Scient. and Tech. Rev., 1974, v. 6, p. 253.
39. Lacroute P. - Highlights Astron., 1977, v. 4, pt. 1, p. 353.
40. Space Astronomy Report on Phase A Study, DP/PS (78), Paris, 1978.
41. Space Astronomy Report on the Mission Definition Study, DP/PS (76), Paris, 1977.
42.7>б0нов B.C., Дравских А.Ф. - В кн.: Задачи современной астрометрии в созда¬
нии инерциальной системы координат. — Труды XXI Астрометрической конфе¬
ренции. - Ташкент: Изд-во ФАН, 1981, с. 249.
43. Губанов В.С. - Астрометрия и небесная механика, 1978, вып. 7, с. 141.
44. Gubanov V.S., Kumkova LI. - In: Modern Astrometry; Proc. IAU Coll., №48, Vien¬
na, 1979, p. 135.
45. Вулард Э. Теория вращения Земли вокруг центра масс. - М.: Наука, 1963.
46. Kinoshita Н. - Celestial Mechanics, 1977, v. 15, р.'277.
47. Федоров Е.П. Нутация и вынужденное движение полюсов Земли по данным ши¬
ротных наблюдений. - Киев: Изд-во АН УССР, 1958.
48. Мельхиор П. Физика и динамика планет: Ч. 11. - М.: Мир, 1976.
49. Cartwright D.E., Tayler R.J. - Geophys. J. Roy. Astron. Soc., 1971, v. 23, p. 45.
50. Jeffreys H. - Foreword to ’’Nutation and Forced Movement of the Earth’s Pole” by
E.P. Fedorov. - Pergamon Press, 1963.
51. Love A.E.H. - Proc. Roy. Soc. of London (A), 1909, v. 82, p. 73.
52. Jeffreys H., Vicente R. - Month. Not. Roy. Astron. Soc., 1957, v. 117, p. 162.
53. Молоденский M.C. Теория нутации и суточных земных приливов. - М.: Изд-во
АН СССР, 1961.
54. Wahr J.M. - Geophys. J. Roy, Astron. Soc., 1981, v. 64, p. 705.
55. Wahr J.M., Smith M.L. - Proposal to the IAU Working Group on Nutation, presented
to the XVII IAU General Assembly, Montreal, 1979.
56. Doodson A. - Proc. Roy. Soc. of London (A), 1922, v. 100, p. 305.
57. Jeffreys H. - Month. Not. Roy. Astron. Soc., Geophys. Suppl., 1928, No., 2, p. 1.
58. Мельхиор П. Физика и динамика планет: Ч. I. - М.: Мир, 1975.
59. Парийский Н.Н., Перцев Б.П. - В кн.: Изучение приливных деформаций Земли. -
М.: Наука, 1973, с. 19.
60. Woolard Е. - Astron. J., 1959, v. 64, р. 140.
61. Wahr J.M. The Tidal Motion of a Rotating, Elliptical, Elastic and Oceanless Earth. -
Colorado, 1979.
62. Larmor J. - Proc. Roy. Soc. of London (A), 1909, v. 82, p. 10.
63. Bullen K.E. - Bull. Seism. Soc. Amer., 1940, v. 30, p. 235.
64. Молоденский M.C. - Труды Геофиз. ин-та АН СССР, 1953, т. 19 (146), с. 3.
65. Melchior Р., GeorisB. - Phys. Earth Planet Interiors, 1968, v. 1, p. 26.
66. Gilbert E, Dziewonski A. Phil. Trans. Roy. Soc. of London (A), 1975, v. 278, p. 187.
бТ.Яцкив Я.С. Нутация в системе астрономических постоянных. - Препринт
ИТФ АН УССР, автореф., 1980.
6Ъ.Губанов В.С., Малкин З.М. - В кн.: Материалы пленума комиссии по изу¬
чению вращения Земли Астросовета АН СССР. - Киев: Наукова думка, 1974,
с. 52.
69. Абалакин В.К. Основы эфемеридной астрономии. - М^: Наука, 1979.
70. Яцкив Я.С., Миронов Н.Т., Корсунь А.А., Тарадий Д.К. Итоги науки и техники:
Астрономия, 1976, т. 12, ч.1 » II.
71. Дравских А.Ф. - Изв. САО АН СССР, 1975, т. 7, с. 199.
72. Wade С.М. - Astrophys. J., 1970, v. 162, р. 381.
73. Finkelstein A.M.,Kreinovich V.Ja.^andey S.N-Astrophys. SpaceSciences,1983,v. 89,p. 3.
74. Брумберг B.A. Релятивистская небесная механика. - M.: Наука, 1972.
75. Cohen М.Н., Shaffer D.В. - Astron. J., 1971, v. 76, p. 91.
76. Губанов B.C. - Астрон. ж., 1972, т. 49, с. 1112.
77. Загребин Д.В. Введение в астрометрию. — М.; Л.: Наука, 1966.
78. Плотников А.В. - Радиотехника и электроника, 1977, №2, с. 275.
~19.Жевакин С.А., Наумов А.П. - Изв. вузов. Сер. ’’Радиофизика”, 1967, т. 10,
с. 1214.
80. Тверской П.Н. Курс метеорологии. - М.: Гидро метео из дат, 1962.
275
Колосов М.А., Арманд Н.А., Яковлев О.И. Распространение радиоволн при косми¬
ческой связи. - М.: Связь, 1969.
82. Progress in Radio Science 1960 - 1963. v. Ionosphere. — Amst., 1965.
83. Bauer S.I., Blume L.I.-J. - Geophys. Res., 1964, v. 69, p. 3613.
84. Titherige I.E. - J. Atmospheric and Terrestrial Phys., 1964, v. 26, p. 177.
85. Троицкий В.С. - Изв. вузов. Сер. ’’Геодезия и аэрофотосъемка”, 1970, вып. 1,
с. 112.
86. Дравских А.Ф., Финкельштейн А.М. - Изв. САО АН СССР, 1977, т. 9, с. 47.
87. Moran J.M. -Proc. IEEE, 1973, v. 61, р. 1236.
88. Broshe P., Wade C.t Hejllming R. - Astrophys. J., 1973, v. 183, p. 805.
89. Жонголович И.Д., Валяев В.И., Малков А.А., Сабанина Т.Б. - Tp. ИТА АН СССР,
1977, т. 16, с. 19.
90. Блинов Н.С., Федосеев Е.Н. - Астрон. ж., 1973, т. 50, с. 601.
91. Блинов Н.С., Федосеев Е.Н. - Сообщения ГАИШ, 1974, т. 190, с. 20.
92. Власов Б.И. - Труды ВНИИФТРИ, 1975, вып. 79 (49), с. 12.
93. Губанов В.С. - Изв. ГАО АН СССР, 1977, т. 195, с. 3.
94. Умарбаева Н.Д. - СообщенияСАО АН СССР. 1976, вып. 16, с. 5.
95. Dravskikh A., Finkelstein A., Krasinsky G. -Astrophys. and Space Science, 1975, v. 38,
р. 255.
96. Krasinsky G. - Proc. IAU Colloq., №26, Torun, 1975, p. 381.
97. Ягудина Э.И. - Бюлл. ИТА АН СССР, 1981, т. 15, №1, с. 59.
98. Алексеев В.А., Липатов Б.Н., Щекотов Б.В. - Изв. вузов. Сер. ’’Радиофизика”,
1976, т. 19, с. 1669.
99. Алексеев В.А. - Кандидатская диссертация. - Горький, 1970.
100. Михайлов А.А. - Кризис астрометрии : Препринт Астросовета АН СССР. -
М., 1969.
101. Федоров Е.П. - В кн.: Системы координат в астрометрии. - Ташкент, 1971, с. 35.
102. Kolaczek D., Weifenbach С. - Proc. IAU Colloq., №26, Warszawa, 1975, p. 21.
103. Дравских А.Ф., Красинский Г.А., Финкельштейн A.M. - Письма в Астрон. ж.,
1975, т. 1,с. 43.
104. Дравских А.Ф., Кошелева О.М., Крейнович В.Я., Финкельштейн А.М. - Письма в
Астрон. ж., 1979, т. 5, с. 122.
105. Дравскмх А.Ф., Кошелева О.М., Крейнович В.Я., Финкельштейн А.М. - Там же,
с. 300.
106. Dravskikh A., Finkelstein A,, Kreinovich V. - In: Modern Astrometry Proc. IAU Col¬
loq., №48. - Vienna, 1979, p. 143.
107. Ибрагимов И.А., Розанов Ю.А. Гауссовские случайные процессы. - М.: Наука,
1970.
108. Жонголович И.Д., Валяев В.И., Малков А.А., Сабанина Т.Б. - Письма в Астрон. ж.,
1978, т. 4, с. 38.
109. Губанов В.С. и др. - Наблюдения искусственных небесных тел, 1975, т. 15, ч. 1,
с. 228.
110. Губанов В.С., Умарбаева Н.Д., Фридман П.А., Ягудин Л.И. - Космические иссле¬
дования, 1980, т. 18, с. 632.
lll.Slysh V.I. - Astrophys. Lett., 1973, v. 14, p. 213.
112. Тернер Б.Е. - В кн.: Галактическая и внегалактическая радиоастрономия. — М.:
Мир, 1976, с. 303.
113. Bolton J.G. - Nature, 1948, v..l62,p. 141.
114. Stenley A.E., Slee O.B. - Astron. J. of Sci. Res., 1950, v. ЗА, p. 234.
115. Bolton J.G., Stenley A.E., Slee O.B. - Austr. J. of Phys., 1964, v.7, p. 110.
116. Dixon R.S. - Astrophys. J. Suppl., Ser. 1970, №180, p. 1.
117. Cohen M. - Astrophys. Letts., 1972, v. 12, p. 81.
118. Douglas J.N. et al. -Astron. J., 1973. v. 78, p. 1.
119. Rogers A. et al. -Astrophys. J., 1973, v. 186,p. 801.
120. Wade C.M., Johnston K.J. - Astron. J., 1977, v. 82, p. 791.
121. Cohen M. et al - Memoirs Roy. Astron. Soc., 1977, v. 84, p. 1.
122. Gubbay J.S. - Astron. J., 1978, v. 83, p. 697.
123. Walter H.C. - Astron, and Astrophys., 198Q, v. 89, p. 198.
124. Умарбаева Н.Д. - Астрон. ж., 1975, т. 53, с. 1132.
125. Kellermann К., DavisМ., Pauliny-Toth I. - Astrophys.J., 1971, v. 170, p. LI.
276
126. Pooley G., Ryle M. - Month. Not. Roy. Astron. Soc., 1968, v. 139, p. 515.
121. Davies M.M. - Astron. J., 1971, v./76, p. 980.
128. Brandie G.W. - Astron. J., 1972, v. 77, p. 197.
129. Есепкина H.A., Корольков Д.В., ПарийскийЮ.Н. Радиотелескопы и радиомет¬
ры. - М.: Наука, 1973.
130. Христиансен У., Хегбом И. Радиотелескопы. - М.: Мир, 1972.
131. Краус Дж. Д. Радиоастрономия. - М.: Советское радио, 1973.
132. Цейтлин Н.М. Антенная техника и радиоастрономия. - М.: Советское радио, .1976.
133. Фомалон Э.Б., Райт М.К. - В кн.: Галактическая и внегалактическая радиоастро¬
номия. - М.: Мир, 1976.
134. Фомалон Э.Б. - ТИИЭР, 1973, т. 61, с. 53.
135. Rogers А. - In: Methods of Exper. Physics, v. 12, pt. C. - N.Y.; Acad. Press, 1976,
p. 139.
136. Booley G. - Ibid., p. 158.
137. Коэн M. - ТИИЭР, 1973, t. 61, №9, c. 31.
138. ReadK.B. - Astrophys. J., 1963, v. 138, p. 1.
139. Read R.B. - Trans. IRE on Ant. and Propag., 1961, v. AP-9, p. 31.
140. Thompson A.R., Clark B.G., Wade C.M., Napier P.J. - Astrophys. J., Supp. Ser., 1980,
v. 44,№2, p. 151.
141. Heeschen D.S. - Sky and Telescope, 1975, v. 49, p. 344.
142. Granlund J., Thompson A., Clark B. - Trans. IRE on Electromagn. Compat., 1978,
v. EMC-20, p. 451.
143. Weinreb S. et al. - Trans. IRE on Microwave Theor. and Techn., 1977, v. MTT-25,
p. 243.
144. Матвеенко Л.И. - Радиоастрономия: Итоги науки и техники, 1977, т. 13, с. 14.
\А5. Сваруп Г., Багри Д. - ТИИЭР, 1973, т. 61, №9, с. 154.
146. Swarup G., Yang K.S. - Trans. IRE on Ant. and Prop., 1961, v. AP-9, №1, p. 75.
147. Legg Т.Н. - Trans. IRE on Ant. and Prop., 1965, v. AP-13,№3, p-. 428.
148. Ко Дж. - ТИИЭР, 1973, т. 61, №9, с. 220.
149. HoggD., Macdonald G., Conway R., Wade C. - Astron. J., 1969, v. 74, p. 1206.
150. Бааре Дж. и dp. - ТИИЭР, 1973, т. 61, №9, с. 115.
15 \. Брейсуэл Р. - ТИИЭР, 1973, т. 61,№9, 103.
152. Христиансен В. - ТИИЭР, 1973, т. 61, №9, 128.
153. Роджер Р. и др. - ТИИЭР, 1973, т. 61, №9, 134.
154-КоуинМ.,Джонси Д., Келлерман К, Кларн Б. - УФН, 1970, т. 100, вып. 1, с. 135.
155. Warwick R.S., Davis R.J., Spencer R.E. - Month. Not. Roy. Astron. Soc., 1976, v. 177,
p.335.
156. Palmer HF. et al. - Nature, 1967, v. 213, p. 789.
157. Стандарты частоты и времени на основе квантовых генераторов и дискримина-
торов/Под ред. Б.П. Фатеева. - М.: Советское радио, 1978.
158. Vessot R. - In: Methods of Exper. Physics., pt.C. - N.Y;: Acad. Press, 1976, v. 12.
159. Audoin C., Vanier J. - J. Phys. Sci. Instr., 1976, v. 9, p. 697.
160. Рютман Ж. - ТИИЭР, 1978, т. 66, №9, с. 70.
161. Хелви X. - ТИИЭР, 1975, т. 63, №2, с. 5.
162. Время и частота. Тематический выпуск. ТИИЭР, 1966, т. 54.
163. Время и частота. Тематический выпуск. ТИИЭР, 1972, т. 60.
164. Дорогин Ю.В., Недоростков А.Н., Смоленцев С.Г., Федотов А.М. Тезисы докладов
XI Всесоюзной радиоастрономической конференции по аппаратуре, антеннам и
методам. — Ереван, 1978, с. 229.
165. Алексеев В.А., Гаталюк Э.Д., Никонов В.Н. - Там же, с. 208.
166. Липатов Б.Н., Сизов А.С. - Там же, с. 224.
167. Rogers А. - Radio Science, 1970, v. 5,р. 1239.
168. Клемперер У. - ТИИЭР, 1972, т. 5, 171.
169. Whitney A. et al - Radio Science, 1976, v. 11, p. 421.
170. Городецкий B.M., Дравских А.Ф., Фридман П.А. - Изв. вузов. Сер. ’’Радиофизи¬
ка”, 1981, т. 24, с. 655.
171. Хоув Д. - ТИИЭР, 1972, т. 60, с. 204.
172. Девис Д. - ТИИЭР, 1970, т. 58, с. 150.
173. Shapiro L.D., Fisher F.O. - Radio Science, 1970, v. 5, p. 1233.
174. Истон P. - ТИИЭР, 1976, т. 64, p. 34.
277
175. Мищенко И.Н. и др. - Зарубежная радиоэлектроника, 1980, №8, с. 52.
176. Thomas J.В. et al. - Geophys. Res., 1976, v. 81, p. 995.
177. Фридман П.А. - Изв. вузов. Сер. ’’Радиофизика”, 1977, т. 20, с. 848.
178. Hellwig Н., Evenson К. - Physics Today , 1978, v. 31, р. 23.
179. Ван-Флек Дж,. Миддлтон Д. - ТИИЭР, 1966, т. 54, №1, с. 5.
180. Грибанов Ю.М., Веселова Г.П., Андреев В.Н. Автоматические цифровые корреля¬
торы. - М.: Энергия, 1971.
181. Bare С. et al. - Science, 1967, v. 157, p. 189.
182. Moran J.M. - In: Methods of Exper. Physics, 1976, v. 12, pt.C, Academic Press, N.Y.
183. Коган Л.Р., Матвеенко ЛИ., Чесалин Л.С. - Автометрия, 1976, №1, с. 51.
184. Гатэлюк Э.Д., Рябов С.А., Янкавцев М.В. - Изв. вузов. Сер. ’’Радиофизика”,
1976, т. 19, с. 1721.
185. А>шрк£. - ТИИЭР, 1973, т. 61, №9, с. 94.
186. Коган Л.Р., Чесалин Л.С. - Препринт ИКИ №375, 1977.
187. WeinrebS. - Proc. IEEE, 1961, v. 49, p. 1283.
188. Vandenberg N.R. et al. - Bull. American. Astron. Soc., 1978, v. 10, p. 640.
189. Broten N.W. et al. - Month. Not. Roy. Astron. Soc., 1969, v. 146, p. 313.
190. Broten N. W. et al. - Science, 1967, v. 156, p. 1592.
191. Michelini R.D. - Radio Science, 1970, v. 5, p. 1263.
192. KawajiriN. et al. - J. Radio Res. Lab., 1979, v. 26, № 119, p. 13.
193. Jen J.L. et al. - Science, 1977, v. 198, p. 289.
194. Counselman C., Shapiro I. - Bull. Geod., 1979, v. 53, p. 139.
195. Davies R.D. et al. - Nature, 1969, v. 222, p. 933.
196. Гуткин Л.С. Теория оптимальных методов радиоприема при флуктуационных
помехах. - М.: Советское радио, 1972.
197. Возенкрафт Дж., Джекобс И. Теоретические основы техники связи. - М.: Мир,
1969.
198. Фомин А.Ф. Помехоустойчивость систем передачи непрерывных сообщений. -
М.: Советское радио, 1975.
199. Hanbury Brown R., Twiss R.Q. - Phil. Mag., 1954, v. 45, p. 663.
200. Ekre H. - IRE Trans. Inform. Theory, 1963, v. IT-9, p. 18.
201. Clark B.G. - IEEE Trans. Antennae Propag., 1968, v. AP-16, p. 143.
202. Стоцкий A.A. - Изв. вузов. Сер. ’’Радиофизика”, 1973, т. 16, с. 806.
203. Левин Б.Р. Теоретические основы статистической радиотехники: Кн. 2. - М.:
Советское радио, 1968.
204. Taylor G.I. - Proc. Roy. Soc. (A), 1938, v. 164, p. 476.
205. Гурвич A.C., Копров БМ., Цванг Л.Р., Яглом А.М. - В кн.: Атмосферная турбу¬
лентность и распространение радиоволн. - М., 1967, с. 30.
206. Татарский В.И. Распространение волн в турбулентной атмосфере. — М.: Нау¬
ка, 1967.
207. Стоцкий А.А. - Радиотехника и электроника, 1973, т. 18, с. 1579.
208. Колмогоров А.Н. - ДАН СССР, 1941, т. 30, с. 299.
209. Обухов А.М. - Изв. АН СССР. Сер.’’Геогр. и геофиз.”, 1941, т. 5, № 4-5, с. 453.
210. Монин А.С. Прогноз погоды как проблема физики. - М.: Наука, 1969.
211. АрмандН.А.,ЛомакинВ.А.,СаркисьянцВ.А. - Радиотехника и электроника, 1976,
т. 21, р. 11.
212. Thompson М.С., Janes Н.В., Kirkpatrick. - J.Geophys. Res., 1961, v. 65, № 1, p. 193.
213. Dravskikh A.F., Finkelstein A.M. Astrophys. and Space Sci., 1979, v. 60, p. 251.
214. Стоцкий A.A. - Докторская диссертация. - Л., 1974.
215. Дравских А.Ф., Стоцкий А.А., Финкельштейн А.М., Фридман П.А. - Радиотехника
и электроника, 1977, т. 22, с. 2305.
216. Дравских А.Ф., Стоцкий А.А., Финкельштейн А.М., Фридман П.А. - Изв.
САО АН СССР, 1978, №10, с. 108.
217. Итенберг В.С., Финкельштейн А.М. Там же, 1983, № 15.
218. Дравских А.Ф., Финкельштейн А.М. - Астрон. ж., 1979, т. 56, с. 1100.
219. Дравских А.Ф., Кошелева О.М., Финкельштейн А.М., Фридман П.А. - Изв.
САО АН СССР, 1982, №16, с. 83.
220. Шапер Л., Стилин Д., Уотерс Дж. - ТИИЭР, 1970, т. 58, с. 161.
221. Борин В.П., Наумов А.П. - Радиотехника и электроника, 1979, №1, с. 44.
278
222. Алексеев В.А., Гайкович К.П., Наумов А.П. - В кн.: Влияние атмосферы на
астрономические наблюдения в оптическом и радиодиапазонах.- Иркутск, 1980,
с. 19.
223. Kellermann К. - An Intercontinental Very-Long-Base Array: VLBI Network Studies
III, 1977, NRAO.
224. Schillizzi R. et al. - Very-Long-Baseline Radiointerferometry Using a Geostationary
Sattelite, 1978, Paris, ESA.
225. Алексеев B.A. и др. Проект ’’Полигам”. - Сообщения САО АН СССР, 1980,
вып. 27 - 30.
226. Broten N. et al. — Preprint CASCA Comittee on Radio Astronomy, 1978.
227. Дравских А.Ф. и др. - УФН, 1981, т. 135, вып. 4, с. 587.
228. Weiss H.G. - Techn. Report of MIT, №445, 20 Febr., 1968.
229. Дравских А.Ф., Финкельштейн A.M. Геодинамика и астрометрия. - Киев, 1980,
с. 137.
230. Алексеев В.А. - Препринт НИРФИ. №127. - Горький, 1979.
231. Матвеенко Л.И. - Препринт ИКИ АН СССР, 1979, с. 479.
232. Kellermann K.I. et al. - Science, 1977, v. 198, p. 289.
233. Куликов KA. Изменяемость широт и долгот. - М.: Физматгиз, 1962.
234. Грушинский Н.П. Теория фигуры Земли. - М.: Физматгиз, 1963.
235. Шимбирев Б.П. Теория фигуры Земли. - М.: Недра, 1975.
236. Сб. Итоги науки и техники, сер. ’’Исследование космического пространства”,
т. 15.- М.: ВИНИТИ, 1980.
237. Bursa М. - Stud, geophys. et geod 1970., v. 14, №2, p. 203 - 211.
23%. Backer D.C. — In: Radio Interferometry Technique for Geodesy. - NASA. Scientific
and Technical Information Office, 1980, p. 187.
239. Johnston K.J. Ibid., p. 45.
240. Purcell G.H. et al. Ibid., p. 165.
Вадим Сергеевич Губанов,
Андрей Михайлович Финкельштейн,
Петр Александрова ч Фридман
ВВЕДЕНИЕ В РАДИОАСТРОМЕТРИЮ
Редактор С.С. Куликов
Тех. редактор Л.Н. Богданова
Корректоры Т.В. Обод, Т.А. П е ч к о
ИБ №11313
Сдано в набор 18.03.83. Подписано к печати 05.09.83
Т-17689. Формат 60 х 90/16. Бумага типографская № 1
Печать офсетная. Усл.печл. 17,50. Уч.-издл. 19,93
Тираж 1650 экз. Тип.зак. 785 Цена 3 р. 30 к.
Издательство ’’Наука
Главная редакция физико-математической литературы
117971, Москва, В-71, Ленинский проспект, 15
4-я типография издательства ’’Наука”
630077, Новосибирск, 77, ул .Станиславского, 25